

Page 1

Applications Manual
Selection of Driveline Components
powersolutions.danfoss.com
Page 2

Applications Manual
Selection of Driveline Components
Revision history Table of revisions
Date Changed Rev
July 2015 Minor edits 0304
April 2015 Minor edits CC
December 2014 Corrections to the equations CB
November 2013 Major rewrite - Danfoss layout CA
July 1997 Second edition B
2 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 3

Applications Manual
Selection of Driveline Components
Contents
Introduction
Applications Manuals......................................................................................................................................................................4
Selection of Driveline Components
Introduction........................................................................................................................................................................................5
Design Goal.........................................................................................................................................................................................5
Sizing Procedure...............................................................................................................................................................................5
Machine Corner Power (CP)..........................................................................................................................................................6
Variable or Fixed Motor..................................................................................................................................................................8
Motor Selection.................................................................................................................................................................................9
Final Drive Selection..................................................................................................................................................................... 11
Input Gearing...................................................................................................................................................................................13
Pump Selection...............................................................................................................................................................................14
Continuous Pressure.....................................................................................................................................................................16
System Sizing Flow Chart............................................................................................................................................................17
Sizing Flow Chart...................................................................................................................................................................... 19
Equations.......................................................................................................................................................................................... 23
Definition of Terms........................................................................................................................................................................25
Tractive Effort
Tractive Effort.................................................................................................................................................................................. 26
Acceleration
Acceleration.....................................................................................................................................................................................30
Charge Pump Sizing
Introduction.....................................................................................................................................................................................33
Charge Pump Considerations....................................................................................................................................................33
Charge Pump Sizing Worksheet...............................................................................................................................................36
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 3
Page 4

Applications Manual
Selection of Driveline Components
Introduction
Applications Manuals
Content included in these manuals
These applications manuals provide design theory and detailed calculations for building hydraulically
powered machines.
The original document was written as one manual with four sections.
The current set of manuals includes the four documents listed below. The section numbers from the
original document are listed in parenthesis after the current document title.
•
Selection of Driveline Components BLN-9885 (originally Section 1)
•
Pressure and Speed Limits for Hydrostatic Units BLN-9884 (originally Section 2)
•
Transmission Circuit Recommendations BLN-9886 (originally Section 4)
•
Fluids and Lubricants 520L0463 (originally Section 3)
Other Reference Manuals
•
Hydraulic Fan Drive Systems Technical Information 520L0824
•
Hydraulic Fan Drive Systems Design Guidelines 520L0926
4 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 5

Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Introduction
This section presents a method of sizing driveline components for typical closed loop hydrostatic
transmissions. Although the method was developed for propel systems, it may be used for winch, or reel,
applications, or other circuits with very slight modifications. The terminology used in this procedure also
tends to reflect off-highway mobile applications.
It is assumed that the specific functional requirements of the application have been defined, and that the
fundamental design parameters have been established for each mode of operation. These typically
include vehicle speed, gradability, useful life, vehicle weight, and drive configuration. It is also assumed
that required engine power has been established.
Design Goal
The goal of this design method is to optimize the performance and cost of the driveline system by
selecting appropriate driveline components. Smaller hydraulic components cost less than larger
components, but they have lower torque capability.
Hydraulic unit life is highly dependent on system pressure. Establish maximum and continuous pressure
based on the required life of the driveline. Danfoss document Pressure and Speed Limits for Hydrostatic
Units BLN-9884 covers this subject in detail.
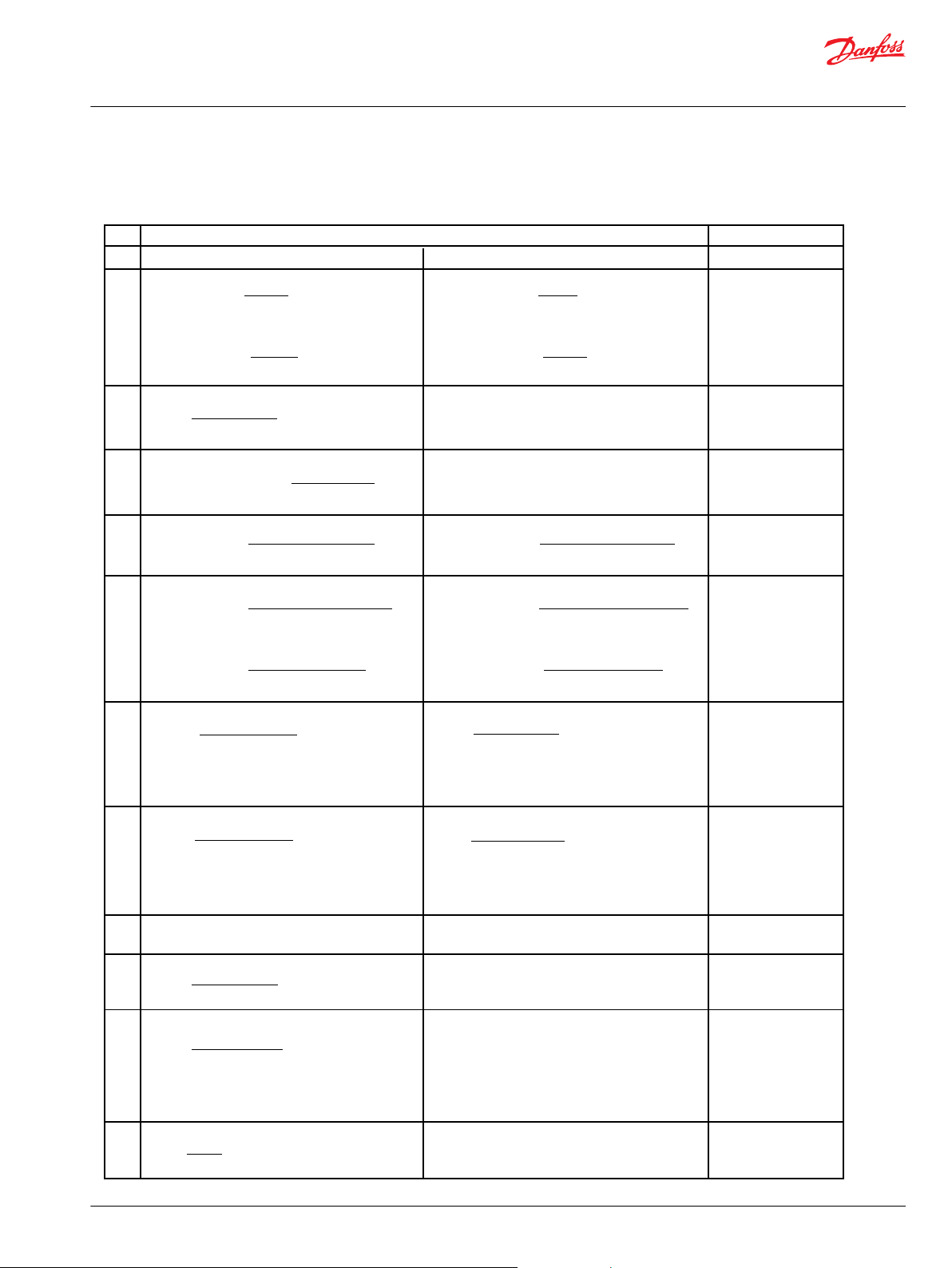
The figure below Driveline Element Selection shows the components typically found in a closed loop
hydrostatic drive system as well as the design parameters and degree of design flexibility associated with
each component. Because driveline design includes so many variables (each dependent on the others),
and because final component selection is ultimately limited by product availability, several iterations of
this procedure may be required before arriving at the optimum system.
Sizing Procedure
The sizing procedure starts with values for the machine maximum torque and required speed. From
these values, a hydraulic motor size can be selected. This motor selection is then made compatible with
ratings of available output gear drives. From a motor size, a pump size can be established. The pump
must be capable of accepting the required input power, and it must be compatible with the pump drive
mechanisms. It must also be large enough to provide sufficient flow to the drive motor to attain the
required speed.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 5
Page 6

Driving
Element
Design
Parameter
Design
Flexibility
Power
Speed
No
Engine
SometimesRatio
Gearing
Yes
Size
Pressure
Speed
Pump
Size
Pressure
Speed
Yes
Motor
Rati
o U
suallyGearing
Speed
Weight
No
Load
Driveline Element Selection
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Machine Corner Power (CP)
Optimizing the size of the hydraulic units depends on selecting the correct gear ratios. By matching machine
corner power with motor corner power, the required unit sizes can be quickly determined. The gear ratios can
usually be adjusted to provide some optimization of hydraulic unit component size.
Along with the equations presented throughout this document, a sizing flowchart is included to assist
with sizing. The flowchart details the sizing procedure and includes numerous design check steps to
validate the calculated sizing values.
Design limits for associated mechanical components are not identified.
Machine designers should verify that the design parameters are met for all driveline components.
The steps outlined in this manual are designed to guide you in component selection. For further
assistance, contact your Danfoss representative for help interpreting and verifying your results.
The first step in the sizing process is to determine the value referred to as Machine Corner Power (CP).
The concept of Corner Power is abstract and is normally not an attainable value of transmission power. It
is useful in the design process because it provides an indication of transmission component size and ratio
requirements. Corner Power is representative of the maximum torque and the maximum speed (at full
load) that the machine is required to have. These two values of maximum speed and maximum torque
(or Tractive Effort) never happen at the same time, but the purpose of Corner Power is to capture both
values to define an operating envelope for the machine and to aid in the selection of the hydraulic motor.
Refer to the Machine Corner Power graph below for an illustration of the concept.
The concept of Corner Power also applies to hydraulic motors. As demonstrated in the topic Motor
Selection on page 9, the maximum corner power of a hydraulic motor represents the maximum torque
and maximum continuous speed capabilities of that product. Equations are provided in the Motor
Selection topic that allow you to select the appropriate motor based on the machine’s corner power.
The equations for calculating Corner Power are provided below. For rotary drives (work function), the
input values to the equation are the required maximum output torque and the maximum output speed
6 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 7

CP
Max System Pressure
HP Out
(Approx. 0.70 HP In)
Output
Torque
Output Speed
Rated Speed
Part Load Speed
No Load, High
Idle Speed (NLHI)
Full Load Speed
BLN-9885-4
W
W
CP = machine corner power kW (hp)
TQ = maximum drive output torque Nm (in lbf)
ND = maximum drive output design speed rpm
SI System US System Description
1)
Rotary Drives
TE = maximum vehicle tractive effort N (lbf)
S = maximum vehicle design speed kph (mph)
Propel Drives
Machine CP =
TQ • ND
63 025
Machine CP =
TQ • ND
9549
Machine CP =
TE • S
375
Machine CP =
3600
TE • S
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
(at full load) of the machine. For propel drives, the input values are maximum tractive effort and
maximum vehicle speed (at full load).
For multi-speed drives (e.g. work mode and travel mode), corner power must be calculated for all ranges.
Tractive Effort
Tractive Effort refers to the amount of force available at the wheel or wheels of the vehicle and represents
the maximum possible pull a vehicle could exert, if it had no resistance to movement.
Ideally, tractive effort or output torque requirements should be derived from actual tests of the machine.
However, for establishing tractive effort design values, an analytical approach based on machine
parameters and functional modes of operation has been used successfully.
The topic Tractive Effort on page 26 describes tractive effort in more detail.
Machine Corner Power
Machine Corner Power (CP) is determined by estimating the maximum torque and maximum output
speed required. It is normally greater than actual transmission output power. Maximum output speed is
assumed to be at engine rated speed. However, under part load conditions slightly higher speed may be
obtained.
Warning
Protect yourself from injury. Use proper safety equipment, including safety glasses, at all times.
Warning
Check to ensure that maximum motor speed is NOT exceeded under dynamic braking conditions, when
engine speed can exceed No Load High Idle (NLHI) ratings.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 7
Page 8

Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Variable or Fixed Motor
Because the machine corner power is an expression of maximum torque (tractive effort) and maximum
vehicle speed, it can be used to establish the effective Transmission Ratio (TR) required to satisfy system
demands.
The effective Transmission Ratio (TR) is the ratio of the required vehicle corner power divided by the
available power from the machine’s prime mover (engine). This ratio is similar to the ratio spread of a
similarly sized mechanical transmission and indicates the amount of hydrostatic ratio which is required.
Systems with high transmission ratios normally benefit from variable, or two-position, drive motors.
For drives with variable load cycles, determine the normal input power (available power) to the
transmission by deducting the average power dedicated to other functions from the maximum engine
power available to the drive.
A Transmission Ratio (TR) greater than 1.0 means that there is not enough engine power available to
meet all of the operating requirements at the same time.
•
Typically, machines with high transmission ratios have high torque (Tractive Effort) requirements at
low speed and high speed requirements at low torque (Tractive Effort). In this case, a large fixed
motor would satisfy the high torque requirements, but operating the same motor to meet the
maximum speed requirement could exceed the speed limit of the motor and require a large
displacement pump. For high transmission ratios, use a variable displacement motor; it can be used
at high displacement to satisfy the maximum torque requirement and then shifted to a smaller
displacement to satisfy the machine’s maximum speed requirement. A fixed motor could be used
with a multi-ratio gearbox for machines with a high transmission ratio, but usually a variable motor
will be the most cost effective solution.
•
If the transmission ratio is low, that means that there is probably enough engine power available to
achieve the maximum torque and speed requirements simultaneously. In those cases, a fixed motor is
suitable for the task.
•
In cases of extremely high transmission ratio, a variable motor may not satisfy the need. In these
cases, a multi-speed gearbox may also be required. Some applications use 2-speed, 3-speed, or 4speed gearboxes to meet the vehicle requirements; but a 2-speed gearbox is most common.
The rule for selecting a fixed or variable drive motor is as follows:
•
If TR is greater than 4, use a variable motor,
•
If TR is less than 2, use a fixed motor,
•
If TR is between 2 and 4, evaluate both variable and fixed motors for suitability,
•
If TR is greater than 14, use a multi-ratio gear box between the motor and the final drive.
There is no direct relationship between transmission ratio and final drive ratio. The final drive ratio is
calculated based on the displacement of the motor that has been chosen, the maximum pressure, the
loaded radius of the wheels, and the required maximum tractive effort.
The transmission ratio is only used to help determine the motor type, not the motor size. Refer to the
topic Final Drive Selection on page 11 to calculate the Final Drive Ratio (FD).]
8 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 9

TR < 2, use fixed displacement motor
TR > 4, use variable displacement motor
SI / US System Description
TR = effective transmission ratio
HP = normal input power kW (hp)
2) TR =
Machine CP
HP
TR > 14, use multi-ratio gearbox
HP = 0.7
*
Available prime mover power
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Motor Selection
Calculate the required motor corner power from machine corner power and driveline efficiency using
equation (3) Required Motor CP. This establishes the minimum motor size capable of meeting the power
requirement of the machine. For multi-speed drives, use the largest corner power for each of the
operating ranges.
For transmission circuits using multiple drive motors, the required motor corner power should be
interpreted as the required corner power at each motor.
Use equation (4) Maximum Motor CP to calculate the maximum motor corner power based on the design
maximum pressure and the design maximum speed and the desired life of the motor.
Design maximum pressure is the maximum pressure at which the motor is intended to operate to meet
the required life. The design maximum pressure may or may not be the same as the maximum pressure
rating published in the product literature. Published ratings for maximum pressure assume the pressure
will occur for only a small percentage of the operating time, usually less than 2% of the total, and will
result in “normal” life. For applications in which the maximum pressure will occur over a significant
portion of the duty cycle, or applications in which additional life is required, the design maximum
pressure should be assigned a value less than the published rating for maximum pressure.
Design maximum speed is the maximum speed at which the motor is intended to operate to meet the
required life. Although speed has less effect on life than pressure, lower operating speeds will have the
effect of increasing life. The value for the design maximum speed must never exceed the maximum
speed rating published in the product literature; and will usually be less, to allow for motor speed
increases as a result of reduced-load, or no-load, conditions (see Machine Corner Power graph).
Danfoss document Pressure and Speed Limits for Hydrostatic Units BLN-9884, provides additional
information concerning pressure and speed limits with respect to component life.
Ideally, values for the design maximum pressure and design maximum speed would be used in Equation
(4) Maximum Motor CP to determine motor CP capability. However, this is difficult at this stage of the
sizing process because both the motor displacement and final drive ratio are unknown. Despite this
limitation, the next step is to choose a logical motor displacement based on the required motor CP. The
table Hydrostatic Motor Corner Power Chart can be used as an aid in preliminary motor selection. You
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 9
should choose a motor with a motor CP at least as large as the required motor CP calculated using
Equation (3) Required Motor CP.
Equation (A) Design Check serves as a design check to ensure that a motor with sufficient corner power
capability is selected. Motor selection based on corner power results in the smallest motor capable of
transmitting the required machine power while achieving system life requirements.
Page 10

Design Check: Maximum Motor CP ≥ Required Motor CP
3)
4)
A
)
Required Motor CP =
Machine CP
E • #
Required Motor CP =
Machine CP
E • #
Maximum Motor CP =
DM • NM • PM
396 000
Maximum Motor CP =
DM • NM • PM
600 000
SI System
US System Description
# = number of motors
CP = corner power
E = final drive efficiency
DM = maximum motor displacement
NM = design maximum speed
PM = design maximum pressure
3
cc [in
]/rev
rpm
bar [psi]
kW [hp]
(%/100)
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
For variable motor systems, the transmission CP is determined only by the motor. For various pump sizes,
actual applied motor CP may be varied by adjusting the minimum motor angle.
For fixed motor systems, the transmission CP is ultimately determined by the pump speed and
displacement. Although the fixed motor CP must be large enough to accommodate the maximum load
and speed, the pump must be large enough to drive the motor at the required design speed.
An additional sizing exercise may be required for fixed motor systems after pump selection has been
made.
For either variable or fixed motor systems, it may be necessary to increase the motor size if proper output
gearing is not available. Gearing must accommodate both the desired transmission ratio and maximum
motor speed, in addition to meeting the torque requirements.
10 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 11

Series 15 4500 4350 ---- 4000 --- - --- - 42 31 ---- ----
Series 40 - M25 5000 4350 ---- 4000 ---- ---- 77 57 ---- ---Series 40 - M35 5000 4350 ---- 3600 5300 4200 97 72 113 84
Series 40 - M44 5000 4350 ---- 3300 4850 3900 112 83 132 99
Series 40 - M46 5000 4350 ---- 3600 5000 4500 128 95 160 119
LV/LC25 6000 ---- ---- 5000 4400 --- - --- - 102 76
LV/LC30 5000 ---- ---- 5150 4450 --- - --- - 103 77
LV/LC35 4350 ---- ---- 5300 4500 --- - --- - 106 79
KV/KC38 6000 ---- --- - 5200 4650 --- - --- - 163 122
KV/KC45 5000 ---- --- - 5050 4500 --- - --- - 156 116
Series 90 - 55cc 7000 4250 3900 5100 4600 231 173 273 204
Series 90 - 75cc 7000 3950 3600 4700 4250 291 217 344 256
Series 90 - 100cc 7000 3650 3300 356 266 --- - --- Series 90 - 130cc 7000 3400 3100 435 324 --- - --- -
H1B060 7000 6525 ---- 7250 5900 --- - --- - 382 285
H1B080 7000 6525 ---- 6600 5300 --- - --- - 457 341
H1B110 7000 6525 ---- 5950 4800 --- - --- - 570 425
H1B160 7000 6525 ---- 5250 4250 --- - --- - 734 547
H1B250 7000 6525 ---- 4500 3650 --- - --- - 985 734
51V060 7000 7000 5600 --- - --- - 363 270
51V080 7000 6250 5000 --- - --- - 432 322
51V110 7000 5600 4500 --- - --- - 534 398
51V160 7000 5000 4000 --- - --- - 691 515
51V250 7000 4250 3400 --- - --- - 917 684
Hydrostatic Motor Corner Power Chart
Fixed Variable
Motor
Max
Pressure
(psid)
Max
Working
Pressure
(psid)
Max
Speed
at Max
Angle
(rpm)
Cont Speed at
Max Angle
(rpm)
Max Speed at
Min Ang le
(rpm)
Cont Speed
at Min Angle
(rpm)
Corner
Power
(HP)
Corner
Power
(kW)
Corner
Power
(HP)
Corner
Power
(kW)
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
These values for corner power capability are based on maximum pressure and maximum speed ratings.
Refer to Pressure and Speed Limits for Hydrostatic Units BLN-9884 for detailed information on ratings of
units and expected life.
Final Drive Selection
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 11
After the motor is initially sized, calculate the required final drive ratio. One of two approaches can be
taken to determine this ratio. Both take into account the design maximum and continuous pressures
allowed to meet the life requirements of the machine (see Pressure and Speed Limits for Hydrostatic Units
BLN-9884).
The two methods are as follows:
Page 12

Applications Manual
Selection of Driveline Components
Selection of Driveline Components
1. Using the Sizing Flow Chart on page 19, size the final drive ratio using the design maximum pressure
and the maximum torque requirement. Use equation (5) Required FD on the following page for this
calculation. After the pump is sized and all speed conditions have been met, estimate the continuous
pressure, using the Sizing Flow Chart on page 19, and compare it with the maximum design
continuous pressure.
2. As an alternate method, calculate the final drive ratio required for all modes of operation (travel
mode, work mode, etc.). Calculate the final drive ratio from the assumed pressure and torque
requirements for each operating mode. For worst case or intermittent modes of operation, use the
design maximum pressure along with the tractive effort or torque requirement to obtain a value for
the final drive ratio. Use the design continuous pressure for typical or continuous modes of operation,
and calculate required final drive ratios for these modes as well. Select the largest final drive ratio
from the values calculated for the various operating modes.
For variable or two-position motors, only final drive ratios from those modes utilizing maximum motor
displacement can be calculated, since the motor minimum displacement is not yet known.
The next step is to check motor speed limits using the limits obtained from Pressure and Speed Limits for
Hydrostatic Units BLN-9884, or the respective Technical Information manual.
Motor speed will usually be satisfactory unless the final drive ratio is significantly higher than required
(Gearbox limits must also be met). Equation (6) NMR=FD•NMD is used to determine the required motor
speed at maximum motor displacement based on the final drive ratio calculated in equation (5) Required
FD. For fixed displacement motors, the maximum motor displacement referred to in the equation is
simply the displacement of the motor. For variable motors, use the displacement at the maximum
swashplate angle. Use design check (C) NMR ≤ NML to ensure that the speed limit of the motor is not
exceeded. If a variable motor is specified, use equation (7) NVR=FD•NMD and design check (D) NVR ≤ NVL
to determine if the speed required at the minimum motor displacement exceeds the maximum reduced
angle speed limit. As explained in Pressure and Speed Limits for Hydrostatic Units BLN-9884, the maximum
speed limit of a variable motor increases with decreasing angle, up to a certain value (the maximum
reduced angle speed limit or cutoff point on the speed/angle curve). At low swashplate angles (i.e., below
the angle cutoff point), a decrease in angle does not result in a greater maximum speed limit.
Note that reduced angle speed limits cannot be checked until the pump displacement and minimum
motor displacement have been established. (This will be done in subsequent steps of this procedure.)
However, if the speed exceeds the limit associated with the smallest possible swashplate angle (i.e., at the
cutoff point of the speed/angle curve), then increase the motor’s maximum displacement and recalculate
the final drive ratio.
Refer to Pressure and Speed Limits for Hydrostatic Units BLN-9884 for more information concerning speed
limits.
Both SM (vehicle speed required at max angle) and SV (vehicle speed required at min angle) are customer
defined conditions
12 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 13

SI System US System Description
Rotary Drives
DM = max motor displacement cc (in
3
)/rev
E = final drive efficiency (%)/100
FD = final drive ratio
LR = wheel loaded radius mm (in)
NMD
NML = motor speed limit at max angle rpm
NMR = req'd motor speed at max angle rpm
NVD = non-propel design speed at min angle rpm
NVR = req'd motor speed at min angle rpm
NVL = motor speed limit at min angle rpm
PM = maximum pressure bar (psid)
SM = vehicle speed req'd at max angle kph (mph)
SV = vehicle speed req'd at min angle kph (mph)
TE = vehicle tractive effort N (lbf)
TQ = max drive output torque Nm (in•lbf)
# = number of motors
Propel Drives
5)
Design Check: FD ≥ Required FD
B)
Propel Drives
Rotary Drives
6)
Design Check: NMR ≤ NML
C)
Propel Drives
Rotary Drives
7)
Design Check: NVR ≤ NVL
D)
NMR = FD • NMDNMR = FD • NMD
NVR = FD • NVDNVR = FD • NVD
Required FD =
DM • PM • E • EM
Torque • 20
π
Required FD =
Required FD =
DM • PM • E • EM • #
TE • LR • 20
π
Required FD =
Torque • 2
π
FD • SM • 2650
LR
NMR =
FD • SM • 168
LR
NMR =
FD • SV • 2650
LR
NVR =
FD • SV • 168
LR
NVR =
DM • PM • E • EM
Torque • 2
π
d’less
E = motor mechanical efficiencyM (%)/100
= non-propel design speed at max angle rpm
DM • PM • E • EM • #
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Input Gearing
The use of input gearing is usually customer defined and determined by the machine configuration. For
vehicles with multiple hydraulic systems, use of an input splitter box is common. Splitter boxes are
usually available with various ratios to accommodate pump speed requirements. For machines with only
a single hydrostatic system (or machines utilizing tandem pumps) a direct drive pump may be
appropriate, in which case the pump speed is the same as the prime mover speed.
Use equation (8) NP = NE•IR to determine the relationship between the prime mover speed, pump speed,
and input gear ratio.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 13
Page 14

NP = NE • IR8)
SI / US System Description
NP = maximum pump design speed rpm
NE = prime mover design speed rpm
IR = pump input ratio
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Pump Selection
Pump sizing consists of selecting a pump that will meet the flow (speed) requirements of the motor, or
motors, in the system.
Use equation (9) to determine the required pump displacement. This calculation is based on an assumed
pump input speed. Select a pump displacement at least as large as the calculated displacement. Also,
check that the desired pump speed does not exceed the rated maximum speed for the pump. If the rated
speed limit is exceeded, choose a different pump and calculate the input speed required and the
corresponding input ratio using equations (10) and (11).
With a pump displacement selected, calculate the actual motor speed. The actual speed will usually be
slightly higher than the required motor speed because the pump that is selected will usually have a
displacement slightly greater than the calculated displacement.
Fixed Motor
For a fixed motor, determine the actual motor speed and compare with its rated maximum speed using
equation (12) and design check (G). Note that equation (12) includes a calculation for an overrunning
condition. An overrunning condition is characterized by a speed increase at the pump (and consequently
the motors), typically by as much as 15%. The condition is especially common during downhill operation.
Not only is there an increase in pump speed, but during either downhill operation or vehicle deceleration
using hydrostatic braking; the motor becomes the pump and the pump becomes the motor. The net
result is that the motor will turn faster for any given pump speed than what would be experienced during
normal propel operation.
A 15% increase in engine speed is just an estimate; check with the engine manufacturer for specific
details concerning the engine’s ability to provide dynamic braking and its maximum, or [not-to-exceed]
operating speed.
14 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 15

9)
SI / US System Description
D)
Design Check: DP ≥ DPR
E)
Design Check: NP ≤ NPL
DM = max motor displacement
DP = max pump displacement
DPR = required max pump displacement
rpm
rpm
rpm
rpm
rpm
rpm
rpm
IR = pump input ratio
NMR = required motor speed at max angle
NE = prime mover design speed
NM = design maximum speed
NML = motor speed limit at max angle
NP = max pump design speed
NPL = pump speed limit at max angle
NPR = required pump speed
# = number of motors
10)
DPR = NMR • DM • #
•NP
NPR = DM • NMR • #
11)
IR = NPR
NE
12)
Without Overrunning Condition:
With Overrunning Condition:
G) Design Check:
NM ≤ NML
NM = DP • NE • IR •
DM • #
NM = DP • NE • IR • 1.15
• DM • #
EVP • EVM
•DP EVP • EVM
EVP • EVM
EVP • EVM
3
)/rev
cc (in
3
)/rev
cc (in
3
)/rev
cc (in
EVP = pump volumetric efficiency
EVM = motor volumetric efficiency
%/100
%/100
Assume EVP = EVM = 95% for first pass thru
the sizing exercise
dimensionless
dimensionless
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Variable Motor
For a variable motor, the procedure for assuring that the rated maximum speed is not exceeded is
somewhat more involved.
The steps are as follows:
1. Determine if the rated maximum speed is exceeded using the method above, reference equation
(12).
2. Determine the minimum motor displacement using equation (13).
3. Calculate the angle associated with this displacement using equation (14). Select an available
minimum swashplate angle using design check (H) and determine the actual motor speed using
equation (15).
4. Determine the reduced swashplate angle speed from Pressure and Speed Limits for Hydrostatic Units
BLN-9884, or by using equation (16). Use design check (I) to ensure that the minimum angle speed
limit is not exceeded.
The Sizing Flowchart below details the above procedure.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 15
Page 16

13)
SI / US System
AV = min angle for a variable motor degrees
DM = max motor displacement
DP = max pump displacement
DPR = req'd max pump displacemnt
DV = min motor displacement
IR = pump input ratio
NE = prime mover design speed
NM = motor speed at max angle
NML = motor speed limit at max angle
NMR = req'd motor speed at max angle
NV = motor speed at min angle
NVL = motor speed limit at min angle
NVR = req'd motor speed at min angle
NP = max pump design speed
NPL = pump speed limit at max angle
SINM = sine of motor at max angle
SINV = sine of motor at min angle
SV = vehicle speed req'd at min angle
TANM= tangent of motor at max angle
TANV = tangent of motor at min angle
# = number of motors
Description
All Swashplate Motors:
All H1B andSeries 51 Bent-Axis Motors:
All Swashplate Motors:
Series 51 Bent-Axis Motors:
H) Design Check:
AV Min Available
With Overrunning Condition:
• NE • IR •
NVR • #
EVP • EVM
DP
Note: Sin 32º = 0.53, 32º = Maximum
angle of H1B and S51 bent axis motors
IF “YES”, then proceed; IF “NO”, increase pump
displacement in Equation 13
NOTE: 1.15 is an estimate of engine max speed capability,
contact engine supplier for additional information
DV =
ARCTAN (TANV)
AV =
TANM • (DV / DM)
TANV =
SINV =
0.53 • (DV / DM)
ARCSIN (SINV)AV =
14)
≥
NVL Max Reduced Angle ValueDesign Check:
I)
IF “YES”, then proceed
≤
15) Without Overrunning Condition:
DP
• NE
• IR •
DV • #
EVP • EVM
NV =
NV =
• NE
• IR • (1.15)
• DV • #
EVP • EVM
DP
16)
NVL =
NML • DM / DV
• (0.53 / SINV)NML NVL =
dimensionless
dimensionless
dimensionless
dimensionless
EVP = pump volumetric efficiency
EVM = motor volumetric efficiency
%/100
%/100
Assume EVP = EVM = 95% for first pass thru the sizing exercise
kph (mph)
rpm
rpm
rpm
rpm
rpm
rpm
rpm
rpm
rpm
dimensionless
dimensionless
3
)/rev
cc (in
3
)/rev
cc (in
3
)/rev
cc (in
3
)/rev
cc (in
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Continuous Pressure
16 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
The final (but crucial) step in the procedure is to estimate the continuous pressure based on the
components selected.
The Pump Selection graph below shows the relationship between system pressure and system flow for a
hydrostatic pump. The figure shows that the continuous system pressure usually occurs near maximum
pump flow and normal input power.
The Sizing Flow Chart on page 19 equations provide a check to ensure that the continuous pressure is
below the pressure required to meet the design life.
Page 17

Full Load Speed
System Pressure Line
NLHI
Continuous
Max
System
Pressure
Output Flow
Rated
Pump Selection
Defined by
Engine Power
17)
SI System US System Description
DP = max pump displacement cc (in3)/rev
FD = final drive ratio
HP = normal power input to drive kW (hp)
IR = pump input ratio
LR = wheel loaded radius mm (inch)
NE = prime mover design speed rpm
NMD = non-propel speed at max angle rpm
NML = motor speed limit at max angle rpm
NVD = non-propel speed at min angle rpm
PC = estimated continuous pressure bar (psid)
SM = vehicle speed req'd at max angle kph (mph)
SV = vehicle speed req'd at min angle kph (mph)
18)
Propel, Motor at Max Angle
Non-Propel, Motor at Max Angle
FD = NML • LR
168 • SM
FD = NML • LR
2650 • SM
PC = HP • 600 000
DP • NE • IR
PC = HP • 396 000
DP • NE • IR
FD = NML
NMD
FD = NML
NMD
Propel, Motor at Min Angle
Non-Propel, Motor at Min Angle
FD = NML • LR
168 • SV
FD = NML • LR
2650 • SV
FD = NML
NVD
FD = NML
NVD
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Continuous system pressure at maximum pump flow may be estimated from the normal input power to
the drive. For many systems, the continuous pressure determined in this manner is a good indicator of
typical system pressure experienced in the drive.
System Sizing Flow Chart
The flowchart is designed to be used as a sizing algorithm to assist in the selection of system
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 17
components. It provides a concise step-by-step run-through of the sizing process. It is intended to
accompany the previous sections and to expand the equations presented with the text.
The symbols used in the flowchart are explained in the box below. The equations used to calculate the
quantities are included following the flowchart, along with the definitions of the symbols.
Be aware that the flowchart does not consider any torque/speed limits associated with various
mechanical components, e.g., pump drives or final drive gearboxes.
Use the flowchart on the following pages to assist in sizing a hydrostatic transmission. The number of the
equation required to complete this calculation is shown at the lower right corner of the boxes (X). This
equation can be found in the tables following the flowchart.
Page 18

(X)
Y
X = Number of equation required to
Y = Flow chart reference numbers
(numbers that jump to other
reference points on the
flowchart).
complete this calculation
A list of equations follows the
Sizing Flow Chart
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
18 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 19

Determine
TE or Torque
Multi-speed
Drive?
Calculate
Machine CP
Calculate
Transmission
Ratio
TR > 4?
TR < 2?
Calculate
Machine CP
for All Speeds
Select
Largest CP
Value
Use MV
Use MF
Try both
MF and MV
Calculate
Required
Motor CP
Yes
No
Yes
Yes
No
No
1
(1)
(2)
(3)
(1)
Begin by calculating the required effort or torque.
For multi-speed drives, machine corner (CP) power must be
calculated for each drive.
Transmission Ratio (TR) indicates the need for a fixed or
variable motor.
Sizing begins at the motor. First, determine the required
motor corner power.
FDR
Yes
1.0
“Direct Drive”
No
LSHT
Yes
1A
No
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Sizing Flow Chart
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 19
Page 20

(7)
Select a
Motor
Size (DM)
Calculate
Motor CP
CP ≥ Required?
Determine
Required Final
Drive Ratio (FD)
Select FD
≥ Required
FD
Calculate Required
Motor Speed (NMR)
at Max. Angle
No
Yes
NMR ≥ NML?
Increase
Motor
Size
MV?
Calculate Required
Motor Speed (NVR)
at Min. Angle
Establish
Pump Speed
(NP)
NVR ≥ NVL
at Smallest Possible
Angle?
Yes
No
Yes
No
Yes
No
4
(6)
3
(8)
1
(4)
(5)
2
1A
Select a likely motor displacement and
either calculate its corner power capability
or use the Motor Power Capabilities table.
If this value is less than the required
corner power, select a larger motor.
Select a
Motor
Size (DM)
Calculate
Motor CP
CP ≥ Required?
No
Yes
(4)
(5)
2
Determine the final drive ratio (FD) required.
This calculation is based on the maximum
motor displacement.
Calculate the required motor speed
at maximum angle and compare
with the maximum speed limit allowed.
Calculate Required
Motor Speed (NMR)
at Max. Angle
(6)
Establish
Pump Speed
For variable motors, calculate the required
motor speed at the minimum angle and
compare with the maximum speed limit at
the smallest possible motor angle. Note
that at this point in the sizing procedure,
the required minimum angle is unknown,
so the reduced angle speed limit is also
unknown. However, the unknown speed
limit will be less than the speed limit at
the smallest possible motor angle.
Increase
Motor
4
NMR ≥ NML?
Yes
(NP)
Size
2A
FDR
1.0
N
o
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
20 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 21

Yes
Calculate Pump Disp.
Req'd (DPR) for Motor
Max. Angle Speed
Choose Pump
Disp. (DP) ≥
Required (DPR)
Overrunning
Condition?
Increase
NP by 15%
NP ≥ NPL?
Choose
Different
Pump Size
Calculate
Required
Pump Speed
Determine
New Pump
Drive Ratio
Yes
No
No
Yes
Calculate Actual
Motor Speed (NM)
at Motor Max. Angle
NM ≥ NML?
Increase
Motor Size
MV?
Calculate
Motor Min.
Disp. (DV)
Calculate
Actual
Motor Speed
(NV) at Motor
Min. Angle
Determine
Min. Motor
Angle (AV)
AV ≤ Min.
Available?
Determine
Speed Limit for
Reduced Angle
Increase
Pump
Disp.
NV ≥ NVL?
Increase
Motor
Size
2
2
5
6
(10) (11)
(12)
(13)
(15)
(14)
(16)
4
5
(9)
Yes
Yes
No
No
No
No
Yes
S elect
Convenient
Angle ≤ AV
Determine Pump Displacement.
Check for the possibility of a overrunning condition
(e.g., vehicle in downhill mode). If so, increase speed by 15%.
Using the displacement for the pump selected, determine the
actual motor speed and compare with the rating. This step is
required since the pump selected usually has a displacement
slightly higher than the displacement required.
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 21
Page 22

Estimate
Continuous
Press. (PC)
Increase
Motor Size
CP ≥ Continuous
Limit?
Can FD be
Increased?
Calculate
Maximum
FD
Choose
FD ≤ Maximum
No
Yes
No
(18)
Yes
END
6
2
3
(17)
Continuous pressure can be estimated based on the
input horsepower.
If the final drive can be increased to reduce pressure, calculate
the largest final drive that will keep motor speed under limits.
Reselect a final drive no larger than this value.
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
22 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 23
stnemmoCderiuqeR snoitauqEpetS
metsyS SUmetsyS cirteM
1 Machine CP = TE • S Machine CP = TE • S Propel Drive
573 0063
Machine CP = TQ • ND Machine CP = TQ • ND Non-Propel Drive
520369459
emaSPC enihcaM = RT2
0.7 • Available power
emaSPC enihcaM = PC rotoM deriuqeR3
E • #
4 Motor CP = 0.95 • DM • NM • PM Motor CP = 0.95 • DM • NM • PM
000 693 000 006
5 Required FD = TE • LR • 0.02
π
Required FD = TE • LR • 2π Propel Drive
0.95 • DM • PM • E • 59.0# • DM • PM • E • #
Required FD = TQ • 20 π Required FD = TQ • 2 π Non-Propel Drive
0.95 • DM • PM • 59.0E • DM • PM • E
6 NMR = FD • SM • 2650 NMR = FD • S • evirD leporP861
RLRL
NMR = FD • evirD leporP-noNemaSMDN
7 NVR = FD • SV • 2650 NVR = FD • SV • evirD leporP861
RLRL
NVR = FD • evirD leporP-noNemaSVDN
8 NP = NE • emaSRI
9 DPR = NMR • DM • emaS#
(0.95)
2
• NP
10 NPR = DM • NMR • emaS#
DP • (0.95)
2
(choose DP ≥ DPR)
emaSRPN = RI11
NE
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Equations
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 23
Page 24

stnemmoCderiuqeR snoitauqEpetS
metsyS SUmetsyS cirteM
12 NM = DP • NE • IR • (0.95)
2
noitarepO lamroNemaS
DM • #
NM = DP • NE • IR • snoitidnoC gninnurrevOemaS51.1
(0.95)
2
• DM • #
13 DV = DP • NE • IR • (0.95)
2
Same
NVR • #
15 NV = DP • NE • IR • (0.95)
2
noitarepO lamroNemaS
DV • #
NV = DP • NE • IR • snoitidnoCgninnurrevOemaS51.1
(0.95)
2
• DV • #
16 NVL = NML • (DM / DV)
1/2
srotoM etalphsawS llAemaS
NVL = emaS
NVL ≥ Reduced Angle Value
17 PC = HP • 600 000 PC = HP • 396 000
DP • NE • PDRI • NE • IR
18 FD = NML • LR FD = NML • LR Propel,
2650 • 861MS • SM Motor at Max Angle
,leporP-noNemaSLMN=DF
elgnA xaM ta rotoMDMN
FD = NVL • LR FD = NVL • LR Propel,
2650 • 861VS • SV Motor at Min Angle
,leporP-noNemaSLVN=DF
elgnA niM ta rotoMDVN
14 TANV = TANM • ( srotoM etalphsawS llAemaS)MD / VD
AV = Arctan (TANV)
Bent Axis Motors
emaS
AV = Refer to Technical
Information manual
H1B & Series 51
Refer to Technical
Information manual
Bent Axis Motors
H1B & Series 51
Applications Manual
Selection of Driveline Components
Selection of Driveline Components
24 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 25

Applications Manual
Selection of Driveline Components
Selection of Driveline Components
Definition of Terms
The following list of terms describe the variables used in the sizing equations:
AV Minimum angle for a variable motor Degrees
CP Corner power kW [hp]
DM Maximum motor displacement cc [in3]/rev
DV Minimum motor displacement cc [in3]/rev
DP Maximum pump displacement cc [in3]/rev
DPR Required maximum pump displacement cc [in3]/rev
E Final drive efficiency %
FD Final drive ratio —
HP Normal power input to drive kW [hp]
IR Input ratio (pump speed /prime mover speed) —
LR Wheel loaded radius (rolling radius) mm [inch]
ND Design speed for non-propel rpm —
NMD Non-propel design speed at motor max angle rpm
NVD Non-propel design speed at motor min angle rpm
NE Prime mover input speed (engine, electric motor) rpm
NML Motor speed limit at maximum angle rpm
NPL Pump speed limit rpm
NVL Motor speed limit at minimum angle rpm
NM Motor speed at maximum angle rpm
NP Pump speed rpm
NV Motor speed at minimum angle rpm
NMR Required motor speed at maximum angle rpm
NPR Required pump speed rpm
NVR Required motor speed at minimum angle rpm
PC Estimated continuous pressure bar [psid]
PM Maximum system pressure bar [psid]
S Maximum vehicle speed kph [mph]
SM Vehicle speed required with motor at max angle kph [mph]
SINM Sine of motor maximum angle —
SINV Sine of motor minimum angle —
SV Vehicle speed required with motor at min angle kph [mph]
TE Tractive effort requirement N [lbf]
TANM Tangent of motor maximum angle —
TQ Torque requirement (non-propel) Nm [in lbf]
TR Transmission ratio —
TANV Tangent of motor minimum angle —
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 25
Page 26

Applications Manual
Selection of Driveline Components
Tractive Effort
Tractive Effort
For vehicle propel drives, motion resistance and required tractive efforts are directly related to vehicle
weight. For a particular class or type of vehicle, the ratio of tractive effort to vehicle weight is relatively
constant. This term is commonly called a pull ratio and it is a convenient design parameter.
The elements constituting a particular class or type of vehicle are machine function, drive configuration,
grade, and terrain. Values for motion resistance contributing to pull ratio requirements have been
estimated and are listed in the table Pull Ratio Requirements for Vehicle Propel Drives below. To establish
the required pull ratio, sum the motion resistance values for machine function, drive configuration, grade
and rolling resistance. Calculate required tractive effort from pull ratio and vehicle weight.
PR = MF + DC + GR + RR
where:
PR = Pull ratio
MF = Machine function motion resistance
DC = Drive configuration motion resistance
GR = Grade motion resistance
RR = Rolling resistance
TE = (PR) (WT)
where:
TE = Vehicle tractive effort (lb)
WT = Vehicle weight (lb)
The tractive effort to weight ratio, or pull ratio, is the sum of all expected demands on vehicle motion
resistance. We recommend verifying the calculated tractive effort values by testing an actual vehicle.
To determine Machine Function (MF) motion resistance, consider all functions and modes of operation
separately. Usually, the functions performed in the worst ground conditions predominate. For
transmissions with multi-speed mechanical gearboxes, designers should consider the functions
performed for each speed range. This usually requires examining several possible work situations and
selecting the one with the highest rolling resistance and/or grade.
The pull ratio listed for propel forces main work drive in the table Pull Ratio Requirements for Vehicle
Propel Drives below is approximate. For propel drives which interact with work functions (cutters,
planers, etc.), make an accurate determination of the required motion resistance by testing a working
machine.
Transport mode should be used only for specific modes of operation in which traveling or carrying is the
only requirement. It is assumed that the vehicle operates at a relatively constant speed in the transport
mode.
The component of pull ratio due to Drive Configuration (DC) results from geometry effects when
steering. The particular form of drive for the vehicle affects motion resistance. Skid steer configurations
imply turning with differential side-to-side torque and no variable geometry. Dual path variable steer
geometry configurations are usually wheeled machines with a single trailing pivot or caster wheel.
Single path track or single path wheel configurations imply a geometry adjustment of the ground
engaging elements to achieve steering.
Grade motion Resistance (GR), or Gradability, is a function of terrain slope. Select the maximum grade at
which the particular machine function is performed. The maximum grade is assumed to be intermittent,
with the average grade one-half to two-thirds of maximum.
Rolling Resistance (RR) affects motion resistance depending on the condition of the terrain. Rolling
resistance values listed here are typical and may vary depending on location, particular conditions and
26 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 27

Pull Ratio Requirements for
Vehicle Propel Drives
Machine Function MF
Dozing (All Wheel / Track Drive) .90
Drawbar (All Wheel / Track Drive) .80
Drawbar (Single Axle Drive) .60
Dig and Load (All Wheel / Track Drive) .50
Propel Forces Main Work Drive .30 (Typ)
Stop and Go Shuttle .15
Transport (No Work Interaction) .00
Drive Configuration DC
04.kcarT reetS dikS
03.leehW reetS dikS
Dual Path Variable Steer Geometry .20
Single Path Track .10
Single Path Wheel .00
Grade (Intermittent) GR
01.edarG %01
02.edarG %02
92.edarG %03
73.edarG %04
54.edarG %05
15.edarG %06
Rolling Resistance RR
52.dnaS
02.duM ,lioS teW
Fresh Deep Snow .16
Loose Soil, Gravel .12
Grassy Field, Dry Cropland .08
Packed Soil, Dirt Roadway .05
20.tnemevaP
Steel on Steel Rails .004
Applications Manual
Selection of Driveline Components
Tractive Effort
drive configuration. These may be adjusted with more specific data. These values apply for typical rubber
tired vehicles. High flotation tires and tracked crawlers may show somewhat lower values in poor terrain.
Vehicle weight (WT) is the maximum weight for the function being considered. For most vehicles, this is
the loaded weight. Empty weight may be appropriate for some transport modes. For shuttle and
transport vehicles, maximum weight is the gross combined weight of the power unit plus any towed
trailer or wagon. For drawbar vehicles, maximum weight is only the weight of the power unit.
Simulating a trailer load: If we make the assumption that the coefficient of rolling resistance is the same
for the vehicle and the trailer, then the weight of the trailer and its load can be added to the weight of the
vehicle. If the coefficient of rolling resistance is different, then pro-rate the trailer weight before adding it
to the vehicle weight with the following formula:
Typical minimum design values of pull ratio for some common vehicles have been determined and are
listed in the Minimum Tractive Efforts Requirements table below. These values may be useful for
checking intended tractive effort requirements. Vehicle performance testing is highly recommended to
verify suitability in an actual working environment.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 27
Pull ratio may be used to determine tractive effort in vehicle propel drives. Pull ratios are based on
working vehicle weight. In general, this is loaded weight. For vehicles having a separate transport mode,
empty weight may be appropriate.
Page 28

Minimum Tractive Effort Requirements
Assumed Operating Conditions Minimum Pull Ratio
Vehicle Type Function and Terrain Working Grade Loaded Empty (Ref)
Crane, Tracked Transport in Wet Soil 30% .89
Crane, Wheeled Transport in Wet Soil 30% .49
Crawler Dozer Dozing, Wet Soil 10% 1.60
Crawler Loader Dig and Load, Loose Soil 10% 1.12 1.30
Excavator, Tracked Transport in Wet Soil 40% .97
Farm Tractor, 2WD Plow in Loose Dirt 15% .82
Farm Tractor, 4WD Plow in Loose Dirt 15% 1.02
Garbage Packer Crane, Wheeled 15% .27
Grader Grading Wet Soil 15% .65
Harvesting Machine High Speed, Grassy Field 15% .23
Harvesting Machine Low Speed, Mud 15% .35
54.elcatsbO bmilCenihcaM gnitsevraH
Commercial Lawn Mower Mow on Grassy Field 30% .37
Lift Truck, Cushion Tire Stop and Go, Pavement 5% .22
Lift Truck, Pneumatic Tire Stop and Go, Gravel 5% .32
Lift Truck, Rough Terrain Stop and Go, Loose Soil 25% .52
Locomotive, Switcher Shuttle Rail Cars 3% .19
Log Feller, Dual Path Steer Accelerate With Load, Wet Soil 10 % .65
Log Forwarder, Wheeled Transport in Wet Soil 30 % .49
Mining Scoop, Wheeled Scoop in Gravel, Rock 10 % .72
54.% 01lioS mriF no gnivaPrevaP
25.% 01yawhgiH enalPrenalP daoR
03.% 01lioS dekcaP lloRrelloR
Skid Steer Loader Dig and Load, Loose Soil 10 % 1.02 1.25
Snow Groomer Grooming Snow on Steep Slope 60 % 1.07
Soil Stabilizer Stabilize Wet Soil 15% .65
Street Sweeper Dump Load in Loose Soil 10% .22
49.% 03llihpU gnidalBrotcapmoC hsarT
Wheel Loader, Articulated Dig and Load, Loose Soil 0 % .62 .80
TE
O
O
F2
R
F1
WT
Applications Manual
Selection of Driveline Components
Tractive Effort
Pull ratio and tractive effort requirements are based on typical vehicles being operated in normal fashion.
Specific requirements may vary. Vehicle testing is recommended to verify that performance is satisfactory
and that sufficient life of the driveline components will be obtained.
Pull Ratio
28 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 29

( )
( )
(
( )
( )
( )( )
( ) ( )
( )
( )
( )
( )
( )
+
−+±
==
+
−+±
=
+
−+−±
=
=++−−
−
−+=
−==
+=+=
==
=
=
=
=
=
=
−
WT*RR1
TERR1*WTTE*RR
CosTan *100θTan *100% y,Gradabilit
*1
1**
*1*2
**1*4***4***2
:X""for Equation Quadratic Solve
0**1****2
*
1***
X1θSin θ, CosXLet
θSin *WTθ Cos*WT*RRF2RTE
:downhill forces balances uphill force when occursy Gradabilit Maximum
(lbf) N θ, Cos*WT*RRF1*RRRForce, Resistance Rolling
(lbf) N θ,Sin *WTF2 Force, Tangential
(lbf) N θ, Cos*WTF1 Force, Normal
degrees Angle,y Gradabiltiθ
:Find
lessd' ,Resistance Rolling oft CoefficienRR
(lbf) N Vehicle, ofWeight WT
(lbf) N Vehicle, of Force TractiveTE
:Given
2
222
1
2
222
22
2222222
22222
2
2
WTRR
TERRWTTERR
X
WTRR
WTTEWTRRWTRRTEWTRRTE
X
XWTRRXWTRRTEWTTE
) ( )
( )
−= 1*
2
22
XWTWTRRTE
XWTXWTRRTE
* X
Applications Manual
Selection of Driveline Components
Tractive Effort
Derivation of Maximum Gradability
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 29
Page 30

Applications Manual
Selection of Driveline Components
Acceleration
Acceleration
Vehicle acceleration and deceleration times are often ignored during a vehicle transmission sizing
proposal. This data is important to know especially for high inertia vehicles. An acceptable tractive force
for steady state running may be inadequate for calculating acceleration time. Tractive force minus rolling
resistance is the force left for calculating acceleration on level terrain.
A simple formula for calculating average acceleration or deceleration time on level terrain is:
t = (W) (V) (g) (F)
t = time (seconds)
W = Vehicle weight (lbs.)
V = Vehicle velocity (ft. per sec.) V = (MPH) (1.467)
g = Gravity (32.2 ft. per sec. per sec.)
F = Drawbar pull (lbs.) (tractive force minus rolling resistance)
Available tractive force will change with vehicle speed due to engine power and/or pump and motor
displacement and power train ratio. Calculating acceleration time requires a summation of forces as they
change with vehicle speed. For example, air resistance may be a factor at high vehicle speeds.
Rolling resistance will have an effect on any vehicle’s ability to accelerate as well as the ability to transmit
all available force to the wheel before wheel slip.
Deceleration time is calculated by this same method, if only engine dynamic braking is used. Tractive
force will vary with pump displacement and the capability of the engine to absorb torque.
Large centrifugal type loads or long conveyor belt drives may also have acceleration time requirements
and should not be overlooked during the equipment selection stage.
An example is attached using computer generated (P-Cubed) performance data.
30 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 31

Prime Mover Speed (rpm): 2800 Limiting Pressure (psid): 5500
Input Power (hp): 200 Charge Pressure (psid): 348
Delta System Pressure (psid) 5500 5500 5500 4961 4012 3356 2871 2477 2000 1800
Pump 1 H1P165 - H1, 10.07cir, 18deg Max Angle, 1.59cir charge pump
Pump Drive Ratio: 1.00 Pump Drive Efficiency (%): 100
Swashplate Angle (deg) 2.8 5.0 7.4 9.5 11.7 13.8 15.9 18.0 18.0 18.0
Displacement (cir) 1.50 2.70 4.00 5.20 6.40 7.60 8.80 10.07 10.07 10.07
Displacement (cc ) 24.6 44.2 65.5 85.2 104.9 124.5 144.2 165.0 165.0 165.0
Input Shaft Speed (rpm) 2800 2800 2800 2800 2800 2800 2800 2800 2800 2800
Torque at Shaft (in-lb) 1646 2718 3877 4502 4502 4502 4502 4502 3724 3398
Actual Flow (gpm) 10.3 24.8 40.5 55.8 71.5 87.0 102.3 118.6 119.2 119.5
Power Loss (hp) 33.7 34.8 35.9 32.2 26.1 23.3 22.2 22.2 20.0 19.1
Charge Pump Loss (hp) 6.44 6.44 6.44 6.44 6.44 6.44 6.44 6.44 6.44 6.44
Volumet ric Efficiency (%) 57 76 84 88 92 94 96 97 98 98
Torque Efficiency (%) 87 92 94 94 94 93 92 91 90 89
Overall Efficiency (%) 49 70 78 83 87 88 89 89 87 87
Tot al Pump Flow (gpm) 10.3 24.8 40.5 55.8 71.5 87.0 102.3 118.6 119.2 119.5
Final Drive Case 1
Motor 1 90M100 - Series 90, 6.1cir, 17deg Max Angle, AxialPiston
Rolling Radius (in): 15.00 Coeff. Rolling Resistance: 0.02 Final Drive Ratio: 6.5
Weight Carried by Motor/Wheel (lb): 17500 Rolling Resistance (lb): 350 Final Drive Efficiency (%): 95
Swashplate Angle (deg) 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0
Displacement (cir) 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10
Displacement (cc ) 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0
Shaft Speed (rpm) 162 432 726 1015 1317 1610 1900 2207 2226 2234
Torque at Motor Shaft (in-lb) 5047 5085 5121 4634 3743 3119 2650 2261 1794 1598
Power Loss (hp) 3.5 4.9 5.9 6.0 5.5 5.5 5.8 6.5 6.2 6.1
Volumet ric Efficiency (%) 83 92 95 96 97 98 98 98 99 99
Torque Efficiency (%) 95 95 96 96 96 96 95 94 92 91
Overall Efficiency (%) 79 88 91 93 93 94 93 92 91 90
Torque at Wheel (in-lb) 31162 31401 31619 28613 23113 19260 16367 13962 11078 9865
Wheel Speed (rpm) 25 67 112 156 203 248 292 340 342 344
Trac tive Force (lb) 2077 2093 2108 1908 1541 1284 1091 931 739 658
Motor 2 90M100 - Series 90, 6.1cir, 17deg Max Angle, AxialPiston
Rolling Radius (in): 15.00 Coeff. Rolling Resistance: 0.02 Final Drive Ratio: 6.5
Weight Carried by Motor/Wheel (lb): 17500 Rolling Resistance (lb): 350 Final Drive Efficiency (%): 95
Swashplate Angle (deg) 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0 17.0
Displacement (cir) 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10 6.10
Displacement (cc ) 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0 100.0
Shaft Speed (rpm) 162 432 726 1015 1317 1610 1900 2207 2226 2234
Torque at Motor Shaft (in-lb) 5047 5085 5121 4634 3743 3119 2650 2261 1794 1598
Power Loss (hp) 3.5 4.9 5.9 6.0 5.5 5.5 5.8 6.5 6.2 6.1
Volumet ric Efficiency (%) 83 92 95 96 97 98 98 98 99 99
Torque Efficiency (%) 95 95 96 96 96 96 95 94 92 91
Overall Efficiency (%) 79 88 91 93 93 94 93 92 91 90
Torque at Wheel (in-lb) 31162 31401 31619 28613 23113 19260 16367 13962 11078 9865
Wheel Speed (rpm) 25 67 112 156 203 248 292 340 342 344
Trac tive Force (lb) 2077 2093 2108 1908 1541 1284 1091 931 739 658
Total Vehicle Performance
Vehicle Weight (lb): 35000 Coeff . Rolling Resistanc e: 0.02 Rolling Resistance (lb): 700
Input Power (hp) 73.1 120.8 172.3 200.0 200.0 200.0 200.0 200.0 165.5 151.0
Output Power (hp) 26.0 69.8 118.0 149.3 156.4 159.4 159.8 158.4 126.7 113.2
Power Loss (hp) 47.2 51.0 54.3 50.7 43.6 40.6 40.2 41.6 38.7 37.7
System Efficiency (%) 36 58 69 75 78 80 80 79 77 75
Trac tive Force (lb) 4155 4187 4216 3815 3082 2568 2182 1862 1477 1315
Vehicle Speed (mph) 2.228 5.938 9.971 13.943 18.085 22.106 26.091 30.305 30.564 30.670
Vehicle Speed (fpm) 196 523 877 1227 1591 1945 2296 2667 2690 2699
Drawbar Pull @ 0% Grade (lb) 3455 3487 3516 3115 2382 1868 1483 1162 777 616
Gradeabilit y (%) 9.94 10.03 10.11 8.95 6.83 5.35 4.24 3.32 2.22 1.76
Applications Manual
Selection of Driveline Components
Acceleration
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 31
Page 32

Drawbar pull Speed Speed
Time to
accel
Cumulative
Tim
e
(lb) (mph) (ft/sec) (sec ) (sec) (ft/sec2) g's
3455 0.000 0.000 0.000 0.000 0.000 0.000
3455 2.228 3.267 1.028 1.028 3.179 0.099
3487 5.938 8.709 1.704 2.732 3.208 0.100
3516 9.971 14.625 1.836 4.568 3.235 0.100
3115 13.943 20.449 1.909 6.477 2.866 0.089
2382 18.085 26.525 2.403 8.880 2.192 0.068
1868 22.106 32.422 3.016 11.896 1.719 0.053
1483 26.091 38.266 3.791 15.687 1.364 0.042
1162 30.305 44.447 5.081 20.768 1.069 0.033
777 30.564 44.827 0.425 21.193 0.715 0.022
616 30.670 44.983 0.244 21.437 0.567 0.018
Assumes average force between two speeds
Accel
Applications Manual
Selection of Driveline Components
Acceleration
32 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 33

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
Introduction
The charge pump is a critical component of the hydrostatic transmission. Without charge flow and
charge pressure, the transmission will cease to function.
The primary function of the charge pump is to replenish fluid lost through leakage. In closed circuit
hydrostatic systems, continual internal leakage of high pressure fluid is inherent in the design of the
components used in such a system, and will generally increase as the displacement of the system’s
pumps and motors increase. This make-up fluid from the charge pump is added to the low pressure side
of the closed circuit to keep the lines full of fluid and avoid cavitation at the pump.
In addition to the primary function of replenishing fluid, another major function of the charge pump is to
provide charge pressure to help return the pistons and keep the slippers against the swashplate.
Another function of the charge pump includes providing fluid for servo pistons on those systems having
servo-controlled transmissions. If an Electronic Displacement Control (EDC) is used, the charge pump
provides flow for the operation of a pressure control pilot valve (PCP). Charge flow also provides a
transfer medium for heat dissipation. If the charge pump is used for auxiliary functions, then it must also
be sized to provide this additional flow.
The Charge Pump Functions illustration shows the functions that the charge pump may be required to
provide in a given application.
Charge Pump Considerations
As a rule of thumb, the charge flow requirement for a simple hydrostatic circuit is approximately 10% of
the total displacement of all units in the system. However, this guideline is only an approximation for a
simple system containing high speed piston components. The best way to size a charge pump is to
individually consider each demand imposed on the charge pump. Many of these requirements do not
occur in a simple hydrostatic circuit.
To properly size a charge pump, each of the following factors must be taken into account:
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 33
Page 34

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
•
System Pressure, and rate-of-change of system pressure (ΔP)
•
Input Speed
•
Minimum operational input speed
•
Line size, length, and Effective Bulk Modulus of the fluid
•
Control requirements
•
Non-Danfoss components
•
Type of loading
The System Leakage graph shows how system pressure and input speed affect leakage in the system. The
graph shows that leakage increases with both higher system pressure and higher input speed. Changes
in pressure have a greater effect on leakage than changes in speed. However, the affects due to changes
in speed are greater at higher system pressures.
The Charge Flow and Leakage graph shows why it is important to also know the “minimum pump input
speed”. In addition to the curves showing leakage, the figure includes curves for two charge pump sizes
and their respective flows. (Charge pump #1 has the larger displacement.) The figure shows that for a
given system pressure and charge pump size, system leakage varies at a rate different than that for
charge flow. .
Disregarding for the moment all other charge pump requirements, other than leakage; for a given speed
and pressure (and temperature) a charge pump has a flow curve which intersects the system leakage
curve. At low speeds and high pressures, the potential system leakage may exceed the flow that the
34 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 35

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
charge pump is capable of providing. Furthermore, the charge pump’s Volumetric Efficiency decreases
with decreasing speed. Therefore, even though leakage rate may be greater at high pump input speeds,
the largest charge pump displacement may be required at a reduced input speed. Both extremes of
speed need to be checked for charge flow requirements. In many cases, the low input speed operational
requirement will predominate in the final charge pump size selection.
If a larger charge pump displacement is selected due to a low input speed, then the case flow rate at the
higher speeds will be greater and larger case drain lines may be required to keep case pressure within
limits.
Make sure that all components with potential leakage are considered. Any component connected to the
charge flow (i.e., connected to the low pressure side of the hydrostatic loop) must have its leakage value
included in the total available charge flow. In addition, if these same components also create large drops
in pressure, additional charge flow may be required for cooling.
The maximum flow required for the “control requirements” for servo-controlled pumps is dependent on
the stroke rate and the servo volume. Normally, the flow required is in the range of 2 to 8 lpm [1/2 to 2
gpm]. In any case, servo flow must be included in the charge pump sizing requirement when applicable.
If an Electrical Displacement Control (EDC) is also used, a small amount of additional charge flow is
required, usually 2 to 4 lpm [1/2 to 1 gpm]. This flow rate is needed for operation of the Pressure Control
Pilot Valve (PCP), which regulates the position of the control spool of the displacement control. This
additional flow requirement does not apply to hydraulic or manual displacement controls.
In some applications, special considerations for “cooling flow” requirements are not necessary. Charge
pump flow necessary to make up for leakage may be sufficient for cooling. More often, additional cooling
flow is required and a loop flushing shuttle valve is specified. The charge pump displacement must then
accommodate this additional requirement for charge flow.
The “type of loading” can also require additional charge flow. Particularly, if the load is erratic or cyclical, a
bulk modulus effect can occur. Bulk modulus is the inverse of a material property, Compressibility, which
is defined as the amount that a fluid compresses for a given pressure increase. At low pressures, the
amount of this fluid compression is small, and for this reason fluids are usually thought of as being
“incompressible”. The pressures that can occur in hydrostatic systems, however, are of a magnitude that
the influence of fluid compressibility can be significant. .
The bulk modulus effect occurs when rapid system pressure spikes compress the fluid in the high
pressure side of the system. This results in an instantaneous reduction of the return flow rate into the low
pressure side of the system. This reduction of return flow rate must be provided by the charge system, in
order to maintain proper charge pressure in the low pressure side of the system.
The degree of bulk modulus effect in a given system will depend on several factors. These are, the length
and diameter of the pressure conduits (which determine the volume of fluid subjected to the high
pressure spikes), the rate of rise of the pressure spike, the magnitude of the pressure spike, and the bulk
modulus of the fluid.
Because the bulk modulus effect is so easily overlooked, and because it often results in a tremendous
increase in required charge flow, a section has been included in Fluids and Lubricants 520L0463. An
example calculation is provided below to bring special attention to this topic.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 35
Page 36

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
The required charge pump displacement is the one which is able to provide flow for all of the above
requirements. If the required charge flow exceeds the capability of all available charge pump
displacements, then a gear pump (or some additional charge flow source) must be used. Most Danfoss
pumps include an auxiliary pad to mount gear pumps of various displacements.
After the charge pump displacement is selected, a system must be tested to be certain that charge flow
and pressure requirements are met.
Use the Charge Pump Sizing Worksheet below to size a charge pump. Each of the charge flow
requirements is included. The sum of the required charge flows represents the total flow required if all
charge flow demands need to be met simultaneously. In reality, this is usually not the case. For example,
it may be that for a particular system, a bulk modulus effect may never occur while an auxiliary function is
active. Each application needs to be reviewed carefully to determine how much charge flow is required.
Charge Pump Sizing Worksheet
Leakage:
"Pump" refers to hydrostatic pump, not the charge pump. Actually, only a portion of all inefficiencies can
be attributed to crossport leakage between high and low system loops. Since the charge pump needs to
replace only fluid leaking past the rotating kits (i.e. case flow), the calculations below are conservative. If
case flow values are available, they should be used instead of the equations below.
36 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 37
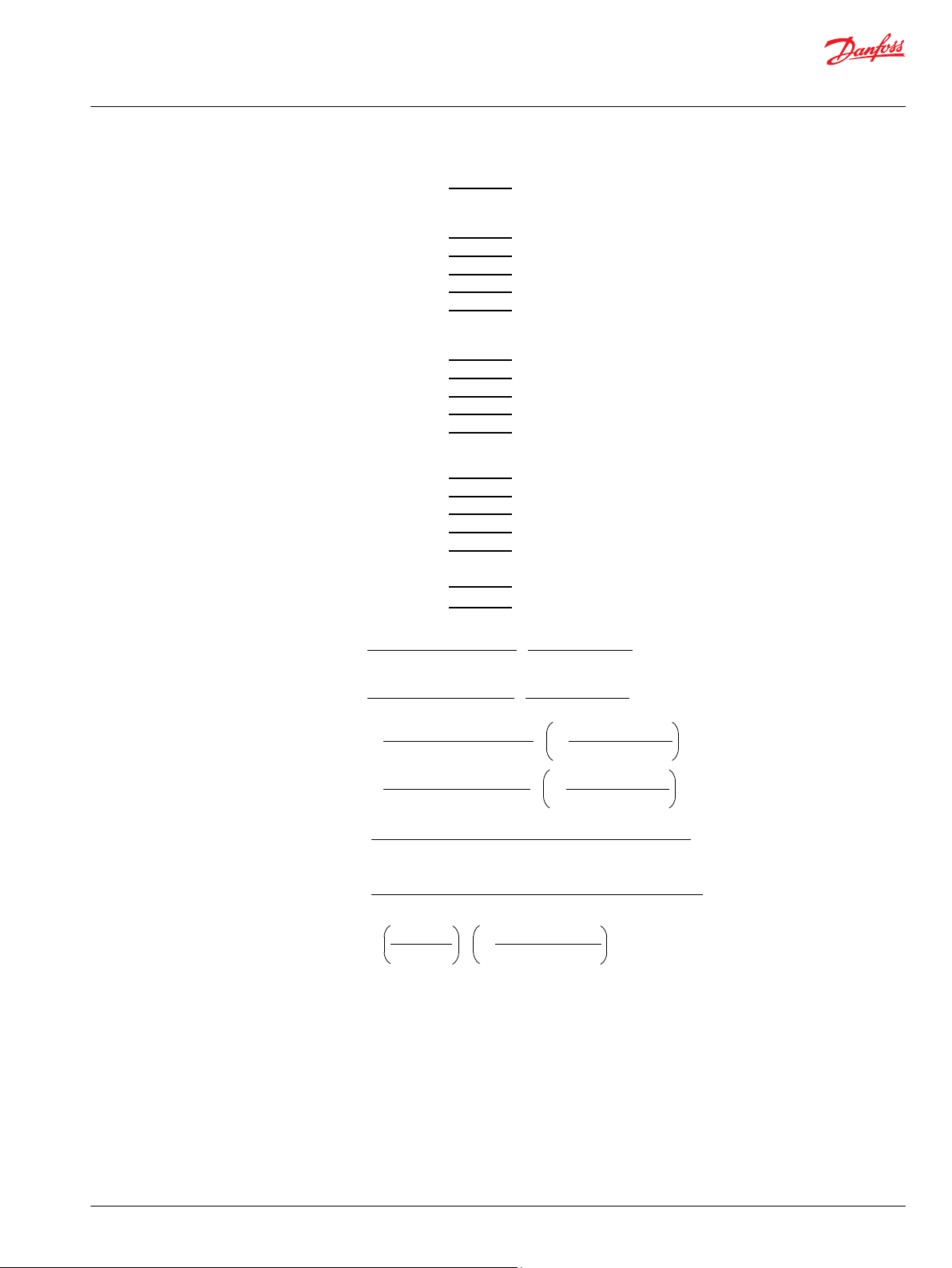
System Pressure psi
Pump
Series
Frame Size
MPRdeepS
Volumetric Efficiency %
mpgegakaeL
Motor #1
Series
Frame Size
MPRdeepS
Volumetric Efficiency %
mpgegakaeL
Motor #2
Series
Frame Size
MPRdeepS
Volumetric Efficiency %
mpgegakaeL
Total Leakage gpm
lpm
( )
(
)
( )
(
)
( )
(
)
( )
(
)
.Efficiency Volumetric of for values
bulletinsn informatio chnicalproduct teConsult :Note
(lpm) gpm ,
100
% ,EfficiencyMotor
1*
Motors #
Flow Pump
geMotorLeaka
,
Motors # * /rev
3
cmDisp,Motor
%/100 ,EfficiencyMotor /3cm 1000* lpm Flow, Pump
SpeedMotor
,
Motors # * /rev
3
inDisp,Motor
%/100 ,EfficiencyMotor /3in 231* gpm Flow, Pump
SpeedMotor
lpm ,
100
% ,Efficiency Pump
1*
cc/liter 1000
RPM Pump*cc Disp, Pump
Leakage Pump
gpm ,
100
% ,Efficiency Pump
1*
/gal
3
in 231
RPM Pump*cir Disp, Pump
Leakage Pump
lpm ,
100
% ,Efficiency Pump
*
cc/liter 1000
RPM Pump*cc Disp, Pump
Flow Pump
gpm ,
100
% ,Efficiency Pump
*
/gal
3
in 231
RPM Pump*cir Disp, Pump
Flow Pump
−=
=
−=
−=
=
=
RPM
liter
RPM
gal
Applications Manual
Selection of Driveline Components
Charge Pump Sizing
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 37
Page 38

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
38 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 39

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 39
Page 40

w/o
1.2 mm0.8 mm0.6
mm
w/o 1.2 mm 0.8 mm 0.6 mm
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
w/o
1.2 mm0.8 mm0.6
mm
w/o 1.2 mm 0.8 mm 0.6 mm
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
w/o 1.2 mm 0.8 mm 0.6 mm
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
60cc
Orifice diame ter
0.40
0.71
1.50
2.70
0.14
0.30
0.74
1.32
0.30
0.61
1.50
2.80
0.19
0.34
0.73
1.16
0.11
0.23
0.57
1.00
210 bar
0.21
0.52
1.00
1.56
210 bar
0.14
0.26
0.58
0.85
30 bar
0.22
0.47
1.13
400 bar
0.14
0.27
0.54
0.90
110cc
Orifice diame ter
0.20
0.33
0.51
80cc
Orifice diame ter
30 bar
0.15
0.25
0.45
0.71
400 bar
0.13
0.21
0.46
0.65
0.15
1.70
30 bar
0.56
1.40
1.94
3.60
0.44
1.13
1.89
3.59
210
bar
0.22
0.45
0.80
1.38
0.21
0.41
0.92
1.67
400
bar
0.22
0.33
0.58
0.97
0.22
0.31
0.69
1.25
160cc
Orifice diame ter
30 bar
0.48
1.32
2.62
4.36
0.50
1.30
3.03
4.92
210
bar
0.27
0.68
1.25
2.10
0.28
0.71
1.61
2.57
400
bar
0.31
0.50
0.90
1.47
0.24
0.56
1.24
2.04
250cc
Orifice diame ter
30 bar
0.55
1.56
3.28
5.59
0.62
1.46
3.52
5.94
210
bar
0.32
0.72
1.38
2.21
0.31
0.72
1.64
2.73
400
bar
0.33
0.53
0.97
1.50
0.25
0.55
1.24
2.03
P108905
2 Position Control: Step Response, seconds
Step response has been tested with a 2-Position control (de-energized max. angle) at delta p = 30 bar. 210 bar and 400 bar and orifices for Servo M4 & M5
For Max. to Min., current went from zero to max, then back to zero current.
Applications Manual
Selection of Driveline Components
Charge Pump Sizing
40 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 41
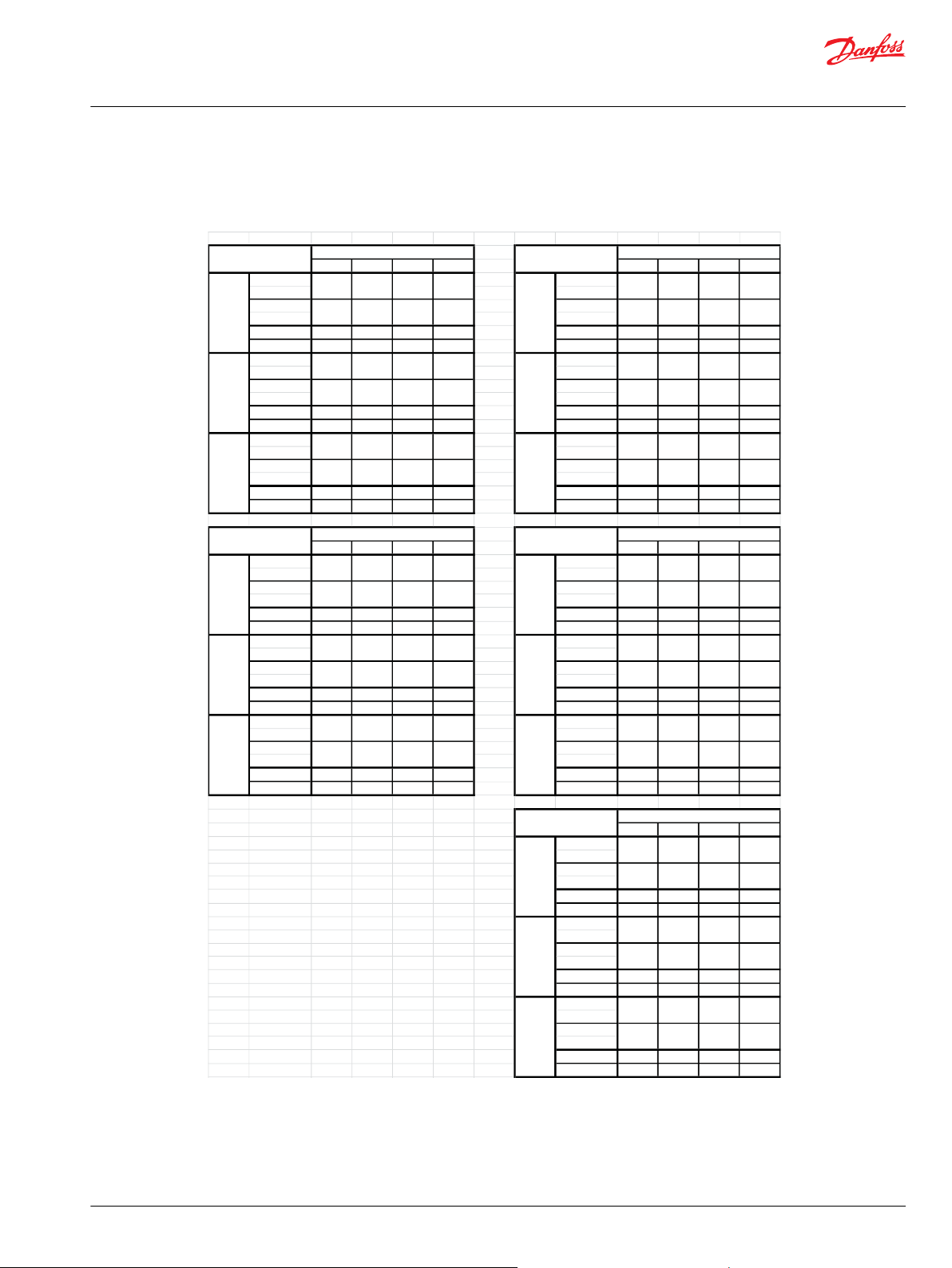
w/o 1.2 mm 0.8 mm 0.6 m m w/o 1.2 mm 0.8 mm 0.6 m m
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.20 0.25 0.43 0.68 50% 20% (s) 0.20 0.34 0.69 1.11
20% 50% (s) 0.21 0.27 0.42 0.62 20% 50% (s) 0.18 0.34 0.68 1.16
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.20 0.19 0.27 0.39 50% 20% (s) 0.18 0.16 0.29 0.45
20% 50% (s) 0.20 0.20 0.24 0.32 20% 50% (s) 0.19 0.20 0.37 0.61
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.23 0.21 0.24 0.33 50% 20% (s) 0.33 0.31 0.21 0.33
20% 50% (s) 0.21 0.20 0.22 0.27 20% 50% (s) 0.24 0.18 0.33 0.56
w/o 1.2 mm 0.8 mm 0.6 m m w/o 1.2 mm 0.8 mm 0.6 m m
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.17 0.30 0.50 0.89 50% 20% (s) 0.27 0.48 0.84 1.45
20% 50% (s) 0.16 0.37 0.53 0.95 20% 50% (s) 0.35 0.48 0.90 1.52
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.18 0.18 0.20 0.34 50% 20% (s) 0.43 0.31 0.45 0.67
20% 50% (s) 0.17 0.20 0.25 0.43 20% 50% (s) 0.49 0.38 0.53 0.81
Max Min (s) Max Min (s)
(100% 20%) (100% 20%)
Min Max (s) Min Max (s)
(20% 100%) (20% 100%)
50% 20% (s) 0.17 0.20 0.15 0.24 50% 20% (s) 0.56 0.39 0.35 0.50
20% 50% (s) 0.13 0.20 0.19 0.33 20% 50% (s) 0.57 0.43 0.45 0.68
w/o 1.2 mm 0.8 mm 0.6 m m
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
50% 20% (s) 0.28 0.53 0.98 1.63
20% 50% (s) 0.23 0.48 1.00 1.76
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
50% 20% (s) 0.42 0.43 0.46 0.66
20% 50% (s) 0.55 0.92
Max Min (s)
(100% 20%)
Min Max (s)
(20% 100%)
50% 20% (s) 0.55 0.50 0.35 0.49
20% 50% (s) 0.48 0.78
060cc
Orifice di ameter
30 bar
0.30
0.47
0.96
1.59
0.04
0.50
0.95
1.37
210 bar
0.24
0.31
0.53
0.84
0.23
0.32
0.46
0.65
400 bar
0.28
0.27
0.43
0.65
0.24
0.26
0.38
0.49
080cc
Orifice di ameter
30 bar
0.36
0.78
1.39
2.28
0.30
0.59
1.45
2.35
210 bar
0.16
0.40
0.56
0.97
0.27
0.31
0.67
1.16
400 bar
0.19
0.34
0.40
0.69
0.32
0.25
0.50
0.86
110cc
Orifice di ameter
30 bar
0.51
1.27
1.76
3.27
0.40
1.03
1.72
3.26
210 bar
0.20
0.41
0.73
1.25
0.19
0.37
0.84
1.52
400 bar
0.20
0.30
0.53
0.88
0.20
0.28
0.63
1.14
160cc
Orifice di ameter
30 bar
0.52
1.15
2.08
3.58
0.42
1.03
2.12
3.74
210 bar
0.40
0.58
1.05
1.64
0.28
0.58
1.15
1.91
400 bar
0.53
0.49
0.75
1.18
0.24
0.46
0.87
1.43
250cc
Orifice di ameter
30 bar
0.58
1.29
3.12
4.68
0.50
1.14
2.89
4.93
210 bar
0.24
0.55
1.12
1.74
0.24
0.56
1.27
2.27
400 bar
0.19
0.41
0.82
1.24
0.19
0.43
0.97
1.72
P108906
Proportional Control: Step Response, seconds
Step response has been tested with a Proportional control (de-energized max. angle) at delta p = 30 bar. 210 bar and 400 bar and orifices for Servo M4 & M5
For Max. to Min., current went from zero to max, then back to zero current.
Applications Manual
Selection of Driveline Components
Charge Pump Sizing
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 41
Page 42

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
42 | © Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
Page 43

Applications Manual
Selection of Driveline Components
Charge Pump Sizing
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304 | 43
Page 44

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions Trading
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 3418 5200
Products we offer:
Comatrol
www.comatrol.com
Turolla
www.turollaocg.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
Bent Axis Motors
•
Closed Circuit Axial Piston
•
Pumps and Motors
Displays
•
Electrohydraulic Power
•
Steering
Electrohydraulics
•
Hydraulic Power Steering
•
Integrated Systems
•
Joysticks and Control
•
Handles
Microcontrollers and
•
Software
Open Circuit Axial Piston
•
Pumps
Orbital Motors
•
PLUS+1® GUIDE
•
Proportional Valves
•
Sensors
•
Steering
•
Transit Mixer Drives
•
Danfoss Power Solutions is a global manufacturer and supplier of high-quality hydraulic and
electronic components. We specialize in providing state-of-the-art technology and solutions
that excel in the harsh operating conditions of the mobile off-highway market. Building on
our extensive applications expertise, we work closely with our customers to ensure
exceptional performance for a broad range of off-highway vehicles.
We help OEMs around the world speed up system development, reduce costs and bring
vehicles to market faster.
Danfoss – Your Strongest Partner in Mobile Hydraulics.
Go to www.powersolutions.danfoss.com for further product information.
Wherever off-highway vehicles are at work, so is Danfoss. We offer expert worldwide support
for our customers, ensuring the best possible solutions for outstanding performance. And
with an extensive network of Global Service Partners, we also provide comprehensive global
service for all of our components.
Please contact the Danfoss Power Solution representative nearest you.
Local address:
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This also applies to products
already on order provided that such alterations can be made without changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
©
Danfoss | July 2015 BLN-9885 | BC00000245en-US0304
 Loading...
Loading...