

Page 1

User Manual
PLUS+1® Compliant
OX024-x10 Function Block
www.danfoss.com
Page 2
User Manual
PLUS+1® Compliant OX024-x10 Function Block
Revision history Table of revisions
Date Changed Rev
July 2018 Rebranding 0101
July 2016 BA
2 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 3

User Manual
PLUS+1® Compliant OX024-x10 Function Block
Contents
OX024-x10 Function Block
Configure CAN...................................................................................................................................................................................4
Inputs – Power Supply....................................................................................................................................................................5
Inputs – CAN Shield......................................................................................................................................................................... 5
Inputs – DOut Output Status........................................................................................................................................................6
Inputs – DOut/PVG Pwr Output Status.....................................................................................................................................6
Inputs – MFOut Output Status.....................................................................................................................................................6
Outputs – Group...............................................................................................................................................................................6
Outputs – Digital Outputs.............................................................................................................................................................7
Outputs – MultiFunction Outputs..............................................................................................................................................7
Inputs – CAN.......................................................................................................................................................................................8
Connections and Signal Overview............................................................................................................................................. 9
Configure Communications Between Controller and I/O Module.............................................................................. 10
Variable Addressing Mode....................................................................................................................................................10
Predefined Addressing Mode.............................................................................................................................................. 10
Fixed Addressing Mode..........................................................................................................................................................11
Volatile Parameters..................................................................................................................................................................11
Non-Volatile Parameters........................................................................................................................................................11
Timing Configurations............................................................................................................................................................11
CAN Bus Load.............................................................................................................................................................................11
CAN Message Identifiers..............................................................................................................................................................11
Troubleshooting.............................................................................................................................................................................12
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 3
Page 4
User Manual
PLUS+1® Compliant OX024-x10 Function Block
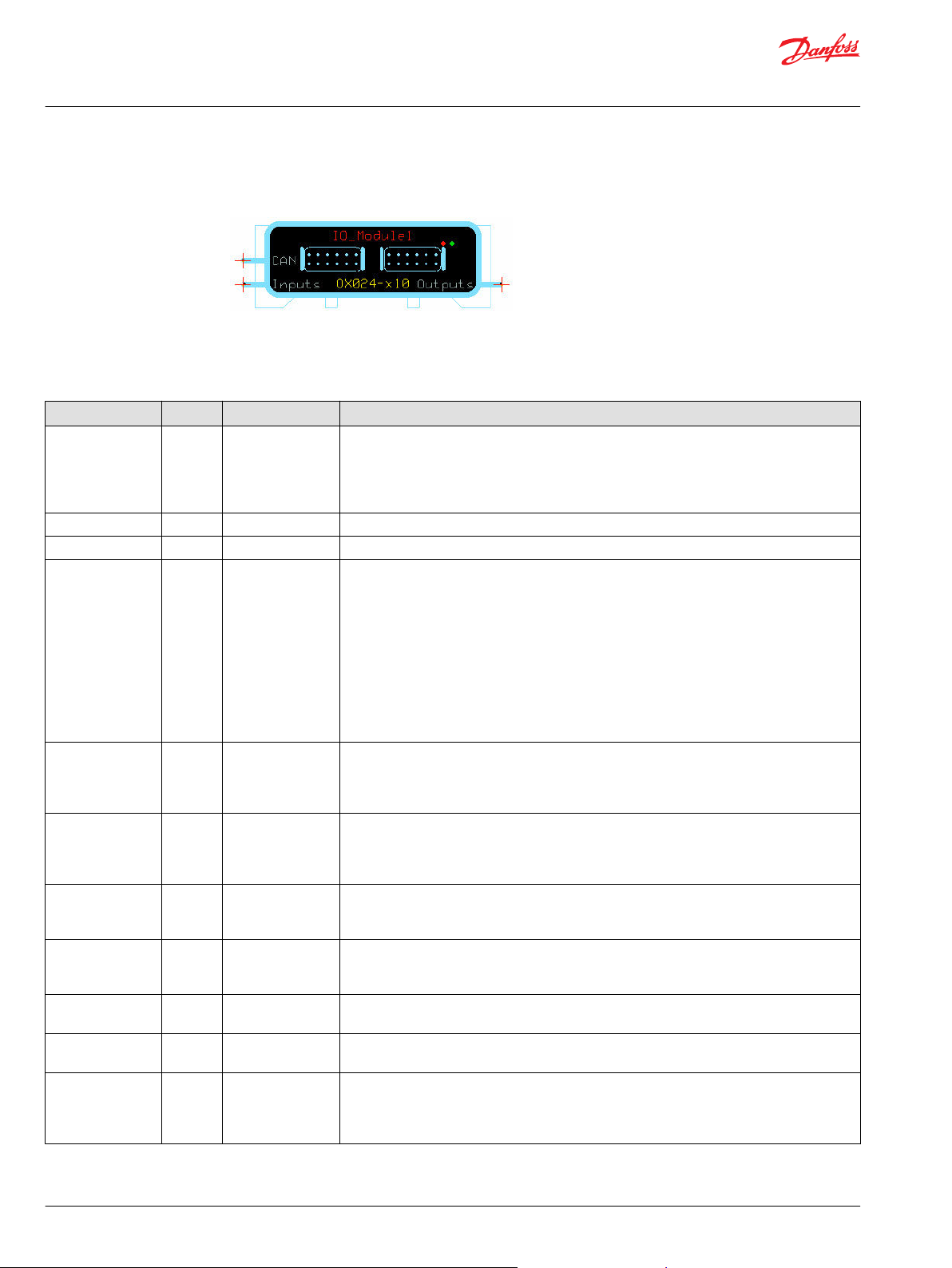
OX024-x10 Function Block
The IO_Module function block enables communication with the OX024-x10 expansion module so that
additional outputs can be used.
Configure CAN
Set up CAN so that CAN messages can be transmitted to and from the I/O module.
Input Type Range Description
CAN Bus —— In the GUIDE template, identify the CAN bus that contains CAN messages to and from the I/O
module. Route this bus to the CAN input on this function block.
CAN messages sent from the I/O module to the function block contain information about the
I/O modules’ inputs, outputs and configuration. CAN messages sent to the I/O module from the
function block set outputs and configurations.
Baudrate U32 50000–1000000 The Baudrate is the speed of the CAN Port.
Port Port —— Assigns the hardware CAN port that transmits the data.
AddrMode U8 0–2 I/O module addressing mode.
0: Variable ID addressing mode. The I/O module Tx and Rx message identifiers are determined
by the I/O module measuring the voltage on its CAN shield input and matching that value with a
predefined range and matching identifiers in the I/O Module CAN Message Identifiers table. The
CAN messages use 11 bit identifiers in this mode.
1: Predefined ID addressing mode. The I/O module Tx and Rx message identifiers are
determined by Node/N1. These identifiers are selected by matching to the N1 value in the I/O
Module CAN Message Identifiers table. The CAN messages use 11 bit identifiers in this mode.
2: Fixed ID addressing mode. The I/O module Tx and Rx message identifiers are determined
directly by setting Tx ID and Rx ID. The CAN messages use either 11 bit or 29 bit identifiers in
this mode, as determined by Frame.
Tx ID U32 0x00–0x1FFFFFFF Tx ID is the CAN message identifier used by the function block for sending messages to the I/O
module when using the Fixed ID addressing mode.
When using the service tool to configure the I/O module, this value corresponds to the Rx
parameter saved on the I/O module.
Rx ID U32 0x00–0x1FFFFFFF Rx ID is the CAN message identifier used by the function block for receiving messages from the
I/O module when using the Fixed ID addressing mode.
When using the service tool to configure the I/O module, this value corresponds to the Tx
parameter saved on the I/O module.
Frame U8 0–1 Sets CAN message identifier length when using the Fixed ID addressing mode.
0: 11 bit ID
1: 29 bit ID
Node/N1 U8 0–15 The KWP2000 node address used for communications between the I/O module and the PLUS+1
Service Tool is Node/N1 x 8. For Variable ID addressing mode and Predefined addressing mode
this value also determines the CAN.
Net U8 0–255 KWP2000 network used for communications between the I/O module and the PLUS+1® Service
Tool.
Enable BOOL —— Enables the function block to send CAN messages to the I/O module. An F/T transition or T at
power up starts initialization.
Enbl_RecheckCRC BOOL —— Determines if the I/O module CRC is periodically checked to ensure the device’s configuration
matches the function block’s configuration.
T: The CRC is requested from the I/O module and compared every 5 seconds.
F: The CRC is only requested from the I/O module during initialization.
®
4 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 5
User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Input Type Range Description
Enbl_ResetTest BOOL —— Determines if the I/O module volatile memory is periodically checked to ensure the device has
not lost volatile configuration information due to temporary loss of power.
T: Volatile information is requested from the I/O module and compared every 1 second.
F: Volatile memory is not checked after initialization and temporary loss of power to the I/O
module may go undetected.
BusRecvryTm U16 0–65535 BusRecvryTm sets the time the I/O module CAN port waits after going into a “bus off” condition
before attempting to go back on the bus.
1000 is 1 ms.
DriverRecvryTm U16 0–65535 DriverRecvryTm sets the time the I/O module CAN port waits after a CAN error causes the
driver to reset before attempting to go back on the bus.
1000 is 1 ms.
RepTime_Supply U16 0–65535 Determines how often the Power, Sensor Power, and CAN Shield input values are transmitted
from the I/O module.
1000 is 1 ms.
RepTime_Status U16 0–65535 Determines how often the Output Status values are transmitted from the I/O module.
1000 is 1 ms.
RepTime_Outputs U16 0–65535 Determines how often the Output values are transmitted to the I/O module.
1000 is 1 ms.
TimeOut_Outputs U16 0–65535 Sets the maximum time allowed between commands for each output. If a command is not
received by the I/O module before the TimeOut_Outputs elapses then that output reverts to its
default output value and default pin configuration.
1000 is 1 ms.
Inputs – Power Supply
The status of power supply input on the connector and pin C1p02 is described.
Signal Type Direction Range Description
C1p02_Pwr Bus —— ——
AnIn U16 Input 0 – 32767 Analog input AD count.
Due to CAN message optimization, this value is approximated by scaling the Volt
signal.
Volt U16 Input 0 – 36000 Analog input voltage
100 is 100 mV.
Updated BOOL Input —— True when the AnIn and Volt signals are refreshed.
Inputs – CAN Shield
The status of analog and CAN0 shield inputs on the connector and pin C1p05 is described.
Signal Type Direction Range Description
C1p05_AnIn Bus —— ——
AnIn U16 Input 0 – 32767 Analog input AD count.
Due to CAN message optimization, this value is approximated by scaling the Volt
signal.
Volt U16 Input 0 – 5250 Analog input voltage.
100 is 100 mV.
Updated BOOL Input —— True when the AnIn and Volt signals are refreshed.
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 5
Page 6

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Inputs – DOut Output Status
The input status of output pins on connectors and pins C1p06, C1p07, C1p08, and C1p09 is described.
Signal Type Direction Range Description
Pin _Status Bus —— ——
PinStatus U16 Input 0 – 1 Output pin status
0: OK
1: Overload detected. Only detected when DigOut = True.
Updated BOOL Input —— True when the PinStatus signal is refreshed.
Inputs – DOut/PVG Pwr Output Status
The input status of output voltage and output status on connectors and pins C1p10 and C1p11 is
described.
Signal Type Direction Range Description
Pin _Status Bus —— ——
Volt U16 Input 0 – 36000 Output pin voltage
100 is 100 mV.
PinStatus U16 Input 0 – 1 Output pin status
0: OK
1: Overload detected . Only detected when DigOut = True.
Updated BOOL Input —— True when the Volt and PinStatus signals are refreshed.
Inputs – MFOut Output Status
The input status of multifunction outputs on connectors and pins C1p12, C2p01, C2p02, C2p03, C2p04,
C2p05, C2p06, C2p07, C2p08, and C2p09 is described.
Signal Type Direction Range Description
Pin _Status Bus —— ——
FeedBackValue S16 Input -32768 –
32767
PinStatus U16 Input 0 – 2 Output pin status.
Updated BOOL Input —— True when the FeedBackValue and PinStatus signals are refreshed.
Measured current flowing through the output pin.
1000 is 100 mA.
0: OK.
1: Incorrect pin configuration.
2: Overload detected.
Outputs – Group
The status for two groups of outputs is described.
A pin group is for C1p12, C2p01, C2p02 and C2p03.
Another pin group is for C2p05, C2p06, C2p07 and C2p08.
6 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 7

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Signal Type Direction Range Description
CurChgLim U16 Output 22 – 333 CurChgLim defines the maximum rate of change of current for the group of
outputs. This parameter is only used when the output’s PinConfig is 4 or 5.
111 is 11.1 mA/ms.
DitherFreq U16 Output 40 – 250 Sets dither frequency when output dither is enabled for the group.
40 is 40 Hz.
ReqFreq U16 Output 30 – 4000 Sets the base PWM frequency for the group.
30 is 30 Hz.
Outputs – Digital Outputs
The output status of digital outputs on connectors and pins C1p06, C1p07, C1p08, C1p09, C1p10, and
C1p11 is described.
Signal Type Direction Range Description
Pin _MFOut Bus —— ——
Config Bus —— ——
DefOutputValue BOOL Output —— Default Output value used when the IO module has not received an output
command within the previous TimeOut_Output.
DigOut BOOL Output —— Output command
Outputs – MultiFunction Outputs
The output status of multifunction outputs on connectors and pins C1p12, C2p01, C2p02, C2p03, C2p04,
C2p05, C2p06, C2p07, C2p08, and C2p09 is described.
Signal Type Direction Range Description
Pin _MFOut Bus —— ——
Config Bus —— ——
PinConfig U16 Output 0 – 8 Output pin configuration
0: Digital Output, Push/Pull
1: Digital Output, Sourcing
2: Digital Output, Sinking
3: PWM Output, 0 – 10000 [0.01% positive duty]
4: PWM Output, 0 – 30000 [0.1 mA]
5: PWM Output, 0 – 30000 [0.1 mA] Dither Enabled
6: PVE Output, 0 – 10000 [0.01% of PVE Power]
7: HBridge Output, 0 – 10000 [0.01% positive duty]
8: PWM Output 0 – 30000 [0.1 mA] current control bidirectional
DefPinConfig U16 Output 0 – 8 Default Output pin configuration used at startup before the master/slave
communication initiates.
0: Digital Output, Push/Pull
1: Digital Output, Sourcing
2: Digital Output, Sinking
3: PWM Output, 0 – 10000 [0.01% positive duty]
4: PWM Output, 0 – 30000 [0.1 mA]
5: PWM Output, 0 – 30000 [0.1 mA] Dither Enabled
6: PVE Output, 0 – 10000 [0.01% of PVE Power]
7: HBridge Output, 0 – 10000 [0.01% positive duty]
8: PWM Output 0 – 30000 [0.1 mA] current control bidirectional
DefOutputValue U16 Output 0 – 10000 or
0 – 30000
Default Output value used when the I/O module has not received an output
command within the previous TimeOut_Output. The output range depends on
PinConfig.
1000 is 10.00%.
or
1000 is 100.0 mA.
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 7
Page 8

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Signal Type Direction Range Description
DigOut BOOL Output —— Output command if PinConfig = 0, 1 or 2.
OutputValue U16 Output 0 – 10000 or
0 – 30000
DitherAmp U16 Output 0 – 5000 Amplitude of dither applied when dither is enabled.
Inputs – CAN
The following signals provide diagnostics and status about CAN communications with the I/O module.
The signals appear in both the Input and Output buses.
Signal Type Direction Range Description
CAN Bus —— ——
CommStatus U16 Input 1 – 8, 255 Current status of communication with the I/O module.
Configured BOOL Input —— True when communication is established and the Outputs are enabled.
Incompat_HW BOOL Input —— The responding hardware does not match the I/O module application layer part
Incompat_Protocl BOOL Input —— The responding hardware uses an incompatible version of the I/O protocol. Either
ProtocolVersion U16 Input 0 – 65535 I/O Communication Protocol Version used by the I/O module hardware.
Output command if PinConfig = 3, 4, 5, 6, 7 or 8. The output range depends on
PinConfig.
1000 is 10.00%.
or
1000 is 100.0 mA.
1000 is 100.0 mA.
0: CAN message transmission is disabled. Outputs disabled.
1: Protocol Version request is being sent to the I/O module. Outputs disabled.
2: Waiting for protocol version and hardware information response Outputs
disabled.
3: The function block is sending all stored parameters to the I/O module. Outputs
disabled.
4: The function block is sending all volatile parameters to the I/O module. Outputs
disabled.
5: CRC request is being sent to the I/O module. Outputs are disabled except for
RecheckCRC.
6: Waiting for CRC response. Outputs are disabled except for RecheckCRC.
7: The I/O module is properly configured and in the normal operational state.
Outputs are enabled.
8: The function block’s output pin configurations have changed. The new
configurations are being transmitted to the I/O module. Outputs are disabled.
9 – 254: Undefined.
255: Incompatible protocol or hardware. Outputs are disabled and communication
to the I/O module is stopped.
number expected by the function block. No more messages are sent to the I/O
module.
the hardware’s firmware should be updated or a newer version of the function block
is required for proper communication. No more messages are sent to the I/O
module.
This version function block requires I/O hardware using protocol version 2.00 to 2.99.
200 is version 2.00.
8 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 9

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Connections and Signal Overview
When more than one I/O module is used in an application, each block requires unique Inputs and
Outputs bus connections. For example, IO_Bus, IO_Bus1, IO_Bus2 are needed.
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 9
Page 10

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Configure Communications Between Controller and I/O Module
Several parameters control the communication between the controller and the I/O module.
The I/O module hardware has two LEDs. The red LED blinks when the I/O module transmits a message.
The green LED blinks when the I/O module receives a message. Both LEDs may appear to be constantly
on, because message transmissions repeat frequently.
If communication is lost, the I/O module green LED blinks at a slow and constant rate.
Variable Addressing Mode
Variable addressing mode is the default addressing mode of the I/O module, but it is not the default
mode for the function block.
When the device is powered, the CAN shield input voltage is measured. Communication parameters are
determined from the I/O Module CAN Message Identifiers table. For proper communication between the
function block and the I/O module, the corresponding N1 value from the table must be entered in the
function block and AddrMode must be set to 0.
Every time the device is powered, the CAN shield input voltage must be within the same N1 range for the
function block and device to reach the Configured status. After the device is powered, the CAN shield
input voltage has no effect on communication.
Predefined Addressing Mode
Predefined addressing mode is the default addressing mode for the function block, but it is not the
default mode for the I/O module.
In this mode, the I/O module reads the N1 value stored in non-volatile memory (EEPROM).
Because the function block and the I/O module use different default addressing modes, as long as the N1
value determined in the I/O module matches the N1 value set in the function block, the device is
configured using predefined addressing mode during all subsequent power cycles. As such, the proper
CAN shield voltage is only required during the first device initialization.
If setting the CAN shield voltage is not practical, use the PLUS+1® Service Tool to set the AddrMode to 1
and to set the required N1 value.
10 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 11

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
Fixed Addressing Mode
Fixed addressing mode allows for any pair of CAN message identifiers to be used for I/O module
communication.
In this mode, the I/O module relies on the RX_ID, TX_ID, and Frame parameters for communication with
the function block. Use the PLUS+1® Service Tool to set the proper values to match the function block and
to set the AddrMode.
Volatile Parameters
Once initial communication is established, all volatile parameter configuration messages are sent to the
I/O module.
Non-Volatile Parameters
After volatile parameters are configured, the function block sends a request for the configuration CRC to
the I/O module.
If this number matches the locally calculated value, then the configurations stored on the I/O module
match those set in the function block. If the numbers do not match, then all configuration commands are
sent and the CRC is requested again.
You can use the PLUS+1® Service Tool to access all non-volatile parameters on the I/O module.
Timing Configurations
Timing for messages to and from the I/O module is established after all other configurations are sent.
CAN Bus Load
Adjust the average amount of message transmissions on the CAN bus to allow for bursts and other
increased message transmission situations.
Any CAN bus has a maximum message transmission capacity. So, to allow for situations that can cause
increases in messages, minimize the CAN bus load.
The CAN bus load is the average amount of message transmission on a CAN bus. Use the PLUS+1® CG150
USB/CAN gateway and CANKing software to view CAN bus loads.
PLUS+1® I/O modules communicate with their associated controllers over a CAN bus. System developers
can adjust I/O module RepTime and TimeOut parameters to manage CAN bus loading. Increasing these
times reduces the CAN bus load. Decreasing these times increases CAN bus load.
CAN Message Identifiers
The function block uses the following message identifiers to enable communication between the
controller and the I/O module.
I/O Module CAN Message Identifiers
CAN Shield Voltage [mV] N1 KWP2000 Node Tx ID Rx ID
0 – 299 0 0 0x180 0x300
300 – 599 1 8 0x188 0x308
600 – 899 2 16 0x190 0x310
900 – 1199 3 24 0x198 0x318
1200 – 1499 4 32 0x1A0 0x320
1500 – 1799 5 40 0x1A8 0x328
1800 – 2099 6 48 0x1B0 0x330
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 11
Page 12

User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
I/O Module CAN Message Identifiers (continued)
CAN Shield Voltage [mV] N1 KWP2000 Node Tx ID Rx ID
2100 – 2399 7 56 0x1B8 0x338
2400 – 2699 8 64 0x1C0 0x340
2700 – 2999 9 72 0x1C8 0x348
3000 – 3299 10 80 0x1D0 0x350
3300 – 3599 11 88 0x1D8 0x358
3600 – 3899 12 96 0x1E0 0x360
3900 – 4199 13 104 0x1E8 0x368
4200 – 4499 14 112 0x1F0 0x370
4500 – 15 120 0x1F8 0x378
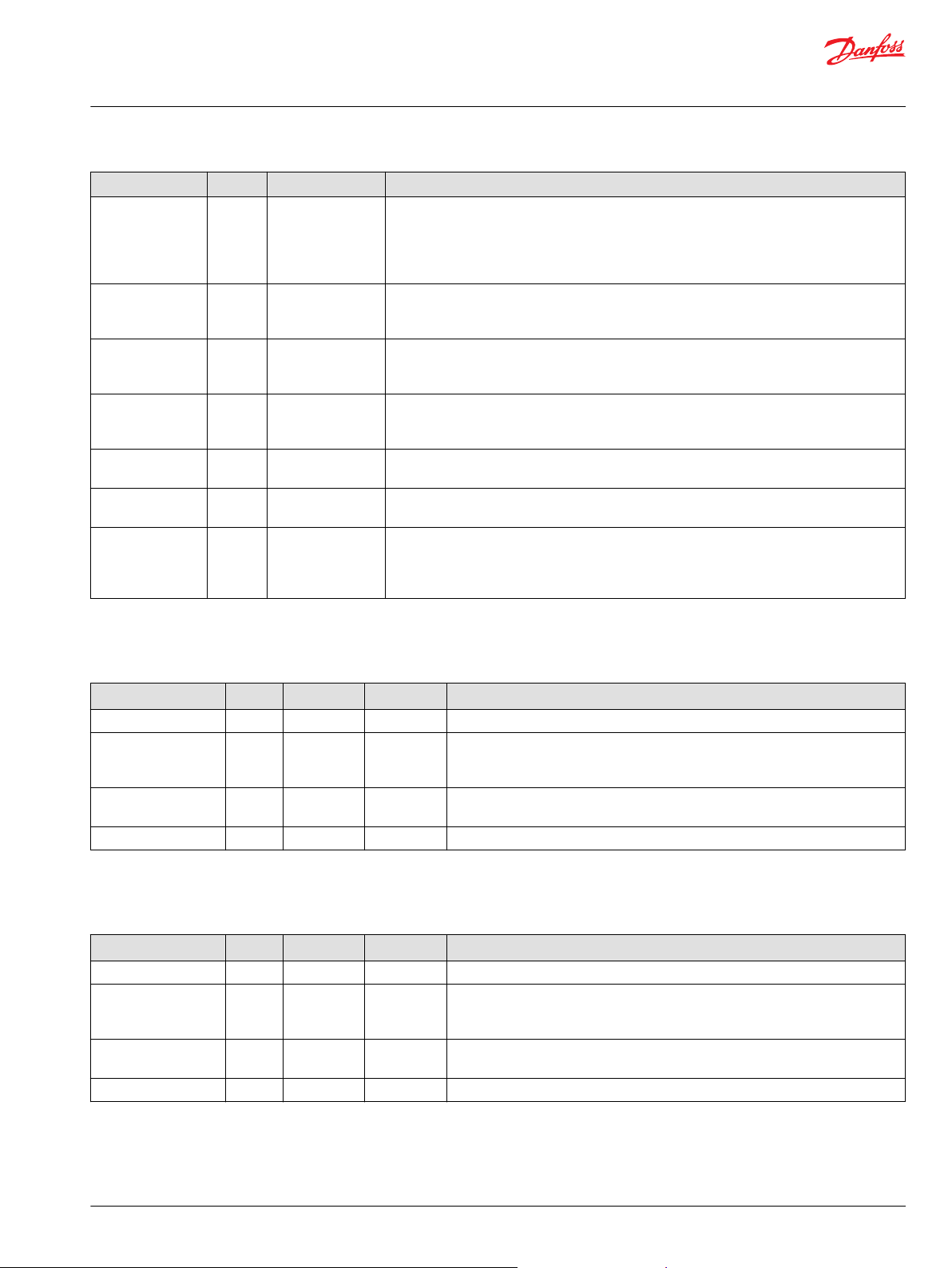
Troubleshooting
Find out how to ensure the outputs of the I/O module function properly, and make sure your changes to
parameters are saved.
Problem Cause Solution
Outputs of I/O module do not
function as expected. Configured is
always false.
When changing the I/O module ’s
parameters with the PLUS+1® Service
Tool, those changes are not properly
saved.
The I/O module is using variable address mode
and the CAN shield voltage does not fall within
the range matching the function block’s N1
value.
Incompat_HW is true. The function block is
communicating with a device other than the I/O
module.
Incompat_Protocl is true. The firmware on the
I/O module uses a version of the I/O Protocol less
than 2.00.
Incompat_Protocl is true. The firmware on the
I/O module uses a version of the I/O Protocol
later than version 2.99.
A function block detects the changes and resets
the parameters to the values specified in the
function block.
Use the I/O Module CAN Message Identifiers table to find the
correct voltage and ensure it is applied to the CAN shield
during power up.
Change the N1 value in the function block to match the
voltage applied to the CAN shield.
Ensure the proper addressing mode and corresponding
communication parameters are set on both the I/O module
and the function block.
It is possible the I/O module is correctly configured, but a
second I/O module has a similar configuration. Review
configuration and make changes to the other I/O modules.
Update the I/O module with the latest firmware.
Replace the function block by using the latest available
HWD file.
Disconnect the function block’s controller before making
parameter changes. If the changes do not result in different
CAN message identifiers for the I/O module, then
reconnecting the controller results in the parameters
reverting back to the values set in the function block.
12 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 13

User Manual
PLUS+1® Compliant OX024-x10 Function Block
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 13
Page 14

User Manual
PLUS+1® Compliant OX024-x10 Function Block
14 | © Danfoss | July 2018 11063395 | AQ00000104en-US0101
Page 15

User Manual
PLUS+1® Compliant OX024-x10 Function Block
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101 | 15
Page 16

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions Trading
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 3418 5200
Products we offer:
Comatrol
www.comatrol.com
Turolla
www.turollaocg.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
Bent Axis Motors
•
Closed Circuit Axial Piston
•
Pumps and Motors
Displays
•
Electrohydraulic Power
•
Steering
Electrohydraulics
•
Hydraulic Power Steering
•
Integrated Systems
•
Joysticks and Control
•
Handles
Microcontrollers and
•
Software
Open Circuit Axial Piston
•
Pumps
Orbital Motors
•
PLUS+1® GUIDE
•
Proportional Valves
•
Sensors
•
Steering
•
Transit Mixer Drives
•
Danfoss Power Solutions is a global manufacturer and supplier of high-quality hydraulic and
electronic components. We specialize in providing state-of-the-art technology and solutions
that excel in the harsh operating conditions of the mobile off-highway market. Building on
our extensive applications expertise, we work closely with our customers to ensure
exceptional performance for a broad range of off-highway vehicles.
We help OEMs around the world speed up system development, reduce costs and bring
vehicles to market faster.
Danfoss – Your Strongest Partner in Mobile Hydraulics.
Go to www.powersolutions.danfoss.com for further product information.
Wherever off-highway vehicles are at work, so is Danfoss. We offer expert worldwide support
for our customers, ensuring the best possible solutions for outstanding performance. And
with an extensive network of Global Service Partners, we also provide comprehensive global
service for all of our components.
Please contact the Danfoss Power Solution representative nearest you.
Local address:
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This also applies to products
already on order provided that such alterations can be made without changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
©
Danfoss | July 2018 11063395 | AQ00000104en-US0101
 Loading...
Loading...