

Page 1
MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® AQUA Drive FC 202
0,25-90 kW
www.vlt.dk
Page 2
Page 3
Indholdsfortegnelse Design Guide
Indholdsfortegnelse
1 Introduktion
1.1 Formålet med Design Guiden
1.2 Opbygning
1.3 Yderligere ressourcer
1.4 Forkortelser, symboler og konventioner
1.5 Ordforklaring
1.6 Dokument- og softwareversion
1.7 Godkendelser og certiceringer
1.7.1 CE-mærke 11
1.7.1.1 Lavspændingsdirektivet 11
1.7.1.2 EMC-direktivet 11
1.7.1.3 Maskindirektivet 11
1.7.1.4 ErP-direktivet 12
1.7.2 C-tick overensstemmelse 12
1.7.3 UL-overensstemmelse 12
1.7.4 Marine-overensstemmelse 12
1.8 Sikkerhed
8
8
8
8
9
10
11
11
13
1.8.1 Generelle sikkerhedsprincipper 13
2 Produktoversigt
2.1 Introduktion
2.2 Beskrivelse af drift
2.3 Driftssekvens
2.3.1 Ensretterdelen 20
2.3.2 Mellemdelen 20
2.3.3 Vekselretterdel 20
2.3.4 Bremseoption 20
2.3.5 Belastningsfordeling 21
2.4 Styringsstrukturer
2.4.1 Styringsstruktur, åben sløjfe 21
2.4.2 Styringsstruktur for lukket sløjfe 22
2.4.3 Lokalbetjening (Hand On) og Fjernbetjening (Auto On) 22
2.4.4 Referencehåndtering 23
2.4.5 Feedbackhåndtering 25
2.5 Automatiserede driftsfunktioner
15
15
19
20
21
26
2.5.1 Kortslutningsbeskyttelse 26
2.5.2 Overspændingsbeskyttelse 26
2.5.3 Detektering af manglende motorfase 27
2.5.4 Detektering af ubalance i netfasen 27
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 1
Page 4
Indholdsfortegnelse
VLT® AQUA Drive FC 202
2.5.5 Kobling på udgangen 27
2.5.6 Overbelastningsbeskyttelse 27
2.5.7 Automatisk derating 27
2.5.8 Automatisk energioptimering 28
2.5.9 Automatisk switchfrekvensmodulering 28
2.5.10 Automatisk derating for høj switchfrekvens 28
2.5.11 Automatisk derating for overtemperatur 28
2.5.12 Auto-rampning 28
2.5.13 Strømgrænsekredsløb 28
2.5.14 Eektudsving i ydeevne 28
2.5.15 Soft start af motoren 28
2.5.16 Resonansdæmpning 29
2.5.17 Temperaturkontrollerede ventilatorer 29
2.5.18 EMC-overensstemmelse 29
2.5.19 Måling af strøm på alle tre motorfaser 29
2.5.20 Galvanisk adskillelse af styreklemmer 29
2.6 Tilpassede applikationsfunktioner
2.6.1 Automatisk motortilpasning 29
2.6.2 Termisk motorbeskyttelse 29
2.6.3 Netudfald 30
2.6.4 Indbyggede PID-styreenheder 30
2.6.5 Automatisk genstart 30
2.6.6 Flying start 30
2.6.7 Fuldt moment ved reduceret hastighed 31
2.6.8 Frekvens-bypass 31
2.6.9 Motorforvarmer 31
2.6.10 Fire programmerbare opsætninger 31
2.6.11 Dynamisk bremsning 31
2.6.12 DC-bremsning 31
2.6.13 Sleep mode 31
2.6.14 Startbeting. 31
2.6.15 Smart Logic Control (SLC) 31
29
2.6.16 STO-funktion 33
2.7 Fejl-, advarsels- og alarmfunktioner
33
2.7.1 Drift ved overtemperatur 33
2.7.2 Høj og lav referenceadvarsel 33
2.7.3 Høj og lav feedbackadvarsel 34
2.7.4 Faseubalance eller fasetab 34
2.7.5 Høj frekvens advarsel 34
2.7.6 Lav frekvens advarsel 34
2 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 5
Indholdsfortegnelse Design Guide
2.7.7 Advarsel, strøm høj 34
2.7.8 Advarsel, strøm lav 34
2.7.9 Uden belastning/advarsel, kilremsbrud 34
2.7.10 Tabt seriel grænseade 34
2.8 Brugergrænseader og programmering
2.8.1 LCP-betjeningspanel 35
2.8.2 Pc-software 35
2.8.2.1 MCT 10-opsætningssoftware 36
2.8.2.2 VLT® Harmonics Calculation Software MCT 31 36
2.8.2.3 Harmonics Calculation Software (HCS) 36
2.9 Vedligeholdelse
2.9.1 Opbevaring 36
3 Systemintegration
3.1 Omgivende driftsforhold
3.1.1 Luftfugtighed 37
3.1.2 Temperatur 37
3.1.3 Køling 38
3.1.4 Motorgenereret overspænding 39
3.1.5 Akustisk støj 39
3.1.6 Vibrationer og rystelser 39
3.1.7 Aggressive atmosfærer 39
34
36
37
37
3.1.8 Denitioner på IP-klassicering 41
3.1.9 Radiofrekvensforstyrrelse 41
3.1.10 Overensstemmelse for PELV og galvanisk adskillelse 42
3.1.11 Opbevaring 42
3.2 EMC, beskyttelse mod harmoniske strømme og overgang til jord
3.2.1 Generelle forhold vedrørende EMC-emissioner 43
3.2.2 EMC-testresultater 44
3.2.3 Emissionskrav 45
3.2.4 Immunitetskrav 45
3.2.5 Motorisolering 46
3.2.6 Motorlejestrøm 46
3.2.7 Harmoniske svingninger 47
3.2.8 Lækstrøm til jord 50
3.3 Netforsyningsintegrering
3.3.1 Netforsyningskongurationer og EMC-virkninger 51
3.3.2 Lavfrekvent netforstyrrelse 51
3.3.3 Analysering af netforstyrrelse 52
43
51
3.3.4 Løsninger til reduktion af netforstyrrelse 53
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 3
Page 6
Indholdsfortegnelse
VLT® AQUA Drive FC 202
3.3.5 Radiofrekvensforstyrrelse 53
3.3.6 Klassicering af driftsstedet 53
3.3.7 Anvend med adskilt indgangskilde 53
3.3.8 Eektfaktorkorrektion 54
3.3.9 Forsinkelse på indgangsstrøm 54
3.3.10 Nettransienter 54
3.3.11 Drift med en standbygenerator 54
3.4 Motorintegrering
3.4.1 Overvejelser ved motorvalg 55
3.4.2 Sinusbølge- og dU/dt-ltre 55
3.4.3 Korrekt jording af motor 55
3.4.4 Motorkabler 55
3.4.5 Skærmning af motorkabel 56
3.4.6 Tilslutning af ere motorer 56
3.4.7 Adskillelse af styreledninger 58
3.4.8 Termisk motorbeskyttelse 58
3.4.9 Udgangskontaktor 58
3.4.10 Bremsefunktioner 58
3.4.11 Dynamisk bremsning 59
3.4.12 Bremsemodstandsberegning 59
3.4.13 Kabelføring for bremsemodstand 60
3.4.14 Bremsemodstand og bremse-IGBT 60
3.4.15 Energieektivitet 60
3.5 Yderligere indgange og udgange
55
62
3.5.1 Ledningsdiagram 62
3.5.2 Relætilslutninger 63
3.5.3 EMC-korrekt elektrisk tilslutning 64
3.6 Mekanisk planlægning
3.6.1 Mindsteafstand 65
3.6.2 Vægmontering 65
3.6.3 Adgang 66
3.7 Optioner og tilbehør
3.7.1 Kommunikationsoptioner 70
3.7.2 Indgang/udgang, feedback og sikkerhedsoptioner 70
3.7.3 Kaskadestyringsoptioner 70
3.7.4 Bremsemodstande 72
3.7.5 Sinusltre 72
3.7.6 dU/dt-ltre 72
3.7.7 Common mode-ltre 72
3.7.8 Harmoniske ltre 73
65
66
4 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 7
Indholdsfortegnelse Design Guide
3.7.9 IP21/NEMA Type 1-kapslingssæt 73
3.7.10 Frembygningssæt til LCP 75
3.7.11 Monteringskonsol for kapslingstyper A5, B1, B2, C1 og C2 76
3.8 RS-485 seriel grænseade
3.8.1 Oversigt 76
3.8.2 Netværksforbindelse 77
3.8.3 RS-485-busterminering 78
3.8.4 EMC-retningslinjer 78
3.8.5 FC-protokoloversigt 78
3.8.6 Netværkskonguration 79
3.8.7 Rammestruktur for FC-protokolmeddelelser 79
3.8.8 FC-protokol, eksempler 82
3.8.9 Modbus RTU-protokol 83
3.8.10 Rammestruktur for Modbus RTU-meddelelse 84
3.8.11 Adgang til parametre 87
3.8.12 FC-apparatstyreprol 88
3.9 Afkrydsningsliste for systemdesign
4 Applikationseksempler
4.1 Oversigt over applikationsfunktioner
4.2 Valgte applikationsfunktioner
76
94
96
96
97
4.2.1 SmartStart 97
4.2.2 Kvikmenu Vand og pumper 97
4.2.3 29-1* Udrensningsfunktion 97
4.2.4 Pre/Post Lube 98
4.2.5 29-5* Flow Conrmation 99
4.3 Eksempler på applikationsopsætninger
4.3.1 Dykpumpeapplikation 102
4.3.2 Basic-kaskadestyreenhed 104
4.3.3 Pumpeindkobling med styrepumpealternering 104
4.3.4 Systemstatus og drift 105
4.3.5 Kabelføringsdiagram for kaskadestyreenhed 106
4.3.6 Kabelføringsdiagram for fast pumpe med variabel hastighed 107
4.3.7 Kabelføringsdiagram til styrepumpealternering 107
5 Særlige forhold
5.1 Manuel derating
5.2 Derating for lange motorkabler eller kabler med større tværsnit
5.3 Derating for omgivelsestemperatur
100
111
111
112
112
6 Typekode og valg
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 5
116
Page 8
Indholdsfortegnelse
VLT® AQUA Drive FC 202
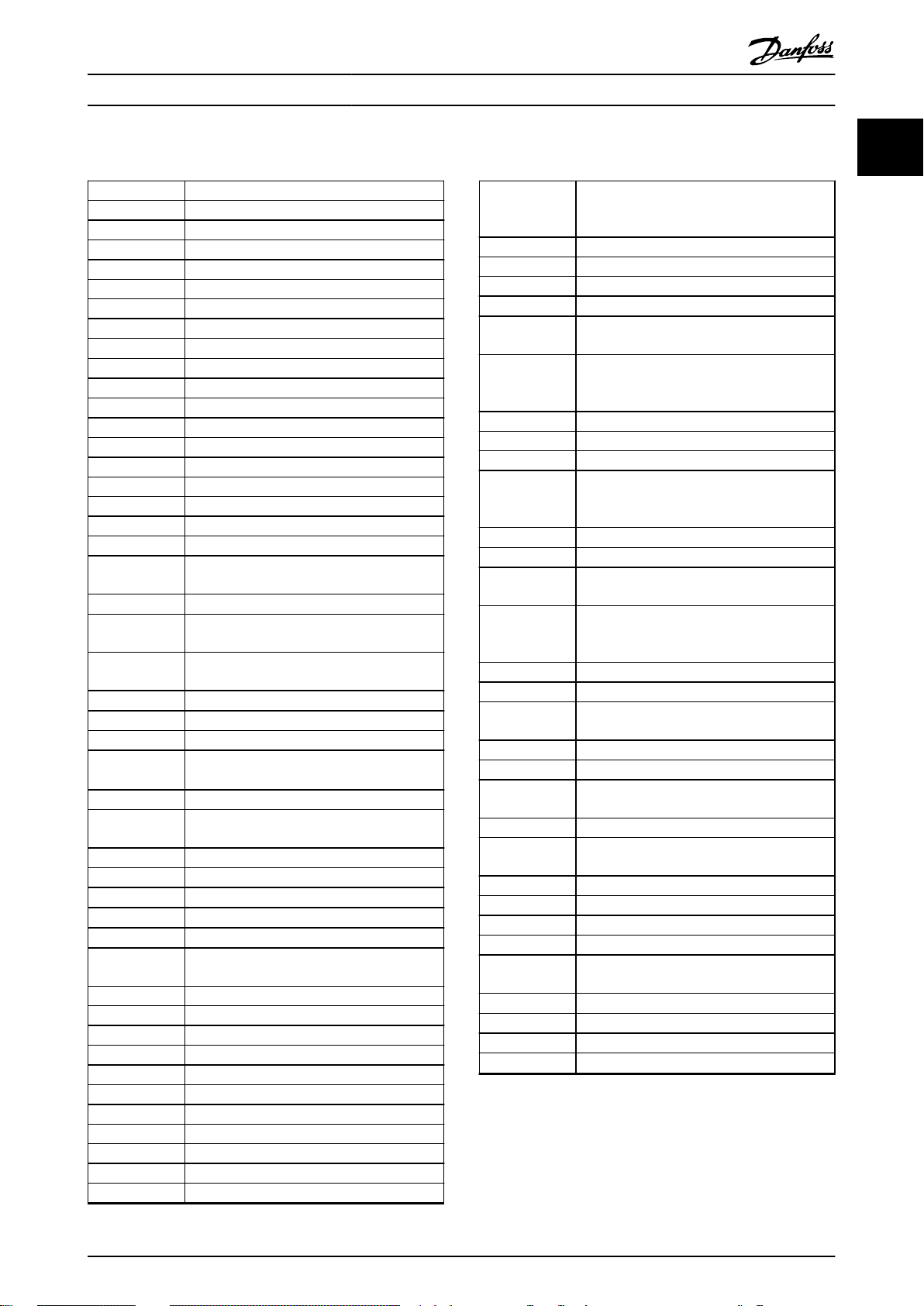
6.1 Bestilling
6.1.1 Typekode 116
6.1.2 Softwaresprog 118
6.2 Optioner, tilbehør og reservedele
6.2.1 Optioner og tilbehør 118
6.2.2 Reservedele 120
6.2.3 Tilbehørsposer 120
6.2.4 Valg af bremsemodstand 121
6.2.5 Anbefalede bremsemodstande 122
6.2.6 Alternative bremsemodstande, T2 og T4 130
6.2.7 Harmoniske ltre 131
6.2.8 Sinusltre 133
6.2.9 dU/dt-ltre 135
6.2.10 Common mode-ltre 136
7 Specikationer
7.1 Elektriske data
7.1.1 Netforsyning 1 x 200-240 V AC 137
116
118
137
137
7.1.2 Netforsyning 3 x 200-240 V AC 138
7.1.3 Netforsyning 1 x 380-480 V AC 141
7.1.4 Netforsyning 3 x 380-480 V AC 142
7.1.5 Netforsyning 3 x 525-600 V AC 146
7.1.6 Netforsyning 3 x 525-690 V AC 150
7.2 Netforsyning
7.3 Motorudgang og motordata
7.4 Omgivelsesforhold
7.5 Kabelspecikationer
7.6 Styringsind-/udgange og styringsdata
7.7 Sikringer og afbrydere
7.8 Nominel eekt, vægt og mål
7.9 dU/dt-test
7.10 Klassicering af akustisk støj
7.11 Valgte optioner
7.11.1 VLT® Universal I/O Module MCB 101 171
7.11.2 VLT® Relækort MCB 105 171
153
153
154
154
155
158
167
168
170
171
7.11.3 VLT® PTC-termistorkort MCB 112 173
7.11.4 VLT® Udvidet relækort MCB 113 175
7.11.5 VLT® Sensor Input Option MCB 114 176
7.11.6 VLT® Udvidet kaskadestyreenhed MCO 101 177
7.11.7 VLT® Avanceret kaskadestyreenhed MCO 102 178
6 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 9
Indholdsfortegnelse Design Guide
8 Appendiks - Udvalgte tegninger
8.1 Tegninger over nettilslutning (3-faser)
8.2 Tegninger over motortilslutning
8.3 Tegninger over relæklemmer
8.4 Kabelindgangshuller
Indeks
181
181
184
186
187
191
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 7
Page 10

Introduktion
VLT® AQUA Drive FC 202
1
1 Introduktion
1.1 Formålet med Design Guiden
Denne Design Guide omhandler Danfoss VLT® AQUA Drive
frekvensomformere og er beregnet til:
Projekt- og systemingeniører
•
Design- og systemrådgivere
•
Applikations- og produktspecialister
•
Design Guiden indeholder tekniske oplysninger om
frekvensomformerens egenskaber i forbindelse med
integrering i motorstyringen og overvågningssystemer.
Formålet med Design Guiden er at beskrive overvejelser
vedrørende design og planlægning af data for at kunne
integrere frekvensomformeren i et system. Design Guiden
afdækker valg af frekvensomformere og optioner i
forskellige applikationer og installationer.
En gennemgang af de detaljerede produktoplysninger i
designfasen muliggør udviklingen af et godt gennemtænkt
system med optimal funktionalitet og virkningsgrad.
VLT® er et registreret varemærke.
1.2
Opbygning
Kapitel 1 Introduktion: Det overordnede formål med Design
Guiden og overensstemmelse med internationale direktiver.
Kapitel 8 Appendiks - Udvalgte tegninger
af grak, der viser netforsyning og motortilslutninger,
relæklemmer, og kabelindgange.
: En sammenfatning
1.3 Yderligere ressourcer
Tilgængelige ressourcer, der kan give en forståelse af
avanceret frekvensomformerdrift, programmering og
overensstemmelse med direktiver:
VLT® AQUA Drive FC 202 Betjeningsvejledningen
•
(der i denne manual vil blive nævnt som
Betjeningsvejledning) indeholder detaljerede
oplysninger om installation og opstart af
frekvensomformeren.
VLT® AQUA Drive FC 202 Design Guide indeholder
•
oplysninger, der er nødvendige for design og
planlægning, når frekvensomformeren skal
integreres i et system.
VLT® AQUA Drive FC 202 Programming Guide (der i
•
denne manual vil blive nævnt som Programming
Guide) indeholder detaljerede oplysninger om,
hvordan der arbejdes med parametre, samt
mange applikationseksempler.
VLT® Safe Torque O -betjeningsvejledningen
•
beskriver, hvordan man bruger Danfoss frekvensomformere i funktionelle sikkerhedsapplikationer.
Denne manual leveres med frekvensomformeren,
når STO-optionen er til stede.
Kapitel 2 Produktoversigt: Frekvensomformerens interne
struktur og funktionalitet og dens driftsmæssige funktioner.
Kapitel 3 Systemintegration: Hensyn til omgivelserne; EMC,
harmoniske strømme, og jordlækstrøm; netforsyning;
motorer og motortilslutninger; andre forbindelser;
mekanisk planlægning; beskrivelser af optioner og tilgængeligt tilbehør.
Kapitel 4 Applikationseksempler: Eksempler på produktapplikationer og retningslinjer til anvendelse.
Kapitel 5 Særlige forhold: Detaljerede oplysninger om
usædvanlige funktionsmiljøer.
Kapitel 6 Typekode og valg: Procedurer for bestilling af
udstyr og optioner, således at den planlagte brug af
systemet imødekommes.
Kapitel 7
i tabeller og grakformat.
Specikationer: En sammenfatning af tekniske data
VLT® Brake Resistor Design Guide forklarer valg af
•
optimal bremsemodstand.
Yderligere publikationer og manualer kan downloades fra
danfoss.com/Product/Literature/Technical+Documentation.htm.
BEMÆRK!
Det er muligt at købe ekstraudstyr, hvilket kan resultere i
ændrede procedurer i forhold til det, der er beskrevet i
disse publikationer. Sørg for at læse instruktionerne, der
følger med ekstraudstyret, vedrørende specikke krav.
Kontakt en Danfoss-leverandør, eller besøg
www.danfoss.com for yderligere oplysninger.
8 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 11
Introduktion
Design Guide
1.4 Forkortelser, symboler og konventioner
1
1
60° AVM 60°° asynkron vektormodulering
A Ampere/AMP
AC Vekselstrøm
AD Luftaadning
AEO Automatisk energioptimering
AI Analog indgang
AMA Automatisk motortilpasning
AWG American Wire Gauge
°C
Grader celsius
CD Konstant aadning
CM Common mode
CT Konstant moment
DC Jævnstrøm
DI Digital indgang
DM Dierential mode
D-TYPE Frekvensomformerafhængigt
EMC Elektromagnetisk kompatibilitet
EMF Elektromotorisk kraft
ETR Elektronisk termorelæ
f
JOG
Motorfrekvensen, når jog-funktionen er
aktiveret.
f
f
M
MAX
Motorfrekvens
Den maksimale udgangsfrekvens, som
frekvensomformeren kan påføre på udgangen.
f
MIN
Den minimale motorfrekvens fra frekvensom-
formeren
f
M,N
Nominel motorfrekvens
FC Frekvensomformer
g Gram
Hiperface
®
Hiperface® er et registreret varemærke
tilhørende Stegmann
hk Hestekræfter
HTL HTL-encoder (10-30 V) pulser - højspænding
transistor logic
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAKS
I
VLT,N
Nominel udgangsstrøm for vekselretter
Strømgrænse
Nominel motorstrøm
Maksimal udgangsstrøm
Nominel udgangsstrøm leveret af frekvensom-
formeren
kHz Kilohertz
LCP LCP-betjeningspanel
lsb Mindst betydende bit
m Meter
mA Milliampere
MCM Mille circular mil
MCT Motion control tool
mH Induktans i milli Henry
min Minut
ms Millisekund
msb Mest betydende bit
η
VLT
Frekvensomformerens virkningsgrad deneret
som forholdet mellem den afgivne og den
modtagne eekt.
nF Kapacitans i nano Farad
NLCP Numerisk LCP-betjeningspanel
Nm Newton meter
n
s
Online-/oineparametre
P
br, forts.
Synkron motorhastighed
Ændringer af onlineparametre aktiveres
umiddelbart efter, at dataværdien er ændret.
Bremsemodstandens nominelle eekt
(gennemsnitlig eekt ved kontinuerlig
bremsning).
PCB Printplade
PCD Procesdata
PELV Beskyttende ekstra lav spænding
P
m
Frekvensomformerens nominelle
udgangsstrøm angivet som høj overbelastning
(HO).
P
M,N
Nominel motoreekt
PM-motor Permanent magnetmotor
Proces PID PID-regulatoren opretholder den ønskede
hastighed, tryk, temperatur, osv.
R
br,nom
Den nominelle modstandsværdi, som sikrer
bremseeekt på motorakslen på 150/160 % i 1
minut
RCD Fejlstrømsafbryder
Regen Regenerative klemmer
R
min
Minimum tilladelig bremsemodstandsværdi pr.
frekvensomformer
RMS Eektiv værdi (RMS - root mean square)
O/MIN Omdrejninger pr. minut
R
rec
Bremsemodstandens anbefalede
modstandsværdi af Danfoss-bremsemodstande
sek Sekund
SFAVM Stator ux-orienteret asynkron vektormodu-
lering
STW Statusord
SMPS Switch mode-strømforsyning
THD Total harmonisk forvrængning
T
LIM
Momentgrænse
TTL TTL-encoder (5 V) pulser - transistor transistor
logic
U
M,N
Nominel motorspænding
V Volt
VT Variabelt moment
VVC+
Voltage vector control
Tabel 1.1 Forkortelser
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 9
Page 12
Introduktion
VLT® AQUA Drive FC 202
1
Konventioner
Nummererede lister angiver procedurer.
Lister med punkttegn angiver andre oplysninger og beskrivelser af illustrationer.
Tekst i kursiv angiver:
Krydsreferencer
•
Link
•
Fodnote
•
Parameternavn, parametergruppenavn, paramete-
•
roption
Alle mål er i mm (tommer).
* angiver en fabriksindstilling for en parameter.
Følgende symboler anvendes i dette dokument:
ADVARSEL
Angiver en potentielt farlig situation, som kan medføre
dødsfald eller alvorlig personskade.
FORSIGTIG
Angiver en potentielt farlig situation, som kan medføre
mindre eller moderat personskade. Kan også bruges til
at advare mod usikre fremgangsmåder.
BEMÆRK!
Angiver vigtige oplysninger, herunder situationer som
kan resultere i skade på udstyr eller ejendom.
1.5 Ordforklaring
Bremsemodstand
Bremsemodstanden er et modul, som kan absorbere den
bremseeekt, der genereres ved regenerativ bremsning.
Denne regenerative bremseeekt øger mellemkredsspændingen, og en bremsechopper sørger for at afsætte
eekten i bremsemodstanden.
Friløb
Motorakslen er i friløb. Intet moment på motoren.
CT-karakteristik
Konstant momentkarakteristik anvendt til alle applikationer,
f.eks. transportbånd, fortrængningspumper og kraner.
Initialisering
Ved initialisering (parameter 14-22 Driftstilstand) vender
frekvensomformeren tilbage til fabriksindstillingen.
Periodisk driftscyklus
Periodisk drift betyder en sekvens af driftscyklusser. Hver
cyklus består af en periode med og en periode uden
belastning. Driften kan være enten periodisk drift eller
ikke-periodisk drift.
Eektfaktor
Den reelle eektfaktor (lambda) tager alle harmoniske
strømme i betragtning og er altid lavere end eektfaktoren
(cosphi), som kun tager den første harmoniske strøm på
spænding og strøm i betragtning.
P kW
cosϕ =
P kVA
Cosphi er også kendt som eektforskydningsfaktor.
Både lambda og cosphi er angivet for Danfoss VLT®frekvensomformere i kapitel 7.2 Netforsyning.
Eektfaktoren angiver, i hvilken grad frekvensomformeren
belaster netforsyningen.
En lavere eektfaktor betyder højere I
kW-ydelse.
Derudover indikerer en høj eektfaktor, at de harmoniske
strømme er lave.
Alle Danfoss-frekvensomformere er forsynet med
indbyggede DC-spoler i DC-linket for at opnå en høj eekt-
faktor og reducere THD på hovedforsyningen.
Opsætning
Parameterindstillinger kan gemmes i 4 opsætninger. Det er
muligt at skifte mellem de 4 parameteropsætninger og
redigere i en opsætning, mens en anden er aktiv.
Slipkompensering
Frekvensomformeren kompenserer for motorslippet ved at
give frekvensen et tilskud, der følger den målte motorbelastning, således at motorhastigheden holdes næsten
konstant.
Smart Logic Control (SLC)
SLC er en række brugerdenerede handlinger, som afvikles,
når de tilknyttede brugerdenerede hændelser evalueres
som sande af SLC. (Parametergruppe 13-** Intelligent logik).
FC-standardbus
Omfatter RS-485-bus med FC-protokol eller MC-protokol.
Se parameter 8-30 Protokol.
Termistor
Temperaturafhængig modstand, der placeres, hvor
temperaturen ønskes overvåget (frekvensomformer eller
motor).
Trip
Tilstand, der skiftes til i fejlsituationer, f.eks. hvis frekvensomformeren udsættes for en overtemperatur, eller når den
beskytter motoren, processen eller mekanismen. Genstart
forhindres, indtil årsagen til fejlen er forsvundet, og triptilstanden annulleres. Annullér trip-tilstanden ved at:
aktivere nulstilling eller
•
programmere frekvensomformeren til at nulstille
•
automatisk
Trip må ikke benyttes til personbeskyttelse.
Triplåst
En tilstand, der skiftes til i fejlsituationer, hvor en frekvensomformer beskytter sig selv og kræver fysisk indgriben, for
eksempel hvis frekvensomformeren udsættes for
UλxIλxcosϕ
=
UλxIλ
for den samme
RMS
10 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 13
Introduktion
kortslutning på udgangen. En triplås kan kun annulleres
ved at afbryde netforsyningen, erne årsagen til fejlen og
tilslutte frekvensomformeren igen. Genstart forhindres,
indtil trip-tilstanden annulleres ved at aktivere nulstilling. I
nogle tilfælde kan nulstillingen udføres automatisk via
programmering. Trip må ikke benyttes til personbeskyttelse.
VT-karakteristik
Variabel momentkarakteristik, som anvendes til pumper og
ventilatorer.
Design Guide
1.6 Dokument- og softwareversion
Denne manual bliver regelmæssigt gennemgået og
opdateret. Alle forslag til forbedringer er velkomne.
EU-direktiv Version
Lavspændingsdirektivet 2006/95/EC
EMC-direktivet 2004/108/EC
Maskindirektivet
ErP-direktivet 2009/125/EC
ATEX-direktivet 94/9/EC
RoHS-direktivet 2002/95/EC
Tabel 1.3 EU-direktiver gældende til frekvensomformere
1) Overholdelse af maskindirektivet er kun påkrævet for frekvensomformere med en integreret sikkerhedsfunktion.
Overensstemmelseserklæringer kan fås ved anmodning.
1.7.1.1
1)
Lavspændingsdirektivet
2006/42/EC
1
1
Tabel 1.2 viser dokumentversionen og den tilsvarende
softwareversion.
Udgave Bemærkninger Softwareversion
MG20N6xx Erstatter MG20N5xx 2.20 og senere
Tabel 1.2 Dokument- og softwareversion
1.7
Godkendelser og certiceringer
Frekvensomformere er konstrueret i overensstemmelse
med de direktiver, der er beskrevet i dette afsnit.
Yderligere oplysninger om godkendelser og certikater kan
downloades fra http://www.danfoss.com/BusinessAreas/
DrivesSolutions/Documentations/.
CE-mærke
1.7.1
Illustration 1.1 CE
CE-mærket (Communauté européenne) indikerer, at
producenten af produktet overholder alle gældende EUdirektiver. De EU-direktiver, der gælder for design og
fremstilling af af frekvensomformere, er anført i Tabel 1.3.
Lavspændingsdirektivet nder anvendelse for alt elektrisk
udstyr, der anvendes i spændingsområderne 50-1.000 V AC
og 75-1.600 V DC.
Formålet med direktivet er at sikre personbeskyttelse og
undgå beskadigelse af ejendom ved drift af elektrisk
udstyr, der er installeret, og som vedligeholdes korrekt i
den tilsigtede applikation.
1.7.1.2
Formålet med EMC-direktivet (elektromagnetisk kompatibilitet) er at reducere elektromagnetisk forstyrrelse og
højne immunitet af elektrisk udstyr og installationer. Det
grundlæggende beskyttelseskrav beskrevet i EMC-direktivet
2004/108/EC angiver, at apparater, som genererer elektromagnetisk forstyrrelse (EMI), eller hvis drift kan påvirkes af
EMI, skal være beregnet til at begrænse frembringelsen af
elektromagnetisk forstyrrelse og skal have en passende
grad af immunitet til EMI, når disse er korrekt installeret og
vedligeholdes og anvendes som beregnet.
Apparater med elektrisk udstyr, der anvendes i enkeltstående løsninger, eller som en del af et system, skal være
udstyret med CE-mærket. Systemer kræver ikke CE-mærket,
men de skal overholde de grundlæggende beskyttelseskrav
beskrevet i EMC-direktivet.
1.7.1.3
EMC-direktivet
Maskindirektivet
Formålet med maskindirektivet er at sikre personbe-
BEMÆRK!
CE-mærket regulerer ikke produktets kvalitet. De
tekniske specikationer kan ikke udledes af CE-mærket.
BEMÆRK!
Frekvensomformere med integreret sikkerhedsfunktion
skal overholde maskindirektivet.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 11
skyttelse og undgå beskadigelse af ejendom for mekanisk
udstyr anvendt i den tilsigtede applikation. Maskindirektivet gælder for en maskine, der består af en samling af
forbundne komponenter eller apparater, hvoraf mindst én
kan udføre mekanisk bevægelse.
Frekvensomformere med integreret sikkerhedsfunktion skal
overholde maskindirektivet. Frekvensomformere uden
sikkerhedsfunktion hører ikke ind under maskindirektivet.
Hvis en frekvensomformer er integreret i et system med
Page 14

1
2
130BD832.10
Introduktion
VLT® AQUA Drive FC 202
1
maskiner, stiller Danfoss oplysninger om sikkerhedsaspekter
angående frekvensomformeren til rådighed.
Når frekvensomformere anvendes i maskiner med mindst
én bevægelig del, skal maskinproducenten kunne fremvise
en erklæring, der angiver, at alle relevante love og sikkerhedsforanstaltninger overholdes.
1.7.1.4 ErP-direktivet
ErP-direktivet er det Europæiske Ecodesign-direktiv for
energi-relaterede produkter. Direktivet beskriver ecodesignkravene til energi-relaterede produkter, herunder
frekvensomformere. Formålet med direktivet er at øge
energieektivitet og niveauet for beskyttelse af miljøet,
idet sikkerheden omkring energiforsyningen øges.
Miljømæssig påvirkning af energi-relaterede produkter
omfatter energiforbrug gennem hele produktets livscyklus.
C-tick overensstemmelse
1.7.2
Illustration 1.2 C-Tick
1.7.4
Marine-overensstemmelse
Apparater med indtrængningsbeskyttelsesklassicering IP55
(NEMA 12) eller højere forhindrer gnistdannelse og er
klassiceret som elektriske apparater med begrænset
eksplosionsrisiko i henhold til European Agreement
concerning International Carriage of Dangerous Goods by
Inland Waterways (ADN).
Gå til www.danfoss.com for yderligere oplysninger om
marine-godkendelser.
For apparater med
IP20/Chassis, IP21/NEMA 1, eller IP54 forhindres risiko for
gnistdannelse på følgende måde:
Der må ikke monteres en netafbryder
•
Kontrollér, at parameter 14-50 RFI-lter er indstillet
•
til [1] Aktiv.
Fjern alle relæstik med mærket RELAY. Se
•
Illustration 1.4.
Kontrollér, hvilke relæoptioner er installeret, hvis
•
der er installeret nogen. Den eneste tilladte
relæoption er VLT® Udvidet relækort MCB 113.
indtrængningsbeskyttelsesklassicering
C-tick-mærket angiver overensstemmelse med gældende
tekniske standarder for elektromagnetisk kompatibilitet
(EMC). C-tick-overensstemmelse er påkrævet, når elektriske
og elektroniske apparater skal etableres på markedet i
Australien og New Zealand.
C-tick-mærkets regulatoriske retningslinjer omhandler
kabelbåret og udstrålet emission. Anvend de emissionsgrænser, der er angivet i EN/IEC 61800-3, for
frekvensomformere.
En overensstemmelseserklæring kan gøres tilgængelig ved
anmodning.
UL-overensstemmelse
1.7.3
Registreret til UL
Illustration 1.3 UL
BEMÆRK!
525–690 V-frekvensomformere er ikke UL-certicerede.
Frekvensomformeren overholder fastholdelseskravene for
termisk hukommelse i UL508C. Yderligere oplysninger
ndes i kapitel 2.6.2 Termisk motorbeskyttelse.
1, 2
Illustration 1.4 Placering af relæstik
Producentens deklaration kan fås ved forespørgsel.
Relæstik
12 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 15
Introduktion
Design Guide
1.8 Sikkerhed
1.8.1 Generelle sikkerhedsprincipper
Frekvensomformere indeholder komponenter med høj
spænding og kan potentielt forårsage dødsfald, hvis de
håndteres ukorrekt. Kun uddannet personale må montere
og betjene udstyret. Reparationsarbejde må ikke
påbegyndes, før strømmen til frekvensomformeren er
ernet, og det angivne tidsrum for aedning af ophobet
elektrisk energi er gået.
Nøje overholdelse af sikkerhedsforanstaltninger og
anmærkninger er obligatorisk for sikker drift af frekvensomformeren.
Uddannet personale
1.8.2
Korrekt og pålidelig transport, lagring, montering, drift og
vedligeholdelse er påkrævet for problemfri og sikker drift
af frekvensomformeren. Det er kun tilladt for uddannet
personale at montere eller betjene dette udstyr.
Kvaliceret personale deneres som uddannet personale,
som er autoriseret til at montere, idriftsætte og
vedligeholde udstyr, systemer og kredsløb i overensstemmelse med relevante love og bestemmelser.
Derudover skal personalet være bekendt med de instruktioner og sikkerhedsforanstaltninger, der er beskrevet i
denne betjeningsvejledning.
ADVARSEL
HØJSPÆNDING
Frekvensomformere indeholder højspænding, når de er
tilsluttet netspændingen, DC-strømforsyning eller belastningsfordeling. Hvis montering, start og vedligeholdelse
udføres af personale, der ikke er uddannet til det, kan
det resultere i død eller alvorlig personskade.
Montering, opstart og vedligeholdelse må kun
•
udføres af uddannet personale.
ADVARSEL
UTILSIGTET START
Når frekvensomformeren er tilsluttet netspændingen, DCstrømforsyningen, eller belastningsfordeling, kan
motoren starte pludseligt. Utilsigtet start under programmering, service- eller reparationsarbejde kan resultere i
død, alvorlig personskade eller beskadigelse af udstyr
eller ejendom. Motoren kan startes med en ekstern
kontakt, en seriel buskommando, et indgangsreferencesignal fra LCP'et, eller efter en slettet fejltilstand.
For at undgå utilsigtet motorstart:
Afbryd frekvensomformeren fra netforsyningen.
•
Tryk på [O/Reset] på LCP'et, før program-
•
mering af parametre.
Frekvensomformeren, motoren og det drevne
•
udstyr skal være fuldstændigt tilsluttet og
samlet, når frekvensomformeren er tilsluttet
netspændingen, DC-strømforsyningen eller
belastningsfordeling.
ADVARSEL
AFLADNINGSTID
Frekvensomformeren indeholder DC-link-kondensatorer,
der kan forblive opladede, selv når frekvensomformeren
ikke er forsynet med strøm. Det kan resultere i død eller
alvorlig personskade, hvis der ikke ventes det angivne
tidsrum, efter at strømmen er slået fra, før der udføres
service- eller reparationsarbejde.
Stop motoren.
•
Frakobl netspændingen og de eksterne DC-link-
•
strømforsyninger, herunder reservebatterier
(backup), UPS og DC-link-tilslutninger til andre
frekvensomformere.
Afbryd eller lås PM-motor.
•
Vent, indtil kondensatorerne er helt aadede,
•
før der foretages service- eller reparationsarbejde. Ventetiden er angivet i Tabel 1.4.
1
1
Spænding
[V]
4 7 15
200-240 0,25-3,7 kW - 5,5-45 kW
380-480 0,37-7,5 kW - 11-90 kW
525-600 0,75-7,5 kW - 11-90 kW
525-690 - 1,1-7,5 kW 11-90 kW
Der kan være højspænding til stede, selv når LED-advarselslamperne er slukkede.
Tabel 1.4 Aadningstid
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 13
Min. ventetid
(minutter)
Page 16
Introduktion
VLT® AQUA Drive FC 202
1
ADVARSEL
FARLIG LÆKSTRØM
Lækstrømmene overstiger 3,5 mA. Hvis frekvensomformeren ikke jordes korrekt, kan det resultere i død
eller alvorlig personskade.
Sørg for, at udstyret jordes korrekt af en
•
autoriseret elektriker.
ADVARSEL
FARER VED UDSTYRET
Kontakt med roterende aksler og elektrisk udstyr kan
resultere i død eller alvorlig personskade.
Montering, start og vedligeholdelse må kun
•
udføres af uddannet og kvaliceret personale.
Elektrisk arbejde skal overholde nationale og
•
lokale sikkerhedsforskrifter.
Følg procedurerne i dette dokument.
•
ADVARSEL
UTILSIGTET MOTOROMDREJNING
VINDMØLLEEFFEKT
Utilsigtet rotation i permanente magnetmotorer
medfører spænding og kan oplade apparatet, hvilket kan
resultere i død, alvorlig personskade eller skade på
udstyret.
Sørg for, at permanente magnetmotorer
•
blokeres for at forhindre utilsigtet rotation.
FORSIGTIG
FARE PGA. INTERN FEJL
En intern fejl i frekvensomformeren kan resultere i
alvorlig personskade, når frekvensomformeren ikke er
lukket korrekt.
Sørg for, at alle dæksler er på plads og fastgjort
•
sikkert, inden apparatet forsynes med strøm.
14 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 17
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Produktoversigt Design Guide
2 Produktoversigt
2.1 Introduktion
2.1.2
Energibesparelser
2
2
Dette kapitel indeholder en oversigt over frekvensomformerens primære samlinger og kredsløb. Det beskriver de
interne elektriske funktioner og signalbehandlingsfunktioner. En beskrivelse af den interne styringsstruktur er
også inkluderet.
Automatiserede og valgfri frekvensomformerfunktioner, der
er tilgængelige for konstruktion af robuste driftssystemer
med avanceret ydeevnerapportering hvad angår styring og
status, er også beskrevet.
Produkt beregnet til applikationer
2.1.1
inden for vand- og
spildevandsområdet.
®
AQUA Drive FC 202 er konstrueret til applikationer
VLT
inden for vand- og spildevandsområdet. Den integrerede
SmartStart-guide og kvikmenuen Vand og pumper hjælper
brugeren igennem idriftsættelsesprocessen. Udvalget af
standardfunktioner og valgfrie funktioner er bl.a. følgende:
Kaskadestyring
•
Detektering af tør kørsel
•
Slut på kurve-detektering
•
Motoralternering
•
Udrensning
•
Indledende og afsluttende rampe
•
Stoprampe
•
STO
•
Registrering af lavt
•
Pre lube
•
Flow-bekræftelse
•
Rørfyldningstilstand
•
Sleep mode
•
Realtidsur
•
Adgangskodebeskyttelse
•
Overbelastningsbeskyttelse
•
Smart Logic Control
•
Minimum speed monitor
•
Gratis programmérbare tekster til oplysninger,
•
advarsler og andre varslinger
ow
Sammenlignet med alternative styresystemer og
teknologier er en frekvensomformer det mest energioptimale styresystem til styring af ventilator- og
pumpeanlæg.
Ved at anvende en frekvensomformer til styring af ow vil
en reduktion på 20 % af pumpehastigheden medføre
energibesparelser på ca. 50 % i typiske applikationer.
Illustration 2.1 viser et eksempel på en opnåelig energireduktion.
1 Energibesparelse
Illustration 2.1 Eksempel: Energibesparelse
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 15
Page 18
Produktoversigt
VLT® AQUA Drive FC 202
2
2.1.3 Eksempel på energibesparelser
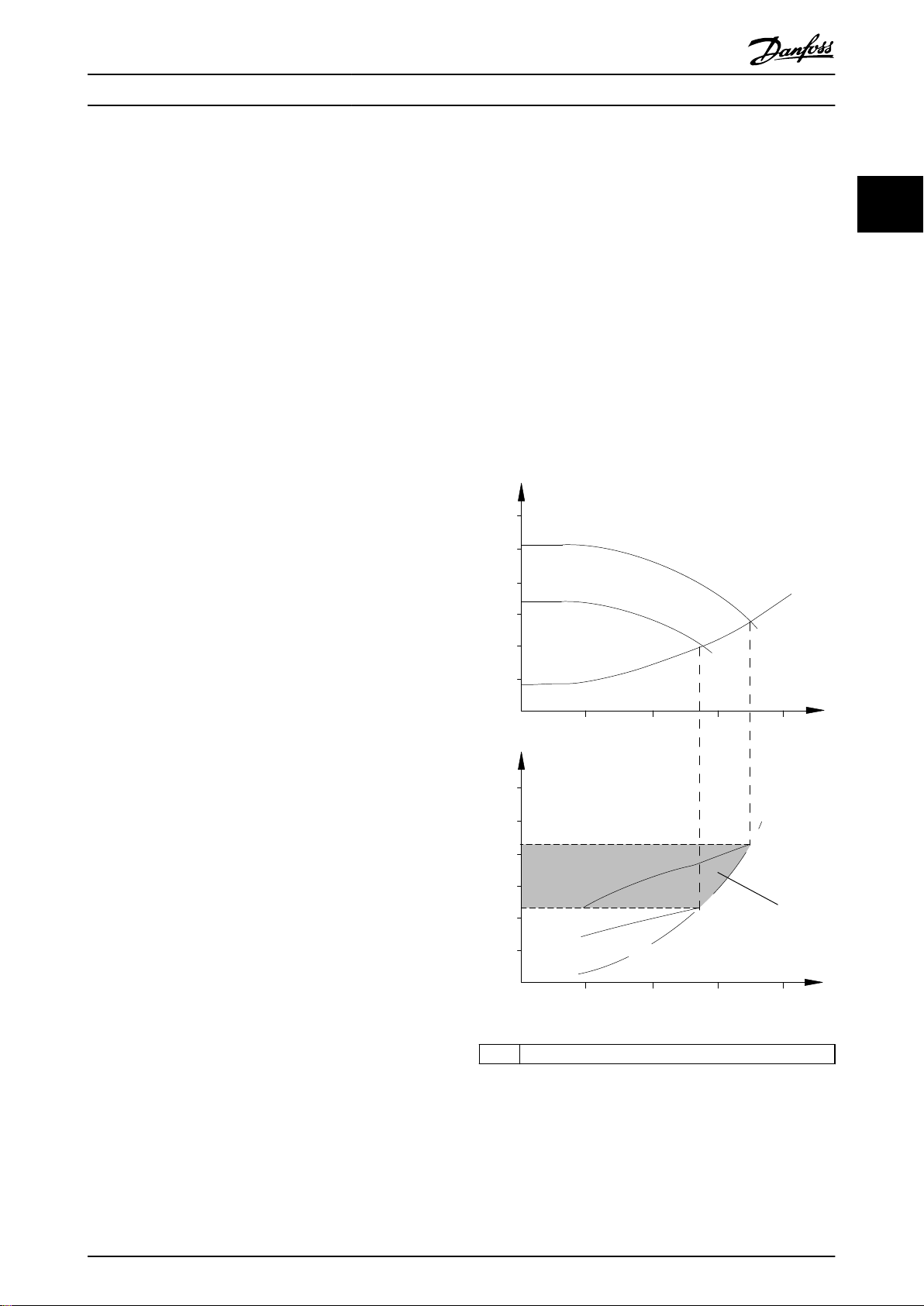
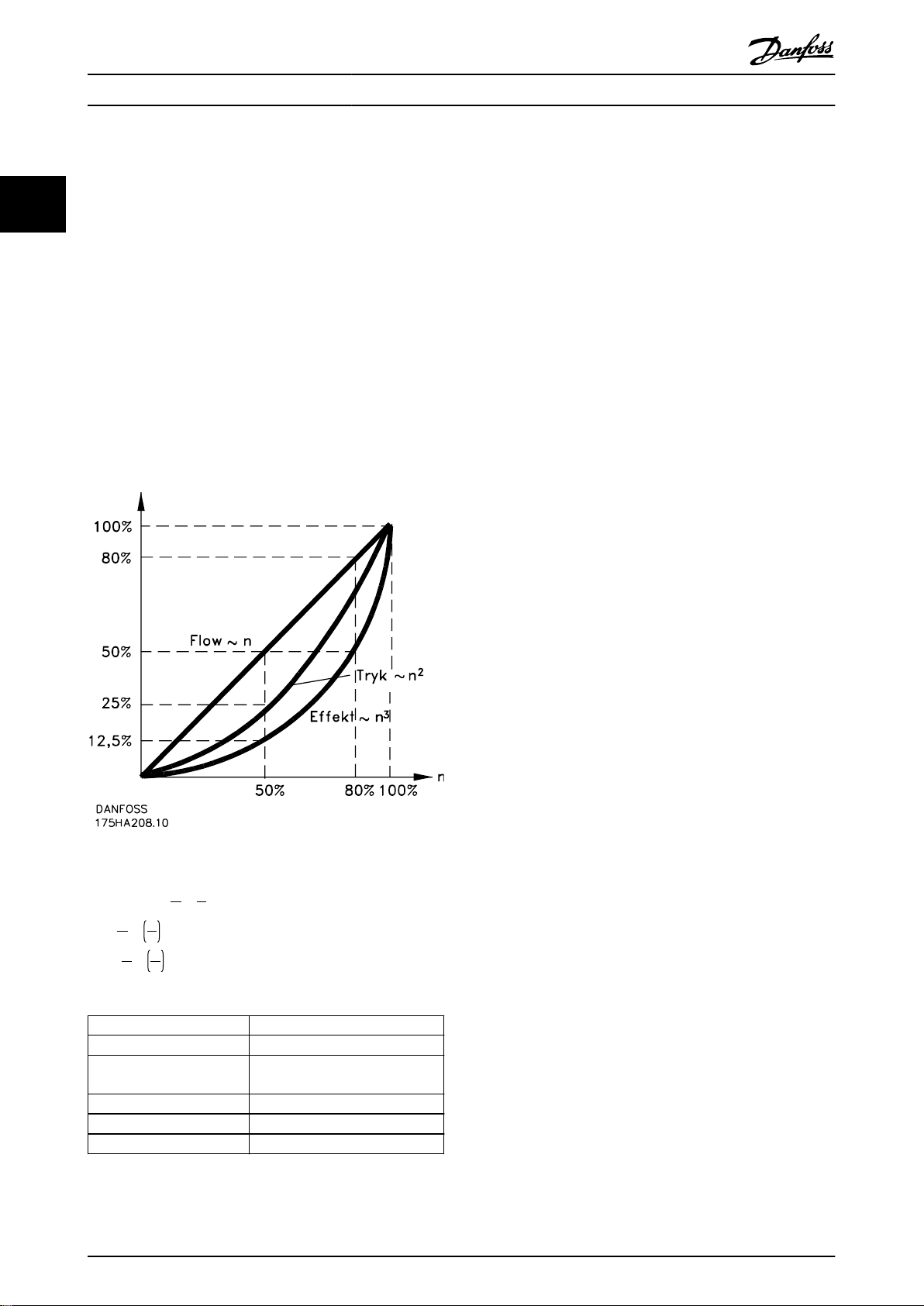
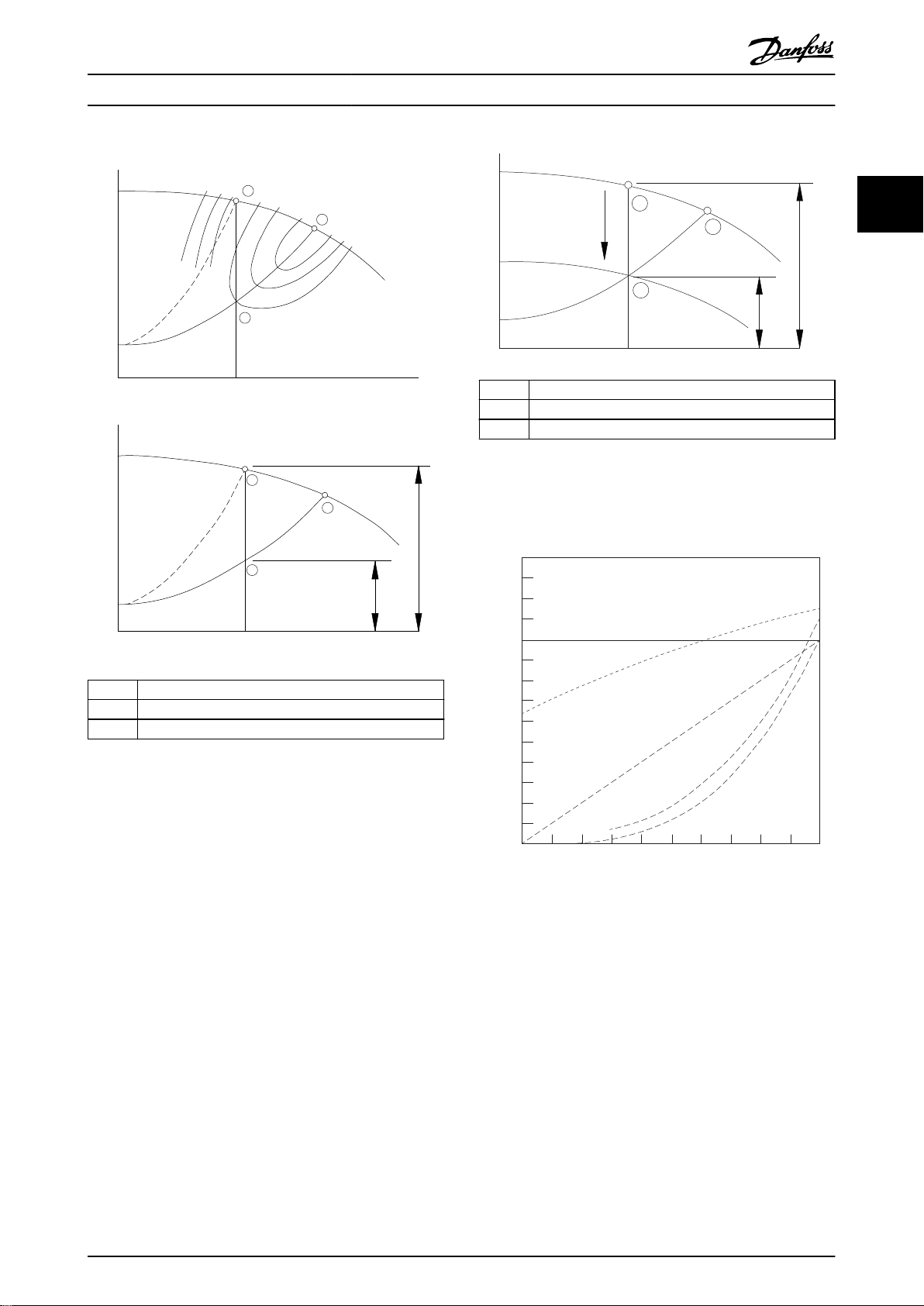
Som vist i Illustration 2.2 styres gennemstrømningen ved at
ændre pumpehastigheden, målt i O/MIN. Ved at reducere
hastigheden med kun 20 % fra den nominelle hastighed
reduceres gennemstrømningen tilsvarende 20 %. Det
skyldes, at gennemstrømningen er direkte proportional
med hastigheden. Elektricitetsforbruget reduceres
imidlertid med næsten 50 %.
Hvis anlægget kun skal kunne levere en gennemstrømning
på 100 % meget få dage om året, og resten af året i
gennemsnit ligger under 80 % af den nominelle gennemstrømning, er energibesparelserne på mere end 50 %.
Illustration 2.2 beskriver afhængigheden af gennemstrømning, tryk og strømforbrug for pumpehastighed i
O/MIN for centrifugalpumper.
2.1.4
Ventilstyring vs. hastighedsstyring af
centrifugalpumper
Ventilstyring
Da behovet for proceskrav i vandsystemer varierer, skal
gennemstrømningen justeres tilsvarende. Hyppigt
anvendte metoder til gennemstrømningstilpasning er
nedregulering eller recirkulering med anvendelse af
ventiler.
En recirkuleringsventil, som er åbnet for meget, kan
forårsage, at pumpen kører til slutningen af pumpekurven
med en høj gennemstrømningshastighed ved en lav
pumpeløftehøjde. Disse forhold forårsager ikke kun et
energispild på grund af høj pumpehastighed, men kan
også medføre hulrumsdannelse med efterfølgende skader
på pumpen.
Nedregulering af gennemstrømningen med en ventil
tilføjer et trykfald henover ventilen (HP-HS). Dette kan
sammenlignes med en bremse, der accelereres og trækkes
samtidig i et forsøg på at reducere bilens hastighed.
Illustration 2.3 viser, at nedregulering får systemkurven til at
vende fra punkt (2) på pumpekurven til et punkt med
betydelig mindre virkningsgrad (1).
Illustration 2.2 Anitetslove for centrifugalpumper
Q
n
1
Gennemstrømning :
H
n
1
Tryk:
Effekt:
1
=
H
n
2
2
P
n
1
=
P
n
2
1
=
Q
n
2
2
2
3
1
2
En lige virkningsgrad i hastighedsområdet antages.
Q = gennemstrømning
Q1 = gennemstrømning 1 P1 = eekt 1
Q2 = reduceret gennemstrømning
H = tryk n = hastighedsregulering
H1 = tryk 1 n1 = hastighed 1
H2 = reduceret tryk n2 = reduceret hastighed
Tabel 2.1 Anitetslove
16 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
P = eekt
P2 = reduceret eekt
Page 19
100% speed
Flow
Flow
Pump curve
Head or pressure Head or pressure
Natural
operating point
Operating
point
Throttled
Unthrottled
Throttled system
Unthrottled system
60
65
70
75
78
80
80
78
75
3
1
1
2
2
3
Hs
Hp
130BD890.10
Flow
Head or Pressure
Pump curve
Operating
point
Natural
Operating point
system
Unthrottled
Speed
reduction
1
2
3
Hp
Hs
130BD894.10
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0 10 20 30 40 50 60 70 80 90 100
Recirculation
Throttle
control
Cycle
control
VSD
control
Ideal pump
control
Q(%)
P(%)
130BD892.10
Produktoversigt
Design Guide
2
2
1 Driftspunkt vha. en drøvleventil
2 Naturligt driftspunkt
3 Driftspunkt med hastighedsstyring
Illustration 2.3 Reducering af gennemstrømning med ventilstyring (nedregulering)
Hastighedsstyring
Samme gennemstrømning kan justeres ved at reducere
hastigheden for pumpen som vist i Illustration 2.4.
Reducering af hastigheden ytter pumpekurven ned.
Driftspunktet er det nye skæringspunkt for pumpekurven
og systemkurven (3). Energibesparelserne kan beregnes
ved at anvende anitetslovene som beskrevet i
kapitel 2.1.3 Eksempel på energibesparelser.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 17
1
Driftspunkt vha. en drøvleventil
2 Naturligt driftspunkt
3 Driftspunkt med hastighedsstyring
Illustration 2.4 Reducering af gennemstrømning ved hastighedsstyring
Illustration 2.5 Sammenlignelige styringskurver for gennemstrømning
Eksempel med en varierende
2.1.5
gennemstrømning over 1 år
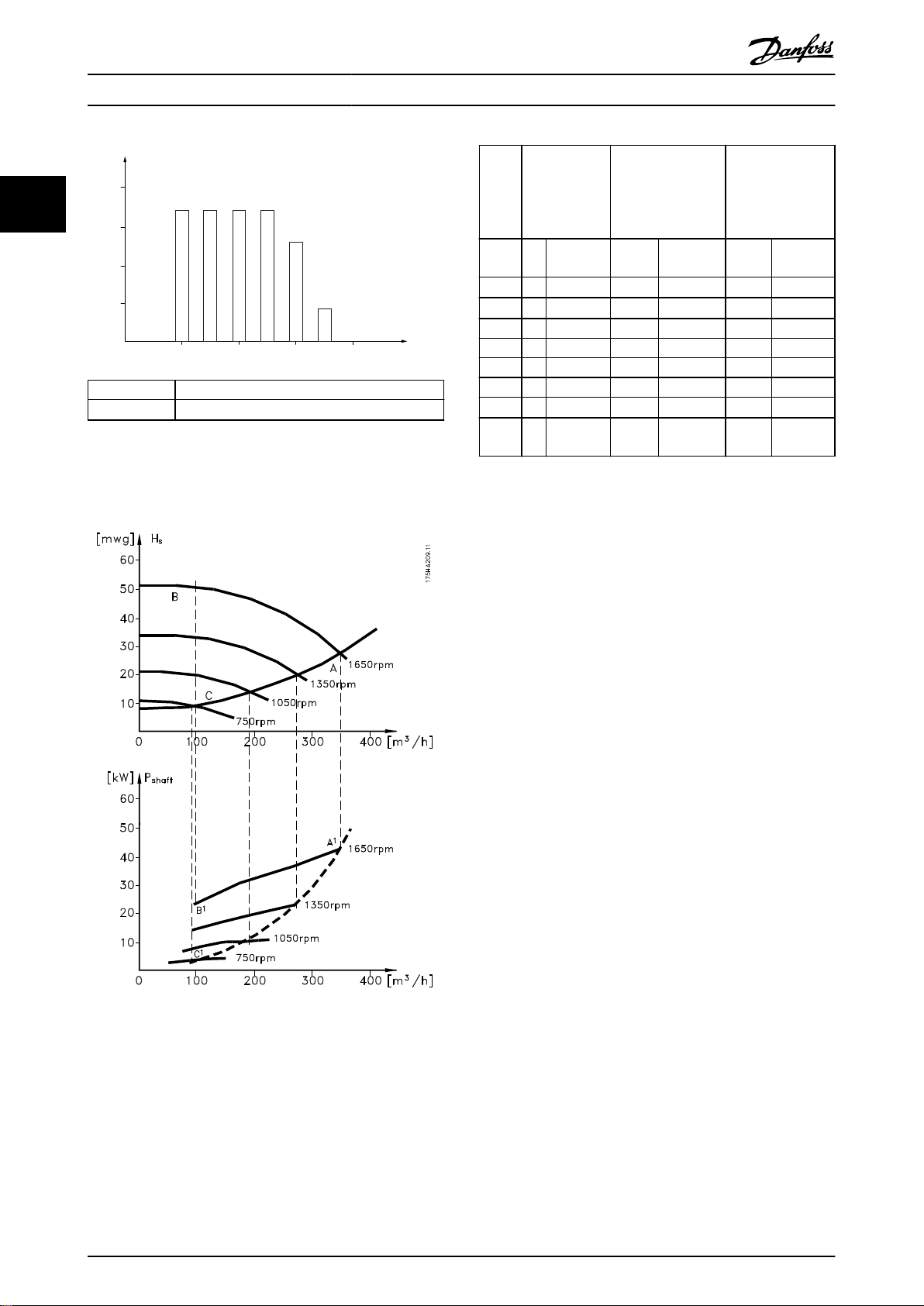
Dette eksempel er beregnet ud fra pumpekarakteristikker
hentet fra et pumpedatablad som vist i Illustration 2.7.
Det opnåede resultat viser energibesparelser på mere end
50 % ved en given distribution af gennemstrømning i
løbet af et år,
se Illustration 2.6. Tilbagebetalingsperioden afhænger af
prisen på elektricitet samt frekvensomformerens pris. I
dette eksempel er tilbagebetalingen mindre end et år
sammenlignet med ventiler og konstant hastighed.
Page 20
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Produktoversigt
VLT® AQUA Drive FC 202
2
t [h]
Q [m3/h]
Illustration 2.6 Gennemstrømningsfordeling over et år
(varighed vs. gennemstrømningshastighed)
Varighed af gennemstrømning. Se også Tabel 2.2.
Gennemstrømningshastighed
Genne
mstrø
mning
shasti
ghed
[m3/h]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
Tabel 2.2 Resultat
1) Læsning af eekt ved punkt A1
2) Læsning af eekt ved punkt B1
3) Læsning af eekt ved punkt C1
2.1.6
Fordeling Ventilregulering Frekvens
% Varighed Eekt For-
brug
[h] [kW] [kWh] [kW] [kWh]
1)
42,5
23,0
1008760 – 275,064 – 26,801
Σ
18,615
2)
40,296
Eekt For-
42,5
3,5
Forbedret styring
omformer
styring
1)
3)
brug
18,615
6,132
Illustration 2.7 Energiforbrug ved forskellige hastigheder
Forbedret styring opnås ved anvendelse af en frekvensomformer til styring af gennemstrømningen eller trykket i et
system.
En frekvensomformer kan ændre ventilatorens eller
pumpens hastighed og derved opnå variabel styring af
gennemstrømning og tryk.
En frekvensomformer kan desuden hurtigt variere ventilatorens eller pumpens hastighed, så den tilpasses de nye
gennemstrømnings- eller trykbetingelser i systemet.
Simpel styring af processen (gennemstrømning, niveau
eller tryk) opnås ved brug af den indbyggede PI-styring.
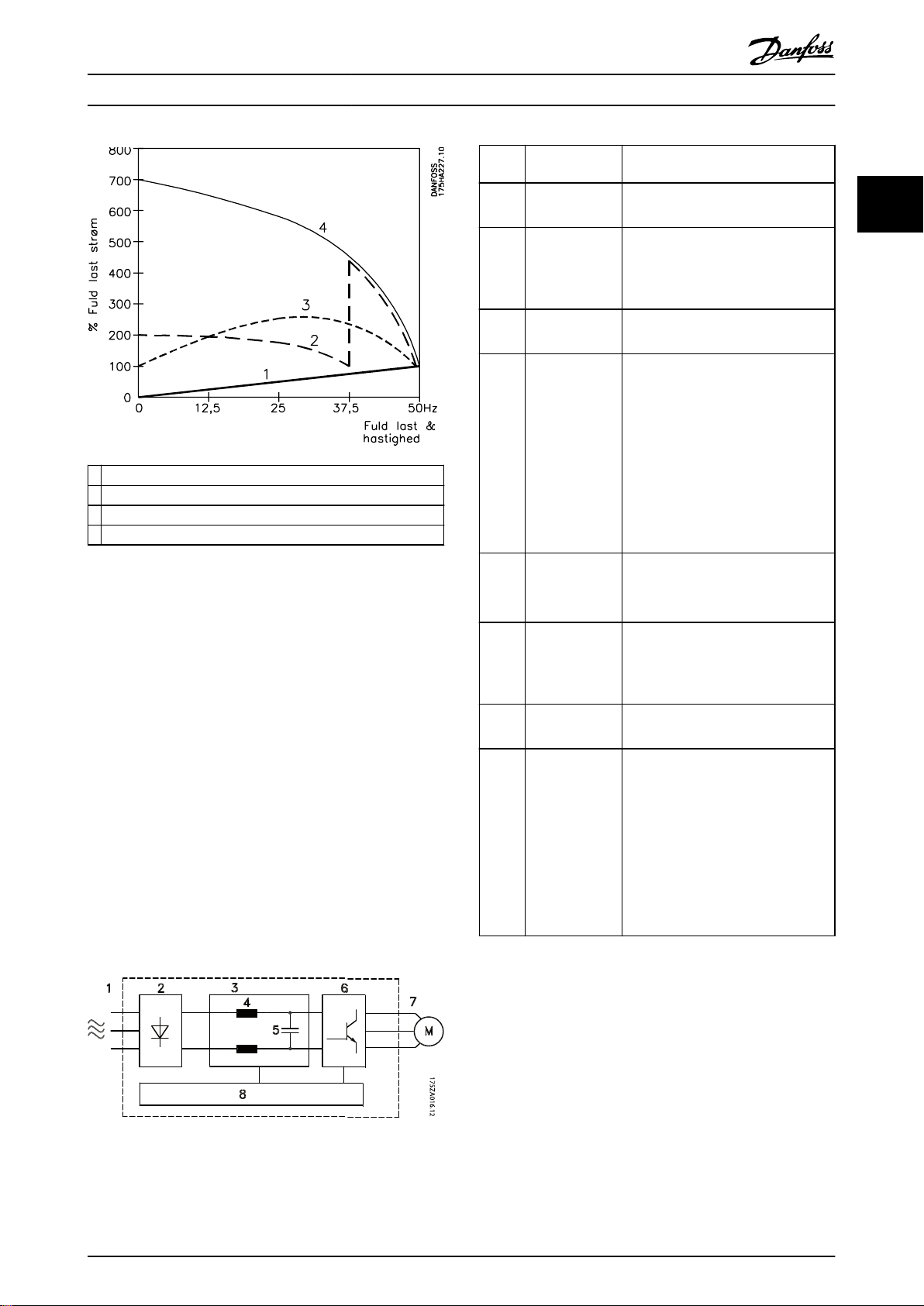
Stjerne-/trekantstarter eller softstarter
2.1.7
Når store motorer skal startes, er det i mange lande
nødvendigt at anvende udstyr, der begrænser startstrømmen. I mere traditionelle systemer anvendes der ofte
en stjerne-/trekantstarter eller softstarter. Denne form for
motorstartere kan undværes, når man bruger en frekvensomformer.
Som illustreret i Illustration 2.8 forbruger en frekvensomformer ikke mere end den nominelle strøm.
18 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 21
Produktoversigt
Design Guide
1
VLT® AQUA Drive FC 202
2 Stjerne-/trekantstarter
3 Softstartere
4 Start direkte på netforsyning
Illustration 2.8 Startstrøm
2.2
Beskrivelse af drift
Frekvensomformeren leverer en reguleret mængde ACstrøm fra netforsyningen til motoren for at styre
hastigheden. Frekvensomformeren leverer variabel frekvens
og spænding til motoren.
Frekvensomformeren er opdelt i re primære moduler:
Ensretter
•
DC-busmellemkreds
•
Vekselretter
•
Styring og regulering
•
Illustration 2.9er et blokdiagram over frekvensomformerens
indvendige komponenter. Se Tabel 2.3 for oplysninger om
deres funktioner.
Områd
e
1 Netforsyning
2 Ensretter
3 DC-bus
4 DC-reaktorer
5
6 Vekselretter
7
8 Styrekredsløb
Tabel 2.3 Forklaring til Illustration 2.9
Titel Funktioner
Trefaset netspænding til frekvens-
•
omformeren.
Ensretterbroen omdanner AC-
•
netspændingen til DC-strøm,
hvilket forsyner vekselretteren med
strøm.
DC-busmellemkredsen håndterer
•
DC-strømmen.
Filtrerer DC-mellemkredsspæn-
•
dingen.
Beskytter mod forbigående netfor-
•
syning
Reducerer RMS-strømmen.
•
Hæver eektfaktoren, der går
•
tilbage til ledningen.
Reducerer harmoniske strømme i
•
AC-indgangsstrømmen.
Lagrer DC-strømmen.
Kondensatorgruppe
Udgang til
motor
•
Giver gennemkøringsbeskyttelse
•
mod korte eekttab.
Omdanner DC-strømmen til en
•
kontrolleret PWM AC-bølgeform
for at opnå en kontrolleret,
regulerbar udgang til motoren.
Reguleret trefaset udgangsstrøm
•
til motoren.
Netforsyning, intern behandling,
•
udgang og motorstrøm overvåges
med henblik på eektiv drift og
styring.
Brugergrænseaden og eksterne
•
kommandoer overvåges og
udføres.
Statusudgang og styring kan
•
leveres.
2
2
1. Frekvensomformeren ensretter AC-spændingen fra
netforsyningen til DC-spænding.
2. DC-spændingen omformes til AC-strøm med
variabel amplitude og frekvens.
Frekvensomformeren forsyner motoren med variabel
spænding/strøm og frekvens, hvilket muliggør variabel
Illustration 2.9 Blokdiagram over frekvensomformeren
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 19
hastighedskontrol af trefasede asynkrone standardmotorer
og ikke-udprægede PM-motorer.
Page 22
Produktoversigt
VLT® AQUA Drive FC 202
2
Frekvensomformeren håndterer forskellige motorstyringsprincipper, som f.eks. speciel U/f-motortilstand og VVC+.
Illustration 2.10 Frekvensomformerstruktur
2.3 Driftssekvens
2.3.1 Ensretterdelen
Når strøm påføres frekvensomformeren, kommer den ind
via netklemmerne (L1, L2 og L3) og videre til afbryderen
og/eller RFI-lteroptionen, afhængigt af apparatets kongu-
ration.
2.3.2 Mellemdelen
Fra ensretter-delen passerer spændingen videre til mellemdelen. Et sinuslter-kredsløb, der består af DCbusinduktoren og DC-buskondensatorgruppen, udjævner
den udbedrede spænding.
DC-businduktoren sørger for seriel impedans til ændret
strøm. Dette hjælper ltreringsprocessen, samtidig med at
harmonisk forvrængning til indgangen AC-bølgeform
reduceres, som normalt er indeholdt i ensretterkredsløb.
Vekselretterdel
2.3.3
I vekselretterdelen, når en kørselskommando og hastighedsreference er til stede, begynder IGBT'ernes kobling at
skabe udgangsbølgeformen. Denne bølgeform, som er
genereret af Danfoss VVC+ PWM-princippet på styrekortet,
giver optimal ydeevne og minimale tab i motoren.
Kortslutningsadfærd på frekvensomformeren afhænger af
de tre strømtransducere i motorfaserne.
Bremseoption
2.3.4
Til de frekvensomformere, der er udstyret med en
dynamisk bremseoption, medfølger der en bremse-IGBT
sammen med klemmerne 81(R-) og 82(R+) til at tilslutte en
ekstern bremsemodstand.
Bremse-IGBT'ens funktion er at begrænse spændingen i
mellemkredsen, når den maksimale spændingsgrænse er
overskredet. Dette opnås ved kobling af den eksternt
monterede modstand henover DC-bussen for at erne
overskydende DC-spænding, der ndes i buskondensatorerne.
Ved udvendig placering af bremsemodstanden opnås
fordelene ved at vælge modstanden baseret på applikationens behov, sprede energien uden for omformeren og
beskytte denne mod overophedning, hvis bremsemodstanden er overbelastet.
Bremse-IGBT'ens indløbssignal opstår på styrekortet og
leveres til bremse-IGBT via
kortet. Derudover overvåger eekt- og styrekortene
bremse-IGBT og bremsemodstandens tilslutning med
hensyn til kortslutninger og overbelastninger. Se
kapitel 7.1 Elektriske data vedrørende specikationer for for-
sikringer. Se også kapitel 7.7 Sikringer og afbrydere.
eektkortet og gate drive-
20 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 23
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Produktoversigt Design Guide
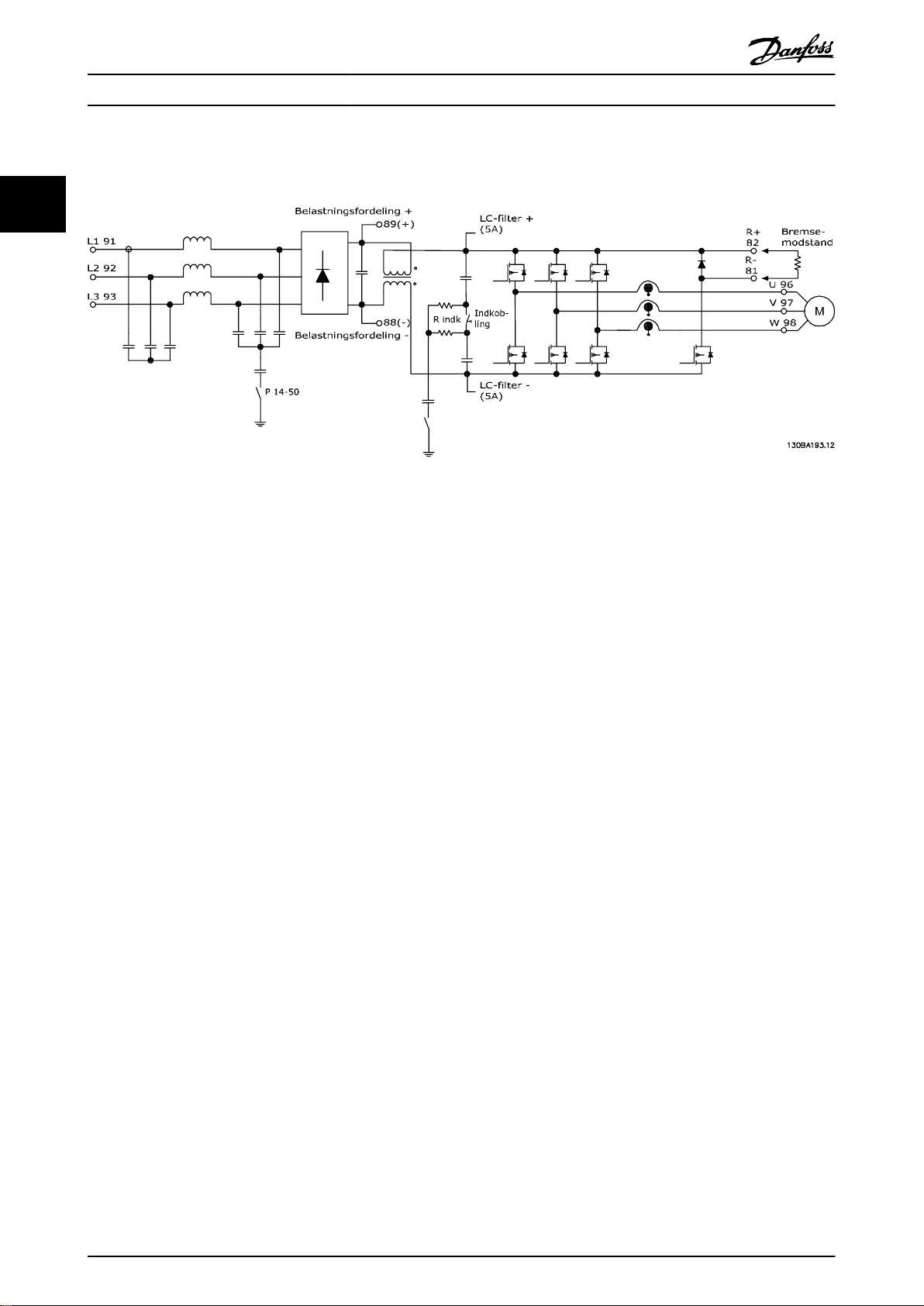
2.3.5 Belastningsfordeling
Apparater med indbygget belastningsfordelingsoption
indeholder klemmer (+) 89 DC og (–) 88 DC. I frekvensomformeren er disse klemmer tilsluttet DC-bussen foran DClinkreaktoren og buskondensatorerne.
Kontakt Danfoss for ere oplysninger.
Belastningsfordelingsklemmerne kan tilsluttes to forskellige
kongurationer.
1. Den første metode indebærer, at klemmerne
bruges til at binde DC-buskredsløbene fra ere
frekvensomformere sammen. Dette muliggør, at
et apparat, der er i regenerativ tilstand, deler den
overskydende busspænding med et andet
apparat, der driver en motor. Denne form for
belastningsfordeling kan reducere behovet for
eksterne dynamiske bremsemodstande samtidig
med, at der spares energi. Antallet af apparater,
der kan tilsluttes på denne måde, er uendelig, så
længe hvert enkelt apparat har samme
spændingsklassicering. Afhængigt af størrelse og
antallet af apparater kan det endvidere være
nødvendigt at installere DC-reaktorer og DCsikringer i DC-link-tilslutningerne, samt ACreaktorer på netforsyningen. Hvis en sådan
konguration forsøges, kræver det nøje overvejelser. Kontakt Danfoss for assistance.
2. Den anden metode indebærer, at frekvensomformeren påføres strøm udelukkende fra en DCkilde. Dette kræver:
2a En DC-kilde.
2b En metode til soft charge-opstart af DC-
bussen.
Hvis sådan en konguration forsøges, kræver det
nøje overvejelser. Kontakt Danfoss for assistance.
2.4 Styringsstrukturer
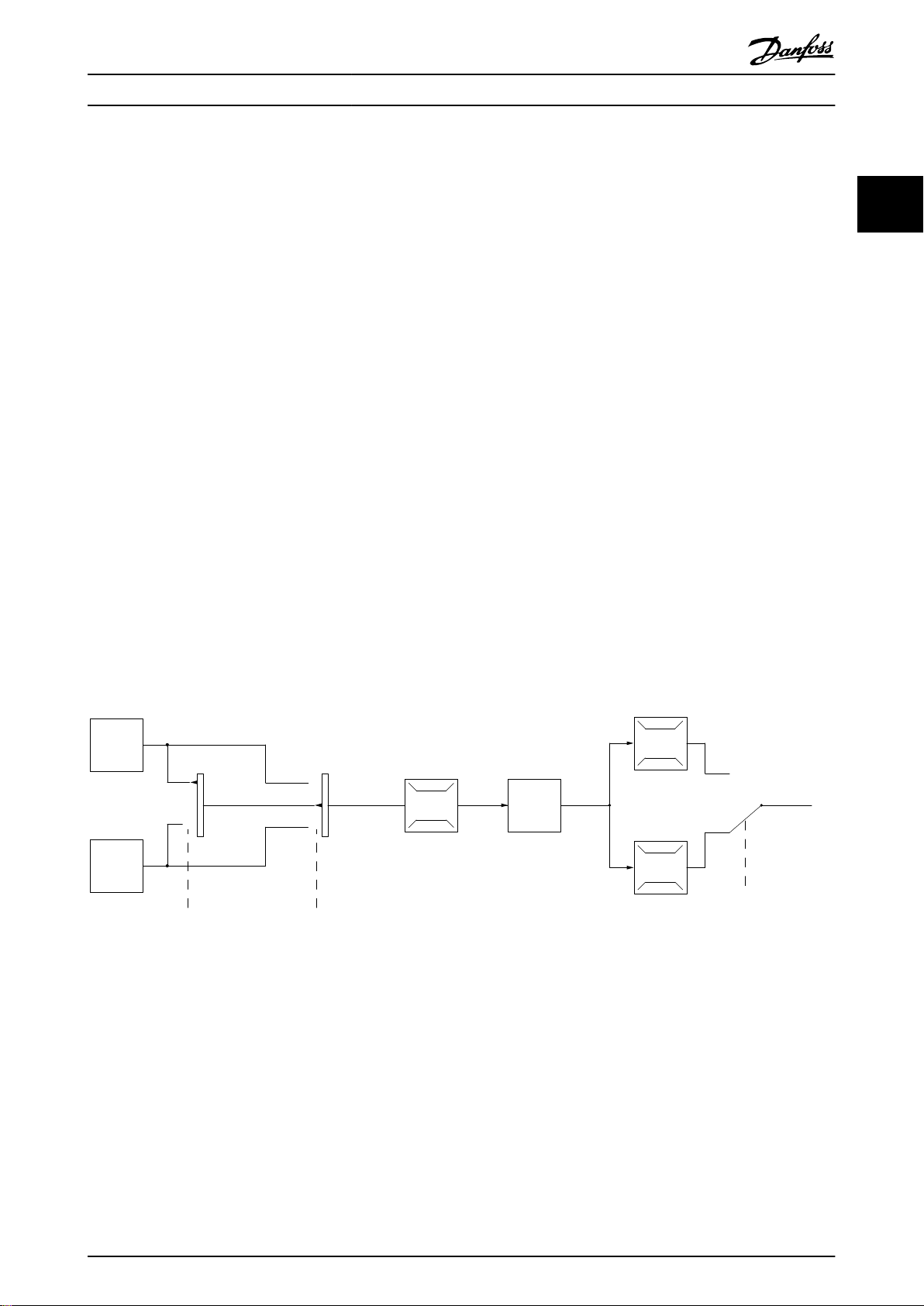
2.4.1 Styringsstruktur, åben sløjfe
Under drift med åben sløjfe reagerer frekvensomformeren
på indgangskommandoer manuelt, via LCP-tasterne eller
ved hjælp af ernstyring via analoge/digitale indgange
eller en seriel bus. . I den kongurationen, der er vist i
Illustration 2.11, kører frekvensomformeren i åben sløjfetilstand. Den modtager input fra enten LCP'et (Hand mode)
eller via et eksternt signal (Auto mode). Signalet (hastighedsreferencen) modtages og er betinget af
programmerede minimale og maksimale motorhastighedsgrænser (i O/MIN og Hz), rampe op- og rampe ned-tider,
og motorens omdrejningsretning. Referencen sendes
derefter videre for at styre motoren.
2
2
Illustration 2.11 Blokdiagram, åben sløjfe-tilstand
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 21
Page 24
Produktoversigt
VLT® AQUA Drive FC 202
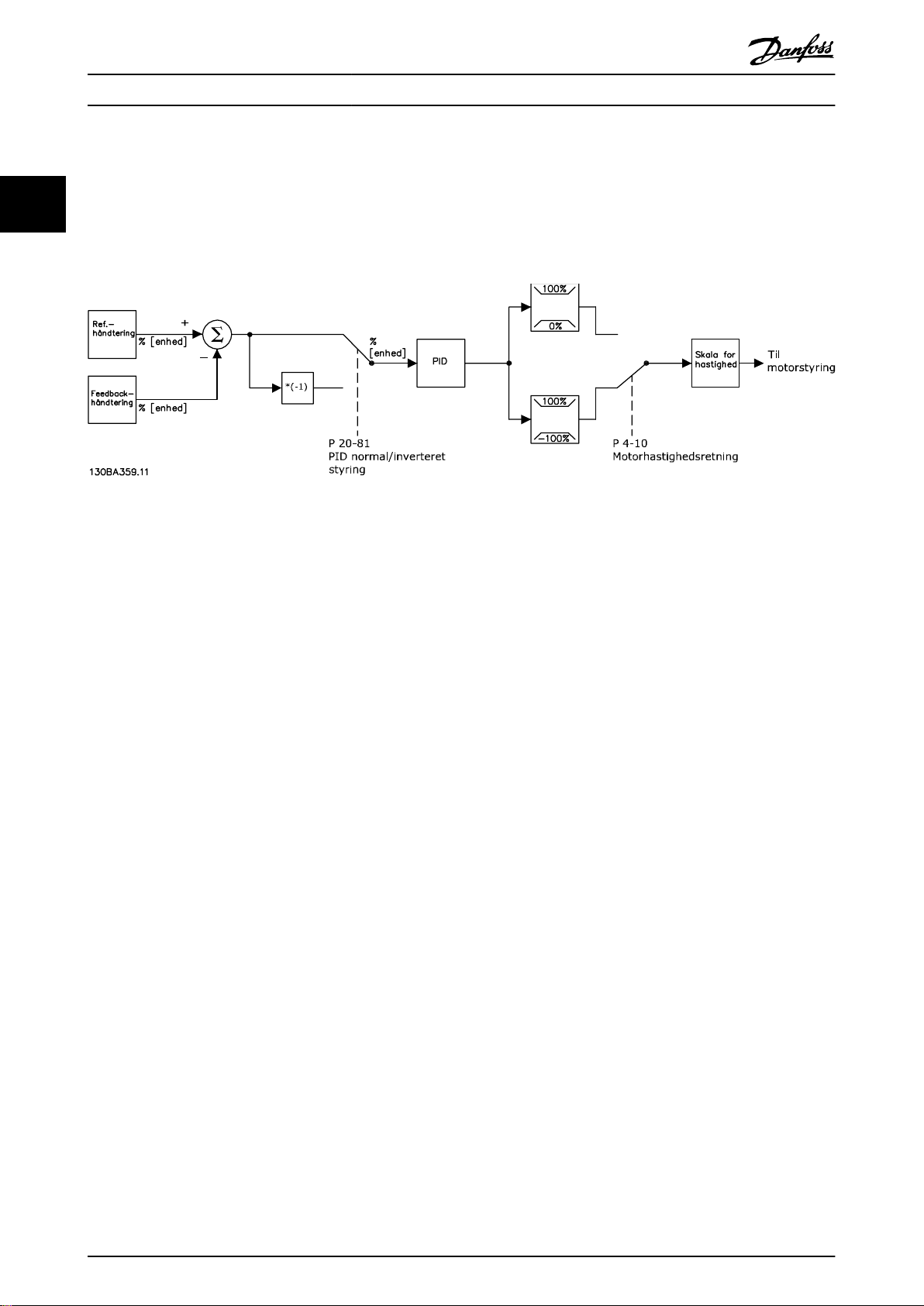
2.4.2 Styringsstruktur for lukket sløjfe
2
I lukket sløjfe-tilstand lader en intern PID-styreenhed
frekvensomformeren behandle systemreference og
feedbacksignaler, således at de fungerer som en uafhængig
styreenhed. Omformeren kan give status- og alarmmedde-
Illustration 2.12 Blokdiagram, lukket sløjfe-styreenhed
Eksempel: En pumpeapplikation, hvor pumpens hastighed
skal styres, så det statiske tryk i røret er konstant (se
Illustration 2.12). Frekvensomformeren modtager et
feedbacksignal fra en føler i systemet. Den sammenligner
denne feedback med en sætpunktsreferenceværdi og
fastslår en eventuel fejl mellem de to signaler. Derefter
justerer frekvensomformeren motorens hastighed for at
afhjælpe fejlen.
Det ønskede sætpunkt for statisk tryk er referencesignalet
til frekvensomformeren. En statisk trykføler måler det
faktiske statiske tryk i røret og leverer denne information til
frekvensomformeren som et feedbacksignal. Hvis feedbacksignalet er højere end sætpunktsreferencen, ramper
frekvensomformeren ned for at reducere trykket. Hvis
trykket i røret er lavere end sætpunktsreferencen, ramper
frekvensomformeren op på samme måde for at øge
pumpetrykket.
Mens standardværdierne for frekvensomformeren i lukket
sløjfe ofte giver en tilfredsstillende ydeevne, kan styringen
af systemet ofte optimeres ved at justere PID-parametrene.
Auto tuning er tilgængelig for denne optimering.
Andre programmerbare funktioner omfatter:
Inverteret regulering - motorhastigheden øges,
•
når et feedbacksignal er højt.
Startfrekvens - tillader systemet hurtigt at opnå
•
en driftsstatus, før PID-styreenheden overtager.
Indbygget lavpaslter - reducerer støj fra
•
feedbacksignalet.
lelser, samt mange andre programmerbare optioner, til
ekstern systemovervågning ved uafhængig drift i lukket
sløjfe.
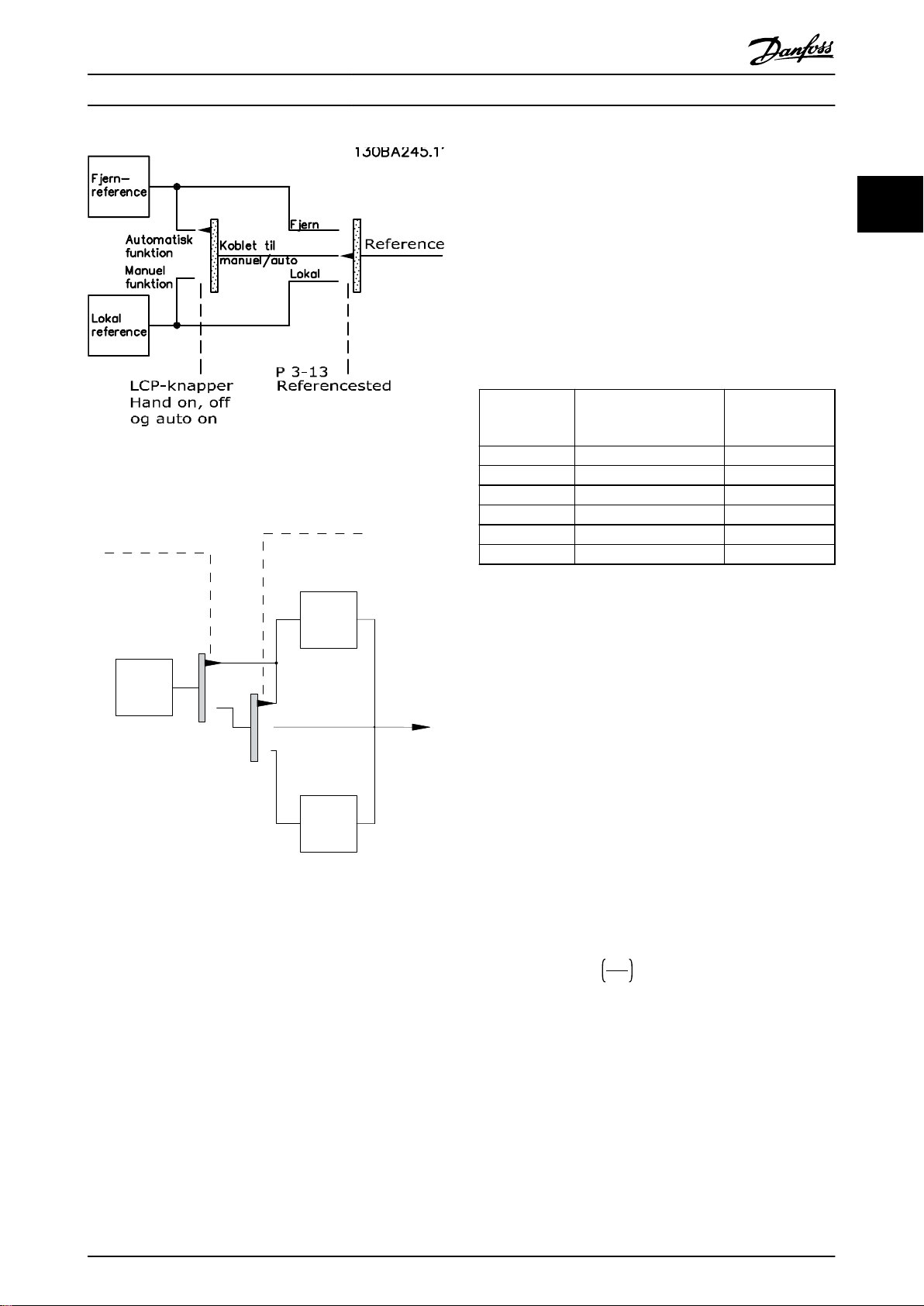
Lokalbetjening (Hand On) og
2.4.3
Fjernbetjening (Auto On)
Frekvensomformeren kan betjenes manuelt via LCP'et eller
via ernstyring via analoge og digitale indgange og en
seriel bus.
Aktiv reference og kongurationstilstand
Den aktive reference er enten en lokal reference eller en
ernreference. Fabriksindstillingen er ernreference.
Kongurér i Hand mode for at anvende den
•
lokale reference. Tilpas parameterindstillinger i
parametergruppe 0-4* LCP-tastatur for at aktivere
Hand mode. Yderligere oplysninger
Programming Guiden.
Kongurér i Auto mode, som er fabriksindstil-
•
lingen, for at anvende ernreferencen. I Auto
mode tilstand er det muligt at styre frekvensomformeren via de digitale indgange og forskellige
serielle grænseader (RS-485, USB eller Fieldbus
(option)).
Illustration 2.13 illustrerer den kongurations-
•
tilstand, der stammer fra aktivt referencevalg,
enten lokalt eller ernbetjent.
Illustration 2.14 illustrerer manuel kongurations-
•
tilstand til lokal reference.
ndes i
22 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 25
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Produktoversigt
Design Guide
Styreprincip for applikation
På ethvert tidspunkt vil enten ernreferencen eller den
lokale reference være aktiv. De kan ikke begge være aktive
samtidig. Indstil styreprincippet for applikationen (dvs.
åben sløjfe eller lukket sløjfe) i Parameter 1-00 Kongurati-
onstilstand som vist i Tabel 2.4.
Når den lokale reference er aktiv, indstilles styreprincippet
for applikationen i Parameter 1-05 Lokal kongurations-
tilstand.
Indstil referencested i parameter 3-13 Referencested som vist
i Tabel 2.4.
Yderligere oplysninger
ndes i Programming Guiden.
2
2
Illustration 2.13 Aktiv reference
Illustration 2.14 Kongurationstilstand
[Hand On]
[Auto On]
LCP-taster
Hand Kædet til Hand/Auto Lokal
Hand⇒O Kædet til Hand/Auto Lokal
Auto Kædet til Hand/Auto Fjernbetjent
Auto ⇒O Kædet til Hand/Auto Fjernbetjent
Alle taster Lokal Lokal
Alle taster Fjernbetjent Fjernbetjent
Tabel 2.4 Lokal- og ernreferencekongurationer
Referencehåndtering
2.4.4
Referencested
parameter 3-13 Referencested
Aktiv reference
Referencehåndtering er gældende i både åben sløjfe- og
lukket sløjfe-drift.
Interne og eksterne referencer
Der kan programmeres op til 8 preset-referencer i frekvensomformeren. Den aktive interne preset-reference kan
vælges eksternt via digitale styreindgange eller den serielle
kommunikationsbus.
Eksterne referencer kan også leveres til omformeren, oftest
via en analog styreindgang. Alle referencekilder og busreferencen tilføjes for at opnå den samlede eksterne reference.
Den eksterne reference, preset-referencen, sætpunktet eller
summen af alle tre kan vælges som den aktive reference.
Denne reference kan skaleres.
Den skalerede reference beregnes således:
Reference = X + X ×
Y
100
Hvor X er den eksterne reference, preset-referencen eller
summen af disse referencer, og Y er parameter 3-14 Preset
relativ reference i [%].
Hvis Y; parameter 3-14 Preset relativ reference er indstillet til
0 %, påvirker skaleringen ikke referencen.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 23
Page 26
2
Produktoversigt
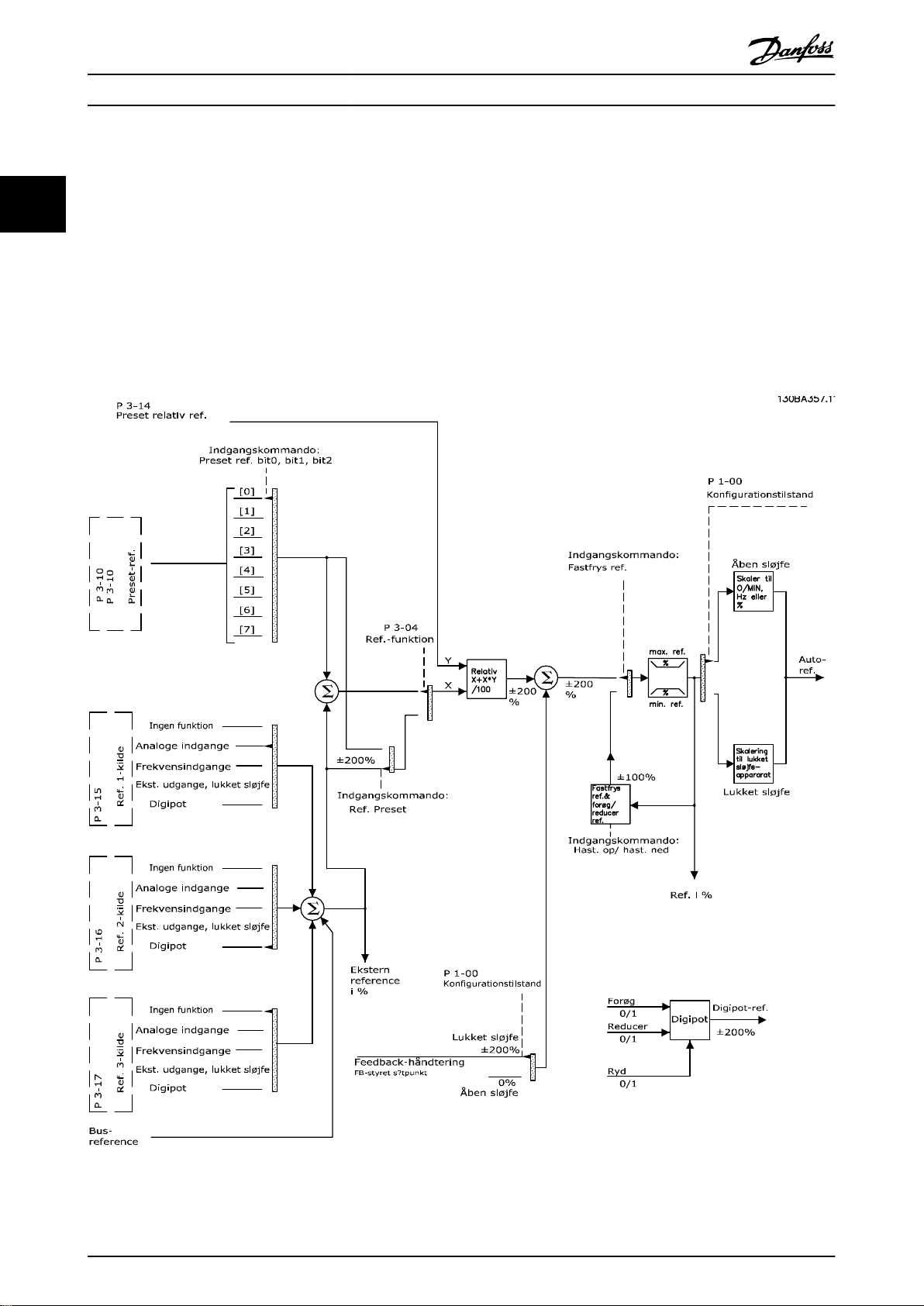
Fjernreference
En ernreference består af følgende (se Illustration 2.15).
Preset-referencer
•
Eksterne referencer:
•
Analoge indgange
-
Pulsfrekvensindgange
-
Digitale potentiometerindgange
-
Referencer for seriel kommunikationsbus
-
Forudindstillet relativ reference
•
Et feedbackstyret sætpunkt
•
VLT® AQUA Drive FC 202
Illustration 2.15 Blokdiagram over ernreferencehåndtering
24 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 27
130BA354.12
Sætpunkt 1
P 20-21
Sætpunkt 2
P 20-22
Sætpunkt 3
P 20-23
Feedback 1-kilde
P 20-00
Feedback 2-kilde
P 20-03
Feedback 3-kilde
P 20-06
Feedback konv.
P 20-01
Feedback konv.
P 20-04
Feedback konv.
P 20-07
Feedback 1
Feedback 2
Feedback 3
Multi-sætpunkt min.
Multi-sætpunkt maks.
Kun feedback 1
Kun feedback 2
Kun feedback 3
Sum (1+2+3)
Forskel (1-2)
Gennemsnit (1+2+3)
Minimum (1|2|3)
Maksimum (1|2|3)
0%
0%
0%
0%
Sætpunkt
Feedbck
Feedbackfunktion
P 20-20
Produktoversigt Design Guide
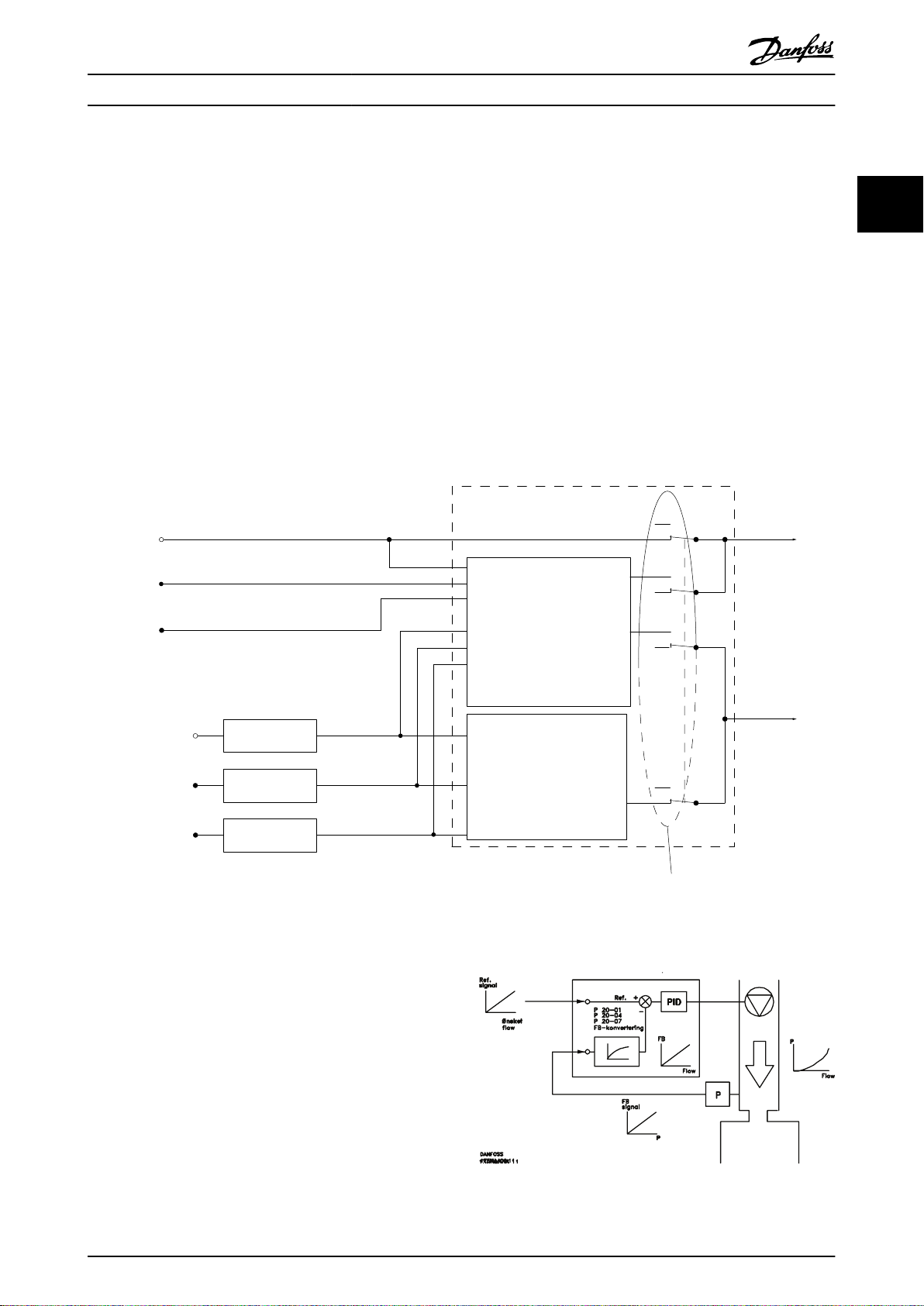
2.4.5 Feedbackhåndtering
Feedbackhåndtering kan kongureres til at fungere med
applikationer, der kræver avanceret styring, f.eks. ere
sætpunkter og ere typer feedbacks (se Illustration 2.16.
Der ndes tre almindelige typer styring:
Enkelt zone, enkelt sætpunkt
Denne styringstype er en grundlæggende
guration. Sætpunkt 1 føjes til en anden reference (hvis en
sådan ndes), og feedbacksignalet vælges.
Multizone, enkelt sætpunkt
Denne styringstype bruger to eller tre feedbackfølere, men
kun ét sætpunkt. Feedback kan tilføjes, trækkes fra, eller
der kan beregnes et gennemsnit. Desuden kan maksimumeller minimumværdien anvendes. Sætpunkt 1 anvendes
udelukkende i denne konguration.
feedbackkon-
Multi-zone, sætpunkt/feedback
Det sætpunkt-/feedbackpar, der har den største forskel,
styrer frekvensomformerens hastighed. Maksimum forsøger
at holde alle zoner på eller under deres respektive
sætpunkter, mens minimum forsøger at holde alle zoner på
eller over deres respektive sætpunkter.
Eksempel
En 2-zone-, 2-sætpunktsapplikation. Zone 1-sætpunktet er
15 bar, og feedback er 5,5 bar. Zone 2-sætpunktet er 4,4
bar, og feedback er 4,6 bar. Hvis maksimum er valgt,
sendes zone 1-sætpunktet og feedback til PIDstyreenheden, eftersom denne har den mindste forskel
(feedbacken er højere end sætpunktet, hvilket resulterer i
en negativ forskel). Hvis minimum er valgt, sendes zone 2sætpunktet til PID-styreenheden, eftersom denne har den
største forskel (feedbacken er lavere end sætpunktet,
hvilket resulterer i en positiv forskel).
2
2
Illustration 2.16 Blokdiagram over behandling af feedbacksignal
Feedbackkonvertering
I nogle applikationer er det nyttigt at konvertere feedbacksignalet. Dette kan f.eks. ske ved at bruge et tryksignal til
at give gennemstrømningsfeedback. Eftersom kvadratroden
af trykket er proportional med gennemstrømningen, giver
kvadratroden af tryksignalet en værdi, der er proportional
med gennemstrømningen, se Illustration 2.17.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 25
Illustration 2.17 Feedbackkonvertering
Page 28

Produktoversigt
VLT® AQUA Drive FC 202
2.5 Automatiserede driftsfunktioner
2.5.2
Overspændingsbeskyttelse
2
Automatiserede driftsfunktioner er aktive, så snart frekvensomformeren kører. De este kræver ingen programmering
eller opsætning. Forståelse for at disse funktioner er til
stede, kan optimere et systemdesign og muligvis undgå, at
der introduceres redundante komponenter eller funktionalitet.
Se Programming Guiden for oplysninger om de nødvendige
opsætninger, især motorparametre.
Frekvensomformeren har et udvalg af indbyggede beskyttelsesfunktioner til at beskytte sig selv og motoren, når
den kører.
Kortslutningsbeskyttelse
2.5.1
Motor (fase-fase)
Frekvensomformeren beskyttes mod kortslutninger på
motorsiden af strømmålinger i hver af de tre motorfaser
eller i DC-linket. En kortslutning mellem to udgangsfaser
medfører overstrøm i vekselretteren. Vekselretteren slukkes,
når kortslutningsstrømmen overstiger den tilladte værdi
(Alarm 16, Triplås).
Netforsyningsside
En frekvensomformer, der fungerer korrekt, begrænser den
strøm, der kan trækkes fra forsyningen. Det anbefales dog
at bruge sikringer og/eller afbrydere på forsyningssiden
som beskyttelse, hvis der skulle forekomme komponentnedbrud inden i frekvensomformeren (første fejl). Se
kapitel 7.7 Sikringer og afbrydere for ere oplysninger.
BEMÆRK!
For at sikre overensstemmelse med IEC 60364 for CE eller
NEC 2009 for UL skal der bruges sikringer og/eller
afbrydere.
Bremsemodstand
Frekvensomformeren er beskyttet mod kortslutning i
bremsemodstanden.
Belastningsfordeling
For at beskytte DC-bussen mod kortslutning og frekvensomformerne mod overbelastning, monteres DC-sikringer i
serier med belastningsfordelingsklemmerne fra alle
tilsluttede apparater. Se kapitel 2.3.5 Belastningsfordeling for
yderligere oplysninger.
Motorgenereret overspænding
Spændingen i mellemkredsen øges, når motoren fungerer
som en generator. Dette sker i følgende tilfælde:
Belastningen driver motoren (ved konstant
•
udgangsfrekvens fra frekvensomformeren), dvs. at
belastningen genererer energi.
Under en deceleration (rampe ned) er friktionen
•
lav, hvis inertimomentet er højt, og rampe nedtiden er for kort til, at energien kan spredes som
et tab i frekvensomformeren, motoren og installationen.
En forkert indstilling af slipkompenseringen kan
•
medføre højere DC-link-spænding.
Modelektromotorisk kraft fra PM-motordrift. Ved
•
friløb ved høje O/MIN kan PM-motorens modelektromotoriske kraft måske overstige den
maksimale spændingstolerance i frekvensomformeren og forårsage skader. For at undgå dette
begrænses værdien af parameter 4-19 Maks.
udgangsfrekvens automatisk via en intern
beregning, der baseres på værdien i
parameter 1-40 Modelektromot.kraft v. 1000 O/MIN,
parameter 1-25 Nominel motorhastighed og
parameter 1-39 Motorpoler.
BEMÆRK!
For at undgå motoroverhastighed (f.eks. pga. meget høje
vindmølle-eekter eller ukontrolleret vandgennemstrømning) skal frekvensomformeren forsynes med en
bremsemodstand.
Overspændingen kan håndteres enten ved at anvende en
bremsefunktion (parameter 2-10 Bremsefunktion) eller
overspændingsstyring (parameter 2-17 Overspændings-
styring).
Overspændingsstyring (OVC)
OVC reducerer risikoen for, at frekvensomformeren tripper
ved en overspænding på DC-linket. Dette håndteres ved
automatisk at forlænge rampe ned-tiden.
BEMÆRK!
OVC kan aktiveres for PM-motorer (PM VVC+).
26 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 29

Produktoversigt Design Guide
Bremsefunktioner
Tilslut en bremsemodstand for udledning af overskydende
bremseenergi. Tilslutning af en bremsemodstand forhindrer
for høj DC-link-spænding under bremsning.
En AC-bremse er et alternativ til at forbedre bremsning
uden brug af en bremsemodstand. Denne funktion styrer
en overmagnetisering af motoren, når den kører som en
generator, der skaber ekstra energi. Denne funktion kan
forbedre OVC. Når de elektriske tab i motoren øges, kan
OVC-funktionen øge bremsemomentet uden at overstige
overspændingsgrænsen.
BEMÆRK!
AC-bremsning er ikke så eektiv som dynamisk
bremsning med en modstand.
2.5.3 Detektering af manglende motorfase
Den manglende motorfase-funktion
(parameter 4-58 Manglende motorfasefunktion) er som
standard aktiveret for at undgå motorskade, hvis der
mangler en motorfase. Fabriksindstillingen er 1.000 ms,
men den kan justeres, så der opnås hurtigere detektering.
Detektering af ubalance i netfasen
2.5.4
Drift under alvorlig ubalance på netforsyningen reducerer
motorens levetid. Forholdene betragtes som alvorlige, hvis
motoren kontinuerligt kører tæt på nominel belastning.
Fabriksindstillingen tripper frekvensomformeren i tilfælde
af ubalance i netforsyningen (parameter 14-12 Funktion ved
netubalance).
Hast.-grænse
Denér lavere og øvre grænser for driftshastighedsområdet
med følgende parametre:
parameter 4-11 Motorhastighed, lav grænse [O/MIN]
•
eller
parameter 4-12 Motorhastighed, lav grænse [Hz] og
•
parameter 4-13 Motorhastighed, høj grænse [O/
MIN], eller
parameter 4-14 Motor Speed High Limit [Hz]
•
For eksempel kan driftshastighedsområdet
mellem 30 og 50/60 Hz.
parameter 4-19 Maks. udgangsfrekvens begrænser den
maksimale udgangshastighed, som frekvensomformeren
kan yde.
ETR
ETR er en elektronisk funktion, der simulerer et bimetalrelæ
på basis af interne målinger. ETR-karakteristika er vist i
Illustration 2.18.
Spænd.-grænse
Frekvensomformeren slukkes for at beskytte transistorerne
og DC-link-kondensatorerne, når der nås et vist indkodet
spændingsniveau.
Overtemperatur
Frekvensomformeren har indbyggede temperaturfølere og
reagerer straks på kritiske værdier via indkodede grænser.
Automatisk derating
2.5.7
Frekvensomformeren undersøger hele tiden, om der er
kritiske niveauer:
deneres til
2
2
Kobling på udgangen
2.5.5
Det er tilladt at tilføje kobling på udgangen mellem motor
og frekvensomformer. Der kan opstå fejlmeddelelser.
Aktivér ying start for at fange en roterende motor.
Overbelastningsbeskyttelse
2.5.6
Momentgrænse
Momentgrænsefunktionen beskytter motoren mod overbelastning uafhængigt af hastigheden. Momentgrænsen
styres i parameter 4-16 Momentgrænse for motordrift eller
parameter 4-17 Momentgrænse for generatordrift , og det
tidsrum, der går, før momentgrænseadvarslen tripper,
styres i parameter 14-25 Trip-forsinkelse ved momenegrænse.
Strømgrænse
Strømgrænsen styres i parameter 4-18 Strømgrænse.
Høj temperatur på styrekortet eller kølepladen
•
Høj motorbelastning
•
Høj DC-link-spænding
•
Lav motorhastighed
•
Som respons på et kritisk niveau kan frekvensomformeren
justere switchfrekvensen. Ved høje interne temperaturer og
lav motorhastighed kan frekvensomformeren også tvinge
PWM-mønstret til SFAVM.
BEMÆRK!
Den automatiske derating er anderledes, når
parameter 14-55 Udgangslter er indstillet til [2] Sinusbøl-
gelter fast.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 27
Page 30

Produktoversigt
VLT® AQUA Drive FC 202
2
2.5.8 Automatisk energioptimering
Automatisk energioptimering (AEO) får frekvensomformeren til kontinuerligt at overvåge belastningen på
motoren og justere udgangsspændingen for at maksimere
virkningsgrad. Ved let belastning reduceres spændingen og
motorstrømmen minimeres. Motoren drager nytte af den
øgede virkningsgrad, reduceret opvarmning, og mere
støjsvag drift. Der er ikke behov for at vælge en V/Hzkurve, da frekvensomformeren automatisk justerer
motorspændingen.
2.5.9 Automatisk switchfrekvensmodulering
Frekvensomformeren genererer korte elektriske pulser, så
der skabes et AC-bølgemønster. Switchfrekvensen er
hastigheden af disse pulser. En lav switchfrekvens (langsom
pulshastighed) forårsager støj i motoren, hvilket betyder, at
en højere switchfrekvens er at foretrække. En høj switchfrekvens genererer dog varme i frekvensomformeren,
hvilket kan begrænse mængden af strøm, som er
tilgængelig for motoren.
Automatisk switchfrekvensmodulering regulerer disse
forhold automatisk for at opnå den højeste switchfrekvens
uden overophedning af frekvensomformeren. Når der
leveres reguleret høj switchfrekvens, dæmpes motorens
driftsstøj ved langsomme hastigheder, når styring af hørbar
støj er kritisk, og medfører fuld udgangsstrøm til motoren,
når det kræves.
omformeren også reducere udgangsfrekvensen og
strømmen med op til 30 % for at undgå et trip ved
overtemperatur.
2.5.12 Auto-rampning
En motor, der prøver at accelerere en belastning for hurtigt
i forhold til den tilgængelige strøm, kan forårsage, at
omformeren tripper. Det samme gælder for en for hurtig
deceleration. Auto-rampning beskytter mod disse
situationer ved at forlænge motorens rampningshastighed
(acceleration eller deceleration) for at kunne matche den
tilgængelige strøm.
2.5.13
Når en belastning overstiger frekvensomformerens
strømkapacitet under normal drift (fra en underdimensioneret omformer eller motor), reducerer strømgrænsen
udgangsfrekvensen til at rampe motoren ned og reducere
belastningen. En justérbar timer er tilgængelig til at
begrænse driften i denne tilstand i 60 sek eller mindre.
Fabriksindstillingens grænse er 110 % af den nominelle
motorstrøm for at minimere overstrømsbelastning.
2.5.14
Frekvensomformeren kan modstå udsving i netforsyningen
så som:
Strømgrænsekredsløb
Eektudsving i ydeevne
2.5.10
Automatisk derating for høj
switchfrekvens
Frekvensomformeren er beregnet til kontinuerlig drift ved
fuld belastning ved switchfrekvenser mellem 3,0 og 4,5 kHz
(dette frekvensområde afhænger af eektstørrelse). En
switchfrekvens, der overstiger det maksimale tilladte
område, genererer øget varme i frekvensomformeren og
kræver, at udgangsstrømmen derates.
En automatisk funktion i frekvensomformeren er styring af
belastningsafhængig switchfrekvens. Denne funktion
tillader, at motoren drager nytte af så høj en switchfrekvens, som belastningen tillader.
2.5.11
Automatisk derating for
overtemperatur
Automatisk derating af overtemperatur fungerer for at
forhindre, at frekvensomformeren tripper ved høj
temperatur. Interne temperaturfølere måler forholdene for
at beskytte eektkomponenterne mod overophedning.
Omformeren kan automatisk reducere switchfrekvensen for
at opretholde egen driftstemperatur inden for sikre
grænser. Efter reducering af switchfrekvensen kan
Transienter
•
Kortvarige udfald
•
Korte spændingstab
•
Spændingsbølger
•
Frekvensomformeren kompenserer automatisk for
indgangsspændinger ±10 % fra den nominelle, så der
opnås fuld nominel motorspænding og moment. Når autogenstart er valgt, starter frekvensomformeren automatisk
op efter et spændingstrip. Med ying start synkroniserer
frekvensomformeren til motorens omdrejningsretning før
start.
2.5.15
Frekvensomformeren leverer den korrekte mængde strøm
til motoren for at overvinde belastningsinerti og få
motoren op i hastighed. Dette forhindrer, at fuld
netspænding påføres en stationær eller langsomtdrejende
motor, hvilket genererer høj strøm og varme. Denne
indbyggede soft start-funktion reducerer den termiske
belastning og mekanisk belastning, forlænger motorens
levetid og giver mere støjsvag systemdrift.
Soft start af motoren
28 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 31

Produktoversigt
Design Guide
2.5.16 Resonansdæmpning
Højfrekvent resonansstøj i motoren kan elimineres ved
hjælp af resonansdæmpning. Det er muligt at vælge
frekvensdæmpning automatisk eller manuelt.
2.5.17 Temperaturkontrollerede ventilatorer
De interne køleventilatorer er temperaturstyrede af følere i
frekvensomformeren. En køleventilator kører ofte ikke
under drift med lav belastning, eller når den er i sleep
mode eller standby-tilstand. Dette reducerer støj, øger
virkningsgraden og forlænger ventilatorens driftslevetid.
2.5.18
Elektromagnetisk forstyrrelse (EMI) eller radiofrekvensforstyrrelse (RFI, i tilfælde af radiofrekvens) er forstyrrelser,
som kan påvirke et elektrisk kredsløb pga. elektromagnetisk induktion eller stråling fra en ekstern kilde.
Frekvensomformeren er konstrueret til at overholde EMCproduktstandarden for frekvensomformere IEC 61800-3
såvel som europæisk standard EN 55011. For at overholde
emissionsniveauerne i EN 55011 skal motorkablet være
skærmet og korrekt afsluttet. For ere oplysninger om
EMC-ydeevne se kapitel 3.2.2 EMC-testresultater.
EMC-overensstemmelse
2.6
Tilpassede applikationsfunktioner
Tilpassede applikationsfunktioner er de mest almindelige
funktioner, der er programmeret i frekvensomformeren, til
opnåelse af bedre systemydelse. De kræver kun mindre
programmering eller opsætning. Forståelse for, at disse
funktioner er tilgængelige, kan optimere et systemdesign
og muligvis undgå, at der introduceres redundante
komponenter eller funktionalitet. Se Programming Guiden
for instruktioner om, hvordan disse funktioner aktiveres.
2.6.1 Automatisk motortilpasning
Automatisk motortilpasning (AMA) er en automatiseret
testprocedure, der anvendes til at måle motorens elektriske
karakteristik. AMA giver en nøjagtig elektronisk model af
motoren. Det giver frekvensomformeren mulighed for at
beregne optimal ydeevne og virkningsgrad med motoren.
Kørsel af AMA-proceduren maksimerer også frekvensomformerens automatiske energioptimeringsfunktion. AMA
udføres, uden at motoren roterer, og uden at belastningen
fra motoren frakobles.
Termisk motorbeskyttelse
2.6.2
Termisk motorbeskyttelse kan opnås på tre måder:
2
2
2.5.19
Måling af strøm på alle tre
motorfaser
Udgangsstrøm til motoren måles kontinuerligt på alle 3
faser for at beskytte frekvensomformeren og motoren mod
kortslutninger, jordingsfejl og fasetab. Jordingsfejl på
udgange detekteres omgående. Hvis en motorfase er tabt,
stopper frekvensomformeren øjeblikkeligt og rapporterer
hvilken fase, der mangler.
2.5.20
Alle styreklemmer og udgangsrelæklemmer er galvanisk
adskilt fra netforsyningen. Dette betyder, at styreenhedens
kredsløb er helt beskyttet mod indgangsstrøm. Udgangsrelæklemmerne kræver deres egen jording. Denne adskillelse
overholder de strenge beskyttende krav for ekstra lav
spænding (PELV) til isolering.
De komponenter, der udgør den galvaniske adskillelse, er:
Galvanisk adskillelse af styreklemmer
Strømforsyning, inkl. signalisolering.
•
Gate drive til IGBT'ere, triggertransformere og
•
optokoblere.
Udgangsstrømmen, Hall-eekt transducere.
•
Via direkte temperaturføling, via én af følgende:
•
PTC-føler i motorviklingerne og
-
forbundet på en standard AI eller DI.
PT100 eller PT1000 i motorviklingerne
-
og motorlejer, tilsluttet på VLT® følerindgangskort MCB 114.
-
PTC-termistorindgang på VLT® PTCtermistorkort MCB 112 (ATEX godkendt).
Mekanisk termisk kontakt (Klixon-type) på en DI.
•
Via det indbyggede elektroniske termorelæ (ETR)
•
for asynkrone motorer.
ETR beregner motortemperaturen ved at måle strøm,
frekvens og driftstid. Frekvensomformeren viser den
termiske belastning på motoren i procent og kan afgive en
advarsel ved et programmerbart overbelastningssætpunkt.
Programmerbare optioner ved overbelastningen gør det
muligt for frekvensomformeren at stoppe motoren,
reducere udgangsstrømmen, eller ignorere tilstanden. Selv
ved lave hastigheder overholder frekvensomformeren
standarder beskrevet i I2t Class 20 vedrørende elektronisk
overbelastning af motor.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 29
Page 32

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
2
Produktoversigt
Illustration 2.18 ETR-karakteristika
X-aksen i Illustration 2.18 viser forholdet mellem I
I
nominel. Y-aksen viser tidsrummet i sekunder, inden
motor
VLT® AQUA Drive FC 202
og
motor
ETR kobler ud og tripper frekvensomformeren. Kurverne
viser den karakteristiske nominelle hastighed ved den
dobbelte nominelle hastighed og ved 0,2 x den nominelle
hastighed.
Ved lavere hastighed kobler ETR ud ved en lavere
temperatur på grund af mindre køling af motoren. Dette
forhindrer, at motoren overophedes selv ved lave
hastigheder. Funktionen ETR beregner motortemperaturen
på basis af den faktiske strøm og hastighed. Den
udregnede temperatur kan ses som en udlæsningsparameter i parameter 16-18 Termisk motorbelastning.
Flying start
Dette valg gør det muligt at fange en motor, som roterer
frit som følge af netudfald. Denne option er relevant for
centrifuger og ventilatorer.
Kinetisk backup
Dette valg sikrer, at frekvensomformeren kører, så længe
der er energi i systemet. Ved korte netudfald gendannes
driften, når netforsyningen vender tilbage, uden at applikationen bringes til et stop eller styringen mistes på noget
tidspunkt. Flere udgaver af kinetisk backup kan vælges.
Kongurér frekvensomformerens adfærd ved netudfald i
parameter 14-10 Netfejl og parameter 1-73 Indkobling på
roterende motor.
Indbyggede PID-styreenheder
2.6.4
De re indbyggede proportionelle, integrerede, aedte
(PID) styreenheder erner behovet for ekstra styringsapparater.
En af PID-styreenhederne opretholder konstant styring af
systemer med lukket sløjfe, hvor reguleret tryk, gennemstrømning, temperatur eller andre systemkrav skal
opretholdes. Frekvensomformeren kan yde uafhængig
styring af motorhastighed som reaktion på feedbacksignaler fra
ernbetjente følere. Frekvensomformeren har
plads til to feedbacksignaler fra to forskellige apparater.
Denne funktion giver mulighed for at regulere et system
med forskellige feedbackkrav. Frekvensomformeren træer
styringsbeslutninger ved at sammenligne de to signaler, så
systemydeevnen optimeres.
Netudfald
2.6.3
Brug de tre yderligere og uafhængige styreenheder til
styring af andet procesudstyr, som f.eks. kemiske
I tilfælde af netudfald fortsætter frekvensomformeren, indtil
mellemkredsspændingen kommer ned under mindste
fødepumper, ventilstyring eller gennemluftning ved
forskellige niveauer.
stopniveau, hvilket typisk er 15 % under den laveste
nominelle forsyningsspænding. Netspændingen før
Automatisk genstart
2.6.5
afbrydelsen bestemmer sammen med motorbelastningen,
hvor længe der skal gå, før frekvensomformeren friløber.
Frekvensomformeren kan programmeres til automatisk at
genstarte motoren efter et mindre trip, som f.eks.
Frekvensomformeren kan kongureres
(parameter 14-10 Netfejl) til forskellige typer adfærd under
netudfald, f.eks.:
Triplås når DC-link er brugt.
•
Friløb med ying start, når netforsyningen vender
•
tilbage (parameter 1-73 Indkobling på roterende
motor).
Kinetisk backup.
•
Kontrolleret nedrampning.
•
kortvarige eekttab eller udsving. Denne funktion erner
behovet for manuel nulstilling og øger automatiseret drift
af ernbetjente styrede systemer. Antallet af genstartsforsøg samt varigheden mellem dem kan begrænses.
2.6.6
Flying start
Flying start giver frekvensomformeren mulighed for at
synkronisere med en kørende motor, der roterer ved op til
fuld hastighed i enhver retning. Dette forhindrer trip på
grund af overstrømstræk. Det minimerer mekanisk stres på
systemet, da motoren ikke modtager pludselige ændringer
30 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
i hastighed, når frekvensomformeren starter.
Page 33

Produktoversigt
Design Guide
2.6.7 Fuldt moment ved reduceret
hastighed
Frekvensomformeren følger en variabel V/Hz-kurve for at
kunne give fuld motormoment selv ved reducerede
hastigheder. Fuld udgangsmoment kan falde sammen med
den maksimalt designede driftshastighed af motoren. Dette
er forskelligt fra omformere med variabelt moment, der
giver reduceret motormoment ved lav hastighed, eller
omformere med konstant moment, der giver overskydende
spænding, varme og motorstøj ved mindre end fuld
hastighed.
Frekvens-bypass
2.6.8
I nogle applikationer kan systemet have driftshastigheder,
der skaber mekanisk resonans. Dette kan generere for
meget støj og muligvis skade mekaniske komponenter i
systemet. Frekvensomformeren har re programmerbare
bypass-frekvens-båndbredder. Disse tillader, at motoren går
over hastigheder, der forårsager systemresonans.
Motorforvarmer
2.6.9
For at forvarme en motor i kolde eller våde miljøer kan en
lille mængde DC-strøm sive kontinuerligt ind i motoren for
at beskytte den mod kondensdannelse og kold start. Dette
kan erne behovet for en rumopvarmer.
2.6.10
Frekvensomformeren har re opsætninger, som kan
programmeres individuelt. Med multiopsætning er det
muligt at skifte mellem individuelt programmerede
funktioner, der aktiveres af digitale indgange eller en seriel
kommando. Individuelle opsætninger bruges f.eks. til at
ændre referencer, eller til dag-/nat- eller sommer-/
vinterdrift, eller til at styre ere motorer. Aktivt setup vises i
LCP'et.
Opsætningsdata kan kopieres fra frekvensomformer til
frekvensomformer via download af oplysningerne fra det
aftagelige LCP.
Fire programmerbare opsætninger
2.6.11
Dynamisk bremse etableres ved:
2.6.12
Nogle applikationer kan kræve bremsning af en motor for
at gøre den langsommere eller stoppe den. Påføring af
jævnstrøm til motoren bremser motoren og kan erne
behovet for en separat motorbremse. DC-bremsning kan
indstilles til at blive aktiveret ved en forudbestemt frekvens
eller ved modtagelse af et signal. Bremsehastigheden kan
også programmeres.
2.6.13
Sleep mode standser automatisk motoren, når behovet er
lavt i et fastsat tidsrum. Når behovet i systemet øges,
genstarter omformeren motoren. Sleep mode giver energibesparelser og reducerer slitage på motoren. I modsætning
til et setback-ur, er omformeren altid klar til at køre, når
det forudindstillede wake-up-krav er nået.
2.6.14
Omformeren kan vente på et eksternt system-klar-signal,
før den starter. Når denne funktion er aktiv, forbliver
omformeren stoppet, indtil tilladelse til at starte er
modtaget. Startbetingelserne sikrer, at systemet eller
ekstraudstyr er i korrekt tilstand, før det er tilladt for
omformeren at starte motoren.
Dynamisk bremsning
Modstandsbremse
•
En bremse-IGBT holder overspændingen under en
vis grænse ved at dirigere bremseenergien fra
motoren til den tilsluttede bremsemodstand
(parameter 2-10 Bremsefunktion = [1]).
AC-bremse
•
Bremseenergien distribueres i motoren ved at
ændre betingelserne for tab i motoren. ACbremsefunktionen kan ikke bruges i applikationer
med høj slutte- og brydefrekvens, da dette
overopheder motoren (parameter 2-10 Bremse-
funktion = [2]).
DC-bremsning
Sleep mode
Startbeting.
2
2
2.6.15
Smart Logic Control (SLC) er en sekvens af brugerde-
nerede
handling [x]), som afvikles af SLC, når den tilknyttede
brugerdenerede hændelse (se parameter 13-51 SL
styreenhed.-hændelse [x]) evalueres som SAND af SLC.
Betingelsen for en hændelse kan være en særlig status,
eller at resultatet af en logisk regel eller en sammenligneroperand bliver SAND. Dette medfører en tilknyttet
handling som vist i Illustration 2.19.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 31
Smart Logic Control (SLC)
handlinger (se parameter 13-52 SL styreenh.-
Page 34

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
2
Produktoversigt
VLT® AQUA Drive FC 202
Illustration 2.19 SCL hændelse og handling
Hver handling og hændelse nummereres og
sammenkædes i par (tilstande). Dette betyder, at når
hændelse [0] opfyldes (opnår værdien SAND), udføres
handling [0]. Derefter vil betingelserne for hændelse [1]
blive evalueret, og hvis de evalueres som SANDE, vil
handling [1] blive udført osv. Der evalueres kun én
hændelse ad gangen. Hvis en hændelse evalueres som
FALSK, sker der ingenting (i SLC) i løbet af det aktuelle
scanningsinterval, og der evalueres ingen andre hændelser.
Dette betyder, at SLC ved start evaluerer hændelse [0] (og
kun hændelse [0]) ved hvert scanningsinterval. Først når
hændelse [0] evalueres som SAND, udfører SLC handling [0]
og påbegynder evalueringen af hændelse [1]. Der kan
programmeres 1 til 20 hændelser og handlinger.
Når den sidste hændelse/handling er blevet afviklet, vil
sekvensen begynde forfra fra hændelse [0]/handling [0].
Illustration 2.20 viser et eksempel med
handlinger:
re hændelser/
Illustration 2.20 Udførelsens rækkefølge, når
re hændelser/
handlinger programmeres
Sammenlignere
Sammenlignere bruges til sammenligning af kontinuerlige
variabler (udgangsfrekvens, udgangsstrøm, analog indgang
osv.) med faste preset-værdier.
Illustration 2.21 Sammenlignere
Logiske regler
Kombinerer op til tre booleske indgange (SAND-/FALSKindgange) fra timere, sammenlignere, digitale indgange,
status bit og hændelser ved hjælp af de logiske operatører
OG, ELLER og IKKE.
Illustration 2.22 Logiske regler
De logiske regler, timere, og sammenlignere kan også til
bruges uden for SLC-sekvensen.
Et eksempel på SLC kan ses i kapitel 4.3 Eksempler på
applikationsopsætninger.3
32 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 35

Produktoversigt
Design Guide
2.6.16 STO-funktion
Frekvensomformeren fås med STO-funktionen via
styreklemme 37. STO deaktiverer styrespændingen til
eekthalvlederne på frekvensomformerens udgangsfase.
Dette forhindrer så generering af den spænding, der
kræves for at rotere motoren. Når STO-funktionen (klemme
37) aktiveres, afgiver frekvensomformeren en alarm, tripper
apparatet og får motoren til at køre friløb indtil standsning.
Der kræves en manuel genstart. STO-funktionen kan
benyttes som nødstop for frekvensomformeren. I normal
driftstilstand, når STO ikke er påkrævet, skal den
almindelige stopfunktion benyttes. Sørg for, at kravene i
ISO 12100-2 paragraf 5.3.2.5 er opfyldt, når automatisk
genstart anvendes,
Ansvarsbetingelser
Det er brugerens ansvar at sikre, at det personale, der
monterer og betjener STO-funktionen:
har læst og forstået sikkerhedsforskrifterne
•
vedrørende helbred, sikkerhed og forebyggelse af
ulykker.
har et godt kendskab til de generiske og sikker-
•
hedsmæssige standarder, der gælder for den
specikke applikation.
En bruger er deneret som:
Integrator
•
Operatør
•
Servicetekniker
•
Vedligeholdelsestekniker
•
Standarder
Brugen af STO på klemme 37 kræver, at brugeren følger
alle sikkerhedsforanstaltninger, herunder relevante love,
bestemmelser og retningslinjer. Den valgfri STO-funktion
overholder følgende standarder:
EN 954-1: 1996 Kategori 3
•
IEC 60204-1: 2005 kategori 0 - ukontrolleret
•
standsning
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 – STO-funktion
•
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 Kategori 3 PL d
•
ISO 14118: 2000 (EN 1037) – forebyggelse af
•
utilsigtet opstart
Oplysningerne og instruktionerne her er ikke tilstrækkelige
til at sikre korrekt og sikker brug af STO-funktionen. For
detaljerede oplysninger om STO henvises der til VLT® Safe
Torque O Betjeningsvejledning
Beskyttelsesforanstaltninger
Kun kvaliceret og uddannet personale må
•
montere og idriftsætte tekniske sikkerhedssystemer
Apparatet skal monteres i et IP54-skab eller i et
•
tilsvarende miljø. For særlige applikationer kræves
en højere IP-grad.
Kablet mellem klemme 37 og det eksterne sikker-
•
hedsudstyr skal beskyttes mod kortslutning i
overensstemmelse med ISO 13849-2 tabel D.4.
Når eksterne kræfter påvirker motoren (f.eks.
•
hængende belastninger), kræves der yderligere
foranstaltninger (f.eks. en sikkerhedsreguleringsbremse) for at undgå farlige situationer.
2.7 Fejl-, advarsels- og alarmfunktioner
Frekvensomformeren overvåger mange aspekter af systemdriften, herunder netforsynings forhold, motorbelastning
og ydeevne, samt omformerstatus. En alarm eller advarsel
indikerer ikke nødvendigvis et problem i selve frekvensomformeren. Det kan være en tilstand uden for omformeren,
der overvåges for ydeevnegrænser. Omformeren har
forskellige forud-programmerede svar på fejl, advarsler og
alarmer. Vælg yderligere alarm- og advarselsfunktioner for
at øge eller justere ydeevnen i systemet.
Dette afsnit beskriver almindelige alarm- og advarselsfunktioner. Forståelse for, at disse funktioner er tilgængelige,
kan optimere et systemdesign og muligvis undgå, at der
introduceres redundante komponenter eller funktionalitet.
Drift ved overtemperatur
2.7.1
Som standard afgiver frekvensomformeren en alarm og trip
ved overtemperatur. Hvis Auto-derate og advarsel er valgt,
vil frekvensomformeren advare om tilstanden men
fortsætte med at køre og forsøge at afkøle sig selv ved
først at reducere switchfrekvensen. Den vil derefter
reducere udgangsfrekvensen, hvis det er nødvendigt.
Autoderating erstatter ikke brugerindstillinger for derating
for omgivelsestemperatur (se kapitel 5.3 Derating for
omgivelsestemperatur).
2.7.2
Høj og lav referenceadvarsel
Under drift med åben sløjfe bestemmer referencesignalet
direkte omformerens hastighed. Displayet viser en
blinkende høj eller lav referenceadvarsel, når det programmerede maksimum eller minimum er nået.
2
2
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 33
Page 36

130BP066.10
1107 O/MIN
0 - ** Betjening/display
1 - ** Last og motor
2 - ** Bremser
3 - ** Reference/ramper
3,84 A 1 (1)
Hovedmenu
Produktoversigt
VLT® AQUA Drive FC 202
2
2.7.3 Høj og lav feedbackadvarsel
Under drift med lukket sløjfe overvåges de valgte høje og
lave feedbackværdier af omformeren. Displayet viser en
blinkende høj eller lav advarsel i de relevante tilfælde.
Omformeren kan også overvåge feedbacksignaler ved drift
med åben sløjfe. Selvom signalerne ikke påvirker drift af
omformeren med åben sløjfe, kan de være nyttige for
indikering af systemstatus lokalt eller via seriel kommunikation. Frekvensomformeren håndterer 39 forskellige
måleenheder.
2.7.4 Faseubalance eller fasetab
For meget rippelstrøm i DC-bussen angiver enten en
ubalance i netfasen eller fasetab. Når en eektfase til
omformeren går tabt, er standardhandlingen at afgive en
alarm og trippe apparatet for at beskytte DC-bussens
kondensatorer. Andre muligheder er at afgive en advarsel
og reducere udgangsstrømmen til 30 % af fuld strøm, eller
at afgive en advarsel og fortsætte med normal drift. Drift
af et apparat, der er tilsluttet en netforsyning med
ubalance, kan være at foretrække, indtil ubalancen rettes.
Høj frekvens advarsel
2.7.5
Kan være nyttigt ved overgang til yderligere udstyr, som
f.eks. pumper eller køleventilatorer, da omformeren kan
advare, når motorhastigheden er høj. En specik indstilling
med høj frekvens kan indlæses i omformeren. Hvis
udgangen overstiger den indstillede advarselsfrekvens,
viser apparatet en advarsel om høj frekvens. En digital
udgang fra omformeren kan signalere overgang for
eksterne apparater.
2.7.8
Advarsel, strøm lav
Denne funktion minder om en lav frekvens-advarsel (se
kapitel 2.7.6 Lav frekvens advarsel), dog anvendes en
indstilling med lav strøm til at afgive en advarsel og lade
udstyr afvikle ved overgang. Funktionen er ikke aktiv, når
den er standset eller ved op start, før den indstillede strøm
er nået.
2.7.9 Uden belastning/advarsel,
kilremsbrud
Denne funktion bruges til at overvåge en situationen uden
belastning, for eksempel en V-kilerem. Efter en lav
strømgrænse er lagret i omformeren, hvis tab af belastningen registreres, kan omformeren programmeres til at
afgive en alarm og trip, eller at fortsætte driften og afgive
en advarsel.
2.7.10
Frekvensomformeren kan registrere tab af seriel kommunikation. En tidsforsinkelse på op til 99 sek. kan vælges for at
undgå et svar pga. afbrydelser på den serielle kommunikationsbus. Når forsinkelsen er overskredet, er følgende
optioner tilgængelige for apparatet for at kunne:
2.8
Tabt seriel grænseade
Opretholde den seneste hastighed.
•
Gå til maksimum hastighed.
•
Gå til en forudindstillet hastighed.
•
Stoppe og afgive en advarsel.
•
Brugergrænseader og programmering
Lav frekvens advarsel
2.7.6
Dette kan være nyttigt ved overgang af udstyr, da
omformeren kan advare, når motorhastigheden er lav. En
specik indstilling med lav frekvens kan vælges til at
advare og lade eksterne apparater afvikle ved overgang.
Apparatet vil ikke afgive en lav frekvens advarsel, når det
standses og heller ikke ved op start, indtil efter driftfrekvensen er nået.
2.7.7
Advarsel, strøm høj
Denne funktion minder om en høj frekvens-advarsel, dog
anvendes en indstilling med høj strøm til at afgive en
advarsel og overgang til yderligere udstyr. Funktionen er
ikke aktiv, når den er standset eller ved op start, før den
indstillede strøm er nået.
34 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Frekvensomformeren bruger parametrene til at
programmere applikationsfunktioner. Parametre indeholder
en beskrivelse af en funktion og en menu med optioner,
som der enten kan vælges fra, eller til at indtaste
numeriske værdier. Et eksempel på en programmeringsmenu er vist i Illustration 2.23.
Illustration 2.23 Eksempel på programmeringsmenu
Page 37

Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
Produktoversigt
Design Guide
Lokal brugergrænseade
Til lokal programmering bliver parametre tilgængelige, når
der trykkes på enten [Quick Menu] eller [Main Menu] på
LCP'et.
2
2
Kvikmenuen er beregnet til den indledende opstart og
motorkarakteristika. Hovedmenuen giver adgang til alle
parametre og giver mulighed for avanceret programmering
af applikationer.
Fjernbetjent brugergrænseade
Til ernbetjent programmering tilbyder Danfoss et softwareprogram til udvikling, lagring og overførsel af
programmeringsoplysninger. Med MCT 10opsætningssoftware kan brugeren koble en computer til
frekvensomformeren og udføre onlineprogrammering i
stedet for at bruge LCP-tastaturet. Eller programmering kan
udføres oine og blot downloades ind i apparatet. Hele
frekvensomformerens prol kan overføres til pc med
henblik på backup eller analyse. Et USB-stik og RS-485klemme er tilgængelige og kan tilsluttes
frekvensomformeren.
MCT 10-opsætningssoftware kan hentes gratis på www.VLT-
software.com. Der kan også bestilles en cd med
varenummer 130B1000. I brugermanualen
ndes
detaljerede betjeningsanvisninger. Se også kapitel 2.8.2 Pcsoftware.
Programmering af styreklemmer
Hver styreklemme har særlige funktioner, som de
•
hver især kan udføre.
Parametre, der er tilknyttet denne klemme,
•
aktiverer funktionsvalgene.
For at omformeren kan fungere korrekt ved brug
•
af styreklemmer, skal klemmerne være:
Tilsluttet korrekt.
-
Programmeret til den tilsigtede funktion.
-
Illustration 2.24 LCP-betjeningspanel
Pc-software
2.8.2
Pc'en tilsluttes via et standard-USB-kabel (vært/enhed) eller
LCP-betjeningspanel
2.8.1
LCP-betjeningspanelet er et grask display foran på
apparatet, som via trykknapsstyring og displayvisninger
giver følgende oplysninger på brugergrænseaden: status
meddelelser, advarsler og alarmer, programmeringsparametre, mm. En numerisk display er også tilgængeligt
med begrænsede displaymuligheder. Illustration 2.24 viser
LCP'et.
via RS-485-grænseaden.
USB er en seriel bus, der anvender 4 skærmede ledninger
med jordsikringsstift 4 på skærmen i pc'ens USB-port. Når
pc'en sluttes til en frekvensomformer via USB-kablet, kan
pc'ens USB-værtscontroller blive beskadiget. Alle standardpc'er fremstilles uden galvanisk adskillelse i USB-porten.
En potentialeforskel i jordledningerne, der opstår, fordi
anbefalingerne i betjeningsvejledningen ikke følges, kan
skade USB-værtscontrolleren gennem USB-kablets
afskærmning.
Det anbefales at bruge en USB-isolator med galvanisk
adskillelse for at beskytte pc'ens USB-værtscontroller mod
potentialeforskelle i jordledningerne, når pc'en sluttes til en
frekvensomformer via et USB-kabel.
Brug ikke et pc-strømkabel med et jordstik, når pc'en
sluttes til frekvensomformeren via et USB-kabel. Det
reducerer potentialeforskellen i jordledningerne, men
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 35
Page 38

130BT308.10
Produktoversigt
VLT® AQUA Drive FC 202
2
erner ikke alle potentialeforskelle pga. jordforbindelsen og
skærmen, der er sluttet til pc'ens USB-port.
Illustration 2.25 USB-tilslutning
2.8.2.1
MCT 10-opsætningssoftware er udviklet til idriftsættelse og
vedligeholdelse af frekvensomformeren og inkluderer
vejledning til programmering af kaskadestyreenhed,
realtidsur, Smart Logic Controller og forebyggende vedligeholdelse.
Denne software gør det nemt at holde styr på alle detaljer
og giver et godt overblik over både små og store systemer.
Værktøjet håndterer alle frekvensomformerserier, VLT
advanced active
Eksempel 1: Datalagring i LCP via MCT 10opsætningssoftware
Alle parametre gemmes nu.
Eksempel 2: Dataoverførsel fra pc til frekvensomformer
via MCT 10-opsætningssoftware
MCT 10-opsætningssoftware
®
lters samt VLT® softstarter-relateret data.
1. Slut en pc til apparatet via USB eller via RS-485-
grænseaden.
2. Åbn MCT 10-opsætningssoftware.
3. Vælg USB-porten eller RS-485-grænseaden.
4.
Vælg copy.
5.
Vælg punktet project.
6.
Vælg paste.
7.
Vælg save as.
1. Slut en pc til apparatet via USB-porten eller via
RS-485-grænseaden.
2. Åbn MCT 10-opsætningssoftware.
3.
Vælg Open – de gemte ler vises.
4. Åbn den relevante l.
5.
Vælg Write to drive.
Alle parametre overføres nu til frekvensomformeren.
Der ndes en separat manual til MCT 10-
opsætningssoftware. Download softwaren og manualen fra
www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/.
2.8.2.2
VLT® Harmonics Calculation
Software MCT 31
Pc-værktøjet MCT 31 til beregning af harmonisk
forvrængning giver mulighed for nemt at anslå den
harmoniske forvrængning i en bestemt applikation.
Harmonisk forvrængning for både Danfoss-frekvensomformere og andre ikke-Danfoss-frekvensomformere med
forskellige andre harmoniske reduktionsapparater, herunder
Danfoss AHF-ltre og 12-18-pulsensrettere, kan beregnes.
MCT 31 kan også hentes fra www.danfoss.com/Busines-
sAreas/DrivesSolutions/Softwaredownload/.
2.8.2.3
Harmonics Calculation Software
(HCS)
HCS er en avanceret version af harmonic calculationværktøjet. De beregnede resultater sammenlignes med
relevante normer og kan udskrives efterfølgende.
ere oplysninger se www.danfoss-hcs.com/Default.asp?
For
LEVEL=START
2.9
Vedligeholdelse
Danfoss frekvensomformermodeller op til 90 kW er
vedligeholdelsesfri. Stærkstrømsfrekvensomformere (110
kW-klassiceret eller mere) har indbyggede ltermåtter,
som kræver periodisk rengøring af operatøren, afhængigt
af mængden af støveksponering og forureningsstoer.
Vedligeholdelsesintervaller for køleventilatorer (ca. 3 år) og
kondensatorer (ca. 5 år) anbefales i de este miljøer.
Opbevaring
2.9.1
Som enhver anden form for elektronisk udstyr skal
frekvensomformere opbevares tørt. Periodisk formning
(kondensatoropladning) er ikke nødvendig ved opbevaring.
Det anbefales at holde udstyret forseglet i dets emballage,
indtil installation nder sted.
36 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 39

Systemintegration
3 Systemintegration
Design Guide
Dette kapitel beskriver de overvejelser, der er nødvendige
for at integrere frekvensomformeren i et systemdesign.
Kapitlet er opdelt i følgende afsnit:
Kapitel 3.1 Omgivende driftsforhold
•
Omgivende driftsforhold for frekvensomformeren
herunder miljø, kapslinger, temperatur, derating
og andre overvejelser.
Kapitel 3.3 Netforsyningsintegrering
•
Indgang i frekvensomformeren fra netforsyningssiden herunder eekt, harmoniske strømme,
overvågning, kabelføring, sikringer og andre
overvejelser.
Kapitel 3.2 EMC, beskyttelse mod harmoniske
•
strømme og overgang til jord
Indgang (regenerering) fra frekvensomformeren til
strømkredsløbet herunder eekt, harmoniske
strømme, overvågning og andre overvejelser.
Kapitel 3.4 Motorintegrering
•
Udgang fra frekvensomformeren til motoren
herunder motortyper, belastning, overvågning,
kabelføring og andre overvejelser.
Kapitel 3.5 Yderligere indgange og udgange,
•
Kapitel 3.6 Mekanisk planlægning
Integrering af frekvensomformerens indgang og
udgang for optimal systemdesign herunder
frekvensomformer/matching af motor, systemkarakteristika og andre overvejelser.
Et omfattende systemdesign forventer og imødegår
potentielle problemområder, samtidig med at der
implementeres den mest
omformerfunktioner. De indhentede oplysninger giver
retningslinjer for planlægning og specicering af et
motorstyret system, der omfatter frekvensomformere.
eektive kombination af
Eekt og krav til styrekabler; type og længde
•
Sikringer
•
Ekstraudstyr
•
Transport og opbevaring
•
Se kapitel 3.9 Afkrydsningsliste for systemdesign for en
praktisk guide til valg og design.
Forståelse af funktioner og strategimuligheder kan
optimere et systemdesign og muligvis undgå, at der
introduceres redundante komponenter eller funktionalitet.
3.1 Omgivende driftsforhold
3.1.1 Luftfugtighed
Selv om frekvensomformeren kan fungere korrekt ved høj
luftfugtighed (op til 95 % relativ luftfugtighed), skal
kondensdannelse undgås. Der er særlig stor risiko for
kondensdannelse, når frekvensomformeren er koldere end
fugtig omgivelsesluft. Fugten i luften kan også kondensere
på de elektroniske komponenter og forårsage kortslutninger. Kondensdannelse opstår i apparater uden strøm.
Det er tilrådeligt at installere en kabinetvarmer, hvor der er
mulighed for kondensdannelse pga. omgivelsesforholdene.
Undgå montering i områder, som udsættes for frost.
Alternativt kan drift af frekvensomformeren i standbytilstand (med apparatet tilsluttet netforsyningen) reducere
risikoen for kondensdannelse. Sørg for, at eekttabet er
tilstrækkeligt til at holde frekvensomformerens kredsløb fri
for fugt.
Temperatur
3.1.2
3 3
Driftsfunktioner giver en række designkoncepter, fra enkel
motorhastighedsstyring til et fuldt integreret automationssystem med feedbackhåndtering, rapportering af
driftsstatus, automatiserede svar på fejl, ernprogram-
mering, mm.
Et komplet designkoncept omfatter detaljeret specicering
af behovene og anvendelse.
Frekvensomformertyper
•
Motorer
•
Netforsyningskrav
•
Styringsstruktur og programmering
•
Seriel kommunikation
•
Udstyrets størrelse, form og vægt
•
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 37
Grænseværdierne for maksimum og minimum omgivelsestemperatur er angivet for alle frekvensomformere. Hvis
ekstreme omgivelsestemperaturer undgås, forlænges
udstyrets levetid, og hele systemets pålidelighed
optimeres. Følg anbefalingerne anført for maksimum
ydeevne og udstyrets levetid.
Selvom frekvensomformeren kan fungere ved
•
temperaturer ned til -10 °C, garanteres korrekt
drift ved nominel belastning kun ved
temperaturer på 0 °C eller mere.
Maksimumgrænsen for temperatur må ikke
•
overstiges.
Levetiden for elektroniske komponenter falder
•
med 50 % for hver 10 °C, når den benyttes over
den temperatur, som den er beregnet til.
Page 40

Systemintegration
VLT® AQUA Drive FC 202
Selv apparater i beskyttelsesklasserne IP54, IP55
•
eller IP66 skal bruges inden for de angivne
omgivelsestemperaturer.
Yderligere luftkonditionering af kabinet eller
•
monteringssted kan være nødvendig.
33
3.1.3 Køling
Frekvensomformere aeder eekten i form af varme.
Følgende anbefalinger er nødvendige for eektiv køling af
apparaterne.
Maksimum lufttemperatur, der trænger ind i
•
kapslingen, må aldrig overstige 40 °C (104 °F).
Gennemsnitstemperaturen for dag/nat må ikke
•
overstige 35 °C (95 °F).
Montér apparatet således, at der er fri adgang for
•
køling via luftstrøm gennem kølennerne. Se
kapitel 3.6.1 Mindsteafstand for korrekt montering
med mindsteafstande.
Angiver minimumkravene til mindsteafstande,
•
både foran og bag ved apparatet, til køling af
luftstrøm. Se betjeningsvejledningen for krav til
korrekt installation.
3.1.3.1
Frekvensomformeren har indbyggede ventilatorer, der
sikrer optimal køling. Hovedventilatoren tvinger
luftstrømmen langs kølennerne på kølepladen, hvilket
sikrer en køling af den interne luft. Nogle eektstørrelser
har en lille sekundær ventilator tæt på styrekortet, hvilket
sikrer, at den interne luft cirkuleres, således at varme
områder undgås.
Hovedventilatoren styres af frekvensomformerens interne
temperatur, og hastigheden øges gradvist med
temperaturen, hvilket reducerer støj og energiforbrug når,
behovet er minimalt, og sikrer derved maksimal køling
efter behov. Ventilatorstyring kan tilpasses via
parameter 14-52 Ventilatorstyring for at imødekomme
enhver applikation og for at beskytte mod negative
eekter af køling i kolde klimaer. I tilfælde af overtemperatur i frekvensomformeren derater den switchfrekvens
og –mønster. Se kapitel 5.1 Derating for yderligere
oplysninger.
Ventilatorer
3.1.3.2
Beregning af påkrævet luftstrøm til
køling af frekvensomformeren
Den luftstrøm, der er påkrævet til at køle en frekvensomformer, eller ere frekvensomformere i samme kapsling,
kan beregnes som følger:
1. Bestem eekttab ved maksimum udgang for alle
frekvensomformere ud fra data i tabellerne i
kapitel 7 Specikationer.
2. Tilføj eekttabsværdier for alle frekvensomformere, der kan fungere på samme tid. Den
resulterende sum er varme Q, der skal overføres.
Multiplicér resultatet med faktor f, læs fra
Tabel 3.1. For eksampel, f = 3,1 m3 x K/Wh ved
havets overade.
3. Bestem den højeste temperatur af den luft, der
trænger ind i kapslingen. Træk denne temperatur
fra den ønskede temperatur i kapslingen, for
eksempel 45 °C (113 °F).
4. Dividér totalsummen fra trin 2 med totalsummen
fra trin 3.
Beregningen udtrykkes ved formlen:
f xQ
V =
Ti − TA
hvor
V = luftstrøm i m3/t
f = faktor i m3 x K/Wh
Q = varme kan overføres i W
Ti = temperatur i kapslingen i °C
TA = omgivelsestemperatur i °C
f = cp x ρ (specik varme af luft x lufttæthed)
BEMÆRK!
Specik varme af luft (cp) og lufttæthed (ρ) er ikke
konstante størrelser, men afhænger af temperatur,
fugtighed og atmosfærisk tryk. Derfor afhænger de af
højden over havet.
Tabel 3.1 viser typiske værdier af faktoren f, beregnet for
forskellige højder.
Højde
[m] [kJ/kgK]
500 0,9348 1,167 3,3
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Specik varme af luftcpLufttæthed
ρ
[kg/m3] [m3⋅K/Wh]
0 0,9480 1,225 3,1
Faktor
f
Tabel 3.1 Faktor f, beregnet for forskellige højder
38 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 41

Systemintegration
Design Guide
Eksempel
Hvilken luftstrøm er nødvendig til at køle to frekvensomformere (varmetab 295 W og 1430 W), der kører samtidigt,
monteret i en kapsling med en omgivelsestemperatur, der
topper ved 37 °C?
1. Summen af varmetab for begge frekvensomformere er 1725 W.
2.
Ved at multiplicere 1725 W ved 3,3 m3 x K/Wh fås
5693 m x K/h.
3.
Ved at trække 37 °C fra 45 °C fås 8 °C (=8 K).
4. Ved at dividere 5693 m x K/t ved 8 K fås: 711,6
m3h.
Hvis det er nødvendigt at angive luftstrømmen i CFM, skal
konverteringen 1 m3/t = 0,589 CFM anvendes.
I eksemplet ovenfor fås 711,6 m3/h = 418,85 CFM.
Motorgenereret overspænding
3.1.4
DC-spændingen i mellemkredsen (DC-bus) øges, når
motoren fungerer som en generator. Dette kan opstå på 2
måder:
Belastningen driver motoren, når frekvensom-
•
formeren kører ved en konstant udgangsfrekvens.
Dette er generelt kendt som en overhaulingbelastning.
Ved deceleration, hvis inertiet af belastningen er
•
høj, og omformerens decelerationstid er indstillet
til en kort værdi.
Frekvensomformeren kan ikke regenerere energi tilbage til
indgangen. Det begrænser derfor den energi, der
accepteres af motoren, når den er indstillet til at aktivere
autorampning. Frekvensomformeren forsøger at gøre dette
ved automatisk at forlænge rampe ned-tiden, hvis
overspændingen opstår under deceleration. Hvis dette ikke
lykkes, eller hvis belastningen driver motoren, når den
kører med konstant frekvens, lukker omformeren ned og
viser en fejl, når et kritisk spændingsniveau i DC-bussen er
nået.
Akustisk støj
3.1.5
Akustisk støj fra frekvensomformeren kommer fra tre kilder:
DC-link (mellemkreds) spoler
•
Drosselspole for RFI-lter
•
Interne ventilatorer
•
Se Tabel 7.60 vedrørende
klassicering af akustisk støj.
3.1.6
Vibrationer og rystelser
Frekvensomformeren er afprøvet i henhold til en
procedure, der er baseret på IEC 68-2-6/34/35 og 36. Disse
tests udsætter apparatet for 0,7 g kræfter, vilkårligt over
området 18 til 1.000 Hz, i tre retninger i to timer. Alle
Danfoss-frekvensomformere overholder krav, der svarer til
disse forhold, når apparatet er monteret på væg eller gulv,
samt ved montering i tavler, der er boltet fast til vægge
eller gulve.
3.1.7 Aggressive atmosfærer
3.1.7.1 Gasser
Aggressive gasser, som f.eks. svovlbrinte, klor eller
ammoniak, kan beskadige elektriske og mekaniske
komponenter i frekvensomformeren. Forurening af
køleluften kan også forårsage gradvis nedbrydning af PCBspor og dørpakninger. Aggressive forureningsstoer er ofte
til stede i spildevandsanlæg eller svømmehaller. Et tydeligt
tegn på en aggressiv atmosfære er korroderet kobber.
I aggressive atmosfærer anbefales det at anvende
begrænsede IP-kapslinger sammen med konform-coatede
printplader. Se Tabel 3.2 for konform-coatede værdier.
BEMÆRK!
Frekvensomformeren leveres som standard med klasse
3C2-coating af printplader. Ved anmodning er 3C3coating også tilgængelig.
Klasse
3C1 3C2 3C3
Gastype Enhed
Havsalt n/a Ingen Salttåge Salttåge
Svovloxi
der
Svovlbri
nte
Klor
Saltsyre
Flussyre
Ammoni
ak
Ozon
Kvælstof
Tabel 3.2 Konform-coating, klassiceringer
1) Maksimumværdier er værdier for forbigående stigninger, som ikke
overstiger 30 minutter pr. dag.
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3
3
3
3
3
3
3
3
Genne
msnits
værdi
0,1 0,3 1,0 5,0 10
0,01 0,1 0,5 3,0 10
0,01 0,1 0,03 0,3 1,0
0,01 0,1 0,5 1,0 5,0
0,003 0,01 0,03 0,1 3,0
0,3 1,0 3,0 10 35
0,01 0,05 0,1 0,1 0,3
0,1 0,5 1,0 3,0 9,0
Maks.
værdi
1)
Genne
msnits
værdi
Maks.
værdi
1)
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 39
Page 42

Systemintegration
VLT® AQUA Drive FC 202
3.1.7.2 Støveksponering
Installation af frekvensomformere i miljøer med stor
støveksponering er ofte uundgåeligt. Støv påvirker vægeller kapslingsmonterede apparater med IP55 eller IP66
beskyttelsesklassicering såvel som kabinetmonterede
33
apparater med beskyttelsesklassicering IP21 eller IP20. De
tre aspekter, der beskrives i dette afsnit, skal tages med i
overvejelserne, når frekvensomformere installeres i sådanne
miljøer.
Reduceret køling
Støv danner aejringer på overaden af og inde i
apparatet på printplader og elektroniske komponenter.
Disse aejringer fungerer som isolerende lag og hæmmer
varmeoverførelsen til omgivelsesluften, idet kølekapaciteten reduceres. Komponenterne bliver varmere. Dette
medfører accelereret aldring af de elektroniske
komponenter, og apparatets levetid reduceres. Støvaej-
ringer på kølepladen på bagsiden af apparatet reducerer
også apparatets levetid.
Køleventilatorer
Luftgennemstrømningen til køling af apparatet skabes af
køleventilatorer, som normalt er placeret på bagsiden af
apparatet. Ventilatorhjulene har små lejer, hvorigennem
støv kan trænge ind og har slibende eekt. Dette medfører
lejeskader og ventilatorfejl.
Filtre
Stærkstrømsfrekvensomformere er udstyret med køleventilatorer, som blæser varm luft ud af apparatet. Ventilatorer
over en vis størrelse er udstyret med ltermåtter. Disse
ltre kan hurtigt blive tilstoppede, når de anvendes i
støvede miljøer. Forebyggende forholdsregler er
nødvendige under disse forhold.
Periodisk vedligeholdelse
Under forholdene, som er beskrevet ovenfor, er det
tilrådeligt at rengøre frekvensomformeren ved periodisk
vedligeholdelse. Fjern støvet fra kølepladen og ventilatorer,
og rengør ltermåtterne.
3.1.7.3
Drift af systemer i potentielt eksplosive atmosfærer skal
overholde særlige betingelser herfor. EU-direktiv 94/9/EC
beskriver drift af elektroniske apparater i potentielt
eksplosive atmosfærer.
Motorer, der styres af frekvensomformere i potentielt
eksplosive atmosfærer, skal temperaturovervåges ved hjælp
af en PTC-temperaturføler. Motorer med antændelsesbeskyttelse i klasse d eller e er godkendt til dette miljø.
BEMÆRK!
Installér ikke en frekvensomformer i en potentiel
eksplosiv atmosfære. Installér frekvensomformeren i et
kabinet uden for dette område. Brug af et sinuslter ved
udgangen på frekvensomformeren anbefales ligeledes til
at dæmpe dU/dt-spændingsstigningen og
spidsspænding. Hold motorkablerne så korte som muligt.
Potentielt eksplosive atmosfærer
d klassikation består i at sikre, at en opstået
•
gnist holdes inden for et beskyttet område.
Selvom der ikke kræves godkendelse, er det
nødvendigt med særlig ledningsføring og
indeslutning.
d/e-kombination er den mest anvendte i
•
potentielt eksplosive atmosfærer. Selve motoren
har antændelsesbeskyttelsesklasse e, mens
motorens kabelføring og tilslutningsmiljø er i
overensstemmelse med e-klassiceringen. Restriktionen på tilslutningsområdet e består af
maksimumspændingen, som er tilladt i dette
område. En frekvensomformers udgangsspænding
er som regel begrænset til netspændingen.
Modulering af udgangsspændingen kan generere
ikke-tilladt høj spidsspænding for e-klassikation.
I praksis har det vist sig, at brug af sinusltre ved
frekvensomformerens udgang er en eektiv
metode til at dæmpe høj spidsspænding.
BEMÆRK!
Frekvensomformere med MCB 112-option er egnet til
PTB-certiceret monitorering med motortermistorføler i
potentielt eksplosive atmosfærer. Skærmede motorkabler
er ikke nødvendige ved drift af frekvensomformere med
sinusudgangsltre.
40 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 43

Systemintegration
Design Guide
3.1.8 Denitioner på IP-klassicering
Mod indtrængen af
faste fremmedlegemer
0 (ikke beskyttet) (ikke beskyttet)
1
≥50 mm diameter
2 12,5 mm diameter Finger
Første cier
Andet cier
Første
bogstav
Yderligere
bogstav
Tabel 3.3 IEC 60529-denitioner på IP-klasser
3 2,5 mm diameter Værktøj
4
≥1,0 mm diameter
5 Støvbeskyttet Ledning
6 Støvtæt Ledning
Mod indtrængen af
vand med skadelig
virkning
0 (ikke beskyttet)
1 Lodrette dråber
2 Dråber i en vinkel på
15°
3 Sprøjtende vand
4 Vandstænk
5 Vandstråler
6 Kraftige vandstråler
7 Midlertidig
nedsænkning
8 Langvarig nedsænkning
Yderligere oplysninger
specikke for
A Håndryggen
B Finger
C Værktøj
D Ledning
Yderligere oplysninger
specikke for
H Højspændingsapparat
M Bevægelse af apparat
under vandtest
S Stationært apparat
under vandtest
W Vejrforhold
Mod adgang til
farlige komponenter
af
Håndryggen
Ledning
3.1.8.1
Kabinetoptioner og klassiceringer
Danfoss -frekvensomformere fås i tre forskellige beskyttelsesklasser:
IP00 eller IP20 til montering i kabinet.
•
IP54 eller IP55 til lokal montering.
•
IP66 til kritiske omgivelsesforhold, som f.eks.
•
ekstrem høj luftfugtighed eller store koncentrationer af støv eller aggressive gasser.
3.1.9 Radiofrekvensforstyrrelse
Det primære formål i praksis er at opnå systemer med
stabil drift uden radiofrekvensforstyrrelser mellem
komponenterne. For at opnå en høj immunitet anbefales
det at bruge frekvensomformere med RFI-ltre af høj
kvalitet.
Brug kategori C1-ltre, som er specicerede i EN 61800-3,
der overholder klasse B-grænserne i den generelle
standard EN 55011.
Placér advarselsmeddelelser på frekvensomformeren, hvis
RFI-ltrene ikke svarer til kategori C1 (kategori C2 eller
lavere). Ansvaret for korrekt mærkning ligger hos
operatøren.
I praksis
ndes der to tilgange inden for RFI-ltre:
Indbygget i udstyret
•
Indbyggede ltre optager plads i
-
kabinettet, men de eliminerer ekstraomkostningerne til montering, kabelføring
og materiale. Den vigtigste fordel er dog
den perfekte EMC-overensstemmelse og
kabelføring ved brug af integrerede
ltre.
Eksterne optioner
•
Valgfri, eksterne RFI-ltre, der installeres
-
på frekvensomformerens indgang,
forårsager et spændingsfald. I praksis
betyder dette, at den fulde netspænding
ikke er til stede ved frekvensomformerens indgang, og en omformer med
højere klassicering kan være
nødvendig. For at være i overensstemmelse med EMC-grænserne skal
den maksimale motorkabellængde ligge
i området 1-50 m. Omkostningerne
omfatter materialer, kabelføring og
montering. EMC-overensstemmelse er
ikke testet.
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 41
Page 44

130BA056.10
1325 4
6
ba
M
Systemintegration
VLT® AQUA Drive FC 202
BEMÆRK!
For at sikre forstyrrelsesfri drift af frekvensomformeren/
motorsystemet skal der altid anvendes et RFI-lter i
kategori C1.
33
BEMÆRK!
VLT® AQUA Drive-apparater leveres som standard med
indbyggede RFI-ltre, der overholder kategori C1 (EN
61800-3) til brug med 400 V-netforsyningssystemer og
nominelle eekter på op til 90 kW eller kategori C2 for
nominelle eekter på 110-630 kW. VLT® AQUA Driveapparater overholder C1 med skærmede motorkabler på
op til 50 m eller C2 med skærmede motorkabler på op til
150 m. Se Tabel 3.4 for ere oplysninger.
3.1.10 Overensstemmelse for PELV og
galvanisk adskillelse
Sørg for beskyttelse mod elektrisk stød, når den elektriske
forsyning er beskyttende ekstra lav spænding (PELV), og
installationen overholder lokale og nationale bestemmelser
vedrørende PELV.
For at opretholde PELV for styreklemmerne skal alle tilslutninger være PELV, såsom forstærkede/dobbeltisolerede
termistorer. Alle styreklemmer og relæklemmer på Danfossfrekvensomformere overholder PELV (undtagen jordet
trekantben på mere end 400 V).
Den galvaniske (sikre) adskillelse opnås ved at opfylde
kravene til bedre isolering og ved at sørge for de relevante
krybninger/luftafstande. Disse krav beskrives i standarden
EN 61800-5-1.
Elektriske isolering opnås som vist i Illustration 3.1. De
beskrevne komponenter overholder både PELV og kravene
til galvanisk adskillelse.
Strømforsyning (SMPS) inklusive signalisolering af V DC, der
1
angiver den mellemliggende strømspænding.
2 Gate drive til IGBT'er
3 Strømtransducere
4 Optokoblere, bremsemodul
5 Intern inrush, RFI og temperaturmålingskredsløb
6 Tilpassede relæer
a Galvanisk adskillelse for 24 V backup-option
b Galvanisk adskillelse for RS-485-standardbusgrænseaden
Illustration 3.1 Galvanisk adskillelse
Montering ved stor højde
Installationer, som overskrider grænserne for stor højde,
overholder måske ikke PELV-kravene. Adskillelsen mellem
komponenterne og de kritiske dele kan være utilstrækkelig.
Der er risiko for overspænding. Reducér risikoen for
overspænding med eksterne beskyttelsesapparater eller
galvanisk adskillelse.
Kontakt Danfoss angående PELV-overensstemmelse ved
installationer i store højder.
380-500 V (kapsling A, B og C): over 2.000 m
•
(6.500 fod)
380-500 V (kapsling D, E og F): over 3.000 m
•
(9.800 fod)
525–690 V: over 2.000 m (6.500 fod)
•
3.1.11
Som enhver anden form for elektronisk udstyr skal
frekvensomformere opbevares tørt. Periodisk formning
(kondensatoropladning) er ikke nødvendig ved opbevaring.
Det anbefales at holde udstyret forseglet i dets emballage,
indtil installation nder sted.
42 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Opbevaring
Page 45

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Systemintegration Design Guide
3.2 EMC, beskyttelse mod harmoniske
strømme og overgang til jord
3.2.1 Generelle forhold vedrørende EMC-
emissioner
Frekvensomformere (og andre elektriske apparater)
genererer elektroniske eller magnetiske felter, som kan give
forstyrrelser i det omgivende miljø. Disse påvirkningers
elektromagnetiske kompatibilitet (EMC) afhænger af
apparaternes karakteristika for eekt og harmoniske
strømme.
Ukontrolleret gensidig påvirkning mellem elektriske
apparater i et system kan forringe kompatibiliteten og
hæmme pålidelig drift. Forstyrrelse kan ske i form af
harmonisk forvrængning på nettet, elektrostatiske
udladninger, hurtige spændingsudsving, eller højfrekvent
forstyrrelse. Elektriske apparater genererer forstyrrelser,
samtidig med at de påvirkes af forstyrrelser fra andre
genererede kilder.
Elektriske forstyrrelser opstår som regel i frekvensområdet
150 kHz til 30 MHz. Luftbårne forstyrrelser fra frekvensomformersystemet i området 30 MHz til 1 GHz genereres af
vekselretteren, motorkablet og motoren.
Kapacitive strømme i motorkablet sammen med høj dU/dt
fra motorspændingen genererer lækstrømme, som vist i
Illustration 3.2.
Brug af et skærmet motorkabel øger lækstrømmen (se
Illustration 3.2), fordi skærmede kabler har højere
kapacitans til jord end uskærmede kabler. Hvis
lækstrømmen ikke ltreres, forårsager det øgede forstyrrelser på netforsyningen i radiofrekvensområdet under ca.
5 MHz. Eftersom lækstrømmen (I1) føres tilbage til
apparatet gennem skærmen (I3), er der i princippet kun et
lille elektromagnetisk felt (I4) fra det skærmede motorkabel
som vist i Illustration 3.2.
Skærmen reducerer de udstrålede forstyrrelser, men øger
den lavfrekvente forstyrrelse på netforsyningen. Motorkabelskærmen skal monteres på frekvensomformerkapslingen
såvel som motorkapslingen. Dette gøres bedst ved at
bruge indbyggede skærmbøjler for at undgå snoede
skærmender (pigtails). Pigtails øger skærmimpedansen ved
højere frekvenser, hvilket reducerer skærmeekten og øger
lækstrømmen (I4).
Når der anvendes et skærmet kabel til relæ, styrekabel,
signalinterface og bremse, skal skærmen monteres på
kapslingen i begge ender. I visse situationer er det dog
nødvendigt at bryde skærmen for at undgå strømsløjfer.
Hvis skærmen skal sættes på en monteringsplade til
frekvensomformeren, skal monteringspladen være lavet af
metal, fordi skærmstrømmene skal føres tilbage til
apparatet. Der skal desuden sikres god elektrisk kontakt fra
monteringspladen gennem monteringsskruerne til
frekvensomformerens chassis.
Hvis der benyttes uskærmede kabler, overholdes enkelte
emissionskrav ikke, skønt de este immunitetskrav
opfyldes.
For at begrænse forstyrrelsesniveauet fra hele systemet
(apparat og installation) skal motor- og bremsekabler gøres
så korte som muligt. Undgå at placere følsomme signalkabler langs med motor- og bremsekablerne.
Radioforstyrrelser over 50 MHz (luftbårne) genereres især af
styreelektronikken.
3 3
Jordledning 3 Netspænding 5 Skærmet motorkabel
1
2 Skærm 4 Frekvensomformer 6 Motor
Illustration 3.2 Generering af lækstrømme
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 43
Page 46

Systemintegration
VLT® AQUA Drive FC 202
3.2.2 EMC-testresultater
Følgende testresultater er opnået i et system med en frekvensomformer, et skærmet styrekabel, en styreboks med potentiometer samt en motor og et skærmet motorkabel (Ölex Classic 100 CY) ved nominel switchfrekvens. I Tabel 3.4 er den
maksimale motorkabellængde til overensstemmelse angivet.
33
BEMÆRK!
Forholdene kan ændre sig betydeligt for andre opsætninger.
BEMÆRK!
Se Tabel 3.17 vedrørende parallelle motorkabler.
RFI-ltertype Kabelbåret emission Udstrålet emission
Kabellængde [m] Kabellængde [m]
Standarde
r
og
krav
H1
FC 202
H2
FC 202 0,25-3,7 kW 200-240 V T2 Nej Nej 5 Nej Nej Nej
H3
FC 202
H4
FC 202
1)
Hx
FC 202
EN 55011 Klasse B Klasse A
Gruppe 1
Boliger,
butikker og
let
industri
EN/IEC 61800-3 Kategori C1 Kategori C2 Kategori C3 Kategori C1 Kategori C2 Kategori C3
First
environment
Bolig og
kontor
0,25-45 kW 200-240 V T2 50 150 150 Nej Ja Ja
1,1-7,5 kW 200-240 V S2 50
0,37-90 kW 380-480 V T4 50 150 150 Nej Ja Ja
7,5 kW 380-480 V S4
5,5-45 kW 200-240 V T2 Nej Nej 25 Nej Nej Nej
1,1-7,5 kW 200-240 V S2 Nej Nej 25 Nej Nej Nej
0,37-7,5 kW 380-480 V T4 Nej Nej 5 Nej Nej Nej
4)
11-90 kW 380-380 V
7,5 kW 380-480 V S4 Nej Nej 25 Nej Nej Nej
11-30 kW 525-690 V
37-90 kW 525-690 V
0,25-45 kW 200-240 V T2 10 50 50 Nej Ja Ja
0,37-90 kW 380-480 V T4 10 50 50 Nej Ja Ja
1,1-30 kW 525-690 V
37-90 kW 525-690 V
1,1-90 kW 525-600 V T6 Nej Nej Nej Nej Nej Nej
15-22 kW 200-240 V S2 Nej Nej Nej Nej Nej Nej
11-37 kW 380-480 V S4 Nej Nej Nej Nej Nej Nej
T4 Nej Nej 25 Nej Nej Nej
1, 4)
T7 Nej Nej 25 Nej Nej Nej
2, 4)
T7 Nej Nej 25 Nej Nej Nej
1)
T7 Nej 100 100 Nej Ja Ja
2)
T7 Nej 150 150 Nej Ja Ja
50 100/150
Industrimiljø Industri
First
environment
Bolig og kontor
100/150
5)
5)
Klasse A
Gruppe 2
miljø
Second
environment
industri
100/150
100/150
Klasse B Klasse A
Boliger,
butikker og
let
industri
First
environment
Bolig og
kontor
5)
5)
Nej Ja Ja
Nej Ja Ja
Gruppe 1
Industri
miljø
First
environment
Bolig og
kontor
Klasse A
Gruppe 2
Industri
miljø
Second
environment
Industrial
Tabel 3.4 EMC-testresultater (emission) maksimal motorkabellængde
1) Kapslingsstørrelse B2.
2) Kapslingsstørrelse C2.
3) Hx-versioner kan bruges i overensstemmelse med EN/IEC 61800-3 kategori C4.
44 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 47

Systemintegration Design Guide
4) T7, 37-90 kW overholder klasse A gruppe 1 med 25 m motorkabel. Der gælder visse begrænsninger for installationen (kontakt Danfoss for
oplysninger).
5) 100 m til fase-nulleder, 150 m til fase-fase (men ikke fra TT eller TT). Enkeltfasede frekvensomformere er ikke beregnede til to-fase-forsyning fra
et TT- eller TN-netværk.
Hx, H1, H2, H3, H4 eller H5 deneres i typekodepos. 16–17 for EMC-ltre.
Hx - Der er ikke indbygget EMC-ltre i frekvensomformeren.
H1 – integreret EMC-lter. Overholder EN 55011 Klasse A1/B og EN/IEC 61800-3 Kategori 1/2.
H2 – Et begrænset RFI-lter, der kun indeholder kondensatorer og uden en common mode-spole. Overholder EN 55011 Klasse A2 og EN/IEC
61800-3 Kategori 3.
H3 – Integreret EMC-lter. Overholder EN 55011 Klasse A1/B og EN/IEC 61800-3 Kategori 1/2.
H4 – Integreret EMC-lter. Overholder EN 55011 Klasse A1 og EN/IEC 61800-3 Kategori 2.
H5 – Marineversioner. Robust version, overholder samme emissionsniveauer som H2-versioner.
3 3
Emissionskrav
3.2.3
EMC-produktstandarden for frekvensomformere denerer
re kategorier (C1, C2, C3 og C4) med specikke krav til
emission og immunitet. Tabel 3.5 bestemmer denitionen
af de re kategorier og den tilsvarende klassicering i EN
55011.
Tilsvarende
Kategori Denition
C1 Frekvensomformere monteret i rst
environment (bolig og kontor) med
en forsyningsspænding på mindre
end 1.000 V.
C2 Frekvensomformere monteret i rst
environment (bolig og kontor) med
forsyningsspænding på mindre end
1.000 V, som hverken er ytbare
eller af typen plug-in, og som skal
monteres og idriftsættes af en
professionel.
C3 Frekvensomformere monteret i
second environment (industri) med
en forsyningsspænding på mindre
end 1.000 V.
C4 Frekvensomformere monteret i
second environment med en
forsyningsspænding lig med eller
over 1.000 V eller nominel
spænding lig med eller over 400 A
eller med henblik på brug i
komplekse installationer.
Tabel 3.5 Korrelation mellem IEC 61800-3 og EN 55011
emissionsklasse i EN
55011
Klasse B
Klasse A
gruppe 1
Klasse A
gruppe 2
Ingen
grænselinje.
Udarbejd en
EMC-plan.
Når de generiske emissionsstandarder (kabelbårne)
anvendes, skal frekvensomformerne overholde grænserne i
Tabel 3.6.
Tilsvarende
Miljø Generisk emissionsstandard
First
environment
(bolig og
kontor)
Second
environment
(industrimiljø)
Tabel 3.6 Korrelation mellem generiske emissionsstandarder og
EN 55011
Immunitetskrav
3.2.4
EN/IEC 61000-6-3 emissionsstandard for beboelses- og
erhvervsmiljøer samt lette
industrimiljøer.
EN/IEC 61000-6-4 emissionsstandard for industrimiljøer.
emissionsklasse i
EN 55011
Klasse B
Klasse A gruppe
1
Immunitetskravene til frekvensomformere afhænger af det
miljø, de monteres i. Kravene til industrimiljøer er højere
end kravene til bolig- og kontormiljøer. Alle Danfossfrekvensomformere overholder kravene til industrimiljøer
og overholder derfor også de lavere krav til bolig- og
kontormiljøer med en stor sikkerhedsmargin.
For at dokumentere immunitet mod elektrisk forstyrrelse er
følgende immunitetstest blevet udført i overensstemmelse
med følgende grundlæggende standarder:
EN 61000-4-2 (IEC 61000-4-2): Elektrostatiske
•
udladninger (ESD): Simulering af elektrostatiske
udladninger fra mennesker.
EN 61000-4-3 (IEC 61000-4-3): Indgående
•
elektromagnetisk feltudstråling, amplitudemoduleret simulering af påvirkninger fra både radarog radiokommunikationsudstyr og mobilt
kommunikationsudstyr.
EN 61000-4-4 (IEC 61000-4-4): Burst-transienter:
•
Simulering af forstyrrelse forårsaget af kobling af
en kontaktor, et relæ eller lignende apparater.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 45
Page 48

Systemintegration
VLT® AQUA Drive FC 202
EN 61000-4-5 (IEC 61000-4-5): Surge-transienter:
•
Simulering af forbigående strømme forårsaget af
eksempelvis lynnedslag i nærheden af installationerne.
EN 61000-4-6 (IEC 61000-4-6): RF common
•
mode: Simulering af påvirkningen fra udstyr til
radiotransmission, som er forbundet til tilslutningskablerne.
Se Tabel 3.7.
33
Grundlæggende standard
IEC 61000-4-42)
Godkendelseskriterier B B B A A
Spændingsområde: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Net
Motor
Bremse 4 kV CM
Belastningsfordeling 4 kV CM
Styrekabler
Standardbus 2 kV CM
Relæledninger 2 kV CM
Applikations- og Fieldbus-
optioner
LCP-kabel
Ekstern 24 V DC
Kapsling
2)
Burst
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
0,5 kV/2 Ω DM
2)
Surge
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1 kV/12 Ω CM
2)
ESD
IEC
61000-4-2
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
Udstrålet elektromagnetisk
felt
IEC 61000-4-3
10 V/m —
mode-spænding
RF-common
IEC 61000-4-6
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
Tabel 3.7 EMC-immunitetsformular
1) Strømtilførsel på kabelafskærmning
2) Værdier, der typisk opnås ved test
Motorisolering
3.2.5
Moderne motorer til frekvensomformerbrug har en høj
grad af isolering, hvilket understøtter den nye generation
af IGBT'er med høj virkningsgrad og med høj dU/dt. Ved
eftermontering i gamle motorer skal motorisoleringen
bekræftes, eller udfør dæmpning med et dU/dt-lter et
sinuslter, hvis det er nødvendigt.
For motorkabellængder ≤ den maksimale kabellængde, der
er anført i kapitel 7.5 Kabelspecikationer, anbefales motorisoleringsklassiceringerne, der er anført i Tabel 3.8. Hvis en
motor har en lavere isoleringsklassicering, anbefales det
at bruge et dU/dt- eller sinuslter.
Nominel netspænding [V] Motorisolering [V]
UN≤420
420 V< UN≤ 500 Forstærket ULL = 1.600
500 V< UN≤ 600 Forstærket ULL = 1.800
600 V< UN≤ 690 Forstærket ULL = 2.000
Tabel 3.8 Motorisolering
Standard ULL = 1.300
Motorlejestrøm
3.2.6
For at minimere leje- og akselstrøm, skal følgende jordes til
den drevne maskine:
Frekvensomformer
•
Motor
•
Drevet maskine
•
Standardstrategier for dæmpning
1. Brug et isoleret leje.
2. Vær grundig med installationsprocedurer:
2a Kontrollér, at motoren og belastnings-
motoren er justeret.
2b Følg EMC-installationsvejledningen
omhyggeligt.
2c Forstærk PE'en, så højfrekvensimpe-
dansen er lavere i PE'en end i
forsyningskablerne.
2d Sørg for en god højfrekvensforbindelse
mellem motoren og frekvensom-
46 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 49

175HA034.10
Systemintegration Design Guide
formeren, for eksempel et skærmet
kabel med en 360° tilslutning i motoren
og frekvensomformeren.
2e Sørg for, at impedansen fra frekvensom-
formeren til bygningens jordspyd er
lavere end maskinens jordingsimpedans.
Dette kan være svært for pumper.
2f Sørg for en direkte jordtilslutning
mellem motoren og belastningsmotoren.
3. Reducér IGBT-switchfrekvensen.
4. Modicér vekselretterens bølgeform, 60° AVM vs.
SFAVM.
5. Montér et akseljordingssystem, eller anvend en
isolerende akselkobling.
6. Påfør ledende smøring.
7. Brug minimumhastighedsindstillinger, hvis det er
muligt.
8. Forsøg at sikre, at netspændingen er balanceret
til jord. Dette kan være svært for IT-, TT- eller TNCS-systemer eller systemer med jordben.
9. Anvend et dU/dt- eller sinuslter.
Harmoniske svingninger
3.2.7
Elektriske apparater med diodeensrettere, som for
eksempel uorescerende belysning, computere, kopimaskiner, faxmaskiner, forskelligt laboratorieudstyr og
telekommunikationssystemer, kan tilføre harmonisk
forvrængning til en netforsyning. Frekvensomformere
bruger en diodebro-indgang, hvilket også kan bidrage til
harmonisk forvrængning.
En frekvensomformer optager en ikke-sinusformet strøm
fra netforsyningen, hvilket øger indgangsstrømmen I
RMS
. En
ikke-sinusformet strøm transformeres via en Fourier-analyse
og deles i sinusbølgestrømme med forskellige frekvenser,
dvs. forskellige harmoniske strømme IN med 50 Hz eller 60
Hz som den grundlæggende frekvens.
De harmoniske strømme påvirker ikke strømforbruget
direkte, men øger varmetabene i installationen
(transformere, induktorer, kabler). Derfor skal harmoniske
strømme holdes på et lavt niveau for at undgå overbelastning af transformeren, induktorer og kabler i
installationer med en høj procentdel af ensretterbelastning.
Forkortelse Beskrivelse
f
1
I
1
U
1
I
n
U
n
n harmonisk rækkefølge
Tabel 3.9 Forkortelser relateret til harmoniske strømme
Grundlæggen
Strøm I
Frekvens
[Hz]
Tabel 3.10 Transformeret ikke-sinusformet strøm
Strøm Harmonisk strøm
I
Indgangsstrøm 1,0 0,9 0,4 0,2 < 0,1
grundlæggende frekvens
grundlæggende strøm
grundlæggende spænding
harmoniske strømme
harmonisk spænding
Harmonisk strøm (In)
de
strøm (I1)
1
50 250 350 550
I
5
RMSI1
I
7
I
I
5
7
I
11-49
I
11
3 3
Frekvensomformeren trækker ikke strøm ensartet fra
netlinjen. Denne ikke-sinusformede strøm har
Tabel 3.11 Harmoniske strømme sammenlignet med
RMS-indgang Strøm
komponenter, der er multipler af den grundlæggende
strømfrekvens. Disse komponenter kaldes harmoniske
strømme. Det er vigtigt at kontrollere den samlede
harmoniske forvrængning på netforsyningen. Selvom de
harmoniske strømme ikke direkte påvirker det elektriske
energiforbrug, genererer de varme i ledningsføringen og
transformere og kan påvirke andre apparater på samme
Illustration 3.3 Mellemkredsspoler
netlinje.
3.2.7.1
Harmonisk analyse
BEMÆRK!
Nogle af de harmoniske strømme kan forstyrre
Forskellige karakteristika for en bygnings elektriske system
bestemmer det præcise harmoniske bidrag fra omformeren
til THD i et anlæg og dens evne til at opfylde IEEE-
kommunikationsudstyr, der er sluttet til samme
transformer, eller skabe resonans i forbindelse med
fasekompenseringskondensatorer.
standarder. Det er svært at generalisere om det
harmoniske bidrag fra frekvensomformere til et specikt
anlæg. Hvis det er nødvendigt, skal der udføres en analyse
af systemets harmoniske strømme for at bestemme
eekterne af udstyrets.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 47
Page 50

Systemintegration
VLT® AQUA Drive FC 202
For at sikre lave harmoniske strømme er frekvensomformeren forsynet med passive ltre. DC-spoler reducerer
den samlede harmoniske forvrængning (THD) til 40 %.
Spændingsforvrængningen på netforsyningsspændingen
afhænger af størrelsen på de harmoniske strømme ganget
med netforsyningsimpedansen for den pågældende
33
frekvens. Den samlede spændingsforvrængning (THD)
beregnes ud fra de enkelte spændingsharmoniske strømme
efter følgende formel:
2
THD =
2
+ U
U
+ ... + U
5
7
U1
2
N
3.2.7.2 Harmoniske emissionskrav
Udstyr, som er sluttet til det oentlige forsyningsnet
Option Denition
1 IEC/EN 61000-3-2 klasse A til trefaset balanceret
udstyr (kun til professionelt udstyr op til 1 kW total
eekt).
2 IEC/EN 61000-3-12 udstyr 16-75 A og professionelt
udstyr fra 1 kW op til 16 A fasestrøm.
Tabel 3.12 Harmoniske emissionsstandarder
Kontakt distributionsnetværksoperatøren for at koble andre
eektstørrelser til det oentlige forsyningsnet.
Overensstemmelse med forskellige retningslinjer for
systemniveauer:
De harmoniske strømdata i Tabel 3.13 er frembragt i
overensstemmelse med IEC/EN 61000-3-12 med henvisning
til produktstandarden for power drive-systemer. De kan
bruges som basis for beregning af den indydelse, som
harmoniske strømme har på strømforsyningssystemet, og
til dokumentation af overensstemmelse med relevante
regionale retningslinjer: IEEE 519 -1992; G5/4.
3.2.7.4 Påvirkninger fra harmoniske
strømme i et
strømdistributionssystem
I Illustration 3.4 sluttes primærsiden af en transformer til et
fælles tilslutningspunkt PCC1 på mellemspændingsforsyningen. Transformeren har en impedans Z
strøm til et antal belastninger. Det fælles tilslutningspunkt,
hvor alle belastninger sammenkobles, er PCC2. Hver
belastning tilsluttes via kabler med impedansen Z1, Z2 og
Z3.
og leverer
xfr
3.2.7.3
Harmoniske testresultater (emission)
Eektstørrelser op til PK75 i T2 og T4 overholder IEC/EN
61000-3-2 klasse A. Eektstørrelser fra P1K1 og op til P18K
i T2 og op til P90K i T4 overholder IEC/EN 61000-3-12,
tabel 4. Eektstørrelse P110-P450 i T4 overholder også
IEC/EN 61000-3-12, selv om det ikke er påkrævet, da
strømmen er over 75 A.
Tabel 3.13 beskriver, at kortslutningseekten af forsyningen
Ssc på grænseadepunktet mellem brugerens forsyning og
det oentlige system (R
3 × R
=
S
SC
Faktisk (typisk)
Grænse for R
120
Faktisk (typisk)
Grænse for R
120
Tabel 3.13 Harmoniske testresultater (emission)
× U
SCE
netforsyning
≥
sce
≥
sce
) er større end eller lig med:
sce
× I
= 3 × 120 × 400 × I
equ
Individuel harmonisk strøm In/I1 (%)
I
5
40 20 10 8
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
I
7
THD PWHD
46 45
48 46
equ
I
11
I
13
Det er brugeren af udstyret eller montørens ansvar at sikre,
om nødvendigt i samråd med distributionsnetværksoperatøren, at udstyret kun er forbundet til en forsyning med
en kortslutningseekt Ssc større end eller lig det, der er
angivet i ligningen.
Illustration 3.4 Lille distributionssystem
Harmoniske strømme, som trækkes af ikke-lineære belastninger, medfører forvrængning af spændingen pga.
spændingsfaldet på impedanserne i distributionssystemet.
Højere impedanser medfører højere niveauer af spændingsforvrængning.
Strømforvrængningen afhænger af apparatets ydeevne og
af den individuelle belastning. Spændingsforvrængningen
afhænger af systemets ydeevne. Det er ikke muligt at
bestemme spændingsforvrængningen i PCC'en, hvis kun
belastningens harmoniske ydeevne er kendt. For at
forudsige forvrængningen i PCC'en skal kongurationen af
distributionssystemet og de relevante impedanser være
kendt.
48 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 51

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegration
Design Guide
Et almindeligt begreb til beskrivelse af impedansen i et net
er kortslutningsforholdet R
mellem kortslutningens tilsyneladende eekt for
forsyningen ved PCC (Ssc) og den nominelle tilsyneladende
eekt for belastningen (S
S
ce
R
=
sce
S
equ
2
U
hvor S
=
sc
Den negative påvirkning fra harmoniske strømme er
dobbelt
Harmoniske strømme bidrager til systemtab (i
•
kabelføringen, transformer).
Harmonisk spændingsforvrængning medfører
•
forstyrrelser i andre belastninger og øger tabet i
andre belastninger
Illustration 3.5 Negative virkninger af harmoniske strømme
Z
forsyning
og
, der deneres som forholdet
sce
).
equ
S
= U × I
equ
equ
3.2.7.5 Standarder og krav vedrørende
begrænsning af harmoniske
strømme
Kravene til begrænsning af harmoniske strømme kan være:
Applikationsspecikke krav
•
Standarder, der skal overholdes.
•
Applikationsspecikke krav er relevante for en specik
installation, hvor der er tekniske årsager til begrænsning af
de harmoniske strømme.
Eksempel
En 250 kVa-transformer med to tilsluttede 110 kW-motorer
er tilstrækkelig, hvis en af motorerne forbindes direkte til
netforsyningen online, og den anden forsynes via en
frekvensomformer. Transformeren er imidlertid for lille, hvis
begge motorer forsynes via en frekvensomformer. Ved at
bruge ekstra metoder til reduktion af harmoniske strømme
i installationen eller ved at vælge frekvensomformervarianter med lave harmoniske strømme kan begge motorer
køre med frekvensomformere.
Der ndes ere forskellige standarder, bestemmelser og
anbefalinger for dæmpning af harmoniske strømme.
Forskellige standarder nder anvendelse i forskellige
geograske områder og brancher. Følgende standarder er
de mest almindelige:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Se AHF005/010 Design Guide for
hver standard.
I Europa er den maksimale THVD 8 %, hvis installationen er
tilsluttet via det oentlige net. Hvis installationen har sin
egen transformer, er grænsen 10 % THVD. VLT® AQUA
Drive er konstrueret til at modstå 10 % THVD.
3.2.7.6
I tilfælde hvor der kræves ekstra begrænsning af
harmoniske strømme, kan Danfoss tilbyde en lang række
dæmpningsudstyr. Disse er:
Valget af den rette løsning afhænger af ere forskellige
faktorer:
Overvej altid dæmpning af harmoniske strømme, hvis
transformerbelastningen har et ikke-lineært bidrag på 40 %
eller mere.
Danfoss tilbyder værktøjer til beregning af harmoniske
strømme, se kapitel 2.8.2 Pc-software.
Dæmpning af harmoniske strømme
12-puls frekvensomformere
•
AHF-ltre
•
Frekvensomformere med lave harmoniske
•
strømme
Aktive ltre
•
Nettet (baggrundsforvrængning, netubalance,
•
resonans og forsyningstype (transformer/
generator)).
Applikation (belastningsprol, antal belastninger
•
og belastningsstørrelse).
Lokale/nationale krav/bestemmelser (IEEE519, IEC,
•
G5/4 osv.).
Samlede ejeromkostninger (anskaelsesomkost-
•
ninger, eektivitet, vedligeholdelse osv.).
specikke oplysninger om
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 49
Page 52

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THVD=0%
THVD=5%
Leakage current
Systemintegration
VLT® AQUA Drive FC 202
Lækstrømmen afhænger også af netforvrængningen.
3.2.8 Lækstrøm til jord
Følg nationale og lokale forskrifter angående beskyttelsesjording af udstyr, hvor en lækstrøm overstiger 3,5 mA.
33
Frekvensomformerteknologi indebærer høj switchfrekvens
ved høj eekt. Dette genererer en lækstrøm i jordtilslutningen.
Lækstrømmen til jord består af ere forskellige bidrag og
afhænger af forskellige systemkongurationer, herunder:
RFI-ltrering
•
Motorkabellængde
•
Skærmning af motorkabler
•
Frekvensomformereekt
•
Illustration 3.6 Kabellængde og eektstørrelsens påvirkning af
lækstrøm. Eektstørrelse a > Eektstørrelse b
Illustration 3.7 Netforvrængning påvirker lækstrøm
Overensstemmelse med EN/IEC61800-5-1 (produktstandarden for power drive-systemer) kræver, at der udvises
særlig opmærksomhed, hvis lækstrømmen overstiger 3,5
mA. Forstærk jording med følgende tilslutningskrav til
beskyttelsesjording:
Jordledning (klemme 95) med et tværsnit på
•
mindst 10 mm2.
To separate jordledninger, der begge opfylder
•
reglerne for dimensionering.
Se EN/IEC61800-5-1 og EN50178 for
Brug af fejlstrømsafbrydere (RCD'er)
Hvis der anvendes fejlstrømsafbrydere (RCD'er), også kaldet
fejlstrømsrelæer, skal følgende overholdes:
Der må kun anvendes fejlstrømsafbrydere af B-
•
typen, da disse kan registrere AC- og DCstrømme.
Anvend fejlstrømsafbrydere med forsinkelse for at
•
forhindre fejl, der skyldes forbigående
jordstrømme.
Fejlstrømsafbryderne skal dimensioneres i
•
henhold til
hensyn til omgivelserne.
Lækstrømmen omfatter ere frekvenser, der stammer både
fra netfrekvensen og switchfrekvensen. Hvorvidt switchfrekvensen registreres, afhænger af den anvendte RCD-type.
systemkongurationen og under
ere oplysninger.
50 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 53

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Systemintegration
Design Guide
3.3
Netforsyningsintegrering
3.3.1 Netforsyningskongurationer og EMCvirkninger
Der anvendes forskellige typer netspændingssystemer til at
forsyne frekvensomformere med strøm. Hver enkelt
påvirker systemets EMC-karakteristika. TN-S-systemet med
fem ledninger anses som det mest optimale for EMC, mens
enkeltstående IT-systemer er de mindst attraktive.
3 3
Illustration 3.8 De vigtigste bidrag til lækstrøm
Mængden af lækstrøm registreret af RCD'en afhænger af
RCD'ens afbrydelsesfrekvens.
Systemtype Beskrivelse
TN-netforsyningssystemer
TN-S Et system med fem ledninger med
TN-C Et system med re ledninger med
TT-netforsyningssystemer
IT-netforsyningssystemer
Tabel 3.14 Typer af netforsyningssystemer
Der ndes to typer af TN-netforsyningsdistributionssystemer: TN-S og TN-C.
separat nulleder (N) og beskyttende
jordleder (PE). Det giver de bedste EMCegenskaber og forhindrer, at forstyrrelser
afsendes.
almindelig nulleder og beskyttende
jordleder (PE) i hele systemet. Den
kombinerede nulleder og beskyttende
jordleder resulterer i ringe EMC-karakteristika.
Et system med re ledninger med en
nulleder til jord og en individuel jording
af omformerenhederne. Det har gode
EMC-karakteristika, hvis jordingen er
korrekt.
Et isoleret system med re ledninger
med nulleder, som enten ikke er jordforbundet eller jordforbundet via en
impedans.
Lavfrekvent netforstyrrelse
3.3.2
Illustration 3.9 RCD'ens afbrydelsesfrekvens' påvirkning på
lækstrøm
3.3.2.1 Ikke sinusformet netforsyning
Netspændingen er sjældent en ensartet sinusformet
spænding med konstant amplitude og frekvens. Dette
skyldes til dels belastninger, som trækker ikkesinusformede spændinger fra netforsyningen eller har ikkelineære karakteristika, som f.eks. computere, tv-apparater,
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 51
skiftende strømforsyninger, lavenergipærer og frekvensomformere. Afvigelser er uundgåelige og tillades inden for
visse grænser.
Page 54

Systemintegration
VLT® AQUA Drive FC 202
3.3.2.2 Overensstemmelse med EMC-
3.3.2.5
Eekt af netforstyrrelse
direktiver
Harmoniske svingninger og spændingssvingninger er to
I det meste af Europa er basis for den objektive vurdering
af netforsyningens kvalitet loven om elektromagnetisk
kompatibilitet. Overensstemmelse med disse regler sikrer,
33
at alle apparater og netværk, der tilsluttet elektriske distributionssystemer, overholder deres tiltænkte formål uden at
generere problemer.
Standard Denition
EN 61000-2-2, EN
61000-2-4, EN 50160
EN 61000-3-2,
61000-3-12
EN 50178 Overvåger elektronisk udstyr til brug i
Tabel 3.15 EN Design standarder for netforsyningens
strømkvalitet
3.3.2.3
Alle frekvensomformere genererer netforstyrrelse. Aktuelle
standarder denerer kun frekvensområder op til 2 kHz.
Nogle omformere løfter netforstyrrelsen til området over 2
kHz, hvilket ikke er omfattet af standarden, og de kan
derfor mærkes som "fri for forstyrrelser". Grænserne for
dette område undersøges i øjeblikket. Frekvensomformerne
løfter ikke netforstyrrelsen.
3.3.2.4
Netforstyrrelsesforvrængning af sinusformede bølger, der
forårsages af pulserende indgangsstrømme, betegnes
generelt som harmoniske strømme. Udledt fra Fourieranalysen anslås det, at op til 2,5 kHz, svarende til den 50.
harmoniske strøm i netforsyningens frekvens.
Indgangsensretterne på frekvensomformere genererer
denne typiske form for harmonisk forstyrrelse på netforsyningen. Når frekvensomformere tilsluttes 50 Hznetforsyningssystemer, viser den 3. harmoniske strøm (150
Hz), den 5. harmoniske strøm (250 Hz) eller den 7.
harmoniske strøm (350 Hz) den stærkeste eekt. Det
samlede harmoniske indhold kaldes den totale harmoniske
forvrængning (THD).
Forstyrrelses-frie frekvensomformere
Sådan opstår netforstyrrelse
Denerer netspændingsgrænserne, der
skal overholdes i de oentlige og
industrielle forsyningsnet.
Regulerer netforstyrrelse, der genereres af
tilsluttede apparater.
strøminstallationer.
former for lavfrekvente netforstyrrelser. De har forskellige
fremtoninger ved oprindelsespunktet i forhold til alle andre
punkter i netforsyningssystemet, når en belastning er
tilsluttet. En række af påvirkninger skal således bestemmes
samlet, når eekten af netforstyrrelse vurderes. Disse
omfatter netforsyningstilførslen, struktur, og belastninger.
Underspændingsadvarsler og større funktionelle tab kan
opstå som følge af netforstyrrelse.
Underspændingsadvarsler
Unøjagtige spændingsmålinger pga.
•
forvrængning af den sinusformede netspænding.
Forårsager unøjagtige eektmålinger, da det kun
•
er RMS-sande målinger, der tager hensyn til
harmonisk indhold.
Større tab
Harmoniske svingninger reducerer den aktive
•
eekt, den tilsyneladende eekt og den reaktive
eekt.
Forvrænger elektriske belastninger, der resulterer i
•
hørbare forstyrrelser i andre apparater, eller, i
værste fald, ødelæggelse af apparatet.
Forkorter levetiden for apparater som resultat af
•
opvarmning.
BEMÆRK!
For stort harmonisk indhold belaster udstyr til eektfak-
torkorrektion og kan endda ødelægge det. Af denne
grund bør støjspoler være tilgængelige for eektfaktor-
korrektionsudstyret, når for stort harmonisk indhold er
til stede.
3.3.3 Analysering af netforstyrrelse
For at undgå forringelse af netforsyningens kvalitet kan der
anvendes en række metoder til analyse af systemer eller
apparater, der genererer harmoniske strømme. Analysepro-
grammer til netforsyning, som f.eks. harmonic calculation
software (HCS), analyserer systemdesign for harmoniske
strømme. Specikke modforanstaltninger kan testes på
forhånd og sikrer efterfølgende systemkompatibilitet.
For analyse af netforsyningssystemer, gå tilhttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START for at
downloade software.
BEMÆRK!
Danfoss har en meget stor viden inden for EMC og
tilbyder EMC-analyser med detaljeret vurdering eller
netforsyningsberegninger til kunder foruden uddannel-
seskurser, seminarer og workshops.
52 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 55

Systemintegration
Design Guide
3.3.4 Løsninger til reduktion af
netforstyrrelse
Generelt kan netforstyrrelse fra omformere reduceres ved
at begrænse amplituden for pulserende strøm. Dette
forbedrer eektfaktoren λ (lambda).
Flere metoder anbefales for at undgå harmoniske strømme
på nettet:
Indgangs- eller DC-link-støjspoler i frekvensom-
•
formerne.
Passive ltre.
•
Aktive ltre.
•
Slim DC-links.
•
Aktive front end- og lavharmoniske frekvensom-
•
formere.
Ensrettere med 12, 18 eller 24 pulser pr cyklus.
•
Radiofrekvensforstyrrelse
3.3.5
Frekvensomformere genererer radiofrekvensforstyrrelse
(RFI) på grund af deres strømpulser med variabel bredde.
Omformere og motorkabler bestråler disse komponenter
og leder dem ind i netforsyningssystemet.
3.3.6.1
Driftssteder, som er forbundet til oentlige lavspændings-
forsyningsnet, herunder let industri, er klassiceret som
Miljø 1/klasse B. De har ikke egne transformere til distri-
bution af højspænding eller mediumspænding til separate
netforsyningssystemer. Miljøklassikationerne gælder både
i og uden for bygningerne. Nogle eksempler kan være
erhvervsområder, beboelse, restauranter, parkeringsanlæg
eller faciliteter til underholdning.
Miljø 1/klasse B: Beboelse
3.3.6.2 Miljø 2/klasse A: industri
Industrimiljøer er ikke tilsluttet det oentlige forsyningsnet.
I stedet har de egne transformere til distribution af
højspænding eller mediumspænding. Miljøklassika-
tionerne gælder både i og uden for bygningerne.
De er deneret som industrimiljø og er karakteriseret af
specikke elektromagnetiske forhold:
Tilstedeværelsen af videnskabelige, medicinske
•
eller industrielle apparater.
Kobling af store induktive og kapacitive belast-
•
ninger.
Forekomst af stærke magnetiske felter (f.eks. pga.
•
stærke strømme).
3 3
RFI-ltre bruges til at reducere denne forstyrrelse på netforsyningen. De giver støjimmunitet, der beskytter apparater
mod højfrekvent kabelbåret forstyrrelse. De reducerer også
forstyrrelser, som udsendes til forsyningskablet eller
stråling fra forsyningskablet. Filtrene er beregnet til at
begrænse forstyrrelse til et angivet niveau. Indbyggede
ltre er ofte standardudstyr klassiceret til specik
immunitet.
BEMÆRK!
Alle VLT® AQUA Drive-frekvensomformere er som
standard udstyret med integrerede støjspoler til netforstyrrelse.
3.3.6 Klassicering af driftsstedet
Idet kravene til miljøet er kendte, er frekvensomformeren
beregnet til at køre i den primære faktor vedrørende EMCoverensstemmelse.
3.3.6.3
I områder, hvor transformere med mediumspænding er
klart afgrænset fra andre områder, beslutter brugeren
hvilken type miljø, deres anlæg skal klassiceres under.
Brugeren er ansvarlig for at sikre den nødvendige elektro-
magnetiske kompatibilitet til problemfri drift af alle
apparater inden for specicerede forhold. Visse eksempler
på særlige miljøer omfatter butikscentre, supermarkeder,
tankstationer, kontorbygninger og lagerbygninger.
3.3.6.4
Når en frekvensomformer ikke overholder kategori C1, skal
der anvendes en advarsel. Dette er brugerens ansvar.
Forstyrrelseseliminering er baseret på klasserne A1, A2 og
B i EN 55011. Brugeren er i sidste ende ansvarlig for den
passende klassicering af apparater og omkostningerne til
afhjælpning af EMC-problemer.
3.3.7
Størstedelen af den oentlige strøm i USA er med jordre-
ference. Selvom det ikke er almindeligt brugt i USA, kan
netforsyningen være en isoleret kilde. Alle Danfoss-
frekvensomformere kan anvendes med isoleret
indgangskilde såvel som med strømledninger med jordre-
ference.
Særlige miljøer
Advarselsmærkater
Anvend med adskilt indgangskilde
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 53
Page 56

Systemintegration
VLT® AQUA Drive FC 202
3.3.8 Eektfaktorkorrektion
Udstyr til eektfaktorkorrektion har til hensigt at reducere
faseskiftene (φ) mellem spændingen og strømmen for at
ytte eektfaktoren tættere på 1 (cos φ). Dette er
nødvendigt, når et stort antal induktive belastninger, som
33
f.eks. motorer eller elektrisk ballast (lysstofrør forkobling),
anvendes i et elektrisk distributionssystem. Frekvensomformere med isoleret DC-link trækker ikke reaktiv eekt fra
netforsyningssystemet eller genererer faseskift til eektfak-
torkorrektion. De har en cos φ på ca. 1.
Af denne grund skal hastighedskontrollerede motorer ikke
tage hensyn, når der dimensioneres udstyr til eektfaktor-
korrektion. Strømmen, der trækkes af udstyret til
fasekorrektion, stiger, fordi frekvensomformere genererer
harmoniske svingninger. Belastningen på kondensatorerne
stiger i takt med et stigende antal harmoniske generatorer.
Montér derfor støjspoler i udstyret til eektfaktorkor-
rektion. Støjspolerne forhindrer ligeledes resonans mellem
belastningsinduktans og kapacitansen. Omformere med
cos φ < 1 kræver også støjspoler i udstyret til eektfaktor-
korrektion. Tag også højde for de højere reaktive
eektniveauer for kabelmål.
Standarden EN 61000-4-1 beskriver disse transienters
former og den mængde energi, de indeholder. Deres
skadelige eekt kan begrænses vha. forskellige metoder.
Gasfyldte overspændingssikringer og gnistgab giver
primær beskyttelse mod højenergitransienter. Som
sekundær beskyttelse anvender de este elektroniske
apparater, herunder frekvensomformere, spændingsaf-
hængige modstande (varistorer) til at dæmpe
transienterne.
3.3.11 Drift med en standbygenerator
Brug backup strømforsyningssystemer, når fortsat drift er
nødvendig i tilfælde af netfejl. De bruges også parallelt
med de oentlige forsyningsnet for at opnå højere netfor-
syningseekt. Det er almindelig praksis for kombinerede
varme- og eektenheder at benytte fordelen ved den høje
eektivitet, der opnås med denne form for energikonver-
tering. Når backupstrømmen leveres af en generator, er
netforsyningsimpedansen normalt større, end når
strømmen leveres fra det oentlige forsyningsnet. Dette
betyder, at den totale harmoniske forvrængning øges. Med
et korrekt design kan generatorer fungere i et system, der
indeholder apparater, der medfører harmoniske strømme.
Forsinkelse på indgangsstrøm
3.3.9
For at sikre, at dæmpning af overspænding på indgangskredsløbet udføres korrekt, skal en tidsforsinkelse mellem
successive netforsyningsapplikationer overholdes.
Tabel 3.16 viser den minimumtid, der skal tillades mellem
netforsyningsapplikationer.
Indgangsspænding [V]
Ventetid [sek]
Tabel 3.16 Forsinkelse på indgangsstrøm
3.3.10
Transienter er kortvarige spændingsstigninger på ca. et par
tusinde volt. De kan opstå i alle typer strømforsyningssystemer, herunder industri- og beboelsesmiljøer.
Lynnedslag er en typisk årsag til transienter. De forårsages
dog også af store skiftende belastninger online eller oine
eller ved kobling af udstyr til nettransienter, som f.eks.
udstyr til eektfaktorkorrektion. Transienter kan også opstå
som følge af kortslutninger, trip af afbrydere i eektdistri-
butionssystemer, og induktiv kobling mellem parallelle
kabler.
Nettransienter
380 415 460 600
48 65 83 133
Det anbefales at overveje et systemdesign med en
standbygenerator.
Når systemet skifter fra netforsyningsdrift til
•
generator, tiltager den harmoniske belastning
som regel.
Designere skal beregne eller måle forøgelsen i
•
den harmoniske belastning for at sikre, at
strømkvaliteten overholder relevante bestemmelser for at forhindre harmoniske problemer og
fejl på udstyret.
Undgå asymmetrisk belastning af generatoren, da
•
det resulterer i øgede tab, og det kan øge den
totale harmoniske forvrængning.
En forskydning på 5/6 af generatorens vikling
•
dæmper 5. og 7. harmoniske strømme, men det
gør, at 3. harmoniske strøm stiger. En forskydning
på 2/3 reducerer 3. harmoniske strøm.
Når det er muligt, skal operatøren frakoble udstyr
•
til eektfaktorkorrektion, da det forårsager
resonans i systemet.
Støjspoler eller aktive absorptionsltre kan
•
dæmpe harmoniske svingninger, såvel som
resistive belastninger, der drives parallelt.
Kapacitive belastninger, der drives parallelt,
•
skaber en ekstra belastning pga. uforudsigelige
resonanspåvirkninger.
54 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 57

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Systemintegration
Design Guide
En mere nøjagtig analyse er mulig vha. software til netforsyningsanalyse, som f.eks. HCS. For analyse af
netforsyningssystemer, gå til http://www.danfoss-hcs.com/
Default.asp?LEVEL=START for at downloade software.
Ved drift med apparater, der medfører harmoniske
strømme, vises maksimumbelastninger baseret på problemfri anlægsdrift i tabellen med harmoniske grænser.
Harmoniske grænser
B2- og B6-ensrettere⇒maksimum 20 % af nominel
•
generatorbelastning.
B6-ensretter med støjspole⇒maksimum 20-35 %
•
af nominel generatorbelastning, afhængigt af
sammensætningen.
Styret B6-ensretter⇒maksimum 10 % af nominel
•
generatorbelastning.
3.4 Motorintegrering
3.4.1 Overvejelser ved motorvalg
Frekvensomformeren kan forårsage elektrisk stress på en
motor. Overvej derfor følgende påvirkninger på motoren,
når motoren skal tilpasses frekvensomformeren:
Isoleringsbelastning
•
Lejebelastning
•
Termisk belastning
•
3.4.3
Korrekt jording af motor
Korrekt jording af motoren er afgørende for personbe-
skyttelse og for at overholde de elektriske EMC-krav til
lavspændingsudstyr. Korrekt jording er nødvendigt for
eektiv brug af skærmning og ltre. Designoplysninger
skal godkendes til korrekt EMC-implementering.
3.4.4 Motorkabler
Anbefalinger til motorkabler og specikationer gives i
kapitel 7.5 Kabelspecikationer.
Alle typer trefasede asynkrone standardmotorer kan
anvendes med en frekvensomformer. Fabriksindstillingen er
omdrejning med uret med frekvensomformerens udgang
tilsluttet på følgende måde:
3 3
3.4.2
Udgangsltre giver fordele til nogle motorer for at
reducere elektrisk belastning og muliggøre længere
kabellængde. Udgangsoptioner omfatter sinusltre (også
kaldet LC-ltre) og dU/dt-ltre. DU/dt-ltre reducerer den
markante stigning i pulshastighed. Sinusltre udjævner
spændingspulser for at konvertere dem til næsten
sinusformet udgangsspænding. Med visse frekvensomformere, overholder sinusltre EN 61800-3 RFI kategori C2
for uskærmede motorkabler, se kapitel 3.7.5
For ere oplysninger om sinusbølge- og dU/dt-lterop-
tioner, se kapitel 3.7.5 Sinusltre og kapitel 3.7.6 dU/dt-ltre.
For
og dU/dt-ltre se og kapitel 6.2.9 dU/dt-ltre.
Sinusbølge- og dU/dt-ltre
Sinusltre.
ere oplysninger om bestillingsnumre til sinusbølge-
Illustration 3.10 Klemmeforbindelse til omdrejning med og
mod uret
Omdrejningsretningen kan ændres ved at ombytte to faser
i motorkablet eller ved at ændre indstillingen for
parameter 4-10 Motorhastighedsretning.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 55
Page 58

130BD774.10
130BD775.10
130BD776.10
Systemintegration
VLT® AQUA Drive FC 202
3.4.5 Skærmning af motorkabel
Frekvensomformere genererer stejle pulsanker ved deres
udgange. Disse pulser indeholder højfrekvente
komponenter (helt op til gigahertz-området), hvilket
forårsager uønsket stråling fra motorkablet. Skærmede
33
motorkabler reducerer denne stråling.
Formålene med skærmning er at:
Reducere styrken af udstrålede forstyrrelser.
•
Forbedrer forstyrrelsesimmuniteten i individuelle
•
apparater.
Skærmen fanger de højfrekvente komponenter og leder
dem tilbage til forstyrrelseskilden, som i dette tilfælde er
frekvensomformeren. Skærmede motorkabler giver også
immunitet til forstyrrelser fra eksterne kilder i nærheden.
Selv god skærmning eliminerer ikke helt strålingen.
Systemkomponenter placeret i strålingsmiljøer skal køre
uden degradering.
Tilslutning af ere motorer
3.4.6
BEMÆRK!
Når motorerne er parallelforbundne, indstil
parameter 1-01 Motorstyringsprincip til [0] U/f.
Illustration 3.11 Tilslutning til fælles klemme ved korte
kabellængder
BEMÆRK!
Da små motorers relativt høje ohmske modstand i
statoren kræver højere spænding ved start og lave O/
MIN-værdier, kan der opstå problemer i forbindelse med
start og lave O/MIN-værdier, hvis motorerne varierer
meget i størrelse.
Frekvensomformeren kan styre ere paralleltilsluttede
motorer. Ved brug af parallel motortilslutning skal der
tages højde for følgende:
VCC+-tilstanden kan anvendes i nogle applika-
•
tioner.
Det samlede strømforbrug i motorerne må ikke
•
overskride den nominelle udgangsstrøm I
frekvensomformeren.
Brug ikke tilslutning til fælles klemme til lange
•
kabellængder, se Illustration 3.12.
Den samlede motorkabellængde angivet i
•
Tabel 3.4 er gyldig, så længe de parallelle kabler
er korte (mindre end 10 m hver), se
Illustration 3.14 og Illustration 3.15.
Tag højde for spændingsfald i motorkablet, se
•
Illustration 3.15.
Anvend
•
Illustration 3.15.
Ved lange kabler uden paralleltilslutning, se
•
Illustration 3.16.
LC-lter til lange parallelle kabler, se
INV
i
Illustration 3.12 Tilslutning til fælles klemme ved lange
kabellængder
Illustration 3.13 Parallelle kabler uden belastning
56 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 59

130BD777.10
130BD778.10
130BD779.10
Systemintegration Design Guide
Illustration 3.14 Parallelle kabler med belastning
3 3
Illustration 3.16 Lange kabler i seriel tilslutning
Illustration 3.15 LC-lter til lange parallelle kabler
Kapslingsstørrelser
A1, A2, A4, A5 0,37–0,75
A2, A4, A5 1,1–1,5
A2, A4, A5 2,2–4
A3, A4, A5 5,5–7,5
B1, B2, B3, B4,
C1, C2, C3, C4
A3 1,1–7,5 525–690 100 50 33 25
B4 11–30 525–690 150 75 50 37
C3 37–45 525–690 150 75 50 37
Tabel 3.17 Maksimum kabellængde for hvert parallelkabel
Eektstørrelse [kW]
11–90
Spænding [V] 1 kabel [m] 2 kabler [m] 3 kabler [m] 4 kabler [m]
400 150 45 8 6
500 150 7 4 3
400 150 45 20 8
500 150 45 5 4
400 150 45 20 11
500 150 45 20 6
400 150 45 20 11
500 150 45 20 11
400 150 75 50 37
500 150 75 50 37
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 57
Page 60

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
Systemintegration
VLT® AQUA Drive FC 202
3.4.7 Adskillelse af styreledninger
Harmoniske forstyrrelser, der genereres af motorkabler, kan
degradere styresignaler i omformerens styreledninger og
medføre styringsfejl. Motorkabler og styreledninger skal
være separate. Påvirkninger fra forstyrrelser falder
33
betydeligt ved adskillelse.
Afstanden mellem styreledninger og
•
motorkablerne bør være mere end 200 mm.
Fordelingsstrips er nødvendige ved mindre adskil-
•
lelser, eller forstyrrelser kobles ind eller overføres.
Skærmning af styreledninger skal tilsluttes i
•
begge ender tilsvarende skærmning af
motorkabler.
Skærmede kabler med snoede ledere giver den
•
højeste dæmpning. Dæmpningen af det
magnetiske felt øges fra ca. 30 dB med en enkelt
skærmning til 60 dB med en dobbelt skærmning
og til ca. 75 dB, hvis lederne også snos.
Termisk motorbeskyttelse
3.4.8
Frekvensomformeren yder termisk motorbeskyttelse på
forskellige måder:
Momentgrænse beskytter motoren mod overbe-
•
lastning uafhængigt af hastigheden.
Minimumhastighed begrænser mindste område
•
for driftshastighed, f.eks. mellem 30 og 50/60 Hz.
Maksimumhastigheden begrænser den maksimale
•
udgangshastighed.
Indgang er tilgængelig for en ekstern termistor.
•
Elektronisk termorelæ (ETR) for asynkrone motorer
•
simulerer et bimetalrelæ på basis af interne
målinger. ETR måler den faktiske strøm, hastighed
og tid for at beregne motortemperaturen og
beskytte motoren mod at blive overophedet ved
at afgive en advarsel eller afbryde strømmen til
motoren. ETR-karakteristika er vist i
Illustration 3.17.
Illustration 3.17 Karakteristika for elektronisk termorelæ
X-aksen viser forholdet mellem I
aksen viser det tidsrum i sekunder, der går, før ETR
afbryder og tripper. Kurverne viser den karakteristiske
nominelle hastighed ved den dobbelte nominelle
hastighed og ved 0,2 x den nominelle hastighed.
Ved lavere hastighed kobler ETR ud ved en lavere
temperatur på grund af mindre køling af motoren. Dette
forhindrer, at motoren overophedes selv ved lave
hastigheder. Funktionen ETR beregner motortemperaturen
på basis af den faktiske strøm og hastighed.
Udgangskontaktor
3.4.9
Selvom det ikke er en almindelig anbefalet praksis,
beskadiger det ikke frekvensomformeren at drive en
udgangskontaktor mellem motoren og frekvensom-
formeren. Lukning af en udgangskontaktor, der tidligere
har været åben, kan tilslutte en kørende frekvensomformer
til en standset motor. Dette kan få frekvensomformeren til
at trippe og vise en fejl.
3.4.10
For at bremse belastningen på motorakslen, skal der enten
bruges en statisk (mekanisk) eller en dynamisk bremse.
Bremsefunktioner
motor
og I
nominel. Y-
motor
58 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 61

Systemintegration
Design Guide
3.4.11 Dynamisk bremsning
Dynamisk bremse etableres ved:
Modstandsbremse: En bremse-IGBT holder
•
overspændingen under en fastsat grænse ved at
dirigere bremseenergien fra motoren til bremsemodstanden.
AC-bremse: Bremseenergien distribueres i
•
motoren ved at ændre betingelserne for tab i
motoren. AC-bremsefunktionen kan ikke bruges i
applikationer med høj slutte- og brydefrekvens,
da dette vil overophede motoren.
DC-bremse: En overmoduleret DC-strøm, der
•
tilføres AC-strømmen, fungerer som en hvirvelstrømsbremse.
3.4.12
En bremsemodstand skal kunne håndtere varmetab og
stigning i DC-link-spændingen under elektrisk-genereret
bremsning. Brug af en bremsemodstand sikrer, at energien
absorberes i bremsemodstanden og ikke i frekvensomformeren. Se Brake Resistor Design Guide for
oplysninger.
Beregning af driftscyklus
Når mængden af kinetisk energi, der overføres til
modstanden i hver bremseperiode, er ukendt, beregnes
gennemsnitseekten på baggrund af cyklustiden og
bremsetiden (kendt som periodisk driftscyklus).
Modstandens periodiske driftscyklus er et tegn på
cyklussen, når modstanden er aktiv (se Illustration 3.18).
Motorleverandører bruger ofte S5, når den tilladelige
belastning angives, hvilket er et udtryk for periodisk driftscyklus.
Bremsemodstandsberegning
ere
Danfoss tilbyder bremsemodstande med en driftscyklus på
5 %, 10 % og 40 %. Når der anvendes en driftscyklus på 10
%, absorberer bremsemodstandene bremseeekten i 10 %
af cyklustiden. De resterende 90 % af cyklustiden bruges
på at sprede overskydende varme.
Sørg for, at modstanden er dimensioneret til den krævede
bremsetid.
Bremsemodstandsberegning
For at forhindre frekvensomformeren i at koble ud af
hensyn til beskyttelse, når motoren bremser, vælges
modstandsværdier på grundlag af spidsbremseeekt og
mellemkredsspændingen. Beregn bremsemodstandens
modstandsværdi som følger:
Rbr =
Ω
P
spids
2
Udc
Bremsemodstandens ydeevne afhænger af DC-link-
spændingen (Udc).
Udc er spændingen, hvorved bremsen er aktiveret. FC-
seriens bremsefunktion er indstillet afhængigt af
netforsyningen.
Netforsyningsindgang
[V AC]
FC 202 3 x 200-240 390 405 410
FC 202 3 x 380-480 778 810 820
FC 202 3 x 525-600
FC 202 3 x 525-600
FC 202 3 x 525-690 1099 1109 1130
Tabel 3.18 DC-link-spænding (Udc)
1) Kapslingsstørrelser A, B, C
2) Kapslingsstørrelser D, E, F
1)
2)
Brug bremsemodstanden R
Bremse
aktiv
[V DC]
943 965 975
1099 1109 1130
til at sikre, at frekvensom-
rec
Høj
spændings
advarsel
[V DC]
formeren kan bremse ved højeste bremsemoment (M
Over
spændings
alarm
[V DC]
br(%)
)
på 160 %. Formlen kan skrives sådan her:
3 3
2
U
x100
R
Ω =
rec
η
er typisk 0,90
motor
η
er typisk 0,98
VLT
P
motor
xM
dc
br( % )
xη
VLT
xη
motor
Når der vælges en højere bremsemodstand, opnås bremse-
momentet på 160 % / 150 % / 110 % ikke, da der kan
være risiko for, at frekvensomformeren afbryder fra DC-link-
Illustration 3.18 Bremsemodstand for driftscyklus
overspændingen af hensyn til beskyttelse.
Ved bremsning ved lavere moment, for eksempel 80 %
Beregn den periodiske driftscyklus for modstanden på
følgende måde:
Driftscyklus=tb/T
moment, er det muligt at montere en bremsemodstand
med lavere nominel eekt. Beregn størrelse ved hjælp af
formlen til beregning af R
.
rec
T = cyklustid i sekunder
tb er bremsetid i sekunder (ud af cyklustiden)
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 59
Page 62

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Systemintegration
VLT® AQUA Drive FC 202
Frekvensomformere med kapslingstyper D og F er forsynet
med mere end én bremsechopper. Brug en bremsemodstand for hver bremsechopper til disse af
kapslingsstørrelser.
VLT® Brake Resistor MCE 101 Design Guide indeholder de
33
mest opdaterede data og beskriver beregningens
forskellige trin i detaljer, herunder:
Beregning af
•
Beregning af bremsemodstandens
•
Beregning af bremsemodstandens gennemsnitlige
•
eekt
Bremsning af inerti
•
3.4.13
EMC (snoede kabler/skærmning)
For at overholde den angivne EMC-ydeevne for frekvensomformeren skal skærmede kabler/ledninger anvendes.
Hvis uskærmede ledninger bruges, anbefales det, at disse
snoes for at reducere elektrisk støj fra ledningerne mellem
bremsemodstanden og frekvensomformeren.
For forstærket EMC-ydeevne skal en metalskærm anvendes.
Kabelføring for bremsemodstand
bremseeekt
spidseekt
formeren undgås. I denne situation forlænges rampe nedtiden.
3.4.15 Energieektivitet
Frekvensomformerens virkningsgrad
Frekvensomformerens belastning påvirker kun i ringe grad
dens virkningsgrad.
Dette betyder også, at frekvensomformerens virkningsgrad
ikke ændres, når der vælges andre u/f-karakteristikker. U/fkarakteristikkerne påvirker imidlertid motorens
virkningsgrad.
Virkningsgraden forringes en lille smule, når switchfrekvensen indstilles til en værdi over 5 kHz. Virkningsgraden
mindskes også lidt, når motorkablet er længere end 30 m.
Beregning af virkningsgrad
Frekvensomformerens virkningsgrad ved forskellige belastninger beregnes baseret på Illustration 3.19. Faktoren i
denne graf skal ganges med den
faktor, der er angivet i kapitel 7.1 Elektriske data.
specikke virkningsgrads-
3.4.14
Bremsemodstand, eektmonitor
Desuden gør funktionen bremseeektmonitor det muligt
at udlæse den aktuelle eekt og middeleekten for en
valgt periode. Bremsen kan også overvåge påførslen af
strøm og sikre, at den ikke overstiger en grænse, der
vælges i parameter 2-12
parameter 2-13 Bremseeektovervågning vælges den
funktion, der skal udføres, når eekten, som sendes til
bremsemodstanden, overstiger den grænse, der er
indstillet i parameter 2-12 Bremseeektgrænse (kW).
Bremsemodstand og bremse-IGBT
Bremseeektgrænse (kW). I
BEMÆRK!
Overvågningen af bremseeekten udfylder ikke en
sikkerhedsfunktion. Bremsemodstandskredsløbet er ikke
beskyttet mod overgang til jord.
Bremsen er beskyttet mod kortslutning i bremsemodstanden, og bremsetransistoren overvåges for at sikre, at
en kortslutning i transistoren registreres. Brug et relæ eller
en digital udgang til at beskytte bremsemodstanden mod
overbelastning i tilfælde af en fejl i frekvensomformeren.
Illustration 3.19 Typiske virkningsgradskurver
Eksempel: Antag en 55 kW, 380-480 V AC frekvensomformer med 25 % belastning ved 50 % hastighed. Grafen
viser 0,97. Den nominelle virkningsgrad for en 55 kW
frekvensomformer er 0,98. Den faktiske virkningsgrad er
derfor: 0,97 x 0,98 = 0,95.
Overspændingsstyring (OVC) kan vælges som en alternativ
bremsefunktion i parameter 2-17 Overspændingsstyring. Hvis
DC-link-spændingen øges, er denne funktion aktiv for alle
apparater. Funktionen sikrer, at et trip kan undgås. Dette
gøres ved at øge udgangsfrekvensen for at begrænse
spændingen fra DC-linket. Det er en nyttig funktion, f.eks.
hvis rampe ned-tiden er for kort, da trip af frekvensom-
60 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 63

Systemintegration Design Guide
Motorvirkningsgrad
Virkningsgraden for en motor, der er sluttet til en frekvensomformer, afhænger af magnetiseringsniveauet. Motorens
virkningsgrad afhænger af motortypen.
Inden for et område på 75-100 % af det
•
nominelle moment er motorens virkningsgrad så
godt som konstant, både når den styres af
frekvensomformeren, og når den kører direkte på
netforsyningen.
Påvirkningen fra U/f-karakteristikken på små
•
motorer er marginal. I motorer fra 11 kW og op er
fordelene for virkningsgraden imidlertid
betydelige.
Switchfrekvensen påvirker ikke virkningsgraden i
•
små motorer. Virkningsgraden forbedres 1-2 % i
motorer fra 11 kW og op. Dette sker, fordi
motorstrømmens sinusform er næsten perfekt
ved en høj switchfrekvens.
Systemeektivitet
Systemets virkningsgrad beregnes ved at gange frekvensomformerens virkningsgrad med motorens virkningsgrad.
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 61
Page 64

+ - + -
S202
**
*
Motor
Analog udgang
relæ1
relæ2
ON=Termineret
OFF=Åben
50 (+10 V UD)
53 (A IND)
54 (A IND)
55 (KOMM. A IND)
12 (+24 V UD)
13 (+24 V UD)
37 (D IND)
18 (D IND)
(KOMM. D IND)
(KOMM. A UD) 39
(A UD) 42
(P RS-485) 68
(N RS-485) 69
(KOMM. RS-485) 61
0/4-20 mA
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IND)
24 V (NPN)
0 V (PNP)
(D IND/UD)
0 V (PNP)
24 V (NPN)
(D IND/UD)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IND)
32 (D IND)
: Chassis
: Jord
240 V AC, 2 A
400 V AC, 2 A
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
20
10 V DC
15 mA 130/200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
0 V
5 V
S801
RS-485
03
24 V DC
02
01
05
04
06
27
24 V
0 V
0 V
24 V
29
1 2
ON
S201
ON
21
ON=0/4-20 mA
OFF=0/-10 V DC -
+10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
130BD552.10
Trefaset
eektindgang
DC-bus
+10 V DC
0/-10 V DC+10 V DC
0/4-20 mA
0/-10 V DC+10 V DC
0/4-20 mA
Switch
mode-strømforsyning
Bremsemodstand
RS-485grænse-
ade
Systemintegration
VLT® AQUA Drive FC 202
3.5 Yderligere indgange og udgange
3.5.1 Ledningsdiagram
Når styreklemmerne er tilsluttet og programmeret korrekt, giver disse:
Feedback, reference og andre indgangssignaler til frekvensomformeren.
33
•
Status på udgange og fejltilstande fra frekvensomformeren.
•
Relæer til at drive ekstraudstyr.
•
En seriel kommunikationsgrænseade.
•
24 V fælles.
•
Styreklemmer kan programmeres til forskellige funktioner ved at vælge parameteroptioner via LCP-betjeningspanelet foran
på apparatet eller via eksterne kilder. De este styreledninger skal leveres af kunden, medmindre andet er speciceret ved
bestilling fra fabrikken.
Illustration 3.20 Grundlæggende ledningsdiagram
A = analog, D = digital
*Klemme 37 (medfølger ikke altid) bruges til STO. Se VLT® Safe Torque O Betjeningsvejledning for installationsinstruktioner.
**Tilslut ikke kabelskærmen.
62 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 65

Systemintegration
3.5.2 Relætilslutninger
Design Guide
3 3
Relæ
1 1 fælles
2 4 fælles
1 01-02 slut (som regel åben)
2 04-05 slut (som regel åben)
Illustration 3.21 Relæudgange 1 og 2, maksimum spændinger
1)
Klemme
2 som regel åben
3 som regel lukket
5 som regel lukket
6 som regel lukket
01-03 bryd (som regel lukket)
04-06 bryd (som regel lukket)
Beskrivelse
maksimum 240 V
maksimum 240 V
maksimum 240 V
maksimum 240 V
1) For at tilføje ere relæudgange installeres VLT® Relæoptionsmodul MCB 105 eller VLT
®
Relæoptionsmodul MCB 113.
For ere oplysninger om relæer, se kapitel 7 Specikationer
og kapitel 8.3 Tegninger over relæklemmer.
ere oplysninger om relæoptioner, se
For
kapitel 3.7 Optioner og tilbehør.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 63
Page 66

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Systemintegration
VLT® AQUA Drive FC 202
3.5.3 EMC-korrekt elektrisk tilslutning
33
1 PLC 7 Motor, tre-faset og PE (skærmet)
2 Frekvens omformer 8 Netforsyning, tre-faset og forstærket PE (ikke skærmet)
3 Udgangs kontaktor 9 Styreledninger (skærmede)
4 Kabelbøjle 10
5 Kabelisolering (asoleret)
6 Kabelbøsning
11
Potentialeudligning min. 16 mm
Afstand mellem styrekabel, motorkabel og forsyningskabel:
Minimum 200 mm
2
Illustration 3.22 EMC-korrekt elektrisk tilslutning
64 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 67

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Systemintegration Design Guide
For yderligere oplysninger om EMC, se kapitel 2.5.18 EMCoverensstemmelse og kapitel 3.2 EMC, beskyttelse mod
harmoniske strømme og overgang til jord.
BEMÆRK!
EMC-FORSTYRRELSE
Brug skærmede kabler til motorkabler og styreledninger
samt separate kabler til indgangsstrøm, motorkabler og
styreledninger. Hvis strømkabler, motorkabler og
styreledninger ikke adskilles, kan det resultere i utilsigtet
funktion eller reduceret ydeevne. Der skal være mindst
200 mm afstand mellem strømkabler, motorkabler og
styreledninger.
3.6 Mekanisk planlægning
3.6.1 Mindsteafstand
Montering side-om-side er egnet til alle kapslingsstørrelser,
undtagen når der anvendes et IP21/IP4X/TYPE 1kapslingssæt (se kapitel 3.7 Optioner og tilbehør).
Horisontal mindsteafstand, IP20
Kapslingsstørrelser IP20 A og B kan monteres side-om-side
uden mindsteafstand. Den korrekte monteringsrækkefølgen
er dog vigtig. Illustration 3.23 viser, hvordan der monteres
korrekt.
Vertikal mindsteafstand
For at opnå optimale køleforhold, skal der være en vertikal
mindsteafstand med fri luftpassage over og under
frekvensomformeren. Se Illustration 3.24.
Kapslingsstørrelse
a [mm] 100 200 225
b [mm] 100 200 225
A1*/A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
3 3
Illustration 3.23 Korrekt montering side-om-side uden
mindsteafstand
Horisontal mindsteafstand, IP21 kapslingssæt
Når et IP21-kapslingssæt anvendes til kapslingsstørrelser
A1, A2 eller A3, skal der sørges for luft mellem frekvensomformerne på mindst 50 mm.
Illustration 3.24 Vertikal mindsteafstand
Vægmontering
3.6.2
Montering på en ad væg kræver ikke en bagplade.
Montering på en ujævn væg kræver en bagplade for at
sikre tilstrækkelig køling over kølepladen. Brug kun
bagpladen med kapslinger A4, A5, B1, B2, C1 og C2.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 65
Page 68

130BA219.11
1
130BA392.11
2
1
3
4
Systemintegration
33
1 Bagplade
Illustration 3.25 Montering med bagplade
Til frekvensomformere med beskyttelsesklasse IP66 skal der
bruges en
beskyttelse af epoxy-coatingen.
1 Bagplade
2 Frekvensomformer med IP66-kapsling
3 Bagplade
4 Fiberspændeskive
Illustration 3.26 Montering med bagplade til beskyttelsesklasse IP66
3.6.3
For at kunne planlægge adgangsforholdene til kabelføring
før montering henvises der til tegningerne i
kapitel 8.1 Tegninger over nettilslutning (3-faser) og
kapitel 8.2 Tegninger over motortilslutning.
berspændeskive eller en nylonspændeskive til
Adgang
VLT® AQUA Drive FC 202
3.7
Optioner og tilbehør
Optioner
For bestillingsnumre, se kapitel 6 Typekode og valg
Netforsyningsafskærmning
Lexan®-skærmning monteret foran indgående
•
eektklemmer og indgangspladen, der beskytter
mod utilsigtet kontakt, når kapslingsdøren er
åben.
Rumopvarmere og termostat: Rumopvarmere, der
•
styres via automatisk termostat, og som er
monteret på indersiden af kabinettet til Fkapslinger, forhindrer kondensering inden i
kapslingen. Fabriksindstillingerne for termostaten
tænder for rumopvarmerne ved 10 °C og slukker
for dem ved 15,6 °C.
RFI-ltre
Frekvensomformerfunktion med integreret klasse
•
A2 RFI-ltre som standard. Hvis yderligere
niveauer af RFI/EMC-beskyttelse er påkrævet, kan
de opnås med valgfri klasse A1 RFI-ltre, hvilket
giver en dæmpning af radiofrekvensforstyrrelse
og elektromagnetisk stråling i henhold til EN
55011.
Fejlstrømsafbryder (RCD)
Benytter kernebalancemetoden til at overvåge jordfejlstrømme i jordede og højmodstandsjordede systemer (TNog TT-systemer i IEC-terminologien). Der er sætpunkter for
forvarsel (50 % af hovedalarmsætpunktet) og hovedalarm.
Et SPDT-alarmrelæ til ekstern brug er knyttet til hvert
sætpunkt, hvilket kræver en ekstern vinduestype
strømtransformer (leveres og monteres af kunden).
Indbygget indbygget frekvensomformerens
•
kredsløb til safe torque
IEC 60755 Type B-apparat overvåger AC, pulsmo-
•
duleret DC og rene DC-jordfejlstrømme
LED-søjlediagrammer over jordfejlstrømsniveauet
•
fra 10-100 % af sætpunktet
Fejlhukommelse
•
TEST/RESET-tast
•
Overvågning af isolationsmodstand (IRM)
Overvåger isolationsmodstanden i ujordede systemer (ITsystemer i IEC-terminologi) mellem systemfaseledere og
jord. Der er sætpunkter for isolationsniveau i ohm for
forvarsel og hovedalarm. Et SPDT-alarmrelæ til ekstern brug
er knyttet til hvert sætpunkt. Bemærk: Der kan kun sluttes
én enhed til overvågning af isolationsmodstanden til hvert
ujordet system (IT-system).
Indbygget i frekvensomformerens til sikker
•
standsningskredsløb
LCD-visning af isolationsmodstand
•
Fejlhukommelse
•
INFO-, TEST-, og RESET-taster
•
o
66 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 69

Systemintegration
Design Guide
Bremsechopper (IGBT'er)
Bremseklemmer med et IGBT bremsechopper-
•
kredsløb tillader tilslutning af eksterne
bremsemodstande. Flere oplysninger om bremsemodstande ndes i
kapitel 3.4.12 Bremsemodstandsberegning og .
Regenereringsklemmer
Disse klemmer muliggør tilslutning af regenere-
•
ringsapparater til DC-bussen på
kondensatorgruppens DC-link-reaktorer til
regenerativ bremsning. Regenereringsklemmer til
F-kapsling er dimensioneret til ca. ½ frekvensomformerens nominelle
vedrørende regenereringens eektgrænser
baseret på den specikke frekvensomformerstørrelse og spænding
Belastningsfordeling for klemmer
Disse klemmer slutter til DC-bussen på ensret-
•
tersiden af DC-linkreaktoren og tillader deling af
DC-bussens eekt mellem ere frekvensomformere. Klemmerne til belastningsfordeling for Fkapslinger er dimensioneret til ca. ⅓ af
frekvensomformerens nominelle
fabrikken vedrørende belastningsfordelingsgrænser baseret på den specikke
frekvensomformerstørrelse og spænding.
Sikringer
Sikringer anbefales til hurtigtreagerende strøm og
•
overbelastningsbeskyttelse af frekvensomformeren. Sikringsbeskyttelse begrænser skader
på frekvensomformeren og minimerer servicetid i
tilfælde af en fejl. Sikringer skal overholde
marinecerticering.
Afbryd
Et håndtag monteret på døren tillader, at en
•
strømafbryderkontakt kan håndteres manuelt,
således at strømmen til frekvensomformeren kan
aktiveres eller deaktiveres, hvorved sikkerhed
under servicearbejde øges. Afbryderen er spærret
ved kapslingsdørene for at forhindre, at at de
åbnes, mens der stadig er strøm i apparatet.
Afbrydere
En afbryder kan trippes via ernstyring, men den
•
skal nulstilles manuelt. Afbrydere er spærret ved
kapslingsdørene for at forhindre, at de åbnes,
mens der stadig er strøm i apparatet. Når en
afbryder bestilles som option, er sikringer også
inkluderet for hurtigtreagerende strøm og
overbelastningsbeskyttelse af frekvensomformeren.
eekt. Kontakt fabrikken
eekt. Kontakt
Kontaktorer
En elektrisk styret kontaktor muliggør ernbetjent
•
aktivering og deaktivering af strøm til frekvensomformeren. Hvis IEC-nødstopsoption er bestilt,
overvåger Pilz Safety en ekstra kontakt på
kontaktoren.
Manuelle motorstartere
Giver trefaset strøm til elektriske blæsere, som ofte kræves
i større motorer. Strømmen til starterne kommer fra belastningssiden fra en af de leverede kontaktorer, afbrydere
eller afbryderkontakter, og fra indgangssiden af Klasse 1
RFI-lter (valgfri). Der sidder en sikring inden hver
motorstarter, og strømmen er slukket, når forsyningsstrømmen til frekvensomformeren er slukket. Der tillades
op til to startere (kun én, hvis der bestilles et sikringsbeskyttet kredsløb på 30 Amp). Indbygget i
frekvensomformerens Safe Torque O-kredsløb.
Apparaterne har følgende:
Betjeningskontakt (on/o).
•
Kortslutnings- og overbelastningsbeskyttelse med
•
testfunktion.
Manuel nulstillingsfunktion.
•
30 Amp, sikringsbeskyttede klemmer
Trefaset strøm, som passer til den indkommende
•
netspænding til strømforsyning af ekstra
kundeudstyr.
Kan ikke fås, hvis der vælges to manuelle
•
motorstartere.
Klemmerne er slukket, når forsyningsstrømmen til
•
frekvensomformeren er slukket.
Strømmen til de sikringsbeskyttede klemmer
•
kommer fra belastningssiden på en af de leverede
kontaktorer, afbrydere eller afbryderkontakter, og
fra indgangssiden af Klasse 1
Strømforsyning på 24 V DC
5 Amp, 120 W, 24 V DC
•
Beskyttet mod udgangsoverstrøm, overbelastning,
•
kortslutninger og overtemperatur.
Anvendes til at strømforsyne tilbehørsenheder fra
•
tredjepart, f.eks. følere, PLC-I/O, kontaktorer,
temperaturprober, indikatorlamper og/eller anden
elektronisk hardware.
Diagnostikken omfatter en tør DC-ok-kontakt, en
•
grøn DC-ok-LED og en rød overbelastnings-LED.
RFI-lter (valgfri).
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 67
Page 70

Systemintegration
VLT® AQUA Drive FC 202
Ekstern temperaturovervågning
Udviklet til overvågning af temperaturer i de
•
eksterne systemkomponenter, f.eks. motorviklinger og/eller lejer. Omfatter otte
universalindgangsmoduler plus to dedikerede
termistorindgangsmoduler. Alle ti moduler er
33
Serielle kommunikationer
PROFIBUS DP V1 MCA 101
DeviceNet MCA 104
PROFINET RT MCA 120
PROFINET-optionen tilbyder tilslutning til PROFINETbaserede netværk via PROFINET-protokollen. Optionen er i
stand til at håndtere en enkelt forbindelse med et faktisk
pakkeinterval ned til 1 ms i begge retninger.
integreret i frekvensomformerens kredsløb til Safe
Torque O og kan overvåges via et Fieldbusnetværk (kræver, at der købes en separat modul-/
buskobler). Bestil en Safe Torque O-bremse-
option for at kunne vælge ekstern
temperaturovervågning.
PROFIBUS DP V1 giver bred kompatibilitet,
•
omfattende tilgængelighed, support til alle store
PLC-forhandlere, og kompatibilitet med fremtidige
versioner.
Hurtig og eektiv kommunikation, gennemskuelig
•
installation, avanceret bestemmelse af diagnose
og parametre, samt auto-kongurering af
procesdata via GSD-l.
A-cyklisk parameter-udvælgelse med PROFIBUS
•
DP V1, PROFIdrive eller Danfoss
tilstandsmaskiner, PROFIBUS DP V1, Master Class
1 og 2 bestillingsnummer 130B1100 ikke-coated –
130B1200 coated (klasse G3/ISA S71.04-1985).
Denne moderne kommunikationsmodel tilbyder
•
nogle vigtige egenskaber, der tillader operatører
eektivt at fastslå, hvilke oplysninger er
nødvendige og hvornår.
Den drager fordel af ODVA's stærke overens-
•
stemmelse med testpolitikker, hvilket sikrer, at
produkter kan arbejde sammen. Bestillingsnummer 130B1102 ikke-coated 130B1202 coated
(Klasse G3/ISA S71.04-1985).
Indbygget webserver til bestemmelse af
•
erndiagnose og udlæsning af grundlæggende
frekvensomformerparametre.
E-mail-noticering kan kongureres, så der sendes
•
en e-mail-meddelelse til en eller ere modtagere,
hvis der opstår bestemte advarsler eller alarmer,
eller disse er blevet slettet igen.
TCP/IP for let adgang til frekvensomformerkon-
•
gurationsdata fra MCT 10-opsætningssoftware.
FTP (File Transfer Protocol) upload og download
•
af ler.
FC-prol
Ethernet IP MCA 121
Ethernet bliver den fremtidige standard for kommunikation
på fabriksgulvet. Ethernet-optionen er baseret på den
nyeste teknologi, der er tilgængelig til industriel brug, og
som kan håndtere selv de mest krævende krav. Ethernet/IP
udvider det erhvervsmæssige o-the-shelf Ethernet til
fælles industriprotokol (CIP™), samme øvre lag-protokol og
objektmodel, som
avancerede funktioner som:
Modbus TCP MCA 122
Modbus-optionen tilbyder tilslutning til Modbus TCPbaserede netværk, som f.eks. Groupe Schneider PLC-system
via Modbus TCP-protokol. Optionen er i stand til at
håndtere en enkelt forbindelse med et faktisk pakkeinterval
på ned til 5 ms i begge retninger.
Flere optioner
Universal I/O MCB 101
I/O-optionen tilbyder et udvidet antal styringsindgange og
-udgange.
Support af DCP (discovery- og kongurations-
•
protokol).
ndes i DeviceNet. MCA 121 giver
Indbyggede højtydende kontakter til at aktivere
•
linjetopologi, og erner behovet for eksterne
kontakter.
Avanceret kontakt- og diagnose-funktioner.
•
En indbygget webserver.
•
En e-mail-tjeneste til servicenoticering.
•
Indbygget webserver til bestemmelse af
•
erndiagnose og udlæsning af grundlæggende
frekvensomformerparametre.
E-mail-noticering kan kongureres, så der sendes
•
en e-mail-meddelelse til en eller ere modtagere,
hvis der opstår bestemte advarsler eller alarmer,
eller disse er blevet slettet igen.
To Ethernet-porte med indbygget kontakt.
•
FTP (File Transfer Protocol) upload og download
•
af ler.
Protokolautomatisk IP-adressekonguration.
•
Tre digitale indgange 0-24 V: Logisk 0<5 V; Logisk
•
1>10 V
To analoge indgange 0-10 V: Opløsning 10 bit
•
plus fortegn
To digitale udgange NPN/PNP push-pull
•
En analog udgang 0/4–20 mA
•
Fjederbelastet tilslutning
•
Separate parameterindstillinger bestillingsnummer
•
130B1125 ikke-coated – 130B1212 coated (Klasse
G3/ISA S71.04-1985)
68 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 71

Systemintegration
Design Guide
Relæoption MCB 105
Aktiverer udvidelse af relæfunktioner med tre yderligere
relæudgange.
Maksimum klemmebelastning: AC-1 resistiv
•
belastning: 240 V AC 2 A AC-15
Induktiv belastning @cos ф 0,4: 240 V AC 0,2 A
•
DC-1
Resistiv belastning: 24 V DC 1 A DC-13
•
Induktiv belastning: @cos ф 0,4: 24 V DC 0,1 A
•
Minimum klemmebelastning: DC 5 V: 10 mA
•
Maks. koblingsfrekvens ved nominel belastning/
•
min. belastning: 6 min-1/20 sek-1
Bestillingsnummer 130B1110 ikke-coated–
•
130B1210 coated (Klasse G3/ISA S71.04-1985)
Analog I/O-option MCB 109
Denne analog indgang-/udgangoption er nem at montere i
frekvensomformeren og opgraderer til avanceret ydelse og
styring via yderligere indgange/udgange. Denne option
opgraderer også frekvensomformeren med batteribackup
til uret, der er indbygget indbygget frekvensomformeren.
Dette giver stabil anvendelse alle urfunktioner i frekvensomformeren som tidsstyrede handlinger.
Tre analoge indgange, hver især
•
som indgang for både spænding og temperatur.
Tilslutning af 0-10 V analoge signaler samt
•
PT1000 og NI1000 temperaturindgange.
Tre analoge udgange hver især kongurerbar som
•
0-10 V udgange.
Backup-forsyning til standardurfunktionen
•
inkluderet frekvensomformeren er inkluderet.
Backup-batteriet holder typisk i op til 10 år,
afhængigt af miljø. Bestillingsnummer 130B1143
ikke-coated – 130B1243 coated (Klasse G3/ISA
S71.04-1985).
PTC-termistorkort MCB 112
Med MCB 112 PTC-termistorkortet kan alle Danfoss
frekvensomformere med STO bruges til at overvåge
motorer i potentielt eksplosive atmosfærer. MCB 112 sikrer
overlegen ydelse sammenlignet med den indbyggede ETRfunktion og termistorklemme.
Beskytter motoren mod overophedning.
•
ATEX-godkendt til brug med EX d og EX e
•
motorer.
Benytter Safe Torque O-funktionen i Danfoss-
•
frekvensomformere til at stoppe motoren i
tilfælde af overtemperatur.
Certiceret til brug til beskyttelse af motorer i
•
zoner 1, 2, 21 og 22.
Certiceret op til SIL2.
•
kongurerbar
Følerindgangskort MCB 114
Optionen beskytter motoren mod overophedning af ved at
overvåge temperaturen på lejerne og viklingerne i
motoren. Grænserne, så vel som handling, er justerbare, og
den enkelte følertemperatur er synlig som en udlæsning
på displayet eller via eldbus.
Beskytter motoren mod overophedning.
•
Tre selvdetekterende følerindgange til to eller tre
•
ledninger til PT100/PT1000-følere.
En ekstra analog indgang 4–20 mA.
•
Udvidet kaskadestyreenhed MCO 101
Nem at montere og opgraderer den indbyggede kaskadestyreenhed til at køre med
pumpestyring i master/slave mode.
Op til seks pumper i en standard kaskadeop-
•
sætning
Op til seks pumper i master/slave-opsætning
•
Tekniske specikationer: Se MCB 105 relæoption
•
Udvidet relækort MCB 113
Det udvidede relækort MCB 113 tilføjer indgange/udgange
til VLT® AQUA Drive for at opnå øget eksibilitet.
Syv digitale indgange: 0–24 V
•
To analoge udgange: 0/4–20 mA
•
Fire SPDT-relæer
•
Klassicering af belastningsrelæer: 240 V AC/2 A
•
(Ohm)
Overholder NAMUR-anbefalinger
•
Galvanisk adskillelsesegenskaber bestillings-
•
nummer 130B1164 ikke-coated – 130B1264
coated (Klasse G3/ISA S71.04-1985)
MCO 102 avanceret kaskadestyreenhed
Udvider egenskaberne ved standard kaskadestyreenheden,
der er bygget ind i frekvensomformere.
Indeholder otte yderligere relæer for overgang af
•
ere motorer.
Giver præcis gennemstrømning, tryk og niveau-
•
styring til optimering af eektiviteten af systemer,
der bruger ere pumper eller blæsere.
Master/slave-mode driver alle blæsere/pumper
•
ved samme hastighed, hvilket derved potentielt
reducerer energiforbruget til mindre end
halvdelen af det, som drøvleventilen har, eller
traditionel, on/o-alternering henover linjen.
Styrepumpealternering sikrer, at ere pumper
•
eller blæsere bruges ligeligt.
ere pumper og mere avanceret
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 69
Page 72

Systemintegration
VLT® AQUA Drive FC 202
24 V DC-forsyningsoption MCB 107
Optionen bruges til at tilslutte en ekstern DC-forsyning for
at holde styredelen, og enhver monteret option, aktiv, når
netforsyningen er nede.
Indgangsspændingsområde: 24 V DC +/-15 %
•
33
3.7.1
For yderligere oplysninger sekapitel 7
3.7.2
(maks. 37 V i 10 sek).
Maksimum indgangsstrøm: 2,2 A.
•
Maksimal kabellængde: 75 m.
•
Indgangskapacitansbelastning <10 uF.
•
Opstartsforsinkelse: <0,6 sek
•
Nem at installere installeres frekvensomformere
•
installeres eksisterende maskiner.
Holder styrekortet og optioner aktive under
•
strømafbrydelser.
Holder eldbusser aktive under strømafbrydelser
•
Bestillingsnummer 130B1108 ikke-coated –
130B1208 coated (Klasse G3/ISA S71.04-1985).
Kommunikationsoptioner
VLT® PROFIBUS DP V1 MCA 101
•
VLT® DeviceNet MCA 104
•
VLT® PROFINET MCA 120
•
VLT® EtherNet/IP MCA 121
•
VLT® Modbus TCP MCA 122
•
Specikationer.
Indgang/udgang, feedback og
sikkerhedsoptioner
3.7.3
Kaskadestyringsoptioner
Kaskadestyreenhedsoptioner udvider antallet af tilgængelige relæer. Når én af optionerne er installeret, er de
parametre, der styrer kaskadestyreenhedens funktioner,
tilgængelige fra betjeningspanelet.
MCO 101 og 102 er add-on-optioner, der forlænger et
understøttet antal pumper og funktionaliteter i den
indbyggede kaskadestyreenhed i VLT® AQUA Drive.
Følgende optioner til kaskadestyring er tilgængelige for
VLT® AQUA Drive:
Indbygget basic-kaskadestyreenhed (standard
•
kaskadestyreenhed)
MCO 101 (udvidet kaskadestyreenhed)
•
MCO 102 (avanceret kaskadestyreenhed)
•
Se kapitel 7
Den udvidede kaskadestyreenhed kan bruges i to
forskellige tilstande:
•
•
MCO 101 tillader brug af i alt fem relæer til kaskadestyring.
MCO 102 muliggør styring af i alt otte pumper. Optionerne
er i stand til at skifte mellem styrepumpen og to relæer pr.
pumpe.
Specikationer for yderligere oplysninger.
Med de udvidede funktioner styret af
parametergruppe 27-** Cascade CTL Option.
Til at udvide antallet af tilgængelige relæer for
basic-kaskade styret af parameter
gruppe 25-**. Kaskadestyreenhed.
VLT® Universal I/O Module MCB 101
•
VLT® Relækort MCB 105
•
VLT® PTC-termistorkort MCB 112
•
VLT® Udvidet relækort MCB 113
•
VLT® Sensor Input Option MCB 114
•
For yderligere oplysninger, se kapitel 7
70 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Specikationer.
BEMÆRK!
Hvis MCO 102 er monteret, kan relæoption MCB 105
udvide antallet af relæer til 13.
Applikation
Kaskadestyring er et almindeligt styresystem til energieffektiv styring af parallelle pumper eller ventilatorer.
Kaskadestyreenhedensoptionen aktiverer styring af ere
pumper kongureret parallelt ved:
Automatisk at slå individuelle pumper til/fra.
•
Hastighedsstyring af pumperne.
•
Ved brug af kaskadestyreenheder kobles de enkelte
pumper automatisk ind og ud efter behov for at
imødekomme det påkrævede gennemstrømnings- eller
trykoutput i systemet. Hastigheden af de pumper, der er
tilsluttet VLT® AQUA Drive, styres også for at give et
konstant outputområde for systemet.
Page 73

Systemintegration
Design Guide
Designeret brug
Kaskadestyreenhedsoptioner er designet til pumpeapplikationer, men det er også muligt at bruge
kaskadestyreenheder til alle applikationer, der kræver ere
motorer kongureret parallelt.
Driftsprincip
Kaskadestyreenhedssoftwaren kører fra en enkelt frekvensomformer med kaskadestyreenhedsoptionen. Den styrer et
sæt pumper, der hver især styres af en frekvensomformer
eller er tilsluttet en kontaktor eller softstarter.
Øvrige frekvensomformere i systemet (slave-frekvensomformere) har ikke behov for noget optionskort til
kaskadestyreenhed. De benyttes i åben sløjfe og modtager
deres hastighedsreference fra masteren. Pumper, der er
sluttet til slave-frekvensomformere, kaldes pumper med
variabel hastighed.
Pumper, der er tilsluttet netforsyningen via en kontaktor
eller softstarter, kaldes en pumpe med fast hastighed.
Hver pumpe, med variabel eller fast hastighed, styres af et
relæ i master-frekvensomformeren.
Kaskadestyreenhedsoptioner kan styre en blanding af
pumper med variabel og fast hastighed.
Indbygget
MCO 101
MCO 102
3 3
1 til 6 VSP + 1 til 5 FSP
(maksimum 6 pumper)
parametergruppe 27-** Cascade CTL Option
1 til 8 VSP + 1 til 7 FSP
(maksimum 8 pumper)
parametergruppe 27-** Cascade CTL Option
Indbygget
MCO 101
MCO 102
Illustration 3.27 Applikationsoversigt
1 VSP + 2 FSP
parametergruppe 25-** Kaskadestyreenhed
1 VSP + 5 FSP
parametergruppe 25-** Kaskadestyreenhed
1 VSP + 8 FSP
parametergruppe 25-** Cascade Controller
Illustration 3.28 Applikationsoversigt
Indbygget
MCO 101
MCO 102
6 VSP
parametergruppe 27-** Cascade CTL Option
8 VSP
parametergruppe 27-** Cascade CTL Option
-
Illustration 3.29 Applikationsoversigt
VSP = variabel hastighedspumpe (direkte tilsluttet frekvensomformeren)
FSP = fast hastighedspumpe (motoren kan tilsluttes via
kontaktor, softstarter eller stjerne-/trekantstarter)
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 71
Page 74

PE U V W
130BD839.10
Systemintegration
VLT® AQUA Drive FC 202
3.7.4 Bremsemodstande
I applikationer, hvor motoren bruges som bremse,
genereres der energi i motoren, som sendes tilbage til
frekvensomformeren. Hvis energien ikke kan sendes tilbage
til motoren, øger den spændingen i frekvensomformerens
33
DC-ledning. I applikationer med hyppig bremsning og/eller
høje inertibelastninger kan denne øgning måske medføre
et overspændingstrip i frekvensomformeren og derefter
lukke den ned. Bremsemodstande bruges til at sprede den
overskydende energi, der stammer fra den regenerative
bremsning. Modstanden vælges baseret på den ohmske
værdi, eekttabet og den fysiske størrelse. Danfoss tilbyder
en lang række af forskellige modstande, der er særligt
konstrueret til Danfoss-frekvensomformere. Se
kapitel 3.4.12 Bremsemodstandsberegning for dimensionering af bremsemodstande. For bestillingsnumre se
kapitel 6.2 Optioner, tilbehør og reservedele.
Sinusltre
3.7.5
Når en motor styres af en frekvensomformer, kan der høres
resonansstøj fra motoren. Denne støj, som opstår pga.
motorens konstruktion, forekommer hver gang en vekselretterkobling i frekvensomformeren aktiveres. Frekvensen af
resonansstøjen svarer derfor til switchfrekvensen i frekvensomformeren.
3.7.7
Common mode-ltre
Højfrekvens common mode-kerner (HF-CM-kerner)
reducerer elektromagnetisk forstyrrelse og eliminerer
lejeskader ved elektrisk aadningsstrøm. De er særlige
nanokrystallinske magnetiske kerner, der har overlegen
ltreringsydeevne sammenlignet med traditionelle ferritkerner. HF-CM-kerner fungerer som en common-modeinduktor (mellem faser og jord).
Når de installeres omkring de tre motorfaser (U, V, W),
reducerer common mode-ltrene højfrekvens commonmode-strømme. På den måde reduceres højfrekvens
elektromagnetiske forstyrrelser fra motorkablet.
Det nødvendige antal kerner afhænger af motorkablets
længde og frekvensomformerens spænding. Hvert sæt
består af to kerner. Se Tabel 3.19 for at bestemme det
påkrævede antal kerner.
Kabellængde
[m] A og B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
1)
Kapslingsstørrelse
T2/T4 T7 T2/T4 T7 T7
Danfoss leverer et sinuslter til at dæmpe den akustiske
motorstøj.
Filtret reducerer rampe op-tiden for spændingen, spidsbelastningsspændingen U
motoren, hvilket betyder, at strømmen og spændingen
nærmest bliver sinusformet. Derfor reduceres den akustiske
motorstøj til et minimum.
Rippelstrømmen i
støj. Løs problemet ved at integrere ltret i et kabinet eller
lignende.
dU/dt-ltre
3.7.6
Danfoss leverer dU/dt-ltre, som er dierential-mode
lavpasltre, der reducerer motorklemmens fase-til-fasespidsspænding og reducerer stigetiden til et niveau, der
sænker belastningen på isoleringen af motorviklingerne.
Dette er især aktuelt med korte motorkabler.
Sammenlignet med sinusltre (se kapitel 3.7.5 Sinusltre)
har dU/dt-ltre en afbrydelsesfrekvens over switchfrekvensen.
sinuslterspolerne skaber også nogen
og rippelstrømmen ΔI til
SPIDS
Tabel 3.19 Antallet af kerner
1) Hvor længere kabler er påkrævet, opbygges yderligere HF-CMkerner.
Installér HF-CM-kernerne ved at lade de tre motorfasekabler (U, V, W) løbe gennem hver enkelt kerne, som vist i
Illustration 3.30.
Illustration 3.30 HF-CM-kerne med motorfaser
72 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 75

A
B
C
D
E
130BT323.10
B
A
E
C
D
130BT324.10
Systemintegration
Design Guide
3.7.8 Harmoniske ltre
Danfoss AHF 005 og AHF 010 er avancerede harmoniske
ltre, der ikke kan sammenlignes med traditionelle
harmoniske ltre. Danfoss' harmoniske ltre er udviklet
specikt til at passe til frekvensomformere fra Danfoss.
Ved at tilslutte Danfoss' harmoniske ltre AHF 005 eller
AHF 010 på fronten af en Danfoss-frekvensomformer
reduceres den samlede harmoniske strømforvrængning,
der sendes tilbage til netforsyningen, til 5 % og 10 %.
3.7.9 IP21/NEMA Type 1-kapslingssæt
IP20/IP4X top/NEMA TYPE 1 er en ekstra kapslingsdel, der
leveres til IP20 compact-apparater.
Ved anvendelse af kapslingssættet opgraderes et IP20apparat, så apparatet overholder kapsling IP21/4X top/TYPE
1.
3 3
IP4X-toppen kan anvendes på alle standardvarianter FC
202 af IP20 .
Topplade
A
B Kant
C Underdel
D Plade til underdel
E Skrue(r)
Illustration 3.32 Kapslingsstørrelse A3
Anbring toppladen som vist. Hvis der anvendes en A- eller
B-option, skal kanten monteres for at dække topindgangen. Anbring underdelen C nederst på
frekvensomformeren, og brug bøjlerne fra tilbehørsposen
til korrekt fastgøring af kablerne.
Huller til kabelbøsninger:
Størrelse A2: 2 x M25 og 3 x M32
•
Illustration 3.31 Kapslingsstørrelse A2
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 73
Størrelse A3: 3 x M25 og 3 x M32
•
Page 76

E
F
D
C
B
A
130BT620.12
130BT621.12
D
C
A
G
Systemintegration
VLT® AQUA Drive FC 202
Kapslingstype
Højde A
[mm]
Bredde B
[mm]
Dybde C
1)
[mm]
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
33
C3 755 329 337
C4 950 391 337
Tabel 3.20 Mål
1) Hvis option A/B anvendes, øges dybden (se kapitel 7.8 Nominel
eekt, vægt og mål for oplysninger)
Illustration 3.34 Kapslingsstørrelser B4, C3 og C4
Topplade
A
B Kant
Illustration 3.33 Kapslingsstørrelse B3
C Underdel
D Plade til underdel
E Skrue(r)
F Ventilatorplade
G Øverste clips
Tabel 3.21 Billedtekst til Illustration 3.33 og Illustration 3.34
74 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Når optionsmodul A og/eller optionsmodul B anvendes,
skal kanten (B) monteres på toppladen (A).
Page 77

130BA138.10
130BA200.10
Systemintegration Design Guide
BEMÆRK!
Montering side-om-side er ikke mulig, når kapslingssæt
IP21/IP4X/TYPE 1 anvendes
3.7.10 Frembygningssæt til LCP
LCP'et kan yttes frem i en kapsling ved hjælp af frembygningssættet. Fastgøringsskruerne skal spændes til et
moment på maksimum 1 Nm.
3 3
LCP-kapslingen er
Kapsling IP66-front
Maksimum kabellængde mellem LCP og
apparat 3 m
Kommunikationsstandard RS485
Tabel 3.22 Tekniske data
klassiceret IP66.
Illustration 3.36 LCP-sæt med numerisk LCP, beslag og pakning
Bestillingsnummer 130B1114
Illustration 3.35 LCP-sæt med grask LCP, beslag, 3 m kabel og
pakning
Bestillingsnummer 130B1113
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 75
Illustration 3.37 Mål på LCP-sæt
Page 78

130BA844.10
130BA845.10
A
B
Systemintegration
VLT® AQUA Drive FC 202
3.7.11 Monteringskonsol for kapslingstyper
3.8
RS-485 seriel grænseade
A5, B1, B2, C1 og C2
3.8.1 Oversigt
RS485 er en busgrænseade med to ledninger, som er
kompatibel med multidrop-netværkstopologi. Noder kan
33
med andre ord tilsluttes som en bus eller via dropkabler
fra en fælles linje. Der kan tilsluttes i alt 32 noder pr.
netværkssegment.
Forstærkere opdeler netværkssegmenter, se Illustration 3.40.
BEMÆRK!
Hver enkelt forstærker fungerer som en node i det
segment, den er installeret i. Hver node, der er tilsluttet i
et givet netværk, skal have en unik nodeadresse på
tværs af alle segmenter.
Illustration 3.38 Laveste monteringskonsol
Terminér hvert segment i begge ender ved hjælp af enten
frekvensomformerens termineringskontakt (S801) eller et
forspændt termineringsmodstandsnetværk. Brug altid
skærmede, snoede kabler (STP) til buskabelføring, og følg
almindelig god installationspraksis.
Illustration 3.39 Øverste monteringskonsol
Se målene i Tabel 3.23.
Kapslingsstørrelse
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tabel 3.23 Oplysninger om monteringskonsoller
IP A [mm] B [mm] Bestillingsnummer
Det er vigtigt at have en jordtilslutning med lav impedans
for skærmen ved hver node, også ved høje frekvenser. Slut
overade på skærmen til jord, f.eks. med en
en stor
kabelbøjle eller en ledende kabelbøsning. Det kan være
nødvendigt at anvende potentialeudlignende kabler for at
bevare det samme jordpotentiale i hele netværket, især i
installationer med lange kabler.
For at forhindre impedansforskydning skal der altid bruges
samme type kabel gennem hele netværket. Hvis der sluttes
en motor til frekvensomformeren, skal der altid anvendes
et skærmet motorkabel.
Kabel Skærmet, snoet (STP)
Impedans [Ω]
Kabellængde
[m]
Tabel 3.24 Kabelspecikationer
120
Maksimum 1.200 m (inkl. dropkabler)
Maksimum 500 m station-til-station
76 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 79

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
Systemintegration Design Guide
3 3
Illustration 3.40 RS-485-busgrænseade
Parametre
Netværksforbindelse
3.8.2
Funktion Indstilling
Parameter 8-30
Protokol FC*
Parameter 8-31
1*
Adresse
Parameter 8-32
9600*
En eller ere frekvensomformere kan tilsluttes en
styreenhed (eller master) vha. RS-485-standardgrænseaden. Klemme 68 sluttes til P-signalet (TX+, RX+), mens
klemme 69 sluttes til N-signalet (TX-,RX-). Se tegningerne i
kapitel 3.5.1 Ledningsdiagram.
Baud-hast.
* = standardværdi
Bemærkninger/kommentarer:
Vælg protokol, adresse og
baud-hastighed i de
ovennævnte parametre.
Digital indgang 37 er en
option.
Hvis der skal sluttes ere frekvensomformere til samme
master, skal der benyttes parallelforbindelser.
Tabel 3.25 RS-485-netværksforbindelse
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 77
Illustration 3.41 Parallelforbindelser
For at undgå potentielle udligningsstrømme i skærmen
skal der kabelføres i henhold til Illustration 3.20.
Page 80

130BB021.10
12 13 18 19 27 29 32
33 20 37
Remove jumper to enable Safe Stop
61 68 69 39 42 50 53 54 55
Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
Systemintegration
VLT® AQUA Drive FC 202
33
Illustration 3.42 Styrekortklemmer
RS-485-busterminering
3.8.3
Terminer RS-485-bussen med et modstandsnetværk i
begge ender. Til dette formål indstilles kontakt S801 på
styrekortet til ON.
Indstil kommunikationsprotokollen parameter 8-30 Protokol.
EMC-retningslinjer
3.8.4
Følgende EMC-retningslinjer anbefales for at opnå forstyrrelsesfri drift af RS-485-netværket.
Følg altid relevant national og lokal lovgivning, f.eks.
vedrørende beskyttelsesjording. RS-485-kommunikationskablet skal holdes på afstand af motorkabler og
bremsemodstandskabler for at undgå kobling af højfrekvensstøj mellem kablerne. Normalt er en afstand på 200
mm tilstrækkelig, men det anbefales at holde den størst
mulige afstand mellem kablerne, især hvis de løber
parallelt over længere afstande. Hvis krydsning ikke kan
undgås, skal RS-485-kablet krydse motor- og bremsemodstandskabler i en vinkel på 90°.
Illustration 3.43 Kabelføring
FC-protokoloversigt
3.8.5
FC-protokollen, også kendt som FC-bussen eller standardbussen, er Danfoss standardeldbussen. Den denerer en
adgangsteknik i overensstemmelse med master-slaveprincippet for kommunikation via en seriel bus.
Der kan tilsluttes en master og maksimalt 126 slaver til
bussen. Masteren vælger de enkelte slaver via et
adressetegn i telegrammet. En slave kan ikke selv overføre,
uden at den først bliver anmodet om at gøre det, og
direkte meddelelsesoverførsel mellem de enkelte slaver er
ikke mulig. Kommunikation foregår i halv duplex-tilstand.
Master-funktionen kan ikke overføres til en anden node
(enkelt master-system).
Det fysiske lag er RS485 og anvender derved RS-485porten, der er indbygget i frekvensomformeren. FCprotokollen understøtter forskellige telegramformater:
Et kort format på 8 byte til procesdata.
•
Et langt format på 16 byte, der også omfatter en
•
parameterkanal.
Et format til tekst.
•
78 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 81

STX LGE ADR D ATA BCC
195NA099.10
Systemintegration Design Guide
3.8.6 Netværkskonguration
Indstil følgende parametre for at aktivere FC-protokollen
for frekvensomformeren:
Parameternummer Indstilling
Parameter 8-30 Protokol FC
Parameter 8-31 Adresse 1–126
Parameter 8-32 FC-portens
baud-hast.
Parameter 8-33 Paritet/stopbits
Tabel 3.26 FC-protokolparametre
Rammestruktur for FC-
3.8.7
2400–115200
Lige paritet, 1 stopbit (standard)
protokolmeddelelser
3.8.7.1 Indhold af et tegn (byte)
Hvert tegn, der overføres, begynder med en startbit.
Derefter overføres der 8 databits, hvilket svarer til en byte.
Hvert tegn sikres via en paritetsbit. Denne bit indstilles til
1, når den når paritet. Paritet er, når der er et lige antal
1'ere i 8-databittene og paritetsbitten i alt. Et tegn afsluttes
af en stopbit og består derfor af 11 bits i alt.
Illustration 3.44 Indhold af et tegn
3.8.7.2 Telegramstruktur
3.8.7.3 Telegramlængde (LGE)
Telegramlængden er antallet af databytes plus
adressebyten ADR og datakontrolbyten BCC.
4 databytes LGE=4+1+1=6 byte
12 databytes LGE=12+1+1=14 byte
Telegrammer, der indeholder tekst
Tabel 3.27 Længde på telegrammer
1) 10 repræsenterer de faste tegn, mens n er variabel (afhængigt af
tekstlængden).
3.8.7.4
Der anvendes to forskellige adresseformater.
Frekvensomformerens adresseområde er enten 1-31 eller
1-126.
Slaven returnerer adressebyten uændret til masteren i
svartelegrammet.
Frekvensomformeradresse (ADR)
Adresseformat 1-31
•
Bit 7 = 0 (adresseformat 1-31 er aktivt).
-
Bit 6 anvendes ikke.
-
Bit 5 = 1: Broadcast. Adressebittene (0-4)
-
anvendes ikke.
Bit 5 = 0: Ingen broadcast.
-
Bit 0-4 = frekvensomformeradresse 1-31.
-
Adresseformat 1-126
•
Bit 7 = 1 (adresseformat 1-126 aktiv).
-
Bit 0-6 = frekvensomformeradresse
-
1-126.
Bit 0-6 = 0 Broadcast.
-
101)+n bytes
3 3
Hvert telegram har følgende struktur:
Starttegn (STX) = 02 hex.
•
En byte, der betegner telegramlængden (LGE).
•
En byte, der betegner frekvensomformeradressen
•
(ADR).
Derefter følger et antal databytes (variable, afhængigt af
telegramtypen).
Telegrammet afsluttes af en datakontrolbyte (BCC).
Illustration 3.45 Telegramstruktur
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 79
Page 82

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Systemintegration
VLT® AQUA Drive FC 202
3.8.7.5 Datakontrolbyte (BCC)
Kontrolsummen beregnes som en XOR-funktion. Inden den første byte i telegrammet modtages, er den beregnede
kontrolsum 0.
33
3.8.7.6 Datafeltet
Datablokkenes struktur afhænger af telegramtypen. Der ndes tre telegramtyper, som nder anvendelse for både styretelegrammer (master⇒slave) og svartelegrammer (slave⇒master).
De tre telegramtyper er:
Procesblok (PCD)
PCD består af datablokke på 4 bytes (2 ord) og omfatter:
Styreord og referenceværdi (fra master til slave).
•
Statusord og aktuel udgangsfrekvens (fra slave til master).
•
Illustration 3.46 Procesblok
Parameterblok
Parameterblokken anvendes til at overføre parametre mellem master og slave. Datablokken består af 12 bytes (6 ord) og
omfatter også procesblokken.
Illustration 3.47 Parameterblok
Tekstblok
Tekstblokken bruges til at læse eller skrive tekst via datablokken.
Illustration 3.48 Tekstblok
80 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 83

Systemintegration
Design Guide
3.8.7.7 PKE-feltet
PKE-feltet indeholder to underfelter:
Parameterkommando og svar (AK)
•
Parameternummer PNU.
•
Illustration 3.49 PKE-feltet
PWE lav
(hex)
11 Det er ikke muligt at ændre data i den denerede
82 Der er ikke busadgang til den denerede
83 Dataændringer er ikke mulige, da fabriksopsæt-
Tabel 3.30 Parameterværdi, fejlrapport
3.8.7.8
Fejlrapport
0 Det anvendte parameternummer ndes ikke.
1 Der er ikke skriveadgang til den denerede
parameter.
2 Dataværdien overskrider grænseværdierne for
parameteren.
3 Underindekset ndes ikke.
4 Parameteren er ikke af array-typen
5 Datatypen svarer ikke til den denerede
parameter.
parameter i frekvensomformerens aktuelle tilstand.
Visse parametre kan kun ændres, når motoren er
stoppet.
parameter.
ningen er valgt
Parameternummer (PNU)
3 3
Bit 12-15 overfører parameterkommandoer fra master til
slave og returnerer behandlede svar fra slave til master.
Bitnummer Parameterkommando
15 14 13 12
0 0 0 0 Ingen kommando
0 0 0 1 Læs parameterværdi
0 0 1 0 Skriv parameterværdi i RAM (ord)
0 0 1 1 Skriv parameterværdi i RAM (dobbeltord)
1 1 0 1 Skriv parameterværdi i RAM og EEPROM
(dobbeltord)
1 1 1 0 Skriv parameterværdi i RAM og EEPROM
(ord)
1 1 1 1 Læs/skriv tekst
Tabel 3.28 Parameterkommandoer, master ⇒ slave
Bitnummer Svar
15 14 13 12
0 0 0 0 Intet svar
0 0 0 1 Parameterværdi overført (ord)
0 0 1 0 Parameterværdi overført (dobbeltord)
0 1 1 1 Kommandoen kan ikke udføres
1 1 1 1 tekst overført
Tabel 3.29 Svar, slave ⇒ master
Hvis kommandoen ikke kan udføres, sender slaven
følgende svar:
0111 Kommandoen kan ikke udføres
- og udstedes følgende fejlrapport (se Tabel 3.30) i parame-
terværdien (PWE):
Bitnummer 0-11 overfører parameternumre. Funktionen af
de relevante parametre er deneret i parameterbeskrivelsen i Programming Guide.
3.8.7.9
Indeks (IND)
Indekset anvendes sammen med parameternummeret til at
opnå læse-/skriveadgang til parametre, der har et indeks,
f.eks. parameter 15-30 Alarm-log: Fejlkode. Indekset består af
2 byte, en lav byte og en høj byte.
Kun den lave byte anvendes som indeks.
3.8.7.10
Parameterværdi (PWE)
Parameterværdiblokken består af 2 ord (4 byte), og
værdien afhænger af den denerede kommando (AK).
Masteren anmoder om en parameterværdi, hvis PWEblokken ikke indeholder en værdi. Hvis en parameterværdi
(skrivekommando) skal ændres, skrives den nye værdi i
PWE-blokken og sendes fra masteren til slaven.
Når en slave svarer på en parameteranmodning
(læsekommando), overføres den aktuelle parameterværdi i
PWE-blokken og returneres til masteren. Hvis en parameter
ikke indeholder en numerisk værdi, men ere dataoptioner,
f.eks. parameter 0-01 Sprog hvor [0] er engelsk og [4] er
dansk, vælges dataværdien ved at indtaste værdien i PWEblokken. Ved hjælp af seriel kommunikation er det kun
muligt at læse parametre, som indeholder datatype 9
(tekststreng).
Parameter 15-40 FC-type til parameter 15-53
Eektkortserienr.
indeholder datatype 9.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 81
Page 84

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Systemintegration
VLT® AQUA Drive FC 202
Læs f.eks. kapslingsstørrelsen og netspændingsområdet i
parameter 15-40 FC-type. Når der overføres (læses) en
tekststreng, er telegramlængden variabel, og teksterne har
forskellig længde. Telegramlængden er deneret i
telegrammets anden byte, LGE. Ved brug af tekstoverførsel
Eksempler:
0 sek ⇒ konverteringsindeks 0
0,00 sek ⇒ konverteringsindeks -2
0 msek ⇒ konverteringsindeks -3
0,00 msek ⇒ konverteringsindeks -5
angiver indekstegnet, om der er tale om en læse- eller
33
skrivekommando.
3.8.7.13 Procesord (PCD)
For at kunne læse en tekst via PWE-blokken skal parameterkommandoen (AK) angives til F hex. Indekstegnets høje
byte skal være 4.
Nogle parametre indeholder tekst, der kan skrives via den
serielle bus. For at kunne skrive en tekst via PWE-blokken
skal parameterkommandoen (AK) angives til F hex. Indekstegnets høje byte skal være 5.
Illustration 3.50 Tekst via PWE-blok
Blokken af procesord er delt i to blokke på hver 16 bit, der
altid kommer i den angivne rækkefølge.
PCD 1 PCD 2
Styretelegram (master⇒slave-styreord)
Styretelegram (slave⇒master)-statusord
Tabel 3.32 Procesord (PCD)
FC-protokol, eksempler
3.8.8
Referenceværdi
Aktuel udgangs-
frekvens
3.8.8.1 Skrivning af en parameterværdi
Skift parameter 4-14 Motorhastighed, høj grænse [Hz] til 100
Hz.
3.8.7.11 Understøttede datatyper
Uden fortegn betyder, at der intet fortegn er med i
telegrammet.
Datatyper Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
10 Bytestreng
13 Tidsforskel
33 Reserveret
35 Bitsekvens
Skriv data i EEPROM.
PKE = E19E hex - Skriv enkelt ord i
parameter 4-14 Motorhastighed, høj grænse [Hz].
IND = 0000 hex
PWEHØJ = 0000 hex
PWELAV = 03E8 hex – Dataværdi 1.000, svarende til 100
Hz, se kapitel 3.8.7.12 Konvertering.
Telegrammet ser således ud:
Illustration 3.51 Skriv data i EEPROM
BEMÆRK!
Tabel 3.31 Understøttede datatyper
3.8.7.12
Konvertering
De forskellige attributter for hver parameter er vist i
fabriksindstillingerne. Parameterværdier overføres kun som
heltal. Derfor bruges konverteringsfaktorer til at overføre
decimaler.
Parameter 4-12 Motorhastighed, lav grænse [Hz] har en
konverteringsfaktor på 0,1. Minimumfrekvensen kan
indstilles til 10 Hz ved at overføre værdien 100. En konverteringsfaktor på 0,1 betyder, at den overførte værdi ganges
med 0,1. Værdien 100 læses derfor som 10,0.
Parameter 4-14 Motorhastighed, høj grænse [Hz] er et
enkelt ord, og parameterkommandoen for skriv i
EEPROM er E. Parameternummer 4-14 er 19E i
hexadecimal.
Svaret fra slaven til masteren er:
Illustration 3.52 Svar fra slave
82 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 85

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Systemintegration
Design Guide
3.8.8.2 Læsning af en parameterværdi
Læs værdien i parameter 3-41 Rampe 1, rampe-op-tid.
PKE = 1155 hex - Læs parameterværdien i
parameter 3-41 Rampe 1, rampe-op-tid.
IND = 0000 hex
PWEHØJ = 0000 hex
PWELAV=0000 hex
Illustration 3.53 Parameterværdi
Hvis værdien i parameter 3-41 Rampe 1, rampe-op-tid er 10
sek, er svaret fra slaven til masteren
Illustration 3.54 Svar fra slave
3E8 hex svarer til 1.000 decimalt. Konverteringsindekset for
parameter 3-41 Rampe 1, rampe-op-tid er -2, dvs. 0,01.
parameter 3-41 Rampe 1, rampe-op-tid er af typen Uden
fortegn 32.
Modbus RTU-protokol
3.8.9
3.8.9.1 Forudsætninger
Danfoss antager, at den installerede styreenhed
understøtter grænseaderne, som er beskrevet i dette
dokument, og at alle de krav og begrænsninger, der er
fastsat i styreenheden såvel som frekvensomformeren,
overholdes nøje.
Modbus RTU (Remote Terminal Unit) er beregnet til at
kommunikere med en styreenhed, der understøtter de
grænseader, som er deneret i dette dokument. Det
antages, at brugeren har et indgående kendskab til
styreenhedens muligheder og begrænsninger.
3.8.9.2
Oversigt over Modbus RTU
Under kommunikation via et Modbus RTU-netværk gør
protokollen følgende:
Bestemmer, hvordan hver styreenhed lærer sin
•
apparatadresse.
Genkender en meddelelse, der er adresseret til
•
den.
Bestemmer, hvilke handlinger der skal udføres.
•
Udtrækker alle data eller andre oplysninger i
•
meddelelsen.
Hvis der kræves et svar, udarbejder og sender
styreenheden svarmeddelelsen.
Styreenheder kommunikerer ved hjælp af en master-slaveteknik, hvor det kun er masteren, der kan igangsætte
transaktioner (kaldet forespørgsler). Slaver svarer ved at
levere de anmodede data til masteren eller ved at foretage
den handling, der anmodes om i forespørgslen.
Masteren kan adressere individuelle slaver eller igangsætte
en broadcast-meddelelse til alle slaver. Slaver returnerer et
svar på de forespørgsler, der adresseres til dem individuelt.
Der returneres ingen svar på broadcast-forespørgsler fra
masteren. Modbus RTU-protokollen etablerer formatet for
masterens forespørgsel ved at levere en:
Apparatets (eller broadcast) adresse.
•
En funktionskode
•
handling.
Alle slags data, der skal sendes.
•
Et fejlkontrolfelt.
•
Slavens svarmeddelelse udformes også ved hjælp af
Modbus-protokollen. Den indeholder felter, der bekræfter
den udførte handling, data, der skal returneres, og et
fejlkontrolfelt. Hvis der opstår en fejl i forbindelse med
modtagelse af meddelelsen, eller hvis slaven ikke kan
udføre den anmodede handling, udformer slaven en
fejlmeddelelse og sender den som svar, eller der opstår
timeout.
3.8.9.3
Frekvensomformer med Modbus
denerer den anmodede
RTU
Frekvensomformeren kommunikerer i Modbus RTU-format
via den indbyggede RS-485-grænseade. Modbus RTU
giver adgang til frekvensomformerens styreord og
busreference.
3 3
Lige meget hvilken type fysisk kommunikationsnetværk,
der anvendes, beskriver Modbus RTU-oversigten den
proces, som en styreenhed anvender til anmodning om
adgang til et andet apparat. Denne proces omfatter,
hvordan Modbus RTU svarer på anmodninger fra andre
apparater, og hvordan fejl registreres og rapporteres. Den
opretter også et fælles format for meddelelsesfelters layout
og indhold.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 83
Page 86

Systemintegration
VLT® AQUA Drive FC 202
Styreordet gør det muligt for Modbus-masteren at styre
ere vigtige funktioner i frekvensomformeren:
Start
•
Standsning af frekvensomformeren på forskellige
•
måder:
33
Nulstilling efter et fejltrip
•
Kør ved en række forudindstillede hastigheder
•
Baglæns kørsel
•
Ændring af aktivt setup
•
Styr frekvensomformerens indbyggede relæ
•
Busreferencen anvendes normalt til hastighedsstyring. Det
er også muligt at få adgang til parametrene, læse deres
værdier og eventuelt skrive værdier til dem. Dette giver
adgang til en række styringsmuligheder, herunder styring
af frekvensomformerens sætpunkt, når den interne PIregulering anvendes.
3.8.9.4
Indstil følgende parametre for at aktivere Modbus RTU på
frekvensomformeren:
Parameter Indstilling
Parameter 8-30 Protokol Modbus RTU
Parameter 8-31 Adresse 1-247
Parameter 8-32 Baud-hast. 2400-115200
Parameter 8-33 Paritet/stopbits
Tabel 3.33 Modbus RTU-parametre
Netværkskonguration
Friløbsstop
-
Hurtigt stop
-
DC-bremsestop
-
Normalt stop (rampestop)
-
Lige paritet, 1 stopbit (standard)
Kodesystem
Bit pr. byte 1 startbit.
Fejlkontrolfelt Cyklisk redundanskontrol (CRC).
3.8.10.2 Modbus RTU-meddelelsesstruktur
Det apparat, der overfører, placerer en Modbus RTUmeddelelse i en ramme med et kendt start- og slutpunkt.
Dette gør det muligt for de modtagende enheder at
begynde ved starten af meddelelsen, læse adressedelen,
fastslå, hvilken enhed der adresseres (eller alle enheder,
hvis meddelelsen broadcastes) og at registrere, når
meddelelsen er fuldført. Delvise meddelelser registreres, og
fejl angives som et resultat. Tegn, der skal overføres, skal
angives i det hexadecimale format 00 til FF i hvert felt.
Frekvensomformeren overvåger konstant netværksbussen,
også i tavse intervaller. Når det første felt (adressefeltet)
modtages, afkoder hver enkelt frekvensomformer eller
apparat det for at fastslå, hvilket apparat der adresseres.
Modbus RTU-meddelelser, der adresseres til nul, er
broadcast-meddelelser. Svar er ikke tilladt for broadcastmeddelelser. Der er vist en typisk meddelelsesramme i
Tabel 3.35.
Start Adresse Funktion Data CRC-
T1-T2-T3-T48 bit 8 bit N x 8 bit 16 bit T1-T2-T3-
Tabel 3.35 Typisk Modbus RTU-meddelelsesstruktur
8–bit binær, hexadecimal 0-9, A–F.
2 hexadecimale tegn i hvert 8-bit-felt i
meddelelsen.
8 databit. Den mindst vigtige bit sendes
først;
1 bit for paritet mellem lige/ulige; ingen bit
for ingen paritet
1 stopbit, hvis der anvendes paritet; 2 bit,
hvis ingen paritet.
Slut
kontrol
T4
3.8.10
Rammestruktur for Modbus RTUmeddelelse
3.8.10.1 Frekvensomformer med Modbus
RTU
Styreenhederne er kongureret til at kommunikere med
Modbus-netværk ved brug af RTU-tilstand, hvor hver enkelt
byte i en meddelelse indeholder to 4-bit hexadecimale
tegn. Formatet for hver byte vises i Tabel 3.34.
Startb
it
Tabel 3.34 Format for hver byte
84 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Databyte Stop/
paritet
Stop
3.8.10.3
Meddelelser starter med en lydløs periode med intervaller
på mindst 3,5 tegn. Dette implementeres som et
multiplum af tegnintervaller ved den valgte netværksbaud-hastighed (vist som Start T1-T2-T3-T4). Det første felt,
der skal overføres, er apparatadressen. Efter det sidste
overførte tegn følger en lignende periode i intervaller af
mindst 3,5 tegn, som markerer afslutningen af
meddelelsen. En ny meddelelse kan begynde efter denne
periode. Hele meddelelsesrammen skal overføres i en
konstant strøm.
Start/stop-felt
Page 87

Systemintegration
Design Guide
Hvis der forekommer en tom periode i intervaller på mere
end 1,5 tegn, inden rammen er fuldført, erner det
modtagende apparat den ufuldendte meddelelse og
antager, at den næste byte er adressefeltet i en ny
meddelelse. Hvis en ny meddelelse begynder inden 3,5
tegnintervaller efter en forudgående meddelelse, opfatter
det modtagende apparat det tilsvarende som en
fortsættelse af den foregående meddelelse. Dette medfører
timeout (intet svar fra slaven), eftersom værdien i det
sidste CRC-felt ikke er gyldig for de kombinerede
meddelelser.
3.8.10.4 Adressefelt
En meddelelsesrammes adressefelt indeholder 8 bit.
Gyldige adresser på slaveenheder skal være i området
0-247 decimalt. De individuelle slaveenheder er tildelt
adresser i området 1-247. (0 er reserveret til broadcasttilstand, som alle slaver kan genkende). En master
adresserer en slave ved at placere slaveadressen i
meddelelsens adressefelt. Når slaven sender sit svar,
placeres dens egen adresse i dette adressefelt, så masteren
ved, hvilken slave der svarer.
3.8.10.5
En meddelelses funktionsfelt indeholder 8 bit. Gyldige
koder skal være i området 1–FF. Funktionsfelter bruges til
at sende meddelelser mellem master og slave. Når der
sendes en meddelelse fra en master til en slaveenhed,
fortæller funktionskodefeltet slaven, hvilken handling
denne skal foretage. Når slaven svarer masteren, bruger
den funktionskodefeltet til at angive, at det enten er et
normalt (fejlfrit) svar, eller at der er opstået en fejl (kaldet
et undtagelsessvar). Ved et normalt svar bruger slaven
ganske enkelt den oprindelige funktionskode. Ved et
undtagelsessvar returnerer slaven en kode, der svarer til
den oprindelige funktionskode med dens mest signikante
bit angivet til logisk 1. Desuden placerer slaven en unik
kode i svarmeddelelsens datafelt. Den fortæller masteren,
hvilken type fejl der er opstået eller årsagen til
undtagelsen. Se også kapitel 3.8.10.10 Funktionskoder, som
understøttes af Modbus RTU og kapitel 3.8.10.11 Modbusundtagelseskoder.
3.8.10.6
Datafeltet består af sæt af to hexadecimale tal i området
00–FF hexadecimalt. Disse består af ét RTU-tegn. Datafeltet
for meddelelser, der sendes fra en master- til en
slaveenhed, indeholder yderligere oplysninger, som slaven
skal bruge for at gennemføre den handling, som deneres
af funktionskoden. Dette kan omfatte elementer som f.eks.
en spole- eller registeradresse, mængden af elementer, der
skal håndteres, og mængden af aktuelle databytes i feltet.
Funktionsfelt
Datafelt
3.8.10.7
Meddelelser omfatter et fejlkontrolfelt, der fungerer baseret
på en cyklisk redundanskontrolmetode (CRC). CRC-feltet
kontrollerer indholdet i hele meddelelsen. Den anvendes
uanset den paritetskontrolmetode, der anvendes for de
enkelte tegn i meddelelsen. CRC-værdien beregnes af
transmitterenheden, som vedhæfter CRC som det sidste
felt i meddelelsen. Modtagerenheden genberegner en CRC
under modtagelse af meddelelsen og sammenligner den
beregnede værdi med den faktiske værdi, der modtages i
CRC-feltet. Hvis de to værdier er ulige, forekommer der bus
time-out. Fejlkontrolfeltet indeholder en 16-bit binær
værdi, der er implementeret som to 8-bit bytes. Når dette
er gennemført, vedhæftes den mindst betydende byte i
feltet først og efterfølges af den mest betydende byte. Den
mest betydende byte i CRC er den sidste byte, der sendes i
meddelelsen.
3.8.10.8
I Modbus er alle data organiseret i spoler og holderegistre.
Spoler holder en enkelt bit, mens holderegistre holder et
2-byte ord (dvs. 16 bit). Alle dataadresser i Modbusmeddelelser refereres til nul. Den første forekomst af
dataelementer adresseres som element 0. For eksempel:
Spolen med navnet spole 1 i en programmerbar
styreenhed adresseres som dataadressefeltet i en Modbusmeddelelse. Spole 127 decimalt adresseres som spole
007EHEX (126 decimalt).
Holderegister 40001 adresseres som register 0000 i
meddelelsens dataadressefelt. I funktionskodefeltet er der
allerede
referencen 4XXXX implicit. Holderegister 40108 adresseres
som register 006BHEX (107 decimalt).
Spolenu
mmer
1–16 Frekvensomformers styreord. Master til slave
17–32 Frekvensomformerens hastighed eller
33–48 Frekvensomformerens statusord (se
49–64 Åben sløjfe-tilstand: Frekvensomfor-
65 Parameterskrivekontrol (master til
66-65536 Reserveret
CRC-kontrolfelt
Spoleregisteradressering
speciceret en holderegister-handling. Derfor er
Beskrivelse Signalretning
Master til slave
sætpunktsreferenceområde
0x0-0xFFFF (-200 % til -200 %).
Slave til master
Tabel 3.38)
Slave til master
merens udgangsfrekvens.
Lukket sløjfe-tilstand: Frekvensomformerens feedbacksignal.
Master til slave
slave)
0=Parameterændringer skrives til
RAM'en i frekvensomformeren.
1=Parameterændringer skrives til
RAM'en og EEPROM'en i frekvensomformeren.
3 3
Tabel 3.36 Spolebeskrivelser
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 85
Page 88

Systemintegration
VLT® AQUA Drive FC 202
Spole 0 1
01 Preset-reference LSB
02 Preset-reference MSB
03 DC-bremse Ingen DC-bremse
04 Friløbsstop Ingen friløbsstop
33
05 Hurtigt stop Intet hurtigt stop
06 Fastfrys frekv. Ingen fastfrys frekv.
07 Rampestop Start
08 Ingen nulstilling Nulstil
09 Ingen jog Jog
10 Rampe 1 Rampe 2
11 Data ikke gyldige Data gyldige
12 Relæ 1 fra Relæ 1 til
13 Relæ 2 fra Relæ 2 til
14 Opsæt LSB
15 Opsæt MSB
16 Ingen reversering Reversering
Tabel 3.37 Frekvensomformerens styreord (FC-prol)
Spole 0 1
33 Styring ikke klar Styring klar
34 Frekvensomformer ikke
klar
35 Friløbsstop Sikkerhedslukket
36 Ingen alarm Alarm
37 Ikke brugt Ikke brugt
38 Ikke brugt Ikke brugt
39 Ikke brugt Ikke brugt
40 Ingen advarsel Advarsel
41 Ikke ved reference Ved reference
42 Hand mode Auto mode
43 Ude af frekvensområde Inden for frekvensområde
44 Standset Kører
45 Ikke brugt Ikke brugt
46 Ingen spændingsadvarsel Spændingsadvarsel
47 Ikke inden for
strømgrænse
48 Ingen termisk advarsel Termisk advarsel
Frekvensomformer klar
Strømgrænse
Registernummer
00001-00006 Reserveret
00007 Sidste fejlkode fra en FC-dataobjektgrænseade
00008 Reserveret
00009
00010-00990 Parametergruppe 000 (parametre 0-01 til 0-99)
01000-01990 100 parametergruppe (parametre 1-00 til 1-99)
02000-02990 200 parametergruppe (parametre 2-00 til 2-99)
03000-03990 300 parametergruppe (parametre 3-00 til 3-99)
04000-04990 400 parametergruppe(parametre 4-00 til 4-99)
... ...
49000-49990 4900 parametergruppe (parametre 49-00 til 49-99)
50000 Indgangsdata: Frekvensomformerens styreordsre-
50010 Indgangsdata: Busreferenceregister (REF).
... ...
50200 Udgangsdata: Frekvensomformerens statusordre-
50210 Udgangsdata: Frekvensomformerens register for
Tabel 3.39 Holderegistre
1) Anvendes til at angive det indeksnummer, der skal bruges ved
åbning af en indekseret parameter.
3.8.10.9
Beskrivelse
Parameterindeks
gister (CTW).
gister (STW).
primær faktisk værdi (MAV).
1)
Sådan styres frekvensomformeren
I kapitel 3.8.10.10 Funktionskoder, som understøttes af
Modbus RTU og kapitel 3.8.10.11 Modbus-undtagelseskoder
beskrives de koder, som kan bruges i funktions- og
datafelterne i en Modbus RTU-meddelelse.
Tabel 3.38 Frekvensomformerens statusord (FC-prol)
86 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 89

Systemintegration
Design Guide
3.8.10.10 Funktionskoder, som understøttes
af Modbus RTU
Modbus RTU understøtter brugen af funktionskoderne (se
Tabel 3.40) i funktionsfeltet i en meddelelse.
Funktion Funktionskode (hex)
Læs spoler 1
Læs holderegistre 3
Skriv enkelt spole 5
Skriv enkelt register 6
Skriv ere spoler F
Skriv ere registre 10
Hent kommunikationshændelsestæller B
Rapportér slave-id 11
Tabel 3.40 Funktionskoder
Funktion Funkti-
onskode
Fejlnding 8 1 Genstart kommunikation
Tabel 3.41 Funktionskoder og underfunktionskoder
3.8.10.11
Modbus-undtagelseskoder
En komplet forklaring af strukturen for et undtagelsessvar
ndes i kapitel 3.8.10.5 Funktionsfelt.
Kode Navn Betydning
1 Ugyldig
funktion
Underfunk
tionskode
2 Returnér fejlndingsre-
10 Ryd tællere og fejlndings-
11 Returnér busmeddelelses-
12 Returnér buskommunikati-
13 Returnér slavefejloptælling
14 Returnér slavemeddelel-
Den funktionskode, der modtages i
forespørgslen, er ikke en tilladt handling
for serveren (eller slaven). Dette kan være,
fordi funktionskoden kun gælder for nyere
apparater og ikke blev implementeret i
det valgte apparat. Det kunne også
indikere, at serveren (eller slaven) ikke er i
den rette tilstand til at behandle en
forespørgsel af denne type, for eksempel
fordi den ikke er kongureret og bliver
bedt om at returnere registerværdier.
Underfunktion
gister
register
tælling
onsfejloptælling
sestælling
Kode Navn Betydning
2 Ugyldig
dataadresse
3 Ugyldig
dataværdi
4 Slaveen-
hedsfejl
Tabel 3.42 Modbus-undtagelseskoder
3.8.11
Adgang til parametre
Den dataadresse, der modtages i
forespørgslen, er ikke en tilladt adresse for
serveren (eller slaven). Mere specikt er
kombinationen af referencenummeret og
overførselslængden ugyldig. For en
styreenhed med 100 registre vil en
forespørgsel med oset 96 og længde 4
lykkes, og en forespørgsel med oset 96
og længde 5 genererer en undtagelse 02.
En værdi, som er indeholdt i forespørgselsdatafeltet, er ikke en tilladt værdi for
serveren (eller slaven). Dette angiver en
fejl i strukturen af resten af en kompleks
forespørgsel, som f.eks. at den implicitte
længde er korrekt. Det betyder helt
specikt IKKE, at et datapunkt, der blev
indsendt til lagring i et register, har en
værdi, der ligger uden for applikationsprogrammets undtagelse, siden Modbusprotokollen ikke kender betydningen af
en bestemt værdi for et bestemt register.
Der opstod en uoprettelig fejl, mens
serveren (eller slaven) forsøgte at udføre
den forespurgte handling.
3.8.11.1 Parameterhåndtering
Parameternummeret (PNU) oversættes fra den registeradresse, der ndes i Modbus-læse- eller skrivemeddelelsen.
Parameternummeret oversættes til Modbus som (10 x
parameternummer) decimal. Eksempel: Læsning
parameter 3-12 Catch up/slow down (16 bit): Holderegister
3120 holder en parameterværdi. Værdien 1352 (decimal)
betyder, at parameteren er indstillet til 12,52 %
Læsning parameter 3-14 Preset relativ reference (32 bit):
Holderegistre 3410 og 3411 holder en parameterværdi.
Værdien 11300 (decimal) betyder, at parameteren er
indstillet til 1113,00.
For oplysninger om parametre, størrelser og konverteringsindeks henvises til Programming Guide.
3.8.11.2
Spole 65-decimalen bestemmer, om data, der skrives til
frekvensomformeren, gemmes i EEPROM og RAM (spole 65
= 1) eller kun i RAM (spole 65 = 0).
Datalagring
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 87
Page 90

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Systemintegration
VLT® AQUA Drive FC 202
3.8.11.3 IND (indeks)
Nogle parametre i frekvensomformeren er array-parametre,
for eksempel parameter 3-10 Preset-reference. Eftersom
Modbus ikke understøtter arrays i holderegistrene, har
3.8.12
FC-apparatstyreprol
3.8.12.1 Styreord i henhold til FC-prol
(parameter 8-10 Styreprol = FC-
prol)
frekvensomformeren reserveret holderegister 9 som pointer
33
til array. Før en array-parameter læses eller skrives, skal
holderegister 9 indstilles. Indstilling af holderegister til
værdien 2 gør, at alle følgende læse-/skrivehandlinger til
array-parametre foregår til indeks 2.
3.8.11.4 Tekstblokke
Illustration 3.55 Styreord
Der etableres adgang til parametre, som er gemt som
tekststrenge, på samme måde som de andre parametre.
Den maksimale tekstblokstørrelse er 20 tegn. Hvis en
læseanmodning for en parameter omfatter ere tegn, end
parameteren kan gemme, afkortes svaret. Hvis læseanmodningen for en parameter omfatter færre tegn, end
parameteren kan gemme, indsættes der mellemrum i
svaret.
3.8.11.5
Konverteringsfaktor
Da en parameterværdi kun kan overføres som heltal, skal
der for at overføre decimaltal anvendes en konverteringsfaktor.
3.8.11.6
Parameterværdier
Standarddatatyper
Standarddatatyperne er int 16, int 32, uint 8, uint 16 og
uint 32. De lagres som 4x-registre (40001–4FFFF).
Parametrene læses ved hjælp af funktionen 03 hex Læs
holderegistre. Parametre skrives ved hjælp af funktionen 6
hex Forudindstil enkelt register for 1 register (16 bit) og
funktionen 10 hex Forudindstil
ere registre for 2 registre
(32 bit). Størrelserne, der kan læses, ligger fra 1 register (16
bit) til 10 registre (20 tegn).
Ikke-standarddatatyper
Ikke-standarddatatyper er tekststrenge og lagres som 4xregistre (40001–4FFFF). Parametrene læses ved hjælp af
funktionen 03 hex Læs holderegistre og skrives ved hjælp af
funktionen 10 hex Forudindstil ere registre. Størrelser, der
kan læses, ligger fra 1 register (2 tegn) op til 10 registre (20
tegn).
Bit Bitværdi = 0 Bitværdi = 1
00 Referenceværdi Ekstern udvælgelse, lsb
01 Referenceværdi Ekstern udvælgelse, msb
02 DC-bremse Rampe
03 Friløb Ingen friløb
04 Hurtigt stop Rampe
05 Hold udgangsfrekvensen Brug rampe
06 Rampestop Start
07 Ingen funktion Nulstil
08 Ingen funktion Jog
09 Rampe 1 Rampe 2
10 Data ugyldige Data gyldige
11 Ingen funktion Relæ 01 aktivt
12 Ingen funktion Relæ 02 aktivt
13 Parameteropsætning Udvalg lsb
14 Parameteropsætning Udvalg msb
15 Ingen funktion Reversering
Tabel 3.43 Styreord-bit
Forklaring af styrebit
Bit 00/01
Bit 00 og 01 anvendes til at vælge mellem de re referenceværdier, der er forprogrammeret i parameter 3-10 Preset-
reference i henhold til Tabel 3.44.
Programmeret
referenceværdi
1
2
3
4
Parameter Bit 01 Bit 00
Parameter 3-10
Preset-reference
[0]
Parameter 3-10
Preset-reference
[1]
Parameter 3-10
Preset-reference
[2]
Parameter 3-10
Preset-reference
[3]
0 0
0 1
1 0
1 1
88 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Tabel 3.44 Referenceværdier
Page 91

Systemintegration
Design Guide
BEMÆRK!
Foretag et valg i parameter 8-56 Vælg preset-reference for
at denere, hvordan der oprettes en gate mellem bit
00/01 og den tilsvarende funktion på de digitale
indgange.
Bit 02, DC-bremse
Bit 02 = 0 medfører DC-bremsning og stop. Bremsestrøm
og varighed indstilles i parameter 2-01 DC-bremsestrøm og
parameter 2-02 DC-bremseholdetid.
Bit 02 = 1 medfører rampning.
Bit 03, Friløb
Bit 03 = 0: Frekvensomformeren slipper motoren med det
samme (udgangstransistorerne afbrydes), og motoren
friløber til standsning.
Bit 03 = 1: Frekvensomformeren starter motoren, hvis de
øvrige startbetingelser er opfyldt.
Træf et valg i parameter 8-50 Vælg friløb for at denere,
hvordan der oprettes en gate mellem bit 03 og den
tilsvarende funktion på en digital indgang.
Bit 04, Hurtigt stop
Bit 04 = 0: Får motorhastigheden til at rampe ned til stop
(angivet i parameter 3-81 Kvikstop rampetid).
Bit 05, Hold udgangsfrekvens
Bit 05 = 0: Den aktuelle udgangsfrekvens (i Hz) fastfryses.
Den fastfrosne udgangsfrekvens kan kun ændres via de
digitale indgange (parameter 5-10 Klemme 18, digital
indgang til parameter 5-15 Klemme 33, digital indgang), som
er programmeret til Hastighed op og Hastighed ned.
BEMÆRK!
Hvis fastfrys udgang er aktiv, kan frekvensomformeren
ikke standses af følgende:
Bit 03 friløbsstop
•
Bit 02 DC-bremsning
•
En digital indgang (parameter 5-10 Klemme 18,
•
digital indgang til parameter 5-15 Klemme 33,
digital indgang) programmeret til DC-bremsning,
Friløbsstop eller Nulstilling og friløbsstop.
Bit 06, Rampestop/-start
Bit 06 = 0: Medfører stop og får motorhastigheden til at
rampe ned til stop via den valgte rampe ned-parameter.
Bit 06 = 1: Tillader, at frekvensomformeren starter motoren,
hvis de øvrige startbetingelser er opfyldt.
Foretag et valg i parameter 8-53 Vælg start for at
hvordan der oprettes en gate mellem bit 06 Rampestop/start og den tilsvarende funktion på en digital indgang.
Bit 07, Nulstil
Bit 07 = 0: Ingen nulstilling.
Bit 07 = 1: Nulstiller trip. Nulstilling aktiveres på signalets
foranke, for eksempel ved skift fra logisk 0 til logisk 1.
denere,
Bit 08, Jog
Bit 08 = 1: Udgangsfrekvensen bestemmes af
parameter 3-19 Jog-hastighed [O/MIN].
Bit 09, Valg af rampe 1/2
Bit 09 = 0: Rampe 1 er aktiv (parameter 3-41 Rampe 1,
rampe-op-tid til parameter 3-42 Rampe 1, rampe-ned-tid).
Bit 09 = 1: Rampe 2 (parameter 3-51 Rampe 2, rampe-op-tid
til parameter 3-52 Rampe 2, rampe-ned-tid) er aktiv.
Bit 10, Dataene er ikke gyldige/Dataene er gyldige
Fortæl frekvensomformeren, om styreordet skal anvendes
eller ignoreres.
Bit 10 = 0: Styreordet ignoreres.
Bit 10 = 1: Styreordet anvendes. Denne funktion er
relevant, fordi telegrammet altid indeholder styreordet
uanset telegramtypen. Deaktivér styreordet, hvis det ikke
skal bruges, når der opdateres eller læses parametre.
Bit 11, Relæ 01
Bit 11 = 0: Relæ er ikke aktiveret.
Bit 11 = 1: Relæ 01 er aktiveret, forudsat at der er valgt
Styreord bit 11 i parameter 5-40 Funktionsrelæ.
Bit 12, Relæ 04
Bit 12 = 0: Relæ 04 er ikke aktiveret.
Bit 12 = 1: Relæ 04 er aktiveret, forudsat at der er valgt
Styreord bit 12 i parameter 5-40 Funktionsrelæ.
Bit 13/14, Valg af opsætning
Anvend bit 13 og 14 til at vælge mellem de re menuopsætninger iht. Tabel 3.45.
Opsætning Bit 14 Bit 13
1 0 0
2 0 1
3 1 0
4 1 1
Tabel 3.45 Specikation af menuopsætninger
Funktionen er kun mulig, når der er valgt [9] Multiopsætning i parameter 0-10 Aktiv opsætning.
Foretag et valg i parameter 8-55 Vælg opsætning for at
denere, hvordan der oprettes en gate mellem bit 13/14
og den tilsvarende funktion på de digitale indgange.
Bit 15, Reversering
Bit 15 = 0: Ingen reversering.
Bit 15 = 1: Reversering. Reversering er indstillet til digital i
parameter 8-54 Vælg reversering i fabriksindstillingen. Bit 15
fører kun til reversering, når Ser. kommunikation, Logik eller
eller Logik og er valgt.
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 89
Page 92

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Systemintegration
VLT® AQUA Drive FC 202
3.8.12.2 Statusord i henhold til FC-prol
(STW) (parameter 8-10 Styreprol =
FC-prol)
Bit 04, Ingen fejl/fejl (ingen trip)
Bit 04 = 0: Frekvensomformeren er ikke i fejltilstand.
Bit 04 = 1: Frekvensomformeren viser en fejl, men tripper
ikke.
Bit 05, Ikke brugt
Bit 05 anvendes ikke i statusordet.
33
Bit 06, Ingen fejl/triplås
Bit 06 = 0: Frekvensomformeren er ikke i fejltilstand.
Bit 06 = 1: Frekvensomformeren trippes og låses.
Illustration 3.56 Statusord (status word)
Bit 07, Ingen advarsel/advarsel
Bit 07 = 0: Der er ingen advarsler.
Bit 07 = 1: Der er opstået en advarsel.
Bit Bit = 0 Bit = 1
00 Styring ikke klar Styring klar
01 Frekvensomformer ikke klar Frekvensomformer klar
02 Friløb Aktivér
03 Ingen fejl Trip
04 Ingen fejl Fejl (ingen trip)
05 Reserveret 06 Ingen fejl Triplås
07 Ingen advarsel Advarsel
08 Hastighed ≠ reference Hastighed = reference
09 Lokal betjening Busstyring
10 Uden for frekvensgrænse Frekvensgrænse OK
11 Ingen funktion I drift
12 Frekvensomformer OK Standset, auto-start
13 Spænding OK Spænding overskredet
14 Moment OK Moment overskredet
15 Timer OK Timer overskredet
Bit 08, Hastighed ≠ reference / hastighed = reference
Bit 08 = 0: Motoren kører, men den nuværende hastighed
er anderledes end den forhåndsindstillede hastighedsreference. Det kan for eksempel være tilfældet, når
hastigheden ramper op/ned under start/stop.
Bit 08 = 1: Motorhastigheden svarer til den forhåndsindstillede hastighedsreference.
Bit 09, Lokal betjening/busstyring
Bit 09 = 0: [Stop/Reset] er aktiveret på styreenheden, eller
der er valgt Lokal i parameter 3-13 Referencested. Styring via
seriel kommunikation er ikke muligt.
Bit 09 = 1 betyder, at det er muligt at styre frekvensomformeren via
eldbus/seriel kommunikation.
Bit 10, Uden for frekvensgrænse
Bit 10 = 0: Udgangsfrekvensen har nået værdien i
parameter 4-11 Motorhastighed, lav grænse [O/MIN] eller
parameter 4-13 Motorhastighed, høj grænse [O/MIN].
Bit 10 = 1: Udgangsfrekvensen ligger inden for de
Tabel 3.46 Statusord, bit
Forklaring af statusbits
Bit 00, Styring ikke klar/klar
Bit 00 = 0: Frekvensomformeren tripper.
Bit 00 = 1: Frekvensomformerens styreenheder er klar, men
strømkomponenten modtager ikke nødvendigvis strøm
(hvis der bruges ekstern 24 V-forsyning til styreenhederne).
denerede grænser.
Bit 11, Ingen drift/i drift
Bit 11 = 0: Motoren kører ikke.
Bit 11 = 1: Frekvensomformeren har et startsignal, eller
udgangsfrekvensen er større end 0 Hz.
Bit 12, Frekvensomformer OK/standset, auto-start:
Bit 12 = 0: Der er ingen midlertidig overtemperatur på
vekselretteren.
Bit 12 = 1: Vekselretteren standser på grund af en overtem-
Bit 01, Frekvensomformer klar
Bit 01 = 1: Frekvensomformeren er klar til drift, men
friløbskommandoen er aktiv via de digitale indgange eller
via seriel kommunikation.
Bit 02, Friløbsstop
Bit 02 = 0: Frekvensomformeren udløser motoren.
Bit 02 = 1: Frekvensomformeren starter motoren med en
startkommando.
Bit 03, Ingen fejl/trip
Bit 03 = 0 : Frekvensomformeren er ikke i fejltilstand.
Bit 03 = 1: Frekvensomformeren tripper. Tryk på [Reset] for
peratur, men apparatet tripper ikke, og driften genoptages,
når overtemperaturen ikke længere er til stede.
Bit 13, Spænding OK/grænse overskredet
Bit 13 = 0: Der er ingen spændingsadvarsler.
Bit 13 = 1: DC-spændingen i frekvensomformerens
mellemkreds er for lav eller for høj.
Bit 14, Moment OK/grænse overskredet
Bit 14 = 0: Motorstrømmen er lavere end momentgrænsen,
der er valgt i parameter 4-18 Strømgrænse.
Bit 14 = 1: Momentgrænsen i parameter 4-18 Strømgrænse
er overskredet.
at genoptage driften.
90 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 93

Actual output
freq.
STW
Follower-master
Speed ref.CTW
Master-follower
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Systemintegration Design Guide
Bit 15, Timer OK/grænse overskredet
Bit 15 = 0: Timerne for termisk motorbeskyttelse og
termisk beskyttelse overskrides ikke 100 %.
Bit 15 = 1: Én af timerne overskrider 100 %.
Alle bits i STW er indstillet til 0, hvis forbindelsen mellem
Interbus-optionen og frekvensomformeren går tabt, eller
hvis der er opstået et internt kommunikationsproblem.
Bit Bit = 0 Bit = 1
00 O 1 On 1
01 O 2 On 2
02 O 3 On 3
03 Friløb Ingen friløb
04 Hurtigt stop Rampe
05 Hold udgangsfrekvens Brug rampe
06 Rampestop Start
3.8.12.3 Bushastighedsreferenceværdi
07 Ingen funktion Nulstil
08 Jog 1 O Jog 1 On
Hastighedsreferenceværdien sendes til frekvensomformeren
som en relativ værdi i %. Værdien sendes i form af et 16bit ord. I heltal (0-32.767) svarer værdien 16.384 (4.000 hex)
til 100 %. Negative tal formateres ved hjælp af 2komplement. Den aktuelle udgangsfrekvens (MAV) skaleres
på samme måde som busreferencen.
09 Jog 2 O Jog 2 On
10 Data ugyldige Data gyldige
11 Ingen funktion Slow-down
12 Ingen funktion Catch up
13 Parameteropsætning Udvalg lsb
14 Parameteropsætning Udvalg msb
15 Ingen funktion Reversering
Tabel 3.47 Styreord-bit
Forklaring af styrebit
O 1/On 1
Bit 00,
En normal rampe standser i henhold til rampetiderne i den
Illustration 3.57 Aktuel udgangsfrekvens (MAV)
aktuelt valgte rampe.
Bit 00 = 0 fører til standsning og aktivering af udgangsrelæ
1 eller 2, hvis udgangsfrekvensen er 0 Hz, og hvis [Relæ
123] er valgt i parameter 5-40 Funktionsrelæ.
Referencen og MAV skaleres som følger:
Når bit 0 = 1, er frekvensomformeren i tilstand 1:
Indkobling er forbudt.
Bit 01, O 2/On 2
Friløbsstop
Når bit 01 = 0, forekommer der friløbsstop og en aktivering
af udgangsrelæ 1 eller 2, hvis udgangsfrekvensen er 0 Hz,
og hvis [Relæ 123] er valgt i parameter 5-40 Funktionsrelæ.
O 3/On 3
Bit 02,
Hurtigt stop ved brug af rampetiden for
parameter 3-81 Kvikstop rampetid. Når bit 02 = 0,
forekommer der et hurtigt stop og en aktivering af
Illustration 3.58 Reference og MAV
udgangsrelæ 1 eller 2, hvis udgangsfrekvensen er 0 Hz, og
hvis [Relæ 123] er valgt i parameter 5-40 Funktionsrelæ.
Når bit 02 = 1, er frekvensomformeren i
3.8.12.4
Styreord i henhold til PROFIdrive-
prol (CTW)
tilstand 1: Indkobling er forbudt.
Bit 03, Friløb/Ingen friløb
Friløbsstop Bit 03 = 0 fører til standsning.
Styreordet bruges til at sende kommandoer fra en master
(for eksempel en pc) til en slave.
Når bit 03 = 1, kan frekvensomformeren starte, hvis de
andre startbetingelser opfyldes.
BEMÆRK!
Valget i parameter 8-50 Vælg friløb bestemmer, hvordan
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 91
bit 03 sammenkædes med den tilsvarende funktion for
de digitale indgange.
3 3
Page 94

Systemintegration
VLT® AQUA Drive FC 202
Bit 04, Hurtigt stop/rampe
Hurtigt stop ved brug af rampetiden for
parameter 3-81 Kvikstop rampetid.
Når bit 04 =0, opstår der et hurtigt stop.
Når bit 04 = 1, kan frekvensomformeren starte, hvis de
andre startbetingelser opfyldes.
33
BEMÆRK!
Valget i parameter 8-51 Kvikstop, valg bestemmer,
hvordan bit 04 er sammenkædet med den tilsvarende
funktion for de digitale indgange.
Bit 05, Hold udgangsfrekvensen/brug rampe
Når bit 05 = 0, fastholdes udgangsfrekvensen, selv hvis
referenceværdien ændres.
Når bit 05 = 1, kan frekvensomformeren udføre sin reguleringsfunktion igen. Driften
pågældende referenceværdi.
Bit 06, Rampestop/-start
Normal rampestop ved brug af rampetiderne for den
faktiske rampe vælges. Derudover aktiveres udgangsrelæ
01 eller 04, hvis udgangsfrekvensen er 0 Hz, og hvis relæ
123 er valgt i parameter 5-40 Funktionsrelæ.
Bit 06 = 0 fører til en standsning.
Når bit 06 = 1, kan frekvensomformeren starte, hvis de
andre startbetingelser er opfyldt.
nder sted i henhold til den
BEMÆRK!
Valget i parameter 8-53 Vælg start bestemmer, hvordan
bit 06 sammenkædes med den tilsvarende funktion for
de digitale indgange.
Bit 11, Ingen funktion/slow-down
Anvendes til at reducere hastighedsreferenceværdien med
den mængde, der angives i parameter 3-12 Catch up/slow
down.
Når bit 11 = 0, ændres referenceværdien ikke.
Når bit 11 = 1, reduceres referenceværdien.
Bit 12, Ingen funktion/catch up
Bruges til at øge hastighedsreferenceværdien med den
mængde, der angives i parameter 3-12 Catch up/slow down.
Når bit 12 = 0, ændres referenceværdien ikke.
Når bit 12 = 1, øges referenceværdien.
Hvis både slow-down og accelerering er aktiveret (bit 11
og 12 = 1), har slow-down første prioritet, dvs. at hastighedsreferenceværdien reduceres.
Bits 13/14, Valg af opsætning
Bit 13 og 14 bruges til at vælge mellem de re parameteropsætninger i henhold til Tabel 3.48.
Funktionen er kun mulig, når der er valgt [9] Multio-
psætning i parameter 0-10 Aktiv opsætning. Valget i
parameter 8-55 Vælg opsætning bestemmer, hvordan bit 13
og 14 sammenkædes med den tilsvarende funktion for de
digitale indgange. Det er kun muligt at ændre
opsætningen under drift, hvis opsætningerne er blevet
sammenkædet i parameter 0-12 Denne opsætning knyttet til.
Opsætning Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Bit 07, Ingen funktion/nulstilling
Nulstil efter slukning.
Anerkender hændelse i
Når bit 07 = 0, opstår der ingen nulstillinger.
Når der sker en hældningsændring for bit 07 til 1, opstår
der en nulstilling efter slukning.
Bit 08, Jog 1
Aktivering af den forhåndsprogrammerede hastighed i
parameter 8-90 Bus-jog 1, hastighed. JOG 1 er kun mulig,
hvis bit 04 = 0 og bit 00-03 = 1.
Bit 09, Jog 2
Aktivering af den forudprogrammerede hastighed i
parameter 8-91 Bus-jog 2, hastighed. Jog 2 er kun mulig,
hvis bit 04 = 0 og bit 00-03 = 1.
Bit 10, Data ugyldig/gyldig
Bruges til at fortælle frekvensomformeren, om styreordet
skal anvendes eller ignoreres.
Bit 10 = 0 forårsager, at styreordet ignoreres.
Bit 10 = 1 forårsager, at styreordet anvendes. Denne
funktion er relevant, fordi styreordet altid er indeholdt i
telegrammet, uanset hvilken telegramtype, der anvendes.
Det er muligt at deaktivere styreordet, hvis det ikke ønskes
brugt til opdatering eller læsning af parametrene.
O/On
O/On
fejlbuer.
Tabel 3.48 Valg af opsætning
Bit 15, Ingen funktion/reverseret
Bit 15 = 0 fører ikke til reversering.
Bit 15 = 1 fører til reversering.
BEMÆRK!
I fabriksindstillingen er reversering indstillet til digital i
parameter 8-54 Vælg reversering.
BEMÆRK!
Bit 15 fører kun til reversering, når Ser. kommunikation,
Logik eller eller Logik og er valgt.
92 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 95

Systemintegration
Design Guide
3.8.12.5 Statusord i henhold til PROFIdrive-
prol (STW)
Statusordet bruges til at underrette en master (for
eksempel en pc) om status for en slave.
Bit Bit = 0 Bit = 1
00 Styring ikke klar Styring klar
01 Frekvensomformer
ikke klar
02 Friløb Aktivér
03 Ingen fejl Trip
04 O 2 On 2
05 O 3 On 3
06 Start mulig Start ikke mulig
07 Ingen advarsel Advarsel
08
09 Lokal betjening Busstyring
10 Uden for frekvens-
11 Ingen funktion I drift
12 Frekvensomformer OK Standset, auto-start
13 Spænding OK Spænding overskredet
14 Moment OK Moment overskredet
15 Timer OK Timer overskredet
Tabel 3.49 Statusord, bit
Hastighed ≠ reference
grænse
Forklaring af statusbits
Bit 00, Styring ikke klar/klar
Når bit 00 = 0, er bit 00, 01 eller 02 for styreordet 0 (OFF 1,
OFF 2 eller OFF 3) – eller frekvensomformeren er slået fra
(trip).
Når bit 00 = 1, er frekvensomformerstyringen klar, men der
er ikke nødvendigvis strømforsyning til det aktuelle
apparat (i tilfælde af ekstern 24 V-forsyning til styresystemet).
Bit 01, Frekvensomformer ikke klar/klar
Samme betydning som bit 00, men der er strømforsyning
til apparatet. Frekvensomformeren er klar, når den
modtager de nødvendige startsignaler.
Bit 02, Friløb/aktiveret
Når bit 02 = 0, er bit 00, 01 eller 02 for styreordet 0 (OFF 1,
OFF 2 eller OFF 3 eller friløb) – eller frekvensomformeren
er slået fra (trip).
Når bit 02 = 1, er bit 00, 01 eller 02 for styreordet 1:
frekvensomformeren er ikke trippet.
Bit 03, Ingen fejl/trip
Når bit 03 = 0, eksisterer der ingen fejltilstand i frekvensomformeren.
Når bit 03 = 1, er frekvensomformeren trippet og kræver et
nulstillingssignal, før den kan starte.
Bit 04, On
2/O 2
Når bit 01 for styreordet er 0, er bit 04 = 0.
Når bit 01 for styreordet er 1, er bit 04 = 1.
Frekvensomformer klar
Hastighed = reference
Frekvensgrænse OK
Bit 05, On
3/O 3
Når bit 02 for styreordet er 0, er bit 05 = 0.
Når bit 02 for styreordet er 1, er bit 05 = 1.
Bit 06, Start mulig/start ikke mulig
Hvis [1] PROFIdrive er valgt i parameter 8-10 Styreordsprol,
er bit 06 1 efter en kvittering for slukning, efter aktivering
af O2 eller O3 og efter tilslutning af netspændingen.
Start ikke mulig nulstilles, bit 00 for styreordet indstilles til
0, og bit 01, 02 og 10 indstilles til 1.
Bit 07, Ingen advarsel/advarsel
Bit 07 = 0 betyder, at der ikke er nogen advarsler.
Bit 07 = 1 betyder, at der er opstået en advarsel.
Bit 08, Hastighed ≠ reference / Hastighed = reference
Når bit 08 = 0, afviger motorens aktuelle hastighed fra den
indstillede hastighedsreferenceværdi. Dette kan for
eksempel ske, når hastigheden ændres under start/stop
ved hjælp af rampe op/ned.
Når bit 08 = 1, svarer motorens aktuelle hastighed til den
indstillede hastighedsreferenceværdi.
Bit 09, Lokal betjening/busstyring
Bit 09 = 0 angiver, at frekvensomformeren er blevet
standset med [Stop] på LCP'et, eller at der er valgt [Kædet
til hand] eller [Lokal] i parameter 3-13 Referencested.
Når bit 09 = 1, kan frekvensomformeren styres via den
serielle grænseade.
Bit 10, Uden for frekvensgrænse/frekvensgrænse OK
Når bit 10 = 0, er udgangsfrekvensen uden for de grænser,
der er angivet i parameter 4-52 Advarsel, hastighed lav og
parameter 4-53 Advarsel, hastighed høj.
Når bit 10 = 1, er udgangsfrekvensen inden for de angivne
grænser.
Bit 11, Ingen funktion/i drift
Når bit 11 = 0, kører motoren ikke.
Når bit 11 = 1, har frekvensomformeren et startsignal, eller
udgangsfrekvensen er højere end 0 Hz.
Bit 12, Frekvensomformer OK/standset, auto-start
Når bit 12 = 0, er der ingen midlertidig overbelastning af
vekselretteren.
Når bit 12 = 1, er vekselretteren standset pga. overbelastning. Frekvensomformeren er imidlertid ikke slået fra
(trip), og den starter igen, når overbelastningen er
forsvundet.
Bit 13, Spænding OK/spænding overskredet
Når bit 13 = 0, er frekvensomformerens spændingsgrænser
ikke overskredet.
Når bit 13 = 1, er DC-spændingen i frekvensomformerens
mellemkreds for lav eller for høj.
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 93
Page 96

Systemintegration
VLT® AQUA Drive FC 202
Bit 14, Moment OK/moment overskredet
Når bit 14 = 0, ligger motormomentet under den grænse,
der er valgt i parameter 4-16 Momentgrænse for motordrift
og parameter 4-17 Momentgrænse for generatordrift.
Når bit 14 = 1, er den grænse, der er valgt i
Bit 15, Timer OK/timer overskredet
Når bit 15 = 0, har timerne for den termiske motorbeskyttelse og den termiske frekvensomformerbeskyttelse
ikke overskredet 100 %.
Når bit 15 = 1, har en af timerne overskredet 100 %.
parameter 4-16 Momentgrænse for motordrift eller
33
parameter 4-17 Momentgrænse for generatordrift,
overskredet.
3.9 Afkrydsningsliste for systemdesign
I Tabel 3.50 ndes en afkrydsningsliste, der kan bruges ved integrering af en frekvensomformer i et motorstyresystem. Listen
er beregnet som en huskeliste til de generelle kategorier og optioner, der er nødvendige for at kunne specicere systemkravene.
Kategori Oplysninger Kommentarer
FC-model
Eekt
Volt
Strøm
Fysiske
Mål
Vægt
Omgivende driftsforhold
Temperatur
Højde
Luftfugtighed
Luftkvalitet/støv
Derating-krav
Kapslingsstørrelse
Indgang
Kabler
Type
Længde
Sikringer
Type
Størrelse
Klassicering
Optioner
Stik
Kontakter
Filtre
Udgang
Kabler
Type
Længde
Sikringer
Type
Størrelse
Klassicering
Optioner
Filtre
Styring
Kabelføring
Type
☑
94 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 97

Systemintegration Design Guide
Kategori Oplysninger Kommentarer
Længde
Klemmetilslutninger
Kommunikation
Protokol
Tilslutning
Kabelføring
Optioner
Stik
Kontakter
Filtre
Motor
Type
Klassicering
Spænding
Optioner
Særlige værktøjer og udstyr
Flytning og opbevaring
Montering
Elektrisk tilslutning
Tabel 3.50 Afkrydsningsliste for systemdesign
☑
3 3
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 95
Page 98

Applikationseksempler
VLT® AQUA Drive FC 202
4 Applikationseksempler
Registrering af lavt ow
4.1 Oversigt over applikationsfunktioner
VLT® AQUA Drive FC 202 er konstrueret til applikationer
inden for vand- og spildevandsområdet. Det store udvalg
af standardfunktioner og valgfri funktioner omfatter
44
optimeret SmartStart og kvikmenu med fokus på vand- og
spildevandsapplikationer:
Kaskadestyring
•
Basic kaskadestyring er indbygget som standard
med en kapacitet på op til tre pumper. Kaskadestyring giver hastighedsstyring af en enkelt pumpe
i et erpumpesystem. Dette er en attraktivt
løsning hvad angår omkostninger, for eksempel til
booster-sæt. Systemer med ere pumper med
variabel hastighed kræver udvidet kaskadestyreenhed (MCO 101) eller avanceret
kaskadestyreenhed (MCO 102).
Motoralternering
•
Funktionen motoralternering er egnet til applikationer med to motorer eller to pumper, der deler
en frekvensomformer.
Flow-kompensering
•
Flow-kompensering tilpasser sætpunktet i
henhold til gennemstrømningen og muliggør
montering af trykføleren tæt på pumpen.
Detektering af tør kørsel
•
Funktionen forhindrer beskadigelse af pumpen
ved at undgå tørkørsel og overophedning af
pumpen.
Slut på kurve-detektering
•
Funktionen registrerer, når pumpen kører med
maksimumhastighed, og sætpunktet ikke kan nås
inden for en
Udrensning
•
Denne forebyggende eller reaktive rengøringsfunktion er beregnet til pumper i
spildevandsapplikationer. Se kapitel 4.2.3 29-1*
Udrensningsfunktion for
Indledende/afsluttende ramper
•
Programmering af korte rampetider til/fra
minimumhastigheden beskytter lejer og sikrer
tilstrækkelig køling i applikationer med
dykpumper.
Kontraventilbeskyttelse
•
En langsom rampe-ned hastighed beskytter
kontraventiler og forhindrer vandslag.
STO
•
STO aktiverer sikker standsning (friløb), når en
kritisk situation opstår.
brugerdeneret periode.
ere oplysninger.
•
Denne funktionen registrerer no ow- eller low
ow-forholdene i systemet.
Sleep mode
•
Sleep mode-funktionen sparer energi ved at
stoppe pumpen, når der ikke er et behov.
Rørfyldningstilstand
•
Rørfyldningstilstand omfatter funktionaliteter, der
fylder rørene jævnt og undgår vandslag. Denne
funktion giver forskellige tilstande for horisontale
og vertikale rør.
Realtidsur
•
Smart Logic Control (SLC)
•
SLC omfatter programmering af en sekvens, der
består af hændelser og handlinger. SLC tilbyder
en lang række PLC-funktioner, der benytter
sammenlignere, logikregler og timere.
Pre/Post Lube
•
Se kapitel 4.2.4 Pre/Post Lube for
Flow-bekræftelse
•
Se kapitel 4.2.5 29-5* Flow Conrmation for ere
oplysninger.
Avanceret overvågning af minimumhastighed
•
for dykpumper
Se kapitel 4.2.6 Avanceret overvågning af minimumhastighed for dykpumper for
Forebyggende vedligeholdelse
•
Funktionen forebyggende vedligeholdelse
muliggør, at planlagte serviceintervaller
programmeres ind i frekvensomformeren.
ere oplysninger.
ere oplysninger.
96 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
Page 99

0 Hz / RPM
Derag O Delay:
Par. 29 -15
+/- Derag
Speed:
Par.: 29 -13
Par.: 29 -14
Deragging Run Time : Par . 29-12
Speed
Derag
function
activated
1 Cycle
Number of Cycles : Par . 29 -10
130BC369.10
Applikationseksempler
Design Guide
4.2 Valgte applikationsfunktioner
4.2.1 SmartStart
Med SmartStart-guiden er det nu nemmere og mere
omkostningseektivt at idriftsætte frekvensomformeren.
SmartStart aktiveres ved den første opstart eller efter en
fabriksnulstilling og vejleder brugeren gennem en række
lette trin for at sikre den mest korrekte og eektive
motorstyring. SmartStart kan også startes direkte via
kvikmenuen. Vælg indstillinger på det graske
betjeningspanel med 28 sprog.
Enkelt pumpe/motor i åben eller lukket sløjfe
•
Motoralternering: Når to motorer deler en
•
frekvensomformer.
Basic kaskadestyring: Hastighedsstyring af en
•
enkelt pumpe i et multipumpesystem. Dette er en
attraktiv løsning, hvad angår omkostninger, for
eksempel til booster-sæt.
Master-follower: Styrer op til otte frekvensom-
•
formere og pumper for at sikre jævn drift af det
overordnede pumpesystem.
4 4
Illustration 4.1 Udrensningsfunktion
Kvikmenu Vand og pumper
4.2.2
Kvikmenuvalget Vand og pumper giver hurtig adgang til
de mest almindelige vand- og pumpefunktioner i VLT
AQUA Drive:
Specielle ramper (indledende/afsluttende rampe,
•
stoprampe)
Sleep mode
•
Udrensning
•
Detektering af tør kørsel
•
Slut på kurve-detektering
•
Flow-kompensering
•
Rørfyldningstilstand til horisontale, vertikale og
•
4.2.3
Formålet med udrensningsfunktionen er at befri
pumpebladet for aejringer i spildevandsapplikationer, så
pumpen kan køre normalt.
En udrensningshændelse deneres som tiden fra frekvensomformeren starter med at udrense, til udrensningen
afsluttes. Når en udrensning startes, ramper frekvensomformeren først til et stop, og derefter udløber en o-
forsinkelsestimer, før den første cyklus begynder.
blandede rørsystemer.
Styreydeevne
•
Minimum speed monitor
•
29-1* Udrensningsfunktion
®
Hvis en udrensning udløses fra en frekvensomformer i
stoppet tilstand, springes den første o-forsinkelsestimer
over. Udrensningshændelsen kan bestå af ere cyklusser.
En cyklus bestående af en puls i bagudgående retning
efterfulgt af en puls i fremadgående retning. Udrensningen
betragtes som værende færdig, når et speciceret antal
cyklusser er fuldført. Mere specikt: På den sidste puls
(denne vil altid være fremadgående) af den sidste cyklus
betragtes udrensningen som værende færdig, når køretid
for udrensning udløber (frekvensomformeren kører ved
udrensningshastighed). Imellem pulserne kører frekvensomformerudgangen friløb i en bestemt o-forsinkelsestid
for at lade aejringerne i pumpen lægge sig.
BEMÆRK!
Aktivér ikke udrensning, hvis pumpen ikke kan køre i
bagudgående retning.
Der er tre forskellige notikationer for en igangværende
udrensning:
Status i LCP'et: Auto-ernbetjent udrensning.
•
En bit i udvidet statusord (bit 23, 80 0000 hex).
•
En digital udgang kan kongureres til at afspejle
•
den aktive udrensningsstatus.
MG20N601 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. 97
Page 100

130BD765.10
N
MAX
N
MIN
0
1
1
0
0
1
2
3
t1 t3t2
T
T
T
Applikationseksempler
VLT® AQUA Drive FC 202
Afhængigt af applikationen og formålet med brug af
denne kan denne funktion bruges som forebyggende eller
reaktiv foranstaltning og kan udløses/startes på følgende
måder:
På hver startkommando (parameter 29-11 Derag at
•
Start/Stop)
På hver stopkommando (parameter 29-11 Derag at
•
Start/Stop)
På hver start-/stopkommando
44
•
(parameter 29-11 Derag at Start/Stop)
På digital indgang (parametergruppe 5-1* Digitale
•
indgange)
På frekvensomformerhandling med Smart Logic
•
Controller (parameter 13-52 SL styreenh.-handling)
Som tidsstyret handling (parametergruppe 23-**
•
Tidsbaserede funkt.r)
På høj
•
eekt (parametergruppe 29-2* Derag Power
Tuning)
Pre/Post Lube
4.2.4
Visse motorer kræver smøring af de mekaniske dele før og
under kørsel for at undgå skader/slitage. Dette er især
1
Hastighedskurve
2 Startkommando (for eksempel klemme 18)
3 Pre lube, udgangssignal
t
Startkommando er afgivet (for eksempel klemme 18 er
1
indstillet til aktiv). Startforsinkel-
sestimer(parameter 1-71 Startforsink.) og pre lube-timer
(parameter 29-41 Pre Lube Time).
t
Startforsinkelsestimeren udløber. Frekvensomformeren
2
begynder at rampe op.
t
Pre lube-timeren(parameter 29-41 Pre Lube Time) udløber.
3
tilfældet, når motoren ikke har kørt i udvidede tidsperioder.
Pre lube understøtter også applikationer, der kræver, at
Illustration 4.2 Eksempel på pre/post lube-funktion
visse udtræksventilatorer skal køre. Pre lube-funktionen
signalerer til et eksternt apparat, at det skal begynde at
udføre en specik handling i en brugerdeneret
tidsperiode, begyndende ved den stigende kant i en
kørselskommando (for eksempel startanmodning). En
startforsinkelse (parameter 1-71 Startforsink.) kan derudover
indlæses, således at pre-lube kun opstår, når frekvensom-
Parameter og
navn
Parameter 29-4
0 Pre/Post Lube
Function
formeren standses, og pre-lube afsluttes, lige før
frekvensomformeren begynder at rampe op. Pre-lube kan
kongureres, så det eksterne apparat forbliver
også
signaleret på ethvert tidspunkt, når frekvensomformeren er
i en kørende tilstand, eller således at signalet forbliver
aktivt, efter at motoren er standset (parameter 29-42 Post
Lube Time). Applikationseksempler omfatter et apparat til
Parameter 29-4
1 Pre Lube Time
at smøre de mekaniske dele af en motor/pumpe eller
nogle typer udtræksventilatorer.
Et eksempel på brug af et smøringsapparat ville være start
af smøring ved den stigende kant i en startanmodning.
Forsink start i en tidsperiode og stop smøring, når forsinkelsen udløber, og frekvensomformeren starter.
Parameter 29-4
2 Post Lube
Time
Illustration 4.2 viser en anden brug af funktionen. I dette
tilfælde udløber forsinkelsen, mens frekvensomformeren
allerede er ved at rampe op. Se de relaterede parametre i
Tabel 4.1.
Tabel 4.1 Pre/post lube-parametre
Beskrivelse Indstillinger Enhed
Vælg når pre/post
lube-funktionen er
aktiv. Brug
parameter 1-71 Startfo
rsink. til at indstille
forsinkelsen, inden
motoren begynder at
rampe op.
Indtast signalets
varighed efter
startsignalet Bruges
kun når [1] Pre Lube
Only er valgt i
parameter 29-40 Pre/
Post Lube Function.
Vælg signalets
varighed, efter at
motoren er stoppet.
Bruges kun når [3]
Pre & Running & Post
er valgt i
parameter 29-40 Pre/
Post Lube Function.
[0]*Deaktiveret
[1] Pre lube only
[2] Pre &
Running
[3] Pre &
Running & Post
0-600 (*10) sek
0-600 (*10) sek
-
98 Danfoss A/S © 09/2014 Alle rettigheder forbeholdes. MG20N601
 Loading...
Loading...