

Page 1

ENGINEERING TOMORROW
Projektierungshandbuch
VLT® AQUA Drive FC 202
110–800 kW, Baugrößen D und E
www.danfoss.de/vlt
Page 2

Page 3
Page 4
Page 5
Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zweck des Projektierungshandbuchs
1.2 Zusätzliche Materialien
1.3 Dokument- und Softwareversion
1.4 Konventionen
2 Sicherheit
2.1 Sicherheitssymbole
2.2 Qualifiziertes Personal
2.3 Sicherheitsmaßnahmen
3 Zulassungen und Zertifizierungen
3.1 Vorschriften und Zulassungen
3.2 Schutzarten
4 Produktübersicht
4.1 VLT® High-power Drives
4.2 Bauform gelistet nach Nennleistung
5
5
5
5
5
6
6
6
6
8
8
10
11
11
11
4.3 Übersicht der Gehäuse, 380–500 V
4.4 Übersicht der Gehäuse, 525–690 V
4.5 Verfügbarkeit der Bausätze
5 Produktfunktionen
5.1 Automatisierte Betriebsfunktionen
5.2 Kundenspezifische Anwendungsfunktionen
5.3 Spezifische Funktionen des VLT® AQUA Drive FC 202
5.4 Kaskadenregelung – Übersicht
5.5 Einfacher Kaskadenregler
5.6 Rückspülmodus
5.7 Vor-/Nach-Schmierung
5.8 Durchflussüberwachung
5.9 Erweiterte Mindestdrehzahlüberwachung – Übersicht
5.10 Dynamisches Bremsen
5.11 Zwischenkreiskopplung
5.12 Rückspeiseeinheit
5.13 Rückseitiger Kühlkanal
12
14
16
17
17
20
24
25
27
28
29
30
31
31
31
33
33
6 Optionen und Zubehör – Übersicht
6.1 Feldbus Baugruppen
6.2 Funktionserweiterungen
6.3 Motion Control und Relaiskarten
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 1
36
36
37
38
Page 6
Inhaltsverzeichnis
VLT® AQUA Drive FC 202
6.4 Bremswiderstände
6.5 Sinusfilter
6.6 du/dt-Filter
6.7 Gleichtaktfilter
6.8 Oberschwingungsfilter
6.9 High Power-Zubehör
7 Spezifikationen
7.1 Elektrische Daten, 380-480 V
7.2 Elektrische Daten, 525-690 V
7.3 Netzversorgung
7.4 Motorausgang und Motordaten
7.5 Umgebungsbedingungen
7.6 Kabelspezifikationen
7.7 Steuereingang/-ausgang und Steuerdaten
7.8 Gehäusegewichte
8 Außen- und Klemmenabmessungen
38
38
38
38
39
39
40
40
44
51
51
51
52
52
55
56
8.1 D1h – Außen- und Klemmenabmessungen
8.2 D2h – Außen- und Klemmenabmessungen
8.3 D3h – Außen- und Klemmenabmessungen
8.4 D4h – Außen- und Klemmenabmessungen
8.5 D5h – Außen- und Klemmenabmessungen
8.6 D6h – Außen- und Klemmenabmessungen
8.7 D7h – Außen- und Klemmenabmessungen
8.8 D8h – Außen- und Klemmenabmessungen
8.9 E1h – Außen- und Klemmenabmessungen
8.10 E2h – Außen- und Klemmenabmessungen
8.11 E3h – Außen- und Klemmenabmessungen
8.12 E4h – Außen- und Klemmenabmessungen
9 Allgemeine Hinweise zur mechanischen Installation
9.1 Lagerung
9.2 Anheben der Einheit
9.3 Betriebsumgebung
9.4 Montagehinweis
56
62
68
73
78
87
98
108
119
125
131
138
145
145
145
145
147
9.5 Kühlung
9.6 Leistungsreduzierung
10 Allgemeine Hinweise zur elektrischen Installation
10.1 Sicherheitshinweise
10.2 Anschlussdiagramm
2 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
147
148
152
152
153
Page 7
Inhaltsverzeichnis Projektierungshandbuch
10.3 Anschlüsse
10.4 Steuerkabel und -klemmen
10.5 Sicherungen und Trennschalter
10.6 Motor
10.7 Bremsung
10.8 Fehlerstromschutzschalter und Isolationswiderstandsüberwachung (IRM)
10.9 Ableitstrom
10.10 IT-Netz
10.11 Wirkungsgrad
10.12 Störgeräusche
10.13 dU/dt-Bedingungen
10.14 Elektromagnetische Verträglichkeit (EMV)
10.15 EMV-gerechte Installation
10.16 Oberschwingungen – Übersicht
11 Grundlagen der Bedienung eines Antriebs
11.1 Beschreibung des Betriebs
11.2 Frequenzumrichtersteuerungen
154
156
159
161
163
166
166
168
168
169
169
175
179
181
184
184
184
12 Anwendungsbeispiele
12.1 Anschlußbeispiel für eine automatische Motoranpassung (AMA)
12.2 Anschlußbeispiel für einen analogen Drehzahlsollwert
12.3 Anschlußbeispiel für Start/Stopp
12.4 Anschlußbeispiel für externe Alarmquittierung
12.5 Anschlußbeispiel für Drehzahlsollwert unter Verwendung eines manuellen Potenziometers
12.6 Anschlußbeispiel für Drehzahl auf/Drehzahl ab
12.7 Anschlußbeispiel für RS485-Netzwerkverbindung
12.8 Anschlußbeispiel für einen Motorthermistor
12.9 Anschlußbeispiel für eine Relaiskonfiguration mit Smart Logic Control
12.10 Anschlußbeispiel für eine Tauchpumpe
12.11 Verkabelungskonfiguration für einen Kaskadenregler
12.12 Anschlussbeispiel für eine Pumpe mit konstanter/variabler Drehzahl
12.13 Anschlussbeispiel für Führungspumpen-Wechsel
13 Bestellung eines Frequenzumrichters
13.1 Antriebskonfigurator
194
194
194
195
196
197
197
197
198
198
199
201
202
202
203
203
13.2 Bestellnummern für Optionen und Zubehör
13.3 Bestellnummern für Filter und Bremswiderstände
13.4 Ersatzteile
14 Anhang
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 3
206
211
211
212
Page 8

Inhaltsverzeichnis
VLT® AQUA Drive FC 202
14.1 Abkürzungen und Symbole
14.2 Definitionen
Index
212
213
215
4 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 9
Einführung Projektierungshandbuch
1 Einführung
1.1 Zweck des Projektierungshandbuchs
Dieses Projektierungshandbuch ist vorgesehen für:
Projektingenieure und Anlagenbauer
•
Planer
•
Anwendungs- und Produktspezialisten
•
Das Projektierungshandbuch liefert technische Informationen zu den Einsatzmöglichkeiten und Funktionen des
Frequenzumrichters und erläutert die Integration in
Systeme zur Motorsteuerung und -überwachung.
VLT® ist eine eingetragene Marke.
1.2 Zusätzliche Materialien
Es stehen weitere Ressourcen zur Verfügung, die Ihnen
helfen, erweiterten Betrieb sowie erweiterte Programmierungen und Konformität mit allen einschlägigen Normen
für Frequenzumrichter zu verstehen.
Für die Frequenzumrichter stehen Optionsmodule
•
zur Verfügung, die einige der in diesen
Dokumenten enthaltenen Informationen ändern
können. Spezifische Anforderungen finden Sie in
den Anweisungen, die den Optionen beiliegen.
Zusätzliche Veröffentlichungen und Handbücher sind bei
Danfoss erhältlich. Siehe drives.danfoss.de/downloads/
portal/#/ für Auflistungen.
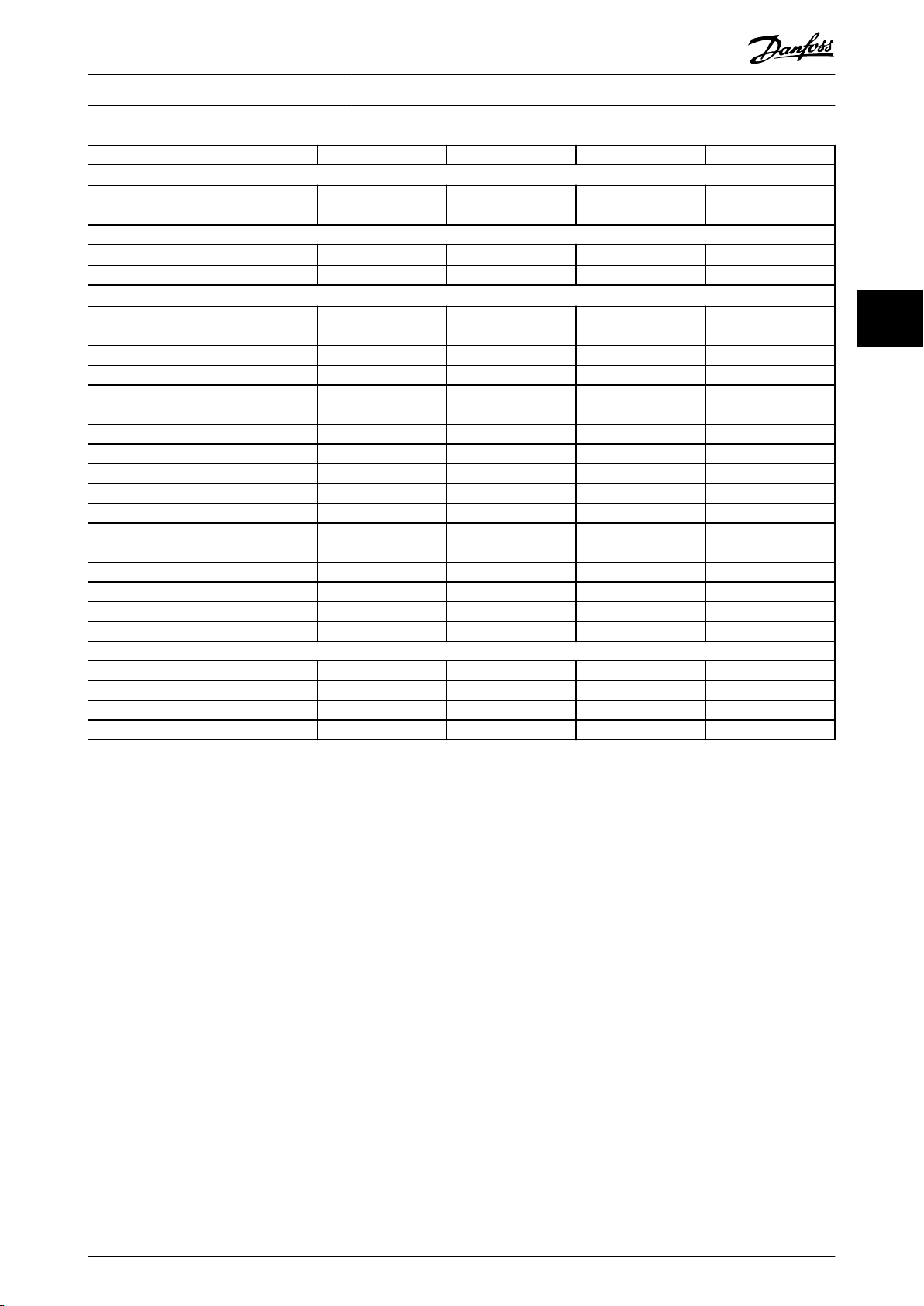
1.3 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1
zeigt die Dokumentversion und die entsprechende Softwareversion an.
Ausgabe Anmerkungen Softwareversion
MG22B2xx Inhalte D1h–D8h ergänzt 3,10
Tabelle 1.1 Dokument- und Softwareversion
1 1
Die Bedienungsanleitung stellt Ihnen detaillierte
•
Informationen zur Installation und
Inbetriebnahme des Frequenzumrichters zur
Verfügung.
Das Programmierhandbuch enthält umfassende
•
Informationen für die Arbeit mit Parametern
sowie viele Anwendungsbeispiele.
Die Bedienungsanleitung VLT® FC Series - Safe
•
Torque Off enthält eine Beschreibung zur
Verwendung von Danfoss-Frequenzumrichtern in
Anwendungen mit funktionaler Sicherheit. Dieses
Handbuch ist im Lieferumfang des Frequenzumrichters enthalten, wenn die Safe Torque OffOption vorhanden ist.
Das Projektierungshandbuch VLT® Brake Resistor
•
MCE 101 beschreibt die Auswahl des optimalen
Bremswiderstands.
Das Projektierungshandbuch VLT® Advanced
•
Harmonic Filters AHF 005/AHF 010 beschreibt
Oberschwingungen, verschiedene Abhilfemaßnahmen und das Funktionsprinzip des
erweiterten Oberschwingungsfilters. Diese
Anleitung beschreibt auch, wie Sie den richtigen
Filter für eine bestimmte Anwendung auswählen.
Im Projektierungshandbuch für Ausgangsfilter wird
•
erläutert, warum es notwendig ist, Ausgangsfilter
für bestimmte Anwendungen zu verwenden und
wie man den optimalen dU/dt oder Sinusfilter
auswählt.
1.4 Konventionen
Nummerierte Listen zeigen Vorgehensweisen.
•
Aufzählungslisten zeigen weitere Informationen
•
und Beschreibung der Abbildungen.
Kursivschrift bedeutet:
•
- Querverweise.
- Link.
- Fußnoten.
- Parameternamen, Parametergrup-
pennamen, Parameteroptionen.
Alle Abmessungen in Zeichnungen sind in mm
•
angegeben.
Ein Sternchen (*) kennzeichnet die Werksein-
•
stellung eines Parameters.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 5
Page 10
Sicherheit
VLT® AQUA Drive FC 202
2 Sicherheit
22
2.1 Sicherheitssymbole
Folgende Symbole kommen in diesem Handbuch zum
Einsatz:
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die
zum Tod oder zu schweren Verletzungen führen kann!
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittelschweren Verletzungen führen kann.
Die Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
2.2 Qualifiziertes Personal
Nur qualifiziertes Personal darf dieses Gerät installieren
oder bedienen.
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der in Tabelle 2.1 angegebenen Wartezeit nach
dem Trennen der Stromversorgung vor Wartungs- oder
Reparaturarbeiten kann zu schweren Verletzungen oder
sogar zum Tod führen!
1. Stoppen Sie den Motor.
2. Trennen Sie die Netzversorgung und alle
externen DC-Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und DCZwischenkreisverbindungen mit anderen
Frequenzumrichtern.
3. Trennen oder verriegeln Sie den Motor.
4. Warten Sie, damit die Kondensatoren
vollständig entladen können. Siehe Tabelle 2.1.
5. Verwenden Sie vor der Durchführung von
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Außerdem muss das Personal mit allen
Anweisungen und Sicherheitsmaßnahmen gemäß dieser
Anleitung vertraut sein.
Sicherheitsmaßnahmen
2.3
WARNUNG
HOCHSPANNUNG
Bei Anschluss an das Versorgungsnetz, DC-Versorgung,
Zwischenkreiskopplung oder Permanentmagnetmotoren
führen Frequenzumrichter Hochspannung. Erfolgen
Installation, Inbetriebnahme und Wartung von Frequenzumrichtern nicht durch qualifiziertes Personal, kann dies
zum Tod oder zu schweren Verletzungen führen!
Installation, Inbetriebnahme und Wartung der
•
Frequenzumrichter dürfen ausschließlich von
qualifiziertem Personal vorgenommen werden.
Spannung Nennleistung
(normale Überlast)
380–480 110–315 kW
150–450 hp
380–480 355–560 kW
500–750 hp
525–690 75–400 kW
75–400 hp
525–690 450–800 kW
450–950 hp
Tabelle 2.1 Entladezeit für die Bauformen D1h–D8h und
E1h–E4h
Gehäuse Entladezeit in
Minuten
D1h–D8h 20
E1h–E4h 40
D1h–D8h 20
E1h–E4h 40
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
6 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 11
1
2
e30bd832.10
Sicherheit Projektierungshandbuch
HINWEIS
NETZABSCHIRMUNG ALS SICHERHEITSOPTION
Eine optionale Netzabschirmung ist für Gehäuse der
Schutzart IP21/IP54 (Typ 1/Typ 12) erhältlich. Die Netzabschirmung ist eine Schutzabdeckung zum Schutz vor
versehentlicher Berührung der Leistungsklemmen gemäß
BGV A2, VBG 4.
2.3.1 ADN-konforme Installation
Um Funkenbildung in Übereinstimmung mit dem Europäischen Übereinkommen über die internationale
Beförderung gefährlicher Güter auf Binnenwasserstraßen
(ADN) zu vermeiden, müssen Sie Vorsichtsmaßnahmen für
Frequenzumrichter mit Schutzart IP00 (Gehäuse), IP20
(Gehäuse), IP21 (Typ 1) oder IP54 (Typ 12) treffen.
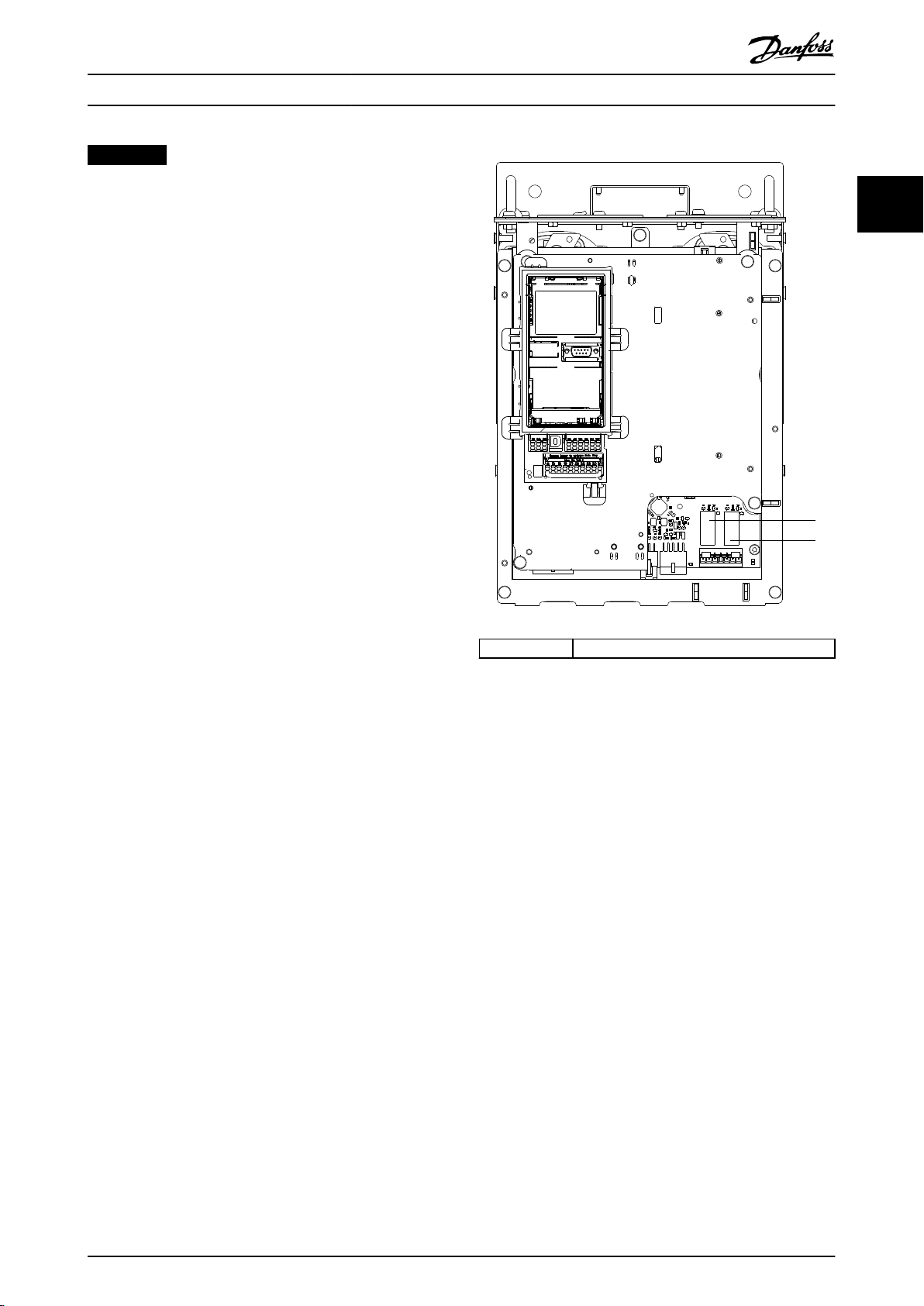
Installieren Sie keinen Netzschalter
•
Vergewissern Sie sich, dass Parameter 14-50 RFI
•
Filter auf [1] Ein eingestellt ist.
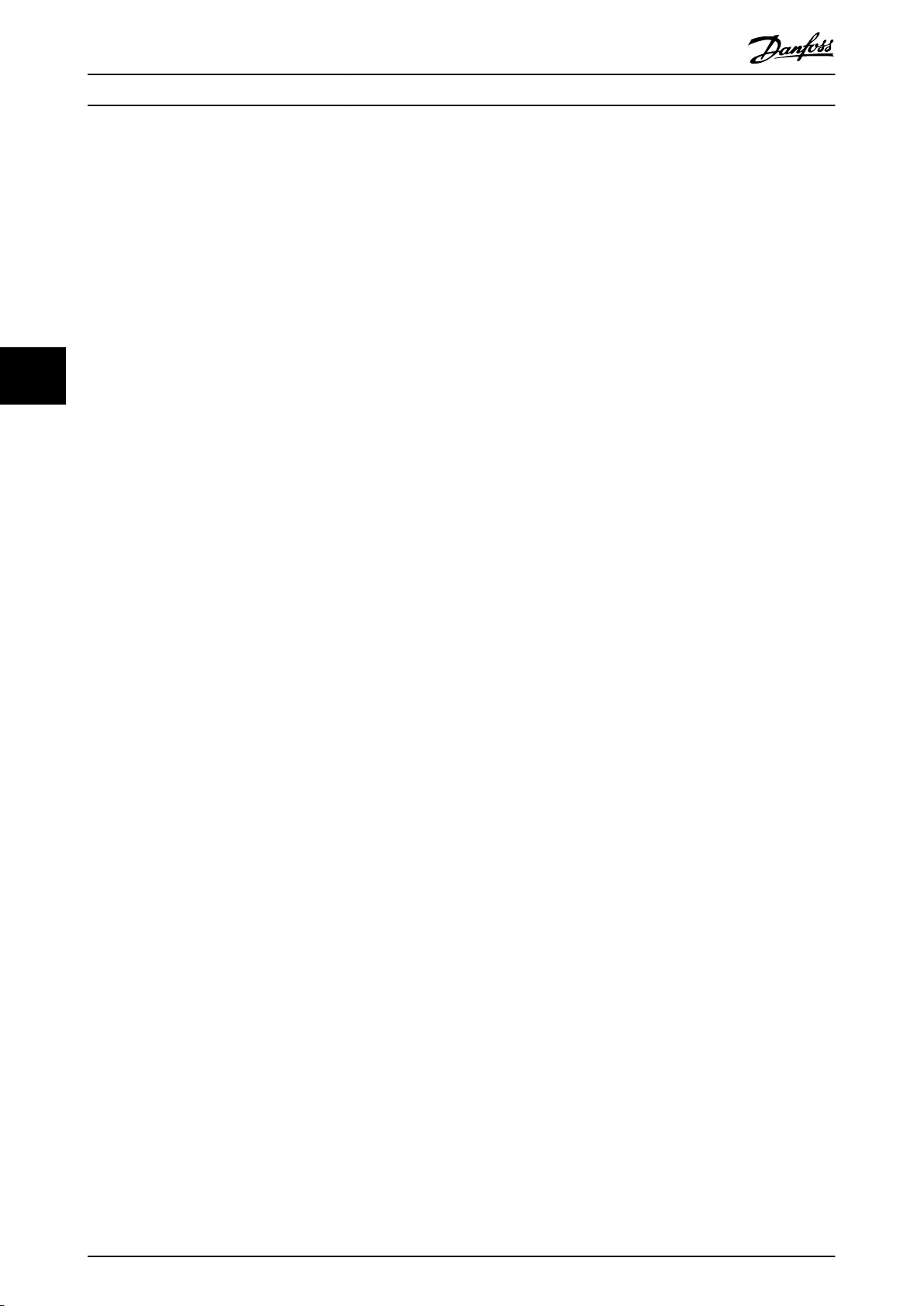
Entfernen Sie alle Relaisstecker mit der
•
Kennzeichnung RELAIS. Siehe Abbildung 2.1.
Kontrollieren Sie, welche Relaisoptionen installiert
•
sind, falls vorhanden. Die einzige zulässige
Relaisoption ist die VLT® Extended Relay Card
MCB 113.
1, 2 Relaisstecker
Abbildung 2.1 Position der Relaisstecker
2 2
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 7
Page 12
Zulassungen und Zertifizier...
VLT® AQUA Drive FC 202
3 Zulassungen und Zertifizierungen
Dieser Abschnitt bietet eine kurze Beschreibung der
verschiedenen Zulassungen und Zertifizierungen, die auf
33
Danfoss-Frequenzumrichtern zu finden sind. Nicht alle
Zulassungen sind auf allen Frequenzumrichtern zu finden.
3.1 Vorschriften und Zulassungen
HINWEIS
AUFERLEGTE BEGRENZUNGEN DER AUSGANGSFREQUENZ
Ab Softwareversion 1.99 ist die Ausgangsfrequenz des
Frequenzumrichters auf 590 Hz begrenzt (bedingt durch
Exportkontrollvorschriften).
3.1.1.1 CE-Zeichen
Das CE-Zeichen (Communauté Européenne) zeigt an, dass
der Hersteller des Produkts alle relevanten EU-Richtlinien
einhält. Die geltenden EU-Richtlinien zu Ausführung und
Konstruktion des Frequenzumrichters sind in Tabelle 3.1
aufgeführt.
HINWEIS
Über die Qualität eines Produkts sagt die CEKennzeichnung nichts aus. Auch gibt sie keinen
Aufschluss zu technischen Spezifikationen.
EU-Richtlinie Version
Niederspannungsrichtlinie 2014/35/EU
EMV-Richtlinie 2014/30/EU
Maschinenrichtlinie
EU-Ökodesignrichtlinie 2009/125/EC
ATEX-Richtlinie 2014/34/EU
RoHS-Richtlinie 2002/95/EC
Tabelle 3.1 Frequenzumrichter betreffende EU-Richtlinien
1) Konformität mit der Maschinenrichtlinie ist nur bei Frequenzumrichtern mit integrierter Sicherheitsfunktion erforderlich.
1)
2014/32/EU
HINWEIS
Frequenzumrichter mit integrierter Sicherheitsfunktion,
wie z. B. Safe Torque Off (STO), müssen mit der Maschinenrichtlinie konform sein.
Konformitätserklärungen sind auf Anfrage erhältlich.
Niederspannungsrichtlinie
Frequenzumrichter müssen seit 1. Januar 2014 die CEKennzeichnung in Übereinstimmung mit der
Niederspannungsrichtlinie erfüllen. Die Niederspannungsrichtlinie gilt für alle elektrischen Geräte im
Spannungsbereich von 50–1000 V AC und 75–1500 V DC.
Der Zweck der Richtlinie ist die Gewährleistung der
Personensicherheit und die Vermeidung von Beschädigungen der Anlage und Geräte, wenn Anwender die
elektrischen Betriebsmittel bei ordnungsgemäßer Installation, Wartung und bestimmungsgemäßer Verwendung
bedienen.
EMV-Richtlinie
Der Zweck der EMV-Richtlinie (elektromagnetische Verträglichkeit) ist die Reduzierung elektromagnetischer
Störungen und die Verbesserung der Störfestigkeit der
elektrischen Geräte und Installationen. Die grundlegende
Schutzanforderung der EMV-Richtlinie gibt vor, dass
Betriebsmittel, die elektromagnetische Störungen
verursachen oder deren Betrieb durch diese Störungen
beeinträchtigt werden kann, so ausgelegt sein müssen,
dass ihre erreichten elektromagnetischen Störungen
begrenzt sind. Die Geräte müssen bei ordnungsgemäßer
Installation und Wartung sowie bestimmungsgemäßer
Verwendung einen geeigneten Grad der Störfestigkeit
gegenüber EMV aufweisen.
Elektrische Geräte, die alleine oder als Teil einer Anlage
verwendet werden, müssen eine CE-Kennzeichnung tragen.
Anlagen müssen nicht über eine CE-Kennzeichnung
verfügen, jedoch den grundlegenden Schutzanforderungen
der EMV-Richtlinie entsprechen.
Maschinenrichtlinie
Der Zweck der Maschinenrichtlinie ist die Gewährleistung
der Personensicherheit und die Vermeidung von Beschädigungen der Anlage und Geräte, wenn Nutzer die
mechanischen Betriebsmittel bestimmungsgemäß
verwenden. Die Maschinenrichtlinie bezieht sich auf
Maschinen, die aus einem Aggregat mehrerer zusammenwirkender Komponenten oder Betriebsmittel bestehen, von
denen mindestens eine(s) mechanisch beweglich ist.
Frequenzumrichter mit integrierter Sicherheitsfunktion
müssen mit der Maschinenrichtlinie konform sein. Frequenzumrichter ohne Sicherheitsfunktion fallen nicht unter die
Maschinenrichtlinie. Wird ein Frequenzumrichter jedoch in
ein Maschinensystem integriert, so stellt Danfoss Informationen zu Sicherheitsaspekten des Frequenzumrichters zur
Verfügung.
Kommen Frequenzumrichter in Maschinen mit mindestens
einem beweglichen Teil zum Einsatz, muss der Maschinenhersteller eine Erklärung zur Verfügung stellen, die die
Übereinstimmung mit allen relevanten gesetzlichen Bestimmungen und Sicherheitsrichtlinien bestätigt.
8 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 13

Zulassungen und Zertifizier... Projektierungshandbuch
3.1.1.2 EU-Ökodesignrichtlinie
Die Ökodesignrichtlinie ist die europäische Richtlinie zur
umweltgerechten Gestaltung energieverbrauchsrelevanter
Produkte, zu denen auch Frequenzumrichter gehören. Die
Richtlinie hat eine verbesserte Energieeffizienz und
allgemeine Umweltverträglichkeit von Elektrogeräten bei
gleichzeitiger Erhöhung der Sicherheit der Energieversorgung zum Ziel. Die Einflüsse der
energieverbrauchsrelevanten Produkte auf die Umwelt
umfassen den Energieverbrauch über die gesamte Produktlebensdauer.
3.1.1.3 UL-Zulassung
Die Underwriters Laboratory(UL)-Markierung zertifiziert die
Sicherheit und Umweltverträglichkeit von Produkten
anhand von Standardprüfungen. Frequenzumrichter der
Bauform T7 (525-690 V) sind nur für 525–600 V nach ULAnforderungen zertifiziert. Der Frequenzumrichter erfüllt
die Anforderungen der UL 61800-5-1 bezüglich der
thermischen Sicherung. Weitere Informationen finden Sie
unter Kapitel 10.6.1 Thermischer Motorschutz.
3.1.1.4 CSA/cUL
Die CSA/cUL-Zulassung ist für Frequenzumrichter mit einer
Nennspannung bis 600 V. Der Standard gewährleistet, dass
der Frequenzumrichter – wenn er gemäß der mitgelieferten Bedienungs-/Installationsanleitung installiert wird –
die UL-Standards für elektrische und thermische Sicherheit
erfüllt. Diese Kennzeichnung zertifiziert, dass das Produkt
alle vorgeschriebenen technischen Spezifikationen und
Prüfungen erfüllt. Eine Konformitätserklärung ist auf
Anfrage erhältlich.
3.1.1.5 EAC
Die EurAsian Conformity(EAC)-Kennzeichnung zeigt an,
dass das Produkt mit allen Anforderungen und technischen
Vorschriften konform ist, die für das Produkt gelten laut
der eurasischen Zollunion, die sich aus den Mitgliedstaaten
der eurasischen Wirtschaftsunion zusammensetzt.
Das EAC-Logo muss sich sowohl auf dem Typenschild als
auch auf der Verpackung befinden. Alle innerhalb des EACBereichs verwendeten Produkte sind bei Danfoss zu
kaufen.
3.1.1.6 UKrSEPRO
Das UKrSEPRO-Zertifikat gewährleistet die Qualität und
Sicherheit von Produkten und Dienstleistungen sowie
Fertigungsstabilität nach den ukrainischen Regulierungsstandards. Das UkrSepro-Zertifikat ist ein erforderliches
Dokument für die Zollabfertigung sämtlicher Produkte, die
in die Ukraine ein- oder aus ihr ausgeführt werden.
3.1.1.7 TÜV
Der TÜV SÜD ist eine europäische Sicherheitsorganisation,
die die Betriebssicherheit des Frequenzumrichters gemäß
EN/IEC 61800-5-2 zertifiziert. Der TÜV SÜD testet Produkte
und überwacht ihre Produktion, um sicherzustellen, dass
Unternehmen ihre Vorschriften einhalten.
3.1.1.8 RCM
Die Regulatory Compliance Mark (RCM, Konformitätskennzeichnung) zeigt die Konformität von Telekommunikationsund EMV/Funkverkehr-Geräten durch den EMVKennzeichnungshinweis der australischen Kommunikationsund Medienbehörden an. Die RCM ist mittlerweile eine
einzelne Konformitätskennzeichnung, die die Kontrollzeichen A-Tick und C-Tick beinhaltet. RCM-Konformität ist
für die Platzierung elektrischer und elektronischer Geräte
auf dem Markt in Australien und Neuseeland erforderlich.
3.1.1.9 Schiffsanwendungen
Schiffsanwendungen – Schiffe und Öl-/Gasplattformen –
müssen von mindestens einer Klassifikationsgesellschaft
zertifiziert werden, um eine Zulassungslizenz und Versicherungsschutz erhalten zu können. Die Frequenzumrichter
der Danfoss VLT® AQUA Drive-Serie verfügen über Zertifizierungen von bis zu 12 Klassifikationsgesellschaften.
Die Anzeige- oder Druckfunktion für die Zulassungen und
Zertifizierungen für Schiffsanwendungen finden Sie im
Downloadbereich unter http://drives.danfoss.de/industries/
marine-and-offshore/marine-type-approvals/#/.
3.1.2 Exportkontrollvorschriften
Frequenzumrichter können regionalen und/oder nationalen
Exportkontrollvorschriften unterliegen.
3 3
Frequenzumrichter, die Exportkontrollvorschriften
unterliegen, sind mit einer ECCN-Nummer gekennzeichnet.
Die ECCN-Nummer finden Sie in den Dokumenten, die Sie
mit dem Frequenzumrichter erhalten.
Im Falle einer Wiederausfuhr ist der Exporteur dafür verantwortlich, die Einhaltung aller geltenden
Exportkontrollvorschriften sicherzustellen.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 9
Page 14
Zulassungen und Zertifizier...
3.2 Schutzarten
Die Frequenzumrichter der VLT®-Serie sind mit unterschiedlichen Gehäuseschutzarten erhältlich, um optimal auf die
Anforderungen der Anwendung eingehen zu können. Die
Schutzart wird jeweils auf Grundlage zweier internationaler
33
Normen angegeben:
Bei einer Prüfung nach UL-Typ wird die
•
Konformität der Gehäuse mit der NEMA(National
Electrical Manufacturers Association)-Norm
ermittelt. Die Bau- und Prüfvorschriften für
Gehäuse sind definiert in „NEMA Standards
Publication 250-2003“ und in UL 50, Elfte
Ausgabe.
IP-Schutzarten (International Protection, Internati-
•
onaler Schutz), definiert von der IEC (International
Electrotechnical Commission, Internationale
Elektrotechnische Kommission) in allen anderen
Staaten weltweit.
Standard-Frequenzumrichter der Danfoss VLT® Serie sind in
verschiedenen Schutzarten erhältlich, um die Anforderungen von IP00 (Gehäuse), IP20 (geschütztes Gehäuse),
IP21 (UL-Typ 1) oder IP54 (UL-Typ 12) zu erfüllen. In diesem
Handbuch wird der UL-Typ als Typ geschrieben. Zum
Beispiel: IP21/Typ 1.
UL-Typ-Standard
Typ 1 – Gehäuse für den Einsatz im Innenbereich, die dem
Personal einen gewissen Schutz vor versehentlichem
Kontakt mit den enthaltenen Einheiten und einen gewissen
Schutz gegen fallenden Schmutz bieten.
Typ 12 – Mehrzweckgehäuse sind für den Einsatz im
Innenbereich vorgesehen und schützen die enthaltenen
Einheiten vor den folgenden Verunreinigungen:
Erste
Kennziffer
0 – Kein Schutz.
1 – Geschützt bis 50 mm (2,0 in). Schutz vor Berührung mit der Hand.
2 – Geschützt bis 12,5 mm (0,5 in). Schutz vor Berührung mit dem Finger.
3 – Geschützt bis 2,5 mm (0,1 in). Schutz vor Berührung durch Werkzeug.
4 – Geschützt bis 1,0 mm (0,04 in). Schutz vor Berührung mit Drähten.
5 – Schutz vor schädlichen Staubablagerungen im Innern.
6 – Schutz vor Eindringen von Staub (staubdicht).
– 0 Kein Schutz.
– 1 Schutz vor senkrecht fallendem Tropfwasser.
– 2
– 3
– 4 Schutz vor Spritzwasser.
– 5 Schutz vor Strahlwasser.
– 6 Schutz vor starkem Strahlwasser.
– 7 Schutz vor eindringendem Wasser beim zeitweiligen Untertauchen.
– 8 Schutz vor eindringendem Wasser beim dauerhaften Untertauchen.
Zweite
Kennziffer
Schutzniveau
Schutz vor schräg fallendem Tropfwasser (15° gegenüber der Senkrechten).
Schutz vor Sprühwasser (bis 60° gegenüber der Senkrechten).
VLT® AQUA Drive FC 202
Das Gehäuse darf keine Löcher und keine Auslässe oder
Öffnungen für Installationsrohre aufweisen, falls hierfür
nicht ölbeständige Dichtungen zur Montage öldichter oder
staubdichter Mechanismen verwendet werden. Die Türen
sind ebenfalls mit ölbeständigen Dichtungen ausgerüstet.
Zusätzlich verfügen Gehäuse für Kombinationsregler über
Schwingtüren mit horizontaler Drehachse, die mit einem
Werkzeug geöffnet werden müssen.
IP-Standard
Tabelle 3.2 bietet einen Quervergleich der beiden Normen.
Tabelle 3.3 erläutert die Bedeutung der IP-Nummer und
definiert den Schutzgrad. Die Frequenzumrichter erfüllen
die Bestimmungen beider Normen.
NEMA undULIP
Gehäuse IP00
Geschütztes
Gehäuse
NEMA 1 IP21
NEMA 12 IP54
Fasern
•
Fussel
•
Staub und Schmutz
•
Leichtes Spritzwasser
•
Sickerwasser
•
Tropfen und externe Kondensation nicht-
•
korrosiver Flüssigkeiten
IP20
Tabelle 3.2 Querverweis NEMA- und IP-Nummer
Tabelle 3.3 Aufschlüsselung der IP-Nummer
10 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 15
Produktübersicht Projektierungshandbuch
4 Produktübersicht
4.1
VLT® High-power Drives
Die in diesem Handbuch beschriebenen VLT® Frequenzumrichter sind als freistehende, wandhängende oder
schrankmontierte Geräte erhältlich. Jeder VLT®-Umrichter
ist für alle Standardmotoren konfigurierbar, kompatibel
und optimiert, was die Einschränkungen der MotorAntriebspakete vermeidet.
Vorteile von VLT®-Umrichtern
In verschiedenen Gehäusegrößen und
•
Schutzarten erhältlich.
Der Wirkungsgrad von 98% reduziert die Betriebs-
•
kosten.
Das einzigartige Design der Rückwandkühlung
•
reduziert den Bedarf an mehr Kühlaggregaten,
was zu geringeren Installations- und wiederkehrenden Kosten führt.
Geringere Leistungsaufnahme für Kontrollraum-
•
Kühlgeräte.
Reduzierte Betriebskosten.
•
Konsistente Benutzerschnittstelle über die
•
gesamte Bandbreite von Danfoss Frequenzumrichtern.
Anwendungsorientierte Inbetriebnahme-
•
Assistenten.
Mehrsprachige Benutzerschnittstelle.
•
1)hp1)
kW
75 75 D1h/D3h/D5h/D6h
90 100 D1h/D3h/D5h/D6h
110 125 D1h/D3h/D5h/D6h
132 150 D1h/D3h/D5h/D6h
160 200 D1h/D3h/D5h/D6h
200 250 D2h/D4h/D7h/D8h
250 300 D2h/D4h/D7h/D8h
315 350 D2h/D4h/D7h/D8h
400 400 D2h/D4h/D7h/D8h
450 450 E1h/E3h
500 500 E1h/E3h
560 600 E1h/E3h
630 650 E1h/E3h
710 750 E2h/E4h
800 950 E2h/E4h
Tabelle 4.2 Gehäuse-Nennleistungen, 525–690 V
1) Alle Nennleistungen sind für normale Überlast angegeben.
Ausgang wird bei 690 V (kW ) und 575 V (hp) gemessen.
Verfügbare Baugrößen
4 4
Bauform gelistet nach Nennleistung
4.2
1)
kW1)hp
110 150 D1h/D3h/D5h/D6h
132 200 D1h/D3h/D5h/D6h
160 250 D1h/D3h/D5h/D6h
200 300 D2h/D4h/D7h/D8h
250 350 D2h/D4h/D7h/D8h
315 450 D2h/D4h/D7h/D8h
355 500 E1h/E3h
400 600 E1h/E3h
450 600 E1h/E3h
500 650 E2h/E4h
560 750 E2h/E4h
Tabelle 4.1 Gehäuse-Nennleistungen, 380–480 V
1) Alle Nennleistungen sind für normale Überlast angegeben.
Ausgangsleistung wird bei 400 V (kW ) und 460 V (hp) angegeben.
Verfügbare Baugrößen
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 11
Page 16
Produktübersicht
VLT® AQUA Drive FC 202
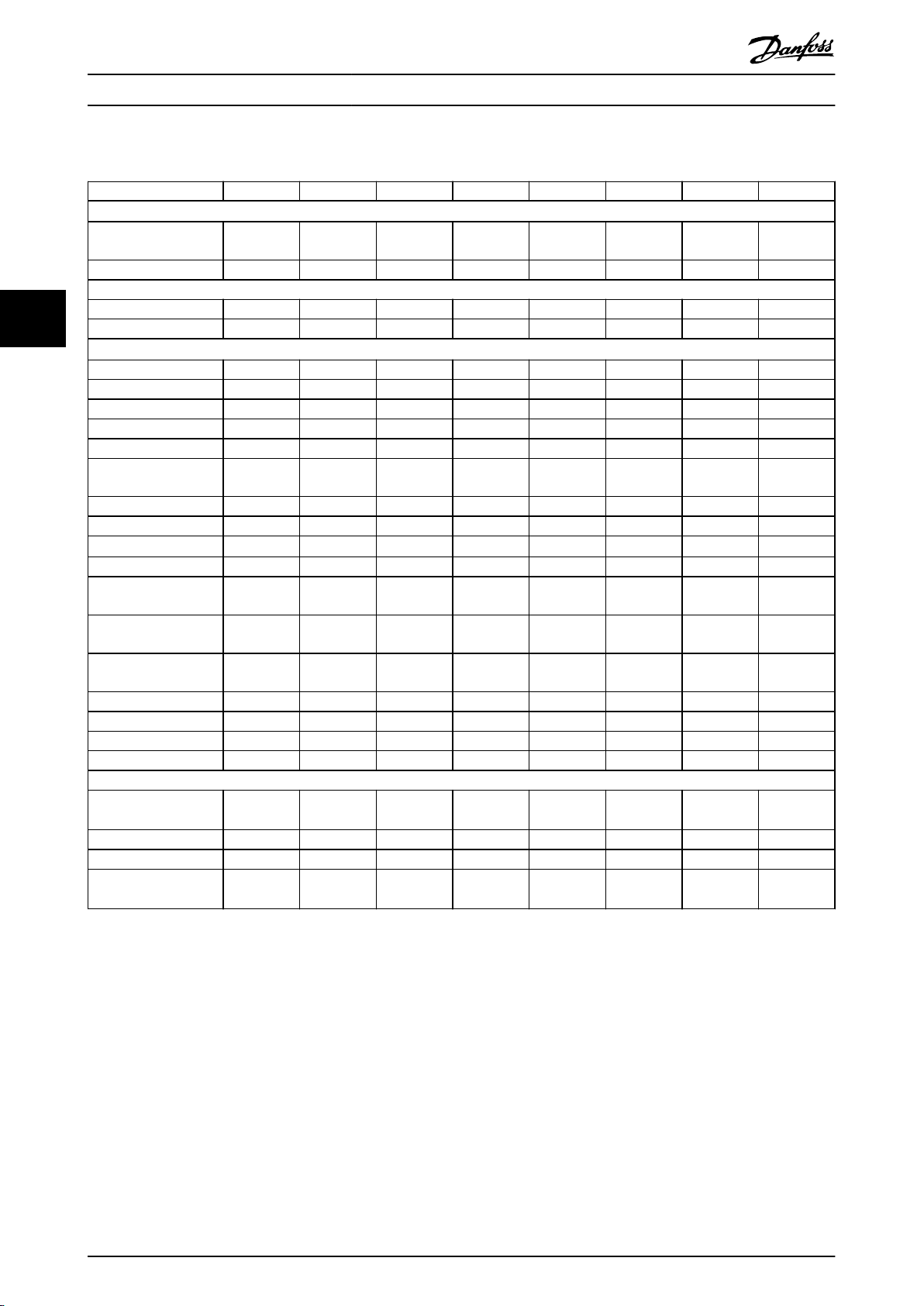
4.3 Übersicht der Gehäuse, 380–500 V
Baugröße D1h D2h D3h D4h D5h D6h D7h D8h
Nennleistung
Ausgang bei 400 V
(kW)
Ausgang bei 460 V (hp) 150–250 300–450 150–250 300–450 150–250 150–250 300–450 300–450
Schutzart
44
IP IP21/54 IP21/54 IP20 IP20 IP21/54 IP21/54 IP21/54 IP21/54
NEMA Typ 1/12 Typ 1/12 Typ Gehäuse Typ Gehäuse Typ 1/12 Typ 1/12 Typ 1/12 Typ 1/12
Hardware-Optionen
Edelstahl-Kühlkanal O O O O O O O O
Netzabschirmung O O – – O O O O
Integrierte Heizung O O – – O O O O
EMV-Filter (Klasse A1) O O O O O O O O
Safe Torque Off S S S S S S S S
Keine Bedieneinheit O O O O O O O O
Numerische Bedieneinheit
Grafische Bedieneinheit O O O O O O O O
Sicherungen O O O O O O O O
Kühlkörperzugang
Bremschopper – – O O O O O O
Anschlussklemmen der
Rückspeiseeinheit
Zwischenkreiskopplungsklemmen
Sicherungen +
Zwischenkreiskopplung
Trennschalter – – – – – O – O
Hauptschalter – – – – – O – O
Schütze – – – – – O – O
24 V DC-Versorgung O O O O O O O O
Abmessungen
Höhe, mm (in) 901 (35,5) 1107 (43,6) 909 (35,8)
Breite, mm (in) 325 (12,8) 325 (12,8) 250 (9,8) 375 (14,8) 325 (12,8) 325 (12,8) 420 (16,5) 420 (16,5)
Tiefe, mm (in) 379 (14,9) 379 (14,9) 375 (14,8) 375 (14,8) 381 (15,0) 381 (15,0) 386 (15,2) 406 (16,0)
Gewicht, kg (lb) 62 (137) 125 (276) 62 (137)
1)
110–160 200–315 110–160 200–315 110–160 110–160 200–315 200–315
2)
O O O O O O O O
3)
O O O O O O O O
– – O O O O O O
– – O O – – – –
– – O O – – – –
1004 (39,5)
108 (238)
4)
1027 (40,4)
4)
1027 (40,4)
125 (276)
179 (395)
1324 (52,1) 1663 (65,5) 1978 (77,9) 2284 (89,9)
4)
99 (218) 128 (282) 185 (408) 232 (512)
4)
Tabelle 4.3 D1h–D8h Frequenzumrichtrer, 380–480 V
1) Alle Nennleistungen sind für normale Überlast angegeben. Ausgangsleistung wird bei 400 V (kW) und 460 V (hp) angegeben.
2) S = Standard, O = Optional und ein Bindestrich zeigt an, dass die Option nicht verfügbar ist.
3) Der Kühlkörperzugang ist nicht mit der Option rückseitiger Kühlkanal aus Edelstahl erhältlich.
4) Mit optionalen Zwischenkreiskopplungs- und Rückspeisungsklemmen.
12 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 17
Produktübersicht Projektierungshandbuch
Baugröße E1h E2h E3h E4h
Nennleistung
Ausgang bei 400 V (kW) 355–450 500–560 355–450 500–560
Ausgang bei 460 V (hp) 500–600 650–750 500–600 650–750
Schutzart
IP IP21/54 IP21/54
UL-Typ Typ 1/12 Typ 1/12 Gehäuse Gehäuse
Hardware-Optionen
Edelstahl-Kühlkanal O O O O
Netzabschirmung O O – –
Integrierte Heizung O O – –
EMV-Filter (Klasse A1) O O O O
Safe Torque Off S S S S
Keine Bedieneinheit O O O O
Grafische Bedieneinheit O O O O
Sicherungen S S O O
Kühlkörperzugang O O O O
Bremschopper O O O O
Zwischenkreisklemmen O O O O
Zwischenkreiskopplungsklemmen – – O O
Sicherungen + Zwischenkreiskopplung – – O O
Trennschalter O O – –
Hauptschalter – – – –
Schütze – – – –
24 V DC-Versorgung (SMPS, 5 A) – – – –
Abmessungen
Höhe, mm (in) 2043 (80,4) 2043 (80,4) 1578 (62,1) 1578 (62,1)
Breite, mm (in) 602 (23,7) 698 (27,5) 506 (19,9) 604 (23,9)
Tiefe, mm (in) 513 (20,2) 513 (20,2) 482 (19,0) 482 (19,0)
Gewicht, kg (lb) 295 (650) 318 (700) 272 (600) 295 (650)
1)
2)
IP20
3)
IP20
2)
4 4
Tabelle 4.4 E1h–E4h Frequenzumrichter, 380–480 V
1) Alle Nennleistungen sind für normale Überlast angegeben. Ausgangsleistung wird bei 400 V (kW) und 460 V (hp) angegeben.
2) Wenn das Gehäuse mit Zwischenkreiskopplungs- oder Rückspeisungsanschlüssen konfiguriert wird, hat es die Schutzart IP00, andernfalls die
Schutzart IP20.
3) S = Standard, O = Optional und ein Bindestrich zeigt an, dass die Option nicht verfügbar ist.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 13
Page 18
Produktübersicht
VLT® AQUA Drive FC 202
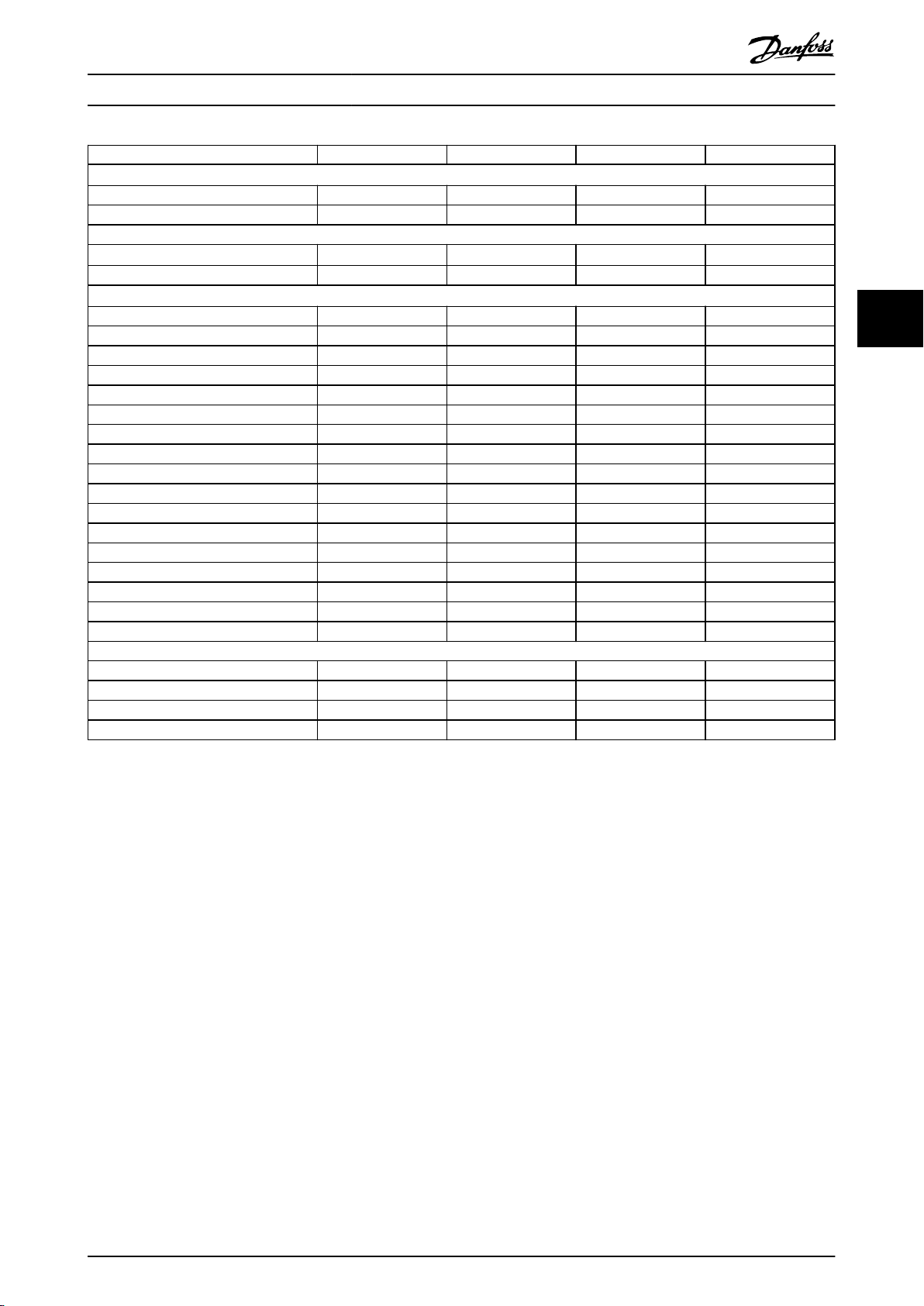
4.4 Übersicht der Gehäuse, 525–690 V
Baugröße D1h D2h D3h D4h D5h D6h D7h D8h
Nennleistung
Ausgang bei 690 V
(kW)
Ausgang bei 575 V (hp) 75–200 250–400 75–200 250–400 75–200 75–200 250–400 250–400
Schutzart
44
IP IP21/54 IP21/54 IP20 IP20 IP21/54 IP21/54 IP21/54 IP21/54
NEMA Typ 1/12 Typ 1/12 Typ Gehäuse Typ Gehäuse Typ 1/12 Typ 1/12 Typ 1/12 Typ 1/12
Hardware-Optionen
Edelstahl-Kühlkanal – – O O – – – –
Netzabschirmung O O O O O O O O
Integrierte Heizung O O O O O O O O
Safe Torque Off S S S S S S S S
Keine Bedieneinheit O O O O O O O O
Numerische Bedieneinheit
Grafische Bedieneinheit O O O O O O O O
Sicherungen O O O O O O O O
Kühlkörperzugang
Bremschopper – – O O O O O XO
Anschlussklemmen der
Rückspeiseeinheit
Zwischenkreiskopplungsklemmen
Sicherungen +
Zwischenkreiskopplung
Trennschalter – – – – O O O O
Hauptschalter – – – – – O – O
Schütze – – – – – O – O
24 V DC-Versorgung O O O O O O O O
Abmessungen
Höhe, mm (in) 901 (35,5) 1107 (43,6) 909 (35,8)
Breite, mm (in) 325 (12,8) 325 (12,8) 250 (9,8) 375 (14,8) 325 (12,8) 325 (12,8) 420 (16,5) 420 (16,5)
Tiefe, mm (in) 379 (14,9) 379 (14,9) 375 (14,8) 375 (14,8) 381 (15,0) 381 (15,0) 386 (15,2) 406 (16,0)
Gewicht, kg (lb) 62 (137) 125 (276) 62 (137)
1)
75–160 200–400 75–160 200–400 75–160 75–160 200–400 200–400
2)
O O O O O O O O
3)
O O O O O O O O
– – O O – – – –
– – O O O O O O
– – O O – – – –
1004 (39,5)
108 (238)
4)
1027 (40,4)
4)
1027 (40,4)
125 (276)
179 (395)
1324 (52,1) 1663 (65,5) 1978 (77,9) 2284 (89,9)
4)
99 (218) 128 (282) 185 (408) 232 (512)
4)
Tabelle 4.5 D1h–D8h Frequenzumrichtrer, 525–690 V
1) Alle Nennleistungen sind für normale Überlast angegeben. Ausgang wird bei 690 V (kW) und 575 V (hp) gemessen.
2) S = Standard, O = Optional und ein Bindestrich zeigt an, dass die Option nicht verfügbar ist.
3) Der Kühlkörperzugang ist nicht mit der Option rückseitiger Kühlkanal aus Edelstahl erhältlich.
4) Mit optionalen Zwischenkreiskopplungs- und Rückspeisungsklemmen.
14 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 19
Produktübersicht Projektierungshandbuch
Baugröße E1h E2h E3h E4h
Nennleistung
Ausgang bei 690 V (kW) 450–630 710–800 450–630 710–800
Ausgang bei 575 V (hp) 450–650 750–950 450–650 750–950
Schutzart
IP IP21/54 IP21/54
UL-Typ Typ 1/12 Typ 1/12 Gehäuse Gehäuse
Hardware-Optionen
Edelstahl-Kühlkanal O O O O
Netzabschirmung O O – –
Integrierte Heizung O O – –
EMV-Filter (Klasse A1) – – – –
Safe Torque Off S S S S
Keine Bedieneinheit O O O O
Grafische Bedieneinheit O O O O
Sicherungen S S O O
Kühlkörperzugang O O O O
Bremschopper O O O O
Zwischenkreisklemmen O O O O
Zwischenkreiskopplungsklemmen – – O O
Sicherungen + Zwischenkreiskopplung – – O O
Trennschalter O O – –
Hauptschalter – – – –
Schütze – – – –
24 V DC-Versorgung (SMPS, 5 A) – – – –
Abmessungen
Höhe, mm (in) 2043 (80,4) 2043 (80,4) 1578 (62,1) 1578 (62,1)
Breite, mm (in) 602 (23,7) 698 (27,5) 506 (19,9) 604 (23,9)
Tiefe, mm (in) 513 (20,2) 513 (20,2) 482 (19,0) 482 (19,0)
Gewicht, kg (lb) 295 (650) 318 (700) 272 (600) 295 (650)
1)
2)
IP20
3)
IP20
2)
4 4
Tabelle 4.6 E1h–E4h Frequenzumrichter, 525–690 V
1) Alle Nennleistungen sind für normale Überlast angegeben. Ausgang wird bei 690 V (kW) und 575 V (hp) gemessen.
2) Wenn das Gehäuse mit Zwischenkreiskopplungs- oder Rückspeisungsanschlüssen konfiguriert wird, hat es die Schutzart IP00, andernfalls die
Schutzart IP20.
3) S = Standard, O = Optional und ein Bindestrich zeigt an, dass die Option nicht verfügbar ist.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 15
Page 20
Produktübersicht
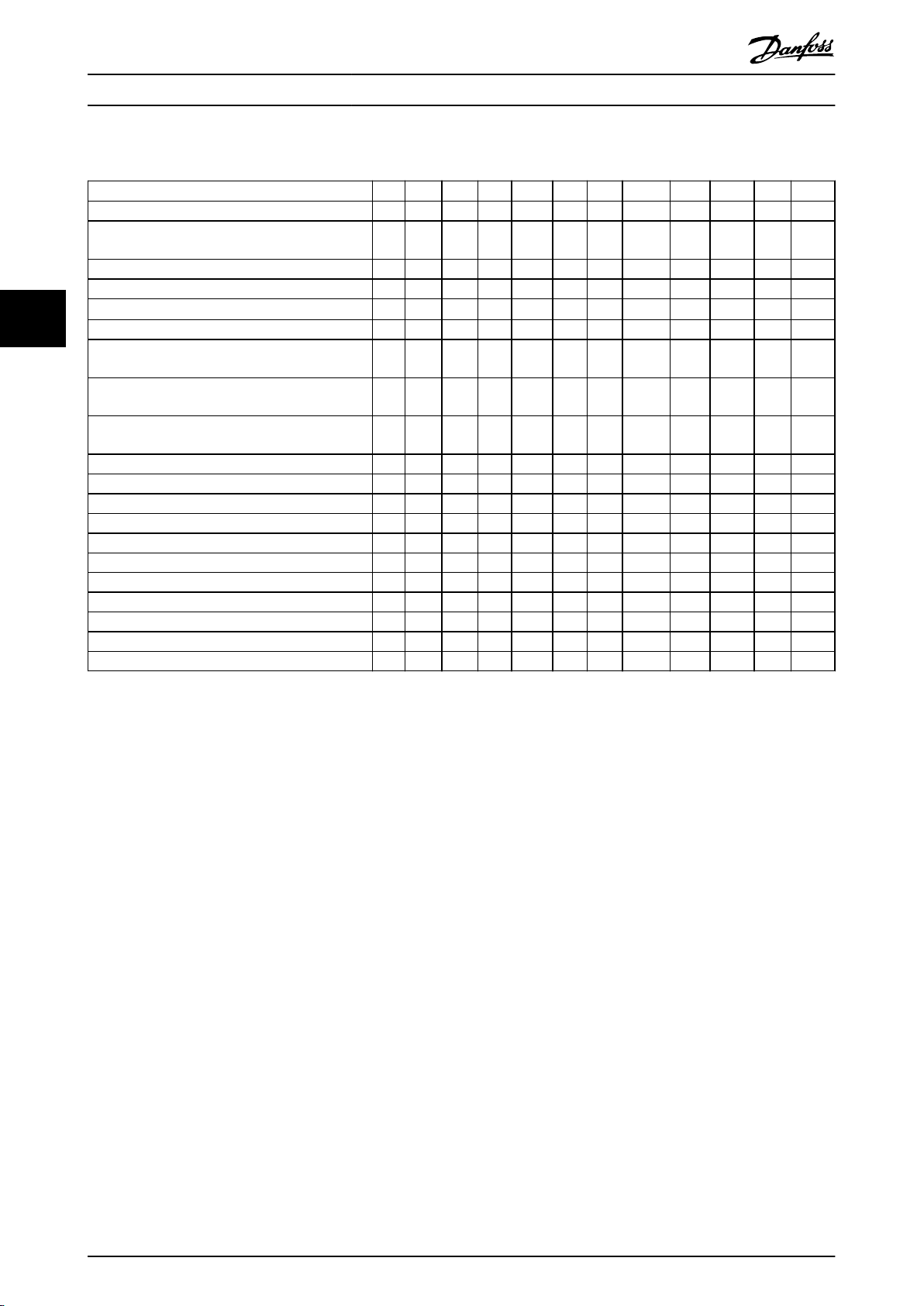
4.5 Verfügbarkeit der Bausätze
VLT® AQUA Drive FC 202
Beschreibung der Bausätze
Wetterschutzabdeckung mit NEMA 3R O O – – – – – – – – – –
NEMA 3R-Schutz für Bausatz für rückseitigen
Kühlkanal – Einlass Rücks./Auslass Rücks.
USB für Türeinbau O O O O O O O O S S – –
Bedieneinheit, numerisch O O O O O O O O O O O O
44
Bedieneinheit, grafisch
Kabel für Bedieneinheit, 3 m (9 ft) O O O O O O O O O O O O
Befestigungssatz für numerische Bedieneinheit
(Bedieneinheit, Befestigungen, Dichtung und Kabel)
Befestigungssatz für grafische Bedieneinheit
(Bedieneinheit, Befestigungen, Dichtung und Kabel)
Befestigungssatz für alle Bedieneinheiten
(Befestigungen, Dichtung und Kabel)
Berührungsschutz – – – – – – – – O O – –
Erdungsschiene – – – – – – – – O O – –
Eingangsplattenoption O O O O O O O O – – – –
Klemmenleisten O O O O O O O O O O O O
Bausatz für oberen Eingang der Feldbuskabel O O O O O O O O O O O O
Sockel O O – – O O O O S S – –
Kühlkanal – Einlass Unters./Auslass Obers. – – O O – – – – – – O O
Kühlkanal – Einlass Unters./Auslass Rücks. O O O O – – – – – – O O
Kühlkanal – Einlass Rücks./Auslass Obers. – – – – – – – – – – O O
Kühlkanal – Einlass Rücks./Auslass Rücks. O O O O O O O O O O O O
Kühlkanal – Auslass Obers. (nur) – – O O – – – – – – – –
1)
2)
D1h D2h D3h D4h D5h D6h D7h D8h E1h E2h E3h E4h
– – O O – – – – – – – –
O O O O O O O O O O O O
O O O O O O O O O O O O
O O O O O O O O O O O O
O O O O O O O O O O O O
Tabelle 4.7 Verfügbare Bausätze für die Bauformen D1h bis D8h und E1h bis E4h
1) S = Standard, O = Optional und ein Bindestrich zeigt an, dass der Bausatz nicht verfügbar ist. Bausatzbeschreibungen und Teilenummern
finden Sie unter Kapitel 13.2.6 Bestellnummern für Bausätze D1h–D8h und Kapitel 13.2.7 Bestellnummern für Bausätze E1h–E4h.
2) Die grafische Bedieneinheit wird standardmäßig mit den Gehäusen D1h–D8h sowie E1h–E4h geliefert. Diesen Bausatz können Sie erwerben,
wenn Sie mehr als eine grafische Bedieneinheit benötigen.
16 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 21
Produktfunktionen Projektierungshandbuch
5 Produktfunktionen
5.1 Automatisierte Betriebsfunktionen
Automatisierte Betriebsfunktionen sind aktiv, wenn der
Frequenzumrichter in Betrieb ist. Die meisten dieser
Funktionen erfordern keine Programmierung oder Konfiguration. Der Frequenzumrichter verfügt über eine Reihe von
integrierten Schutzfunktionen zum Selbstschutz und zum
Schutz des angetriebenen Motors.
Detaillierte Informationen zu einer erforderlichen Konfiguration, insbesondere von Motorparametern, finden Sie im
Programmierhandbuch.
5.1.1 Kurzschlussschutz
Motor (Phase-Phase)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der drei Motorphasen gegen Kurzschlüsse geschützt.
Ein Kurzschluss zwischen zwei Ausgangsphasen bewirkt
einen Überstrom im Wechselrichter. Der Frequenzumrichter
wird abgeschaltet, sobald sein Kurzschlussstrom den
zulässigen Wert (Alarm 16 Abschaltblockierung)
überschreitet.
Netzseite
Ein ordnungsgemäß arbeitender Frequenzumrichter
begrenzt die Stromaufnahme vom Netz. Wir empfehlen,
versorgungsseitig Sicherungen und/oder Trennschalter als
Schutz für den Fall einer Bauteilstörung im Inneren des
Frequenzumrichters zu verwenden (erster Fehler).
Netzseitige Vorsicherungen sind für die UL-Konformität
obligatorisch.
HINWEIS
Zur Übereinstimmung mit IEC 60364 für CE oder NEC
2009 für UL ist die Verwendung von Sicherungen bzw.
Trennschaltern zwingend erforderlich.
Bremswiderstand
Der Frequenzumrichter ist vor Kurzschlüssen im Bremswiderstand geschützt.
Zwischenkreiskopplung
Installieren Sie zum Schutz des DC-Busses gegen
Kurzschlüsse sowie des Frequenzumrichters gegen Überlast
DC-Sicherungen in Reihe an den Zwischenkreiskopplungen
aller angeschlossenen Geräte.
5.1.2 Überspannungsschutz
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Diese Situation tritt in
folgenden Fällen auf:
HINWEIS
Statten Sie den Frequenzumrichter zur Vermeidung einer
zu hohen Motordrehzahl (z. B. aufgrund eines zu starken
Windmühleneffekts) mit einem Bremswiderstand aus.
Sie können die Überspannung mithilfe einer Bremsfunktion
(Parameter 2-10 Brake Function) und/oder einer Überspannungssteuerung (Parameter 2-17 Over-voltage Control)
beseitigen.
Bremsfunktionen
Schließen Sie einen Bremswiderstand ist zur Ableitung der
überschüssigen Bremsenergie an. Bei angeschlossenem
Bremswiderstand ist beim Bremsen eine höhere Zwischenkreisspannung verfügbar.
Eine AC-Bremse ist eine Alternative für ein verbessertes
Bremsen ohne Verwendung eines Bremswiderstands. Diese
Funktion regelt die Übermagnetisierung des Motors im
Generatorbetrieb. Durch Erhöhen der elektrischen Verluste
im Motor kann die OVC-Funktion das Bremsmoment
erhöhen, ohne die Überspannungsgrenze zu überschreiten.
HINWEIS
Die AC-Bremse ist nicht so wirksam wie das dynamische
Bremsen mit einem Widerstand.
Überspannungssteuerung (OVC)
Durch die automatische Verlängerung der Rampe-Ab-Zeit
reduziert die Überspannungssteuerung die Gefahr einer
Abschaltung des Frequenzumrichters aufgrund einer
Überspannung im Zwischenkreis.
Die Last treibt den Motor bei konstanter
•
Ausgangsfrequenz des Frequenzumrichters an,
d. h. die Last erzeugt Energie.
Während der Verzögerung (Rampe Ab) ist die
•
Reibung bei hohem Trägheitsmoment niedrig und
die Rampenzeit zu kurz, um die Energie als
Verlustleistung im Frequenzumrichter abzugeben.
Eine falsche Einstellung beim Schlupfausgleich
•
ruft eine höhere Zwischenkreisspannung hervor.
Gegen-EMK durch PM-Motorbetrieb. Bei Freilauf
•
mit hoher Drehzahl kann die Gegen-EMK des PMMotors möglicherweise die maximale
Spannungstoleranz des Frequenzumrichters
überschreiten und Schäden verursachen. Der Wert
von Parameter 4-19 Max Output Frequency wird
automatisch basierend auf einer internen
Berechnung anhand des Werts von
Parameter 1-40 Back EMF at 1000 RPM,
Parameter 1-25 Motor Nominal Speed und
Parameter 1-39 Motor Poles berechnet.
5 5
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 17
Page 22
Produktfunktionen
VLT® AQUA Drive FC 202
HINWEIS
Sie können OVC für einen PM-Motor mit allen Steuerverfahren aktivieren, PM VVC+, Flux OL und Flux CL für PMMotoren aktivieren.
5.1.3 Erkennung fehlender Motorphasen
Die Motorphasenüberwachung (Parameter 4-58 Missing
Motor Phase Function) ist werkseitig aktiviert, um Beschädigungen des Motors im Falle es Ausfalls einer Motorphase
zu verhindern. Die Werkseinstellung ist 1.000 ms, für eine
55
schnellere Erkennung kann diese jedoch geändert werden.
Elektronisches Thermorelais (ETR)
Bei ETR handelt es sich um eine elektronische Funktion, die
anhand interner Messungen ein Bimetallrelais simuliert. Die
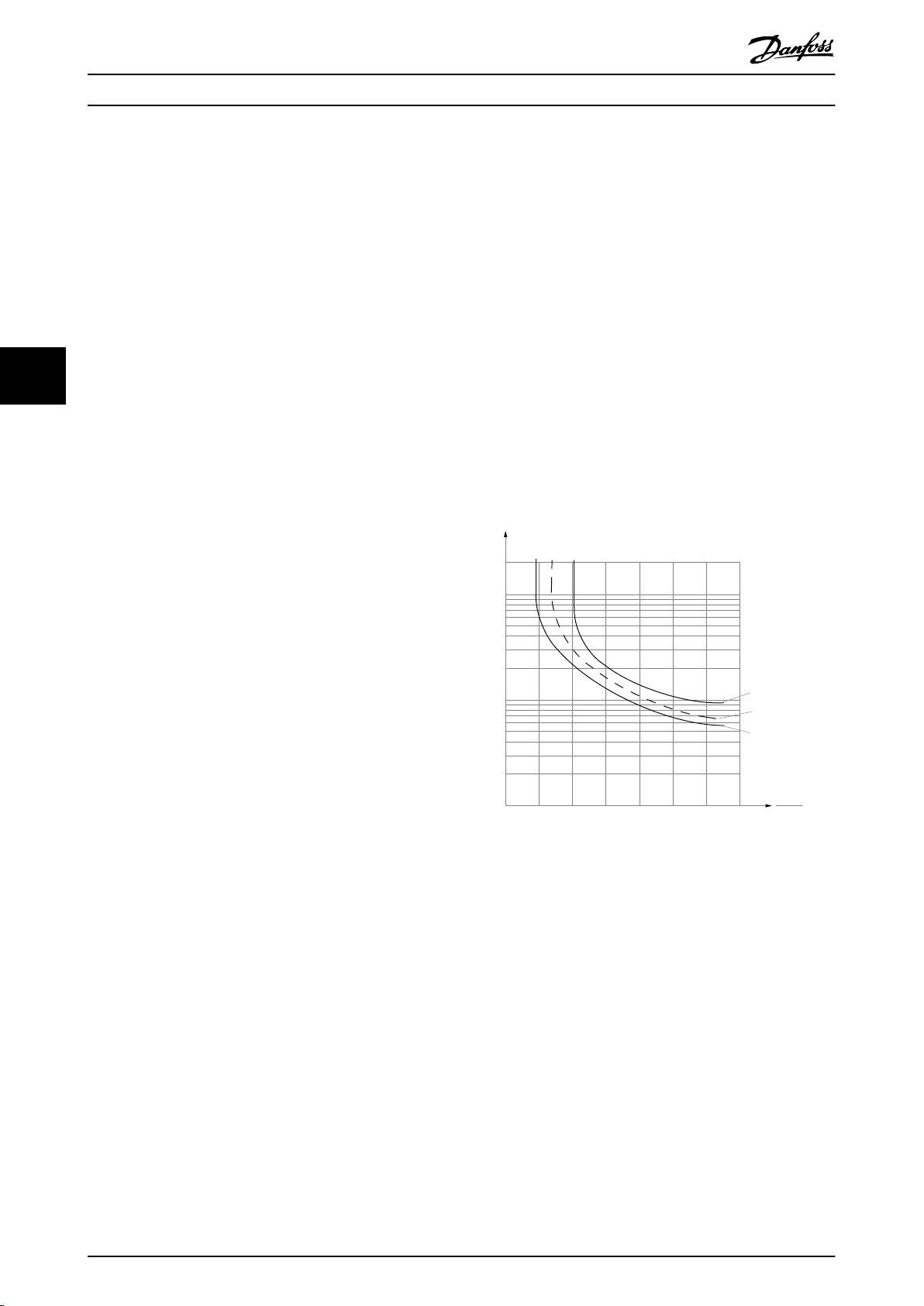
Kennlinie wird in Abbildung 5.1 gezeigt.
Spannungsgrenze
Der Frequenzumrichter wird nach Erreichen eines
bestimmten fest programmierten Spannungsniveaus
abgeschaltet, um die Transistoren und die Zwischenkreiskondensatoren zu schützen.
Übertemperatur
Der Frequenzumrichter verfügt über integrierte Temperatursensoren und reagiert aufgrund von fest
programmierten Grenzen sofort auf kritische Werte.
5.1.4 Netzasymmetrie Erkennung
5.1.7 Blockierter Rotorschutz
Ein Betrieb bei starker Netzasymmetrie kann die
Lebensdauer des Motors und des Umrichters reduzieren.
Die Bedingungen gelten als schwer, wenn der Motor bei
nahezu nomineller Last kontinuierlich betrieben wird. Bei
der Werkseinstellung wird der Frequenzumrichter bei einer
Netzasymmetrie (Parameter 14-12 Response to Mains
Imbalance) abgeschaltet.
5.1.5 Schalten am Ausgang
Es kann zu Situationen kommen, wenn der Rotor aufgrund
von übermäßiger Last oder aufgrund anderer Faktoren
blockiert ist. Der blockierte Rotor kann nicht für eine
ausreichende Kühlung sorgen, was wiederum zu einer
Überhitzung der Motorwicklung führen kann. Der Frequenzumrichter kann den blockierten Rotor per PM FluxRegelung ohne Rückführung und PM VVC+-Regelung
(Parameter 30-22 Locked Rotor Detection) erkennen.
Das Hinzufügen eines Schalters am Ausgang zwischen
Motor und Frequenzumrichter ist zulässig. Jedoch können
Fehlermeldungen angezeigt werden. Danfoss empfiehlt
eine Nutzung dieser Funktion nicht für 525–690-V-Frequenzumrichter, die an ein IT-Netz angeschlossen sind.
5.1.6 Überlastschutz
Drehmomentgrenze
Die Drehmomentgrenze schützt den Motor unabhängig
von der Drehzahl vor Überlast. Die Drehmomentgrenze
wird in Parameter 4-16 Torque Limit Motor Mode und
Parameter 4-17 Torque Limit Generator Mode gesteuert. Die
Verzögerungszeit zwischen Drehmomentgrenzen-Warnung
und Abschaltung wird in Parameter 14-25 Trip Delay at
Torque Limit definiert.
Stromgrenze
Die Stromgrenze wird kontrolliert in Parameter 4-18 Current
Limit, und die Zeit vor der Abschaltung des Frequenzum-
richters wird in Parameter 14-24 Trip Delay at Current Limit
festgelegt.
Drehzahlgrenze
Minimale Drehzahl: Parameter 4-11 Motor Speed Low Limit
[RPM] oder Parameter 4-12 Motor Speed Low Limit [Hz]
begrenzt den minimalen Drehzahlbereich des Frequenzumrichters.
Maximale Drehzahl: Parameter 4-13 Motor Speed High Limit
[RPM] oder Parameter 4-19 Max Output Frequency begrenzt
die maximale Drehzahl, die der Frequenzumrichter liefern
kann.
5.1.8 Automatische Leistungsreduzierung
Der Frequenzumrichter prüft ständig, ob folgende kritische
Werte vorliegen:
Hohe Temperatur an Steuerkarte oder Kühlkörper.
•
Hohe Motorbelastung.
•
Hohe Zwischenkreisspannung.
•
Niedrige Motordrehzahl.
•
Als Reaktion auf einen kritischen Wert passt der Frequenzumrichter die Taktfrequenz an. Bei hohen internen
Temperaturen und niedriger Motordrehzahl kann der
Frequenzumrichter ebenfalls den PWM-Schaltmodus auf
SFAVM setzen.
HINWEIS
Die automatische Leistungsreduzierung erfolgt anders,
wenn Parameter 14-55 Output Filter auf [2] Fester
Sinusfilter programmiert ist.
5.1.9 Automatische Energieoptimierung
Die Automatische Energieoptimierung (AEO) gibt dem
Frequenzumrichter vor, die Motorlast kontinuierlich zu
überwachen und die Ausgangsspannung für eine maximale
Effizienz anzupassen. Bei geringer Last wird die Spannung
reduziert, und der Motorstrom wird minimiert. Der Motor
profitiert von:
18 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 23
Produktfunktionen Projektierungshandbuch
Gesteigerter Effizienz
•
Reduzierter Motorerwärmung
•
Leiserem Betrieb.
•
Sie müssen keine V/Hz-Kurve wählen, da der Frequenzumrichter die Motorspannung automatisch anpasst.
5.1.10 Automatische
Taktfrequenzmodulation
Der Frequenzumrichter erzeugt kurze elektrische Impulse
zur Bildung einer AC-Sinuskurve. Die Taktfrequenz ist die
Rate dieser Impulse. Eine niedrige Taktfrequenz (langsame
Pulsrate) führt zu Störgeräuschen im Motor, weshalb
vorzugsweise eine höhere Taktfrequenz verwendet werden
sollte. Eine hohe Taktfrequenz erzeugt jedoch wiederum
Wärme im Frequenzumrichter, wodurch der verfügbare
Ausgangsstrom zum Motor begrenzt wird.
Die automatische Taktfrequenzmodulation regelt diese
Zustände automatisch, damit ohne Überhitzen des
Frequenzumrichters die höchste Taktfrequenz zur
Verfügung steht. Die geregelte hohe Taktfrequenz reduziert
die Betriebsgeräusche des Motors bei niedrigen
Drehzahlen, wenn eine Geräuschdämpfung wichtig ist, und
stellt die volle Ausgangsleistung zum Motor zur Verfügung.
5.1.11 Automatische Leistungsreduzierung
wegen erhöhter Taktfrequenz
Der Frequenzumrichter ist für den Dauerbetrieb bei Volllast
bei Taktfrequenzen zwischen 1,5 und 2 kHz für 380–480 V
und 1–1,5 kHz für 525–690 V ausgelegt. Dieser Frequenzbereich ist von der Leistungsgröße abhängig. Überschreitet
die Taktfrequenz den maximal zulässigen Bereich, erzeugt
sie eine erhöhte Wärmeabgabe im Frequenzumrichter, was
eine Reduzierung des Ausgangsstroms erfordert.
den automatischen Wiederanlauf ausgewählt haben, läuft
der Frequenzumrichter nach einer Überspannungsabschaltung automatisch wieder an. Bei aktivierter
Motorfangschaltung synchronisiert der Frequenzumrichter
vor dem Start die Motordrehung.
5.1.13 Resonanzdämpfung
Resonanzdämpfung unterbindet hochfrequente Motorresonanzgeräusche. Hierbei steht Ihnen die automatische oder
manuelle Frequenzdämpfung zur Auswahl.
5.1.14 Temperaturgeregelte Lüfter
Sensoren im Frequenzumrichter regeln den Betrieb der
internen Kühllüfter. Der Kühllüfter läuft meist nicht bei
Betrieb mit niedriger Last, im Energiesparmodus oder
Standby. Die Sensoren helfen, den Geräuschpegel zu
senken, erhöhen die Effizienz und verlängern die
Nutzungsdauer der Lüfter.
5.1.15 EMV-Konformität
Elektromagnetische Störungen (EMI) und Funkfrequenzstörungen (EMV) sind Interferenzen, die einen Stromkreis
durch elektromagnetische Induktion oder Strahlung von
einer externen Quelle beeinträchtigen. Der Frequenzumrichter ist so konzipiert, dass er die Anforderungen der
EMV-Produktnorm für Frequenzumrichter, IEC 61800-3, und
die Europäische Norm EN 55011, erfüllt. Motorkabel
müssen abgeschirmt und ordnungsgemäß abgeschlossen
werden, um die Emissionswerte der Norm EN 55011
einzuhalten. Weitere Informationen zur EMV-Leistung
finden Sie unter Kapitel 10.14.1 EMV-Prüfergebnisse.
5.1.16 Galvanische Trennung der
Steuerklemmen
5 5
Der Frequenzumrichter umfasst eine automatische
Funktion zur lastabhängigen Taktfrequenzregelung. Mit
dieser Funktion kann der Motor von einer der zulässigen
Last entsprechenden, hohen Taktfrequenz profitieren.
5.1.12 Ausgleich der Leistungsschwankung
Der Frequenzumrichter hält den nachfolgend gelisteten
Netzereignissen stand:
Transienten
•
Vorübergehenden Netzausfällen.
•
Kurzen Spannungsabfällen.
•
Überspannungen.
•
Der Frequenzumrichter gleicht Schwankungen in der
Eingangsspannung von ±10 % der Nennspannung
automatisch aus, um die volle Motornennspannung und
das volle Drehmoment bereitstellen zu können. Wenn Sie
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 19
Alle Steuerklemmen und Ausgangsrelaisklemmen sind
galvanisch von der Netzversorgung getrennt, was für einen
umfassenden Schutz des Steuerteils vor den Eingangssignalen sorgt. Die Ausgangsrelaisklemmen müssen separat
geerdet werden. Diese Isolierung entspricht den strengen
Anforderungen der PELV-Richtlinie (Protective Extra Low
Voltage, Schutzkleinspannung).
Die Komponenten, aus denen die galvanische Trennung
besteht, umfassen:
Stromversorgung, einschließlich Signaltrennung.
•
Treiberstufen der IGBTs, Triggertransformatoren
•
und Optokoppler.
Die Ausgangsstrom-Halleffektwandler.
•
Page 24
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Produktfunktionen
VLT® AQUA Drive FC 202
5.2 Kundenspezifische
Anwendungsfunktionen
- mittels PTC-Thermistoreingang an der
VLT® PTC Thermistor Card MCB 112 (mit
ATEX-Zulassung).
Bei kundenspezifischen Anwendungsfunktionen handelt es
sich um die gängigsten Funktionen, die Sie zur Verbesserung der Systemleistung in den Frequenzumrichter
einprogrammieren können. Sie erfordern einen minimalen
Programmierungs- oder Einrichtungsaufwand.
Anweisungen zur Aktivierung dieser Funktionen finden Sie
im Programmierhandbuch.
Die ETR-Funktion berechnet die Motortemperatur, indem
es den Strom, die Frequenz und die Betriebszeit misst. Der
mittels des mechanischen Thermoschalters
•
(Klixon-Schalter) an einem Digitaleingang.
mittels des integrierten elektronischen Thermo-
•
relais (ETR).
Frequenzumrichter zeigt die thermische Belastung des
55
5.2.1 Automatische Motoranpassung
Die automatische Motoranpassung (AMA) ist ein automatisierter Testalgorithmus zur Messung der elektrischen
Motorparameter. Die AMA stellt ein genaues elektronisches
Modell des Motors bereit. Mit dieser Funktion kann der
Frequenzumrichter optimale Leistung und Effizienz
berechnen. Indem Sie das AMA-Verfahren durchführen,
Motors in Prozent an und kann bei einem programmierbaren Überlast-Sollwert eine Warnung ausgeben.
Durch die programmierbaren Optionen bei einer Überlast
kann der Frequenzumrichter den Motor stoppen, die
Ausgangsleistung reduzieren oder den Zustand ignorieren.
Sogar bei niedrigen Drehzahlen erfüllt der Frequenzumrichter die Normen der I2t Klasse 20 für elektronische
Motorüberwachung.
wird die Energieoptimierungsfunktion des Frequenzumrichters verbessert. Die AMA wird bei Motorstillstand
durchgeführt. Ein Abkoppeln der Last vom Motor ist nicht
nötig.
5.2.2 Integrierter PID-Regler
Der integrierte, proportionale, differentiale PID-Regler
macht zusätzliche Steuergeräte überflüssig. Der PID-Regler
sorgt für eine konstante Steuerung von Systemen mit
Rückführung, bei denen eine Regelung von Druck,
Durchfluss, Temperatur oder einer anderen Systemanforderung aufrecht erhalten werden muss.
Der Frequenzumrichter kann zwei Istwertsignale von zwei
verschiedenen Geräten verarbeiten. Der Frequenzumrichter
ergreift Steuerungsmaßnahmen, indem er die beiden
Signale zur Optimierung der Systemleistung vergleicht.
5.2.3 Thermischer Motorschutz
Für die Bereitstellung des thermischen Motorschutzes gibt
es folgende Möglichkeiten:
Direkte Temperaturmessung
•
- mittels PTC- oder KTY-Sensor in den mit
einem der Analog- oder Digitaleingänge
verbundenen Motorwicklungen.
- mittels PT100 oder PT1000 in den mit
der VLT® Sensor Input Card MCB 114
verbundenen Motorwicklungen und
Motorlagern.
20 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Abbildung 5.1 ETR-Eigenschaften
Die X-Achse zeigt das Verhältnis zwischen Motorstrom
(I
) und Motornennstrom (I
motor
motor, nom
). Die Y-Achse zeigt
die Zeit in Sekunden, bevor ETR eingreift und den
Frequenzumrichter abschaltet. Die Kurven zeigen das
Verhalten der Nenndrehzahl bei Nenndrehzahl x 2 und
Nenndrehzahl x 0,2.
Bei geringerer Drehzahl schaltet das ETR aufgrund einer
geringeren Kühlung des Motors schon bei geringerer
Wärmeentwicklung ab. So wird der Motor auch in
niedrigen Drehzahlbereichen vor Überhitzung geschützt.
Die ETR-Funktion berechnet die Motortemperatur anhand
der Istwerte von Strom und Drehzahl. Sie können die
berechnete Temperatur als Anzeigeparameter in
Parameter 16-18 Motor Thermal ablesen.
Für Ex-e-Motoren in ATEX-Bereichen ist auch eine spezielle
Ausführung des ETR verfügbar. Mit dieser Funktion können
Sie eine spezifische Kurve zum Schutz des Ex-e-Motors
Page 25
130BD888.10
CONVERTER SUPPLY
VALID FOR 380 - 415V FWP 50Hz
3 ~ Motor
MIN. SWITCHING FREQ. FOR PWM CONV. 3kHz
l = 1.5XI
M,N
tOL = 10s tCOOL = 10min
MIN. FREQ. 5Hz MAX. FREQ. 85 Hz
PWM-CONTROL
f [Hz]
Ix/I
M,N
PTC °C DIN 44081/-82
Manufacture xx
EN 60079-0
EN 60079-7
СЄ 1180 Ex-e ll T3
5 15 25 50 85
0.4 0.8 1.0 1.0 0.95
1
xЗ
2
3
4
Produktfunktionen Projektierungshandbuch
eingeben. Konfigurationsanweisungen finden Sie im
Programmierhandbuch.
5.2.4 Thermischer Motorschutz für Ex-eMotoren
Der Frequenzumrichter ist mit einer ATEX ETR Temperaturüberwachung-Funktion zum Betrieb von Ex-e-Motoren
gemäß EN-60079-7 ausgestattet. In Kombination mit einer
ATEX-zugelassenen PTC-Überwachungsvorrichtung wie die
VLT® PTC Thermistor Card MCB 112 oder einer externen
Vorrichtung ist für die Installation keine separate Zulassung
einer ausgewiesenen Zertifizierungsstelle erforderlich.
Die ATEX ETR-Temperaturüberwachungsfunktion ermöglicht
die Verwendung eines Ex-e-Motors anstelle eines teureren,
größeren und schwereren Ex-d-Motors. Die Funktion
gewährleistet, dass der Frequenzumrichter den Motorstrom
zur Vermeidung einer Überhitzung begrenzt.
Anforderungen für den Ex-e-Motor
Stellen Sie sicher, dass der Ex-e-Motor für einen
•
Einsatz in explosionsgefährdeten Bereichen (ATEXZone 1/21, ATEX-Zone 2/22) mit
Frequenzumrichtern zugelassen ist. Der Motor
muss für die jeweiligen explosionsgefährdeten
Bereiche zertifiziert sein.
Installieren Sie den Ex-e-Motor entsprechend der
•
Motorzulassung in Bereich 1/21 oder 2/22 des
explosionsgefährdeten Bereichs.
- Lange Kabel (Spannungsspitzen) oder
eine erhöhte Netzspannung
Spannungen erzeugen, die die maximal
zulässige Spannung an den
Motorklemmen überschreiten.
- Die minimale Taktfrequenz des Frequen-
zumrichters erfüllt nicht die vom
Motorenhersteller angegebene
Anforderung. Die minimale Taktfrequenz
des Frequenzumrichters wird in
Parameter 14-01 Switching Frequency als
Werkseinstellung angezeigt.
Kompatibilität von Motor und Frequenzumrichter
Für gemäß EN-60079-7 zertifizierte Motoren stellt der
Motorenhersteller eine Datenliste einschließlich Grenzen
und Regeln als Datenblatt oder auf dem Motor-Typenschild
bereit. Berücksichtigen Sie während Planung, Installation,
Inbetriebnahme, Betrieb und Wartung die vom Hersteller
bereitgestellten Grenzen und Regeln für:
Minimale Taktfrequenz.
•
Maximalen Strom.
•
Minimale Motorfrequenz.
•
Maximale Motorfrequenz.
•
Abbildung 5.2 zeigt, wo die Anforderungen auf dem MotorTypenschild angegeben sind.
5 5
HINWEIS
Installieren Sie den Frequenzumrichter außerhalb des
explosionsgefährdeten Bereichs.
Stellen Sie sicher, dass der Ex-e-Motor mit einer
•
ATEX-zugelassenen Motorüberlastschutzvorrichtung ausgestattet ist. Diese Vorrichtung
überwacht die Temperatur in den Motorwicklungen. Im Falle eines kritischen
Temperaturniveaus oder einer Fehlfunktion
schaltet die Vorrichtung den Motor ab.
-
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 21
- Alternativ können Sie auch eine externe
Unter folgenden Umständen ist ein Sinusfilter
•
erforderlich:
Mit der VLT® PTC Thermistor Card MCB
112 können Sie gemäß ATEX-Zulassung
die Motortemperatur überwachen. Es ist
Voraussetzung, dass der Frequenzumrichter gemäß DIN 44081 oder 44082
mit 3 bis 6 in Reihe geschalteten PTCThermistoren ausgestattet ist.
PTC-Schutzvorrichtung mit ATEXZulassung verwenden.
1 Minimale Taktfrequenz
2 Maximaler Strom
3 Minimale Motorfrequenz
4 Maximale Motorfrequenz
Abbildung 5.2 Motor-Typenschild mit Frequenzumrichteranforderungen
Page 26
Produktfunktionen
VLT® AQUA Drive FC 202
Bei der Anpassung von Frequenzumrichter und Motor legt
Danfoss die folgenden zusätzlichen Anforderungen fest,
um einen ausreichenden thermischen Motorschutz zu
gewährleisten:
Überschreiten Sie nicht das maximal zulässige
•
Verhältnis zwischen Frequenzumrichtergröße und
Motorgröße. Der typische Wert ist I
Berücksichtigen Sie alle Spannungsabfälle
•
zwischen Frequenzumrichter und Motor. Wenn
der Motor mit einer niedrigeren Spannung als in
der U/f-Kennlinie aufgeführt betrieben wird, kann
55
Weitere Informationen erhalten Sie durch das
Anwendungsbeispiel in Kapitel 12 Anwendungsbeispiele.
sich der Strom erhöhen, wodurch ein Alarm
ausgelöst wird.
VLT, n
≤2xI
m,n
5.2.5 Netzausfall
Während eines Netzausfalls arbeitet der Frequenzumrichter
weiter, bis die Zwischenkreisspannung unter das minimale
Niveau abfällt. Das minimale Niveau liegt typischerweise
15 % unter der niedrigsten Versorgungsnennspannung. Die
Höhe der Netzspannung vor dem Ausfall und die aktuelle
Motorbelastung bestimmen, wie lange der Frequenzumrichter im Freilauf ausläuft.
5.2.6 Automatischer Wiederanlauf
Sie können den Frequenzumrichter so programmieren, dass
er den Motor nach einer Abschaltung aufgrund eines
leichten Fehlers, wie vorübergehender Netzausfall oder
Netzschwankung, automatisch neu startet. Durch diese
Funktion entfällt die Notwendigkeit eines manuellen Resets
und der automatisierte Betrieb für ferngesteuerte Systeme
wird verbessert. Die Anzahl der Neustartversuche und die
Dauer zwischen den Versuchen können begrenzt sein.
5.2.7 Volles Drehmoment bei gesenkter
Drehzahl
Der Frequenzumrichter folgt einer variablen V/Hz-Kurve,
damit das volle Motordrehmoment sogar bei gesenkten
Drehzahlen vorhanden ist. Das volle Ausgangsmoment
kann mit der maximalen ausgelegten Betriebsdrehzahl des
Motors übereinstimmen. Dieser Frequenzumrichter
unterscheidet sich von Frequenzumrichtern mit variablem
und konstantem Drehmoment. Frequenzumrichter mit
variablem Drehmoment bieten bei niedrigen Drehzahlen
ein reduziertes Motordrehmoment. Bei Frequenzumrichtern
mit konstantem Drehmoment sind die Verluste und das
Motorgeräusch hoch, wenn nicht die volle Drehzahl
erreicht wird.
In (Parameter 14-10 Mains Failure) können Sie für den
Frequenzumrichter unterschiedliche Verhaltensweisen für
Netzausfälle konfigurieren:
Abschaltblockierung, sobald die Leistung des
•
Zwischenkreises verbraucht ist.
Motorfreilauf mit Motorfangschaltung, sobald die
•
Netzversorgung zurückkehrt
(Parameter 1-73 Flying Start).
Kinetischer Speicher.
•
Geregelte Rampe ab.
•
Motorfangschaltung
Mit dieser Funktion kann der Frequenzumrichter einen
Motor, der aufgrund eines Netzausfalls unkontrolliert läuft,
„fangen“. Diese Option ist für Zentrifugen und Lüfter
relevant.
Kinetischer Speicher
Mit dieser Funktion wird sichergestellt, dass der Frequenzumrichter so lange weiterläuft, wie Energie im System
vorhanden ist. Bei kurzen Netzausfällen wird der Betrieb
wiederhergestellt, sobald das Netz wieder verfügbar ist,
ohne dabei die Anwendung anzuhalten oder die Kontrolle
zu verlieren. Sie können mehrere Varianten des kinetischen
Speichers auswählen.
Das Verhalten des Frequenzumrichters bei einem
Netzausfall können Sie in Parameter 14-10 Mains Failure
und Parameter 1-73 Flying Start konfigurieren.
5.2.8 Frequenzausblendung
In bestimmten Anwendungen kann die Anlage Betriebsdrehzahlen aufweisen, die eine mechanische Resonanz
erzeugen. Diese mechanische Resonanz kann zu
übermäßiger Geräuschentwicklung führen und
mechanische Komponenten in der Anlage beschädigen.
Der Frequenzumrichter verfügt über 4 programmierbare
Ausblendfrequenzbandbreiten. Anhand dieser Bandbreiten
kann der Motor Drehzahlen überspringen, die Resonanzen
in der Anlage verursachen.
5.2.9 Motor-Vorheizung
Zum Vorheizen eines Motors in kalten oder feuchten
Umgebungen kann ein kleiner, kontinuierlicher Gleichstrom
am Motor angelegt werden, um diesen vor Kondensation
und einem Kaltstart zu schützen. Diese Funktion macht
den Einsatz eines Heizgeräts überflüssig.
5.2.10 Programmierbare Parametersätze
Der Frequenzumrichter verfügt über 4 voneinander
unabhängig programmierbare Parametersätze. Über
Externe Anwahl können Sie über Digitaleingänge oder die
serielle Kommunikation zwischen mehreren unabhängig
programmierten Funktionen umschalten. Es werden
unabhängige Konfigurationen verwendet, zum Beispiel zur
22 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 27
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.13
Zustand 1
Ereignis 1/
Aktion 1
Zustand 2
Ereignis 2/
Aktion 2
Start
Ereignis P13-01
Zustand 3
Ereignis 3/
Aktion 3
Zustand 4
Ereignis 4/
Aktion 4
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktfunktionen Projektierungshandbuch
Änderung von Sollwerten, für einen Tages-/Nachtbetrieb
bzw. einen Sommer-/Winterbetrieb oder zur Steuerung
mehrerer Motoren. Die Bedieneinheit zeigt die aktive
Konfiguration.
Sie können Konfigurationsdaten zwischen Frequenzumrichtern kopieren, indem Sie die Informationen vom
abnehmbaren LCP herunterladen.
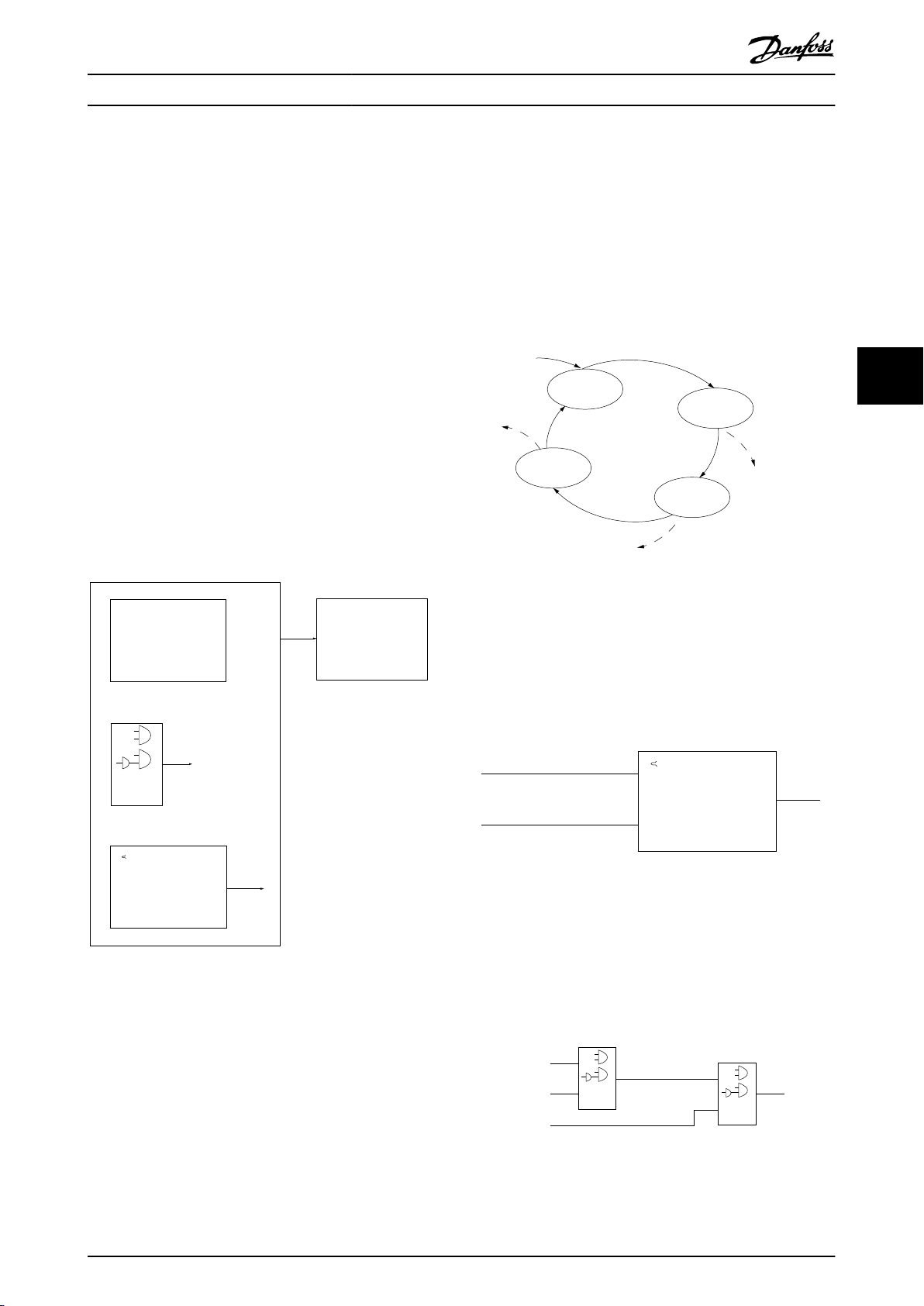
5.2.11 Smart Logic Control (SLC)
Smart Logic Control (SLC) ist eine Folge benutzerdefinierter
Aktionen (siehe Parameter 13-52 SL Controller Action [x]), die
ausgeführt werden, wenn das zugehörige benutzerdefinierte Ereignis (siehe Parameter 13-51 SL Controller Event
[x]) durch die SLC als WAHR ermittelt wird.
Die Bedingung für ein Ereignis kann ein bestimmter Status
sein oder wenn der Ausgang einer Logikregel oder einer
Vergleicher-Funktion WAHR wird. Der Zustand führt zu
einer zugehörigen Aktion, wie in Abbildung 5.3 gezeigt.
Abtastintervall nur Ereignis [0] aus. Nur wenn Ereignis [0]
als wahr bewertet wird, führt der SLC Aktion [0] aus und
beginnt, das nächste Ereignis auszuwerten. Es ist möglich,
zwischen 1 und 20 Ereignisse und Aktionen zu programmieren.
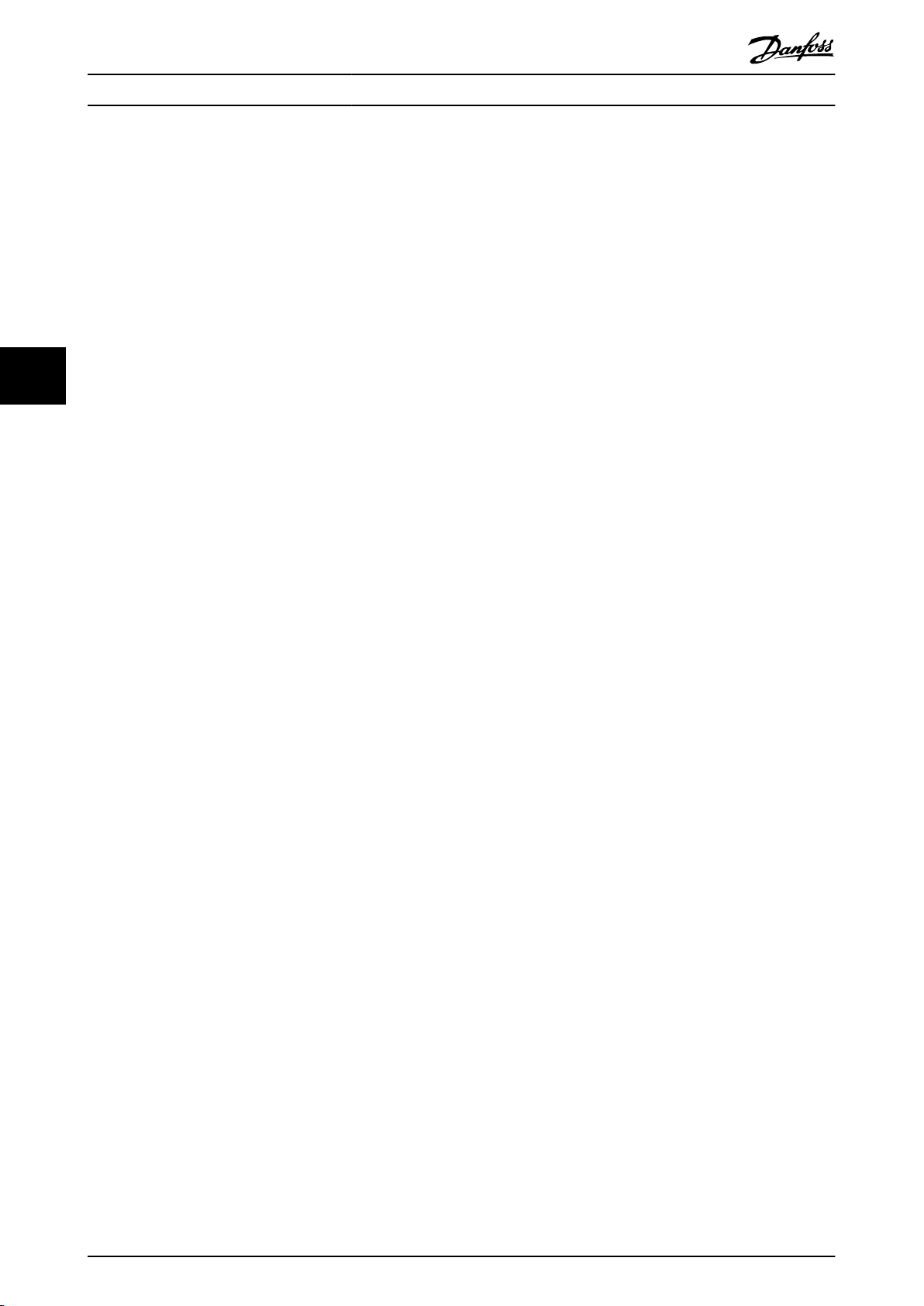
Wenn das letzte Ereignis/die letzte Aktion durchgeführt
wurde, startet die Sequenz ausgehend von Ereignis [0]/
Aktion [0] erneut. Abbildung 5.4 zeigt ein Beispiel mit 4
Ereignissen/Aktionen:
5 5
Abbildung 5.4 Ausführungsreihenfolge bei einer Programmierung von 4 Ereignissen/Aktionen
Vergleicher
Vergleicher dienen zum Vergleichen von Betriebsvariablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang
usw.) mit festen Sollwerten.
Abbildung 5.5 Vergleicher
Abbildung 5.3 SLC-Ereignis und Aktion
Die Ereignisse und Aktionen sind paarweise verknüpft.
Logikregeln
Es ist möglich, 3 boolesche Eingänge (WAHR/FALSCH) von
Timern, Vergleichern, Digitaleingängen, Statusbits und
Ereignissen über UND, ODER, NICHT miteinander zu
verknüpfen.
Wenn also das Ereignis [0] erfüllt ist (WAHR), dann wird
Aktion [0] ausgeführt. Nach Ausführung der ersten Aktion
werden die Bedingungen des nächsten Ereignisses
ausgewertet. Wird dieses Ereignis als wahr ausgewertet,
wird die entsprechende Aktion ausgeführt. Es wird jeweils
nur ein Ereignis ausgewertet. Ist das Ereignis FALSCH, wird
während des aktuellen Abtastintervalls keine Aktion (im
SLC) ausgeführt und es werden keine anderen Ereignisse
ausgewertet. Wenn der SLC startet, wertet er bei jedem
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 23
Abbildung 5.6 Logikregeln
Page 28
Produktfunktionen
VLT® AQUA Drive FC 202
5.2.12 Safe Torque Off
Die Funktion Safe Torque Off (STO) dient zum Stoppen des
Antriebs im Notfall. Der Frequenzumrichter kann die STOFunktion mit Asynchron-, Synchron- und PermanenmagnetMotoren verwenden.
Weitere Informationen zur Funktion Safe Torque Off
einschließlich Installation und Inbetriebnahme finden Sie in
der Bedienungsanleitung VLT® FC Series - Safe Torque Off.
55
Haftungsbedingungen
Der Kunde muss sicherstellen, dass das Personal über
Installation und Betrieb der Funktion Safe Torque Off
informiert ist, insbesondere durch:
Sorgfältiges Lesen der Sicherheitsvorschriften im
•
Hinblick auf Arbeitsschutz und Unfallverhütung.
Verstehen der allgemeinen und Sicherheitsricht-
•
linien in der Bedienungsanleitung VLT® FC Series -
Safe Torque Off.
Gute Kenntnisse über die allgemeinen und Sicher-
•
heitsnormen der jeweiligen Anwendung.
5.3
Spezifische Funktionen des VLT® AQUA
Drive FC 202
Der VLT® AQUA Drive FC 202 ist für Frisch- und Schmutzwasseranwendungen ausgelegt. Die zahlreichen Standardund optionalen Funktionen beinhalten einen optimierten
SmartStart-Assistenten und ein Quick-Menü mit Fokus auf
Wasser- und Abwasseranwendungen:
Kaskadenregelung
•
Die Basis-Kaskadenregelung ist standardmäßig
integriert, mit einer Kapazität von bis zu 3
Pumpen. Die Kaskadenregelung ermöglicht die
Drehzahlregelung einer einzelnen Pumpe in einer
Anlage mit mehreren Pumpen. Diese Funktion ist
eine kostengünstige Lösung, z. B. für Druckerhöhungsanlagen. In Anlagen mit mehreren Pumpen
mit variabler Drehzahl ist der VLT® Extended
Cascade Controller MCO 101 oder der VLT
Advanced Cascade Controller MCO 102
erforderlich.
Motorwechsel
•
Die Motorwechselfunktion eignet sich für
Anwendungen mit 2 Motoren oder 2 Pumpen, die
an einem Frequenzumrichter betrieben werden.
Durchflussausgleich
•
Der Durchflussausgleich passt den Sollwert
gemäß Durchfluss an und ermöglicht, den
Drucksensor nahe an der Pumpe zu installieren.
Trockenlauferkennung
•
®
Diese Funktion schützt die Pumpe vor Beschädigungen, indem sie Trockenlauf und Überhitzen
der Pumpe verhindert.
Kennlinienende-Erkennung
•
Diese Funktion erkennt, wenn die Pumpe bei
maximaler Drehzahl läuft und der Sollwert in
einer benutzerdefinierten Zeit nicht erreicht wird.
Rückspülmodus
•
Diese vorbeugende oder reaktive Reinigungsfunktion ist für Pumpen in
Abwasseranwendungen ausgelegt. Nähere
Angaben finden Sie in Kapitel 5.6 Rückspülmodus.
Ausgangs-/Endrampen
•
Durch die Programmierung von kurzen Rampenzeiten für die Mindestdrehzahl (Rampe auf/ab)
werden die Lager geschützt, und es wird eine
ausreichende Kühlung in Anwendungen mit
Tauchpumpen sichergestellt.
Rückschlagventilschutz
•
Durch eine kurze Rampe-Ab-Zeit werden die
Rückschlagventile geschützt und Wasserschläge
vermieden.
STO
•
STO ermöglicht Safe Torque Off (Motorfreilauf ),
wenn eine kritische Situation auftritt.
Trockenlauferkennung
•
Diese Funktion erkennt Bedingungen in der
Anlage, bei denen kein oder wenig Durchfluss
vorhanden ist.
Energiesparmodus
•
Der Energiesparmodus spart Energie, indem er
die Pumpe stoppt, wenn kein Bedarf besteht.
Rohrfüllmodus
•
Der Rohrfüllmodus umfasst mehrere Funktionen
zum sanften Füllen von Rohren und zur
Vermeidung von Wasserschlägen. Diese Funktion
bietet verschiedene Funktionen für horizontale
und vertikale Rohre.
Echtzeituhr
•
Smart Logic Control (SLC)
•
Die SLC umfasst die Programmierung einer
Sequenz aus Ereignissen und Aktionen. Sie bietet
eine Vielzahl von SPS-Funktionen mit
Vergleichern, Logikregeln und Timern.
Vor-/Nach-Schmierung
•
Nähere Angaben finden Sie in Kapitel 5.7 Vor-/
Nach-Schmierung.
Durchflussüberwachung
•
Nähere Angaben finden Sie in
Kapitel 5.8 Durchflussüberwachung.
Erweiterte Mindestdrehzahlüberwachung für
•
Tauchpumpen
24 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 29
Produktfunktionen Projektierungshandbuch
Nähere Angaben finden Sie in
Kapitel 5.9 Erweiterte Mindestdrehzahlüberwachung
– Übersicht.
Vorbeugende Wartung
•
Die Funktion für die vorbeugende Wartung
ermöglicht die Programmierung von geplanten
Wartungsintervallen im Frequenzumrichter.
5.3.1 Einfache Inbetriebnahme
SmartStart
Mit dem SmartStart-Assistenten können Sie den Frequenzumrichter jetzt einfacher und kosteneffizienter in Betrieb
nehmen. Der SmartStart-Assistent wird bei der ersten NetzEinschaltung oder nach einem Zurücksetzen auf die
Werkseinstellungen aktiviert und führt den Benutzer durch
mehrere einfache Schritte zur Gewährleistung einer
möglichst einwandfreien und effizienten Motorregelung.
Sie können den SmartStart-Assistenten auch direkt über
das Quick-Menü starten.
Einzelpumpe/Motor im Betrieb mit oder ohne
•
Rückführung.
Motorwechsel: Wenn 2 Motoren an einem
•
Frequenzumrichter betrieben werden.
Basis-Kaskadenregelung: Drehzahlregelung einer
•
einzelnen Pumpe in einer Anlage mit mehreren
Pumpen.
Master-Follower: Steuerung von bis zu 8 Frequen-
•
zumrichtern und Pumpen zur Gewährleistung
eines reibungslosen Betriebs der gesamten
Pumpenanlage.
Quick Menu
Der Menüpunkt „Wasser und Pumpen“ im Quick-Menü
bietet schnellen Zugriff auf die gängigsten Funktionen für
Wasser- und Pumpenanwendungen des VLT® AQUA Drive
FC 202:
Spezielle Rampen (Ausgangs-/Endrampe,
•
Rückschlagventil-Rampe).
Energiesparmodus.
•
Rückspülmodus.
•
Trockenlauferkennung.
•
Kennlinienende-Erkennung.
•
Durchflussausgleich.
•
Rohrfüllmodus für horizontale, vertikale und
•
gemischte Rohrsysteme.
Steuerleistung.
•
Mindestdrehzahlüberwachung.
•
Kaskadenregelung – Übersicht
5.4
Durch die Kaskadenregleroptionen wird die Anzahl der
verfügbaren Relais erweitert. Nach Installation einer Option
können Sie die Kaskadenreglerfunktionen über die Bedieneinheit verwalten.
VLT® Extended Cascade Controller MCO 101 und VLT
Advanced Cascade Controller MCO 102 sind Zusatzoptionen, welche die unterstützte Anzahl an Pumpen sowie
die Funktionen des im VLT® AQUA Drive FC 202
integrierten Kaskadenreglers erweitern.
Folgende Optionen zur Kaskadenregelung stehen zur
Verfügung:
Einfacher integrierter Kaskadenregler (Standard-
•
Kaskadenregler).
MCO 101 (erweiterter Kaskadenregler).
•
MCO 102 (erweiterter Kaskadenregler).
•
Weitere Informationen finden Sie in Kapitel 12 Anwendungsbeispiele und im Programmierhandbuch.
Sie können den erweiterten Kaskadenregler in zwei
verschiedenen Arten einsetzen:
Mit erweiterten Funktionen, die durch
•
Parametergruppe 27-** Cascade CTL Option
gesteuert werden.
Zur Erweiterung der Anzahl an verfügbaren Relais
•
für den einfachen Kaskadenregler, der durch
Parametergruppe 25-** Kaskadenregler gesteuert
wird.
Mit MCO 101 können Sie insgesamt 5 Relais zur Kaskadenregelung verwenden. Mit MCO 102 können Sie insgesamt 8
Pumpen steuern. Mithilfe der Optionen können Sie die
Führungspumpe mit zwei Relais pro Pumpe wechseln.
®
HINWEIS
Wenn MCO 102 installiert ist, können Sie mithilfe der
VLT® Relay Card MCB 105 die Anzahl der Relais auf 13
erweitern.
Anwendung
Die Kaskadenregelung ist ein gängiges Steuerungssystem
zur energieeffizienten Regelung von parallel angeordneten
Pumpen oder Lüftern.
Mit der Kaskadenregleroption können Sie mehrere parallel
konfigurierte Pumpen auf folgende Weise regeln:
Automatisches Ein-/Ausschalten einzelner Pumpen
•
Drehzahlregelung der Pumpen
•
Der erweiterte Kaskadenregler kann zwecks Regelung des
gewünschten Durchflusses oder Drucks im System einzelne
5 5
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 25
Page 30
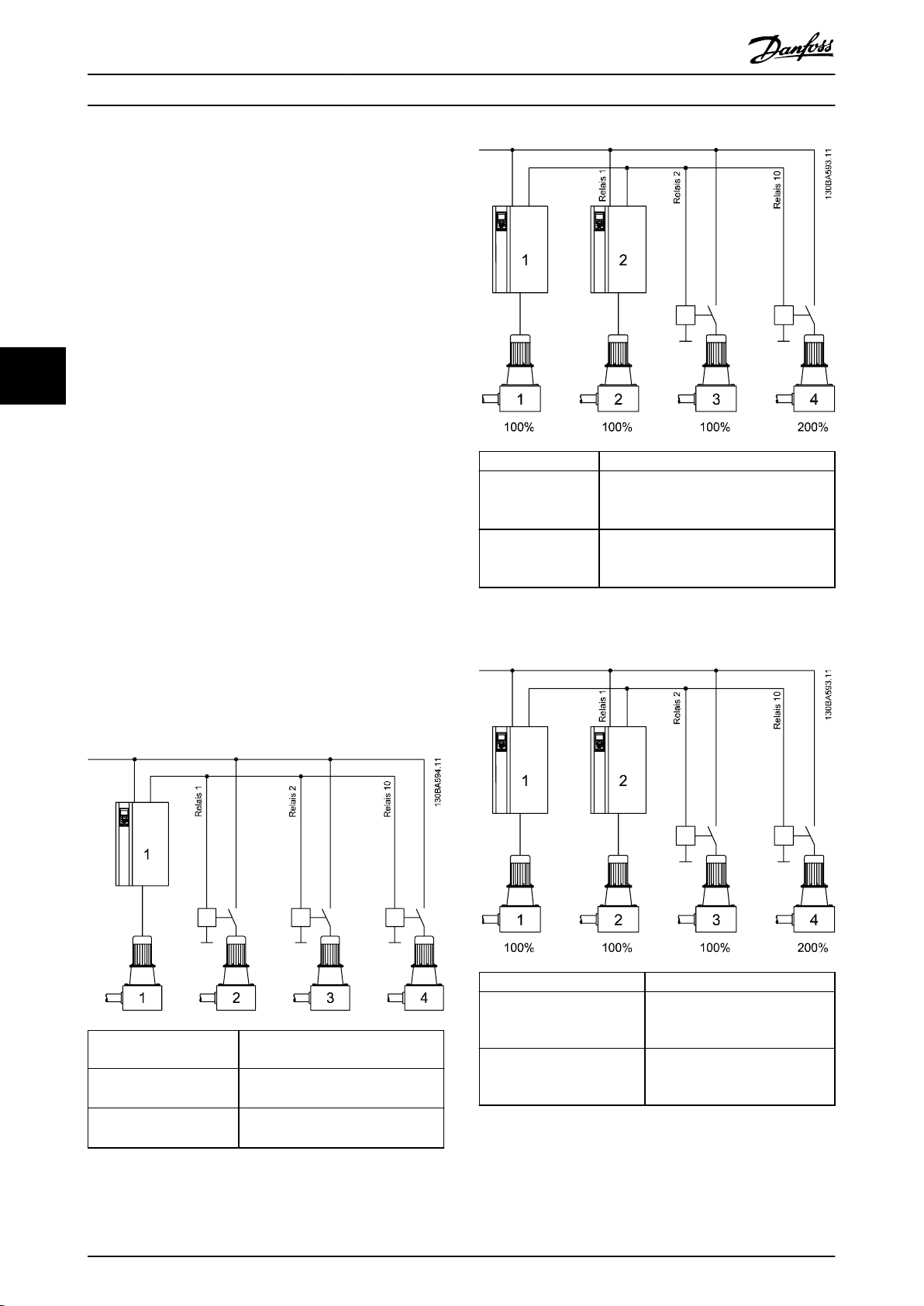
Produktfunktionen
VLT® AQUA Drive FC 202
Pumpen nach Bedarf automatisch zu- und abschalten.
Außerdem regelt er die Drehzahl der an einen VLT® AQUA
Drive FC 202 angeschlossenen Pumpe, um so eine
konstante Ausgangsleistung zu erzielen.
Verwendungszweck
Die Kaskadenregleroption wurde grundsätzlich für den
Einsatz mit Pumpenanwendungen entwickelt. Die
Kaskadenregler eignen sich jedoch für alle Anwendungen,
die mehrere parallel konfigurierte Motoren erfordern.
Funktionsprinzip
55
Die Software für den erweiterten Kaskadenregler läuft auf
einem einzelnen Frequenzumrichter, auf dem die
Kaskadenregler-Option installiert ist. Er regelt eine Anzahl
von Pumpen, die jeweils von einem Frequenzumrichter
geregelt werden oder über ein Schütz oder einen
Softstarter angeschlossen sind.
Bei zusätzlichen Frequenzumrichtern im System (FollowerFrequenzumrichter) ist keine weitere
Kaskadenregleroptionskarte erforderlich. Sie arbeiten in
Drehzahlregelung (ohne Rückführung) und erhalten ihren
Drehzahlsollwert vom Master-Frequenzumrichter. Die an
Follower-Frequenzumrichter angeschlossenen Pumpen
Integriert –
VLT® Extended
Cascade Controller
MCO 101
VLT® Advanced
Cascade Controller
MCO 102
1 bis 6 VSP + 1 bis 5 FSP (Max. 6 Pumpen)
Parametergruppe 27-** Cascade CTL Option
1 bis 8 VSP + 1 bis 7 FSP (Max. 8 Pumpen)
Parametergruppe 27-** Cascade CTL Option
werden als Pumpen mit variabler Drehzahl bezeichnet.
Über ein Schütz oder einen Softstarter an das Netz
Abbildung 5.8 Anwendungsübersicht
angeschlossene Pumpen arbeiten als Pumpen mit
konstanter Drehzahl. Jede Pumpe, ob mit variabler oder
konstanter Drehzahl, wird durch ein Relais im MasterFrequenzumrichter gesteuert. Die Kaskadenregleroptionen
können eine Kombination aus Pumpen mit variabler und
konstanter Drehzahl regeln.
Integriert –
6 VSP
Parametergruppe 27-** Cascade
CTL Option
8 VSP
Parametergruppe 27-** Cascade
CTL Option
Integriert 1 VSP + 2 FSP
Parametergruppe 25-** Kaskadenregler
VLT® Extended Cascade
Controller MCO 101
VLT® Advanced Cascade
Controller MCO 102
Abbildung 5.7 Anwendungsübersicht
1 VSP + 5 FSP
Parametergruppe 25-** Kaskadenregler
1 VSP + 8 FSP
Parametergruppe 25-** Kaskadenregler
VLT® Extended Cascade
Controller MCO 101
VLT® Advanced Cascade
Controller MCO 102
Abbildung 5.9 Anwendungsübersicht
VSP = Pumpe mit variabler Drehzahl (direkt an den Frequenzumrichter angeschlossen).
26 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 31

Pumpen m. Konst.
Drehzahl (4)
Pumpen m. variab.
Drehzahl (1)
Motorstarter
Frequenzumrichter
mit kaskadenregler
Druckgeber
130BA362.10
Produktfunktionen Projektierungshandbuch
FSP = Pumpe mit konstanter Drehzahl (der Motor kann über
einen Schütz, Softstarter oder Stern/Dreieck-Starter
angeschlossen werden).
5.5 Einfacher Kaskadenregler
Der einfache Kaskadenregler wird für Pumpenanwendungen eingesetzt, in denen ein bestimmter Druck
(Förderhöhe) oder eine bestimmte Druckstufe über einen
weiten dynamischen Bereich beibehalten werden muss.
Der Betrieb einer großen Pumpe mit variabler Drehzahl
über einen weiten Bereich ist aufgrund eines geringen
Pumpenwirkungsgrads bei geringerer Drehzahl keine ideale
Lösung. Es liegt eine praktische Grenze von etwa 25 % der
Nenndrehzahl bei Volllast für den Betrieb einer Pumpe vor.
Beim einfachen Kaskadenregler regelt der Frequenzumrichter einen Motor mit variabler Drehzahl
(Führungspumpe) als die Pumpe mit variabler Drehzahl
und kann bis zu 2 zusätzliche Pumpen mit konstanter
Drehzahl ein- und ausschalten. Schließen Sie die zusätzlichen Pumpen mit konstanter Drehzahl direkt oder über
einen Softstarter an das Netz an. Die Drehzahlregelung des
Systems erfolgt durch Änderung der Drehzahl der ursprünglichen Pumpe. Die Drehzahlregelung behält einen
konstanten Druck bei, was eine geringere Systembelastung
und einen ruhigeren Betrieb ermöglicht.
Abbildung 5.10 Einfacher Kaskadenregler
Feste Führungspumpe
Die Motorleistungen müssen übereinstimmen. Mit dem
einfachen Kaskadenregler kann der Frequenzumrichter bis
zu 3 Pumpen gleicher Größe über die beiden integrierten
Relais steuern. Ist die variable Pumpe (Führungspumpe)
direkt an den Frequenzumrichter angeschlossen, werden
die beiden anderen Pumpen von den beiden integrierten
Relais gesteuert. Ist Führungspumpen-Wechsel aktiviert,
sind die Pumpen mit den integrierten Relais verbunden
und der Frequenzumrichter kann zwei Pumpen betätigen.
Führungspumpen-Wechsel
Die Motorleistungen müssen übereinstimmen. Die Funktion
ermöglicht es, den Frequenzumrichter zwischen den
Pumpen im System (max. zwei Pumpen) wechseln zu
lassen. Bei diesem Betrieb wird die Laufzeit gleichmäßig
unter den verfügbaren Pumpen aufgeteilt, um damit die
erforderliche Pumpenwartung zu reduzieren und die
Zuverlässigkeit und Lebensdauer des Systems zu erhöhen.
Der Wechsel der Führungspumpe kann bei einem Befehlssignal oder bei Zuschaltung (einer weiteren Pumpe)
stattfinden.
Der Befehl kann ein manueller Wechsel oder ein Wechselereignissignal sein. Bei Wahl des Wechselereignisses findet
der Führungspumpen-Wechsel bei jedem Ereignis statt. Zu
den Auswahloptionen zählen:
Bei Ablauf eines Wechselzeitgebers.
•
Zu einer festgelegten Tageszeit.
•
Wenn die Führungspumpe in den Energie-
•
sparmodus wechselt.
Die Zuschaltung wird von der aktuellen Systemlast
bestimmt.
Ein gesonderter Parameter begrenzt den Wechsel auf den
Punkt, an dem die benötigte Gesamtkapazität > 50 % ist.
Die Gesamtpumpenkapazität wird als Führungspumpe plus
Kapazitäten der Pumpen mit konstanter Drehzahl
bestimmt.
Bandbreitenverwaltung
In Kaskadenregelsystemen wird der gewünschte
Systemdruck zur Vermeidung häufiger Schaltvorgänge der
Pumpen mit konstanter Drehzahl in der Regel eher
innerhalb einer gewissen Bandbreite als auf einem festen
Niveau gehalten. Die Schaltbandbreite liefert die
erforderliche Bandbreite für den Betrieb. Wenn eine große
oder schnelle Änderung im Systemdruck auftritt, umgeht
die Übersteuerungsbandbreite die Schaltbandbreite, um
ein sofortiges Ansprechen während einer kurzfristigen
Druckänderung zu verhindern. Durch Programmierung des
Übersteuerungsbandbreiten-Zeitgebers kann eine Zu- bzw.
Abschaltung verhindert werden, bis sich das System
stabilisiert hat und die normale Regelung wieder einsetzt.
Bei Aktivierung des Kaskadenreglers wird die Systemdruckhöhe durch Zu- und Abschalten von Pumpen mit
konstanter Drehzahl aufrecht erhalten, wenn der Frequenzumrichter mit einem Alarm abschaltet. Um häufiges Zuund Abschalten zu verhindern und Druckschwankungen zu
minimieren, wird eine breitere Konstantdrehzahlbandbreite
statt der Schaltbandbreite verwendet.
5.5.1.1 Pumpenzuschaltung mit
Führungspumpen-Wechsel
Bei aktiviertem Führungspumpen-Wechsel werden maximal
2 Pumpen geregelt. Bei Wechselbefehl stoppt der PID und
die Führungspumpe fährt zur Mindestfrequenz (f
herunter und fährt nach einer Verzögerung zur maximalen
Frequenz (f
Führungspumpe die Abschaltfrequenz erreicht, schaltet die
Pumpe mit konstanter Drehzahl ab. Die Führungspumpe
fährt weiter über Rampe hoch und fährt anschließend über
) hoch. Wenn die Drehzahl der
max
min
)
5 5
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 27
Page 32

Zeit
Zeit
Netzbetrieb
Freq. Zerstörung
Abwechselnd
Befehl / PID stoppt
Freq. Inszenieren
Netzbetrieb
Contr.
beginnt PID
130BA364.10
5s
f
max
f
max
f
min
0 Hz / RPM
Derag O Delay:
Par. 29 -15
+/- Derag
Speed:
Par.: 29 -13
Par.: 29 -14
Deragging Run Time : Par . 29-12
Speed
Derag
function
activated
1 Cycle
Number of Cycles : Par . 29 -10
130BC369.10
Produktfunktionen
VLT® AQUA Drive FC 202
Rampe bis zum Stopp hinunter, woraufhin die beiden
Relais trennen.
Abschaltung bei fehlendem Durchfluss stellt
•
sicher, dass alle Pumpen mit konstanter Drehzahl
einzeln gestoppt werden, bis der Zustand „kein
Durchfluss“ nicht mehr zutrifft.
5.6 Rückspülmodus
Der Rückspülfunktion dient der Säuberung der Pumpenschaufel von Rückständen in Abwasseranwendungen,
sodass die Pumpe normal arbeitet.
Ein Rückspülereignis wird als Zeitraum definiert, den der
Abbildung 5.11 Führungspumpen-Wechsel
55
Nach einer Zeitverzögerung schaltet sich das Relais für die
Pumpe mit konstanter Drehzahl ein und diese Pumpe wird
zur neuen Führungspumpe. Die neue Führungspumpe
fährt auf die maximale Drehzahl hoch und danach über
Rampe ab zur minimalen Drehzahl hinunter. Bei Erreichen
der Zuschaltfrequenz wird dann die vorherige
Führungspumpe am Netz als die neue Pumpe mit
konstanter Drehzahl zugeschaltet.
Ist die Führungspumpe über einen programmierten
Zeitraum mit minimaler Frequenz (f
Führungspumpe nur wenig zum System bei, wenn eine
Pumpe mit konstanter Drehzahl läuft. Bei Ablauf des
programmierten Zeitgeberwerts wird die Führungspumpe
abgeschaltet. Damit wird ein Heißwasserproblem
vermieden.
) in Betrieb, trägt die
min
Frequenzumrichter vom Starten bis zum Beenden des
Rückspülvorgangs benötigt. Beim Start eines Rückspülvorgangs führt der Frequenzumrichter zunächst eine
Rampe bis zum Stopp aus, anschließend läuft eine
Abschaltverzögerung ab, bevor der erste Zyklus beginnt.
5.5.1.2 Systemstatus und Betrieb
Wenn die Führungspumpe in den Energiesparmodus
schaltet, wird die Funktion am LCP-Bedienteil angezeigt. Es
ist möglich, die Führungspumpe bei Vorliegen einer
Energiesparmodus-Bedingung zu wechseln.
Bei aktiviertem Kaskadenregler zeigt das LCP den Betriebszustand für jede Pumpe und den Kaskadenregler an.
Angezeigte Informationen:
jeder Pumpe zugeordneten Relais. Das Display
zeigt Pumpen, die deaktiviert oder ausgeschaltet
Pumpenstatus, die Anzeige des Status für die
•
sind, am Frequenzumrichter laufen oder am Netz/
Motorstarter laufen.
Kaskadenstatus, die Anzeige des Status für den
•
Kaskadenregler. Das Display zeigt Folgendes an:
- Kaskadenregler ist deaktiviert.
- Alle Pumpen sind ausgeschaltet.
- Ein Notfall hat zum Stopp aller Pumpen
geführt.
- Alle Pumpen in Betrieb.
- Pumpen mit konstanter Drehzahl
28 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
werden zugeschaltet/abgeschaltet.
- Führungspumpen-Wechsel tritt auf.
Abbildung 5.12 Rückspülfunktion
Wenn ein Rückspülmodus von einem gestoppten Zustand
des Frequenzumrichters aus ausgelöst wird, wird die erste
Abschaltverzögerung übersprungen. Das Rückspülereignis
besteht aus mehreren Zyklen. Ein Zyklus besteht aus einem
Puls im Rückwärtslauf, gefolgt von einem Puls im
Vorwärtslauf. Der Rückspülvorgang ist abgeschlossen,
nachdem die angegebene Anzahl von Zyklen beendet
wurden. Genauer gesagt ist der Rückspülvorgang beim
letzten Puls (immer im Vorwärtslauf) des letzten Zyklus
abgeschlossen, nachdem die Rückspüllaufzeit abgelaufen
ist (der Frequenzumrichter läuft bei Rückspüldrehzahl).
Zwischen den Pulsen wechselt der Frequenzumrichter für
die angegebene Abschaltverzögerungszeit in den Freilauf,
damit sich die Rückstände in der Pumpe absetzen können.
Page 33

130BD765.10
N
MAX
N
MIN
0
1
1
0
0
1
2
3
t1 t3t2
T
T
T
Produktfunktionen Projektierungshandbuch
HINWEIS
Aktivieren Sie den Rückspülvorgang nicht, wenn die
Pumpe nicht im Rückwärtslauf arbeiten kann.
Es gibt 3 verschiedene Meldungen bei einem laufenden
Rückspülereignis:
Status im LCP: Auto Remote Derag.
•
Ein Bit in dem erweiterten Zustandswort
•
(Bit 23, 80 0000 Hex).
Sie können einen Digitalausgang so konfigurieren,
•
dass er den aktiven Rückspülzustand anzeigt.
Je nach Anwendung und Zweck der Anwendung können
Sie diese Funktion als vorbeugende oder reaktive
Maßnahme verwenden und folgendermaßen auslösen/
starten:
Bei jedem Startbefehl (Parameter 29-11 Derag at
•
Start/Stop).
Bei jedem Stoppbefehl (Parameter 29-11 Derag at
•
Start/Stop).
Bei jedem Start-/Stoppbefehl
•
(Parameter 29-11 Derag at Start/Stop).
Über einen Digitaleingang (Parametergruppe 5-1*
•
Digitaleingänge).
Über eine Frequenzumrichter-Aktion mit dem
•
Smart Logic Controller (Parameter 13-52 SL
Controller Action).
Als Zeitfunktion (Parametergruppe 23-** Zeitfunk-
•
tionen).
Bei hoher Leistung (Parametergruppe 29-2* Derag
•
Power Tuning).
Vor-/Nach-Schmierung
5.7
Die mechanischen Teile bestimmter Motoren müssen vor
dem Betrieb bzw. während des Betriebs geschmiert
werden, um Beschädigungen und Verschleiß vorzubeugen.
Das ist besonders wichtig, wenn der Motor für einen
längeren Zeitraum außer Betrieb war. Die Vorschmierungsfunktion eignet sich auch für Anwendungen, bei denen
Abluftventilatoren in Betrieb sein müssen. Die Vorschmierungsfunktion signalisiert einem externen Gerät, dass für
eine benutzerdefinierte Dauer eine bestimmte Aktion
eingeleitet werden soll, beginnend mit der steigenden
Flanke eines Startbefehls (z. B. einer Startaufforderung).
Des Weiteren können Sie eine Startverzögerung
(Parameter 1-71 Start Delay) programmieren, sodass die
Vorschmierung nur bei einem Stopp des Frequenzumrichters durchgeführt wird. Die Vorschmierung wird dann
unmittelbar vor Beginn der Anfahrrampe des Frequenzumrichters abgeschlossen. Es ist auch eine Konfiguration der
Vorschmierungsfunktion möglich, bei der das externe Gerät
durchgängig Signale erhält, wenn sich der Frequenzumrichter im Betriebszustand befindet oder bei der das Signal
bestehen bleibt, nachdem der Motor gestoppt hat
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 29
(Parameter 29-42 Post Lube Time). Zu den Anwendungsbeispielen zählen eine Schmiervorrichtung für mechanische
Teile eines Motors bzw. einer Pumpe oder bestimmte
Abluftventilatoren.
Ein Anwendungsbeispiel für eine Schmiervorrichtung wäre
ein Beginn der Schmierung bei steigender Flanke der
Startanforderung. Verzögern Sie den Start für eine
bestimmte Zeit und stoppen Sie die Schmierung, wenn die
Verzögerung abläuft und der Frequenzumrichter startet.
Abbildung 5.13 zeigt eine abweichende Verwendung der
Funktion. In diesem Fall läuft die Verzögerung ab, während
der Frequenzumrichter bereits die Rampe auf fährt. Die
zugehörigen Parameter finden Sie in Tabelle 5.1.
1 Drehzahlkurve.
2 Startbefehl (z. B. Klemme 18).
3 Vorschmierung-Ausgangssignal.
t
Startbefehl erteilt (zum Beispiel Klemme 18 ist aktiv). Der
1
Anlaufverzögerungstimer (Parameter 1-71 Start Delay) und
der Vorschmierungstimer (Parameter 29-41 Pre Lube Time).
t
Der Anlaufverzögerungstimer läuft ab. Der Frequenzum-
2
richter beginnt die Rampe "Auf" zu fahren.
t
Der Vorschmierungstimer (Parameter 29-41 Pre Lube Time)
3
läuft ab.
Abbildung 5.13 Beispiel Vor-/Nachschmierungsfunktion
5 5
Page 34

130BD766.10
N
MAX
N
MIN
0
0
1
1
0
1
0
1
2
3
4
t0 <t1 t2
T
T
T
T
Produktfunktionen
VLT® AQUA Drive FC 202
Parameter und
Name
Parameter 29-4
0 Pre/Post Lube
Function
Parameter 29-4
55
1 Pre Lube Time
Parameter 29-4
2 Post Lube
Time
Tabelle 5.1 Vor-/Nachschmierungsparameter
Beschreibung Einstellungen Einhei
t
Wählen Sie die Vor-/
Nachschmierungsfunktion aus.
Verwenden Sie
Parameter 1-71 Start
Delay, um die
Verzögerung
einzustellen, bevor
der Motor anläuft.
Geben Sie die
Signaldauer nach
dem Startsignal ein.
Verwenden Sie
diesen Parameter nur,
wenn in
Parameter 29-40 Pre/
Post Lube Function
die Option [1] Pre
lube Only ausgewählt
ist.
Wählen Sie die
Signaldauer,
nachdem der Motor
gestoppt hat.
Verwenden Sie
diesen Parameter nur,
wenn in
Parameter 29-40 Pre/
Post Lube Function
die Option [3] Pre &
running & post
ausgewählt ist.
[0]* Disabled
(Deaktiviert)
[1] Pre lube only
[2] Pre & running
[3] Pre & running
& post
0–600 (*10) s
0–600 (*10) s
–
Wenn das erwartete Digitaleingangssignal inaktiv wird,
bevor die Durchflussprüfungszeit oder die Durchflussverifizierungszeit abgelaufen ist, schaltet der Frequenzumrichter
mit Alarm 92, Kein Durchfluss ab.
1 Drehzahlkurve.
2 Startbefehl (z. B. Klemme 18).
3 Digitaleingangssignal von einer externen Vorrichtung,
die bestätigt, dass Durchfluss möglich ist.
4 Durchflussprüfung
t
Startbefehl erteilt (zum Beispiel Klemme 18 ist aktiv).
0
t
Digitaleingangssignal von einer externen Vorrichtung
1
wird aktiv, bevor Parameter 29-50 Validation Time abläuft.
t
Wenn Parameter 29-51 Verification Time abgelaufen ist,
2
prüft der Frequenzumrichter erneut das Signal von der
externen Vorrichtung und läuft dann im normalen
Betrieb.
Abbildung 5.14 Durchflussüberwachung
Durchflussüberwachung
5.8
Die Durchflussüberwachungsfunktion ist für Anwendungen
ausgelegt, bei denen der Motor/die Pumpe laufen muss,
während auf ein externes Ereignis gewartet wird. Die
Durchflussüberwachung erwartet ein Digitaleingangssignal
von einem Sensor an einem Absperrventil, einem
Durchflussschalter oder einer ähnlichen externen
Parameter und
Name
Parameter 29-5
0 Validation
Time
Parameter 29-5
1 Verification
Time
Vorrichtung, die anzeigt, dass sich die Vorrichtung in der
offenen Position befindet und Durchfluss möglich ist. In
Parameter 29-50 Validation Time können Sie definieren, wie
lange der VLT® AQUA Drive FC 202 auf ein Digitaleingangssignal von einer externen Vorrichtung wartet, um den
Durchfluss zu bestätigen. Nachdem der Durchfluss
bestätigt ist, prüft der Frequenzumrichter das Signal nach
der Durchflussprüfungszeit erneut und läuft dann im
normalen Betrieb. Während die Durchflussüberwachung
aktiv ist, zeigt das LCP Durchfluss wird überprüft an.
30 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Tabelle 5.2 Durchflussüberwachung – Parameter
HINWEIS
Die Parameter werden nur auf dem LCP angezeigt, wenn
ein Digitaleingang als Durchflussbestätigung konfiguriert
wird.
Beschreibung Einstellungen Einheit
Der Digitaleingang
muss während der
Prüfzeit aktiv sein.
Der Durchfluss
wird bestätigt,
wenn der Digitaleingang am Ende
der Verifizierungszeit immer
noch aktiv ist.
0,1–999,0
(*größenabhängig)
0,1–255,0
(*15)
s
s
Page 35

N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
Produktfunktionen Projektierungshandbuch
5.9 Erweiterte
Mindestdrehzahlüberwachung –
Übersicht
Einige Pumpen sind sehr empfindlich gegenüber dem
Betrieb bei niedriger Drehzahl. Typische Gründe dafür sind
eine unzureichende Kühlung oder Schmierung bei
niedriger Drehzahl.
Unter Überlastbedingungen schützt sich der Frequenzumrichter durch die integrierten Schutzfunktionen, die eine
Absenkung der Drehzahl umfassen. Beispielsweise kann der
Stromgrenzenregler die Drehzahl absenken. Das bedeutet,
dass die Drehzahl in einigen Fällen unter den in
Parameter 4-11 Motor Speed Low Limit [RPM] und
Parameter 4-12 Motor Speed Low Limit [Hz] angegebenen
Wert abgesenkt wird.
Wenn die Drehzahl unter einen bestimmten Wert fällt,
schaltet die erweiterte Funktion zur Mindestdrehzahlüberwachung den Frequenzumrichter ab. Wenn der Motor der
Pumpe die in Parameter 1-86 Trip Speed Low [RPM]
angegebene Drehzahl nicht innerhalb des in
Parameter 1-79 Pump Start Max Time to Trip angegebenen
Zeitraums erreicht (Rampe-Auf dauert zu lange), schaltet
der Frequenzumrichter ab. Timer für Parameter 1-71 Start
Delay und Parameter 1-79 Pump Start Max Time to Trip
starten gleichzeitig, wenn der Startbefehl ausgegeben wird.
Zum Beispiel, wenn der Wert in Parameter 1-71 Start Delay
größer oder gleich dem Wert in Parameter 1-79 Pump Start
Max Time to Trip ist, läuft der Frequenzumrichter nie an.
einer hohen Ein-/Ausschaltzyklen verwenden, da
dies zu einer Überhitzung des Motors führen
würde.
DC-Bremse
•
Ein übermodulierter Gleichstrom verstärkt den
Wechselstrom und funktioniert als Wirbelstrombremse (Parameter 2-02 DC Braking Time ≠ 0 s).
Bremswiderstand
•
Ein Brems-IGBT leitet die Bremsenergie vom
Motor an den angeschlossenen Bremswiderstand
(Parameter 2-10 Brake Function = [1]) und
verhindert so, dass die Überspannung einen
bestimmten Grenzwert überschreitet. Weitere
Informationen zur Auswahl eines Bremswiderstands finden Sie im Projektierungshandbuch
®
Brake Resistor MCE 101.
VLT
Bei Frequenzumrichtern mit der Bremsoption ist ein BremsIGBT zusammen mit den Klemmen 81(R-) und 82(R+) zum
Anschluss eines externen Bremswiderstands vorgesehen.
Die Funktion des Brems-IGBT ist die Begrenzung der
Spannung im Zwischenkreis, wenn die maximal erlaubte
Spannungsgrenze überschritten wird. Dazu schaltet er den
externen Widerstand an den Zwischenkreis ein, um die
überhöhte Gleichspannung der Zwischenkreiskondensatoren abzuführen.
Die externe Anschaltung eines Bremswiderstands bietet
Vorteile. So lässt sich der Widerstand angepasst an die
Anforderungen der Anwendung auswählen. Die Energie
wird aus dem Schaltschrank abgeleitet und der Frequenzumrichter vor Überhitzung geschützt, sollte die Spannung
zu einer Überlastung des Bremswiderstands führen.
5 5
Das IGBT-Gate-Signal des Brems-IGBTs wird von der
Steuerkarte generiert und über Leistungskarte und IGBT-
T
1-71
T
1-79
N
1-86
1 Normalbetrieb.
Parameter 1-71 Start Delay.
Parameter 1-79 Pump Start Max Time to Trip. Dieser
Wert enthält die Zeit in T
Parameter 1-86 Trip Speed Low [RPM]. Wenn die
Drehzahl während des Normalbetriebs unter diesen
Wert fällt, schaltet der Frequenzumrichter ab.
1-71
.
Ansteuerkarte an das Brems-IGBT übermittelt. Zusätzlich
überwachen Leistungs- und Steuerkarten das Brems-IGBT
bzgl. Kurzschluss. Die Leistungskarte überwacht zudem den
Bremswiderstand bzgl. Überlasten.
Zwischenkreiskopplung
5.11
Die Zwischenkreiskopplung ist eine Funktion, die eine
Verbindung der Gleichspannungskreise mehrerer Frequen-
Abbildung 5.15 Erweiterte Mindestdrehzahlüberwachung
zumrichter ermöglicht, sodass ein System mit mehreren
Frequenzumrichtern für den Betrieb eines mechanischen
Verbrauchers entsteht. Eine Zwischenkreiskopplung bietet
5.10 Dynamisches Bremsen
Dynamisches Bremsen verzögert den Motor mit einer der
folgenden Methoden:
AC-Bremse
•
die folgenden Vorteile:
Energieeinsparungen
Ein im generatorischen Betrieb befindlicher Motor kann
Frequenzumrichter im Überwachungsmodus versorgen.
Durch Ändern der Verlustbedingungen im Motor
wird die Bremsenergie im Motor verteilt
(Parameter 2-10 Brake Function = [2]). Sie dürfen
die AC-Bremsfunktion nicht in Anwendungen mit
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 31
Page 36

130BF758.10
380 V
2x aR-32 2x aR-12
3x 0.23mH
11 kW
FC-302
4 kW
FC-302
3x 0.81 mH
3x gG-40
3x gG-16
M
Common mains
disconnect switch
Mains connecting point for
additional drives in the
load sharing application
DC connecting point for
additional drives in the
load sharing application
91
92
93
91
92
93
96
97
98
96
97
98
82 81 82 81
M
89 88 89 88
Produktfunktionen
VLT® AQUA Drive FC 202
Weniger Ersatzteilbedarf
In der Regel wird nur 1 Bremswiderstand für das gesamte
Frequenzumrichtersystem anstatt eines Bremswiderstands
pro Frequenzumrichter benötigt.
Pufferung
Im Falle eines Netzausfall können alle verbundenen
Frequenzumrichter über den Zwischenkreis durch eine
externe Batterie versorgt werden. Die Anwendung kann
ihren Betrieb fortsetzen oder eine kontrollierte Abschaltung
durchführen.
Voraussetzungen
55
Die folgenden Voraussetzungen müssen erfüllt sein, bevor
Sie eine Zwischenkreiskopplung in Betracht ziehen können:
Der Frequenzumrichter muss über Zwischenkreis-
•
kopplungsklemmen verfügen.
Die Produktserie muss identisch sein. Sie können
•
Ein Diagramm einer Zwischenkreiskopplungsanwendung, in
der bewährte Verfahren angewendet werden, finden Sie
unter Abbildung 5.16. Wenden Sie sich für weitere Informationen zu Zwischenkreiskopplungen an Danfoss.
Die Frequenzumrichter müssen räumlich nah
•
beieinander aufgestellt werden, damit die
Verkabelung zwischen ihnen eine Länge von
25 m nicht überschreitet.
Die Frequenzumrichter müssen dieselbe
•
Nennspannung aufweisen.
Falls ein Bremswiderstand zu einer Zwischenkreis-
•
kopplungskonfiguration hinzugefügt wird, müssen
alle Frequenzumrichter mit einem Bremschopper
ausgestattet sein.
Sicherungen sind in der Zwischenkreiskopplung
•
vorzusehen.
nur VLT® AQUA Drive FC 202-Frequenzumrichter
mit anderen VLT® AQUA Drive FC 202-Frequen-
zumrichtern verwenden.
Abbildung 5.16 Diagramm einer Zwischenkreiskopplungsanwendung, in der bewährte Verfahren angewendet werden
Zwischenkreiskopplung
Geräte mit eingebauter Zwischenkreiskopplung enthalten die Klemmen (+) 89 DC und (-) 88 DC. Innerhalb des Frequenzumrichters sind diese Klemmen mit dem DC-Bus an der Eingangsseite der DC-Zwischenkreisdrossel und den
Zwischenkreiskondensatoren verbunden.
Für die Verwendung der Zwischenkreiskopplungsklemmen stehen 2 Konfigurationen zur Verfügung.
Die Klemmen dienen dazu, die DC-Buskreise mehrerer Frequenzumrichter miteinander zu verbinden. In dieser
•
Konfiguration kann ein im generatorischen Betrieb befindliches Gerät überschüssige DC-Busspannung an ein
anderes Gerät weitergeben, das den Motor antreibt. Diese Zwischenkreiskopplung reduziert den Bedarf an
externen dynamischen Bremswiderständen und spart Energie. Theoretisch ist die Anzahl der Geräte, die Sie auf
diese Weise miteinander verbinden können, unendlich, sofern alle Geräte die gleiche Nennspannung aufweisen.
Darüber hinaus kann es je nach Größe und Anzahl der Geräte erforderlich sein, DC-Zwischenkreisdrosseln und DC-
32 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 37

130BG068.10
225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
Produktfunktionen Projektierungshandbuch
Sicherungen am Zwischenkreis sowie AC- Netzdrosseln eingangsseitig zu installieren. Für eine derartige
Konfiguration sind besondere Überlegungen erforderlich.
Der Frequenzumrichter wird ausschließlich von einer DC-Quelle gespeist. Diese Konfiguration erfordert Folgendes:
•
- Eine DC-Quelle.
- Eine Vorrichtung zum Vorladen des DC-Busses bei Netz-Einschaltung.
5.12 Rückspeiseeinheit
Rückspeisung geschieht üblicherweise in Anwendungen mit kontinuierlichem Bremsen, wie z. B. Krane/Hubwerke, Abwärtsförderer und Zentrifugen, bei denen die Energie aus einem abgebremsten Motor gewonnen wird.
Eine der folgenden Optionen sorgt für die Ableitung der überschüssigen Energie aus dem Frequenzumrichter:
Der Bremschopper ermöglicht die Ableitung der überschüssigen Energie in Form von Wärme in den Bremswiders-
•
tandspulen.
Rückspeiseklemmen ermöglichen den Anschluss einer Rückspeiseeinheit eines Drittanbieters an einen Frequenzum-
•
richter, sodass überschüssige Energie an das Stromnetz abgegeben wird.
Die Rückspeisung überschüssiger Energie in das Stromnetz ist bei Anwendungen mit kontinuierlichem Bremsen die effizienteste Nutzung dieser Energie.
5.13 Rückseitiger Kühlkanal
Dank eines einzigartigen rückseitigen Kanals wird Kühlluft über Kühlkörper geleitet, wobei nur äußerst wenig Luft über die
Steuerelektronik strömt. Es gibt eine IP54-/Typ-12-Dichtung zwischen dem Rückwandkühlkanal und dem Elektronikbereich
des VLT® Frequenzumrichters. Diese Rückwandkühlung ermöglicht die direkte Abführung von 90 % der Wärmeverluste aus
dem Gehäuse. Dieses Design verbessert die Zuverlässigkeit und verlängert die Komponentenlebensdauer, indem es die
Innentemperaturen und die Verunreinigung der elektronischen Komponenten drastisch reduziert. Unterschiedliche
Rückwandkühlungssätze sind verfügbar, die die Luftzirkulation je nach den individuellen Bedürfnissen umleiten.
5.13.1 Luftzirkulation für Gehäuse D1h–D8h
5 5
Abbildung 5.17 Standard-Luftzirkulationskonfiguration für die Bauformen D1h/D2h (Links), D3h/D4h (Mitte), and D5h–D8h (Rechts).
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 33
Page 38

130BG069.10
225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
Produktfunktionen
VLT® AQUA Drive FC 202
55
Abbildung 5.18 Optionale Luftstromkonfiguration mit Bausätzen für die Rückwandkühlung für die Bauformen D1h–D8h.
(Links)Kühlbausatz mit Belüftungseingang im unteren und Belüftungsausgang im hinteren Bereich für die Bauformen D1h/D2h.
(Mitte) Kühlbausatz mit Belüftungseingang im unteren und Belüftungsausgang im oberen Bereich für die Bauformen D3h/D4h.
(Rechts) Kühlbausatz mit Belüftungseingang im hinteren und Belüftungsausgang im hinteren Bereich für die Bauformen D5-D8h.
34 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 39

225 mm (8.9 in)
225 mm (8.9 in)
225 mm (8.9 in)
130BF699.10
225 mm (8.9 in)
130BF700.10
Produktfunktionen Projektierungshandbuch
5.13.2 Luftzirkulation für Gehäuse E1h–E4h
5 5
Abbildung 5.19 Standard-Luftzirkulationskonfiguration für E1h/E2h (links) und E3h/E4h (rechts)
Abbildung 5.20 Optionale Luftzirkulationskonfiguration durch die Rückwand für E1h/E2h (links) und E3h/E4h (rechts)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 35
Page 40

6
Optionen und Zubehör – Über...
VLT® AQUA Drive FC 202
6 Optionen und Zubehör – Übersicht
6.1 Feldbus Baugruppen
Dieser Abschnitt enthält eine Beschreibung der Feldbusgeräte, die mit der VLT® AQUA Drive FC 202-Serie erhältlich
sind. Durch die Verwendung eines Feldbusgerätes werden
Kosten reduziert, eine schnellere und effizientere
Kommunikation gewährleistet und eine benutzerfreundlichere Serviceschnittstelle bereitgestellt. Bestellnummern
finden Sie unter Kapitel 13.2 Bestellnummern für Optionen
und Zubehör.
6.1.1
VLT® PROFIBUS DP-V1 MCA 101
Der VLT® PROFIBUS DP-V1 MCA 101 bietet:
Umfassende Kompatibilität, hohe Verfügbarkeit,
•
Unterstützung aller führenden SPS-Anbieter und
Kompatibilität mit künftigen Ausführungen.
Schnelle, effiziente Kommunikation, transparente
•
Installation, erweiterte Diagnose und Parametrisierung sowie Autokonfiguration von
Prozessdaten per GSD-Datei.
Azyklische Parametrierung mittels PROFIBUS DP-
•
V1, PROFIdrive oder Danfoss FC-Profil.
6.1.2
VLT® DeviceNet MCA 104
Der VLT® DeviceNet MCA 104 bietet:
Unterstützung des ODVA-Frequenzumrichterprofils
•
mittels I/O-Instanz 20/70 und 21/71 gewährleistet
Kompatibilität mit bestehenden Systemen.
Vorteile ergeben sich aus den strengen ODVA-
•
Konformitätsprüfungsrichtlinien, die die
Interoperabilität der Produkte gewährleisten.
Unterstützt DP-V1. Die Diagnose ermöglicht eine
•
einfache, schnelle und standardisierte
Handhabung von Warnungs- und Fehlerinformationen in der SPS, was die Bandbreite im System
verbessert
Unterstützt PROFIsafe in Verbindung mit VLT
•
Safety Option MCB 152.
Implementierung gemäß Konformitätsklasse B.
•
6.1.4
VLT® EtherNet/IP MCA 121
Ethernet ist der kommende Kommunikationsstandard in
der Feldebene. Die Option VLT® EtherNet/IP MCA 121
basiert auf der neuesten verfügbaren Technologie für die
industrielle Nutzung und ist auch für anspruchsvollste
Anforderungen geeignet. EtherNet/IP™ erweitert das
handelsübliche Ethernet zum Common Industrial Protocol
(CIP™) – dasselbe Upper-Layer-Protokoll und Objektmodell,
das auch bei DeviceNet zum Einsatz kommt.
Diese Option bietet erweiterte Funktionen wie z. B.:
Integrierter Hochleistungsschalter für Leitungsto-
•
pologie, ohne dass externe Schalter erforderlich
sind.
DLR-Ring (Oktober 2015)
•
Erweiterte Schalt- und Diagnosefunktionen
•
Integrierter Webserver.
•
E-Mail-Client für Service-Mails.
•
Unicast- und Multicast-Kommunikation.
•
6.1.5
VLT® Modbus TCP MCA 122
®
6.1.3
VLT® PROFINET MCA 120
Der VLT® PROFINET MCA 120 kombiniert höchste Leistung
mit dem höchsten Grad einer offenen Struktur. Die Option
ist so ausgelegt, dass Sie viele Funktionen der VLT
PROFIBUS MCA 101 weiter verwenden können, was den
Aufwand für eine Migration zu PROFINET minimiert und
die Investition in das SPS-Programm sichert.
Gleiche PPO-Typen wie bei VLT® PROFIBUS DP V1
•
MCA 101 für eine einfache Migration nach
PROFINET.
Integrierter Web-Server zur Ferndiagnose und
•
zum Auslesen grundlegender Parameter des
Frequenzumrichters.
Unterstützt MRP.
•
36 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
®
Die VLT® Modbus TCP MCA 122 stellt die Verbindung zu
Modbus TCP-basierten Netzwerken her. Die Option bedient
Verbindungsintervalle von 5 ms in beiden Richtungen.
Damit gehört sie in die Klasse der schnellsten Modbus TCPGeräte am Markt. Für eine Master-Redundanz bietet sie ein
Hot Swapping zwischen zwei Mastern.
Zu den sonstigen Funktionen zählen:
Integrierter Webserver zur Ferndiagnose und zum
•
Auslesen grundlegender Parameter des Frequenzumrichters.
Mögliche Einrichtung einer E-Mail-Benachrich-
•
tigung zum Versenden einer Mitteilung per E-Mail
an einen oder mehrere Adressaten beim Eintreten
oder Quittieren von bestimmten Warn- oder
Alarmmeldungen.
Doppelte Master-SPS-Verbindung für Redundanz.
•
Page 41

Optionen und Zubehör – Über... Projektierungshandbuch
6.2 Funktionserweiterungen
Dieser Abschnitt enthält eine Beschreibung der Funktionserweiterungen, die mit der VLT® AQUA Drive FC 202-Serie
erhältlich sind. Bestellnummern finden Sie unter
Kapitel 13.2 Bestellnummern für Optionen und Zubehör.
6.2.1
VLT® General Purpose I/O Module
MCB 101
Das VLT® General Purpose I/O Module MCB 101 erweitert
die Anzahl der frei programmierbaren Steuerein- und ausgänge um folgende Schnittstellen:
3 Digitaleingänge 0-24 V: Logik 0 < 5 V; Logik 1 >
•
10 V.
2 Analogeingänge 0-10 V: Auflösung 10 Bit plus
•
Vorzeichen.
2 Digitalausgänge NPN/PNP Gegentakt.
•
1 Analogausgang 0/4-20 mA
•
Federzugklemmen
•
6.2.2
VLT®-Relaiskarte MCB 105
Die VLT® Relay Card MCB 105 erweitert die Relaisfunktionen um 3 zusätzliche Relaisausgänge.
Schützt die Steuerleitungen.
•
Federzugklemmen.
•
Maximale Taktfrequenz (Nennlast/min. Last)
6 Minuten-1/20 s-1.
Maximaler Belastungsstrom der Klemme
AC-1 Ohmsche Last: 240 V AC, 2 A.
6.2.3
VLT® Analog I/O-Option MCB 109
Die VLT® Analog I/O Option MCB 109 wird problemlos am
Frequenzumrichter angebracht. Somit profitieren Sie von
einer erweiterten Leistung und Steuerung durch
zusätzliche Eingänge/Ausgänge. Diese Option stattet den
Frequenzumrichter zusätzlich mit einer externen Batterie
aus, die die in den Frequenzumrichter integrierte Uhr
puffert. Hierdurch ist eine stabile Nutzung aller Zeitablaufsteuerungen durch den Frequenzumrichter möglich.
3 Analogeingänge, jeweils für Spannungs- und
•
Temperatureingänge konfigurierbar
Anschluss von 0-10-V-Analogsignalen sowie von
•
PT1000- und NI1000-Temperatureingängen
3 Analogausgänge, jeweils als 0-10-V-Ausgänge
•
konfigurierbar.
6.2.4
VLT® PTC-Thermistorkarte MCB 112
Die VLT® PTC Thermistor Card MCB 112 bietet eine
zusätzliche Motorüberwachung im Vergleich zur
integrierten ETR-Funktion und zur Thermistorklemme.
Schützt den Motor vor Überhitzung
•
Nach ATEX für eine Verwendung mit Ex-d-
•
Motoren zugelassen
Verwendet die gemäß SIL 2 IEC 61508
•
zugelassene Funktion „Safe Torque Off“.
6.2.5
VLT® Sensoreingangsoption MCB 114
Die VLT® Sensor Input Option MCB 114 schützt den Motor
durch Überwachung der Temperatur von Lagern und
Wicklungen vor Überhitzung.
Drei selbsterkennende Sensoreingänge für 2- oder
•
3-adrige PT100/PT1000-Sensoren.
Ein zusätzlicher Analogeingang 4-20 mA.
•
6.2.6
VLT® Extended Cascade Controller
MCO 101
Der VLT® Extended Cascade Controller MCO 101 wird
problemlos montiert und dient als Erweiterung, sodass Sie
mehr Pumpen betreiben können und über eine erweiterte
Pumpenregelung im Master-/Follower-Modus verfügen.
Bis zu sechs Pumpen in Standard-Kaskadenkonfi-
•
guration.
Bis zu fünf Pumpen in Master/Follower-Konfigu-
•
ration.
Maximaler Belastungsstrom der Klemme
AC-1 Ohmsche Last 240 V AC 2 A.
•
AC-15 induktive Last @cos fi 0,4 240 V AC 0,2 A.
•
DC-1 Ohmsche Last 24 V DC 1 A.
•
DC-13 induktive Last @cos fi 0,4 24 V DC 0,1 A.
•
Minimaler Belastungsstrom der Klemme:
DC 5 V 10 mA.
•
Maximale Taktfrequenz bei Nennlast/min. Last 6
•
min-1/20 s-1.
6
6
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 37
Page 42

Optionen und Zubehör – Über...
VLT® AQUA Drive FC 202
6
6.2.7
VLT® Advanced Cascade Controller
MCO 102
Der VLT® Advanced Cascade Controller MCO 102 wird
problemlos montiert und dient als Erweiterung des
integrierten Kaskadenreglers, sodass Sie bis zu 8 Pumpen
betreiben können und über eine erweiterte Pumpenregelung im Master-/Follower-Modus verfügen.
Dieselbe Kaskadenregler-Hardware kann für den
•
gesamten Leistungsbereich bis 1,2 MW eingesetzt
werden.
Bis zu acht Pumpen in Standard-Kaskadenkonfi-
•
guration. Bis zu acht Pumpen in Master/FollowerKonfiguration.
6.3 Motion Control und Relaiskarten
Dieser Abschnitt enthält eine Beschreibung der Motion
Control- und Relaiskarten-Optionen, die mit der VLT® AQUA
Drive FC 202-Serie erhältlich sind. Bestellnummern finden
Sie unter Kapitel 13.2 Bestellnummern für Optionen und
Zubehör.
6.3.1
VLT® Erweiterte Relais-Optionskarte
MCB 113
Die VLT® Extended Relay Card MCB 113sorgt mit zusätzlichen Ein-/Ausgängen für mehr Flexibilität.
7 Digitaleingänge
•
2 Analogausgänge
•
4 einpolige Lastrelais
•
Erfüllt NAMUR-Empfehlungen
•
Galvanisch getrennt
•
Bremswiderstände
6.4
Sinusfilter
6.5
Steuert ein Frequenzumrichter einen Motor, sind aus dem
Motor Resonanzgeräusche zu hören. Die Geräusche,
verursacht durch die Motorkonstruktion, treten immer bei
der Ummagnetisierung des Blechpakets auf. Die Frequenz
der Resonanzgeräusche entspricht somit der Taktfrequenz
des Frequenzumrichters.
Danfoss bietet einen Sinusfilter zur Dämpfung der
akustischen Motorgeräusche an. Der Filter verändert die
Spannungsanstiegszeit, die Spitzenlastspannung (U
und den Rippel-Strom (ΔI) zum Motor. Das heißt, dass
Strom und Spannung beinahe sinusförmig werden. Die
Motorgeräusche werden auf ein Minimum reduziert.
Auch der Rippel-Strom in den Spulen des Sinusfilters
verursacht Geräusche. Dieses Problem können Sie durch
Einbau des Filters in einen Schaltschrank oder ein Gehäuse
beseitigen.
Bestellnummern und nähere Informationen über Sinusfilter
finden Sie im Projektierungshandbuch für Ausgangsfilter.
du/dt-Filter
6.6
Danfoss bietet dU/dt-Filter. Hierbei handelt es sich um
Gegentakt-Tiefpassfilter, die Spannungsspitzen an den
Motorklemmen verringern und die Anstiegzeit bis auf ein
Niveau senken, auf dem die Belastung der Motorwicklungsisolierung reduziert wird. Dies ist ein typisches
Problem für Konfigurationen mit kurzen Motorkabeln.
Im Vergleich zu Sinusfiltern haben die du/dt-Filter eine
Trennfrequenz über der Taktfrequenz.
Bestellnummern und nähere Informationen über dU/dtFilter finden Sie im Projektierungshandbuch für
Ausgangsfilter.
PEAK
)
Gleichtaktfilter
In Anwendungen mit motorischem Bremsen wird Energie
im Motor erzeugt und in den Frequenzumrichter zurückgespeist. Ist eine Energierückspeisung zum Motor nicht
möglich, erhöht sich die Spannung im Zwischenkreis des
Frequenzumrichters. In Anwendungen mit häufigem
Bremsen oder hoher Trägheitsmasse kann diese Erhöhung
zur Abschaltung des Frequenzumrichters aufgrund von
Überspannung führen. Bremswiderstände dienen zur
Ableitung der bei generatorischer Bremsung erzeugten
Energie. Die Auswahl des Bremswiderstands erfolgt anhand
seines ohmschen Widerstands, seines Leistungsverlusts und
seiner Größe. Danfoss bietet eine große Auswahl an
unterschiedlichen Bremswiderständen, die speziell auf
Danfoss-Frequenzumrichter abgestimmt sind. Bestellnummern und weitere Informationen zur Dimensionierung
von Bremswiderständen finden Sie im Projektierungs-
handbuch VLT
38 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
®
Brake Resistor MCE 101.
6.7
Hochfrequenz-Gleichtaktkerne (HF-CM-Kerne) verringern
elektromagnetische Störungen und eliminieren
Lagerschäden durch elektrische Entladungen. Bei diesen
handelt es sich um nanokristalline Magnetkerne, die im
Vergleich zu normalen Ferritkernen höhere Filterleistungen
aufweisen. Der HF-CM-Kern verhält sich wie eine Gleichtaktdrossel zwischen Phasen und Erde.
Bei Installation um die drei Motorphasen (U, V, W)
reduzieren die Gleichtaktfilter hochfrequente Gleichtaktströme. Als Ergebnis werden hochfrequente
elektromagnetische Störungen vom Motorkabel verringert.
Bestellnummern finden Sie im Projektierungshandbuch für
Ausgangsfilter.
Page 43

Optionen und Zubehör – Über... Projektierungshandbuch
6.8 Oberschwingungsfilter
Die VLT® Advanced Harmonic Filters AHF 005 & AHF 010
sollten nicht mit herkömmlichen Oberschwingungsfiltern
verglichen werden. Die Danfoss-Oberschwingungsfilter sind
speziell an die Danfoss-Frequenzumrichter angepasst.
Bei Anschluss der Oberschwingungsfilter AHF 005 oder
AHF 010 vor einem Danfoss-Frequenzumrichter reduzieren
diese die in das Netz zurückgespeiste Gesamt-Oberschwingungsstromverzerrung auf 5 % bzw. 10 %.
Bestellnummern und weitere Informationen zur Dimensionierung von Bremswiderständen finden Sie im
Projektierungshandbuch VLT® Advanced Harmonic Filters AHF
005/AHF 010.
6.9 High Power-Zubehör
High-Power-Nachrüstsätze, wie z. B. Rückwand-Kühlung,
Heizgerät, Netzabschirmung, sind für diese Gehäuse
erhältlich. Eine kurze Beschreibung und die Bestellnummern für alle verfügbaren Bausätze finden Sie unter
Kapitel 13.2 Bestellnummern für Optionen und Zubehör.
6
6
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 39
Page 44

Spezifikationen
7 Spezifikationen
7.1 Elektrische Daten, 380-480 V
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 %
Strom/60 s)
Typische Wellenleistung bei 400 V [kW] 90 110 110 132 132 160
Typische Wellenleistung bei 460 V [HP] (nur Nordamerika) 125 150 150 200 200 250
Typische Wellenleistung bei 480 V [kW] 110 132 132 160 160 200
Baugröße D1h/D3h/D5h/D6h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 400 V) [A] 177 212 212 260 260 315
Überlast (60 s) (bei 400 V) [A] 266 233 318 286 390 347
Dauerbetrieb (bei 460/480 V) [A] 160 190 190 240 240 302
77
Überlast (60 s) (bei 460/480 V) [kVA] 240 209 285 264 360 332
Dauerleistung kVA (bei 400 V) [kVA] 123 147 147 180 180 218
Dauerleistung kVA (bei 460 V) [kVA] 127 151 151 191 191 241
Dauerleistung kVA (bei 480 V) [kVA] 139 165 165 208 208 262
Max. Eingangsstrom
Dauerbetrieb (bei 400 V) [A] 171 204 204 251 251 304
Dauerbetrieb (bei 460/480 V) [A] 154 183 183 231 231 291
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm
(AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 400 V [W]
Geschätzte Verlustleistung bei 460 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
2
N110K N132 N160
2x95 (2x3/0) 2x95 (2x3/0) 2x95 (2x3/0)
315 350 400
2031 2559 2289 2954 2923 3770
1828 2261 2051 2724 2089 3628
0,98 0,98 0,98
110 (230) 110 (230) 110 (230)
75 (167) 75 (167) 75 (167)
Tabelle 7.1 Elektrische Daten für Bauformen D1h/D3h/D5h/D6h, Netzversorgung 3x380–480 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
40 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 45

Spezifikationen Projektierungshandbuch
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 %
Strom/60 s)
Typische Wellenleistung bei 400 V [kW] 160 200 200 250 250 315
Typische Wellenleistung bei 460 V [HP] (nur Nordamerika) 250 300 300 350 350 450
Typische Wellenleistung bei 480 V [kW] 200 250 250 315 315 355
Baugröße D2h/D4h/D7h/D8h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 400 V) [A] 315 395 395 480 480 588
Überlast (60 s) (bei 400 V) [A] 473 435 593 528 720 647
Dauerbetrieb (bei 460/480 V) [A] 302 361 361 443 443 535
Überlast (60 s) (bei 460/480 V) [kVA] 453 397 542 487 665 589
Dauerleistung kVA (bei 400 V) [kVA] 218 274 274 333 333 407
Dauerleistung kVA (bei 460 V) [kVA] 241 288 288 353 353 426
Dauerleistung kVA (bei 480 V) [kVA] 262 313 313 384 384 463
Max. Eingangsstrom
Dauerbetrieb (bei 400 V) [A] 304 381 381 463 463 567
Dauerbetrieb (bei 460/480 V) [A] 291 348 348 427 427 516
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm
(AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 400 V [W]
Geschätzte Verlustleistung bei 460 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
2
N200 N250 N315
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
550 630 800
3093 4116 4039 5137 5005 6674
2872 3569 3575 4566 4458 5714
0,98 0,98 0,98
110 (230) 110 (230) 110 (230)
80 (176) 80 (176) 80 (176)
7 7
Tabelle 7.2 Elektrische Daten für Bauformen D2h/D4h/D7h/D8h, Netzversorgung 3x380–480 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
15 % liegen (Toleranz bezieht sich auf Schwankungen der
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 41
Page 46

Spezifikationen
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale
Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 400 V [kW] 315 355 355 400 400 450
Typische Wellenleistung bei 460 V [HP] (nur
Nordamerika)
Typische Wellenleistung bei 480 V [kW] 355 400 400 500 500 530
Baugröße E1h/E3h E1h/E3h E1h/E3h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 400 V) [A] 600 658 658 745 695 800
Überlast (60 s) (bei 400 V) [A] 900 724 987 820 1043 880
Dauerbetrieb (bei 460/480 V) [A] 540 590 590 678 678 730
Überlast (60 s) (bei 460/480 V) [A] 810 649 885 746 1017 803
Dauerleistung kVA (bei 400 V) [kVA] 416 456 456 516 482 554
Dauerleistung kVA (bei 460 V) [kVA] 430 470 470 540 540 582
Max. Eingangsstrom
77
Dauerbetrieb (bei 400 V) [A] 578 634 634 718 670 771
Dauerbetrieb (bei 460/480 V) [A] 520 569 569 653 653 704
Maximale Anzahl und Kabelquerschnitt pro Phase (E1h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Bremse oder Rückspeisung [mm2 (AWG)]
Maximale Anzahl und Kabelquerschnitt pro Phase (E3h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Zwischenkreiskopplung oder Rückspeisung
[mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 400 V [W]
Geschätzte Verlustleistung bei 460 V [W]
Wirkungsgrad
Ausgangsfrequenz 0–590 Hz 0–590 Hz 0–590 Hz
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
Leistungskarte Übertemperatur Abschalt. [°C (°F)]
Lüfterleistungskarte Übertemperatur Abschalt.
[°C (°F)]
Aktive Einschaltkarte Übertemperatur
Abschaltung [°C (°F)]
3)
2)
2), 3)
2), 3)
N355 N400 N450
450 500 500 600 550 600
5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm)
4 x 240 (4 x 500 mcm) 4 x 240 (4 x 500 mcm) 4 x 240 (4 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm)
800 800 800
6178 6928 6851 8036 7297 8783
5322 5910 5846 6933 7240 7969
0,98 0,98 0,98
110 (230) 110 (230) 110 (230)
80 (176) 80 (176) 80 (176)
85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185)
Tabelle 7.3 Elektrische Daten für Bauformen E1h/E3h, Netzversorgung 3 x 380–480 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
42 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 47

Spezifikationen Projektierungshandbuch
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 400 V [kW] 450 500 500 560
Typische Wellenleistung bei 460 V [HP] (nur Nordamerika) 600 650 650 750
Typische Wellenleistung bei 480 V [kW] 530 560 560 630
Baugröße E2h/E4h E2h/E4h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 400 V) [A] 800 880 880 990
Überlast (60 s) (bei 400 V) [A] 1200 968 1320 1089
Dauerbetrieb (bei 460/480 V) [A] 730 780 780 890
Überlast (60 s) (bei 460/480 V) [A] 1095 858 1170 979
Dauerleistung kVA (bei 400 V) [kVA] 554 610 610 686
Dauerleistung kVA (bei 460 V) [kVA] 582 621 621 709
Max. Eingangsstrom
Dauerbetrieb (bei 400 V) [A] 771 848 848 954
Dauerbetrieb (bei 460/480 V) [A] 704 752 752 858
Maximale Anzahl und Kabelquerschnitt pro Phase (E2h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Bremse oder Rückspeisung [mm2 (AWG)]
Maximale Anzahl und Kabelquerschnitt pro Phase (E4h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Zwischenkreiskopplung oder Rückspeisung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 400 V [W]
Geschätzte Verlustleistung bei 460 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
Leistungskarte Übertemperatur Abschalt. [°C (°F)]
Lüfterleistungskarte Übertemperatur Abschalt. [°C (°F)]
Aktive Einschaltkarte Übertemperatur Abschaltung [°C (°F)]
3)
1)
2), 3)
2), 3)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm)
N500 N560
1200 1200
8352 9473 9449 11102
7182 7809 7771 9236
0,98 0,98
110 (230) 100 (212)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
7 7
Tabelle 7.4 Elektrische Daten für Bauformen E2h/E4h, Netzversorgung 3 x 380–480 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 43
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 48

Spezifikationen
7.2 Elektrische Daten, 525-690 V
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale
Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 525 V [kW] 45 55 55 75 75 90
Typische Wellenleistung bei 575 V [HP] 60 75 75 100 100 125
Typische Wellenleistung bei 690 V [kW] 55 75 75 90 90 110
Baugröße D1h/D3h/D5h/D6h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 76 90 90 113 113 137
Aussetzbetrieb (60 s) (bei 525 V) [A] 114 99 135 124 170 151
Dauerbetrieb (bei 575/690 V) [A] 73 86 86 108 108 131
Aussetzbetrieb (60 s)(bei 575/690 V) [A] 110 95 129 119 162 144
Dauerbetrieb kVA (bei 525 V) [kVA] 69 82 82 103 103 125
Dauerbetrieb kVA (bei 575 V) [kVA] 73 86 86 108 108 131
77
Dauerbetrieb kVA (bei 690 V) [kVA] 87 103 103 129 129 157
Max. Eingangsstrom
Dauerbetrieb (bei 525 V) [A] 74 87 87 109 109 132
Dauerbetrieb (bei 575/690 V) 70 83 83 104 104 126
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm
(AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 575 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
2
N75K N90K N110K
2x95 (2x3/0) 2x95 (2x3/0) 2x95 (2x3/0)
160 315 315
1098 1162 1162 1428 1430 1740
1057 1204 1205 1477 1480 1798
0,98 0,98 0,98
110 (230) 110 (230) 110 (230)
75 (167) 75 (167) 75 (167)
Tabelle 7.5 Elektrische Daten für Bauformen D1h/D3h/D5h/D6h, Netzversorgung 3x525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
15 % liegen (Toleranz bezieht sich auf Schwankungen der
44 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 49

Spezifikationen Projektierungshandbuch
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 % Strom/60
s)
Typische Wellenleistung bei 525 V [kW] 90 110 110 132
Typische Wellenleistung bei 575 V [HP] 125 150 150 200
Typische Wellenleistung bei 690 V [kW] 110 132 132 160
Baugröße D1h/D3h/D5h/D6h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 137 162 162 201
Aussetzbetrieb (60 s) (bei 525 V) [A] 206 178 243 221
Dauerbetrieb (bei 575/690 V) [A] 131 155 155 192
Aussetzbetrieb (60 s)(bei 575/690 V) [A] 197 171 233 211
Dauerbetrieb kVA (bei 525 V) [kVA] 125 147 147 183
Dauerbetrieb kVA (bei 575 V) [kVA] 131 154 154 191
Dauerbetrieb kVA (bei 690 V) [kVA] 157 185 185 230
Max. Eingangsstrom
Dauerbetrieb (bei 525 V) [A] 132 156 156 193
Dauerbetrieb (bei 575/690 V) 126 149 149 185
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 575 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
N132 N160
2x95 (2x3/0) 2x95 (2x3/0)
160 315
1742 2101 2080 2649
1800 2167 2159 2740
0,98 0,98
110 (230) 110 (230)
75 (167) 75 (167)
7 7
Tabelle 7.6 Elektrische Daten für Bauformen D1h/D3h/D5h/D6h, Netzversorgung 3x525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
15 % liegen (Toleranz bezieht sich auf Schwankungen der
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 45
Page 50

Spezifikationen
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Überlast HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 % Strom/60
s)
Typische Wellenleistung bei 525 V [kW] 132 160 160 200
Typische Wellenleistung bei 575 V [HP] 200 250 250 300
Typische Wellenleistung bei 690 V [kW] 160 200 200 250
Baugröße D2h/D4h/D7h/D8h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 201 253 253 303
Aussetzbetrieb (60 s) (bei 525 V) [A] 301 278 380 333
Dauerbetrieb (bei 575/690 V) [A] 192 242 242 290
Aussetzbetrieb (60 s Überlast) (bei 575/690 V) [A] 288 266 363 319
Dauerbetrieb kVA (bei 525 V) [kVA] 183 230 230 276
Dauerbetrieb kVA (bei 575 V) [kVA] 191 241 241 289
Dauerbetrieb kVA (bei 690 V) [kVA] 229 289 289 347
Max. Eingangsstrom
77
Dauerbetrieb (bei 525 V) [A] 193 244 244 292
Dauerbetrieb (bei 575/690 V) 185 233 233 279
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 575 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
N200 N250
2x185 (2x350) 2x185 (2x350)
550 550
2361 3074 3012 3723
2446 3175 3123 3851
0,98 0,98
110 (230) 110 (230)
80 (176) 80 (176)
Tabelle 7.7 Elektrische Daten für Bauformen D2h/D4h/D7h/D8h, Netzversorgung 3x525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
15 % liegen (Toleranz bezieht sich auf Schwankungen der
46 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 51

Spezifikationen Projektierungshandbuch
VLT® AQUA Drive FC 202
Hohe/normale Überlast HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale Überlast=110 % Strom/60
s)
Typische Wellenleistung bei 525 V [kW] 200 250 250 315
Typische Wellenleistung bei 575 V [HP] 300 350 350 400
Typische Wellenleistung bei 690 V [kW] 250 315 315 400
Baugröße D2h/D4h/D7h/D8h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 303 360 360 418
Aussetzbetrieb (60 s) (bei 525 V) [A] 455 396 540 460
Dauerbetrieb (bei 575/690 V) [A] 290 344 344 400
Aussetzbetrieb (60 s Überlast) (bei 575/690 V) [A] 435 378 516 440
Dauerbetrieb kVA (bei 525 V) [kVA] 276 327 327 380
Dauerbetrieb kVA (bei 575 V) [kVA] 289 343 343 398
Dauerbetrieb kVA (bei 690 V) [kVA] 347 411 411 478
Max. Eingangsstrom
Dauerbetrieb (bei 525 V) [A] 292 347 347 403
Dauerbetrieb (bei 575/690 V) 279 332 332 385
Maximale Kabelanzahl und -querschnitt pro Phase
- Netz, Motor, Bremse und Zwischenkreiskopplung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 575 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–590 0–590
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
3)
1)
2), 3)
2), 3)
N315 N400
2x185 (2x350) 2x185 (2x350)
550 550
3642 4465 4146 5028
3771 4614 4258 5155
0,98 0,98
110 (230) 110 (230)
80 (176) 80 (176)
7 7
Tabelle 7.8 Elektrische Daten für Bauformen D2h/D4h/D7h/D8h, Netzversorgung 3x525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
15 % liegen (Toleranz bezieht sich auf Schwankungen der
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 47
Page 52

Spezifikationen
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale
Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 525 V [kW] 315 355 315 400
Typische Wellenleistung bei 575 V [HP] 400 450 400 500
Typische Wellenleistung bei 690 V [kW] 355 450 400 500
Baugröße E1h/E3h E1h/E3h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 395 470 429 523
Aussetzbetrieb (60 s) (bei 525 V) [A] 593 517 644 575
Dauerbetrieb (bei 575/690 V) [A] 380 450 410 500
Aussetzbetrieb (60 s Überlast) (bei 575/690 V) [A] 570 495 615 550
Dauerbetrieb kVA (bei 525 V) [kVA] 376 448 409 498
Dauerbetrieb kVA (bei 575 V) [kVA] 378 448 408 498
Dauerbetrieb kVA (bei 690 V) [kVA] 454 538 490 598
Max. Eingangsstrom
77
Dauerbetrieb (bei 525 V) [A] 381 453 413 504
Dauerbetrieb (bei 575/690 V) [A] 366 434 395 482
Maximale Anzahl und Kabelquerschnitt pro Phase (E1h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Bremse oder Rückspeisung [mm2 (AWG)]
Maximale Anzahl und Kabelquerschnitt pro Phase (E3h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Zwischenkreiskopplung oder Rückspeisung [mm
(AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 600 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–500 0–500
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
Leistungskarte Übertemperatur Abschalt. [°C (°F)]
Lüfterleistungskarte Übertemperatur Abschalt. [°C
(°F)]
Aktive Einschaltkarte Übertemperatur Abschaltung
[°C (°F)]
3)
1)
2), 3)
2), 3)
2
4989 6062 5419 6879
4920 5939 5332 6715
N450 N500
5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm)
4 x 240 (4 x 500 mcm) 4 x 240 (4 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm)
800 800
0,98 0,98
110 (230) 110 (230)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
Tabelle 7.9 Elektrische Daten für Bauformen E1h/E3h, Netzversorgung 3 x 525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
48 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 53

Spezifikationen Projektierungshandbuch
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale
Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 525 V [kW] 400 450 450 500
Typische Wellenleistung bei 575 V [HP] 500 600 600 650
Typische Wellenleistung bei 690 V [kW] 500 560 560 630
Baugröße E1h/E3h E1h/E3h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 523 596 596 630
Aussetzbetrieb (60 s) (bei 525 V) [A] 785 656 894 693
Dauerbetrieb (bei 575/690 V) [A] 500 570 570 630
Aussetzbetrieb (60 s Überlast) (bei 575/690 V) [A] 750 627 855 693
Dauerbetrieb kVA (bei 525 V) [kVA] 498 568 568 600
Dauerbetrieb kVA (bei 575 V) [kVA] 498 568 568 627
Dauerbetrieb kVA (bei 690 V) [kVA] 598 681 681 753
Max. Eingangsstrom
Dauerbetrieb (bei 525 V) [A] 504 574 574 607
Dauerbetrieb (bei 575/690 V) [A] 482 549 549 607
Maximale Anzahl und Kabelquerschnitt pro Phase (E1h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Bremse oder Rückspeisung [mm2 (AWG)]
Maximale Anzahl und Kabelquerschnitt pro Phase (E3h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Zwischenkreiskopplung oder Rückspeisung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 600 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–500 0–500
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
Leistungskarte Übertemperatur Abschalt. [°C (°F)]
Lüfterleistungskarte Übertemperatur Abschalt. [°C (°F)]
Aktive Einschaltkarte Übertemperatur Abschaltung [°C
(°F)]
3)
1)
2), 3)
2), 3)
6833 8076 8069 9208
6678 7852 7848 8921
N560 N630
5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm)
4 x 240 (4 x 500 mcm) 4 x 240 (4 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm)
800 800
0,98 0,98
110 (230) 110 (230)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
7 7
Tabelle 7.10 Elektrische Daten für Bauformen E1h/E3h, Netzversorgung 3 x 525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 49
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 54

Spezifikationen
VLT® AQUA Drive FC 202
VLT® AQUA Drive FC 202
Hohe/normale Last HO NO HO NO
(Hohe Überlast=150 % Strom/60 s, Normale
Überlast=110 % Strom/60 s)
Typische Wellenleistung bei 525 V [kW] 500 560 560 670
Typische Wellenleistung bei 575 V [HP] 650 750 750 950
Typische Wellenleistung bei 690 V [kW] 630 710 710 800
Baugröße E2h/E4h E2h/E4h
Ausgangsstrom (3-phasig)
Dauerbetrieb (bei 525 V) [A] 659 763 763 889
Aussetzbetrieb (60 s) (bei 525 V) [A] 989 839 1145 978
Dauerbetrieb (bei 575/690 V) [A] 630 730 730 850
Aussetzbetrieb (60 s Überlast) (bei 575/690 V) [A] 945 803 1095 935
Dauerbetrieb kVA (bei 525 V) [kVA] 628 727 727 847
Dauerbetrieb kVA (bei 575 V) [kVA] 627 727 727 847
Dauerbetrieb kVA (bei 690 V) [kVA] 753 872 872 1016
Max. Eingangsstrom
77
Dauerbetrieb (bei 525 V) [A] 635 735 735 857
Dauerbetrieb (bei 575/690 V) [A] 607 704 704 819
Maximale Anzahl und Kabelquerschnitt pro Phase (E2h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Bremse oder Rückspeisung [mm2 (AWG)]
Maximale Anzahl und Kabelquerschnitt pro Phase (E4h)
- Netz und Motor ohne Bremse [mm2 (AWG)]
- Netz und Motor mit Bremse [mm2 (AWG)]
- Zwischenkreiskopplung oder Rückspeisung [mm2 (AWG)]
Maximale externe Netzsicherungen [A]
Geschätzte Verlustleistung bei 600 V [W]
Geschätzte Verlustleistung bei 690 V [W]
Wirkungsgrad
Ausgangsfrequenz [Hz] 0–500 0–500
Kühlkörper Übertemperatur Abschalt. [°C (°F)]
Steuerkarte Übertemperatur Abschalt. [°C (°F)]
Leistungskarte Übertemperatur Abschalt. [°C (°F)]
Lüfterleistungskarte Übertemperatur Abschalt. [°C (°F)]
Aktive Einschaltkarte Übertemperatur Abschaltung [°C
(°F)]
3)
1)
2), 3)
2), 3)
8543 10346 10319 12723
8363 10066 10060 12321
N710 N800
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
5 x 240 (5 x 500 mcm) 5 x 240 (5 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
6 x 240 (6 x 500 mcm) 6 x 240 (6 x 500 mcm)
2 x 185 (2 x 350 mcm) 2 x 185 (2 x 350 mcm)
4 x 185 (4 x 350 mcm) 4 x 185 (4 x 350 mcm)
1200 1200
0,98 0,98
110 (230) 110 (230)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
Tabelle 7.11 Elektrische Daten für Bauformen E2h/E4h, Netzversorgung 3 x 525–690 V AC
1) Nennwerte der Sicherungen siehe Kapitel 10.5 Sicherungen und Trennschalter.
±
2) Die typische Verlustleistung gilt für normale Bedingungen und sollte innerhalb von
Spannung und der Kabelbedingungen). Diese Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE/IE3). Motoren mit niedrigerem
Wirkungsgrad tragen zur Verlustleistung im Frequenzumrichter bei. Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn Sie die
Taktfrequenz im Vergleich zur Werkseinstellung erhöhen, kann die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer
Steuerkarten sind eingeschlossen. Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energyefficiency-directive/#/. Optionen und Anschlusslasten können die Verluste um bis zu 30 W erhöhen, auch wenn in der Regel bei einer vollständig
belasteten Steuerkarte und Optionen für jeweils die Steckplätze A und B nur jeweils 4 W zusätzlich anfallen.
3) Gemessen mit 5 m langen abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Bei Nennstrom gemessener Wirkungsgrad. Die Energie-
effizienzklasse finden Sie unter Kapitel 7.5 Umgebungsbedingungen.. Informationen zu Teillastverlusten finden Sie unter drives.danfoss.com/
knowledge-center/energy-efficiency-directive/#/.
50 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
15 % liegen (Toleranz bezieht sich auf Schwankungen der
Page 55

Spezifikationen Projektierungshandbuch
7.3 Netzversorgung
Netzversorgung (L1, L2, L3)
Versorgungsspannung 380–480 V ±10%, 525–690 V ±10%
Niedrige Netzspannung/Netzausfall:
Bei einer niedrigen Netzspannung oder einem Netzausfall arbeitet der Frequenzumrichter weiter, bis die Zwischenkreisspannung
unter den minimalen Stopppegel abfällt, der normalerweise 15 % unter der niedrigsten Versorgungsnennspannung des Frequenzumrichters liegt. Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des
Frequenzumrichters erfolgt keine Netz-Einschaltung und es wird kein volles Drehmoment erreicht.
Netzfrequenz 50/60 Hz ±5 %
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥0,9 bei Nennlast
Verschiebungs-Leistungsfaktor (cos Φ) nahe 1 (>0,98)
Schalten am Versorgungseingang L1, L2, L3 (Netz-Einschaltungen) Max. 1 Mal alle 2 Minuten
Umgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
Der Frequenzumrichter ist für einen Kurzschluss-Nennstrom (SCCR) von maximal 100 kA bei 480/600 V geeignet.
1) Die Berechnungen basieren auf UL/IEC61800-3.
7.4 Motorausgang und Motordaten
1)
7 7
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
Ausgangsfrequenz 0–590 Hz
Ausgangsfrequenz bei Fluxvektorbetrieb 0–300 Hz
Schalten am Ausgang Unbegrenzt
Rampenzeiten 0,01–3600 s
1) Spannungs- und leistungsabhängig.
Drehmomentkennlinie
Startmoment (konstantes Drehmoment) Maximal 150 %/60 s
Überlastmoment (konstantes Drehmoment) Maximal 150 %/60 s
1) Prozentzahl bezieht sich auf den Nennstrom des Frequenzumrichters.
2) Einmal alle 10 Minuten.
1), 2)
1), 2)
7.5 Umgebungsbedingungen
Umgebung
Gehäuse D1h/D2h/D5h/D6h/D7h/D8h/E1h/E2h IP21/Typ 1, IP54/Typ 12
Gehäuse D3h/D4h/E3h/E4h IP20/Gehäuse
Vibrationstest (Standard/robust) 0,7 g/1,0 g
Luftfeuchtigkeit 5–95 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb)
Aggressive Umgebungsbedingungen (IEC 60068-2-43) H2S-Test Klasse kD
Aggressive Gase (IEC 60721-3-3) Klasse 3C3
Prüfverfahren nach IEC 60068-2-43 H2S (10 Tage)
Umgebungstemperatur (bei Schaltmodus SFAVM)
- mit Leistungsreduzierung Maximal 55 °C (131 °F)
- bei voller Ausgangsleistung typischer EFF2-Motoren (bis zu 90 % Ausgangsstrom) Maximal 50 °C (122 °F)
- bei vollem FC-Dauerausgangsstrom Maximal 45 °C (113 °F)
Min. Umgebungstemperatur bei Volllast 0 °C (32 °F)
Min. Umgebungstemperatur bei reduzierter Leistung -10 °C (14 °F)
Temperatur bei Lagerung/Transport -25 bis +65/70 °C (13 bis 149/158 °F)
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m (3281 ft)
Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m (9842 ft)
1) Weitere Informationen zur Leistungsreduzierung finden Sie unter Kapitel 9.6 Leistungsreduzierung.
1)
1)
1)
1)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 51
Page 56

Spezifikationen
EMV-Normen, Störaussendung EN 61800-3
EMV-Normen, Störfestigkeit EN 61800-3
Energieeffizienzklasse
1) Bestimmt gemäß EN 50598-2 bei:
Nennlast
•
90 % der Nennfrequenz
•
Taktfrequenz-Werkseinstellung.
•
Schaltmodus-Werkseinstellung
•
1)
VLT® AQUA Drive FC 202
IE2
7.6 Kabelspezifikationen
Kabellängen und -querschnitte für Steuerleitungen
Max. Motorkabellänge, abgeschirmt 150 m (492 ft)
Max. Motorkabellänge, nicht abgeschirmt 300 m (984 ft)
Maximaler Querschnitt zu Motor, Netz, Zwischenkreiskopplung und Bremse Siehe Kapitel 7 Spezifikationen
Max. Querschnitt für Steuerklemmen, starrer Draht 1,5 mm2/16 AWG (2x0,75 mm2)
77
Max. Querschnitt für Steuerklemmen, flexibles Kabel 1 mm2/18 AWG
Max. Querschnitt für Steuerklemmen, Kabel mit Aderendhülse 0,5 mm2/20 AWG
Mindestquerschnitt für Steuerklemmen 0,25 mm2/23 AWG
1) Leistungskabel, siehe Kapitel 7.1 Elektrische Daten, 380-480 V und Kapitel 7.2 Elektrische Daten, 525-690 V .
1)
7.7 Steuereingang/-ausgang und Steuerdaten
Digitaleingänge
Programmierbare Digitaleingänge 4 (6)
Klemme Nr. 18, 19, 271), 291), 32, 33
Logik PNP oder NPN
Spannungsniveau 0–24 V DC
Spannungsniveau, logisch 0 PNP <5 V DC
Spannungsniveau, logisch 1 PNP >10 V DC
Spannungsniveau, logisch 0 NPN >19 V DC
Spannungsniveau, logisch 1 NPN <14 V DC
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
Alle Digitaleingänge sind von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
1) Sie können die Klemmen 27 und 29 auch als Ausgänge programmieren.
i
Ca. 4 kΩ
Analogeingänge
Anzahl der Analogeingänge 2
Klemme Nr. 53, 54
Betriebsarten Spannung oder Strom
Betriebsartwahl Schalter A53 und A54
Einstellung Spannung Schalter A53/A54=(U)
Spannungsniveau -10 V bis +10 V (skalierbar)
Eingangswiderstand, R
Höchstspannung ±20 V
Strom Schalter A53/A54=(I)
Strombereich 0/4 bis 20 mA (skalierbar)
Eingangswiderstand, R
Maximaler Strom 30 mA
Auflösung der Analogeingänge 10 Bit (+ Vorzeichen)
Genauigkeit der Analogeingänge Maximale Abweichung 0,5 % der Gesamtskala
52 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
i
i
Ca. 10 kΩ
Ca. 200 Ω
Page 57

Spezifikationen Projektierungshandbuch
Bandbreite 100 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage/Schutzkleinspannung)
und anderen Hochspannungsklemmen getrennt.
Abbildung 7.1 PELV-Isolierung
Pulseingänge
Programmierbare Pulseingänge 2
Klemmennummer Puls 29, 33
Maximalfrequenz an Klemme 29, 33 (Gegentakt) 110 kHz
Maximalfrequenz an Klemme 29, 33 (offener Kollektor) 5 kHz
Minimale Frequenz an Klemme 29, 33 4 Hz
Spannungsniveau Siehe Kapitel 7.7.1 Digitaleingänge
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
Pulseingangsgenauigkeit (0,1-1 kHz) Maximale Abweichung: 0,1 % der Gesamtskala
Analogausgang
Anzahl programmierbarer Analogausgänge 1
Klemme Nr. 42
Strombereich am Analogausgang 0/4–20 mA
Maximale Widerstandslast zum Bezugspotential am Analogausgang 500 Ω
Genauigkeit am Analogausgang Maximale Abweichung: 0,8 % der Gesamtskala
Auflösung am Analogausgang 8 Bit
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV – Schutzkleinspannung, Protective extra low voltage) und
anderen Hochspannungsklemmen getrennt.
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Die serielle RS485-Kommunikationsschnittstelle ist von anderen zentralen Stromkreisen funktional und von der Versorgungsspannung (PELV) galvanisch getrennt.
i
Ca. 4 kΩ
7 7
Digitalausgang
Programmierbare Digital-/Pulsausgänge 2
Klemme Nr. 27, 29
Spannungsniveau am Digital-/Pulsausgang 0–24 V
Maximaler Ausgangsstrom (Körper oder Quelle) 40 mA
Maximale Last am Pulsausgang 1 kΩ
Maximale kapazitive Last am Pulsausgang 10 nF
Min. Ausgangsfrequenz am Pulsausgang 0 Hz
Max. Ausgangsfrequenz am Pulsausgang 32 kHz
Genauigkeit am Pulsausgang Maximale Abweichung: 0,1 % der Gesamtskala
Auflösung der Pulsausgänge 12 Bit
1) Sie können die Klemmen 27 und 29 auch als Eingänge programmieren.
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 53
1)
Page 58

Spezifikationen
Der Digitalausgang ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerkarte, 24 V DC-Ausgang
Klemme Nr. 12, 13
Maximale Last 200 mA
Die 24-V-DC-Versorgung ist galvanisch von der Versorgungsspannung (PELV) getrennt, hat jedoch das gleiche Potenzial wie die
analogen und digitalen Ein- und Ausgänge.
Relaisausgang
Programmierbare Relaisausgänge 2
Maximaler Querschnitt an Relaisklemmen 2,5 mm2 (12 AWG)
Minimaler Querschnitt an Relaisklemmen 0,2 mm2 (30 AWG)
Abzuisolierende Kabellänge 8 mm (0,3 Zoll)
Klemmennummer Relais 01 1-3 (öffnen), 1-2 (schließen))
Maximale Last an Klemme (AC-1)1) auf 1-2 (NO/Schließer) (ohmsche Last)
Maximale Last an Klemme (AC-15)1) auf 1-2 (NO/Schließer) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 1-2 (NO/Schließer) (ohmsche Last) 80 V DC, 2 A
77
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 1-2 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 1-3 (NC/Öffner) (ohmsche Last) 240 V AC, 2 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 1-3 (NC/Öffner) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 1-3 (NC/Öffner) (ohmsche Last) 50 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) an 1-3 (NC/Öffner) (induktive Last) 24 V DC, 0,1 A
Minimaler Belastungsstrom der Klemme an 1-3 (NC/Öffner), 1-2 (NO/Schließer) 24 V DC 10 mA, 24 V AC 2 mA
Umgebung nach EN 60664-1 Überspannungskategorie III/sVerschmutzungsgrad 2
Klemmennummer Relais 02 4-6 (öffnen), 4-5 (schließen)
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 4-5 (NO/Schließer) (ohmsche Last)
Maximale Last an Klemme (AC-15)1) auf 4-5 (NO/Schließer) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 4-5 (NO/Schließer) (ohmsche Last) 80 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 4-5 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 4-6 (NC/Öffner) (ohmsche Last) 240 V AC, 2 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 4-6 (NC/Öffner) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 4-6 (NC/Öffner) (ohmsche Last) 50 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) an 4-6 (NC/Öffner) (induktive Last) 24 V DC, 0,1 A
Minimaler Belastungsstrom der Klemme an 4-6 (NC/Öffner), 4-5 (NO/Schließer) 24 V DC 10 mA, 24 V AC 2 mA
Umgebung nach EN 60664-1 Überspannungskategorie III/sVerschmutzungsgrad 2
Die Relaiskontakte sind durch verstärkte Isolierung (PELV – Protective extra low voltage/Schutzkleinspannung) vom Rest der
Schaltung galvanisch getrennt.
1) IEC 60947 Teile 4 und 5
2) Überspannungskategorie II
3) UL-Anwendungen 300 V AC 2 A.
VLT® AQUA Drive FC 202
2), 3)
2), 3)
400 V AC, 2 A
400 V AC, 2 A
Steuerkarte, +10-V-DC-Ausgang
Klemme Nr. 50
Ausgangsspannung 10,5 V ±0,5 V
Maximale Last 25 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerungseigenschaften
Auflösung der Ausgangsfrequenz bei 0-1000 Hz ±0,003 Hz
System-Reaktionszeit (Klemmen 18, 19, 27, 29, 32, 33) ≤2 m/s
Drehzahlregelbereich (ohne Rückführung) 1:100 der Synchrondrehzahl
Drehzahlgenauigkeit (ohne Rückführung) 30–4000 UPM: Maximale Abweichung von ±8 UPM
Alle Angaben zu Steuerungseigenschaften basieren auf einem vierpoligen Asynchronmotor.
54 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 59

Spezifikationen Projektierungshandbuch
Steuerkartenleistung
Abtastintervall 5 M/S
Steuerkarte, serielle USB-Schnittstelle
USB-Standard 1,1 (Full Speed)
USB-Buchse USB-Stecker Typ B
HINWEIS
Der Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.
Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspannungsklemmen getrennt.
Der USB-Anschluss ist nicht galvanisch von der Masse getrennt. Verwenden Sie ausschließlich einen isolierten Laptop/PC
für die Verbindung zum USB-Anschluss am Frequenzumrichter oder ein isoliertes USB-Kabel bzw. einen isolierten USBKonverter.
7.8 Gehäusegewichte
Gehäuse 380–480/500 V 525–690 V
D1h 62 (137) 62 (137)
D2h 125 (276) 125 (276)
D3h 62 (137)
108 (238)
D4h 125 (276)
179 (395)
D5h 99 (218) 99 (218)
D6h 128 (282) 128 (282)
D7h 185 (408) 185 (408)
D8h 232 (512) 232 (512)
1)
1)
62 (137)
108 (238)
125 (276)
179 (395)
1)
1)
7 7
Tabelle 7.12 Gewichte der Bauformen D1h–D8h, kg (lb)
1) Mit optionalen Anschlussklemmen für Zwischenkreiskopplung oder Rückspeiseeinheit.
Gehäuse 380–480/500 V 525–690 V
E1h 295 (650) 295 (650)
E2h 318 (700) 318 (700)
E3h 272 (600) 272 (600)
E4h 295 (650) 295 (650)
Tabelle 7.13 Gewichte der Bauformen E1h–E4h, kg (lb)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 55
Page 60

130BE982.10
667 (26.3)
500 (19.7)
164 (6.5)
99 (3.9)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8 Außen- und Klemmenabmessungen
8.1 D1h – Außen- und Klemmenabmessungen
8.1.1 D1h – Außenabmessungen
88
Abbildung 8.1 Frontansicht der Bauform D1h
56 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 61

378 (14.9)
82 (3.2)
148 (5.8)
20 (0.8)
844 (33.2)
561 (22.1)
18 (0.7)
130BF797.10
Außen- und Klemmenabmessung... Projektierungshandbuch
Abbildung 8.2 Seitenansicht der Bauform D1h
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 57
Page 62

200 (7.9)
246 (9.7)
893
(35.2)
656
(25.8)
200 (7.9)
844
(33.2)
130 (5.1)
180 (7.1)
325 (12.8)
123
(4.8)
78
(3.1)
63 (2.5)
11
(0.4)
20
(0.8)
9
(0.3)
24
(0.9)
33
(1.3)
25
(1.0)
11 (0.4)
130BF798.10
A
A
B
B
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.3 Rückansicht der Bauform D1h
58 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 63

130BF669.10
404 (15.9)
298 (11.7)
105
130BF607.10
205 (8.1)
138 (5.4)
274 (10.8)
27 (1.0)
137 (5.4)
1
2
Außen- und Klemmenabmessung... Projektierungshandbuch
Abbildung 8.4 Türabstand der Bauform D1h
8 8
1 Netzseite 2 Motorseite
Abbildung 8.5 Bodenplattenabmessungen der Bauform D1h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 59
Page 64

88 (3.5)
0.0
200 (7.9)
130BF342.10
0.0
94 (3.7)
293 (11.5)
263 (10.4)
33 (1.3)
62 (2.4)
101 (4.0)
140 (5.5)
163 (6.4)
185 (7.3)
224 (8.8)
2
1
3
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.1.2 D1h – Klemmenabmessungen
88
1 Netzklemmen 3 Motorklemmen
2 Erdungsklemmen – –
Abbildung 8.6 D1h – Klemmenabmessungen (Frontansicht)
60 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 65

130BF343.10
244 (9.6)
272 (10.7)
0.0
0.0
1 2
M10
M10
32
(1.3)
13
(0.5)
32
(1.3)
13
(0.5)
Außen- und Klemmenabmessung... Projektierungshandbuch
1 Netzklemmen 2 Motorklemmen
Abbildung 8.7 Klemmenabmessungen der Bauform D1h (Seitenansichten)
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 61
Page 66

130BF321.10
96 (3.8)
211 (8.3)
602 (23.7)
871 (34.3)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.2 D2h – Außen- und Klemmenabmessungen
8.2.1 D2h – Außenabmessungen
88
Abbildung 8.8 Frontansicht der Bauform D2
62 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 67

130BF799.10
1050 (41.3)
718 (28.3)
148 (5.8)
18 (0.7)
378 (14.9)
142 (5.6)
20 (0.8)
Außen- und Klemmenabmessung... Projektierungshandbuch
Abbildung 8.9 Seitenansicht der Bauform D2
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 63
Page 68

1099
(43.3)
1051
(41.4)
107
(4.2)
320 (12.6)
213 (8.4)
857 (33.7)
130 (5.1)
420 (16.5)
346 (13.6)
280 (11.0)
271 (10.7)
A
A
B
B
9 (0.3)
20 (0.8)
11 (0.4)
75 (2.9)
24 (0.9)
11 (0.4)
33 (1.3)
130BF800.10
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.10 Rückansicht der Bauform D2
64 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 69

395 (15.6)
523 (20.6)
105
130BF670.10
130BF608.10
27 (1.0)
185 (7.3)
1
2
369 (14.5)
196 (7.7)
145 (5.7)
Außen- und Klemmenabmessung... Projektierungshandbuch
Abbildung 8.11 Türabstand der Bauform D2
8 8
1 Netzseite 2 Motorseite
Abbildung 8.12 Bodenplattenabmessungen der Bauform D2
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 65
Page 70

130BF345.10
143 (5.6)
168 (6.6)
331 (13.0)
211 (8.3)
168 (6.6)
143 (5.6)
42 (1.6)
68 (2.7)
126 (5.0)
184 (7.2)
246 (9.7)
300 (11.8)
354 (13.9)
378 (14.9)
0.0
0.0
2
1
3
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.2.2 D2h – Klemmenabmessungen
88
1 Netzklemmen 3 Motorklemmen
2 Erdungsklemmen – –
Abbildung 8.13 D2h – Klemmenabmessungen (Frontansicht)
66 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 71

130BF346.10
0.0
0.0
1 2
255 (10.0)
284 (11.2)
M10
15 (0.6)
38 (1.5)
19 (0.8)
15 (0.6)
18 (0.7)
35 (1.4)
M10
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
1 Netzklemmen 2 Motorklemmen
Abbildung 8.14 D2h – Klemmenabmessungen (Seitenansichten)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 67
Page 72

130BF322.10
61 (2.4)
128 (5.0)
495 (19.5)
660 (26.0)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.3 D3h – Außen- und Klemmenabmessungen
8.3.1 D3h – Außenabmessungen
88
Abbildung 8.15 Frontansicht der Bauform D3
68 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 73

148 (5.8)
20 (0.8)
130BF801.10
844 (33.2)
39 (1.5)
375 (14.8)
82 (3.2)
18 (0.7)
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
Abbildung 8.16 Seitenansicht der Bauform D3
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 69
Page 74

656 (25.8)
200 (7.9)
200 (7.9)
130 (5.1)
889 (35.0)
909 (35.8)
844 (33.2)
78 (3.1)
123
(4.8)
250 (9.8)
180 (7.1)
A
B
A
B
33 (1.3)
11 (0.4)
25 (1.0)
11 (0.4)
20 (0.8)
9 (0.3)
24
(0.9)
25 (1.0)
M10
M10
130BF802.10
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.17 Rückansicht der Bauform D3
70 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 75

130BF341.10
83 (3.3)
0.0
188 (7.4)
22 (0.9)
62 (2.4)
101 (4.0)
145 (5.7)
184 (7.2)
223 (8.8)
152 (6.0)
217 (8.5)
292 (11.5)
0.0
2
1
3
4
Außen- und Klemmenabmessung... Projektierungshandbuch
8.3.2 D3h – Klemmenabmessungen
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen 4 Erdungsklemmen
Abbildung 8.18 D3h – Klemmenabmessungen (Frontansicht)
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 71
Page 76

M10
13 (0.5)
32 (1.3)
59 (2.3)
12 (0.5)
10 (0.4)
38 (1.5)
M10
244 (9.6)
290 (11.4)
272 (10.7)
130BF344.10
0.0
0.0
3
2
1
5
4
6
7
M10
13 (0.5)
32 (1.3)
145 (5.7)
182 (7.2)
3X M8x18
0
0
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
1 und 6 Untere Bremsen-/Rückspeiseklemmen 3 und 5 Netzklemmen
2 und 7 Motorklemmen 4 Erdungsklemmen
Abbildung 8.19 D3h – Klemmenabmessungen (Seitenansichten)
72 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 77

130BF323.10
176 (6.9)
611 (24.1)
59 (2.3)
868 (34.2)
Außen- und Klemmenabmessung... Projektierungshandbuch
8.4 D4h – Außen- und Klemmenabmessungen
8.4.1 D4h – Gehäuseabmessungen
8 8
Abbildung 8.20 Frontansicht der Bauform D4
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 73
Page 78

130BF803.10
20 (0.8)
148 (5.8)
18 (0.7)
1050 (41.3)
39 (1.5)
375 (14.8)
142 (5.6)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.21 Seitenabmessungen für die Bauform D4h
74 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 79

B
130BF804.10
B
857 (33.7)
A
A
320 (12.6)
280 (11.0)
350 (13.8)
107
(4.2)
213 (8.4)
1122 (44.2)
1096 (43.1)
1051 (41.4)
271 (10.7)
130 (5.1)
25 (1.0)
33 (1.3)
11 (0.4)
40
(1.6)
11 (0.4)
9 (0.3)
20 (0.8)
24 (0.9)
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
Abbildung 8.22 Rückseitige Abmessungen für die Bauform D4h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 75
Page 80

33 (1.3)
91 (3.6)
149 (5.8)
211 (8.3)
265 (10.4)
319 (12.6)
200 (7.9)
319 (12.6)
376 (14.8)
293 (11.5)
237 (9.3)
130BF347.10
0.0
o.o
1
3
2
4
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.4.2 D4h – Klemmenabmessungen
88
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen 4 Erdungsklemmen
Abbildung 8.23 D4h – Klemmenabmessungen (Frontansicht)
76 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 81

5
4
6
7
91 (3.6)
13 (0.5)
200 (7.9)
259 (10.2)
3X M10X20
0
0
M10
19 (0.8)
38 (1.5)
255 (10.0)
306 (12.1)
284 (11.2)
130BF348.10
0.0
0.0
3
2
1
M10
22 (0.9)
35 (1.4)
15 (0.6)
18 (0.7)
M10
16 (0.6)
32 (1.3)
19 (0.7)
Außen- und Klemmenabmessung... Projektierungshandbuch
1 und 6 Anschlussklemmen für Bremse oder Rückspeiseeinheit 3 und 5 Netzklemmen
2 und 7 Motorklemmen 4 Erdungsklemmen
8 8
Abbildung 8.24 D4h – Klemmenabmessungen (Seitenansichten)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 77
Page 82

149 (5.9)
733 (28.9)
1107 (43.6)
130BF324.10
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.5 D5h – Außen- und Klemmenabmessungen
8.5.1 Außenabmessungen D5h
88
Abbildung 8.25 Frontansicht D5h
78 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 83

130BF805.10
161 (6.3)
23 (0.9)
115 (4.5)
381 (15.0)
1277 (50.3)
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
Abbildung 8.26 Seitenansicht D5h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 79
Page 84

130BF806.10
B
B
1276
(50.2)
64
(2.5)
A
A
M10
M10
325 (12.8)
306 (12.1)
276 (10.9)
180 (7.1)
130
(5.1)
123
(4.8)
78
(3.1)
200
(7.9)
1324
(52.1)
1111
(43.7)
130 (5.1)
123
(4.8)
78
(3.1
200
(7.9)
200 (7.9)
220 (8.7)
25
(1)
4X 11 (0.4)
63 (2.5)
15 (0.6)
11 (0.4)
24 (0.9)
20
(0.8)
9
(0.3)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.27 Rückansicht D5h
80 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 85

130BF828.10
433 (17.0)
670 (26.4)
218 (8.6)
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
Abbildung 8.28 Abmessungen des Kühlkörperzugangs D5h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 81
Page 86

130BF669.10
404 (15.9)
298 (11.7)
105
111 (4.4)
224 (8.8)
242 (9.5)
121 (4.8)
43 (1.7)
1 2
130BF609.10
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.29 Türabstand D5h
1 Netzseite 2 Motorseite
Abbildung 8.30 Abmessungen der Bodenplatte D5h
82 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 87

130BF349.10
0.0
0.0
45 (1.8)
46 (1.8)
99 (3.9)
153 (6.0)
146 (5.8)
182 (7.2)
193 (7.6)
249 (9.8)
221 (8.7)
260 (10.2)
118 (4.6)
148 (5.8)
90 (3.6)
196 (7.7)
227 (9.0)
221 (8.7)
3
4
2
1
Außen- und Klemmenabmessung... Projektierungshandbuch
8.5.2 D5h – Klemmenabmessungen
1 Netzklemmen 3 Bremsklemmen
2 Erdungsklemmen 4 Motorklemmen
Abbildung 8.31 D5h – Klemmenabmessungen mit Trennschalteroption (Frontansicht)
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 83
Page 88

0.0
0.0
113 (4.4)
206 (8.1)
130BF350.10
1
3
2
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen – –
Abbildung 8.32 D5h – Klemmenabmessungen mit Trennschalteroption (Seitenansichten)
84 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 89

130BF351.10
1
2
0.0
33 (1.3)
0.0
62 (2.4)
101 (4.0)
140 (5.5)
163 (6.4)
185 (7.3)
191 (7.5)
224 (8.8)
256 (10.1)
263 (10.4)
293 (11.5)
511 (20.1)
517 (20.4)
623 (24.5)
727 (28.6)
3
4
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen 4 Erdungsklemmen
Abbildung 8.33 D5h – Klemmenabmessungen mit Bremsoption (Frontansicht)
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 85
Page 90

130BF352.10
246 (9.7)
293 (11.5)
274 (10.8)
0.0
0.0
2
1
3
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen – –
Abbildung 8.34 D5h – Klemmenabmessungen mit Bremsoption (Seitenansichten)
86 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 91

159 (6.3)
130BF325.10
909 (35.8)
1447 (57.0)
Außen- und Klemmenabmessung... Projektierungshandbuch
8.6 D6h – Außen- und Klemmenabmessungen
8.6.1 Außenabmessungen D6h
8 8
Abbildung 8.35 Frontansicht D6h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 87
Page 92

130BF807.10
1617 (63.7)
181 (7.1)
23 (0.9)
115 (4.5)
381 (15.0)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.36 Seitenansicht D6h
88 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 93

A
M10
25 (1)
4X 11 (0.4)
63 (2.5)
15 (0.6)
A
B
B
130BF808.10
325 (12.8)
306 (12.1)
276 (10.9)
180 (7.1)
130
(5.1)
1452
(57.2)
200 (7.9)
559 (22.0)
130 (5.1)
200
(7.9)
78
(3.1)
123
(4.8)
1615
(63.6)
1663
(65.5)
200
(7.9)
78
(3.1)
123
(4.8)
24 (0.9)
20 (0.8)
9 (0.1)
64 (3.0)
11 (0.4)
M10
Außen- und Klemmenabmessung... Projektierungshandbuch
8 8
Abbildung 8.37 Rückansicht D6h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 89
Page 94

130BF829.10
433 (17.0)
1009 (39.7)
218 (8.6)
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
Abbildung 8.38 Abmessungen des Kühlkörperzugangs D6h
90 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 95

130BF669.10
404 (15.9)
298 (11.7)
105
111 (4.4)
224 (8.8)
242 (9.5)
121 (4.8)
43 (1.7)
1 2
130BF609.10
Außen- und Klemmenabmessung... Projektierungshandbuch
Abbildung 8.39 Türabstand D6h
8 8
1 Netzseite 2 Motorseite
Abbildung 8.40 Abmessungen der Bodenplatte D6h
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 91
Page 96

130BF353.10
0.0
96 (3.8)
195 (7.7)
227 (8.9)
123 (4.8)
153 (6.0)
458 (18.0)
0.0
46 (1.8)
50 (2.0)
99 (3.9)
147 (5.8)
182 (7.2)
193 (7.6)
221 (8.7)
249 (9.8)
260 (10.2)
146 (5.8)
3
2
1
4
5
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
8.6.2 D6h – Klemmenabmessungen
88
1 Netzklemmen 4 Bremsklemmen
2 Erdungsklemmen 5 Motorklemmen
3 TB6 Klemmenblock für Schütz – –
Abbildung 8.41 D6h – Klemmenabmessungen mit Schützoption (Frontansicht)
92 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 97

e30bf354.10
0.0
0.0
123
286 (11.2)
113 (4.4)
206 (8.1)
Außen- und Klemmenabmessung... Projektierungshandbuch
1 Netzklemmen 3 Motorklemmen
2 Bremsklemmen – –
Abbildung 8.42 D6h – Klemmenabmessungen mit Schützoption (Seitenansichten)
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 93
Page 98

130BF355.10
99 (3.9)
153 (6.0)
0.0
225 (8.9)
45 (1.8)
0.0
4
1
2
5
3
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
1 Netzklemmen 4 Bremsklemmen
2 Erdungsklemmen 5 Motorklemmen
3 TB6 Klemmenblock für Schütz – –
Abbildung 8.43 D6h – Klemmenabmessungen mit Schütz- und Trennschalteroptionen (Frontansicht)
94 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
Page 99

130BF356.10
0.0
286 (11.2)
1
2
3
Außen- und Klemmenabmessung... Projektierungshandbuch
1 Bremsklemmen 3 Motorklemmen
2 Netzklemmen – –
Abbildung 8.44 D6h – Klemmenabmessungen mit Schütz- und Trennschalteroptionen (Seitenansichten)
8 8
MG22B203 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. 95
Page 100

130BF357.10
467 (18.4)
0.0
52 (2.1)
0.0
99 (3.9)
145 (5.7)
1
2
3
4
Außen- und Klemmenabmessung...
VLT® AQUA Drive FC 202
88
1 Netzklemmen 3 Bremsklemmen
2 Erdungsklemmen 4 Motorklemmen
Abbildung 8.45 D6h – Klemmenabmessungen mit Hauptschalteroption (Frontansicht)
96 Danfoss A/S © 12/2017 Alle Rechte vorbehalten. MG22B203
 Loading...
Loading...