

Page 1
ENGINEERING TOMORROW
Guida alla Programmazione
VLT® AQUA Drive FC 202
Versione software: 3.30
www.danfoss.it/vlt-drives
Page 2

Page 3
Sommario Guida alla Programmazione
Sommario
1 Introduzione
1.1 Scopo del manuale
1.2 Risorse aggiuntive
1.3 Versione software
1.4 Conformità
1.5 Simboli
1.6 Denizioni
1.6.1 Convertitore di frequenza 4
1.6.2 Ingresso 4
1.6.3 Motore 4
1.6.4 Riferimenti 5
1.6.5 Varie 5
1.7 Abbreviazioni, simboli e convenzioni
1.8 Sicurezza
1.9 Cablaggio elettrico
2 Programmazione
2.1 Il Pannello di Controllo Locale Graco e Numerico
4
4
4
4
4
4
4
7
8
10
13
13
2.2 Programmazione sull'LCP graco
2.2.1 Il display LCP 14
2.2.2 Trasferimento rapido delle impostazioni parametri tra diversi convertitori di frequenza. 17
2.2.3 Modalità visualizzazione 17
2.2.4 Modalità visualizzazione - selezione delle visualizzazioni 17
2.2.5 Programmazione parametri 18
2.2.6 Funzioni dei tasti del Menu rapido 18
2.2.7 Menu rapido, Q3 Impostaz. funzione 19
2.2.8 Menu rapido, Q4 SmartStart 21
2.2.9 Modalità Menu principale 21
2.2.10 Selezione dei parametri 21
2.2.11 Modica dei dati 21
2.2.12 Modica di un valore di testo 21
2.2.13 Modica di un valore dati 22
2.2.14 Variazione continua di un valore del dato numerico 22
2.2.15 Valore, passo dopo passo 22
2.2.16 Visualizzazione e programmazione dei parametri indicizzati 22
13
2.2.17 Programmazione con il Pannello di Controllo Locale numerico 23
2.2.18 Tasti dell'LCP 24
3 Descrizione dei parametri
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 1
26
Page 4
Sommario
VLT® AQUA Drive FC 202
3.1 Selezione dei parametri
3.2 Parametri 0-** Funzionam./display
3.3 Parametri 1-** Carico e Motore
3.4 Parametri 2-** Freni
3.5 Parametetri 3-** Rif./rampe
3.6 Parametri 4-** Limiti / avvisi
3.7 Parametri 5-** I/O digitali
3.8 Parametri 6-** I/O analogici
3.9 Parametri 8-** Comun. e opzioni
3.10 Parametri 9-** PROFIBUS
3.11 Parametri 10-** Bus di campo CAN
3.12 Parametri 13-** Smart Logic
3.13 Parametri 14-** Funzioni speciali
3.14 Parametri 15-** Inform. conv. freq.
3.15 Parametri 16-** Visualizzazione dati
3.16 Parametri 18-** Visualizzazione dei dati 2
3.17 Parametri 20-** FC anello chiuso
26
27
43
69
73
81
86
104
115
129
129
133
156
168
178
186
189
3.18 Parametri 21-** Anello chiuso est.
3.19 Parametri 22-** Funzioni applicazione
3.20 Parametri 23-** Funzioni temporizzate
3.21 Parametri 24-** Funyioni dell|applicazione 2
3.22 Parametri 25-** Controllore in cascata
3.23 Parametri 26-** Opzione I/O anal.
3.24 Parametri 27-** Cascade CTL Option
3.25 Parametri 29-** Water Application Functions
3.26 Parametri 30-** Caratteristiche speciali
3.27 Parametri 31-** Opzione bypass
3.28 Parametri 35-** Opzione ingresso sensore
4 Elenchi dei parametri
4.1 Opzioni dei parametri
4.1.1 Impostazioni di fabbrica 295
4.1.2 0-** Funzionam./display 296
4.1.3 1-** Carico e Motore 298
4.1.4 2-** Freni 300
201
210
227
241
247
260
267
281
290
291
292
295
295
4.1.5 3-** Rif./rampe 301
4.1.6 4-** Limiti / avvisi 302
4.1.7 5-** I/O digitali 303
4.1.8 6-** I/O analogici 305
4.1.9 8-** Comun. e opzioni 307
4.1.10 9-** PROFIdrive 308
2 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 5
Sommario Guida alla Programmazione
4.1.11 10-** Fieldbus CAN 309
4.1.12 13-** Smart logic 310
4.1.13 14-** Funzioni speciali 311
4.1.14 15-** Inform. conv. freq. 313
4.1.15 16-** Visualizzazione dati 315
4.1.16 18-** Inform. & visualizz. 317
4.1.17 20-** Conv. freq. anello chiuso 318
4.1.18 21-** Anello chiuso est. 319
4.1.19 22-** Funzioni applicazione 321
4.1.20 23-** Funzioni temporizzate 323
4.1.21 24-** Funz. appl. 2 324
4.1.22 25-** Controllore in cascata 324
4.1.23 26-** Opzione I/O anal. 325
4.1.24 29-** Water Application Functions 327
4.1.25 30-** Caratteristiche speciali 329
4.1.26 31-** Opzione bypass 329
4.1.27 35-** Opzione ingresso sensore 329
5 Ricerca ed eliminazione dei guasti
5.1 Messaggi di stato
5.1.1 Avvisi/Messaggi di allarme 331
Indice
331
331
338
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 3
Page 6
Introduzione
VLT® AQUA Drive FC 202
11
1 Introduzione
1.1 Scopo del manuale
La Guida alla Programmazione fornisce le informazioni
necessarie per la programmazione del convertitore di
frequenza in varie applicazioni.
VLT® è un marchio registrato.
1.2 Risorse aggiuntive
Sono disponibili altre risorse di supporto alla comprensione
del funzionamento e della programmazione avanzati del
convertitore di frequenza.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
1.6 Denizioni
Il Manuale di Funzionamento VLT® AQUA Drive FC
•
202 descrive l'installazione meccanica ed elettrica
del convertitore di frequenza.
La Guida alla Progettazione VLT® AQUA Drive FC
•
202 fornisce informazioni dettagliate sulle
capacità e funzionalità per progettare sistemi di
controllo motore.
Istruzioni per il funzionamento con apparec-
•
chiatura opzionale.
Pubblicazioni e manuali supplementari sono disponibili
presso Danfoss. Vedere drives.danfoss.com/knowledge-
center/technical-documentation/ per gli elenchi.
1.6.1 Convertitore di frequenza
I
VLT,MAX
Corrente di uscita massima.
I
VLT,N
Corrente di uscita nominale fornita dal convertitore di
frequenza.
U
VLT,MAX
Tensione di uscita massima.
1.6.2 Ingresso
Versione software
1.3
Versione software: 3.30
Il numero di versione software può essere letto dal
parametro 15-43 Versione software.
1.4 Conformità
1.5 Simboli
Nella presente guida vengono usati i seguenti simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
Comando di controllo
Avviare e arrestare il motore collegato mediante l'LCP e gli
ingressi digitali.
Le funzioni sono divise in due gruppi.
Le funzioni nel gruppo 1 hanno una priorità maggiore
rispetto a quelle nel gruppo 2.
Gruppo 1 Ripristino, arresto a ruota libera, ripristino e
arresto a ruota libera, arresto rapido, frenatura CC,
arresto, tasto [OFF].
Gruppo 2 Avvio, avviamento a impulsi, inversione, avvio
inverso, jog, uscita congelata.
Tabella 1.1 Gruppi di funzioni
1.6.3 Motore
Motore in funzione
Coppia generata sull'albero di trasmissione e velocità da 0
Giri/min. alla velocità massima sul motore.
f
JOG
Frequenza motore quando viene attivata la funzione jog
(mediante i morsetti digitali).
f
M
Frequenza motore.
4 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 7
175ZA078.10
Coppia massima
Giri / min.
Coppia
Introduzione Guida alla Programmazione
f
MAX
Frequenza motore massima.
f
MIN
Frequenza motore minima.
f
M,N
Frequenza nominale del motore (dati di targa).
I
M
Corrente motore (eettiva).
I
M,N
Corrente nominale del motore (dati di targa).
n
M,N
Velocità nominale del motore (dati di targa).
n
s
Velocità del motore sincrono.
2 × par . 1 − 23 × 60s
ns=
n
slip
par . 1 − 39
Scorrimento del motore.
P
M,N
Potenza nominale del motore (dati di targa in kW o cv).
T
M,N
Coppia nominale (motore).
U
M
Tensione motore istantanea.
U
M,N
Tensione nominale del motore (dati di targa).
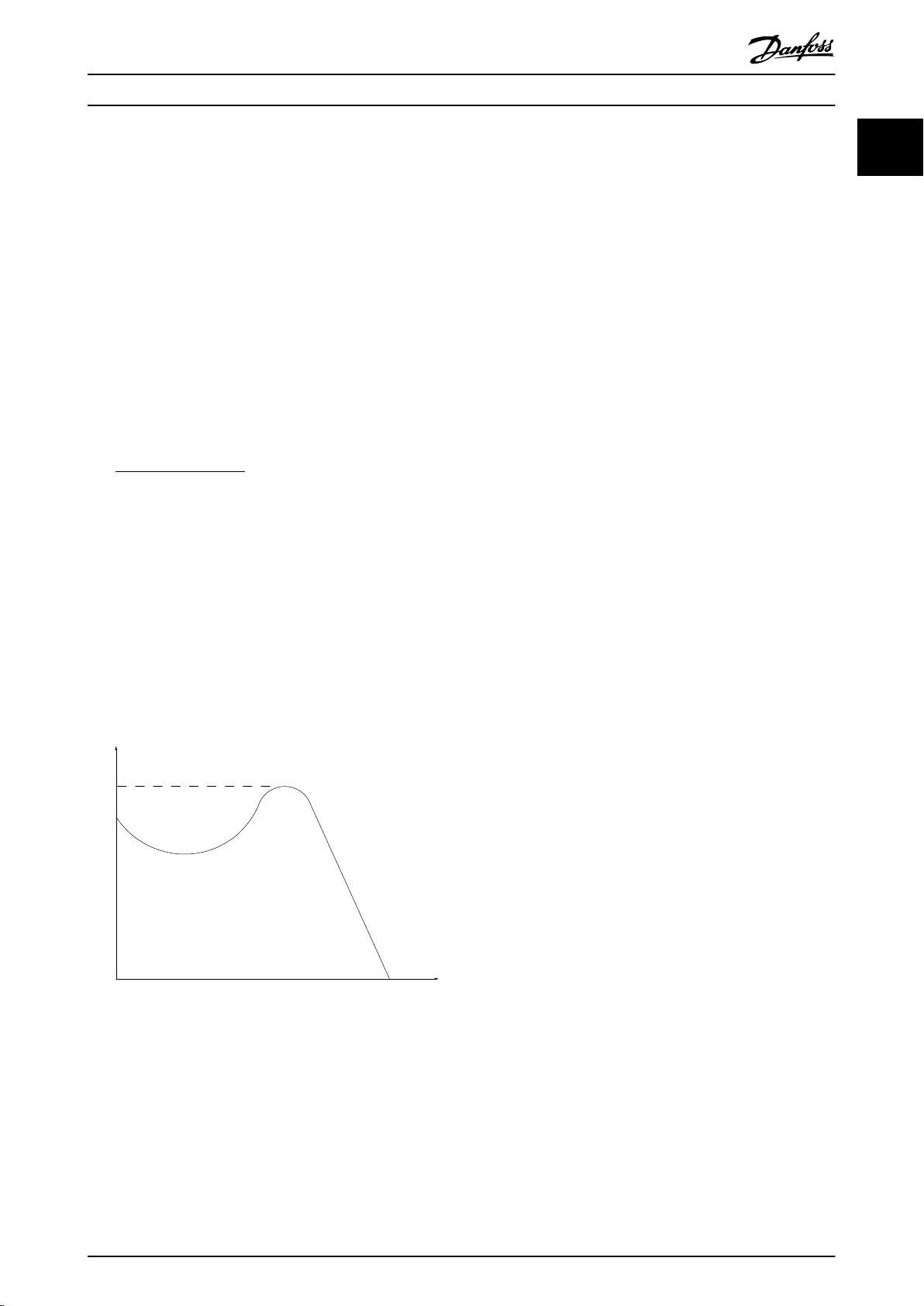
Coppia di interruzione
Comando di arresto
Un comando di arresto appartenente ai comandi di
controllo del gruppo 1 - vedere Tabella 1.1.
1.6.4 Riferimenti
Riferimento analogico
Un segnale trasmesso agli ingressi analogici 53 o 54
(tensione o corrente).
Riferimento binario
Un segnale trasmesso alla porta di comunicazione seriale.
Riferimento preimpostato
Un riferimento preimpostato denito che può essere
impostato tra -100% e +100% dell'intervallo di riferimento.
Selezione di otto riferimenti preimpostati mediante i
morsetti digitali.
Riferimento impulsi
Segnale a impulsi di frequenza trasmesso agli ingressi
digitali (morsetto 29 o 33).
Ref
MAX
Determina la relazione tra l'ingresso di riferimento al 100%
del valore di fondo scala (tipicamente 10 V, 20 mA) e il
riferimento risultante. Il valore di riferimento massimo è
impostato nel parametro 3-03 Riferimento max..
Ref
MIN
Determina la relazione tra l'ingresso di riferimento allo 0%
del valore (tipicamente 0 V, 0 mA, 4 mA) e il riferimento
risultante. Il valore di riferimento minimo è impostato nel
parametro 3-02 Riferimento minimo.
1 1
Disegno 1.1 Coppia di interruzione
η
VLT
L'ecienza del convertitore di frequenza è denita come il
rapporto tra la potenza di uscita e quella di ingresso.
Comando per disabilitare l'avviamento
Un comando di arresto appartenente ai comandi di
controllo del gruppo 1 - vedere Tabella 1.1.
1.6.5 Varie
Ingressi analogici
Gli ingressi analogici vengono utilizzati per controllare varie
funzioni del convertitore di frequenza.
Esistono due tipi di ingressi analogici:
ingresso in corrente, 0–20 mA e 4–20 mA;
ingresso in tensione, da -10 V CC a +10 V CC.
Uscite analogiche
Le uscite analogiche sono in grado di fornire un segnale di
0–20 mA, 4–20 mA.
Adattamento automatico motore, AMA
L'algoritmo AMA determina i parametri elettrici del motore
collegato durante il suo arresto.
Resistenza freno
La resistenza freno è un modulo in grado di assorbire la
potenza freno generata nella fase di frenatura rigenerativa.
Questa potenza di frenatura rigenerativa aumenta la
tensione del collegamento CC e un chopper di frenatura
assicura che la potenza venga trasmessa alla resistenza di
frenatura.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 5
Page 8

Introduzione
VLT® AQUA Drive FC 202
11
Caratteristiche CT
Caratteristiche della coppia costante, usate per tutte le
applicazioni quali nastri trasportatori, pompe di trasferimento e gru.
Ingressi digitali
Gli ingressi digitali consentono di controllare varie funzioni
del convertitore di frequenza.
Uscite digitali
Il convertitore di frequenza presenta due stadi di uscita a
stato solido che sono in grado di fornire un segnale a 24 V
CC (massimo 40 mA).
DSP
Processore di segnali digitali.
ETR
Il relè termico elettronico è un calcolo del carico termico
basato sul carico presente e sul tempo. Lo scopo è stimare
la temperatura del motore.
HIPERFACE
HIPERFACE® è un marchio registrato di Stegmann.
Inizializzazione
Se viene eseguita un'inizializzazione (parametro 14-22 Modo
di funzionamento), il convertitore di frequenza ritorna
all'impostazione di fabbrica.
Duty cycle intermittente
Un grado di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire con servizio periodico o aperiodico.
LCP
Il pannello di controllo locale rappresenta un'interfaccia
completa per il controllo e la programmazione del convertitore di frequenza. Il quadro di comando è estraibile e può
essere installato a una distanza massima di 3 m (10 piedi)
dal convertitore di frequenza, vale a dire in un pannello
anteriore mediante il kit di montaggio opzionale.
NLCP
Interfaccia del pannello di controllo locale numerico per il
controllo e la programmazione del convertitore di
frequenza. Il display è numerico e il pannello viene
utilizzato per mostrare i valori di processo. L'NLCP non
possiede funzioni di memorizzazione e copia.
lsb
Bit meno
msb
Bit più signicativo.
MCM
Abbreviazione per Mille Circular Mil, un'unità di misura
americana per la sezione trasversale dei cavi. 1 MCM ≡
0,5067 mm2.
Parametri online/oine
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei dati.
Premere [OK] per attivare le modiche ai parametri oine.
®
signicativo.
PID di processo
Il controllo PID mantiene la velocità, la pressione, la
temperatura ecc. richieste regolando la frequenza di uscita
in base alle variazioni del carico.
PCD
Dati del controllo di processo.
Spegnere e riaccendere
Disinserire l'alimentazione di rete no a quando il display
(LCP) non si spegne, quindi reinserirla.
Ingresso a impulsi/encoder incrementale
Trasmettitore di impulsi esterno usato per retroazionare
informazioni sulla velocità del motore. L'encoder viene
usato nelle applicazioni che richiedono una grande
precisione nel controllo di velocità.
RCD
Dispositivo a corrente residua.
Setup
Salvare le impostazioni parametri in quattro setup.
Cambiare tra le quattro programmazioni parametri e
modicare un setup mentre è attivo un altro setup.
SFAVM
Modello di commutazione chiamato modulazione vettoriale
asincrona orientata secondo il usso dello statore
(parametro 14-00 Modello di commutaz.).
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico del
motore rilevato, mantenendo costante la velocità del
motore.
SLC
L'SLC (Smart Logic Control) è una sequenza di azioni
denite dall'utente, che vengono eseguite quando gli
eventi associati deniti dall'utente sono valutati come VERI
dall'SLC. (Vedere il capitolo 3.12 Parametri 13-** Smart
Logic).
STW
Parola di stato.
Bus standard FC
Include il bus RS485 con protocollo FC o protocollo MC.
Vedere la parametro 8-30 Protocollo.
THD
La distorsione armonica totale determina il contributo
totale di armoniche.
Termistore
Una resistenza dipendente dalla temperatura, installata sul
convertitore di frequenza o sul motore.
Scatto
Uno stato che si verica in situazioni di guasto, per
esempio se il convertitore di frequenza è soggetto a un
surriscaldamento o quando interviene per proteggere il
motore, un processo o un meccanismo. Il convertitore di
frequenza impedisce il riavvio nché la causa del guasto
non è scomparsa. Per annullare la condizione di scatto,
6 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 9
Introduzione Guida alla Programmazione
riavviare il convertitore di frequenza. Non usare la
condizione di scatto per ragioni di sicurezza personale.
Scatto bloccato
Il convertitore di frequenza entra in questo stato in
condizioni di guasto per proteggersi. Il convertitore di
frequenza richiede un intervento sico, per esempio
quando è presente un cortocircuito sull'uscita. Uno scatto
bloccato può essere annullato scollegando l'alimentazione
di rete, eliminando la causa del guasto e ricollegando il
convertitore di frequenza all'alimentazione. Il riavvio viene
impedito no a che lo stato di scatto non viene annullato
attivando il ripristino o, talvolta, tramite programmazione
di ripristino automatico. Non usare la condizione di scatto
bloccato ai ni della sicurezza delle persone.
Caratteristiche VT
Caratteristiche coppia variabile utilizzate per pompe e
ventole.
+
VVC
Rispetto a una regolazione a rapporto tensione/frequenza
tradizionale, il controllo vettoriale della tensione (VVC+ )
migliora sia la dinamica che la stabilità, anche nel caso di
variazioni della velocità di riferimento e della coppia di
carico.
60° AVM
Modulazione vettoriale asincrona a 60°
(parametro 14-00 Modello di commutaz.).
Fattore di potenza
Il fattore di potenza indica la relazione fra I1 e I
Fattoredi potenza =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
Il fattore di potenza per la regolazione trifase:
Fattoredi potenza =
I1xcosϕ1
I
RMS
=
I
1
da cuicosϕ1 = 1
I
RMS
Il fattore di potenza indica in che misura il convertitore di
frequenza impone un carico sull'alimentazione di rete.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
2
I
RMS
=
I
+ I
1
2
5
per lo stesso rendimento in kW.
RMS
+ I
2
+ .. + I
7
2
n
Un fattore di potenza elevato indica inoltre che le dierenti
correnti armoniche sono basse.
Le bobine CC nei convertitori di frequenza producono un
elevato fattore di potenza che minimizza il carico applicato
sull'alimentazione di rete.
Posizione di destinazione
La posizione di destinazione nale specicata dai comandi
di posizionamento. Il generatore di proli utilizza questa
posizione per calcolare il prolo di velocità.
Posizione regolata
Il riferimento di posizionamento eettivo calcolato dal
generatore di proli. Il convertitore di frequenza utilizza la
posizione regolata come setpoint per il posizionamento PI.
Posizione eettiva
La posizione eettiva da un encoder, o un valore che il
controllo motore calcola in anello aperto. Il convertitore di
frequenza utilizza la posizione eettiva come retroazione
per il posizionamento PI.
Errore posizione
L'errore di posizione è la dierenza tra la posizione eettiva
e quella regolata. L'errore di posizione è l'ingresso per il
controllore PI di posizione.
Unità di posizione
L'unità sica per i valori di posizione.
1.7 Abbreviazioni, simboli e convenzioni
°C
°F
CA Corrente alternata
AEO Ottimizzazione automatica dell'energia
AWG American Wire Gauge
AMA Adattamento automatico motore
CC Corrente continua
EMC Compatibilità elettromagnetica
ETR Relè termico elettronico
f
M,N
FC Convertitore di frequenza
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Classe di protezione IP
LCP Pannello di controllo locale
MCT Motion Control Tool
n
s
P
M,N
PELV Tensione di protezione bassissima
PCB Scheda di circuito stampato
Motore PM Motore a magneti permanenti
PWM
Giri/min. Giri al minuto
Regen Morsetti rigenerativi
T
LIM
U
M,N
Gradi Celsius
Gradi Fahrenheit
Frequenza nominale motore
Corrente nominale di uscita dell'inverter
Limite di corrente
Corrente nominale del motore
Corrente di uscita massima
Corrente di uscita nominale fornita dal
convertitore di frequenza
Velocità del motore sincrono
Potenza nominale motore
Modulazione di larghezza degli
impulsi
Limite di coppia
Tensione nominale motore
1 1
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 7
Page 10
Introduzione
VLT® AQUA Drive FC 202
11
1.8 Sicurezza
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eettuati esclusivamente da
personale qualicato.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che non sia presente
tensione residua nel convertitore di frequenza.
Norme di sicurezza
Scollegare il convertitore di frequenza dall'alimen-
•
tazione di rete ogniqualvolta debbano essere
eettuati lavori di riparazione. Accertarsi che
l'alimentazione di rete sia stata disinserita e che
sia trascorso il tempo necessario prima di
rimuovere le spine di alimentazione. Per
informazioni sul tempo di scarica vedere la
Tabella 1.2.
[O] non disinserisce l'alimentazione di rete e,
•
pertanto, non deve essere utilizzato come un
interruttore di sicurezza.
Mettere correttamente a terra l'apparecchiatura.
•
Proteggere l'utente dalla tensione di alimentazione e il motore dal sovraccarico in conformità
alle normative nazionali e locali vigenti in
materia.
La corrente di dispersione verso terra supera i 3,5
•
mA.
La protezione da sovraccarico motore non è
•
inclusa nelle impostazioni di fabbrica. Se si
desidera questa funzione, impostare il
parametro 1-90 Protezione termica motore al valore
dati [4] ETR scatto 1 o al valore dati [3] ETR avviso
1.
Non rimuovere i connettori del motore e dell'ali-
•
mentazione di rete mentre il convertitore di
frequenza è collegato alla rete. Accertarsi che
l'alimentazione di rete sia stata disinserita e che
sia trascorso il tempo necessario prima di
rimuovere i connettori.
Quando sono installati la condivisione del carico
•
(collegamento CC) oppure l'alimentazione 24 V
CC esterna, il convertitore di frequenza dispone di
AVVIO INVOLONTARIO
Quando il convertitore di frequenza è collegato alla rete
CA, all'alimentazione CC o alla condivisione del carico, il
motore può avviarsi in qualsiasi momento. L'avvio
involontario durante le operazioni di programmazione o i
lavori di manutenzione o riparazione può causare morte,
lesioni gravi o danni alle cose. Il motore può essere
avviato tramite un interruttore esterno, un comando bus
di campo, un segnale di riferimento in ingresso dall'LCP
oppure dopo aver eliminato una condizione di guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
più sorgenti di tensione oltre a L1, L2 e L3.
Controllare che tutte le sorgenti di tensione siano
state scollegate e che sia trascorso il tempo
necessario prima di cominciare i lavori di
riparazione. Per informazioni sul tempo di scarica
vedere la Tabella 1.2.
AVVISO
Scollegare il convertitore di frequenza dalla
•
rete.
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
8 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 11
Introduzione Guida alla Programmazione
AVVISO
TEMPO DI SCARICA
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore stesso non è alimentato. Può
ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o di
riparazione può causare lesioni gravi o mortali.
Arrestare il motore.
•
Scollegare la rete CA e l'alimentazione remota
•
del collegamento CC, incluse le batterie di
backup, i gruppi di continuità e le connessioni
del collegamento CC ad altri convertitori di
frequenza.
Scollegare o bloccare il motore PM.
•
Attendere che i condensatori si scarichino
•
completamente. Il tempo di attesa minimo è
specicato nel Tabella 1.2 ed è anche indicato
sulla targhetta ubicata sulla parte superiore del
convertitore di frequenza.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che i condensatori siano
completamente scarichi.
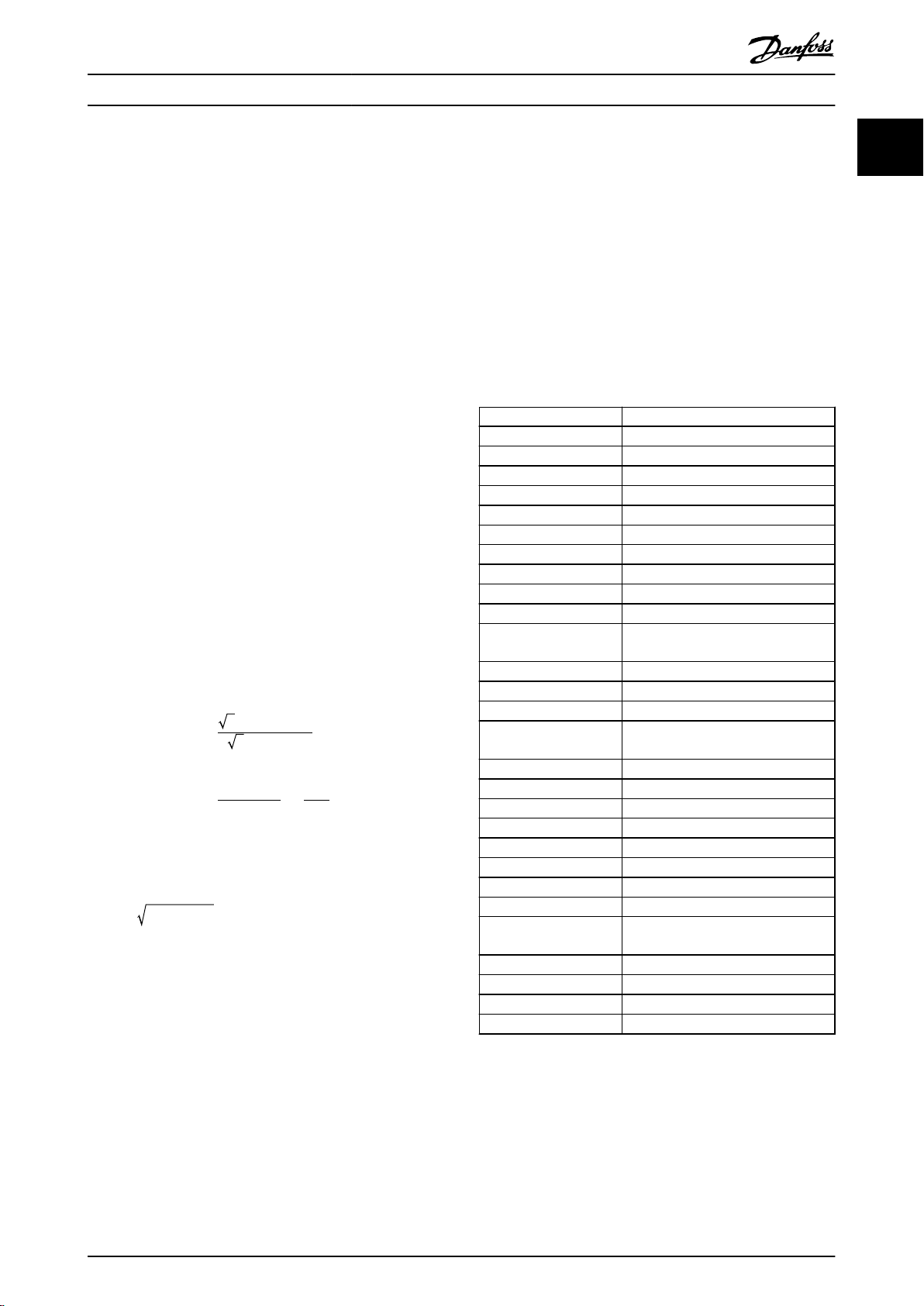
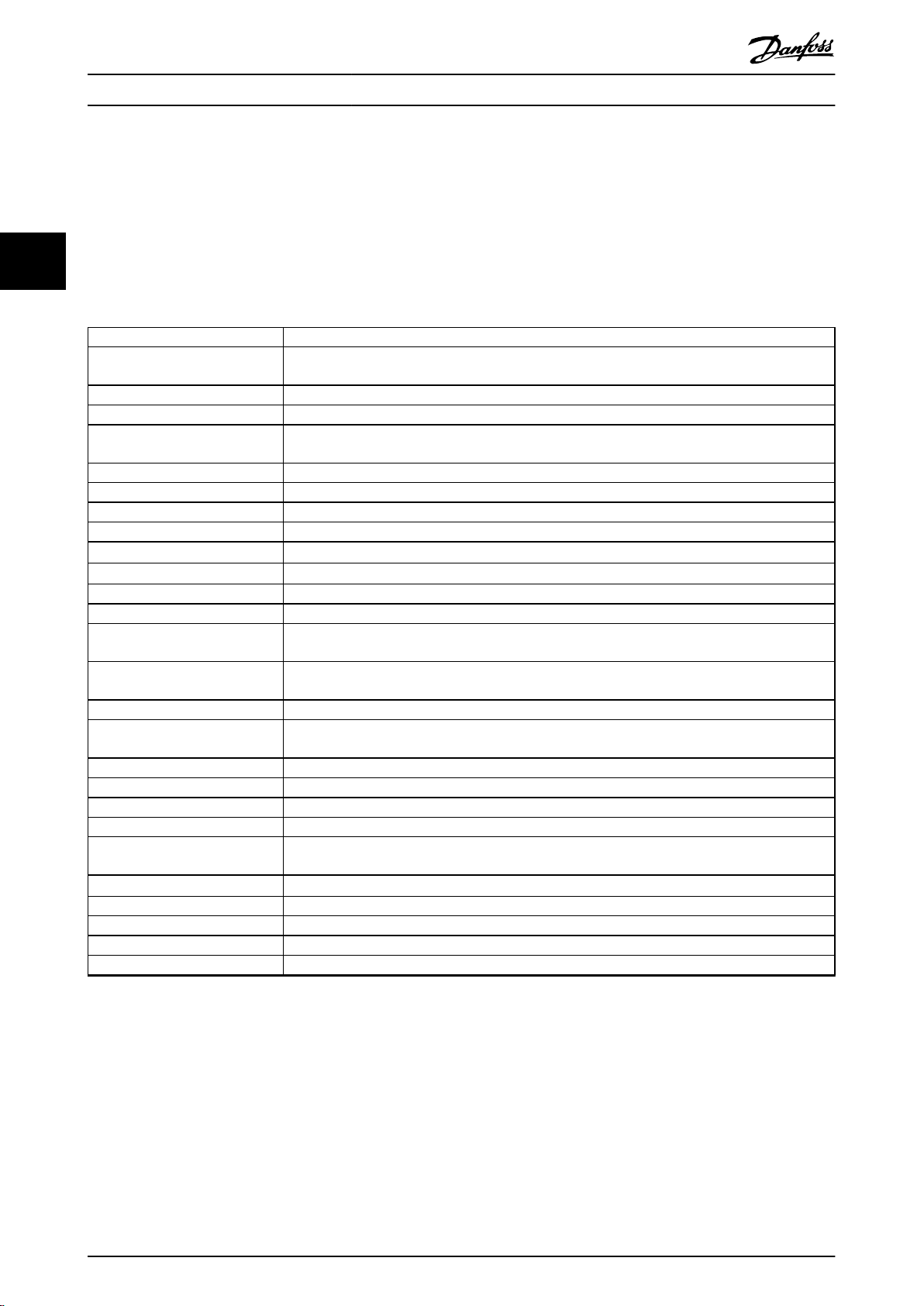
Tensione [V]
200–240 0,25–3,7 kW
380–480 0,37–7,5 kW
525–600 0,75–7,5 kW
525–690 – 1,1–7,5 kW
Tempo di attesa minimo (minuti)
4 7 15
– 5,5–45 kW
(0,34–5 cv)
– 11–90 kW
(0,5–10 cv)
– 11–90 kW
(1–10 cv)
(1,5–10 cv)
(7,5–60 cv)
(15–121 cv)
(15–121 cv)
11–90 kW
(15–121 cv)
AVVISO!
Quando si usa Safe Torque O, seguire sempre le
istruzioni nel Manuale di funzionamento Safe Torque O
per convertitori di frequenza VLT®.
AVVISO!
I segnali di controllo provenienti dal convertitore di
frequenza o presenti al suo interno possono, in casi rari,
essere attivati per errore, essere ritardati o non ricorrere
per niente. Se utilizzati in situazioni in cui la sicurezza è
un fattore critico, è necessario non adarsi esclusivamente a questi segnali di controllo.
AVVISO!
Le situazioni rischiose devono essere identicate dal
costruttore della macchina/dal personale addetto all'integrazione che ha la responsabilità di valutare le
necessarie misure preventive. Potrebbero essere inclusi
più dispositivi di monitoraggio e protettivi, sempre in
base alle norme di sicurezza in vigore, per esempio la
legge sugli utensili meccanici, le norme per la
prevenzione degli infortuni, ecc.
Modalità di protezione
Se viene superato un limite hardware relativo alla corrente
motore o a una tensione del collegamento CC, il convertitore di frequenza entra in modalità di protezione. La
Modalità di protezione signica un cambiamento della
strategia di modulazione PWM e una bassa frequenza di
commutazione per minimizzare le perdite. Questa continua
per 10 s dopo l'ultimo guasto e aumenta l'adabilità e la
robustezza del convertitore di frequenza, ristabilendo al
contempo il pieno controllo del motore.
1 1
Tabella 1.2 Tempo di scarica
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 9
Page 12
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Introduzione
VLT® AQUA Drive FC 202
11
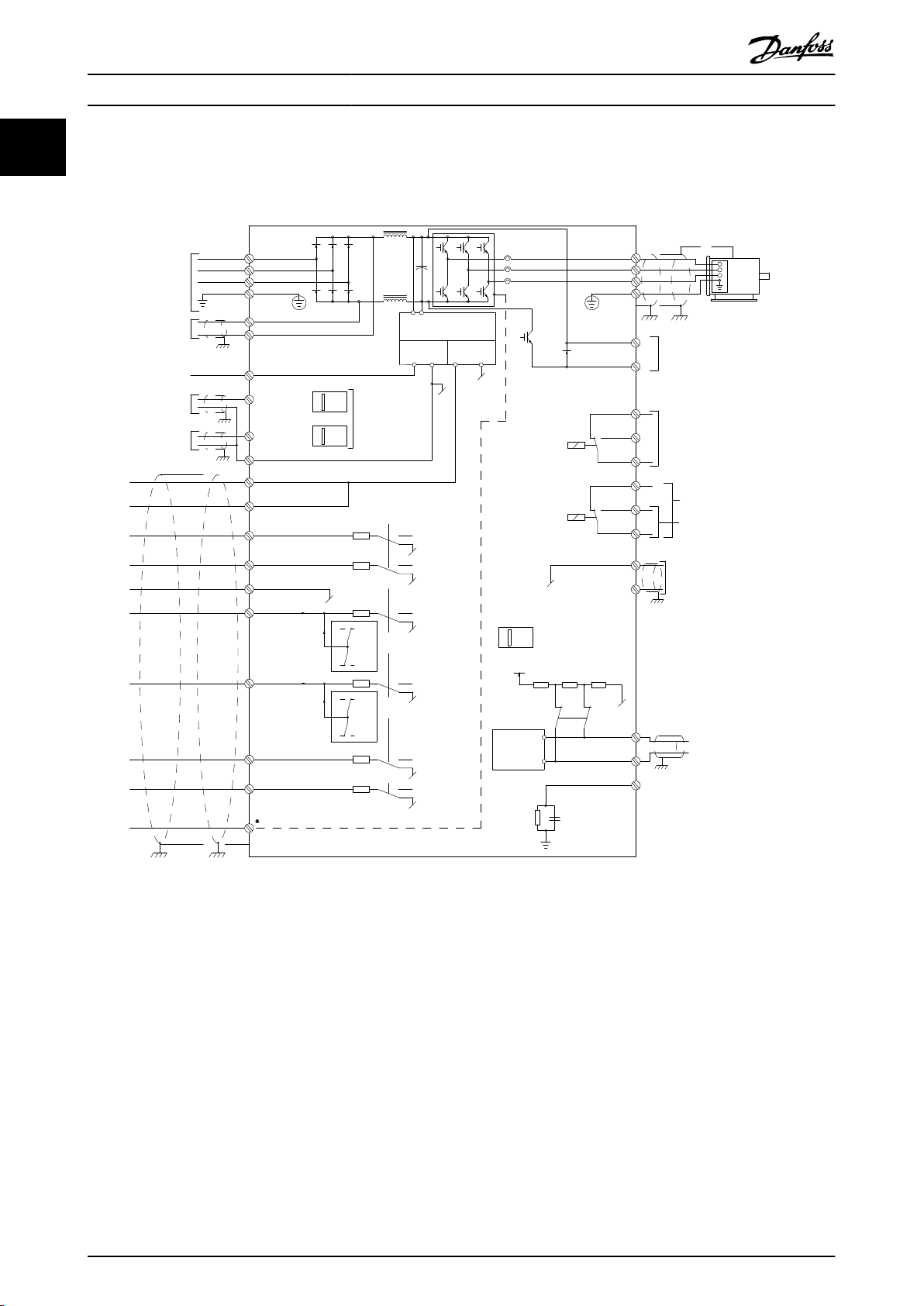
1.9 Cablaggio elettrico
1.9.1 Cablaggio elettrico - cavi di comando
Disegno 1.2 Schema di cablaggio base
A = analogico, D = digitale
Il morsetto 37 viene usato per Safe Torque O. Per istruzioni sull'installazione Safe Torque O, fare riferimento al Manuale di
funzionamento Safe Torque O per convertitori di frequenza VLT®.
* Il morsetto 37 non è incluso in FC 202 (ad eccezione del frame di taglia A1). Il relè 2 e il morsetto 29 non svolgono alcuna
funzione in VLT® AQUA Drive FC 202.
Con cavi di comando molto lunghi e segnali analogici si
possono vericare, raramente e a seconda dell'installazione,
loop di terra a 50/60 Hz causati dai disturbi trasmessi dai
cavi dell'alimentazione di rete.
In tali circostanze può essere necessario rompere lo
schermo o inserire un condensatore da 100 nF fra lo
schermo e il frame.
10 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Collegare separatamente gli ingressi e le uscite digitali e
analogiche agli ingressi comuni (morsetti 20, 55 e 39) del
convertitore di frequenza per evitare che le correnti di terra
provenienti da entrambi i gruppi incidano su altri gruppi.
Per esempio, commutazioni sull'ingresso digitale possono
disturbare il segnale d'ingresso analogico.
Page 13
12 13 18 19 27 29 32 33 20 37
+24 V CC
0 VCC
130BT106.10
PNP (source)
Cablaggio ingresso digitale
NPN (sink)
Cablaggio ingresso digitale
12 13 18 19 27 29 32 33 20 37
+24 V CC
0 VCC
130BT107.11
130BA681.10
Introduzione Guida alla Programmazione
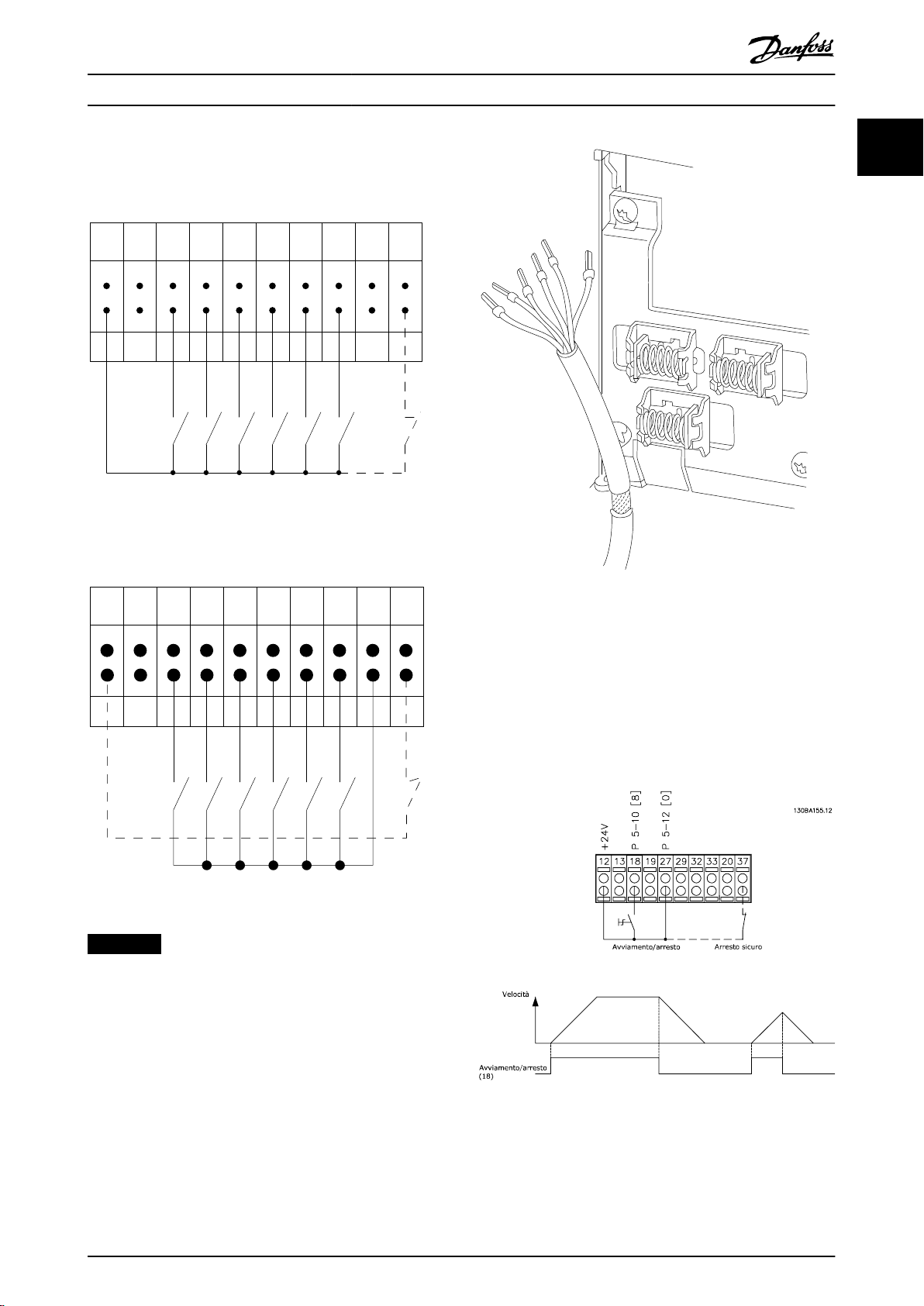
Polarità di ingresso dei morsetti di controllo
Disegno 1.3 PNP (source)
1 1
Disegno 1.5 Messa a terra dei cavi di comando schermati
Disegno 1.4 NPN (sink)
AVVISO!
I cavi di comando devono essere schermati.
Vedere la sezione Messa a terra di cavi di comando
schermati nella Guida alla Progettazione per la corretta
terminazione dei cavi di comando.
1.9.2 Avviamento/arresto
Morsetto 18 = Parametro 5-10 Ingr. digitale morsetto 18 [8]
Avviamento.
Morsetto 27 = Parametro 5-12 Ingr. digitale morsetto 27 [0]
Nessuna funzione (predenito [2] Evol. libera neg.).
Morsetto 37 = Safe Torque O (dove disponibile).
Disegno 1.6 Avviamento/arresto
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 11
Page 14
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Velocità [giri/m]
P 6-15
Tensione di rif.
P 6-11 10 V
+10 V/30 mA
130BA154.11
1 kΩ
Introduzione
VLT® AQUA Drive FC 202
11
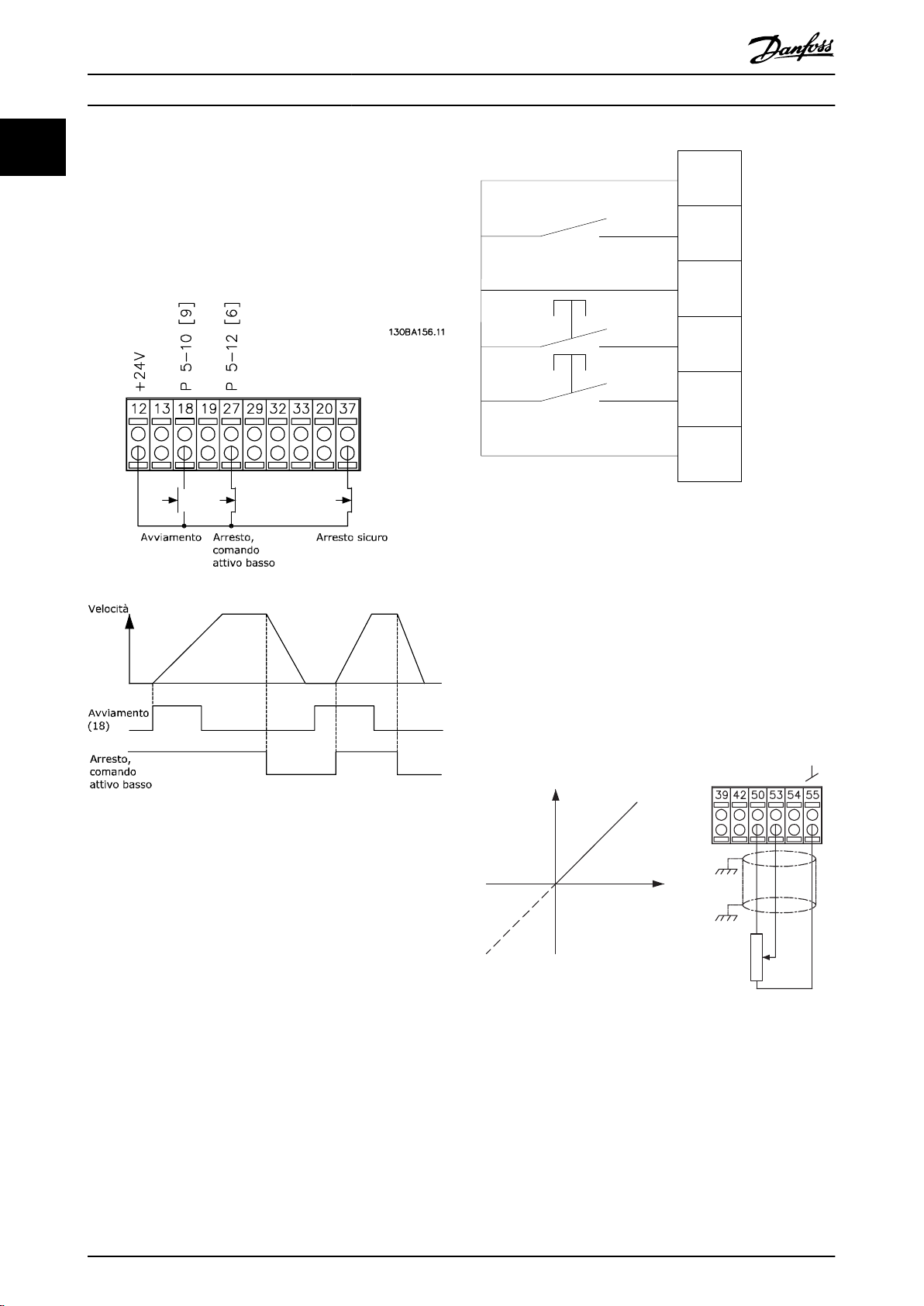
1.9.3 Avviamento/arresto a impulsi
Morsetto 18 = Parametro 5-10 Ingr. digitale morsetto 18 [9]
Avv. a impulsi
Morsetto 27 = Parametro 5-12 Ingr. digitale morsetto 27 [6]
Stop (negato).
Morsetto 37 = Safe Torque O (dove disponibile).
Disegno 1.8 Accelerazione/decelerazione
1.9.5 Riferimento del potenziometro
Riferimento tensione mediante potenziometro
Risorsa di riferimento 1 = [1] Ingr. analog. 53 (default).
Morsetto 53, bassa tensione = 0 V.
Morsetto 53, alta tensione = 10 V.
Morsetto 53, Rif.basso/val.retroaz. = 0 giri/min.
Rif.alto/ val.retroaz. morsetto 53 = 1500 giri/min.
Interruttore S201 = OFF (U).
Disegno 1.7 Avviamento/arresto a impulsi
1.9.4 Accelerazione/decelerazione
Morsetti 29/32 = Accelerazione/Decelerazione
Morsetto 18 = Parametro 5-10 Ingr. digitale morsetto 18 [9]
Avv. a impulsi (predenito).
Morsetto 27= Parametro 5-12 Ingr. digitale morsetto 27 [19]
Blocco riferimento.
Morsetto 29 = Parametro 5-13 Ingr. digitale morsetto 29 [21]
Accelerazione.
Morsetto 32 = Parametro 5-14 Ingr. digitale morsetto 32 [22]
Decelerazione.
Disegno 1.9 Riferimento del potenziometro
12 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 15
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Programmazione Guida alla Programmazione
2 Programmazione
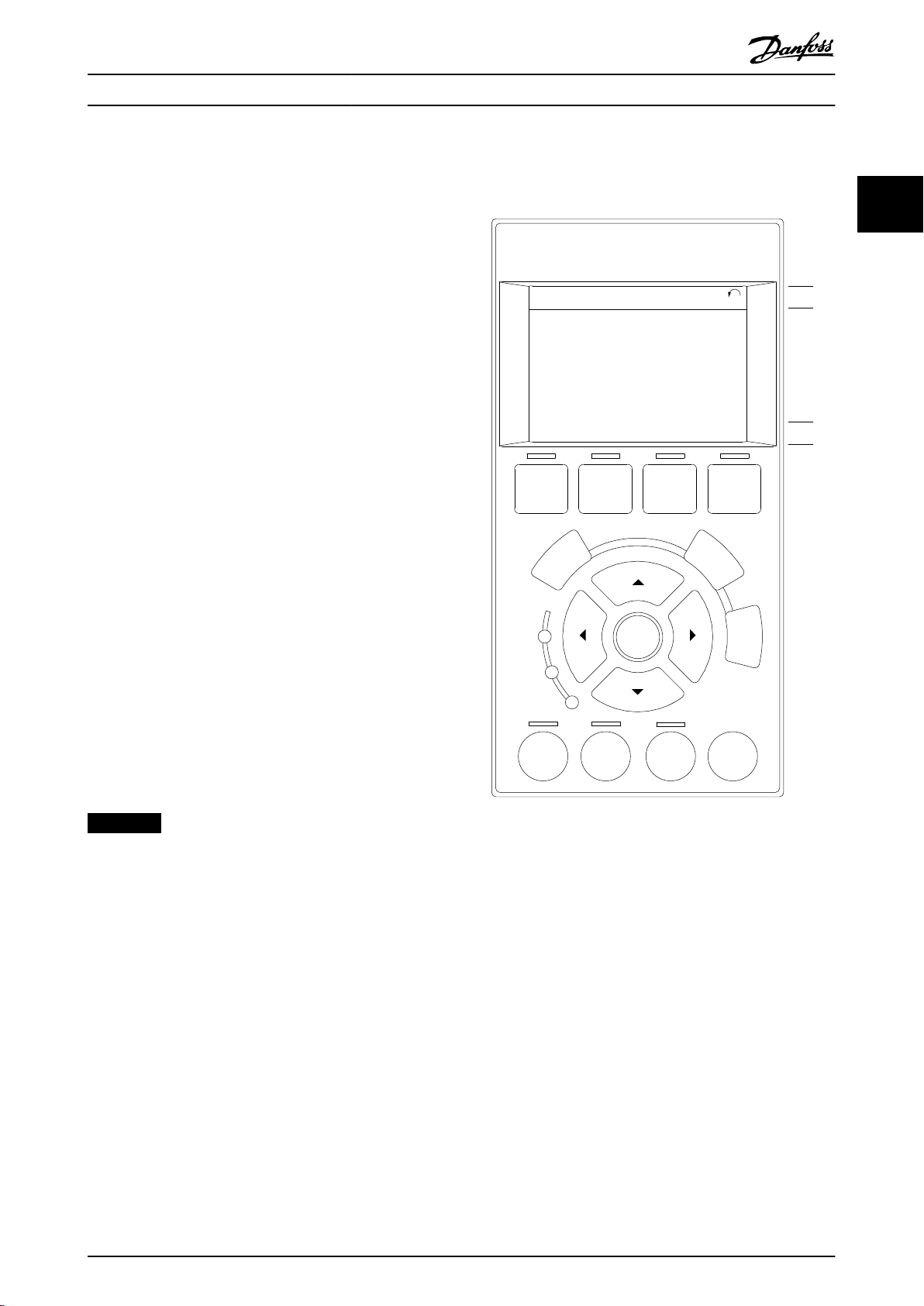
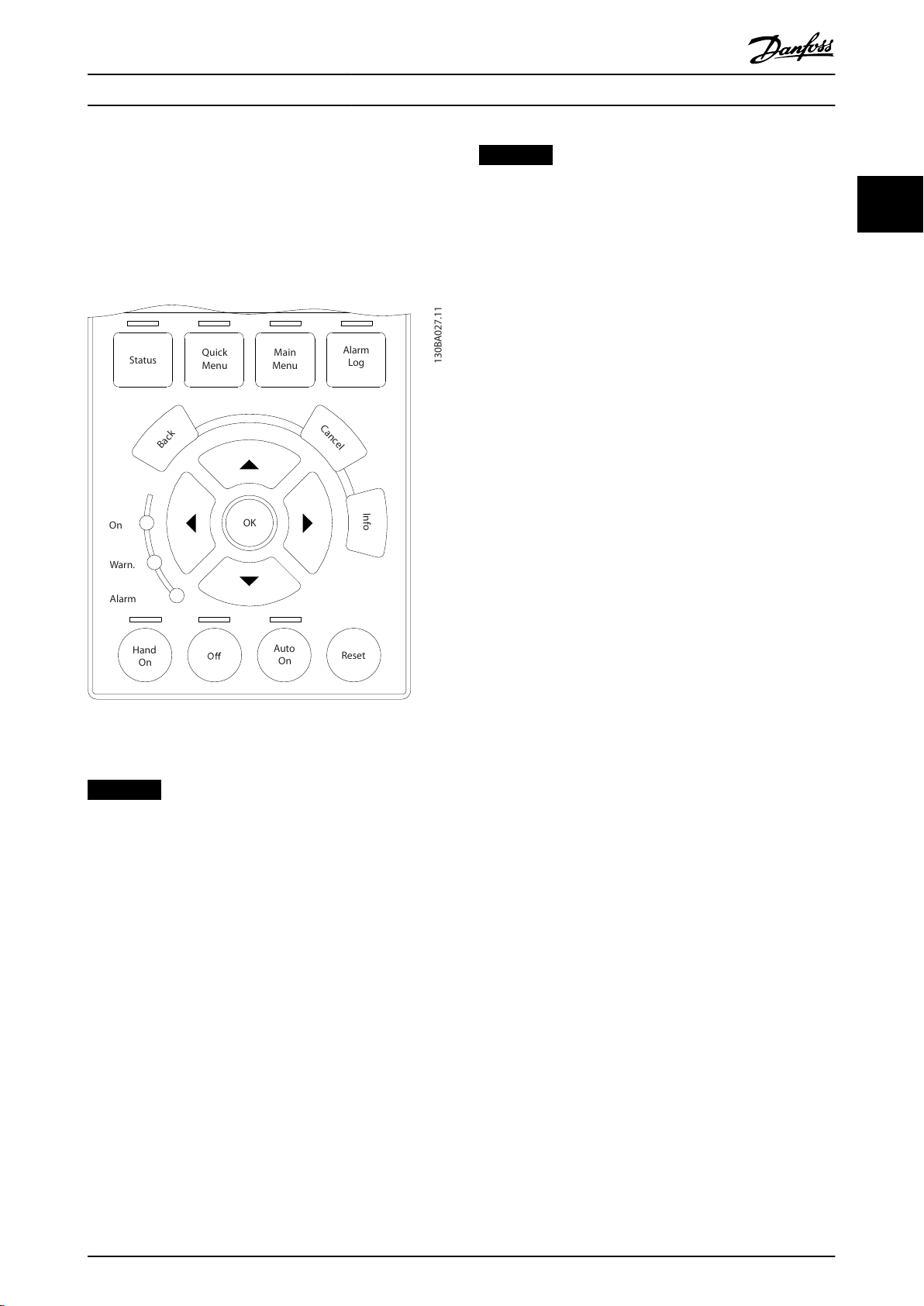
2.1 Il Pannello di Controllo Locale Graco e
Numerico
L'LCP graco (LCP 102) consente una facile programmazione del convertitore di frequenza. Per informazioni
sull'uso del pannello di controllo locale numerico (LCP
101), vedere il capitolo 2.2.17 Programmazione con il
Pannello di Controllo Locale numerico.
2.2 Programmazione sull'LCP graco
L'LCP è suddiviso in quattro gruppi funzionali:
1. Display graco con linee di stato.
2. Tasti menu e spie luminose - modica dei
parametri e selezione delle funzioni di visualizzazione.
3. Tasti di navigazione e spie luminose.
4. Tasti funzione e spie luminose.
Il display LCP può mostrare no a cinque elementi di dati
di funzionamento durante la visualizzazione Stato.
2 2
Linee di visualizzazione:
a. Riga di stato: messaggi di stato con visualiz-
zazione di icone e
graci.
b. Righe 1–2: righe dei dati dell'operatore con
visualizzazione dei dati deniti o selezionati.
Aggiungere no a una riga supplementare
premendo il tasto [Status].
c. Riga di stato: messaggi di stato con visualiz-
AVVISO!
zazione di testo.
Disegno 2.1 LCP
Se l'avviamento viene ritardato, l'LCP visualizza il
messaggio INITIALIZING nché non è pronto. L'aggiunta
o la rimozione di opzioni può ritardare l'avviamento.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 13
Page 16
Sezione
superiore
Sezione
intermedia
Sezione
inferiore
Stato
43 giri/min.
1,4 Hz
Funzionamento automatico remoto
! Temp. scheda di pot. (W29)
2,9%
5,44 A 25,3kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Programmazione
VLT® AQUA Drive FC 202
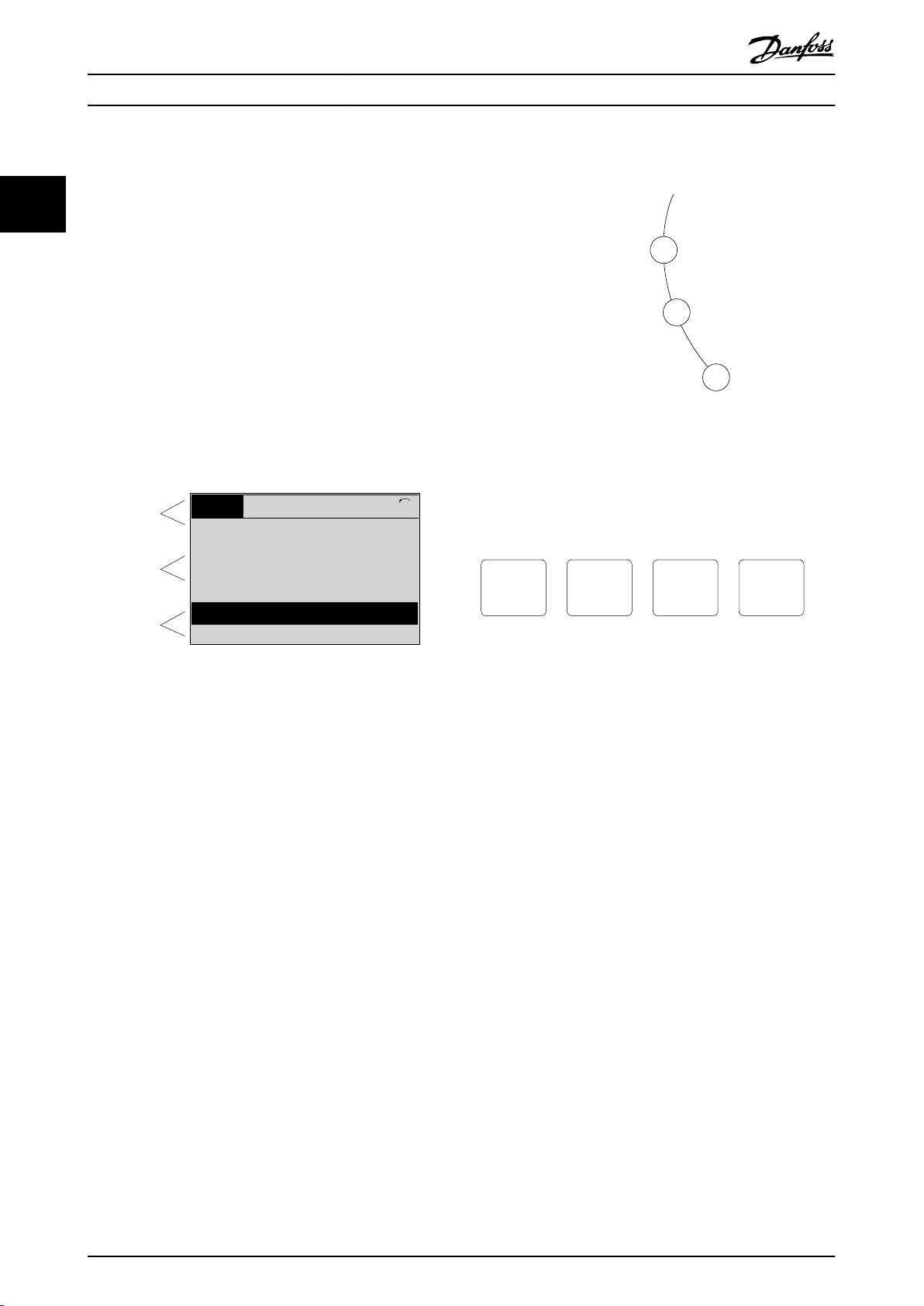
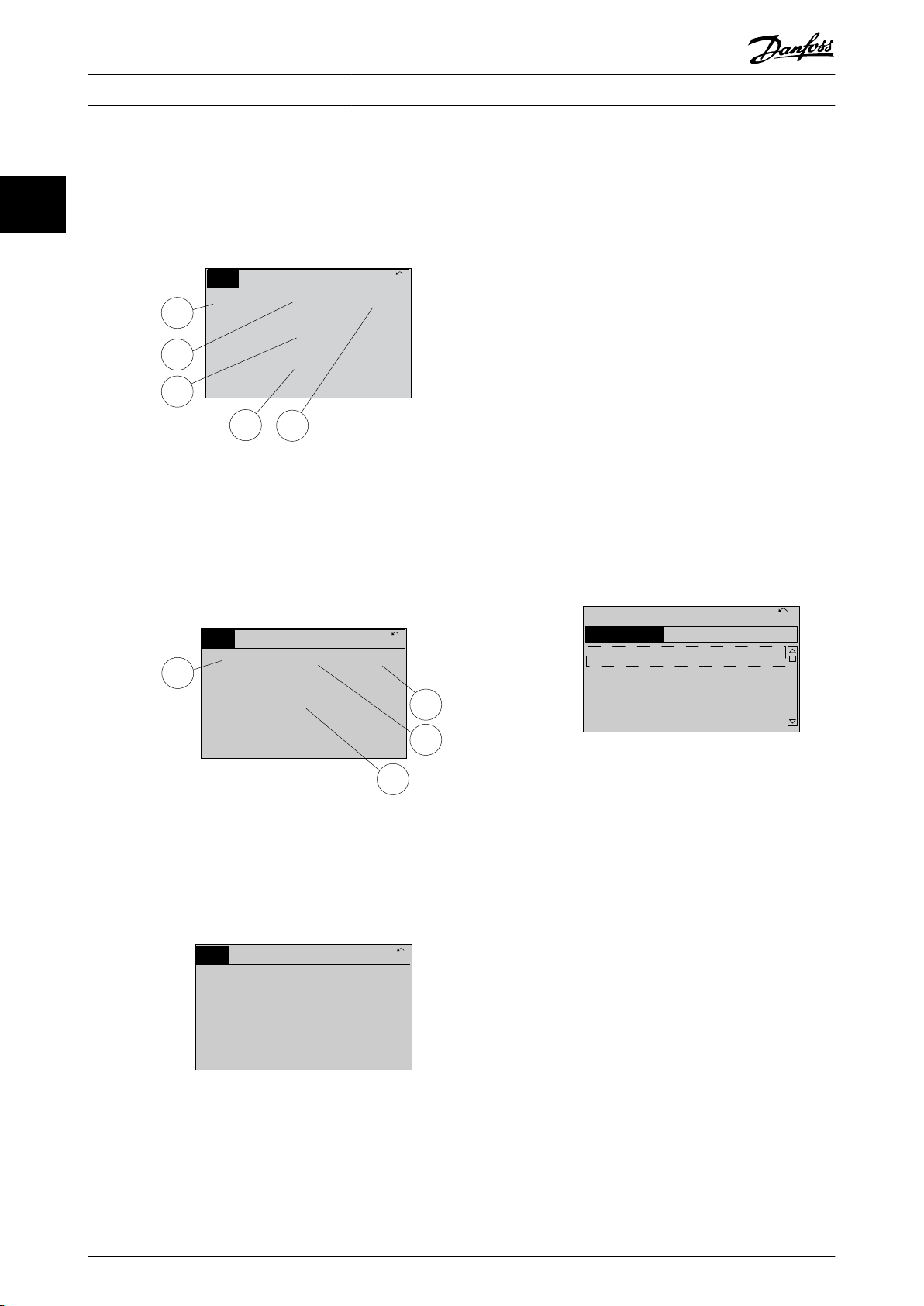
2.2.1 Il display LCP
22
Il display LCP è dotato di retroilluminazione e di un totale
di sei righe alfanumeriche. Le linee di visualizzazione
indicano il senso di rotazione (freccia), il setup selezionato,
nonché il setup di programmazione. Il display è suddiviso
in tre sezioni.
Sezione superiore
Visualizza
Sezione intermedia
La riga superiore visualizza no a cinque misure con le
relative unità di misura, indipendentemente dallo stato
(tranne se è presente un allarme/avviso).
Sezione inferiore
Visualizza sempre lo stato del convertitore di frequenza
nella modalità Stato.
no a due misure nello stato operativo normale.
Disegno 2.3 Spie luminose
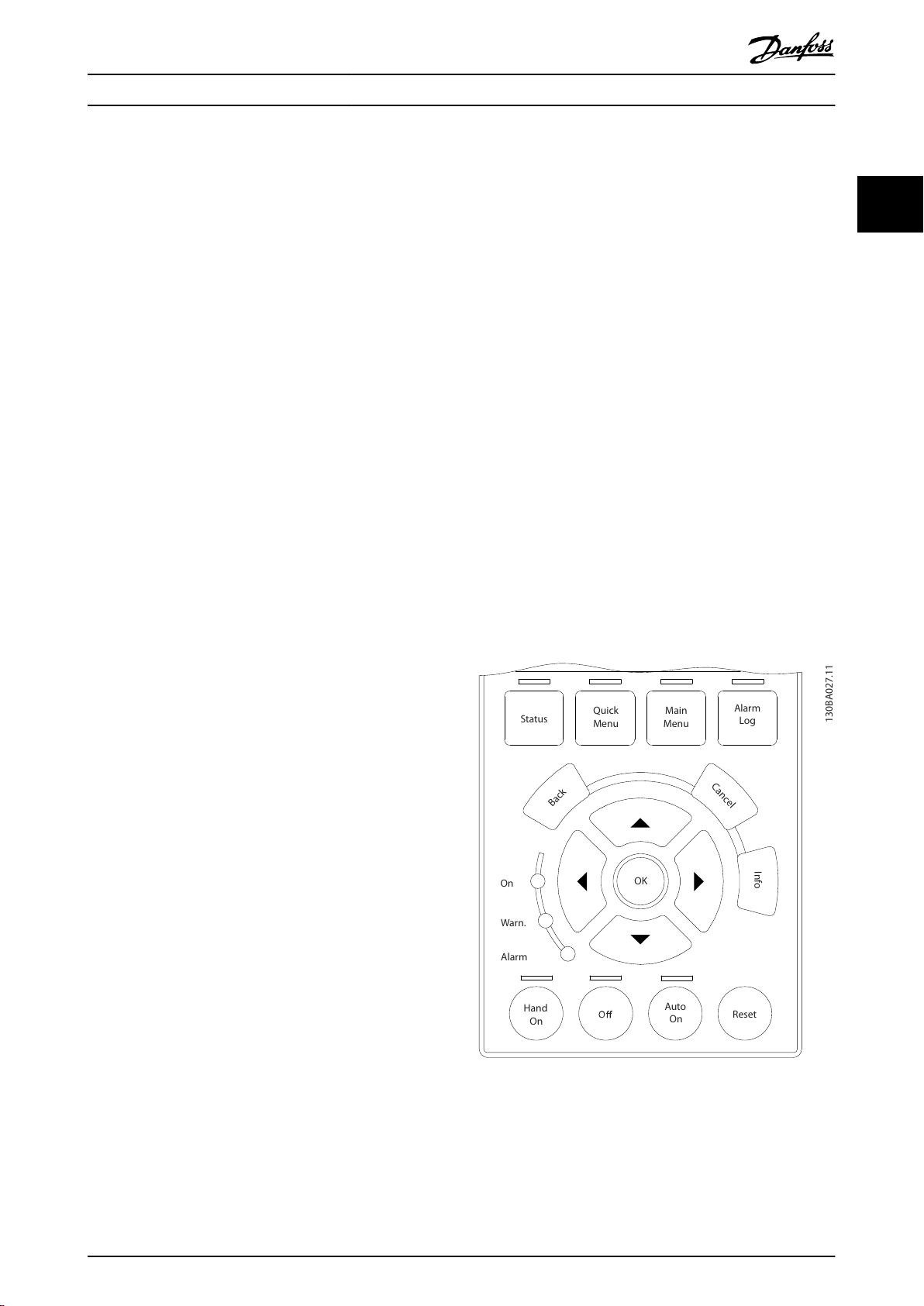
Tasti dell'LCP
I tasti di comando sono divisi per funzioni. I tasti sotto il
display e le spie luminose sono usati per la programmazione parametri, con l'opzione di indicazioni sul display
durante il funzionamento normale.
LED rosso lampeggiante/Allarme: indica un
•
allarme.
Disegno 2.4 Tasti dell'LCP
Disegno 2.2 Sezione inferiore
[Status]
Viene visualizzato il setup attivo (selezionato come setup
attivo nel parametro 0-10 Setup attivo). Se si programma un
setup diverso da quello attivo, il numero del setup
programmato appare sulla destra.
Regolazione del contrasto del display
Premere [Status] e [▲] per ridurre la luminosità del display.
Premere [Status] e [▼] per aumentarne la luminosità.
La maggior parte delle programmazioni parametri può
essere modicata immediatamente tramite l'LCP, a meno
che non sia stata creata una password mediante il
parametro 0-60 Passw. menu princ. o il
parametro 0-65 Password menu personale.
Spie luminose
Se vengono superati determinati valori di soglia, si accende
la spia luminosa di allarme e/o quella di avviso. Sull'LCP
vengono visualizzati un testo di stato e un testo d'allarme.
La spia luminosa ON si accende quando il convertitore di
frequenza riceve tensione di rete o viene alimentato da un
morsetto del bus CC o da un'alimentazione esterna a 24 V.
Contemporaneamente è accesa la retroilluminazione.
LED verde/On: la sezione di comando è in
•
funzione.
•
14 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
LED giallo/Avviso: indica un avviso.
Indica lo stato del convertitore di frequenza e/o del
motore. Selezionare tra tre visualizzazioni diverse
premendo [Status]: visualizzazioni a cinque righe, visualizzazioni a quattro righe o Smart Logic Control.
Premere [Status] per selezionare la modalità visualizzazione
o per tornare in modalità visualizzazione dalla modalità
Menu rapido, dalla modalità Menu principale o dalla
modalità Allarme. Usare [Status] anche per commutare tra
la modalità visualizzazione singola e quella doppia.
[Quick Menu]
Fornisce un accesso rapido alle funzioni più comuni del
convertitore di frequenza.
Il [Quick Menu] è composto da:
Q1: menu personale.
•
Q2: messa a punto rapida.
•
Q3: setup funzione.
•
Q4: SmartStart.
•
Q5: modiche eettuate.
•
Q6: registrazioni.
•
Q7: acque e pompe.
•
Il setup funzione permette di accedere facilmente e
rapidamente a tutti i parametri necessari per gran parte
delle applicazioni di trattamento acque e acque reue tra
cui:
Page 17
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programmazione Guida alla Programmazione
Coppia variabile.
•
Coppia costante.
•
Pompe.
•
Pompe dosatrici.
•
Pompe a immersione.
•
Pompe per autoclave.
•
Pompe per miscelatori.
•
Soanti di aerazione.
•
Altre pompe.
•
Applicazioni a ventole.
•
Tra altre funzioni, include anche parametri per selezionare
quanto segue:
Le variabili da mostrare nell'LCP.
•
Velocità digitali preimpostate.
•
Conversione in scala di riferimenti analogici.
•
Applicazioni a zona singola e multizona ad anello
•
chiuso.
Funzioni speciche relative all'acqua.
•
Applicazioni di trattamento acque reue.
•
Il menu rapido Q7: Acqua e Pompe fornisce un accesso
diretto ad alcune delle caratteristiche dedicate più
importanti relative all'acqua e alle pompe:
Q7-1: rampe speciali (rampa iniziale, rampa nale,
•
rampa della valvola di controllo).
Q7-2: modo pausa.
•
Q7-3: pulizia.
•
Q7-4: funzionamento a secco.
•
Q7-5: rilevamento ne curva.
•
Q7-6: compensazione del usso.
•
Q7-7: riempimento tubi (tubi orizzontali, tubi
•
verticali, sistemi misti).
Q7-8: prestazione del controllo.
•
Q7-9: Min. Speed Monitor.
•
È possibile accedere immediatamente ai parametri del
Menu rapido a meno che non sia stata creata una password
tramite uno dei seguenti parametri:
Parametro 0-60 Passw. menu princ..
•
Parametro 0-61 Accesso menu princ. senza passw..
•
Parametro 0-65 Password menu personale.
•
Parametro 0-66 Accesso al menu pers. senza passw..
•
È possibile passare direttamente dalla modalità Menu
rapido alla modalità Menu principale.
[Main Menu]
Questa sezione viene usata per la programmazione di tutti
i parametri.
È possibile accedere immediatamente ai parametri del
Menu principale a meno che non sia stata creata una
password tramite uno dei seguenti parametri:
Parametro 0-60 Passw. menu princ..
•
Parametro 0-61 Accesso menu princ. senza passw..
•
Parametro 0-65 Password menu personale.
•
Parametro 0-66 Accesso al menu pers. senza passw..
•
Per la maggior parte delle applicazioni per il trattamento
delle acque e delle acque reue non è necessario accedere
ai parametri del Menu principale. Il Menu rapido, la messa a
punto rapida e il setup funzioni forniscono l'accesso più
semplice e rapido a tutti i parametri tipici richiesti.
È possibile passare direttamente dalla modalità Menu
principale alla modalità Menu rapido e viceversa.
Per creare un collegamento ai parametri premere [Main
Menu] per 3 s. Il tasto di scelta rapida parametri consente
di accedere direttamente a qualsiasi parametro.
[Alarm Log]
Visualizza un elenco degli ultimi cinque allarmi (numerati
A1–A5). Per ottenere ulteriori dettagli su un allarme,
premere i tasti di navigazione per navigare al rispettivo
numero di allarme e premere [OK]. Poco prima di
immettere la modalità di allarme, vengono fornite
informazioni circa la condizione del convertitore di
frequenza.
Disegno 2.5 LCP
[Back]
Consente di ritornare alla fase o al livello precedente nella
struttura di navigazione.
2 2
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 15
Page 18
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmazione
VLT® AQUA Drive FC 202
[Cancel]
Annulla l'ultima modica o l'ultimo comando, sempre che
la visualizzazione non sia stata cambiata.
22
[Info]
Fornisce informazioni circa un comando, un parametro o
una funzione in qualsiasi nestra del display. [Info] fornisce
informazioni dettagliate ogniqualvolta è necessario un
aiuto.
Premendo [Info], [Back], oppure [Cancel] si esce dalla
modalità informazione.
Disegno 2.6 Back
I segnali di arresto esterni attivati con segnali di comando
o un bus di campo annullano un comando di avvio tramite
l'LCP.
Quando viene attivato [Hand on], rimangono attivi i
seguenti segnali di comando:
[Hand On] - [O] - [Auto On].
•
Ripristino.
•
Arresto a ruota libera negato.
•
Inversione.
•
Selez. setup bit 0 - selez. setup bit 1.
•
Comando di arresto da comunicazione seriale.
•
Arresto rapido.
•
Freno CC.
•
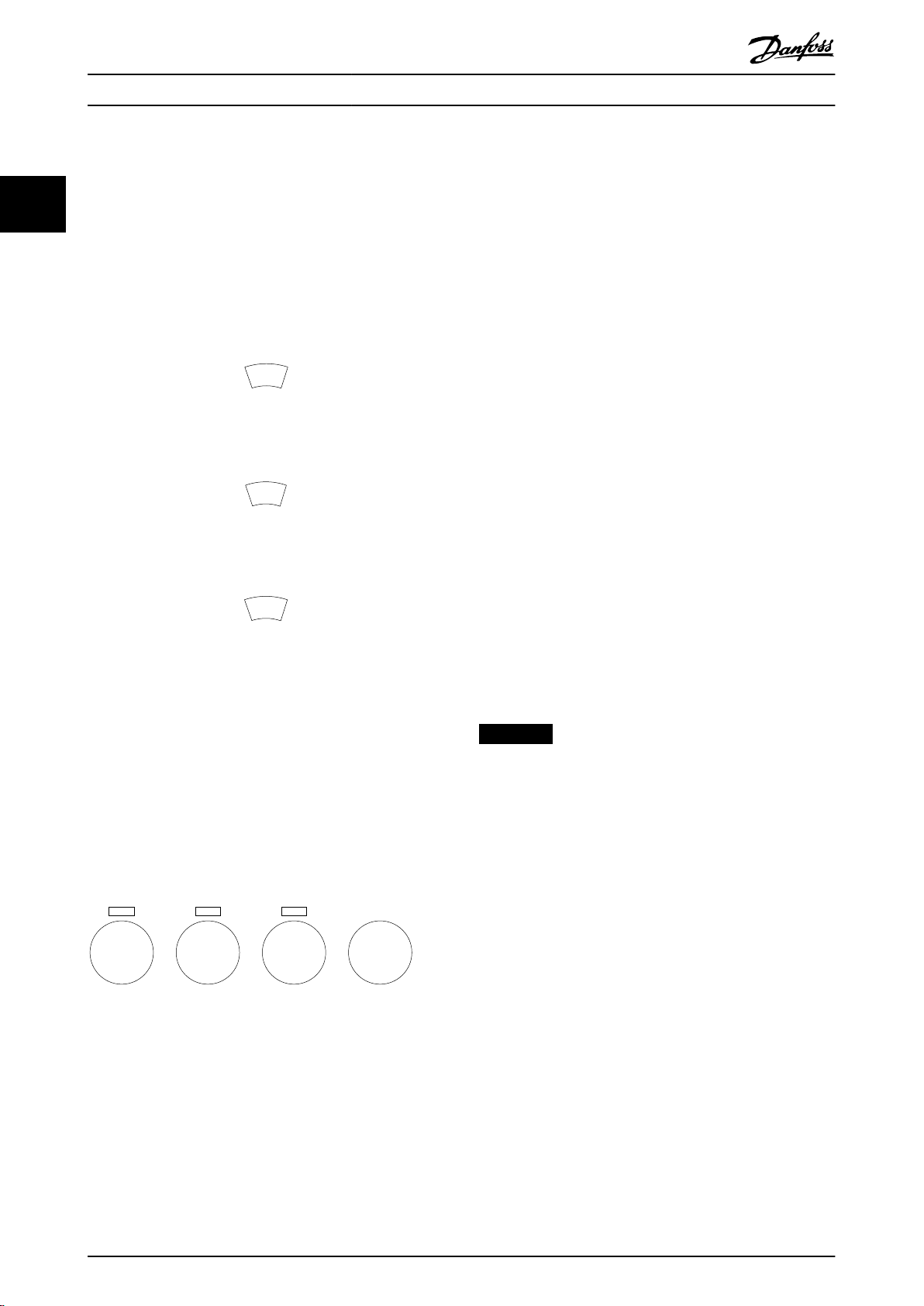
[O]
Arresta il motore collegato. Il tasto può essere selezionato
come [1] Abilitato o [0] Disattivato mediante il
Disegno 2.7 Cancel
parametro 0-41 Tasto [O] sull'LCP. Se non viene selezionata
alcuna funzione di arresto esterna e il tasto [O] è inattivo,
il motore può essere arrestato scollegando la tensione.
[Auto On]
Consente di controllare il convertitore di frequenza tramite
i morsetti di controllo e/o la comunicazione seriale.
Disegno 2.8 Info
Quando sui morsetti di controllo e/o sul bus di campo
viene applicato un segnale di avviamento, il convertitore di
frequenza si avvia. Il tasto può essere selezionato come [1]
Abilitato o [0] Disattivato mediante il parametro 0-42 Tasto
Tasti di navigazione
[Auto on] sull'LCP.
I quattro tasti di navigazione sono usati per navigare tra le
diverse opzioni disponibili in Menu rapido, Menu principale
e Registro allarmi. Premere i tasti per muovere il cursore.
[OK]
Viene usato per selezionare un parametro puntato dal
cursore e per consentire la modica di un parametro.
Tasti di comando locale
I tasti di comando locale si trovano nella parte inferiore
dell'LCP.
AVVISO!
Un segnale HAND-OFF-AUTO attivo sugli ingressi digitali
ha una priorità maggiore rispetto ai tasti di comando
[Hand on] e [Auto on].
[Reset]
Viene utilizzato per ripristinare il convertitore di frequenza
dopo un allarme (scatto). Può essere selezionato come [1]
Abilitato o [0] Disattivato mediante il parametro 0-43 Tasto
[Reset] sull'LCP.
Il tasto di scelta rapida parametri può essere creato
premendo [Main Menu] per 3 s. Il tasto di scelta rapida
parametri consente di accedere direttamente a qualsiasi
Disegno 2.9 Tasti di comando locale
parametro.
[Hand On]
Abilita il controllo del convertitore di frequenza mediante
l'LCP. [Hand On] inoltre avvia il motore e, successivamente,
è possibile inserire il valore della velocità del motore con i
tasti di navigazione. Il tasto può essere selezionato come
[1] Abilitato o [0] Disattivato mediante il
parametro 0-40 Tasto [Hand on] sull'LCP.
16 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 19
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programmazione Guida alla Programmazione
2.2.2 Trasferimento rapido delle
impostazioni parametri tra diversi
convertitori di frequenza.
Una volta completato il setup di un convertitore di
frequenza, memorizzare i dati nell'LCP o su un PC
mediante il Software di congurazione MCT 10.
AVVISO!
Arrestare il motore prima di eettuare questa
operazione.
Per trasferire i dati dall'LCP al convertitore di frequenza:
1. Andare al parametro 0-50 Copia LCP.
2. Premere il tasto [OK].
3. Selezionare [2] Tutti da LCP.
4. Premere il tasto [OK].
Ora le impostazioni parametri memorizzate nell'LCP
vengono trasferite al convertitore di frequenza. Il processo
di trasferimento viene visualizzato sulla barra di
avanzamento. Quando viene raggiunto il 100%, premere
[OK].
2.2.3 Modalità visualizzazione
In condizioni di funzionamento normale, nella sezione
centrale possono essere visualizzate in modo continuo no
a 5 diverse variabili operative: 1.1, 1.2 e 1.3 nonché 2 e 3.
2.2.4 Modalità visualizzazione - selezione
delle visualizzazioni
2 2
Disegno 2.10 LCP
Memorizzazione dei dati nell'LCP
AVVISO!
Arrestare il motore prima di eettuare questa
operazione.
Per memorizzare i dati nell'LCP:
1. Andare al parametro 0-50 Copia LCP.
2. Premere il tasto [OK].
3. Selezionare [1] Tutti a LCP.
4. Premere il tasto [OK].
Ora tutte le impostazioni parametri vengono memorizzate
nell'LCP. Il processo di memorizzazione viene visualizzato
sulla barra di avanzamento. Quando viene raggiunto il
100%, premere [OK].
Collegare l'LCP a un altro convertitore di frequenza e
copiare le impostazioni parametri anche su questo convertitore.
Trasferimento di dati dall'LCP al convertitore di
frequenza
Premere [Status] per commutare tra le tre schermate di
visualizzazione.
Le variabili operative con un formato diverso vengono
visualizzate in ciascuna schermata di stato. Per maggiori
informazioni, vedere gli esempi in questo capitolo.
Diversi valori o misure possono essere riferiti a ciascuna
delle variabili operative visualizzate. I valori e le misure che
devono essere visualizzati possono essere deniti tramite i
seguenti parametri:
Parametro 0-20 Visualiz.ridotta del display- riga 1,1.
•
Parametro 0-21 Visualiz.ridotta del display- riga 1,2.
•
Parametro 0-22 Visualiz.ridotta del display- riga 1,3.
•
Parametro 0-23 Visual.completa del display-riga 2.
•
Parametro 0-24 Visual.completa del display-riga 3.
•
Accedere ai parametri mediante [Quick Menu], Q3
Impostaz. funzione, Q3-1 Impost. gener., Q3-13 Relays.
Ogni parametro di visualizzazione selezionato nel
parametro 0-20 Visualiz.ridotta del display- riga 1,1
no al
parametro 0-24 Visual.completa del display-riga 3 presenta
una propria scala e un determinato numero di cifre dopo
la virgola decimale. Quanto maggiore è il valore numerico
di un parametro, tanto minore è la quantità cifre decimali
mostrate dopo la virgola.
Esempio: Visualizzazione di corrente 5,25 A; 15,2 A; 105 A.
Vedere il gruppo di parametri 0-2* Display LCP per una
descrizione più dettagliata.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 17
Page 20
1.1
2
3
1.3
1.2
130BP041.10
799 giri/min
Rampa automatica remota
1 (1)
36,4 kw7,83 A
0,000
53,2 %
Stato
1.1
1.2
2
1.3
130BP062.10
207 giri/min
Funzionamento automatico remoto
1 (1)
24,4 kW5,25A
6,9Hz
Stato
130BP063.10
778 giri/min.
Funzionamento automatico remoto
1 (1)
4,0 kW0,86 A
Stato: 0 o 0 (o)
In caso di: Fare: -
Stato
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Programmazione
VLT® AQUA Drive FC 202
Schermata di stato I
2.2.5 Programmazione parametri
Questo stato di visualizzazione è standard dopo
l'avviamento oppure dopo l'inizializzazione.
22
Premere [Info] per ottenere informazioni sulle misure
riferite alle variabili operative mostrate (1.1, 1.2, 1.3, 2 e 3).
Vedere le variabili operative visualizzate nella Disegno 2.11.
Il convertitore di frequenza può essere utilizzato
praticamente per tutti gli incarichi e ore due opzioni di
modalità di programmazione:
Modalità Menu principale.
•
Modalità Menu rapido.
•
Il Menu principale consente di accedere a tutti i parametri.
Il Menu rapido conduce l'utente attraverso alcuni parametri
che consentono di avviare il funzionamento del convertitore di frequenza.
Un parametro può essere modicato sia nella modalità
Menu principale sia nella modalità Menu rapido.
2.2.6 Funzioni dei tasti del Menu rapido
Disegno 2.11 Schermata di stato I
Premere [Quick Menu] per accedere a una lista delle varie
aree comprese nel Menu rapido.
Schermata di stato II
Vedere le variabili operative (1.1, 1.2, 1.3 e 2) visualizzate in
Disegno 2.12.
Nell’esempio, velocità, corrente motore, potenza motore e
frequenza vengono selezionate come variabili nella prime
due righe.
Selezionare Q1 Menu personale per mostrare i parametri
personali selezionati. Questi parametri vengono selezionati
in parametro 0-25 Menu personale. In questo menu possono
essere aggiunti
no a 50 parametri diversi.
Disegno 2.14 Menu rapidi
Disegno 2.12 Schermata di stato II
Selezionare Q2 Setup rapido per esaminare un numero
limitato di parametri che possono essere sucienti per
garantire che il motore funzioni in modo quasi ottimale. Le
Schermata di stato III
Questo stato visualizza l'evento e l'azione dello Smart Logic
Control. Per maggiori informazioni vedere il gruppo di
impostazioni di fabbrica degli altri parametri riguardano le
funzioni di controllo richieste e la congurazione degli
ingressi/uscite di segnale (morsetti di controllo).
parametri 13-** Smart logic.
La selezione dei parametri viene eettuata con i tasti di
navigazione. Sono accessibili i parametri nella Tabella 2.1.
Disegno 2.13 Schermata di stato III
18 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 21
Programmazione Guida alla Programmazione
Parametro Impostazione
Parametro 0-01 Lingua
Parametro 1-20 Potenza motore [kW] [kW]
Parametro 1-22 Tensione motore [V]
Parametro 1-23 Frequen. motore [Hz]
Parametro 1-24 Corrente motore [A]
Parametro 1-25 Vel. nominale motore [Giri/min.]
Parametro 5-12 Ingr. digitale morsetto 27
Parametro 1-29 Adattamento automatico
motore (AMA)
Parametro 3-02 Riferimento minimo [Giri/min.]
Parametro 3-03 Riferimento max. [Giri/min.]
Parametro 3-41 Rampa 1 tempo di accel. [s]
Parametro 3-42 Rampa 1 tempo di decel. [s]
Parametro 3-13 Sito di riferimento
Tabella 2.1 Selezione del parametro
1) Se il morsetto 27 è impostato su [0] Nessuna funzione, sul
morsetto 27 non è necessario alcun collegamento a +24 V.
Selezionare Modiche eettuate per avere informazioni su:
Le ultime dieci modiche. Utilizzare i tasti di
•
navigazione [▲] [▼] per scorrere gli ultimi dieci
parametri modicati.
Le modiche eettuate rispetto all'impostazione
•
di fabbrica.
Selezionare Registrazioni per ottenere informazioni sulle
visualizzazioni nella linea di visualizzazione. Le informazioni
vengono visualizzate sotto forma di graci.
Possono essere visualizzati solo i parametri selezionati in
parametro 0-20 Visualiz.ridotta del display- riga 1,1 e
parametro 0-24 Visual.completa del display-riga 3. È possibile
memorizzare no a 120 campionamenti nella memoria per
riferimenti futuri.
I parametri del Setup funzioni sono raggruppati nel modo seguente:
[0] Nessuna funzione
[1] Abilit.AMA compl.
2.2.7 Menu rapido, Q3 Impostaz. funzione
Il setup funzione permette di accedere facilmente e
rapidamente a tutti i parametri necessari per gran parte
delle applicazioni di trattamento acque e acque reue tra
cui:
1)
Tra le altre funzioni, il menu Impostaz. funzione include
anche parametri per selezionare quanto segue:
Coppia variabile.
•
Coppia costante.
•
Pompe.
•
Pompe dosatrici.
•
Pompe a immersione.
•
Pompe per autoclave.
•
Pompe per miscelatori.
•
Soanti di aerazione.
•
Altre pompe.
•
Applicazioni a ventole.
•
Le variabili da mostrare nell'LCP.
•
Velocità digitali preimpostate.
•
Conversione in scala di riferimenti analogici.
•
Applicazioni a zona singola e multizona ad anello
•
chiuso.
Funzioni
•
Applicazioni di trattamento acque reue.
•
speciche relative all'acqua.
2 2
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 19
Page 22
Programmazione
Q3-10 Impost. orologio Q3-11 Impost. display Q3-12 Uscita analogica Q3-13 Relays
22
Parametro 0-70 Data e ora Parametro 0-20 Visualiz.ridotta del
display- riga 1,1
Parametro 0-71 Formato data Parametro 0-21 Visualiz.ridotta del
display- riga 1,2
Parametro 0-72 Formato dell'ora Parametro 0-22 Visualiz.ridotta del
display- riga 1,3
Parametro 0-74 DST/ora legale Parametro 0-23 Visual.completa del
display-riga 2
Parametro 0-76 DST/avvio ora
legale
Parametro 0-77 DST/ne ora legale Parametro 0-37 Testo display 1 – –
– Parametro 0-38 Testo display 2 – –
– Parametro 0-39 Testo 3 del display – –
Parametro 0-24 Visual.completa del
display-riga 3
VLT® AQUA Drive FC 202
Q3-1 Impost. gener.
Parametro 6-50 Uscita morsetto 42 Relè
Parametro 6-51 Mors. 42, usc. scala
min.
Parametro 6-52 Mors. 42, usc. scala
max.
– Opzione relè
– Opzione relè
1⇒Parametro 5-40 Funzione
relè
Relè
2⇒Parametro 5-40 Funzione
relè
Opzione relè
7⇒Parametro 5-40 Funzione
relè
8⇒Parametro 5-40 Funzione
relè
9⇒Parametro 5-40 Funzione
relè
Tabella 2.2 Q3-1 Impost. gener.
Q3-2 Impostaz. anello aperto
Q3-20 Riferim. digitale Q3-21 Riferim. analogico
Parametro 3-02 Riferimento minimo Parametro 3-02 Riferimento minimo
Parametro 3-03 Riferimento max. Parametro 3-03 Riferimento max.
Parametro 3-10 Riferim preimp. Parametro 6-10 Tens. bassa morsetto 53
Parametro 5-13 Ingr. digitale morsetto 29 Parametro 6-11 Tensione alta morsetto 53
Parametro 5-14 Ingr. digitale morsetto 32 Parametro 6-14 Rif.basso/val.retroaz.morsetto 53
Parametro 5-15 Ingr. digitale morsetto 33 Parametro 6-15 Rif. alto/valore retroaz. morsetto 53
Tabella 2.3 Q3-2 Impostaz. anello aperto
Q3-3 Impostaz. anello chiuso
Q3-30 Feedback Settings Q3-31 PID Settings
Parametro 1-00 Modo congurazione Parametro 20-81 PID, contr. n./inv.
Parametro 20-12 Unità riferimento/Retroazione Parametro 20-82 PID, veloc. avviam. [giri/min]
Parametro 3-02 Riferimento minimo Parametro 20-21 Riferimento 1
Parametro 3-03 Riferimento max. Parametro 20-93 Guadagno proporzionale PID
Parametro 6-20 Tens. bassa morsetto 54 Parametro 20-94 Tempo di integrazione PID
Parametro 6-21 Tensione alta morsetto 54
Parametro 6-24 Rif.basso/val.retroaz.morsetto 54
Parametro 6-25 Rif. alto/valore retroaz. morsetto 54
Parametro 6-00 Tempo timeout tensione zero
Parametro 6-01 Funz. temporizz. tensione zero
Tabella 2.4 Q3-3 Impostaz. anello chiuso
20 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 23
130BP066.10
1107 giri/min.
0 - ** Funzionam./display
1 - ** Carico/Motore
2 - ** Freni
3 - ** Rif./rampe
3,84 A 1 (1)
Menu princ.
130BP067.10
740 giri/min
0 -01 Lingua
[0] Inglese
10,64A 1 [1]
0-0*
Impost.di base
130BP068.10
740 giri/min
0 -01 Lingua
[0] Inglese
10,64 A 1 [1]
0-0*
Impost.di base
Programmazione Guida alla Programmazione
2.2.8 Menu rapido, Q4 SmartStart
SmartStart funziona automaticamente alla prima
accensione del convertitore di frequenza o dopo un
ripristino delle impostazioni di fabbrica. SmartStart guida
gli utenti attraverso una serie di facili passi per assicurare
un controllo motore corretto e più eciente. Lo SmartStart
può anche essere avviato direttamente tramite il Menu
rapido.
Le seguenti impostazioni sono disponibili tramite
SmartStart:
Pompa/motore singolo: ad anello aperto o
•
chiuso.
Alternanza del motore: due motori condividono
•
un convertitore di frequenza.
Regolazione in cascata di base: controllo di
•
velocità di una singola pompa in un sistema con
più pompe.
Questa, per esempio, può essere una soluzione
economica in gruppi di pressione.
Master/slave: controllo di un massimo di otto
•
convertitori di frequenza e pompe per assicurare
il funzionamento regolare del sistema di pompe
complessivo.
(parametro 1-00 Modo congurazione), alcuni parametri
possono essere nascosti. Per esempio, la congurazione ad
anello aperto nasconde tutti i parametri PID, mentre altre
opzioni abilitate rendono visibili un maggior numero di
gruppi di parametri.
2.2.10 Selezione dei parametri
Nella modalità Menu principale i parametri sono suddivisi
in gruppi. Selezionare un gruppo di parametri mediante i
tasti di navigazione.
Dopo aver selezionato un gruppo di parametri, selezionare
un parametro con i tasti di navigazione.
La sezione centrale del display visualizza il numero e il
nome del parametro nonché il valore del parametro
selezionato.
Disegno 2.16 Selezione dei parametri
2 2
2.2.9 Modalità Menu principale
Premere [Main Menu] per accedere alla modalità Menu
principale. La visualizzazione in Disegno 2.15 appare sul
display.
Le sezioni centrali e inferiori sul display mostrano un
elenco di gruppi di parametri che possono essere
selezionati premendo alternativamente i tasti [▲] e [▼].
Disegno 2.15 Modalità Menu principale
Ogni parametro possiede un nome e un numero che
restano invariati indipendentemente dalla modalità di
programmazione. Nella modalità Menu principale i
parametri sono suddivisi in gruppi. La prima cifra del
numero del parametro (da sinistra) indica il numero del
gruppo di parametri.
2.2.11 Modica dei dati
La procedura per la modica dei dati è la stessa sia nella
modalità Menu rapido sia nella modalità Menu principale.
Premere [OK] per modicare il parametro selezionato.
La procedura per la modica dei dati dipende dal fatto che
il parametro selezionato rappresenti un valore dato
numerico o un valore di testo.
2.2.12 Modica di un valore di testo
Se il parametro selezionato è un valore di testo, modicare
il valore di testo con i tasti [▲] [▼].
Posizionare il cursore sul valore da salvare e premere [OK].
Disegno 2.17 Modica di un valore di testo
Tutti i parametri possono essere modicati nel Menu
principale. Tuttavia, a seconda della congurazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 21
Page 24
130BP069.10
1- 6*
113 giri/min. 1,78 A 1(1)
Imp. dipend. dal car.
1 - 60 Compensaz. del carico
a bassa vel.
1
0
0%
130BP070.10
1 - 60 Compensaz. del carico
a bassa vel.
1 0%
Imp. dipend. dal car. 1- 6*
729 giri/min 6,21A 1(1)
6
130BP073.10
130BP072.10
Programmazione
VLT® AQUA Drive FC 202
2.2.13 Modica di un valore dati
22
Se il parametro selezionato mostra un valore dati
numerico, modicare il valore dati selezionato mediante i
tasti di navigazione [◀] [▶], nonché i tasti di navigazione
[▲] [▼]. Premere i tasti [◀] [▶] per spostare il cursore
orizzontalmente.
Disegno 2.18 Modica di un valore dati
Il cursore indica la cifra selezionata. Posizionare il cursore
sulla cifra da salvare e premere [OK].
Disegno 2.21 Salvataggio
2.2.15 Valore, passo dopo passo
Premere i tasti [
aumenta il valore dati e [▼] riduce il valore dati.
Posizionare il cursore sul valore da salvare e premere [OK].
] [▼] per
▲
modicare il valore dati. [▲]
Determinati parametri possono essere modicati passo
dopo passo. Ciò si applica a quanto segue.
Parametro 1-20 Potenza motore [kW].
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
I parametri possono essere modicati a piacere sia come
gruppo di valori di dati numerici sia come valori di dati
numerici innitamente variabili.
Disegno 2.19 Salvataggio di un valore dati
2.2.14 Variazione continua di un valore del
dato numerico
Se il parametro selezionato rappresenta un valore dato
numerico, selezionare una cifra con [◀] [▶].
Disegno 2.20 Selezione di una cifra
2.2.16 Visualizzazione e programmazione
dei parametri indicizzati
I parametri vengono indicizzati quando inseriti in una pila.
Parametro 15-30 Log allarme: Codice guasto no a
parametro 15-32 Log allarme: Tempo contengono un log
guasti che può essere letto. Selezionare un parametro,
premere [OK] e premere i tasti [▲] [▼] per scorrere il log
dei valori.
Per esempio, il parametro 3-10 Riferim preimp. viene
modicato nel modo seguente:
1. Selezionare il parametro, premere [OK] e premere
[▲] [▼] per scorrere i valori indicizzati.
2. Per modicare il valore del parametro, selezionare
il valore indicizzato e premere [OK].
3.
Cambiare il valore utilizzando i tasti [▲] [▼].
4. Premere [OK] per accettare la nuova
impostazione.
5. Premere [Cancel] per annullare. Premere [Back]
per uscire dal parametro.
Modicare la cifra selezionata in modo continuo mediante
[▲] [▼].
22 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 25
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Programmazione Guida alla Programmazione
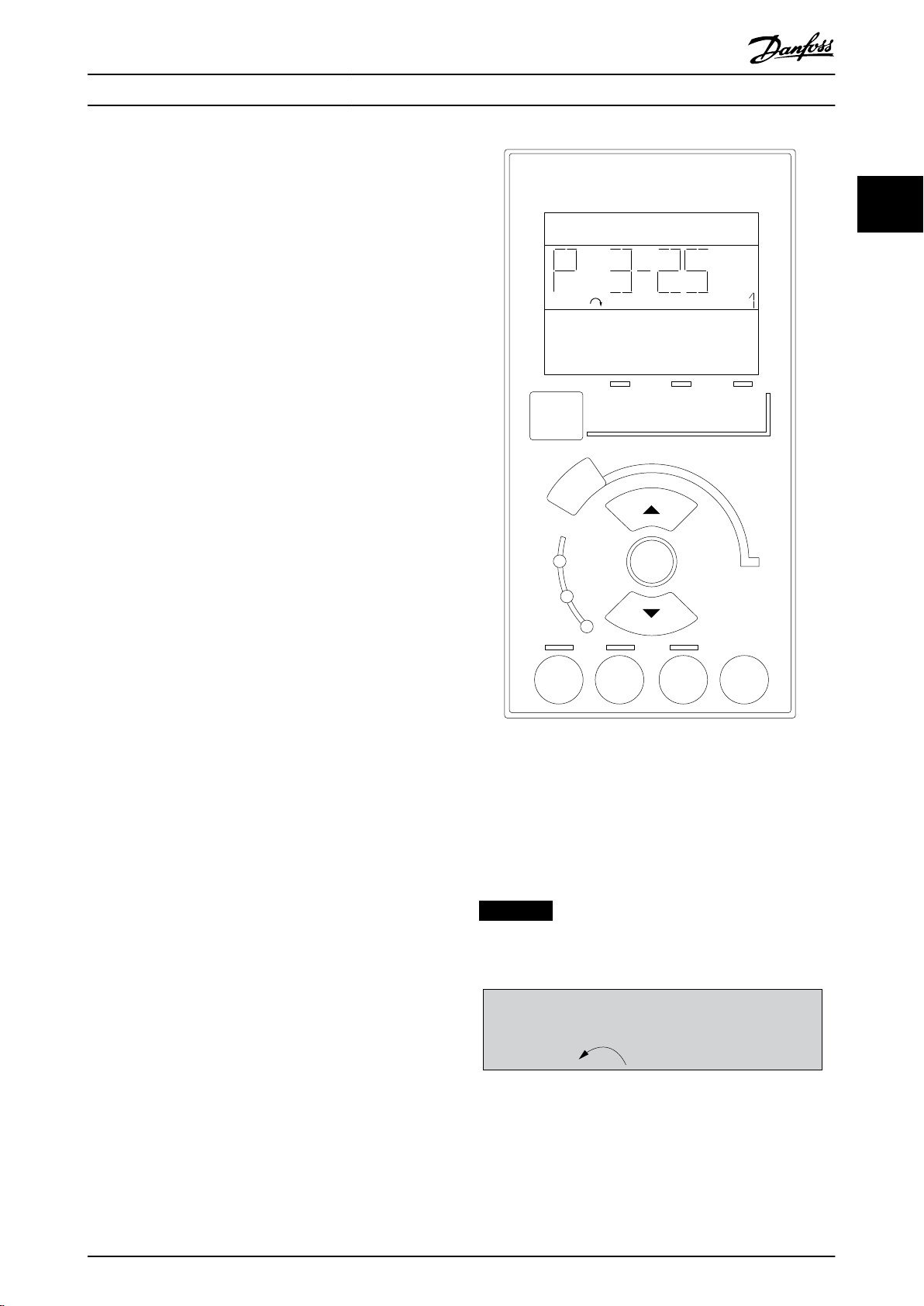
2.2.17 Programmazione con il Pannello di
Controllo Locale numerico
Le seguenti istruzioni sono valide per l'LCP numerico (LCP
101).
Il quadro di comando è suddiviso in quattro gruppi
funzionali:
Display numerico.
•
Tasti menu e spie luminose - modica dei
•
parametri e selezione delle funzioni di visualizzazione.
Tasti di navigazione e spie luminose.
•
Tasti funzione e spie luminose.
•
Linea di visualizzazione
Messaggi di stato completi di icone e valore numerico.
Spie luminose
LED verde/On: indica il funzionamento della
•
sezione di comando.
LED giallo/Avviso: indica un avviso.
•
LED rosso lampeggiante/Allarme: indica un
•
allarme.
Tasti dell'LCP
[Menu]
Selezionare una delle seguenti modalità:
Stato.
•
Messa a punto rapida.
•
Menu principale.
•
2 2
Disegno 2.22 Tasti dell'LCP
Modalità Stato
La modalità Stato visualizza lo stato del convertitore di
frequenza o del motore.
Se si verica un allarme, l'NLCP passa automaticamente alla
modalità di stato.
Possono essere visualizzati più allarmi.
AVVISO!
La copia di parametri non è possibile con il pannello di
controllo locale numerico LCP 101.
Disegno 2.23 Modalità Stato
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 23
Page 26
Setup 1
130BP078.10
A 17
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmazione
VLT® AQUA Drive FC 202
2.2.18 Tasti dell'LCP
22
Disegno 2.24 Allarme
Menu principale/Setup rapido
Utilizzati per programmare tutti i parametri o soltanto
quelli nel Menu rapido (vedere anche la descrizione
dell'LCP 102 nel capitolo 2.1 Il Pannello di Controllo Locale
Graco e Numerico).
Quando il valore lampeggia, premere [▲] o [▼] per
modicare i valori parametrici.
1. Premere [Main Menu] per selezionare il Menu
principale.
2. Selezionare il gruppo di parametri [xx-__] e
premere [OK].
3. Selezionare il parametro [__-xx] e premere [OK].
4. Se il parametro è un parametro array, selezionare
il numero di array e premere [OK].
5. Selezionare il valore dei dati desiderato e premere
[OK].
I parametri con opzioni funzionali visualizzano valori come
[1], [2], e così via. Per una descrizione delle diverse opzioni,
consultare le descrizioni di singoli parametri nel
capitolo 3 Descrizione dei parametri.
[Back]
Usato per tornare indietro.
[▲] [▼] sono usati per spostarsi tra i comandi e all'interno
dei parametri.
Disegno 2.25 Menu principale/Setup rapido
I tasti per il comando locale si trovano nella parte inferiore
dell'LCP.
Disegno 2.26 Tasti dell'LCP
[Hand On]
Abilita il controllo del convertitore di frequenza mediante
l'LCP. [Hand On] inoltre avvia il motore e ora è possibile
inserire i dati relativi alla velocità del motore con i tasti di
navigazione. Il tasto può essere selezionato come [1]
Abilitato o [0] Disattivato mediante il parametro 0-40 Tasto
[Hand on] sull'LCP.
I segnali di arresto esterni attivati con segnali di comando
o un bus di campo annullano un comando di avvio tramite
l'LCP.
Quando viene attivato [Hand on], rimangono attivi i
seguenti segnali di comando:
[Hand On] - [O] - [Auto On].
•
Ripristino.
•
Arresto a ruota libera negato.
•
Inversione.
•
Selezione setup lsb - Selezione setup msb.
•
Comando di arresto da comunicazione seriale.
•
Arresto rapido.
•
Freno CC.
•
[O]
Arresta il motore collegato. Il tasto può essere selezionato
come [1] Abilitato o [0] Disattivato mediante il
parametro 0-41 Tasto [O] sull'LCP.
Se non viene selezionata alcuna funzione di arresto esterna
e il tasto [O] è inattivo, il motore può essere arrestato
scollegando la tensione.
[Auto On]
Consente di controllare il convertitore di frequenza tramite
i morsetti di controllo e/o la comunicazione seriale.
Quando sui morsetti di controllo e/o sul bus viene
applicato un segnale di avviamento, il convertitore di
frequenza si avvia. Il tasto può essere selezionato come [1]
Abilitato o [0] Disattivato mediante il parametro 0-42 Tasto
[Auto on] sull'LCP.
AVVISO!
Un segnale HAND-OFF-AUTO attivo sugli ingressi digitali
ha una priorità maggiore rispetto ai tasti di comando
[Hand on] e [Auto on].
24 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 27
Programmazione Guida alla Programmazione
[Reset]
Utilizzato per ripristinare il convertitore di frequenza dopo
un allarme (scatto). Può essere selezionato come [1]
Abilitato o [0] Disattivato mediante il parametro 0-43 Tasto
[Reset] sull'LCP.
2.3.1 Inizializzazione alle impostazioni di
fabbrica
Inizializzare il convertitore di frequenza alle impostazioni di
fabbrica in due modi.
Inizializzazione raccomandata (mediante il
parametro 14-22 Modo di funzionamento).
1. Selezionare il parametro 14-22 Modo di funzionamento.
2. Premere [OK].
3. Selezionare [2] Inizializzazione.
4. Premere [OK].
5. Scollegare l'alimentazione di rete e attendere lo
spegnimento del display.
6. Ricollegare l'alimentazione di rete. Il convertitore
di frequenza è stato ripristinato.
Il Parametro 14-22 Modo di funzionamento inizializza tutti, a
eccezione di:
Parametro 14-50 Filtro RFI.
•
Parametro 8-30 Protocollo.
•
Parametro 8-31 Indirizzo.
•
Parametro 8-32 Baud rate.
•
Parametro 8-35 Ritardo minimo risposta.
•
Parametro 8-36 Ritardo max. risposta.
•
Parametro 8-37 Ritardo max. intercar..
•
dal Parametro 15-00 Ore di funzionamento al
•
parametro 15-05 Sovratensioni.
dal Parametro 15-20 Log storico: Evento al
•
parametro 15-22 Log storico: Tempo.
dal Parametro 15-30 Log allarme: Codice guasto al
•
parametro 15-32 Log allarme: Tempo.
Inizializzazione manuale
1. Scollegare l'unità dalla rete e attendere lo
spegnimento del display.
2. 2a Tenere premuti contemporaneamente
[Status] - [Main Menu] - [OK] durante
l'accensione del display graco LCP 102.
2b Premere [Menu] - [OK] durante
l'accensione del display numerico LCP
101.
3. Rilasciare i tasti dopo 5 s.
4. Ora il convertitore di frequenza è programmato
secondo le impostazioni di fabbrica.
Questa procedura consente l'inizializzazione di tutte le
impostazioni, ad eccezione delle seguenti:
Parametro 15-00 Ore di funzionamento.
•
Parametro 15-03 Accensioni.
•
Parametro 15-04 Sovratemp..
•
Parametro 15-05 Sovratensioni.
•
AVVISO!
Un'inizializzazione manuale ripristina anche la comunicazione seriale, le impostazioni del ltro RFI
(parametro 14-50 Filtro RFI) e le impostazioni del log
guasti.
2 2
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 25
Page 28
Descrizione dei parametri
VLT® AQUA Drive FC 202
3 Descrizione dei parametri
3.1 Selezione dei parametri
33
I parametri sono raggruppati in vari gruppi di parametri per semplicare la selezione dei parametri corretti e assicurare un
funzionamento ottimale del convertitore di frequenza.
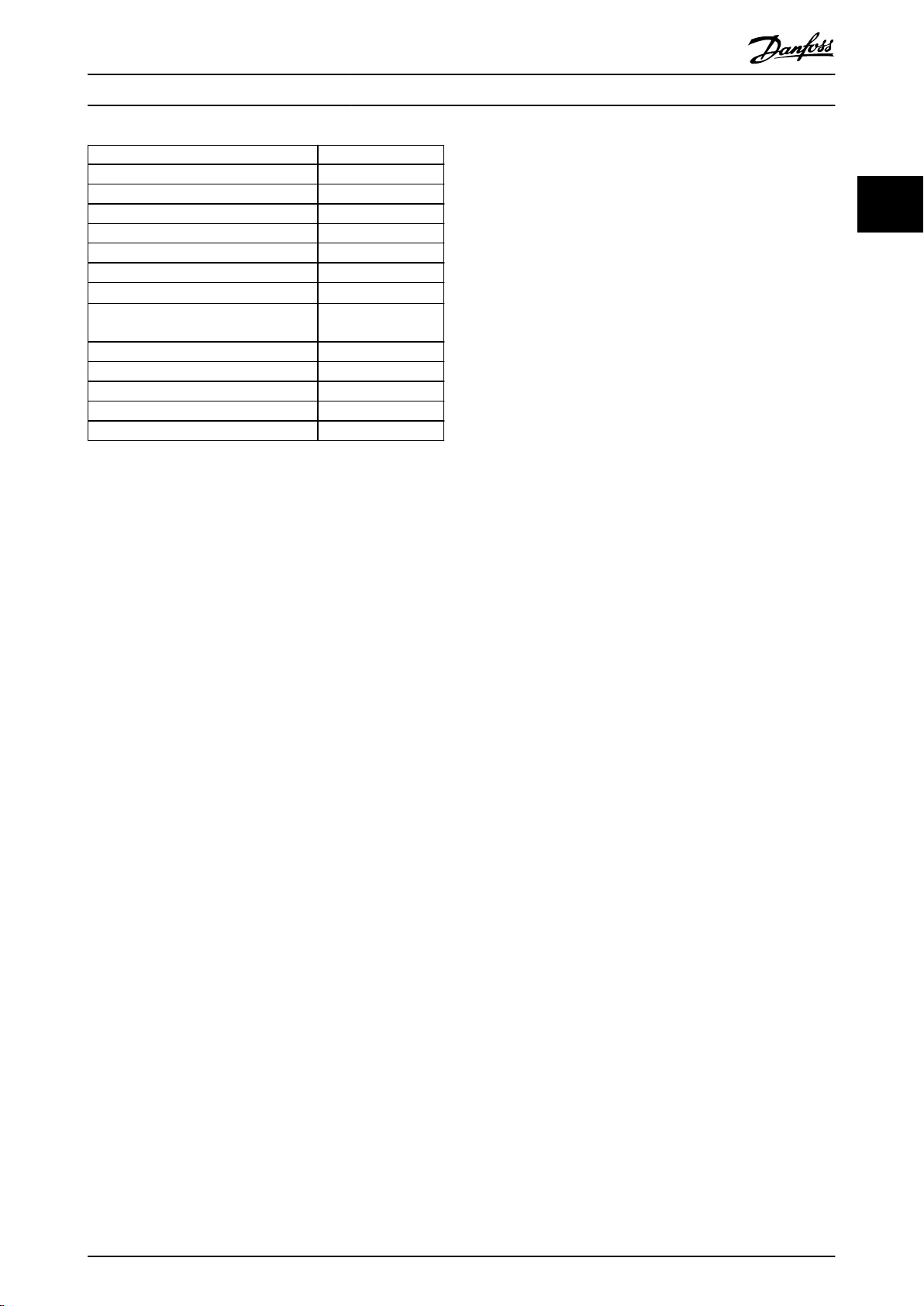
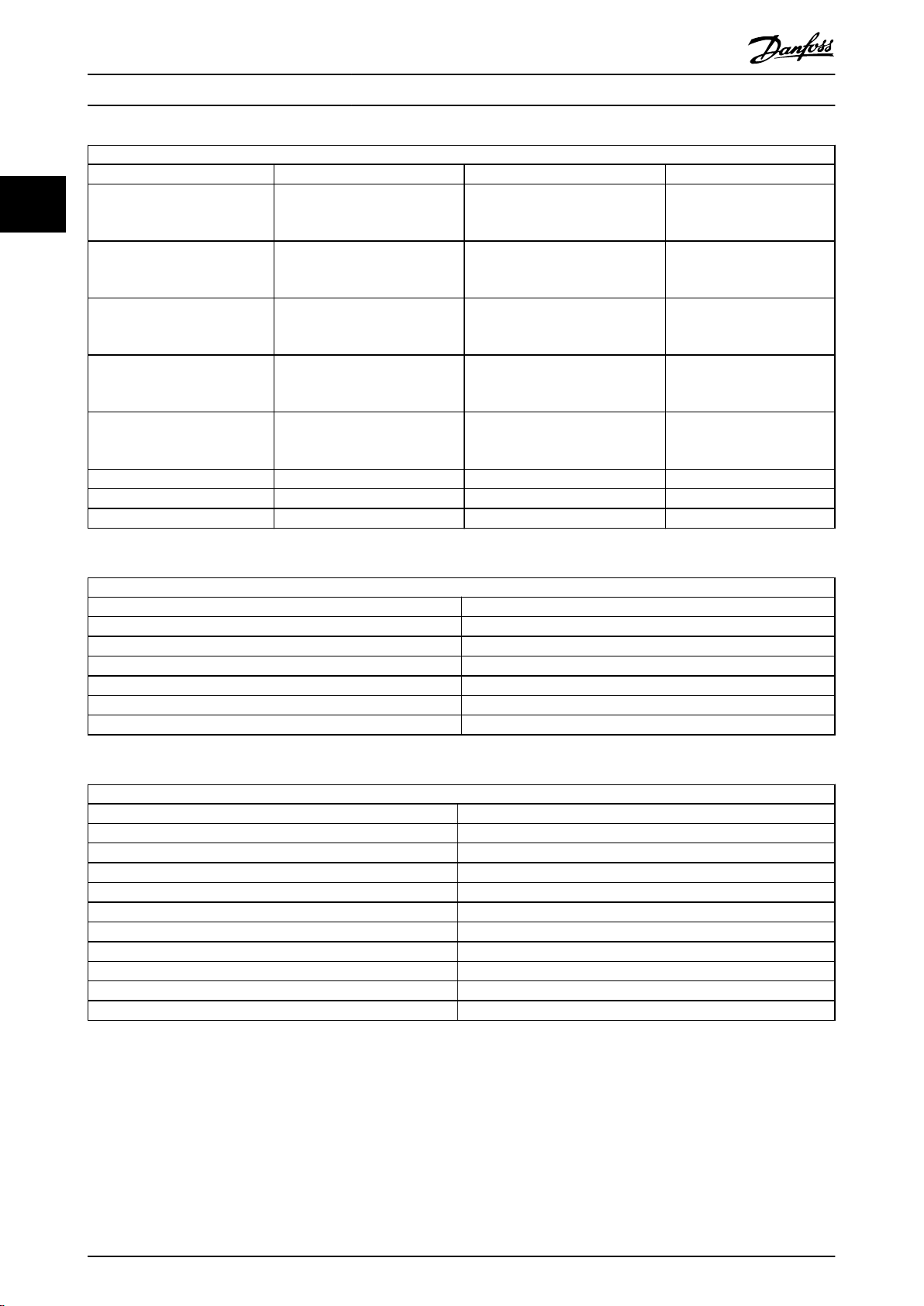
Panoramica dei gruppi di parametri
Gruppo Funzione
0-** Funzionam./display Parametri associati alle funzioni di base del convertitore di frequenza, alla funzione dei tasti LCP e alla
congurazione del display LCP.
1-** Carico e Motore Parametri relativi alle impostazioni motore.
2-** Freni Parametri relativi alle caratteristiche del freno nel convertitore di frequenza.
3-** Rif./rampe Parametri per la gestione dei riferimenti, le denizioni dei limiti e la congurazione della reazione del
convertitore di frequenza alle variazioni.
4-** Limiti / avvisi Parametri per congurare limiti e avvisi.
5-** I/O digitali Parametri per congurare gli ingressi e le uscite digitali.
6-** I/O analogici Parametri per congurare gli ingressi e le uscite analogici.
8-** Comun. e opzioni Gruppo di parametri per congurare comunicazioni e opzioni.
9-** PROFIdrive
10-** Fieldbus CAN
13-** Smart logic Gruppo di parametri per lo Smart Logic Control.
14-** Funzioni speciali Gruppo di parametri per la congurazione delle funzioni speciali del convertitore di frequenza
15-** Inform. conv. freq. Gruppo di parametri che contiene informazioni sul convertitore di frequenza come dati di funzio-
16-** Visualizzazione dati Gruppo di parametri per la visualizzazione dei dati, ad esempio riferimenti eettivi, tensioni, parole di
18-** Visual. dati 2 Questo gruppo di parametri contiene gli ultimi dieci log relativi alla manutenzione preventiva.
20-** Conv. freq. anello chiuso Questo gruppo di parametri viene utilizzato per congurare il controllore PID ad anello chiuso che
21-** Anello chiuso est. Parametri per congurare i 3 controllori PID ad anello chiuso esteso.
22-** Funzioni applicazione Parametri per applicazioni per il trattamento delle acque.
23-** Funzioni temporizzate Parametri per azioni da eseguire su base giornaliera o settimanale.
24-** Funz. appl. 2 Parametri per il bypass del convertitore di frequenza.
25-** Controllore in cascata Parametri per congurare il controllore in cascata di base per il controllo sequenziale di pompe
26-* *Opzione I/O anal. MCB 109
29-** Water Application Functions Parametri per impostare funzioni speciche all'acqua.
30-** Caratteristiche speciali Parametri per congurare le caratteristiche speciali.
31-** Opzione bypass Parametri per congurare la funzione di bypass.
35-** Opzione ingresso sensore Parametri per congurare la funzione di ingresso del sensore.
Gruppo di parametri per parametri specici Probus (richiede VLT® PROFIBUS DP MCA 101).
Gruppo di parametri per parametri specici DeviceNet (richiede VLT® DeviceNet MCA 104).
namento, congurazione hardware e versioni software.
controllo, allarme, avviso e stato.
regola la frequenza di uscita dell'unità.
multiple.
Parametri per congurare l'opzione VLT® Analog I/O MCB 109.
Tabella 3.1 Gruppi di parametri
Le descrizioni dei parametri e le selezioni sono visualizzate
nell'LCP graco o nell'LCP numerico. Vedere il
capitolo 2 Programmazione per dettagli. Accedere ai
parametri premendo [Quick Menu] o [Main Menu] sull'LCP. Il
Menu rapido viene usato prevalentemente per mettere in
servizio l'unità all'avviamento fornendo i parametri
necessari per avviare il funzionamento. Il Menu principale
Tutti i morsetti di ingresso/uscita digitali e i morsetti di
ingresso/uscita analogici sono polifunzionali. Tutti i
morsetti sono dotati di funzioni predenite di fabbrica
adatte alla maggior parte delle applicazioni di trattamento
delle acque. Nel caso siano necessarie altre funzioni
speciali, programmarle nei gruppi di parametri 5-** I/O
digitali o 6-** I/O analogici.
consente di accedere a tutti i parametri per una programmazione dettagliata dell'applicazione.
26 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 29
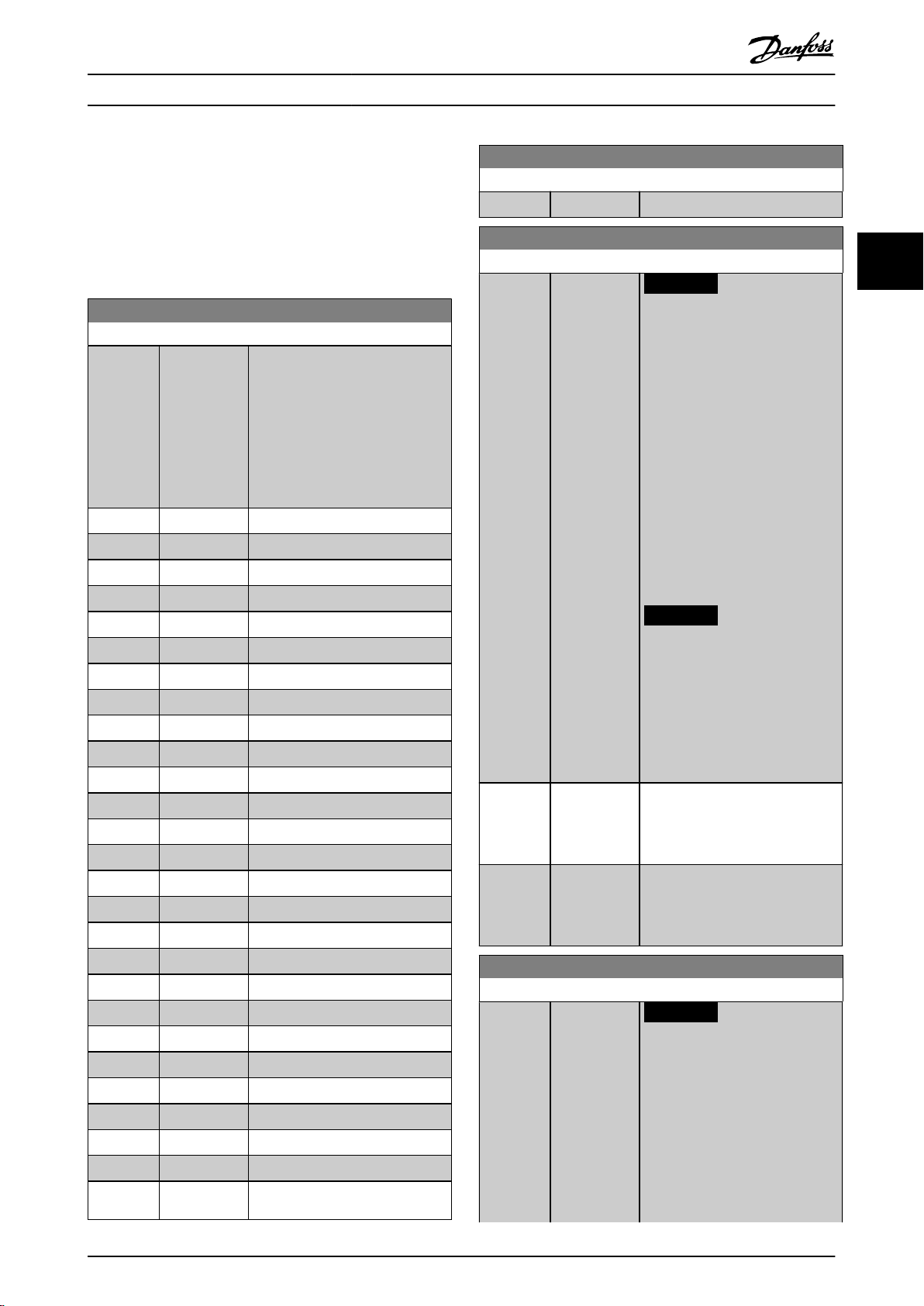
0-01 Lingua
Option: Funzione:
Denisce la lingua da utilizzare sul
display.
Il convertitore di frequenza può
essere fornito con due pacchetti di
lingue diversi. L'inglese e il tedesco
sono inclusi in entrambi i pacchetti.
L'inglese non può essere cancellato
o modicato.
[0] * English Parte dei pacchetti di lingue 1–2.
[1] Deutsch Parte dei pacchetti di lingue 1–2.
[2] Francais Parte del pacchetto di lingue 1.
[3] Dansk Parte del pacchetto di lingue 1.
[4] Spanish Parte del pacchetto di lingue 1.
[5] Italiano Parte del pacchetto di lingue 1.
[6] Svenska Parte del pacchetto di lingue 1.
[7] Nederlands Parte del pacchetto di lingue 1.
[10] Chinese Parte del pacchetto di lingue 2.
[20] Suomi Parte del pacchetto di lingue 1.
[22] English US Parte del pacchetto di lingue 1.
[27] Greek Parte del pacchetto di lingue 1.
[28] Bras.port Parte del pacchetto di lingue 1.
[36] Slovenian Parte del pacchetto di lingue 1.
[39] Korean Parte del pacchetto di lingue 2.
[40] Japanese Parte del pacchetto di lingue 2.
[41] Turkish Parte del pacchetto di lingue 1.
[42] Trad.Chinese Parte del pacchetto di lingue 2.
[43] Bulgarian Parte del pacchetto di lingue 1.
[44] Srpski Parte del pacchetto di lingue 1.
[45] Romanian Parte del pacchetto di lingue 1.
[46] Magyar Parte del pacchetto di lingue 1.
[47] Czech Parte del pacchetto di lingue 1.
[48] Polski Parte del pacchetto di lingue 1.
[49] Russian Parte del pacchetto di lingue 1.
[50] Thai Parte del pacchetto di lingue 2.
[51] Bahasa
Indonesia
Parte del pacchetto di lingue 2.
0-01 Lingua
Option: Funzione:
[52] Hrvatski Parte del pacchetto di lingue 2.
0-02 Unità velocità motore
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Le informazioni visualizzate sul
display dipendono dalle
impostazioni nel
parametro 0-02 Unità velocità motore
e nel parametro 0-03 Impostazioni
locali. Le impostazioni di fabbrica
del parametro 0-02 Unità velocità
motore e del
parametro 0-03 Impostazioni locali
dipendono dalla regione del mondo
in cui viene fornito il convertitore di
frequenza.
AVVISO!
La modica dell'unità velocità
del motore determina il
ripristino di alcuni parametri al
loro valore iniziale. Selezionare
l'unità velocità del motore
prima di modicare altri
parametri.
[0] * Giri/minuto Selezionare per mostrare le variabili
della velocità del motore e i
parametri usando la velocità del
motore (Giri/min.).
[1] Hz Selezionare per mostrare le variabili
della velocità del motore e i
parametri usando la frequenza di
uscita (Hz).
0-03 Impostazioni locali
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
La schermata visualizzata dipende
dalle impostazioni eettuate in
parametro 0-02 Unità velocità motore
e parametro 0-03 Impostazioni locali.
Le impostazioni di fabbrica del
parametro 0-02 Unità velocità motore
Descrizione dei parametri Guida alla Programmazione
3.2 Parametri 0-** Funzionam./display
Parametri associati alle funzioni di base del convertitore di
frequenza, alla funzione dei tasti LCP e alla congurazione
del display LCP.
3.2.1 0-0* Impost. di base
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 27
3 3
Page 30
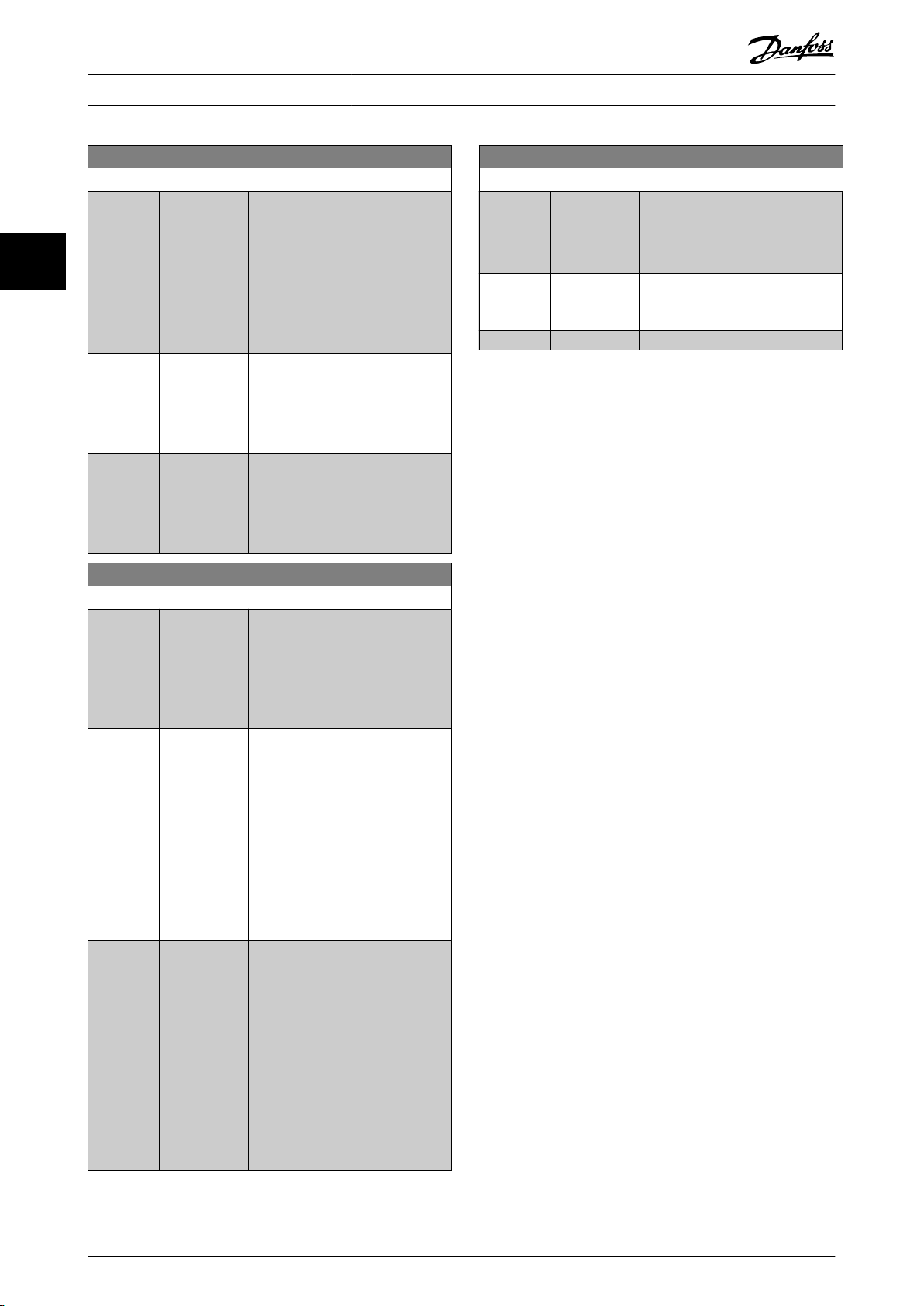
0-03 Impostazioni locali
Option: Funzione:
e del parametro 0-03 Impostazioni
locali dipendono dalla regione del
mondo in cui viene fornito il
convertitore di frequenza.
Riprogrammare le impostazioni
come richiesto.
Le impostazioni inutilizzate
vengono rese invisibili.
[0] Internazionale Imposta le unità del
parametro 1-20 Potenza motore [kW]
su [kW] e il valore predenito del
parametro 1-23 Frequen. motore su
50 Hz.
[1] Nordamerica Imposta le unità del
parametro 1-21 Potenza motore [HP]
su [hp] e il valore predenito del
parametro 1-23 Frequen. motore su
60 Hz.
0-04 Stato di funz. all'accens.
Option: Funzione:
Selezionare il modo di funzionamento quando la tensione di rete
viene reinserita dopo lo
spegnimento del convertitore di
frequenza quando è in modalità
hand on (locale).
[0] * Prosegui Riprende il funzionamento del
convertitore di frequenza
mantenendo lo stesso riferimento
locale e la stessa condizione di
avviamento/arresto. La condizione
di avviamento/arresto viene
applicata tramite [Hand On]/[O]
sull'LCP o avviamento locale tramite
un ingresso digitale come prima
dello spegnimento del convertitore
di frequenza.
[1] Arr. forz.,
rif=vecc.
Arresta il convertitore di frequenza,
ma contemporaneamente mantiene
in memoria il riferimento di velocità
locale prima dello spegnimento.
Dopo il reinserimento della
tensione e dopo aver ricevuto un
comando di avvio (premendo [Hand
On] o il comando di avviamento
locale tramite un ingresso digitale),
il convertitore di frequenza si
riavvia e funziona al riferimento di
velocità mantenuto.
0-05 Unità modo locale
Option: Funzione:
Denisce se l'unità di riferimento
locale deve essere visualizzata come
velocità dell'albero motore (in Giri/
min. o Hz) o percentuale.
[0] * Come unità
velocità
motore
[1] %
Descrizione dei parametri
33
28 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
3.2.2 0-1* Operazioni di setup
Denisce e controlla le singole programmazioni parametri.
Il convertitore di frequenza possiede quattro program-
mazioni parametri programmabili indipendentemente l'una
dall'altra. Ciò rende il convertitore di frequenza essibile e
in grado di soddisfare i requisiti di diversi schemi di
controllo del sistema, risparmiando il costo per apparec-
chiature di controllo esterne. Ad esempio, i setup possono
essere utilizzati per programmare il convertitore di
frequenza in modo che funzioni secondo uno schema di
controllo in un setup (ad esempio, funzionamento durante
le ore del giorno) e un altro schema di controllo in un altro
setup (ad esempio, ripristino alle ore notturne). In
alternativa, possono essere utilizzati da un'unità di
trattamento dell'aria o da un'unità OEM per programmare
in modo identico tutti i rispettivi convertitori di frequenza
assemblati in fabbrica per modelli
chiature in un determinato campo, anché abbiano gli
stessi parametri. Durante la produzione/messa in servizio, è
suciente selezionare un setup specico in base al
modello di convertitore di frequenza.
Selezionare il setup attivo (vale a dire il setup nel quale il
convertitore di frequenza sta funzionando) nel
parametro 0-10 Setup attivo. L'LCP in seguito visualizza il
setup attivo selezionato. Utilizzando il multi setup, è
possibile passare da un setup all'altro mentre il conver-
titore di frequenza è in funzione o arrestato, mediante
ingresso digitale o comandi di comunicazione seriale (per
esempio per il ripristino alle ore notturne). Se è necessario
modicare i setup durante il funzionamento, assicurarsi che
il parametro 0-12 Questo setup collegato a sia programmato
come richiesto. Per la maggior parte delle applicazioni di
trattamento acque/acque reue non è necessario
programmare il parametro 0-12 Questo setup collegato a
anche se occorre modicare il setup durante il funzio-
namento. Tuttavia, potrebbe essere necessario per le
applicazioni complesse che utilizzano la piena essibilità
dei setup multipli. Usando il parametro 0-11 Setup di
programmazione è possibile modicare i parametri in uno
dei setup senza alterare il funzionamento del convertitore
di frequenza nel setup attivo. Il setup attivo può essere un
setup diverso da quello che si sta modicando. Mediante il
parametro 0-51 Copia setup è possibile copiare le
impostazioni parametri tra i setup per abilitare una messa
dierenti di apparec-
Page 31

0-10 Setup attivo
Option: Funzione:
Selezionare il setup con il quale il
convertitore di frequenza deve
funzionare.
Utilizzare il parametro 0-51 Copia
setup per copiare un setup su un
altro o su tutti gli altri setup. Per
evitare conitti di impostazione
dello stesso parametro in due setup
diversi collegare i setup utilizzando
il parametro 0-12 Questo setup
collegato a. Arrestare il convertitore
di frequenza quando si commuta
tra i setup, nei quali i parametri
segnati come non modicabili
durante il funzionamento hanno
valori diversi.
I parametri che sono non modi-
cabili durante il funzionamento sono
contrassegnati come FALSE nel
capitolo 4 Elenchi dei parametri.
[0] Setup di
fabbrica
Non può essere modicato.
Contiene i dati Danfoss e può
essere usato come fonte di dati per
riportare gli altri setup a uno stato
noto.
[1] * Setup 1 [1] Setup 1 no a [4] Setup 4 sono le
quattro diverse programmazioni
entro le quali è possibile
programmare tutti i parametri.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] Multi setup Usato per selezioni remote del
setup usando gli ingressi digitali e
la porta di comunicazione seriale.
Questo setup usa le impostazioni
del parametro 0-12 Questo setup
collegato a.
0-11 Setup di programmazione
Option: Funzione:
Selezionare il setup da modicare
(vale a dire programmare) durante il
funzionamento; il setup attivo o
uno dei setup inattivi. Il numero di
setup modicati è visualizzato
nell'LCP tra parentesi.
[0] Setup di
fabbrica
Non può essere modicato ma è
utile come fonte di dati per
0-11 Setup di programmazione
Option: Funzione:
riportare gli altri setup a uno stato
noto.
[1] Setup 1 [1] Da Setup 1 no a [4] Setup 4
possono essere modicati senza
problemi durante il funzionamento,
indipendentemente dal setup attivo.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] * Setup attivo Il setup in cui il convertitore di
frequenza sta funzionando può
essere modicato durante il funzionamento. La modica dei parametri
nel setup selezionato viene di
norma eseguita dall'LCP, ma è
anche possibile da una qualsiasi
porta di comunicazione seriale.
0-12 Questo setup collegato a
Option: Funzione:
Usare questo parametro solo se è
necessaria una modica dei setup
mentre il motore è in funzione.
Questo parametro assicura che i
parametri che non sono modicabili
durante il funzionamento abbiano
la stessa impostazione in tutti i
setup pertinenti.
Per consentire cambiamenti senza
conitti da un setup all'altro mentre
il convertitore di frequenza è in
funzione, collegare i setup
contenenti parametri che non sono
modicabili durante il funzionamento. Il collegamento assicura
la sincronizzazione dei valori dei
parametri non modicabili durante il
funzionamento passando da un
setup a un altro durante il funzionamento. Non è possibile
modicare i parametri contrassegnati con FALSE negli elenchi dei
parametri (nel capitolo 4 Elenchi dei
parametri) mentre il convertitore di
frequenza è in funzione.
La caratteristica
parametro 0-12 Questo setup
collegato a viene utilizzata quando
[9] Multi setup viene selezionato nel
parametro 0-10 Setup attivo.
Utilizzare [9] Multi setup per passare
da un setup all'altro durante il
Descrizione dei parametri Guida alla Programmazione
in servizio più rapida se sono necessarie impostazioni
parametri simili in setup dierenti.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 29
3 3
Page 32

0-12 Questo setup collegato a
Option: Funzione:
funzionamento mentre il motore è
in funzione.
Per esempio:
Utilizzare [9] Multi setup per passare
da setup 1 a setup 2 durante il
funzionamento del motore.
Programmare prima nel setup 1,
quindi assicurarsi che il setup 1 e il
setup 2 siano sincronizzati (o
collegati).
La sincronizzazione può essere
eettuata in due modi:
•
Cambiare il setup di
modica a [2] Setup 2 nel
parametro 0-11 Setup di
programmazione e
impostare il
parametro 0-12 Questo
setup collegato a su [1]
Setup 1. Ciò avvia il
processo di collegamento
(sincronizzazione).
130BP075.10
Disegno 3.1 Gestione setup
•
Mentre si è nel setup 1,
usare il
parametro 0-50 Copia LCP,
copiare setup 1 al setup 2.
Quindi impostare il
parametro 0-12 Questo
setup collegato a su [2]
Setup 2. Ciò avvia il
processo di collegamento.
130BP076.10
Disegno 3.2 Gestione setup
A collegamento avvenuto il
parametro 0-13 Visualizz.: Setup
collegati legge i setup 1 e 2 per
indicare che tutti i parametri non
modicabili durante il funzionamento
0-12 Questo setup collegato a
Option: Funzione:
sono ora identici nel setup 1 e nel
setup 2. In caso di cambiamento di
un parametro non modicabile
durante il funzionamento nel setup
2, per esempio il
parametro 1-30 Resist. statore (RS), lo
stesso sarà cambiato automaticamente anche nel setup 1. Ora è
possibile commutare tra il setup 1 e
il setup 2 durante il funzionamento.
[0] * Non collegato
[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
0-13 Visualizz.: Setup collegati
Array [5]
Range: Funzione:
0* [0 - 255 ] Visualizza un elenco di tutti i setup
collegati mediante
parametro 0-12 Questo setup
collegato a. Il parametro possiede
un indice per ogni programmazione
parametri. Il valore per ogni indice
mostra quali setup sono collegati a
tale programmazione parametri.
Indice Valore LCP
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tabella 3.2 Esempio di
collegamento di setup
Descrizione dei parametri
33
VLT® AQUA Drive FC 202
30 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 33

0-14 Visualizz.: Prog. setup/canale
Range: Funzione:
0* [-2147483648
2147483647 ]
Visualizza l'impostazione del
parametro 0-11 Setup di programmazione per ognuno dei quattro
diversi canali di comunicazione.
Quando il numero viene
visualizzato in hex, come nell'LCP,
ogni numero visualizza un canale.
I numeri 1-4 visualizzano un
numero di setup; F sta per l'impostazione di fabbrica e A sta per un
setup attivo. I canali sono, da destra
a sinistra: LCP, bus di campo del
convertitore di frequenza, USB,
HPFB1.5.
Esempio: il valore AAAAAA21h
signica che il canale del bus di
campo ha selezionato il setup 2 nel
parametro 0-11 Setup di programmazione, che l'LCP ha selezionato il
setup 1 e che tutti gli altri
utilizzano il setup attivo.
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
Selezionare la variabile da
visualizzare nella riga 1, posizione a
sinistra.
[0] Nessuno Nessun valore di visualizzazione
selezionato
[15] Readout:
actual setup
[37] Testo display 1 Parola di controllo attuale
[38] Testo display 2
[39] Testo 3 del
display
[89] Visual. data e
ora
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[953] Parola di
avviso
Probus
Visualizza gli avvisi di comunicazione PROFIBUS.
[1005] Visual.
contatore
errori
trasmissione
Visualizza il numero errori di
trasmissione di controllo CAN
dall'ultima accensione.
[1006] Visual.
contatore
errori ricezione
Visualizza il numero errori di
ricezione di controllo CAN
dall'ultima accensione.
[1007] Visual.
contatore o
bus
Visualizza il numero di eventi bus
o dall'ultima accensione.
[1013] Parametro di
avviso
Visualizza una parola di avviso
specica DeviceNet. A ogni avviso è
assegnato un bit separato.
[1230] Parametro di
avviso
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] Ore di funzio-
namento
Visualizza il numero di ore di
esercizio del convertitore di
frequenza.
[1501] Ore esercizio Visualizza il numero di ore di
esercizio del motore.
[1502] Contatore kWh Visualizza il consumo di potenza
della rete espresso in kWh.
[1580] Ore di
esercizio della
ventola
[1600] Parola di
controllo
Visualizza la parola di controllo
inviata dal convertitore di frequenza
tramite la porta di comunicazione
seriale in codice hex.
[1601] * Riferimento
[unità]
Riferimento totale (somma dei
riferimenti digitali, analogici,
preimpostati, bus, riferimento
congelato, catch-up e slow-down)
nell'unità selezionata.
[1602] Riferimento
[%]
Riferimento totale (somma dei
riferimenti digitali, analogici,
preimpostati, bus, riferimento
congelato, catch-up e slow-down)
in percentuale.
[1603] Parola di stato Parola di stato attuale.
[1605] Val. reale
princ. [%]
Uno o più avvisi in un codice hex.
Descrizione dei parametri Guida alla Programmazione
3.2.3 0-2* Display LCP
Denisce le variabili visualizzate nell'LCP.
AVVISO!
Per informazioni su come scrivere i testi display,
consultare:
•
•
•
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 31
Parametro 0-37 Testo display 1.
Parametro 0-38 Testo display 2.
Parametro 0-39 Testo 3 del display.
3 3
Page 34

0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[1609] Visual.
personaliz.
Visualizza le visualizzazioni denite
dall'utente in:
•
Parametro 0-30 Unità
visual. person..
•
Parametro 0-31 Valore min.
visual. person..
•
Parametro 0-32 Valore max.
visual. person..
[1610] Potenza [kW] Potenza eettivamente consumata
dal motore in kW.
[1611] Potenza [hp] Potenza eettivamente consumata
dal motore in cv.
[1612] Tensione
motore
Tensione erogata al motore.
[1613] Frequenza Frequenza motore, vale a dire la
frequenza di uscita dal convertitore
di frequenza in Hz.
[1614] Corrente
motore
Corrente di fase del motore
misurata come valore ecace.
[1615] Frequenza [%] Frequenza motore, vale a dire la
frequenza di uscita dal convertitore
di frequenza in percentuale.
[1616] Coppia [Nm] Carico del motore presente come
percentuale della coppia motore
nominale.
[1617] Velocità
[giri/m]
Velocità in RPM (giri al minuto), vale
a dire la velocità dell'albero motore
in anello chiuso in base ai dati di
targa del motore, la frequenza di
uscita e il carico applicato sul
convertitore di frequenza.
[1618] Term. motore Carico termico sul motore calcolato
dalla funzione ETR. Vedere anche il
gruppo di parametri 1-9* Temp.
motore.
[1619] Temperatura
sensore KTY
[1622] Coppia [%] Mostra la coppia eettiva prodotta
in percentuale.
[1623] Motor Shaft
Power [kW ]
Visualizza la potenza meccanica
applicata all'albero motore.
[1624] Calibrated
Stator
Resistance
[1626] Potenza
ltrata [kW]
[1627] Potenza
ltrata [hp]
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[1630] Tensione busCCTensione collegamento CC nel
convertitore di frequenza.
[1631] System Temp.
[1632] Energia
freno/s
Attuale potenza di frenatura
trasferita a una resistenza di
frenatura esterna.
Visualizza un valore istantaneo.
[1633] Energia
freno/2 min
Potenza di frenatura trasferita a una
resistenza di frenatura esterna. La
potenza media è calcolata
continuamente per gli ultimi 120 s.
[1634] Temp. dissip. Temperatura attuale del dissipatore
di calore del convertitore di
frequenza. Il limite per il disinserimento è 95 ±5 °C. La riattivazione
avviene a 70 ±5 °C.
[1635] Termico
inverter
Carico percentuale degli inverter.
[1636] Corrente nom
inv.
Corrente nominale del convertitore
di frequenza.
[1637] Corrente max
inv.
Corrente massima del convertitore
di frequenza.
[1638] Condiz. regol.SLStato dell'evento eseguito dal
regolatore.
[1639] Temp. scheda
di controllo
Temperatura della scheda di
controllo.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Riferimento
esterno
Somma in percentuale del
riferimento esterno, vale a dire la
somma di riferimenti analogici,
impulsi e bus.
[1652] Retroazione
[unità]
Valore del segnale in unità dagli
ingressi digitali programmati.
[1653] Riferim. pot.
digit.
Visualizza il contributo del
potenziometro digitale alla
retroazione di riferimento eettiva.
[1654] Retroazione 1
[unità]
Visualizza il valore della retroazione
1. Vedere il gruppo di parametri
20-0* Retroazione.
[1655] Retroazione 2
[unità]
Visualizza il valore della retroazione
2. Vedere il gruppo di parametri
20-0* Retroazione.
Descrizione dei parametri
33
32 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
Page 35

0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[1656] Retroazione 3
[unità]
Visualizza il valore della retroazione
3. Vedere il gruppo di parametri
20-0* Retroazione.
[1658] Uscita PID [%] Visualizza il valore di uscita del
controllore PID ad anello chiuso in
percentuale.
[1659] Adjusted
Setpoint
Visualizza l'attuale setpoint di
funzionamento dopo che è stato
modicato dalla compensazione del
usso. Vedere il gruppo di parametri
22-8* Comp. del usso.
[1660] Ingresso
digitale
Visualizza lo stato degli ingressi
digitali. Segnale basso = 0; segnale
alto = 1.
Per l'ordine, vedere
parametro 16-60 Ingresso digitale. Il
bit 0 si trova sull'estrema destra.
[1661] Mors. 53
impost.
commut.
Impostazione del morsetto di
ingresso 53. Corrente = 0; tensione
= 1.
[1662] Ingr. analog.53Valore eettivo sull'ingresso 53
espresso come riferimento o valore
di protezione.
[1663] Mors. 54
impost.
commut.
Impostazione del morsetto di
ingresso 54. Corrente = 0; tensione
= 1.
[1664] Ingr. analog.54Valore eettivo sull'ingresso 54
espresso come riferimento o valore
di protezione.
[1665] Uscita
analogica 42
[mA]
Valore eettivo in mA sull'uscita 42.
Utilizzare il parametro 6-50 Uscita
morsetto 42 per selezionare la
variabile da mostrare nell'uscita 42.
[1666] Uscita digitale
[bin]
Valore binario di tutte le uscite
digitali.
[1667] Ingr. impulsi
#29 [Hz]
Valore eettivo della frequenza
applicata al morsetto 29 come
ingresso a impulsi.
[1668] Ingr. impulsi
#33 [Hz]
Valore eettivo della frequenza
applicata al morsetto 33 come
ingresso a impulsi.
[1669] Uscita impulsi
#27 [Hz]
Valore eettivo degli impulsi
applicati al morsetto 27 in modalità
uscita digitale.
[1670] Uscita impulsi
#29 [Hz]
Valore eettivo degli impulsi
applicati al morsetto 29 in modalità
uscita digitale.
[1671] Uscita relè
[bin]
Visualizza l'impostazione di tutti i
relè.
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[1672] Contatore A Visualizza il valore attuale del
contatore A.
[1673] Contatore B Visualizza il valore attuale del
contatore B.
[1675] Ingresso
analogico
X30/11
Valore eettivo del segnale sull'ingresso X30/11 (VLT® General
Purpose I/O MCB 101, opzionale).
[1676] Ingresso
analogico
X30/12
Valore eettivo del segnale sull'ingresso X30/12 (VLT® General
Purpose I/O MCB 101, opzionale).
[1677] Uscita
analogica
X30/8 [mA]
Valore eettivo all'uscita X30/8
(VLT® General Purpose I/O MCB 101,
opzionale). Usare
parametro 6-60 Uscita morsetto
X30/8 per selezionare la variabile
che deve essere visualizzata.
[1678] Uscita anal.
X45/1 [mA]
[1679] Uscita anal.
X45/3 [mA]
[1680] Par. com. 1
F.bus
Parola di controllo (CTW) ricevuta
dal bus di campo.
[1682] RIF 1 Fieldbus Valore di riferimento principale
inviato insieme alla parola di
controllo tramite la rete di comunicazione seriale, per esempio dal
BMS, PLC o da un altro controllore.
[1684] Opz. com. par.
stato
Parola di stato estesa per comunicazione opzionale bus di campo.
[1685] Par. com. 1 p.FCParola di controllo (CTW) ricevuta
dal bus di campo.
[1686] RIF 1 porta FC Parola di stato (STW) inviata al bus
di campo.
[1687] Bus Readout
Alarm/Warning
[1689] Congurable
Alarm/Warning
Word
Visualizza la parola di allarme/
avviso che è congurata nel
parametro 8-17 Congurable Alarm
and Warningword.
[1690] Parola
d'allarme
Uno o più allarmi in codice hex
(usato per la comunicazione seriale).
[1691] Parola di
allarme 2
Uno o più allarmi in codice hex
(usato per la comunicazione seriale).
[1692] Parola di
avviso
Uno o più avvisi in codice hex
(usato per la comunicazione seriale).
[1693] Parola di
avviso 2
Uno o più avvisi in codice hex
(usato per la comunicazione seriale).
Descrizione dei parametri Guida alla Programmazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 33
3 3
Page 36

0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[1694] Parola di stato
est.
Una o più condizioni di stato in un
codice hex (usato per la comunicazione seriale).
[1695] Parola di stato
est. 2
Una o più condizioni di stato in un
codice hex (usato per la comunicazione seriale).
[1696] Parola di
manutenzione
I bit riettono lo stato per gli eventi
di manutenzione preventiva
programmati nel gruppo di
parametri 23-1* Manutenzione.
[1697] Alarm Word 3
[1698] Warning Word
3
[1830] Ingresso anal.
X42/1
Mostra il valore del segnale
applicato al morsetto X42/1 sulla
scheda I/O analogici.
[1831] Ingresso anal.
X42/3
Mostra il valore del segnale
applicato al morsetto X42/3 sulla
scheda I/O analogici.
[1832] Ingresso anal.
X42/5
Mostra il valore del segnale
applicato al morsetto X42/5 sulla
scheda I/O analogici.
[1833] Uscita anal.
X42/7 [V]
Mostra il valore del segnale
applicato al morsetto X42/7 sulla
scheda I/O analogici.
[1834] Uscita anal.
X42/9 [V]
Mostra il valore del segnale
applicato al morsetto X42/9 sulla
scheda I/O analogici.
[1835] Uscita anal.
X42/11 [V]
Mostra il valore del segnale
applicato al morsetto X42/11 sulla
scheda I/O analogici.
[1836] Ingr. anal.
X48/2 [mA]
[1837] Ingr. temp.
X48/4
[1838] Ingr. temp.
X48/7
[1839] Ingr. temp.
X48/10
[1850] Lettura senza
sensore [unità]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectier DC
Volt.
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[2117] Riferimento
est. 1 [unità]
Il valore del riferimento per il
controllore ad anello chiuso esteso
1.
[2118] Retroazione
est. 1 [unità]
Il valore del segnale di retroazione
per il controllore ad anello chiuso
esteso 1.
[2119] Uscita est. 1
[%]
Il valore dell'uscita per il controllore
ad anello chiuso esteso 1.
[2137] Riferimento
est. 2 [unità]
Il valore del riferimento per il
controllore ad anello chiuso esteso
2.
[2138] Retroazione
est. 2 [unità]
Il valore del segnale di retroazione
per il controllore ad anello chiuso
esteso 2.
[2139] Uscita est. 2
[%]
Il valore dell'uscita per il controllore
ad anello chiuso esteso 2.
[2157] Riferimento
est. 3 [unità]
Il valore del riferimento per il
controllore ad anello chiuso esteso
3.
[2158] Retroazione
est. 3 [unità]
Il valore del segnale di retroazione
per il controllore ad anello chiuso
esteso 3.
[2159] Uscita est. 3
[%]
Il valore dell'uscita per il controllore
ad anello chiuso esteso 3.
[2230] Potenza a
portata nulla
La potenza a portata nulla calcolata
per la velocità di funzionamento
attuale.
[2316] Testo di
manutenzione
[2580] Stato cascata Stato per vericare il funzio-
namento del controllore in cascata.
[2581] Stato pompa Stato per vericare il funzio-
namento di ogni pompa individuale
comandata dal controllore in
cascata.
[2791] Cascade
Reference
Uscita di riferimento per l'utilizzo
con convertitori di frequenza slave.
[2792] % Of Total
Capacity
Parametro di visualizzazione che
mostra il punto di operatività del
sistema come una percentuale della
capacità totale dello stesso.
[2793] Cascade
Option Status
Parametro di visualizzazione che
mostra lo stato del sistema in
cascata.
[2794] Stato sistema
in cascata
[2795] Advanced
Cascade Relay
Output [bin]
Descrizione dei parametri
33
34 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
Page 37

0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[2796] Extended
Cascade Relay
Output [bin]
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] Par. di stato
bypass
[3111] Ore di
esercizio
bypass
[3401] Scrittura PCD
1 su MCO
[3402] Scrittura PCD
2 su MCO
[3403] Scrittura PCD
3 su MCO
[3404] Scrittura PCD
4 su MCO
[3405] Scrittura PCD
5 su MCO
[3406] Scrittura PCD
6 su MCO
[3407] Scrittura PCD
7 su MCO
[3408] Scrittura PCD
8 su MCO
[3409] Scrittura PCD
9 su MCO
[3410] Scrittura PCD
10 su MCO
[3421] PCD 1 lettura
da MCO
[3422] PCD 2 lettura
da MCO
[3423] PCD 3 lettura
da MCO
[3424] PCD 4 lettura
da MCO
[3425] PCD 5 lettura
da MCO
[3426] PCD 6 lettura
da MCO
[3427] PCD 7 lettura
da MCO
[3428] PCD 8 lettura
da MCO
[3429] PCD 9 lettura
da MCO
0-20 Visualiz.ridotta del display- riga 1,1
Option: Funzione:
[3430] PCD 10 lettura
da MCO
[9920] Fan Ctrl deltaT
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
0-25 Menu personale
Array [50]
Range: Funzione:
Size
related*
[0 - 9999 ] Denire no a 20 parametri che
devono apparire nel Menu persona-
lizzato Q1, accessibile tramite il
tasto [Quick Menu] sull'LCP. I
parametri sono visualizzati nel Menu
personale Q1 nell'ordine
programmato in questo parametro
array. Cancellare i parametri
impostando il valore a 0000.
Per esempio, può essere usato per
fornire un accesso rapido e
semplice a uno o no a un
Descrizione dei parametri Guida alla Programmazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 35
3 3
0-21 Visualiz.ridotta del display- riga 1,2
Le opzioni sono le stesse di quelle elencate per il
parametro 0-20 Visualiz.ridotta del display- riga 1,1. Selezionare
una variabile da visualizzare nella riga 1, posizione centrale.
0-22 Visualiz.ridotta del display- riga 1,3
Le opzioni sono le stesse di quelle elencate per il
parametro 0-20 Visualiz.ridotta del display- riga 1,1. Selezionare
una variabile da visualizzare nella riga 1, posizione destra.
0-23 Visual.completa del display-riga 2
Le opzioni sono le stesse di quelle elencate per il
parametro 0-20 Visualiz.ridotta del display- riga 1,1. Selezionare
una variabile da visualizzare nella riga 2.
0-24 Visual.completa del display-riga 3
Le opzioni sono le stesse di quelle elencate per il
parametro 0-20 Visualiz.ridotta del display- riga 1,1. Selezionare
una variabile da visualizzare nella riga 2.
Page 38

0-25 Menu personale
Array [50]
Range: Funzione:
massimo di 50 parametri che
devono essere modicati
regolarmente.
130BT105.11
0
Visual. personaliz. (valore)
P 16-09
Unità visual.
person. P 0-30
Valore max.
P 0-32
Valore min.
P 0-31
Velocità del motor
Lim. alto vel.
motore
P 4-13 (RPM)
P 4-14 (Hz)
Unità quadratica (pressione)
Unità cubica (potenza)
Solo unità linear
Unità lineare (ad es. velocità e portata)
0-30 Unità visual. person.
Option: Funzione:
Programmare un valore da mostrare
nel display dell'LCP. Il valore ha una
relazione lineare, quadratica o
cubica rispetto alla velocità. Questa
relazione dipende dall'unità
selezionata (vedere la Tabella 3.3). Il
valore reale calcolato può essere
letto nel parametro 16-09 Visual.
personaliz. e/o mostrato nel display
selezionando [1609] Visual.
personaliz. nel
parametro 0-20 Visualiz.ridotta del
display- riga 1,1 no al
parametro 0-24 Visual.completa del
display-riga 3.
[0]
[1] * %
[5] PPM
[10] 1/min
[11] Giri/min.
[12] IMPULSI/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
Descrizione dei parametri
33
3.2.4 0-3* Visual. person. LCP
È possibile personalizzare gli elementi del display per vari
scopi:
Visualizzazione personalizzata. Valore propor-
•
zionale alla velocità (lineare, quadrato o cubico a
seconda dell'unità selezionata in
parametro 0-30 Unità visual. person.).
Testo display. Stringa di testo memorizzata in un
•
parametro.
Visualizzazione personalizzata
Il valore calcolato per la visualizzazione si basa sulle
impostazioni in:
•
•
•
•
•
•
Disegno 3.3 Visualizzazione personalizzata
Parametro 0-30 Unità visual. person..
Parametro 0-31 Valore min. visual. person. (soltanto
lineare);
Parametro 0-32 Valore max. visual. person..
Parametro 4-13 Lim. alto vel. motore [giri/min].
Parametro 4-14 Limite alto velocità motore [Hz].
Velocità attuale.
La relazione dipende dal tipo di unità selezionata in
parametro 0-30 Unità visual. person.:
36 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
Tipo di unità Relazione velocità
Senza dimensioni
Velocità
Flusso, volume
Flusso, massa
Velocità
Lunghezza
Temperatura
Pressione Quadratica
Potenza Cubica
Lineare
Tabella 3.3 Relazioni di velocità per diversi tipi di unità
Page 39

0-30 Unità visual. person.
Option: Funzione:
[73] kPa
[74] m
[75] mm Hg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
[180] HP
0-31 Valore min. visual. person.
Range: Funzione:
Size
related*
[ -999999.99 -
100.00
CustomRea-
doutUnit]
Questo parametro permette la
scelta del valore minimo della
visualizzazione personalizzata
(avviene a velocità zero). È possibile
impostare un valore diverso da 0
soltanto quando si seleziona
un'unità lineare nel
parametro 0-30 Unità visual. person..
Per unità quadratiche e cubiche il
valore minimo è 0.
0-32 Valore max. visual. person.
Range: Funzione:
100
CustomReadoutUni
t*
[ par. 0-31 -
999999.99
CustomRea-
doutUnit]
Questo parametro imposta il valore
massimo da visualizzare quando la
velocità del motore ha raggiunto il
valore impostato per il
parametro 4-13 Lim. alto vel. motore
[giri/min] o il parametro 4-14 Limite
alto velocità motore [Hz] (in
funzione dell'impostazione nel
parametro 0-02 Unità velocità
motore).
0-37 Testo display 1
Range: Funzione:
0* [0 - 25 ] In questo parametro è possibile
scrivere una stringa di testo singola
da visualizzare nell'LCP o da leggere
tramite la comunicazione seriale.
Per mostrare il testo in modo
permanente selezionare [37] Testo
display 1 in uno dei seguenti
parametri:
•
Parametro 0-20 Visualiz.rido
tta del display- riga 1,1.
•
Parametro 0-21 Visualiz.rido
tta del display- riga 1,2.
•
Parametro 0-22 Visualiz.rido
tta del display- riga 1,3.
•
Parametro 0-23 Visual.comp
leta del display-riga 2.
•
Parametro 0-24 Visual.comp
leta del display-riga 3.
•
Parametro 0-37 Testo
display 1.
La modica del
parametro 12-08 Nome di host
cambia il parametro 0-37 Testo
display 1, ma non viceversa.
0-38 Testo display 2
Range: Funzione:
0* [0 - 25 ] In questo parametro è possibile
scrivere una stringa di testo singola
da visualizzare nell'LCP o da leggere
tramite la comunicazione seriale.
Per mostrare il testo in modo
permanente, selezionare [38] Testo
display 2 in:
•
Parametro 0-20 Visualiz.rido
tta del display- riga 1,1.
•
Parametro 0-21 Visualiz.rido
tta del display- riga 1,2.
•
Parametro 0-22 Visualiz.rido
tta del display- riga 1,3.
•
Parametro 0-23 Visual.comp
leta del display-riga 2.
•
Parametro 0-24 Visual.comp
leta del display-riga 3.
Premere [▲] o [▼] per cambiare un
carattere. Premere [◀] e [▶] per
spostare il cursore. Quando un
carattere è evidenziato con il
cursore, questo carattere può essere
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 37
Page 40

0-38 Testo display 2
Range: Funzione:
modicato. Un carattere può essere
inserito posizionando il cursore tra
due caratteri e premendo [▲] o [▼].
0-39 Testo 3 del display
Range: Funzione:
0* [0 - 25 ] In questo parametro è possibile
scrivere una riga di testo
individuale da visualizzare nell'LCP
o da leggere tramite la comunicazione seriale. Per mostrare il testo
in modo permanente, selezionare
Testo 3 del display nel
parametro 0-20 Visualiz.ridotta del
display- riga 1,1,
parametro 0-21 Visualiz.ridotta del
display- riga 1,2,
parametro 0-22 Visualiz.ridotta del
display- riga 1,3,
parametro 0-23 Visual.completa del
display-riga 2 o
parametro 0-24 Visual.completa del
display-riga 3. Premere [▲] o [▼] per
cambiare un carattere. Premere [◀]
e [▶] per spostare il cursore.
Quando un carattere è evidenziato
con il cursore, questo carattere può
essere modicato. Un carattere può
essere inserito posizionando il
cursore tra due caratteri e
premendo [▲] o [▼].
0-40 Tasto [Hand on] sull'LCP
Option: Funzione:
[0] Disattivato Selezionare per disattivare il tasto.
[1] * Abilitato Il tasto [Hand On] è abilitato.
[2] Protezione
password
Evitare un avviamento non
autorizzato in modalità manuale
Hand on. Se il parametro 0-40 Tasto
[Hand on] sull'LCP è incluso nel
Menu personalizzato, denire la
password nel
parametro 0-65 Password menu
personale. Altrimenti, denire la
password nel parametro 0-60 Passw.
menu princ..
0-40 Tasto [Hand on] sull'LCP
Option: Funzione:
[3] Attivato senza
OFF
[4] Password
senza OFF
[5] Abilitato con
OFF
[6] Password con
OFF
[9] Enabled, ref =
0
0-41 Tasto [O] sull'LCP
Option: Funzione:
[0] Disattivato Selezionare per disattivare il tasto.
[1] * Abilitato Il tasto [O] è abilitato.
[2] Protezione
password
Evitare l'arresto non autorizzato. Se
il parametro 0-41 Tasto [O] sull'LCP
è incluso nel Menu personalizzato,
denire la password nel
parametro 0-65 Password menu
personale. Altrimenti, denire la
password nel parametro 0-60 Passw.
menu princ..
0-42 Tasto [Auto on] sull'LCP
Option: Funzione:
[0] Disattivato Selezionare per disattivare il tasto.
[1] * Abilitato Il tasto [Auto on] è abilitato.
[2] Protezione
password
Evitare un avviamento non
autorizzato in modalità Auto on. Se
il parametro 0-42 Tasto [Auto on]
sull'LCP è incluso nel Menu personalizzato, denire la password nel
parametro 0-65 Password menu
personale. Altrimenti, denire la
password nel parametro 0-60 Passw.
menu princ..
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
3.2.5 0-4* Tastierino LCP
Attiva, disattiva e protegge tramite password singoli tasti
sull'LCP.
38 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 41

0-43 Tasto [Reset] sull'LCP
Option: Funzione:
[0] Disattivato Selezionare per disattivare il tasto.
[1] * Abilitato Il tasto [Reset] è abilitato.
[2] Protezione
password
Evitare il ripristino non autorizzato.
Se parametro 0-43 Tasto [Reset]
sull'LCP è incluso nel
parametro 0-25 Menu personale,
denire la password in
parametro 0-65 Password menu
personale. Altrimenti, denire la
password nel parametro 0-60 Passw.
menu princ..
[3] Attivato senza
OFF
[4] Password
senza OFF
[5] Abilitato con
OFF
La pressione del tasto ripristina il
convertitore di frequenza, ma non
lo avvia.
[6] Password con
OFF
Impedisce un ripristino non
autorizzato. In seguito a un
ripristino autorizzato, il convertitore
di frequenza non si avvia. Vedere
l'opzione [2] Protezione password
per informazioni su come impostare
la password.
0-44 Tasto [O/Reset] sull'LCP
Abilita o disabilita il tasto [O/Reset].
Option: Funzione:
[0] Disattivato
[1] * Abilitato
[2] Protezione
password
0-45 Tasto [Drive Bypass] sull'LCP
Premere [O] e selezionare [0] Disattivato per evitare l'arresto
involontario del convertitore di frequenza. Premere [O] e
selezionare [2] Protezione password per evitare un bypass non
autorizzato del convertitore di frequenza. Se il
parametro 0-45 Tasto [Drive Bypass] sull'LCP è incluso nel Menu
rapido, denire la password nel parametro 0-65 Password menu
personale.
Option: Funzione:
[0] Disattivato Selezionare per disattivare il tasto.
[1] * Abilitato
[2] Protezione
password
0-50 Copia LCP
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
[0] * Nessuna copia
[1] Tutti a LCP Copia tutti i parametri in tutti i
setup dalla memoria del convertitore di frequenza alla memoria
dell'LCP. Per scopi di manutenzione,
copiare tutti i parametri sull'LCP
dopo la messa in servizio.
[2] Tutti da LCP Copia tutti i parametri in tutti i
setup dalla memoria dell'LCP alla
memoria del convertitore di
frequenza.
[3] Dim. indip. da
LCP
Copia solo i parametri che sono
indipendenti dalla portata del
motore. Utilizzare l'ultima selezione
per programmare vari convertitori
di frequenza con la stessa funzione
senza violare i dati motore che
sono già impostati.
[10] Delete LCP
copy data
0-51 Copia setup
Option: Funzione:
[0] * Nessuna copia Nessuna funzione.
[1] Copia nel
setup 1
Copia tutti i parametri nell'attuale
setup di programmazione (denito
nel parametro 0-11 Setup di
programmazione) nel setup 1.
[2] Copia nel
setup 2
Copia tutti i parametri nell'attuale
setup di programmazione (denito
nel parametro 0-11 Setup di
programmazione) nel setup 2.
[3] Copia nel
setup 3
Copia tutti i parametri nell'attuale
setup di programmazione (denito
nel parametro 0-11 Setup di
programmazione) nel setup 3.
[4] Copia nel
setup 4
Copia tutti i parametri nell'attuale
setup di programmazione (denito
nel parametro 0-11 Setup di
programmazione) nel setup 4.
Descrizione dei parametri Guida alla Programmazione
3.2.6 0-5* Copia/Salva
Copia i parametri da e verso l'LCP. Usare questi parametri
per salvare e copiare i setup da un convertitore di
frequenza all'altro.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 39
Page 42

0-51 Copia setup
Option: Funzione:
[9] Copia in tutti Copia i parametri nel presente
setup in tutti i setup da 1 a 4.
0-60 Passw. menu princ.
Range: Funzione:
100* [-9999 -
9999 ]
Denire la password per accedere al
Menu principale tramite il tasto
[Main Menu]. Se
parametro 0-61 Accesso menu princ.
senza passw. è impostato su [0]
Accesso pieno, questo parametro
viene ignorato.
0-61 Accesso menu princ. senza passw.
Option: Funzione:
[0] * Accesso pieno Disabilita la password nel
parametro 0-60 Passw. menu princ..
Se questa opzione è selezionata, il
parametro 0-60 Passw. menu princ., il
parametro 0-65 Password menu
personale e il
parametro 0-66 Accesso al menu
pers. senza passw. vengono ignorati.
[1] LCP: sola
lettura
Impedisce la modica non
autorizzata dei parametri del Menu
principale.
[2] LCP: nessun
accesso
Impedisce le visualizzazioni e le
modiche non autorizzate dei
parametri del Menu principale.
[3] Bus: sola
lettura
Impedisce l'accesso di sola lettura ai
parametri tramite bus di campo.
[4] Bus: nessun
accesso
Disabilita l'accesso ai parametri
tramite bus di campo.
[5] Alt: sola
lettura
Impedisce le modiche non
autorizzate dei parametri del Menu
principale e fornisce un accesso di
sola lettura ai parametri tramite bus
di campo.
[6] Alt: nessun
accesso
Impedisce le visualizzazioni e le
modiche non autorizzate dei
parametri del Menu principale e
disabilita l'accesso ai parametri
tramite bus di campo.
0-65 Password menu personale
Range: Funzione:
200* [-9999 -
9999 ]
Denire la password per accedere al
Menu personale tramite il tasto
[Quick Menu]. Se il
parametro 0-66 Accesso al menu
pers. senza passw. è impostato su [0]
Accesso pieno, questo parametro
viene ignorato.
0-66 Accesso al menu pers. senza passw.
Se il parametro 0-61 Accesso menu princ. senza passw. è impostato
su [0] Accesso pieno, questo parametro viene ignorato.
Option: Funzione:
[0] * Accesso pieno Disabilita la password nel
parametro 0-65 Password menu
personale.
[1] LCP: sola
lettura
Impedisce modiche non
autorizzate dei parametri del Menu
personale.
[3] Bus: sola
lettura
[5] Alt: sola
lettura
0-67 Accesso password bus
Range: Funzione:
0* [0 - 9999 ] La scrittura su questo parametro
consente agli utenti di sbloccare il
convertitore di frequenza dal bus/
Software di congurazione MCT 10.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
3.2.7 0-6* Password
40 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
3.2.8 0-7* Impost. orologio
Impostare data e ora dell'orologio interno. Ad esempio,
l'orologio interno può essere usato per:
Azioni temporizzate.
•
Log energia.
•
Analisi tendenze.
•
Data/marcatempo sugli allarmi.
•
Dati registrati.
•
Manutenzione preventiva.
•
È possibile programmare l'orologio per l'ora legale, per
giorni feriali/festivi, incluse 20 eccezioni (vacanze ecc.).
Anche se le impostazioni dell'orologio possono essere
impostate mediante l'LCP, ciò è possibile anche con azioni
temporizzate e funzioni di manutenzione preventiva con
l'ausilio dello strumento Software di congurazione MCT
10.
Page 43

0-70 Data e ora
Range: Funzione:
Size
related*
[ 0 - 0 ] Imposta la data e l'ora dell'orologio
interno. Il formato da utilizzare è
impostato nel
parametro 0-71 Formato data e nel
parametro 0-72 Formato dell'ora.
Quando si usa VLT® Real-time Clock
MCB 117 l'ora viene sincronizzata
ogni giorno alle 15:00.
0-71 Formato data
Option: Funzione:
[0] AAAA-MM-GG Imposta il formato data da utilizzare
nell'LCP.
[1] GG-MM-AAAA Imposta il formato data da utilizzare
nell'LCP.
[2] MM/GG/AAAA Imposta il formato data da utilizzare
nell'LCP.
0-72 Formato dell'ora
Option: Funzione:
Imposta il formato dell'ora da usare
nell'LCP.
[0] 24 h
[1] 12 h
0-73 Dierenza fuso orario
Range: Funzione:
0 min* [-780 - 780
min]
Immettere la dierenza di fuso
orario relativa a UTC. Questo
parametro è necessario per la
regolazione automatica dell'ora
legale.
0-74 DST/ora legale
Option: Funzione:
Selezionare come gestire l'ora
legale. Per l'impostazione manuale
dell'ora legale immettere la data
iniziale e la data nale nel
parametro 0-76 DST/avvio ora legale
e nel parametro 0-77 DST/ne ora
legale.
[0] * O
[2] Manuale
0-76 DST/avvio ora legale
Range: Funzione:
Size
related*
[ 0 - 0 ] Imposta la data e l'ora di avvio
dell'ora legale. La data viene
programmata nel formato
selezionato nel
parametro 0-71 Formato data.
0-77 DST/ne ora legale
Range: Funzione:
Size
related*
[ 0 - 0 ] Imposta la data e l'ora di ne
dell'ora legale. La data viene
programmata nel formato
selezionato nel
parametro 0-71 Formato data.
0-79 Errore orologio
Option: Funzione:
Abilita o disabilita l'allarme dell'orologio quando questo non è stato
impostato o è stato azzerato per
uno spegnimento e non è installato
alcun backup. Se è installata
l'opzione VLT® Analog I/O MCB 109,
[1] Abilitato è il valore predenito.
[0] Disabilitato
[1] Abilitato
Descrizione dei parametri Guida alla Programmazione
AVVISO!
Il convertitore di frequenza non dispone di una funzione
di backup della funzione orologio e dopo uno
spegnimento data/ora impostate vengono ripristinate a
quelle predenite (01/01/2007 00:00 lun.), a meno che
non sia installato un modulo real time clock con
funzione di backup. Se non è installato nessun modulo
con funzione backup, utilizzare la funzione orologio
soltanto se il convertitore di frequenza è integrato in un
sistema esterno che sfrutta le comunicazioni seriali, in
cui il sistema mantiene la sincronizzazione degli orari
degli orologi per le apparecchiature di controllo. Nel
parametro 0-79 Errore orologio è possibile programmare
un avviso se l'orologio non è stato impostato correttamente, per esempio dopo uno spegnimento.
AVVISO!
In presenza di un'opzione VLT® Analog I/O MCB 109 o
VLT® Real-time Clock MCB 117 esiste in dotazione un
backup a batteria della data e dell'ora.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 41
Page 44

0-81 Giorni feriali
Array [7]
L'array con 7 elementi [0]–[6] è mostrato sotto il numero di
parametro nel display. Premere [OK] e spostarsi tra gli elementi
con [▲] e [▼].
Option: Funzione:
Impostare per ogni giorno della
settimana se si tratta di un giorno
feriale o festivo. Il primo elemento
dell'array è il Lunedì. I giorni feriali
vengono utilizzati per le azioni
temporizzate.
[0] No
[1] Sì
0-82 Giorni feriali aggiuntivi
Array [5]
L'array con 5 elementi [0]–[4] è mostrato sotto il numero di
parametro nel display. Premere [OK] e spostarsi tra gli elementi
con [▲] e [▼].
Range: Funzione:
Size
related*
[ 0 - 0 ] Denisce le date per i giorni feriali
aggiuntivi che normalmente sono
giorni festivi secondo
parametro 0-81 Giorni feriali.
0-83 Giorni festivi aggiuntivi
Array [15]
L'array con 15 elementi [0]–[14] è mostrato sotto il numero di
parametro nel display. Premere [OK] e spostarsi tra gli elementi
con [▲] e [▼].
Range: Funzione:
Size
related*
[ 0 - 0 ] Denisce le date per i giorni feriali
aggiuntivi che normalmente sono
giorni festivi secondo
parametro 0-81 Giorni feriali.
0-84 Time for Fieldbus
Range: Funzione:
0* [0 -
4294967295 ]
Mostra il tempo per bus di campo.
0-85 Summer Time Start for Fieldbus
Range: Funzione:
0* [0 -
4294967295 ]
Mostra l'inizio dell'ora legale per
bus di campo.
0-86 Summer Time End for Fieldbus
Range: Funzione:
0* [0 -
4294967295 ]
Mostra la ne dell'ora legale per
bus di campo.
0-89 Visual. data e ora
Range: Funzione:
0* [0 - 25 ] Mostra la data e l'ora attuali. La
data e l'ora sono continuamente
aggiornate.
L'orologio non inizia a contare
nché è stata eettuata un'impostazione diversa da quella
predenita in parametro 0-70 Data e
ora.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
42 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 45

1-00 Modo congurazione
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
AVVISO!
Quando impostati su [3] Anello
chiuso, i comandi inversione e
avvio inversione non invertono
il senso di rotazione del
motore.
[0] Anello aperto La velocità del motore è
determinata applicando una
velocità di riferimento o
impostando la velocità desiderata
mentre si è in Modalità Hand on.
L'anello aperto è anche utilizzato se
il convertitore di frequenza è parte
di un sistema di controllo ad anello
chiuso basato su un controllore PID
esterno che fornisce un segnale di
riferimento di velocità come uscita.
[3] Anello chiuso La velocità del motore viene
determinata da un riferimento dato
dal controllore PID integrato che
varia la velocità del motore come
parte di un processo di controllo ad
anello chiuso (per esempio,
pressione o usso costante).
Congurare il controllore PID nel
gruppo di parametri 20-0*
Retroazione oppure tramite Setup
funzione accessibile premendo
[Quick Menu].
1-01 Principio controllo motore
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Selezionare quale principio
controllo motore impiegare.
1-01 Principio controllo motore
Option: Funzione:
[0] U/f Modo motore speciale, per motori
collegati in parallelo in applicazioni
motore speciali. Quando viene
selezionata U/f, è possibile
modicare la caratteristiche del
principio di regolazione nel
parametro 1-55 Caratteristica V/f - V
e nel parametro 1-56 Caratteristica
V/f - f.
[1] * VVC+ Principio di controllo vettoriale della
tensione adatto per la maggior
parte delle applicazioni. Il principale
vantaggio del funzionamento VVC
+
sta nel fatto che usa un modello di
motore robusto.
1-03 Caratteristiche di coppia
Option: Funzione:
[0] Coppia del
compressore
Per il controllo della velocità di
applicazioni con coppia constante
come:
•
Pompe assiali.
•
Pompe volumetriche
positive.
•
Soanti.
Fornisce una tensione ottimizzata
per una caratteristica di carico a
coppia costante del motore per
tutto l'intervallo di velocità
[1] Coppia
variabile
Per il controllo di velocità di pompe
e ventole centrifughe. Da utilizzarsi
anche quando più di un motore
viene controllato dallo stesso
convertitore di frequenza (ad
esempio ventilatori dei condensatori o torri di rareddamento
multipli). Fornisce una tensione
ottimizzata per una caratteristica di
carico della coppia quadratica del
motore.
[2] Ottim. en.
autom. CT
Per il controllo della velocità
ottimale e ad alto rendimento
energetico di compressori a vite e
scroll. Fornisce una tensione
ottimizzata per una caratteristica di
carico di coppia costante del
motore in tutta la gamma no a 15
Hz. Inoltre, la funzione AEO adatta
la tensione esattamente alla
corrente situazione di carico,
riducendo il consumo energetico e i
disturbi percettibili provenienti dal
Descrizione dei parametri Guida alla Programmazione
3.3 Parametri 1-** Carico e Motore
3.3.1 1-0* Impost.generali
Denire se il convertitore di frequenza funziona ad anello
aperto o ad anello chiuso.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 43
Page 46

1-03 Caratteristiche di coppia
Option: Funzione:
motore. Per ottenere prestazioni
ottimali, impostare correttamente il
fattore di potenza del motore cos
phi. Il valore è impostato in
parametro 14-43 Cosphi motore. Il
parametro ha un valore predenito
che è automaticamente regolato
all'atto della programmazione dei
dati motore. Generalmente queste
impostazioni assicurano una
tensione motore ottimale, ma se il
fattore di potenza motore cos phi
richiede una taratura, la funzione
AMA può essere eseguita
utilizzando
parametro 1-29 Adattamento
automatico motore (AMA).
[3] * Ottim. en.
autom. VT
Per il controllo di velocità ottimale
e ad alto rendimento energetico di
ventole e pompe centrifughe.
Fornisce una tensione ottimizzata
per una caratteristica di carico della
coppia quadratica del motore.
Inoltre, la funzione AEO adatta la
tensione esattamente alla corrente
situazione di carico, riducendo il
consumo energetico e i disturbi
percettibili provenienti dal motore.
Per ottenere prestazioni ottimali,
impostare correttamente il fattore
di potenza del motore. Il valore è
impostato in
parametro 14-43 Cosphi motore. Il
parametro ha un valore predenito
che è automaticamente regolato
all'atto della programmazione dei
dati motore. Generalmente queste
impostazioni assicurano una
tensione motore ottimale, ma se il
fattore di potenza motore cos phi
richiede una taratura, la funzione
AMA può essere eseguita
utilizzando
parametro 1-29 Adattamento
automatico motore (AMA). Il
parametro del fattore di potenza
del motore richiede una
regolazione manuale solo in casi
rari.
1-04 Modo sovraccarico
Selezionare il livello di coppia in modo sovraccarico.
Option: Funzione:
[0] Coppia elevata Rende disponibile no al 160% di
sovracoppia per motori di portata
inferiore.
[1] * Coppia
normale
Rende disponibile no al 110% di
sovracoppia.
1-06 Senso orario
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Questo parametro denisce il
termine senso orario corrispondente
alla freccia di direzione dell'LCP.
Utilizzato per cambiare in modo
semplice il senso di rotazione
dell'albero senza scambiare i li
elettrici del motore.
[0] * Normale L'albero motore gira in senso orario
quando il convertitore di frequenza
è collegato U⇒U, V⇒V e W⇒W al
motore.
[1] Inverso L'albero motore gira in senso
antiorario quando il convertitore di
frequenza è collegato U⇒U, V⇒V e
W⇒W al motore.
Descrizione dei parametri
33
AVVISO!
Il Parametro 1-03 Caratteristiche di coppia non ha alcun
eetto quando il parametro 1-10 Struttura motore = [1]
PM, SPM non saliente.
44 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
3.3.2 1-1* Selezione motore
AVVISO!
Questo gruppo di parametri non può essere regolato a
motore in funzione.
I seguenti parametri sono attivi in funzione dell'impostazione nel parametro 1-10 Struttura motore.
Parametro 1-10 Strutt
ura motore
Parametro 1-00 Modo
congurazione
Parametro 1-03 Caratte
ristiche di coppia
Parametro 1-06 Senso
orario
[1] PM,
[0]
Asincro
SPM
non
no
saliente
x x x x
x – - -
x x x x
[2]
IPMSM
[3]
Motore
SynRM
Page 47

Descrizione dei parametri Guida alla Programmazione
Parametro 1-10 Strutt
ura motore
Parametro 1-14 Fatt. di
guad. attenuaz.
Parametro 1-15 Cost.
tempo ltro a bassa
velocità
Parametro 1-16 Cost.
tempo ltro ad alta
velocità
Parametro 1-17 Cost. di
tempo ltro tensione
Parametro 1-20 Potenz
a motore [kW]
Parametro 1-21 Potenz
a motore [HP]
Parametro 1-22 Tension
e motore
Parametro 1-23 Freque
n. motore
Parametro 1-24 Corrent
e motore
Parametro 1-25 Vel.
nominale motore
Parametro 1-26 Coppia
motore nominale cont.
Parametro 1-28 Control
lo rotazione motore
Parametro 1-29 Adatta
mento automatico
motore (AMA)
Parametro 1-30 Resist.
statore (RS)
Parametro 1-31 Resiste
nza rotore (Rr)
Parametro 1-35 Reatta
nza principale (Xh)
Parametro 1-37 Indutta
nza asse d (Ld)
Parametro 1-39 Poli
motore
Parametro 1-40 Forza
c.e.m. a 1000 giri/
minuto
Parametro 1-44 d-axis
Inductance Sat. (LdSat)
Parametro 1-45 q-axis
Inductance Sat. (LqSat)
Parametro 1-46 Guada
gno rilevamento
posizione
[1] PM,
[0]
Asincro
SPM
non
no
saliente
– x x x
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
[2]
IPMSM
[3]
Motore
SynRM
Parametro 1-10 Strutt
ura motore
Parametro 1-47 Taratur
a della coppia a bassa
velocità
Parametro 1-48 Inducta
nce Sat. Point
Parametro 1-49 Corrent
e a induttanza min.
Parametro 1-50 Magne
tizz. motore a vel.
nulla.
Parametro 1-51 Min
velocità magnetizz.
norm. [RPM]
Parametro 1-52 Min
velocità magnetizz.
normale [Hz]
Parametro 1-58 Impulsi
corr. test riagg. al volo
Parametro 1-59 Freque
nza imp. test riagg. al
volo
Parametro 1-60 Compe
nsaz. del carico a bassa
vel.
Parametro 1-61 Compe
nsaz. del carico ad alta
vel.
Parametro 1-62 Compe
ns. scorrim.
Parametro 1-63 Costan
te di tempo compens.
scorrim.
Parametro 1-64 Smorza
mento risonanza
Parametro 1-65 Smorza
mento ris. tempo
costante
Parametro 1-66 Corrent
e min. a velocità bassa
Parametro 1-70 Modali
tà avvio
Parametro 1-71 Ritardo
avv.
Parametro 1-72 Funz.
di avv.
Parametro 1-73 Riagga
ncio al volo
Parametro 1-80 Funzio
ne all'arresto
Parametro 1-81 Vel.min
. per
funz.all'arresto[giri/min]
[1] PM,
[0]
Asincro
SPM
non
no
saliente
– x x x
– – – x
– – x –
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
[2]
IPMSM
[3]
Motore
SynRM
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 45
Page 48

1-10 Struttura motore
Selezionare il tipo di struttura motore.
Option: Funzione:
[0] * Asincrono Per motori asincroni.
[1] PM, SPM non
saliente
Per motori a magneti permanenti
(PM). I motori PM si dividono in
due gruppi con magneti montati
sulla supercie (non salienti) o
interni (salienti).
[2] IPMSM
[5] SynRM
Descrizione dei parametri
VLT® AQUA Drive FC 202
Parametro 1-10 Strutt
ura motore
Parametro 1-82 V. min.
funz. all'arr. [Hz]
33
Parametro 1-86 Velocit
à scatto bassa [giri/
min]
Parametro 1-87 Velocit
à scatto bassa [Hz]
Parametro 1-90 Protezi
one termica motore
Parametro 1-91 Ventila
z. est. motore
Parametro 1-93 Fonte
termistore
Parametro 2-00 Corrent
e CC funzionamento/
preriscaldamento
Parametro 2-01 Corrent
e di frenatura CC
Parametro 2-02 Tempo
di frenata CC
Parametro 2-03 Vel.
inserim. frenatura CC
[RPM]
Parametro 2-04 Velocit
à inserimento frenatura
CC [Hz]
Parametro 2-06 Corrent
e di parcheggio
Parametro 2-07 Tempo
di parcheggio
Parametro 2-10 Funzio
ne freno
Parametro 2-11 Resiste
nza freno (ohm)
Parametro 2-12 Limite
di potenza freno (kW)
Parametro 2-13 Monito
r. potenza freno
Parametro 2-15 Control
lo freno
Parametro 2-16 Corrent
e max. per freno CA
Parametro 2-17 Control
lo sovratensione
Parametro 4-10 Direz.
velocità motore
Parametro 4-11 Lim.
basso vel. motore [giri/
min]
46 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
[0]
Asincro
no
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
x x x x
x x x x
[1] PM,
SPM
non
saliente
[2]
IPMSM
[3]
Motore
SynRM
Parametro 1-10 Strutt
ura motore
Parametro 4-12 Limite
basso velocità motore
[Hz]
Parametro 4-13 Lim.
alto vel. motore [giri/
min]
Parametro 4-14 Limite
alto velocità motore
[Hz]
Parametro 4-16 Lim. di
coppia in modo motore
Parametro 4-17 Lim. di
coppia in modo
generatore
Parametro 4-18 Limite
di corrente
Parametro 4-19 Freq. di
uscita max.
Parametro 4-58 Funzio
ne fase motore
mancante
Parametro 14-40 Livello
VT
Parametro 14-41 Magn
etizzazione minima
AEO
Parametro 14-42 Frequ
enza minima AEO
Parametro 14-43 Cosph
i motore
[1] PM,
[0]
Asincro
SPM
non
no
saliente
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
[2]
IPMSM
[3]
Motore
SynRM
Page 49

Descrizione dei parametri Guida alla Programmazione
3.3.3 Setup del motore asincrono
Inserire i seguenti dati motore. Le informazioni sono
riportate sulla targa del motore.
1. Parametro 1-20 Potenza motore [kW] o
parametro 1-21 Potenza motore [HP].
2. Parametro 1-22 Tensione motore.
3. Parametro 1-23 Frequen. motore.
4. Parametro 1-24 Corrente motore.
5. Parametro 1-25 Vel. nominale motore.
Per ottenere prestazioni ottimali in modalità VVC+ sono
necessari ulteriori dati motore per impostare i seguenti
parametri. I dati sono reperibili nella scheda tecnica del
motore (di norma non sono disponibili sulla targa del
motore). Eseguire un adattamento automatico motore
(AMA) completo usando il parametro 1-29 Adattamento
automatico motore (AMA) [1] Abilit.AMA compl. o immettere
i parametri manualmente. Il Parametro 1-36 Resist. perdite
ferro viene sempre immesso manualmente.
1. Parametro 1-30 Resist. statore (RS).
2. Parametro 1-31 Resistenza rotore (Rr).
3. Parametro 1-33 Reatt. dispers. statore (X1).
4. Parametro 1-34 Reattanza dispers. rotore (X2).
5. Parametro 1-35 Reattanza principale (Xh).
6. Parametro 1-36 Resist. perdite ferro.
Regolazione
namento VVC
VVC+ è la modalità di controllo più robusta. Nella maggior
parte delle situazioni, fornisce prestazioni ottimali senza
necessità di altre regolazioni. Eseguire un AMA completo
per ottenere prestazioni migliori.
specica dell'applicazione nel funzio-
+
3.3.4 Setup motore PM
Questa sezione descrive come impostare un motore PM.
Fasi di programmazione iniziale
Per attivare il funzionamento del motore PM, selezionare
[1] PM, SPM non saliente o [2] IPMSM nel
parametro 1-10 Struttura motore.
Programmazione dei dati del motore
Dopo aver selezionato un motore PM, sono attivi i
parametri relativi al motore PM nei gruppi di parametri 1-2*
Dati motore, 1-3* Dati motore avanz. e 1-4* Dati motore
avanz. II.
I dati necessari sono riportati sulla targa del motore e sulla
scheda tecnica del motore.
Programmare i seguenti parametri nell'ordine elencato:
1. Parametro 1-24 Corrente motore.
2. Parametro 1-25 Vel. nominale motore.
3. Parametro 1-26 Coppia motore nominale cont..
4. Parametro 1-39 Poli motore.
Eettuare un AMA completo usando il
parametro 1-29 Adattamento automatico motore (AMA) [1]
Abilit.AMA compl.
AVVISO!
Quando si usa AMA, assicurarsi che il valore del
parametro 1-40 Forza c.e.m. a 1000 giri/minuto sia
calcolato utilizzando la velocità nominale.
Se non viene eettuato un AMA completo, congurare
manualmente i seguenti parametri:
1. Parametro 1-30 Resist. statore (RS)
Immettere la resistenza dell'avvolgimento dello
statore da linea a lo comune (Rs). Se sono
disponibili solo dati linea-linea, dividere il valore
linea-linea per 2 per ottenere il valore da linea a
lo comune.
2. Parametro 1-37 Induttanza asse d (Ld)
Immettere l'induttanza assiale diretta del motore
PM da linea a lo comune.
Se sono disponibili solo dati linea-linea, dividere il
valore linea-linea per 2 per ottenere il valore da
linea a lo comune.
3. Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
Immettere la forza c.e.m. tra le fasi del motore PM
con 1000 Giri/min. (valore RMS). La forza c.e.m. è
la tensione generata da un motore PM quando
non è collegato alcun convertitore di frequenza e
l'albero è girato verso l'esterno. Normalmente
questa è specicata per la velocità nominale del
motore oppure per 1000 Giri/min. misurati tra
due fasi. Se il valore non è disponibile per una
velocità del motore di 1000 Giri/min., calcolare il
valore corretto come segue:
Se la forza c.e.m. è, per esempio, 320 V a 1800
Giri/min., può essere calcolata a 1000 Giri/min.
come segue:
Forza c.e.m. = (tensione/Giri/min.) x 1000 =
(320/1800) x 1000 = 178.
4. Per i motori IPM: congurare i valori di induttanza
nei seguenti parametri:
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-44 d-axis Inductance Sat.
•
(LdSat).
Parametro 1-45 q-axis Inductance Sat.
•
(LqSat).
Parametro 1-49 Corrente a induttanza
•
min..
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 47
Page 50
Descrizione dei parametri
VLT® AQUA Drive FC 202
AVVISO!
Alcuni valori di induttanza dei motori IPM potrebbero
non essere riportati sulle targhe o nelle schede tecniche.
Eseguire l'AMA per avere valori validi.
33
Test del funzionamento del motore
1. Avviare il motore a bassa velocità (da 100 a 200
Giri/min.). Se il motore non gira, controllare
l'installazione, la programmazione generale e i
dati del motore.
2. Controllare se la funzione di avviamento nel
parametro 1-70 Modalità avvio è adatta per i
Applicazione Impostazioni
Carico elevato a bassa
velocità
< 30% (velocità nominale)
Aumentare parametro 1-17 Cost. di
tempo ltro tensione
Aumentare il
parametro 1-66 Corrente min. a
velocità bassa per regolare la coppia
di avviamento. Il valore 100%
fornisce una coppia nominale come
coppia di avviamento. Un funzionamento a un livello di corrente
superiore al 100% per un tempo
prolungato può provocare un
surriscaldamento del motore.
requisiti dell'applicazione.
Rilevamento del rotore
Questa funzione è la scelta raccomandata per applicazioni
in cui il motore parte da fermo, per esempio pompe o
trasportatori. Su alcuni motori, si ode un suono quando il
convertitore di frequenza esegue il rilevamento del rotore.
Ciò non danneggia il motore.
Parcheggio
Tabella 3.4 Raccomandazioni per diverse applicazioni
Se il motore inizia a oscillare a una certa velocità,
aumentare il parametro 1-14 Fatt. di guad. attenuaz..
Aumentare il valore in piccoli passi. A seconda del motore,
questo parametro può essere impostato su un valore
superiore del 10% no al 100% rispetto al valore
predenito.
Questa funzione è la scelta raccomandata per applicazioni
in cui il motore ruota a velocità lenta, per esempio eetto
di autorotazione in applicazioni con ventola. Il
Parametro 2-06 Corrente di parcheggio e il
parametro 2-07 Tempo di parcheggio possono essere
regolati. Aumentare le impostazioni di fabbrica di questi
3.3.5 Setup motore SynRM
Questa sezione descrive come impostare un motore
sincrono a riluttanza.
parametri per applicazioni con inerzia elevata.
Regolazione specica dell'applicazione nel funzionamento VVC
+
VVC+ è la modalità di controllo più robusta. Nella maggior
parte delle situazioni, fornisce prestazioni ottimali senza
necessità di altre regolazioni. Eseguire un AMA completo
per ottenere prestazioni migliori.
Avviare il motore a velocità nominale. Se l'applicazione non
funziona correttamente, controllare le impostazioni PM VVC
+
. La Tabella 3.4 contiene raccomandazioni per diverse
applicazioni.
Applicazione Impostazioni
Applicazioni a bassa
inerzia
I
Load/IMotor
Applicazioni a bassa
inerzia
50>I
Applicazioni a inerzia
elevata
I
Load/IMotor
<5
Load/IMotor
>50
>5
Aumentare parametro 1-17 Cost. di
tempo ltro tensione in fattori da 5 a
10.
Ridurre parametro 1-14 Fatt. di guad.
attenuaz..
Ridurre parametro 1-66 Corrente min.
a velocità bassa (< 100%).
Mantenere i valori predeniti.
Aumentare parametro 1-14 Fatt. di
guad. attenuaz., parametro 1-15 Cost.
tempo ltro a bassa velocità e
parametro 1-16 Cost. tempo ltro ad
alta velocità
Fasi di programmazione iniziale
Per attivare il funzionamento del motore SynRM,
selezionare l'opzione [5] SynRM nel parametro 1-10 Struttura
motore.
Programmazione dei dati del motore
Dopo aver selezionato l'opzione [5] SynRM, i parametri
relativi al motore SynRM nei gruppi di parametri 1-2* Dati
motore, 1-3* Dati motore avanz. e 1-4* Dati motore avanz. II
sono attivi.
I dati necessari sono riportati sulla targa del motore e sulla
scheda tecnica del motore.
Programmare i seguenti parametri nell'ordine elencato:
1. Parametro 1-24 Corrente motore.
2. Parametro 1-25 Vel. nominale motore.
3. Parametro 1-26 Coppia motore nominale cont..
4. Parametro 1-39 Poli motore.
Eettuare un AMA completo usando il
parametro 1-29 Adattamento automatico motore (AMA) [1]
Abilit.AMA compl.
Se non viene eettuato un AMA completo, congurare
manualmente i seguenti parametri:
1. Parametro 1-30 Resist. statore (RS)
Immettere la resistenza dell'avvolgimento dello
statore da linea a lo comune (Rs). Se sono
disponibili solo dati linea-linea, dividere il valore
48 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 51

Descrizione dei parametri Guida alla Programmazione
linea-linea per 2 per ottenere il valore da linea a
lo comune.
2. Parametro 1-37 Induttanza asse d (Ld)
Immettere l'induttanza assiale diretta del motore
da linea a lo comune.
Se sono disponibili solo dati linea-linea, dividere il
valore linea-linea per 2 per ottenere il valore da
linea a lo comune.
3. Parametro 1-38 Induttanza asse q (Lq).
Immettere l'induttanza assiale di quadratura del
motore da linea a lo comune.
Se sono disponibili solo dati linea-linea, dividere il
valore linea-linea per 2 per ottenere il valore da
linea a lo comune.
4. Parametro 1-44 d-axis Inductance Sat. (LdSat).
Impostare il valore di saturazione dell'induttanza
asse d da linea a lo comune. Questo è il valore
di una corrente superiore a quella nominale in cui
l'induttanza è completamente satura.
5. Parametro 1-48 Inductance Sat. Point.
Immettere la percentuale di corrente nominale in
cui l'induttanza asse d è semisatura, ovvero
presenta il valore medio dei valori non saturi e
saturi.
AVVISO!
Alcuni valori di induttanza dei motori potrebbero non
essere riportati sulle targhe o nelle schede tecniche.
Eseguire l'AMA per avere valori validi.
Test del funzionamento del motore
1. Avviare il motore a bassa velocità (da 100 a 200
Giri/min.). Se il motore non gira, controllare
l'installazione, la programmazione generale e i
dati del motore.
2. Controllare se la funzione di avviamento nel
parametro 1-70 Modalità avvio è adatta per i
requisiti dell'applicazione.
Rilevamento del rotore
Questa funzione è la scelta raccomandata per applicazioni
in cui il motore parte da fermo, per esempio pompe o
trasportatori. Su alcuni motori, si ode un suono quando il
convertitore di frequenza esegue il rilevamento del rotore.
Ciò non danneggia il motore.
Parcheggio
Questa funzione è la scelta raccomandata per applicazioni
in cui il motore ruota a velocità lenta, per esempio eetto
di autorotazione in applicazioni con ventola. Il
Parametro 2-06 Corrente di parcheggio e il
parametro 2-07 Tempo di parcheggio possono essere
regolati. Aumentare le impostazioni di fabbrica di questi
parametri per applicazioni con inerzia elevata.
Regolazione specica dell'applicazione nel funzionamento VVC
+
VVC+ è la modalità di controllo più robusta. Nella maggior
parte delle situazioni, fornisce prestazioni ottimali senza
necessità di altre regolazioni. Eseguire un AMA completo
per ottenere prestazioni migliori.
Avviare il motore a velocità nominale. Se l'applicazione non
funziona correttamente, controllare le impostazioni SynRM
VVC+ . La Tabella 3.5 contiene raccomandazioni per diverse
applicazioni.
Applicazione Impostazioni
Applicazioni a bassa
inerzia
I
Load/IMotor
Applicazioni a bassa
inerzia
50>I
Applicazioni a inerzia
elevata
I
Load/IMotor
Carico elevato a bassa
velocità
< 30% (velocità nominale)
<5
>5
Load/IMotor
>50
Tabella 3.5 Raccomandazioni per diverse applicazioni
Aumentare parametro 1-17 Cost. di
tempo ltro tensione in fattori da 5 a
10.
Ridurre parametro 1-14 Fatt. di guad.
attenuaz..
Ridurre parametro 1-66 Corrente min.
a velocità bassa (< 100%).
Mantenere i valori predeniti.
Aumentare parametro 1-14 Fatt. di
guad. attenuaz., parametro 1-15 Cost.
tempo ltro a bassa velocità e
parametro 1-16 Cost. tempo ltro ad
alta velocità
Aumentare parametro 1-17 Cost. di
tempo ltro tensione
Aumentare il
parametro 1-66 Corrente min. a
velocità bassa per regolare la coppia
di avviamento. Il valore 100%
fornisce una coppia nominale come
coppia di avviamento. Un funzionamento a un livello di corrente
superiore al 100% per un tempo
prolungato può provocare un
surriscaldamento del motore.
Se il motore inizia a oscillare a una certa velocità,
aumentare il parametro 1-14 Fatt. di guad. attenuaz..
Aumentare il valore in piccoli passi. A seconda del motore,
questo parametro può essere impostato su un valore
superiore del 10% no al 100% rispetto al valore
predenito.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 49
Page 52

1-14 Fatt. di guad. attenuaz.
Range: Funzione:
Size
related*
[0 - 250 %] Il parametro stabilizza il motore PM
al ne di farlo funzionare in modo
regolare e stabile. Il valore del
guadagno di smorzamento controlla
le prestazioni dinamiche del motore
PM. Un basso guadagno di
smorzamento produce un'elevata
prestazione dinamica, mentre un
valore elevato produce una
prestazione dinamica ridotta. Se il
guadagno di smorzamento è
troppo alto o troppo basso, il
controllo diventa instabile. La
prestazione dinamica risultante è
collegata ai dati della macchina e al
tipo di carico.
1-15 Cost. tempo ltro a bassa velocità
Range: Funzione:
Size
related*
[0.01 - 20 s] La costante di tempo per lo
smorzamento del ltro passa alto
determina il tempo di risposta alle
fasi di caricamento. Ottenere un
controllo rapido attraverso una
costante di tempo di smorzamento
breve. Tuttavia, se questo valore è
troppo piccolo, il controllo diventa
instabile. Questa costante di tempo
viene usata al di sotto del 10%
della velocità nominale.
1-16 Cost. tempo ltro ad alta velocità
Range: Funzione:
Size
related*
[0.01 - 20 s] La costante di tempo per lo
smorzamento del ltro passa alto
determina il tempo di risposta alle
fasi di caricamento. Ottenere un
controllo rapido attraverso una
costante di tempo di smorzamento
breve. Tuttavia, se questo valore è
troppo piccolo, il controllo diventa
instabile. Questa costante di tempo
viene usata al di sopra del 10%
della velocità nominale.
1-17 Cost. di tempo ltro tensione
Range: Funzione:
Size
related*
[0.001 - 2 s] La costante di tempo del ltro della
tensione di alimentazione viene
usata per ridurre l'inusso di
elevate ondulazioni di frequenza e
risonanze del sistema nel calcolo
della tensione di alimentazione
della macchina. Senza questo ltro,
Descrizione dei parametri
3.3.6
1-1* VVC+ PM/SYN RM
VLT® AQUA Drive FC 202
I parametri di controllo predeniti per il nucleo di controllo
di motore PMSM VVC+ sono ottimizzati per applicazioni e
un carico inerziale nell'intervallo di 50>Jl/Jm>5, dove Jl è
33
l'inerzia di carico dall'applicazione e Jm è l'inerzia della
macchina.
Per applicazioni a inerzia ridotta Jl/Jm<5, si raccomanda di
aumentare il parametro 1-17 Cost. di tempo ltro tensione
con un fattore di 5–10 e in alcuni casi sarebbe necessario
ridurre parametro 1-14 Fatt. di guad. attenuaz. per
migliorare le prestazioni e la stabilità.
Per applicazioni a inerzia elevata Jl/Jm>50 aumentare il
parametro 1-15 Cost. tempo
ltro a bassa velocità, il
parametro 1-16 Cost. tempo ltro ad alta velocità e il
parametro 1-14 Fatt. di guad. attenuaz. per migliorare le
prestazioni e la stabilità.
Per un carico elevato a bassa velocità (<30% della velocità
nominale), aumentare il parametro 1-17 Cost. di tempo ltro
tensione a causa della non linearità nell'inverter a basse
velocità.
1-11 Modello motore
Option: Funzione:
Imposta automaticamente i valori di fabbrica
per il motore selezionato. Se viene usato il
valore predenito Std. Asynchron, determinare
manualmente le impostazioni in base alla
selezione parametro 1-10 Struttura motore.
[1] Asincrono
Std.
[2] PM std.,
non saliente
[10] Danfoss
OGD LA10
[11] Danfoss
OGD V210
50 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Modello di motore predenito quando [0]
Asincrono è selezionato nel
parametro 1-10 Struttura motore.
Selezionabile quando [1] PM, SPM non saliente
viene selezionato nel parametro 1-10 Struttura
motore.
Selezionabile quando [1] PM, SPM non saliente
viene selezionato nel parametro 1-10 Struttura
motore. Solo disponibile per T4, T5 in 1,5–3
kW. Le impostazioni vengono caricate automaticamente per questo motore specico.
Selezionabile quando [1] PM, SPM non saliente
viene selezionato nel parametro 1-10 Struttura
motore. Solo disponibile per T4, T5 in 0,75–3
kW. Le impostazioni vengono caricate automaticamente per questo motore specico.
Page 53

1-17 Cost. di tempo ltro tensione
Range: Funzione:
le ondulazioni nelle correnti
possono distorcere la tensione
calcolata e compromettere la
stabilità del sistema.
1-20 Potenza motore [kW]
Range: Funzione:
Size
related*
[ 0.09 -
2000.00 kW]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Inserire la potenza nominale del
motore in kW in base ai dati di
targa del motore. Il valore di default
corrisponde all'uscita nominale
dell'unità.
A seconda delle selezioni eettuate
nel parametro 0-03 Impostazioni
locali, nel parametro 1-20 Potenza
motore [kW] o nel
parametro 1-21 Potenza motore [HP]
è reso invisibile.
1-21 Potenza motore [HP]
Range: Funzione:
Size
related*
[ 0.09 -
500.00 hp]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Inserire la potenza nominale del
motore in cv in base ai dati di targa
del motore. Il valore di default
corrisponde all'uscita nominale
dell'unità.
A seconda delle selezioni eettuate
nel parametro 0-03 Impostazioni
locali, nel parametro 1-20 Potenza
motore [kW] o nel
parametro 1-21 Potenza motore [HP]
è reso invisibile.
1-22 Tensione motore
Range: Funzione:
Size
related*
[ 10 - 1000
V]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Immettere la tensione motore
nominale in base ai dati di targa
del motore. Il valore di default
corrisponde all'uscita nominale
dell'unità.
1-23 Frequen. motore
Range: Funzione:
Size
related*
[20 - 1000
Hz]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Selezionare la frequenza motore dai
dati di targa del motore. Per il
funzionamento a 87 Hz con motori
da 230/400 V, impostare i dati di
targa relativi a 230 V/50 Hz.
Adattare il parametro 4-13 Lim. alto
vel. motore [giri/min] e il
parametro 3-03 Riferimento max.
all'applicazione da 87 Hz.
Descrizione dei parametri Guida alla Programmazione
3.3.7 1-2* Dati motore
Questo gruppo di parametri contiene i dati di ingresso
dalla targhetta sul motore collegato.
AVVISO!
Il cambiamento del valore di questi parametri ha eetto
sull'impostazione di altri parametri.
AVVISO!
I seguenti parametri non hanno alcun eetto quando
parametro 1-10 Struttura motore è impostato su [1] PM,
SPM non saliente, [2] PM, IPM saliente, [5] Sync. Reluctance:
Parametro 1-20 Potenza motore [kW].
•
Parametro 1-21 Potenza motore [HP].
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 51
Page 54

1-24 Corrente motore
Range: Funzione:
Size
related*
[ 0.10 -
10000.00 A]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Immettere il valore di corrente
nominale del motore dai dati di
targa del motore. I dati vengono
utilizzati per calcolare la coppia del
motore, la protezione termica del
motore e così via.
1-25 Vel. nominale motore
Range: Funzione:
Size
related*
[100 - 60000
RPM]
AVVISO!
Questo parametro non può
essere regolato mentre il
motore è in funzione.
Immettere il valore di velocità
nominale del motore dai dati di
targa del motore. I dati vengono
utilizzati per calcolare le compensazioni automatiche del motore.
1-26 Coppia motore nominale cont.
Range: Funzione:
Size
related*
[1 - 10000.0
Nm]
Impostare il valore dai dati di targa
del motore. Il valore di default
corrisponde all'uscita nominale
dell'unità. Questo parametro è
disponibile quando il
parametro 1-10 Struttura motore è
impostato su [1] PM, SPM non
saliente, vale a dire che il parametro
è valido solamente per motori PM e
SPM di tipo non saliente.
1-28 Controllo rotazione motore
Option: Funzione:
AVVISO
ALTA TENSIONE
I convertitori di frequenza
sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla
condivisione del carico.
•
Rimuovere l'alimentazione di rete prima
di disinserire i cavi
delle fasi del motore.
AVVISO!
Una volta che il controllo
rotazione motore è abilitato, il
display visualizza: Nota! Il
motore può girare nella
direzione sbagliata.
Premendo [OK], [Back] o
[Cancel], il messaggio viene
annullato e compare un nuovo
messaggio: Premere [Hand On]
per avviare il motore. Premere
[Cancel] per annullare.
Premendo [Hand On], il
motore viene avviato a 5 Hz in
avanti e il display visualizza:
Motore in marcia. Controllare
se il senso di rotazione del
motore è corretto. Premere
[O] per arrestare il motore.
Premendo [O] il motore si
arresta e
parametro 1-28 Controllo
rotazione motore viene
ripristinato. Se il senso di
rotazione del motore è
scorretto, scambiare due cavi
della fase del motore.
Dopo aver installato e collegato il
motore, questa funzione consente
di vericare l'esatto senso di
rotazione del motore. Attivando
questa funzione si esclude qualsiasi
comando bus o ingresso digitale, a
eccezione di interblocco esterno e
Safe Torque O (STO) (se inclusi).
[0] * O Il controllo della rotazione del
motore non è attivo.
Descrizione dei parametri
33
VLT® AQUA Drive FC 202
52 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 55

1-28 Controllo rotazione motore
Option: Funzione:
[1] Abilitato Il controllo della rotazione del
motore è abilitato.
1-29 Adattamento automatico motore (AMA)
Option: Funzione:
La funzione AMA migliora le
prestazioni dinamiche del motore
mediante l'ottimizzazione
automatica, a motore fermo, dei
parametri motore avanzati (dal
parametro 1-30 Resist. statore (RS) al
parametro 1-35 Reattanza principale
(Xh)).
[0] * O Nessuna funzione.
[1] Abilit.AMA
compl.
Esegue l'AMA della resistenza di
statore RS, della resistenza di rotore
Rr, della reattanza di dispersione
dello statore X1, della reattanza di
dispersione del rotore X2 e della
reattanza principale Xh.
[2] Abilitare AMA
ridotto
Eettua un AMA ridotto in cui viene
determinata solo la resistenza di
statore Rs del sistema. Selezionare
questa opzione se si utilizza un
ltro LC tra il convertitore di
frequenza e il motore.
[3] Enable
Complete
AMA II
Esegue funzionalità avanzate AMA II
di resistenza di statore RS, della
resistenza di rotore Rr, della
reattanza di dispersione dello
statore X1, della reattanza di
dispersione del rotore X2 e della
reattanza principale Xh. Per risultati
ottimali aggiornare il
parametro 14-43 Cosphi motore.
[4] Enable
Reduced AMA
II
Eettua un AMA II ridotto della sola
resistenza di statore Rs del sistema.
Selezionare questa opzione se si
utilizza un ltro LC tra il convertitore di frequenza e il motore.
Descrizione dei parametri Guida alla Programmazione
terminare l'AMA. Dopo aver premuto [OK], il convertitore di
frequenza è pronto per funzionare.
AVVISO!
•
•
AVVISO!
Evitare una coppia rigenerativa esterna durante l'AMA.
AVVISO!
Se una delle impostazioni nel gruppo di parametri 1-2*
Dati motore viene modicata, i parametri dal
parametro 1-30 Resist. statore (RS) al parametro 1-39 Poli
motore tornano alle impostazioni di fabbrica
Non è possibile regolare questo parametro mentre il
motore è in funzione.
Per un adattamento ottimale del convertitore di
frequenza, eseguire l'AMA su un motore freddo.
L'AMA non può essere eettuato quando il
motore è in funzione.
3 3
AVVISO!
Il Parametro 1-29 Adattamento automatico motore (AMA)
non ha alcun eetto quando il parametro 1-10 Struttura
motore = [1] PM, SPM non saliente.
Attivare la funzione AMA premendo [Hand on] dopo aver
selezionato [1] Abilit.AMA compl. o [2] Abilitare AMA ridotto.
Consultare anche il capitolo Adattamento Automatico
Motore nella Guida alla Progettazione. Dopo una sequenza
normale, il display visualizza il messaggio: Premere [OK] per
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 53
AVVISO!
La funzione AMA completo va eseguita solo senza ltro,
mentre la funzione AMA ridotto può essere eseguita con
il ltro.
Consultare anche il capitolo Adattamento Automatico
Motore nella Guida alla Progettazione VLT® AQUA Drive FC
202.
3.3.8 1-3* Dati motore avanz.
Parametri per immettere i dati avanzati del motore. I dati
motore dal parametro 1-30 Resist. statore (RS) no al
parametro 1-39 Poli motore devono essere corrispondenti al
motore specico per far funzionare il motore in modo
ottimale. Le impostazioni di fabbrica sono valori basati sui
valori di parametro comuni dei motori standard normali. Se
i parametri motore non vengono impostati correttamente,
può vericarsi un guasto del sistema del convertitore di
frequenza. Se i dati motore avanzati non sono noti, si
raccomanda di eseguire un AMA. Consultare anche il
capitolo Adattamento Automatico Motore nella Guida alla
Progettazione VLT® AQUA Drive FC 202. La sequenza AMA
regola tutti i parametri motore, ad eccezione del momento
d'inerzia del rotore e della resistenza perdite del ferro
(parametro 1-36 Resist. perdite ferro).
Page 56

130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Resist. statore (RS)
Range: Funzione:
Size
related*
[ 0.0140 -
140.0000
Ohm]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Per motori PM vedere la descrizione
nel parametro 1-37 Induttanza asse
d (Ld).
Impostare il valore della resistenza
di statore. Fare riferimento al valore
nella scheda tecnica del motore o
eettuare un AMA a motore freddo.
1-31 Resistenza rotore (Rr)
Range: Funzione:
Size
related*
[ 0.0100 -
100.0000
Ohm]
AVVISO!
Il Parametro 1-31 Resistenza
rotore (Rr) non ha alcun eetto
quando il
parametro 1-10 Struttura
motore è impostato su [1] PM,
SPM non saliente, [5] Syn RM.
Impostare il valore della resistenza
dello statore Rr per migliorare le
prestazioni dell'albero usando uno
di questi metodi.
•
Eseguire l'AMA su un
motore freddo. Il convertitore di frequenza misura
il valore dal motore. Tutte
le compensazioni sono
ripristinate al 100%.
•
Impostare manualmente il
valore Rr. I valori sono
indicati dal fornitore del
motore.
•
Utilizzare l'impostazione di
fabbrica Rr. Il convertitore
di frequenza stabilisce
l'impostazione sulla base
dei dati di targa del
motore.
1-33 Reatt. dispers. statore (X1)
Range: Funzione:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVVISO!
Questo parametro è rilevante
solo per motori asincroni.
Impostare la reattanza di
dispersione dello statore del motore
usando uno di questi metodi:
•
Eseguire l'AMA su un
motore freddo. Il convertitore di frequenza misura
il valore dal motore.
•
Impostare manualmente il
valore X1. I valori sono
indicati dal fornitore del
motore.
•
Utilizzare l'impostazione di
fabbrica X1. Il convertitore
di frequenza stabilisce
l'impostazione sulla base
dei dati di targa del
motore.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
Disegno 3.4 Graco equivalente per un motore asincrono
Disegno 3.5 Diagramma di circuito equivalente di un motore
PM non saliente
54 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 57

1-33 Reatt. dispers. statore (X1)
Range: Funzione:
Vedere la Disegno 3.4.
AVVISO!
Il valore del parametro viene
aggiornato dopo ciascuna
taratura della coppia se
l'opzione [3] 1st start with store
o l'opzione [4] Every start with
store è selezionata nel
parametro 1-47 Taratura della
coppia a bassa velocità.
1-34 Reattanza dispers. rotore (X2)
Range: Funzione:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVVISO!
Questo parametro è rilevante
solo per motori asincroni.
Impostare la reattanza di
dispersione del rotore del motore
usando uno di questi metodi:
•
Eseguire l'AMA su un
motore freddo. Il convertitore di frequenza misura
il valore dal motore.
•
Impostare manualmente il
valore X2. I valori sono
indicati dal fornitore del
motore.
•
Utilizzare l'impostazione di
fabbrica X2. Il convertitore
di frequenza stabilisce
l'impostazione sulla base
dei dati di targa del
motore.
Vedere la Disegno 3.4.
AVVISO!
Il valore del parametro viene
aggiornato dopo ciascuna
taratura della coppia se
l'opzione [3] 1st start with store
o l'opzione [4] Every start with
store è selezionata nel
parametro 1-47 Taratura della
coppia a bassa velocità.
1-35 Reattanza principale (Xh)
Range: Funzione:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
AVVISO!
Il Parametro 1-35 Reattanza
principale (Xh) non ha alcun
eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Impostare la reattanza principale
del motore utilizzando uno dei
metodi seguenti:
•
Eseguire l'AMA su un
motore freddo. Il convertitore di frequenza misura
il valore dal motore.
•
Immettere il valore X
h
manualmente. I valori
sono indicati dal fornitore
del motore.
•
Usare l'impostazione di
fabbrica Xh. Il convertitore
di frequenza stabilisce
l'impostazione sulla base
dei dati di targa del
motore.
1-36 Resist. perdite ferro
Range: Funzione:
Size
related*
[ 0 -
10000.000
Ohm]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Impostare il valore di resistenza
equivalente perdite del ferro (RFe)
per compensare perdite di ferro nel
motore.
Il valore RFe non può essere trovato
eseguendo un AMA.
Il valore RFe è particolarmente
importante nelle applicazioni a
controllo di coppia. Se RFe non è
noto, lasciare parametro 1-36 Resist.
perdite ferro sull'impostazione di
fabbrica.
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 55
Page 58

1-37 Induttanza asse d (Ld)
Range: Funzione:
Size
related*
[0.000 -
1000.000 mH]
AVVISO!
Questo parametro è attivo
soltanto quando il
parametro 1-10 Struttura
motore è impostato su [1] PM,
SPM non saliente.
Impostare il valore dell'induttanza
asse d. Ottenere il valore dalla
scheda tecnica del motore PM.
Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 Induttanza asse q (Lq)
Range: Funzione:
Size
related*
[0.000 - 1000
mH]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Impostare il valore dell’induttanza
asse q. Vedere la scheda tecnica del
motore.
Descrizione dei parametri
VLT® AQUA Drive FC 202
AVVISO!
I costruttori del motore forniscono valori per la
resistenza di statore (parametro 1-30 Resist. statore (RS)) e
l'induttanza asse d (parametro 1-37 Induttanza asse d
(Ld)) nelle speciche tecniche come tra linea e
33
Per i motori asincroni, la resistenza di statore e i valori di
induttanza asse d sono normalmente descritti in speciche
tecniche come tra linea e conduttore comune (centro
stella). Per i motori PM, sono tipicamente descritti nelle
speciche tecniche come tra linea-linea. I motori PM sono
tipicamente costruiti per il collegamento a stella.
conduttore comune (punto di partenza) o tra linea e
linea. Non esiste alcuno standard generale. I vari setup
della resistenza di statore dell'avvolgitore e dell'induzione sono mostrati in Disegno 3.6. I convertitori di
frequenza Danfoss richiedono sempre il valore da linea a
conduttore comune. La forza c.e.m. del motore PM è
denita come forza c.e.m indotta attraverso due fasi
qualsiasi dell'avvolgimento statorico di un motore a
corsa libera. I convertitori di frequenza Danfoss
richiedono sempre il valore RMS da linea a linea
misurata a 1000 Giri/min., velocità meccanica di
rotazione. Ciò è mostrato nella Disegno 3.7.
Parametro 1-30 Resist.
statore (RS)
(da linea a conduttore
comune).
Parametro 1-37 Induttanz
a asse d (Ld)
(da linea a conduttore
comune).
Parametro 1-40 Forza
c.e.m. a 1000 giri/minuto
RMS (valore da linea a
linea).
Tabella 3.6 Parametri correlati ai motori PM.
Questo parametro indica la resistenza
di statore dell'avvolgitore (Rs) simile
alla resistenza di statore del motore
asincrono. La resistenza di statore è
denita per la misurazione da linea a
conduttore comune. Per dati linealinea, dove la resistenza di statore
viene misurata tra due linee qualsiasi,
dividere per 2.
Questo parametro indica l'induttanza
assiale diretta del motore PM.
L'induttanza asse d viene denita per
una misurazione da fase a conduttore
comune. Per dati linea-linea, dove la
resistenza di statore viene misurata tra
due linee qualsiasi, dividere per 2.
Questo parametro indica la forza c.e.m
attraverso il morsetto dello statore del
motore PM specicamente alla
velocità meccanica di 1000 Giri/min.
Viene denito tra linea e linea ed
espresso nel valore RMS.
Disegno 3.6 Setup dell'avvolgimento statore
Disegno 3.7 Denizioni dei parametri macchina della forza
c.e.m di motori PM
56 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 59

1-39 Poli motore
Range: Funzione:
Size
related*
[2 - 132 ]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Immettere il numero di poli del
motore.
Poli ~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabella 3.7 Conteggio dei poli e
frequenze relative
Tabella 3.7 mostra il numero di poli
per intervalli di velocità normali per
i diversi tipi di motore. Denire
separatamente i motori progettati
per altre frequenze. Il valore dei
poli motore deve sempre essere un
numero pari perché si riferisce al
numero totale di poli, non alla
coppia di poli. Il convertitore di
frequenza esegue l'impostazione
iniziale del parametro 1-39 Poli
motore sulla base del
parametro 1-23 Frequen. motore e
del parametro 1-25 Vel. nominale
motore.
1-40 Forza c.e.m. a 1000 giri/minuto
Range: Funzione:
Size
related*
[ 10 - 9000V]Impostare la forza c.e.m. nominale
per il motore a 1000 Giri/min.
Questo parametro è attivo soltanto
quando il parametro 1-10 Struttura
motore è impostato su [1] PM, SPM
non saliente.
1-44 d-axis Inductance Sat. (LdSat)
Range: Funzione:
Size
related*
[0 - 1000
mH]
Immettere il punto di saturazione di
Ld. Idealmente questo parametro ha
lo stesso valore del
parametro 1-37 Induttanza asse d
(Ld). Se il fornitore del motore
fornisce una curva di induzione,
immettere qui il valore di induzione
al 200% del valore nominale.
1-45 q-axis Inductance Sat. (LqSat)
Range: Funzione:
Size
related*
[0 - 1000
mH]
Questo parametro corrisponde alla
saturazione dell'induttanza d Lq.
Idealmente questo parametro ha lo
stesso valore del
parametro 1-38 Induttanza asse q
(Lq). Se il fornitore del motore
fornisce una curva di induzione,
immettere qui il valore di induzione
al 200% del valore nominale.
1-47 Taratura della coppia a bassa velocità
Option: Funzione:
Usare questo parametro per
ottimizzare la stima della coppia a
piena velocità. La coppia stimata è
basata sulla potenza dell'albero,
P
shaft
= Pm - Rs x I2. Assicurarsi che il
valore Rs sia corretto. Il valore Rs in
questa formula è uguale alla perdita
di potenza nel motore, nel cavo e
nel convertitore di frequenza.
Quando questo parametro è attivo,
il convertitore di frequenza calcola
il valore Rs durante l'accensione,
assicurando una stima ottimale
della coppia e una prestazione
ottimale. Utilizzare questa funzione
nei casi in cui non è possibile
regolare parametro 1-30 Resist.
statore (RS) su ogni convertitore di
frequenza per compensare la
lunghezza del cavo, le perdite del
convertitore di frequenza e lo
scostamento di temperatura sul
motore.
[0] * O
[1] 1° avviamento
dopo
l'accensione
Si calibra al primo avviamento dopo
l'accensione e mantiene questo
valore nché viene resettato da un
ciclo di accensione.
[2] Ogni avvio Si calibra a ogni avviamento,
compensando una possibile
variazione della temperatura
motore dall'ultimo avviamento. Il
valore viene resettato dopo lo
spegnimento e la riaccensione.
[3] 1st start with
store
Il convertitore di frequenza calibra
la coppia al primo avviamento
dopo l'accensione. Questa opzione
viene usata per aggiornare i
parametri motore.
Descrizione dei parametri Guida alla Programmazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 57
3 3
Page 60

1-47 Taratura della coppia a bassa velocità
Option: Funzione:
•
Parametro 1-30 Resist.
statore (RS).
•
Parametro 1-33 Reatt.
dispers. statore (X1).
•
Parametro 1-34 Reattanza
dispers. rotore (X2).
•
Parametro 1-37 Induttanza
asse d (Ld).
[4] Every start
with store
Il convertitore di frequenza calibra
la coppia a ogni avviamento,
compensando una possibile
variazione della temperatura
motore dall'ultima accensione.
Questa opzione viene usata per
aggiornare i parametri motore.
•
Parametro 1-30 Resist.
statore (RS).
•
Parametro 1-33 Reatt.
dispers. statore (X1).
•
Parametro 1-34 Reattanza
dispers. rotore (X2).
•
Parametro 1-37 Induttanza
asse d (Ld).
1-48 Inductance Sat. Point
Range: Funzione:
Size
related*
[1 - 500 %] Immettere il punto di saturazione
dell'induttanza.
1-49 Corrente a induttanza min.
Range: Funzione:
Size
related*
[ 0 - 200 %]
AVVISO!
Eseguire un AMA per
impostare il valore di questo
parametro. Modicare il valore
manualmente soltanto quando
l'applicazione richiede un
valore diverso da quello
determinato dall'AMA.
Immettere il punto di saturazione
dell'induttanza dell'asse q. Il convertitore di frequenza usa questo
valore per ottimizzare le prestazioni
di motori IPM.
Selezionare il valore che
corrisponde al punto in cui
l'induttanza è uguale al valore
medio del
parametro 1-38 Induttanza asse q
(Lq) e del parametro 1-45 q-axis
1-49 Corrente a induttanza min.
Range: Funzione:
Inductance Sat. (LqSat), come
percentuale di corrente nominale.
1-50 Magnetizz. motore a vel. nulla.
Range: Funzione:
100 %* [0 - 300 %]
AVVISO!
Il Parametro 1-50 Magnetizz.
motore a vel. nulla. non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Usare questo parametro insieme
along parametro 1-51 Min velocità
magnetizz. norm. [RPM] per ottenere
un carico termico dierente sul
motore nel funzionamento a bassa
velocità.
Immettere un valore che è una
percentuale della corrente
magnetizzante nominale. Un valore
troppo basso può ridurre la coppia
sull'albero motore.
Disegno 3.8 Corrente di
magnetizzazione
1-51 Min velocità magnetizz. norm. [RPM]
Range: Funzione:
Size
related*
[10 - 300
RPM]
AVVISO!
Il Parametro 1-51 Min velocità
magnetizz. norm. [RPM] non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Impostare la velocità richiesta per la
corrente di magnetizzazione
normale. Se la velocità è impostata
a un valore inferiore alla velocità di
scorrimento del motore, il
parametro 1-50 Magnetizz. motore a
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
3.3.9 1-5* Impos.indip.carico
58 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 61

1-51 Min velocità magnetizz. norm. [RPM]
Range: Funzione:
vel. nulla. e il parametro 1-51 Min
velocità magnetizz. norm. [RPM] non
hanno alcun signicato.
Utilizzare questo parametro insieme
al parametro 1-50 Magnetizz. motore
a vel. nulla.. Vedere la Tabella 3.7.
1-52 Min velocità magnetizz. normale [Hz]
Range: Funzione:
Size
related*
[ 0.3 - 10.0
Hz]
AVVISO!
Il Parametro 1-52 Min velocità
magnetizz. normale [Hz] non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Impostare la frequenza richiesta per
la corrente di magnetizzazione
normale. Se la frequenza viene
impostata a un valore inferiore alla
frequenza di scorrimento del
motore, il parametro 1-50 Magnetizz.
motore a vel. nulla. e il
parametro 1-51 Min velocità
magnetizz. norm. [RPM] sono
inattivi.
Utilizzare questo parametro insieme
al parametro 1-50 Magnetizz. motore
a vel. nulla.. Vedere la Tabella 3.7.
1-55 Caratteristica V/f - V
Array [6]
Range: Funzione:
Size
related*
[0 - 1000 V] Immettere la tensione in ogni
punto di frequenza per formare
manualmente una caratteristica U/f
che corrisponda al motore.
I punti di frequenza sono deniti
nel parametro 1-56 Caratteristica V/f
- f.
Questo parametro è un parametro
array [0-5] ed è solo accessibile
quando il parametro 1-01 Principio
controllo motore è impostato su [0]
U/f.
1-56 Caratteristica V/f - f
Array [6]
Range: Funzione:
Size
related*
[ 0 - 1000.0
Hz]
Immettere i punti di frequenza per
formare manualmente una caratteristica U/f che corrisponda al
motore.
La tensione in ogni punto è denita
nel parametro 1-55 Caratteristica V/f
- V.
Questo parametro è un parametro
array [0–5] ed è solo accessibile
quando il parametro 1-01 Principio
controllo motore è impostato su [0]
U/f.
1-58 Impulsi corr. test riagg. al volo
Range: Funzione:
Size
related*
[ 0 - 200 %] Impostare la grandezza della
corrente di magnetizzazione degli
impulsi usati per rilevare la
direzione del motore. L'intervallo di
valori e la funzione dipendono dal
parametro 1-10 Struttura motore:
[0] Asincrono: [0–200%]
La riduzione di questo valore riduce
la coppia generata. 100% equivale
alla corrente nominale piena del
motore. In questo caso il valore di
default è 30%.
[1] PM, SPM non saliente: [0–40%]
Si raccomanda un'impostazione
generale del 20% sui motori PM.
Valori più alti possono dare delle
prestazioni maggiori. Tuttavia, sui
motori in cui la forza c.e.m. è
superiore a 300 VLL (rms) a velocità
nominale e con un'elevata
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 59
Disegno 3.9 Caratteristica U/f
Page 62

1-58 Impulsi corr. test riagg. al volo
Range: Funzione:
induttanza dell'avvolgimento
(superiore a 10 mH) è
raccomandato un valore inferiore
per evitare un'errata stima della
velocità. Questo parametro è attivo
soltanto se il
parametro 1-73 Riaggancio al volo è
abilitato.
1-59 Frequenza imp. test riagg. al volo
Range: Funzione:
Size
related*
[ 0 - 500 %]
AVVISO!
Vedere la descrizione di
parametro 1-70 Modalità avvio
per una panoramica della
relazione tra i parametri di
riaggancio al volo PM.
L'intervallo di valori e la funzione
dipendono dal
parametro 1-10 Struttura motore:
[0] Asincrono: [0–500%]
Controlla la percentuale della
frequenza degli impulsi usati per
rilevare la direzione del motore.
L'aumento di questo valore riduce
la coppia generata. In questa
modalità, 100% signica due volte
la frequenza di scorrimento.
[1] PM, SPM non saliente: [0–10%]
Questo parametro denisce la
velocità del motore (in percentuale
della velocità nominale del motore)
al di sotto della quale la funzione di
parcheggio (vedere
parametro 2-06 Corrente di
parcheggio e parametro 2-07 Tempo
di parcheggio) diventa attiva.
Questo parametro è attivo soltanto
quando il parametro 1-70 Modalità
avvio è impostato su [1] Parcheggio
e solamente dopo l'avviamento del
motore.
1-60 Compensaz. del carico a bassa vel.
Range: Funzione:
100 %* [0 - 300 %]
AVVISO!
Il Parametro 1-60 Compensaz.
del carico a bassa vel. non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere il valore % per
compensare la tensione in relazione
al carico quando il motore funziona
a bassa velocità e ottenere la
caratteristica U/f ottimale. Le
dimensioni del motore determinano
i campi di frequenza entro i quali è
attivo questo parametro.
Dimensioni
motore [kW]
Commutazione
[Hz]
0,25–7,5 <10
11–45 <5
55–550 <3–4
Tabella 3.8 Frequenza di
commutazione
130BA046.11
60%
0%
100%
U
m
Par.1- 60
Par.1- 61
f
out
COMMUTAZIONE
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.3.10 1-6* Imp. dipend. dal car.
33
60 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Disegno 3.10 Compensazione del carico a bassa velocità
Page 63
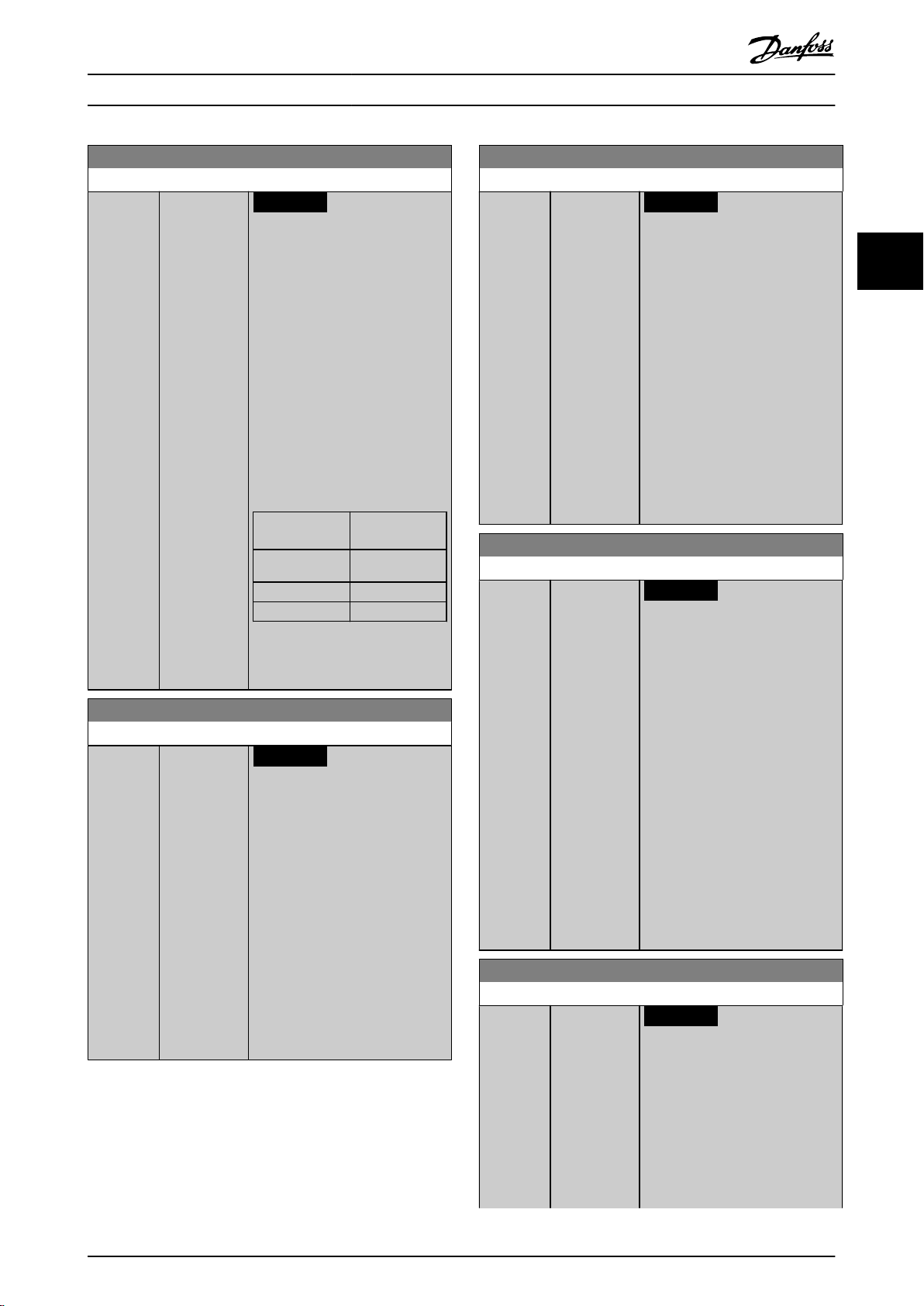
1-61 Compensaz. del carico ad alta vel.
Range: Funzione:
100 %* [0 - 300 %]
AVVISO!
Il Parametro 1-61 Compensaz.
del carico ad alta vel. non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere il valore percentuale per
compensare la tensione in relazione
al carico quando il motore funziona
ad alta velocità e ottenere la
caratteristica U/f ottimale. Le
dimensioni del motore determinano
i campi di frequenza entro i quali è
attivo questo parametro.
Dimensioni
motore [kW]
Commutazione
[Hz]
0,25–7,5 >10
11–45 <5
55–550 <3–4
Tabella 3.9 Frequenza di
commutazione
1-62 Compens. scorrim.
Range: Funzione:
0 %* [-500 -
500 %]
AVVISO!
Il Parametro 1-62 Compens.
scorrim. non ha alcun eetto
quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Per compensare le tolleranze nel
valore di n
M,N
, immettere il valore %
per la compensazione dello
scorrimento. La compensazione
dello scorrimento viene calcolata
automaticamente, vale a dire in
base alla velocità nominale del
motore n
M,N
.
1-63 Costante di tempo compens. scorrim.
Range: Funzione:
Size
related*
[0.05 - 5 s]
AVVISO!
Il Parametro 1-63 Costante di
tempo compens. scorrim. non
ha alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere la velocità di reazione
della compensazione dello
scorrimento. Un valore alto
comporta una reazione lenta
mentre un valore basso comporta
una reazione veloce. In caso di
problemi di risonanza a bassa
frequenza, prolungare l'impostazione del tempo.
1-64 Smorzamento risonanza
Range: Funzione:
Size
related*
[0 - 500 %]
AVVISO!
Il Parametro 1-64 Smorzamento
risonanza non ha alcun eetto
quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere il valore di smorzamento
risonanza. Impostare
parametro 1-64 Smorzamento
risonanza e
parametro 1-65 Smorzamento ris.
tempo costante per eliminare
problemi di risonanza ad alta
frequenza. Per ridurre l'oscillazione
di risonanza aumentare il valore del
parametro 1-64 Smorzamento
risonanza.
1-65 Smorzamento ris. tempo costante
Range: Funzione:
5 ms* [5 - 50 ms]
AVVISO!
Il Parametro 1-65 Smorzamento
ris. tempo costante non ha
alcun eetto quando il
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Impostare
parametro 1-64 Smorzamento
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 61
Page 64

1-65 Smorzamento ris. tempo costante
Range: Funzione:
risonanza e
parametro 1-65 Smorzamento ris.
tempo costante per eliminare
problemi di risonanza ad alta
frequenza. Immettere la costante di
tempo che fornisce lo smorzamento
ideale.
1-66 Corrente min. a velocità bassa
Range: Funzione:
Size
related*
[ 1 - 200 %]
AVVISO!
Il Parametro 1-66 Corrente min.
a velocità bassa non ha alcun
eetto quando il
parametro 1-10 Struttura
motore = [0] Asincrono.
Immettere la corrente motore
minima a bassa velocità.
L'aumento di questa corrente
migliora la coppia del motore a
bassa velocità. La bassa velocità qui
è denita come velocità inferiore al
6% della velocità nominale del
motore (parametro 1-25 Vel.
nominale motore) nel controllo PM
VVC+ .
1-70 Modalità avvio
Option: Funzione:
[0] Rilevamento
del rotore
Adatto per tutte le applicazioni in
cui il motore è fermo al momento
dell'avviamento (per esempio
trasportatori, pompe e ventole non
autorotanti).
[1] Parcheggio Se il motore gira a una velocità
ridotta (cioè meno del 2–5% della
velocità nominale), per esempio a
causa di ventole con una leggera
autorotazione, selezionare [1]
Parcheggio e regolare il
parametro 2-06 Corrente di
parcheggio e il
parametro 2-07 Tempo di parcheggio
di conseguenza.
[2] Rotor Det. w/
Parking
1-71 Ritardo avv.
Range: Funzione:
00 s* [0 - 300 s] Immettere il ritardo di tempo tra il
comando di avviamento e il
momento in cui il convertitore di
frequenza alimenta il motore.
Questo parametro si riferisce alla
funzione di avviamento selezionata
nel parametro 1-72 Funz. di avv..
1-72 Funz. di avv.
Option: Funzione:
Selezionare la funzione di
avviamento durante il ritardo all'avviamento. Questo parametro è
collegato al parametro 1-71 Ritardo
avv..
[0] Corr. CC/t.
ritardo
Alimenta il motore con una
corrente di mantenimento CC
(parametro 2-00 Corrente CC funzio-
namento/preriscaldamento) durante
il tempo di ritardo all'avviamento.
[2] Ev. libera/t.
ritardo
Motore a ruota libera durante il
tempo di ritardo all'avviamento
(inverter disinserito).
Le scelte disponibili dipendono dal
parametro 1-10 Struttura motore: [0]
Asincrono:
•
[2] Ev. libera.
•
[0] Corr. CC.
[1] PM, SPM non saliente:
•
[2] Ev. libera.
1-73 Riaggancio al volo
Option: Funzione:
Questa funzione consente di sincronizzarsi con un motore che gira
liberamente a causa di una caduta
di tensione di rete.
Quando il
parametro 1-73 Riaggancio al volo è
abilitato, il parametro 1-71 Ritardo
avv. non ha alcuna funzione.
La direzione di ricerca per il
riaggancio al volo è collegata all'impostazione nel parametro 4-10 Direz.
velocità motore.
[0] Senso orario: il riaggancio al volo
cerca in senso orario. Se non
funziona, viene eseguito un freno
CC.
[2] Entrambe le direzioni: il
riaggancio al volo prima eettua
una ricerca nella direzione
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
3.3.11 1-7* Regolaz.per avvio
62 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 65

1-73 Riaggancio al volo
Option: Funzione:
determinata dall'ultimo riferimento
(direzione). Se la velocità non viene
trovata, eettua una ricerca
nell'altra direzione. Se non funziona,
viene attivato un freno CC nel
tempo impostato nel
parametro 2-02 Tempo di frenata CC.
In seguito l'avvio avviene da 0 Hz.
[0] Disattivato Selezionare [0] Disattivato se questa
funzione non è necessaria.
[1] Abilitato Selezionare [1] Abilitato per abilitare
il convertitore di frequenza ad
agganciare e controllare un motore
in rotazione.
Il parametro è sempre impostato su
[1] Abilitato quando il
parametro 1-10 Struttura motore =
[1] PM, SPM non saliente.
Parametri relativi importanti:
•
Parametro 1-58 Impulsi
corr. test riagg. al volo.
•
Parametro 1-59 Frequenza
imp. test riagg. al volo.
•
Parametro 1-70 Modalità
avvio.
•
Parametro 2-03 Vel. inserim.
frenatura CC [RPM].
•
Parametro 2-04 Velocità
inserimento frenatura CC
[Hz].
•
Parametro 2-06 Corrente di
parcheggio.
•
Parametro 2-07 Tempo di
parcheggio.
1-79 T. max scatto avviam. compr.
Range: Funzione:
0 s* [ 0 - 3600.0s]Se il motore non raggiunge la
velocità specicata nel
parametro 1-86 Velocità scatto bassa
[giri/min] entro il tempo specicato
in questo parametro, il convertitore
di frequenza scatta. Il tempo in
questo parametro include il tempo
specicato nel
parametro 1-71 Ritardo avv.. Per
esempio, se il valore nel
parametro 1-71 Ritardo avv. è
superiore o uguale al valore nel
parametro 1-79 T. max scatto
avviam. compr., il convertitore di
frequenza non si avvia mai.
Descrizione dei parametri Guida alla Programmazione
Quando il parametro 1-73 Riaggancio al volo è abilitato, il
parametro 1-71 Ritardo avv. non ha alcuna funzione.
La funzione di avviamento Riaggancio al volo per motori
PM è basata su una stima di velocità iniziale. La velocità è
sempre stimata immediatamente dopo che viene dato un
segnale di avviamento attivo. Sulla base dell'impostazione
del parametro 1-70 Modalità avvio avviene quanto segue:
Parametro 1-70 Modalità avvio = [0] Rilevamento del rotore:
Se la stima di velocità risulta essere superiore a 0 Hz, il
convertitore di frequenza aggancia il motore a quella
velocità e riprende il funzionamento normale. Altrimenti il
convertitore di frequenza stima la posizione del rotore e
avvia il funzionamento normale da lì.
Parametro 1-70 Modalità avvio=[1] Parcheggio:
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 63
Se la stima di velocità risulta essere inferiore dell'impostazione nel parametro 1-59 Frequenza imp. test riagg. al
volo, allora viene attivata la funzione di parcheggio (vedere
parametro 2-06 Corrente di parcheggio e
parametro 2-07 Tempo di parcheggio). Altrimenti il conver-
titore di frequenza aggancia il motore a quella velocità e
riprende il funzionamento normale. Fare riferimento alla
descrizione del parametro 1-70 Modalità avvio per le
impostazioni consigliate.
Limitazioni correnti del principio di riaggancio al volo usato
per motori PM:
L'intervallo di velocità arriva no al 100% della
•
velocità nominale o alla velocità di indebolimento
di campo (a seconda del valore che è più basso).
Il PMSM con elevata forza c.e.m. (>300 VLL(rms))
•
e un'elevata induttanza di avvolgimento (>10 mH)
richiede più tempo per azzerare la corrente di
cortocircuito e potrebbe essere soggetto a errori
di stima.
Test della corrente limitato a un intervallo di
•
velocità no a 300 Hz. Per certe unità, il limite è
250 Hz; tutte le unità 200–240 V no a 2,2 kW (3
cv) inclusi e tutte le unità 380–480 V no a 4 kW
(5,4 cv) inclusi.
Il test della corrente è limitato a una taglia di
•
potenza della macchina no a 22 kW (30 cv).
Predisposto per una macchina a poli salienti
•
(IPMSM) ma non ancora vericato su questo tipo
di macchina.
Per applicazioni ad alta inerzia (dove l'inerzia del
•
carico è di oltre 30 volte superiore all'inerzia del
motore), si raccomanda una resistenza di
frenatura per evitare uno scatto per sovratensione
durante l'intervento ad alta velocità della
funzione di riaggancio al volo.
3 3
Page 66

1-80 Funzione all'arresto
Option: Funzione:
Seleziona la funzione del convertitore di frequenza dopo un
comando di arresto o dopo che la
velocità è stata decelerata in rampa
secondo quanto impostato nel
parametro 1-81 Vel.min. per
funz.all'arresto[giri/min].
Le scelte disponibili dipendono dal
parametro 1-10 Struttura motore:
[0] Asincrono:
•
[0] Evol. libera.
•
[1] Corrente CC.
[1] PM, SPM non saliente:
•
[0] Evol. libera.
[0] * Evol. libera Lascia il motore in evoluzione
libera.
[1] Corrente CC/
prerisc. mot.
Alimenta il motore con una
corrente di mantenimento CC
(vedere il parametro 2-00 Corrente
CC funzionamento/preriscaldamento).
[2] Ctrl mot.
[6] Contr. motore,
all.
1-81 Vel.min. per funz.all'arresto[giri/min]
Range: Funzione:
Size
related*
[0 - 600
RPM]
Impostare la velocità alla quale
attivare parametro 1-80 Funzione
all'arresto.
1-82 V. min. funz. all'arr. [Hz]
Range: Funzione:
Size
related*
[ 0 - 20.0 Hz] Impostare la frequenza di uscita alla
quale attivare
parametro 1-80 Funzione all'arresto.
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Velocità scatto bassa [giri/min]
Range: Funzione:
Size
related*
[ 0 - par. 4-13
RPM]
AVVISO!
Questo parametro è
disponibile soltanto se il
parametro 0-02 Unità velocità
motore è impostato su [11]
Giri/minuto.
Impostare il limite basso per la
velocità del motore alla quale il
convertitore di frequenza scatta. Se
il valore è 0, la funzione non è
attiva. Se in un momento qualsiasi
dopo l'avviamento (o durante un
arresto), la velocità scende al di
sotto del valore nel parametro, il
convertitore di frequenza scatta
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.3.12 1-8* Adattam. arresto
basso vel. motore [giri/min] e nel parametro 4-12 Limite
basso velocità motore [Hz].
Se la velocità scende al di sotto di un determinato valore,
la funzione di monitoraggio avanzato della velocità minima
fa scattare il convertitore di frequenza. Se il motore della
pompa non raggiunge la velocità specicata nel
33
parametro 1-86 Velocità scatto bassa [giri/min] entro il
tempo specicato nel parametro 1-79 T. max scatto avviam.
compr. (la rampa richiede troppo tempo), il convertitore di
frequenza scatta. I timer per il parametro 1-71 Ritardo avv. e
il parametro 1-79 T. max scatto avviam. compr. si avviano
contemporaneamente quando viene emesso il comando di
avviamento. Per esempio, ciò signica che se il valore nel
parametro 1-71 Ritardo avv. è superiore o uguale al valore
nel parametro 1-79 T. max scatto avviam. compr., il conver-
titore di frequenza non si avvia mai.
3.3.13 Monitoraggio avanzato della velocità
Alcune pompe sono sensibili al funzionamento a bassa
velocità. Le ragioni tipiche sono un rareddamento o una
lubricazione insucienti a bassa velocità.
In condizioni di sovraccarico, il convertitore di frequenza si
autoprotegge usando le sue funzioni di protezione
integrate, che includono l'abbassamento della velocità. Per
esempio, il regolatore limitazione di corrente può
abbassare la velocità. Talvolta, la velocità può scendere al
di sotto della velocità specicata nel parametro 4-11 Lim.
64 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
minima per pompe sommerse
T
1-71
T
1-79
N
1-86
1 Funzionamento normale.
Disegno 3.11 Monitoraggio avanzato della velocità minima
Parametro 1-71 Ritardo avv..
Parametro 1-79 T. max scatto avviam. compr.. Questo
tempo include il tempo in T
Parametro 1-86 Velocità scatto bassa [giri/min]. Se la
velocità scende al di sotto di questo valore durante il
funzionamento normale, il convertitore di frequenza
scatta.
1-71
.
Page 67

1-86 Velocità scatto bassa [giri/min]
Range: Funzione:
emettendo l'allarme 49, Lim.
velocità.
1-87 Velocità scatto bassa [Hz]
Range: Funzione:
Size
related*
[ 0 - par. 4-14
Hz]
AVVISO!
Questo parametro è
disponibile soltanto se il
parametro 0-02 Unità velocità
motore è impostato su [1] Hz.
Impostare il limite basso per la
velocità del motore alla quale il
convertitore di frequenza scatta. Se
il valore è 0, la funzione non è
attiva. Se in un momento qualsiasi
dopo l'avviamento (o durante un
arresto), la velocità scende al di
sotto del valore nel parametro, il
convertitore di frequenza scatta
emettendo l'allarme 49, Lim.
velocità.
Descrizione dei parametri Guida alla Programmazione
3.3.14 1-9* Temp. motore
1-90 Protezione termica motore
Option: Funzione:
La protezione termica del motore può essere
implementata mediante una gamma di
tecniche:
Per il mercato nordamericano: le funzioni ETR
forniscono una protezione da sovraccarico
motore classe 20, conformemente alle norme
NEC.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 65
Tramite un sensore PTC negli
•
avvolgimenti del motore collegato a
uno degli ingressi analogici o digitali
(parametro 1-93 Fonte termistore).
Vedere la capitolo 3.3.15 Collegamento
termistore PTC.
Mediante il calcolo del carico termico
•
(ETR = relè termico elettronico),
basato sul carico corrente e sul
tempo. Il carico termico calcolato
viene confrontato con la corrente
nominale del motore I
frequenza nominale del motore f
Vedere la capitolo 3.3.16 ETR e la
capitolo 3.3.17 ATEX ETR.
Mediante un interruttore termomec-
•
canico (tipo Klixon). Vedere la
capitolo 3.3.18 Klixon.
M,N
e la
M,N
1-90 Protezione termica motore
Option: Funzione:
.
[0] Nessuna
protezione
[1] Termistore,
avviso
[2] Termistore,
scatto
[3] ETR avviso1Calcola il carico quando è attivo Setup 1 ed
[4] ETR scatto1Calcola il carico quando è attivo Setup 1 e
[5] ETR avviso
2
[6] ETR scatto
2
[7] ETR avviso
3
[8] ETR scatto
3
[9] ETR avviso
4
[10] ETR scatto
4
[20] ATEX ETR Attiva la funzione di monitoraggio termico dei
AVVISO!
Motore continuamente in sovraccarico quando
non è richiesto alcun avviso o scatto del
convertitore di frequenza.
Attiva un avviso quando il termistore collegato
o il sensore KTY nel motore reagiscono se si
verica una sovratemperatura del motore.
Arresta (fa scattare) il convertitore di frequenza
quando il termistore collegato o il sensore KTY
nel motore reagiscono se si verica una
sovratemperatura del motore.
Il valore di disinserimento del termistore deve
essere maggiore di 3 kΩ.
Integrare un termistore (sensore PTC) nel
motore come protezione degli avvolgimenti.
emette un avviso sul display quando il motore
è sovraccaricato. Programmare un segnale di
avviso tramite una delle uscite digitali.
arresta (fa scattare) il convertitore di frequenza
quando il motore è sovraccaricato.
Programmare un segnale di avviso tramite una
delle uscite digitali. Il segnale appare se è
presente un avviso e se il convertitore di
frequenza scatta (avviso termico).
motori Ex-e per ATEX. Abilita il
parametro 1-94 ATEX ETR cur.lim. speed
reduction, il parametro 1-98 ATEX ETR interpol.
points freq. e il parametro 1-99 ATEX ETR
interpol points current.
Se è selezionato [20] ATEX ETR, seguire rigorosamente le
istruzioni nel capitolo dedicato nella Guida alla Proget-
tazione e le istruzioni fornite dal produttore del motore.
AVVISO!
Se viene selezionato [20] ATEX ETR, impostare il
parametro 4-18 Limite di corrente su 150%.
3 3
Page 68

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.3.15 Collegamento termistore PTC
Impostare parametro 1-90 Protezione termica
•
motore su [2] Termistore, scatto.
Impostare parametro 1-93 Fonte termistore su [2]
•
Ingr. analog. 54
33
Disegno 3.14 Collegamento termistore PTC - ingresso
analogico
Disegno 3.12 Prolo PTC
Utilizzando un ingresso digitale e 10 V come alimentazione.
Esempio: il convertitore di frequenza scatta quando la
temperatura del motore è eccessiva.
Programmazione parametri:
Impostare parametro 1-90 Protezione termica
•
motore su [2] Termistore, scatto.
Impostare parametro 1-93 Fonte termistore su [6]
•
Ingresso digitale.
Ingresso
digitale/
analogico
Digitale 10 V
Analogico 10 V
Tabella 3.10 Soglia valori di disinserimento
AVVISO!
Vericare che la tensione di alimentazione selezionata
corrisponda alle speciche dell'elemento termistore
usato.
3.3.16 ETR
Il calcolo stima la richiesta di una diminuzione del carico a
basse velocità a causa di un minor rareddamento dalla
ventola incorporata nel motore.
Tensione di
alimentazione
Soglia
valori di disinserimento
<800 Ω⇒2,7 kΩ
<3,0 kΩ⇒3,0 kΩ
Disegno 3.13 Collegamento termistore PTC - ingresso digitale
Utilizzando un ingresso analogico e 10 V come alimentazione.
Esempio: il convertitore di frequenza scatta quando la
temperatura del motore è eccessiva.
Programmazione parametri:
Disegno 3.15 Prolo ETR
66 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 69

Descrizione dei parametri Guida alla Programmazione
3.3.17 ATEX ETR
La VLT® PTC Thermistor Card MCB 112 ore un monitoraggio approvato ATEX della temperatura del motore. In
alternativa è possibile utilizzare un dispositivo di
protezione PTC esterno approvato ATEX.
AVVISO!
Usare solo motori approvati ATEX Ex-e per questa
funzione. Vedere la targhetta del motore, il certicato di
approvazione, la scheda tecnica o contattare il fornitore
del motore.
Quando si controlla un motore Ex-e con maggiore
sicurezza, è importante assicurare certi limiti. I parametri
che devono essere programmati sono illustrati nella
Tabella 3.11.
Funzione Impostazione
Parametro 1-90 Protezione
termica motore
Parametro 1-94 ATEX ETR cur.lim.
speed reduction
Parametro 1-98 ATEX ETR
interpol. points freq.
Parametro 1-99 ATEX ETR interpol
points current
Parametro 1-23 Frequen. motore Immettere lo stesso valore
Parametro 4-19 Freq. di uscita
max.
Parametro 4-18 Limite di corrente Forzato a 150% da 1-90 [20]
Parametro 5-15 Ingr. digitale
morsetto 33
Parametro 5-19 Arresto di
sicurezza morsetto 37
Parametro 14-01 Freq. di
commutaz.
Parametro 14-26 Ritardo scatto
al guasto inverter
[20] ATEX ETR
20%
Targhetta del motore.
come per il
parametro 4-19 Freq. di uscita
max..
Targa del motore,
possibilmente ridotta per
lunghi cavi motore, ltro
sinusoidale o tensione di
alimentazione ridotta.
[80] Scheda PTC 1
[4] Allarme PTC 1
Controllare che il valore
predenito soddis i requisiti
della targhetta del motore. In
caso contrario, usare un ltro
sinusoidale.
0
AVVISO!
Confrontare il requisito di frequenza di commutazione
minima indicata dal costruttore del motore con la
frequenza di commutazione minima del convertitore di
frequenza il valore predenito in parametro 14-01 Freq. di
commutaz.. Se il convertitore di frequenza non soddisfa
questo requisito, usare un ltro sinusoidale.
Per maggiori informazioni sul monitoraggio termico ATEX
ETR, consultare le Note sull'applicazione per la funzione di
monitoraggio termico ATEX ETR FC 300.
3.3.18 Klixon
L'interruttore termico Klixon utilizza un disco di metallo
KLIXON®. A un sovraccarico prestabilito, il calore causato
dalla corrente nel disco provoca uno scatto.
Utilizzando un ingresso digitale e 24 V come alimentazione.
Esempio: il convertitore di frequenza scatta quando la
temperatura del motore è eccessiva.
Programmazione parametri:
Impostare parametro 1-90 Protezione termica
•
motore su [2] Termistore, scatto.
Impostare parametro 1-93 Fonte termistore su [6]
•
Ingresso digitale.
Disegno 3.16 Collegamento termistore
3 3
Tabella 3.11 Parametri
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 67
Page 70
1-91 Ventilaz. est. motore
Option: Funzione:
[0] * No Non è necessario alcun ventilatore
esterno, vale a dire che il motore
viene declassato a bassa velocità.
[1] Sì Applica una ventola esterna del
motore (ventilazione esterna),
quindi non è necessario alcun
declassamento del motore a bassa
velocità. La curva superiore nel
graco in Disegno 3.15 (f
out
= 1 x
f
M,N
) viene seguita se la corrente
motore è inferiore alla corrente
nominale del motore (vedere
parametro 1-24 Corrente motore). Se
la corrente motore supera la
corrente nominale, il tempo di
funzionamento continua a
diminuire come se non fosse
installata alcuna ventola.
1-93 Fonte termistore
Option: Funzione:
AVVISO!
Questo parametro non può
essere regolato mentre il
motore è in funzione.
AVVISO!
L'ingresso digitale deve essere
impostato su [0] PNP - attivo a
24V in parametro 5-00 Modo
I/O digitale.
Selezionare l'ingresso al quale
dovrebbe essere collegato il
termistore (sensore PTC).
Un'opzione ingresso analogico [1]
Ingr. analog. 53 o [2] Ingr. analog. 54
non può essere selezionata se
l'ingresso analogico è già utilizzato
come risorsa di riferimento
(selezionato in
parametro 3-15 Risorsa di rif. 1,
parametro 3-16 Risorsa di riferimento
2, o parametro 3-17 Risorsa di
riferimento 3).
Quando si usa una VLT® PTC
Thermistor Card MCB 112,
selezionare sempre [0] Nessuno.
[0] * Nessuno
[1] Ingr. analog.
53
[2] Ingr. analog.
54
1-93 Fonte termistore
Option: Funzione:
[3] Ingresso
digitale 18
[4] Ingresso
digitale 19
[5] Ingresso
digitale 32
[6] Ingresso
digitale 33
1-95 Tipo di sensore KTY
Option: Funzione:
Selezionare il tipo di sensore
termistore.
[0] * Sensore KTY 1
1 kΩ a 100 °C (212 °F).
[1] Sensore KTY 2
1 kΩ a 25 °C (77 °F).
[2] Sensore KTY 3
2 kΩ a 25 °C (77 °F).
[3] Pt1000
1-96 Risorsa termistore KTY
Option: Funzione:
Selezionare il morsetto 54 di
ingresso analogico come ingresso
sensore termistore. Il morsetto 54
non può essere selezionato come
fonte termistore se utilizzato
altrimenti come riferimento (vedere
dal parametro 3-15 Risorsa di rif. 1 al
parametro 3-17 Risorsa di riferimento
3).
AVVISO!
Collegamento del sensore
termistore tra morsetto 54 e
55 (GND). Vedere la
capitolo 3.3.15 Collegamento
termistore PTC.
[0] * Nessuno
[2] Ingr. analog.
54
1-97 Livello soglia KTY
Range: Funzione:
80 °C* [ -40 -
220 °C]
Selezionare il livello soglia del
sensore termistore per la protezione
termica del motore.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
68 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 71

2-00 Corrente CC funzionamento/preriscaldamento
Range: Funzione:
50 %* [ 0 - 160 %]
AVVISO!
Il Parametro 2-00 Corrente CC
funzionamento/preriscaldamento non ha alcun eetto
quando
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
AVVISO!
Il valore massimo dipende
dalla corrente nominale del
motore.
Evitare di applicare il 100%
della corrente per troppo
tempo. Potrebbe danneggiare
il motore.
Immettere un valore per la corrente
di mantenimento come percentuale
della corrente nominale del motore
I
M,N
impostata in
parametro 1-24 Corrente motore. Il
100% della corrente di
mantenimento CC corrisponde a
I
M,N
.
Questo parametro serve a
mantenere il motore (coppia di
mantenimento) o a preriscaldare il
motore.
Questo parametro è attivo se viene
selezionato [1] Corrente CC/prerisc.
mot. nel parametro 1-80 Funzione
all'arresto.
2-01 Corrente di frenatura CC
Range: Funzione:
50 %* [ 0 - 1000 %]
AVVISO!
Il valore massimo dipende
dalla corrente nominale del
motore. Evitare di applicare il
100% della corrente per
troppo tempo. Potrebbe
danneggiare il motore.
2-01 Corrente di frenatura CC
Range: Funzione:
Immettere un valore per la corrente
di mantenimento come percentuale
della corrente nominale del motore
I
M,N
, vedere parametro 1-24 Corrente
motore. Il 100% della corrente di
frenatura CC corrisponde a I
M,N
.
La corrente di frenatura CC viene
applicata in occasione di un
comando di arresto se la velocità è
inferiore al limite impostato nel:
•
Parametro 2-03 Vel. inserim.
frenatura CC [RPM].
•
Parametro 2-04 Velocità
inserimento frenatura CC
[Hz], quando è attiva la
funzione frenatura CC a
recupero o mediante la
porta di comunicazione
seriale.
La corrente di frenatura è attiva
durante il periodo di tempo
impostato nel
parametro 2-02 Tempo di frenata CC.
2-02 Tempo di frenata CC
Range: Funzione:
10 s* [0 - 60 s] Immettere la durata della corrente
di frenatura CC impostata in
parametro 2-01 Corrente di frenatura
CC dopo l'attivazione.
2-03 Vel. inserim. frenatura CC [RPM]
Range: Funzione:
Size
related*
[ 0 - 0 RPM]
AVVISO!
Il Parametro 2-03 Vel. inserim.
frenatura CC [RPM] non ha
alcun eetto quando
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere la velocità di inserimento
del freno CC per l'attivazione della
corrente di frenatura CC impostata
nel parametro 2-01 Corrente di
frenatura CC in seguito a un
comando di arresto.
Quando il parametro 1-10 Struttura
motore è impostato su [1] PM, SPM
non saliente, questo valore è
limitato a 0 Giri/min. (OFF).
Descrizione dei parametri Guida alla Programmazione
3.4 Parametri 2-** Freni
3.4.1 2-0* Freno CC
Gruppo di parametri per congurare il freno CC e le
funzioni di mantenimento CC.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 69
Page 72

2-04 Velocità inserimento frenatura CC [Hz]
Range: Funzione:
Size
related*
[ 0 - 0.0 Hz]
AVVISO!
Il Parametro 2-04 Velocità
inserimento frenatura CC [Hz]
non ha alcun eetto quando
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere la velocità di inserimento
del freno CC per l'attivazione della
corrente di frenatura CC impostata
nel parametro 2-01 Corrente di
frenatura CC dopo un comando di
arresto.
2-06 Corrente di parcheggio
Range: Funzione:
50 %* [ 0 - 1000 %]
AVVISO!
Parametro 2-06 Corrente di
parcheggio e
parametro 2-07 Tempo di
parcheggio: è attivo soltanto
quando [1] PM, SPM non
saliente è selezionato nel
parametro 1-10 Struttura
motore.
Impostare la corrente come
percentuale della corrente nominale
del motore, parametro 1-24 Corrente
motore. Attiva con il
parametro 1-73 Riaggancio al volo.
La corrente di parcheggio è attiva
durante il periodo di tempo
impostato nel
parametro 2-07 Tempo di parcheggio.
2-07 Tempo di parcheggio
Range: Funzione:
3 s* [0.1 - 60 s] Impostare la durata della corrente
di parcheggio impostata nel
parametro 2-06 Corrente di
parcheggio. Attiva con il
parametro 1-73 Riaggancio al volo.
AVVISO!
Parametro 2-07 Tempo di
parcheggio è attivo soltanto
quando [1] PM, SPM non
saliente viene selezionato nel
parametro 1-10 Struttura
motore.
2-10 Funzione freno
Option: Funzione:
Le scelte disponibili dipendono dal
parametro 1-10 Struttura motore:
[0] Asincrono:
•
[0] O.
•
[1] Freno resistenza.
•
[2] Freno CA.
[1] PM, SPM non saliente:
•
[0] O.
•
[1] Freno resistenza.
[0] O Nessuna resistenza di frenatura
installata.
[1] Freno
resistenza
La resistenza freno incorporata nel
sistema, per la dissipazione o per
un eccesso di energia di frenatura
come calore. Il collegamento di una
resistenza freno consente una
maggiore tensione del
collegamento CC durante la
frenatura (funzionamento rigenerativo). La funzione freno resistenza
è attiva solo in convertitori di
frequenza dotati di un freno
dinamico integrale.
[2] Freno CA La frenatura CA funziona solo nel
modo coppia del compressore nel
parametro 1-03 Caratteristiche di
coppia.
2-11 Resistenza freno (ohm)
Range: Funzione:
Size
related*
[ 5 - 65535
Ohm]
Impostare il valore della resistenza
di frenatura in Ω. Questo valore
viene usato per monitorare la
potenza trasmessa alla resistenza di
frenatura nel
parametro 2-13 Monitor. potenza
freno. Questo parametro è solo
attivo in convertitori di frequenza
dotati di un freno dinamico
integrale.
Utilizzare questo parametro per i
valori senza decimali. Per una
selezione con due decimali,
utilizzare il
parametro 30-81 Resistenza freno
(ohm).
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.4.2 2-1* Funz. energia freno
Gruppo di parametri per selezionare i parametri del freno
dinamico. Solo valido per convertitori di frequenza con
chopper di frenatura.
33
70 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 73

2-12 Limite di potenza freno (kW)
Range: Funzione:
Size
related*
[ 0.001 -
2000.000 kW]
AVVISO!
Questo parametro è solo attivo
in convertitori di frequenza
dotati di un freno dinamico
integrale.
Impostare il limite di monitoraggio
della potenza freno trasmessa alla
resistenza.
Il limite di monitoraggio è un
prodotto del massimo duty cycle
(120 s) e della massima potenza
della resistenza di frenatura a quel
duty cycle. Vedere le formule
seguenti.
Per unità a 200–240 V:
P
resistor
=
3902 × dutytime
R × 120
Per unità a 380–480 V:
P
resistor
=
7782 × dutytime
R × 120
Per unità a 525–600 V:
P
resistor
=
9432 × dutytime
R × 120
2-13 Monitor. potenza freno
Option: Funzione:
AVVISO!
Questo parametro è solo attivo
in convertitori di frequenza
dotati di un freno dinamico
integrale.
Questo parametro abilita il monitoraggio della potenza trasmessa alla
resistenza freno. La potenza viene
calcolata sulla base della resistenza
(parametro 2-11 Resistenza freno
(ohm)), la tensione del
collegamento CC e il tempo di
funzionamento della resistenza.
[0] * O Non è necessario alcun monito-
raggio della potenza freno.
Se il monitoraggio potenza è
impostato su [0] O o [1] Avviso, la
funzione freno rimane attivata
anche se il limite di monitoraggio è
stato superato. Ciò può causare un
sovraccarico termico del convertitore. Inoltre è possibile ricevere un
avviso mediante il relè o l'uscita
digitale. La precisione di
misurazione del monitoraggio
2-13 Monitor. potenza freno
Option: Funzione:
potenza dipende dalla precisione
della resistenza del resistore
(superiore a ±20%).
[1] Avviso Attiva un avviso quando la potenza
trasmessa per 120 s supera il 100%
del limite di monitoraggio
(parametro 2-12 Limite di potenza
freno (kW)).
L'avviso scompare se la potenza
trasmessa scende al di sotto
dell'80% del limite di monitoraggio.
[2] Allarme Fa scattare il convertitore di
frequenza e visualizza un allarme
quando la potenza calcolata supera
il 100% del limite di monitoraggio.
[3] Avviso e
allarme
Attiva entrambi, incluso avviso,
scatto e allarme.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
2-15 Controllo freno
Option: Funzione:
AVVISO!
Rimuovere un avviso emesso
in relazione a [0] O o [1]
Avviso disinserendo e
reinserendo l'alimentazione di
rete. Correggere prima il
guasto. Con [0] O o [1] Avviso,
il convertitore di frequenza
continua a funzionare anche se
è stato rilevato un guasto.
Selezionare il tipo di test e la
funzione di monitoraggio per
controllare il collegamento alla
resistenza freno o la presenza di
una resistenza freno, quindi
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 71
Page 74

2-15 Controllo freno
Option: Funzione:
visualizzare un avviso o un allarme
se si verica un guasto. La funzione
di disconnessione della resistenza di
frenatura viene testata durante
l'accensione. Comunque il test
dell'IGBT freno è eseguito in
assenza di frenatura. Un avviso o
scatto disinserisce la funzione freno.
La sequenza di prova è la seguente:
1. Misurare l'ampiezza
ondulazione bus CC per
300 ms senza frenare.
2. L'ampiezza ondulazione
bus CC viene misurata per
300 ms con il freno
inserito.
3. Se l’ampiezza ondulazione
bus CC durante la
frenatura è inferiore
all’ampiezza ondulazione
bus CC prima della
frenatura di +1%, il
controllo freno fallisce. Se
il controllo freno fallisce,
viene restituito un avviso
o un allarme.
4. Se l’ampiezza ondulazione
bus CC durante la
frenatura è superiore
all'ampiezza ondulazione
bus CC prima della
frenatura di +1%, il
controllo freno è OK.
[0] * O Controlla la presenza di un
cortocircuito nella resistenza di
frenatura o nell'IGBT freno durante
il funzionamento. In caso di
cortocircuito viene visualizzato un
avviso.
[1] Avviso Controlla la presenza di un
cortocircuito nella resistenza di
frenatura o nell'IGBT freno ed
eettua un test per il disinserimento della resistenza di frenatura
durante l'accensione.
[2] Scatto Controlla la presenza di un
cortocircuito o di una disconnessione della resistenza di
frenatura o di un cortocircuito
dell'IGBT freno. In caso di guasto, il
convertitore di frequenza si
2-15 Controllo freno
Option: Funzione:
disinserisce visualizzando un
allarme (scatto bloccato).
[3] Stop e scatto Controlla la presenza di un
cortocircuito o di una disconnessione della resistenza di
frenatura o di un cortocircuito
dell'IGBT freno. In caso di guasto, il
convertitore di frequenza decelera
no a procedere a ruota libera e
quindi scatta. Viene visualizzato un
allarme scatto bloccato.
[4] Freno CA Controlla la presenza di un
cortocircuito o di una disconnessione della resistenza di
frenatura o di un cortocircuito
dell'IGBT freno. In caso di guasto, il
convertitore di frequenza esegue
una rampa di decelerazione
controllata.
2-16 Corrente max. per freno CA
Range: Funzione:
100 %* [ 0 -
1000.0 %]
AVVISO!
Il Parametro 2-16 Corrente max.
per freno CA non ha alcun
eetto quando
parametro 1-10 Struttura
motore = [1] PM, SPM non
saliente.
Immettere la corrente massima
consentita per l'uso della frenatura
CA al ne di evitare il surriscaldamento degli avvolgimenti
motore.
2-17 Controllo sovratensione
Option: Funzione:
[0] Disabilitato Nessun OVC richiesto.
[2] * Abilitato Attiva l'OVC.
2-19 Guadagno sovratensione
Range: Funzione:
100 %* [10 - 200 %] Selezionare il guadagno di
sovratensione.
Descrizione dei parametri
33
72 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
Page 75

3-02 Riferimento minimo
Range: Funzione:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Immettere il valore minimo per il
riferimento remoto. Il valore di
riferimento minimo e l'unità
corrispondono alla selezione della
congurazione eettuata nel
parametro 1-00 Modo congurazione
e nel parametro 20-12 Unità
riferimento/Retroazione.
3-03 Riferimento max.
Range: Funzione:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Immettere il valore massimo
accettabile per il riferimento
remoto. Il valore e l'unità di
riferimento massimo corrispondono
all'opzione di congurazione
eettuata nel parametro 1-00 Modo
congurazione e nel
parametro 20-12 Unità riferimento/
Retroazione.
3-04 Funzione di riferimento
Option: Funzione:
[0] * Somma Somma le risorse di riferimento
esterne e preimpostate.
[1] Esterno/
Preimpost.
Utilizza le risorse di riferimento
esterne o quelle preimpostate.
Passaggio da esterno a
preimpostato mediante un
comando o un ingresso digitale.
3-10 Riferim preimp.
Array [8]
Range: Funzione:
0 %* [-100 -
100 %]
Immettere no a otto riferimenti
preimpostati diversi (0–7) in questo
parametro usando una programmazione ad array. Il riferimento
preimpostato viene determinato
come percentuale del valore Ref
MAX
(parametro 3-03 Riferimento max.).
Quando si usano i riferimenti
preimpostati, selezionare Rif. preimp.
3-10 Riferim preimp.
Array [8]
Range: Funzione:
bit 0/1/2 [16], [17] o [18] per gli
ingressi digitali corrispondenti nel
gruppo di parametri 5-1* Ingressi
digitali.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
3-11 Velocità di jog [Hz]
Range: Funzione:
Size
related*
[ 0 - par. 4-14
Hz]
La velocità jog è la velocità di
uscita ssata a cui il convertitore
funziona quando la funzione jog è
attivata.
Vedere anche
parametro 3-19 Velocità marcia jog
[RPM] e parametro 3-80 Tempo
rampa Jog.
Descrizione dei parametri Guida alla Programmazione
3.5 Parametetri 3-** Rif./rampe
3.5.1 3-0* Limiti riferimento
3 3
3.5.2 3-1* Riferimenti
Selezionare i riferimenti preimpostati. Selezionare Riferim
preimp. bit 0/1/2 [16], [17] o [18] per gli ingressi digitali
corrispondenti nel gruppo di parametri 5-1* Ingressi digitali.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 73
Disegno 3.17 Riferimento preimpostato
Disegno 3.18 Schema di riferimento preimpostato
Page 76

3-13 Sito di riferimento
Option: Funzione:
Seleziona la posizione riferimento
da attivare.
[0] * Collegato
Man./Auto
Usare il riferimento locale in
Modalità Hand on o il riferimento
remoto in modalità Auto on.
[1] Remoto Usare il riferimento remoto sia nella
modalità Hand on sia nella modalità
Auto on.
[2] Locale Usare il riferimento locale sia nella
modalità Hand on sia nella modalità
Auto on.
AVVISO!
Se impostato su [2] Locale, il
convertitore di frequenza si
avvia nuovamente con questa
impostazione in seguito a uno
spegnimento.
[3] Linked to H/A
MCO
Selezionare questa opzione per
abilitare il fattore FFACC. L'abilitazione di FFACC riduce il tremolio
e velocizza la trasmissione dal
motion controller alla scheda di
controllo del convertitore di
frequenza. Ciò consente tempi di
risposta più rapidi per applicazioni
dinamiche e il controllo della
posizione. Per maggiori
informazioni sul FFACC, vedere il
Manuale di funzionamento VLT
®
Motion Control MCO 305.
3-14 Rif. relativo preimpostato
Range: Funzione:
0 %* [-100 -
100 %]
Il riferimento corrente, X, viene
aumentato o diminuito con la
percentuale Y impostata nel
parametro 3-14 Rif. relativo
preimpostato.
Questo produce il riferimento
attuale Z. Il riferimento corrente (X)
è la somma degli ingressi
selezionati in:
•
Parametro 3-15 Risorsa di
rif. 1.
•
Parametro 3-16 Risorsa di
riferimento 2.
•
Parametro 3-17 Risorsa di
riferimento 3.
•
Parametro 8-02 Origine del
controllo.
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Risorsa di rif. 1
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Selezionare l'ingresso di riferimento
da usare per il primo segnale di
riferimento:
•
Parametro 3-15 Risorsa di
rif. 1.
•
Parametro 3-16 Risorsa di
riferimento 2.
•
Parametro 3-17 Risorsa di
riferimento 3.
Denire no a tre diversi segnali di
riferimento. La somma di questi
segnali di riferimento denisce il
riferimento attuale.
[0] Nessuna funz.
[1] * Ingr. analog.
53
[2] Ingr. analog.
54
[7] Ingr. impulsi
29
[8] Ingr. impulsi
33
[20] Potenziom.
digitale
[21] Ingresso anal.
X30/11
Descrizione dei parametri
VLT® AQUA Drive FC 202
Disegno 3.19 Riferimento relativo preimpostato
33
Disegno 3.20 Riferimento corrente
74 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 77

3-15 Risorsa di rif. 1
Option: Funzione:
[22] Ingresso anal.
X30/12
[23] Ingresso anal.
X42/1
[24] Ingresso anal.
X42/3
[25] Ingresso anal.
X42/5
[29] Ingresso anal.
X48/2
[30] Anello chiuso
est. 1
[31] Anello chiuso
est. 2
[32] Anello chiuso
est. 3
[35] Digital input
select
Il convertitore di frequenza
seleziona AI53 o AI54 come risorsa
di riferimento sulla base del segnale
di ingresso denito nell'opzione [42]
Ref source bit 0 di uno degli ingressi
digitali. Per maggiori informazioni,
vedere il gruppo di parametri
5-1*Ingressi digitali, opzione [42] Ref
source bit 0.
3-16 Risorsa di riferimento 2
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Selezionare l'ingresso di riferimento
da usare per il secondo segnale di
riferimento:
•
Parametro 3-15 Risorsa di
rif. 1.
•
Parametro 3-16 Risorsa di
riferimento 2.
•
Parametro 3-17 Risorsa di
riferimento 3.
Denire no a tre diversi segnali di
riferimento. La somma di questi
segnali di riferimento denisce il
riferimento attuale.
[0] * Nessuna funz.
[1] Ingr. analog.
53
[2] Ingr. analog.
54
3-16 Risorsa di riferimento 2
Option: Funzione:
[7] Ingr. impulsi
29
[8] Ingr. impulsi
33
[20] Potenziom.
digitale
[21] Ingresso anal.
X30/11
[22] Ingresso anal.
X30/12
[23] Ingresso anal.
X42/1
[24] Ingresso anal.
X42/3
[25] Ingresso anal.
X42/5
[29] Ingresso anal.
X48/2
[30] Anello chiuso
est. 1
[31] Anello chiuso
est. 2
[32] Anello chiuso
est. 3
[35] Digital input
select
Il convertitore di frequenza
seleziona AI53 o AI54 come risorsa
di riferimento sulla base del segnale
di ingresso denito nell'opzione [42]
Ref source bit 0 di uno degli ingressi
digitali. Per maggiori informazioni,
vedere il gruppo di parametri
5-1*Ingressi digitali, opzione [42] Ref
source bit 0.
3-17 Risorsa di riferimento 3
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Selezionare l'ingresso di riferimento
da usare per il terzo segnale di
riferimento:
•
Parametro 3-15 Risorsa di
rif. 1.
•
Parametro 3-16 Risorsa di
riferimento 2.
•
Parametro 3-17 Risorsa di
riferimento 3.
Denire no a tre diversi segnali di
riferimento. La somma di questi
Descrizione dei parametri Guida alla Programmazione
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 75
Page 78

3-17 Risorsa di riferimento 3
Option: Funzione:
segnali di riferimento denisce il
riferimento attuale.
[0] * Nessuna funz.
[1] Ingr. analog.
53
[2] Ingr. analog.
54
[7] Ingr. impulsi
29
[8] Ingr. impulsi
33
[20] Potenziom.
digitale
[21] Ingresso anal.
X30/11
[22] Ingresso anal.
X30/12
[23] Ingresso anal.
X42/1
[24] Ingresso anal.
X42/3
[25] Ingresso anal.
X42/5
[29] Ingresso anal.
X48/2
[30] Anello chiuso
est. 1
[31] Anello chiuso
est. 2
[32] Anello chiuso
est. 3
[35] Digital input
select
Il convertitore di frequenza
seleziona AI53 o AI54 come risorsa
di riferimento sulla base del segnale
di ingresso denito nell'opzione [42]
Ref source bit 0 di uno degli ingressi
digitali. Per maggiori informazioni,
vedere il gruppo di parametri
5-1*Ingressi digitali, opzione [42] Ref
source bit 0.
3-19 Velocità marcia jog [RPM]
Range: Funzione:
Size
related*
[ 0 - par. 4-13
RPM]
Inserire un valore per la velocità jog
n
JOG
che è una velocità di uscita
ssa. Il convertitore di frequenza
funziona a questa velocità quando
la funzione jog è attiva. Il limite
massimo è denito in
parametro 4-13 Lim. alto vel. motore
[giri/min].
3-19 Velocità marcia jog [RPM]
Range: Funzione:
Vedere anche
parametro 3-11 Velocità di jog [Hz] e
parametro 3-80 Tempo rampa Jog.
130BA169.11
Giri/min.
P 4-13
Lim. alto
P 1-25
vel. motore
P 4-11
Lim. basso
P 3-*2P 3-*1
Rampa (x)
tempo di
decelerazione (Dec)
Rampa (x)
tempo di
accelerazione (Acc)
t
dec
t
acc
Tempo
Riferimento
3-41 Rampa 1 tempo di accel.
Range: Funzione:
Size
related*
[ 0.10 - 3600s]Immettere il tempo rampa di
accelerazione, vale a dire il tempo
di accelerazione necessario da 0
Giri/min. a parametro 1-25 Vel.
nominale motore. Selezionare un
tempo rampa di accelerazione tale
che la corrente di uscita non superi
il limite di corrente impostato nel
parametro 4-18 Limite di corrente
durante la rampa. Vedere il tempo
rampa di decelerazione nel
parametro 3-42 Rampa 1 tempo di
decel..
par . 3 − 41 =
tacc × nnom par .1 − 25
ref RPM
s
Descrizione dei parametri
33
76 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
3.5.3 3-4* Rampa 1
Congurare i tempi di rampa per ciascuna delle due rampe
(gruppo di parametri 3-4* Rampa 1 e gruppo di parametri
3-5* Rampa 2).
Disegno 3.21 Rampa 1
Page 79

3-42 Rampa 1 tempo di decel.
Range: Funzione:
Size
related*
[ 0.10 - 3600s]Impostare il tempo rampa di
decelerazione, vale a dire il tempo
di decelerazione da
parametro 1-25 Vel. nominale motore
a 0 Giri/min. Selezionare un tempo
rampa di decelerazione tale da
impedire sovratensioni nell'inverter
a causa del funzionamento rigenerativo del motore. Il tempo rampa
di decelerazione dovrebbe essere
anche abbastanza lungo da
impedire che la corrente generata
superi il limite di corrente
impostato nel parametro 4-18 Limite
di corrente. Vedere tempo rampa di
accelerazione nel
parametro 3-41 Rampa 1 tempo di
accel..
par . 3 − 42 =
tdec × nnom par .1 − 25
ref RPM
s
3-51 Rampa 2 tempo di accel.
Range: Funzione:
Size
related*
[ 0.10 - 3600s]Immettere il tempo rampa di
accelerazione, vale a dire il tempo
di accelerazione necessario da 0
Giri/min. a parametro 1-25 Vel.
nominale motore. Selezionare un
tempo rampa di accelerazione tale
che la corrente di uscita non superi
il limite di corrente impostato nel
parametro 4-18 Limite di corrente
durante la rampa. Vedere il tempo
rampa di decelerazione nel
parametro 3-52 Rampa 2 tempo di
decel..
par . 3 − 51 =
tacc × nnom par . 1 − 25
ref rpm
s
3-52 Rampa 2 tempo di decel.
Range: Funzione:
Size
related*
[ 0.10 - 3600s]Impostare il tempo rampa di
decelerazione, vale a dire il tempo
di decelerazione da
parametro 1-25 Vel. nominale motore
a 0 Giri/min. Selezionare un tempo
rampa di decelerazione tale in
modo da far sì che non si
verichino sovratensioni nell'inverter a causa del funzionamento
3-52 Rampa 2 tempo di decel.
Range: Funzione:
rigenerativo del motore oppure tale
che la corrente generata non
raggiunga il limite di corrente
impostato in parametro 4-18 Limite
di corrente. Vedere tempo rampa di
accelerazione nel
parametro 3-51 Rampa 2 tempo di
accel..
par . 3 − 52 =
tdec × nnom par . 1 − 25
ref rpm
s
3-80 Tempo rampa Jog
Range: Funzione:
Size
related*
[0.1 - 3600 s] Immettere il tempo rampa jog, vale
a dire il tempo di accelerazione/
decelerazione da 0 Giri/min. alla
velocità nominale del motore (n
M,N
)
(impostato nel parametro 1-25 Vel.
nominale motore). Assicurarsi che la
corrente di uscita risultante richiesta
per il tempo di rampa jog in
questione non superi il limite di
corrente impostato nel
parametro 4-18 Limite di corrente. Il
tempo di rampa jog inizia dopo
l'attivazione di un segnale di jog
tramite il quadro di comando, un
ingresso digitale selezionato o la
porta di comunicazione seriale.
par . 3 − 80 =
t jog × nnom par . 1 − 25
jog speed par .3 − 19
s
Descrizione dei parametri Guida alla Programmazione
3.5.5 3-8* Altre rampe
3 3
3.5.4 3-5* Rampa 2
Per selezionare i parametri di rampa, vedere il gruppo di
parametri 3-4* Rampa 1.
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 77
Disegno 3.22 Tempo di rampa jog
Page 80

3-84 Tempo rampa iniz
Range: Funzione:
0 s* [0 - 60 s] Immettere il tempo di rampa di
accelerazione iniziale dalla velocità
zero al limite basso della velocità
motore, parametro 4-11 Lim. basso
vel. motore [giri/min] o
parametro 4-12 Limite basso velocità
motore [Hz]. Le pompe a
immersione sommerse possono
danneggiarsi se girano con una
velocità inferiore al minimo. Si
consiglia un tempo di rampa veloce
inferiore alla velocità minima della
pompa. Questo parametro può
essere applicato come velocità di
rampa veloce dalla velocità zero al
limite basso velocità motore. Vedere
la Disegno 3.23.
130BA962.10
Velocità motore
Velocità motore
Alta
Bassa
Normale
Rampe
Rampa
iniziale
Rampa
Tempo
Velocità
3-85 Check Valve Ramp Time
Range: Funzione:
0 s* [0 - 650 s] Al ne di proteggere le valvole di
controllo a sfera in caso di arresto,
la rampa della valvola di controllo
può essere utilizzata come velocità
di rampa lenta dal
parametro 4-11 Lim. basso vel.
motore [giri/min] o dal
parametro 4-12 Limite basso velocità
motore [Hz] alla velocità nale di
rampa della valvola di controllo,
impostata dall'utente nel
parametro 3-86 Check Valve Ramp
End Speed [RPM] o nel
parametro 3-87 Check Valve Ramp
End Speed [HZ]. Quando il
parametro 3-85 Check Valve Ramp
Time è diverso da 0 secondi, il
tempo di rampa della valvola di
controllo è in vigore e verrà
utilizzato per ridurre la velocità dal
limite basso di velocità del motore
3-85 Check Valve Ramp Time
Range: Funzione:
alla velocità nale della valvola di
controllo impostata nel
parametro 3-86 Check Valve Ramp
End Speed [RPM] o nel
parametro 3-87 Check Valve Ramp
End Speed [HZ]. Vedere la
Disegno 3.24.
130BA961.10
Velocità
Velocità motore
Normale
Valvola di controllo
Velocità motore
Alta
Bassa
Tempo
Rampa
3-86 Check Valve Ramp End Speed [RPM]
Range: Funzione:
Size
related*
[ 0 - par. 4-11
RPM]
Impostare la velocità in [RPM] al di
sotto del limite basso velocità
motore laddove si prevede di
chiudere la valvola di controllo.
Controllare che la valvola non sia
più attiva. Vedere la Disegno 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Range: Funzione:
Size
related*
[ 0 - par. 4-12
Hz]
Impostare la velocità in [Hz] a un
valore inferiore al limite basso
velocità motore laddove la rampa
della valvola di controllo non è più
attiva. Vedere la Disegno 3.24.
3-88 Tempo nale rampa
Range: Funzione:
0 s* [0 - 60 s] Immettere il tempo nale della
rampa da usare quando si decelera
da parametro 4-11 Lim. basso vel.
motore [giri/min] o
parametro 4-12 Limite basso velocità
motore [Hz] alla velocità zero.
Le pompe a immersione sommerse
possono danneggiarsi se girano con
una velocità inferiore al minimo. Si
consiglia un tempo di rampa veloce
inferiore alla velocità minima della
pompa. Questo parametro può
essere applicato come velocità di
rampa veloce da
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
Disegno 3.24 Controllo Rampa Valvola
Disegno 3.23 Tempo di rampa iniziale e nale
78 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 81

3-88 Tempo nale rampa
Range: Funzione:
parametro 4-11 Lim. basso vel.
motore [giri/min] a
parametro 4-12 Limite basso velocità
motore [Hz] alla velocità zero.
Vedere la Disegno 3.23.
3-90 Dimensione Passo
Range: Funzione:
0.10 %* [0.01 200 %]
Immettere la dimensione di
incremento richiesta per
l'aumento/la riduzione come valore
percentuale della velocità del
motore sincrono, ns. Se viene
attivato Aumenta/Diminuisci, il
riferimento risultante viene
aumentato o diminuito del valore
impostato in questo parametro.
3-91 Tempo rampa
Range: Funzione:
1 s [0 - 3600 s] Immettere il tempo di rampa, vale a
dire il tempo per la regolazione del
riferimento dallo 0% al 100% della
funzione potenziometro digitale
specicata (Aumenta, Diminuisci o
Cancella).
Se Aumenta/Diminuisci viene
attivato per un tempo superiore al
periodo di ritardo rampa specicato
in parametro 3-95 Ritardo rampa, il
riferimento attuale viene
aumentato/diminuito secondo
questo tempo di rampa. Il tempo di
rampa è denito come il tempo
richiesto per regolare il riferimento
con passi di dimensione denita in
parametro 3-90 Dimensione Passo.
3-92 Rispristino della potenza
Option: Funzione:
[0] * O Ripristina il riferimento del
potenziometro digitale a 0% dopo
l'accensione.
[1] On Ripristina il riferimento più recente
del potenziometro digitale all'accensione.
3-93 Limite massimo
Range: Funzione:
100 %* [-200 -
200 %]
Impostare il valore massimo
consentito per il riferimento
risultante. Questo è consigliato se il
potenziometro digitale viene usato
per la regolazione di precisione del
riferimento risultante.
3-94 Limite minimo
Range: Funzione:
0 %* [-200 -
200 %]
Impostare il valore minimo
consentito per il riferimento
risultante. Questo è consigliato se il
potenziometro digitale viene usato
per la regolazione di precisione del
riferimento risultante.
3-95 Ritardo rampa
Range: Funzione:
Size
related*
[ 0 - 0 ] Impostare il ritardo richiesto dall'at-
tivazione della funzione
potenziometro digitale nché il
convertitore di frequenza inizia ad
aumentare il riferimento. Con un
ritardo di 0 ms, il riferimento inizia
ad aumentare quando viene
attivato il segnale aumento/
diminuzione. Vedere anche il
parametro 3-91 Tempo rampa.
Descrizione dei parametri Guida alla Programmazione
3.5.6 3-9* Pot.metro dig.
Usare la funzione potenziometro digitale per aumentare o
ridurre il riferimento corrente regolando i setup degli
ingressi digitali tramite le funzioni Aumenta, Diminuisci o
Cancella. Per attivare la funzione, almeno un ingresso
digitale deve essere impostato su Aumenta o Diminuisci.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 79
Disegno 3.25 Ritardo rampa caso 1
Page 82

Descrizione dei parametri
VLT® AQUA Drive FC 202
33
Disegno 3.26 Ritardo rampa caso 2
80 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 83

4-10 Direz. velocità motore
Option: Funzione:
Seleziona la direzione di velocità
del motore richiesta. Quando il
parametro 1-00 Modo congurazione
è impostato su [3] Anello chiuso,
l'impostazione predenita del
parametro viene cambiata a [0]
Senso orario. Se vengono
selezionate entrambe le direzioni,
non è possibile scegliere la
rotazione in senso antiorario
dall'LCP.
[0] * Senso orario
[2] Entrambe le
direzioni
4-11 Lim. basso vel. motore [giri/min]
Range: Funzione:
Size
related*
[ 0 - par. 4-13
RPM]
Immettere il limite minimo della
velocità del motore in Giri/min. Il
limite basso velocità motore può
essere impostato per corrispondere
alla velocità minima del motore
consigliata dal costruttore. Il limite
basso velocità motore non deve
superare l'impostazione nel
parametro 4-13 Lim. alto vel. motore
[giri/min].
4-12 Limite basso velocità motore [Hz]
Range: Funzione:
Size
related*
[ 0 - par. 4-14
Hz]
Impostare il limite minimo per la
velocità del motore in Hz. Il limite
basso velocità motore può essere
impostato per corrispondere alla
frequenza di uscita minima
dell'albero motore. Il limite basso
velocità non deve superare l'impostazione nel parametro 4-14 Limite
alto velocità motore [Hz].
4-13 Lim. alto vel. motore [giri/min]
Range: Funzione:
Size
related*
[ 0 - 60000
RPM]
AVVISO!
Qualsiasi modica nel
parametro 4-13 Lim. alto vel.
motore [giri/min] ripristina il
valore nel
parametro 4-53 Avviso velocità
alta al valore impostato nel
parametro 4-13 Lim. alto vel.
motore [giri/min].
AVVISO!
La frequenza di uscita massima
non può superare il 10% della
frequenza di commutazione
dell'inverter
(parametro 14-01 Freq. di
commutaz.).
Immettere il limite massimo per la
velocità del motore in Giri/min. Il
limite alto velocità motore può
essere impostato in modo tale da
uguagliare la velocità massima del
motore consigliata. Il limite alto
velocità motore deve essere
maggiore del valore impostato nel
parametro 4-11 Lim. basso vel.
motore [giri/min].
Il nome del parametro appare come
parametro 4-11 Lim. basso vel.
motore [giri/min] o
parametro 4-12 Limite basso velocità
motore [Hz] in funzione di:
•
Le impostazioni di altri
parametri nel Menu
principale.
•
Impostazioni di fabbrica
basate sulla posizione
geograca.
4-14 Limite alto velocità motore [Hz]
Range: Funzione:
Size
related*
[ .1 - par.
4-19 Hz]
Immettere il limite massimo per la
velocità del motore in Hz.
Parametro 4-14 Limite alto velocità
motore [Hz] può essere impostato
per corrispondere alla massima
velocità del motore consigliata dal
produttore. Il limite alto velocità
motore deve essere superiore al
valore impostato nel
parametro 4-12 Limite basso velocità
motore [Hz]. La frequenza di uscita
Descrizione dei parametri Guida alla Programmazione
3.6 Parametri 4-** Limiti / avvisi
3.6.1 4-1* Limiti motore
Denire i limiti di coppia, di corrente e di velocità per il
motore e la reazione del convertitore di frequenza al
superamento dei limiti.
Un limite può generare un messaggio nel display. Un
avviso genera sempre un messaggio nel display o nel bus
di campo. Una funzione di monitoraggio può avviare un
avviso o uno scatto, dopodiché il convertitore di frequenza
si arresta e genera un messaggio di allarme.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 81
Page 84

4-14 Limite alto velocità motore [Hz]
Range: Funzione:
non deve superare il 10% della
frequenza di commutazione
(parametro 14-01 Freq. di
commutaz.).
4-16 Lim. di coppia in modo motore
Range: Funzione:
Size
related*
[ 0 -
1000.0 %]
Immettere il limite di coppia
massima per il funzionamento del
motore. Il limite di coppia è attivo
nel campo di velocità no alla
velocità nominale del motore
impostata in parametro 1-25 Vel.
nominale motore. Per proteggere il
motore e impedire che raggiunga la
coppia di stallo, l’impostazione di
fabbrica corrisponde a 1,1 volte la
coppia nominale del motore (valore
calcolato). Vedere anche
parametro 14-25 Ritardo scatto al
limite di coppia per ulteriori dettagli.
Se viene modicata un'impostazione nel parametro 1-00 Modo
congurazione no al
parametro 1-28 Controllo rotazione
motore, il parametro 4-16 Lim. di
coppia in modo motore non viene
ripristinato automaticamente alle
impostazioni di fabbrica.
4-17 Lim. di coppia in modo generatore
Range: Funzione:
100 %* [ 0 -
1000.0 %]
Immettere il limite di coppia
massimo per il funzionamento
rigenerativo. Il limite di coppia è
attivo nel campo di velocità no
alla velocità nominale del motore
(parametro 1-25 Vel. nominale
motore). Fare riferimento al
parametro 14-25 Ritardo scatto al
limite di coppia per informazioni più
dettagliate.
Se viene modicata un'impostazione in parametro 1-00 Modo
congurazione no a
parametro 1-28 Controllo rotazione
motore , parametro 4-17 Lim. di
coppia in modo generatore non
viene ripristinato automaticamente
alle impostazioni di fabbrica.
4-18 Limite di corrente
Range: Funzione:
Size
related*
[ 1.0 -
1000.0 %]
Immettere il limite di corrente per il
funzionamento motore e
generatore. Per proteggere il
motore e impedire che raggiunga la
coppia di stallo, l’impostazione di
fabbrica corrisponde a 1,1 volte la
coppia nominale del motore (valore
calcolato). Se viene modicata
un'impostazione nel
parametro 1-00 Modo congurazione
no al parametro 1-26 Coppia
motore nominale cont., il
parametro 4-18 Limite di corrente
non viene ripristinato automaticamente alle impostazioni di
fabbrica.
4-19 Freq. di uscita max.
Range: Funzione:
Size
related*
[ 1 - 590 Hz]
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
AVVISO!
Quando il
parametro 1-10 Struttura
motore è impostato su [1] PM,
SPM non saliente, il valore
massimo è limitato a 300 Hz.
Immettere il valore massimo della
frequenza di uscita. Il
Parametro 4-19 Freq. di uscita max.
specica il limite assoluto della
frequenza di uscita del convertitore
di frequenza per una maggiore
protezione nell'applicazione, nei casi
in cui deve essere evitato un
fuorigiri involontario. Questo limite
assoluto è valido per tutte le
congurazioni ed è indipendentemente dall'impostazione nel
parametro 1-00 Modo congurazione.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
82 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 85

4-50 Avviso corrente bassa
Range: Funzione:
0 A* [ 0 - par. 4-51A]Gli avvisi vengono visualizzati sul
display, sull'uscita programmata o
sul bus di campo.
130BA064.10
REF
ON REF
I
motore
(P 4 - 18)
(P 4 - 53)
(P 4 - 50)
(P 4 - 13)
(P 4-11)
(P 4-52)
n
motore
[giri / min.]
IN CAMPO
I
Lim
(P 4 - 51)
I
HIGH
I
low
n
HIGH
n
max
n
MIN
n
LOW
Disegno 3.27 Limite corrente
bassa
Immettere il valore I
LOW.
Se la
corrente motore scende al di sotto
di questo limite (I
LOW
), il display
indica Corr. bassa. Le uscite possono
essere programmate per produrre
un segnale di stato sul morsetto 27
o 29 e sull'uscita a relè 01 o 02.
Fare riferimento al Disegno 3.27.
4-51 Avviso corrente alta
Range: Funzione:
Size
related*
[ par. 4-50 par. 16-37 A]
Immettere il valore I
HIGH.
Quando la
corrente motore supera questo
limite (I
HIGH
), il display indica
Corrente alta. Le uscite possono
essere programmate per produrre
un segnale di stato sul morsetto 27
o 29 e sull'uscita a relè 01 o 02.
Fare riferimento al Disegno 3.27.
4-52 Avviso velocità bassa
Range: Funzione:
0 RPM* [ 0 - par. 4-53
RPM]
Immettere il valore n
LOW.
Quando la
velocità del motore scende al di
sotto di questo limite (n
LOW
), il
display indica Vel. bassa. Le uscite
possono essere programmate per
produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
4-52 Avviso velocità bassa
Range: Funzione:
01 o 02. Programmare il limite
minimo del segnale della velocità
del motore, n
LOW
, all'interno del
normale intervallo di funzionamento del convertitore di
frequenza. Fare riferimento al
Disegno 3.27.
4-53 Avviso velocità alta
Range: Funzione:
Size
related*
[ par. 4-52 par. 4-13 RPM]
AVVISO!
Qualsiasi modica nel
parametro 4-13 Lim. alto vel.
motore [giri/min] ripristina il
valore nel
parametro 4-53 Avviso velocità
alta allo stesso valore
impostato nel
parametro 4-13 Lim. alto vel.
motore [giri/min].
Se è necessario un valore
diverso nel
parametro 4-53 Avviso velocità
alta, deve essere impostato
dopo la programmazione del
parametro 4-13 Lim. alto vel.
motore [giri/min].
Immettere il valore n
HIGH.
Quando la
velocità del motore supera il limite
(n
HIGH
), il display indica Vel. alta. Le
uscite possono essere programmate
per produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
01 o 02. Programmare il limite
massimo del segnale della velocità
del motore, n
HIGH
, all'interno del
normale intervallo di funzionamento del convertitore di
frequenza. Fare riferimento al
Disegno 3.27.
4-54 Avviso rif. basso
Range: Funzione:
-999999.999* [ -999999.999
- par. 4-55 ]
Immettere il limite inferiore del
riferimento. Quando il riferimento
attuale scende al di sotto di questo
limite, il display indica Ref
Low
. Le
uscite possono essere programmate
per produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
01 o 02.
Descrizione dei parametri Guida alla Programmazione
3.6.2 4-5* Adattam. avvisi
Denire i limiti di avviso impostabili per corrente, velocità,
riferimento e retroazione.
AVVISO!
Non visibile nel display, soltanto nel Software di
congurazione MCT 10.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 83
Page 86

4-55 Avviso riferimento alto
Range: Funzione:
999999.999* [ par. 4-54 -
999999.999 ]
Immettere il limite superiore del
riferimento. Quando il riferimento
attuale supera questo limite, il
display mostra Ref
High
. Le uscite
possono essere programmate per
produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
01 o 02.
4-56 Avviso retroazione bassa
Range: Funzione:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Impostare il limite basso della
retroazione. Se la retroazione
scende al di sotto di questo limite,
il display indica Feedb
Low
. Le uscite
possono essere programmate per
produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
01 o 02.
4-57 Avviso retroazione alta
Range: Funzione:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Immettere il limite superiore della
retroazione. Se la retroazione
supera questo limite, il display
visualizza Feedb
High
. Le uscite
possono essere programmate per
produrre un segnale di stato sul
morsetto 27 o 29 e sull'uscita a relè
01 o 02.
4-58 Funzione fase motore mancante
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Mostra un allarme se manca una
fase del motore.
[0] Disattivato Non viene visualizzato alcun allarme
in caso di mancanza di una fase del
motore.
[1] Scatto 100 ms Viene visualizzato un allarme in
caso di mancanza di una fase del
motore.
[2] * Scatto 1000
ms
[5] Motor Check
4-60 Bypass velocità da [giri/min]
Array [4]
Range: Funzione:
Size
related*
[ 0 - par. 4-13
RPM]
Alcuni sistemi richiedono che certe
frequenze di uscita vengano evitate
a causa di problemi di risonanza nel
sistema. Immettere i limiti inferiori
delle velocità da evitare.
4-61 Bypass velocità da [Hz]
Array [4]
Range: Funzione:
Size
related*
[ 0 - par. 4-14
Hz]
Alcuni sistemi richiedono che certe
frequenze di uscita vengano evitate
a causa di problemi di risonanza nel
sistema. Immettere i limiti inferiori
delle velocità da evitare.
4-62 Bypass velocità a [giri/min]
Array [4]
Range: Funzione:
Size
related*
[ 0 - par. 4-13
RPM]
Alcuni sistemi richiedono che certe
frequenze di uscita vengano evitate
a causa di problemi di risonanza nel
sistema. Immettere i limiti superiori
delle velocità da evitare.
4-63 Bypass velocità a [Hz]
Array [4]
Range: Funzione:
Size
related*
[ 0 - par. 4-14
Hz]
Alcuni sistemi richiedono che certe
frequenze di uscita vengano evitate
a causa di problemi di risonanza nel
sistema. Immettere i limiti superiori
delle velocità da evitare.
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.6.3 4-6* Bypass di velocità
Alcuni sistemi richiedono che certe frequenze di uscita
vengano evitate a causa di problemi di risonanza nel
sistema. È possibile evitare no a 4 intervalli di frequenza o
di velocità.
33
84 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 87

4-64 Setup bypass semiautom.
Option: Funzione:
[0] * O Nessuna funzione.
[1] Abilitato Avvia il setup del bypass semiauto-
matico e continua con la procedura
descritta nel capitolo 3.6.4 Setup
velocità bypass semiautomatica.
Descrizione dei parametri Guida alla Programmazione
3.6.4 Setup velocità bypass semiautomatica
Usare il setup velocità bypass semiautomatico per facilitare
la programmazione delle frequenze da saltare a causa di
risonanze nel sistema.
Eettuare il seguente processo:
1. Arrestare il motore.
2. Selezionare [1] Abilitato nel parametro 4-64 Setup
bypass semiautom..
3. Premere [Hand On] sull'LCP per iniziare la ricerca
di bande di frequenza che causano le risonanze. Il
motore accelera secondo la rampa impostata.
4. Quando si percorre una banda di risonanza,
premere [OK] sull'LCP quando ci si sposta dalla
banda. La frequenza del momento viene salvata
come primo elemento nel parametro 4-62 Bypass
velocità a [giri/min] o nel parametro 4-63 Bypass
velocità a [Hz] (array). Ripetere questo passaggio
per ogni banda di risonanza identicata nella
rampa di salita (no a un massimo di quattro
regolazioni).
5. Quando viene raggiunta la velocità massima il
motore inizia automaticamente a decelerare.
Ripetere la procedura quando la velocità si
discosta dalle bande di risonanza durante la
decelerazione. Le frequenze attuali registrate
quando si preme [OK] vengono salvate nel
parametro 4-60 Bypass velocità da [giri/min] o nel
parametro 4-61 Bypass velocità da [Hz].
6. Quando il motore ha decelerato no all'arresto,
premere [OK]. Il Parametro 4-64 Setup bypass
semiautom. viene automaticamente ripristinato a
O. Il convertitore di frequenza rimane nella
modalità Hand on nché non viene premuto [O]
o [Auto On] sull'LCP.
Se le frequenze per una determinata banda di risonanza
non sono registrate nell'ordine corretto, tutte le
registrazioni vengono eliminate ed è mostrato il seguente
messaggio: Le aree di velocità rilevate si sovrappongono o
non sono determinate completamente. Premere [Cancel] per
annullare. La registrazione nell'ordine errato avviene
quando i valori di frequenza memorizzati nel
parametro 4-62 Bypass velocità a [giri/min] sono superiori ai
valori presenti nel parametro 4-60 Bypass velocità da [giri/
min], o se questi non hanno lo stesso numero di
registrazioni per il Bypass da e Bypass a.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 85
Page 88

5-00 Modo I/O digitale
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
Gli ingressi digitali e le uscite
digitali programmate sono preprogrammabili per funzionare sia in
sistemi PNP che NPN.
[0] * PNP - attivo a
24V
Azione sul fronte di salita
dell'impulso (0). I sistemi PNP sono
collegati con uno stadio di pulldown a GND.
[1] NPN - attivo a0VAzione sugli impulsi con fronte
negativo (1). I sistemi NPN vengono
collegati in pull-up a +24 V
all'interno del convertitore di
frequenza.
5-01 Modo Morsetto 27
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
[0] * Ingresso Denisce il morsetto 27 come un
ingresso digitale.
[1] Uscita Denisce il morsetto 27 come
un'uscita digitale.
5-02 Modo morsetto 29
Option: Funzione:
AVVISO!
Non è possibile regolare
questo parametro mentre il
motore è in funzione.
[0] * Ingresso Denisce il morsetto 29 come un
ingresso digitale.
5-02 Modo morsetto 29
Option: Funzione:
[1] Uscita Denisce il morsetto 29 come
un'uscita digitale.
Descrizione dei parametri
VLT® AQUA Drive FC 202
3.7 Parametri 5-** I/O digitali
Gruppo di parametri per congurare ingressi e uscite
digitali.
3.7.1 5-0* Modalità I/O digitali
33
Parametri per congurare l'ingresso e l'uscita usando NPN
e PNP.
3.7.2 5-1* Ingressi digitali
Parametri per congurare le funzioni di ingresso per i
morsetti di ingresso.
Gli ingressi digitali vengono utilizzati per selezionare varie
funzioni nel convertitore di frequenza. Tutti gli ingressi
digitali possono essere impostati sulle seguenti funzioni:
Le opzioni [120]–[138] sono relative alla funzionalità del
controllore in cascata. Per maggiori informazioni, vedere il
gruppo di parametri 25-** Controllore in cascata.
86 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Funzione dell'ingresso
digitale
Nessuna funzione [0] 19, 29, 32, 33
Ripristino [1] Tutti
Evol. libera neg. [2] 27
Ruota lib. e ripr. inv. [3] Tutti
Freno CC neg. [5] Tutti
Stop (negato) [6] Tutti
Interblocco esterno [7] Tutti
Avviamento [8] Tutti
Avv. a impulsi [9] Tutti
Inversione [10] Tutti
Avv. inversione [11] Tutti
Marcia jog [14] Tutti
Rif. preimp. abil. [15] Tutti
Rif. preimp. bit 0 [16] Tutti
Rif. preimp. bit 1 [17] Tutti
Rif. preimp. bit 2 [18] Tutti
Blocco riferimento [19] Tutti
Blocco uscita [20] Tutti
Accelerazione [21] Tutti
Decelerazione [22] Tutti
Selez. setup bit 0 [23] Tutti
Selez. setup bit 1 [24] Tutti
Ingr. impulsi [32] 29, 33
Rampa bit 0 [34] Tutti
Guasto rete (negato) [36] Tutti
Ref source bit 0 [42] Tutti
Hand/Auto Start [51] Tutti
Abilitaz. avviam. [52] Tutti
Avviam. manuale [53] Tutti
Avviam. autom. [54] Tutti
Aumento pot. digit. [55] Tutti
Riduzione pot. digit. [56] Tutti
Azzeram. pot. digit. [57] Tutti
Cont. A (increm.) [60] 29, 33
Opzione Morsetto
Page 89

Descrizione dei parametri Guida alla Programmazione
Funzione dell'ingresso
digitale
Cont. A (decrem.) [61] 29, 33
Ripristino cont. A [62] Tutti
Cont. B (increm.) [63] 29, 33
Cont. B (decrem.) [64] 29, 33
Ripristino cont. B [65] Tutti
Pausa motore [66] Tutti
Riprist. parola manutenz.
preventiva
Scheda PTC 1 [80] Tutti
Latched Pump Derag [85] Tutti
Avviam. pompa di
comando
Altern. pompa primaria [121] Tutti
Interbl. pompa 1 [130] Tutti
Interbl. pompa 2 [131] Tutti
Interbl. pompa 3 [132] Tutti
Tabella 3.12 Funzioni per ingressi digitali
Opzione Morsetto
[78] Tutti
[120] Tutti
Tutti sta per i morsetti 18, 19, 27, 29, 32, X30/2, X30/3 e
X30/4.
X30/X sono i morsetti sul VLT® General Purpose I/O MCB
101.
Le funzioni dedicate a un singolo ingresso digitale sono
indicate nel parametro relativo.
Tutti gli ingressi digitali possono essere impostati sulle
seguenti funzioni:
[0] Nessuna
funzione
[1] Ripristino Ripristina il convertitore di frequenza dopo
[2] Evol. libera
neg.
[3] Ruota lib. e
ripr. inv.
[5] Freno CC
neg.
Nessuna reazione ai segnali trasmessi al
morsetto.
uno scatto/allarme. Non tutti gli allarmi
possono essere ripristinati.
Lascia il motore in evoluzione libera. 0
logico=arresto a ruota libera.
(Ingresso digitale di default 27): Arresto a
ruota libera, ingresso negato (NC).
Ripristinare e arrestare a ruota libera
l'ingresso negato (NC).
Lascia il motore in evoluzione libera e
ripristina il convertitore di frequenza. 0 logico
= arresto a ruota libera e ripristino.
Ingresso invertito per il freno CC (NC).
Arresta il motore alimentandolo con una
corrente CC per un determinato lasso di
tempo. Vedere dal parametro 2-01 Corrente di
frenatura CC no al parametro 2-03 Vel.
inserim. frenatura CC [RPM]. La funzione è
attiva soltanto quando il valore nel
parametro 2-02 Tempo di frenata CC è diverso
da 0. 0 logico=freno CC.
Questa selezione non è possibile quando il
parametro 1-10 Struttura motore è impostato
su [1] PM, SPM non saliente.
[6] Stop
(negato)
Funzione stop negato. Genera una funzione
di arresto quando il morsetto selezionato
passa dal livello logico 1 a 0. L'arresto viene
eseguito in base al tempo di rampa
selezionato (parametro 3-42 Rampa 1 tempo
di decel. e parametro 3-52 Rampa 2 tempo di
decel.).
AVVISO!
Quando il convertitore di frequenza è
al limite di coppia e ha ricevuto un
comando di arresto potrebbe non
fermarsi da solo. Per assicurare che il
convertitore di frequenza si arresti,
congurare un'uscita digitale come
[27] Coppia lim.&arresto e collegarla a
un ingresso digitale congurato come
ruota libera.
[7] Interblocco
esterno
[8] Avviamento Selezionare un valore di avvio per un
[9] Avv. a
impulsi
[10] Inversione Cambia il senso di rotazione dell'albero
[11] Avv.
inversione
Stessa funzione di arresto a ruota libera
negato, ma l'interblocco esterno genera il
messaggio di allarme guasto esterno quando
il morsetto selezionato per ruota libera
negato è 0 logico. Il messaggio di allarme è
anche attivo tramite le uscite digitali e le
uscite a relè, se è stata eseguita la programmazione per interblocco esterno. È possibile
ripristinare l'allarme utilizzando un ingresso
digitale o il tasto [Reset] se è stata eliminata
la causa dell'interblocco esterno. Un ritardo
può essere programmato nel
parametro 22-00 Ritardo interblocco esterno.
Dopo aver dato un segnale all'ingresso, la
reazione viene ritardata con il tempo
impostato nel parametro 22-00 Ritardo
interblocco esterno.
comando di avviamento/arresto.
1=avviamento, 0=arresto.
(Ingresso digitale di default 18).
Il motore viene avviato se viene fornito un
impulso per almeno 2 ms. Il motore si arresta
se viene attivato stop negato.
motore. Selezionare 1 logico per l'inversione.
Il segnale di inversione cambia solo il senso
di rotazione, ma non attiva la funzione di
avviamento. Selezionare entrambe le
direzioni nel parametro 4-10 Direz. velocità
motore.
(Ingresso digitale di default 19).
Utilizzato per l’avviamento/arresto e per
l'inversione sullo stesso lo. Non sono
ammessi segnali di avviamento contemporanei.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 87
Page 90

Descrizione dei parametri
VLT® AQUA Drive FC 202
[14] Marcia jog Utilizzato per attivare la velocità jog. Vedere
la parametro 3-11 Velocità di jog [Hz].
(Ingresso digitale di default 29).
[15] Rif. preimp.
abil.
33
[16] Rif. preimp.
bit 0
[17] Rif. preimp.
bit 1
[18] Rif. preimp.
bit 2
[19] Blocco
riferimento
[20] Blocco uscita Blocca la frequenza del motore corrente (Hz).
Utilizzato per passare dai riferimenti esterni
ai riferimenti preimpostati. Si presume che
nel parametro 3-04 Funzione di riferimento sia
stato selezionato [1] Esterno/Preimpost. 0
logico = riferimento esterno attivo; 1 logico
= è attivo uno degli otto riferimenti
preimpostati.
Consente una selezione di uno degli otto
riferimenti preimpostati secondo la
Tabella 3.13.
Consente una selezione di uno degli otto
riferimenti preimpostati secondo la
Tabella 3.13.
Consente una selezione di uno degli otto
riferimenti preimpostati secondo la
Tabella 3.13.
Bit rif. preimp. 2 1 0
Riferimento
preimpostato 0
Riferimento
preimpostato 1
Riferimento
preimpostato 2
Riferimento
preimpostato 3
Riferimento
preimpostato 4
Riferimento
preimpostato 5
Riferimento
preimpostato 6
Riferimento
preimpostato 7
Tabella 3.13 Bit di riferimento
preimpostato
Blocca il riferimento attuale. Il riferimento
bloccato è ora il punto che abilita/condiziona
l'utilizzo di accelerazione e decelerazione. Se
vengono utilizzati accelerazione/decelerazione, la variazione di velocità segue
sempre la rampa 2 (parametro 3-51 Rampa 2
tempo di accel. e parametro 3-52 Rampa 2
tempo di decel.) nell’intervallo 0–
parametro 3-03 Riferimento max..
La frequenza motore bloccata è ora il punto
che abilita/condiziona l’utilizzo di accelerazione e decelerazione. Se vengono utilizzati
accelerazione/decelerazione, la variazione di
velocità segue sempre la rampa 2
(parametro 3-51 Rampa 2 tempo di accel. e
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
[21] Accele-
razione
[22] Decele-
razione
[23] Selez. setup
bit 0
[24] Selez. setup
bit 1
[32] Ingr. impulsi Selezionare [32] Ingr. impulsi se si utilizza una
[34] Rampa bit 0 Selezionare quale ingresso usare. Lo 0 logico
[36] Guasto rete
(negato)
[42] Ref source
bit 0
[51] Hand/Auto
Start
[52] Abilitaz.
avviam.
parametro 3-52 Rampa 2 tempo di decel.)
nell’intervallo 0–parametro 1-23 Frequen.
motore.
AVVISO!
Se è attivo [20] Blocco uscita, non è
possibile arrestare il convertitore di
frequenza mediante un [13] Segnale di
avviamento basso. Arrestare il convertitore di frequenza tramite un
morsetto programmato per [2] Evol.
libera neg. o [3] Ruota lib. e ripr. inv.
Per il controllo digitale di accelerazione/
decelerazione (potenziometro motore).
Attivare questa funzione selezionando [19]
Blocco riferimento o [20] Blocco uscita. Se [21]
Accelerazione è attivato per un tempo
inferiore a 400 ms, il riferimento risultante
viene aumentato dello 0,1%. Se [21] Accele-
razione viene attivato per oltre 400 ms, il
riferimento risultante viene aumentato in
base alla rampa 1 nel parametro 3-41 Rampa
1 tempo di accel..
Uguale a [21] Accelerazione.
Seleziona uno dei quattro setup. Impostare il
parametro 0-10 Setup attivo su Multi setup.
Uguale a [23] Selez. setup bit 0.
(Ingresso digitale di default 32).
sequenza di impulsi come riferimento o
retroazione. La conversione in scala viene
eettuata nel gruppo di parametri 5-5* Ingr.
impulsi.
seleziona la rampa 1 mentre l'1 logico
seleziona la rampa 2.
Attiva il parametro 14-10 Guasto di rete.
Guasto rete (negato) è attivo in una
condizione di 0 logico.
Un ingresso attivo nel bit 0 seleziona AI54
come risorsa di riferimento (vedere gruppo di
parametri 3-1* Riferimenti, opzione [35] Digital
input select). Un ingresso inattivo seleziona
AI53.
Seleziona avvio manuale o automatico. Il
segnale alto seleziona solo auto on, il
segnale basso seleziona solo hand on.
Il morsetto di ingresso per il quale è stato
programmato [52] Abilitaz. avviam. deve
essere in una condizione di 1 logico prima
che possa essere accettato un comando di
avviamento. Abilitazione avviamento
comprende una funzione logica AND legata
al morsetto programmato per [8] Avviamento,
[14] Marcia jog o [20] Blocco uscita. Per
88 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 91

Descrizione dei parametri Guida alla Programmazione
[53] Avviam.
manuale
[54] Avviam.
autom.
[55] Aumento
pot. digit.
[56] Riduzione
pot. digit.
[57] Azzeram.
pot. digit.
[60] Cont. A
(increm.)
[61] Cont. A
(decrem.)
[62] Ripristino
cont. A
iniziare a far funzionare il motore, devono
essere soddisfatte entrambe le condizioni. Se
[52] Abilitaz. avviam. è stato programmato su
più morsetti, è suciente che il suo valore
sia 1 logico su un solo morsetto per eseguire
la funzione. I segnali di uscita digitale per
richiesta di funzionamento ([8] Avviamento,
[14] Marcia jog o [20] Blocco uscita)
programmati nel gruppo parametri 5-3*
Uscite digitali, o nel gruppo di parametri 5-4*
Relè, non vengono inuenzati da [52] Abilitaz.
avviam.
Un segnale applicato mette il convertitore di
frequenza in modalità Hand on come se
fosse stato premuto [Hand On] e venisse
bypassato un normale comando di arresto.
Se si disconnette il segnale, il motore si
ferma. Per validare qualsiasi altro comando di
avvio è necessario assegnare un altro
ingresso digitale a [54] Avviam. autom. e
applicare a questo un segnale. [Hand On] e
[Auto On] non hanno alcun eetto. [O]
esclude l'avviamento locale e l'avvio
automatico. Premere [Hand On] o [Auto On]
per rendere nuovamente attivi l'avviamento
locale e l'avvio automatico. Se non è
presente alcun segnale su [53] Avviam.
manuale e su [54] Avviam. autom., il motore
si ferma indipendentemente dal comando di
avviamento applicato. Se i segnali vengono
applicati sia a [53] Avviam. manuale che a
[54] Avviam. autom., la funzione è avvio
automatico. Premendo il pulsante [O] il
motore si arresta indipendentemente dai
segnali [53] Avviam. manuale e [54] Avviam.
autom.
Un segnale applicato mette il convertitore di
frequenza in modalità Auto on come se fosse
stato premuto [Auto On]. Vedere anche [53]
Avviam. manuale.
Usa l'ingresso come un segnale di aumento
per la funzione potenziometro digitale
descritta nel gruppo di parametri 3-9*
Pot.metro dig.
Usa l'ingresso come un segnale di riduzione
per la funzione potenziometro digitale
descritta nel gruppo di parametri 3-9*
Pot.metro dig.
Usa l'ingresso per cancellare il riferimento
potenziometro digitale descritto nel gruppo
di parametri 3-9* Pot.metro dig.
(Solo morsetto 29 o 33) Ingresso per il
conteggio incrementale nel contatore SLC.
(Solo morsetto 29 o 33) Ingresso per il
conteggio in decremento nel contatore SLC.
Ingresso per il ripristino del contatore A.
[63] Cont. B
(increm.)
[64] Cont. B
(decrem.)
[65] Ripristino
cont. B
[66] Pausa
motore
[78] Riprist.
parola
manutenz.
preventiva
[80] Scheda PTC1 Tutti gli ingressi digitali possono essere
[85] Latched
Pump Derag
(Solo morsetto 29 e 33) Ingresso per il
conteggio incrementale nel contatore SLC.
(Solo morsetto 29 e 33) Ingresso per il
conteggio in decremento nel contatore SLC.
Ingresso per il ripristino del contatore B.
Costringe il convertitore di frequenza a
passare al modo pausa (vedere il gruppo di
parametri 22-4* Modo pausa). Reagisce sul
fronte di salita del segnale applicato.
Azzera tutti i dati nel parametro 16-96 Parola
di manutenzione.
impostati su [80] Scheda PTC 1. Tuttavia solo
un ingresso digitale deve essere impostato
su questa opzione.
Avvia la pulizia.
Le opzioni [120]–[138] sono relative alla funzionalità del
controllore in cascata. Per maggiori informazioni, vedere il
gruppo di parametri 25-** Controllore in cascata.
[120] Avviam.
pompa di
comando
[121] Altern.
pompa
primaria
[130
Interbl.
-
pompa 1 -
138]
Interbl.
pompa 9
Avvia/Arresta la pompa primaria (controllata
dal convertitore di frequenza). Un avvio
richiede anche l'applicazione di un segnale di
avviamento del sistema, per esempio a uno
degli ingressi digitali impostati su [8]
Avviamento.
Causa l'alternanza della pompa primaria in un
controllore in cascata. Impostare il
parametro 25-50 Alternanza pompa primaria su
[2] In fase di comando or [3] In fase di attivaz.
o comando. Il Parametro 25-51 Evento di
alternanza può essere impostato su
un'opzione qualsiasi delle quattro.
La funzione dipende anche dall'impostazione
nel parametro 25-06 Numero di pompe. Se
impostato su [0] No, Pompa 1 si riferisce alla
pompa comandata dal relè 1 e così via. Se
impostato su [1] Sì, Pompa 1 si riferisce solo
alla pompa comandata dal convertitore di
frequenza (senza alcuno dei relè integrati
interessati) e Pompa 2 alla pompa comandata
dal relè 1. La pompa a velocità variabile
(primaria) non può essere interbloccata nel
controllore in cascata di base.
Vedere la Tabella 3.14.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 89
Page 92

5-19 Arresto di sicurezza morsetto 37
Usare questo parametro per congurare la funzionalità Safe
Torque O. Un messaggio di avviso fa sì che il convertitore di
frequenza faccia procedere il motore a ruota libera e abilita il
riavvio automatico. Un messaggio di allarme fa sì che il convertitore di frequenza faccia procedere il motore a ruota libera e
richiede un riavvio manuale (tramite un bus di campo, I/O
digitali oppure premendo [RESET] sull'LCP). Quando è montata la
VLT® PTC Thermistor Card MCB 112, congurare le opzioni PTC
per ottenere il massimo vantaggio dalla gestione degli allarmi.
Option: Funzione:
[1] * All. arresto di
sic.
Fa girare il convertitore di frequenza
a ruota libera quando è attivato
Safe Torque O. Ripristino manuale
da LCP, ingresso digitale o bus di
campo.
[3] All. arresto di
sic.
Fa girare il convertitore di frequenza
a ruota libera quando è attivato
Safe Torque O (morsetto 37 o).
Quando viene ristabilito il circuito
Safe Torque O, il convertitore di
Descrizione dei parametri
VLT® AQUA Drive FC 202
Impostazione
nel gruppo di
parametri
5-1* Ingressi
digitali
[0] No [1] Sì
33
[130] Interbl.
pompa 1
[131] Interbl.
pompa 2
[132] Interbl.
pompa 3
[133] Interbl.
pompa 4
[134] Interbl.
pompa 5
[135] Interbl.
pompa 6
[136] Interbl.
pompa 7
[137] Interbl.
pompa 8
[138] Interbl.
pompa 9
5-10 Ingr. digitale morsetto 18
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali, fatta eccezione per
l'opzione [32] Ingr. impulsi.
Impostazione nel
parametro 25-06 Numero di
pompe
Comandato
da relè 1
(solo se non
è la pompa
primaria)
Comandato
dal relè 2
Comandato
dal relè 3
Comandato
dal relè 4
Comandato
dal relè 5
Comandato
dal relè 6
Comandato
dal relè 7
Comandato
dal relè 8
Comandato
dal relè 9
Controllato
dal conver-
titore di
frequenza
(non può
essere
interbloccato)
Comandato
dal relè 1
Comandato
dal relè 2
Comandato
dal relè 3
Comandato
dal relè 4
Comandato
dal relè 5
Comandato
dal relè 6
Comandato
dal relè 7
Comandato
dal relè 8
5-15 Ingr. digitale morsetto 33
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali.
5-16 Ingr. digitale morsetto X30/2
Option: Funzione:
[0] * Nessuna
funzione
Questo parametro è attivo quando il VLT
General Purpose I/O MCB 101 è installato nel
convertitore di frequenza. Il parametro
contiene tutte le opzioni e funzioni elencate
nel gruppo di parametri 5-1* Ingressi digitali,
fatta eccezione per l'opzione [32] Ingr.
impulsi.
5-17 Ingr. digitale morsetto X30/3
Option: Funzione:
[0] * Nessuna
funzione
Questo parametro è attivo quando il VLT
General Purpose I/O MCB 101 è installato nel
convertitore di frequenza. Il parametro
contiene tutte le opzioni e funzioni elencate
nel gruppo di parametri 5-1* Ingressi digitali,
fatta eccezione per l'opzione [32] Ingr.
impulsi.
5-18 Ingr. digitale morsetto X30/4
Option: Funzione:
[0] * Nessuna
funzione
Questo parametro è attivo quando il VLT
General Purpose I/O MCB 101 è installato nel
convertitore di frequenza. Il parametro
contiene tutte le opzioni e funzioni elencate
nel gruppo di parametri 5-1* Ingressi digitali,
fatta eccezione per l'opzione [32] Ingr.
impulsi.
®
®
®
5-11 Ingr. digitale morsetto 19
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali, fatta eccezione per
l'opzione [32] Ingr. impulsi.
5-12 Ingr. digitale morsetto 27
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali, fatta eccezione per
l'opzione [32] Ingr. impulsi.
5-13 Ingr. digitale morsetto 29
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali.
5-14 Ingr. digitale morsetto 32
Il parametro contiene tutte le opzioni e funzioni elencate nel
gruppo di parametri 5-1* Ingressi digitali, fatta eccezione per
l'opzione [32] Ingr. impulsi.
90 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 93

5-19 Arresto di sicurezza morsetto 37
Usare questo parametro per congurare la funzionalità Safe
Torque O. Un messaggio di avviso fa sì che il convertitore di
frequenza faccia procedere il motore a ruota libera e abilita il
riavvio automatico. Un messaggio di allarme fa sì che il convertitore di frequenza faccia procedere il motore a ruota libera e
richiede un riavvio manuale (tramite un bus di campo, I/O
digitali oppure premendo [RESET] sull'LCP). Quando è montata la
VLT® PTC Thermistor Card MCB 112, congurare le opzioni PTC
per ottenere il massimo vantaggio dalla gestione degli allarmi.
Option: Funzione:
frequenza continua a funzionare
senza ripristino manuale.
[4] Allarme PTC 1 Fa girare il convertitore di frequenza
a ruota libera quando è attivato
Safe Torque O. Ripristino manuale
da LCP, ingresso digitale o bus di
campo.
[5] Avviso PTC 1 Fa girare il convertitore di frequenza
a ruota libera quando è attivato
Safe Torque O (morsetto 37 o).
Quando viene ristabilito il circuito
Safe Torque O, il convertitore di
frequenza continua a funzionare
senza ripristino manuale, a meno
che sia ancora abilitato un ingresso
digitale impostato su [80] Scheda
PTC 1.
[6] PTC 1 e relè A Questa opzione viene utilizzata
quando la VLT® PTC Thermistor
Card MCB 112 è abbinata a un
tasto di arresto tramite un relè di
sicurezza sul morsetto 37. Fa girare
il convertitore di frequenza a ruota
libera quando è attivato Safe
Torque O. Ripristino manuale da
LCP, ingresso digitale o bus di
campo.
[7] PTC 1 e relè W Questa opzione viene utilizzata
quando la VLT® PTC Thermistor
Card MCB 112 è abbinata a un
tasto di arresto tramite un relè di
sicurezza sul morsetto 37. Fa girare
il convertitore di frequenza a ruota
libera quando è attivato Safe
Torque O (morsetto 37 o).
Quando viene ristabilito il circuito
Safe Torque O, il convertitore di
frequenza continua a funzionare
senza ripristino manuale, a meno
che sia ancora abilitato un ingresso
digitale impostato su [80] Scheda
PTC 1.
5-19 Arresto di sicurezza morsetto 37
Usare questo parametro per congurare la funzionalità Safe
Torque O. Un messaggio di avviso fa sì che il convertitore di
frequenza faccia procedere il motore a ruota libera e abilita il
riavvio automatico. Un messaggio di allarme fa sì che il convertitore di frequenza faccia procedere il motore a ruota libera e
richiede un riavvio manuale (tramite un bus di campo, I/O
digitali oppure premendo [RESET] sull'LCP). Quando è montata la
VLT® PTC Thermistor Card MCB 112, congurare le opzioni PTC
per ottenere il massimo vantaggio dalla gestione degli allarmi.
Option: Funzione:
[8] PTC 1 e relè
A/W
Questa opzione permette di
utilizzare una combinazione di
Allarme e Avviso.
[9] PTC 1 e relè
W/A
Questa opzione permette di
utilizzare una combinazione di
Allarme e Avviso.
Descrizione dei parametri Guida alla Programmazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 91
AVVISO!
Le opzioni [4] Allarme PTC 1 no a [9] PTC 1 e relè W/A
sono disponibili soltanto quando il MCB 112 è collegato.
AVVISO!
La selezione di Auto Reset/Warning abilita il riavvio
automatico del convertitore di frequenza.
Funzione Num
Nessuna funzione [0] – –
Allarme Safe TorqueO[1]* – Arresto sicuro
Avviso Safe TorqueO[3] – Arresto sicuro
Allarme PTC 1 [4] Arr. sic. PTC 1
Avviso PTC 1 [5] Arr. sic. PTC 1
PTC 1 e relè A [6] Arr. sic. PTC 1
PTC 1 e relè W [7] Arr. sic. PTC 1
PTC 1 e relè A/W [8] Arr. sic. PTC 1
PTC 1 e relè W/A [9] Arr. sic. PTC 1
Tabella 3.14 Descrizione di funzioni, allarmi e avvisi
La lettera W signica avviso e la lettera A signica allarme. Per
ulteriori informazioni, vedere Allarmi e avvisi nel capitolo 5 Ricerca ed
eliminazione dei guasti.
Un guasto pericoloso relativo a Safe Torque O fa scattare
l'Allarme 72 Guasto peric.
Fare riferimento al Tabella 5.1.
PTC Relè
ero
[A71]
[W71]
[A71]
[W71]
[A71]
[W71]
[A68]
[A68]
–
–
Arresto sicuro
[A68]
Arresto sicuro
[A68]
Arresto sicuro
[A68]
Arresto sicuro
[A68]
3 3
Page 94

Descrizione dei parametri
VLT® AQUA Drive FC 202
5-20 Ingr. digitale morsetto X46/1
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
33
5-21 Ingr. digitale morsetto X46/3
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
5-22 Ingr. digitale morsetto X46/5
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
5-23 Ingr. digitale morsetto X46/7
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
5-24 Ingr. digitale morsetto X46/9
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
5-25 Ingr. digitale morsetto X46/11
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
5-26 Ingr. digitale morsetto X46/13
Questo parametro è collegato all'ingresso digitale sulla VLT
Extended Relay Card MCB 113. Il parametro contiene tutte le
opzioni e funzioni elencate nel gruppo di parametri 5-1* Ingressi
digitali, fatta eccezione per l'opzione [32] Ingr. impulsi.
3.7.3 5-3* Uscite digitali
®
[0] Nessuna
funzione
[1] Comando
pronto
[2] Conv. freq.
®
®
®
®
®
®
pronto
[3] Conv. freq. pr. /
rem.
[4] Standby /
nessun avviso
[5] In funzione Motore in marcia.
[6] In marcia/no
avviso
[8] Mar./rif. rag./n.
avv.
[9] Allarme L'uscita è attivata da un allarme. Non
[10] Allarme o
avviso
[11] Al lim. coppia È stato superato il limite di coppia
[12] Fuori interv.di
corr.
[13] Sotto corrente,
bassa
[14] Sopra corrente,
alta
[15] Fuori dall'in-
tervallo di
velocità
Parametri per congurare le funzioni di uscita per i
morsetti di uscita. Le due uscite digitali allo stato solido
sono comuni per i morsetti 27 e 29. Impostare la funzione
[16] Sotto velocità,
bassa
I/O per il morsetto 27 nel parametro 5-01 Modo Morsetto 27
e la funzione I/O per il morsetto 29 nel
parametro 5-02 Modo morsetto 29.
AVVISO!
Questi parametri non possono essere regolati mentre il
[17] Sopra velocità,
alta
[18] Fuori campo
retroaz.
motore è in funzione.
È possibile programmare le uscite digitali
mediante queste funzioni:
Valore predenito per tutte le uscite
digitali e le uscite a relè.
Il quadro di comando riceve tensione di
alimentazione.
Il convertitore di frequenza è pronto per
il funzionamento e alimenta il quadro di
comando.
Il convertitore di frequenza è pronto per
il funzionamento ed è in modalità Auto
on.
Il convertitore di frequenza è pronto per
il funzionamento. Non è stato dato
nessun comando di avvio o di arresto
(avviamento/disabilitazione). Non sono
presenti avvisi.
La velocità di uscita è superiore alla
velocità impostata nel
parametro 1-81 Vel.min. per
funz.all'arresto[giri/min]. Il motore è in
funzione e non ci sono avvisi.
Il motore gira alla velocità di riferimento.
sono presenti avvisi.
L'uscita è attivata da un allarme o da un
avviso.
impostato nel parametro 4-16 Lim. di
coppia in modo motore.
La corrente motore è al di fuori dell'intervallo impostato nel
parametro 4-18 Limite di corrente.
La corrente motore è inferiore a quella
impostata nel parametro 4-50 Avviso
corrente bassa.
La corrente motore è superiore all'impostazione nel parametro 4-51 Avviso
corrente alta.
La velocità di uscita non rientra nell'intervallo impostato nel
parametro 4-52 Avviso velocità bassa e nel
parametro 4-53 Avviso velocità alta.
La velocità di uscita è inferiore al valore
impostato nel parametro 4-52 Avviso
velocità bassa.
La velocità di uscita è superiore al valore
impostato nel parametro 4-53 Avviso
velocità alta.
Il campo di retroazione non rientra negli
intervalli impostati nel
parametro 4-56 Avviso retroazione bassa e
nel parametro 4-57 Avviso retroazione alta.
92 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 95

Descrizione dei parametri Guida alla Programmazione
[19] Sotto retroaz.
bassa
[20] Sopra retroaz.
alta
[21] Termica Avviso È attivo l'avviso termico se è stato
[25] Inversione Inversione. 1 logico = relè attivato, 24 V
[26] Bus OK Comunicazione attiva (nessuna temporiz-
[27] Coppia
lim.&arresto
[28] Freno, ness. avv. Il freno è attivo e non ci sono avvisi.
[29] Fr.pronto, no
gu.
[30] Guasto freno
(IGBT)
[35] Interblocco
esterno
[40] Fuori campo rif.
[41] Sotto rif., basso
[42] Sopra rif., alto
[45] Com. bus
[46] Com. bus, 1 se
T/O
[47] Com. bus, 0 se
T/O
[55] Uscita a impulsi
[60] Comparatore 0 Vedere il gruppo di parametri 13-1*
[61] Comparatore 1 Vedere il gruppo di parametri 13-1*
[62] Comparatore 2 Vedere il gruppo di parametri 13-1*
La retroazione è al di sotto del limite
impostato nel parametro 4-52 Avviso
velocità bassa.
La retroazione è superiore al limite
impostato nel parametro 4-56 Avviso
retroazione bassa.
superato il limite di temperatura nel
motore, nel convertitore di frequenza,
nella resistenza di frenatura o nel
termistore.
CC quando il motore ruota in senso
orario. 0 logico = relè non attivato,
nessun segnale quando il motore ruota
in senso antiorario.
zazione) mediante la porta di
comunicazione seriale.
Utilizzato quando si esegue un arresto a
ruota libera e in condizioni di limite di
coppia. Il convertitore di frequenza ha
ricevuto un segnale di arresto ed è al
limite di coppia, il segnale è 0 logico.
Il freno è pronto per funzionare e non ci
sono guasti.
L'uscita è un 1 logico quando l'IGBT freno
è cortocircuitato. Utilizzare questa
funzione per proteggere il convertitore di
frequenza in caso di guasti nei moduli
dei freni. Utilizzare l'uscita o il relè per
scollegare la tensione di rete dal convertitore di frequenza.
Interblocco esterno viene attivato
mediante 1 degli ingressi digitali.
Comparatori. Se il comparatore 0 viene
valutato come VERO, l'uscita diventa alta.
Altrimenti è bassa.
Comparatori. Se il comparatore 1 viene
valutato come VERO l'uscita diventa alta.
Altrimenti è bassa.
Comparatori. Se il comparatore 2 viene
valutato come VERO, l'uscita diventa alta.
Altrimenti è bassa.
[63] Comparatore 3 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 3 viene
valutato come VERO, l'uscita diventa alta.
Altrimenti è bassa.
[64] Comparatore 4 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 4 viene
valutato come VERO, l'uscita diventa alta.
Altrimenti è bassa.
[65] Comparatore 5 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 5 viene
valutato come VERO, l'uscita diventa alta.
Altrimenti è bassa.
[70] Regola logica 0 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 0 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[71] Regola logica 1 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 1 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[72] Regola logica 2 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 2 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[73] Regola logica 3 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 3 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[74] Reg. log. 4 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 4 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[75] Reg. log. 5 Vedere il gruppo di parametri 13-4*Regole
logiche. Se la regola logica 5 viene
valutata come VERA, l'uscita diventa alta.
Altrimenti è bassa.
[80] Uscita digitale
SL A
[81] Uscita digitale
SL B
[82] Uscita digitale
SL C
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'azione Smart Logic [38] Imp.
usc. dig. A alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'azione
Smart Logic [32] Imp. usc. dig. A bassa.
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'Azione Smart Logic [39] Imp.
usc. dig. B alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'Azione
Smart Logic [33] Imp. usc. dig. B bassa.
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'Azione Smart Logic [40] Imp.
usc. dig. C alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'Azione
Smart Logic [34] Imp. usc. dig. C bassa.
3 3
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 93
Page 96

Descrizione dei parametri
VLT® AQUA Drive FC 202
[83] Uscita digitale
SL D
33
[84] Uscita digitale
SL E
[85] Uscita digitale
SL F
[90] Impulsi
contatore kWh
[120] System On Ref
[155] Verifying Flow
[160] Nessun allarme L'uscita aumenta se non è presente alcun
[161] Inversione
attiva
[165] Rif. locale attivo L'uscita è alta se il parametro 3-13 Sito di
[166] Rif. remoto
attivo
[167] Comando di
avviamento
attivo
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'Azione Smart Logic [41] Imp.
usc. dig. D alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'Azione
Smart Logic [35] Imp. usc. dig. D bassa.
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'Azione Smart Logic [42] Imp.
usc. dig. E alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'Azione
Smart Logic [36] Imp. usc. dig. E bassa.
Vedere il parametro 13-52 Azione regol.
SL. L'uscita aumenta ogniqualvolta viene
eseguita l'Azione Smart Logic [43] Imp.
usc. dig. F alta. L'uscita diminuisce
ogniqualvolta viene eseguita l'Azione
Smart Logic [37] Imp. usc. dig. F bassa.
Crea un impulso sull'uscita digitale
ogniqualvolta il convertitore di frequenza
usa 1 kWh.
allarme.
L'uscita è alta ogniqualvolta il convertitore di frequenza ruota in senso
antiorario (il prodotto logico dei bit di
stato in funzione E inversione).
riferimento = [2] Locale o se il
parametro 3-13 Sito di riferimento = [0]
Collegato Man./Auto sono attivi contem-
poraneamente mentre l'LCP è in modalità
Hand on.
L'uscita è alta quando il
parametro 3-13 Sito di riferimento è
impostato su [1] Remoto o [0] Collegato
Man./Auto sono attivi mentre l'LCP è in
modalità Auto on.
L'uscita è alta ogniqualvolta sono
presenti un comando di avviamento
attivo, per esempio Auto On, e un
comando di avvio mediante un ingresso
digitale o bus, oppure [Hand on].
[180] Errore orologio La funzione orologio è stata reimpostata
[181] Manutenzione
preventiva
[182] Deragging La pulizia è attiva.
[188] Connessione
condensatori
AHF
[189] Com. vent.
esterno
[190] Portata nulla Una situazione di portata nulla o di
[191] Funzione
pompa a secco
[192] Fine curva Attivo quando è presente una condizione
[193] Modo pausa Il convertitore di frequenza/sistema è
[194] Cinghia rotta È stata rilevata una condizione di cinghia
[195] Controllo
valvola bypass
AVVISO!
Tutti i comandi di arresto/
evoluzione a ruota libera devono
essere inattivi.
[168] Modalità
manuale
[169] Modalità
automatica
L'uscita è alta ogniqualvolta il convertitore di frequenza è in modalità Hand
On (come indicato dalla luce del LED in
alto [Hand on]).
L'uscita passa al valore alto ogniqualvolta
il convertitore di frequenza è in modalità
Auto On (come indicato dalla spia
luminosa in alto [Auto On]).
ai valori predeniti (2000-01-01) a causa
di una caduta di tensione.
Uno o più eventi di manutenzione
preventiva programmati nel
parametro 23-10 Elemento soggetto a
manutenzione hanno superato il tempo
per l'intervento specicato nel
parametro 23-11 Intervento di
manutenzione.
Vedere il parametro 5-80 Ritardo
riconnessione condensatori AHF.
Il comando ventilatore esterno è attivo.
velocità minima è stata rilevata se
abilitata nel Parametro 22-21 Rilevam.
bassa potenza.
È stata rilevata una condizione di pompa
a secco. Abilitare questa funzione nel
parametro 22-26 Funzione pompa a secco.
di ne curva.
entrato nel modo pausa. Vedere il gruppo
di parametri 22-4* Modo pausa.
rotta. Abilitare questa funzione nel
parametro 22-60 Funzione cinghia rotta.
Il comando valvola bypass (uscita
digitale/a relè nel convertitore di
frequenza) viene utilizzato anché i
sistemi compressore scarichino il
compressore durante l'avviamento
utilizzando una valvola di bypass. Dopo il
comando di avviamento, la valvola di
bypass sarà aperta nché il convertitore
di frequenza raggiunge
parametro 4-11 Lim. basso vel. motore
[giri/min]). Dopo il raggiungimento del
limite, la valvola di bypass viene chiusa,
permettendo al compressore di
funzionare normalmente. Questa
procedura non viene riattivata prima
dell'inizializzazione di un nuovo
avviamento e se la velocità del convertitore di frequenza è pari a 0 durante la
ricezione del segnale di avviamento. Il
Parametro 1-71 Ritardo avv. può essere
utilizzato per ritardare l'avviamento del
motore.
94 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Page 97

130BA251.10
Velocita
RIF
Min
ON
OFF
ON
OFF
Avviamento Arresto
Tempo
Tempo
Tempo
Descrizione dei parametri Guida alla Programmazione
[242] RS Flipop 2 Vedere parametro 13-15 RS-FF Operand S,
[243] RS Flipop 3 Vedere parametro 13-15 RS-FF Operand S,
[244] RS Flipop 4 Vedere parametro 13-15 RS-FF Operand S,
[245] RS Flipop 5 Vedere parametro 13-15 RS-FF Operand S,
Disegno 3.28 Principio di regolazione
della valvola di bypass
[246] RS Flipop 6 Vedere parametro 13-15 RS-FF Operand S,
[247] RS Flipop 7 Vedere parametro 13-15 RS-FF Operand S,
parametro 13-16 RS-FF Operand R.
parametro 13-16 RS-FF Operand R.
parametro 13-16 RS-FF Operand R.
3 3
parametro 13-16 RS-FF Operand R.
parametro 13-16 RS-FF Operand R.
parametro 13-16 RS-FF Operand R.
[199] Pipe Filling Attivo quando la funzione riempimento
tubo è operativa. Vedere il gruppo di
parametri 29-** Water Application
Functions.
Le opzioni di impostazione seguenti sono
tutte relazionate al controllore in cascata.
Vedere il gruppo di parametri 25-**
Controllore in cascata per maggiori
dettagli.
[200] Piena capacità Tutte le pompe funzionano a piena
velocità.
[201] Pompa 1 in
funzione
[202] Pompa 2 in
funzione
[203] Pompa 3 in
funzione
[204] Pompa 4 in
funzione
[205] Pompa 5 in
funzione
[206] Pompa 6 in
funzione
[207] Pompa 7 in
marcia
[208] Pompa 8 in
marcia
[209] Pompa 9 in
marcia
[240] RS Flipop 0 Vedere parametro 13-15 RS-FF Operand S,
[241] RS Flipop 1 Vedere parametro 13-15 RS-FF Operand S,
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 95
Una o più pompe controllate dal
controllore in cascata sono in funzione. La
funzione dipende anche dall'impostazione
nel parametro 25-05 Pompa primaria ssa.
Se impostato su [0] No, Pompa 1 si
riferisce alla pompa comandata dal relè 1
e così via. Se impostato su [1] Sì, Pompa 1
si riferisce soltanto alla pompa comandata
dal convertitore di frequenza (senza
alcuno dei relè integrati interessati) e
Pompa 2 alla pompa comandata dal relè
1. Vedere la Tabella 3.15.
Vedere [201].
Vedere [201].
parametro 13-16 RS-FF Operand R.
parametro 13-16 RS-FF Operand R.
Impostazione nel
gruppo di parametri
5-3* Uscite digitali
[0] No [1] Sì
[201] Pompa 1
in funzione
[202] Pompa 2
in funzione
[203] Pompa 3
in funzione
Tabella 3.15 Pompe controllate dal controllore in cascata
5-30 Uscita dig. morsetto 27
Le opzioni di questo parametro sono descritte nel
capitolo 3.7.3 5-3* Uscite digitali.
Option: Funzione:
[0] * Nessuna funzione
5-31 Uscita dig. morsetto 29
Le opzioni di questo parametro sono descritte nel
capitolo 3.7.3 5-3* Uscite digitali.
Option: Funzione:
[0] * Nessuna funzione
5-32 Uscita dig. mors. X30/6 (MCB 101)
Le opzioni di questo parametro sono descritte nel
capitolo 3.7.3 5-3* Uscite digitali.
Option: Funzione:
[0] * Nessuna funzione Questo parametro è attivo quando il
5-33 Uscita dig. mors. X30/7 (MCB 101)
Option: Funzione:
[0] * Nessuna
funzione
Impostazione nel parametro 25-05 Pompa
primaria ssa
Comandata dal
relè 1
Comandata dal
relè 2
– Comandata dal
VLT® General Purpose I/O MCB 101 è
installato nel convertitore di frequenza.
Questo parametro è attivo quando il VLT
General Purpose I/O MCB 101 è installato
nel convertitore di frequenza. Stesse
opzioni e funzioni del gruppo di parametri
5-1* Ingressi digitali.
Comandata dal
convertitore di
frequenza
Comandata dal
relè 1
relè 2
®
Page 98

5-40 Funzione relè
Array [20]
Option: Funzione:
Selezionare le opzioni per denire
la funzione dei relè.
La selezione di ciascun relè
meccanico è realizzata in un
parametro array.
[0] Nessuna
funzione
[1] Comando
pronto
[2] Conv. freq.
pronto
[3] Conv. freq.
pr. / rem.
[4] Standby /
nessun avviso
[5] In funzione
[6] In marcia/no
avviso
[8] Mar./rif. rag./n.
avv.
[9] Allarme
[10] Allarme o
avviso
[11] Al lim. coppia
[12] Fuori interv.di
corr.
[13] Sotto corrente,
bassa
[14] Sopra
corrente, alta
[15] Fuori dall'in-
tervallo di
velocità
[16] Sotto velocità,
bassa
[17] Sopra velocità,
alta
[18] Fuori campo
retroaz.
[19] Sotto retroaz.
bassa
[20] Sopra retroaz.
alta
[21] Termica Avviso
[25] Inversione
[26] Bus OK
5-40 Funzione relè
Array [20]
Option: Funzione:
[27] Coppia
lim.&arresto
[28] Freno, ness.
avv.
[29] Fr.pronto, no
gu.
[30] Guasto freno
(IGBT)
[33] Arresto di sic.
att.
[35] Interblocco
esterno
[36] Bit 11 par. di
contr.
[37] Bit 12 par. di
contr.
[40] Fuori campo
rif.
[41] Sotto rif.,
basso
[42] Sopra rif., alto
[45] Com. bus
[46] Com. bus, 1 se
T/O
[47] Com. bus, 0 se
T/O
[51] Controllato da
MCO
[59] Remote,enable
,no TW
[60] Comparatore 0
[61] Comparatore 1
[62] Comparatore 2
[63] Comparatore 3
[64] Comparatore 4
[65] Comparatore 5
[70] Regola logica
0
[71] Regola logica
1
[72] Regola logica
2
[73] Regola logica
3
[74] Reg. log. 4
[75] Reg. log. 5
[80] Uscita digitale
SL A
[81] Uscita digitale
SL B
[82] Uscita digitale
SL C
Descrizione dei parametri
3.7.4 5-4* Relè
Parametri per congurare la temporizzazione e le funzioni
di uscita per i relè.
33
96 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
VLT® AQUA Drive FC 202
Page 99

5-40 Funzione relè
Array [20]
Option: Funzione:
[83] Uscita digitale
SL D
[84] Uscita digitale
SL E
[85] Uscita digitale
SL F
[120] System On Ref
[151] ATEX ETR cur.
alarm
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Nessun
allarme
[161] Inversione
attiva
[164] Local ref
active, not
OFF
[165] Rif. locale
attivo
[166] Rif. remoto
attivo
[167] Comando di
avviamento
attivo
[168] Modalità
manuale
[169] Modalità
automatica
[180] Errore
orologio
[181] Manutenzione
preventiva
[183] Pre/Post Lube
[188] Connessione
condensatori
AHF
[189] Com. vent.
esterno
[190] Portata nulla
[191] Funzione
pompa a
secco
[192] Fine curva
[193] Modo pausa
[194] Cinghia rotta
5-40 Funzione relè
Array [20]
Option: Funzione:
[195] Controllo
valvola bypass
[196] Mod. di
incendio attiva
[197] Mod. inc. era
attiva
[198] Modo bypass
attivo
[199] Pipe Filling
[211] Pompa in
cascata 1
[212] Pompa in
cascata 2
[213] Pompa in
cascata 3
[214] Pompa in
cascata 4
[215] Pompa in
cascata 5
[216] Pompa in
cascata 6
[217] Pompa in
cascata 7
[218] Pompa in
cascata 8
[219] Pompa in
cascata 9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
[238] Ext. CL 3 on
Ref
[240] RS Flipop 0 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[241] RS Flipop 1 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[242] RS Flipop 2 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[243] RS Flipop 3 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[244] RS Flipop 4 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
Descrizione dei parametri Guida alla Programmazione
MG20OB06 Danfoss A/S © 05/2018 Tutti i diritti riservati. 97
3 3
Page 100

5-40 Funzione relè
Array [20]
Option: Funzione:
[245] RS Flipop 5 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[246] RS Flipop 6 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
[247] RS Flipop 7 Vedere parametro 13-15 RS-FF
Operand S, parametro 13-16 RS-FF
Operand R.
5-41 Ritardo attiv., relè
Array [20]
Range: Funzione:
0.01 s* [0.01 - 600 s] Immettere il ritardo per il tempo di
attivazione dei relè. Selezionare uno
tra i due relè meccanici interni in
una funzione array. Vedere il
parametro 5-40 Funzione relè per
dettagli.
5-42 Ritardo disatt., relè
Array[20]
Range: Funzione:
0.01 s* [0.01 - 600 s] Immettere il ritardo del tempo di
disattivazione dei relè. Scegliere
uno tra i due relè meccanici interni
in una funzione array. Vedere
parametro 5-40 Funzione relè per
dettagli. Se la condizione
dell'evento selezionato cambia
prima dello scadere del timer di
5-42 Ritardo disatt., relè
Array[20]
Range: Funzione:
ritardo, l'uscita a relè non viene
modicata.
Descrizione dei parametri
VLT® AQUA Drive FC 202
33
Disegno 3.30 Ritardo disatt., relè
Disegno 3.29 Ritardo attiv., relè
Se la condizione dell'evento selezionato cambia prima che
il timer di ritardo di attivazione o disattivazione scada,
l'uscita a relè non viene modicata.
3.7.5 5-5* Ingr. impulsi
I parametri degli ingressi a impulsi vengono usati per
denire una nestra adatta per l'area del riferimento a
impulsi congurando la scala e le impostazioni del ltro
per gli ingressi digitali. I morsetti di ingresso 29 o 33
fungono da ingressi di riferimento di frequenza. Impostare
il morsetto 29 parametro 5-13 Ingr. digitale morsetto 29) o il
morsetto 33 (parametro 5-15 Ingr. digitale morsetto 33) su
[32] Ingr. impulsi. Se il morsetto 29 viene utilizzato come
ingresso, impostare il parametro 5-02 Modo morsetto 29 su
[0] Ingresso.
98 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG20OB06
Disegno 3.31 Ingresso a impulsi
 Loading...
Loading...