

Page 1
MAKING MODERN LIVING POSSIBLE
설계 지침서
VLT® AQUA Drive FC 202
0.25-90 kW
www.DanfossDrives.com
Page 2
Page 3

차례 설계 지침서
차례
1 소개
1.1 설계 지침서의 용도
1.2 구성
1.3 추가 리소스
1.4 약어, 기호 및 규약
1.5 정의
1.6 문서 및 소프트웨어 버전
1.7 승인 및 인증
1.7.1 CE 마크 11
1.7.1.1 저전압 규정 11
1.7.1.2 EMC 규정 11
1.7.1.3 기계류 규정 11
1.7.1.4 ErP 규정 12
1.7.2 C-tick 준수 12
1.7.3 UL 준수 12
1.7.4 선박 준수 12
1.8 안전
8
8
8
8
9
10
11
11
13
1.8.1 일반 안전 원칙 13
2 제품 개요
2.1 소개
2.2 운전 설명
2.3 운전 순서
2.3.1 정류기부 19
2.3.2 매개부 19
2.3.3 인버터부 19
2.3.4 제동 옵션 20
2.3.5 부하 공유 20
2.4 제어 구조
2.4.1 제어 구조 개회로 20
2.4.2 제어 구조 폐회로 21
2.4.3 현장(수동 운전) 및 원격(자동 운전) 제어 21
2.4.4 지령 처리 22
2.4.5 피드백 처리 24
2.5 자동 운전 기능
15
15
18
19
20
25
2.5.1 단락 회로 보호 25
2.5.2 과전압 보호 25
2.5.3 모터 결상 감지 26
2.5.4 주전원 위상 불균형 감지 26
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 1
Page 4
차례
VLT® AQUA Drive FC 202
2.5.5 출력(전원) 차단/공급 26
2.5.6 과부하 보호 26
2.5.7 자동 용량 감소 26
2.5.8 자동 에너지 최적화 26
2.5.9 자동 스위칭 주파수 변조 26
2.5.10 높은 스위칭 주파수에 따른 자동 용량 감소 27
2.5.11 과열에 따른 자동 용량 감소 27
2.5.12 자동 가감속 27
2.5.13 전류 제한 회로 27
2.5.14 전력 변동 성능 27
2.5.15 모터 소프트 기동 27
2.5.16 공진 감쇄 27
2.5.17 온도 제어 팬 27
2.5.18 EMC 준수 27
2.5.19 3가지 모터 위상 전체에서의 전류 측정 27
2.5.20 제어 단자의 갈바닉 절연 27
2.6 사용자 정의 어플리케이션 기능
2.6.1 Automatic Motor Adaptation(자동 모터 최적화) 28
2.6.2 모터 써멀 보호 28
2.6.3 주전원 저전압 28
2.6.4 내장 PID 제어기 29
2.6.5 자동 재기동 29
2.6.6 플라잉 기동 29
2.6.7 감속 시 최대 토오크 29
2.6.8 주파수 바이패스 29
2.6.9 모터 예열 29
2.6.10 4개의 프로그래밍 가능한 셋업 29
2.6.11 다이나믹 제동 29
2.6.12 직류 제동 30
2.6.13 슬립 모드 30
2.6.14 인가 시 운전 30
2.6.15 스마트 로직 컨트롤러(SLC) 30
28
2.6.16 STO 기능 31
2.7 결함, 경고 및 알람 기능
32
2.7.1 과열 시 운전 32
2.7.2 최고 및 최저 지령 경고 32
2.7.3 최고 및 최저 피드백 경고 32
2.7.4 위상 불균형 또는 결상 32
2.7.5 최고 주파수 경고 32
2.7.6 최저 주파수 경고 32
2 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 5
차례 설계 지침서
2.7.7 최고 전류 경고 32
2.7.8 최저 전류 경고 32
2.7.9 무부하/벨트 파손 경고 32
2.7.10 직렬 인터페이스 손실 33
2.8 사용자 인터페이스 및 프로그래밍
2.8.1 현장 제어 패널 33
2.8.2 PC 소프트웨어 34
2.8.2.1 MCT 10 셋업 소프트웨어 34
2.8.2.2 VLT® 고조파 계산 소프트웨어 MCT 31 35
2.8.2.3 고조파 계산 소프트웨어 (HCS) 35
2.9 유지보수
2.9.1 보관 35
3 시스템 통합
3.1 주위 운전 조건
3.1.1 습도 36
3.1.2 온도 36
3.1.3 냉각 36
3.1.4 모터에서 발생된 전압에 의한 과전압 37
3.1.5 청각적 소음 38
3.1.6 진동 및 충격 38
3.1.7 공격성 대기환경 38
33
35
36
36
3.1.8 IP 등급 정의 39
3.1.9 무선 주파수 간섭 40
3.1.10 PELV 및 갈바닉 절연 준수 40
3.1.11 보관 41
3.2 EMC, 고조파 및 접지 누설 보호
3.2.1 EMC 방사의 일반적 측면 41
3.2.2 EMC 시험 결과 42
3.2.3 방사 요구사항 44
3.2.4 방지 요구사항 44
3.2.5 모터 절연 45
3.2.6 모터 베어링 전류 45
3.2.7 고조파 46
3.2.8 접지 누설 전류 48
3.3 주전원 통합
3.3.1 주전원 구성 및 EMC 영향 49
3.3.2 저주파수 주전원 간섭 50
3.3.3 주전원 간섭 분석 50
41
49
3.3.4 주전원 간섭 감소를 위한 옵션 51
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 3
Page 6
차례
VLT® AQUA Drive FC 202
3.3.5 무선 주파수 간섭 51
3.3.6 운전 장소의 분류 51
3.3.7 절연된 입력 소스와 함께 사용하는 경우 51
3.3.8 역률 보정 51
3.3.9 입력 전력 지연 52
3.3.10 주전원 과도 현상 52
3.3.11 예비 발전기를 사용한 운전 52
3.4 모터 통합
3.4.1 모터 선택 시 고려사항 53
3.4.2 사인파 및 dU/dt 필터 53
3.4.3 올바른 모터 접지 53
3.4.4 모터 케이블 53
3.4.5 모터 케이블 차폐 53
3.4.6 여러 모터의 연결 54
3.4.7 제어 와이어 절연 55
3.4.8 모터 써멀 보호 55
3.4.9 출력 콘택터 56
3.4.10 제동 기능 56
3.4.11 다이나믹 제동 56
3.4.12 제동 저항 계산 56
3.4.13 제동 저항 배선 57
3.4.14 제동 저항 및 제동 IGBT 57
3.4.15 에너지 효율 57
3.5 추가적인 입력 및 출력
53
59
3.5.1 배선 약도 59
3.5.2 릴레이 연결 60
3.5.3 EMC 호환 전기 연결 61
3.6 기계적 계획
3.6.1 여유 공간 62
3.6.2 벽면 장착 62
3.6.3 접근 63
3.7 옵션 및 액세서리
3.7.1 통신 옵션 66
3.7.2 입력/출력, 피드백 및 안전 옵션 66
3.7.3 캐스케이드 컨트롤러 옵션 67
3.7.4 제동 저항 68
3.7.5 사인파 필터 68
3.7.6 dU/dt 필터 68
3.7.7 공통 모드 필터 68
3.7.8 고조파 필터 69
62
63
4 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 7
차례 설계 지침서
3.7.9 IP21/NEMA Type 1 외함 키트 69
3.7.10 LCP용 원격 설치 키트 71
3.7.11 외함 용량 A5, B1, B2, C1 및 C2용 장착 브래킷 72
3.8 직렬 인터페이스 RS485
3.8.1 개요 73
3.8.2 네트워크 연결 74
3.8.3 RS485 버스통신 종단 74
3.8.4 EMC 주의사항 74
3.8.5 FC 프로토콜 개요 75
3.8.6 네트워크 구성 75
3.8.7 FC 프로토콜 메시지 프레임 구조 75
3.8.8 FC 프로토콜 예 78
3.8.9 Modbus RTU 프로토콜 79
3.8.10 Modbus RTU 메시지 프레임 구조 80
3.8.11 파라미터 액세스 83
3.8.12 FC 인버터 제어 프로필 83
3.9 시스템 설계 체크리스트
4 적용 예
4.1 어플리케이션 기능 개요
4.2 엄선된 어플리케이션 기능
73
89
91
91
91
4.2.1 SmartStart 91
4.2.2 단축 메뉴 수처리 및 펌프 92
4.2.3 29-1* 디래깅 기능 92
4.2.4 사전/사후 윤활 93
4.2.5 29-5* 유량 확인 93
4.3 어플리케이션 셋업 예시
4.3.1 수중 펌프 어플리케이션 96
4.3.2 기본형 캐스케이드 컨트롤러 98
4.3.3 리드 펌프 절체를 통한 펌프 스테이징 98
4.3.4 시스템 상태 및 운전 99
4.3.5 캐스케이드 컨트롤러 배선 다이어그램 100
4.3.6 고정 가변 속도 펌프 배선 다이어그램 101
4.3.7 리드 펌프 절체 배선 다이어그램 101
5 특수 조건
5.1 수동 용량 감소
5.2 긴 모터 케이블 또는 단면적이 넓은 모터 케이블에 따른 용량 감소
5.3 주위 온도에 따른 용량 감소
95
105
105
106
106
6 유형 코드 및 선택항목
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 5
110
Page 8
차례
VLT® AQUA Drive FC 202
6.1 발주
6.1.1 유형 코드 110
6.1.2 소프트웨어 언어 112
6.2 옵션, 액세서리 및 예비 부품
6.2.1 옵션 및 액세서리 112
6.2.2 예비 부품 114
6.2.3 액세서리 백 114
6.2.4 제동 저항 선정 115
6.2.5 권장 제동 저항 116
6.2.6 대체 제동 저항, T2 및 T4 123
6.2.7 고조파 필터 124
6.2.8 사인파 필터 126
6.2.9 dU/dt 필터 128
6.2.10 공통 모드 필터 129
7 사양
7.1 전기적 기술 자료
7.1.1 주전원 공급 1x200-240 V AC 130
110
112
130
130
7.1.2 주전원 공급 3x200-240V AC 131
7.1.3 주전원 공급 1x380–480 V AC 134
7.1.4 주전원 공급 3x380-480V AC 135
7.1.5 주전원 공급 3x525–600 V AC 139
7.1.6 주전원 공급 3x525–690 V AC 143
7.2 주전원 공급
7.3 모터 출력 및 모터 데이터
7.4 주위 조건
7.5 케이블 사양
7.6 제어 입력/출력 및 제어 데이터
7.7 퓨즈 및 회로 차단기
7.8 전원 등급, 중량 및 치수
7.9 dU/dt 시험
7.10 청각적 소음 등급
7.11 엄선된 옵션
7.11.1 VLT® 일반용 I/O 모듈 MCB 101 164
7.11.2 VLT® 릴레이 카드 MCB 105 165
146
146
147
147
148
151
161
162
164
164
7.11.3 VLT® PTC 써미스터 카드 MCB 112 166
7.11.4 VLT® 확장형 릴레이 카드 MCB 113 168
7.11.5 VLT® 센서 입력 옵션 MCB 114 169
7.11.6 VLT® 확장형 캐스케이드 컨트롤러 MCO 101 170
7.11.7 VLT® 고급형 캐스케이드 컨트롤러 MCO 102 171
6 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 9
차례 설계 지침서
8 부록 - 엄선된 그림
8.1 주전원 연결 그림(3상)
8.2 모터 연결부 그림
8.3 릴레이 단자 그림
8.4 케이블 입구
인덱스
174
174
177
179
180
184
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 7
Page 10

소개
VLT® AQUA Drive FC 202
1
1 소개
1.1 설계 지침서의 용도
댄포스 VLT® AQUA Drive 주파수 변환기를 위한 본
설계 지침서는 다음을 대상으로 합니다.
프로젝트 및 시스템 엔지니어
•
설계 컨설턴트
•
어플리케이션 및 제품 전문가
•
설계 지침서는 모터 제어 및 감시 시스템에 통합할 수
있도록 주파수 변환기의 성능 이해를 돕는 기술 정보를
제공합니다.
설계 지침서는 주파수 변환기를 시스템에 통합할 수 있
도록 설계 고려사항 및 기획 데이터의 제공을 목적으로
합니다. 설계 지침서는 다양한 어플리케이션 및 설비에
적합한 주파수 변환기 및 옵션 관련 정보를 제공합니다.
설계 지침서의 자세한 제품 정보를 검토하면 최적의 기
능 및 효율을 갖추고 제대로 설계된 시스템을 개발할
수 있습니다.
VLT®는 등록 상표입니다.
구성
1.2
장을 1 소개
준수 여부.
장을 2 제품 개요
과 운전 관련 특징.
장을 3 시스템 통합
누설, 주전원 입력, 모터 및 모터 연결부, 기타 연결부,
기계적 계획 및 사용 가능한 옵션 및 액세서리의 설명.
: 설계 지침서의 일반 용도 및 국제 규정의
: 주파수 변환기의 내부 구조 및 기능
: 환경 조건, EMC, 고조파 및 접지
추가 리소스
1.3
주파수 변환기의 고급 운전, 프로그래밍 및 규정 준수를
이해하는 데 사용 가능한 리소스:
VLT® AQUA Drive FC 202 사용 설명서
•
하 본 설명서에서는
파수 변환기의 설치 및 기동과 관련하여 자세
한 정보를 제공합니다.
VLT® AQUA Drive FC 202 설계 지침서
•
파수 변환기의 시스템 통합을 설계 및 계획하
는 데 필요한 정보를 제공합니다.
VLT® AQUA Drive FC 202 프로그래밍 지침
•
서(
이하 본 설명서에서는
고 함)는 파라미터 사용 방법 및 각종 어플리케
이션 예시와 관련하여 보다 자세한 내용을 제
공합니다.
VLT® 안전 토오크 정지 사용 설명서
•
안전 어플리케이션에서 댄포스 주파수 변환기
를 사용하는 방법에 관해 설명합니다. 본 설명
서는 STO 옵션이 있는 경우 주파수 변환기와
함께 제공됩니다.
VLT® 제동 저항 설계 지침서
•
저항 선택을 설명합니다.
보충 자료 및 설명서는 다음 사이트에서 다운로드할 수
있습니다.
+Documentation.htm
danfoss.com/Product/Literature/Technical
.
사용 설명서
프로그래밍 지침서
는 최적의 제동
라고 함)는 주
(이
는 주
라
는 기능
주의 사항
이들 자료에 설명된 정보 중 일부를 변경할 수 있는 옵
션 장비가 제공됩니다. 특정 요구사항은 옵션과 함께 제
공된 설명서를 참조하십시오.
장을 4 적용 예
장을 5 특수 조건
장을 6 유형 코드 및 선택항목
충족하기 위한 장비 및 옵션의 발주 절차.
장을 7 사양
장을 8 부록 - 엄선된 그림
부, 릴레이 단자 및 케이블 삽입부를 묘사하는 그래픽
모음.
8 Danfoss A/S © 09/2014 All rights reserved. MG20N639
: 제품 어플리케이션 예시 및 사용 지침.
: 특이한 운전 환경에 관한 세부 정보.
: 시스템의 기본 용도를
: 표 및 그래픽 형식의 기술 데이터 모음.
: 주전원 연결부, 모터 연결
자세한 정보는 댄포스 공급업체에 문의하거나
www.danfoss.com
를 확인합니다.
Page 11
소개 설계 지침서
1.4 약어, 기호 및 규약
1
1
60° AVM 60° Asynchronous Vector Modulation(60° 비동
기식 벡터 변조)
A Ampere(암페어)/AMP
AC Alternating current(교류)
AD Air Discharge(대기 중 방전)
AEO Automatic energy optimisation(자동 에너지 최
적화)
AI Analog input(아날로그 입력)
AMA Automatic Motor Adaptation(자동 모터 최적화)
AWG American wire gauge(미국 전선 규격)
°C
Degrees Celsius(섭씨도)
CD Constant discharge(일정 방전)
CM Common mode(공통 모드)
CT Constant torque(일정 토오크)
DC Direct current(직류)
DI Digital input(디지털 입력)
DM Differential mode(차동 모드)
D-TYPE Drive dependent(인버터 의존적)
EMC Electromagnetic Compatibility(전자기 호환성)
EMF Electromotive force(기전력)
ETR Electronic Thermal Relay(전자 써멀 릴레이)
f
JOG
조그 기능이 활성화되었을 때의 모터 주파수입니
다.
f
f
M
MAX
모터 주파수
주파수 변환기가 자체 출력에 적용하는 최대 출력
주파수입니다.
f
MIN
f
M,N
주파수 변환기의 최소 모터 주파수입니다.
Nominal motor frequency(모터 정격 주파수)
FC Frequency converter(주파수 변환기)
g Gramme(그램)
Hiperface
®
Hiperface®는 Stegmann의 등록 상표입니다.
hp Horse power(마력)
HTL HTL 엔코더(10-30 V) 펄스 - High-voltage
Transistor Logic(고전압 트랜지스터 논리)
Hz Hertz(헤르츠)
I
INV
Rated Inverter Output Current(인버터 정격 출력
전류)
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
Current limit(전류 한계)
Nominal motor current(모터 정격 전류)
The maximum output current(최대 출력 전류)
The rated output current supplied by the
frequency converter(주파수 변환기가 공급하는
정격 출력 전류)
kHz Kilohertz(킬로헤르츠)
LCP Local Control Panel(현장 제어 패널)
lsb Least significant bit(최하위 비트)
m Meter(미터)
mA Milliampere(밀리암페어)
MCM Mille Circular Mil(1000 서큘러 밀)
MCT Motion Control Tool(모션컨트롤 소프트웨어)
mH Inductance in milli Henry(밀리 헨리 단위의 인
덕턴스)
min Minute(분)
ms Millisecond(밀리초)
msb Most significant bit(최상위 비트)
η
VLT
전원 입력과 전원 출력 간의 비율로 정의된 주파
수 변환기의 효율.
nF Capacitance in nano Farad(나노패럿 단위의 용
량)
NLCP Numerical Local Control Panel(숫자 방식의 현
장 제어 패널)
Nm Newton meter(뉴튼 미터)
n
s
온라인/오프라인
파라미터
P
br,cont.
Synchronous Motor Speed(동기식 모터 속도)
온라인 파라미터에 대한 변경 사항은 데이터 값이
변경되면 즉시 적용됩니다.
제동 저항의 정격 출력(제동 지속 중 평균 출력).
PCB Printed Circuit Board(인쇄회로기판)
PCD 공정 데이터
PELV Protective Extra Low Voltage(방호초저전압)
P
m
P
M,N
주파수 변환기 정격 출력(높은 과부하(HO) 기준).
Nominal motor power(모터 정격 출력)
PM motor Permanent magnet motor(영구 자석 모터)
공정 PID PID 조절기는 속도, 압력, 온도 등을 원하는 수준
으로 유지합니다.
R
br,nom
모터축의 제동 동력이 1분간 150/160%가 되게
하는 정격 저항 값
RCD Residual Current Device(잔류 전류 장치)
Regen Regenerative terminals(재생 단자)
R
min
주파수 변환기별로 허용 가능한 최소 제동 저항
RMS Root Mean Square(평균평방근)
RPM Revolutions Per Minute(분당 회전수)
R
rec
제동 저항의 권장 제동 저항 값댄포스
s Second(초)
SFAVM Stator Flux oriented Asynchronous Vector
Modulation(고정자속 지향성 비동기식 벡터 변조)
STW Status word(상태 워드)
SMPS Switch Mode Power Supply(스위치 모드 전원
공급)
THD Total Harmonic Distortion(총 고조파 왜곡)
T
LIM
Torque limit(토오크 한계)
TTL TTL 엔코더(5 V) 펄스 - 트랜지스터 트랜지스터
논리
U
M,N
Nominal motor voltage(모터 정격 전압)
V Volts(볼트)
VT Variable Torque(가변 토오크)
VVC+
Voltage Vector Control(전압 벡터 제어)
표 1.1 약어
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 9
Page 12

소개
VLT® AQUA Drive FC 202
1
규약
번호 목록은 절차를 의미합니다.
글머리 기호(Bullet) 목록은 기타 정보 및 그림 설명을
의미합니다.
기울임꼴 텍스트는 다음을 의미합니다.
상호 참조
•
링크
•
각주
•
파라미터명, 파라미터 그룹 이름, 파라미터 옵
•
션
모든 치수는 mm 단위 (인치).
*파라미터의 초기 설정을 나타냅니다.
본 문서에 사용된 기호는 다음과 같습니다.
경고
사망 또는 중상으로 이어질 수 있는 잠재적으로 위험한
상황을 나타냅니다.
주의
경상 또는 중등도 상해로 이어질 수 있는 잠재적으로
위험한 상황을 나타냅니다. 이는 또한 안전하지 않은 실
제 상황을 알리는 데도 이용될 수 있습니다.
주의 사항
장비 또는 자산의 파손으로 이어질 수 있는 상황 등의
중요 정보를 나타냅니다.
1.5 정의
제동 저항
제동 저항은 재생 제동 시에 발생하는 제동 동력을 흡
수하기 위한 모듈입니다. 재생 제동 동력은 매개 회로
전압을 증가시키고, 제동 초퍼는 이 때 발생한 동력을
제동 저항에 전달되도록 합니다.
코스팅
모터 축이 코스팅(프리런) 상태입니다. 모터에 토오크가
없습니다.
CT 특성
컨베이어 벨트, 배수 펌프나 크레인 등에는 일정 토오크
특성이 사용됩니다.
초기화
초기화가 실행(
초기 설정으로 복원됩니다.
단속적 듀티 사이클
단속적 듀티 정격은 듀티 사이클의 시퀀스를 나타냅니
다. 각각의 사이클은 부하 기간과 부하 이동 기간으로
구성되어 있습니다. 단속 부하로 운전하거나 정상 부하
로 운전할 수 있습니다.
14-22 운전 모드
)되면 주파수 변환기가
역률
실제 역률(람다)은 모든 고조파를 고려하며 전류 및 전
압의 1차 고조파만 고려하는 역률(코사인파이)보다 항
상 작습니다.
P kW
cosϕ =
P kVA
코사인파이는 변위 역률이라고도 합니다.
댄포스 VLT® 주파수 변환기와 관련된 람다와 코사인파
이는
장을 7.2 주전원 공급
역률은 주파수 변환기가 주전원 공급에 가하는 부하의
크기입니다.
역률이 낮을수록 동일한 kW(출력)를 얻기 위해 I
높아집니다.
또한 역률이 높으면 고조파 전류는 낮아집니다.
모든 댄포스 주파수 변환기의 직류단에는 역률을 생성
하고 주전원 공급의 THD를 줄이기 위해 내장된 직류
코일이 있습니다.
셋업
4개의 셋업에 파라미터 설정을 저장할 수 있습니다. 4
개의 파라미터 셋업을 서로 변경할 수 있으며 하나의
셋업이 활성화되어 있더라도 다른 셋업을 편집할 수 있
습니다.
슬립 보상
주파수 변환기는 모터의 미끄럼 보상을 위해 모터의 회
전수를 거의 일정하도록 하는 모터 부하를 측정하고 그
에 따라 주파수를 보완하여 줍니다.
스마트 로직 컨트롤러(SLC)
SLC는 관련 사용자 정의 이벤트가 SLC에 의해 참
(TRUE)으로 결정되었을 때 실행된 사용자 정의 동작의
시퀀스입니다. (파라미터 그룹
FC 표준 버스통신
FC 프로토콜이나 MC 프로토콜이 있는 RS485 버스통
신이 여기에 해당합니다.
십시오.
써미스터
온도에 따라 작동되는 저항이며, 주파수 변환기 또는 모
터의 온도를 감시하는데 사용됩니다.
트립
주파수 변환기의 온도가 너무 높거나 주파수 변환기가
모터, 공정 또는 기계장치의 작동을 방해하는 경우 등
결함이 발생한 상태입니다. 결함의 원인이 사라져야 재
기동할 수 있으며 트립 상태를 해제할 수 있습니다. 다
음을 통해 트립 상태를 해제합니다.
리셋 활성화 또는
•
자동으로 리셋하도록 주파수 변환기 프로그래
•
밍
사용자의 안전을 위해 트립을 사용하지 마십시오.
트립 잠김
주파수 변환기의 출력 단자가 단락된 경우 등 주파수
변환기에 결함이 발생하여 사용자의 개입이 필요한 상
태입니다. 주전원을 차단하고 결함의 원인을 제거한 다
음 주파수 변환기를 다시 연결해야만 잠긴 트립을 해제
할 수 있습니다. 리셋을 실행하거나 자동으로 리셋하도
UλxIλxcosϕ
=
UλxIλ
에 언급되어 있습니다.
13-** 스마트 로직
8-30 프로토콜
을(를) 참조하
RMS
).
가
10 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 13
소개 설계 지침서
록 프로그래밍하여 트립 상태를 해제해야만 재기동할
수 있습니다. 사용자의 안전을 위해 트립을 사용하지 마
십시오.
VT 특성
펌프와 팬을 위한 가변 토오크 특성입니다.
1.6 문서 및 소프트웨어 버전
본 설명서는 정기적으로 검토 및 업데이트됩니다. 개선
관련 제안은 언제든지 환영합니다.
표 1.2
는 문서 버전 및 해당 소프트웨어 버전을 나타냅
니다.
EU 규정 버전
저전압 규정 2006/95/EC
EMC 규정 2004/108/EC
기계류 규정
ErP 규정 2009/125/EC
ATEX 규정 94/9/EC
RoHS 규정 2002/95/EC
표 1.3 주파수 변환기에 적용 가능한 EU 규정
1) 기계류 규정 준수는 안전 기능이 통합된 주파수 변환기에만
필요합니다.
적합성 선언은 요청 시 제공해 드릴 수 있습니다.
1)
2006/42/EC
1
1
버전 비고 소프트웨어 버전
MG20N6xx MG20N5xx에서 변경 2.20 이상
표 1.2 문서 및 소프트웨어 버전
1.7 승인 및 인증
주파수 변환기는 이 절에 설명된 규정을 준수하도록 설
계되어 있습니다.
승인 및 인증서에 관한 자세한 정보를 확인하려면 다음
웹사이트의 다운로드 영역으로 이동합니다.
http://
www.danfoss.com/BusinessAreas/DrivesSolutions/
Documentations/
.
1.7.1 CE 마크
그림 1.1 CE
CE 마크(Communauté européenne)는 해당 제품 제조
업체가 모든 관련 EU 규정을 준수함을 의미합니다. 주
파수 변환기의 설계 및 제조에 적용 가능한 EU 규정은
표 1.3
에 수록되어 있습니다.
주의 사항
CE 마크는 제품의 품질을 규제하지 않습니다. CE 마크
에서 기술 사양을 추론해 낼 수는 없습니다.
주의 사항
안전 기능이 통합된 주파수 변환기는 기계류 규정을 준
수해야 합니다.
1.7.1.1 저전압 규정
저전압 규정은 50–1000 V AC 및 75–1600 V DC 전
압 범위의 모든 전기 장비에 적용됩니다.
규정의 목적은 올바르게 설치 및 유지보수된 전기 장비
가 용도에 맞는 어플리케이션에서 운전할 때 신체 안전
을 보장하고 자산의 파손을 피하기 위하는 데 있습니다.
1.7.1.2 EMC 규정
EMC(전자기 호환성) 규정의 목적은 전자기 간섭을 줄
이고 전기 장비 및 설비의 방지를 강화하는 데 있습니
다. EMC 규정 2004/108/EC의 기본 보호 요구사항에
따르면 전자기 간섭(EMI)을 유발하거나 EMI에 의해 그
작동이 영향을 받을 수 있는 장치는 전자기 간섭의 유
발을 제한하도록 설계되어야 하며 올바르게 설치, 유지
보수 및 용도에 맞게 사용할 경우 적절한 EMI 방지 수
준을 갖춰야 합니다.
전기 설비 장치는 단독으로 사용하든지 아니면 시스템
의 일부로 사용하든지 간에 CE 마크를 고려해야 합니
다. 시스템에 CE 마크가 필요한 것은 아니지만 EMC 규
정의 기본 보호 요구사항은 반드시 준수해야 합니다.
1.7.1.3 기계류 규정
기계류 규정의 목적은 용도에 맞는 어플리케이션에서
사용된 기계 장비에 대해 신체 안전을 보장하고 자산의
파손을 피하는 데 있습니다. 기계류 규정은 상호 연결된
구성품 또는 장치의 집합체로 구성된 기계류 중 그 구
성품이나 장치의 하나 이상이 기계적으로 움직일 수 있
는 기계류에 적용합니다.
안전 기능이 통합된 주파수 변환기는 기계류 규정을 준
수해야 합니다. 안전 기능이 없는 주파수 변환기는 기계
류 규정의 적용을 받지 않습니다. 주파수 변환기가 기계
류 시스템에 통합되어 있는 경우 댄포스는 주파수 변환
기와 관련한 안전 정보를 제공할 수 있습니다.
주파수 변환기가 하나 이상의 가동 부품이 있는 기계류
에서 사용되는 경우 기계류 제조업체는 모든 관련 법규
및 안전 정책을 준수한다는 선언을 제공해야 합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 11
Page 14
1
2
130BD832.10
소개
VLT® AQUA Drive FC 202
1
1.7.1.4 ErP 규정
ErP 규정은 에너지 관련 제품에 대한 유럽 친환경 설계
규정입니다. 이 규정은 주파수 변환기를 포함한 에너지
관련 제품에 대한 친환경 설계 요구사항을 규정합니다.
규정의 목적은 에너지 공급의 안전성을 높이는 동시에
에너지 효율 및 환경 보호 수준을 높이는 데 있습니다.
에너지 관련 제품의 환경 영향에는 제품 수명 전체에
걸친 에너지 소비가 포함됩니다.
1.7.2 C-tick 준수
그림 1.2 C-Tick
C-tick 라벨은 전자기 호환성(EMC)의 관련 기술 표준
의 준수를 나타냅니다. C-tick 준수는 호주 및 뉴질랜드
에 출시되는 전기 및 전자 장치에 필요합니다.
C-tick 규정은 전도 방사 및 복사 방사에 관한 규정입
니다. 주파수 변환기의 경우, EN/IEC 61800-3에 명시
된 방사 한계가 적용됩니다.
추가적인 선박 승인 정보는
합니다.
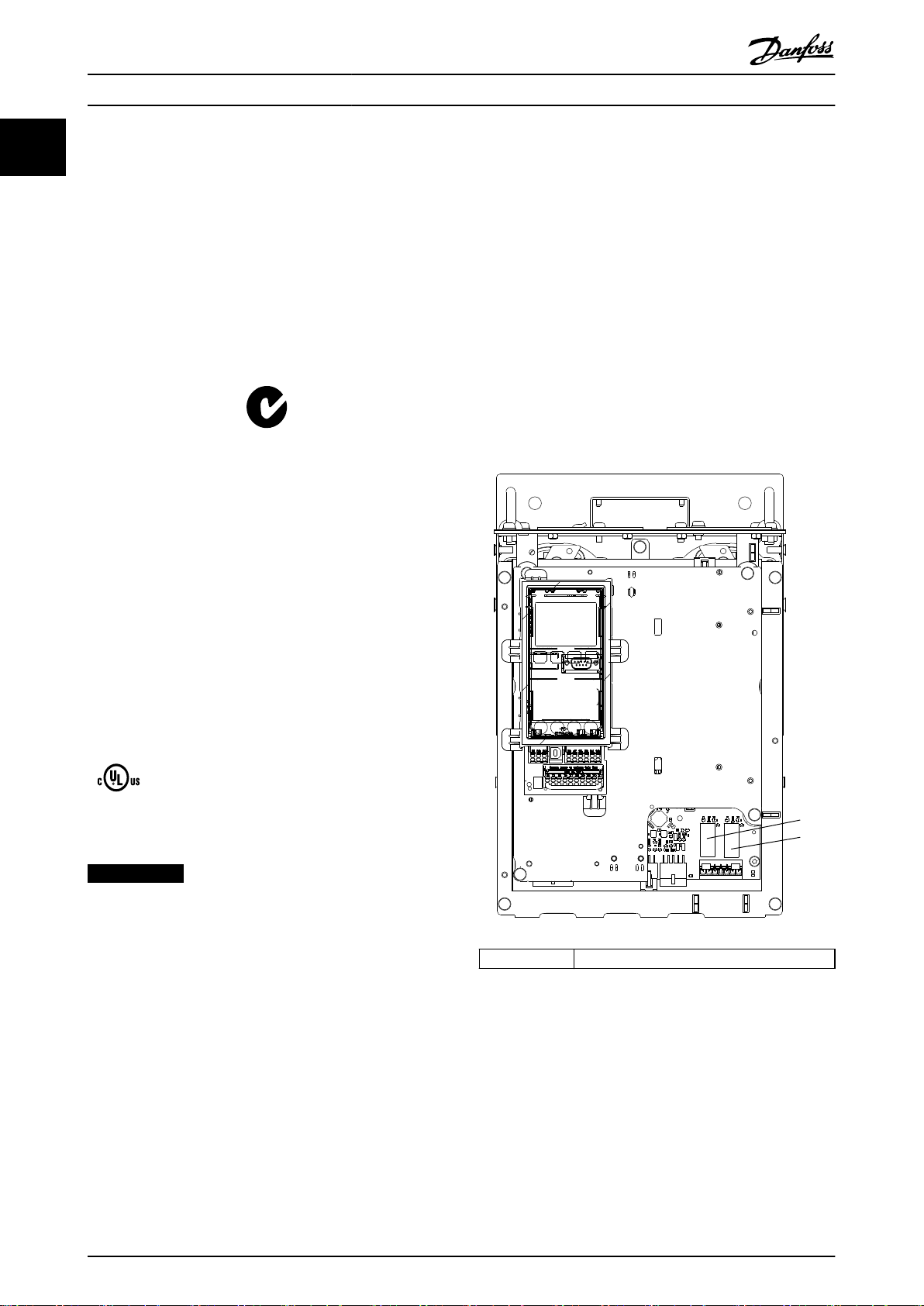
인입 보호 등급 IP20/섀시, IP21/NEMA 1 또는 IP54의
유닛은 다음과 같은 경우에 발화 위험을 차단합니다.
주전원 스위치를 설치하지 않습니다.
•
14-50 RFI 필터가 [1] 켜짐
•
는지 확인합니다.
RELAY(릴레이)
•
그를 제거합니다.
오.
해당하는 경우 어떤 릴레이 옵션이 설치되어
•
있는지 확인합니다. 유일하게 허용된 릴레이
옵션은 VLT® 확장형 릴레이 카드MCB 113입
니다.
www.danfoss.com
으로 설정되어 있
라고 표시된 모든 릴레이 플러
그림 1.4
을(를) 참조하십시
를 확인
적합성 선언은 요청 시 제공해 드릴 수 있습니다.
1.7.3 UL 준수
UL 준수
그림 1.3 UL
주의 사항
525-690V) 주파수 변환기는 UL 인증을 받지 않았습니
다.
주파수 변환기는 UL508C 써멀 메모리 유지 요구사항
을 준수합니다. 자세한 정보는
호
를 참조하십시오.
장을 2.6.2 모터 써멀 보
1.7.4 선박 준수
인입 보호 등급 IP55 (NEMA 12) 이상의 유닛은 발화
를 차단하며 국제 내륙수로 위험물품 운송에 관한 유럽
협정(European Agreement concerning International
Carriage of Dangerous Goods by Inland Waterways,
ADN)에 따라 폭발 위험이 제한적인 전기기기로 분류됩
니다.
1, 2 릴레이 플러그
그림 1.4 릴레이 플러그의 위치
제조업체 관련 서류는 요청 시 제공해 드릴 수 있습니
다.
12 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 15
소개 설계 지침서
1.8 안전
1.8.1 일반 안전 원칙
주파수 변환기에는 고압 구성품이 있으며 부적절히 취
급하면 치명상을 입을 수 있습니다. 장비의 설치 및 운
전은 반드시 공인 기사가 해야 합니다. 먼저 주파수 변
환기에서 전원을 분리하고 저장된 전기 에너지가 소실
될 때까지 정해진 시간을 기다리지 않은 채 수리 작업
을 시도하지 마십시오.
안전 주의사항 및 참고사항의 엄격한 준수가 주파수 변
환기의 안전한 운전에 있어 필수 조건입니다.
1.8.2 공인 기사
주파수 변환기를 문제 없이 안전하게 운전하기 위해서
는 올바르고 안정적인 운송, 보관, 설치, 운전 및 유지보
수가 필요합니다. 본 장비의 설치 또는 운전은 공인 기
사에게만 허용됩니다.
경고
의도하지 않은 기동
주파수 변환기가 교류 주전원, 직류 전원 공급 또는 부
하 공유에 연결되어 있는 경우, 모터는 언제든지 기동할
수 있습니다. 프로그래밍, 서비스 또는 수리 작업 중에
의도하지 않은 기동이 발생하면 사망, 중상 또는 장비나
자산의 파손으로 이어질 수 있습니다. 모터는 외부 스위
치, 직렬 버스통신 명령 또는 LCP의 입력 지령 신호를
이용하거나 결함 조건 해결을 통해 기동할 수 있습니다.
의도하지 않은 모터 기동을 방지하려면:
주전원으로부터 주파수 변환기를 연결 해제합
•
니다.
파라미터를 프로그래밍하기 전에 LCP의 [Off/
•
Reset]를 누릅니다.
주파수 변환기가 교류 주전원, 직류 전원 공급
•
또는 부하 공유에 연결될 때 주파수 변환기, 모
터 및 관련 구동 장비는 완벽히 배선 및 조립
되어 있어야 합니다.
1
1
공인 기사는 교육받은 기사 중 해당 법률 및 규정에 따
라 장비, 시스템 및 회로를 설치, 작동 및 유지보수하도
록 승인된 기사로 정의됩니다. 또한 공인 기사는 본 사
용 설명서에 수록된 지침 및 안전 조치에 익숙해야 합
니다.
경고
고전압
교류 주전원 입력, 직류 전원 공급장치 또는 부하 공유
에 연결될 때 주파수 변환기에 고전압이 발생합니다. 설
치, 기동 및 유지보수를 공인 기사가 수행하지 않으면
사망 또는 중상으로 이어질 수 있습니다.
설치, 기동 및 유지보수는 반드시 공인 기사만
•
수행해야 합니다.
경고
방전 시간
주파수 변환기에는 주파수 변환기에 전원이 인가되지
않더라도 충전을 지속할 수 있는 직류단 커패시터가 포
함되어 있습니다. 전원을 분리한 후 서비스 또는 수리를
진행하기 전까지 지정된 시간 동안 기다리지 않으면 사
망 또는 중상으로 이어질 수 있습니다.
모터를 정지합니다.
•
교류 주전원 및 원격 직류단 전원 공급장치(배
•
터리 백업장치, UPS 및 다른 주파수 변환기에
연결된 직류단 연결장치 포함)를 차단합니다.
모든 PM 모터를 차단하거나 잠급니다.
•
서비스 또는 수리 작업을 수행하기 전에 커패
•
시터가 완전히 방전될 때까지 기다립니다. 대
기 시간은
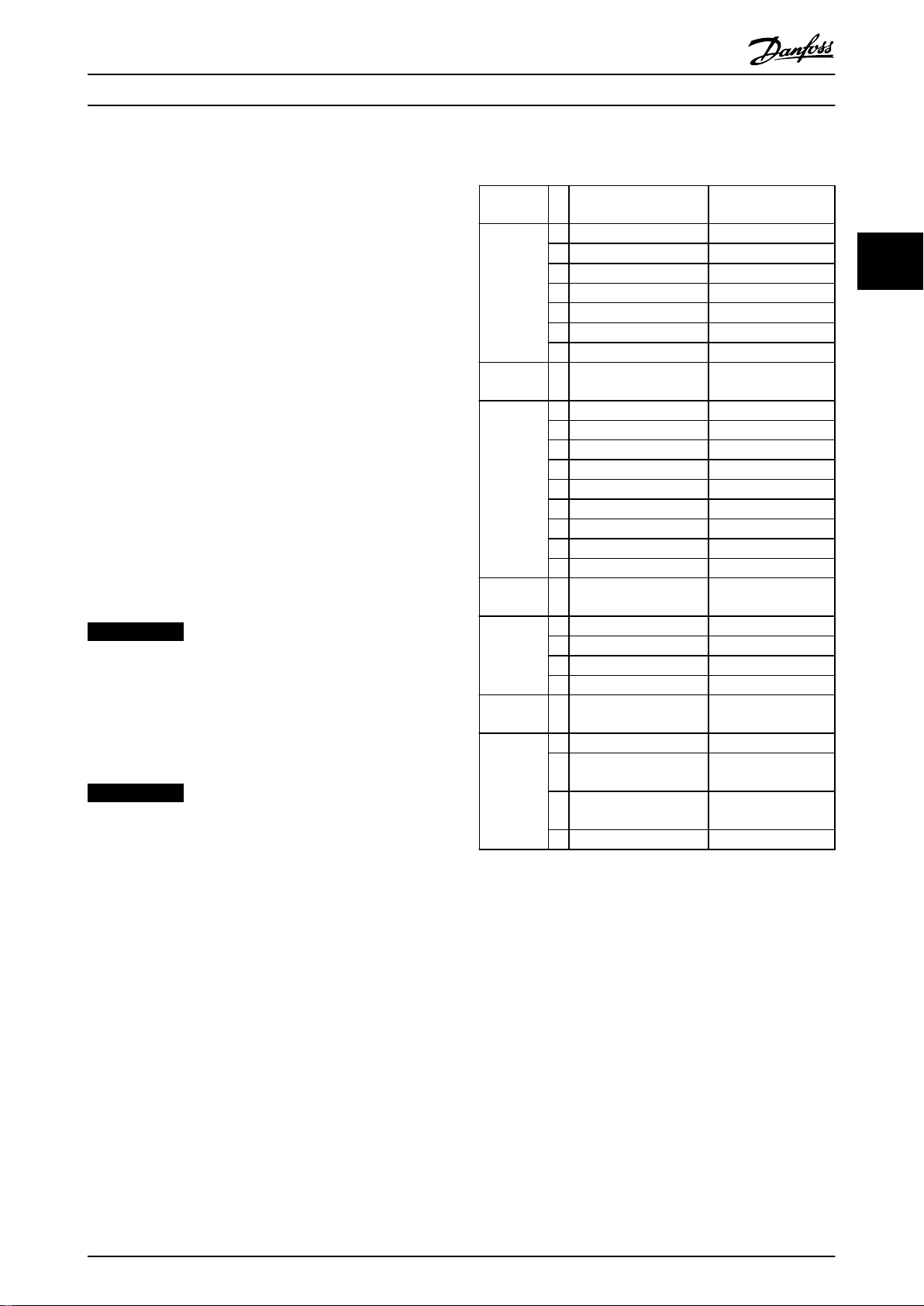
전압
[V]
200-240 0.25-3.7 kW - 5.5-45 kW
380-480 0.37-7.5 kW - 11-90 kW
525-600 0.75-7.5 kW - 11-90 kW
525-690 - 1.1-7.5 kW 11-90 kW
경고 LED 표시등이 꺼져 있더라도 고전압이 있을 수 있습니다.
표 1.4
에 명시되어 있습니다.
최소 대기 시간
(분)
4 7 15
표 1.4 방전 시간
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 13
Page 16
소개
VLT® AQUA Drive FC 202
1
경고
누설 전류 위험
누설 전류가 3.5 mA를 초과합니다. 주파수 변환기를 올
바르게 접지하지 못하면 사망 또는 중상으로 이어질 수
있습니다.
공인 전기 설치업자가 장비를 올바르게 접지하
•
게 합니다.
경고
장비 위험
회전축 및 전기 장비에 접촉하면 사망 또는 중상으로
이어질 수 있습니다.
반드시 해당 교육을 받은 공인 기사가 설치, 기
•
동 및 유지보수를 수행해야 합니다.
전기 작업 시에는 항상 국제 및 국내 전기 규
•
정을 준수해야 합니다.
본 문서의 절차를 따릅니다.
•
경고
의도하지 않은 모터 회전
풍차 회전
영구자석 모터가 의도하지 않게 회전하면 전압이 생성
되고 유닛을 충전하여 사망, 중상 및 장비 파손으로 이
어질 수 있습니다.
의도하지 않은 회전을 방지하기 위해서는 영구
•
자석 모터를 차단해야 합니다.
주의
내부 결함 위험
주파수 변환기가 올바르게 닫혀 있지 않으면 주파수 변
환기의 내부 결함 시 중상으로 이어질 수 있습니다.
전원을 공급하기 전에 모든 안전 덮개가 제자
•
리에 안전하게 고정되어 있는지 확인해야 합니
다.
14 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 17
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
제품 개요 설계 지침서
2 제품 개요
2.1 소개
이 장은 주파수 변환기의 일차 조립부 및 회로의 개요
를 제공합니다. 이는 내부 전기 및 신호 처리 기능을 설
명합니다. 내부 제어 구조에 대한 설명 또한 포함되어
있습니다.
또한 설명된 모든 부분은 자동화되어 있으며 정교한 제
어 및 상태 보고 성능을 갖춘 견고한 운전 시스템의 설
계를 위해 주파수 변환기 옵션 기능이 제공됩니다.
2.1.1 수처리 및 폐수처리 전용 제품
VLT® AQUA Drive FC 202는 수처리 및 폐수처리 용
도로 설계되어 있습니다. 내장된 SmartStart 마법사와
단축 메뉴
를 안내합니다. 표준 구성 및 옵션 기능은 다음과 같습
니다.
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
2.1.2 에너지 절감
주파수 변환기는 다른 대체 제어 시스템 및 기술과 비
교하더라도 팬 및 펌프 시스템을 제어하는 데 가장 적
합한 에너지 제어 시스템입니다.
수처리 및 펌프
캐스케이드 제어
드라이 런 감지
유량 과다 감지
모터 절체
디래깅
초기 및 최종 가감속
체크 밸브 가감속
STO
저유량 감지
사전 윤활
유량 확인
배관 급수 모드
슬립 모드
실시간 클럭
비밀번호 보호
과부하 보호
스마트 로직 컨트롤러
최소 속도 감시
자유롭게 프로그래밍이 가능한 정보, 경고 및
알람용 텍스트
는 작동 절차를 통해 사용자
주파수 변환기를 사용하여 유량을 제어하면 펌프 속도
가 20% 낮아지고 이는 일반적인 어플리케이션에서 약
50%의 에너지 절감으로 이어집니다.
그림 2.1
다.
1 에너지 절감
는 달성 가능한 에너지 절감의 예를 보여줍니
그림 2.1 예: 에너지 절감
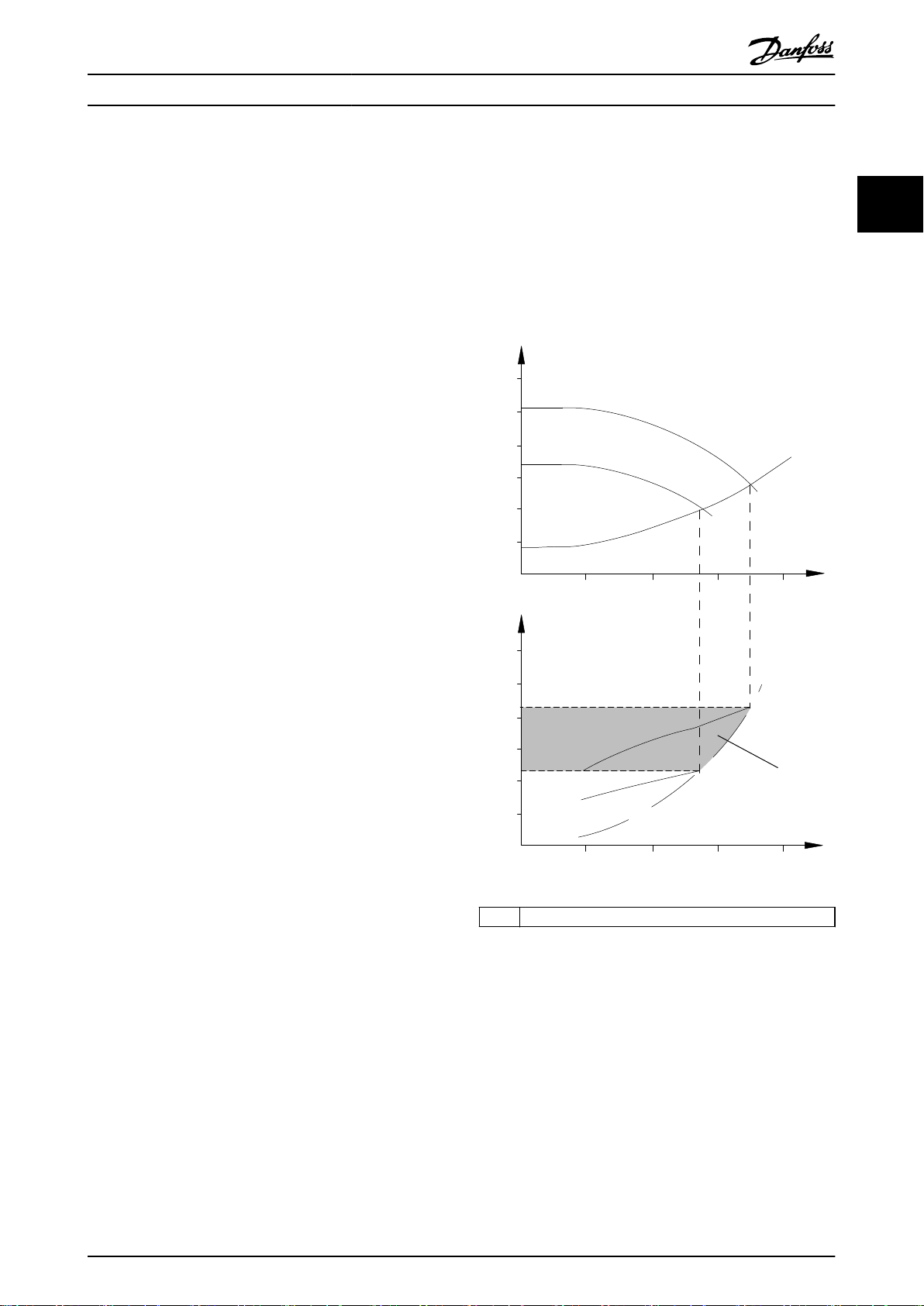
2.1.3 에너지 절감의 예
그림 2.2
속도를 변경함으로써 유량이 제어됩니다. 정격 속도에
서 20%만 속도를 줄여도 유량 또한 20%까지 감소합니
다. 이는 유량이 속도에 직비례하기 때문입니다. 반대로
전기 소비량은 최대 약 50%까지 감소합니다.
시스템이 일 년에 몇 일 정도 100%의 유량을 공급하고
나머지 기간 동안은 평균적으로 정격 유량의 80%를 공
급해야 하는 경우, 에너지 절감분은 50%를 초과합니다.
에서 보는 바와 같이 RPM 단위로 측정된 펌프
2 2
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 15
Page 18
n
100%
50%
25%
12,5%
50% 100%
80%
80%
175HA208.10
Power ~n
3
Pressure ~n
2
Flow ~n
100% speed
Flow
Flow
Pump curve
Head or pressure Head or pressure
Natural
operating point
Operating
point
Throttled
Unthrottled
Throttled system
Unthrottled system
60
65
70
75
78
80
80
78
75
3
1
1
2
2
3
Hs
Hp
130BD890.10
제품 개요
VLT® AQUA Drive FC 202
그림 2.2
한 유량, 압력 및 소비전력의 의존도를 설명합니다.
는 원심 펌프에서 RPM 단위의 펌프 속도에 대
펌프 곡선의 지점 (2)에서 효율이 상당히 감소한 지점
(1)로 전환됨을 보여줍니다.
22
그림 2.2 원심 펌프의 유사 이론
Q
n
1
유량
압력
전력
속도 범위에서 효율이 동일하다고 가정합니다.
1
:
=
Q
n
2
2
2
H
n
1
:
:
1
=
H
n
2
2
3
P
n
1
1
=
P
n
2
2
Q=유량 P=전력
Q1=유량 1 P1=전력 1
Q2=감소된 유량 P2=감소된 전력
H=압력 n=속도 조절
H1=압력 1 n1=속도 1
H2=감소된 압력 n2=감소된 속도
표 2.1 유사 이론
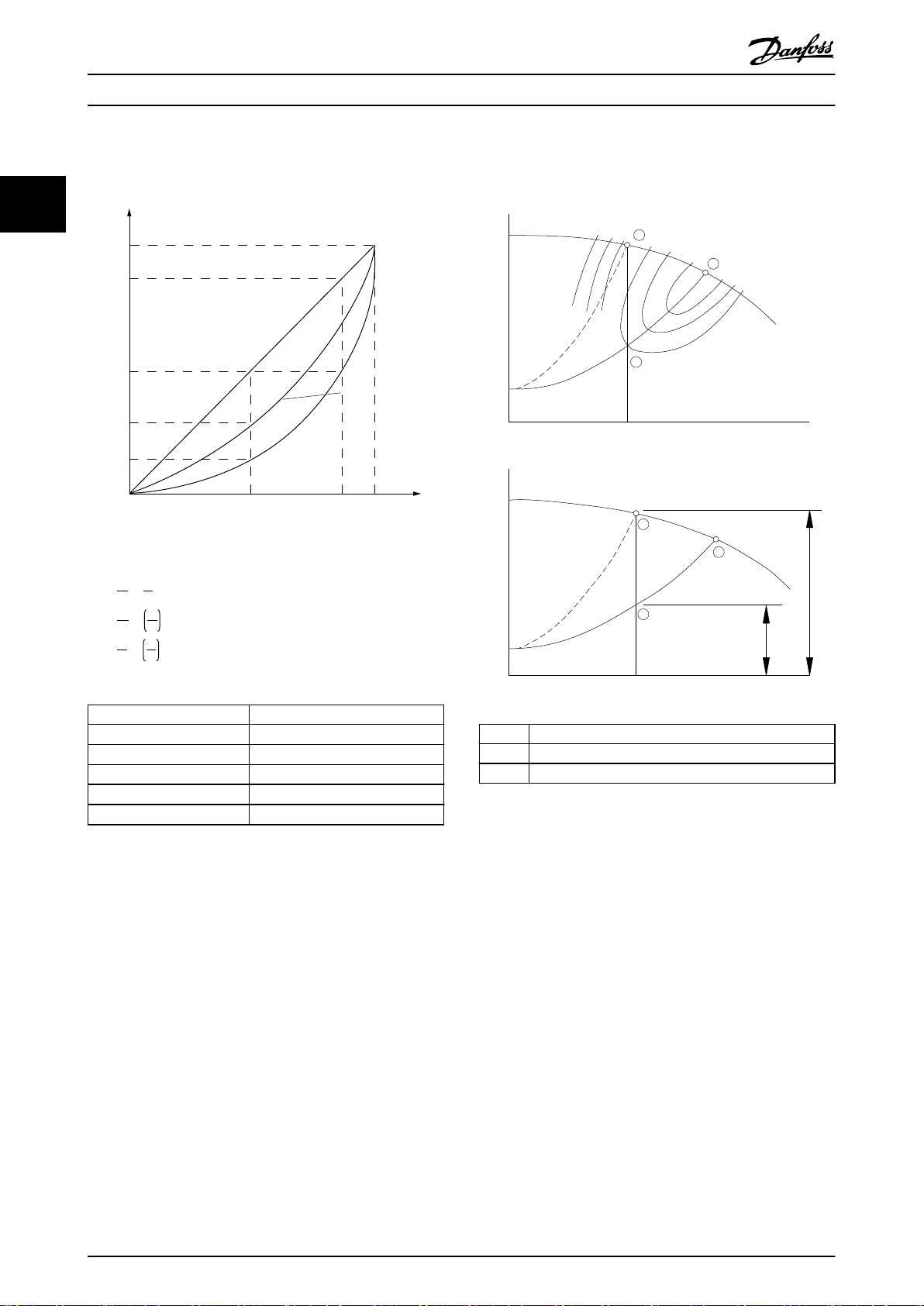
2.1.4 원심 펌프의 밸브 제어와 속도 제
어
1 스로틀 밸브를 사용한 운전 지점
2 기본 동작점
3 속도 제어를 사용한 운전 지점
그림 2.3 밸브 제어를 통한 유량 감소(스로틀링)
속도 제어
그림 2.4
에서 보는 바와 같이 펌프의 속도를 낮춰 동일
한 유량을 조정할 수 있습니다. 속도를 줄이면 펌프 곡
선이 아래로 이동합니다. 운전 지점은 펌프 곡선과 시스
밸브 제어
수처리 시스템의 공정 요구사항에 대한 수요가 다양하
므로 유량은 그에 따라 조정되어야 합니다. 유량 최적화
템 곡선 (3)의 새로운 교차 지점입니다. 에너지 절감분
은
장을 2.1.3 에너지 절감의 예
에서 설명한 대로 유사
이론을 적용하여 계산할 수 있습니다.
에 자주 사용되는 방식은 밸브를 사용한 스로틀링 또는
재순환입니다.
너무 넓게 개방되는 재순환 밸브는 펌프가 펌프 곡선의
끝, 그리고 낮은 펌프 헤드에서 고유량으로 구동되게 할
수 있습니다. 이러한 조건은 펌프의 높은 속도로 인해
에너지가 낭비될 수 있을 뿐만 아니라 펌프 캐비테이션
으로 이어져 결과적으로 펌프가 손상될 수 있습니다.
밸브로 유량을 스로틀링하면 밸브에 걸쳐 압력 강하가
추가됩니다(HP-HS). 이는 자동차 속도를 줄이기 위한
시도로 가속과 제동을 동시에 수행하는 것과 비교할 수
있습니다.
그림 2.3
는 스로틀링을 통해 시스템 곡선이
16 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 19
Flow
Head or Pressure
Pump curve
Operating
point
Natural
Operating point
system
Unthrottled
Speed
reduction
1
2
3
Hp
Hs
130BD894.10
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0 10 20 30 40 50 60 70 80 90 100
Recirculation
Throttle
control
Cycle
control
VSD
control
Ideal pump
control
Q(%)
P(%)
130BD892.10
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
제품 개요 설계 지침서
2 2
1 스로틀 밸브를 사용한 운전 지점
2 기본 동작점
3 속도 제어를 사용한 운전 지점
그림 2.4 속도 제어를 통한 유량 감소
t [h] 유량 기간.
Q [m3/h]
유량
표 2.2
또한 참조하십시오.
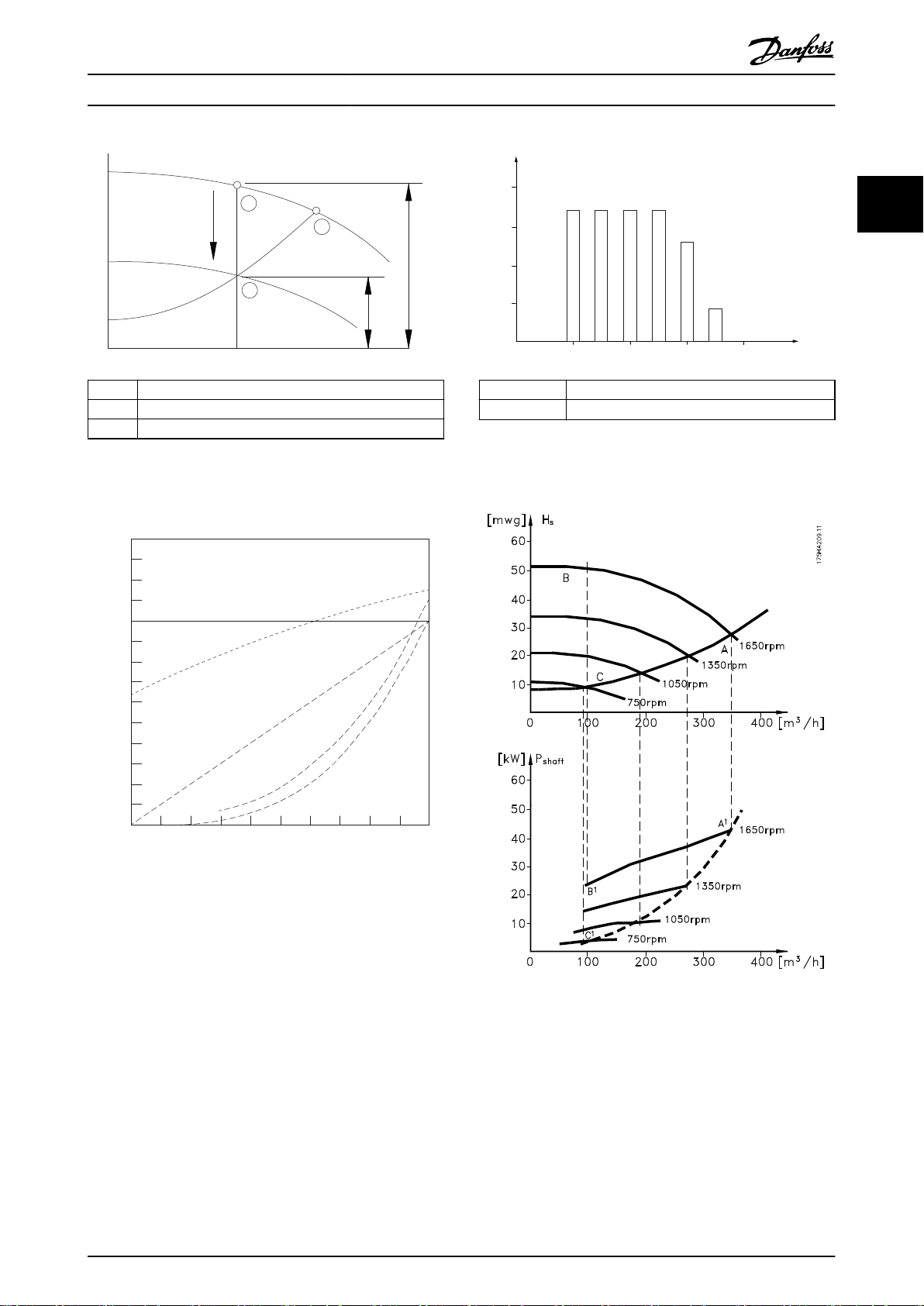
그림 2.6 1년 동안의 유량 분포(기간 및 유량)
그림 2.5 유량 제어 곡선 비교
2.1.5 1년 동안 다양한 유량을 필요로 하
는 경우의 예
이 예는
그림 2.7
에서 보는 바와 같이 펌프 데이터시트
에서 얻은 펌프 특성을 기준으로 계산됩니다.
그 결과, 주어진 유량 분포를 기준으로 1년 동안 50%를
초과하는 에너지 절감을 보여줍니다.
그림 2.6
기의 가격에 따라 다릅니다. 이 예에서는 밸브 및 일정
속도와 비교했을 때 페이백 기간이 1년 미만입니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 17
참조. 페이백 기간은 전기 가격과 주파수 변환
그림 2.7 각기 다른 속도의 에너지 소비
Page 20
Full load
% Full load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
제품 개요
유량 분포 밸브 조절 주파수
22
% 기간 전력 소모 전력 소모
[m3/h]
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38.5 50.589 29.0 38.106
250 20 1752 35.0 61.320 18.5 32.412
200 20 1752 31.5 55.188 11.5 20.148
150 20 1752 28.0 49.056 6.5 11.388
100 20 1752
1008760 – 275.064 – 26.801
Σ
표 2.2 결과
42.5
23.0
1)
18.615
2)
40.296
VLT® AQUA Drive FC 202
변환기
제어
1)
42.5
3.5
18.615
3)
6.132
1) 지점 A1의 전력 판독값
2) 지점 B1의 전력 판독값
3) 지점 C1의 전력 판독값
2.1.6 제어 성능 향상
1
VLT® AQUA Drive FC 202
2 스타/델타 스타터
3 소프트 스타터
4 주전원 직기동
주파수 변환기를 사용하여 시스템의 유량 또는 압력을
제어하면 제어 성능이 향상됩니다.
주파수 변환기는 팬 또는 펌프의 속도를 다양하게 할
수 있으며 유량 및 압력을 다양하게 제어할 수 있습니
다.
또한 주파수 변환기는 팬 또는 펌프의 속도를 시스템의
새로운 유량 또는 압력 조건에 신속하게 적용할 수 있
습니다.
내장된 PI 제어 기능을 활용하여 공정(유량, 레벨 또는
압력)을 쉽게 제어할 수 있습니다.
2.1.7 스타/델타 스타터 또는 소프트 스
타터
대형 모터가 기동할 때 기동 전류를 제한하는 장비를
사용해야 하는 국가가 많습니다. 기존 시스템에서는 스
타/델타 스타터 또는 소프트 스타터가 널리 사용됩니다.
주파수 변환기가 사용되는 경우, 이러한 모터 스타터가
필요하지 않습니다.
그림 2.8
전류를 많이 소모하지 않습니다.
에서와 같이 주파수 변환기는 정격 전류보다
그림 2.8 기동 전류
운전 설명
2.2
주파수 변환기는 모터 속도를 제어하기 위해 조절된 양
의 교류 주전원을 모터에 공급합니다. 주파수 변환기는
가변 주파수와 전압을 모터에 공급합니다.
주파수 변환기는 4가지 주요 모듈로 나뉩니다.
정류기
•
직류 버스통신 매개회로
•
인버터
•
제어 및 조절
•
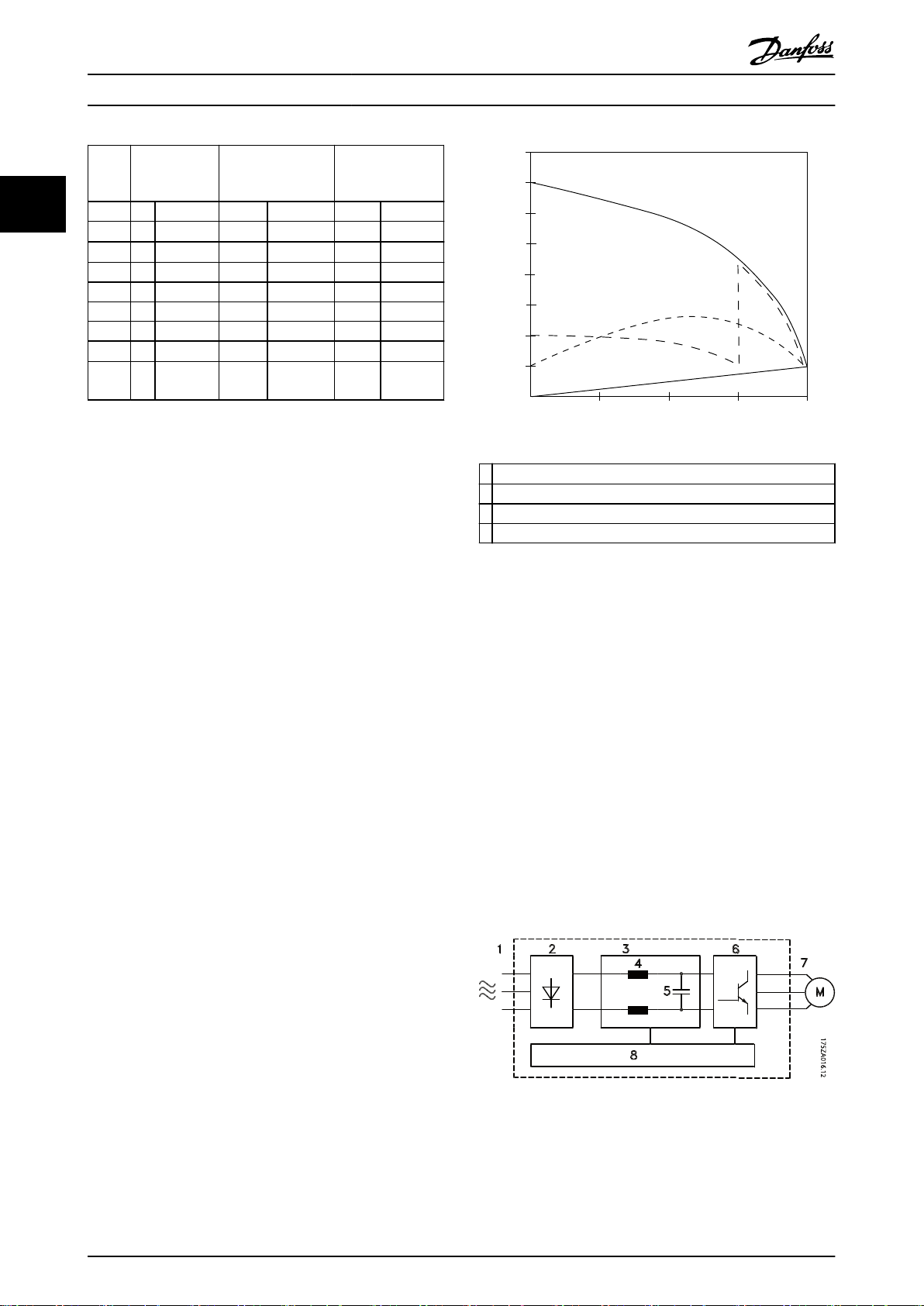
그림 2.9
그램입니다. 각각의 기능은
은 주파수 변환기 내부 구성품의 블록 다이어
표 2.3
을(를) 참조하십시오.
18 Danfoss A/S © 09/2014 All rights reserved. MG20N639
그림 2.9 주파수 변환기 블록 다이어그램
Page 21
Inrush
R inr
Load sharing -
Load sharing +
LC Filter (5A)
LC Filter +
(5A)
Brake
Resistor
130BA193.14
M
L2 92
L1 91
L3 93
89(+)
88(-)
R+
82
R81
U 96
V 97
W 98
P 14-50 R Filter
제품 개요 설계 지침서
면적 제목 기능
3상 교류 주파수 변환기 주전원 공급
1 주전원 입력
2 정류기
3 직류 버스통신
4 직류 리액터
5 커패시터 뱅크
6 인버터
7 모터에 대한 출력
•
장치입니다.
정류기 브리지는 교류 입력을 직류 전
•
류로 변환하여 인버터 전원을 공급합
니다.
직류 버스통신 매개회로는 직류 전류
•
를 처리합니다.
직류 매개회로 전압을 필터링합니다.
•
주전원 과도 현상을 보호합니다.
•
RMS 전류를 줄입니다.
•
라인에 재반영된 역률을 올립니다.
•
AC 입력의 고조파를 줄입니다.
•
직류 전원을 저장합니다.
•
단기간의 전력 손실에 대해 계속적인
•
운전을 제공합니다.
모터에 대해 제어된 가변 출력을 위해
•
직류를 제어된 PWM 교류 파형으로
변환합니다.
모터에 대한 3상 출력 전원을 조절합
•
니다.
면적 제목 기능
효율적인 운전 및 제어를 위해 입력
•
전원, 내부 프로세싱, 출력 및 모터 전
류가 감시됩니다.
사용자 인터페이스 및 외부 명령 또한
8 제어 회로
표 2.3
그림 2.9
에 대한 범례
•
감시되고 실행됩니다.
상태 출력 및 제어가 제공될 수 있습
•
니다.
1. 주파수 변환기는 주전원으로부터의 교류 전압
을 정류하여 직류 전압으로 변환합니다.
2. 이 직류 전압을 가변 진폭과 주파수를 가진 교
류 전류로 변환시킵니다.
주파수 변환기는 모터에 가변 전압/전류와 가변 주파수
를 공급하므로 3상 표준형 비동기식 모터와 비돌극 PM
모터의 가변 속도를 제어할 수 있습니다.
주파수 변환기는 U/f 특수 모터 모드 및 VVC+와 같이
다양한 모터 제어 방식을 관리합니다. 주파수 변환기에
서의 단락 동작은 모터 위상의 전류 변환기 3개에 따라
다릅니다.
2 2
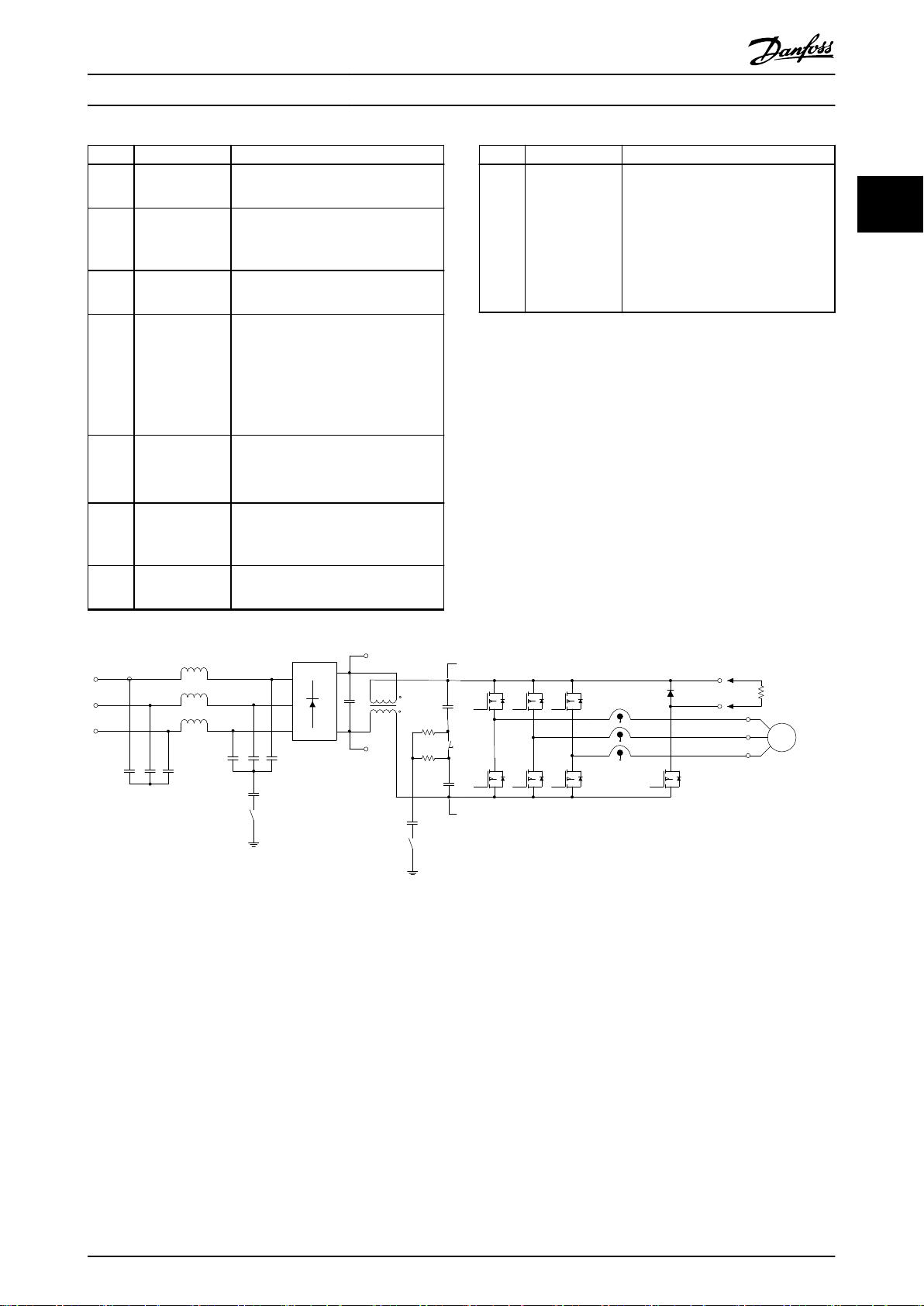
그림 2.10 주파수 변환기 구조
2.3 운전 순서
직류 버스통신 인덕터는 변화 전류에 직렬 임피던스를
제공합니다. 이렇게 하면 보통 정류기 회로 내에 존재하
2.3.1 정류기부
는 입력 교류 전류 파형에 대한 고조파 왜곡을 줄이면
서 필터링 공정에도 도움이 됩니다.
전원이 주파수 변환기에 적용될 때 전원은 주전원 단자
(L1, L2 및 L3)를 통해 진입하여 유닛 구성에 따라 차
단부 및/또는 RFI 필터 옵션으로 전달됩니다.
2.3.2 매개부
정류기부를 지난 전압은 매개부로 전달됩니다. 직류 버
스통신 인덕터와 직류 버스통신 커패시터 뱅크로 구성
된 사인파 필터는 정류된 전압을 부드럽게 만듭니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 19
2.3.3 인버터부
인버터부에 구동 명령과 속도 지령이 있으면 IGBT는
출력 파형을 생성하기 위해 스위칭을 시작합니다. 제어
카드에서 댄포스 VVC+ PWM 방식에 의해 생성된 이
파형은 최적 성능 및 모터의 손실 최소화를 제공합니다.
Page 22
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
제품 개요
VLT® AQUA Drive FC 202
2.3.4 제동 옵션
하면 재생 모드 상태인 하나의 유닛이 모터를
구동 중인 다른 유닛과 과도한 버스통신 전압
다이나믹 제동 옵션이 장착된 주파수 변환기의 경우 외
22
부 제동 저항을 연결하기 위해 단자 81(R-) 및 82(R+)
와 함께 제동 IGBT가 포함되어 있습니다.
을 공유합니다. 이러한 방식의 부하 공유는 외
부 다이나믹 제동 저항의 필요성을 감소시킬
뿐만 아니라 에너지를 절감할 수 있습니다. 각
유닛의 전압 등급이 동일하기만 하면 이러한
제동 IGBT의 기능은 최대 전압 한계를 초과할 때마다
매개회로의 전압을 제한하는 것입니다. 버스통신 커패
시터에 있는 과도한 직류 전압을 제거하도록 직류 버스
통신에 걸쳐 외부에 장착된 저항을 전환하면 이렇게 제
한할 수 있습니다.
외부에 배치된 제동 저항은 어플리케이션 요구사항에
따라 저항을 선택하고 제어 패널 밖의 에너지를 소실하
며 제동 저항이 과부하 상태인 경우 주파수 변환기가
과열되지 않게 보호할 수 있는 장점이 있습니다.
방식으로 연결할 수 있는 유닛의 개수가 무제
한입니다. 또한 유닛의 용량 및 개수에 따라 주
전원의 직류단 연결부 및 교류 리액터에 직류
리액터와 직류 퓨즈를 설치해야 할 수도 있습
니다.이러한 구성을 시도하려면 특정 사항을
고려해야 합니다. 댄포스에 문의하여 도움을
받으십시오.
2. 두 번째 방법으로, 직류 소스를 통해서만 주파
수 변환기에 전원을 공급합니다. 여기에는 다
음이 필요합니다.
2a 직류 소스.
제동 IGBT 게이트 신호는 제어 카드에서 시작되며 전
원 카드와 게이트 드라이브 카드를 통해 제동 IGBT에
전달됩니다. 또한 전원 카드와 제어 카드는 단락 및 과
부하 여부를 위해 제동 IGBT와 제동 저항 연결부를 감
시합니다. 전단 퓨즈 사양은
를 참조하십시오.
장을 7.7 퓨즈 및 회로 차단기
장을 7.1 전기적 기술 자료
또한
참조하십시오.
2.4
2b 전원 인가 시 직류 버스통신을 소프트
차지할 방법.
다시, 이러한 구성을 시도하려면 특정 사항을
고려해야 합니다. 댄포스에 문의하여 도움을
받으십시오.
제어 구조
2.3.5 부하 공유
부하 공유 옵션이 내장된 유닛에는 단자 (+) 89 DC 및
(–) 88 DC가 포함되어 있습니다. 이러한 단자는 주파수
변환기 내에서 직류단 리액터와 버스통신 커패시터 앞
2.4.1 제어 구조 개회로
개회로 모드로 운전 시 주파수 변환기는 LCP 키를 통
해 수동으로나 아날로그/디지털 입력 또는 직렬 버스통
신을 통해 원격으로 입력 명령에 응답합니다.
의 직류 버스통신을 연결합니다.
자세한 정보는 댄포스에 문의하십시오.
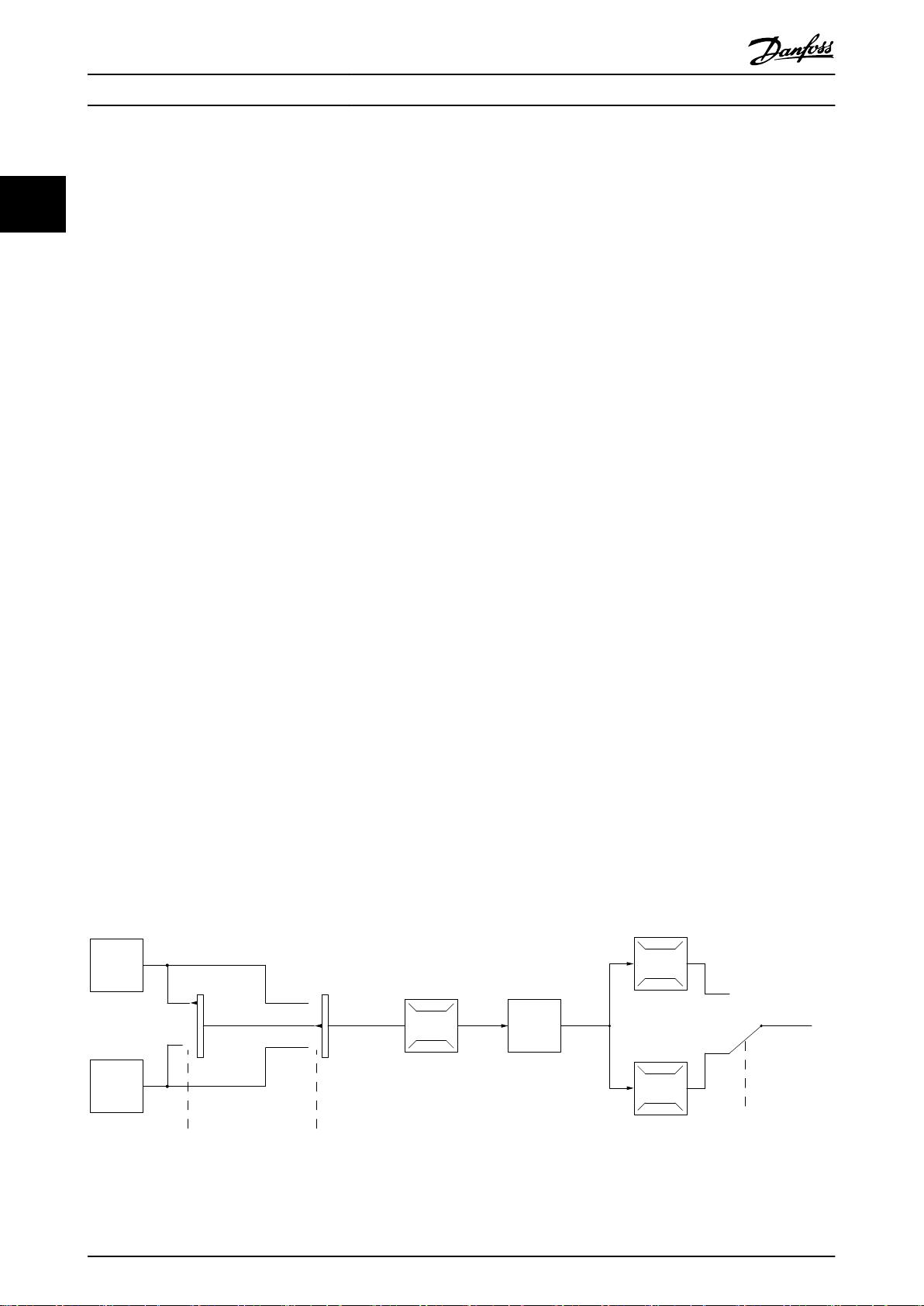
그림 2.11
모드로 운전합니다. 그리고 LCP(수동 모드)에서 또는
에 나타난 구성에서 주파수 변환기는 개회로
원격 신호(자동 모드)를 통해 입력을 수신합니다. 신호
부하 공유 단자는 각기 다른 2가지 구성으로 연결할 수
있습니다.
(속도 지령)는 프로그래밍된 최소 및 최대 모터 속도 한
계(RPM 및 Hz 단위), 가속 시간 및 감속 시간, 모터 회
전 방향으로 수신 및 조절됩니다. 그리고 나서 지령은
1. 첫 번째 방법으로, 단자는 여러 주파수 변환기
모터를 제어하도록 전달됩니다.
의 직류 버스통신 회로를 결합합니다. 이렇게
그림 2.11 개회로 모드 블록 다이어그램
20 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 23
제품 개요 설계 지침서
2.4.2 제어 구조 폐회로
폐회로 모드에서 내부 PID 제어기를 사용하면 주파수
변환기가 하나의 독립된 제어 유닛의 역할을 할 수 있
도록 시스템 지령 및 피드백 신호를 처리할 수 있습니
다. 변환기는 폐회로에서 독립적으로 운전하는 동안 외
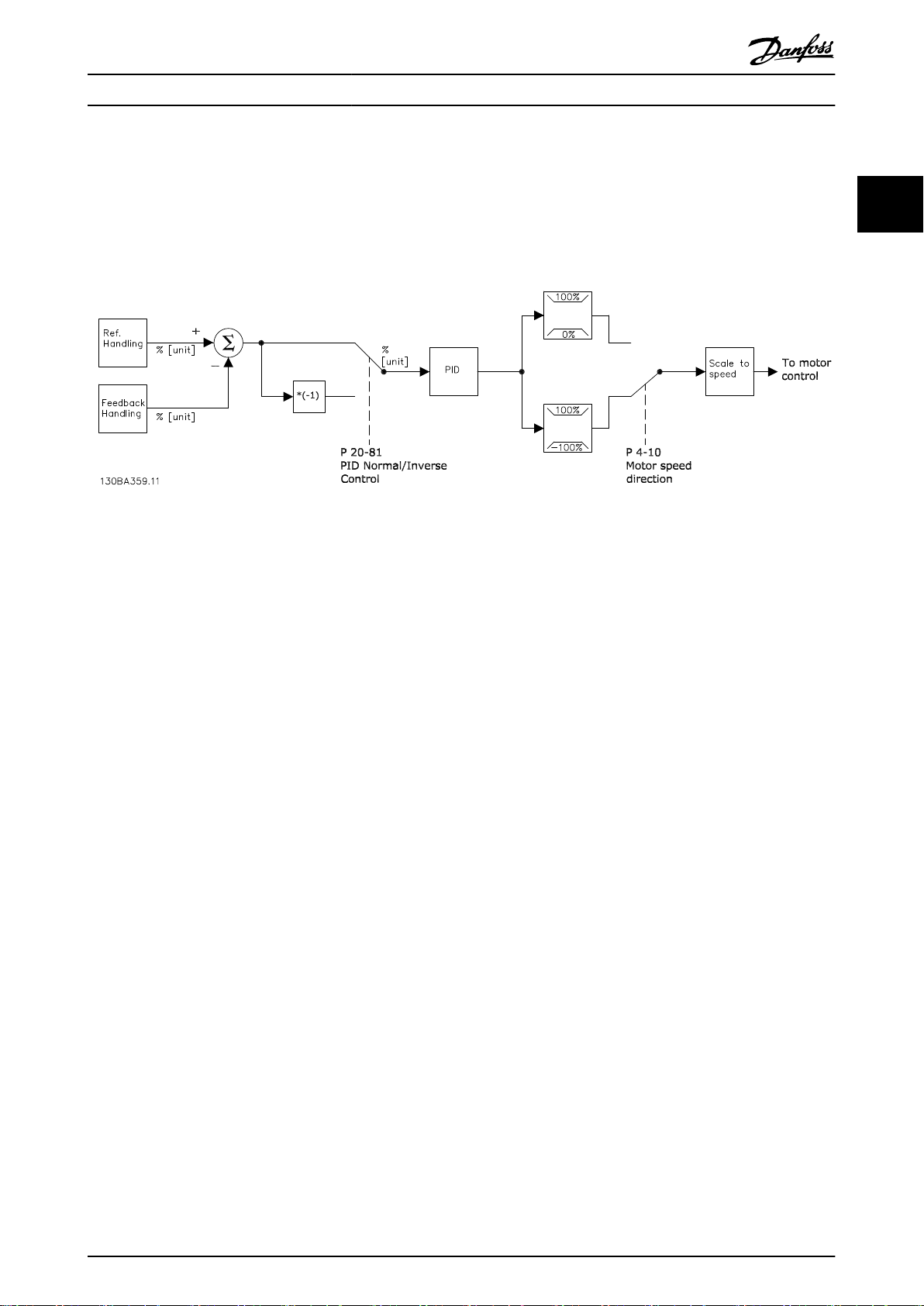
그림 2.12 폐회로 제어기의 블록 다이어그램
예를 들어, 펌프 속도가 제어되어 배관 내 정적 압력이
일정한 펌프 어플리케이션을 고려해 보겠습니다(
림 2.12
드백 신호를 수신합니다. 이 피드백을 설정포인트 지령
값과 비교하고 이러한 두 신호 사이에 오류가 있는지
판단합니다. 그리고 나서 모터의 속도를 조정하여 이 오
류를 수정합니다.
원하는 정적 압력 설정포인트는 주파수 변환기로의 지
령 신호입니다. 정적 압력 센서는 배관의 실제 정적 압
력을 측정하고 이 정보를 피드백 신호로서 주파수 변환
기에 제공합니다. 피드백 신호가 설정포인트 지령보다
큰 경우, 압력을 줄이기 위해 주파수 변환기가 감속합니
다. 그와 유사한 방식으로 배관 압력이 설정포인트 지령
보다 낮은 경우, 펌프 압력을 증가시키기 위해 주파수
변환기가 가속합니다.
폐회로에서 주파수 변환기의 초기 설정값이 만족할 만
한 성능을 제공하는 경우가 많기는 하지만 PID 파라미
터를 튜닝하여 시스템 제어를 최적화할 수 있는 경우도
많습니다. 이러한 최적화를 위해
다.
프로그래밍 가능한 기타 기능은 다음과 같습니다.
참조). 주파수 변환기는 시스템의 센서에서 피
자동 튜닝
인버스 조절 - 피드백 신호가 높을 때 모터 속
•
도가 증가합니다.
기동 주파수 - PID 제어기로 넘어가기 전에 시
•
스템이 신속히 운전 상태에 도달하게 합니다.
내장 저주파 통과 필터 - 피드백 신호 노이즈
•
를 줄입니다.
그
이 제공됩니
부 시스템 감시를 위해 기타 여러가지 프로그래밍 가능
한 옵션과 함께 상태 및 알람 메시지를 제공할 수 있습
니다.
2.4.3 현장(수동 운전) 및 원격(자동 운
전) 제어
주파수 변환기는 LCP을 통해 수동으로 작동하거나 아
날로그 및 디지털 입력과 직렬 버스통신을 통해 원격으
로 작동할 수 있습니다.
활성화된 지령 및 구성 모드
활성화된 지령은 현장 지령이거나 원격 지령입니다. 원
격 지령은 초기 설정입니다.
현장 지령을 사용하려면 수동 모드에서 구성합
•
니다. 수동 모드를 활성화하려면 파라미터 그
룹
0-4* LCP 키패드
합니다. 자세한 정보는
참조하십시오.
원격 지령을 사용하려면 자동 모드에서 구성하
•
며 이는 초기 설정 모드입니다. 자동 모드에서
는 디지털 입력 및 다양한 직렬 인터페이스
(RS485, USB 또는 선택사양인 필드버스)를 통
해 주파수 변환기를 제어할 수 있습니다.
그림 2.13
•
에 따른 구성 모드를 설명합니다.
그림 2.14
•
명합니다.
는 현장 또는 원격의 활성 지령 선택
는 현장 지령의 수동 구성 모드를 설
의 파라미터 설정을 적용
프로그래밍 지침서
를
2 2
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 21
Page 24

Remote
reference
Local
reference
Auto mode
Hand mode
Linked to hand/auto
Local
Remote
Reference
130BA245.11
LCP Hand on,
o and auto
on keys
P 3-13
Reference site
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
제품 개요
VLT® AQUA Drive FC 202
22
그림 2.13 활성화된 지령
그림 2.14 구성 모드
어플리케이션 제어 방식
원격 지령이나 현장 지령은 항상 활성 상태입니다. 두
지령을 동시에 활성화할 수 없습니다.
이
1-00 구성 모드
표 2.4
에서 적절한 제어 방식(개회로 또는
에서와 같
폐회로)을 설정합니다.
현장 지령이 활성화되어 있으면
에서 어플리케이션 제어 방식을 설정합니다.
표 2.4
에서와 같이
1-05 현장 모드 구성
3-13 지령 위치
에서 지령 위치를 설
정합니다.
자세한 정보는
프로그래밍 지침서
를 참조하십시오.
[Hand On]
[Auto On]
LCP 키
Hand (수동) 수동/자동에 링크 현장
수동⇒꺼짐 수동/자동에 링크 현장
Auto (자동) 수동/자동에 링크 원격
자동 ⇒꺼짐 수동/자동에 링크 원격
키 전체 현장 현장
키 전체 원격 원격
표 2.4 현장 및 원격 지령 구성
지령 위치
3-13 지령 위치
활성화된 지령
2.4.4 지령 처리
지령 처리는 개회로 운전과 폐회로 운전에서 모두 적용
가능합니다.
내부 및 외부 지령
최대 8개의 내부 프리셋 지령을 주파수 변환기에 프로
그래밍할 수 있습니다. 활성 내부 프리셋 지령은 디지털
입력 또는 직렬 통신 버스통신을 통해 외부에서 선택할
수 있습니다.
외부 지령은 주파수 변환기에도 공급할 수 있으며 대부
분 아날로그 제어 입력을 통해 공급됩니다. 모든 지령
소스와 버스통신 지령은 총 외부 지령을 산출하기 위해
추가됩니다. 외부 지령, 프리셋 지령, 설정포인트 또는
이 3가지의 합을 활성 지령으로 선택할 수 있습니다. 이
지령은 범위를 설정할 수 있습니다.
범위가 설정된 지령은 다음과 같이 계산됩니다.
지령
= X + X ×
여기서 X는 외부 지령, 프리셋 지령 또는 이 두 지령의
합이며 Y는 [%] 단위의
Y,
3-14 프리셋 상대 지령
설정이 지령에 영향을 주지 않습니다.
원격 지령
원격 지령은 다음으로 구성되어 있습니다(
조).
프리셋 지령
•
외부 지령:
•
프리셋 상대 지령
•
피드백으로 제어된 설정포인트
•
Y
100
3-14 프리셋 상대 지령
가 0%로 설정되더라도 범위
- 아날로그 입력
- 펄스 주파수 입력
- 디지털 가변 저항 입력
- 직렬 통신 버스통신 지령
입니다.
그림 2.15
참
22 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 25

제품 개요 설계 지침서
2 2
그림 2.15 원격 지령 처리를 보여주는 블록 다이어그램
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 23
Page 26
제품 개요
VLT® AQUA Drive FC 202
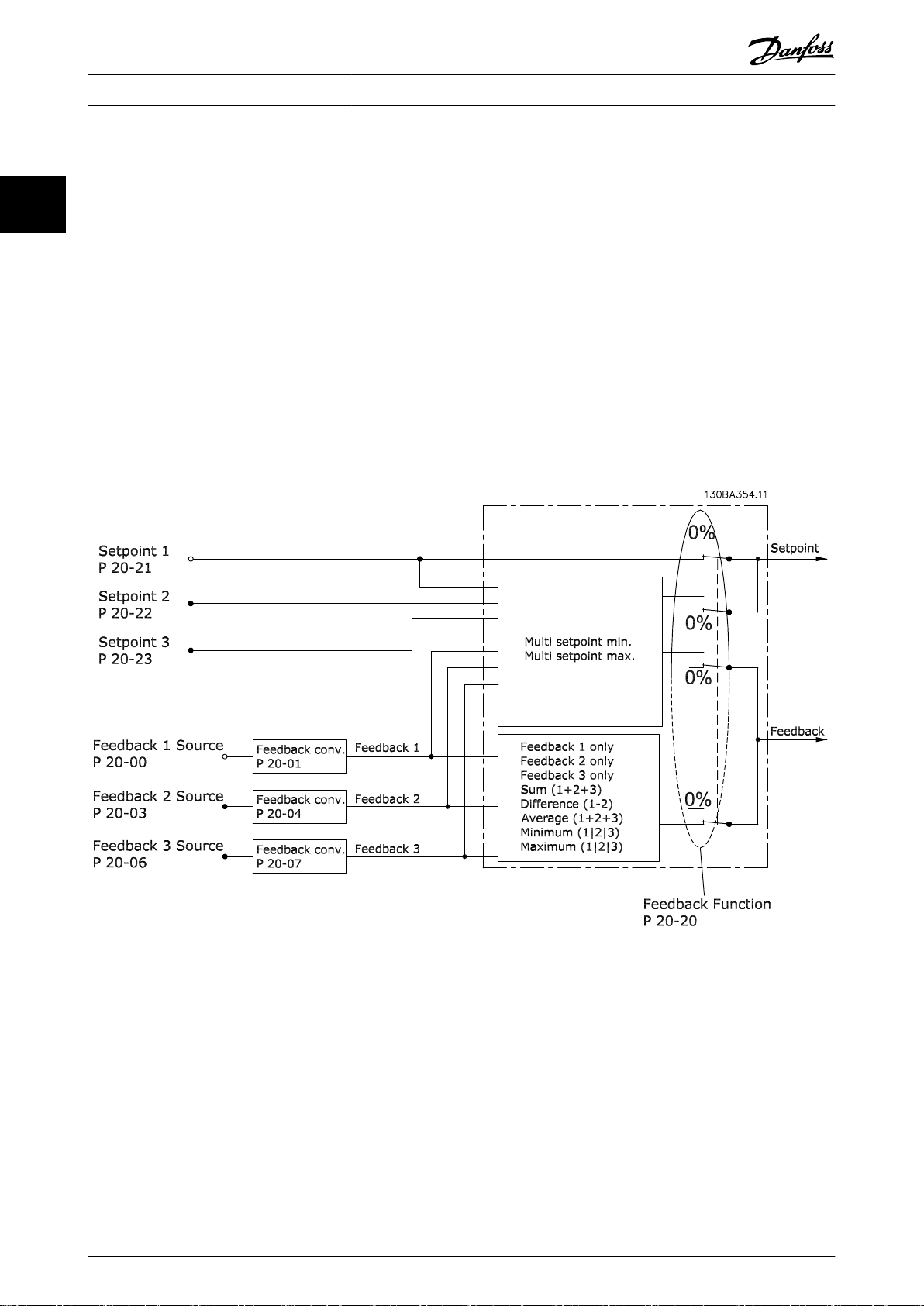
2.4.5 피드백 처리
다중 설정포인트, 다중 피드백과 같은 고급 제어가 필요
22
한 어플리케이션에서 사용할 수 있도록 피드백 처리를
구성할 수 있습니다(
가지 종류의 제어가 통상적입니다.
단일 영역, 단일 설정포인트
이 제어 유형은 기본 피드백 구성입니다. 설정포인트 1
은 다른 지령(해당하는 경우)에 추가되고 피드백 신호가
선택됩니다.
다중 영역, 단일 설정포인트
이 제어 유형은 2개나 3개의 피드백 센서를 사용하고
설정포인트는 하나만 사용합니다. 피드백은 추가, 추출
또는 평균화할 수 있습니다. 또한 최대 또는 최소 값을
사용할 수도 있습니다. 설정포인트 1는 이 구성에서만
사용됩니다.
그림 2.16
참조). 다음과 같이 세
다중 영역, 설정포인트/피드백
차이가 가장 큰 설정포인트/피드백 쌍은 주파수 변환기
의 속도를 제어합니다. 최대는 각 설정포인트 이하에서
모든 영역을 유지하려고 하는 반면 다중 최소는 각 설
정포인트 이상에서 모든 영역을 유지하려고 합니다.
예
2-영역, 2-설정포인트 어플리케이션. 영역 1 설정포인
트는 15 bar이며 피드백은 5.5 bar입니다. 영역 2 설정
포인트는 4.4 bar이며 피드백은 4.6 bar입니다. 최대가
선택되면 그 차이가 적기 때문에 영역 1의 설정포인트
와 피드백이 PID 제어기에 전송됩니다(피드백이 설정포
인트보다 높으므로 결과는 음의 차이입니다). 최소가 선
택되면 그 차이가 크기 때문에 영역 2의 설정포인트와
피드백이 PID 제어기에 전송됩니다(피드백이 설정포인
트보다 낮으므로 결과는 양의 차이입니다).
그림 2.16 피드백 신호 공정의 블록 다이어그램
24 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 27
제품 개요 설계 지침서
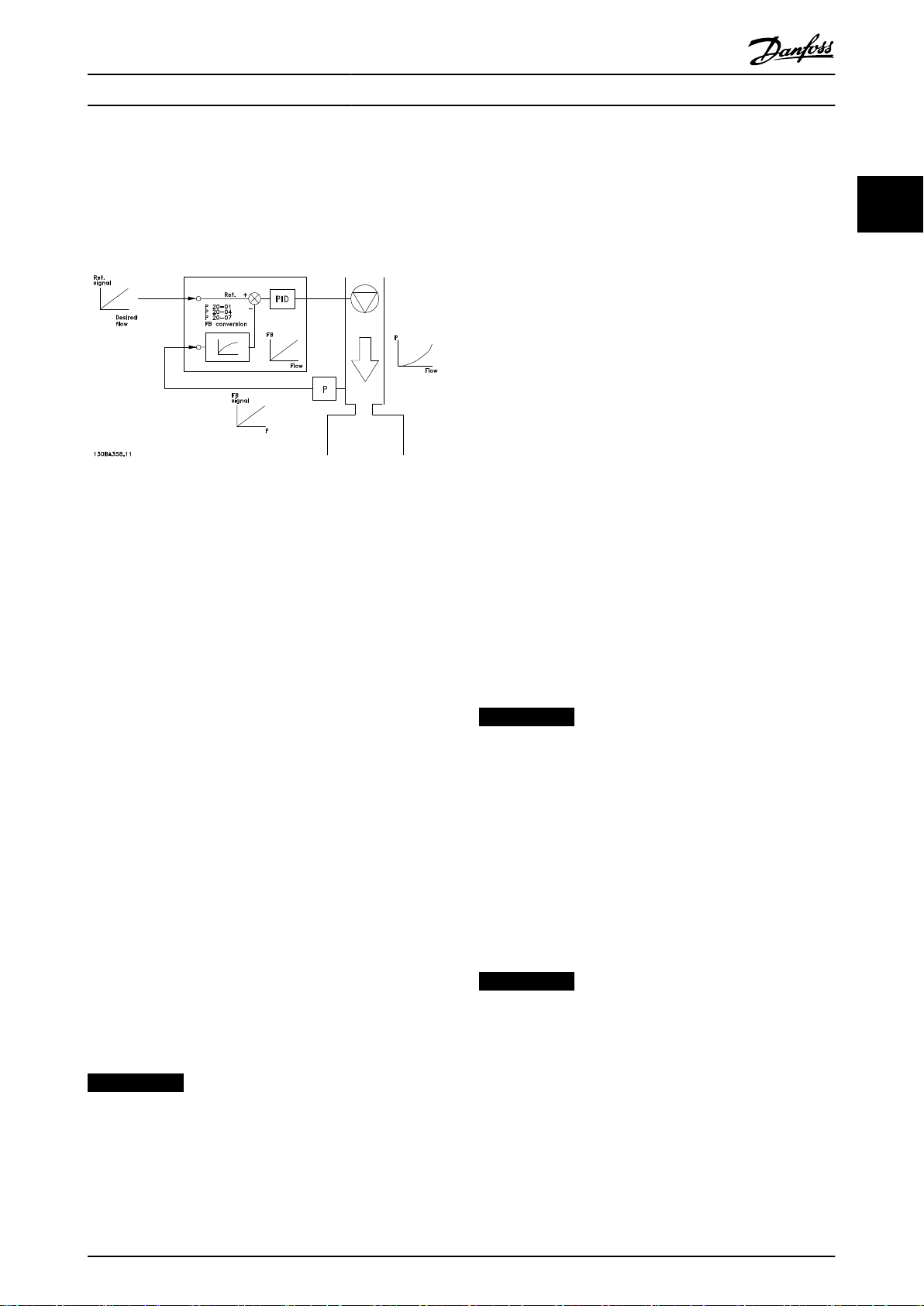
피드백 변환
일부 어플리케이션의 경우 피드백 신호를 변환하는 것
이 유용합니다. 하나의 예가 압력 신호를 사용하여 유량
피드백을 제공하는 것입니다. 압력의 제곱근이 유량에
비례하므로 압력 신호의 제곱근은 유량에 비례하는 값
을 산출합니다(
그림 2.17 피드백 변환
그림 2.17
참조).
2.5 자동 운전 기능
자동 운전 기능은 주파수 변환기가 운전하자마자 활성
화됩니다. 대부분은 프로그래밍하거나 셋업할 필요가
없습니다. 이러한 기능을 알고 있으면 시스템 설계를 최
적화할 수 있고 구성품이나 기능을 중복해서 사용하지
않아도 됩니다.
필요한 셋업, 특히 모터 파라미터에 관한 자세한 설명은
프로그래밍 지침서
주파수 변환기에는 주파수 변환기 자체와 모터를 보호
하도록 다양한 내장 보호 기능이 있습니다.
를 참조하십시오.
2.5.1 단락 회로 보호
부하 공유
단락되지 않도록 직류 버스통신을 보호하고 과부하되지
않도록 주파수 변환기를 보호하려면 연결된 모든 유닛
의 부하 공유 단자에 직류 퓨즈를 직렬로 설치합니다.
자세한 정보는
장을 2.3.5 부하 공유
참조.
2.5.2 과전압 보호
모터에서 발생된 전압에 의한 과전압
매개회로의 전압은 모터를 발전기로 사용하는 경우에
상승합니다. 발생 원인은 다음과 같습니다.
주파수 변환기는 일정 출력 주파수로 운전되지
•
만 부하가 모터를 작동시키는 경우, 예를 들어,
부하에 의해 에너지가 발생하는 경우.
감속 중에 관성 모멘트가 크고 마찰력이 작으
•
며 감속 시간이 너무 짧아 에너지가 주파수 변
환기, 모터 및 설비에서 소모될 수 없는 경우.
미끄럼 보상을 잘못 설정하면 직류단 전압이
•
상승할 수 있습니다.
PM 모터 운전 시 역 EMF. 높은 RPM에서 코
•
스팅되는 경우, PM 모터 역 EMF가 주파수 변
환기의 최대 허용 전압 공차를 초과하고 손상
을 야기할 가능성이 있습니다. 이러한 상황을
방지하기 위해
EMF, 1-25 모터 정격 회전수
극수
의 값을 기준으로 한 내부 계산에 따라
4-19 최대 출력 주파수
됩니다.
1-40 1000 RPM에서의 역회전
및
1-39 모터
의 값이 자동으로 제한
주의 사항
(예를 들어, 과도한 풍차 효과 또는 제어할 수 없는 유
수량으로 인한) 모터 과속을 피하려면 주파수 변환기에
제동 저항을 설치합니다.
2 2
모터(상간)
주파수 변환기는 모터의 3상 또는 직류단에서 각각 전
류를 측정하여 모터 측 단락으로부터 보호됩니다. 출력
2상이 단락되면 인버터에서 과전류가 발생합니다. 단락
회로 전류가 허용 범위를 초과하면 인버터는 동작을 멈
춥니다(알람 16 트립 잠김).
주전원 측
올바르게 작동하는 주파수 변환기는 공급부에서 전류가
알맞게 흐를 수 있게 전류를 제한할 수 있습니다. 주파
수 변환기 내부의 구성품 고장 (첫 결함) 시 보호할 수
있도록 퓨즈 및/또는 회로 차단기를 공급부 측에 사용할
것을 권장합니다. 자세한 정보는
차단기
참조.
장을 7.7 퓨즈 및 회로
주의 사항
IEC 60364 (CE) 또는 NEC 2009 (UL) 준수를 위해서
는 퓨즈 및/또는 회로 차단기의 사용이 필수입니다.
제동 저항
주파수 변환기는 제동 저항에서 단락이 발생하지 않도
록 보호됩니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 25
과전압은 제동 기능(
(
2-17 과전압 제어
다.
과전압 제어 (OVC)
OVC는 직류단의 과전압으로 인해 주파수 변환기가 트
립될 위험을 감소시킵니다. 이는 감속 시간을 자동으로
연장하여 제어됩니다.
주의 사항
OVC는 PM 모터(PM VVC+)의 경우 활성화할 수 있습
니다.
제동 기능
잉여 제동 에너지를 소실시키기 위해 제동 저항을 연결
합니다. 제동 저항을 연결하면 제동 중에 직류단 전압이
과도하게 상승하지 못합니다.
교류 제동 장치는 제동 저항을 사용하지 않고 제동 기
능을 향상시키고자 할 때 선택할 수 있는 방법입니다.
이 기능은 추가 에너지를 생성하는 발전기로 구동할 때
모터의 과도 자화를 제어합니다. 이 기능은 OVC를 향
2-10 제동 기능
)의 사용을 통해 처리할 수 있습니
) 또는 과전압 제어
Page 28

제품 개요
VLT® AQUA Drive FC 202
상시킬 수 있습니다. 모터의 전기적 손실이 증가하면
OVC 기능은 과전압 한계를 초과하지 않고도 제동 토오
크를 높일 수 있습니다.
22
주의 사항
교류 제동은 저항이 있는 다이내믹 제동으로 적합하지
않습니다.
2.5.3 모터 결상 감지
모터 결상
상 시 모터 손상을 방지하기 위해 초기 설정으로 활성
화되어 있습니다. 초기 설정은 1000 ms이지만 보다 신
속한 감지를 위해 조정할 수 있습니다.
시 기능(
4-58 모터 결상 시 기능
)은 모터 결
2.5.4 주전원 위상 불균형 감지
심각한 주전원 불균형 상태에서 운전을 계속하면 모터
의 수명이 단축됩니다. 정격 부하에 가깝게 계속해서 인
버터를 운전하는 것은 심각히 고려해야 할 사안입니다.
초기 설정은 주전원 불균형(
기능
) 시 주파수 변환기를 트립합니다.
14-12 공급전원 불균형 시
전압 한계
특정 하드 코드 전압 수준에 이르면 트랜지스터 및 직
류단 콘덴서를 보호하기 위해 주파수 변환기가 꺼집니
다.
과열
주파수 변환기에는 온도 센서가 내장되어 있어 하드 코
드 한계를 통해 임계치에 즉각적으로 반응합니다.
2.5.7 자동 용량 감소
주파수 변환기는 다음과 같이 중대한 상황이 있는지 지
속적으로 확인합니다.
제어 카드 또는 방열판의 온도가 높은 경우
•
모터 부하가 매우 큰 경우
•
직류단 전압이 매우 높은 경우
•
모터 회전수가 낮은 경우
•
주파수 변환기는 이렇게 중대한 상황에 대한 응답으로
스위칭 주파수를 조정합니다. 내부 온도가 높거나 모터
회전수가 낮은 경우, 주파수 변환기는 또한 PWM 방식
을 SFAVM으로 강제 전환할 수 있습니다.
2.5.5 출력(전원) 차단/공급
주의 사항
모터와 주파수 변환기 간 출력에 스위치를 추가할 수
있습니다. 결함 메시지가 표시될 수 있습니다. 회전하는
모터를 정지하려면 플라잉 기동을 활성화합니다.
2.5.6 과부하 보호
토오크 한계
토오크 제한 기능은 속도와 관계 없이 모터가 과부하되
지 않게 보호합니다. 토오크 한계는
토오크 한계
서 제어되며 토오크 한계 경고로 트립되기 전까지의 시
간은
전류 한계
전류 한계는
속도 한계
다음의 파라미터를 사용하여 운전 속도 범위의 하한과
상한을 정의합니다.
•
•
•
예를 들어, 30Hz와 50/60Hz 사이에서 운전 속도 범위
를 정의할 수 있습니다.
4-19 최대 출력 주파수
있는 최대 출력 속도를 제한합니다.
ETR
ETR은 내부 측정값을 기준으로 바이메탈 릴레이를 모
의 시험하는 전자 기능입니다. 특성은
나 있습니다.
및/또는
14-25 토오크 한계 시 트립 지연
4-18 전류 한계
4-11 모터의 저속 한계 [RPM]
4-12 모터 속도 하한 [Hz]
고속 한계 [RPM]
4-14 Motor Speed High Limit [Hz]
4-17 재생 운전의 토오크 한계
, 또는
는 주파수 변환기가 제공할 수
4-16 모터 운전의
에서 제어됩니다.
에서 제어됩니다.
또는
및
4-13 모터의
그림 2.18
에
에 나타
14-55 출력 필터가 [2] 사인파 필터 고정
면 자동 용량 감소가 달라집니다.
으로 설정되
2.5.8 자동 에너지 최적화
자동 에너지 최적화(AEO)는 주파수 변환기가 모터의
부하를 지속적으로 감시하고 효율을 극대화하도록 출력
전압을 조정하게 합니다. 경부하 조건에서 전압은 감소
되며 모터 전류는 최소화됩니다. 모터의 효율이 높아지
고 발열은 감소하며 운전 소음도 줄어듭니다. 주파수 변
환기가 자동으로 모터 전압을 조정하므로 V/Hz 곡선을
선택하지 않아도 됩니다.
2.5.9 자동 스위칭 주파수 변조
주파수 변환기는 짧은 전기 펄스를 발생시켜 교류 파형
을 생성합니다. 스위칭 주파수는 이러한 펄스의 비율입
니다. 낮은 스위칭 주파수(저속 펄스율)는 모터 소음을
야기하므로 높은 스위칭 주파수가 바람직합니다. 하지
만 높은 스위칭 주파수는 주파수 변환기에 발열을 야기
하여 모터에 사용할 수 있는 전류량을 제한할 수 있습
니다.
자동 스위칭 주파수 변조는 이러한 조건을 자동으로 조
절하여 주파수 변환기 과열을 야기하지 않고 가장 높은
스위칭 주파수를 제공합니다. 조절된 높은 스위칭 주파
수를 제공하면 소음 제어가 매우 중요한 상황에서는 저
속으로 모터 운전 소음이 최소화되며 필요한 경우 모터
에 최대 출력 전원이 공급됩니다.
26 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 29

제품 개요 설계 지침서
2.5.10 높은 스위칭 주파수에 따른 자동
용량 감소
주파수 변환기는 3.0 kHz에서 4.5 kHz 사이의 스위칭
주파수에서 지속적인 최대 부하 운전에 적합하도록 설
계되어 있습니다(이 주파수 범위는 전력 용량에 따라 다
릅니다). 최대 허용 범위를 초과하는 스위칭 주파수는
주파수 변환기 발열량을 증가시키고 출력 전류의 용량
감소를 필요로 합니다.
주파수 변환기의 자동 기능은 부하 의존적인 스위칭 주
파수 제어 방식입니다. 이 기능을 사용하면 부하가 허용
하는 한 높은 스위칭 주파수를 모터가 사용할 수 있습
니다.
2.5.11 과열에 따른 자동 용량 감소
과열에 따른 자동 용량 감소는 높은 온도에서 주파수
변환기가 트립되지 않게 합니다. 내부 온도 센서는 관련
조건을 측정하여 전원 구성품이 과열되지 않게 합니다.
변환기는 안전 한계 내에서 운전 온도가 유지되도록 스
위칭 주파수를 자동으로 감소시킬 수 있습니다. 스위칭
주파수를 감소시킨 후 변환기는 과열로 인한 트립을 피
하기 위해 최대 30%까지 출력 주파수와 전류 또한 감
소시킬 수 있습니다.
2.5.12 자동 가감속
사용 가능한 전류에 따라 너무 빨리 부하 가속을 시도
하는 모터는 변환기의 트립을 야기할 수 있습니다. 감속
을 너무 빨리 하는 경우도 마찬가지입니다. 자동 가감속
은 사용 가능한 전류에 맞게 모터 가감속율(가속 또는
감속)을 확대하여 이러한 상황에 대비합니다.
2.5.13 전류 제한 회로
(용량이 부족한 변환기 또는 모터로 인해) 부하가 주파
수 변환기 정상 운전의 전류 성능을 초과하는 경우 전
류 제한은 모터를 감속하고 부하를 줄이기 위해 출력
주파수를 감소시킵니다. 이러한 조건에서 60초 이하 동
안의 운전을 제한할 수 있도록 조절 가능한 타이머가
제공됩니다. 과전류 스트레스의 최소화를 위해 공장 초
기 설정 한계는 모터 정격 전류의 110%입니다.
합니다. 자동 재기동을 선택하면 주파수 변환기는 전압
트립 후에 자동으로 전원을 인가합니다. 플라잉 기동을
사용하면 주파수 변환기는 기동에 앞서 모터 회전에 동
기화합니다.
2.5.15 모터 소프트 기동
주파수 변환기는 부하 관성을 극복하고 모터를 최대 속
도로 구동하도록 모터에 적절한 전류량을 공급합니다.
이렇게 하면 정지 상태 또는 서서히 회전하는 모터에
주전압이 최대로 적용되지 않으며 최대로 적용되는 경
우 높은 전류와 열이 발생합니다. 이러한 소프트 기동
기능은 써멀 부하와 기계적 스트레스를 줄이고 모터 수
명을 연장하며 보다 조용한 시스템 운전을 제공합니다.
2.5.16 공진 감쇄
고주파 모터 공진 소음은 공진 감쇄를 통해 제거할 수
있습니다. 자동 또는 수동으로 선택한 주파수 감쇄를 사
용할 수 있습니다.
2.5.17 온도 제어 팬
내부 냉각 팬은 주파수 변환기에서 센서로 온도를 제어
합니다. 냉각 팬은 저부하 운전 중이나 슬립 모드 또는
대기 상태에서 구동하지 않는 경우가 있습니다. 이는 소
음을 줄이고 효율을 높이며 팬의 작동 수명을 연장합니
다.
2.5.18 EMC 준수
전자기 간섭(EMI) 또는 무선 주파수 간섭(RFI, 무선 주
파수인 경우)은 외부 소스에서의 전자기 유도 또는 방사
로 인해 전기 회로에 영향을 줄 수 있는 간섭입니다. 주
파수 변환기는 인버터의 EMC 제품 표준 IEC 61800-3
뿐만 아니라 유럽 표준 EN 55011을 준수하도록 설계
되어 있습니다. EN 55011의 방사 수준을 준수하려면
모터 케이블은 반드시 차폐되어야 하고 올바르게 종단
되어야 합니다. EMC 성능에 관한 자세한 정보는
을 3.2.2 EMC 시험 결과
를 참조하십시오.
장
2.5.19 3가지 모터 위상 전체에서의 전
류 측정
2 2
2.5.14 전력 변동 성능
주파수 변환기는 다음과 같은 주전원 변동을 견딥니다.
과도 현상
•
일시적 저전압
•
순간적인 전압 강하
•
서지
•
주파수 변환기는 최대 정격 모터 전압 및 토오크를 제
공하도록 정격에서 ±10%의 입력 전압을 자동으로 보상
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 27
모터에 전달되는 출력 전류는 단락, 접지 결함 및 결상
으로부터 주파수 변환기와 모터를 보호하도록 3상 전체
에서 지속적으로 측정됩니다. 출력 접지 결함은 순간적
으로 감지됩니다. 모터 결상이 발생하면 주파수 변환기
는 즉시 정지하고 결상된 위상을 보고합니다.
2.5.20 제어 단자의 갈바닉 절연
모든 제어 단자와 출력 릴레이 단자는 주전원으로부터
갈바닉 절연되어 있습니다. 이는 제어기 회로가 입력 전
류로부터 완벽히 보호되어 있음을 의미합니다. 출력 릴
Page 30
제품 개요
VLT® AQUA Drive FC 202
레이 단자는 자체 접지를 필요로 합니다. 이러한 절연은
절연을 위해 엄격한 방호초저전압(PELV) 요구사항을
충족합니다.
22
갈바닉 절연을 구성하는 구성품은 다음과 같습니다.
전원 공급 장치, 신호 절연 포함.
•
IGBT, 트리거 변압기 및 옵토커플러용 게이트
•
드라이브.
출력 전류 홀 효과 변환기.
•
과부하 시 프로그래밍 가능한 옵션을 사용하면 주파수
변환기가 모터를 정지하거나 출력을 줄이거나 해당 조
건을 무시할 수 있습니다. 심지어 저속에서도 주파수 변
환기는 I2t 클래스 20 전자 모터 과부하 표준을 충족합
니다.
2.6 사용자 정의 어플리케이션 기능
사용자 정의 어플리케이션 기능은 보다 향상된 시스템
성능을 위해 주파수 변환기에 프로그래밍된 가장 공통
된 기능입니다. 이러한 기능은 최소한의 프로그래밍이
나 셋업을 필요로 합니다. 이러한 기능을 사용할 수 있
다는 점을 잘 알고 있으면 시스템 설계를 최적화할 수
있고 구성품이나 기능의 중복을 피할 수 있습니다. 이러
한 기능의 활성화에 관한 지침은
참조하십시오.
프로그래밍 지침서
를
2.6.1 Automatic Motor Adaptation(자
동 모터 최적화)
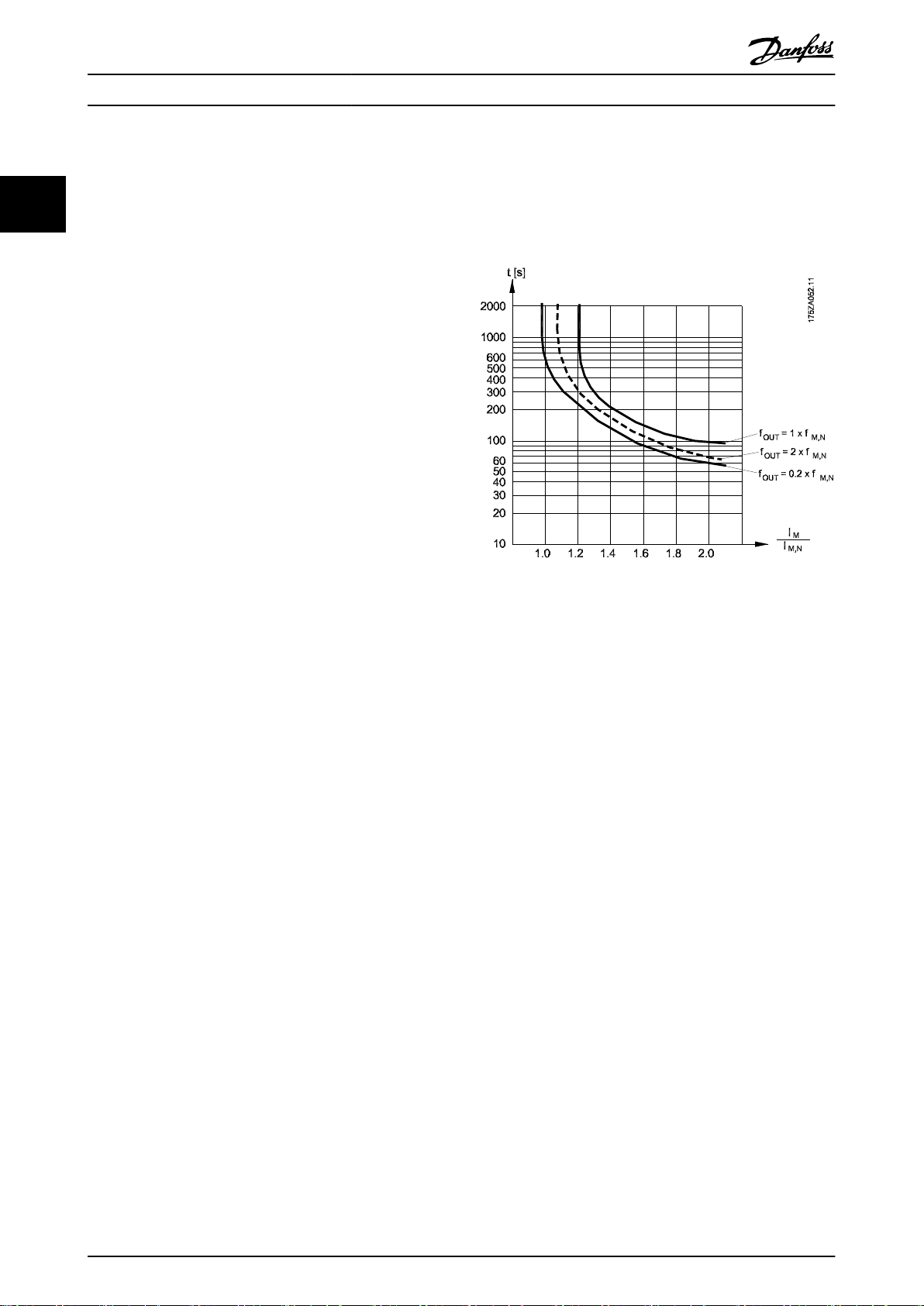
그림 2.18 ETR 특성
자동 모터 최적화(AMA)는 모터의 전기적 특성을 측정
하는 데 사용하도록 자동화된 시험 절차입니다. AMA는
모터의 정확한 전자 모델을 제공합니다. 이를 통해 주파
수 변환기는 모터와의 최적 성능 및 효율을 계산할 수
있습니다. AMA 절차를 실행하면 또한 주파수 변환기의
자동 에너지 최적화 기능을 극대화합니다. AMA는 모터
회전 없이 또한 모터에서 부하를 제거하지 않고 수행됩
니다.
2.6.2 모터 써멀 보호
모터 써멀 보호는 다음과 같은 3가지 방식으로 제공될
수 있습니다.
다음 중 하나를 통한 직접 온도 감지
•
- 모터 와인딩에 있고 표준 AI 또는 DI
에 연결된 PTC 센서.
- 모터 와인딩 및 모터 베어링에 있고
VLT® 센서 입력 카드 MCB 114에 연
결된 PT100 또는 PT1000.
-
VLT® PTC 써미스터 카드 MCB 112
(ATEX 인증)의 PTC 써미스터 입력.
DI의 기계식 써멀 스위치(Klixon 유형).
•
비동기형 모터의 경우 내장된 전자 써멀 릴레
•
이(ETR).
ETR은 전류, 주파수 및 운전 시간을 측정하여 모터 온
도를 계산합니다. 주파수 변환기는 모터의 써멀 부하를
백분율로 표시하고 프로그래밍 가능한 과부하 설정포인
트에서 경고를 발령할 수 있습니다.
그림 2.18
타냅니다. Y축은 ETR이 차단되고 주파수 변환기가 트
립되기 전의 시간을 초 단위로 나타냅니다. 곡선은 정격
속도 2배와 정격 속도 0.2배 시점의 정격 속도 특성을
나타냅니다.
속도가 낮으면 모터의 냉각 성능이 감소하여 낮은 써멀
조건에서 ETR이 차단됩니다. 이러한 방식으로 낮은 속
도에서도 모터가 과부하되지 않도록 보호됩니다. ETR
기능은 실제 전류와 속도를 기준으로 하여 모터 온도를
계산합니다. 계산된 온도는
터 읽기 값으로 확인할 수 있습니다.
의 X축은 I
와 정격 I
motor
16-18 모터 과열
간의 비율을 나
motor
의 파라미
2.6.3 주전원 저전압
주전원 저전압 중에도 주파수 변환기는 매개회로 전압
이 최소 정지 수준으로 떨어질 때까지 운전을 계속합니
다. 최소 정지 수준은 일반적으로 최저 정격 공급 전압
보다 15% 정도 낮습니다. 주파수 변환기가 코스팅 정지
되는데 소요된 시간은 저전압 이전의 주전원 전압 및
모터 부하에 따라 달라질 수 있습니다.
주파수 변환기는 주전원 저전압 중에도 다음과 같이 각
기 다른 동작 유형으로 구성할 수 있습니다(
원 결함
).
직류단 전원이 모두 소모된 후 트립 잠금.
•
주전원이 복구될 때마다 플라잉 기동으로 코스
•
팅(
회생동력 백업.
•
감속제어.
•
1-73 플라잉 기동
).
14-10 주전
28 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 31

제품 개요 설계 지침서
플라잉 기동
이 옵션을 선택하면 주전원 차단으로 인해 프리런 상태
인 모터를 정지시킬 수 있습니다. 이 옵션은 원심분리기
및 팬과 관련이 있습니다.
회생동력 백업
이러한 옵션을 사용하면 시스템 내에 에너지가 있는 한
주파수 변환기가 실행될 수 있습니다. 짧은 주전원 저전
압의 경우, 어플리케이션으로 정지하거나 제어 손실 없
이 주전원이 복구되면 해당 운전 또한 복구됩니다. 선택
할 수 있는 회생동력 백업 옵션이 일부 있습니다.
14-10 주전원 결함
저전압 시 주파수 변환기의 동작을 구성합니다.
및
1-73 플라잉 기동
에서 주전원
2.6.4 내장 PID 제어기
내장된 4개의 비례, 적분, 파생(PID) 제어기를 사용하면
보조 제어 장치가 필요 없습니다.
PID 제어기 중 하나는 조절된 압력, 유량, 온도 또는 기
타 시스템 요구사항을 유지해야 하는 경우 폐회로 시스
템에 대해 일정한 제어를 유지합니다. 주파수 변환기는
원격 센서의 피드백 신호에 대한 응답으로 모터 속도에
대해 자체 의존적인 제어를 제공할 수 있습니다. 주파수
변환기는 각기 다른 2개의 장치에서 2개의 피드백 신호
를 수용합니다. 이 기능을 사용하면 시스템을 각기 다른
피드백 요구사항에 따라 조절할 수 있습니다. 주파수 변
환기는 시스템 성능을 최적화하기 위해 두 신호를 비교
하여 제어 방식을 결정합니다.
2.6.7 감속 시 최대 토오크
주파수 변환기는 가변 V/Hz 곡선을 따라 감속 시에도
최대 모터 토오크를 제공합니다. 최대 출력 토오크는 설
계된 모터의 최대 운전 속도와 일치할 수 있습니다. 하
지만 이는 저속에서 낮은 모터 토오크를 제공하는 가변
토오크 변환기나 최대 속도 미만에서 과도한 전압, 발열
및 모터 소음을 제공하는 일정 토오크 변환기와 다릅니
다.
2.6.8 주파수 바이패스
일부 어플리케이션의 경우 기계적인 공진을 발생시키는
운전 속도가 시스템에 있을 수 있습니다. 이는 과도한
소음을 발생시키고 시스템 내 기계 구성품을 손상시킬
수 있습니다. 주파수 변환기에는 프로그래밍 가능한 4
개의 바이패스 주파수 대역폭이 있습니다. 이를 통해 모
터는 시스템 공진을 유발하는 속도를 뛰어넘을 수 있습
니다.
2.6.9 모터 예열
기온이 낮거나 습도가 높은 환경에서 모터를 예열하려
면 작은 양의 직류 전류를 모터에 지속적으로 흘려보내
응결 및 냉간 시동으로부터 모터를 보호합니다. 이는 공
간 히터의 필요성을 없앨 수 있습니다.
2.6.10 4개의 프로그래밍 가능한 셋업
2 2
약품 투입 펌프와 같은 기타 공정 장비의 제어, 밸브 제
어 또는 각기 다른 레벨의 통기에 3개의 추가 독립 제
어기를 사용합니다.
2.6.5 자동 재기동
일시적인 정전 또는 전력 변동과 같이 경미한 트립 후
자동으로 모터를 재기동하도록 주파수 변환기를 프로그
래밍할 수 있습니다. 이 기능을 사용하면 수동으로 리셋
할 필요가 없고 원격 제어 시스템의 자동 운전 기능이
향상됩니다. 재기동 시도 횟수뿐만 아니라 시도 간 주기
를 제한할 수 있습니다.
2.6.6 플라잉 기동
플라잉 기동을 사용하면 주파수 변환기가 회전 방향과
관계 없이 최대 속도를 기준으로 모터 회전에 동기화할
수 있습니다. 이렇게 하면 과전류 발생으로 인한 트립이
방지됩니다. 주파수 변환기가 기동할 때 모터가 갑작스
런 속도 변화를 수신하지 않으므로 이는 시스템에 대한
기계적인 스트레스를 최소화합니다.
주파수 변환기에는 개별적으로 프로그래밍할 수 있는 4
개의 셋업이 있습니다. 다중 셋업을 사용하면 디지털 입
력 또는 직렬 명령에 의해 활성화되고 개별적으로 프로
그래밍된 기능 간 전환이 가능합니다. 개별 셋업은 예를
들어, 지령을 변경하거나 주간/야간 또는 하계/동계 운
전이나 여러 모터를 제어하는 데 사용됩니다. 활성 셋업
은 LCP에 표시됩니다.
셋업 데이터는 탈착 가능한 LCP에서 정보를 다운로드
하여 주파수 변환기에서 다른 주파수 변환기로 복사할
수 있습니다.
2.6.11 다이나믹 제동
다이나믹 제동은 다음에 의해 가능합니다.
저항 제동
•
제동 IGBT는 제동 에너지를 모터에서 연결된
제동 저항으로 직접 전달함으로써 특정 임계값
하에서 과전압을 유지합니다(
= [1]).
교류 제동
•
모터의 손실 조건을 변경함으로써 제동 에너지
가 모터에 전달됩니다. 고주기 주파수가 모터
를 과열시키므로 고주기 주파수가 있는 어플리
케이션에 교류 제동 기능을 사용할 수 없습니
다(
2-10 제동 기능
= [2]).
2-10 제동 기능
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 29
Page 32

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
제품 개요
VLT® AQUA Drive FC 202
2.6.12 직류 제동
일부 어플리케이션의 경우 감속 또는 정지하도록 모터
22
를 제동해야 할 수도 있습니다. 모터에 직류 전류를 적
용하면 모터에 제동이 걸리며 별도의 모터 제동 장치가
필요 없게 됩니다. 직류 제동은 사전 정의된 주파수에서
나 신호 수신에 따라 활성화하도록 설정할 수 있습니다.
제동 속도 또한 프로그래밍할 수 있습니다.
2.6.13 슬립 모드
슬립 모드는 지정된 시간 동안 운전 요구가 적을 때 모
터를 자동으로 정지합니다. 시스템의 요구가 증가하면
변환기는 모터를 재기동합니다. 슬립 모드는 에너지 절
감을 제공하고 모터 마모를 감소시킵니다. 타이머와 달
리 변환기는 프리셋 재가동 요구에 도달하면 항상 구동
할 수 있습니다.
2.6.14 인가 시 운전
변환기는 기동하기 전에 원격
시스템 준비
신호를 기다
릴 수 있습니다. 이 기능이 활성화되면 변환기는 기동
인가를 받을 때까지 정지 상태를 유지합니다. 인가 시
운전은 변환기가 모터를 기동할 수 있기 전에 시스템
또는 보조 장비가 올바른 상태에 있는지 확인할 수 있
습니다.
2.6.15 스마트 로직 컨트롤러(SLC)
스마트 로직 컨트롤러(SLC)는 기본적으로 관련 사용자
정의
이벤트(13-51 SL 컨트롤러 이벤트
SLC가 TRUE(참)로 연산하였을 때 SLC가 실행한 사용
자 정의 동작(
13-52 SL 컨트롤러 동작
퀀스입니다.
이벤트의 조건은 특정 상태이거나 논리 규칙 또는 비교
기 피연산자의 출력이 참(TRUE)이 되는 조건일 수 있
습니다. 이러한 조건은
그림 2.19
관련 동작으로 이어집니다.
[x] 참조)를
[x] 참조)의 시
에서 보는 바와 같은
그림 2.19 SCL 이벤트 및 동작
이벤트와 동작은 각각 번호가 매겨지며 각각의 이벤트
와 동작이 한 쌍을 이루어 링크됩니다. 이는
이벤트
[0]
가 완료되면(TRUE (참) 값을 얻으면), 동작 [0]이 실행
됨을 의미합니다. 이후,
이벤트
[1]의 조건이 연산되고
그 결과, TRUE (참)로 연산되면 동작 [1]가 실행되는
식으로 반복됩니다. 한 번에 하나의
있습니다. 만약
이벤트
가 FALSE(거짓)로 연산되었다면,
이벤트
만 연산할 수
현재 스캐닝 시간/입력 중에는 (SLC에서) 아무 일도 발
생하지 않으며 어떤 다른
이벤트
도 연산되지 않습니다.
이는 SLC가 실행을 시작하면 한 번의 스캐닝 시간/입력
동안에는 단 하나의
을 연산함을 의미합니다.
연산되었을 때만 SLC가 동작 [0]을 실행하고
[1]의 연산을 시작합니다. 1번부터 20번까지의
이벤트
[0](첫 번째
이벤트
[0]이 TRUE (참)로
이벤트
[0])만
이벤트
이벤트
와 동작을 프로그래밍할 수 있습니다.
마지막
서부터 다시 위 과정을 반복합니다.
이벤트/동작
이 실행되면,
이벤트
[0]/동작 [0]에
그림 2.20
은 4가지
이벤트/동작의 예를 나타냅니다.
30 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 33

130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
제품 개요 설계 지침서
2.6.16 STO 기능
주파수 변환기는 제어 단자 37을 통해 STO 기능을 사
용할 수 있습니다. STO는 주파수 변환기 출력 단계의
전원부 반도체의 제어 전압을 비활성화하며 모터를 회
전하는 데 필요한 전압이 생성되는 것을 방지합니다.
STO(단자 37)가 활성화되면 주파수 변환기에서 알람이
발생하고 유닛이 트립되며 모터가 코스팅 정지됩니다.
수동 재기동이 필요합니다. STO 기능은 주파수 변환기
의 비상 정지로 사용할 수 있습니다. STO가 필요 없는
정상 운전 모드에서는 일반 정지 기능을 사용합니다. 자
그림 2.20 4가지 이벤트/동작이 프로그래밍될 때의 실행 순
서
비교기
비교기는 연속 변수(출력 주파수, 출력 전류, 아날로그
입력 등)를 고정 프리셋 값과 비교할 때 사용합니다.
그림 2.21 비교기
논리 규칙
AND, OR 및 NOT 논리 연산자를 사용하는 타이머, 비
교기, 디지털 입력, 상태 비트 및 이벤트의 부울 입력
(TRUE(참)/FALSE(거짓) 입력)을 최대 3개까지 결합합
니다.
그림 2.22 논리 규칙
논리 규칙, 타이머 및 비교기는 또한 SLC 시퀀스 외에
도 사용할 수 있습니다.
SLC의 예는
장을 4.3 어플리케이션 셋업 예시
를 참조
하십시오.3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 31
동 재기동을 사용하는 경우 ISO 12100-2 5.3.2.5절의
요건을 충족해야 합니다.
책임 조건
STO 기능 설치 및 운전에 있어 다음 사항을 준수하는
것은 사용자의 책임입니다.
건강, 안전 및 사고 방지와 관련된 안전 규정의
•
숙지 및 이해
특정 어플리케이션에 적용할 수 있는 일반 표
•
준 및 안전 표준의 숙지.
사용자는 다음으로 정의됩니다.
통합자
•
운영자
•
서비스 기사
•
유지보수 기사
•
표준
단자 37의 STO를 사용하기 위해서는 사용자가 관련 법
률, 규정 및 지침 등 안전에 관한 모든 조항을 충족해야
합니다. STO 기능(옵션)은 다음과 같은 표준을 준수합
니다.
EN 954-1: 1996 부문 3
•
IEC 60204-1: 2005 부문 0 – 비제어 정지
•
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 – STO 기능
•
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 부문 3 PL d
•
ISO 14118: 2000 (EN 1037) – 예기치 않은
•
기동 방지
여기의 정보 및 지침만으로는 STO 기능을 올바르고 안
전하게 사용할 수 없습니다. STO에 관한 정보는
안전 토오크 정지 사용 설명서
를 참조하십시오.
VLT
보호 조치
숙련된 공인 기사가 안전 엔지니어링 시스템을
•
설치 및 작동해야 합니다.
유닛은 반드시 IP54 외함 또는 그와 동등한 환
•
경에 설치해야 합니다. 특수 어플리케이션에서
는 보다 높은 IP 등급이 필요합니다.
2 2
®
Page 34

제품 개요
VLT® AQUA Drive FC 202
단자 37과 외부 안전 장치 간의 케이블은 ISO
•
13849-2 표 D.4에 따라 단락 보호되어야 합니
다.
22
외부 힘에 의해 모터 축이 영향을 받는 경우(예
•
컨대, 일시 정지된 부하), 추가적인 조치(예컨
대, 안전 유지 제동)가 필요합니다.
2.7 결함, 경고 및 알람 기능
주파수 변환기는 주전원 조건, 모터 부하 및 성능뿐만
아니라 변환기 상태 등 시스템 운전의 다양한 측면을
감시합니다. 알람 또는 경고가 주파수 변환기 자체 문제
를 나타내지 않을 수도 있습니다. 이는 성능 제한을 위
해 감시 중인 변환기 외부의 조건일 수 있습니다. 변환
기에는 사전에 프로그래밍된 다양한 결함, 경고 및 알람
응답이 있습니다. 추가 알람 및 경고 기능을 선택하여
시스템 성능을 강화 또는 수정합니다.
이 섹션은 공통 알람 및 경고 기능을 설명합니다. 이러
한 기능을 사용할 수 있다는 점을 잘 알고 있으면 시스
템 설계를 최적화할 수 있고 구성품이나 기능의 중복을
피할 수 있습니다.
2.7.4 위상 불균형 또는 결상
직류 버스통신의 과도한 리플 전류는 주전원 위상 불균
형 또는 결상을 나타냅니다. 변환기에 대한 전원이 결상
되면 알람을 발령하고 유닛을 트립하여 직류 버스통신
커패시터를 보호하는 것이 초기 설정 동작입니다. 다른
옵션은 경고를 발령하고 출력 전류를 최대 전류의 30%
까지 감소시키거나 경고를 발령하고 정산 운전을 계속
하는 것입니다. 불균형이 수정될 때까지 불균형 라인에
연결된 유닛의 운전을 원할 수도 있습니다.
2.7.5 최고 주파수 경고
펌프와 같은 추가 장비를 스테이징하거나 팬을 냉각하
는 데 유용하며 변환기는 모터 속도가 높을 때 경고를
발령할 수 있습니다. 변환기에 특정 최고 주파수 설정값
을 입력할 수 있습니다. 출력이 설정된 경고 주파수를
초과하면 유닛에 최고 주파수 경고가 표시됩니다. 변환
기의 디지털 출력은 스테이징하도록 외부 장치에 신호
를 보낼 수 있습니다.
2.7.6 최저 주파수 경고
2.7.1 과열 시 운전
장비를 디스테이징하는 데 유용하며 모터 속도가 낮을
기본적으로 주파수 변환기는 과열 시 알람 및 트립을
발령합니다.
파수 변환기는 해당 조건의 경고를 발령하지만 계속 구
동하고 먼저 스위칭 주파수를 감소시켜 냉각을 시도합
니다. 그리고 나서 필요한 경우 출력 주파수를 감소시킵
니다.
자동 용량 감소 및 경고
를 선택한 경우 주
때 변환기는 경고를 발령할 수 있습니다. 경고 및 외부
장치의 디스테이징을 위해 특정 최저 주파수 설정을 선
택할 수 있습니다. 유닛은 운전 주파수에 도달할 때까지
정지되어 있거나 기 동 시 최저 주파수 경고를 발령하
지 않습니다.
2.7.7 최고 전류 경고
자동 용량 감소를 하더라도 주위 온도에 따른 용량 감
소에 대한 사용자 설정은 변경되지 않습니다(
을 5.3 주위 온도에 따른 용량 감소
참조).
2.7.2 최고 및 최저 지령 경고
장
이 기능은 최고 전류 설정이 경고를 발령하고 추가 장
비를 스테이징하는 데 사용되는 경우를 제외하고 최고
주파수 경고와 유사합니다. 이 기능은 설정된 운전 전류
에 도달할 때까지 정지되어 있거나 기 동 시 활성화되
지 않습니다.
개회로 운전에서 지령 신호는 직접적으로 변환기의 속
도를 결정합니다. 프로그래밍된 최대 또는 최소에 도달
하면 표시창에 지령 상한 또는 하한 경고가 점멸합니다.
2.7.3 최고 및 최저 피드백 경고
폐회로 운전에서 선택한 최고 및 최저 피드백 값이 변
환기에 의해 감시됩니다. 해당하는 경우가 발생하면 표
시창에 상한 경고 또는 하한 경고가 점멸합니다. 변환기
는 개회로 운전의 피드백 신호 또한 감시할 수 있습니
다. 신호가 개회로에서의 주파수 변환기 운전에 양항을
주지 않지만 현장 또는 직렬 통신을 통한 시스템 상태
표시에 유용할 수 있습니다. 주파수 변환기는 각기 다른
39가지의 측정 단위를 처리합니다.
32 Danfoss A/S © 09/2014 All rights reserved. MG20N639
2.7.8 최저 전류 경고
이 기능은 최저 전류 설정이 경고를 발령하고 장비를
디스테이징하는 데 사용되는 경우를 제외하고 최저 주
파수 경고(
니다. 이 기능은 설정된 운전 전류에 도달할 때까지 정
지되어 있거나 기 동 시 활성화되지 않습니다.
장을 2.7.6 최저 주파수 경고
참조)와 유사합
2.7.9 무부하/벨트 파손 경고
이 기능은 무부하 조건, 예를 들어 V 벨트를 감시하는
데 사용할 수 있습니다. 변환기에 최저 전류 한계가 저
장된 후에 부하 손실이 감지되면 변환기는 알람을 발령
하고 트립하거나 운전을 계속하고 경고를 발령하도록
프로그래밍할 수 있습니다.
Page 35

제품 개요 설계 지침서
2.7.10 직렬 인터페이스 손실
주파수 변환기는 직렬 통신의 손실을 감지할 수 있습니
다. 직렬 버스통신의 간섭으로 인한 응답을 피하기 위해
최대 99초의 시간 지연을 선택할 수 있습니다. 시간 지
연이 초과되는 경우 다음을 위해 사용할 수 있는 옵션
이 유닛에 포함되어 있습니다.
마지막 속도의 유지.
•
최대 속도로 이동.
•
프리셋 속도로 이동.
•
정지 및 경고 발령.
•
2.8 사용자 인터페이스 및 프로그래밍
주파수 변환기는 해당 어플리케이션 기능을 프로그래밍
하기에 알맞은 파라미터를 사용합니다. 파라미터는 기
능 설명과 숫자 값을 선택하거나 입력할 수 있는 옵션
메뉴를 제공합니다. 샘플 프로그래밍 메뉴는
에서 보는 바와 같습니다.
그림 2.23
사용자 설명서는 자세한 운전 지침을 제공합니다..
을 2.8.2 PC 소프트웨어
제어 단자 프로그래밍
각 제어 단자에는 수행할 수 있는 기능이 지정
•
되어 있습니다.
단자와 연결된 파라미터는 해당 기능 선택항목
•
을 활성화합니다.
제어 단자를 사용했을 때 변환기가 올바르게
•
작동하게 하려면 단자는 반드시
- 올바르게 배선되어야 합니다.
- 원하는 기능에 맞게 프로그래밍되어야
또한 참조하십시오.
합니다.
장
2.8.1 현장 제어 패널
현장 제어 패널(LCP)은 유닛 전면의 그래픽 표시창으
로, 푸시 버튼 제어부를 통해 사용자 인터페이스를 제공
하고 상태 메시지, 경고 및 알람, 프로그래밍 파라미터
등을 표시합니다. 숫자 방식의 표시창 또한 제한된 표시
창 옵션과 함께 제공됩니다.
니다.
그림 2.24
는 LCP를 나타냅
2 2
그림 2.23 샘플 프로그래밍 메뉴
현장 사용자 인터페이스
현장 프로그래밍의 경우 LCP의 [Quick Menu] 또는
[Main Menu]를 눌러 파라미터에 접근할 수 있습니다.
단축 메뉴는 초기 기 동 및 모터 특성 관련 용도로 사용
됩니다. 주 메뉴는 모든 파라미터에 접근하며 고급 어플
리케이션 프로그래밍이 가능합니다.
원격 사용자 인터페이스
원격 프로그래밍의 경우, 댄포스는 프로그래밍 정보를
개발, 저장 및 전송하는 데 사용되는 소프트웨어 프로그
램을 제공합니다. MCT 10 셋업 소프트웨어를 사용하면
사용자가 주파수 변환기를 PC에 연결하고 LCP 키패드
를 사용하지 않고도 실시간으로 프로그래밍을 수행할
수 있습니다. 또는 프로그래밍을 오프라인에서 수행하
고 유닛에 쉽게 다운로드할 수 있습니다. 스토리지 백업
이나 분석을 위해 변환기 프로필 전체를 PC에 로드할
수 있습니다. USB 커넥터 또는 RS485 단자는 주파수
변환기에 연결하는 데 사용할 수 있습니다.
MCT 10 셋업 소프트웨어는 다음 사이트에서 무료로
다운로드할 수 있습니다.
품 번호 130B1000을 요청하면 CD 또한 제공됩니다.
www.VLT-software.com
. 부
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 33
Page 36

Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
130BT308.10
제품 개요
VLT® AQUA Drive FC 202
기는 하지만 PC USB 포트에 연결된 접지 및 차폐선으
로 인해 모든 전위차가 없어지지는 않습니다.
22
그림 2.25 USB 연결
2.8.2.1 MCT 10 셋업 소프트웨어
MCT 10 셋업 소프트웨어는 캐스케이드 컨트롤러, 실시
간 클럭, 스마트 로직 컨트롤러 및 예방적 유지보수의
프로그래밍 안내 등 주파수 변환기의 작동 및 서비스를
위해 설계되어 있습니다.
이 소프트웨어는 대형 또는 소형 시스템의 전반적인 개
요를 제공할 뿐만 아니라, 손쉽게 세부내용을 제어할 수
있도록 해 줍니다. 이 도구는 모든 주파수 변환기 시리
즈, VLT® 고급 능동 필터 및 VLT® 소프트 스타터 관
련 데이터를 처리합니다.
그림 2.24 현장 제어 패널
2.8.2 PC 소프트웨어
PC는 표준(호스트/장치) USB 케이블 또는 RS485 인터
페이스를 통해 연결됩니다.
USB는 PC USB 포트의 차폐선에 연결된 접지 핀 4가
있는 차폐 와이어 4개를 활용하는 직렬 버스통신입니
다. USB 케이블을 통해 주파수 변환기에 PC를 연결하
면 잠재적인 PC USB 호스트 컨트롤러 손상 위험이 있
습니다. 모든 표준 PC의 USB는 USB 포트에 갈바닉 절
사용 설명서
연이 없는 상태로 제조됩니다.
에 설명된 권장사항을 준수하지 않아서 발
생되는 접지 전위차는 USB 케이블의 차폐선을 통해
USB 호스트 컨트롤러를 손상시킬 수 있습니다.
USB 케이블을 통해 주파수 변환기에 PC를 연결하는
경우, PC USB 호스트 컨트롤러에 접지 전위차가 발생
하지 않도록 갈바닉 절연과 함께 USB 절연자를 사용할
것을 권장합니다.
USB 케이블을 통해 주파수 변환기에 PC를 연결하는
경우, 접지 플러그가 있는 PC 전원 케이블을 사용하지
마십시오. 이 케이블을 사용하면 접지 전위차가 감소하
예 1: MCT 10 셋업 소프트웨어를 통한 PC의 데이터
저장
1. USB 또는 RS485 인터페이스를 통해 PC를 유
닛에 연결합니다.
2. MCT 10 셋업 소프트웨어을 엽니다.
3. USB 포트 또는 RS485 인터페이스를 선택합니
다.
4.
copy(복사)
5.
project(프로젝트)
6.
paste(붙여넣기)
7.
save as(다른 이름으로 저장)
를 선택합니다.
섹션을 선택합니다.
를 선택합니다.
를 선택합니다.
이제 모든 파라미터가 저장됩니다.
예 2: MCT 10 셋업 소프트웨어를 통한 PC에서 주파
수 변환기로 데이터 전송
1. USB 포트 또는 RS485 인터페이스를 통해 PC
를 유닛에 연결합니다.
2. MCT 10 셋업 소프트웨어을 엽니다.
3.
Open(열기)
를 선택하면 저장된 파일이 표시됩
니다.
4. 해당 파일을 엽니다.
5.
Write to drive(업로드)
를 선택합니다.
34 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 37

제품 개요 설계 지침서
이제 모든 파라미터가 주파수 변환기로 전송됩니다.
별도의 MCT 10 셋업 소프트웨어 설명서가 제공됩니다.
다음 웹사이트에서 소프트웨어와 설명서를 다운로드합
니다.
www.danfoss.com/BusinessAreas/
DrivesSolutions/Softwaredownload/
.
2 2
2.8.2.2
VLT® 고조파 계산 소프트웨어
MCT 31
MCT 31 고조파 계산 PC 도구를 사용하면 주어진 어플
리케이션에서 고조파 왜곡을 쉽게 예측할 수 있습니다.
댄포스 주파수 변환기의 고조파 왜곡 뿐만 아니라 댄포
스 AHF 필터 및 12-18펄스 정류기와 같이 추가적인
고조파 감소 장치를 갖춘 댄포스 외의 타사 주파수 변
환기의 고조파 왜곡도 계산할 수 있습니다.
MCT 31은 다음 사이트에서도 다운로드할 수 있습니
다:
www.danfoss.com/BusinessAreas/
DrivesSolutions/Softwaredownload/
.
2.8.2.3 고조파 계산 소프트웨어 (HCS)
HCS는 고조파 계산 도구의 고급 버전입니다. 계산된 결
과는 관련 정격과 비교되며 그 결과를 인쇄할 수 있습
니다.
자세한 정보는 를 참조하십시오.
hcs.com/Default.asp?LEVEL=START
유지보수
2.9
댄포스 주파수 변환기 모델(최대 90 kW)은 유지보수가
필요 없습니다. 고출력 주파수 변환기(정격 110 kW 이
상)에는 먼지 및 오염물질 노출에 따라 작업자가 정기적
으로 청소해야 하는 필터 매트가 내장되어 있습니다. 대
부분의 환경에서 냉각 팬의 경우 약 3년의 유지보수 간
격, 커패시터의 경우 약 5년의 유지보수 간격이 권장됩
니다.
www.danfoss-
2.9.1 보관
모든 전자 장비와 마찬가지로 주파수 변환기는 건조한
곳에 보관해야 합니다. 보관 중에는 정기적인 충전(커패
시터 충전)이 필요 없습니다.
설치할 때까지 장비를 해당 패키지 내에 밀폐된 상태로
유지하는 것이 권장됩니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 35
Page 38

시스템 통합
3 시스템 통합
VLT® AQUA Drive FC 202
이 장에서는 주파수 변환기를 시스템 설계에 통합하는
데 필요한 고려사항을 설명합니다. 이 장은 다음과 같이
33
3개의 섹션으로 나뉘어져 있습니다.
장을 3.1 주위 운전 조건
•
환경, 외함, 온도, 용량 감소 및 기타 고려사항
등 주파수 변환기의 주위 운전 조건.
장을 3.3 주전원 통합
•
전원, 고조파, 감시, 케이블 배선, 퓨즈 배선 및
기타 고려사항 등 주전원 측에서 주파수 변환
기로의 입력.
장을 3.2 EMC, 고조파 및 접지 누설 보호
•
전원, 고조파, 감시 및 기타 고려사항 등 주파
수 변환기에서 전력 그리드로의 입력(재생).
장을 3.4 모터 통합
•
모터 유형, 부하, 감시, 케이블 배선 및 기타 고
려사항 등 주파수 변환기에서 모터로의 출력.
장을 3.5 추가적인 입력 및 출력, 장을 3.6 기
•
계적 계획
주파수 변환기/모터 일치화, 시스템 특성 및 기
타 고려사항 등 최적의 시스템 설계를 위한 주
파수 변환기 입력 및 출력의 통합.
종합적인 시스템 설계에는 가장 효과적인 조합의 변환
기 기능을 구현하면서 문제가 될 가능성이 있는 영역을
파악하는 것이 포함되어 있습니다. 다음의 정보는 주파
수 변환기가 장착된 모터 제어 시스템을 계획 및 지정
하기 위한 지침을 제공합니다.
기능과 전략 옵션을 이해하면 시스템 설계를 최적화할
수 있고 구성품이나 기능을 중복해서 사용하지 않아도
됩니다.
3.1 주위 운전 조건
3.1.1 습도
주파수 변환기는 높은 습도(최대 95% 상대 습도)에서도
올바르게 운전할 수 있지만 응결은 피합니다. 주파수 변
환기가 습도가 높은 주위 공기보다 차가우면 응결 발생
위험이 있습니다. 공기 중 수분은 또한 전제 구성품에서
응결되어 단락을 야기할 수 있습니다. 전원이 없는 유닛
에서 응결이 발생합니다. 주위 조건으로 인해 응결 발생
가능성이 있으면 캐비닛 히터를 설치하라고 권고합니
다. 성에가 생길 수 있는 곳에 설치하지 마십시오.
혹은 주파수 변환기를 (주전원에 연결된 유닛과 함께)
대기 모드로 운전하면 응결 위험이 감소합니다. 주파수
변환기 회로에 습기가 없도록 유지하기에 전력 소실이
충분한지 확인합니다.
3.1.2 온도
최소 및 최대 주위 온도 한계는 모든 주파수 변환기에
대해 지정되어 있습니다. 극한의 주위 온도를 피하면 장
비의 수명이 연장되고 전체적인 시스템 안정성이 극대
화됩니다. 성능 및 장비 수명 극대화를 위해서는 열거된
권장 사항을 준수합니다.
운전 기능은 단순한 모터 속도 제어에서 피드백 처리,
운전 상태 보고, 자동 결함 응답, 원격 프로그래밍 등이
완벽히 통합된 자동화 시스템에 이르기까지 다양한 설
계 컨셉트를 제공합니다.
완벽한 설계 컨셉트에는 요구사항 및 사용방법에 관한
자세한 사양이 포함되어 있습니다.
주파수 변환기 유형
•
모터
•
주전원 요구사항
•
제어 구조 및 프로그래밍
•
직렬 통신
•
장비 용량, 형태, 중량
•
전력 및 제어 배선 요구사항, 유형 및 길이
•
퓨즈
•
보조 장비
•
운반 및 보관
•
선정 및 설계를 위한 실제 지침서는
계 체크리스트
를 참조하십시오.
장을 3.9 시스템 설
주파수 변환기는 -10 °C의 온도에서도 운전할
•
수 있지만 정격 부하 시 올바른 운전은 0 °C
이상에서만 보장됩니다.
최대 온도 한계를 초과하지 마십시오.
•
설계 온도를 초과하는 온도에서 운전하면 전자
•
구성품의 수명이 10 °C마다 50%씩 감소합니
다.
보호 등급이 IP54, IP55 또는 IP66인 장치도
•
지정된 주위 온도 범위를 준수해야 합니다.
캐비닛이나 설치 현장에 추가적인 공조가 필요
•
할 수 있습니다.
3.1.3 냉각
주파수 변환기는 열의 형태로 전력을 소실합니다. 다음
의 권장사항은 유닛의 효과적인 냉각에 필요합니다.
외함에 유입되는 최대 공기 온도가 40 °C
•
(104 °F)를 초과해서는 안됩니다.
주간/야간 평균 온도가 35 °C (95 °F)를 초과
•
해서는 안됩니다.
36 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 39
시스템 통합 설계 지침서
냉각 팬을 통해 충분히 냉각 통풍량이 제공되
•
도록 유닛을 장착합니다. 올바른 장착 여유 공
간은
장을 3.6.1 여유 공간
냉강 통풍량을 위한 전면 및 후면의 최소 요구
•
사항을 제공합니다. 올바른 설치 요구사항은
사용 설명서
를 참조하십시오.
를 참조하십시오.
3.1.3.1 팬
주의 사항
특정 공기 발열량(cp)과 공기 밀도(ρ)는 정수가 아니며
온도, 습도 및 대기압에 따라 다릅니다. 따라서 해발 고
도에 따라 다릅니다.
표 3.1
는 각기 다른 고도에서 계산된 인수 f의 일반적인
값을 나타냅니다.
3 3
주파수 변환기에는 최적 냉각을 위해 팬이 내장되어 있
습니다. 기본 팬은 방열판의 냉각 핀을 따라 강제로 환
기하여 내부 공기의 냉각을 보장합니다. 일부 전력 용량
에는 제어 카드 가까이에 소형 보조 팬이 있어서 고온
점이 생기지 않도록 내부 공기를 순환시킵니다.
기본 팬은 주파수 변환기의 내부 온도에 의해 제어되며
속도가 온도에 따라 점차 증가합니다. 팬의 작동 필요성
이 낮을 때는 소음 및 에너지 소비를 줄이며 필요성이
생기면 냉각을 극대화합니다. 팬 제어는 모든 어플리케
이션에 사용할 수 있도록 또한 추운 기후에서 냉각의
역효과를 방지하도록
있습니다. 주파수 변환기 내부가 과열된 경우 팬은 스위
칭 주파수 및 그 방식을 용량 감소합니다. 자세한 정보
는
장을 5.1 용량 감소
14-52 팬 제어
를 참조하십시오.
를 통해 적용할 수
3.1.3.2 주파수 변환기 냉각에 필요한 통
풍량 계산
단일 주파수 변환기 또는 단일 외함 내의 여러 주파수
변환기를 냉각하는 데 필요한 통풍량은 다음과 같이 계
산할 수 있습니다.
1.
장을 7 사양
준으로 하여 모든 주파수 변환기의 전력 손실
을 결정합니다.
2. 동시에 운전할 수 있는 모든 주파수 변환기의
전력 손실 값을 더합니다. 그 합이 전달될 열
Q입니다.
합니다. 예를 들어, 해수면 기준 f = 3.1 m3 x
K/Wh.
3. 외함에 유입되는 공기의 최고 온도를 결정합니
다. 외함 내부에 필요한 온도, 예를 들어, 45
°C (113 °F)에서 이 온도를 뺍니다.
4. 2단계의 합계를 3단계의 합계로 나눕니다.
계산식은 다음의 공식으로 표현됩니다.
f xQ
V =
Ti − TA
여기서
V = 통풍량(m3/h 기준)
f = 인수(m3 x K/Wh 기준)
Q = 전달될 열(W 기준)
Ti = 외함 내부의 온도(°C 기준)
TA = 주위 온도(°C 기준)
f = cp x ρ (특정 공기 발열량 x 공기 밀도)
의 데이터 표에서 최대 출력을 기
표 3.1
에 있는 인수 f를 결과값에 곱
고도
[m] [kJ/kgK]
0 0.9480 1.225 3.1
500 0.9348 1.167 3.3
1000 0.9250 1.112 3.5
1500 0.8954 1.058 3.8
2000 0.8728 1.006 4.1
2500 0.8551 0.9568 4.4
3000 0.8302 0.9091 4.8
3500 0.8065 0.8633 5.2
표 3.1 각기 다른 고도에서 계산된 인수 f
예
주위 피크 온도가 37 °C인 외함 내에 장착되어 동시에
구동 중인 2개의 주파수 변환기(열 손실 295 W 및
1430 W)를 냉각하는 데 필요한 통풍량은 얼마입니까?
1. 두 주파수 변환기의 열 손실 합은 1725 W입니
2.
3.
4.
CFM에서 퉁풍량이 필요하면 변환식 1 m3/h = 0.589
CFM을 사용합니다.
상기 예시의 경우 711.6 m3/h = 418.85 CFM입니다.
특정 공기 발열량
cp
다.
1725 W에 3.3 m3 x K/Wh를 곱하면 5693 m
x K/h입니다.
45 °C에서 37 °C를 빼면 8 °C (=8 K)입니다.
5693 m x K/h를 8 K로 나누면: 711.6 m3h입
니다.
공기 밀도
ρ
[kg/m3] [m3⋅K/Wh]
인수
f
3.1.4 모터에서 발생된 전압에 의한 과전
압
매개회로(직류 버스통신)의 직류 전압은 모터를 발전기
로 사용하는 경우에 상승합니다. 이는 다음과 같이 2가
지 방식으로 발생합니다.
주파수 변환기가 일정 출력 주파수에서 운전하
•
면 부하에 의해 모터가 구동됩니다. 이는 일반
적으로 정비 부하라고도 합니다.
감속 중에 부하의 관성이 높고 변환기의 감속
•
시간이 짧게 설정되어 있는 경우.
주파수 변환기는 입력으로 에너지를 다시 재생할 수 없
습니다. 따라서 자동 가감속을 사용함으로 설정하면 모
터에서 수용된 에너지를 제한합니다. 주파수 변환기는
감속 도중에 과전압이 발생하는 경우 자동으로 감속 시
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 37
Page 40

시스템 통합
VLT® AQUA Drive FC 202
간을 연장하여 이를 시도합니다. 이러한 시도가 실패하
거나 일정 주파수에서 운전 중일 때 부하에 의해 모터
가 구동되는 경우 임계 직류 버스통신 전압 레벨에 도
기체 유형 단위
3C1 3C2 3C3
달하면 변환기가 종료되고 결함이 표시됩니다.
33
3.1.5 청각적 소음
다음 세 가지 원인에 의해 주파수 변환기에 청각적 소
음이 발생합니다.
직류단(매개회로) 코일
•
RFI 필터 초크
•
내부 팬
•
청각적 소음 등급은
3.1.6 진동 및 충격
표 7.60
를 참조하십시오.
바다 소금 해당 없음 없음 염수 분무 염수 분무
황산화물
황화수소
염소
염화수소
플루오르화 수소
암모니아
오존
질소
표 3.2 콘포말 코팅 클래스 등급
1) 최대 값은 하루에 30분을 초과하지 않는 일시적인 피크 값
입니다.
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3
0.1 0.3 1.0 5.0 10
3
0.01 0.1 0.5 3.0 10
3
0.01 0.1 0.03 0.3 1.0
3
0.01 0.1 0.5 1.0 5.0
3
0.003 0.01 0.03 0.1 3.0
3
0.3 1.0 3.0 10 35
3
0.01 0.05 0.1 0.1 0.3
3
0.1 0.5 1.0 3.0 9.0
클래스
평균값최대
값
1)
평균값최대
값
1)
주파수 변환기는 IEC 68-2-6/34/35 및 36을 기초로
한 절차에 따라 검사되었습니다. 이러한 테스트는 2시
3.1.7.2 먼지 노출
간 동안 3 방향으로 18 ~ 1000 Hz의 범위 중 임의로
0.7 g의 힘을 가하는 유닛을 대상으로 합니다. 모든 댄
포스 주파수 변환기는 유닛이 벽면 또는 바닥에 설치된
경우뿐만 아니라 벽면이나 지면에 볼트로 연결된 패널
에 설치된 경우 이러한 조건에 부합하는 요구사항을 준
수합니다.
주파수 변환기를 먼지 노출이 심한 환경에 설치하는 것
을 피하는 것이 좋습니다. 먼지는 IP55 또는 IP66 보호
등급의 벽면 또는 프레임 장착 유닛에 영향을 주며
IP21 또는 IP20 보호 등급의 캐비닛 장착 장치에도 영
향을 줍니다. 주파수 변환기를 이러한 환경에 설치할 때
는 아래 설명된 3가지 사항을 고려합니다.
3.1.7 공격성 대기환경
냉각 저하
먼지는 장치 표면, 회로기판 내부 및 전자 구성품에 퇴
3.1.7.1 기체
적물로 형성됩니다. 이러한 퇴적물은 절연층의 역할을
하고 열이 주위 공기로 이동하는 것을 방해하여 냉각
황화수소, 염소 또는 암모니아와 같은 공격성 기체는 주
파수 변환기의 전기 및 전자 구성품을 손상시킬 수 있
습니다. 냉각 공기의 오염 또한 PCB 트랙 및 도어 씰의
점진적인 분해를 야기할 수 있습니다. 공격성 오염물질
은 하수 처리 공장 또는 수영장에서 흔히 발견됩니다.
공격성 대기환경의 명확한 징후는 구리의 부식입니다.
공격성 대기환경에서는 콘포멀 코팅 회로기판과 함께
제한적인 IP 외함이 권장됩니다. 콘포말 코팅 값은
표 3.2
를 참조하십시오.
주의 사항
주파수 변환기는 기본적으로 회로기판에 클래스 3C2가
코팅되어 있습니다. 요청 시 클래스 3C3 코팅이 제공될
수 있습니다.
성능이 감소합니다. 구성품의 온도가 상승합니다. 이는
전자 구성품의 노후화를 가속하며 유닛의 서비스 수명
이 단축됩니다. 유닛 뒤쪽에 있는 방열판의 먼지 퇴적물
또한 유닛의 서비스 수명을 단축시킵니다.
냉각 팬
유닛 냉각을 위한 통풍은 주로 장치 뒤쪽에 있는 냉각
팬에 의해 이루어집니다. 팬 회전자에는 먼지가 침투하
여 연마재 역할을 할 수 있는 작은 베어링이 있습니다.
이는 베어링 손상 및 팬 고장으로 이어집니다.
필터
고출력 주파수 변환기에는 장치 내부에서 뜨거운 공기
를 빼내는 냉각 팬이 장착되어 있습니다. 특정 용량 이
상에서는 이러한 팬에 필터 매트가 장착되어 있습니다.
이러한 필터는 먼지가 많은 환경에서 사용 시 빠르게
막힐 수 있습니다. 이러한 조건에서는 예방적 조치가 필
요합니다.
정기적인 유지보수
위에서 설명한 조건에서는 정기적인 유지보수 중에 주
파수 변환기를 청소하는 것이 권장됩니다. 방열판 및 팬
에서 먼지를 제거하고 필터 매트를 청소합니다.
38 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 41
시스템 통합 설계 지침서
3.1.7.3 폭발성 대기환경
폭발성 대기환경에서 작동되는 시스템은 특수 조건을
충족해야 합니다. EU 규정 94/9/EC는 폭발성 대기환경
에서의 전자 장치 작동을 설명합니다.
폭발성 대기환경에서 주파수 변환기에 의해 제어되는
모터는 PTC 온도 센서를 사용하여 그 온도가 감시되어
야 합니다. 점화 보호 클래스가 d 또는 e인 모터가 이러
한 환경에 대해 인증을 받았습니다.
클래스 d는 불꽃이 발생하는 경우 보호된 영역
•
내에 머물게 하도록 구성되어 있습니다. 인증
을 필요로 하지는 않지만 특수 배선 및 격납
조치가 필요합니다.
d/e 조합은 폭발성 대기환경에서 가장 흔히 사
•
용됩니다. 모터 자체에는 e 점화 보호 등급이
있으며 모터 배선 및 연결 환경은 e 클래스를
준수합니다. e 연결 공간의 제한은 이 공간에
허용된 최대 전압에 따릅니다. 주파수 변환기
의 출력 전압은 주로 주전원 전압으로 제한됩
니다. 출력 전압의 변조는 e 클래스에 허용되
지 않은 높은 피크 전압을 생성할 수 있습니다.
실제로 주파수 변환기 출력에서 사인파 필터를
사용하는 것이 높은 피크 전압을 감쇠시키는
데 효과적인 수단으로 입증되었습니다.
주의 사항
폭발성 대기환경에 주파수 변환기를 설치하지 마십시
오. 이러한 폭발성 대기환경을 벗어나 캐비닛 내에 주파
수 변환기를 설치합니다. 주파수 변환기의 출력에서 사
인파 필터를 사용하는 것 또한 dU/dt 전압 상승 및 피
크 전압을 감쇠시키는 데 권장됩니다. 모터 케이블을 가
능한 짧게 합니다.
주의 사항
MCB 112 옵션이 있는 주파수 변환기에는 폭발성 대기
환경을 위한 PTB 인증 모터 써미스터 센서 감시 기능
이 있습니다. 주파수 변환기를 사인파 출력 필터와 함께
사용하지 않을 때는 차폐 모터 케이블이 필요하지 않습
니다.
3.1.8 IP 등급 정의
고형 이물질에 의한 침투방지다음에 의해 위험 부품
0 (보호 안됨) (보호 안됨)
1
≥50 mm 직경
첫 번째 자
릿수
두 번째 자
릿수
첫 번째 글
자
추가 글자
표 3.3 IP 등급의 IEC 60529 정의
2 12.5 mm 직경 손가락
3 2.5 mm 직경 도구
4
≥1.0 mm 직경
5 방진 와이어
6 내진 와이어
유해 효과가 있는 수분 침
투 방지
0 (보호 안됨)
1 수직 낙하
2 15° 기울기 낙하
3 물 분사
4 물 비산
5 초고압수
6 초강력 초고압수
7 일시적 침수
8 장기간 침수
다음을 위한 특별 추가 정
보
A 손등
B 손가락
C 도구
D 와이어
다음을 위한 특별 추가 정
보
H 고전압 장치
M 수처리 테스트 도중 장치
움직임
S 수처리 테스트 도중 장치정지
W 기후 조건
3.1.8.1 캐비닛 옵션 및 등급
접근 방지
손등
3 3
와이어
댄포스 주파수 변환기는 다음과 같이 각기 다른 3가지
보호 등급으로 제공됩니다.
캐비닛 설치 용도의 IP00 또는 IP20.
•
현장 장착 용도의 IP54 또는 IP55.
•
(대기중) 습도가 매우 높거나 먼지 또는 공격성
•
기체의 농도가 높은 극심한 주위 조건 용도의
IP66.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 39
Page 42

130BA056.10
1
3
25 4
6
ba
M
시스템 통합
VLT® AQUA Drive FC 202
3.1.9 무선 주파수 간섭
실제로 주요 목적은 구성품 간 무선 주파수 간섭 없이
안정적으로 운전하는 시스템을 확보하는 것입니다. 높
은 수준의 방지를 확보하려면 고품질의 RFI 필터가 장
착된 주파수 변환기의 사용을 권장합니다.
33
일반 표준 EN 55011의 클래스 B 한계를 준수하고 EN
61800-3에 명시된 부문 C1 필터를 사용합니다.
RFI 필터가 부문 C1 (부문 C2 이하)에 해당하지 않는
경우 주파수 변환기에 해당 경고 문구를 부착합니다. 올
바른 라벨 표기는 작업자의 책임입니다.
실제로 RFI 필터의 접근 방식은 다음과 같이 2가지입니
다.
장비에 내장
•
- 내장 필터는 캐비닛 내부 공간을 절약
할 뿐만 아니라 피팅, 배선 및 재료에
대한 추가 비용을 줄여줍니다. 하지만
가장 중요한 이점은 통합 필터의 완벽
한 EMC 적합성 및 케이블 배선입니
다.
외장 옵션
•
- 주파수 변환기의 입력에 설치되어 있
는 외장 RFI 필터(옵션)는 전압 강하
를 유발합니다. 이는 실제로 주파수
변환기 입력에서 주전원 최대 전압이
없으며 보다 높은 등급의 변환기가 필
요할 수 있습니다. EMC 한계를 준수
하기 위한 모터 케이블의 최대 길이의
범위는 1-50 m입니다. 자재, 케이블
배선 및 조립 비용이 발생합니다.
EMC 적합성 시험은 거치지 않았습니
다.
주의 사항
주파수 변환기를 아무 간섭 없이 운전하기 위해서는 항
상 부문 C1 RFI 필터를 사용합니다.
3.1.10 PELV 및 갈바닉 절연 준수
전기 공급 장치가 방호초저전압(PELV)형인 경우 감전
에 대비해야 하며 설치 시 국내 및 국제 PELV 규정을
준수해야 합니다.
제어 단\자에서 PELV를 유지하기 위해서는 써미스터
를 절연 보강재 처리/이중 절연하는 등 모든 연결부가
PELV 갈바닉 절연되어 있어야 합니다. 모든 댄포스 주
파수 변환기 제어 및 릴레이 단자는 PELV가 적용되어
공급됩니다(400 V 이상에서 접지된 델타형 편선은 예
외).
가장 높은 등급의 절연과 적당한 여유 거리를 만족시켜
야만 갈바닉 절연이 이루어집니다. 이 규정은 EN
61800-5-1 표준에 명시되어 있습니다.
전기 절연은
구성품은 PELV 요구사항과 갈바닉 절연 요구사항을 모
두 준수합니다.
1 직류단 전압의 신호 절연 및 직류단 전류 전압 V DC를 포함한
내부 전원 분배기(SMPS)
2 IGBT용 게이트 드라이브
3 전류 변환기
4 옵토커플러, 제동 모듈
5 잦은 내부적 기동, RFI 및 온도를 측정하는 회로.
6 주문형 릴레이
a 24 V 백업 옵션용 갈바닉 절연
b RS485 표준 버스통신 인터페이스용 갈바닉 절연
그림 3.1
에서와 같이 제공됩니다. 설명된
주의 사항
VLT® AQUA Drive 유닛에는 400 V 주전원 시스템 및
최대 90 kW의 전력 등급 용도의 부문 C1 (EN
61800-3) 또는 최대 110 - 630 kW의 전력 등급 용도
의 부문 C2를 준수하는 내장 RFI 필터가 기본 제공됩니
다. VLT® AQUA Drive 유닛은 최대 50 m 길이의 차
폐 모터 케이블이 장착되어 C1을 준수하거나 최대 150
m 길이의 차폐 모터 케이블이 장착되어 C2를 준수합니
다. 자세한 내용은
표 3.4
를 참조하십시오.
그림 3.1 갈바닉 절연
고도가 높은 곳에서의 설치
고도 상한을 초과하는 곳에 설치하는 경우 PELV 요구
사항을 준수하지 못할 수 있습니다. 구성품과 주요 부품
간의 절연이 충분하지 않을 수 있습니다. 과전압 위험이
있습니다. 외부 보호 장치 또는 갈바닉 절연을 통해 과
전압 위험을 줄입니다.
40 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 43

시스템 통합 설계 지침서
고도가 높은 곳에 설치할 경우 PELV에 대해 댄포스에
문의하십시오.
380–500 V (외함 A, B 및 C): 2000m (6500
•
ft) 이상
380–500 V (외함 D, E 및 F): 3000 m (9800
•
ft) 이상
525–690 V: 2000m (6500 ft) 이상
•
3.1.11 보관
모든 전자 장비와 마찬가지로 주파수 변환기는 건조한
곳에 보관해야 합니다. 보관 중에는 정기적인 충전(커패
시터 충전)이 필요 없습니다.
설치할 때까지 장비를 해당 패키지 내에 밀폐된 상태로
유지하는 것이 권장됩니다.
3.2 EMC, 고조파 및 접지 누설 보호
3.2.1 EMC 방사의 일반적 측면
주파수 변환기 (및 기타 전기 장치)는 해당 환경을 간섭
할 수 있는 전자장 또는 자기장을 발생시킵니다. 이러한
현상에 따른 전자기 호환성(EMC)은 전력 및 장치의 고
조파 특성에 따라 다릅니다.
시스템 내 전기 장치 간의 비제어 상호작용은 호환성을
떨어뜨릴 수 있으며 안정적인 운전을 방해할 수 있습니
다. 간섭은 주전원 고조파 왜곡, 정전기 방전, 급속한 전
압 변동 또는 고주파수 간섭 등의 형태로 나타날 수 있
습니다. 전기 장치는 간섭을 발생시킬 뿐만 아니라 발생
된 다른 소스로부터도 간섭을 받습니다.
차폐된 케이블은 비차폐 케이블에 비해 접지 용량이 크
기 때문에 차폐된 모터 케이블을 사용하면 누설 전류가
증가합니다(
으면 약 5MHz 이하의 무선 주파수 범위에서 주전원에
대한 간섭이 증가합니다. 누설 전류(I1)는 차폐선(I3)을
통해 장치로 다시 보내지므로 대체로
는 바와 같이 차폐된 모터 케이블의 전자기장(I4)은 작
습니다.
차폐선은 방사 간섭을 감소시키지만 주전원에 대한 저
주파수 간섭을 증가시킵니다. 모터 케이블의 차폐선을
주파수 변환기 외함 뿐만 아니라 모터 외함에 연결합니
다. 차폐선 클램프를 사용하여 차폐선의 양쪽 끝(돼지꼬
리 모양)이 꼬이지 않도록 고정시키는 것이 가장 좋습니
다. 꼬아서 연결하게 되면 높은 주파수 대역에서 차폐선
의 임피던스를 증가시켜 차폐 효과를 감소시키고 누설
전류(I4)을 증가시킵니다.
차폐된 케이블을 릴레이, 제어 케이블, 신호 인터페이스
및 제동 장치에 사용하는 경우에는 외함의 양쪽 끝에
차폐선을 설치합니다. 하지만 전류 루프 발생을 피하기
위해 차폐선을 차단해야 하는 경우도 있습니다.
차폐선을 주파수 변환기의 마운팅 플레이트에 연결하는
경우에는 차폐된 전류가 유닛으로 다시 전달되도록 마
운팅 플레이트가 금속 재질이어야 합니다. 또한 마운팅
플레이트에서 주파수 변환기의 섀시까지 가능한 높은
전기적 접촉을 얻기 위해 클램프와 나사로 차폐선을 고
정시켜야 합니다.
비차폐 케이블을 사용하면 대부분의 방지 요구 사항은
만족하더라도 방사 요구 사항은 일부 만족하지 않을 수
있습니다.
그림 3.2
참조). 누설 전류가 필터링되지 않
그림 3.2
에서 보
3 3
전기적인 간섭은 보통 150kHz에서 30MHz 범위 내의
주파수에서 발생합니다. 30MHz에서 1GHz 범위에 있는
주파수 변환기 시스템의 부유물에 의한 간섭은 인버터,
모터 케이블, 모터 등에서 발생합니다.
그림 3.2
dU/dt가 모터 케이블의 용량형 전류와 결합하면 누설
전류의 원인이 됩니다.
에서 보는 바와 같이 모터 전압에서 높은
전체 시스템(장치 + 설비)의 간섭 수준을 낮추려면 모
터 및 제동 케이블을 가능한 짧게 합니다. 케이블을 모
터 및 제동 케이블 주변의 민감한 신호 수준에 노출시
키지 마십시오. 50MHz(공기 중) 이상의 무선 간섭은 제
어 전자 장치에 의해 특히 많이 발생합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 41
Page 44

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
시스템 통합
VLT® AQUA Drive FC 202
33
1 접지 와이어 3 AC 주전원 공급 5 차폐된 모터 케이블
2 차폐선 4 주파수 변환기 6 모터
그림 3.2 누설 전류의 생성
3.2.2 EMC 시험 결과
다음은 정격 스위칭 주파수를 기준으로 하여 주파수 변환기, 차폐된 제어 케이블, 가변 저항기 및 제어 박스, 단일 모
터 및 모터 차폐 케이블을 사용한 시스템(Ölflex Classic 100 CY)의 시험 결과입니다.
표 3.4
에는 적합성을 위한 최
대 모터 케이블 길이가 명시되어 있습니다.
주의 사항
다른 셋업의 경우 조건이 크게 변할 수 있습니다.
주의 사항
병렬 모터 케이블은
표 3.17
를 참조하십시오.
42 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 45

시스템 통합 설계 지침서
RFI 필터 유형 전도 방사 복사 방사
케이블 길이 [m] 케이블 길이 [m]
표준
및
요구
사항
H1
FC 202
H2
FC 202 0.25-3.7 kW 200-240VT2 아니오 아니오 5 아니오 아니오 아니오
EN 55011 클래스 B 클래스 A
그룹 1
주택, 상업
공업지역 산업
및 경공업
지역
클래스 A
그룹 2
환경
클래스 B 클래스 A
그룹 1
주택, 상업
및 경공업
산업
환경
지역
클래스 A
그룹 2
산업
환경
EN/IEC 61800-3 부문 C1 부문 C2 부문 C3 부문 C1 부문 C2 부문 C3
1차
환경
가정 및
사무실
0.25-45 kW 200-240
V
1.1-7.5 kW 200-240 V S2 50
0.37-90 kW 380-480
V
7.5 kW 380-480 V S4
T2 50 150 150 아니오 예 예
T4
50 150 150 아니오 예 예
50 100/150
1차 환경
가정 및 사무실
5)
100/150
5)
2차
환경
산업
100/150
100/150
1차 환경
가정 및 사무
실
5)
5)
아니오 예 예
아니오 예 예
1차
환경
가정 및 사무
실
Second
environmen
t
Industrial
3 3
H3
FC 202
H4
FC 202
1)
Hx
FC 202
5.5-45 kW 200-240 V T2 아니오 아니오 25 아니오 아니오 아니오
1.1-7.5 kW 200-240 V S2 아니오 아니오 25 아니오 아니오 아니오
0.37-7.5 kW 380-480
V
11-90 kW 380-380 V
7.5 kW 380-480 V S4 아니오 아니오 25 아니오 아니오 아니오
11-30 kW 525-690 V
4)
37-90 kW 525-690 V
4)
0.25-45 kW 200-240
V
0.37-90 kW 380-480
V
1.1-30 kW 525-690
1)
V
37-90 kW 525-690 V
1.1-90kW 525-600V T6 아니오 아니오 아니오 아니오 아니오 아니오
15-22 kW 200-240 V S2 아니오 아니오 아니오 아니오 아니오 아니오
11-37 kW 380-480 V S4 아니오 아니오 아니오 아니오 아니오 아니오
T4
4)
T4 아니오 아니오 25 아니오 아니오 아니오
1,
T7 아니오 아니오 25 아니오 아니오 아니오
2,
T7 아니오 아니오 25 아니오 아니오 아니오
T2
T4
T7 아니오 100 100 아니오 예 예
2)
T7 아니오 150 150 아니오 예 예
아니오 아니오 5 아니오 아니오 아니오
10 50 50 아니오 예 예
10 50 50 아니오 예 예
표 3.4 EMC 시험 결과 (방사) 최대 모터 케이블 길이
1) 외함 용량 B2.
2) 외함 용량 C2.
3) EN/IEC 61800-3 부문 C4에 따라 Hx 버전 사용 가능.
4) T7, 37-90 kW는 25 m 모터 케이블이 있는 클래스 A 그룹 1 준수. 설치 적용 시 일부 제약(자세한 정보는 댄포스에 문의).
5) 100 m(위상-중성), 150 m(상간) (TT 또는 TN의 경우 예외). 단상 주파수 변환기는 TT 또는 TN 네트워크의 2상 공급에 사용
하도록 설계되어 있지 않습니다.
Hx, H1, H2, H3, H4 또는 H5는 EMC 필터의 유형 코드 위치 16-17에서 정의.
Hx - 주파수 변환기에 EMC 필터가 내장되지 않습니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 43
Page 46

시스템 통합
H1 - EMC 필터 내장. EN 55011 클래스 A1/B 및 EN/IEC 61800-3 부문 1/2 충족.
H2 – 커패시터만 포함되어 있고 공통 모드 코일이 없는 제한적 RFI 필터. EN 55011 클래스 A2 및 EN/IEC 61800-3 부문 3 충
족.
H3 - EMC 필터 내장. EN 55011 클래스 A1/B 및 EN/IEC 61800-3 부문 1/2 충족.
H4 - EMC 필터 내장. EN 55011 클래스 A1 및 EN/IEC 61800-3 부문 2 충족.
H5 – 선박 버전. 고정밀 버전, H2 버전과 동일한 방사 수준 충족.
VLT® AQUA Drive FC 202
33
3.2.3 방사 요구사항
3.2.4 방지 요구사항
주파수 변환기의 EMC 제품 표준에는 방사 및 방지 관
련 특정 요구사항과 함께 4가지 범주(C1, C2, C3 및
C4)가 정의되어 있습니다.
표 3.5
에는 4가지 범주의 정
의와 EN 55011의 관련 분류가 명시되어 있습니다.
EN 55011의
부문 정의
C1 1000V 미만의 공급 전압과 함께 1차
환경(가정 및 사무실)에 설치된 주파
수 변환기.
C2 1000V 미만의 공급 전압과 함께 1차
환경(가정 및 사무실)에 설치되며 플
러그인 또는 이동이 가능하지 않고 전
문가에 의해 설치 및 작동이 필요한
주파수 변환기.
C3 1000V 미만의 공급 전압과 함께 2차
환경(산업)에 설치된 주파수 변환기.
C4 1000V 이상의 공급 전압 또는 400A
이상의 정격 전류와 함께 2차 환경에
설치되며 복잡한 시스템에 사용할 목
적인 주파수 변환기.
표 3.5 IEC 61800-3과 EN 55011 간의 상관관계
관련 방사 클
래스
클래스 B
클래스 A 그룹 1
클래스 A 그룹 2
라인 한계가 없
습니다.
EMC 계획.
일반적인(전도) 방사 표준이 사용되는 경우, 주파수 변
환기는
표 3.6
환경
1차 환경
(가정 및 사무실)
2차 환경
(산업 환경)
의 한계를 준수해야 합니다.
일반적인 방사
표준
주택, 상업 및 경공업 환경을
위한 EN/IEC 61000-6-3 방
사 표준.
산업 환경을 위한 EN/IEC
61000-6-4 방사 표준.
EN 55011의 관
련 방사 클래스
클래스 B
클래스 A 그룹 1
주파수 변환기의 방지 요구사항은 설치되는 환경에 따
라 다릅니다. 산업 환경은 가정 및 사무실 환경보다 높
은 요구사항을 필요로 합니다. 댄포스 주파수 변환기는
모두 산업 환경의 요구사항을 충족할 뿐만 아니라 가정
및 사무실 환경의 보다 낮은 요구사항(안전에 신경 쓸
여유가 보다 많음)을 충족합니다.
다음은 전기 간섭에 대한 방지를 측정(문서화)하기 위해
다음과 같은 기본 표준에 따라 실시한 방지 시험 결과
입니다.
EN 61000-4-2 (IEC 61000-4-2): 정전기 방
•
전 (ESD): 사용자로부터의 정전기 방전 실험.
EN 61000-4-3 (IEC 61000-4-3): 유입 전자
•
장 방사, 진폭 변조 휴대폰 통신기기와 같은 전
파 및 무선방송 장비의 영향 실험.
EN 61000-4-4 (IEC 61000-4-4): 과도 현
•
상: 콘택터 또는 릴레이 등과 같은 장치의 과도
현상에 대한 간섭 실험.
EN 61000-4-5 (IEC 61000-4-5): 서지 트랜
•
지언트: 기기 주변에 발생할 수 있는 번개 등의
영향 실험.
EN 61000-4-6 (IEC 61000-4-6): RF 공통
•
모드: 연결 케이블에 의해 연결된 무선전송 장
비의 영향 실험.
표 3.7
을(를) 참조하십시오.
표 3.6 일반적인 방사 표준과
EN 55011
44 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 47

시스템 통합 설계 지침서
적용 기준
과도 현상
2)
IEC
61000-4-42)
IEC 61000-4-5
서지
2)
2)
ESD
IEC
61000-4-2
방사 전자장
IEC 61000-4-3
RF 공통
모드 전압
IEC 61000-4-6
허용 기준 B B B A A
전압 범위: 200-240 V, 380-500 V, 525-600 V, 525-690 V
라인
모터
제동 장치 4 kV CM
부하 공유 4 kV CM
제어선
표준 버스통신 2kV CM
릴레이선 2kV CM
어플리케이션 및 필드버스 옵
션
LCP 케이블
외부 24V DC
외함
4 kV CM
4 kV CM
2kV CM
2kV CM
2kV CM
2 V CM
— —
2 kV/2Ω DM
4 kV/12Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0.5 kV/2Ω DM
1kV/12Ω CM
1)
1)
1)
1)
1)
1)
1)
1)
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10V/m —
표 3.7 EMC 방지 자료
1) 케이블의 차폐선에 방출
2) 일반적으로 시험에 의해 파악된 값
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
3 3
3.2.5 모터 절연
오늘날 주파수 변환기와 함께 사용할 모터는 dU/dt가
높은 차세대 고효율 IGBT를 고려하여 높은 수준의 절
연을 갖추고 있습니다. 구형 모터를 개장하는 경우, 모
터 절연을 재확인하거나 dU/dt 필터로 저감하거나 필요
한 경우 사인파 필터로 저감합니다.
모터 케이블 길이 ≤
대 케이블 길이인 경우,
장을 7.5 케이블 사양
표 3.8
에 수록된 모터 절연 등
에 수록된 최
급이 권장됩니다. 절연 등급이 낮은 모터의 경우, du/dt
또는 사인파 필터의 사용을 권장합니다.
주전원 정격 전압 [V] 모터 절연 [V]
UN≤420
420 V< UN≤ 500 보강 ULL=1600
500 V< UN≤ 600 보강 ULL=1800
600 V< UN≤ 690 보강 ULL=2000
표 3.8 모터 절연
표준 ULL=1300
3.2.6 모터 베어링 전류
베어링과 축 전류를 최소화하기 위해서는 구동 설비에
대해 다음을 접지합니다.
주파수 변환기
•
모터
•
구동 설비
•
표준 완화 전략
1. 절연 베어링을 사용합니다.
2. 엄격한 설치 절차를 적용합니다.
2a 모터와 부하 모터가 올바르게 정렬되
었는지 확인합니다.
2b EMC 설치 지침을 엄격히 준수합니다.
2c PE를 보강하여 PE에서 고주파수 임피
던스가 입력 전원 리드보다 낮아지게
합니다.
2d 예를 들어, 차폐된 케이블로 모터와
주파수 변환기 간에 360° 연결을 하는
등 모터와 주파수 변환기 간에 양호한
고주파수 연결을 제공합니다.
2e 주파수 변환기에서 건물 접지까지의
임피던스가 설비의 접지 임피던스보다
낮아야 합니다. 펌프의 경우에는 이
작업이 어려울 수 있습니다.
2f 모터와 부하 모터 간에 직접 접지 연
결을 합니다.
3. IGBT 스위칭 주파수를 낮춥니다.
4. 인버터 파형(60° AVM 또는 SFAVM)을 수정
합니다.
5. 축 접지 시스템을 설치하거나 절연 커플링을
사용합니다.
6. 전도성 윤활제를 바릅니다.
7. 가능하면 최소 속도 설정을 사용합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 45
Page 48
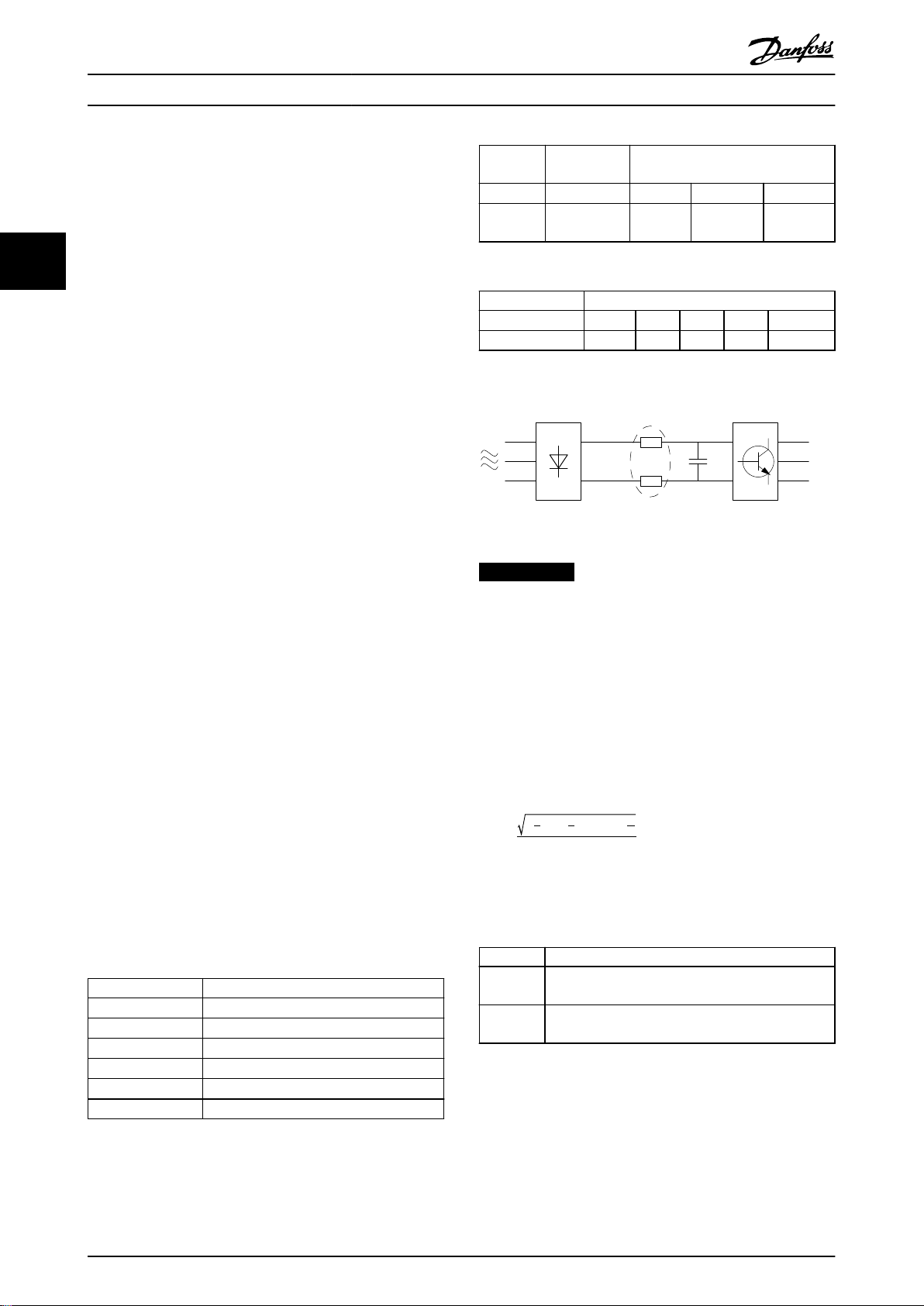
175HA034.10
시스템 통합
VLT® AQUA Drive FC 202
8. 라인 전압이 접지에 대해 균형을 이루는지 확
인합니다. 이 작업은 IT, TT, TN-CS 또는 접
지된 레그 시스템의 경우에는 어려울 수 있습
니다.
9. dU/dt 또는 사인파 필터를 사용합니다.
33
3.2.7 고조파
기본
전류 (I1)
전류 I
주파수
[Hz]
1
50 250 350 550
표 3.10 변형된 비정현 전류
고조파 전류 (In)
I
5
I
7
I
11
전류 고조파 전류
형광등, 컴퓨터, 복사기, 팩스, 각종 실험실 장비 및 통
신 장비와 같이 다이오드 정류기가 있는 전기 장치는
I
입력 전류 1.0 0.9 0.4 0.2 < 0.1
RMS
I
I
I
1
5
I
7
11-49
주전원 전원 공급 장치에 고조파 왜곡을 추가할 수 있
습니다. 주파수 변환기는 다이오드 브리지 입력을 사용
하며 이 또한 고조파 왜곡을 야기할 수 있습니다.
표 3.11 RMS 입력 전류와 고조파
전류
주파수 변환기는 전력선에서 일정하게 전류를 공급 받
지 않습니다. 이 비정현 전류에는 기본 전류 주파수의
몇 배에 해당하는 구성 요소가 있습니다. 이러한 구성
요소를 고조파라고 합니다. 주전원 공급 장치에서 총 고
조파 왜곡을 제어하는 것이 중요합니다. 고조파 전류가
전기 에너지 소모에 직접적으로 영향을 주지는 않지만
그림 3.3 매개회로 코일
배선과 변압기에서 열을 발생시키고 동일 전력선 상의
다른 장치에 영향을 줄 수 있습니다.
주의 사항
3.2.7.1 고조파 분석
건물 전기 시스템의 다양한 특성은 IEEE 표준을 충족하
기 위해 설비 및 설비 성능의 THD에 대한 변환기의 정
확한 고조파 기여도를 결정 짓습니다. 특정 설비에 대한
주파수 변환기의 고조파 기여도 일반화는 어렵습니다.
필요한 경우 시스템 고조파의 분석을 수행하여 장비에
미치는 영향을 판단합니다.
주파수 변환기는 주전원에서 입력된 사인 곡선이 아닌
전류 (즉 고조파 전류)를 포함하고 있으며 이는 입력 전
류I
를 증가시킵니다. 이 고조파 전류는 푸리에 분석
RMS
에 의해 변형되고 다른 주파수의 사인 곡선 전류가 분
리됩니다. 즉 기본 주파수 50Hz 또는 60 Hz에서 고조
파 전류 IN가 분리됩니다.
이 고조파 전류는 전력 소비에 직접적으로 영향을 미치
지는 않지만 설비(변압기, 인덕터, 케이블)의 열 손실을
증가시킵니다. 따라서 정류기 부하가 큰 현장에서는 고
조파 전류를 낮게 유지하여 변압기, 인덕터 및 케이블의
과부하를 방지해야 합니다.
약어 설명
f
1
I
1
U
1
I
n
U
n
n 고조파 순서
기본 주파수
기본 전류
기본 전압
고조파 전류
고조파 전압
일부 고조파 전류는 같은 변압기에 연결된 기기의 통신
에 간섭을 줄 수 있으며 역률 보정 커패시터에 공진을
발생시킵니다.
고조파 전류를 낮추기 위해 주파수 변환기에는 수동 필
터가 장착되어 있습니다. DC 코일은 총 고조파 왜곡
(THD)을 40%까지 낮춥니다.
주전원 공급 전압의 전압 왜곡은 고조파 전류에 해당
주파수의 주전원 임피던스를 곱한 크기에 따라 다릅니
다. 전체 전압 왜곡(THD)은 다음 식을 이용하여 각각의
고조파 전압을 기준으로 하여 계산됩니다.
2
THD
2
+ U
U
=
+ ... + U
5
7
U1
2
N
3.2.7.2 고조파 방사 요구사항
공공 공급 네트워크에 연결된 장비
옵션 정의
1 3상 밸런스 장비(총 출력이 최대 1kW인 전문 장비)를
위한 IEC/EN 61000-3-2 클래스 A.
2 IEC/EN 61000-3-12 장비 16A-75A 및 1kW에서 위상
전류가 최대 16A인 전문 장비.
표 3.12 고조파 방사 표준
표 3.9 고조파 관련 약어
46 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 49

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
시스템 통합 설계 지침서
3.2.7.3 고조파 시험 결과 (방사)
최대 PK75(T2 및 T4의 경우)의 출력 용량은 IEC/EN
61000-3-2 클래스 A를 준수합니다. P1K1에서 최대
P18K(T2의 경우)까지의 출력 용량과 P1K1에서 최대
P90K(T4의 경우)까지의 출력 용량은 IEC/EN
61000-3-12, 표 4를 준수합니다. 전류가 75 A를 초과
하기 때문에 필요하지 않더라도 P110 - P450(T4)의
출력 용량 또한 IEC/EN 61000-3-12를 충족합니다.
표 3.13
에서 공급 Ssc의 단락 전력(R
을 설명합니다.
S
는 사용자 인터페이스와 공공 시스템 간의 접점
)이 다음보다 크다는 점
sce
3 × R
× U
× I
=
SCE
SC
mains
= 3 × 120 × 400 × I
equ
equ
3 3
실제(일반적) 40 20 10 8
R
≥120의 한계
sce
실제(일반적) 46 45
R
≥120의 한계
sce
표 3.13 고조파 시험 결과 (방사)
개별 고조파 전류 In/I1 (%)
I
5
40 25 15 10
I
7
고조파 전류 왜곡 계수(%)
THD PWHD
48 46
I
11
I
13
필요한 경우, 분산 네트워크 작업자의 자문을 구해 단락
회로 출력 Ssc이 등식에서 지정된 값 이상인 공급부에만
장비를 연결해야 하며 이는 장비 설치자 또는 장비 사
용자의 책임입니다.
분산 네트워크 작업자의 자문을 구해 다른 전력 용량을
공공 공급 네트워크에 연결합니다.
다양한 시스템 수준과의 적합성 지침:
표 3.13
의 고조파 전류 데이터는 Power Drive
Systems 제품 표준을 참고하여 IEC/EN 61000-3-12
에 따라 제공됩니다. 이들 데이터는 전원 공급 시스템에
대한 고조파 전류의 영향을 계산하는 기준으로 사용될
수 있으며로 사용될 수 있으며 다음과 같은 관련 지역
지침과의 적합성 문서의 기준으로 사용될 수 있습니다:
IEEE 519 -1992; G5/4.
3.2.7.4 배전 시스템 내 고조파의 영향
그림 3.4
PCC1 지점에 대한 1차 측에 연결되어 있습니다. 변압
기에는 임피던스 Z
다. 모든 부하가 함께 연결된 공통 커플링 지점은 PCC2
입니다. 각각의 부하는 임피던스가 Z1, Z2, Z3인 케이블
을 통해 연결됩니다.
에서 변압기는 중간 전압 공급의 공통 커플링
가 있으며 여러 부하를 전달합니
xfr
그림 3.4 소형 배전 시스템
비선형 부하에 의해 발생한 고조파 전류는 배전 시스템
임피던스의 전압 하락 때문에 전압 왜곡을 야기합니다.
임피던스가 높을수록 전압 왜곡 수준이 높아집니다.
전류 왜곡은 개별 구성품 성능과 관련이 있으며 개벌
구성품 성능은 개별 부하와 관련이 있습니다. 전압 왜곡
은 시스템 성능과 관련이 있습니다. 부하의 고조파 성능
만으로는 PCC의 전압 왜곡을 판단할 수 없습니다.
PCC의 왜곡을 예측하기 위해서는 배전 시스템의 구성
과 관련 임피던스 또한 파악해야 합니다.
전력망의 임피던스를 설명하는 데 공통적으로 사용되는
용어는 단락비 R
피상 전력(Ssc)과 부하의 정격 피상 전력(S
이며 PCC에서의 기준 공급의 단락
sce
) 간의 비
equ
율로 정의됩니다.
S
ce
=
R
sce
S
equ
여기서
Ssc=
Z
2
U
supply
및
S
equ
= U × I
equ
고조파의 부정적인 영향은 2배 더 많습니다.
고조파 전류는 (배선, 변압기의) 시스템 손실을
•
직접적으로 야기합니다.
고조파 전압 왜곡은 다른 부하에 대한 간섭을
•
유발하고 다른 부하의 손실을 증가시킵니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 47
그림 3.5 고조파의 부정적인 영향
Page 50

130BB955.12
a
b
Leakage current
Motor cable length
시스템 통합
VLT® AQUA Drive FC 202
3.2.7.5 고조파 제한 기준 및 요구사항
고조파 제한 요구사항은 다음과 같습니다.
어플리케이션별 요구사항.
•
준수해야 할 기준.
•
33
어플리케이션별 요구사항은 기술적으로 고조파를 제한
할 이유가 있는 특정 설치와 관련이 있습니다.
예
모터 2개 중 하나가 온라인에 직접 연결되어 있고 다른
하나는 주파수 변환기를 통해 공급되는 경우, 110 kW
모터 2개가 연결된 250 kVA 변압기 하나면 충분합니
다. 하지만 모터 2개가 모두 주파수 변환기에서 공급되
는 경우에는 변압기 용량을 낮춰야 합니다. 설비 내에서
고조파를 줄이기 위해 추가적인 방법을 사용하거나 저
고조파 인버터 제품을 선정하면 두 모터 모두 주파수
변환기와 함께 구동할 수 있습니다.
다양한 고조파 저감 표준, 규정 및 권장사항이 있습니
다. 각기 다른 표준이 각기 다른 지리적 위치와 산업에
적용됩니다. 다음 표준이 가장 공통적인 표준입니다.
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
각 표준에 관한 특정 세부정보는
침서
를 참조하십시오.
유럽에서는 공장이 공공 전력망에 연결되어 있는 경우
최대 THVD는 8%입니다. 공장에 자체 변압기가 있는
경우 그 한계는 10% THVD입니다. VLT® AQUA
Drive는 10% THVD를 견디도록 설계되어 있습니다.
AHF005/010 설계 지
변압기 부하에 40% 이상의 비선형 기여도가 있는 경우
고조파 저감을 항상 고려해야 합니다.
댄포스는 고조파 계산을 위한 도구를 제공합니다.
을 2.8.2 PC 소프트웨어
참조.
장
3.2.8 접지 누설 전류
누설 전류가 3.5 mA를 초과하는 장비의 보호 접지는
국내 및 현지 규정을 준수합니다.
주파수 변환기 기술은 높은 출력에서의 높은 주파수 스
위칭을 의미합니다. 이는 접지 연결부에 누설 전류를 발
생시킵니다.
접지 누설 전류는 몇 가지의 기여도로 구성되며 다음과
같이 다양한 시스템 구성에 따라 다릅니다.
RFI 필터링
•
모터 케이블 길이
•
모터 케이블 차폐
•
주파수 변환기 전력
•
3.2.7.6 고조파 저감
추가적인 고조파 저감이 필요한 경우를 위해 댄포스는
다양한 저감 장비를 제공합니다. 이러한 장비는 다음과
같습니다.
12-펄스 인버터
•
AHF 필터
•
저고조파 인버터
•
능동 필터
•
다음과 같은 몇 가지 요소에 따라 적절한 솔루션을 선
택합니다.
전력망(배경 왜곡, 주전원 불균형, 공진 및 공
•
급 유형(변압기/발전기)).
어플리케이션(부하 프로필, 부하 개수 및 부하
•
용량).
국내/국제 요구사항/규정(IEEE519, IEC, G5/4
•
등).
총 소유 비용(초기 비용, 효율, 유지보수 등).
•
48 Danfoss A/S © 09/2014 All rights reserved. MG20N639
그림 3.6 모터 케이블 길이와 출력 용량에 따른 누설 전류의
영향. 전원용량 a > 전원용량 b
Page 51

130BB956.12
THVD=0%
THVD=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
시스템 통합 설계 지침서
누설 전류는 또한 라인 왜곡에 따라 다릅니다.
3 3
그림 3.8 누설 전류에 대한 주요 기여도
RCD에 의해 감지된 누설 전류량은 RCD의 차단 주파수
에 따라 다릅니다.
그림 3.7 라인 왜곡에 따른 누설 전류의 영향
EN/IEC61800-5-1(Power Drive 시스템 제품 표준)
준수와 관련하여 누설 전류가 3.5mA를 초과하는 경우
특별한 주의를 요구합니다. 다음의 보호 접지 연결 요구
사항으로 접지를 보강합니다.
최소 단면적 10mm2의 접지 와이어(단자 95).
•
치수 규칙을 각각 준수하는 접지 와이어 2개.
•
자세한 정보는 EN/IEC61800-5-1 및 EN50178을 참
조하십시오.
RCD 사용
접지 누설 회로 차단기(ELCB)라고도 하는 잔류 전류
장치(RCD)를 사용하는 경우에는 다음 사항을 준수해야
합니다.
교류 전류와 직류 전류를 감지할 수 있는 B형
•
의 RCD만 사용합니다.
과도한 접지 전류로 인한 결함을 방지하기 위
•
해 지연 기능이 있는 RCD를 사용합니다.
시스템 구성 및 환경적 고려사항에 따라 RCD
•
치수를 정합니다.
누설 전류에는 주전원 주파수와 스위칭 주파수 모두에
서 비롯된 주파수가 일부 포함되어 있습니다. 스위칭 주
파수가 감지되는지 여부는 사용한 RCD 유형에 따라 다
릅니다.
그림 3.9 누설 전류에 대한 RCD 차단 주파수의 영향
3.3 주전원 통합
3.3.1 주전원 구성 및 EMC 영향
주파수 변환기에 전력을 공급하기 위한 교류 주전원 시
스템에는 몇 가지 유형이 있습니다. 각각의 유형은 시스
템의 EMC 특성에 영향을 줍니다. EMC에는 5선 TN-S
시스템이 최상으로 간주되며 적어도 절연 IT 시스템 정
도는 되어야 합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 49
Page 52

시스템 통합
VLT® AQUA Drive FC 202
시스템 유형설명
TN 주전원
시스템
TN-S 별도의 중성(N) 도체와 보호 접지(PE) 도체가 있는 5선
33
TN-C 시스템 전체에 걸쳐 공통 중성 및 보호 접지(PE) 도체가
TT 주전원
시스템
IT 주전원
시스템
표 3.14 교류 주전원 시스템 유형
TN 주전원 배전 시스템의 2가지 유형은 TN-S와 TN-C
입니다.
시스템. 이는 최상의 EMC 속성을 제공하며 간섭이 전달
되지 않게 합니다.
있는 4선 시스템. 중성 및 보호 접지 결합형 도체는 좋지
않은 EMC 특성을 제공합니다.
접지된 중성 도체와 변환기 유닛의 개별 접지가 있는 4
선 시스템. 올바르게 접지되면 양호한 EMC 특성을 젝오
합니다.
접지되지 않았거나 임피던스를 통해 접지된 중성 도체가
있는 절연 4선 시스템.
3.3.2.4 주전원 간섭 발생 원리
맥동 입력 전류에 의해 야기된 정현파의 주전원 간섭
왜곡은 일반적으로 고조파라고 합니다. 푸리에 분석에
따라 도출된 결과는 최대 2.5 kHz이며 이는 주전원 주
파수의 50번째 고조파에 해당합니다.
주파수 변환기의 입력 정류기는 주전원에서 이러한 형
태의 고조파 간섭을 발생시킵니다. 주파수 변환기가 50
Hz 주전원 시스템에 연결되면 3번째 고조파(150 Hz),
5번째 고조파 (250 Hz) 또는 7번째 고조파(350 Hz)에
서 가장 강한 영향을 보입니다. 전체적인 고조파량은 총
고조파 왜곡(THD)이라고 합니다.
3.3.2.5 주전원 간섭의 영향
고조파 및 전압 변동은 저주파 주전원 간섭의 2가지 형
태입니다. 이들은 부하가 연결되었을 때 주전원 시스템
3.3.2 저주파수 주전원 간섭
3.3.2.1 비정현 주전원 공급
의 기타 다른 지점보다도 그 근원 지점에서 각기 다른
양상을 갖고 있습니다. 결론적으로 영향력의 범위는 주
전원 간섭의 영향을 평가할 때 종합적으로 평가되어야
합니다. 여기에는 주전원 공급, 구조 및 부하가 포함됩
니다.
주전원 전압이 고도와 주파수가 일정한 정현 전압인 경
우가 드물게 있습니다. 이는 부분적으로 컴퓨터, 텔레비
전 세트, 스위칭 전원 공급 장치, 에너지 효율적인 램프
및 주파수 변환기와 같이 주전원에서 비정현 전류를 공
급 받는 부하 또는 비선형 특성이 있는 부하 때문입니
다. 편차는 피할 수 없으며 특정 한계 내에서 허용 가능
합니다.
저전압 경고와 높은 기능 손실은 주전원 간섭의 결과로
발생할 수 있습니다.
저전압 경고
정현 주전원 전압의 왜곡으로 인해 잘못된 전
•
압 측정.
RMS에 맞는 측정만 고조파량을 고려하기 때문
•
에 잘못된 전력 측정이 야기됩니다.
3.3.2.2 EMC 규정 준수
대부분의 유럽에서 주전원 전력 품질의 객관적 평가 기
준은 장치 전자기 호환성 법률(EMVG)입니다. 이 규정
을 준수하면 배전 시스템에 연결된 모든 장치와 네트워
크가 문제를 일으키지 않고 기본 용도를 충족합니다.
표준 정의
EN 61000-2-2, EN
61000-2-4, EN
50160
EN 61000-3-2,
61000-3-12
EN 50178 전력 설비에서 사용할 전자 장비를 감시합니
표 3.15 주전원 전력 품질의 EN 설계 표준
공공 및 산업 전력망에서의 준수를 위해 주전
원 전압 한계를 정의합니다.
연결된 장치에 의해 발생한 주전원 간섭을 규
제합니다.
다.
높은 손실
고조파는 유효 전력, 피상 전력 및 무효 전력을
•
감소시킵니다.
전기 부하를 왜곡하여 다른 장치에 가청 간섭
•
으로 이어지거나 심지어는 파괴로 이어집니다.
발열의 결과로 장치의 수명이 단축됩니다.
•
주의 사항
과도한 고조파량은 역률 보정 장치에 부하를 가하고 심
지어 파괴를 야기할 수도 있습니다. 이러한 이유로 과도
한 고조파량이 존재할 때는 역률 보정 장비에 초크를
제공합니다.
3.3.3 주전원 간섭 분석
주전원 전력 품질의 장애를 피하기 위해 다양한 방법으
3.3.2.3 간섭이 없는 주파수 변환기
모든 주파수 변환기는 주전원 간섭을 발생시킵니다. 현
재 표준은 최대 2 kHz의 주파수 범위만을 정의합니다.
일부 변환기는 2 kHz를 초과하는 지역에서 주전원 간
섭을 전달하며 이는 표준으로 해결되지 않지만 간섭이
로 고조파 전류를 발생시키는 시스템 또는 장치를 분석
할 수 있습니다. 고조파 계산 소프트웨어(HCS)와 같은
주전원 분석 프로그램은 고조파에 대비해 시스템 설계
를 분석합니다. 그에 앞서 특별한 보호 조치를 시험할
수 있으며 이렇게 하면 이후 시스템 호환성이 보장됩니
다.
없는 것으로 라벨 표기됩니다. 이 지역에 대한 한계는
현재 연구 중입니다. 주파수 변환기는 주전원 간섭을 전
달하지 않습니다.
50 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 53

시스템 통합 설계 지침서
주전원 시스템을 분석하려면
hcs.com/Default.asp?LEVEL=START
프트웨어를 다운로드합니다.
http://www.danfoss-
로 이동하여 소
주의 사항
댄포스는 매우 높은 수준의 EMC 노하우를 갖고 있으며
고객에게 교육 과정, 세미나 및 워크숍을 제공할 뿐만
아니라 세밀한 평가를 포함한 EMC 분석 또는 주전원
계산을 제공합니다.
3.3.4 주전원 간섭 감소를 위한 옵션
일반적으로 변환기의 주전원 간섭은 펄스 전류의 진폭
제한을 통해 감소됩니다. 이렇게 하면 역률 λ(람다)가
개선됩니다.
주전원 고조파를 피하기 위해 다음과 같은 일부 방법이
권장됩니다.
주파수 변환기 내 입력 초크 또는 직류단 초크.
•
수동 필터.
•
능동 필터.
•
슬림형 직류단.
•
능동형 프론트엔드 및 저고조파 인버터.
•
사이클당 펄스가 12, 18 또는 24인 정류기.
•
3.3.5 무선 주파수 간섭
주파수 변환기는 가변 폭 전류 펄스로 인해 무선 주파
수 간섭(RFI)을 발생시킵니다. 변환기와 모터 케이블은
이러한 구성 요소를 복사하고 이를 주전원 시스템으로
전도합니다.
3.3.6.1 환경 1/클래스 B: 가정
공공 저전압 전력망에 연결된 운전 장소는 경공업 지역
을 포함해 환경 1/클래스 B로 분류됩니다. 여기에는 별
도의 주전원 시스템을 위한 자체 고전압 또는 중간 전
압 배전 변압기가 없습니다. 환경 분류는 건물 내부와
외부에 모두 적용됩니다. 일반적인 예로는 비즈니스 지
역, 가정 주택, 레스토랑, 주차장 및 유흥 시설 등이 있
습니다.
3.3.6.2 환경 2/클래스 A: 산업
산업 환경은 공공 전력망에 연결되지 않습니다. 대신 자
체 고전압 또는 중간 전압 배전 변압기가 있습니다. 환
경 분류는 건물 내부와 외부에 모두 적용됩니다.
이는 산업 환경으로 정의되며 다음과 같은 전자기적 조
건에 의해 특성이 결정됩니다.
과학, 의료 또는 산업 장치의 존재 여부.
•
대규모 유도성 및 용량성 부하의 스위칭 여부.
•
강력한 자기장(예를 들어, 높은 전류로 인한 자
•
기장)의 발생 유무.
3.3.6.3 특수 환경
다른 지역과 명확히 경계가 구분되는 중간 전압 변압기
가 있는 지역에서는 사용자가 해당 설비를 구분하기 위
해 환경 유형을 결정합니다. 지정된 조건 내에서 모든
장치를 문제 없이 작동하는 데 필요한 전자기 호환성을
보장하는 책임은 사용자에게 있습니다. 특수 환경의 예
로는 쇼핑센터, 슈퍼마켓, 주유소, 사무실 건물 및 창고
등이 있습니다.
3.3.6.4 경고 라벨
3 3
RFI 필터는 주전원에서 이러한 간섭을 줄이는 데 사용
됩니다. 이는 고주파 전도성 간섭으로부터 장치를 보호
하도록 노이즈 방지를 제공합니다, 이는 또한 주전원 케
이블에 방사된 간섭이나 주전원 케이블의 복사를 줄입
니다. 필터는 간섭을 특정 수준으로 제한하는 용도로 사
용됩니다. 내장 필터가 특정 방지 용도에 알맞은 표준
장비인 경우도 있습니다.
주파수 변환기가 부문 C1을 준수하지 않는 경우 경고
문구가 제공됩니다. 이는 사용자의 책임입니다. 간섭 제
거는 EN 55011의 클래스 A1, A2 및 B를 기초로 합니
다. 적절한 장치 분류 및 EMC 플랫폼 해결 비용에 대
한 책임은 사용자에게 있습니다.
3.3.7 절연된 입력 소스와 함께 사용하는
주의 사항
모든 VLT® AQUA Drive 주파수 변환기에는 기본으로
통합형 주전원 간섭 초크가 장착되어 있습니다.
3.3.6 운전 장소의 분류
주파수 변환기의 운전에 적합한 환경의 요구사항을 이
해하는 것이 EMC 준수와 관련하여 가장 중요한 요소입
니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 51
대부분의 미국 내 공공 전력은 접지된 전력으로 간주됩
니다. 미국 내에서 흔히 볼 수 있는 용도는 아니지만 입
력 전력이 절연된 소스일 수 있습니다. 모든 댄포스 주
파수 변환기는 1상 접지 전원 뿐만 아니라 비접지 입력
전원에서도 사용할 수 있습니다.
3.3.8 역률 보정
역률 보정 장비는 전압과 전류 간의 위상 변이(φ)를 줄
여 역률이 단일성(cos φ)에 근접하도록 합니다. 이는 배
전 시스템에서 사용되는 모터 또는 램프용 안정기와 같
경우
Page 54

시스템 통합
VLT® AQUA Drive FC 202
은 유도성 부하가 많을 때 필요합니다. 절연된 직류단이
있는 주파수 변환기는 주전원 시스템에서 무효 전력을
공급 받지 않거나 위상 역률 보정 변이를 발생시키지
않습니다. 이는 약 1의 cos φ를 나타냅니다.
이러한 이유로 역률 보정 장비를 선정할 때 속도 제어
33
형 모터는 고려하지 않습니다. 하지만 주파수 변환기가
고조파를 발생시키기 때문에 위상 보정 장비에 의해 공
급되는 전류가 증가합니다. 고조파 발생 요인이 많아지
므로 커패시터의 부하 및 발열 요인이 증가합니다. 결과
적으로 역률 보정 장비에 초크를 장착합니다. 초크는 또
한 부하 인덕턴스와 용량 간의 공진을 방지합니다. cos
φ <1인 변환기 또한 역률 보정 장비 내 초크를 필요로
합니다. 또한 케이블 치수 결정 시 보다 높은 무효 전력
수준을 고려해야 합니다.
3.3.9 입력 전력 지연
입력 서지 억제 회로가 올바르게 작동하도록 하려면 입
력 전력의 연속 적용 간 시간 지연을 관찰합니다.
표 3.16
간을 나타냅니다.
는 입력 전력 적용 간에 허용해야 하는 최소 시
입력 전압 [V] 380 415 460 600
대기 시간 [s] 48 65 83 133
표 3.16 입력 전력 지연
3.3.10 주전원 과도 현상
과도 현상은 수 천 볼트 범위에서 전압이 순간적으로
과도하게 높아지는 현상입니다. 이는 산업 환경, 가정
환경 등 모든 유형의 배전 시스템에서 발생할 수 있습
니다.
과도 현상의 흔한 원인은 벼락입니다. 하지만 온라인 또
는 오프라인에서의 대규모 부하 스위칭 또는 역률 보정
장비와 같은 기타 주전원 과도 현상 장비의 스위칭에
의해서도 발생합니다. 과도 현상은 단락, 배전 시스템의
회로 차단기 트립 및 병렬 케이블 간 유도성 커플링에
의해서도 발생할 수 있습니다.
EN 61000-4-1 표준은 이러한 과도 현상의 형태와 과
도 현상에 포함된 에너지량을 설명합니다. 이러한 유해
효과는 다양한 방법으로 제한할 수 있습니다. 가스 충전
서지 흡수기와 스파크 간극은 에너지량이 많은 과도 현
상으로부터 1단계 보호를 제공합니다. 2단계 보호를 위
해 주파수 변환기를 포함한 대부분의 전자 장치는 전압
가변 저항(바리스터)을 사용하여 과도 현상을 감쇠시킵
니다.
3.3.11 예비 발전기를 사용한 운전
주전원이 정전된 경우 지속적인 운전이 필요할 때는 예
비 전력 시스템을 사용합니다. 이는 또한 보다 높은 주
전원 전력을 확보하기 위해 공공 전력망에 병렬로 사용
됩니다. 이는 발열 및 전력 조합 유닛에 흔히 사용되는
방법으로, 이러한 형태의 에너지 변환으로 높은 효율을
달성합니다. 발전기에서 예비 전력을 공급하는 경우 일
반적으로 공공 전력망에서 전력이 공급되는 경우에 비
해 주전원 임피던스가 높습니다. 이는 총 고조파 왜곡의
증가를 야기합니다. 올바르게 설계된 발전기는 고조파
를 유도하는 장치가 포함된 시스템 내에서 사용할 수
있습니다.
시스템 설계를 고려할 때 예비 발전기를 포함하도록 권
장합니다.
시스템이 주전원 작동에서 발전기로 전환될 때
•
고조파 부하는 대체로 증가합니다.
설계자는 전력 품질이 고조파 문제 및 장비 고
•
장을 방지하기 위한 규정을 준수하도록 고조파
부하를 계산하거나 그 증가분을 측정해야 합니
다.
손실 증가 야기 및 총 고조파 왜곡 증가 가능
•
성이 있으므로 발전기의 비대칭 부하가 발생하
지 않게 해야 합니다.
발전기 권선의 5/6 스태거는 5번째 및 7번째
•
고조파를 감쇠시키지만 3번째 고조파의 증가를
허용합니다. 2/3 스태거는 3번쨰 고조파를 감
소시킵니다.
시스템 내 공진이 야기되므로 작업자는 가능하
•
면 역률 보정 장비를 차단해야 합니다.
초크나 능동 흡수 필터는 고조파뿐만 아니라
•
병렬로 작동하는 저항 부하를 감쇠시킬 수 있
습니다.
병렬로 작동하는 용량성 부하는 예측할 수 없
•
는 공진 효과로 인해 추가적인 부하를 생성합
니다.
HCS와 같은 주전원 분석 소프트웨어를 사용하여 보다
정밀한 분석이 가능합니다. 주전원 시스템을 분석하려
면
http://www.danfoss-hcs.com/Default.asp?
LEVEL=START
니다.
고조파 유도 장치를 사용하여 운전하는 경우 설비 운전
에 문제가 없다는 가정 하에 최대 부하는 고조파 한계
표에 나타나 있습니다.
고조파 한계
B2 및 B6 정류기⇒발전기 정격 부하의 최대
•
20%.
초크가 있는 B6 정류기⇒발전기 정격 부하의
•
최대 20–35%(구성에 따라 다름).
로 이동하여 소프트웨어를 다운로드합
52 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 55

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
시스템 통합 설계 지침서
제어형 B6 정류기⇒발전기 정격 부하의 최대
•
10%.
3.4 모터 통합
3.4.1 모터 선택 시 고려사항
주파수 변환기는 모터의 전계 응력을 유도할 수 있습니
다. 따라서 주파수 변환기에 맞는 모터를 선정할 때는
다음과 같은 모터 관련 효과를 고려합니다.
절연 스트레스
•
베어링 스트레스
•
써멀 스트레스
•
3.4.2 사인파 및 dU/dt 필터
출력 필터는 전계 응력을 감소시키고 보다 긴 케이블
길이를 허용하는 장점을 일부 모터에 제공합니다. 출력
옵션으로는 사인파 필터(LC 필터라고도 함)와 dU/dt 필
터가 있습니다. dU/dt 필터는 펄스의 가파른 상승 비율
을 감소시킵니다. 사인파 필터는 전압 펄스를 부드럽게
하여 정현에 근접한 출력 전압으로 변환합니다. 일부 주
파수 변환기에 장착된 사인파 필터는 비차폐 모터 케이
블을 위해 EN 61800-3 RFI 부문 C2를 준수합니다(
을 3.7.5 사인파 필터
참조).
사인파 및 dU/dt 필터 옵션에 관한 자세한 정보는
을 3.7.5 사인파 필터
및
장을 3.7.6 dU/dt 필터
하십시오.
장
장
를 참조
3 3
그림 3.10 시계 방향 및 반 시계 방향 회전을 위한 단자 연
결
사인파 및 dU/dt 필터 발주 번호에 관한 자세한 정보는
및
3.4.3 올바른 모터 접지
모터의 올바른 접지는 신체 안전에도 중요하고 저전압
장비의 EMC 전기 요구사항을 충족하기 위해서도 중요
합니다. 올바른 접지는 차폐 및 필터의 효과적인 사용에
필요합니다. 올바른 EMC 구현을 위해 설계 세부 사항
을 검증해야 합니다.
3.4.4 모터 케이블
모터 케이블 권장사항 및 사양은
에 수록되어 있습니다.
모든 유형의 3상 비동기 표준 모터는 주파수 변환기 유
닛과 함께 사용할 수 있습니다. 공장 출고 시 설정은 다
음과 같이 주파수 변환기 출력이 연결된 시계 방향 회
전입니다.
장을 6.2.9 dU/dt 필터
를 참조하십시오.
장을 7.5 케이블 사양
모터 케이블의 2상을 전환하거나
4-10 모터 속도 방향
의 설정을 변경하여 모터 회전 방향을 변경합니다.
3.4.5 모터 케이블 차폐
주파수 변환기는 해당 출력에서 스티프 에지 펄스를 생
성합니다. 이러한 펄스에는 고주파 구성 요소(기가헤르
츠 범위로 확대)가 포함되어 있으며 모터 케이블에서 원
하지 않는 복사가 야기됩니다. 차폐 모터 케이블은 이러
한 복사를 감소시킵니다.
차폐는 다음을 목적으로 합니다.
복사된 간섭의 규모 축소.
•
개별 장치의 간섭 방지 개선.
•
차폐선은 고주파 구성 요소를 포착하고 이를 간섭 소스
(이 경우에는 주파수 변환기)로 다시 전도합니다. 차폐
모터 케이블은 또한 가까이에 있는 외부 소스의 간섭에
대한 방지를 제공합니다.
양호한 차폐선이라 하더라도 복사를 완벽히 제거하지는
못합니다. 복사 환경에 위치한 시스템 구성품은 저하 없
이 작동해야 합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 53
Page 56

130BD774.10
130BD775.10
130BD776.10
130BD777.10
시스템 통합
VLT® AQUA Drive FC 202
3.4.6 여러 모터의 연결
주의 사항
모터의 용량이 현저하게 차이가 날 경우에는 모터 기동
시와 낮은 RPM 값에서 문제가 발생할 수 있습니다. 이
33
는 모터 기동 시와 낮은 RPM 값에서 상대적으로 큰 저
항을 가진 소형 모터에 큰 전압이 인가되기 때문입니다.
주파수 변환기는 병렬로 연결된 모터 여러 개를 제어할
수 있습니다. 모터를 병렬로 연결할 때는 다음을 준수해
야 합니다.
일부 어플리케이션에서는 VCC+ 모드를 사용
•
할 수도 있습니다.
모터의 총 전류 소모량은 주파수 변환기의 정
•
격 출력 전류 I
케이블 길이가 긴 경우에는 공통 조인트 연결
•
부를 사용하지 마십시오.
표 3.4
•
•
•
•
에 명시된 모터 케이블 총 길이는 각 병
렬 케이블 길이가 10 m 미만으로 짧은 한 유
효합니다.
모터 케이블 전체에 걸쳐 전압 하락을 고려합
니다.
그림 3.15
병렬 케이블 길이가 긴 경우 LC 필터를 사용합
니다.
그림 3.15
병렬 연결 없이 케이블 길이가 긴 경우
림 3.16
참조.
를 초과하지 않아야 합니다.
INV
그림 3.12
그림 3.14
및
참조.
참조.
그림 3.15
참조.
참조.
그
그림 3.12 케이블 길이가 긴 경우의 공통 조인트 연결
그림 3.13 부하 없는 병렬 케이블
주의 사항
모터를 병렬로 연결할 때는
[0] U/f
로 설정합니다.
1-01 모터 제어 방식
을
그림 3.14 부하 있는 병렬 케이블
그림 3.11 케이블 길이가 짧은 경우의 공통 조인트 연결
54 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 57

130BD778.10
130BD779.10
시스템 통합 설계 지침서
그림 3.15 병렬 케이블 길이가 긴 경우의 LC 필터
그림 3.16 직렬로 연결된 긴 케이블
외함 용량 출력 용량 [kW] 전압[V] 케이블 1개 [m] 케이블 2개 [m] 케이블 3개 [m] 케이블 4개 [m]
A1, A2, A4, A5 0.37–0.75
400 150 45 8 6
500 150 7 4 3
3 3
A2, A4, A5 1.1–1.5
A2, A4, A5 2.2–4
A3, A4, A5 5.5–7.5
B1, B2, B3, B4,
C1, C2, C3, C4
A3 1.1–7.5 525–690 100 50 33 25
B4 11–30 525–690 150 75 50 37
C3 37–45 525–690 150 75 50 37
표 3.17 각 병렬 케이블의 최대 케이블 길이
11–90
3.4.7 제어 와이어 절연
모터 케이블 배선에 의해 생성된 고조파 간섭은 변환기
제어 배선의 제어 신호를 저하시키고 제어 결함으로 이
어질 수 있습니다. 모터 케이블과 제어 배선은 분리되어
야 합니다. 간섭 효과는 분리로 인해 크게 감소합니다.
제어 배선과 모터 케이블 간의 간격은 200
•
mm 이상이어야 합니다.
구분자 스트립은 보다 작은 분리에 필수적이며
•
이러한 경우에 구분자 스트립이 없으면 간섭이
결합되거나 이전될 수 있습니다.
제어 케이블 차폐선은 모터 케이블 차폐선과
•
동일한 방식으로 양쪽 끝에 연결해야 합니다.
도체가 꼬여 있는 차폐 케이블은 가장 큰 감쇠
•
를 제공합니다. 자기장의 감쇠는 약 30 dB(단
일 차폐인 경우)에서 60 dB(이중 차폐인 경우)
까지 증가하고 도체 또한 꼬여 있는 경우에는
약 75 dB까지 증가합니다.
400 150 45 20 8
500 150 45 5 4
400 150 45 20 11
500 150 45 20 6
400 150 45 20 11
500 150 45 20 11
400 150 75 50 37
500 150 75 50 37
3.4.8 모터 써멀 보호
주파수 변환기는 다음과 같은 몇 가지 방식으로 모터
써멀 보호를 제공합니다.
토오크 한계는 속도와 관계 없이 모터가 과부
•
하되지 않게 보호합니다.
최소 속도 한계는 예를 들어, 30Hz에서
•
50/60Hz 사이로 최소 운전 속도 범위를 제한
합니다.
최대 속도 한계는 최대 출력 속도를 제한합니
•
다.
입력은 외부 써미스터에 사용할 수 있습니다.
•
비동기형 모터의 경우 전자 써멀 릴레이(ETR)
•
는 내부 측정값을 기준으로 바이메탈 릴레이를
모의 시험합니다. ETR은 실제 전류, 속도 및
시간을 측정하여 모터 온도를 계산하고 경고를
발령하거나 모터로의 전력을 차단하여 모터가
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 55
Page 58
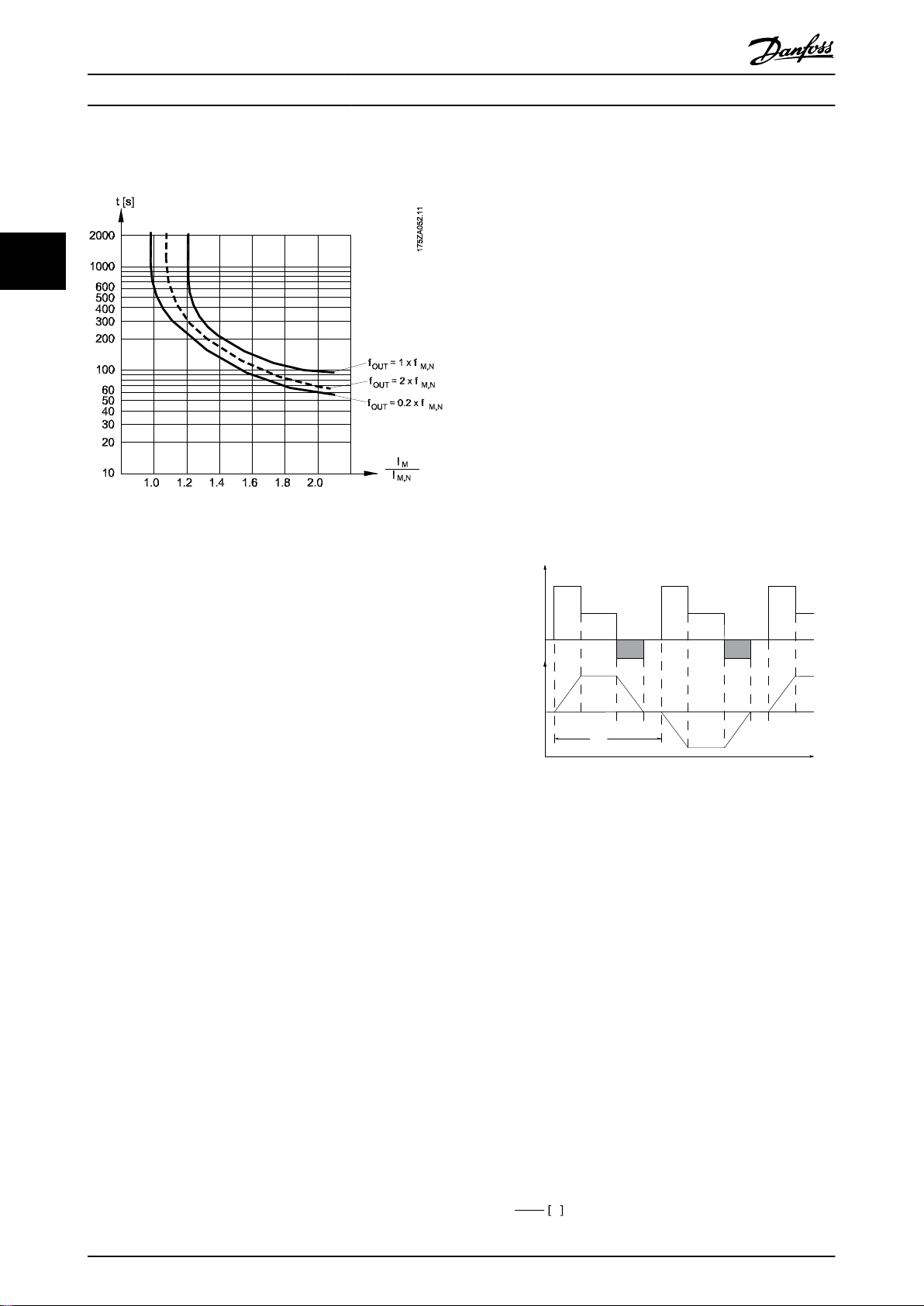
T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Load
Time
Speed
시스템 통합
VLT® AQUA Drive FC 202
과열되지 않도록 보호합니다. ETR의 특성은
그림 3.17
에서 보는 바와 같습니다.
있는 어플리케이션에 교류 제동 기능을 사용할
수 없습니다.
직류 제동: 교류 전류에 추가된 과변조 직류 전
•
류는 에디 전류 제동의 역할을 합니다.
33
3.4.12 제동 저항 계산
제동 저항은 전기적으로 발생된 제동 도중의 열 소실
및 직류단 전압 상승을 관리하는 데 필요합니다. 제동
저항을 사용하면 주파수 변환기가 아닌 제동 저항에 에
너지가 흡수됩니다. 자세한 정보는
서
를 참조하십시오.
제동 저항 설계 지침
듀티 사이클 계산
각각의 제동 기간 중에 저항으로 전달된 회생동력 에너
지량을 알 수 없는 경우, 주기 시간 및 제동 시간을 기
준으로 하여 평균 전력(단속적 듀티 사이클라고 함)을
계산합니다. 저항 단속적 듀티 사이클은 저항이 동작하
그림 3.17 전자 써멀 릴레이 특성
는 시점의 듀티 사이클을 나타냅니다(
그림 3.18
참조).
모터 공급업체는 주로 단속적 듀티 사이클을 나타내는
허용 부하를 기동할 때 S5를 사용합니다.
X축은 I
motor
와 정격 I
간의 비율을 나타냅니다. Y축
motor
은 ETR이 차단되고 트립되기 전의 시간을 초 단위로
나타냅니다. 곡선은 정격 속도 2배와 정격 속도 0.2배
시점의 정격 속도 특성을 나타냅니다.
속도가 낮으면 모터의 냉각 성능이 감소하여 낮은 써멀
조건에서 ETR이 차단됩니다. 이러한 방식으로 낮은 속
도에서도 모터가 과부하되지 않도록 보호됩니다. ETR
기능은 실제 전류와 속도를 기준으로 하여 모터 온도를
계산합니다.
3.4.9 출력 콘택터
일반적으로 권장하는 방법은 아니지만 모터와 주파수
변환기 간에 출력 콘택터를 작동하면 주파수 변환기에
손상을 야기하지 않습니다. 이전에 개방된 출력 콘택터
를 닫으면 구동 중인 주파수 변환기가 정지된 모터에
연결될 수 있습니다. 이렇게 하면 주파수 변환기가 트립
되고 결함이 표시됩니다.
3.4.10 제동 기능
모터 축의 부하를 제동하려면 정적(기계식) 또는 다이나
믹 제동을 사용합니다.
3.4.11 다이나믹 제동
다이나믹 제동은 다음에 의해 가능합니다.
저항 제동: 제동 IGBT는 제동 에너지를 모터
•
에서 제동 저항으로 직접 전달함으로써 지정된
임계값 하에서 과전압을 유지합니다.
교류 제동: 모터의 손실 조건을 변경함으로써
•
제동 에너지가 모터에 전달됩니다. 고주기 주
파수가 모터를 과열시키므로 고주기 주파수가
그림 3.18 제동 저항 듀티 사이클
저항에 대한 단속적 듀티 사이클은 다음과 같이 계산합
니다.
듀티 사이클=tb/T
T = 초 단위 주기 시간
tb는 초 단위의 (주기 시간 중) 제동 시간입니다.
댄포스는 듀티 사이클이 5%, 10% 및 40%인 제동 저항
을 제공합니다. 만일 듀티 사이클 10%를 적용하면 제동
저항은 주기 시간의 10%에 해당하는 제동 동력을 흡수
합니다. 주기 시간의 나머지 90%는 잉여 열을 소실시키
는 데 사용됩니다.
제동 저항이 필요한 제동 시간에 맞게 선정되었는지 확
인합니다.
제동 저항 계산
모터가 제동할 때 보호를 위해 주파수 변환기가 차단되
지 않게 하려면 피크 제동 동력 및 매개 회로 전압을 기
초로 하여 저항 값을 선택합니다. 다음과 같이 제동 저
항의 저항값을 계산합니다.
2
Udc
R
=
br
Ω
P
peak
56 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 59

시스템 통합 설계 지침서
제동 저항 성능은 직류단 전압(Udc)에 따라 다릅니다.
Udc는 제동이 활성화되는 시점의 전압입니다. FC 시리
즈 제동 기능은 주전원 공급에 따라 결정됩니다.
주전원 공급 입력
[V AC]
FC 202 3x200-240 390 405 410
FC 202 3x380-480 778 810 820
FC 202 3x525-600
FC 202 3x525-600
FC 202 3x525-690 1099 1109 1130
표 3.18 직류단 전압 (Udc)
1) 외함 용량 A, B, C
2) 외함 용량 D, E, F
제동 저항 R
제동 토오크(M
1)
2)
을 사용하여 주파수 변환기가 가장 높은
rec
br(%)
제동
활성화
[V DC]
943 965 975
1099 1109 1130
) 160%에서 제동이 가능한지 확인합
고
전압
경고
[V DC]
과
전압
알람
[V DC]
니다. 식은 다음과 같습니다.
2
U
x100
R
Ω =
rec
η
η
P
motor
값은 일반적으로 0.90이고
motor
값은 일반적으로 0.98입니다.
VLT
xM
dc
br( % )
xη
VLT
xη
motor
저항 값이 높은 제동 저항을 선택하면 160%/150%/
110%의 제동 토오크에 도달할 수 없으며 보호를 위해
주파수 변환기가 직류단 과전압을 차단하게 될 위험이
있습니다.
낮은 토오크에서, 예를 들어, 80% 토오크에서 제동하는
경우 낮은 전력 등급의 제동 저항을 설치할 수 있습니
다. R
을 계산하기 위한 식을 사용하여 용량을 계산합
rec
니다.
주파수 변환기 D 및 F 외함 용량에는 하나 이상의 제동
초퍼가 있습니다. 이러한 외함 용량에는 각 초퍼에 하나
의 제동 저항을 사용합니다.
3.4.13 제동 저항 배선
EMC (꼬여 있는 케이블/차폐)
주파수 변환기에 지정된 EMC 성능을 충족하려면 차폐
케이블/와이어를 사용합니다. 비차폐 와이어를 사용하는
경우 와이어를 꼬아서 제동 저항과 주파수 변환기 사이
와이어의 전기적 노이즈를 줄이는 것이 좋습니다.
EMC 성능을 향상시키기 위해 금속 차폐선을 사용합니
다.
3.4.14 제동 저항 및 제동 IGBT
제동 저항 전력 감시
또한 제동 동력 감시 기능을 통해 순간 동력 및 선택한
시간 동안의 평균 동력을 읽을 수 있습니다. 제동 장치
는 또한 동력의 에너지화를 감시할 수 있으며
동 동력 한계(kW)
니다. 제동 저항에 전달된 동력이
(kW)
에서 설정한 한계를 초과할 때 수행할 기능을
2-13 제동 동력 감시
에서 선택한 한계를 초과해서는 안됩
2-12 제동 동력 한계
에서 선택합니다.
2-12 제
주의 사항
제동 동력 감시는 안전 기능을 충족하지 않습니다. 제동
저항 회로는 접지 누설이 보호되어 있지 않습니다.
제동 장치는 제동 저항의 단락으로부터 보호되고 제동
트랜지스터는 트랜지스터의 단락을 감지하기 위해 감시
를 받습니다. 릴레이 또는 디지털 출력을 사용하여 주파
수 변환기의 결함이 있는 경우 과부하로부터 제동 저항
을 보호합니다.
과전압 제어 (OVC)는 2-17 과전압 제어
대신 선택할 수 있습니다. 직류단 전압이 증가하는 경우
이 기능은 모든 유닛에 대해 활성화됩니다. 이 기능은
트립되지 않게 합니다. 직류단에서 전압을 제한, 출력
주파수를 증가시켜 트립되지 않도록 할 수 있습니다. 이
기능은 특히 감속 시간이 너무 짧을 경우 주파수 변환
기가 트립되지 않도록 하는데 유용한 기능입니다. 이런
경우에는 감속 시간을 늘리면 됩니다.
3.4.15 에너지 효율
에서 제동 기능
3 3
VLT® 제동 저항 MCE 101 설계 지침서
데이터가 수록되어 있으며 다음과 같은 계산 단계가 보
다 자세히 설명되어 있습니다.
제동 동력의 계산
•
제동 저항 피크 전력의 계산
•
제동 저항 평균 전력의 계산
•
관성 제동
•
에는 최신 선정
주파수 변환기의 효율
주파수 변환기의 부하는 효율에 거의 영향을 미치지 않
습니다.
이는 다른 U/f 특성을 선택해도 주파수 변환기의 효율
은 변하지 않음을 의미하기도 합니다. 하지만 U/f 특성
은 모터의 효율에는 영향을 미칩니다.
스위칭 주파수가 5kHz 이상으로 설정된 경우 효율이
약간 떨어집니다. 또한 모터 케이블의 길이가 30미터
이상인 경우에도 효율이 약간 떨어집니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 57
Page 60

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
시스템 통합
VLT® AQUA Drive FC 202
효율 계산
그림 3.19
기의 효율을 계산합니다. 이 그래프의 계수를
을 7.1 전기적 기술 자료
를 기준으로 각각 다른 부하에서 주파수 변환
장
에 수록된 특정 효율 계수에 곱
합니다.
33
그림 3.19 일반적인 효율 곡선
예: 55 kW, 380-480 V AC 주파수 변환기(25% 부하,
50% 속도 기준)를 가정하겠습니다. 그래프에 0.97이 표
시되는 데 55kW FC인버터의 정격 효율은 0.98입니다.
실제 효율은 다음과 같습니다: 0.97 x 0.98=0.95.
모터 효율
주파수 변환기에 연결된 모터의 효율은 전류의 사인 곡
선에 따라 달라집니다. 모터 효율은 모터 종류에 따라
달라집니다.
정격 토오크의 75-100% 범위에서 주파수 변
•
환기에 의해 제어되거나 주전원에서 직접 구동
되는 경우에도 실제 모터 효율은 일정합니다.
소형 모터에서 U/f 특성은 효율에 거의 영향을
•
주지 않습니다. 하지만 11kW 이상의 대형 모
터에서는 U/f 특성이 효율에 큰 영향을 미칩니
다.
스위칭 주파수는 소형 모터의 효율에는 영향을
•
미치지 않습니다. 11kW 이상의 모터는 높은
스위칭 주파수에서 모터 전류의 사인 곡선의
모양이 거의 완벽하므로 약 1-2% 정도 효율이
증가합니다.
시스템 효율
시스템 효율을 계산하려면, 다음과 같이 주파수 변환기
의 효율에 모터의 효율을 곱합니다.
58 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 61

+ - + -
S202
**
*
모터
아날로그 출력
릴레이1
릴레이2
켜짐=종단됨
OFF=개방
50 (+10V 출력)
53 (아날로그
입력)
54 (아날로그
입력)
55 (공통 아날로그 입력)
12 (+24 V 출력)
13 (+24 V 출력)
37 (디지털 입력)
18 (디지털 입력)
(공통 디지털 입력)
(공통 아날로그 출력) 39
(아날로그 출력) 42
(P RS-485) 68
(N RS-485) 69
(공통 RS-485) 61
0/4-20 mA
240V AC, 2A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (디지털 입력)
24 V (NPN)
0 V (PNP)
(디지털 입/출력)
0 V (PNP)
24 V (NPN)
(디지털 입/출력)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (디지털 입력)
32 (디지털 입력)
: 섀시
: 접지
240V AC, 2A
400V AC, 2A
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
20
10 V DC
15 mA 130/200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
0 V
5V
S801
RS-485
03
24 V DC
02
01
05
04
06
27
24V
0 V
0 V
24V
29
1 2
켜짐
S201
켜짐
21
켜짐=0/4-20 mA
꺼짐=0/-10 V DC -
+10 V DC
95
P 5-00
21
켜짐
S801
(R+) 82
(R-) 81
130BD552.10
3상 전원
입력
직류
버스통신
+10 V DC
0/-10 V DC+10 V DC
0/4-20 mA
0/-10 V DC+10 V DC
0/4-20 mA
스위치 모드 전원 공급
제동 저항
RS-485
인터페이스
시스템 통합 설계 지침서
3.5 추가적인 입력 및 출력
3.5.1 배선 약도
올바르게 배선 및 프로그래밍된 경우 제어 단자는 다음을 제공합니다.
주파수 변환기에 대한 피드백, 지령 및 기타 입력 신호.
•
주파수 변환기의 출력 상태 및 결함 조건.
•
보조 장비 운전을 위한 릴레이.
•
직렬 통신 인터페이스.
•
24 V 공통.
•
유닛이나 외부 소스의 전면에 있는 현장 제어 패널(LCP)을 통해 파라미터 옵션을 선택하여 제어 단자를 다양한 기능
으로 프로그래밍할 수 있습니다. 대부분의 제어 배선은 공장 발주서에 명시되어 있지 않는 한 고객이 직접 제공합니
다.
3 3
그림 3.20 기본 배선 약도
A=아날로그, D=디지털
*단자 37(옵션)은 STO에 사용합니다. STO 설치 지침은
**케이블 차폐선을 연결하지 마십시오.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 59
VLT® 안전 토오크 정지 사용 설명서
를 참조하십시오.
Page 62
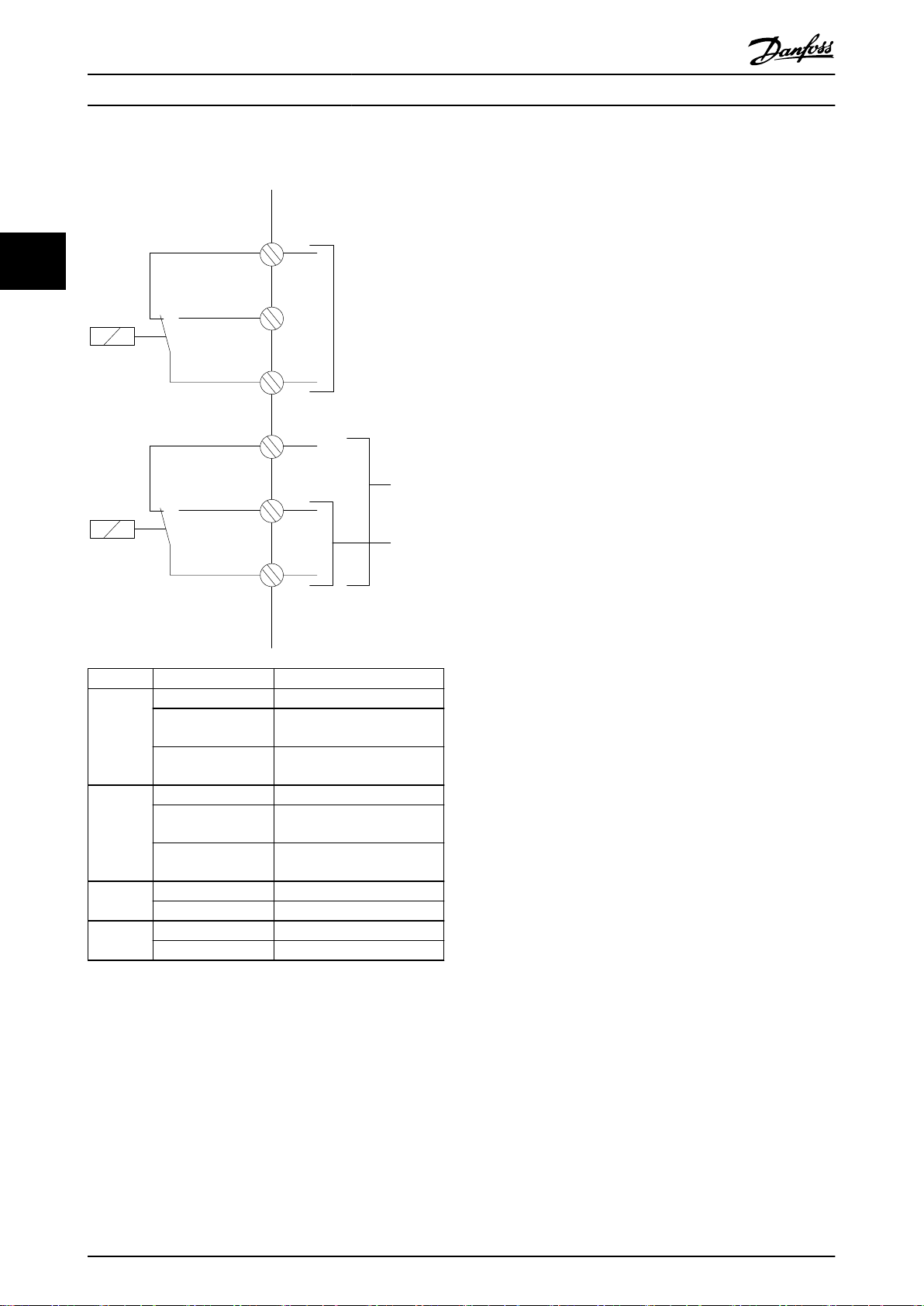
relay1
relay2
03
02
240Vac, 2A
240Vac, 2A
400Vac, 2A
01
06
05
04
130BA047.10
시스템 통합
VLT® AQUA Drive FC 202
3.5.2 릴레이 연결
33
릴레이
1 1 공통
2 4 공통
1 01-02 운전 (NO)
2 04-05 운전 (NO)
그림 3.21 릴레이 출력 1 및 2, 최대 전압
1) 릴레이 출력을 추가하려면 VLT® 릴레이 옵션 모듈
MCB 105 또는 VLT® 릴레이 옵션 모듈 MCB 113을
1)
단자
2 NO
3 NC
5 NC
6 NC
01-03 제동 (NC)
04-06 제동 (NC)
설명
최대 240 V
최대 240 V
최대 240 V
최대 240 V
설치합니다.
릴레이에 관한 자세한 정보는
을 8.3 릴레이 단자 그림
장을 7 사양
를 참조하십시오.
및
장
릴레이 옵션에 관한 자세한 정보는
세서리
60 Danfoss A/S © 09/2014 All rights reserved. MG20N639
를 참조하십시오.
장을 3.7 옵션 및 액
Page 63
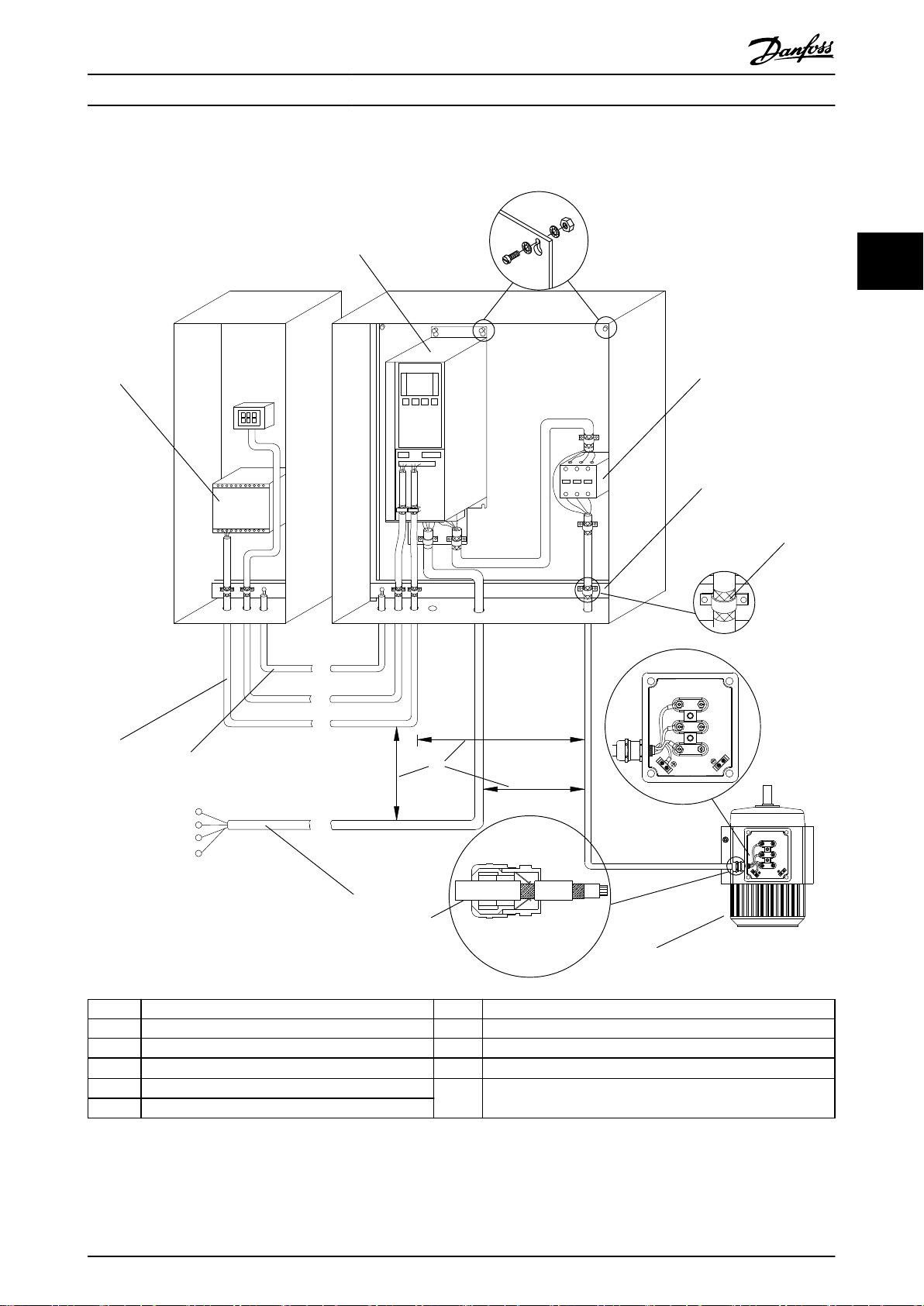
130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
시스템 통합 설계 지침서
3.5.3 EMC 호환 전기 연결
3 3
1 PLC 7 모터, 3상 및 PE (차폐)
2 주파수 변환기 8 주전원, 3상 및 보강 PE (비차폐)
3 출력 콘택터 9 제어 배선 (차폐)
4 케이블 클램프 10
5 케이블 절연 (피복 벗김)
6 케이블 글랜드
11
전위 등화 최소 16 mm2 (0.025인치)
제어 케이블, 모터 케이블 및 주전원 케이블 간의 여유 공간:
최소 200 mm
그림 3.22 EMC-호환 전기 연결
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 61
Page 64
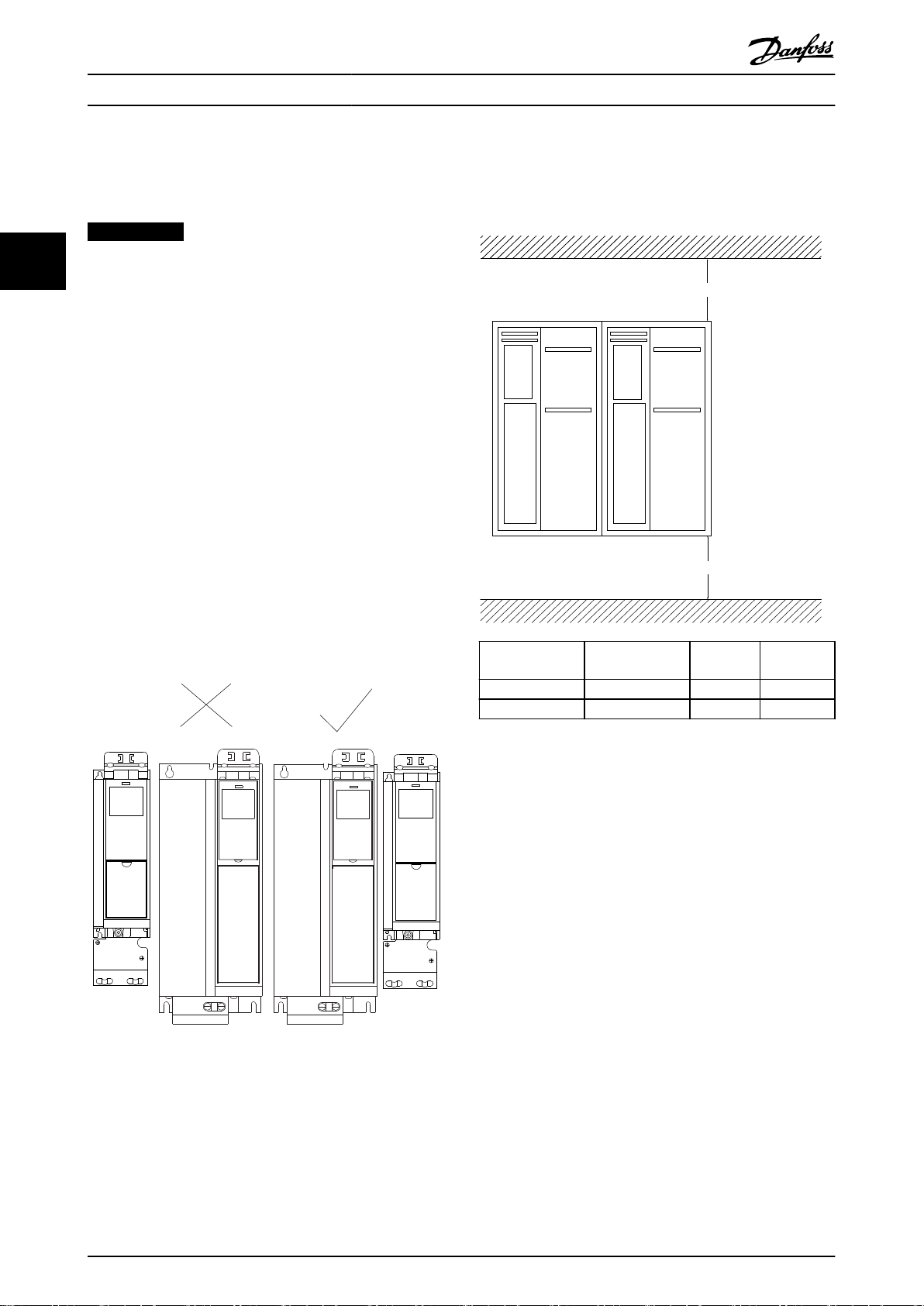
130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
시스템 통합
VLT® AQUA Drive FC 202
EMC에 관한 자세한 정보는
장을 3.2 EMC, 고조파 및 접지 누설 보호
시오.
장을 2.5.18 EMC 준수
를 참조하십
및
수직 여유 공간
최적의 냉각 조건을 위해 주파수 변환기의 상/하부에 충
분한 수직 여유 공간이 있는지 확인합니다.
그림 3.24
을
(를) 참조하십시오.
주의 사항
33
EMC 간섭
모터 및 제어 배선에는 차폐 케이블을 사용하고 입력
전원, 모터 배선 및 제어 배선에는 개별 케이블을 사용
합니다. 전원, 모터 및 제어 케이블을 절연하지 못하면
의도하지 않은 동작이나 성능 감소로 이어질 수 있습니
다. 전원, 모터 및 제어 케이블 간에는 최소 200
mm(7.9인치)의 여유 공간이 필요합니다.
3.6 기계적 계획
3.6.1 여유 공간
옆면끼리 나란히 붙여서 설치하는 방법은 IP21/IP4X/
TYPE 1 외함 키트가 사용되는 경우를 제외하고는 모든
외함 용량에 적합합니다(
조).
수평 여유 공간, IP20
IP20 A 및 B 외함 용량은 여유 공간 없이 옆면끼리 나
란히 붙일 수 있습니다. 하지만 올바른 장착 순서가 중
요합니다.
그림 3.23
줍니다.
장을 3.7 옵션 및 액세서리
참
는 올바르게 장착하는 방법을 보여
외함 용량
a [mm] 100 200 225
b [mm] 100 200 225
A1*/A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
그림 3.23 여유 공간 없이 옆면끼리 나란히 붙여서 올바르게
장착하는 방식
수평 여유 공간, IP21 외함 키트
외함 A1, A2 또는 A3에서 IP 21 외함 키트를 사용하는
경우에는 주파수 변환기 사이에 최소 50 mm의 여유 공
간이 있는지 확인합니다.
그림 3.24 수직 여유 공간
3.6.2 벽면 장착
평평한 벽에 장착하는 경우 백플레이트가 필요 없습니
다.
고르지 않은 벽에 장착하는 경우 백플레이트를 사용하
여 냉각 공기가 충분히 방열판을 지나도록 합니다. 백플
레이트는 외함 A4, A5, B1, B2, C1 및 C2에만 사용합
니다.
62 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 65

130BA219.11
1
130BA392.11
2
1
3
4
시스템 통합 설계 지침서
1 백플레이트
그림 3.25 백플레이트를 사용한 장착
보호 등급 IP66을 갖춘 주파수 변환기의 경우 섬유 또
는 나일론 와셔를 사용하여 에폭시 코팅을 보호합니다.
1 백플레이트
2 IP66 외함을 갖춘 주파수 변환기
3 백플레이트
4 섬유 와셔
그림 3.26 보호 등급 IP66의 경우 백플레이트를 사용한 장착
3.6.3 접근
장착에 앞서 케이블 배선을 위한 접근성을 계획하려면
장을 8.1 주전원 연결 그림(3상)
부 그림
의 그림을 참조하십시오.
및
장을 8.2 모터 연결
옵션 및 액세서리
3.7
옵션
발주 번호는
주전원 차폐
•
•
RFI 필터
•
잔류 전류 장치(RCD)
코어 밸런스 기법을 사용하여 접지된 시스템 및 고저항
으로 접지된 시스템(IEC 용어로 TN 및 TT 시스템)의
접지 결함 전류를 감시합니다. 여기에는 사전 경고(주
알람 설정포인트의 50%)와 주 알람 설정포인트가 있습
니다. 각 설정포인트와 연결된 릴레이는 외부 용도의
SPDT 알람 릴레이이며 외부
객이 직접 공급 및 설치)가 필요합니다.
•
•
•
•
•
절연 저항 감시장치(IRM)
접지되지 않은 시스템(IEC 용어로 IT 시스템)의 시스템
위상 도체와 접지 간 절연 저항을 감시합니다. 여기에는
저항 사전 경고 및 절연 수준에 대한 주 알람 설정포인
트가 있습니다. 각 설정포인트와 연결된 알람 릴레이는
SPDT 알람 릴레이로, 외부용입니다. 참고: 단 하나의
절연 저항 감시장치만 각각의 접지되지 않은(IT) 시스템
에 연결할 수 있습니다.
•
•
•
•
장을 6 유형 코드 및 선택항목
Lexan® 차폐선은 입력 전원 단자 및 입력 플
레이트 전면에 장착되어 외함 도어가 열릴 때
실수로 접촉하지 못하게 합니다.
공간 히터 및 써모스탯: F 프레임의 캐비닛 안
쪽에 장착되어 자동 써모스탯을 통해 제어되는
공간 히터는 외함 내부의 응결을 방지합니다.
써모스탯 초기 설정값에 따라 히터는 10 °C
(50 °F)에서 켜지고 15.6°C(60°F)에서 꺼집니
다.
주파수 변환기에는 기본적으로 클래스 A2 RFI
필터가 통합되어 있습니다. 추가적인 RFI/EMC
보호 수준이 필요한 경우 옵션인 클래스 A1
RFI 필터를 사용하면 해결할 수 있으며 이 필
터는 EN 55011에 따라 무선 주파수 간섭 및
전자기 복사 저감을 제공합니다.
윈도우형
주파수 변환기의 안전 토오크 정지 회로에 내
장
IEC 60755 Type B 장치는 펄스 직류 및 순
직류 접지 결함 전류를 감시합니다.
접지 결함 전류 수준(설정포인트의 10-100%)
을 나타내는 LED 막대형 그래프 표시기
메모리 오류
TEST/RESET 키
주파수 변환기의 안전 정지 회로에 내장
절연 저항을 표시하는 LCD 표시창
메모리 오류
정보, 테스트 및 리셋 키
참조
전류 변압기(고
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 63
Page 66
시스템 통합
VLT® AQUA Drive FC 202
제동 초퍼 (IGBT)
IGBT 제동 초퍼 회로가 있는 제동 단자에는
•
외부 제동 저항의 연결이 허용됩니다. 제동 저
항에 관한 자세한 정보는
항 계산
33
재생 단자
이러한 단자는 재생 제동을 위해 직류단 리액
•
터의 커패시터 뱅크 측에 있는 직류 버스통신
에 재생 유닛의 연결을 허용합니다. F 프레임
재생 단자는 주파수 변환기 정격 등급의 약
1/2에 맞게 용량이 결정되어 있습니다. 특정
주파수 변환기 용량 및 전압을 기준으로 한 재
생 전력 한계는 공장에 문의하십시오.
부하 공유 단자
이러한 단자는 직류단 리액터의 정류기 측에
•
있는 직류 버스통신에 연결하고 여러 장치의
직류 버스통신 전력의 공유를 허용합니다. F
프레임 부하 공유 단자는 주파수 변환기 전력
등급의 약 1/3에 맞게 용량이 결정되어 있습니
다. 특정 주파수 변환기 용량 및 전압을 기준으
로 한 부하 공유 한계는 공장에 문의하십시오.
퓨즈
주파수 변환기의 신속한 전류 과부하 보호를
•
위해 퓨즈가 권장됩니다. 퓨즈 보호는 주파수
변환기 손상을 제한하고 고장 시 서비스 시간
을 최소화합니다. 퓨즈는 선급 인증을 충족하
는 데 필요합니다.
차단
도어에 장착된 핸들은 전원 차단 스위치의 수
•
동 작동을 가능하게 하여 주파수 변환기의 전
력을 활성화 및 비활성화할 수 있으며 서비스
를 받는 동안 안전성이 증가합니다. 차단부는
전원이 인가되어 있는 동안 개방되지 않도록
외함 도어에 인터록되어 있습니다.
회로 차단기
회로 차단기는 원격으로 트립할 수 있지만 수
•
동으로 리셋해야 합니다. 회로 차단기는 전원
이 인가되어 있는 동안 개방되지 않도록 외함
도어에 인터록되어 있습니다. 회로 차단기를
옵션으로 주문한 경우 주파수 변환기의 신속한
전류 과부하 보호를 위해 퓨즈가 포함되어 있
습니다.
콘택터
전기적으로 제어되는 콘택터 스위치는 주파수
•
변환기의 전력을 원격으로 활성화 및 비활성화
할 수 있습니다. IEC 비상 정지 옵션을 주문한
경우 Pilz 안전이 콘택터의 보조 접점을 감시합
니다.
수동 모터 스타터
대형 모터에 주로 필요한 전기 냉송풍기를 위해 3상 전
원을 제공합니다. 스타터용 전원은 제공된 콘택터, 회로
차단기 또는 차단 스위치의 부하 측과 클래스 1 RFI 필
터(옵션)의 입력 측에서 제공됩니다. 전원은 각 모터 스
타터 이전에 퓨즈 처리되어 있으며 주파수 변환기에 입
력되는 전원이 꺼질 때 전원이 꺼집니다. 최대 2개의 스
및 를 참조하십시오.
장을 3.4.12 제동 저
타터가 허용됩니다(하나가 30암페어인 경우에는 퓨즈
보호 회로가 주문됩니다). 주파수 변환기의 안전 토오크
정지 회로에 내장되어 있습니다.
유닛의 기능은 다음과 같습니다.
운전 스위치(on/off).
•
단락 및 과부하 보호(테스트 기능 포함).
•
수동 리셋 기능.
•
30암페어, 퓨즈 보호 단자
고객의 보조 장비의 전원 공급을 위해 입력되
•
는 주전원 전압과 일치하는 3상 전원.
2개의 수동 모터 스타터가 선택된 경우에는 사
•
용할 수 없습니다.
주파수 변환기에 입력되는 전원이 꺼질 때 단
•
자가 꺼집니다.
퓨즈 보호 단자용 전원은 제공된 콘택터, 회로
•
차단기 또는 차단 스위치의 부하 측과 클래스
1 RFI 필터(옵션)의 입력 측에서 제공됩니다.
24V DC 전원 공급
5 A, 120 W, 24 V DC.
•
출력 과전류, 과부하, 단락 및 과열로부터 보
•
호.
센서, PLC I/O, 콘택터, 온도 탐침, 표시등 및/
•
또는 기타 전자 장치와 같이 고객이 제공한 부
속 장치의 전원 공급용.
진단에는 건식 직류 가능 접점, 녹색 직류 가능
•
LED 및 적색 과부하 LED가 포함되어 있습니
다.
외부 온도 감시
모터 와인딩 및/또는 베어링과 같이 외부 시스
•
템 구성 요소의 온도를 감시하도록 설계되어
있습니다. 8개의 범용 입력 모듈과 2개의 정밀
써미스터 입력 모듈이 포함되어 있습니다. 모
듈 10개가 모두 주파수 변환기의 안전 토오크
정지 회로에 내장되어 있으며 필드버스 네트워
크를 통해 감시할 수 있습니다(별도의 모듈/버
스통신 커플러를 구매해야 합니다). 외부 온도
감시를 선택할 수 있도록 안전 토오크 정지 제
동 옵션을 주문합니다.
직렬 통신
PROFIBUS DP V1 MCA 101
PROFIBUS DP V1은 폭넓은 호환성, 높은 수
•
준의 가용성, 모든 주요 PLC 벤더 지원 및 향
후 버전과의 호환성을 제공합니다.
GSD 파일을 통한 신속하고 효율적인 통신, 투
•
명성 있는 설치, 고급 진단 및 파라미터화 및
공정 데이터의 자동 구성.
PROFIBUS DP V1, PROFIdrive 또는 댄포스
•
FC 프로필 상태 장비, PROFIBUS DP V1, 마
스터 클래스 1 및 2 발주 번호 130B1100 비
코팅 – 130B1200 코팅 (클래스 G3/ISA
S71.04-1985)의 주기적 파라미터화.
64 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 67

시스템 통합 설계 지침서
DeviceNet MCA 104
이 현대적인 통신 모델은 어떤 정보가 필요하
•
고 언제 정보가 필요한지 효율적으로 판단할
수 있게 하는 주요 기능을 제공합니다.
제품의 상호 호환성을 보장하는 ODVA의 엄격
•
한 적합성 테스트 정책을 통해 혜택을 제공합
니다. 발주 번호 130B1102 비코팅 130B1202
코팅 (클래스 G3/ISA S71.04-1985).
PROFINET RT MCA 120
PROFINET 옵션은 PROFINET 프로토콜을 통해
PROFINET 기반 네트워크에 대한 연결을 제공합니다.
이 옵션은 양방향에서 1 ms까지 실제 패킷 간격을 낮
춰 단일 연결을 처리합니다.
원격 진단 및 기본 주파수 변환기 파라미터 읽
•
기를 위한 내장형 웹 서버.
특정 경고 또는 알람이 발생하거나 다시 해결
•
된 경우 이메일 메시지를 한 명 이상의 수신자
에게 전송할 용도로 이메일 알림을 구성할 수
있습니다.
MCT 10 셋업 소프트웨어에서 주파수 변환기
•
구성 데이터에 쉽게 접근하기 위한 TCP/IP.
파일 업로드 및 다운로드를 위한 FTP (File
•
Transfer Protocol, 파일 전송 프로토콜).
DCP(discovery and configuration protocol,
•
검색 및 구성 프로토콜)의 지원.
EtherNet IP MCA 121
EtherNet은 작업 현장의 차세대 통신 표준으로 자리잡
고 있습니다. EtherNet 옵션은 산업용 최신 기술을 기
반으로 하며 가장 어려운 요구사항도 처리합니다.
EtherNet/IP는 상업 규격 EtherNet을 동일한 상위 프
로토콜인 공통 산업용 프로토콜(CIP™) 및 DeviceNet
의 개체 모델까지 확장합니다. MCA 121는 다음으로
고급 기능을 제공합니다.
라인 토폴로지를 활성화하고 외부 스위치의 필
•
요성을 없애는 내장형 고성능 스위치.
고급 스위치 및 진단 기능.
•
내장형 웹 서버.
•
서비스 알림을 위한 이메일 클라이언트.
•
Modbus TCP MCA 122
Modbus 옵션은 Modbus TCP 프로토콜을 통해
Groupe Schneider PLC 시스템과 같은 Modbus TCP
기반 네트워크에 대한 연결을 제공합니다. 이 옵션은 양
방향에서 5 ms까지 실제 패킷 간격을 낮춰 단일 연결
을 처리합니다.
원격 진단 및 기본 주파수 변환기 파라미터 읽
•
기를 위한 내장형 웹 서버.
특정 경고 또는 알람이 발생하거나 다시 해결
•
된 경우 이메일 메시지를 한 명 이상의 수신자
에게 전송할 용도로 이메일 알림을 구성할 수
있습니다.
내장 스위치가 있는 이더넷 포트 2개.
•
파일 업로드 및 다운로드를 위한 FTP (file
•
transfer protocol, 파일 전송 프로토콜).
프로토콜 자동 IP 주소 구성.
•
보다 자세한 옵션
일반용 I/O MCB 101
I/O 옵션은 확장된 개수의 제어 입력 및 출력을 제공합
니다.
3개의 디지털 입력 0–24 V: 논리 0<5 V; 논리
•
1>10 V
2개의 아날로그 입력 0–10 V: 분해능 10비트
•
+ 기호
2개의 디지털 출력 NPN/PNP 푸시-풀
•
1개의 아날로그 출력 0/4–20 mA
•
스프링 작동 연결부
•
별도의 파라미터 설정 발주 번호 130B1125
•
비코팅 – 130B1212 코팅 (클래스 G3/ISA
S71.04-1985)
릴레이 옵션 MCB 105
3개의 추가 릴레이 출력으로 릴레이 기능 확장이 가능
합니다.
최대 단자 부하: AC-1 저항 부하: 240 V AC
•
2 A AC-15
유도 부하 @cos ф 0.4: 240 V AC 0.2 A
•
DC-1
저항 부하: 24 V DC 1 A DC-13
•
유도 부하: @cos ф 0.4: 24V DC 0.1A
•
최소 단자 부하: DC 5 V: 10mA
•
정격 부하/최소 부하 시 최대 스위칭율: 6
•
분-1/20초-1
발주 번호 130B1110 비코팅–130B1210 코팅
•
(클래스 G3/ISA S71.04-1985)
아날로그 I/O 옵션 MCB 109
이 아날로그 입력/출력 옵션은 추가 입력/출력을 사용하
여 고급 성능 및 제어로 업그레이드할 수 있도록 주파
수 변환기에 쉽게 장착할 수 있습니다. 이 옵션은 또한
주파수 변환기에 내장된 클럭을 위해 배터리 예비 공급
장치가 있는 주파수 변환기로 업그레이드합니다. 이는
모든 주파수 변환기 클럭 기능을 시간 예약 동작으로
안정감 있게 사용할 수 있게 합니다.
3개의 아날로그 입력 - 전압 입력 및 온도 입
•
력으로 각각 구성 가능.
0-10V 아날로그 신호, PT1000 및 NI1000 온
•
도 입력의 연결.
3개의 아날로그 출력 - 0–10 V 출력으로 각각
•
구성 가능.
주파수 변환기의 표준 클럭 기능을 위해 예비
•
공급 장치 포함. 예비 배터리는 일반적으로 10
년간 지속되지만 환경에 따라 다릅니다. 발주
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 65
Page 68

시스템 통합
VLT® AQUA Drive FC 202
번호 130B1143 비코팅 – 130B1243 코팅 (클
래스 G3/ISA S71.04-1985).
PTC 써미스터 카드 MCB 112
STO가 있는 모든 댄포스 주파수 변환기는 MCB 112
PTC 써미스터 카드를 사용하여 폭발성 대기환경에서
33
모터를 감시할 수 있습니다. MCB 112는 내장형 ETR
기능 및 써미스터 써멀에 비해 우수한 성능을 제공합니
다.
과열로부터 모터를 보호합니다.
•
EX d 및 EX e 모터에 사용할 수 있는 ATEX
•
인증.
댄포스 주파수 변환기의 안전 토오크 정지 기
•
능을 사용하여 과열이 발생하는 경우 모터를
정지합니다.
영역 1, 2, 21 및 22에서 모터를 보호하는 용
•
도로 인증.
최대 SIL2 인증.
•
센서 입력 카드 MCB 114
옵션은 모터의 베어링 및 와인딩 온도를 감시함으로써
모터가 과열되지 않게 보호합니다. 한계 뿐만 아니라 동
작을 조정할 수 있으며 개별 센서 온도는 표시창의 판
독값이나 필드버스를 통해 볼 수 있습니다.
과열로부터 모터를 보호합니다.
•
2선 또는 3선 PT100/PT1000 센서를 위한 3
•
개의 자체 감지 센서 입력.
1개의 추가적인 아날로그 입력 4-20mA
•
확장형 캐스케이드 컨트롤러 MCO 101
내장형 캐스케이드 컨트롤러는 장착이 용이하며 업그레
이드를 통해 마스터/슬레이브 모드로 더 많은 펌프와 더
많은 고급 펌프 제어를 작동할 수 있습니다.
표준 캐스케이드 셋업 시 최대 6개의 펌프
•
마스터/슬레이브 셋업 시 최대 6개의 펌프
•
기술 사양: MCB 105 릴레이 옵션 참조
•
확장형 릴레이 카드 MCB 113
확장형 릴레이 카드 MCB 113는 유연성 증대를 위해
VLT® AQUA Drive에 입력/출력을 추가합니다.
7개의 디지털 입력: 0–24V
•
2개의 아날로그 출력: 0/4–20mA
•
4개의 SPDT 릴레이
•
부하 릴레이의 등급: 240 V AC/2 A (Ohm)
•
NAMUR 권장사항 충족
•
갈바닉 절연 성능 발주 번호 130B1164 비코
•
팅 – 130B1264 코팅 (클래스 G3/ISA
S71.04-1985)
MCO 102 고급형 캐스케이드 컨트롤러
주파수 변환기에 내장된 표준 캐스케이드 컨트롤러의
기능을 확장합니다.
추가 모터의 스테이징을 위해 8개의 추가 릴레
•
이를 제공합니다.
여러 펌프 똔느 송풍기를 사용하는 시스템의
•
효율을 최적화하도록 정확한 유량, 압력 및 레
벨 제어를 제공합니다.
마스터/슬레이브 모드는 동일한 속도로 모든
•
송풍기/펌프를 구동하며 라인 전원 리셋에 걸
쳐 밸브 스로틀링 또는 기존 방식에 비해 에너
지 소모를 줄일 수 있습니다.
리드 펌프 절체는 여러 펌프 또는 송풍기가 균
•
등하게 사용되도록 합니다.
24 V DC 공급 옵션 MCB 107
이 옵션은 외부 DC 공급에 연결하여 주전원이 차단되
었을 때 제어부와 기타 설치된 옵션이 활성 상태를 유
지할 수 있게 합니다.
입력 전압 범위: 24 V DC +/- 15% (10초 내
•
최대 37 V).
최대 입력 전류: 2.2 A.
•
최대 케이블 길이: 75 m.
•
입력 캐피턴스 부하: <10 uF.
•
전원인가 지연: <0.6 s.
•
기존 시스템의 주파수 변환기에 설치 용이.
•
정전 중에 제어반 및 옵션의 활성 상태 유지.
•
정전 중 필드버스의 활성 유지 발주 번호
•
130B1108 비코팅 – 130B1208 코팅 (클래스
G3/ISA S71.04-1985).
3.7.1 통신 옵션
VLT® PROFIBUS DP V1 MCA 101
•
VLT® DeviceNet MCA 104
•
VLT® PROFINET MCA 120
•
VLT® EtherNet/IP MCA 121
•
VLT® Modbus TCP MCA 122
•
자세한 정보는
장을 7 사양
를 참조하십시오.
3.7.2 입력/출력, 피드백 및 안전 옵션
VLT® 일반용 I/O 모듈 MCB 101
•
VLT® 릴레이 카드 MCB 105
•
VLT® PTC 써미스터 카드 MCB 112
•
VLT® 확장형 릴레이 카드 MCB 113
•
VLT® 센서 입력 옵션 MCB 114
•
자세한 정보는
장을 7 사양
를 참조하십시오.
66 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 69

100% 100% 200% 200%
130BA594.12
Relay 1
Relay 2
Relay 10
시스템 통합 설계 지침서
3.7.3 캐스케이드 컨트롤러 옵션
캐스케이드 컨트롤러 옵션은 사용 가능한 릴레이 개수
를 확대합니다. 옵션 중 하나가 설치되면 캐스케이드 컨
트롤러 기능을 지원하는 데 필요한 파라미터는 제어 패
널을 통해 사용할 수 있습니다.
MCO 101과 102는 VLT® AQUA Drive의 펌프 대수를
늘리고 내장 캐스케이드 컨트롤러 기능을 확장하는 데
사용하는 추가 옵션입니다.
다음의 캐스케이드 제어 옵션은 VLT® AQUA Drive에
사용할 수 있습니다.
내장된 기본형 캐스케이드 컨트롤러(표준 캐스
•
케이드 컨트롤러)
MCO 101 (확장형 캐스케이드 컨트롤러)
•
MCO 102 (고급형 캐스케이드 컨트롤러)
•
자세한 정보는
확장형 캐스케이드 컨트롤러는 다음과 같이 2가지 각기
다른 모드로 사용할 수 있습니다.
•
•
MCO 101을 사용하면 캐스케이드 제어에 총 5개의 릴
레이를 사용할 수 있고, MCO 102를 사용하면 총 8대
의 펌프를 제어할 수 있습니다. 이 옵션은 펌프 당 2개
의 릴레이로 리드 펌프를 절체할 수 있습니다.
장을 7 사양
파라미터 그룹
의해 제어되는 확장 기능을 사용하는 방식.
기본형 캐스케이드에 사용 가능한 릴레이 개수
를 늘리기 위해 파라미터
그룹
25-** 캐스케이드 컨트롤러
방식.
를 참조하십시오.
27-** 캐스케이드 CTL 옵션
를 제어하는
에
에 연결된 펌프의 속도는 또한 지속적인 시스템 출력
범위를 제공하기 위해 제어됩니다.
지정 용도
캐스케이드 컨트롤러는 펌프 어플리케이션에 사용하도
록 되어 있으나 여러 대의 모터를 병렬로 구성해야 하
는 어플리케이션에도 캐스케이드 컨트롤러를 사용할 수
있습니다.
운전 방식
캐스케이드 컨트롤러 소프트웨어는 캐스케이드 컨트롤
러 옵션 카드와 함께 단일 주파수 변환기에서 실행됩니
다. 이는 주파수 변환기에 의해 각각 제어되거나 콘택터
또는 소프트 스타터에 연결된 여러 대의 펌프를 제어합
니다.
시스템에 추가되는 주파수 변환기(슬레이브 주파수 변
환기)에는 캐스케이드 컨트롤러 옵션 카드가 필요 없습
니다. 이들은 개회로 모드에서 운전하며 마스터 주파수
변환기에서 속도 지령을 받습니다. 슬레이브 주파수 변
환기에 연결된 펌프는 가변 속도 펌프라고 합니다.
콘택터나 소프트 스타터를 통해 주전원에 연결된 펌프
는 고정 속도 펌프라고 합니다.
각각의 펌프(가변 속도 또는 고정 속도)는 마스터 주파
수 변환기의 릴레이에 의해 제어됩니다.
캐스케이드 컨트롤러 옵션은 가변 속도 펌프와 고정 속
도 펌프를 함께 제어할 수 있습니다.
3 3
주의 사항
MCO 102가 설치된 경우, 릴레이 옵션 MCB 105는 릴
레이 개수를 13개까지 늘릴 수 있습니다.
어플리케이션
캐스케이드 컨트롤러는 에너지 효율적인 방식으로 병렬
펌프 또는 팬을 제어하는 데 사용되는 공통 제어 시스
템입니다.
캐스케이드 컨트롤러 옵션은 다음을 통해 병렬로 구성
된 여러 펌프를 제어할 수 있습니다.
개별 펌프의 자동 전원 공급/차단.
•
펌프의 속도 제어.
•
캐스케이드 컨트롤러를 사용하면 유량 또는 압력에 필
요한 시스템 출력을 충족시키기 위해 필요에 따라 각각
의 펌프에 자동으로 전원을 공급(스테이징)하고 전원을
차단(디스테이징)할 수 있습니다. VLT® AQUA Drive
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 67
내장
MCO 101
MCO 102
그림 3.27 어플리케이션 개요
1 VSP + 2 FSP
파라미터 그룹
1 VSP + 5 FSP
파라미터 그룹
1 VSP + 8 FSP
파라미터 그룹
25-** 캐스케이드 컨트롤러
25-** 캐스케이드 컨트롤러
25-** 캐스케이드 컨트롤러
Page 70

시스템 통합
VLT® AQUA Drive FC 202
3.7.4 제동 저항
모터가 제동장치로 사용되는 어플리케이션의 경우, 에
너지가 모터에서 발생하며 주파수 변환기로 재전송됩니
다. 에너지가 모터로 재전송되지 못하면 주파수 변환기
직류라인의 전압이 상승합니다. 제동이 빈번하고/하거나
33
내장 -
1 - 6 VSP + 1 - 5 FSP
MCO 101
MCO 102
그림 3.28 어플리케이션 개요
(최대 6대의 펌프)
파라미터 그룹
1 - 8 VSP + 1 - 7 FSP
(최대 8대의 펌프)
파라미터 그룹
27-** 캐스케이드 CTL 옵션
27-** 캐스케이드 CTL 옵션
관성 부하가 높은 어플리케이션의 경우, 이러한 전압 상
승으로 인해 주파수 변환기에 과전압 트립이 발생할 수
있으며 결국 셧다운됩니다. 제동 저항은 재생 제동으로
인해 너무 많이 발생한 에너지를 소모하는 데 사용됩니
다. 저항은 저항 값, 전력 소모율 및 물리적 크기를 기
준으로 선정됩니다. 댄포스는 특히 댄포스 주파수 변환
기에 알맞게 설계된 다양한 저항을 제공합니다. 제동 저
항의 치수는
오. 발주 번호는
장을 3.4.12 제동 저항 계산
를 참조하십시
장을 6.2 옵션, 액세서리 및 예비 부품
를 참조하십시오.
3.7.5 사인파 필터
모터가 주파수 변환기에 의해 제어될 경우 모터에서 공
진 소음이 납니다. 모터 설계에 의한 이 소음은 주파수
변환기의 인버터 스위치를 켜고 끌 때마다 발생합니다.
따라서 공진 소음의 주파수는 주파수 변환기의 스위칭
주파수에 해당합니다.
댄포스는 청각적인 모터 소음을 줄이기 위해 사인파 필
터를 제공할 수 있습니다.
내장 -
MCO 101
MCO 102
그림 3.29 어플리케이션 개요
6 VSP
파라미터 그룹
8 VSP
파라미터 그룹
27-** 캐스케이드 CTL 옵션
27-** 캐스케이드 CTL 옵션
VSP = 가변 속도 펌프(주파수 변환기에 직접 연결)
FSP = 고정 속도 펌프(모터가 콘택터, 소프트 스타터
또는 스타/델타 스타터를 통해 연결 가능)
필터는 전압의 가속 시간, 피크 부하 전압 U
PEAK
와 모
터의 리플 전류 ΔI를 감소시키며, 이는 전류와 전압이
거의 사인 곡선임을 의미합니다. 따라서, 청각적인 모터
소음은 최소화됩니다.
사인파 필터 코일의 리플 전류도 소음을 약간 발생시킵
니다. 외함 등에 필터를 설치하여 문제를 해결합니다.
3.7.6 dU/dt 필터
댄포스는 모터 단자 상간 피크 전압을 줄이고 모터 와
인딩 시 절연체에 가해지는 스트레스를 줄이는 수준까
지 상승 시간을 낮추는 차동 모드 로우패스 필터인
dU/dt 필터를 제공합니다. 이는 특히 모터 케이블이 짧
을 때 해당합니다.
dU/dt 필터에는 사인파 필터(
장을 3.7.5 사인파 필터
참조)와는 달리 스위칭 주파수보다 높은 차단 주파수가
있습니다.
3.7.7 공통 모드 필터
고주파 공통 모드 코어(HF-CM 코어)는 전자기 간섭을
줄이고 전기 방전을 통해 베어링 손상 가능성을 제거합
니다. 이 코어는 특수 나노결정질 자석 코어로, 일반 페
라이트 코어에 비해 탁월한 필터링 성능을 갖고 있습니
68 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 71

PE U V W
130BD839.10
A
B
C
D
E
130BT323.10
시스템 통합 설계 지침서
다. HF-CM 코어는 위상과 접지 간 공통 모드 인덕터
역할을 합니다.
3개의 모터 위상(U, V, W) 주변에 설치된 공통 모드 필
터는 고주파 공통 모드 전류를 감소시킵니다. 결과적으
로 모터로부터의 고주파 전자기 간섭이 감소됩니다.
필요한 코어 개수는 모터 케이블 길이 및 주파수 변환
기 전압에 따라 다릅니다. 각 키트는 코어 2개로 구성되
어 있습니다.
표 3.19
를 참조하여 필요한 코어 개수를
결정합니다.
케이블 길이
[m] A 및 B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
표 3.19 코어 개수
1) 보다 긴 케이블이 필요한 경우 HF-CM 코어를 추가로 설
치합니다.
그림 3.30
1)
에서와 같이 각 코어에 3개의 모터 위상 케이
외함 용량
T2/T4 T7 T2/T4 T7 T7
블(U, V, W)을 통과시켜 HF-CM 코어를 설치합니다.
3.7.9 IP21/NEMA Type 1 외함 키트
IP20/IP4X top/NEMA TYPE 1은 IP20 소형 유닛에 사
용할 수 있는 선택사양 외함 부품입니다.
외함 키트를 사용하는 경우 IP21/4x top/TYPE 1에 부
합하도록 IP20 유닛을 업그레이드할 수 있습니다.
3 3
IP4X top은 모든 표준 IP20 FC 202 제품에 적용할 수
있습니다.
그림 3.30 모터 위상이 있는 HF-CM 코어
3.7.8 고조파 필터
댄포스 AHF 005와 AHF 010은 고급 고조파 필터이며
기존의 고조파 트랩 필터와는 비교도 안 됩니다. 댄포스
고조파 필터는 댄포스 주파수 변환기에 맞게 특별히 설
계되었습니다.
댄포스 주파수 변환기 전면에 댄포스 고조파 필터 AHF
005 또는 AHF 010을 연결하면 주전원에 다시 생성된
총 고조파 전류 왜곡이 5% 및 10%까지 감소됩니다.
그림 3.31 외함 용량 A2
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 69
Page 72

B
A
E
C
D
130BT324.10
E
F
D
C
B
A
130BT620.12
시스템 통합
VLT® AQUA Drive FC 202
외함 종류
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
33
C3 755 329 337
C4 950 391 337
높이 A
[mm]
너비 B
[mm]
깊이 C
[mm]
1)
표 3.20 치수
1) 옵션 A/B가 사용되는 경우, 깊이가 증가합니다(자세한 내용
은 장을 7.8 전원 등급, 중량 및 치수 참조).
A 상부 덮개
B 모서리 덮개
C 하부
D 하부 덮개
E 나사
그림 3.32 외함 용량 A3
상부 덮개를 그림과 같이 놓습니다. A 옵션이나 B 옵션
을 사용하는 경우에는 모서리 덮개를 설치하여 상부를
완전히 덮어야 합니다. 하부 C를 주파수 변환기의 하단
에 놓고 액세서리 백에 있는 클램프를 사용하여 케이블
을 올바르게 고정시킵니다.
케이블 그랜드용 구멍:
용량 A2: 2x M25 및 3xM32
•
용량 A3: 3xM25 및 3xM32
•
그림 3.33 외함 용량 B3
70 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 73
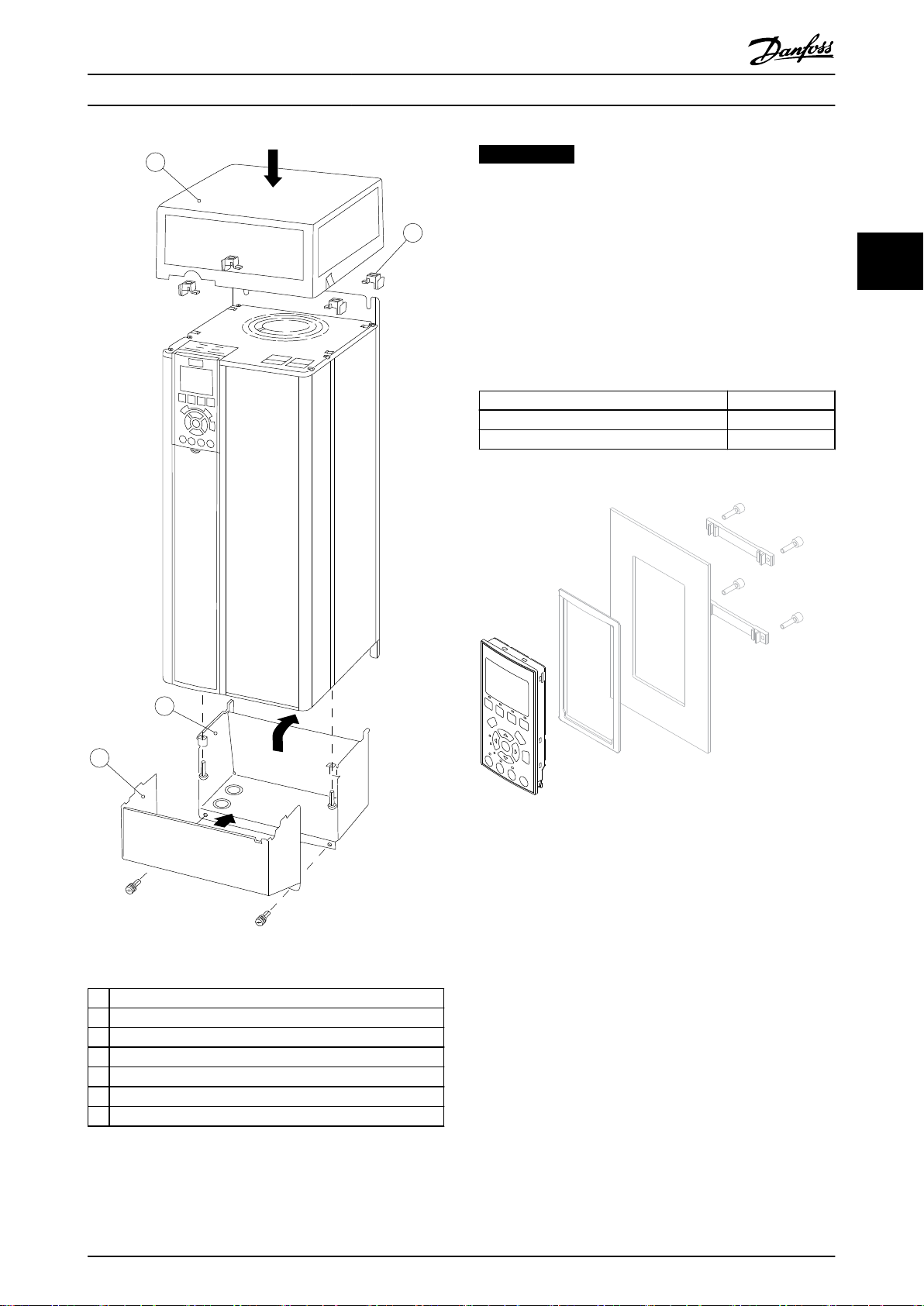
130BT621.12
D
C
A
G
130BA138.10
시스템 통합 설계 지침서
주의 사항
IP21/IP4X/TYPE 1 외함 키트를 사용하는 경우, 옆면끼
리 여유 공간 없이 바로 붙여서 설치할 수 없습니다.
3.7.10 LCP용 원격 설치 키트
3 3
원격 내장 키트를 사용하여 LCP를 외함의 전면으로 이
동시킬 수 있습니다. 나사는 최대 1Nm의 토오크로 조
여야 합니다.
LCP 외함의 정격은 IP66입니다.
외함 IP66 전면
LCP 및 유닛 간의 최대 케이블 길이 3미터
통신 표준 RS485
표 3.22 기술 자료
그림 3.35 그래픽 LCP, 고정 장치, 3m 케이블 및 가스켓이
포함된 LCP 키트
발주 번호 130B1113
그림 3.34 외함 용량 B4, C3 및 C4
A 상부 덮개
B 모서리 덮개
C 하부
D 하부 덮개
E 나사
F 팬 덮개
G 상단 클립
표 3.21
그림 3.33
및
그림 3.34
에 대한 범례
옵션 모듈 A 및/또는 옵션 모듈 B가 사용되는 경우, 상
단 덮개(A)에 모서리 덮개(B)를 설치합니다.
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 71
Page 74

130BA200.10
Max R2(0.08)
Panel
cut out
Min 72(2.8)
130BA139.11
129,5± 0.5 mm
64,5± 0.5 mm
(2.54± 0.04 in)
(5.1± 0.04 in)
130BA844.10
130BA845.10
A
B
시스템 통합
VLT® AQUA Drive FC 202
3.7.11 외함 용량 A5, B1, B2, C1 및
C2용 장착 브래킷
33
그림 3.36 숫자 방식의 LCP, 고정 장치 및 가스켓이 포함된
LCP 키트
발주 번호 130B1114
그림 3.38 하부 브래킷
그림 3.37 LCP 키트의 치수
72 Danfoss A/S © 09/2014 All rights reserved. MG20N639
그림 3.39 상부 브래킷
표 3.23
의 치수 참조.
외함 용량 IP A [mm] B [mm] 발주 번호
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
표 3.23 장착 브래킷의 세부 사항
Page 75
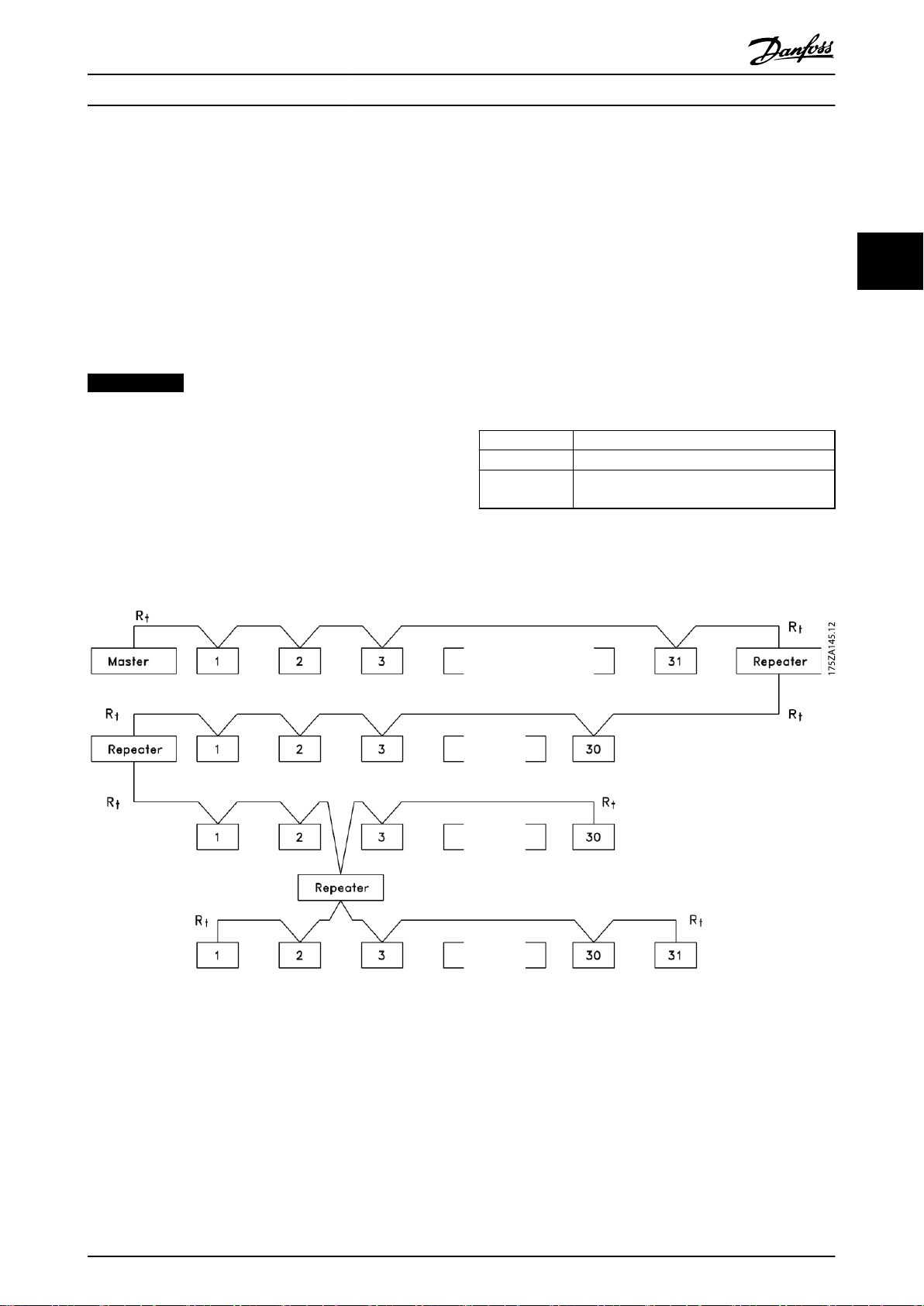
시스템 통합 설계 지침서
3.8 직렬 인터페이스 RS485
3.8.1 개요
RS485는 멀티드롭 네트워크 토폴로지와 호환되는 2선
식 버스통신 인터페이스이므로 노드를 버스통신으로 연
결하거나 일반적인 트렁크 라인의 드롭 케이블을 통해
연결할 수 있습니다. 총 32개의 노드를 하나의 네트워
크 세그먼트에 연결할 수 있습니다.
반복자는 네트워크 세그먼트를 분할합니다.
참조.
그림 3.40
주의 사항
각각의 반복자는 설치된 세그먼트 내에서 노드로서의
기능을 한다는 점에 유의합니다. 주어진 네트워크 내에
연결된 각각의 노드는 모든 세그먼트에 걸쳐 고유한 노
드 주소를 갖고 있어야 합니다.
주파수 변환기의 종단 스위치(S801)나 편조 종단 저항
네트워크를 이용하여 각 세그먼틑의 양쪽 끝을 종단합
니다. 버스통신 배선에는 반드시 꼬여 있는 차폐 케이블
(STP 케이블)을 사용하고 공통 설치 지침을 준수합니
다.
각각의 노드에서 차폐선을 낮은 임피던스와 높은 주파
수로 접지 연결하는 것은 중요합니다. 따라서 케이블 클
램프나 전도성 케이블 글랜드로 차폐선의 넓은 면을 접
지에 연결합니다. 전체 네트워크에 걸쳐, 특히 긴 케이
블이 설치된 영역에서 동일한 접지 전위를 유지할 수
있도록 전위 등화 케이블을 사용할 필요가 있을 수도
있습니다.
임피던스 불일치를 방지하려면 전체 네트워크에 걸쳐
동일한 유형의 케이블을 사용합니다. 모터를 주파수 변
환기에 연결할 때는 반드시 차폐된 모터 케이블을 사용
합니다.
케이블 꼬여 있는 차폐 케이블(STP)
임피던스 [Ω]
케이블 길이 [m]
표 3.24 케이블 사양
120
최대 1200 (드롭 라인 포함)
최대 500 (국간)
3 3
그림 3.40 RS485 버스통신 인터페이스
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 73
Page 76

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
130BB021.10
12 13 18 19 27 29 32
33 20 37
Remove jumper to enable Safe Stop
61 68 69 39 42 50 53 54 55
시스템 통합
VLT® AQUA Drive FC 202
파라미터
기능 설정
8-30 프로토콜 FC*
8-31 주소 1*
8-32 통신 속도 9600*
* = 초기값
33
참고/설명:
위에서 언급한 파라미터에서 프로
토콜, 주소 및 통신 속도를 선택합
니다.
D IN 37은 옵션입니다.
차폐선에서 전위 등화 전류가 발생하지 않도록
림 3.20
에 따라 배선합니다.
그
그림 3.42 제어카드 단자
표 3.25 RS485 네트워크 연결
3.8.2 네트워크 연결
RS485 표준 인터페이스를 사용하여 제어기 (또는 마스
터)에 하나 이상의 주파수 변환기를 연결할 수 있습니
다. 단자 68은 P 신호(TX+, RX+)에 연결되며 단자 69
는 N 신호(TX-, RX-)에 연결됩니다.
약도
의 그림 참조.
마스터에 연결된 주파수 변환기가 두 대 이상인 경우
병렬로 연결합니다.
장을 3.5.1 배선
3.8.3 RS485 버스통신 종단
양단의 저항 네트워크를 사용하여 RS485 버스통신을
종단합니다. 이렇게 하려면 제어카드의 S801 스위치를
켜짐으로 설정합니다.
통신 프로토콜을
8-30 프로토콜
로 설정합니다.
3.8.4 EMC 주의사항
RS485 네트워크를 장애 없이 운영하기 위해서는 다음
의 EMC 주의사항 준수를 권장합니다.
국제 및 국내 관련 규정(예를 들어, 보호 접지 연결에
관한 규정)을 준수합니다. 고주파 소음이 하나의 케이블
에서 다른 케이블로 연결되지 않게 하려면 RS485 통신
케이블을 반드시 모터 케이블과 제동 저항 케이블에서
멀리 합니다. 일반적으로 200mm(8인치)의 간격이면 충
분하지만 특히 긴 거리에 나란히 배선되어 있는 경우에
는 케이블 간 간격을 최대한 멀리하는 것이 좋습니다.
케이블 간 교차가 불가피한 경우에는 RS485 케이블을
모터 케이블 및 제동 저항 케이블과 90° 수직으로 교차
하게 해야 합니다.
그림 3.41 병렬 연결
74 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 77

Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
STX LGE ADR DATA BCC
195NA099.10
시스템 통합 설계 지침서
파라미터 번호 설정
8-30 프로토콜 FC
8-31 주소 1–126
8-32 FC 포트 통신 속도 2400–115200
8-33 Parity / Stop Bits 짝수 패리티, 1 정지 비트 (초기 설정
값)
3 3
표 3.26 FC 프로토콜 파라미터
3.8.7 FC 프로토콜 메시지 프레임 구조
3.8.7.1 문자 용량(바이트)
전송되는 각 문자는 시작 비트로 시작됩니다. 그리고 1
바이트에 해당하는 8 데이터 비트가 전송됩니다. 각 문
자는 패리티 비트에 의해 보호됩니다. 이 비트는 패리티
에 도달할 때 1에서 설정됩니다. 패리티는 8 데이터 비
트와 패리티 비트의 합에서 1의 개수가 동일할 때를 의
미합니다. 하나의 정지 비트로 하나의 문자가 완성하므
로 총 11비트로 구성됩니다.
그림 3.43 케이블 배선
3.8.5 FC 프로토콜 개요
FC 버스통신이나 표준 버스통신이라고도 하는 FC 프로
토콜은 댄포스의 표준 필드버스입니다. 이는 직렬 버스
통신을 통한 통신 마스터-슬레이브 방식에 따른 접근
기법을 정의합니다.
버스통신에 1개의 마스터와 최대 126개의 슬레이브를
연결할 수 있습니다. 마스터는 텔레그램의 주소 문자를
통해 개별 슬레이브를 선택합니다. 슬레이브 자체는 전
송 요청 없이 전송할 수 없으며 개별 슬레이브 간의 직
접 메시지 전송이 불가능합니다. 통신은 반이중 모드에
서 이루어집니다.
마스터 기능을 다른 노드(단일 마스터 시스템)에 전송할
수 없습니다.
물리적 레이어는 RS485이므로 RS485 포트를 활용하여
주파수 변환기에 내장되었습니다. FC 프로토콜은 다음
과 같이 각기 다른 텔레그램 형식을 지원합니다.
공정 데이터를 위한 8바이트의 짧은 형식.
•
파라미터 채널 또한 포함된 16바이트의 긴 형
•
식.
텍스트에 사용되는 형식.
•
그림 3.44 문자 용량
3.8.7.2 텔레그램 구조
각 텔레그램에는 다음과 같은 구조가 있습니다.
시작 문자(STX)=02 hex.
•
텔레그램 길이(LGE)를 나타내는 바이트.
•
주파수 변환기 주소(ADR)를 나타내는 바이트.
•
그 뒤에 텔레그램의 종류에 따라 가변 데이터 바이트가
붙습니다.
데이터 제어 바이트(BCC)로 텔레그램이 완성됩니다.
그림 3.45 텔레그램 구조
3.8.7.3 텔레그램 길이(LGE)
3.8.6 네트워크 구성
주파수 변환기의 FC 프로토콜을 사용 가능하게 하려면
다음 파라미터를 설정합니다:
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 75
텔레그램 길이는 데이터 바이트 수에 주소 바이트
(ADR) 및 데이터 제어 바이트(BCC)를 더한 것과 같습
니다.
Page 78
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE INDADRLGESTX PCD1 PCD2 BCC
130BA271.10
PWE
high
PWE
low
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
시스템 통합
VLT® AQUA Drive FC 202
4 데이터 바이트 LGE=4+1+1=6바이트입니다.
12 데이터 바이트 LGE=12+1+1=14바이트입니다.
텍스트를 포함한 텔레그램
101)+n바이트입니다
•
표 3.27 텔레그램 길이
1) 10은 고정 문자를 나타내고 n은 (텍스트의 길이에 따른) 변
33
수입니다.
3.8.7.4 주파수 변환기 주소(ADR)
- 비트 5=0: 브로드캐스트 안함.
- 비트 0-4=주파수 변환기 주소 1-31.
주소 형식 1-126
- 비트 7=1 (주소 형식 1-126 활성화).
- 비트 0-6=주파수 변환기 주소
1-126.
- 비트 0-6 =0 브로드캐스트.
슬레이브는 마스터에 응답 텔레그램을 보낼 때 주소 바
두 가지 주소 형식이 사용됩니다.
이트를 변경하지 않고 그대로 보냅니다.
주파수 변환기의 주소 범위는 1-31 또는 1-126입니다.
3.8.7.5 데이터 제어 바이트(BCC)
주소 형식 1-31
•
- 비트 7=0 (주소 형식 1-31 활성화).
체크섬은 XOR 함수로 계산됩니다. 텔레그램의 첫 번째
바이트가 수신되기 전에 계산된 체크섬은 0입니다.
- 비트 6은 사용되지 않습니다.
- 비트 5=1: 브로드캐스트, 주소 비트
(0-4)는 사용되지 않습니다.
3.8.7.6 데이터 필드
데이터 블록의 구조는 텔레그램의 구조에 따라 다릅니다. 텔레그램의 종류에는 세 가지가 있으며 제어 텔레그램(마스
터⇒슬레이브) 및 응답 텔레그램(슬레이브⇒마스터)에 모두 적용됩니다.
텔레그램의 종류에는 다음과 같이 세 가지가 있습니다.
공정 블록(PCD)
PCD는 4바이트(2단어)의 데이터 블록으로 이루어지며 다음을 포함합니다.
제어 워드 및 지령 값(마스터에서 슬레이브로).
•
상태 워드 및 현재 출력 주파수(슬레이브에서 마스터로).
•
그림 3.46 공정 블록
파라미터 블록
파라미터 블록은 마스터와 슬레이브 간의 파라미터 전송에 사용됩니다. 데이터 블록은 최대 12바이트(6단어)로 이루
어지며 공정 블록이 포함됩니다.
그림 3.47 파라미터 블록
텍스트 블록
텍스트 블록은 데이터 블록을 통해 전송되는 텍스트를 읽거나 쓰는데 사용됩니다.
그림 3.48 텍스트 블록
76 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 79
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA268.11
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
시스템 통합 설계 지침서
3.8.7.7 PKE 필드
PKE 필드에는 다음과 같이 2개의 하위 필드가 있습니
다.
파라미터 명령 및 응답 AK.
•
파라미터 번호 PNU.
•
그림 3.49 PKE 필드
비트 번호 12-15는 마스터에서 슬레이브로 파라미터
명령을 전송하고 처리된 슬레이브 응답을 마스터로 나
타냅니다.
비트 번호 파라미터 명령
15 14 13 12
0 0 0 0 명령 없음
0 0 0 1 파라미터 값 읽기
0 0 1 0 RAM에 파라미터 값 쓰기(단어)
0 0 1 1 RAM에 파라미터 값 쓰기(2단어)
1 1 0 1 RAM 및 EEprom에 파라미터 값 쓰기(2단
어)
1 1 1 0 RAM 및 EEprom에 파라미터 값 쓰기(단어)
1 1 1 1 텍스트 읽기/쓰기
표 3.28 파라미터 명령 마스터⇒슬레이브
비트 번호 응답
15 14 13 12
0 0 0 0 응답 없음
0 0 0 1 전송된 파라미터 값(단어)
0 0 1 0 전송된 파라미터 값(2단어)
0 1 1 1 명령을 수행할 수 없음
1 1 1 1 전송된 텍스트
표 3.29 응답 슬레이브⇒마스터
명령을 수행할 수 없는 경우에 슬레이브는
0111 명령을 수행할 수 없음이라는 응답을 보내고
- 파라미터 값(PWE)에 다음 오류 보고를 전송합니다
(
표 3.30
참조).
PWE 낮음
(Hex)
11 주파수 변환기의 현재 모드에서는 정의된 파라미터의
82 정의된 파라미터에 대한 버스통신 접근 권한이 없습니
83 초기 셋업이 선택되어 있으므로 데이터를 변경할 수
표 3.30 파라미터 값 오류 보고
오류 보고
0 사용된 파라미터 번호가 존재하지 않습니다.
1 정의된 파라미터에 대한 쓰기 권한이 없습니다.
2 데이터 값이 파라미터의 한계를 초과했습니다.
3 사용된 하위 색인이 존재하지 않습니다.
4 파라미터가 배열 형식이 아닙니다.
5 데이터 형식이 정의된 파라미터와 일치하지 않습니다.
데이터를 변경할 수 없습니다. 특정 파라미터는 모터
가 꺼져 있는 경우에만 변경할 수 있습니다.
다.
없습니다.
3.8.7.8 파라미터 번호(PNU)
비트 번호 0-11은 파라미터 번호를 전송합니다. 관련
파라미터의 기능은
프로그래밍 지침서
의 파라미터 설명
에서 확인할 수 있습니다.
3.8.7.9 색인(IND)
색인은 파라미터 번호와 함께 색인이 붙은 파라미터에
읽기/쓰기 접근하는데 사용됩니다(예:
록: 오류 코드
). 색인은 2바이트(하위 바이트 및 상위
15-30 알람 기
바이트)로 구성됩니다.
하위 바이트만 색인으로 사용됩니다.
3.8.7.10 파라미터 값(PWE)
파라미터 값 블록은 2단어(4바이트)로 이루어지며 값은
정의된 명령(AK)에 따라 다릅니다. PWE 블록에 값이
포함되어 있지 않으면 마스터가 파라미터 값을 입력하
라는 메시지를 표시합니다. 파라미터 값을 변경(쓰기)하
려면 PWE 블록에 새로운 값을 쓴 다음 마스터에서 슬
레이브로 보냅니다.
슬레이브가 파라미터 요청(읽기 명령)에 대해 응답하면
현재 PWE 블록에 있는 파라미터 값이 마스터에 반환됩
니다. 파라미터가 숫자 값을 포함하지 않지만 여러 가지
데이터 옵션이 있는 경우(예:
고 [4] 덴마크어), PWE 블록에 값을 입력하여 데이터
값을 선택합니다. 직렬 통신은 데이터 유형 9(텍스트 문
자열)가 포함된 파라미터만 읽을 수 있습니다.
15-40 FC 유형
-
15-53 전원 카드 일련 번호
데이터 유형 9를 포함합니다.
예를 들어,
15-40 FC 유형
압 범위를 읽을 수 있습니다. 텍스트 문자열이 전송되는
경우(읽기의 경우) 텔레그램의 길이는 가변적이며 다양
한 길이의 텍스트가 전송될 수 있습니다. 텔레그램 길이
는 텔레그램의 두 번째 바이트(LGE)에서 정의됩니다.
0-01 언어
[0] 영어 그리
은(는)
에서 단위 크기와 주전원 전
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 77
Page 80

PWE
high
PWE
low
Read text
Write text
130BA275.10
PKE IND
Fx xx 04 00
Fx xx 05 00
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
시스템 통합
VLT® AQUA Drive FC 202
텍스트 전송을 사용하는 경우에는 색인 문자가 읽기 명
3.8.7.13 공정 워드(PCD)
령인지 아니면 쓰기 명령인지를 나타냅니다.
PWE 블록을 통해 텍스트를 읽으려면 파라미터 명령
(AK)을 F Hex로 설정합니다. 색인 문자 상위 바이트는
반드시 4여야 합니다.
33
일부 파라미터에는 직렬 버스통신을 통해 기록할 수 있
는 텍스트가 포함되어 있습니다. PWE 블록을 통해 텍
프로세스 워드의 블록은 정의 시퀀스에서 항상 발생하
는 두 개의 16비트 블록으로 나뉩니다.
PCD 1 PCD 2
제어 텔레그램(마스터⇒슬레이브 제어 워드)
제어 텔레그램(슬레이브⇒마스터) 상태 워드
지령 값
현재 출력 주파수
스트를 기록하려면 파라미터 명령(AK)을 F Hex로 설정
합니다. 색인 문자 상위 바이트는 반드시 5여야 합니다.
표 3.32 공정 워드(PCD)
3.8.8 FC 프로토콜 예
3.8.8.1 파라미터 값 쓰기
그림 3.50 PWE 블록을 통한 텍스트
4-14 모터 속도 상한 [Hz]
을(를) 100Hz로 변경합니다.
EEPROM에 데이터를 씁니다.
3.8.7.11 지원하는 데이터 유형
PKE=E19E Hex -
4-14 모터 속도 상한 [Hz]
에 단일
워드 쓰기.
'부호없는'은 텔레그램에 연산 부호가 없음을 의미합니
다.
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=03E8 Hex - 100Hz에 해당하는 데이터 값
데이터 유형 설명
3 정수 16
4 정수 32
5 부호없는 8
6 부호없는 16
7 부호없는 32
9 텍스트 문자열
10 바이트 문자열
13 시차
33 예비
35 비트 시퀀스
표 3.31 지원하는 데이터 유형
(1000),
장을 3.8.7.12 변환
참조.
따라서 텔레그램은 다음과 같습니다:
그림 3.51 EEPROM에 데이터 쓰기
주의 사항
4-14 모터 속도 상한 [Hz]
EEPROM 쓰기 파라미터 명령은 E입니다. 파라미터 번
은(는) 단일 워드이며
호 4-14는 16진수로 19E입니다.
3.8.7.12 변환
슬레이브에서 마스터로 전송되는 응답:
각 파라미터의 여러 속성은 초기 설정에 표시됩니다. 파
라미터 값은 정수로만 전송됩니다. 따라서 변환 인수는
소수를 전송하는 데 사용합니다.
4-12 모터 속도 하한 [Hz]
니다. 최소 주파수를 10Hz로 프리셋하려면 값 100을
전송합니다. 변환 인수 0.1은 전송된 값에 0.1을 곱한다
는 의미입니다. 따라서 값 100은 10.0으로 표기됩니다.
에는 변환 인수 0.1이 있습
그림 3.52 슬레이브의 응답
예시:
0초⇒변환 지수 0
0.00초⇒변환 지수 -2
0밀리초⇒변환 지수 -3
0.00밀리초⇒변환 지수 -5
78 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 81
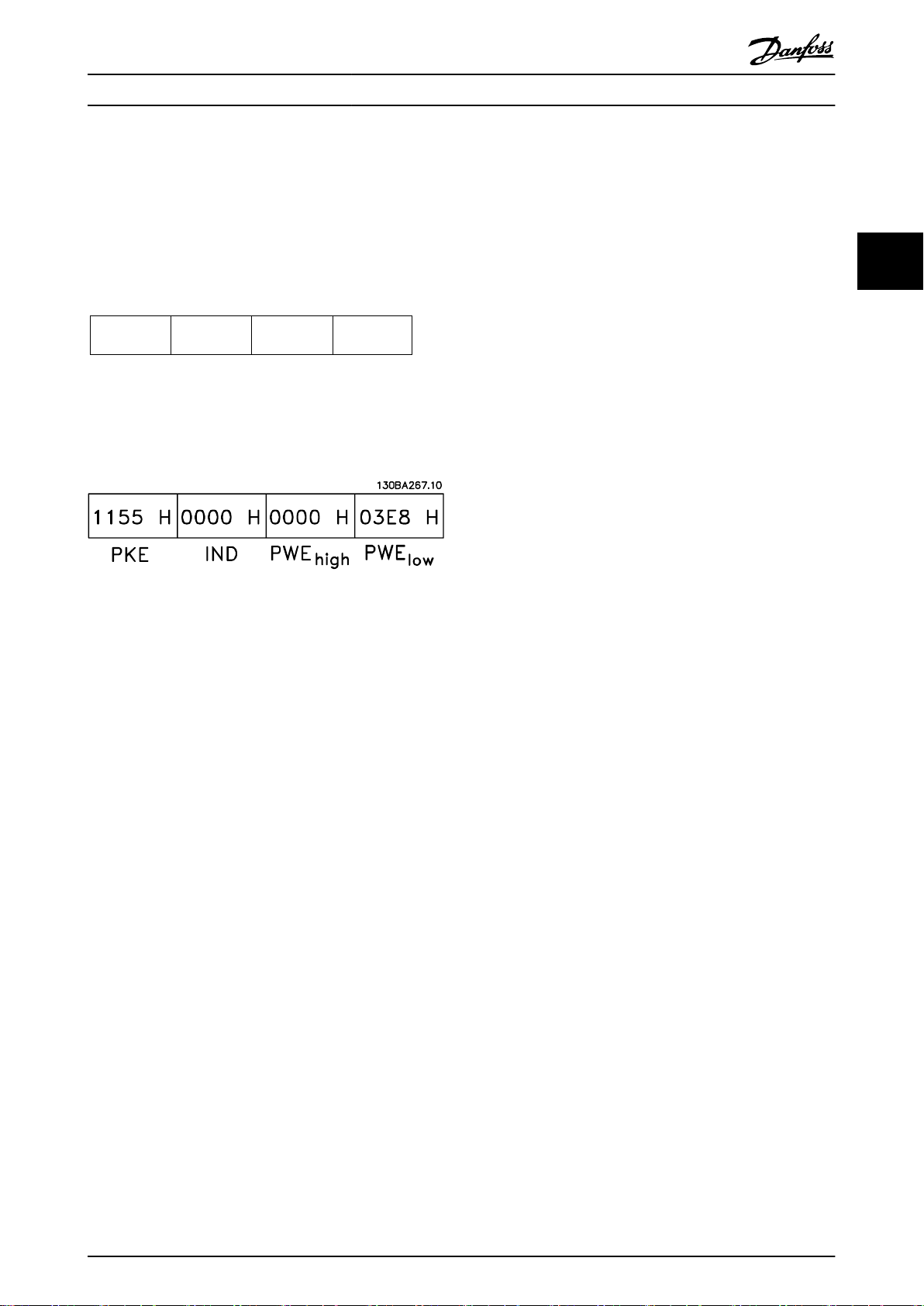
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
시스템 통합 설계 지침서
3.8.8.2 파라미터 값 읽기
3-41 1 가속 시간
PKE=1155 Hex 읽기.
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=0000 hex
그림 3.53 파라미터 값
3-41 1 가속 시간
마스터로 전송되는 응답
그림 3.54 슬레이브의 응답
3E8 Hex는 10진수로 1000에 해당합니다.
속 시간
3-41 1 가속 시간
의 변환 지수는 -2입니다. 예컨대, 0.01.
의 값 읽기.
3-41 1 가속 시간
의 값이 10초인 경우에 슬레이브에서
은(는)
부호 없는 32
의 파라미터 값
유형입니다.
3.8.9 Modbus RTU 프로토콜
3.8.9.1 가정
3-41 1 가
각 컨트롤러가 해당 장치 주소를 어떻게 학습
•
하는지 판단합니다.
주소가 지정된 메시지를 인식합니다.
•
수행할 동작을 어떻게 결정하는지 판단합니다.
•
메시지에 포함된 데이터 또는 기타 정보를 어
•
떻게 추출하는지 판단합니다.
답신이 필요한 경우, 컨트롤러는 답신 메시지를 구성하
고 전송합니다.
컨트롤러는 마스터만으로 트랜잭션(쿼리라고 함)을 시
작할 수 있는 마스터-슬레이브 방식을 사용하여 통신합
니다. 슬레이브는 마스터에 요청된 데이터를 제공하거
나 쿼리에 요청된 동작을 수행함으로써 응답합니다.
마스터는 개별 슬레이브에 주소를 지정하거나 모든 슬
레이브에 브로드캐스트 메시지를 전달할 수 있습니다.
슬레이브는 개별적으로 주소가 지정된 쿼리에 대한 응
답을 돌려보냅니다. 마스터의 브로드캐스트 쿼리에는
응답이 돌아오지 않습니다. Modbus RTU 프로토콜은
다음을 제공하여 마스터의 쿼리에 대한 형식을 규정합
니다.
장치 (또는 브로드캐스트) 주소.
•
요청된 동작을 정의하는 기능 코드.
•
전송할 데이터.
•
오류 검사 필드.
•
슬레이브의 응답 메시지 또한 Modbus 프로토콜을 사용
하여 구성됩니다. 여기에는 수행할 동작, 돌려보낼 데이
터 및 오류 검사 필드를 확정하는 필드가 포함되어 있
습니다. 메시지 수신 도중에 오류가 발생하거나 슬레이
브가 요청된 동작을 수행할 수 없는 경우에는 슬레이브
가 오류 메시지를 구성하고 이를 응답으로 전송하거나
타임아웃이 발생합니다.
3 3
댄포스는 설치된 컨트롤러가 본 문서의 인터페이스를
지원하고 컨트롤러 및 주파수 변환기에 규정된 모든 요
구사항 및 제한사항을 엄격히 준수한다고 가정합니다.
내장된 Modbus RTU(원격 단말 유닛)는 본 문서에 정
의된 인터페이스를 지원하는 모든 컨트롤러와 통신하도
록 설계되어 있습니다. 사용자가 컨트롤러의 기능 및 제
한사항에 대해 완벽한 지식을 갖고 있다고 가정합니다.
3.8.9.2 Modbus RTU 개요
Modbus RTU 개요는 물리적 통신 네트워크 종류와 관
계 없이 다른 장치에 대한 접근을 요청하는 데 컨트롤
러를 사용할 수 있게 하는 공정을 설명합니다. 이 공정
에는 Modbus RTU가 다른 장치로부터의 요청에 어떻
게 응답하는지 또한 오류가 어떻게 감지 및 보고되는지
에 관한 내용이 포함되어 있습니다. 또한 메시지 필드의
레이아웃 및 내용에 관한 공통된 형식을 규정합니다.
Modbus RTU 네트워크를 통해 통신하는 동안 프로토
콜은
3.8.9.3 Modbus RTU가 있는 주파수 변
환기
주파수 변환기는 내장된 RS485 인터페이스를 통해
Modbus RTU 형식으로 통신합니다. Modbus RTU는
주파수 변환기의 제어 워드 및 버스통신 지령에 대한
접근 권한을 제공합니다.
제어 워드를 통해 Modbus 마스터는 다음과 같은 주파
수 변환기의 일부 중요 기능을 제어할 수 있습니다.
기동
•
다양한 방법으로 주파수 변환기 정지:
•
- 코스팅 정지
- 순간 정지
- 직류 제동 정지
- 정상(가감속) 정지
결함 트립 후 리셋
•
다양한 프리셋 속도로 구동
•
역회전 구동
•
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 79
Page 82

시스템 통합
VLT® AQUA Drive FC 202
활성 셋업 변경
•
주파수 변환기의 내장 릴레이 제어
•
버스통신 지령은 속도 제어에 공통적으로 사용됩니다.
또한 파라미터 접근, 값 읽기 및 가능한 경우, 값 쓰기
도 할 수 있습니다. 이는 내장 PI 제어기가 사용되는 경
33
우 주파수 변환기의 설정포인트를 제어하는 등 다양한
제어 옵션을 허용합니다.
달) 메시지가 완료될 때를 인식합니다. 부분 메시지가
감지되고 오류가 결과로 설정됩니다. 전송하기 위한 문
자는 각 필드에서 16진수 00 ~ FF 형식이어야 합니다.
주파수 변환기는 유휴 기간 도중에도 계속해서 네트워
크 버스통신을 감시합니다. 첫 번째 필드(주소 필드)가
수신되면 각 주파수 변환기 또는 장치는 이를 디코딩하
여 어떤 장치에 주소가 지정되는지 판단합니다. 0으로
주소가 지정된 Modbus RTU 메시지는 브로드캐스트
메시지입니다. 브로드캐스트 메시지에 대한 응답은 허
3.8.9.4 네트워크 구성
용되지 않습니다. 일반적인 메시지 프레임은
표 3.35
와
같습니다.
주파수 변환기에서 Modbus RTU를 활성화하려면 다음
파라미터를 설정합니다.
파라미터 설정
8-30 프로토콜 Modbus RTU
8-31 주소 1-247
8-32 통신 속도 2400-115200
8-33 패리티/정지 비트 짝수 패리티, 1 정지 비트 (초기 설
정값)
표 3.33 Modbus RTU 파라미터
기동 주소 기능 데이터 CRC 검사 종료
T1-T2-
T3-T4
표 3.35 일반적인 Modbus RTU 메시지 구조
8비트 8비트 N x 8비트16비트 T1-T2-
T3-T4
3.8.10.3 시작/정지 필드
메시지는 최소 3.5자 간격의 유휴 기간으로 시작합니다.
이는 선택한 네트워크 통신 속도에서 여러 문자 간격으
로 구현됩니다(T1-T2-T3-T4 시작과 같이 나타남).
3.8.10 Modbus RTU 메시지 프레임 구
조
전송할 첫 번째 필드는 장치 주소입니다. 마지막으로 전
송된 문자 이후, 최소 3.5자 간격의 유사한 기간은 메시
지 종료를 의미합니다. 새 메시지는 이 기간 후에 시작
할 수 있습니다. 전체 메시지 프레임은 지속적인 흐름으
3.8.10.1 Modbus RTU가 있는 주파수
변환기
로 전송되어야 합니다. 프레임 완료 이전에 1.5자 간격
이상의 유휴 기간이 발생하면 수신 장치가 불완전한 메
시지를 내보내고 다음 바이트가 새 메시지의 주소 필드
컨트롤러는 RTU 모드를 사용하여 Modbus 네트워크에
서 통신하도록 셋업되며 메시지의 각 바이트에는 4비트
16진수 문자 2개가 포함되어 있습니다. 각 바이트의 형
식은
표 3.34
시작
비트
에서 보는 바와 같습니다.
데이터 바이트 정지/
정지
패리티
라고 인식하게 됩니다. 그와 마찬가지로, 이전 메시지
이후 3.5자 간격 이전에 새 메시지가 시작하면 수신 장
치가 이를 이전 메시지의 연속으로 간주합니다. 이렇게
되면 결합된 메시지에 대해 마지막 CRC 필드의 값이
유효하지 않기 때문에 타임아웃(슬레이브에서 응답 없
음)이 발생합니다.
3.8.10.4 주소 필드
표 3.34 각 바이트의 형식
메시지 프레임의 주소 필드에는 8비트가 포함되어 있습
코딩 시스템 8–비트 이진수, 16진수 0–9,–F.
메시지의 각 8비트 필드에 16진수 문자 2개 포
함.
바이트당 비트 시작 비트 1개.
데이터 비트 8개, 큰 비트 먼저 전송.
짝수/홀수 패리티를 위한 비트 1개, 패리티 없
음에는 비트 0개.
패리티가 사용된 경우 정지 비트 1개, 패리티
없음에는 비트 2개.
오류 검사 필드 주기적 잉여 검사(CRC)
니다. 유효한 슬레이브 장치 주소는 십진수 0–247의 범
위 내에 있습니다. 개별 슬레이브 장치는 1–247의 범위
내에서 주소가 할당됩니다(0은 브로드캐스트 모드를 위
한 예비용이며 모든 슬레이브가 인식합니다). 마스터는
메시지의 주소 필드에 슬레이브 주소를 배치함으로써
슬레이브에 주소를 지정합니다. 슬레이브가 응답을 전
송할 때 이 주소 필드에 자신의 주소를 배치하여 어떤
슬레이브가 응답하고 있는지 마스터가 알 수 있게 합니
다.
3.8.10.5 기능 필드
3.8.10.2 Modbus RTU 메시지 구조
메시지 프레임의 기능 필드에는 8비트가 포함되어 있습
전송 장치는 시작 및 종료 지점이 알려진 프레임에
Modbus RTU 메시지를 배치합니다. 이렇게 하면 수신
장치가 메시지 시작 지점에서 수신을 시작하고 주소 부
분을 읽으며 어떤 장치에 주소가 지정되는지 판단하고
(또는 메시지가 브로드캐스트인 경우, 모든 장치에 전
니다. 유효한 코드는 1-FF의 범위 내에 있습니다. 기능
필드는 마스터와 슬레이브 간의 메시지 전송에 사용됩
니다. 마스터에서 슬레이브 장치로 메시지가 전송될 때
기능 코드 필드는 어떤 종류의 동작을 수행하는지 슬레
이브에 알려줍니다. 슬레이브가 마스터에 응답할 때 기
80 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 83

시스템 통합 설계 지침서
능 코드 필드를 사용하여 (오류가 없는) 정상 응답인지
아니면 (예외 응답이라고 하는) 오류가 발생하는지 여부
를 표시합니다. 정상 응답의 경우, 슬레이브는 원래의
기능 코드를 그대로 돌려보냅니다. 예외 응답의 경우,
슬레이브는 논리 1에 설정된 가장 큰 비트와 함께 원래
의 기능 코드에 상당하는 코드를 돌려보냅니다. 또한 슬
레이브는 응답 메시지의 데이터 필드에 고유 코드를 배
치합니다. 이는 발생한 오류 종류나 예외 이유를 마스터
에 알려줍니다. 또한
지원하는 기능 코드
코드
를 참조하십시오.
장을 3.8.10.10 Modbus RTU에서
및
장을 3.8.10.11 Modbus 예외
3.8.10.6 데이터 필드
데이터 필드는 16진수 00-FF의 범위 내에 있는 2자리
의 16진수 세트를 사용하여 구성됩니다. 이는 하나의
RTU 문자로 구성됩니다. 마스터에서 슬레이브 장치로
전송된 메시지의 데이터 필드에는 슬레이브가 기능 코
드에 의해 정의된 동작을 수행하는 데 사용해야 하는
추가 정보가 포함되어 있습니다. 여기에는 코일 또는 레
지스터 주소와 같은 항목, 처리할 항목의 수량 및 필드
내 실제 데이터 바이트 개수가 포함될 수 있습니다.
3.8.10.7 CRC 검사 필드
메시지에는 오류 검사 필드가 포함되며 오류 검사 필드
는 주기적 잉여 검사(CRC) 방식을 기준으로 작동합니
다. CRC 필드는 전체 메시지의 내용을 검사합니다. 이
는 메시지의 개별 문자에 사용된 패리티 검사 방식과
관계 없이 적용됩니다. CRC 값은 전송 장치에 의해 계
산되며 메시지의 마지막 필드로 CRC를 붙입니다. 수신
장치는 메시지를 수신하는 동안 CRC를 다시 계산하고
계산된 값을 CRC 필드에 수신된 실제 값과 비교합니다.
두 값이 서로 다른 경우, 버스통신 타임아웃이 결과로
발생합니다. 오류 검사 필드에는 2개의 8비트 바이트로
구현된 16비트 이진수 값이 포함되어 있습니다. 오류
검사 필드가 완료되면 필드의 낮은 순서 바이트가 먼저
붙고 높은 순서 바이트가 그 다음에 붙습니다. CRC 높
은 순서 바이트는 메시지에서 마지막으로 전송된 바이
트입니다.
3.8.10.8 코일 레지스터 주소 지정
Modbus에서 모든 데이터는 코일과 고정 레지스터에 구
성됩니다. 코일은 단일 비트를 갖고 있는 반면 고정 레
지스터는 2바이트 워드(16비트)를 갖고 있습니다.
Modbus 메시지의 모든 데이터 주소는 0으로 귀결됩니
다. 데이터 항목의 첫 번째 빈도는 항목 번호 0으로 주
소가 지정됩니다. 예를 들어: 프로그래밍 가능한 컨트롤
러에서
터 주소 필드로 주소가 지정됩니다.
코일 007EHEX(126 십진수)
고정 레지스터 40001
서
필드는 이미 고정 레지스터 동작을 지정합니다. 따라서
4XXXX 지령은 암묵적인 지령입니다.
코일 1
로 알려진 코일은 Modbus 메시지의 데이
레지스터 0000
코일 127 십진수
로 주소가 지정됩니다.
은 메시지의 데이터 주소 필드에
으로 주소가 지정됩니다. 기능 코드
고정 레지스터
는
40108은 레지스터 006BHEX(107 십진수)
로 주소가 지
정됩니다.
코일 번호 설명 신호 방향
1–16 주파수 변환기 제어 워드. 마스터 ⇒ 슬레
이브
17–32 주파수 변환기 속도 또는 설정포인트 지
령 범위 0x0–0xFFFF (-200% ...
~200%).
33–48 주파수 변환기 상태 워드(
49–64 개회로 모드: 주파수 변환기 출력 주파
수.
폐회로 모드: 주파수 변환기 피드백 신
호.
65 파라미터 쓰기 제어(마스터 ⇒ 슬레이브)마스터 ⇒ 슬레
0=파라미터 변경사항은 주파수 변환기
의 RAM에 씌여집니다.
1=파라미터 변경사항은 주파수 변환기
의 RAM 및 EEPROM에 씌여집니
다.
66-65536예비
표 3.36 코일 설명
코일 0 1
01 프리셋 지령 LSB
02 프리셋 지령 MSB
03 직류 제동 직류 제동 안함
04 코스팅 정지 코스팅 정지 안함
05 순간 정지 순간 정지 안함
06 주파수 고정 주파수 고정 안함
07 감속 정지 기동
08 리셋 안함 리셋
09 조그 안함 조그
10 가감속 1 가감속 2
11 유효하지 않은 데이터 유효한 데이터
12 릴레이 1 꺼짐 릴레이 1 켜짐
13 릴레이 2 꺼짐 릴레이 2 켜짐
14 셋업 LSB
15 셋업 MSB
16 역회전 안함 역회전
표 3.37 주파수 변환기 제어 워드(FC 프로필)
표 3.38
마스터 ⇒ 슬레
이브
참조) 슬레이브 ⇒ 마
스터
슬레이브 ⇒ 마
스터
이브
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 81
Page 84

시스템 통합
VLT® AQUA Drive FC 202
코일 0 1
33 제어 준비 안됨 제어 준비
34 주파수 변환기 준비 안됨 주파수 변환기 준비 완료
35 코스팅 정지 안전 차단
36 알람 없음 알람
37 사용안함 사용안함
33
38 사용안함 사용안함
39 사용안함 사용안함
40 경고 없음 경고
41 지령 시 이외 지령 시
42 수동 모드 자동 모드
43 주파수 범위 초과 주파수 범위 내
44 정지 구동
45 사용안함 사용안함
46 전압 경고 없음 전압 경고
47 전류 한계 이외 전류 한계
48 써멀 경고 없음 과열 경고
표 3.38 주파수 변환기 상태 워드(FC 프로필)
레지스터 번호 설명
00001-00006 예비
00007 FC 데이터 개체 인터페이스의 마지막 오류 코드
00008 예비
00009
00010-00990 000 파라미터 그룹 (파라미터 0-01 - 0-99)
01000-01990 100 파라미터 그룹 (파라미터 1-00 - 1-99)
02000-02990 200 파라미터 그룹 (파라미터 2-00 - 2-99)
03000-03990 300 파라미터 그룹 (파라미터 3-00 - 3-99)
04000-04990 400 파라미터 그룹 (파라미터 4-00 - 4-99)
... ...
49000-49990 4900 파라미터 그룹 (파라미터 49-00 - 49-99)
50000 입력 데이터: 주파수 변환기 제어 워드 레지스터
50010 입력 데이터: 버스통신 지령 레지스터(REF).
... ...
50200 출력 데이터: 주파수 변환기 상태 워드 레지스터
50210 출력 데이터: 주파수 변환기 주요 실제 값 레지스터
파라미터 색인
(CTW).
(STW).
(MAV).
1)
3.8.10.10 Modbus RTU에서 지원하는
기능 코드
Modbus RTU는 메시지의 기능 필드에 있는 기능 코드
(
표 3.40
기능 기능 코드 (hex)
코일 읽기 1
고정 레지스터 읽기 3
단일 코일 쓰기 5
단일 레지스터 쓰기 6
다중 코일 쓰기 F
다중 레지스터 쓰기 10
통신 이벤트 카운터 얻기 B
슬레이브 ID 보고 11
기능 기능 코드 하위 기능코드하위 기능
진단 8 1 통신 재시작
참조)의 사용을 지원합니다.
표 3.40 기능 코드
2 진단 레지스터로 돌아가기
10 카운터 및 진단 레지스터 지
우기
11 버스통신 메시지 카운트로
돌아가기
12 버스통신 오류 카운트로 돌
아가기
13 슬레이브 오류 카운트로 돌
아가기
14 슬레이브 메시지 카운트로
돌아가기
표 3.41 기능 코드 및 하위 기능 코드
3.8.10.11 Modbus 예외 코드
예외 코드 응답 구조에 관한 전체 설명은
을 3.8.10.5 기능 필드
를 참조하십시오.
장
코드 이름 의미
표 3.39 고정 레지스터
1) 색인이 붙은 파라미터에 접근할 때 사용하기 위한 색인 번
호를 지정하는 데 사용됩니다.
3.8.10.9 주파수 변환기 제어 방법
Modbus RTU 메시지의 기능과 데이터 필드에서 사용
할 수 있는 코드는
지원하는 기능 코드
코드
에 수록되어 있습니다.
장을 3.8.10.10 Modbus RTU에서
및
장을 3.8.10.11 Modbus 예외
1 잘못된 기능 쿼리에 수신된 기능 코드가 서버 (또는 슬레
이브)에 허용할 수 있는 동작이 아닌 경우입
니다. 이는 기능 코드가 보다 새로운 장치에
만 적용되기 때문일 수 있으며 선택한 유닛에
구현되지 않았습니다. 이는 또한 서버 (또는
슬레이브)가 잘못된 상태에 있어 이러한 유형
의 요청을 처리할 수 없음을 의미하는 데, 예
를 들어, 구성되어 있지 않고 레지스터 값을
돌려보내도록 요청하는 중이기 때문에 요청을
처리할 수 없습니다.
82 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 85

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
시스템 통합
설계 지침서
코드 이름 의미
2 잘못된 데이터주소쿼리에 수신된 데이터 주소가 서버 (또는 슬
레이브)에 허용할 수 있는 동작이 아닌 경우
입니다. 보다 자세히 말하면, 지령 번호와 전
달 길이의 조합이 유효하지 않습니다. 100개
의 레지스터를 가진 컨트롤러의 경우, 오프셋
96과 길이 4로 요청하면 성공하지만 오프셋
96과 길이 5로 요청하면 예외 02가 발생합니
다.
3 잘못된 데이터값쿼리 데이터 필드에 포함된 값이 서버 (또는
슬레이브)에 허용할 수 있는 값이 아닌 경우
입니다. 이는 암시적 길이가 올바르지 않은
등 복잡한 요청의 나머지 부분의 구조에 결함
이 있음을 의미합니다. 하지만 이는 Modbus
프로토콜이 특정 레지스터의 특정 값의 중요
성을 인식하지 못하기 때문에 레지스터에 저
장하기 위해 제출된 데이터 항목에 어플리케
이션 프로그램의 예상을 벗어난 값이 있다는
의미는 아닙니다.
4 슬레이브 장치실패서버 (또는 슬레이브))가 요청한 동작의 수행
을 시도하는 도중에 복구할 수 없는 오류가
발생한 경우입니다.
표 3.42 Modbus 예외 코드
3.8.11 파라미터 액세스
3.8.11.1 파라미터 처리
PNU(파라미터 번호)는 Modbus 읽기 또는 메시지 읽기
에 포함된 레지스터 주소로부터 번역됩니다. 파라미터
번호는 (10 x 파라미터 번호) 십진법으로 Modbus에 번
역됩니다. 예:
기: 고정 레지스터 3120은 파라미터 값을 유지합니다.
1352(십진수)의 값은 파라미터가 12.52%로 설정되어
있음을 의미합니다.
3-14 프리셋 상대 지령
3410 및 3411은 파라미터 값을 유지합니다. 11300(십
진수)의 값은 파라미터가 1113.00로 설정되어 있음을
의미합니다.
파라미터, 용량 및 변환 지수에 관한 정보는 해당
그래밍 지침서
3-12 캐치업/슬로우다운 값
(32비트) 읽기: 고정 레지스터
를 참조하십시오.
(16비트) 읽
프로
정 레지스터를 2의 값으로 설정하면 다음의 모든 읽기/
쓰기 배열 파라미터가 지수 2가 됩니다.
3.8.11.4 텍스트 블록
텍스트 문자열에 저장된 파라미터는 다른 파라미터와
같은 방식으로 액세스합니다. 최대 텍스트 블록 길이는
20자입니다. 파라미터에 대한 판독 요청이 파라미터가
저장하는 문자 길이보다 긴 경우 응답의 일부가 생략됩
니다. 파라미터에 대한 판독 요청이 파라미터가 저장하
는 문자 길이보다 짧은 경우 응답 공간이 채워집니다.
3.8.11.5 변환 인수
파라미터 값은 정수로만 전송될 수 있기 때문에 변환
인수는 십진수를 전송하는 데만 사용되어야 합니다.
3.8.11.6 파라미터 값
표준 데이터 유형
표준 데이터 유형에는 int16, int32, uint8, uint16 및
uint32가 있습니다. 이들은 4x 레지스터(40001–
4FFFF)로 저장됩니다. 기능 03 hex
독
을 사용하여 파라미터를 판독합니다. 파라미터는 1
레지스터(16비트)를 위한 6 hex
기능과 2 레지스터(32비트)를 위한 10 hex
스터 프리셋
기능을 사용하여 기록되었습니다. 판독 가
고정 레지스터 판
단일 레지스터 프리셋
다중 레지
능한 길이는 1레지스터(16비트)부터 10레지스터(20자)
까지입니다.
비표준 데이터 유형
비표준 데이터 유형은 텍스트 문자열이며 4x 레지스터
(40001–4FFFF)로 저장됩니다. 파라미터는 03 hex
정 레지스터 판독
중 레지스터 프리셋
기능을 사용하여 판독되며 10 hex
기능을 사용하여 기록됩니다. 판독
고
가능한 길이는 레지스터 1개(문자 2개)부터 최대 레지
스터 10개(문자 20개)까지입니다.
3.8.12 FC 인버터 제어 프로필
3.8.12.1 FC 프로필에 따른 제어 워드
(
8-10 제어 프로필
= FC 프로
필)
3 3
다
3.8.11.2 데이터 보관
코일 65 십진수는 주파수 변환기에 기록된 데이터가
EEPROM과 RAM(코일 65=1) 또는 RAM(코일 65=0)에
만 저장되었는지 판단합니다.
3.8.11.3 IND (색인)
주파수 변환기의 일부 파라미터는 배열 파라미터(예:
3-10 프리셋 지령
배열을 지원하지 않으므로 주파수 변환기는 배열에 대
한 포인터로 고정 레지스터 9를 유지합니다. 파라미터
를 읽거나 쓰기 전에 고정 레지스터 9를 설정합니다. 고
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 83
그림 3.55 제어 워드
)입니다. Modbus는 고정 레지스터 내
Page 86

시스템 통합
VLT® AQUA Drive FC 202
비트 비트 값=0 비트 값=1
00 지령 값 외부 선택 lsb
01 지령 값 외부 선택 msb
02 직류 제동 가감속
03 코스팅 코스팅 없음
04 순간 정지 가감속
33
05 출력 주파수 유지 가감속 사용
06 감속 정지 기동
07 기능 없음 리셋
08 기능 없음 조그
09 가감속 1 가감속 2
10 유효하지 않은 데이터 유효한 데이터
11 기능 없음 릴레이 01 동작
12 기능 없음 릴레이 02 동작
13 파라미터 설정 선택 lsb
14 파라미터 설정 선택 msb
15 기능 없음 역회전
표 3.43 제어 워드 비트
제어 비트 설명
비트 00/01
비트 00과 01은
표 3.44
에 따라
3-10 프리셋 지령
에
미리 프로그래밍되어 있는 4개의 지령 값 중에서 선택
하는 데 사용됩니다.
프로그래밍된 지령값파라미터 비트 01 비트 00
1
2
3
4
3-10 프리셋 지
령
[0]
3-10 프리셋 지
령
[1]
3-10 프리셋 지
령
[2]
3-10 프리셋 지
령
[3]
0 0
0 1
1 0
1 1
비트 03이 디지털 입력의 해당 기능을 계산하는 방법을
정의하려면
8-50 코스팅 선택
에서 코스팅을 선택합니
다.
비트 04, 순간 정지
비트 04=0: 정지할 때까지 모터를 감속합니다(
간 정지 가감속 시간
에서 설정).
3-81 순
비트 05, 출력 주파수 고정
비트 05=0: 현재 출력 주파수(Hz)가 고정됩니다. 고정
된 출력 주파수는 가속 및 감속하도록 프로그래밍된 디
지털 입력(
33 디지털 입력
5-10 단자 18 디지털 입력
)으로만 변경됩니다.
에서
5-15 단자
주의 사항
고정된 출력이 활성화되어 있는 경우 주파수 변환기는
다음 방법으로만 정지될 수 있습니다.
비트 03 코스팅 정지
•
비트 02, 직류 제동
•
직류 제동, 코스팅 정지
•
정지
하도록 프로그래밍된 디지털 입력
(
5-10 단자 18 디지털 입력
디지털 입력
).
비트 06, 가감속 정지/기동
비트 06=0: 모터를 정지시키고 선택된 감속 파라미터를
통해 정지할 때까지 모터를 감속시킵니다.
비트 06=1: 기타 기동 조건을 만족하는 경우 주파수 변
환기가 모터를 기동하도록 허용합니다.
비트 06(가감속 정지/기동)이 디지털 입력의 해당 기능
을 계산하는 방법을 정의하려면
기동을 선택합니다.
비트 07, 리셋
비트 07=0: 리셋 안함.
비트 07=1: 트립을 리셋합니다. 신호의 전연에서, 예를
들어, 논리 0에서 논리 1로 변경할 때 리셋이 활성화됩
, 또는 리셋 및
~
5-15 단자 33
8-53 기동 선택
코스팅
에서
니다.
표 3.44 지령 값
비트 08, 조그
주의 사항
비트 00/01이 디지털 입력의 해당 기능을 계산하는 방
법을 정의하려면
선택합니다.
비트 02, 직류 제동
비트 02=0일 때 직류 제동 및 정지됩니다.
제동 전류과 2-02 직류 제동 시간
간을 설정합니다.
비트 02=1일 때 가감속됩니다.
비트 03, 코스팅
비트 03=0: 주파수 변환기가 모터를 즉시 정지시키고
(출력 트랜지스터는 차단) 모터가 코스팅 정지됩니다.
비트 03=1: 기타 기동 조건을 만족하는 경우 주파수 변
환기가 모터를 기동합니다.
8-56 프리셋 지령 선택
에서 제동 전류 및 시
에서 지령을
2-01 직류
비트 08=1: 출력 주파수는
따라 결정됩니다.
비트 09, 가감속 1/2 선택
비트 09=0: 가감속 1이 활성화됩니다(
간
~
3-42 1 감속 시간
비트 09=1: 가감속 2(
속 시간
)가 활성화됩니다.
비트 10, 유효하지 않은 데이터/유효한 데이터
제어 워드를 사용할지 아니면 무시할지를 주파수 변환
기에 알립니다.
비트 10=0: 제어 워드를 무시합니다.
비트 10=1: 제어 워드를 사용합니다. 텔레그램의 종류
에 관계 없이 텔레그램에는 항상 제어 워드가 포함되기
때문에 이 기능이 사용됩니다. 파라미터를 업데이트하
거나 읽을 때 제어 워드를 사용하면 안되는 경우 제어
워드를 끕니다.
3-19 조그 속도 [RPM]
3-41 1 가속 시
).
3-51 2 가속 시간
~
3-52 2 감
에
84 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 87

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
시스템 통합 설계 지침서
비트 11, 릴레이 01
비트 11=0: 릴레이는 활성화되지 않습니다.
비트 11=1:
선택되어 있으면 릴레이 01이 활성화됩니다.
비트 12, 릴레이 04
비트 12=0: 릴레이 04는 활성화되지 않습니다.
비트 12=1:
선택되어 있다면 릴레이 04가 활성화됩니다.
비트 13/14, 셋업 선택
표 3.45
메뉴 셋업 중 하나를 선택합니다.
이 기능은
택되었을 경우에만 사용할 수 있습니다.
비트 13/14가 디지털 입력의 해당 기능을 계산하는 방
법을 정의하려면
다.
비트 15 역회전
비트 15=0: 역회전 안함
비트 15=1: 역회전
지털로 초기 설정되어 있습니다.
OR
역회전됩니다.
3.8.12.2 FC 프로필 (STW) (
5-40 릴레이 기능에 제어 워드 비트 11
5-40 릴레이 기능에 제어 워드 비트 12
를 기준으로 비트 13과 14를 사용하여 4개의
셋업 비트 14 비트 13
1 0 0
2 0 1
3 1 0
4 1 1
표 3.45 메뉴 셋업의 사양
0-10 셋업 활성화
8-55 셋업 선택
8-54 역회전 선택
에서
[9] 다중 설정
에서 지령을 선택합니
에서 역회전이 디
직렬 통신
또는
논리 AND
가 선택되었을 경우에만 비트 15가
프로필
=FC 프로필)에 따른 상
태 워드
그림 3.56 상태 워드
이 선
이나
논리
8-10 제어
이
가
비트 비트=0 비트=1
00 제어 준비 안됨 제어 준비
01 인버터준비X 운전 준비
02 코스팅 사용함
03 오류 없음 트립
04 오류 없음 오류(트립 없음)
05 예비 -
06 오류 없음 트립 잠금
07 경고 없음 경고
08 속도 ≠ 지령 속도 = 지령
09 현장 운전 버스통신 제어
10 주파수 한계 초과 주파수 한계 내
11 기능 없음 운전 중
12 인버터 정상 정지, 자동 기동
13 전압 정상 전압 초과
14 토오크 정상 토오크 초과
15 타이머 정상 타이머 초과
표 3.46 상태 워드 비트
상태 비트 설명
비트 00, 제어 준비 안됨/준비됨
비트 00=0: 주파수 변환기가 트립합니다.
비트 00=1: 주파수 변환기 제어는 준비되지만, 반드시
전원 부품이 전원 공급을 받는 것은 아닙니다(외부 24V
가 제어 장치에 공급될 경우).
비트 01, 인버터 준비
비트 01=1: 주파수 변환기는 운전 준비되지만 코스팅
명령은 디지털 입력이나 직렬 통신을 통해서만 활성화
됩니다.
비트 02, 코스팅 정지
비트 02=0: 주파수 변환기가 모터를 정지시킵니다.
비트 02=1: 주파수 변환기가 기동 명령을 사용하여 모
터를 기동합니다.
비트 03, 오류 없음/트립
비트 03=0: 주파수 변환기가 정상적으로 운전하고 있습
니다.
비트 03=1: 주파수 변환기가 트립합니다. 운전을 다시
시작하려면 [Reset]을 입력합니다.
비트 04, 오류 없음/오류(트립 안됨)
비트 04=0: 주파수 변환기가 정상적으로 운전하고 있습
니다.
비트 04=1: 주파수 변환기에 오류가 있지만 트립하지는
않습니다.
비트 05, 사용안함
비트 05는 상태 워드에서 사용되지 않습니다.
비트 06, 오류 없음/트립 잠금
비트 06=0: 주파수 변환기가 정상적으로 운전하고 있습
니다.
비트 06=1: 주파수 변환기가 트립되고 잠겼습니다.
비트 07, 경고 없음/경고
비트 07=0: 경고가 없습니다.
비트 07=1: 경고가 발생했습니다.
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 85
Page 88

Actual output
freq.
STW
Follower-master
Speed ref.CTW
Master-follower
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
33
시스템 통합
VLT® AQUA Drive FC 202
비트 08, 속도≠지령/속도=지령
비트 08=0: 모터가 운전 중이지만 현재 운전 속도가 프
리셋 속도 지령과 일치하지 않습니다. 기동 또는 정지
시 속도가 가속 또는 감속되었을 때 이런 현상이 나타
날 수 있습니다.
비트 08=1: 모터의 속도가 프리셋 속도 지령과 일치합
니다.
비트 09, 현장 운전/버스통신 제어
비트 09=0: [Stop/Reset]은
치 또는
현장 제어
가 선택되어 있을 경우에 활성화됩니
3-13 지령 위치
다. 직렬 통신을 통해 제어할 수 없습니다.
에 제어 장
그림 3.57 실제 출력 주파수(MAV)
지령과 MAV는 다음과 같이 범위가 설정됩니다:
비트 09=1 필드 버스/직렬 통신을 이용하여 주파수 변
환기를 제어할 수 있습니다.
비트 10, 주파수 한계 초과
비트 10=0: 출력 주파수가
[RPM]
또는
4-13 모터의 고속 한계 [RPM]
4-11 모터의 저속 한계
에서 설정
된 값에 도달했습니다.
비트 10=1: 출력 주파수가 정의된 한계 내에 있습니다.
비트 11, 운전하지 않음/운전 중
비트 11=0: 모터가 운전하지 않습니다.
비트 11=1: 주파수 변환기가 기동 신호를 받았거나 출
력 주파수가 0Hz 보다 큽니다.
비트 12, 인버터 정상/정지, 자동 기동
그림 3.58 지령 및 MAV
비트 12=0: 인버터에 일시적 과열 현상이 없습니다.
비트 12=1: 과열로 인해 인버터가 정지되지만 트립되지
는 않고 과열 현상이 없어질 경우 다시 운전을 시작합
니다.
비트 13, 전압 정상/한계 초과
비트 13=0: 전압 경고가 발생하지 않았습니다.
비트 13=1: 주파수 변환기 매개회로의 직류 전압이 너
무 낮거나 높습니다.
비트 14, 토오크 정상/한계 초과
비트 14=0: 모터 전류가
4-18 전류 한계
에서 선택된
토오크 한계보다 낮습니다.
비트 14=1:
4-18 전류 한계
의 토오크 한계가 초과되었
습니다.
비트 15, 타이머 정상/한계 초과
비트 15=0: 모터 써멀 보호와 써멀 보호의 타이머가
100%를 초과하지 않았습니다.
비트 15=1: 타이머 중 하나가 100%를 초과했습니다.
Interbus 옵션과 주파수 변환기 간의 연결이 끊어졌거
나 내부 통신 문제가 발생한 경우에는 STW의 모든 비
트가 0으로 설정됩니다.
3.8.12.3 버스통신 속도 지령 값
속도 지령 값은 상대적인 값(%)으로 주파수 변환기에
전달됩니다. 값은 16비트 형태(정수(0-32767))로 전달
되며 값 16384(4000 hex)는 100%에 해당합니다. 음의
기호는 2의 보수에 의해 정해집니다. 실제 출력 주파수
(MAV)는 버스통신 지령과 동일한 방법으로 범위가 설
정됩니다.
86 Danfoss A/S © 09/2014 All rights reserved. MG20N639
3.8.12.4 프로피드라이브 프로필(CTW)
에 따른 제어 워드
제어 워드는 마스터(예: PC)의 명령을 슬레이브에 전달
하는데 사용됩니다.
비트 비트=0 비트=1
00 꺼짐 1 켜짐 1
01 꺼짐 2 켜짐 2
02 꺼짐 3 켜짐 3
03 코스팅 코스팅 없음
04 순간 정지 가감속
05 주파수 출력 유지 가감속 사용
06 감속 정지 기동
07 기능 없음 리셋
08 조그 1 꺼짐 조그 1 켜짐
09 조그 2 꺼짐 조그 2 켜짐
10 유효하지 않은 데이터 유효한 데이터
11 기능 없음 슬로우다운
12 기능 없음 캐치업
13 파라미터 설정 선택 lsb
14 파라미터 설정 선택 msb
15 기능 없음 역회전
표 3.47 제어 워드 비트
제어 비트 설명
비트 00, 꺼짐 1/켜짐 1
일반적인 가감속 정지는 실제 설정된 가감속 기능의 가
감속 시간을 사용합니다.
Page 89

시스템 통합 설계 지침서
출력 주파수가 0Hz이고 [릴레이 123]이
기능
에서 선택되었다면, 비트 00=0일 때 출력 릴레이 1
또는 2가 정지 및 활성화합니다.
비트 0=1일 때는 주파수 변환기가 상태 1:
공급 중지
비트 01, 꺼짐 2/켜짐 2
코스팅 정지
출력 주파수가 0Hz이고 [릴레이 123]이
기능
1 또는 2가 코스팅 정지 및 활성화됩니다.
비트 02, 꺼짐 3/켜짐 3
3-81 순간 정지 가감속 시간
지에 사용됩니다. 출력 주파수가 0Hz이고 [릴레이
123]이
02=0일 때, 출력 릴레이 1 또는 2가 순간 정지 및 활성
화됩니다.
비트 02=1일 때는 주파수 변환기가
상태 1:
비트 03, 코스팅/코스팅 없음
코스팅 정지 비트 03=0일 때 정지됩니다.
기타 기동 조건을 만족하는 경우 비트 03=1일 때 주파
수 변환기가 기동할 수 있습니다.
입니다.
에서 선택되었다면, 비트 01=0일 때, 출력 릴레이
의 가감속 시간이 순간 정
5-40 릴레이 기능
입력 전원 공급 중지
에서 선택되었다면, 비트
입니다.
5-40 릴레이
입력 전원
5-40 릴레이
주의 사항
8-50 코스팅 선택
지털 입력의 해당 기능을 결정할 수 있습니다.
비트 04, 순간 정지/가감속
3-81 순간 정지 가감속 시간
지에 사용됩니다.
비트 04=0일 때 순간 정지가 발생합니다.
기타 기동 조건을 만족하는 경우 비트 04=1일 때 주파
수 변환기가 기동할 수 있습니다.
을 설정하여 비트 03에 연결되는 디
의 가감속 시간이 순간 정
주의 사항
8-51 순간 정지 선택
디지털 입력의 해당 기능을 결정할 수 있습니다.
비트 05, 주파수 출력 유지/가감속 사용
비트 05=0일 때, 지령 값이 수정되더라도 현재의 출력
주파수가 유지됩니다.
비트 05=1일 때, 주파수 변환기가 조정 기능을 다시 수
행할 수 있으며 각각 해당하는 지령 값에 따라 운전이
시작됩니다.
비트 06, 가감속 정지/기동
일반적인 가감속 정지는 실제 설정된 가감속 기능의 가
감속 시간을 사용합니다. 또한 출력 주파수가 0Hz이고
릴레이 123이
력 릴레이 01 또는 04가 활성화됩니다.
비트 06=0일 때 정지됩니다.
기타 기동 조건을 충족하는 경우 비트 06=1일 때 주파
수 변환기가 기동할 수 있습니다.
을 설정하여 비트 04에 연결되는
5-40 릴레이 기능
에서 선택되었다면, 출
주의 사항
8-53 기동 선택
털 입력의 해당 기능을 결정할 수 있습니다.
비트 07, 기능 없음/리셋
스위치가 꺼진 후 리셋됩니다.
결함 버퍼의 이벤트를 알려줍니다.
비트 07=0일 때, 리셋되지 않습니다.
비트 07이 1로 변경될 경우, 스위치가 꺼진 후 리셋됩
니다.
비트 08, 조그 1 꺼짐/켜짐
8-90 통신 조그 1속
성화됩니다. 조그 1는 비트 04=0이고 비트 00-03=1일
때만 가능합니다.
비트 09, 조그 2 꺼짐/켜짐
8-91 통신 조그 2속
성화됩니다. 조그 2는 비트 04=0이고 비트 00-03=1일
때만 가능합니다.
비트 10, 유효하지 않은/유효한 데이터
제어 워드를 사용할 것인지 아니면 무시할 것인지 여부
를 주파수 변환기에 알려주는 데 사용됩니다.
비트 10=0일 때 제어 워드가 무시됩니다.
비트 10=1일 때 제어 워드가 사용됩니다. 사용되는 텔
레그램의 종류와 관계 없이 제어 워드가 항상 텔레그램
에 포함되어 있으므로 이 기능이 사용됩니다. 파라미터
를 업데이트하거나 읽을 때 제어 워드를 사용하지 않으
려면 제어 워드를 끌 수 있습니다.
비트 11, 기능 없음/슬로우다운
3-12 캐치업/슬로우다운 값
령 값을 줄이는 데 사용됩니다.
비트 11=0일 때, 지령 값이 변경되지 않습니다.
비트 11=1일 때, 지령 값이 감소합니다.
비트 12, 기능 없음/캐치업
3-12 캐치업/슬로우다운 값
령 값을 증가시키는 데 사용됩니다.
비트 12=0일 때, 지령 값이 변경되지 않습니다.
비트 12=1일 때, 지령 값이 증가합니다.
만약 슬로우다운과 캐치업이 동시에 활성화되면(비트
11 및 12=1), 슬로우다운이 우선순위를 가지므로 속도
지령 값이 감소합니다.
비트 13/14, 셋업 선택
비트 13과 14는
미터 셋업 중 하나를 선택하는 데 사용됩니다.
이 기능은
택되었을 경우에만 사용할 수 있습니다.
택
을 설정하여 비트 13과 14에 연결되는 디지털 입력의
해당 기능을 결정할 수 있습니다. 셋업이
링크된 설정
변경이 가능합니다.
을 설정하여 비트 06에 연결되는 디지
에서 미리 프로그래밍된 속도가 활
에서 미리 프로그래밍된 속도가 활
에 주어진 크기만큼 속도 지
에 주어진 크기만큼 속도 지
표 3.48
0-10 셋업 활성화
를 기준으로 하여 4개의 파라
에서
[9] 다중 설정
8-55 셋업 선
0-12 다음에
에 링크되어 있는 경우에만 구동 중 셋업
이 선
3 3
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 87
Page 90
시스템 통합
VLT® AQUA Drive FC 202
셋업 비트 13 비트 14
1 0 0
2 1 0
3 0 1
4 1 1
33
표 3.48 셋업 선택
비트 15, 기능 없음/역회전
비트 15=0일 때, 역회전이 발생하지 않습니다.
비트 15=1일 때, 역회전이 발생합니다.
비트 01, 인버터 준비 안됨/준비됨
전원부 공급이 있다는 점을 제외하면 비트 00과 동일합
니다. 필요한 기동 신호를 받으면 주파수 변환기가 준비
됩니다.
비트 02, 코스팅/사용함
비트 02=0일 때, 제어 워드의 비트 00, 01 또는 02가
0 (꺼짐 1, 꺼짐 2, 꺼짐 3 또는 코스팅)이거나 주파수
변환기가 꺼집니다(트립됩니다).
비트 02=1일 때, 제어 워드의 비트 00, 01 또는 02가
1이고 주파수 변환기는 트립되지 않습니다.
비트 03, 오류 없음/트립
주의 사항
8-54 역회전 선택
어 있습니다.
에서 역회전은
디지털
로 초기 설정되
비트 03=0일 때, 주파수 변환기에 오류 조건이 없습니
다.
비트 03=1일 때, 주파수 변환기가 트립되고 다시 기동
하려면 리셋 신호가 필요합니다.
주의 사항
직렬 통신
경우에만 비트 15가 역회전됩니다.
이나
논리 OR
또는
논리 AND
가 선택되었을
비트 04, 켜짐 2/꺼짐 2
제어 워드의 비트 01이 0일 때, 비트 04=0입니다.
제어 워드의 비트 01이 1일 때, 비트 04=1입니다.
비트 05, 켜짐 3/꺼짐 3
3.8.12.5 프로피드라이브 프로필에 따른
상태 워드(STW)
제어 워드의 비트 02가 0일 때, 비트 05=0입니다.
제어 워드의 비트 02가 1일 때, 비트 05=1입니다.
비트 06, 기동 가능/불가
상태 워드는 슬레이브의 상태를 마스터(예: PC)에 알릴
때 사용됩니다.
비트 비트=0 비트=1
00 제어 준비 안됨 제어 준비
01 인버터준비X 운전 준비
02 코스팅 사용함
03 오류 없음 트립
04 꺼짐 2 켜짐 2
05 꺼짐 3 켜짐 3
06 기동 가능 기동 불가
07 경고 없음 경고
08
09 현장 운전 버스통신 제어
10 주파수 한계 초과 주파수 한계 내
11 기능 없음 운전 중
12 인버터 정상 정지, 자동 기동
13 전압 정상 전압 초과
14 토오크 정상 토오크 초과
15 타이머 정상 타이머 초과
표 3.49 상태 워드 비트
속도≠지령
속도=지령
8-10 컨트롤 워드 프로필
에서
[1] PROFIdrive
가 선택
되었다면 스위치 꺼짐을 인식하고, 꺼짐2 또는 꺼짐3이
활성화되며 주전압의 스위치가 꺼진 후에 비트 06은 1
이 됩니다. 제어 워드의 비트 00이 0으로 설정되고, 비
트 01, 02 및 10이 1로 설정되었을 때
기동 불가
가 리
셋됩니다.
비트 07, 경고 없음/경고
비트 07=0은 경고 없음을 의미합니다.
비트 07=1은 경고가 발생했음을 의미합니다.
비트 08, 속도≠지령/속도=지령
비트 08=0일 때, 모터의 현재 속도가 설정된 속도 지령
값 범위를 벗어납니다. 예를 들어, 기동 또는 정지 시
속도가 가속 또는 감속되었을 때 이런 현상이 나타날
수 있습니다.
비트 08=1일 때, 모터의 현재 속도가 설정된 속도 지령
값에 따라 변화합니다.
비트 09, 현장 운전/버스통신 제어
비트 09=0은 LCP의 [정지]이나
3-13 지령 위치
에서
선택된 [수동에 링크] 또는 [현장]을 통해 주파수 변환
기가 정지되었음을 의미합니다.
비트 09=1일 때, 직렬 인터페이스를 통해 주파수 변환
기를 제어할 수 있습니다.
상태 비트 설명
비트 00, 제어 준비 안됨/준비됨
비트 00=0일 때, 제어 워드의 비트 00, 01 또는 02가
0 (꺼짐 1, 꺼짐 2 또는 꺼짐 3)이거나 주파수 변환기가
꺼집니다(트립됩니다).
비트 00=1일 때, 주파수 변환기 제어는 준비되지만 반
드시 현재 전원부에 전원이 공급되지는 않습니다(제어
시스템에 외부 24V가 공급되는 경우).
비트 10, 주파수 한계 초과/주파수 한계 내
비트 10=0일 때, 출력 주파수가
4-53 고속 경고
에서 설정된 한계를 벗어났습니다.
4-52 저속 경고
및
비트 10=1일 때, 출력 주파수가 설정된 범위 내에 있습
니다.
비트 11, 운전하지 않음/운전 중
비트 11=0일 때, 모터가 작동하지 않습니다.
비트 11=1일 때, 주파수 변환기가 기동 신호를 받았거
나 출력 주파수가 0Hz보다 큽니다.
88 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 91

시스템 통합 설계 지침서
비트 12, 인버터 정상/정지, 자동기동
비트 12=0일 때, 인버터에 일시적인 과부하가 걸리지
않습니다.
비트 12=1일 때, 과부하로 인해 인버터가 정지됩니다.
하지만 주파수 변환기가 꺼지지(트립되지) 않았고, 과부
하가 멈추면 다시 기동합니다.
비트 13, 전압 정상/한계 초과
비트 13=0일 때, 주파수 변환기의 전압 한계가 초과되
비트 14=1일 때,
4-17 재생 운전의 토오크 한계
4-16 모터 운전의 토오크 한계
에서 선택된 한계를 초
과합니다.
비트 15, 타이머 정상/한계 초과
비트 15=0일 때, 모터 써멀 보호와 주파수 변환기 써멀
보호의 타이머가 100%를 초과하지 않았습니다.
비트 15=1일 때, 타이머 중 하나가 100%를 초과했습니
다.
지 않습니다.
비트 13=1일 때, 주파수 변환기 매개회로의 직류 전압
이 너무 낮거나 높습니다.
비트 14, 토오크 정상/한계 초과
비트 14=0일 때, 모터 토오크는
오크 한계
및
4-17 재생 운전의 토오크 한계
4-16 모터 운전의 토
에서 선택
된 한계보다 낮습니다.
3.9 시스템 설계 체크리스트
표 3.50
스템 요구사항을 지정하는 데 필요한 일반 부문 및 옵션을 상기시킬 목적으로 제공됩니다.
는 모터 제어 시스템에 주파수 변환기를 통합하는 데 필요한 체크리스트를 제공합니다. 이 체크리스트는 시
부문 세부 사항 참고
FC 모델
전력
전압
전류
물리적
치수
중량
주위 운전 조건
온도
고도
습도
공기질/먼지
용량 감소 요구사항
외함 용량
입력
케이블
유형
길이
퓨즈
유형
용량
등급
옵션
커넥터
접점
필터
출력
케이블
유형
길이
퓨즈
유형
용량
또는
3 3
☑
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 89
Page 92

시스템 통합
VLT® AQUA Drive FC 202
부문 세부 사항 참고
등급
옵션
필터
제어
배선
33
유형
길이
단자 연결
통신
프로토콜
연결
배선
옵션
커넥터
접점
필터
모터
유형
등급
전압
옵션
특수 공구 및 장비
이동 및 보관
장착
전기 연결
☑
표 3.50 시스템 설계 체크리스트
90 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 93
적용 예 설계 지침서
4 적용 예
4.1 어플리케이션 기능 개요
VLT® AQUA Drive FC 202는 수처리 및 폐수처리 용
도로 설계되어 있습니다. 다양한 표준 및 옵션 기능으로
는 수처리 및 폐수처리에 중점을 두고 최적화된
SmartStart와 단축 메뉴가 있습니다.
캐스케이드 제어
•
기본형 캐스케이드 컨트롤러는 기본적으로 내
장되어 있으며 최대 용량은 펌프 3대입니다.
캐스케이드 컨트롤러는 다중 펌프 시스템 내
단일 펌프의 속도 제어를 제공합니다. 이는 예
를 들어, 부스터 세트의 경우 비용 효율적인 솔
루션입니다. 여러 대의 가변 속도 펌프를 갖춘
시스템은 확장형 캐스케이드 컨트롤러 (MCO
101) 또는 고급형 캐스케이드 컨트롤러 (MCO
102)를 필요로 합니다.
모터 절체
•
모터 절체 기능은 2개의 모터 또는 2대의 펌프
가 1대의 주파수 변환기를 공유하는 어플리케
이션에 적합합니다.
유량 보상
•
유량 보상은 유량에 따라 설정포인트를 적용하
고 압력 센서를 펌프에 가까이 장착할 수 있게
합니다.
드라이 런 감지
•
이 기능은 드라이 런 및 펌프 과열을 피해 펌
프의 손상을 방지합니다.
유량 과다 감지
•
이 기능은 펌프가 최대 속도로 구동 중이고 사
용자가 정의한 시간 동안 설정포인트에 도달할
수 없을 때를 감지합니다.
디래깅
•
이 예방적 또는 반응적 청소 기능은 폐수처리
어플리케이션의 펌프용으로 설계되었습니다.
자세한 내용은
을 참조하십시오.
초기/최종 가감속
•
최소 속도까지의 짧은 감속 시간과 최소 속도
부터의 짧은 가속 시간을 프로그래밍하면 베어
링이 보호되고 수중 펌프를 사용하는 어플리케
이션에 충분한 냉각이 제공됩니다.
체크 밸브 보호
•
느린 감속 속도는 체크 밸브를 보호하고 수격
을 방지합니다.
STO
•
STO는 심각한 상황이 발생할 때 안전 정지(코
스팅 정지)를 활성화합니다.
장을 4.2.3 29-1* 디래깅 기능
저유량 감지
•
이 기능은 시스템의 유량 없음 또는 저유량 조
건을 감지합니다.
슬립 모드
•
슬립 모드 기능은 작동 요구가 없을 때 펌프를
정지시켜 에너지를 절감합니다.
배관 급수 모드
•
배관 급수 모드는 천천히 배관 급수가 이루어
지고 수격을 방지하기 위한 기능으로 구성됩니
다. 이 기능은 수평 및 수직 배관에 각기 다른
모드를 제공합니다.
실시간 클럭
•
스마트 로직 컨트롤러(SLC)
•
SLC는 이벤트 및 동작으로 구성된 시퀀스의
프로그래밍으로 이루어집니다. SLC는 비교기,
논리 규칙 및 타이머를 사용하여 다양한 PLC
기능을 제공합니다.
사전/사후 윤활
•
자세한 내용은
조하십시오.
유량 확인
•
자세한 내용은
참조하십시오.
수중 펌프를 위한 고급형 최소 속도 감시
•
자세한 내용은
급형 최소 속도 감시
예방적 유지보수
•
예방적 유지보수 기능은 예정된 서비스 간격을
주파수 변환기에 프로그래밍할 수 있게 합니
다.
엄선된 어플리케이션 기능
4.2
장을 4.2.4 사전/사후 윤활
장을 4.2.5 29-5* 유량 확인
장을 4.2.6 수중 펌프를 위한 고
을 참조하십시오.
을 참
을
4.2.1 SmartStart
이제 SmartStart 마법사를 사용하여 주파수 변환기를
보다 쉽고 비용 효율적으로 작동할 수 있습니다.
SmartStart는 최초 전원 인가 시 또는 공장 출고 리셋
후에 활성화되며 간단한 일련의 단계를 통해 사용자가
올바르고 가장 효율적으로 모터를 제어할 수 있도록 안
내합니다. SmartStart는 또한 단축 메뉴를 통해서도 직
접 시작할 수 있습니다. 28개 언어의 그래픽 제어 패널
에서 설정을 선택합니다.
개회로 또는 폐회로의 단일 펌프/모터
•
모터 절체: 2개의 모터가 1대의 주파수 변환기
•
를 공유하는 경우.
기본형 캐스케이드 제어: 다중 펌프 시스템 내
•
단일 펌프의 속도 제어. 이는 예를 들어, 부스
터 세트의 경우 비용 효율적인 솔루션입니다.
4 4
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 91
Page 94
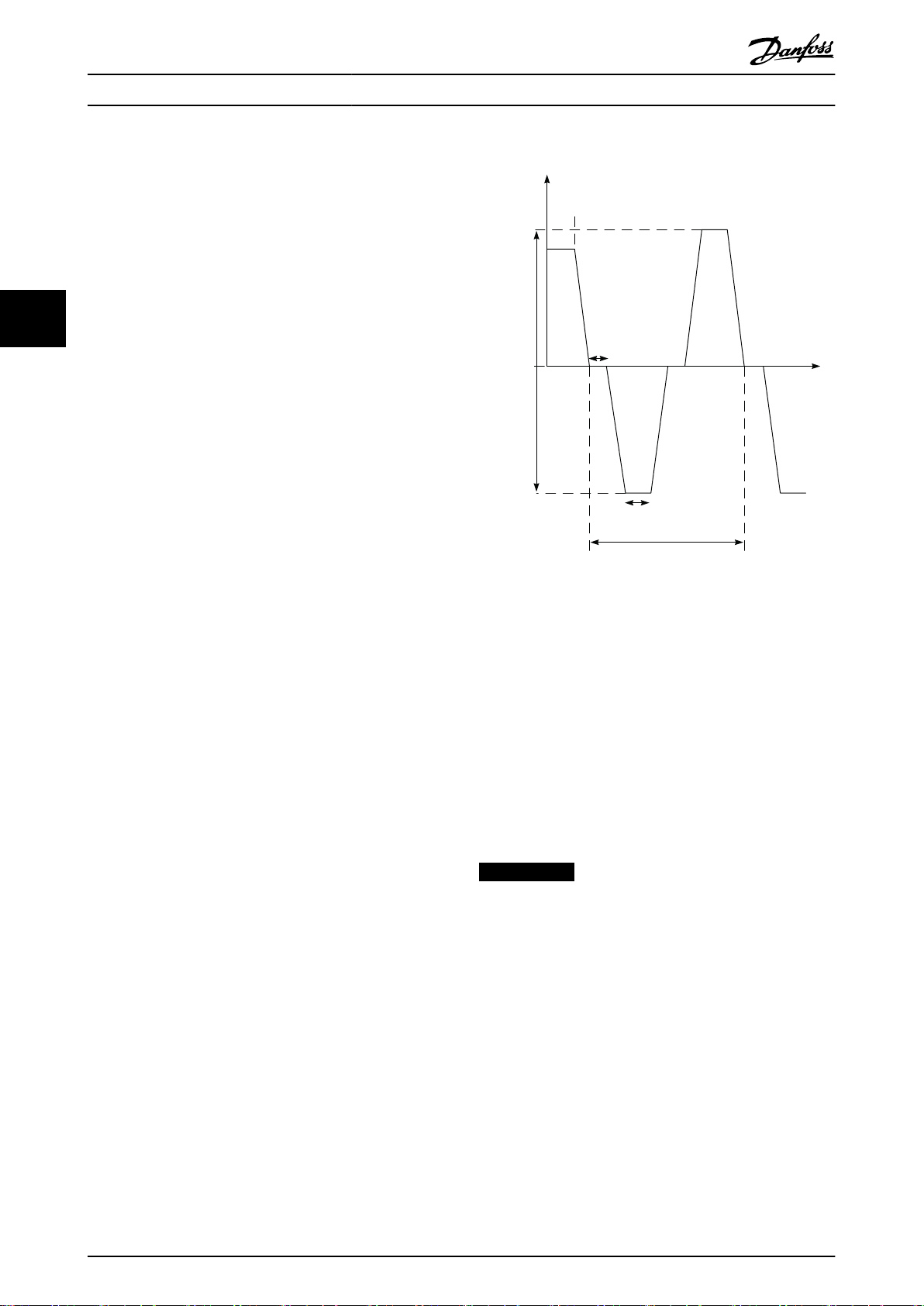
0 Hz / RPM
Derag O Delay:
Par. 29 -15
+/- Derag
Speed:
Par.: 29 -13
Par.: 29 -14
Deragging Run Time : Par . 29-12
Speed
Derag
function
activated
1 Cycle
Number of Cycles : Par . 29 -10
130BC369.10
적용 예
•
마스터-종동: 최대 8대의 주파수 변환기 및 펌
프를 제어하여 전체 펌프 시스템을 부드럽게
운전할 수 있습니다.
VLT® AQUA Drive FC 202
4.2.2 단축 메뉴 수처리 및 펌프
단축 메뉴 항목인 수처리 및 펌프는 VLT® AQUA
Drive의 가장 공통된 수처리 및 펌프 기능에 신속히 접
44
근할 수 있게 합니다.
특수 가감속 (초기/최종 가감속, 체크 밸브 가
•
감속)
슬립 모드
•
디래깅
•
드라이 런 감지
•
유량 과다 감지
•
유량 보상
•
수평, 수직 및 혼합 배관 시스템을 위한 배관
•
급수 모드
제어 성능
•
최소 속도 감시
•
그림 4.1 디래깅 기능
4.2.3 29-1* 디래깅 기능
디래깅 기능은 폐수처리 어플리케이션의 펌프 블레이드
에 이물질이 없게 하여 펌프가 정상적으로 작동하도록
하는 것을 목적으로 합니다.
디래깅 이벤트는 주파수 변환기가 디래깅을 시작할 때
부터 디래깅이 끝날 때까지의 시간으로 정의됩니다. 디
래깅이 시작되면 주파수 변환기는 먼저 정지 시까지 감
속한 다음 첫 번째 사이클이 시작되기 전에 차단 지연
이 만료됩니다.
주파수 변환기가 정지된 상태에서 디래깅이 트리거되면
첫 번째 차단 지연이 무시됩니다. 디래깅 이벤트는 몇
번의 사이클로 구성될 수 있습니다. 하나의 사이클은 하
나의 역방향 펄스 이후 하나의 정방향 펄스로 구성됩니
다. 지정된 횟수의 사이클이 완료되면 디래깅이 끝난 것
으로 간주됩니다. 보다 자세히 설명하면 마지막 사이클
의 마지막 펄스(항상 정방향 펄스)에서 디래깅 구동 시
간이 만료된 후(주파수 변환기는 디래깅 속도로 구동
중)에 디래깅이 끝난 것으로 간주됩니다. 펄스 간에 주
파수 변환기 출력은 지정된 차단 지연 시간 동안 코스
팅되어 펌프에 이물질이 침전되게 합니다.
주의 사항
펌프를 역회전으로 구동할 수 없는 경우에는 디래깅을
활성화하지 마십시오.
진행 중인 디래깅 이벤트를 위한 알림은 다음과 같이 3
가지입니다.
LCP의 상태:
•
확장형 상태 워드의 비트(비트 23, 80 0000
•
hex).
디지털 출력은 능동 디래깅 상태를 반영하도록
•
구성할 수 있습니다.
자동 원격 디래깅
.
92 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 95

130BD765.10
N
MAX
N
MIN
0
1
1
0
0
1
2
3
t1 t3t2
T
T
T
적용 예 설계 지침서
어플리케이션 및 그 사용 목적에 따라 이 기능을 예방
적 또는 반응적 조치로 사용할 수 있으며 다음과 같은
방식으로 트리거/시작할 수 있습니다.
각 기동 명령(
•
29-11 Derag at Start/Stop
)을
통한 방식
각 정지 명령(
•
29-11 Derag at Start/Stop
)을
통한 방식
각 기동/정지 명령(
•
Stop
)을 통한 방식
디지털 입력(파라미터 그룹
•
29-11 Derag at Start/
5-1* 디지털 입력
4 4
)
을 통한 방식
스마트 로직 컨트롤러(
•
작
)를 사용한 인버터 동작을 통한 방식
시간 예약 동작(파라미터 그룹
•
련 기능
고출력(파라미터 그룹
•
닝
)을 통한 방식
)을 통한 방식
4.2.4 사전/사후 윤활
특정 모터는 손상/마모를 방지하기 위해 구동 전 및 구
13-52 SL 컨트롤러 동
23-** 시간 관
29-2* 디래깅 출력 튜
1 속도 곡선
2 기동 명령(예: 단자 18)
3 사전 윤활 출력 신호
t
기동 명령이 활성화됩니다(예: 단자 18이 활성화로 설정됩니
1
다). 기동 지연 타이머(
(
29-41 Pre Lube Time
t
기동 지연 타이머가 만료됩니다. 주파수 변환기가 가속을 시
2
작합니다.
t
사전 윤활 타이머(
3
1-71 기동 지연
).
29-41 Pre Lube Time
) 및 사전 윤활 타이머
)가 만료됩니다.
동 중에 모터 기계 부품의 윤활을 필요로 합니다. 이는
특히 모터가 장시간 구동되지 않을 때 해당합니다. 사전
그림 4.2 사전/사후 윤활 기능 예시
윤활은 또한 특정 배기 팬을 구동해야 하는 어플리케이
션을 지원합니다. 사전 윤활 기능은 외부 장치에 신호를
전달하여 구동 명령(예: 기동 요청)의 상승 에지부터 사
파라미터 및이름설명 설정 단위
용자 정의 시간 동안 특정 동작의 수행을 시작합니다.
더 나아가, 기동 지연(
기가 정지된 상태에서 사전 윤활만 시작되고 주파수 변
환기가 가속을 시작하기 직전에 사전 윤활이 완료되는
경우에 입력할 수 있습니다. 사전 윤활은 또한 주파수
변환기가 구동 상태일 때는 항상 외부 장치의 신호가
유지되는 경우 또는 모터가 정지한 후에 신호가 유지되
는 경우에 구성할 수 있습니다(
Time
). 어플리케이션 예시로는 모터/펌프의 기계 부품
또는 일부 유형의 배기 팬 유닛을 윤활하기 위한 장치
가 있습니다.
윤활 장치의 이용 사례로는 기동 요청의 상승 에지에서
윤활을 시작하는 사례가 있습니다. 특정 시간 동안 기동
을 지연하고 지연이 만료되고 주파수 변환기가 기동할
때 윤활을 정지합니다.
그림 4.2
는 기능의 각기 다른 사용 방법을 보여줍니다.
이 사례에서 주파수 변환기가 이미 가속 중일 때 지연
이 만료됩니다.
오.
1-71 기동 지연
)은 주파수 변환
29-42 Post Lube
표 4.1
에서 관련 파라미터를 참조하십시
29-40 Pre/
Post Lube
Function
29-41 Pre
Lube Time
29-42 Post
Lube Time
표 4.1 사전/사후 윤활 파라미터
사전/사후 윤활 기능을
선택합니다.
지연
가 가감속을 시작하기
전에 지연을 설정합니
다.
기동 신호 이후의 신호
시간을 입력합니다.
29-40 Pre/Post Lube
Function
윤활만
에만 사용합니다.
모터가 정지된 후의 신
호 기간을 선택합니다.
29-40 Pre/Post Lube
Function
윤활 및 구동 및 사후
윤활
만 사용합니다.
1-71 기동
를 사용하여 모터
에서
[1] 사전
을 선택한 경우
에서
[3] 사전
을 선택한 경우에
[0]*사용안함
[1] 사전 윤활만
[2] 사전윤활 및
구동
[3] 사전윤활 및
구동 및 사후윤활
0-600 (*10) s
0-600 (*10) s
-
4.2.5 29-5* 유량 확인
유량 확인 기능은 외부 이벤트를 기다리는 동안 모터/펌
프를 구동할 필요가 있는 어플리케이션을 위해 설계되
었습니다. 유량 확인 감시장치는 게이트 밸브, 유량 스
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 93
Page 96

130BD766.10
N
MAX
N
MIN
0
0
1
1
0
1
0
1
2
3
4
t0 <t1 t2
T
T
T
T
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
적용 예
VLT® AQUA Drive FC 202
위치 또는 이들과 유사하게 장치가 개방 위치에 있고
유량이 있음을 알려주는 외부 장치의 센서에서 디지털
입력 신호의 수신을 예상합니다.
Time
에서 사용자는 유량을 확인하기 위해 VLT
29-50 Validation
®
AQUA Drive FC 202가 외부 장치의 디지털 입력 신호
를 얼마나 오래 기다리는지를 정의합니다. 유량이 확인
되고 나면 주파수 변환기는 유량 확인 시간 이후의 신
주의 사항
파라미터는 디지털 입력이 유량 확인으로 구성된 경우
에만 LCP에서 보입니다.
4.2.6 수중 펌프를 위한 고급형 최소 속
도 감시
호를 다시 점검한 다음 정상적으로 구동합니다. 유량 감
시장치가 활성화되어 있는 동안 LCP 상태는 "유량 확
44
인 중"으로 표시됩니다.
유량 검증 시간 또는 유량 확인 시간이 만료된 후에 예
상된 디지털 입력 신호가 비활성화되면 주파수 변환기
는
유량 확인 안됨
알람과 함께 트립됩니다.
일부 펌프는 저속에서 작동하기에 매우 민감합니다. 그
대표적인 이유는 저속에서는 냉각 또는 윤활이 충분하
지 않기 때문입니다.
과부하 조건에서 주파수 변환기는 통합 보호 기능을 사
용하여 자체를 보호하며 여기에는 감속이 포함됩니다.
예를 들어, 전류 한계 컨트롤러는 속도를 낮출 수 있습
니다. 이는 일부의 경우 속도가
[RPM]
및
4-12 모터 속도 하한 [Hz]
4-11 모터의 저속 한계
에서 지정된 속도
보다 낮아질 수 있음을 의미합니다.
고급형 최소 속도 감시 기능은 속도가 특정 값 아래로
떨어지면 주파수 변환기를 트립합니다. 펌프의 펌프 모
터가
1-79 압축기 기동 후 트립 시까지 최대시간
시된 시간 내에
1-86 트립 속도 하한 [RPM]
에 명
에 명시된
속도에 도달하지 못하면(가속이 너무 오래 걸리면) 주파
수 변환기가 트립됩니다.
축기 기동 후 트립 시까지 최대시간
1-71 기동 지연
의 타이머는 기동
및
1-79 압
명령이 활성화될 때 동시에 시작합니다. 예를 들어, 이
는
1-71 기동 지연
시까지 최대시간
의 값이
1-79 압축기 기동 후 트립
의 값 이상이면 주파수 변환기가 절대
기동하지 않음을 의미합니다.
1 속도 곡선
2 기동 명령(예: 단자 18)
3 유량이 있음을 확인하는 외부 장치의 디지털 신호.
4 유량 검증
t
기동 명령이 활성화됩니다(예: 단자 18이 활성화로 설정됩니
0
다).
t
29-50 Validation Time
1
털 신호가 활성화됩니다.
t
29-51 Verification Time
2
장치의 신호를 다시 점검한 다음 정상적으로 구동합니다.
가 만료되기 전에 외부 장치의 디지
가 끝나면 주파수 변환기는 외부
그림 4.3 유량 확인
T
1-71
T
1-79
N
1-86
1 정상 운전.
1-71 기동 지연
1-79 압축기 기동 후 트립 시까지 최대시간
T
의 시간이 포함됩니다.
1-71
1-86 트립 속도 하한 [RPM]
이 값 미만으로 떨어지면 주파수 변환기가 트립됩니다.
.
. 이 시간에는
. 정상 운전 도중에 속도가
그림 4.4 고급형 최소 속도 감시
파라미터 및이름설명 설정 단위
29-50 Validati
on Time
29-51 Verifica
tion Time
표 4.2 유량 확인 파라미터
94 Danfoss A/S © 09/2014 All rights reserved. MG20N639
검증 시간 동안 디지
털 입력이 활성화되
어 있어야 합니다.
검증 시간이 끝날 때
에도 디지털 입력이
계속 활성화되어 있
으면 유량이 확인됩
니다.
0.1–999.0
(*용량에 따라 다
름)
0.1–255.0
(*15)
s
s
Page 97

2 sec
Max. ref.
P 3-03
2 sec
Preset ref.(0)
P 3-10(0)
State 1
State 3State 2
Preset ref.(1)
P 3-10(1)
Term 18
P 5-10(start)
130BA157.11
적용 예 설계 지침서
4.3 어플리케이션 셋업 예시
본 절에서의 예는 공통 어플리케이션에 대한 요약 참고
자료입니다.
파라미터 설정은 별도의 언급이 없는 한 지역
•
별 초기 값입니다(
단자와 연결된 파라미터와 그 설정은 그림 옆
•
에 표시됩니다.
아날로그 단자 A53 또는 A54에 필요한 스위
•
치 설정 또한 표시됩니다.
SLC 적용 예
과정 1:
1. 기동.
2. 가속.
3. 지령 속도 2초에서 구동.
4. 감속.
5. 정지 시까지 축 고정.
0-03 지역 설정
에서 선택).
주의 사항
STO 기능(옵션)을 사용하는 경우, 공장 초기 프로그래
밍 값 사용 시 주파수 변환기를 작동하기 위해서는 단
자 12(또는 13)와 단자 37 사이에 점퍼 와이어가 필요
할 수도 있습니다.
4 4
그림 4.5 가속/감속
3-41 1 가속 시간과 3-42 1 감속 시간
t
× n
par . 1 − 25
acc
=
t
ramp
단자 27을
norm
ref RPM
[0] 운전하지 않음
으로 설정합니다(
프리셋 지령 0을 최소 프리셋 속도 (
에서 원하는 시간으로 가감속 시간을 설정합니다.
5-12 단자 27 디지털 입력
3-10 프리셋 지령
[0])로 설정하되 최대 지령 속도 (
).
3-03 최대 지령
)의 %로 설
정합니다. 예: 60%
프리셋 지령 1을 두 번째 프리셋 속도(
13-20 SL 컨트롤러 타이머
13-51 SL 컨트롤러 이벤트
13-51 SL 컨트롤러 이벤트
13-51 SL 컨트롤러 이벤트
13-51 SL 컨트롤러 이벤트
13-52 SL 컨트롤러 동작
13-52 SL 컨트롤러 동작
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 95
[0]에서 일정 운전 속도에 대한 타이머 0을 설정합니다. 예: 2 s
[1]의 이벤트 1을
[2]의 이벤트 2를
[3]의 이벤트 3을
[4]의 이벤트 4를
[1]의 동작 1을
[2]의 동작 2를
3-10 프리셋 지령
[10] 프리셋 0 선택
[29] 타이머 0 기동
[1], 예: 0% (0)로 설정합니다.
[1] 참
으로 설정합니다.
[4] 지령 시
로 설정합니다.
[30] 타임아웃 0
[0] 거짓
으로 설정합니다.
으로 설정합니다.
으로 설정합니다.
으로 설정합니다.
Page 98

Event 1 True (1)
Action 1 Select Preset (10)
Start
command
State 0
Stop
command
Event 4 False (0)
Action 4 No Action (1)
State 2
State 1
Event 2 On Reference (4)
Action 2 Start Timer (29)
Event 3 Time Out (30)
Action 3 Select Preset ref. (11)
130BA148.12
적용 예
VLT® AQUA Drive FC 202
13-52 SL 컨트롤러 동작
13-52 SL 컨트롤러 동작
켜짐으로 (
13-00 SL 컨트롤러 모드
[3]의 동작 3을
[4]의 동작 4를
)를 설정합니다.
[11] 프리셋 1 선택
[1] 동작하지 않음
으로 설정합니다.
으로 설정합니다.
기동/정지 명령이 단자 18에 적용됩니다. 만일 정지 신호가 적용되면 주파수 변환기는 감속하다가 코스팅 정지 모드
로 전환됩니다.
44
그림 4.6 SLC 적용 예
4.3.1 수중 펌프 어플리케이션
시스템은 댄포스 VLT® AQUA Drive에 의해 제어되는
수중 펌프와 압력 트랜스미터로 구성되어 있습니다. 트
랜스미터는 주파수 변환기에 4-20 mA 피드백 신호를
전달하며 펌프의 속도를 제어함으로써 일정한 압력을
유지합니다. 수중 펌프 어플리케이션에 맞는 주파수 변
환기를 설계하기 위해서는 고려해야 할 중요 사항이 몇
가지 있습니다. 모터 전류에 따라 주파수 변환기를 선택
합니다.
1. 모터는 고정자와 회전자 사이에 스테인리스강
2. 펌프에는 최저 속도보다 낮게(일반적으로 30
3. 모터 리액턴스는 수중 펌프 모터에 대해 비선
캔이 있는 이른바,
캔 모터
입니다. 일반 모터에
비해 크고 내자성이 높은 에어갭이 있어 자기
장이 보다 약하며 이로 인해 정격 출력이 비슷
한 일반 모터에 비해 정격 전류가 높은 모터가
설계되고 있습니다.
Hz) 구동 시 손상되는 트러스트 베어링이 포함
되어 있습니다.
형이므로 자동 모터 최적화(AMA)를 사용하지
4. 펌프 및 모터의 마모를 최소화하면서 시스템을
5. 우물의 습한 조건을 견딜 수 있는 특수 펌프
못할 수 있습니다. 일반적으로 수중 펌프는 긴
모터 케이블로 운전되며 이는 비선형 모터 리
액턴스를 없애고 주파수 변환기가 AMA를 실
행할 수 있게 합니다. AMA에 실패한 경우, 파
라미터 그룹
1-3* 고급 모터 데이터
에서 모터
데이터를 설정할 수 있습니다(모터 데이터시트
참조). AMA에 성공한 경우, 주파수 변환기는
긴 모터 케이블의 전압 하락에 대해 보상하며
고급 모터 데이터가 수동으로 설정된 경우, 시
스템 성능을 최적화하기 위해서는 모터 케이블
의 길이를 고려해야 한다는 점에 유의합니다.
운전하는 것이 중요합니다. 댄포스 사인파 필
터는 모터 절연 스트레스를 낮추고 수명을 늘
릴 수 있습니다(실제 모터 절연 상태 및 주파수
변환기 du/dt 사양을 확인합니다). 참고로 대부
분의 수중 펌프 제조업체에서 출력 필터의 사
용을 필요로 합니다.
케이블은 일반적으로 비차폐 케이블이므로
EMC 성능 조건을 달성하기 어려울 수 있습니
다. 우물 위에서 차폐 케이블을 사용하고 차폐
96 Danfoss A/S © 09/2014 All rights reserved. MG20N639
Page 99

130BA728.10
Speed
Max. speed
Min. speed
Initial ramp
Fill rate units/sec.
Closed loop
Time
Pipe Fill Vertical Pipes
Filled setpoint
적용 예 설계 지침서
선을 우물 배관에 고정하면 문제를 해결할 수
있습니다. 이 때, 우물 배관은 강철 배관이어야
합니다. 사인파 필터는 또한 비차폐 모터 케이
블로부터 EMI를 줄여줍니다.
습한 설치 조건으로 인해 특수 캔 모터가 사용됩니다.
출력 전류에 따라 시스템에 맞게 주파수 변환기를 설계
하여 정격 출력으로 모터를 구동할 수 있게 할 필요가
있습니다.
펌프의 트러스트 베어링 손상을 방지하고 최대한 신속
히 충분한 모터 냉각을 보장하기 위해서는 최대한 신속
히 정지 상태에서 최저 속도로 펌프를 가감속하는 것이
중요합니다. 주요 수중 펌프 제조업체들은 최대 2~3초
내에 펌프를 최저 속도(30 Hz)까지 가감속하라고 권장
합니다. VLT® AQUA Drive FC 202는 이러한 어플리
케이션에 맞는 초기 및 최종 가감속으로 설계되어 있습
니다. 초기 및 최종 가감속은 각기 다른 2개의 가감속이
고 여기서 초기 가감속이 활성화되며 정지 상태에서 최
저 속도로 모터가 가감속하며 최저 속도에 도달하면 정
상 가감속으로 자동 전환됩니다. 최종 가감속은 그와 반
대로 정지 시 최저 속도에서 정지까지 모터를 가감속합
니다.
장을 4.2 엄선된 어플리케이션 기능
에 설명된 바
와 같이 고급형 최소 속도 감시의 활성화 또한 고려합
니다.
추가적인 펌프 보호를 위해 드라이 런 감지 기능을 사
용합니다. 자세한 정보는
프로그래밍 지침서
를 참조하
십시오.
수격을 방지하기 위해 배관 급수 모드를 활성화할 수
있습니다. 댄포스 주파수 변환기는 PID 제어기를 통한
수직 배관 급수 기능을 사용하여 사용자가 지정한 속도
(단위/초)로 압력을 서서히 가속할 수 있습니다. 활성화
된 경우에는 기동 후 최소 속도에 도달하면 주파수 변
환기가 배관 급수 모드로 전환됩니다. 사용자가 지정한
급수 설정포인트에 도달할 때까지 압력이 서서히 가속
되며 주파수 변환기의 배관 급수 모드가 자동으로 비활
성화된 후에는 정상 폐회로 운전을 계속합니다.
주의 사항
아날로그 입력 2, (단자 54) 형식을 mA로 설정합니다
(202 스위치).
파라미터 설정
파라미터
1-20 모터 출력[kW]/1-21 모터 동력 [HP]
1-22 모터 전압
1-24 모터 전류
1-28 모터 회전 점검
1-29 자동 모터 최적화 (AMA)
합니다.
표 4.3 수중 펌프 관련 파라미터
어플리케이션
파라미터 설정
3-02 최소 지령
3-03 최대 지령
3-84 Initial Ramp Time
3-88 Final Ramp Time
3-41 1 가속 시간
3-42 1 감속 시간
4-11 모터의 저속 한계 [RPM]
4-13 모터의 고속 한계 [RPM]
Quick Menu(단축 메뉴)_Function(기능)_Set-up(셋업)
마법사
를 사용하여 PID 제어기의 피드백 설정을 쉽게 셋업합니다.
표 4.4 수중 펌프
어플리케이션 설정의 예시
파라미터
29-00 Pipe Fill Enable
29-04 Pipe Fill Rate
29-05 Filled Setpoint
표 4.5 배관 급수 모드의 설정 예시
에서 축소 자동 모터 최적화를 활성화
최소 지령 단위는
드백 단위
최대 지령 단위는
드백 단위
(2 s)
(2 s)
(8 s, 용량에 따라 다름)
(8 s, 용량에 따라 다름)
(30 Hz)
(50/60 Hz)
설정
(피드백 단위/초)
(피드백 단위)
20-12 지령/피
의 단위와 일치합니다.
20-12 지령/피
의 단위와 일치합니다.
아래의
폐회로
4 4
전기 배선
그림 4.7 수중 펌프 어플리케이션의 배선
MG20N639 Danfoss A/S © 09/2014 All rights reserved. 97
성능
그림 4.8 배관 급수 모드, 성능 곡선
Page 100

적용 예
VLT® AQUA Drive FC 202
4.3.2 기본형 캐스케이드 컨트롤러
기본형 캐스케이드 컨트롤러는 폭넓은 다이내믹 범위에
서 특정 압력(헤드) 또는 레벨을 유지해야 하는 펌프 어
플리케이션에 사용됩니다. 폭넓은 범위에서 가변 속도
로 대형 펌프를 구동하는 것은 펌프 효율이 낮기 때문
에 적합한 해결책이 아닙니다. 실제로 펌프에 대해 정격
최대 부하 속도의 25%가 한계입니다.
44
기본형 캐스케이드 컨트롤러에서는 가변 속도(리드) 모
터를 가변 속도 펌프로 제어하고 최대 2개의 추가적인
일정 속도 펌프를 스테이징 및 디스테이징할 수 있습니
다. 추가적인 일정 속도 펌프를 주전원에 직접 연결하거
나 소프트 스타터를 통해 연결합니다. 초기 펌프의 속도
를 다양하게 함으로써 전체 시스템의 가변 속도 제어가
제공됩니다. 가변 속도가 일정 압력을 유지하여 시스템
스트레스가 줄어들고 펌프 시스템의 운전 소음 또한 줄
어듭니다.
명령은 수동 절체 또는 절체 이벤트 신호 중에서 선택
할 수 있습니다. 절체 이벤트가 선택되면 이벤트가 발생
할 때마다 리드 펌프 절체가 이루어집니다. 선택 항목은
다음과 같습니다.
절체 타이머가 만료될 때마다
•
사전 정의된 일 단위 시점에
•
또는 리드 펌프가 슬립 모드로 전환될 때.
•
실제 시스템 부하에 따라 스테이징이 결정됩니다.
별도의 파라미터로 필요한 총 용량이 >50%일 때만 절
체하도록 제한할 수 있습니다. 총 펌프 용량은 리드 펌
프와 고정 속도 펌프 용량을 합하여 결정됩니다.
대역폭 관리
캐스케이드 제어 시스템에서 고정 속도 펌프의 수시 전
환을 피하기 위해 원하는 시스템 압력이 일정한 수준
이외의 대역폭 내에서 유지됩니다. 스테이징 대역폭은
운전에 필요한 대역폭을 제공합니다. 시스템에서 크고
순간적인 압력 변화가 발생하면 대역폭 무시를 통해 스
테이징 대역폭을 무시하여 순간적인 압력 변화에 대해
즉각적인 응답이 이루어지지 않게 합니다. 시스템 압력
이 안정화되고 정상적인 제어가 가능할 때까지 스테이
징하지 않도록 대역폭 무시 타이머를 프로그래밍할 수
있습니다.
캐스케이드 컨트롤러가 활성화되고 주파수 변환기에서
트립 알람이 발생하면 고정 속도 펌프의 스테이징 및
디스테이징에 의해 시스템 헤드가 유지됩니다. 빈번한
스테이징 및 디스테이징을 방지하고 급격한 압력 변화
를 최소화하기 위해 스테이징 대역폭 대신 폭넓은 고정
속도 대역폭을 사용합니다.
그림 4.9 기본형 캐스케이드 컨트롤러
고정 리드 펌프
모터는 반드시 용량이 동일해야 합니다. 기본형 캐스케
이드 컨트롤러를 사용하면 주파수 변환기가 주파수 변
환기에 내장된 릴레이 2개를 사용하여 동일 용량의 펌
프를 최대 3개까지 제어할 수 있습니다. 가변 펌프(리
드)가 주파수 변환기에 직접 연결되면 내장된 릴레이 2
개가 다른 2개의 펌프를 제어합니다. 리드 펌프 절체가
활성화되면 펌프가 내장된 릴레이에 연결되고 주파수
변환기가 펌프 2개를 운전할 수 있습니다.
리드 펌프 절체
모터는 반드시 용량이 동일해야 합니다. 이 기능을 사용
하면 시스템 내 펌프 (최대 2개의 펌프) 사이에서 주파
수 변환기의 주기를 설정할 수 있습니다. 이 운전에서
펌프 간의 구동 시간이 동일해지고 펌프 유지보수 필요
성이 줄어들며 시스템의 신뢰성 및 수명이 증가합니다.
리드 펌프는 명령 신호 시 또는 스테이징(다른 펌프 추
가) 시 절체할 수 있습니다.
4.3.3 리드 펌프 절체를 통한 펌프 스테
이징
리드 펌프 절체가 활성화되면 최대 2개의 펌프가 제어
됩니다. 절체 명령 시 PID는 정지하고, 리드 펌프는 최
소 주파수(f
로 가속합니다. 리드 펌프의 속도가 디스테이징 주파수
에 도달하면 고정 속도 펌프가 차단(디스테이징)됩니다.
리드 펌프는 계속 가속한 다음 정지할 때까지 감속하고
릴레이 2개는 차단됩니다.
그림 4.10 리드 펌프 절체
)로 감속하며 지연 후에 최대 주파수(f
min
max
)
98 Danfoss A/S © 09/2014 All rights reserved. MG20N639
 Loading...
Loading...