

Page 1
ENGINEERING TOMORROW
Programmeerhandleiding
VLT® AQUA Drive FC 202
Softwareversie: 3.30
vlt-drives.danfoss.com
Page 2

Page 3
Inhoud Programmeerhandleiding
Inhoud
1 Inleiding
1.1 Doel van de handleiding
1.2 Aanvullende hulpmiddelen
1.3 Softwareversie
1.4 Goedkeuringen
1.5 Symbolen
1.6 Denities
1.6.1 Frequentieregelaar 4
1.6.2 Ingang 4
1.6.3 Motor 5
1.6.4 Referenties 5
1.6.5 Diversen 6
1.7 Afkortingen, symbolen en conventies
1.8 Veiligheid
1.9 Elektrische bedrading
2 Programmeren
2.1 Grasch en numeriek lokaal bedieningspaneel
4
4
4
4
4
4
4
8
8
10
13
13
2.2 Programmeren via het grasche LCP
2.2.1 Het LCP-display 13
2.2.2 Snel overzetten van parameterinstellingen naar andere frequentieregelaars 17
2.2.3 Displaymodus 17
2.2.4 Displaymodus – Uitleesstatus selecteren 17
2.2.5 Parametersetup 18
2.2.6 Toetsfuncties van snelmenu 18
2.2.7 Snelmenu, Q3 Functiesetups 19
2.2.8 Snelmenu, Q4 SmartStart 20
2.2.9 Modus Hoofdmenu 20
2.2.10 Parameterselectie 21
2.2.11 Gegevens wijzigen 21
2.2.12 Een tekstwaarde wijzigen 21
2.2.13 Een tekstwaarde wijzigen 21
2.2.14 Oneindig variabele wijziging van een numerieke datawaarde 21
2.2.15 Waarde, stapsgewijs 22
2.2.16 Geïndexeerde parameters uitlezen en programmeren 22
13
2.2.17 Programmeren via het numerieke lokale bedieningspaneel 22
2.2.18 LCP-toetsen 24
3 Parameterbeschrijving
3.1 Parameterselectie
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 1
26
26
Page 4
Inhoud
VLT® AQUA Drive FC 202
3.2 Parameters 0-** Bediening/display
3.3 Parameters 1-** Belasting & motor
3.4 Parameters 2-** Remmen
3.5 Parameters 3-** Ref./Ramp.
3.6 Parameters 4-** Begr./waarsch.
3.7 Parameters 5-** Digitaal In/Uit
3.8 Parameters 6-** Analoog In/Uit
3.9 Parameters 8-** Comm. en opties
3.10 Parameters 9-** PROFIBUS
3.11 Parameters 10-** CAN-veldbus
3.12 Parameters 13-** Smart Logic
3.13 Parameters 14-** Speciale functies
3.14 Parameters 15-** Geg. omvormer
3.15 Parameters 16-** Data-uitlezingen
3.16 Parameters 18-** Info & uitlez.
3.17 Parameters 20-** Omvormer met terugkoppeling
3.18 Parameters 21-** Uitgebr. met terugk.
27
43
69
74
81
86
104
115
129
129
133
155
167
177
185
188
200
3.19 Parameters 22-** Toep. functies
3.20 Parameters 23-** Tijdgebonden functies
3.21 Parameters 24-** Toep. functies 2
3.22 Parameters 25-** Cascaderegelaar
3.23 Parameters 26-** Anal. I/O-optie (MCB 109)
3.24 Parameters 27-** Cascade CTL Option (Cascaderegelaaroptie)
3.25 Parameters 29-** Water Application Functions (Watertoepassingsfuncties)
3.26 Parameters 30-** Speciale functies
3.27 Parameters 31-** Bypass-optie
3.28 Parameters 35-** Sensoringangoptie
4 Parameterlijsten
4.1 Parameteropties
4.1.1 Standaardinstellingen 295
4.1.2 0-** Bediening/display 296
4.1.3 1-** Belasting & motor 298
4.1.4 2-** Remmen 300
4.1.5 3-** Ref./Ramp. 301
209
226
239
245
259
266
281
290
291
292
295
295
4.1.6 4-** Begr./waarsch. 302
4.1.7 5-** Digitaal In/Uit 303
4.1.8 6-** Analoog In/Uit 305
4.1.9 8-** Comm. en opties 307
4.1.10 9-** PROFIdrive 308
4.1.11 10-** CAN-veldbus 309
2 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 5
Inhoud Programmeerhandleiding
4.1.12 13-** Smart Logic 310
4.1.13 14-** Speciale functies 311
4.1.14 15-** Geg. omvormer 313
4.1.15 16-** Data-uitlezingen 315
4.1.16 18-** Info & uitlez. 317
4.1.17 20-** Omvormer met terugkoppeling 318
4.1.18 21-** Uitgebr. met terugk. 319
4.1.19 22-** Toep. functies 321
4.1.20 23-** Tijdgebonden functies 323
4.1.21 24-** Toep. functies 2 324
4.1.22 25-** Cascaderegelaar 324
4.1.23 26-** Anal. I/O-optie 325
4.1.24 29-** Water Application Functions (Watertoepassingsfuncties) 327
4.1.25 30-** Speciale functies 329
4.1.26 31-** Bypass-optie 329
4.1.27 35-** Sensoringangoptie 329
5 Probleem verhelpen
5.1 Statusmeldingen
5.1.1 Waarschuwingen/alarmmeldingen 331
Trefwoordenregister
331
331
338
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 3
Page 6
Inleiding
VLT® AQUA Drive FC 202
11
1 Inleiding
1.1 Doel van de handleiding
De programmeerhandleiding bevat informatie die nodig is
om de frequentieregelaar te programmeren voor uiteenlopende toepassingen.
1.5 Symbolen
In dit document worden de volgende symbolen gebruikt:
WAARSCHUWING
VLT® is een gedeponeerd handelsmerk.
1.2 Aanvullende hulpmiddelen
Er zijn andere informatiebronnen beschikbaar om inzicht te
krijgen in geavanceerde functies en programmering van de
frequentieregelaar.
De Bedieningshandleiding VLT® AQUA Drive FC
•
202 beschrijft de mechanische en elektrische
installatie van de frequentieregelaar.
De VLT® AQUA Drive FC 202 Design Guide biedt
•
gedetailleerde informatie over de mogelijkheden
en functies voor het ontwerpen van motorregelsystemen.
Instructies voor gebruik met optionele
•
apparatuur.
Aanvullende documentatie en handleidingen zijn
beschikbaar bij Danfoss. Zie drives.danfoss.com/knowledge-
center/technical-documentation/ voor een overzicht.
Softwareversie
1.3
Softwareversie: 3.30
Het softwareversienummer is uit te lezen via
parameter 15-43 Softwareversie.
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot ernstig of dodelijk letsel.
VOORZICHTIG
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot licht of matig letsel. Kan tevens worden
gebruikt om te waarschuwen tegen onveilige werkpraktijken.
LET OP
Geeft belangrijke informatie aan, waaronder situaties die
kunnen leiden tot schade aan apparatuur of
eigendommen.
1.6 Denities
1.6.1 Frequentieregelaar
I
VLT,MAX
Maximale uitgangsstroom.
I
VLT,N
Nominale uitgangsstroom die door de frequentieregelaar
wordt geleverd.
U
VLT,MAX
Maximale uitgangsspanning.
1.6.2 Ingang
1.4 Goedkeuringen
4 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Stuurcommando
U kunt de aangesloten motor starten of stoppen via het
LCP en de digitale ingangen.
De functies zijn in 2 groepen verdeeld.
De functies in groep 1 hebben een hogere prioriteit dan
de functies in groep 2.
Groep 1 Reset, vrijloop, reset en vrijloop, snelle stop, DC-
rem, stop en de [O]-toets.
Groep 2 Start, pulsstart, omkeren, start omkeren, jog en
uitgang vasthouden.
Tabel 1.1 Functiegroepen
Page 7
Inleiding Programmeerhandleiding
1.6.3 Motor
Motor actief
Koppel gegenereerd op de uitgaande as en toerental van 0
tpm tot maximaal toerental op motor.
f
JOG
De motorfrequentie wanneer de jogfunctie is geactiveerd
(via digitale klemmen).
f
M
Motorfrequentie.
f
MAX
Maximale motorfrequentie.
f
MIN
Minimale motorfrequentie.
f
M,N
Nominale motorfrequentie (gegevens typeplaatje).
I
M
Motorstroom (actueel).
I
M,N
Nominale motorstroom (gegevens typeplaatje).
n
M,N
Nominaal motortoerental (gegevens typeplaatje).
n
s
Synchroonmotortoerental.
2 × par. . 1 − 23 × 60s
ns=
n
slip
Motorslip.
P
M,N
Nominaal motorvermogen (gegevens typeplaatje in kW of
pk).
T
M,N
Nominaal koppel (motor).
U
M
Momentele motorspanning.
U
M,N
Nominale motorspanning (gegevens typeplaatje).
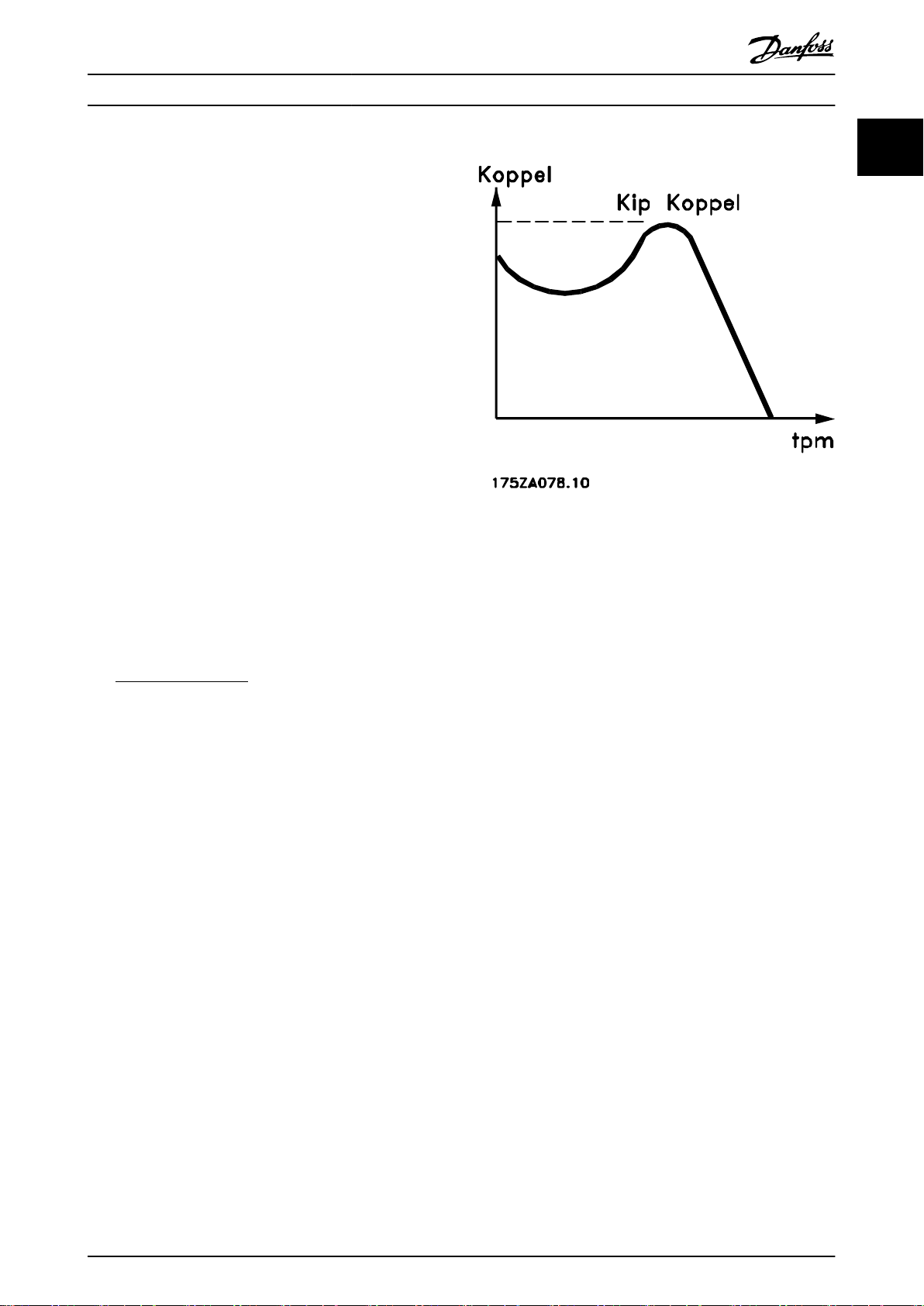
par. . 1 − 39
Losbreekkoppel
Afbeelding 1.1 Losbreekkoppel
η
VLT
Het rendement van de frequentieregelaar wordt gedenieerd als de verhouding tussen het uitgangsvermogen en
het ingangsvermogen.
Startdeactiveercommando
Een stopcommando behorend tot groep 1 van de
stuurcommando's – zie Tabel 1.1.
Stopcommando
Een stopcommando behorend tot groep 1 van de
stuurcommando's – zie Tabel 1.1.
1.6.4 Referenties
Analoge referentie
Een signaal dat naar analoge ingang 53 of 54 (spanning of
stroom) wordt gestuurd.
Binaire referentie
Een signaal dat naar de seriële-communicatiepoort wordt
gestuurd.
Digitale referentie
Een gedenieerde, vooraf ingestelde referentie die kan
worden ingesteld van -100% tot +100% van het referentiebereik. Selectie van 8 vooraf ingestelde referenties via de
digitale klemmen.
Pulsreferentie
Een pulsfrequentiesignaal dat naar de digitale ingangen
(klem 29 of 33) wordt gestuurd.
Ref
MAX
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 100% van de volledige schaal (gewoonlijk 10 V,
20 mA) en de totale referentie. De maximumreferentiewaarde wordt ingesteld in parameter 3-03 Max. referentie.
1 1
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 5
Page 8

Inleiding
VLT® AQUA Drive FC 202
11
Ref
MIN
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 0% (gewoonlijk 0 V, 0 mA, 4 mA) en de totale
referentie. De minimumreferentiewaarde wordt ingesteld in
parameter 3-02 Minimumreferentie.
1.6.5 Diversen
Analoge ingangen
De analoge ingangen worden gebruikt om diverse functies
van de frequentieregelaar te besturen.
Er zijn 2 typen analoge ingangen:
Stroomingang, 0-20 mA en 4-20 mA
Spanningsingang, -10 V DC tot +10 V DC.
Analoge uitgangen
De analoge uitgangen kunnen een signaal van 0-20 mA,
4-20 mA leveren.
Automatische aanpassing motorgegevens, AMA
Het AMA-algoritme bepaalt de elektrische parameters voor
de aangesloten motor bij stilstand.
Remweerstand
De remweerstand is een module die het remvermogen kan
opnemen dat bij regeneratief remmen wordt gegenereerd.
Dit regeneratieve remvermogen verhoogt de DC-tussenkringspanning en een remchopper zorgt ervoor dat het
vermogen wordt overgebracht naar de remweerstand.
CT-karakteristieken
Constant-koppelkarakteristieken, gebruikt voor alle toepassingen zoals transportbanden, verdringerpompen en
kranen.
Digitale ingangen
De digitale ingangen kunnen worden gebruikt voor het
besturen van diverse functies van de frequentieregelaar.
Digitale uitgangen
De frequentieregelaar heeft 2 halfgeleideruitgangen die
een signaal van 24 V DC (maximaal 40 mA) kunnen
leveren.
DSP
Digitale signaalverwerker.
ETR
Elektronisch thermisch relais is een berekening van de
thermische belasting op basis van de actuele belasting en
de tijd. Het doel hiervan is het schatten van de motortemperatuur.
HIPERFACE
HIPERFACE® is een gedeponeerd handelsmerk van
Stegmann.
Initialisatie
Bij initialisatie (parameter 14-22 Bedrijfsmodus) keert de
frequentieregelaar terug naar de standaardinstelling.
®
Intermitterende belastingscyclus
De nominale intermitterende belasting heeft betrekking op
een reeks belastingscycli. Elke cyclus bestaat uit een
belaste en een onbelaste periode. Het kan een periodieke
cyclus of een niet-periodieke cyclus betreen.
LCP
Het lokale bedieningspaneel biedt een complete interface
voor bediening en programmering van de frequentieregelaar. Het bedieningspaneel kan worden losgekoppeld en
op maximaal 3 m (10 ft) van de frequentieregelaar worden
geïnstalleerd, d.w.z. op een frontpaneel, met behulp van de
optionele installatieset.
NLCP
Numerieke lokale bedieningspaneelinterface voor
bediening en programmering van de frequentieregelaar.
Het display is numeriek en het paneel wordt gebruikt om
proceswaarden weer te geven. Het NLCP beschikt niet over
opslag- en kopieerfuncties.
lsb
Minst signicante bit.
msb
Meest signicante bit.
MCM
Staat voor Mille Circular Mil, een Amerikaanse meeteenheid
voor de doorsnede van kabels. 1 MCM = 0,5067 mm².
Online-/oineparameters
Wijzigingen van onlineparameters worden meteen na het
wijzigen van de gegevenswaarde geactiveerd Druk op [OK]
om wijzigingen van oineparameters te activeren.
Proces-PID
De PID-regeling zorgt ervoor dat de vereiste snelheid, druk,
temperatuur en dergelijke worden gehandhaafd door de
uitgangsfrequentie aan te passen aan veranderingen in de
belasting.
PCD
Proces Control Data.
Uit- en inschakelen
Schakel de netvoeding uit totdat het display (LCP) donker
is en schakel de voeding vervolgens weer in.
Pulsingang/incrementele encoder
Een externe, digitale pulstransmitter die wordt gebruikt
voor terugkoppeling van informatie over het motortoerental. De encoder wordt gebruikt in toepassingen
waarvoor een uiterst nauwkeurige snelheidsregeling vereist
is.
RCD
Reststroomapparaat.
Setup
U kunt parameterinstellingen opslaan in 4 setups. Het is
mogelijk om tussen de 4 parametersetups te schakelen en
de ene setup te bewerken terwijl een andere setup actief
is.
6 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 9
Inleiding Programmeerhandleiding
SFAVM
Schakelpatroon genaamd Stator Flux Asynchrone Vectormodulatie (parameter 14-00 Schakelpatroon).
Slipcompensatie
De frequentieregelaar compenseert voor het slippen van
de motor door verhoging van de frequentie op basis van
de gemeten motorbelasting, waardoor het motortoerental
vrijwel constant wordt gehouden.
SLC
De SLC (Smart Logic Control) is een reeks door de
gebruiker gedenieerde acties die wordt uitgevoerd
wanneer de bijbehorende, door de gebruiker gedenieerde
gebeurtenis door de SLC wordt geëvalueerd als true. (Zie
hoofdstuk 3.12 Parameters 13-** Smart Logic).
STW
Statuswoord.
Standaard FC-bus
Omvat een RS485-bus met FC-protocol of MC-protocol. Zie
parameter 8-30 Protocol.
THD
Total Harmonic Distortion – geeft de totale harmonische
vervorming aan.
Thermistor
Een temperatuurafhankelijke weerstand die op de frequentieregelaar of motor wordt aangebracht.
Uitschakeling (trip)
Een toestand die zich voordoet in foutsituaties,
bijvoorbeeld als de frequentieregelaar te maken heeft met
overtemperatuur of wanneer de frequentieregelaar de
motor, het proces of het mechanisme beschermt. De
frequentieregelaar voorkomt een herstart totdat de
oorzaak van de fout is weggenomen. Hef de uitschakeling
(trip) op door de frequentieregelaar opnieuw te starten.
Gebruik de uitschakeling (trip) niet voor persoonlijke
veiligheid.
Uitschakeling met blokkering
De frequentieregelaar gaat in foutsituaties naar deze
toestand om zichzelf te beschermen. Er moet fysiek
worden ingegrepen in de frequentieregelaar, bijvoorbeeld
bij kortsluiting op de uitgang. Een uitschakeling met
blokkering kan alleen worden opgeheven door de
netvoeding te onderbreken, de oorzaak van de fout weg te
nemen en de frequentieregelaar opnieuw aan te sluiten op
het net. Een herstart is niet mogelijk totdat de uitschakelingsstatus is opgeheven door het activeren van de reset of,
in sommige gevallen, doordat een automatische reset is
geprogrammeerd. Gebruik de uitschakeling met blokkering
niet voor persoonlijke veiligheid.
VT-karakteristieken
Variabel-koppelkarakteristieken die worden gebruikt voor
pompen en ventilatoren.
+
VVC
In vergelijking met een standaardregeling van de
spanning-frequentieverhouding zorgt Voltage Vector
Control (VVC+) voor betere dynamische prestaties en
stabiliteit, zowel bij een wijziging van de toerentalreferentie als met betrekking tot het belastingskoppel.
60° AVM
60° asynchrone vectormodulatie (parameter 14-00 Schakelpatroon).
Arbeidsfactor
De arbeidsfactor is de verhouding tussen I1 en I
Arbeids− factor =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
De arbeidsfactor voor 3-faseregeling:
Arbeids− factor =
I1xcosϕ1
I
RMS
=
I
1
aangeziencosϕ1 = 1
I
RMS
De arbeidsfactor geeft aan in hoeverre een frequentieregelaar de netvoeding belast.
Hoe lager de arbeidsfactor, hoe hoger de I
RMS
voor
dezelfde kW-prestatie.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Bovendien betekent een hoge arbeidsfactor dat de
verschillende harmonische stromen zwak zijn.
De DC-spoelen in de frequentieregelaar zorgen voor een
hoge arbeidsfactor, waardoor de belasting op de
netvoeding wordt geminimaliseerd.
Doelpositie
De uiteindelijke doelpositie zoals gespeciceerd door
positioneringscommando's. De proelgenerator gebruikt
deze positie om het snelheidsproel te berekenen.
Aangegeven positie
De huidige positiereferentie die door de proelgenerator is
berekend. De frequentieregelaar gebruikt de aangegeven
positie als setpoint voor positie PI.
Huidige positie
De huidige positie van een encoder, of een waarde die de
motorregeling berekent in een regeling zonder terugkoppeling. De frequentieregelaar gebruikt de huidige positie
als terugkoppeling voor positie PI.
Positiefout
Positiefout is het verschil tussen de huidige positie en de
aangegeven positie. De positiefout is de invoer voor de
positie-PI-regelaar.
Positie-eenheid
De fysieke eenheid voor positiewaarden.
1 1
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 7
Page 10
Inleiding
VLT® AQUA Drive FC 202
11
1.7 Afkortingen, symbolen en conventies
°C
°F
AC Wisselstroom
AEO Automatische energieoptimalisatie
AWG American Wire Gauge
AMA
DC Gelijkstroom
EMC Elektromagnetische compatibiliteit
ETR Elektronisch thermisch relais
f
M,N
FC Frequentieregelaar
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP IP-bescherming
LCP Lokaal bedieningspaneel
MCT Motion Control Tool
n
s
P
M,N
PELV Protective Extra Low Voltage
PCB Printed Circuit Board – printkaart
PM-motor Permanentmagneetmotor
PWM Pulsbreedtemodulatie
tpm Toeren per minuut
Regeneratie Regeneratieklemmen
T
LIM
U
M,N
Graden Celsius
Graden Fahrenheit
Automatische aanpassing motorgegevens
Nominale motorfrequentie
Nominale uitgangsstroom van de
inverter
Stroomgrens
Nominale motorstroom
Maximale uitgangsstroom
Nominale uitgangsstroom die door de
frequentieregelaar wordt geleverd
Synchroonmotortoerental
Nominaal motorvermogen
Koppelbegrenzing
Nominale motorspanning
1.8 Veiligheid
WAARSCHUWING
HOGE SPANNING
Frequentieregelaars bevatten hoge spanning wanneer ze
zijn aangesloten op een netingang, DC-voeding of
loadsharing. Als installatie, opstarten en onderhoud niet
worden uitgevoerd door gekwaliceerd personeel, kan
dat leiden tot ernstig of dodelijk letsel.
Installatie, opstarten en onderhoud mogen
•
uitsluitend worden uitgevoerd door gekwaliceerd personeel.
Controleer met een geschikt spanningsmeetap-
•
paraat of er geen spanning meer op de
frequentieregelaar staat voordat u service- of
reparatiewerkzaamheden gaat uitvoeren.
Veiligheidsvoorschriften
Onderbreek de netvoeding naar de frequentiere-
•
gelaar wanneer er reparaties moeten worden
uitgevoerd. Controleer of de netvoeding is
onderbroken en of de voorgeschreven tijd is
verstreken voordat u motor- en netvoedingsstekkers verwijdert. Zie Tabel 1.2 voor informatie
over de ontladingstijd.
[O] onderbreekt de netvoeding niet en mag dus
•
niet als veiligheidsschakelaar worden gebruikt.
Aard de apparatuur op correcte wijze. Bescherm
•
de gebruiker tegen voedingsspanning en
bescherm de motor tegen overbelasting volgens
de geldende nationale en plaatselijke
voorschriften.
De aardlekstroom is groter dan 3,5 mA.
•
Beveiliging tegen overbelasting van de motor
•
maakt geen deel uit van de fabrieksinstellingen.
Als deze functie vereist is, moet
parameter 1-90 Therm. motorbeveiliging worden
ingesteld op de gegevenswaarde [4] ETR-uitsch. 1
of de gegevenswaarde [3] ETR-waarsch. 1.
Verwijder in geen geval de stekkers naar de
•
motor en netvoeding terwijl de frequentieregelaar is aangesloten op het net. Controleer of de
netvoeding is onderbroken en of de voorgeschreven tijd is verstreken voordat u motor- en
netstekkers verwijdert.
De frequentieregelaar heeft meer spannings-
•
bronnen dan enkel L1, L2 en L3 wanneer
loadsharing (koppeling van de DC-tussenkring) of
externe 24 V DC is geïnstalleerd. Controleer of
alle spanningsbronnen zijn afgeschakeld en de
voorgeschreven tijd is verstreken voordat u
begint met reparatiewerkzaamheden. Zie Tabel 1.2
voor informatie over de ontladingstijd.
8 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 11
Inleiding Programmeerhandleiding
WAARSCHUWING
ONBEDOELDE START
Wanneer de frequentieregelaar is aangesloten op de
netvoeding, DC-voeding of loadsharing, kan de motor op
elk moment starten. Een onbedoelde start tijdens
programmeer-, onderhouds- of reparatiewerkzaamheden
kan leiden tot ernstig of dodelijk letsel of tot schade aan
apparatuur of eigendommen. De motor kan worden
gestart door een externe schakelaar, een veldbuscommando, een ingangsreferentiesignaal vanaf het LCP
of door het opheen van een foutconditie.
Om een onbedoelde motorstart te voorkomen:
Onderbreek de netvoeding naar de frequentie-
•
regelaar.
Druk op [O/Reset] op het LCP voordat u
•
parameters gaat programmeren.
Zorg dat de frequentieregelaar, motor en
•
eventuele door de motor aangedreven
werktuigen volledig bedraad en gemonteerd
zijn voordat u de frequentieregelaar aansluit op
de netvoeding, DC-voeding of loadsharing.
WAARSCHUWING
ONTLADINGSTIJD
De frequentieregelaar bevat DC-tussenkringcondensatoren waarop spanning kan blijven staan, ook wanneer
de frequentieregelaar niet van spanning wordt voorzien.
Er kan hoge spanning aanwezig zijn, ook wanneer de
waarschuwingsleds uit zijn. Als u de aangegeven
wachttijd na afschakeling niet in acht neemt voordat u
onderhouds- of reparatiewerkzaamheden uitvoert, kan
dat leiden tot ernstig of dodelijk letsel.
Stop de motor.
•
Schakel de netvoeding en externe DC-tussen-
•
kringvoedingen af, inclusief backupvoedingen,
UPS-eenheden en DC-tussenkringaansluitingen
naar andere frequentieregelaars.
Onderbreek de voeding naar de PM-motor of
•
vergrendel de motor.
Wacht tot de condensatoren volledig ontladen
•
zijn. De vereiste minimale wachttijd staat
vermeld in Tabel 1.2 en is ook te vinden op het
typeplaatje boven op de frequentieregelaar.
Controleer met een geschikt spanningsmeetap-
•
paraat of de condensatoren volledig ontladen
zijn voordat u service- of reparatiewerkzaamheden gaat uitvoeren.
Spanning
[V]
200–240 0,25-3,7 kW
380–480 0,37-7,5 kW
525–600 0,75-7,5 kW
525–690 – 1,1-7,5 kW
Tabel 1.2 Ontladingstijd
Minimale wachttijd (minuten)
4 7 15
– 5,5-45 kW
(0,34-5 pk)
– 11-90 kW
(0,5-10 pk)
– 11-90 kW
(1-10 pk)
(1,5-10 pk)
(7,5-60 pk)
(15-121 pk)
(15-121 pk)
11-90 kW
(15-121 pk)
LET OP
Volg bij gebruik van Safe Torque O altijd de instructies
in de Bedieningshandleiding VLT® Frequency Converters -
Safe Torque O.
LET OP
Stuursignalen vanuit of interne signalen in de frequentieregelaar kunnen in uitzonderlijke gevallen per ongeluk
geactiveerd of vertraagd worden, of helemaal uitblijven.
Wanneer de frequentieregelaar wordt gebruikt in
situaties waarbij veiligheid essentieel is, mag niet enkel
op deze stuursignalen worden vertrouwd.
LET OP
Gevaarlijke situaties moeten worden geïdenticeerd door
de machinebouwer/integrator die verantwoordelijk is
voor het beoordelen van de noodzakelijke preventiemaatregelen. Mogelijk moet aanvullende bewakings- en
beveiligingsapparatuur worden opgenomen in de
installatie, altijd volgens de geldende nationale veiligheidsvoorschriften, zoals wetgeving met betrekking tot
mechanische werktuigen en regelgeving ter voorkoming
van ongevallen.
Beschermingsmodus
Wanneer een hardwarematige begrenzing van de
motorstroom of DC-tussenkringspanning wordt
overschreden, schakelt de frequentieregelaar naar de
beschermingsmodus. 'Beschermingsmodus' betekent een
wijziging van de PWM-modulatiestrategie en een lagere
schakelfrequentie om verliezen tot een minimum te
beperken. Dat houdt aan tot 10 s na de laatste fout en
verbetert de betrouwbaarheid en degelijkheid van de
frequentieregelaar tijdens het herstellen van de volledige
controle over de motor.
1 1
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 9
Page 12
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Inleiding
VLT® AQUA Drive FC 202
11
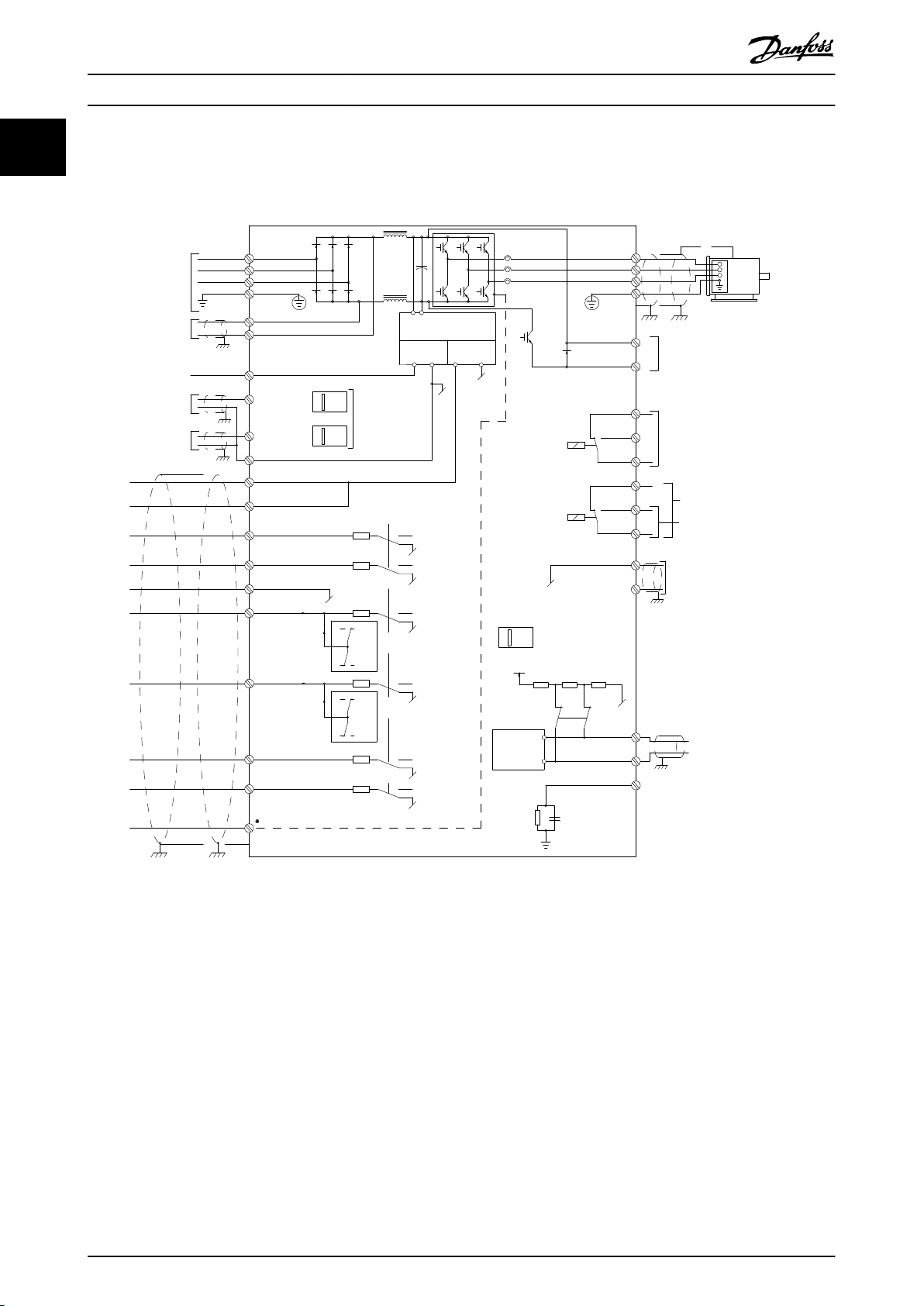
1.9 Elektrische bedrading
1.9.1 Elektrische bedrading – stuurkabels
Afbeelding 1.2 Eenvoudig bedradingsschema
A = analoog, D = digitaal
Klem 37 wordt gebruikt voor Safe Torque O. Installatie-instructies voor de STO-functie vindt u in de Bedieningshandleiding
VLT® Frequency Converters - Safe Torque O.
* Klem 37 is niet beschikbaar in FC 202 (met uitzondering van behuizingsgrootte A1). Relais 2 en klem 29 hebben geen
functie in de VLT® AQUA Drive FC 202.
Bij lange stuurkabels en analoge signalen kunnen, in
uitzonderlijke gevallen en afhankelijk van de installatie,
aardlussen van 50/60 Hz ontstaan als gevolg van verstoringen uit de netvoedingskabels.
In dat geval kan het nodig zijn om de afscherming te
doorbreken of een condensator van 100 nF te plaatsen
tussen de afscherming en de behuizing.
10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Sluit de digitale en analoge in- en uitgangen afzonderlijk
aan op de gemeenschappelijke ingangen (klem 20, 55 en
39) van de frequentieregelaar, om te voorkomen dat
aardstromen van die groepen andere groepen
beïnvloeden. Het inschakelen van de digitale ingang kan
bijvoorbeeld het analoge ingangssignaal verstoren.
Page 13
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 V DC
130BT106.10
PNP (source)
Bedrading digitale ingang
NPN (sink)
Bedrading digitale ingang
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 V DC
130BT107.11
130BA681.10
12 13 18 37
130BA155.12
322719 29 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Snelheid
Veilige stop
Start/Stop
[18]
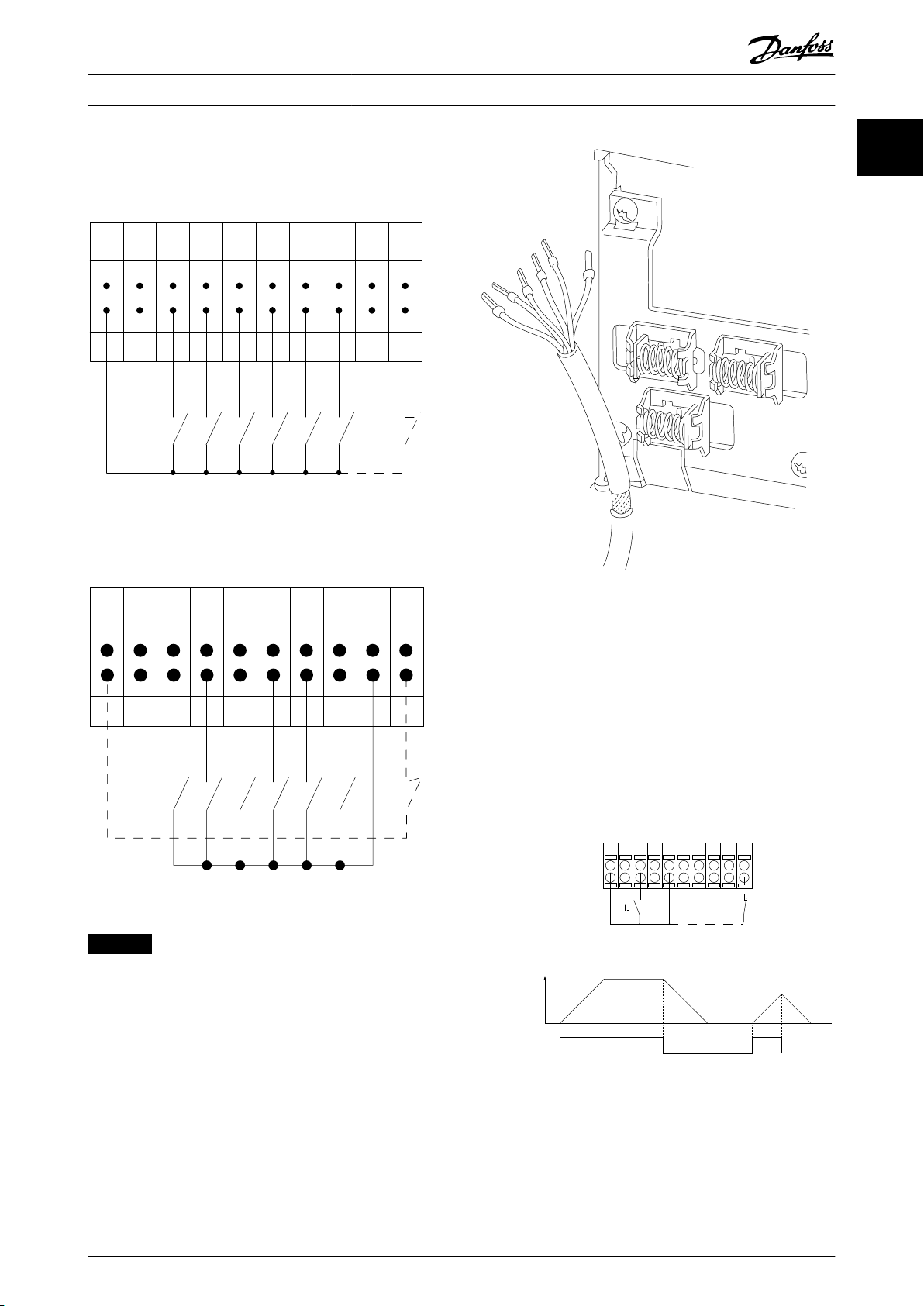
Inleiding Programmeerhandleiding
Ingangspolariteit van stuurklemmen
Afbeelding 1.3 PNP (source)
1 1
Afbeelding 1.5 Aarding van afgeschermde/gewapende
stuurkabels
Afbeelding 1.4 NPN (sink)
LET OP
Stuurkabels moeten zijn afgeschermd/gewapend.
Zie de sectie Aarding van afgeschermde/gewapende
stuurkabels in de design guide voor de juiste eindaan-
sluiting van stuurkabels.
1.9.2 Start/Stop
Klem 18 = Parameter 5-10 Klem 18 digitale ingang [8] Start.
Klem 27 = Parameter 5-12 Klem 27 digitale ingang [0] Niet in
bedrijf (standaard [2] Vrijloop geïnv.).
Klem 37 = Safe Torque O (indien aanwezig).
Afbeelding 1.6 Start/Stop
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 11
Page 14
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Snelheid TPM
P 6-15
Ref. spanning
P 6-11 10 V
+10 V/30 mA
130BA154.11
Inleiding
VLT® AQUA Drive FC 202
11
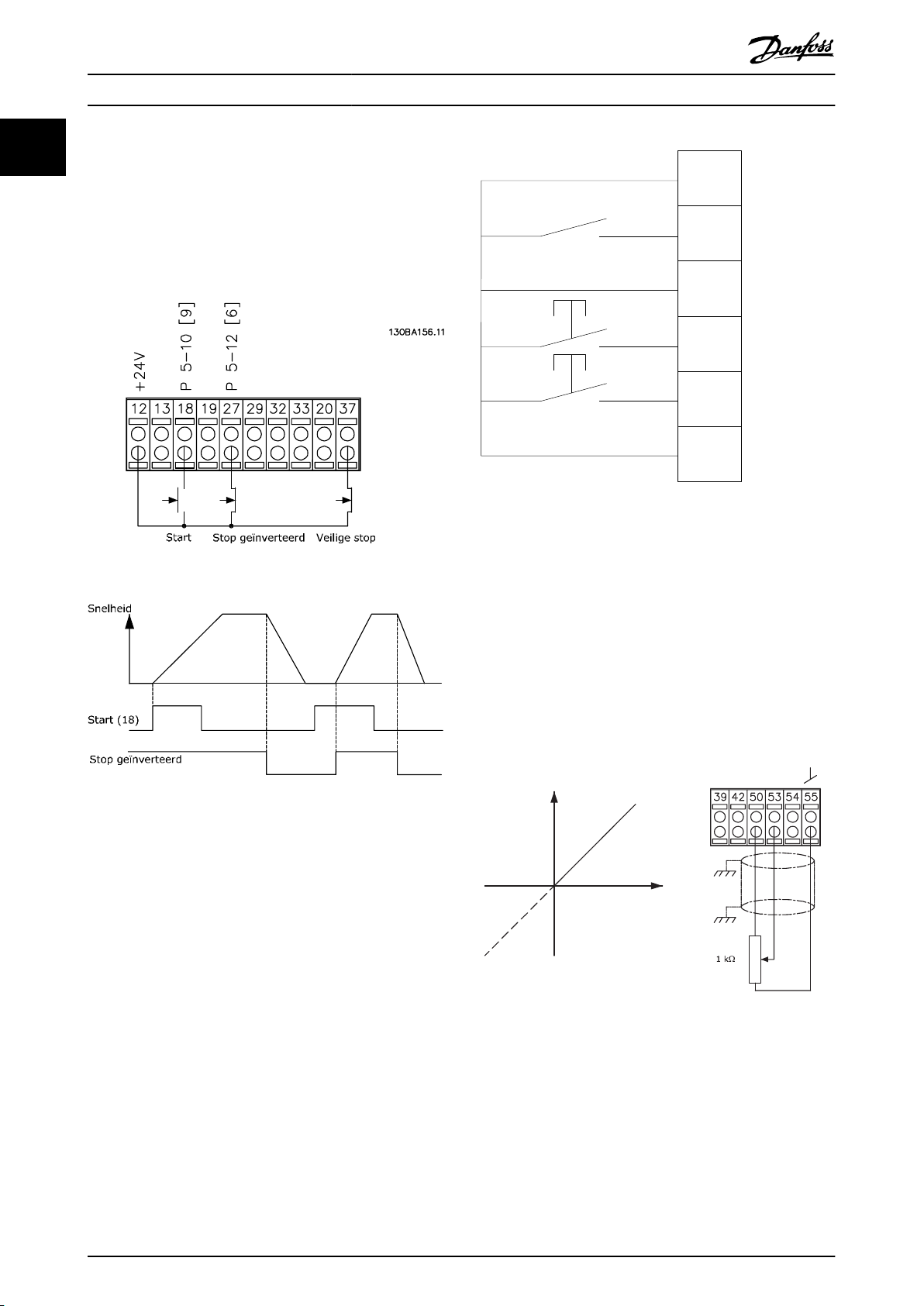
1.9.3 Pulsstart/stop
Klem 18 = Parameter 5-10 Klem 18 digitale ingang [9]
Pulsstart.
Klem 27= Parameter 5-12 Klem 27 digitale ingang [6] Stop
geïnverteerd.
Klem 37 = Safe Torque O (indien aanwezig).
Afbeelding 1.8 Snelheid omhoog/omlaag
1.9.5 Potentiometerreferentie
Spanningsreferentie via een potentiometer
Referentiebron 1 = [1] Anal. ingang 53 (standaard).
Klem 53, lage spanning = 0 V.
Klem 53, hoge spanning = 10 V.
Klem 53 lage ref./terugkopp. waarde = 0 tpm.
Klem 53, hoge ref./terugkopp. waarde = 1500 tpm.
Schakelaar S201 = UIT (U).
Afbeelding 1.7 Pulsstart/stop
1.9.4 Snelheid omhoog/omlaag
Klem 29/32 = Snelh. omh./omlaag
Klem 18 = Parameter 5-10 Klem 18 digitale ingang [9] Start
(standaard).
Klem 27 = Parameter 5-12 Klem 27 digitale ingang [19] Ref.
vasthouden.
Klem 29 = Parameter 5-13 Klem 29 digitale ingang [21]
Snelh. omh.
Klem 32 = Parameter 5-14 Klem 32 digitale ingang [22]
Snelh. omlaag.
Afbeelding 1.9 Potentiometerreferentie
12 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 15
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Programmeren Programmeerhandleiding
2 Programmeren
2.1 Grasch en numeriek lokaal
bedieningspaneel
De frequentieregelaar is eenvoudig te programmeren via
het grasche LCP (LCP 102). Zie
hoofdstuk 2.2.17 Programmeren via het numerieke lokale
bedieningspaneel voor informatie over het gebruik van het
numerieke lokale bedieningspaneel (LCP 101).
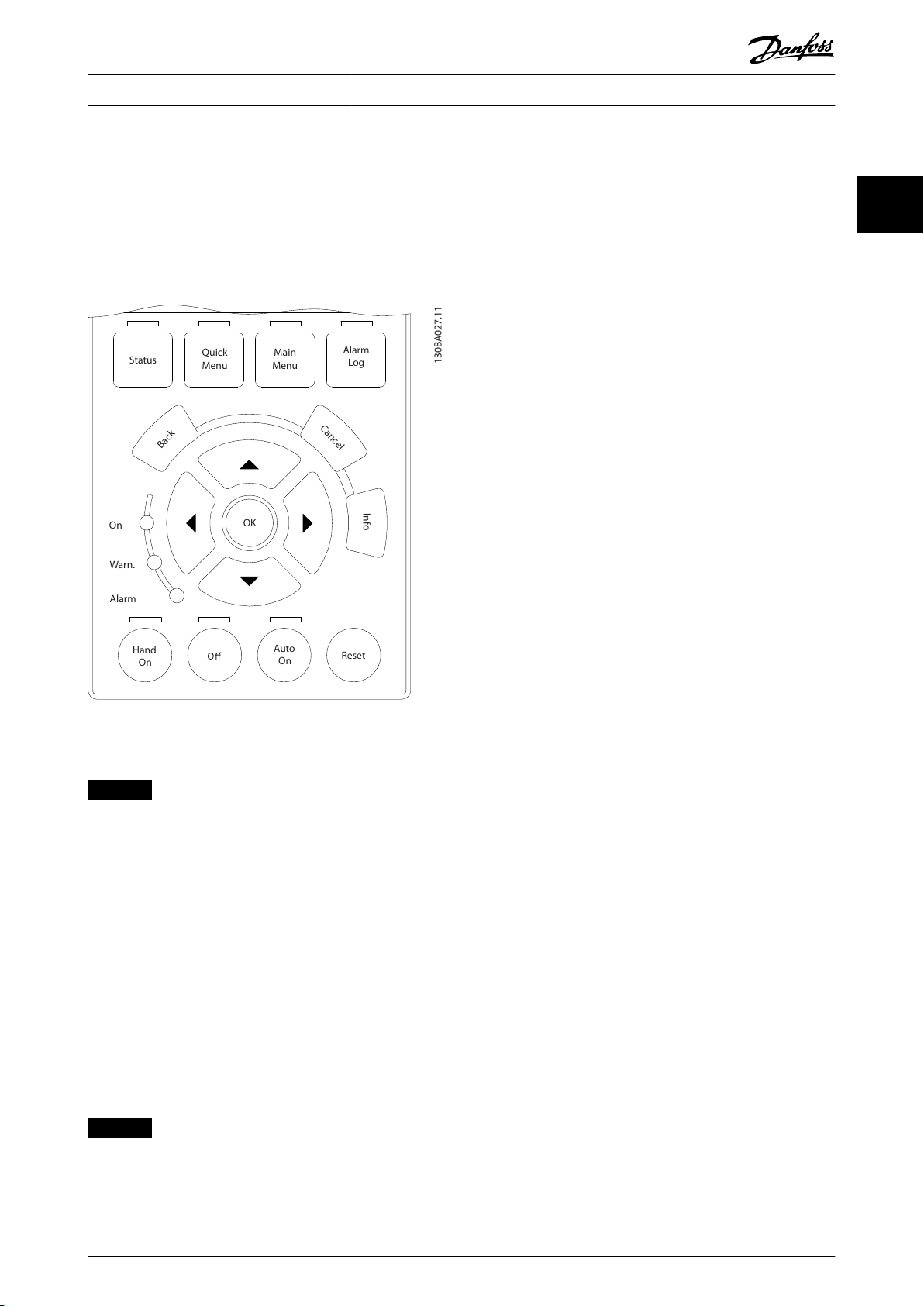
2.2 Programmeren via het grasche LCP
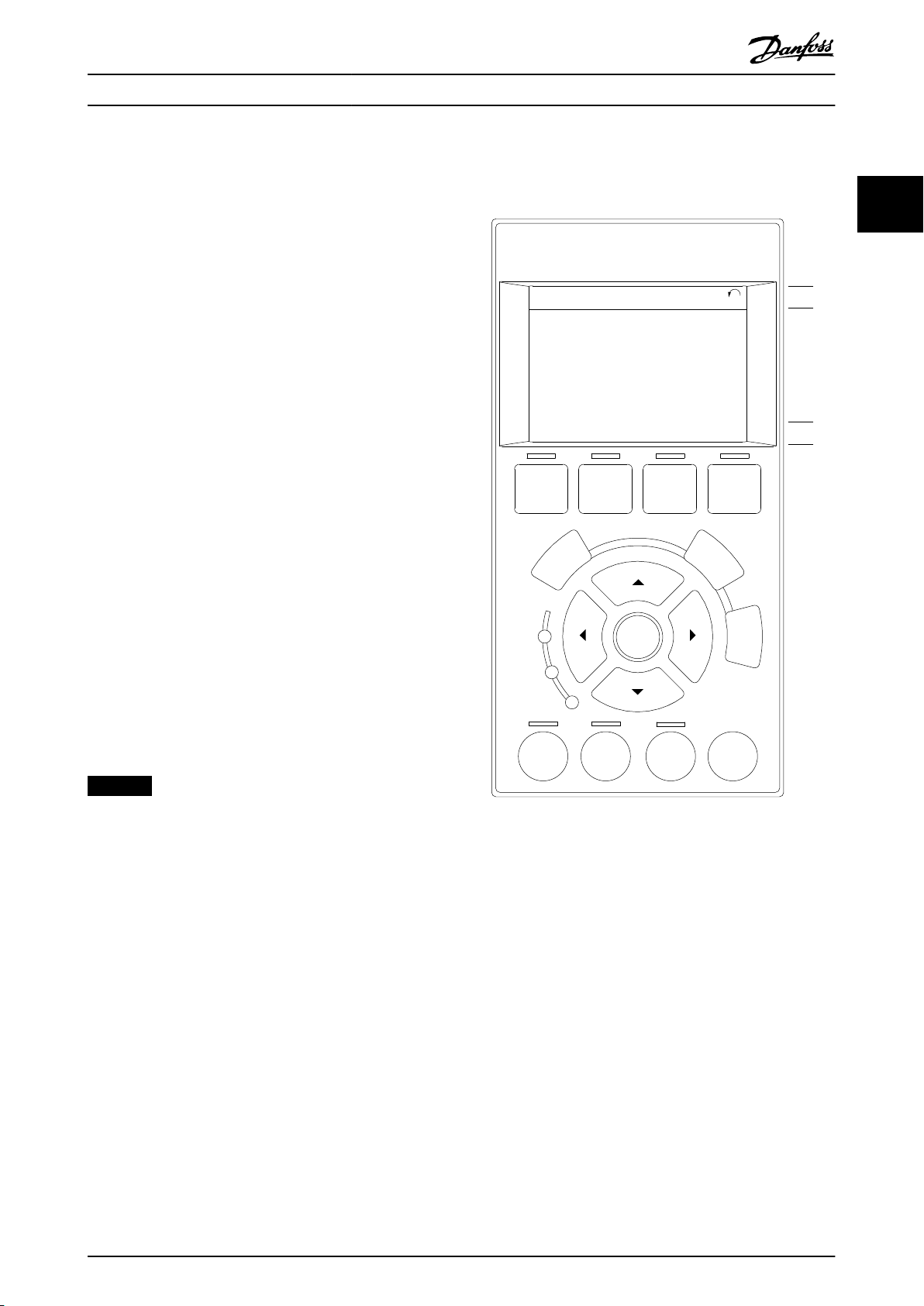
De functies van het LCP zijn onderverdeeld in 4
groepen:
1. Grasch display met statusregels.
2. Menutoetsen en indicatielampjes – parameters
wijzigen en schakelen tussen displayfuncties.
3. Navigatietoetsen en indicatielampjes
4. Bedieningstoetsen en indicatielampjes
Het LCP-display kan tot 5 bedieningsvariabelen tonen
wanneer Status wordt weergegeven.
2 2
Displayregels:
a. Statusregel: statusmeldingen met pictogrammen
en afbeeldingen.
b. Regel 1-2: regels met bedieningsgegevens die
gedenieerd of geselecteerd. Voeg maximaal
zijn
1 extra regel toe door op [Status] te drukken.
c. Statusregel: statusmeldingen met tekst.
LET OP
Als het opstarten wordt vertraagd, toont het LCP de
melding INITIALISATIE totdat het opstarten is voltooid.
Afbeelding 2.1 LCP
Het toevoegen of verwijderen van opties kan het
opstarten vertragen.
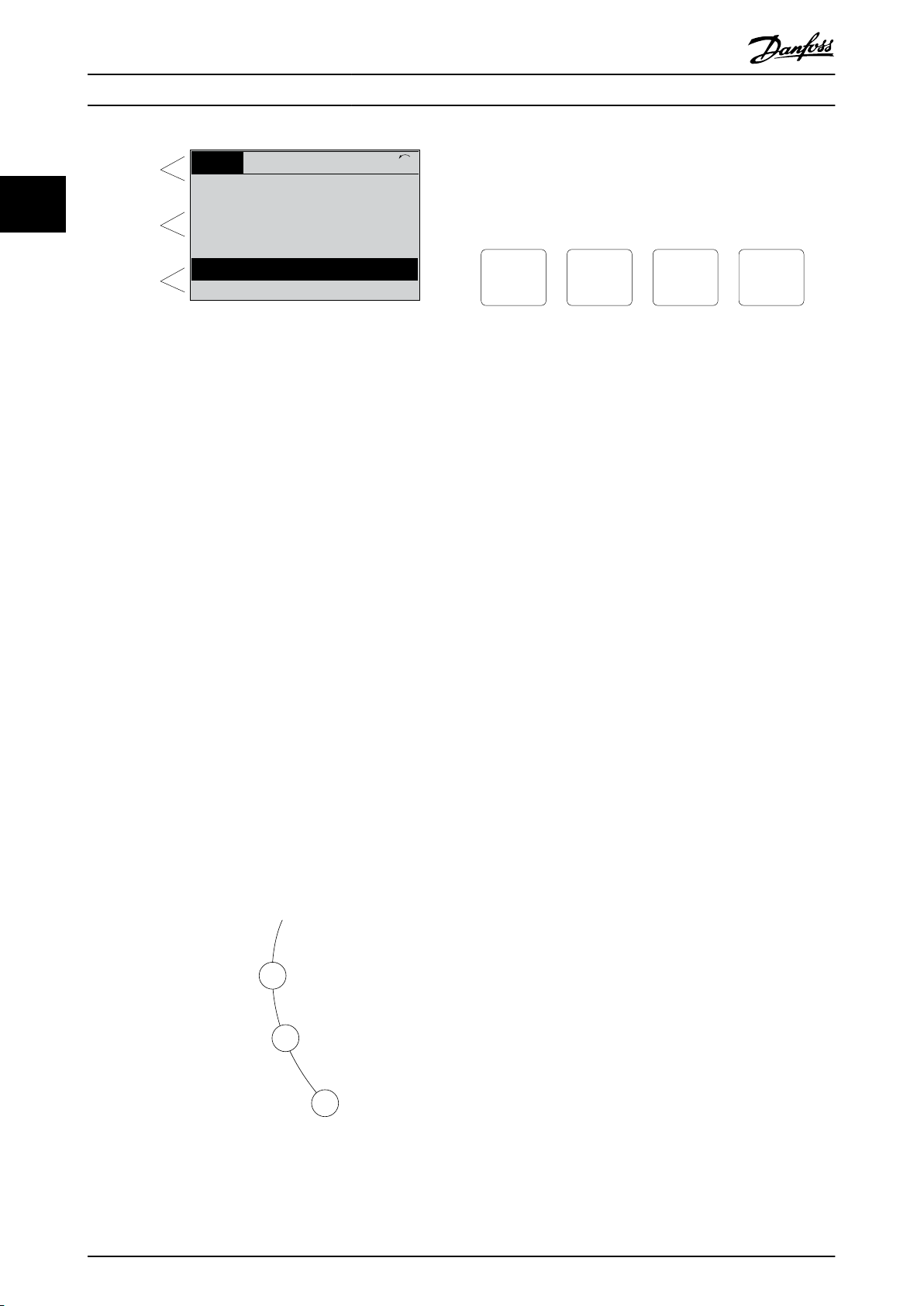
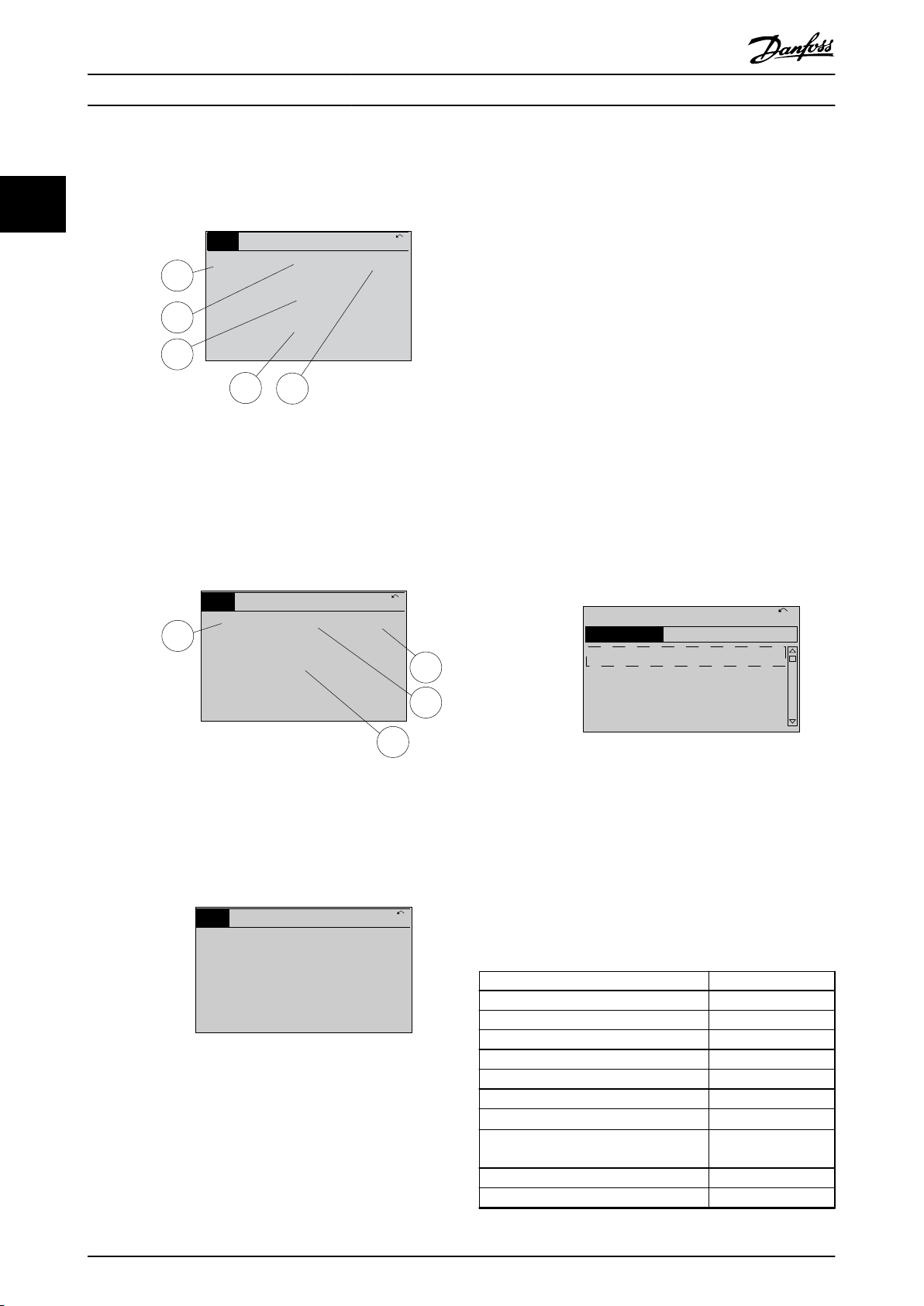
2.2.1 Het LCP-display
Het LCP-display heeft achtergrondverlichting en maximaal
6 alfanumerieke regels. De displayregels tonen de
draairichting (pijl), de geselecteerde setup en de setup
voor programmering. Het display bestaat uit 3 delen.
Bovenste gedeelte
Toont maximaal 2 metingen in de normale bedrijfsstatus.
Middelste gedeelte
De bovenste regel toont maximaal 5 metingen met
bijbehorende eenheden, ongeacht de status (behalve bij
een alarm/waarschuwing).
Onderste gedeelte
Toont altijd de status van de frequentieregelaar in de
statusmodus.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 13
Page 16
Bovenste
gedeelte
Middelste
gedeelte
Onderste
gedeelte
Status
43 tpm
1,4 Hz
Externe (Auto) bediening
! Temp. voed.krt (W29)
2,9%
5,44 A 25,3 kW
1 (1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Programmeren
22
VLT® AQUA Drive FC 202
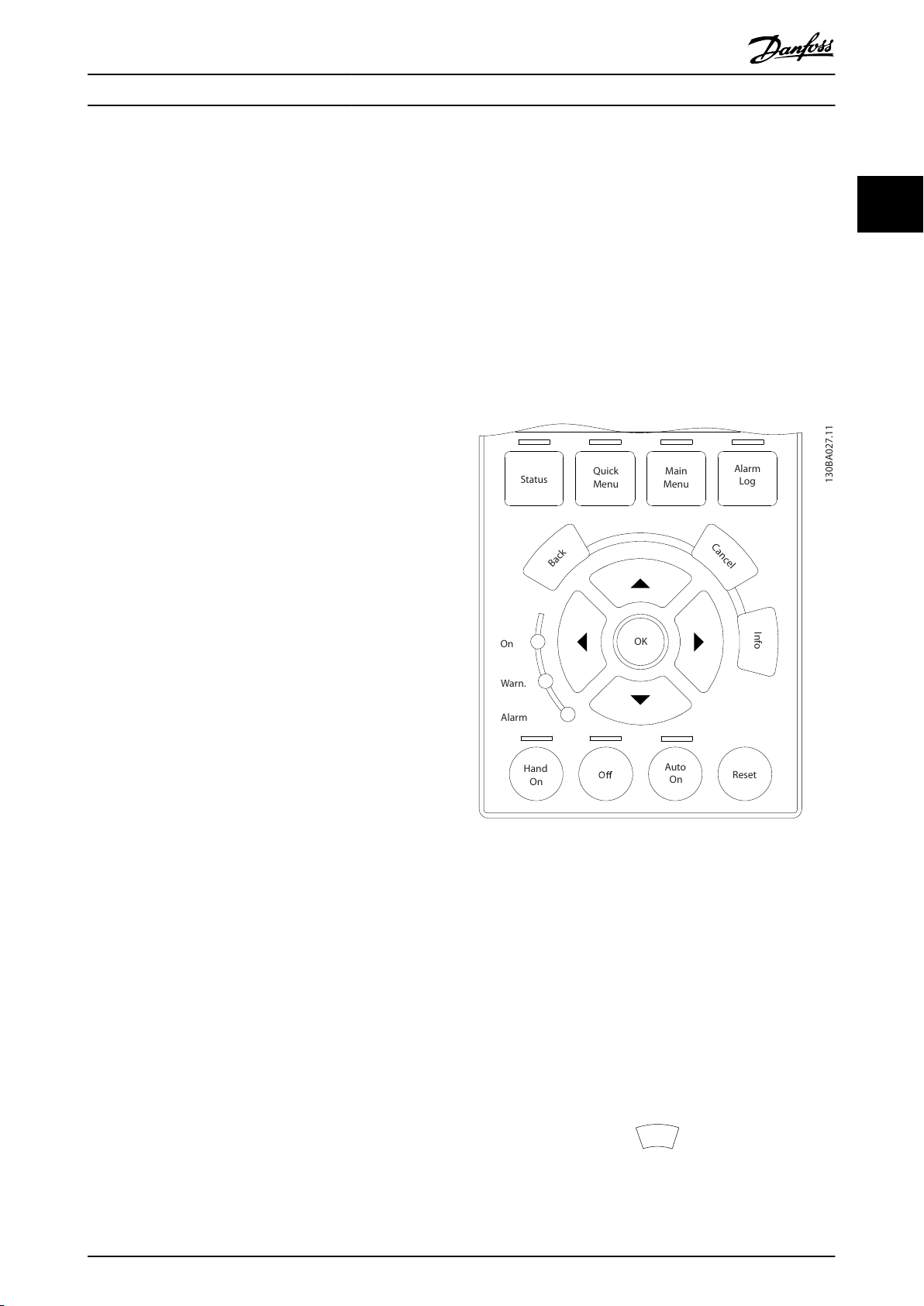
LCP-toetsen
De bedieningstoetsen zijn onderverdeeld naar functie. De
toetsen onder het display en de indicatielampjes dienen
voor het instellen van de parameters en het selecteren van
de displayweergave tijdens normaal bedrijf.
Afbeelding 2.2 Onderste gedeelte
De actieve setup (in parameter 0-10 Actieve setup
geselecteerd als de actieve setup) wordt weergegeven. Bij
het programmeren van een andere setup dan de actieve
setup verschijnt aan de rechterkant het nummer van de
setup die wordt geprogrammeerd.
Aanpassing contrast display
Druk op [Status] en [▲] om het display donkerder te
maken.
Druk op [Status] en [▼] om het display helderder te maken.
De meeste parameterinstellingen kunnen onmiddellijk
worden gewijzigd via het LCP, tenzij er een wachtwoord is
ingesteld via parameter 0-60 Wachtw. hoofdmenu of
parameter 0-65 Wachtw persoonlijk menu.
Indicatielampjes
Als bepaalde drempelwaarden worden overschreden, gaat
het alarm- en/of waarschuwingslampje branden. Er
verschijnen tevens een status- en een alarmtekst op het
LCP.
Het AAN-indicatielampje gaat branden wanneer de
frequentieregelaar spanning ontvangt via het net, een DCaansluitklem of een externe 24 V-voeding. Tegelijkertijd is
de achtergrondverlichting aan.
Groene led/On: geeft aan dat de besturingssectie
•
werkt.
Gele led/Warn.: geeft een waarschuwing aan.
•
Knipperende rode led/Alarm: geeft een alarm aan.
•
Afbeelding 2.3 Indicatielampjes
14 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Afbeelding 2.4 LCP-toetsen
[Status]
Geeft de status van de frequentieregelaar en/of de motor
weer. U kunt uit 3 verschillende uitlezingen kiezen door op
[Status] te drukken: 5-regelige uitlezing, 4-regelige uitlezing
of Smart Logic Control.
Druk op [Status] om de displaymodus te selecteren of om
naar de displaymodus terug te keren vanuit de modi
Snelmenu, Hoofdmenu of Alarm. Gebruik [Status] ook om
heen en weer te schakelen tussen de enkele en de
dubbele uitleesmodus.
[Quick Menu]
Biedt snelle toegang tot de meest gebruikte functies van
de frequentieregelaar.
Via [Quick Menu] hebt u toegang tot de volgende
onderdelen:
Q1: Persoonlijk menu.
•
Q2: Snelle setup.
•
Q3: Functiesetups.
•
Q4: SmartStart.
•
Q5: Gemaakte wijzigingen.
•
Q6: Logdata.
•
Q7: Water en pompen.
•
De functiesetupparameters voorzien in snelle toegang tot
alle benodigde
water- en afvalwatertoepassingen:
•
•
•
•
•
•
•
•
•
•
Het functiesetupmenu bevat ook parameters voor het
selecteren van de volgende instellingen:
specieke parameters voor de meeste
Variabel koppel.
Constant koppel.
Pompen.
Doseerpompen.
Bronpompen.
Boosterpompen.
Mixerpompen.
Blowers voor beluchters.
Andere pompen.
Ventilatortoepassingen.
Page 17
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
B
a
c
k
Programmeren Programmeerhandleiding
Welke variabelen op het LCP moeten worden
•
weergegeven.
Vooraf ingestelde toerentallen.
•
Schaling van analoge referenties.
•
Toepassingen met één zone of meerdere zones
•
en een regeling met terugkoppeling.
Waterspecieke functies.
•
Afvalwatertoepassingen.
•
Het snelmenu Q7: Water en pompen voorziet in directe
toegang tot een aantal van de belangrijkste specieke
functies voor water en pompen:
Q7-1: Speciale ramps (initiële/uiteindelijke ramp,
•
ramp afsluit-/terugslagklep).
Q7-2: Slaapmodus.
•
Q7-3: Deragging.
•
Q7-4: Drooglopen.
•
Q7-5: Einde-curvedetectie.
•
Q7-6: Flowcompensatie.
•
Q7-7: Leidingvulmodus (horizontale, verticale en
•
gemengde systemen).
Q7-8: Regelprestaties.
•
Q7-9: Bewaking mininumtoerental.
•
De parameters van het Snelmenu zijn direct toegankelijk,
tenzij er via 1 van de volgende parameters een
wachtwoord is ingesteld:
Parameter 0-60 Wachtw. hoofdmenu.
•
Parameter 0-61 Toegang hoofdmenu zonder
•
wachtw..
Parameter 0-65 Wachtw persoonlijk menu.
•
Parameter 0-66 Toegang pers. menu zonder
•
wachtw..
Het is mogelijk om rechtstreeks te schakelen tussen de
modi Snelmenu en Hoofdmenu.
[Main Menu]
Deze sectie dient voor het programmeren van alle
parameters.
De parameters van het Hoofdmenu zijn direct toegankelijk,
tenzij er via 1 van de volgende parameters een
wachtwoord is ingesteld:
Parameter 0-60 Wachtw. hoofdmenu.
•
Parameter 0-61 Toegang hoofdmenu zonder
•
wachtw..
Parameter 0-65 Wachtw persoonlijk menu.
•
Parameter 0-66 Toegang pers. menu zonder
•
wachtw..
Voor de meeste water- en afvalwatertoepassingen is het
niet nodig om parameters te wijzigen via het Hoofdmenu.
Snelmenu, Snelle setup en Functiesetups bieden de snelste
en eenvoudigste manier om toegang te krijgen tot alle
benodigde specieke parameters.
Het is mogelijk om rechtstreeks te schakelen tussen de
modi Hoofdmenu en Snelmenu.
Houd [Main Menu] 3 seconden ingedrukt om een parametersnelkoppeling te creëren. De parametersnelkoppeling
biedt directe toegang tot elke mogelijke parameter.
[Alarm Log]
Toont een overzicht van de laatste 5 alarmmeldingen
(genummerd A1-A5). U kunt aanvullende gegevens over
een alarm krijgen door via de navigatietoetsen naar het
alarmnummer te gaan en op [OK] te drukken. U krijgt nu
informatie over de toestand van uw frequentieregelaar net
voordat de alarmmodus werd ingeschakeld.
Afbeelding 2.5 LCP
[Back]
Brengt u een stap of laag terug in de navigatiestructuur.
[Cancel]
Annuleert uw laatste wijziging of commando, zolang het
display niet is gewijzigd.
[Info]
Geeft informatie over een commando, parameter of functie
in elk displayvenster. [Info] geeft uitgebreide informatie
wanneer u hulp nodig hebt.
Verlaat de infomodus door op [Info], [Back] of [Cancel] te
drukken.
Afbeelding 2.6 Back
2 2
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 15
Page 18
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmeren
VLT® AQUA Drive FC 202
[O]
Stopt de aangesloten motor. De toets kan worden
ingesteld op [1] Ingesch. of [0] Uitgesch. via
22
Afbeelding 2.7 Cancel
parameter 0-41 [O]-toets op LCP. Als er geen externe
stopfunctie is geselecteerd en de toets [O] niet actief is,
kunt u de motor stoppen door de spanning te
onderbreken.
[Auto On]
Maakt besturing van de frequentieregelaar via de
Afbeelding 2.8 Info
stuurklemmen en/of seriële communicatie mogelijk. Als
een startsignaal naar de stuurklemmen en/of de bus wordt
gestuurd, start de frequentieregelaar. De toets kan worden
Navigatietoetsen
Met de 4 navigatietoetsen navigeert u tussen de
verschillende opties in Snelmenu, Hoofdmenu en Alarm Log.
Druk op de toetsen om de cursor te verplaatsen.
[OK]
Dient om een parameter te selecteren die wordt
ingesteld op [1] Ingesch. of [0] Uitgesch. via
parameter 0-42 [Auto on]-toets op LCP.
LET OP
Een actief signaal HAND-OFF-AUTO via de digitale
ingangen heeft een hogere prioriteit dan de bedieningstoetsen [Hand On] en [Auto On].
gemarkeerd door de cursor, en om de wijziging van een
parameter te bevestigen.
Lokale bedieningstoetsen
De lokale bedieningstoetsen bevinden zich onderaan het
LCP.
[Reset]
Dient om de frequentieregelaar te resetten na een alarm
(trip). De toets kan worden ingesteld op [1] Ingesch. of [0]
Uitgesch. via parameter 0-43 [Reset]-toets op LCP.
Houd [Main Menu] 3 seconden ingedrukt om een parametersnelkoppeling te creëren. De parametersnelkoppeling
biedt directe toegang tot elke mogelijke parameter.
Afbeelding 2.9 Lokale bedieningstoetsen
[Hand On]
Maakt het mogelijk om de frequentieregelaar via het LCP
te besturen. [Hand On] start ook de motor, waarna de
gegevens voor het motortoerental kunnen worden
ingesteld met de navigatietoetsen. De toets kan worden
ingesteld op [1] Ingesch. of [0] Uitgesch. via
parameter 0-40 [Hand on]-toets op LCP.
Externe stopsignalen die via stuursignalen of via een
veldbus worden geactiveerd, onderdrukken een
startcommando via het LCP.
De volgende stuursignalen blijven actief wanneer [Hand
On] wordt geactiveerd:
[Hand On] - [O] - [Auto On].
•
Reset.
•
Vrijloop geïnverteerd.
•
Omkeren.
•
Setupselectie bit 0 – Setupselectie bit 1.
•
Stopcommando via seriële communicatie.
•
Snelle stop.
•
DC-rem.
•
16 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 19
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programmeren Programmeerhandleiding
2.2.2 Snel overzetten van
parameterinstellingen naar andere
frequentieregelaars
Wanneer de setup van een frequentieregelaar voltooid is,
kunt u de gegevens opslaan in het LCP of op een pc met
behulp van MCT 10 setupsoftware.
De gegevens overzetten van het LCP naar de frequentieregelaar:
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op de [OK]-toets.
3. Selecteer [2] Alles vanaf LCP.
4. Druk op de [OK]-toets.
De parameterinstellingen die in het LCP zijn opgeslagen,
worden nu gekopieerd naar de frequentieregelaar, wat
wordt aangegeven door de voortgangsbalk. Druk op [OK]
als 100% is bereikt.
2.2.3 Displaymodus
Bij normaal bedrijf kunnen permanent maximaal 5
verschillende bedrijfsvariabelen worden aangegeven in het
middelste gedeelte: 1.1, 1.2 en 1.3, en tevens 2 en 3.
2.2.4 Displaymodus – Uitleesstatus
selecteren
Druk op [Status] om te schakelen tussen 3 statusuitlezingsschermen.
In elk statusscherm worden de bedrijfsvariabelen met een
andere opmaak weergegeven. Zie de voorbeelden in dit
hoofdstuk voor meer informatie.
2 2
Afbeelding 2.10 LCP
Gegevens opslaan in het LCP
LET OP
Stop de motor vóór u deze handeling uitvoert.
Gegevens opslaan in het LCP:
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op de [OK]-toets.
3. Selecteer [1] Alles naar LCP.
4. Druk op de [OK]-toets.
Alle parameterinstellingen worden nu opgeslagen in het
LCP, wat wordt aangegeven via de voortgangsbalk. Druk
op [OK] als 100% is bereikt.
Sluit het LCP aan op een andere frequentieregelaar en
kopieer de parameterinstellingen ook naar die frequentieregelaar.
Gegevens overzetten van LCP naar frequentieregelaar
LET OP
Stop de motor vóór u deze handeling uitvoert.
Aan elk van de weergegeven bedrijfsvariabelen kunnen
diverse waarden of metingen worden gekoppeld. De te
tonen waarden of metingen kunnen worden gedenieerd
via de volgende parameters:
Parameter 0-20 Displayregel 1.1 klein.
•
Parameter 0-21 Displayregel 1.2 klein.
•
Parameter 0-22 Displayregel 1.3 klein.
•
Parameter 0-23 Displayregel 2 groot.
•
Parameter 0-24 Displayregel 3 groot.
•
U hebt toegang tot deze parameters via [Quick Menu], Q3
Functiesetups, Q3-1 Alg. instellingen en Q3-11 Displayinstellingen.
Elke uitleesparameter die in parameter 0-20 Displayregel 1.1
klein t/m parameter 0-24 Displayregel 3 groot is
geselecteerd, wordt gekenmerkt door een eigen schaal en
aantal cijfers achter het decimaalteken. Hoe hoger de
numerieke waarde van een parameter, hoe lager het aantal
cijfers dat achter het decimaalteken wordt weergegeven.
Voorbeeld: uitlezing stroom 5,25 A; 15,2 A; 105 A.
Zie parametergroep 0-2* LCP-display voor meer informatie.
Statusscherm I
Deze uitleesstatus is standaard actief na een start of initialisatie.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 17
Page 20
1.1
2
3
1.3
1.2
130BP041.10
799 tpm
Externe (Auto) uitloop
1 (1)
36,4 kW7,83 A
0,000
53,2%
Status
1.1
1.2
2
1.3
130BP062.10
207 tpm
Externe (Auto) bediening
1 (1)
24,4 kW5,25 A
6,9 Hz
Status
130BP063.10
778 tpm
Externe (Auto) bediening
1 (1)
4,0 kW0,86 A
Status: 0 uit 0 (uit)
Wanneer: Actie: -
Status
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Programmeren
VLT® AQUA Drive FC 202
Druk op [Info] voor informatie over de meetkoppelingen
2.2.5 Parametersetup
met de weergegeven bedrijfsvariabelen (1.1, 1.2, 1.3, 2 en
3).
22
Zie de getoonde bedrijfsvariabelen in Afbeelding 2.11.
De frequentieregelaar kan voor bijna elke toepassing
worden gebruikt en biedt 2 programmeermodusopties:
Hoofdmenumodus.
•
Snelmenumodus.
•
Het hoofdmenu biedt toegang tot alle parameters. Het
snelmenu leidt de gebruiker langs diverse parameters,
zodat de frequentieregelaar snel in gebruik kan worden
genomen.
U kunt een parameter wijzigen in de hoofdmenu of de
snelmenumodus.
Afbeelding 2.11 Statusscherm I
2.2.6 Toetsfuncties van snelmenu
Druk op [Quick Menu] voor een overzicht van de
Statusscherm II
Zie de getoonde bedrijfsvariabelen (1.1, 1.2, 1.3 en 2) in
Afbeelding 2.12.
In het voorbeeld zijn toerental, motorstroom,
motorvermogen en frequentie als variabelen geselecteerd
op de eerste 2 regels.
beschikbare opties in het Snelmenu.
Selecteer Q1 Persoonlijk menu om alleen de geselecteerde
persoonlijke parameters weer te geven. Deze parameters
worden geselecteerd in parameter 0-25 Persoonlijk menu. Er
kunnen maximaal 50 parameters worden opgenomen in
dit menu.
Afbeelding 2.14 Quick Menu
Afbeelding 2.12 Statusscherm II
Selecteer Q2 Snelle setup om de motor met behulp van
Statusscherm III
In deze uitleesstatus worden de gebeurtenis en de actie
van de Smart Logic Control weergegeven. Zie parame-
tergroep 13-** Smart Logic voor meer informatie.
enkele parameters vrijwel optimaal af te stellen. De
standaardinstellingen voor de overige parameters houden
rekening met de gewenste stuurfuncties en de conguratie
van de signaalingangen/-uitgangen (stuurklemmen).
De parameter is te selecteren met behulp van de navigatietoetsen. De parameters in Tabel 2.1 zijn beschikbaar.
Parameter Instelling
Parameter 0-01 Taal
Parameter 1-20 Motorverm. [kW] [kW]
Afbeelding 2.13 Statusscherm III
18 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Parameter 1-22 Motorspanning [V]
Parameter 1-23 Motorfrequentie [Hz]
Parameter 1-24 Motorstroom [A]
Parameter 1-25 Nom. motorsnelheid [tpm]
Parameter 5-12 Klem 27 digitale ingang
Parameter 1-29 Autom. aanpassing
motorgeg. (AMA)
Parameter 3-02 Minimumreferentie [tpm]
Parameter 3-03 Max. referentie [tpm]
[0] Geen functie
[1] Volledige AMA
insch.
1)
Page 21
Programmeren Programmeerhandleiding
Parameter Instelling
Parameter 3-41 Ramp 1 aanlooptijd [s]
Parameter 3-42 Ramp 1 uitlooptijd [s]
Parameter 3-13 Referentieplaats
Tabel 2.1 Selectie van parameter
1) Als klem 27 is ingesteld op [0] Niet in bedrijf, is er geen aansluiting
op +24 V nodig voor klem 27.
Selecteer Gemaakte wijz. voor informatie over:
De laatste 10 wijzigingen. Doorloop met de
•
navigatietoetsen [▲] [▼] de laatste 10 gewijzigde
parameters.
De wijzigingen die sinds de standaardinstelling
•
zijn gemaakt.
2.2.7 Snelmenu, Q3 Functiesetups
De functiesetupparameters voorzien in snelle toegang tot
alle benodigde specieke parameters voor de meeste
water- en afvalwatertoepassingen:
Variabel koppel.
•
Constant koppel.
•
Pompen.
•
Doseerpompen.
•
Bronpompen.
•
Boosterpompen.
•
Mixerpompen.
•
Blowers voor beluchters.
•
Andere pompen.
•
De functiesetupparameters zijn als volgt onderverdeeld:
Selecteer Logdata voor informatie over de uitlezingen in de
displayregel. De informatie wordt als graek weergegeven.
Alleen de in parameter 0-20 Displayregel 1.1 klein en
parameter 0-24 Displayregel 3 groot ingestelde displayparameters kunnen worden bekeken. Er kunnen maximaal 120
voorbeelden in het geheugen worden opgeslagen voor
later gebruik.
Ventilatortoepassingen.
•
Het functiesetupmenu bevat ook parameters voor het
selecteren van de volgende instellingen:
Welke variabelen op het LCP moeten worden
•
weergegeven.
Vooraf ingestelde toerentallen.
•
Schaling van analoge referenties.
•
Toepassingen met één zone of meerdere zones
•
en een regeling met terugkoppeling.
Waterspecieke functies.
•
Afvalwatertoepassingen.
•
2 2
Q3-1 Alg. instellingen
Q3-10 Klokinstellingen Q3-11 Displayinstellingen Q3-12 Analoge uitgang Q3-13 Relais
Parameter 0-70 Datum en tijd Parameter 0-20 Displayregel 1.1
klein
Parameter 0-71 Datumindeling Parameter 0-21 Displayregel 1.2
klein
Parameter 0-72 Tijdsindeling Parameter 0-22 Displayregel 1.3
klein
Parameter 0-74 DST/zomer tijd Parameter 0-23 Displayregel 2
groot
Parameter 0-76 DST/zomer tijd
start
Parameter 0-77 DST/zomer tijd
einde
– Parameter 0-38 Displaytekst 2 – –
– Parameter 0-39 Displaytekst 3 – –
Tabel 2.2 Q3-1 Alg. instellingen
Parameter 0-24 Displayregel 3
groot
Parameter 0-37 Displaytekst 1 – –
Parameter 6-50 Klem 42 uitgang
Parameter 6-51 Klem 42 uitgang min.
schaal
Parameter 6-52 Klem 42 uitgang
max. schaal
–
–
Relais 1 ⇒
Parameter 5-40 Functierelais
Relais 2 ⇒
Parameter 5-40 Functierelais
Optierelais 7 ⇒
Parameter 5-40 Functierelais
Optierelais 8 ⇒
Parameter 5-40 Functierelais
Optierelais 9 ⇒
Parameter 5-40 Functierelais
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 19
Page 22
130BP066.10
1107 tpm
0-** Bediening/display
1-** Belasting & motor
2-** Remmen
3-** Ref./Ramp.
3,84 A 1 (1)
Hoofdmenu
Programmeren
Q3-20 Digitale referentie Q3-21 Analoge referentie
22
Parameter 3-02 Minimumreferentie Parameter 3-02 Minimumreferentie
Parameter 3-03 Max. referentie Parameter 3-03 Max. referentie
Parameter 3-10 Ingestelde ref. Parameter 6-10 Klem 53 lage spanning
Parameter 5-13 Klem 29 digitale ingang Parameter 6-11 Klem 53 hoge spanning
Parameter 5-14 Klem 32 digitale ingang Parameter 6-14 Klem 53 lage ref./terugkopp. waarde
Parameter 5-15 Klem 33 digitale ingang Parameter 6-15 Klem 53 hoge ref./terugkopp. waarde
Tabel 2.3 Q3-2 Inst. geen terugk.
Q3-30 Feedback Settings (Terugkoppeling.instell.) Q3-31 PID Settings (PID-instellingen)
Parameter 1-00 Conguratiemodus Parameter 20-81 PID normaal/inv regeling
Parameter 20-12 Referentie/terugk.eenheid Parameter 20-82 PID startsnelheid [tpm]
Parameter 3-02 Minimumreferentie Parameter 20-21 Setpoint 1
Parameter 3-03 Max. referentie Parameter 20-93 PID prop. versterking
Parameter 6-20 Klem 54 lage spanning Parameter 20-94 PID integratietijd
Parameter 6-21 Klem 54 hoge spanning
Parameter 6-24 Klem 54 lage ref./terugkopp. waarde
Parameter 6-25 Klem 54 hoge ref./terugkopp. waarde
Parameter 6-00 Live zero time-out-tijd
Parameter 6-01 Live zero time-out-functie
VLT® AQUA Drive FC 202
Q3-2 Inst. geen terugk.
Q3-3 Inst. Met terugk.
Tabel 2.4 Q3-3 Inst. Met terugk.
2.2.8 Snelmenu, Q4 SmartStart
SmartStart start automatisch op bij de eerste inschakeling
van de frequentieregelaar of na herstel van de fabrieksinstellingen. SmartStart leidt gebruikers via een aantal
stappen naar een correcte en eciënte motorbesturing.
SmartStart kan ook rechtstreeks via het Snelmenu worden
gestart.
De volgende instellingen zijn beschikbaar via SmartStart:
Eén pomp/motor: in een regeling met of zonder
•
terugkoppeling.
Motorwisseling: wanneer 2 motoren samen
•
gebruikmaken van 1 frequentieregelaar.
Eenvoudige cascaderegeling: snelheidsregeling
•
van één pomp in een systeem met meerdere
pompen.
Dit is een
bijvoorbeeld boostersets.
Master/slave: regel tot 8 frequentieregelaars en
•
pompen om te zorgen voor een soepele werking
van het totale pompsysteem.
kosteneectieve oplossing in
2.2.9 Modus Hoofdmenu
Druk op [Main Menu] om naar de hoofdmenumodus te
gaan. Het display toont de uitlezing die in Afbeelding 2.15
is weergegeven.
Op het middelste en onderste gedeelte van het display
wordt een lijst met parametergroepen weergegeven, die
met behulp van de toetsen [▲] en [▼] kunnen worden
geselecteerd.
Afbeelding 2.15 Modus Hoofdmenu
Elke parameter heeft een naam en een nummer die altijd
hetzelfde zijn, ongeacht de programmeermodus. In de
hoofdmenumodus zijn de parameters onderverdeeld in
groepen. Het eerste cijfer van het parameternummer (vanaf
links) geeft het groepsnummer van de parameter aan.
Alle parameterinstellingen kunnen worden gewijzigd in het
20 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Hoofdmenu. Afhankelijk van de geselecteerde conguratie
(parameter 1-00 Conguratiemodus) kunnen sommige
parameters echter onzichtbaar zijn. De instelling Geen
Page 23
130BP067.10
740 tpm
0-01 Taal
[7] Nederlands
10,64 A 1 [1]
0-0*
Basisinstellingen
130BP068.10
740 tpm
0-01 Taal
[7] Nederlands
10,64 A 1 [1]
0-0*
Basisinstellingen
130BP069.10
1-6*
113 tpm 1,78 A 1 (1)
Bel. afhank. inst.
1-60 Belast. comp. bij
lage snelheid
1
0
0%
130BP070.10
1-60 Belast. comp. bij
lage snelheid
160%
Bel. afhank. inst. 1-6*
729 tpm 6,21 A 1 (1)
6
130BP073.10
Programmeren Programmeerhandleiding
terugk. verbergt bijvoorbeeld alle PID-parameters, terwijl bij
andere ingeschakelde opties juist meer parametergroepen
zichtbaar worden.
2.2.10 Parameterselectie
In de hoofdmenumodus zijn de parameters onderverdeeld
in groepen. Selecteer een parametergroep met behulp van
de navigatietoetsen.
Nadat u een parametergroep hebt geselecteerd, kunt u
een parameter selecteren met de navigatietoetsen.
Het middelste gedeelte van het display toont het nummer
en de naam van de parameter, en de geselecteerde
parameterwaarde.
Afbeelding 2.16 Parameterselectie
2.2.13 Een tekstwaarde wijzigen
Als de geselecteerde parameter een numerieke datawaarde
vertegenwoordigt, kunt u de geselecteerde datawaarde
wijzigen met behulp van de navigatietoetsen [◀] [▶] en de
navigatietoetsen [▲] [▼]. Druk op de toetsen [◀] [▶] om de
cursor horizontaal te verplaatsen.
Afbeelding 2.18 Een tekstwaarde wijzigen
Druk op de toetsen [
[▲] verhoogt de waarde en [▼] verlaagt de waarde. Plaats
de cursor op de waarde die u wilt opslaan en druk op
[OK].
] [▼] om de datawaarde te wijzigen.
▲
2 2
2.2.11 Gegevens wijzigen
Voor het wijzigen van gegevens via de snelmenumodus en
de hoofdmenumodus geldt dezelfde procedure. Druk op
[OK] om de geselecteerde parameter te wijzigen.
De procedure voor het wijzigen van data is verschillend
naargelang de geselecteerde parameter een numerieke
datawaarde of een tekstwaarde vertegenwoordigt.
2.2.12 Een tekstwaarde wijzigen
Als de geselecteerde parameter een tekstwaarde heeft,
kunt u de tekstwaarde wijzigen via de toetsen [▲] [▼].
Plaats de cursor op de waarde die u wilt opslaan en druk
op [OK].
Afbeelding 2.17 Een tekstwaarde wijzigen
Afbeelding 2.19 Een datawaarde opslaan
2.2.14 Oneindig variabele wijziging van
een numerieke datawaarde
Als de geselecteerde parameter een numerieke datawaarde
vertegenwoordigt, selecteert u eerst een cijfer met behulp
van [◀] [▶].
Afbeelding 2.20 Een cijfer selecteren
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 21
Page 24
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
Programmeren
VLT® AQUA Drive FC 202
Wijzig het gekozen cijfer variabel met behulp van [▲] [▼].
De plaats van de cursor geeft het geselecteerde cijfer aan.
Plaats de cursor op het cijfer dat u wilt opslaan en druk op
22
[OK].
Afbeelding 2.21 Opslaan
2.2.15 Waarde, stapsgewijs
Bepaalde parameters zijn stapsgewijs te wijzigen. Dit geldt
voor:
Parameter 1-20 Motorverm. [kW].
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Dit betekent dat de parameters niet alleen als een groep
van numerieke datawaarden maar ook als oneindig
variabele numerieke datawaarden kunnen worden
ingesteld.
2.2.16 Geïndexeerde parameters uitlezen
en programmeren
2.2.17 Programmeren via het numerieke
lokale bedieningspaneel
Onderstaande instructies gelden voor het numerieke LCP
(LCP 101).
De functies van het bedieningspaneel zijn onderverdeeld
in 4 groepen:
Numeriek display.
•
Menutoetsen en indicatielampjes – parameters
•
wijzigen en schakelen tussen displayfuncties.
Navigatietoetsen en indicatielampjes
•
Bedieningstoetsen en indicatielampjes
•
Displayregel
Statusmeldingen met pictogrammen en numerieke
waarden.
Indicatielampjes
Groene led/On: geeft aan of de besturingssectie
•
is ingeschakeld.
Gele led/Warn.: geeft een waarschuwing aan.
•
Knipperende rode led/Alarm: geeft een alarm aan.
•
LCP-toetsen
[Main Menu]
Selecteer 1 van de volgende modi:
Status.
•
Snelle setup.
•
Hoofdmenu.
•
Parameters worden geïndexeerd wanneer ze in een
roterende stapel worden geplaatst.
Parameter 15-30 Alarmlog: foutcode tot
parameter 15-32 Alarmlog: tijd bevatten een foutlog die kan
worden uitgelezen. Selecteer een parameter, druk op [OK]
en gebruik de navigatietoetsen [▲] [▼] om de log met
waarden te doorlopen.
Zo wordt parameter 3-10 Ingestelde ref. als volgt gewijzigd:
1. Selecteer de parameter, druk op [OK] en druk op
[▲] [▼] om de geïndexeerde waarden te
doorlopen.
2. Wijzig de waarde van de parameter door de
geïndexeerde waarde te selecteren en op [OK] te
drukken.
3.
Wijzig de waarde met behulp van [▲] [▼].
4. Druk op [OK] om de nieuwe instelling op te slaan.
5. Druk op [Cancel] om te annuleren. Druk op [Back]
om de parameter te verlaten.
22 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 25
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
Programmeren Programmeerhandleiding
2 2
Afbeelding 2.24 Alarm
Snelmenu/Snelle setup
Dienen om alle parameters te programmeren of alleen de
parameters in het snelmenu (zie ook de beschrijving van
LCP 102 in hoofdstuk 2.1 Grasch en numeriek lokaal
bedieningspaneel).
Wanneer de waarde knippert, drukt u op [▲] of [▼] om
parameterwaarden te wijzigen.
1. Druk op [Main Menu] om het hoofdmenu te
selecteren.
2. Selecteer de parametergroep [xx-__] en druk op
[OK].
3. Selecteer de parameter [__-xx] en druk op [OK].
4. Selecteer het arraynummer en druk op [OK] als
de parameter een arrayparameter is.
5. Selecteer de gewenste datawaarde en druk op
[OK].
Parameters met functionele opties geven waarden weer
zoals [1], [2] enz. Zie de beschrijving van de diverse
parameters in hoofdstuk 3 Parameterbeschrijving voor een
beschrijving van de verschillende opties.
Afbeelding 2.22 LCP-toetsen
Statusmodus
In de statusmodus wordt de status van de frequentieregelaar of de motor weergegeven.
Als zich een alarm voordoet, schakelt het NLCP
automatisch naar de statusmodus.
Er kunnen diverse alarmen worden weergegeven.
[Back]
Dient om een stap terug te gaan.
[▲] [▼] dienen om tussen commando's en binnen
parameters te navigeren.
LET OP
Kopiëren van parameters is niet mogelijk met het
numerieke lokale bedieningspaneel LCP 101.
Afbeelding 2.23 Statusmodus
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 23
Afbeelding 2.25 Snelmenu/Snelle setup
Page 26
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmeren
VLT® AQUA Drive FC 202
2.2.18 LCP-toetsen
22
Onderaan het LCP bevinden zich toetsen voor lokale
bediening.
[Reset]
Dient om de frequentieregelaar te resetten na een alarm
(trip). De toets kan worden ingesteld op [1] Ingesch. of [0]
Uitgesch. via parameter 0-43 [Reset]-toets op LCP.
2.3.1 Initialiseren naar
standaardinstellingen
De frequentieregelaar kan op 2 manieren worden geïnitialiseerd, waarbij de standaardinstellingen worden hersteld.
Afbeelding 2.26 LCP-toetsen
[Hand On]
Maakt het mogelijk om de frequentieregelaar via het LCP
te besturen. [Hand On] start ook de motor, waarna het
mogelijk is om de gegevens voor het motortoerental in te
stellen via de navigatietoetsen. De toets kan worden
ingesteld op [1] Ingesch. of [0] Uitgesch. via
parameter 0-40 [Hand on]-toets op LCP.
Externe stopsignalen die via stuursignalen of via een
veldbus worden geactiveerd, onderdrukken een
startcommando via het LCP.
De volgende stuursignalen blijven actief wanneer [Hand
On] wordt geactiveerd:
[Hand On] - [O] - [Auto On].
•
Reset.
•
Vrijloop geïnverteerd.
•
Omkeren.
•
Setupselectie lsb – Setupselectie msb.
•
Stopcommando via seriële communicatie.
•
Snelle stop.
•
DC-rem.
•
[O]
Stopt de aangesloten motor. De toets kan worden
ingesteld op [1] Ingesch. of [0] Uitgesch. via
parameter 0-41 [O]-toets op LCP.
Als er geen externe stopfunctie is geselecteerd en de toets
[O] niet actief is, kunt u de motor stoppen door de
spanning te onderbreken.
[Auto On]
Maakt besturing van de frequentieregelaar via de
stuurklemmen en/of seriële communicatie mogelijk. Als
een startsignaal naar de stuurklemmen en/of de bus wordt
gestuurd, start de frequentieregelaar. De toets kan worden
ingesteld op [1] Ingesch. of [0] Uitgesch. via
parameter 0-42 [Auto on]-toets op LCP.
LET OP
Een actief signaal HAND-OFF-AUTO via de digitale
ingangen heeft een hogere prioriteit dan de bedieningstoetsen [Hand On] en [Auto On].
Aanbevolen initialisatie (via
parameter 14-22 Bedrijfsmodus)
1. Selecteer parameter 14-22 Bedrijfsmodus.
2. Druk op [OK].
3. Selecteer [2] Initialisatie.
4. Druk op [OK].
5. Onderbreek de netvoeding en wacht tot het
display is uitgeschakeld.
6. Sluit de netvoeding weer aan. De frequentieregelaar is nu gereset.
Parameter 14-22 Bedrijfsmodus initialiseert alles behalve:
Parameter 14-50
•
Parameter 8-30 Protocol.
•
Parameter 8-31 Adres.
•
Parameter 8-32 Baudsnelheid.
•
Parameter 8-35 Min. responsvertr..
•
Parameter 8-36 Max. responsvertr..
•
Parameter 8-37 Max. tss.-tekenvertr..
•
Parameter 15-00 Bedrijfsuren tot parameter 15-05 x
•
Overspann..
Parameter 15-20 Hist. log: event tot
•
parameter 15-22 Hist. log: tijd.
Parameter 15-30 Alarmlog: foutcode tot
•
parameter 15-32 Alarmlog: tijd.
Handmatige initialisatie
1. Onderbreek de netvoeding en wacht tot het
display is uitgeschakeld.
2. 2a Druk tegelijkertijd op [Status] – [Main
2b Druk tegelijkertijd op [Menu] – [OK]
3. Laat de toetsen na 5 seconden los.
4. De frequentieregelaar is nu ingesteld volgens de
standaardinstellingen.
RFI-lter.
Menu] – [OK] tijdens het inschakelen
van het grasche display LCP 102.
tijdens het inschakelen van het
numerieke display LCP 101.
24 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 27

Programmeren Programmeerhandleiding
Met deze procedure wordt alles geïnitialiseerd behalve:
Parameter 15-00 Bedrijfsuren.
•
Parameter 15-03 Inschakelingen.
•
Parameter 15-04 x Overtemp..
•
Parameter 15-05 x Overspann..
•
LET OP
Bij het uitvoeren van een handmatige initialisatie worden
ook de instellingen voor seriële communicatie, RFI-lter
(parameter 14-50 RFI-lter) en foutlog gereset.
2 2
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 25
Page 28
Parameterbeschrijving
3 Parameterbeschrijving
3.1 Parameterselectie
VLT® AQUA Drive FC 202
33
De parameters zijn onderverdeeld in diverse parametergroepen om een selectie van de juiste parameters mogelijk te maken
voor een optimale werking van de frequentieregelaar.
Overzicht van parametergroepen
Groep Functie
0-** Bediening/display Parameters die betrekking hebben op de basisfuncties van de frequentieregelaar, de functie van de
LCP-toetsen en de conguratie van het LCP-display.
1-** Belasting & motor Parameters voor motorinstellingen.
2-** Remmen Parameters voor het instellen van remfuncties in de frequentieregelaar.
3-** Ref./Ramp. Parameters voor het gebruiken van referenties, het instellen van begrenzingen en het congureren
van de reactie van de frequentieregelaar op wijzigingen.
4-** Begr./waarsch. Parameters voor het congureren van begrenzingen en waarschuwingen.
5-** Digitaal In/Uit Parameters voor het congureren van de digitale in- en uitgangen.
6-** Analoog In/Uit Parameters voor het congureren van de analoge in- en uitgangen.
8-** Comm. en opties Parametergroep voor het congureren van communicatie en opties.
9-** PROFIdrive
10-** CAN-veldbus
13-** Smart Logic Parametergroep voor Smart Logic Control.
14-** Speciale functies Parametergroep voor het congureren van speciale functies van de frequentieregelaar.
15-** Geg. omvormer Parametergroep met informatie over de frequentieregelaar, zoals bedrijfsgegevens, hardwarecon-
16-** Data-uitlezingen Parametergroep voor data-uitlezing, bijvoorbeeld actuele referenties, spanning, regeling, alarmen,
18-** Info & uitlez. Deze parametergroep bevat de laatste 10 logboeken voor preventief onderhoud.
20-** Omvormer met terugkoppeling
21-** Uitgebr. met terugk. Parameters voor het congureren van de 3 PID-regelaars voor uitgebreide terugkoppeling.
22-** Toep. functies Parameters voor watertoepassingen.
23-** Tijdgebonden functies Parameters voor acties die op dagelijkse of wekelijkse basis moeten worden uitgevoerd.
24-** Toep. functies 2 Parameters voor de frequentieregelaarbypass.
25-** Cascaderegelaar Parameters voor het congureren van de standaard cascaderegelaar voor het sequentieel regelen van
26-** Anal. I/O-optie MCB 109
29-** Water Application Functions
(Watertoepassingsfuncties)
30-** Speciale functies Parameters voor het congureren van speciale functies.
31-** Bypass-optie Parameters voor het congureren van de bypassfunctie.
35-** Sensoringangoptie Parameters voor het congureren van de sensoringangsfunctie.
Parametergroep voor Probus-specieke parameters (VLT® PROFIBUS DP MCA 101 vereist)
Parametergroep voor DeviceNet-specieke parameters (VLT® DeviceNet MCA 104 vereist).
guratie en softwareversies.
waarschuwingen en statuswoorden.
Deze parametergroep wordt gebruikt voor het congureren van de PID-regelaar voor terugkoppeling
die de uitgangsfrequentie van de eenheid regelt.
meerdere pompen.
Parameters voor het congureren van de VLT® Analog I/O MCB 109.
Parameters voor het instellen van waterspecieke functies.
Tabel 3.1 Parametergroepen
Parameterbeschrijvingen en -opties worden op het display
van het grasche of numerieke LCP weergegeven. Zie
hoofdstuk 2 Programmeren voor meer informatie. Druk op
[Quick Menu] of [Main Menu] op het LCP om toegang te
krijgen tot de parameters. Het Snelmenu wordt voornamelijk gebruikt om de eenheid de eerste keer bedrijfsklaar
te maken door programmering van de parameters die
nodig zijn om de eenheid op te starten. Het Hoofdmenu
26 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
biedt toegang tot alle parameters om de eenheid voor een
specieke toepassing te programmeren.
Alle digitale en analoge in- en uitgangsklemmen zijn
multifunctioneel. Alle klemmen zijn standaard ingesteld op
functies die voor de meeste watertoepassingen geschikt
zijn. Als andere speciale functie vereist zijn, moet u die
programmeren via parametergroep 5-** Digitaal In/Uit of
6** Analoog In/Uit.
Page 29
0-01 Taal
Option: Functie:
Bepaalt welke taal wordt gebruikt
op het display.
De frequentieregelaar wordt
geleverd met 2 verschillende
taalpakketten. Engels en Duits zijn
opgenomen in beide pakketten.
Engels kan niet worden gewist of
gewijzigd.
[0] * English Opgenomen in taalpakket 1-2.
[1] Deutsch Opgenomen in taalpakket 1-2.
[2] Francais Opgenomen in taalpakket 1.
[3] Dansk Opgenomen in taalpakket 1.
[4] Spanish Opgenomen in taalpakket 1.
[5] Italiano Opgenomen in taalpakket 1.
[6] Svenska Opgenomen in taalpakket 1.
[7] Nederlands Opgenomen in taalpakket 1.
[10] Chinese Opgenomen in taalpakket 2.
[20] Suomi Opgenomen in taalpakket 1.
[22] English US Opgenomen in taalpakket 1.
[27] Greek Opgenomen in taalpakket 1.
[28] Bras.port Opgenomen in taalpakket 1.
[36] Slovenian Opgenomen in taalpakket 1.
[39] Korean Opgenomen in taalpakket 2.
[40] Japanese Opgenomen in taalpakket 2.
[41] Turkish Opgenomen in taalpakket 1.
[42] Trad.Chinese Opgenomen in taalpakket 2.
[43] Bulgarian Opgenomen in taalpakket 1.
[44] Srpski Opgenomen in taalpakket 1.
[45] Romanian Opgenomen in taalpakket 1.
[46] Magyar Opgenomen in taalpakket 1.
[47] Czech Opgenomen in taalpakket 1.
[48] Polski Opgenomen in taalpakket 1.
[49] Russian Opgenomen in taalpakket 1.
[50] Thai Opgenomen in taalpakket 2.
[51] Bahasa
Indonesia
Opgenomen in taalpakket 2.
0-01 Taal
Option: Functie:
[52] Hrvatski Opgenomen in taalpakket 2.
0-02 Eenh. motortoerental
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Welke informatie op het display
wordt weergegeven, hangt af van
de instellingen in
parameter 0-02 Eenh. motortoerental
en parameter 0-03 Regionale instellingen. De standaardinstelling van
parameter 0-02 Eenh. motortoerental
en parameter 0-03 Regionale instellingen hangt af van de geograsche
regio waar de frequentieregelaar is
geleverd.
LET OP
Bij een wijziging van de
eenheid voor het motortoerental worden bepaalde
parameters teruggezet op hun
oorspronkelijke waarde.
Selecteer de eenheid voor het
motortoerental voordat u
andere parameters wijzigt.
[0] * TPM Selecteer deze optie om variabelen
en parameters met betrekking tot
het motortoerental weer te geven
op basis van het motortoerental
(tpm).
[1] Hz Selecteer deze optie om variabelen
en parameters met betrekking tot
het motortoerental weer te geven
op basis van de motorfrequentie
(Hz).
0-03 Regionale instellingen
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
De weergave op het display hangt
af van de instellingen in
parameter 0-02 Eenh. motortoerental
en parameter 0-03 Regionale instel-
Parameterbeschrijving Programmeerhandleiding
3.2 Parameters 0-** Bediening/display
Parameters die betrekking hebben op de basisfuncties van
de frequentieregelaar, de functie van de LCP-toetsen en de
conguratie van het LCP-display.
3.2.1 0-0* Basisinstellingen
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 27
3 3
Page 30
0-03 Regionale instellingen
Option: Functie:
lingen. De standaardinstelling van
parameter 0-02 Eenh. motortoerental
en parameter 0-03 Regionale instellingen hangt af van de geograsche
regio waar de frequentieregelaar is
geleverd. Pas de instellingen waar
nodig aan.
De niet-gebruikte instelling wordt
onzichtbaar gemaakt.
[0] Internationaal Stelt de eenheid voor
parameter 1-20 Motorverm. [kW] in
op [kW] en stelt
parameter 1-23 Motorfrequentie
standaard in op 50 Hz.
[1] Noord-
Amerika
Stelt de eenheid voor
parameter 1-21 Motorverm. [PK] in
op [pk] en stelt
parameter 1-23 Motorfrequentie
standaard in op 60 Hz.
0-04 Bedieningsstatus bij insch.
Option: Functie:
Selecteer de bedieningsmodus voor
het moment waarop de
netspanning weer wordt
ingeschakeld na een uitschakeling
in de handmatige (lokale) modus.
[0] * Hervatten Start de frequentieregelaar weer op
met dezelfde lokale referentie en
start/stop-instellingen als voorheen.
De start/stop-conditie wordt
toegepast met behulp van [Hand
On]/[O] op het LCP of met lokale
start via een digitale ingang zoals
van kracht was voordat de frequentieregelaar werd uitgeschakeld.
[1] Gedw. stop,
ref=oud
Stopt de frequentieregelaar, maar
slaat tevens de lokale snelheidsreferentie die voor de uitschakeling
actief was, op in het geheugen.
Nadat de netspanning weer is
aangesloten en een startcommando
is gegeven (via de [Hand On]-toets
of een lokaal startcommando via
een digitale ingang) zal de frequentieregelaar weer starten en werken
op basis van de opgeslagen
snelheidsreferentie.
0-05 Eenh lok modus
Option: Functie:
Bepaalt of de lokale referentie
weergegeven moet worden als
toerental van de motoras (in
tpm/Hz) of als percentage.
[0] * Als eenh
motorsnelh
[1] %
Parameterbeschrijving
33
28 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
3.2.2 0-1* Setupafhandeling
Denieer en beheer de afzonderlijke parametersetups.
De frequentieregelaar heeft 4 parametersetups die
onafhankelijk van elkaar kunnen worden geprogrammeerd.
Dat maakt de frequentieregelaar exibel in gebruik en
geschikt om te voldoen aan de eisen ten aanzien van veel
verschillende regelfuncties voor watersystemen, waardoor
vaak bespaard kan worden op externe regelapparatuur. De
setups kunnen bijvoorbeeld worden gebruikt om de
frequentieregelaar te programmeren voor werking met 1
bepaald type regeling in 1 setup (bijvoorbeeld voor
gebruik overdag) en voor werking met een ander type
regeling in een andere setup (bijvoorbeeld voor de
nachtstand). De diverse setups kunnen ook door een OEM
van luchtbehandelingskasten of kant-en-klare eenheden
worden gebruikt om alle toegepaste frequentieregelaars
voor diverse varianten binnen een productgamma op
identieke wijze te programmeren. In dat geval hoeft u
tijdens de productie/inbedrijfstelling enkel maar de juiste
setup te selecteren op basis van het frequentieregelaarmodel.
Selecteer in parameter 0-10 Actieve setup de actieve setup
(dat wil zeggen de setup op basis waarvan de frequentieregelaar op dit moment werkt). De geselecteerde actieve
setup wordt op het LCP weergegeven. Via de optie Multi
setup is het mogelijk om via een digitale ingang of seriële
communicatie te schakelen tussen setups (bijvoorbeeld
voor de nachtstand) terwijl de frequentieregelaar in bedrijf
is of is gestopt. Als het nodig is om tijdens bedrijf van
setup te wisselen, moet parameter 0-12 Setup gekoppeld
aan correct zijn geprogrammeerd. Voor de meeste water-/
afvalwatertoepassingen is het niet nodig om
parameter 0-12 Setup gekoppeld aan te programmeren, ook
niet als een wijziging van setup vereist is tijdens bedrijf.
Voor complexe toepassingen waarbij de volledige
liteit van de verschillende setups wordt gebruikt, kan dat
echter wel nodig zijn. Met behulp van
parameter 0-11 Setup wijzigen is het mogelijk om
parameters binnen elk van de setups te wijzigen terwijl de
frequentieregelaar blijft functioneren in de actieve setup.
De actieve setup kan een andere setup zijn dan de setup
die wordt gewijzigd. Met behulp van parameter 0-51 Kopie
setup is het mogelijk om parameterinstellingen van de ene
setup naar de andere te kopiëren, waardoor de inbedrijf-
exibi-
Page 31

0-10 Actieve setup
Option: Functie:
Selecteer de setup op basis
waarvan de frequentieregelaar
moet werken.
Kopieer een setup met behulp van
parameter 0-51 Kopie setup naar 1 of
alle andere setups. Om conic-
terende instellingen van een
bepaalde parameter binnen 2
verschillende setups te voorkomen,
moet u de setups koppelen via
parameter 0-12 Setup gekoppeld aan.
Stop de frequentieregelaar voordat
u schakelt tussen setups waarbij
parameters die zijn gemarkeerd als
niet te wijzigen tijdens bedrijf,
verschillende waarden hebben.
Niet tijdens bedrijf te wijzigen
parameters zijn in de parameterlijsten in
hoofdstuk 4 Parameterlijsten
gemarkeerd als FALSE.
[0] Fabrieksinstell. Kan niet worden gewijzigd. Deze
setup bevat de dataset van Danfoss
en kan als gegevensbron worden
gebruikt wanneer de andere setups
in een bekende staat moeten
worden teruggebracht.
[1] * Setup 1 [1] Setup 1 tot [4] Setup 4 zijn de 4
afzonderlijke parametersetups
waarbinnen alle parameters kunnen
worden geprogrammeerd.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] Multi setup Dient voor externe setupselectie via
digitale ingangen en de seriëlecommunicatiepoort. Deze setup
maakt gebruik van de instellingen
van parameter 0-12 Setup gekoppeld
aan.
0-11 Setup wijzigen
Option: Functie:
Selecteer de setup die tijdens
bedrijf moet worden bewerkt (dat
wil zeggen geprogrammeerd); dit
kan de actieve setup zijn of 1 van
de inactieve setups. Het nummer
van de setup die wordt gewijzigd,
wordt tussen haakjes weergegeven
op het LCP.
0-11 Setup wijzigen
Option: Functie:
[0] Fabrieksinstell. Deze setup kan niet worden
gewijzigd maar is nuttig als
gegevensbron wanneer de andere
setups in een bekende staat
moeten worden teruggebracht.
[1] Setup 1 [1] Setup 1 tot [4] Setup 4 kunnen
vrij worden gewijzigd tijdens
bedrijf, ongeacht welke setup actief
is.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] * Actieve setup De setup op basis waarvan de
frequentieregelaar werkt, kan
worden gewijzigd tijdens bedrijf.
Het wijzigen van parameters in de
geselecteerde setup wordt
gewoonlijk gedaan vanaf het LCP
maar is tevens mogelijk via een
seriële-communicatiepoort.
0-12 Setup gekoppeld aan
Option: Functie:
Gebruik deze parameter alleen
wanneer een wisseling van setup
met draaiende motor noodzakelijk
is. Deze parameter zorgt ervoor dat
parameters die niet tijdens bedrijf
kunnen worden gewijzigd, dezelfde
waarde hebben in alle relevante
setups.
Om probleemloos over te kunnen
schakelen naar een andere setup
terwijl de frequentieregelaar in
bedrijf is, moeten setups met
parameters die niet tijdens bedrijf
kunnen worden gewijzigd, aan
elkaar worden gekoppeld. De
koppeling zorgt ervoor dat de niet
tijdens bedrijf te wijzigen parameters
worden gesynchroniseerd wanneer
tijdens bedrijf tussen setups wordt
overgeschakeld. Parameters die in
de parameterlijsten (in
hoofdstuk 4 Parameterlijsten) als
FALSE zijn gemarkeerd, kunnen niet
worden gewijzigd terwijl de
frequentieregelaar in bedrijf is.
De functie parameter 0-12 Setup
gekoppeld aan wordt gebruikt
wanneer parameter 0-10 Actieve
setup is ingesteld op [9] Multi setup.
Gebruik [9] Multi setup om tijdens
Parameterbeschrijving Programmeerhandleiding
stelling sneller kan verlopen als vergelijkbare
parameterinstellingen nodig zijn in verschillende setups.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 29
3 3
Page 32

0-12 Setup gekoppeld aan
Option: Functie:
bedrijf tussen setups over te
schakelen terwijl de motor draait.
Bijvoorbeeld:
Gebruik [9] Multi setup om van
setup 1 naar setup 2 over te
schakelen terwijl de motor draait.
Programmeer eerst de parameters
in setup 1 en zorg er vervolgens
voor dat setup 1 en setup 2
gesynchroniseerd (of gekoppeld)
zijn.
De synchronisatie kan op 2
manieren worden uitgevoerd:
•
Stel de te wijzigen setup
via parameter 0-11 Setup
wijzigen in op [2] Setup 2
en stel
parameter 0-12 Setup
gekoppeld aan in op [1]
Setup 1. Hierdoor wordt
het koppelingsproces (de
synchronisatie) gestart.
130BP075.10
Afbeelding 3.1 Setupafhandeling
•
Terwijl setup 1 nog actief
is, kopieert u met
parameter 0-50 LCP
kopiëren setup 1 naar
setup 2. Stel vervolgens
parameter 0-12 Setup
gekoppeld aan in op [2]
Setup 2. Dit start het
koppelingsproces.
130BP076.10
Afbeelding 3.2 Setupafhandeling
Nadat het koppelen is voltooid,
toont parameter 0-13 Uitlez.: Gekopp.
setups setup 1 en 2 om aan te
geven dat alle niet tijdens bedrijf te
wijzigen parameters nu identiek zijn
0-12 Setup gekoppeld aan
Option: Functie:
in setup 1 en setup 2. Als er een
wijziging optreedt in een niet
tijdens bedrijf te wijzigen parameter,
bijvoorbeeld parameter 1-30 Stator-
weerstand (Rs) in setup 2, dan
wordt die ook automatisch
gewijzigd in setup 1. Nu kan er
tijdens bedrijf tussen setup 1 en
setup 2 worden geschakeld.
[0] * Niet
gekoppeld
[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
0-13 Uitlez.: Gekopp. setups
Array [5]
Range: Functie:
0* [0 - 255 ] Geeft een overzicht weer van alle
setups die gekoppeld zijn via
parameter 0-12 Setup gekoppeld aan.
De parameter heeft 1 index voor
elke parametersetup. De waarde die
voor elke index wordt
weergegeven, geeft aan welke
setups zijn gekoppeld aan de
betreende parametersetup.
Index LCP-waarde
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tabel 3.2 Voorbeeld setupkop-
peling
Parameterbeschrijving
33
VLT® AQUA Drive FC 202
30 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 33

0-14 Uitlez.: prog. setups/kanaal
Range: Functie:
0* [-2147483648
-
2147483647 ]
Geef de instelling van
parameter 0-11 Setup wijzigen weer
voor elk van de 4 communicatiekanalen. Wanneer het nummer als
hex-code wordt weergegeven, zoals
op het LCP, geeft elk nummer 1
kanaal weer.
De cijfers 1-4 geven het
setupnummer aan; 'F' betekent
fabrieksinstellingen en 'A' betekent
actieve setup. De kanalen zijn, van
rechts naar links: LCP, veldbus, USB,
HPFB1.5.
Voorbeeld: de waarde AAAAAA21h
betekent dat het veldbuskanaal is
ingesteld op Setup 2 via
parameter 0-11 Setup wijzigen, het
LCP gebruikmaakt van Setup 1 en
dat de overige kanalen allemaal de
actieve setup gebruiken.
0-20 Displayregel 1.1 klein
Option: Functie:
Selecteer een variabele voor
weergave in regel 1, linker positie.
[0] Geen Geen displaywaarde geselecteerd.
[15] Readout:
actual setup
[37] Displaytekst 1 Huidig stuurwoord.
[38] Displaytekst 2
[39] Displaytekst 3
[89] Uitlezing
datum en tijd
[953] Probus
waarsch.-wrd
Geeft PROFIBUS-communicatiewaarschuwingen weer.
0-20 Displayregel 1.1 klein
Option: Functie:
[1005] Uitlez. zend-
foutenteller
Geef het aantal zendfouten van de
CAN-regelaar sinds de laatste
inschakeling weer.
[1006] Uitlez.
ontvangst-
foutenteller
Geef het aantal ontvangstfouten
van de CAN-regelaar sinds de
laatste inschakeling weer.
[1007] Uitlez. bus-uit-
teller
Geeft het aantal bus-uit-gebeurtenissen sinds de laatste inschakeling
weer.
[1013] Waarschu-
wingspar.
Geeft een DeviceNet-speciek
waarschuwingswoord weer. Voor
iedere waarschuwing wordt één bit
toegewezen.
[1230] Waarschu-
wingspar.
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] Bedrijfsuren Geeft het aantal uren weer dat de
frequentieregelaar in bedrijf is
geweest.
[1501] Aantal
draaiuren
Geeft het aantal uren weer dat de
motor heeft gedraaid.
[1502] KWh-teller Geeft het opgenomen netvermogen
in kWh weer.
[1580] Draaiuren
ventilator
[1600] Stuurwoord Geeft het stuurwoord weer dat via
de seriële-communicatiepoort als
hex-code naar de frequentieregelaar
wordt verzonden.
[1601] * Referentie
[Eenh.]
Totale referentie (som van digitaal/
analoog/vooraf ingesteld/bus/
vasthouden ref./versnellen en
vertragen) in de geselecteerde
eenheid.
[1602] Referentie % Totale referentie (som van digitaal/
analoog/vooraf ingesteld/bus/
vasthouden ref./versnellen en
vertragen) in procenten.
[1603] Statuswoord Huidig statuswoord.
[1605] Vrnste huid.
waarde [%]
Een of meer waarschuwingen in
hex-code.
[1609] Standaard
uitlez.
Geeft de door de gebruiker gede-
nieerde uitlezingen weer zoals
ingesteld in:
Parameterbeschrijving Programmeerhandleiding
3.2.3 0-2* LCP-display
Denieer de variabelen die worden weergegeven op het
LCP.
LET OP
Informatie over het schrijven van displayteksten vindt u
in:
•
•
•
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 31
Parameter 0-37 Displaytekst 1.
Parameter 0-38 Displaytekst 2.
Parameter 0-39 Displaytekst 3.
3 3
Page 34

0-20 Displayregel 1.1 klein
Option: Functie:
•
Parameter 0-30 Eenheid
voor uitlezing gebr..
•
Parameter 0-31 Min.
waarde uitlezing klant.
•
Parameter 0-32 Max.
waarde uitlezing klant.
[1610] Verm. [kW] Huidig motorvermogen in kW.
[1611] Verm. [pk] Huidig motorvermogen in pk.
[1612] MotorspanningDe spanning die aan de motor
wordt geleverd.
[1613] Frequentie Motorfrequentie, dat wil zeggen de
uitgangsfrequentie van de frequentieregelaar in Hz.
[1614] Motorstroom Fasestroom van de motor, gemeten
als eectieve waarde.
[1615] Frequentie [%] Motorfrequentie, dat wil zeggen de
uitgangsfrequentie van de frequentieregelaar in procenten.
[1616] Koppel [Nm] Huidige motorbelasting als een
percentage van het nominale
motorkoppel.
[1617] Snelh. [RPM] Toerental in tpm (toeren per
minuut), d.w.z. het toerental van de
motoras bij een regeling met
terugkoppeling, op basis van de
ingevoerde gegevens van het
motortypeplaatje, de uitgangsfrequentie en de belasting van de
frequentieregelaar.
[1618] Motor therm. Thermische belasting van de motor,
berekend via de ETR-functie. Zie
ook parametergroep 1-9* Motortem-
peratuur.
[1619] KTY-sensor-
temperatuur
[1622] Koppel [%] Geeft het geproduceerde actuele
koppel weer als een percentage.
[1623] Motor Shaft
Power [kW ]
Uitlezing van het mechanische
vermogen dat door de motoras
wordt geleverd.
[1624] Calibrated
Stator
Resistance
[1626] Verm. gelterd
[kW]
[1627] Verm. gelterd
[pk]
[1630] DC-aansluitsp. DC-tussenkringspanning in de
frequentieregelaar.
0-20 Displayregel 1.1 klein
Option: Functie:
[1631] System Temp.
[1632] Remenergie/s Het actuele remvermogen dat naar
een externe remweerstand wordt
overgebracht.
Geeft de momentane waarde weer.
[1633] Remenergie/2
min.
Het remvermogen dat naar een
externe remweerstand wordt
overgebracht. Het gemiddelde
vermogen wordt voortdurend
berekend voor de laatste 120
seconden.
[1634] Temp. koellich. De actuele temperatuur van het
koellichaam van de frequentieregelaar. De uitschakellimiet is 95
± 5 °C. Opnieuw inschakelen vindt
plaats bij 70 ± 5 °C.
[1635] Inverter therm. Belastingspercentage van de
inverters.
[1636] Geïnv. nom.
stroom
Nominale stroom van de frequentieregelaar.
[1637] Geïnv. max.
ingangsstr.
De maximale stroom van de
frequentieregelaar.
[1638] SL-controller-
status
Staat van de gebeurtenis zoals
uitgevoerd door de regelaar.
[1639] Temp.
stuurkaart
Temperatuur van de stuurkaart.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Externe
referentie
Som van de externe referenties als
een percentage, dat wil zeggen de
som van analoog, puls en bus.
[1652] Terugk. [Eenh] De signaalwaarde van de ingestelde
digitale ingangen.
[1653] Digi Pot
referentie
Geeft de bijdrage van de digitale
potentiometer aan de terugkoppeling van de actuele referentie
weer.
[1654] Terugk. 1
[Eenh]
Geeft de waarde van terugkoppeling 1 weer. Zie ook
parametergroep 20-0* Terugkop-
peling.
[1655] Terugk. 2
[Eenh]
Geeft de waarde van terugkoppeling 2 weer. Zie ook
Parameterbeschrijving
33
32 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
Page 35

0-20 Displayregel 1.1 klein
Option: Functie:
parametergroep 20-0* Terugkop-
peling.
[1656] Terugk. 3
[Eenh]
Geeft de waarde van terugkoppeling 3 weer. Zie ook
parametergroep 20-0* Terugkop-
peling.
[1658] PID-uitgang
[%]
Geeft de uitgangswaarde van de
PID-regelaar met terugkoppeling
weer als een percentage.
[1659] Adjusted
Setpoint
Geeft het actuele bedrijfssetpoint
weer nadat het is aangepast
vanwege owcompensatie. Zie
parametergroep 22-8* Flowcom-
pensatie.
[1660] Dig. ingang Geeft de status van de digitale
ingangen weer. Signaal laag = 0;
signaal hoog = 1.
Zie parameter 16-60 Dig. ingang
voor informatie over de volgorde.
Bit 0 is de meest rechtse bit.
[1661] Klem 53
schakelinstell.
De instelling van ingangsklem 53.
Stroom = 0; spanning = 1.
[1662] Anal. ingang53De huidige waarde van ingang 53
als referentie- of beveiligingswaarde.
[1663] Klem 54
schakelinstell.
De instelling van ingangsklem 54.
Stroom = 0; spanning = 1.
[1664] Anal. ingang54Huidige waarde van ingang 54 als
referentie- of beveiligingswaarde.
[1665] Anal. uitgang
42 [mA]
De huidige waarde van uitgang 42
in mA. Selecteer met
parameter 6-50 Klem 42 uitgang een
variabele voor uitgang 42.
[1666] Dig. uitgang
[bin]
De binaire waarde van alle digitale
uitgangen.
[1667] Pulsingang
#29 [Hz]
Huidige waarde van de toegepaste
frequentie van klem 29 als een
pulsingang.
[1668] Pulsingang
#33 [Hz]
Huidige waarde van de toegepaste
frequentie van klem 33 als een
pulsingang.
[1669] Pulsuitg. nr. 27
[Hz]
De huidige waarde van de op klem
27 toegepaste pulsen in de digitale
uitgangsmodus.
[1670] Pulsuitg. nr. 29
[Hz]
De huidige waarde van de op klem
29 toegepaste pulsen in de digitale
uitgangsmodus.
[1671] Relaisuitgang
[bin]
Geeft de instelling van alle relais
weer.
0-20 Displayregel 1.1 klein
Option: Functie:
[1672] Teller A Geeft de huidige waarde van teller
A weer.
[1673] Teller B Geeft de huidige waarde van teller
B weer.
[1675] Anal. ingang
X30/11
Huidige waarde van het signaal op
ingang X30/11 (VLT® General
Purpose I/O MCB 101, optioneel).
[1676] Anal. ingang
X30/12
Huidige waarde van het signaal op
ingang X30/12 (VLT® General
Purpose I/O MCB 101, optioneel).
[1677] Anal. uitgang
X30/8 [mA]
Huidige waarde van het signaal op
ingang X30/8 (VLT® General
Purpose I/O MCB 101, optioneel).
Selecteer met parameter 6-60 Klem
X30/8 uitgang de weer te geven
variabele.
[1678] Anal. uitgang
X45/1 [mA]
[1679] Anal. uitgang
X45/3 [mA]
[1680] Veldbus CTW1Het stuurwoord (CTW) dat is
ontvangen vanuit de veldbus.
[1682] Veldbus REF 1 Belangrijkste referentiewaarde die
met het stuurwoord wordt
verzonden vanuit het seriëlecommunicatienetwerk, zoals een
GBS, PLC of andere regelaar.
[1684] Comm. optie
STW
Uitgebreid statuswoord voor
veldbuscommunicatieoptie.
[1685] FC-poort CTW1Het stuurwoord (CTW) dat is
ontvangen vanuit de veldbus.
[1686] FC-poort REF1Het statuswoord (STW) dat naar de
veldbus wordt verzonden.
[1687] Bus Readout
Alarm/Warning
[1689] Congurable
Alarm/Warning
Word
Geeft het alarm-/waarschuwingswoord weer dat is ingesteld
in parameter 8-17 Congurable
Alarm and Warningword.
[1690] Alarmwoord Een of meer alarmen in hex-code
(gebruikt voor seriële
communicatie).
[1691] Alarmwoord 2 Een of meer alarmen in hex-code
(gebruikt voor seriële
communicatie).
[1692] Waarsch.-wrd Een of meer waarschuwingen in
hex-code (gebruikt voor seriële
communicatie).
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 33
3 3
Page 36

0-20 Displayregel 1.1 klein
Option: Functie:
[1693] Waarsch.woor
d 2
Een of meer waarschuwingen in
hex-code (gebruikt voor seriële
communicatie).
[1694] Uitgebr.
statusw.
Een of meer statuscondities in hexcode (gebruikt voor seriële
communicatie).
[1695] Uitgebr.
statusw. 2
Een of meer statuscondities in hexcode (gebruikt voor seriële
communicatie).
[1696] Onderhoudsw
oord
De bits geven de status voor de
geprogrammeerde preventiefonderhoudsgebeurtenissen in
parametergroep 23-1* Onderhoud
aan.
[1697] Alarm Word 3
[1698] Warning Word
3
[1830] Anal. ingang
X42/1
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/1 op de analoge I/Okaart.
[1831] Anal. ingang
X42/3
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/3 op de analoge I/Okaart.
[1832] Anal. ingang
X42/5
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/5 op de analoge I/Okaart.
[1833] Anal. Uit
X42/7 [V]
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/7 op de analoge I/Okaart.
[1834] Anal. Uit
X42/9 [V]
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/9 op de analoge I/Okaart.
[1835] Anal. Uit
X42/11 [V]
Geeft de waarde weer van het
signaal dat wordt toegepast op
klem X42/11 op de analoge I/Okaart.
[1836] Anal. ingang
X48/2 [mA]
[1837] Temp. ing.
X48/4
[1838] Temp. ing.
X48/7
[1839] Temp. ing.
X48/10
0-20 Displayregel 1.1 klein
Option: Functie:
[1850] Uitlezing
sensorless
[eenh]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectier DC
Volt.
[2117] Uitgebr ref 1
[Eenh]
De waarde van de referentie voor
uitgebreide regelaar met terugkoppeling 1.
[2118] Uitgebr
terugk. 1
[Eenh]
De waarde van het terugkoppelingssignaal voor uitgebreide
regelaar met terugkoppeling 1.
[2119] Uitgebr verm
1 [%]
De uitgangswaarde van uitgebreide
regelaar met terugkoppeling 1.
[2137] Uitgebr ref 2
[Eenh]
De waarde van de referentie voor
uitgebreide regelaar met terugkoppeling 2.
[2138] Uitgebr
terugk. 2
[Eenh]
De waarde van het terugkoppelingssignaal voor uitgebreide
regelaar met terugkoppeling 2.
[2139] Uitgebr verm
2 [%]
De uitgangswaarde van uitgebreide
regelaar met terugkoppeling 2.
[2157] Uitgebr ref 3
[Eenh]
De waarde van de referentie voor
uitgebreide regelaar met terugkoppeling 3.
[2158] Uitgebr
terugk. 3
[Eenh]
De waarde van het terugkoppelingssignaal voor uitgebreide
regelaar met terugkoppeling 3.
[2159] Uitgebr verm
3 [%]
De uitgangswaarde van uitgebreide
regelaar met terugkoppeling 3.
[2230] Verm. geen
ow
Het berekende geen-ow-vermogen
voor het actuele bedrijfstoerental.
[2316] Onderhoudste
kst
[2580] Cascadestatus Status voor de werking van de
cascaderegelaar.
[2581] Pompstatus Status voor de werking van elke
pomp die wordt bestuurd door de
cascaderegelaar.
[2791] Cascade
Reference
Referentie-uitgang voor gebruik
met slave-frequentieregelaars.
[2792] % Of Total
Capacity
Uitleesparameter die het systeemwerkpunt weergeeft als een
Parameterbeschrijving
33
34 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
Page 37

0-20 Displayregel 1.1 klein
Option: Functie:
percentage van de totale systeemcapaciteit.
[2793] Cascade
Option Status
Uitleesparameter die de status van
het cascadesysteem aangeeft.
[2794] Cascadesys-
teemstatus
[2795] Advanced
Cascade Relay
Output [bin]
[2796] Extended
Cascade Relay
Output [bin]
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] Bypass
statuswoord
[3111] Bypass
draaiuren
[3401] PCD 1 Schrijf
naar MCO
[3402] PCD 2 Schrijf
naar MCO
[3403] PCD 3 Schrijf
naar MCO
[3404] PCD 4 Schrijf
naar MCO
[3405] PCD 5 Schrijf
naar MCO
[3406] PCD 6 Schrijf
naar MCO
[3407] PCD 7 Schrijf
naar MCO
[3408] PCD 8 Schrijf
naar MCO
[3409] PCD 9 Schrijf
naar MCO
[3410] PCD 10 Schrijf
naar MCO
[3421] PCD 1 Lees
van MCO
[3422] PCD 2 Lees
van MCO
[3423] PCD 3 Lees
van MCO
[3424] PCD 4 Lees
van MCO
0-20 Displayregel 1.1 klein
Option: Functie:
[3425] PCD 5 Lees
van MCO
[3426] PCD 6 Lees
van MCO
[3427] PCD 7 Lees
van MCO
[3428] PCD 8 Lees
van MCO
[3429] PCD 9 Lees
van MCO
[3430] PCD 10 Lees
van MCO
[9920] Fan Ctrl deltaT
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 35
3 3
0-21 Displayregel 1.2 klein
De opties zijn dezelfde als beschreven voor
parameter 0-20 Displayregel 1.1 klein. Selecteer een variabele voor
weergave in regel 1, middelste positie.
0-22 Displayregel 1.3 klein
De opties zijn dezelfde als beschreven voor
parameter 0-20 Displayregel 1.1 klein. Selecteer een variabele voor
weergave in regel 1, rechter positie.
0-23 Displayregel 2 groot
De opties zijn dezelfde als beschreven voor
parameter 0-20 Displayregel 1.1 klein. Selecteer een variabele voor
weergave in regel 2.
0-24 Displayregel 3 groot
De opties zijn dezelfde als beschreven voor
parameter 0-20 Displayregel 1.1 klein. Selecteer een variabele voor
weergave in regel 2.
Page 38

0-25 Persoonlijk menu
Array [50]
Range: Functie:
Size
related*
[0 - 9999 ] U kunt maximaal 20 parameters
programmeren voor weergave in Q1
Persoonlijk menu. Dit menu is
toegankelijk via de toets [Quick
Menu] op het LCP. De parameters
worden in Q1 Persoonlijk menu
weergegeven in de volgorde waarin
ze zijn geprogrammeerd in deze
arrayparameter. Om parameters te
wissen, stelt u de waarde in op
0000.
Met deze functie kan bijvoorbeeld
snel en eenvoudig toegang worden
verkregen tot maximaal 50
parameters die regelmatig moeten
worden gewijzigd.
Uitlezing gebr. (waarde)
P 16-09
Eenheid voor uitlezing
Unit P 0-30
Max waarde
P 0-32
Min waarde
P 0-31
Alleen lineaire
eenheden
Kwadratische eenheid (druk)
Kubieke eenheid (vermogen)
Motorsnelheid
Motorsnelheid
hoge begr.
P 4-13 (tpm)
P 4-14 (Hz)
0
130BT105.12
Lineaire eenheid (bijv. snelheid e n ow)
0-30 Eenheid voor uitlezing gebr.
Option: Functie:
Programmeer een waarde voor
weergave op het LCP. De waarde
staat in een lineaire, kwadratische
of kubieke verhouding tot het
toerental. Deze verhouding is
afhankelijk van de geselecteerde
eenheid (zie Tabel 3.3). De huidige
berekende waarde kan worden
uitgelezen via
parameter 16-09 Standaard uitlez.
en/of worden weergegeven op het
display door [1609] Standaard uitlez.
te selecteren in
parameter 0-20 Displayregel 1.1 klein
tot parameter 0-24 Displayregel 3
groot.
[0]
[1] * %
[5] PPM
[10] 1/min
Parameterbeschrijving
33
3.2.4 0-3* Std uitlezing LCP
Het is mogelijk om de displayelementen aan te passen
voor diverse doeleinden:
Uitlezing gebruiker. Waarde evenredig aan het
•
toerental (lineair, kwadratisch of kubiek,
afhankelijk van de in parameter 0-30 Eenheid voor
uitlezing gebr. ingestelde eenheid).
Displaytekst. Tekstreeks die in een parameter
•
wordt opgeslagen.
Uitlezing gebruiker
De weer te geven berekende waarde is gebaseerd op de
instellingen in:
Parameter 0-30 Eenheid voor uitlezing gebr..
•
Parameter 0-31 Min. waarde uitlezing klant (alleen
•
lineair).
Parameter 0-32 Max. waarde uitlezing klant.
•
Parameter 4-13 Motorsnelh. hoge begr. [RPM].
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Huidige toerental.
•
36 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
Afbeelding 3.3 Standaard uitlez.
De relatie is afhankelijk van het type eenheid dat is
geselecteerd in parameter 0-30 Eenheid voor uitlezing gebr.:
Type eenheid Relatie met toerental
Dimensieloos
Toerental
Flow, volume
Flow, massa
Snelheid
Lengte
Temperatuur
Druk Kwadratisch
Vermogen Kubiek
Tabel 3.3 Relatie met toerental voor verschillende typen eenheden
Lineair
Page 39

0-30 Eenheid voor uitlezing gebr.
Option: Functie:
[11] tpm
[12] PULS/s
[20] l/s
[21] l/min
[22] l/u.
[23] m³/s
[24] m³/min
[25] m3/u.
[30] kg/s
[31] kg/min
[32] kg/u.
[33] t/min
[34] t/u.
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/u.
[124] CFM
[125] ft3/s
[126] ft3/min
[127] ft3/u.
[130] lb/s
[131] lb/min
[132] lb/u.
[140] ft/s
[141] ft/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
[180] pk
0-31 Min. waarde uitlezing klant
Range: Functie:
Size
related*
[ -999999.99 -
100.00
CustomRea-
doutUnit]
Via deze parameter kunt u de
minimale waarde van de door de
gebruiker gedenieerde uitlezing
selecteren (vindt plaats bij nultoerental). Het selecteren van een
andere waarde dan 0 is alleen
mogelijk als parameter 0-30 Eenheid
voor uitlezing gebr. is ingesteld op
een lineaire eenheid. Voor kwadratische en kubieke eenheden is de
minimumwaarde 0.
0-32 Max. waarde uitlezing klant
Range: Functie:
100
CustomReadoutUnit*
[ par. 0-31 -
999999.99
CustomRea-
doutUnit]
Deze parameter bepaalt de
maximumwaarde die moet worden
weergegeven wanneer het
motortoerental de in
parameter 4-13 Motorsnelh. hoge
begr. [RPM] of
parameter 4-14 Motorsnelh. hoge
begr. [Hz] ingestelde waarde heeft
bereikt (hangt af van de instelling
in parameter 0-02 Eenh. motortoe-
rental).
0-37 Displaytekst 1
Range: Functie:
0* [0 - 25 ] In deze parameter kunt u een
aparte tekstreeks schrijven voor
weergave op het LCP of voor
uitlezing via seriële communicatie.
Om de tekst permanent weer te
geven, selecteert u [37] Displaytekst
1 in 1 van de volgende parameters:
•
Parameter 0-20 Displayregel
1.1 klein.
•
Parameter 0-21 Displayregel
1.2 klein.
•
Parameter 0-22 Displayregel
1.3 klein.
•
Parameter 0-23 Displayregel
2 groot.
•
Parameter 0-24 Displayregel
3 groot.
•
Parameter 0-37 Displaytekst
1.
Wanneer u
parameter 12-08 Hostnaam wijzigt,
wordt ook
parameter 0-37 Displaytekst 1
gewijzigd, maar niet andersom.
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 37
3 3
Page 40

0-38 Displaytekst 2
Range: Functie:
0* [0 - 25 ] In deze parameter kunt u een
aparte tekstreeks schrijven voor
weergave op het LCP of voor
uitlezing via seriële communicatie.
Om de tekst permanent weer te
geven, selecteert u [38] Displaytekst
2 in:
•
Parameter 0-20 Displayregel
1.1 klein.
•
Parameter 0-21 Displayregel
1.2 klein.
•
Parameter 0-22 Displayregel
1.3 klein.
•
Parameter 0-23 Displayregel
2 groot.
•
Parameter 0-24 Displayregel
3 groot.
Druk op [▲] en [▼] om een teken
te wijzigen. Druk op [◀] en [▶] om
de cursor te verplaatsen. Als een
teken is gemarkeerd door de cursor
kan dit teken worden gewijzigd. U
kunt een teken tussenvoegen door
de cursor tussen 2 tekens te
plaatsen en op [▲] of [▼] te
drukken.
0-39 Displaytekst 3
Range: Functie:
0* [0 - 25 ] In deze parameter kunt u een
aparte tekstreeks schrijven voor
weergave op het LCP of voor
uitlezing via seriële communicatie.
Om de tekst permanent weer te
geven selecteert u Displaytekst 3 in
parameter 0-20 Displayregel 1.1 klein,
parameter 0-21 Displayregel 1.2 klein,
parameter 0-22 Displayregel 1.3 klein,
parameter 0-23 Displayregel 2 groot
of parameter 0-24 Displayregel 3
groot. Druk op [▲] en [▼] om een
teken te wijzigen. Druk op [◀] en
[▶] om de cursor te verplaatsen. Als
een teken is gemarkeerd door de
cursor kan dit teken worden
gewijzigd. U kunt een teken tussenvoegen door de cursor tussen 2
tekens te plaatsen en op [▲] of [▼]
te drukken.
0-40 [Hand on]-toets op LCP
Option: Functie:
[0] Uitgesch. Schakelt de toets uit.
[1] * Ingesch. [Hand On]-toets is ingeschakeld.
[2] Wachtw. Voorkomt een onbevoegde start in
de handmodus. Als
parameter 0-40 [Hand on]-toets op
LCP is opgenomen in Persoonlijk
menu, moet u het wachtwoord
deniëren in
parameter 0-65 Wachtw persoonlijk
menu. Denieer anders een
wachtwoord in
parameter 0-60 Wachtw. hoofdmenu.
[3] Ingesch.
zonder OFF
[4] Wachtw.
zonder OFF
[5] Ingesch. met
OFF
[6] Wachtw. met
OFF
[9] Enabled, ref =
0
0-41 [O]-toets op LCP
Option: Functie:
[0] Uitgesch. Schakelt de toets uit.
[1] * Ingesch. [O]-toets is ingeschakeld.
[2] Wachtw. Voorkomt een onbevoegde stop.
Als parameter 0-41 [O]-toets op LCP
is opgenomen in Persoonlijk menu,
moet u het wachtwoord deniëren
in parameter 0-65 Wachtw
persoonlijk menu. Denieer anders
een wachtwoord in
parameter 0-60 Wachtw. hoofdmenu.
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.2.5 0-4* LCP-toetsenbord
Schakel de afzonderlijke toetsen op het LCP in en uit en
beveilig ze met een wachtwoord.
33
38 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 41

0-42 [Auto on]-toets op LCP
Option: Functie:
[0] Uitgesch. Schakelt de toets uit.
[1] * Ingesch. [Auto On]-toets is ingeschakeld.
[2] Wachtw. Voorkomt een onbevoegde start in
de automodus. Als
parameter 0-42 [Auto on]-toets op
LCP is opgenomen in Persoonlijk
menu, moet u het wachtwoord
deniëren in
parameter 0-65 Wachtw persoonlijk
menu. Denieer anders een
wachtwoord in
parameter 0-60 Wachtw. hoofdmenu.
0-43 [Reset]-toets op LCP
Option: Functie:
[0] Uitgesch. Schakelt de toets uit.
[1] * Ingesch. [Reset]-toets is ingeschakeld.
[2] Wachtw. Voorkomt een onbevoegde reset.
Als parameter 0-43 [Reset]-toets op
LCP is opgenomen in
parameter 0-25 Persoonlijk menu,
moet u het wachtwoord deniëren
in parameter 0-65 Wachtw
persoonlijk menu. Denieer anders
een wachtwoord in
parameter 0-60 Wachtw. hoofdmenu.
[3] Ingesch.
zonder OFF
[4] Wachtw.
zonder OFF
[5] Ingesch. met
OFF
Door indrukken van de toets wordt
de frequentieregelaar gereset, maar
niet gestart.
[6] Wachtw. met
OFF
Voorkomt een onbevoegde reset.
Na een bevoegde reset start de
frequentieregelaar niet. Zie optie [2]
Wachtw. voor informatie over het
instellen van een wachtwoord.
0-44 [O/Reset]-toets LCP
Schakelt de [O/Reset]-toets in of uit.
Option: Functie:
[0] Uitgesch.
[1] * Ingesch.
[2] Wachtw.
0-45 [Drive Bypass]-toets LCP
Druk op [O] en selecteer [0] Uitgesch. om een onbedoelde stop
van de frequentieregelaar te voorkomen. Druk op [O] en
selecteer [2] Wachtw. om een onbevoegde bypass van de
frequentieregelaar te voorkomen. Als parameter 0-45 [Drive
Bypass]-toets LCP is opgenomen in het snelmenu, moet u het
wachtwoord deniëren in parameter 0-65 Wachtw persoonlijk
menu.
Option: Functie:
[0] Uitgesch. Schakelt de toets uit.
[1] * Ingesch.
[2] Wachtw.
0-50 LCP kopiëren
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
[0] * Geen kopie
[1] Alles naar LCP Hierdoor worden alle parameters in
alle setups vanuit het geheugen
van de frequentieregelaar
gekopieerd naar het LCP-geheugen.
Voor servicedoeleinden adviseren
we om na de inbedrijfstelling alle
parameters naar het LCP te
kopiëren.
[2] Alles vanaf
LCP
Hierdoor worden alle parameters in
alle setups vanuit het LCPgeheugen gekopieerd naar het
geheugen van de frequentieregelaar.
[3] Verm.onafh. v.
LCP
Kopieert alleen de parameters die
niet afhankelijk zijn van het
motorvermogen. Gebruik de laatste
optie om meerdere frequentieregelaars te programmeren voor
dezelfde functie zonder de al
ingestelde motorgegevens te
verstoren.
[10] Delete LCP
copy data
Parameterbeschrijving Programmeerhandleiding
3.2.6 0-5* Kopiëren/Opsl.
Kopieer parameters van en naar het LCP. Gebruik deze
parameters om setups op te slaan en om setups te
kopiëren van de ene frequentieregelaar naar een andere.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 39
Page 42

0-51 Kopie setup
Option: Functie:
[0] * Geen kopie Geen functie.
[1] Kopie naar
setup 1
Kopieert alle parameters in de
huidige, te bewerken setup
(ingesteld in parameter 0-11 Setup
wijzigen) naar setup 1.
[2] Kopie naar
setup 2
Kopieert alle parameters in de
huidige, te bewerken setup
(ingesteld in parameter 0-11 Setup
wijzigen) naar setup 2.
[3] Kopie naar
setup 3
Kopieert alle parameters in de
huidige, te bewerken setup
(ingesteld in parameter 0-11 Setup
wijzigen) naar setup 3.
[4] Kopie naar
setup 4
Kopieert alle parameters in de
huidige, te bewerken setup
(ingesteld in parameter 0-11 Setup
wijzigen) naar setup 4.
[9] Kopie naar alle Kopieert de parameters in de
huidige setup naar setup 1 tot en
met 4.
0-60 Wachtw. hoofdmenu
Range: Functie:
100* [-9999 -
9999 ]
Stel het wachtwoord in voor
toegang tot het Hoofdmenu via de
[Main Menu]-toets. Deze parameter
wordt genegeerd als
parameter 0-61 Toegang hoofdmenu
zonder wachtw. is ingesteld op [0]
Voll. toeg.
0-61 Toegang hoofdmenu zonder wachtw.
Option: Functie:
[0] * Voll. toeg. Schakelt het in
parameter 0-60 Wachtw. hoofdmenu
ingestelde wachtwoord uit. Als deze
optie is geselecteerd, worden
parameter 0-60 Wachtw. hoofdmenu,
parameter 0-65 Wachtw persoonlijk
menu en parameter 0-66 Toegang
pers. menu zonder wachtw.
genegeerd.
[1] LCP: alleen
lezen
Voorkomt het onbevoegd bewerken
van de parameters in het
Hoofdmenu.
[2] LCP: geen
toegang
Voorkomt het onbevoegd
weergeven en bewerken van
parameters in het Hoofdmenu.
0-61 Toegang hoofdmenu zonder wachtw.
Option: Functie:
[3] Bus: alleen
lezen
Biedt alleen-lezentoegang tot
parameters via een veldbus.
[4] Bus: geen
toegang
Schakelt toegang tot parameters via
een veldbus uit.
[5] Alt: alleen
lezen
Voorkomt het onbevoegd bewerken
van de parameters in het
Hoofdmenu en biedt alleenlezentoegang tot parameters via
een veldbus.
[6] Alt: geen
toegang
Voorkomt het onbevoegd
weergeven en bewerken van de
parameters in het Hoofdmenu en
schakelt toegang tot parameters via
een veldbus uit.
0-65 Wachtw persoonlijk menu
Range: Functie:
200* [-9999 -
9999 ]
Stel het wachtwoord in voor
toegang tot Persoonlijk menu via de
[Quick Menu]-toets. Deze parameter
wordt genegeerd als
parameter 0-66 Toegang pers. menu
zonder wachtw. is ingesteld op [0]
Voll. toeg.
0-66 Toegang pers. menu zonder wachtw.
Deze parameter wordt genegeerd als parameter 0-61 Toegang
hoofdmenu zonder wachtw. is ingesteld op [0] Voll. toeg.
Option: Functie:
[0] * Voll. toeg. Schakelt het in
parameter 0-65 Wachtw persoonlijk
menu ingestelde wachtwoord uit.
[1] LCP: alleen
lezen
Voorkomt het onbevoegd bewerken
van de parameters in Persoonlijk
menu.
[3] Bus: alleen
lezen
[5] Alt: alleen
lezen
0-67 Wachtwoord bus
Range: Functie:
0* [0 - 9999 ] Door naar deze parameter te
schrijven, kunt u de frequentieregelaar ontgrendelen via bus/MCT
10 setupsoftware.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
3.2.7 0-6* Wachtw.
40 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 43

0-70 Datum en tijd
Range: Functie:
Size
related*
[ 0 - 0 ] Stelt de datum en tijd van de
interne klok in. De te gebruiken
indeling kunt u instellen in
parameter 0-71 Datumindeling en
parameter 0-72 Tijdsindeling.
Bij gebruik van VLT® Real-time Clock
MCB 117 wordt de tijd elke dag om
15.00 uur gesynchroniseerd.
0-71 Datumindeling
Option: Functie:
[0] JJJJ-MM-DD Stelt de datumindeling in die in het
LCP wordt gebruikt.
[1] DD-MM-JJJJ Stelt de datumindeling in die in het
LCP wordt gebruikt.
[2] MM/DD/JJJJ Stelt de datumindeling in die in het
LCP wordt gebruikt.
0-72 Tijdsindeling
Option: Functie:
Stelt de tijdsindeling in die in het
LCP wordt gebruikt.
[0] 24 u
[1] 12 u
0-73 Oset tijdzone
Range: Functie:
0 min* [-780 - 780
min]
Voer de tijdzoneoset ten opzichte
van UTC in. Deze parameter is
vereist voor de automatische
aanpassing aan de zomer- en
wintertijd.
0-74 DST/zomertijd
Option: Functie:
Selecteer hoe er moet worden
omgegaan met Daylight Saving
Time/zomertijd. Voor een
handmatige zomertijd
programmeert u de begindatum en
einddatum in parameter 0-76 DST/
zomertijd start en
parameter 0-77 DST/zomertijd einde.
[0] * Uit
[2] Handm
0-76 DST/zomertijd start
Range: Functie:
Size
related*
[ 0 - 0 ] Stelt de datum en tijd in waarop de
zomertijd ingaat. De datum wordt
ingesteld in de indeling die is
geselecteerd in
parameter 0-71 Datumindeling.
0-77 DST/zomertijd einde
Range: Functie:
Size
related*
[ 0 - 0 ] Stelt de datum en tijd in waarop de
zomertijd eindigt. De datum wordt
ingesteld in de indeling die is
geselecteerd in
parameter 0-71 Datumindeling.
Parameterbeschrijving Programmeerhandleiding
3.2.8 0-7* Klokinstellingen
Stel de tijd en datum voor de interne klok in. Gebruik de
interne klok bijvoorbeeld voor:
Tijdgebonden acties.
•
Energielog.
•
Trendanalyse.
•
Datum-/tijdstempels voor alarmen.
•
Gelogde gegevens.
•
Preventief onderhoud.
•
Het is mogelijk om de klok in te stellen op Daylight Saving
Time/zomertijd, wekelijkse werkdagen/niet-werkdagen
inclusief 20 uitzonderingen (feestdagen en dergelijke).
Hoewel de klokinstellingen via het LCP kunnen worden
ingesteld, is het ook mogelijk om zowel de klokinstellingen
als de tijdgebonden acties en preventief-onderhoudsfuncties in te stellen met behulp van de MCT 10
setupsoftware.
3 3
LET OP
De frequentieregelaar beschikt niet over een backup van
de klokfunctie. Dat betekent dat de ingestelde datum/
tijd na een uitschakeling wordt teruggezet naar de
standaardinstelling (01.01.2007 00:00 Mon), tenzij een
realtimeklokmodule met backup is geïnstalleerd. Als er
geen module met backup is geïnstalleerd, adviseren we
om de klokfunctie alleen te gebruiken als de frequentieregelaar door middel van seriële communicatie is
geïntegreerd in een extern systeem en dat systeem zorg
draagt voor de synchronisatie van de kloktijden van de
regelapparatuur. Via parameter 0-79 Klokfout kunt u
instellen dat er een waarschuwing moet worden
gegenereerd als de klok niet correct is ingesteld,
bijvoorbeeld na een uitschakeling.
LET OP
Wanneer een VLT® Analog I/O MCB 109 of een VLT® Realtime Clock MCB 117 is geïnstalleerd, wordt tevens
voorzien in een backup van datum en tijd.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 41
Page 44

0-79 Klokfout
Option: Functie:
Schakelt de klokwaarschuwing in of
uit. Een klokwaarschuwing kan
worden gegeven wanneer de klok
niet juist is ingesteld of de instellingen zijn gereset tijdens een
uitschakeling en er geen backup is
geïnstalleerd. Als de VLT® Analog
I/O MCB 109 is geïnstalleerd, is [1]
Ingesch. de standaardwaarde.
[0] Uitgesch.
[1] Ingesch.
0-81 Werkdagen
Array [7]
Array met 7 elementen [0]-[6] onder het parameternummer op
het display. Druk op [OK] en schakel tussen de elementen met
behulp van [▲] en [▼].
Option: Functie:
Stel voor elke dag van de week in
of het een werkdag of een nietwerkdag is. Het eerste element van
de array is maandag. De werkdagen
worden gebruikt voor tijdgebonden
acties.
[0] Nee
[1] Ja
0-82 Andere werkdagen
Array [5]
Array met 5 elementen [0]-[4] onder het parameternummer op
het display. Druk op [OK] en schakel tussen de elementen met
behulp van [▲] en [▼].
Range: Functie:
Size
related*
[ 0 - 0 ] Denieert data voor andere
werkdagen die normaliter nietwerkdagen zouden zijn op basis
van parameter 0-81 Werkdagen.
0-83 Andere niet-werkdagen
Array [15]
Array met 15 elementen [0]-[14] onder het parameternummer op
het display. Druk op [OK] en schakel tussen de elementen met
behulp van [▲] en [▼].
Range: Functie:
Size
related*
[ 0 - 0 ] Denieert data voor andere
werkdagen die normaliter nietwerkdagen zouden zijn op basis
van parameter 0-81 Werkdagen.
0-84 Time for Fieldbus
Range: Functie:
0* [0 -
4294967295 ]
Geeft de tijd voor de veldbus weer.
0-85 Summer Time Start for Fieldbus
Range: Functie:
0* [0 -
4294967295 ]
Geeft de start van de zomertijd
voor de veldbus weer.
0-86 Summer Time End for Fieldbus
Range: Functie:
0* [0 -
4294967295 ]
Geeft het einde van de zomertijd
voor de veldbus weer.
0-89 Uitlezing datum en tijd
Range: Functie:
0* [0 - 25 ] Geeft de huidige datum en tijd
weer. De datum en tijd worden
continu bijgewerkt.
De klok begint pas met tellen na
het wijzigen van de standaardinstelling in parameter 0-70 Datum en
tijd.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
42 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 45

1-00 Conguratiemodus
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
LET OP
Wanneer de parameter op [3]
Met terugk. is ingesteld,
wijzigen de commando's
Omkeren en Start omgekeerd
de draairichting van de motor
niet.
[0] Geen terugk. Het motortoerental wordt bepaald
door toepassing van een toerentalreferentie of door het
motortoerental in te stellen in de
handmodus.
Geen terugk. wordt ook gebruikt als
de frequentieregelaar deel uitmaakt
van een systeem met terugkoppeling op basis van een externe
PID-regelaar die een toerentalreferentiesignaal als uitgang geeft.
[3] Met terugk. Het motortoerental wordt bepaald
door een referentie van de
ingebouwde PID-regelaar, waardoor
het motortoerental variabel is zoals
in een regelproces met terugkoppeling (bijvoorbeeld constante druk
of ow). Congureer de PIDregelaar via parametergroep 20-**
Omvormer met terugkoppeling of via
de menuoptie Functiesetups na het
indrukken van [Quick Menu].
1-01 Motorbesturingsprincipe
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Selecteer het motorbesturingsprincipe dat moet worden gebruikt.
1-01 Motorbesturingsprincipe
Option: Functie:
[0] U/f Speciale motormodus voor parallel
aangesloten motoren in speciale
motortoepassingen. Wanneer U/f is
geselecteerd, kunnen de kenmerken
van het besturingsprincipe worden
gewijzigd via parameter 1-55 V/f-
karakteristiek - V en
parameter 1-56 V/f-karakteristiek - f.
[1] * VVC+ Voltage Vector Control-principe dat
geschikt is voor de meeste toepassingen. Het belangrijkste voordeel
van een besturing via VVC+ is dat
het gebruikmaakt van een robuust
motormodel.
1-03 Koppelkarakteristiek
Option: Functie:
[0] Compressor-
koppel
Voor een snelheidsregeling voor
toepassingen met een constant
koppel, zoals:
•
Axiaalpompen.
•
Verdringerpompen.
•
Blowers.
Levert een spanning die is geoptimaliseerd voor een motorbelasting
met een constante koppelkarakteristiek voor het gehele
toerentalbereik.
[1] Variabel
koppel
Voor een snelheidsregeling voor
centrifugaalpompen en ventilatoren.
Moet ook worden gebruikt voor het
regelen van meerdere motoren
vanaf dezelfde frequentieregelaar
(bijvoorbeeld bij meerdere condensorventilatoren of
koeltorenventilatoren). Levert een
spanning die is geoptimaliseerd
voor motorbelastingen met een
kwadratisch verlopende koppelkarakteristiek.
[2] Auto Energie
Optim. CT
Voor een optimale, energiezuinige
snelheidsregeling voor schroef- en
scrollcompressoren. Levert een
spanning die is geoptimaliseerd
voor een motorbelasting met een
constante koppelkarakteristiek voor
het gehele bereik vanaf 15 Hz.
Bovendien past de AEO-functie de
spanning nauwkeurig aan de
huidige belastingscondities aan,
waardoor het energieverbruik en
het hoorbare geluid van de motor
Parameterbeschrijving Programmeerhandleiding
3.3 Parameters 1-** Belasting & motor
3.3.1 1-0* Alg. instellingen
Stel in of de frequentieregelaar met of zonder terugkoppeling moet werken.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 43
Page 46

1-03 Koppelkarakteristiek
Option: Functie:
afnemen. Voor een optimale
werking moet de arbeidsfactor van
de motor correct worden ingesteld.
Deze waarde is in te stellen in
parameter 14-43 Cosphi motor. De
parameter heeft een standaardinstelling die automatisch wordt
aangepast wanneer de motorgegevens worden geprogrammeerd.
Deze instelling zal in de meeste
gevallen zorgen voor een optimale
motorspanning, maar als de
arbeidsfactor cos phi nauwkeuriger
moet worden afgesteld, kunt u een
AMA uitvoeren via
parameter 1-29 Autom. aanpassing
motorgeg. (AMA).
[3] * Auto Energie
Optim. VT
Voor een optimale, energiezuinige
snelheidsregeling voor centrifugaalpompen en ventilatoren. Levert een
spanning die is geoptimaliseerd
voor motorbelastingen met een
kwadratisch verlopende koppelkarakteristiek. Bovendien past de AEOfunctie de spanning nauwkeurig
aan de huidige belastingscondities
aan, waardoor het energieverbruik
en het hoorbare geluid van de
motor afnemen. Voor een optimale
werking moet de arbeidsfactor van
de motor correct worden ingesteld.
Deze waarde is in te stellen in
parameter 14-43 Cosphi motor. De
parameter heeft een standaardinstelling die automatisch wordt
aangepast wanneer de motorgegevens worden geprogrammeerd.
Deze instelling zal in de meeste
gevallen zorgen voor een optimale
motorspanning, maar als de
arbeidsfactor cos phi nauwkeuriger
moet worden afgesteld, kunt u een
AMA uitvoeren via
parameter 1-29 Autom. aanpassing
motorgeg. (AMA). Het is zelden
nodig om de parameter voor de
arbeidsfactor voor de motor
handmatig in te stellen.
1-04 Overspanningsmodus
Selecteer het koppelniveau voor de overbelastingsmodus.
Option: Functie:
[0] Hoog koppel Laat een overkoppel tot 160% toe
voor ondergedimensioneerde
motoren.
[1] * Normaal
koppel
Laat een overkoppel tot 110% toe.
1-06 Richting rechtsom
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Deze parameter denieert de term
rechtsom die overeenkomt met de
richtingpijl op het LCP. Is te
gebruiken om de draairichting van
de as eenvoudig te wijzigen zonder
motordraden te verwisselen.
[0] * Normaal De motoras draait rechtsom
wanneer de frequentieregelaar als
volgt is aangesloten: U⇒U, V⇒V en
W⇒W op de motor.
[1] Geïnverteerd De motoras draait linksom wanneer
de frequentieregelaar als volgt is
aangesloten: U⇒U, V⇒V en W⇒W
op de motor.
Parameterbeschrijving
33
LET OP
Parameter 1-03 Koppelkarakteristiek heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr. SPM.
44 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
3.3.2 1-1* Motorselectie
LET OP
Deze parametergroep kan niet worden gewijzigd terwijl
de motor loopt.
Of de volgende parameters actief zijn, hangt af van de
instelling in parameter 1-10 Motorconstructie.
Parameter 1-10 Motor
constructie
Parameter 1-00 Congu
ratiemodus
Parameter 1-03 Koppel-
karakteristiek
Parameter 1-06 Richtin
g rechtsom
Parameter 1-14 Verst.
demping
[1] PM,
[0] Asyn-
chroon
niet-
uitspr.
SPM
x x x x
x – - -
x x x x
– x x x
[2] PM,
uitspr.
IPM
[3]
SynRM
Page 47

Parameterbeschrijving Programmeerhandleiding
Parameter 1-10 Motor
constructie
Parameter 1-15 Filter-
tijdconstante lage
snelh.
Parameter 1-16 Filter-
tijdconstante hoge
snelh.
Parameter 1-17 Filter-
tijdconstante spanning
Parameter 1-20 Motorv
erm. [kW]
Parameter 1-21 Motorv
erm. [PK]
Parameter 1-22 Motors
panning
Parameter 1-23 Motorfr
equentie
Parameter 1-24 Motorst
room
Parameter 1-25 Nom.
motorsnelheid
Parameter 1-26 Cont.
nom. motorkoppel
Parameter 1-28 Control
e draair. motor
Parameter 1-29 Autom.
aanpassing motorgeg.
(AMA)
Parameter 1-30 Stator-
weerstand (Rs)
Parameter 1-31 Rotorw
eerstand (Rr)
Parameter 1-35 Hoofdr
eactantie (Xh)
Parameter 1-37 Inducta
ntie d-as (Ld)
Parameter 1-39 Motorp
olen
Parameter 1-40 Tegen-
EMK bij 1000 TPM
Parameter 1-44 d- axis
Inductance Sat. (LdSat)
Parameter 1-45 q- axis
Inductance Sat. (LqSat)
Parameter 1-46 Verst.
positiedetectie
Parameter 1-47 Torque
Calibration
Parameter 1-48 Inducta
nce Sat. Point
Parameter 1-49 q- axis
Inductance Sat. Point
[1] PM,
[0] Asyn-
chroon
niet-
uitspr.
SPM
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
– x x x
– – – x
– – x –
[2] PM,
uitspr.
IPM
[3]
SynRM
Parameter 1-10 Motor
constructie
Parameter 1-50 Motor
magnetisering bij
nulsnelheid
Parameter 1-51 Min.
snelh. norm. magneti-
sering [TPM]
Parameter 1-52 Min.
snelh. norm. magneti-
sering [Hz]
Parameter 1-58 Stroom
testpulsen vlieg.start
Parameter 1-59 Freq.
testpulsen vlieg.start
Parameter 1-60 Belast.
comp. bij lage snelheid
Parameter 1-61 Belastin
gcomp. bij hoge
snelheid
Parameter 1-62 Slipco
mpensatie
Parameter 1-63 Slipco
mpensatie tijdcon-
stante
Parameter 1-64 Resona
ntiedemping
Parameter 1-65 Resona
ntiedemping tijdcon-
stante
Parameter 1-66 Min.
stroom bij lage snelh.
Parameter 1-70 Star tm
odus
Parameter 1-71 Star tve
rtraging
Parameter 1-72 Star tfu
nctie
Parameter 1-73 Vlieg.
start
Parameter 1-80 Functie
bij stop
Parameter 1-81 Min.
snelh. functie bij stop
[RPM]
Parameter 1-82 Min.
snelh. voor functie bij
stop [Hz]
Parameter 1-86 Uitsch
lg snelh [tpm]
Parameter 1-87 Uitsch
lg snelh [Hz]
Parameter 1-90 Therm.
motorbeveiliging
[1] PM,
[0] Asyn-
chroon
niet-
uitspr.
SPM
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
[2] PM,
uitspr.
IPM
[3]
SynRM
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 45
Page 48

1-10 Motorconstructie
Stel het type motorconstructie in.
Option: Functie:
[0] * Asynchroon Voor asynchrone motoren.
[1] PM, niet-uitspr.
SPM
Voor permanentmagneetmotoren
(PM-motoren). PM-motoren zijn
onderverdeeld in 2 groepen: met
op de buitenzijde gemonteerde
(niet uitspringende) of interne
(uitspringende) magneten.
[2] PM, uitspr. IPM
[5] SynRM
Parameterbeschrijving
VLT® AQUA Drive FC 202
[1] PM,
Parameter 1-10 Motor
constructie
Parameter 1-91 Ext.
motor-ventilator
33
Parameter 1-93 Thermi
storbron
Parameter 2-00 DC-
houd/voorverw.stroom
Parameter 2-01 DC-
remstroom
Parameter 2-02 DC-
remtijd
Parameter 2-03 Inscha-
kelsnelh. DC-rem [tpm]
Parameter 2-04 Inscha-
kelsnelh. DC-rem [Hz]
Parameter 2-06 Parkeer
stroom
Parameter 2-07 Parkeer
tijd
Parameter 2-10 Remfun
ctie
Parameter 2-11 Remwe
erstand (ohm)
Parameter 2-12 Begren
zing remvermogen
(kW)
Parameter 2-13 Bewaki
ng remvermogen
Parameter 2-15 Remtes
t
Parameter 2-16 AC-rem
max. stroom
Parameter 2-17 Oversp
anningsreg.
Parameter 4-10 Draairi
chting motor
Parameter 4-11 Motors
nelh. lage begr. [RPM]
Parameter 4-12 Motors
nelh. lage begr. [Hz]
Parameter 4-13 Motors
nelh. hoge begr. [RPM]
Parameter 4-14 Motors
nelh. hoge begr. [Hz]
Parameter 4-16 Koppel-
begrenzing
motormodus
Parameter 4-17 Koppel-
begrenzing
generatormodus
Parameter 4-18 Stroom
begr.
46 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
[0] Asyn-
chroon
niet-
uitspr.
SPM
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
[2] PM,
uitspr.
IPM
[3]
SynRM
Parameter 1-10 Motor
constructie
Parameter 4-19 Max.
uitgangsfreq.
Parameter 4-58 Motorf
asefunctie ontbreekt
Parameter 14-40 V T-
niveau
Parameter 14-41 Min.
magnetisering AEO
Parameter 14-42 Min.
AEO-frequentie
Parameter 14-43 Cosph
i motor
[1] PM,
[0] Asyn-
chroon
niet-
uitspr.
SPM
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
[2] PM,
uitspr.
IPM
[3]
SynRM
3.3.3 Setup asynchrone motor
Voer de volgende motorgegevens in. Deze informatie is te
vinden op het motortypeplaatje.
1. Parameter 1-20 Motorverm. [kW] of
parameter 1-21 Motorverm. [PK].
2. Parameter 1-22 Motorspanning.
3. Parameter 1-23 Motorfrequentie.
4. Parameter 1-24 Motorstroom.
5. Parameter 1-25 Nom. motorsnelheid.
Voor optimale prestaties in de VVC+-modus zijn extra
motorgegevens nodig om de volgende parameters in te
stellen. U vindt de gegevens op het motordatablad (deze
gegevens staan gewoonlijk niet op het motortypeplaatje).
Voer een volledige AMA uit via parameter 1-29 Autom.
aanpassing motorgeg. (AMA) [1] Volledige AMA insch. of stel
de parameters handmatig in. Parameter 1-36 Ijzerverlies-
weerstand (Rfe) wordt altijd handmatig ingevoerd.
1. Parameter 1-30 Statorweerstand (Rs).
2. Parameter 1-31 Rotorweerstand (Rr).
Page 49

Parameterbeschrijving Programmeerhandleiding
3. Parameter 1-33 Statorlek-reactantie (X1).
4. Parameter 1-34 Rotorlekreactantie (X2).
5. Parameter 1-35 Hoofdreactantie (Xh).
6. Parameter 1-36 Ijzerverliesweerstand (Rfe).
Toepassingsspecieke aanpassing bij gebruik van VVC
VVC+ is de meest robuuste regelmodus. Deze biedt in de
meeste situaties optimale prestaties zonder verdere
aanpassingen. Voer een volledige AMA uit voor de beste
prestaties.
+
3.3.4 Setup PM-motor
Deze sectie beschrijft het congureren van een PM-motor.
Stappen voor eerste programmering
Activeer het gebruik van een PM-motor door
parameter 1-10 Motorconstructie in te stellen op [1] PM,
niet-uitspr. SPM of [2] PM, uitspr. IPM.
De motorgegevens programmeren
Nadat u een PM-motor hebt geselecteerd, zijn de PMmotorgerelateerde parameters in parametergroep 1-2*
Motordata, 1-3* Geav. Motordata en 1-4* Geav. Motordata II
beschikbaar.
De benodigde gegevens zijn te vinden op het motortypeplaatje en op het motordatablad.
Programmeer de volgende parameters in de aangegeven
volgorde:
1. Parameter 1-24 Motorstroom.
2. Parameter 1-25 Nom. motorsnelheid.
3. Parameter 1-26 Cont. nom. motorkoppel.
4. Parameter 1-39 Motorpolen.
Voer een volledige AMA uit via parameter 1-29 Autom.
aanpassing motorgeg. (AMA) [1] Volledige AMA insch.
LET OP
Zorg er bij gebruik van AMA voor dat de waarde van
parameter 1-40 Tegen-EMK bij 1000 TPM wordt berekend
op basis van het nominale toerental.
Als geen volledige AMA wordt uitgevoerd, congureert u
de volgende parameters handmatig:
1. Parameter 1-30 Statorweerstand (Rs)
Voer de weerstand van de statorwikkeling in voor
fase-sterpunt (Rs). Als enkel fase-fasegegevens
beschikbaar zijn, moet u de waarde delen door 2
om de waarde voor fase-sterpunt te verkrijgen.
2. Parameter 1-37 Inductantie d-as (Ld)
Voer de directe asinductantie van de PM-motor in
voor fase-sterpunt.
Als enkel fase-fasegegevens beschikbaar zijn,
moet u de waarde delen door 2 om de waarde
voor fase-sterpunt te verkrijgen.
3. Parameter 1-40 Tegen-EMK bij 1000 TPM.
Voer de tegen-EMK (fase-fase, rms-waarde) van de
PM-motor bij 1000 tpm in. Tegen-EMK is de
spanning die door een PM-motor wordt
gegenereerd wanneer er geen frequentieregelaar
is aangesloten en de as extern wordt gedraaid. In
specicaties wordt deze meestal vermeld voor het
nominale motortoerental of voor een motortoerental van 1000 tpm, gemeten tussen 2 fasen. Als
de waarde voor een motortoerental van 1000
tpm niet beschikbaar is, kunt u de juiste waarde
als volgt berekenen:
Stel, de tegen-EMK is 320 V bij 1800 tpm. De
waarde bij 1000 tpm kan dan als volgt worden
berekend:
Tegen-EMK = (spanning/tpm) x 1000 = (320/1800)
x 1000 = 178.
4. Voor IPM-motoren – congureer de inductantiewaarden in de volgende parameters:
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-44 d-axis Inductance Sat.
•
(LdSat).
Parameter 1-45 q-axis Inductance Sat.
•
(LqSat).
Parameter 1-49 q-axis Inductance Sat.
•
Point.
LET OP
Mogelijk ontbreken er voor IPM-motoren een aantal
inductantiewaarden op de typeplaatjes of de databladen.
Voer een AMA uit om de geldige waarden te verkrijgen.
Motorwerking testen
1. Start de motor bij een laag toerental (100 tot 200
tpm). Als de motor niet draait, moet u de
installatie, algemene programmering en motorgegevens controleren.
2. Controleer of de startfunctie in
parameter 1-70 Startmodus geschikt is voor de
vereisten van de toepassing.
Rotordetectie
Deze functie is de aanbevolen optie voor toepassingen
waarbij de motor start vanuit stilstand, zoals bij pompen of
transportbanden. Bij sommige motoren is een geluid
hoorbaar wanneer de frequentieregelaar de rotordetectie
uitvoert. Dat is niet schadelijk voor de motor.
Parkeren
Deze functie is de aanbevolen optie voor toepassingen
waarbij de motor met laag toerental draait, zoals bij
windmilling in ventilatortoepassingen.
Parameter 2-06 Parkeerstroom en parameter 2-07 Parkeertijd
kunnen worden gewijzigd. Verhoog de fabrieksinstelling
van deze parameters voor toepassingen met hoge
massatraagheid.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 47
Page 50

Parameterbeschrijving
VLT® AQUA Drive FC 202
Toepassingsspecieke aanpassing bij gebruik van VVC
+
VVC+ is de meest robuuste regelmodus. Deze biedt in de
meeste situaties optimale prestaties zonder verdere
aanpassingen. Voer een volledige AMA uit voor de beste
prestaties.
33
Start de motor op het nominale toerental. Controleer de
VVC+ PM-instellingen als de toepassing niet goed werkt.
Tabel 3.4 bevat aanbevelingen voor diverse toepassingen.
De benodigde gegevens zijn te vinden op het motortypeplaatje en op het motordatablad.
Programmeer de volgende parameters in de aangegeven
volgorde:
1. Parameter 1-24 Motorstroom.
2. Parameter 1-25 Nom. motorsnelheid.
3. Parameter 1-26 Cont. nom. motorkoppel.
4. Parameter 1-39 Motorpolen.
Toepassing Instellingen
Toepassingen met lage
massatraagheid
I
Load/IMotor
Toepassingen met lage
massatraagheid
50 > I
Toepassingen met hoge
massatraagheid
I
Load/IMotor
Hoge belasting bij laag
toerental
< 30% (nominaal
toerental)
< 5
Load/IMotor
> 50
> 5
Verhoog parameter 1-17 Filtertijdcon-
stante spanning met een factor 5-10.
Verlaag parameter 1-14 Verst.
demping.
Verlaag parameter 1-66 Min. stroom
bij lage snelh. (< 100%).
Handhaaf de standaardwaarden.
Verhoog parameter 1-14 Verst.
demping, parameter 1-15 Filtertijdconstante lage snelh. en
parameter 1-16 Filtertijdconstante
hoge snelh..
Verhoog parameter 1-17 Filtertijdconstante spanning.
Verhoog parameter 1-66 Min. stroom
bij lage snelh. om het startkoppel
aan te passen. Een stroom van 100%
geeft het nominale koppel als
startkoppel. Gedurende langere tijd
werken bij een stroomniveau hoger
dan 100% kan leiden tot oververhitting van de motor.
Voer een volledige AMA uit via parameter 1-29 Autom.
aanpassing motorgeg. (AMA) [1] Volledige AMA insch.
Als geen volledige AMA wordt uitgevoerd, congureert u
de volgende parameters handmatig:
1. Parameter 1-30 Statorweerstand (Rs)
Voer de weerstand van de statorwikkeling in voor
fase-sterpunt (Rs). Als enkel fase-fasegegevens
beschikbaar zijn, moet u de waarde delen door 2
om de waarde voor fase-sterpunt te verkrijgen.
2. Parameter 1-37 Inductantie d-as (Ld)
Voer de directe asinductantie van de motor in
voor fase-sterpunt.
Als enkel fase-fasegegevens beschikbaar zijn,
moet u de waarde delen door 2 om de waarde
voor fase-sterpunt te verkrijgen.
3. Parameter 1-38 q-axis Inductance (Lq).
Voer de kwadratuur asinductantie van de motor
in voor fase-sterpunt.
Als enkel fase-fasegegevens beschikbaar zijn,
moet u de waarde delen door 2 om de waarde
voor fase-sterpunt te verkrijgen.
4. Parameter 1-44 d-axis Inductance Sat. (LdSat).
Stel de verzadigingswaarde voor de inductantie
van de d-as in voor fase-sterpunt. Deze waarde
Tabel 3.4 Aanbevelingen voor diverse toepassingen
wordt bepaald bij een stroom die hoger is dan de
nominale stroom en waarbij de inductantie
Verhoog parameter 1-14 Verst. demping wanneer de motor
bij een bepaald toerental gaat oscilleren. Verhoog de
waarde in kleine stappen. Afhankelijk van de motor kan de
instelling voor deze parameter 10-100% hoger liggen dan
de standaardwaarde.
volledig verzadigd is.
5. Parameter 1-48 Inductance Sat. Point.
Voer het percentage van de nominale stroom in
waarbij de inductantie van de d-as half-verzadigd
is, dat wil zeggen de gemiddelde waarde van de
niet-verzadigde en de verzadigde waarde.
3.3.5 Motorsetup SynRM
LET OP
In deze sectie wordt het congureren van een synchrone
reluctantiemotor beschreven.
Stappen voor eerste programmering
Activeer het gebruik van een SynRM-motor door
parameter 1-10 Motorconstructie in te stellen op [5] SynRM.
De motorgegevens programmeren
Nadat u de optie [5] SynRM hebt geselecteerd, zijn de
SynRM-motorgerelateerde parameters in parametergroep
1-2* Motordata, 1-3* Geav. Motordata en 1-4* Geav.
Motordata II beschikbaar.
Mogelijk ontbreken er voor de motor een aantal
inductantiewaarden op de typeplaatjes of de databladen.
Voer een AMA uit om de geldige waarden te verkrijgen.
Motorwerking testen
1. Start de motor bij een laag toerental (100 tot 200
tpm). Als de motor niet draait, moet u de
48 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 51

Parameterbeschrijving Programmeerhandleiding
installatie, algemene programmering en motorgegevens controleren.
2. Controleer of de startfunctie in
parameter 1-70 Startmodus geschikt is voor de
vereisten van de toepassing.
Rotordetectie
Deze functie is de aanbevolen optie voor toepassingen
waarbij de motor start vanuit stilstand, zoals bij pompen of
transportbanden. Bij sommige motoren is een geluid
hoorbaar wanneer de frequentieregelaar de rotordetectie
uitvoert. Dat is niet schadelijk voor de motor.
Parkeren
Deze functie is de aanbevolen optie voor toepassingen
waarbij de motor met laag toerental draait, zoals bij
windmilling in ventilatortoepassingen.
Parameter 2-06 Parkeerstroom en parameter 2-07 Parkeertijd
kunnen worden gewijzigd. Verhoog de fabrieksinstelling
van deze parameters voor toepassingen met hoge
massatraagheid.
Toepassingsspecieke aanpassing bij gebruik van VVC
+
VVC+ is de meest robuuste regelmodus. Deze biedt in de
meeste situaties optimale prestaties zonder verdere
aanpassingen. Voer een volledige AMA uit voor de beste
prestaties.
Start de motor op het nominale toerental. Controleer de
VVC+ SynRM-instellingen als de toepassing niet goed
werkt. Tabel 3.5 bevat aanbevelingen voor diverse toepas-
singen.
Toepassing Instellingen
Toepassingen met lage
massatraagheid
I
Load/IMotor
Toepassingen met lage
massatraagheid
50 > I
Toepassingen met hoge
massatraagheid
I
Load/IMotor
Hoge belasting bij laag
toerental
< 30% (nominaal
toerental)
Tabel 3.5 Aanbevelingen voor diverse toepassingen
< 5
Load/IMotor
> 50
> 5
Verhoog parameter 1-17 Filtertijdcon-
stante spanning met een factor 5-10.
Verlaag parameter 1-14 Verst.
demping.
Verlaag parameter 1-66 Min. stroom
bij lage snelh. (< 100%).
Handhaaf de standaardwaarden.
Verhoog parameter 1-14 Verst.
demping, parameter 1-15 Filtertijdconstante lage snelh. en
parameter 1-16 Filtertijdconstante
hoge snelh..
Verhoog parameter 1-17 Filtertijdconstante spanning.
Verhoog parameter 1-66 Min. stroom
bij lage snelh. om het startkoppel
aan te passen. Een stroom van 100%
geeft het nominale koppel als
startkoppel. Gedurende langere tijd
werken bij een stroomniveau hoger
dan 100% kan leiden tot oververhitting van de motor.
Verhoog parameter 1-14 Verst. demping wanneer de motor
bij een bepaald toerental gaat oscilleren. Verhoog de
waarde in kleine stappen. Afhankelijk van de motor kan de
instelling voor deze parameter 10-100% hoger liggen dan
de standaardwaarde.
3.3.6
1-1* VVC+ PM/SYN RM
De standaardparameters voor een VVC+ PMSM-regeling
zijn geoptimaliseerd voor toepassingen en traagheidsbelastingen in het bereik van 50 > Jl/Jm > 5. Jl is de
belastingstraagheid van de toepassing en Jm is de
massatraagheid van de machine.
Bij toepassingen met een lage massatraagheid (Jl/Jm < 5)
kunt u parameter 1-17 Filtertijdconstante spanning met een
factor 5-10 verhogen om de prestaties en stabiliteit te
verbeteren. In sommige gevallen kan het ook nodig zijn
om parameter 1-14 Verst. demping te verhogen.
Bij toepassingen met een hoge massatraagheid (Jl/Jm >
50) moet u parameter 1-15 Filtertijdconstante lage snelh.,
parameter 1-16 Filtertijdconstante hoge snelh. en
parameter 1-14 Verst. demping verhogen om de prestaties
en stabiliteit te verbeteren.
Voor hoge belastingen bij lage toerentallen (< 30% van het
nominale toerental) moet u parameter 1-17 Filtertijdcon-
stante spanning verhogen vanwege de niet-lineariteit van
de omvormer bij lage toerentallen.
1-11 Motor Model (Motormodel)
Option: Functie:
Stelt de fabriekswaarden voor de geselecteerde motor automatisch in. Als de
standaardwaarde Std. Asynchron (Std.
asynchroon) wordt gebruikt, bepaalt u de
instellingen handmatig op basis van de
instelling van parameter 1-10 Motorcon-
structie.
[1] Std. Asynchron
(Std.
asynchroon)
[2] Std. PM, non
salient (Std.
PM, nietuitspr.)
[10] Danfoss OGD
LA10
[11] Danfoss OGD
V210
Standaard motormodel wanneer [0]
Asynchroon is geselecteerd in
parameter 1-10 Motorconstructie.
Beschikbaar wanneer [1] PM, niet-uitspr.
SPM is geselecteerd in
parameter 1-10 Motorconstructie.
Beschikbaar wanneer [1] PM, niet-uitspr.
SPM is geselecteerd in
parameter 1-10 Motorconstructie. Alleen
beschikbaar voor klem 4, klem 5 in 1,5-3
kW. De instellingen voor deze specieke
motor worden automatisch ingeladen.
Beschikbaar wanneer [1] PM, niet-uitspr.
SPM is geselecteerd in
parameter 1-10 Motorconstructie. Alleen
beschikbaar voor klem 4, klem 5 in 0,75-3
kW. De instellingen voor deze specieke
motor worden automatisch ingeladen.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 49
Page 52

1-14 Verst. demping
Range: Functie:
Size
related*
[0 - 250 %] De parameter stabiliseert de PM-
motor om die soepel en stabiel te
laten werken. De waarde van de
dempingsversterking regelt de
dynamische prestaties van de PMmotor. Een lage waarde voor de
dempingsversterking zorgt voor
hoge dynamische prestaties, terwijl
een hoge waarde zorgt voor lage
dynamische prestaties. Als de
dempingsversterking te hoog of te
laag is, wordt de regeling instabiel.
De dynamische prestaties zijn
gerelateerd aan de machinegegevens en het type belasting.
1-15 Filtertijdconstante lage snelh.
Range: Functie:
Size
related*
[0.01 - 20 s] De dempingstijdconstante voor
hoogdoorlaatlters bepaalt de
responstijd bij belastingsstappen.
Een korte dempingstijdconstante
zorgt voor een snelle regeling.
Wanneer deze waarde echter te
laag is, wordt de regeling instabiel.
Deze tijdconstante wordt gebruikt
bij toerentallen lager dan 10% van
het nominale toerental.
1-16 Filtertijdconstante hoge snelh.
Range: Functie:
Size
related*
[0.01 - 20 s] De dempingstijdconstante voor
hoogdoorlaatlters bepaalt de
responstijd bij belastingsstappen.
Een korte dempingstijdconstante
zorgt voor een snelle regeling.
Wanneer deze waarde echter te
laag is, wordt de regeling instabiel.
Deze tijdconstante wordt gebruikt
bij toerentallen hoger dan 10% van
het nominale toerental.
1-17 Filtertijdconstante spanning
Range: Functie:
Size
related*
[0.001 - 2 s] De ltertijdconstante voor de
voedingsspanning van de machine
wordt gebruikt om de invloed van
hoogfrequente rimpels en
resonantie in het systeem te
beperken bij de berekening van de
voedingsspanning van de machine.
Zonder dit lter kunnen de rimpels
in de stroom de berekende
1-17 Filtertijdconstante spanning
Range: Functie:
spanning verstoren en de stabiliteit
van het systeem aantasten.
1-20 Motorverm. [kW]
Range: Functie:
Size
related*
[ 0.09 -
2000.00 kW]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel het nominale motorvermogen
in kW in volgens de gegevens op
het motortypeplaatje. De standaardwaarde komt overeen met het
nominale vermogen van de
eenheid.
Afhankelijk van de selecties in
parameter 0-03 Regionale instellingen
wordt parameter 1-20 Motorverm.
[kW] of parameter 1-21 Motorverm.
[PK] onzichtbaar gemaakt.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
3.3.7 1-2* Motordata
Deze parametergroep bevat invoergegevens voor de
gegevens van het motortypeplaatje voor de aangesloten
motor.
LET OP
Het wijzigen van de waarde van deze parameters
beïnvloedt de instelling van andere parameters.
LET OP
De volgende parameters hebben geen eect als
parameter 1-10 Motorconstructie is ingesteld op [1] PM,
niet-uitspr. SPM, [2] PM, salient IPM (PM, uitspr. IPM), [5]
Sync. Reluctance (Synchr. reluctantie):
Parameter 1-20 Motorverm. [kW].
•
Parameter 1-21 Motorverm. [PK].
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
50 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 53

1-21 Motorverm. [PK]
Range: Functie:
Size
related*
[ 0.09 -
500.00 hp]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel het nominale motorvermogen
in pk in volgens de gegevens op
het motortypeplaatje. De standaardwaarde komt overeen met het
nominale vermogen van de
eenheid.
Afhankelijk van de selecties in
parameter 0-03 Regionale instellingen
wordt parameter 1-20 Motorverm.
[kW] of parameter 1-21 Motorverm.
[PK] onzichtbaar gemaakt.
1-22 Motorspanning
Range: Functie:
Size
related*
[ 10 - 1000
V]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel de nominale motorspanning in
volgens de gegevens van het
motortypeplaatje. De standaardwaarde komt overeen met het
nominale vermogen van de
eenheid.
1-23 Motorfrequentie
Range: Functie:
Size
related*
[20 - 1000
Hz]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel de motorfrequentie in volgens
de gegevens van het motortypeplaatje. Voor 87 Hz-bedrijf met
230/400 V-motoren stelt u de
gegevens van het typeplaatje in
voor 230 V/50 Hz. Stel
parameter 4-13 Motorsnelh. hoge
begr. [RPM] en parameter 3-03 Max.
referentie in voor de 87 Hz-
toepassing.
1-24 Motorstroom
Range: Functie:
Size
related*
[ 0.10 -
10000.00 A]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel de nominale motorstroom in
volgens de gegevens van het
motortypeplaatje. De gegevens
worden gebruikt voor het
berekenen van het motorkoppel, de
thermische motorbeveiliging en
dergelijke.
1-25 Nom. motorsnelheid
Range: Functie:
Size
related*
[100 - 60000
RPM]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Voer het nominale motortoerental
in overeenkomstig de gegevens van
het motortypeplaatje. De gegevens
worden gebruikt voor de
berekening van motorcompensaties.
1-26 Cont. nom. motorkoppel
Range: Functie:
Size
related*
[1 - 10000.0
Nm]
Voer de waarde in volgens de
gegevens op het motortypeplaatje.
De standaardwaarde komt overeen
met het nominale vermogen. Deze
parameter is beschikbaar als
parameter 1-10 Motorconstructie is
ingesteld op [1] PM, niet-uitspr. SPM,
wat wil zeggen dat de parameter
alleen geldig is voor PM-motoren
en SPM-motoren met nietuitspringende magneten.
Parameterbeschrijving Programmeerhandleiding
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 51
Page 54

1-28 Controle draair. motor
Option: Functie:
WAARSCHUWING
HOGE SPANNING
Frequentieregelaars bevatten hoge
spanning wanneer ze zijn aangesloten
op een netingang, DC-voeding of
loadsharing.
•
Onderbreek de netvoeding
voordat u motorfasekabels
loskoppelt.
LET OP
Zodra de controlefunctie voor
de draairichting van de motor
is ingeschakeld, toont het
display: NB! Motor draait
mogelijk in verkeerde richting.
Wanneer u op [OK], [Back] of
[Cancel] drukt, verdwijnt deze
melding en verschijnt er een
nieuwe melding: Druk op
[Hand On] om de motor te
starten. Druk op [Cancel] om te
annuleren. Wanneer u op
[Hand On] drukt, wordt de
motor bij 5 Hz in voorwaartse
richting gestart en toont het
display: Motor is actief.
Controleer de draairichting van
de motor.' Druk op [O] om de
motor te stoppen. Wanneer u
op [O] drukt, wordt de motor
gestopt en wordt
parameter 1-28 Controle draair.
motor gereset. Als de
draairichting van de motor
verkeerd is, moet u 2 motorfasekabels verwisselen.
Na installatie en aansluiting van de
motor kan met behulp van deze
functie de draairichting van de
motor worden gecontroleerd.
Wanneer deze functie wordt
ingeschakeld, worden alle
commando's via een bus of de
digitale ingangen genegeerd, met
uitzondering van externe vergrendeling en Safe Torque O (STO)
(indien aanwezig).
[0] * Uit Controle draair. motor is niet actief.
[1] Ingesch. De draairichting van de motor
wordt gecontroleerd.
1-29 Autom. aanpassing motorgeg. (AMA)
Option: Functie:
De AMA-functie optimaliseert de
dynamische motorprestaties door
een automatische optimalisatie van
de geavanceerde motorparameters
(parameter 1-30 Statorweerstand (Rs)
tot parameter 1-35 Hoofdreactantie
(Xh)) terwijl de motor stationair
loopt.
[0] * Uit Geen functie.
[1] Volledige AMA
insch.
Hiermee wordt een AMA uitgevoerd
voor de statorweerstand Rs, de
rotorweerstand Rr, de statorlekreactantie X1, de rotorlekreactantie X
2
en de hoofdreactantie Xh.
[2] Beperkte AMA
insch.
Hiermee wordt een beperkte AMA
uitgevoerd waarbij alleen de statorweerstand Rs in het systeem wordt
bepaald. Selecteer deze optie als
een LC-lter wordt gebruikt tussen
de frequentieregelaar en de motor.
[3] Enable
Complete
AMA II
Hiermee wordt een AMA II met
verbeterde functionaliteit
uitgevoerd voor de statorweerstand
Rs, de rotorweerstand Rr, de statorlekreactantie X1, de
rotorlekreactantie X2 en de hoofdreactantie Xh. Werk
parameter 14-43 Cosphi motor bij
voor betere resultaten.
[4] Enable
Reduced AMA
II
Hiermee wordt een beperkte AMA II
uitgevoerd waarbij alleen de statorweerstand Rs in het systeem wordt
bepaald. Selecteer deze optie als
een LC-lter wordt gebruikt tussen
de frequentieregelaar en de motor.
Parameterbeschrijving
33
52 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
LET OP
Parameter 1-29 Autom. aanpassing motorgeg. (AMA) heeft
geen eect als parameter 1-10 Motorconstructie = [1] PM,
niet-uitspr. SPM.
Activeer de AMA-functie door de [Hand On]-toets in te
drukken nadat u [1] Volledige AMA insch. of [2] Beperkte
AMA insch. hebt geselecteerd. Zie ook het hoofdstuk
Automatische aanpassing motorgegevens in de design guide.
Na een normale procedure toont het display: Druk op [OK]
om AMA te voltooien. Nadat u op [OK] hebt gedrukt, is de
frequentieregelaar gereed voor bedrijf.
Page 55

130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Statorweerstand (Rs)
Range: Functie:
Size
related*
[ 0.0140 -
140.0000
Ohm]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Zie de beschrijving in
parameter 1-37 Inductantie d-as (Ld)
voor PM-motoren.
Stel de statorweerstandswaarde in.
Voer de waarde in volgens het
datablad voor de motor of voer een
AMA uit met een koude motor.
Parameterbeschrijving Programmeerhandleiding
LET OP
Voor een optimale aanpassing van de frequen-
•
tieregelaar wordt aanbevolen om een AMA uit
te voeren met een koude motor.
Een AMA kan niet worden uitgevoerd terwijl de
•
motor loopt.
LET OP
Voorkom dat er tijdens de AMA een extern koppel wordt
gegenereerd.
Afbeelding 3.4 Motorequivalentiediagram voor een
asynchrone motor
LET OP
Als 1 van de instellingen in parametergroep 1-2*
Motordata wordt gewijzigd, worden
parameter 1-30 Statorweerstand (Rs) tot
parameter 1-39 Motorpolen teruggezet op de standaard-
instelling.
Deze parameter kan niet worden gewijzigd terwijl de
motor loopt.
3 3
LET OP
Een volledige AMA moet zonder lter worden
uitgevoerd, terwijl een beperkte AMA moet worden
uitgevoerd als er een lter is geïnstalleerd.
Zie ook het hoofdstuk Automatische aanpassing motorgegevens in de VLT
3.3.8 1-3* Geav. Motordata
Parameters voor geavanceerde motorgegevens. De
motorgegevens in parameter 1-30 Statorweerstand (Rs) tot
en met parameter 1-39 Motorpolen moeten zijn afgestemd
op de betreende motor om de motor optimaal te laten
werken. De standaardinstellingen zijn gebaseerd op
gangbare motorparameterwaarden van standaardmotoren.
Als de motorparameters niet juist zijn ingesteld, kan dat
een storing van het frequentieregelaarsysteem tot gevolg
hebben. Als de geavanceerde motorgegevens niet bekend
zijn, wordt aangeraden om een AMA uit te voeren. Zie ook
het hoofdstuk Automatische aanpassing motorgegevens in
de VLT® AQUA Drive FC 202 Design Guide. Tijdens de AMAprocedure worden alle motorparameters aangepast, met
uitzondering van het traagheidsmoment van de rotor en
de ijzerverliesweerstand (parameter 1-36 Ijzerverlies-
weerstand (Rfe)).
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 53
®
AQUA Drive FC 202 Design Guide.
Afbeelding 3.5 Motorequivalentiediagram voor een PM-motor
met niet-uitspringende magneten
Page 56

1-31 Rotorweerstand (Rr)
Range: Functie:
Size
related*
[ 0.0100 -
100.0000
Ohm]
LET OP
Parameter 1-31 Rotorweerstand
(Rr) heeft geen eect als
parameter 1-10 Motorconstructie is ingesteld op [1] PM,
niet-uitspr. SPM of [5] SynRM.
Stel met behulp van 1 van deze
methoden de rotorweerstandswaarde Rr in om de asprestaties
verbeteren:
•
Voer een AMA uit met een
koude motor. De frequentieregelaar meet de
waarde van de motor. Alle
compensaties worden
gereset op 100%.
•
Voer de Rr-waarde
handmatig in. Vraag de
waarde op bij de
leverancier van de motor.
•
Gebruik de standaardinstelling voor Rr. De
frequentieregelaar bepaalt
de instelling op basis van
de gegevens van het
motortypeplaatje.
1-33 Statorlek-reactantie (X1)
Range: Functie:
Size
related*
[ 0.0400 -
400.0000
Ohm]
LET OP
Deze parameter is alleen
relevant voor asynchrone
motoren.
Stel op 1 van de volgende
manieren de statorlekreactantie van
de motor in:
•
Voer een AMA uit met een
koude motor. De frequentieregelaar meet de
waarde van de motor.
•
Voer de X1-waarde
handmatig in. Vraag de
waarde op bij de
leverancier van de motor.
•
Gebruik de standaardinstelling voor X1. De
frequentieregelaar bepaalt
de instelling op basis van
de gegevens van het
motortypeplaatje.
1-33 Statorlek-reactantie (X1)
Range: Functie:
Zie Afbeelding 3.4.
LET OP
De parameterwaarde wordt na
elke koppelkalibratie
bijgewerkt als optie [3] 1st
start with store (1e start met
opslaan) of optie [4] Every start
with store (Elke start met
opslaan) is geselecteerd in
parameter 1-47 Torque
Calibration.
1-34 Rotorlekreactantie (X2)
Range: Functie:
Size
related*
[ 0.0400 -
400.0000
Ohm]
LET OP
Deze parameter is alleen
relevant voor asynchrone
motoren.
Stel op 1 van de volgende
manieren de rotorlekreactantie van
de motor in:
•
Voer een AMA uit met een
koude motor. De frequentieregelaar meet de
waarde van de motor.
•
Voer de X2-waarde
handmatig in. Vraag de
waarde op bij de
leverancier van de motor.
•
Gebruik de standaardinstelling voor X2. De
frequentieregelaar bepaalt
de instelling op basis van
de gegevens van het
motortypeplaatje.
Zie Afbeelding 3.4.
LET OP
De parameterwaarde wordt na
elke koppelkalibratie
bijgewerkt als optie [3] 1st
start with store (1e start met
opslaan) of optie [4] Every start
with store (Elke start met
opslaan) is geselecteerd in
parameter 1-47 Torque
Calibration.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
54 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 57

1-35 Hoofdreactantie (Xh)
Range: Functie:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
LET OP
Parameter 1-35 Hoofdreactantie
(Xh) heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel op 1 van de volgende
manieren de hoofdreactantie van
de motor in:
•
Voer een AMA uit met een
koude motor. De frequentieregelaar meet de
waarde van de motor.
•
Voer de Xh-waarde
handmatig in. Vraag de
waarde op bij de
leverancier van de motor.
•
Gebruik de standaard Xhinstelling. De
frequentieregelaar bepaalt
de instelling op basis van
de gegevens van het
motortypeplaatje.
1-36 Ijzerverliesweerstand (Rfe)
Range: Functie:
Size
related*
[ 0 -
10000.000
Ohm]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Voer de ijzerverliesweerstandswaarde (RFe) in die nodig is om
ijzerverliezen in de motor te
compenseren.
De RFe-waarde kan niet worden
gevonden via een AMA.
De RFe-waarde is vooral belangrijk
in koppelregelingstoepassingen.
Laat parameter 1-36 Ijzerverlies-
weerstand (Rfe) op de
standaardinstelling staan als R
Fe
onbekend is.
1-37 Inductantie d-as (Ld)
Range: Functie:
Size
related*
[0.000 -
1000.000 mH]
LET OP
Deze parameter is alleen actief
als parameter 1-10 Motorcon-
structie is ingesteld op [1] PM,
niet uitspr. SPM.
Stel de waarde voor de inductantie
van de d-as in. Raadpleeg het
datablad voor de PM-motor voor de
juiste waarde.
Parameterbeschrijving Programmeerhandleiding
In technische specicaties hebben de vermelde waarden
voor de statorweerstand en de inductantie van de d-as
voor asynchrone motoren gewoonlijk betrekking op de
gemeten waarde tussen fase en gemeenschappelijke nul
(sterpunt). Voor PM-motoren worden deze waarden
meestal gegeven voor fase naar fase. PM-motoren zijn
typisch bedoeld voor een steraansluiting.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 55
Parameter 1-30 Stator-
weerstand (Rs)
(fase naar gemeenschappelijke nul).
Parameter 1-37 Inductanti
e d-as (Ld)
(fase naar gemeenschappelijke nul).
Parameter 1-40 Tegen-
EMK bij 1000 TPM
RMS (fase-fasewaarde).
Tabel 3.6 Parameters die betrekking hebben op PM-motoren
Deze parameter geeft de weerstand
van de statorwikkeling (Rs) aan,
vergelijkbaar met de statorweerstand
van een asynchrone motor. De statorweerstand is gedenieerd voor een
meting tussen fase en gemeenschappelijke nul. In geval van fasefasegegevens, waarbij de
statorweerstand wordt gemeten
tussen 2 willekeurige fasen, moet u
de waarde delen door 2.
Deze parameter geeft de directe
asinductantie van de PM-motor. De
inductantie van de d-as is gede-
nieerd voor een meting tussen fase
en gemeenschappelijke nul. In geval
van fase-fasegegevens, waarbij de
statorweerstand wordt gemeten
tussen 2 willekeurige fasen, moet u
de waarde delen door 2.
Deze parameter geeft de specieke
tegen-EMK over de statorklem van
een PM-motor bij een mechanisch
toerental van 1000 tpm. Deze waarde
wordt bepaald tussen twee fasen en
wordt uitgedrukt in een RMS-waarde.
Page 58

Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 q-axis Inductance (Lq)
Range: Functie:
Size
related*
[0.000 - 1000
mH]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel de waarde voor de inductantie
van de q-as in. Zie het motordatablad.
1-39 Motorpolen
Range: Functie:
Size
related*
[2 - 132 ]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel het aantal motorpolen in.
Polen~nn bij 50Hz~nn bij 60
Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabel 3.7 Aantal polen en
bijbehorende frequenties
Tabel 3.7 geeft het aantal polen
weer voor normale toerentalbereiken voor verschillende typen
motoren. Motoren die voor andere
frequenties zijn ontworpen, moeten
afzonderlijk worden
gedenieerd.
De waarde voor de motorpolen is
altijd een even getal, omdat de
waarde verwijst naar het totale
aantal polen en niet naar het aantal
poolparen. De frequentieregelaar
stelt parameter 1-39 Motorpolen in
eerste instantie in op basis van
parameter 1-23 Motorfrequentie en
parameter 1-25 Nom. motorsnelheid.
1-40 Tegen-EMK bij 1000 TPM
Range: Functie:
Size
related*
[ 10 - 9000V]Stel de nominale tegen-EMK in voor
een motor die draait op 1000 tpm.
Deze parameter is alleen actief als
parameter 1-10 Motorconstructie is
ingesteld op [1] PM, niet uitspr. SPM.
1-44 d-axis Inductance Sat. (LdSat)
Range: Functie:
Size
related*
[0 - 1000
mH]
Voer het inductantieverzadigingspunt van Ld in. In het ideale
geval heeft deze parameter
dezelfde waarde als
parameter 1-37 Inductantie d-as (Ld).
Als de motorfabrikant een
inductiecurve heeft vermeld, voert
u de inductiewaarde bij 200% van
de nominale waarde in.
Parameterbeschrijving
VLT® AQUA Drive FC 202
LET OP
De waarden voor de statorweerstand
(parameter 1-30 Statorweerstand (Rs)) en de inductantie
van de d-as (parameter 1-37 Inductantie d-as (Ld)) die
door motorfabrikanten in de technische specicaties
33
worden vermeld, hebben betrekking op de gemeten
waarde tussen fase en gemeenschappelijke nul (sterpunt)
of tussen twee fasen. Er geldt geen algemene standaard.
De verschillende conguraties voor de weerstand van de
statorwikkeling en inductantie zijn weergegeven in
Afbeelding 3.6. Voor de frequentieregelaars van Danfoss
hebt u altijd de waarde voor fase naar gemeenschappelijk nulpunt nodig. De tegen-EMK voor een PM-motor
is gedenieerd als de geïnduceerde EMK ontwikkeld over
2 willekeurige fasen van de statorwikkeling van een
vrijlopende motor. Voor frequentieregelaars van Danfoss
hebt u altijd de rms-waarde tussen twee fasen nodig,
gemeten bij een mechanisch toerental van 1000 tpm.
Dat is te zien in Afbeelding 3.7.
Afbeelding 3.6 Statorwikkelingconguraties
Afbeelding 3.7 Machineparameterdenities voor de tegen-EMK
van PM-motoren
56 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 59

1-45 q-axis Inductance Sat. (LqSat)
Range: Functie:
Size
related*
[0 - 1000
mH]
Deze parameter komt overeen met
de inductantieverzadiging van Lq. In
het ideale geval heeft deze
parameter dezelfde waarde als
parameter 1-38 q-axis Inductance
(Lq). Als de motorfabrikant een
inductiecurve heeft vermeld, voert
u de inductiewaarde bij 200% van
de nominale waarde in.
1-47 Torque Calibration
Option: Functie:
Gebruik deze parameter om de
schatting van het koppel over het
volledige toerentalbereik te optimaliseren. Het geschatte koppel is
gebaseerd op het asvermogen,
P
shaft
= Pm - Rs x I2. Controleer of de
waarde Rs correct is. De Rs-waarde
in deze formule is gelijk aan het
vermogensverlies in de motor, de
kabel en de frequentieregelaar.
Wanneer deze functie actief is,
berekent de frequentieregelaar de
Rs-waarde tijdens het opstarten,
zodat een optimale schatting van
het koppel en dus optimale
prestaties zijn gewaarborgd.
Gebruik deze functie als het niet
mogelijk is om
parameter 1-30 Statorweerstand (Rs)
op elke frequentieregelaar aan te
passen om te compenseren voor de
kabellengte, verliezen in de
frequentieregelaar en de temperatuurafwijking op de motor.
[0] * O
[1] 1st start after
pwr-up
Voert een kalibratie uit bij de eerste
start na inschakeling en handhaaft
deze waarde tot deze wordt gereset
door het uit- en weer inschakelen.
[2] Every start Voert bij elke start een kalibratie uit
om eventuele wijzigingen in de
motortemperatuur sinds de laatste
start te compenseren. De waarde
wordt gereset na het uit- en weer
inschakelen.
[3] 1st start with
store
De frequentieregelaar kalibreert het
koppel bij de eerste start na inschakeling. Deze optie wordt gebruikt
om de motorparameters bij te
werken:
1-47 Torque Calibration
Option: Functie:
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-34 Rotorlekreactantie (X2).
•
Parameter 1-37 Inductantie
d-as (Ld).
[4] Every start
with store
De frequentieregelaar kalibreert het
koppel bij elke start om eventuele
wijzigingen in de motortemperatuur sinds de laatste start te
compenseren. Deze optie wordt
gebruikt om de motorparameters
bij te werken:
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-34 Rotorlekreactantie (X2).
•
Parameter 1-37 Inductantie
d-as (Ld).
1-48 Inductance Sat. Point
Range: Functie:
Size
related*
[1 - 500 %] Voer het inductantieverzadi-
gingspunt in.
1-49 q-axis Inductance Sat. Point
Range: Functie:
Size
related*
[ 0 - 200 %]
LET OP
Voer een AMA uit om de
waarde van deze parameter te
bepalen. Handmatig wijzigen
van de waarde is alleen
toegestaan als de toepassing
een waarde vereist die afwijkt
van de waarde die via een
AMA is bepaald.
Voer het inductantieverzadigingspunt van de q-as in. De
frequentieregelaar gebruikt deze
waarde om de prestaties van IPMmotoren te optimaliseren.
Selecteer de waarde die
overeenkomt met het punt waarbij
de inductantie de gemiddelde
waarde van parameter 1-38 q-axis
Inductance (Lq) en parameter 1-45 q-
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 57
3 3
Page 60

1-49 q-axis Inductance Sat. Point
Range: Functie:
axis Inductance Sat. (LqSat) heeft, als
een percentage van de nominale
stroom.
1-50 Motormagnetisering bij nulsnelheid
Range: Functie:
100 %* [0 - 300 %]
LET OP
Parameter 1-50 Motormagnetisering bij nulsnelheid heeft
geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Gebruik deze parameter in
combinatie met parameter 1-51 Min.
snelh. norm. magnetisering [TPM] om
een andere thermische belasting op
de motor te verkrijgen bij lage
toerentallen.
Voer een waarde in die een
percentage van de nominale
magnetiseringsstroom aangeeft. Als
de instelling te laag is, wordt het
koppel op de motoras mogelijk
beperkt.
Afbeelding 3.8 Magnetiserings-
stroom
1-51 Min. snelh. norm. magnetisering [TPM]
Range: Functie:
Size
related*
[10 - 300
RPM]
LET OP
Parameter 1-51 Min. snelh.
norm. magnetisering [TPM]
heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Stel het gewenste toerental voor
normale magnetiseringsstroom in.
Als het toerental lager wordt
ingesteld dan het motorsliptoe-
1-51 Min. snelh. norm. magnetisering [TPM]
Range: Functie:
rental, hebben
parameter 1-50 Motormagnetisering
bij nulsnelheid en
parameter 1-51 Min. snelh. norm.
magnetisering [TPM] geen betekenis.
Gebruik deze parameter in
combinatie met
parameter 1-50 Motormagnetisering
bij nulsnelheid. Zie Tabel 3.7.
1-52 Min. snelh. norm. magnetisering [Hz]
Range: Functie:
Size
related*
[ 0.3 - 10.0
Hz]
LET OP
Parameter 1-52 Min. snelh.
norm. magnetisering [Hz] heeft
geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Stel de gewenste frequentie voor
normale magnetiseringsstroom in.
Als de frequentie lager wordt
ingesteld dan de motorslipfrequentie, hebben
parameter 1-50 Motormagnetisering
bij nulsnelheid en
parameter 1-51 Min. snelh. norm.
magnetisering [TPM] geen betekenis.
Gebruik deze parameter in
combinatie met
parameter 1-50 Motormagnetisering
bij nulsnelheid. Zie Tabel 3.7.
1-55 V/f-karakteristiek - V
Array [6]
Range: Functie:
Size
related*
[0 - 1000 V] Stel de spanning bij elk frequen-
tiepunt in om handmatig een U/fkarakteristiek te verkrijgen die
overeenkomt met de motor.
De frequentiepunten worden
ingesteld in parameter 1-56 V/f-
karakteristiek - f.
Deze parameter is een arrayparameter [0-5] en is alleen
beschikbaar als
parameter 1-01 Motorbesturingsprincipe is ingesteld op [0] U/f.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
3.3.9 1-5* Bel. onafh. inst.
58 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 61

1-56 V/f-karakteristiek - f
Array [6]
Range: Functie:
Size
related*
[ 0 - 1000.0
Hz]
Stel de frequentiepunten in om
handmatig een U/f-karakteristiek te
verkrijgen die overeenkomt met de
motor.
De spanning op elk punt wordt
ingesteld in parameter 1-55 V/f-
karakteristiek - V.
Deze parameter is een arrayparameter [0-5] en is alleen
beschikbaar als
parameter 1-01 Motorbesturingsprincipe is ingesteld op [0] U/f.
1-58 Stroom testpulsen vlieg.start
Range: Functie:
Size
related*
[ 0 - 200 %] Bepaalt de hoogte van de magneti-
seringsstroom voor de pulsen die
worden gebruikt om de
draairichting van de motor te
detecteren. Het instelbereik en de
functie zijn afhankelijk van
parameter 1-10 Motorconstructie:
[0] Asynchroon: [0-200%]
Een lagere waarde verlaagt het
geproduceerde koppel. 100% komt
overeen met de volledige nominale
motorstroom. In dat geval is de
standaardwaarde 30%.
[1] PM, niet-uitspr. SPM: [0-40%]
Voor PM-motoren wordt een
algemene instelling van 20%
aangeraden. Hogere waarden
kunnen voor betere prestaties
zorgen. Voor motoren met een
tegen-EMK hoger dan 300 VLL (rms)
1-58 Stroom testpulsen vlieg.start
Range: Functie:
bij nominaal toerental en een hoge
spoelinductie (meer dan 10 mH)
wordt echter een lagere waarde
aangeraden om een foutieve
schatting van het toerental te
voorkomen. Deze parameter is
actief wanneer parameter 1-73 Vlieg.
start is ingeschakeld.
1-59 Freq. testpulsen vlieg.start
Range: Functie:
Size
related*
[ 0 - 500 %]
LET OP
Zie de beschrijving van
parameter 1-70 Startmodus
voor een overzicht van de
relatie tussen de parameters
voor een vliegende start bij
PM-motoren.
Het instelbereik en de functie zijn
afhankelijk van
parameter 1-10 Motorconstructie:
[0] Asynchroon: [0-500%]
Bepaalt het percentage van de
frequentie voor de pulsen die
worden gebruikt om de
draairichting van de motor te
detecteren. Een hogere waarde
verlaagt het geproduceerde koppel.
In deze modus komt 100% overeen
met 2 keer de slipfrequentie.
[1] PM, niet-uitspr. SPM: [0-10%]
Deze parameter denieert het
motortoerental (in % van het
nominale motortoerental)
waaronder de parkeerfunctie (zie
parameter 2-06 Parkeerstroom en
parameter 2-07 Parkeertijd) actief
wordt. Deze parameter is alleen
actief als parameter 1-70 Startmodus
is ingesteld op [1] Parkeren en
uitsluitend na het starten van de
motor.
Parameterbeschrijving Programmeerhandleiding
3 3
Afbeelding 3.9 U/f-karakteristiek
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 59
Page 62

1-60 Belast. comp. bij lage snelheid
Range: Functie:
100 %* [0 - 300 %]
LET OP
Parameter 1-60 Belast. comp. bij
lage snelheid heeft geen eect
als parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Voer de %-waarde in voor
compensatie van de spanning in
verhouding tot de belasting bij een
op lage toeren draaiende motor en
verkrijg zo de optimale U/f-karakteristiek. Het vermogen van de motor
bepaalt het frequentiebereik
waarbinnen deze parameter actief
is.
Motorvermogen
[kW]
Omschakeling
[Hz]
0,25-7,5 <10
11–45 <5
55–550 <3–4
Tabel 3.8 Omschakelfrequentie
1-61 Belastingcomp. bij hoge snelheid
Range: Functie:
100 %* [0 - 300 %]
LET OP
Parameter 1-61 Belastingcomp.
bij hoge snelheid heeft geen
eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
1-61 Belastingcomp. bij hoge snelheid
Range: Functie:
Voer de %-waarde in voor
compensatie van de spanning in
verhouding tot de belasting bij een
op hoge toeren draaiende motor en
verkrijg zo de optimale U/f-karakteristiek. Het vermogen van de motor
bepaalt het frequentiebereik
waarbinnen deze parameter actief
is.
Motorvermogen
[kW]
Omschakeling
[Hz]
0,25-7,5 >10
11–45 <5
55–550 <3–4
Tabel 3.9 Omschakelfrequentie
1-62 Slipcompensatie
Range: Functie:
0 %* [-500 -
500 %]
LET OP
Parameter 1-62 Slipcompensatie
heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Voer de %-waarde voor slipcompensatie in om toleranties in de
waarde van n
M,N
te compenseren.
De slipcompensatie wordt
automatisch berekend op basis van
het nominale motortoerental n
M,N
.
1-63 Slipcompensatie tijdconstante
Range: Functie:
Size
related*
[0.05 - 5 s]
LET OP
Parameter 1-63 Slipcompensatie
tijdconstante heeft geen eect
als parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Voer de reactiesnelheid van de
slipcompensatie in. Een hoge
waarde resulteert in een trage
reactie en een lage waarde
resulteert in een snelle reactie. Stel
een langere tijd in als bij lage
frequenties resonantieproblemen
optreden.
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.3.10 1-6* Bel. afhank. inst.
33
Afbeelding 3.10 Belast. comp. bij lage snelheid
60 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 63

1-64 Resonantiedemping
Range: Functie:
Size
related*
[0 - 500 %]
LET OP
Parameter 1-64 Resonantiedemping heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Stel de resonantiedempingswaarde
in. Stel parameter 1-64 Resonantie-
demping en
parameter 1-65 Resonantiedemping
tijdconstante in om problemen met
hoogfrequentresonantie te helpen
elimineren. Verhoog de waarde van
parameter 1-64 Resonantiedemping
om resonantietrilling te
verminderen.
1-65 Resonantiedemping tijdconstante
Range: Functie:
5 ms* [5 - 50 ms]
LET OP
Parameter 1-65 Resonantiedemping tijdconstante heeft
geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Stel parameter 1-64 Resonantiedemping en
parameter 1-65 Resonantiedemping
tijdconstante in om problemen met
hoogfrequentresonantie te helpen
elimineren. Voer de tijdconstante in
die de beste demping oplevert.
1-66 Min. stroom bij lage snelh.
Range: Functie:
Size
related*
[ 1 - 200 %]
LET OP
Parameter 1-66 Min. stroom bij
lage snelh. heeft geen eect
als parameter 1-10 Motorconstructie = [0] Asynchroon.
Stel de minimale motorstroom bij
lage toerentallen in.
Het verhogen van deze stroom
verbetert het ontwikkelde
motorkoppel bij lage toerentallen.
Laag toerental heeft hier betrekking
op toerentallen lager dan 6% van
het nominale motortoerental
1-66 Min. stroom bij lage snelh.
Range: Functie:
(parameter 1-25 Nom. motorsnelheid)
in een VVC+ PM-regeling.
1-70 Startmodus
Option: Functie:
[0] Rotordetectie Geschikt voor alle toepassingen
waarbij de motor in principe
stilstaat bij het starten (zoals
transportbanden, pompen, en
ventilatoren zonder windmilling).
[1] Parkeren Als de motor met een laag
toerental draait (d.w.z. minder dan
2-5% van het nominale toerental),
bijvoorbeeld als gevolg van
ventilatoren met windmilling,
selecteert u [1] Parkeren en past u
parameter 2-06 Parkeerstroom en
parameter 2-07 Parkeertijd overeen-
komstig aan.
[2] Rotor Det. w/
Parking
1-71 Startvertraging
Range: Functie:
00 s* [0 - 300 s] Voer de tijdsvertraging in tussen
het startcommando en het moment
waarop de frequentieregelaar
vermogen gaat leveren aan de
motor.
Deze parameter verwijst naar de in
parameter 1-72 Startfunctie
ingestelde startfunctie.
1-72 Startfunctie
Option: Functie:
Selecteer de startfunctie die actief
is tijdens de startvertraging. Deze
parameter is gekoppeld aan
parameter 1-71 Startvertraging.
[0] DC-houd/vertr.
tijd
Hierdoor krijgt de motor gedurende
de startvertraging een DChoudstroom (parameter 2-00 DC-
houd/voorverw.stroom).
[2] Vrijloop/vertr.-
tijd
De motor loopt vrij tijdens de
startvertragingstijd (omvormer uit).
De beschikbare opties zijn
afhankelijk van de instelling in
parameter 1-10 Motorconstructie: [0]
Asynchroon:
Parameterbeschrijving Programmeerhandleiding
3.3.11 1-7* Startaanpassingen
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 61
Page 64

1-72 Startfunctie
Option: Functie:
•
[2] Vrijloop.
•
[0] DC-houd.
[1] PM, niet-uitspr. SPM:
•
[2] Vrijloop.
1-73 Vlieg. start
Option: Functie:
Deze functie maakt het mogelijk
een motor op te vangen wanneer
die vrij draait als gevolg van een
netstoring.
Wanneer parameter 1-73 Vlieg. start
is ingesteld op Ingesch., heeft
parameter 1-71 Startvertraging geen
functie.
De te zoeken draairichting voor een
inschakeling bij draaiende motor is
gekoppeld aan de instelling in
parameter 4-10 Draairichting motor.
[0] Rechtsom: rechtsom zoeken bij
een inschakeling bij draaiende
motor. Als het zoeken niets
oplevert, wordt er geremd via de
DC-rem.
[2] Bidirectioneel: bij een inschakeling bij draaiende motor wordt
eerst gezocht in de richting zoals
bepaald door de laatste referentie
(richting). Als het toerental niet
wordt gevonden, wordt er in de
andere richting gezocht. Als dat
ook zonder succes is, zal een DCrem worden geactiveerd gedurende
de in parameter 2-02 DC-remtijd
ingestelde tijd. De start vindt dan
plaats vanaf 0 Hz.
[0] Uitgesch. Selecteer [0] Uitgesch. als deze
functie niet vereist is.
[1] Ingesch. Selecteer [1] Ingesch. als de frequen-
tieregelaar in staat moet zijn een
draaiende motor op te vangen en
te besturen.
Deze parameter wordt altijd
ingesteld op [1] Ingesch. wanneer
parameter 1-10 Motorconstructie is
ingesteld op [1] PM, niet uitspr. SPM.
Belangrijke gerelateerde parameters:
•
Parameter 1-58 Stroom
testpulsen vlieg.start.
•
Parameter 1-59 Freq.
testpulsen vlieg.start.
1-73 Vlieg. start
Option: Functie:
•
Parameter 1-70 Star tmodus.
•
Parameter 2-03 Inschakelsnelh. DC-rem [tpm].
•
Parameter 2-04 Inschakelsnelh. DC-rem [Hz].
•
Parameter 2-06 Parkeerstroom.
•
Parameter 2-07 Parkeertijd.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
62 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Wanneer parameter 1-73 Vlieg. start is ingesteld op Ingesch.,
heeft parameter 1-71 Startvertraging geen functie.
De vliegendestartfunctie die voor PM-motoren wordt
gebruikt, is gebaseerd op een schatting van het initiële
toerental. Het toerental wordt altijd geschat zodra een
actief startsignaal is gegeven. Op basis van de instelling in
parameter 1-70 Startmodus gebeurt er het volgende:
Parameter 1-70 Startmodus = [0] Rotordetectie:
Als het geschatte toerental hoger is dan 0 Hz, vangt de
frequentieregelaar de motor bij dat toerental op en wordt
het normale bedrijf hervat. In andere gevallen schat de
frequentieregelaar de rotorpositie en wordt het normale
bedrijf vanaf dat punt hervat.
Parameter 1-70 Startmodus = [1] Parkeren:
Als de geschatte tijd lager is dan de instelling in
parameter 1-59 Freq. testpulsen vlieg.start, wordt de parkeerfunctie ingeschakeld (zie parameter 2-06 Parkeerstroom en
parameter 2-07 Parkeertijd). In andere gevallen vangt de
frequentieregelaar de motor bij dat toerental op en wordt
het normale bedrijf hervat. Zie de beschrijving bij
parameter 1-70 Startmodus voor de aanbevolen instellingen.
Stroomgrenzen bij gebruik van het vliegendestartprincipe
voor PM-motoren:
Het toerentalbereik loopt tot 100% van het
•
nominale toerental of het veldverzwakkingstoerental (de laagste van deze twee).
Een PMSM met een hoge tegen-EMK (> 300 VLL
•
(rms)) en een hoge spoelinductie (> 10 mH) heeft
meer tijd nodig om de kortsluitstroom te
verlagen tot 0 en kan gevoelig zijn voor een
foutieve schatting.
Stroomtests zijn enkel mogelijk tot een toerental
•
van 300 Hz. Voor bepaalde eenheden ligt deze
grens bij 250 Hz; dat geldt voor alle eenheden
van 200-240 V met een vermogen tot en met
2,2 kW (3 pk) en alle eenheden van 380-480 V
met een vermogen tot en met 4 kW (5,4 pk).
Stroomtests zijn enkel mogelijk bij een machine-
•
vermogen tot 22 kW (30 pk).
Page 65

1-79 Max starttijd compressor tot uitsch
Range: Functie:
0 s* [ 0 - 3600.0s]Als de motor het ingestelde
toerental in parameter 1-86 Uitsch lg
snelh [tpm] niet bereikt binnen de
tijd die in deze parameter is
ingesteld, wordt de frequentieregelaar uitgeschakeld. De tijd in
deze parameter is inclusief de tijd
die is ingesteld in
parameter 1-71 Startvertraging. Dat
betekent bijvoorbeeld dat de
frequentieregelaar nooit zal starten
als de waarde in
parameter 1-71 Startvertraging
hoger dan of gelijk aan de waarde
in parameter 1-79 Max starttijd
compressor tot uitsch is.
1-80 Functie bij stop
Option: Functie:
Selecteer de functie van de
frequentieregelaar na een
stopcommando of wanneer de
frequentie is uitgelopen naar de
instellingen in parameter 1-81 Min.
snelh. functie bij stop [RPM].
De beschikbare opties zijn
afhankelijk van de instelling in
parameter 1-10 Motorconstructie:
[0] Asynchroon:
•
[0] Vrijloop.
•
[1] DC-houd.
[1] PM, niet-uitspr. SPM:
•
[0] Vrijloop.
[0] * Vrijloop Laat de motor vrijlopen.
[1] DC-houd/
motorvoorver
w
Voorziet de motor van een DChoudstroom (zie parameter 2-00 DC-
houd/voorverw.stroom).
1-80 Functie bij stop
Option: Functie:
[2] Motorcontrole
[6] Motorcontr,
alarm
1-81 Min. snelh. functie bij stop [RPM]
Range: Functie:
Size
related*
[0 - 600
RPM]
Stel het toerental in waarbij
parameter 1-80 Functie bij stop moet
worden geactiveerd.
1-82 Min. snelh. voor functie bij stop [Hz]
Range: Functie:
Size
related*
[ 0 - 20.0 Hz] Stel de uitgangsfrequentie in
waarbij parameter 1-80 Functie bij
stop moet worden geactiveerd.
Parameterbeschrijving Programmeerhandleiding
De tests zijn in principe ook mogelijk bij
•
machines met uitspringende polen (IPMSM) maar
zijn nog niet geverieerd voor dergelijke
machines.
Voor toepassingen met een hoge massatraagheid
•
(wanneer de massatraagheid van de belasting
meer dan 30 keer hoger is dan de
massatraagheid van de motor) wordt het gebruik
van een remweerstand aangeraden om uitschakeling (trip) door overspanning te voorkomen in
het geval van inschakeling bij hoog toerental van
de vliegendestartfunctie.
3.3.13 Geavanceerde bewaking van het
3 3
minimale toerental van
dompelpompen
3.3.12 1-8* Stopaanpassingen
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 63
Sommige pompen zijn gevoelig voor werken bij laag
toerental. Typische redenen hiervoor zijn onvoldoende
koeling of smering bij laag toerental.
Bij overbelastingscondities beschermt de frequentieregelaar
zichzelf door middel van geïntegreerde beveiligingsfuncties, waaronder het verlagen van het toerental. Zo kan
de stroombegrenzingsregeling bijvoorbeeld het toerental
verlagen. Dat betekent dat het toerental in sommige
gevallen lager kan worden dan het toerental dat is
ingesteld in parameter 4-11 Motorsnelh. lage begr. [RPM] en
parameter 4-12 Motorsnelh. lage begr. [Hz].
Als het toerental tot onder een bepaalde waarde daalt,
schakelt de geavanceerde functie voor bewaking van het
minimale toerental de frequentieregelaar uit. Als de
pompmotor of de pomp het ingestelde toerental in
parameter 1-86 Uitsch lg snelh [tpm] niet bereikt binnen de
ingestelde tijd in parameter 1-79 Max starttijd compressor
tot uitsch (het aanlopen duurt te lang), wordt de frequentieregelaar uitgeschakeld. De timers voor
parameter 1-71 Startvertraging en parameter 1-79 Max
starttijd compressor tot uitsch starten op het moment dat
het startcommando wordt gegeven. Dat betekent
bijvoorbeeld dat de frequentieregelaar nooit zal starten als
de waarde in parameter 1-71 Startvertraging hoger dan of
gelijk aan de waarde in parameter 1-79 Max starttijd
compressor tot uitsch is.
Page 66

N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Uitsch lg snelh [tpm]
Range: Functie:
Size
related*
[ 0 - par. 4-13
RPM]
LET OP
Deze parameter is alleen
beschikbaar als
parameter 0-02 Eenh. motortoerental is ingesteld op [11] tpm.
Stel de onderlimiet voor het
motortoerental in waarbij de
frequentieregelaar wordt
uitgeschakeld (trip). Als de waarde
0 is, is de functie niet actief. Als het
toerental op enig moment na de
start (of tijdens een stop) lager
wordt dan de ingestelde waarde,
wordt de frequentieregelaar
uitgeschakeld en wordt alarm 49,
Snelheidslimiet gegenereerd.
1-87 Uitsch lg snelh [Hz]
Range: Functie:
Size
related*
[ 0 - par. 4-14
Hz]
LET OP
Deze parameter is alleen
beschikbaar als
parameter 0-02 Eenh. motortoerental is ingesteld op [1] Hz.
Stel de onderlimiet voor het
motortoerental in waarbij de
frequentieregelaar wordt
uitgeschakeld (trip). Als de waarde
0 is, is de functie niet actief. Als het
toerental op enig moment na de
start (of tijdens een stop) lager
wordt dan de ingestelde waarde,
1-87 Uitsch lg snelh [Hz]
Range: Functie:
wordt de frequentieregelaar
uitgeschakeld en wordt alarm 49,
Snelheidslimiet gegenereerd.
Parameterbeschrijving
33
T
1-71
T
1-79
N
1-86
1 Normaal bedrijf.
Afbeelding 3.11 Geavanceerde bewaking van het minimale
toerental
64 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Parameter 1-71 Star tvertraging.
Parameter 1-79 Max starttijd compressor tot uitsch. Deze
tijd is inclusief de tijd in T
Parameter 1-86 Uitsch lg snelh [tpm]. Als het toerental
tijdens normaal bedrijf lager wordt dan deze waarde,
wordt de frequentieregelaar uitgeschakeld.
1-71
VLT® AQUA Drive FC 202
3.3.14 1-9* Motortemperatuur
.
1-90 Thermische motorbeveiliging
Option: Functie:
Thermische motorbeveiliging kan met behulp
van diverse technieken worden geïmplementeerd:
Via een PTC-sensor in de motorwik-
•
kelingen die is verbonden met 1 van
de analoge of digitale ingangen
(parameter 1-93 Thermistorbron). Zie
hoofdstuk 3.3.15 Aansluiting PTCthermistor.
Via een berekening (ETR =
•
elektronisch thermisch relais) van de
thermische belasting op basis van de
actuele belasting en tijd. De
berekende thermische belasting
wordt vergeleken met de nominale
motorstroom I
motorfrequentie f
hoofdstuk 3.3.16 ETR en
hoofdstuk 3.3.17 ATEX ETR.
Via een thermo-mechanische
•
schakelaar (type Klixon). Zie
hoofdstuk 3.3.18 Klixon.
Voor de Noord-Amerikaanse markt: de ETRfuncties bieden bescherming tegen
overbelasting van de motor, klasse 20, volgens
NEC.
[0] Geen
bescherm.
[1] Thermistor-
waarsch.
[2] Thermisto-
ruitsch.
[3] ETR-
waarsch. 1
Continue overbelasting van de motor,
wanneer geen waarschuwing of een uitschakeling van de frequentieregelaar vereist is.
Genereert een waarschuwing als de
aangesloten thermistor of KTY-sensor in de
motor reageert vanwege een overtemperatuur
van de motor.
Schakelt de frequentieregelaar uit (trip) als de
aangesloten thermistor of KTY-sensor in de
motor reageert vanwege een overtemperatuur
van de motor.
De uitschakelwaarde van de thermistor moet
meer dan 3 kΩ bedragen.
Integreer een thermistor (PTC-sensor) in de
motor om de wikkelingen te beschermen.
Berekent de belasting wanneer setup 1 actief
is en genereert een waarschuwing op het
display bij overbelasting van de motor.
en de nominale
M,N
. Zie
M,N
Page 67

Parameterbeschrijving Programmeerhandleiding
1-90 Thermische motorbeveiliging
Option: Functie:
Programmeer een waarschuwingssignaal via 1
van de digitale uitgangen.
[4] ETR-uitsch.1Berekent de belasting wanneer setup 1 actief
is en schakelt de frequentieregelaar uit (trip)
bij overbelasting van de motor. Programmeer
een waarschuwingssignaal via 1 van de
digitale uitgangen. Het signaal wordt gegeven
bij een waarschuwing en als de frequentieregelaar wordt uitgeschakeld (thermische
waarschuwing).
[5] ETR-
waarsch. 2
[6] ETR-uitsch.
2
[7] ETR-
waarsch. 3
[8] ETR-uitsch.
3
[9] ETR-
waarsch. 4
[10] ETR-uitsch.
4
[20] ATEX ETR Activeert de thermische bewakingsfunctie
voor explosieveilige motoren conform ATEX
Ex-e. Schakelt parameter 1-94 ATEX ETR cur.lim.
speed reduction, parameter 1-98 ATEX ETR
interpol. points freq. en parameter 1-99 ATEX
ETR interpol points current in.
LET OP
Als [20] ATEX ETR is geselecteerd, moet u de instructies in
het aan dit onderwerp gewijde hoofdstuk in de design
guide en de instructies van de motorfabrikant opvolgen.
3.3.15 Aansluiting PTC-thermistor
Afbeelding 3.12 PTC-proel
Bij gebruik van een digitale ingang en 10 V als voeding:
Voorbeeld: de frequentieregelaar wordt uitgeschakeld (trip)
wanneer de motortemperatuur te hoog is.
Parametersetup:
Stel parameter 1-90 Therm. motorbeveiliging in op
•
[2] Thermistoruitsch.
Stel parameter 1-93 Thermistorbron in op [6] Dig.
•
ingang 33.
3 3
LET OP
Stel parameter 4-18 Stroombegr. in op 150% als [20] ATEX
ETR is geselecteerd.
Afbeelding 3.13 Aansluiting PTC-thermistor – digitale ingang
Bij gebruik van een analoge ingang en 10 V als voeding:
Voorbeeld: de frequentieregelaar wordt uitgeschakeld (trip)
wanneer de motortemperatuur te hoog is.
Parametersetup:
Stel parameter 1-90 Therm. motorbeveiliging in op
•
[2] Thermistoruitsch.
Stel parameter 1-93 Thermistorbron in op [2] Anal.
•
ingang 54.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 65
Page 68

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.3.17 ATEX ETR
De VLT® PTC Thermistor Card MCB 112 biedt bewaking
met ATEX-goedkeuring van de motortemperatuur. Het is
ook mogelijk om in plaats hiervan een externe PTC-veiligheidsvoorziening met ATEX-goedkeuring te gebruiken.
33
LET OP
Afbeelding 3.14 Aansluiting PTC-thermistor – analoge ingang
Ingang
digitaal/
analoog
Digitaal 10 V
Analoog 10 V
Tabel 3.10 Drempelwaarden voor uitschakeling
Voedings-
spanning
Drempelwaarden
voor uitschakeling
< 800 Ω ⇒ 2,7 kΩ
< 3,0 kΩ ⇒ 3,0 kΩ
LET OP
Controleer of de geselecteerde voedingsspanning
overeenkomt met de specicatie van het gebruikte
thermistorelement.
3.3.16 ETR
Aan de hand van de berekening wordt bepaald of een
lagere belasting nodig is bij lagere toerentallen vanwege
minder koeling door de in de motor ingebouwde
ventilator.
Afbeelding 3.15 ETR-proel
Gebruik voor deze functie uitsluitend motoren met ATEX
Ex-e-goedkeuring. Zie het motortypeplaatje, goedkeuringscerticaat of datablad, of neem contact op met de
motorleverancier.
Wanneer een Ex-e-motor met verhoogde veiligheid wordt
bestuurd, moeten bepaalde begrenzingen worden
ingesteld. De te programmeren parameters zijn te zien in
Tabel 3.11.
Functie Instelling
Parameter 1-90 Therm. motorbe-
veiliging
Parameter 1-94 ATEX ETR cur.lim.
speed reduction
Parameter 1-98 ATEX ETR interpol.
points freq.
Parameter 1-99 ATEX ETR interpol
points current
Parameter 1-23 Motorfrequentie Voer dezelfde waarde in als bij
Parameter 4-19 Max.
uitgangsfreq.
Parameter 4-18 Stroombegr. Naar 150% geforceerd door
Parameter 5-15 Klem 33 digitale
ingang
Parameter 5-19 Klem 37 Veilige
stop
Parameter 14-01 Schakelfre-
quentie
Parameter 14-26 Uitschakelver-
traging bij inverterfout
Tabel 3.11 Parameters
[20] ATEX ETR
20%
Motortypeplaatje.
parameter 4-19 Max.
uitgangsfreq..
Motortypeplaatje, mogelijk
gereduceerd bij lange
motorkabels, sinuslter of
gereduceerde voedingsspanning.
1-90 [20]
[80] PTC-kaart 1
[4] PTC 1-alarm
Controleer of de standaardwaarde voldoet aan de
vereisten volgens het motortypeplaatje. Gebruik een
sinuslter als dat niet het
geval is.
0
66 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 69

1-91 Ext. motor-ventilator
Option: Functie:
[0] * Nee Er is geen externe ventilator nodig,
dat wil zeggen dat de motor lager
wordt belast bij lage toerentallen.
[1] Ja Maakt gebruik van een externe
motorventilator (externe ventilatie),
zodat bij lage toerentallen geen
reductie van de motor nodig is. De
bovenste curve in Afbeelding 3.15
(f
out
= 1 x f
M,N
) wordt gevolgd als
de motorstroom lager is dan de
nominale motorstroom (zie
parameter 1-24 Motorstroom). Als de
motorstroom hoger is dan de
1-91 Ext. motor-ventilator
Option: Functie:
nominale stroom, loopt de
bedrijfstijd toch terug, alsof er geen
ventilator geïnstalleerd is.
1-93 Thermistorbron
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
LET OP
Stel de digitale ingang in op
[0] PNP - actief bij 24V via
parameter 5-00 Dig. I/O-modus.
Selecteer de ingang waarop de
thermistor (PTC-sensor) moet
worden aangesloten. Het is niet
mogelijk om een analoge ingang
([1] Anal. ingang 53 of [2] Anal.
ingang 54 te selecteren wanneer de
analoge ingang al wordt gebruikt
als referentiebron (ingesteld in
parameter 3-15 Referentiebron 1,
parameter 3-16 Referentiebron 2 of
parameter 3-17 Referentiebron 3).
Bij gebruik van de VLT® PTC
Thermistor Card MCB 112 moet u
altijd [0] Geen selecteren.
[0] * Geen
[1] Anal. ingang
53
[2] Anal. ingang
54
[3] Dig. ingang 18
[4] Dig. ingang 19
[5] Dig. ingang 32
[6] Dig. ingang 33
1-95 KTY-sensortype
Option: Functie:
Selecteer het type thermistorsensor.
[0] * KTY-sensor 1
1 kΩ bij 100 °C (212 °F).
[1] KTY-sensor 2
1 kΩ bij 25 °C (77 °F).
[2] KTY-sensor 3
2 kΩ bij 25 °C (77 °F).
[3] Pt1000
Parameterbeschrijving Programmeerhandleiding
LET OP
Vergelijk de door de motorfabrikant vereiste minimale
schakelfrequentie met de minimale schakelfrequentie
van de frequentieregelaar, de standaardwaarde in
parameter 14-01 Schakelfrequentie. Gebruik een sinuslter
als de frequentieregelaar niet aan deze vereiste voldoet.
Meer informatie over ATEX ETR thermische bewaking is te
vinden in de toepassingsnotitie voor de ATEX ETR thermische
bewakingsfunctie van de FC 300.
3.3.18 Klixon
De thermische circuitbreaker van het type Klixon maakt
gebruik van een KLIXON® metalen schijf. Bij een vooraf
bepaalde overbelasting kan de warmte die wordt
gegenereerd door de stroom die door de schijf loopt, een
uitschakeling (trip) veroorzaken.
Bij gebruik van een digitale ingang en 24 V als voeding:
Voorbeeld: de frequentieregelaar wordt uitgeschakeld (trip)
wanneer de motortemperatuur te hoog is.
3 3
Stel parameter 1-90 Therm. motorbeveiliging in op
•
[2] Thermistoruitsch.
Stel parameter 1-93 Thermistorbron in op [6] Dig.
•
ingang 33.
Parametersetup:
Afbeelding 3.16 Aansluiting thermistor
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 67
Page 70

1-96 KTY-thermistorbron
Option: Functie:
Selecteer analoge ingangsklem 54
als een thermistorsensoringang.
Klem 54 kan niet worden
geselecteerd als thermistorbron als
die al als referentie wordt gebruikt
(zie parameter 3-15 Referentiebron 1
tot parameter 3-17 Referentiebron 3).
LET OP
Aansluiting van thermistorsensor tussen klem 54 en 55
(GND). Zie
hoofdstuk 3.3.15 Aansluiting
PTC-thermistor.
[0] * Geen
[2] Anal. ingang
54
1-97 KTY-drempelwaarde
Range: Functie:
80 °C* [ -40 -
220 °C]
Stel de thermistorsensordrempelwaarde voor thermische
motorbeveiliging in.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
68 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 71

2-00 DC-houd/voorverw.stroom
Range: Functie:
50 %* [ 0 - 160 %]
LET OP
Parameter 2-00 DC-houd/
voorverw.stroom heeft geen
eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
LET OP
De maximumwaarde is
afhankelijk van de nominale
motorstroom.
Vermijd 100% stroom
gedurende een langere
periode, omdat dit de motor
kan beschadigen.
Stel de houdstroom in als een
percentage van de in
parameter 1-24 Motorstroom
ingestelde nominale motorstroom
I
M,N
. 100% DC-houdstroom komt
overeen met I
M,N
.
Deze parameter dient om de motor
tegen te houden (houdkoppel) of
om de motor voor te verwarmen.
Deze parameter is actief als [1] DC-
houd/motorvoorverw is geselecteerd
in parameter 1-80 Functie bij stop.
2-01 DC-remstroom
Range: Functie:
50 %* [ 0 - 1000 %]
LET OP
De maximumwaarde is
afhankelijk van de nominale
motorstroom. Vermijd 100%
stroom gedurende een langere
periode, omdat dit de motor
kan beschadigen.
Stel de stroomwaarde in als een
percentage van de nominale
motorstroom I
M,N
, zie
parameter 1-24 Motorstroom. 100%
DC-remstroom komt overeen met
I
M,N
.
2-01 DC-remstroom
Range: Functie:
DC-remstroom wordt toegepast na
een stopcommando, wanneer het
toerental lager is dan de ingestelde
begrenzing in:
•
Parameter 2-03 Inschakelsnelh. DC-rem [tpm].
•
Parameter 2-04 Inschakelsnelh. DC-rem [Hz],
wanneer de functie DCrem geïnv. actief is; of via
de seriële-communicatiepoort.
De remstroom is actief gedurende
de periode die is ingesteld in
parameter 2-02 DC-remtijd.
2-02 DC-remtijd
Range: Functie:
10 s* [0 - 60 s] Bepaal hoelang de ingestelde DC-
remstroom in parameter 2-01 DC-
remstroom na activering moet
worden toegepast.
2-03 Inschakelsnelh. DC-rem [tpm]
Range: Functie:
Size
related*
[ 0 - 0 RPM]
LET OP
Parameter 2-03 Inschakelsnelh.
DC-rem [tpm] heeft geen eect
als parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Bepaal het inschakeltoerental van
de DC-rem bij activering van de in
parameter 2-01 DC-remstroom
ingestelde DC-remstroom na een
stopcommando.
Wanneer parameter 1-10 Motorcon-
structie is ingesteld op [1] PM, nietuitspr. SPM, is deze waarde altijd 0
tpm (uit).
Parameterbeschrijving Programmeerhandleiding
3.4 Parameters 2-** Remmen
3.4.1 2-0* DC-rem
Parametergroep voor het congureren van de DC-rem en
de DC-houdfuncties.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 69
Page 72

2-04 Inschakelsnelh. DC-rem [Hz]
Range: Functie:
Size
related*
[ 0 - 0.0 Hz]
LET OP
Parameter 2-04 Inschakelsnelh.
DC-rem [Hz] heeft geen eect
als parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Bepaal het inschakeltoerental van
de DC-rem bij activering van de in
parameter 2-01 DC-remstroom
ingestelde DC-remstroom na een
stopcommando.
2-06 Parkeerstroom
Range: Functie:
50 %* [ 0 - 1000 %]
LET OP
Parameter 2-06 Parkeerstroom
en parameter 2-07 Parkeertijd:
alleen beschikbaar als
parameter 1-10 Motorconstructie is ingesteld op [1] PM,
niet-uitspr. SPM.
Stel de stroom in als een
percentage van de nominale
motorstroom,
parameter 1-24 Motorstroom. Actief
bij gebruik van parameter 1-73 Vlieg.
start. De parkeerstroom is actief
gedurende de tijd die is ingesteld
in parameter 2-07 Parkeertijd.
2-07 Parkeertijd
Range: Functie:
3 s* [0.1 - 60 s] Bepaal hoelang de in
parameter 2-06 Parkeerstroom
ingestelde parkeerstroom moet
worden toegepast. Actief bij
gebruik van parameter 1-73 Vlieg.
start.
LET OP
Parameter 2-07 Parkeertijd is
alleen beschikbaar als
parameter 1-10 Motorconstructie is ingesteld op [1] PM,
niet-uitspr. SPM.
2-10 Remfunctie
Option: Functie:
De beschikbare opties zijn
afhankelijk van de instelling in
parameter 1-10 Motorconstructie:
[0] Asynchroon:
•
[0] Uit.
•
[1] Weerstand rem.
•
[2] AC-rem.
[1] PM, niet-uitspr. SPM:
•
[0] Uit.
•
[1] Weerstand rem.
[0] Uit Er is geen remweerstand
geïnstalleerd.
[1] Weerstand
rem
Er is een remweerstand opgenomen
in het systeem om overtollige
remenergie als warmte af te voeren.
Het aansluiten van een
remweerstand laat een hogere DCtussenkringspanning tijdens het
remmen (generatorwerking) toe. De
functie Weerstand rem is alleen
actief bij frequentieregelaars met
een ingebouwde dynamische rem.
[2] AC-rem AC-rem is alleen van toepassing
wanneer parameter 1-03 Koppelka-
rakteristiek is ingesteld op
Compressorkoppel.
2-11 Remweerstand (ohm)
Range: Functie:
Size
related*
[ 5 - 65535
Ohm]
Stel de weerstandswaarde in Ω in.
Deze waarde wordt gebruikt voor
het bewaken van het vermogen
naar de remweerstand in
parameter 2-13 Bewaking
remvermogen. Deze parameter is
alleen actief bij frequentieregelaars
met een ingebouwde dynamische
rem.
Gebruik deze parameter voor
waarden zonder decimalen. Gebruik
parameter 30-81 Remweerstand
(ohm) voor waarden met 2
decimalen.
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.4.2 2-1* Remenergie-functie
Parametergroep voor het selecteren van de parameters
voor dynamisch remmen. Geldt alleen voor frequentieregelaars met remchopper.
33
70 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 73

2-12 Begrenzing remvermogen (kW)
Range: Functie:
Size
related*
[ 0.001 -
2000.000 kW]
LET OP
Deze parameter is alleen actief
bij frequentieregelaars met
een ingebouwde dynamische
rem.
Stel de bewakingslimiet in voor het
remvermogen dat wordt overgebracht naar de weerstand.
De bewakingslimiet is een product
van de maximale belastingscyclus
(120 s) en het maximale vermogen
van de remweerstand tijdens die
belastingscyclus. Zie onderstaande
formules.
Voor 200-240 V-eenheden:
P
weerstand
=
3902 × bedrijfstijd
R × 120
Voor 380-480 V-eenheden:
P
weerstand
=
7782 × bedrijfstijd
R × 120
Voor 525-600 V-eenheden:
P
weerstand
=
9432 × bedrijfstijd
R × 120
2-13 Bewaking remvermogen
Option: Functie:
LET OP
Deze parameter is alleen actief
bij frequentieregelaars met
een ingebouwde dynamische
rem.
Deze parameter zorgt voor
bewaking van het vermogen naar
de remweerstand. Het vermogen
wordt berekend op basis van de
waarde van de weerstand
(parameter 2-11 Remweerstand
(ohm)), de DC-tussenkringspanning
en de cyclustijd van de weerstand.
[0] * Uit Er is geen bewaking van het
remvermogen nodig.
Als vermogensbewaking is ingesteld
op [0] Uit of [1] Waarsch. blijft de
remfunctie actief, ook als de
bewakingslimiet wordt
overschreden. Dat kan leiden tot
thermische overbelasting van de
weerstand. Het is ook mogelijk om
een waarschuwing te genereren via
een relais-/digitale uitgang. De
meetnauwkeurigheid van de
2-13 Bewaking remvermogen
Option: Functie:
vermogensbewaking is afhankelijk
van de nauwkeurigheid van de
weerstand (beter dan ± 20%).
[1] Waarsch. Hiermee wordt een waarschuwing
op het display weergegeven
wanneer het vermogen dat
gedurende 120 seconden wordt
afgegeven, hoger is dan 100% van
de bewakingslimiet
(parameter 2-12 Begrenzing
remvermogen (kW)).
De waarschuwing verdwijnt
wanneer het afgegeven vermogen
daalt tot minder dan 80% van de
bewakingslimiet.
[2] Uitsch. Schakelt de frequentieregelaar uit
en geeft een alarm weer wanneer
het berekende vermogen hoger is
dan 100% van de bewakingslimiet.
[3] Waarsch. en
uitsch.
Beide bovengenoemde functies
worden geactiveerd, inclusief
waarschuwing, uitschakeling (trip)
en alarm.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 71
3 3
Page 74

2-15 Remtest
Option: Functie:
LET OP
Om een waarschuwing in
verband met [0] Uit of [1]
Waarsch. op te heen, moet de
netvoeding worden
onderbroken en opnieuw
worden aangesloten. Hef eerst
de fout op. Bij [0] Uit of [1]
Waarsch. blijft de frequentieregelaar werken, ook als er een
fout is gedetecteerd.
Selecteer een test-/bewakingsfunctie om de aansluiting naar de
remweerstand te controleren, of om
te controleren of een remweerstand
aanwezig is, en vervolgens een
waarschuwing of alarm weer te
geven als er een fout optreedt. De
remtest wordt uitgevoerd bij
inschakeling van de frequentieregelaar. De rem-IGBT-test wordt
echter uitgevoerd als er niet wordt
geremd. Een waarschuwing of
uitschakeling (trip) deactiveert de
remfunctie.
De testvolgorde is als volgt:
1. Meet de rimpelamplitude
van de DC-tussenkring
gedurende 300 ms zonder
remmen.
2. Meet de rimpelamplitude
van de DC-tussenkring
gedurende 300 ms met
geactiveerde rem.
3. Als de rimpelamplitude
van de DC-tussenkring
tijdens het remmen lager
is dan de rimpelamplitude
van de DC-tussenkring
vóór het remmen + 1%, is
de remtest mislukt. Als de
remtest mislukt, wordt een
waarschuwing of alarm
gegenereerd.
4. Als de rimpelamplitude
van de DC-tussenkring
tijdens het remmen hoger
is dan de rimpelamplitude
van de DC-tussenkring
vóór het remmen + 1%, is
de remtest succesvol.
2-15 Remtest
Option: Functie:
[0] * Uit De remweerstand en rem-IGBT
worden tijdens bedrijf bewaakt op
kortsluiting. Als er kortsluiting
optreedt, wordt een waarschuwing
weergegeven.
[1] Waarsch. De remweerstand en rem-IGBT
worden bewaakt op kortsluiting en
bij inschakeling van de frequentieregelaar wordt getest of de
remweerstand niet is ontkoppeld.
[2] Uitsch. De remweerstand wordt op
kortsluiting of ontkoppeling
bewaakt, en de rem-IGBT wordt op
kortsluiting bewaakt. Als er een fout
optreedt, wordt de frequentieregelaar uitgeschakeld en wordt er
een alarm weergegeven (uitschakeling met blokkering).
[3] Stop en
uitsch.
De remweerstand wordt op
kortsluiting of ontkoppeling
bewaakt, en de rem-IGBT wordt op
kortsluiting bewaakt. Als er een fout
optreedt, zal de frequentieregelaar
uitlopen tot vrijloop en vervolgens
uitschakelen (trip). Er wordt een
alarm wegens uitschakeling met
blokkering weergegeven.
[4] AC-rem De remweerstand wordt op
kortsluiting of ontkoppeling
bewaakt, en de rem-IGBT wordt op
kortsluiting bewaakt. Als er een fout
optreedt, dan zal de frequentieregelaar een gecontroleerde uitloop
uitvoeren.
2-16 AC-rem max. stroom
Range: Functie:
100 %* [ 0 -
1000.0 %]
LET OP
Parameter 2-16 AC-rem max.
stroom heeft geen eect als
parameter 1-10 Motorconstructie = [1] PM, niet-uitspr.
SPM.
Voer de maximaal toegestane
stroom bij gebruik van een AC-rem
in om oververhitting van de
motorwikkelingen te voorkomen.
Parameterbeschrijving
33
72 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
Page 75

2-17 Overspanningsreg.
Option: Functie:
[0] Uitgesch. Geen OVC vereist.
[2] * Ingesch. Schakelt OVC in.
2-19 Over-voltage Gain
Range: Functie:
100 %* [10 - 200 %] Selecteer de overspanningsver-
sterking.
Parameterbeschrijving Programmeerhandleiding
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 73
Page 76

3-02 Minimumreferentie
Range: Functie:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Voer de minimumwaarde voor de
externe referentie in. De waarde en
eenheid voor de minimumreferentie
komen overeen met de conguratie
die is geselecteerd in
parameter 1-00 Conguratiemodus
en parameter 20-12 Referentie/
terugk.eenheid.
3-03 Max. referentie
Range: Functie:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Voer de maximumwaarde voor de
externe referentie in. De waarde en
eenheid voor de maximumreferentie komen overeen met de
conguratie die is geselecteerd in
parameter 1-00 Conguratiemodus
en parameter 20-12 Referentie/
terugk.eenheid.
3-04 Referentiefunctie
Option: Functie:
[0] * Som Telt de externe en digitale referen-
tiebronnen bij elkaar op.
[1] Extern/digitaal Gebruikt enkel de digitale of de
externe referentiebron.
Schakelen tussen extern en digitaal
is mogelijk met behulp van een
commando of een digitale ingang.
3-10 Ingestelde ref.
Array [8]
Range: Functie:
0 %* [-100 -
100 %]
Voer maximaal 8 verschillende
digitale referenties (0-7) in deze
parameter in, door middel van
arrayprogrammering. De digitale
referentie wordt gegeven als een
percentage van de waarde Ref
MAX
(parameter 3-03 Max. referentie). Bij
gebruik van digitale referenties
moet Ingest. ref. bit 0/1/2 [16], [17]
of [18] worden geselecteerd voor de
3-10 Ingestelde ref.
Array [8]
Range: Functie:
betreende digitale ingangen in
parametergroep 5-1* Digitale
ingangen.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
3-11 Jog-snelh. [Hz]
Range: Functie:
Size
related*
[ 0 - par. 4-14
Hz]
De jogsnelheid is de vaste
uitgangssnelheid waarbij de
frequentieregelaar functioneert
wanneer de jogfunctie is
geactiveerd.
Zie ook parameter 3-19 Jog-snelh.
[TPM] en parameter 3-80 Jog ramptijd.
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.5 Parameters 3-** Ref./Ramp.
3.5.1 3-0* Ref. begrenz.
33
3.5.2 3-1* Referenties
Selecteer de digitale referenties. Selecteer Ingest. ref. bit
0/1/2 [16], [17] of [18] voor de corresponderende digitale
ingangen in parametergroep 5-1* Digitale ingangen.
74 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Afbeelding 3.17 Ingestelde ref.
Afbeelding 3.18 Overzicht digitale referenties
Page 77

3-13 Referentieplaats
Option: Functie:
Stel de gewenste referentieplaats in.
[0] * Gekoppeld
Hand/Auto
Gebruik de lokale referentie in de
handmodus en de externe
referentie in de automodus.
[1] Extern Gebruik de externe referentie in
zowel de handmodus als de
automodus.
[2] Lokaal Gebruik de externe referentie in
zowel de handmodus als de
automodus.
LET OP
Wanneer [2] Lokaal is
geselecteerd, gebruikt de
frequentieregelaar deze
instelling ook bij het opstarten
na een uitschakeling.
[3] Linked to H/A
MCO
Selecteer deze optie om de FFACCfactor in te schakelen. Het
inschakelen van FFACC beperkt de
jitter en maakt de transmissie van
de bewegingsregelaar naar de
stuurkaart van de frequentieregelaar sneller. Dat leidt tot snellere
responstijden voor dynamische
toepassingen en positieregeling. Zie
de VLT® Motion Control MCO 305
Operating Instructions voor meer
informatie over FFACC.
3-14 Ingestelde relatieve ref.
Range: Functie:
0 %* [-100 -
100 %]
De actuele referentie X wordt
verhoogd of verlaagd met
percentage Y, dat is ingesteld in
parameter 3-14 Ingestelde relatieve
ref..
Dit levert de actuele referentie Z
op. Actuele referentie (X) is de som
van de ingangen die zijn
geselecteerd in:
•
Parameter 3-15 Referentiebron 1.
•
Parameter 3-16 Referentiebron 2.
•
Parameter 3-17 Referentiebron 3.
•
Parameter 8-02 Stuur woord
bron.
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Referentiebron 1
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel in welke ingang moet worden
gebruikt voor het 1e referentiesignaal.
•
Parameter 3-15 Referentiebron 1.
•
Parameter 3-16 Referentiebron 2.
•
Parameter 3-17 Referentiebron 3.
Denieer maximaal 3 verschillende
referentiesignalen. De som van deze
referentiesignalen bepaalt de
actuele referentie.
[0] Geen functie
[1] * Anal. ingang
53
[2] Anal. ingang
54
[7] Pulsingang 29
[8] Pulsingang 33
[20] Dig. potmeter
[21] Anal. ingang
X30/11
[22] Anal. ingang
X30/12
[23] Anal. ingang
X42/1
Parameterbeschrijving Programmeerhandleiding
Afbeelding 3.19 Ingestelde relatieve ref.
Afbeelding 3.20 Actuele referentie
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 75
Page 78

3-15 Referentiebron 1
Option: Functie:
[24] Anal. ingang
X42/3
[25] Anal. ingang
X42/5
[29] Anal. ingang
X48/2
[30] Uitgebr. met
terugk. 1
[31] Uitgebr. met
terugk. 2
[32] Uitgebr. met
terugk. 3
[35] Digital input
select
De frequentieregelaar selecteert
analoge ingang 53 of 54 als de
referentiebron op basis van het
ingangssignaal dat in optie [42] Ref
source bit 0 (Referentiebron bit 0) is
gedenieerd als 1 van de digitale
ingangen. Zie parametergroep 5-1*
Digitale ingangen, optie [42] Ref
source bit 0 (Referentiebron bit 0)
voor meer informatie.
3-16 Referentiebron 2
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel in welke ingang moet worden
gebruikt voor het 2e referentiesignaal.
•
Parameter 3-15 Referentiebron 1.
•
Parameter 3-16 Referentiebron 2.
•
Parameter 3-17 Referentiebron 3.
Denieer maximaal 3 verschillende
referentiesignalen. De som van deze
referentiesignalen bepaalt de
actuele referentie.
[0] * Geen functie
[1] Anal. ingang
53
[2] Anal. ingang
54
[7] Pulsingang 29
[8] Pulsingang 33
[20] Dig. potmeter
3-16 Referentiebron 2
Option: Functie:
[21] Anal. ingang
X30/11
[22] Anal. ingang
X30/12
[23] Anal. ingang
X42/1
[24] Anal. ingang
X42/3
[25] Anal. ingang
X42/5
[29] Anal. ingang
X48/2
[30] Uitgebr. met
terugk. 1
[31] Uitgebr. met
terugk. 2
[32] Uitgebr. met
terugk. 3
[35] Digital input
select
De frequentieregelaar selecteert
analoge ingang 53 of 54 als de
referentiebron op basis van het
ingangssignaal dat in optie [42] Ref
source bit 0 (Referentiebron bit 0) is
gedenieerd als 1 van de digitale
ingangen. Zie parametergroep 5-1*
Digitale ingangen, optie [42] Ref
source bit 0 (Referentiebron bit 0)
voor meer informatie.
3-17 Referentiebron 3
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Stel in welke ingang moet worden
gebruikt voor het 3e referentiesignaal.
•
Parameter 3-15 Referentiebron 1.
•
Parameter 3-16 Referentiebron 2.
•
Parameter 3-17 Referentiebron 3.
Denieer maximaal 3 verschillende
referentiesignalen. De som van deze
referentiesignalen bepaalt de
actuele referentie.
[0] * Geen functie
[1] Anal. ingang
53
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
76 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 79

3-17 Referentiebron 3
Option: Functie:
[2] Anal. ingang
54
[7] Pulsingang 29
[8] Pulsingang 33
[20] Dig. potmeter
[21] Anal. ingang
X30/11
[22] Anal. ingang
X30/12
[23] Anal. ingang
X42/1
[24] Anal. ingang
X42/3
[25] Anal. ingang
X42/5
[29] Anal. ingang
X48/2
[30] Uitgebr. met
terugk. 1
[31] Uitgebr. met
terugk. 2
[32] Uitgebr. met
terugk. 3
[35] Digital input
select
De frequentieregelaar selecteert
analoge ingang 53 of 54 als de
referentiebron op basis van het
ingangssignaal dat in optie [42] Ref
source bit 0 (Referentiebron bit 0) is
gedenieerd als 1 van de digitale
ingangen. Zie parametergroep 5-1*
Digitale ingangen, optie [42] Ref
source bit 0 (Referentiebron bit 0)
voor meer informatie.
3-19 Jog-snelh. [TPM]
Range: Functie:
Size
related*
[ 0 - par. 4-13
RPM]
Voer een waarde in voor de
jogsnelheid n
JOG
, wat een vaste
uitgangssnelheid is. De frequentieregelaar loopt op dit toerental
wanneer de jogfunctie is
ingeschakeld. De maximale
begrenzing is ingesteld in
parameter 4-13 Motorsnelh. hoge
begr. [RPM].
Zie ook parameter 3-11 Jog-snelh.
[Hz] en parameter 3-80 Jog ramptijd.
3-41 Ramp 1 aanlooptijd
Range: Functie:
Size
related*
[ 0.10 - 3600s]Voer de aanlooptijd in, d.w.z. de
acceleratietijd van 0 tpm tot
parameter 1-25 Nom. motorsnelheid.
Stel de aanlooptijd zo in dat de
uitgangsstroom tijdens het
aanlopen de in
parameter 4-18 Stroombegr.
ingestelde stroomgrens niet
overschrijdt. Zie uitlooptijd in
parameter 3-42 Ramp 1 uitlooptijd.
par. . 3 − 41 =
tacc × nnom par. . 1 − 25
ref tpm
s
3-42 Ramp 1 uitlooptijd
Range: Functie:
Size
related*
[ 0.10 - 3600s]Voer de uitlooptijd in, d.w.z. de
deceleratietijd van
parameter 1-25 Nom. motorsnelheid
tot 0 tpm. Stel de uitlooptijd zo in
dat er in de omvormer geen
overspanning ontstaat als gevolg
van de generatorwerking van de
motor. De uitlooptijd moet ook
lang genoeg zijn om te voorkomen
dat de opgewekte stroom de in
parameter 4-18 Stroombegr.
ingestelde stroomgrens overschrijdt.
Zie aanlooptijd in
parameter 3-41 Ramp 1 aanlooptijd.
par. . 3 − 42 =
tdec × nnom par. . 1 − 25
ref tpm
s
Parameterbeschrijving Programmeerhandleiding
3.5.3 3-4* Ramp 1
Congureer de ramp-tijden voor elk van de 2 ramps
(parametergroep 3-4* Ramp 1 en 3-5* Ramp 2).
Afbeelding 3.21 Ramp 1
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 77
Page 80

3-51 Ramp 2 aanlooptijd
Range: Functie:
Size
related*
[ 0.10 - 3600s]Voer de aanlooptijd in, d.w.z. de
acceleratietijd van 0 tpm tot
parameter 1-25 Nom. motorsnelheid.
Stel de aanlooptijd zo in dat de
uitgangsstroom tijdens het
aanlopen de in
parameter 4-18 Stroombegr.
ingestelde stroomgrens niet
overschrijdt. Zie uitlooptijd in
parameter 3-52 Ramp 2 uitlooptijd.
par. . 3 − 51 =
tacc × nnom par. . 1 − 25
ref tpm
s
3-52 Ramp 2 uitlooptijd
Range: Functie:
Size
related*
[ 0.10 - 3600s]Voer de uitlooptijd in, d.w.z. de
deceleratietijd van
parameter 1-25 Nom. motorsnelheid
tot 0 tpm. Stel de uitlooptijd zo in
dat er in de omvormer geen
overspanning ontstaat als gevolg
van de generatorwerking van de
motor en de opgewekte stroom de
in parameter 4-18 Stroombegr.
ingestelde stroomgrens niet
overschrijdt. Zie aanlooptijd in
parameter 3-51 Ramp 2 aanlooptijd.
par. . 3 − 52 =
tdec × nnom par. . 1 − 25
ref tpm
s
3-80 Jog ramp-tijd
Range: Functie:
Size
related*
[0.1 - 3600 s] Stel de jog-ramptijd in voor het
versnellen/vertragen tussen 0 tpm
en het nominale toerental (n
M,N
)
(ingesteld in parameter 1-25 Nom.
motorsnelheid). Zorg ervoor dat de
totale uitgangsstroom die nodig is
voor de betreende jog-ramptijd,
de in parameter 4-18 Stroombegr.
ingestelde stroomgrens niet
overschrijdt. De jog-ramptijd start
wanneer er via het bedieningspaneel, een geselecteerde digitale
ingang of de seriële-communicatiepoort een jog-signaal wordt
gegeven.
3-80 Jog ramp-tijd
Range: Functie:
par. . 3 − 80 =
t jog × nnom par. . 1 − 25
jog snelheid par. .3 − 19
s
130BA070.10
Tijd
P 3-80
TPM
P 4-13 TPM
hoge begrenzing
P 1-25
Motorsnelheid
Jogsnelheid
P 3-19
P 3-80
Aanlopen
Uitlopen
t jog t jog
P 4-11 RPM
lage begrenzing
3-84 Initial Ramp Time
Range: Functie:
0 s* [0 - 60 s] Voer de initiële aanlooptijd in voor
het aanlopen van het nultoerental
tot de ingestelde lage begrenzing
voor het motortoerental in
parameter 4-11 Motorsnelh. lage
begr. [RPM] of
parameter 4-12 Motorsnelh. lage
begr. [Hz]. Dompelpompen kunnen
beschadigd raken wanneer ze
onder het minimale toerental
werken. Onder het minimale
pomptoerental wordt een snelle
aan-/uitlooptijd aanbevolen. Deze
parameter kan worden gebruikt
voor het instellen van een snelle
aanlooptijd vanaf het nultoerental
tot de ingestelde Motorsnelh. lage
begr. Zie Afbeelding 3.23.
130BA962.10
Motorsnelheid
Motorsnelheid
Hoog
Laag
Normale
Aan/uitlopen
Initiële
aanloop
Uiteindelijke
uitloop
Tijd
Snelheid
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.5.4 3-5* Ramp 2
Zie parametergroep 3-4* Ramp 1 voor informatie over het
selecteren van rampparameters.
33
Afbeelding 3.22 Jog ramp-tijd
3.5.5 3-8* Andere Ramps
78 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Afbeelding 3.23 Initiële en uiteindelijke ramp-tijd
Page 81

3-85 Check Valve Ramp Time
Range: Functie:
0 s* [0 - 650 s] Om kogelafsluiters in een stopsi-
tuatie te beschermen, kan de
uitlooptijd van de 'check-valve'
(terugslagklep) worden gebruikt om
het toerental te verlagen van
parameter 4-11 Motorsnelh. lage
begr. [RPM] of
parameter 4-12 Motorsnelh. lage
begr. [Hz] naar het in
parameter 3-86 Check Valve Ramp
End Speed [RPM] of
parameter 3-87 Check Valve Ramp
End Speed [HZ] ingestelde uitein-
delijke toerental van de
terugslagklep. Als
parameter 3-85 Check Valve Ramp
Time is ingesteld op een andere
waarde dan 0 s, is de ingestelde
uitlooptijd voor de terugslagklep
actief en wordt de ingevoerde
waarde gebruikt om het motortoerental vanaf Motorsnelh. lage begr.
te vertragen naar het uiteindelijke
toerental van de terugslagklep dat
is ingesteld in parameter 3-86 Check
Valve Ramp End Speed [RPM] of
parameter 3-87 Check Valve Ramp
End Speed [HZ]. Zie Afbeelding 3.24.
130BA961.10
Snelheid
Motorsnelheid
Normale
Regelklep
Motorsnelheid
Hoog
Laag
Tijd
uitloop
Stopsnelh.
3-86 Check Valve Ramp End Speed [RPM]
Range: Functie:
Size
related*
[ 0 - par. 4-11
RPM]
Denieer het toerental in [tpm]
onder de lage begrenzing van het
motortoerental waarbij de regelafsluiter naar verwachting gesloten
zal zijn. Controleer of de afsluiter
niet meer actief is. Zie
Afbeelding 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Range: Functie:
Size
related*
[ 0 - par. 4-12
Hz]
Voer hier het toerental in Hz onder
de lage begrenzing van de
motorsnelheid in waarbij de
terugslagklep niet meer actief is.
Zie Afbeelding 3.24.
3-88 Final Ramp Time
Range: Functie:
0 s* [0 - 60 s] Voer de eind-ramp-tijd in die moet
worden gebruikt bij het uitlopen
van parameter 4-11 Motorsnelh. lage
begr. [RPM] of
parameter 4-12 Motorsnelh. lage
begr. [Hz] naar het nultoerental.
Dompelpompen kunnen
beschadigd raken wanneer ze
onder het minimale toerental
werken. Onder het minimale
pomptoerental wordt een snelle
aan-/uitlooptijd aanbevolen. Deze
parameter kan worden gebruikt om
snel uit te lopen van
parameter 4-11 Motorsnelh. lage
begr. [RPM] of
parameter 4-12 Motorsnelh. lage
begr. [Hz] naar het nultoerental. Zie
Afbeelding 3.23.
3-90 Stapgrootte
Range: Functie:
0.10 %* [0.01 200 %]
Stel de stapgrootte voor verhogen/
verlagen in als een percentage van
het synchrone motortoerental, ns.
Als verhogen/verlagen is
geactiveerd, wordt de totale
referentie verhoogd of verlaagd
met de waarde die in deze
parameter is ingesteld.
Parameterbeschrijving Programmeerhandleiding
3 3
Afbeelding 3.24 Uitloop terugslagklep
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 79
3.5.6 3-9* Dig. pot.meter
Gebruik de digitale-potentiometerfunctie om de actuele
referentie te verhogen of te verlagen door de setup voor
de digitale ingangen aan te passen via de functies
Verhogen, Verlagen of Wissen. Om de functie te activeren,
moet minstens 1 digitale ingang worden ingesteld op
Verhogen of Verlagen.
Page 82

3-91 Ramp-tijd
Range: Functie:
1 s [0 - 3600 s] Stel de ramp-tijd in, dat wil zeggen
de tijd die nodig is om de
referentie aan te passen naar een
waarde tussen 0 en 100% van de
ingestelde digitale-potentiometerfunctie (verhogen, verlagen of
wissen).
Als verhogen/verlagen wordt
geactiveerd gedurende een tijd die
langer is dan de in
parameter 3-95 Aan/uitloopvertr.
ingestelde aan-/uitloopvertraging,
loopt de actuele referentie aan/uit
op basis van deze aan-/uitlooptijd.
De ramp-tijd is gedenieerd als de
tijd die nodig is om de referentie
aan te passen op basis van de
stapgrootte die is ingesteld in
parameter 3-90 Stapgrootte.
3-92 Spann.herstel
Option: Functie:
[0] * Uit Zet de digitale-potentiometerrefe-
rentie na inschakeling van de
regelaar terug naar 0%.
[1] Aan Stelt de meest recente digitale-
potentiometerreferentie opnieuw in
na inschakeling van de regelaar.
3-93 Max. begrenzing
Range: Functie:
100 %* [-200 -
200 %]
Stel de maximaal toelaatbare
waarde voor de totale referentie in.
Dat wordt aanbevolen als de
digitale potentiometer wordt
gebruikt voor een jnafstelling van
de totale referentie.
3-94 Min. begrenzing
Range: Functie:
0 %* [-200 -
200 %]
Stel de minimaal toelaatbare
waarde voor de totale referentie in.
Dat wordt aanbevolen als de
digitale potentiometer wordt
gebruikt voor een jnafstelling van
de totale referentie.
3-95 Aan/uitloopvertr.
Range: Functie:
Size
related*
[ 0 - 0 ] Voer de vertraging in die nodig is
vanaf activering van de digitalepotentiometerfunctie tot aan het
moment dat de frequentieregelaar
begint met het aan-/uitlopen van
de referentie. Met een vertraging
van 0 ms begint de referentie
aan/uit te lopen wanneer verhogen/
verlagen wordt geactiveerd. Zie ook
parameter 3-91 Ramp-tijd.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
Afbeelding 3.25 Voorbeeld 1 aan-/uitloopvertraging
80 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Afbeelding 3.26 Voorbeeld 2 aan-/uitloopvertraging
Page 83

4-10 Draairichting motor
Option: Functie:
Stelt de gewenste draairichting van
de motor in. Wanneer
parameter 1-00 Conguratiemodus is
ingesteld op [3] Met terugk., wordt
deze parameter standaard ingesteld
op [0] Rechtsom. Als de parameter is
ingesteld op Bidirectioneel, kan de
draairichting Linksom niet worden
geselecteerd vanaf het LCP.
[0] * Rechtsom
[2] Bidirectioneel
4-11 Motorsnelh. lage begr. [RPM]
Range: Functie:
Size
related*
[ 0 - par. 4-13
RPM]
Stel de lage begrenzing voor het
motortoerental in tpm in. De lage
begrenzing voor het motortoerental
kan worden ingesteld op het door
de fabrikant aanbevolen minimale
motortoerental. De lage begrenzing
voor het motortoerental mag de
instelling in
parameter 4-13 Motorsnelh. hoge
begr. [RPM] niet overschrijden.
4-12 Motorsnelh. lage begr. [Hz]
Range: Functie:
Size
related*
[ 0 - par. 4-14
Hz]
Stel de lage begrenzing voor het
motortoerental in Hz in. De lage
begrenzing voor het motortoerental
kan worden ingesteld op een
waarde die overeenkomt met de
minimale uitgangsfrequentie van de
motoras. De lage begrenzing voor
het motortoerental mag de
instelling in
parameter 4-14 Motorsnelh. hoge
begr. [Hz] niet overschrijden.
4-13 Motorsnelh. hoge begr. [RPM]
Range: Functie:
Size
related*
[ 0 - 60000
RPM]
LET OP
Bij wijzigingen in de instelling
van parameter 4-13 Motorsnelh.
hoge begr. [RPM] wordt
parameter 4-53 Waarschuwing
snelheid hoog ingesteld op
dezelfde waarde als is
ingesteld in
parameter 4-13 Motorsnelh.
hoge begr. [RPM].
LET OP
De maximale uitgangsfrequentie mag niet hoger zijn
dan 10% van de schakelfrequentie van de omvormer
(parameter 14-01 Schakelfre-
quentie).
Voer de hoge begrenzing voor het
motortoerental in tpm in. De hoge
begrenzing voor het motortoerental
kan worden ingesteld volgens de
door de fabrikant aanbevolen
maximale motorklasse. De hoge
begrenzing voor het motortoerental
moet hoger zijn dan de instelling in
parameter 4-11 Motorsnelh. lage
begr. [RPM].
De parameternaam wordt
weergegeven als
parameter 4-11 Motorsnelh. lage
begr. [RPM] of
parameter 4-12 Motorsnelh. lage
begr. [Hz], afhankelijk van:
•
de instellingen van andere
parameters in het
Hoofdmenu;
•
de standaardinstellingen
op basis van de geograsche locatie.
Parameterbeschrijving Programmeerhandleiding
3.6 Parameters 4-** Begr./waarsch.
3.6.1 4-1* Motorbegr.
Denieer de koppel-, stroom- en snelheidsbegrenzingen
voor de motor en de reactie van de frequentieregelaar
wanneer de begrenzingen worden overschreden.
Een begrenzing kan een melding op het display genereren.
Een waarschuwing genereert altijd een melding op het
display of op de veldbus. Een bewakingsfunctie kan zorgen
voor een waarschuwing of een uitschakeling (trip), waarna
de frequentieregelaar stopt en een alarmmelding
genereert.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 81
Page 84

4-14 Motorsnelh. hoge begr. [Hz]
Range: Functie:
Size
related*
[ .1 - par.
4-19 Hz]
Voer de hoge begrenzing voor het
motortoerental in Hz in.
Parameter 4-14 Motorsnelh. hoge
begr. [Hz] kan worden ingesteld op
het door de fabrikant aanbevolen
maximale motortoerental. De hoge
begrenzing voor het motortoerental
moet hoger zijn dan de instelling in
parameter 4-12 Motorsnelh. lage
begr. [Hz]. De uitgangsfrequentie
mag nooit hoger zijn dan 10% van
de schakelfrequentie
(parameter 14-01 Schakelfrequentie).
4-16 Koppelbegrenzing motormodus
Range: Functie:
Size
related*
[ 0 -
1000.0 %]
Stel de maximale koppelbegrenzing
voor motorwerking in. De koppelbegrenzing is actief in het
toerentalbereik tot en met het
ingestelde nominale motortoerental
in parameter 1-25 Nom.
motorsnelheid. Om de motor te
beschermen tegen het bereiken van
het blokkeerkoppel is de standaardinstelling 1,1 x het nominale
motorkoppel (berekende waarde).
Zie ook parameter 14-25 Uitsch.vertr.
bij Koppelbegr. voor meer
informatie.
Wanneer een instelling in
parameter 1-00 Conguratiemodus
tot parameter 1-28 Controle draair.
motor wordt gewijzigd, wordt
parameter 4-16 Koppelbegrenzing
motormodus niet automatisch
teruggezet naar de standaardinstelling.
4-17 Koppelbegrenzing generatormodus
Range: Functie:
100 %* [ 0 -
1000.0 %]
Stel de maximale koppelbegrenzing
voor generatorwerking in. De
koppelbegrenzing is actief in het
toerentalbereik tot en met het
ingestelde nominale motortoerental
in parameter 1-25 Nom.
motorsnelheid. Zie
parameter 14-25 Uitsch.vertr. bij
Koppelbegr. voor meer informatie.
Wanneer een instelling in
parameter 1-00 Conguratiemodus
tot parameter 1-28 Controle draair.
motor wordt gewijzigd, wordt
4-17 Koppelbegrenzing generatormodus
Range: Functie:
parameter 4-17 Koppelbegrenzing
generatormodus niet automatisch
teruggezet naar de standaardinstelling.
4-18 Stroombegr.
Range: Functie:
Size
related*
[ 1.0 -
1000.0 %]
Voer de stroomgrens voor motoren generatorwerking in. Om de
motor te beschermen tegen het
bereiken van het blokkeerkoppel is
de standaardinstelling 1,1 x het
nominale motorkoppel (berekende
waarde). Wanneer een instelling in
parameter 1-00 Conguratiemodus
tot parameter 1-26 Cont. nom.
motorkoppel wordt gewijzigd, wordt
parameter 4-18 Stroombegr. niet
automatisch teruggezet naar de
standaardinstelling.
4-19 Max. uitgangsfreq.
Range: Functie:
Size
related*
[ 1 - 590 Hz]
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
LET OP
De maximumwaarde wordt
begrensd op 300 Hz als
parameter 1-10 Motorconstructie is ingesteld op [1] PM,
niet uitspr. SPM.
Stel de maximale uitgangsfrequentie in. Parameter 4-19 Max.
uitgangsfreq. speciceert de
absolute begrenzing van de
uitgangsfrequentie van de frequentieregelaar voor een verbeterde
veiligheid in toepassingen waarbij
onbedoelde overtoeren moeten
worden vermeden. Deze absolute
begrenzing geldt voor alle
congu-
raties, ongeacht de instelling in
parameter 1-00 Conguratiemodus.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
82 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 85

4-50 Waarschuwing stroom laag
Range: Functie:
0 A* [ 0 - par. 4-51A]Waarschuwingen worden
weergegeven op het display, een
geprogrammeerde uitgang of een
veldbus.
Afbeelding 3.27 Begrenzing lage
stroom
Voer de waarde voor I
LOW
in.
Wanneer de motorstroom lager
wordt dan deze begrenzing (I
LOW
),
verschijnt op het display de
melding Stroom laag. De signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02. Zie Afbeelding 3.27.
4-51 Waarschuwing stroom hoog
Range: Functie:
Size
related*
[ par. 4-50 par. 16-37 A]
Voer de waarde voor I
HIGH
in.
Wanneer de motorstroom hoger
wordt dan deze begrenzing (I
HIGH
),
verschijnt op het display de
melding Stroom hoog. De signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02. Zie Afbeelding 3.27.
4-52 Waarschuwing snelheid laag
Range: Functie:
0 RPM* [ 0 - par. 4-53
RPM]
Voer de waarde voor n
LOW
in.
Wanneer het motortoerental lager
wordt dan deze begrenzing (n
LOW
),
verschijnt op het display de
melding Snelh. laag. De signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02. De lage begrenzing van
het motortoerentalsignaal n
LOW
moet worden geprogrammeerd
binnen het normale werkbereik van
de frequentieregelaar. Zie
Afbeelding 3.27.
4-53 Waarschuwing snelheid hoog
Range: Functie:
Size
related*
[ par. 4-52 par. 4-13 RPM]
LET OP
Bij wijzigingen in de instelling
van parameter 4-13 Motorsnelh.
hoge begr. [RPM] wordt
parameter 4-53 Waarschuwing
snelheid hoog ingesteld op
dezelfde waarde als is
ingesteld in
parameter 4-13 Motorsnelh.
hoge begr. [RPM].
Als voor
parameter 4-53 Waarschuwing
snelheid hoog een andere
waarde nodig is, moet deze
worden ingesteld nadat
parameter 4-13 Motorsnelh.
hoge begr. [RPM] is
geprogrammeerd!
Voer de waarde voor n
HIGH
in.
Wanneer het motortoerental hoger
wordt dan deze begrenzing (n
HIGH
),
verschijnt op het display de
melding Snelh. hoog. De signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02. Programmeer het signaal
voor de hoge begrenzing van het
motortoerental, n
HIGH
, binnen het
normale werkbereik van de
frequentieregelaar. Zie
Afbeelding 3.27.
Parameterbeschrijving Programmeerhandleiding
3.6.2 4-5* Aanp. waarsch.
Denieer instelbare waarschuwingsbegrenzingen voor
stroom, toerental, referentie en terugkoppeling.
LET OP
Niet zichtbaar op het display; alleen in MCT 10
setupsoftware.
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 83
3 3
Page 86

4-54 Waarsch: referentie laag
Range: Functie:
-999999.999* [ -999999.999
- par. 4-55 ]
Stel de lage referentiebegrenzing in.
Wanneer de actuele referentie lager
wordt dan deze begrenzing,
verschijnt op het display de
melding Ref.
laag
. De signaaluit-
gangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02.
4-55 Waarsch: referentie hoog
Range: Functie:
999999.999* [ par. 4-54 -
999999.999 ]
Stel de hoge referentiebegrenzing
in. Wanneer de actuele referentie
hoger wordt dan deze begrenzing,
verschijnt op het display de
melding Ref.
hoog
. De signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02.
4-56 Waarsch: terugk. laag
Range: Functie:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Stel de lage terugkoppelingsbegrenzing in. Wanneer de
terugkoppeling lager wordt dan
deze begrenzing, verschijnt op het
display de melding Terugk
laag
. De
signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02.
4-57 Waarsch: terugk. hoog
Range: Functie:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Stel de hoge terugkoppelingsbegrenzing in. Wanneer de
terugkoppeling hoger wordt dan
deze begrenzing, verschijnt op het
display de melding Terugk.
hoog
. De
signaaluitgangen kunnen worden
geprogrammeerd voor het
genereren van een statussignaal via
klem 27 of 29 en via relaisuitgang
01 of 02.
4-58 Motorfasefunctie ontbreekt
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Toont een alarm als er een
motorfase ontbreekt.
[0] Uitgesch. Er wordt geen alarm weergegeven
in geval van een ontbrekende
motorfase.
[1] Uitsch. 100 ms Er wordt een alarm weergegeven in
geval van een ontbrekende
motorfase.
[2] * Uitsch. 1000
ms
[5] Motor Check
4-60 Bypass-snelh. vanaf [RPM]
Array [4]
Range: Functie:
Size
related*
[ 0 - par. 4-13
RPM]
Bij sommige systemen moeten
bepaalde uitgangsfrequenties of toerentallen worden vermeden om
problemen met resonantie in het
systeem te voorkomen. Stel de lage
begrenzing van de te vermijden
toerentallen in.
4-61 Bypass-snelh. vanaf [Hz]
Array [4]
Range: Functie:
Size
related*
[ 0 - par. 4-14
Hz]
Bij sommige systemen moeten
bepaalde uitgangsfrequenties of toerentallen worden vermeden om
problemen met resonantie in het
systeem te voorkomen. Stel de lage
begrenzing van de te vermijden
toerentallen in.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
3.6.3 4-6* Snelh.-bypass
Bij sommige systemen moeten bepaalde uitgangsfrequenties of -toerentallen worden vermeden om problemen
met resonantie in het systeem te voorkomen. Er kunnen
maximaal 4 frequentie- of toerentalbereiken worden
vermeden.
84 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 87

4-62 Bypass-snelh. naar [RPM]
Array [4]
Range: Functie:
Size
related*
[ 0 - par. 4-13
RPM]
Bij sommige systemen moeten
bepaalde uitgangsfrequenties of toerentallen worden vermeden om
problemen met resonantie in het
systeem te voorkomen. Voer de
hoge begrenzingen van de te
vermijden toerentallen in.
4-63 Bypass-snelh. tot [Hz]
Array [4]
Range: Functie:
Size
related*
[ 0 - par. 4-14
Hz]
Bij sommige systemen moeten
bepaalde uitgangsfrequenties of toerentallen worden vermeden om
problemen met resonantie in het
systeem te voorkomen. Voer de
hoge begrenzingen van de te
vermijden toerentallen in.
4-64 Semi-auto bypass setup
Option: Functie:
[0] * Uit Geen functie.
[1] Ingesch. Start Semi-auto bypass setup waarna
de procedure in
hoofdstuk 3.6.4 Semi- auto bypass
setup moet worden gevolgd.
Parameterbeschrijving Programmeerhandleiding
Als de frequenties voor een bepaalde resonantieband niet
in de juiste volgorde zijn geregistreerd, worden alle
registraties geannuleerd en wordt de volgende melding
weergegeven: Bypasszones overlappen of sets met start-
eindpunten zijn onvolledig. Druk op [Cancel] om te annuleren.
Registratie in de verkeerde volgorde houdt in dat de in
parameter 4-62 Bypass-snelh. naar [RPM] opgeslagen
frequentiewaarden hoger zijn dan de waarden in
parameter 4-60 Bypass-snelh. vanaf [RPM] of dat voor
Bypass-snelh. vanaf en Bypass-snelh. tot niet hetzelfde
aantal registraties is opgeslagen.
6. Druk op [OK] wanneer de motor is uitgelopen tot
stop. Parameter 4-64 Semi-auto bypass setup wordt
automatisch teruggezet naar Uit. De frequentieregelaar blijft in de handmodus staan totdat [O] of
[Auto On] op het LCP wordt ingedrukt.
3 3
3.6.4 Semi-auto bypass setup
Gebruik Semi-auto bypass setup om te programmeren
welke frequenties moeten worden overgeslagen in verband
met resonantie in het systeem.
Voer de volgende procedure uit:
1. Stop de motor.
2. Selecteer [1] Ingesch. in parameter 4-64 Semi-auto
bypass setup.
3. Druk op [Hand On] op het LCP om te beginnen
met zoeken naar frequentiebanden die resonantie
veroorzaken. De motor loopt aan op basis van de
ingestelde aanloop.
4. Bij het doorlopen van een resonantieband drukt
u op [OK] op het LCP bij het verlaten van de
band. De actuele frequentie wordt opgeslagen als
het eerste element in parameter 4-62 Bypass-snelh.
naar [RPM] of parameter 4-63 Bypass-snelh. tot [Hz]
(array). Herhaal deze stap voor elke resonantieband die wordt gevonden tijdens het aanlopen
(u kunt er maximaal 4 afstellen).
5. Wanneer het maximale toerental is bereikt, begint
de motor automatisch uit te lopen. Herhaal de
bovenstaande procedure wanneer het toerental
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 85
tijdens het vertragen buiten de resonantiebanden
komt. De actuele frequenties die worden geregistreerd wanneer op [OK] wordt gedrukt, worden
opgeslagen in parameter 4-60 Bypass-snelh. vanaf
[RPM] of parameter 4-61 Bypass-snelh. vanaf [Hz].
Page 88

5-00 Dig. I/O-modus
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
Digitale ingangen en geprogrammeerde digitale uitgangen zijn
vooraf te programmeren voor
gebruik in PNP- of NPN-systemen.
[0] * PNP - actief
bij 24V
Actie na positieve directionele
pulsen (0). PNP-systemen worden
naar aarde getrokken.
[1] NPN - actief
bij 0V
Actie na negatieve directionele
pulsen (1). NPN-systemen worden
verhoogd tot +24 V, intern in de
frequentieregelaar.
5-01 Klem 27 modus
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
[0] * Ingang Stelt klem 27 in als digitale ingang.
[1] Uitgang Stelt klem 27 in als digitale uitgang.
5-02 Klem 29 modus
Option: Functie:
LET OP
Deze parameter kan niet
worden gewijzigd terwijl de
motor loopt.
[0] * Ingang Stelt klem 29 in als digitale ingang.
[1] Uitgang Stelt klem 29 in als digitale uitgang.
Parameterbeschrijving
VLT® AQUA Drive FC 202
3.7 Parameters 5-** Digitaal In/Uit
Parametergroep voor het congureren van digitale in- en
uitgangen.
3.7.1 5-0* Dig. I/O-modus
33
Parameters voor het congureren van in- of uitgang, en
voor NPN of PNP.
86 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
3.7.2 5-1* Digitale ingangen
Parameters voor het congureren van de ingangsfuncties
voor de ingangsklemmen.
De digitale ingangen worden gebruikt om diverse functies
van de frequentieregelaar in te stellen. Alle digitale
ingangen kunnen worden ingesteld op de volgende
functies:
De opties [120]-[138] hebben allemaal betrekking op
cascaderegelaarfuncties. Zie parametergroep 25-** Cascade-
regelaar voor meer informatie.
Functie digitale ingang Optie Klem
Niet in bedrijf [0] 19, 29, 32, 33
Alarm resetten [1] Alle
Vrijloop geïnv. [2] 27
Vrijloop & reset inv [3] Alle
DC-rem geïnv. [5] Alle
Stop geïnverteerd [6] Alle
Ext. vergrendeling [7] Alle
Start [8] Alle
Pulsstart [9] Alle
Omkeren [10] Alle
Start omgekeerd [11] Alle
Jog [14] Alle
Digitale ref. aan [15] Alle
Ingest. ref. bit 0 [16] Alle
Ingest. ref. bit 1 [17] Alle
Ingest. ref. bit 2 [18] Alle
Ref. vasthouden [19] Alle
Uitgang vasth. [20] Alle
Snelh. omh. [21] Alle
Snelh. omlaag [22] Alle
Setupselectie bit 0 [23] Alle
Setupselectie bit 1 [24] Alle
Pulsingang [32] 29, 33
Ramp bit 0 [34] Alle
Netstoring geïnv. [36] Alle
Ref source bit 0 (Referentiebron bit 0)
Hand/Auto Start [51] Alle
Startvoorwaarde [52] Alle
Handmatige start [53] Alle
Autostart [54] Alle
DigiPot verhogen [55] Alle
DigiPot verlagen [56] Alle
DigiPot wissen [57] Alle
Teller A (omhoog) [60] 29, 33
Teller A (omlaag) [61] 29, 33
Reset Teller A [62] Alle
Teller B (omhoog) [63] 29, 33
Teller B (omlaag) [64] 29, 33
Reset Teller B [65] Alle
[42] Alle
Page 89

Parameterbeschrijving Programmeerhandleiding
Functie digitale ingang Optie Klem
Slaapmodus [66] Alle
Reset prev.
onderhoudswoord
PTC-kaart 1 [80] Alle
Latched Pump Derag
(Derag pulspomp)
Start hoofdpomp [120] Alle
Wisseling hoofdpomp [121] Alle
Vergr. pomp 1 [130] Alle
Vergr. pomp 2 [131] Alle
Vergr. pomp 3 [132] Alle
Tabel 3.12 Functies voor digitale ingangen
[78] Alle
[85] Alle
Alle staat voor klem 18, 19, 27, 29, 32, X30/2, X30/3 en
X30/4.
X30/X zijn de klemmen op VLT® General Purpose I/O MCB
101.
Functies die speciek zijn voor 1 digitale ingang, worden in
de
betreende parameter vermeld.
Alle digitale ingangen kunnen worden ingesteld op de
volgende functies:
[0] Niet in bedrijf Geen reactie op signalen die naar de
klem worden gestuurd.
[1] Alarm resetten Reset de frequentieregelaar na een trip/
alarm. Niet elk alarm kan worden
gereset.
[2] Vrijloop geïnv. Laat de motor vrijlopen. Logische 0 =
vrijloop.
(Standaard digitale klem 27) vrijloop,
geïnverteerde ingang (NC).
[3] Vrijloop & reset
inv
[5] DC-rem geïnv. Geïnverteerde ingang voor DC-rem
[6] Stop geïnverteerd Geïnverteerde stopfunctie. Genereert
Reset en vrijloop, geïnverteerde ingang
(NC).
Laat de motor vrijlopen en voert
vervolgens een reset van de frequentieregelaar uit. Logische 0 = vrijloop en
reset.
(NC).
Stopt de motor door gedurende een
bepaalde tijd gelijkstroom toe te
voeren. Zie parameter 2-01 DC-
remstroom tot
parameter 2-03 Inschakelsnelh. DC-rem
[tpm]. Deze functie is alleen actief als
de waarde in parameter 2-02 DC-remtijd
niet 0 is. Logische 0 = DC-rem.
Deze optie is niet beschikbaar als
parameter 1-10 Motorconstructie is
ingesteld op [1] PM, niet uitspr. SPM.
een stopfunctie wanneer de geselec-
teerde klem van logisch niveau 1 naar 0
gaat. De stop wordt uitgevoerd in
overeenstemming met de geselecteerde
uitlooptijd (parameter 3-42 Ramp 1
uitlooptijd en parameter 3-52 Ramp 2
uitlooptijd).
LET OP
Wanneer de frequentieregelaar de
koppelbegrenzing heeft bereikt en
een stopcommando heeft
ontvangen, zal hij mogelijk niet
vanzelf stoppen. Om ervoor te
zorgen dat de frequentieregelaar
stopt, moet een digitale uitgang
worden ingesteld op [27]
Koppelbegr. & stop en worden
aangesloten op een digitale
ingang die als vrijloop is gecon-
gureerd.
[7] Ext. vergrendeling Dezelfde functie als Vrijloop, geïnv.,
maar Ext. vergrendeling genereert de
alarmmelding Externe storing wanneer
de geprogrammeerde klem voor
Vrijloop, geïnv. logische 0 is. De
alarmmelding is ook actief via digitale
uitgangen en relaisuitgangen als deze
voor een externe vergrendeling zijn
geprogrammeerd. Het alarm kan
worden gereset via een digitale ingang
of de [Reset]-toets nadat de oorzaak
van de externe vergrendeling is
weggenomen. In parameter 22-00 Ext.
vergrendel.vertr. kan een tijdsvertraging
worden geprogrammeerd. Nadat een
signaal op de ingang wordt toegepast,
wordt bovenstaande actie vertraagd
met de ingestelde tijd in
parameter 22-00 Ext. vergrendel.vertr..
[8] Start Selecteer de startwaarde voor een
start-/stopcommando. 1 = start, 0 =
stop.
(Standaard voor digitale ingang 18.)
[9] Pulsstart Als gedurende minstens 2 ms een puls
wordt gegeven, wordt de motor
gestart. De motor stopt als Stop geïnv.
wordt geactiveerd.
[10] Omkeren Wijzigt de draairichting van de motoras.
Logische 1 leidt tot omkeren. Het
omkeersignaal wijzigt alleen de
draairichting. Het activeert de
startfunctie niet. Selecteer Bidirectioneel
in parameter 4-10 Draairichting motor.
(Standaard voor digitale ingang 19.)
[11] Start omgekeerd Gebruikt voor start/stop en voor
omkeren via dezelfde draad. Gelijktijdige startsignalen zijn niet
toegestaan.
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 87
Page 90

Parameterbeschrijving
VLT® AQUA Drive FC 202
[14] Jog Gebruikt om de jogsnelheid in te
schakelen. Zie parameter 3-11 Jog-snelh.
[Hz].
(Standaard voor digitale ingang 29.)
[15] Digitale ref. aan Gebruikt om te schakelen tussen
externe referentie en digitale referentie.
33
[16] Ingest. ref. bit 0 Maakt het mogelijk om 1 van de 8
[17] Ingest. ref. bit 1 Maakt het mogelijk om 1 van de 8
[18] Ingest. ref. bit 2 Maakt het mogelijk om 1 van de 8
[19] Ref. vasthouden Houdt de huidige referentie vast. De
[20] Uitgang vasth. Houdt de huidige motorfrequentie (in
Hiervoor moet [1] Extern/digitaal zijn
geselecteerd in parameter 3-04 Referen-
tiefunctie. Logische 0 = externe
referentie actief, logische 1 = 1 van de
8 vooraf ingestelde referenties is actief.
digitale referenties te selecteren volgens
Tabel 3.13.
digitale referenties te selecteren volgens
Tabel 3.13.
digitale referenties te selecteren volgens
Tabel 3.13.
Ingest. ref. bit 2 1 0
Digitale
referentie 0
Digitale
referentie 1
Digitale
referentie 2
Digitale
referentie 3
Digitale
referentie 4
Digitale
referentie 5
Digitale
referentie 6
Digitale
referentie 7
Tabel 3.13 Ingestelde referentiebit
vastgehouden referentie is nu het
inschakelpunt/de voorwaarde voor het
gebruik van versnellen en vertragen. Als
Snelh. omh./omlaag wordt gebruikt,
volgt de snelheidsverandering altijd
ramp 2 (parameter 3-51 Ramp 2
aanlooptijd en parameter 3-52 Ramp 2
uitlooptijd) in het bereik 0 -
parameter 3-03 Max. referentie.
Hz) vast. De vastgehouden motorfrequentie is nu het inschakelpunt/de
voorwaarde voor het gebruik van Snelh.
omh. en Snelh. omlaag. Als Snelh. omh./
omlaag wordt gebruikt, volgt de
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
[21] Snelh. omh. Voor digitale besturing voor het
[22] Snelh. omlaag Zie [21] Snelh. omh.
[23] Setupselectie bit 0 Selecteert 1 van de 4 setups. Stel
[24] Setupselectie bit 1 Zie [23] Setupselectie bit 0.
[32] Pulsingang Selecteer [32] Pulsingang wanneer een
[34] Ramp bit 0 Selecteer welke ingang moet worden
[36] Netstoring geïnv. Schakelt parameter 14-10 Netstoring in.
[42] Ref source bit 0
(Referentiebron bit
0)
[51] Hand/Auto Start Selecteert handmatige of autostart.
[52] Startvoorwaarde De ingangsklem waarvoor [52]
snelheidsverandering altijd ramp 2
(parameter 3-51 Ramp 2 aanlooptijd en
parameter 3-52 Ramp 2 uitlooptijd) in
het bereik 0 - parameter 1-23 Motorfre-
quentie.
LET OP
Als [20] Uitgang vasth. actief is,
kan de frequentieregelaar niet
worden gestopt via een laag [13]
Startsignaal. De frequentieregelaar
wordt gestopt via een klem die is
ingesteld op [2] Vrijloop geïnv. of
[3] Vrijloop & reset inv.
verhogen/verlagen van het motortoerental (motorpotentiometer). Selecteer
[19] Ref. vasthouden of [20] Uitgang
vasth. om deze functie te activeren. Als
[21] Snelh. omh. korter dan 400 ms
wordt geactiveerd, wordt de totale
referentie verhoogd met 0,1%. Als [21]
Snelh. omh. langer dan 400 ms wordt
geactiveerd, wordt de totale referentie
verhoogd op basis van ramp 1 in
parameter 3-41 Ramp 1 aanlooptijd.
parameter 0-10 Actieve setup in op Multi
setup.
(Standaard voor digitale ingang 32.)
pulsreeks wordt gebruikt als referentie
of terugkoppeling. Schaling is mogelijk
via parametergroep 5-5* Pulsingang.
gebruikt. Logische 0 selecteert ramp 1,
terwijl logische 1 ramp 2 selecteert.
Netstoring geïnv. is actief in een
logische 0-situatie.
Een actieve ingang in bit 0 selecteert
analoge ingang 54 als de referentiebron
(zie parametergroep 3-1* Referenties,
optie [35] Digital input select (Selectie
digitale ingang)). Een inactieve ingang
selecteert analoge ingang 53.
Hoog signaal selecteert alleen Auto On,
laag signaal selecteert alleen Hand On.
Startvoorwaarde is geprogrammeerd,
moet logische 1 zijn om een
startcommando te kunnen accepteren.
Startvoorwaarde heeft een logische
88 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 91

Parameterbeschrijving Programmeerhandleiding
AND-functie die gerelateerd is aan de
klem die is geprogrammeerd voor [8]
Start, [14] Jog of [20] Uitgang vasth. Er
moet aan beide voorwaarden zijn
voldaan voordat de motor kan worden
gestart. Als [52] Startvoorwaarde is
geprogrammeerd op meerdere
klemmen, hoeft Startvoorwaarde slechts
op 1 van de klemmen logische 1 te zijn
om de functie uit te voeren. Het
digitale uitgangssignaal voor
startverzoek ([8] Start, [14] Jog of [20]
Uitgang vasth.) dat is geprogrammeerd
in parametergroep 5-3* Digitale
uitgangen of parametergroep 5-4* Relais
wordt niet beïnvloed door [52]
Startvoorwaarde.
[53] Handmatige start Als dit signaal wordt toegepast, wordt
de frequentieregelaar in de handmodus
gezet alsof [Hand On] werd ingedrukt
en wordt een normaal stopcommando
genegeerd. Als het signaal wordt
weggenomen, stopt de motor. Om een
ander startcommando geldig te maken,
moet een andere digitale ingang
worden toegewezen aan [54] Autostart
en moet daarop een signaal worden
toegepast. [Hand On] en [Auto On]
hebben geen invloed. [O] onderdrukt
lokale start en autostart onderdrukt.
Druk op [Hand On] of [Auto On] om
lokale start en autostart weer te
activeren. Als noch op [53] Handmatige
start noch op [54] Autostart een signaal
wordt toegepast, stopt de motor,
ongeacht eventuele normale startcommando's die worden gegeven. Als op
zowel als [53] Handmatige start als [54]
Autostart een signaal wordt toegepast,
is de functie Autostart. Als op de [O]-
toets wordt gedrukt, stop de motor,
ongeacht eventuele signalen op [53]
Handmatige start en [54] Autostart.
[54] Autostart Als dit signaal wordt toegepast, wordt
de frequentieregelaar in de automodus
gezet alsof er op [Auto On] is
ingedrukt. Zie ook [53] Handmatige
start.
[55] DigiPot verhogen Gebruikt de ingang als een verhoog-
signaal naar de digitalepotentiometerfunctie die wordt
beschreven in parametergroep 3-9* Dig.
pot.meter.
[56] DigiPot verlagen Gebruikt de ingang als een verlaag-
signaal naar de digitalepotentiometerfunctie die wordt
beschreven in parametergroep 3-9* Dig.
pot.meter.
[57] DigiPot wissen Gebruikt de ingang voor het wissen van
de digitale-potentiometerreferentie die
wordt beschreven in parametergroep
3-9* Dig. pot.meter.
[60] Teller A (omhoog) (Alleen voor klem 29 of 33) Ingang om
de telling in de SLC-teller stapsgewijs te
verhogen.
[61] Teller A (omlaag) (Alleen voor klem 29 of 33) Ingang om
de telling in de SLC-teller stapsgewijs te
verlagen.
[62] Reset Teller A Ingang om teller A te resetten.
[63] Teller B (omhoog) (Alleen voor klem 29 en 33) Ingang om
de telling in de SLC-teller stapsgewijs te
verhogen.
[64] Teller B (omlaag) (Alleen voor klem 29 en 33) Ingang om
de telling in de SLC-teller stapsgewijs te
verlagen.
[65] Reset Teller B Ingang om teller B te resetten.
[66] Slaapstand Forceert de frequentieregelaar naar de
slaapmodus (zie parametergroep 22-4*
Slaapstand). Reageert op de stijgende
ank van het toegepaste signaal.
[78] Reset prev.
onderhoudswoord
[80] PTC-kaart 1 Alle digitale ingangen kunnen worden
[85] Latched Pump
Derag (Derag
pulspomp)
Zet alle elementen in de tellers voor
parameter 16-96 Onderhoudswoord terug
op 0.
ingesteld op [80] PTC-kaart 1. Er mag
echter slechts 1 digitale ingang worden
ingesteld op deze optie.
Start het deraggingproces.
De opties [120]-[138] hebben allemaal betrekking op
cascaderegelaarfuncties. Zie parametergroep 25-** Cascade-
regelaar voor meer informatie.
[120] Start
hoofdpomp
[121] Wisseling
hoofdpomp
[130
Vergr. pomp
-
1 - Vergr.
138]
pomp 9
Start/stopt de hoofdpomp (bestuurd door
de frequentieregelaar). Om te kunnen
starten is ook een systeemstartsignaal
nodig, bijv. naar een digitale ingang die is
ingesteld op [8] Start.
Dwingt een wisseling van hoofdpomp in
een cascaderegelaar af. Stel
parameter 25-50 Wisseling hoofdpomp in op
[2] Op commando of [3] Bij staging/op
commando. Parameter 25-51 Wisselgebeurt.
kan worden ingesteld op elk van de 4
mogelijke opties.
De functie hangt af van de instelling in
parameter 25-06 Aantal pompen. Als deze is
ingesteld op [0] Nee, heeft pomp 1
betrekking op de pomp die wordt bestuurd
door relais 1 enz. Als deze parameter is
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 89
Page 92

5-19 Klem 37 Veilige stop
Gebruik deze parameter voor het congureren van de Safe
Torque O-functionaliteit. In geval van een waarschuwingsmelding laat de frequentieregelaar de motor vrijlopen en is een
automatische herstart mogelijk. In geval van een alarmmelding
laat de frequentieregelaar de motor vrijlopen en is een
handmatige herstart vereist (via een veldbus, digitale I/O, of door
te drukken op [Reset] op het LCP). Wanneer VLT® PTC Thermistor
Card MCB 112 wordt geïnstalleerd, moet u de PTC-opties
congureren om de alarmafhandelingsfunctie optimaal te
benutten.
Option: Functie:
[1] * Alarm Veilige
stop
Laat de frequentieregelaar vrijlopen
wanneer Safe Torque O wordt
geactiveerd. Handmatige reset via
LCP, digitale ingang of veldbus.
Parameterbeschrijving
VLT® AQUA Drive FC 202
ingesteld op [1] Ja, heeft pomp 1
betrekking op de pomp die enkel door de
frequentieregelaar wordt bestuurd (waarbij
geen enkel ingebouwd relais betrokken is)
en pomp 2 op de pomp die wordt bestuurd
door relais 1. Vergrendeling van de pomp
33
met variabel toerental (hoofdpomp) is niet
mogelijk in de standaard cascaderegelaar.
Zie Tabel 3.14.
Instelling in
parame-
tergroep 5-1*
Digitale
ingangen.
[0] Nee [1] Ja
[130] Vergr.
pomp 1
[131] Vergr.
pomp 2
[132] Vergr.
pomp 3
[133] Vergr.
pomp 4
[134] Vergr.
pomp 5
[135] Vergr.
pomp 6
[136] Vergr.
pomp 7
[137] Vergr.
pomp 8
[138] Vergr.
pomp 9
Instelling in
parameter 25-06 Aantal
pompen
Bestuurd
door relais 1
(alleen als dit
niet de
hoofdpomp
is)
Bestuurd
door relais 2
Bestuurd
door relais 3
Bestuurd
door relais 4
Bestuurd
door relais 5
Bestuurd
door relais 6
Bestuurd
door relais 7
Bestuurd
door relais 8
Bestuurd
door relais 9
Bestuurd
door
frequentiere-
gelaar
(kan niet
worden
vergrendeld)
Bestuurd
door relais 1
Bestuurd
door relais 2
Bestuurd
door relais 3
Bestuurd
door relais 4
Bestuurd
door relais 5
Bestuurd
door relais 6
Bestuurd
door relais 7
Bestuurd
door relais 8
5-13 Klem 29 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen.
5-14 Klem 32 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen, met uitzondering van optie
[32] Pulsingang.
5-15 Klem 33 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen.
5-16 Klem X30/2 digitale ingang
Option: Functie:
[0] * Niet in
bedrijf
Deze parameter is actief wanneer de VLT
General Purpose I/O MCB 101 in de frequentieregelaar is geïnstalleerd. De parameter
bevat alle opties en functies die staan vermeld
in parametergroep 5-1 Digitale ingangen, met
uitzondering van optie [32] Pulsingang.
®
5-17 Klem X30/3 digitale ingang
Option: Functie:
[0] * Niet in
bedrijf
Deze parameter is actief wanneer de VLT
General Purpose I/O MCB 101 in de frequentieregelaar is geïnstalleerd. De parameter
bevat alle opties en functies die staan vermeld
in parametergroep 5-1 Digitale ingangen, met
uitzondering van optie [32] Pulsingang.
®
5-18 Klem X30/4 digitale ingang
Option: Functie:
[0] * Niet in
bedrijf
Deze parameter is actief wanneer de VLT
General Purpose I/O MCB 101 in de frequentieregelaar is geïnstalleerd. De parameter
bevat alle opties en functies die staan vermeld
in parametergroep 5-1 Digitale ingangen, met
uitzondering van optie [32] Pulsingang.
®
5-10 Klem 18 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen, met uitzondering van optie
[32] Pulsingang.
5-11 Klem 19 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen, met uitzondering van optie
[32] Pulsingang.
5-12 Klem 27 digitale ingang
De parameter bevat alle opties en functies die staan vermeld in
parametergroep 5-1 Digitale ingangen, met uitzondering van optie
[32] Pulsingang.
90 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 93

5-19 Klem 37 Veilige stop
Gebruik deze parameter voor het congureren van de Safe
Torque O-functionaliteit. In geval van een waarschuwingsmelding laat de frequentieregelaar de motor vrijlopen en is een
automatische herstart mogelijk. In geval van een alarmmelding
laat de frequentieregelaar de motor vrijlopen en is een
handmatige herstart vereist (via een veldbus, digitale I/O, of door
te drukken op [Reset] op het LCP). Wanneer VLT® PTC Thermistor
Card MCB 112 wordt geïnstalleerd, moet u de PTC-opties
congureren om de alarmafhandelingsfunctie optimaal te
benutten.
Option: Functie:
[3] Waarsch.
Veilige stop
Laat de frequentieregelaar vrijlopen
als Safe Torque O wordt
geactiveerd (klem 37 uit). Wanneer
het Safe Torque O-circuit weer
hersteld is, wordt de werking van
de frequentieregelaar zonder een
handmatige reset hervat.
[4] PTC 1-alarm Laat de frequentieregelaar vrijlopen
wanneer Safe Torque O wordt
geactiveerd. Handmatige reset via
LCP, digitale ingang of veldbus.
[5] PTC 1
waarsch.
Laat de frequentieregelaar vrijlopen
als Safe Torque O wordt
geactiveerd (klem 37 uit). Als het
Safe Torque O-circuit weer
hersteld is, wordt de werking van
de frequentieregelaar zonder een
handmatige reset hervat, tenzij er
nog een digitale ingang actief is die
is ingesteld op [80] PTC-kaart 1.
[6] PTC 1 & relaisADeze optie wordt gebruikt wanneer
de VLT® PTC Thermistor Card MCB
112 is gekoppeld aan een stoptoets
via een veiligheidsrelais naar klem
37. Laat de frequentieregelaar
vrijlopen wanneer Safe Torque O
wordt geactiveerd. Handmatige
reset via LCP, digitale ingang of
veldbus.
[7] PTC 1 & relaisWDeze optie wordt gebruikt wanneer
de VLT® PTC Thermistor Card MCB
112 is gekoppeld aan een stoptoets
via een veiligheidsrelais naar klem
37. Laat de frequentieregelaar
vrijlopen als Safe Torque O wordt
geactiveerd (klem 37 uit). Als het
Safe Torque O-circuit weer
hersteld is, wordt de werking van
de frequentieregelaar zonder een
handmatige reset hervat, tenzij er
nog een digitale ingang actief is die
is ingesteld op [80] PTC-kaart 1.
5-19 Klem 37 Veilige stop
Gebruik deze parameter voor het congureren van de Safe
Torque O-functionaliteit. In geval van een waarschuwingsmelding laat de frequentieregelaar de motor vrijlopen en is een
automatische herstart mogelijk. In geval van een alarmmelding
laat de frequentieregelaar de motor vrijlopen en is een
handmatige herstart vereist (via een veldbus, digitale I/O, of door
te drukken op [Reset] op het LCP). Wanneer VLT® PTC Thermistor
Card MCB 112 wordt geïnstalleerd, moet u de PTC-opties
congureren om de alarmafhandelingsfunctie optimaal te
benutten.
Option: Functie:
[8] PTC 1 & relais
A/W
Deze optie maakt een combinatie
van alarm en waarschuwing
mogelijk.
[9] PTC 1 & relais
W/A
Deze optie maakt een combinatie
van alarm en waarschuwing
mogelijk.
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 91
LET OP
De opties [4] PTC 1-alarm tot [9] PTC 1 & relais W/A zijn
alleen beschikbaar als de MCB 112 is aangesloten.
LET OP
Selectie van automatische reset/waarschuwing maakt
automatisch herstarten van de frequentieregelaar
mogelijk.
Functie Num
Geen functie [0] – –
Alarm Veilige stop [1]* – Veilige stop
Waarsch. Veilige
stop
PTC 1-alarm [4] VStop PTC 1 [A71] –
PTC 1 waarsch. [5] VStop PTC 1
PTC 1 & relais A [6] VStop PTC 1 [A71] Veilige stop
PTC 1 & relais W [7] VStop PTC 1
PTC 1 & relais A/W [8] VStop PTC 1 [A71] Veilige stop
PTC 1 & relais W/A [9] VStop PTC 1
Tabel 3.14 Overzicht van functies, alarmen en waarschuwingen
W betekent waarschuwing en A betekent alarm. Zie Alarmen en
waarschuwingen in hoofdstuk 5 Probleem verhelpen voor meer
informatie.
Een gevaarlijke storing in verband met Safe Torque O
genereert alarm 72 Gev. storing.
PTC Relais
-
mer
[A68]
[3] – Veilige stop
[W68]
–
[W71]
[A68]
Veilige stop
[W71]
[W71]
[W68]
[W68]
Veilige stop
[A68]
3 3
Page 94

Parameterbeschrijving
VLT® AQUA Drive FC 202
Zie Tabel 5.1.
5-20 Klem X46/1 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
33
ingangen, met uitzondering van optie [32] Pulsingang.
®
[0] Niet in bedrijf Standaard voor alle digitale uitgangen
[1] Besturing
gereed
[2] Omv. gereed De frequentieregelaar is gereed voor
5-21 Klem X46/3 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
®
[3] Omv. gereed/
extern
[4] Standby/gn
waarsch.
5-22 Klem X46/5 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
®
[5] Actief Motor is actief.
[6] Draaien/gn
wsch.
5-23 Klem X46/7 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
®
[8] Op ref/geen
waarsch.
[9] Alarm Een alarm activeert de uitgang. er zijn
5-24 Klem X46/9 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
®
5-25 Klem X46/11 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
®
[10] Alarm of
waarsch.
[11] Op koppelbegr. De ingestelde koppelbegrenzing in
[12] Buiten stroom-
bereik
[13] Onder stroom,
laag
5-26 Klem X46/13 digitale ingang
Deze parameter heeft betrekking op de digitale ingang op VLT
Extended Relay Card MCB 113. De parameter bevat alle opties en
functies die staan vermeld in parametergroep 5-1 Digitale
ingangen, met uitzondering van optie [32] Pulsingang.
3.7.3 5-3* Digitale uitgangen
®
[14] Boven stroom,
hoog
[15] Buiten snelh.-
bereik
Parameters voor het congureren van de uitgangsfuncties
voor de uitgangsklemmen. De 2 digitale halfgeleideruitgangen zijn gemeenschappelijk voor klem 27 en 29.
Programmeer de I/O-functie voor klem 27 in
[16] Onder snelh.,
laag
parameter 5-01 Klem 27 modus en programmeer de I/Ofunctie voor klem 29 in parameter 5-02 Klem 29 modus.
[17] Boven snelh.,
hoog
LET OP
Deze parameters kunnen niet worden gewijzigd terwijl
De digitale uitgangen kunnen worden
ingesteld op de volgende functies:
en relaisuitgangen.
De stuurkaart krijgt voedingsspanning.
bedrijf en geeft een voedingssignaal aan
de stuurkaart.
De frequentieregelaar is gereed voor
bedrijf en staat in de automodus.
De frequentieregelaar is gereed voor
bedrijf. Er is geen start- of
stopcommando gegeven (start/
uitschakelen). er zijn geen waarschuwingen.
De uitgangssnelheid is hoger dan de
ingestelde snelheid in
parameter 1-81 Min. snelh. functie bij stop
[RPM]. De motor loopt en er zijn geen
waarschuwingen.
De motor loopt op het referentietoerental.
geen waarschuwingen.
Een alarm of een waarschuwing
activeert de uitgang.
parameter 4-16 Koppelbegrenzing
motormodus is overschreden.
De motorstroom ligt buiten het in
parameter 4-18 Stroombegr. ingestelde
bereik.
De motorstroom is lager dan is
ingesteld in
parameter 4-50 Waarschuwing stroom
laag.
De motorstroom is hoger dan is
ingesteld in
parameter 4-51 Waarschuwing stroom
hoog.
De uitgangsfrequentie ligt buiten het
ingestelde bereik in
parameter 4-52 Waarschuwing snelheid
laag en parameter 4-53 Waarschuwing
snelheid hoog.
De uitgangssnelheid is lager dan is
ingesteld in
parameter 4-52 Waarschuwing snelheid
laag.
De uitgangssnelheid is hoger dan is
ingesteld in
parameter 4-53 Waarschuwing snelheid
hoog.
de motor loopt.
92 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 95

Parameterbeschrijving Programmeerhandleiding
[18] Buiten
terugk.bereik
[19] Onder terugk.,
laag
[20] Boven terugk.,
hoog
[21] Therm. waarsch. Een thermische waarschuwing wordt
[25] Omkeren Omkeren. Logische 1 = relais
[26] Bus OK Actieve communicatie (geen time-out)
[27] Koppelbegr. &
stop
[28] Rem, geen
waarsch.
[29] Rem klaar, geen
fout
[30] Remfout (IGBT) De uitgang is logische 1 wanneer de
[35] Ext. vergren-
deling
[40] Buiten ref.bereik
[41] Onder ref, laag
[42] Boven ref, hoog
[45] Busbest.
[46] Busbest, 1 bij t-
o
[47] Busbest, 0 bij t-
o
[55] Pulsuitgang
[60] Comparator 0 Zie parametergroep 13-1* Comparatoren.
De terugkoppeling ligt buiten het
ingestelde bereik in
parameter 4-56 Waarsch: terugk. laag en
parameter 4-57 Waarsch: terugk. hoog.
De terugkoppeling is lager dan de
begrenzing die is ingesteld in
parameter 4-52 Waarschuwing snelheid
laag.
De terugkoppeling is hoger dan de
begrenzing die is ingesteld in
parameter 4-56 Waarsch: terugk. laag.
gegeven als de temperatuurbegrenzing
in de motor, frequentieregelaar,
remweerstand of thermistor is
overschreden.
geactiveerd, 24 V DC wanneer de motor
rechtsom draait. Logische 0 = relais niet
geactiveerd, geen signaal wanneer de
motor linksom draait.
via de seriële-communicatiepoort.
Gebruik deze functie bij vrijloop na stop
en in koppelbegrenzingssituaties. Het
signaal is logische 0 wanneer de
frequentieregelaar een stopsignaal heeft
ontvangen en de koppelbegrenzing
heeft bereikt.
De rem is actief en er zijn geen
waarschuwingen.
De rem is gereed voor bedrijf en er zijn
geen fouten.
rem-IGBT is kortgesloten. Gebruik deze
functie om de frequentieregelaar te
beschermen wanneer er een fout
optreedt in de remmodules. Gebruik de
uitgang/het relais om de netvoeding
van de frequentieregelaar uit te
schakelen.
De externe vergrendelfunctie is
geactiveerd via 1 van de digitale
ingangen.
De uitgang wordt hoog als comparator
0 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[61] Comparator 1 Zie parametergroep 13-1* Comparatoren.
De uitgang wordt hoog als comparator
1 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[62] Comparator 2 Zie parametergroep 13-1* Comparatoren.
De uitgang wordt hoog als comparator
2 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[63] Comparator 3 Zie parametergroep 13-1* Comparatoren.
De uitgang wordt hoog als comparator
3 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[64] Comparator 4 Zie parametergroep 13-1* Comparatoren.
De uitgang wordt hoog als comparator
4 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[65] Comparator 5 Zie parametergroep 13-1* Comparatoren.
De uitgang wordt hoog als comparator
5 als true wordt geëvalueerd. In andere
gevallen is hij laag.
[70] Log. regel 0 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 0
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[71] Log. regel 1 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 1
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[72] Log. regel 2 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 2
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[73] Log. regel 3 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 3
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[74] Log. regel 4 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 4
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[75] Log. regel 5 Zie parametergroep 13-4* Log. regels. De
uitgang wordt hoog als logische regel 5
als true wordt geëvalueerd. In andere
gevallen is hij laag.
[80] SL dig. uitgangAZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer SL-controlleractie [38] Dig. uitgang A hoog wordt
uitgevoerd. De uitgang wordt laag
wanneer SL-controlleractie [32] Dig.
uitgang A laag wordt uitgevoerd.
[81] SL dig. uitgangBZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer Smart
Logic Action [39] Dig. uitgang B hoog
wordt uitgevoerd. De uitgang wordt
3 3
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 93
Page 96

Parameterbeschrijving
VLT® AQUA Drive FC 202
laag wanneer Smart Logic Action [33]
Dig. uitgang B laag wordt uitgevoerd.
[82] SL dig. uitgangCZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer Smart
Logic Action [40] Dig. uitgang C hoog
wordt uitgevoerd. De uitgang wordt
33
[83] SL dig. uitgangDZie parameter 13-52 SL-controlleractie. De
[84] SL dig. uitgangEZie parameter 13-52 SL-controlleractie. De
[85] SL dig. uitgangFZie parameter 13-52 SL-controlleractie. De
[90] kWh-tellerpuls Veroorzaakt een puls op de digitale
[120] System On Ref
(Systeem op
referentie)
[155] Verifying Flow
(Controle ow)
[160] Geen alarm De uitgang is hoog als er geen alarm
[161] Omgekeerd
draaien
[165] Lokale ref. actief De uitgang is hoog als
[166] Externe ref.
actief
[167] Startcommando
actief
laag wanneer Smart Logic Action [34]
Dig. uitgang C laag wordt uitgevoerd.
uitgang wordt hoog wanneer Smart
Logic Action [41] Dig. uitgang D hoog
wordt uitgevoerd. De uitgang wordt
laag wanneer Smart Logic Action [35]
Dig. uitgang D laag wordt uitgevoerd.
uitgang wordt hoog wanneer Smart
Logic Action [42] Dig. uitgang E hoog
wordt uitgevoerd. De uitgang wordt
laag wanneer Smart Logic Action [36]
Dig. uitgang E laag wordt uitgevoerd.
uitgang wordt hoog wanneer Smart
Logic Action [43] Dig. uitgang F hoog
wordt uitgevoerd. De uitgang wordt
laag wanneer Smart Logic Action [37]
Dig. uitgang F laag wordt uitgevoerd.
uitgang telkens wanneer de frequentieregelaar 1 kWh heeft verbruikt.
aanwezig is.
De uitgang is hoog als de frequentieregelaar linksom werkt (het logische
product van de statusbits 'actief' EN
'omkeren').
parameter 3-13 Referentieplaats = [2]
Lokaal of als parameter 3-13 Referentieplaats = [0] Gekoppeld Hand/Auto terwijl
het LCP in de handmodus staat.
De uitgang is hoog als
parameter 3-13 Referentieplaats is
ingesteld op [1] Extern of [0] Gekoppeld
Hand/Auto terwijl het LCP in de
automodus staat.
De uitgang is hoog als er een actief
startcommando is (bijvoorbeeld [Auto
On] terwijl er een startcommando via
een digitale ingang of bus actief is, of
[Hand On]).
[168] Handmodus De uitgang is hoog als de frequentiere-
[169] Automodus De uitgang is hoog als de frequentiere-
[180] Klokfout De klokfunctie is teruggezet naar de
[181] Prev. onderhoud Een van de preventief-onderhoudsge-
[182] Deragging Deragging is actief.
[188] AHF-
condensator
insch.
[189] Ext. ventila-
torreg.
[190] Geen ow Er is een situatie zonder ow of een
[191] Droge pomp Er is een situatie met een droge pomp
[192] Einde curve Actief als er een einde-curveconditie
[193] Slaapstand De frequentieregelaar/het systeem is in
[194] Band defect Er is een situatie met een defecte band
[195] Bypassklepbe-
sturing
LET OP
Alle geïnverteerde-stop-/vrijloopcommando's moeten inactief zijn.
gelaar in de handmodus staat
(aangegeven door het lampje boven
[Hand On]).
gelaar in de automodus staat
(aangegeven door het lampje boven
[Auto On]).
standaardinstelling (2000-01-01)
vanwege een stroomstoring.
beurtenissen die in
parameter 23-10 Onderhoudspunt zijn
geprogrammeerd, heeft de voor die
actie ingestelde tijd in
parameter 23-11 Onderhoudsactie
overschreden.
Zie parameter 5-80 Inschakelvertr. AHF-
cond..
Een regeling met externe ventilator is
actief.
situatie met minimumtoerental
gedetecteerd. Deze functie moet zijn
ingeschakeld in Parameter 22-21 Detectie
laag verm..
gedetecteerd. Activeer deze functie in
parameter 22-26 Drogepompfunctie.
optreedt.
de slaapmodus gegaan. Zie parame-
tergroep 22-4* Slaapstand.
gedetecteerd. Activeer deze functie in
parameter 22-60 Functie Defecte band.
De bypassklepregeling (digitale/relaisuitgang in de frequentieregelaar) wordt
gebruikt voor compressorsystemen om
de compressor door middel van een
bypassklep te ontlasten tijdens het
opstarten. Nadat het startcommando is
gegeven, blijft de bypassklep open
totdat de frequentieregelaar de
ingestelde waarde in
parameter 4-11 Motorsnelh. lage begr.
[RPM] heeft bereikt. Nadat de limiet is
bereikt, wordt de bypassklep gesloten,
waardoor de compressor weer normaal
94 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Page 97

Min
Start
Stop
130BA251.10
RFF
AAN
UIT
AAN
UIT
Snelheid
Tijd
Tijd
Tijd
Parameterbeschrijving Programmeerhandleiding
kan werken. Deze procedure wordt pas
opnieuw geactiveerd als een nieuwe
start wordt geïnitieerd en het toerental
van de frequentieregelaar tijdens de
ontvangst van het startsignaal 0 is.
Parameter 1-71 Star tvertraging kan
worden gebruikt om de motorstart te
vertragen.
Afbeelding 3.28 Principe van de
bypassklepregeling
[199] Pipe Filling
(Leid. vullen)
[200] Volle capac. Alle pompen draaien op volle toeren.
[201] Pomp 1
draait
[202] Pomp 2
draait
[203] Pomp 3
draait
[204] Pomp 4
draait
[205] Pomp 5
draait
[206] Pomp 6
draait
[207] Pomp 7
draait
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 95
Actief wanneer de leidingvulmodus
actief is. See parametergroep 29-** Water
Application Functions (Watertoepassings-
functies).
Onderstaande instelmogelijkheden hebben
allemaal betrekking op de cascaderegelaar.
Zie parametergroep 25-** Cascaderegelaar
voor meer informatie.
Een of meer pompen die door de cascaderegelaar worden bestuurd, draaien. De
functie is mede afhankelijk van de instelling
in parameter 25-05 Vaste hoofdpomp. Als die
parameter is ingesteld op [0] Nee, heeft
pomp 1 betrekking op de pomp die wordt
bestuurd door relais 1 enz. Als de
parameter is ingesteld op [1] Ja, heeft
pomp 1 betrekking op de pomp die enkel
door de frequentieregelaar wordt bestuurd
(waarbij geen enkel ingebouwd relais
betrokken is), en heeft pomp 2 betrekking
op de pomp die wordt bestuurd door relais
1. Zie Tabel 3.15.
Zie [201].
Zie [201].
[208] Pomp 8
draait
[209] Pomp 9
draait
[240] RS Flipop 0 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[241] RS Flipop 1 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[242] RS Flipop 2 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[243] RS Flipop 3 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[244] RS Flipop 4 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[245] RS Flipop 5 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[246] RS Flipop 6 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[247] RS Flipop 7 Zie parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
Instelling in
parametergroep 5-3*
Digitale uitgangen
[0] Nee [1] Ja
[201] Pomp 1
draait
[202] Pomp 2
draait
[203] Pomp 3
draait
Tabel 3.15 Pompen die worden bestuurd door de cascaderegelaar.
Instelling in parameter 25-05 Vaste
hoofdpomp
Bestuurd door
relais 1
Bestuurd door
relais 2
– Bestuurd door
Bestuurd door
frequentieregelaar
Bestuurd door
relais 1
relais 2
5-30 Klem 27 dig. uitgang
Deze parameter heeft de opties die staan beschreven in
hoofdstuk 3.7.3 5-3* Digitale uitgangen.
Option: Functie:
[0] * Niet in bedrijf
5-31 Klem 29 dig. uitgang
Deze parameter heeft de opties die staan beschreven in
hoofdstuk 3.7.3 5-3* Digitale uitgangen.
Option: Functie:
[0] * Niet in bedrijf
5-32 Klem X30/6 dig. uitgang (MCB 101)
Deze parameter heeft de opties die staan beschreven in
hoofdstuk 3.7.3 5-3* Digitale uitgangen.
Option: Functie:
[0] * Niet in bedrijf
Deze parameter is actief als VLT® General
Purpose I/O MCB 101 in de frequentieregelaar is geïnstalleerd.
3 3
Page 98

5-40 Functierelais
Array [20]
Option: Functie:
Selecteer de opties om de functie
van de relais in te stellen.
De selectie van elk relais vindt
plaats via een arrayparameter.
[0] Niet in bedrijf
[1] Besturing
gereed
[2] Omv. gereed
[3] Omv gereed/
rembest.
[4] Standby/gn
waarsch.
[5] Actief
[6] Draaien/gn
wsch.
[8] Op ref/geen
waarsch.
[9] Alarm
[10] Alarm of
waarsch.
[11] Op
koppelbegr.
[12] Buiten stroom-
bereik
[13] Onder stroom,
laag
[14] Boven stroom,
hoog
[15] Buiten snelh.-
bereik
[16] Ondersnelh.,
laag
[17] Boven snelh.,
hoog
[18] Buiten
terugk.bereik
[19] Onder terugk.,
laag
5-40 Functierelais
Array [20]
Option: Functie:
[20] Boven terugk.,
hoog
[21] Therm.
waarsch.
[25] Omkeren
[26] Bus ok
[27] Koppelbegr. &
stop
[28] Rem, geen
waarsch.
[29] Rem klaar,
geen fout
[30] Remfout
(IGBT)
[33] Veilige stop
actief
[35] Ext. vergren-
deling
[36] Stuurwoord
bit 11
[37] Stuurwoord
bit 12
[40] Buiten
ref.bereik
[41] Onder ref, laag
[42] Boven ref,
hoog
[45] Busbest.
[46] Busbest, 1 bij
t-o
[47] Busbest, 0 bij
t-o
[51] MCO-gestuurd
[59] Remote,enable
,no TW
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Log. regel 0
[71] Log. regel 1
[72] Log. regel 2
[73] Log. regel 3
[74] Log. regel 4
[75] Log. regel 5
[80] SL dig.
uitgang A
[81] SL dig.
uitgang B
Parameterbeschrijving
5-33 Klem X30/7 dig. uitgang (MCB 101)
Option: Functie:
[0] * Niet in bedrijf
33
3.7.4 5-4* Relais
Parameters voor het congureren van de tijdslimieten en
de uitgangsfuncties voor de relais.
96 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
VLT® AQUA Drive FC 202
Deze parameter is actief als VLT® General
Purpose I/O MCB 101 in de frequentieregelaar is geïnstalleerd. Dezelfde opties en
functies als parametergroep 5-1* Digitale
ingangen.
Page 99

5-40 Functierelais
Array [20]
Option: Functie:
[82] SL dig.
uitgang C
[83] SL dig.
uitgang D
[84] SL dig.
uitgang E
[85] SL dig.
uitgang F
[120] System On Ref
[151] ATEX ETR cur.
alarm
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Geen alarm
[161] Omgekeerd
draaien
[164] Local ref
active, not
OFF
[165] Lokale ref.
actief
[166] Externe ref.
actief
[167] Startcommand
o actief
[168] Handmodus
[169] Automodus
[180] Klokfout
[181] Prev.
onderhoud
[183] Pre/Post Lube
[188] AHF-
condensator
insch.
[189] Ext. ventila-
torreg.
[190] Geen ow
[191] Droge pomp
[192] Einde curve
[193] Slaapstand
[194] Band defect
[195] Bypassklepre-
geling
[196] Brandmodus
actief
[197] Brandmodus
was actief
5-40 Functierelais
Array [20]
Option: Functie:
[198] Omv.bypass
[199] Pipe Filling
[211] Cascadepomp
1
[212] Cascadepomp
2
[213] Cascadepomp
3
[214] Cascadepomp
4
[215] Cascadepomp
5
[216] Cascadepomp
6
[217] Cascadepomp
7
[218] Cascadepomp
8
[219] Cascadepomp
9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
[238] Ext. CL 3 on
Ref
[240] RS Flipop 0 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[241] RS Flipop 1 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[242] RS Flipop 2 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[243] RS Flipop 3 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[244] RS Flipop 4 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[245] RS Flipop 5 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[246] RS Flipop 6 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[247] RS Flipop 7 Zie parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
Parameterbeschrijving Programmeerhandleiding
MG20OB10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 97
3 3
Page 100

5-41 Aan-vertr., relais
Array [20]
Range: Functie:
0.01 s* [0.01 - 600 s] Stel de vertraging voor de inscha-
keltijd van het relais in. Selecteer 1
van de 2 interne mechanische relais
in een arrayfunctie. Zie
parameter 5-40 Functierelais voor
meer informatie.
5-42 Uit-vertr., relais
Array [20]
Range: Functie:
0.01 s* [0.01 - 600 s] Stel de vertragingstijd voor uitscha-
keling van het relais in. Selecteer 1
van de 2 interne mechanische relais
in een arrayfunctie. Zie
parameter 5-40 Functierelais voor
meer informatie. Als de conditie
voor de geselecteerde gebeurtenis
verandert voordat de timer voor de
in- of uitschakelvertraging is
verstreken, blijft de relaisuitgang
ongewijzigd.
5-50 Klem 29 lage freq.
Range: Functie:
100 Hz* [0 - 110000
Hz]
Stel in parameter 5-52 Klem 29 lage
ref./terugk. waarde de lage
begrenzing in voor de frequentie
die overeenkomt met het lage
toerental van de motoras (dat wil
zeggen de lage referentiewaarde).
Zie Afbeelding 3.31 in deze sectie.
Parameterbeschrijving
VLT® AQUA Drive FC 202
33
Afbeelding 3.30 Uit-vertr., relais
Als de conditie voor de geselecteerde gebeurtenis
verandert voordat de timer voor de in- of uitschakelvertraging is verstreken, blijft de relaisuitgang ongewijzigd.
3.7.5 5-5* Pulsingang
De pulsingangparameters worden gebruikt om een
geschikt raamwerk te deniëren voor de pulsreferenties
door de schaling en lterinstellingen voor de pulsingangen
in te stellen. Ingangsklem 29 of 33 werkt als frequentiereferentie-ingang. Stel klem 29 (parameter 5-13 Klem 29
digitale ingang) of klem 33 (parameter 5-15 Klem 33 digitale
ingang) in op [32] Pulsingang. Als klem 29 wordt gebruikt
als ingang, moet u parameter 5-02 Klem 29 modus instellen
Afbeelding 3.29 Aan-vertr., relais
op [0] Ingang.
98 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG20OB10
Afbeelding 3.31 Pulsingang
 Loading...
Loading...