

Page 1
MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® AQUA Drive FC 202
0,25–90 kW
www.danfoss.se/vlt
Page 2

Page 3
Innehåll Design Guide
Innehåll
1 Inledning
1.1 Syftet med Design Guide
1.2 Struktur
1.3 Ytterligare dokumentation
1.4 Förkortningar, symboler och praxis
1.5 Denitioner
1.6 Dokument- och programversion
1.7 Godkännanden och certikat
1.7.1 CE-märkning 11
1.7.1.1 Lågspänningsdirektivet 11
1.7.1.2 EMC-direktivet 11
1.7.1.3 Maskindirektivet 11
1.7.1.4 ErP-direktivet 12
1.7.2 Uppfyller C-tick 12
1.7.3 Uppfyller UL 12
1.7.4 Uppfyller Marine 12
1.8 Säkerhet
8
8
8
8
9
10
11
11
13
1.8.1 Allmänna säkerhetsprinciper 13
2 Produktöversikt
2.1 Inledning
2.2 Driftsbeskrivning
2.3 Driftsekvens
2.3.1 Likriktardelen 20
2.3.2 Mellanliggande del 20
2.3.3 Växelriktardel 20
2.3.4 Bromstillval 20
2.3.5 Lastdelning 21
2.4 Styrstrukturer
2.4.1 Styrstruktur utan återkoppling 21
2.4.2 Styrstrukturer med återkoppling 22
2.4.3 Lokalstyrning (Hand On) och Fjärrstyrning (Auto On) 22
2.4.4 Referenshantering 23
2.4.5 Återkopplingshantering 25
2.5 Automatiserade driftfunktioner
15
15
19
20
21
26
2.5.1 Kortslutningsskydd 26
2.5.2 Överspänningsskydd 26
2.5.3 Detektering av motorfas saknas 27
2.5.4 Detektering av nätfasobalans 27
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 1
Page 4
Innehåll
VLT® AQUA Drive FC 202
2.5.5 In- och urkoppling på utgången 27
2.5.6 Överbelastningsskydd 27
2.5.7 Automatisk nedstämpling 27
2.5.8 Automatisk energioptimering 27
2.5.9 Automatisk switchfrekvensmodulering 28
2.5.10 Automatisk nedstämpling för hög switchfrekvens 28
2.5.11 Automatisk nedstämpling för överhettning 28
2.5.12 Automatisk ramp 28
2.5.13 Strömgränskrets 28
2.5.14 Prestanda vid eektuktuationer 28
2.5.15 Mjukstart av motorn 28
2.5.16 Resonansdämpning 28
2.5.17 Temperaturstyrda äktar 28
2.5.18 EMC-överensstämmelse 29
2.5.19 Strömmätning på alla tre motorfaser 29
2.5.20 Galvanisk isolation av styrplintar 29
2.6 Anpassade tillämpningsfunktioner
2.6.1 Automatisk motoranpassning 29
2.6.2 Termiskt motorskydd 29
2.6.3 Nätavbrott 30
2.6.4 Inbyggda PID-regulator 30
2.6.5 Automatisk omstart 30
2.6.6 Flygande start 30
2.6.7 Fullt moment med reducerad hastighet 30
2.6.8 Förbikoppling av frekvens 30
2.6.9 Förvärmning av motor 30
2.6.10 Fyra programmerbara menyer 31
2.6.11 Dynamisk bromsning 31
2.6.12 Likströmsbroms 31
2.6.13 Energisparläge 31
2.6.14 Drift tillåten 31
2.6.15 Smart Logic Control (SLC) 31
29
2.6.16 STO-funktion 32
2.7 Fel-, varnings- och larmfunktioner
33
2.7.1 Drift vid överhettning 33
2.7.2 Varning för hög och låg referens 33
2.7.3 Varning om hög och låg återkoppling 33
2.7.4 Fasobalans eller fasbortfall 33
2.7.5 Varning för hög frekvens 33
2.7.6 Varning för låg frekvens 33
2 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 5
Innehåll Design Guide
2.7.7 Varning för hög ström 33
2.7.8 Varning för låg ström 34
2.7.9 Ingen last/trasigt band-varning 34
2.7.10 Förlorat seriegränssnitt 34
2.8 Användargränssnitt och programmering
2.8.1 Lokal manöverpanel 34
2.8.2 PC-program 35
2.8.2.1 MCT 10-kongurationsprogramvara 35
2.8.2.2 VLT® Harmonics Calculation Software MCT 31 36
2.8.2.3 Programvaran Harmonic Calculation Software (HCS) 36
2.9 Underhåll
2.9.1 Lagring 36
3 Systemintegrering
3.1 Omgivande miljöförhållanden
3.1.1 Fukt 37
3.1.2 Temperatur 37
3.1.3 Kylning 38
3.1.4 Motorgenererad överspänning 39
3.1.5 Ljudnivå 39
3.1.6 Vibrationer och stötar 39
3.1.7 Aggressiva miljöer 39
34
36
37
37
3.1.8 Denitioner av IP-klassicering 40
3.1.9 Radiofrekvensstörningar 41
3.1.10 Överensstämmelse för PELV och galvanisk Isolation 41
3.1.11 Lagring 42
3.2 EMC, övertoner och skydd mot läckström till jord
3.2.1 Allmänt om EMC-emissioner 42
3.2.2 EMC-testresultat 43
3.2.3 Emissionskrav 45
3.2.4 Immunitetskrav 45
3.2.5 Motorisolering 46
3.2.6 Lagerströmmar i motorn 46
3.2.7 Övertoner 47
3.2.8 Läckström till jord 49
3.3 Nätintegrering
3.3.1 Nätkongurationer och EMC-eekter 51
3.3.2 Lågfrekventa nätstörningar 51
3.3.3 Analysera nätstörningar 52
42
51
3.3.4 Alternativ för att minska nätstörningarna 52
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 3
Page 6
Innehåll
VLT® AQUA Drive FC 202
3.3.5 Radiofrekvensstörningar 52
3.3.6 Klassicering av driftplatsen 52
3.3.7 Använda med isolerad ingångskälla 53
3.3.8 Korrigering av eektfaktor 53
3.3.9 Fördröjning av inström 53
3.3.10 Nättransienter 53
3.3.11 Drift med en reservgenerator 54
3.4 Motorintegrering
3.4.1 Överväganden vid motorval 54
3.4.2 Sinus- och dU/dt-lter 54
3.4.3 Korrekt motorjordning 54
3.4.4 Motorkablar 55
3.4.5 Motorkabelskärmning 55
3.4.6 Ansluta era motorer 55
3.4.7 Isolering av styrledning 57
3.4.8 Termiskt motorskydd 57
3.4.9 Utgångskontaktor 58
3.4.10 Bromsfunktioner 58
3.4.11 Dynamisk bromsning 58
3.4.12 Bromsmotståndsberäkning 58
3.4.13 Kabeldragning för bromsmotstånd 59
3.4.14 Bromsmotstånd och broms-IGBT 59
3.4.15 Energiverkningsgrad 59
3.5 Extra ingångar och utgångar
54
61
3.5.1 Kopplingsschema 61
3.5.2 Reläanslutningar 62
3.5.3 EMC-korrekt elektrisk anslutning 63
3.6 Mekanisk ritning
3.6.1 Avstånd 64
3.6.2 Väggmontering 64
3.6.3 Åtkomst 65
3.7 Tillval och tillbehör
3.7.1 Kommunikationstillval 69
3.7.2 Tillval för ingångar/utgångar, återkoppling och säkerhet 69
3.7.3 Kaskadregleringstillval 69
3.7.4 Bromsmotstånd 70
3.7.5 Sinuslter 71
3.7.6 dU/dt-lter 71
3.7.7 Common mode-lter 71
3.7.8 Övertonslter 71
64
65
4 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 7

Innehåll Design Guide
3.7.9 IP21/NEMA typ 1-kapslingssats 71
3.7.10 Fjärrmonteringssats för LCP 74
3.7.11 Monteringsfäste för kapslingstyp A5, B1, B2, C1 och C2 75
3.8 Seriegränssnitt RS485
3.8.1 Översikt 75
3.8.2 Nätverksanslutning 76
3.8.3 RS485-bussavslutning 77
3.8.4 EMC-säkerhetsåtgärder 77
3.8.5 Översikt över FC-protokollet 77
3.8.6 Nätverkskonguration 78
3.8.7 Grundstruktur för meddelanden inom FC-protokollet 78
3.8.8 FC-protokollexempel 81
3.8.9 Modbus RTU-protokoll 82
3.8.10 Grundstruktur för Modbus RTU-meddelanden 83
3.8.11 Åtkomst till parametrar 86
3.8.12 FC-frekvensomformarstyrprol 87
3.9 Checklista för systemkonstruktion
4 Tillämpningsexempel
4.1 Översikt över tillämpningsfunktioner
4.2 Valda tillämpningsfunktioner
75
93
95
95
95
4.2.1 SmartStart 95
4.2.2 Snabbmeny för vatten och pumpar 96
4.2.3 29-1* Rensningsfunktion 96
4.2.4 Före/efter smörjning 97
4.2.5 29-5* Flödesbekräftelse 98
4.3 Exempel på tillämpningskonguration
4.3.1 Applikation med dränkbar pump 100
4.3.2 Kaskadregulatorn BASIC 102
4.3.3 Pumpinkoppling med växling av huvudpump 103
4.3.4 Systemets status och drift 103
4.3.5 Kopplingsschema för kaskadregulator 104
4.3.6 Kopplingsschema för pump med variabelt varvtal 104
4.3.7 Kopplingsschema för huvudpumpsväxling 104
5 Speciella förhållanden
5.1 Manuell nedstämpling
5.2 Nedstämpling för långa motorkablar eller kablar med stor ledarareax
5.3 Nedstämpling för omgivningstemperaturer
99
109
109
110
110
6 Typkod och val
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 5
114
Page 8
Innehåll
VLT® AQUA Drive FC 202
6.1 Beställa
6.1.1 Typkod 114
6.1.2 Programvaruspråk 116
6.2 Tillval, tillbehör och reservdelar
6.2.1 Tillval och tillbehör 116
6.2.2 Reservdelar 118
6.2.3 Tillbehörspåsar 118
6.2.4 Val av bromsmotstånd 119
6.2.5 Rekommenderade bromsmotstånd 120
6.2.6 Alternativa bromsmotstånd, T2 och T4 127
6.2.7 Övertonslter 128
6.2.8 Sinuslter 131
6.2.9 dU/dt-lter 133
6.2.10 Common Mode-lter 134
7 Specikationer
7.1 Elektriska data
7.1.1 Nätförsörjning 1 x 200–240 V AC 135
114
116
135
135
7.1.2 Nätförsörjning 3 x 200–240 V AC 136
7.1.3 Nätförsörjning 1 x 380–480 V AC 139
7.1.4 Nätförsörjning 3 x 380–480 V AC 140
7.1.5 Nätförsörjning 3 x 525–600 V AC 144
7.1.6 Nätförsörjning 3 x 525–690 V AC 148
7.2 Nätförsörjning
7.3 Motoreekt och motordata
7.4 Omgivande miljöförhållanden
7.5 Kabelspecikationer
7.6 Styringång/-utgång och styrdata
7.7 Säkringar och maximalbrytare
7.8 Märkeekter, vikt och mått
7.9 dU/dt-testning
7.10 Klassicering av ljudnivå
7.11 Valda tillval
7.11.1 VLT® Generellt I/O-kort, modul MCB 101 168
7.11.2 VLT® Reläkort MCB 105 168
151
151
152
152
153
156
164
165
167
168
7.11.3 VLT® PTC-termistorkort MCB 112 170
7.11.4 VLT® Utökat reläkort MCB 113 172
7.11.5 VLT® Givaringångstillval MCB 114 173
7.11.6 VLT® Utökad kaskadregulator MCO 101 174
7.11.7 VLT® Avancerad kaskadregulator MCO 102 176
6 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 9
Innehåll Design Guide
8 Bilaga – Valda ritningar
8.1 Ritningar över nätanslutning (3-faser)
8.2 Ritningar för motoranslutning
8.3 Ritningar över reläplint
8.4 Kabelingångshål
Index
178
178
181
183
184
188
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 7
Page 10

Inledning
VLT® AQUA Drive FC 202
1
1 Inledning
1.1 Syftet med Design Guide
Denna Design Guide för DanfossVLT® AQUA Drive-frekvensomformare är avsedd för:
Projekt- och systemtekniker
•
Konstruktionskonsulter
•
Tillämpnings- och produktspecialister
•
Design Guide innehåller teknisk information om frekvensomformarens kapacitet för integrering i motorstyrningsoch övervakningssystem.
Syftet med denna Design Guide är att tillhandahålla
konstruktionsfaktorer och planeringsdata för integrering av
frekvensomformaren i ett system. Design Guide tillhandahåller ett urval av frekvensomformare och tillval för en
mängd olika tillämpningar och installationer.
Genom att läsa den detaljerade produktinformation i
utformningsstadiet är det möjligt att utveckla ett väl
uttänkt system med optimal funktionalitet och
verkningsgrad.
VLT® är ett registrerat varumärke.
1.2
Struktur
Kapitel 1 Inledning: Det generella syftet med Design Guide
och överensstämmelse med internationella direktiv.
Kapitel 2 Produktöversikt: Den interna strukturen och
funktionaliteten hos frekvensomformaren och driftfunktionerna.
Kapitel 3 Systemintegrering: Omgivningsförhållanden; EMC,
övertoner, och jordläckage; nätingång; motorer och
motoranslutningar; övriga anslutningar; mekaniska
planering; samt beskrivningar av tillgängliga tillval och
tillbehör.
Kapitel 4 Tillämpningsexempel: Exempel på produkttillämpningar och användarriktlinjer.
Kapitel 5 Speciella förhållanden: Information om ovanliga
driftmiljöer.
Kapitel 6 Typkod och val: Procedurer för beställning av
utrustning och tillval för att uppnå avsedd användning av
systemet.
Kapitel 7
data i tabeller och diagram.
Kapitel 8 Bilaga – Valda ritningar: En sammanställning av
diagram som illustrerar nät- och motoranslutningar,
reläplintar och kabelgenomföringar.
Specikationer: En sammanställning av tekniska
1.3 Ytterligare dokumentation
Dokumentation som hjälper dig att förstå avancerad
frekvensomformardrift, programmering och överensstämmelse med direktiv:
Handboken för VLT® AQUA DriveFC 202 (nedan
•
kallad handboken) innehåller detaljerade
anvisningar för hur du installerar och startar
frekvensomformaren.
Design Guide för VLT® AQUA DriveFC 202
•
innehåller den information som krävs för att
utforma och planera integreringen av frekvensomformaren i ett system.
Programmeringshandboken för VLT
•
202 (nedan kallad programmeringshandboken)
innehåller mer detaljerad information om hur du
arbetar med parametrar och ger
tillämpningar.
Handboken för VLT
•
information om hur du använder frekvensomformare från Danfoss i
funktionssäkerhetstillämpningar. Denna handbok
levereras med frekvensomformaren när STO-tillval
föreligger.
I Design Guide för VLT® Bromsmotstånd förklaras
•
val av optimalt bromsmotstånd.
Ytterligare dokumentation och handböcker kan hämtas på
danfoss.com/Product/Literature/Technical+Documentation.htm.
®
Safe Torque O innehåller
®
AQUA DriveFC
era exempel på
OBS!
De beskrivna procedurerna gäller inte alltid helt och fullt
om du använder viss tillvalsutrustning. Glöm inte att
kontrollera de specika krav som beskrivs i instruktionerna som medföljer tillvalsutrustningen.
Kontakta en Danfoss-återförsäljare eller besök
www.danfoss.com om du vill ha ytterligare information.
8 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 11
Inledning
Design Guide
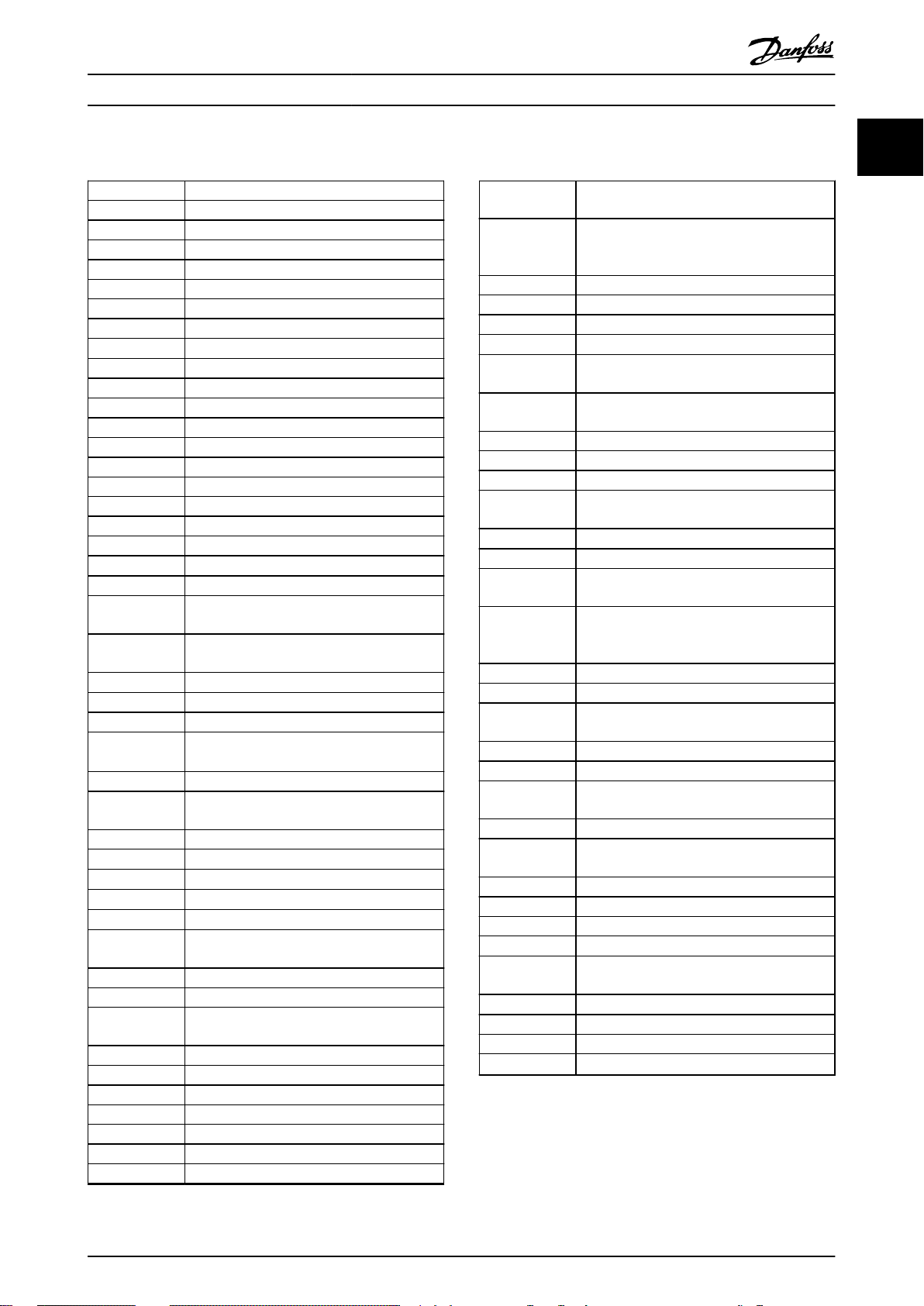
1.4 Förkortningar, symboler och praxis
1
1
60° AVM 60° asynkron vektor modulering
A Ampere/AMP
AC Växelström
AD Frånluft
AEO Automatisk energioptimering
AI Analog ingång
AMA Automatisk motoranpassning
AWG American Wire Gauge
°C
Grader Celsius
CD Konstant urladdning
CM Common mode
CT Konstant moment
DC Likström
DI Digital ingång
DM Dierential mode
D-TYP Beror på frekvensomformaren
EMC Elektromagnetisk kompatibilitet
EMF Elektromotorisk kraft
ETR Elektronisk-termiskt relä
f
f
f
JOG
M
MAX
Motorfrekvensen när joggfunktion är aktiverad
Motorfrekvens
Den maximala utfrekvens som frekvensom-
formaren använder på denna utgång.
f
MIN
Den minimala motorfrekvensen från frekven-
somformaren.
f
M,N
Nominell motorfrekvens
FC Frekvensomformare
g Gram
Hiperface
®
Hiperface® är ett registrerat varumärke som
tillhör Stegmann
hk Hästkraft
HTL HTL-pulsgivarpulser (10–30 V) – högspännings-
transistorlogik
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
Nominell växelriktarutström
Strömgräns
Nominell motorström
Den maximala utströmmen
Den nominella utströmmen från frekvensom-
formaren
kHz Kilohertz
LCP Lokal manöverpanel
lsb Den minst signikanta biten (least signicant
bit)
m Meter
mA Milliampere
MCM Mille circular mil
MCT Rörelsekontrollverktyg
mH Induktans i millihenry
min Minut
ms Millisekund
msb Den mest signikanta biten (most signicant
bit)
?
VLT
Frekvensomformarens verkningsgrad denierad
som förhållandet mellan utgående och
ingående eekt.
nF Kapacitans i nanofarad
NLCP Numerisk lokal manöverpanel
Nm Newtonmeter
n
s
Online/oineparametrar
P
br,cont.
Synkront motorvarvtal
Ändringar av onlineparametrar aktiveras
omedelbart efter det att datavärdet ändrats.
Bromsmotståndets märkeekt (genomsnittlig
eekt vid kontinuerlig bromsning).
PCB Ytbehandlat kretskort
PCD Processdata
PELV Protective Extra Low Voltage
P
m
Frekvensomformarens nominella uteekt som
hög överbelastning (HO).
P
M,N
Nominell motoreekt
PM-motor Permanentmagnetmotor
Process-PID PID-regulatorn upprätthåller önskat varvtal,
tryck och temperatur osv.
R
br,nom
Det nominella motståndsvärdet som
säkerställer en bromseekt på motoraxeln på
150/160 % under 1 minut.
RCD Jordfelsbrytare
Regen Regenerativa plintar
R
min
Minsta tillåtna bromsmotståndsvärde enligt
frekvensomformaren
RMS Eektivvärde
varv/minut Varv per minut
R
rec
Rekommenderat bromsmotstånd för
bromsmotstånd från Danfoss
s Sekund
SFAVM Stator Flux-orienterad asynkron vektor
modulering
STW Statusord
SMPS Strömförsörjning i switchläge
THD Total övertonsdistorsion
T
LIM
Momentgräns
TTL TTL-pulsgivarpulser (5 V) – transistor-transis-
torlogik
U
M,N
Nominell motorspänning
V Volt
VT Variabelt moment
VVC+
Voltage Vector Control
Tabell 1.1 Förkortningar
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 9
Page 12
Inledning
VLT® AQUA Drive FC 202
1
Konventioner
Numrerade listor används för procedurer.
Punktlistor används för annan information och för
beskrivning av illustrationer.
Kursiv text används för:
hänvisningar
•
länkar
•
fotnoter
•
parameternamn, parametergruppens namn,
•
parameteralternativ.
Alla mått anges i mm (tum).
* indikerar fabriksinställningen för en parameter.
Följande symboler används i det här dokumentet:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
mindre eller måttliga personskador. Symbolen kan även
användas för att uppmärksamma farligt handhavande.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
1.5 Denitioner
Bromsmotstånd
Bromsmotståndet är en modul som kan absorbera
bromseekten som genereras vid regenerativ bromsning.
Denna regenerativa bromseekt höjer mellankretsspänningen. En bromschopper ser till att eekten avsätts i
bromsmotståndet.
Utrullning
Motoraxeln är i fritt läge. Inget moment på motorn.
CT-kurva
Konstanta momentegenskaper används för alla tillämpningar med t.ex. transportband, förträngningspumpar och
kranar.
Initiering
Om initiering utförs (parameter 14-22 Driftläge) återställs
frekvensomformaren till fabriksinställningarna.
Intermittent driftcykel
Ett intermittent driftcykel avser en serie driftcykler. Varje
cykel består av en period med belastning och en period
utan belastning. Driften kan vara endera periodisk eller
icke-periodisk.
Eektfaktor
Den sanna eektfaktorn (lambda) tar med alla övertoner i
beräkningen och är alltid mindre än eektfaktorn (cos ),
som endast tar de första övertonerna för ström och
spänning i beaktning.
P kW
cos? =
P kVA
Cos kallas även förskjuten eektfaktor.
Både lambda och cos för Danfoss VLT®-frekvensom-
formare anges i kapitel 7.2 Nätförsörjning.
Eektfaktorn indikerar i vilken grad frekvensomformaren
belastar nätförsörjningen.
Ju lägre eektfaktor, desto högre I
Dessutom visar en hög eektfaktor att övertonsströmmarna är låga.
Alla Danfoss-frekvensomformare har inbyggda likströmsspolar i DC-bussen för att ge en hög eektfaktor och
minska THD på nätet.
Meny
Spara parameterinställningarna i fyra menyer. Byt mellan
de fyra parameterinställningarna, och redigera en
inställning medan en annan är aktiv.
Eftersläpningskompensation
Frekvensomformaren kompenserar motorns eftersläpning
med ett frekvenstillskott som följer den uppmätta
motorbelastningen, vilket håller motorvarvtalet närmast
konstant.
Smart logic Control (SLC)
SLC är en serie användardenierade åtgärder som utförs
när tillhörande användardenierade händelser utvärderas
som sanna av SLC. (Parametergrupp 13-** Smart Logic).
FC-standardbuss
Inkluderar RS485-buss med FC-protokoll eller MC-protokoll.
Se parameter 8-30 Protokoll.
Termistor
Ett temperaturberoende motstånd som placeras där
temperaturen ska övervakas (frekvensomformare eller
motor).
Tripp
Ett tillstånd som uppstår vid felsituationer, exempelvis när
frekvensomformaren utsätts för överhettning eller när den
skyddar motorn, processen eller mekanismen. Omstart
förhindras tills orsaken till felet har försvunnit och
trippläget annulleras. Annullera trippläget genom att:
aktivera återställning eller
•
programmera frekvensomformarens så att den
•
återställs automatiskt.
Trippfunktionen får inte användas för personsäkerhet.
Tripp låst
Ett läge som uppstår vid felsituationer när frekvensomformaren skyddar sig själv och som kräver fysiska ingrepp,
exempelvis om frekvensomformaren utsatts för
kortslutning vid utgången. En låst tripp kan annulleras
U?xI?xcos?
=
U?xI?
vid samma kW-eekt.
RMS
10 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 13
Inledning
genom att slå av nätspänningen, eliminera felorsaken och
ansluta frekvensomformaren på nytt. Omstart förhindras
tills trippläget annulleras genom återställning eller, i vissa
fall, genom programmerad automatisk återställning.
Trippfunktionen får inte användas för personsäkerhet.
VT-kurva
Variabel momentkurva för pumpar och äktar.
Design Guide
EU-direktiv Version
Lågspänningsdirektivet 2006/95/EC
EMC-direktivet 2004/108/EC
Maskindirektivet
ErP-direktivet 2009/125/EC
ATEX-direktivet 94/9/EC
RoHS-direktivet 2002/95/EC
1)
2006/42/EC
1
1
1.6 Dokument- och programversion
Denna handbok granskas och uppdateras regelbundet. Alla
förslag på förbättringar är välkomna.
Tabell 1.2 visar dokumentversionen och motsvarande
programversion.
Utgåva Anmärkningar Programversion
MG20N6xx Ersätter MG20N5xx 2.20 och senare
Tabell 1.2 Dokument- och programversion
1.7 Godkännanden och certikat
Frekvensomformare är konstruerade i överensstämmelse
med de direktiv som beskrivs i detta avsnitt.
Mer information om godkännanden och certikat kan
hämtas på http://www.danfoss.com/BusinessAreas/DrivesSo-
lutions/Documentations/.
CE-märkning
1.7.1
Bild 1.1 CE
CE-märket (Conformité Européenne) anger att produkttillverkaren följer alla gällande EU-direktiv. De EU-direktiv som
gäller för utformning och tillverkning av frekvensomformare nns i Tabell 1.3.
OBS!
CE-märkningen avser inte produktens kvalitet.
Märkningen ger inte heller någon information om
produktens tekniska specikationer.
OBS!
Frekvensomformare som har en inbyggd säkerhetsfunktion måste uppfylla kraven i maskindirektivet.
Tabell 1.3 EU-direktiv som gäller frekvensomformare
1) Överensstämmelse med maskindirektivet krävs endast för frekvensomformare som har en inbyggd säkerhetsfunktion.
Försäkran om överensstämmelse
begäran.
1.7.1.1
Lågspänningsdirektivet omfattar all elektrisk utrustning
avsedd för 50–1000 V AC och 75–1600 V DC.
Målet med direktivet är att säkerställa personlig säkerhet
och undvika skador på egendom vid drift av elektrisk
utrustning som installeras korrekt, underhålls och används
som avsett.
1.7.1.2
Syftet med EMC-direktivet (elektromagnetisk kompatibilitet)
är att reducera elektromagnetisk störning och förbättra
immuniteten hos elektrisk utrustning och installationer. Det
grundläggande skyddskravet i EMC-direktivet 2004/108/EG
anger att enheter som genererar elektromagnetiska
störningar (EMI), eller vars drift kan påverkas av EMI, måste
vara konstruerade för att begränsa generering av elektromagnetiska störningar och ska ha en lämplig
immunitetsklass för EMI när de installeras korrekt,
underhålls och används som avsett.
Elektrisk utrustning som används fristående eller som en
del av ett system måste vara CE-märkta. System måste inte
vara CE-märkta, men måste uppfylla EMC-direktivets
grundläggande skyddskrav.
1.7.1.3
Målet med maskindirektivet är att säkerställa personlig
säkerhet och undvika skador på egendom för mekanisk
utrustning som används som avsett. Maskindirektivet gäller
maskiner som består av ett antal sammankopplade
komponenter eller enheter varav minst en kan utföra
mekanisk rörelse.
Frekvensomformare som har en inbyggd säkerhetsfunktion
måste uppfylla kraven i maskindirektivet. Frekvensomformare som saknar säkerhetsfunktion omfattas inte av
maskindirektivet. Om en frekvensomformare integreras i ett
maskinsystem, kan Danfoss ge information om vilka
säkerhetsbestämmelser som gäller för frekvensomformaren.
Lågspänningsdirektivet
EMC-direktivet
Maskindirektivet
nns tillgänglig på
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 11
Page 14
1
2
130BD832.10
Inledning
VLT® AQUA Drive FC 202
1
När frekvensomformare används i maskiner med minst en
rörlig del, måste maskintillverkaren tillhandahålla en
deklaration som informerar om att maskinen uppfyller alla
relevanta lagar och säkerhetsföreskrifter.
1.7.1.4 ErP-direktivet
ErP-direktivet är det europeiska ekodesigndirektivet för
energi-relaterade produkter. Direktivet anger
ekodesignkraven för energirelaterade produkter, inklusive
frekvensomformare. Målet med direktivet är att öka energieektiviteten och miljöskyddet, och samtidigt öka
säkerheten kring av strömförsörjning. Miljöpåverkan av
energirelaterade produkter inkluderar energiförbrukningen
genom hela produktens livscykel.
Uppfyller C-tick
1.7.2
Bild 1.2 C-Tick
1.7.4
Uppfyller Marine
Enheter med IP-klassiceringen IP55 (NEMA 12) eller högre
förhindrar gnistbildning och klassiceras som elektrisk
apparat med begränsad explosionsrisk enligt den
europeiska överenskommelsen om transport av farligt gods
på inre vattenväg (ADN).
Gå till www.danfoss.com om du vill ha ytterligare
information om Marine-godkännande.
För enheter med
eller IP54 förhindrar du gnistbildning på följande sätt:
Installera ingen huvudströmbrytare.
•
Kontrollera att parameter 14-50 RFI-lter är inställd
•
på [1] På.
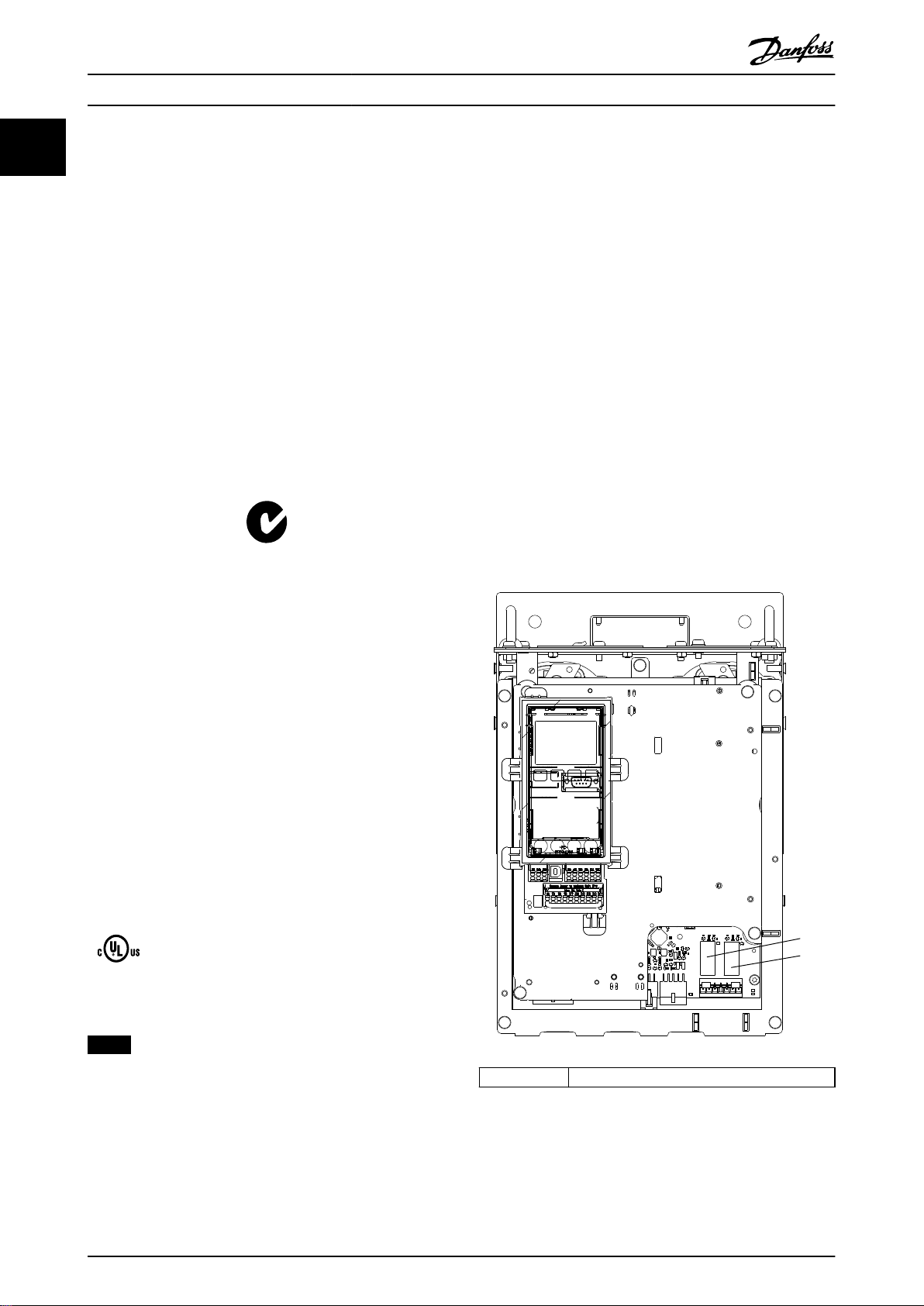
Ta bort alla reläkontakter som är märkta med
•
RELÄ. Se Bild 1.4.
Kontrollera vilka reläalternativ som eventuellt är
•
installerade. Det enda tillåtna relätillvalet är VLT
utökat reläkort MCB 113.
klassiceringen IP20/chassi, IP21/NEMA 1
®
Märket C-tick indikerar överensstämmelse med gällande
tekniska standarder för elektromagnetisk kompatibilitet
(EMC). C-tick-överensstämmelse krävs för elektriska och
elektroniska enheter på marknaden i Australien och på Nya
Zeeland.
C-tick-regelverket berör ledningsburen och luftburen
emission. För frekvensomformare kan de emissionsgränser
som anges i SS-EN/IEC 61800-3 tillämpas.
En försäkran om överensstämmelse kan tillhandahållas på
begäran.
Uppfyller UL
1.7.3
UL-klassad
Bild 1.3 UL
OBS!
525–690 V-frekvensomformare är inte UL-certierade.
1, 2
Reläkontakter
Frekvensomformaren uppfyller kraven i UL508C. Mer
information nns i kapitel 2.6.2 Termiskt motorskydd.
12 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Bild 1.4 Placering av reläkontakter
Intyg från tillverkaren nns tillgängligt på begäran.
Page 15
Inledning
Design Guide
1.8 Säkerhet
1.8.1 Allmänna säkerhetsprinciper
Frekvensomformare innehåller högspänningskomponenter
och kan ge livshotande skador om de hanteras felaktigt.
Endast behörig personal får installera och använda denna
utrustning. Inget reparationsarbete får utföras utan att
frekvensomformaren har gjorts strömlös och att den
föreskrivna tidsperioden som krävs för att lagrad energi ska
avges har förutit.
Alla säkerhetsföreskrifter och säkerhetsmeddelanden måste
följas för säker drift av frekvensomformaren.
Behörig personal
1.8.2
Korrekt och säker transport, lagring, installation, drift och
underhåll krävs för problemfri och säker drift av frekvensomformaren. Endast utbildad personal får installera och
använda denna utrustning.
Utbildad personal denieras som utbildade medarbetare
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Dessutom måste utbildad
personal vara införstådd med de instruktioner och
säkerhetsåtgärder som beskrivs i denna handbok.
VARNING
HÖG SPÄNNING
Frekvensomformare innehåller hög spänning när de är
anslutna till växelströmsnätet, likströmsförsörjning eller
lastdelning. Om installation, driftsättning och underhåll
inte utförs av utbildad personal kan det leda till dödsfall
eller allvarliga personskador.
Installation, driftsättning och underhåll får
•
endast utföras av utbildad personal.
VARNING
OAVSIKTLIG START
När frekvensomformaren är ansluten till växelströmsnät,
likströmsförsörjning eller lastdelning kan motorn starta
när som helst. Oavsiktlig start vid programmering,
underhåll eller reparationsarbete kan leda till dödsfall,
allvarliga personskador eller materiella skador. Motorn
kan starta med hjälp av en extern brytare, ett seriellt
buss-kommando, en ingångsreferenssignal från LCP eller
efter ett uppklarat feltillstånd.
Så här förhindrar du oavsiktlig motorstart:
Koppla bort frekvensomformaren från nätet.
•
Tryck på [O/Reset] på LCP innan du
•
programmerar parametrar.
Frekvensomformaren, motorn och all annan
•
elektrisk utrustning måste vara driftklara när
frekvensomformaren ansluts till växelströmsnät,
likströmsförsörjning eller lastdelning.
VARNING
URLADDNINGSTID
Frekvensomformaren har DC-busskondensatorer som kan
behålla sin spänning även när nätspänningen kopplats
från. Om du inte väntar den angivna tiden efter att
strömmen bryts innan underhålls- eller reparationsarbete
utförs kan det leda till dödsfall eller livshotande skador.
Stoppa motorn.
•
Koppla från växelströmsnät och externa DC-
•
bussförsörjningar, inklusive reservbatterier, UPS
och DC-bussanslutningar till andra frekvensomformare.
Koppla från eller lås PM-motorn om en sådan
•
nns.
Vänta tills kondensatorerna är helt urladdade
•
innan underhålls- eller reparationsarbete utförs.
Information om väntetiderna nns i Tabell 1.4.
1
1
Spänning
[V]
4 7 15
200-240 0,25–3,7 kW - 5,5–45 kW
380-480 0,37-7,5 kW - 11–90 kW
525-600 0,75–7,5 kW - 11–90 kW
525-690 - 1,1–7,5 kW 11–90 kW
Hög spänning kan nnas kvar även om varningslysdioderna är
släckta.
Tabell 1.4 Urladdningstid
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 13
Minsta väntetid
(minuter)
Page 16
Inledning
VLT® AQUA Drive FC 202
1
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om frekvensomformaren
inte jordas korrekt kan det leda till dödsfall eller
allvarliga personskador.
En certierad elinstallatör ska säkerställa att
•
utrustningen har korrekt jordning.
VARNING
FARLIG UTRUSTNING
Kontakt med roterande axlar och elektrisk utrustning kan
leda till dödsfall eller allvarliga personskador.
Säkerställ att endast utbildad och behörig
•
personal utför installation, driftsättning och
underhåll.
Kontrollera att elektriskt arbete följer gällande
•
nationella och lokala elsäkerhetsföreskrifter.
Följ procedurerna i detta dokument.
•
VARNING
OAVSIKTLIG MOTORROTATION
ROTERANDE DELAR
Oavsiktlig rotation av permanentmagnetmotorer skapar
spänning och kan ladda enheten, vilket kan orsaka
dödsfall, allvarliga personskador eller materiella skador.
Säkerställ att permanentmagnetmotorer
•
blockeras för att förhindra oavsiktlig rotation.
FÖRSIKTIGT
RISK FÖR INTERNT FEL
Om frekvensomformaren inte stängs på rätt sätt, kan ett
internt fel leda till dödsfall eller allvarliga personskador.
Innan du kopplar på strömmen ska du
•
säkerställa att alla skyddskåpor sitter på plats
och är säkrade.
14 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 17
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Produktöversikt Design Guide
2 Produktöversikt
2.1 Inledning
2.1.2
Minskad energiåtgång
2
2
Detta avsnitt innehåller en översikt över frekvensomformarens viktigaste delar och kretssystem. Det beskriver
interna elektriska funktioner och signalbehandling. Det
beskriver också den interna styrstrukturen.
Dessutom beskrivs automatiserade funktioner och tillvalsfunktioner för frekvensomformaren, som kan användas för
att utforma kraftfulla driftsystem med
reglerings- och statusrapporteringsfunktioner.
2.1.1 Produkt avsedd för vatten- och
avloppstillämpningar
VLT® AQUA Drive FC 202 är avsedd för vatten- och
avloppstillämpningar. Den integrerade SmartStart-guiden
och snabbmenyn Vatten och pumpar leder användaren
genom idrifttagningsprocessen. Utbudet av standardfunktioner och tillvalsfunktioner omfattar:
Kaskadreglering
•
Torrkörningsdetektering
•
Kurvslutsdetektering
•
Motorväxling
•
Rensning
•
Inledande och avslutande ramp
•
Backventilsramp
•
STO
•
Lågödesdetektering
•
Försmörjning
•
Flödesbekräftelse
•
Rörfyllningsläge
•
Energisparläge
•
Realtidsklocka
•
Lösenordsskydd
•
Överbelastningsskydd
•
Smart logic control
•
Övervakning av lägsta varvtal
•
Fritt programmerbar text för information och
•
varningar
sostikerade
I jämförelse med andra tillgängliga tekniker och system för
varvtalsreglering av äktar och pumpar är metoden med
frekvensomformare den optimala ur energisynpunkt.
Genom att styra ödet med en frekvensomformare kan en
varvtalsminskning på 20 % för en pump leda till att energiåtgång minskas med ca 50 % vid vanlig användning.
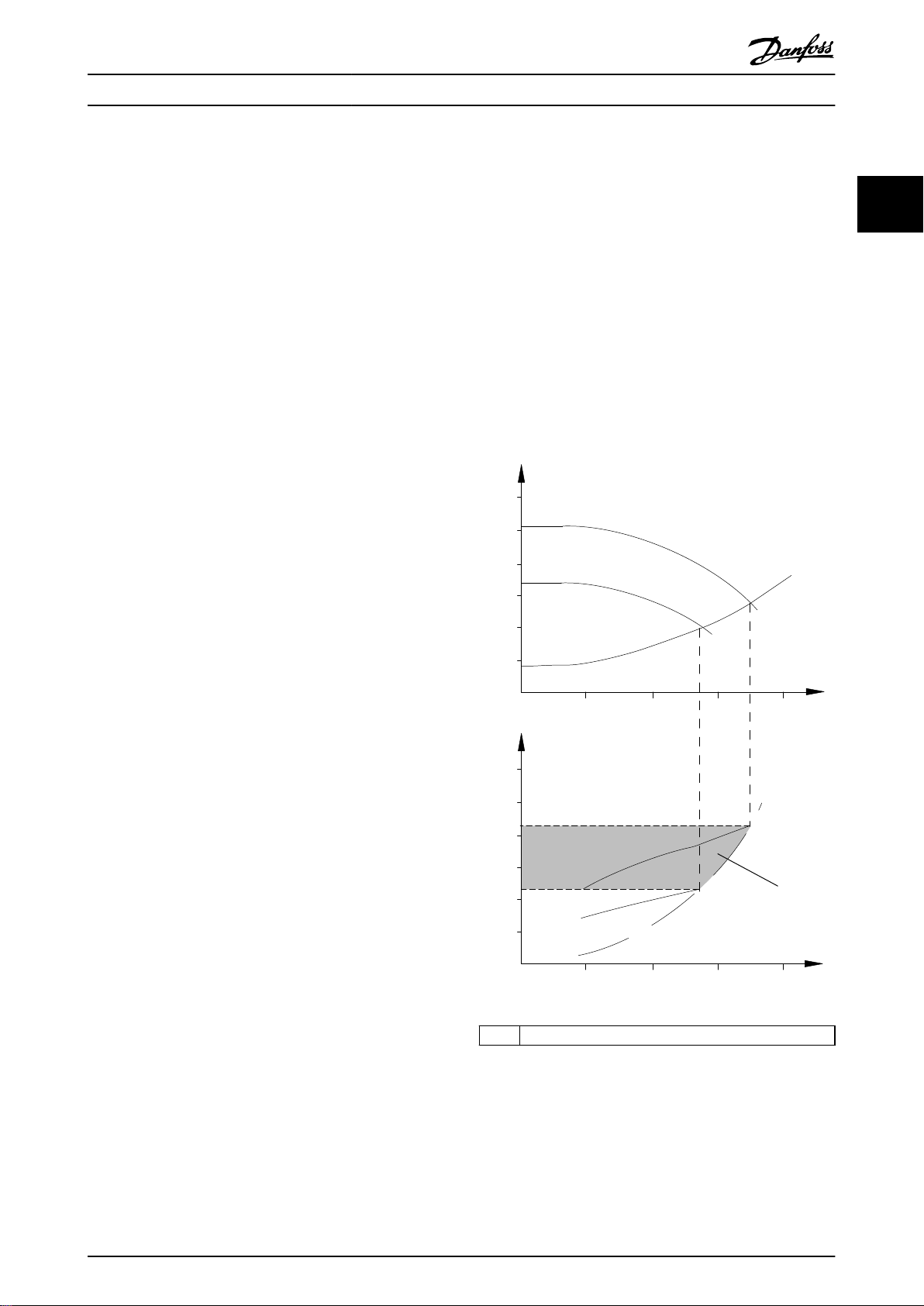
Bild 2.1 visar ett exempel på den energiminskning som kan
uppnås.
1 Minskad energiåtgång
Bild 2.1 Exempel: Minskad energiåtgång
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 15
Page 18
100% speed
Flow
Flow
Pump curve
Head or pressure Head or pressure
Natural
operating point
Operating
point
Throttled
Unthrottled
Throttled system
Unthrottled system
60
65
70
75
78
80
80
78
75
3
1
1
2
2
3
Hs
Hp
130BD890.10
Produktöversikt
VLT® AQUA Drive FC 202
2
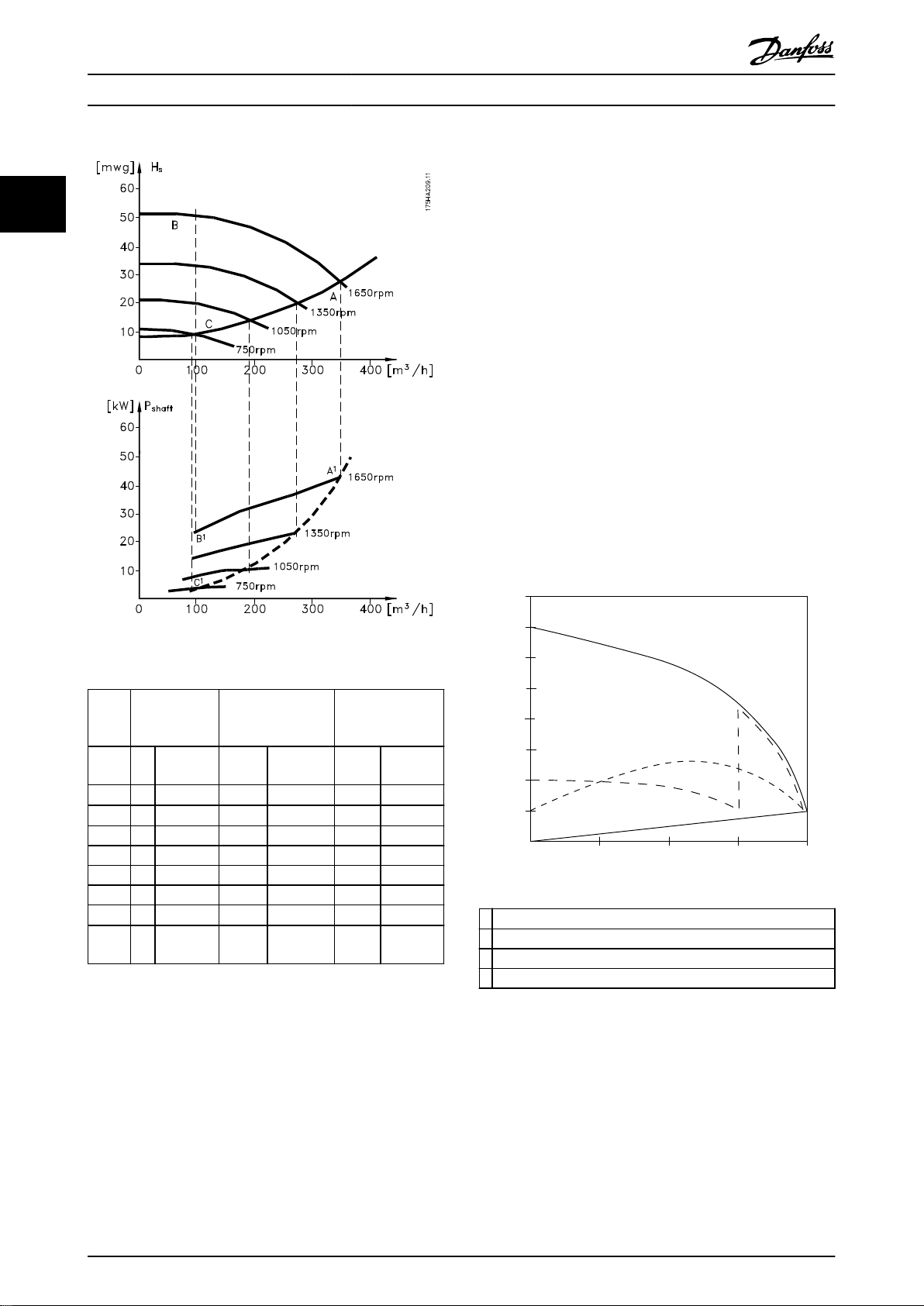
2.1.3 Exempel på minskad energiåtgång
Flödet kan ändras genom reglering av pumpens varvtal,
mätt i varv/minut, så som visas i Bild 2.2. Genom att
reducera varvtalet med 20 % av det nominella varvtalet
reduceras även ödet med 20 %. Detta visar att ödet är
linjärt i förhållande till varvtalet. Den elektriska energiförbrukningen minskar däremot med nästan 50 %.
Om ett system endast behöver ge ett öde som motsvarar
100 % några få dagar om året, och där snittet ligger under
ett öde på 80 % under resten av året, är minskningen av
energiåtgången mer än 50 %.
Bild 2.2 beskriver påverkan av
brukningen på pumpens varvtal i varv/minut för
centrifugalpumpar.
öde, tryck och eektför-
2.1.4
Ventilreglering kontra
varvtalsreglering för
centrifugalpumpar
Ventilreglering
Eftersom processkraven i vattensystem varierar måste
ödet justeras därefter. Metoder som ofta används för
ödesanpassning är strypning eller återcirkulation med
hjälp av ventiler.
En ventil för återcirkulation som öppnas för mycket kan få
pumpen att köra vid slutet på pumpkurvan – med ett högt
öde då pumpens tryckhöjd är låg. Dessa omständigheter
leder inte bara till slöseri med energi på grund av
pumpens höga varvtal, utan kan även leda till pumpkavitation, vilket skadar pumpen.
Om ödet stryps med en ventil uppstår ett tryckfall över
ventilen (HP-HS) Detta kan jämföras med att försöka
minska en bils varvtal genom att gasa och bromsa
samtidigt. Bild 2.3 visar att strypning får systemkurvan att
vända från punkt (2) på pumpkurvan till en punkt med
betydligt lägre verkningsgrad (1).
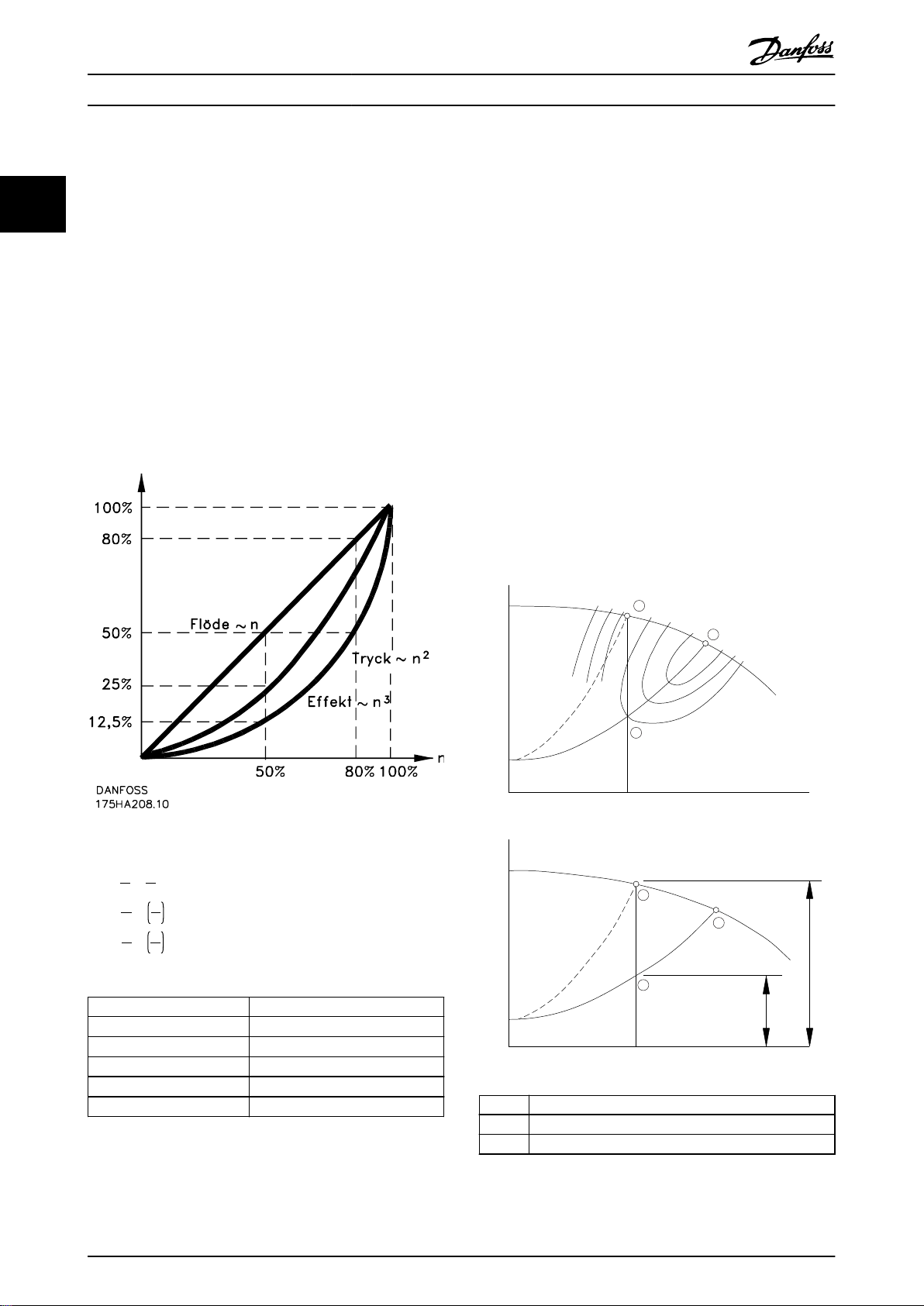
Bild 2.2 Anitetslagar för centrifugalpumpar
Q
n
1
Flöde:
Tryck:
Effekt:
Förutsatt en jämn verkningsgrad i varvtalsområdet.
1
=
Q
n
2
2
2
H
n
1
1
=
H
n
2
2
3
P
n
1
1
=
P
n
2
2
Q = Flöde
Q1= Flöde 1 P1= Eekt 1
P = Eekt
Q2 = Reducerat öde P2 = Reducerad eekt
H = Tryck n = Varvtalsreglering
H1= Tryck 1 n1= Varvtal 1
H2 = Reducerat tryck n2 = Reducerat varvtal
Tabell 2.1 Anitetslagar
1 Driftpunkt med en strypventil
2 Naturlig driftpunkt
3 Driftpunkt med varvtalsreglering
Bild 2.3 Flödesreducering med ventilreglering (strypning)
16 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 19
Flow
Head or Pressure
Pump curve
Operating
point
Natural
Operating point
system
Unthrottled
Speed
reduction
1
2
3
Hp
Hs
130BD894.10
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0 10 20 30 40 50 60 70 80 90 100
Recirculation
Throttle
control
Cycle
control
VSD
control
Ideal pump
control
Q(%)
P(%)
130BD892.10
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Produktöversikt Design Guide
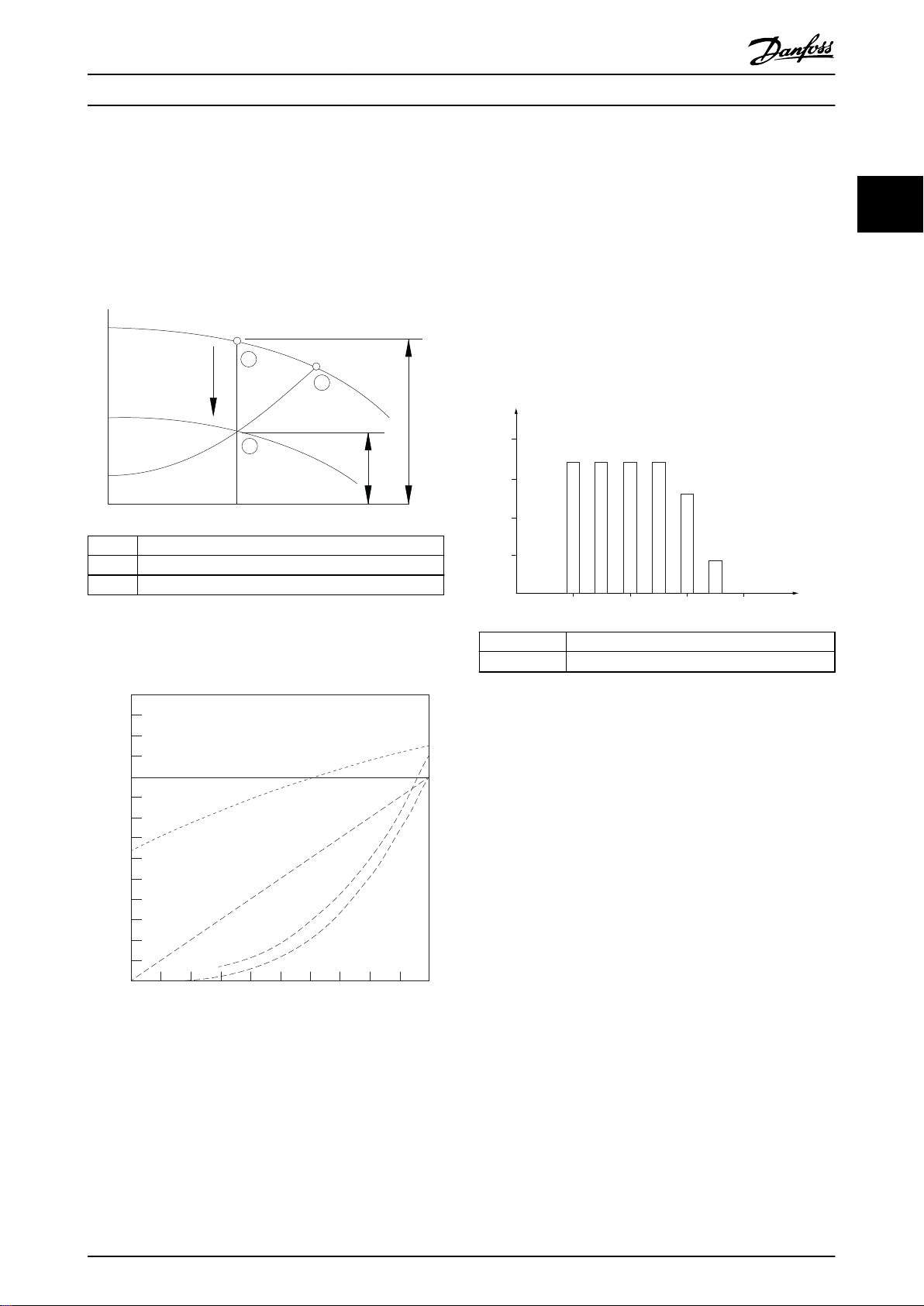
Varvtalsreglering
Samma öde kan justeras genom att reducera varvtalet på
pumpen, så som visas i Bild 2.4. Genom varvtalsminskning
yttas pumpkurvan ned. Driftpunkten är den nya
skärningspunkten på pump- och systemkurvan (3) Energibesparingarna kan beräknas med hjälp av anitetslagarna
som beskrivs i kapitel 2.1.3 Exempel på minskad energi-
åtgång.
1 Driftpunkt med en strypventil
2 Naturlig driftpunkt
3 Driftpunkt med varvtalsreglering
Exempel med varierande öde under
2.1.5
1 år
Exemplet är beräknat på pumpegenskaper hämtade från
ett pumpdatablad som visas i Bild 2.7.
Resultatet visar energibesparingar på mer än 50 % vid den
angivna ödesfördelningen över ett år,
se Bild 2.6. Återbetalningstiden beror på elpriser samt
inköpspriset på frekvensomformaren. I detta exempel är
återbetalningstiden kortare än ett år jämfört med ventiler
och drift med fast varvtal.
2
2
Bild 2.4 Flödesreducering med varvtalsreglering
Bild 2.5 Jämförbara kurvor för ödeskontroll
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 17
t [h]
Q [m3/h]
Varaktighet av öde Se även Tabell 2.2.
Flöde
Bild 2.6 Flödesfördelning över 1 år (varaktighet kontra öde)
Page 20
Full load
% Full load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
2
Produktöversikt
VLT® AQUA Drive FC 202
2.1.6
Genom att reglerna ett systems öde och tryck med en
frekvensomformare förbättras regleringen.
En frekvensomformare kan ändra äktens eller pumpens
varvtal, vilket ger en steglös reglering av öde och tryck.
Dessutom kan du med frekvensomformaren snabbt
anpassa äktens eller pumpens varvtal till förändrade
ödes- eller tryckbehov i systemet.
Uppnå enkel styrning av processer (öde, nivå eller tryck)
med hjälp av den inbyggda PI-styrningen.
2.1.7 Stjärn-/deltastart eller mjukstartare
För start av stora motorer är det i många länder
nödvändigt att använda startutrustning som begränsar
startströmmen. I traditionella system används normalt
stjärn-/deltastartare eller mjukstartare. Denna typ av
motorstartare behövs inte när frekvensomformare används.
Förbättrad kontroll
Bild 2.7 Energiförbrukning vid olika varvtal
Flöde Fördelning Ventilreglering Frekvens-
omformar-
reglering
% VaraktighetEekt Förbruk-
ning
[m3/h]
1) Eekt vid punkt A1
2) Eekt vid punkt B1
3) Eekt vid punkt C1
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
S
Tabell 2.2 Resultat
42,5
23,0
1)
18,615
2)
40,296
Eekt Förbruk-
1)
42,5
3)
3,5
ning
18,615
6,132
Som Bild 2.8 visar förbrukar frekvensomformaren inte högre
ström än den nominella strömmen.
1
VLT® AQUA Drive FC 202
2 Stjärn-/deltastart
3 Mjukstartare
4 Direktstart vid nätspänning
Bild 2.8 Startström
18 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 21
Produktöversikt
Design Guide
2.2 Driftsbeskrivning
Frekvensomformaren ger en reglerad mängd växelström
från elnätet till motorn för att styra motorvarvtalet.
Frekvensomformaren försörjer motorn med variabel
frekvens och spänning.
Frekvensomformaren består av fyra huvudmoduler:
Likriktare
•
Mellanliggande DC-busskrets
•
Växelriktare
•
Styrning och reglering
•
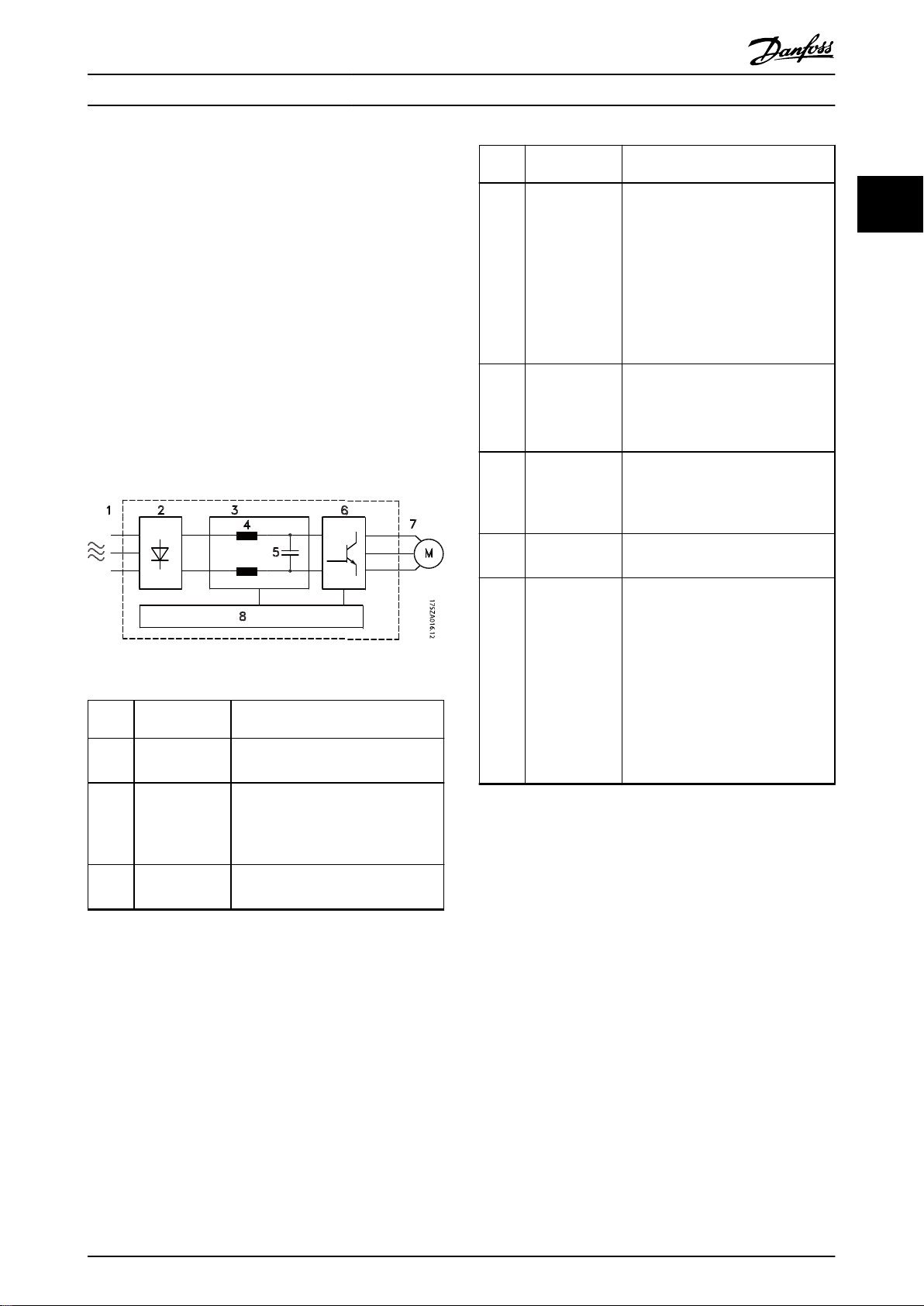
Bild 2.9 är ett blockschema över frekvensomformarens
interna komponenter. Information om deras funktioner
hittar du i Tabell 2.3.
Bild 2.9 Blockschema för frekvensomformaren
OmrådeBenämning Funktioner
3-fas växelströmsförsörjning till
1 Nätingång
2 Likriktare
3 Likströmsbuss
•
frekvensomformaren.
Likriktarbryggan konverterar den
•
ingående växelströmmen till
likström, vilket växelriktaren matas
med.
Mellankretsen hanterar
•
likströmmen.
OmrådeBenämning Funktioner
Filtrerar mellankretsspänningen
•
(likström).
Ger skydd mot nättransienter.
•
Reducerar RMS-ström.
Likströms-
4
reaktorer
Kondensa-
5
torbank
6 Växelriktare
Utström till
7
motorn
8 Styrströmkrets
Tabell 2.3 Teckenförklaring till Bild 2.9
1. Frekvensomformaren omvandlar växelspänning
från nätet till likspänning.
2. Likspänningen konverteras till växelström med
reglerbar amplitud och frekvens.
Frekvensomformaren försörjer motorn med variabel
spänning/ström och frekvens. Det möjliggör variabel
varvtalsreglering av asynkrona 3-fasmotorer och ej
•
Höjer den eektfaktor som skickas
•
tillbaka till nätet.
Reducerar övertoner på
•
växelströmsingången.
Lagrar likströmmen.
•
Tillhandahåller genomström-
•
ningsskydd vid kortvariga
eektförluster.
Konverterar likströmmen till en
•
reglerad PWM-växelströmsform för
en reglerad, variabel utgång till
motorn.
Reglerad utgående 3-fasström till
•
motorn.
Inströmmen, den interna bearbet-
•
ningen, uteekten och
motorströmmen övervakas för att
driften och styrningen ska bli
eektiv.
Användargränssnittet och de
•
externa kommandona övervakas
och utförs.
Statusutgång och statusstyrning
•
kan tillhandahållas.
2
2
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 19
Page 22
Produktöversikt
VLT® AQUA Drive FC 202
2
utpräglade PM-motorer. Frekvensomformaren hanterar
olika motorstyrningsprinciper, som t.ex. U/f -specialmotordrift, VVC+. Vad som händer vid kortslutning i
Bild 2.10 Frekvensomformarens struktur
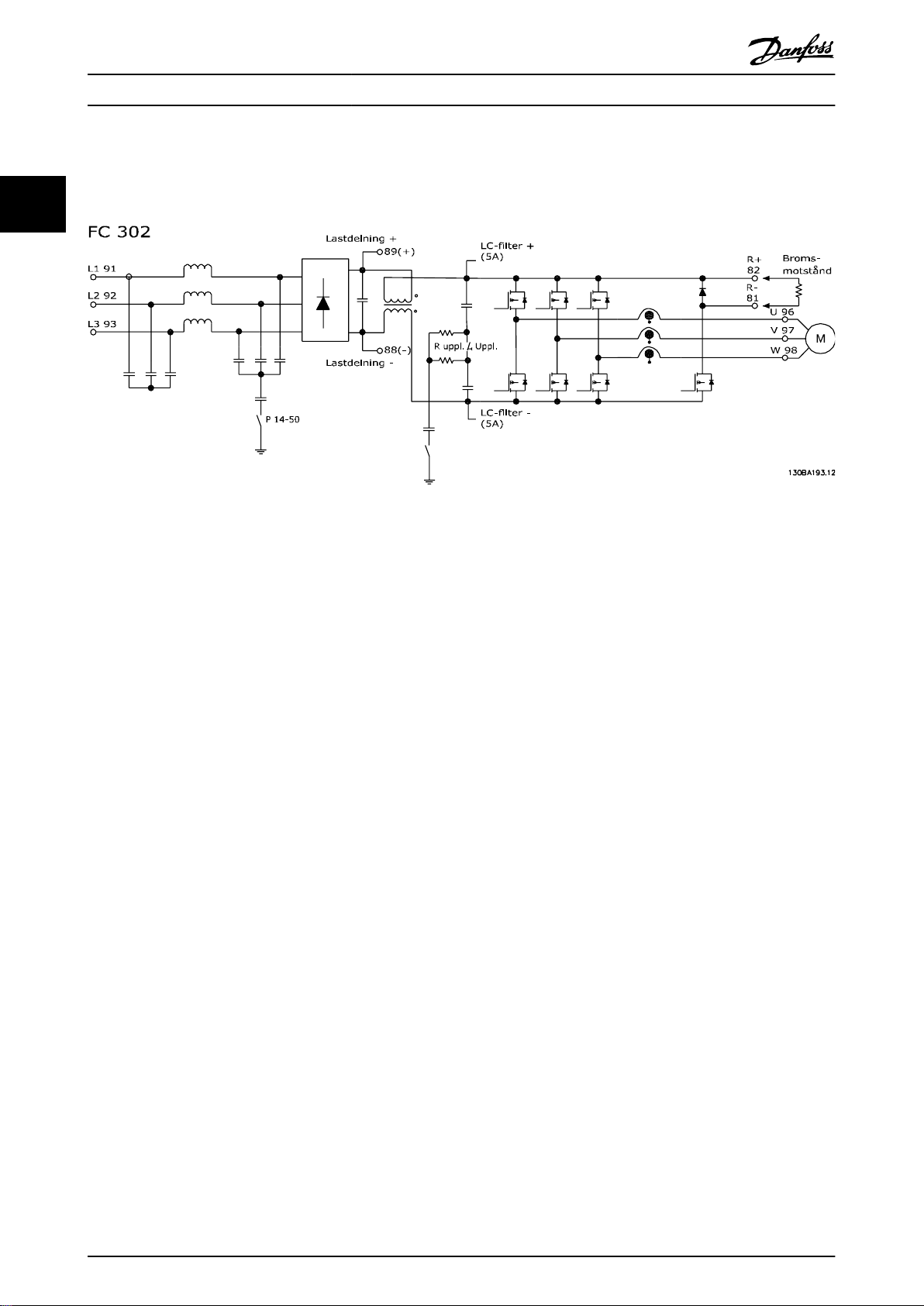
2.3 Driftsekvens
2.3.1 Likriktardelen
När strömmen ansluts till frekvensomformaren går den in
via nätplintarna (L1, L2 och L3) och vidare till nätbrytaren
och/eller RFI-ltervalet, beroende på hur enheten är
kongurerad.
2.3.2 Mellanliggande del
Efter likriktardelen passerar spänningen till den mellanliggande delen. Ett sinuslterkrets, som består av DCbussinduktorn och DC-kondensatorbanken, jämnar ut den
likriktade spänningen.
DC-bussinduktorn ger serieimpedans till varierande ström.
Detta underlättar ltreringen och minskar övertonsstörningarna på ingångsväxelströmmens vågform som normalt
nns i likriktarkretsar.
Växelriktardel
2.3.3
I växelriktardelen börjar IGBT-modulerna att växla för att
skapa utgångsvågformen när ett körkommando och en
varvtalsreferens nns tillgängliga. Vågformen som
genereras av Danfoss VVC+ PWM-principen på styrkortet
ger optimal prestanda och minimala förluster i motorn.
frekvensomformaren beror på de tre strömomvandlarna i
motorfaserna.
Bromstillval
2.3.4
För frekvensomformare som är utrustade med tillvalet
dynamisk broms, inkluderas en broms-IGBT tillsammans
med plint 81(R-) och 82(R+) för att ansluta ett externt
bromsmotstånd.
Ändamålet med broms-IGBT är att minska spänningen i
mellankretsen när den maximala spänningsgränsen
överskrids. Detta görs genom att växla det externt
monterade motståndet över DC-bussen för att ta bort
överskottslikspänning på busskondensatorerna.
Fördelarna med att placera bromsmotståndet externt är att
det går att välja motstånd baserat på tillämpningens
behov, att avsätta energin utanför manöverpanelen samt
att skydda frekvensomformaren mot överhettning ifall
bromsmotståndet skulle överbelastas.
Växelsignalen från broms-IGBT kommer från styrkortet och
levereras till broms-IGBT via
kortet. Dessutom övervakar eekt- och styrkorten bromsIGBT och bromsmotståndsanslutningen avseende
kortslutning och överbelastning. Mer information om
nätsäkringar nns i kapitel 7.1 Elektriska data. Se även
kapitel 7.7 Säkringar och maximalbrytare.
eektkortet och växelriktar-
20 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 23
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Produktöversikt Design Guide
2.3.5 Lastdelning
Enheter med inbyggt lastdelningstillval innehåller plintarna
(+) 89 DC och (–) 88 DC. I frekvensomformaren ansluter
dessa plintar till DC-bussen framför DC-bussreaktorn och
busskondensatorerna.
Kontakta Danfoss om du vill ha mer information.
Lastdelningsplintarna kan anslutas med två olika
tioner.
1. Med den ena metoden kopplar plintarna samman
era frekvensomformares DC-busskretsar. På så
sätt kan en enhet som är i regenerativt läge dela
sin överskottsbusspänning med en annan enhet
som kör en motor. Lastdelning på detta sätt kan
minska behovet av externa dynamiska
bromsmotstånd och samtidigt spara energi.
Antalet enheter som kan anslutas på detta sätt
obegränsat, men alla enheter måste ha samma
märkspänning. Beroende på storlek och antal
enheter kan det dessutom vara nödvändigt att
installera likströmsreaktorer och likströmssäkringar
i DC-bussens anslutningar samt växelströmsreaktorer på nätet. En sådan konguration kräver
specika överväganden. Kontakta Danfoss för att
få hjälp.
2. Med den andra metoden får frekvensomformaren
ström enbart från en likströmskälla. Det kräver:
kongura-
2a En likströmskälla.
2b Ett sätt att mjukladda DC-bussen vid
start.
Som sagt kräver en sådan konguration specika
överväganden. Kontakta Danfoss för att få hjälp.
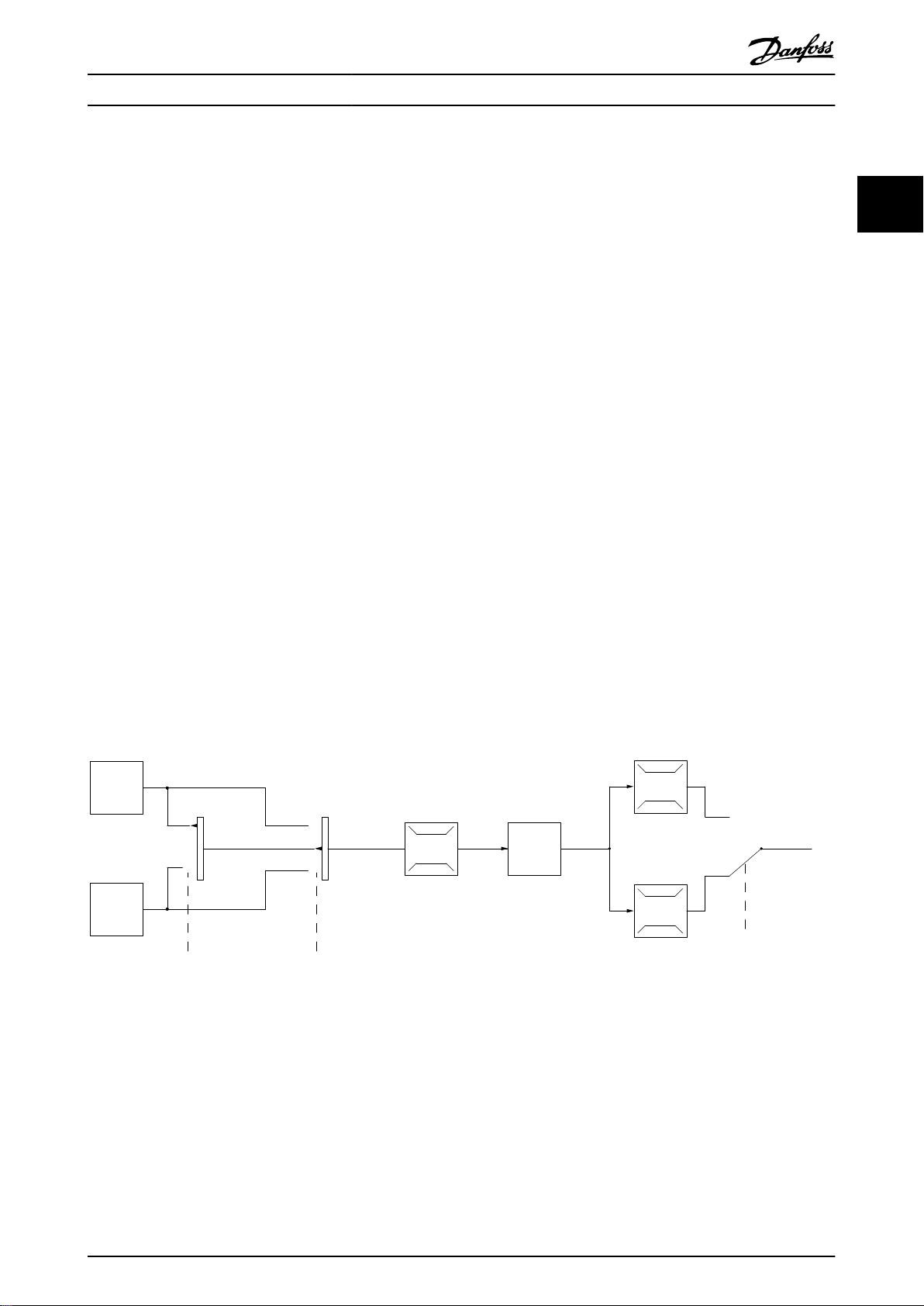
2.4 Styrstrukturer
2.4.1 Styrstruktur utan återkoppling
När frekvensomformaren drivs i läge utan återkoppling
svarar den på manuella ingångskommandon via LCP eller
så kan den ärrstyras via de analoga /digitala ingångarna
eller en seriell buss.
I kongurationen som visas i Bild 2.11 körs frekvensomformaren i läge utan återkoppling. Den får indata antingen
från LCP (Hand-läge) eller en
Signalen (varvtalsreferensen) tas emot och konditioneras
med programmerade minimala och maximala motorvarvtalsgränser (i varv/minut och Hz), upp- och nedramptider
och riktningen för motorrotation. Referensen skickas sedan
vidare för att styra motorn.
ärrsignal (läget Auto).
2
2
Bild 2.11 Blockdiagram över läge utan återkoppling
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 21
Page 24
2
Produktöversikt
VLT® AQUA Drive FC 202
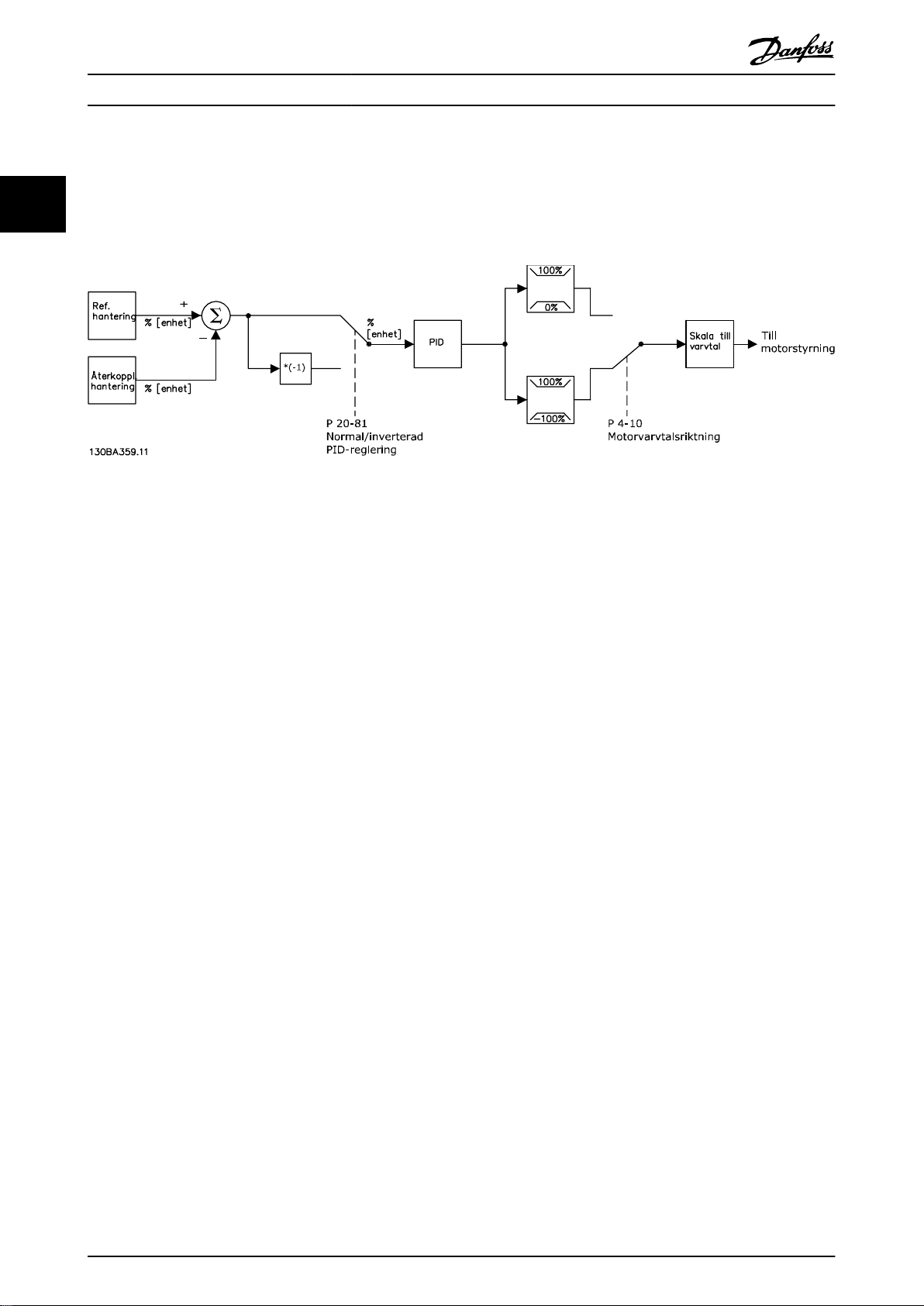
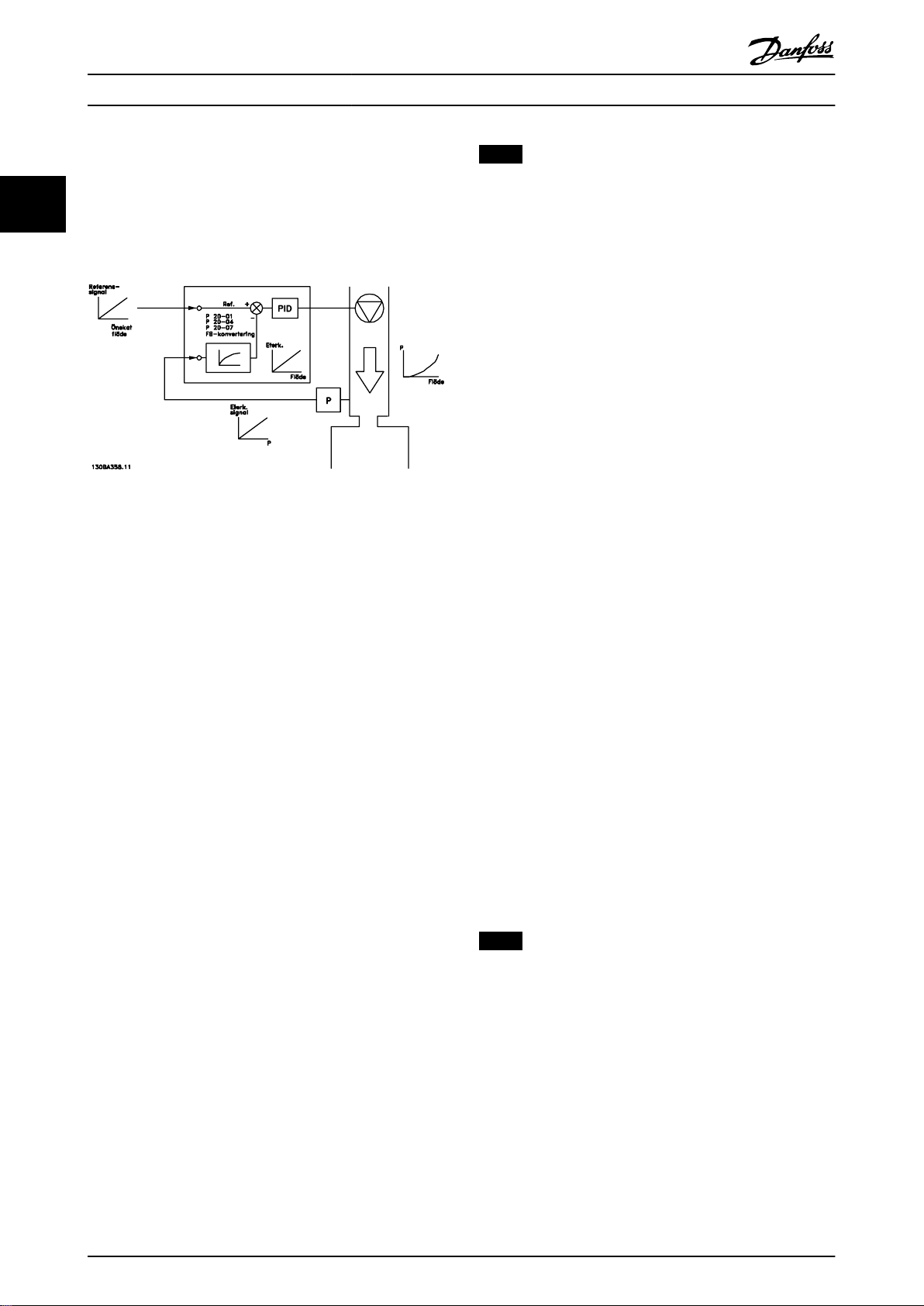
2.4.2 Styrstrukturer med återkoppling
I läge med återkoppling gör en intern PID-regulator det möjligt för frekvensomformaren att agera som en självständig
styrenhet och behandla systemreferenser och återkopplingssignaler. Omformaren kan ge status- och larmmeddelanden, och
med era andra programmerbara alternativ, för extern systemövervakning under självständig drift med återkoppling.
Bild 2.12 Blockdiagram över regulator med återkoppling
Ta till exempel ett pumpsystem där pumpens varvtal
regleras så att det statiska trycket i röret hålls konstant (se
Bild 2.12). Frekvensomformaren får en återkopplingssignal
från en givare i systemet. Den jämför denna återkoppling
med ett referensbörvärde och avgör avvikelsen, om en
sådan föreligger, mellan de två signalerna. Därefter justeras
motorvarvtalet för att korrigera felet.
Det önskade börvärdet för statiskt tryck är referenssignalen
till frekvensomformaren. En givare som mäter det faktiska
statiska trycket i röret skickar värdet till frekvensomformaren som en återkopplingssignal. Om
återkopplingssignalen överstiger börvärdesreferensen
rampar frekvensomformaren ned för att minska trycket. På
samma sätt rampar frekvensomformaren upp för att öka
pumptrycket om rörtrycket är lägre än börvärdesreferensen.
Även om standardvärdena för frekvensomformaren vid drift
med återkoppling för det mesta ger nöjaktig prestanda,
går det ofta att optimera systemstyrningen genom att
justera vissa PID-parametrar. Autojustering
typ av anpassning.
Andra programmerbara funktioner är:
Inverterad reglering – motorvarvtalet ökar när en
•
återkopplingssignal är hög.
Startfrekvens – låter snabbt systemet nå
•
driftstatus innan PID-regulatorn tar vid.
Inbyggt
•
återkopplingssignal.
lågpasslter – minskar störningar i
nns för denna
Lokalstyrning (Hand On) och
2.4.3
Fjärrstyrning (Auto On)
Frekvensomformaren kan drivas manuellt via LCP eller
ärrstyras med analoga eller digitala ingångar eller en
seriell buss.
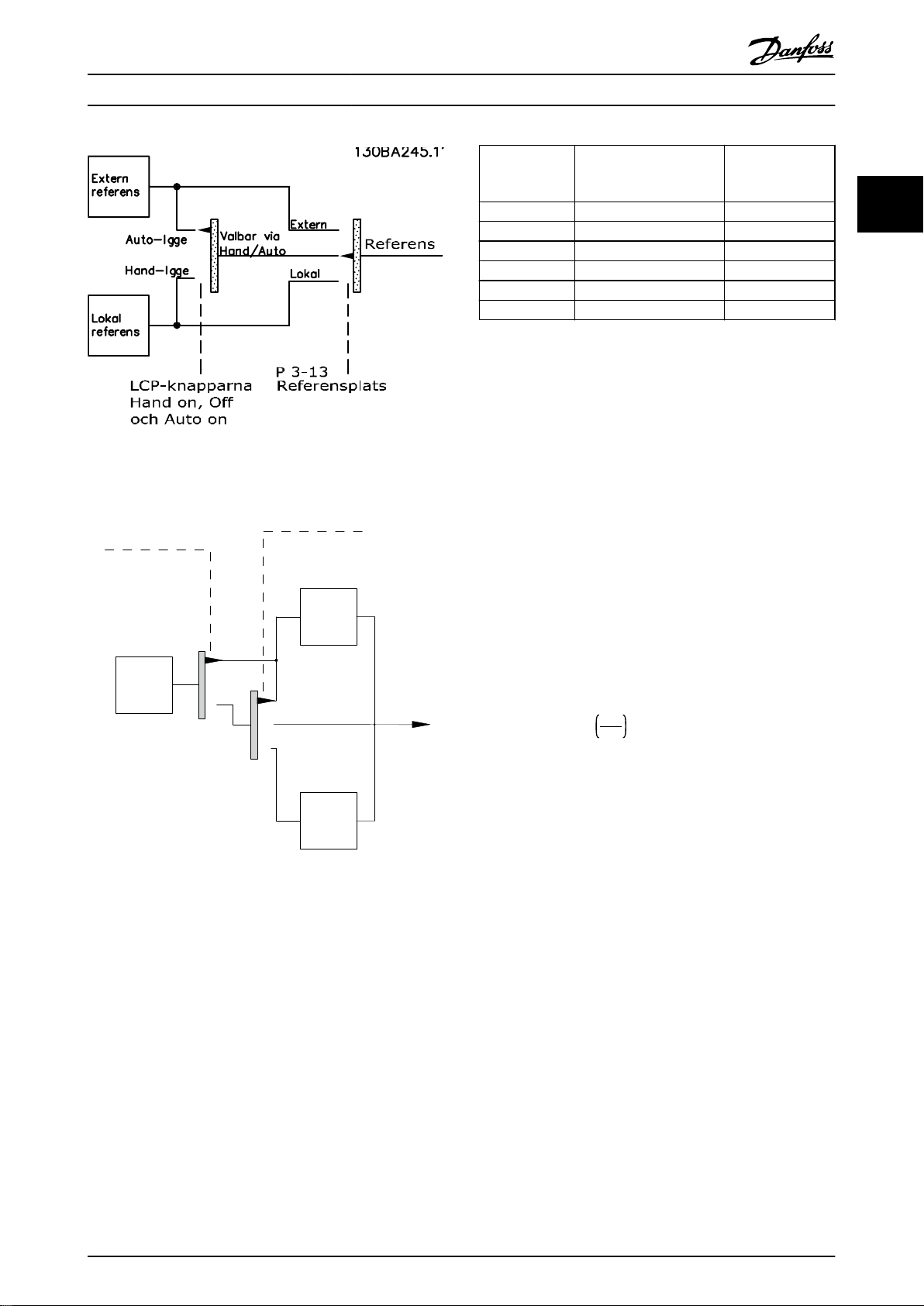
Läge för aktiv referens och konguration
Den aktiva referensen är antingen en lokal referens eller en
extern referens. Den externa referensen är fabriksinställningen.
Kongurera i Hand-läge om du vill använda en
•
den lokala referensen. Aktivera Hand-läget genom
att anpassa parameterinställningarna i parametergrupp 0–4* LCP-knappsats. Mer information
nns i Programmeringshandboken.
Kongurera i läget Auto, som är standardläget,
•
om du vill använda den externa referensen I läget
Auto är det möjligt att styra frekvensomformaren
via de digitala ingångarna och olika
seriegränssnitt (RS485, USB eller ett valbar
fältbuss).
I Bild 2.13 visas kongurationsläget som är
•
resultatet av ett aktivt referensval, antingen en
lokal eller extern referens.
I Bild 2.14 visas manuellt
•
lokal referens.
kongurationsläge för
22 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 25
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Produktöversikt
Design Guide
Bild 2.13 Aktiv referens
Bild 2.14 Kongurationsläge
Styrprincip för tillämpning
Bara en av referenserna, antingen den externa eller lokala,
är aktiv vid en viss tidpunkt. Båda kan inte vara aktiva
samtidigt. Ställ in tillämpningens styrprincip (dvs. utan
återkoppling eller med återkoppling) i
Parameter 1-00 Kongurationsläge enligt Tabell 2.4.
När den lokala referensen är aktiv anger du styrprincipen i
Parameter 1-05
Ange referensplatsen i parameter 3-13 Referensplats, enligt
Tabell 2.4.
Mer information
Konguration i lokalt läge.
nns i Programmeringshandboken.
[Hand On]
[Auto On]
LCP-knappar
Hand Länkat till Hand/Auto Lokal
Hand? Av Länkat till Hand/Auto Lokal
Auto Länkat till Hand/Auto Extern
Auto ? Av Länkat till Hand/Auto Extern
Alla knappar Lokal Lokal
Alla knappar Extern Extern
Tabell 2.4 Kongurationer för lokal eller extern referens
Referensplats
parameter 3-13 Referenspl
ats
Aktiv referens
2.4.4 Referenshantering
Referenshantering är tillämpbar både i drift utan och med
återkoppling.
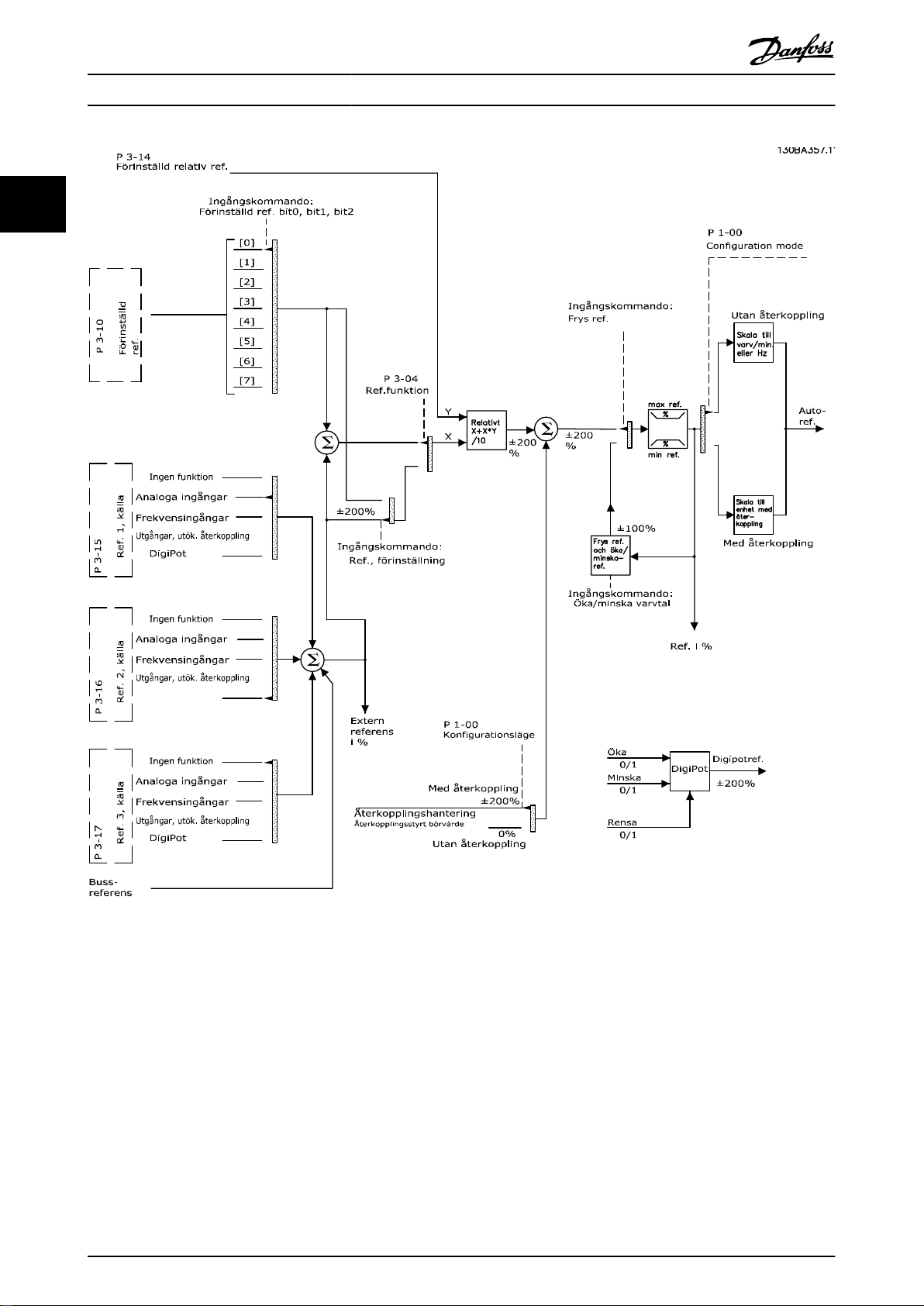
Interna och externa referenser
Upp till 8 interna förinställda referenser kan programmeras
i frekvensomformaren. Den aktiva interna förinställda
referensen kan väljas externt via digitala styringångar eller
den seriella kommunikationsbussen.
Externa referenserna kan också matas till omformaren,
vanligen via en analog styringång. Referenskällorna och
bussreferensen adderas för att skapa den totala externa
referensen. Den externa referensen, den förinställda
referensen, börvärdet eller summan av alla tre kan anges
som den aktiva referensen. Denna referens kan skalas.
Den skalade referensen beräknas på följande sätt:
Referens = X + X ×
När X den externa referensen, den förinställda referensen
eller summan av dem, och Y är parameter 3-14 Förinställd
relativ referens i [%].
Om Y, parameter 3-14 Förinställd relativ referens, är inställd
på 0 % påverkar skalningen inte referensen.
Extern referens
En extern referens består av följande (se Bild 2.15).
Förinställda referenser
•
Externa referenser:
•
-
-
-
-
En förinställd relativ referens
•
Ett återkopplingsstyrt börvärde
•
Y
100
Analoga ingångar
Pulsfrekvensingångar
Digital potentiometeringångar
Bussreferenser för seriell kommunikation
2
2
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 23
Page 26
2
Produktöversikt
VLT® AQUA Drive FC 202
Bild 2.15 Blockdiagram som visar extern referenshantering
24 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 27
Produktöversikt Design Guide
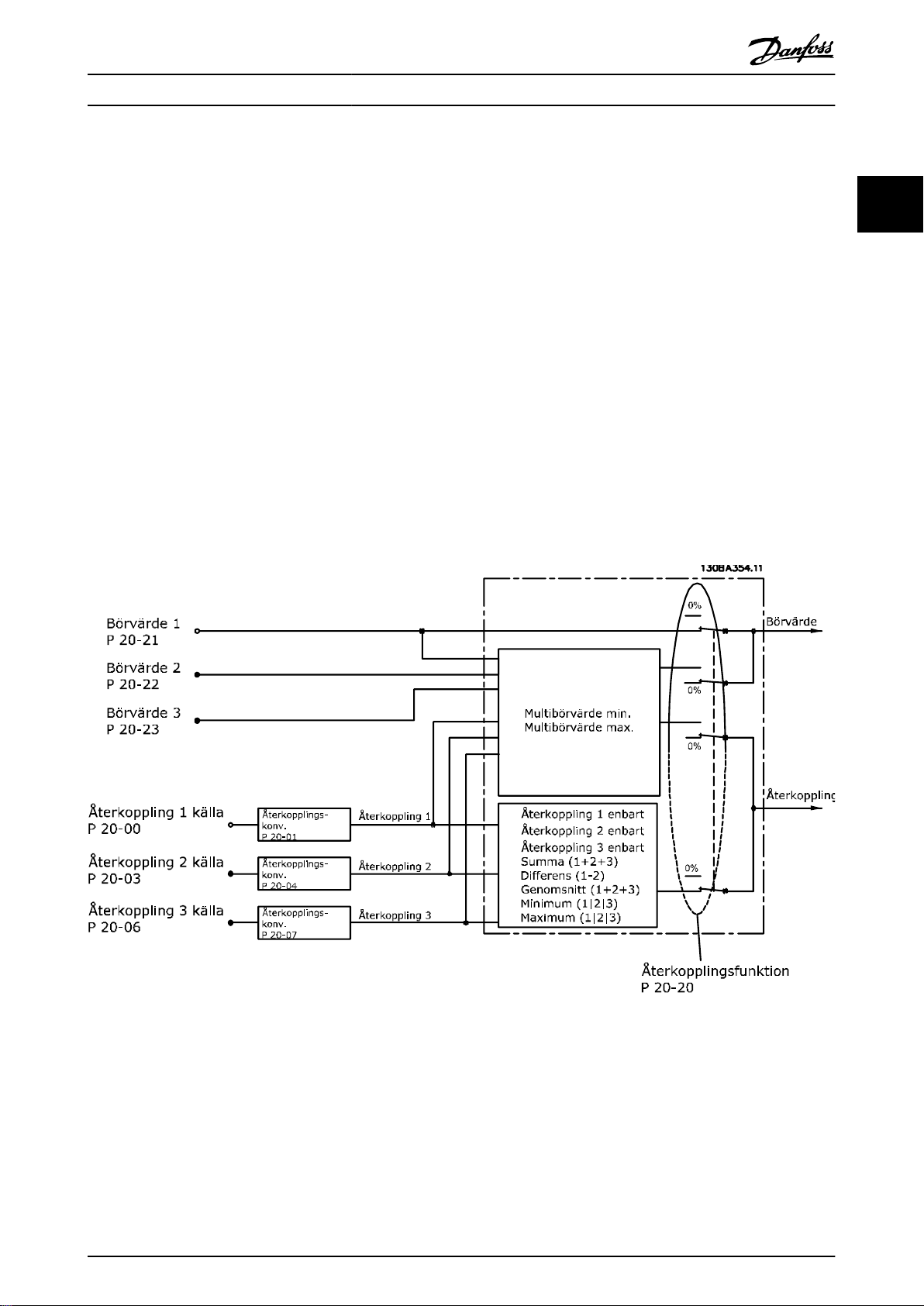
2.4.5 Återkopplingshantering
Återkopplingshanteringen kan kongureras så att den
fungerar med tillämpningar där avancerad styrning krävs,
t.ex. vid era börvärden och återkopplingar (se Bild 2.16).
Tre typer av styrning är vanliga:
En zon, ett börvärde
Denna styrningstyp är en grundläggande återkopplingskonguration. Börvärde 1 adderas till en annan referens
(om sådan nns) och återkopplingssignalen väljs.
Multizon, ett börvärde
Denna styrningstyp använder två eller tre återkopplingsgivare men endast ett börvärde. Återkopplingen kan
adderas, subtraheras eller genomsnittsberäknas. Dessutom
kan maximi- eller minimivärdet användas. Börvärde 1
används uteslutande i denna konguration.
Multizon, börvärde/återkoppling
Det börvärdes-/återkopplingspar med den största
skillnaden styr frekvensomformarens varvtal. Maximi
försöker hålla alla zoner vid eller under respektive
börvärden, medan minimi försöker hålla alla zoner vid eller
över respektive börvärden.
Exempel
Tillämpning med 2 zoner och 2 börvärden. Börvärdet för
zon 1 är 15 bar och återkopplingen är 5,5 bar. Börvärdet
för zon 2 är 4,4 bar och återkopplingen är 4,6 bar. Om
maximivärdet väljs kommer börvärdet och återkopplingen
för zon 1 att skickas till PID-regulatorn, eftersom det
uppvisar den lägre skillnaden (återkopplingen är högre än
börvärdet, vilket ger en negativ dierens). Om minimivärdet väljs kommer börvärdet och återkopplingen för zon
2 att skickas till PID-regulatorn eftersom det uppvisar den
större skillnaden (återkopplingen är lägre än börvärdet,
vilket ger en positiv dierens).
2
2
Bild 2.16 Blockdiagram över behandlingen av återkopplingssignalen
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 25
Page 28
Produktöversikt
VLT® AQUA Drive FC 202
2
Återkopplingskonvertering
I vissa tillämpningar är det praktiskt att konvertera
återkopplingssignalen. Ett exempel på detta är när en
trycksignal används för att ge ödesåterkoppling. Eftersom
kvadratroten ur trycket är proportionellt mot ödet ger
kvadratroten ur trycksignalen ett värde som är proportionellt mot ödet, se Bild 2.17.
Bild 2.17 Återkopplingskonvertering
2.5 Automatiserade driftfunktioner
Automatiserade driftfunktioner aktiveras så snart frekvensomformaren är igång. De esta av dem kräver ingen
programmering eller inställning. Om du känner till
funktionerna kan du optimera systemkonstruktionen och
eventuellt undvika att införa överödiga komponenter och
funktioner.
Information om eventuella inställningar som krävs, i
synnerhet motorparametrar, nns i Programmering-
shandboken.
Frekvensomformaren har ett antal inbyggda skyddsfunktioner som skyddar enheten och den motor som körs.
Kortslutningsskydd
2.5.1
Motor (fas – fas)
Frekvensomformaren skyddas mot kortslutning på
motorsidan genom strömmätning i de tre motorfaserna
eller i DC-bussen. Vid kortslutning mellan två utfaser
uppstår överström i växelriktaren. Växelriktaren stängs av
så snart kortslutningsströmmen överstiger det tillåtna
värdet (Larm 16 Tripplås).
Nätsida
En frekvensomformare som fungerar korrekt begränsar
strömmen som den drar från försörjningen. Säkringar och/
eller maximalbrytare rekommenderas trots det på försörjningssidan som skydd vid eventuella komponentfel inne i
frekvensomformaren (första felställe). Mer information nns
i kapitel 7.7 Säkringar och maximalbrytare.
OBS!
Säkringar och/eller maximalbrytare på försörjningssidan
är obligatoriskt för uppfyllelse av kraven i IEC 60364 för
CE eller NEC 2009 för UL.
Bromsmotstånd
Frekvensomformaren skyddas från kortslutning i
bromsmotståndet.
Lastdelning
För att skydda DC-bussen mot kortslutning och frekvensomformarna från överbelastning kan du installera DCsäkringar i serie med lastdelningsplintarna för alla anslutna
enheter. Mer information
Överspänningsskydd
2.5.2
Motorgenererad överspänning
Spänningen i mellankretsen ökar när motorn fungerar som
generator. Detta sker vid följande tillfällen:
Belastningen driver motorn (vid konstant
•
utfrekvens från frekvensomformaren), t.ex.
belastningen alstrar energi.
Vid deceleration (nedrampning) när tröghetsmo-
•
mentet är högt, är friktionen låg och
nedramptiden för kort för att energin ska avsättas
som en förlust i frekvensomformaren, motorn och
installationen.
Felaktigt inställd eftersläpningskompensation kan
•
ge upphov till en högre DC-busspänning.
Mot-Emk från PM-motordrift. PM-motorns mot-
•
Emk kan komma att överskrida
frekvensomformarens maximala spänningstolerans
och orsaka skador om den rullas ut på höga
varvtal. För att förhindra detta är värdet för
parameter 4-19 Max. utfrekvens automatiskt
begränsat enligt en intern beräkning baserad på
värdet för parameter 1-40 Mot-EMK vid 1000 RPM,
parameter 1-25 Nominellt motorvarvtal och
parameter 1-39 Motorpoler.
nns i kapitel 2.3.5 Lastdelning.
OBS!
Frekvensomformaren kan utrustas med ett
bromsmotstånd för att undvika rusningsvarvtal i motorn
(t.ex. på grund av för kraftigt roterande delar eller
oreglerat vattenöde).
Överspänningen kan hanteras antingen med en
bromsfunktion (parameter 2-10 Bromsfunktion) eller med
överspänningsstyrning (parameter 2-17 Överspännings-
styrning).
Överspänningsstyrning (OVC)
OVC minskar risken att frekvensomformaren trippar på
grund av en överspänning på DC-bussen. Detta uppnås
genom att automatiskt utöka nedramptiden.
26 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 29

Produktöversikt
Design Guide
OBS!
OVC kan aktiveras för PM-motorer (PM VVC+).
Bromsfunktioner
Anslut ett bromsmotstånd för avgivning av överskott av
bromsenergi. Anslutning av ett bromsmotstånd förhindrar
överdrivet hög DC-busspänning under bromsning.
En AC-broms kan användas för att få bättre bromsförmåga
utan att bromsmotstånd behöver användas. Denna
funktion styr en övermagnetisering av motorn när den körs
som en generator som skapar extra energi. Denna funktion
kan förbättra OVC. Genom att öka de elektriska förlusterna
i motorn kan OVC-funktionen öka bromsmomentet utan
att överskrida överspänningsgränsen.
OBS!
AC-broms inte är lika eektiv som dynamisk broms med
motstånd.
2.5.3 Detektering av motorfas saknas
Funktionen motorfas saknas (parameter 4-58 Motorfas-
funktion saknas) är aktiverad som standard för att undvika
motorskador om en motorfas saknas. Fabriksinställningen
är 1 000 ms, men kan justeras för en snabbare detektering.
Varvtalsgräns
Ange de nedre och övre gränserna för intervallet för driftsvarvtal med någon av följande parametrar:
parameter 4-11 Motorvarvtal, nedre gräns [rpm]
•
parameter 4-12 Motorvarvtal, nedre gräns [Hz] och
•
parameter 4-13 Motorvarvtal, övre gräns [rpm]
parameter 4-14 Motor Speed High Limit [Hz]
•
Till exemplet kan intervallet för driftsvarvtal anges till
mellan 30 och 50/60 Hz.
parameter 4-19 Max. utfrekvens begränsar det maximala
utvarvtalet som frekvensomformaren kan ge.
ETR
ETR är en elektronisk funktion som simulerar ett
bimetallrelä baserat på interna mätningar. Kurvan visas
iBild 2.18.
Spänningsgräns
Frekvensomformaren kopplas från så att transistorerna och
DC-busskondensatorerna skyddas när en viss hårdkodad
spänningsnivå överskrids.
Överhettning
Frekvensomformaren har inbyggda temperaturgivare och
reagerar direkt vid kritiska värden via hårdkodade gränser.
Automatisk nedstämpling
2.5.7
2
2
Detektering av nätfasobalans
2.5.4
Om frekvensomformaren körs med ett allvarligt fasbortfall
förkortas motorns livslängd. Förhållanden anses som
allvarliga om motorn kontinuerligt körs nära nominell
belastning. Fabriksinställningen trippar frekvensomformaren vid fasbortfall (parameter 14-12 Funktion vid
nätfel).
In- och urkoppling på utgången
2.5.5
Det är tillåtet att lägga till en brytare på utgången mellan
motorn och frekvensomformaren. Felmeddelanden kan
visas. Fånga in en roterande motor genom att aktivera
ygande start.
Överbelastningsskydd
2.5.6
Momentgräns
Med momentgränsfunktionen skyddas motorn från överbelastning oberoende av varvtal. Momentgränsen styrs i
parameter 4-16 Momentgräns, motordrift eller
parameter 4-17 Momentgräns, generatordrift och den tid det
tar innan momentgränsvarningen trippar styrs i
parameter 14-25 Trippfördr. vid mom.gräns.
Strömgräns
Strömgränsen styrs i parameter 4-18 Strömbegränsning.
Frekvensomformaren kontrollerar löpande om det
föreligger kritiska nivåer:
Hög temperatur på styrkort eller kylplatta
•
Hög motorbelastning
•
Hög DC-busspänning
•
Lågt motorvarvtal
•
Som svar på en kritisk nivå justerar frekvensomformaren
switchfrekvensen. Vid kritiskt höga interna temperaturer
och lågt motorvarvtal kan frekvensomformare också tvinga
PWM-mönstret till SFAVM.
OBS!
Den automatiska nedstämplingen ser annorlunda ut när
parameter parameter 14-55 Utgångslter är inställd på [2]
Fast Sinuslter.
2.5.8 Automatisk energioptimering
Automatisk energioptimering (AEO) styr frekvensomformaren att kontinuerligt övervaka belastningen på
motorn och justera utspänningen för att maximera
verkningsgraden. Under lätt belastning minskas
spänningen och motorströmmen minimeras. Det ger
motorn högre verkningsgrad, minskad uppvärmning och
tystare drift. Det nns inget behov för att välja en V/Hz-
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 27
Page 30

Produktöversikt
VLT® AQUA Drive FC 202
2
kurva eftersom frekvensomformaren automatiskt justerar
motorspänningen.
2.5.9 Automatisk switchfrekvensmodulering
Frekvensomformaren genererar korta elektriska pulser som
bildar ett växelströmsvågmönster. Switchfrekvensen är
hastigheten på dessa pulser. En låg switchfrekvens
(långsam pulshastighet) orsakar hörbart ljud i motorn,
vilket gör att en högre switchfrekvens är att föredra. En
hög switchfrekvens genererar dock värme i frekvensomformaren, vilket kan begränsa strömtillgången för motorn.
Automatisk switchfrekvensmodulering reglerar dessa förhållanden automatiskt och ger den högsta switchfrekvensen
utan att frekvensomformaren överhettas. Genom att ge en
reglerad hög switchfrekvens dämpas motorljudet vid
långsamma varvtal, som när det är viktigt att kunna reglera
hörbart ljud, och ger full uteekt till motorn när det krävs.
2.5.10
Automatisk nedstämpling för hög
switchfrekvens
Frekvensomformaren är utformad för kontinuerlig drift med
full belastning vid switchfrekvenser mellan 3,0 och 4,5 kHz
(frekvensområdet beror på eektstorlek). En switchfrekvensen som överstiger högsta tillåtna värde genererar
värmeökning i frekvensomformaren och kräver
nedstämpling av utströmmen.
En av frekvensomformarens automatiska funktioner är
belastningsberoende reglering av switchfrekvensen. Denna
funktion gör att motorn kan dra nytta av den högsta
switchfrekvens som belastningen tillåter.
2.5.11
Automatisk nedstämpling för
överhettning
Automatisk nedstämpling för överhettning arbetar för att
förhindra att frekvensomformaren trippar vid höga
temperaturer. Interna temperaturgivare skyddar kraftkomponenterna från överhettning genom att mäta
förhållanden. Omformaren kan automatiskt minska sin
switchfrekvens för att behålla sin drifttemperatur inom
säkerhetsgränserna. Efter att switchfrekvens har reducerats
kan omformaren även reducera utfrekvensen och
utströmmen med upp till 30 % för att undvika en tripp
orsakad av överhettning.
(acceleration eller deceleration) efter den tillgängliga
strömmen.
2.5.13 Strömgränskrets
Om en belastning överstiger strömkapacitet vid normal
drift av frekvensomformaren (från en underdimensionerad
omvandlare eller motor), reducerar strömgränsen utfrekvensen för att rampa ned motorn och minska
belastningen. En justerbar timer är tillgänglig för att
begränsa driften i detta tillstånd till 60 s eller mindre. Den
fabriksinställda gränsen är 110 % av den nominella
motorströmmen, vilket minimerar överströmspåfrestningar.
2.5.14
Frekvensomformaren tål nätuktuationer som t.ex.:
Frekvensomformaren kompenserar automatiskt för ingångsspänningar med en avvikelse på ±10 % från nominell
spänning för att ge full nominell motorspänning och
moment. Om automatisk omstart har valts, startar frekvensomformaren automatiskt efter en tripp. Med ygande
start synkroniseras frekvensomformaren till motorns
rotation före start.
2.5.15
Frekvensomformaren ger rätt mängd ström till motorn för
att överbrygga belastningströgheten och få motorn upp till
rätt varvtal. Detta förhindrar att en motor som är stationär
eller som har långsam vridning utsätts för full nätspänning,
vilket genererar hög spänning och värme. Denna inbyggda
mjukstartsfunktion minskar termisk belastning och
mekaniska påfrestningar. Den ökar även motorns livslängd
och ger tystare driftsystem.
2.5.16
Högfrekventa motorresonansstörningar kan elimineras med
hjälp av resonansdämpning. Automatisk eller manuellt vald
frekvensdämpning är möjligt.
Prestanda vid eektuktuationer
Transienter
•
Tillfälliga avbrott
•
Kortare spänningsfall
•
Spänningstoppar
•
Mjukstart av motorn
Resonansdämpning
2.5.12
Om en motor försöker accelerera en belastning för snabbt
för den tillgängliga strömmen, kan det leda till att frekvensomformaren trippar. Detsamma gäller för en för snabb
deceleration. Automatisk ramp skyddar mot sådana
situationer genom att anpassa motorns ramphastighet
28 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Automatisk ramp
2.5.17
De interna kyläktarna temperaturregleras av givare i
frekvensomformaren. Kyläkten körs vanligen inte vid låg
belastning, i energisparläge eller i standbyläge. Det minskar
bullret, ökar verkningsgraden och ökar äktens livslängd.
Temperaturstyrda äktar
Page 31

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Produktöversikt
Design Guide
2.5.18 EMC-överensstämmelse
Elektromagnetiska störningar (EMI) eller radiofrekvensstörningar (RFI) är störningar som kan påverka en elektrisk
krets på grund av elektromagnetisk induktans eller
strålning från en extern källa. Frekvensomformaren är
utformad för att uppfylla kraven enligt EMC-produktstandarden för frekvensomformare IEC 61800-3 samt den
europeiska standarden SS-EN 55011. För att uppfylla
emissionsnivåerna i SS-EN 55011 måste motorkabeln vara
skärmad och korrekt avslutad. Mer information om EMCprestanda nns i kapitel 3.2.2 EMC-testresultat.
2.5.19
Utström till motorn mäts kontinuerligt på alla tre faser för
att skydda frekvensomformaren och motorn mot
kortslutning, jordfel och fasbortfall. Jordfel i utgången
upptäcks direkt. Om en motorfas saknas stannar frekvensomformaren omedelbart och rapporterar vilken fas som
saknas.
2.5.20
Alla styrplintar och utgångsreläplintar är galvaniskt
isolerade från nätspänningen. Det innebär att regulatorns
kretssystem är helt skyddade från inströmmen. Utgångsreläplintarna kräver separat jordning. Isoleringen uppfyller de
hårda isoleringskraven för skyddsklenspänning (PELV).
Komponenterna som utgör den galvaniska isolationen är:
Strömmätning på alla tre motorfaser
Galvanisk isolation av styrplintar
Strömförsörjning, inklusive signalisolering.
•
Växelriktare för IGBT-enheter, triggtransformatorer
•
och optokopplare.
Halleektomvandlare för utström.
•
utförs utan att motorn roterar och utan frånkoppling av
motorbelastningen.
2.6.2 Termiskt motorskydd
Termiskt motorskydd kan tillhandahållas på tre sätt:
Via direkt temperaturavkänning med något av
•
följande:
PTC-sensor i motorlindningarna och
-
ansluten till en vanlig AI eller DI
PT100 eller PT1000 i motorlindningar
-
och motorlager, ansluten på VLT
givaringångskort MCB 114.
-
PTC-termistoringång på VLT® PTC
Termistorkort MCB 112 (ATEX-godkänd).
Mekanisk termisk brytare (Klixon-typ) på en DI.
•
Via det inbyggda elektronisk-termiska reläet (ETR)
•
för asynkronmotorer.
ETR beräknar motortemperaturen genom att mäta ström,
frekvens och drifttid. Frekvensomformaren visar den
termiska belastningen på motorn i procent och kan utfärda
en varning vid ett programmerbart överbelastningsbörvärde.
Med programmerbara alternativ vid överbelastningen kan
frekvensomformaren stoppa motorn, minska uteekten
eller ignorera tillståndet. Även vid låga varvtal uppfyller
frekvensomformaren I2t klass 20-standarder för överbelastning av elektronisk motor.
®
2
2
2.6
Anpassade tillämpningsfunktioner
Anpassade tillämpningsfunktioner är de vanligaste
funktionerna som programmeras i frekvensomformaren för
att förbättra systemets prestanda. De kräver minimalt med
programmering och kongurering. Om du känner till
funktionerna kan du optimera systemkonstruktionen och
eventuellt undvika att införa överödiga komponenter och
funktioner. I programmeringshandboken nns instruktioner
om hur dessa funktionerna aktiveras.
2.6.1
Automatisk motoranpassning
Automatisk motoranpassning (AMA) är en automatiserad
testprocedur som används för mätning av en motors
elektriska egenskaper. AMA ger en korrekt elektronisk
modell av motorn. Den gör att frekvensomformaren kan
beräkna optimal funktion och verkningsgrad med motorn.
Med AMA-processen maximeras också den automatiska
energioptimeringsfunktionen av frekvensomformaren. AMA
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 29
Bild 2.18 ETR-kurva
X-axeln i Bild 2.18 visar förhållandet mellan I
nominell. Y-axeln visar tiden i sekunder innan ETR stänger
av och trippar frekvensomformaren. Kurvorna visar det
karaktäristiska nominella varvtalet vid dubbla det
motor
och I
motor
Page 32

Produktöversikt
VLT® AQUA Drive FC 202
2
nominella varvtalet och vid 0,2 x det nominella
motorvarvtalet.
Vid lägre varvtal stänger ETR av vid lägre temperatur
eftersom motorn kyls sämre. På så sätt skyddas motorn
från överhettning även vid låga varvtal. ETR-funktionen
beräknar motortemperaturen baserat på faktisk ström och
faktiskt varvtal. Den beräknade temperaturen visas som en
avläsningsparameter i parameter 16-18 Motor, termisk.
2.6.3 Nätavbrott
Vid nätavbrott fortsätter frekvensomformaren att köra tills
mellankretsspänningen är lägre än den lägsta tillåtna
spänningen, som normalt är 15 % under frekvensomformarens lägsta nominella spänningsnivå. Nätspänningen
före avbrottet och motorbelastningen bestämmer hur lång
tid som går innan frekvensomformaren utrullar.
Frekvensomformaren kan
(parameter 14-10 Nätfel) för olika typer av beteende under
nätavbrott,
Tripplås när DC-bussen är uttömd.
•
Utrullning med ygande start när nätspänningen
•
återkommer (parameter 1-73 Flygande start).
Kinetisk back-up.
•
Kontrollerad nedrampning .
•
kongureras
lingssignaler från två olika enheter. Den här funktionen gör
det möjligt att reglera ett system med olika återkopplingskrav. Frekvensomformaren fattar styrningsbeslut
genom att jämföra de två signalerna för att optimera
systemets prestanda.
Använd de 3 andra oberoende styrningsregulatorerna för
annan processutrustning, t.ex.kemiska matarpumpar,
ventilstyrning eller för ventilation med olika nivåer.
2.6.5 Automatisk omstart
Frekvensomformaren kan programmeras att automatiskt
starta om motorn efter en mindre tripp, t.ex. tillfällig
eektförlust eller uktuation. Denna funktion undanröjer
behovet av manuell återställning och förbättrar automatisk
drift för ärrstyrda system. Antalet omstartsförsök samt
varaktigheten mellan försöken kan begränsas.
Flygande start
2.6.6
Med ygande start kan frekvensomformaren synkroniseras
med en motor i drift som roterar med fullt, eller lägre,
varvtal och i båda riktningarna. Detta förhindrar trippar på
grund av överström. Det minimerar mekaniska påfrestningar på systemet eftersom motorn inte får någon plötslig
ändring av varvtalet när frekvensomformaren startas.
Flygande start
Med denna funktion kan du fånga in en motor som roterar
okontrollerat på grund av nätavbrott. Detta alternativ är
användbart för centrifuger och
Kinetisk back-up
Detta val säkerställer att frekvensomformaren körs så länge
som det nns energi i systemet. Vid korta nätavbrott
återställs driften när nätspänningen återkommer, utan att
tillämpningen någonsin stoppas eller förlorar styrning. Flera
varianter av kinetisk back-up kan väljas.
Frekvensomformarens beteende vid nätavbrott
kongureras i parameter 14-10 Nätfel och
parameter 1-73 Flygande start.
Inbyggda PID-regulator
2.6.4
De fyra inbyggda proportionella, integrerande och
deriverande (PID) regulatorerna är undanröjer behovet av
extra styrenheter.
En av PID-regulatorerna upprätthåller konstant styrning av
system med återkoppling som kräver att reglerat tryck,
öde, temperatur eller andra systemkrav upprätthålls.
Frekvensomformaren kan ge oberoende styrning av
motorvarvtalet som svar på återkopplingssignaler från
externa givare. Frekvensomformaren hanterar två återkopp-
äktar.
Fullt moment med reducerad
2.6.7
hastighet
Frekvensomformaren följer en variabel V/Hz-kurva som ger
fullt motormoment även vid reducerat varvtal. Fullt
utgående moment kan sammanfalla med motorns
maximala driftvarvtal. Detta är en skillnad jämfört med
omformare med variabelt moment som ger minskat
motormoment vid lågt varvtal, eller omformare med
konstant moment som ger överskottsspänning, värme och
motorljud vid mindre än fullt varvtal.
Förbikoppling av frekvens
2.6.8
I vissa tillämpningar kan systemet ha funktionsdugliga
varvtal som skapar en mekanisk resonans. Det kan ge
upphov till stora ljudstörningar och potentiella skador på
mekaniska komponenter i systemet. Frekvensomformaren
har fyra programmerbara bandbredder för förbikoppling av
frekvens. De gör att motorn kan hoppa över varvtal som
ger upphov till systemresonans.
2.6.9
Förvärmning av motor
För att förvärma en motor i kall eller fuktig miljö kan en
mycket låg likström överföras till motorn kontinuerligt för
att skydda den från kondens och kallstart. Detta kan
undanröja behovet av en värmare.
30 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 33

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Produktöversikt
Design Guide
2.6.10 Fyra programmerbara menyer
Frekvensomformaren har fyra menyer som kan
programmeras oberoende av varandra. Med externt
menyval är det möjligt att växla mellan oberoende
programmerade funktioner som aktiveras av digitala
ingångar eller ett seriellt kommando. Oberoende inställningar används till exempel för att ändra referenser eller
för drift under dag/natt eller sommar/vinter, eller för att
styra era motorer. Den aktiva menyn visas på LCP:n.
Inställningsdata kan kopieras från frekvensomformare till
frekvensomformare genom att information hämtas från
den avtagbara LCP:n.
2.6.11
Dynamisk broms uppnås med hjälp av:
Dynamisk bromsning
Bromsmotstånd
•
En broms-IGBT håller överspänningen under en
viss tröskelnivå genom att styra bromsenergin
från motorn till det anslutna bromsmotståndet
(parameter 2-10 Bromsfunktion = [1]).
AC-broms
•
Bromsenergin distribueras i motorn genom att
ändra förlustvillkoren i motorn. AC-bromsfunktionen kan inte användas i tillämpningar med
hög cykelfrekvens eftersom detta kan leda till
överhettning i motorn
(parameter 2-10 Bromsfunktion = [2]).
tillstånd innan frekvensomformaren tillåts för att starta
motorn.
2.6.15 Smart Logic Control (SLC)
Smart Logic Control (SLC) är en sekvens av användarde-
nierade åtgärder (se parameter 13-52 SL Controller-
funktioner [x]) som SLC:n utför när motsvarande
användardenierad händelse (se parameter 13-51 SL
Controller-villkor [x]) utvärderas som SANN av SLC:n.
Villkoret för en händelse kan vara en viss status eller att
uteekten från en logisk regel eller komparator är SANN.
Detta leder till en förutbestämd åtgärd, så som visas i
Bild 2.19.
2
2
2.6.12
Vissa tillämpningar kan kräva att en motor bromsas ineller
stoppas. Genom att ge likström till motorbromsarna kan
motorn undanröja behovet av en separat motorbroms.
likströmsbromsning kan ställas in till att aktiveras vid en
angiven frekvens eller vid mottagningen av en signal. Även
bromshastigheten kan programmeras.
2.6.13
I energisparläget stannas motorn automatiskt när behovet
är lågt under en viss tidsperiod. När behovet i systemet
ökar startar frekvensomformaren om motorn. Energisparläge ger energibesparingar och minskar slitaget på
motorn. Till skillnad från en setback-klocka kan frekvensomformaren alltid köra när det förinställda kravet om
"uppvaknande" nås.
2.6.14
Omformaren kan vänta på en extern system klar-signal
innan den startar. När den här funktionen är aktiv förblir
frekvensomformaren stoppad tills den tillåts starta. Drift
tillåten säkerställer att systemet eller extrautrustning är rätt
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 31
Likströmsbroms
Energisparläge
Drift tillåten
Bild 2.19 SLC-händelse och -åtgärd
Alla händelser och åtgärder är numrerade och sammanlänkade i par (tillstånd). Detta innebär att när händelse [0]
inträar (får värdet SANT) utförs åtgärd [0]. Därefter
kommer villkoren för händelse [1] att utvärderas, och om
resultatet blir SANT kommer åtgärd [1] att utföras osv.
Endast en händelse utvärderas åt gången. Om en händelse
efter utvärderingen får värdet FALSKT händer ingenting (i
SLC) under det pågående scan intervallet och inga andra
händelser kommer att utvärderas. Detta innebär att när SLC
startas utvärderas händelse [0] (och endast händelse [0]) vid
varje scan intervall. Det är bara om händelse [0] utvärderas
som SANT som SLC utför åtgärd [0] och börjar en
utvärdering av händelse [1]. Det går att programmera från
1 till 20 händelser och åtgärder.
När den sista händelsen/åtgärden har utförts börjar
sekvensen om igen från händelse [0]/åtgärd [0]. Bild 2.20
visar ett exempel med 4 händelser/åtgärder:
Page 34

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktöversikt
VLT® AQUA Drive FC 202
2
2.6.16
Frekvensomformaren nns att få med en STO-funktion via
styrplint 37. STO inaktiverar styrspänningen på eekthalv-
ledarna i frekvensomformarens utgångssteg. Detta
förhindrar i sin tur att den spänning som krävs för att
motorn ska rotera generas. När STO (plint 37) aktiveras
utfärdar frekvensomformaren ett larm, trippar enheten och
utrullar motorn till stopp. Manuell omstart krävs. STOfunktionen kan användas som ett nödstopp för
frekvensomformaren. I normalt driftläge, när STO inte är
nödvändigt, ska den vanliga stoppfunktion användas. När
automatisk omstart används måste du se till att kraven i
ISO 12100-2 paragraf 5.3.2.5 uppfylls.
Bild 2.20 Ordning för utförandet när fyra händelser/åtgärder
har programmerats
Komparatorer
Komparatorer används för jämförelse av kontinuerliga
variabler (utfrekvens, utström, analog ingång osv.) med
fasta förinställda värden.
Bild 2.21 Komparatorer
Logiska regler
Kombinera upp till tre booleska ingångar (SANT/FALSKTingångar) från timers, komparatorer, digitala ingångar,
statusbitar och händelser med hjälp av de logiska
operatorerna OCH, ELLER och INTE.
Bild 2.22 Logiska regler
De logiska reglerna, timern och komparatorerna är även
tillgängliga för användning utanför SLC-sekvensen.
Ett exempel på SLC nns i kapitel 4.3 Exempel på tillämp-
ningskonguration.3
32 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Ansvarsåtaganden
Det är användarens ansvar att säkerställa att personalen
som installerar och använder STO-funktionen:
En användare denieras som:
Standarder
För att STO på plint 37 ska få användas måste användaren
uppfylla alla säkerhetsvillkor, inklusive relevanta lagar,
bestämmelser och riktlinjer. STO-funktionen uppfyller
följande standarder:
Informationen och instruktionerna här är inte tillräckliga för
att STO-funktionen ska kunna användas på ett korrekt och
säkert sätt. Fullständig information om STO nns i VLT
Safe Torque O -handboken.
STO-funktion
Läser och förstår säkerhetsföreskrifterna rörande
•
hälsa, säkerhet och olycksprevention.
Har god kännedom om de allmänna riktlinjer och
•
säkerhetsråd som gäller den specika tillämpningen.
Integratör
•
Operatör
•
Servicetekniker
•
Underhållstekniker
•
SS-EN 954-1: 1996, kategori 3
•
IEC 60204-1: 2005, kategori 0 – okontrollerat
•
stopp
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 – STO-funktion
•
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006, kategori 3 PL d
•
ISO 14118: 2000 (SS-EN 1037) – förhindrande av
•
oavsiktlig start
®
Page 35

Produktöversikt
Design Guide
Skyddsåtgärder
Kvalicerad och kunnig personal krävs för instal-
•
lation och idrifttagning av säkerhetssystem.
Enheten måste installeras i ett IP54-apparatskåp
•
eller i motsvarande miljö. Vid särskild tillämpning
är en högre IP-grad nödvändigt.
Kabeln mellan plint 37 och den externa
•
säkerhetsenheten måste kortslutningsskyddas
enligt ISO 13849-2, tabell D.4.
Om externa krafter påverkar motoraxeln (till
•
exempel upphängda laster) måste ytterligare
åtgärder vidtas (till exempel en säkerhetshållbroms) för att eliminera potentiella risker.
2.7 Fel-, varnings- och larmfunktioner
Frekvensomformaren övervakar många aspekter av
systemets drift, inklusive nätförhållanden, motorbelastning
och -prestanda status för omformaren. Ett larm eller en
varning behöver inte nödvändigtvis indikera att det har
uppstått ett problem i själva frekvensomformaren. Det kan
vara ett tillstånd utanför omformaren som övervakas för
prestandagränser. Frekvensomformaren har olika förprogrammerade reaktioner på fel, varningar och larm. Välj
ytterligarelarm- och varningsfunktioner för att förbättra
eller ändra systemets prestanda.
Detta avsnitt beskriver vanliga larm- och varningsfunktioner. Om du känner till funktionerna kan du optimera
systemkonstruktionen och eventuellt undvika att införa
överödiga komponenter och funktioner.
Drift vid överhettning
2.7.1
2.7.3
Varning om hög och låg återkoppling
Vid drift med återkoppling övervakas de angivna höga
respektive låga återkopplingsvärdena av omformaren.
Displayen visar en blinkande varning om högt eller lågt
värde när så är lämpligt. Omformaren kan också övervaka
återkopplingssignaler vid drift utan återkoppling.
Signalerna påverkar inte frekvensomformaren vid drift utan
återkoppling, med de kan ge användbar systemstatusinformation lokalt eller via seriell kommunikation.
Frekvensomformaren hanterar 39 olika mätenheter.
2.7.4 Fasobalans eller fasbortfall
Överdriven strömrippel i DC-bussen indikerar antingen
fasobalans eller fasbortfall. När en eektfas till frekvensomformaren bryts är standardåtgärden att larma och trippa
enheten för att skydda DC-bussens kondensatorer. Det är
även möjligt att utfärda en varning och minska
utströmmen till 30 % av full ström, alternativt att utfärda
en varning och fortsätta normal drift. Att använda en
enhet kopplad till en obalanserad ledning kan vara
önskvärt tills obalansen är åtgärdad.
Varning för hög frekvens
2.7.5
Omformaren kan varna när motorvarvtalet är högt, vilket
är användbart vid inkoppling av ytterligare utrustning, som
pumpar eller kyläktar. En specik högfrekvensinställning
kan anges i frekvensomformaren. Om uteekten överstiger
den angivna varningsfrekvensen, visas en varning för hög
frekvens på enhetens display. En digital utgång på frekvensomformaren kan signalera till externa enheter att de ska
koppla in.
2
2
Som standard utfärdar frekvensomformaren ett larm och
trippar vid överhettning. Om Automatisk nedstämpling och
varning har valts kommer frekvensomformaren att varna
om tillståndet men fortsätta att köras och försök kyla ned
sig själv genom att reducera sin switchfrekvens. Om det är
nödvändigt reducerar den utfrekvensen.
Automatisk nedstämpling ersätter inte användarinställningen för nedstämpling för omgivningstemperaturer (se
kapitel 5.3 Nedstämpling för omgivningstemperaturer).
2.7.2
Varning för hög och låg referens
Vid drift utan återkoppling bestämmer referenssignalen
direkt omformarens varvtal. Displayen visar en blinkande
varning om att referensen är hög eller låg när
programmerat maximi eller minimi uppnås.
Varning för låg frekvens
2.7.6
Omformaren kan varna när motorvarvtalet är lågt, vilket är
användbart vid bortkoppling av utrustning. Med en
specik lågfrekvensinställning kan du välja när varningar
ska avges och externa enheter ska kopplas bort. Enheten
utfärdar inte varningar för låg frekvens då den är stoppad
eller vid uppstart förrän driftfrekvensen har uppnåtts.
2.7.7
Varning för hög ström
Den här funktionen liknarden som varnar för hög frekvens,
men här är det en inställning för hög ström som används
för att utfärda en varning och för att koppla in extra
utrustning. Funktionen är inte aktiv när omformaren är
stoppad eller vid uppstart förrän den angivna driftströmmen har uppnåtts.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 33
Page 36

130BP066.10
1107 v/m
0 - ** Drift/display
1 - ** Last/motor
2 - ** Bromsar
3 - ** Referens / Ramper
3,84 A 1 (1)
Huvudmeny
Produktöversikt
VLT® AQUA Drive FC 202
2
2.7.8 Varning för låg ström
Den här funktionen liknar den som varnar för låg frekvens
(se kapitel 2.7.6 Varning för låg frekvens), men här är det en
inställning för låg ström som används för att utfärda en
varning och för att koppla bort utrustning. Funktionen är
inte aktiv när omformaren är stoppad eller vid uppstart
förrän den angivna driftströmmen har uppnåtts.
2.7.9 Ingen last/trasigt band-varning
Denna funktion kan användas för att övervaka ett tillstånd
utan belastning, till exempel ett V-band. Efter att en låg
strömgräns har sparats i omformaren och om förlust av last
registreras, kan omformaren programmeras till att antingen
avge ett larm och trippa eller att fortsätta driften och
utfärda en varning.
2.7.10
Frekvensomformaren kan registrera förlust av seriell
kommunikation. En tidsfördröjning på upp till 99 s kan
väljas för att undvika en reaktion på grund av störningarna
på den seriella kommunikationsbussen. När fördröjningen
överskridits kan enheten utföra något av följande:
2.8
Förlorat seriegränssnitt
Bibehålla det senaste varvtalet.
•
Gå till maximalt varvtal.
•
Gå till ett förinställt varvtal.
•
Stoppa och utfärda en varning.
•
Användargränssnitt och
programmering
Frekvensomformarens funktioner programmeras med hjälp
av parametrar. Parametrar innehåller en funktionsbeskrivning och en meny med alternativ som du antingen
väljer på eller anger numeriska värden i. Ett exempel på en
programmeringsmeny visas i Bild 2.23.
Lokalt användargränssnitt
Vid lokal programmering når du parametrarna genom att
trycka på antingen [Quick Menu] eller [Main Menu ] på LCP.
Snabbmenyn används vid driftsättning och för motoregenskaper. Från huvudmenyn kommer du åt alla parametrar
och du kan utföra avancerad programmering.
Fjärranvändargränssnitt
För ärrprogrammering erbjuder Danfoss en programvara
för utveckling, lagring och överföring av programmeringsinformation. MCT 10-kongurationsprogramvara möjliggör
för användaren att ansluta en dator till frekvensomformaren och programmera i realtid istället för att använda
LCP-knappsatsen. Programmering kan även utföras oine
och sedan enkelt laddas ned till enheten. Du kan även föra
över hela frekvensomformarprolen till datorn för att
säkerhetskopiera eller analysera den. En USB-anslutning
och RS485-plint är tillgängliga för anslutning till frekvensomformaren.
MCT 10-kongurationsprogramvara kan hämtas gratis på
www.VLT-software.com. Du kan också beställa en CD-skiva
(artikelnummer 130B1000). I användarhandboken
detaljerade driftsinstruktioner. Se även kapitel 2.8.2 PC-
program.
Programmera styrplintarna
Varje styrplint har en
•
den kan utföra.
Parametrar som är kopplade till plinten aktiverar
•
funktionsvalen.
För att frekvensomformaren ska fungera korrekt
•
med hjälp av styrplintarna måste plintarna vara:
korrekt anslutna
-
programmerade för avsedd funktion.
-
Lokal manöverpanel
2.8.1
Den lokala manöverpanelen (LCP) är en grask display på
enhetens framsida. Den har ett användargränssnittet med
tryckknappar och visar statusmeddelanden, varningar och
larmsamt programmeringsparametrar med mera. En
numerisk display nns också tillgänglig med begränsade
displayalternativ. LCP visas i Bild 2.24.
specicerad funktion som
nns
Bild 2.23 Exempel på programmeringsmeny
34 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 37

Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
130BT308.10
Produktöversikt
Design Guide
alla potentialskillnader orsakade av jord- och skärmanslutningen till datorns USB-port.
Bild 2.25 USB-anslutning
2
2
2.8.2.1
MCT 10-kongurationsprogramvara
MCT 10-kongurationsprogramvara är utformad för idrifttagning och underhåll av frekvensomformaren, inklusive
handledd programmering av kaskadregulatorn, realtidsklocka, Smart Logic Control och förebyggande underhåll.
Med programmet är det enkelt att styra detaljer och det
ger en överblick över system, stora som små. Verktyget
hanterar alla frekvensomformarserier, VLT® Advanced
Active Filters och alla data relaterade till VLT®-mjukstartare.
Bild 2.24 Lokal manöverpanel
PC-program
2.8.2
Datorn ansluts med en vanlig USB-kabel (värd/enhet) eller
via RS485-gränssnittet.
UBS är en seriell buss som använder fyra skärmade
ledningar med jordstift 4 anslutet till datorns USBportskärmning. Att ansluta datorn till en
frekvensomformare via USB-kabel medför en potentiell risk
för skador på datorns USB-värdregulator. Alla standard-
Alla jordpotentialskillnader orsakade av underlåtenhet att
datorer tillverkas utan galvanisk isolation på USB-porten.
följa rekommendationerna i handboken kan skada USBvärdregulatorn genom USB-kabelskärmningen.
Det rekommenderas att du använder en USB-frånskiljare
med galvanisk isolation för att skydda datorns USB-värdregulator mot jordpotentialskillnader när datorn ansluts till
en frekvensomformare med en USB-kabel.
Använd inte en datorkraftkabel med jordkontakt när
datorn ansluts till frekvensomformaren med en USB-kabel.
En sådan minskar jordpotentialskillnaden men tar inte bort
Exempel 1: Datalagring i dator med MCT
kongurationsprogramvara
1. Anslut en dator till enheten via USB-porten eller
RS485-gränssnittet.
2. Öppna MCT 10-kongurationsprogramvara.
3. Välj USB-porten eller RS485-gränssnittet.
4.
Välj kopiera.
5.
Markera avsnittet projekt.
6.
Välj klistra in.
7.
Välj spara som.
Alla parametrar lagras nu.
Exempel 2: Dataöverföring från dator till frekvensomformare med MCT
10-kongurationsprogramvara
1. Anslut en dator till enheten via USB-porten eller
via RS485-gränssnittet.
2. Öppna MCT 10-kongurationsprogramvara.
3.
Välj Öppna om du vill visa de lagrade
4. Öppna den önskade len.
5.
Välj Skriv till frekvensomformare.
Alla parametrar överförs nu till frekvensomformaren.
10-
lerna.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 35
Page 38

2
Produktöversikt
En separat handbok för MCT 10-kongurationsprogramvara
nns tillgänglig. Hämta programvaran och handboken från
www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/.
VLT® AQUA Drive FC 202
2.8.2.2
VLT® Harmonics Calculation
Software MCT 31
Datorverktyget MCT 31 för övertonsberäkning gör det
enkelt att uppskatta övertonsdistorsion i en viss
applikation. Både övertonsdistorsion från frekvensomformare från Danfoss och frekvensomformare som inte
kommer från Danfoss, men som har olika tilläggsfunktioner
för övertonsreducering, som t ex Danfoss AHF-lter och
12–18-pulslikriktare, kan beräknas.
MCT 31 kan också hämtas från www.danfoss.com/Busines-
sAreas/DrivesSolutions/Softwaredownload/.
2.8.2.3
Programvaran Harmonic Calculation
Software (HCS)
HCS är en avancerad version av övertonsberäkningsverktyget. De beräknade resultaten jämförs med relevanta
standarder och kan skrivas ut efteråt.
Mer information
LEVEL=START
2.9
Underhåll
nns på www.danfoss-hcs.com/Default.asp?
Frekvensomformarmodeller från Danfoss på upp till 90 kW
är underhållsfria. Frekvensomformare för höga eekter (110
kW och mer) har inbyggda ltermattor. Dessa måste
rengöras då och då av operatören beroende på hur
dammig och smutsig miljön är. Underhållsintervall för
kyläktar (ungefär 3 år) och kondensatorer (ungefär 5 år)
rekommenderas för de esta miljöer.
Lagring
2.9.1
Precis som all annan elektronisk utrustning måste frekvensomformare förvaras torrt. Periodisk formering
(kondensatorladdning) är inte nödvändigt vid lagring.
Vi rekommenderar att utrustningen förvaras i sin obrutna
förpackning fram till installationen.
36 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 39

Systemintegrering
3 Systemintegrering
Design Guide
Detta kapitel beskriver nödvändiga överväganden vid
integrering av frekvensomformaren i en systemkonstruktionen. Kapitlet är indelat i följande avsnitt:
Kapitel 3.1 Omgivande miljöförhållanden
•
Omgivande driftförhållanden för frekvensomformaren, inklusive miljö, kapslingar, temperatur,
nedstämpling och andra överväganden.
Kapitel 3.3 Nätintegrering
•
Ingång till frekvensomformaren från nätsidan,
inklusive eekt, övertoner, övervakning,
kabeldragning, säkring och andra överväganden.
Kapitel 3.2 EMC, övertoner och skydd mot läckström
•
till jord
Ingång (regenerering) från frekvensomformaren
till elnätet, inklusive eekt, övertoner,
övervakning och andra överväganden.
Kapitel 3.4 Motorintegrering
•
Utgång från frekvensomformaren till motorn,
inklusive motortyper, belastning, övervakning,
kabeldragning och andra överväganden.
Kapitel 3.5 Extra ingångar och utgångar,
•
Kapitel 3.6 Mekanisk ritning
Integrering av frekvensomformarens ingång och
utgång för optimal systemkonstruktion, inklusive
matchning av frekvensomformare och motor,
systemegenskaper och andra överväganden.
En omfattande systemkonstruktion förutser potentiella
problemområden och implementerar den mest
kombinationen av funktioner. Informationen nedan ger
riktlinjer för hur du ska planera och specicera ett
styrsystem för en motor med frekvensomformare.
Driftfunktioner ger en rad olika designkoncept, allt från
enkel motorvarvtalsreglering till ett helt integrerat automationssystemet med återkopplingshantering,
driftstatusrapportering, automatiserade reaktioner på fel
samt ärrprogrammering med mera.
Ett komplett designkoncept innehåller detaljerade speci-
kationer om behov och användning.
Frekvensomformartyper
•
Motorer
•
Nätkrav
•
Styrstruktur och programmering
•
Seriell kommunikation
•
Utrustningens storlek, form och vikt
•
Krav på eekt- och styrkabel: typ och längd
•
eektiva
Säkringar
•
Extrautrustning
•
Transport och lagring
•
En praktisk guide nns i kapitel 3.9 Checklista för systemkonstruktion.
Om du känner till funktionerna och strategialternativen kan
du optimera systemkonstruktionen och eventuellt undvika
att införa överödiga komponenter och funktioner.
3.1 Omgivande miljöförhållanden
3.1.1 Fukt
Även om frekvensomformaren kan fungera korrekt vid hög
luftfuktighet ( upp till 95 % relativ luftfuktighet) bör
kondensation undvikas. Det föreligger särskilt risk för
kondensation när frekvensomformaren är kallare än fuktig
omgivande luft. Fukten i luften kan också kondensera på
de elektroniska komponenterna och orsaka kortslutningar.
Kondensation inträar in strömlösa enheter. Det är en god
idé att installera en värmare i apparatskåpet om det nns
risk för kondensation på grund av omgivande miljöförhållanden. Undvik installation på platser där det förekommer
frost.
Ett annat alternativ är att använda frekvensomformaren i
standby-läge (med enheten ansluten till nätet) för att
minska risken för kondensation. Kontrollera att
ningen är tillräcklig för att hålla kretsarna i
frekvensomformaren torra.
Temperatur
3.1.2
Den lägsta och högsta omgivningstemperaturen anges för
alla frekvensomformare. Genom att undvika extrema
omgivningstemperaturer förlänger du frekvensomformarens livslängd och maximerar systemets tillförlitlighet.
Följ de rekommendationer som anges för bästa möjliga
prestanda och livslängd för utrustningen.
Även om frekvensomformaren kan användas vid
•
så låga temperaturer som -10 °C, kan driften vid
nominell belastning endast garanteras vid
temperaturer på 0 °C eller mer.
Överskrid inte den maximala temperaturgränsen.
•
Elektroniska komponenters livslängd minskar med
•
50 % för varje tiograderssteg (°C) vid drift över
märktemperaturen.
eektavgiv-
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 37
Page 40

Systemintegrering
VLT® AQUA Drive FC 202
Även enheter med IP54-, IP55- och IP66-skydds-
•
klassicering måste användas inom de intervall
för omgivningstemperatur som anges.
Ytterligare luftkonditionering av apparatskåp eller
•
installationsplats kan krävas.
33
3.1.3 Kylning
Frekvensomformare avger eekt i form av värme. Följande
rekommendationer är nödvändiga för eektiv kylning av
enheterna.
Temperaturen på den luft som kommer in i
•
kapslingar får vara max. 40 °C.
Dygnsmedeltemperaturen får inte överstiga 35 °C.
•
Montera enheten så att kylningsluften kan öda
•
fritt genom kylfenorna. Mer information om
avstånd vid montering nns i
kapitel 3.6.1 Avstånd.
Tillhandahåll det minsta avståndet som krävs för
•
kylningens luftöde framtill och baktill. Mer
information om installationskrav nns i
handboken.
3.1.3.1
Frekvensomformaren har inbyggda äktar för att säkerställa
optimal kylning. Huvudäkten leder luftödet utmed
kylfenorna på kylplattan och kyler på så sätt luften på
insidan. Vissa eektstorlekar har en liten sekundär äkt
nära styrkortet som säkerställer att luften på insidan
cirkulerar för att undvika lokal överhettning.
Huvudäkten styrs av temperaturen inuti frekvensomformaren och varvtalet ökar gradvis i takt med
temperaturen. Det minskar buller och energiförbrukning
när behovet är lågt och säkerställer maximal kylning när
situationen kräver det. Fläktstyrningen kan anpassas via
parameter 14-52 Fläktstyrning för att passa alla tillämpningar, liksom för att skydda mot negativa
kylning i kallt klimat. Vid överhettning inuti frekvensomformaren stämplas switchfrekvensen och switchmönstret
ned. Mer information nns i kapitel 5.1 Nedstämpling.
Fläktar
eekter av
3.1.3.2
Beräkning av luftödet som krävs
för kylning av frekvensomformaren
Luftödet som krävs för att kyla en frekvensomformare,
eller era frekvensomformare i en kapsling, kan beräknas
på följande vis:
1. Avgör eektförlusten vid maximal uteekt för alla
frekvensomformare med hjälp av datatabellerna i
kapitel 7 Specikationer.
2. Addera eektförlustvärden för alla frekvensomformare som kan användas samtidigt. Summan är
värmen Q som ska överföras. Multiplicera
resultatet med faktor f, enligt Tabell 3.1. Till
exempel, f = 3,1 m3 x K/Wh vid havsytan.
3. Avgör den högsta temperaturen på luften som
kommer in i kapslingen. Subtrahera den här
temperaturen från temperaturen som krävs inuti
kapslingen, till exempel 45 °.
4. Dela totalen från steg 2 med totalen från steg 3.
Beräkningen uttrycks med formeln:
f xQ
V =
Ti − TA
där
V = luftöde i m3/h
f = faktor i m3 x K/Wh
Q = värme som ska överföras i W
Ti = temperatur inuti kapslingen i °C
TA = omgivande temperatur i °C
f = cp x ?
(specik värmekapacitet x luftdensitet)
OBS!
Specik värmekapacitet (cp) och luftdensitet (?) inte är
konstanter, utan beror på temperatur, fuktighet och
atmosfäriskt tryck. De beror därför på höjd över havet.
Tabell 3.1 visar typiska värden för faktor f och är beräknad
för olika höjder.
Höjd
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Specik värmekapacitetcpLuftdensitet?Faktor
[m] [kJ/kgK]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
[kg/m3] [m3·K/Wh]
f
Tabell 3.1 Faktor f, beräknad för olika höjder
38 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 41

Systemintegrering
Design Guide
Exempel
Vilket luftöde krävs för att kyla två frekvensomformare
som körs samtidigt (värmeförlusterna är 295 W och 1 430
W) och som är monterade i en kapsling med en högsta
omgivningstemperatur på 37 °C?
1. Summan av värmeförlusten från båda frekvensomformarna är 1 725 W.
2.
Genom att multiplicera 1 725 W med 3,3 m3 x
K/Wh får du 5 693 m x K/h.
3.
Genom att subtrahera 37 °C från 45 ° får du 8 °C
(= 8 K).
4. Genom att dela 5 693 m x K/h med 8 K får du:
711,6 m3h.
Om luftödet krävs i CFM ska du använda konverteringen
1 m3/h = 0,589 CFM.
I exemplet ovan gäller 711,6 m3/h = 418,85 CFM.
Motorgenererad överspänning
3.1.4
Likspänningen i mellankretsen (DC-bussen) ökar när
motorn fungerar som generator. Detta kan inträa på två
sätt:
Belastningen driver motorn när frekvensom-
•
formaren körs vid en konstant utfrekvens. Detta
kallas vanligen för negativ belastning.
Under deceleration om belastningens tröghet är
•
hög och om frekvensomformarens decelerationstid är inställd på ett kort värde.
Frekvensomformaren kan inte regenerera energi tillbaka till
ingången. Därför begränsar den mängden godkänd energi
från motorn när automatisk rampning är aktiverad. Om
överspänning sker under deceleration försöker frekvensomformaren göra detta genom att automatiskt förlänga
nedramptiden. Om detta misslyckas, eller om belastningen
driver motorn vid drift vid en konstant frekvens, stängs
omformaren av och visar ett felmeddelande när en kritisk
spänningsnivå i en DC-buss nås.
Ljudnivå
3.1.5
Ljudnivån från frekvensomformaren kommer från tre källor:
3.1.6
Vibrationer och stötar
Frekvensomformaren är testad enligt ett förfarande som
bygger på IEC 68-2-6/34/35 och 36. Dessa tester utsätter
enheten för 0,7 g-krafter i ett intervall av 18 till 1 000 Hz,
slumpmässigt, i tre riktningar under två timmar. Alla
frekvensomformare från Danfoss uppfyller de krav som
motsvarar dessa villkor, både om enheten monteras på
vägg eller golv eller om den monteras i apparatskåp eller
är reglad till väggar eller golv.
3.1.7 Aggressiva miljöer
3.1.7.1 Gaser
Aggressiva gaser som svavelväte, klorin eller ammoniak
kan skada frekvensomformarens elektriska och mekaniska
komponenter. Förorening av den kylande luften kan orsaka
gradvis nedbrytning av mönsterkort och lucktätningar.
Aggressiva föroreningar förekommer ofta i reningsverk och
simbassänger. Ett tydligt tecken på att miljön är aggressiv
är att koppar korroderar.
I aggressiva miljöer rekommenderas begränsade IPkapslingar tillsammans med kretskort med godkänd
ytbehandling. I Tabell 3.2 nns värden för godkänd
ytbeläggning.
OBS!
Frekvensomformaren levereras som standard med klass
3C2-ytbeläggning på kretskort. På begäran kan klass
3C3-ytbeläggning användas.
Klass
3C1 3C2 3C3
Gastyp Enhet
Havssalt Ej tillämpligt Ingen Saltsprej Saltsprej
Svaveloxider
Svavelväte
Klor
Väteklorid
Väteuorid
Ammoniak
Ozon
Kväve
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3
3
3
3
3
3
3
3
Medelvärde
0,1 0,3 1,0 5,0 10
0,01 0,1 0,5 3,0 10
0,01 0,1 0,03 0,3 1,0
0,01 0,1 0,5 1,0 5,0
0,003 0,01 0,03 0,1 3,0
0,3 1,0 3,0 10 35
0,01 0,05 0,1 0,1 0,3
0,1 0,5 1,0 3,0 9,0
Max.värde
1)
Medelvärde
Max.värde
1)
3 3
DC-busspolar (mellankrets)
•
RFI-lterdrossel
•
Interna äktar
•
Tabell 3.2 Klassiceringar av godkänd ytbeläggning
1) De maximala värdena är transienta toppvärden som inte får
överskridas längre än 30 minuter per dag.
Se Tabell 7.60 för klassicering av ljudnivå.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 39
Page 42

Systemintegrering
VLT® AQUA Drive FC 202
3.1.7.2 Exponering för damm
I praktiken går det ofta inte att undvika att frekvensomformare installeras i miljöer med stor exponering för
damm. Damm påverkar vägg- eller rammonterade frekvensomformare med IP55- eller IP66-skyddsklassicering, samt
33
sådana som monterats i apparatskåp med IP21- eller IP20skyddsklassicering. De tre aspekter som beskrivs i detta
avsnitt måste beaktas när frekvensomformare installeras i
sådana miljöer.
Reducerad kylning
Damm samlas på enhetens ytor samt på kretskort och
elektroniska komponenter inuti enheten. Dammet fungerar
som ett isolerande lager och hindrar värmeöverföringen till
den omgivande luften och minskar kylningskapaciteten.
Komponenterna blir varmare. Detta medför att de
elektroniska komponenterna åldras fortare, och frekvensomformarens livslängd förkortas. Dammavlagringar på
kylplattan på frekvensomformarens baksida påverkar också
enhetens livslängd negativt.
Kyläktar
Luftödet för kylning av frekvensomformaren genereras av
kyläktar, som vanligtvis nns på enhetens baksida. Damm
kan tränga in i äktrotorernas lager och fungerar då som
slipmedel. Det leder till lagerskador och äkthaveri.
Filter
Frekvensomformare för höga eekter är utrustade med
kyläktar som blåser ut varm luft från enhetens insida.
Över en viss storlek har de här äktarna ltermattor. Dessa
lter kan snabbt bli igensatta om de används i dammiga
miljöer. Under sådana omständigheter måste förebyggande
åtgärder vidtas.
Periodiskt underhåll
Under de förhållanden som beskrivs ovan bör frekvensomformaren rengöras under det periodiska underhållet.
Avlägsna damm från kylplattan och äktarna, och rengör
ltermattorna.
3.1.7.3
System som används i potentiellt explosiva atmosfär måste
uppfylla särskilda krav. EU-direktiv 94/9/EG beskriver driften
av elektroniska enheter i potentiellt explosiva atmosfärer.
Motorer som regleras av frekvensomformare i potentiellt
explosiva atmosfärer måste temperaturövervakas med en
PTC-temperaturgivare. Motorer med antändningsskyddsklass d eller e är godkända i den här miljön.
Potentiellt explosiv atmosfär
d-klassicering består i att eventuella gnistor som
•
uppstår innesluts i ett skyddat område. Inget
godkännande behövs, men däremot särskilda
ledningar och inneslutning.
En kombination av d och e är vanligast vid
•
användning i potentiellt explosiva atmosfärer.
Själva motorn har antändningsskyddsklass e,
OBS!
Installera aldrig en frekvensomformare i en potentiellt
explosiv atmosfär. Installera frekvensomformaren i ett
apparatskåp utanför området. Användning av ett
sinuslter vid frekvensomformarens utgång
rekommenderas också för att dämpa dU/dt-spänningsökning och toppspänning. Se till att motorkablarna hålls
så korta som möjligt.
OBS!
Frekvensomformare med tillvalet MCB 112 har PTBcertierad övervakningsfunktion för motorns
termistorgivare för potentiellt explosiva atmosfärer.
Skärmade motorkablar behövs inte när frekvensomformare används med sinusutgångslter.
3.1.8 Denitioner av IP-klassicering
Första
siran
Andra
siran
medan motorns kabeldragning och anslutningsområdet uppfyller e-klassiceringen.
Begränsningen för det e-klassade anslutningsområdet är den maximala spänning som tillåts i
området. En frekvensomformares utspänning är
vanligtvis begränsad till nätspänningen.
Modulering av utspänningen kan generera
otillåtna toppspänningsnivåer för e-klassicering.
Det har i praktiken visat sig att användningen av
ett sinuslter vid frekvensomformarens
utgångsström är ett eektivt sätt att dämpa den
höga toppspänningen.
Skydd mot inträngande
föremål
0 (inget skydd) (inget skydd)
1
=50 mm i diameter
2 12,5 mm i diameter Finger
3 2,5 mm i diameter Verktyg
4
=1,0 mm i diameter
5 Dammskyddat Ledning
6 Dammtätt Ledning
Skydd mot inträngande
vatten med skadlig
påverkan
0 (inget skydd)
1 Droppar som faller
vertikalt
2 Droppar vid 15°-lutning
3 Vattenstänk
4 Vattenstril
5 Vattenstrålar
6 Kraftfulla vattenstrålar
7 Tillfällig nedsänkning i
vatten
8 Långvarig nedsänkning i
vatten
Skydd mot beröring
av farliga delar med
Baksidan av handen
Ledning
40 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 43

Systemintegrering
Design Guide
Skydd mot inträngande
föremål
Ytterligare information
särskilt för
A Baksidan av handen
Första
bokstav
Extra
bokstav
Tabell 3.3 IEC 60529, denitioner av IP-klassicering
3.1.8.1
B Finger
C Verktyg
D Ledning
Ytterligare information
särskilt för
H Högspänningsenhet
M Enheten rör sig under
vattentest
S Enheten stillastående
under vattentest
W Väderförhållanden
Tillval av apparatskåp och
Skydd mot beröring
av farliga delar med
klassiceringar
Frekvensomformare från Danfoss är tillgängliga med tre
olika skyddsklassiceringar:
IP00 eller IP20 för installation i apparatskåp.
•
IP54 eller IP55 för lokal montering.
•
IP66 för kritiska omgivande förhållanden, som
•
extremt hög luftfuktighet eller höga koncentrationer av damm eller aggressiva gaser.
Radiofrekvensstörningar
3.1.9
Det huvudsakliga målet i praktiken är att skapa system
som fungerar stabilt utan radiofrekvensstörningar mellan
komponenterna. För att uppnå en hög störningsimmunitet
bör frekvensomformare med högkvalitativa RFI-lter
användas.
Använd kategori
uppfyller klass B-gränsvärdena för den allmänna
standarden SS-EN 55011.
Förse frekvensomformaren med varningsmeddelanden om
RFI-ltren inte motsvarar kategori C1 (kategori C2 eller
lägre). Ansvaret för korrekt märkning ligger hos operatören.
C1-lter som anges i SS-EN 61800-3. De
material. Den viktigaste fördelen är
emellertid den perfekta EMC-kompatibiliteten och kabeldragning för inbyggda
lter.
Externa tillval
•
Externa RFI-lter som installeras på
-
frekvensomformarens ingång orsakar ett
spänningsfall. Detta betyder att hela
nätspänningen inte når frekvensomformarens ingång och det kan bli
nödvändigt med en frekvensomformare
med högre nominell spänning. Motorkabellängden måste vara mellan 1–50 m
för att uppfylla EMC-gränserna. Det
uppstår då extra kostnader för material,
kabeldragning och montering. EMCkompatibiliteten har inte testats.
OBS!
Använd alltid ett RFI-lter i kategori C1 för att försäkra
dig om att frekvensomformarsystemet kan köras utan
störningar.
OBS!
VLT® AQUA Drive levereras som standard med inbyggda
RFI-lter som uppfyller kraven för kategori C1 (SS-EN
61800-3) för användning med 400 V-nätspänningssystem
och märkeekter på upp till 90 kW, eller kategori C2 för
märkeekter på 110 till 630 kW. VLT® AQUA Driveenheter uppfyller kraven för C1 med skärmade
motorkablar upp till 50 m, eller C2 med skärmade
motorkablar upp till 150 m. Mer information nns i
Tabell 3.4.
3.1.10 Överensstämmelse för PELV och
galvanisk Isolation
Skydd mot elektriska stötar säkerställs när elförsörjningen
är av PELV-typ och när installationen har utförts enligt
lokala och nationella bestämmelser för PELV.
För att PELV ska bibehållas på styrplintarna måste alla
anslutningar vara PELV-isolerande. Till exempel ska en
termistor är förstärkt/dubbelisolerad. Alla frekvensomformare från Danfoss har styr- och reläplintar som uppfyller
PELV (förutom jordad Delta över 400 V).
3 3
I praktiken nns det två sätt att hantera RFI-lter:
Inbyggt i utrustningen
•
Inbyggda
-
skåpet, men eliminerar extra kostnader
för installation, ledningsdragning och
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 41
lter upptar plats i apparat-
Du uppnår galvanisk (säker) isolering genom att uppfylla
kraven för förstärkt isolering och iaktta de föreskrivna
luftspalterna för krypströmmar. Dessa krav beskrivs i
standarden SS-EN 61800-5-1.
Elektrisk isolering ges enligt Bild 3.1. Komponenterna som
beskrivs uppfyller kraven för både PELV och galvanisk
isolation.
Page 44
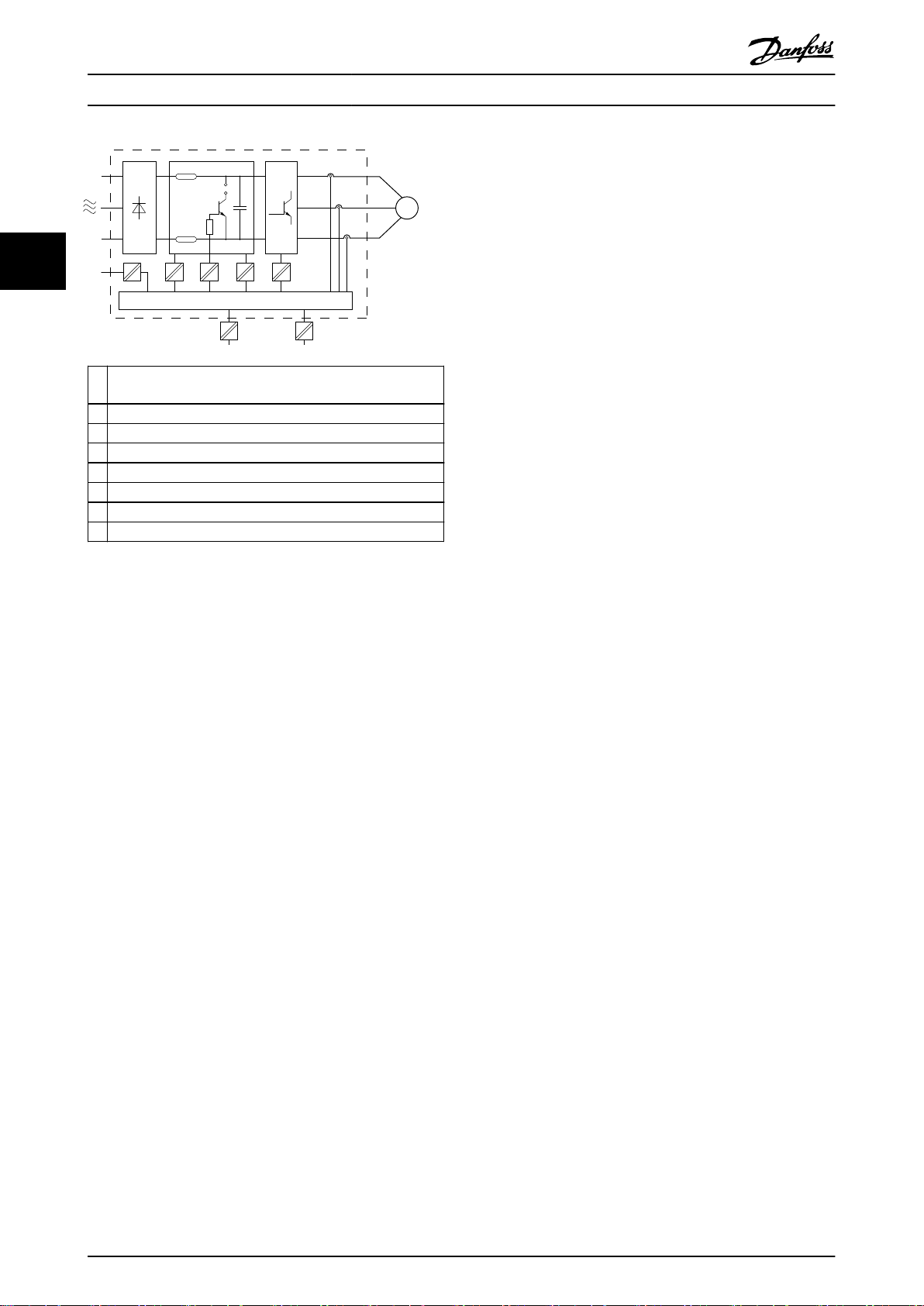
130BA056.10
1325 4
6
ba
M
Systemintegrering
VLT® AQUA Drive FC 202
3.2
3.2.1 Allmänt om EMC-emissioner
EMC, övertoner och skydd mot
läckström till jord
33
1 Strömförsörjning (SMPS) inkluderar signalisolering av V DC,
som indikerar mellanliggande strömnivå
2 Växelriktare för IGBT-enheter
3 Strömomvandlare
4 Optokopplare, bromsmodul
5 Kretsar för mätning av interna strömmar, RFI och temperatur
6 Anpassade reläer
a Galvanisk isolation för 24 V säkerhetskopiering
b Galvanisk isolation för standardbussens gränssnitt RS485
Bild 3.1 Galvanisk isolation
Installation på hög höjd
Installationer som överskrider gränserna för hög höjd
uppfyller eventuellt inte PELV-kraven. Isoleringen mellan
komponenter och kritiska delar kan vara otillräcklig. Det
nns risk för överspänning. Minska risken för överspänning
genom att använda externa skyddsenheter eller galvanisk
isolation.
Kontakta Danfoss om du vill ha mer information om PELV
vid installationer på hög höjd.
380–500 V (kapsling A, B och C): över 2 000 m
•
380–500 V (kapsling D, E och F): över 3 000 m
•
525–690 V: över 2 000 m
•
3.1.11
Precis som all annan elektronisk utrustning måste frekvensomformare förvaras torrt. Periodisk formering
(kondensatorladdning) är inte nödvändigt vid lagring.
Vi rekommenderar att utrustningen förvaras i sin obrutna
förpackning fram till installationen.
Lagring
Frekvensomformare (och andra elektriska enheter)
genererar elektriska eller magnetiska fält som kan störa
deras miljö. Den elektromagnetisk kompatibiliteten (EMC)
av denna påverkan beror på enhetens eekt och övertonsegenskaper.
Okontrollerad växelverkan mellan elektriska enheter i ett
system kan försämra kompatibilitet och minska driftens
pålitlighet. Störningarna kan till exempel vara övertonsströmmar på nätet, elektrostatiska urladdningar, snabba
spänningsuktueringar eller högfrekventa störningar.
Elektriska enheter både genererar störningar och påverkas
av störningar från andra genererande källor.
Elektriska störningar uppstår vanligtvis på frekvenser
mellan 150 kHz och 30 MHz. Luftburen störning från
frekvensomformaren på mellan 30 MHz och 1 GHz
genereras av växelriktaren, motorkabeln och
motorsystemet.
Kapacitiva strömmar i motorkabeln tillsammans med ett
högt dU/dt från motorspänningen genererar läckströmmar,
så som visas i Bild 3.2.
Användning av en skärmad motorkabel ökar läckströmmen
(se Bild 3.2), eftersom skärmade kablar har högre
kapacitans till jord än oskärmade kablar. Om läckströmmen
inte ltreras orsakar den större störning på nätströmmen i
radiofrekvensområdet under ca 5 MHz. Eftersom
läckströmmen (I1) förs tillbaka till enheten via skärmen (I3),
nns i princip bara ett litet elektromagnetiskt fält (I4) från
den skärmade motorkabeln enligt Bild 3.2.
Skärmen reducerar luftburen störning, men ökar den
lågfrekventa störningen i nätledningen. Motorkabelns
skärm ska anslutas både till frekvensomformarens kapsling
och motorns kapsling. Använd de inbyggda
skärmklämmorna för att undvika tvinnade skärmändar.
Tvinnade skärmändar ökar skärmimpedansen vid högre
frekvenser, vilket minskar skärmeekten och ökar
läckströmmen (I4).
Om du använder en skärmad kabel till relä, styrkabel,
signalgränssnitt och broms ska du ansluta skärmen till
kapslingen i båda slutpunkterna. I vissa situationer kan det
dock vara nödvändigt att göra ett avbrott på skärmen för
att undvika strömslingor.
Om skärmen ska anslutas till en monteringsplåt i frekvensomformaren måste monteringsplåten vara av metall så att
skärmströmmen kan gå tillbaka till enheten. Se också till
42 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
att det blir god elektrisk kontakt från monteringsplåten via
monteringsskruvarna till frekvensomformarens chassi.
Page 45

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Systemintegrering Design Guide
Om oskärmade kablar används uppfylls de esta immunitetskrav, men inte vissa emissionskrav.
bromskablarna vara så korta som möjligt. Undvik att lägga
kablar med känsliga signalnivåer längs med motor- eller
bromskablar. Radiostörningar över 50 MHz (luftburen)
För att reducera den totala störningsnivån från hela
genereras i synnerhet av styrelektroniken.
systemet (enhet och installation) ska motor- och
1 Jordledning 3 Växelströmsnätförsörjning 5 Skärmad motorkabel
2 Skärm 4 Frekvensomformare 6 Motor
3 3
Bild 3.2 Generering av läckströmmar
EMC-testresultat
3.2.2
Följande testresultat har erhållits vid tester utförda med ett system med en frekvensomformare, en skärmad styrkabel, en
styrdosa med potentiometer samt en separat motor och en skärmad motorkabel (Ölex Classic 100 CY) vid nominell switchfrekvens. I Tabell 3.4 anges maximala motorkabellängder för överensstämmelse.
OBS!
Förhållandena kan variera betydligt för olika kongurationer.
OBS!
Kontakta Tabell 3.17 angående parallella motorkablar.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 43
Page 46
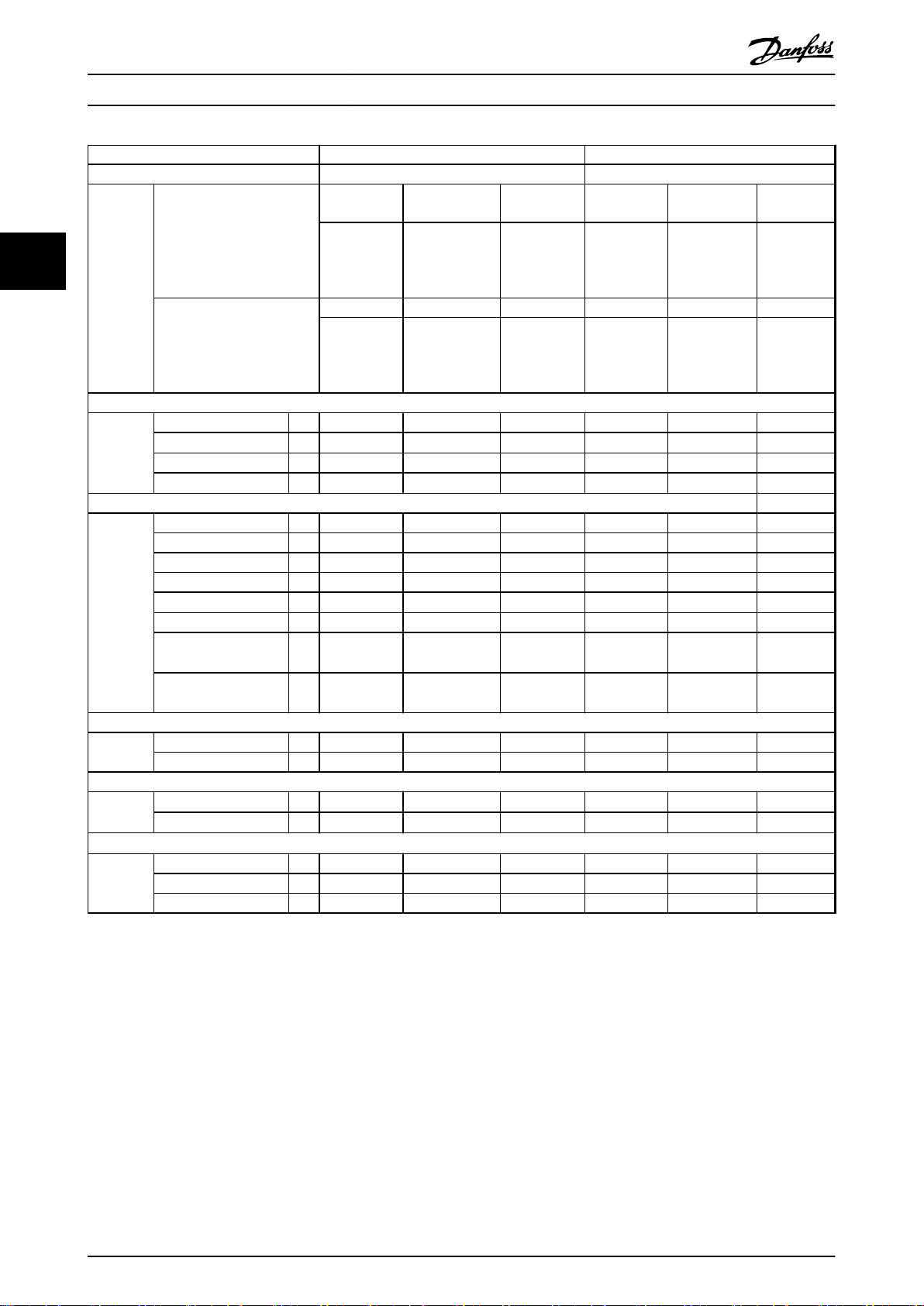
Systemintegrering
VLT® AQUA Drive FC 202
RFI-ltertyp Ledningsburen emission Luftburen emission
Kabellängd [m] Kabellängd [m]
Standarde
r
och
krav
33
SS-EN 55011 Klass B Klass A
Grupp 1
Bostäder,
Industrimiljö Industrihandel och
lätt
industri
Klass A
Grupp 2
miljö
Klass B Klass A
Grupp 1
Bostäder,
handel och
Industri-
miljö
lätt
industri
Klass A
Grupp 2
Industrimiljö
SS-EN/IEC 61800-3 Kategori C1 Kategori C2 Kategori C3 Kategori C1 Kategori C2 Kategori C3
First
environment
Hem och
kontor
First
environment
Hem och kontor
Second
environment
Industri
First
environment
Hem och
kontor
First
environment
Hem och
kontor
Second
environment
Industrial
H1
0,25–45 kW 200–240 V T2 50 150 150 Nej Ja Ja
FC 202
1,1–7,5 kW 200–240 V S2 50
100/150
5)
0,37–90 kW 380–480 V T4 50 150 150 Nej Ja Ja
7,5 kW 380–480 V S4
50 100/150
5)
100/150
100/150
5)
5)
Nej Ja Ja
Nej Ja Ja
H2
FC 202 0,25–3,7 kW 200–240 V T2 Nej Nej 5 Nej Nej Nej
5,5–45 kW 200–240 V T2 Nej Nej 25 Nej Nej Nej
1,1–7,5 kW 200–240 V S2 Nej Nej 25 Nej Nej Nej
0,37–7,5 kW 380–480 V T4 Nej Nej 5 Nej Nej Nej
4)
11–90 kW 380–380 V
T4 Nej Nej 25 Nej Nej Nej
7,5 kW 380–480 V S4 Nej Nej 25 Nej Nej Nej
11–30 kW 525–690 V
4)
37–90 kW 525–690 V
4)
1,
T7 Nej Nej 25 Nej Nej Nej
2,
T7 Nej Nej 25 Nej Nej Nej
H3
FC 202
0,25–45 kW 200–240 V T2 10 50 50 Nej Ja Ja
0,37–90 kW 380–480 V T4 10 50 50 Nej Ja Ja
H4
1)
FC 202
1)
Hx
1,1–30 kW 525–690 V
37–90 kW 525–690 V
T7 Nej 100 100 Nej Ja Ja
2)
T7 Nej 150 150 Nej Ja Ja
1,1–90 kW 525–600 V T6 Nej Nej Nej Nej Nej Nej
FC 202
15–22 kW 200–240 V S2 Nej Nej Nej Nej Nej Nej
11–37 kW 380–480 V S4 Nej Nej Nej Nej Nej Nej
Tabell 3.4 EMC-testresultat (emission) maximal motorkabellängd
1) Kapslingsstorlek B2.
2) Kapslingsstorlek C2.
3) Hx-versioner kan användas enligt SS-EN/IEC 61800-3 kategori C4.
4) T7, 37–90 kW överensstämmer med klass A grupp 1 med 25 m motorkabel. Vissa restriktioner gäller för installationen (kontakta Danfoss för
mer information).
5) 100 m för fas-neutral, 150 m för fas-fas (men inte från T T eller TT). Frekvensomformare med 1-fas är inte avsedda för 2-fasmatning från ett TT
eller TN-nätverk.
Hx, H1, H2, H3, H4 eller H5 anges i typkodposition 16–17 för
EMC-lter.
Hx - Inga inbyggda EMC-lter i frekvensomformaren.
H1 - Integrerat EMC-lter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2.
H2 – Ett begränsat RFI-lter som endast innehåller kondensatorer och utan en common-mode-spole. Uppfyller SS-EN 55011 klass A2 och SSEN/IEC 61800-3, kategori 3.
H3 - Integrerat EMC-lter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2.
H4 – Integrerat EMC-lter. Uppfyller SS-EN 55011 klass A1 och SS-EN/IEC 61800-3, kategori 2.
44 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 47

Systemintegrering
H5 – Marina versioner. Robust version. Uppfyller samma emissionsnivåer som H2-versioner.
Design Guide
3.2.3 Emissionskrav
EMC-produktstandarden för frekvensomformare denierar
fyra kategorier (C1, C2, C3 och C4) med specicerade krav
för emission och immunitet. Tabell 3.5 visar denitionen av
de fyra kategorierna och motsvarande klassicering från
SS-EN 55011.
Motsvarande
Kategori Denition
C1 Frekvensomformare som är instal-
lerade i rst environment (publika
nät, hem och kontor) med en
nätspänning som understiger 1 000
V.
C2 Frekvensomformare som är instal-
lerade i rst environment (publika
nät, hem och kontor) med en
nätspänning som understiger 1 000
V, som varken är yttbara eller
utrustade med kontakter och som
är avsedda för installation och
idrifttagning av en fackman.
C3 Frekvensomformare som är instal-
lerade i second environment
(industrinät) med en nätspänning
som understiger 1 000 V.
C4 Frekvensomformare som är instal-
lerade i second environment
(industrinät) med en nätspänning
som är lika med eller överstiger 1
000 V, med en märkspänning som
är lika med eller överstiger 400 A
eller som är avsedda att användas i
komplexa system.
Tabell 3.5 Förhållande mellan IEC 61800-3 och SS-EN 55011
När de generella (ledningsburna) emissionsstandarderna
används måste frekvensomformarna uppfylla gränsvärdena
i Tabell 3.6.
Miljö
First
environment
(publika nät,
hem och
kontor)
Allmän emissionsstandard
SS-EN/IEC 61000-6-3
Emissionsstandard för
bostads- och kontorsmiljöer
samt lätt industrimiljö.
emissionsklass
i SS-EN 55011
Klass B
Klass A Grupp 1
Klass A Grupp 2
Ingen
begränsning.
Gör en EMCplan.
Motsvarande
emissionsklass i
SS-EN 55011
Klass B
Miljö
Second
environment
(industrinät)
Tabell 3.6 Samband mellan allmänna emissionsstandarder och
SS-EN 55011
Allmän emissionsstandard
SS-EN/IEC 61000-6-4
Emissionsstandard för
industrimiljö.
Motsvarande
emissionsklass i
SS-EN 55011
Klass A Grupp 1
3.2.4 Immunitetskrav
Immunitetskraven för frekvensomformare beror på miljön
där de installeras. Kraven på industrimiljön är högre än
kraven för hem- och kontorsmiljöer. Alla frekvensomformare från Danfoss uppfyller kraven för industrimiljön
och uppfyller således också de lägre kraven för hem- och
kontorsmiljöer med en bred säkerhetsmarginal.
För att dokumentera immuniteten mot elektrisk störning
har följande immunitetstest utförts enligt följande
grundläggande standarder:
SS-EN 61000-4-2 (IEC 61000-4-2): Elektrostatiska
•
urladdningar (ESD): Simulering av elektrostatiska
urladdningar från människor.
SS-EN 61000-4-3 (IEC 61000-4-3): Inkommande
•
elektromagnetisk strålning, amplitudmodulerad
simulering av påverkan från radar- och radioutrustning och mobila kommunikationsapparater.
SS-EN 61000-4-4 (IEC 61000-4-4): Transienter:
•
Simulering av störningar som orsakas av till- och
frånslag i kontaktorer, reläer eller liknande
enheter.
SS-EN 61000-4-5 (IEC 61000-4-5): Stötpulser:
•
Simulering av transienter som orsakas av till
exempel blixtnedslag i närliggande installationer.
SS-EN 61000-4-6 (IEC 61000-4-6): RF Common
•
mode: Simulering av
rustning som sammanfogats med
anslutningskablar.
Se Tabell 3.7.
eekten från radiolänksut-
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 45
Page 48

Systemintegrering
VLT® AQUA Drive FC 202
Grundstandard
IEC 61000-4-42)
Acceptansvillkor B B B A A
Spänningsområde: 200–240 V, 380–500 V, 525–600 V, 525–690 V
Ledning
33
Motor
Broms 4 kV CM
Lastdelning 4 kV CM
Styrledningar
Standardbuss 2 kV CM
Reläledningar 2 kV CM
Applikation och fältbus-
stillval
LCP-kabel
Extern 24 V DC
Kapsling
Tabell 3.7 EMC-immunitetsschema
1) Injektion på kabelskärmen
2) Värden erhålls normalt genom testning
2)
Burst
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
0,5 kV/2 O DM
IEC 61000-4-5
2 kV/2 O DM
4 kV/12 O CM
1 kV/12 O CM
Surge
4 kV/2 O
4 kV/2 O
4 kV/2 O
2 kV/2 O
2 kV/2 O
2 kV/2 O
2 kV/2 O
2 kV/2 O
2)
1)
1)
1)
1)
1)
1)
1)
1)
2)
ESD
IEC
61000-4-2
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
Utstrålat elektromagnetiskt
fält
IEC 61000-4-3
10 V/m —
mode-spänning
RF common
IEC 61000-4-6
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
Motorisolering
3.2.5
Moderna motorer utformade för användning med frekvensomformare har en hög isoleringsgrad för att fungera med
den nya generationen IGBT med hög verkningsgrad och
dU/dt. Vid uppgradering av gamla motorer ska motorisoleringen kontrolleras eller anpassas med dU/dt-lter eller
ett sinuslter vid behov.
För motorkabellängder = den maximala kabellängden som
anges i kapitel 7.5 Kabelspecikationer rekommenderas
värdena för motorisoleringsklassicering som anges i
Tabell 3.8. Om en motor har lägre isoleringsmärkdata
rekommenderar vi användning av dU-/dt- eller sinuslter.
Nominell nätspänning [V] Motorisolering [V]
UN=420
420 V< UN= 500 Förstärkt ULL=1 600
500 V< UN= 600 Förstärkt ULL=1 800
600 V< UN= 690 Förstärkt ULL=2 000
Tabell 3.8 Motorisolering
Standard ULL=1 300
Lagerströmmar i motorn
3.2.6
För att minimera lager- och axelströmmar ska du jorda
följande till den drivna maskinen:
Frekvensomformare
•
Motor
•
Driven maskin
•
Standardstrategier för störningsminskning
1. Använd isolerade lager.
2. Tillämpa ordentliga installationsprocedurer:
2a Kontrollera att motorn och belastnings-
motorn är rätt inriktade:
2b Följ noggrant EMC-installationsråden.
2c Förstärk PE:n så att den höga frekven-
simpedansen är lägre i PE:n än i
ingångsströmledningarna.
2d Se till att det
nns en bra högfrekvensanslutning mellan motorn och
frekvensomformaren, till exempel en
skärmad kabel som har 360° anslutning i
motorn och frekvensomformaren.
2e Se till att impedansen från frekvensom-
formaren till jord är lägre än maskinens
jordningsimpedans. Detta kan vara svårt
för pumpar.
46 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 49

175HA034.10
Systemintegrering
Design Guide
2f Skapa en direkt jordanslutning mellan
motorn och belastningsmotorn.
3. Sänk IGBT-switchfrekvensen.
4. Ändra växelriktarens vågform, 60° AVM kontra
SFAVM.
5. Installera ett axeljordningssystem eller använd en
isolerande koppling.
6. Använd ledande smörjmedel.
7. Använd minsta varvtalsinställningar om möjligt.
8. Försök att säkerställa att nätspänningen är
balanserad till jord. Det kan vara svårt för IT-, TToch TN-CS-system eller jordade system.
9. Använd ett dU/dt- eller sinuslter.
Övertoner
3.2.7
Elektriska enheter med diodlikriktare, t.ex. lysrör, datorer,
kopiatorer, faxar, viss laboratorieutrustning och telekommunikationssystem, kan lägga till övertonsdistorsionen på
strömförsörjningen från nät. Frekvensomformare använder
en ingång för en diodbrygga som också kan bidra till
övertonsdistorsion.
nivå för att undvika överbelastning i transformatorn,
spolarna och kablarna.
Förkortningar Beskrivning
f
1
I
1
U
1
I
n
U
n
n överton för
Tabell 3.9 Övertonsrelaterade förkortningar
Grundläggan
ström (I1)
Ström I
Frekvens
[Hz]
Tabell 3.10 Transformed icke sinusformad ström
Ström Övertonsström
I
Inström 1,0 0,9 0,4 0,2 < 0,1
grundläggande frekvens
grundström
grundläggande spänning
övertonsströmmar
övertonsspänning
Övertonsström (In)
de
1
50 250 350 550
RMS
I
5
I
1
I
7
I
I
5
I
7
11-49
3 3
I
11
Frekvensomformaren drar inte ström likartat från strömledningen. Denna icke sinusformade ström har komponenter
som är multipler av den grundläggande strömfrekvensen.
Dessa komponenter kallas för övertoner. Det är viktigt att
styra den totala övertonsdistorsionen på nätet. Även om
övertonsströmmarna inte direkt påverkar den elektriska
energiförbrukningen så genererar de värme i ledningar och
transformatorer och kan påverka andra enheter på samma
strömledning.
3.2.7.1
Övertonsanalys
Olika egenskaper i en byggnads elektriska system avgör
exakt hur mycket övertoner omformaren bidrar med till en
anläggnings THD och dess möjlighet att uppfylla IEEEstandarder. Att generellt säga hur mycket övertoner en
frekvensomformare bidrar med till en viss anläggning är
svårt. En analys av systemets övertoner kan vid behov
utföras för att avgöra utrustningens påverkan.
En frekvensomformare drar en icke sinusformad ström från
nätet, vilket ökar ingångsströmmen I
. En icke
RMS
sinusformad ström omvandlas genom Fourier-analys och
delas upp i sinusformade strömmar med olika frekvens, det
vill säga olika övertonsströmmar IN med 50 Hz eller 60 Hz
som grundfrekvens.
Övertonerna påverkar inte den direkta eektförbrukningen
men ökar värmeförlusterna i installationen (transformatorer,
spolar och kablar). I anläggningar med hög likriktarbelastning bör därför övertonsströmmarna hållas på en låg
Tabell 3.11 Övertonsströmmar jämfört med RMS-ingång
Ström
Bild 3.3 Mellankretsspolar
OBS!
Vissa övertonsströmmar kan störa kommunikationsutrustning som är ansluten till samma transformator, eller
orsaka resonans i kombination med kondensatorer för
korrigering av eektfaktor.
För att säkerställa låga övertonsströmmar är frekvensomformaren utrustad med passiva lter. DC-spolar minskar
den totala övertonsstörningen (THD) till 40 %.
Spänningsdistortionen på nätspänningen är en funktion av
övertonsströmmen multiplicerad med nätimpedansen för
den aktuella frekvensen. Den totala spänningsdistortionen
(THD) beräknas ur de enskilda övertonsspänningarna med
formeln:
2
THD
2
+ U
U
=
+ ... + U
5
7
U1
2
N
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 47
Page 50

Systemintegrering
VLT® AQUA Drive FC 202
3.2.7.2 Emissionskrav gällande övertoner
3.2.7.4
Övertonseekter i ett
strömdistributionssystem
Utrustning som är ansluten till det allmänna strömförsörjningsnätet
Tillval Denition
33
1 IEC/SS-EN 61000-3-2 Klass A för 3-fasbalanserad
utrustning (för professionell utrustning upp till 1 kW
total eekt).
2 IEC/SS-EN 61000-3-12 Utrustning 16 A–75 A och
professionell utrustning från 1 kW upp till 16 Afasström.
Tabell 3.12 Emissionsstandarder gällande övertoner
3.2.7.3
Övertoner, testresultat (emission)
Eektstorlekar upp till PK75 i T2 och T4 uppfyller IEC/SS-EN
61000-3-2 klass A. Eektstorlekar från P1K1 och upp till
P18K i T2 och upp till P90K i T4 uppfyller IEC/SS-EN
61000-3-12, tabell 4. Eektstorlekar P110–P450 i T4
uppfyller också IEC/SS-EN 61000-3-12 även om det inte
krävs eftersom strömmen ligger över 75 A.
Tabell 3.13 visar att kortslutningsströmmen från försörjning
Ssc vid kopplingen mellan användarens system och det
allmänna systemet (R
S
= 3 × R
SC
× U
SCE
) är större eller lika med:
sce
× I
= 3 × 120 × 400 × I
nät
equ
equ
I Bild 3.4 är en transformator ansluten på primärsidan till
en gemensam kopplingspunkt PCC1 på medelnätspänning.
Transformatorn har impedans Z
och matar ett ertal
xfr
laster. Den gemensamma kopplingspunkten där alla laster
är sammankopplade är PCC2. Varje last är ansluten via
kablar med en impedans på Z1, Z2, Z3.
Bild 3.4 Litet distributionssystem
Faktiskt (normal)
Gräns för
R
=120
sce
Faktiskt (normal)
Gräns för
R
=120
sce
Tabell 3.13 Övertoner, testresultat (emission)
Individuell övertonsström In/I1 (%)
I
5
40 20 10 8
40 25 15 10
Övertonsström, distortionsfaktor (%)
I
7
THD PWHD
46 45
48 46
I
11
I
13
Det åligger installatören eller användaren av utrustningen
att säkerställa, efter konsultation med det lokala elbolaget
om nödvändigt, att utrustningen bara är ansluten till en
källa med en kortslutningsström Ssc som är större än eller
lika med det som anges i ekvationen.
Kontakta det lokala elbolaget om du vill ansluta andra
eektstorlekar till det allmänna spänningsnätet.
Uppfyller olika systemnivåriktlinjer:
De övertonsströmsdata som nns i Tabell 3.13 ges enligt
IEC/SS-EN 61000-3-12 med referens till produktstandarden
för elektriska drivsystem. De kan användas som grund för
beräkning av övertonströmmarnas påverkan på strömförsörjningssystemet, och för dokumentation av att relevanta
regionala riktlinjer uppfylls: IEEE 519-1992; G5/4.
Övertonsströmmar från icke-linjära laster orsakar
spänningsdistortion beroende på spänningsfallet på distributionssystemets impedans. Högre impedans medför
högre nivåer av spänningsdistortion.
Strömdistortion påverkar maskinprestanda och påverkar
den individuella lasten. Spänningsdistortion påverkar
systemets prestanda. Det går inte att fastställa spänningsdistortionen i PCC enbart baserat på lastens
övertonsprestanda. För att kunna förutsäga distortionen i
PCC måste distributionssystemets konguration och
relevanta impedanser vara kända.
En vanlig term för att beskriva impedansen i ett nät är
kortslutningsförhållande R
, denierat som förhållandet
sce
mellan den synbara kortslutningseekten vid nätanslutningen på PCC (Ssc) och den beräknade synbara eekten
för lasten (S
S
R
=
sce
S
där
S
sc
ce
equ
=
equ
U
Z
f örsörjning
).
2
och
S
= U × I
equ
equ
48 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 51

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegrering Design Guide
Det nns två negativa eekter av övertoner
Övertonsströmmar bidrar till systemförluster (i
•
kabeldragning och transformator).
Övertonsspänningsdistortion orsakar störningar
•
på andra laster och ökar förlusterna i andra laster.
Bild 3.5 Negativa eekter av övertoner
3.2.7.5 Övertonsbegränsningar, standard
och krav
Kraven för över övertonsbegränsning kan vara:
Tillämpningsspecika krav.
•
Standarder som måste följas.
•
De tillämpningsspecika kraven relaterar till en specik
installation där det nns tekniska skäl att begränsa
övertoner.
Exempel
En transformator på 250 kVA med två motorer på 110 kW
ansluta räcker om en av motorerna är ansluten direkt och
den andra får sin strömförsörjning via en frekvensomformare. Om båda motorerna försörjs av
frekvensomformare är transformatorn dock underdimensionerad. Om ytterligare åtgärder utförs för
övertonsminskning inom installationen, eller om frekvensomformare med låg övertonshalt används kan båda
motorerna köras med frekvensomformare.
Det nns olika begränsningsstandarder, regler och
rekommendationer för övertoner. Olika standarder gäller
inom olika geograska områden och verksamheter.
Följande standarder är de vanligaste:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Detaljerad information om varje standard nns i AHF
005/010 Design Guide.
I Europa är maximal THVD 8 % om anläggningen är
ansluten till det allmänna nätet. Om anläggningen har en
egen transformator, är gränsen 10 % THVD. VLT® AQUA
Driveär utformad för att tåla 10 % THVD.
3.2.7.6
I fall där ytterligare övertonsbegränsning krävs kan Danfoss
erbjuda ett stort urval av begränsningsutrustning. Dessa är:
Vilken som är den bästa lösningen beror på era faktorer:
Överväg alltid övertonsbegränsning om transformatorbelastningen har en ickelinjär eekt på 40 % eller mer.
Danfoss erbjuder verktyg för beräkning av övertoner, se
kapitel 2.8.2 PC-program.
3.2.8
Följ gällande nationella och lokala regler om skyddsjordning av utrustning med en läckström som överskrider
3,5 mA.
Frekvensomformarens teknik innefattar högfrekvent växling
vid hög eekt. Detta ger upphov till en läckström i
jordanslutningen.
Läckström till jord har olika orsaker och beror på olika
delar av systemkongurationen, inklusive:
Övertonsbegränsning
12-pulsfrekvensomformare
•
AHF-lter
•
Frekvensomformare med låg övertonshalt
•
Aktiva lter
•
Nätet (bakgrundsdistortion, nätobalans, resonans
•
och typ av nätförsörjning (transformator/
generator)).
Tillämpning (lastprol, antal laster och laststorlek).
•
Lokala/nationella krav/föreskrifter (IEEE519, IEC,
•
G5/4, etc.).
Totalkostnad för ägaren (startkostnad, eektivitet,
•
underhåll etc.).
Läckström till jord
RFI-ltrering
•
Motorkabellängd
•
Motorkabelns skärmning
•
Frekvensomformareekt
•
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 49
Page 52

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THVD=0%
THVD=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
Systemintegrering
VLT® AQUA Drive FC 202
Se SS-EN/IEC 61800-5-1 och SS-EN 50178 för mer
information.
Användning av jordfelsbrytare (RCD)
Om jordfelsbrytare (RCD) används måste följande krav
uppfyllas:
33
Använd endast jordfelsbrytare av typ B eftersom
•
de kan känna av både växelström och likström.
Använd jordfelsbrytare med fördröjning för att
•
förhindra fel på grund av transienta jordströmmar.
Dimensionera jordfelsbrytarna enligt systemkon-
•
gurationen och med hänsyn till omgivningen.
Bild 3.6 Motorkabellängdens och eektstorlekens inverkan på
läckström. Eektklass a > eektklass b
Läckströmmen innehåller era frekvenser som härrör från
både nätfrekvensen och switchfrekvensen. Huruvida
switchfrekvensen registreras eller ej beror på vilken typ av
jordfelsbrytare som används.
Läckströmmen beror också på ledningsdistortionen.
Bild 3.7 Ledningsstörningar påverkar läckströmmen
Enligt SS-EN/IEC 61800-5-1 (standard för varvtalsstyrda
elektriska drivsystem) måste du iaktta särskild försiktighet
om läckströmmen överstiger 3,5 mA. Förstärk jordning med
följande krav på skyddande jordanslutning:
Jordledning (plint 95) med en ledararea på minst
•
10 mm
Två separata jordledningar som båda uppfyller
•
2.
dimensioneringskraven.
Bild 3.8 Huvudsakliga bidragande faktorer till läckström
50 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 53

130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Systemintegrering
Design Guide
Mängden läckström som detekteras av jordfelsbrytaren
beror på jordfelsbrytarens gränsfrekvens.
Bild 3.9 Påverkan av jordfelsbrytarens gränsfrekvens på
läckström
3.3
Nätintegrering
3.3.1 Nätkongurationer och EMC-eekter
3.3.2
Lågfrekventa nätstörningar
3.3.2.1 Icke sinusformad nätförsörjning
Nätspänningen är sällan en enhetlig sinusformad spänning
med konstant amplitud och frekvens. Detta beror delvis på
laster som drar icke sinusformad ström från nätet eller som
har icke-linjära egenskaper, som datorer, tv-apparater,
enheter med pulserande strömförsörjning, lågenergilampor
och frekvensomformare. Avvikelser är oundvikliga och kan
accepteras inom vissa gränser.
3.3.2.2 Överensstämmelse med EMCdirektiv
I största delen av Europa är grunden för objektiv
utvärdering av nätspänningskvaliteten EU-direktivet om
elektromagnetisk kompatibilitet för utrustning. Överensstämmelse med dessa bestämmelser säkerställer att alla
enheter och nätverk anslutna till elektriska distributionssystem uppfyller sina avsedda tillämpningar utan att
generera problem.
Standard Denition
SS-EN 61000-2-2, SS-EN
61000-2-4, SS-EN 50160
SS-EN 61000-3-2,
61000-3-12
SS-EN 50178 Övervakar elektronisk utrustning för
Denierar nätspänningsgränserna som
ska efterlevas i oentliga och industriella kraftnät.
Reglerar nätstörningar som skapas av
anslutna enheter.
användning i ströminstallationer.
3 3
Det nns era typer av växelströmsnätsystem för att ge
ström till frekvensomformare. De påverkar alla systemets
EMC-egenskaper. Femledarsystemen TN-S anses vara de
bästa för EMC ,medan det isolerade IT-systemet är det
sämsta.
systemtyp Beskrivning
TNnätsystem
TN-S Ett femledarsystem med separata neutralledare (N)
TN-C Ett fyrledarsystem med en kombinerad neutral- och
TTnätsystem
IT-nätsystem Ett isolerat fyrledarsystem där neutralledaren
Tabell 3.14 Typer av växelströmsnät
Det nns två typer av TN-nätdistributionssystem:
TN-S och TN-C.
och skyddsjordsledare (PE). Det ger bäst EMCegenskaper och överföring av störningar undviks.
skyddsjordsledare (PE) i hela systemet. Den
kombinerade neutral- och skyddsjordsledaren
resulterar i dåliga EMC-egenskaper.
Ett fyrledarsystem med en jordad neutralledare och
individuellt jordade frekvensomformare. Systemet
har goda EMC-egenskaper om jordningen är
korrekt utförd.
antingen inte är jordad eller jordad via impendans.
Tabell 3.15 Designstandarder för nätspänningskvalitet
3.3.2.3
Störningsfria frekvensomformare
Alla frekvensomformare genererar nätstörningar.
Nuvarande standarder denierar endast frekvensområden
upp till 2 kHz. Vissa frekvensomformare växlar nätstörningarna i området över 2 kHz, något som inte behandlas i
standarden, och kallar dem för störningsfria. Gränser för
det här området undersöks just nu. Frekvensomformare
växlar inte nätstörningar.
3.3.2.4
Så här uppstår nätstörningar
Nätstörningsdistorsion av den sinusformade vågformen
som orsakas av pulserande inströmmar kallas i allmänhet
för övertoner. Det är härlett från Fourier-analys och
analyseras upp till 2,5 kHz, vilket motsvarar den 50:e
övertonen i nätfrekvensen.
Frekvensomformarens ingångslikriktare genererar den här
typiska formen av övertonsstörningar i nätet. När frekvensomformare ansluts till 50 Hz-nätspänningssystem visar
den tredje övertonen (150 Hz), den femte övertonen (250
Hz) eller den sjunde övertonen (350 Hz) starkast eekt. Det
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 51
Page 54

Systemintegrering
VLT® AQUA Drive FC 202
totala övertonsinnehållet kallas också total övertonsdistorsion (THD).
3.3.2.5 Eekten av nätstörningar
33
Övertoner och spänningsuktueringar är två typer av
lågfrekventa nätstörningar. Deras utseende är mer olika vid
källan än vid någon annan punkt i nätsystemet när en last
är ansluten. Därför måste en rad inuenser bestämmas
kollektivt när en bedömning av nätstörningseekten görs.
Dessa inkluderar nätspänning, struktur och laster.
Varningar om underspänning och högre funktionsförluster
inträa på grund av nätstörningar.
kan
Varningar om underspänning
Felaktiga spänningsmätningar på grund av
•
distorsion av den sinusformade nätspänningen.
Orsakar felaktiga eektmätningar eftersom endast
•
mätning av sant eektivvärde tar övertonsinnehållet i beräkningen.
Större förluster
Övertoner minskar den aktiva, synbara och
•
reaktiva eekten.
Förvanskar elektriska laster, vilket leder till
•
hörbara störningar i andra enheter eller, i värsta
fall, till att de förstörs.
Förkortar livslängden på enheter på grund av
•
uppvärmning.
OBS!
För stort övertonsinnehåll belastar utrustning för eektfaktorkorrigering och kan till och med medföra att
utrustningen blir obrukbar. Därför bör du tillhandahålla
drosslar för utrustning för eektfaktorkorrigering när för
stort harmoniskt innehåll föreligger.
3.3.3 Analysera nätstörningar
För att undvika en försämrad nätspänningskvalitet nns ett
ertal metoder tillgängliga för att analysera system eller
enheter som genererar övertonsströmmar. Program för
nätanalys, som program för beräkning av övertoner (HCS),
analyserar systemkonstruktioner för att hitta övertoner.
Specika motåtgärder kan testas i förväg och på så vis
försäkra efterföljande systemetkompatibilitet.
OBS!
Danfoss har stor EMC-expertis och erbjuder förutom
EMC-analyser med detaljerade utvärderingar eller
nätberäkningar även utbildningskurser, seminarier och
workshoppar.
3.3.4 Alternativ för att minska
nätstörningarna
I allmänhet minskas nätstörningar från frekvensomformare
genom att amplituden för pulserande strömmar begränsas.
Detta förbättrar eektfaktorn ? (lambda).
Flera metoder rekommenderas för att undvika övertonsströmmar på nätet:
Ingångsdrosslar eller DC-bussdrosslar i frekven-
•
somformarna.
Passiva lter.
•
Aktiva lter.
•
Tunna DC-bussar.
•
Frekvensomformare AFE (active front end) och
•
låga övertoner.
Likriktare med 12, 18 eller 24 pulsar per cykel.
•
Radiofrekvensstörningar
3.3.5
Frekvensomformare genererar radiofrekvensstörningar (RFI)
på grund av deras strömpulser med variabel bredd.
Frekvensomformare och motorkablar sänder ut dessa
komponenter och leder dem till nätspänningssystemet.
RFI-lter används för att minska denna störning på näten.
De ger bullerimmunitet som skyddar enheter mot
ledningsburna högfrekventa störningar. De minskar även
störning som avges till strömkabeln eller strålning från
nätkablarna. Filtren är avsedda att begränsa störningar till
en angiven nivå. Inbyggda lter är ofta standardutrustning
klassade för specika immunitet.
OBS!
Alla VLT® AQUA Drivefrekvensomformare är utrustade
med integrerade nätstörningsdrosslar som standard.
Om du vill analysera nätspänningssystemet går du tillhttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START och hämtar
programvaran.
52 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
3.3.6 Klassicering av driftplatsen
Att känna till kraven på den miljö som frekvensomformaren är avsedd att användas i är den viktigaste faktorn
vad gäller EMC-överensstämmelse.
Page 55

Systemintegrering
Design Guide
3.3.6.1 First environement/klass B: Bostads
Driftplatser som är anslutna till allmänna lågspänningsnätet, inklusive lätta industrimiljöer, klassiceras som
rst environment/klass B. De har inte egna distributionstransformatorer med hög eller medelhög spänning för ett
separat nätsystem. Miljöklassiceringarna gäller både inuti
och utanför byggnader. Några exempel är näringsverksamhetsområden, bostadshus, restauranger, parkeringsplatser
och underhållningslokaler.
3.3.6.2 Second environment/klass A:
Industri
Industrimiljöer är inte anslutna till det allmänna kraftnätet.
Istället har de egna distributionstransformatorer med hög
eller medelhög spänning. Miljöklassiceringarna gäller
både inuti och utanför byggnader.
De denieras som industriella och kännetecknas av
specika elektromagnetiska villkor:
Närvaro av vetenskapliga, medicinska eller indust-
•
riella enheter.
Växling av stora induktiva och kapacitiva laster.
•
Förekomst av starka magnetiska fält (till exempel
•
på grund av hög ström).
3.3.6.3
I områden med mellanspänningstransformatorer som är
tydligt avgränsade från andra områden, bestämmer
användaren vilken typ av miljö deras anläggning ska klassiceras som. Användarena ansvarar för att säkerställa den
elektromagnetiska kompatibilitet som krävs för problemfri
drift av alla enheter under vissa villkor. Några exempel på
specialmiljöer är shoppingcenter, snabbköp, bensinstationer, kontorsbyggnader och lagerlokaler.
3.3.6.4
Specialmiljöer
Varningsmärken
3.3.8
Korrigering av eektfaktor
Utrustning för eektfaktorkorrigering används för att
minska fasförskjutningen (f) mellan spänningen och
strömmen och yttar eektfaktorn närmare ett (cos f ).
Detta behövs när ett stort antal induktiva belastningar,
som motorer eller driftdon, används i ett eldistributionssystem. Frekvensomformare med en isolerad DC-buss drar
inte någon reaktiv eekt från nätet och de genererar inte
några fasväxlingar vid korrigering av eektfaktorn. De har
en cos f på ungefär 1.
Därför behöver motorer med varvtalsreglering inte ta
hänsyn till dem vid eventuell dimensionering av utrustning
för korrigering av eektfaktorn. Den ström som utrustningen för faskorrigering drar ökar dock eftersom
frekvensomformare genererar övertoner. Last- och
värmefaktorn på kondensatorerna ökar eftersom antalet
enheter som genererar övertoner ökar. Därför bör drosslar
monteras i utrustning för korrigering av eektfaktorn.
Drosslarna förhindrar även resonanser mellan lastinduktanser och kapacitansen. Omvandlare med cos f < 1 kräver
också drosslar i utrustningen för korrigering av eekt-
faktorn. Ta även hänsyn till den högre reaktiva eektnivån
för kabeldimensioner.
Fördröjning av inström
3.3.9
Säkerställ att kretssystemet för ingångens överspänningssydd fungerar korrekt genom att iaktta en viss
tidsfördröjning mellan efterföljande tillämpningar av
inström.
I Tabell 3.16 visas minimitiden för intervallet mellan tillämp-
ningar av ingångsströmmen.
Spänningsingång [V]
Väntetid [s]
Tabell 3.16 Fördröjning av inström
380 415 460 600
48 65 83 133
3 3
Om en frekvensomformare inte uppfyller kategori C1 ska
den förses med ett varningsmeddelande. Detta är
användarens ansvar. Störningseliminering beror på
klasserna A1, A2 och B i SS-EN 55011. Användaren ansvar
ytterst för att enheterna klassiceras korrekt och för
kostnaderna för att avhjälpa EMC-problem.
3.3.7
Använda med isolerad ingångskälla
Större delen av nätströmmen i USA refereras till jord. Även
om det inte är vanligt i USA så kan inströmmen vara en
isolerad källa. Alla frekvensomformare från Danfoss kan
användas med såväl en isolerad ingångskälla som med
jordade referenseektledningar.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 53
3.3.10
Transienter är korta spänningstoppar runt några tusen volt.
De kan inträa i alla sorters eldistributionssystem, både i
industri- och bostadsmiljöer.
Blixtnedslag är en vanlig orsak till transienter. De kan dock
även orsakas av att stora laster växlas på eller av, eller av
att annan nättransientsutrustning växlas, t.ex. utrustning
för korrigering av eektfaktor. Transienter kan även orsakas
av kortslutningar, trippning av maximalbrytare i eldistributionssystem och induktiv koppling mellan parallellkablar.
Nättransienter
Page 56

Systemintegrering
VLT® AQUA Drive FC 202
I standarden SS-EN 61000-4-1 beskrivs de olika
transienterna och hur mycket energi de innehåller. Deras
negativa eekter kan begränsas på olika sätt. Gasfyllda
ventilavledare och gniststräckor ger ett primärt skydd mot
högenergitransienter. Som sekundärt skydd använder de
esta elektroniska enheter, däribland frekvensomformare,
33
spänningsberoende motstånd (varistorer) för att minska
transienter.
3.3.11 Drift med en reservgenerator
Använd reservkraftsystem om fortsatt drift är nödvändigt
även i händelse av nätfel. De används också parallellt med
det allmänna kraftnätet för att uppnå högre nätspänning.
Detta är vanligt för kombinerade värme- och kraftenheter
eftersom det utnyttjar den höga verkningsgraden som
uppnås med den här typen av energikonvertering. När
reservkraften kommer från en generator är nätimpedansen
vanligtvis större än när kraften kommer från det allmänna
nätet. Detta innebär att den totala övertonsdistorsionen
ökar. Med korrekt konstruktion kan generatorer användas i
ett system med enheter som genererar övertoner.
Systemkonstruktioner med en reservgenerator
rekommenderas.
När systemet växlas från nätdrift till generatordrift
•
ökar oftast övertonslasten.
Konstruktörer måste beräkna eller mäta ökningen
•
av övertonslasten för att säkerställa att nätspänningskvaliteten uppfyller kraven i bestämmelserna
så att övertonsproblem och skador på utrustningen förhindras.
Asymmetriska laster på generatorn måste
•
undvikas, eftersom det orsakar större förluster
och kan medföra att den totala övertonsdistorsionen ökar.
En 5/6-sicksackkoppling av generatorlindningen
•
dämpar den femte och sjunde övertonen, men
tillåter att den tredje ökar. En 2/3-sicksackkoppling minskar den tredje övertonen.
Om det är möjligt bör operatören koppla från
•
utrustningen för korrigering av eektfaktorn,
eftersom det kan uppstå resonanser i systemet.
Drosslar eller aktiva absorptionslter kan dämpa
•
övertoner samt resistiva belastningar som körs
parallellt.
Kapacitiva laster som körs parallellt skapar en
•
extra belastning på grund av oförutsägbara
resonanseekter.
En mer exakt analys kan utföras med ett nätanalysprogram,
t.ex. HCS. Om du vill analysera nätspänningssystemet går
du till http://www.danfoss-hcs.com/Default.asp?LEVEL=START
och hämtar programvaran.
Vid drift med enheter som genererar övertoner visas de
maximala lasterna, baserat på problemfri drift, i tabellen
över övertonsgränser.
Övertonsgränser
B2- och B6-likriktare ? max. 20 % av nominell
•
generatorlast.
B6-likriktare med drossel ? max. 20–35 % av
•
nominell generatorlast, beroende på sammansättning.
Reglerad B6-likriktare ? max. 10 % av nominell
•
generatorlast.
3.4 Motorintegrering
3.4.1 Överväganden vid motorval
Frekvensomformaren kan generera elektriska påfrestningar
på en motor. Ta därför följande eekter på motorn i
beaktande när du matchar en motor med en frekvensomformare:
isoleringspåfrestningar
•
lagerpåfrestningar
•
termisk påfrestning.
•
Sinus- och dU/dt-lter
3.4.2
Utgångslter är fördelaktiga för vissa motorer eftersom de
minskar elektriskt påfrestning och tillåter längre
kabellängd. Alternativen för utgångslter omfattar
sinuslter (även kallad LC-lter) och dU/dt-lter. dU/dt-lter
minskar den kraftiga ökningen av pulsen. Sinuslter jämnar
ut spänningspulserna och konverterar dem till en nästan
sinusformad utgångsspänning. Med vissa frekvensomformare uppfyller sinuslter kraven i SS-EN 61800-3 RFIkategori C2 för oskärmade motorkablar, se
kapitel 3.7.5 Sinuslter.
Mer information om
kapitel 3.7.5
Mer information om sinusltrens och dU/dt-ltrens beställningsnummer nns i och kapitel 6.2.9 dU/dt-lter.
3.4.3
Korrekt jordning av motorn är av yttersta vikt för personsäkerheten och för att uppfylla de elektriska EMC-kraven för
lågspänningsutrustning. Korrekt jordning är nödvändigt för
att användning av skärmning och lter ska vara eektiv.
Konstruktionsinformation måste verieras för korrekt EMCimplementering.
Sinuslter och kapitel 3.7.6 dU/dt-lter.
Korrekt motorjordning
sinuslter- och dU/dt-ltertillval nns i
54 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 57

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Systemintegrering Design Guide
3.4.4 Motorkablar
Rekommendationer och specikationer för motorkablar
nns i kapitel 7.5 Kabelspecikationer.
Det går att använda alla typer av standardmässiga,
asynkrona 3-fasmotorer tillsammans med frekvensomformaren. Fabriksinställningen gäller för medurs
motorrotation med följande anslutningar från frekvensomformarens utgång:
Syftet med skärmning är att:
Minska den luftburna störningens styrka.
•
Förbättra störningsimmuniteten för enskilda
•
enheter.
Skärmningen fångar de högfrekventa komponenterna och
skickar tillbaka dem till störningskällan, som i det här fallet
är frekvensomformaren. Skärmade motorkablar ger också
bättre immunitet mot störningar från närliggande externa
källor.
Inte ens bra skärmning eliminerar strålningen helt. Systemkomponenter som nns i strålningsmiljöer måste köras
utan degradering.
Ansluta era motorer
3.4.6
OBS!
Problem kan uppstå vid start och vid låga varvtal om
motorstorlekarna skiljer sig mycket, eftersom små
motorers relativt höga ohmska motstånd i statorn kräver
högre spänning vid start och vid lågt antal varv/minut.
3 3
Bild 3.10 Plintanslutning för rotation medurs och moturs
Ändra rotationsriktningen genom att skifta två faser i
motorkabeln, eller genom att ändra inställningen för
parameter 4-10 Motorvarvtal, riktning.
3.4.5
Frekvensomformare genererar pulser med skarpa kanter i
utgångarna. Dessa pulser innehåller högfrekventa
komponenter (som sträcker sig in i GHz-området), vilket
ger upphov till oönskad strålning från motorkabeln.
Skärmade motorkablar minskar denna strålning.
Motorkabelskärmning
Frekvensomformaren kan styra era parallellkopplade
motorer. Följande måste beaktas när parallell motoranslutning används:
VCC+-läge kan användas i vissa tillämpningar.
•
Motorernas sammanlagda strömförbrukning får
•
inte överstiga frekvensomformarens nominella
utström I
Använd inte gemensam kopplingsanslutning för
•
INV.
långa kabellängder, se Bild 3.12.
Den totala motorkabellängd som anges i
•
Tabell 3.4 är godkänd så länge som parallellkablarna hålls korta (mindre än 10 meter var), se
Bild 3.14 och Bild 3.15.
Var uppmärksam på spänningsfall längs
•
motorkablarna, se Bild 3.15.
•
Använd
LC-lter för långa parallellkablar, se
Bild 3.15.
För långa kablar utan parallellkoppling, se
•
Bild 3.16.
OBS!
När motorerna är parallellkopplade ska
parameter 1-01 Motorstyrningsprincip ställas till [0] U/f.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 55
Page 58

130BD774.10
130BD775.10
130BD776.10
130BD777.10
130BD778.10
130BD779.10
Systemintegrering
VLT® AQUA Drive FC 202
33
Bild 3.11 Gemensam kopplingsanslutning för korta
kabellängder
Bild 3.14 Parallellkablar med belastning
Bild 3.12 Gemensam kopplingsanslutning för långa
kabellängder
Bild 3.13 Parallellkablar utan belastning
Bild 3.15 LC-lter för långa parallellkablar
Bild 3.16 Långa kablar i seriekoppling
56 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 59

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Systemintegrering Design Guide
Kapslingsstorlek Eekt [kW] Spänning [V] 1 kabel [m] 2 kablar [m] 3 kablar [m] 4 kablar [m]
A1, A2, A4, A5 0,37–0,75
400 150 45 8 6
500 150 7 4 3
A2, A4, A5 1,1–1,5
A2, A4, A5 2,2–4
A3, A4, A5 5,5–7,5
B1, B2, B3, B4,
C1, C2, C3, C4
A3 1,1–7,5 525–690 100 50 33 25
B4 11–30 525–690 150 75 50 37
C3 37–45 525–690 150 75 50 37
Tabell 3.17 Maximal kabellängd för varje parallellkabel
Isolering av styrledning
3.4.7
11–90
400 150 45 20 8
500 150 45 5 4
400 150 45 20 11
500 150 45 20 6
400 150 45 20 11
500 150 45 20 11
400 150 75 50 37
500 150 75 50 37
och skyddar motorn från att bli överhettad
genom att utfärda en varning eller bryta
Övertonsstörningar som skapas av motorkabeldragning
kan försämra styrsignaler i omformarens styrkablar och
strömmen till motorn. Egenskaperna för ETR visas
i Bild 3.17.
resultera i styrningsfel. Motorkablar och styrkablar ska
placeras separat. Störningseekterna minskar avsevärt med
då de är separerade.
Avståndet mellan styrkablar och motorkablar bör
•
vara mer än 200 mm.
Avdelare är viktiga när avstånden är korta för
•
annars kan störningar kopplas in eller överföras.
Styrkabelskärmningar måste anslutas i båda
•
ändarna på samma sätt som motorkabelskärmningar.
Skärmade kablar med tvinnade ledare ger den
•
bästa dämpningen. Dämpningen av magnetfältet
ökar från runt 30 dB med enkel skärmning till 60
dB med dubbel skärmning, och till ungefär 75 dB
om ledarna dessutom är tvinnade.
Bild 3.17 Egenskaper för elektronisk-termiskt relä
3 3
Termiskt motorskydd
3.4.8
Frekvensomformaren ger termiskt motorskydd på era sätt:
Momentgräns skyddar motorn från överbe-
•
lastning, oberoende av varvtal.
Minsta varvtal begränsar driftvarvtalsområdet, till
•
exempel mellan 30 och 50/60 Hz.
Max. varvtal begränsar det maximala utvarvtalet.
•
En ingång är tillgänglig för en extern termistor.
•
Elektronisk-termiska relä (ETR) för asynkron-
•
X-axeln visar förhållandet mellan I
motor
och I
motor
nominellt.
Y-axeln visar tiden i sekunder innan ETR stänger av och
trippar frekvensomformaren. Kurvorna visar det karaktäristiska nominella varvtalet vid dubbla det nominella
varvtalet och vid 0,2 x det nominella motorvarvtalet.
Vid lägre varvtal stänger ETR av vid lägre temperatur
eftersom motorn kyls sämre. På så sätt skyddas motorn
från överhettning även vid låga varvtal. ETR-funktionen
beräknar motortemperaturen baserat på faktisk ström och
faktiskt varvtal.
motorer simulerar ett bimetallrelä baserat på
interna mätningar. ETR mäter faktisk ström,
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 57
varvtal och tid för att beräkna motortemperatur,
Page 60

Systemintegrering
VLT® AQUA Drive FC 202
3.4.9 Utgångskontaktor
Även om det vanligen inte rekommenderas så är drift med
en utgångskontaktor mellan motorn och frekvensomformaren inte skadligt för frekvensomformaren. Genom att
stänga en tidigare öppen utgångskontaktor kan en
33
frekvensomformare som är igång anslutas till en stoppad
motor. Detta kan leda till att frekvensomformaren att
trippa och visa ett fel.
3.4.10 Bromsfunktioner
Bromsa lasten på motoraxeln genom att använda antingen
en statisk (mekanisk) eller dynamisk broms.
3.4.11
Dynamisk bromsning
Dynamisk broms uppnås på följande sätt:
Motståndsbroms: En broms-IGBT håller överspän-
•
ningen under en viss tröskelnivå genom att styra
bromsenergin från motorn till bromsmotståndet.
AC-broms: Bromsenergin distribueras i motorn
•
genom att ändra förlustvillkoren i motorn. ACbromsfunktionen kan inte användas i
tillämpningar med hög cykelfrekvens eftersom
detta kan leda till att motorn överhettas.
DC-broms: En övermodulerad likström som läggs
•
till växelströmmen fungerar som virvelströmsbroms.
3.4.12
Bromsmotståndsberäkning
Ett bromsmotstånd krävs för att hantera värmeavgivning
och ökning av DC-busspänning under elektriskt genererad
bromsning. Med hjälp av ett bromsmotstånd garanteras att
energin absorberas i bromsmotståndet och inte i frekvensomformaren. Mer information nns i Bromsmotstånd
Design Guide.
Driftcykelsberäkning
Om mängden kinetisk energi som överförs till motståndet i
varje bromsperiod inte är känd, kan medeleekten räknas
ut baserat på cykeltiden och bromstiden (så kallad
intermittent driftcykel). Motståndets intermittenta driftcykel
är ett mått på driftcykeln när motståndet är aktivt (se
Bild 3.18). Motorleverantörer använder ofta S5 när de anger
den tillåtna belastningen som är ett uttryck av intermittent
driftcykel.
Bild 3.18 Bromsmotståndets driftcykel
Beräkna den intermittent driftcykeln för motståndet på
följande sätt:
Driftcykel = tb/T
T = cykeltiden i sekunder
tb är bromstiden i sekunder (av den totala cykeltiden)
Danfoss erbjuder bromsmotstånd med driftcykel på 5 %,
10 % och 40 %. Om en driftcykel på 10 % används, kan
bromsmotstånden absorbera bromseekt under 10 % av
cykeltiden. Resterande 90 % av cykeltiden används för att
avsätta överskottsvärme.
Säkerställ att bromsmotståndet är dimensionerat för att
klara den krävda bromstiden.
Beräkning av bromsmotstånd
Genom att välja motståndsvärdena med utgångspunkt från
toppeekten och mellankretsspänningen kan du förhindra
att frekvensomformaren kopplas ur av säkerhetsskäl när
motorn bromsas. Beräkna bromsmotståndets motstånd på
följande sätt:
2
Udc
=
R
br
O
P
topp
Bromsmotståndets prestanda beror på DC-busspänningen
(Udc).
Udc är spänningen vid vilken bromsen aktiveras. FC-seriens
bromsfunktion bestäms beroende på nätförsörjningen.
Nätförsörjningsingång
[V AC]
FC 202 3 x 200–240 390 405 410
FC 202 3 x 380–480 778 810 820
FC 202 3 x 525–600
FC 202 3 x 525–600
FC 202 3 x 525–690 1099 1109 1130
1)
2)
Broms
aktiv
[V DC]
943 965 975
1099 1109 1130
Varning
för hög
spänning
[V DC]
Larm om
över-
spänning
[V DC]
Tabell 3.18 DC-busspänning (Udc)
1) Kapslingsstorlek A, B, C
2) Kapslingsstorlek D, E, F
58 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 61

Systemintegrering
Design Guide
Säkerställ att frekvensomformaren kan bromsa vid det
högsta bromsmomentet (M
använd bromsmotståndet Rrec. Formeln kan skrivas så här:
2
U
x100
R
O =
rec
?
motor
?
VLT
Om ett högre motstånd för bromsmotståndet väljs kan
bromsmoment på 160 %/150 %/110 % inte uppnås, och
det nns en risk att frekvensomformaren kopplar ur DCbussens överspänning för att skydda sig.
För bromsning vid lägre moment, till exempel 80 %, kan
du installera ett bromsmotstånd med lägre märkeekt.
Beräkna storleken med formeln för att beräkna R
Frekvensomformare med kapslingsstorlek D och F
innehåller er än en bromschopper. Använd ett
bromsmotstånd per bromschopper för dessa kapslingsstorlekar.
I VLT
dataalternativen och beräkningsstegen beskrivs mer
detaljerat. Bland annat beskrivs:
P
motor
har normalt värdet 0,90
har normalt värdet 0,98
®
Bromsmotstånd MCE 101 Design Guide nns senaste
Beräkning av bromseekten
•
Beräkning av bromsmotståndets toppeekt
•
Beräkning av bromsmotståndets genomsnittliga
•
eekt
Bromsning av tröghet
•
xM
dc
br( % )
x?
) på 160 % genom att
br(%)
x?
VLT
motor
.
rec
3.4.14
Bromsmotståndets eektövervakning
Dessutom ger övervakningen av bromseekten möjlighet
till avläsning av den momentana eekten och medeleffekten för en viss tid. Bromsen kan också övervaka
eektutvecklingen och säkerställa att den inte överskrider
ett gränsvärde som anges i parameter 2-12 Bromsef-
fektgräns (kW). I parameter 2-13 Bromseektövervakning
väljs vilken funktion som ska utföras när eekten som
överförs till bromsmotståndet överstiger den inställda
gränsen i parameter 2-12 Bromseektgräns (kW).
Bromsmotstånd och broms-IGBT
OBS!
Övervakning av bromseekten uppfyller inte en
säkerhetsfunktion. Bromsmotståndets krets är inte
skyddad för läckström till jord.
Bromsen skyddas mot kortslutning i bromsmotståndet och
bromstransistorn övervakas för att säkerställa att
kortslutning i transistorn upptäcks. Genom att använda en
reläutgång eller en digital utgång kan du skydda
bromsmotståndet mot den överbelastning som kan uppstå
i samband med fel i frekvensomformaren.
Överspänningsstyrning (OVC) kan väljas som alternativ
bromsfunktion i parameter 2-17 Överspänningsstyrning. Om
DC-busspänningen ökar är den här funktionen aktiv för alla
enheter. Funktionen säkerställer att frekvensomformaren
inte trippar. Detta görs genom att öka utgångsfrekvensen
för att begränsa spänningen från DC-bussen. Funktionen är
användbar t.ex. för att förhindra tripp när nedramptiden är
för kort. Nedramptiden kommer då att förlängas.
3 3
3.4.13
EMC (tvinnade kablar/skärmning)
I överensstämmelse med frekvensomformarens angivna
EMC-prestanda ska skärmade kablar/ledningar användas.
Om du använder oskärmade kablar bör du tvinna
ledningarna för att reducera elektrisk störning från
ledningarna mellan bromsmotståndet och frekvensomformaren.
Använd metallskärm för förbättrad EMC-prestanda.
Kabeldragning för bromsmotstånd
3.4.15
Frekvensomformarens verkningsgrad
Frekvensomformarens verkningsgrad påverkas mycket lite
av dess belastning.
Detta innebär också att frekvensomformarens
verkningsgrad inte påverkas om andra U/f-kurvor väljs. U/fkurvan påverkar däremot motorns verkningsgrad.
Verkningsgraden minskar något när switchfrekvensen har
satts till ett värde över 5 kHz. Verkningsgraden minskar
också något om motorkabeln är längre än 30 m.
Energiverkningsgrad
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 59
Page 62

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Systemintegrering
VLT® AQUA Drive FC 202
Beräkning av verkningsgrad
Beräkna frekvensomformarens verkningsgrad vid olika
varvtal och belastning med hjälp av Bild 3.19. Multiplicera
faktorn i diagrammet med den specika verkningsgradsfaktorn som nns i kapitel 7.1 Elektriska data.
33
Bild 3.19 Typiska verkningsgradskurvor
Exempel: Anta en frekvensomformare på 55 kW, 380–480 V
AC vid 25 % belastning och 50 % varvtal. Diagrammet visar
att 0,97 nominell verkningsgrad för en frekvensomformare
på 55 kW är 0,98. Den faktiska verkningsgraden är då: 0,97
x 0,98 = 0,95.
Motorverkningsgrad
Verkningsgraden för en motor som drivs från frekvensomformaren beror på magnetiseringsnivån. Motorns
verkningsgrad är beroende av motortypen.
I området 75–100 % av nominellt moment är
•
motorns verkningsgrad nästan konstant, både när
den är ansluten till frekvensomformaren och
direkt till nätet.
För små motorer påverkar U/f-kurvan inte
•
verkningsgraden nämnvärt. Men för motorer på
11 kW och mer kan det göra stor skillnad.
Switchfrekvensen påverkar inte verkningsgraden
•
för små motorer. Verkningsgraden för motorer på
11 kW och större förbättras med 1–2 %. Detta
beror på att motorströmmens sinusform i princip
är perfekt vid hög switchfrekvens.
Systemverkningsgrad
Systemets verkningsgrad kan beräknas genom att frekvensomformarens verkningsgrad multipliceras med motorns
verkningsgrad.
60 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 63

+ - + -
S202
**
*
Motor
Analog utgång
relä 1
relä 2
ON = Terminerad
OFF = Öppen
50 (+10 V UT)
53 (A IN)
54 (A IN)
55 (COM A IN)
12 (+24 V UT)
13 (+24 V UT)
37 (D IN)
18 (D IN)
(COM D IN)
(COM A UT) 39
(A UT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0/4-20 mA
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
(D IN/UT)
0 V (PNP)
24 V (NPN)
(D IN/UT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
: Chassi
: Jord
240 V AC, 2 A
400 V AC, 2 A
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
20
10 V DC
15 mA 130/200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
0 V
5 V
S801
RS-485
03
24 V DC
02
01
05
04
06
27
24 V
0 V
0 V
24 V
29
1 2
ON
S201
ON
21
ON=0/4-20 mA
OFF=0/-10 V DC -
+10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
130BD552.10
3fasingång
DC-buss
+10 V DC
0/-10 V DC+10 V DC
0/4-20 mA
0/-10 V DC+10 V DC
0/4-20 mA
Strömförsörjning i
switchläge
Bromsmotstånd
RS-485-
anslutning
Systemintegrering
Design Guide
3.5 Extra ingångar och utgångar
3.5.1 Kopplingsschema
Korrekt anslutna och programmerade styrplintar ger:
Återkoppling, referens och andra ingångssignaler till frekvensomformaren.
•
Utgångsstatus och feltillstånd från frekvensomformaren.
•
Reläer som används för tillvalsutrustning
•
Ett seriellt kommunikationsgränssnitt.
•
24 V common.
•
Du kan programmera styrplintarna för olika funktioner genom att välja parametertillval via den lokala manöverpanelen (LCP)
på enhetens framsida eller externa källor. Majoriteten av styrkabeldragningen görs av kunden om annat inte specicerats vid
fabriksbeställningen.
3 3
Bild 3.20 Grundläggande kopplingsschema
A = analog, D = digital
*Plint 37 (tillval) används för STO. Installationsinstruktioner för STO nns i VLT® Safe Torque O-handboken.
**Anslut inte kabelskärmen.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 61
Page 64

Systemintegrering
VLT® AQUA Drive FC 202
3.5.2 Reläanslutningar
33
Relä
1 1 common
2 4 common
1 01-02 slutande (normalt öppen)
2 04-05 slutande (normalt öppen)
Bild 3.21 Reläutgång 1 och 2, maximal spänning
1)
Plint
2 normalt öppen
3 normalt stängd
5 normalt stängd
6 normalt stängd
01-03 brytande (normalt stängd)
04-06 brytande (normalt stängd)
Beskrivning
max. 240 V
max. 240 V
max. 240 V
max. 240 V
1) Installera VLT®-relätillvalsmodul MCB 105 eller VLT®-relätillvalsmodul MCB 113 om du vill lägga till er reläutgångar.
Mer information om reläer nns i kapitel 7 Specikationer
ochkapitel 8.3 Ritningar över reläplint.
Mer information om relätillval
nns i kapitel 3.7 Tillval och
tillbehör.
62 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 65

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Systemintegrering
Design Guide
3.5.3 EMC-korrekt elektrisk anslutning
3 3
1 PLC 7 Motor, 3-fas och PE (skärmad)
2 Frekvensomformare 8 Nät, 3-fas och förstärkt PE (inte skärmad)
3 Utgångskontaktor 9 Styrkablar (skärmade)
4 Kabelklämma 10
5 Kabelisolering (skalad)
6 Kabelförskruvning
11
Potentialutjämning min. 16 mm2 (0,025 tum)
Avstånd mellan styrkabel, motorkabel och nätkabel:
Minst 200 mm
Bild 3.22 EMC--korrektelektrisk anslutning
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 63
Page 66

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Systemintegrering
VLT® AQUA Drive FC 202
Mer information om EMC nns i kapitel 2.5.18 EMC-överensstämmelse och kapitel 3.2 EMC, övertoner och skydd mot
läckström till jord.
Vertikala avstånd
För optimala kylningsförhållanden krävs ett fritt
luftutrymme över och under frekvensomformaren. Se
Bild 3.24.
OBS!
33
EMC-STÖRNINGAR
Använd skärmade kablar för motor- och styrkablar och
separera kablar för ingångsström, motorledningar och
styrkablar. Oisolerade ström-, motor-, och styrkablar kan
leda till oönskad funktion eller försämrad prestanda.
Minst 200 mm avstånd måste nnas mellan nät-, motoroch styrkablar.
3.6 Mekanisk ritning
3.6.1 Avstånd
Installation sida vid sida är lämpligt för alla kapslingsstorlekar, förutom om en IP21/IP4X/TYP 1-kapslingssats
används (se kapitel 3.7 Tillval och tillbehör).
Horisontella avstånd, IP20
IP20 A- och B-kapslingsstorlekar kan monteras sida vid sida
utan något mellanrum. Det är dock viktigt att de monteras
i rätt ordning, se Bild 3.23.
Kapslingsstorlek
a [mm] 100 200 225
b [mm] 100 200 225
A1*/A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
Bild 3.23 Korrekt montering sida vid sida utan något
mellanrum
Horisontella avstånd, IP21-kapslingssats
Om IP21-kapslingssatsen används på kapslingsstorlek A1,
A2 eller A3 måste det nnas ett avstånd på minst 50 mm
mellan frekvensomformarna.
Bild 3.24 Vertikala avstånd
Väggmontering
3.6.2
Vid montering på en plan vägg behövs ingen bakre plåt.
Vid montering på en ojämna vägg ska en bakre plåt
användas för att säkerställa tillräcklig kylluft över
kylplattan. Använd endast en bakre plåt med kapsling A4,
A5, B1, B2, C1 och C2.
64 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 67

130BA219.11
1
130BA392.11
2
1
3
4
Systemintegrering
1 Bakre plåt
Bild 3.25 Montering med bakre plåt
Skydda epoxiytbeläggningen på frekvensomformare med
skyddsklassicering IP66 genom att använda en ber- eller
nylonbricka.
1 Bakre plåt
2 Frekvensomformare med IP66-kapsling
3 Bakre plåt
4 Fiberbricka
Bild 3.26 Montering med bakre plåt för med skyddsklassicering IP66
Åtkomst
3.6.3
Ritningarna i kapitel 8.1 Ritningar över nätanslutning (3-
faser) och kapitel 8.2 Ritningar för motoranslutning visar hur
du planerar åtkomligheten för kabeldragning innan
montering.
Design Guide
3.7
Tillval och tillbehör
Tillval
Beställningsnummer nns i kapitel 6 Typkod och val.
Nätskydd
Lexan®-skydd monteras framför ingående
•
strömplintar och ingångsplattan och skyddar från
kontakt när kapslingsluckan är öppen.
Värmare och termostat: På apparatskåpets insida
•
på en F-ram sitter det termostatreglerade värmare
som förhindrar kondensation inuti kapslingen.
Termostatens fabriksinställning startar värmarna
vid 10 °C och stoppar vid 15,6 °C.
RFI-lter
Frekvensomformare har integrerade klass A2 RFI-
•
lter som standard. Om ytterligare nivåer av RFI-/
EMC-skydd krävs, kan de uppnås med hjälp av
klass A1 RFI-lter. De hämmar radiofrekvensstörning och elektromagnetisk strålning i enlighet
med SS-EN 55011.
Jordfelsbrytare (RCD)
Använder summaströmsmetoden för att övervaka jordfelströmmar i jordade och högmotståndsjordade system (TNoch TT-system i IEC-terminologi). Det nns en förvarning
(50 % av huvudlarmets börvärde) och ett börvärde för
huvudlarm. Ett SPDT-larmrelä för extern användning är
kopplat till varje börvärde. Det kräver en extern strömtransformator av window-typ (införskaas och installeras av
kunden).
Inbyggd i frekvensomformarens krets för safe
•
torque o
IEC 60755 Typ B-enhet övervakar pulserande
•
likström och rena jordfel i likström
Lysdiodsindikator som visar strömnivå på jordfel
•
från 10–100 % av börvärdet
Larmminne
•
TEST-/ÅTERSTÄLLNINGSNYCKEL
•
Isolationsmotståndsövervakning (IRM)
Övervakar isolationsmotståndet i ojordade system (ITsystem i IEC-terminologi) mellan systemfasledare och jord.
Det nns en ohmsk förvarning och ett börvärde för
huvudlarm för isoleringsnivån. Ett SPDT-larmrelä är kopplat
till varje börvärde för externt bruk. Obs! Endast en
isolationsmotståndsövervakning kan vara ansluten till ett
ojordat (IT) system.
Integrerad i frekvensomformarens säkerhets-
•
stoppkrets
Isolationsmotståndet visas på LCD-displayen
•
Larmminne
•
Knapparna INFO, TEST och RESET
•
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 65
Page 68

Systemintegrering
VLT® AQUA Drive FC 202
Bromschopper (IGBT:er)
Bromsplintar med en IGBT-bromschopperkrest
•
möjliggör anslutning till ett externt
bromsmotstånd. Mer information om
bromsmotstånd nns i kapitel 3.4.12 Bromsmot-
33
Regenerativa plintar
Lastdelningsplintar
Säkringar
Strömbrytare
Maximalbrytare
Kontaktorer
ståndsberäkning och .
Dessa plintar möjliggör anslutning av regene-
•
rativa enheter till DC-bussen på kondensatorsidan
av DC-bussens reaktorer för regenerativ
bromsning. F-kapslingens regenereringsplintar är
tillverkade för ungefär hälften av frekvensomformarens
veta mer om regenerativa strömgränser som
baseras på specik frekvensomformarstorlek och
spänning.
Dessa plintar ansluter till DC-bussen på likrik-
•
tarsidan på DC-bussreaktorn och gör det möjligt
att dela eekten från DC-bussen mellan olika
frekvensomformare. F-kapslingens lastdelningsplintar är tillverkade för ungefär 1/3 av
frekvensomformarens märkeekt. Kontakta
fabriken om du vill veta mer om lastdelningsgränser baserat på en specik
frekvensomformarstorlek och spänning.
Säkringarna rekommenderas för ett snabbt
•
strömöverbelastningsskydd för frekvensomformaren. Säkringsskyddet begränsar skador i
frekvensomformaren och minimerar servicetiden i
de fall ett fel uppstår. Säkringar krävs för att
uppfylla marine-certiering.
Ett dörrmonterat handtag gör det möjligt att
•
manuellt stänga av och sätta på strömmen med
en strömbrytare, vilket ökar säkerheten vid
service. Strömbrytaren är sammankopplad med
kapslingsluckorna för att förhindra att de öppnas
när strömmen fortfarande är på.
En maximalbrytare kan ärrtrippas men måste
•
återställas manuellt. Maximalbrytare är sammankopplade med kapslingsluckorna för att förhindra
att de öppnas när strömmen fortfarande är på.
Om en maximalbrytare beställs som tillval ingår
även säkringar för att säkerställa ett snabbt
överbelastningsskydd för frekvensomformaren.
En elektrisk styrd kontaktorbrytare gör det möjligt
•
att ärrstyra strömmen till frekvensomformaren.
Om tillvalet IEC-nödstopp har beställts, övervakar
Pilz Safety en extra kontakt på kontaktorn.
märkeekt. Kontakta fabriken om du vill
Manuella motorstarter
Ger 3-fasström till de elektriska äktarna som ofta krävs för
större motorer. Ström till startare kommer från
belastningssidan på en ansluten kontaktor, maximalbrytare
eller strömbrytare och från ingångssidan på klass 1 RFI-
ltret (om tillämpligt). Strömmen säkras före varje
motorstartare och stängs av när den ingående strömmen
till frekvensomformaren stängs av. Upp till två
motorstartare kan användas (endast en om en 30 A-säkring
beställs). Inbyggd i frekvensomformarens krets för safe
torque o.
Enhetsfunktioner:
Strömbrytare (på/av).
•
Kortslutnings- och överbelastningsskydd med
•
testfunktion.
Manuell återställningsfunktion.
•
30 A, säkringsskyddade plintar
3-fasspänning, motsvarande nätspänningen för
•
strömförsörjning av extrautrustning.
Ej tillgängliga om 2 manuella motorstartare valts.
•
Plintarna stängs av när den ingående spänningen
•
till frekvensomformaren stängs av.
Ström till de säkringsskyddade plintarna kommer
•
från belastningssidan på en ansluten
kontaktor,maximalbrytare eller strömbrytare och
från ingångssidan på klass 1 RFI-ltret (om
tillämpligt).
24 V DC strömförsörjning
5 A, 120 W, 24 V DC.
•
Skyddad mot utgångsöverströmmar, överbe-
•
lastning, kortslutning och överhettning.
För strömförsörjning av externa enheter som till
•
exempel givare, PLC I/O, kontaktorer, temperatursonder, indikeringslampor och/eller annan
elektronisk maskinvara.
Diagnostiken innehåller en torr kontakt för DC-ok,
•
en grön lysdiod för DC-ok och en röd lysdiod
som indikerar överbelastning.
Extern temperaturövervakning
Utformad för att övervaka temperaturer på
•
externa systemkomponenter, till exempel
motorlindningar och/eller lager. Inkluderar åtta
universalingångsmoduler och två dedikerade
termistoringångsmoduler. Alla tio moduler är
integrerade i frekvensomformarens krets för Safe
Torque O, och kan övervakas med ett fältbussnätverk (kräver inköp av separat modul-/
busskoppling). Beställ ett safe torque o-
bromstillval om du vill välja extern
temperaturövervakning.
66 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 69

Systemintegrering
Design Guide
Seriell kommunikation
PROFIBUS DP V1 MCA 101
PROFIBUS DP V1 ger en bred kompabilitet, en
•
hög nivå av tillgänglighet och stöds av alla stora
PLC-försäljare. Den är dessutom kompatibel med
framtida versioner.
Snabb och eektiv kommunikation, tydlig instal-
•
lation, avancerad diagnostik samt
parameterbestämning och autokongurering av
processdata via GSD-l.
Cyklisk parameterbestämning med hjälp av
•
Probus DP V1, PROFIdrive eller Danfoss FC-prol
state-maskin, Probus DP V1, masterklass 1 och 2
Beställningsnummer 130B1100 ej ytbehandlad –
130B1200 ytbehandlad (klass G3/ISA S71.04-1985).
DeviceNet MCA 104
Den här kommunikationsmodellen erbjuder
•
nyckelkapaciteter där du eektivt kan avgöra
vilken information som behövs och när den
behövs.
ODVA:s stränga testpolicy säkerställer att
•
produkterna är kompatibla. Beställningsnummer
130B1102 ej ytbehandlad, 130B1202 ytbehandlad
(klass G3/ISA S71.04-1985).
PROFINET RT MCA 120
PROFINET-tillvalet erbjuder anslutning till PROFINETbaserade nätverk via PROFINET.protokollet. Tillvalet kan
hantera en anslutning med ett faktiskt paketintervall ned
till 1 ms i båda riktningarna.
Inbyggd webbserver för ärrdiagnostik och
•
avläsning av frekvensomformarens
grundläggande parametrar.
Ett e-postmeddelande kan kongureras för att
•
skickas till en eller era mottagare i händelse av
specika varningar eller larm, eller om dessa har
åtgärdats.
TCP/IP för enkel åtkomst av frekvensomformarens
•
kongurationsdata från MCT 10kongurationsprogramvara.
Upp- och nedladdning av FTP-l (File Transfer
•
Protocol).
Stöd för DCP (discovery and conguration
•
protocol).
EtherNet IP MCA 121
EtherNet blir den framtida standarden för kommunikation
på fabriksgolvet. EtherNet-tillvalet är baserat på den senast
tillgängliga tekniken för industriell användning och
hanterar även de mest krävande behoven. EtherNet/IP
utökar dagens kommersiella EtherNet till CIP™ (Common
Industrial Protocol) – samma yttre protokoll och objektmodell som
funktioner som:
nns i DeviceNet. MCA 121 har avancerade
Inbyggd växel med hög prestanda som gör att du
•
kan använda linjär topologi och eliminera
behovet för externa växlar.
Avancerade växel- och diagnosfunktioner.
•
En inbyggd webbserver.
•
En e-postklient för servicemeddelanden.
•
Modbus TCP MCA 122
Modbus-tillvalet erbjuder anslutning till Modbus TCPbaserade nätverk, t.ex.Groupe Schneider PLC-system via
Modbus TCP-protokollet. Tillvalet kan hantera en
anslutning med ett faktiskt paketintervall ned till 5 ms i
båda riktningarna.
Inbyggd webbserver för
•
avläsning av frekvensomformarens
grundläggande parametrar.
Ett e-postmeddelande kan kongureras för att
•
skickas till en eller era mottagare i händelse av
specika varningar eller larm, eller om dessa har
åtgärdats.
2 Ethernet-portar med inbyggd växel.
•
Upp- och nedladdning av FTP-l (File Transfer
•
Protocol)
Konguration av protokollautomatisk IP-adress.
•
Fler tillval
Generellt I/O-kort MCB 101
I/O-tillvalet erbjuder ett utökat antal styringångar och utgångar.
Tre digitala ingångar, 0-24 V: Logisk 0 < 5 V;
•
Logisk 1 > 10 V
Två analoga ingångar, 0–10 V: Upplösning, 10
•
bitar plus förtecken
Två digitala utgångar, NPN/PNP-mottakt
•
En analog utgång, 0/4–20 mA
•
Fjäderspänd anslutning
•
Separata parameterinställningar. Beställnings-
•
nummer 130B1125 ej ytbehandlad – 130B1212
ytbehandlad (klass G3/ISA S71.04-1985)
Relätillval MCB 105
Ger reläfunktioner med 3 extra reläutgångar.
Maximal plintbelastning: AC-1 resistiv belastning:
•
240 V AC 2 A AC-15
Induktiv belastning @cos ? 0,4: 240 V AC 0,2 A
•
DC-1
Resistiv belastning: 24 V DC 1 A DC-13
•
Induktiv belastning: @cos ? 0,4: 24 V DC 0,1 A
•
Minsta plintbelastning: DC 5 V: 10 mA
•
Maximal switchhastighet vid nominell belastning/
•
min. belastning: 6 min-1/20 s-1
ärrdiagnostik och
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 67
Page 70

Systemintegrering
VLT® AQUA Drive FC 202
Beställningsnummer 130B1110 ej ytbehandlad –
•
130B1210 ytbehandlad (klass G3/ISA S71.04-1985)
Analogt I/O-tillval MCB 109
Den här analoga ingången/utgången är enkel att montera
på frekvensomformaren för uppgradering till avancerad
33
prestanda och reglering med extra ingångar/utgångar.
Detta alternativ uppgraderar även frekvensomformaren
med reservbatteriförsörjning för dess inbyggda klocka.
Detta ger en stabil användning av alla frekvensomformares
klockfunktioner och tidsåtgärder.
Tre analoga ingångar, som alla kan kongureras
•
som både spännings- och temperaturingång.
Anslutning av 0–10 V analoga signaler och
•
temperaturingångar PT1000 och NI1000.
Tre analoga utgångar, som alla kan kongureras
•
som 0–10 V utgångar.
Reservförsörjning av frekvensomformarens
•
standardklockfunktionen ingår. Reservbatteriet
håller vanligtvis i 10 år, beroende på miljö.
Beställningsnummer 130B1143 ej ytbehandlad –
130B1243 ytbehandlad (klass G3/ISA S71.04-1985).
PTC-termistorkort MCB 112
Med ett MCB 112 PTC-termistorkort kan alla frekvensomformare från Danfoss med STO användas till att övervaka
motorer i potentiellt explosiva atmosfärer. MCB 112
erbjuder överlägsen prestanda jämfört med inbyggd ETRfunktion och termistorplint.
Skyddar motorn från att överhettas.
•
ATEX-godkänd för användning med EX d- och EX
•
e-motorer.
Använder Danfoss-frekvensomformarnas safe
•
torque o-funktion för att stoppa motorn i
händelse av överhettning.
Certierad för användning för att skydda motorer
•
i zonerna 1, 2, 21 och 22.
Certierad upp till SIL2.
•
Givaringångskort MCB 114
Alternativet skyddar motorn från att överhettas genom att
övervaka lager och ledningstemperaturer i motorn.
Gränsen, så väl som åtgärden, kan justeras och den
enskilda givartemperaturen är synlig som en avläsning på
displayen eller genom fältbussen.
Skyddar motorn från att överhettas.
•
Tre självdetekterande givaringångar för två eller
•
tre PT100/PT1000-ledningsgivare.
En extra analog ingång, 4–20 mA.
•
Utökad kaskadregulator MCO 101
Enkel att montera och den uppgraderar den inbyggda
kaskadregulatorn för att styra er pumpar och mer
avancerad pumpreglering i master/slav-läge
Utökat reläkort MCB 113
Det utökade reläkortet MCB 113 lägger till ingångar/
utgångar till VLT® AQUA Drive för ökad exibilitet.
MCO 102 Avancerad kaskadregulator
Förlänger frekvensomformarens inbyggda standardkaskadregulators kapacitet.
24 V DC-försörjning, tillval MCB 107
Det här tillvalet används vid anslutning av en extern DCförsörjning för att hålla styrningen och installerade tillval
aktiva vid strömavbrott.
Upp till sex pumpar i standardkaskadinställning
•
Upp till sex pumpar i master/slav-inställning
•
Tekniska specikationer: Se MCB 105-relätillval
•
Sju digital ingångar: 0–24 V
•
Två analoga utgångar: 0/4–20 mA
•
4 SPDT-reläer
•
Märkdata av belastningsreläer: 240 V AC/2 A
•
(Ohm)
Uppfyller NAMUR:s rekommendationer
•
Galvanisk isolationkapacitet. Beställningsnummer
•
130B1164 ej ytbehandlad – 130B1264
ytbehandlad (klass G3/ISA S71.04-1985)
Ger åtta extra reläer för inkoppling av ytterligare
•
motorer.
Ger korrekt öde, tryck och nivåstyrning för
•
optimering av verkningsgraden på system som
använder era pumpar eller äktar.
Master/slav-läget styr alla äktar/pumpar i samma
•
hastighet. Det reducerar potentiellt energiförbrukningen till mindre än hälften, jämfört med vad
ventilspjäll eller traditionella av/på-cykler gör.
Växling av huvudpump garanterar att era
•
pumpar och äktar används lika mycket.
Inspänningsomfång: 24 V DC +/- 15 % (max. 37 V
•
i 10 s).
Maximal inström: 2,2 A.
•
Maximal kabellängd: 75 m.
•
Kapacitanslast på ingång: < 10 uF.
•
Startfördröjning: < 0,6 s.
•
Enkelt att installera i frekvensomformare i
•
bentliga maskiner.
Håller styrkortet och tillvalen aktiva vid
•
strömavbrott.
Håller fältbussen aktiv vid strömavbrott. Beställ-
•
ningsnummer 130B1108 ej ytbehandlad –
130B1208 ytbehandlad (klass G3/ISA S71.04-1985).
68 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 71

Systemintegrering
Design Guide
3.7.1 Kommunikationstillval
VLT® PROFIBUS DP V1 MCA 101
•
VLT® DeviceNet MCA 104
•
VLT® PROFINET MCA 120
•
VLT® EtherNet/IP MCA 121
•
VLT® Modbus TCP MCA 122
•
Mer information
nns i kapitel 7 Specikationer.
3.7.2 Tillval för ingångar/utgångar,
återkoppling och säkerhet
VLT® Generellt I/O-kort, modul MCB 101
•
VLT® Reläkort MCB 105
•
VLT® PTC-termistorkort MCB 112
•
VLT® Utökat reläkort MCB 113
•
VLT® Givaringångstillval MCB 114
•
Mer information
Kaskadregleringstillval
3.7.3
nns i kapitel 7 Specikationer.
Med MCO 101 kan totalt fem reläer användas för kaskadreglering. MCO 102 möjliggör reglering av totalt åtta
pumpar. Tillvalen kan alternera huvudpumpen med två
reläer per pump.
OBS!
Om MCO 102 installeras kan relätillvalet MCB 105 utöka
antalet reläer till 13.
Användning
Kaskadreglering är ett gemensamt styrsystem som används
för att reglera parallella pumpar eller
eektivt sätt.
Med kaskadregulatortillvalet är det möjligt att reglera era
pumpar som är kongurerade parallellt genom att:
Automatiskt slå på och av enskilda pumpar.
•
Reglera pumparnas varvtal.
•
När en kaskadregulatorn används slås de enskilda
pumparna automatiskt på (inkoppling) och av (urkoppling)
allt eftersom systemet behöver mer eller mindre eekt för
öde eller tryck. Varvtalen på pumparna som är anslutna
till VLT® AQUA Drive regleras också för att ge en
kontinuerlig
systemeekt.
äktar på ett energi-
3 3
Kaskadregulatortillvalen utökar antalet tillgängliga reläer.
Så snart ett av tillvalen har installerats nns de nödvändiga
parametrarna som stöder kaskadregulatorns funktioner
tillgängliga via manöverpanelen.
MCO 101 och 102 är tillval som utökar antalet pumpar som
stöds och antalet funktionaliteter i den inbyggda kaskadre-
gulatorn i VLT® AQUA Drive.
Följande kaskadregulatortillval nns tillgängliga för VLT
AQUA Drive:
Inbyggd grundläggande kaskadregulator
•
(standardkaskadregulator)
MCO 101 (utökad kaskadregulator)
•
MCO 102 (avancerad kaskadregulator)
•
Mer information nns i kapitel 7 Specikationer.
Den utökad kaskadregulatorn kan användas i två olika
lägen:
Med de utökade funktionerna som styrs av
•
parametergrupp 27-** Kaskadregulatortillval.
Utöka antalet tillgängliga reläer för den
•
grundläggande kaskadregulatorn genom
parametergrupp 25-**. Kaskadregulator.
®
Avsedd användning
Kaskadregulatortillvalen är utformade för pumptillämpningar, men de kan användas i alla tillämpningar som
kräver att era motorer kongureras parallellt.
Driftsprincip
Kaskadregulatorns programvara körs från en frekvensomformare med kaskadregulatortillvalet. Den styr ett antal
pumpar, som alla styrs av en frekvensomformare eller är
anslutna till en kontaktor eller mjukstartare
Andra frekvensomformare i systemet (slavfrekvensformare)
behöver inte ha något tillvalskort för kaskadregulator. De
styrs utan återkoppling och får sin varvtalsreferens från
masterfrekvensomformaren. Pumpar som är anslutna till
slavfrekvensomformare refereras till som pumpar med
variabelt varvtal.
Pumpar som är anslutna till nätet via en kontaktor eller
mjukstartare refereras till som pumpar med fast varvtal.
Varje pump, med fast eller variabelt varvtal, styrs av ett relä
i masterfrekvensomformaren.
Kaskadregulatortillvalen kan styra en blandning av pumpar
med fast och variabelt varvtal.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 69
Page 72

Systemintegrering
VLT® AQUA Drive FC 202
33
Inbyggd
MCO 101
MCO 102
Bild 3.27 Tillämpningsöversikt
Inbyggd
MCO 101
MCO 102
1 VSP + 2 FSP
parametergrupp 25-** Kaskadregulator
1 VSP + 5 FSP
parametergrupp 25-** Kaskadregulator
1 VSP + 8 FSP
parametergrupp 25-** Kaskadregulator
1 till 6 VSP + 1 till 5 FSP
(max. sex pumpar)
parametergrupp 27-** Kaskadregulatortillval
1 till 8 VSP + 1 till 7 FSP
(åtta pumpar)
parametergrupp 27-** Kaskadregulatortillval
Inbyggd
MCO 101
MCO 102
Bild 3.29 Tillämpningsöversikt
6 VSP
parametergrupp 27-** Kaskadregulatortillval
8 VSP
parametergrupp 27-** Kaskadregulatortillval
-
VSP = Pump med variabelt varvtal (direktansluten till frekvensomformaren)
FSP = Pump med fast varvtal (motorn kan vara ansluten via
kontaktor, mjukstartare eller stjärn-/deltastartare)
Bromsmotstånd
3.7.4
I tillämpningar där motorn används som broms alstras
energi i motorn som leds tillbaka till frekvensomformaren.
Om energin inte kan transporteras tillbaka till motorn,
kommer spänningen att öka i frekvensomformarens
likströmsled. I tillämpningar med frekvent bromsning och/
eller höga tröghetsbelastningar kan denna ökning leda till
en överspänningstripp i frekvensomformaren och slutligen
till avstängning. Bromsmotstånd används för att avsätta
överskottsenergin från regenerativ bromsning. Motståndet
-
väljs med avseende på dess ohmska värde, eektavgiv-
ningshastighet och fysiska storlek. Danfoss erbjuder ett
brett sortiment av olika motstånd som är speciellt
framtagna för Danfoss-frekvensomformare. Mer information
om dimensionering av bromsmotstånd nns i
kapitel 3.4.12 Bromsmotståndsberäkning. Beställningsnummer nns i kapitel 6.2 Tillval, tillbehör och reservdelar.
Bild 3.28 Tillämpningsöversikt
70 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 73

PE U V W
130BD839.10
Systemintegrering
Design Guide
3.7.5 Sinuslter
När en motor styrs av en frekvensomformare hörs
resonansljud från motorn. Ljudet, som orsakas av motorns
konstruktion, uppstår varje gång en växelriktaromkopplare
i frekvensomformaren aktiveras. Resonansljudets frekvens
motsvarar därför frekvensomformarens switchfrekvens.
Danfosserbjuder ett sinuslter som dämpar det akustiska
motorljudet.
Filtret minskar spänningens uppramptid, toppspänningen
U
och strömrippeln ?I till motorn, vilket innebär att
PEAK
strömmen och spänningen nästan blir sinusformade. Detta
medför att det akustiska motorljudet dämpas till ett
minimum.
Strömrippeln i
Problemet kan lösas genom att ltret byggs in i ett
apparatskåp eller liknande.
3.7.6
sinusltrets spolar skapar också ett ljud.
dU/dt-lter
Kabellängd
[m] A och B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
Tabell 3.19 Antal kärnor
1) Stapla ytterligare HF-CM-kärnor om längre kablar krävs.
Montera HF-CM-kärnorna genom att föra de tre motorfaskablarna (U, V och W) genom varje kärna, som visas i
Bild 3.30.
1)
Kapslingsstorlek
T2/T4 T7 T2/T4 T7 T7
3 3
Danfoss erbjuder dU/dt-lter, som är dierential modeoch lågpasslter. De minskar motorplintens fas-till-fastoppspänning och minskar stigtiden till en nivå som sänker
belastningen på motorlindningarnas isolering. Detta
problem uppstår framförallt med korta motorkablar.
Jämfört med
dU/dt-lter en gränsfrekvens över switchfrekvensen.
3.7.7
Högfrekventa common mode-kärnor (HF-CM-kärnor)
reducerar de elektromagnetiska störningarna och
förhindrar skador på lager på grund av elektrisk
urladdning. De är särskilda magnetkärnor av nanokristallin,
som har en överlägsen ltreringsförmåga jämfört med
vanliga ferritkärnor. HF-CM-kärnorna fungerar som en
common mode-spole mellan fas och jord.
Installerade runt de tre motorfaserna (U, V och W) kan
common mode-lter reducera högfrekventa commonmode-strömmar. Som ett resultat av det reduceras de
högfrekventa elektromagnetiska störningarna från
motorkabeln.
Antalet kärnor som krävs beror på motorkabelns längd och
frekvensomformarens spänning. Varje sats består av två
kärnor. Mer information om hur du avgör antalet kärnor
nns i Tabell 3.19.
sinuslter (se kapitel 3.7.5 Sinuslter) har
Common mode-lter
Bild 3.30 HF-CM-kärna med motorfaserna
Övertonslter
3.7.8
Danfoss AHF 005 och AHF 010 är avancerade övertonslter
och ska inte förväxlas med traditionella övertonslter.
Danfoss övertonslter är speciellt utformade för att passa
frekvensomformare från Danfoss.
Genom att ansluta Danfoss övertonslter AHF 005 eller
AHF 010 framför en frekvensomformare från Danfoss
reduceras den totala distortionen från övertonsströmmen
som genereras tillbaka till nätet till 5 % respektive 10 %.
3.7.9
IP21/NEMA typ 1-kapslingssats
IP20/IP4X top/NEMA TYPE 1 är ett kapslingstillval för IP20kompaktenheter.
Om kapslingssatsen används uppgraderas en IP20-enhet så
att den uppfyller kraven för kapsling IP21/4X top/TYPE 1.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 71
IP4X-toppkåpa kan användas för alla IP20 FC 202-varianter
av standardtyp.
Page 74

A
B
C
D
E
130BT323.10
B
A
E
C
D
130BT324.10
Systemintegrering
VLT® AQUA Drive FC 202
33
Bild 3.31 Kapslingsstorlek A2
Toppkåpa
A
B Kant
C Basdetalj
D Bashölje
E Skruvar
Bild 3.32 Kapslingsstorlek A3
Placera toppkåpan så som visas. Om tillval A eller B
används måste kantdetaljen sättas dit så att den täcker
toppingången. Placera basdel C på frekvensomformarens
undersida och använd klämmorna från tillbehörspåsen för
att sätta fast kablarna korrekt.
Hål för kabelförskruvning:
Storlek A2: 2 x M25 och 3 x M32
•
Storlek A3: 3 x M25 och 3 x M32
•
72 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 75

E
F
D
C
B
A
130BT620.12
130BT621.12
D
C
A
G
Systemintegrering
Design Guide
Kapslingstyp
Höjd A
[mm]
Bredd B
[mm]
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tabell 3.20 Mått
1) Om tillval A/B används ökar djupet (mer information
kapitel 7.8 Märkeekter, vikt och mått)
Djup C
[mm]
nns i
1)
3 3
Bild 3.34 Kapslingsstorlek B4, C3 och C4
Toppkåpa
A
B Kant
Bild 3.33 Kapslingsstorlek B3
C Basdetalj
D Bashölje
E Skruvar
F Fläktkåpa
G Övre klämma
Tabell 3.21 Teckenförklaring till Bild 3.33 och Bild 3.34
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 73
Page 76

130BA138.10
130BA200.10
Systemintegrering
Om tillvalsmodul A och/eller B används måste kantdetaljen
(B) sättas dit så att den täcker toppkåpan (A).
VLT® AQUA Drive FC 202
OBS!
Installation sida-vid-sida är inte möjlig om IP21/IP4X/
33
TYPE 1 Kapslingssats används
3.7.10 Fjärrmonteringssats för LCP
LCP:n kan yttas till den främre delen av ett kapsling med
hjälp av ärrmonteringssatsen. Monteringsskruvarna måste
dras åt med ett moment på max. 1 Nm.
LCP-kapslingen är IP66-klassicerad.
Kapsling IP66-front
Max. kabellängd mellan LCP och enhet 3 m
Kommunikationsstandard RS485
Tabell 3.22 Tekniska data
Bild 3.35 LCP-sats med grask LCP, fästdon, 3 m kabel och
packning
Beställningsnummer 130B1113
Bild 3.36 LCP-sats med numerisk LCP, fästdon och packning
Beställningsnummer 130B1114
Bild 3.37 LCP-satsens mått
74 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 77

130BA844.10
130BA845.10
A
B
Systemintegrering Design Guide
3.7.11 Monteringsfäste för kapslingstyp A5,
B1, B2, C1 och C2
Bild 3.38 Undre fästet
3.8
Seriegränssnitt RS485
3.8.1 Översikt
RS485 är ett bussgränssnitt med två ledningar som är
kompatibelt med en nätverkstopologi med multidropp,
dvs. där noder kan anslutas som bussar, eller via
droppkablar från en gemensam förbindelseledning. Totalt
kan 32 noder anslutas till ett nätverkssegment.
Förstärkare delar nätverkssegmenten, se Bild 3.40.
OBS!
Varje förstärkare fungerar som en nod i det segment där
den är installerad. Varje nod som är ansluten inom ett
visst nätverk måste också ha en unik nodadress, inom
alla segment.
Avsluta alla segment i båda ändar, antingen med frekvensomformarnas termineringsbrytare (S801) eller med ett
obalanserat nät med slutmotstånd. Använd alltid skärmade
tvinnade parkablar (STP) vid busskabeldragning, och följ
god installationspraxis.
Det är viktigt att skärmens jordanslutning har låg
impedans vid varje nod, även vid höga frekvenser. Anslut
därför en stor yta av skärmningen till jord, exempelvis med
en kabelklämma eller en ledande kabelförskruvning. Det
kan vara nödvändigt att använda potentialutjämnande
kablar för att behålla samma jordningspotential i hela
nätverket, speciellt i installationer med långa kablar.
Undvik felmatchande impedans genom att alltid använda
samma kabeltyp i hela nätverket. Använd alltid en skärmad
motorkabel mellan motorn och frekvensomformaren.
3 3
nummer
Bild 3.39 Övre fästet
Måtten nns angivna i Tabell 3.23.
Kapslingsstorlek
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tabell 3.23 Information om monteringsfästen
IP A [mm] B [mm] Beställnings-
Kabel Skärmade tvinnade parkablar (STP)
Impedans [O]
Kabellängd [m]
Tabell 3.24
120
Max. 1 200 (inklusive droppledningar)
Max. 500 station till station
Kabelspecikationer
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 75
Page 78

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
Systemintegrering
VLT® AQUA Drive FC 202
33
Bild 3.40 RS485-bussgränssnitt
Parametrar
Nätverksanslutning
3.8.2
Funktion Inställning
Parameter 8-30
Protokoll FC*
Parameter 8-31
1*
Adress
Parameter 8-32
9600*
En eller era frekvensomformare kan anslutas till en
styrning (eller master) genom standardgränssnittet RS485.
Plint 68 är ansluten till P-signalen (TX+, RX+), medan plint
69 är ansluten till N-signalen (TX-, RX-). Ritningar nns i
kapitel 3.5.1 Kopplingsschema.
Baudhastighet
* = Standardvärde
Anteckningar/kommentarer:
Välj protokoll, adress och
baudhastighet i de ovan
nämnda parametrarna.
D IN 37 är ett tillval.
Om era frekvensomformare ska anslutas till samma
master måste dessa parallellkopplas.
Bild 3.41 Parallellkopplingar
Undvik spänningsutjämningsströmmar i skärmen genom
att dra ledningarna så som visas i Bild 3.20.
Tabell 3.25 RS485-nätverksanslutning
76 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 79

130BB021.10
12 13 18 19 27 29 32
33 20 37
Remove jumper to enable Safe Stop
61 68 69 39 42 50 53 54 55
Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
Systemintegrering
Bild 3.42 Plintar på styrkort
Design Guide
3 3
RS485-bussavslutning
3.8.3
Avsluta RS485-bussen med ett motståndsnät i båda
ändarna. För detta ändamål sätter du brytaren S801 på
styrkortet i läget PÅ.
Ange kommunikationsprotokoll till parameter 8-30 Protokoll.
EMC-säkerhetsåtgärder
3.8.4
Följande EMC-säkerhetsåtgärder rekommenderas för att
RS485-nätverket ska kunna fungera störningsfritt.
Följ gällande nationella och lokala regelverk, till exempel
avseende skyddande jordanslutning. Genom att hålla
RS485-kommunikationskabeln borta från motor- och
bromsmotståndskablage undviker du koppling av
högfrekventa störningar mellan kablarna. Normalt är ett
avstånd på 200 mm tillräckligt, men största möjliga
avstånd mellan kablarna rekommenderas, särskilt om de
löper parallellt över en längre sträcka. När det är
oundvikligt att kablarna korsar varandra måste RS485kabeln korsa motor- och bromsmotståndskablarna i 90°
vinkel.
Bild 3.43 Kabeldragning
Översikt över FC-protokollet
3.8.5
FC-protokollet, som även kallas FC-bussen eller standardbussen, är standardfältbussen från Danfoss. Protokollet
denierar en åtkomstteknik enligt master/slav-principen för
kommunikation via en seriell buss.
Det går att ansluta en master och maximalt 126 slavar till
bussen. De enskilda slavarna väljs ut av mastern via ett
adresstecken i telegrammet. En slav kan aldrig sända ut
data om den inte blir ombedd att göra det, och det är inte
möjligt med ett direkt utbyte av meddelanden mellan de
enskilda slavarna. Kommunikationen sker i halv duplexläge.
Masterfunktionen kan inte överföras till en annan nod
(system med en master).
Det fysiska lagret utgörs av RS485, och därmed används
RS485-porten som nns inbyggd i frekvensomformaren.
FC-protokollet stöder era telegramformat:
Ett kort format om 8 byte för processdata.
•
Ett långt format om 16 byte som även omfattar
•
en parameterkanal.
Ett format som används för texter.
•
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 77
Page 80

STX LGE ADR D ATA BCC
195NA099.10
Systemintegrering
VLT® AQUA Drive FC 202
3.8.6 Nätverkskonguration
Ange följande parametrar för att aktivera FC-protokollet för
frekvensomformaren:
33
Parameternummer Inställning
Parameter 8-30 Protokoll FC
Parameter 8-31 Adress 1–126
Parameter 8-32 FC-port,
baudhast.
Parameter 8-33 Paritet/
stoppbitar
Tabell 3.26 FC-protokollparametrar
Grundstruktur för meddelanden inom
3.8.7
2400–115200
Jämn paritet, 1 stoppbit (standard)
FC-protokollet
3.8.7.1 Innehållet i ett tecken (byte)
Varje tecken som överförs börjar med en startbit. Därefter
överförs 8 databitar, vilket motsvarar en byte. Varje tecken
kontrolleras med hjälp av en paritetsbit. Denna bit anges
till 1 när den når paritet. Paritet innebär att det nns ett
jämnt antal binära 1:or i gruppen med 8 databitar och hela
paritetsbiten. Varje tecken avslutas med en stoppbit, och
består således av totalt 11 bitar.
Bild 3.44 Innehållet i ett tecken
3.8.7.3 Telegramlängd (LGE)
Med telegramlängd menas antalet databyte plus
adressbyten ADR och datakontrollbyten BCC.
4 databyte LGE = 4 + 1 + 1 = 6 byte
12 databyte LGE = 12 + 1 + 1 = 14 byte
Telegram som innehåller text
Tabell 3.27 Längden på telegram
1) 10 anger de fasta tecknen, medan n är variabel (beroende på
textens längd).
3.8.7.4
Två adressformat används.
Frekvensomformarens adressområde är antingen 1–31 eller
1–126.
Slaven sänder tillbaka adressbyten oförändrad i svarstelegrammet till mastern.
Frekvensomformarens adress (ADR)
Adressformat 1–31
•
Bit 7 = 0 (adressformat 1–31 aktivt).
-
Bit 6 används inte.
-
Bit 5 = 1: Broadcast, adressbit (0–4)
-
används inte.
Bit 5 = 0: Ingen broadcast.
-
Bit 0–4 = frekvensomformaradress 1–31.
-
Adressformat 1–126
•
Bit 7 = 1 (adressformat 1–126 aktivt).
-
Bit 0–6 = rekvensomformaradress 1–126.
-
Bit 0–6 = 0 Broadcast.
-
101)+n byte
3.8.7.2 Telegramstruktur
Alla telegram har följande struktur:
Starttecken (STX) = 02 hex
•
En byte som anger telegramlängden (LGE).
•
En byte betecknar frekvensomformarens adress
•
(ADR).
Därefter följer ett antal databyte (varierar beroende på
telegramtyp).
Telegrammet slutar med en datakontrollbyte (BCC).
Bild 3.45 Telegramstruktur
78 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
3.8.7.5
Kontrollsumman beräknas med en XOR-funktion. Innan
första byten i telegrammet tas emot är den beräknade
checksumman lika med 0.
Datakontrollbyte (BCC)
Page 81

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Systemintegrering Design Guide
3.8.7.6 Datafältet
Databyteblockens uppbyggnad beror på telegramtypen. Det nns tre telegramtyper. De gäller för både styrtelegram
(master ? slav) och svarstelegram (slav ? master).
De tre telegramtyperna är:
Processblock (PCD)
PCD består av ett datablock på 4 byte (2 ord) och omfattar:
Styrord och referensvärde (från master till slav).
•
Statusord och aktuell utfrekvens (från slav till master).
•
Bild 3.46 Processblock
Parameterblock
Parameterblocket används för överföring av parametrar mellan master och slav. Ett datablock är uppbyggt av 12 byte (6 ord)
och innehåller även processblocket.
3 3
Bild 3.47 Parameterblock
Textblock
Textblocket används för att läsa eller skriva text via datablocket.
Bild 3.48 Textblock
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 79
Page 82

Systemintegrering
VLT® AQUA Drive FC 202
3.8.7.7 PKE-fältet
PKE-fältet innehåller två delfält:
Parameterkommando och svars-AK.
•
Parameternummer PNU.
•
PWE låg
(hex)
33
11 Dataändring i den angivna parametern är inte
82 Den angivna parametern kan inte nås via bussen.
83 Det går inte att ändra data eftersom fabriksin-
Tabell 3.30 Felrapport för parametervärde
3.8.7.8
Bild 3.49 PKE-fält
Bitarna med nummer 0–11 överför parameternummer. Den
aktuella parameterns funktion framgår av parameterbeskrivningen i Programmeringshandboken.
Felrapport
0 Det använda parameternumret nns inte.
1 Det går inte att skriva i den angivna parametern.
2 Datavärdet överstiger parameterns gränser.
3 Det använda underindexet nns inte.
4 Parametern är inte av matristyp.
5 Datatypen passar inte den angivna parametern.
möjlig i frekvensomformarens aktuella läge. Vissa
parametrar kan bara ändras när motorn är
avstängd.
ställning har valts
Parameternummer (PNU)
Bit nummer 12–15 överför parameterkommandon från
master till slav och skickar tillbaka slavens bearbetade svar
till mastern.
Bit nummer Parameterkommando
15 14 13 12
0 0 0 0 Inget kommando
0 0 0 1 Läs parametervärde
0 0 1 0 Skriv parametervärde i RAM (ord)
0 0 1 1 Skriv parametervärde i RAM (dubbelord)
1 1 0 1 Skriv parametervärde i RAM och EEPROM
(dubbelord)
1 1 1 0 Skriv parametervärde i RAM och EEPROM
(ord)
1 1 1 1 Läs/skriv text
Tabell 3.28 Parameterkommandon master ? slav
Bit nummer Svar
15 14 13 12
0 0 0 0 Inget svar
0 0 0 1 Parametervärde överfört (ord)
0 0 1 0 Parametervärde överfört (dubbelord)
0 1 1 1 Kommando kan inte utföras
1 1 1 1 text överförd
Tabell 3.29 Svar slav ? master
Om kommandot inte kan utföras sänder slaven svaret:
0111 Kommandot kan inte utföras
- och skickar följande felrapport (se Tabell 3.30) i parametervärdet (PWE):
3.8.7.9
Index används tillsammans med parameternumret för läs-/
skrivåtkomst till indexerade parametrar, t.ex.
parameter 15-30 Larmlogg: Felkod. Indexet består av 2 byte,
ett lågt och ett högt byte.
Endast den låga byten används som index.
3.8.7.10
Parametervärdeblocket består av 2 ord (4 byte) och värdet
beror på det givna kommandot (AK). Mastern frågar efter
ett parametervärde om PWE-blocket inte innehåller något
värde. Om du vill ändra ett parametervärde (write) skriver
du det nya värdet i PWE-blocket och skickar det från
mastern till slaven.
När en slav svarar på en parameterförfrågan
(läskommando) överförs det aktuella parametervärdet i
PWE-blocket och sänds tillbaka till mastern. Om en
parameter inte innehåller något numeriskt värde, utan era
olika dataalternativ, t.ex. parameter 0-01 Språk där [0] är
engelska och [4] är danska, väljer du önskat datavärde
genom att skriva in värdet i PWE-blocket. Det går endast
att läsa av parametrar som innehåller datatyp 9 (textsträng)
med seriell kommunikation.
Parameter 15-40 FC-typ till parameter 15-53 Serienummer för
nätkort är av datatyp 9.
Det går t.ex. att läsa av enhetsstorleken och nätspänningsområdet i parameter 15-40 FC-typ. När en textsträng
överförs (läses) är telegramlängden variabel och texterna är
olika långa. Telegramlängden anges med telegrammets
Index (IND)
Parametervärde (PWE)
80 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 83

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Systemintegrering
Design Guide
andra byte, LGE. Vid textöverföring anger indextecknet om
det är ett läs- eller skrivkommando.
Om du vill läsa av en text via PWE-blocket anger du
parameterkommandot (AK) till F-hex. Indextecknets höga
byte måste vara 4.
Vissa parametrar innehåller text som går att skriva till via
den seriella bussen. Om du vill skriva en text via PWEblocket anger du parameterkommandot (AK) till F-hex.
Indextecknets höga byte måste vara 5.
Bild 3.50 Text via PWE-block
3.8.7.11 Datatyper som stöds
Osignerad betyder att det inte nns något förtecken i
telegrammet.
Datatyper Beskrivning
3 Heltal, 16 bitar
4 Heltal, 32 bitar
5 Osignerat 8
6 Osignerat, 16 bitar
7 Osignerat 32
9 Textsträng
10 Bytesträng
13 Tidsskillnad
33 Reserverat
35 Bitsekvens
Tabell 3.31 Datatyper som stöds
3.8.7.13
Processord (PCD)
Blocket med processord är indelat i två block på 16 bitar
vardera, som alltid kommer i den angivna ordningsföljden.
PCD 1 PCD 2
Styrtelegram (master ? styrord slav)
Styrtelegram (slav ? master) statusord
Tabell 3.32 Processord (PCD)
Referensvärde
Aktuell utfrekvens
3.8.8 FC-protokollexempel
3.8.8.1 Skriva ett parametervärde
Ändra parameter 4-14 Motorvarvtal, övre gräns [Hz] till 100
Hz.
Skriv data till EEPROM.
PKE = E19E hex – Skriv enskilt nummer i
parameter 4-14 Motorvarvtal, övre gräns [Hz].
IND = 0000 hex
PWEHIGH = 0000 hex
PWELOW = 03E8 Hex – Datavärde 1 000 motsvarar 100 Hz,
se kapitel 3.8.7.12 Konvertering.
Telegrammet ser ut så här:
Bild 3.51 Skriv data till EEPROM
OBS!
Parameter 4-14 Motorvarvtal, övre gräns [Hz] är ett enda
ord, och parameterkommandot för skrivning till EEPROM
är E. Parameternummer 4–14 är 19E hexadecimalt.
3 3
3.8.7.12
I avsnittet ned fabriksinställningar nns de olika attributen
för varje parameter sammanställda. Parametervärden
överförs endast som heltal. Därför används konverteringsfaktorer för att överföra decimaler.
Parameter 4-12 Motorvarvtal, nedre gräns [Hz] har konverteringsfaktorn 0,1. Om du vill ställa in minimifrekvensen till 10
Hz måste värdet 100 överföras. En konverteringsfaktor på
0,1 betyder att det överförda värdet multipliceras med 0,1.
Värdet 100 läses därför som 10,0.
Examples:
0 s ? konverteringsindex 0
0,00 s ? konverteringsindex -2
0 ms ? konverteringsindex -3
0,00 ms ? konverteringsindex -5
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 81
Konvertering
Svaret från slaven till mastern blir:
Bild 3.52 Svar från slav
3.8.8.2 Läsa ett parametervärde
Läs värdet i parameter 3-41 Ramp 1, uppramptid.
PKE = 1155 hex – Läs parametervärdet i
parameter 3-41 Ramp 1, uppramptid.
IND = 0000 hex
PWEHIGH = 0000 hex
PWELOW = 0000 hex
Page 84

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Systemintegrering
Bild 3.53 Parametervärde
33
Om värdet i parameter 3-41 Ramp 1, uppramptid är 10
sekunder blir svaret från slaven till mastern
Bild 3.54 Svar från slav
3E8 hex motsvarar till 1000 decimalt. Konverteringsindex
för parameter 3-41 Ramp 1, uppramptid är -2, dvs. 0,01.
parameter 3-41 Ramp 1, uppramptid är av typen Osignerad
32.
Modbus RTU-protokoll
3.8.9
3.8.9.1 Antaganden
Danfoss förutsätter att det installerade styrsystemet stöder
gränssnitten i detta dokument, och att alla krav och
begränsningar som anges för regulatorn och frekvensomformaren efterföljs noga.
Den inbyggda Modbus RTU (Remote Terminal Unit) är
utformad för att kommunicera med alla regulatorer som
stöder de gränssnitt som nns denierade i detta
dokument. Läsaren förutsätts ha goda kunskaper om
regulatorns möjligheter och begränsningar.
3.8.9.2
Modbus RTU-översikten beskriver, oberoende av fysisk
nätverkskommunikationstyp, den process en regulator
använder för att begära åtkomst till en annan enhet.
Processen omfattar hur Modbus RTU reagerar på förfrågningar från en annan enhet, samt hur fel identieras och
rapporteras. Här denieras även ett gemensamt format för
meddelandefältens layout och innehåll.
Vid kommunikation via ett Modbus RTU-nätverk gör
protokollet följande:
Översikt över Modbus RTU
Bestämmer hur varje regulator får reda på sin
•
adress.
Känner igen ett meddelande som är adresserat till
•
den.
Avgör vilka åtgärder som ska vidtas.
•
Utvinner alla data eller all annan information som
•
nns i meddelandet.
VLT® AQUA Drive FC 202
Om ett svar krävs kommer regulatorn att utforma ett
svarsmeddelande och skicka iväg det.
Regulatorer kommunicerar enligt en master/slav-princip där
endast mastern kan initiera transaktioner (som kallas
förfrågningar). Slavarna svarar genom att skicka
efterfrågade data till mastern, eller genom att vidta den
åtgärd som efterfrågades.
Mastern kan kommunicera med enskilda slavar, eller
initiera ett broadcastmeddelande till samtliga slavar. Slavar
returnerar ett svar på förfrågningar som är riktade till just
dem. Inga svar skickas vid broadcastförfrågningar från
mastern. Modbus RTU-protokollet anger formatet för
masterns förfrågan genom att ge:
Slavens svarsmeddelande utformas också enligt Modbusprotokollet. Det innehåller fält som bekräftar vidtagen
åtgärd, eventuella data som ska returneras och ett felkontrollfält. Om det uppstår ett fel när meddelandet tas emot,
eller om slaven inte kan utföra den efterfrågade åtgärden,
kommer slaven att skapa ett felmeddelande och skicka
detta som svar, eller också inträar en timeout.
3.8.9.3
Frekvensomformaren kommunicerar i Modbus RTUformatet via det inbyggda RS485-gränssnittet. Modbus RTU
ger tillgång till funktionerna för styrord och bussreferens i
frekvensomformaren.
Styrordet gör att Modbus-mastern kan styra era viktiga
funktioner i frekvensomformaren:
Bussreferensen används vanligen för varvtalsreglering. Det
går även att nå parametrarna, läsa av deras värden och,
där så är tillåtet, ange värden för dem. Detta erbjuder en
mängd styrmöjligheter, inklusive att styra börvärdet för
frekvensomformaren när dess interna PI-regulator används.
Enhetens (eller broadcastens) adress.
•
En funktionskod som denierar den begärda
•
åtgärden.
Data som ska skickas.
•
Ett felkontrollfält.
•
Frekvensomformare med Modbus
RTU
Start
•
Stoppa frekvensomformaren på era sätt:
•
Utrullningsstopp
-
Snabbstopp
-
DC-bromsstopp
-
Normalt (ramp) stopp
-
Återställning efter tripp på grund av fel
•
Körning med varierande förinställda varvtal
•
Körning bakåt
•
Ändra aktiv meny
•
Styra frekvensomformarens inbyggda relä
•
82 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 85

Systemintegrering
Design Guide
3.8.9.4 Nätverkskonguration
Du aktiverar Modbus RTU på frekvensomformaren genom
att ange följande parametrar:
Parameter Inställning
Parameter 8-30 Protokoll Modbus RTU
Parameter 8-31 Adress 1-247
Parameter 8-32 Baudhastighet
Parameter 8-33 Paritet/
stoppbitar
Tabell 3.33 Modbus RTU-parametrar
3.8.10
Grundstruktur för Modbus RTU-
2400-115200
Jämn paritet, 1 stoppbit (standard)
meddelanden
3.8.10.1 Frekvensomformare med Modbus
RTU
Regulatorerna är kongurerade för att kommunicera i
Modbus-nätverket i RTU-läge, där varje byte i ett
meddelande innehåller två 4-bitars hexadecimala tecken.
Formatet för varje byte visas i Tabell 3.34.
Startb
it
Tabell 3.34 Format för varje byte
Kodningssystem
Bitar per byte 1 startbit.
Felkontrollfält Cyklisk redundanskontroll (CRC).
Databyte Stopp/
8-bitars binärt, hexadecimalt 0-9, A-F.
Två hexadecimala tecken i varje 8-bitarsfält i
meddelandet.
8 databitar, där den minst signikanta biten
sänds först;
1 bit för jämn/udda paritet; ingen bit då
paritet saknas.
1 stoppbit om paritet används; 2 bitar om
paritet saknas.
Stopp
paritet
3.8.10.2 Meddelandestruktur för Modbus
RTU
avkodar alla frekvensomformare och enheter detta för att
avgöra om de är mottagare. Modbus RTU-meddelanden
som har adressaten angiven till noll är broadcastmeddelanden. Det går inte att besvara broadcastmeddelanden. En
typisk meddelanderam visas i Tabell 3.35.
Start Adress Funktion Data CRC-
kontroll
T1-T2-T3-T48 bitar 8 bitar N x 8
bitar
Tabell 3.35 Typisk meddelandestruktur för Modbus RTU
16 bitar T1-T2-T3-
Slut
T4
3.8.10.3 Start-/stoppfält
Meddelanden inleds med en tyst period på minst 3,5
teckenintervall. Den genomförs i form av ett multipelt
teckenintervall vid vald nätverksbaudhastighet (visas som
start T1-T2-T3-T4). Det första fältet som överförs är enhetsadressen. Efter det sist överförda tecknet följer en liknande
period på minst 3,5 teckenintervall som indikerar
meddelandets slut. Ett nytt meddelande kan börja efter
denna period. Hela meddelandet måste sändas som en
kontinuerlig ström. Om en tyst period på mer än 1,5
teckenintervall uppstår innan hela meddelandet slutförts
kommer mottagande enhet att radera hela det ofullständiga meddelandet och förutsätta att nästa byte är
adressfältet i ett nytt meddelande. Om ett nytt
meddelande börjar innan 3,5 teckenintervall efter
föregående meddelande, kommer mottagande enhet att
identiera det som en fortsättning av föregående
meddelande. Detta ger upphov till en timeout (ingen
reaktion från slaven) eftersom värdet i det sista CRC-fältet
inte är giltigt för de kombinerade meddelandena.
3.8.10.4
Adressfältet i en meddelandemall består av 8 bitar. Giltiga
adresser till slavenheter nns inom intervallet 0–247
decimaler. De enskilda slavenheterna tilldelas adresser
inom intervallet 1–247 (0 är reserverat för broadcastläget,
som alla slavar känner igen). En master kommunicerar med
en slav genom att ange slavens adress i meddelandets
adressfält. När slaven skickar sitt svar placerar den sin egen
adress i detta adressfält för att låta mastern veta vilken slav
som svarar.
Adressfält
3 3
Den sändande enheten infogar ett Modbus RTUmeddelande i en mall med känd start- och slutpunkt.
Detta gör att de mottagande enheterna kan börja där
meddelandet startar, läsa adressdelen, avgöra vilken enhet
som är mottagare (eller alla enheter om det är ett
broadcastmeddelande) och avgöra när meddelandet är
slut. Partiella meddelanden identieras och fel anges som
resultat. Tecknen som ska överföras måste anges i hexadecimalt format, 00 till FF, för varje fält. Frekvensomformaren
övervakar hela tiden nätverksbussen, även under tysta
intervall. När det första fältet (adressfältet) tas emot
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 83
3.8.10.5
Funktionsfältet i ett meddelande består av 8 bitar. Giltiga
koder nns i intervallet 1–FF. Funktionsfält används för att
skicka meddelanden mellan master och slav. När ett
meddelande skickas från en master till en slavenhet är det
funktionskodfältet som informerar slaven om vilken åtgärd
som ska utföras. När slaven svarar mastern används
funktionskodfältet för att ange endera ett normalt (felfritt)
svar, eller för att informera om att någon typ av fel
inträade (ett så kallat undantagssvar). Vid ett normalt svar
Funktionsfält
Page 86

Systemintegrering
VLT® AQUA Drive FC 202
ekar slaven helt enkelt den ursprungliga funktionskoden.
Vid ett undantagssvar returnerar slaven en kod som
motsvarar den ursprungliga funktionskoden med den mest
signikanta biten angiven till logisk 1. Dessutom lägger
Spolnum
mer
1–16 Styrord för frekvensomformare. Master till slav
17–32 Referensområdet för frekvensomfor-
slaven in en unik kod i svarsmeddelandets datafält. Detta
informerar mastern om vilken typ av fel som inträade,
33
eller orsaken till undantaget. Mer information nns i
33–48 Statusord för frekvensomformare (se
kapitel 3.8.10.10 Funktionskoder som stöds av Modbus RTU
och kapitel 3.8.10.11 Undantagskoder i Modbus.
49–64 Utan återkoppling: Frekvensomfor-
3.8.10.6 Datafält
Datafältet utgörs av uppsättningar av två hexadecimala tal,
inom intervallet 00–FF hexadecimalt. Dessa består av ett
RTU-tecken. Datafältet i meddelanden som skickas från en
master till slavenheter innehåller ytterligare information
som slaven måste utnyttja för att kunna vidta den åtgärd
som funktionskoden denierar. Här kan ingå information
som exempelvis spol- eller registeradresser, antalet punkter
att hantera samt antalet faktiska databyte i fältet.
3.8.10.7
Fältet CRC-kontroll
Meddelanden innehåller ett fält för felkontroll som
fungerar enligt CRC-principen (Cyclical Redundancy Check).
CRC-fältet kontrollerar innehållet i hela meddelandet. Det
tillämpas oberoende av eventuell paritetskontrollmetod
som används för de enskilda tecknen i meddelandet. CRCvärdet beräknas av den sändande enheten, som lägger till
CRC som det sista fältet i meddelandet. Den mottagande
enheten räknar om ett CRC-värde vid mottagning av
meddelandet, och jämför det beräknade värdet med det
faktiska värde som mottogs i CRC-fältet. Om de två
värdena inte är desamma uppstår en busstimeout. Felkontrollfältet innehåller ett 16-bitars binärt värde som uttrycks
med två 8-bitars byte. När detta skett läggs lågbytedelen
av fältet till först, och därefter högbytedelen. Högbytedelen
med CRC är den sista byte som skickas i meddelandet.
3.8.10.8
Adressering av spolregister
I Modbus är alla data ordnade i spol- och inforegister.
Spolar innehåller en enda bit, medan inforegister rymmer
65 Styrning av parameterskrivning
66-65536 Reserverat
Tabell 3.36 Beskrivningar av spole
Spole 0 1
01 Förinställd referens, LSB
02 Förinställd referens, MSB
03 DC-broms Ingen DC-broms
04 Utrullningsstopp Inget utrullningsstopp
05 Snabbstopp Inget snabbstopp
06 Frysfrekv. Inte frysfrekv.
07 Rampstopp Start
08 Ingen återställning Återställning
09 Ingen jogg Jogg
10 Ramp 1 Ramp 2
11 Ogiltiga data Giltiga data
12 Relä 1 från Relä 1 till
13 Relä 2 från Relä 2 till
14 Ställ in LSB
15 Ställ in MSB
16 Ingen reversering Reversering
Tabell 3.37 Styrord för frekvensomformare (FC-prol)
Beskrivning Signalriktning
Master till slav
marens varvtal eller börvärde är 0 x
0–0 x FFFF (-200 % ... ~200 %)
Slav till master
Tabell 3.38)
Slav till master
marens utfrekvens.
Med återkoppling: Frekvensomformarens återkopplingssignal.
Master till slav
(master till slav)
0=Parameterändringar skrivs till
frekvensomformarens RAMminne.
1=Parameterändringar skrivs till
frekvensomformarens RAM-minne
och EEPROM.
ett ord på 2 byte (16 bitar). Alla dataadresser i Modbusmeddelanden refereras till noll. Den första förekomsten av
ett dataobjekt adresseras som objekt noll. Exempel: Spolen
som kallas spole 1 i en programmerbar regulator benämns
som dataadressfältet i ett Modbus-meddelande. Spole 127
decimalt benämns spole 007EHEX (126 decimalt).
Inforegister 40001 benämns register 0000 i meddelandets
dataadressfält. Fältet för funktionskoden anger redan en
åtgärd av typen inforegister. Därför är referensen 4XXXX
implicit. Inforegister 40108 benämns register 006BHEX (107
decimalt).
84 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 87

Systemintegrering Design Guide
Spole 0 1
33 Styrning inte klar Styrning klar
34 Frekvensomformaren är
inte driftklar
35 Utrullningsstopp Säkerhet sluten
36 Inget larm Larm
37 Används inte Används inte
38 Används inte Används inte
39 Används inte Används inte
40 Ingen varning Varning
41 Ej på referens På referens
42 Hand-läge Läget Auto
43 Utanför frekvensområdet Inom frekvensområdet
44 Stoppad Körs
45 Används inte Används inte
46 Ingen spänningsvarning Spänningsvarning
47 Ej på strömgräns Strömgräns
48 Ingen termisk varning Termisk varning
Tabell 3.38 Statusord för frekvensomformare (FC-prol)
Registernummer
00001-00006 Reserverat
00007 Senaste felkod från ett objektgränssnitt för FC-
00008 Reserverat
00009
00010-00990 000 parametergrupp (parametrarna 0–01 till 0–99)
01000-01990 100 parametergrupp (parametrarna 100 till 1–99)
02000-02990 200 parametergrupp (parametrarna 2–00 till 2–99)
03000-03990 300 parametergrupp (parametrarna 3–00 till 3–99)
04000-04990 400 parametergrupp (parametrarna 4–00 till 4–99)
... ...
49000-49990 4900 parametergrupp (parametrarna 49–00 till
50000 Indata: Styrordsregister för frekvensomformare
50010 Indata: Bussreferensregister (REF).
... ...
50200 Utdata: Statusordregister för frekvensomformare
50210 Utdata: Huvudregister över faktiska värden för
Beskrivning
data
Parameterindex
49–99)
(CTW).
(STW).
frekvensomformare (MAV).
Frekvensomformaren är
driftklar
1)
3.8.10.9
Styra frekvensomformaren
De koder som kan användas i funktions- och datafälten i
ett Modbus RTU-meddelande anges i
kapitel 3.8.10.10 Funktionskoder som stöds av Modbus RTU
och kapitel 3.8.10.11 Undantagskoder i Modbus.
3.8.10.10 Funktionskoder som stöds av
Modbus RTU
Modbus RTU stöder användningen av funktionskoder i ett
meddelandes funktionsfält (se Tabell 3.40).
Funktion Funktionskod (hex)
Läs spolar 1
Läs inforegister 3
Skriv enskild spole 5
Skriv enskilt register 6
Skriv era spolar F
Skriv era register 10
Hämta händelseräknare för kommunikation
Rapportera slav-ID 11
Tabell 3.40 Funktionskoder
Funktion Funktions
kod
Diagnostik 8 1 Starta om kommunikation
Tabell 3.41 Funktionskoder och delfunktionskoder
Delfunktionskod
2 Returnera diagnostikre-
10 Rensa räknare och diagno-
11 Returnera antal bussmed-
12 Returnera antal fel vid
13 Returnera antal slavfel
14 Returnera antal slavmed-
B
Delfunktion
gister
stiskt register
delanden
busskommunikation
delanden
3 3
Tabell 3.39 Inforegister
1) Används för att ange det indexnummer som behövs för att få
åtkomst till en indexerad parameter.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 85
Page 88

Systemintegrering
VLT® AQUA Drive FC 202
3.8.10.11 Undantagskoder i Modbus
En fullständig förklaring av strukturen i ett svar med
undantagskoder nns i kapitel 3.8.10.5 Funktionsfält.
Kod Namn Betyder
33
1 Ogiltig
funktion
2 Ogiltig
dataadress
3 Ogiltigt
datavärde
4 Fel på
slavenhet
Tabell 3.42 Undantagskoder i Modbus
3.8.11
Åtkomst till parametrar
Funktionskoden som mottogs i frågan är
inte en tillåten åtgärd för servern (eller
slaven). Detta kan ske på grund av att
funktionskoden endast är tillämpbar på
nyare enheter och inte nns på den valda
enheten. Det kan också indikera att
servern (eller slaven) är i fel tillstånd för
att bearbeta en förfrågan av denna typ.
Till exempel så är den kanske inte
kongurerad och får en förfrågan om att
returnera registervärden.
Dataadressen som togs emot i frågan är
inte en tillåten adress för servern (eller
slaven). Kombination av referensnummer
och överföringslängd är ogiltig. I en
regulator med 100 register kan en
förfrågan med oset 96 och längd 4
lyckas, men en med oset 96 och längd 5
returnerar undantag 02.
Ett värde som nns i frågedatafältet är
inte ett tillåtet värde för servern (eller
slaven). Detta indikerar ett fel i strukturen
på den återstående delen av en komplex
förfrågan, till exempel att den implicerade
längden är inkorrekt. Den betyder INTE att
ett dataobjekt som skickats för lagring i
en post har ett värde utanför det som
tillämpningen förväntar, eftersom
Modbus-protokollet inte känner till det
specika värdets betydelse i en särskild
post.
Ett oåterkalleligt fel inträade när servern
(eller slaven) försökte utföra den begärda
åtgärden.
3.8.11.1 Parameterhantering
PNU (parameternumret) översätts från registeradressen i
Modbus läs- eller skrivmeddelandet. Parameternumret
översätts till Modbus som (10 x parameternumret) decimal.
Exempel: Avläsning av parameter 3-12 Öka/minska-värde (16
bitar): Inforegister 3120 innehåller parametervärdet. Värdet
1352 (decimalt) innebär att parametern är inställd på 12,52
%
Avläsning av parameter 3-14 Förinställd relativ referens (32
bitar): Inforegister 3410 och 3411 innehåller parametervärdet. Värdet 11300 (decimalt) innebär att parametern är
inställd på 1 113,00.
Information om parametrar, storlek och konverteringsindex
nns i Programmeringshandboken.
3.8.11.2 Datalagring
Spole 65 decimalt avgör om data som skrivs till frekvensomformaren lagras i EEPROM och RAM-minne (spole 65 =
1) eller endast i RAM-minnet (spole 65 = 0).
3.8.11.3 IND (Index)
Vissa parametrar i frekvensomformaren är matrisparametrar, t.ex. parameter 3-10 Förinställd referens. Eftersom
Modbus inte stöder matriser i inforegister har frekvensomformaren reserverat inforegister 9 som pekare till matrisen.
Innan du avläser eller skriver en matrisparameter ska
inforegister 9 anges. Om inforegistret anges till värdet 2
sker alla efterföljande läsningar/skrivningar till matrisparametrar till index 2.
3.8.11.4
Parametrar lagrade som textsträngar nås på samma sätt
som andra parametrar. Maximal textblockstorlek är 20
tecken. Om en läsbegäran för en parameter består av er
tecken än vad som nns i parametern avkortas svaret. Om
läsbegäran för en parameter avser färre tecken än vad som
nns i parametern utfylls svaret med blanksteg.
3.8.11.5
Eftersom ett parametervärde endast kan överföras som
heltal måste en konverteringsfaktor användas vid
överföring av decimaltal.
3.8.11.6
Standarddatatyper
Standarddatatyperna är int 16, int 32, uint 8, uint 16 och
uint 32. De lagras som 4x register (40001–4FFFF).
Parametrarna läses med hjälp av funktionen 03 hex Läs
inforegister. Parametrarna skrivs med hjälp av funktionen 6
hex Förinställt enskilt register för ett register (16 bitar), och
funktionen 10 hex Flera förinställda register för två register
(32 bitar). Läsbara storlekar från ett register (16 bitar) upp
till tio register (20 tecken).
Icke standarddatatyper
Icke standarddatatyper är textsträngar och lagras som 4x
register (40001–4FFFF). Parametrarna läses med hjälp av
funktionen 03 hex Läs inforegister och skrivs med hjälp av
funktionen 10 hex Förinställ
storlekarna varierar från ett register (2 tecken) upp till tio
register (20 tecken).
Textblock
Konverteringsfaktor
Parametervärden
era register. De läsbara
86 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 89

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Systemintegrering
Design Guide
3.8.12 FC-frekvensomformarstyrprol
3.8.12.1 Styrord enligt FC-prol
Bild 3.55 Styrord
Bit Bitvärde = 0 Bitvärde = 1
00 Referensvärde Externt val lsb
01 Referensvärde Externt val msb
02 DC-broms Ramp
03 Utrullning Ingen utrullning
04 Snabbstopp Ramp
05 Frys utfrekvens Använd ramp
06 Rampstopp Start
07 Ingen funktion Återställning
08 Ingen funktion Jogg
09 Ramp 1 Ramp 2
10 Ogiltiga data Giltiga data
11 Ingen funktion Relä 01 aktivt
12 Ingen funktion Relä 02 aktivt
13 Parameterinställning Val lsb
14 Parameterinställning Val msb
15 Ingen funktion Reversera
Tabell 3.43 Styrordsbitar
Förklaring av styrbitar
Bit 00/01
Bit 00 och 01 används för att välja mellan de fyra referensvärdena som nns förprogrammerade i
parameter 3-10 Förinställd referens enligt Tabell 3.44.
Programmerat
referensvärde
1
2
3
4
Tabell 3.44 Referensvärden
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 87
(parameter 8-10 Styrprol = FC-
prol)
Parameter Bit 01 Bit 00
Parameter 3-10
Förinställd
referens [0]
Parameter 3-10
Förinställd
referens [1]
Parameter 3-10
Förinställd
referens [2]
Parameter 3-10
Förinställd
referens [3]
0 0
0 1
1 0
1 1
OBS!
Gör ett val i parameter 8-56 Välj förinställd referens och
ange hur bit 00/01 ska sammanföras med motsvarande
funktion på de digitala ingångarna.
Bit 02, DC-broms
Bit 02 = 0 medför likströmsbroms och stopp. Bromsström
och varaktighet ställs in i parameter 2-01 DC-bromsström
och parameter 2-02 DC-bromstid.
Bit 02 = 1 ger ramp.
Bit 03, Utrullning
Bit 03 = 0: Frekvensomformaren släpper omedelbart
motorn (utgångstransistorerna stängs av) så att den
utrullar och stannar.
Bit 03 = 1: Frekvensomformaren startar motorn om övriga
startvillkor är uppfyllda.
Gör ett val i parameter 8-50 Välj utrullning och ange hur bit
03 ska sammanföras med motsvarande funktion på en
digital ingång.
Bit 04, Snabbstopp
Bit 04 = 0: Gör att motorvarvtalet rampar ned till stopp
(angivet i parameter 3-81 Snabbstopp, ramptid).
Bit 05, Frys utgångsfrekvens
Bit 05 = 0: Fryser den aktuella utgångsfrekvensen (i Hz).
Ändra den frysta utgångsfrekvensen enbart med hjälp av
de digitala ingångarna (parameter 5-10 Plint 18, digital
ingång till parameter 5-15 Plint 33, digital ingång) programmerade till Öka varvtal och Minska varvtal.
OBS!
Om Frys utfrekvens är aktivt kan frekvensomformaren
bara stoppas på följande sätt:
Bit 03, Utrullningsstopp
•
Bit 02, Likströmsbroms
•
Digital ingång parameter 5-10 Plint 18, digital
•
ingång till parameter 5-15 Plint 33, digital
ingångprogrammerad till Likströmsbroms, Utrullningsstopp eller Återställning och
utrullningsstopp.
Bit 06, Rampstopp/start
Bit 06 = 0: Orsakar ett stopp och gör att motorvarvtalet
rampas ned till stopp via den valda nedrampparametern.
Bit 06 = 1: Gör att frekvensomformaren kan starta motorn
om övriga startvillkor är uppfyllda.
Gör ett val i parameter 8-53 Välj start och ange hur bit 06
Rampstopp/start ska sammanföras med motsvarande
funktion på en digital ingång.
Bit 07, Återställning
Bit 07 = 0: Ingen återställning.
Bit 07 = 1: Återställning efter tripp. Återställning aktiveras
på signalens
0 till logisk 1.
framank, till exempel vid växling från logisk
3 3
Page 90

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Systemintegrering
VLT® AQUA Drive FC 202
Bit 08, Jogg
Bit 08 = 1: Utfrekvensen bestäms av
parameter 3-19 Joggvarvtal [v/m].
3.8.12.2
Statusord enligt FC-prol (STW)
(parameter 8-10 Styrprol = FC-
prol)
Bit 09, Val av ramp 1/2
Bit 09 = 0: Ramp 1 är aktiv (parameter 3-41 Ramp 1,
uppramptid till parameter 3-42 Ramp 1, nedramptid).
33
Bit 09 = 1: Ramp 2 (parameter 3-51 Ramp 2, uppramptid till
parameter 3-52 Ramp 2, nedramptid) är aktiv.
Bit 10, Ogiltiga data/Giltiga data
Används för att bestämma om frekvensomformaren ska
använda eller ignorera styrordet.
Bild 3.56 Statusord
Bit 10 = 0: Styrordet ignoreras.
Bit 10 = 1: Styrordet används. Denna funktion är relevant
eftersom telegrammet alltid innehåller styrordet oavsett
vilken typ av telegram det är. Stäng av styrordet om du
inte vill använda det vid uppdatering eller läsning av
parametrar.
Bit 11, relä 01
Bit 11 = 0: Reläet är inte aktivt.
Bit 11 = 1: Relä 01 aktiveras, förutsatt att Styrordsbit 11 har
valts i parameter 5-40 Funktionsrelä.
Bit 12, relä 04
Bit 12 = 0: Relä 04 är inte aktivt.
Bit 12 = 1: Relä 04 aktiveras, förutsatt att Styrordsbit 12 har
valts i parameter 5-40 Funktionsrelä.
Bit 13/14, Menyval
Bit 13 och 14 används för att välja mellan de fyra
menyvalen enligt Tabell 3.45.
Meny Bit 14 Bit 13
1 0 0
2 0 1
3 1 0
4 1 1
Tabell 3.45 Specikation av menyvalen
Bit Bit = 0 Bit = 1
00 Styrning inte klar Styrning klar
01 Frekvensomformare inte
klar
02 Utrullning Aktivera
03 Inget fel Tripp
04 Inget fel Fel (ingen tripp)
05 Reserverat 06 Inget fel Tripplåsning
07 Ingen varning Varning
08 Varvtal ? referens Varvtal = referens
09 Lokal styrning Busstyrning
10 Utanför frekvensgräns Frekvensgräns OK
11 Ingen drift I drift
12 Frekvensomformare OK Stoppad, autostart
13 Spänning OK För hög spänning
14 Moment OK För högt moment
15 Timer OK Timer överskriden
Tabell 3.46 Statusordbitar
Frekvensomformare klar
Förklaring till statusbitar
Bit 00, Styrning inte klar/klar
Bit 00 = 0: Frekvensomformaren trippar.
Funktionen är bara tillgänglig när alternativet [9] Ext
menyval har valts i parameter 0-10 Aktiv meny.
Gör ett val i parameter 8-55 Menyval och ange hur bit
13/14 ska sammanföras med motsvarande funktion på de
digitala ingångarna.
Bit 15, Reversering
Bit 15 = 0: Ingen reversering.
Bit 15 = 1: Reversering. I fabriksinställningen är reversering
angett till digital i parameter 8-54 Välj reversering. Bit 15
medför reversering endast när Seriell kommunikation,
Logiskt eller eller Logiskt och har valts.
Bit 00 = 1: Frekvensomformarens styrning är klar, men den
nödvändiga strömförsörjningen till
eektdelen saknas (vid
extern 24 V-försörjning för styrning).
Bit 01, Frekvensomformare klar
Bit 01 = 1: Frekvensomformaren är driftklar, men
kommandot utrullning är aktivt på de digitala ingångarna
eller i den seriella kommunikationen.
Bit 02, Utrullningsstopp
Bit 02 = 0: Frekvensomformaren släpper motorn.
Bit 02 = 1: Frekvensomformaren startar motorn med ett
startkommando.
Bit 03, Inget fel/tripp
Bit 03 = 0: Frekvensomformaren benner sig inte i ett
feltillstånd.
Bit 03 = 1: Frekvensomformaren trippar. Återuppta driften
genom att använda [Reset].
88 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 91

Actual output
freq.
STW
Follower-master
Speed ref.CTW
Master-follower
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Systemintegrering Design Guide
Bit 04, Inget fel/fel (ingen tripp)
Bit 04 = 0: Frekvensomformaren benner sig inte i ett
feltillstånd.
Bit 04 = 1: Frekvensomformaren visar ett fel men trippar
inte.
Bit 05, Används inte
Bit 05 används inte i statusordet.
Bit 15, Timer OK/gränsen överskriden
Bit 15 = 0: Varken timern för termiskt motorskydd eller för
termiskt skydd har överskridit 100 %.
Bit 15 = 1: En timer har överskridit 100 %.
Alla bitar i STW anges till 0 om anslutningen mellan
InterBus-tillvalet och frekvensomformaren bryts eller om
ett internt kommunikationsproblem har uppstått.
Bit 06, Inget fel/tripplåsning
Bit 06 = 0: Frekvensomformaren benner sig inte i ett
3.8.12.3 Varvtalsreferens för buss
feltillstånd.
Bit 06 = 1: Frekvensomformaren har trippat och är låst.
Bit 07, Ingen varning/varning
Bit 07 = 0: Det nns inga varningar.
Bit 07 = 1: En varning inträade.
Bit 08, Varvtal ? referens/varvtal = referens
Hastighetsreferensvärdet överförs till frekvensomformaren
som ett relativt procentvärde. Värdet överförs i form av ett
16-bitarsord; i heltal (0–32767) motsvarar värdet 16384 (4
000 hex) 100 %. Negativa tal bildas genom 2-komplement.
Den aktuella utfrekvensen (MAV) skalas på samma sätt som
bussreferensen.
Bit 08 = 0: Motorn körs, men det aktuella varvtalet avviker
från den förinställda varvtalsreferensen. Detta kan till
exempel vara fallet då varvtalet rampas upp/ned vid start/
stopp.
Bit 08 = 1: Motorvarvtalet matchar den förinställda
varvtalsreferensen.
Bit 09, Lokal styrning/busstyrning
Bit 09 = 0: [Stopp/återställning] är aktiverat på styrenheten,
eller också är alternativet Lokal styrning valt i
Bild 3.57 Aktuell utfrekvens (MAV)
parameter 3-13 Referensplats. Styrning via seriell kommunikation är inte möjlig.
Bit 09 = 1 Det är möjligt att styra frekvensomformaren via
Referensen och MAV skalas på följande sätt:
fältbussen/den seriella kommunikationen.
Bit 10, Utanför frekvensgränsen
Bit 10 = 0: Utfrekvensen har nått det värde som ställts in i
parameter 4-11 Motorvarvtal, nedre gräns [rpm] eller
parameter 4-13 Motorvarvtal, övre gräns [rpm].
Bit 10 = 1: Utfrekvensen ligger inom de angivna gränserna.
Bit 11, Ej i drift/i drift
Bit 11 = 0: Motorn kör inte.
Bit 11 = 1: Frekvensomformaren har en startsignal eller så
är utfrekvensen större än 0 Hz.
Bit 12, Frekvensomformare OK/stoppad, autostart
Bild 3.58 Referens och MAV
Bit 12 = 0: Det föreligger ingen tillfällig överhettning på
växelriktaren.
Bit 12 = 1: Växelriktaren har stoppats p.g.a. överhettning,
men enheten trippar inte och kommer att återuppta
driften så snart överhettningen upphör.
Bit 13, Spänning OK/gränsen överskriden
Bit 13 = 0: Det
nns inga spänningsvarningar.
Bit 13 = 1: Likspänningen i frekvensomformarens
mellankrets är för låg eller för hög.
Bit 14, Moment OK/gränsen överskriden
Bit 14 = 0: Motorströmmen är lägre än den momentgräns
som ställts in i parameter 4-18 Strömbegränsning.
Bit 14 = 1: Momentgränsen i parameter 4-18 Strömbe-
gränsning har överskridits.
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 89
3 3
Page 92

Systemintegrering
VLT® AQUA Drive FC 202
3.8.12.4 Styrord enligt PROFIdrive-prolen
(CTW)
Styrordet används för att sända kommandon från en
master (t.ex. en dator) till en slav.
33
Bit Bit = 0 Bit = 1
00 Av 1 På 1
01 Av 2 På 2
02 Av 3 På 3
03 Utrullning Ingen utrullning
04 Snabbstopp Ramp
05 Frys utfrekvensen Använd ramp
06 Rampstopp Start
07 Ingen funktion Återställning
08 Jogg 1 Av Jogg 1 På
09 Jogg 2 Av Jogg 2 På
10 Ogiltiga data Giltiga data
11 Ingen funktion Minska
12 Ingen funktion Öka
13 Parameterinställning Val lsb
14 Parameterinställning Val msb
15 Ingen funktion Reversera
Tabell 3.47 Styrordsbitar
Förklaring av styrbitar
Bit 00, AV 1/PÅ 1
Normala rampstopp där ramptiderna för den valda rampen
används.
Bit 00 = 0 leder till stopp och aktivering av reläutgång 1
eller 2 om utfrekvensen är 0 Hz och om [Relä 123] har
valts i parameter 5-40 Funktionsrelä.
När bit 0 = 1 är frekvensomformaren i Tillstånd 1: Koppling
på ej möjlig.
Bit 01, Av 2/På 2
Utrullningsstopp
När bit 01 = 0
utgångsrelä 1 eller 2 om utfrekvensen är 0 Hz och om
[Relä 123] har valts i parameter 5-40 Funktionsrelä.
Bit 02, Av 3/På 3
Snabbstopp där ramptiden i parameter 3-81 Snabbstopp,
ramptid används. När bit 02 = 0
aktivering av utgångsrelä 1 eller 2 om utfrekvensen är 0 Hz
och om [Relä 123] har valts i parameter 5-40 Funktionsrelä.
När bit 02 = 1 är frekvensomformaren i
Tillstånd 1: Koppling på ej möjlig.
Bit 03, Utrullning/ingen utrullning
Utrullningsstopp, bit 03 = 0 leder till stopp.
När bit 03 = 1 kan frekvensomformaren startas om övriga
startvillkor är uppfyllda.
inträar utrullningsstopp och aktivering av
inträar snabbstopp och
OBS!
Valet i parameter 8-50 Välj utrullning bestämmer hur bit
03 länkas till motsvarande funktion för digitala ingångar.
Bit 04, Snabbstopp/ramp
Snabbstopp där ramptiden i parameter 3-81 Snabbstopp,
ramptid används.
När bit 04 = 0 utförs ett snabbstopp.
När bit 04 = 1 kan frekvensomformaren startas om övriga
startvillkor är uppfyllda.
OBS!
Valet i parameter 8-51 Välj snabbstopp bestämmer hur bit
04 länkas till motsvarande funktion för de digitala
ingångarna.
Bit 05, Frys utfrekvens/använd ramp
När bit 05 = 0 upprätthålls den aktuella utfrekvensen
oavsett om referensvärdet ändras.
När bit 05 = 1 kan frekvensomformaren utföra regleringsfunktionen igen; styrningen sker enligt respektive
referensvärden.
Bit 06, Rampstopp/start
Normalt rampstopp där de valda ramptiderna för den
aktuella rampen används. Dessutom aktiveras utgångsrelä
01 eller 04 om utfrekvensen är 0 Hz och relä 123 har valts i
parameter 5-40 Funktionsrelä.
Bit 06 = 0 leder till stopp.
När bit 06 = 1 kan frekvensomformaren startas om övriga
startvillkor är uppfyllda.
OBS!
Valet i parameter 8-53 Välj start bestämmer hur bit 06
länkas till motsvarande funktion för de digitala
ingångarna.
Bit 07, Ingen funktion/återställning
Återställ efter avstängning.
Bekräfta händelsen i felbuerten.
När bit 07 = 0 utförs ingen återställning.
Om det inträar en lutningsändring i bit 07 till 1 inträar
en återställning efter avstängning.
Bit 08, Jogg 1 av/på
Aktivering av det förprogrammerade varvtalet i
parameter 8-90 Bussjogg 1, varvtal. JOGG 1 är endast möjlig
om bit 04 = 0 och bit 00–03 = 1.
Bit 09, Jogg 2 av/på
Aktivering av det förprogrammerade varvtalet i
parameter 8-91 Bussjogg 2, varvtal. Jogg 2 kan bara
användas när bit 04 = 0 och bit 00–03 = 1.
Bit 10, Data ogiltiga/giltiga
Används för att bestämma om frekvensomformaren ska
använda eller ignorera styrordet.
Bit 10 = 0 innebär att styrordet ignoreras,
Bit 10 = 1 innebär att styrordet används. Den här
funktionen behövs eftersom styrordet alltid ingår i
telegrammet, oavsett vilken telegramtyp som används. Det
går att stänga av styrordet om det inte ska användas vid
uppdatering eller läsning av parametrar.
90 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 93

Systemintegrering
Design Guide
Bit 11, Ingen funktion/minska
Används för att minska varvtalsreferensvärdet enligt vad
som angetts i parameter 3-12 Öka/minska-värde.
När bit 11 = 0 ändras inte referensvärdet.
När bit 11 = 1 minskas referensvärdet.
Bit 12, Ingen funktion/öka
Används för att öka varvtalsreferensvärdet enligt värdet
som angetts i parameter 3-12 Öka/minska-värde.
När bit 12 = 0 ändras inte referensvärdet.
När bit 12 = 1 ökas referensvärdet.
Om både minskning och acceleration är aktiverade (bit 11
och 12 = 1), har minskning högsta prioritet, dvs. varvtalets
referensvärde minskas.
Bits 13/14, Menyval
Bit 13 och 14 används för att välja mellan de fyra parameterinställningarna, enligt Tabell 3.48.
Funktionen är bara tillgänglig när [9] Ext. menyval har valts
i parameter 0-10 Aktiv meny. Valet i parameter 8-55 Menyval
bestämmer hur bit 13 och 14 länkas till motsvarande
funktion för digitala ingångar. Det går endast att växla
meny under körning om menyerna har länkats i
parameter 0-12 Menyn är länkad till.
Meny Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Tabell 3.48 Menyval
Bit 15, Ingen funktion/reversering
Bit 15 = 0 medför att ingen reversering sker.
Bit 15 = 1 medför reversering.
OBS!
I fabriksinställningen är reversering angett till digital i
parameter 8-54 Välj reversering.
OBS!
Bit 15 medför reversering endast när Seriell kommunikation, Logiskt eller eller Logiskt och har valts.
3.8.12.5 Statusord enligt PROFIdrive-prol
(STW)
Statusordet används för att informera en master (t.ex. en
dator) om en slavs status.
Bit Bit = 0 Bit = 1
00 Styrning inte klar Styrning klar
01 Frekvensomformare
inte klar
02 Utrullning Aktivera
03 Inget fel Tripp
04 Av 2 På 2
05 Av 3 På 3
06 Start möjlig Start ej möjlig
07 Ingen varning Varning
08
09 Lokal styrning Busstyrning
10 Utanför frekvensgräns Frekvensgräns OK
11 Ingen drift I drift
12 FrekvensomformareOKStoppad, autostart
13 Spänning OK För hög spänning
14 Moment OK För högt moment
15 Timer OK Timer överskriden
Tabell 3.49 Statusordbitar
Varvtals?referens
Förklaring till statusbitar
Bit 00, Styrning inte klar/klar
När bit 00 = 0 ska bit 00, 01 eller 02 i styrordet vara 0 (AV
1, AV 2 eller AV 3), annars stängs frekvensomformaren av
(tripp).
När bit 00 = 1 är styrningen av frekvensomformaren klar,
men det är inte säkert att det
till den aktuella enheten (om styrsystemet har extern 24 Vmatning).
Bit 01, Frekvensomformare inte klar/klar
Samma betydelse som bit 00, men med matning från
eektenheten. Frekvensomformaren är klar när de
nödvändiga startsignalerna tas emot.
Bit 02, Utrullning/aktivera
När bit 02 = 0 ska bit 00, 01 eller 02 i styrordet vara 0 (Av
1, Av 2, Av 3 eller utrullning), annars stängs frekvensomformaren av (tripp).
När bit 02 = 1 ska bit 00, 01 eller 02 i styrordet vara 1;
frekvensomformaren har inte trippat.
Bit 03, Inget fel/tripp
När bit 03 = 0 föreligger inget feltillstånd i frekvensomformaren.
När bit 03 = 1 har frekvensomformaren trippat och kräver
en återställningssignal för att kunna startas.
Bit 04, På 2/Av 2
När bit 01 i styrordet är 0 är bit 04 = 0.
När bit 01 i styrordet är 1 är bit 04 = 1.
Frekvensomformare klar
Varvtal = referens
nns någon strömförsörjning
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 91
Page 94

Systemintegrering
VLT® AQUA Drive FC 202
Bit 05, På 3/Av 3
När bit 02 i styrordet är 0 är bit 05 = 0.
När bit 02 i styrordet är 1 är bit 05 = 1.
Bit 06, Start möjlig/start ej möjlig
Om [1] PROFIdrive har valts i parameter 8-10 Prol för
33
styrord så är bit 06 1 efter en bekräftelse av en
avstängning, efter aktivering av Av2 eller Av3, och efter
anslutning av nätspänningen, Start ej möjlig återställs, med
bit 00 i styrordet angett till 0 och bit 01, 02 och 10 har
angetts till 1.
Bit 07, Ingen varning/varning
Bit 07 = 0 betyder att inga varningar föreligger.
Bit 07 = 1 betyder att en varning har utlösts.
Bit 08, Varvtal ? referens/varvtal = referens
När bit 08 = 0 avviker motorns aktuella varvtal från det
inställda varvtalets referensvärde. Detta kan t.ex. inträa
när varvtalet ändras under start/stopp genom upp-/
nedrampning.
När bit 08 = 1 avviker motorns aktuella varvtal från det
inställda varvtalets referensvärde.
Bit 09, Lokal styrning/busstyrning
Bit 09 = 0 anger att frekvensomformaren har stoppats med
[Stopp] på LCP:n eller att [Länkat till hand] eller [Lokal] har
valts i parameter 3-13 Referensplats.
När bit 09 = 1 kan frekvensomformaren styras via det
seriella gränssnittet.
Bit 10, Utanför frekvensgräns/frekvensgräns OK
När bit 10 = 0 ligger utfrekvensen utanför de gränser som
angetts i parameter 4-52 Varning, lågt varvtal och
parameter 4-53 Varning, högt varvtal.
När bit 10 = 1 ligger utfrekvensen inom de angivna
gränserna.
Bit 11, Ej i drift/i drift
När bit 11 = 0 roterar inte motorn.
När bit 11 = 1 har frekvensomformaren en startsignal eller
så är utfrekvensen är större än 0 Hz.
Bit 12, Frekvensomformare OK/stoppad, autostart
När bit 12 = 0 föreligger ingen tillfällig överbelastning av
växelriktaren.
När bit 12 = 1 har växelriktaren stoppats p.g.a. överbelastning. Frekvensomformaren har emellertid inte stängts
av (tripp), utan kommer att starta om när överbelastningen
har upphört.
Bit 13, Spänning OK/för hög spänning
När bit 13 = 0 har frekvensomformarens spänningsgränser
inte överskridits.
När bit 13 = 1 är likspänningen i frekvensomformarens
mellankrets för låg eller för hög.
Bit 14, Moment OK/för stort moment
När bit 14 = 0 ligger motormomentet under den gräns
som har valts i parameter 4-16 Momentgräns, motordrift och
parameter 4-17 Momentgräns, generatordrift.
När bit 14 = 1 är den gräns som valts i
parameter 4-16 Momentgräns, motordrift eller
parameter 4-17 Momentgräns, generatordrift överskriden.
Bit 15, Timer OK/timer överskriden
När bit 15 = 0 har timern för termiskt motorskydd och
timern för termiskt skydd av frekvensomformaren inte
överstigit 100 %.
När bit 15 = 1 har någon av dem överstigit 100 %.
92 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 95

Systemintegrering Design Guide
3.9 Checklista för systemkonstruktion
I Tabell 3.50 nns en checklista för integrering en frekvensomformare till ett motorstyrsystem. Listan är tänkt som en
påminnelse om de allmänna kategorierna och tillvalen som krävs för att specicera systemkraven.
Kategori Information Anmärkningar
FC-modell
Eekt
Volt
Ström
Fysiska
Mått
Vikt
Omgivande miljöförhållanden
Temperatur
Höjd
Fukt
Luftkvalitet/damm
Nedstämplingskrav
Kapslingsstorlek
Ingång
Kablar
Typ
Längd
Säkringar
Typ
Storlek
Klassicering
Tillval
Anslutningar
Kontakter
Filter
Utgång
Kablar
Typ
Längd
Säkringar
Typ
Storlek
Klassicering
Tillval
Filter
Styrning
Kabeldragning
Typ
Längd
Plintanslutningar
Kommunikation
Protokoll
Anslutning
Kabeldragning
Tillval
Anslutningar
?
3 3
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 93
Page 96

Systemintegrering
VLT® AQUA Drive FC 202
Kategori Information Anmärkningar
Kontakter
Filter
Motor
Typ
33
Klassicering
Spänning
Tillval
Specialverktyg och utrustning
Flyttning och lagring
Montering
Elektrisk anslutning
Tabell 3.50 Checklista för systemkonstruktion
?
94 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
Page 97

Tillämpningsexempel
Design Guide
4 Tillämpningsexempel
4.1 Översikt över tillämpningsfunktioner
VLT® AQUA Drive FC 202 är avsedd för vatten- och
avloppstillämpningar. De olika standard- och tillvalsfunktioner som nns omfattar optimerad SmartStart och
snabbmeny med fokus på vatten- och avloppstillämpningar:
Kaskadreglering
•
Grundläggande kaskadreglering är inbyggd som
standard med en kapacitet på upp till 3 pumpar.
Kaskadreglering ger varvtalsreglering av en
enskild pump i ett system med era pumpar.
Detta är en attraktiv lösning för att sänka
kostnaderna,till exempel för tryckstegringsanläggningar. System som har era pumpar med
variabelt varvtal kräver den utökade kaskadregulatorn (MCO 101) eller den avancerad
kaskadregulatorn (MCO 102).
Motorväxling
•
Motorväxlingsfunktionen är lämplig för tillämpningar med två motorer eller pumpar som delar
på en frekvensomformare.
Flödeskompensation
•
Flödeskompensation anpassar börvärdet efter
ödet och gör det möjligt att montera en
trycksensor nära pumpen.
Torrkörningsdetektering
•
Funktionen förhindrar skador på pumpen genom
att undvika torrkörning och pumpöverhettning.
Detektering av kurvslut
•
Funktionen upptäcker när pumpen körs vid
maximalt varvtal och börvärdet inte uppnås
under en användardenierad tidsperiod.
Rensning
•
Denna förebyggande eller reaktiva rengöringsfunktion är avsedd för pumpar i
avloppstillämpningar. Mer information nns i
kapitel 4.2.3 29-1* Rensningsfunktion.
Inledande/avslutande ramper
•
Programmering av korta ramptider till/från
minimihastighet skyddar lager, och säkerställer
tillräcklig kylning i tillämpningar med dränkbara
pumpar.
Backventilsskydd
•
En långsam nedrampningshastighet skyddar
backventilerna och förhindrar vattenslag.
STO
•
STO aktiverar säkerhetsstoppet (utrullning) när en
kritisk situation uppstår.
Lågödesdetektering
•
Funktionen upptäcker tillstånd utan öde eller
med lågt öde i systemet.
Energisparläge
•
Energisparlägesfunktion sparar energi genom att
stoppa pumpen om den inte behövs.
Rörfyllningsläge
•
Rörfyllningsläget omfattar funktioner för jämn
påfyllning av rör och för att undvika vattenslag.
Den här funktionen ger olika lägen för
horisontella och vertikala rör.
Realtidsklocka
•
Smart Logic Control (SLC)
•
SLC omfattar programmering av en sekvens som
består av händelser och åtgärder. SLC erbjuder en
rad olika PLC-funktioner med komparatorer,
logiska regler och timer.
Före/efter smörjning
•
Mer information
smörjning.
Flödesbekräftelse
•
Mer information nns i kapitel 4.2.5 29-5* Flödesbekräftelse.
Avancerad övervakning av minimivarvtal för
•
dränkbara pumpar
Mer information
övervakning av minimivarvtal för dränkbara
pumpar.
Förebyggande underhåll
•
Funktionen för förebyggande underhåll gör det
möjligt att programmera in schemalagda serviceintervall i frekvensomformaren.
4.2
Valda tillämpningsfunktioner
nns i kapitel 4.2.4 Före/efter
nns i kapitel 4.2.6 Avancerad
4.2.1 SmartStart
Med SmartStart-guiden är idrifttagning av frekvensomformaren nu både enklare och mer kostnadseektiv.
SmartStart aktiveras vid den första starten eller efter en
fabriksåterställning och ledsagar användaren genom ett
antal enkla steg för att säkerställa en motorstyrning som är
korrekt och så eektiv som möjligt. SmartStart kan även
startas direkt via snabbmenyn. Välj inställningar på den
graska manöverpanelen med 28 tillgängliga språk.
En pump/motor utan eller med återkoppling
•
Motorväxling: När två motorer delar på en
•
frekvensomformare.
4 4
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 95
Page 98

0 Hz / RPM
Derag O Delay:
Par. 29 -15
+/- Derag
Speed:
Par.: 29 -13
Par.: 29 -14
Deragging Run Time : Par . 29-12
Speed
Derag
function
activated
1 Cycle
Number of Cycles : Par . 29 -10
130BC369.10
Tillämpningsexempel
Grundläggande kaskadreglering: Varvtalsreglering
•
av en enskild pump i ett system med era
pumpar. Detta är en attraktiv lösning för att sänka
kostnaderna, till exempel för tryckstegringsanläggningar.
Master–slav: Styr upp till 8 frekvensomformare
•
och pumpar, och säkerställ jämn drift på de
övergripande pumpsystemet.
VLT® AQUA Drive FC 202
44
4.2.2 Snabbmeny för vatten och pumpar
Snabbmenyns post för vatten och pumpar ger snabb
åtkomst till de vanligaste vatten- och pumpfunktioner för
VLT® AQUA Drive:
Speciella ramper (inledande/avslutande ramp,
•
backventilsramp)
Energisparläge
•
Rensning
•
Torrkörningsdetektering
•
Kurvslutsdetektering
•
Flödeskompensation
•
Rörfyllningsläge för horisontella, vertikala och
•
blandade rörsystem
Regulatorprestanda
•
Övervakning av lägsta varvtal
•
29-1* Rensningsfunktion
4.2.3
Meningen med rensningsfunktionen är att rensa
pumpbladen från smuts vid avloppsvattentillämpningar så
att pumpen fungerar normalt.
En rensningshändelse denieras som den tid då frekvensomformaren startar rensningen fram till att den avslutas.
När en rensning startas rampar frekvensomformaren först
för att stanna och sedan löper en frånkopplingsfördröjning
ut innan den första cykeln startar.
Bild 4.1 Rensningsfunktion
Om en rensning startas från en frekvensomformares
stoppläge, hoppas den första frånkopplingsfördröjningen
över. Rensningshändelsen kan bestå av era cykler. En
cykel består av en puls i reverserad riktning som följs av en
puls i framåtriktning. Rensningen är klar när det speci-
cerade antalet cykler har slutförts. På den sista pulsen (som
alltid är framåt) för den sista cykeln är rensningen slutförd
när rensningstiden löper ut (frekvensomformaren går på
rensningshastighet). Mellan pulserna ger frekvensomformaren utrullningar för en given
frånkopplingsfördröjningstid så att smutsen i pumpen kan
sjunka.
OBS!
Aktivera inte rensningen om pumpen inte kan köras i
reverserad riktning.
Det nns tre olika meddelanden för en pågående
rensningshändelse:
Status på LCP: Autoärrensning.
•
En bit i det utökade statusordet (Bit 23, 80 0000
•
Beroende på tillämpningen och på vilket sätt den ska
användas kan den här funktionen användas som en
förebyggande eller reaktiv åtgärd, och kan startas på
följande sätt:
96 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
hex).
En digital utgång kan kongureras för att återge
•
den aktiva reningsstatusen.
Page 99

130BD765.10
N
MAX
N
MIN
0
1
1
0
0
1
2
3
t1 t3t2
T
T
T
Tillämpningsexempel
Vid varje startkommando (parameter 29-11 Derag
•
Design Guide
at Start/Stop)
Vid varje stoppkommande (parameter 29-11 Derag
•
at Start/Stop)
Vid varje start-/stoppkommando
•
(parameter 29-11 Derag at Start/Stop)
På digital ingång (parametergrupp 5-1* Digitala
•
ingångar)
Vid frekvensomformaråtgärd med Smart Logic
•
4 4
Controller (parameter 13-52 SL Controllerfunktioner)
Som tidsstyrd åtgärd (parametergrupp 23-**
•
Tidsbaserade funktioner)
1
På hög
•
eekt (parametergrupp 29-2* Rensningsef-
fektjustering)
Före/efter smörjning
4.2.4
Vissa motorer kräver att deras mekaniska delar smörjs
innan och under drift för att förhindra skador/slitage. Detta
gäller särskilt när motorn inte har körts på en lång tid.
Försmörjning stöder även tillämpningar som kan kräva att
frånluftsäktar körs. Försmörjningsfunktionen signaler
vissa
Varvtalskurva
2 Startkommando (till exempel plint 18)
3 Försmörjningens utsignal
t
Startkommando utfärdat (till exempel plint 18 anges som
1
aktiv). Startfördröjningstiden (parameter 1-71 Star tfördr.)
och försmörjningstiden (parameter 29-41 Pre Lube Time).
t
Startfördröjningstiden löper ut. Frekvensomformaren
2
börjar rampa upp.
t
Försmörjningstiden (parameter 29-41 Pre Lube Time) löper
3
ut.
till en extern enhet att den ska påbörja en specik åtgärd
under en av användaren angiven tidsperiod och att den
Bild 4.2 För-/eftersmörjning, funktionsexempel
ska börja på framanken av ett körkommando (till exempel
en startbegäran). Dessutom kan en en startfördröjning
(parameter 1-71 Startfördr.) anges så att försmörjningen
endast inträar när frekvensomformaren är stoppad och att
den slutförs precis innan frekvensomformaren börjar att
rampa upp. Försmörjning kan också kongureras så att den
externa enheten alltid får signaler då frekvensomformaren
Parameter och
namn
Parameter 29-4
0 Pre/Post Lube
Function
är i körstatus, eller så att signalen stannar kvar efter det att
motorn har stoppats (parameter 29-42 Post Lube Time).
Tillämpningsexempel innehåller en enhet som smörjer de
mekaniska delarna av en motor/pump eller en viss typ av
frånluftsäkt.
Parameter 29-4
1 Pre Lube Time
Ett exemplariskt fall vore att smörjenheten påbörjar
smörjningen vid
framanken av en startbegäran. Fördröj
starten under en viss tidsperiod och avsluta smörjningen
då fördröjningen löper ut och frekvensomformaren startar.
I Bild 4.2 visas en annan typ av funktion. I det här fallet
löper fördröjningen medan frekvensomformaren redan
börjat rampa upp. Mer information om relaterade
parametrar
nns i Tabell 4.1.
Parameter 29-4
2 Post Lube
Time
Tabell 4.1 För-/eftersmörjningsparametrar
Beskrivning Inställningar Enhet
Välj för-/eftersmörjningsfunktion. Ange
fördröjningen innan
motorn rampar upp
genom att använda
parameter 1-71 Startfö
rdr..
Ange varaktigheten
för signalen efter
startsignalen.
Används endast när
[1] Endast
försmörjning väljs i
parameter 29-40 Pre/
Post Lube Function.
Välj varaktighet för
signalen efter det att
motorn stoppats.
Används endast när
[3] Före, under körning
och efter väljs i
parameter 29-40 Pre/
Post Lube Function.
[0]*Inaktiverad
[1] Endast
försmörjning
[2] Före och
under körning
[3] Före, under
körning och efter
0-600 (*10) s
0-600 (*10) s
-
MG20N607 Danfoss A/S © 09/2014 Med ensamrätt. 97
Page 100

130BD766.10
N
MAX
N
MIN
0
0
1
1
0
1
0
1
2
3
4
t0 <t1 t2
T
T
T
T
Tillämpningsexempel
VLT® AQUA Drive FC 202
4.2.5 29-5* Flödesbekräftelse
Funktionen för ödesbekräftelse är avsedd för tillämpningar där du vill att motorn/pumpen ska köra medan den
väntar på en extern händelse. Övervakningen av ödesbe-
Parameter och
namn
Parameter 29-5
0 Validation
Time
kräftelsen förväntar sig att få en digital ingångssignal från
en givare på en slussventil, ödesbrytare eller liknande
extern enhet som indikerar att enheten är i öppet läge och
att öde är möjligt. I parameter 29-50 Validation Time
44
denierar en användare hur länge VLT® AQUA DriveFC 202
Parameter 29-5
1 Verication
Time
ska vänta på den digitala ingångssignalen från den externa
enheten som bekräftar
ödet. Efter att ödet har bekräftats
kontrollerar frekvensomformaren signalen igen efter att
ödesverieringstiden och körs sedan normalt. LCPstatusen lyder ”Verierar öde” medan
Tabell 4.2 Parametrar för ödesbekräftelse
Beskrivning Inställningar Enhet
Den digitala
ingångssignalen
måste vara aktiv
under valideringstiden.
Flödet bekräftas
om den digital
ingångssignalen
fortfarande är aktiv
när valideringstiden är slut.
0,1–999,0
(*beroende på
storlek)
0,1–255,0
(*15)
s
s
ödesövervakningen är aktiv.
Frekvensomformaren trippar med larmet Flöde ej bekräftat
om den förväntade digitala ingångssignal blir inaktiv innan
ödets validerings- eller verieringstid löper ut.
OBS!
Parametrarna syns endast på LCP:n när en digital ingång
är kongurerad som ödesbekräftelse.
4.2.6 Avancerad övervakning av
minimivarvtal för dränkbara pumpar
Vissa pumpar är mycket känslig för drift vid lågt varvtal.
Vanliga skäl för detta är otillräcklig kylning eller smörjning
vid låga varvtal.
Vid överbelastning skyddar frekvensomformaren sig själv
med dess inbyggda skyddsfunktioner, som t.ex. innefattar
att sänka varvtalet. Till exempel kan strömbegränsningsregulatorn sänka varvtalet. Detta innebär att varvtalet i vissa
fall kan sänkas under det varvtal som anges i
parameter 4-11 Motorvarvtal, nedre gräns [rpm] och
parameter 4-12 Motorvarvtal, nedre gräns [Hz].
Den avancerade övervakningen av minimivarvtal trippar
1 Varvtalskurva
2 Startkommando (till exempel plint 18)
3 Digital signal från en extern enhet som bekräftar att
ödet är möjligt.
4 Flödesveriering
t
Startkommando utfärdat (till exempel plint 18 anges
0
som aktiv).
t
Digital signal från en extern enhet blir aktiv innan
1
parameter 29-50 Validation Time löper ut.
t
När parameter 29-51 Verication Time passerar
2
kontrollerar frekvensomformaren signalen från den
98 Danfoss A/S © 09/2014 Med ensamrätt. MG20N607
extern enheten igen och körs sedan normalt.
Bild 4.3 Flödesbekräftelse
frekvensomformaren om varvtalet faller under ett visst
värde. Om pumpens pumpmotor inte når det varvtal som
anges i parameter 1-86 Tripp lågt varvtal [RPM] inom den
tid som anges i parameter 1-79 Kompressorstart max tripptid
(upprampning tar för lång tid) trippar frekvensomformaren.
Timern för parameter 1-71 Startfördr. och
parameter 1-79 Kompressorstart max tripptid startar
samtidigt när startkommandot utfärdas. Det innebär till
exempel att om värdet i parameter 1-71 Startfördr. är större
än eller lika med värdet i parameter 1-79 Kompressorstart
max tripptid startar aldrig frekvensomformaren.
 Loading...
Loading...