

Page 1
ENGINEERING TOMORROW
Programlama Kılavuzu
VLT® AQUA Drive FC 202
Yazılım sürümü: 3.30
www.danfoss.tr/drives
Page 2

Page 3
içindekiler Programlama Kılavuzu
içindekiler
1 Giriş
1.1 Kılavuzun Amacı
1.2 Ek Kaynaklar
1.3 Yazılım Versiyonu
1.4 Onaylar
1.5 Simgeler
1.6 Tanımlar
1.6.1 Frekans Dönüştürücü 4
1.6.2 Giriş 4
1.6.3 Motor 4
1.6.4 Referanslar 5
1.6.5 Çeşitli 5
1.7 Kısaltmalar, Semboller ve Kurallar
1.8 Güvenlik
1.9 Elektrik Tel Bağlantısı
2 Programlama
2.1 Grafiksel ve Sayısal Yerel Denetim Panosu
4
4
4
4
4
4
4
7
8
10
13
13
2.2 Grafiksel LCP‘yi Programlama
2.2.1 LCP Ekranı 14
2.2.2 Parametre Ayarlarının Çoklu Frekans Dönüştürücüler arasında Hızlı Aktarımı 17
2.2.3 Ekran Modu 17
2.2.4 Ekran Modu - Okumaların Seçimi 17
2.2.5 Parametre Kurulumu 18
2.2.6 Hızlı Menu Tuşu İşlevleri 18
2.2.7 Hızlı Menü, Q3 İşlev Kurulumları 19
2.2.8 Hızlı Menü, Q4 SmartStart 21
2.2.9 Ana Menü Modu 21
2.2.10 Parametre Seçimi 21
2.2.11 Verileri Değiştirme 21
2.2.12 Bir Metin Değerini Değiştirme 22
2.2.13 Bir Veri Değerini Değiştirme 22
2.2.14 Sayısal Veri Değerinin Sonsuz Değişken Değişikliği 22
2.2.15 Değer, Adım adım 23
2.2.16 Dizinli Parametreleri Okuma ve Programlama 23
13
2.2.17 Sayısal Yerel Denetim Panosu'nda Nasıl Programlanır? 23
2.2.18 LCP Tuşları 24
3 Parametre Açıklaması
3.1 Parametre Seçimi
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 1
26
26
Page 4
içindekiler
VLT® AQUA Drive FC 202
3.2 0-** İşletim/Ekran Parametreleri
3.3 Parametre 1-** Yük ve Motor
3.4 2-** Frenler Parametreleri
3.5 3-** Rferans / Rampalar Parametreleri
3.6 4-** Sınırlar / Uyarılar Parametreleri
3.7 5-** Dijital Giriş/Çıkış Parametreleri
3.8 6-** Analog Giriş/Çıkış Parametreleri
3.9 8-** İletişim ve Sçnkler Parametreleri
3.10 9-** PROFIBUS parametreleri
3.11 10-** CAN Fieldbus parametreleri
3.12 Parametreler 13-** Smart Logic
3.13 14-** Özel İşlevler parametreleri
3.14 15-** Sürücü Bilgisi parametreleri
3.15 16-** Veri Okumaları Parametreleri
3.16 18-** Bilgi ve Okmlr Parametreleri
3.17 20-** Sür. Kpl Çevrimi Parametreleri
3.18 21-** Dış Kapalı Çevrim parametreleri
27
42
66
70
77
81
97
107
121
121
125
147
158
168
176
179
191
3.19 22-** Uygulama İşlevleri Parametreleri
3.20 23-** Süre Esaslı İşlevler Parametreleri
3.21 24-** Uygulama İşlevleri 2 Parametreleri
3.22 25-** Kademeli Dntlyc Parametreleri
3.23 26-** Analog G/Ç Seçeneği MCB 109 Parametreleri
3.24 27-** Kademeli Kontrol Seçeneği Parametreleri
3.25 29-** Su Uygulama İşlevleri Parametreleri
3.26 30-** Özel İşlevler Parametreleri
3.27 31-** Bypass Seç. Parametreleri
3.28 35-** Sensör Giriş Seçeneği Parametreler
4 Parametre Listeleri
4.1 Parametre Seçenekleri
4.1.1 Varsayılan Ayarlar 278
4.1.2 0-** İşletim/Ekran 279
4.1.3 1-** Yük ve Motor 281
4.1.4 2-** Frenler 283
4.1.5 3-** Referans / Rampalar 284
200
215
227
232
244
251
265
273
274
275
278
278
4.1.6 4-** Sınırlar / Uyarılar 285
4.1.7 5-** Dijital Giriş/Çıkış 286
4.1.8 6-** Analog Giriş/Çıkış 288
4.1.9 8-** İletişim ve Seçenekler 290
4.1.10 9-** PROFIdrive 291
4.1.11 10-** CAN Fieldbus 292
2 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 5
içindekiler Programlama Kılavuzu
4.1.12 13-** Smart Logic 293
4.1.13 14-** Özel İşlevler 294
4.1.14 15-** Sürücü Bilgisi 295
4.1.15 16-** Veri Okumaları 297
4.1.16 18-** Bilgi ve Okmlr 299
4.1.17 20-** Sürücü Kapalı Çevrimi 300
4.1.18 21-** Dış Kapalı Çevrim 301
4.1.19 22-** Uygl. Fonksiyonlar 303
4.1.20 23-** Süre Esaslı İşlevler 305
4.1.21 24-** Uygl. Fonksiyonlar 2 306
4.1.22 25-** Kademeli Dntlyc 306
4.1.23 26-** Analog G/Ç Seçn. 307
4.1.24 29-** Water Application Functions 309
4.1.25 30-** Özel İşlevler 311
4.1.26 31-** Bypass Seç. 311
4.1.27 35-** Sensör Giriş Seçeneği 311
5 Sorun giderme
5.1 Durum Mesajları
5.1.1 Uyarılar/Alarm Mesajları 313
Dizin
313
313
319
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 3
Page 6
Giriş
VLT® AQUA Drive FC 202
11
1 Giriş
1.1 Kılavuzun Amacı
Programlama Kılavuzu frekans dönüştürücünün çeşitli
uygulamalarda programlanması için gerekli bilgileri sunar.
VLT® bir tescilli ticari markadır.
1.2 Ek Kaynaklar
Gelişmiş frekans dönüştürücü işlevlerini ve programlamayı
anlamak için başka kaynaklar mevcuttur.
®
AQUA Drive FC 202 Kullanma Kılavuzu frekans
VLT
•
dönüştürücünün mekanik ve elektrik tesisatını
anlatır.
VLT® AQUA Drive FC 202 Dizayn Kılavuzu, motor
•
kontrol sistemlerini tasarlamak için yetenekler ve
işlevsellik hakkında ayrıntılı bilgi sağlar.
Opsiyonel ekipman ile kullanım talimatları.
•
Ek yayınlar ve kılavuzlar için Danfoss ile görüşün. Bkz
drives.danfoss.com/knowledge-center/technical-documentation/ listeleme için.
Yazılım Versiyonu
1.3
Yazılım sürümü: 3.30
Yazılım sürüm numarası parametre 15-43 Yazılım Sürümü
konumundan okunabilir.
DUYURU!
Donanım veya eşya hasarına neden olabilecek durumlar
da dahil önemli bilgileri gösterir.
1.6 Tanımlar
1.6.1 Frekans Dönüştürücü
I
VLT,MAX
Maksimum çıkış akımı.
I
VLT,N
Frekans dönüştürücü tarafından sağlanan nominal çıkış
akımı.
U
VLT,MAX
Maksimum çıkış voltajı.
1.6.2 Giriş
Kontrol komutu
LCP ve dijital girişler ile bağlı motoru başlatın ve durdurun.
İşlevler 2 gruba ayrılır.
Grup 1'deki işlevler grup 2'dekilere oranla daha yüksek
önceliğe sahiptir.
Grup 1 Sıfırlama, durdurmaya yanaşma, sıfırlama ve
durdurmaya yanaşma, DC freni, durdurma [OFF]
tuşu.
Grup 2 Başlatma, darbe başlatma, ters başlatma, aralıklı
çalıştırma, dondurulmuş çıkış.
1.4 Onaylar
1.5 Simgeler
Bu kılavuzda aşağıdaki simgeler kullanılmıştır:
UYARI
Ölüme veya ciddi yaralanmalara neden olabilen olası
tehlikeli durumları gösterir.
DİKKAT
Küçük veya orta ölçekli yaralanmalara neden olabilen
olası tehlikeli durumları gösterir. Tehlikeli uygulamalara
karşı alarm vermek için de kullanılabilir.
Tablo 1.1 İşlev Grupları
1.6.3 Motor
Motor çalışıyor
Tork çıkış milinde ve hızda 0 RPM'den motordaki
maksimum hıza kadar oluşturulur.
f
JOG
Aralıklı çalıştırma işlevi etkinleştirildiğinde motor frekansı
(dijital terminaller aracılığıyla).
f
M
Motor Frekansı.
f
MAX
Maksimum motor frekansı.
f
MIN
Minimum motor frekansı.
f
M,N
Nominal motor frekansı (plaka verileri).
I
M
Motor akımı (gerçek).
4 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 7
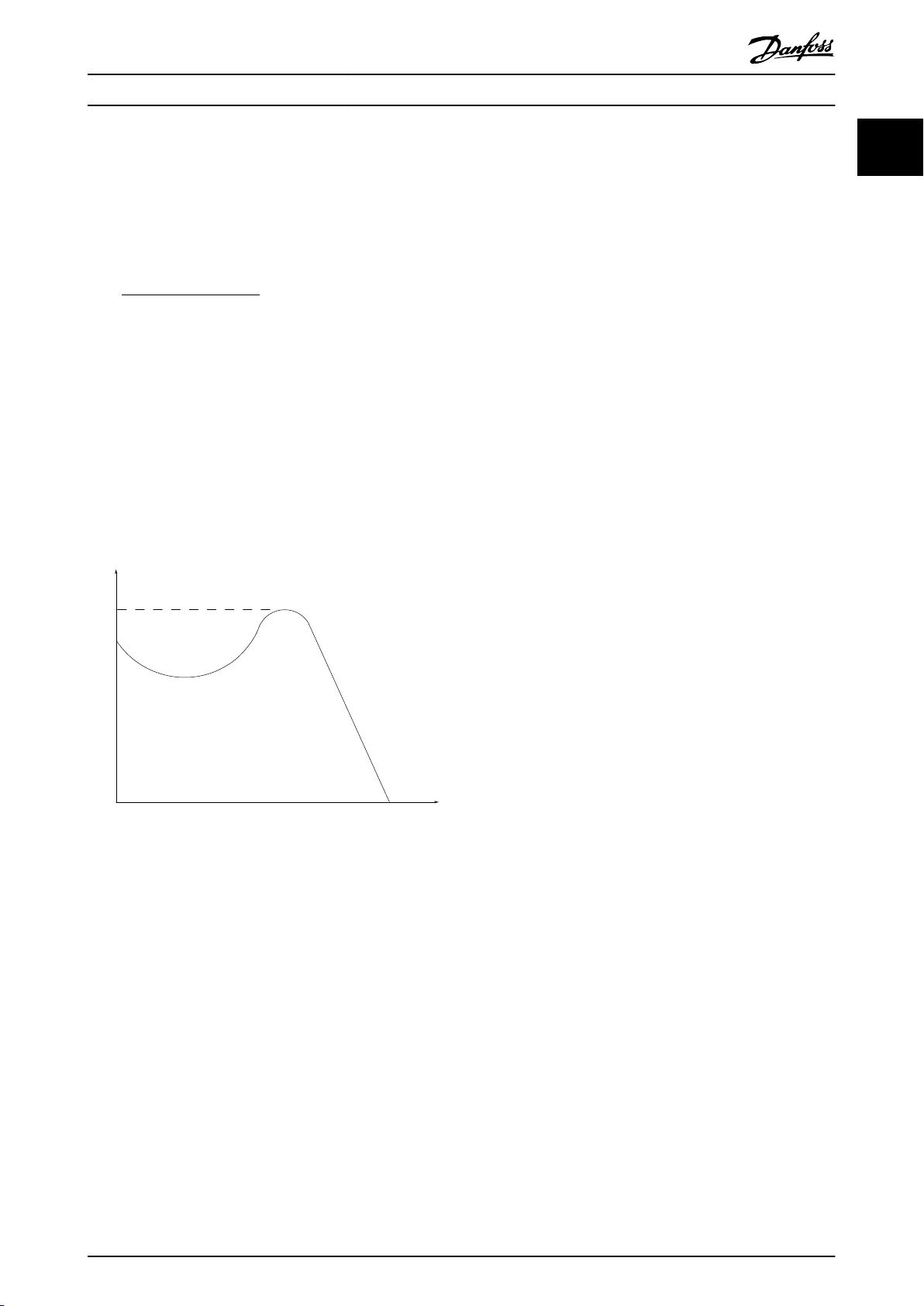
175ZA078.10
Pull-out
RPM
Torque
Giriş Programlama Kılavuzu
I
M,N
Nominal motor akımı (plaka verileri).
n
M,N
Nominal motor hızı (plaka verileri).
n
s
Senkronize motor hızı.
2 × par . 1 − 23 × 60sn
nsn=
n
slip
par . 1 − 39
Motor kayması.
P
M,N
Nominal motor gücü (kW veya hp cinsinden plaka verileri).
T
M,N
Nominal tork (motor).
U
M
Ani motor voltajı.
U
M,N
Nominal motor voltajı (plaka verileri).
Ayrılma torku
1.6.4 Referanslar
Analog referans
Analog girişi 53 veya 54'e (voltaj veya akım) iletilen sinyal.
İkili referans
Seri iletişim bağlantı noktasına iletilen sinyal.
Önceden ayarlı referans
Referans aralığın -%100 ila +%100 arasında ayarlanacak
tanımlı, önceden ayarlanmış referans. Dijital terminaller
vasıtasıyla 8 önceden ayarlanmış referans seçimi.
Darbe referansı
Dijital girişlere (terminal 29 veya 33) iletilen darbe frekans
sinyali.
Ref
MAX
%100 tam ölçek değerindeki referans girişi (genellikle 10 V,
20 mA) ile sonuç referansı arasındaki ilişkiyi belirler.
Maksimum referans değeri parametre 3-03 Maksimum
Referans bölümünde ayarlanır.
Ref
MIN
%0 değerindeki referans girişi (genellikle 0 V, 0 mA, 4 mA)
ile sonuç referansı arasındaki ilişkiyi belirler. Minimum
referans değeri parametre 3-02 Minimum Referans
bölümünde ayarlanır.
1 1
Çizim 1.1 Ayrılma Torku
η
VLT
Frekans dönüştürücünün etkinliği güç çıkışı ile güç girişi
arasındaki oran olarak tanımlanır.
Başlatmayı devreden çıkarma komutu
Grup 1'e ait bir durdurma komutu, komutları kontrol eder bkz. Tablo 1.1.
Durdurma komutu
Grup 1'e ait bir durdurma komutu, komutları kontrol eder bkz. Tablo 1.1.
1.6.5 Çeşitli
Analog girişler
Analog girişler, frekans dönüştürücüde çeşitli işlevleri
kontrol etmek için kullanılır.
2 ip analog girişi vardır:
Akım girişi, 0-20 mA ve 4-20 mA
Voltaj girişi, -10 V DC ila +10 V DC.
Analog çıkışlar
Analog çıkışları 0-20 mA, 4-20 mA'lık sinyali besleyebilir.
Otomatik motor adaptasyonu, AMA
AMA algoritması, hareketsiz bağlı bir motorun elektriksel
parametrelerini belirler.
Fren rezistörü
Fren rezistörü, reaktif frenlemede üretilen fren gücüne
absorbe etme yetisine sahip bir modüldür. Bu reaktif fren
gücü DC-bağlantılı voltajı artırır ve bir fren kesici gücün
fren rezistörüne iletilmesini sağlar.
CT özellikleri
Sabit tork özellikleri konveyör kayışları, yer değiştirme
pompaları ve vinçleri gibi tüm uygulamalarda kullanılabilir.
Dijital girişler
Dijital girişler, frekans dönüştürücüde çeşitli işlevleri kontrol
etmek için kullanılabilir.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 5
Page 8

Giriş
VLT® AQUA Drive FC 202
11
Dijital çıkışlar
Frekans dönüştürücünün 24 V DC'lik (maksimum 40 mA'lık)
sinyali besleyebilen 2 kathal çıkışı bulunmaktadır.
DSP
Dijital sinyal işlemcisi,
ETR
Elektronik termal rölesi mevcut yük ile zamana dayalı
termal yük hesaplamasıdır. Amacı motor sıcaklığını tahmin
etmektir.
HIPERFACE
HIPERFACE®, Stegmann'ın tescilli ticari markasıdır.
Başlatma
Başlatma gerçekleştirildiyse (parametre 14-22 İşletim Modu)
frekans dönüştürücü varsayılan ayara geri döner.
Aralıklı görev çevrimi
Aralıklı görev gücü, görev çevrimlerinin sekansını ifade
eder. Her çevrim, bir yüklü ve bir yüksüz dönemden oluşur.
İşletim hem periyodik görev hem de periyodik olmayan
görev olabilir.
LCP
Yerel denetim panosu, frekans dönüştürücünün kontrolü ve
programlanması için tam bir arayüz oluşturur. Denetim
panosu çıkarılabilir ve kurulum kiti seçeneğiyle öndeki bir
panele frekans dönüştürücünün 3 m (10 ft) uzağına kadar
kurulabilir.
NLCP
Sayısal yerel denetim panosu, frekans dönüştürücünün
kontrolü ve programlanması için tam bir arayüz oluşturur.
Ekran sayılardan oluşur ve pano işlem değerlerinin
gösterimi amacıyla kullanılır. NLCP'nin depolama ve
kopyalama işlevleri yoktur.
lsb
En önemsiz bit.
msb
En önemli bit.
MCM
Kablo kesiti için mevcut Amerikan ölçüm birimi, bin
dairesel milin kısaltmasıdır. 1 MCM = 0,5067 mm2.
Çevrimiçi/çevrimdışı parametreler
Çevrimiçi parametre değişiklikleri veri değeri değiştirildikten hemen sonra etkinleştirilir. Çevrimdışı parametre
değişikliklerini etkinleştirmek için [OK] tuşuna basın.
İşlem PID
PID denetimi, gerekli hızı, basıncı, sıcaklığı ve benzerini,
çıkış frekansını değişen yük ile eşleştirmek suretiyle
ayarlayarak devam ettirir.
PCD
İşlem kontrol verileri.
Güç çevrimi
Ekran (LCP) kararıncaya kadar şebekeyi kapatın ve ardından
yeniden açın.
®
Darbe girişi/artımlı kodlayıcı
Harici, dijital bir darbe iletici motor hızında geri besleme
bilgisi için kullanılır. Kodlayıcı hız denetiminde tam
doğruluğun gerektiği uygulamalarda kullanılır.
RCD
Kaçak akım aygıtı.
Kurulum
Parametre ayarlarını 4 ayarda kaydedin. .Başka bir ayar
etkinken 4 parametre ayarı ile 1 düzenleme ayarı arasında
değişiklik yapın.
SFAVM
Anahtarlama deseni adındaki hareketsiz akış yönlü
asenkronize vektör modülasyonu
(parametre 14-00 Anahtarlama deseni).
Kayma dengeleme
Frekans dönüştürücü frekansa, motor hızını neredeyse sabit
tutan ölçülmüş motor yükünü takip eden bir besleme
sağlayarak motor kaymasını dengeler.
SLC
SLC (akıllı mantık denetleyici), ilişkilendirilmiş kullanıcı
tanımlı olaylar SLC tarafından doğru olarak değerlendirildiğinde gerçekleştirilen kullanıcı tanımlı eylemler dizisidir.
(Bkz. bölüm 3.12 Parametreler 13-** Smart Logic).
STW
Durum sözcüğü.
FC standart veri yolu
FC protokolü veya MC protokollü RS485 veri yolunu içerir.
Bkz. parametre 8-30 Protokol.
THD
Toplam harmonik bozulma, harmoniklerin toplam katkısını
belirtir.
Termistör
Frekans dönüştürücü veya motora takılan sıcaklığa bağlı bir
rezistördür.
Alarm
Arıza durumlarda, örneğin, frekans dönüştürücü aşırı
sıcaklığa maruz kaldığında veya frekans dönüştürücü
motor, işlem veya mekanizmayı korurken girilen bir durum.
Frekans dönüştürücü, arızanın nedeni giderilene kadar
yeniden başlatmaya izin vermez. Alarm durumundan
çıkmak için frekans dönüştürücüyü yeniden başlatın. Alarm
durumunu kişisel güvenlik için kullanmayın.
6 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 9
Giriş Programlama Kılavuzu
Alarm kilidi
Frekans dönüştürücü arıza durumlarında kendini korumak
için bu duruma girer. Frekans dönüştürücü fiziksel
müdahaleye, örneğin, çıkışta bir kısa devre olduğunda,
gerek duyar. Alarm kilidi yalnızca şebeke bağlantısı
kesilerek, arızanın nedeni giderilerek ve frekans
dönüştürücü yeniden bağlanarak iptal edilebilir. Alarm
durumu, sıfırlama etkinleştirilerek veya bazen otomatik
olarak sıfırlamaya programlanarak iptal edilene kadar
yeniden başlatma engellenir. Alarm kilidini kişisel güvenlik
için kullanmayın.
VT özellikleri
Değişken tork özellikleri pompalar ve fanlar için kullanılır.
+
VVC
Standart voltaj/frekans oranı kontrolü ile karşılaştırıldığında,
voltaj vektör denetimi (VVC+) hem hız referansı değiştirildiğinde hem de yük torku ile bağlantılıyken dinamikleri ve
stabiliteyi artırır.
60° AVM
60° asenkronize vektör modülasyonu
(parametre 14-00 Anahtarlama deseni).
Güç faktörü
Güç faktörü, I1 ile I
Güç faktörü =
.arasındaki ilişkidir.
RMS
3xUxI1cosϕ
3xUxI
RMS
3 fazlı denetim için güç faktörü:
Güç faktörü =
I1xcosϕ1
I
RMS
=
I
1
çünkü:cosϕ1 = 1
I
RMS
Güç faktörü, frekans dönüştürücünün şebeke beslemesine
hangi ölçüde yük vereceğini belirtir.
Güç faktörü ne kadar düşük olursa aynı kW performansı
için I
I
de o kadar büyük olur.
RMS
2
=
I
RMS
+ I
1
2
5
+ I
2
+ .. + I
7
2
n
Ek olarak, yüksek bir güç faktörü farklı harmonik akımların
düşük olduğunu gösterir.
Frekans dönüştürücüdeki DC bobinleri, şebeke beslemesine
yüklenen yükü en aza indiren yüksek güç faktörü oluşturur.
Hedef konum
Nihai hedef konumu konumlandırma komutlarıyla belirlenir.
Profil oluşturucu bu konumu hız profilini hesaplamak için
kullanır.
Komut verilen konum
Profil oluşturucunun hesapladığı gerçek konum referansı.
Frekans dönüştürücü komut verilen konumu PI konumu
için ayar noktası olarak kullanır.
Gerçek konum
Kodlayıcıdan gelen gerçek konum veya motor denetiminin
açık çevrimde hesapladığı değer. Frekans dönüştürücü
gerçek konumu PI konumu için ayar noktası olarak kullanır.
Konum hatası
Gerçek konum ile komut verilen konum arasındaki fark,
konum hatasıdır. Konum hatası PI denetleyicisi konumu için
giriştir.
Konum birimi
Konum değerleri için fiziksel birim.
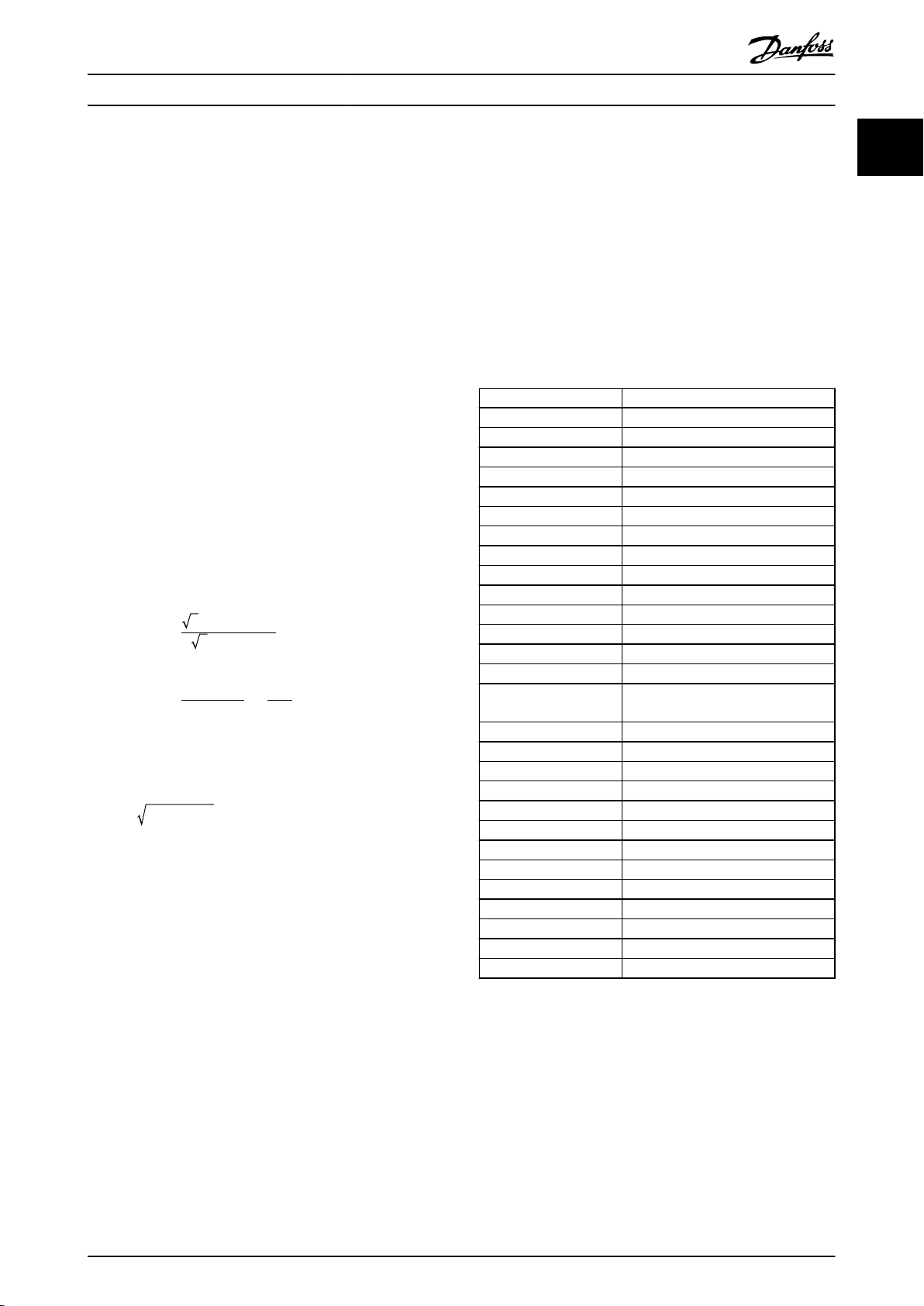
1.7 Kısaltmalar, Semboller ve Kurallar
°C
°F
AC Alternatif akım
AEO Otomatik enerji optimizasyonu
AWG Amerikan tel çapı
AMA Otomatik motor uyarlaması
DC Doğru akım
EMC Elektro manyetik uyumluluk
ETR Elektronik termal röle
f
M,N
FC Frekans dönüştürücü
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Giriş koruması
LCP Yerel denetim panosu
MCT Hareket denetim aracı
n
s
P
M,N
PELV Koruyucu ekstra düşük voltaj
PCB Baskılı devre kartı
PM Motoru Kalıcı mıknatıs motoru
PWM Darbe genişliği modülasyonu
RPM Dakika başına devir
Reak Reaktif terminaller
T
LIM
U
M,N
Santigrat Derece
Dereceler Fahrenhayt
Nominal motor frekansı
Nominal evirici çıkış akımı
Akım sınırı
Nominal motor akımı
Maksimum çıkış akımı
Frekans dönüştürücü tarafından
sağlanan nominal çıkış akımı
Senkronize motor hızı
Nominal motor gücü
Tork sınırı
Nominal motor voltajı
1 1
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 7
Page 10
Giriş
VLT® AQUA Drive FC 202
11
1.8 Güvenlik
UYARI
İSTENMEYEN BAŞLATMA
UYARI
YÜKSEK VOLTAJ
Frekans dönüştürücüler, AC şebeke giriş gücü, DC
beslemesi veya yük paylaşımına bağlandıklarında yüksek
voltaj içerirler. Kurulum, başlatma ve bakımın uzman
personel tarafından yapılmaması, ölüme veya ciddi
yaralanmaya neden olabilir.
Kurulum, başlatma ve bakımın sadece kalifiye
•
personel tarafından yapılması gerekir.
Herhangi bir bakım veya onarım çalışması
•
gerçekleştirmeden önce, frekans dönüştürücüde
voltaj kalmadığından emin olmak adına uygun
bir voltaj ölçüm aygıtı kullanın.
Güvenlik düzenlemeleri
Onarım yapılacağı durumlarda frekans dönüştü-
•
rücünün şebeke bağlantısı kesilmelidir. Şebeke
beslemesinin kesik olduğundan ve motor ve
şebeke fişlerini çıkarmadan önce yeterli sürenin
geçtiğinden emin olun. Deşarj zamanı hakkında
daha fazla bilgi için bkz. Tablo 1.2
[O] şebeke beslemesi bağlantısını kesmez, bu
•
yüzden güvenlik anahtarı olarak kullanılmamalıdır.
Ekipmanı uygun şekilde topraklayın. Yürürlükteki
•
ulusal ve yerel yönetmeliklere uygun olarak
kullanıcıyı besleme voltajına karşı ve motoru da
aşırı yüke karşı koruyun.
Toprak kaçak akımları 3,5 mA'nın üzerindedir.
•
Motor aşırı ısınmasına karşı koruma fabrika
•
ayarında yoktur. Bu işlev gerekirse
parametre 1-90 Motor Termal Koruması seçeneğini
[4] ETR alarmı 1 veri değeri ya da [3] ETR uyarısı 1
veri değeri olarak ayarlayın.
Frekans dönüştürücü şebekeye bağlıyken, motor
•
ve şebeke beslemesi fişlerini çıkarmayın. Şebeke
beslemesinin kesik olduğundan ve motor ve
şebeke fişlerini çıkarmadan önce yeterli sürenin
geçtiğinden emin olun.
Yük paylaşımı yapılırken (DC bağlantısının
•
bağlanması) veya harici 24 V DC kurulurken
frekans dönüştürücünün L1, L2 ve L3'ten daha
fazla voltaj kaynağı vardır. Tüm voltaj giriş kaynaklarının bağlantısının kesildiğinden ve onarıma
başlamadan önce gerekli sürenin geçtiğinden
emin olun. Deşarj zamanı hakkında daha fazla
bilgi için bkz. Tablo 1.2
Frekans dönüştürücü, AC şebekesine, DC beslemesine
veya yük paylaşımına bağlandığında, motor herhangi bir
zamanda başlayabilir. Programlama, servis veya onarım
işi sırasındaki istenmeyen başlatma ölüm, ciddi
yaralanma veya mal hasarına neden olabilir. Motor harici
bir anahtar, bir fieldbus komutu, LCP'den bir giriş
referans sinyali ya da bir hata koşulunun giderilmesiyle
başlatılabilir.
Motorun istenmeden çalışmasını önlemek için:
Frekans dönüştürücünün şebekeden bağlantısını
•
kesin.
Parametreleri programlamadan önce LCP
•
üzerindeki [O/Reset] düğmesine basın.
Frekans dönüştürücüsünü AC şebekesine, DC
•
beslemesine veya yük paylaşımına bağlamadan
önce tamamen kablolayıp frekans dönüştürücüyü, motoru ve herhangi bir sürücü
teçhizatını montajlayın.
UYARI
DEŞARJ SÜRESİ
Frekans dönüştürücü, frekans dönüştürücü çalıştırılmadığında bile yüklenmiş kalmaya devam edebilen DC
bağlantı kondansatörleri içerir. Uyarı LED'i sönük olsa bile
yüksek voltaj bulunuyor olabilir. Güç kesildikten sonra,
servis veya onarım yapmadan önce belirtilen süre kadar
beklenmemesi, ölüme veya ciddi yaralanmaya neden
olabilir.
Motoru durdurun.
•
AC şebekesinin ve uzak DC bağlantılı güç
•
kaynaklarının (pil yedekleri, UPS ve diğer
frekans dönüştürücülere DC bağlantıları dahil)
bağlantısını kesin.
PM motorunun bağlantısını kesin veya kilitleyin.
•
Kapasitörlerin tamamen deşarj olmasını
•
bekleyin. Minimum bekleme süresi Tablo 1.2
bölümünde belirtilmiş olup frekans dönüştürücünün en üstündeki plakada da görünebilir.
Herhangi bir bakım veya onarım çalışması
•
gerçekleştirmeden önce, kapasitörlerin
tamamen deşarj olduğundan emin olmak adına
uygun bir voltaj ölçüm aygıtı kullanın.
8 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 11
Giriş Programlama Kılavuzu
Voltaj [V]
200–240 0,25–3,7 kW
380–480 0,37–7,5 kW
525–600 0,75–7,5 kW
525–690 – 1,1–7,5 kW
Tablo 1.2 Deşarj Süresi
Minimum bekleme süresi (dakika)
4 7 15
– 5,5–45 kW
(0,34–5 hp)
– 11–90 kW
(0,5–10 hp)
– 11–90 kW
(1–10 hp)
(1,5–10 hp)
(7,5–60 hp)
(15–121 hp)
(15–121 hp)
11–90 kW
(15–121 hp)
DUYURU!
Safe Torque O'u kullanırken daima VLT® Frekans
Dönüştürücüleri - Safe Torque O Kullanma Kılavuzu
talimatlarını izleyin.
DUYURU!
Frekans dönüştürücüden gelen veya içerisinde olan
kontrol sinyalleri nadiren hatayla etkinleştirilebilir,
geciktirilebilir veya tamamen meydana gelmesi başarısız
olabilir. Güvenliğin kritik olduğu durumlarda kullanılırken, bu kontrol sinyallerine tek başına
güvenilmemelidir.
DUYURU!
Tehlikeli durumlar, gerekli önleyici önlemleri düşünmesi
almaktan sorumlu olan makine üreticisi/entegratörü
tarafından belirlenmelidir. Her zaman geçerli ulusal
güvenlik yönetmeliklerine (ör. mekanik araçlarla ilgili
kanun, kazaların önlenmesi yönetmelikleri, vb.) göre
daha fazla izleme ve koruyucu aygıtlarla donatılması
gerekir.
Koruma modu
Motor akımındaki veya DC bağlantı voltajındaki bir
donanım sınırının aşılması durumunda frekans dönüştürücü
koruma moduna girer. Koruma modu, kayıpları en aza
indirgemek için PWM modülasyon stratejisinin değiştirilmesi ve düşük bir anahtarlama frekansı demektir. Bu
işlem, son arızadan sonra 10 sn sürer ve motorun tam
kontrolünü yeniden kurarken frekans dönüştürücünün
güvenilirliğini ve sağlamlığını artırır.
1 1
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 9
Page 12
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Giriş
VLT® AQUA Drive FC 202
11
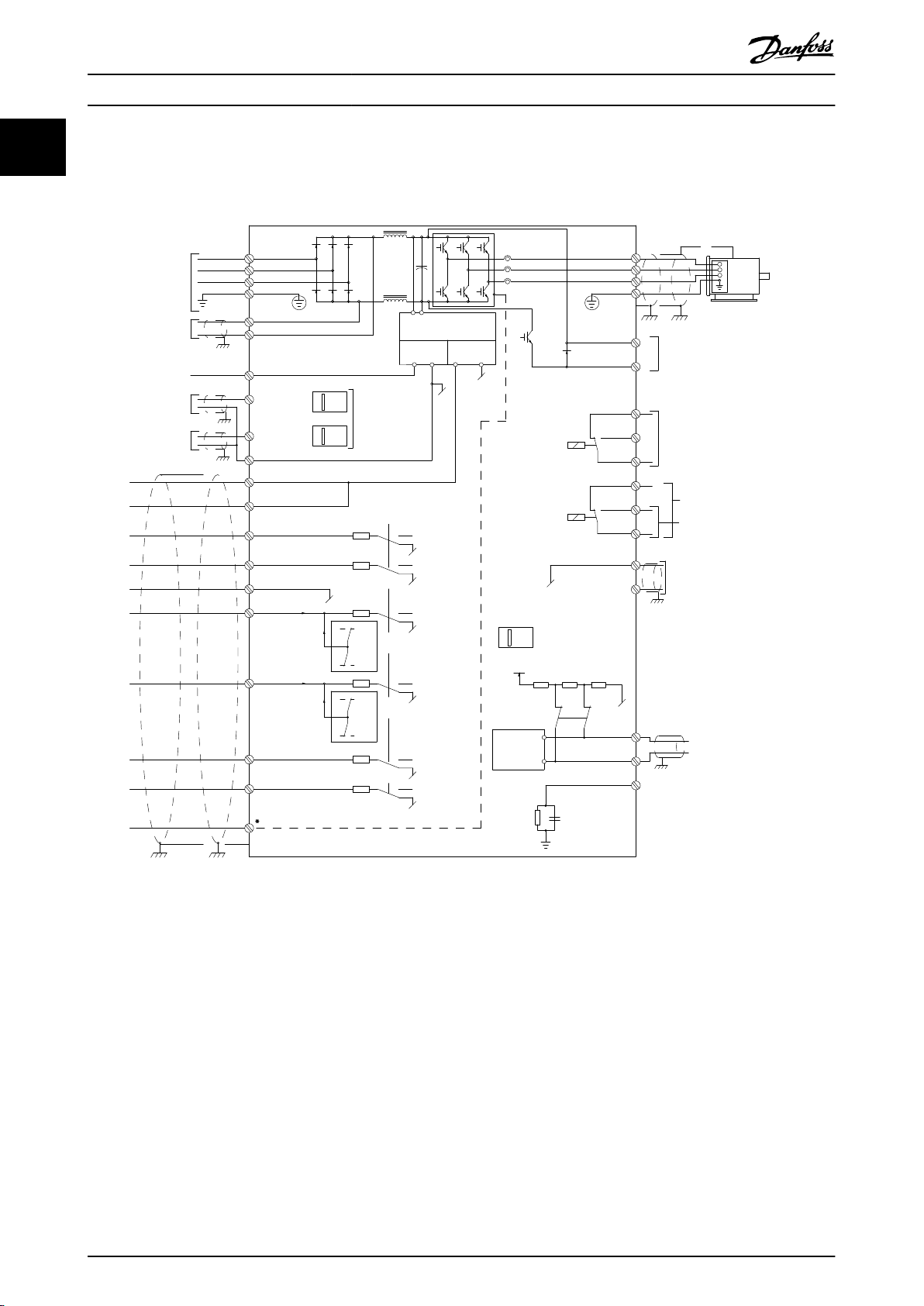
1.9 Elektrik Tel Bağlantısı
1.9.1 Elektrik Tel Bağlantısı - Kontrol Kabloları
Çizim 1.2 Temel Kablo Tesisatı Çizimi
A = Analog, D = Dijital
Terminal 37 Safe Torque O için kullanılır. Safe Torque O kurulum yönergeleri için bkz. VLT® Frekans Dönüştürücüleri - Safe
Torque O Kullanma Kılavuzu.
* Terminal 37, FC 202 ürününde bulunmaz (muhafaza tipi A1 dışında). Röle 2 ve Terminal 29'un VLT® AQUA Drive FC 202
ürününde işlevi yoktur.
Uzun kontrol kabloları ve analog sinyaller, nadiren ve tesisata bağlı olarak, şebeke besleme kablolarından gelen gürültü
nedeniyle 50/60 Hz toprak çevrime yol açabilir.
Bu gerçekleşirse ekranı kırmanız veya ekran ile muhafaza arasında bir 100 nF kondansatör takmanız gerekebilir.
Dijital ve analog giriş ve çıkışlar, frekans dönüştürücü ortak girişlerine (terminal 20, 55 ve 39) ayrı ayrı bağlanarak, bu iki
gruptan gelen toprak akımlarının diğer grupları etkilemesini engelleyin. Örneğin, dijital girişe geçilmesi analog giriş sinyalini
bozabilir.
10 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 13
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT106.10
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT107.11
130BA681.10
12 13 18 37
130BA155.12
322719 29 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Safe Stop
Start/Stop
[18]
Giriş Programlama Kılavuzu
Kontrol terminallerinin giriş polaritesi
Çizim 1.3 (PNP) Kaynak
1 1
Çizim 1.5 Blendajlı/Zırhlı Kontrol Kablolarını Topraklama
Çizim 1.4 NPN (Soğutma)
DUYURU!
Kontrol kabloları blendajlı/korumalı olmalıdır.
Kontrol kablolarının doğru uçlandırması için dizayn
kılavuzunda, Blendajlı Kontrol Kablolarını Topraklama
bölümüne göz atın.
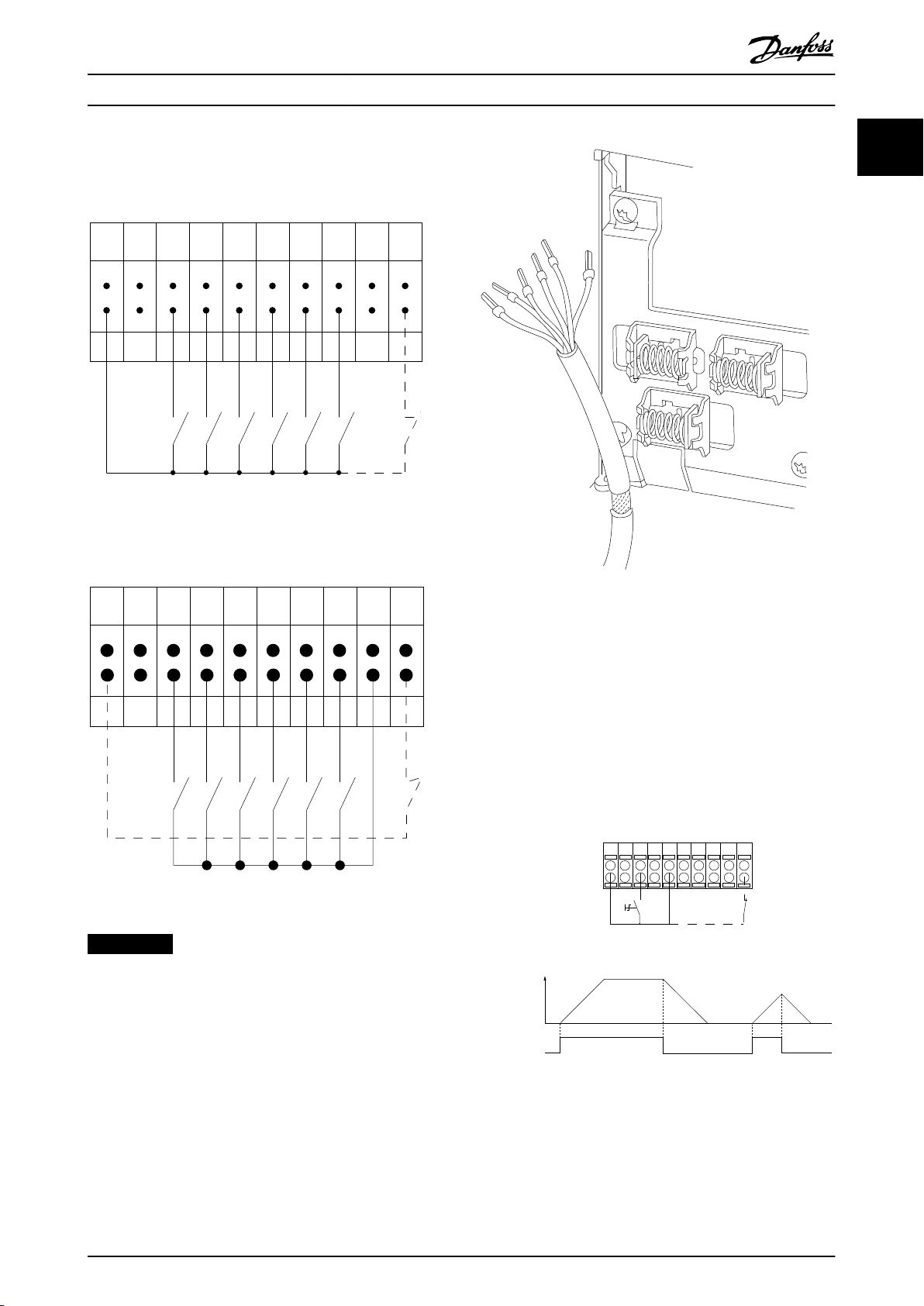
1.9.2 Başlatma/Durdurma
Terminal 18 = Parametre 5-10 Terminal 18 Dijital Giriş [8]
Başlatma.
Terminal 27 = Parametre 5-12 Terminal 27 Dijital Giriş [0]
İşletim yok (Varsayılan [2] Ters serbest duruş).
Terminal 37 = Safe Torque O (kullanılabildiği durumlarda).
Çizim 1.6 Başlatma/Durdurma
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 11
Page 14
12 13 18 37
130BA156.12
322719 29 33 20
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse Safe Stop
Start (18)
Start (27)
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Giriş
VLT® AQUA Drive FC 202
11
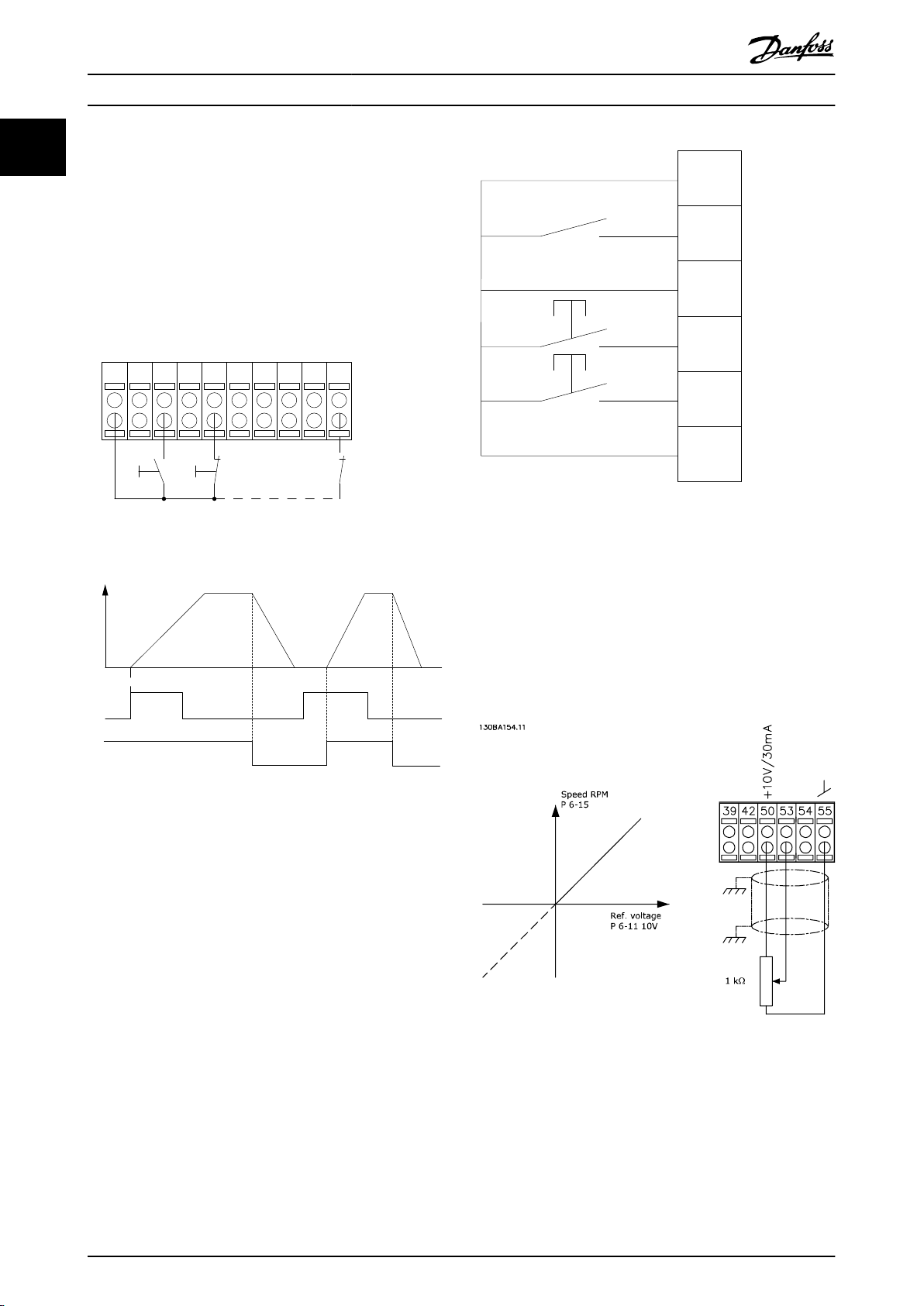
1.9.3 Darbe Başlatma/Durdurma
Terminal 18 = Parametre 5-10 Terminal 18 Dijital Giriş [9]
Mandallı başlatma.
Terminal 27 = Parametre 5-12 Terminal 27 Dijital Giriş [6] Ters
durdurma.
Terminal 37 = Safe Torque O (kullanılabildiği durumlarda).
Çizim 1.8 Hız Artırma/Azaltma
1.9.5 Potansiyometre Referansı
Potansiyometre ile voltaj referansı
Referans Kaynağı 1 = [1] Analog giriş 53 (varsayılan).
Terminal 53, Düşük Voltaj = 0 V.
Terminal 53, Yüksek Voltaj = 10 V.
Terminal 53, Düşük Ref./Geri Besleme = 0 RPM.
Terminal 53, Yüksek Ref./Geri Besleme = 1500 RPM.
Anahtar S201 = OFF (U).
Çizim 1.7 Darbe Başlatma/Durdurma
1.9.4 Hız Artırma/Azaltma
Terminaller 29/32 = Hız artırma/azaltma
Terminal 18 = Parametre 5-10 Terminal 18 Dijital Giriş [9]
Başlatma (varsayılan).
Terminal 27 = Parametre 5-12 Terminal 27 Dijital Giriş [19]
Referansı dondur.
Terminal 29 = Parametre 5-13 Terminal 29 Dijital Giriş [21]
Hız artırma.
Terminal 32 = Parametre 5-14 Terminal 32 Dijital Giriş [22]
Hız azaltma.
Çizim 1.9 Potansiyometre Referansı
12 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 15
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Programlama Programlama Kılavuzu
2 Programlama
2.1 Grafiksel ve Sayısal Yerel Denetim
Panosu
Frekans dönüştürücünün kolay programlaması Grafiksel LCP
(LCP 102) ile gerçekleştirilir. Sayısal yerel denetim panosu
(LCP 101) kullanımı hakkında bilgi almak için bkz.
bölüm 2.2.17 Sayısal Yerel Denetim Panosu'nda Nasıl
Programlanır?.
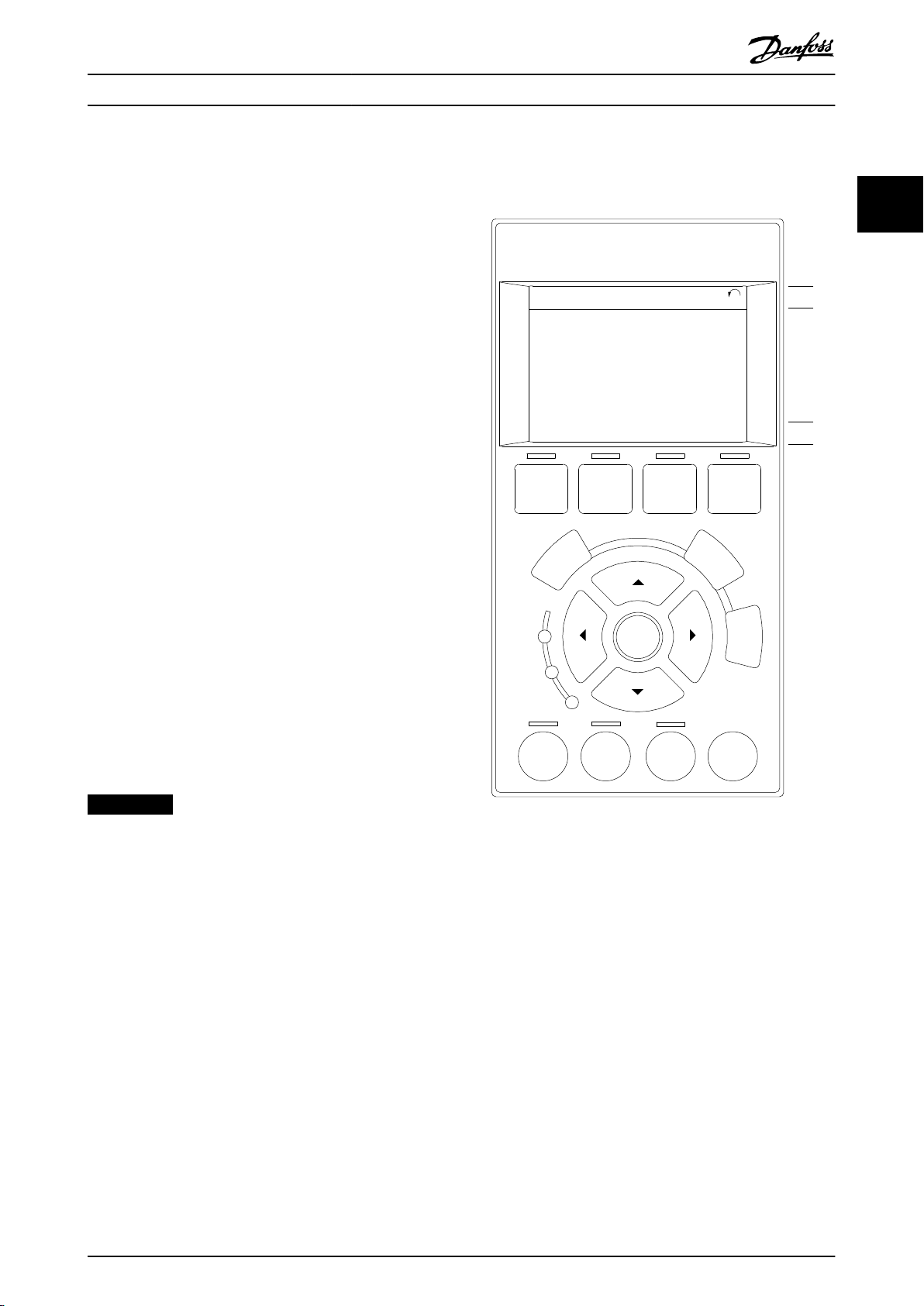
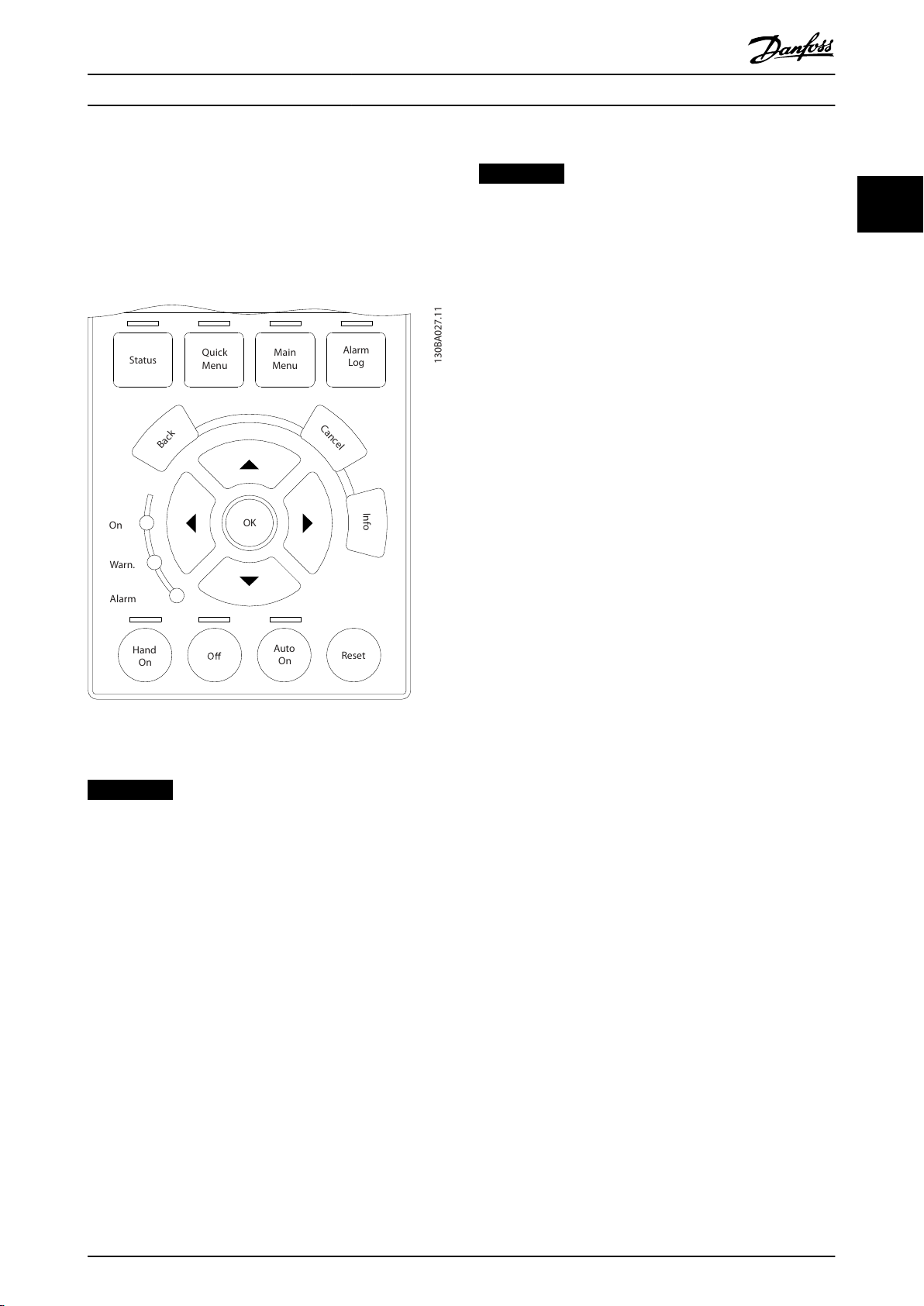
2.2 Grafiksel LCP‘yi Programlama
LCP 4 işlevsel gruba ayrılır:
1. Durum satırları olan grafik ekranı.
2. Menü anahtarları ve gösterge ışıkları - parametreleri değiştirme ve ekran işlevleri arasında geçiş
yapma.
3. Gezinme tuşları ve gösterge ışıkları.
4. İşletim tuşları ve gösterge ışıkları.
LCP ekranı Durum modunu görüntülerken 5 taneye kadar
işletim verisini görüntüleyebilir.
2 2
Ekran satırları:
a. Durum satırı: Durum mesajları simgeleri ve
grafikleri görüntüler.
b. Satır 1–2: Kullanıcının tanımladığı veya seçtiği
verileri görüntüleyen operatör veri satırları.
[Status] tuşuna basarak 1 ilave satır ekleyin.
c. Durum satırı: Metin görüntüleyen durum
mesajları.
DUYURU!
Başlatma ertelendiğinde LCP, hazır olana kadar INITIA-
Çizim 2.1 LCP
LIZING mesajını gösterir. Ekleme veya çıkarma
seçenekleri başlatmayı geciktirebilir.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 13
Page 16
130BP074.10
T op section
Middle section
Bottom section
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Programlama
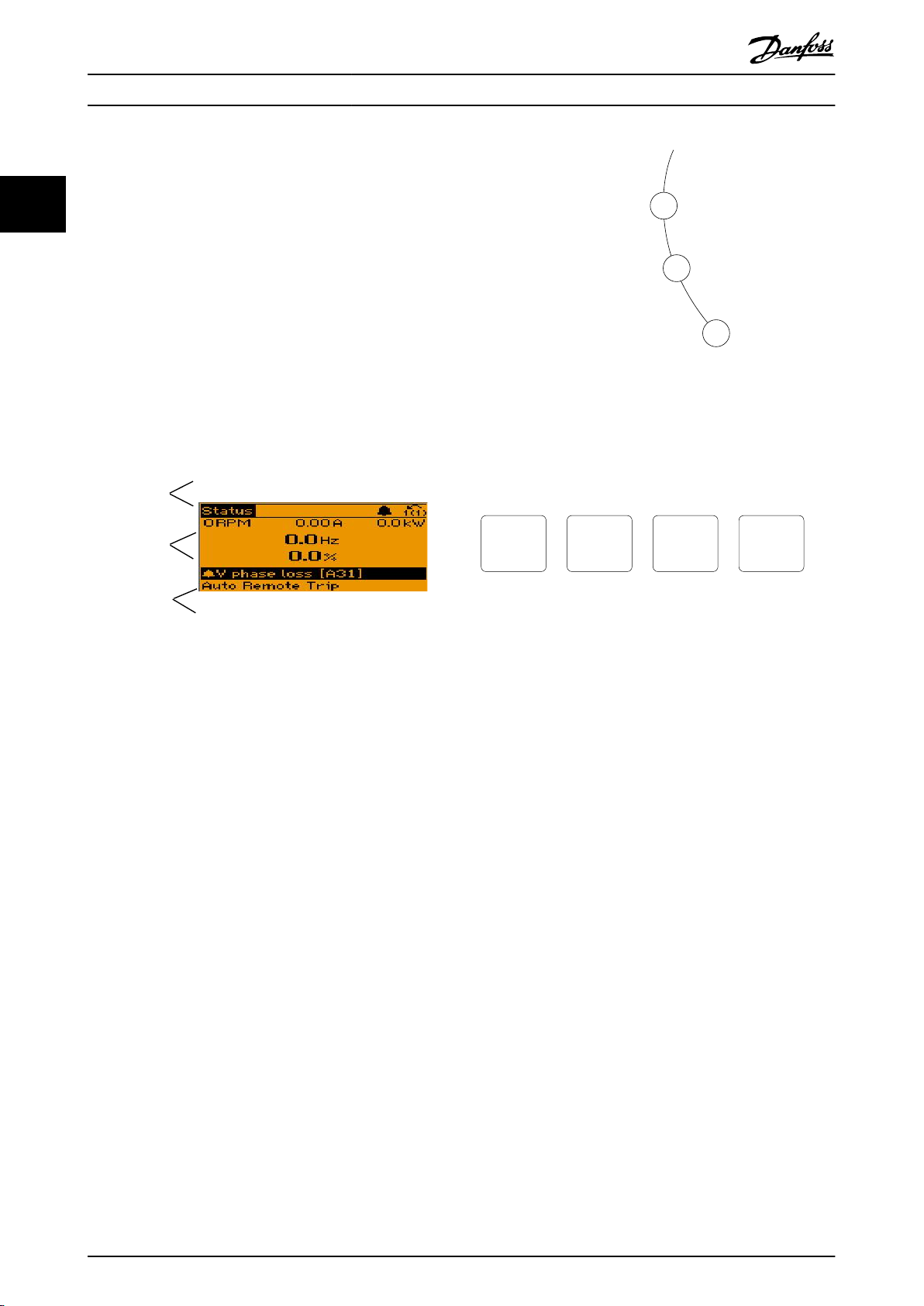
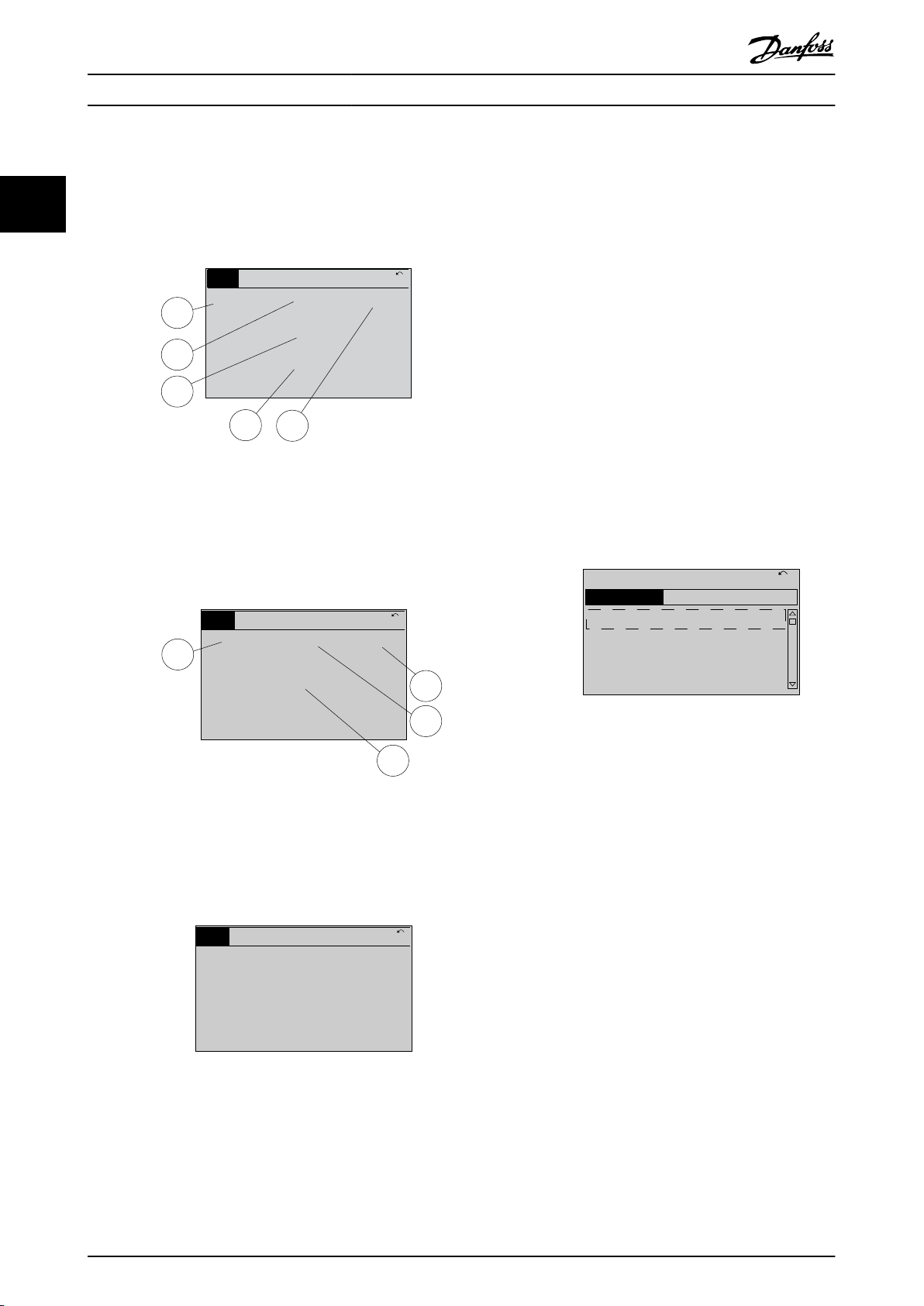
2.2.1 LCP Ekranı
VLT® AQUA Drive FC 202
22
LCD ekran bir arka ışığa sahiptir ve alfa sayısal karakterlerden oluşan 6 satır içerir. Gösterge satırları dönüş yönünü
(ok), seçilen kurulumu ve programlama kurulumunu
gösterir. Gösterge 3 kısma ayrılmıştır.
Üst bölüm
Normal çalışma durumunda en fazla 2 ölçüme kadar
görüntüler.
Orta bölüm
Üst satır 5 ölçümü ilgili birimlerle durumdan bağımsız
olarak gösterir (alarm/uyarı olduğu durumlar hariç).
Alt kısım
Daima Durum modunda frekans dönüştürücünün
durumunu gösterir.
Çizim 2.2 Alt Bölüm
Etkin Kurulum (parametre 0-10 Etkin Kurulum bölümünde
Etkin Kurulum olarak seçilir) gösterilir. Etkin Kurulum
dışında başka bir kurulum programlarken, programlanan
kurulumun numarası sağ tarafta görünür.
Ekran kontrast ayarı
Daha koyu bir görüntü için [Status] ve [▲] tuşlarına basın
Daha açık bir görüntü için [Status] ve [▼] tuşlarına basın
parametre 0-60 Ana Menü Parolası veya
parametre 0-65 Personel Menü Parolası aracılığıyla bir parola
oluşturulmadıysa parametre ayarlarının çoğu LCP ile hemen
değiştirilebilir.
Gösterge ışıkları
Belirli eşik değerleri aşılırsa alarm ve/veya uyarı göstergeleri
yanar. LCP'de bir durum ve alarm metni görünür.
Frekans dönüştürücüsü bir DC veri yolu terminali ya da
24 V dış güç aracılığıyla şebeke gerilimi aldığında AÇIK
gösterge lambası etkinleştirilir. Aynı zamanda, arka
aydınlatma da yanar.
Yeşil LED/On: Denetim kısmı çalışıyor.
•
Sarı LED/Warn: Bir uyarı gösterir.
•
Yanıp sönen kırmızı LED/Alarm: Bir alarm gösterir.
•
Çizim 2.3 Gösterge Işıkları
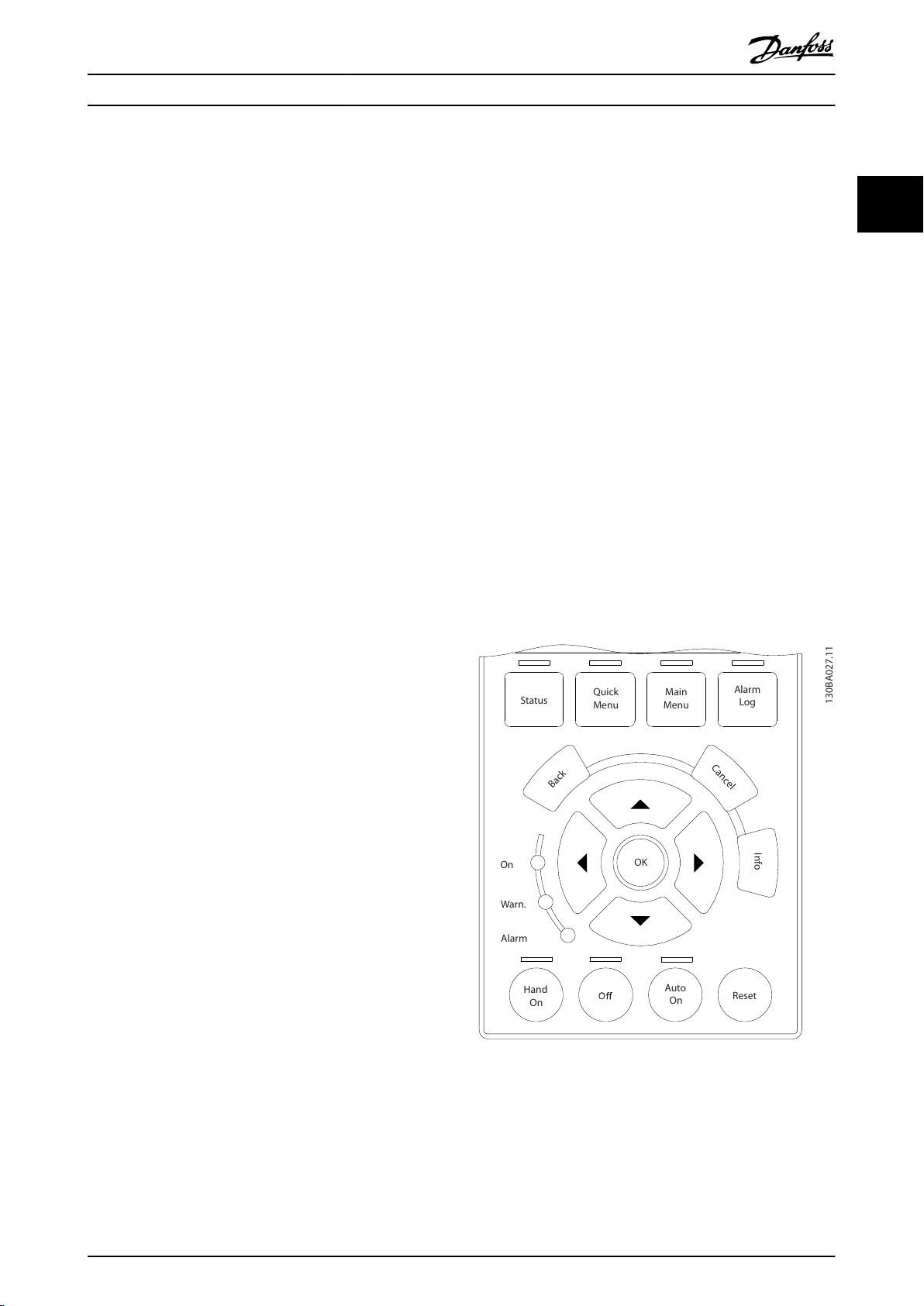
LCP tuşları
Denetim tuşları işlevlere ayrılmıştır. Göstergenin ve
gösterge ışıklarının altındaki tuşlar, normal işletim
sırasındaki gösterge seçeneği dahil, parametre ayarları için
kullanılır.
Çizim 2.4 LCP Tuşları
[Status]
Frekans dönüştürücünün ve/veya motorun durumunu
gösterir. [Status] tuşuna basarak 3 farklı okuma arasında
seçim yapın: 5 satırlı okuma, 4 satırlı okuma veya smart
logic control.
Ekran modunu seçmek veya Hızlı Menü modundan, Ana
Menü modundan veya Alarm modundan tekrar ekran
moduna dönmek için [Status] tuşuna basın. [Status] tuşunu
aynı zamanda tek veya çift okuma modu arasında geçiş
yapmak için de kullanabilirsiniz.
[Quick Menu]
Frekans dönüştürücünün en yaygın işlevlerine hızlı erişim
sağlar.
[Quick Menu] şunları içerir:
Q1: Kişisel menüm.
•
Q2: Hızlı kurulum.
•
Q3: İşlev kurulumları.
•
Q4: SmartStart.
•
Q5: Yapılan değişiklikler.
•
Q6: Günlükler.
•
Q7: Su ve pompalar.
•
14 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 17
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programlama Programlama Kılavuzu
İşlev kurulumu, şunlar da dahil olmak üzere su ve atık su
uygulamalarının birçoğu için gereken parametrelerin
tümüne hızlı erişim sağlar:
Değişken tork.
•
Sabit tork.
•
Pompalar.
•
Dozaj pompaları.
•
Kuyu pompaları.
•
Yükseltici pompalar.
•
Karıştırıcı pompalar.
•
Havalandırmalar.
•
Diğer pompalar.
•
Fan uygulamaları.
•
Diğer özelliklerin arasında aşağıdakileri seçmek için mevcut
parametreleri de içermektedir:
LCP'de gösterilecek değişkenler.
•
Dijital önceden ayarlı hızlar.
•
Analog referansların ölçeklenmesi.
•
Kapalı çevrim tek alanlı ve çok alanlı uygulamalar.
•
Su ile ilgili özel işlevler.
•
Atık su uygulamaları.
•
Hızlı menü Q7: Su ve Pompalar en önemli özel su ve pompa
özelliklerinin bazılarına doğrudan erişim sağlar.
Q7-1: Özel rampalar (ilk rampa, son rampa, valf
•
rampasını kontrolü).
Q7-2: Uyku modu.
•
Q7-3: Sürükleme.
•
Q7-4: Kuru Çalışma.
•
Q7-5: Eğri Sonu Algılaması.
•
Q7-6: Akış Dengeleme.
•
Q7-7: Boru Doldurma (Yatay Borular, Dikey
•
Borular, Karışık Sistemler).
Q7-8: Kontrol Performansı.
•
Q7-9: Min. Speed Monitor
•
Aşağıdaki parametrelerin 1'i ile bir parola oluşturulmamışsa
Hızlı Menü parametrelerine hemen erişilebilir.
Parametre 0-60 Ana Menü Parolası.
•
Parametre 0-61 Ana Menüye Parolasız Erişim.
•
Parametre 0-65 Personel Menü Parolası.
•
Parametre 0-66 Kişisel Menüye Parolasız Erişim.
•
Hızlı Menü modu ve Ana Menü modu arasında doğrudan
geçiş yapmanız mümkündür.
[Main Menu]
Bu bölüm tüm parametrelerin programlanması içindir.
Aşağıdaki parametrelerin 1'i ile bir parola oluşturulmamışsa
Ana Menü parametrelerine hemen erişilebilir:
Parametre 0-60 Ana Menü Parolası.
•
Parametre 0-61 Ana Menüye Parolasız Erişim.
•
Parametre 0-65 Personel Menü Parolası.
•
Parametre 0-66 Kişisel Menüye Parolasız Erişim.
•
Su ve atık su uygulamalarının çoğunda Ana Menü parametrelerine erişilmesi gerekmez. Hızlı Menü, hızlı kurulum ve
işlev kurulumları genelde gereken parametrelere en basit
ve en hızlı erişimi sağlar.
Ana Menü modu ve Hızlı Menü modu arasında doğrudan
geçiş yapmanız mümkündür.
Parametre kısayolu oluşturmak için [Main Menu] tuşuna 3
sn boyunca basın. Parametre kısayolu, herhangi bir
parametreye doğrudan erişim sağlar.
[Alarm Log]
En son 5 alarmı içeren Alarm listesini görüntüler (A1-A5
olarak numaralandırılır). Bir alarm hakkında daha fazla bilgi
almak için gezinme tuşlarına basarak alarm numarasına
ilerleyin ve [OK] tuşuna basın. Alarm moduna girmeden
hemen önce frekans dönüştürücünün durumu hakkındaki
bilgiler verilir.
Çizim 2.5 LCP
[Back]
Gezinme yapısındaki bir önceki adıma veya katmana geri
götürür.
2 2
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 15
Page 18
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programlama
VLT® AQUA Drive FC 202
[Cancel]
Ekran değiştirilmediği sürece son değişiklik veya komut
iptal edilir.
22
[Info]
Herhangi bir ekran penceresindeki komut, parametre veya
işlev hakkında bilgi verir. [Info] anahtarı, yardım
gerektiğinde ayrıntılı bilgi sağlar.
[Info], [Back] veya [Cancel] tuşuna basarak Bilgi modundan
çıkın.
[Hand On] - [O] - [Auto On].
•
Sıfırla.
•
Ters serbest duruş.
•
Ters çevirme.
•
Kurulum seçme bit 0 - Kurulum seçme bit 1.
•
Seri iletişimden durdurma komutu.
•
Hızlı durdurma.
•
DC freni.
•
[O]
Çizim 2.6 Back
Bağlı motoru durdurur. Tuş, parametre 0-41 LCP'de [O]
Anahtarı ile [1] Devrede veya [0] Devre Dışı olarak seçilebilir.
Hiçbir dış durdurma işlevi seçili değil ve [O] tuşu etkin
değilse gerilim bağlantısını keserek motoru durdurun.
[Auto On]
Frekans dönüştürücünün kontrol terminalleri ve/veya seri
Çizim 2.7 Cancel
iletişim aracılığıyla kontrol edilebilmesini sağlar. Fieldbus
ve/veya kontrol terminallerine bir başlatma sinyali
uygulandığı zaman, frekans dönüştürücü başlatılacaktır. Tuş,
parametre 0-42 LCP'de [Auto on] Anahtarı ile [1] Devrede
veya [0] Devre Dışı olarak seçilebilir.
DUYURU!
Çizim 2.8 Info
Dijital girişler aracılığıyla etkin bir HAND-OFF-AUTO
sinyalinin önceliği [Hand on] ve [Auto on] denetim
tuşlarından daha fazladır.
Gezinme tuşları
4 gezinti tuşu, Quick Menu, Main Menu ve Alarm Log
içindeki farklı seçenekler arasında gezinmek için kullanılır.
İmleci taşımak için tuşlara basın.
[OK]
imleçle işaretlenen bir parametreyi seçmek ve bir
parametre değişikliğini etkinleştirmek için kullanılır.
Yerel denetim tuşları
Yerel denetim tuşları LCP'nin altında yer alır.
Çizim 2.9 Yerel Kontrol Tuşları
[Hand On]
Frekans dönüştürücünün LCP ile denetlenebilmesini sağlar.
[Hand On] aynı zamanda motoru başlatır ve artık gezinme
tuşlarıyla motor hızı verileri girilebilir. Tuş,
parametre 0-40 LCP'de [Hand on] Anahtarı ile [1] Devrede
veya [0] Devre Dışı olarak seçilebilir.
Kontrol sinyalleri veya bir fieldbus ile etkinleştirilen dış
durdurma sinyalleri başlatma komutunu LCP aracılığıyla
geçersiz kılacaktır.
[Hand on] etkinleştirildiğine aşağıdaki denetim sinyalleri
hala etkin olur:
[Reset]
bir alarmdan sonra frekans dönüştürücüyü sıfırlamak için
kullanılır. Tuş, parametre 0-43 LCP'de [Reset] Anahtarı ile [1]
Devrede veya [0] Devre Dışı olarak seçilebilir.
Parametre kısayolu [Main Menu] tuşuna 3 sn boyunca
basılarak oluşturulabilir. Parametre kısayolu, herhangi bir
parametreye doğrudan erişim sağlar.
16 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 19
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programlama Programlama Kılavuzu
2.2.2 Parametre Ayarlarının Çoklu Frekans
Dönüştürücüler arasında Hızlı
Aktarımı
Frekans dönüştürücünün kurulumu tamamlandığında
verileri MCT 10 Kurulum Yazılımı aracılığıyla verileri LCP
veya PC'de depolayın.
LCP’den frekans dönüştürücüye veri aktarma
DUYURU!
Bu işlemi yapmadan önce motoru durdurun.
LCP’den Frekans dönüştürücüye veri aktarmak için:
1. parametre 0-50 LCP Kopyası'ye gidin.
2. [OK] anahtarına basın.
3. Şunu seçin: [2] Tümü LCP'den.
4. [OK] anahtarına basın.
LCP'de depolanan parametre ayarları, ilerleme çubuğunda
belirtilerek frekans dönüştürücüye aktarılıyor. %100'e ulaşıldığında [OK] tuşuna basın.
2.2.3 Ekran Modu
Normal işletimde 5'e kadar farklı işletim değişkeni orta
bölümde sürekli olarak gösterilebilir: 1.1, 1.2 ve 1.3'ün yanı
sıra 2 ve 3.
2.2.4 Ekran Modu - Okumaların Seçimi
3 durum okuma ekranı arasında geçiş yapmak için [Status]
tuşuna basın.
Her bir durum ekranında farklı biçimlerde işletim
değişkenleri görünür. Daha fazla bilgi için bu bölümdeki
örneklere bakın.
2 2
Çizim 2.10 LCP
LCP'de veri depolama
DUYURU!
Bu işlemi yapmadan önce motoru durdurun.
Verileri LCP'de depolamak için:
1. parametre 0-50 LCP Kopyası'ye gidin.
2. [OK] anahtarına basın.
3. Şunu seçin: [1] Tümü LCP'ye.
4. [OK] anahtarına basın.
Tüm parametre ayarları, ilerleme çubuğunda belirtilerek
LCP’ye depolanıyor. %100'e ulaşıldığında [OK] tuşuna basın.
LCP'yi başka bir frekans dönüştürücüye bağlayın ve
parametre ayarlarını da bu frekans dönüştürücüye
kopyalayın.
Gösterilen işletim değişkenlerinin her birine birden fazla
değer veya ölçüm bağlanabilir. Gösterilen değerler ve
ölçümler aşağıdaki parametrelerle tanımlanabilir:
Parametre 0-20 Ekran Satırı 1.1 Küçük.
•
Parametre 0-21 Ekran Satırı 1.2 Küçük.
•
Parametre 0-22 Ekran Satırı 1.3 Küçük.
•
Parametre 0-23 Ekran Satırı 2 Büyük.
•
Parametre 0-24 Ekran Satırı 3 Büyük.
•
[Quick Menu], Q3 Fonksiyon Kurulumları, Q3-1 Genel Ayarlar,
Q3-13 Ekran Ayarları ile parametrelere erişin.
parametre 0-20 Ekran Satırı 1.1 Küçük ila
parametre 0-24 Ekran Satırı 3 Büyük arasında seçilen okuma
parametrelerinin tümünün kendi ölçeği ve virgülden sonra
basamağı vardır. Parametrenin sayısal değeri ne kadar
yüksek olursa virgülden sonra gösterilen basamak sayısı o
kadar az olur.
Örnek: Akım okuması 5,25 A; 15.2 A; 105 A.
Daha fazla ayrıntı için bkz. 0-2* LCP Ekranı.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 17
Page 20
1.1
2
3
1.3
1.2
130BP041.10
799 RPM
Auto Remote Ramping
1 (1)
36.4 kw7.83 A
0.000
53.2 %
Status
1.1
1.2
2
1.3
130BP062.10
207RPM
Auto Remote Running
1 (1)
24.4 kW5.25A
6.9
Hz
Status
130BP063.10
778 RPM
Auto Remote Running
1 (1)
4.0 kW0.86 A
State: 0 o 0 (o)
When: Do: -
Status
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Programlama
VLT® AQUA Drive FC 202
Durum ekranı I
2.2.5 Parametre Kurulumu
Bu okuma durumu başlatmadan sonra standarttır.
Gösterilen işletim değişkenlerine (1.1, 1.2, 1.3, 2 ve 3)
22
bağlanan ölçüm bağlantıları hakkındaki bilgileri
görüntülemek için [Info] tuşuna basın.
Çizim 2.11 kısmında gösterilen işletim değişkenlerine bakın.
Frekans dönüştürücü pratik olarak tüm görevler için
seçilebilir ve 2 programlama modu seçeneği sunar:
Ana menü modu.
•
Hızlı menü modu.
•
Ana menü tüm parametrelere erişim sağlar. Hızlı menü
frekans dönüştürücüyü işletmeye başlatma imkanı sunarak
kullanıcıyı birkaç parametreye götürür.
Ana menü veya hızlı menü modunda bir parametre
değiştirin.
2.2.6 Hızlı Menu Tuşu İşlevleri
[Quick Menu] düğmesine basarak Hızlı Menüde bulunan
Çizim 2.11 Durum Ekranı I
Durum ekranı II
Çizim 2.12 kısmında gösterilen işletim değişkenlerine (1.1,
1.2, 1.3, ve 2) bakın.
Örnekte, hız, motor akımı, motor gücü ve frekans ilk 2
sırada değişkenler olarak seçilmiştir.
çeşitli alanların listesine girin.
Seçili kişisel parametreleri görüntülemek için Q1 My
Personal Menu (Kişisel Menü) seçeneğini belirleyin. Bu
parametreler parametre 0-25 Kişisel Menüm'de seçilir. Bu
menüde 50’ye kadar faklı parametre eklenebilir.
Çizim 2.14 Hızlı Menüler
Motoru neredeyse tamamen optimal olarak çalıştırmak için
Çizim 2.12 Durum Ekranı II
Q2 Hızlı Kurulum seçeneğini belirleyerek parametre
seçeneğine gidin. Diğer parametrelerin varsayılan ayarları
gereken kontrol işlevlerini ve sinyal girişlerinin/çıkışlarının
Durum ekranı III
(kontrol terminalleri) konfigürasyonunu dikkate alır.
Bu durum Smart Logic Control'ün olay ve eylemlerini
gösterir. Daha fazla bilgi için bkz.13-** Smart Logic
parametre grubu.
Çizim 2.13 Durum Ekranı III
18 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 21
Programlama Programlama Kılavuzu
Parametre seçimi gezinme tuşlarıyla yapılır. Tablo 2.1
içindeki parametrelere erişilebilir.
Parametre Ayar.
Parametre 0-01 Dil
Parametre 1-20 Motor Gücü [kW] [kW]
Parametre 1-22 Motor Voltajı [V]
Parametre 1-23 Motor Frekansı [Hz]
Parametre 1-24 Motor Akımı [A]
Parametre 1-25 Motor Nominal Hızı [RPM]
Parametre 5-12 Terminal 27 Dijital Giriş
Parametre 1-29 Otomatik Motor
Adaptasyonu (AMA)
Parametre 3-02 Minimum Referans [RPM]
Parametre 3-03 Maksimum Referans [RPM]
Parametre 3-41 Rampa 1 Hızlanma Süresi [s]
Parametre 3-42 Rampa 1 Yavaşlama Süresi [s]
Parametre 3-13 Referans Sitesi
Tablo 2.1 Parametre Seçimi
1) Terminal 27 [0] İşletim yok olarak ayarlandıysa terminal 27'deki
+24 V'ye bağlantı gerekli değildir.
Aşağıdaki konularda bilgi edinmek için, Yapılan değişiklikler’i
seçin:
Son 10 değişiklik. Değişen son 10 parametre
•
arasında gezinmek için [▲] [▼] gezinme tuşlarını
kullanın.
Varsayılan ayardan beri yapılan değişiklikler.
•
Ekran satırı okumaları hakkında bilgi edinmek için Günlükler
seçeneğini seçin. Bilgiler grafik olarak gösterilir.
Yalnızca parametre 0-20 Ekran Satırı 1.1 Küçük ve
parametre 0-24 Ekran Satırı 3 Büyük içinde seçili parametreler görüntülenebilir. Daha sonra başvurmak üzere
bellekte 120’ye kadar örnek saklamak mümkündür.
[0] İşletim yok
[1] Tam AMA'yı
etknlştir
1)
2.2.7 Hızlı Menü, Q3 İşlev Kurulumları
İşlev kurulumu, şunlar da dahil olmak üzere su ve atık su
uygulamalarının birçoğu için gereken parametrelerin
tümüne hızlı erişim sağlar:
Değişken tork.
•
Sabit tork.
•
Pompalar.
•
Dozaj pompaları.
•
Kuyu pompaları.
•
Yükseltici pompalar.
•
Karıştırıcı pompalar.
•
Havalandırmalar.
•
Diğer pompalar.
•
Fan uygulamaları.
•
Diğer özellikler arasında işlev kurulumları menüsü aşağıdakileri seçmek için mevcut parametreleri de içermektedir:
LCP'de gösterilecek değişkenler.
•
Dijital önceden ayarlı hızlar.
•
Analog referansların ölçeklenmesi.
•
Kapalı çevrim tek alanlı ve çok alanlı uygulamalar.
•
Su ile ilgili özel işlevler.
•
Atık su uygulamaları.
•
2 2
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 19
Page 22
Programlama
VLT® AQUA Drive FC 202
İşlev kurulumu parametreleri aşağıdaki gibi gruplandırılır:
22
Q3-10 Saat Ayarları Q3-11 Ekran Ayarları Q3-12 Analog Çıkış Q3-13 Relays
Parametre 0-70 Tarih ve Saat Parametre 0-20 Ekran Satırı 1.1
Küçük
Parametre 0-71 Tarih Biçimi Parametre 0-21 Ekran Satırı 1.2
Küçük
Parametre 0-72 Saat Biçimi Parametre 0-22 Ekran Satırı 1.3
Küçük
Parametre 0-74 Yaz Saati/Yaz Parametre 0-23 Ekran Satırı 2
Büyük
Parametre 0-76 Yaz Saati/Yaz
Başlangıcı
Parametre 0-77 Yaz Saati/Yaz Bitişi Parametre 0-37 Ekran Metni 1 – –
– Parametre 0-38 Ekran Metni 2 – –
– Parametre 0-39 Ekran Metni 3 – –
Tablo 2.2 Q3-1 Genel Ayarlar
Q3-20 Dijital referans Q3-21 Analog referans
Parametre 3-02 Minimum Referans Parametre 3-02 Minimum Referans
Parametre 3-03 Maksimum Referans Parametre 3-03 Maksimum Referans
Parametre 3-10 Önceden Ayarlı Referans Parametre 6-10 Terminal 53 Düşük Voltaj
Parametre 5-13 Terminal 29 Dijital Giriş Parametre 6-11 Terminal 53 Yüksek Voltaj
Parametre 5-14 Terminal 32 Dijital Giriş Parametre 6-14 Terminal 53 Düşük Ref./Gerib. Değeri
Parametre 5-15 Terminal 33 Dijital Giriş Parametre 6-15 Terminal 53 Yüksek Ref./Gerib. Değeri
Parametre 0-24 Ekran Satırı 3
Büyük
Q3-1 Genel ayarlar
Parametre 6-50 Terminal 42 Çıkış
Parametre 6-51 Terminal 42 Çıkış Min.
Ölçeği
Parametre 6-52 Terminal 42 Çıkış
Maks. Ölçeği
– Töle seçeneği
– Röle seçeneği
Q3-2 Açık çevrim ayarları
Röle 1⇒Parametre 5-40 İşlev
Rölesi
Röle 2⇒Parametre 5-40 İşlev
Rölesi
Röle seçeneği
7⇒Parametre 5-40 İşlev Rölesi
8⇒Parametre 5-40 İşlev Rölesi
9⇒Parametre 5-40 İşlev Rölesi
Tablo 2.3 Q3-2 Açık Çevrim Ayarları
Q3-3 Kapalı çevrim ayarları
Q3-30 Feedback settings Q3-31 PID settings
Parametre 1-00 Konfigürasyon Modu Parametre 20-81 PID Normal/Ters Denetim
Parametre 20-12 Referans/Geri Besleme Birimi Parametre 20-82 PID Başlatma Hızı [RPM]
Parametre 3-02 Minimum Referans Parametre 20-21 Ayr Nkts 1
Parametre 3-03 Maksimum Referans Parametre 20-93 PID Orantılı Kazanç
Parametre 6-20 Terminal 54 Düşük Voltaj Parametre 20-94 PID Enteg. Süresi
Parametre 6-21 Terminal 54 Yüksek Voltaj
Parametre 6-24 Terminal 54 Düşük Ref./Gerib. Değeri
Parametre 6-25 Terminal 54 Yüksek Ref./Gerib. Değeri
Parametre 6-00 Yüklü Sıfır Zaman Aşımı Süresi
Parametre 6-01 Yüklü Sıfır Zaman Aşımı İşlevi
Tablo 2.4 Q3-3 Kapalı Çevrim Ayarları
20 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 23
e30bp066.14
0-** Operation/Display
1-** Load/Motor
2-** Brakes
1107 RPM 3.84 A
Main Menu
1(1)
3-** References/Ramps
130BP067.10
Programlama Programlama Kılavuzu
2.2.8 Hızlı Menü, Q4 SmartStart
SmartStart otomatik olarak frekans dönüştürücünün ilk
başlatmasında veya fabrika ayarlarına sıfırlandıktan sonra
çalışır. SmartStart, doğru ve en etkili motor denetimi
sağlanması için kullanıcıları bir dizi aşamaya öncülük eder.
SmartStart doğrudan Hızlı Menü ile de başlatılabilir.
Aşağıdaki ayarlat SmartStart ile kullanılabilir:
Tekli pompa/motor: Açık çevrimde veya kapalı
•
çevrimde.
Motor alternasyonu: 2 motor 1 frekans
•
dönüştürücü paylaşır.
Temel kademeli denetim: Çok pompalı sistemde
•
tekli pompanın hız denetimi.
Örneğin bu, yükseltici setlerindeki uygun maliyetli
bir çözüm olabilir.
Ana/uydu: Genel pompa sisteminin düzgün
•
işletimi için 8 frekans dönüştürücü ve pompaya
kadar denetim.
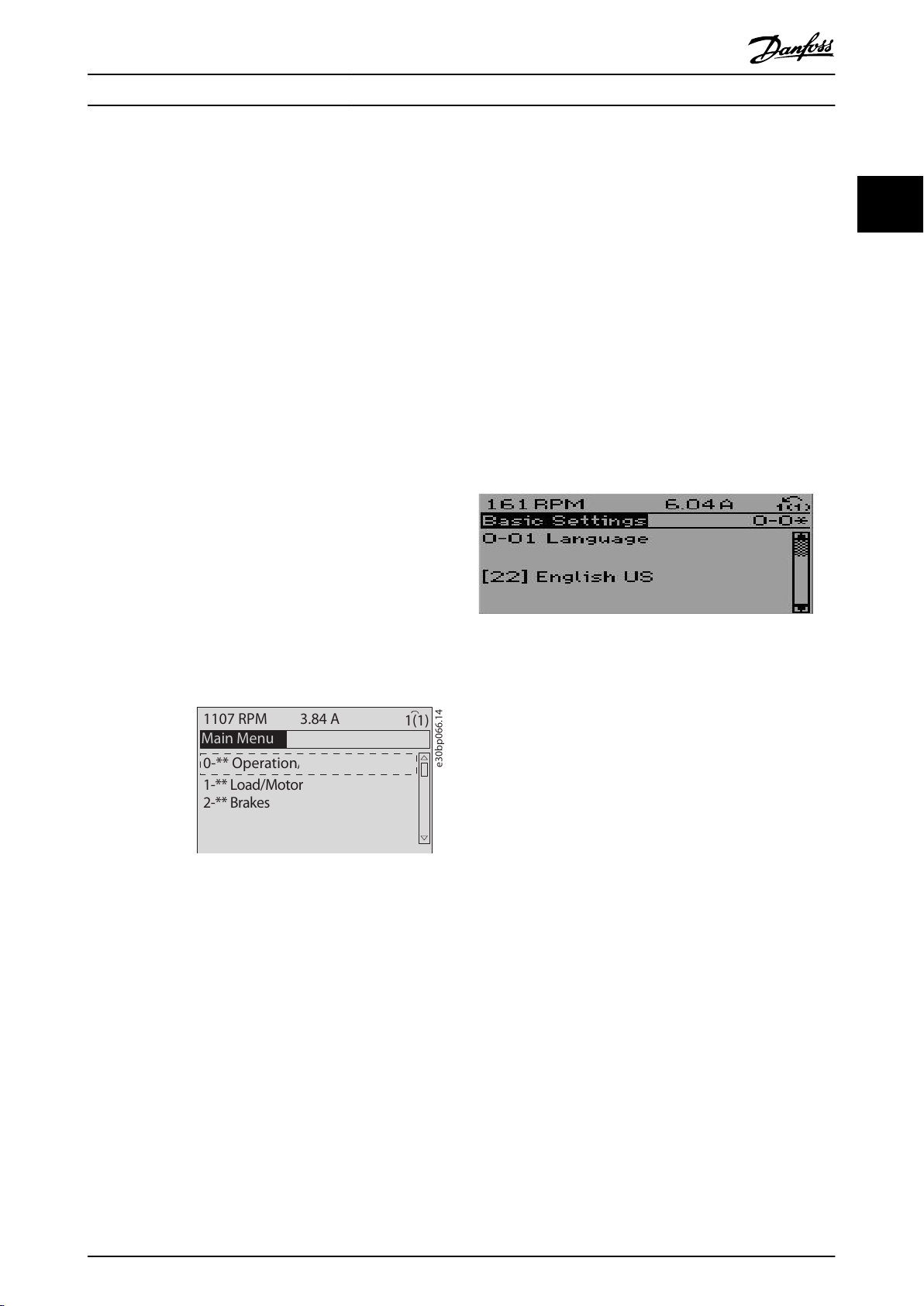
2.2.9 Ana Menü Modu
Tüm parametreler Ana Menü’de değiştirilebilir. Ancak,
yapılandırmaya (parametre 1-00 Konfigürasyon Modu) bağlı
olarak bazı parametreler gizlenebilir. Örneğin, açık çevrim
tüm PID parametrelerini gizler ve diğer etkin seçenekler
daha fazla parametre grubunu görünür kılar.
2.2.10 Parametre Seçimi
Ana menü modunda, parametreler gruplara ayrılır. Gezinme
tuşları ile bir parametre grubu seçin.
Parametre grubu seçtikten sonra, gezinme tuşları ile bir
parametre seçin.
Ekrandaki orta bölüm, seçilen parametre değerleri ile
parametre numarasını ve adını da gösterir.
2 2
Ana menü moduna girmek için [Main Menu] tuşuna basın.
Çizim 2.15 kısmındaki okuma ekranda görünür.
Ekrandaki orta ve alt bölümler [▲] ve [▼] tuşları ile
seçilebilen parametre gruplarının bir listesini gösterir.
Çizim 2.15 Ana Menü Modu
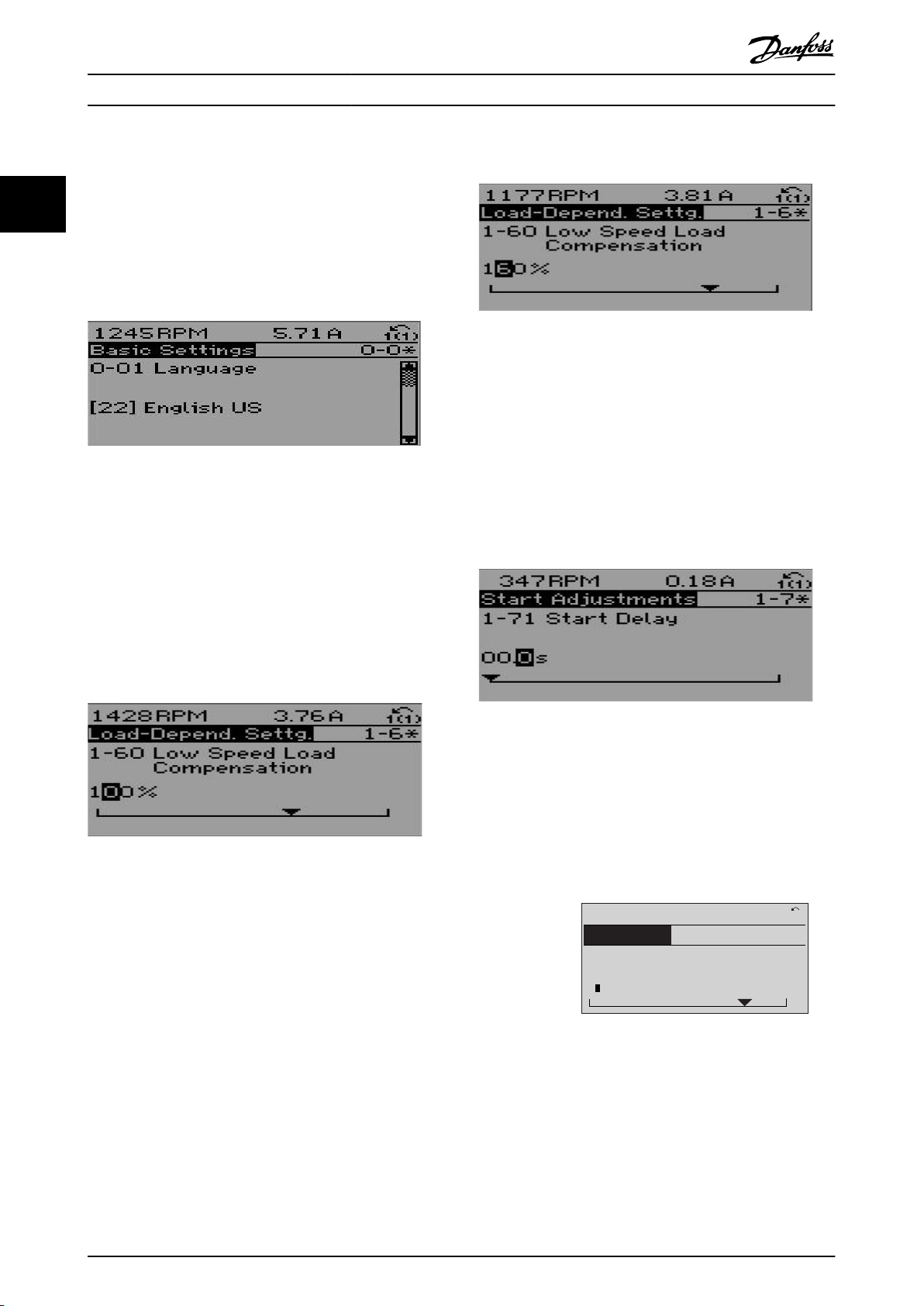
Parametrelerin her biri programlama moduna bakılmaksızın
aynı kalan bir ada ve numaraya sahiptir. Ana menü
modunda, parametreler gruplara ayrılır. Parametre
numarasının (soldan) ilk hanesi parametre grup numarasını
gösterir.
Çizim 2.16 Parametre Seçimi
2.2.11 Verileri Değiştirme
Verilerin değişimine yönelik prosedür hızlı menü modu ve
ana menü modundaki gibidir. [OK] tuşuna basarak seçili
parametreyi değiştirin.
Verilerin değişimine yönelik prosedür, seçili parametrenin
sayısal veri değeri veya metin değeri taşımasına bağlıdır.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 21
Page 24
130BP068.10
130BP069.10
130BP070.10
130BP073.10
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
Programlama
VLT® AQUA Drive FC 202
2.2.12 Bir Metin Değerini Değiştirme
22
Seçili parametre metin değeri ise [▲] [▼] gezinme tuşlarını
kullanarak metin değerini değiştirin.
İmleci kaydedilecek değerin üzerine getirip [OK] tuşuna
basın.
Çizim 2.19 Bir Veri Değerini Kaydetme
2.2.14 Sayısal Veri Değerinin Sonsuz
Değişken Değişikliği
Çizim 2.17 Bir Metin Değerini Değiştirme
Seçili parametre sayısal veri değeri gösteriyorsa [◀] [▶] ile
basamağı seçin.
2.2.13 Bir Veri Değerini Değiştirme
Seçili parametre bir sayısal veri değerini gösteriyorsa seçili
veri değerini [◀] [▶] ve [▲] [▼] gezinme tuşlarıyla değiştirin.
[◀] [▶] tuşlarına basarak imleci yatay hareket ettirin.
Çizim 2.18 Bir Veri Değerini Değiştirme
Veri değerini değiştirmek için [▲] [▼] tuşlarına basın. [▲]
veri değerini artırırken [▼] veri değerini azaltır. İmleci
kaydedilecek değerin üzerine getirip [OK] tuşuna basın.
Çizim 2.20 Basamak Seçimi
[
] [▼] tuşları ile seçili basamak sonsuz değişkenini
▲
değiştirin.
İmleç, seçili basamağı gösterir. İmleci kaydedilecek
basamağın üzerine getirip [OK] tuşuna basın.
Çizim 2.21 Kaydediliyor
22 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 25
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
Programlama Programlama Kılavuzu
2.2.15 Değer, Adım adım
Belirli parametreler adım adım değiştirilebilir. Bu durum
şunlar için geçerlidir:
Parametre 1-20 Motor Gücü [kW].
•
Parametre 1-22 Motor Voltajı.
•
Parametre 1-23 Motor Frekansı.
•
Parametreler hem bir grup sayısal veri değeri hem de
sonsuz değişkenli sayısal veri değerleri olarak değiştirilir.
2.2.16 Dizinli Parametreleri Okuma ve
Programlama
Parametreler dönen yığına yerleştirilince dizinlenir.
Parametre 15-30 Alarm Gnlğ: Hata Kodu parametre 15-32 Alarm Gnlğ: Zaman, okunabilen bir arıza
günlüğü içerir. Bir parametre seçin, [OK] tuşuna basın ve
değer günlüğünde ilerlemek için [▲] [▼] tuşlarını kullanın.
Örneğin, parametre 3-10 Önceden Ayarlı Referans şu şekilde
değiştirilir:
1. Parametreyi seçin, [OK] tuşuna basın ve dizinli
değerlerde ilerlemek için [▲] [▼] tuşlarını kullanın.
2. Parametre değerini değiştirmek için, dizinli değeri
seçip [OK] tuşuna basın.
3.
[▲] [▼] tuşlarına basarak değeri değiştirin.
4. Yeni ayarı kabul etmek için [OK] tuşuna basın.
5. İptal etmek için [Cancel] tuşuna basın. Parametreden çıkmak için [Back] tuşuna basın.
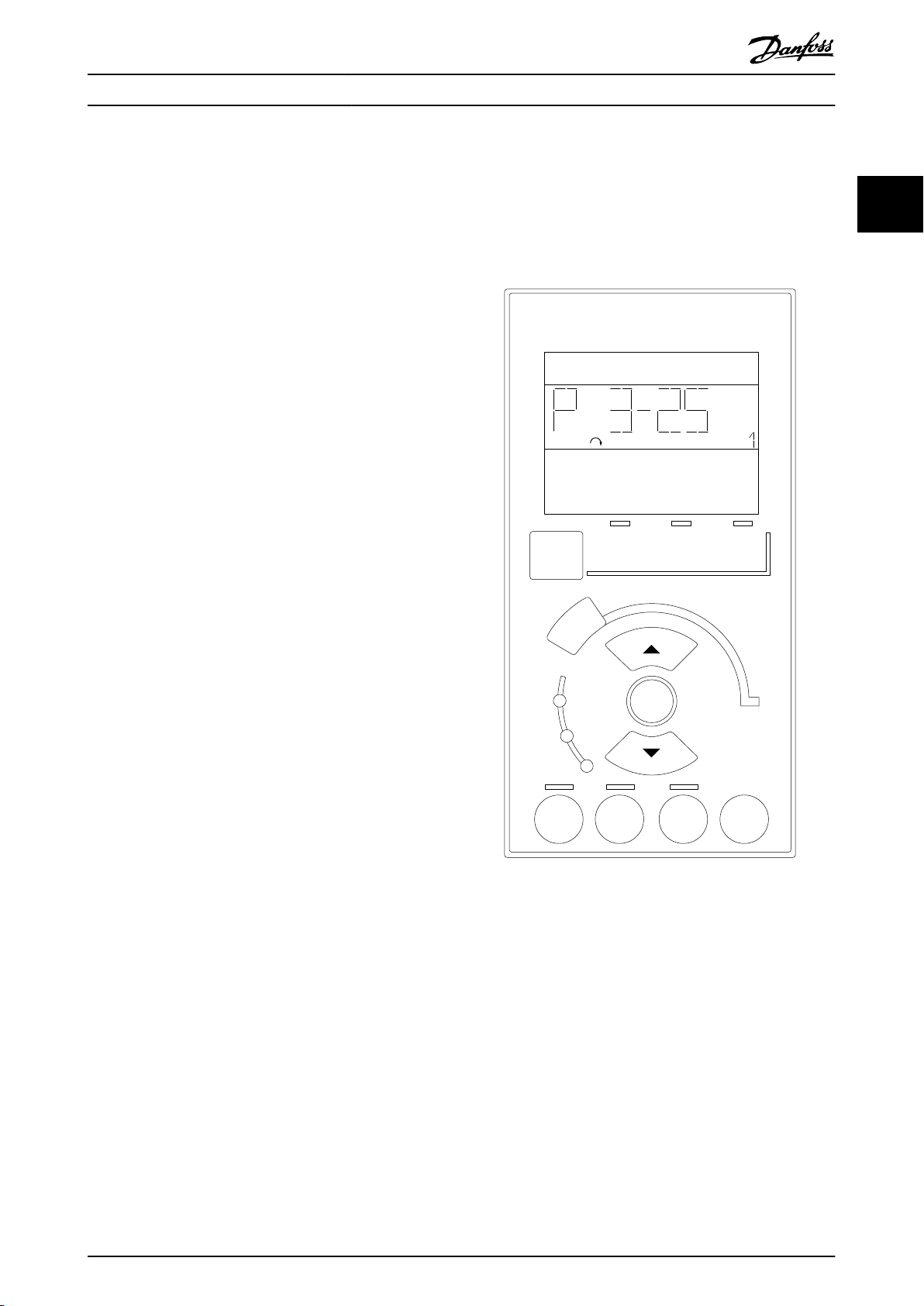
LCP tuşları
[Menu]
Aşağıdaki modlardan 1'ini seçin:
Status.
•
Quick set-up.
•
Main menu.
•
2 2
2.2.17 Sayısal Yerel Denetim Panosu'nda
Nasıl Programlanır?
Sayısal LCP (LCP 101) için şu yönergeler geçerlidir.
Denetim panosu 4 işlevsel gruba ayrılır:
Ekran satırı
Simgeleri ve sayısal değerleri gösteren durum mesajları.
Gösterge ışıkları
Sayısal ekran.
•
Menü anahtarları ve gösterge ışıkları - parame-
•
treleri değiştirme ve ekran işlevleri arasında geçiş
yapma.
Gezinme tuşları ve gösterge ışıkları.
•
•
•
•
•
İşletim tuşları ve gösterge ışıkları.
Yeşil LED/On: Denetim bölümünün çalıştığını
gösterir.
Sarı LED/Uyarı: Bir uyarı gösterir.
Yanıp sönen kırmızı LED/Alarm: Bir alarm gösterir.
Çizim 2.22 LCP Tuşları
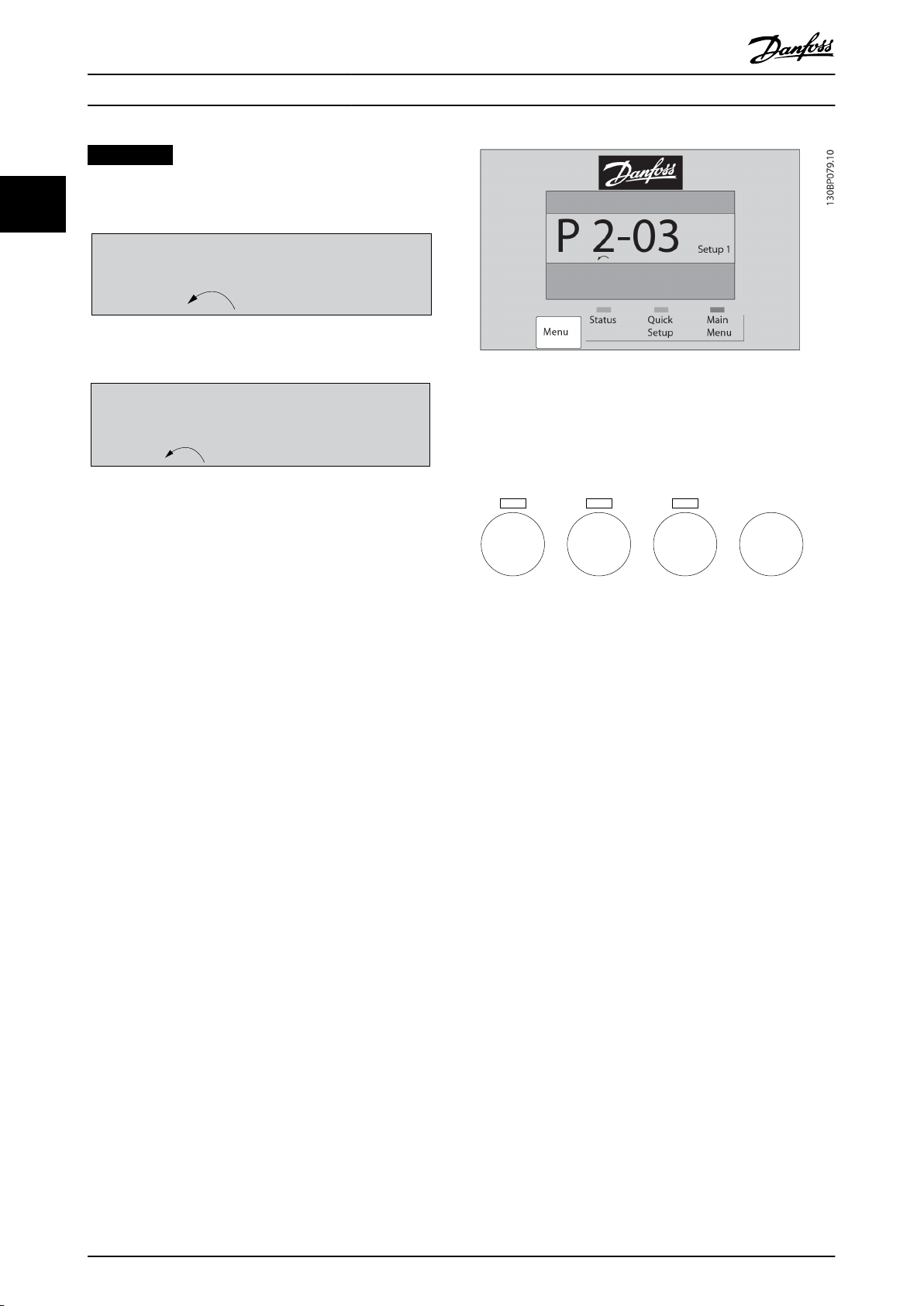
Durum modu
Durum modu, frekans dönüştürücünün veya motorun
durumunu gösterir.
Alarm halinde, NLCP otomatik olarak durum moduna geçer.
Birçok alarm gösterilebilir.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 23
Page 26
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programlama
VLT® AQUA Drive FC 202
DUYURU!
LCP 101 sayısal yerel denetim panosu ile parametre
22
kopyalanamaz.
Çizim 2.23 Durum Modu
Çizim 2.24 Alarm
Ana Menü/Hızlı Kurulum
Tüm parametrelerin veya yalnızca Hızlı Menü'deki parametrelerin programlanması için kullanılır (ayrıca LCP 102'nin
bölüm 2.1 Grafiksel ve Sayısal Yerel Denetim Panosu
bölümündeki açıklamasına bakın).
Değer yanıp söndüğünde, parametre değerini değiştirmek
için [▲] veya [▼] tuşuna basın.
1. Ana menüye dönmek için [Main Menu] tuşuna
basın.
2. [xx-__] parametre grubunu seçip [OK] tuşuna
basın.
3. [__-xx] parametresini seçip [OK] tuşuna basın.
4. Parametre bir dizi parametresiyse dizi numarasını
seçip [OK] tuşuna basın.
5. Gerekli veri değerini seçin ve [OK] tuşuna basın.
İşlevsel seçenekli parametreler [1], [2] ve benzeri değerler
gösterir. Farklı seçeneklerin açıklaması için
bölüm 3 Parametre Açıklaması bölümündeki bireysel
parametre açıklamalarına bakın.
[Back]
Geri dönmek için kullanılır.
[▲] [▼] komutlar arasında veya parametrelerin içinde
hareket etmek için kullanılır.
Çizim 2.25 Ana Menü/Hızlı Kurulum
2.2.18 LCP Tuşları
Yerel denetim tuşları LCP'nin altında bulunur.
Çizim 2.26 LCP Tuşları
[Hand On]
Frekans dönüştürücünün LCP ile denetlenebilmesini sağlar.
[Hand On] aynı zamanda motoru başlatır ve artık gezinme
tuşlarıyla motor hızı verileri girilebilir. Tuş,
parametre 0-40 LCP'de [Hand on] Anahtarı ile [1] Devrede
veya [0] Devre Dışı olarak seçilebilir.
Kontrol sinyalleri veya bir fieldbus ile etkinleştirilen dış
durdurma sinyalleri başlatma komutunu LCP aracılığıyla
geçersiz kılacaktır.
[Hand on] etkinleştirildiğine aşağıdaki denetim sinyalleri
hala etkin olur:
[Hand On] - [O] - [Auto On].
•
Sıfırla.
•
Ters serbest duruş.
•
Ters çevirme.
•
Kurulum seçimi lsb – Kurulum seçimi msb.
•
Seri iletişimden durdurma komutu.
•
Hızlı durdurma.
•
DC freni.
•
[O]
Bağlı motoru durdurur. Tuş, parametre 0-41 LCP'de [O]
Anahtarı ile [1] Devrede veya [0] Devre Dışı olarak seçilebilir.
Hiçbir dış durdurma işlevi seçili değil ve [O] tuşu etkin
değilse gerilim bağlantısını keserek motoru durdurun.
24 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 27

Programlama Programlama Kılavuzu
[Auto On]
Frekans dönüştürücünün kontrol terminalleri ve/veya seri
iletişim aracılığıyla kontrol edilebilmesini sağlar. Bus ve/
veya kontrol terminallerine bir başlatma sinyali uygulandığı
zaman, frekans dönüştürücü başlatılacaktır. Tuş,
parametre 0-42 LCP'de [Auto on] Anahtarı ile [1] Devrede
veya [0] Devre Dışı olarak seçilebilir.
DUYURU!
Dijital girişler aracılığıyla etkin bir HAND-OFF-AUTO
sinyalinin önceliği [Hand on] ve [Auto on] denetim
tuşlarından daha fazladır.
[Reset]
Bir alarmdan sonra frekans dönüştürücüyü sıfırlamak için
kullanılır. Tuş, parametre 0-43 LCP'de [Reset] Anahtarı ile [1]
Devrede veya [0] Devre Dışı olarak seçilebilir.
2.3.1 Varsayılan Ayarlara Başlatma
Frekans dönüştürücüyü 2 şekilde varsayılan ayarlarından
başlatın.
Önerilen başlatma (parametre 14-22 İşletim Modu
aracılığıyla)
1. parametre 14-22 İşletim Modu'i seçin.
2. [OK] tuşuna basın.
3. Şunu seçin: [2] Başlatma.
4. [OK] tuşuna basın.
5. Şebeke beslemesi ile bağlantısını kesin ve ekran
kapanıncaya kadar bekleyin.
6. Şebeke beslemesini yeniden bağlayın. Frekans
dönüştürücü sıfırlanmıştır.
Parametre 14-22 İşletim Modu, şu hariç hepsini başlatır:
Parametre 14-50 RFI Filtresi.
•
Parametre 8-30 Protokol.
•
Parametre 8-31 Adres.
•
Parametre 8-32 Baud Hızı.
•
Parametre 8-35 Minimum Yanıt Gecikmesi.
•
Parametre 8-36 Maks. Yanıt Gecikmesi.
•
Parametre 8-37 Maksimum Inter-Char Gecikmesi.
•
Parametre 15-00 İşletim Saatleri -
•
parametre 15-05 Aşırı Voltajlar.
Parametre 15-20 Tarihsel kayıt: Olay -
•
parametre 15-22 Tarihsel Günlük: Zaman.
Parametre 15-30 Alarm Gnlğ: Hata Kodu -
•
parametre 15-32 Alarm Gnlğ: Zaman.
Manuel başlatma
1. Şebekeyle bağlantısını kesin ve ekran kapanıncaya
kadar bekleyin.
2. 2a Grafik Ekran LCP 102’de enerji varken
[Status] - [Main Menu] - [OK] tuşlarına
aynı anda basın.
2b LCP 101’de, sayısal ekranda enerji varken
[Menu] tuşuna basın
3. 5 sn sonra tuşları bırakın.
4. Frekans dönüştürücü artık varsayılan ayarlara göre
programlanmıştır.
Bu prosedür aşağıdakiler dışındakileri başlatır:
Parametre 15-00 İşletim Saatleri.
•
Parametre 15-03 Açma Sayısı.
•
Parametre 15-04 Aşırı Sıcaklıklar.
•
Parametre 15-05 Aşırı Voltajlar.
•
DUYURU!
Manuel başlatma, seri iletişim, RFI filtre ayarları
(parametre 14-50 RFI Filtresi) ve arıza günlüğü ayarlarını
da sıfırlar.
2 2
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 25
Page 28
Parametre Açıklaması
3 Parametre Açıklaması
3.1 Parametre Seçimi
VLT® AQUA Drive FC 202
33
Parametreler frekans dönüştürücünün optimum kullanımını sağlamak üzere doğru parametrenin kolayca seçilebilmesi için
çeşitli parametre gruplarına ayrılmıştır.
Parametre gruplarına genel bakış
Grup İşlev
0-** İşletim ve Ekran Frekans dönüştürücünün temel işlevleri ile ilgili parametreler, LCP tuşlarının işlevi ve LCP ekranının
yapılandırılması.
1-** Yük ve Motor Motor ayarlarına bağlı parametreler.
2-** Frenler Frekans dönüştürücüdeki fren özelliklerine bağlı parametreler.
3-** Referans / Rampalar Referans kullanımı, sınırlamaların tanımları ve frekans dönüştürücünün değişikliklere reaksiyonu için
parametreler.
4-** Sınırlar / Uyarılar Sınırların ve uyarıların konfigürasyonunu yapan parametreler.
5-** Dijital Giriş/Çıkış Dijital girişlerin ve çıkışların konfigürasyonunu yapan parametreler.
6-** Analog Giriş/Çıkış Analog girişlerin ve çıkışların konfigürasyonunu yapan parametreler.
8-** İletişimler ve Seçeneklerin İletişim ve seçeneklerin konfigürasyonunu yapan parametre grubu.
9-** PROFIBUS
10-** CAN Fieldbus
13-** Smart Logic Smart logic control için parametre grubu
14-** Özel İşlevler Frekans dönüştürücüdeki özel işlevlerin konfigürasyonunu yapan parametre grubu.
15-** Sürücü Bilgisi İşletim verileri, donanım konfigürasyonu ve yazılım sürümleri gibi frekans dönüştürücü bilgilerini
16-** Veri Okumaları Gerçek referanslar, voltajlar, kontrol, alarm, uyarı ve durum sözcükleri gibi veri okumaları için
18-** Bilgi ve Okmlr Bu parametre grubu son 10 koruyucu bakım günlüğünü içerir.
20-** Sür. Kpl Çevrimi Bu parametre grubu, birimin çıkış frekansını kontrol eden kapalı çevrim PID denetleyicinin konfigüras-
21-** Dış Kapalı Çevrim 3 genişletilmiş kapalı çevrim PID denetleyicinin konfigürasyonunu yapan parametreler.
22-** Uygulama İşlevleri Su uygulamaları için parametreler.
23-** Süre Esaslı İşlevler Günlük veya haftalık olarak gerçekleştirilecek eylemler için parametreler.
24-** Uygulama İşlevleri 2 Frekans dönüştürücü by-passı için parametreler.
25-** Kademeli Dntlyc Birden fazla pompanın sırasını kontrol etmek üzere temel kademeli denetleyiciyi yapılandıran parame-
26-** Analog G/Ç Seçn. MCB 109
29-** Water Application Functions Suya özgü işlev ayarlamaları için parametreler.
30-** Özel İşlevler Özel işlevlerin konfigürasyonunu yapan parametreler.
31-** Bypass Seç. By-pass işlevinin konfigürasyonunu yapmak için parametreler.
35-** Sensör Giriş Seçeneği Sensör giriş işlevinin konfigürasyonunu yapmak için parametreler.
Profibus’a özel parametreler için parametre grubu (VLT® PROFIBUS DP MCA 101 gereklidir).
DeviceNet'e özel parametreler için parametre grubu (VLT® DeviceNet MCA 104 gereklidir).
içeren parametre grubu.
parametre grubu.
yonunu yapmak için kullanılır.
treler.
VLT® Analog G/Ç Seçeneği MCB 109 konfigürasyonunu yapmak için parametreler.
Tablo 3.1 Parametre Grupları
Parametre tanımları ve seçimler grafik LCP veya sayısal LCP ekranda görüntülenir. Ayrıntılar için bkz. bölüm 2 Programlama.
LCP'de [Quick Menu] veya [Main Menu] tuşlarına basarak parametrelere erişin. Quick Menu düğmesi öncelikle, üniteyi
kullanıma alırken, başlatma işlemi için gereken parametreleri sağlamak üzere kullanılır. Main Menu düğmesi, ayrıntılı bir
uygulama programlaması için tüm parametrelere erişim sağlar.
Tüm dijital giriş/çıkış ve analog giriş/çıkış terminalleri çok işlevlidir. Tüm terminallerin pek çok su uygulaması için uygun
fabrika varsayılan işlevleri vardır. Diğer özel işlevlere gerek duyulursa 5-** Dijital Giriş/Çıkış veya 6-** Analog Giriş/Çıkış
parametre gruplarında programlanmaları gerekir.
26 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 29
0-01 Dil
Seçenek: fonksiyon:
Ekranda kullanılacak dili tanımlar.
Frekans dönüştürücü, 2 farklı dil
paketiyle teslim edilir. İngilizce ve
Almanca, her iki pakette de
mevcuttur. İngilizce silinemez veya
değiştirilemez.
[0] * English Dil paketi 1 - 2’nin parçası.
[1] Deutsch Dil paketi 1 - 2’nin parçası.
[2] Francais Dil paketi 1'in parçası.
[3] Dansk Dil paketi 1'in parçası.
[4] Spanish Dil paketi 1'in parçası.
[5] Italiano Dil paketi 1'in parçası.
[6] Svenska Dil paketi 1'in parçası.
[7] Nederlands Dil paketi 1'in parçası.
[10] Chinese Dil paketi 2’nin parçası.
[20] Suomi Dil paketi 1'in parçası.
[22] English US Dil paketi 1'in parçası.
[27] Greek Dil paketi 1'in parçası.
[28] Bras.port Dil paketi 1'in parçası.
[36] Slovenian Dil paketi 1'in parçası.
[39] Korean Dil paketi 2’nin parçası.
[40] Japanese Dil paketi 2’nin parçası.
[41] Turkish Dil paketi 1'in parçası.
[42] Trad.Chinese Dil paketi 2’nin parçası.
[43] Bulgarian Dil paketi 1'in parçası.
[44] Srpski Dil paketi 1'in parçası.
[45] Romanian Dil paketi 1'in parçası.
[46] Magyar Dil paketi 1'in parçası.
[47] Czech Dil paketi 1'in parçası.
[48] Polski Dil paketi 1'in parçası.
[49] Russian Dil paketi 1'in parçası.
[50] Thai Dil paketi 2’nin parçası.
[51] Bahasa
Indonesia
Dil paketi 2’nin parçası.
[52] Hrvatski Dil paketi 2’nin parçası.
0-02 Motor Hız Birimi
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Ekranda gösterilen bilgiler
parametre 0-02 Motor Hız Birimi ve
parametre 0-03 Bölgesel Ayarlar
içindeki ayarlara bağlıdır.
parametre 0-02 Motor Hız Birimi ve
parametre 0-03 Bölgesel Ayarlar'ın
varsayılan ayarları frekans dönüştürücünün dünyanın hangi bölgesinde
tedarik edildiğine bağlıdır.
DUYURU!
Motor hızı birimi değiştirilirse
bazı parametreler ilk
değerlerine sıfırlanır. Diğer
parametreleri değiştirmeden
önce motor hızı birimini seçin.
[0] * RPM Motor hızını (RPM) kullanarak motor
hızı değişkenlerini ve parametrelerini göstermek için seçin.
[1] Hz Çıkış frekansını (Hz) kullanarak
motor hızı değişkenlerini ve
parametrelerini göstermek için
seçin.
0-03 Bölgesel Ayarlar
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Ekran çıkışı parametre 0-02 Motor
Hız Birimi ve parametre 0-03 Bölgesel
Ayarlar içindeki ayarlara bağlıdır.
parametre 0-02 Motor Hız Birimi ve
parametre 0-03 Bölgesel Ayarlar
varsayılan ayarları frekans dönüştürücünün dünyanın hangi bölgesinde
tedarik edildiğine bağlıdır. Ayarları
gereken şekilde yeniden
programlayın.
Kullanılmayan ayarlar görünmezdir.
[0] Uluslararası parametre 1-20 Motor Gücü [kW]
ünitelerini [kW]'ye ve
parametre 1-23 Motor Frekansı
varsayılan değerini 50 Hz'ye ayarlar.
Parametre Açıklaması Programlama Kılavuzu
3.2 0-** İşletim/Ekran Parametreleri
Frekans dönüştürücünün temel işlevleri ile ilgili parametreler, LCP tuşlarının işlevi ve LCP ekranının yapılandırılması.
3.2.1 0-0* Temel Ayarlar
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 27
3 3
Page 30
0-03 Bölgesel Ayarlar
Seçenek: fonksiyon:
[1] Kuzey Amerika parametre 1-21 Motor Gücü [HP]
ünitelerini [hp]'ye ve
parametre 1-23 Motor Frekansı
varsayılan değerini 60 Hz'ye ayarlar.
0-04 Açmada İşletim Durumu
Seçenek: fonksiyon:
Kapatmanın ardından frekans
dönüştürücünün şebeke voltajına
yeniden bağlanmasından sonra el
ile (yerel) modunda işletimdeyken
işletim modunu seçin.
[0] * Sürdürme Frekans dönüştürücünün işletimini
aynı yerel referansı ve aynı
başlatma/durdurma koşulunu
sürdürerek devam ettirir. Başlat/
durdur koşulu LCP'de, frekans
dönüştürücü kapatılmadan önce
dijital giriş aracılığıyla [Hand On]/
[O] ile uygulanır.
[1] Zrn. drd.,
ref=eski
Frekans dönüştürücüyü durdurur,
ancak aynı zamanda kapatmadan
önce bellekteki yerel hız referansını
sürdürür. Şebeke voltajı yeniden
bağlandıktan ve başlatma komutu
aldıktan ([Hand On]'a basılarak veya
dijital giriş aracılığıyla yerel
başlatma komutu) sonra frekans
dönüştürücü yeniden başlatılır ve
korunan hız referansında işletilir.
0-05 Yerel Mod Birimi
Seçenek: fonksiyon:
Yerel referans biriminin motor mili
hızı (RPM/Hz cinsinden) ya da yüzde
cinsinden gösterileceğini belirler.
[0] * As Motor Hız
Birimi
[1] %
0-10 Etkin Kurulum
Seçenek: fonksiyon:
Frekans dönüştürücünün işletildiği
kurulumu seçin.
Bir kurulumu 1 veya diğer tüm
kurulumlara kopyalamak için
parametre 0-51 Kurulum Kopyası
özelliğini kullanın. 2 farklı
kurulumda aynı parametre ayarının
çakışmasını önlemek adına
parametre 0-12 Bu Kurulum Şuna
Bağlı özelliğini kullanarak
kurulumlara bağlantı kurun. İşletim
esnasında değiştirilemez olarak
işaretli parametrelerin farklı
değerlerinin olduğu kurumlar
arasında geçiş yapmadan önce
frekans dönüştürücüyü durdurun.
İşletim esnasında değiştirilemez
olarak işaretli parametreler
bölüm 4 Parametre Listeleri
öğelerinde FALSE olarak işaretlidir.
[0] Fabrika
değerleri
Değiştirilemez. Danfoss veri ayarını
içerir ve diğer kurulumlar bilinen bir
duruma dönerken veri kaynağı
olarak kullanılabilir.
[1] * Kurlm 1 [1] Kurlm 1 ila [4] Kurlm 4 tüm
parametrelerin programlanabileceği
4 parametre ayarıdır.
Parametre Açıklaması
VLT® AQUA Drive FC 202
birimi, aynı parametrelerin olacağı bir yelpazede farklı
ekipman modelleri için tüm fabrika uyumlu frekans
dönüştürücüleri benzer şekilde programlamak amacıyla da
kullanılabilir. Üretim/işletime alma süresince frekans
dönüştürücü modeline bağlı olarak belirli bir kurulum
seçin.
33
parametre 0-10 Etkin Kurulum içinde etkin kurulumu
(frekans dönüştürücünün işletildiği kurulumu) seçin.
Ardından LCP seçili etkin kurulumu gösterecektir. Çoklu
kurulum kullanarak dijital giriş veya seri iletişim komutları
aracılığıyla frekans dönüştürücünün çalışması ve durması ile
kurulumlar arasında geçiş yapılabilir. Çalışma esnasında
kurulumların değiştirilmesi gerekir, parametre 0-12 Bu
Kurulum Şuna Bağlı öğesinin gereken şekilde programlanmasını sağlayın. Çoğu su/atık su uygulaması için çalışma
esnasında kurulum değişimi gerekse dahi
parametre 0-12 Bu Kurulum Şuna Bağlı programlamasına
gerek yoktur. Ancak bu, çoklu kurulumların tam esnekliğini
kullanan karışık uygulamalarda gerekebilir.
parametre 0-11 Programlama Ayarı kullanılarak frekans
dönüştürücünün işletimi etkin kurulumda devam ederken,
kurulumların herhangi birinde parametreler düzenlenebilir.
Etkin kurulum düzenlenen kurulumdan farklı olabilir. Farklı
kurulumlarda aynı parametre ayarları gerekiyorsa hızlı
işletime alınmayı etkinleştirmek için
parametre 0-51 Kurulum Kopyası kullanılarak kurulumlar
arasında parametre ayarları kopyalanabilir.
3.2.2 0-1* Kurulum İşletimleri
Ayrı parametre kurulumlarını tanımlayın ve denetleyin.
Frekans dönüştürücünün birbirinden ayrı olarak programlanabilen 4 parametre ayarı vardır. Bu, frekans
dönüştürücünün kullanımını esnek kılar ve pek çok farklı su
sistemi denetim şemaları gereksinimine uyarak genellikle
harici denetim ekipmanın maliyetinden tasarruf edilmesini
sağlar. Örneğin kurulumlar, 1 kurulumda (örneğin, günlük
işletim) 1 denetim şemasına ve diğer kurulumda diğer bir
denetim şemasına (örneğin, gece azaltması) göre işletim
için frekans dönüştürücüyü programlamak amacıyla kullanılabilir. Alternatif olarak hava işleme birimi veya bir OEM
28 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 31

0-10 Etkin Kurulum
Seçenek: fonksiyon:
[2] Kurlm 2
[3] Kurlm 3
[4] Kurlm 4
[9] Çoklu kurulum dijital giriş ve seri iletişim bağlantı
noktası kullanarak seçimlerin
uzaktan kurulumu için kullanılır. Bu
kurulum parametre 0-12 Bu Kurulum
Şuna Bağlı öğesinden ayarlar
kullanır.
0-11 Programlama Ayarı
Seçenek: fonksiyon:
İşletim esnasında düzenlenecek
(programlanacak) kurulumu seçin;
ya etkin kurulum ya da etkin
olmayan kurulumlardan 1'i.
Düzenlenen kurulum sayısı LCP'de
parantez içinde gösterilir.
[0] Fabrika
değerleri
Düzenlenemez, ancak diğer
kurulumlar bilinen bir duruma
dönerken veri kaynağı olarak
kullanılabilir.
[1] Kurlm 1 [1] Kurlm 1 ila [4] Kurlm 4 etkin
kurulumdan bağımsız olarak işletim
esnasında serbest bir şekilde
düzenlenebilir.
[2] Kurlm 2
[3] Kurlm 3
[4] Kurlm 4
[9] * Etkin kurulum Frekans dönüştürücünün çalıştığı
kurulum işletim esnasında düzenlenebilir. Seçili kurulumdaki
parametreler normalde LCP'den
düzenlenebilir, ancak seri iletişim
bağlantı noktalarından da gerçekleştirilebilir.
0-12 Bu Kurulum Şuna Bağlı
Seçenek: fonksiyon:
Bu parametreyi yalnızca motor
çalışırken kurulumların değiştirilmesi
gerektiğinde kullanın. Bu parametre
işletim esnasında değiştirilemeyen
parametrelerin ilgili tüm
kurulumlarda aynı ayarda olmasını
sağlar.
Frekans dönüştürücü çalışırken 1
kurulumdan diğerine çakışma
oluşturmayan değişiklikleri etkinleştirmek için işletim esnasında
değiştirilemeyen parametreleri
içeren kurulumlara bağlantı
0-12 Bu Kurulum Şuna Bağlı
Seçenek: fonksiyon:
oluşturun. Bağlantı, işletim
esnasında 1 kurulumdan diğerine
geçerken işletim esnasında değişti-
rilemez parametre değerlerinin
senkronizasyonunu sağlar.
Parametre listelerinde
(bölüm 4 Parametre Listeleri içindeki)
FALSE olarak işaretli parametreler
frekans dönüştürücü çalışırken
değiştirilemez.
parametre 0-10 Etkin Kurulum içinde
[9] Çoklu kurulum seçiliyken
parametre 0-12 Bu Kurulum Şuna
Bağlı özelliği kullanılır. Motor
çalışırken işletim esnasında 1
kurulumdan diğerine geçmek için
[9] Çoklu kurulum özelliğini kullanın.
Örneğin:
Motor çalışırken işletim esnasında
kurulum 1'den kurulum 2'ye
geçmek için [9] Çoklu kurulum
özelliğini kullanın. Öncelikle
kurulum 1'deki parametreleri
programlayın ardından kurulum 1
ile kurulum 2'nin senkronize
edilmesini (veya bağlantılı olmasını)
sağlayın.
Senkronizasyon 2 şekilde gerçekleştirilebilir:
•
Düzen kurulumunu
parametre 0-11 Programla
ma Ayarı öğesinde [2]
Kurlm 2 olarak değiştirin
ve parametre 0-12 Bu
Kurulum Şuna Bağlı öğesini
[1] Kurlm 1 olarak
ayarlayın. Bu, bağlantı
(senkronizasyon) işlemini
başlatır.
130BP075.10
Çizim 3.1 Kurulum İşleme
•
Hala kurulum 1'de iken
parametre 0-50 LCP Kopyası
özelliğini kullanarak
kurulum 1'i kurulum 2'ye
kopyalayın. Ardından
Parametre Açıklaması Programlama Kılavuzu
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 29
3 3
Page 32

0-12 Bu Kurulum Şuna Bağlı
Seçenek: fonksiyon:
parametre 0-12 Bu Kurulum
Şuna Bağlı öğesini [2]
Kurlm 2 olarak ayarlayın.
Bu, bağlantı işlemini
başlatır.
130BP076.10
Çizim 3.2 Kurulum İşleme
Bağlantı tamamlandığında,
parametre 0-13 Okuma: Bağlantılı
Kurulumlar işletim esnasında değiştirilemez tüm parametrelerin artık
kurulum 1 ve kurulum 2'de aynı
olduğunu belirmek amacıyla
kurulum 1 ve 2'yi okur. Kurulum
2'de işletim esnasında değiştirilemez
parametrede parametre 1-30 Stator
Direnci (Rs) gibi değişiklikler
yapılırsa bu değişiklikler otomatik
olarak kurulum 1'de de değiştirilir.
Artık işletim esnasında kurulum 1
ile kurulum 2 arasında bir geçiş
yapılabilir.
[0] * Bağlı değil
[1] Kurlm 1
[2] Kurlm 2
[3] Kurlm 3
[4] Kurlm 4
0-13 Okuma: Bağlantılı Kurulumlar
Array (Dizi) [5]
Aralık: fonksiyon:
0* [0 - 255 ] parametre 0-12 Bu Kurulum Şuna
Bağlı tarafından bağlantılı tüm
kurulumların listesini görüntüleyin.
Her bir parametre ayarı için
parametrenin 1 dizini vardır. Her
dizindeki değer, kurulumların
bağlantılı olduğu parametre ayarını
gösterir.
0-13 Okuma: Bağlantılı Kurulumlar
Array (Dizi) [5]
Aralık: fonksiyon:
Dizin LCP değeri
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tablo 3.2 Kurulum Bağlantısı
Örneği
0-14 Okuma: Prog. Kurulumları /Kanal
Aralık: fonksiyon:
0* [-2147483648
2147483647 ]
4 farklı iletişim kanalının her biri
için parametre 0-11 Programlama
Ayarı ayarını görüntüleyin. Sayı
LCP'de de olduğu gibi on altılı
şekilde gösterildiğinde, her sayı 1
kanalı gösterir.
1 ila 4 arası sayılar bir kurulum
sayısını gösterir; F, fabrika ayarını ve
A, etkin kurulumu simgeler. Kanallar
sağdan sola doğru şöyledir: LCP,
fieldbus, USB, HPFB1.5
Örnek: AAAAAA21h değeri fieldbus
kanalının
parametre 0-11 Programlama Ayarı
öğesinde kurulum 2'yi kullandığı,
LCP'nin kurulum 1'i kullandığı ve
diğer tüm kanalların erkin kurulumu
kullandığı anlamına gelir.
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
Satır 1’de, sol konumda
görüntülemek için bir değişken
seçer
[0] Hiçbiri Hiçbir ekran değeri seçilmedi
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
30 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
3.2.3 0-2* LCP Ekranı
LCP'de gösterilen değişkenleri tanımlayın.
DUYURU!
Ekran metinlerinin nasıl yazılacağı hakkında bilgi almak
için bkz.
Parametre 0-37 Ekran Metni 1.
•
Parametre 0-38 Ekran Metni 2.
•
Parametre 0-39 Ekran Metni 3.
•
Page 33

0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[15] Readout:
actual setup
[37] Ekran Metni 1 Mevcut kontrol sözcüğü
[38] Ekran Metni 2
[39] Ekran Metni 3
[89] Tarih ve Saat
Okuması
[953] Profibus Uyarı
Sözcüğü
PROFIBUS iletişim uyarıları
görüntüler.
[1005] Okuma İletim
Hatası Sayacı
Son çalışmadan bu yana oluşan
CAN kontrolü iletim hatası sayısını
görüntüler.
[1006] Okuma Alma
Hatası Sayacı
Son çalışmadan bu yana oluşan
CAN kontrolü alma hatası sayısını
görüntüler.
[1007] Okuma Bus
Kapalı Sayacı
Son çalışmadan bu yana oluşan bus
kapalı olayı sayısını görüntüler.
[1013] Uyarı
Parametresi
DeviceNet’e özgü bir uyarı sözcüğü
görüntüler. Her uyarıya ayrı bir bit
atanır.
[1230] Uyarı
Parametresi
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] İşletim Saatleri Frekans dönüştürücünün kaç saat
çalıştığını görüntüler.
[1501] Çalışma
Saatleri
Motorun kaç saat çalıştığını
görüntüler.
[1502] kWh Sayacı kWh cinsinden elektrik tüketimini
görüntüler.
[1580] Fan Çalışma
Saatleri
[1600] Kontrol
Sözcüğü
Seri iletişim bağlantı noktası
üzerinden frekans dönüştürücüden
on altılı kodda gönderilen kontrol
sözcüğünü görüntüler.
[1601] * Referans
[Birim]
Seçilen birimdeki toplam referans
(dijital, analog, önceden ayarlı, bus,
ref. dondur, yakalama ve yavaşlama
değerlerinin toplamı).
[1602] Referans % Yüzden cinsinden toplam referans
(dijital, analog, önceden ayarlı, bus,
ref. dondur, yakalama ve yavaşlama
değerlerinin toplamı).
[1603] Durum
Sözcüğü
Mevcut durum sözcüğü.
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[1605] Ana Gerçek
Değer [%]
Onaltılı kodda bir veya daha çok
uyarı.
[1609] Özel Okuma Şurada belirlenen kullanıcı tanımlı
okumaları görüntüler:
•
Parametre 0-30 Özel
Okuma Birimi.
•
Parametre 0-31 Özel
Okuma Min. Değeri.
•
Parametre 0-32 Özel
Okuma Maks. Değeri.
[1610] Güç [kW] Motor tarafından tüketilen güç (kW
olarak).
[1611] Güç [hp] Motor tarafından tüketilen güç (HP
olarak).
[1612] Motor voltajı Motor tarafından sağlanan voltaj.
[1613] Frekans Motor frekansı, başka bir deyişle
frekans dönüştürücüden gelen çıkış
frekansının Hz cinsinden değeri.
[1614] Motor Akımı Motorun verim değeri olarak
ölçülen faz akımı.
[1615] Frekans [%] Motor frekansı, başka bir deyişle
frekans dönüştürücüden gelen çıkış
frekansının yüzde cinsinden değeri.
[1616] Tork [Nm] Nominal motor torkundaki motor
yükünün yüzde değeri.
[1617] Hız [RPM] RPM (dakikadaki dönüş sayısı)
cinsinden hız, başka bir deyişle
girilen motor plakası verilerini, çıkış
frekansını ve frekans dönüştürücüdeki yükü esas alan kapalı çevrim
motor milinin hızı.
[1618] Motor Termal ETR işlevi ile hesaplanan motor
termal yükü. Ayrıca 1-9* Motor
Sıcaklığı parametre grubuna da
bakın.
[1619] KTY sensör
sıcaklığı
[1622] Tork [%] Üretilen gerçek torku yüzde olarak
görüntüler.
[1623] Motor Shaft
Power [kW ]
Motor miline uygulanan mekanik
gücü görüntüler.
[1624] Calibrated
Stator
Resistance
[1626] Güç Filtreli
[kW]
[1627] Güç Filtreli
[hp]
Parametre Açıklaması Programlama Kılavuzu
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 31
3 3
Page 34

0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[1630] DC Bağlantı
Voltajı
Frekans dönüştürücüdeki DC
bağlantısı voltajı.
[1631] System Temp.
[1632] Fren Enerjisi /s Bir dış fren rezistörüne aktarılan
mevcut fren gücü.
Anlık değer gösterir.
[1633] Fren Enerjisi /2
dak
Bir dış fren rezistörüne aktarılan
fren gücü. Son 120 saniye için
ortalama güç sürekli olarak
hesaplanır.
[1634] Soğutucu
sıcaklığı.
Frekans dönüştürücünün mevcut ısı
alıcı sıcaklığı. Devreden çıkarma
sınırı 95 ±5 °C'dir. 70 ±5 °C'de
devreden çıkarma işlemi meydana
gelir.
[1635] Çevirici Termal Çeviricilerin yüzde olarak yükü.
[1636] Çvr. Nom.
Akım
Frekans dönüştürücünün nominal
akımı.
[1637] Çvr. Maks.
Akım
Frekans dönüştürücünün maksimum
akımı.
[1638] SL Denetle-
yicisi Durumu
Kontrol tarafından yürütülen olayın
durumu.
[1639] Kntr. Kartı
Sıcaklığı
Kontrol kartının sıcaklığı.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Dış Referans Dış referansın yüzde cinsinden
toplamı, başka bir deyişle analog,
darbe ve bus değerlerinin toplamı.
[1652] Geri Besleme
[Birim]
Programlanan dijital girişlerden
sinyal değeri.
[1653] Digi Pot
Referansı
Dijital potansiyometrenin gerçek
referans geri beslemeye katkısını
görüntüler.
[1654] Geri Besleme
1 [Birim]
Geri besleme 1 değerini görüntüler.
Ayrıca bkz. parametre grubu 20-0*
Geri bildirim.
[1655] Geri Besleme
2 [Birim]
Geri besleme 2 değerini görüntüler.
Ayrıca bkz. parametre grubu 20-0*
Geri bildirim.
[1656] Geri Besleme
3 [Birim]
Geri Besleme 3 değerini görüntüler.
Ayrıca bkz. parametre grubu 20-0*
Geri bildirim.
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[1658] PID Çıkışı [%] Kapalı devre PID denetleyicisi çıkış
değerini yüzde olarak verir.
[1659] Adjusted
Setpoint
Akış dengelemesi ile değiştirildikten
sonraki gerçek işletim ayar noktasını
gösterir. Bkz. 22-8* Akış Dengeleme
parametre grubu.
[1660] Dijital Giriş Dijital girişlerin durumunu
görüntüler. Sinyal alt değeri = 0;
Sinyal üst değeri = 1.
İlgili sıra, bkz. parametre 16-60 Dijital
Giriş. Bit 0 en sağdadır.
[1661] Terminal 53
Anahtar Ayarı
Giriş terminal 53’ün ayarı. Akım = 0,
gerilim = 1.
[1662] Analog Giriş53Referans veya koruma değeri olarak
giriş 53’teki gerçek değer.
[1663] Terminal 54
Anahtar Ayarı
Giriş terminal 54’ün ayarı. Akım = 0,
gerilim = 1.
[1664] Analog Giriş54Referans veya koruma değeri olarak
giriş 54’teki gerçek değer.
[1665] Analog Çıkış
42 [mA]
Çıkış 42’deki gerçek değer (mA).
Çıkış 42 tarafından temsil edilecek
değişkeni seçmek için
parametre 6-50 Terminal 42 Çıkış
parametresini kullanın.
[1666] Dijital Çıkış
[bin]
Tüm dijital çıkışların ikili değeri.
[1667] Darbe Grş #29
[Hz]
Terminal 29’da darbe giriş olarak
uygulanan frekansın gerçek değeri.
[1668] Darbe Grş #33
[Hz]
Terminal 33’te darbe giriş olarak
uygulanan frekansın gerçek değeri.
[1669] Darbe Çıkışı
#27 [Hz]
Terminal 27’de dijital çıktı modunda
uygulanan darbelerin gerçek değeri.
[1670] Darbe Çıkışı
#29 [Hz]
Terminal 29’da dijital çıktı modunda
uygulanan darbelerin gerçek değeri.
[1671] Röle Çıkışı
[bin]
Tüm rölelerin ayarını görüntüler.
[1672] Sayaç A Sayaç A’nın mevcut değerini
görüntüler.
[1673] Sayaç B Sayaç B’nin mevcut değerini
görüntüler.
[1675] Analog Grş
X30/11
Giriş X30/11’deki sinyalin gerçek
değeri (VLT® Genel Amaçlı G/Ç MCB
101, isteğe bağlı olarak).
[1676] Analog Grş
X30/12
Giriş X30/12’deki sinyalin gerçek
değeri (VLT® Genel Amaçlı G/Ç MCB
101, isteğe bağlı olarak).
[1677] Analog Çkş
X30/8 [mA]
Giriş X30/8’deki sinyalin gerçek
değeri (VLT® Genel Amaçlı G/Ç MCB
Parametre Açıklaması
33
32 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 35
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
101, isteğe bağlı olarak). Temsil
edilecek değişkeni seçmek için
parametre 6-60 Terminal X30/8 Çıkış
parametresini kullanın.
[1678] Analog Çkş
X45/1 [mA]
[1679] Analog Çkş
X45/3 [mA]
[1680] Fieldbus CTW1Kontrol sözcüğü (CTW) fieldbus'tan
alınır.
[1682] Fieldbus REF 1 BMS, PLC veya diğer ana denetleyici
gibi seri iletişim ağı aracılığıyla
kontrol sözcüğü ile gönderilen ana
referans değeri.
[1684] İltşm. Seçeneği
STW
Genişletilmiş fieldbus iletişim
seçeneği durum sözcüğü.
[1685] FC Bağlantı
Noktası CTW 1
Kontrol sözcüğü (CTW) fieldbus'tan
alınır.
[1686] FC Bağlantı
Noktası REF 1
Fieldbus’a gönderilen durum
sözcüğü (STW).
[1687] Bus Readout
Alarm/Warning
[1689] Configurable
Alarm/Warning
Word
parametre 8-17 Configurable Alarm
and Warningword öğesinde yapılan-
dırılan alarm/uyarı sözcüğünü
görüntüler.
[1690] Alarm
Sözcüğü
On altılı bir kodda bir veya daha
fazla alarm (seri iletişim için
kullanılır).
[1691] Alarm
Sözcüğü 2
On altılı bir kodda bir veya daha
fazla alarm (seri iletişim için
kullanılır).
[1692] Uyarı Sözcüğü On altılı bir kodda bir veya daha
fazla uyarı (seri iletişim için
kullanılır).
[1693] Uyarı Sözcüğü2On altılı bir kodda bir veya daha
fazla uyarı (seri iletişim için
kullanılır).
[1694] Genişletilmiş
Durum
Sözcüğü
On altılı bir kodda bir veya daha
fazla durum koşulu (seri iletişim için
kullanılır).
[1695] Dış Durum
Sözcüğü 2
On altılı bir kodda bir veya daha
fazla durum koşulu (seri iletişim için
kullanılır).
[1696] Bakım
Sözcüğü
Bitler programlanan Koruyucu
Bakım Olayları için 23-1* Bakım
parametre grubundaki durumu
yansıtır
[1697] Alarm Word 3
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[1698] Warning Word
3
[1830] Analog Girişi
X42/1
Analog G/Ç kartında terminal
X42/1’e uygulanan sinyalin değerini
gösterir.
[1831] Analog Girişi
X42/3
Analog G/Ç kartında terminal
X42/3’e uygulanan sinyalin değerini
gösterir.
[1832] Analog Girişi
X42/5
Analog G/Ç kartında terminal
X42/5’e uygulanan sinyalin değerini
gösterir.
[1833] Analog Çkş
X42/7 [V ]
Analog G/Ç kartında terminal
X42/7’ye uygulanan sinyalin
değerini gösterir.
[1834] Analog Çkş
X42/9 [V ]
Analog G/Ç kartında terminal
X42/9’a uygulanan sinyalin değerini
gösterir.
[1835] Analog Çkş
X42/11 [V ]
Analog G/Ç kartında terminal
X42/11’e uygulanan sinyalin
değerini gösterir.
[1836] Analog Giriş
X48/2 [mA]
[1837] Sıc. Giriş X48/4
[1838] Sıc. Giriş X48/7
[1839] Sıc. Giriş
X48/10
[1850] Sensörsüz
Okuma [unit]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectifier DC
Volt.
[2117] Dış 1 Referans
[Birim]
Genişletilmiş kapalı devre denetleyicisi 1 için referans değeri.
[2118] Dış 1 Geri
Besleme
[Birim]
Genişletilmiş kapalı çevrim denetleyicisi 1 için geri besleme sinyalinin
değeri.
[2119] Dış 1 Çıkış [%] Genişletilmiş kapalı çevrim denetle-
yicisi 1’den alınan çıkışın değeri
[2137] Dış 2 Referans
[Birim]
Genişletilmiş kapalı devre denetleyicisi 2 için referans değeri.
[2138] Dış 2 Geri
Besleme
[Birim]
Genişletilmiş kapalı çevrim denetleyicisi 2 için geri besleme sinyalinin
değeri.
[2139] Dış 2 Çıkış [%] Genişletilmiş kapalı çevrim denetle-
yicisi 2’den alınan çıkışın değeri
Parametre Açıklaması Programlama Kılavuzu
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 33
3 3
Page 36

0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[2157] Dış 3 Referans
[Birim]
Genişletilmiş kapalı devre denetleyicisi 3 için referans değeri.
[2158] Dış 3 Geri
Besleme
[Birim]
Genişletilmiş kapalı çevrim denetleyicisi 3 için geri besleme sinyalinin
değeri.
[2159] Dış 3 Çıkış [%] Genişletilmiş kapalı çevrim denetle-
yicisi 3’den alınan çıkışın değeri
[2230] Akış Yok Gücü Gerçek işletim hızı için hesaplanan
akış yok gücü.
[2316] Bakım Metni
[2580] Kademe
Durumu
Kademeli Denetleyicinin çalışma
durumu.
[2581] Pmp Durumu Kademeli Denetleyici tarafından
kontrol edilen her pompanın
çalışma durumu.
[2791] Cascade
Reference
Uydu frekans dönüştürücüler ile
kullanım için referans çıkışı.
[2792] % Of Total
Capacity
Sistem işletim noktasını toplam
sistem kapasitesinin kapasite
yüzdesi olarak göstermek için
okuma parametresi.
[2793] Cascade
Option Status
Kademeli sistemin durumunu
göstermek için okuma parametresi.
[2794] Kademeli
Sistem
Durumu
[2795] Advanced
Cascade Relay
Output [bin]
[2796] Extended
Cascade Relay
Output [bin]
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] By-pass
Durum
Sözcüğü
[3111] Çalışma
Saatleri By-
pass
[3401] PCD 1 MCO'ya
Yaz
[3402] PCD 2 MCO'ya
Yaz
0-20 Ekran Satırı 1.1 Küçük
Seçenek: fonksiyon:
[3403] PCD 3 MCO'ya
Yaz
[3404] PCD 4 MCO'ya
Yaz
[3405] PCD 5 MCO'ya
Yaz
[3406] PCD 6 MCO'ya
Yaz
[3407] PCD 7 MCO'ya
Yaz
[3408] PCD 8 MCO'ya
Yaz
[3409] PCD 9 MCO'ya
Yaz
[3410] PCD 10
MCO'ya Yaz
[3421] PCD 1
MCO'dan Oku
[3422] PCD 2
MCO'dan Oku
[3423] PCD 3
MCO'dan Oku
[3424] PCD 4
MCO'dan Oku
[3425] PCD 5
MCO'dan Oku
[3426] PCD 6
MCO'dan Oku
[3427] PCD 7
MCO'dan Oku
[3428] PCD 8
MCO'dan Oku
[3429] PCD 9
MCO'dan Oku
[3430] PCD 10
MCO'dan Oku
[9920] Fan Ctrl deltaT
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectifier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
Parametre Açıklaması
33
34 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 37

0-25 Kişisel Menüm
Dizi [50]
Aralık: fonksiyon:
Size
related*
[0 - 9999 ] LCP'de [Quick Menu] tuşuyle erişile-
bilien Q1 Kişisel Menüm'de
görüntülenecek 20'ye kadar
parametreyi tanımlayın. Parametreler, Q1 Kişisel Menüm'de bu dizi
parametresinde programlandıkları
sıra ile görüntülenir. Değeri 0000
olarak ayarlayarak parametreleri
silin.
Örneğin bu, düzenli olarak değiştirilmesi gereken 1'den 50'ye kadar
parametreye hızlı ve basit erişim
sağlamak adına kullanılabilir.
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
P 0-31
Linear
units only
Quadratic Unit (Pressure)
Cubic Unit (Power)
Motor Speed
Motor Speed
High limit
P 4-13 (RPM)
P 4-14 (Hz)
0
130BT105.12
Linear Unit (e.g. speed and ow)
0-30 Özel Okuma Birimi
Seçenek: fonksiyon:
LCP ekranında görüntülenecek bir
değer programlayın. Değerin hız ile
doğrusal, karesel veya kübik bir
ilişkisi vardır. İlişki, belirlenen birime
bağlıdır (bkz. Tablo 3.3). Gerçek
hesaplanan değer
parametre 16-09 Özel Okuma
öğesinde okunabilir ve/veya
parametre 0-20 Ekran Satırı 1.1 Küçük
ila parametre 0-24 Ekran Satırı 3
Büyük öğelerindeki [1609] Özel
Okuma seçilerek ekranda görüntüle-
nebilir.
[0]
[1] * %
[5] PPM
[10] 1/dak
[11] RPM
Parametre Açıklaması Programlama Kılavuzu
0-21 Ekran Satırı 1.2 Küçük
Seçenekler parametre 0-20 Ekran Satırı 1.1 Küçük için listele-
nenlerle aynıdır. Satır 1’de, merkez konumda görüntülemek için
bir değişken seçer
0-22 Ekran Satırı 1.3 Küçük
Seçenekler parametre 0-20 Ekran Satırı 1.1 Küçük için listele-
nenlerle aynıdır. Satır 1’de, sağ konumda görüntülemek için bir
değişken seçer
0-23 Ekran Satırı 2 Büyük
Seçenekler parametre 0-20 Ekran Satırı 1.1 Küçük için listele-
nenlerle aynıdır. Satır 2’de görüntülemek için bir değişken seçin.
0-24 Ekran Satırı 3 Büyük
Seçenekler parametre 0-20 Ekran Satırı 1.1 Küçük için listele-
nenlerle aynıdır. Satır 2’de görüntülemek için bir değişken seçin.
Gerçek hız.
•
Çizim 3.3 Özel Okuma
İlişki, parametre 0-30 Özel Okuma Birimi seçeneğinde
belirlenen birimin tipine bağlıdır:
3 3
3.2.4 0-3* LCP Özel Okuma
Ekran unsurları çeşitli amaçlara yönelik olarak özelleştirilebilir.
Özel okuma Hıza oranlı değer
•
Özel okuma
Görüntülenecek hesaplanan değer şuradaki ayarlara
bağlıdır:
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 35
(parametre 0-30 Özel Okuma Birimi seçeneğinde
belirlenen birime bağlı olarak doğrusal, kare veya
küp).
Ekran metni. Bir parametrede depolanan metin
•
•
•
•
•
•
dizgisi.
Parametre 0-30 Özel Okuma Birimi.
Parametre 0-31 Özel Okuma Min. Değeri (yalnızca
doğrusal).
Parametre 0-32 Özel Okuma Maks. Değeri.
Parametre 4-13 Motor Hızı Üst Sınırı [RPM].
Parametre 4-14 Motor Hızı Üst Sınırı [Hz].
Birim türü Hız ilişkisi
Boyutsuz
Hızı
Akış, hacim
Akış, kütle
Hız
Uzunluk
Sıcaklık
Basınç Karesel
Güç Kübik
Tablo 3.3 Farklı Birim Tipleri için Hız İlişkileri
Linear
Page 38

0-30 Özel Okuma Birimi
Seçenek: fonksiyon:
[12] DARBE/sn
[20] l/sn
[21] l/dak
[22] l/sa
[23] m³/sn
[24] m³/dak
[25] m³/sa
[30] kg/sn
[31] kg/dak
[32] kg/sa
[33] t/dak
[34] t/sa
[40] m/sn
[41] m/dak
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] gal/sn
[122] gal/dak
[123] gal/sa
[124] CFM
[125] ft³/sn
[126] ft³/dak
[127] ft/sa
[130] lb/sn
[131] lb/dak
[132] lb/sa
[140] ft/sn
[141] ft/dak
[145] Ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] inç Hg
[180] HP
0-31 Özel Okuma Min. Değeri
Aralık: fonksiyon:
Size
related*
[ -999999.99 -
100.00
CustomRea-
doutUnit]
Bu parametre özel tanımlı
okumanın minimum değerinin
seçimine izin verir (sıfır hızda
gerçekleşir). Yalnızca
parametre 0-30 Özel Okuma Birimi
öğesinde doğrusal bir birim
seçerken 0'dan farklı bir değe
seçilebilir. Karesel ve kübik birimler
için minimum değer 0'dır.
0-32 Özel Okuma Maks. Değeri
Aralık: fonksiyon:
100
CustomReadoutUni
t*
[ par. 0-31 -
999999.99
CustomRea-
doutUnit]
Bu parametre, motorun hızı
(parametre 4-13 Motor Hızı Üst Sınırı
[RPM] veya parametre 4-14 Motor
Hızı Üst Sınırı [Hz] için ayar değerine
ulaştığında gösterilecek maksimu
değeri ayarlar (parametre 0-02 Motor
Hız Birimi öğesindeki ayara bağlı
olarak).
0-37 Ekran Metni 1
Aralık: fonksiyon:
0* [0 - 25 ] Bu parametrede, LCP içerisindeki
ekrana bağımsız bir metin dizesi
yazmak veya seri iletişim ile okumak
mümkündür.
Metni sürekli olarak görüntülemek
için aşağıdaki parametrelerin 1'inde
[37] Metni Görüntüle 1' seçin.
•
Parametre 0-20 Ekran Satırı
1.1 Küçük.
•
Parametre 0-21 Ekran Satırı
1.2 Küçük.
•
Parametre 0-22 Ekran Satırı
1.3 Küçük.
•
Parametre 0-23 Ekran Satırı
2 Büyük.
•
Parametre 0-24 Ekran Satırı
3 Büyük.
•
Parametre 0-37 Ekran Metni
1.
parametre 12-08 Ana Bilgisayar Adı
öğesi değiştirildiğinde
parametre 0-37 Ekran Metni 1 değişir
- ancak bunun tersi mümkün
değildir.
Parametre Açıklaması
33
36 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 39

0-38 Ekran Metni 2
Aralık: fonksiyon:
0* [0 - 25 ] Bu parametrede, LCP içerisindeki
ekrana bağımsız bir metin dizesi
yazmak veya seri iletişim ile okumak
mümkündür.
Metni sürekli olarak görüntülemek
için aşağıdakilerde [38] Metni
Görüntüle 2'yi seçin:
•
Parametre 0-20 Ekran Satırı
1.1 Küçük.
•
Parametre 0-21 Ekran Satırı
1.2 Küçük.
•
Parametre 0-22 Ekran Satırı
1.3 Küçük.
•
Parametre 0-23 Ekran Satırı
2 Büyük.
•
Parametre 0-24 Ekran Satırı
3 Büyük.
Bir karakteri değiştirmek için [▲]
veya [▼] tuşuna basın. İmleci
hareket ettirmek için [◀] ve [▶]
tuşuna basın. İmleç bir karakterin
üzerindeyken, bu karakter değiştirilebilir. İmleç 2 karakterin arasına
yerleştirilip [▲] veya [▼] düğmesine
basılarak bir karakter girilebilir.
0-39 Ekran Metni 3
Aralık: fonksiyon:
0* [0 - 25 ] Bu parametrede, LCP içerisindeki
ekrana bağımsız bir metin dizesi
yazmak veya seri iletişim ile okumak
mümkündür. Metni sürekli olarak
görüntülemek için şurada metni
görüntüle 3'ü seçin:
parametre 0-20 Ekran Satırı 1.1
Küçük, parametre 0-21 Ekran Satırı
1.2 Küçük, parametre 0-22 Ekran
Satırı 1.3 Küçük,
parametre 0-23 Ekran Satırı 2 Büyük
veya parametre 0-24 Ekran Satırı 3
Büyük. Bir karakteri değiştirmek için
[▲] veya [▼] tuşuna basın. İmleci
hareket ettirmek için [◀] ve [▶]
tuşuna basın. İmleç bir karakterin
üzerindeyken, bu karakter değiştirilebilir. İmleç 2 karakterin arasına
yerleştirilip [▲] veya [▼] düğmesine
basılarak bir karakter girilebilir.
0-40 LCP'de [Hand on] Anahtarı
Seçenek: fonksiyon:
[0] Devre Dışı Tuşu devreden çıkarmak için seçin.
[1] * Devrede [Hand On] tuşu etkin.
[2] Parola El ile modunda yetkisiz kullanımdan
kaçının. Kişisel Menüm'e
parametre 0-40 LCP'de [Hand on]
Anahtarı ayarı dahil ise
parametre 0-65 Personel Menü
Parolası öğesinde parolayı
tanımlayın. Aksi takdirde parolayı,
parametre 0-60 Ana Menü Parolası
öğesinde tanımlayın.
[3] KAPALI
olmadan etkin
[4] KAPALI olmdn
parola
[5] KAPALI olarak
etkin
[6] KAPALI olarak
parola
[9] Enabled, ref =
0
0-41 LCP'de [O] Anahtarı
Seçenek: fonksiyon:
[0] Devre Dışı Tuşu devreden çıkarmak için seçin.
[1] * Devrede [O] tuşu etkin.
[2] Parola Yetkisiz durdurmadan kaçının. Kişisel
Menüm'e parametre 0-41 LCP'de [O]
Anahtarı ayarı dahil ise
parametre 0-65 Personel Menü
Parolası öğesinde parolayı
tanımlayın. Aksi takdirde parolayı,
parametre 0-60 Ana Menü Parolası
öğesinde tanımlayın.
0-42 LCP'de [Auto on] Anahtarı
Seçenek: fonksiyon:
[0] Devre Dışı Tuşu devreden çıkarmak için seçin.
[1] * Devrede [Auto On] tuşu etkin.
[2] Parola Oto. modunda yetkisiz kullanımdan
kaçının. Kişisel Menüm'e
parametre 0-42 LCP'de [Auto on]
Anahtarı ayarı dahil ise
parametre 0-65 Personel Menü
Parolası öğesinde parolayı
tanımlayın. Aksi takdirde parolayı,
Parametre Açıklaması Programlama Kılavuzu
3.2.5 0-4* LCP Tuş Takımı
LCP'deki etkinleştir, devreden çıkar ve parola koruma
tuşları.
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 37
Page 40

0-42 LCP'de [Auto on] Anahtarı
Seçenek: fonksiyon:
parametre 0-60 Ana Menü Parolası
öğesinde tanımlayın.
0-43 LCP'de [Reset] Anahtarı
Seçenek: fonksiyon:
[0] Devre Dışı Tuşu devreden çıkarmak için seçin.
[1] * Devrede [Reset] tuşu etkin.
[2] Parola Yetkisiz sıfırlamadan kaçının.
parametre 0-25 Kişisel Menüm'e
parametre 0-43 LCP'de [Reset]
Anahtarı ayarı dahil ise
parametre 0-65 Personel Menü
Parolası öğesinde parolayı
tanımlayın. Aksi takdirde parolayı,
parametre 0-60 Ana Menü Parolası
öğesinde tanımlayın.
[3] KAPALI
olmadan etkin
[4] KAPALI olmdn
parola
[5] KAPALI olarak
etkin
Tuşa basıldığında frekans
dönüştürücü sıfırlanır, ancak
yeniden başlatılmaz.
[6] KAPALI olarak
parola
Yetkisiz sıfırlamayı önler. Yetkili
sıfırlamadan sonra frekans
dönüştürücü başlatılmaz. Parolanın
nasıl ayarlanacağına dair bilgi için
bkz. [2] Parola seçeneği.
0-44 LCP'de [O/Reset] Anah.
[O/Reset] tuşunu etkinleştir veya devreden çıkar.
Seçenek: fonksiyon:
[0] Devre Dışı
[1] * Devrede
[2] Parola
0-45 LCP'de [Drive Bypass] Anahtarı
[O] tuşuna basın ve frekans dönüştürücünün istenmeyen
durdurmalardan kaçınması için [0] Devre Dışı öğesini seçin. [O]
tuşuna basın ve frekans dönüştürücünün yetkisiz by-pass'tan
kaçınması için [2] Parola öğesini seçin. Hızlı Menü'ye
parametre 0-45 LCP'de [Drive Bypass] Anahtarı ayarı dahil ise
parametre 0-65 Personel Menü Parolası öğesinde parolayı
tanımlayın.
Seçenek: fonksiyon:
[0] Devre Dışı Tuşu devreden çıkarmak için seçin.
[1] * Devrede
[2] Parola
0-50 LCP Kopyası
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
[0] * Kopyalama
yok
[1] Tümü LCP'ye Tüm kurulumlardaki tüm parame-
treleri frekans dönüştürücü
belleğinden LCP belleğine kopyalar.
Servis amacıyla işletime alımdan
sonra tüm parametreleri LCP'ye
kopyalayın.
[2] Tümü LCP'den Tüm kurulumlardaki tüm parame-
treleri LCP belleğinden frekans
dönüştürücü belleğine kopyalar.
[3] Byt LCP'den
bğmsz
Yalnızca motor boyutundan
bağımsız olan parametreleri
kopyalar. Değişik frekans dönüştürücüleri motor verisini bozmadan aynı
işlevle programlamak için son
seçimi kullanın.
[10] Delete LCP
copy data
0-51 Kurulum Kopyası
Seçenek: fonksiyon:
[0] * Kopyalama
yok
İşlev yok.
[1] Kurulum 1'e
kopyala
Önceden gönderilen programlama
kurulumundaki tüm parametreleri
(parametre 0-11 Programlama
Ayarı'de tanımlanan) kurulum 1'e
kopyalar.
[2] Kurulum 2'e
kopyala
Önceden gönderilen programlama
kurulumundaki tüm parametreleri
(parametre 0-11 Programlama
Ayarı'de tanımlanan) kurulum 2'ye
kopyalar.
[3] Kurulum 3'e
kopyala
Önceden gönderilen programlama
kurulumundaki tüm parametreleri
(parametre 0-11 Programlama
Ayarı'de tanımlanan) kurulum 3'e
kopyalar.
[4] Kurulum 4'e
kopyala
Önceden gönderilen programlama
kurulumundaki tüm parametreleri
(parametre 0-11 Programlama
Parametre Açıklaması
VLT® AQUA Drive FC 202
3.2.6 0-5* Kpyalama/Kydetme
LCP'den ve LCP'ye parametreleri kopyalar. Bu parametreleri
1 frekans dönüştürücüden diğerine kurulumları kopyalamak
ve kaydetmek için kullanın.
33
38 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 41

0-51 Kurulum Kopyası
Seçenek: fonksiyon:
Ayarı'de tanımlanan) kurulum 4'e
kopyalar.
[9] Tümüne
kopyala
Önceden gönderilen kurulumdaki
parametreleri kurulum 1 ila 4'ün her
birine kopyalar.
0-60 Ana Menü Parolası
Aralık: fonksiyon:
100* [-9999 -
9999 ]
[Main Menu] tuşu ile Ana Menüye
erişmek için parolayı belirleyin.
parametre 0-61 Ana Menüye
Parolasız Erişim seçeneği [0] Tam
erişim olarak ayarlanırsa bu
parametre göz ardı edilir.
0-61 Ana Menüye Parolasız Erişim
Seçenek: fonksiyon:
[0] * Tam erişim parametre 0-60 Ana Menü Parolası'de
tanımlanan parolayı devreden
çıkarır. Bu seçenek işaretliyse
parametre 0-60 Ana Menü Parolası,
parametre 0-65 Personel Menü
Parolası, ve parametre 0-66 Kişisel
Menüye Parolasız Erişim göz ardı
edilir.
[1] LCP: Salt
okunur
Ana Menü parametrelerinin yetkisiz
düzenlenmesini önler.
[2] LCP: Erişim
yok
Ana Menü parametrelerinin yetkisiz
görüntülenmesini önler.
[3] Bus: Salt
okunur
Fieldbus aracılığıyla parametrelere
salt okunur erişim sağlar.
[4] Bus: Erişim yok Fieldbus aracılığıyla parametrelere
salt okunur erişimi devreden çıkarır.
[5] Alt: Salt
okunur
Ana Menü parametrelerinin yetkisiz
düzenlenmesini önler ve fieldbus
aracılığıyla salt okunur erişim sağlar.
[6] Alt: Erişim yok Ana Menü parametrelerinin yetkisiz
düzenlenmesini önler ve fieldbus
aracılığıyla salt okunur erişimi
devreden çıkarır.
0-65 Personel Menü Parolası
Aralık: fonksiyon:
200* [-9999 -
9999 ]
[Quick Menu] tuşu ile Kişisel
Menüm'e erişmek için parolayı
belirleyin. parametre 0-66 Kişisel
Menüye Parolasız Erişim seçeneği [0]
Tam erişim olarak ayarlanırsa bu
parametre göz ardı edilir.
0-66 Kişisel Menüye Parolasız Erişim
parametre 0-61 Ana Menüye Parolasız Erişim seçeneği [0] Tam
erişim olarak ayarlanırsa bu parametre göz ardı edilir.
Seçenek: fonksiyon:
[0] * Tam erişim parametre 0-65 Personel Menü
Parolası'de tanımlanan parolayı
devreden çıkarır.
[1] LCP: Salt
okunur
Kişisel Menüm parametrelerinin
yetkisiz düzenlenmesini önler.
[3] Bus: Salt
okunur
[5] Alt: Salt
okunur
0-67 Bus Parola Erişimi
Aralık: fonksiyon:
0* [0 - 9999 ] Bu parametreye yazmak frekans
dönüştürücünün kilidinin veri
yolundan/MCT 10 Kurulum Yazılımı
açılmasını sağlar.
Parametre Açıklaması Programlama Kılavuzu
3.2.7 0-6* Parola
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 39
3.2.8 0-7* Saat Ayarları
Dahili saatin saatini ve tarihini ayarlar. Örneğin, dahili saat
şunlar için kullanılabilir:
Zamanlı eylemler.
•
Enerji günlüğü
•
Trend analizleri.
•
Alarmlardaki tarih/saat damgaları.
•
Kaydedilen veriler.
•
Koruyucu bakım.
•
20 istisna (tatil vb.) dahil kış saati/yaz saati, çalışma günleri/
tatil günleri için saat programlanabilir. Saat ayarları LCP
aracılığıyla yapılabilmesine karşın zamanlamalı eylemler ve
MCT 10 Kurulum Yazılımı aracı kullanılarak koruyucu bakım
işlevleri ile de yapılabilir.
Page 42

0-70 Tarih ve Saat
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] Dahili saatin tarihini ve saatini
ayarlar. Kullanılacak biçim
parametre 0-71 Tarih Biçimi ve
parametre 0-72 Saat Biçimi’de
ayarlanır.
VLT® Gerçek Zamanlı Saat MCB 117
kullanılırken her gün saat 15.00'da
saat senkronize edilir.
0-71 Tarih Biçimi
Seçenek: fonksiyon:
[0] YYYY-AA-GG LCP’de kullanılacak tarih biçimini
ayarlar.
[1] GG-AA-YYYY LCP’de kullanılacak tarih biçimini
ayarlar.
[2] AA/GG/YYYY LCP’de kullanılacak tarih biçimini
ayarlar.
0-72 Saat Biçimi
Seçenek: fonksiyon:
LCP’de kullanılacak saat biçimini
ayarlar.
[0] 24 saat
[1] 12 saat
0-73 Saat Dilimi Denkleştirme
Aralık: fonksiyon:
0 min* [-780 - 780
min]
UTC ile ilişkili saat dilimi denkleştirmeyi girin. Bu parametre
otomatik kış saati ayarı için
gereklidir.
0-74 Yaz Saati/Yaz
Seçenek: fonksiyon:
Kış saatinin/yaz saatinin nasıl ele
alınacağını seçin. Manuel kış
saati/yaz saati için
parametre 0-76 Yaz Saati/Yaz
Başlangıcı ve parametre 0-77 Yaz
Saati/Yaz Bitişi parametrelerine
başlangıç ve bitiş tarihini girin.
[0] * Kapalı
[2] Manuel
0-76 Yaz Saati/Yaz Başlangıcı
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] Kış saati/yaz saati başladığında tarih
ve saati ayarlar. Tarih
parametre 0-71 Tarih Biçimi içinde
seçilen biçimde programlanır.
0-77 Yaz Saati/Yaz Bitişi
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] Kış saati/yaz saati sonlandığında
tarih ve saati ayarlar. Tarih
parametre 0-71 Tarih Biçimi içinde
seçilen biçimde programlanır.
0-79 Saat Arızası
Seçenek: fonksiyon:
Saat ayarlanmadığında veya
kapatma nedeniyle sıfırlandığında
ve yedekleme kurulmadığında saat
uyarısını etkinleştirir veya devreden
çıkarır. VLT® Analog G/Ç Seçeneği
MCB 109 kuruluysa [1] Etkin
seçeneği varsayılandır.
[0] Devre Dışı
[1] Etkin
0-81 Çalışma Günleri
Dizi [7]
Ekranda parametre numarasının altında gösterilen 7 öğeli [0]–[6]
dizi. [OK] tuşuna basın ve [▲] ve [▼] ile öğeler arasında geçiş
yapın.
Seçenek: fonksiyon:
Haftanın günlerinin her birini
çalışma veya tatil günü olarak
ayarlayın. Dizinin ilk öğesi
Pazartesidir. Çalışma günleri
zamanlamalı eylemler için kullanılır.
[0] Hayır
[1] Evet
Parametre Açıklaması
VLT® AQUA Drive FC 202
DUYURU!
Frekans dönüştürücüde saat işlevinin yedeklemesi yoktur
ve yedeklemeli bir gerçek zamanlı saat modülü kurulu
değilse tarih/saat, kapatmadan sonra varsayılana
(01.01.2007 00:00 Pzt) döner. Yedeklemeli bir modül
kurulmadıysa frekans dönüştürücü, kontrol ekipmanı
33
saatlerinin sistem bakım senkronizasyonuyla, seri iletişimi
kullanarak harici bir sisteme entegre olduğunda yalnızca
saat işlevini kullanın. Örneğin, kapatmanın ardından
saatin doğru şekilde ayarlanmaması durumunda
parametre 0-79 Saat Arızası içinde bir uyarı programlanabilir.
DUYURU!
VLT® Analog G/Ç Seçeneği MCB 109 veya VLT® Gerçek
Zamanlı Saat MCB 117 takılırken tarih ve saat için
kullanılan yedek pil de eklenir.
40 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 43
0-82 Ek Çalışma Günleri
Array (Dizi) [5]
Ekranda parametre numarasının altında gösterilen 5 öğeli [0]–[4]
dizi. [OK] tuşuna basın ve [▲] ve [▼] ile öğeler arasında geçiş
yapın.
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] parametre 0-81 Çalışma Günleri
öğesine göre normalde tatil günü
olacak ilave çalışma günlerinin
tarihlerini tanımlar.
0-83 Ek Çalışılmayan Günler
Dizi [15]
Ekranda parametre numarasının altında gösterilen 15 öğeli [0]–
[14] dizi. [OK] tuşuna basın ve [▲] ve [▼] ile öğeler arasında geçiş
yapın.
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] parametre 0-81 Çalışma Günleri
öğesine göre normalde tatil günü
olacak ilave çalışma günlerinin
tarihlerini tanımlar.
0-84 Time for Fieldbus
Aralık: fonksiyon:
0* [0 -
4294967295 ]
Fieldbus saatini gösterir.
0-85 Summer Time Start for Fieldbus
Aralık: fonksiyon:
0* [0 -
4294967295 ]
Fieldbus için yaz saati başlangıcını
gösterir.
0-86 Summer Time End for Fieldbus
Aralık: fonksiyon:
0* [0 -
4294967295 ]
Fieldbus için yaz saati sonunu
gösterir.
0-89 Tarih ve Saat Okuması
Aralık: fonksiyon:
0* [0 - 25 ] Geçerli tarihi ve saati görüntüler.
Tarih ve saat sürekli olarak
güncelleNİR.
parametre 0-70 Tarih ve Saat
öğesinde yapılmış varsayılan
ayardan farklı bir ayar yapılana
kadar saat saymaya başlamaz.
Parametre Açıklaması Programlama Kılavuzu
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 41
Page 44
1-00 Konfigürasyon Modu
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
DUYURU!
[3] Kapalı Çevrim olarak
ayarlandığında, ters çevirme ve
ters başlatma komutları
motorun yönünü tersine
çevirmez.
[0] Açık Çevrim Motor hızı, hız referansı uygulanarak
veya el ile modunda hıza
ayarlanarak belirlenir.
Açık Çevrim, frekans dönüştürücü
çıkış olarak hız referansı sağlayan
bir dış PID denetleyiciye bağlı
olarak kapalı çevrim kontrol
sisteminin bir parçası olduğunda da
kullanılır.
[3] Kapalı Çevrim Motor hızı, kapalı çevrim kontrol
sürecinde (örneğin, sabit basınç ve
akış) olduğu gibi motor hızını
değiştiren dahili PID denetleyiciden
gelen bir referansla belirlenir. PID
denetimini, 20-** Geri bildirim
parametre grubunda veya [Quick
Menu] tuşuna basılarak erişilen İşlev
Kurulumları aracılığıyla yapılandırın.
1-01 Motor Kontrol prensibi
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Hangi motor kontrol ilkesinin
kullanılacağını seçin.
[0] U/f Özel motor uygulamalarındaki
paralel bağlı motorlar için özel
motor modu. U/f seçildiğinde,
parametre 1-55 V/f Karakteristikleri V ve parametre 1-56 V/f Karakteristiği
- f'de kontrol ilkesinin özelliklerini
düzenleyin.
1-01 Motor Kontrol prensibi
Seçenek: fonksiyon:
[1] * VVC+ Voltaj vektör denetimi ilkesi çoğu
uygulama için uygundur. VVC
+
işletiminin temel faydası sağlam bir
motor modelini kullanmasıdır.
1-03 Tork Karakteristikleri
Seçenek: fonksiyon:
[0] Kompresör
torku
Şu gibi sabit tork uygulamalarının
hız denetimi için:
•
Eksenel pompalar.
•
Pozitif yer değiştirmeli
pompalar.
•
Üeyiciler.
Tüm hız aralığındaki motorun sabit
tork yükü karakteristikleri için
optimize edilen bir voltaj sağlar.
[1] Değişken tork Santrifüj pompalar ve fanların hız
kontrolü içindir. Ayrıca aynı frekans
dönüştürücüden 1'den çok motor
denetlenirken kullanılır (örneğin,
birden çok yoğunlaştırıcı fanı veya
soğutma kulesi fanı). Motorun kare
tork yükü karakteristikleri için
optimize edilmiş bir voltaj sağlar.
[2] Otomatik
Enerji Optim.
CT
Vidalı ve şerit kompresörlerin en iyi
enerji verimli hız kontrolü içindir.
Toplam aralıkta 15 Hz’e kadar
düşen, motorun sabit tork yükü
karakteristikleri için optimize edilen
bir voltaj sağlar. Üstelik, AEO
özelliği, tüketimi ve motordan gelen
duyulabilen gürültüyü azaltarak
voltajı mevcut yük durumuna tam
olarak adapte edecektir. En iyi
performansı elde etmek için motor
güç faktörü cos phi doğru bir
şekilde ayarlayın. Bu değer,
parametre 14-43 Motor Cosphi'te
ayarlanır. Parametre, motor verileri
programlandığında otomatik olarak
ayarlanan varsayılan bir değere
sahiptir. Bu ayarlar genellikle en iyi
motor voltajını sağlar ancak motor
güç faktörü cos phi’nin ayarlanması
gerekiyorsa
parametre 1-29 Otomatik Motor
Adaptasyonu (AMA) kullanılarak bir
AMA işlevi gerçekleştirilebilir.
[3] * Otomatik
Enerji Optim.
VT
Santrifüj pompalar ve fanların en iyi
verimli hız kontrolü içindir. Motorun
kare tork yükü karakteristikleri için
optimize edilmiş bir voltaj sağlar.
Parametre Açıklaması
3.3 Parametre 1-** Yük ve Motor
3.3.1 1-0* Genel Ayarlar
Frekans dönüştürücünün açık çevrimde mi yoksa kapalı
çevrimde mi çalıştırılacağını tanımlayın.
33
42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 45

1-03 Tork Karakteristikleri
Seçenek: fonksiyon:
Üstelik, AEO özelliği, tüketimi ve
motordan gelen duyulabilen
gürültüyü azaltarak voltajı mevcut
yük durumuna tam olarak adapte
edecektir. En iyi performansı elde
etmek için motor güç faktörünü
doğru bir şekilde ayarlayın. Bu
değer, parametre 14-43 Motor
Cosphi'te ayarlanır. Parametre, motor
verileri programlandığında otomatik
olarak ayarlanan varsayılan bir
değere sahiptir. Bu ayarlar genellikle
en iyi motor voltajını sağlar ancak
motor güç faktörü cos phi’nin
ayarlanması gerekiyorsa
parametre 1-29 Otomatik Motor
Adaptasyonu (AMA) kullanılarak bir
AMA işlevi gerçekleştirilebilir.
Nadiren motor güç faktörü parametresini manuel olarak ayarlamak
gerekir.
1-04 Aşırı Yük Modu
Aşırı yük modunda tork düzeyini seçin.
Seçenek: fonksiyon:
[0] Yüksek tork Normalden küçük motorlarda
%160'a kadar aşırı torka izin verir.
[1] * Normal tork %110'a kadar aşırı torka izin verir.
1-06 Saat Yönünde
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Bu parametre LCP yön okuna
uyumlu olarak saat yönünde
terimini tanımlar. Mil dönme
yönünün motor telleri değiştirilmeden kolay değişimi için
kullanılır.
[0] * Normal
Frekans dönüştürücü motora U⇒U,
V⇒V, and W⇒W şeklinde bağlandığında motor mili saat yönünde
döner.
[1] Ters
Frekans dönüştürücü motora ⇒U,
V⇒V, and W⇒W şeklinde bağlan-
1-06 Saat Yönünde
Seçenek: fonksiyon:
dığında motor mili saat yönünün
tersinde döner.
Parametre Açıklaması Programlama Kılavuzu
DUYURU!
parametre 1-10 Motor Yapısı = [1] PM, yüzeye mon. SP
olduğunda Parametre 1-03 Tork Karakteristikleri etkisizdir.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 43
3.3.2 1-1* Motor Seçimi
DUYURU!
Motor çalışırken bu parametre grubu düzeltilemez.
parametre 1-10 Motor Yapısı içindeki ayara bağlı olarak
aşağıdaki parametreler etkindir.
Parametre 1-10 Motor
Yapısı
Parametre 1-00 Konfigü
rasyon Modu
Parametre 1-03 Tork
Karakteristikleri
Parametre 1-06 Saat
Yönünde
Parametre 1-14 Sönüml
enme Kazancı
Parametre 1-15 Düşük
Hız Filtre Süresi Sabiti
Parametre 1-16 Yüksek
Hız Filtre Süresi Sabiti
Parametre 1-17 Voltaj
filtre süresi sabiti
Parametre 1-20 Motor
Gücü [kW]
Parametre 1-21 Motor
Gücü [HP]
Parametre 1-22 Motor
Voltajı
Parametre 1-23 Motor
Frekansı
Parametre 1-24 Motor
Akımı
Parametre 1-25 Motor
Nominal Hızı
Parametre 1-26 Nomin
al Motor Torku
Parametre 1-28 Motor
Dönüş Kontrolü
Parametre 1-29 Otomat
ik Motor Adaptasyonu
(AMA)
Parametre 1-30 Stator
Direnci (Rs)
Parametre 1-31 Rotor
Direnci (Rr)
[1] PM,
[0]
Asenkron
yüzeye
mon. SP
x x x x
x – - -
x x x x
– x x x
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
[2] PM,
belirli
IPM
[3]
SynRM
3 3
Page 46

Parametre Açıklaması
VLT® AQUA Drive FC 202
Parametre 1-10 Motor
Yapısı
Parametre 1-35 Ana
Reaktans (Xh)
Parametre 1-37 d-eksen
33
Endüktansı (Ld)
Parametre 1-39 Motor
Kutupları
Parametre 1-40 1000
RPM'de geri EMF
Parametre 1-44 d-axis
Inductance Sat. (LdSat)
Parametre 1-45 q-axis
Inductance Sat. (LqSat)
Parametre 1-46 Konum
Algılama Kazancı
Parametre 1-47 Torque
Calibration
Parametre 1-48 Inducta
nce Sat. Point
Parametre 1-49 q-axis
Inductance Sat. Point
Parametre 1-50 Sıfır
Hızda Motor Mıknatıslaması
Parametre 1-51 Min
Hızda Normal
Mıknatıslama [RPM]
Parametre 1-52 Min
Hızda Normal
Mıknatıslama [Hz]
Parametre 1-58 Hızlı
Başlatma Test Darbeleri
Akımı
Parametre 1-59 Hızlı
Başlatma Test Darbeleri
Frekansı
Parametre 1-60 Düşük
Hız Yük Dengeleme
Parametre 1-61 Yüksek
Hız Yük Dengeleme
Parametre 1-62 Kayma
Dengeleme
Parametre 1-63 Kayma
Dengeleme Zaman
Sabiti
Parametre 1-64 Rezona
ns Sönümlenmesi
Parametre 1-65 Rezona
ns Sönümlenmesi
Zaman Sabiti
Parametre 1-66 Düşük
Hızda Min. Akım
Asenkron
[1] PM,
[0]
yüzeye
mon. SP
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
– x x x
– – – x
– – x –
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
[2] PM,
belirli
IPM
[3]
SynRM
Parametre 1-10 Motor
Yapısı
Parametre 1-70 Başlat
ma Modu
Parametre 1-71 Bşlt.
gecikm.
Parametre 1-72 Başlat
ma İşlevi
Parametre 1-73 Dönen
Mot. Yakalama
Parametre 1-80 Durdur
mada İşlev
Parametre 1-81 Durdur
mada İşlev için Min Hız
[RPM]
Parametre 1-82 Durdur
mada İşlev için Min Hız
[Hz]
Parametre 1-86 Alarm
Hızı Alt Sınırı [RPM]
Parametre 1-87 Alarm
Hızı Alt Sınırı [Hz]
Parametre 1-90 Motor
Termal Koruması
Parametre 1-91 Motor
Dış Fanı
Parametre 1-93 Termist
ör Kaynağı
Parametre 2-00 DC
Tutc/Önc Isıtm Akımı
Parametre 2-01 DC
Fren Akımı
Parametre 2-02 DC
Frenleme Süresi
Parametre 2-03 DC
Fren Dvr. Girme Hızı
[RPM]
Parametre 2-04 DC
Fren Dvr. Girme Hızı
[Hz]
Parametre 2-06 Park
Akımı
Parametre 2-07 Park
Süresi
Parametre 2-10 Fren
İşlevi
Parametre 2-11 Fren
Direnci (ohm)
Parametre 2-12 Fren
Gücü Sınırı (kW )
Parametre 2-13 Fren
Gücü İzleme
Parametre 2-15 Fren
kontrolü
[1] PM,
[0]
Asenkron
yüzeye
mon. SP
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
[2] PM,
belirli
IPM
[3]
SynRM
44 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 47

1-10 Motor Yapısı
Motor yapı tipini seçin.
Seçenek: fonksiyon:
[0] * Asenkron Asenkron motorlar için.
[1] PM, yüzeye
mon. SP
Kalıcı mıknatıs (PM) motorlar için.
PM motorlar yüzeye monte veya
dahili mıknatıslar olmak üzere 2
grubu ayrılır.
[2] PM, belirli IPM
[5] SynRM
Parametre Açıklaması Programlama Kılavuzu
Parametre 1-10 Motor
Yapısı
Parametre 2-16 AC fren
Maks. Akım
Parametre 2-17 Aşırı
Voltaj Denetimi
Parametre 4-10 Motor
Hızı Yönü
Parametre 4-11 Motor
Hızı Alt Sınırı [RPM]
Parametre 4-12 Motor
Hızı Alt Sınırı [Hz]
Parametre 4-13 Motor
Hızı Üst Sınırı [RPM]
Parametre 4-14 Motor
Hızı Üst Sınırı [Hz]
Parametre 4-16 motor
modda moment limiti
Parametre 4-17 jenerat
ör modda moment
limiti
Parametre 4-18 Akım
Sınırı
Parametre 4-19 Maks.
Çıkış Frekansı
Parametre 4-58 Eksik
Motor Fazı İşlevi
Parametre 14-40 VT
Düzeyi
Parametre 14-41 AEO
Minimum Mıknatıslama
Parametre 14-42 Minim
um AEO Frekansı
Parametre 14-43 Motor
Cosphi
[1] PM,
[0]
Asenkron
yüzeye
mon. SP
x – – –
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
[2] PM,
belirli
IPM
[3]
SynRM
3.3.3 Asenkron Motor Kurulumu
Aşağıdaki motor verilerini girin. Bilgileri motor plakasında
bulabilirsiniz.
1. Parametre 1-20 Motor Gücü [kW] veya
parametre 1-21 Motor Gücü [HP].
2. Parametre 1-22 Motor Voltajı.
3. Parametre 1-23 Motor Frekansı.
4. Parametre 1-24 Motor Akımı.
5. Parametre 1-25 Motor Nominal Hızı.
VVC+ modunda optimum performans için aşağıdaki
parametreleri ayarlamak amacıyla ek motor verileri
gereklidir. Verilere motor verisi sayfasından erişin (bu veri
normalde motor plakasında bulunmamaktadır).
parametre 1-29 Otomatik Motor Adaptasyonu (AMA) [1] Tam
AMA'yı etknlştir'yı kullanarak tam otomatik motor adaptas-
yonunu (AMA) çalıştırın veya parametreleri manuel olarak
girin. Parametre 1-36 Demir Kaybı Direnci (Rfe), her zaman
manuel olarak girilir.
1. Parametre 1-30 Stator Direnci (Rs).
2. Parametre 1-31 Rotor Direnci (Rr).
3. Parametre 1-33 Stator Kaçak Reaktansı (X1).
4. Parametre 1-34 Rotor Kaçak Reaktansı (X2).
5. Parametre 1-35 Ana Reaktans (Xh).
6. Parametre 1-36 Demir Kaybı Direnci (Rfe).
VVC+ çalışırken uygulamaya özel ayarlama
VVC+ en dayanıklı denetim modudur. Birçok durumda daha
fazla ayarlama yapmadan optimum performans sağlar. En
iyi performans için tam AMA çalıştırın.
3.3.4 PM Motor Ayarı
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 45
Bu bölüm nasıl PM motoru kurulacağını açıklar.
İlk programlama adımları
PM motor kullanımını etkinleştirmek için
parametre 1-10 Motor Yapısı içinde [1] PM, yüzeye mon. SP
veya [2] PM, belirli IPM i seçin.
Programlama motor verileri
PM motorunu seçtikten sonra, 1-2* Motor Verileri, 1-3* Geliş.
Motor Ver. ve 1-4* Motor Data II (Geliş. Motor Ver. II)
parametre gruplarındaki SynRM motoru ilintili parametreler
etkinleşir.
Gerekli veriler, motor plakasında ve motor verisi sayfasında
bulunmaktadır.
Aşağıdaki parametreleri listelenen sırada programlayın:
1. Parametre 1-24 Motor Akımı.
2. Parametre 1-25 Motor Nominal Hızı.
Page 48

Parametre Açıklaması
VLT® AQUA Drive FC 202
3. Parametre 1-26 Nominal Motor Torku.
4. Parametre 1-39 Motor Kutupları.
parametre 1-29 Otomatik Motor Adaptasyonu (AMA) [1]
Enable Complete AMA'yı kullanarak tam bir AMA işlemi
yürütün.
33
DUYURU!
AMA'yı kullanırken parametre 1-40 1000 RPM'de geri EMF
değerinin nominal hız ile hesaplandığından emin olun.
Test motoru kullanımı
1. Motoru düşük hızda (100–200 RPM arası) başlatın.
Motor dönmezse kurulumu, genel programlamayı
ve motor verisini kontrol edin.
2. parametre 1-70 Başlatma Modu'daki başlatma
işlevinin uygulama gerekliliklerini karşıladığını
kontrol edin.
Rotor algılama
Bu işlev, pompalar veya konveyörler gibi motorun sabit
çalışmaya başladığı uygulamalar için önerilen seçimdir. Bazı
Tam bir AMA yürütülemiyorsa aşağıdaki parametreleri
manuel olarak konfigüre edin:
1. Parametre 1-30 Stator Direnci (Rs)
Ortak stator sarım direncine (Rs) satırı girin.
Sadece hat-hat verisi mevcut iken, hattı ortak
değere ulaştırmak için hat-hat değerini 2'ye
bölün.
2. Parametre 1-37 d-eksen Endüktansı (Ld)
Hattı PM motorunun direkt eksen endüktansına
girin.
Sadece hat-hat verisi mevcut iken, hattı ortak
değere ulaştırmak için hat-hat değerini 2'ye
bölün.
3. Parametre 1-40 1000 RPM'de geri EMF.
Hattı, 1000 RPM (RMS değeri) değerli PM Motorun
geri hat EMF'sine girin. Geri EMF, frekans
dönüştürücü bağlı değilken ve şaft dıştan
döndürüldüğü sırada PM motoru tarafından
üretilen voltajdır. Bu, normalde nominal motor
hızı veya 2 hat arasında ölçülen 1000 RPM ile
ilişkili olarak verilir. 1000 RPM motor hızı için
değer mevcut değilse doğru değeri aşağıdaki gibi
hesaplayın:
Arka EMF örneğin 1800 RPM'de 320 V ise 1000
RPM'de aşağıdaki şekilde hesaplanabilir:
Geri EMF= (Voltaj/RPM)x1000 = (320/1800)x1000
= 178.
4. IPM motorlar için: Aşağıdaki parametrelerdeki
endüktans değerlerini yapılandırın:
Parametre 1-38 q-axis Inductance (Lq).
•
Parametre 1-44 d-axis Inductance Sat.
•
(LdSat).
Parametre 1-45 q-axis Inductance Sat.
•
(LqSat).
Parametre 1-49 q-axis Inductance Sat.
•
Point.
DUYURU!
IPM motorlarının plakalarda veya veri sayfalarında bazı
endüktans değerleri eksik olabilir. Geçerli değerleri
motorlarda frekans dönüştürücü rotor algılama gerçekleştirirken bir ses duyulur. Bu, motora zarar vermez.
Park Etme
Bu uygulama, fan uygulamalarında rüzgar enerjisi üretmek
gibi motorun düşük hızda çalıştığı uygulamalar için
önerilen seçimdir. Parametre 2-06 Park Akımı ve
parametre 2-07 Park Süresi ayarlanabilir. Bu parametrelerin
fabrika ayarlarını yüksek eylemsizlik uygulamaları için
artırın.
VVC+ çalışırken uygulamaya özel ayarlama
VVC+ en dayanıklı denetim modudur. Birçok durumda daha
fazla ayarlama yapmadan optimum performans sağlar. En
iyi performans için tam AMA çalıştırın.
Motoru nominal hızda başlatın. Uygulamanın düzgün
çalışmaması durumunda VVC+ PM ayarlarını kontrol edin.
Tablo 3.4, çeşitli uygulamalara yönelik öneriler içerir.
Uygulama Ayarlar
Düşük eylemsizlik uygulamaları
I
<5
Yük/IMotor
Düşük eylemsizlik uygulamaları
50>I
Yüksek eylemsizlik uygulamaları
I
Yük/IMotor
Düşük hızda fazla yük
<%30 (nominal hız)
Tablo 3.4 Çeşitli Uygulamalara Yönelik Öneriler
Yük/IMotor
>50
>5
parametre 1-17 Voltaj filtre süresi
sabiti'i 5'ten 10 faktörüne artırın.
parametre 1-14 Sönümlenme Kazancı
azaltın.
parametre 1-66 Düşük Hızda Min.
Akım azaltın (<%100).
Varsayılan değerleri koruyun.
parametre 1-14 Sönümlenme Kazancı,
parametre 1-15 Düşük Hız Filtre Süresi
Sabiti ve parametre 1-16 Yüksek Hız
Filtre Süresi Sabiti'ü artırın
Artır parametre 1-17 Voltaj filtre süresi
sabiti
Başlatma torkunu ayarlamak için
parametre 1-66 Düşük Hızda Min.
Akım'ü artırın. %100 başlatma
torkunda nominal tork sağlar. Uzun
süre %100'den yüksek akım
düzeyinde çalışmak motorda aşırı
ısınmaya yol açabilir.
edinmek için AMA gerçekleştirin.
Motor belirli bir hızda sarsılarak çalışırsa
parametre 1-14 Sönümlenme Kazancı'i artırın. Değeri azar
azar artırın. Motora bağlı olarak, bu parametre varsayılan
değerden %10–100'den fazla olabilir.
46 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 49

Parametre Açıklaması Programlama Kılavuzu
3.3.5 SynRM Motor Ayarı
Bu bölüm senkronlu bir relüktans motorunun kurulumunu
anlatır.
İlk programlama adımları
SynRM motor işletimini etkinleştirmek için
parametre 1-10 Motor Yapısı öğesinde [5] SynRM özelliğini
seçin.
Programlama motor verileri
[5] SynRM seçeneğini belirledikten sonra, 1-2* Motor Verileri,
1-3* Geliş. Motor Ver. ve 1-4* Adv. Motor Data II (Geliş. Motor
Ver. II) parametre gruplarındaki SynRM motoru ilintili
parametreler etkinleşir.
Gerekli veriler, motor plakasında ve motor verisi sayfasında
bulunmaktadır.
Aşağıdaki parametreleri listelenen sırada programlayın:
1. Parametre 1-24 Motor Akımı.
2. Parametre 1-25 Motor Nominal Hızı.
3. Parametre 1-26 Nominal Motor Torku.
4. Parametre 1-39 Motor Kutupları.
parametre 1-29 Otomatik Motor Adaptasyonu (AMA) [1] Tam
AMA'yı etknlştir'yı kullanarak tam bir AMA işlemi yürütün.
Tam bir AMA yürütülemiyorsa aşağıdaki parametreleri
manuel olarak konfigüre edin:
1. Parametre 1-30 Stator Direnci (Rs)
Ortak stator sarım direncine (Rs) satırı girin.
Sadece hat-hat verisi mevcut iken, hattı ortak
değere ulaştırmak için hat-hat değerini 2'ye
bölün.
2. Parametre 1-37 d-eksen Endüktansı (Ld)
Hattı, motorunun direkt eksen endüktansına girin.
Sadece hat-hat verisi mevcut iken, hattı ortak
değere ulaştırmak için hat-hat değerini 2'ye
bölün.
3. Parametre 1-38 q-axis Inductance (Lq).
Hattı, motorunun dörtlü eksen endüktansına girin.
Sadece hat-hat verisi mevcut iken, hattı ortak
değere ulaştırmak için hat-hat değerini 2'ye
bölün.
4. Parametre 1-44 d-axis Inductance Sat. (LdSat).
D ekseni endüktansının hattan ortağa doygun
değerini girin. Bu, endüktansın tamamen doyduğu
yerdeki nominal akımdan daha yüksekteki
değerdir.
5. Parametre 1-48 Inductance Sat. Point.
D-ekseni endüktansı yarı doygun olduğu yerdeki
nominal akımın yüzdesini girin, bu değer doygun
olmayan ve doygun değerlerin ortalama değeridir.
DUYURU!
Motorların plakalarda veya veri sayfalarında bazı
endüktans değerleri eksik olabilir. Geçerli değerleri
edinmek için AMA gerçekleştirin.
Test motoru kullanımı
1. Motoru düşük hızda (100–200 RPM arası) başlatın.
Motor dönmezse kurulumu, genel programlamayı
ve motor verisini kontrol edin.
2. parametre 1-70 Başlatma Modu'daki başlatma
işlevinin uygulama gerekliliklerini karşıladığını
kontrol edin.
Rotor algılama
Bu işlev, pompalar veya konveyörler gibi motorun sabit
çalışmaya başladığı uygulamalar için önerilen seçimdir. Bazı
motorlarda frekans dönüştürücü rotor algılama gerçekleştirirken bir ses duyulur. Bu, motora zarar vermez.
Park Etme
Bu uygulama, fan uygulamalarında rüzgar enerjisi üretmek
gibi motorun düşük hızda çalıştığı uygulamalar için
önerilen seçimdir. Parametre 2-06 Park Akımı ve
parametre 2-07 Park Süresi ayarlanabilir. Bu parametrelerin
fabrika ayarlarını yüksek eylemsizlik uygulamaları için
artırın.
VVC+ çalışırken uygulamaya özel ayarlama
VVC+ en dayanıklı denetim modudur. Birçok durumda daha
fazla ayarlama yapmadan optimum performans sağlar. En
iyi performans için tam AMA çalıştırın.
Motoru nominal hızda başlatın. Uygulamanın düzgün
çalışmaması durumunda VVC+ SynRM ayarlarını kontrol
edin. Tablo 3.5, çeşitli uygulamalara yönelik öneriler içerir.
Uygulama Ayarlar
Düşük eylemsizlik uygulamaları
I
<5
Yük/IMotor
Düşük eylemsizlik uygulamaları
50>I
Yüksek eylemsizlik uygulamaları
I
Yük/IMotor
Yük/IMotor
>50
>5
parametre 1-17 Voltaj filtre süresi
sabiti'i 5'ten 10 faktörüne artırın.
parametre 1-14 Sönümlenme Kazancı
azaltın.
parametre 1-66 Düşük Hızda Min.
Akım azaltın (<%100).
Varsayılan değerleri koruyun.
parametre 1-14 Sönümlenme Kazancı,
parametre 1-15 Düşük Hız Filtre Süresi
Sabiti ve parametre 1-16 Yüksek Hız
Filtre Süresi Sabiti'ü artırın
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 47
Page 50

1-14 Sönümlenme Kazancı
Aralık: fonksiyon:
Size
related*
[0 - 250 %] Parametre, düzgün ve istikrarlı bir
şekilde çalışması için PM motorunu
dengede tutar. Sönümleme kazancı
değeri PM motorunun dinamik
performansını denetler. Düşük
sönümleme kazancı yüksek dinamik
performansla, yüksek değer ise
düşük dinamik performansla
sonuçlanır. Sönümleme kazancı çok
yüksek veya düşükse denetim
kararsızlaşır. Oluşan dinamik
performans makine verileri ve yük
tipiyle ilişkilidir.
1-15 Düşük Hız Filtre Süresi Sabiti
Aralık: fonksiyon:
Size
related*
[0.01 - 20 s] Yüksek geçişli filtre sönümleme
zaman sabitiyi yük adımlarına yanıt
süresini belirler. Kısa sönümleme
zaman sabiti ile hızlı denetim
edinin. Ancak, bu değer çok düşük
ise kontrol kararsızlaşır. Bu zaman
sabiti %10 nominal hızın altında
kullanılır.
1-16 Yüksek Hız Filtre Süresi Sabiti
Aralık: fonksiyon:
Size
related*
[0.01 - 20 s] Yüksek geçişli filtre sönümleme
zaman sabitiyi yük adımlarına yanıt
süresini belirler. Kısa sönümleme
zaman sabiti ile hızlı denetim
edinin. Ancak, bu değer çok düşük
ise kontrol kararsızlaşır. Bu zaman
sabiti %10 nominal hızın üstünde
kullanılır.
1-17 Voltaj filtre süresi sabiti
Aralık: fonksiyon:
Size
related*
[0.001 - 2 s] Besleme voltajı filtre zamanı sabiti
yüksek frekanslı ripellerin etkisini ve
makine besleme voltajı hesaplamasında sistem rezonanslarını
azaltmak için kullanılır. Bu filtre
olmadan akımlardaki ripeller
hesaplanan voltajı değiştirir ve
sistemin kararlılığını etkiler.
Parametre Açıklaması
VLT® AQUA Drive FC 202
Uygulama Ayarlar
Düşük hızda fazla yük
<%30 (nominal hız)
33
Tablo 3.5 Çeşitli Uygulamalara Yönelik Öneriler
Artır parametre 1-17 Voltaj filtre süresi
sabiti
Başlatma torkunu ayarlamak için
parametre 1-66 Düşük Hızda Min.
Akım'ü artırın. %100 başlatma
torkunda nominal tork sağlar. Uzun
süre %100'den yüksek akım
düzeyinde çalışmak motorda aşırı
ısınmaya yol açabilir.
1-11 Motor Modeli
Seçenek: fonksiyon:
[11] Danfoss OGD
V210
parametre 1-10 Motor Yapısı öğesinde [1]
PM, yüzeye mon. SP seçildiğinde seçilebilir.
Yalnızca T4, T5 ve 0,75-3 kW için
mevcuttur. Bu özel motor için ayarlar
otomatik olarak yüklenir.
Motor belirli bir hızda sarsılarak çalışırsa
parametre 1-14 Sönümlenme Kazancı'i artırın. Değeri azar
azar artırın. Motora bağlı olarak, bu parametre varsayılan
değerden %10–100'den fazla olabilir.
3.3.6
1-1* VVC+ PM/SynRM
VVC+ PMSM denetim merkezi için varsayılan denetim
parametreleri uygulamalar ve 50>Jl/Jm>5 aralığındaki
eylemsizlik yükü için optimize edilir. JI uygulmadan gelen
yük eylemsizliğidir, Jm ise makine eylemsizliğidir.
Düşük eylemsizlikli uygulamalar (Jl/Jm<5) için, 5-10 faktörü
ile parametre 1-17 Voltaj filtre süresi sabiti ve bazen de
parametre 1-14 Sönümlenme Kazancı öğesini performans ve
durgunluğu iyileştirmek adına artırın.
Yüksek eylemsizlikli uygulamalar (Jl/Jm>50) için,
parametre 1-15 Düşük Hız Filtre Süresi Sabiti,
parametre 1-16 Yüksek Hız Filtre Süresi Sabiti ve
parametre 1-14 Sönümlenme Kazancı öğesini performans ve
durgunluğu iyileştirmek adına artırın.
Düşüj hızda çeviricide doğrusallık olmayacağından düşük
hızdaki (nominal hızın %30'undan küçük) yüksek yük için
parametre 1-17 Voltaj filtre süresi sabiti değerini artırın.
1-11 Motor Modeli
Seçenek: fonksiyon:
[1] Std. Asenkron
(Std.
Asynchron)
[2] Std. PM, non
salient (Std.
PM, yüzeye
monte)
[10] Danfoss OGD
48 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
LA10
Seçili motor için fabrika ayarlarını otomatik
olarak ayarlar. Std. Asynchron varsayılan
değeri kullanılırsa parametre 1-10 Motor
Yapısı seçimine uygun olarak ayarları el ile
belirleyin.
parametre 1-10 Motor Yapısı öğesinde [0]
Asenkron seçildiğinde varsayılan motor
modeli.
parametre 1-10 Motor Yapısı öğesinde [1]
PM, yüzeye mon. SP seçildiğinde seçilebilir.
parametre 1-10 Motor Yapısı öğesinde [1]
PM, yüzeye mon. SP seçildiğinde seçilebilir.
Yalnızca T4, T5 ve 1,5-3 kW için mevcuttur.
Bu özel motor için ayarlar otomatik olarak
yüklenir.
Page 51

1-20 Motor Gücü [kW]
Aralık: fonksiyon:
Size
related*
[ 0.09 -
2000.00 kW]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Nominal motor gücünü, motor
plakası verilerine uygun olarak kW
cinsinden girin. Varsayılan değer,
cihazın nominal çıkış değerine
karşılık gelir.
parametre 0-03 Bölgesel Ayarlar
parametresinde yapılan seçimlere
bağlı olarak, parametre 1-20 Motor
Gücü [kW] veya
parametre 1-21 Motor Gücü [HP]
görünmez olur.
1-21 Motor Gücü [HP]
Aralık: fonksiyon:
Size
related*
[ 0.09 -
500.00 hp]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Nominal motor gücünü, motor
plakası verilerine uygun olarak hp
cinsinden girin. Varsayılan değer,
cihazın nominal çıkış değerine
karşılık gelir.
parametre 0-03 Bölgesel Ayarlar
parametresinde yapılan seçimlere
bağlı olarak, parametre 1-20 Motor
Gücü [kW] veya
1-21 Motor Gücü [HP]
Aralık: fonksiyon:
parametre 1-21 Motor Gücü [HP]
görünmez olur.
1-22 Motor Voltajı
Aralık: fonksiyon:
Size
related*
[ 10 - 1000
V]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Nominal motor voltajını, motor
plakası verilerine uygun olarak girin.
Varsayılan değer, cihazın nominal
çıkış değerine karşılık gelir.
1-23 Motor Frekansı
Aralık: fonksiyon:
Size
related*
[20 - 1000
Hz]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Motor frekansı değerini motor
plakası verilerinden seçin. 230/400 V
motorlarda 87 Hz’de çalıştırma için,
plaka verilerini 230 V/50 Hz olarak
ayarlayın. parametre 4-13 Motor Hızı
Üst Sınırı [RPM] ve
parametre 3-03 Maksimum Referans
değerlerini 87 Hz uygulamaya
uyarlayın.
1-24 Motor Akımı
Aralık: fonksiyon:
Size
related*
[ 0.10 -
10000.00 A]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Nominal motor akım değerini motor
plakası verilerinden girin. Bu veriler
motor torku, motor termal
koruması, vb. hesaplamalarında
kullanılır.
Parametre Açıklaması Programlama Kılavuzu
3.3.7 1-2* Motor Verileri
Bu parametre grubu, bağlı motorun plakasından gelen giriş
verilerini içerir.
DUYURU!
Bu parametrelerin değerinin değiştirilmesi diğer parametrelerin ayarlarını etkiler.
DUYURU!
parametre 1-10 Motor Yapısı [1] PM, yüzeye mon. SP, [2]
PM, belirli IPM, [5] SynRM olarak ayarlandığında aşağıdaki
parametreler etkisizdir :
Parametre 1-20 Motor Gücü [kW].
•
Parametre 1-21 Motor Gücü [HP].
•
Parametre 1-22 Motor Voltajı.
•
Parametre 1-23 Motor Frekansı.
•
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 49
Page 52

1-25 Motor Nominal Hızı
Aralık: fonksiyon:
Size
related*
[100 - 60000
RPM]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Nominal motor hızı değerini motor
plakası verilerinden girin. Bu veri,
otomatik motor dengelemesi
hesaplamasında kullanılır.
1-26 Nominal Motor Torku
Aralık: fonksiyon:
Size
related*
[1 - 10000.0
Nm]
Motor plakası verilerinden gelen
değeri girin. Varsayılan değer,
nominal çıkış değerine karşılık gelir.
Bu parametre yalnızca
parametre 1-10 Motor Yapısı [1] PM,
yüzeye mon. SP olarak ayarlan-
dığında, yani parametre yalnızca PM
ve yüzeye monte SPM motorları için
geçerli olduğunda kullanılabilir.
1-28 Motor Dönüş Kontrolü
Seçenek: fonksiyon:
UYARI
YÜKSEK VOLTAJ
Frekans dönüştürücüler, AC
şebeke giriş gücü, DC
beslemesi veya yük
paylaşımına bağlandıklarında
yüksek voltaj içerirler.
•
Motor faz kablolarının
bağlantısını
kesmeden önce
şebeke gücünü kesin.
1-28 Motor Dönüş Kontrolü
Seçenek: fonksiyon:
DUYURU!
Motor dönüş kontrolü etkinleştirildiğinde ekranda şunlar
görüntülenir: Not! Motor yanlış
yönde çalışıyor olabilir.
[OK], [Back] veya [Cancel]
tuşuna bastığınızda, mesaj yok
olur ve yeni bir mesaj
görüntülenir: Motoru
başlatmak için [Hand On] düğ.
basın. İptal etmek için [Cancel]
tuşuna basın. [Hand On]
düğmesine bastığınızda, motor
5Hz'de ileri doğru çalışır ve
ekranda şu mesaj görüntülenir:
Motor çalışıyor. Motor dönüş
yönünün doğru olup
olmadığını kontrol edin.
Motoru durdurmak için [O]
düğmesine basın. [O]
düğmesine bastığınızda motor
durur ve parametre 1-28 Motor
Dönüş Kontrolü sıfırlanır. Motor
dönüş yönü yanlışsa 2 motor
faz kablosunu birbiriyle
değişin.
Motorun kurulumundan ve bağlanmasından sonra, bu işlev doğru
motor dönüşü yönünün doğrulanmasına olanak verir. Bu işlev
etkinleştirilince, Dış Kilit ve Safe
Torque O (STO) (varsa) dışında tüm
bus komutlarını veya dijital girişleri
geçersiz kılar.
[0] * Kapalı Motor devri kontrolü etkin değildir.
[1] Etkin Motor devri kontrolü etkindir.
1-29 Otomatik Motor Adaptasyonu (AMA)
Seçenek: fonksiyon:
AMA işlevi, motor sabit
durumdayken gelişmiş motor
parametrelerini
(parametre 1-30 Stator Direnci (Rs) ila
parametre 1-35 Ana Reaktans (Xh))
otomatik olarak optimize ederek,
dinamik motor performansını
optimize eder.
[0] * Kapalı İşlev yok.
[1] Tam AMA'yı
etknlştir
Stator direnci RS, rotor direnci Rr,
stator kaçak reaktansı X1, rotor
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
50 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 53

1-29 Otomatik Motor Adaptasyonu (AMA)
Seçenek: fonksiyon:
kaçak reaktansı X2 ve ana reaktansın
Xh AMA testini gerçekleştirir.
[2] Azltlmş AMA'yı
etk.
Yalnızca sistemdeki stator direncinin
(Rs) indirgenmiş AMA testini gerçekleştirir. Frekans dönüştürücü ile
motor arasında LC filtresi kullanılıyorsa, bu seçeneği tercih edin.
[3] Enable
Complete
AMA II
Stator direnci RS, rotor direnci Rr,
stator kaçak reaktansı X1, rotor
kaçak reaktansı X2 ve ana reaktansın
Xh AMA II testini gerçekleştirir.
Gelişmiş sonuçlar için
parametre 14-43 Motor Cosphi
öğesini güncelleyin.
[4] Enable
Reduced AMA
II
Yalnızca sistemdeki stator direncinin
Rs indirgenmiş AMA II testini
gerçekleştirir. Frekans dönüştürücü
ile motor arasında LC filtresi kullanılıyorsa, bu seçeneği tercih edin.
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
Parametre Açıklaması Programlama Kılavuzu
DUYURU!
Yalnızca indirgenmiş AMA'nın filtreli çalıştırılması
gerektiğinde tam AMA filtresiz çalıştırılmalıdır.
VLT® AQUA Drive FC 202 Dizayn Kılavuzu'ndaki Otomatik
Motor Adaptasyonu bölümüne bakın.
3.3.8 1-3* Geliş. Motor Ver.
Gelişmiş motor verileri için parametreler.
parametre 1-30 Stator Direnci (Rs) ila parametre 1-39 Motor
Kutupları arasındaki parametreler en iyi şekilde çalışması
için ilgili motor ile eşlemelidir. Varsayılan ayarlar normal
standart motorlardan alınan ortak motor parametresi
değerlerine bağlı sayılardır. Motor parametreleri doğru bir
şekilde ayarlanmadıysa frekans dönüştürücüde bir arıza
gerçekleşebilir. Gelişmiş motor verileri bilinmiyor ise
®
AMA'nin çalıştırılması önerilir. VLT
Dizayn Kılavuzu'ndaki Otomatik Motor Adaptasyonu
bölümüne bakın. AMA sekansı rotorun eylemsizlik momenti
ve demir kaybı direnci hariç tüm motor parametrelerini
ayarlar (parametre 1-36 Demir Kaybı Direnci (Rfe)).
AQUA Drive FC 202
3 3
DUYURU!
parametre 1-10 Motor Yapısı = [1] PM, yüzeye mon. SP
olduğunda Parametre 1-29 Otomatik Motor Adaptasyonu
(AMA) etkisizdir.
AMA işlevini [1] Tam AMA'yı etkinleştir veya [2] Azltlmş
AMA'yı etk. öğesini seçtikten sonra [Hand On] tuşuna
basarak başlatın. Ayrıca dizayn kılavuzundaki Otomatik
Motor Adaptasyonu bölümüne de bakın. Normal bir diziden
sonra, ekranda aşağıdaki yazı görünür: AMA'yı bitirmek için
[OK] tuşuna basın. [OK] tuşuna bastıktan sonra frekans
dönüştürücü artık çalışmaya hazırdır.
DUYURU!
Frekans dönüştürücünün en iyi adaptasyonu
•
için AMA’yı soğuk bir motorda çalıştırın.
Motor çalışırken AMA gerçekleştirilemez.
•
DUYURU!
AMA sırasında harici olarak tork oluşmasını önleyin.
DUYURU!
1-2* Motor Verileri parametre grubundaki ayarlardan 1'i
değiştirilirse parametre 1-30 Stator Direnci (Rs) ila
parametre 1-39 Motor Kutupları varsayılan ayar ayara
döner.
Motor çalışırken bu parametre düzeltilemez.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 51
Çizim 3.4 Asenkron Motor için Motor Eşdeğeri Şeması
Page 54

I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Stator Direnci (Rs)
Aralık: fonksiyon:
Size
related*
[ 0.0140 -
140.0000
Ohm]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
PM motorlar için şurada yer alan
açıklamaya bakın: parametre 1-37 d-
eksen Endüktansı (Ld).
Statör direnç değerini ayarlayın.
Motor veri sayfasından alınan değeri
girin veya soğuk bir motorda bir
AMA çalıştırın.
1-31 Rotor Direnci (Rr)
Aralık: fonksiyon:
Size
related*
[ 0.0100 -
100.0000
Ohm]
DUYURU!
Parametre 1-31 Rotor Direnci
(Rr) ayarı,
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP, [5] SynRM
olarak ayarlandığında
etkisizdir. .
Şu yöntemlerden 1'ini kullanarak
mil performansını geliştirmek için
rotor direnci değeri Rr'yi ayarlayın:
•
Soğuk bir motorda AMA'yı
çalıştırın. Frekans
dönüştürücü motordan
gelen değeri ölçer. Tüm
1-31 Rotor Direnci (Rr)
Aralık: fonksiyon:
dengelemeler %100'e
sıfırlanır.
•
Rr değerini el ile girin.
Değeri motor tedarikçisinden alın.
•
Rr varsayılan ayarını
kullanın. Frekans
dönüştürücü, motor
plakası verilerine bağlı
olarak ayarı kurar.
1-33 Stator Kaçak Reaktansı (X1)
Aralık: fonksiyon:
Size
related*
[ 0.0400 -
400.0000
Ohm]
DUYURU!
Bu parametre yalnızca
asenkron motorlarla ilişkilidir.
Şu yöntemlerden 1'ini kullanarak
stator kaçak reaktansını ayarlayın:
•
Soğuk bir motorda AMA'yı
çalıştırın. Frekans
dönüştürücü motordan
gelen değeri ölçer.
•
X1 değerini el ile girin.
Değeri motor tedarikçisinden alın.
•
X1 varsayılan ayarını
kullanın. Frekans
dönüştürücü, motor
plakası verilerine bağlı
olarak ayarı kurar.
Bkz. Çizim 3.4.
DUYURU!
parametre 1-47 Torque
Calibration ayarında [3] 1st
start with store veya [4] Every
start with store seçeneği
belirlenirse her tork yapılandırmasından sonra parametre
değeri güncellenir.
1-34 Rotor Kaçak Reaktansı (X2)
Aralık: fonksiyon:
Size
related*
[ 0.0400 -
400.0000
Ohm]
DUYURU!
Bu parametre yalnızca
asenkron motorlarla ilişkilidir.
Şu yöntemlerden 1'ini kullanarak
rotor kaçak reaktansını ayarlayın:
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
Çizim 3.5 PM Yüzeye Monte Motor için Motora Eşdeğer Devre
Şeması
52 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 55
1-34 Rotor Kaçak Reaktansı (X2)
Aralık: fonksiyon:
•
Soğuk bir motorda AMA'yı
çalıştırın. Frekans
dönüştürücü motordan
gelen değeri ölçer.
•
X2 değerini el ile girin.
Değeri motor tedarikçisinden alın.
•
X2 varsayılan ayarını
kullanın. Frekans
dönüştürücü, motor
plakası verilerine bağlı
olarak ayarı kurar.
Bkz. Çizim 3.4.
DUYURU!
parametre 1-47 Torque
Calibration ayarında [3] 1st
start with store veya [4] Every
start with store seçeneği
belirlenirse her tork yapılandırmasından sonra parametre
değeri güncellenir.
1-35 Ana Reaktans (Xh)
Aralık: fonksiyon:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda Parametre 1-35 Ana
Reaktans (Xh) etkisizdir.
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Şu yöntemlerden 1'ini kullanarak
motorun ana reaktansını ayarlayın:
•
Soğuk bir motorda AMA'yı
çalıştırın. Frekans
dönüştürücü motordan
gelen değeri ölçer.
•
Xh değerini el ile girin.
Değeri motor tedarikçisinden alın.
•
Xh varsayılan ayarını
kullanın. Frekans
dönüştürücü, motor
plakası verilerinden gelen
ayarı kurar.
1-36 Demir Kaybı Direnci (Rfe)
Aralık: fonksiyon:
Size
related*
[ 0 -
10000.000
Ohm]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Motordaki demir kayıplarını
dengelemek için eşdeğer demir
kaybı direnci değerini (RFe) girin.
R
Fe
değeri AMA yapılarak
bulunamaz.
R
Fe
değeri özellikle tork denetimi
uygulamalarında önemlidir. R
Fe
bilinmiyor ise parametre 1-36 Demir
Kaybı Direnci (Rfe) değerini
varsayılan ayarda bırakın.
1-37 d-eksen Endüktansı (Ld)
Aralık: fonksiyon:
Size
related*
[0.000 -
1000.000 mH]
DUYURU!
Bu parametre yalnızca
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP olduğunda
etkindir.
D ekseni indüktans voltaj değerini
girin. Değeri PM motoru veri
sayfasından alın.
Parametre Açıklaması Programlama Kılavuzu
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 53
Asenkron motoru için, stator direnci ve d-eksen endüktansı
değerleri normalde hat ile ortak alan (nötr nokta) arasında
teknik özelliklerde açıklanır. PM motorları için, hat ila hat
arasında olduğu gibi teknik özelliklerde açıklanırlar. PM
motorları tipik olarak yıldız bağlantı için yapılmıştır.
Parametre 1-30 Stator
Direnci (Rs)
(hat-ortak).
Parametre 1-37 d-eksen
Endüktansı (Ld)
(hat-ortak).
Parametre 1-40 1000
RPM'de geri EMF
RMS (hat-hat değeri)
Tablo 3.6 PM Motorlarına Bağlı Parametreler
Bu parametre asenkron motor stator
reaktansına benzeyen stator sarım
direnci (Rs) verir. Stator reaktansı hatortak ölçüm için tanımlanır. Hat
verileri için, stator reaktansı 2 hat
arasında ölçüldüğünde 2'ye böllün.
Bu parametre PM motorunun direkt
eksen endüktansını verir. D-eksen
endüktansı faz-ortak ölçüm için
tanımlanır. Hat verileri için, stator
reaktansı 2 hat arasında ölçüldüğünde
2'ye böllün.
Bu parametre, özel olarak 1000 RPM
mekanik hızında PM Motorunda stator
terminali üzerinde geri EMF'yi verir.
Hat-hat arasında tanımlanır ve RMS
değeri olarak ifade edilir.
Page 56

Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 q-axis Inductance (Lq)
Aralık: fonksiyon:
Size
related*
[0.000 - 1000
mH]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Q-eksen indüktansının değerini
ayarlayın. Motor veri sayfasına
bakın.
1-39 Motor Kutupları
Aralık: fonksiyon:
Size
related*
[2 - 132 ]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Motor kutuplarının sayısını girin.
Kutu
plar
~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tablo 3.7 Kutup Sayıları ve İlgili
Frekanslar
Tablo 3.7, çeşitli motor tiplerinin
normal hız aralıkları için kutup
numaralarını gösterir. Diğer
frekanslar için tasarlanan motorları
ayrı olarak tanımlayın. Motor kutbu
değeri, kutup çiftlerine değil toplam
kutup sayısına tekabül etmesi
sebebiyle daima bir çift sayıdır.
Frekans dönüştürücü
parametre 1-23 Motor Frekansı ve
parametre 1-25 Motor Nominal Hızı
değerlerine bağlı olarak
parametre 1-39 Motor Kutupları
birincil ayarını oluşturur.
1-40 1000 RPM'de geri EMF
Aralık: fonksiyon:
Size
related*
[ 10 - 9000V]1000 RPM'de çalıştığında motorun
nominal geri EMF'sini ayarlayın. Bu
parametre yalnızca
parametre 1-10 Motor Yapısı [1] PM,
yüzeye mon. SP olduğunda etkindir.
1-44 d-axis Inductance Sat. (LdSat)
Aralık: fonksiyon:
Size
related*
[0 - 1000
mH]
Ld.'nin indüktans yoğunluk noktasını
girin. İdeal olarak bu parametre
parametre 1-37 d-eksen Endüktansı
(Ld)'deki ile aynı değere sahiptir.
Motor tedarikçisi bir indüksiyon
eğrisi sağlıyorsa nominal değerin
%200'ündeki indüksiyon değerini
girin.
Parametre Açıklaması
VLT® AQUA Drive FC 202
DUYURU!
Motor üreticileri hat ile ortak (yıldız noktası) veya hat ile
hat arsında olacak şekilde teknik özelliklerde stator
reaktansı (parametre 1-30 Stator Direnci (Rs)) ve d-eksen
endüktansı (parametre 1-37 d-eksen Endüktansı (Ld)) için
33
değerler sağlar. Genel bir standart yoktur. Stator bobin
reaktansı ve endüksiyonunun farklı kurulumları Çizim 3.6
bölümünde gösterilir. Danfoss frekans dönüştürücüler
her zaman hat-ortak değer gerektirir. PM motorunun geri
EMF'si serbest çalışan motorun stator bobininin 2 fazının
herhangi birinde gelişen indüklenmiş EMF olarak
tanımlanır. Danfoss frekans dönüştürücüler her zaman
1000 RPM'de, devrin mekanik hızında ölçülen hat-hat
RMS değerine ihtiyaç duyar. Bu, Çizim 3.7 bölümünde
gösterilir.
Çizim 3.6 Stator Bobini Kurulumları
Çizim 3.7 PM Motorlarının Geri EMF'sinin Makine Parametresi
Tanımları
54 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 57

1-45 q-axis Inductance Sat. (LqSat)
Aralık: fonksiyon:
Size
related*
[0 - 1000
mH]
Bu parametre, Lq'nin indüktans
yoğunluğuna karşılık gelir. İdeal
olarak bu parametre
parametre 1-38 q-axis Inductance
(Lq)'deki ile aynı değere sahiptir.
Motor tedarikçisi bir indüksiyon
eğrisi sağlıyorsa nominal değerin
%200'ündeki indüksiyon değerini
girin.
1-47 Torque Calibration
Seçenek: fonksiyon:
Bu parametreyi tam hız aralığındaki
tork tahminini iyileştirmek için
kullanın. Mil gücüne bağlı tahmini
tork, P
shaft
= Pm - Rs x I2. R
s
değerinin doğru olduğundan emin
olun. Bu formüldeki Rs değeri
motordaki, kablodaki ve frekans
dönüştürücüdeki güç kaybına eşittir.
Bu parametre etkinken frekans
dönüştürücü açma esnasında R
s
değerini hesaplayarak en iyi tork
tahminini ve en iyi performansı
sağlar. Kablo uzunluğunu, frekans
dönüştürücü kayıplarını ve
motordaki sıcaklık sapmasını
dengelemek adına her frekans
dönüştürücüde
parametre 1-30 Stator Direnci (Rs)
değerini ayarlamanın mümkün
olmadığı durumlarda bu özelliği
kullanın.
[0] * O
[1] 1st start after
pwr-up
Açmadan sonraki ilk başlatmada
kalibre eder ve güç döngüsünün
sıfırlamasına kadar bu değeri saklar.
[2] Every start Her başlatmada kalibre ederek son
başlatmadan itibaren motor sıcaklğındaki olası değişikliği dengeler.
Güç döngüsünden sonra değer
sıfırlanır.
[3] 1st start with
store
Frekans dönüştürücü açmadan
sonraki ilk başlatmada torku kalibre
eder. Bu seçenek motor parametrelerini güncellemek için kullanılır:
•
Parametre 1-30 Stator
Direnci (Rs).
•
Parametre 1-33 Stator
Kaçak Reaktansı (X1).
•
Parametre 1-34 Rotor Kaçak
Reaktansı (X2).
1-47 Torque Calibration
Seçenek: fonksiyon:
•
Parametre 1-37 d-eksen
Endüktansı (Ld).
[4] Every start
with store
Frekans dönüştürücü torku her
başlatmada kalibre ederek son
başlatmadan itibaren motor sıcaklığındaki olası değişikliği dengeler. Bu
seçenek motor parametrelerini
güncellemek için kullanılır:
•
Parametre 1-30 Stator
Direnci (Rs).
•
Parametre 1-33 Stator
Kaçak Reaktansı (X1).
•
Parametre 1-34 Rotor Kaçak
Reaktansı (X2).
•
Parametre 1-37 d-eksen
Endüktansı (Ld).
1-48 Inductance Sat. Point
Aralık: fonksiyon:
Size
related*
[1 - 500 %] İndüktans doygunluk noktasını girin.
1-49 q-axis Inductance Sat. Point
Aralık: fonksiyon:
Size
related*
[ 0 - 200 %]
DUYURU!
Bu parametrenin değerini
ayarlamak için AMA'yı
çalıştırın. Yalnızca uygulama
AMA'nın belirlediğinden başka
bir değere ihtiyaç duyduğunda
değeri el ile düzenleyin.
q-Ekseni endüktans doygunluk
noktasını girin. Frekans dönüştürücü
bu değeri IPM motorlarının performansını en iyi hale getirmek için
kullanır.
Endüktansın nominal akımın
yüzdesi olarak parametre 1-38 q-axis
Inductance (Lq) ve parametre 1-45 q-
axis Inductance Sat. (LqSat)
öğelerinin ortalama değerine eşit
olduğu durumlarda nokta ile
eşleşen değeri seçin.
Parametre Açıklaması Programlama Kılavuzu
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 55
3 3
Page 58

1-50 Sıfır Hızda Motor Mıknatıslaması
Aralık: fonksiyon:
100 %* [0 - 300 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda Parametre 1-50 Sıfır
Hızda Motor Mıknatıslaması
etkisizdir.
Düşük hızda çalışırken motorda
farklı bir termal yük edinmek için
parametre 1-51 Min Hızda Normal
Mıknatıslama [RPM] ile birlikte bu
parametreyi kullanın.
Nominal mıknatıslama akımının
yüzdesi olan değeri girin. Ayar çok
düşükse motor milindeki tork
indirgenebilir.
Magn. current
130BA045.11
Hz
Par.1-50
Par.1-51
100%
Par.1-52 RPM
Çizim 3.8 Mıknatıslama Akımı
1-51 Min Hızda Normal Mıknatıslama [RPM]
Aralık: fonksiyon:
Size
related*
[10 - 300
RPM]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda Parametre 1-51 Min
Hızda Normal Mıknatıslama
[RPM] etkisizdir.
Normal mıknatıslama akımı için
gereken hızı ayarlayın. Hız motor
kayma hızından düşük ise
parametre 1-50 Sıfır Hızda Motor
Mıknatıslaması ve
parametre 1-51 Min Hızda Normal
Mıknatıslama [RPM] önemsizdir.
Bu parametreyi parametre 1-50 Sıfır
Hızda Motor Mıknatıslaması ile
birlikte kullanın. Bkz. Tablo 3.7.
1-52 Min Hızda Normal Mıknatıslama [Hz]
Aralık: fonksiyon:
Size
related*
[ 0.3 - 10.0
Hz]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda Parametre 1-52 Min
Hızda Normal Mıknatıslama
[Hz] etkisizdir.
Normal mıknatıslama akımı için
gereken frekansı ayarlayın. Frekans,
motor kayma hızından düşük ise
parametre 1-50 Sıfır Hızda Motor
Mıknatıslaması ve
parametre 1-51 Min Hızda Normal
Mıknatıslama [RPM] devre dışıdır.
Bu parametreyi parametre 1-50 Sıfır
Hızda Motor Mıknatıslaması ile
birlikte kullanın. Bkz. Tablo 3.7.
1-55 V/f Karakteristikleri - V
Dizi [6]
Aralık: fonksiyon:
Size
related*
[0 - 1000 V] Motor ile manuel olarak eşleşen bir
U/f Karakteristiği oluşturmak için
her frekans noktasındaki voltajı
girin.
Frekans noktaları parametre 1-56 V/f
Karakteristiği - f bölümünde
tanımlanır.
Bu parametre, [0-5] dizi parametresidir ve yalnızca
parametre 1-01 Motor Kontrol
prensibi [0] U/f olarak ayarlandığında
erişilebilir.
1-56 V/f Karakteristiği - f
Dizi [6]
Aralık: fonksiyon:
Size
related*
[ 0 - 1000.0
Hz]
Motor ile manuel olarak eşleşen bir
U/f Karakteristiği oluşturmak için
frekans noktalarını girin.
Her noktadaki voltaj şurada
tanımlanır: parametre 1-55 V/f
Karakteristikleri - V.
Bu parametre, [0–5] dizi parametresidir ve yalnızca
parametre 1-01 Motor Kontrol
prensibi [0] U/f olarak ayarlandığında
erişilebilir.
Parametre Açıklaması
VLT® AQUA Drive FC 202
3.3.9 1-5* Yük Bağımsız Ayarı
33
56 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 59

Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
1-58 Hızlı Başlatma Test Darbeleri Akımı
Aralık: fonksiyon:
Size
related*
[ 0 - 200 %] Motor yönünü tespit etmek için
kullanılan darbeler için
mıknatıslama akımının büyüklüğünü
ayarlayın. Değer aralığı ve işlevi
parametre 1-10 Motor Yapısı
özelliğine bağlıdır:
[0] Asenkron: [0–200%]
Bu değerin düşürülmesi üretilen
torku düşürür. %100 tam nominal
motor akımı anlamına gelir. Bu
durumda varsayılan değer %30'dur.
[1] PM, yüzeye mon. SP: [0–40%]
PM motorlar için %20 genel ayarı
önerilir. Daha yüksek değerler
artırılmış performans verebilir.
Ancak, geri EMF'si nominal hızda ve
bobin endüktansında (10 mH'den
daha fazla) 300 VLL (rms)'den
yüksek motorlarda yanlış hız
tahmininin önüne geçmek adına
düşük bir değer önerilir.
parametre 1-73 Dönen Mot.
Yakalama etkinleştirildiğinde
parametre etkindir.
1-59 Hızlı Başlatma Test Darbeleri Frekansı
Aralık: fonksiyon:
Size
related*
[ 0 - 500 %]
DUYURU!
PM Dönen Motoru Yakalama
parametreleri arasındaki
ilişkinin genel görünümü için
parametre 1-70 Başlatma Modu
açıklamasına bakın.
1-59 Hızlı Başlatma Test Darbeleri Frekansı
Aralık: fonksiyon:
Değer aralığı ve işlevi
parametre 1-10 Motor Yapısı
özelliğine bağlıdır:
[0] Asenkron: [0–500%]
Motor yönünü tespit etmek için
kullanılan darbeler için frekansın
yüzdesini denetleyin. Bu değer
artırılması üretilen torku düşürür. Bu
modda %100, kayma frekansının 2
katı anlamına gelir.
[1] PM, yüzeye mon. SP: [0–10%]
Bu parametre, altında park işlevinin
(bkz. parametre 2-06 Park Akımı ve
parametre 2-07 Park Süresi) etkinleştirildiği motor hızını tanımlar. Bu
parametre yalnızca
parametre 1-70 Başlatma Modu [1]
Park Etme olarak ayarlandığında ve
yalnızca motor başlatmasından
sonra etkindir.
1-60 Düşük Hız Yük Dengeleme
Aralık: fonksiyon:
100 %* [0 - 300 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-60 Düşük Hız Yük
Dengeleme etkisizdir.
Motor düşük hızda çalışırken yük
açısından voltajı dengelemek için %
değerini girin ve en iyi U/f karakteristiğini edinin. Motor boyutu, bu
parametrenin etkin olduğu frekans
aralığını belirler.
Motor boyutu
[kW]
Değiştirme [Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
Tablo 3.8 Değiştirme Frekansı
Parametre Açıklaması Programlama Kılavuzu
Çizim 3.9 U/f Karakteristiği
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 57
3.3.10 1-6* Yük Bağımlı Ayarı
Page 60

130BA046.11
60%
0%
100%
U
m
Changeover
f
out
Par.1-60 Par.1-61
1-61 Yüksek Hız Yük Dengeleme
Aralık: fonksiyon:
100 %* [0 - 300 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-61 Yüksek Hız Yük
Dengeleme etkisizdir.
Motor yüksek hızda çalışırken yük
açısından voltajı dengelemek için %
değerini girin ve en iyi U/f karakteristiğini edinin. Motor boyutu, bu
parametrenin etkin olduğu frekans
aralığını belirler.
Motor boyutu
[kW]
Değiştirme [Hz]
0.25–7.5 >10
11–45 <5
55–550 <3–4
Tablo 3.9 Değiştirme Frekansı
1-62 Kayma Dengeleme
Aralık: fonksiyon:
0 %* [-500 -
500 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-62 Kayma
Dengeleme etkisizdir.
n
M,N
değerindeki toleransları
dengelemek için kayma dengeleme
dengelemenin % değerini girin.
Kayma dengeleme, n
M,N
nominal
1-62 Kayma Dengeleme
Aralık: fonksiyon:
motor hızına bağlı şekilde otomatik
olarak hesaplanır.
1-63 Kayma Dengeleme Zaman Sabiti
Aralık: fonksiyon:
Size
related*
[0.05 - 5 s]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-63 Kayma
Dengeleme Zaman Sabiti
etkisizdir.
Kayma dengeleme tepki hızını girin.
Yüksek değer yavaş tepkiyle, düşük
değer ise hızlı tepkiyle sonuçlanır.
Düşük frekanslı rezonans sorunları
ortaya çıkarsa daha uzun süreli
ayarlar kullanın.
1-64 Rezonans Sönümlenmesi
Aralık: fonksiyon:
Size
related*
[0 - 500 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-64 Rezonans
Sönümlenmesi etkisizdir.
Rezonans sönümlemesi değerini
girin. Yüksek frekanslı rezonans
sorunlarının giderilmesine yardım
etmek için parametre 1-64 Rezonans
Sönümlenmesi ve
parametre 1-65 Rezonans
Sönümlenmesi Zaman Sabiti ayarını
yapın. Rezonans osilasyonunu
azaltmak için
parametre 1-64 Rezonans
Sönümlenmesi değerini artırın.
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
Çizim 3.10 Düşük Hız Yük Dengeleme
58 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 61

1-65 Rezonans Sönümlenmesi Zaman Sabiti
Aralık: fonksiyon:
5 ms* [5 - 50 ms]
DUYURU!
parametre 1-10 Motor Yapısı =
[1] PM, yüzeye mon. SP
olduğunda
Parametre 1-65 Rezonans
Sönümlenmesi Zaman Sabiti
etkisizdir.
Yüksek frekanslı rezonans
sorunlarının giderilmesine yardım
etmek için parametre 1-64 Rezonans
Sönümlenmesi ve
parametre 1-65 Rezonans
Sönümlenmesi Zaman Sabiti ayarını
yapın. En iyi sönümlemeyi sağlayan
zaman sabitini girin.
1-66 Düşük Hızda Min. Akım
Aralık: fonksiyon:
Size
related*
[ 1 - 200 %]
DUYURU!
parametre 1-10 Motor Yapısı =
[0] Asenkron ise
Parametre 1-66 Düşük Hızda
Min. Akım etkisizdir.
Düşük hızda minimum motor akımı
girin.
Akımın artırılması düşük hızda
gelişmiş motor torkunu iyileştirir.
Burada düşük hız VVC+ PM
Control'deki nominal motor hızının
(parametre 1-25 Motor Nominal Hızı)
%6'sının altındaki hızlar olarak
tanımlanır.
1-70 Başlatma Modu
Seçenek: fonksiyon:
[0] Rotor Algılama Motorun başlatmada hareketsiz
olarak bilindiği tüm uygulamalar
için (örneğin, konveyörler, pompalar
ve sargısız şaft fanları) uygundur.
[1] Park Etme Motor , örneğin rüzgarın pervaneyi
döndürmesi sebebiyle düşük bir
hızda (nominal hızın %2-5'inden
daha düşük) dönerse[1] Park Etme
öğesini seçin ve parametre 2-06 Park
Akımı ve parametre 2-07 Park Süresi
öğelerini uygun şekilde ayarlayın.
[2] Rotor Det. w/
Parking
1-71 Bşlt. gecikm.
Aralık: fonksiyon:
00 s* [0 - 300 s] Başlat komutu ile frekans dönüştü-
rücünün motora güç verdiği zaman
arasındaki zaman gecikmesini girin.
Bu parametre
parametre 1-72 Başlatma İşlevi
ayarında seçili başlatma işlevine
ilişkindir.
1-72 Başlatma İşlevi
Seçenek: fonksiyon:
Başlatma gecikmesi esnasında
başlatma işlevini seçin. Bu
parametre parametre 1-71 Bşlt.
gecikm. öğesine bağlıdır.
[0] DC Dur./
gckme sür.
Başlatma gecikme zamanında
motoru DC tutucu bir akım
(parametre 2-00 DC Tutc/Önc Isıtm
Akımı) ile çalıştırır.
[2] Yanaşma/
gckme sür.
Başlatma gecikme zamanında motor
yanaştırılır (çevirici kapalı).
parametre 1-10 Motor Yapısı öğesine
bağlı seçimler mevcuttur: [0]
Asenkron:
•
[2] Yanaşma.
•
[0] DC Dur.
[1] PM, yüzeye mon. SP:
•
[2] Yanaşma.
1-73 Dönen Mot. Yakalama
Seçenek: fonksiyon:
Bu işlev, şebekedeki düşüşlerden
dolayı serbestçe dönen motoru
yakalamayı mümkün kılar.
parametre 1-73 Dönen Mot.
Yakalama etkinleştirildiğinde,
parametre 1-71 Bşlt. gecikm.’nin
işlevi yoktur.
Hızlı başlatma için arama yönü
parametre 4-10 Motor Hızı Yönü
içerisindeki ayara bağlanır.
[0] Saat yönünde: Hızlı başlatma saat
yönünde dönen motor arar. Başarılı
değilse, bir DC freni uygulanır.
[2] Her iki yön. Hızlı başlatma işlevi
öncelikle son referans (yön)
tarafından belirlenen yönde arama
yapar. Hız bulunmazsa diğer yönde
arama yapacaktır. Başarılı değilse
parametre 2-02 DC Frenleme Süresi
içinde belirlenen sürede bir DC fren
etkinleştirilecektir. Başlatma bunun
ardından 0 Hz’den başlayacaktır.
Parametre Açıklaması Programlama Kılavuzu
3 3
3.3.11 1-7* Başlatma Ayarlam.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 59
Page 62

1-73 Dönen Mot. Yakalama
Seçenek: fonksiyon:
[0] Devre Dışı Bu işlev gerekmiyorsa [0] Devre Dışı
öğesini seçin.
[1] Etkin Dönen bir motoru yakalamak üzere
frekans dönüştürücüyü etkinleştirmek için [1] Etkinleştir seçeneğini
belirleyin.
parametre 1-10 Motor Yapısı = [1]
PM yüzeye mon. SP olduğunda
parametre her zaman [1] Etkinleştir
olarak ayarlıdır.
Önemli ilgili parametreler:
•
Parametre 1-58 Hızlı
Başlatma Test Darbeleri
Akımı.
•
Parametre 1-59 Hızlı
Başlatma Test Darbeleri
Frekansı.
•
Parametre 1-70 Başlatma
Modu.
•
Parametre 2-03 DC Fren
Dvr. Girme Hızı [RPM].
•
Parametre 2-04 DC Fren
Dvr. Girme Hızı [Hz].
•
Parametre 2-06 Park Akımı.
•
Parametre 2-07 Park Süresi.
1-79 Komprsör Başltmdn Alarm Mks. Süre
Aralık: fonksiyon:
0 s* [ 0 - 3600.0s]Motor, parametre 1-86 Alarm Hızı Alt
Sınırı [RPM] içinde belirtilen hıza bu
parametrede belirtilen süre içinde
ulaşamazsa frekans dönüştürücü
alarm verir. Bu parametredeki süre
parametre 1-71 Bşlt. gecikm.
öğesinde belirtilen süreyi de içerir.
Örneğin, parametre 1-71 Bşlt.
gecikm. içindeki değer
parametre 1-79 Komprsör Başltmdn
Alarm Mks. Süre içindeki değere eşit
veya bu değerden daha büyük ise
frekans dönüştürücü asla
başlatılamaz.
1-80 Durdurmada İşlev
Seçenek: fonksiyon:
Durdurma komutundan sonra veya
hız parametre 1-81 Durdurmada İşlev
için Min Hız [RPM] içerisindeki
ayarlarına düştükten sonra frekans
dönüştürücü işlevini seçin.
parametre 1-10 Motor Yapısı öğesine
bağlı seçimler mevcuttur:
[0] Asenkron:
Parametre Açıklaması
33
VLT® AQUA Drive FC 202
Dönen motoru yakalama ilkesinin akım sınırlamaları PM
motorları için kullanılır:
Hız aralığı nominal hızın %100'üne veya alan
•
zayıaması hızına (en düşük olana) kadardır.
Yüksek geri EMF'li (>300 VLL(rms)) PMSM ve
•
yüksek sargı endüktansı (>10 mH), kısa devre
akımını 0'a indirmek için daha fazla zamana
ihtiyaç duyar ve tahminde hataya daha yatkındır.
Akım test etme 300 Hz'lik hız aralığıyla sınırlıdır.
•
Belirli birimler için sınır 250 Hz'dir; 2.2 kW
(3 hp)'ye kadar olan tüm 200–240 V birimler ve
4 kW (5.4 hp)'ye kadar olan tüm 380–480 V
birimler.
Akım test etme 22 kW (30 hp)'ye kadar makine
•
gücü ölçüsüyle sınırlıdır.
Dahili kutup makinesi (IPMSM) için hazırlanmıştır
•
ancak henüz bu tip makinelerde doğrulanmamıştır.
Yüksek eylemsizlikli uygulamalarda (yük eylemsiz-
•
liğinin motor eylemsizliğinden 30 kat daha büyük
olduğu durumlarda), dönen motoru yakalamanın
yüksek hızlı devreye girmesi esnasında aşırı voltaj
alarmından kaçınmak adına bir fren rezistörü
önerilir.
parametre 1-73 Dönen Mot. Yakalama etkinleştirildiğinde,
parametre 1-71 Bşlt. gecikm.’nin işlevi yoktur.
Dönen motoru yakalama işlevi birincil hız tahminine
bağlıdır ve PM motorlar için kullanılır. Hız daima etkin
başlatma sinyali verildikten hemen sonra hesaplanır.
parametre 1-70 Başlatma Modu ayarına bağlı olarak şunlar
gerçekleşir:
Parametre 1-70 Başlatma Modu = [0] Rotor Algılama:
Hız tahmini 0 Hz'den yüksek olarak gelirse frekans
dönüştürücü motoru bu hızda yakalar ve normal işletime
devem eder. Aksi takdirde, frekans dönüştürücü rotor
konumunu tahmin eder ve normal işletimi buradan başlatır.
Parametre 1-70 Başlatma Modu=[1] Park Etme:
Hız tahmini parametre 1-59 Hızlı Başlatma Test Darbeleri
Frekansı öğesindeki ayardan düşük olarak gelirse park etme
işlevi devreye girer (bkz. parametre 2-06 Park Akımı ve
parametre 2-07 Park Süresi). Aksi takdirde, frekans
dönüştürücü motoru bu hızda yakalar ve normal işletime
devem eder. Önerilen ayarlar için bkz.
parametre 1-70 Başlatma Modu.
60 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
3.3.12 1-8* Durdurma Ayarla.
Page 63
1-80 Durdurmada İşlev
Seçenek: fonksiyon:
•
[0] Yanaşma.
•
[1] DC Dur.
[1] PM, yüzeye mon. SP:
•
[0] Yanaşma.
[0] * Yanaşma Motoru serbest modda bırakır.
[1] DC Dur./Mtr
Ön. Isıt.
Motoru DC tutma akımıyla
çalıştırır(bkz. parametre 2-00 DC
Tutc/Önc Isıtm Akımı).
[2] Motor denet.
[6] Motor dntmi,
alarm
1-81 Durdurmada İşlev için Min Hız [RPM]
Aralık: fonksiyon:
Size
related*
[0 - 600
RPM]
parametre 1-80 Durdurmada İşlev
etkinleşeceği hızı ayarlayın.
1-82 Durdurmada İşlev için Min Hız [Hz]
Aralık: fonksiyon:
Size
related*
[ 0 - 20.0 Hz] parametre 1-80 Durdurmada İşlev
etkinleşeceği çıkış frekansını
ayarlayın.
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Alarm Hızı Alt Sınırı [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-13
RPM]
DUYURU!
Bu parametre yalnızca
parametre 0-02 Motor Hız Birimi
[11] RPM olarak ayarlandığında
görülür.
Frekans dönüştürücünün alarm
verdiği motor hızı için alt sınırı girin.
Değer 0 ise işlev etkin değildir.
Başlatmadan sonra (veya durdurma
sırasında) hız, parametredeki
değerden aşağı düşerse frekans
dönüştürücü alarm 49, Hız Sınırı ile
alarm verir.
1-87 Alarm Hızı Alt Sınırı [Hz]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-14
Hz]
DUYURU!
Bu parametre yalnızca
parametre 0-02 Motor Hız Birimi
[1] Hz olarak ayarlandığında
görülür.
Frekans dönüştürücünün alarm
verdiği motor hızı için alt sınırı girin.
Değer 0 ise işlev etkin değildir.
Başlatmadan sonra (veya durdurma
sırasında) hız, parametredeki
değerden aşağı düşerse frekans
dönüştürücü alarm 49, Hız Sınırı ile
alarm verir.
Parametre Açıklaması Programlama Kılavuzu
T
1-71
T
1-79
N
1-86
1 Normal işletim.
Çizim 3.11 Gelişmiş Minimum Hız Görüntüleme
Parametre 1-71 Bşlt. gecikm.
Parametre 1-79 Komprsör Başltmdn Alarm Mks. Süre. Bu
süre T
Parametre 1-86 Alarm Hızı Alt Sınırı [RPM]. Normal
işletim esnasında hız bu değerin altına düşerse frekans
dönüştürücü alarm verir.
'deki süreyi de içerir..
1-71
3 3
3.3.13 Dalgıç Pompaları için Gelişmiş
Minimum Hız Görüntüleme
Bazı pompalar düşük hızda işletime duyarlıdır. Yetersiz
soğutma veya düşük hızda yağlama tipik nedenlerdir.
Aşırı yük koşulları altında, frekans dönüştürücü hızı
düşürmeyi içeren integral koruma özelliklerini kullanarak
kendini korur. Örneğin, akım sınırı denetleyicisi hızı
düşürebilir. Bazen hız, parametre 4-11 Motor Hızı Alt Sınırı
[RPM] ve parametre 4-12 Motor Hızı Alt Sınırı [Hz] öğesinde
belirtilen hızdan daha düşük olabilir.
Hız belirli bir değerin altına düşerse gelişmiş minimum hız
görüntüleme özelliği frekans dönüştürücüye alarm verdirir.
Pompa motoru, parametre 1-86 Alarm Hızı Alt Sınırı [RPM]
parametresinde belirtilen hıza parametre 1-79 Komprsör
Başltmdn Alarm Mks. Süre parametresinde belirtilen süre
içinde ulaşamazsa (rampalama çok uzun sürerse) frekans
dönüştürücü alarm verir. parametre 1-71 Bşlt. gecikm. ve
parametre 1-79 Komprsör Başltmdn Alarm Mks. Süre
zamanlayıcıları başlatma komutu verildiğinde başlatılır.
Örneğin, parametre 1-71 Bşlt. gecikm. içindeki değer
parametre 1-79 Komprsör Başltmdn Alarm Mks. Süre içindeki
değere eşit veya bu değerden daha büyük ise frekans
dönüştürücü asla başlatılamaz.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 61
Page 64

Parametre Açıklaması
VLT® AQUA Drive FC 202
3.3.14 1-9* Motor Sıcaklığı
1-90 Motor Termal Koruması
Seçenek: fonksiyon:
1-90 Motor Termal Koruması
Seçenek: fonksiyon:
Motor termal koruması bir dizi teknik
33
[0] Koruma
yok
[1] Termistör
uyarısı
[2] Termistör
alarmı
[3] ETR uyarısı1Kurulum 1 etkinken yükü hesaplar ve motor
[4] ETR alarmı1Kurulum 1 etkinken yükü hesaplar ve motor
[5] ETR uyarısı
2
[6] ETR alarmı
2
[7] ETR uyarısı
3
kullanılarak sağlanabilir:
Analog veya dijital girişlerden 1'ine
•
bağlanan motor sargılarındaki bir PTC
sensörü aracılığıyla
(parametre 1-93 Termistör Kaynağı).
Bkz. bölüm 3.3.15 PTC Termistör
Bağlantısı.
Gerçek yüke ve süreye bağlı olan
•
termal yükün hesaplanması ile (ETR =
Elektronik Termal Röle) . Hesaplanan
termal yük nominal motor akımı I
ve nominal motor frekansı f
karşılaştırılır. Ayrıca bkz.
bölüm 3.3.16 ETR ve bölüm 3.3.17 ATEX
ETR.
Bir mekanik termal anahtar (Klixon
•
tipi) yoluyla; Bkz. bölüm 3.3.18 Klixon.
Kuzey Amerika pazarı için: ETR işlevleri, NEC'ye
uygun olarak sınıf 20 motor aşırı yük koruması
sağlar.
Frekans dönüştürücünün uyarı veya açma
vermesi istenmiyorsa sürekli olarak aşırı yüklü
motor.
Motorun aşırı ısınması durumunda, motora
bağlı termistör veya KTY sensörü harekete
geçtiğinde uyarı verir.
Motorun aşırı ısınması durumunda, motora
bağlı termistör veya KTY sensör harekete
geçtiğinde frekans dönüştürücüyü durdurur
(açar).
Termistörü devreden çıkarma değeri 3 kΩ
değerinden fazla olmalıdır.
Sarım koruması için motora bir termistör (PTC
sensörü) entegre edin.
aşırı yüklendiğinde ekranda bir uyarıyı
etkinleştirir. Dijital çıkışların 1'i aracılığıyla bir
uyarı sinyali programlayın.
aşırı yüklendiğinde frekans dönüştürücüyü
durdurur (alarm verir). Dijital çıkışların 1'i
aracılığıyla bir uyarı sinyali programlayın. Uyarı
sırasında ve frekans dönüştürücü alarm
verdiğinde (termal uyarı) sinyal görünür.
M,N
M,N
ile
[8] ETR alarmı
3
[9] ETR uyarısı
4
[10] ETR alarmı
4
[20] ATEX ETR ATEX için Ex-e motorlarının termal izleme
işlevini etkinleştirir. parametre 1-94 ATEX ETR
cur.lim. speed reduction, parametre 1-98 ATEX
ETR interpol. points freq., ve parametre 1-99 ATEX
ETR interpol points current'yi etkinleştirir.
DUYURU!
[20] ATEX ETR seçilirse dizayn kılavuzunun ilgili
bölümündeki yönergeleri ve motor üreticisi tarafından
sağlanan yönergeleri takip edin.
DUYURU!
[20] ATEX ETR seçildiğinde, parametre 4-18 Akım Sınırı
öğesini %150 olarak ayarlayın.
3.3.15 PTC Termistör Bağlantısı
Çizim 3.12 PTC Profili
Besleme olarak dijital bir giriş ve 10 V kullanarak:
Örnek: Motor sıcaklığı çok yükseldiğinde, frekans
dönüştürücü alarm verir.
Parametre kurulumu:
parametre 1-90 Motor Termal Koruması parame-
•
tresini [2] Termistör Alarmı olarak ayarlayın.
parametre 1-93 Termistör Kaynağı parametresini [6]
•
Dijital giriş olarak ayarlayın
62 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 65

PTC / Thermistor
R
OFF
ON
<800 Ω
+10V
130BA152.10
>2.7 kΩ
12 13 18 37322719 29 33 20
5550
39 42 53 54
555039 42 53 54
R
<3.0 k Ω
>3.0 k Ω
+10V
130BA153.11
PTC / Thermistor
OFF
ON
Parametre Açıklaması Programlama Kılavuzu
Çizim 3.13 PTC Termistör Bağlantısı - Dijital Giriş
Besleme olarak analog bir giriş ve 10 V kullanarak:
Örnek: Motor sıcaklığı çok yükseldiğinde, frekans
dönüştürücü alarm verir.
Parametre kurulumu:
parametre 1-90 Motor Termal Koruması parame-
•
tresini [2] Termistör Alarmı olarak ayarlayın.
parametre 1-93 Termistör Kaynağı parametresini [2]
•
Analog giriş 54 olarak ayarlayın.
3.3.16 ETR
Hesaplamalar düşük hızda motorla ilişkili fanın az soğutma
yapmasından kaynaklanan daha düşük güç gereksinimini
tahmin eder.
3 3
Çizim 3.15 ETR Profili
Çizim 3.14 PTC Termistör Bağlantısı - Analog Giriş
Dijital/analog
giriş
Dijital 10 V
Analog 10 V
Tablo 3.10 Eşik Devreden Çıkma Değerleri
DUYURU!
Seçilen besleme voltajının, kullanılan termistör
elemanının özellikleri ile örtüşüp örtüşmediğini kontrol
edin.
Besleme voltajı Eşik
devreden çıkma değerleri
<800 Ω⇒2.7 kΩ
<3.0 kΩ⇒3.0 kΩ
3.3.17 ATEX ETR
VLT T® PTC Termistör Kartı MCB 112, ATEX onaylı motor
sıcaklığı izleme özelliği sağlar. Alternatif olarak, harici bir
ATEX onaylı PTC koruma aygıtı kullanılabilir.
DUYURU!
Bu işlev için yalnızca ATEX Ex-e onaylı motorlar kullanın.
Motor plakasına, onay sertifikasına, veri formuna bakın
veya motor tedarikçisiyle irtibata geçin.
Artırılan güvenlik özelliği bulunan bir Ex-e motorunu
kontrol ederken, belirli sınırlamalar getirmek önemlidir.
Parametreler Tablo 3.11 içinde listelenen düzene göre
programlanmalıdır.
İşlev Ayar.
Parametre 1-90 Motor Termal
Koruması
Parametre 1-94 ATEX ETR cur.lim.
speed reduction
Parametre 1-98 ATEX ETR interpol.
points freq.
Parametre 1-99 ATEX ETR interpol
points current
Parametre 1-23 Motor Frekansı parametre 4-19 Maks. Çıkış
[20] ATEX ETR
20%
Motor plakası.
Frekansı değeriyle aynı değeri
girin.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 63
Page 66

PTC / Thermistor
OFF
ON
+24V
12 13 18 3732
A
2719 29 33B20
GND
R<6.6 k Ω >10.8 k Ω
130BA151.11
1-91 Motor Dış Fanı
Seçenek: fonksiyon:
[0] * Hayır Harici fana gerek yoktur, motor
düşük hızda azaltılır.
[1] Evet Harici motor fanı (harici
havalandırma) uygular, böylelikle
düşük hızda motorun azaltılması
gerekmez. Motor akımı nominal
motor akımından düşük ise
Çizim 3.15 (f
out
= 1 x f
M,N
)
öğesindeki üst eğrisi takip edilir
(bkz. parametre 1-24 Motor Akımı)
Motor akımı nominal akımı aşarsa
işletim süresi fan kurulmamış gibi
azalır.
1-93 Termistör Kaynağı
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
DUYURU!
Dijital girişi
parametre 5-00 Dijital G/Ç
Modu'de [0] PNP - 24 V'de Etkin
olarak ayarlayın.
Termistörün (PTC sensörü)
bağlanması gereken girişi seçin.
Analog girişi seçeneği [1] Analog
girişi 53 veya [2] Analog girişi 54,
analog girişi referans kaynağı olarak
kullanılıyorsa seçilemez.
(parametre 3-15 Referans 1 Kaynağı,
parametre 3-16 Referans 2 Kaynağı
veya parametre 3-17 Referans 3
Kaynağı parametrelerinde seçili).
VLT® PTC Termistör Kartı MCB 112
kullanılırken her zaman [0] Hiçbiri
öğesini seçin.
[0] * Hiçbiri
[1] Analog giriş
53
Parametre Açıklaması
İşlev Ayar.
Parametre 4-19 Maks. Çıkış Frekansı Motor plakası, muhtemelen
uzun motor kabloları için
kısaltılmış, sine-dalga filtresi
veya indirgenmiş besleme
voltajı.
33
Parametre 4-18 Akım Sınırı 1-90 [20] tarafından %150'ye
zorlanmış
Parametre 5-15 Terminal 33 Dijital
Giriş
Parametre 5-19 Ter. 37 Güvenli
Durd.
Parametre 14-01 Anahtarlama
Frekansı
Parametre 14-26 Çevirici Arızasında
Alarm Gecikmesi
Tablo 3.11 Parametreler
[80] PTC Kartı 1
[4] PTC 1 Alarmı
Varsayılan değerin motor
plakasının gerektirdiği değeri
karşıladığını kontrol edin.
Karşılamıyorsa bir sine-dalga
filtresi kullanın.
0
VLT® AQUA Drive FC 202
Çizim 3.16 Termistör Bağlantısı
DUYURU!
Motor üreticisi tarafından belirtilen minimum
anahtarlama frekansının parametre 14-01 Anahtarlama
Frekansı'daki frekans dönüştürücünün minimum
anahtarlama frekansıyla karşılaştırın. Frekans
dönüştürücü bu gerekliliği karşılamıyorsa, bir sine dalga
filtresi kullanın.
ATEX ETR termal görüntüleme hakkında daha fazla bilgi FC
300 ATEX ETR Termal Görüntüleme İşlemi için Uygulama
Notunda bulunabilir.
3.3.18 Klixon
Klixon tipi termal devre kesicilerde KLIXON® metal çanak
kullanılır. Önceden belirlenmiş olan bir aşırı yükte, akımın
disk içerisinde neden olduğu ısı alarma neden olur.
Besleme olarak dijital bir giriş ve 24 V kullanarak:
Örnek: Motor sıcaklığı çok yükseldiğinde, frekans
dönüştürücü alarm verir.
Parametre kurulumu:
•
•
64 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
parametre 1-90 Motor Termal Koruması parametresini [2] Termistör Alarmı olarak ayarlayın.
parametre 1-93 Termistör Kaynağı parametresini [6]
Dijital giriş olarak ayarlayın
Page 67

1-93 Termistör Kaynağı
Seçenek: fonksiyon:
[2] Analog giriş
54
[3] Dijital giriş 18
[4] Dijital giriş 19
[5] Dijital giriş 32
[6] Dijital giriş 33
1-95 KTY Sensör Türü
Seçenek: fonksiyon:
Termistör sensörünün tipini seçin.
[0] * KTY Sensörü 1
1 kΩ at 100 °C (212 °F).
[1] KTY Sensörü 2
1 kΩ at 25 °C (77 °F).
[2] KTY Sensörü 3
2 kΩ at 25 °C (77 °F).
[3] Pt1000
1-96 KTY Termistör Kaynağı
Seçenek: fonksiyon:
Analog giriş terminali 54'ü termistör
sensör girişi olarak seçin. Referans
olarak kullanılıyorsa Terminal 54,
termistör kaynağı olarak seçilemez
(bkz. parametre 3-15 Referans 1
Kaynağı ila parametre 3-17 Referans
3 Kaynağı).
DUYURU!
Termistör sensörünün terminal
54 ile 55 (GND) arasındaki
bağlantısı. Bkz.
bölüm 3.3.15 PTC Termistör
Bağlantısı.
[0] * Hiçbiri
[2] Analog giriş
54
1-97 KTY Eşik düzeyi
Aralık: fonksiyon:
80 °C* [ -40 -
220 °C]
Motor termal koruması için
termistör sensörü eşik düzeyini
seçin.
Parametre Açıklaması Programlama Kılavuzu
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 65
Page 68

2-00 DC Tutc/Önc Isıtm Akımı
Aralık: fonksiyon:
50 %* [ 0 - 160 %]
DUYURU!
Parametre 2-00 DC Tutc/Önc
Isıtm Akımı ayarı,
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP olarak
ayarlandığında etkisizdir.
DUYURU!
Maksimum değer nominal
motor akımına bağlıdır.
Motoru uzun süre %100 akımla
çalıştırmaktan kaçının. Bu,
motora zarar verebilir.
Akımı, parametre 1-24 Motor Akımı
içerisinden ayarlanan nominal
motor akımının I
M,N
yüzdesi olarak
tutmak için bir değer girin. %100
DC tutma akımı, I
M,N
'ye karşılık gelir.
Bu parametre, motoru tutar (tutma
torku) ya da motora ön ısıtma
yapar.
parametre 1-80 Durdurmada İşlev
içerisinde [1] DC Dur./Mtr Ön. Isıt.
seçeneği belirlenirse bu parametre
etkinleştirilir.
2-01 DC Fren Akımı
Aralık: fonksiyon:
50 %* [ 0 - 1000 %]
DUYURU!
Maksimum değer nominal
motor akımına bağlıdır.
Motoru uzun süre %100 akımla
çalıştırmaktan kaçının. Bu,
motora zarar verebilir.
Akımı, parametre 1-24 Motor Akımı
içerisinden ayarlanan nominal
motor akımının I
M,N
yüzdesi olarak
görmek için bir değer girin. %100
DC freni akımı, I
M,N
'ye karşılık gelir.
DC Freni, hız şurada ayarlanan
sınırdan daha düşük olduğunda bir
durdurma komutu ile uygulanır:
2-01 DC Fren Akımı
Aralık: fonksiyon:
•
Parametre 2-03 DC Fren
Dvr. Girme Hızı [RPM].
•
Ters DC freni işlevi
etkinken veya seri iletişim
bağlantı noktası aracılığıyla
Parametre 2-04 DC Fren
Dvr. Girme Hızı [Hz].
Fren akımı parametre 2-02 DC
Frenleme Süresi içerisinde ayarlanan
zaman periyodunda etkindir.
2-02 DC Frenleme Süresi
Aralık: fonksiyon:
10 s* [0 - 60 s] Etkinleştirildiğinde,
parametre 2-01 DC Fren Akımı
içerisinde ayarlanan DC freni
süresini ayarlayın.
2-03 DC Fren Dvr. Girme Hızı [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - 0 RPM]
DUYURU!
Parametre 2-03 DC Fren Dvr.
Girme Hızı [RPM] ayarı,
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP olarak
ayarlandığında etkisizdir.
Durdurma komutundan sonra
parametre 2-01 DC Fren Akımı
içerisinde ayarlı DC freni akımını
etkinleştirmek için DC freni devreye
giriş hızını ayarlayın.
parametre 1-10 Motor Yapısı
parametresi [1] PM, yüzeye mon. SP
olarak ayarlandığında, değer 0 RPM
(OFF) ile sınırlıdır.
2-04 DC Fren Dvr. Girme Hızı [Hz]
Aralık: fonksiyon:
Size
related*
[ 0 - 0.0 Hz]
DUYURU!
Parametre 2-04 DC Fren Dvr.
Girme Hızı [Hz] ayarı,
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP olarak
ayarlandığında etkisizdir.
Durdurma komutundan sonra
parametre 2-01 DC Fren Akımı
içerisinde ayarlı DC freni akımınının
etkinleştirilmesi için DC freni
devreye giriş hızını ayarlayın.
Parametre Açıklaması
VLT® AQUA Drive FC 202
3.4 2-** Frenler Parametreleri
3.4.1 2-0* DC Fren
DC freni ve DC tutma işlevlerinin yapılandırılması için
parametre grubu.
33
66 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 69

2-06 Park Akımı
Aralık: fonksiyon:
50 %* [ 0 - 1000 %]
DUYURU!
Parametre 2-06 Park Akımı ve
parametre 2-07 Park Süresi:
Yalnızca parametre 1-10 Motor
Yapısı içerisinde [1] PM, yüzeye
mon. SP seçiliyse etkindir.
Akımı nominal motor akımının
yüzdesi olarak ayarlayın,
parametre 1-24 Motor Akımı.
parametre 1-73 Dönen Mot.
Yakalama ile etkin. Park etme akımı
parametre 2-07 Park Süresi içerisinde
ayarlanan zaman periyodunda
etkindir.
2-07 Park Süresi
Aralık: fonksiyon:
3 s* [0.1 - 60 s] parametre 2-06 Park Akımı içerisinde
ayarlanan park etme akımının
süresini ayarlayın.
parametre 1-73 Dönen Mot.
Yakalama ile etkin.
DUYURU!
Parametre 2-07 Park Süresi,
yalnızca parametre 1-10 Motor
Yapısı içerisinde [1] PM, yüzeye
mon. SP seçiliyse etkindir.
2-10 Fren İşlevi
Seçenek: fonksiyon:
parametre 1-10 Motor Yapısı öğesine
bağlı seçimler mevcuttur:
[0] Asenkron:
•
[0] Kapalı.
•
[1] Direnç freni.
•
[2] AC fren.
[1] PM, yüzeye mon. SP:
•
[0] Kapalı.
•
[1] Direnç freni.
[0] Kapalı Fren rezistörü takılı değil.
[1] Direnç freni Fazla fren enerjisinin ısı olarak
atılmasını sağlamak için, sistemde
fren rezistörü bulunur. Fren
rezistörünün bağlı olması, frenleme
2-10 Fren İşlevi
Seçenek: fonksiyon:
sırasında daha yüksek DC bağlantısı
voltajının elde edilmesini sağlar.
Fren rezistörü işlevi yalnızca entegre
dinamik frenli frekans dönüştürücülerinde etkindir.
[2] AC fren AC Freni, parametre 1-03 Tork
Karakteristikleri'de yalnızca
Kompresör Torku modunda çalışır.
2-11 Fren Direnci (ohm)
Aralık: fonksiyon:
Size
related*
[ 5 - 65535
Ohm]
Fren direnç değerini Ω cinsinden
ayarlayın. Bu değer,
parametre 2-13 Fren Gücü İzleme
dahilinde fren rezistörüne gelen
gücü izlemek için kullanılır. Bu
parametre yalnızca entegre dinamik
frenli frekans dönüştürücülerinde
etkindir.
Ondalıksız değerler için bu
parametreyi kullanın. 2 ondalıklı bir
seçim için parametre 30-81 Fren
Rezistörü (ohm) kullanın.
2-12 Fren Gücü Sınırı (kW)
Aralık: fonksiyon:
Size
related*
[ 0.001 -
2000.000 kW]
DUYURU!
Bu parametre yalnızca entegre
dinamik frenli frekans
dönüştürücülerinde etkindir.
Dirence aktarılan fren gücünün
izleme sınırını ayarlayın.
İzleme sınırı, ilgili görev
döngüsünde maksimum görev
döngüsü (120 sn.) ile maksimum
fren direnci gücünün çarpımıdır.
Aşağıdaki formüllere bakın.
200-240 V birimleri için:
P
direnç
=
3902 × görevsüresi
R × 120
380-480 V birimleri için:
P
direnç
=
7782 × görevsüresi
R × 120
525-600 V birimleri için:
P
direnç
=
9432 × görevsüresi
R × 120
Parametre Açıklaması Programlama Kılavuzu
3 3
3.4.2 2-1* Fren Enerji İşlevi
Dinamik fren parametrelerinin seçimi için parametre grubu.
Yalnızca fren kesicili frekans dönüştürücüler için geçerlidir.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 67
Page 70

2-13 Fren Gücü İzleme
Seçenek: fonksiyon:
DUYURU!
Bu parametre yalnızca entegre
dinamik frenli frekans
dönüştürücülerinde etkindir.
Bu parametre, fren rezistörü
gücünün izlenmesine olanak tanır.
Güç; direnç (parametre 2-11 Fren
Direnci (ohm)), DC-bağlantı voltajı ve
rezistör görev süresi baz alınarak
hesaplanır.
[0] * Kapalı Fren gücü izleme gerekmez.
Güç izleme [0] Kapalı veya [1] Uyarı
olarak ayarlandıysa izleme sınırı
aşılsa bile fren işlevi etkin kalır. Bu,
rezistörün termal aşırı yüküne yol
açabilir. Röle/dijital çıkışlarla da bir
uyarı üretilebilir. Güç izlemenin
ölçüm doğruluğu rezistörün direnç
doğruluğuna bağlıdır ( ± %20'den
daha iyi).
[1] Uyarı 120 sn üzerinde aktarılan güç
izleme sınırının (parametre 2-12 Fren
Gücü Sınırı (kW )) %100'ünü
geçtiğinde bir uyarı etkinleştirir.
Aktarılan güç, izleme sınırının
%80'inin altına düştüğünde uyarı
yok olur.
[2] Alarm Verme Hesaplanan güç, izleme sınırının
%100'ünü aştığında frekans
dönüştürücüyü uyarır ve bir alarm
görüntüler.
[3] Uyarı ve alrm
verme
Uyarı ve alarm dahil olmak üzere
yukarıdakilerin ikisini de etkinleştirir.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
2-15 Fren kontrolü
Seçenek: fonksiyon:
DUYURU!
[0] Kapalı veya [1] Uyarı
uyarısını şebeke beslemesi
çevrimi yaparak kaldırın.
Öncelikle arızayı düzeltin. [0]
Kapalı veya [1] Uyarı için
frekans dönüştürücü, bir arıza
bulunsa bile çalışmasını
sürdürür.
Fren rezistörüne olan bağlantıyı
veya bir fren rezistörü olup
olmadığını kontrol etmek için test
ve izleme işlevinin türünü seçin ve
ardından bir arıza olursa bir uyarı
veya alarm görüntüleyin. Fren
rezistörü bağlantı kesme işlevi, açılış
sırasında test edilir. Bununla
beraber, frenleme olmadığında fren
IGBT testi yapılır. Bir uyarı veya
alarm, fren işlevinin bağlantısını
keser.
Test sırası şu şekildedir:
1. DC bağlantısı dalga
genliği, frenleme olmadan
300 ms için ölçün.
2. DC bağlantısı dalga
genliği, fren açıkken 300
ms için ölçün.
3. Frenleme varken DC
bağlantısı dalga genliği, +
%1 frenlemeden önceki
DC bağlantısı dalga
genliğinden daha düşükse
fren denetimi başarısız
olur. Fren denetimi
başarısız olursa bi uyarı
veya alarm geri döner.
4. Frenleme varken DC
bağlantısı dalga genliği, +
%1 frenlemeden önceki
DC bağlantısı dalga
genliğinden daha yüksekse
fren denetimi başarılıdır.
[0] * Kapalı İşletim sırasında bir kısa devre için
fren rezistörünü ve fren IGBT'sini
izler. Kısa devre durumunda, bir
uyarı görünür.
[1] Uyarı Bir kısa devre için fren rezistörünü
ve fren IGBT'sini izler ve açılış
sırasında fren rezistörü bağlantı
kesilmesi için bir test çalıştırır.
Parametre Açıklaması
33
68 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 71

2-15 Fren kontrolü
Seçenek: fonksiyon:
[2] Alarm Verme Kısa devreyi veya fren rezistörü
bağlantısının kesilmesini ya da fren
IGBT'si kısa devresini izler. Bir arıza
durumunda, frekans dönüştürücü
bir alarm (görüntülerken devreden
çıkarır (alarm kilidi).
[3] Durd. ve al.
ver.
Kısa devreyi veya fren rezistörü
bağlantısının kesilmesini ya da fren
IGBT'si kısa devresini izler. Bir arıza
durumunda, frekans dönüştürücü
yanaşmaya yavaşlar ve ardından
alarm verir. Kilit alarmı görüntülenir.
[4] AC fren Kısa devreyi veya fren rezistörü
bağlantısının kesilmesini ya da fren
IGBT'si kısa devresini izler. Bir arıza
durumunda, frekans dönüştürücü
kontrollü yavaşlama yapar.
2-16 AC fren Maks. Akım
Aralık: fonksiyon:
100 %* [ 0 -
1000.0 %]
DUYURU!
Parametre 2-16 AC fren Maks.
Akım ayarı,
parametre 1-10 Motor Yapısı [1]
PM, yüzeye mon. SP olarak
ayarlandığında etkisizdir.
Motor sarımlarının aşırı ısınmasını
önlemek için AC frenleme kullanılırken izin verilen maksimum akım
değerini girin.
2-17 Aşırı Voltaj Denetimi
Seçenek: fonksiyon:
[0] Devre dışı OVC gerekli değildir.
[2] * Etkin OVC’yi etkinleştirir.
2-19 Over-voltage Gain
Aralık: fonksiyon:
100 %* [10 - 200 %] Aşırı voltaj kazancını seçin.
Parametre Açıklaması Programlama Kılavuzu
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 69
Page 72

3-02 Minimum Referans
Aralık: fonksiyon:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Uzak referans için minimum değeri
girin. Minimum referans değeri ve
birim, parametre 1-00 Konfigürasyon
Modu ve parametre 20-12 Referans/
Geri Besleme Birimi parametrelerinde
yapılan yapılandırma seçimiyle
eşleşir.
3-03 Maksimum Referans
Aralık: fonksiyon:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Uzak referans için bir maksimum
kabul edilebilir değeri girin.
Maksimum referans değeri ve birim,
parametre 1-00 Konfigürasyon Modu
ve parametre 20-12 Referans/Geri
Besleme Birimi parametrelerinde
yapılan yapılandırma seçimine
karşılık gelir.
3-04 Referans İşlev
Seçenek: fonksiyon:
[0] * Toplam Hem harici hem de önceden
ayarlanmış referans kaynaklarını
toplar.
[1] Dış/Ön Ayar Önceden ayarlanmış veya harici
referans kaynağını kullanın.
Harici ve önceden ayarlanmış
arasında komut veya dijital giriş ile
geçiş yapın.
3-10 Önceden Ayarlı Referans
Dizi [8]
Aralık: fonksiyon:
0 %* [-100 -
100 %]
Bu parametrede dizi programlama
kullanarak birbirinden farklı
önceden ayarlanmış en fazla 8
referans (0-7) girin. Önceden
ayarlanmış Ref
MAX
referans değerinin
yüzdesi olarak belirtilir
(parametre 3-03 Maksimum
Referans). Önceden ayarlı
referansları kullanırken, 5-1* Dijital
Girişler parametre grubundaki ilgili
3-10 Önceden Ayarlı Referans
Dizi [8]
Aralık: fonksiyon:
dijital girişler için Önc. ayar ref. bit
0/1/2 [16], [17] veya [18]’i seçin.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
[P 5-13=Preset ref. bit 0]
Preset
[P 5-14=Preset ref. bit 1]
[P 5-15=Preset ref. bit 2]
10101010
76543210
29
12
(+24V)
11001100
32
11110000
33
130BA149.10
3-11 Arlk. Çlşt. Hızı [Hz]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-14
Hz]
Yavaş çalıştırma hızı, yavaş
çalıştırma işlevi etkinleştirildiğinde
frekans dönüştürücünün çalıştığı
sabit çıkış hızıdır.
Ayrıca bkz. parametre 3-19 Arlk. Çlşt.
Hızı [RPM] ve parametre 3-80 Aralıklı
Çalıştırma Rampa Süresi.
Parametre Açıklaması
VLT® AQUA Drive FC 202
3.5 3-** Rferans / Rampalar Parametreleri
3.5.1 3-0* Referans Sınırları
33
3.5.2 3-1* Referanslar
Önceden ayarlanmış referansları seçin. 5.1* Dijital Girişler
parametre grubundaki ilgili dijital girişler için Önc. ayarlı ref.
bit 0/1/2 [16], [17] veya [18]’i seçin.
70 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Çizim 3.17 Önceden Ayarlı Referans
Çizim 3.18 Önceden Ayarlanmış Referans Şeması
Page 73

3-13 Referans Sitesi
Seçenek: fonksiyon:
Hangi referans sitesinin etkinleştirileceğini seçin.
[0] * Ele Bağlı /
Otomatik
El ile modundayken yerel referansı
veya oto. modundayken uzaktan
referans kullanın.
[1] Uzaktan Hem el ile modunda hem de oto.
modunda uzaktan referans kullanın.
[2] Yerel Hem el ile modunda hem de oto.
modunda yerel referans kullanın.
DUYURU!
[2] Yerel öğesine ayarlan-
dığında, frekans dönüştürücü
kapatmadan sonra yeniden bu
ayar ile başlatılır.
[3] Linked to H/A
MCO
FFACC faktörünü etkinleştirmek için
bu seçeneği işaretleyin. FFACC'nin
etkinleştirilmesi seğirmeyi azaltır ve
hareket denetleyiciden frekans
dönüştürücünün kontrol kartına
giden iletimi hızlandırır. Bu, dinamik
uygulamalar ve konum kontrolü için
tepki sürelerini hızlandırır. FFACC
hakkında daha fazla bilgi için bkz.
VLT® Hareket Denetleme MCO 305
Kullanma Kılavuzu.
3-14 Önceden Ayarlı Göreli Referans
Aralık: fonksiyon:
0 %* [-100 -
100 %]
X gerçek referansı
parametre 3-14 Önceden Ayarlı Göreli
Referans parametresinde ayarlanan
Y yüzdesi ile artırılır veya azaltılır.
Bu, Z gerçek referansı ile sonuçlanır.
Gerçek referans (X) şurada seçili
girişlerin toplamıdır:
•
Parametre 3-15 Referans 1
Kaynağı.
•
Parametre 3-16 Referans 2
Kaynağı.
•
Parametre 3-17 Referans 3
Kaynağı.
•
Parametre 8-02 Kontrol
Kaynağı.
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Referans 1 Kaynağı
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
1. referans sinyali için kullanılacak
referans girişini seçin:
•
Parametre 3-15 Referans 1
Kaynağı.
•
Parametre 3-16 Referans 2
Kaynağı.
•
Parametre 3-17 Referans 3
Kaynağı.
3 farklı referans sinyaline kadar
tanımlayın. Bu referans sinyallerinin
toplamı gerçek referansı tanımlar.
[0] İşlev yok
[1] * Analog giriş
53
[2] Analog giriş
54
[7] Darbe grş 29
[8] Darbe grş 33
[20] Dijital
pot.metre
[21] Analog giriş
X30/11
[22] Analog giriş
X30/12
[23] Analog Girişi
X42/1
[24] Analog Girişi
X42/3
[25] Analog Girişi
X42/5
[29] Analog Giriş
X48/2
[30] Dış Kapalı
Çevrim 1
Parametre Açıklaması Programlama Kılavuzu
3 3
Çizim 3.20 Gerçek Referans
Çizim 3.19 Önceden Ayarlı Göreli Referans
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 71
Page 74

3-15 Referans 1 Kaynağı
Seçenek: fonksiyon:
[31] Dış Kapalı
Çevrim 2
[32] Dış Kapalı
Çevrim 3
[35] Digital input
select
Dijital girişlerin 1'i olarak frekans
dönüştürücü, [42] Ref kanyağı bit
0seçeneğinde tanımlı giriş sinyaline
bağlı olarak AI53 veya AI54'ü
referans kaynağı olarak seçer. Daha
fazla bilgi için bkz. 5-1* Dijital
Girişler parametre grubu, [42] Ref.
kaynağı bit 0 seçeneği.
3-16 Referans 2 Kaynağı
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
2. referans sinyali için kullanılacak
referans girişini seçin:
•
Parametre 3-15 Referans 1
Kaynağı.
•
Parametre 3-16 Referans 2
Kaynağı.
•
Parametre 3-17 Referans 3
Kaynağı.
3 farklı referans sinyaline kadar
tanımlayın. Bu referans sinyallerinin
toplamı gerçek referansı tanımlar.
[0] * İşlev yok
[1] Analog giriş
53
[2] Analog giriş
54
[7] Darbe grş 29
[8] Darbe grş 33
[20] Dijital
pot.metre
[21] Analog giriş
X30/11
[22] Analog giriş
X30/12
[23] Analog Girişi
X42/1
[24] Analog Girişi
X42/3
[25] Analog Girişi
X42/5
[29] Analog Giriş
X48/2
3-16 Referans 2 Kaynağı
Seçenek: fonksiyon:
[30] Dış Kapalı
Çevrim 1
[31] Dış Kapalı
Çevrim 2
[32] Dış Kapalı
Çevrim 3
[35] Digital input
select
Dijital girişlerin 1'i olarak frekans
dönüştürücü, [42] Ref kanyağı bit
0seçeneğinde tanımlı giriş sinyaline
bağlı olarak AI53 veya AI54'ü
referans kaynağı olarak seçer. Daha
fazla bilgi için bkz. 5-1* Dijital
Girişler parametre grubu, [42] Ref.
kaynağı bit 0 seçeneği.
3-17 Referans 3 Kaynağı
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
3. referans sinyali için kullanılacak
referans girişini seçin:
•
Parametre 3-15 Referans 1
Kaynağı.
•
Parametre 3-16 Referans 2
Kaynağı.
•
Parametre 3-17 Referans 3
Kaynağı.
3 farklı referans sinyaline kadar
tanımlayın. Bu referans sinyallerinin
toplamı gerçek referansı tanımlar.
[0] * İşlev yok
[1] Analog giriş
53
[2] Analog giriş
54
[7] Darbe grş 29
[8] Darbe grş 33
[20] Dijital
pot.metre
[21] Analog giriş
X30/11
[22] Analog giriş
X30/12
[23] Analog Girişi
X42/1
[24] Analog Girişi
X42/3
[25] Analog Girişi
X42/5
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
72 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 75
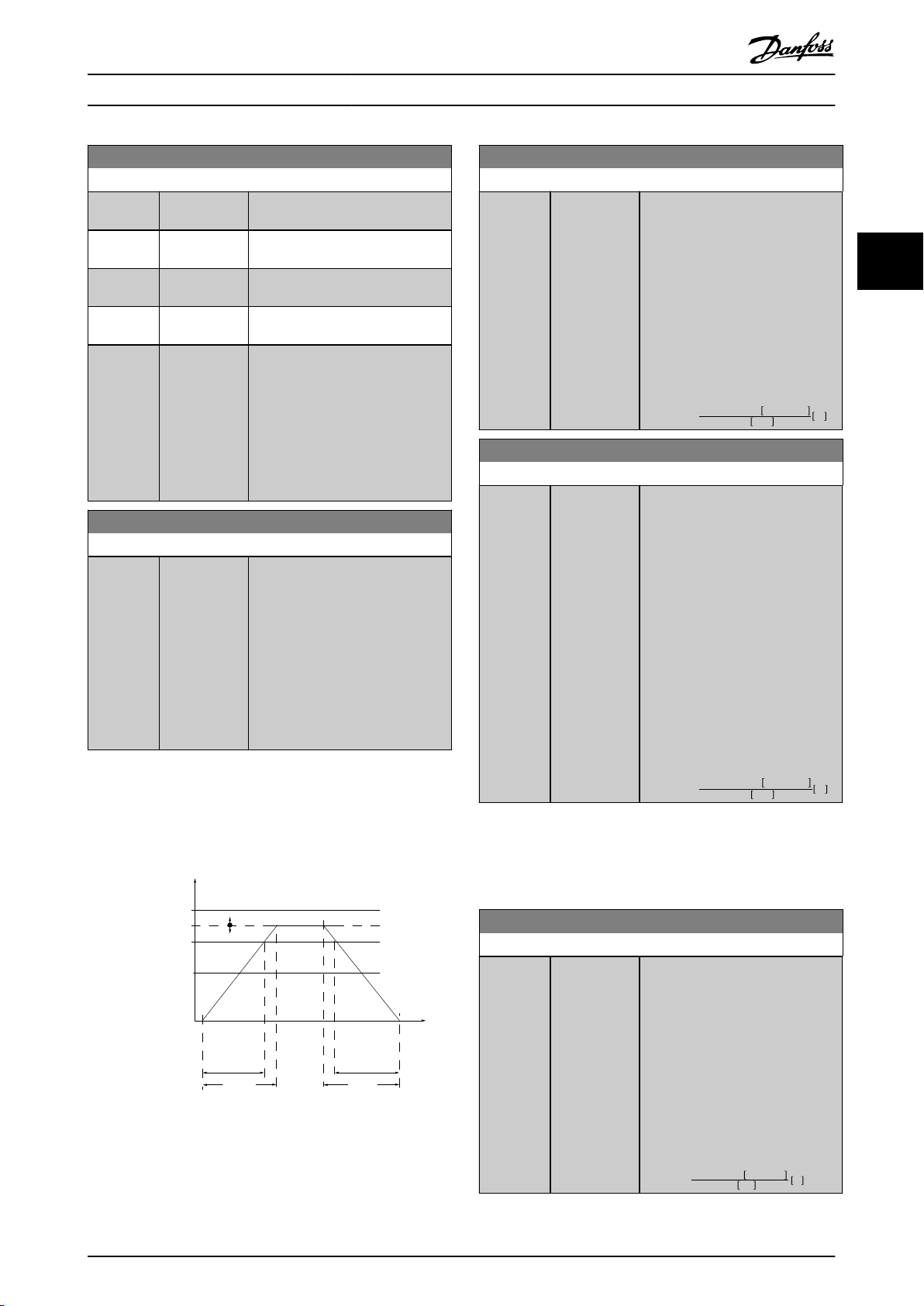
3-17 Referans 3 Kaynağı
Seçenek: fonksiyon:
[29] Analog Giriş
X48/2
[30] Dış Kapalı
Çevrim 1
[31] Dış Kapalı
Çevrim 2
[32] Dış Kapalı
Çevrim 3
[35] Digital input
select
Dijital girişlerin 1'i olarak frekans
dönüştürücü, [42] Ref kanyağı bit
0seçeneğinde tanımlı giriş sinyaline
bağlı olarak AI53 veya AI54'ü
referans kaynağı olarak seçer. Daha
fazla bilgi için bkz. 5-1* Dijital
Girişler parametre grubu, [42] Ref.
kaynağı bit 0 seçeneği.
3-19 Arlk. Çlşt. Hızı [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-13
RPM]
Sabit bir çıkış hızı olan n
JOG
aralıklı
çalıştırma hızı için bir değer girin.
Aralıklı çalıştırma işlevi etkinleştirildiğinde frekans dönüştürücü bu
hızda çalışır. Maksimum sınır
parametre 4-13 Motor Hızı Üst Sınırı
[RPM]'de tanımlanır.
Ayrıca bkz. parametre 3-11 Arlk. Çlşt.
Hızı [Hz] ve parametre 3-80 Aralıklı
Çalıştırma Rampa Süresi.
t
acc
t
dec
130BA169.11
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-13
High-limit
RPM
Reference
P 1-25
Motor
speed
P 4-11
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
3-41 Rampa 1 Hızlanma Süresi
Aralık: fonksiyon:
Size
related*
[ 0.10 - 3600s]Hızlanma ivme süresini, yani,
ivmelenme süresini 0 RPM ila
parametre 1-25 Motor Nominal Hızı
arası için girin. Çıkış akımının
hızlanma sırasındaki
parametre 4-18 Akım Sınırı içindeki
akım sınırını aşmayacak şekilde bir
hızlanma süresi seçin.
parametre 3-42 Rampa 1 Yavaşlama
Süresi parametresindeki yavaşlama
süresine bakın.
par . 3 − 41 =
thzlnm × nnom par .1 − 25
ref RPM
sn
3-42 Rampa 1 Yavaşlama Süresi
Aralık: fonksiyon:
Size
related*
[ 0.10 - 3600s]Rampa yavaşlama süresini, yani,
yavaşlama süresini 0 RPM ila
parametre 1-25 Motor Nominal Hızı
arası için girin. Motorun pozitif
geribeslemeli işletimi nedeniyle
çeviriciden kaynaklanan aşırı voltajı
önleyecek bir rampa yavaşlama
süresi seçin. Rampa yavaşlama
süresi ayrıca, oluşan akımın
parametre 4-18 Akım Sınırı parametresinde ayarlanan akım sınırını
aşmasını engelleyecek kadar uzun
olmalıdır. parametre 3-41 Rampa 1
Hızlanma Süresi parametresindeki
hızlanma süresine bakın.
par . 3 − 42 =
tazlma × nnom par .1 − 25
ref RPM
sn
3-51 Rampa 2 Hızlanma Süresi
Aralık: fonksiyon:
Size
related*
[ 0.10 - 3600s]Hızlanma ivme süresini, yani,
ivmelenme süresini 0 RPM ila
parametre 1-25 Motor Nominal Hızı
arası için girin. Çıkış akımının
hızlanma sırasındaki
parametre 4-18 Akım Sınırı içindeki
akım sınırını aşmayacak şekilde bir
hızlanma süresi seçin.
parametre 3-52 Rampa 2 Yavaşlama
Süresi parametresindeki yavaşlama
süresine bakın.
par . 3 − 51 =
thzlnm × nnom par .1 − 25
ref rpm
sn
Parametre Açıklaması Programlama Kılavuzu
3 3
3.5.3 3-4* Rampa 1
Her 2 rampa için rampa sürelerini yapılandırın (parametre
grubu 3-4* Rampa 1 ve parametre grubu 3-5* Rampa 2)
Çizim 3.21 Rampa 1
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 73
3.5.4 3-5* Rampa 2
Rampa parametrelerini seçmek için bkz. 3-4* Rampa 1
parametre grubu.
Page 76

3-52 Rampa 2 Yavaşlama Süresi
Aralık: fonksiyon:
Size
related*
[ 0.10 - 3600s]Rampa yavaşlama süresini, yani,
yavaşlama süresini 0 RPM ila
parametre 1-25 Motor Nominal Hızı
arası için girin. Motorun pozitif geri
beslemeli, işletimi nedeniyle
çeviricide aşırı voltaj olmayacak ve
oluşan akımın parametre 4-18 Akım
Sınırı parametresinde belirtilen akım
limitini aşmayacağı bir yavaşlama
süresi seçin. parametre 3-51 Rampa
2 Hızlanma Süresi parametresindeki
hızlanma süresine bakın.
par . 3 − 52 =
tazlma × nnom par .1 − 25
ref rpm
sn
3-80 Aralıklı Çalıştırma Rampa Süresi
Aralık: fonksiyon:
Size
related*
[0.1 - 3600 s] Aralıklı çalıştırma rampa süresini,
yani 0 RPM ile nominal motor hızı
arasındaki hızlanma/yavaşlama
süresini (n
M,N
) (parametre 1-25 Motor
Nominal Hızı parametresinde
ayarlanan) girin. Verilen aralıklı
çalıştırma süresi için gereken çıkış
akımının parametre 4-18 Akım Sınırı
parametresindeki akım sınırını
aşmadığından emin olun. Aralıklı
çalıştırma rampa süresi kontrol
panei, seçili bir dijital giriş veya seri
iletişim bağlantı noktası aracılığıyla
aralıklı çalıştırma sinyali etkinleştirildikten sonra başlatılır.
par . 3 − 80 =
taralıklı çalıştırma ×nnom par .1 − 25
aralıklı çalıştırmahızı par . 3 − 19
sn
130BA070.10
Time
P 3-80
RPM
P 4-13 RPM
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-11 RPM
low limit
3-84 Initial Ramp Time
Aralık: fonksiyon:
0 s* [0 - 60 s] İlk hızlanma süresini sıfırdan Motor
Hızı Alt Sınırı, parametre 4-11 Motor
Hızı Alt Sınırı [RPM] veya
parametre 4-12 Motor Hızı Alt Sınırı
[Hz] parametresine kadar girin.
Minimum hızın altında çalışması
dalgıç pompaya zarar verebilir.
Minimum pompa hızının altında
hızlı rampa süresi önerilir. Bu
parametre sıfırdan motor hızı alt
sınırına kadar olan hızlı rampa oranı
olarak uygulanabilir. Bkz. Çizim 3.23.
130BA962.10
Motor Speed
Motor Speed
High
Low
Normal
Ramps
Initial
Ramp
Final
Ramp
Time
Speed
3-85 Check Valve Ramp Time
Aralık: fonksiyon:
0 s* [0 - 650 s] Valf rampası kontrol topuzunu
korumak için kontrol valfi rampası
parametre 4-11 Motor Hızı Alt Sınırı
[RPM] veya parametre 4-12 Motor
Hızı Alt Sınırı [Hz] parametrelerinden
kontrol valfi parametre 3-86 Check
Valve Ramp End Speed [RPM] veya
parametre 3-87 Check Valve Ramp
End Speed [HZ] parametrelerinde
ayarlanan rampa sonu hızına yavaş
rampa değeri olarak kullanılabilir.
parametre 3-85 Check Valve Ramp
Time değeri 0 sn'den farklı
olduğunda, kontrol valf rampası
süresi etkilenir ve motor hızı alt
sınırından parametre 3-86 Check
Valve Ramp End Speed [RPM] veya
parametre 3-87 Check Valve Ramp
End Speed [HZ] parametrelerindeki
kontrol valfi son hızını yavaşlatmak
için kullanılır. Bkz. Çizim 3.24.
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
3.5.5 3-8* Diğer Rampalar
Çizim 3.22 Jog Rampa Süresi
74 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Çizim 3.23 İlk ve Son Rampa Süresi
Page 77

130BA961.10
Speed
Motor Speed
Normal
Check valve
Motor Speed
High
Low
Time
Ramp
End Speed
3-86 Check Valve Ramp End Speed [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-11
RPM]
Kontrol valfinin kapatılmasının
beklendiği motor hızı alt sınırının
altındaki hızı [RPM] cinsinden
ayarlayın. Valfin artık etkin
olmadığını kontrol edin. Bkz.
Çizim 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-12
Hz]
Denetim Valfi Rampası etkin
olmadığı zaman Motor Hızı Alt
Sınırı'nın altında [Hz] cinsinden hız
ayarlanabilir. Bkz. Çizim 3.24.
3-88 Final Ramp Time
Aralık: fonksiyon:
0 s* [0 - 60 s] parametre 4-11 Motor Hızı Alt Sınırı
[RPM] veya parametre 4-12 Motor
Hızı Alt Sınırı [Hz] değerinden sıfır
hıza yavaşlarken kullanılacak son
rampa süresini girin.
Minimum hızın altında çalışması
dalgıç pompaya zarar verebilir.
Minimum pompa hızının altında
hızlı rampa süresi önerilir. Bu
parametre parametre 4-11 Motor Hızı
Alt Sınırı [RPM] veya
parametre 4-12 Motor Hızı Alt Sınırı
[Hz] değerinden sıfıra getirmek
üzere hızlı rampa oranı olarak
kullanılabilir. Bkz. Çizim 3.23.
3-90 Adım Boyutu
Aralık: fonksiyon:
0.10 %* [0.01 200 %]
Senkron motor hızı ns'nin yüzdesi
olarak arırma/azalrma için gereken
artış ölçüsünü girin. Artırma/azaltma
etkinleştirilirse sonuç referansı, bu
parametrede ayarlanan değer ile
artırılır veya azaltılır.
3-91 Rampa Süresi
Aralık: fonksiyon:
1 s [0 - 3600 s] Rampa süresini, yani belirtilen dijital
potansiyometre işlevinin (artırma,
azaltma veya temizleme) %0-100
referansının ayarı için mevcut süreyi
girin.
Artırma/azaltma,
parametre 3-95 Rampa Gecikmesi
parametresinde belirtilen rampa
gecikme periyodundan daha uzun
bir süre için etkinleştirilirse gerçek
referans bu rampa süresine göre
hızlanır/yavaşlar. Rampa süresi,
referansın parametre 3-90 Adım
Boyutu parametresinde belirtilen
adım ölçüsü tarafından ayarlanması
için harcanan süre olarak tanımlanır.
3-92 Güç Geri Yükleme
Seçenek: fonksiyon:
[0] * Kapalı Açmadan sonra dijital potansi-
yometre referansını %0'a sıfırlar.
[1] Açık Açmada, en son dijital potansi-
yometre referansını geri yükler.
3-93 Maksimum Sınır
Aralık: fonksiyon:
100 %* [-200 -
200 %]
Sonuç referansı için bir maksimum
kabul edilebilir değeri girin. Dijital
potansiyometre sonuç referansının
ince ayarı için kullanıldığında bu
önerilir.
Parametre Açıklaması Programlama Kılavuzu
Çizim 3.24 Valf Rampasını Kontrol Et
3.5.6 3-9* Dijital Pot.metresi
İşlev artırma, azaltma veya temizleme kullanarak dijital
girişlerin kurulumunu ayarlayarak gerçek referansı artırmak
veya azaltmak için dijital potansiyometre işlevini kullanın.
İşlevi etkinleştirmek için en az 1 dijital giriş artır veya azalt
olarak ayarlanmalıdır.
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 75
Page 78

3-94 Minimum Sınır
Aralık: fonksiyon:
0 %* [-200 -
200 %]
Sonuç referansı için bir minimum
kabul edilebilir değeri girin. Dijital
potansiyometre sonuç referansının
ince ayarı için kullanıldığında bu
önerilir.
3-95 Rampa Gecikmesi
Aralık: fonksiyon:
Size
related*
[ 0 - 0 ] Frekans dönüştürücü referansı
rampalamaya başlayana kadar dijital
potansiyometrenin etkinleştirilmesi
için gereken gecikmeyi girin.
Artırma/azaltma etkinleştirildğinde 0
ms'lik gecikme ile referans
rampalamaya başlar. Ayrıca bkz.
parametre 3-91 Rampa Süresi.
Speed
Time (s)
Inc
130BA158.11
P 3-95
Speed
Time (s)
Dec
Inc
130BA159.11
P 3-95
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
Çizim 3.25 Rampa Gecikme Durumu 1
Çizim 3.26 Rampa Gecikme Durumu 2
76 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 79
4-10 Motor Hızı Yönü
Seçenek: fonksiyon:
Gerekli motor hız yönünü seçer.
parametre 1-00 Konfigürasyon Modu
[3] Kapalı Çevrim olarak ayarlan-
dığında, parametre varsayılanı [0]
Saat yönünde olarak ayarlanır. Her
iki yön de seçilirse LCP'den saat
yönünün tersinde seçilemez.
[0] * Saat yönünde
[2] Her iki yön
4-11 Motor Hızı Alt Sınırı [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-13
RPM]
Motor hızı için RPM cinsinden
minimum sınırı girin. Motor hızı alt
sınırı üreticinin önerdiği minimum
motor hızına göre ayarlanabilir.
Motor hızı alt sınırı
parametre 4-13 Motor Hızı Üst Sınırı
[RPM] değerindeki ayarı
aşmamalıdır.
4-12 Motor Hızı Alt Sınırı [Hz]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-14
Hz]
Motor hızı için Hz cinsinden
minimum sınırı girin. Motor hızı alt
sınırı üreticinin önerdiği, motor
milinin minimum çıkış frekansına
göre ayarlanabilir. Hızı Alt Sınırı
parametre 4-14 Motor Hızı Üst Sınırı
[Hz] değerindeki ayarı aşmamalıdır.
4-13 Motor Hızı Üst Sınırı [RPM]
Aralık: fonksiyon:
Size
related*
[ 0 - 60000
RPM]
DUYURU!
parametre 4-13 Motor Hızı Üst
Sınırı [RPM] parametresinde
yapılan değişiklikler,
parametre 4-53 Uyarı Hız
Yüksek parametresindeki
değeri parametre 4-13 Motor
Hızı Üst Sınırı [RPM] parame-
tresinde ayarlanan değere
sıfırlar.
DUYURU!
Maksimum çıkış frekansı
çevirici anahtarlama
frekansının () %10’unu aşamaz
(parametre 14-01 Anahtarlama
Frekansı).
Motor hızı için RPM cinsinden
maksimum sınırı girin. Motor hızı
üst sınırı üreticinin önerdiği
maksimum nominal motor hızına
göre ayarlanabilir. Motor hızı üst
sınırı parametre 4-11 Motor Hızı Alt
Sınırı [RPM] değerindeki ayarı
aşmamalıdır.
Parametre adı şunlara bağlı olarak
parametre 4-11 Motor Hızı Alt Sınırı
[RPM] veya parametre 4-12 Motor
Hızı Alt Sınırı [Hz] olarak görünür:
•
Diğer parametrelerin Ana
Menü'deki ayarları.
•
Coğrafi konuma dayalı
varsayılan ayarlar.
4-14 Motor Hızı Üst Sınırı [Hz]
Aralık: fonksiyon:
Size
related*
[ .1 - par.
4-19 Hz]
Motor hızı için maksimum sınırı Hz
cinsinden girin.
Parametre 4-14 Motor Hızı Üst Sınırı
[Hz] üreticinin önerdiği maksimum
motor hızına göre ayarlanabilir.
Motor hızı üst sınırının
parametre 4-12 Motor Hızı Alt Sınırı
[Hz] değerini aşması gerekir. Çıkış
frekansı anahtarlama frekansının
%10’unu aşamaz
(parametre 14-01 Anahtarlama
Frekansı).
Parametre Açıklaması Programlama Kılavuzu
3.6 4-** Sınırlar / Uyarılar Parametreleri
3.6.1 4-1* Motor Sınırları
Motor için torku, akımı ve hız sınırlarını ve sınırlar
aşıldığında frekans dönüştürücünün vereceği tepkiyi
belirleyin
Bir sınır ekranda mesaj oluşturabilir. Bir uyarı ekranda veya
fieldbus'ta daima bir mesaj oluşturur. Görüntüleme işlevi,
sonrasında frekans dönüştürücünün duracağı ve bir alarm
mesajı oluşturacağı bir uyarı veya alarm verebilir.
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 77
Page 80

4-16 motor modda moment limiti
Aralık: fonksiyon:
Size
related*
[ 0 -
1000.0 %]
Motor işletimi için maksimum tork
sınırını girin. Tork sınırı,
parametre 1-25 Motor Nominal Hızı
parametresinde ayarlı nominal
motor hızına kadar olan hız
aralığında etkindir. Motorun
tekleme torkuna ulaşmasının önüne
geçmek adına varsayılan ayar, 1,1 x
nominal motor torkudur
(hesaplanan değer). Diğer ayrıntılar
için bkz. parametre 14-25 Moment
Sınırında Alarm Gecikmesi.
parametre 1-00 Konfigürasyon Modu
ila parametre 1-28 Motor Dönüş
Kontrolü arasında bir ayar değişti-
rilirse parametre 4-16 motor modda
moment limiti otomatik olarak
varsayılan ayara sıfırlanmaz.
4-17 jeneratör modda moment limiti
Aralık: fonksiyon:
100 %* [ 0 -
1000.0 %]
Jeneratör modu işletimi için
maksimum tork sınırını girin. Tork
sınırı, nominal motor hızına kadar
olan hız aralığında etkindir
(parametre 1-25 Motor Nominal Hızı).
Diğer ayrıntılar için bkz.
parametre 14-25 Moment Sınırında
Alarm Gecikmesi.
parametre 1-00 Konfigürasyon Modu
ila parametre 1-28 Motor Dönüş
Kontrolü arasında bir ayar değişti-
rilirse parametre 4-17 jeneratör
modda moment limiti otomatik
olarak varsayılan ayara sıfırlanmaz.
4-18 Akım Sınırı
Aralık: fonksiyon:
Size
related*
[ 1.0 -
1000.0 %]
Motor ve jeneratör işletimi için akım
sınırını girin. Motorun tekleme
torkuna ulaşmasının önüne geçmek
adına varsayılan ayar, 1,1 x nominal
motor torkudur (hesaplanan değer).
parametre 1-00 Konfigürasyon Modu
ila parametre 1-26 Nominal Motor
Torku arasında bir ayar değiştirilirse
parametre 4-18 Akım Sınırı otomatik
olarak varsayılan ayara sıfırlanmaz.
4-19 Maks. Çıkış Frekansı
Aralık: fonksiyon:
Size
related*
[ 1 - 590 Hz]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
DUYURU!
parametre 1-10 Motor Yapısı
parametresi [1] PM, yüzeye
mon. SP olarak ayarlandığında,
maksimum değer 300 Hz ile
sınırlıdır.
Maksimum çıkış frekansı değerini
girin. Parametre 4-19 Maks. Çıkış
Frekansı, kasıtsız aşırı hızlanmadan
kaçınılmasının gerktiği uygulamalarda gelişmiş güvenlik için
frekans dönüştürücü çıkış frekansındaki mutlak sınırı belirler. Bu
mutlak sınır tüm yapılandırmalara
uygulanır ve
parametre 1-00 Konfigürasyon Modu
modundaki ayardan bağımsızdır.
4-50 Uyarı Akım Düşük
Aralık: fonksiyon:
0 A* [ 0 - par. 4-51A]Uyarılar ekranda, programlanan
çıkışta veya fieldbus'ta gösterilir.
130BA064.10
(P 4-18)
(P 4-51)
(P 4-50)
(P 4-11) (P 4-53)(P 4-52) (P 4-13)
I
HIGH
I
LOW
n
LOW
n
HIGH
n
motor
I
motor
REF
ON REF
IN RANGE
I
LIM
n
MAX
n
MIN
[RPM]
Çizim 3.27 Düşük Akım Sınırı
I
LOW
değerini girin. Motor akımı bu
sınırın (I
LOW
) altına düşerse ekranda
Akım düşük okunur. Terminal 27
veya 29’da ve röle çıkışı 01 veya
02’de bir durum sinyali üretmek
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
78 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
3.6.2 4-5* Bitişik Uyarılar
Akım, hız ve geri besleme için ayarlanabilir uyarı sınırlarını
tanımlayın.
DUYURU!
Ekranda görünmez, yalnızca MCT 10 Kurulum Yazılımı
yazılımında görünür.
Page 81

4-50 Uyarı Akım Düşük
Aralık: fonksiyon:
üzere sinyal çıkışı programlanabilir.
Bkz. Çizim 3.27.
4-51 Uyarı Akım Yüksek
Aralık: fonksiyon:
Size
related*
[ par. 4-50 par. 16-37 A]
I
HIGH
değerini girin. Motor akımı bu
sınırı I
HIGH
aşarsa ekranda Akım
yüksek okunur. Terminal 27 veya
29’da ve röle çıkışı 01 veya 02’de bir
durum sinyali üretmek üzere sinyal
çıkışı programlanabilir. Bkz.
Çizim 3.27.
4-52 Uyarı Hız Düşük
Aralık: fonksiyon:
0 RPM* [ 0 - par. 4-53
RPM]
n
LOW
değerini girin. Motor hızı bu
sınırın (I
LOW
) altına düşerse ekranda
Hız düşük okunur. Terminal 27 veya
29’da ve röle çıkışı 01 veya 02’de bir
durum sinyali üretmek üzere sinyal
çıkışı programlanabilir. Motor hızının
alt sinyal sınırını n
LOW
, frekans
dönüştürücünün normal işletim
aralığının içinde programlayın. Bkz.
Çizim 3.27.
4-53 Uyarı Hız Yüksek
Aralık: fonksiyon:
Size
related*
[ par. 4-52 par. 4-13 RPM]
DUYURU!
parametre 4-13 Motor Hızı Üst
Sınırı [RPM] parametresinde
yapılan değişiklikler,
parametre 4-53 Uyarı Hız
Yüksek parametresindeki
değeri parametre 4-13 Motor
Hızı Üst Sınırı [RPM] parame-
tresinde ayarlanan değerin
aynısına sıfırlar.
parametre 4-53 Uyarı Hız
Yüksek bölümünde farklı bir
değer gerekirse
parametre 4-13 Motor Hızı Üst
Sınırı [RPM] programlandıktan
sonra ayarlanması gerekir.
n
HIGH
değerini girin. Geri besleme
bu sınırı (n
HIGH
) aşarsa ekranda
Yüksek hız okunur. Terminal 27 veya
29’da ve röle çıkışı 01 veya 02’de bir
durum sinyali üretmek üzere sinyal
çıkışı programlanabilir. Motor hızının
üst sinyal sınırını, n
HIGH,
frekans
dönüştürücünün normal işletim
4-53 Uyarı Hız Yüksek
Aralık: fonksiyon:
aralığının içinde programlayın. Bkz.
Çizim 3.27.
4-54 Uyarı Referans Düşük
Aralık: fonksiyon:
-999999.999* [ -999999.999
- par. 4-55 ]
Alt referans sınırını girin. Gerçek
referans bu sınırın altına
düştüğünde, ekranda Ref
Low
.
gösterilir. Terminal 27 veya 29’da ve
röle çıkışı 01 veya 02’de bir durum
sinyali üretmek üzere sinyal çıkışı
programlanabilir.
4-55 Uyarı Referans Yüksek
Aralık: fonksiyon:
999999.999* [ par. 4-54 -
999999.999 ]
Üst referans sınırını girin. Gerçek
referans bu sınırı aşarsa ekranda
Ref
High
okunur. Terminal 27 veya
29’da ve röle çıkışı 01 veya 02’de bir
durum sinyali üretmek üzere sinyal
çıkışı programlanabilir.
4-56 Uyarı Geri Besleme Düşük
Aralık: fonksiyon:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Alt geri besleme sınırını girin. Geri
besleme bu sınırın altına düşerse
ekranda Feedb
Low
. okunur. Terminal
27 veya 29’da ve röle çıkışı 01 veya
02’de bir durum sinyali üretmek
üzere sinyal çıkışı programlanabilir.
4-57 Uyarı Geri Besleme Yüksek
Aralık: fonksiyon:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Üst geri besleme sınırını girin. Geri
besleme bu sınırı aşarsa ekranda
Feedb
High
. okunur. Terminal 27 veya
29’da ve röle çıkışı 01 veya 02’de bir
durum sinyali üretmek üzere sinyal
çıkışı programlanabilir.
4-58 Eksik Motor Fazı İşlevi
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Motor fazı eksikse bir alarm gösterir.
[0] Devre Dışı Eksik motor fazı gerçekleşirse alarm
gösterilmez.
[1] Alarm 100 ms Eksik motor fazı gerçekleşirse bir
alarm gösterilir.
[2] * Alarm 100 ms
Parametre Açıklaması Programlama Kılavuzu
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 79
Page 82

4-58 Eksik Motor Fazı İşlevi
Seçenek: fonksiyon:
[5] Motor Check
4-60 [RPM]'den By-pass Hızı
Dizi [4]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-13
RPM]
Sistemdeki rezonans sorunlarından
dolayı bazı sistemlerin belirli çıkış
frekanslarından veya hızlardan
kaçınması gerekir. Kaçınılacak hız alt
sınırlarını girin.
4-61 Bypass Hızı İlk [Hz]
Dizi [4]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-14
Hz]
Sistemdeki rezonans sorunlarından
dolayı bazı sistemlerin belirli çıkış
frekanslarından veya hızlardan
kaçınması gerekir. Kaçınılacak hız alt
sınırlarını girin.
4-62 [RPM]'ye By-pass Hızı
Dizi [4]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-13
RPM]
Sistemdeki rezonans sorunlarından
dolayı bazı sistemlerin belirli çıkış
frekanslarından veya hızlardan
kaçınması gerekir. Kaçınılacak hız
üst sınırlarını girin.
4-63 Bypass Hızı Son [Hz]
Dizi [4]
Aralık: fonksiyon:
Size
related*
[ 0 - par. 4-14
Hz]
Sistemdeki rezonans sorunlarından
dolayı bazı sistemlerin belirli çıkış
frekanslarından veya hızlardan
kaçınması gerekir. Kaçınılacak hız
üst sınırlarını girin.
4-64 Yarı Oto Bypass Kurulumu
Seçenek: fonksiyon:
[0] * Kapalı İşlev yok.
[1] Etkin Yarı Otomatik ByPass kurulumunu
başlatır ve bölüm 3.6.4 Yarı Oto.
Bypass Hız Ayarı öğesinde açıklanan
prosedürle devam eder.
Parametre Açıklaması
VLT® AQUA Drive FC 202
3.6.4 Yarı Oto. Bypass Hız Ayarı
Sistemdeki rezonanslar nedeniyle yarı oto. bypass hızı
ayarını frekansların programlanmasının atlanmasını
3.6.3 4-6* Hız By-pass
33
Sistemdeki rezonans sorunlarından dolayı bazı sistemlerin
belirli çıkış frekanslarından veya hızlardan kaçınması
gerekir. Maksimum 4 frekanstan veya hız aralığından kaçınılabilir.
kolaylaştırmak için kullanın.
Aşağıdaki işlemleri gerçekleştirin:
1. Motoru durdurun.
2. parametre 4-64 Yarı Oto Bypass Kurulumu
bölümünde [1] Etkin öğesini seçin.
3. Rezonanslara sebep olan frekans bantlarını arama
için LCP'de [Hand On] tuşuna basın. Motor, rampa
ayarına göre hızlanır.
4. Bir rezonans bandından geçtiğiniz sırada banttan
çıkarken LCP'de [OK] tuşuna basın. Gerçek frekans
parametre 4-62 [RPM]'ye By-pass Hızı veya
parametre 4-63 Bypass Hızı Son [Hz] parame-
tresinde ilk eleman olarak depolanır (dizi). Bu
adımı hızlanmada belirtilen her rezonans bandı
için tekrarlayın (maksimum 4 adet ayarlanabilir).
5. Maksimum hıza ulaşıldığında, motor otomatik
olarak yavaşlamya başlar. Yavaşlama esnasında hız
rezonans bantlarını bıraktığında yukarıdaki ilkeyi
tekrarlayın. [OK] tuşuna basarken kayıt edilen
gerçek frekanslar parametre 4-60 [RPM]'den By-pass
Hızı veya parametre 4-61 Bypass Hızı İlk [Hz]
öğesinde depolanır.
6. Motor durmak için yavaşladığında [OK] tuşuna
basın. Parametre 4-64 Yarı Oto Bypass Kurulumu
otomatik olarak Kapalıya sıfırlanır. LCP'de [O]
veya [Auto On] tuşuna basılana kadar frekans
dönüştürücü el ile modunda kalır.
Belirli bir rezonans bandının frekansları doğru sıra ile kayıt
edilmez ise tüm kayıtlar iptal edilir ve aşağıdaki mesaj
gösterilir: Toplanan hız alanları birbiri üzerine kaydedilmiş
veya tam olarak belirlenmemiş. İptal etmek için [Cancel]
tuşuna basın. parametre 4-62 [RPM]'ye By-pass Hızı öğesinde
depolanan frekans değerleri parametre 4-60 [RPM]'den Bypass Hızı öğesindeki değerlerden daha yüksek olduğunda
veya bunların Şuradan Bypass veya Şuraya Bypass için
yapılan kayıtları aynı sayıda değilse kayıt yanlış sıradadır.
80 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 83

5-00 Dijital G/Ç Modu
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Dijital girişler ve programlanan
dijital çıkışlar, PNP veya NPN sistemlerindeki işletim için önceden
programlanabilirdir.
[0] * PNP - 24V'de
Etkin
Pozitif yönelimli darbelerde işlem
(0). PNP sistemler GND'ye çekilir.
[1] NPN - 0V'de
Etkin
Negatif yönelimli darbelerde işlem
(1). NPN sistemler frekans dönüştürücüde dahili olarak +24 V'a çekilir.
5-01 Terminal 27 Modu
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
[0] * Giriş Terminal 27’yi dijital giriş olarak
tanımlar.
[1] Çıkış Terminal 27’yi dijital çıkış olarak
tanımlar.
5-02 Terminal 29 Modu
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
[0] * Giriş Terminal 29’u dijital giriş olarak
tanımlar.
[1] Çıkış Terminal 29’u dijital çıkış olarak
tanımlar.
Parametre Açıklaması Programlama Kılavuzu
3.7 5-** Dijital Giriş/Çıkış Parametreleri
Dijital girişlerin ve çıkışların konfigürasyonunu yapan
parametre grubu.
3.7.1 5-0* Dijital G/Ç Modu
NPN ve PNP kullanarak giriş ve çıkışı yapılandırma parametreleri.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 81
3.7.2 5-1* Dijital Girişler
Giriş terminallerinin temel giriş işlevlerini ayarlama parametreleri.
Dijital girişler, frekans dönüştürücüde çeşitli işlevleri seçmek
için kullanılır. Tüm dijital girişler aşağıdaki işlevlere ayarlanabilir:
[120]–[138] seçenekleri kademeli denetleyici işlevselliği ile
ilgidir. Daha fazla bilgi için bkz. 25-** Kademeli Dntlyc
parametre grubu.
Dijital giriş işlevi Seçenek Terminal
İşletim yok [0] 19, 29, 32, 33
Sıfırla [1] Tümü
Ters serbest duruş [2] 27
Ters yanaşma ve sıf. [3] Tümü
Ters DC fren [5] Tümü
Ters durdurma [6] Tümü
Dış kilit [7] Tümü
Başlatma [8] Tümü
Mandallı başlatma [9] Tümü
Ters çevirme [10] Tümü
Ters başlatma [11] Tümü
Jog [14] Tümü
Ön ayar. ref. konumu [15] Tümü
Öncdn ayar. ref bit 0 [16] Tümü
Öncdn ayar. ref bit 1 [17] Tümü
Öncdn ayar. ref bit 2 [18] Tümü
Referansı dondur [19] Tümü
Çıkışı dondur [20] Tümü
Hız artırma [21] Tümü
Hız azaltma [22] Tümü
Kurulum seçme bit 0 [23] Tümü
Kurulum seçme bit 1 [24] Tümü
Darbe girişi [32] 29, 33
Rampa bit 0 [34] Tümü
Şebeke ksintisi evrik [36] Tümü
Ref source bit 0 [42] Tümü
Hand/auto start [51] Tümü
Çalış. izin veren [52] Tümü
Elle Başlat [53] Tümü
Oto. başlat [54] Tümü
DigiPot artırma [55] Tümü
DigiPot azaltma [56] Tümü
DigiPot silme [57] Tümü
Sayaç A (yukarı) [60] 29, 33
Sayaç A (aşağı) [61] 29, 33
A Sayacını Sıfırla [62] Tümü
Sayaç B (yukarı) [63] 29, 33
Sayaç B (aşağı) [64] 29, 33
B Sayacını Sıfırla [65] Tümü
Uyku modu [66] Tümü
3 3
Page 84

Parametre Açıklaması
VLT® AQUA Drive FC 202
Dijital giriş işlevi Seçenek Terminal
Önleyici Bakım
Sözcüğünü Sıfırla
PTC Kartı 1 [80] Tümü
Latched pump derag [85] Tümü
33
Bir. Pompa Başl. [120] Tümü
Brnc Pompa Geçişi [121] Tümü
Pompa 1 Kilidi [130] Tümü
Pompa 2 Kilidi [131] Tümü
Pompa 3 Kilidi [132] Tümü
Tablo 3.12 Dijital Girişleri için İşlevler
[78] Tümü
[7] Dış kilit Ters durdurmaya yanaşma ile aynı işlev, ancak
Tümü, 18, 19, 27, 29, 32, X30/2, X30/3 ve X30/4 terminallerini temsil eder.
X30/X, VLT® Genel Amaçlı G/Ç MCB 101 üzerindeki
terminallerdir.
Yalnızca 1 dijital girişe atanan işlevler ilgili parametrede
belirtilir.
Tüm dijital girişler şu işlevlere ayarlanabilir:
[0] İşletim yok Terminale aktarılan sinyallere tepki yok.
[1] Sıfırla Açma/alarmdan sonra frekans dönüştürücüyü
sıfırlar. Bütün alarmlar sıfırlanamaz.
[2] Ters serbest
duruş
[3] Ters
yanaşma ve
sıf.
[5] Ters DC fren DC freni için çevrilmiş giriş (NC).
[6] Ters
durdurma
Motoru serbest modda bırakır. Mantık 0 =
durdurmaya yanaşma.
(Varsayılan dijital giriş 27) Durdurmaya
yanaşma, çevrilmiş giriş (NC).
Sıfırlama ve durdurmaya yanaşma çevrilmiş
giriş (NC).
Motoru serbest modda bırakır ve frekans
dönüştürücüyü sıfırlar. Mantık 0 =
durdurmaya yanaşma ve sıfırlama.
Belirli bir süre DC akımı vererek motoru
durdurur. Bkz. parametre 2-01 DC Fren Akımı parametre 2-03 DC Fren Dvr. Girme Hızı [RPM].
İşlev yalnızca parametre 2-02 DC Frenleme
Süresi'deki değer 0'dan farklıysa etkin olur.
Mantık 0=DC freni.
parametre 1-10 Motor Yapısı [1] PM, yüzeye
mon. SP olarak ayarlandığında bu seçim
mümkün değildir.
Çevrilmiş işlevi durdurma. Seçilen terminal 1
mantık düzeyinden 0'a geçerken durdurma
işlevi oluşturur. Durdurma, seçilen rampa
süresine (parametre 3-42 Rampa 1 Yavaşlama
Süresi ve parametre 3-52 Rampa 2 Yavaşlama
Süresi) göre gerçekleştirilir.
[8] Başlatma Başlatma/durdurma komutu için başlatma
[9] Mandallı
başlatma
[10] Ters çevirme Motor milinin dönme yönü değişir. Tersine
[11] Ters
başlatma
[14] Jog Aralıklı çalıştırma hızını etkinleştirmek için
[15] Ön ayar. ref.
konumu
[16] Öncdn ayar.
ref bit 0
[17] Öncdn ayar.
ref bit 1
DUYURU!
Frekans dönüştürücü moment
sınırındaysa ve durdurma komutu
aldıysa kendiliğinden durmayabilir.
Frekans dönüştürücünün durduğundan
emin olmak için dijital çıkışı [27] Tork
sınırı ve durdurma parametresine
ayarlayın ve yanaşma olarak yapılandırılan dijital girişe bağlayın.
ters yanaşma için programlanan terminalde
mantık 0 olduğunda harici kilit harici arıza
alarm mesajını verir. Dış Kilit için programlanırsa alarm mesajı dijital çıkışlar ile röle
çıkışları aracılığıyla da etkin olur. Dış Kilit
durumunun nedeni ortadan kalkarsa dijital
girişler veya [Reset] tuşu kullanılarak alarm
sıfırlanabilir. Gecikme, parametre 22-00 Harici
Kilit Gecikmesi parametresinde programlanabilir. Girişe sinyal uyguladıktan sonra
yukarıda açıklanan tepki
parametre 22-00 Harici Kilit Gecikmesi
içerisinde ayarlanan süre kadar gecikir.
değerini seçin. 1=başlat, 0=durdur.
(Varsayılan dijital giriş 18).
Darbe en az 2 ms boyunca uygulanırsa motor
başlatılır. Ters durdurma etkinleştirildiğinde
motor durdurulur.
çevirmek üzere Mantık 1'i seçin. Ters çevirme
sinyali yalnızca dönüş yönünü değiştirir.
Başlatma işlevini etkinleştirmez.
parametre 4-10 Motor Hızı Yönü'te her iki yönü
seçin.
(Varsayılan dijital giriş 19).
Başlatma/durdurma ile aynı telde ters çevirme
için kullanılır. Başlatmadaki sinyallere aynı
anda izin verilmez.
kullanılır. Bkz. parametre 3-11 Arlk. Çlşt. Hızı
[Hz].
(Varsayılan dijital giriş 29).
Dış kilit ile ön ayarlı referans arasında geçiş
yapmak için kullanılır. [1] Dış/Ön Ayar
değerinin parametre 3-04 Referans İşlev'te
seçildiği varsayılır. Mantık 0 = dış referans
etkin; mantık 1 = 8 ön ayarlı referanstan 1'i
etkin.
Tablo 3.13 ile uyumlu olarak 8 önceden
ayarlanmış referansın 1'inin seçilmesine
olanak sağlar.
Tablo 3.13 ile uyumlu olarak 8 önceden
ayarlanmış referansın 1'inin seçilmesine
olanak sağlar.
82 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 85

Parametre Açıklaması Programlama Kılavuzu
[18] Öncdn ayar.
ref bit 2
[19] Referansı
dondur
[20] Çıkışı
dondur
Tablo 3.13 ile uyumlu olarak 8 önceden
ayarlanmış referansın 1'inin seçilmesine
olanak sağlar.
Öncdn ayar. ref
bit
Önceden ayarlı
referans 0
Önceden ayarlı
referans 1
Önceden ayarlı
referans 2
Önceden ayarlı
referans 3
Önceden ayarlı
referans 4
Önceden ayarlı
referans 5
Önceden ayarlı
referans 6
Önceden ayarlı
referans 7
Tablo 3.13 Öncdn Ayar. Ref Bit
Gerçek referansı dondurur. Donmuş referans
kullanılacak Hız artışı veya Düşüşünün
etkinleştirme/durum noktasıdır. Hız artırma/
azaltma kullanılırsa hız değişimi her zaman 0–
parametre 3-03 Maksimum Referans aralığında
rampa 2'yi (parametre 3-51 Rampa 2 Hızlanma
Süresi ve parametre 3-52 Rampa 2 Yavaşlama
Süresi) izler.
Gerçek motor frekansını (Hz) dondurur.
Dondurulan motor frekansı kullanılacak hız
artırma ve hız azaltma etkinleştirme/durum
noktasıdır. Hız artırma/azaltma kullanılırsa hız
değişimi her zaman 0–parametre 1-23 Motor
Frekansı aralığında rampa 2'yi
(parametre 3-51 Rampa 2 Hızlanma Süresi ve
parametre 3-52 Rampa 2 Yavaşlama Süresi)
izler.
2 1 0
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
DUYURU!
[20] Çıkışı dondur etkin olduğunda
frekans dönüştürücü düşük [13]
Başlatma sinyali ile durdurulamaz. [2]
Ters yanaşma veya [3] Yanaşma ve
sıfırlama, ters çevirme için
programlanan terminal ile frekans
dönüştürücüyü durdurun.
[21] Hız artırma Hız artışının/düşüşünün dijital denetimi için
(motor potansiyometresi). [19] Referansı
dondur veya [20] Çıkışı dondur seçeneklerini
belirleyerek bu işlevi etkinleştirin. [21] Hız
artırma 400 ms.'den daha kısa bir süre için
etkinleştirilirse sonuç referansı %0,1 oranında
artar. [21] Hız artırma 400 ms.'den daha uzun
süre için etkinleştirilirse sonuç referansı
parametre 3-41 Rampa 1 Hızlanma Süresi
parametresindeki Rampa 1'e göre artar.
[22] Hız azaltma [21] Hız Artırma ile aynıdır.
[23] Kurulum
seçme bit 0
[24] Kurulum
seçme bit 1
[32] Darbe girişi Referans veya geri besleme olarak darbe dizisi
[34] Rampa bit 0 Kullanılacak rampayı seçin. Mantık 0 rampa 1'i
[36] Şebeke
ksintisi evrik
[42] Ref source
bit 0
[51] Elle/Oto.
Başlatma
[52] Çalış. izin
veren
[53] Elle Başlat Uygulanan sinyal üzerindeki [Hand On]
4 kurulumdan 1'ini seçer. parametre 0-10 Etkin
Kurulum'i Çoklu Kurulum olarak ayarlayın.
[23] Kurulum seçme bit 0 ile aynıdır.
(Varsayılan dijital giriş 32).
kullanırken [32] Darbe girişi öğesini seçin.
Ölçekleme 5-5* Darbe Girişi parametre
grubunda yapılır.
seçerken mantık 1 rampa 2'yi seçer.
parametre 14-10 Şebeke Kesintisi'i etkinleştirir.
Şebeke kesintisi evrik mantık 0 durumunda
etkin olur.
Bit 0'daki etkin bir giriş referans kaynağı
olarak AI54'ü seçer (bkz. 3-1* Referanslar
parametre grubu, [35] Dijital giriş seçimi
seçeneği). Etkin olmayan giriş AI53'ü seçer.
Elle veya oto. başlatmayı seçer. Yüksek sinyal
yalnızca oto.'yu seçer, Düşük sinyal yalnızca el
ile'yi seçer.
Başlatma komutu kabul edilmeden önce [52]
Çalış. İzin Veren'in programlandığı giriş
terminali mantık 1olmalıdır. Çalıştırmaya izin
veren [8] Başlatma, [14] Jog veya [20] Çıkışı
Dondur için programlanan terminale ilişkin
mantık AND işlevi vardır. Motoru çalıştırmaya
başlamak için her iki koşul da gerçekleştiril-
melidir. [52] Çalış. izin Veren birden çok
terminal için programlanırsa gerçekleştirilecek
işleve ait terminallerden 1'inde mantığın 1
olması gerekir. 5-3* Dijital Çıkışlar veya 5-4*
Röleler parametre grubunda programlanan
çalıştırma isteği ([8] Başlatma, [14] Jog veya
[20] Çıkışı dondur) için dijital çıkış sinyali [52]
Çalış. İzin Veren'den etkilenmez.
düğmesine basılmış gibi frekans dönüştü-
rücüyü el ile moduna geçirir ve normal
durdurma komutu geçersiz olur. Sinyal
kesilirse motor durur. Diğer başlatma
komutlarını geçerli kılmak için diğer dijital
girişi [54] Oto. başlat düğmesine atamanız ve
buna bir sinyal uygulamanız gerekir. [Hand
On] ve [Auto On] etkisizdir. [O] yerel
başlatma ve oto. başlatmayı geçersiz kılar.
Yerel başlatma ve otomatik başlatma
işlevlerini yeniden etkinleştirmek için [Hand
On] veya [Auto On] düğmesine basın. [53] Elle
başlat veya [54] Oto. başlat üzerinde sinyal
yoksa motor uygulanan normal başlatma
komutunun uygulanmasına bakılmaksızın
durur. Bir sinyal hem [53] Elle Başlat hem de
[54] Oto. Başlat işlevine uygulanırsa işlev,
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 83
Page 86

Parametre Açıklaması
VLT® AQUA Drive FC 202
otomatik başlat olur. [O] tuşuna basılırsa
motor, [53] Elle başlatma ve [54] Oto. başlat-
madaki sinyallere bakılmaksızın durur.
[54] Oto. başlat Uygulanan bir sinyal frekans dönüştürücüyü
sanki düğmesi olan [Auto On] tuşuna basılmış
gibi otomatik moda geçirir. Ayrıca bkz. [53]
33
[55] DigiPot
Artırma
[56] DigiPot
Azaltma
[57] DigiPot
Silme
[60] Sayaç A
(yukarı)
[61] Sayaç A
(aşağı)
[62] A Sayacını
Sıfırla
[63] Sayaç B
(yukarı)
[64] Sayaç B
(aşağı)
[65] B Sayacını
Sıfırla
[66] Uyku Modu Frekans dönüştürücünün uyku moduna
[78] Önleyici
Bakım
Sözcüğünü
Sıfırla
[80] PTC Kartı 1 Tüm dijital girişler [80] PTC Kart 1 olarak
[85] Latched
Pump Derag
Elle Başlat.
3-9* Dijital Pot.metresi parametre grubunda
açıklanan dijital potansiyometre işlevine
gönderilen artış sinyali olarak girişi kullanır.
3-9* Dijital Pot. metresi parametre grubunda
açıklanan dijital potansiyometre işlevine
gönderilen azalma sinyali olarak girişi kullanır.
3-9* Dijital Pot. metresi parametre grubunda
açıklanan dijital potansiyometre referansını
temizlemek için girişi kullanır.
(Yalnızca Terminal 29 veya 33) SLC sayacında
artan sayım için giriş.
(Yalnızca Terminal 29 veya 33) SLC sayacında
azalan sayım için giriş.
A sayacının sıfırlanması için giriş.
(Yalnızca Terminal 29 ve 33) SLC sayacında
artan sayım için giriş.
(Yalnızca Terminal 29 ve 33) SLC sayacında
azalan sayım için giriş
B sayacının sıfırlanması için giriş.
geçmesini sağlar (bkz. 22-4* Uyku Modu
parametre grubu). Uygulanan sinyalin artan
kenarında tepki verir.
parametre 16-96 Bakım Sözcüğü'deki tüm
veriyi 0'a sıfırlar.
ayarlanabilir. Bununla beraber, yalnızca 1
dijital giriş bu seçeneğe ayarlanmalıdır.
Sürüklemeyi başlatır.
[120]–[138] seçenekleri kademeli denetleyici işlevselliği ile
ilgidir. Daha fazla bilgi için bkz. 25-** Kademeli Dntlyc
parametre grubu.
[130
138]
Pompa 1
Kilidi Pompa 9
Kilidi
İşlev, parametre 25-06 Pompa Sayısı'daki ayara
bağlıdır. [0] No (Hayır) olarak ayarlanırsa Pompa
1 röle1 gibi bir röle ile kontrol edilen pompayı
ifade eder. [1] Yes (Evet) olarak ayarlanırsa
Pompa1 yalnızca frekans dönüştürücü ile
kontrol edilen pompayı (dahili röleler
olmadan ), Pompa2 ise röle1 ile kontrol edilen
pompayı ifade eder Temel K-kademeli denetleyicide değişken hız pompası (birinci)
kilitlenemez.
Bkz. Tablo 3.14.
5-1* Dijital
Girişler
parametre
grubundaki
ayar
[0] No (Hayır) [1] Yes (Evet)
[130] Pompa1
Kilidi
[131] Pompa2
Kilidi
[132] Pompa3
Kilidi
[133] Pompa4
Kilidi
[134] Pompa5
Kilidi
[135] Pompa6
Kilidi
[136] Pompa7
Kilidi
[137] Pompa8
Kilidi
[138] Pompa9
Kilidi
Şundaki ayar:
parametre 25-06 Pompa
Sayısı
Röle1 ile
kontrol edilir
(birinci
pompa
değilse)
Röle2 ile
kontrol edilir
Röle3 ile
kontrol edilir
Röle4 ile
kontrol edilir
Röle5 ile
kontrol edilir
Röle6 ile
kontrol edilir
Röle7 ile
kontrol edilir
Röle8 ile
kontrol edilir
Röle9 ile
kontrol edilir
Frekans
dönüştürücü
ile kontrol
edilir
(kilitlenemez)
Röle1 ile
kontrol edilir
Röle2 ile
kontrol edilir
Röle3 ile
kontrol edilir
Röle4 ile
kontrol edilir
Röle5 ile
kontrol edilir
Röle6 ile
kontrol edilir
Röle7 ile
kontrol edilir
Röle8 ile
kontrol edilir
5-10 Terminal 18 Dijital Giriş
Parametre, [32] Darbe girişi seçeneği hariç 5-1* Dijital Girişler
parametre grubunda listelenen tüm seçeneklere ve işlevlere
sahiptir.
[120] Bir.
Pompa
Başl.
[121] Brnc
Pompa
Geçişi
84 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Birinci pompayı başlatır/durdurur (frekans
dönüştürücü ile denetlenir). Başlatma sistem
başlatma sinyalinin uygulanmasına, örneğin,
dijital girişlerin 1'inin [8] Başlatma için ayarlanmasına ihtiyaç duyar.
Kademeli denetleyicide birinci pompanın
geçişini zorlar. parametre 25-50 Brnc Pompa
Geçişi parametresini [2] Komut üzrn veya [3]
Aşamalandırma veya komutta olarak ayarlayın.
Parametre 25-51 Geçiş Olayı 4 seçeneğin
herhangi birine ayarlanabilir.
5-11 Terminal 19 Dijital Giriş
Parametre, [32] Darbe girişi seçeneği hariç 5-1* Dijital Girişler
parametre grubunda listelenen tüm seçeneklere ve işlevlere
sahiptir.
5-12 Terminal 27 Dijital Giriş
Parametre, [32] Darbe girişi seçeneği hariç 5-1* Dijital Girişler
parametre grubunda listelenen tüm seçeneklere ve işlevlere
sahiptir.
Page 87

5-19 Ter. 37 Güvenli Durd.
Safe Torque O işlevselliğini yapılandırmak için bu parametreyi
kullanın. Bir uyarı mesajı frekans dönüştürücünün motora
yanaşmasını sağlar ve otomatik yeniden başlatmayı etkinleştirir.
Bir alarm mesajı frekans dönüştürücünün motora yanaşmasını
sağlar ve manuel bir yeniden başlatma gerektirir (fieldbus, Dijital
G/Ç veya LCP'deki [RESET] tuşuna basılarak). VLT® PTC Termistör
Kartı MCB 112 takıldığında, alarm işleminden tam fayda sağlamak
için PTC seçeneklerini yapılandırın.
Seçenek: fonksiyon:
[1] * Güv. Durd.
Alarmı
Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır.
LCP'den, dijital girişten veya
fieldbus'tan manuel sıfırlama.
[3] Güv. Durd.
Uyarısı
Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır
(terminal 37 kapalı). Safe Torque O
devresi yeniden kurulduğunda,
5-19 Ter. 37 Güvenli Durd.
Safe Torque O işlevselliğini yapılandırmak için bu parametreyi
kullanın. Bir uyarı mesajı frekans dönüştürücünün motora
yanaşmasını sağlar ve otomatik yeniden başlatmayı etkinleştirir.
Bir alarm mesajı frekans dönüştürücünün motora yanaşmasını
sağlar ve manuel bir yeniden başlatma gerektirir (fieldbus, Dijital
G/Ç veya LCP'deki [RESET] tuşuna basılarak). VLT® PTC Termistör
Kartı MCB 112 takıldığında, alarm işleminden tam fayda sağlamak
için PTC seçeneklerini yapılandırın.
Seçenek: fonksiyon:
frekans dönüştürücü manuel
sıfırlama olmaksızın devam eder.
[4] PTC 1 Alarmı Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır.
LCP'den, dijital girişten veya
fieldbus'tan manuel sıfırlama.
[5] PTC 1 Uyarısı Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır
(terminal 37 kapalı). Safe Torque O
devresi yeniden kurulduğunda,
frekans dönüştürücü [80] PTC Kartı 1
öğesine ayarlı bir dijital giriş hala
etkin değilse manuel sıfırlama
olmaksızın devam eder.
[6] PTC 1 ve Röle
A
VLT® PTC Termistör Kartı MCB 112
kapıları güvenlik rölesiyle terminal
37'ye giden durdurma anahtarı ile
olduğunda bu seçenek kullanılır.
Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır.
LCP'den, dijital girişten veya
fieldbus'tan manuel sıfırlama.
[7] PTC 1 ve Röle
W
VLT® PTC Termistör Kartı MCB 112
kapıları güvenlik rölesiyle terminal
37'ye giden durdurma anahtarı ile
olduğunda bu seçenek kullanılır.
Safe Torque O etkinleştirildiğinde
frekans dönüştürücüyü yanaştırır
(terminal 37 kapalı). Safe Torque O
devresi yeniden kurulduğunda,
frekans dönüştürücü [80] PTC Kartı 1
öğesine ayarlı bir dijital giriş hala
etkin değilse manuel sıfırlama
olmaksızın devam eder.
[8] PTC 1 ve Röle
A/W
Bu seçenek alarm ve uyarı
kombinasyonunun kullanılmasını
mümkün kılar.
[9] PTC 1 ve Röle
W/A
Bu seçenek alarm ve uyarı
kombinasyonunun kullanılmasını
mümkün kılar.
Parametre Açıklaması Programlama Kılavuzu
5-13 Terminal 29 Dijital Giriş
Parametre, 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-14 Terminal 32 Dijital Giriş
Parametre, [32] Darbe girişi seçeneği hariç 5-1* Dijital Girişler
parametre grubunda listelenen tüm seçeneklere ve işlevlere
sahiptir.
3 3
5-15 Terminal 33 Dijital Giriş
Parametre, 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-16 Terminal X30/2 Dijital Giriş
Seçenek: fonksiyon:
[0] * İşletim yok
5-17 Terminal X30/3 Dijital Giriş
Seçenek: fonksiyon:
[0] * İşletim yok
5-18 Terminal X30/4 Dijital Giriş
Seçenek: fonksiyon:
[0] * İşletim yok
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 85
VLT® Genel Amaçlı G/Ç MCB 101 frekans
dönüştürücüye kurulduğunda bu parametre
etkindir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda
listelenen tüm seçeneklere ve işlevlere sahiptir.
VLT® Genel Amaçlı G/Ç MCB 101 frekans
dönüştürücüye kurulduğunda bu parametre
etkindir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda
listelenen tüm seçeneklere ve işlevlere sahiptir.
VLT® Genel Amaçlı G/Ç MCB 101 frekans
dönüştürücüye kurulduğunda bu parametre
etkindir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda
listelenen tüm seçeneklere ve işlevlere sahiptir.
Page 88

Parametre Açıklaması
VLT® AQUA Drive FC 202
DUYURU!
[4] PTC 1 Alarmı ile [9] PTC 1 ve Röle W/A yalnızca MCB
112 bağlandığında mevcuttur.
DUYURU!
33
Oto. Yeniden Başlatma/Uyarı öğesinin seçilmesi frekans
dönüştürücünün otomatik yeniden başlatılmasını sağlar.
İşlev Num
İşletim yok [0] – –
Güvenli Durdurma
Alarmı
Safe Torque O
Uyarısı
PTC 1 Alarmı [4] PTC 1 Safe Torque
PTC 1 Uyarısı [5] PTC 1 Safe Torque
PTC 1 ve Röle A [6] PTC 1 Safe Torque
PTC 1 ve Röle W [7] PTC 1 Safe Torque
PTC 1 ve Röle A/W [8] PTC 1 Safe Torque
PTC 1 ve Röle W/A [9] PTC 1 Safe Torque
PTC Röle
ara
[1]* – Safe Torque O
[A68]
[3] – Safe Torque O
[W68]
–
O [A71]
–
O [W71]
Safe Torque O
O [A71]
O [W71]
O [A71]
O [W71]
[A68]
Safe Torque O
[W68]
Safe Torque O
[W68]
Safe Torque O
[A68]
5-23 Terminal X46/7 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-24 Terminal X46/9 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-25 Terminal X46/11 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-26 Terminal X46/13 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
3.7.3 5-3* Dijital Çıkışlar
Çıkış terminallerinin çıkış işlevlerini yapılandırma parametreleri. 2 adet sabit durumdaki dijital çıkışlar, 27 ve 29
terminalleri için ortaktır. parametre 5-01 Terminal 27 Modu
öğesindeki terminal 27 için ve parametre 5-02 Terminal 29
Tablo 3.14 İşlevlere, Alarmlara ve Uyarılara Genel Bakış
W uyarı, A alarm anlamına gelir. Daha fazla bilgi için bkz.
bölüm 5 Sorun giderme Alarmlar ve Uyarılar.
Safe Torque
O işlevine ilişkin tehlikeli bir arıza alarm 72,
Modu öğesindei terminal 29 için G/Ç işlevini ayarlayın.
DUYURU!
Motor çalışırken bu parametreler düzeltilemez.
Tehlikeli arıza alarmını verir.
Bkz. Tablo 5.1.
5-20 Terminal X46/1 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-21 Terminal X46/3 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
5-22 Terminal X46/5 Dijital Giriş
Bu parametre VLT® Genişletilmiş Röle Kartı MCB 113 ekipmanındaki dijital giriş ile ilgilidir. Parametre, [32] Darbe girişi seçeneği
hariç 5-1* Dijital Girişler parametre grubunda listelenen tüm
seçeneklere ve işlevlere sahiptir.
[0] İşletim yok Tüm dijital çıkışlar ve röle çıkışları için
[1] Kontrol hazır Kontrol panosu, besleme voltajı alır.
[2] Sürücü hazır Frekans dönüştürücü işletim için hazırdır
[3] Sürücü hzr/
uzk. knt.
[4] Beklemede /
uyarı yok
[5] Çalıştırma Motor çalışıyor.
[6] Çlıştırma /
uyarı yok
[8] Refrn. Çlş./
uyarı yok
[9] Alarm Alarm, çıkışı etkinleştirir. Uyarı yok.
Dijital girişler şu işlevlere ayarlanabilir:
varsayılan.
ve kontrol kartına bir besleme sinyali
uygular.
Frekans dönüştürücü işletim için hazırdır
ve otomatik açık modundadır.
Frekans dönüştürücü çalışmaya hazırdır.
Başlatma veya durdurma komutu
verilmedi (başlatma/iptal etme). Uyarı yok.
Çıkış hızı, parametre 1-81 Durdurmada İşlev
için Min Hız [RPM] parametresinde
ayarlanan hızdan yüksek. Motor çalışıyor
ve uyarı yok.
Motor, referans hızında çalışır.
86 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 89
Parametre Açıklaması Programlama Kılavuzu
[10] Alarm veya
uyarı
[11] Moment
sınırında
[12] Akım aralığı
dışında
[13] Akımın altında,
düşük
[14] Akımın
üstünde, yük.
[15] Hız aralığı
dışında
[16] Hızın altında,
düşük
[17] Hız üstünde,
yüksek
[18] Geri bsl aralğ
dışnda
[19] Geri bsl altnda,
düşk
[20] Geri bsl üstnd,
yüksk
[21] Termal uyarısı Termal uyarı, sıcaklık motordaki, frekans
[25] Ters Ters çevirme. Mantık 1 = motorun saat
[26] Bus Tamam Seri iletişim bağlantı noktası ile etkin
[27] Mom. sın. ve
drdurma
[28] Fren, fren
uyarı. yok
[29] Fren hazır,
arıza yok
[30] Fren arızası
(IGBT)
[35] Dış kilit Dış kilitleme işlevi dijital girişlerin 1'iyle
[40] Ref aralığı
dışında
[41] Ref altı düşük
Alarm veya uyarı, çıkışı etkinleştirir.
parametre 4-16 motor modda moment
limiti içerisinde ayarlanan tork sınırı aşıldı.
Motor akımı, parametre 4-18 Akım Sınırı'de
belirlenen aralık dışında.
Motor akımı parametre 4-50 Uyarı Akım
Düşük parametresindeki ayardan düşük.
Motor akımı parametre 4-51 Uyarı Akım
Yüksek parametresindeki ayardan yüksek.
Çıkış hızı parametre 4-52 Uyarı Hız Düşük
ve parametre 4-53 Uyarı Hız Yüksek
içerisinde ayarlanan aralıkların dışında.
Çıkış hızı, parametre 4-52 Uyarı Hız
Düşük'deki ayardan düşük.
Çıkış hızı, parametre 4-53 Uyarı Hız
Yüksek’da ayarlanan değerden yüksek.
Geri besleme parametre 4-56 Uyarı Geri
Besleme Düşük ve parametre 4-57 Uyarı
Geri Besleme Yüksek içerisinde ayarlanan
aralıkların dışında.
Geri besleme, parametre 4-52 Uyarı Hız
Düşük'de ayarlanan sınırın altında.
Geri besleme parametre 4-56 Uyarı Geri
Besleme Düşük içerisinde ayarlanan sınırın
üzerinde.
dönüştürücüdeki, fren direncindeki veya
termistördeki sınırı aştığında açılır.
yönünde dönüşünde röle etkin, 24 V DC.
Mantık 0 = motorun saat yönünün
tersinde dönüşünde röle etkin değil, sinyal
yok.
iletişim (zaman aşımı yok).
Durdurmaya yanaşma yaparken ve tork
sınırı durumunda kullanılır. Frekans
dönüştürücü bir durdurma sinyali almış ve
tork sınırında ise sinyal mantık 0'dır.
Fren etkin ve uyarı yok.
Fren işletime hazır ve arıza yok.
Fren IGBT kısa devre iken çıkış, mantık
1'dir. Fren modüllerinde bir arıza varsa
frekans dönüştürücüyü korumak için bu
işlevi kullanın. Frekans dönüştürücüden
şebeke voltajını kesmek için çıkışı/röleyi
kullanın.
etkinleştirilmiştir.
[42] Ref üstü,
yüksek
[45] Bus Ktrl.
[46] Bs Ktrl, zmn
aşmnd 1
[47] Bs Ktrl, zmn
aşmnd 0
[55] Darbe çıkışı
[60] Karşılaştırıcı 0 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 0, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[61] Karşılaştırıcı 1 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 1, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[62] Karşılaştırıcı 2 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 2, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[63] Karşılaştırıcı 3 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 3, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[64] Karşılaştırıcı 4 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 4, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[65] Karşılaştırıcı 6 Bkz. 13-1* Karşılaştırıcılar parametre grubu.
Karşılaştırıcı 5, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[70] Mantık kuralı 0 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 0, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[71] Mantık kuralı 1 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 1, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[72] Mantık kuralı 2 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 2, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[73] Mantık kuralı 3 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 3, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[74] Mantık kuralı 4 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 4, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
[75] Mantık kuralı 5 Bkz. 13-4* Mantık Kuralları parametre
grubu. Mantık kuralı 5, true (doğru) olarak
değerlendirilmişse çıkış yüksek olur. Aksi
taktirde, düşük olur.
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 87
Page 90

Parametre Açıklaması
VLT® AQUA Drive FC 202
[80] SL dijital çıkışABkz. parametre 13-52 SL Denetleyici Eylemi.
Smart Logic İşlemi [38] Dij. çkş A'yı
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [32] Dij. çkş A'yı
ayar:düş gerçekleştirilirken çıkış düşük olur.
[81] SL dijital çıkışBBkz. parametre 13-52 SL Denetleyici Eylemi.
33
[82] SL dijital çıkışCBkz. parametre 13-52 SL Denetleyici Eylemi.
[83] SL dijital çıkışDBkz. parametre 13-52 SL Denetleyici Eylemi.
[84] SL dijital çıkışEBkz. parametre 13-52 SL Denetleyici Eylemi.
[85] SL dijital çıkışFBkz. parametre 13-52 SL Denetleyici Eylemi.
[90] kWh sayaç
darbesi
[120] System On Ref
[155] Verifying Flow
[160] Alarm yok Alarm yokken çıkış yüksektir.
[161] Ters çalıştırma Frekans dönüştürücü, saatin tersi yönde
[165] Yerel ref. etkin parametre 3-13 Referans Sitesi=[2] Yerel
[166] Uzaktan ref.
etkin
[167] Başlatma kom.
etkin
Smart Logic İşlemi [39] Dij. çkş B'yi
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [33] Dij. çkş B'yi
ayar:düş gerçekleştirilirken çıkış düşük olur.
Smart Logic İşlemi [40] Dij. çkş C'yi
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [34] Dij. çkş C'yi
ayar:düş gerçekleştirilirken çıkış düşük olur.
Smart Logic İşlemi [41] Dij. çkş D'yi
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [35] Dij. çkş D'yi
ayar:düş gerçekleştirilirken çıkış düşük olur.
Smart Logic İşlemi [42] Dij. çkş E'yi
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [36] Dij. çkş E'yi
ayar:düş. gerçekleştirilirken çıkış düşük
olur.
Smart Logic İşlemi [43] Dij. çkş F'yi
ayar:yük. gerçekleştirilirken çıkış yüksek
olur. Smart Logic İşlemi [37] Dij. çkş F'yi
ayar:düş. gerçekleştirilirken çıkış düşük
olur.
Frekans dönüştürücünün 1 kWh kullandığı
her seferde dijital çıkışta bir darbe
oluşturur.
çalışırken çıkış yüksektir (durum bitlerinin
lojik sonucu çalışıyor VE ters).
olduğunda veya LCP el ile modunda iken
aynı zamanda parametre 3-13 Referans
Sitesi=[0] Ele Bağlı / Otomatik olarak
ayarlandığında çıkış yüksektir.
parametre 3-13 Referans Sitesi [1] Uzaktan
veya LCP oto açık modundayken [0] Ele
Bağlı / Otomatik olarak ayarlandığında
çıkış yüksektir.
Oto. açık gibi etkin bir başlatma komutu
olduğunda çıkış yüksektir ve başlatma
komutu dijital giriş veya bus veya [Hand
On] ile etkindir.
[168] El modu Frekans dönüştürücü el ile modunda iken
[169] Oto. modu Frekans dönüştürücü oto. açık modunda
[180] Saat Arızası Saat işlevi güç arızası sebebiyle varsayılana
[181] Önck. Bakım parametre 23-10 Bakım Öğesi öğesinde
[182] Deragging Sürükleme etkin.
[188] AHF
Kondansatör
Bağl
[189] Harici Fan
Kontrolü
[190] Akış Yok Akış yok durumu veya minimum hız
[191] Kuru Pompa Kuru pompa durumu tespit edildi. Bu
[192] Eğri Sonu Eğri sonu durumu varsa etkindir.
[193] Uyku Modu Frekans dönüştürücü/sistem uyku moduna
[194] Kopmuş Kayış Kopmuş kayış durumu tespit edildi. Bu
[195] Bypass Valf
Kontrolü
DUYURU!
Tüm ters durdurma/yanaşma
komutları devre dışı olmalıdır.
çıkış yüksektir ([Hand on] üzerindeki
gösterge ışığı ile gösterildiği gibi).
iken çıkış yüksektir ([Auto On] üzerindeki
gösterge ışığı ile gösterildiği gibi).
(2000-01-01) sıfırlanmıştır.
programlanan koruyucu bakım olaylarının
bir veya daha fazlası
parametre 23-11 Bakım Eylemi öğesinde
belirtilen eylem için süreyi geçmiştir.
Bkz. parametre 5-80 AHF Tutucu Yeniden
Bağlantı Gecikmesi.
Harici fan kontrolü etkin.
durumu Parametre 22-21 Düşük Güç
Algılama içerisinde etkinken tespit
edilmiştir.
işlevi parametre 22-26 Kuru Pompa İşlevi
içerisinde etkinleştirin.
girdi. Bkz. 22-4* Uyku Modu parametre
grubu.
işlevi parametre 22-60 Kopmuş Bant İşlevi
içerisinde etkinleştirin.
Bypass valf kontrolü (frekans dönüştürücüdeki dijital/röle çıkışı), bypass valfi
kullanarak başlatma esnasında kompresör
yükünü boşaltan kompresör sistemleri için
kullanılır. Başlatma komutu verildikten
sonra bypass valfi, frekans dönüştürücü
parametre 4-11 Motor Hızı Alt Sınırı [RPM]
değerine ulaşıncaya kadar açıktır. Sınıra
ulaşıldığında, bypass valfi kapatılarak
kompresörün normal şekilde işletilmesi
sağlanır. Bu ilke yeni bir başlatma
yapılmadan ve frekans dönüştürücü hızı
başlatma sinyali alımında 0 olmadan önce
yeniden etkinleştirilmez.
Parametre 1-71 Bşlt. gecikm. motor başlatmasını geciktirmek için kullanılabilir.
88 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 91

Time
REF
Min
Speed
ON
Time
Time
OFF
ON
OFF
Start
Stop
130BA251.10
Speed
Parametre Açıklaması Programlama Kılavuzu
[244] RS Flipop 4 Bkz. parametre 13-15 RS-FF Operand S,
parametre 13-16 RS-FF Operand R.
[245] RS Flipop 5 Bkz. parametre 13-15 RS-FF Operand S,
parametre 13-16 RS-FF Operand R.
[246] RS Flipop 6 Bkz. parametre 13-15 RS-FF Operand S,
parametre 13-16 RS-FF Operand R.
[247] RS Flipop 7 Bkz. parametre 13-15 RS-FF Operand S,
parametre 13-16 RS-FF Operand R.
3 3
Çizim 3.28 Bypass Valf Kontrolü İlkesi
[199] Pipe Filling Boru doldurma işlevi işletimdeyken
etkindir. Bkz. 29-** Water Application
Functions (Su Uygulaması İşlevleri)
parametre grubu.
Aşağıdaki ayar seçeneklerinin hepsi
kademeli denetleyici ile ilgidir.
Daha fazla ayrıntı için bkz. 25-** Kademeli
Dntlyc parametre grubu.
[200] Tam Kapasite Tüm pompalar tam hızda çalışıyor.
[201] Pompa 1
çalışıyor
[202] Pompa 2
çalışıyor
[203] Pompa 3
çalışıyor
[204] Pompa 4
çalışıyor
[205] Pompa 5
çalışıyor
[206] Pompa 6
çalışıyor
[207] Pompa 7
çalışıyor
[208] Pompa 8
çalışıyor
[209] Pompa 9
çalışıyor
[240] RS Flipop 0 Bkz. parametre 13-15 RS-FF Operand S,
[241] RS Flipop 1 Bkz. parametre 13-15 RS-FF Operand S,
[242] RS Flipop 2 Bkz. parametre 13-15 RS-FF Operand S,
[243] RS Flipop 3 Bkz. parametre 13-15 RS-FF Operand S,
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 89
Kademeli denetim tarafından denetlenen
pompaların bir veya daha fazlası çalışıyor.
İşlev aynı zamanda parametre 25-05 Sabit
Brnc Pmpa içerisindeki ayara da bağlıdır.
[0] Hayır olarak ayarlanırsa Pompa 1 röle 1
tarafından denetlenen pompayı ifade eder
ve sıralama bu şekilde deva eder. [1] Evet
olarak ayarlanırsa Pompa1 yalnızca frekans
dönüştürücü ile kontrol edilen pompayı
(dahili röleler olmadan ), Pompa 2 ise röle1
ile kontrol edilen pompayı ifade eder. Bkz.
Tablo 3.15.
Bkz. [201].
Bkz. [201].
parametre 13-16 RS-FF Operand R.
parametre 13-16 RS-FF Operand R.
parametre 13-16 RS-FF Operand R.
parametre 13-16 RS-FF Operand R.
5-3* Dijital Çıkışlar
parametre
grubundaki ayar.
[0] Hayır [1] Evet
[201] Pompa 1
çalışıyor
[202] Pompa 2
çalışıyor
[203] Pompa 3
çalışıyor
Tablo 3.15 Kademeli Denetleyicinin Denetlediği Pompalar
Şundaki ayar: parametre 25-05 Sabit Brnc
Pmpa
Röle1
ile kontrol edilir
Röle 2
ile kontrol edilir
– Röle 2
Frekans dönüştürücü
ile kontrol edilir
Röle1
ile kontrol edilir
ile kontrol edilir
5-30 Terminal 27 Dijital Çıkış
Bu parametrenin bölüm 3.7.3 5-3* Dijital Çıkışlar içerisinde
açıklanan seçenekleri vardır.
Seçenek: fonksiyon:
[0] * İşletim yok
5-31 Terminal 29 Dijital Çıkış
Bu parametrenin bölüm 3.7.3 5-3* Dijital Çıkışlar içerisinde
açıklanan seçenekleri vardır.
Seçenek: fonksiyon:
[0] * İşletim yok
5-32 Term X30/6 Diji Çıkış (MCB 101)
Bu parametrenin bölüm 3.7.3 5-3* Dijital Çıkışlar içerisinde
açıklanan seçenekleri vardır.
Seçenek: fonksiyon:
[0] * İşletim yok
VLT® Genel Amaçlı G/Ç MCB 101 frekans
dönüştürücüye takıldığında bu parametre
etkindir.
5-33 Term X30/7 Diji. Çıkış (MCB 101)
Seçenek: fonksiyon:
[0] * İşletim yok
VLT® Genel Amaçlı G/Ç MCB 101 frekans
dönüştürücüye takıldığında bu parametre
etkindir. 5-3* Dijital Girişler parametre
grubundaki ile aynı seçenekler ve işlevler.
Page 92

5-40 İşlev Rölesi
Dizi [20]
Seçenek: fonksiyon:
Rölelerin işlevini tanımlamak için
seçenekleri belirleyin.
Her bir mekanik rölenin seçilmesi,
bir dizi parametresi ile gerçekleştirilir.
[0] İşletim yok
[1] Kontrol hazır
[2] Sürücü hazır
[3] Sürücü hzr/
uzk. knt.
[4] Beklemede /
uyarı yok
[5] Çalıştırma
[6] Çlıştırma /
uyarı yok
[8] Refrn. Çlş./
uyarı yok
[9] Alarm
[10] Alarm veya
uyarı
[11] Moment
sınırında
[12] Akım aralığı
dışında
[13] Akımın
altında, düşük
[14] Akımın
üstünde, yük.
[15] Hız aralığı
dışında
[16] Hızın altında,
düşük
[17] Hız üstünde,
yüksek
[18] Geri bsl aralğ
dışnda
[19] Geri bsl
altnda, düşk
[20] Geri bsl üstnd,
yüksk
[21] Termal uyarısı
[25] Ters
[26] Bus Tamam
[27] Mom. sın. ve
drdurma
[28] Fren, fren
uyarı. yok
5-40 İşlev Rölesi
Dizi [20]
Seçenek: fonksiyon:
[29] Fren hazır,
arıza yok
[30] Fren arızası
(IGBT)
[33] Güvenli durd.
etkin
[35] Dış kilit
[36] Kntrol sözcüğü
bit 11
[37] Kntrol sözcüğü
bit 12
[40] Ref aralığı
dışında
[41] Ref altı, düşük
[42] Ref üstü,
yüksek
[45] Bus ktrl.
[46] Bs ktrl, zmn
aşmnd 1
[47] Bs ktrl, zmn
aşmnd 0
[51] MCO kontrollü
[59] Remote,enable
,no TW
[60] Karşılaştırıcı 0
[61] Karşılaştırıcı 1
[62] Karşılaştırıcı 2
[63] Karşılaştırıcı 3
[64] Karşılaştırıcı 4
[65] Karşılaştırıcı 5
[70] Mantık kuralı 0
[71] Mantık kuralı 1
[72] Mantık kuralı 2
[73] Mantık kuralı 3
[74] Mantık kuralı 4
[75] Mantık kuralı 5
[80] SL dijital çıkış
A
[81] SL dijital çıkış
B
[82] SL dijital çıkış
C
[83] SL dijital çıkış
D
[84] SL dijital çıkış
E
[85] SL dijital çıkış
F
[120] System On Ref
[151] ATEX ETR cur.
alarm
Parametre Açıklaması
3.7.4 5-4* Röleler
Rölelerin zamanlama ve giriş işlevlerinin yapılandırılması
için parametreler.
33
90 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
VLT® AQUA Drive FC 202
Page 93

5-40 İşlev Rölesi
Dizi [20]
Seçenek: fonksiyon:
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Alarm yok
[161] Ters çalıştırma
[164] Local ref
active, not
OFF
[165] Yerel ref. etkin
[166] Uzaktan ref.
etkin
[167] Başlatma kom.
etkin
[168] El modu
[169] Oto. modu
[180] Saat Arızası
[181] Önck. Bakım
[183] Pre/Post Lube
[188] AHF
Kondansatör
Bağl
[189] Harici Fan
Kontrolü
[190] Akış Yok
[191] Kuru Pompa
[192] Eğri Sonu
[193] Uyku Modu
[194] Kopmuş Kayış
[195] Bypass Valf
Kontrolü
[196] Yangın Modu
Etkin
[197] Yangın Modu
Etkindi
[198] Drive Bypass
(Sürücü
Bypass)
[199] Pipe Filling
[211] Kademeli
Pompa 1
[212] Kademeli
Pompa 2
[213] Kademeli
Pompa 3
[214] Kademeli
Pompa 4
[215] Kademeli
Pompa 5
5-40 İşlev Rölesi
Dizi [20]
Seçenek: fonksiyon:
[216] Kademeli
Pompa 6
[217] Kademeli
Pompa 7
[218] Kademeli
Pompa 8
[219] Kademeli
Pompa 9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
[238] Ext. CL 3 on
Ref
[240] RS Flipop 0 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[241] RS Flipop 1 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[242] RS Flipop 2 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[243] RS Flipop 3 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[244] RS Flipop 4 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[245] RS Flipop 5 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[246] RS Flipop 6 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
[247] RS Flipop 7 Bkz. parametre 13-15 RS-FF Operand
S, parametre 13-16 RS-FF Operand R.
5-41 Açık Gecikme, Röle
Dizi [20]
Aralık: fonksiyon:
0.01 s* [0.01 - 600 s] Röle devreye girme süresinin
gecikmesini girin. Dizi işlevinde 2
dahili mekanik röleden 1'ini seçin.
Ayrıntılar için bkz.
parametre 5-40 İşlev Rölesi.
Parametre Açıklaması Programlama Kılavuzu
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 91
3 3
Page 94

Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
5-42 Kapalı Gecikme, Röle
Dizi[20]
Aralık: fonksiyon:
0.01 s* [0.01 - 600 s] Röle devreden çıkma süresinin
gecikmesini girin. Dizi işlevinde 2
dahili mekanik röleden 1'ini seçin.
Ayrıntılar için bkz.
parametre 5-40 İşlev Rölesi. Seçili
olay koşulu gecikme zamanlayıcısı
dolmadan değişirse röle çıkışı
etkilenmez.
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
130BA076.10
(RPM)
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 Terminal 29 Düşük Frekans
Aralık: fonksiyon:
100 Hz* [0 - 110000
Hz]
parametre 5-52 Terminal 29 Düşük
Ref./Gerib. Değeri içerisine düşük
motor mili hızına (düşük referans
değeri) karşılık gelen alt frekans
sınırını girin. Bu bölümde şuna
bakın: Çizim 3.31.
5-51 Terminal 29 Yüksek Frekans
Aralık: fonksiyon:
100 Hz* [0 - 110000
Hz]
parametre 5-53 Terminal 29 Yüksek
Ref./Gerib. Değeri içerisine yüksek
motor mili hızına (yüksek referans
değeri) karşılık gelen üst frekans
sınırını girin.
5-52 Terminal 29 Düşük Ref./Gerib. Değeri
Aralık: fonksiyon:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Motor mili hızı [RPM] için alt
referans değeri sınırını girin. Bu aynı
zamanda en düşük geri besleme
değeridir, ayrıca bkz.
parametre 5-57 Terminal 33 Düşük
Ref./Gerib. Değeri.
5-53 Terminal 29 Yüksek Ref./Gerib. Değeri
Aralık: fonksiyon:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Motor mil hızının yüksek referans
değerini [RPM] ile yüksek geri
besleme değerini girin, ayrıca bkz.
parametre 5-58 Terminal 33 Yüksek
Ref./Gerib. Değeri.
Parametre Açıklaması
VLT® AQUA Drive FC 202
kullanılırsa parametre 5-02 Terminal 29 Modu öğesini [0]
Giriş olarak ayarlayın.
33
Çizim 3.29 Açık Gecikme, Röle
Çizim 3.31 Darbe Girişi
Çizim 3.30 Kapalı Gecikme, Röle
Seçili olay koşulu gecikmede veya gecikmede değil
zamanlayıcısı dolmadan değişirse röle çıkışı etkilenmez.
3.7.5 5-5* Darbe Girişi
Darbe girişi parametreleri, darbe girişleri için ölçekleme ve
filtre ayarlarını yapılandırarak darbe referans alanı için
uygun bir pencere tanımlamak amacıyla kullanılır. Giriş
terminali 29 veya 33 frekans referans girişi olarak işler.
Terminal 29 (parametre 5-13 Terminal 29 Dijital Giriş) veya
terminal 33'ü (parametre 5-15 Terminal 33 Dijital Giriş) [32]
Darbe girişi olarak ayarlayın. Terminal 29 bir giriş olarak
92 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 95
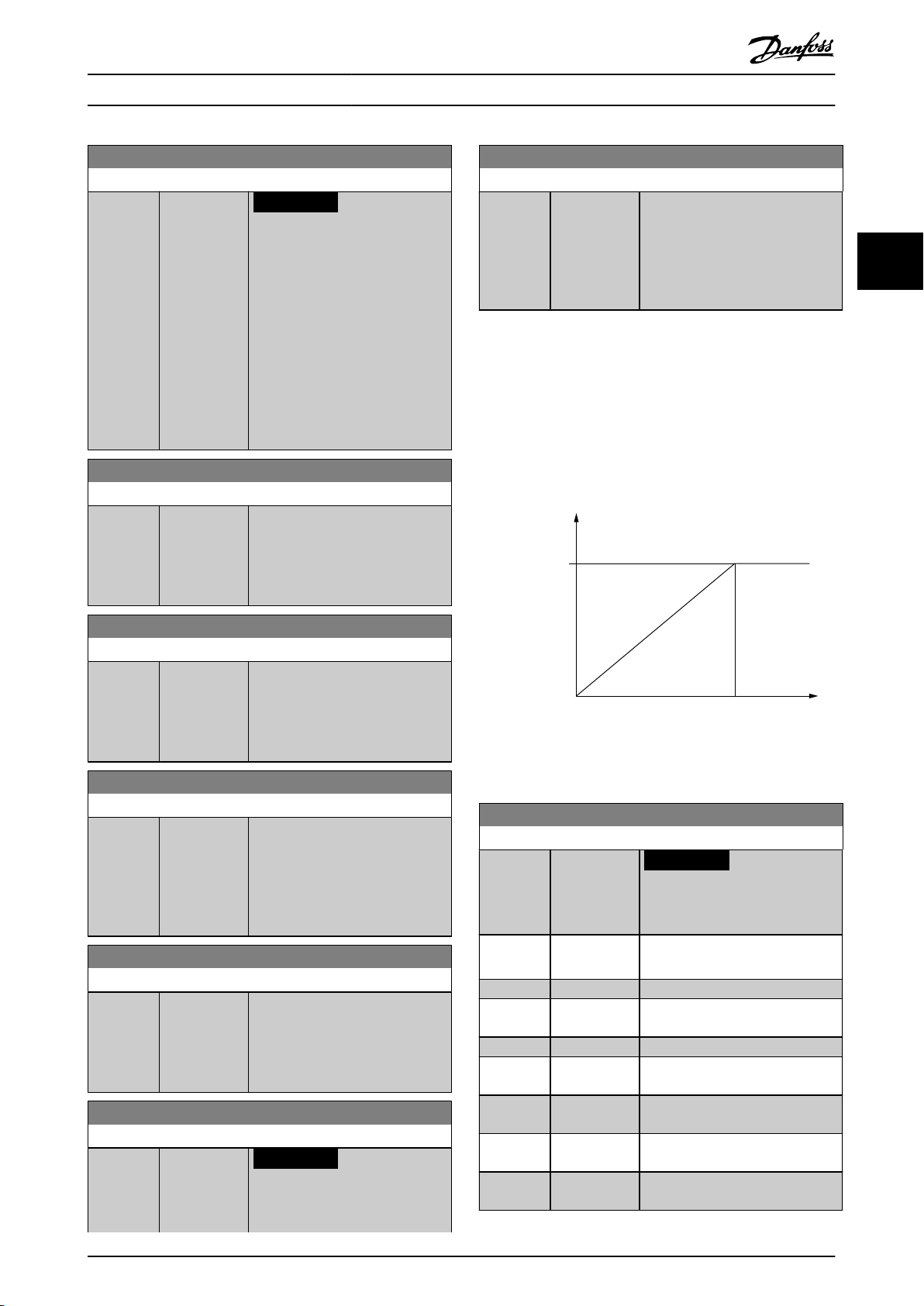
5-54 Darbe Filtresi Zaman Sabiti #29
Aralık: fonksiyon:
100 ms* [5 - 1000 ms]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Darbe filtresi zaman sabitini girin.
Darbe filtresi, sistemde çok fazla
gürültü varsa bir avantaj olacak
şekilde geri besleme sinyalinin
salınımlarını indirger. Yüksek bir
zaman sabiti değeri daha iyi bir
sönümleme sağlar, ancak aynı
zamanda filtredeki zaman
gecikmesini de artırır.
5-55 Terminal 33 Düşük Frekans
Aralık: fonksiyon:
100 Hz* [0 - 110000
Hz]
parametre 5-57 Terminal 33 Düşük
Ref./Gerib. Değeri içerisine düşük
motor mili hızına (düşük referans
değeri) karşılık gelen alt frekansı
girin.
5-56 Terminal 33 Yüksek Frekans
Aralık: fonksiyon:
100 Hz* [0 - 110000
Hz]
parametre 5-58 Terminal 33 Yüksek
Ref./Gerib. Değeri içerisine yüksek
motor mili hızına (yüksek referans
değeri) karşılık gelen üst frekansı
girin.
5-57 Terminal 33 Düşük Ref./Gerib. Değeri
Aralık: fonksiyon:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Motor mili hızı için alt referans
değerini [RPM] girin. Bu aynı
zamanda düşük geri besleme
değeridir, ayrıca bkz.
parametre 5-52 Terminal 29 Düşük
Ref./Gerib. Değeri.
5-58 Terminal 33 Yüksek Ref./Gerib. Değeri
Aralık: fonksiyon:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Motor mil hızının yüksek referans
değerini [RPM] ile yüksek geri
besleme değerini girin. Ayrıca bkz.
parametre 5-53 Terminal 29 Yüksek
Ref./Gerib. Değeri.
5-59 Darbe Filtresi Zaman Sabiti #33
Aralık: fonksiyon:
100 ms* [5 - 1000 ms]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
5-59 Darbe Filtresi Zaman Sabiti #33
Aralık: fonksiyon:
Darbe filtresi zaman sabitini girin.
Düşük geçiş filtresi etkiyi azaltır ve
kontrolden gelen geri besleme
sinyalindeki salınımları indirger.
Sistemde çok fazla gürültü varsa bu
bir avantajdır.
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
5-60 Terminal 27 Darbe Çıkış Değişkeni
Aralık: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
[0] * İşletim yok Terminal 27 okumaları için atanan
işletim değişkenini seçin.
[45] Bus ktrl.
[48] Bus ktrl., zmn
aşımı
[51] MCO kontrollü
[100] Çıkış frekansı
0-100
[101] Maks.-Min.
Referans
[102] Geri besleme
+- %200
[103] Motor akımı 0-
Imax
Parametre Açıklaması Programlama Kılavuzu
3 3
3.7.6 5-6* Darbe Çıkışı
Darbe çıkışlarının ölçekleme ve çıkış işlevlerinin yapılandırılması için parametreler. Darbe çıkışları terminal 27 veya 29
olarak belirlenir. parametre 5-01 Terminal 27 Modu içerisinde
terminal 27 çıkışını ve parametre 5-02 Terminal 29 Modu
içerisinde terminal 29 çıkışını seçin.
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 93
Çizim 3.32 Darbe Çıkışı
Page 96

5-60 Terminal 27 Darbe Çıkış Değişkeni
Aralık: fonksiyon:
[104] Tork 0-Tlim
[105] Tork 0-Tnom
[106] Güç 0-Pnom
[107] Hız 0-HighLim
[108] Tork %+-160
[109] Çıkış frk 0-
Fmax
[113] Dış Kapalı
Çevrim 1
[114] Dış Kapalı
Çevrim 2
[115] Dış Kapalı
Çevrim 3
[116] Cascade
Reference
5-62 Darbe Çıkış Maks. Frek #27
Aralık: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
5000 Hz* [0 - 32000
Hz]
parametre 5-60 Terminal 27 Darbe
Çıkış Değişkeni içerisinde seçilen
çıkış değişkenine karşılık gelen
terminal 27 için maksimum frekansı
ayarlayın.
5-63 Terminal 29 Darbe Çıkış Değişkeni
Seçenek: fonksiyon:
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Terminal 29'da görüntülemek için
değişkeni seçin. 5-6* Darbe Çıkışı
parametre grubundaki ile aynı
seçenekler ve işlevler.
[0] * İşletim yok
[45] Bus ktrl.
[48] Bus ktrl., zmn
aşımı
[51] MCO kontrollü
[100] Çıkış frekansı
0-100
[101] Maks.-Min.
Referans
[102] Geri besleme
+- %200
[103] Motor akımı 0-
Imax
[104] Tork 0-Tlim
5-63 Terminal 29 Darbe Çıkış Değişkeni
Seçenek: fonksiyon:
[105] Tork 0-Tnom
[106] Güç 0-Pnom
[107] Hız 0-HighLim
[108] Tork %+-160
[109] Çıkış frk 0-
Fmax
[113] Dış Kapalı
Çevrim 1
[114] Dış Kapalı
Çevrim 2
[115] Dış Kapalı
Çevrim 3
[116] Cascade
Reference
5-65 Darbe Çıkış Maks. Frek #29
Aralık: fonksiyon:
5000 Hz* [0 - 32000
Hz]
parametre 5-63 Terminal 29 Darbe
Çıkış Değişkeni içerisinde ayarlanan
çıkış değişkenine karşılık gelen
terminal 29 için maksimum frekansı
ayarlayın.
5-66 Terminal X30/6 Darbe Çıkış Değişkeni
Terminal X30/6'daki okuma için değişkeni seçin.
VLT® Genel Amaçlı G/Ç MCB 101 frekans dönüştürücüye
kurulduğunda bu parametre etkindir.
5-6* Darbe Çıkışı parametre grubundaki ile aynı seçenekler ve
işlevler.
Seçenek: fonksiyon:
[0] * İşletim yok
[45] Bus ktrl.
[48] Bus ktrl., zmn
aşımı
[51] MCO kontrollü
[100] Çıkış frekansı
0-100
[101] Maks.-Min.
Referans
[102] Geri besleme
+- %200
[103] Motor akımı 0-
Imax
[104] Tork 0-Tlim
[105] Tork 0-Tnom
[106] Güç 0-Pnom
[107] Hız 0-HighLim
[108] Tork %+-160
[109] Çıkış frk 0-
Fmax
[113] Dış Kapalı
Çevrim 1
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
94 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 97

5-66 Terminal X30/6 Darbe Çıkış Değişkeni
Terminal X30/6'daki okuma için değişkeni seçin.
VLT® Genel Amaçlı G/Ç MCB 101 frekans dönüştürücüye
kurulduğunda bu parametre etkindir.
5-6* Darbe Çıkışı parametre grubundaki ile aynı seçenekler ve
işlevler.
Seçenek: fonksiyon:
[114] Dış Kapalı
Çevrim 2
[115] Dış Kapalı
Çevrim 3
[116] Cascade
Reference
5-68 Darbe Çıkış Maks. Frek # X30/6
Aralık: fonksiyon:
5000 Hz* [0 - 32000
Hz]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
parametre 5-66 Terminal X30/6 Darbe
Çıkış Değişkeni içerisindeki çıkış
değişkenine istinaden terminal
X30/6'daki maksimum frekansı
seçin.
VLT® Genel Amaçlı G/Ç MCB 101
frekans dönüştürücüye
kurulduğunda bu parametre
etkindir.
5-80 AHF Tutucu Yeniden Bağlantı Gecikmesi
Aralık: fonksiyon:
25 s* [1 - 120 s] Birbirini takip eden 2 AHF
kondansatör bağlantısı arasındaki
gecikme süresi. AHF kondansatörü
bağlantısı kesildiğinde zamanlayıcı
başlar ve gecikme sonlandığında ve
frekans dönüştürücülerin gücü
nominal gücün %20 üzerinde ve
%30 altında olduğunda tekrar
bağlanır.
10 20 30 40 50 60 70 80 90 100 110 120 130
Time (s)
Relay Output
On
t
1
t
2
130BC368.10
Nominal Power of Drive
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
...................................................................................................................................................................................................................
....................................................................................................................................................................................................................
....................................................................................................................................................................................................................
Parametre Açıklaması Programlama Kılavuzu
Kondansatör yeniden bağlama gecikmesi
•
(varsayılan=1-120 sn aralığıyla 25 sn, bkz.
parametre 5-80 AHF Tutucu Yeniden Bağlantı
Gecikmesi) AHF kondansatörü çıkış işlevinin
minimum kapalı zamanı için kullanılır.
Güç kaybı varsa frekans dönüştürücü, güç
•
yeniden geldiğinde minimum kapalı zamanın
telafi edileceğini garanti eder.
3 3
Dijital ve röle çıkışları için AHF kondansatörü bağlantı
çıkış işlevi.
İşlevsel açıklama:
%20 nominal güçte kondansatörleri bağlayın.
•
Nominal gücün %20'sinin ±%50 histerezi
•
•
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 95
(=minimum %10 ve maksimum %30 nominal
güç).
Kapalı gecikme zamanlayıcısı = 10 sn. Kondansatörlerin bağlantısının kesilmesi için 10 sn boyunca
nominal güç %10'un altında olmalıdır. 10 sn'lik
gecikme esnasında nominal güç %10'u aşarsa
zamanlayıcı (10 sn) yeniden başlatılır.
Çizim 3.33 Çıkış İşlevi Örneği
t1 kapalı gecikme zamanlayıcısını (10 sn) gösterir. .
t2 kondansatör yeniden bağlanma gecikmesini gösterir
(parametre 5-80 AHF Tutucu Yeniden Bağlantı Gecikmesi).
Frekans dönüştürücünün nominal gücü %20'yi aştığında,
çıkış işlevi başlatılır. Güç %10'un altına düştüğünde, çıkış
düşmeden önce kapalı bir gecikme zamanlayıcısı
dolmalıdır. Bu t1 ile gösterilir. Çıkış düştükten sonra
kondansatör yeniden bağlanma gecikme zamanlayıcısı
çıkışın yeniden açılmasına izin verilmeden önce dolmalıdır,
bu t2 ile gösterilir. t2 dolduğunda, nominal güç %30'un
üzerindedir ve röle başlatılmaz.
Page 98
5-90 Dijital ve Röle Bus Denetimi
Aralık: fonksiyon:
0* [0 -
2147483647 ]
Bu parametre bus tarafından
kontrol edilen dijital çıkışların ve
rölelerin durumunu korur.
Mantıksal 1, çıkışın yüksek veya
etkin olduğunu gösterir.
Mantıksal 0, çıkışın düşük veya
devre dışı olduğunu gösterir.
Bit 0 CC dijital çıkışı, terminal 27
Bit 1 CC dijital çıkışı, terminal 29
Bit 2 GPIO dijital çıkışı, terminal
X 30/6
Bit 3 GPIO dijital çıkışı, terminal
X 30/7
Bit 4 CC röle 1 çıkış terminali
Bit 5 CC röle 2 çıkış terminali
Bit 6 Seçenek B röle 1 çıkış
terminali
Bit 7 Seçenek B röle 2 çıkış
terminali
Bit 8 Seçenek B röle 3 çıkış
terminali
Bit 9–15İlerideki terminaller için
saklıdır
Bit 16 Seçenek C röle 1 çıkış
terminali
Bit 17 Seçenek C röle 2 çıkış
terminali
Bit 18 Seçenek C röle 3 çıkış
terminali
Bit 19 Seçenek C röle 4 çıkış
terminali
Bit 20 Seçenek C röle 5 çıkış
terminali
Bit 21 Seçenek C röle 6 çıkış
terminali
Bit 22 Seçenek C röle 7 çıkış
terminali
Bit 23 Seçenek C röle 8 çıkış
terminali
Bit
24–31
İlerideki terminaller için
saklıdır
Tablo 3.16 Dijital Çıkış Bit'leri
5-93 Darbe Çıkış #27 Bus Denetimi
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü olarak yapılandırıl-
dığında dijital çıkış terminali 27'ye
uygulanacak frekansı içerir.
5-94 Darbe Çıkış #27 Zmn Aşm. Ön Ayarı
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü zaman aşımı olarak
yapılandırıldığında dijital çıkış
terminali 27'ye uygulanacak frekansı
içerir ve zaman aşımı tespit edilir.
5-95 Darbe Çıkış #29 Bus Denetimi
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü olarak yapılandırıl-
dığında dijital çıkış terminali 29'a
uygulanacak frekansı içerir.
5-96 Darbe Çıkış #29 Zmn Aşm. Ön Ayarı
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü zaman aşımı olarak
yapılandırıldığında dijital çıkış
terminali 29'a uygulanacak frekansı
içerir ve zaman aşımı tespit edilir.
5-97 Darbe Çıkış #X30/6 Bus Denetimi
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü olarak yapılandırıl-
dığında dijital çıkış terminali 6'ya
uygulanacak frekansı içerir.
5-98 Darbe Çıkış #X30/6 Zmn Aşm. Ön Ayarı
Aralık: fonksiyon:
0 %* [0 - 100 %] Bus kontrollü zaman aşımı olarak
yapılandırıldığında dijital çıkış
terminali 6'ya uygulanacak frekansı
içerir ve zaman aşımı tespit edilir.
Parametre Açıklaması
3.7.7 5-9* Denetlenen Bus
Bu parametre grubu fieldbus aracılığıyla dijital ve röle
çıkışlarını seçer.
33
VLT® AQUA Drive FC 202
96 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
Page 99

6-00 Yüklü Sıfır Zaman Aşımı Süresi
Aralık: fonksiyon:
10 s* [1 - 99 s] Yüklü sıfır zaman aşımını sn
cinsinden girin. Yüklü sıfır zaman
aşımı süresi analog girişler için
etkindir, başka bir deyişle terminal
53 veya terminal 54, referans veya
geri besleme kaynakları olarak
kullanılır.
Seçili akım girişine ilişkin referans
sinyali değeri, şurada ayarlı değerin
%50'sinin altına düşerse:
•
Parametre 6-10 Terminal 53
Düşük Voltaj
•
Parametre 6-12 Terminal 53
Düşük Akım
•
Parametre 6-20 Terminal 54
Düşük Voltaj
•
Parametre 6-22 Terminal 54
Düşük Akım
parametre 6-00 Yüklü Sıfır Zaman
Aşımı Süresi içerisinde ayarlanan
zamandan daha uzun bir zaman
periyodu için, parametre 6-01 Yüklü
Sıfır Zaman Aşımı İşlevi içerisinde
seçili işlev etkinleştirilir.
6-01 Yüklü Sıfır Zaman Aşımı İşlevi
Seçenek: fonksiyon:
Zaman aşımı işlevini seçin.
parametre 6-01 Yüklü Sıfır Zaman
Aşımı İşlevi içerisinde ayarlanan işlev,
terminal 53 veya 54'teki giriş sinyali
şuradaki değerin %50'sinin altına
düşerse etkinleştirilir:
6-01 Yüklü Sıfır Zaman Aşımı İşlevi
Seçenek: fonksiyon:
•
Parametre 6-10 Terminal 53
Düşük Voltaj.
•
Parametre 6-12 Terminal 53
Düşük Akım.
•
Parametre 6-20 Terminal 54
Düşük Voltaj.
•
Parametre 6-22 Terminal 54
Düşük Akım.
Ayrıca işlev, parametre 6-00 Yüklü
Sıfır Zaman Aşımı Süresi içerisinde
tanımlanan zaman periyodu için de
etkinleştirilebilir. Aynı anda birden
fazla zaman aşımı gerçekleşirse,
frekans dönüştürücü zaman aşımı
işlevini aşağıdaki gibi öncelik
sırasına dizer:
1. Parametre 6-01 Yüklü Sıfır
Zaman Aşımı İşlevi.
2. Parametre 8-04 Kontrol
Zmn Aşm İşlevi.
[0] * Kapalı
[1] Çıkışı dondur Mevcut değerde donmuş. Yüklü sıfır
zaman aşımı süresi dondurulmuş
çıkışa uygulanmaz.
[2] Durdurma Duruş için iptal edilmiş.
[3] Aralıklı
çalıştırma
Aralıklı çalıştırma hızı için iptal
edilmiş.
[4] Maks. hız Maksimum hız için iptal edilmiş.
[5] Durd. ve al.
ver.
Daha sonraki alarm ile duruş için
iptal edilmiş.
Ref./Feedback
[RPM]
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Parametre Açıklaması Programlama Kılavuzu
3.8 6-** Analog Giriş/Çıkış Parametreleri
3.8.1 6-0* Analog G/Ç Modu
Analog G/Ç yapılandırılması ayarı için parametre grubu.
Frekans dönüştürücü 2 analog girişle donatılmıştır:
Terminaller 53.
•
Terminaller 54.
•
Analog girişleri voltaj (0-10 V) veya akım girişine (0/4–20
mA) serbetçe atanabilir.
DUYURU!
Termistörler analog veya dijital girişe bağlanabilir.
3 3
MG20OB42 Danfoss A/S © 05/2018 Tüm hakları saklıdır. 97
Çizim 3.34 Yüklü Sıfır Koşulları
Page 100

6-02 Yangın Modu Yüklü Sıfır Zmn Aş. İşl.
Seçenek: fonksiyon:
Acil durum modu etkinken zaman
aşımı işlevini seçin. Analog girişlerindeki giriş sinyali
parametre 6-00 Yüklü Sıfır Zaman
Aşımı Süresi içerisinde tanımlanan
zaman periyodu için düşük değerin
%50'sinden daha düşük ise bu
parametrede ayarlanan işlev
etkinleştirilir.
[0] * Kapalı
[1] Çıkışı dondur Mevcut değerde donmuş.
[2] Durdurma Duruş için iptal edilmiş.
[3] Aralıklı
çalıştırma
Aralıklı çalıştırma hızı için iptal
edilmiş.
[4] Maks. hız Maksimum hız için iptal edilmiş.
6-10 Terminal 53 Düşük Voltaj
Aralık: fonksiyon:
0.07 V* [ 0 - par. 6-11
V]
DUYURU!
Sıfır yüklü alarmların çalışması
için parametre 6-10 Terminal 53
Düşük Voltaj değeri 1 V veya
daha yüksek olmalıdır.
Düşük voltaj değerini girin. Bu
analog giriş ölçeklendirme değeri
parametre 6-14 Terminal 53 Düşük
Ref./Gerib. Değeri parametresinde
ayarlanan düşük referans geri
besleme değeri ile ilişkili olmalıdır.
6-11 Terminal 53 Yüksek Voltaj
Aralık: fonksiyon:
10 V* [ par. 6-10 -
10 V]
Yüksek voltaj değerini girin. Bu
analog giriş ölçeklendirme değeri
parametre 6-15 Terminal 53 Yüksek
Ref./Gerib. Değeri parametresinde
ayarlanan yükek referans geri
besleme değeri ile ilişkili olmalıdır.
6-12 Terminal 53 Düşük Akım
Aralık: fonksiyon:
4 mA* [ 0 - par. 6-13
mA]
Düşük akım değerini girin. Bu
referans sinyali
parametre 6-14 Terminal 53 Düşük
6-12 Terminal 53 Düşük Akım
Aralık: fonksiyon:
Ref./Gerib. Değeri parametresinde
ayarlanan düşük referans geri
besleme değeri ile ilişkili olmalıdır.
parametre 6-01 Yüklü Sıfır Zaman
Aşımı İşlevi içerisindeki yüklü sıfır
zaman aşımı işlevini etkinleştirmek
için değeri 2 mA'dan daha yüksek
ayarlayın.
6-13 Terminal 53 Yüksek Akım
Aralık: fonksiyon:
20 mA* [ par. 6-12 -
20 mA]
parametre 6-15 Terminal 53 Yüksek
Ref./Gerib. Değeri'de ayarlanan
yüksek referans/geri besleme değeri
ile ilişkili yüksek akım değerini girin.
6-14 Terminal 53 Düşük Ref./Gerib. Değeri
Aralık: fonksiyon:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
ReferenceFeedbackUnit]
parametre 6-10 Terminal 53 Düşük
Voltaj ve parametre 6-12 Terminal 53
Düşük Akım parametrelerinde
ayarlanan, düşük voltaj/düşük akım
ile ilgili analog giriş ölçeklendirme
değerini girin.
6-15 Terminal 53 Yüksek Ref./Gerib. Değeri
Aralık: fonksiyon:
Size
related*
[-999999.999
- 999999.999
ReferenceFeedbackUnit]
parametre 6-11 Terminal 53 Yüksek
Voltaj ve parametre 6-13 Terminal 53
Yüksek Akım parametrelerinde
ayarlanan, yüksek voltaj/yüksek
akım ile ilgili analog giriş
ölçeklendirme değerini girin
6-16 Terminal 53 Filtre Zaman Sabiti
Aralık: fonksiyon:
0.005 s* [0.005 - 10 s]
DUYURU!
Motor çalışırken bu parametre
düzeltilemez.
Filtre süre sabitini girin. Bu sabit,
terminal 53’teki elektriksel paraziti
baskılayan birinci dereceden bir low
pass (düşük geçiren) filtre
zamanıdır. Yüksek bir değer
sönümlemeyi artırır ancak aynı
zamanda filtredeki gecikmeyi de
artırır.
Parametre Açıklaması
VLT® AQUA Drive FC 202
33
3.8.2 6-1* Analog Giriş 1
Analog girişi 1'in ölçeklemesi ve sınırlarının yapılandırılması
için parametreler (terminal 53).
98 Danfoss A/S © 05/2018 Tüm hakları saklıdır. MG20OB42
 Loading...
Loading...