

Page 1
MAKING MODERN LIVING POSSIBLE
Guía de diseño
VLT® Refrigeration Drive FC 103
1,1-90 kW
vlt-drives.danfoss.com
Page 2
Page 3
Índice Guía de diseño
Índice
1 Introducción
1.1 Propósito de la Guía de diseño
1.2 Organización
1.3 Recursos adicionales
1.4 Abreviaturas, símbolos y convenciones
1.5 Símbolos de seguridad
1.6 Deniciones
1.7 Versión del documento y del software
1.8 Homologaciones y certicados
1.8.1 Marca CE 10
1.8.1.1 Directiva de tensión baja 10
1.8.1.2 Directiva CEM 10
1.8.1.3 Directiva de máquinas 11
1.8.1.4 Directiva ErP 11
1.8.2 Conformidad con C-Tick 11
1.8.3 Conformidad con UL 11
1.8.4 Conformidad marítima (ADN) 11
7
7
7
7
8
9
9
10
10
1.8.5 Normativa de control de exportación 12
1.9 Seguridad
1.9.1 Principios generales de seguridad 12
2 Vista general de producto
2.1 Introducción
2.2 Descripción del funcionamiento
2.3 Secuencia de funcionamiento
2.3.1 Sección del recticador 18
2.3.2 Sección intermedia 18
2.3.3 Sección del inversor 18
2.4 Estructuras de control
2.4.1 Estructura de control de lazo abierto 18
2.4.2 Estructura de control de lazo cerrado 19
2.4.3 Control Local (Hand On) y Remoto (Auto On) 20
2.4.4 Manejo de referencias 21
2.4.5 Manejo de la realimentación 23
2.5 Funciones operativas automatizadas
12
14
14
17
18
18
24
2.5.1 Protección ante cortocircuitos 24
2.5.2 Protección contra sobretensión 24
2.5.3 Detección de que falta una fase del motor 25
2.5.4 Detección de desequilibrio de fase de red 25
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 1
Page 4
Índice
VLT® Refrigeration Drive FC 103
2.5.5 Conmutación en la salida 25
2.5.6 Protección de sobrecarga 25
2.5.7 Reducción de potencia automática 25
2.5.8 Optimización automática de energía 25
2.5.9 Modulación automática de frecuencia de conmutación 26
2.5.10 Reducción automática de potencia por alta frecuencia de conmutación 26
2.5.11 Reducción de potencia automática por sobretemperatura 26
2.5.12 Rampa automática 26
2.5.13 Circuito del límite de intensidad 26
2.5.14 Rendimiento de uctuación de potencia 26
2.5.15 Arranque suave del motor 26
2.5.16 Amortiguación de resonancia 27
2.5.17 Ventiladores controlados por temperatura 27
2.5.18 Conformidad con CEM 27
2.5.19 Medición de la intensidad en las tres fases del motor 27
2.5.20 Aislamiento galvánico de los terminales de control 27
2.6 Funciones de aplicación personalizadas
2.6.1 Adaptación automática del motor 27
2.6.2 Protección térmica motor 27
2.6.3 Corte de red 28
2.6.4 Controladores PID integrados 28
2.6.5 Rearranque automático 29
2.6.6 Motor en giro 29
2.6.7 Par completo a velocidad reducida 29
2.6.8 Bypass de frecuencia 29
2.6.9 Precalentador del motor 29
2.6.10 Cuatro ajustes programables 29
2.6.11 Frenado de CC 29
2.6.12 Modo reposo 29
2.6.13 Permiso de arranque 29
2.6.14 Smart Logic Control (SLC) 29
2.6.15 Función de Safe Torque O 31
27
2.7 Funciones de fallo, advertencia y alarma
31
2.7.1 Funcionamiento con temperatura excesiva 31
2.7.2 Advertencias de referencia alta o baja 32
2.7.3 Advertencia de realimentación alta o baja 32
2.7.4 Desequilibrio de fase o pérdida de fase 32
2.7.5 Advertencia de frecuencia alta 32
2.7.6 Advertencia de baja frecuencia 32
2.7.7 Advertencia de intensidad alta 32
2 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 5
Índice Guía de diseño
2.7.8 Advertencia de intensidad baja 32
2.7.9 Advertencia de ausencia de carga / correa rota 32
2.7.10 Interfaz serie perdida 32
2.8 Interfaces de usuario y programación
2.8.1 Panel de control local 33
2.8.2 Software para PC 33
2.8.2.1 Software de conguración MCT 10 34
2.8.2.2 VLT® Harmonics Calculation Software MCT 31 34
2.8.2.3 Software de cálculo de armónicos (HCS) 34
2.9 previo
2.9.1 Almacenamiento 35
3 Integración del sistema
3.1 Condiciones ambientales de funcionamiento
3.1.1 Humedad 37
3.1.2 Temperatura 37
3.1.3 Refrigeración 37
3.1.4 Sobretensión generada por el motor 38
3.1.5 Ruido acústico 38
3.1.6 Vibración y golpe 38
3.1.7 Entornos agresivos 39
33
35
36
37
3.1.8 Deniciones de clasicación IP 39
3.1.9 Interferencias de radiofrecuencia 40
3.1.10 Conformidad PELV y de aislamiento galvánico 41
3.2 CEM, armónicos y protección de fuga a tierra
3.2.1 Aspectos generales de las emisiones CEM 41
3.2.2 Resultados de las pruebas de CEM (emisión) 43
3.2.3 Requisitos en materia de emisiones 44
3.2.4 Requisitos de inmunidad 44
3.2.5 Aislamiento del motor 45
3.2.6 Corrientes en los cojinetes del motor 45
3.2.7 Armónicos 46
3.2.8 Corriente de fuga a tierra 49
3.3 Rendimiento energético
3.3.1 Clases IE e IES 51
3.3.2 Datos de pérdida de potencia y datos de rendimiento 51
3.3.3 Pérdidas y rendimiento de un motor 52
3.3.4 Pérdidas y rendimiento de un sistema Power Drive 53
41
51
3.4 Integración de la red
3.4.1 Conguraciones de red y efectos CEM 53
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 3
53
Page 6
Índice
VLT® Refrigeration Drive FC 103
3.4.2 Interferencia de la red de baja frecuencia 53
3.4.3 Análisis de la interferencia de la red 54
3.4.4 Opciones para la reducción de la interferencia de la red 54
3.4.5 Interferencias de radiofrecuencia 55
3.4.6 Clasicación del lugar de funcionamiento 55
3.4.7 Utilización con una fuente de entrada aislada 56
3.4.8 Corrección del factor de potencia 56
3.4.9 Retardo de la potencia de entrada 56
3.4.10 Transitorios de red 56
3.4.11 Funcionamiento con un generador de reserva 56
3.5 Integración del motor
3.5.1 Consideraciones sobre la selección del motor 57
3.5.2 Filtros senoidales y ltros dU/dt 57
3.5.3 Conexión a tierra correcta del motor 57
3.5.4 Cables de motor 57
3.5.5 Apantallamiento del cable de motor 58
3.5.6 Conexión de motores múltiples 58
3.5.7 Protección térmica motor 60
3.5.8 Contactor de salida 60
3.5.9 Rendimiento energético 60
3.6 Entradas y salidas adicionales
3.6.1 Esquema de cableado 62
3.6.2 Conexiones de los relés 63
3.6.3 Conexión eléctrica conforme a CEM 64
3.7 Planicación mecánica
3.7.1 Separación 65
3.7.2 Montaje en pared 66
57
62
65
3.7.3 Acceso 66
3.8 Opciones y accesorios
3.8.1 Opciones de comunicación 69
3.8.2 Entrada/salida, realimentación y opciones de seguridad 70
3.8.3 Filtros senoidales 70
3.8.4 Filtros dU/dt 70
3.8.5 Filtros armónicos 70
3.8.6 Kit de protección IP21 / NEMA tipo 1 70
3.8.7 Filtros de modo común 72
3.8.8 Kit de montaje remoto para LCP 73
3.8.9 Soporte de montaje para tamaños de protección A5, B1, B2, C1 y C2 74
3.9 Interfaz serie RS485
3.9.1 Descripción general 74
4 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
67
74
Page 7
Índice Guía de diseño
3.9.2 Conexión de red 75
3.9.3 Terminación de bus RS485 76
3.9.4 Precauciones de compatibilidad electromagnética (CEM) 76
3.9.5 Aspectos generales del protocolo FC 76
3.9.6 Conguración de red 77
3.9.7 Estructura de formato de mensaje del protocolo FC 77
3.9.8 Ejemplos de protocolo FC 80
3.9.9 Protocolo Modbus RTU 81
3.9.10 Estructura de formato de mensaje de Modbus RTU 82
3.9.11 Acceso a los parámetros 85
3.9.12 Perl de control del convertidor de frecuencia 86
3.10 Lista de vericación del diseño del sistema
4 Ejemplos de aplicaciones
4.1 Ejemplos de aplicaciones
4.2 Funciones de aplicación seleccionadas
4.2.1 SmartStart 95
4.2.2 Arranque/parada 96
4.2.3 Arranque/parada por pulsos 96
4.2.4 Referencia de potenciómetro 97
4.3 Ejemplos de conguración de la aplicación
5 Condiciones especiales
5.1 Reducción de potencia
5.2 Reducción de potencia manual
5.3 Reducción de potencia para cables de motor largos o de mayor sección transversal
5.4 Reducción de potencia en función de la temperatura ambiente
6 Código descriptivo y selección
93
95
95
95
97
103
103
103
104
104
109
6.1 Pedidos
6.1.1 Introducción 109
6.1.2 Código descriptivo 109
6.2 Opciones, accesorios y repuestos
6.2.1 Números de pedido: Opciones y accesorios 110
6.2.2 Números de pedido: Filtros armónicos 113
6.2.3 Números de pedido: Módulos de ltro senoidal, 200-480 V CA 113
6.2.4 Números de pedido: Módulos de ltro senoidal, 525-600/690 V CA 114
6.2.5 Filtros armónicos 115
6.2.6 Filtros senoidales 117
6.2.7 Filtros dU/dt 118
6.2.8 Filtros de modo común 119
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 5
109
110
Page 8
Índice
VLT® Refrigeration Drive FC 103
7 Especicaciones
7.1 Datos eléctricos
7.1.1 Fuente de alimentación de red 3 × 200-240 V CA 120
7.1.2 Fuente de alimentación de red 3 × 380-480 V CA 122
7.1.3 Fuente de alimentación de red 3 × 525-600 V CA 124
7.2 Fuente de alimentación de red
7.3 Salida del motor y datos del motor
7.4 Condiciones ambientales
7.5 Especicaciones del cable
7.6 Entrada/salida de control y datos de control
7.7 Par de apriete de conexión
7.8 Fusibles y magnetotérmicos
7.9 Potencias de salida, peso y dimensiones
7.10 Prueba dU/dt
7.11 Clasicaciones de ruido acústico
7.12 Opciones seleccionadas
7.12.1 VLT® General Purpose I/O Module MCB 101 141
120
120
126
126
127
127
128
131
131
137
138
140
141
7.12.2 VLT® Relay Card MCB 105 141
7.12.3 VLT® Extended Relay Card MCB 113 143
8 Apéndice: selección de dibujos
8.1 Diagramas de la conexión de red
8.2 Dibujos de la conexión del motor
8.3 Dibujos del terminal de relé
8.4 Oricios de entrada para cables
Índice
145
145
148
150
151
155
6 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 9

Introducción Guía de diseño
1 Introducción
1.1 Propósito de la Guía de diseño
Esta Guía de diseño para los convertidores de frecuencia
FC 103 de VLT® Refrigeration Drive está dirigida a:
Ingenieros de proyectos y sistemas.
•
Asesores de diseño.
•
Especialistas de productos y aplicaciones.
•
La Guía de diseño proporciona información técnica para
entender la capacidad de integración del convertidor de
frecuencia en los sistemas de control y seguimiento del
motor.
La nalidad de la Guía de diseño es facilitar consideraciones de diseño y datos de planicación para la
integración del convertidor de frecuencia en un sistema. La
Guía de diseño abarca una selección de convertidores de
frecuencia y opciones para toda una serie de aplicaciones
e instalaciones.
Revisar la información detallada del producto en la fase de
diseño permite el desarrollo de un sistema bien concebido,
con una funcionalidad y un rendimiento óptimos.
VLT® es una marca registrada.
Organización
1.2
Capétulo 1 Introducción: objetivo general de la Guía de
diseño y cumplimiento de las normativas internacionales.
Capétulo 7 Especicaciones: recopilación de datos técnicos
en formato de tabla y grácos.
Capétulo 8 Apéndice: selección de dibujos: Recopilación de
grácos en los que se ilustran:
Conexiones de red y del motor
•
Terminales de relé
•
Entradas de cables
•
1.3 Recursos adicionales
Tiene a su disposición recursos para comprender el funcionamiento avanzado del convertidor de frecuencia, su
programación y su conformidad con las normativas
aplicables:
El Manual de funcionamiento de VLT® Refrigeration
•
Drive FC 103 (en adelante, el «Manual de funcionamiento») ofrece información detallada acerca
de la instalación y el arranque del convertidor de
frecuencia.
La Guía de diseño del VLT® Refrigeration Drive FC
•
103 proporciona la información necesaria para
diseñar y planicar la integración del convertidor
de frecuencia en un sistema.
La Guía de programación de VLT® Refrigeration
•
Drive FC 103 (en adelante, la «Guía de programación») proporciona información detallada sobre
cómo trabajar con parámetros y muchos
ejemplos de aplicación.
1 1
El Manual de funcionamiento de VLT® Safe Torque
Capétulo 2 Vista general de producto: estructura interna y
funcionalidades del convertidor de frecuencia y características operativas.
Capétulo 3 Integración del sistema: condiciones ambientales;
CEM, armónicos y fuga a tierra; entrada de red; motores y
conexiones de los motores; otras conexiones;
mecánica y descripciones de las opciones y accesorios
disponibles.
Capétulo 4 Ejemplos de aplicaciones: muestras de aplicaciones del producto e instrucciones de uso.
Capétulo 5 Condiciones especiales: detalles sobre entornos
de funcionamiento no convencionales.
Capétulo 6 Código descriptivo y selección: procedimientos de
pedido de equipos y opciones para realizar el uso previsto
del sistema.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 7
planicación
•
O describe cómo utilizar los convertidores de
frecuencia de Danfoss en aplicaciones de
seguridad funcional. Este manual se suministra
junto al convertidor de frecuencia cuando se
incluye la opción STO.
Existen publicaciones y manuales complementarios a su
disposición que se pueden descargar desde vlt-
-drives.danfoss.com/Products/Detail/Technical-Documents.
AVISO!
El equipo opcional disponible podría cambiar alguna
información descrita en estas publicaciones. Asegúrese
de leer las instrucciones suministradas con las opciones
para los requisitos especícos.
Póngase en contacto con un proveedor de Danfoss o
acceda a www.danfoss.com para obtener información
complementaria.
Page 10
Introducción
VLT® Refrigeration Drive FC 103
11
1.4 Abreviaturas, símbolos y convenciones
mH Inductancia en milihenrios
mm Milímetro
60° AVM Modulación asíncrona de vectores de 60°
A Amperio
CA Corriente alterna
AD Descarga por el aire
AEO Optimización automática de energía
AI Entrada analógica
AMA Adaptación automática del motor
AWG Calibre de cables estadounidense
°C
Grados celsius
CD Descarga constante
CDM Módulo de convertidor de frecuencia completo: el
convertidor de frecuencia, la sección de alimen-
tación y los componentes auxiliares
CM Modo común
CT Par constante
CC Corriente continua
DI Entrada digital
DM Modo diferencial
D-TYPE Dependiente del convertidor de frecuencia
CEM Compatibilidad electromagnética
EMF Fuerza contraelectromotriz
ETR Relé termoelectrónico
f
VELOCIDAD FIJA
Frecuencia del motor cuando se activa la función
de velocidad ja.
f
f
M
MÁX.
Frecuencia motor
La frecuencia de salida máxima que el convertidor
de frecuencia aplica a su salida.
f
MÍN.
La frecuencia mínima del motor del convertidor
de frecuencia
f
M, N
Frecuencia nominal del motor
FC Convertidor de frecuencia
g Gramos
Hiperface®Hiperface® es una marca registrada de Stegmann
HO sobrecarga alta
CV Caballos de vapor
HTL Pulsos del encoder HTL (10-30 V), (lógica de
transistor de tensión alta)
Hz Hercio
I
INV
I
LÍM.
I
M, N
I
VLT, MÁX.
I
VLT,N
Intensidad nominal de salida del convertidor
Límite de intensidad
Corriente nominal del motor
Intensidad de salida máxima
Corriente nominal de salida suministrada por el
convertidor de frecuencia
kHz Kilohercio
LCP Panel de control local
lsb Bit menos signicativo
m Metro
mA Miliamperio
MCM Mille Circular Mil, unidad norteamericana de
sección de cables
ms Milisegundo
msb Bit más signicativo
η
VLT
Eciencia del convertidor de frecuencia denida
como la relación entre la potencia de salida y la
potencia de entrada.
nF Capacitancia en nanofaradios
NLCP Panel de control local numérico
Nm Newton metro
NO Sobrecarga normal
n
s
Parámetros
en línea y
fuera de
Velocidad del motor síncrono
Los cambios realizados en los parámetros en línea
se activan inmediatamente después de cambiar el
valor de dato.
línea
P
br, cont.
Potencia nominal de la resistencia de freno
(potencia media durante el frenado continuo).
PCB Placa de circuito impreso
PCD Datos de proceso
PDS Sistema Power Drive: un CDM y un motor
PELV Tensión de protección muy baja
P
m
Potencia nominal de salida del convertidor de
frecuencia como sobrecarga alta (HO).
P
M,N
Potencia nominal del motor
Motor PM Motor de magnetización permanente
PID de
proceso
Controlador PID (diferencial proporcional
integrado), que mantiene la velocidad, la presión,
la temperatura, etc.
R
br, nom
Valor de resistencia nominal que garantiza una
potencia de frenado en el eje del motor del
150/160 % durante 1 minuto
RCD Dispositivo de corriente diferencial
Regen Terminales regenerativos
R
mín.
Valor de resistencia de freno mínima permitida
por el convertidor de frecuencia
RMS Media cuadrática
RPM Revoluciones por minuto
R
rec
Resistencia recomendada de las resistencias de
freno de Danfoss
s Segundo
SFAVM Modulación asíncrona de vectores orientada al
ujo del estátor
STW Código de estado
SMPS Fuente de alimentación del modo de
conmutación
THD Distorsión armónica total
T
LÍM.
Límite de par
TTL Pulsos del encoder TTL (5 V), (lógica transistor
transistor)
U
M, N
Tensión nominal del motor
V Voltios
VT Par variable
MCT Herramienta de control de movimientos
8 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 11

Introducción Guía de diseño
VVC+
Tabla 1.1 Abreviaturas
Convenciones
Las listas numeradas indican procedimientos.
Las listas de viñetas indican otra información y descripción
de ilustraciones.
El texto en cursiva indica:
•
•
•
•
Todas las dimensiones indicadas en mm (in).
* indica un ajuste predeterminado de un parámetro.
Control vectorial de la tensión plus
Referencia cruzada.
Vínculo.
Nota al pie.
Nombre del parámetro, nombre del grupo de
parámetros, opción del parámetro.
1.5 Símbolos de seguridad
En este manual se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
1.6 Deniciones
Inercia
El eje del motor se encuentra en modo libre. Sin par en el
motor.
Características de par constante (CT)
Características de par constante utilizadas para todas las
aplicaciones, tales como:
Cintas transportadoras.
•
Bombas de desplazamiento.
•
Grúas.
•
Inicialización
Si se lleva a cabo una inicialización (parámetro 14-22 Modo
funcionamiento), el convertidor de frecuencia vuelve a los
ajustes predeterminados.
Ciclo de trabajo intermitente
Una clasicación de trabajo intermitente es una secuencia
de ciclos de trabajo. Cada ciclo está formado por un
periodo en carga y un periodo sin carga. El funcionamiento
puede ser de trabajo periódico o de trabajo no periódico.
Factor de potencia
El factor de potencia real (lambda) tiene en cuenta todos
los armónicos. Siempre es inferior al factor de potencia real
(cosphi), que solo tiene en cuenta los armónicos
fundamentales de corriente y de tensión.
cosϕ =
Cosphi también se conoce como el factor de potencia de
desplazamiento.
Tanto lambda como cosphi se indican para los convertidores de frecuencia Danfoss VLT®, en el
capétulo 7.2 Fuente de alimentación de red.
El factor de potencia indica hasta qué punto el convertidor
de frecuencia impone una carga a la fuente de alimentación de red.
Cuanto menor es el factor de potencia, mayor es I
el mismo rendimiento en kW.
Además, un factor de potencia elevado indica que las
corrientes armónicas son bajas.
Todos los convertidores de frecuencia de Danfoss tienen
bobinas de CC integradas en el bus de CC. Las bobinas
garantizan un factor de potencia alto y reducen el THDi en
la fuente de alimentación de red.
Ajuste
Guardar ajustes de parámetros en cuatro
distintas. Cambiar entre estos cuatro ajustes de parámetros
y editar un ajuste mientras otro está activo.
Compensación de deslizamiento
El convertidor de frecuencia compensa el deslizamiento del
motor añadiendo un suplemento a la frecuencia que sigue
a la carga medida del motor, manteniendo la velocidad del
mismo casi constante.
Smart logic control (SLC)
SLC es una secuencia de acciones denidas por el usuario
que se ejecuta cuando el SLC evalúa como verdaderos los
eventos asociados denidos por el usuario. (Grupo de
parámetros 13-** Lógica inteligente).
Bus estándar FC
Incluye el bus RS485 bus con el protocolo FC o el
protocolo MC. Consulte el parámetro 8-30 Protocolo.
Termistor
Resistencia que depende de la temperatura y que se
coloca en el punto donde ha de controlarse la temperatura
(convertidor de frecuencia o motor).
Desconexión
Estado al que se pasa en situaciones de fallo; por ejemplo,
si el convertidor de frecuencia se sobrecalienta o cuando
este protege el motor, el proceso o el mecanismo. Se
impide el rearranque hasta que desaparece la causa del
P kW
P kVA
UλxIλxcosϕ
=
UλxIλ
para
RMS
conguraciones
1 1
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 9
Page 12
Introducción
VLT® Refrigeration Drive FC 103
11
fallo y se anula el estado de desconexión. Para cancelar el
estado de desconexión:
active el reinicio o
•
programe el convertidor de frecuencia para que
•
se reinicie automáticamente
La desconexión no debe utilizarse para la seguridad
personal.
Bloqueo por alarma
Estado al que se pasa en situaciones de fallo cuando el
convertidor de frecuencia está protegiéndose a sí mismo y
requiere una intervención física; por ejemplo, si el
convertidor de frecuencia se cortocircuita en la salida. Un
bloqueo por alarma solo puede cancelarse cortando la
alimentación de red, eliminando la causa del fallo y
volviendo a conectar el convertidor de frecuencia. Se
impide el rearranque hasta que se cancela el estado de
desconexión mediante la activación del reinicio o, en
algunos casos, mediante la programación del reinicio
automático. La desconexión no debe utilizarse para la
seguridad personal.
Características VT
Características de par variable utilizadas en bombas y
ventiladores.
La marca CE (Comunidad Europea) indica que el fabricante
del producto cumple todas las directivas aplicables de la
UE. Las directivas europeas aplicables al diseño y a la
fabricación de convertidores de frecuencia se enumeran en
la Tabla 1.3.
AVISO!
La marca CE no regula la calidad del producto. Las
especicaciones técnicas no pueden deducirse de la
marca CE.
AVISO!
Los convertidores de frecuencia que tengan una función
de seguridad integrada deben cumplir la directiva de
máquinas.
Directiva de la UE Versión
Directiva de tensión baja 2014/35/EU
Directiva CEM 2014/30/EU
Directiva de máquinas
Directiva ErP 2009/125/EC
Directiva ATEX 2014/34/EU
Directiva RoHS 2002/95/EC
1)
2014/32/EU
Versión del documento y del software
1.7
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras.
La Tabla 1.2 muestra las versiones de documento y
software.
Edición Comentarios Versión de software
MG16G2xx Sustituye a la MG16G1xx 1.4x
Tabla 1.2 Versión del documento y del software
Homologaciones y certicados
1.8
Los convertidores de frecuencia están diseñados conforme
a las directivas descritas en este apartado.
Para más información sobre homologaciones y certicados,
diríjase a la zona de descargas en vlt-marine.danfoss.com/
support/type-approval-certicates/.
1.8.1 Marca CE
Ilustración 1.1 CE
Tabla 1.3 Directivas de la UE aplicables a los convertidores de frecuencia
1) La conformidad con la directiva de máquinas solo se exige en los
convertidores de frecuencia dotados de una función de seguridad
integrada.
Las declaraciones de conformidad están disponibles previa
solicitud.
1.8.1.1 Directiva de tensión baja
La directiva de tensión baja se aplica a todos los equipos
eléctricos situados en los intervalos de tensión
50-1000 V CA y 75-1600 V CC.
La nalidad de esta directiva es garantizar la seguridad
personal y evitar los daños materiales cuando se manejen,
para su aplicación prevista, equipos eléctricos correctamente instalados y mantenidos.
1.8.1.2 Directiva CEM
El propósito de la Directiva CEM (compatibilidad electromagnética) es reducir las interferencias electromagnéticas y
mejorar la inmunidad de los equipos e instalaciones
eléctricos. Los requisitos de protección básicos de la
directiva CEM son que los dispositivos que generen interferencias electromagnéticas (EMI) o los dispositivos cuyo
funcionamiento se pueda ver afectado por las EMI se
diseñen para limitar la generación de interferencias electromagnéticas. Estos dispositivos deben tener un grado
adecuado de inmunidad a las EMI cuando se instalan
10 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 13
Introducción Guía de diseño
correctamente, se mantienen y se usan conforme a lo
previsto.
Los dispositivos eléctricos que se utilizan independientemente o como parte de un sistema deben disponer de la
marca CE. Los sistemas no necesitan la marca CE pero
deben cumplir con los requisitos básicos de protección de
la Directiva CEM.
1.8.1.3 Directiva de máquinas
La nalidad de la Directiva de máquinas es garantizar la
seguridad personal y evitar daños materiales en los
equipos mecánicos utilizados para su aplicación prevista.
La Directiva de máquinas es aplicable a una máquina que
conste de un conjunto de componentes o dispositivos
interconectados de los cuales al menos uno sea capaz de
realizar un movimiento mecánico.
Los convertidores de frecuencia que tengan una función
de seguridad integrada deberán cumplir la Directiva de
máquinas. Los convertidores de frecuencia sin función de
seguridad no se incluyen en la Directiva de máquinas. Si
un convertidor de frecuencia está integrado en un sistema
de maquinaria, Danfoss proporciona información sobre los
aspectos de seguridad relativos al convertidor.
Cuando los convertidores de frecuencia se utilizan en
máquinas con al menos una parte móvil, el fabricante de la
máquina debe proporcionar una declaración de cumplimiento de todas las normas y medidas de seguridad
pertinentes.
(CEM). El cumplimiento C-tick es necesario para la distribución de dispositivos eléctricos y electrónicos en el
mercado australiano y en el neozelandés.
La normativa C-tick se reere a las emisiones por
conducción y radiación. En el caso de los convertidores de
frecuencia, aplique los límites de emisiones especicados
en EN/CEI 61800-3.
Podrá emitirse una declaración de conformidad si así se
solicita.
1.8.3 Conformidad con UL
Listado como UL
Ilustración 1.3 UL
AVISO!
Los convertidores de frecuencia de 525-690 V no
disponen de certicado para UL.
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Para
obtener más información, consulte el
capétulo 2.6.2 Protección térmica motor.
1 1
1.8.1.4 Directiva ErP
La directiva ErP es la directiva europea de diseño ecológico
de productos relacionados con la energía. Esta directiva
establece requisitos de diseño ecológico para los
productos relacionados con la energía, incluidos los
convertidores de frecuencia. El objetivo de la directiva es
incrementar el rendimiento energético y el nivel de
protección del medio ambiente, mientras se aumenta la
seguridad del suministro energético. El impacto medioambiental de los productos relacionados con la energía
incluye el consumo de energía en todo el ciclo de vida útil
del producto.
1.8.2 Conformidad con C-Tick
Ilustración 1.2 C-tick
El sello C-tick indica el cumplimiento de los estándares
técnicos aplicables de compatibilidad electromagnética
1.8.4 Conformidad marítima (ADN)
Las unidades con protección Ingress de clasicación IP55
(NEMA 12) o superior evitan la formación de chispas y se
clasican como aparatos eléctricos con riesgo de explosión
limitado según el acuerdo europeo relativo al transporte
internacional de mercancías peligrosas por vías navegables
(ADN).
En las unidades con protección Ingress de clasicación
IP20/chasis, IP21 / NEMA 1 o IP54, el riesgo de formación
de chispas se evita de la siguiente forma:
No instale un interruptor de red.
•
Asegúrese de que parámetro 14-50 Filtro RFI está
•
ajustado en [1] Sí.
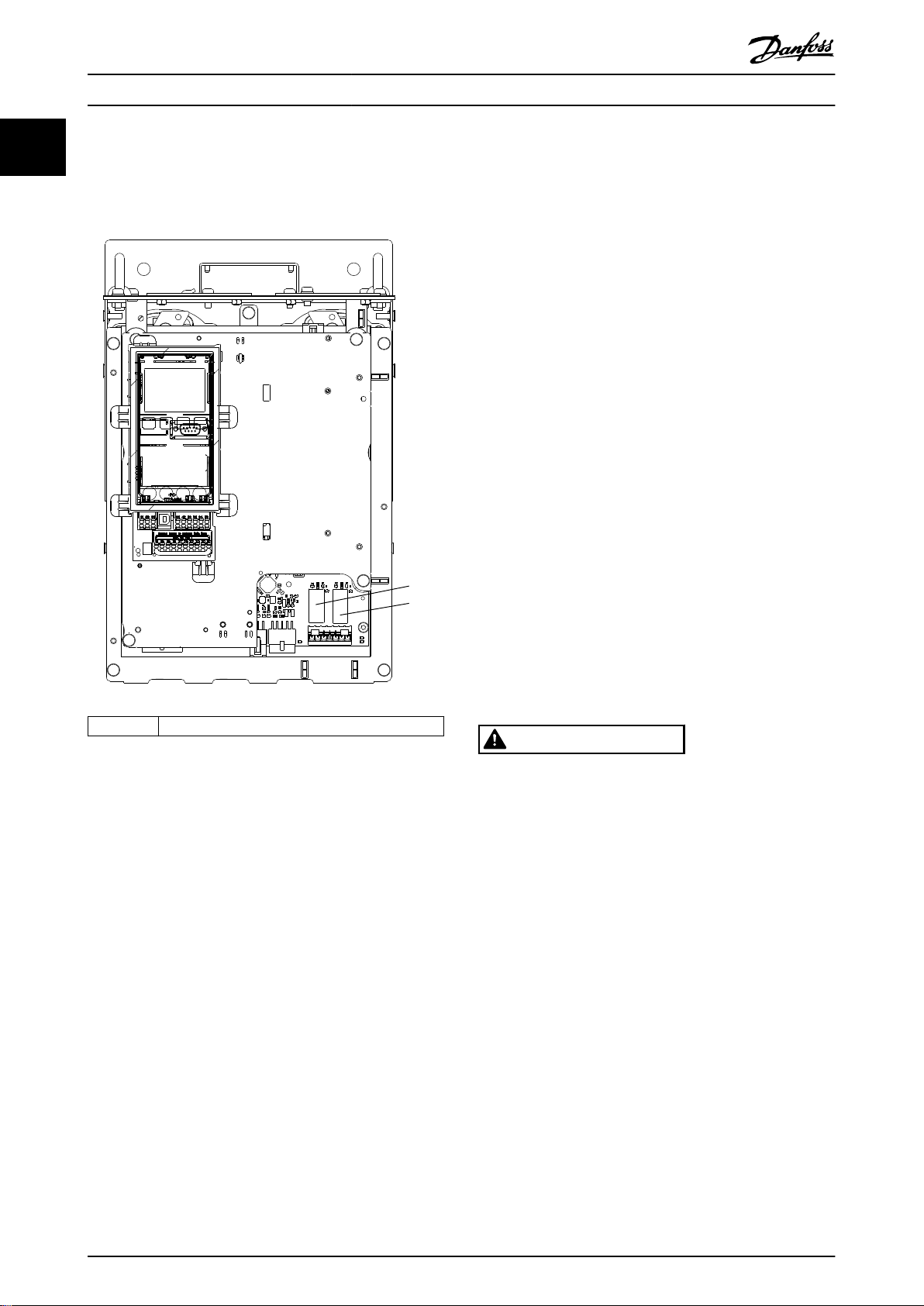
Retire todos los conectores de relé marcados
•
como RELAY. Consulte el Ilustración 1.4.
Compruebe qué opciones de relé están
•
instaladas, si es que las hay. La única opción de
relé permitida es VLT® Extended Relay Card MCB
113.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 11
Page 14
1
2
130BD832.10
Introducción
VLT® Refrigeration Drive FC 103
11
Vaya a vlt-marine.danfoss.com/support/type-approval-
-certicates/ para obtener más información sobre requisitos
marítimos.
1, 2 Conectores de relé
Seguridad
1.9
1.9.1 Principios generales de seguridad
Si se manipulan incorrectamente, los convertidores de
frecuencia pueden resultar mortales, ya que contienen
componentes de tensión alta. El equipo solo debería ser
instalado y manejado por personal
realizar trabajos de reparación sin desconectar primero la
alimentación del convertidor de frecuencia y esperar el
tiempo necesario para que la energía eléctrica almacenada
se disipe.
Es obligatorio seguir estrictamente las precauciones y
avisos para que el convertidor de frecuencia tenga un
funcionamiento seguro.
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser instalado y
manejado por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para instalar, poner en marcha y efectuar el
mantenimiento de equipos, sistemas y circuitos conforme a
la legislación y la regulación vigentes. Asimismo, el
personal cualicado debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en este
manual de funcionamiento.
ables para que el convertidor de frecuencia
cualicado. No intente
ADVERTENCIA
Ilustración 1.4 Ubicación de los conectores de relé
La declaración del fabricante está disponible bajo pedido.
1.8.5 Normativa de control de exportación
Los convertidores de frecuencia pueden estar sujetos a
normativas regionales y/o nacionales de control de
exportaciones.
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
Solo el personal cualicado deberá llevar a cabo
•
la instalación, el arranque y el mantenimiento.
Aquellos convertidores de frecuencia sujetos a normativas
de control de exportaciones se clasicarán con un código
ECCN.
El código ECCN se incluye en los documentos adjuntos al
convertidor de frecuencia.
En caso de reexportación, recaerá en el exportador la
responsabilidad de garantizar la conformidad con las
normativas pertinentes de control de exportaciones.
12 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 15
Introducción Guía de diseño
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
interruptor externo, un comando de bus de campo, una
señal de referencia de entrada desde el LCP o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
red.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
ADVERTENCIA
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores de
enlace de CC que pueden seguir cargados incluso si el
convertidor de frecuencia está apagado. Puede haber
tensión alta presente aunque las luces del indicador LED
de advertencia estén apagadas. Si después de
desconectar la alimentación no espera el tiempo especicado antes de realizar cualquier trabajo de reparación o
tarea de mantenimiento, se pueden producir lesiones
graves o incluso la muerte.
1. Pare el motor.
2. Desconecte la red de CA, los motores de
magnetización permanente y las fuentes de
alimentación de bus de CC remotas, entre las
que se incluyen las baterías de emergencia, los
SAI y las conexiones de bus de CC a otros
convertidores de frecuencia.
3. Espere a que los condensadores se descarguen
por completo antes de efectuar actividades de
mantenimiento o trabajos de reparación. La
duración del tiempo de espera se especica en
la Tabla 1.4.
Tensión [V] Tiempo de espera mínimo (minutos)
4 15
200–240 1,1-3,7 kW 5,5-45 kW
380–480 1,1-7,5 kW 11-90 kW
525–600 1,1-7,5 kW 11-90 kW
Tabla 1.4 Tiempo de descarga
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
toma de tierra correcta del convertidor de frecuencia
puede ser causa de lesiones graves e incluso muerte.
La correcta toma a tierra del equipo debe estar
•
garantizada por un instalador eléctrico
certicado.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes de rotación y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
cumplan con los códigos eléctricos nacionales y
locales.
Siga los procedimientos de este manual.
•
ADVERTENCIA
GIRO ACCIDENTAL DEL MOTOR
AUTORROTACIÓN
El giro accidental de los motores de magnetización
permanente puede crear tensión y cargar la unidad,
dando lugar a lesiones graves, daños materiales o
incluso la muerte.
Asegúrese de que los motores de magneti-
•
zación permanente estén bloqueados para
evitar un giro accidental.
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en el convertidor de frecuencia
puede causar lesiones graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
1 1
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 13
Page 16
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Vista general de producto
VLT® Refrigeration Drive FC 103
2 Vista general de producto
22
2.1 Introducción
2.1.2 Ahorro energético
Este capítulo ofrece una visión general de los principales
conjuntos y circuitos del convertidor de frecuencia. En él se
describen las funciones eléctricas internas y de procesamiento de señal. También se incluye una descripción de la
estructura de control interna.
Además, se describen las funciones opcionales y automatizadas del convertidor de frecuencia disponibles para
diseñar sistemas operativos sólidos con un control
sosticado y un rendimiento de información de estado.
2.1.1 Producto diseñado para aplicaciones
de refrigeración
VLT® Refrigeration Drive FC 103 está diseñado para aplicaciones de refrigeración. El asistente de aplicación integrado
guiará al usuario a lo largo del proceso de puesta en
servicio. La gama de funciones de serie y opcionales
incluye:
Control en cascada multizona
•
Control de zona neutra.
•
Control de temperatura de condensación otante.
•
Gestión de retorno de aceite.
•
Control de evaporador de realimentación
•
múltiple.
Control en cascada.
•
Detección de funcionamiento en seco.
•
Detección de n de curva.
•
Alternancia del motor.
•
STO.
•
Modo reposo.
•
Protección por contraseña.
•
Protección de sobrecarga.
•
Smart Logic Control.
•
Control de velocidad mínima.
•
Libre programación de textos informativos,
•
advertencias y alertas.
Si se compara con sistemas de control y tecnologías
alternativos, un convertidor de frecuencia es el sistema de
control de energía óptimo para controlar sistemas de
ventiladores y bombas.
Utilizando un convertidor de frecuencia para controlar el
caudal, una reducción de velocidad de la bomba del 20 %
genera un ahorro de energía de aproximadamente el 50 %
en las aplicaciones típicas. En la
Ilustración 2.1 se muestra un ejemplo de la reducción
potencial de energía.
1 Ahorro de energía
14 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Ilustración 2.1 Ejemplo: ahorro de energía
Page 17
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Vista general de producto Guía de diseño
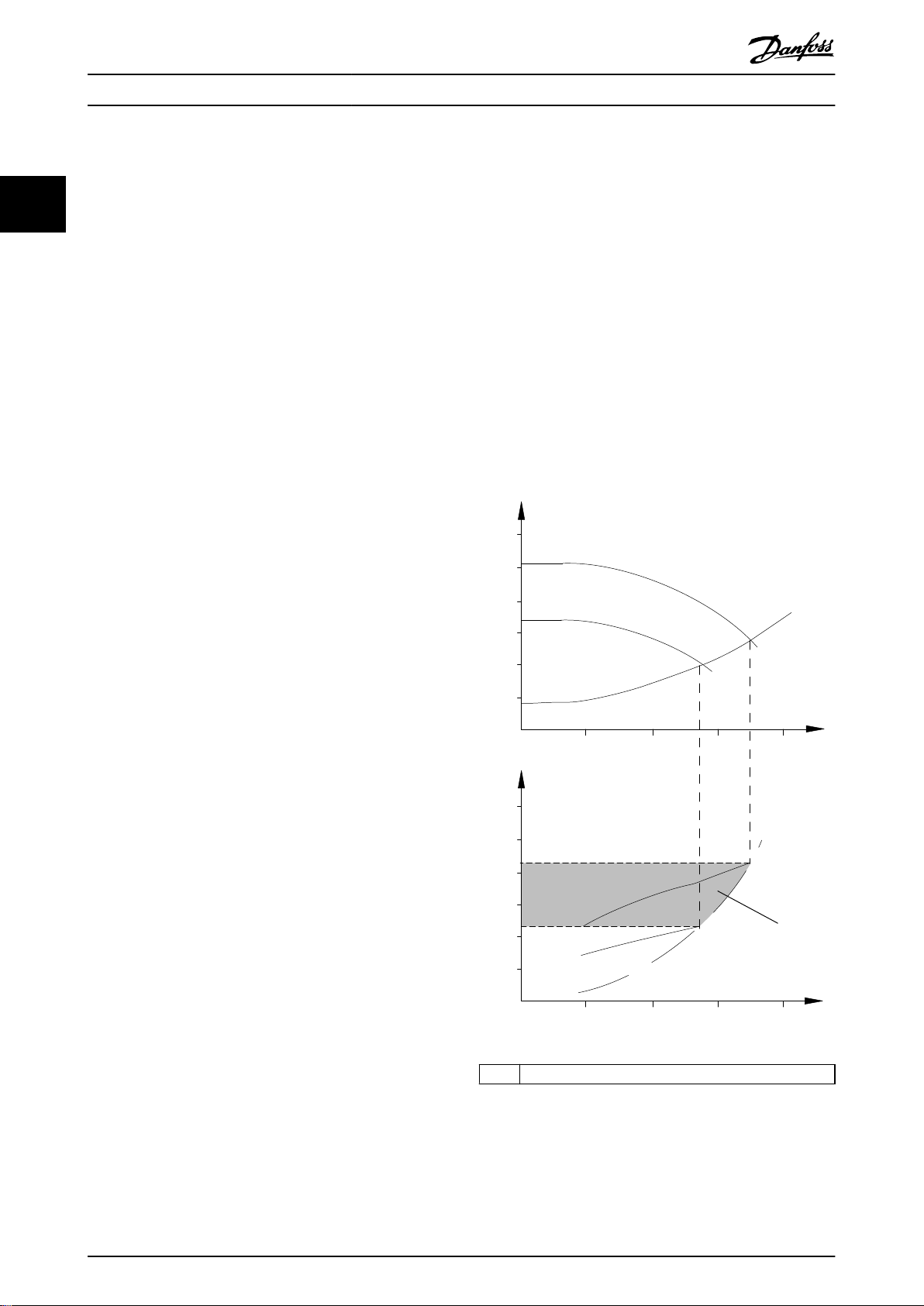
2.1.3 Ejemplo de ahorro de energía
Tal y como se muestra en la Ilustración 2.2, el caudal se
controla cambiando la velocidad de la bomba, medida en
r/min. Al reducir la velocidad solo un 20 % respecto a la
velocidad nominal, el caudal también se reduce en un
20 %. El caudal es directamente proporcional a la
velocidad. El consumo eléctrico se reduce hasta en un
50 %.
Si el sistema solo tiene que suministrar un caudal correspondiente al 100 % durante unos días al año, mientras que
el promedio es inferior al 80 % del caudal nominal durante
el resto del año, el ahorro energético es incluso superior al
50 %.
La Ilustración 2.2 describe la dependencia del caudal, la
presión y el consumo de energía en la velocidad de
bomba en r/min para bombas centrífugas.
Q=Caudal P=Potencia
Q1=Caudal 1 P1=Potencia 1
Q2=Caudal reducido P2=Potencia reducida
H=Presión n=Regulación de velocidad
H1=Presión 1 n1=Velocidad 1
H2=Presión reducida n2=Velocidad reducida
Tabla 2.1 Leyes de anidad
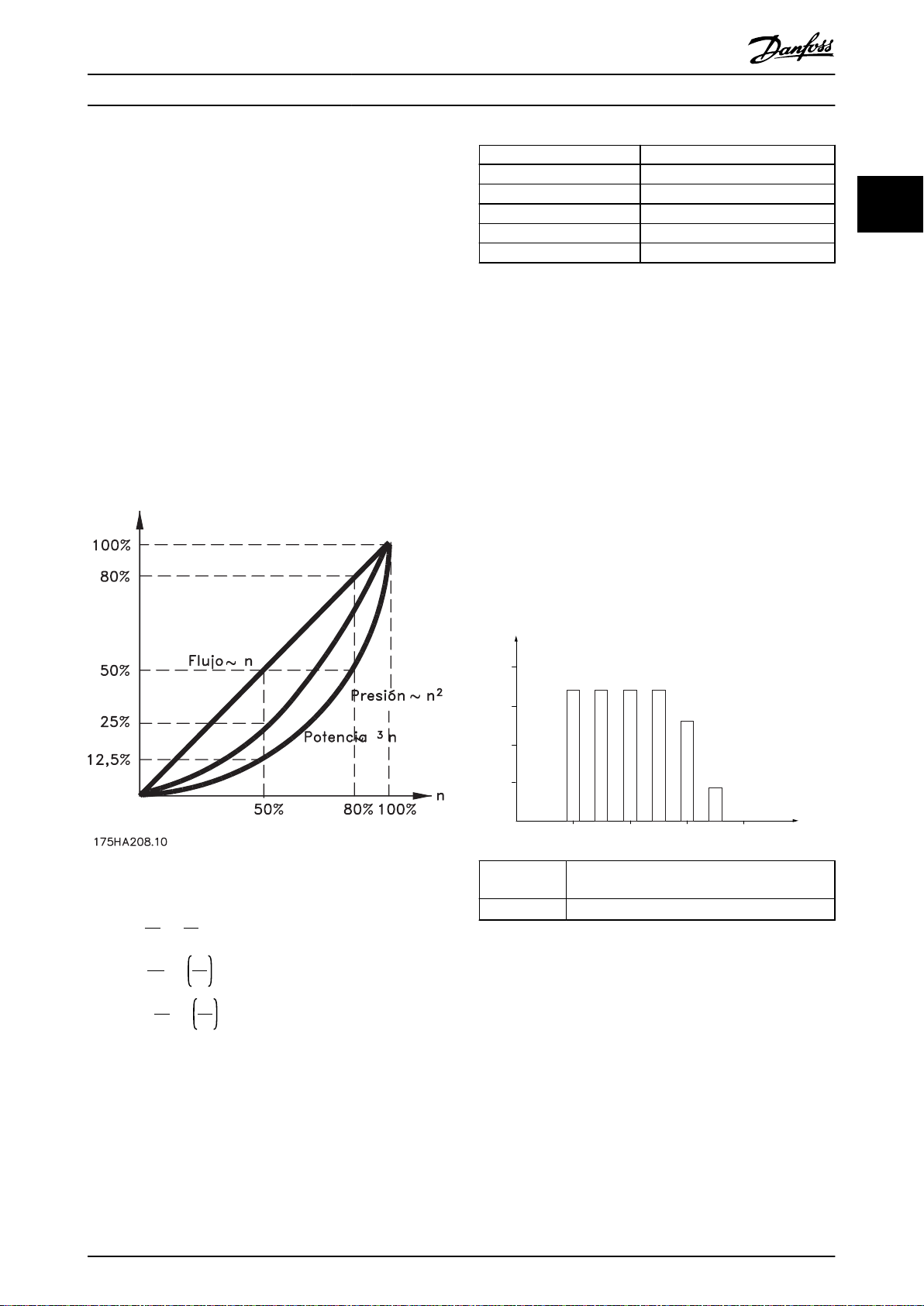
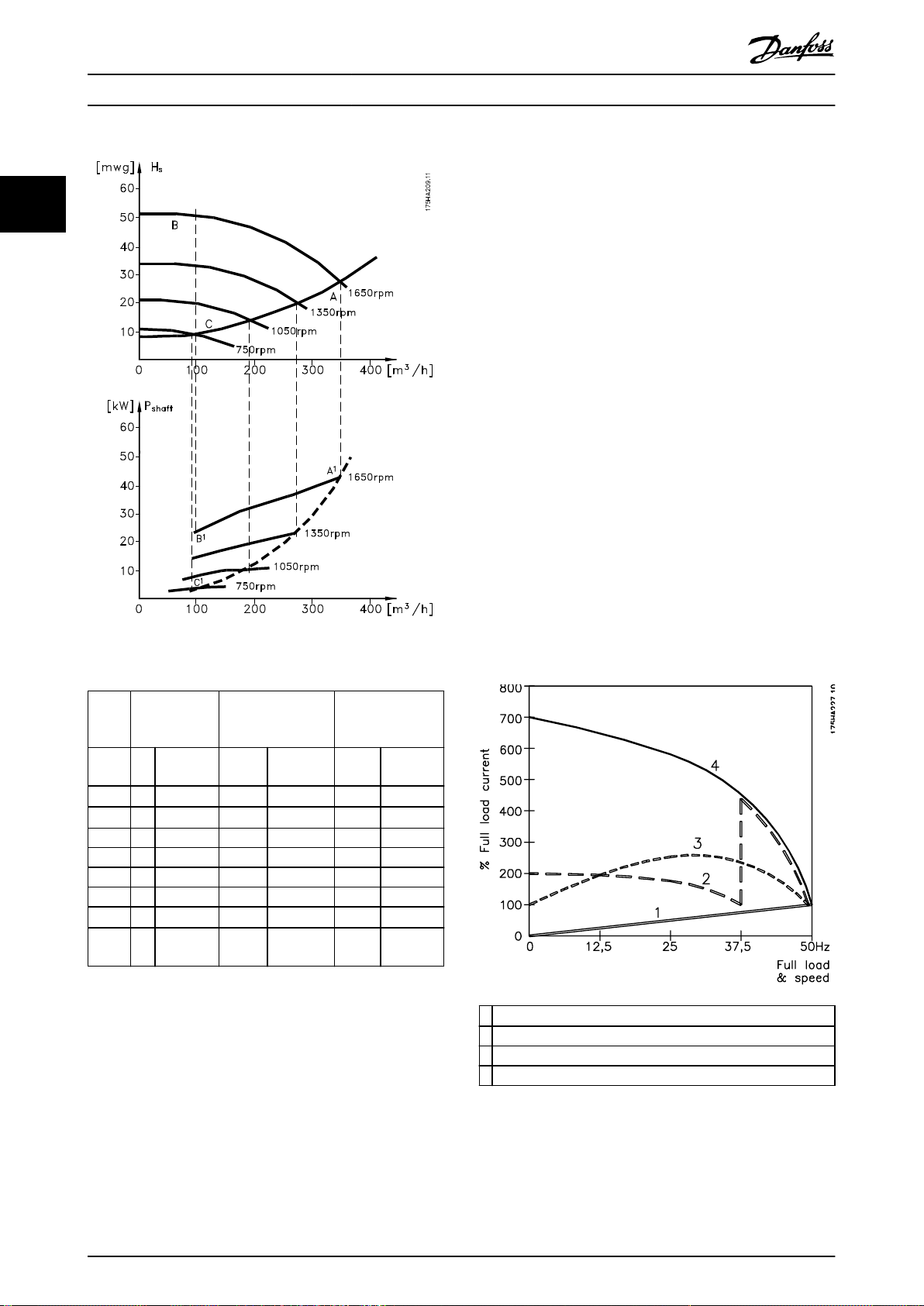
2.1.4 Ejemplo con caudal variable durante
1 año
Este ejemplo está calculado en función de las características de una bomba según su hoja de datos, como se
muestra en la Ilustración 2.4.
El resultado obtenido muestra un ahorro de energía
superior al 50 % para la correspondiente distribución del
caudal durante un año.
Consulte la Ilustración 2.3. El periodo de amortización
depende del precio de la electricidad y del precio del
convertidor de frecuencia. En este ejemplo, será inferior a
un año, si se compara con las válvulas y la velocidad
constante.
2 2
Ilustración 2.2 Leyes de anidad para bombas centrífugas
Q
n
1
Caudal:
Presión:
Potencia:
1
=
Q
n
2
2
=
2
n
1
n
2
3
n
1
n
2
H
1
=
H
2
P
1
P
2
t [h] Duración del caudal. Consulte también el
Tabla 2.2.
Q [m3/h]
Ilustración 2.3 Distribución del caudal durante un año
(duración frente a caudal)
Caudal
Asumiendo un igual rendimiento en el rango de velocidad.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 15
Page 18
Vista general de producto
VLT® Refrigeration Drive FC 103
2.1.5 Control mejorado
22
del caudal o la presión de un sistema.
Utilice un convertidor de frecuencia para variar la
velocidad de un compresor, un ventilador o una bomba, lo
que permitirá obtener un control variable del caudal y la
presión.
Además, un convertidor de frecuencia puede adaptar
rápidamente la velocidad del compresor, ventilador o
bomba a las nuevas condiciones de caudal o presión del
sistema.
Obtenga un sencillo control del proceso (caudal, nivel o
presión) utilizando el control de PI integrado.
2.1.6 Arrancador en estrella/triángulo o
arrancador suave
A la hora de arrancar motores grandes, en muchos países
es necesario usar equipos que limitan la tensión de
arranque. En sistemas más tradicionales, se suele utilizar un
arrancador en estrella/triángulo o un arrancador suave. Si
se utiliza un convertidor de frecuencia, no serán necesarios
este tipo de arrancadores del motor.
Utilice un convertidor de frecuencia para mejorar el control
Ilustración 2.4 Consumo energético a diferentes velocidades
Como se muestra en la Ilustración 2.5, un convertidor de
frecuencia no consume más intensidad que la nominal.
CaudalDistribución Regulación por
válvula
% Duración PotenciaConsumo PotenciaConsumo
[m3/h]
1) Lectura de potencia en el punto A1.
2) Lectura de potencia en el punto B1.
3) Lectura de potencia en el punto C1.
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
Σ
Tabla 2.2 Resultado
42,5
23,0
1)
18,615
2)
40,296
Control
del convertidor
de frecuencia
1)
42,5
3)
3,5
18,615
6,132
1
VLT® Refrigeration Drive FC 103
2 Arrancador en estrella/triángulo
3 Arrancador suave
4 Arranque directamente con la alimentación de red
Ilustración 2.5 Intensidad de arranque
16 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 19
Vista general de producto Guía de diseño
2.2 Descripción del funcionamiento
El convertidor de frecuencia suministra una cantidad
regulada de alimentación de CA al motor con el n de
controlar su velocidad. El convertidor de frecuencia
suministra frecuencia y tensión variables al motor.
El convertidor de frecuencia se divide en cuatro módulos
principales:
Recticador
•
Circuito de bus de CC intermedio
•
Inversor
•
Control y regulación
•
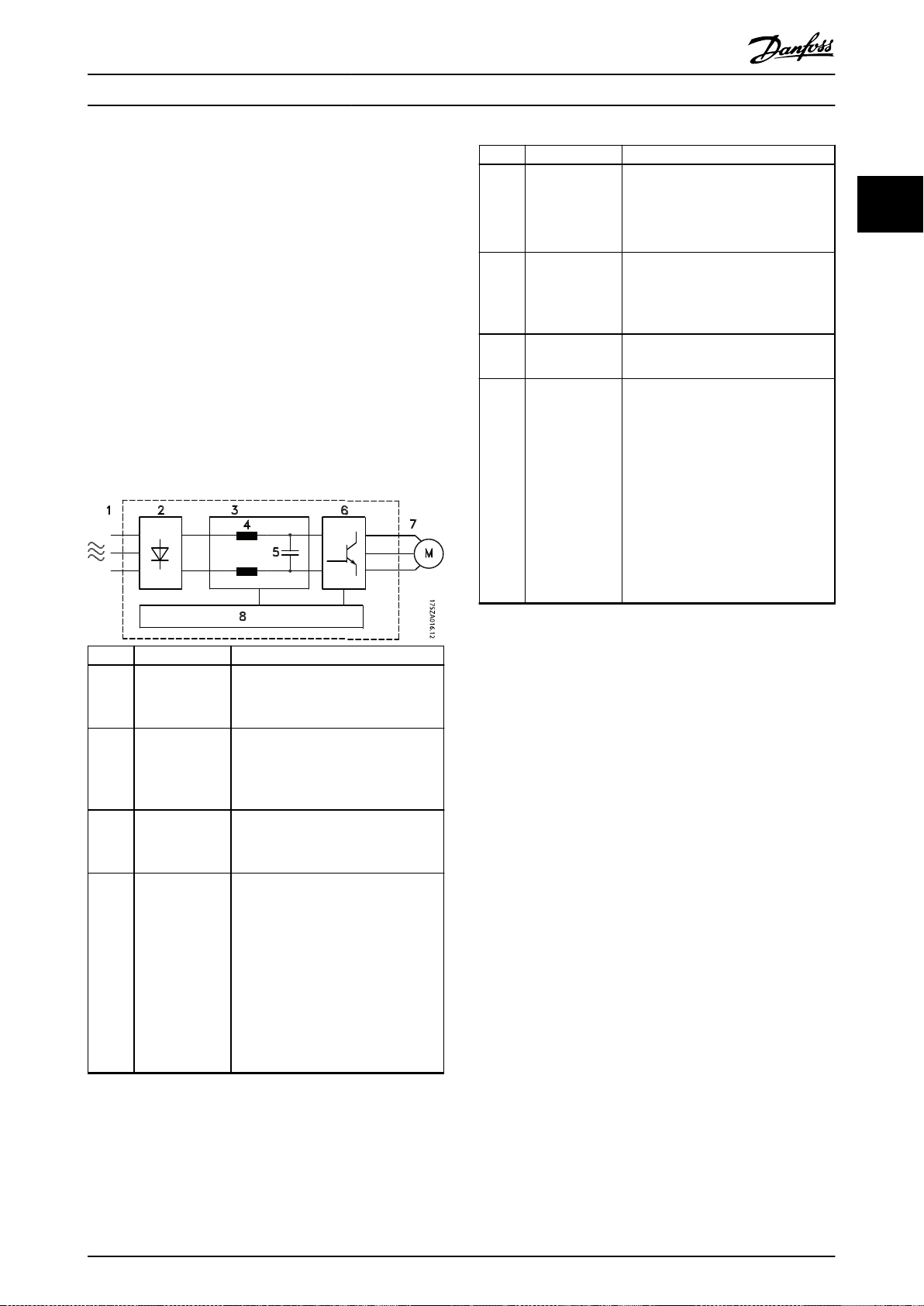
La Ilustración 2.6 es un diagrama de bloques de los
componentes internos del convertidor de frecuencia.
Área Denominación de aplicación
Almacena la potencia de CC.
•
Banco de
5
condensadores
6 Inversor
7 Salida al motor
Circuitos de
8
control
Proporciona protección ininte-
•
rrumpida para pérdidas de
potencia cortas.
Convierte la CC en una forma de
•
onda de CA PWM controlada para
una salida variable controlada al
motor.
Regula la potencia de salida
•
trifásica al motor.
La potencia de entrada, el
•
procesamiento interno, la salida y
la intensidad del motor se
monitorizan para proporcionar un
funcionamiento y un control
ecientes.
Se monitorizan y ejecutan los
•
comandos externos y la interfaz
de usuario.
Puede suministrarse salida de
•
estado y control.
2 2
Área Denominación de aplicación
Fuente de alimentación de la red
•
1 Entrada de red
2 Recticador
3 Bus de CC
4 Bobinas de CC
de CA trifásica al convertidor de
frecuencia.
El puente del recticador convierte
•
la entrada de CA en corriente CC
para suministrar electricidad al
inversor.
El circuito de bus de CC
•
intermedio gestiona la intensidad
de CC.
Filtran la tensión de circuito de CC
•
intermedio.
Prueban la protección transitoria
•
de red.
Reducen la corriente RMS.
•
Elevan el factor de potencia
•
reejado de vuelta a la línea.
Reducen los armónicos en la
•
entrada de CA.
Ilustración 2.6 Diagrama de bloques de convertidor de
frecuencia
2.2.1 Principio de la estructura de control
El convertidor de frecuencia transforma la tensión
•
de CA de la red en tensión de CC.
Esta tensión de CC se convierte en corriente
•
alterna con amplitud y frecuencia variables.
El convertidor de frecuencia suministra al motor tensión/
intensidad y frecuencia variables, lo que permite un control
de velocidad variable en motores asíncronos trifásicos
estándar y en motores PM no salientes.
El convertidor de frecuencia gestiona diversos principios de
control de motor, tales como el modo de motor especial
U/f y el VVC+. El comportamiento en cortocircuito del
convertidor de frecuencia depende de los tres
transductores de corriente de las fases del motor.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 17
Page 20
Vista general de producto
VLT® Refrigeration Drive FC 103
22
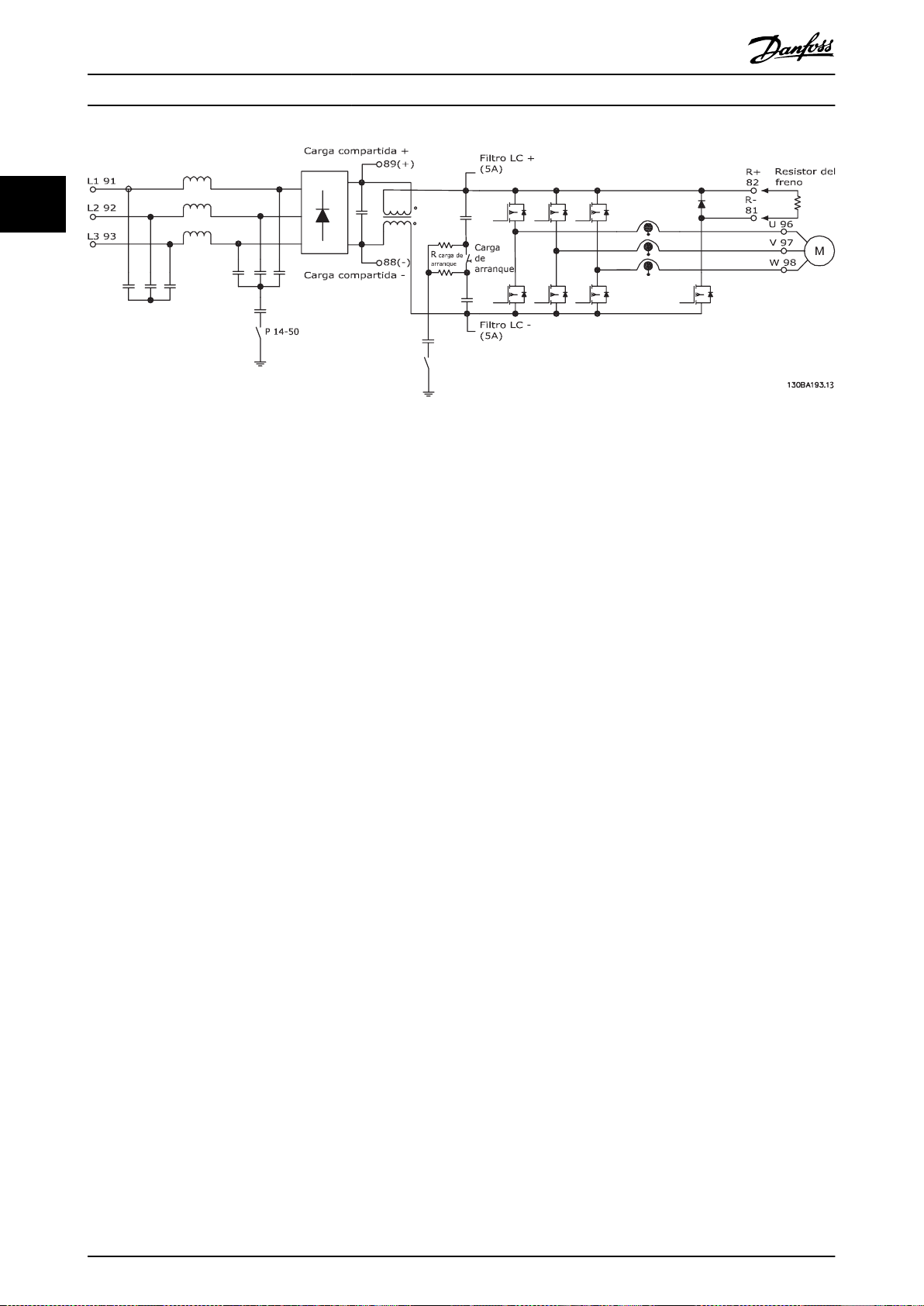
Ilustración 2.7 Estructura del convertidor de frecuencia
2.3 Secuencia de funcionamiento
2.3.1 Sección del recticador
Cuando se aplica potencia al convertidor de frecuencia,
esta entra a través de los terminales de red (L1, L2 y L3).
En función de la
pasa a las opciones de desconexión y/o ltro RFI.
conguración de la unidad, la potencia
2.3.2 Sección intermedia
A continuación de la sección del recticador, la tensión
pasa a la sección intermedia. Un circuito de ltro,
compuesto por la bobina del bus de CC y el banco de
condensadores del bus de CC, suaviza la tensión
recticada.
El inductor del bus de CC proporciona impedancia en serie
a la intensidad cambiante. Esto ayuda al proceso de
ltrado reduciendo la distorsión armónica a la forma de
onda de la corriente CA de entrada, normalmente
inherente en los circuitos recticadores.
2.3.3 Sección del inversor
En la sección del inversor, una vez estén presentes un
comando de ejecución y una referencia de velocidad, los
IGBT comienzan a conmutar para crear la onda de salida.
Esta forma de onda, generada por el principio PWM VVC
de Danfoss en la tarjeta de control, proporciona un
rendimiento óptimo y pérdidas mínimas en el motor.
+
2.4 Estructuras de control
2.4.1 Estructura de control de lazo abierto
Al funcionar en modo de lazo abierto, el convertidor de
frecuencia responderá a los comandos de entrada
manualmente, a través de las teclas del LCP, o de forma
remota, mediante las entradas analógicas/digitales o el bus
serie.
En la conguración que se muestra en la Ilustración 2.8, el
convertidor de frecuencia funciona en modo de lazo
abierto. Recibe datos de entrada desde el LCP (modo
manual) o mediante una señal remota (modo automático).
La señal (referencia de velocidad) se recibe y condiciona
conforme a lo siguiente:
Límites de velocidad del motor máximo y mínimo
•
programados (en RPM y Hz).
Tiempos de deceleración y aceleración.
•
Sentido de giro del motor.
•
A continuación, se transmite la referencia para controlar el
motor.
18 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 21
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Vista general de producto Guía de diseño
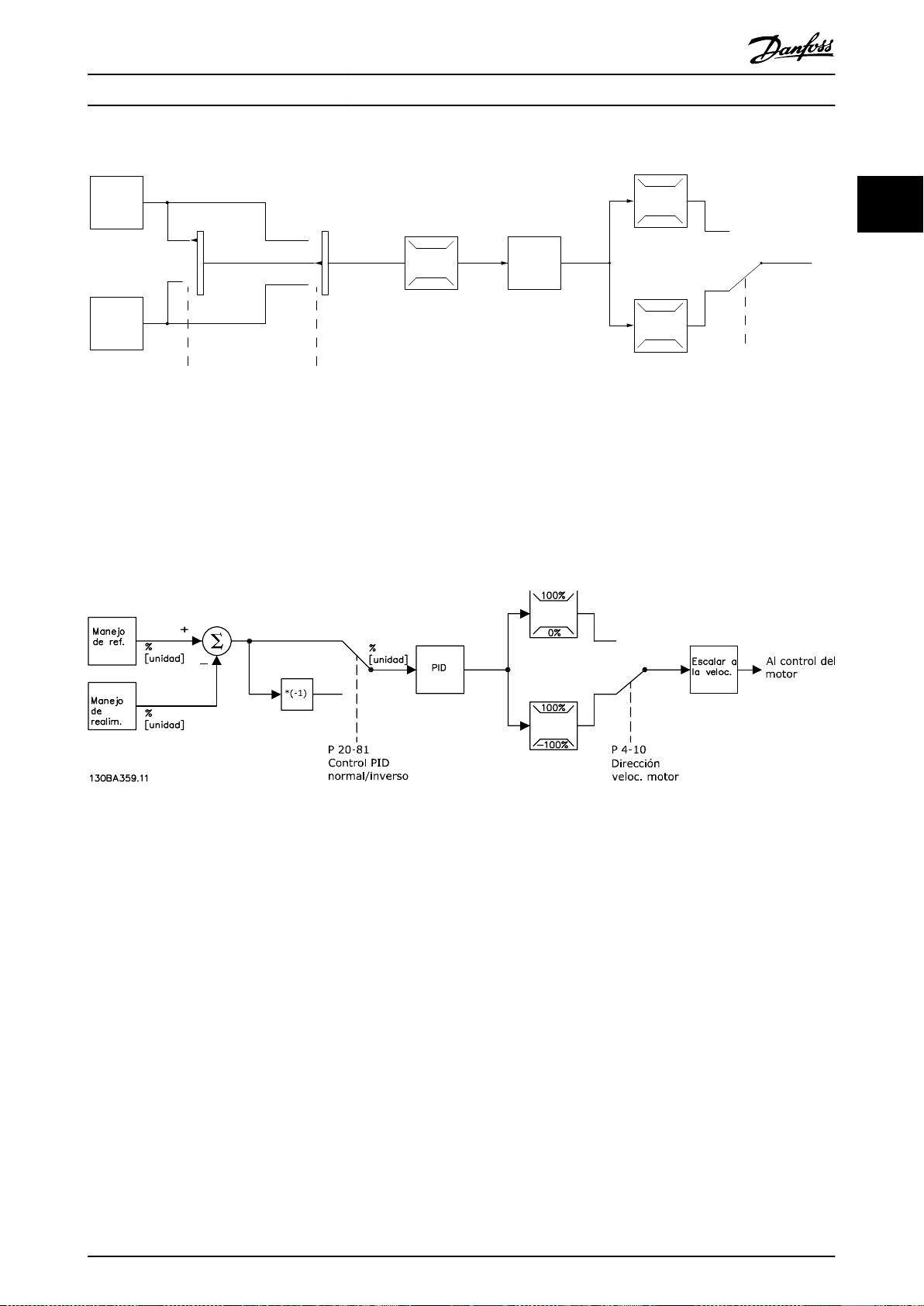
Ilustración 2.8 Diagrama de bloques del modo de lazo abierto
2 2
2.4.2 Estructura de control de lazo cerrado
funcionar como una unidad de control independiente. El
convertidor de frecuencia puede indicar el estado y
En el modo de lazo cerrado, un controlador PID interno
permite que el convertidor de frecuencia procese señales
de realimentación y de referencia del sistema para
Ilustración 2.9 Diagrama de bloques del controlador de lazo cerrado
Por ejemplo, consideremos una aplicación de bombas en la
que la velocidad de una bomba debe ser controlada de
transmitir mensajes de alarma, así como muchas otras
opciones programables, para el control externo del sistema
cuando funciona en lazo cerrado de forma independiente.
frecuencia acelera para aumentar la presión suministrada
por la bomba.
forma que la presión en una tubería sea constante
(consulte la Ilustración 2.9). El convertidor de frecuencia
recibe una señal de realimentación desde un sensor en el
sistema. Compara esta señal con un valor de referencia de
consigna y determina el error, si lo hay, entre las dos
señales. A continuación, ajusta la velocidad del motor para
Aunque los valores predeterminados del convertidor de
frecuencia de lazo cerrado normalmente proporcionan un
rendimiento satisfactorio, a menudo puede optimizarse el
control del sistema ajustando los parámetros de PID. Para
dicha optimización, se facilita el ajuste automático.
corregir el error.
También se incluyen otras funciones programables, como:
El valor de consigna de presión estática es la señal de
referencia al convertidor de frecuencia. Un sensor de
presión estática mide la presión estática real en la tubería
y suministra esta información al convertidor de frecuencia
en forma de señal de realimentación. Si la señal de
realimentación es mayor que el valor de consigna, el
convertidor de frecuencia disminuye la velocidad para
reducir la presión. De forma similar, si la presión en la
tubería es inferior al valor de consigna, el convertidor de
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 19
Regulación inversa: la velocidad del motor se
•
incrementa cuando existe una señal de realimentación alta. Esto resulta útil en aplicaciones de
compresor, en las que la velocidad debe
Page 22
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Vista general de producto
VLT® Refrigeration Drive FC 103
aumentarse si la presión/temperatura es
demasiado alta.
Frecuencia de arranque: permite que el sistema
22
•
alcance rápidamente el estado de funcionamiento
antes de que el controlador PID tome el control.
Filtro de paso bajo integrado: reduce el ruido de
•
la señal de realimentación.
2.4.3 Control Local (Hand On) y Remoto
(Auto On)
Maneje el convertidor de frecuencia manualmente
mediante el LCP y el bus serie o de forma remota
mediante las entradas analógicas y digitales.
Referencia activa y modo de conguración
La referencia activa puede ser tanto una referencia local
como remota. El ajuste predeterminado es referencia
remota.
Para utilizar la referencia local, haga la
•
ración en modo manual. Para activar el modo
manual, adapte los ajustes de parámetros del
grupo de parámetros 0–4* Teclado LCP. Si desea
más información, consulte la guía de progra-
mación.
Para utilizar la referencia remota, haga la congu-
•
ración en modo automático, que es el modo
predeterminado. En el modo automático, es
posible controlar el convertidor de frecuencia a
través de las entradas digitales y de diferentes
interfaces serie (RS485, USB o un bus de campo
opcional).
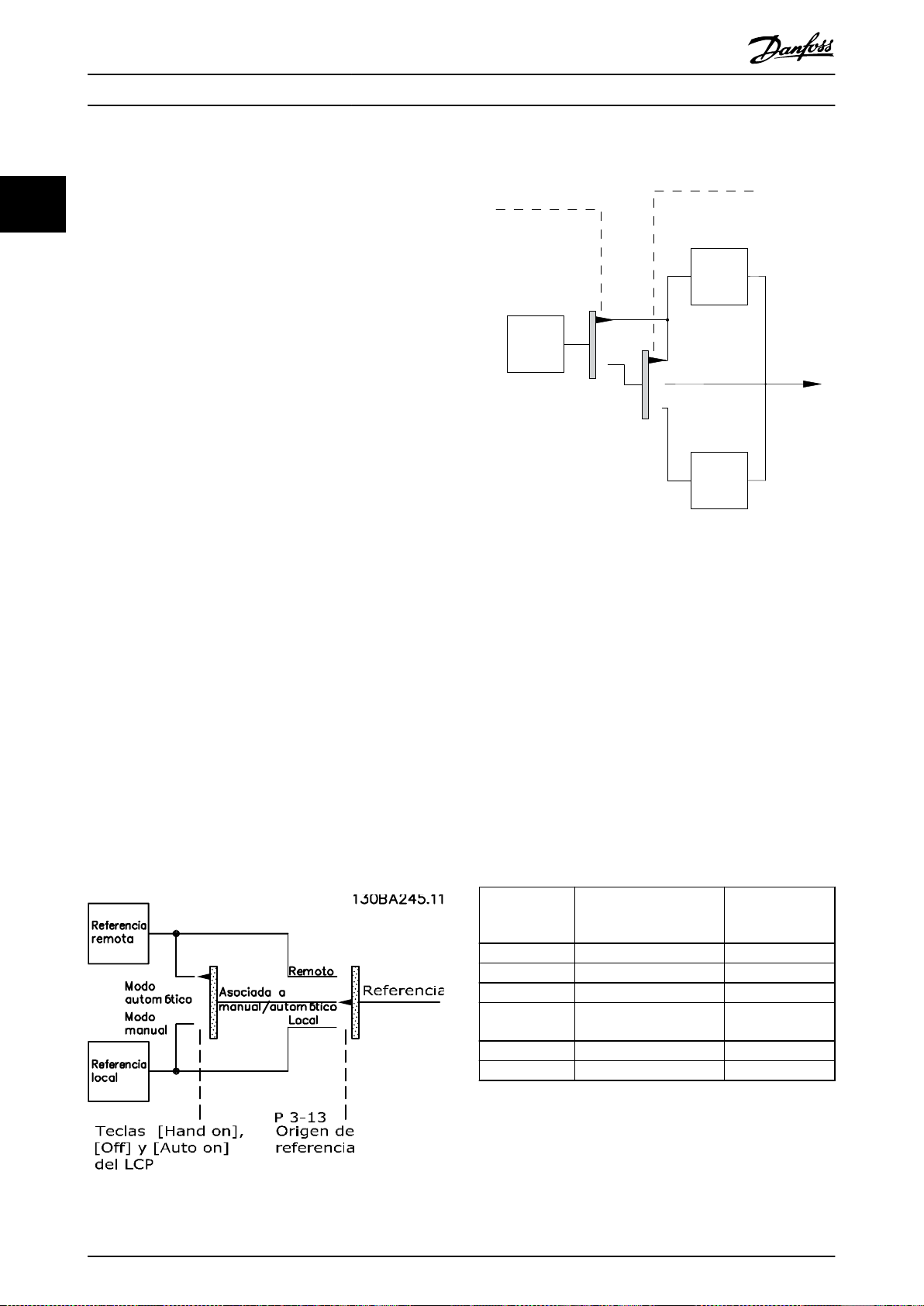
La Ilustración 2.10 muestra el modo de congu-
•
ración resultante de la selección de referencia
activa, ya sea local o remota.
La Ilustración 2.11 muestra el modo de congu-
•
ración manual para la referencia local.
congu-
Ilustración 2.11 Modo de conguración manual
Principio de control de la aplicación
En cualquier momento dado estará activada la referencia
remota o la referencia local. No pueden estar activadas
ambas a la vez. Congure el principio de control de la
aplicación (es decir, lazo abierto o lazo cerrado) en
parámetro 1-00 Modo Conguración, como se muestra en la
Tabla 2.3.
Cuando la referencia local esté activada, congure el
principio de control de la aplicación en
parámetro 1-05 Local Mode Conguration.
Congure el origen de referencia en parámetro 3-13 Lugar
de referencia, como se muestra en la Tabla 2.3.
Si desea más información, consulte la guía de progra-
mación.
[Hand On]
[Auto On]
Teclas del LCP
Hand Conex. a manual/auto Local
Hand⇒O
Autom. Conex. a manual/auto Remoto
Auto⇒Desconexi
ón
Todas las teclas Local Local
Todas las teclas Remoto Remoto
Parámetro 3-13 Lugar de
referencia
Conex. a manual/auto Local
Conex. a manual/auto Remoto
Referencia activa
Ilustración 2.10 Referencia activa
20 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Tabla 2.3 Conguraciones de referencia remota y referencia
local
Page 23

Vista general de producto Guía de diseño
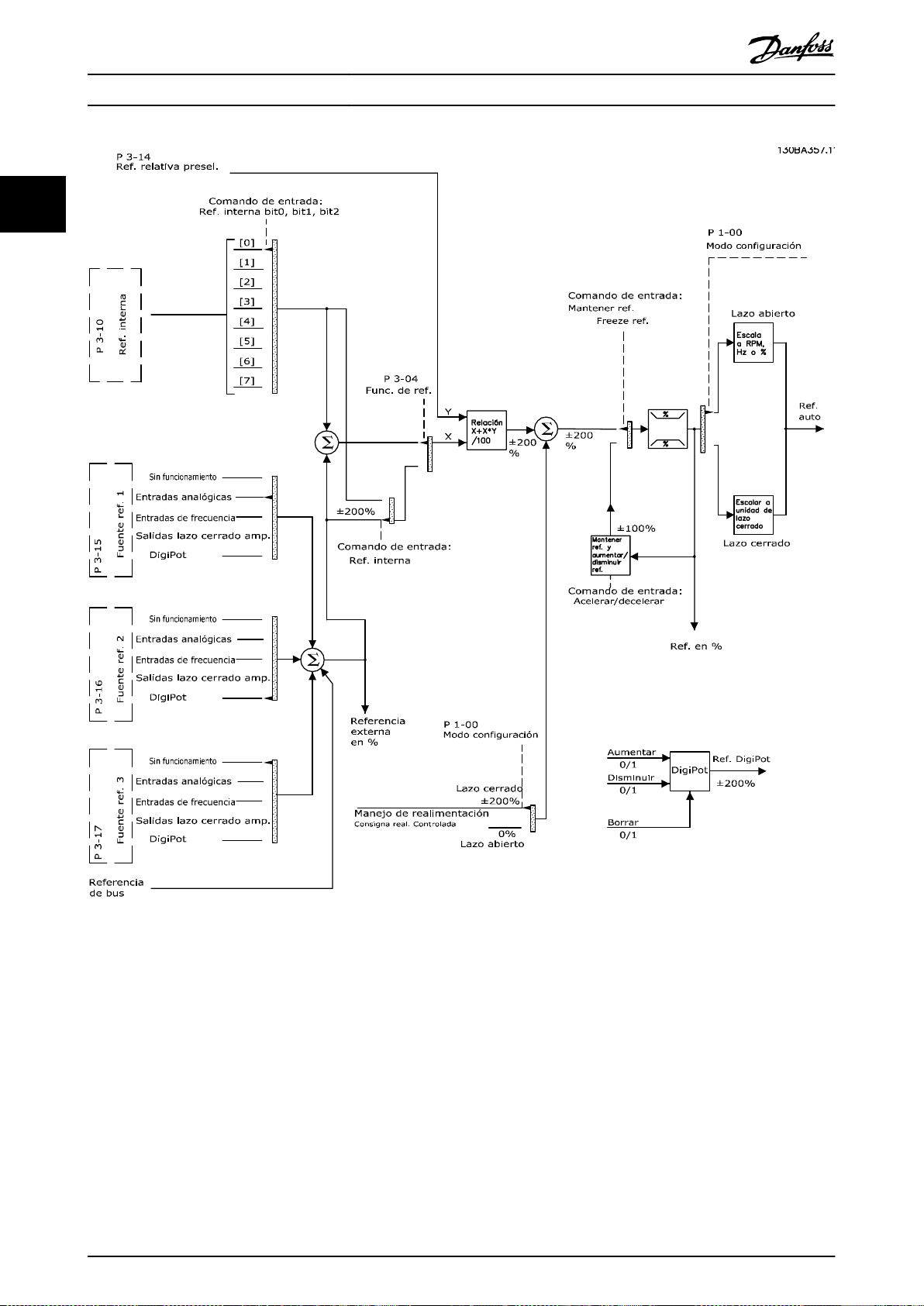
2.4.4 Manejo de referencias
El manejo de referencias se aplica tanto al funcionamiento
en lazo abierto como en lazo cerrado.
Referencias internas y externas
Es posible programar hasta ocho referencias internas
distintas en el convertidor de frecuencia. La referencia
interna activa puede seleccionarse de forma externa
utilizando entradas de control digitales o el bus de
comunicación serie.
También pueden suministrarse referencias externas al
convertidor de frecuencia, generalmente a través de una
entrada de control analógico. Todas las fuentes de
referencias y la referencia de bus se suman para producir
la referencia externa total. Seleccione la referencia activa
entre las siguientes:
La referencia externa
•
La referencia interna
•
El valor de consigna
•
La suma de las tres cuestiones anteriores
•
La referencia activa puede escalarse.
La referencia escalada se calcula de la siguiente forma:
Ref . = X + X ×
X es la referencia externa, la referencia interna o la suma
de ambas e Y es el parámetro 3-14 Referencia interna
relativa en [%].
Si Y, parámetro 3-14 Referencia interna relativa, se ajusta a
0 %, el escalado no afectará a la referencia.
Referencia remota
Una referencia remota está compuesta de las siguientes
(consulte la Ilustración 2.12):
Referencias internas
•
Referencias externas:
•
Referencia relativa interna
•
Valor de consigna controlada de realimentación
•
Y
100
- Entradas analógicas
- Entradas de frecuencia de pulsos
- Entradas de potenciómetro digital
- Referencias de bus de comunicación
serie
2 2
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 21
Page 24
Vista general de producto
VLT® Refrigeration Drive FC 103
22
Ilustración 2.12 Manejo de referencias remotas
22 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 25
Vista general de producto Guía de diseño
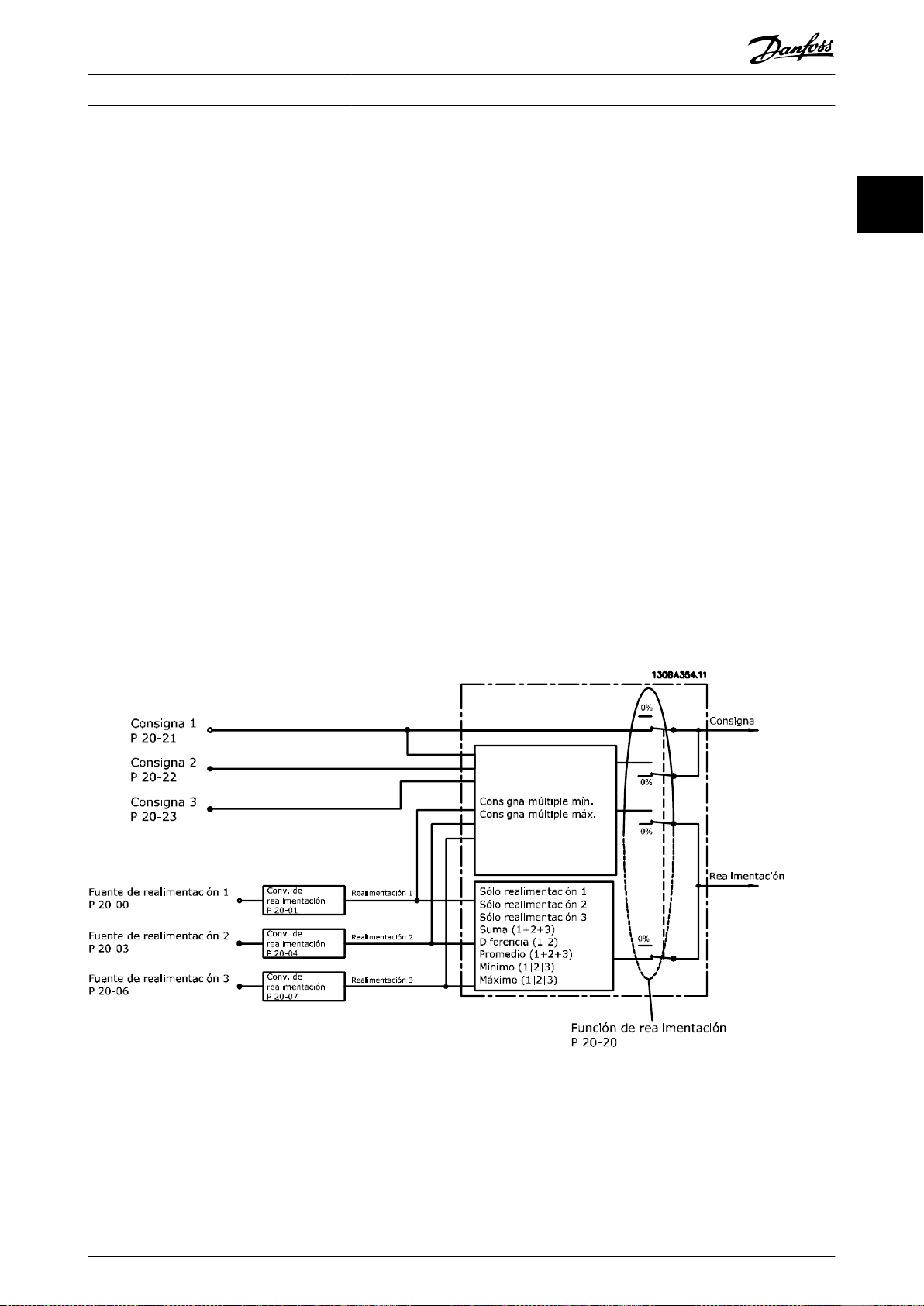
2.4.5 Manejo de la realimentación
El manejo de la realimentación puede congurarse para
funcionar con aplicaciones que requieran un control
avanzado, como múltiples valores de consigna y varios
tipos de realimentación (consulte la Ilustración 2.13).
Son habituales tres tipos de control:
Zona única, valor de consigna único
Este tipo de control es una
tación básica. El valor de consigna 1 se añade a cualquier
otra referencia (si la hubiese) y se selecciona la señal de
realimentación.
Multizona, valor de consigna único
Este tipo de control utiliza dos o tres sensores de realimentación pero solo un valor de consigna. La realimentación
puede sumarse, restarse o puede hallarse su promedio.
Adicionalmente, puede usarse el valor máximo o el
mínimo. El valor de consigna 1 se utiliza exclusivamente en
esta conguración.
Multizona, realimentación / valor de consigna
El par valor de consigna / realimentación con mayor
diferencia controlará la velocidad del convertidor de
frecuencia. El valor máximo intenta mantener todas las
conguración de realimen-
zonas en sus respectivos valores de consigna o por debajo,
mientras que el valor mínimo intenta mantener todas las
zonas en sus respectivos valores de consigna o por encima
de estos.
Ejemplo
Una aplicación de dos zonas y dos valores de consigna. El
valor de consigna de la zona 1 es 15 bar y su realimen-
tación es de 5,5 bar. El valor de consigna de la zona 2 es
4,4 bar y la realimentación es de 4,6 bar. Si se selecciona el
máximo, el valor de consigna y la realimentación de la
zona 2 se envían al controlador PID, puesto que este tiene
la diferencia más pequeña (la realimentación es más alta
que el valor de consigna, de manera que se obtiene una
diferencia negativa). Si se selecciona el mínimo, el valor de
consigna y la realimentación de la zona 1 se envían al
controlador PID, puesto que este tiene la mayor diferencia
(la realimentación es más baja que el valor de consigna, de
manera que se obtiene una diferencia positiva).
2 2
Ilustración 2.13 Diagrama de bloques de procesamiento de señal de realimentación
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 23
Page 26
Vista general de producto
VLT® Refrigeration Drive FC 103
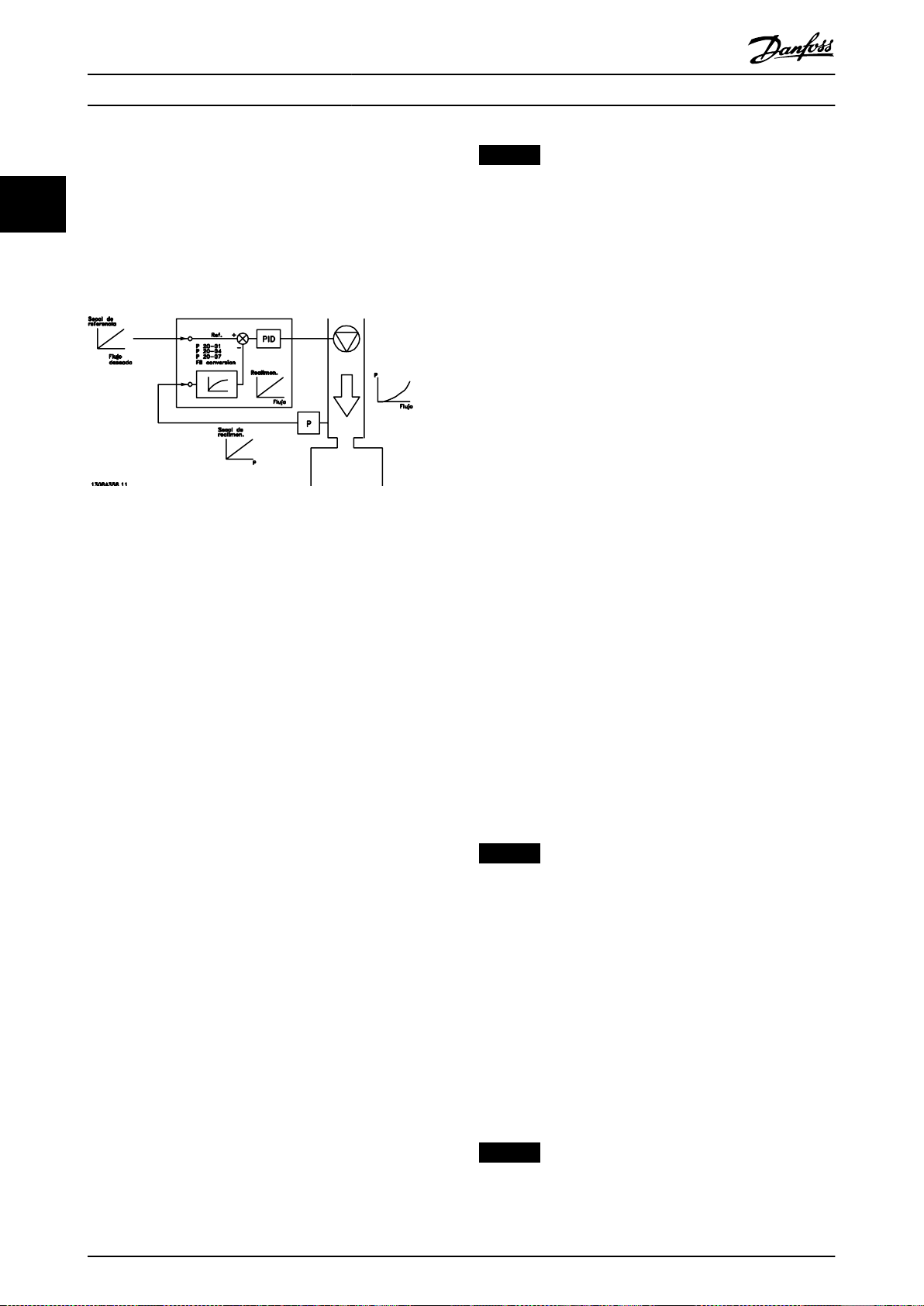
Conversión de realimentación
En algunas aplicaciones, resulta útil convertir la señal de
realimentación. Un ejemplo de ello es el uso de una señal
22
de presión para proporcionar realimentación de caudal.
Puesto que la raíz cuadrada de la presión es proporcional
al caudal, la raíz cuadrada de la señal de presión suministra
un valor proporcional al caudal. Consulte la Ilustración 2.14.
Ilustración 2.14 Conversión de realimentación
2.5 Funciones operativas automatizadas
Las funciones operativas automatizadas se activarán en
cuanto el convertidor de frecuencia comience a funcionar.
La mayoría no necesitan programación ni conguración.
Entender que estas funciones están presentes puede
optimizar un diseño de sistema y, posiblemente, evitar
añadirle componentes o funciones duplicados.
Para obtener más detalles sobre cualquier conguración
requerida y, en especial, sobre los parámetros del motor,
consulte la Guía de programación.
El convertidor de frecuencia tiene todo un abanico de
funciones de protección integradas para protegerse a sí
mismo y al motor cuando está en funcionamiento.
AVISO!
Para garantizar la conformidad con las normas CEI 60364
(CE) o NEC 2009 (UL), es obligatorio utilizar fusibles y/o
magnetotérmicos.
2.5.2 Protección contra sobretensión
Sobretensión generada por el motor
Cuando el motor funciona como generador, la tensión del
bus de CC aumenta. Esto ocurre en los siguientes casos:
Cuando la carga arrastra al motor (a una
•
frecuencia de salida constante del convertidor de
frecuencia), por ejemplo, cuando la carga genera
energía.
Durante la desaceleración (rampa de decele-
•
ración), si el momento de inercia es alto, la
fricción es baja y el tiempo de deceleración es
demasiado corto para que la energía se disipe
como una pérdida en el convertidor de
frecuencia, el motor y la instalación.
Un ajuste de compensación de deslizamiento
•
incorrecto puede provocar una tensión de enlace
de CC más elevada.
Fuerza contraelectromotriz desde el funciona-
•
miento del motor PM. Si queda en inercia a unas
r/min altas, la fuerza contraelectromotriz del
motor PM puede superar, potencialmente, la
tolerancia de tensión máxima del convertidor de
frecuencia y provocar daños. Para evitarlo, el valor
del parámetro 4-19 Frecuencia salida máx. se limita
automáticamente de acuerdo con un cálculo
interno basado en el valor del
parámetro 1-40 fcem a 1000 RPM, el
parámetro 1-25 Veloc. nominal motor y el
parámetro 1-39 Polos motor.
2.5.1 Protección ante cortocircuitos
Motor (fase-fase)
El convertidor de frecuencia está protegido contra cortocircuitos en el lado del motor con la medición de la
intensidad en cada una de las fases del motor o en el bus
de CC. Un cortocircuito entre dos fases de salida provoca
una sobreintensidad en el inversor. El inversor se apaga
cuando la intensidad de cortocircuito excede el valor
permitido (Alarma 16, Trip Lock).
Red
Un convertidor de frecuencia que funciona correctamente
limita la intensidad que puede tomar de la fuente de
alimentación. Utilice fusibles y/o magnetotérmicos en el
lateral de la fuente de alimentación a modo de protección
en caso de avería de componentes internos del
convertidor de frecuencia (primer fallo). Consulte el
capétulo 7.8 Fusibles y magnetotérmicos para obtener más
información.
24 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
AVISO!
Para evitar un exceso de velocidad del motor (p. ej.,
debido a efectos excesivos de autorrotación o a un
caudal de agua descontrolado), equipe el convertidor de
frecuencia con una resistencia de freno.
Controle la sobretensión con una función de freno
(parámetro 2-10 Función de freno) o bien con un control de
sobretensión (parámetro 2-17 Control de sobretensión).
Control de sobretensión (OVC)
El OVC reduce el riesgo de que el convertidor de
frecuencia se desconecte debido a una sobretensión en el
enlace de CC. Esto se soluciona ampliando automáti-
camente el tiempo de deceleración.
AVISO!
El OVC se puede activar para los motores PM (PM VVC+).
Page 27

Vista general de producto Guía de diseño
2.5.3 Detección de que falta una fase del
motor
La función Falta una fase del motor
(parámetro 4-58 Función Fallo Fase Motor) está activada de
manera predeterminada para evitar daños en el motor en
caso de que falte una fase del motor. El ajuste predeterminado es 1000 ms, pero se puede ajustar para una
detección más rápida.
2.5.4 Detección de desequilibrio de fase de
red
El funcionamiento en situación de grave desequilibrio de
red reduce la vida útil del motor. Si el motor se utiliza
continuamente cerca del valor nominal de carga, las
condiciones se consideran extremas. El ajuste predeterminado desconecta el convertidor de frecuencia en caso
de desequilibrio de red (parámetro 14-12 Función desequil.
alimentación).
2.5.5 Conmutación en la salida
Se permite añadir un interruptor a la salida entre el motor
y el convertidor de frecuencia. Es posible que aparezcan
mensajes de fallo. Para capturar un motor en giro, active la
función de motor en giro.
2.5.6 Protección de sobrecarga
Límite de par
La función de límite de par protege el motor ante
sobrecargas, independientemente de la velocidad. El límite
de par se controla en el parámetro 4-16 Modo motor límite
de par o en el parámetro 4-17 Modo generador límite de par
y el tiempo anterior a la desconexión de la advertencia de
límite de par se controla en el parámetro 14-25 Retardo
descon. con lím. de par.
Límite de intensidad
El límite de intensidad se controla en parámetro 4-18 Límite
intensidad.
Límite de velocidad
Dena los límites inferior y superior del intervalo operativo
de velocidad mediante uno o varios de los siguientes
parámetros:
Parámetro 4-11 Límite bajo veloc. motor [RPM].
•
Parámetro 4-12 Límite bajo veloc. motor [Hz] y
•
parámetro 4-13 Límite alto veloc. motor [RPM].
Parámetro 4-14 Motor Speed High Limit [Hz].
•
Por ejemplo, el intervalo operativo de velocidad puede
denirse entre 30 y 50/60 Hz.
El Parámetro 4-19 Frecuencia salida máx. limita la velocidad
de salida máxima que puede proporcionar el convertidor
de frecuencia.
ETR
El ETR es un dispositivo electrónico que simula un relé
bimetal basado en mediciones internas. Las características
se muestran en la Ilustración 2.15.
Límite tensión
Cuando se alcanza un determinado nivel de tensión de
codicación ja, el convertidor de frecuencia se apaga para
proteger los transistores y los condensadores del bus de
CC.
Sobretemperatura
El convertidor de frecuencia tiene sensores de temperatura
integrados y reacciona inmediatamente a valores críticos
mediante los límites de codicación ja.
2.5.7 Reducción de potencia automática
El convertidor de frecuencia comprueba constantemente
los niveles críticos:
Alta temperatura en la tarjeta de control o el
•
disipador
Carga del motor alta
•
Tensión de enlace de CC alta
•
Velocidad del motor baja
•
Como respuesta a un nivel crítico, el convertidor de
frecuencia ajusta la frecuencia de conmutación. En caso de
temperaturas internas elevadas y velocidades de motor
bajas, los convertidores de frecuencia también pueden
forzar el patrón de PWM a SFAVM.
AVISO!
La reducción de potencia automática es diferente cuando
parámetro 14-55 Filtro de salida está ajustado en [2] Filtro
senoidal jo.
2.5.8 Optimización automática de energía
La optimización automática de energía (AEO) dirige el
convertidor de frecuencia para que controle
continuamente la carga del motor y ajuste la tensión de
salida para aumentar al máximo la ecacia. Con carga
ligera, la tensión disminuye y la intensidad del motor se
reduce al mínimo. El motor obtiene:
Mayor rendimiento.
•
Calentamiento reducido.
•
Funcionamiento más silencioso.
•
No es necesario seleccionar una curva de V/Hz porque el
convertidor de frecuencia ajusta automáticamente la
tensión del motor.
2 2
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 25
Page 28

Vista general de producto
VLT® Refrigeration Drive FC 103
2.5.9 Modulación automática de frecuencia
de conmutación
22
El convertidor de frecuencia genera impulsos eléctricos
cortos para formar un patrón de onda de CA. La frecuencia
de conmutación es el ritmo de estos impulsos. Una
frecuencia de conmutación baja (ritmo de impulsos lento)
causa ruido audible en el motor, de modo que es
preferible una frecuencia de conmutación más elevada.
Una frecuencia de conmutación alta, sin embargo, genera
calor en el convertidor de frecuencia, lo que puede limitar
la cantidad de corriente disponible en el motor.
La modulación automática de frecuencia de conmutación
regula estas condiciones automáticamente para ofrecer la
frecuencia de conmutación más elevada sin sobrecalentar
el convertidor de frecuencia. Al ofrecer una frecuencia de
conmutación alta regulada, se silencia el ruido de funcionamiento del motor a velocidades bajas, cuando el control
del ruido audible es crítico, y se produce una plena
potencia de salida al motor cuando la demanda lo
requiere.
2.5.10 Reducción automática de potencia
por alta frecuencia de conmutación
en un 30 % para evitar una desconexión por sobretempe-
ratura.
2.5.12 Rampa automática
Un motor que intenta acelerar una carga demasiado
rápidamente para la intensidad disponible puede provocar
la desconexión del convertidor de frecuencia. Lo mismo
sucede en caso de una desaceleración demasiado rápida.
La rampa automática protege de estas situaciones
aumentando la tasa de rampa del motor (aceleración o
desaceleración) para adaptarla a la intensidad disponible.
2.5.13 Circuito del límite de intensidad
Cuando una carga supera la capacidad de intensidad del
convertidor de frecuencia en funcionamiento normal (de
un convertidor o un motor demasiado pequeños), el límite
de intensidad reduce la frecuencia de salida para efectuar
una rampa de desaceleración del motor y reducir la carga.
Un temporizador ajustable está disponible para limitar el
funcionamiento en estas condiciones a 60 s o menos. El
límite predeterminado de fábrica es el 110 % de la
corriente nominal del motor, para reducir al mínimo el
estrés por sobreintensidad.
El convertidor de frecuencia está diseñado para un funcionamiento continuo a plena carga a frecuencias de
conmutación de entre 3,0 y 4,5 kHz (este rango de
frecuencia depende del nivel de potencia). Una frecuencia
de conmutación que supere el rango máximo permisible
genera un aumento del calor en el convertidor de
frecuencia y requiere que se reduzca la potencia de la
intensidad de salida.
Una característica automática del convertidor de frecuencia
es que el control de la frecuencia de conmutación
depende de la carga. Esta característica permite al motor
obtener la máxima frecuencia de conmutación que la carga
permita.
2.5.11 Reducción de potencia automática
por sobretemperatura
Se aplica una reducción de potencia automática por
sobretemperatura para evitar la desconexión del
convertidor de frecuencia en caso de temperatura elevada.
Los sensores de temperatura interna miden las condiciones
existentes para evitar que se sobrecalienten los
componentes de alimentación. El convertidor de frecuencia
puede reducir automáticamente su frecuencia de
conmutación para mantener la temperatura de funcionamiento dentro de límites seguros. Tras reducir la frecuencia
de conmutación, el convertidor de frecuencia también
puede reducir la intensidad y la frecuencia de salida hasta
2.5.14 Rendimiento de uctuación de
potencia
El convertidor de frecuencia soporta uctuaciones de red
como:
Transitorios.
•
Cortes momentáneos.
•
Caídas cortas de tensión.
•
Sobretensiones.
•
El convertidor de frecuencia compensa automáticamente
las tensiones de entrada de un ±10 % del valor nominal
para ofrecer un par y una tensión nominal del motor
completos. Con el rearranque automático seleccionado, el
convertidor de frecuencia se enciende automáticamente
tras una desconexión de tensión. Con la función de motor
en giro, el convertidor de frecuencia sincroniza el giro del
motor antes del arranque.
2.5.15 Arranque suave del motor
El convertidor de frecuencia suministra al motor la
cantidad correcta de intensidad para superar la inercia de
la carga y poner el motor a la velocidad correcta. Esto
evita que toda la tensión de red se aplique a un motor
parado o que gira lentamente, lo cual genera una alta
intensidad y calor. Esta función inherente de arranque
suave reduce la carga térmica y el estrés mecánico, alarga
26 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 29

Vista general de producto Guía de diseño
la vida del motor y genera un funcionamiento más
silencioso del sistema.
2.5.16 Amortiguación de resonancia
Elimine el ruido de resonancia del motor a alta frecuencia
mediante la amortiguación de resonancia. Está disponible
la amortiguación de frecuencia automática o seleccionada
manualmente.
2.5.17 Ventiladores controlados por
temperatura
La temperatura de los ventiladores de refrigeración interna
se controla mediante sensores ubicados en el convertidor
de frecuencia. Los ventiladores de refrigeración suelen no
funcionar durante el funcionamiento a baja carga, así como
en el modo reposo y en espera. Esto reduce el ruido,
aumenta el rendimiento y alarga la vida útil del ventilador.
2.5.18 Conformidad con CEM
Las interferencias electromagnéticas (EMI) o las interferencias de radiofrecuencia (RFI, en caso de radiofrecuencia)
son perturbaciones que pueden afectar al circuito eléctrico
a causa de la inducción o radiación electromagnética de
una fuente externa. El convertidor de frecuencia está
diseñado para cumplir con la norma de productos CEM
para convertidores de frecuencia CEI 61800-3 y la norma
europea EN 55011. Para cumplir con los niveles de emisión
de la norma EN 55011, apantalle y termine correctamente
el cable de motor. Para obtener más información sobre el
rendimiento de CEM, consulte el capétulo 3.2.2 Resultados
de las pruebas de CEM (emisión).
2.5.19 Medición de la intensidad en las tres
fases del motor
requisitos de protección de tensión muy baja (PELV) para
el aislamiento.
Los componentes que conforman el aislamiento galvánico
son:
Fuente de alimentación, incluido el aislamiento
•
de la señal.
Accionamiento de puerta para el IGBT, los
•
transformadores de disparo y los optoacopladores.
Los transductores de efecto Hall de intensidad de
•
salida.
2.6 Funciones de aplicación personalizadas
Las funciones de aplicación personalizadas son las
funciones más comunes programadas en el convertidor de
frecuencia para un rendimiento mejorado del sistema.
Requieren una programación o conguración mínimas.
Entender que estas funciones están disponibles puede
optimizar el diseño del sistema y, posiblemente, evitar la
introducción de componentes o funciones duplicados.
Consulte la guía de programación para obtener instrucciones sobre la activación de estas funciones.
2.6.1 Adaptación automática del motor
La adaptación automática del motor (AMA) es un procedimiento de prueba automatizado utilizado para medir las
características eléctricas del motor. El AMA proporciona un
modelo electrónico preciso del motor. Permite que el
convertidor de frecuencia calcule el rendimiento y la
ecacia óptimos con el motor. Llevar a cabo el procedimiento AMA también aumenta al máximo la función de
optimización automática de energía del convertidor de
frecuencia. El AMA se realiza sin que el motor esté girando
y sin desacoplar la carga del motor.
2 2
La intensidad de salida del motor se mide continuamente
en las tres fases para proteger el convertidor de frecuencia
y el motor ante cortocircuitos, fallos a tierra y pérdidas de
fase. Los fallos a tierra de salida se detectan al instante. Si
se pierde una fase del motor, el convertidor de frecuencia
se detiene inmediatamente e indica cuál es la fase que
falta.
2.5.20 Aislamiento galvánico de los
terminales de control
Todos los terminales de control y los terminales de relé de
salida están galvánicamente aislados de la potencia de red.
Esto signica que los circuitos del controlador están
totalmente protegidos de la intensidad de entrada. Los
terminales de relé de salida necesitan su propia toma de
tierra. Estos aislamientos cumplen con los estrictos
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 27
2.6.2 Protección térmica motor
La protección térmica del motor se puede proporcionar de
tres maneras:
Mediante la detección directa de la temperatura a
•
través del sensor PTC ubicado en los bobinados
del motor y conectado a una entrada analógica o
digital estándar.
Mediante un interruptor termomecánico (tipo
•
Klixon) en una entrada digital.
Mediante el relé termoelectrónico (ETR) integrado
•
para motores asíncronos.
El ETR calcula la temperatura del motor midiendo la
intensidad, la frecuencia y el tiempo de funcionamiento. El
convertidor de frecuencia muestra la carga térmica del
Page 30
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fSAL = 0,2 x f M,N
fSAL = 2 x f M,N
fSAL = 1 x f M,N
IMN
IM
Vista general de producto
VLT® Refrigeration Drive FC 103
motor en forma de porcentaje y puede emitir una
advertencia cuando llega a un valor de consigna de
sobrecarga programable.
22
Las opciones programables en la sobrecarga permiten que
el convertidor de frecuencia detenga el motor, reduzca la
salida o ignore la condición. Incluso a velocidades bajas, el
convertidor de frecuencia cumple con las normas de
sobrecarga electrónica del motor I2t Clase 20.
Congure el convertidor de frecuencia
(parámetro 14-10 Fallo aliment.) para diferentes tipos de
comportamientos durante el corte de red,
Bloqueo por alarma cuando el bus de CC se
•
agote.
Inercia con función de motor en giro cuando
•
vuelva la red (parámetro 1-73 Motor en giro).
Energía regenerativa.
•
Rampa de deceleración controlada.
•
Motor en giro
Esta selección hace posible atrapar un motor que, debido a
un corte de red, gira sin control. Esta opción es importante
para centrífugas y ventiladores.
Energía regenerativa
Esta selección garantiza que el convertidor de frecuencia
funciona mientras haya energía en el sistema. En cortes de
red breves, el funcionamiento se restablece cuando vuelve
la red, sin que se detenga la aplicación o se pierda el
control en ningún momento. Se pueden seleccionar
diferentes variantes de energía regenerativa.
Congure el comportamiento del convertidor de frecuencia
en caso de corte de red en parámetro 14-10 Fallo aliment. y
Ilustración 2.15 Características ETR
parámetro 1-73 Motor en giro.
AVISO!
El eje X de la Ilustración 2.15 muestra la relación entre los
valores I
motor
e I
nominal. El eje Y muestra el intervalo
motor
en segundos que transcurre antes de que el ETR se corte y
desconecte el convertidor de frecuencia. Las curvas
muestran la velocidad nominal característica, al doble de la
velocidad nominal y al 0,2x de la velocidad nominal.
A una velocidad inferior, el ETR se desconecta con un
calentamiento inferior debido a una menor refrigeración
del motor. De ese modo, el motor queda protegido frente
a un posible sobrecalentamiento, incluso a baja velocidad.
La función ETR calcula la temperatura del motor en
función de la intensidad y la velocidad reales. La
temperatura calculada puede verse como un parámetro de
lectura de datos en el parámetro 16-18 Térmico motor.
2.6.3 Corte de red
Durante un corte de red, el convertidor de frecuencia sigue
funcionando hasta que la tensión del enlace del bus de CC
desciende por debajo del nivel mínimo de parada.
Generalmente, dicho nivel es un 15 % inferior a la tensión
de alimentación nominal más baja. La tensión de red antes
del corte y la carga del motor determinan el tiempo
necesario para la parada de inercia del convertidor de
frecuencia.
28 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
La inercia esta recomendada para compresores, ya que
en la mayoría de los casos esta es demasiado pequeña
para la función de Motor en giro.
2.6.4 Controladores PID integrados
Los cuatro controladores proporcionales, integrales y
derivativos (PID) integrados eliminan la necesidad de
dispositivos de control auxiliares.
Uno de los controladores PID mantiene un control
constante de los sistemas de lazo cerrado en los que se
deben mantener regulados la presión, el ujo, la
temperatura u otros requisitos del sistema. El convertidor
de frecuencia puede ofrecer un control autosuciente de la
velocidad del motor en respuesta a las señales de
realimentación de los sensores remotos. El convertidor de
frecuencia acomoda dos señales de realimentación de dos
dispositivos diferentes. Esta función permite regular un
sistema con diferentes requisitos de realimentación. El
convertidor de frecuencia toma decisiones de control
comparando las dos señales para optimizar el rendimiento
del sistema.
Utilice los tres controladores adicionales e independientes
para controlar otros equipos, como bombas de alimentación química, control de válvulas o ventilación con
diferentes niveles.
Page 31

Vista general de producto Guía de diseño
2.6.5 Rearranque automático
El convertidor de frecuencia puede programarse para
reiniciar el motor automáticamente tras una pequeña
desconexión, como una uctuación o pérdida de potencia
momentáneas. Esta característica elimina la necesidad de
reiniciar manualmente y mejorar el funcionamiento
automatizado para sistemas controlados remotamente. La
cantidad de intentos de rearranque y la duración entre
intentos se puede limitar.
2.6.6 Motor en giro
La función de motor en giro permite que el convertidor de
frecuencia se sincronice con un motor en funcionamiento
girando hasta a máxima velocidad en cualquier dirección.
Esto evita desconexiones causadas por sobreintensidad.
Además, reduce al mínimo la tensión mecánica del sistema,
ya que el motor no sufre ningún cambio abrupto de la
velocidad cuando se inicia el convertidor de frecuencia.
2.6.7 Par completo a velocidad reducida
El convertidor de frecuencia sigue una curva V/Hz variable
para ofrecer un par del motor completo incluso a
velocidades reducidas. El par de salida completo puede
coincidir con la velocidad de funcionamiento máxima
diseñada del motor. Esto diere en los convertidores de
frecuencia de par variable y los de par constante. Los
convertidores de frecuencia de par variable ofrecen un par
motor reducido a baja velocidad. Los convertidores de
frecuencia de par constante proporcionan un exceso de
tensión, calor y ruido del motor a una velocidad inferior a
la máxima.
2.6.8 Bypass de frecuencia
En algunas aplicaciones, el sistema puede tener
velocidades de funcionamiento que crean una resonancia
mecánica. Esto puede generar un ruido excesivo y puede
dañar los componentes mecánicos del sistema. El
convertidor de frecuencia dispone de cuatro anchos de
banda de frecuencia de bypass programables. Esto permite
que el motor evite las velocidades que provocan
resonancia en el sistema.
2.6.9 Precalentador del motor
Para precalentar un motor en un entorno húmedo o frío,
puede suministrarse continuamente una pequeña cantidad
de corriente CC al motor para protegerlo de la condensación y de un arranque en frío. Esto puede eliminar la
necesidad de resistencia calefactora.
2.6.10 Cuatro ajustes programables
El convertidor de frecuencia tiene cuatro ajustes que se
pueden programar independientemente. Utilizando un
ajuste múltiple, es posible alternar entre funciones
programadas independientemente activadas por entradas
digitales o un comando de serie. Los ajustes independientes se utilizan, por ejemplo, para cambiar las
referencias, para el funcionamiento día/noche o verano/
invierno o para controlar varios motores. En el LCP se
muestra el ajuste activo.
Los datos de ajuste se pueden copiar de un convertidor de
frecuencia a otro descargando la información desde el LCP
extraíble.
2.6.11 Frenado de CC
Algunas aplicaciones pueden requerir el frenado de un
motor hasta una velocidad baja o su parada. La aplicación
de intensidad de CC frena el motor y elimina la necesidad
de un freno de motor independiente. El freno de CC puede
congurarse para su activación a una frecuencia predeterminada o al recibir una señal. La tasa de frenado también
se puede programar.
2.6.12 Modo reposo
El modo reposo detiene automáticamente el motor cuando
la demanda es baja durante un periodo determinado.
Cuando la demanda del sistema aumenta, el convertidor
de frecuencia vuelve a arrancar el motor. El modo reposo
genera ahorro energético y reduce el desgaste del motor.
A diferencia de lo que sucede con un temporizador de
retardo, el convertidor de frecuencia siempre está listo para
funcionar cuando se alcanza la demanda de activación
predeterminada.
2.6.13 Permiso de arranque
El convertidor de frecuencia puede esperar por una señal
remota que indique que el sistema está preparado para
arrancar. Cuando esta función está activada, el convertidor
de frecuencia permanece parado hasta recibir el permiso
para arrancar. El permiso de arranque garantiza que el
sistema o los equipos auxiliares estén en un estado
adecuado antes de que se permita al convertidor de
frecuencia arrancar el motor.
2.6.14 Smart Logic Control (SLC)
El Smart Logic Control (SLC) es una secuencia de acciones
denidas por el usuario (consulte el parámetro 13-52 Acción
Controlador SL [x]) y ejecutadas por el SLC cuando este
evalúa como VERDADERO el evento asociado denido por
2 2
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 29
Page 32
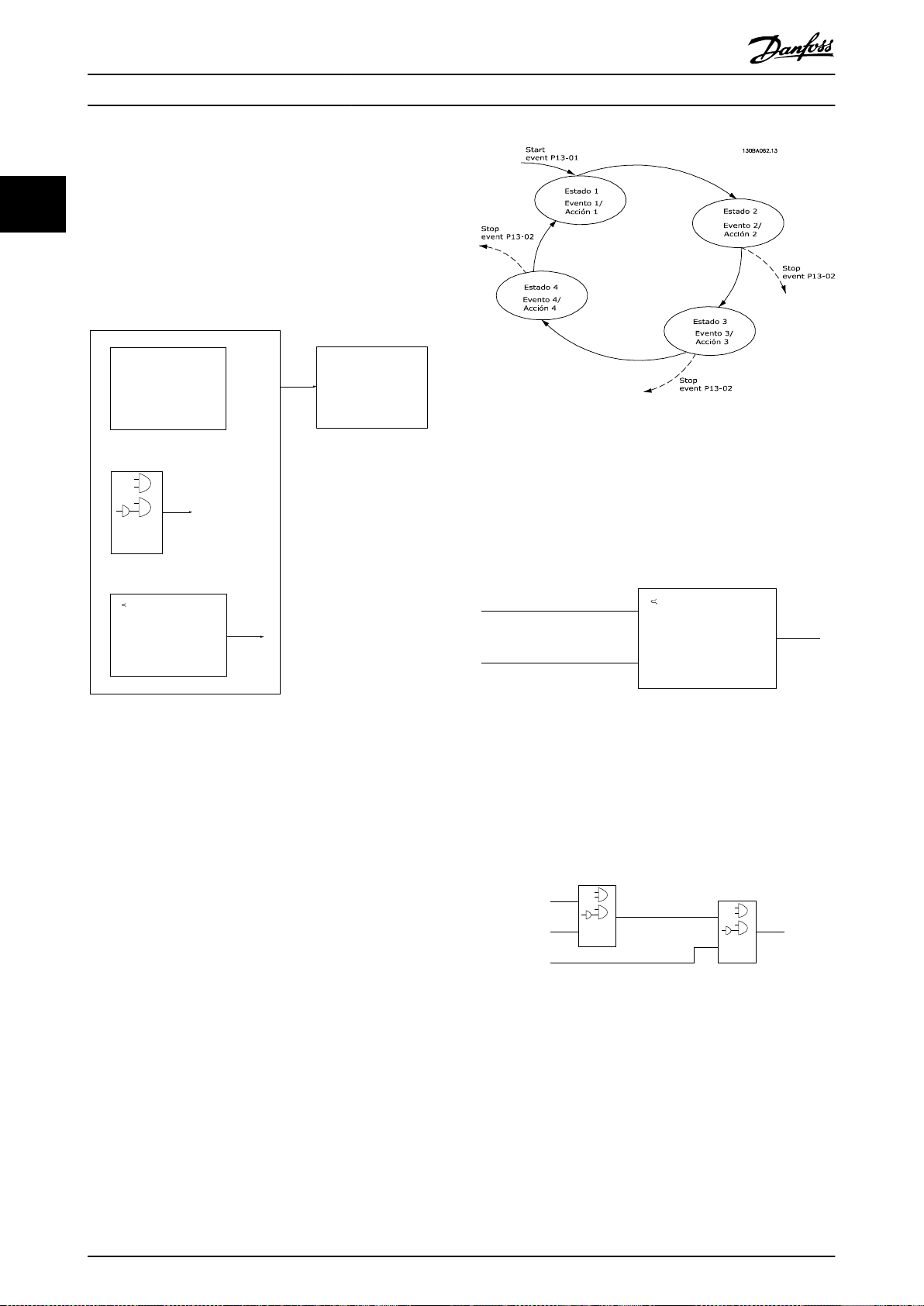
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Vista general de producto
VLT® Refrigeration Drive FC 103
el usuario (consulte el parámetro 13-51 Evento Controlador
SL [x]).
La condición para que se produzca un evento puede ser
22
un estado determinado o que la salida de una regla lógica
o un operando comparador pase a ser VERDADERO. Esto
da lugar a una acción asociada, como se muestra en la
Ilustración 2.16.
Ilustración 2.17 Orden de ejecución cuando están
programados 4 eventos/acciones
Comparadores
Los comparadores se usan para comparar variables
continuas (frecuencia o intensidad de salida, entrada
analógica, etc.) con valores jos predeterminados.
Ilustración 2.16 Evento y acción SLC
Los eventos y las acciones están numerados y vinculados
en parejas (estados). Esto signica que cuando se complete
el evento [0] (cuando alcance el valor VERDADERO), se
ejecutará la acción [0]. Después de esto, se evalúan las
condiciones del evento [1], y si el resultado es VERDADERO,
Ilustración 2.18 Comparadores
Reglas lógicas
Se pueden combinar hasta tres entradas booleanas
(entradas VERDADERO/FALSO) de temporizadores,
comparadores, entradas digitales, bits de estado y eventos
mediante los operadores lógicos Y, O y NO.
se ejecuta la acción [1], y así sucesivamente. En cada
momento solo se evalúa un evento. Si un evento se evalúa
como FALSO, no sucede nada (en el SLC) durante el
intervalo de exploración actual y no se evalúan otros
eventos. Esto signica que cuando el SLC se inicia, evalúa
el evento [0] (y solo el evento [0]) en cada intervalo de
exploración. El SLC ejecuta una acción [0] e inicia la
evaluación de otro evento [1] solo si el evento [0] se
considera VERDADERO. Se pueden programar entre 1 y 20
eventos y acciones.
Ilustración 2.19 Reglas lógicas
Cuando se haya ejecutado el último evento o acción, la
secuencia volverá a comenzar desde el evento o acción [0].
En la Ilustración 2.17 se muestra un ejemplo con cuatro
eventos/acciones:
Las reglas lógicas, los temporizadores y los comparadores
también están disponibles para su uso fuera de la
secuencia SLC.
Para obtener un ejemplo de SLC, consulte el
30 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
capétulo 4.3 Ejemplos de conguración de la aplicación.
Page 33

Vista general de producto Guía de diseño
2.6.15 Función de Safe Torque O
El convertidor de frecuencia está disponible con una
función de Safe Torque O (STO) a través del terminal de
control 37. La función STO desactiva la tensión de control
de los semiconductores de potencia de la etapa de salida
del convertidor. Esto a su vez impide la generación de la
tensión necesaria para girar el motor. Cuando se activa la
STO (terminal 37), el convertidor de frecuencia emite una
alarma, desconecta la unidad y hace que el motor entre en
modo de inercia hasta detenerse. Será necesario un
rearranque manual. La función STO puede usarse como
una parada de emergencia para el convertidor de
frecuencia. En el modo de funcionamiento normal, cuando
no se necesite la STO, utilice la función de parada normal.
Al usar el rearranque automático, asegúrese de que se
respeten los requisitos de la norma ISO 12100-2, apartado
5.3.2.5.
Responsabilidad
Es responsabilidad del usuario garantizar que el personal
que se ocupe de la instalación y el manejo de la función
STO:
Lea y comprenda las normas de seguridad
•
relativas a la salud, la seguridad y la prevención
de accidentes.
Conozca a la perfección las normas generales y
•
de seguridad correspondientes a la aplicación
especíca.
Se considerará usuarios a:
Integradores.
•
Operarios.
•
Técnicos de servicio.
•
Técnicos de mantenimiento.
•
Normas
El uso de la STO en el terminal 37 conlleva el cumplimiento por parte del usuario de todas las disposiciones de
seguridad, incluidas las normas, los reglamentos y las
directrices pertinentes. La función STO opcional cumple las
siguientes normas:
EN 954-1: 1996 categoría 3
•
CEI 60204-1: 2005 categoría 0, parada no
•
controlada
CEI 61508: 1998 SIL2
•
CEI 61800-5-2: 2007, función STO
•
CEI 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 categoría 3 PL d
•
ISO 14118: 2000 (EN 1037), prevención de
•
arranque inesperado
La información y las instrucciones incluidas no son
sucientes para garantizar un uso correcto y seguro de la
función STO. Para obtener la información completa sobre la
función la STO, consulte el Manual de funcionamiento de
VLT® Safe Torque O.
Medidas de protección
La instalación y puesta en servicio de sistemas de
•
ingeniería de seguridad solo pueden ser llevadas
a cabo por personal competente y
Instale la unidad en un alojamiento IP54 o en un
•
entorno equivalente. En aplicaciones especiales se
requiere un grado de protección IP mayor.
El cable situado entre el terminal 37 y el
•
dispositivo externo de seguridad debe estar
protegido contra cortocircuitos, de conformidad
con la tabla D.4 de la norma ISO 13849-2.
Cuando haya fuerzas externas que inuyan sobre
•
el eje del motor (por ejemplo, cargas
suspendidas), deben tomarse medidas adicionales
para evitar peligros potenciales (por ejemplo, un
freno de retención de seguridad).
cualicado.
2.7 Funciones de fallo, advertencia y alarma
El convertidor de frecuencia monitoriza muchos aspectos
del funcionamiento del sistema, incluidas las condiciones
de la red, la carga y el rendimiento del motor, así como el
estado del convertidor. Una alarma o advertencia no indica
necesariamente que haya un problema en el propio
convertidor de frecuencia. Puede tratarse de una situación
externa al convertidor de frecuencia, que se controla para
estudiar los límites de rendimiento. El convertidor de
frecuencia incluye diversas respuestas preprogramadas
ante fallos, advertencias y alarmas. Seleccione funciones de
alarma y advertencia adicionales para mejorar o modicar
el rendimiento del sistema.
En este apartado se describen funciones comunes de
alarma y advertencia. Entender que estas funciones están
disponibles puede optimizar un diseño de sistema y,
posiblemente, evitar añadirle componentes o funciones
duplicados.
2.7.1 Funcionamiento con temperatura
excesiva
Por defecto, el convertidor de frecuencia emite una alarma
y realiza una desconexión en caso de temperatura
excesiva. Si se selecciona Reducción automática y
advertencia, el convertidor de frecuencia emitirá un aviso
de la situación pero continuará funcionando e intentará
enfriarse por sí mismo reduciendo su frecuencia de
conmutación. Después, si es necesario, reducirá la
frecuencia de salida.
La reducción automática de la potencia no sustituye los
ajustes del usuario para reducción de potencia en función
de la temperatura ambiente (consulte el
2 2
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 31
Page 34

Vista general de producto
VLT® Refrigeration Drive FC 103
capétulo 5.4 Reducción de potencia en función de la
temperatura ambiente).
22
2.7.2 Advertencias de referencia alta o baja
En el modo de funcionamiento de lazo abierto, la señal de
referencia determina directamente la velocidad del
convertidor de frecuencia. La pantalla muestra una
advertencia parpadeante de referencia alta o baja cuando
se alcanza el máximo o el mínimo programado.
2.7.3 Advertencia de realimentación alta o
2.7.6 Advertencia de baja frecuencia
Al desconectar equipos por etapas, el convertidor de
frecuencia podrá emitir una advertencia cuando la
velocidad del motor sea baja. Puede seleccionarse un
ajuste de frecuencia baja especíca para la advertencia y
para la desconexión de dispositivos externos. La unidad no
emitirá ninguna advertencia de baja frecuencia cuando se
detenga ni tras el arranque mientras no se haya alcanzado
la frecuencia de funcionamiento.
2.7.7 Advertencia de intensidad alta
baja
Esta función es similar a la advertencia de alta frecuencia,
En el modo de funcionamiento de lazo cerrado, el
convertidor de frecuencia controla los valores
seleccionados de realimentación alta y baja. La pantalla
mostrará una advertencia parpadeante de valor alto o bajo
cuando corresponda. El convertidor de frecuencia también
puede monitorizar las señales de realimentación en el
modo de funcionamiento de lazo abierto. Mientras las
señales no afecten al funcionamiento del convertidor de
frecuencia en lazo abierto, pueden resultar útiles para
indicar el estado del sistema localmente o mediante
comunicación serie. El convertidor de frecuencia puede
trabajar con 39 unidades de medida diferentes.
2.7.4 Desequilibrio de fase o pérdida de
fase
con la excepción de que se utiliza un ajuste de intensidad
alta para emitir una advertencia y conectar equipos
adicionales. La función no está activa cuando la unidad
está parada ni en el arranque mientras no se alcanza la
intensidad de funcionamiento congurada.
2.7.8 Advertencia de intensidad baja
Esta función es similar a la advertencia de baja frecuencia
(consulte el capétulo 2.7.6 Advertencia de baja frecuencia),
con la excepción de que se utiliza un ajuste de intensidad
baja para emitir una advertencia y desconectar los equipos.
La función no está activa cuando la unidad está parada ni
en el arranque mientras no se alcanza la intensidad de
funcionamiento congurada.
Una corriente de rizado excesiva en el bus de CC indica un
desequilibrio de fase de red o una pérdida de fase. Cuando
se pierde una fase de alimentación al convertidor de
frecuencia, la acción predeterminada es emitir una alarma
y desconectar la unidad para proteger los condensadores
del bus de CC. Otras opciones son emitir una advertencia y
reducir la intensidad de salida al 30 % de la intensidad
total o emitir una advertencia y continuar con el funcionamiento normal. Hacer funcionar una unidad conectada a
una línea desequilibrada puede ser deseable hasta que se
corrija el desequilibrio.
2.7.5 Advertencia de frecuencia alta
Al conectar por etapas equipos adicionales, como
compresores o ventiladores, el convertidor de frecuencia
podrá emitir una advertencia cuando la velocidad del
motor sea elevada. Puede introducirse un ajuste especíco
de alta frecuencia en el convertidor de frecuencia. Si la
frecuencia de salida sobrepasa el límite ajustado, la unidad
emite una advertencia de alta frecuencia. Una salida digital
del convertidor de frecuencia puede indicar la conexión de
dispositivos externos.
2.7.9 Advertencia de ausencia de carga /
correa rota
Esta función puede usarse para monitorizar una situación
de ausencia de carga, por ejemplo una correa trapezoidal.
Una vez que se ha guardado en el convertidor un límite de
intensidad baja, si se detecta una pérdida de carga, el
convertidor de frecuencia puede programarse para emitir
una alarma y realizar una desconexión o para continuar en
funcionamiento y emitir una advertencia.
2.7.10 Interfaz serie perdida
El convertidor de frecuencia puede detectar una pérdida
de comunicación serie. Se puede seleccionar un retardo de
tiempo de hasta 99 s para evitar una respuesta por
interrupciones en el bus de comunicación serie. Cuando se
exceda el retardo, las opciones disponibles serán que la
unidad:
Mantenga su última velocidad.
•
Funcione a máxima velocidad.
•
Funcione a una velocidad predeterminada.
•
Se detenga y emita una advertencia.
•
32 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 35

130BP066.10
1107 rpm
0 - ** Funcionamiento / Display
1 - ** Carga / Motor
2 - ** Frenos
3 - ** Referencia / Rampas
3,84 A 1 (1)
Menú principal
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
Vista general de producto Guía de diseño
2.8 Interfaces de usuario y programación
El convertidor de frecuencia utiliza parámetros para la
programación de sus funciones de aplicación. Los
parámetros incluyen la descripción de una función y un
2.8.1 Panel de control local
- Correctamente conectados.
- Programados para la función pretendida.
2 2
menú de opciones seleccionables o para la introducción de
valores numéricos. Un ejemplo de menú de programación
está disponible en la Ilustración 2.20.
El panel de control local (LCP) es una pantalla gráca
situada en la parte delantera de la unidad, que facilita la
interfaz de usuario mediante botones y mensajes de
estado, advertencias y alarmas, programación de
parámetros y más. También está disponible una pantalla
numérica con opciones de visualización limitadas. En la
Ilustración 2.21 se muestra el LCP.
Ilustración 2.20 Ejemplo de menú de programación
Interfaz de usuario local
Para la programación local, se puede acceder a los
parámetros pulsando [Quick Menu] o [Main Menu] en el
LCP.
El menú rápido está destinado al arranque inicial y a las
características del motor. El menú principal accede a todos
los parámetros y permite la programación de aplicaciones
avanzadas.
Interfaz de usuario remoto
Para la programación remota, Danfoss cuenta con un
programa de software para el desarrollo, el almacenamiento y la transferencia de información. Software de
conguración MCT 10 permite al usuario conectar un PC al
convertidor de frecuencia y realizar una programación en
vivo en lugar de utilizar el teclado LCP. Igualmente, la
programación puede hacerse sin conexión y descargarse a
la unidad. También puede cargarse en el PC todo el perl
del convertidor de frecuencia para su almacenamiento de
seguridad o análisis. Un conector USB y un terminal RS485
están disponibles para la conexión al convertidor de
frecuencia.
Software de conguración MCT 10 puede descargarse
gratuitamente en www.VLT-software.com. También puede
solicitar el CD con el número de referencia 130B1000. Un
funcionamiento. Consulte también el
manual del usuario suministra instrucciones detalladas del
Ilustración 2.21 Panel de control local
capétulo 2.8.2 Software para PC.
Programación de los terminales de control
Cada terminal de control posee funciones
•
especícas que puede realizar.
Los parámetros asociados con el terminal activan
•
las selecciones de la función.
•
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 33
Para un funcionamiento adecuado del convertidor
de frecuencia mediante los terminales de control,
estos deben estar:
2.8.2 Software para PC
El PC se conecta mediante un cable USB estándar (host/
dispositivo) o mediante la interfaz RS485.
El USB es un bus serie que emplea cuatro cables apantallados con cuatro clavijas de toma a tierra conectadas al
apantallamiento del puerto USB del PC. Si se conecta el PC
Page 36

130BT308.10
Vista general de producto
VLT® Refrigeration Drive FC 103
a un convertidor de frecuencia a través del cable USB,
existe el riesgo potencial de dañar el controlador del host
del USB del PC. Todos los PC estándar se fabrican sin
22
aislamiento galvánico en el puerto USB.
Cualquier diferencia de potencial de toma de tierra
causada por no seguir las recomendaciones descritas en el
Manual de funcionamiento puede dañar el controlador del
puerto USB a través del apantallamiento del cable USB.
Al conectar el PC a un convertidor de frecuencia mediante
un cable USB, utilice un aislamiento USB con aislamiento
galvánico para proteger el controlador del puerto USB del
PC de las diferencias de potencial de toma de tierra.
No utilice un cable de alimentación de PC con un conector
de tierra si el PC está conectado a un convertidor de
frecuencia a través de un cable USB. Este reduce la
diferencia de potencial de la toma de tierra, pero no
elimina todas las diferencias de potencial debidas a la
toma de tierra y al apantallamiento conectado al puerto
USB del PC.
4. Seleccione copy.
5. Seleccione el apartado project.
6. Seleccione paste.
7. Seleccione save as.
En este momento, se almacenarán todos los parámetros.
Ejemplo 2: transferencia de datos del PC al convertidor
de frecuencia a través del Software de conguración
MCT 10
1. Conecte un PC a la unidad mediante el puerto
USB o través de la interfaz RS485.
2. Abra el Software de conguración MCT 10
3. Seleccione Open (se muestran los archivos
guardados).
4. Abra el archivo apropiado.
5. Seleccione Write to drive.
En este momento, todos los parámetros se transeren al
convertidor de frecuencia.
Tiene a su disposición un manual independiente del
Software de conguración MCT 10. Descargue el software
y el manual de www.danfoss.com/BusinessAreas/DrivesSo-
lutions/Softwaredownload/.
Ilustración 2.22 Conexión USB
2.8.2.1 Software de conguración MCT 10
Software de conguración MCT 10 se ha concebido para la
puesta en servicio y el mantenimiento del convertidor de
frecuencia, incluida la programación guiada del controlador
de centrales, el reloj en tiempo real, el controlador smart
logic y el mantenimiento preventivo.
Este software permite controlar fácilmente los detalles y
facilita una visión general de los sistemas, ya sean grandes
o pequeños. La herramienta maneja todas las series de
convertidores de frecuencia, VLT® Advanced Active Filters
AAF 006 y los datos relacionados con VLT® Soft Starter.
Ejemplo 1: almacenamiento de datos en el PC a través
del Software de conguración MCT 10
1. Conecte un PC a la unidad mediante USB o a
través de la interfaz RS485.
2. Abra el Software de conguración MCT 10
3. Seleccione el puerto USB o la interfaz RS485.
2.8.2.2
VLT® Harmonics Calculation
Software MCT 31
La herramienta de cálculo de armónicos MCT 31 para PC
permite realizar con facilidad una estimación de la
distorsión armónica en una aplicación especíca. Puede
calcularse la distorsión armónica tanto de los convertidores
de frecuencia de Danfoss como de marcas distintas a
Danfoss con dispositivos adicionales de reducción
armónica, como Danfoss VLT® Advanced Harmonic Filters
AHF 005/AHF 010 y los recticadores de 12-18 pulsos.
MCT 31 también puede descargarse desde
www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/.
2.8.2.3 Software de cálculo de armónicos
(HCS)
El HCS es una versión avanzada de la herramienta de
cálculo de armónicos. Los resultados calculados se
comparan con las normas pertinentes y se pueden
imprimir.
Para obtener más información, consulte www.danfoss-
-hcs.com/Default.asp?LEVEL=START
34 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 37

Vista general de producto Guía de diseño
2.9 previo
Los modelos de convertidor de frecuencia de Danfoss de
hasta 90 kW no requieren mantenimiento. Los convertidores de frecuencia de alta potencia (potencia nominal
de 110 kW o superior) tienen esteras de ltro incorporadas
que el operario debe limpiar periódicamente, en función
de la exposición al polvo y los contaminantes. Los
intervalos de mantenimiento para los ventiladores de
refrigeración (aproximadamente 3 años) y para los condensadores (aproximadamente 5 años) se recomiendan en la
mayoría de entornos.
2.9.1 Almacenamiento
Al igual que el resto de equipos electrónicos, los convertidores de frecuencia se deben almacenar en un lugar seco.
El conformado periódico (carga del condensador) no es
necesario durante el almacenamiento.
Se recomienda mantener el equipo sellado en su embalaje
hasta la instalación.
2 2
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 35
Page 38

Integración del sistema
3 Integración del sistema
VLT® Refrigeration Drive FC 103
Este capítulo describe las consideraciones que se deben
tener en cuenta para integrar el convertidor de frecuencia
33
en el diseño de un sistema. El capítulo está dividido en los
siguientes apartados:
Capétulo 3.1 Condiciones ambientales de funciona-
•
miento
Condiciones ambientales de funcionamiento del
convertidor de frecuencia, que incluyen:
- Entorno.
- Alojamientos.
- Temperatura.
- Reducción de potencia.
- Otras consideraciones.
Capétulo 3.2 CEM, armónicos y protección de fuga a
•
tierra
Entrada (de regeneración) del convertidor de
frecuencia a la red eléctrica, que incluye:
- Potencia.
- Armónicos.
- Seguimiento.
- Otras consideraciones.
Capétulo 3.4 Integración de la red
•
Entrada al convertidor de frecuencia desde la red
eléctrica, que incluye:
- Potencia.
- Armónicos.
- Seguimiento.
- Cableado.
- Fusibles.
- Otras consideraciones.
Capétulo 3.5 Integración del motor
•
Salida del convertidor de frecuencia al motor, que
incluye:
- Tipos de motor.
- Carga.
- Seguimiento.
- Cableado.
- Otras consideraciones.
Capétulo 3.6 Entradas y salidas adicionales,
•
capétulo 3.7 Planicación mecánica
Integración de la entrada y la salida del
convertidor de frecuencia para un diseño óptimo
del sistema, que incluye:
Un diseño integral del sistema toma en consideración las
áreas potencialmente problemáticas mientras que aplica la
combinación más ecaz de las funciones del convertidor
de frecuencia. La siguiente información proporciona pautas
para la planicación y la especicación de un sistema de
control de motor con convertidores de frecuencia.
Las características operativas aportan una serie de
conceptos de diseño, desde el simple control de velocidad
del motor hasta un sistema de automatización completamente integrado, donde se incluye, a modo de ejemplo:
•
•
•
•
Un concepto de diseño completo incluye la
detallada de las necesidades y el uso.
•
•
•
•
•
•
•
•
•
•
Consulte el capétulo 3.10 Lista de
sistema, donde encontrará una guía práctica de selección y
el diseño.
Entender las funciones y las opciones estratégicas puede
optimizar un diseño de sistema y, posiblemente, evitar
añadirle componentes o funciones duplicados.
- Acoplamiento del convertidor de
frecuencia y el motor.
- Características del sistema.
- Otras consideraciones.
Manejo de retroalimentación.
Información del estado operativo.
Respuestas automatizadas ante fallos.
Programación remota.
especicación
Tipos de convertidores de frecuencia
Motores
Requisitos de red
Estructura de control y programación
Comunicación serie
Tamaño, forma y peso del equipo
Requisitos de potencia y de cableado de control;
tipo y longitud
Fusibles
Equipo auxiliar
Transporte y almacenamiento
vericación del diseño del
36 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 39

Integración del sistema Guía de diseño
3.1 Condiciones ambientales de
funcionamiento
3.1.1 Humedad
Aunque el convertidor de frecuencia pueda funcionar
correctamente a humedades elevadas (hasta el 95 % de
humedad relativa), evite la condensación. Hay un riesgo
especíco de condensación cuando el convertidor de
frecuencia está más frío que el aire ambiente húmedo. La
humedad del aire también puede condensarse en los
componentes electrónicos y provocar cortocircuitos. La
condensación se produce en unidades sin potencia. Instale
un calefactor de armario cuando pueda formarse condensación a causa de las condiciones ambientales. Evite la
instalación en áreas con escarcha. Alternativamente, operar
el convertidor de frecuencia en modo de espera (con la
unidad conectada a la red) reduce el riesgo de condensación. Asegúrese de que la disipación de potencia sea
suciente para mantener los circuitos del convertidor de
frecuencia sin humedad.
3.1.2 Temperatura
Se especican límites de temperatura ambiente mínimos y
máximos para todos los convertidores de frecuencia. Si se
evitan temperaturas ambiente extremas, se prolonga la
vida del equipo y se aumenta al máximo la abilidad
general del sistema. Siga las recomendaciones enumeradas
para disfrutar del rendimiento y la vida útil máximos del
equipo.
Aunque el convertidor de frecuencia puede
•
funcionar a temperaturas de hasta –10 °C, solo se
garantiza un funcionamiento correcto con la
carga nominal con temperaturas de 0 °C o
superiores.
No sobrepase el límite máximo de temperatura.
•
La vida útil de los componentes electrónicos
•
disminuye un 50 % cada 10 °C cuando funciona
por encima de la temperatura prevista.
Incluso los dispositivos con
•
protección IP54, IP55 o IP66 deben seguir los
rangos de temperatura ambiente especicados.
Puede ser necesaria una climatización adicional
•
del alojamiento o del lugar de instalación.
clasicaciones de
3.1.3 Refrigeración
Los convertidores de frecuencia disipan la potencia en
forma de calor. Las siguientes recomendaciones son
necesarias para la ecaz refrigeración de las unidades.
La temperatura máxima del aire que penetre en
•
la protección nunca debe exceder los 40 °C
(104 °F).
La temperatura media diurna/nocturna no debe
•
superar los 35 °C (95 °F).
Monte la unidad de manera que permita que el
•
aire de refrigeración uya libremente a través de
las aletas de refrigeración. Consulte el
capétulo 3.7.1 Separación para realizar el montaje
con los espacios de separación correctos.
Cumpla con los requisitos mínimos de espacio
•
libre delante y detrás de la unidad para proporcionar el ujo de aire de refrigeración adecuado.
Consulte los requisitos para una instalación
adecuada en el manual de funcionamiento.
3.1.3.1 Ventiladores
El convertidor de frecuencia tiene ventiladores integrados
para garantizar una refrigeración óptima. El ventilador
principal fuerza el caudal de aire a lo largo de las aletas de
refrigeración del disipador, lo que garantiza que el aire
interno se refrigere. Algunos tamaños de potencia tienen
un pequeño ventilador secundario cerca de la tarjeta de
control, lo que garantiza que el aire interno circule para
evitar puntos calientes.
La temperatura interna del convertidor de frecuencia
controla el ventilador principal. La velocidad aumenta
gradualmente junto con la temperatura, lo que reduce el
ruido y el consumo energético cuando disminuye la
necesidad y garantiza la refrigeración máxima cuando es
necesaria. El control de ventilador se puede adaptar
mediante parámetro 14-52 Control del ventilador para que
se ajuste a cualquier aplicación, además de proteger contra
los efectos negativos de la refrigeración en climas fríos. Si
se produce un exceso de temperatura dentro del
convertidor de frecuencia, este reduce el patrón y la
frecuencia de conmutación. Consulte el
capétulo 5.1 Reducción de potencia para más información.
3.1.3.2 Cálculo del ujo de aire necesario
para la refrigeración del convertidor
de frecuencia
El ujo de aire necesario para refrigerar un convertidor de
frecuencia, o varios convertidores de frecuencia en un
mismo alojamiento, puede calcularse de la siguiente
manera:
1. Determine la pérdida de potencia a salida
máxima para todos los convertidores de
frecuencia a partir de las tablas de datos del
capétulo 7 Especicaciones.
2. Añada los valores de pérdida de potencia de
todos los convertidores de frecuencia que pueden
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 37
Page 40

Integración del sistema
VLT® Refrigeration Drive FC 103
funcionar simultáneamente. La suma resultante
será el calor Q que se debe transferir. Multiplique
el resultado con el factor f, tomado de la
Tabla 3.1. Por ejemplo, f = 3,1 m3 × K/Wh al nivel
del mar.
33
3. Determine la temperatura más alta del aire que
entre en el alojamiento. Sustraiga esta
temperatura a la temperatura requerida en el
interior del alojamiento, por ejemplo 45 °C
(113 °F).
4. Divida el total del paso 2 por el total del paso 3.
El cálculo se expresa mediante la siguiente fórmula:
f xQ
V =
Ti − T A
donde
V = ujo de aire en m3/h
f = factor en m3 × K/Wh
Q = calor que se debe transferir en W
Ti = temperatura en el interior del alojamiento en °C
TA = temperatura ambiente en °C
f = cp × ρ (calor
especíco del aire x densidad del aire)
AVISO!
El calor especíco del aire (cp) y la densidad del aire (ρ)
no son constantes, pero dependen de la temperatura, de
la humedad y de la presión atmosférica. Por lo tanto,
dependen de la altitud sobre el nivel del mar.
La Tabla 3.1 muestra los valores típicos del factor f,
calculados para diferentes altitudes.
Altitud
Ejemplo
¿Qué ujo de aire se necesita para refrigerar dos convertidores de frecuencia (con pérdidas de calor de 295 W y
1430 W) que funcionan simultáneamente y montados en
un alojamiento con un pico de temperatura ambiente de
37 °C?
Calor especíco del airecpDensidad del aireρFactor
[m] [kJ/kgK]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Tabla 3.1 Factor f, calculado para diferentes altitudes
La suma de las pérdidas de calor de ambos
•
convertidores de frecuencia es 1725 W.
Si multiplicamos 1725 W por 3,3 m3 × K/Wh se
•
obtiene un resultado de 5693 m × K/h.
[kg/m3] [m3⋅K/Wh]
f
Si se necesita el ujo de aire en CFM, utilice el factor de
conversión 1 m3/h = 0,589 CFM.
En el ejemplo anterior, 711,6 m3/h = 418,85 CFM.
3.1.4 Sobretensión generada por el motor
La tensión del bus de CC aumenta cuando el motor actúa
como generador. Esto puede ocurrir de dos maneras:
El convertidor de frecuencia no puede regenerar energía
que vuelva a la entrada. Por lo tanto, limita la energía
aceptada desde el motor cuando está congurado para
activar la rampa automática. Si la sobretensión se produce
durante la desaceleración, el convertidor de frecuencia
intentará hacer esto incrementando automáticamente el
tiempo de deceleración. Si esto no resulta, o si la carga
arrastra al motor cuando funciona a frecuencia constante,
el convertidor de frecuencia se apaga y muestra un
mensaje de fallo cuando se alcanza un nivel crítico de
tensión de bus de CC.
3.1.5 Ruido acústico
El ruido acústico del convertidor de frecuencia procede de
tres fuentes:
Consulte la Tabla 7.40 para obtener información sobre las
clasicaciones de ruido acústico.
3.1.6 Vibración y golpe
El convertidor de frecuencia ha sido probado según un
procedimiento basado en la norma CEI 68-2-6/34/35 y 36.
Estas pruebas someten la unidad a fuerzas de 0,7 g en el
rango de 18 a 1000 Hz aleatoriamente, en tres direcciones
y durante dos horas. Todos los convertidores de frecuencia
de Danfoss cumplen con los requisitos que corresponden a
estas condiciones cuando la unidad está montada en la
Si restamos 37 °C a 45 °C, el resultado es 8 °C
•
(=8 K).
Si dividimos 5693 m × K/h por 8 K, el resultado
•
es: 711,6 m3h.
La carga arrastra al motor cuando el convertidor
•
de frecuencia funciona con una frecuencia de
salida constante. Esto se conoce generalmente
como carga de arrastre.
Durante la desaceleración, si la inercia de la carga
•
es alta y el tiempo de desaceleración del
convertidor de frecuencia está congurado en un
valor corto.
Bobinas del enlace de CC (circuito intermedio)
•
Bobina de choque del ltro RFI
•
Vent. internos
•
38 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 41
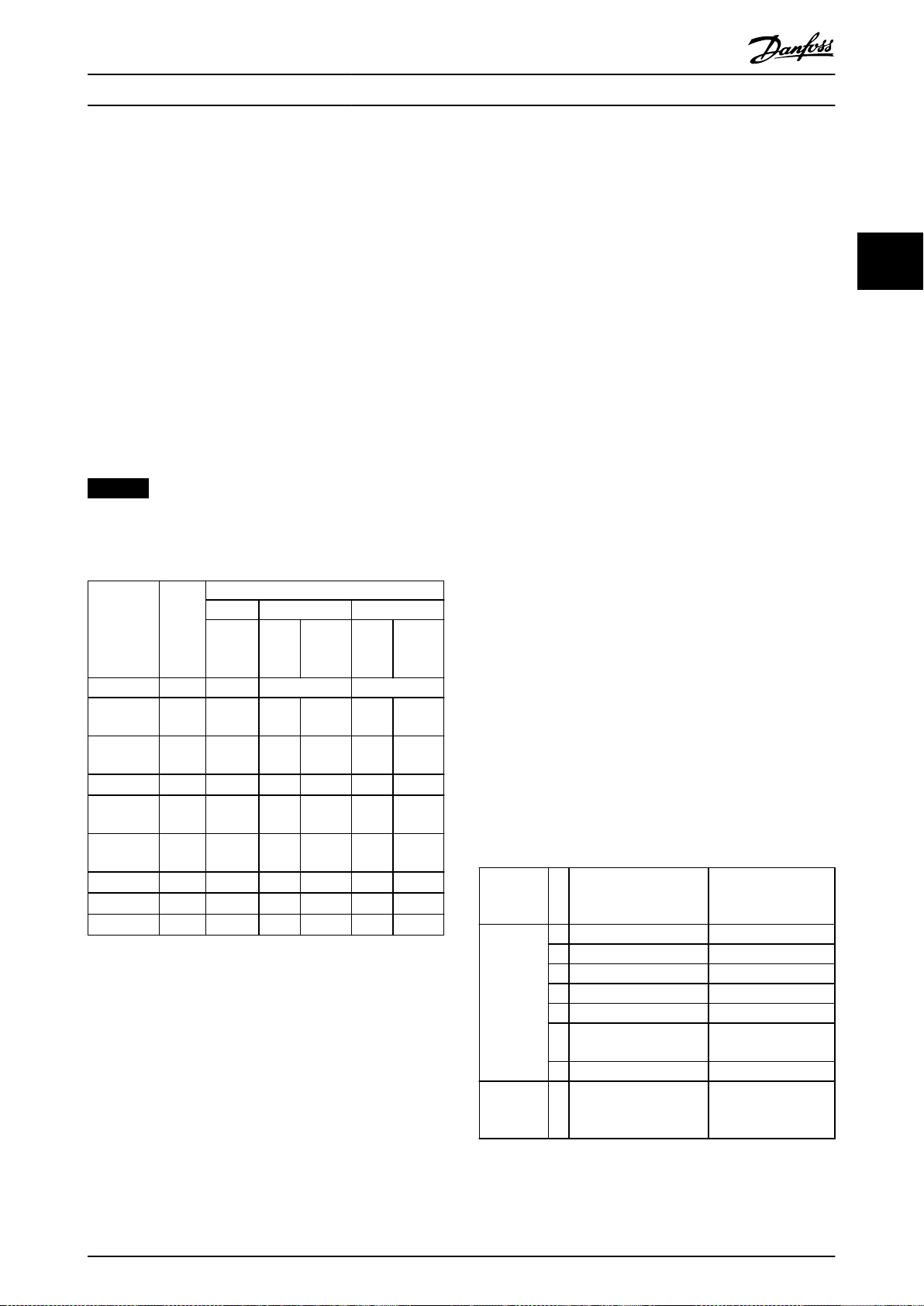
Integración del sistema Guía de diseño
pared o el suelo, así como cuando está montada en
paneles o atornillada a paredes o suelos.
3.1.7 Entornos agresivos
3.1.7.1 Gases
Los gases agresivos, como el sulfuro de hidrógeno, cloro o
amoníaco, pueden dañar los componentes mecánicos y
eléctricos del convertidor de frecuencia. La contaminación
del aire de refrigeración también puede causar la descomposición gradual de las juntas de las puertas y las pistas de
PCB. Los contaminantes agresivos están a menudo
presentes en instalaciones de tratamiento de aguas
residuales o piscinas. La corrosión del cobre es una señal
clara de un entorno agresivo.
Clasicaciones de las clases del revestimiento barnizado
AVISO!
El convertidor de frecuencia se entrega de serie con un
barnizado de las placas de circuito de clase 3C2. Si se
solicita, el barnizado clase 3C3 está disponible.
Clase
3C1 3C2 3C3
Tipo de gas Unidad
Sal marina n/a Ninguno Neblina salina Neblina salina
Óxidos de
azufre
Sulfuro de
hidrógeno
Cloro
Cloruro de
hidrógeno
Fluoruro de
hidrógeno
Amoníaco
Ozono
Nitrógeno
Tabla 3.2 Clasicaciones de las clases del revestimiento
barnizado
1) Los valores máximos son valores pico transitorios que no deben
ocurrir durante más de 30 minutos al día.
3
0,1 0,3 1,0 5,0 10
mg/m
3
0,01 0,1 0,5 3,0 10
mg/m
3
0,01 0,1 0,03 0,3 1,0
mg/m
3
0,01 0,1 0,5 1,0 5,0
mg/m
3
0,003 0,01 0,03 0,1 3,0
mg/m
3
0,3 1,0 3,0 10 35
mg/m
3
0,01 0,05 0,1 0,1 0,3
mg/m
3
0,1 0,5 1,0 3,0 9,0
mg/m
3.1.7.2 Exposición al polvo
La instalación de convertidores de frecuencia en entornos
con una alta exposición al polvo es, a menudo, inevitable.
El polvo afecta a las unidades montadas en pared o
bastidor con clasicación de protección IP55 o IP66, y
también a dispositivos montados en armario con clasi-
cación de protección IP21 o IP20. Considere los tres
Valor
medio
Valor
máximo
1)
Valor
medio
Valor
máximo
1)
aspectos descritos en este apartado cuando se instalen
convertidores de frecuencia en estos entornos.
Refrigeración reducida
El polvo forma depósitos en la supercie del dispositivo y
dentro de él, en las placas de circuitos y los componentes
electrónicos. Estos depósitos funcionan como capas de
aislamiento y obstaculizan la transferencia de calor al aire
ambiente, lo que reduce la capacidad de refrigeración. Los
componentes se calientan, lo cual produce un envejecimiento acelerado de los componentes electrónicos y
disminuye la vida útil de la unidad. Los depósitos de polvo
en el disipador de la parte posterior de la unidad también
disminuyen la vida útil de la unidad.
Ventiladores de refrigeración
El ujo de aire para refrigerar la unidad se produce
mediante los ventiladores de refrigeración, normalmente
ubicados en la parte posterior del dispositivo. Los rotores
del ventilador poseen pequeños cojinetes en los que el
polvo puede penetrar y actuar como un abrasivo. La
presencia de polvo en los cojinetes provoca daños en los
cojinetes y fallos del ventilador.
Filtros
Los convertidores de frecuencia de alta potencia están
equipados con ventiladores de refrigeración que expelen
aire caliente desde el interior del dispositivo. A partir de un
determinado tamaño, estos ventiladores se equipan con
esteras de ltro. Estos ltros se puede obstruir rápidamente
cuando se utilizan en ambientes polvorientos. En estas
condiciones, es necesario tomar medidas preventivas.
Mantenimiento periódico
En las condiciones descritas anteriormente, se recomienda
limpiar el convertidor de frecuencia durante el mantenimiento periódico. Elimine el polvo del disipador y los
ventiladores y limpie las esteras de ltro.
3.1.8 Deniciones de clasicación IP
Primer
dígito
Contra la penetración
de objetos sólidos
extraños
0 (no protegido) (no protegido)
1
≥50 mm de diámetro
2 12,5 mm de diámetro Dedo
3 2,5 mm de diámetro Herramienta
4
≥1,0 mm de diámetro
5 Protección contra el
polvo
6 Hermetismo al polvo Cable
Contra la penetración
de agua con efecto
nocivo
Contra el acceso a
piezas peligrosas por
Dorso de la mano
Cable
Cable
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 39
Page 42

Integración del sistema
VLT® Refrigeration Drive FC 103
Contra la penetración
de objetos sólidos
extraños
0 (no protegido) –
1 Gotas que caen
verticalmente
33
Segundo
dígito
Primera
letra
Letra
adicional
2 Caídas con un ángulo
de 15º
3 Agua pulverizada –
4 Salpicaduras de agua –
5 Chorros de agua –
6 Potentes chorros de
agua
7 Inmersión temporal –
8 Inmersión a largo plazo –
Información comple-
mentaria especíca
para
A Dorso de la mano
B Dedo
C Herramienta
D Cable
Información comple-
mentaria especíca
para
H Dispositivo de tensión
alta
M Dispositivo que se
desplaza durante la
prueba de agua
S Dispositivo jo durante
la prueba de agua
W Condiciones
atmosféricas
Contra el acceso a
piezas peligrosas por
–
–
–
–
–
–
–
3.1.9 Interferencias de radiofrecuencia
El objetivo principal en la práctica es obtener sistemas que
funcionen de forma estable sin interferencias de radiofrecuencia entre sus componentes. Para conseguir un alto
nivel de inmunidad, se recomienda usar convertidores de
frecuencia con ltros RFI de alta calidad.
Utilice
ltros de categoría C1, especicados en la norma EN
61800-3, que respetan los límites de la Clase B de la norma
general EN 55011.
Coloque avisos en el convertidor de frecuencia si los ltros
RFI no corresponden a la categoría C1 (Categoría C2 o
inferior). La responsabilidad del etiquetado correcto recae
en el operador.
En la práctica, existen dos enfoques sobre los ltros RFI:
Integrados en el equipo
•
- Los ltros integrados requieren espacio
en el armario pero eliminan los costes
suplementarios de instalación, cableado
y materiales. Sin embargo, la ventaja
más importante es la conformidad
perfecta con CEM y el cableado de
ltros integrados.
Opciones externas
•
- Los ltros RFI externos opcionales
instalados en la entrada del convertidor
de frecuencia generan una caída de
tensión. En la práctica, esto quiere decir
que la tensión máxima de red no está
presente en la entrada del convertidor
de frecuencia y puede ser necesario un
Tabla 3.3 Deniciones CEI 60529 de las clasicaciones IP
convertidor de una mayor clasicación.
La longitud máxima del cable de motor
3.1.8.1 Opciones de armario y
clasicaciones
para que respete los límites de CEM está
comprendida entre 1 y 50 m. Se
generan costes por materiales, cableado
Los convertidores de frecuencia de Danfoss están
disponibles con tres clasicaciones de protección
y ensamblaje. La conformidad CEM no
ha sido probada.
diferentes:
IP00 o IP20 para instalación en armario.
•
IP54 o IP55 para montaje local.
•
IP66 para condiciones ambientales extremas,
•
como una humedad (del aire) extremadamente
AVISO!
Para garantizar un funcionamiento sin interferencias del
convertidor de frecuencia, utilice siempre un ltro RFI de
categoría C1.
alta o altas concentraciones de polvo o de gases
agresivos.
40 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 43
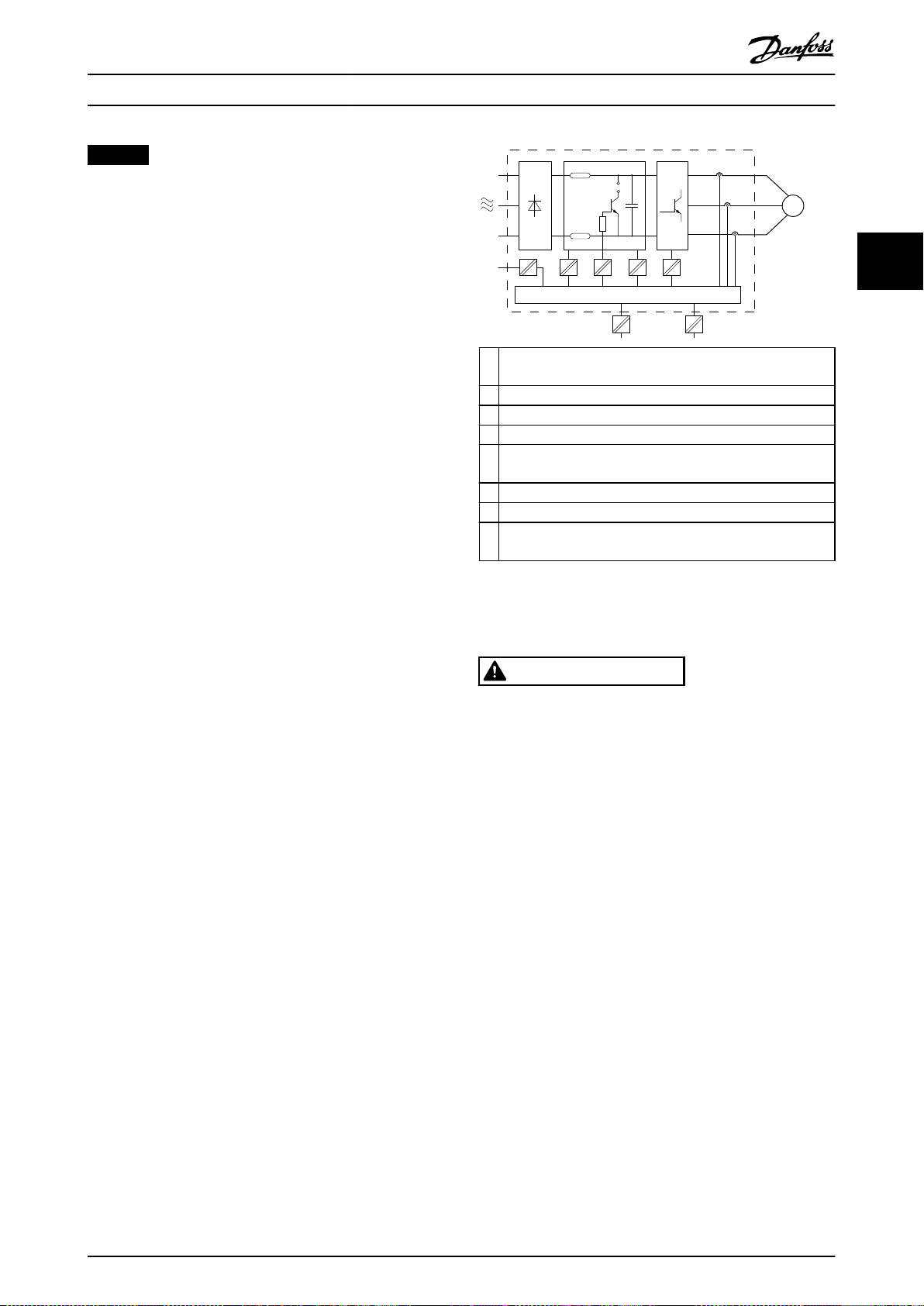
130BA056.10
1325 4
6
ba
M
Integración del sistema Guía de diseño
AVISO!
Las unidades VLT® Refrigeration Drive FC 103 se
suministran de serie con ltros RFI integrados conformes
a la categoría C1 (EN 61800-3) para su uso en sistemas
de red de 400 V y potencias de salida de hasta 90 kW o
conformes a la categoría C2 para potencias de salida
comprendidas entre 110 y 630 kW. Las unidades FC 103
son conformes a la categoría C1, con cables de motor
apantallados de hasta 50 m o a la categoría C2, con
cables de motor apantallados de hasta 150 m. Consulte
la Tabla 3.4 para obtener más detalles.
3.1.10 Conformidad PELV y de aislamiento
galvánico
Garantice la protección contra descargas eléctricas cuando
la fuente de alimentación eléctrica sea del tipo de tensión
de protección muy baja (PELV) y asegúrese de que la
instalación se realice de acuerdo con las normativas locales
y nacionales sobre equipos PELV.
Para mantener el estado PELV en los terminales de control,
todas las conexiones deben ser PELV, por ejemplo, los
termistores deben disponer de un aislamiento reforzado/
doble. Todos los terminales de control y de relé de los
convertidores de frecuencia de Danfoss cumplen con los
requisitos de PELV (salvo la conexión a tierra en triángulo
por encima de 400 V).
El aislamiento galvánico (garantizado) se consigue
cumpliendo los requisitos relativos a un mayor aislamiento
y proporcionando las distancias necesarias en los circuitos.
Estos requisitos se describen en la norma EN 61800-5-1.
Se proporciona aislamiento eléctrico como se muestra en
la Ilustración 3.1. Los componentes descritos cumplen con
los requisitos de aislamiento galvánico y PELV.
1 Fuente de alimentación (SMPS) con aislamiento de V CC e
indicación de la tensión de corriente intermedia.
2 Accionamiento de puerta para los IGBT
3 Transductores de corriente
4 Optoacoplador, módulo de freno.
5 Circuitos de aujo de corriente interna, RFI y medición de
temperatura.
6 Relés congurables
a Aislamiento galvánico para la opción de seguridad de 24 V
b Aislamiento galvánico para la interfaz del bus estándar
RS485.
Ilustración 3.1 Aislamiento galvánico
Instalación en altitudes elevadas
ADVERTENCIA
SOBRETENSIÓNLas instalaciones que exceden los
límites de altitud pueden no respetar los requisitos de
PELV. El aislamiento entre los componentes y las piezas
esenciales puede resultar insuciente. Existe un riesgo de
sobretensión. Para reducir el riesgo de sobretensión,
utilice dispositivos de protección externos o aislamiento
galvánico.
Para instalaciones en altitudes elevadas, consulte a Danfoss
sobre el cumplimiento de los requisitos de PELV.
380-500 V (protecciones A, B y C): más de 2000 m
•
(6500 ft)
380-500 V (protecciones D, E y F): más de 3000 m
•
(9800 ft)
525-690 V: más de 2000 m (6500 ft)
•
3 3
CEM, armónicos y protección de fuga a
3.2
tierra
3.2.1 Aspectos generales de las emisiones
CEM
Los convertidores de frecuencia (y otros dispositivos
eléctricos) generan campos magnéticos o electrónicos que
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 41
pueden interferir con su entorno. La compatibilidad
electromagnética (CEM) de estos efectos depende de la
potencia y de las características armónicas de los
Page 44

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Integración del sistema
VLT® Refrigeration Drive FC 103
dispositivos. La interacción incontrolada entre dispositivos
eléctricos en un sistema puede degradar la compatibilidad
y perjudicar su funcionamiento able. Las interferencias
pueden adoptar la forma de:
Distorsión de los armónicos del suministro de red.
•
Descargas electrostáticas.
33
•
Fluctuaciones rápidas de tensión.
•
Interferencia de alta frecuencia.
•
eléctrica. Conecte el apantallamiento del cable de motor a
la protección del convertidor de frecuencia, así como a la
protección del motor. La mejor forma de realizar la
conexión es utilizar abrazaderas de apantallamiento
integradas para evitar extremos de apantallamiento en
espiral (cables de pantalla retorcidos y embornados). Estos
cables de pantalla retorcidos y embornados aumentan la
impedancia del apantallamiento a frecuencias superiores,
lo que reduce el efecto de pantalla y aumenta la corriente
de fuga (I4).
Si se emplea un cable apantallado para el relé, el cable de
Los dispositivos eléctricos generan interferencias y se ven
afectados por las interferencias de otras fuentes.
Las interferencias eléctricas suelen aparecer a frecuencias
situadas en el intervalo de 150 kHz a 30 MHz. Las interfe-
control, la interfaz de señales y el freno, monte el apantallamiento en ambos extremos de la protección. En algunas
situaciones, sin embargo, es necesario romper el apantallamiento para evitar lazos de intensidad.
rencias generadas por el convertidor de frecuencia y
transmitidas por el aire, con frecuencias en el rango de 30
MHz a 1 GHz, tienen su origen en el inversor, el cable de
motor y el motor.
Las intensidades capacitivas en el cable de motor, junto
con una alta dU/dt de la tensión del motor, generan
corrientes de fuga, como se muestra en la Ilustración 3.2.
La utilización de un cable de motor apantallado aumenta
la corriente de fuga (consulte la Ilustración 3.2), porque los
cables apantallados tienen una mayor capacitancia a tierra
que los cables no apantallados. Si la corriente de fuga no
se
ltra, provoca una mayor interferencia en la alimentación de red, en el rango de radiofrecuencia inferior a 5
MHz. Puesto que la corriente de fuga (I1) se reconduce a la
unidad a través del apantallamiento (I3), en principio solo
habrá un pequeño campo electromagnético (I4) desde el
cable apantallado del motor, tal y como se indica en la
Ilustración 3.2.
El apantallamiento reduce la interferencia radiada, aunque
Al colocar el apantallamiento en una placa de montaje
para el convertidor de frecuencia, dicha placa deberá estar
fabricada en metal para conducir las intensidades del
apantallamiento de vuelta a la unidad. Asegúrese, además,
de que la placa de montaje y el alojamiento del
convertidor de frecuencia hagan buen contacto eléctrico a
través de los tornillos de montaje.
Si se utilizan cables no apantallados, no se cumplirán
algunos de los requisitos de emisiones, aunque sí se
respetarán la mayoría de los requisitos de inmunidad.
Para reducir el nivel de interferencia del sistema completo
(unidad + instalación), haga que los cables de motor y de
freno sean lo más cortos posibles. Los cables con un nivel
de señal sensible no deben colocarse junto a los cables de
motor y de freno. Concretamente, los elementos
electrónicos de control generan una radiointerferencia
superior a 50 MHz (transmitida por el aire).
incrementa la interferencia de baja frecuencia en la red
1 Cable de conexión a tierra 3 Fuente de alimentación de red de CA 5 Cable de motor apantallado
2 Apantallamiento 4 Convertidor de frecuencia 6 Motor
Ilustración 3.2 Generación de corrientes de fuga
42 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 45

Integración del sistema Guía de diseño
3.2.2 Resultados de las pruebas de CEM (emisión)
Los siguientes resultados de las pruebas se obtuvieron utilizando un sistema con un convertidor de frecuencia (con
opciones, si era el caso), un cable de control apantallado y un cuadro de control con potenciómetro, así como un motor y
un cable de motor apantallado.
Tipo de ltro
RFI
Normas
y
requisitos
EN/CEI 61800-3 Categoría C1
H1
1,1-22 kW 220-240 V 50 150 150 No Sí N/A
1,1-45 kW 200-240 V 50 150 150 No Sí Sí
1,1-90 kW 380-480 V 50 150 150 No Sí Sí
H2/H5
1,1-22 kW 220-240 V No No 25 No No N/A
1,1-3,7 kW 200-240 V No No 5 No No No
5,5-45 kW 200-240 V No No 25 No No No
1,1-7,5 kW 380-480 V No No 5 No No No
11-90 kW 380-480 V No No 25 No No No
HX
1,1-90 kW 525-600 V No No No No No No
EN 55011 Clase B
Entorno
doméstico,
estableci-
mientos
comerciales e
industria ligera
Primer
ambiente
(hogar y
ocina)
Emisión conducida Emisión irradiada
Longitud del cable [m] Longitud del cable [m]
Clase A, grupo
1
Entorno
industrial
Categoría C2
Primer
ambiente
(hogar y
ocina)
Clase A, grupo
2
Entorno
industrial
Categoría C3
Segundo
ambiente
(entorno
industrial)
Clase B
Entorno
doméstico,
estableci-
mientos
comerciales e
industria ligera
Categoría C1
Primer ambiente
(hogar y ocina)
Clase A, grupo
1
Entorno
industrial
Categoría C2
Primer
ambiente
(hogar y
ocina)
Clase A, grupo
2
Entorno
industrial
Categoría C3
Segundo
ambiente
(entorno
industrial)
3 3
Tabla 3.4 Resultados de las pruebas de CEM (emisión)
HX, H1 o H2 se
HX: no hay ltros de CEM integrados en el convertidor de frecuencia (solo en unidades de 600 V).
H1: ltro de CEM integrado. Cumple con la clase A1/B
H2: sin ltro de CEM adicional. Cumple con la clase A2.
H5: versiones marítimas. Cumple con los mismos niveles de emisiones que las versiones H2.
dene en las pos. 16-17 del código descriptivo para ltros de CEM.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 43
Page 46

Integración del sistema
VLT® Refrigeration Drive FC 103
3.2.3 Requisitos en materia de emisiones
La norma de productos CEM para convertidores de
frecuencia dene cuatro categorías (C1, C2, C3 y C4) con
requisitos especicados para la emisión e inmunidad. La
33
Tabla 3.5 indica la denición de las cuatro categorías y la
clasicación equivalente de la norma EN 55011.
3.2.4 Requisitos de inmunidad
Los requisitos de inmunidad para convertidores de
frecuencia dependen del entorno en el que estén
instalados. Los requisitos para el entorno industrial son
más exigentes que los del entorno doméstico y de ocina.
Todos los convertidores de frecuencia de Danfoss cumplen
los requisitos para el entorno industrial. Por consiguiente,
Clase de
Categoría Denición
C1 Convertidores de frecuencia
instalados en el primer ambiente
(hogar y ocina) con una tensión
de alimentación inferior a 1000 V.
C2 Convertidores de frecuencia
instalados en el primer ambiente
(hogar y ocina), con una tensión
de alimentación inferior a 1000 V,
que no son ni enchufables ni
desplazables y están previstos para
su instalación y puesta en marcha
por profesionales.
C3 Convertidores de frecuencia
instalados en el segundo ambiente
(industrial) con una tensión de
alimentación inferior a 1000 V.
C4 Convertidores de frecuencia
instalados en el segundo ambiente
con una tensión de alimentación
igual o superior a 1000 V y una
intensidad nominal igual o superior
a 400 A o prevista para el uso en
sistemas complejos.
Tabla 3.5 Correlación entre CEI 61800-3 y EN 55011
emisiones
equivalente en
EN 55011
Clase B
Clase A, grupo
1
Clase A, grupo
2
Sin límite.
Realice un plan
de CEM.
también cumplen los requisitos mínimos de los entornos
domésticos y de ocina, con un amplio margen de
seguridad.
Para documentar la inmunidad contra interferencias
eléctricas, se han realizado las siguientes pruebas de
inmunidad según las siguientes normas básicas:
EN 61000-4-2 (CEI 61000-4-2): descargas electro-
•
státicas (ESD): simulación de descargas
electrostáticas de seres humanos.
EN 61000-4-3 (CEI 61000-4-3): radiación del
•
campo electromagnético entrante, simulación
modulada en amplitud de los efectos de equipos
de radar y de comunicación por radio, así como
las comunicaciones móviles.
EN 61000-4-4 (CEI 61000-4-4): Transitorios de
•
conexión/desconexión: Simulación de la interferencia introducida por el acoplamiento de un
contactor, relés o dispositivos similares.
EN 61000-4-5 (CEI 61000-4-5): Transitorios de
•
sobretensión: simulación de transitorios
introducidos, por ejemplo, al caer rayos cerca de
las instalaciones.
EN 61000-4-6 (CEI 61000-4-6): RF modo común:
•
simulación del efecto del equipo transmisor de
radio conectado a cables de conexión.
Consulte el Tabla 3.7.
Cuando se utilizan normas de emisiones generales
(conducidas), los convertidores de frecuencia deben
cumplir los límites de la Tabla 3.6.
Clase de
Entorno
Primer ambiente
(hogar y ocina)
Segundo
ambiente
(entorno
industrial)
Tabla 3.6 Correlación entre Normas de emisiones generales y
EN 55011
44 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Norma de emisiones
generales
Norma de emisiones para
entornos residenciales,
comerciales e industria
ligera EN/CEI 61000-6-3.
Norma de emisiones para
entornos industriales EN/CEI
61000-6-4.
emisiones
equivalente en
EN 55011
Clase B
Clase A, grupo 1
Page 47

Integración del sistema Guía de diseño
Norma básica
CEI 61000-4-42)
Criterios de aceptación B B B A A
Rango de tensión: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Línea
Motor
Cables de control
Bus estándar 2 kV CM
Cables de relé 2 kV CM
Opciones de bus de campo
y de aplicación
Cable del LCP
24 V CC externa
Protección
Tabla 3.7 Tabla sobre inmunidad CEM
1) Inyección en apantallamiento de cables.
2) Valores obtenidos normalmente mediante pruebas.
2)
Ráfaga
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
Sobretensión
CEI 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
3.2.5 Aislamiento del motor
2)
1)
1)
1)
1)
1)
1)
2)
ESD
CEI
61000-4-2
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
8 kV AD
6 kV CC
Campo electromagnético
radiado
CEI 61000-4-3
10 V/m —
Tensión de RF
modo común
CEI 61000-4-6
Estrategias estándar de mitigación
1. Utilizar un cojinete aislado.
Los motores modernos para uso con convertidores de
frecuencia presentan un elevado grado de aislamiento para
responder a la nueva generación de IGBT de gran ecacia
con una dU/dt elevada. Para actualizar motores antiguos,
conrme el aislamiento del motor o mitíguelo con un ltro
dU/dt o incluso un ltro senoidal, si fuera necesario.
Para longitudes del cable de motor ≤ que la longitud del
cable máxima que se indica en el capétulo 7 Especica-
ciones, se recomiendan las clasicaciones de aislamiento
del motor disponibles en la Tabla 3.8. Si un motor tiene
2. Aplicar rigurosos procedimientos de instalación:
2a Asegúrese de que el motor y la carga
del motor estén alineados.
2b Seguir estrictamente las directrices de
instalación CEM.
2c Reforzar la PE de modo que la
impedancia de alta frecuencia sea
inferior en la PE que los cables de
alimentación de entrada
una clasicación de aislamiento inferior, utilice un ltro
dU/dt o senoidal.
2d Proporcione una buena conexión de alta
frecuencia entre el motor y el
Tensión de red nominal [V] Aislamiento del motor [V]
UN≤420
420 V< UN≤ 500 ULL reforzada = 1600
500 V< UN≤ 600 ULL reforzada = 1800
600 V< UN≤ 690 ULL reforzada = 2000
Tabla 3.8 Aislamiento del motor
ULL estándar = 1300
convertidor de frecuencia, por ejemplo,
mediante un cable apantallado que
tenga una conexión de 360º en el motor
y en el convertidor de frecuencia.
2e Asegurarse de que la impedancia desde
el convertidor de frecuencia hasta la
tierra sea inferior que la impedancia de
tierra de la máquina, lo que puede
3.2.6 Corrientes en los cojinetes del motor
resultar difícil para las bombas.
2f Realice una conexión a tierra directa
Para reducir al mínimo las corrientes en el eje y los
cojinetes, conecte a tierra lo siguiente respecto a la
máquina accionada:
Convertidor de frecuencia
•
Motor
•
Máquina accionada
•
3. Reducir la frecuencia de conmutación de IGBT.
4. Modicar la forma de onda del inversor, AVM de
60° frente a SFAVM.
5. Instalar un sistema de conexión a tierra del eje o
entre el motor y la carga del motor (por
ejemplo, una bomba).
usar un acoplador aislante.
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 45
Page 48
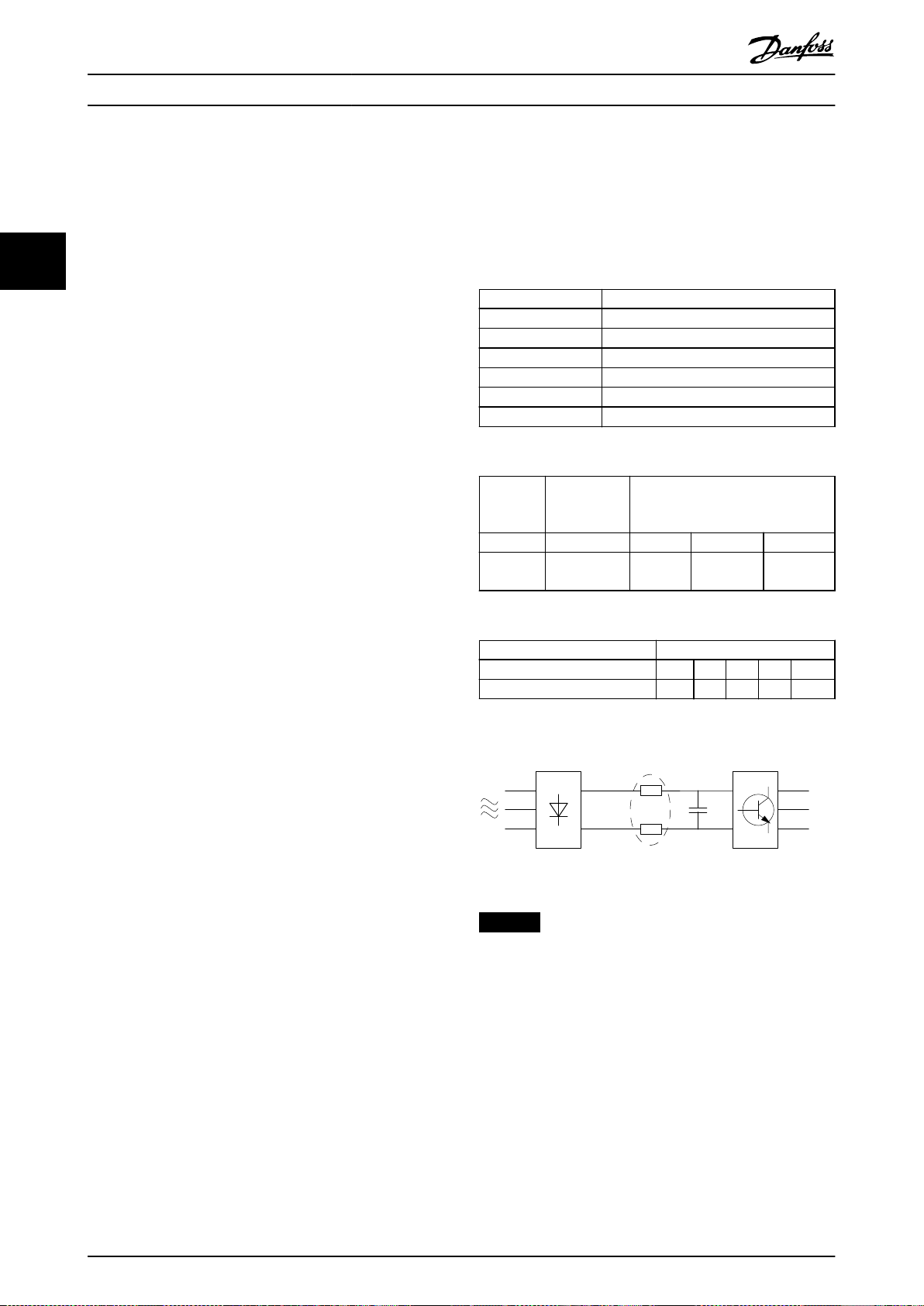
175HA034.10
Integración del sistema
VLT® Refrigeration Drive FC 103
6. Aplicar un lubricante conductor.
7. Usar el ajuste mínimo de velocidad, si es posible.
8. Tratar de asegurar que la tensión de red esté
equilibrada con la conexión a tierra. Esto puede
resultar difícil para sistemas de patilla con toma
33
de tierra, IT, TT o TN-CS.
9. Usar un ltro senoidal o dU/dt.
3.2.7 Armónicos
Dispositivos eléctricos con recticadores de diodos, como
por ejemplo
Luces uorescentes
•
Ordenadores
•
Fotocopiadoras
•
Faxes
•
Diversos equipos de laboratorio y
•
Sistemas de telecomunicaciones
•
pueden añadir distorsión armónica a la alimentación de
Los armónicos no afectan directamente al consumo de
energía, aunque aumentan las pérdidas de calor en la
instalación (transformador, inductores, cables). Por ello, en
instalaciones eléctricas con un porcentaje alto de carga del
recticador, mantenga las corrientes armónicas en un nivel
bajo para evitar sobrecargar el transformador, los
inductores y los cables.
Abreviatura Descripción
f
1
I
1
U
1
I
n
U
n
n Orden armónico
Tabla 3.9 Abreviaturas relativas a armónicos
Corriente
fundamental
Corriente I
Frecuencia
[Hz]
Frecuencia fundamental
Corriente fundamental
Tensión fundamental
Corrientes armónicas
Tensión armónica
Corriente armónica (In)
(I1)
1
50 250 350 550
I
5
I
7
I
11
red. Los convertidores de frecuencia utilizan una entrada
con puente de diodos, que también puede contribuir a la
Tabla 3.10 Corriente no senoidal transformada
distorsión armónica.
Corriente Corriente armónica
El convertidor de frecuencia no consume corriente de
forma uniforme de la línea de suministro. Esta corriente no
senoidal tiene componentes que son múltiplos de la
frecuencia de corriente fundamental. Estos componentes se
conocen como armónicos. Es importante controlar la
I
Intensidad de entrada 1,0 0,9 0,4 0,2 <0,1
Tabla 3.11 Corrientes armónicas en comparación con la
corriente de entrada RMS Corriente
RMSI1I5I7I11-49
distorsión armónica total en la fuente de alimentación de
red. Aunque las corriente armónicas no afecten
directamente al consumo de energía eléctrica, estas
generan calor en el cableado y los transformadores. Esta
generación de calor puede afectar a otros dispositivos que
se encuentren en la misma línea de potencia.
Ilustración 3.3 Bobinas del bus de CC
3.2.7.1 Análisis de armónicos
AVISO!
Diversas características del sistema eléctrico de un edicio
determinan la contribución exacta de armónicos del
convertidor de frecuencia al THD de una instalación y a su
capacidad de cumplir las normas IEEE. Es difícil hacer
generalizaciones sobre la contribución de armónicos de los
convertidores de frecuencia en una instalación especíca.
Cuando sea necesario, realice un análisis de los armónicos
del sistema para determinar los efectos sobre el equipo.
El convertidor de frecuencia acepta una intensidad no
senoidal de la red, lo que aumenta la intensidad de
entrada I
. Se transforma una intensidad no senoidal por
RMS
medio de un análisis de series Fourier y se separa en
intensidades de onda senoidal con diferentes frecuencias,
es decir, con diferentes corrientes armónicas IN con 50 Hz o
60 Hz como frecuencia fundamental.
46 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Algunas corrientes armónicas pueden perturbar el
equipo de comunicación conectado al mismo
transformador o causar resonancias si se utilizan condensadores de corrección del factor de potencia.
Para asegurar corrientes armónicas bajas, el convertidor de
frecuencia cuenta con ltros pasivos. Las bobinas de CC
reducen la distorsión armónica total (THD) al 40 %.
La distorsión de la tensión de alimentación de red
depende de la magnitud de las corrientes armónicas
multiplicada por la impedancia interna de la red para la
frecuencia dada. La distorsión de tensión total (THD) se
calcula según los distintos armónicos de tensión individual,
usando esta fórmula:
Page 49

Integración del sistema Guía de diseño
2
THD =
2
+ U
U
+ ... + U
5
7
U1
2
N
3.2.7.2 Requisitos en materia de emisión de
armónicos
Equipos conectados a la red pública de suministro
eléctrico
Opción Denición
1 CEI/EN 61000-3-2 Clase A para equipo trifásico
equilibrado (solo para equipos profesionales de
hasta 1 kW de potencia total).
2 CEI/EN 61000-3-12 Equipo 16 A-75 A y equipo
profesional desde 1 kW hasta una intensidad de fase
de 16 A.
Tabla 3.12 Normas de emisión de armónicos
3.2.7.3 Resultados de la prueba de
armónicos (emisión)
Los tamaños de potencia de hasta PK75 en T2 y T4
cumplen las disposiciones de CEI / EN 61000-3-2 Clase A.
Los tamaños de potencia desde P1K1 hasta P18K en T2 y
hasta P90K en T4 cumplen las disposiciones de CEI / EN
61000-3-12, tabla 4. Los tamaños de potencia de P110 a
P450 en T4 también cumplen las disposiciones de la
norma CEI/EN 61000-3-12, aunque no sea necesario porque
las intensidades se encuentran por encima de los 75 A.
La Tabla 3.13 describe cómo la potencia de cortocircuito de
la fuente de alimentación SSC en el punto de conexión
entre el suministro del usuario y el sistema público (R
mayor o igual a:
S
= 3 × R
SC
× U
× I
SCE
= 3 × 120 × 400 × I
red
equ
equ
sce
) es
Para conectar otros tamaños de potencia a la red pública
de suministro eléctrico, consulte al operador de la red de
distribución.
Conformidad con varias directrices de nivel de sistema:
Los datos de corriente armónica de la Tabla 3.13 se propor-
cionan de acuerdo con la norma CEI/EN61000-3-12, con
referencia al estándar de producto de sistemas Power
Drive. Pueden utilizarse como base para el cálculo de la
inuencia de las corrientes armónicas sobre la fuente de
alimentación del sistema y para la documentación del
cumplimiento de las directrices regionales aplicables: IEEE
519-1992; G5/4.
3.2.7.4 Efecto de los armónicos en un
sistema de distribución de potencia
En la Ilustración 3.4, un transformador está conectado en el
lado primario a un punto de acoplamiento común PCC1,
en la fuente de alimentación de media tensión. El
transformador tiene una impedancia Z
número de cargas. El punto de acoplamiento común al
que se conectan todas las cargas es el PCC2. Cada carga
está conectada a través de cables con una impedancia Z1,
Z2 y Z3.
y alimenta un
xfr
3 3
Real (típico) 40 20 10 8
Límite para
R
≥120
sce
Real (típico) 46 45
Límite para
R
≥120
sce
Tabla 3.13 Resultados de la prueba de armónicos (emisión)
Corriente armónica individual In/I1 (%)
I
5
40 25 15 10
Factor de distorsión de corriente armónica
I
7
THD PWHD
48 46
(%)
I
11
I
13
Ilustración 3.4 Sistema de distribución pequeño
Las corrientes armónicas consumidas por cargas no lineales
causan distorsión de la tensión debido a la caída de
tensión en las impedancias del sistema de distribución.
Impedancias más elevadas se traducen en mayores niveles
de distorsión de tensión.
La distorsión de corriente está relacionada con el
Es responsabilidad del instalador o del usuario del equipo
asegurar, mediante consulta con la compañía de distribución si fuera necesario, que el equipo está conectado
únicamente a una fuente de alimentación con una
potencia de cortocircuito Ssc superior o igual a la especicada en la ecuación.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 47
rendimiento del aparato, el cual está relacionado con la
carga individual. La distorsión de tensión está relacionada
con el rendimiento del sistema. No es posible determinar
la distorsión de tensión en el PCC sabiendo únicamente el
rendimiento armónico de la carga. Para predecir la
distorsión en el PCC, deben conocerse tanto la congu-
Page 50

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Integración del sistema
VLT® Refrigeration Drive FC 103
ración del sistema de distribución como las impedancias
relevantes.
Un término empleado comúnmente para describir la
impedancia de una red es la relación de cortocircuito R
Esta relación se dene como la relación entre la potencia
33
aparente de cortocircuito de la fuente de alimentación en
el PCC (Ssc) y la potencia aparente nominal de la carga
(S
).
equ
S
ce
R
=
sce
S
equ
donde S
El efecto negativo de los armónicos es doble.
Ilustración 3.5 Efecto negativo de los armónicos
=
sc
Z
Las corrientes armónicas contribuyen a las
•
pérdidas del sistema (en el cableado,
transformador).
La distorsión de tensión armónica provoca
•
interferencias en otras cargas e incrementa las
perdidas en otras cargas.
2
U
fuente de alimentación
y S
equ
3.2.7.5 Normas y requisitos de limitación
armónica
Los requisitos para la limitación armónica pueden ser:
Requisitos especícos de la aplicación.
•
Normas que deben respetarse.
•
Los requisitos especícos de la aplicación están
relacionados con una instalación especíca en la que hay
razones técnicas para limitar los armónicos.
Ejemplo
Si uno de los motores está conectado directamente en
línea y el otro recibe alimentación a través de un
convertidor de frecuencia, será suciente con un
transformador de 250 kVa con dos motores de 110 kW
conectados. Sin embargo, si ambos motores reciben la
alimentación a través de un convertidor de frecuencia, el
transformador tendrá un tamaño menor. Empleando
medios adicionales para la reducción de armónicos dentro
de la instalación o seleccionando variantes de convertidores de frecuencia de bajos armónicos es posible que
ambos motores funcionen con convertidores de frecuencia.
= U × I
equ
sce
Hay varias normas, reglamentos y recomendaciones de
mitigación de armónicos. Hay que tener en cuenta que la
aplicación de las diferentes normas depende de las
.
diferentes regiones geográcas y sectores industriales. Las
normas siguientes son las más comunes:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Consulte la Guía de diseño de VLT® Advanced Harmonic Filter
AHF 005/AHF 010 para obtener detalles especícos de cada
norma.
En Europa, la THDv máxima es del 8 % si la planta está
conectada a través de la red pública. Si la planta cuenta
con su propio transformador, el límite es del 10 % de
THVD. VLT® Refrigeration Drive FC 103 está concebido para
soportar el 10 % de THVD.
3.2.7.6 Mitigación de armónicos
Para casos en los que se necesita una supresión adicional
de armónicos, Danfoss ofrece una amplia gama de equipos
de mitigación. Se trata de:
Convertidores de frecuencia de 12 pulsos.
•
Filtros AHF.
•
Convertidores de frecuencia de bajos armónicos.
•
Filtros activos.
•
La elección de la solución correcta depende de varios
factores:
La red (distorsión de fondo, desequilibrio de red,
•
resonancia y tipo de fuente de alimentación
[transformador/generador]).
Aplicación (perl de carga, número de cargas y
•
tamaño de la carga).
Requisitos/reglamentos locales/nacionales
•
(IEEE519, CEI, G5/4, etc.).
Coste total de propiedad (coste inicial,
•
rendimiento, mantenimiento, etc.).
Considere siempre la mitigación de armónicos si la carga
del transformador presenta una contribución no lineal del
40 % o superior.
Danfoss ofrece herramientas para el cálculo de armónicos;
consulte el capétulo 2.8.2 Software para PC.
48 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 51

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Integración del sistema Guía de diseño
3.2.8 Corriente de fuga a tierra
Siga las normas locales y nacionales sobre la conexión a
tierra de protección del equipo con una corriente de fuga
superior a 3,5 mA.
La tecnología del convertidor de frecuencia implica una
conmutación de alta frecuencia con alta potencia. Esto
genera una corriente de fuga en la conexión a tierra.
La corriente de fuga a tierra está compuesta por varias
contribuciones y depende de las diversas conguraciones
del sistema, incluidos:
Filtrado RFI.
•
Longitud del cable de motor.
•
Apantallamiento de cables de motor.
•
Potencia del convertidor de frecuencia.
•
3 3
Ilustración 3.7 La distorsión de la línea inuye en la corriente
de fuga
Ilustración 3.6 La longitud del cable de motor y la magnitud
de potencia inuyen en la corriente de fuga. Magnitud de
potencia a > magnitud de potencia b
La corriente de fuga también depende de la distorsión de
la línea.
Si la corriente de fuga supera los 3,5 mA, el cumplimiento
de la norma EN/CEI 61800-5-1 (estándar de producto de
sistemas Power Drive) requiere una atención especial.
Refuerce la conexión a tierra con los siguientes requisitos
de conexión a tierra de protección:
Cable de puesta a tierra (terminal 95) con sección
•
transversal de al menos 10 mm2.
Dos cables de conexión a tierra independientes
•
que cumplan con las normas de dimensionamiento.
Consulte las normas EN/CEI 61800-5-1 y EN 50178 para
obtener más información.
Uso de RCD
En caso de que se usen dispositivos de corriente
diferencial (RCD), llamados también disyuntores de fuga a
tierra (ELCB), habrá que cumplir las siguientes indicaciones:
Utilice únicamente RCD de tipo B, que son
•
capaces de detectar intensidades de CA y CC.
Utilice RCD con retardo para evitar fallos
•
provocados por las intensidades a tierra de los
transitorios.
La dimensión de los RCD debe ser conforme a la
•
conguración de sistema y las consideraciones
medioambientales.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 49
Page 52

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Integración del sistema
VLT® Refrigeration Drive FC 103
La corriente de fuga incluye varias frecuencias que
proceden tanto de la frecuencia de red como de la
frecuencia de conmutación. Que la frecuencia de
conmutación se detecte depende del tipo de RCD
utilizado.
33
Ilustración 3.8 Contribuciones principales a la corriente de
fuga
La cantidad de corriente de fuga detectada por el RCD
depende de la frecuencia de corte del RCD.
Ilustración 3.9 Inuencia de la frecuencia de corte del RCD
sobre la corriente de fuga
50 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 53
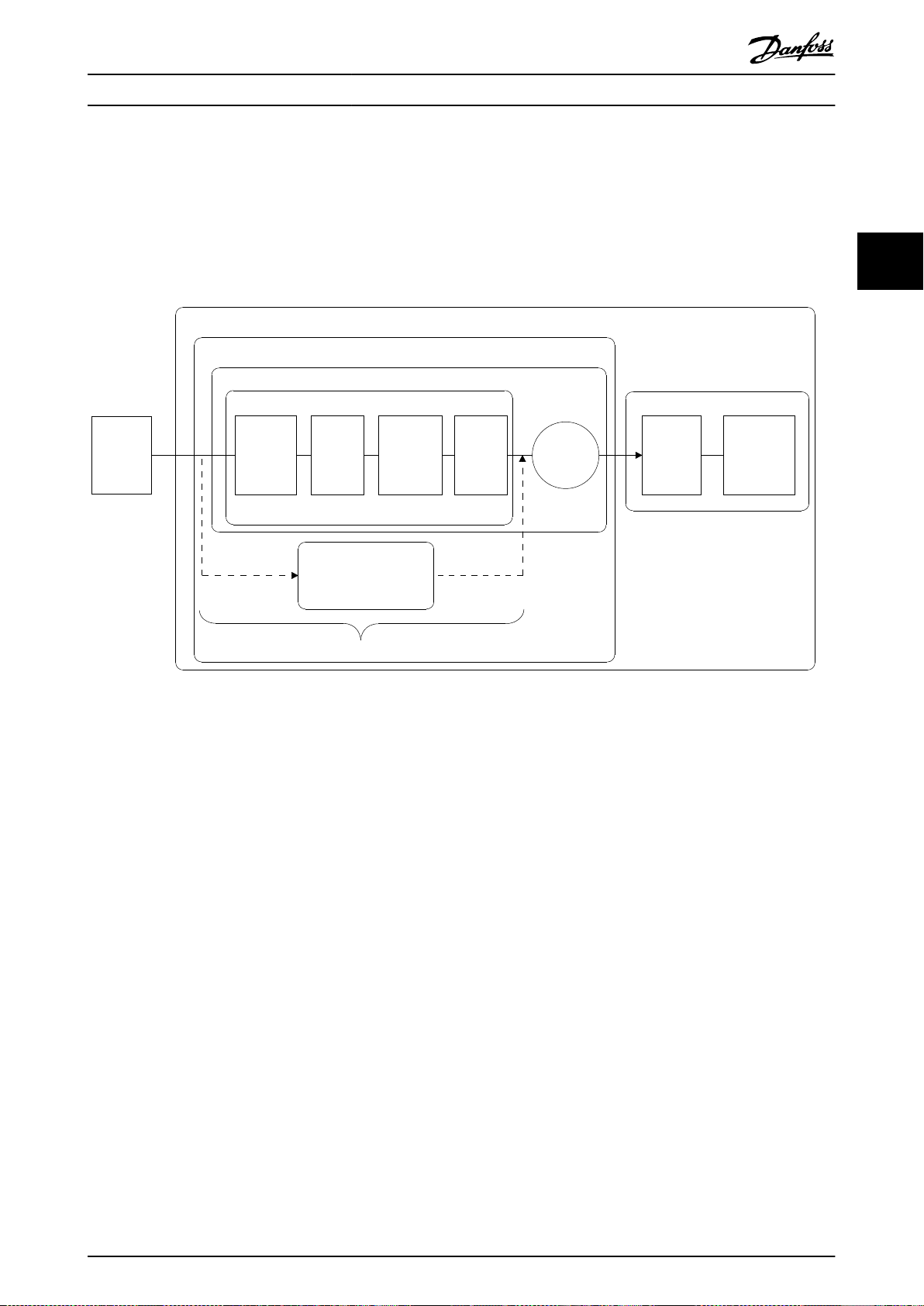
Extended product
Motor system
Drive system (PDS)
Complete drive module (CDM)
Infeed
section
Auxiliaries Auxiliaries Motor
Motor starter
contactors, soft starters, ...
Motor control system = CDM or starter
Driven equipment
Trans-
mission
Load
machine
Basic
drive
module
(BDM)
Mains
and
mains
cable
130BE604.11
Integración del sistema Guía de diseño
3.3 Rendimiento energético
La norma EN 50598, Ecodiseño para los accionamientos eléctricos de potencia, arrancadores de motores, electrónica de potencia y
sus aplicaciones, proporciona directrices para la evaluación del rendimiento energético de los convertidores de frecuencia.
Esta norma ofrece un método neutral para determinar las clases de rendimiento y las pérdidas de potencia con carga
máxima y parcial. La norma permite la combinación de cualquier motor con cualquier convertidor de frecuencia.
3 3
Ilustración 3.10 Sistema Power Drive (PDS) y módulo de convertidor de frecuencia completo (CDM)
Componentes auxiliares: ltro armónico avanzado AHF 005, AHF 010, reactancia de línea MCC 103, ltro senoidal MCC 101,
ltro dU/dt MCC 102.
3.3.1 Clases IE e IES
Módulos de convertidor de frecuencia completo (CDM)
Según la norma EN 50598-2, el módulo de convertidor de
frecuencia completo (CDM) abarca el convertidor de
frecuencia, su sección de alimentación y los componentes
auxiliares.
Clases de rendimiento energético para CDM:
IE0 = inferior al nivel técnico actual del sector.
•
IE1 = nivel técnico actual del sector.
•
IE2 = superior al nivel técnico actual del sector.
•
Los convertidores de frecuencia de Danfoss cumplen los
requisitos de la clase de rendimiento energético IE2. La
clase de rendimiento energético se dene en el punto
nominal del CDM.
Sistemas Power drive (PDS)
Un sistema Power Drive (PDS) está formado por un módulo
de convertidor de frecuencia completo (CDM) y un motor.
En función del rendimiento del motor, los motores
accionados por un convertidor de frecuencia Danfoss VLT
cumplen habitualmente los requisitos de rendimiento
energético de la clase IES2.
La clase de rendimiento energético se dene en el punto
nominal del PDS y puede calcularse a partir del CDM y de
las pérdidas del motor.
3.3.2 Datos de pérdida de potencia y datos
La pérdida de potencia y el rendimiento de un convertidor
de frecuencia dependen de la conguración y de los
equipos auxiliares. Para obtener los datos de pérdida de
potencia y rendimiento especícos para una conguración,
utilice la herramienta DanfossDanfoss ecoSmart.
IES0 = inferior al nivel técnico actual del sector.
•
IES1 = nivel técnico actual del sector.
•
IES2 = superior al nivel técnico actual del sector.
•
de rendimiento
Clases de rendimiento energético para el PDS:
®
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 51
Page 54

T
f
100%
50%
50% 90%
25%
0%
0%
130BE605.10
130BD930.11
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0 10 20 30 40 50 60 70 80 90 100
n [%]
P
L,CDM
(freq,load)
[%]
1
2
3
130BD931.11
n [%]
0 20 40 60 80 100
100.00
98.00
96.00
94.00
92.00
90.00
η
CDM (freq,load)
[%]
1
2
3
Integración del sistema
VLT® Refrigeration Drive FC 103
Los datos de pérdida de potencia se presentan en % de la
potencia nominal aparente de salida y se determinan
conforme a la norma EN 50598-2. Cuando se han
determinado los datos de pérdida de potencia, el
convertidor de frecuencia utiliza los ajustes de fábrica,
salvo en el caso de los datos del motor que se necesitan
33
para accionar el motor.
1 100 % de carga
2 50 % de carga
3 25 % de carga
Ilustración 3.12 Datos de pérdida de potencia del convertidor
de frecuencia. Pérdidas relativas de CDM (P
la velocidad (n) [% de velocidad nominal].
) [%] frente a
L, CDM
T Par [%]
f Frecuencia [%]
Ilustración 3.11 Puntos de funcionamiento del convertidor de
frecuencia conforme a la norma EN 50598-2
Consulte www.danfoss.com/vltenergyeciency para obtener
los datos de pérdida de potencia y rendimiento del
convertidor de frecuencia en los puntos de funcionamiento
especicados en la Ilustración 3.11.
Utilice la aplicación Danfoss ecoSmart para calcular las
clases de rendimiento IE e IES. Dicha aplicación está
disponible en ecosmart.danfoss.com.
Ejemplo de datos disponibles
En el siguiente ejemplo se muestran los datos de pérdida
de potencia y rendimiento para un convertidor de
frecuencia de las siguientes características:
Potencia de salida de 55 kw, tensión nominal de
•
400 V.
Potencia nominal aparente, Sr, 67,8 kVa.
•
Potencia nominal de salida, P
•
Rendimiento nominal, ηr, 98,3 %.
•
En la Ilustración 3.12 y la Ilustración 3.13 se muestran las
curvas de rendimiento y pérdida de potencia. La velocidad
es proporcional a la frecuencia.
52 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
1 100 % de carga
2 50 % de carga
3 25 % de carga
Ilustración 3.13 Datos de rendimiento del convertidor de
frecuencia. Rendimiento del CDM (η
la velocidad (n) [% de la velocidad nominal].
CDM [frec, carga]
) [%] frente a
Interpolación de la pérdida de potencia
Determine la pérdida de potencia en un punto de funcionamiento arbitrario mediante interpolación de dos
dimensiones.
3.3.3 Pérdidas y rendimiento de un motor
El rendimiento de un motor que funciona al 50-100 % de
, 59,2 kW.
CDM
su velocidad nominal y al 75-100 % de su par nominal es
prácticamente constante. Esto es así cuanto el convertidor
de frecuencia controla el motor y también cuando el
motor funciona directamente con alimentación de red.
El rendimiento depende del tipo de motor y del nivel de
magnetización.
Page 55
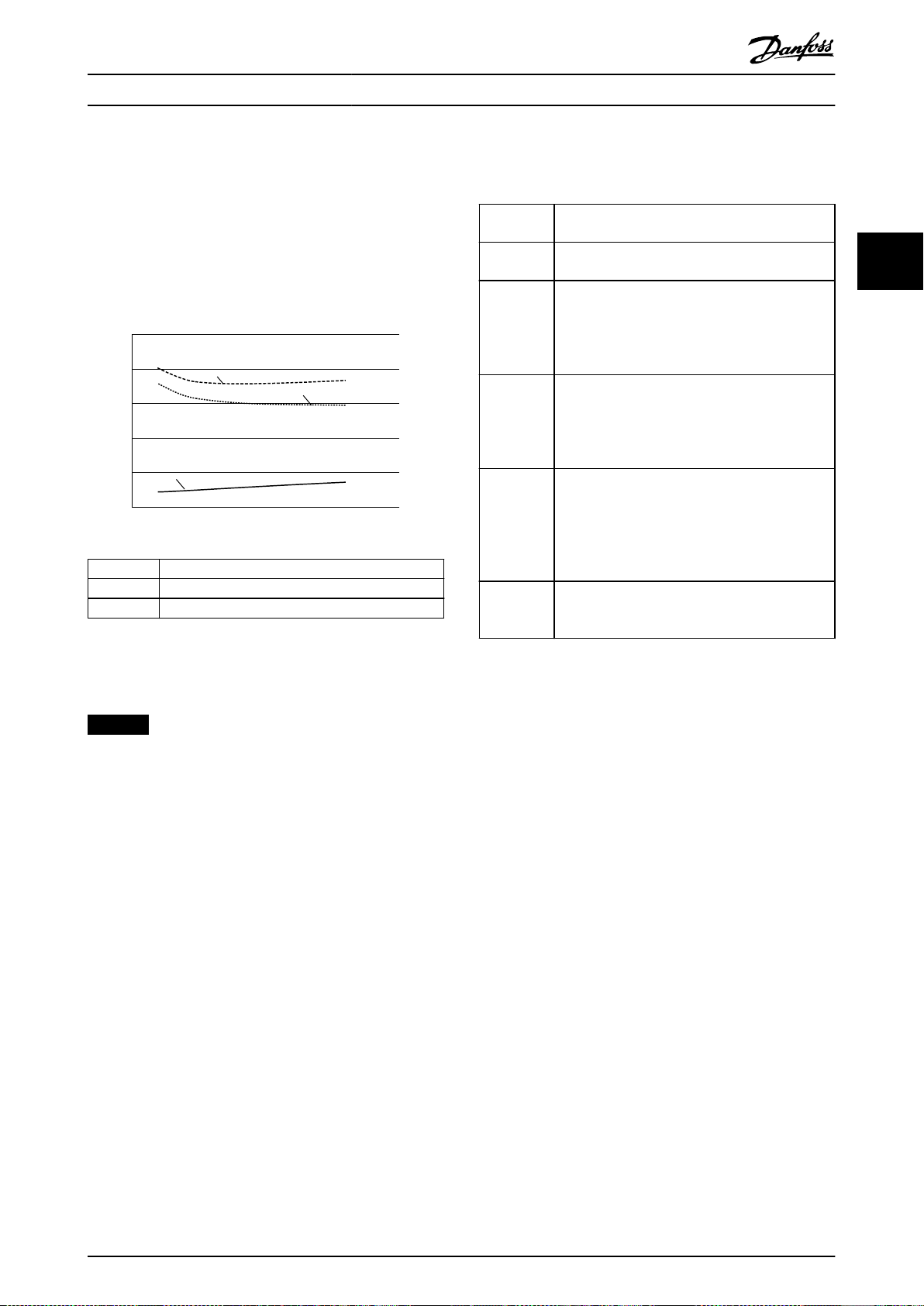
130BE107.10
25
20
15
10
5
0
0 2 4 6 8 10
[kHz]
[%]
1
2
3
Integración del sistema Guía de diseño
Para obtener más información sobre tipos de motores,
consulte el folleto de tecnología de motores disponible en
www.vlt-drives.danfoss.com.
Frecuencia de conmutación
La frecuencia de conmutación inuye en las pérdidas de
magnetización del motor y en las pérdidas de
conmutación del convertidor de frecuencia, como se
muestra en la Ilustración 3.14.
1 Motor y convertidor de frecuencia
2 Solo motor
3 Solo convertidor de frecuencia
Ilustración 3.14 Pérdidas [%] frente a la frecuencia de
conmutación [kHz]
cuanto a la CEM, siendo el sistema aislado IT el menos
recomendable.
Tipo de
sistema
Sistemas de
red de TN
TN-S Se trata de un sistema de cinco cables con
TN-C Se trata de un sistema de cuatro cables con un
Sistemas de
red TT
Sistema de
red de IT
Tabla 3.14 Tipos de sistemas de red de CA
Descripción
Existen dos tipos de sistemas de distribución de
red de TN: TN-S y TN-C.
conductor neutro (N) y conexión a tierra de
protección (PE) separados. Ofrece las mejores
propiedades CEM y evita la transmisión de interferencias.
conductor común neutro y conexión a tierra de
protección (PE) en todo el sistema. La suma de un
conductor neutro y una conexión a tierra de
protección genera malas características de CEM.
Se trata de un sistema de cuatro cables con un
conductor neutro conectado a tierra y una
conexión a tierra individual de los convertidores
de frecuencia. Este sistema presenta buenas
características de CEM si se realiza bien la
conexión a tierra.
Se trata de un sistema de cuatro cables aislado
con el conductor neutro no conectado a tierra o
conectado a tierra a través de una impedancia.
3 3
3.4.2 Interferencia de la red de baja
AVISO!
Un convertidor de frecuencia produce pérdidas
adicionales de armónicos en el motor. Estas pérdidas
disminuyen cuando aumenta la frecuencia de
conmutación.
3.3.4 Pérdidas y rendimiento de un sistema
Power Drive
Para calcular las pérdidas de potencia de un sistema Power
Drive en diferentes puntos de funcionamiento, añada las
pérdidas de potencia al punto de funcionamiento de cada
componente del sistema:
Convertidor de frecuencia.
•
Motor.
•
Equipo auxiliar.
•
Integración de la red
3.4
3.4.1 Conguraciones de red y efectos CEM
Se utilizan diversos tipos de sistemas de red de CA para
suministrar alimentación a los convertidores de frecuencia.
Todos ellos afectan a las características de CEM del sistema.
El sistema TN-S de cinco cables se considera el mejor en
frecuencia
3.4.2.1 Fuente de alimentación de red no
senoidal
La tensión de red no suele ser una tensión senoidal
uniforme con amplitud y frecuencia constantes. Esto se
debe en parte a las cargas que consumen corrientes no
senoidales de la red o que tienen características no
lineales, como por ejemplo:
Ordenadores.
•
Televisores.
•
Fuentes de alimentación conmutadas.
•
Lámparas de alto rendimiento energético.
•
Convertidores de frecuencia.
•
Las desviaciones son inevitables y admisibles dentro de
ciertos límites.
3.4.2.2 Conformidad con la Directiva CEM
En la mayor parte de Europa, la base para la evaluación
objetiva de la calidad de la potencia de red es la Ley sobre
compatibilidad electromagnética de dispositivos (EMVG). La
conformidad con esta normativa garantiza que todos los
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 53
Page 56

Integración del sistema
VLT® Refrigeration Drive FC 103
dispositivos y redes conectados a los sistemas de distribución eléctrica cumplan su objetivo sin causar problemas.
Norma Denición
EN 61000-2-2, EN
61000-2-4, EN
33
50160
EN 61000-3-2,
61000-3-12
EN 50178 Controla los equipos electrónicos que se
Tabla 3.15 Normas de diseño EN para la calidad de la potencia
de red
Dene los límites de la tensión de red que
se deben respetar en las redes eléctricas
públicas e industriales.
Regula la interferencia de la red producida
por los dispositivos conectados.
usan en las instalaciones de potencia.
3.4.2.3 Convertidores de frecuencia sin
interferencias
Todos los convertidores de frecuencia generan interferencias de la red. Las normas actuales solo denen rangos
de frecuencia de hasta 2 kHz. Algunos convertidores de
frecuencia desplazan la interferencia de la red a la zona
situada por encima de los 2 kHz, que no está contemplada
en la norma, y se anuncian como dispositivos «sin interferencias». Actualmente se están estudiando los límites para
esta región. Los convertidores de frecuencia no alteran la
interferencia de la red.
Pueden producirse advertencias de baja tensión y pérdidas
funcionales más elevadas como resultado de la interferencia de la red.
Advertencias de baja tensión
Mediciones de tensión incorrectas debido a la
•
distorsión de la tensión de red senoidal.
Causan mediciones de potencia incorrectas
•
porque solo los sistemas de medición capaces de
medir RMS reales tienen los armónicos en cuenta.
Pérdidas más elevadas
Los armónicos reducen la potencia activa, la
•
potencia aparente y la potencia reactiva.
Distorsionan las cargas eléctricas produciendo
•
interferencias audibles en otros dispositivos o, en
el peor de los caso, incluso su destrucción.
Reducen la vida útil de los dispositivos como
•
resultado de su calentamiento.
AVISO!
Un contenido excesivo de armónicos supone una carga
para el equipo de corrección del factor de potencia y
puede incluso causar su destrucción. Por este motivo,
instale bobinas de choque para la corrección del factor
de potencia del equipo cuando el contenido de
armónicos sea excesivo.
3.4.2.4 Descripción de la interferencia de la
red
La distorsión por la interferencia de la red de la forma de
onda senoidal causada por las intensidades de entrada
pulsatorias se conoce comúnmente como «armónicos». Se
deriva del análisis de Fourier y se calcula hasta los 2,5 kHz,
que corresponden al 50.º armónico de la frecuencia de red.
Los recticadores de entrada de convertidores de
frecuencia generan esta forma típica de interferencia
armónica en la red. Cuando los convertidores de frecuencia
están conectados a sistemas de red de 50 Hz, el tercer
armónico (150 Hz), el quinto armónico (250 Hz) o el
séptimo armónico (350 Hz) muestran los efectos más
fuertes. El contenido total de armónicos se denomina
distorsión armónica total (THD).
3.4.2.5 Efectos de la interferencia de la red
Las uctuaciones de armónicos y las de tensión son dos
formas de interferencias de la red de baja frecuencia.
Tienen un aspecto diferente en su origen del que tienen
en cualquier otro punto del sistema de red cuando se ha
conectado una carga. Por consiguiente, se deben tener en
cuenta colectivamente toda una serie de inuencias a la
hora de evaluar los efectos de la interferencia de la red.
Entre estas inuencias se incluyen la alimentación de la
red, la estructura y las cargas.
3.4.3 Análisis de la interferencia de la red
Para evitar deciencias en la calidad de la potencia de red,
pueden utilizarse diversos métodos para analizar los
sistemas o dispositivos que producen corrientes armónicas.
Los programas de análisis de la red, como el software de
cálculo de armónicos (HCS), analizan los diseños de los
sistemas en lo que respecta a los armónicos. Pueden
probarse de antemano medidas especícas, de modo que
se garantice la consiguiente compatibilidad del sistema.
Para el análisis de los sistemas de red, diríjase ahttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START para
descargar el software.
AVISO!
Danfoss tiene un nivel muy alto de competencia en CEM
y suministra a sus clientes cálculos de red o análisis de
CEM con una evaluación detallada, además de cursos,
seminarios y talleres de formación.
3.4.4 Opciones para la reducción de la
interferencia de la red
En términos generales, la interferencia de la red generada
por convertidores de frecuencia puede reducirse limitando
la amplitud de las corrientes pulsadas. Esta reducción
mejora el factor de potencia λ (lambda).
54 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 57

Integración del sistema Guía de diseño
Se recomiendan diferentes métodos para evitar los
armónicos del suministro de red:
Bobinas de choque de entrada o bobinas de
•
choque de enlace de CC en los convertidores de
frecuencia.
Filtros pasivos.
•
Filtros activos.
•
Enlaces de CC reducidos.
•
Convertidores de frecuencia de entrada activa y
•
bajos armónicos.
Recticadores de 12, 18 o 24 pulsos por ciclo.
•
3.4.5 Interferencias de radiofrecuencia
Los convertidores de frecuencia generan interferencias de
radiofrecuencia (RFI) debido a sus pulsos de corriente de
anchura variable. Los convertidores de frecuencia y los
cables de motor irradian estos componentes y los dirigen
al sistema de red.
ltros RFI se utilizan para reducir esta interferencia en
Los
la red. Proporcionan inmunidad al ruido para proteger los
dispositivos de la interferencia conducida de alta
frecuencia. También reducen la interferencia emitida al
cable de red y la radiación procedente del cable de red.
Los ltros están diseñados para limitar la interferencia a un
nivel especíco. A menudo, se suministran ltros
integrados de serie previstos para un nivel especíco de
inmunidad.
AVISO!
Todos los convertidores de frecuencia VLT® Refrigeration
Drive FC 103 están equipados de serie con bobinas de
choque para interferencias de la red.
3.4.6 Clasicación del lugar de
funcionamiento
Conocer los requisitos del entorno en que el convertidor
de frecuencia está diseñado para funcionar es el factor más
importante en lo que respecta a la conformidad con CEM.
Áreas empresariales.
•
Edicios residenciales.
•
Restaurantes.
•
Aparcamientos.
•
Instalaciones de ocio.
•
3.4.6.2 Entorno 2/clase A: Industrial
Los entornos industriales no están conectados a la red
eléctrica pública. En su lugar, disponen de sus propios
transformadores de distribución de tensión alta o media.
Las clasicaciones de los entornos se aplican tanto dentro
como fuera de los edicios.
Se denen como industriales y se caracterizan por
condiciones electromagnéticas especícas:
La presencia de dispositivos cientícos, médicos o
•
industriales.
La conmutación de grandes cargas inductivas o
•
capacitivas.
La incidencia de fuertes campos magnéticos (por
•
ejemplo, debido a corrientes elevadas).
3.4.6.3 Entornos especiales
En áreas con transformadores de tensión media claramente
demarcadas de otras áreas, el usuario decidirá la clasi-
cación de entorno de su instalación. El usuario es
responsable de garantizar la compatibilidad electromagnética necesaria para permitir el funcionamiento sin
problemas de todos los dispositivos en determinadas
condiciones. Algunos ejemplos de estos entornos
especiales son:
Centros comerciales.
•
Supermercados.
•
Estaciones de servicio.
•
Edicios de ocina.
•
Almacenes.
•
3.4.6.4 Etiquetas de advertencia
3 3
3.4.6.1 Entorno 1/clase B: Residencial
Los lugares de funcionamiento conectados a la red
eléctrica pública de tensión baja, incluidas las áreas de
industria ligera, se clasican como Entorno 1 / Clase B. No
tienen transformadores de distribución propios de tensión
alta o tensión media para un sistema de red independiente. Las clasicaciones de entornos se aplican tanto
dentro como fuera de los edicios. Algunos ejemplos
generales son:
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 55
Cuando un convertidor de frecuencia no sea conforme a la
Categoría C1, se debe suministrar una nota de advertencia.
Esto será responsabilidad del usuario. La eliminación de
interferencias se basa en las clases A1, A2 y B de la norma
EN 55011. El usuario es el último responsable de la
adecuada clasicación de los dispositivos y del coste de
solucionar problemas de CEM.
Page 58

Integración del sistema
VLT® Refrigeration Drive FC 103
3.4.7 Utilización con una fuente de entrada
3.4.10 Transitorios de red
aislada
Los transitorios son breves picos de tensión en el rango de
La mayoría de los sistemas de alimentación de los Estados
Unidos deben conectarse a tierra. Aunque no es lo más
33
habitual en los Estados Unidos, la potencia de entrada
puede proceder de una fuente aislada. Todos los convertidores de frecuencia de Danfoss pueden utilizarse con una
fuente de entrada aislada, así como con líneas de alimentación con toma de tierra.
3.4.8 Corrección del factor de potencia
El equipamiento de corrección del factor de potencia sirve
para reducir el cambio de fase (φ) entre la tensión y la
corriente y para desplazar el factor de potencia más cerca
de la unidad (coseno φ). Esto es necesario cuando en un
sistema de distribución eléctrica se utiliza un gran número
de cargas inductivas, como motores o lastres de lámparas.
Los convertidores de frecuencia que disponen de un bus
de CC aislado no consumen ninguna potencia reactiva del
sistema de red ni generan cambios de fase con corrección
del factor de potencia. Tienen un coseno φ de aproximadamente 1.
Por esta razón, los motores con control de velocidad no
tienen que tenerlos en cuenta a la hora de dimensionar
equipos de corrección del factor de potencia. Sin embargo,
la corriente consumida por el equipo de corrección de fase
aumenta porque los convertidores de frecuencia generan
armónicos. La carga y el calor de los condensadores
aumentan a medida que el número de generadores de
armónicos aumenta. Por este motivo, instale bobinas de
choque en el equipo de corrección del factor de potencia.
Estas bobinas de choque también evitan la resonancia
entre las inductancias de carga y la capacitancia. Los
convertidores de frecuencia que tienen cosφ<1 también
requieren bobinas de choque en el equipo de corrección
del factor de potencia. Asimismo, para las dimensiones de
los cables tenga en cuenta el nivel de potencia reactiva
más elevado.
3.4.9 Retardo de la potencia de entrada
Para asegurarse de que los circuitos de supresión de la
sobretensión de entrada funcionen correctamente, aplique
un retardo de tiempo entre las sucesivas aplicaciones de
potencia de entrada.
La Tabla 3.16 muestra el tiempo mínimo que se debe
permitir entre las aplicaciones de potencia de entrada.
Tensión de entrada [V] 380 415 460 600
Tiempo de espera [s] 48 65 83 133
Tabla 3.16 Retardo de la potencia de entrada
unos pocos miles de voltios. Pueden ocurrir en todo tipo
de sistemas de distribución de potencia, tanto en entornos
industriales como residenciales.
Los rayos son una causa frecuente de transitorios. Sin
embargo, también son causados por cargas grandes de
conmutación en línea o fuera de línea o cuando se
conmuta otro equipo de transitorios de red, como, por
ejemplo, un equipo de corrección del factor de potencia.
También pueden producir transitorios los cortocircuitos, las
desconexiones de magnetotérmicos en sistemas de distri-
bución de potencia y los acoplamientos inductivos entre
cables paralelos.
La norma EN 61000-4-1 describe las formas de estos transi-
torios y la cantidad de energía que contienen. Hay varias
maneras para limitar los efectos nocivos de los transitorios.
Los descargadores de gas contra sobretensiones y los
explosores ofrecen una protección de primer nivel contra
los transitorios de alta energía. Para una protección de
segundo nivel, la mayoría de los dispositivos electrónicos
(incluidos los convertidores de frecuencia) utilizan
resistencias (varistores) que dependen de la tensión para
atenuar los transitorios.
3.4.11 Funcionamiento con un generador
de reserva
Utilice sistemas de potencia de seguridad cuando se
necesite mantener el funcionamiento en caso de fallo de
red. También se utilizan en paralelo con la red eléctrica
pública para conseguir una mayor potencia de red. Esta es
una práctica común en las unidades combinadas de
potencia eléctrica y térmica, en la que se aprovecha el alto
rendimiento que se alcanza con esta forma de conversión
de energía. Cuando la potencia de seguridad la suministra
un generador, la impedancia de la red suele ser mayor que
si la potencia se toma de la red pública. Esto hace que la
distorsión armónica total aumente. Con un diseño
adecuado, los generadores pueden operar en un sistema
con dispositivos inductores de armónicos.
Al diseñar un sistema, valore la posibilidad de usar un
generador de reserva.
Cuando el sistema conmuta de funcionamiento
•
en red a alimentación desde el generador, es
habitual que la carga de armónicos aumente.
Los diseñadores deben calcular el aumento de
•
carga armónica para garantizar que la calidad de
la potencia cumpla las normativas de prevención
de problemas con armónicos y fallos en los
equipos.
56 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 59

Integración del sistema Guía de diseño
Evite la carga asimétrica del generador, puesto
•
que produce mayores pérdidas y puede hacer
que la distorsión armónica total aumente.
Un escalonamiento 5/6 del bobinado del
•
generador atenúa el quinto y el séptimo
armónico, pero permite el aumento del tercer
armónico. Un escalonamiento 2/3 reduce el tercer
armónico.
Cuando sea posible, el operador deberá
•
desconectar el equipo de corrección del factor de
potencia porque este genera resonancia en el
sistema.
Las bobinas de choque o los ltros de absorción
•
activos, así como las cargas resistivas en paralelo,
pueden atenuar los armónicos.
Las cargas capacitivas en paralelo crean una carga
•
adicional debido a los imprevisibles efectos de
resonancia.
Puede realizarse un análisis más exacto usando un
software de análisis de red, como el HCS. Para el análisis
de los sistemas de red, diríjase a http://www.danfoss-
-hcs.com/Default.asp?LEVEL=START para descargar el
software.
Al operar con dispositivos inductores de armónicos, las
cargas máximas basadas en un funcionamiento sin
problemas de la instalación se muestran en la tabla de
límites de armónicos.
Límites de armónicos
Recticadores B2 y B6⇒máximo 20 % de la carga
•
nominal del generador.
Recticador B6 con bobina de choque⇒máximo
•
20-35 % de la carga nominal del generador,
según la composición.
Recticador B6 controlado⇒máximo 10 % de la
•
carga nominal del generador.
Integración del motor
3.5
3.5.1 Consideraciones sobre la selección
del motor
3.5.2 Filtros senoidales y ltros dU/dt
Los ltros de salida facilitan que algunos motores reduzcan
el estrés eléctrico y permiten una mayor longitud del
cable. Las opciones de salida incluyen los ltros senoidales
(también llamados ltros LC) y los ltros DU/dt. Los ltros
dU/dt reducen la subida brusca de la tasa de pulsos. Los
ltros senoidales reducen los pulsos de tensión para
convertirlos en una tensión de salida casi senoidal. Con
algunos convertidores de frecuencia, los ltros senoidales
cumplen la norma EN 61800-3 RFI, categoría C2 para
cables de motor no apantallados. Consulte el
capétulo 3.8.3 Filtros senoidales.
Para obtener más información sobre opciones de
senoidales y dU/dt, consulte el capétulo 6.2.6 Filtros
senoidales, el capétulo 3.8.3 Filtros senoidales y el
capétulo 6.2.7 Filtros dU/dt.
Para obtener más información sobre los números de
pedido de ltros senoidales y dU/dt, consulte el
capétulo 3.8.3 Filtros senoidales y el capétulo 6.2.7 Filtros
dU/dt.
ltros
3.5.3 Conexión a tierra correcta del motor
La correcta conexión a tierra del motor es imperativa para
la seguridad personal y para cumplir los requisitos
eléctricos de CEM en equipos de tensión baja. Una correcta
conexión a tierra es necesaria para un uso efectivo del
apantallamiento y los ltros. Deben comprobarse los
detalles del diseño para ejecutar correctamente la CEM.
3.5.4 Cables de motor
En el capétulo 7.5 Especicaciones del cable se facilitan
recomendaciones y especicaciones de cable de motor.
Es posible utilizar cualquier tipo de motor asíncrono
trifásico estándar con una unidad de convertidor de
frecuencia. Según el ajuste de fábrica, el motor gira en
sentido horario con la salida del convertidor de frecuencia
conectada del modo siguiente:
3 3
El convertidor de frecuencia puede inducir estrés eléctrico
en un motor. Por lo tanto, tenga en cuenta los siguientes
efectos sobre el motor al acoplarlo con el convertidor de
frecuencia:
Tensión de aislamiento
•
Tensión de apoyo
•
Tensión térmica
•
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 57
Page 60

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Integración del sistema
VLT® Refrigeration Drive FC 103
ubicados en entornos de radiación deben funcionar sin
degradación.
3.5.6 Conexión de motores múltiples
33
Ilustración 3.15 Conexión de terminal para giros en sentido
horario y en sentido antihorario
Cambie el sentido de giro invirtiendo dos fases en el cable
de motor o modicando el ajuste de
parámetro 4-10 Dirección veloc. motor.
3.5.5 Apantallamiento del cable de motor
Los convertidores de frecuencia generan pulsos de ancos
inclinados en sus salidas. Estos pulsos contienen
componentes de alta frecuencia (llegando hasta el rango
de los gigahercios), que causan una radiación indeseable
desde el cable del motor. Los cables de motor apantallados
reducen esta radiación.
La nalidad del apantallamiento es:
•
•
El apantallamiento captura los componentes de alta
frecuencia y los devuelve a la fuente de la interferencia, en
este caso el convertidor de frecuencia. Los cables de motor
apantallados también aportan inmunidad a la interferencia
de fuentes externas próximas.
Reducir la magnitud de la interferencia radiada.
Mejorar la inmunidad a las interferencias de los
dispositivos individuales.
AVISO!
Al arrancar y con valores bajos de r/min, pueden surgir
problemas si los tamaños de los motores son muy
diferentes, ya que la resistencia óhmica del estátor, relativamente alta en los motores pequeños, necesita
tensiones más altas a pocas revoluciones.
El convertidor de frecuencia puede controlar varios
motores conectados en paralelo. Al utilizar la conexión del
motor en paralelo, tenga en cuenta lo siguiente:
El modo VCC+ se puede utilizar en algunas aplica-
•
ciones.
El consumo total de corriente por parte de los
•
motores no debe sobrepasar la corriente nominal
de salida I
No utilice conexiones de punto común para
•
longitudes de cable largas, consulte la
Ilustración 3.17.
La longitud total del cable de motor detallada en
•
la Tabla 3.4 es válida siempre y cuando se
mantengan cortos los cables paralelos (menos de
10 m cada uno); consulte la Ilustración 3.19 y la
Ilustración 3.20.
Tenga en cuenta la caída de tensión en todos los
•
cables de motor, consulte la Ilustración 3.20.
Para cables paralelos largos, utilice un ltro LC.
•
Consulte la Ilustración 3.20.
Para cables largos sin conexión paralela, consulte
•
la Ilustración 3.21.
del convertidor de frecuencia.
INV
Ni siquiera un buen apantallamiento elimina completamente la radiación. Los componentes del sistema
58 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 61

130BD774.10
130BD775.10
130BD776.10
130BD777.10
130BD778.10
130BD779.10
Integración del sistema Guía de diseño
AVISO!
Cuando los motores se encuentran conectados en
paralelo, ajuste parámetro 1-01 Motor Control Principle en
[0] U/f.
Ilustración 3.16 Conexión de punto común para longitudes del
cable cortas
3 3
Ilustración 3.19 Cables paralelos con carga
Ilustración 3.17 Conexión de punto común para longitudes del
cable largas
Ilustración 3.18 Cables paralelos sin carga
Ilustración 3.20 Filtro LC para cables paralelos largos
Ilustración 3.21 Cables largos en conexión en serie
Consulte la Tabla 7.7 para obtener información sobre las
longitudes de los cables para varias conexiones de motor
en paralelo.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 59
Page 62

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fSAL = 0,2 x f M,N
fSAL = 2 x f M,N
fSAL = 1 x f M,N
IMN
IM
1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Integración del sistema
VLT® Refrigeration Drive FC 103
3.5.7 Protección térmica motor
El convertidor de frecuencia aporta protección térmica del
motor de varias maneras:
3.5.8 Contactor de salida
Aunque en general no es una práctica recomendada, hacer
funcionar un contactor de salida entre el motor y el
convertidor de frecuencia no produce daños en el
El límite de par protege el motor ante
33
•
sobrecargas, independientemente de la velocidad.
convertidor de frecuencia. Cerrando un contactor de salida
previamente abierto puede conectarse un convertidor de
frecuencia en funcionamiento a un motor detenido. Esto
La velocidad mínima limita el rango de velocidad
•
mínima de funcionamiento, por ejemplo a entre
puede hacer que el convertidor de frecuencia se
desconecte y emita una señal de error.
30 y 50/60 Hz.
3.5.9 Rendimiento energético
La velocidad máxima limita la velocidad de salida
•
máxima.
Hay una entrada disponible para un termistor
•
externo.
El relé termoelectrónico (ETR) para motores
•
asíncronos simula un relé bimetálico basado en
mediciones internas. El ETR mide la tensión real,
la velocidad y el tiempo para calcular la
temperatura del motor y protegerlo de recalentamientos emitiendo una advertencia o cortando la
alimentación al motor. Las características del ETR
se muestran en la Ilustración 3.22.
Rendimiento de los convertidores de frecuencia
La carga del convertidor de frecuencia apenas inuye en
su rendimiento.
Esto signica que el rendimiento del convertidor de
frecuencia no cambia cuando se seleccionan otras características U/f distintas. Sin embargo, las características U/f
inuyen en el rendimiento del motor.
El rendimiento disminuye un poco si la frecuencia de
conmutación se ajusta en un valor superior a 5 kHz. El
rendimiento también se reduce ligeramente si el cable de
motor tiene más de 30 m de longitud.
Cálculo del rendimiento
Calcule el rendimiento del convertidor de frecuencia a
diferentes cargas basándose en la Ilustración 3.23.
Multiplique el factor de este
gráco por el factor de
rendimiento especíco indicado en el capétulo 7.1 Datos
eléctricos.
Ilustración 3.22 Características del relé termoelectrónico
el eje X muestra la relación entre los valores I
nominal. El eje Y muestra el intervalo en segundos que
transcurre antes de que el ETR se corte y realice una
desconexión. Las curvas muestran la velocidad nominal
característica, al doble de la velocidad nominal y al 0,2 x
de la velocidad nominal.
A una velocidad inferior, el ETR se desconecta con un
calentamiento inferior debido a una menor refrigeración
del motor. De ese modo, el motor queda protegido frente
al sobrecalentamiento, incluso a baja velocidad. La función
ETR calcula la temperatura del motor en función de la
intensidad y la velocidad reales.
60 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
e I
motor
Ilustración 3.23 Curvas de rendimiento típico
motor
Ejemplo: supongamos un convertidor de frecuencia de
55 kW, 380-480 V CA con un 25 % de su carga al 50 % de
velocidad. El gráco muestra que un rendimiento nominal
de 0,97 para un convertidor de frecuencia de 55 kW es
0,98. El rendimiento real es: 0,97 × 0,98 = 0,95.
Page 63

Integración del sistema Guía de diseño
Rendimiento del motor
El rendimiento de un motor conectado al convertidor de
frecuencia depende del nivel de magnetización. El
rendimiento del motor depende del tipo de motor.
En el intervalo del 75-100 % del par nominal, el
•
rendimiento del motor es prácticamente
constante, tanto cuando lo controla el convertidor
de frecuencia como cuando funciona
directamente con tensión de red.
La inuencia de la característica U/f en motores
•
pequeños es mínima. Sin embargo, en motores a
partir de 11 kW y superiores se obtienen ventajas
de rendimiento considerables.
La frecuencia de conmutación no afecta al
•
rendimiento de los motores pequeños, pero los
motores de 11 kW y superiores obtienen un
rendimiento mejorado (1-2 %). Esto se debe a
que la forma senoidal de la intensidad del motor
es casi perfecta a una frecuencia de conmutación
alta.
Rendimiento del sistema
Para calcular el rendimiento del sistema, multiplique el
rendimiento del convertidor de frecuencia por el
rendimiento del motor.
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 61
Page 64

Integración del sistema
VLT® Refrigeration Drive FC 103
3.6 Entradas y salidas adicionales
3.6.1 Esquema de cableado
Cuando están cableados y programados correctamente, los terminales de control proporcionan:
Realimentación, referencia y otras señales de entrada al convertidor de frecuencia.
33
•
El estado de salida y las condiciones de fallo del convertidor de frecuencia.
•
Relés para utilizar equipos auxiliares.
•
Una interfaz de comunicación serie.
•
24 V comunes.
•
Los terminales de control se pueden programar para varias funciones seleccionando opciones de parámetros mediante el
panel de control local (LCP) en la parte frontal de la unidad o las fuentes externas. La mayor parte del cableado de control
será suministrado por el cliente, a no ser que se solicite a la fábrica.
Ilustración 3.24 Esquema básico del cableado
A = analógico, D = digital
*El terminal 37 (opcional) se utiliza para la STO. Para conocer las instrucciones de instalación de la STO, consulte el Manual
de funcionamiento de Safe Torque O para los convertidores de frecuencia VLT®.
**No conecte el apantallamiento de cables.
62 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 65

Integración del sistema Guía de diseño
3.6.2 Conexiones de los relés
3 3
Relé
1 1 Común
2 4 Común
1 01–02 Conexión (normalmente
2 04–05 Conexión (normalmente
Ilustración 3.25 Salida de relé 1 y 2, tensiones máximas
Terminal
1)
Descripción
2 Normalmente abierto
Máximo 240 V
3 Normalmente cerrado
Máximo 240 V
5 Normalmente cerrado
Máximo 240 V
6 Normalmente cerrado
Máximo 240 V
abierta)
01–03 Desconexión (normalmente
cerrada)
abierta)
04–06 Desconexión (normalmente
cerrada)
1) Para añadir más salidas de relé, instale VLT® Relay Option
Module MCB 105 o VLT® Relay Option Module MCB 113.
Para obtener más información sobre los relés, consulte el
capétulo 7 Especicaciones y el capétulo 8.3 Dibujos del
terminal de relé.
Para obtener más información sobre las opciones de relé,
consulte el capétulo 3.8 Opciones y accesorios.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 63
Page 66
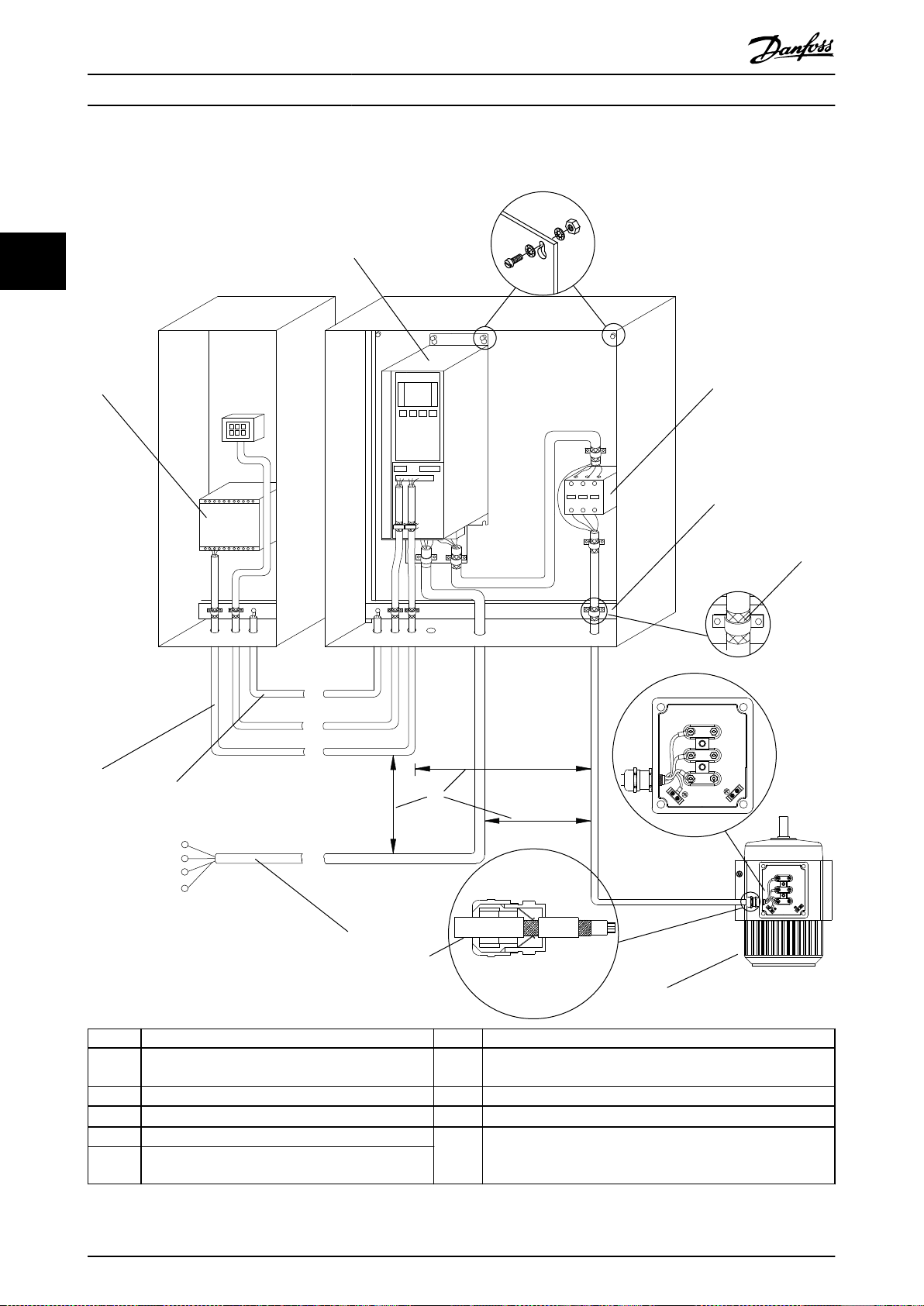
130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Integración del sistema
VLT® Refrigeration Drive FC 103
3.6.3 Conexión eléctrica conforme a CEM
33
1 PLC 7 Motor, trifásico, y toma de tierra de seguridad (apantallada).
2 Convertidor de frecuencia 8 Red, trifásica, y toma de tierra de seguridad reforzada (no
apantallada)
3 Contactor de salida 9 Cableado de control (apantallado)
4 Abrazadera de cable 10
5 Aislamiento de cable (pelado)
6 Prensacables
Ilustración 3.26 Conexión eléctrica conforme a CEM
11
64 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Ecualización de potencial mín. 16 mm2 (0,025 en)
Espacio libre entre el cable de control, el cable de motor y el
cable de red:
mínimo 200 mm
Page 67

130BD389.11
A2
B3 B3
A2
Integración del sistema Guía de diseño
Para obtener más información sobre CEM, consulte el
capétulo 2.5.18 Conformidad con CEM y el capétulo 3.2 CEM,
armónicos y protección de fuga a tierra.
AVISO!
INTERFERENCIA DE CEM
Utilice cables apantallados para el cableado de control y
del motor y cables independientes para la potencia de
entrada, el cableado del motor y el cableado de control.
No aislar los cables de control, del motor o de potencia
puede provocar un comportamiento inesperado o una
reducción del rendimiento. Se requiere un espacio libre
mínimo de 200 mm (7,9 in) entre los cables de control,
del motor y de potencia.
3.7 Planicación mecánica
3.7.1 Separación
3 3
El montaje lado a lado es adecuado para todos los
tamaños de protección, excepto cuando se utiliza un kit de
protección IP21/IP4X/TIPO 1 (consulte el
capétulo 3.8 Opciones y accesorios).
Espacio libre horizontal, IP20
Los tamaños de protección IP20 A y B pueden colocarse
lado a lado sin espacio libre en medio. Sin embargo, el
orden correcto de montaje sí es importante. La
Ilustración 3.27 muestra cómo realizar correctamente el
montaje.
NOTA
Para A2 y A3, asegúrese de que exista un espacio libre
entre los convertidores de frecuencia de 40 mm, como
mínimo.
Ilustración 3.27 Montaje lado a lado correcto sin espacio de
separación
Espacio de separación horizontal, kit de protección IP21
Cuando se utilice el kit de protección IP21 en los tipos de
protección A2 o A3, asegúrese de que exista un espacio
libre entre los convertidores de frecuencia de 50 mm,
como mínimo.
Espacio de separación vertical
Para conseguir unas condiciones de refrigeración óptimas,
asegúrese de dejar un espacio para que circule el aire
libremente por encima y por debajo del convertidor de
frecuencia. Consulte el Ilustración 3.28.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 65
Page 68

a
b
130BA419.10
130BA219.11
1
130BA392.11
2
1
3
4
Integración del sistema
VLT® Refrigeration Drive FC 103
33
1 Placa posterior
Ilustración 3.29 Montaje con placa posterior
En el caso de convertidores de frecuencia con clasicación
de protección IP66, utilice una arandela de bra o de
nailon para proteger el barnizado epoxi.
Tamaño de
la
protección
a [mm] 100 200 225
b [mm] 100 200 225
Ilustración 3.28 Espacio de separación vertical
A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
3.7.2 Montaje en pared
Cuando se realice el montaje contra una pared lisa, no se
necesitará placa posterior.
Cuando se realice el montaje contra una pared irregular,
utilice una placa posterior para garantizar que corra el aire
de refrigeración necesario sobre el disipador. Utilice la
placa posterior únicamente con los modelos de protección
A4, A5, B1, B2, C1 y C2.
1 Placa posterior
2 Convertidor de frecuencia con protección IP66
3 Placa posterior
4 Arandela de bra
Ilustración 3.30 Montaje con placa posterior para clasicación
de protección IP66
3.7.3 Acceso
66 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Para planicar la accesibilidad del cableado antes de
realizar el montaje, consulte los dibujos disponibles en el
capétulo 8.1 Diagramas de la conexión de red y el
capétulo 8.2 Dibujos de la conexión del motor.
Page 69

Integración del sistema Guía de diseño
3.8 Opciones y accesorios
Opciones
Para conocer los números de pedido, consulte el
capétulo 6 Código descriptivo y selección
Apantallamiento de red
Apantallamiento Lexan® montado frente a los
•
terminales de potencia de entrada y la placa de
entrada para protección contra contactos cuando
la puerta del alojamiento esté abierta.
Filtros RFI
El convertidor de frecuencia incluye
•
clase A2 integrados de serie. Si se requieren
niveles adicionales de protección RFI/CEM,
pueden obtenerse utilizando ltros RFI opcionales
de clase A1 para la supresión de interferencias de
radiofrecuencia y radiación electromagnética de
conformidad con la norma EN 55011.
Dispositivo de corriente diferencial (RCD)
Utiliza el método de equilibrado central para supervisar las
corrientes de fallo a tierra en sistemas conectados a tierra
y en sistemas conectados a tierra de alta resistencia
(sistemas TN y TT en la terminología CEI). Hay una
advertencia previa (50 % del valor de consigna de alarma
principal) y un valor de consigna de alarma principal. Cada
valor de consigna lleva asociado un relé de alarma SPDT
para uso externo, que requiere un transformador de
corriente externo de tipo «ventana» (suministrado e
instalado por el cliente).
Integrado en el circuito de Safe Torque O del
•
convertidor de frecuencia.
El dispositivo CEI 60755 de tipo B supervisa las
•
intensidades de fallo a tierra CC con pulsos y CC
pura.
Indicador LED de gráco de barras para el nivel
•
de corriente de fallo a tierra desde el 10 hasta el
100 % del valor de consigna.
Memoria de fallos.
•
Tecla TEST/RESET.
•
Monitor de resistencia de aislamiento (IRM)
Supervisa la resistencia del aislamiento en sistemas sin
toma de tierra (sistemas IT en terminología CEI) entre los
conductores de fase del sistema y la toma de tierra. Hay
una advertencia previa mediante resistencia y un valor de
consigna de alarma principal para el nivel de aislamiento.
Para cada valor de consigna hay asociado un relé de
alarma SPDT para uso externo.
ltros RFI de
AVISO!
Solo puede conectarse un sistema de control de
resistencia del aislamiento a cada sistema sin toma de
tierra (IT).
Integrado en el circuito de Safe Torque O del
•
convertidor de frecuencia.
Pantalla LCD de la resistencia de aislamiento.
•
Memoria de fallos.
•
Teclas INFO, TEST y RESET.
•
Fusibles
Se recomiendan fusibles para la protección de
•
sobrecarga de corriente de acción rápida en el
convertidor de frecuencia. La protección de los
fusibles limitará los daños al convertidor de
frecuencia y minimizará el tiempo de reparación
en caso de una avería. Los fusibles son necesarios
para cumplir con la certicación marítima.
Desconexión
Un mango montado en la puerta permite el
•
funcionamiento manual de un interruptor de
desconexión de potencia para activar y desactivar
la potencia al convertidor de frecuencia,
aumentando la seguridad durante el mantenimiento. La desconexión se bloquea con las
puertas del alojamiento para evitar que estas se
abran mientras se sigue aplicando potencia.
Magnetotérmicos
Un magnetotérmico puede desconectarse
•
remotamente pero debe reiniciarse manualmente.
Los magnetotérmicos se bloquean con las puertas
del alojamiento para impedir que se abran
mientras se aplica potencia. Cuando se pide un
magnetotérmico como opción, los fusibles
también se incluyen para una protección de
sobrecarga de corriente de acción rápida en el
convertidor de frecuencia.
Contactores
Un interruptor de contactor controlado eléctri-
•
camente permite la activación y desactivación
remotas de la potencia al convertidor de
frecuencia. Si se solicita la opción de parada de
emergencia CEI, el relé de seguridad Pilz
monitoriza un contacto auxiliar con el contactor.
Arrancadores manuales del motor
Proporcionan potencia trifásica para los ventiladores de
refrigeración eléctricos que suelen necesitar los motores de
mayor tamaño. Los guardamotores reciben el suministro
eléctrico desde el lado de carga de cualquier contactor,
magnetotérmico o interruptor de desconexión alimentado
y desde el lado de entrada del ltro RFI de clase 1
(opcional). La alimentación se activa antes de cada
arrancador del motor y se desactiva cuando la alimentación de entrada al convertidor de frecuencia está
desconectada. Pueden usarse hasta dos arrancadores (uno
si se ha solicitado un circuito de 30 A protegido por
fusible). Los arrancadores del motor están integrados en el
circuito de Safe Torque O del convertidor de frecuencia.
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 67
Page 70
Integración del sistema
VLT® Refrigeration Drive FC 103
La unidad presenta las siguientes funciones:
Interruptor de funcionamiento (activado/
•
desactivado).
Protección contra cortocircuitos y sobrecargas con
•
función de prueba.
33
30 A, terminales protegidos con fusible
Suministro externo de 24 V CC
Supervisión de temperatura externa
Comunicaciones serie
VLT® PROFIBUS DP-V1 MCA 101
Función de reinicio manual.
•
Potencia trifásica ajustada a la tensión de red
•
entrante para alimentar equipos auxiliares del
cliente.
No disponible si se seleccionan dos arrancadores
•
manuales del motor.
Los terminales estarán desactivados cuando la
•
alimentación de entrada al convertidor de
frecuencia esté desconectada.
La alimentación para los terminales protegidos
•
por fusible se suministrará desde el lado de carga
de cualquier contactor, magnetotérmico o
interruptor de desconexión y desde el lado de
entrada del ltro RFI de clase 1 (opcional).
5 A, 120 W, 24 V CC.
•
Protegida frente a sobreintensidad de salida,
•
sobrecarga, cortocircuitos y sobretemperatura.
Para la alimentación de accesorios suministrados
•
por el cliente, como sensores, dispositivos PLC de
E/S, contactores, detectores de temperatura, luces
indicadoras y/u otros dispositivos electrónicos.
El diagnóstico incluye un contacto seco de estado
•
de CC, un LED verde de estado de CC y un LED
rojo de sobrecarga.
Diseñada para supervisar la temperatura de
•
componentes de sistema externos, como las
bobinas y/o los cojinetes del motor. Incluye ocho
módulos de entrada universal más dos módulos
exclusivos de entrada de termistor. Los diez
módulos están integrados en el circuito de STO y
pueden supervisarse mediante una red de bus de
campo (requiere la compra de un acoplador de
módulo/bus independiente). Encargue una opción
de freno STO para seleccionar la supervisión de la
temperatura externa.
Al utilizar el PROFIBUS DP V1, se garantiza un
•
producto con un gran nivel de compatibilidad y
disponibilidad, así como servicio técnico para los
principales proveedores de PLC y compatibilidad
con futuras versiones.
Comunicación rápida y ecaz, instalación
•
transparente, diagnóstico avanzado y parametri-
VLT® LonWorks para ADAP-KOOL® MCA 107
VLT® PROFINET MCA 120
La opción PROFINET ofrece conectividad a redes basadas
en PROFINET a través del protocolo PROFINET. Esta opción
puede manejar una sola conexión con un intervalo real de
paquetes de hasta 1 ms en ambas direcciones.
Más opciones
VLT® General Purpose I/O MCB 101
La opción de E/S ofrece un número ampliado de entradas
y salidas de control.
zación y autoconguración de los datos de
proceso a través del archivo GSD.
Una parametrización cíclica utilizando PROFIBUS
•
DP-V1, PROFIdrive o las máquinas de estado de
perles FC de Danfoss, PROFIBUS DP-V1, maestro
clase 1 y 2.
Números de pedido:
•
- 130B1100 sin revestimiento barnizado.
- 130B1200 barnizado (Clase G3/ISA
S71.04-1985).
Intercambio continuo de mensajes entre
•
diferentes procesadores.
Permite la comunicación directa entre dispositivos
•
individuales de la red.
Servidor web incorporado para diagnóstico
•
remoto y lectura de parámetros básicos del
convertidor de frecuencia.
Si se producen determinadas advertencias o
•
alarmas, o si estas se han solucionado, puede
congurarse el envío de un mensaje de correo
electrónico a uno o varios destinatarios.
TCP/IP para acceso fácil a los datos de congu-
•
ración del convertidor de frecuencia de Software
de conguración MCT 10.
Subida y bajada de archivo a través de FTP (File
•
Transfer Protocol).
Soporte del DCP (protocolo de descubrimiento y
•
conguración).
Tres entradas digitales de 0-24 V: lógica 0<5 V;
•
lógica 1>10 V.
Dos entradas analógicas de 0-10 V: Resolución de
•
10 bits más signo
Dos salidas digitales NPN/PNP en contrafase.
•
Una salida analógica de 0/4-20 mA.
•
Conexión con resorte.
•
Ajustes independientes de parámetros.
•
68 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 71

Integración del sistema Guía de diseño
Números de pedido:
•
- 130B1125 sin revestimiento barnizado.
- 130B1212 barnizado (Clase G3/ISA
S71.04-1985).
VLT® Relay Option MCB 105
Permite ampliar las funciones de relé con 3 salidas de relé
adicionales.
Carga máxima del terminal: carga resistiva CA-1:
•
240 V CA, 2 A, CA-15.
Carga inductiva con cos ф 0,4: 240 V CA, 0,2 A,
•
CC-1.
Carga resistiva: 24 V CC, 1 A, CC-13.
•
Carga inductiva: para cos ф 0,4: 24 V CC, 0,1 A.
•
Carga mínima del terminal: CC 5 V: 10 mA.
•
Frecuencia máxima de conmutación con carga
•
nominal/mínima: 6 min – 1/20 s – 1.
Números de pedido:
•
- 130B1110 sin revestimiento barnizado.
- 130B1210 barnizado (Clase G3/ISA
S71.04-1985).
VLT® Analog I/O Option MCB 109
Esta opción analógica de entrada/salida se instala
fácilmente en el convertidor de frecuencia para actualizar a
un rendimiento y control avanzados utilizando entradas/
salidas adicionales. Esta opción también actualiza el
convertidor de frecuencia con un sistema de alimentación
auxiliar mediante batería de emergencia para el reloj
integrado en el convertidor de frecuencia. De este modo,
se ofrece un uso estable de todas las funciones del reloj
del convertidor de frecuencia, como las acciones
temporizadas.
Tres entradas analógicas, cada una de ellas
•
congurable como entrada de tensión y de
temperatura.
Conexión de señales analógicas de 0 a 10 V, así
•
como de entradas de temperatura PT1000 y
NI1000.
Tres salidas analógicas, cada una de ellas
•
congurable como salida de 0-10 V.
Se incluye una fuente de alimentación de
•
seguridad para la función de reloj integrada en el
convertidor de frecuencia. La duración normal de
la batería de seguridad es de 10 años, según el
entorno.
Números de pedido:
•
- 130B1143 sin revestimiento barnizado
- 130B1243 barnizado (Clase G3/ISA
S71.04-1985)
®
Extended Relay Card MCB 113
VLT
Extended Relay Card MCB 113añade entradas/salidas al
convertidor de frecuencia para conseguir una mayor
exibilidad.
Siete entradas digitales.
•
Dos salidas analógicas.
•
Cuatro relés SPDT.
•
Cumple con las recomendaciones de NAMUR.
•
Posibilidad de aislamiento galvánico.
•
Números de pedido:
•
- 130B1164 sin revestimiento barnizado.
- 130B1264 barnizado.
VLT® 24 V DC Supply Option MCB 107
Esta opción se utiliza para conectar un suministro de CC
externo para mantener activas la sección de control y
cualquier opción activa cuando la potencia de red está
desconectada.
Rango de tensión de entrada: 24 V CC ±15 %
•
(máximo 37 V en 10 s).
Intensidad de entrada máxima: 2,2 A.
•
Longitud máxima del cable: 75 m.
•
Carga de capacitancia de entrada: <10 uF.
•
Retardo de arranque: <0,6 s.
•
Fácil de instalar en convertidores de frecuencia de
•
máquinas existentes.
Mantiene la actividad de la placa de control y de
•
las opciones durante los cortes de alimentación.
Mantiene activos los buses de campo durante los
•
cortes de alimentación.
Números de pedido:
•
- 130B1108 sin revestimiento barnizado.
- 130B1208 barnizado (Clase G3/ISA
S71.04-1985).
3.8.1 Opciones de comunicación
VLT® PROFIBUS DP-V1 MCA 101
•
VLT® AK-LonWorks MCA 107
•
VLT® PROFINET MCA 120
•
Si desea obtener información adicional, consulte el
capétulo 7 Especicaciones.
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 69
Page 72

A
B
C
D
E
130BT323.10
Integración del sistema
VLT® Refrigeration Drive FC 103
3.8.2 Entrada/salida, realimentación y
opciones de seguridad
VLT® General Purpose I/O Module MCB 101
•
VLT® Relay Card MCB 105
•
33
Si desea obtener información adicional, consulte el
capétulo 7
VLT® Extended Relay Card MCB 113
•
Especicaciones.
para adaptarse a los convertidores de frecuencia de
Danfoss.
Si se conectan los ltros armónicos AHF 005 o AHF 010 de
Danfoss delante de un convertidor de frecuencia de
Danfoss, la distorsión de corriente armónica total devuelta
a la red eléctrica se reducirá al 5 % y 10 %, respectivamente.
3.8.6 Kit de protección IP21 / NEMA tipo 1
3.8.3 Filtros senoidales
IP20/IP4X superior / NEMA TIPO 1 es una protección
Cuando un convertidor de frecuencia controla un motor, se
oyen ruidos de resonancias procedentes del motor. Este
ruido, resultado del diseño del motor, aparece cada vez
que se activa uno de los interruptores del inversor en el
convertidor de frecuencia. En este aspecto, la frecuencia
del ruido de resonancia corresponde a la frecuencia de
conmutación del convertidor de frecuencia.
Danfoss suministra un ltro senoidal para amortiguar el
ruido acústico del motor.
opcional disponible para las unidades IP20 compactas.
Si se utiliza el kit de protección, una unidad IP20 sube a la
categoría de protección IP21/4X parte superior / TIPO 1.
La IP4X superior puede aplicarse a todos los modelos
estándar del FC 103 IP20.
ltro reduce el tiempo de aceleración de la tensión, la
El
tensión pico de carga U
motor, lo que signica que la corriente y la tensión se
vuelven casi senoidales. Por ello, el ruido acústico del
motor se reduce al mínimo.
La corriente de rizado en las bobinas del ltro senoidal
también produce algo de ruido. Resuelva este problema
integrando el ltro en un alojamiento o similar.
3.8.4 Filtros dU/dt
Danfoss suministra ltros dU/dt, que son ltros de paso
bajo de modo diferencial que reducen las tensiones pico
entre fases en el terminal del motor y reducen el tiempo
de subida a un nivel que reduce el esfuerzo del
aislamiento de los bobinados del motor. Esto es un
problema, especialmente en cables de motor cortos.
En comparación con los
capétulo 3.8.3 Filtros senoidales), los ltros dU/dt tienen una
frecuencia de corte por encima de la frecuencia de
conmutación.
y la corriente de rizado ΔI al
PICO
ltros senoidales (consulte el
3.8.5 Filtros armónicos
VLT® Advanced Harmonic Filter AHF 005 y AHF 010 son
ltros armónicos avanzados que no pueden compararse
con ltros de trampa armónica tradicionales. Los ltros
armónicos de Danfoss han sido especialmente diseñados
70 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Ilustración 3.31 Protección tamaño A2
Page 73

B
A
E
C
D
130BT324.10
E
F
D
C
B
A
130BT620.12
Integración del sistema Guía de diseño
Tipo de protección
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tabla 3.17 Dimensiones
1) Si se utiliza la opción A/B, aumenta la profundidad (consulte el
capétulo 7.9 Potencias de salida, peso y dimensiones para obtener
más información).
Altura A
[mm]
Anchura B
[mm]
Profundidad C
[mm]
1)
3 3
A Tapa superior
B Ala
C Pieza base
D Tapa de la base
E Tornillo/s
Ilustración 3.32 Protección tamaño A3
1. Coloque la tapa superior tal como indica la
imagen. Si se usa la opción A o B, ajuste el ala de
forma que tape la entrada superior.
2. Coloque la pieza base C en la parte inferior del
convertidor de frecuencia.
3. Use las abrazaderas de la bolsa de accesorios
para sujetar correctamente los cables.
Oricios para prensacables:
Tamaño A2: 2 × M25 y 3 × M32.
•
Tamaño A3: 3 × M25 y 3 × M32.
•
Ilustración 3.33 Tamaño de la protección B3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 71
Page 74
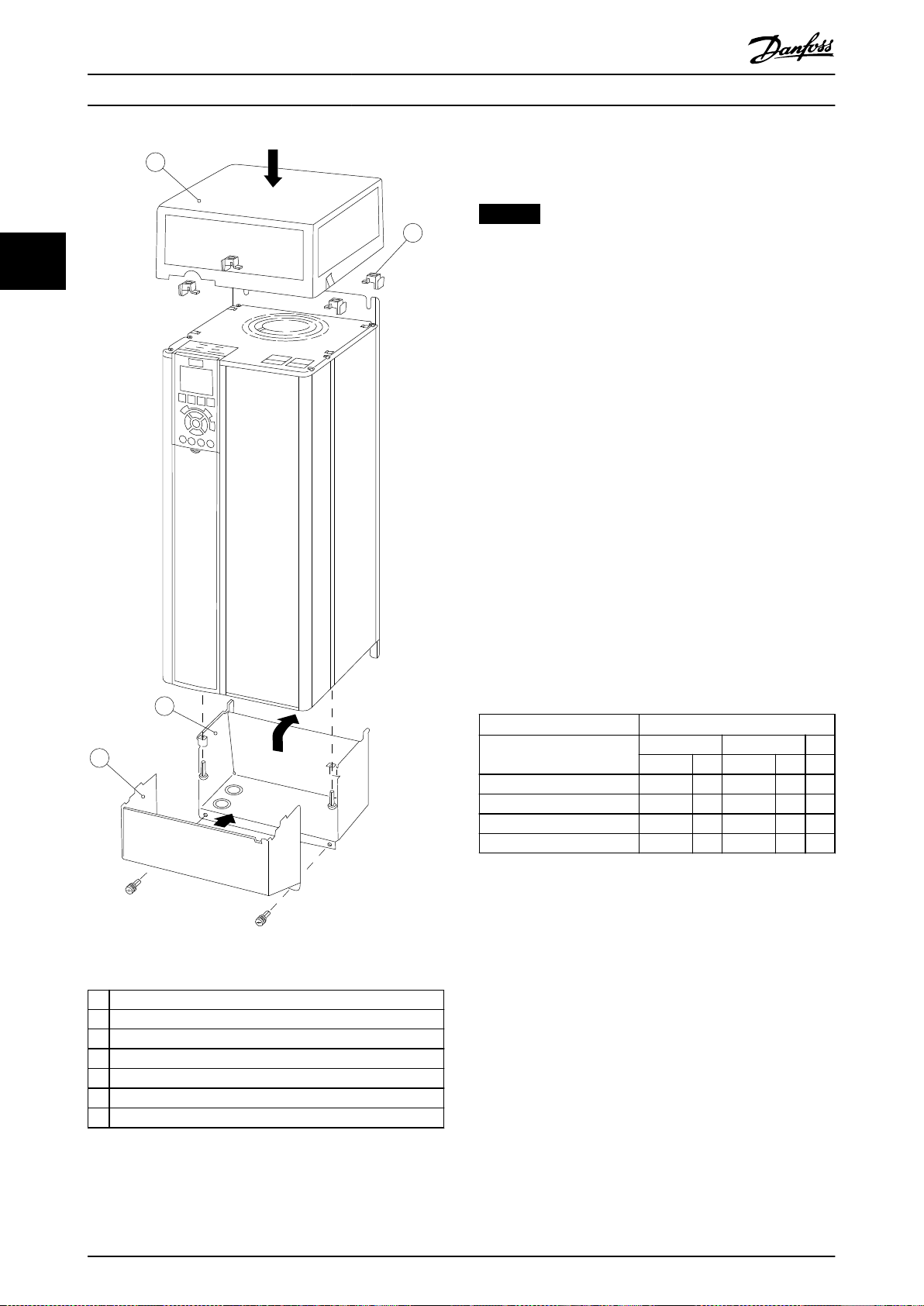
130BT621.12
D
C
A
G
Integración del sistema
VLT® Refrigeration Drive FC 103
Cuando se usan el módulo de opción A y/o el módulo de
opción B, el ala (B) debe ajustarse a la tapa superior (A).
AVISO!
La instalación lado a lado no es posible cuando se utiliza
33
el Kit de protección IP21/IP4X / TIPO 1
3.8.7 Filtros de modo común
Los núcleos de modo común de alta frecuencia (núcleos
HF-CM) reducen la interferencia electromagnética y
eliminan el daño generado a los cojinetes por las
descargas eléctricas. Son núcleos magnéticos nanocristalinos especiales que tienen un rendimiento de ltrado
superior en comparación con los núcleos de ferrita
habituales. El núcleo HF-CM actúa como un inductor de
modo común entre fases y tierra.
Instalados alrededor de las tres fases del motor (U, V y W),
los ltros de modo común reducen las intensidades de
modo común de alta frecuencia. Como resultado, se
reduce la interferencia electromagnética de alta frecuencia
del cable de motor.
El número de núcleos necesarios depende de la longitud
del cable de motor y de la tensión del convertidor de
frecuencia. Cada kit consta de dos núcleos. Consulte la
Tabla 3.19 para determinar el número de núcleos
necesarios.
Ilustración 3.34 Tamaños de protección B4, C3 y C4
Longitud del cable
[m] A y B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
Tabla 3.19 Número de núcleos
1) Cuando se necesiten cables más largos, apile más núcleos HF-CM.
1)
Instale los núcleos HF-CM pasando los cables de las tres
fases del motor (U, V y W) a través de cada núcleo, como
Tamaño de la protección
T2/T4 T7 T2/T4 T7 T7
se indica en la Ilustración 3.35.
A Tapa superior
B Ala
C Pieza base
D Tapa de la base
E Tornillo/s
F Tapa del ventilador
G Clip superior
Tabla 3.18 Leyenda para la Ilustración 3.33 y la Ilustración 3.34
72 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 75

PE U V W
130BD839.10
130BA138.11
130BA200.10
Integración del sistema Guía de diseño
3 3
Ilustración 3.35 Núcleo HF-CM con las fases del motor
3.8.8 Kit de montaje remoto para LCP
El LCP se puede llevar hasta el frontal de un alojamiento
utilizando el kit de montaje remoto. Apriete los tornillos de
sujeción con un par máximo de 1 Nm.
La protección del LCP es IP66 nominal.
Protección IP66 delantero
Longitud máxima del cable entre el LCP y la
unidad 3 m
Comunicación serie RS485
Tabla 3.20 Datos técnicos
Ilustración 3.37 Kit LCP con LCP numérico, sujeciones y junta
Número de pedido 130B1114
Ilustración 3.38 Dimensiones del kit LCP
Ilustración 3.36 Kit LCP con LCP gráco, sujeciones, cable de
3 m y junta Número de pedido 130B1113
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 73
Page 76

130BA844.10
130BA845.10
A
B
Integración del sistema
VLT® Refrigeration Drive FC 103
3.8.9 Soporte de montaje para tamaños de
protección A5, B1, B2, C1 y C2
33
Tamaño de la
protección
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tabla 3.21 Detalles de los soportes de montaje
IP A [mm] B [mm] Número de
pedido
3.9 Interfaz serie RS485
3.9.1 Descripción general
RS485 es una interfaz de bus de dos cables compatible
con la topología de red multipunto. Los nodos se puede
conectar como bus, o mediante cables de derivación desde
una línea de tronco común. Se pueden conectar un total
Ilustración 3.39 Soporte inferior
de 32 nodos a un único segmento de red.
Los repetidores dividen los segmentos de la red, consulte
la Ilustración 3.41.
AVISO!
Cada repetidor funciona como un nodo dentro del
segmento en el que está instalado. Cada nodo conectado
en una red determinada debe tener una dirección de
nodo única en todos los segmentos.
Ilustración 3.40 Soporte superior
Consulte las dimensiones en la Tabla 3.21.
Termine cada segmento en ambos extremos, utilizando
bien el interruptor de terminación (S801) del convertidor
de frecuencia, o bien una red predispuesta de resistencias
de terminación. Utilice siempre cable de par trenzado y
apantallado (STP) para cablear el bus y siga unas buenas
prácticas de instalación.
Es importante disponer de una conexión a tierra de baja
impedancia para el apantallamiento de cada nodo, incluso
a frecuencias altas. De este modo, conecte una gran
supercie del apantallamiento a la toma de tierra, por
ejemplo, mediante una abrazadera o un prensacables
conductor. Puede ser necesario utilizar cables ecualizadores
de potencial para mantener el mismo potencial de masa
en toda la red, especialmente en instalaciones que
incluyan cables largos.
Para evitar diferencias de impedancia, utilice siempre el
mismo tipo de cable en toda la red. Cuando conecte un
motor al convertidor de frecuencia, utilice siempre cable
de motor apantallado.
Cable Par trenzado apantallado (STP)
Impedancia [Ω]
Longitud del
cable [m]
Tabla 3.22 Especicaciones del cable
120
Máximo 1200 (incluidos los ramales
conectables)
Máximo 500 entre estaciones.
74 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 77

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
Integración del sistema Guía de diseño
3 3
Ilustración 3.41 Interfaz de bus RS485
Parámetros
3.9.2 Conexión de red
Función Ajuste
Parámetro 8-30
Protocolo FC*
Parámetro 8-31
1*
Dirección
Parámetro 8-32
9600*
Velocidad en
Puede haber uno o varios convertidores de frecuencia
conectados a un controlador (o maestro) mediante la
interfaz normalizada RS485. El terminal 68 está conectado
a la señal P (TX+, RX+), mientras que el terminal 69 esta
conectado a la señal N (TX–, RX–). Consulte las imágenes
en el capétulo 3.6.1 Esquema de cableado.
baudios
Notas/comentarios:
seleccione el protocolo, la
dirección y la velocidad en
baudios en los parámetros
mencionados anteriormente.
D IN 37 es una opción.
* = Valor por defecto
Si hay más de un convertidor de frecuencia conectado a
un maestro, utilice conexiones en paralelo.
Tabla 3.23 Conexión de red RS485
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 75
Ilustración 3.42 Conexiones en paralelo
Para evitar potenciales corrientes de ecualización en la
pantalla, realice el cableado conforme a la Ilustración 3.24.
Page 78
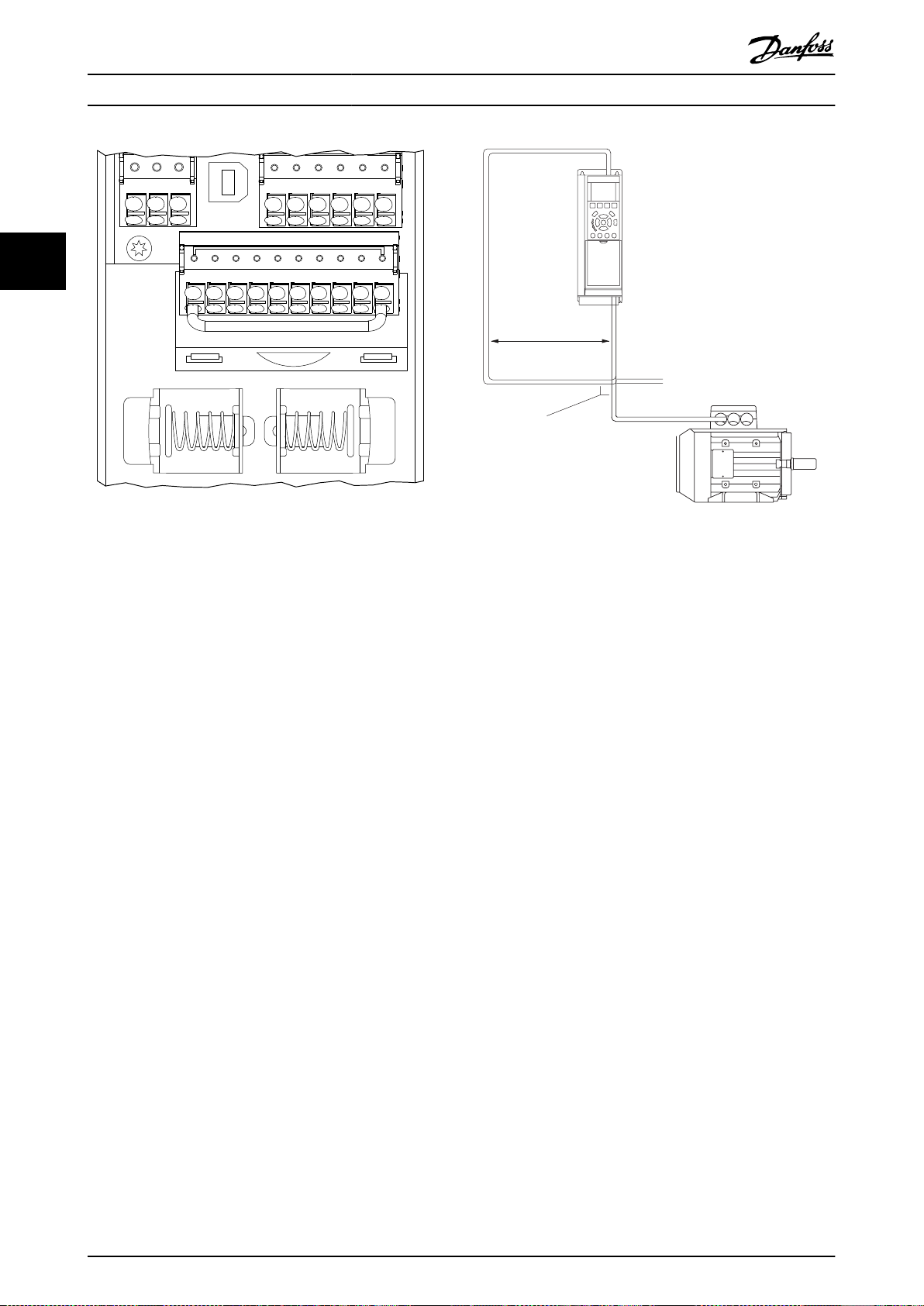
130BB021.11
12 13 18 19 27 29 32
332037
Remove jumper to enable Safe Stop
61
68
69 39 42 50 53 54 55
Fieldbus cable
90° crossing
130BE039.11
Minimum 200 mm (8 in)
Integración del sistema
VLT® Refrigeration Drive FC 103
33
Ilustración 3.43 Terminales de la tarjeta de control
3.9.3 Terminación de bus RS485
Termine el bus RS485 con una resistencia de red en ambos
extremos. Para este propósito, ajuste el interruptor S801 de
la tarjeta de control en ON.
Ajuste el protocolo de comunicación a
parámetro 8-30 Protocolo.
3.9.4 Precauciones de compatibilidad
electromagnética (CEM)
Se recomienda adoptar las siguientes precauciones de CEM
para que la red RS485 funcione sin interferencias.
Cumpla las disposiciones nacionales y locales pertinentes,
por ejemplo, las relativas a la conexión a tierra de
protección. Mantenga alejado el cable de comunicación
RS485 de los cables del motor y de la resistencia de freno
para evitar el acoplamiento del ruido de alta frecuencia de
un cable con otro. Normalmente, es suciente con una
distancia de 200 mm (8 in), pero se recomienda guardar la
mayor distancia posible entre los cables, especialmente
cuando estos se instalen en paralelo y cubran distancias
largas. Si el cruce es inevitable, el cable RS485 debe cruzar
los cables de motor en un ángulo de 90°.
Ilustración 3.44 Enrutado de los cables
3.9.5 Aspectos generales del protocolo FC
El protocolo FC, también conocido como bus FC o bus
estándar, es el bus de campo estándar de Danfoss. Dene
una técnica de acceso conforme al principio maestro/
esclavo para las comunicaciones mediante bus de campo.
Pueden conectarse al bus un maestro y un máximo de 126
esclavos. El maestro selecciona individualmente los
esclavos mediante un carácter de dirección incluido en el
telegrama. Un esclavo no puede transmitir por sí mismo
sin recibir previamente una petición para hacerlo, y
tampoco es posible la transmisión directa de mensajes
entre esclavos. Las comunicaciones se producen en modo
semidúplex.
La función de maestro no se puede transmitir a otro nodo
(sistema de maestro único).
La capa física es RS485, por lo que utiliza el puerto RS485
integrado en el convertidor de frecuencia. El protocolo FC
admite varios formatos de telegrama:
un formato breve de 8 bytes para datos de
•
proceso,
un formato largo de 16 bytes, que también
•
incluye un canal de parámetros,
un formato para textos.
•
76 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 79

STX LGE ADR D ATA BCC
195NA099.10
Integración del sistema Guía de diseño
3.9.6 Conguración de red
Para permitir el protocolo FC para el convertidor de
frecuencia, ajuste los siguientes parámetros:
Número de parámetro Ajuste
Parámetro 8-30 Protocolo FC
Parámetro 8-31 Dirección 1–126
Parámetro 8-32 Velocidad en
baudios
Parámetro 8-33 Paridad / Bits de
parada
Tabla 3.24 Parámetros de protocolo FC
2400–115200
Paridad par, 1 bit de parada
(predeterminado)
3.9.7 Estructura de formato de mensaje del
protocolo FC
3.9.7.1 Contenido de un carácter (byte)
La transferencia de cada carácter comienza con un bit de
inicio. A continuación, se transeren 8 bits de datos, que
corresponden a un byte. Cada carácter está asegurado
mediante un bit de paridad. Este bit se ajusta a 1 cuando
alcanza la paridad. La paridad se da cuando hay un
número equivalente de 1 s en los 8 bits de datos y en el
bit de paridad en total. Un bit de parada completa un
carácter, por lo que consta de 11 bits en total.
Ilustración 3.45 Contenido de un carácter
3.9.7.2 Estructura de telegramas
Cada telegrama tiene la siguiente estructura:
Carácter de inicio (STX) = 02 hex
•
Un byte que indica la longitud del telegrama
•
(LGE).
Un byte que indica la dirección del convertidor
•
de frecuencia (ADR).
A continuación, están los bytes de datos, en número
variable según el tipo de telegrama.
Un byte de control de datos (BCC) completa el telegrama.
3.9.7.3 Longitud del telegrama (LGE)
La longitud del telegrama es el número de bytes de datos,
más el byte de dirección ADR y el byte de control de datos
BCC.
4 bytes de datos LGE = 4 + 1 + 1 = 6 bytes
12 bytes de datos LGE = 12 + 1 + 1 = 14 bytes
Telegramas que contienen texto
Tabla 3.25 Longitud de los telegramas
1) 10 es el número de caracteres
longitud del texto).
101)+n bytes
jos, y 'n' es variable (depende de la
3.9.7.4 Dirección del convertidor de
frecuencia (ADR)
Se utilizan dos formatos diferentes para la dirección.
El intervalo de direcciones del convertidor de frecuencia es
de 1 a 31 o de 1 a 126.
Formato de dirección 1-31
•
- Bit 7 = 0 (formato de dirección 1-31
activado).
- El bit 6 no se utiliza.
- Bit 5 = 1: Transmisión, los bits de
dirección (0-4) no se utilizan.
- Bit 5 = 0: sin transmisión.
- Bit 0-4 = dirección del convertidor de
frecuencia 1-31.
Formato de dirección 1-126
•
- Bit 7 = 1 (formato de dirección 1-126
activado).
- Bit 0-6 = dirección del convertidor de
frecuencia 1-126.
- Bit 0-6 = 0 transmisión.
El esclavo devuelve el byte de la dirección sin cambios al
maestro en el telegrama de respuesta.
3.9.7.5 Byte de control de datos (BCC)
La suma de vericación (checksum) se calcula como una
función XOR. Antes de que se reciba el primer byte del
telegrama, la suma de vericación calculada es 0.
3 3
Ilustración 3.46 Estructura de telegramas
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 77
Page 80

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Integración del sistema
VLT® Refrigeration Drive FC 103
3.9.7.6 El campo de datos
La estructura de los bloques de datos depende del tipo de telegrama. Hay tres tipos de telegrama, y cada uno de ellos se
aplica tanto a los telegramas de control (maestro⇒esclavo) como a los de respuesta (esclavo⇒maestro).
Los 3 tipos de telegrama son:
33
Bloque de proceso (PCD)
El PCD está formado por un bloque de datos de cuatro bytes (2 códigos) y contiene:
Código de control y valor de referencia (de maestro a esclavo).
•
Código de estado y frecuencia de salida actual (de esclavo a maestro).
•
Ilustración 3.47 Bloque de proceso
Bloque de parámetros
El bloque de parámetros se utiliza para transferir parámetros entre un maestro y un esclavo. El bloque de datos está
formado por 12 bytes (6 códigos) y también contiene el bloque de proceso.
Ilustración 3.48 Bloque de parámetros
Bloque de texto
El bloque de texto se utiliza para leer o escribir textos mediante el bloque de datos.
Ilustración 3.49 Bloque de texto
78 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 81
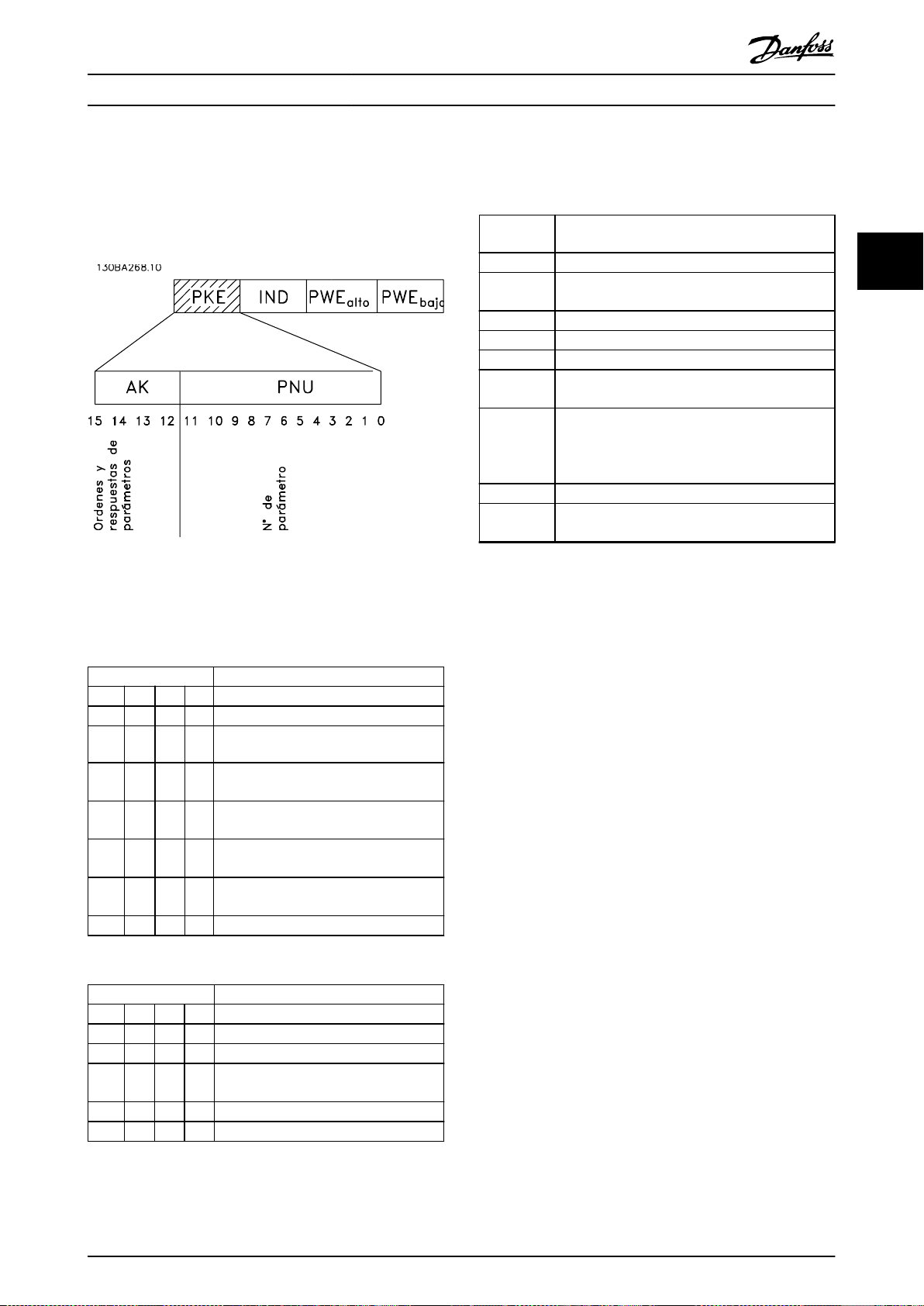
Integración del sistema Guía de diseño
3.9.7.7 El campo PKE
El campo PKE contiene dos subcampos:
Comando de parámetro y respuesta AK.
•
Número de parámetro PNU.
•
Ilustración 3.50 Campo PKE
0111 Comando no ejecutable
y devuelve un informe de fallo (consulte la Tabla 3.28) en
el valor del parámetro (PWE):
PWE bajo
(hex)
11 No es posible cambiar los datos del parámetro
82 No hay acceso de bus al parámetro denido.
83 No es posible modicar datos por estar
Tabla 3.28 Informe de fallo en el valor del parámetro
Informe de fallo
0 El número de parámetro utilizado no existe.
1 No hay acceso de escritura para el parámetro
denido.
2 El valor de dato supera los límites del parámetro.
3 El subíndice utilizado no existe.
4 El parámetro no es de tipo matriz.
5 El tipo de datos no coincide con el parámetro
denido.
denido en el modo actual del convertidor de
frecuencia. Algunos parámetros solo se pueden
cambiar cuando el motor está parado.
seleccionado el ajuste de fábrica
3 3
Los bits n.º 12-15 transeren comandos de parámetros del
maestro al esclavo y devuelven las respuestas procesadas
del esclavo al maestro.
Número de bit Comando de parámetro
15 14 13 12
0 0 0 0 Sin comando.
0 0 0 1 Leer valor de parámetro.
0 0 1 0 Escribir valor de parámetro en RAM
(código).
0 0 1 1 Escribir valor de parámetro en RAM
(doble código).
1 1 0 1 Escribir valor de parámetro en RAM y
EEPROM (doble código).
1 1 1 0 Escribir valor de parámetro en RAM y
EEPROM (código).
1 1 1 1 Leer/escribir texto.
Tabla 3.26 Comandos de parámetro maestro⇒esclavo
Número de bit Respuesta
15 14 13 12
0 0 0 0 Sin respuesta.
0 0 0 1 Valor de parámetro transferido (código).
0 0 1 0 Valor de parámetro transferido (doble
código).
0 1 1 1 El comando no se puede ejecutar.
1 1 1 1 texto transferido.
Tabla 3.27 Respuesta esclavo⇒maestro
Si el comando no se puede realizar, el esclavo envía esta
respuesta:
3.9.7.8 Número de parámetro (PNU)
Los bits 0-11 transeren los números de parámetros. La
función del parámetro correspondiente se explica en la
descripción del parámetro en la Guía de programación.
3.9.7.9 Índice (IND)
El índice se utiliza junto con el número de parámetro para
el acceso de lectura / escritura a los parámetros con un
índice, por ejemplo, parámetro 15-30 Reg. alarma: código de
fallo. El índice consta de 2 bytes, un byte bajo y un byte
alto.
Solo el byte bajo se utiliza como índice.
3.9.7.10 Valor de parámetro (PWE)
El bloque de valor de parámetro consta de 2 códigos (4
bytes) y el valor depende del comando denido (AK). El
maestro solicita un valor de parámetro cuando el bloque
PWE no contiene ningún valor. Para cambiar el valor de un
parámetro (escritura), escriba el nuevo valor en el bloque
PWE y envíelo del maestro al esclavo.
Si el esclavo responde a una solicitud de parámetro
(comando de lectura), el valor de parámetro actual en el
bloque PWE se transere y devuelve al maestro. Si un
parámetro no contiene un valor numérico, sino varias
opciones de datos, por ejemplo el parámetro 0-01 Idioma,
donde [0] es Inglés y [4] es Danés, seleccione el valor de
dato introduciéndolo en el bloque PWE. La comunicación
serie solo es capaz de leer parámetros que tienen el tipo
de dato 9 (cadena de texto).
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 79
Page 82

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Integración del sistema
VLT® Refrigeration Drive FC 103
De Parámetro 15-40 Tipo FC a parámetro 15-53 Número serie
tarjeta potencia contienen el tipo de dato 9.
Por ejemplo, se puede leer el tamaño del convertidor de
frecuencia y el intervalo de tensión de red en
parámetro 15-40 Tipo FC. Cuando se transere una cadena
Ejemplos:
0 s⇒índice de conversión 0
0,00 s⇒índice de conversión –2
0 ms⇒índice de conversión –3
0,00 ms⇒índice de conversión –5
de texto (lectura), la longitud del telegrama varía, y los
33
textos pueden tener distinta longitud. La longitud del
3.9.7.13 Códigos de proceso (PCD)
telegrama se dene en el segundo byte, denominado LGE.
Cuando se utiliza la transferencia de texto, el carácter de
índice indica si se trata de un comando de lectura o de
escritura. Para leer un texto a través del bloque PWE, ajuste
el comando del parámetro (AK) a F hex. El carácter de
índice de byte alto debe ser 4. Algunos parámetros
contienen texto que se puede escribir mediante el bus de
campo. Para escribir un texto mediante el bloque PWE,
ajuste el comando de parámetro (AK) a F hex. El carácter
de índice de byte alto debe ser 5.
El bloque de códigos de proceso se divide en dos bloques
de 16 bits, que siempre se suceden en la secuencia
denida.
PCD 1 PCD 2
Telegrama de control (código de control
maestro⇒esclavo)
Telegrama de control (código de estado
esclavo⇒maestro)
Tabla 3.30 Códigos de proceso (PCD)
Valor de
referencia
Frecuencia de
salida actual
3.9.8 Ejemplos de protocolo FC
3.9.8.1 Escritura del valor de un parámetro.
Ilustración 3.51 Texto a través del bloque PWE
3.9.7.11 Tipos de datos admitidos
«Sin signo» signica que el telegrama no tiene ningún
signo de funcionamiento.
Tipos de datos Descripción
3 Entero 16
4 Entero 32
5 Sin signo 8
6 Sin signo 16
7 Sin signo 32
9 Cadena de texto
10 Cadena de bytes
13 Diferencia de tiempo
33 Reservado
35 Secuencia de bits
Tabla 3.29 Tipos de datos admitidos
3.9.7.12 Conversion
Cambie parámetro 4-14 Límite alto veloc. motor [Hz] a 100
Hz.
Escriba los datos en EEPROM.
PKE=E19E hex - Escriba un único código en
parámetro 4-14 Límite alto veloc. motor [Hz].
IND = 0000 hex
PWEALTO = 0000 Hex
PWEBAJO=03E8 hex - Valor de dato 1000, correspondiente
a 100 Hz, consulte el capétulo 3.9.7.12 Conversion.
El telegrama tendrá este aspecto:
Ilustración 3.52 Escriba los datos en EEPROM
AVISO!
El Parámetro 4-14 Límite alto veloc. motor [Hz] es un
único código, y el comando de parámetro que se debe
grabar en la EEPROM es E. El número de parámetro 4-14
es 19E en hexadecimal.
Los distintos atributos de cada parámetro se muestran en
los ajustes de fábrica. Los valores de parámetros que se
transeren son únicamente números enteros. Para transferir
decimales se utilizan factores de conversión.
Parámetro 4-12 Límite bajo veloc. motor [Hz] tiene un factor
de conversión de 0,1. Para preajustar la frecuencia mínima
a 10 Hz, transera el valor 100. Un factor de conversión de
0,1 signica que el valor transferido se multiplica por 0,1.
Por lo tanto, el valor 100 se lee como 10,0.
80 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
La respuesta del esclavo al maestro será la siguiente:
Ilustración 3.53 Respuesta del esclavo
Page 83

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Integración del sistema Guía de diseño
3.9.8.2 Lectura del valor de un parámetro
Lea el valor en parámetro 3-41 Rampa 1 tiempo acel. rampa.
PKE=1155 hex - Lea el valor del parámetro en
parámetro 3-41 Rampa 1 tiempo acel. rampa.
IND = 0000 hex
PWEALTO = 0000 Hex
PWEBAJO = 0000 hex
Ilustración 3.54 Valor del parámetro
Si el valor de parámetro 3-41 Rampa 1 tiempo acel. rampa
es 10 s, la respuesta del esclavo al maestro será
Ilustración 3.55 Respuesta del esclavo
3E8 Hex corresponde a 1000 en decimal. El índice de
conversión para el parámetro 3-41 Rampa 1 tiempo acel.
rampa es –2, es decir, 0,01.
El Parámetro 3-41 Rampa 1 tiempo acel. rampa es del tipo
Sin signo 32.
3.9.9 Protocolo Modbus RTU
3.9.9.1 Requisitos previos
Danfoss da por sentado que el controlador instalado es
compatible con las interfaces mencionadas en este manual
y que se siguen estrictamente todos los requisitos y limitaciones estipulados tanto en el controlador como en el
convertidor de frecuencia.
El Modbus RTU (Remote Terminal Unit) integrado está
diseñado para comunicarse con cualquier controlador
compatible con las interfaces denidas en este manual. Se
da por supuesto que el usuario tiene pleno conocimiento
de las capacidades y limitaciones del controlador.
3.9.9.2 Visión general de Modbus RTU
Independientemente de los tipos de redes de comunicación física, en la visión general de Modbus RTU se
describe el proceso que un controlador utiliza para solicitar
acceso a otro dispositivo. Esto incluye cómo el Modbus
RTU responde a las solicitudes de otro dispositivo y cómo
se detectarán y se informará de los errores que se
produzcan. También se establece un formato común para
el diseño y los contenidos de los campos de mensajes.
Durante las comunicaciones en una red Modbus RTU, el
protocolo:
Determina cómo aprende cada controlador su
•
dirección de dispositivo.
Reconoce un mensaje dirigido a él.
•
Determina qué acciones tomar.
•
Extrae cualquier dato o información incluidos en
•
el mensaje.
Si se requiere una respuesta, el controlador construirá el
mensaje de respuesta y lo enviará.
Los controladores se comunican utilizando una técnica
maestro/esclavo en la que solo el maestro puede iniciar
transacciones (llamadas peticiones). Los esclavos responden
proporcionando al maestro los datos pedidos o realizando
la acción solicitada en la petición.
El maestro puede dirigirse a un esclavo individualmente, o
puede iniciar la transmisión de un mensaje a todos los
esclavos. Los esclavos devuelven una respuesta a las
peticiones que se les dirigen individualmente. No se
responde a las peticiones transmitidas por el maestro. El
protocolo Modbus RTU establece el formato de la petición
del maestro suministrando:
La dirección (o transmisión) del dispositivo.
•
Un código de función en el que se dene la
•
acción solicitada.
Cualquier dato que se deba enviar.
•
Un campo de comprobación de errores.
•
El mensaje de respuesta del esclavo también se construye
utilizando el protocolo Modbus. Contiene campos que
conrman la acción realizada, los datos que se hayan de
devolver y un campo de comprobación de errores. Si se
produce un error en la recepción del mensaje o si el
esclavo no puede realizar la acción solicitada, este
devuelve un mensaje de error. Si no, se producirá un error
de tiempo límite.
3.9.9.3 Convertidor de frecuencia con
Modbus RTU
El convertidor de frecuencia se comunica en formato
Modbus RTU a través de la interfaz RS485 integrada.
Modbus RTU proporciona acceso al código de control y a
la referencia de bus del convertidor de frecuencia.
El código de control permite al maestro del Modbus
controlar varias funciones importantes del convertidor de
frecuencia:
Arranque
•
Detener el convertidor de frecuencia de diversas
•
formas:
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 81
Page 84

Integración del sistema
VLT® Refrigeration Drive FC 103
- Paro por inercia
- Parada rápida
- Parada por freno de CC
- Parada (de rampa) normal
Reinicio tras desconexión por avería
33
•
Funcionamiento a diferentes velocidades
•
predeterminadas
Funcionamiento en sentido inverso
•
Cambiar el ajuste activo
•
Controlar el relé integrado del convertidor de
•
frecuencia
La referencia de bus se utiliza, normalmente, para el
control de velocidad. También es posible acceder a los
parámetros, leer sus valores y, en su caso, escribir valores
en ellos. Esto permite una amplia variedad de opciones de
control, incluido el control del valor de consigna del
convertidor de frecuencia cuando se utiliza el controlador
PI interno.
3.9.9.4 Conguración de red
Para activar Modbus RTU en el convertidor de frecuencia,
ajuste los siguientes parámetros:
Parámetro Ajuste
Parámetro 8-30 Protocolo Modbus RTU
Parámetro 8-31 Dirección 1–247
Parámetro 8-32 Velocidad en
baudios
Parámetro 8-33 Paridad / Bits de
parada
Tabla 3.31 Parámetros de Modbus RTU
2400–115200
Paridad par, 1 bit de parada
(predeterminado)
Sistema de codi-
cación
Bits por byte 1 bit de inicio.
Campo de
comprobación de
errores
3.9.10.2 Estructura de telegrama Modbus
El dispositivo emisor coloca un mensaje Modbus RTU en
un formato con un comienzo conocido y un punto nal.
Esto permite a los dispositivos receptores comenzar al
principio del mensaje, leer la parte de la dirección,
determinar a qué dispositivo se dirige (o a todos, si el
mensaje es una transmisión) y reconocer cuándo el
mensaje se ha completado. Los mensaje parciales se
detectan y se determinan los errores resultantes. Los
caracteres que se van a transmitir deben estar en formato
hexadecimal 00 a FF en cada campo. El convertidor de
frecuencia monitoriza continuamente el bus de red,
también durante los intervalos silenciosos. Cuando el
primer campo (el campo de dirección) es recibido, cada
convertidor de frecuencia o dispositivo lo descodica para
determinar a qué dispositivo se dirige. Los mensajes
Modbus RTU dirigidos a cero son mensajes de transmisión.
No se permiten respuestas a los mensajes de transmisión.
En la Tabla 3.33 se muestra un formato típico de mensaje.
ArranqueDirección Función Datos Compro-
3.9.10 Estructura de formato de mensaje
de Modbus RTU
T1-T2-T3-
-T4
binario de 8 bits, hexadecimal 0-9, A-F
Dos caracteres hexadecimales contenidos en
cada campo de 8 bits del mensaje.
8 bits de datos, el menos signicativo
enviado primero;
1 bit de paridad par/impar; sin bit de no
paridad.
1 bit de parada si se utiliza paridad; 2 bits si
no se usa paridad.
Comprobación de redundancia cíclica (CRC).
RTU
8 bits 8 bits N × 8
bits
nal
bación
CRC
16 bits T1-T2-T3-
decel.
-T4
3.9.10.1 Convertidor de frecuencia con
Modbus RTU
Tabla 3.33 Estructura típica de telegrama Modbus RTU
Los controladores están congurados para comunicarse en
la red Modbus utilizando el modo RTU, con cada byte de
un mensaje que contenga dos caracteres hexadecimales de
4 bits. El formato de cada byte se muestra en la Tabla 3.32.
Bit de
inicio
Tabla 3.32 Formato de cada byte
82 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Byte de datos Parada
/
parida
d
Parad
a
3.9.10.3 Campo de arranque/parada
El mensaje comienza con un periodo de silencio de al
menos 3,5 intervalos de caracteres. Esto se implementa
como un múltiplo de intervalos de caracteres a la
velocidad en baudios seleccionada (mostrada como
Arranque T1-T2-T3-T4). El primer campo que se transmite
es la dirección del dispositivo. Tras el último carácter
transmitido, un periodo similar de al menos 3,5 intervalos
de carácter marca el n del mensaje. Después de este
periodo, puede comenzar otro mensaje. El formato
completo del mensaje debe transmitirse como un ujo
continuo. Si se produce un periodo de más de 1,5
intervalos de carácter antes de que se complete el formato,
Page 85

Integración del sistema Guía de diseño
el dispositivo receptor descarta el mensaje incompleto y
asume que el siguiente byte es el campo de dirección de
un nuevo mensaje. De forma similar, si un nuevo mensaje
comienza antes de 3,5 intervalos de carácter tras un
mensaje previo, el dispositivo receptor lo considerará una
continuación del mensaje anterior. Esto produce un error
de tiempo límite (falta de respuesta por parte del esclavo),
porque el valor del campo CRC nal no es válido para los
mensaje combinados.
3.9.10.4 Campo de dirección
El campo de dirección de un mensaje contiene 8 bits. Las
direcciones válidas de dispositivos esclavos están en el
rango de 0 a 247 decimal. Los dispositivos esclavos individuales tienen direcciones asignadas en un rango entre 1 y
247 (0 se reserva para el modo de transmisión, que
reconocen todos los esclavos). Un maestro se dirige a un
esclavo poniendo la dirección de este en el campo de
dirección del mensaje. Cuando el esclavo envía su
respuesta, pone su propia dirección en dicho campo de
dirección, para que el maestro sepa qué esclavo le está
contestando.
3.9.10.5 Campo de función
El campo de función de un mensaje contiene 8 bits. Los
códigos válidos están en el rango de 1 a FF. Los campos
de función se utilizan para enviar mensajes entre el
maestro y el esclavo. Cuando se envía un mensaje desde
un maestro a un dispositivo esclavo, el campo de código
de función le indica al esclavo la clase de acción que debe
realizar. Cuando el esclavo responde al maestro, utiliza el
campo de código de función para indicar una respuesta
normal (sin error) o que se ha producido un error de
alguna clase (esta respuesta se denomina «excepción»).
Para dar una respuesta normal, el esclavo simplemente
devuelve el código de función original. Para responder con
una excepción, el esclavo devuelve un código equivalente
al de la función original, pero con su bit más signicativo
cambiado a 1 lógico. Además, el esclavo pone un código
único en el campo de datos del mensaje de respuesta. Este
código le indica al maestro el tipo de error producido o la
razón de la excepción. Consulte también el
capétulo 3.9.10.10 Códigos de función admitidos por Modbus
RTU y el capétulo 3.9.10.11 Códigos de excepción Modbus.
elementos que se manejarán y el contador de los bytes de
datos reales del campo.
3.9.10.7 Campo de comprobación CRC
En los mensajes se incluye un campo de comprobación de
errores, que opera en base al método de comprobación de
redundancia cíclica (CRC). El campo CRC comprueba el
contenido de todo el mensaje. Se aplica independientemente del método de comprobación de paridad utilizado
para los caracteres individuales del mensaje. El dispositivo
transmisor calcula el valor de CRC y lo añade como último
campo en el mensaje. El dispositivo receptor vuelve a
calcular un CRC durante la recepción del mensaje y
compara el valor calculado con el valor recibido en el
campo CRC. Si los dos valores son distintos, se produce un
error de tiempo límite de bus. El campo de comprobación
de errores contiene un valor binario de 16 bits
implementado como dos bytes de 8 bits. Cuando esto se
ha realizado, el byte de orden bajo del campo se añade
primero, seguido del byte de orden alto. El byte de orden
alto del CRC es el último byte que se envía en el mensaje.
3.9.10.8 Direccionamiento de bobinas
En Modbus, todos los datos están organizados en bobinas
y registros de retención. Las bobinas almacenan un solo
bit, mientras que los registros de retención alojan un
código de 2 bytes (16 bits). Todas las direcciones de datos
de los mensajes Modbus están referenciadas a cero. La
primera aparición de un elemento de datos se gestiona
como elemento número cero. Por ejemplo: la bobina
conocida como bobina 1 de un controlador programable se
trata como el campo de dirección de un mensaje Modbus.
La Bobina 127 decimal se trata como bobina 007EHEX (126
decimal).
El registro de retención 40001 se trata como registro 0000 en
el campo de dirección del mensaje. El campo de código de
función ya especica una operación de registro de
retención. Por lo tanto, la referencia 4XXXX es implícita. El
registro de retención 40108 se procesa como un registro
006BHEX (107 decimal).
3 3
3.9.10.6 Campo de datos
El campo de datos se construye utilizando grupos de dos
dígitos hexadecimales, en el intervalo de 00 a FF en
hexadecimal. Están hechos con un carácter RTU. El campo
de datos de los mensajes enviados desde un maestro a un
dispositivo esclavo contiene información más detallada que
el esclavo debe utilizar para realizar la acción denida por
el código de función. Este puede incluir elementos tales
como direcciones de registro o bobinas, la cantidad de
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 83
Page 86

Integración del sistema
VLT® Refrigeration Drive FC 103
Número
de
bobina
1–16 Código de control del convertidor de
17–32 Velocidad del convertidor de
33
33–48 Código de estado del convertidor de
49–64 Modo de lazo abierto: frecuencia de
65 Control de escritura de parámetro
66–
65536
Tabla 3.34 Descripciones de bobinas
Bobina 0 1
01 Referencia interna, bit menos signicativo (lsb)
02 Referencia interna, bit más signicativo (msb)
03 Freno de CC Sin freno de CC
04 Paro por inercia Sin paro por inercia
05 Parada rápida Sin parada rápida
06 Mantener frecuencia No mantener frecuencia
07 Parada de rampa Arranque
08 Sin reinicio Reinicio
09 Sin velocidad ja Velocidad ja
10 Rampa 1 Rampa 2
11 Datos no válidos Datos válidos
12 Relé 1 desactivado Relé 1 activado
13 Relé 2 desactivado Relé 2 activado
14 Ajuste del bit menos signicativo (lsb)
15 Ajuste del bit más signicativo (msb)
16 Sin cambio de sentido Cambio de sentido
Tabla 3.35 Código de control del convertidor de frecuencia
(perl FC)
Descripción Dirección de la
señal
De maestro a
frecuencia.
frecuencia o intervalo de referencias
de valor de consigna 0x0-0xFFFF (–
200 %-~200 %).
frecuencia (consulte la Tabla 3.36).
salida del convertidor de frecuencia.
Modo de lazo cerrado: señal de
realimentación del convertidor de
frecuencia.
(maestro a esclavo).
0=Los cambios en los parámetros
se escriben en la RAM del
convertidor de frecuencia.
1=Los cambios de los parámetros
se escriben en la RAM y en la
EEPROM del convertidor de
frecuencia.
Reservado.
esclavo
De maestro a
esclavo
De esclavo a
maestro
De esclavo a
maestro
De maestro a
esclavo
Bobina 0 1
33 Control no preparado Control prep.
34 Convertidor de frecuencia
no preparado
35 Paro por inercia Cerrado seguro
36 Sin alarma Alarma
37 Sin uso Sin uso
38 Sin uso Sin uso
39 Sin uso Sin uso
40 Sin advertencia Advertencia
41 No en referencia En referencia
42 Modo manual Modo automático
43 Fuera de rango de
frecuencia
44 Detenido En func.
45 Sin uso Sin uso
46 Sin advertencia de tensión Advertencia de tensión
47 No en límite de intensidad Límite de intensidad
48 Sin advertencia térmica Advertencia térmica
Tabla 3.36 Código de estado del convertidor de frecuencia
(perl FC)
Número de
registro
00001–00006 Reservado
00007 Último código de error desde una interfaz de
00008 Reservado
00009
00010–00990 Grupo de parámetros 000 (parámetros del 0-01 al
01000–01990 Grupo de parámetros 100 (parámetros del 1-00 al
02000–02990 Grupo de parámetros 200 (parámetros del 2-00 al
03000–03990 Grupo de parámetros 300 (parámetros del 3-00 al
04000–04990 Grupo de parámetros 400 (parámetros del 4-00 al
... ...
49000–49990 Grupo de parámetros 4900 (parámetros del 49-00
50000 Datos de entrada: registro de código de control
50010 Datos de entrada: registro de referencia de bus
... ...
50200 Datos de salida: registro de código de estado de
50210 Datos de salida: registro del valor actual principal
Descripción
objeto de datos de convertidor de frecuencia
Índice de parámetro
0-99)
1-99)
2-99)
3-99)
4-99)
al 49-99)
de convertidor de frecuencia (CTW)
(REF)
convertidor de frecuencia (STW).
del convertidor de frecuencia (MAV).
Convertidor de frecuencia
listo
En rangos de frecuencia
1)
Tabla 3.37 Registros de retención
1) Utilizado para especicar el número de índice que se debe usar al
acceder a un parámetro indexado.
84 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 87

Integración del sistema Guía de diseño
3.9.10.9 Control del convertidor de
frecuencia
Los códigos disponibles para su uso en los campos de
datos y función de un mensaje Modbus RTU se enumeran
en el capétulo 3.9.10.10 Códigos de función admitidos por
Modbus RTU y el capétulo 3.9.10.11 Códigos de excepción
Modbus.
3.9.10.10 Códigos de función admitidos por
Modbus RTU
El Modbus RTU admite el uso de los códigos de función
(consulte la Tabla 3.38) en el campo de función de un
mensaje.
Función Código de función
(hex)
Leer bobinas 1
Leer registros de retención 3
Escribir una sola bobina 5
Escribir un solo registro 6
Escribir múltiples bobinas F
Escribir múltiples registros 10
Obtener contador de eventos de
comunicación
Informar de ID de esclavo 11
Tabla 3.38 Códigos de función
Función Código
de
función
Diagnóstico 8 1 Reiniciar comunicación
Tabla 3.39 Códigos de función y códigos de subfunción
Código de
subfunción
2 Devolver registro de
10 Borrar contadores y
11 Devolver recuento de
12 Devolver recuento de
13 Muestra el recuento de
14 Devolver recuento de
B
Subfunción
diagnóstico
registro de diagnóstico
mensajes de bus
errores de comunicación
de bus
errores de esclavo
mensajes de esclavo
3.9.10.11 Códigos de excepción Modbus
Para obtener una explicación completa sobre la estructura
de una excepción, consulte el capétulo 3.9.10.5 Campo de
función.
CódigoNombre Signicado
1 Función
incorrecta
2 Dirección de
datos
incorrecta
3 Valor de
datos
incorrecto
4 Fallo del
dispositivo
esclavo
Tabla 3.40 Códigos de excepción Modbus
El código de función recibido en la
petición no es una acción permitida para
el servidor (o esclavo). Esto puede ser
debido a que el código de la función solo
se aplica a dispositivos recientes y no se
implementó en la unidad seleccionada.
También puede indicar que el servidor (o
esclavo) se encuentra en un estado
incorrecto para procesar una petición de
este tipo, por ejemplo, porque no esté
congurado y se le pide devolver valores
registrados.
La dirección de datos recibida en la
petición no es una dirección admisible
para el servidor (o esclavo). Más concretamente, la combinación del número de
referencia y la longitud de transferencia
no es válida. Para un controlador con 100
registros, una petición con desviación 96 y
longitud 4 sería aceptada, mientras que
una petición con desviación 96 y longitud
5 genera una excepción 02.
Un valor contenido en el campo de datos
de solicitud no es un valor permitido para
el servidor (o esclavo). Esto indica un fallo
en la estructura de la parte restante de
una petición compleja como, por ejemplo,
la de que la longitud implicada es
incorrecta. NO signica, especícamente,
que un conjunto de datos enviado para
su almacenamiento en un registro tenga
un valor que se encuentra fuera de la
expectativa del programa de la aplicación,
ya que el protocolo Modbus no conoce el
signicado de cualquier valor
determinado de cualquier registro en
particular.
Un error irrecuperable se produjo
mientras el servidor (o esclavo) intentaba
ejecutar la acción solicitada.
3.9.11 Acceso a los parámetros
3.9.11.1 Gestión de parámetros
El PNU (número de parámetro) se traduce de la dirección
del registro contenida en el mensaje de lectura o escritura
Modbus. El número de parámetro se traslada a Modbus
como (10 × número de parámetro) decimal. Ejemplo:
Lectura parámetro 3-12 Catch up/slow Down Value (16 bit):
el registro de retención 3120 almacena el valor de los
parámetros. Un valor de 1352 (decimal) signica que el
parámetro está ajustado en 12,52 %
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 85
Page 88

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Integración del sistema
VLT® Refrigeration Drive FC 103
Lectura del parámetro 3-14 Referencia interna relativa (32
bits): los registros de retención 3410 y 3411 almacenan el
valor de los parámetros. Un valor de 11 300 (decimal)
signica que el parámetro está ajustado en 1113,00.
Para obtener más información sobre los parámetros, el
33
tamaño y el índice de conversión, consulte la Guía de
programación.
legibles van desde 1 registro (16 bits) hasta 10 registros (20
caracteres).
Tipos de datos no estándar
Los tipos de datos no estándar son cadenas de texto y se
almacenan como registros 4x (40001-4FFFF). Los
parámetros se leen utilizando la función 03 hex Read
Holding Registers (Lectura de registros de retención) y se
escriben utilizando la función 10 hex Preset Multiple
3.9.11.2 Almacenamiento de datos
Registers (Preajustar múltiples registros). Los tamaños
legibles van desde 1 registro (2 caracteres) hasta 10
El decimal de la bobina 65 determina si los datos escritos
registros (20 caracteres).
en el convertidor de frecuencia se almacenan en EEPROM y
RAM (bobina 65 = 1) o solo en RAM (bobina 65 = 0).
3.9.12 Perl de control del convertidor de
frecuencia
3.9.11.3 IND (índice)
3.9.12.1 Código de control de acuerdo con
Algunos de los parámetros del convertidor de frecuencia
son parámetro de matrices, p. ej., el
parámetro 3-10 Referencia interna. Dado que el Modbus no
es compatible con matrices en los registros de retención, el
convertidor de frecuencia ha reservado el registro de
retención 9 como indicador para la matriz. Antes de leer o
escribir un parámetro de matrices, congure el registro de
retención 9. Si se congura el registro de retención en el
valor 2, las siguientes lecturas/escrituras a los parámetros
de matrices estarán en el índice 2.
Ilustración 3.56 Código de control
el perl FC (parámetro 8-10 Trama
control=perl FC)
3.9.11.4 Bloques de texto
A los parámetros almacenados como cadenas de texto se
accede de la misma forma que a los restantes. El tamaño
máximo de un bloque de texto es 20 caracteres. Si se
realiza una petición de lectura de un parámetro por más
caracteres de los que el parámetro almacena, la respuesta
se trunca. Si la petición de lectura se realiza por menos
caracteres de los que el parámetro almacena, la respuesta
se rellena con espacios en blanco.
3.9.11.5 Factor de conversión
Debido a que un valor de parámetro solo puede
transferirse como un número entero, es necesario utilizar
un factor de conversión para transmitir las cifras decimales.
3.9.11.6 Valores de parámetros
Tipos de datos estándar
Los tipos de datos estándar son int 16, int 32, uint 8, uint
16 y uint 32. Se guardan como registros 4x (40001-4FFFF).
Los parámetros se leen utilizando la función 03 hex Read
Holding Registers (Lectura de registros de retención). Los
parámetros se escriben utilizando la función 6 hex Preset
Single Register (Preajustar registro único) para 1 registro (16
bits) y la función 10 Hex Preset Multiple Registers (Preajustar
múltiples registros) para 2 registros (32 bits). Los tamaños
86 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Bit Valor de bit = 0 Valor de bit = 1
00 Valor de referencia Selección externa, bit menos
signicativo (lsb)
01 Valor de referencia Selección externa, bit más
signicativo (msb)
02 Freno de CC Rampa
03 Funcionamiento por
inercia
04 Parada rápida Rampa
05 Mantener frecuencia de
salida
06 Parada de rampa Arranque
07 Sin función Reinicio
08 Sin función Velocidad ja
09 Rampa 1 Rampa 2
10 Datos no válidos Datos válidos
11 Sin función Relé 01 activo
12 Sin función Relé 02 activo
13 Ajuste de parámetros Selección del bit menos
14 Ajuste de parámetros Selección del bit más signi-
15 Sin función Cambio sentido
Tabla 3.41 Bits del código de control
Sin funcionamiento por
inercia
Usar rampa
signicativo (lsb)
cativo (msb)
Page 89
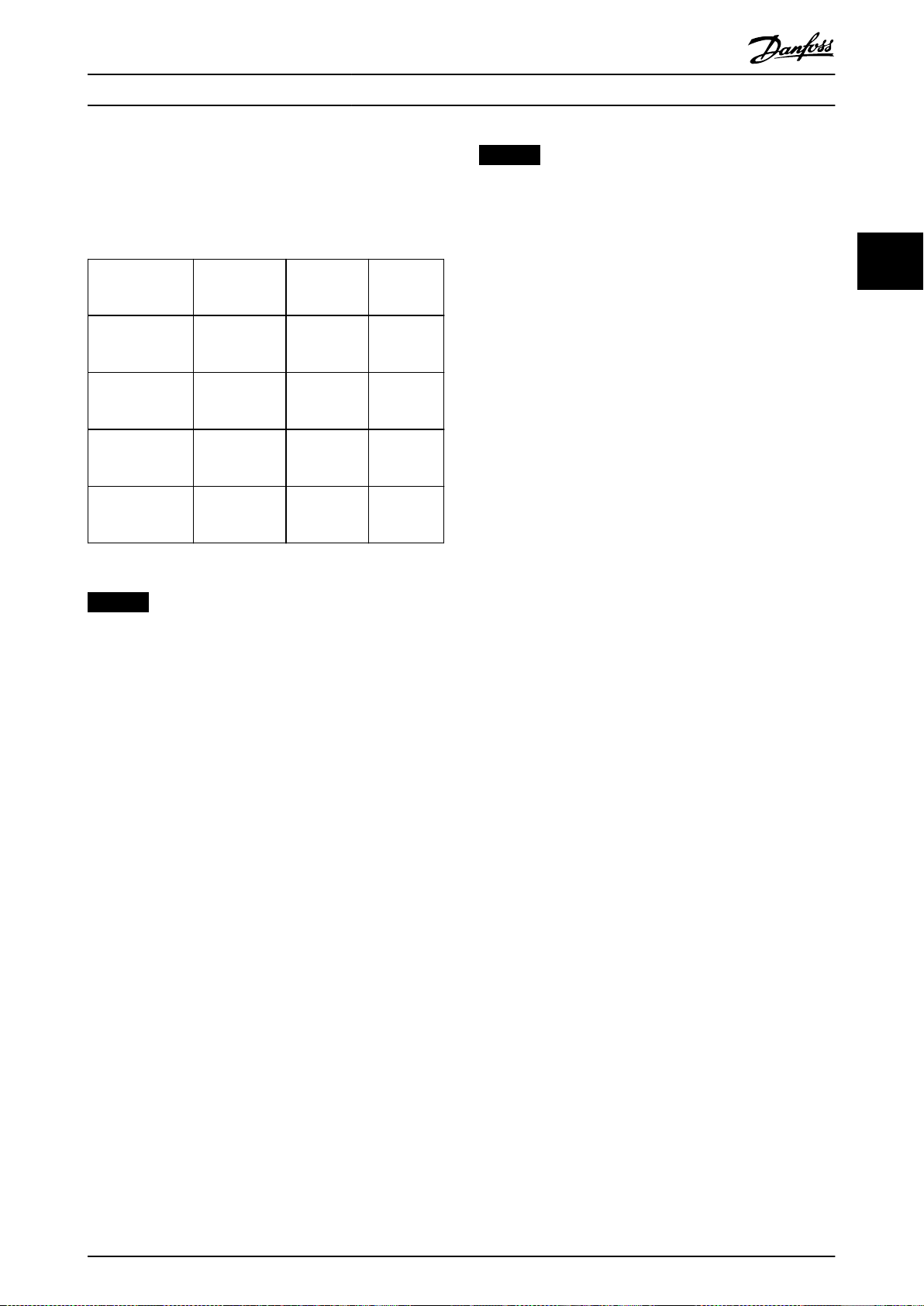
Integración del sistema Guía de diseño
Explicación de los bits de control
Bits 00/01
Los bits 00 y 01 se utilizan para seleccionar entre los
cuatro valores de referencia, que están preprogramados en
parámetro 3-10 Referencia interna, según la Tabla 3.42.
Valor de
referencia
programado
1 Parámetro 3-10
2 Parámetro 3-10
3 Parámetro 3-10
4 Parámetro 3-10
Tabla 3.42 Valores de referencia
Parámetro Bit 01 Bit 00
0 0
Referencia
interna [0]
0 1
Referencia
interna [1]
1 0
Referencia
interna [2]
1 1
Referencia
interna [3]
AVISO!
Haga una selección en parámetro 8-56 Selec. referencia
interna para denir cómo se direccionan los bits 00/01
con la función correspondiente en las entradas digitales.
Bit 02: freno de CC
El bit 02 = 0 causa el frenado de CC y la parada. Ajuste la
intensidad y duración de frenado en parámetro 2-01 Intens.
freno CC y en parámetro 2-02 Tiempo de frenado CC.
El bit 02 = 1 provoca una rampa.
Bit 03: funcionamiento por inercia
Bit 03=0: el convertidor de frecuencia libera inmediatamente al motor (los transistores de salida se desactivan)
y se produce inercia hasta la parada.
Bit 03=1: si se cumplen las demás condiciones de
arranque, el convertidor de frecuencia arranca el motor.
Haga una selección en parámetro 8-50 Selección inercia
para denir cómo se direcciona el bit 03 con la correspondiente función en una entrada digital.
Bit 04: parada rápida
Bit 04=0: hace decelerar el motor hasta pararse (se ajusta
en parámetro 3-81 Tiempo rampa parada rápida).
Bit 05: mantener la frecuencia de salida
Bit 05=0: la frecuencia de salida actual (en Hz) se
mantiene. Cambiar la frecuencia de salida mantenida
únicamente mediante las entradas digitales (de
parámetro 5-10 Terminal 18 Entrada digital a
parámetro 5-15 Terminal 33 entrada digital) programadas en
Aceleración y Enganc. abajo.
AVISO!
Si está activada la opción Mantener salida, detenga el
convertidor de frecuencia mediante:
Bit 03: paro por inercia.
•
Bit 02: frenado de CC.
•
Entrada digital (de parámetro 5-10 Terminal 18
•
Entrada digital a parámetro 5-15 Terminal 33
entrada digital) programada en Frenado de CC,
Paro por inercia o Reinicio y Paro por inercia.
Bit 06: parada/arranque de rampa
Bit 06=0: provoca una parada y hace que la velocidad del
motor decelere hasta detenerse mediante el parámetro de
rampa de deceleración seleccionado.
Bit 06=1: si se cumplen las demás condiciones de
arranque, se permite al convertidor de frecuencia arrancar
el motor.
Haga una selección en parámetro 8-53 Selec. arranque para
denir cómo se direcciona el bit 06 Parada/arranque de
rampa con la función correspondiente en una entrada
digital.
Bit 07: reinicio
Bit 07=0: sin reinicio.
Bit 07=1: reinicia una desconexión. El reinicio se activa en
el frente delantero de la señal, es decir, cuando cambia de
0 lógico a 1 lógico.
Bit 08: velocidad ja
Bit 08=1: Parámetro 3-19 Velocidad ja [RPM] determina la
frecuencia de salida.
Bit 09: selección de rampa 1/2
Bit 09=0: la rampa 1 está activa (de parámetro 3-41 Rampa
1 tiempo acel. rampa a parámetro 3-42 Rampa 1 tiempo
desacel. rampa).
Bit 09=1: la rampa 2 está activa (de parámetro 3-51 Rampa
2 tiempo acel. rampa a parámetro 3-52 Rampa 2 tiempo
desacel. rampa).
Bit 10: datos no válidos / datos válidos
Indica al convertidor de frecuencia si debe utilizar o
ignorar el código de control.
Bit 10=0: el código de control se ignora.
Bit 10=1: el código de control se utiliza. Esta función es
relevante porque el telegrama contiene siempre el código
de control, independientemente del tipo de telegrama.
Desactive el código de control si no se debe utilizar al
actualizar o leer parámetros.
Bit 11: relé 01
Bit 11=0: relé no activado.
Bit 11=1: relé 01 activado, siempre que se haya
seleccionado [36] Bit código control 11 en el
parámetro 5-40 Relé de función.
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 87
Page 90

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Integración del sistema
VLT® Refrigeration Drive FC 103
Bit 12, relé 04
Bit 12=0: el relé 04 no está activado.
Bit 12=1: relé 04 activado, siempre que se haya
seleccionado [37] Bit código control 12 en el
parámetro 5-40 Relé de función.
33
Bit 13/14: selección de ajuste
Utilice los bits 13 y 14 para elegir entre los cuatro ajustes
de menú, según la Tabla 3.43.
Ajuste Bit 14 Bit 13
1 0 0
2 0 1
3 1 0
4 1 1
Tabla 3.43 Especicación de los ajustes del menú
Esta función solamente es posible cuando se selecciona [9]
Ajuste activo en el parámetro 0-10 Ajuste activo.
Haga una selección en parámetro 8-55 Selec. ajuste para
denir cómo se direccionan los bits 13/14 con la función
correspondiente en las entradas digitales.
Bit 15: cambio del sentido
Bit Bit = 0 Bit = 1
00 Control no preparado Control prep.
01 Convertidor de frecuencia
no preparado
02 Funcionamiento por inercia Activar
03 Sin error Desconexión
04 Sin error Error (sin desconexión)
05 Reservado 06 Sin error Bloqueo por alarma
07 Sin advertencia Advertencia
08 Velocidad ≠ ref. Velocidad = referencia
09 Funcionamiento local Control de bus
10 Fuera del límite de
frecuencia
11 Sin función En funcionamiento
12 Convertidor de frecuenciaOKDetenido, arranque
13 Tensión OK Tensión excedida
14 Par OK Par excedido
15 Temporizador OK Temporizador excedido
Tabla 3.44 Bits del código de estado
Convertidor listo
Límite de frecuencia OK
automático
Bit 15=0: sin cambio de sentido.
Bit 15=1: Cambio de sentido. En los ajustes predeterminados, el cambio de sentido se ajusta a digital en
parámetro 8-54 Selec. sentido inverso. El bit 15 solo causa el
cambio de sentido cuando se ha seleccionado [1] Bus, [2]
Lógico Y o [3] Lógico O.
Explicación de los bits de estado
Bit 00: control no listo / listo
Bit 00=0: el convertidor de frecuencia se desconecta.
Bit 00=1: Los controles del convertidor de frecuencia están
preparados, pero el componente de potencia podría no
estar recibiendo suministro eléctrico (en el caso de
3.9.12.2 Código de estado conforme al
perl FC (STW)
(parámetro 8-10 Trama control =
perl FC)
suministro externo de 24 V a los controles).
Bit 01: convertidor de frecuencia preparado
Bit 01=1: el convertidor de frecuencia está listo para
funcionar, pero la orden de funcionamiento por inercia
esta activada mediante las entradas digitales o la comunicación serie.
Bit 02: paro por inercia
Bit 02=0: el convertidor de frecuencia libera el motor.
Bit 02=1: el convertidor de frecuencia arranca el motor con
una orden de arranque.
Ilustración 3.57 Código de estado
Bit 03: sin error / desconexión
Bit 03=0: el convertidor de frecuencia no está en modo de
fallo.
Bit 03=1: el convertidor de frecuencia se desconecta. Para
restablecer el funcionamiento, pulse [Reset].
Bit 04: sin error / error (sin desconexión)
Bit 04=0: el convertidor de frecuencia no está en modo de
fallo.
Bit 04=1: el convertidor de frecuencia muestra un error
pero no se desconecta.
Bit 05: sin uso
El bit 05 no se utiliza en el código de estado.
88 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 91
Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Integración del sistema Guía de diseño
Bit 06: sin error / bloqueo por alarma
Bit 06=0: el convertidor de frecuencia no está en modo de
fallo.
Bit 06=1: el convertidor de frecuencia se ha desconectado
y bloqueado.
Bit 07: sin advertencia / advertencia
Bit 07=0: No hay advertencias.
Bit 07=1: se ha producido una advertencia.
Bit 08: velocidad ≠ referencia / velocidad = referencia
Bit 08=0: el motor está funcionando pero la velocidad
Bit 15: temporizador OK / límite excedido
Bit 15=0: los temporizadores para la protección térmica del
motor y la protección térmica no han sobrepasado el
100 %.
Bit 15=1: uno de los temporizadores ha sobrepasado el
100 %.
Si se pierde la conexión entre la opción InterBus y el
convertidor de frecuencia, o si se produce un problema de
comunicación interna, todos los bits del STW se ajustan a
«0».
actual es distinta a la referencia interna de velocidad. Por
ejemplo, esto puede ocurrir cuando la velocidad sigue una
rampa hacia arriba o hacia abajo durante el arranque / la
3.9.12.3 Valor de referencia de velocidad de
bus
parada.
Bit 08=1: la velocidad del motor es igual a la referencia
interna de velocidad.
Bit 09: funcionamiento local / control de bus
Bit 09=0: [Stop/Reset] está activo en la unidad de control o
se selecciona [2] Local en el parámetro 3-13 Lugar de
referencia. No es posible el control mediante la comunicación serie.
El valor de referencia de la velocidad se transmite al
convertidor de frecuencia en forma de valor relativo en %.
El valor se transmite en forma de una palabra de 16 bits;
en enteros (0-32 767), el valor 16 384 (4000 Hex)
corresponde al 100 %. Las cifras negativas se codican en
complemento a 2. La frecuencia real de salida (MAV) se
escala de la misma forma que la referencia del bus.
Bit 09=1 Es posible controlar el convertidor de frecuencia a
través de la comunicación serie / el bus de campo.
Bit 10: fuera de límite de frecuencia
Bit 10=0: la frecuencia de salida ha alcanzado el valor
ajustado en parámetro 4-11 Límite bajo veloc. motor [RPM] o
parámetro 4-13 Límite alto veloc. motor [RPM].
Bit 10=1: la frecuencia de salida está dentro de los límites
denidos.
Ilustración 3.58 Frecuencia real de salida (MAV)
Bit 11: sin función / en funcionamiento
Bit 11=0: el motor no está en marcha.
Bit 11=1: el convertidor de frecuencia tiene una señal de
La referencia y la MAV se escalan de la siguiente forma:
arranque o la frecuencia de salida es superior a 0 Hz.
Bit 12, Convertidor OK/parado, arranque automático
Bit 12=0: no hay una sobretemperatura temporal en el
inversor.
Bit 12=1: el inversor se ha parado debido a una
temperatura excesiva, pero la unidad no se ha
desconectado y terminará su funcionamiento cuando la
temperatura disminuya.
Bit 13: tensión OK / límite excedido
Bit 13=0: no hay advertencias de tensión.
Bit 13=1: la tensión del bus de CC del convertidor de
frecuencia es demasiado baja o demasiado elevada.
Ilustración 3.59 Referencia y MAV
Bit 14: par OK / límite excedido
Bit 14=0: la intensidad del motor es inferior al límite de par
seleccionado en parámetro 4-18 Límite intensidad.
Bit 14=1: se ha sobrepasado el límite de par en
parámetro 4-18 Límite intensidad.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 89
3 3
Page 92

Integración del sistema
VLT® Refrigeration Drive FC 103
3.9.12.4 Código de control de acuerdo con
el perl de PROFIdrive (CTW)
El código de control se utiliza para enviar comandos de un
maestro (p. ej., un PC) a un esclavo.
33
Bit Bit = 0 Bit = 1
00 O 1 On 1
01 O 2 On 2
02 O 3 On 3
03 Funcionamiento por inercia Sin funcionamiento por
inercia
04 Parada rápida Rampa
05 Mantener la salida de
frecuencia
06 Parada de rampa Arranque
07 Sin función Reinicio
08 Velocidad ja 1 O Velocidad ja 1 On
09 Velocidad ja 2 O Velocidad ja 2 On
10 Datos no válidos Datos válidos
11 Sin función Enganche abajo
12 Sin función Enganche arriba
13 Ajuste de parámetros Selección del bit menos
14 Ajuste de parámetros Selección del bit más
15 Sin función Cambio sentido
Tabla 3.45 Bits del código de control
Explicación de los bits de control
Bit 00: APAGADO 1 / ENCENDIDO 1
Las paradas de rampa normal utilizan los tiempos de
rampa de la rampa actualmente seleccionada.
Bit 00=0 provoca una parada y la activación del relé de
salida 1 o 2 si la frecuencia de salida es 0 Hz y si se ha
seleccionado [31] Relay 123 en el parámetro 5-40 Relé de
función.
Cuando bit 0=1, el convertidor de frecuencia está en el
estado 1: Encendido inhibido.
Bit 01: o 2 / on 2
Paro por inercia
Si la frecuencia de salida es de 0 Hz y se ha seleccionado
[31] Relay 123 en el parámetro 5-40 Relé de función, cuando
el bit 01=0, se produce una parada por inercia y la
activación del relé de salida 1 o 2.
Bit 02: o 3 / on 3
Parada rápida utilizando el tiempo de rampa de
parámetro 3-81 Tiempo rampa parada rápida. Si la
frecuencia de salida es de 0 Hz y se ha seleccionado [31]
Relay 123 en el parámetro 5-40 Relé de función, cuando el
bit 02=0, se produce una parada rápida y la activación del
relé de salida 1 o 2.
Cuando bit 02=1, el convertidor de frecuencia está en
Estado 1: Encendido inhibido.
Usar rampa
signicativo (lsb)
signicativo (msb)
Bit 03: funcionamiento por inercia / sin inercia
Paro por inercia, bit 03=0 produce una parada.
Si se cumplen las demás condiciones de arranque, cuando
el bit 03=1, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en parámetro 8-50 Selección inercia
determina el enlace del bit 03 con la correspondiente
función de las entradas digitales.
Bit 04: parada rápida / rampa
Parada rápida utilizando el tiempo de rampa de
parámetro 3-81 Tiempo rampa parada rápida.
Cuando el bit 04=0, se produce una parada rápida.
Si se cumplen las demás condiciones de arranque, cuando
el bit 04=1, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en parámetro 8-51 Quick Stop Select
determina el enlace del bit 04 con la correspondiente
función de las entradas digitales.
Bit 05: mantener la salida de frecuencia / utilizar rampa
Cuando el bit 05=0, se mantiene la frecuencia de salida
actual aunque se cambie el valor de referencia.
Cuando bit 05=1, el convertidor de frecuencia realiza su
función reguladora de nuevo; el funcionamiento se
produce de acuerdo con el respectivo valor de referencia.
Bit 06: parada / arranque de rampa
La parada de rampa normal utiliza los tiempos de rampa
de la rampa actualmente seleccionada. Además, se activa
el relé de salida 01 o 04 si la frecuencia de salida es 0 Hz y
si se ha seleccionado [31] Relay 123 en el
parámetro 5-40 Relé de función.
Bit 06=0 da lugar a una parada.
Si se cumplen las demás condiciones de arranque, cuando
el bit 06=1, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en parámetro 8-53 Selec. arranque determina
el enlace del bit 06 con la correspondiente función de las
entradas digitales.
Bit 07: sin función / reinicio
Reinicio después de la desconexión.
Reconoce el evento en el buer defectuoso.
Cuando el bit 07=0, no se produce el reinicio.
Cuando hay un cambio de inclinación del bit 07 a 1, se
produce un reinicio después de la desconexión.
Bit 08: velocidad ja 1 o/on
Activación de la velocidad preprogramada en el
parámetro 8-90 Veloc Bus Jog 1. VELOCIDAD FIJA 1 solo es
posible si el bit 04=0 y el bit 00-03=1.
Bit 09: velocidad ja 2 o/on
Activación de la velocidad preprogramada en
parámetro 8-91 Veloc Bus Jog 2. Velocidad ja 2 solo es
posible si el bit 04=0 y el bit 00-03=1.
90 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 93

Integración del sistema Guía de diseño
Bit 10: datos no válidos / válidos
Indica al convertidor de frecuencia si debe utilizar o pasar
por alto el código de control.
El bit 10=0 hace que se pase por alto el código de control.
El bit 10=1 hace que se utilice el código de control. Esta
función es importante, debido a que el código de control
siempre está contenido en el telegrama, independientemente del tipo de telegrama que se emplee. Si no hay
que utilizarlo para actualizar o leer parámetros, será
posible desactivar el código de control.
Bit 11: sin función / ralentizar
Se utiliza para reducir el valor de referencia de velocidad
en la cantidad señalada en parámetro 3-12 Catch up/slow
Down Value.
Cuando el bit 11=0, no se producirá ninguna modicación
del valor de referencia.
Cuando el bit 11=1, el valor de referencia se reduce.
Bit 12: sin función / enganche arriba
Se utiliza para aumentar el valor de referencia de velocidad
en la cantidad señalada en el parámetro 3-12 Catch up/slow
Down Value.
Cuando el bit 12=0, no se producirá ninguna modicación
del valor de referencia.
Cuando el bit 12=1, el valor de referencia se incrementa.
Si tanto la deceleración como la aceleración están
activadas (bits 11 y 12=1), la deceleración tiene prioridad,
es decir, el valor de referencia de velocidad se reducirá.
Bits 13/14: selección de ajustes
Los bits 13 y 14 se utilizan para seleccionar entre los
cuatro ajustes de parámetros de acuerdo con la Tabla 3.46.
La función solo es posible cuando se selecciona [9] Ajuste
activo en parámetro 0-10 Ajuste activo. La selección del
parámetro 8-55 Selec. ajuste determina cómo los bits 13 y
14 enlazan con la función correspondiente de las entradas
digitales. Solo es posible modicar el ajuste durante el
funcionamiento si los ajustes se han enlazado en
parámetro 0-12 Ajuste actual enlazado a.
Ajuste Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Tabla 3.46 Selección de ajustes
Bit 15: sin función / cambio de sentido
El bit 15=0 hace que no haya cambio de sentido.
El bit 15=1 hace que haya un cambio de sentido.
AVISO!
En los ajustes de fábrica, el cambio de sentido se ajusta
a [0] Entrada digital en el parámetro 8-54 Selec. sentido
inverso.
AVISO!
El bit 15 solo causa el cambio de sentido cuando se ha
seleccionado [1] Bus, [2] Lógico Y o [3] Lógico O en el
parámetro 8-54 Selec. sentido inverso.
3.9.12.5 Código de estado según el perl
de PROFIdrive (STW)
El código de estado se utiliza para comunicar al maestro
(por ejemplo, un PC) el estado de un esclavo.
Bit Bit = 0 Bit = 1
00 Control no preparado Control prep.
01 Convertidor de
frecuencia no
preparado
02 Funcionamiento por
inercia
03 Sin error Desconexión
04 O 2 On 2
05 O 3 On 3
06 Arranque posible Arranque imposible
07 Sin advertencia Advertencia
08
09 Funcionamiento local Control de bus
10 Fuera del límite de
11 Sin función En funcionamiento
12 Convertidor de
13 Tensión OK Tensión excedida
14 Par OK Par excedido
15 Temporizador OK Temporizador excedido
Tabla 3.47 Bits del código de estado
Velocidad≠referencia
frecuencia
frecuencia OK
Explicación de los bits de estado
Bit 00: control no listo / listo
Cuando el bit 00=0, los bits 00, 01 o 02 del código de
control son 0 (OFF 1, OFF 2 o OFF 3) o el convertidor de
frecuencia se apaga (desconexión).
Cuando el bit 00=1, el control del convertidor de
frecuencia está preparado, pero no hay necesariamente
una fuente de alimentación a la unidad (en el caso de
suministro externo de 24 V del sistema de control).
Bit 01: convertidor de frecuencia no preparado /
preparado
Misma importancia que el bit 00, no obstante, hay
suministro desde la unidad de alimentación. El convertidor
de frecuencia está preparado cuando recibe las señales de
arranque necesarias.
Bit 02: funcionamiento por inercia / activar
Cuando el bit 02=0, los bits 00, 01 o 02 del código de
control son 0 (OFF 1, OFF 2 o OFF 3 o funcionamiento por
inercia) o el convertidor de frecuencia se apaga
(desconexión).
Convertidor listo
Activar
Velocidad = referencia
Límite de frecuencia OK
Detenido, arranque
automático
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 91
Page 94

Integración del sistema
VLT® Refrigeration Drive FC 103
Cuando bit 02=1, los bits 00, 01 o 02 del código de control
son 1; el convertidor de frecuencia no se ha desconectado.
Bit 03: sin error / desconexión
Cuando el bit 03=0, hay un estado sin error del
convertidor de frecuencia.
33
Cuando el bit 03=1, el convertidor de frecuencia se ha
desconectado y necesita una señal de reinicio para poder
arrancar.
Bit 04: on 2/o 2
Cuando el bit 01 del código de control es 0, el bit 04=0.
Cuando el bit 01 del código de control es 1, el bit 04=1.
Bit 05: on 3/o 3
Cuando el bit 02 del código de control es 0, el bit 05=0.
Cuando el bit 02 del código de control es 1, el bit 05=1.
Bit 06: arranque posible / arranque imposible
Si se ha seleccionado [1] Perl PROFIdrive en el
parámetro 8-10 Trama control, el bit 06 es 1 tras el recono-
cimiento de la desconexión, tras la activación de O2 u
O3 y tras la conexión de la tensión de red, se reinicia
Arranque imposible, el bit 00 del código de control se
ajusta a 0 y los bits 01, 02 y 10 se ajustan a 1.
Bit 07: sin advertencia / advertencia
El bit 07=0 signica que no hay advertencias.
Bit 07=1 signica que se ha producido una advertencia.
Bit 08: velocidad ≠ referencia / velocidad = referencia
Cuando el bit 08=0, la velocidad actual del motor se desvía
del valor de referencia de velocidad ajustado. Esto podría
suceder, por ejemplo, cuando la velocidad cambia durante
el arranque / la parada mediante una rampa de
aceleración/deceleración.
Cuando el bit 08=1, la velocidad del motor se corresponde
con el valor de referencia de velocidad ajustado.
Bit 09: funcionamiento local / control de bus
Bit 09=0 indica que el convertidor de frecuencia se ha
detenido mediante el botón [Stop] del LCP o que se ha
seleccionado [0] Conex. a manual/auto o [2] Local en el
parámetro 3-13 Lugar de referencia.
Cuando el bit 09=1, el convertidor de frecuencia se puede
controlar mediante la interfaz serie.
Bit 10: fuera del límite de frecuencia / límite de
frecuencia OK
Cuando el bit 10=0, la frecuencia de salida está fuera de
los límites ajustados en parámetro 4-52 Advert. Veloc. baja y
en parámetro 4-53 Advert. Veloc. alta.
Cuando el bit 10=1, la frecuencia de salida se encuentra
dentro de los límites indicados.
Bit 11: sin función / en funcionamiento
Cuando el bit 11=0, el motor no está en funcionamiento.
Cuando el bit 11=1, el convertidor de frecuencia tiene una
señal de arranque o la frecuencia de salida es mayor que 0
Hz.
Bit 12, convertidor de frecuencia OK/parado, arranque
automático
Cuando el bit 12=0, no hay sobrecarga temporal del
inversor.
Cuando el bit 12=1, el inversor se para debido a
sobrecarga. No obstante, el convertidor de frecuencia no
está apagado (desconectado) y arranca de nuevo cuando
naliza la sobrecarga.
Bit 13: tensión OK / tensión excedida
Cuando el bit 13=0, signica que no se han excedido los
límites de tensión del convertidor de frecuencia.
Cuando el bit 13=1, la tensión directa al enlace de CC del
convertidor de frecuencia es demasiado baja o demasiado
alta.
Bit 14: par OK / par excedido
Cuando el bit 14=0, el par del motor es inferior al límite
seleccionado en parámetro 4-16 Modo motor límite de par y
en parámetro 4-17 Modo generador límite de par.
Cuando el bit 14=1, se ha sobrepasado el límite
seleccionado en parámetro 4-16 Modo motor límite de par o
parámetro 4-17 Modo generador límite de par.
Bit 15: temporizador OK / temporizador excedido
Cuando el bit 15=0, los temporizadores para la protección
térmica del motor y la protección térmica del convertidor
de frecuencia, respectivamente, no han sobrepasado el
100 %.
Cuando el bit 15=1, uno de los temporizadores ha
sobrepasado el 100 %.
92 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 95
Integración del sistema Guía de diseño
3.10 Lista de vericación del diseño del sistema
Tabla 3.48 proporciona una lista de vericación para integrar un convertidor de frecuencia en un sistema de control de
motor. La función de la lista es servir de recordatorio de las categorías generales y las opciones necesarias para especicar
los requisitos del sistema.
Categoría Detalles Notas
Modelo de
convertidor
Potencia
Voltios
Corriente
Características físicas
Dimensiones
Peso
Condiciones ambientales de funcionamiento
Temperatura
Altitud
Humedad
Calidad del aire/polvo
Requisitos de reducción de
Tamaño de la
protección
Entrada
Cables
Tipo
Longitud
Fusibles
Tipo
Tamaño
Clasicación
Opciones
Conectores
Contactos
Filtros
Salida
Cables
Tipo
Longitud
Fusibles
Tipo
Tamaño
Clasicación
Opciones
Filtros
Control
Cableado
Tipo
Longitud
Conexiones de terminal
Comunicación
Protocolo
Conexión
potencia
☑
3 3
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 93
Page 96

Integración del sistema
VLT® Refrigeration Drive FC 103
Categoría Detalles Notas
Cableado
Opciones
Conectores
Contactos
33
Filtros
Motor
Tipo
Clasicación
Tensión
Opciones
Equipo y herramientas especiales
Movimiento y almacenamiento
Montaje
Conexión de la red de alimen-
tación
Tabla 3.48 Lista de vericación del diseño del sistema
☑
94 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 97

Ejemplos de aplicaciones Guía de diseño
4 Ejemplos de aplicaciones
4.1 Ejemplos de aplicaciones
VLT® Refrigeration Drive FC 103 está diseñado para aplicaciones de refrigeración. Entre la amplia gama de funciones
de serie y opcionales se incluye el SmartStart optimizado:
Alternancia del motor
•
La función de alternancia del motor resulta
adecuada para las aplicaciones con dos motores
que comparten un convertidor de frecuencia (por
ejemplo, aplicaciones de ventilador o de bomba).
AVISO!
No utilice la alternancia del motor con compresores.
Control de centrales
•
El control de centrales básico está integrado de
serie, con una capacidad de hasta tres
compresores. El control de centrales permite el
control de velocidad de un compresor particular
de un grupo de compresores. Para controlar hasta
seis compresores, utilice VLT® Extended Relay
Card MCB 113.
Control de temperatura de condensación
•
otante
Ahorra dinero mediante el control de la
temperatura exterior y haciendo que la
temperatura de condensación sea lo más baja
posible, lo cual reduce la velocidad del ventilador
y el consumo energético.
Gestión de retorno de aceite
•
La gestión de retorno de aceite mejora la
abilidad y la vida útil del compresor y garantiza
una lubricación adecuada, mediante el
seguimiento del compresor de velocidad variable.
Cuando ha estado funcionando durante un
tiempo determinado, aumenta la velocidad para
devolver el aceite al depósito
Seguimiento de baja presión y alta presión
•
Ahorra dinero reduciendo la necesidad de
reinicios in situ. El convertidor de frecuencia
controla la presión del sistema y, si esta alcanza
un nivel cercano al que acciona la válvula de
parada, el convertidor de frecuencia efectúa un
apagado de seguridad y rearranca poco después.
STO
•
La STO activa la Safe Torque O (inercia) cuando
se produce una situación grave.
Modo reposo
•
El modo reposo ahorra energía deteniendo la
bomba cuando no hay demanda.
Reloj en tiempo real.
•
Smart logic control (SLC)
•
El SLC comprende la programación de una
secuencia que consta de eventos y acciones. El
SLC ofrece una amplia gama de funciones de PLC
con comparadores, reglas lógicas y temporizadores.
4.2 Funciones de aplicación seleccionadas
4.2.1 SmartStart
Para congurar el convertidor de frecuencia del modo más
lógico y eciente, el texto y el lenguaje utilizados en el
convertidor de frecuencia deben ser perfectamente
comprensibles para los ingenieros e instaladores del sector
de la refrigeración. Para que la instalación sea aún más
ecaz, el menú del asistente de conguración integrado
guía al usuario a través de la
de frecuencia de una manera clara y estructurada.
Se contemplan las siguientes aplicaciones:
Control multicompresor.
•
Ventilador multi condensador, torre de refrige-
•
ración / condensación por evaporación.
Bomba y ventilador únicos.
•
Sistema de bomba.
•
Esta función se activa en el primer encendido, tras un
reinicio de fábrica o desde el menú rápido. Al activar el
asistente, el convertidor de frecuencia solicitará la
información que necesita para ejecutar la aplicación.
conguración del convertidor
4 4
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 95
Page 98

Ejemplos de aplicaciones
VLT® Refrigeration Drive FC 103
4.2.2 Arranque/parada
Terminal 18 = Arranque/parada, parámetro 5-10 Terminal 18
Entrada digital [8] Arranque.
Terminal 27 = Sin función, parámetro 5-12 Terminal 27
Entrada digital [0] Sin función (predeterminado: [2] Inercia).
Parámetro 5-10 Terminal 18 Entrada digital = [8]
Arranque (predeterminado).
4.2.3 Arranque/parada por pulsos
Terminal 18 = Arranque/parada, parámetro 5-10 Terminal 18
Entrada digital [9] Arranque por pulsos.
Terminal 27 = Parada parámetro 5-12 Terminal 27 Entrada
digital [6] Parada.
Parámetro 5-10 Terminal 18 Entrada digital = [9]
Arranque por pulsos.
44
Parámetro 5-12 Terminal 27 Entrada digital = [2]
Inercia (predeterminado).
Parámetro 5-12 Terminal 27 Entrada digital = [6]
Parada.
Ilustración 4.1 Terminal 37: Disponible solo con la función de
Safe Torque O (STO)
Ilustración 4.2 Terminal 37: solo disponible con la función STO
96 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
Page 99

Ejemplos de aplicaciones Guía de diseño
4.2.4 Referencia de potenciómetro
Referencia de tensión mediante un potenciómetro.
Parámetro 3-15 Fuente 1 de referencia [1] = Entrada
analógica 53
Parámetro 6-10 Terminal 53 escala baja V = 0 V
Parámetro 6-11 Terminal 53 escala alta V = 10 V
Parámetro 6-14 Term. 53 valor bajo ref./realim = 0
r/min
Parámetro 6-15 Term. 53 valor alto ref./realim =
1500 r/min
Interruptor S201 = OFF (U)
4 4
Ilustración 4.3 Referencia de tensión a través de un
potenciómetro
4.3 Ejemplos de conguración de la aplicación
Los ejemplos de esta sección pretenden ser una referencia rápida para aplicaciones comunes.
Los ajustes de parámetros son los valores regionales predeterminados, salvo que se indique lo contrario
•
(seleccionado en parámetro 0-03 Ajustes regionales).
Los parámetros asociados con los terminales y sus ajustes se muestran al lado de los dibujos.
•
También se muestran los ajustes de interruptor necesarios para los terminales analógicos A53 o A54.
•
AVISO!
Si se usa la función opcional STO, puede ser necesario un puente entre el terminal 12 (o 13) y el 37 para que el
convertidor de frecuencia funcione cuando esté usando los valores de programación ajustados en fábrica.
Ejemplo de aplicación del SLC
Una secuencia 1:
1. Arranque.
2. Rampa de aceleración.
3. Funcionamiento a la velocidad de referencia durante 2 s.
4. Rampa de desaceleración.
5. Detención del eje hasta la parada.
MG16G205 Danfoss A/S © 08/2015 Reservados todos los derechos. 97
Page 100
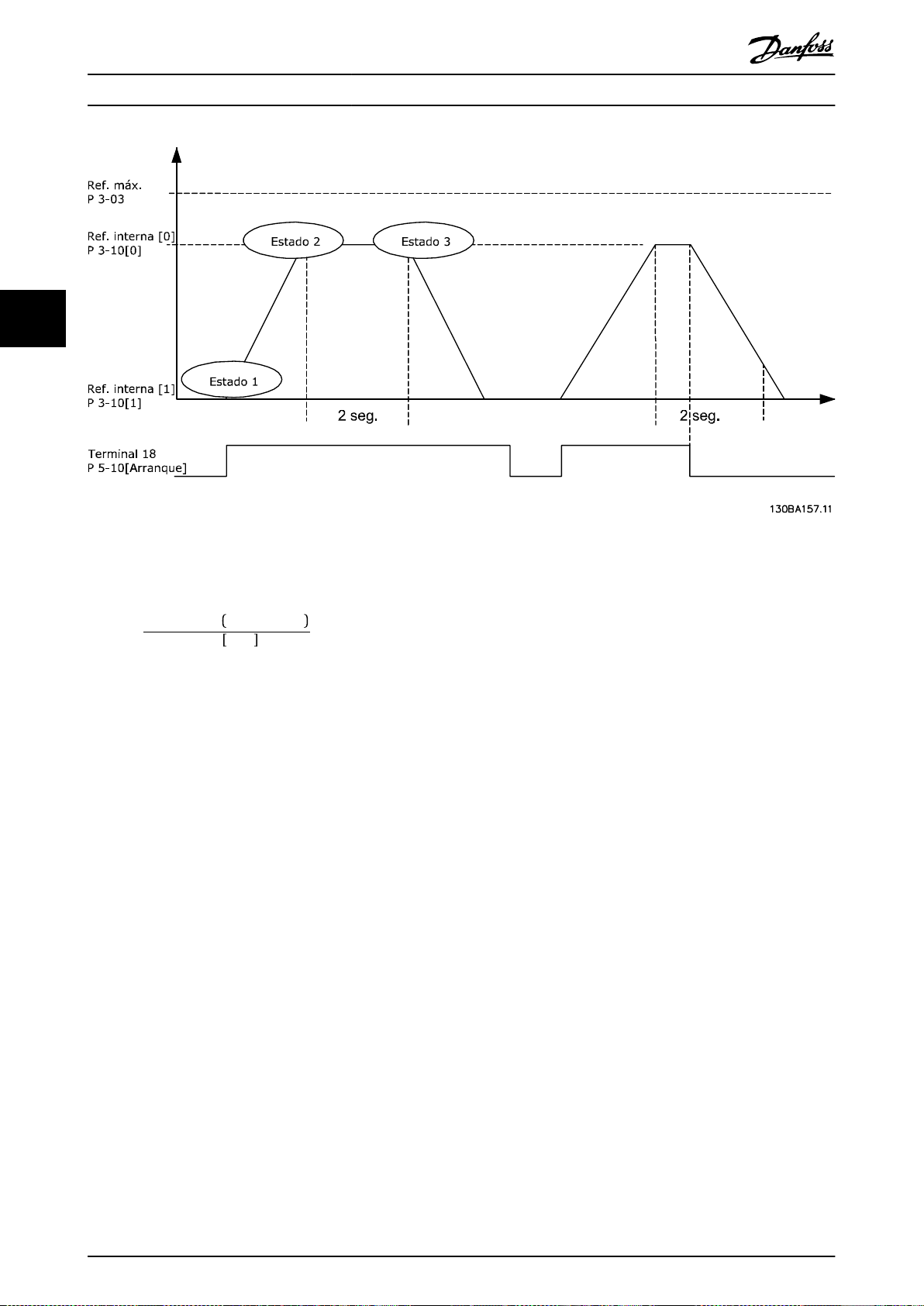
Ejemplos de aplicaciones
VLT® Refrigeration Drive FC 103
44
Ilustración 4.4 Aceleración de rampa / deceleración de rampa
Ajuste los tiempos de rampa en el parámetro 3-41 Rampa 1 tiempo acel. rampa y el parámetro 3-42 Rampa 1 tiempo desacel.
rampa a los valores deseados.
t
× n
acel.
=
t
rampa
Ajuste el terminal 27 a [0] Sin función (parámetro 5-12 Terminal 27 Entrada digital)
Ajuste la referencia interna 0 a la primera velocidad preajustada (parámetro 3-10 Referencia interna [0]) en forma de
porcentaje de la velocidad de referencia máxima (parámetro 3-03 Referencia máxima). Ejemplo: 60 %
Ajuste la referencia interna 1 a la segunda velocidad preajustada (parámetro 3-10 Referencia interna [1] Ejemplo: 0 % (cero).
Ajuste el temporizador 0 para una velocidad de funcionamiento constante en parámetro 13-20 Temporizador Smart Logic
Controller [0]. Ejemplo: 2 s
Ajuste el Evento 1 de parámetro 13-51 Evento Controlador SL [1] a [1] Verdadero.
Ajuste el Evento 2 de parámetro 13-51 Evento Controlador SL [2] a [4] En referencia.
Ajuste el Evento 3 de parámetro 13-51 Evento Controlador SL [3] a [30] Tiempo límite SL 0.
Ajuste el Evento 4 de parámetro 13-51 Evento Controlador SL [4] a [0] Falso.
Ajuste la Acción 1 de parámetro 13-52 Acción Controlador SL [1] a [10] Selec. ref. presel. 0.
Ajuste la Acción 2 de parámetro 13-52 Acción Controlador SL [2] a [29] Tempor. inicio 0.
Ajuste la Acción 3 de parámetro 13-52 Acción Controlador SL [3] a [11] Selec. ref. presel. 1.
Ajuste la Acción 4 de parámetro 13-52 Acción Controlador SL [4] a [1] Sin acción.
Ajuste el en el parámetro 13-00 Modo Controlador SL a ON.
El comando de arranque/parada se aplica en el terminal 18. Si se aplica la señal de parada, el convertidor de frecuencia se
desacelerará y pasará a modo libre.
par. . 1 − 25
norm
ref . RPM
98 Danfoss A/S © 08/2015 Reservados todos los derechos. MG16G205
 Loading...
Loading...