

MAKING MODERN LIVING POSSIBLE
Guida alla progettazione
VLT® Refrigeration Drive FC 103
1,1–90 kW
www.danfoss.it/vlt-drives

Sommario Guida alla progettazione
Sommario
1 Introduzione
1.1 Scopo della Guida alla Progettazione
1.2 Organizzazione
1.3 Risorse aggiuntive
1.4 Abbreviazioni, simboli e convenzioni
1.5 Simboli di sicurezza
1.6 Denizioni
1.7 Versione del documento e del software
1.8 Approvazioni e certicazioni
1.8.1 Marchio CE 10
1.8.1.1 Direttiva sulla bassa tensione 10
1.8.1.2 Direttiva EMC 10
1.8.1.3 Direttiva macchine 11
1.8.1.4 Direttiva ErP 11
1.8.2 Conformità C-tick 11
1.8.3 Conformità UL 11
1.8.4 Conformità alle norme ADN 11
7
7
7
7
8
9
9
10
10
1.8.5 Regolamentazioni sul controllo delle esportazioni 12
1.9 Sicurezza
1.9.1 Principi di sicurezza generali 12
2 Panoramica dei prodotti
2.1 Introduzione
2.2 Descrizione del funzionamento
2.3 Sequenza di funzionamento
2.3.1 Sezione raddrizzatore 18
2.3.2 Sezione intermedia 18
2.3.3 Sezione inverter 18
2.4 Strutture di controllo
2.4.1 Struttura di controllo ad anello aperto 18
2.4.2 Struttura di controllo ad anello chiuso 19
2.4.3 Comando locale (Hand On) e remoto (Auto On) 20
2.4.4 Gestione dei riferimenti 21
2.4.5 Gestione della retroazione 23
2.5 Funzioni operative automatizzate
12
14
14
17
18
18
24
2.5.1 Protezione contro i cortocircuiti 24
2.5.2 Protezione da sovratensione 24
2.5.3 Rilevamento di una fase del motore mancante 25
2.5.4 Rilevamento dello sbilanciamento della fase di rete 25
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 1
Sommario
VLT® Refrigeration Drive FC 103
2.5.5 Commutazione sull’uscita 25
2.5.6 Protezione da sovraccarico 25
2.5.7 Declassamento automatico 25
2.5.8 Ottimizzazione Automatica dell’Energia (Funzione AEO) 25
2.5.9 Modulazione Automatica della Frequenza di Commutazione 26
2.5.10 Declassamento per alta frequenza di commutazione 26
2.5.11 Declassamento automatico per sovratemperatura 26
2.5.12 Rampa automatica 26
2.5.13 Circuito limite di corrente 26
2.5.14 Prestazioni con variazione della potenza 26
2.5.15 Avviamento morbido del motore 26
2.5.16 Smorzamento risonanza 27
2.5.17 Ventole controllate in temperatura 27
2.5.18 Conformità EMC 27
2.5.19 Misurazioni della corrente su tutte e tre le fasi del motore 27
2.5.20 Isolamento galvanico di morsetti di controllo 27
2.6 Funzioni applicative personalizzate
2.6.1 Adattamento automatico motore 27
2.6.2 Protezione termica del motore 27
2.6.3 Caduta di tensione di rete 28
2.6.4 Controllori PID integrati 28
2.6.5 Riavvio automatico 28
2.6.6 Riaggancio al volo 29
2.6.7 Piena coppia a velocità ridotta 29
2.6.8 Bypass di frequenza 29
2.6.9 Preriscaldamento del motore 29
2.6.10 Quattro setup programmabili 29
2.6.11 Frenatura in CC 29
2.6.12 Funzione Sleep Mode 29
2.6.13 Abilitazione avviamento 29
2.6.14 Smart Logic Control (SLC) 29
2.6.15 Funzione Safe Torque O 31
27
2.7 Guasto, funzioni di avviso e di allarme
31
2.7.1 Funzionamento in presenza di sovratemperatura 31
2.7.2 Avviso riferimento alto e basso 32
2.7.3 Avviso retroazione alta e bassa 32
2.7.4 Sbilanciamento di fase o perdita di fase 32
2.7.5 Avviso di alta frequenza 32
2.7.6 Avviso bassa frequenza 32
2.7.7 Avviso corrente alta 32
2 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Sommario Guida alla progettazione
2.7.8 Avviso corrente bassa 32
2.7.9 Avviso carico nullo/cinghia rotta 32
2.7.10 Interfaccia seriale persa 32
2.8 Interfacce utente e programmazione
2.8.1 Pannello di controllo locale 33
2.8.2 Software PC 33
2.8.2.1 Software di congurazione MCT 10 34
2.8.2.2 Software di calcolo delle armoniche VLT® MCT 31 34
2.8.2.3 Software per il calcolo delle armoniche (HCS) 34
2.9 Manutenzione
2.9.1 Immagazzinamento 35
3 Integrazione nel sistema
3.1 Condizioni ambientali di funzionamento
3.1.1 Umidità 37
3.1.2 Temperatura 37
3.1.3 Rareddamento 37
3.1.4 Sovratensione generata dal motore 38
3.1.5 Rumorosità acustica 38
3.1.6 Vibrazioni e urti 38
3.1.7 Atmosfere aggressive 39
32
34
36
37
3.1.8 Denizioni del grado IP 39
3.1.9 Interferenza in radiofrequenza 40
3.1.10 Conformità all'isolamento PELV e galvanico 41
3.2 EMC, armoniche e protezione dalla dispersione verso terra
3.2.1 Considerazioni generali sulle emissioni EMC 41
3.2.2 Risultati test EMC (emissione) 43
3.2.3 Requisiti relativi alle emissioni 44
3.2.4 Requisiti di immunità 44
3.2.5 Isolamento del motore 45
3.2.6 Correnti nei cuscinetti del motore 45
3.2.7 Armoniche 46
3.2.8 Corrente di dispersione verso massa 49
3.3 Ecienza energetica
3.3.1 Classi IE e IES 51
3.3.2 Dati sulla perdita di potenza e dati sul rendimento 51
3.3.3 Perdite e rendimento di un motore 52
3.3.4 Perdite e rendimento di un sistema motorizzato 53
41
51
3.4 Integrazione della rete
3.4.1 Congurazioni di rete ed eetti EMC 53
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 3
53
Sommario
VLT® Refrigeration Drive FC 103
3.4.2 Interferenza di rete a bassa frequenza 53
3.4.3 Analisi dell'interferenza di rete 54
3.4.4 Opzioni per la riduzione dell'interferenza di rete 54
3.4.5 Interferenza in radiofrequenza 55
3.4.6 Classicazione del sito operativo 55
3.4.7 Uso con sorgente d'ingresso isolata 55
3.4.8 Correzione del fattore di potenza 56
3.4.9 Ritardo dell'alimentazione di ingresso 56
3.4.10 Transitori di rete 56
3.4.11 Funzionamento con un generatore di stand-by 56
3.5 Integrazione del motore
3.5.1 Considerazioni per la scelta del motore 57
3.5.2 Filtri sinusoidali e dU/dt 57
3.5.3 Corretta messa a terra del motore 57
3.5.4 Cavi motore 57
3.5.5 Schermatura del cavo motore 58
3.5.6 Collegamento di motori multipli 58
3.5.7 Protezione termica del motore 60
3.5.8 Contattore di uscita 60
3.5.9 Ecienza energetica 60
3.6 Ingressi e uscite supplementari
3.6.1 Schema di cablaggio 62
3.6.2 Collegamenti relè 63
3.6.3 Installazione elettrica conforme ai requisiti EMC 64
3.7 Pianicazione meccanica
3.7.1 Spazio 65
3.7.2 Montaggio a muro 65
57
62
65
3.7.3 Accesso 66
3.8 Opzioni e accessori
3.8.1 Opzioni di comunicazione 69
3.8.2 Opzioni di ingresso/uscita, retroazione e sicurezza 69
3.8.3 Filtri sinusoidali 69
3.8.4 Filtri dU/dt 69
3.8.5 Filtri antiarmoniche 69
3.8.6 Kit contenitore IP21/NEMA Tipo 1 70
3.8.7 Filtri di modo - comune 72
3.8.8 Kit di montaggio remoto per LCP 72
3.8.9 Staa di montaggio per dimensioni contenitore A5, B1, B2, C1 e C2 73
3.9 Interfaccia seriale RS485
3.9.1 Panoramica 74
4 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
66
74
Sommario Guida alla progettazione
3.9.2 Collegamento in rete 75
3.9.3 Terminazione bus RS485 75
3.9.4 Precauzioni EMC 75
3.9.5 Panoramica del protocollo FC 76
3.9.6 Congurazione della rete 76
3.9.7 Struttura frame messaggio protocollo FC 76
3.9.8 Esempi del protocollo FC 80
3.9.9 Protocollo Modbus RTU 81
3.9.10 Struttura frame messaggio Modbus RTU 82
3.9.11 Accesso ai parametri 85
3.9.12 Prolo di controllo convertitore di frequenza FC 86
3.10 Lista di controllo della progettazione
4 Esempi applicativi
4.1 Esempi applicativi
4.2 Funzioni selezionate dell'applicazione
4.2.1 SmartStart 95
4.2.2 Avviamento/arresto 96
4.2.3 Avviamento/arresto a impulsi 96
4.2.4 Riferimento del potenziometro 97
4.3 Esempi di setup dell'applicazione
5 Condizioni speciali
5.1 Declassamento
5.2 Declassamento manuale
5.3 Declassamento per cavi motore lunghi o per cavi con sezione trasversale maggiore
5.4 Declassamento in base alla temperatura ambiente
6 Codice tipo e guida alla selezione
93
95
95
95
97
103
103
103
104
104
109
6.1 Ordine
6.1.1 Introduzione 109
6.1.2 Codice identicativo 109
6.2 Opzioni, accessori e ricambi
6.2.1 Numeri d'ordine: Opzioni e accessori 110
6.2.2 Numeri d'ordine: Filtri antiarmoniche 113
6.2.3 Numeri d'ordine: Moduli ltro sinusoidali, 200–480 V CA 113
6.2.4 Numeri d'ordine: Moduli ltro sinusoidali, 525-600/690 V CA 114
6.2.5 Filtri antiarmoniche 115
6.2.6 Filtri sinusoidali 117
6.2.7 Filtri dU/dt 118
6.2.8 Filtri modo - comune 119
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 5
109
110

Sommario
VLT® Refrigeration Drive FC 103
7 Speciche
7.1 Dati elettrici
7.1.1 Alimentazione di rete 3x200–240 V CA 120
7.1.2 Alimentazione di rete 3x380–480 V CA 122
7.1.3 Alimentazione di rete 3x525–600 V CA 124
7.2 Alimentazione di rete
7.3 Uscita motore e dati motore
7.4 Condizioni ambientali
7.5 Speciche dei cavi
7.6 Ingresso/uscita di dati e di controllo
7.7 Coppia di serraggio della connessione
7.8 Fusibili e interruttori
7.9 Potenze nominali, peso e dimensioni
7.10 Test dU/dt
7.11 Valori nominali di rumorosità acustica
7.12 Opzioni selezionate
7.12.1 Modulo MCB 101 VLT® General Purpose I/O 141
120
120
126
126
127
127
128
131
131
137
138
141
141
7.12.2 VLT® Relay Card MCB 105 141
7.12.3 VLT® Extended Relay Card MCB 113 143
8 Appendice - disegni selezionati
8.1 Disegni collegamento di rete
8.2 Disegni collegamento del motore
8.3 Disegni morsetto relè
8.4 Fori di ingresso dei cavi
Indice
146
146
149
151
152
157
6 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Introduzione Guida alla progettazione
1 Introduzione
1.1 Scopo della Guida alla Progettazione
La presente guida alla progettazione per convertitori di
frequenza VLT® Refrigeration Drive FC 103 è concepita per:
Progettisti e sistemisti.
•
Consulenti di progettazione.
•
Specialisti delle applicazioni e di prodotto.
•
La Guida alla Progettazione fornisce informazioni tecniche
per comprendere le capacità del convertitore di frequenza
per l'integrazione nel controllo del motore e nei sistemi di
monitoraggio.
Lo scopo della Guida alla Progettazione è quello di fornire
requisiti di progettazione e dati di progettazione per l'integrazione del convertitore di frequenza in un sistema. La
Guida alla Progettazione provvede alla selezione di convertitori di frequenza e opzioni per una varietà di applicazioni
e installazioni.
Capitolo 7 Speciche: Una raccolta di dati tecnici in tabelle
e graci.
Capitolo 8 Appendice - disegni selezionati: Una raccolta di
graci che illustrano:
Collegamenti alla rete e del motore
•
Morsetti relè
•
Entrate cavi
•
1.3 Risorse aggiuntive
Risorse di supporto alla comprensione del funzionamento
avanzato del convertitore di frequenza, della programmazione e della conformità alle direttive:
Il Manuale di funzionamento VLT® Refrigeration
•
Drive FC 103 (denominato manuale di funzionamento nel presente manuale) fornisce
informazioni dettagliate per l'installazione e
l'avviamento del convertitore di frequenza.
1 1
Il riesame delle informazioni di prodotto dettagliate nella
fase di progettazione consente di sviluppare un sistema
ben concepito con funzionalità ed
VLT® è un marchio registrato.
Organizzazione
1.2
Capitolo 1 Introduzione: Lo scopo generale della Guida alla
Progettazione e la conformità alle direttive internazionali.
Capitolo 2 Panoramica dei prodotti: La struttura interna e la
funzionalità del convertitore di frequenza e le caratteristiche di funzionamento.
Capitolo 3 Integrazione nel sistema: Condizioni ambientali;
EMC, armoniche e dispersione verso massa; ingresso di
rete; motori e collegamenti del motore; altri collegamenti;
pianicazione meccanica; e descrizione delle opzioni e
accessori disponibili.
Capitolo 4 Esempi applicativi: Esempi di applicazioni del
prodotto e istruzioni per l'uso.
Capitolo 5 Condizioni speciali: Dettagli su ambienti di
funzionamento inconsueti.
Capitolo 6 Codice tipo e guida alla selezione: Procedure per
l'ordinazione di apparecchiature e opzioni per soddisfare
l'uso previsto del sistema.
ecienza ottimali.
La Guida alla Progettazione VLT® Refrigeration
•
Drive FC 103 fornisce le informazioni richieste per
la progettazione e la pianicazione per l'integrazione del convertitore di frequenza in un
sistema.
La Guida alla Programmazione VLT® Refrigeration
•
Drive FC 103 (denominata guida alla programmazione nel presente manuale) fornisce
informazioni dettagliate su come lavorare con i
parametri, nonché diversi esempi applicativi.
Il Manuale di funzionamento VLT® Safe Torque O
•
descrive come usare i convertitori di frequenza
Danfoss in applicazioni di sicurezza funzionale.
Questo manuale viene fornito con il convertitore
di frequenza quando è presente l'opzione STO.
Ulteriori pubblicazioni e manuali sono disponibili per il
download all'indirizzo vlt-drives.danfoss.com/Products/Detail/
Technical-Documents.
AVVISO!
Sono disponibili dispositivi opzionali che possono
riportare informazioni diverse da quelle presenti in
queste pubblicazioni. Assicurarsi di leggere le istruzioni
fornite con le opzioni per i requisiti specici.
Contattare un fornitore Danfoss o visitare www.danfoss.com
per maggiori informazioni.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 7
Introduzione
VLT® Refrigeration Drive FC 103
11
1.4 Abbreviazioni, simboli e convenzioni
mm Millimetri
ms Millisecondo
60° AVM Modulazione vettoriale asincrona 60°
A Ampere/AMP
CA Corrente alternata
AD Air Discharge (scarica in aria)
AEO Ottimizzazione automatica dell'energia
AI Ingresso analogico
AMA Adattamento automatico motore
AWG American Wire Gauge
°C
Gradi Celsius
CD Constant discharge (scarica costante)
CDM Modulo convertitore di frequenza completo: il
convertitore di frequenza, la sezione di alimen-
tazione e le apparecchiature ausiliarie
CM Common mode (modo - comune)
CT Coppia costante
CC Corrente continua
DI Ingresso digitale
DM Dierential Mode (modalità dierenziale)
D-TYPE In funzione del convertitore di frequenza
EMC Compatibilità elettromagnetica
FEM Forza elettromotrice
ETR Relè termico elettronico
f
JOG
Frequenza del motore quando viene attivata la
funzione Marcia jog.
f
f
M
MAX
Frequenza motore
La frequenza di uscita massima che il convertitore
di frequenza applica sulla sua uscita.
f
MIN
La frequenza minima del motore dal convertitore
di frequenza
f
M,N
Frequenza nominale motore
FC Convertitore di frequenza
g Grammo
Hiperface®Hiperface® è un marchio registrato da Stegmann
HO Sovraccarico elevato
cv Cavallo vapore
HTL Encoder HTL (10-30 V) impulsi - logica transistor
ad alta tensione
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
Corrente nominale di uscita dell'inverter
Limite di corrente
Corrente nominale del motore
Corrente di uscita massima
Corrente di uscita nominale fornita dal conver-
titore di frequenza
kHz Kilohertz
LCP Pannello di controllo locale
lsb Bit meno signicativo
m Metro
mA Milliampere
MCM Mille circular mil
MCT Motion Control Tool
mH Induttanza in milli henry
msb Bit più signicativo
η
VLT
Il rendimento del convertitore di frequenza
denito come rapporto tra la potenza in uscita e
la potenza in ingresso.
nF Capacità in nano Farad
NLCP Pannello di controllo locale numerico
Nm Newton meter
NO Sovraccarico normale
n
s
Parametri
online/oine
Velocità del motore sincrono
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei
dati.
P
br,cont.
Potenza nominale della resistenza di frenatura
(potenza media durante la frenatura continua).
PCB Scheda di circuito stampato
PCD Dati di processo
PDS Sistema di azionamento elettrico: un CDM e un
motore
PELV Tensione di protezione bassissima
P
m
Potenza di uscita nominale del convertitore di
frequenza come sovraccarico elevato (HO).
P
M,N
Potenza nominale motore
Motore PM Motore a magneti permanenti
PID di
processo
Controllore PID (Proporzionale Integrale
Derivativo) che mantiene la velocità, pressione,
temperatura, ecc..
R
br,nom
Il valore nominale della resistenza che assicura
una potenza di frenatura sull'albero motore pari al
150/160% per 1 minuto
RCD Dispositivo a corrente residua
Regen Morsetti rigenerativi
R
min
Valore minimo consentito della resistenza di
frenatura da parte del convertitore di frequenza
RMS Radice della media del quadrato
Giri/min. Giri al minuto
R
rec
Resistenza di frenatura consigliata per resistenze
freno Danfoss
s Secondo
SFAVM Modulazione vettoriale asincrona orientata
secondo il usso dello statore
STW Parola di stato
SMPS Alimentazione a commutazione
THD Distorsione armonica totale
T
LIM
Limite di coppia
TTL Encoder TTL (5 V) impulsi - logica transistor-
transistor
U
M,N
Tensione nominale motore
V Volt
VT Coppia variabile
VVC+
Controllo vettoriale della tensione plus
Tabella 1.1 Abbreviazioni
8 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Introduzione Guida alla progettazione
Convenzioni
Gli elenchi numerati indicano le procedure.
Gli elenchi puntati indicano altre informazioni e una
descrizione delle illustrazioni.
Il testo in corsivo indica:
Riferimento incrociato.
•
Collegamento.
•
Nota a piè di pagina.
•
Nomi di parametri, gruppi di parametri o opzioni
•
dei parametri
Tutte le dimensioni sono in mm (pollici).
* indica un'impostazione di fabbrica di un parametro.
1.5 Simboli di sicurezza
Nel presente manuale vengono utilizzati i seguenti simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
1.6 Denizioni
Ruota libera
L'albero motore è in evoluzione libera. Nessuna coppia sul
motore.
Caratteristiche CT
Caratteristiche di coppia costante usate per tutte le
applicazioni come:
Nastri trasportatori.
•
Pompe volumetriche.
•
Gru.
•
Inizializzazione
Se viene eseguita un'inizializzazione (parametro 14-22 Modo
di funzionamento), il convertitore di frequenza ritorna
all'impostazione di fabbrica.
Duty cycle intermittente
Un ciclo di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire sia con servizio periodico sia aperiodico.
Fattore di potenza
Il fattore di potenza reale (lambda) considera tutte le
armoniche. Il fattore di potenza reale è sempre inferiore al
fattore di potenza (cosphi) che considera solo la 1a
armonica di corrente e di tensione.
cosϕ =
Cosphi è anche noto come fattore di potenza dovuto allo
sfasamento.
Sia lambda che cosphi sono indicati per convertitori di
frequenza Danfoss Danfoss VLT® in capitolo 7.2 Alimen-
tazione di rete.
Il fattore di potenza indica in che misura il convertitore di
frequenza impone un carico sull'alimentazione di rete.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
Inoltre, un fattore di potenza elevato indica che le correnti
armoniche sono basse.
Tutti i convertitori di frequenza Danfoss possiedono bobine
integrate nel collegamento CC. Le bobine assicurano un
elevato fattore di potenza e riducono la distorsione
armonica totale sulla rete di alimentazione.
Setup
Salvare le impostazioni parametri in 4 setup. Cambiare tra
le 4 programmazioni di parametri e
mentre è attivo un altro setup.
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico rilevato
del motore, mantenendo costante la velocità del motore.
Smart logic control (SLC)
L'SLC è una sequenza di azioni denite dall'utente, che
vengono eseguite quando gli eventi associati deniti
dall'utente sono valutati come TRUE dall'SLC. (Gruppo di
parametri 13-** Smart logic).
Bus standard FC
Include il bus RS485 con protocollo FC o protocollo MC.
Vedere parametro 8-30 Protocollo.
Termistore
Una resistenza dipendente dalla temperatura, installata nei
punti in cui deve essere controllata la temperatura (convertitore di frequenza o motore).
Scatto
Uno stato di allarme nel quale si entra in situazioni di
guasto, come quando il convertitore di frequenza è
soggetto a un surriscaldamento o quando protegge il
motore, un processo o un meccanismo. Il riavvio viene
impedito nché la causa del guasto non è scomparsa e lo
stato di scatto viene annullato. Annullare lo stato di scatto
tramite:
P kW
P kVA
attivazione del ripristino oppure
•
programmazione del convertitore di frequenza
•
anché si ripristini automaticamente
UλxIλxcosϕ
=
UλxIλ
RMS
per lo stesso rendimento in kW.
modicare un setup
1 1
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 9
Introduzione
VLT® Refrigeration Drive FC 103
11
Non usare lo scatto per la sicurezza personale.
Scatto bloccato
Uno stato di allarme che si verica in situazioni di guasto
quando il convertitore di frequenza entra in autoprotezione
e che richiede un intervento manuale, per esempio il
convertitore di frequenza è soggetto a un cortocircuito
sull'uscita. Uno scatto bloccato può essere annullato
scollegando la rete, eliminando la causa del guasto e
ricollegando il convertitore di frequenza all'alimentazione. Il
riavvio viene impedito no a che lo stato di scatto non
viene eliminato attivando il ripristino o, in alcuni casi,
tramite la programmazione di un ripristino automatico.
Non usare lo scatto per la sicurezza personale.
Caratteristiche del VT
Caratteristiche coppia variabile per pompe e ventole.
1.7 Versione del documento e del software
Il presente manuale è revisionato e aggiornato
regolarmente. Tutti i suggerimenti per migliorare sono ben
accetti.
Tabella 1.2 mostra la versione del documento e la versione
software corrispondente.
Edizione Osservazioni Versione software
MG16G2xx Sostituisce MG16G1xx 1.4x
Tabella 1.2 Versione del documento e del software
AVVISO!
I convertitori di frequenza con una funzione di sicurezza
integrata devono soddisfare la direttiva macchine.
Direttiva UE Versione
Direttiva sulla bassa tensione 2014/35/EU
Direttiva EMC 2014/30/EU
Direttiva macchine
Direttiva ErP 2009/125/EC
Direttiva ATEX 2014/34/EU
Direttiva RoHS 2002/95/EC
Tabella 1.3 Direttive UE applicabili ai convertitori di frequenza
1) La conformità alla direttiva macchine è richiesta esclusivamente
per convertitori di frequenza con una funzione di sicurezza integrata.
Le dichiarazioni di conformità sono disponibili su richiesta.
1)
1.8.1.1 Direttiva sulla bassa tensione
La direttiva sulla bassa tensione concerne tutte le apparecchiature elettriche funzionanti negli intervalli di tensione
compresi fra 50 e 1000 V CA e fra 75 e 1600 V CC.
L'obiettivo della direttiva è quello di garantire la sicurezza
personale ed evitare danni alla proprietà quando vengono
fatte funzionare apparecchiature elettriche che sono
installate e mantenute correttamente, nella loro
applicazione prevista.
2014/32/EU
Approvazioni e certicazioni
1.8
I convertitori di frequenza sono progettati in conformità
con le direttive descritte in questa sezione.
Per maggiori informazioni su approvazioni e certicati,
andare all'area di download all'indirizzo vlt-
marine.danfoss.com/support/type-approval-certicates/.
1.8.1 Marchio CE
Disegno 1.1 CE
Il marchio CE (Comunità Europea) indica che il fabbricante
del prodotto rispetta tutte le direttive UE pertinenti. Le
direttive UE applicabili alla progettazione e alla produzione
di convertitori di frequenza sono elencate in Tabella 1.3
AVVISO!
Il marchio CE non regola la qualità del prodotto. Le
speciche tecniche non possono essere dedotte dal
marchio CE.
1.8.1.2 Direttiva EMC
Lo scopo della direttiva EMC (compatibilità elettromagnetica) è quello di ridurre l'interferenza elettromagnetica
e migliorare l'immunità delle apparecchiature e degli
impianti elettrici. Il requisito di protezione di base della
direttiva EMC aerma che i dispositivi che generano
interferenza elettromagnetica (EMI), o il cui funzionamento
potrebbe essere soggetto a interferenze elettromagnetiche,
devono essere progettati per limitare la generazione di
interferenze elettromagnetiche e devono avere un livello di
immunità adatto alle interferenze elettromagnetiche
quando sono correttamente installate, sottoposte a
manutenzione e usate come previsto.
I dispositivi elettrici usati da soli o come parte di un
sistema devono recare il marchio CE. I sistemi non
richiedono il marchio CE ma devono soddisfare i requisiti
di protezione di base della direttiva EMC.
10 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Introduzione Guida alla progettazione
1.8.1.3 Direttiva macchine
L'obiettivo della direttiva macchine è di garantire la
sicurezza personale ed evitare danni alla proprietà per
apparecchiature meccaniche utilizzate nella loro
applicazione prevista. La direttiva macchine vale per una
macchina composta da un gruppo di componenti o
dispositivi interconnessi, dei quali almeno uno è in grado
di eseguire un movimento meccanico.
I convertitori di frequenza con una funzione di sicurezza
integrata devono soddisfare la direttiva macchine. I convertitori di frequenza senza la funzione di sicurezza non
rientrano nella Direttiva macchine. Se un convertitore di
frequenza è integrato in un sistema di macchinari, Danfoss
fornisce informazioni sugli aspetti di sicurezza relativi al
convertitore di frequenza.
Quando i convertitori di frequenza vengono usati in
macchine con almeno una parte mobile, il produttore della
macchina deve fornire una dichiarazione che attesti la
conformità con tutti le normative e le misure di sicurezza
pertinenti.
1.8.1.4 Direttiva ErP
La direttiva ErP è la direttiva europea Eco-design per
prodotti connessi all'energia. La direttiva impone requisiti
ecodesign per prodotti connessi all'energia, inclusi i
convertitori di frequenza. L'obiettivo della direttiva è quello
di aumentare l'ecienza energetica e il livello di protezione
dell'ambiente, aumentando allo stesso tempo la sicurezza
dell'alimentazione energetica. L'impatto ambientale dei
prodotti connessi all'energia include il consumo energetico
attraverso l'intero ciclo di vita del prodotto.
1.8.2 Conformità C-tick
Disegno 1.2 C-tick
Il marchio C-tick indica la conformità con le norme
tecniche applicabili per la compatibilità elettromagnetica
(EMC). La conformità C-tick è richiesta per posizionare i
dispositivi elettrici ed elettronici sul mercato in Australia e
Nuova Zelanda.
1.8.3 Conformità UL
Certicato UL
Disegno 1.3 UL
AVVISO!
I convertitori di frequenza da 525–690 V non sono
certicati per UL.
Il convertitore di frequenza soddisfa i requisiti UL 508C di
protezione della memoria termica. Per maggiori
informazioni, consultare capitolo 2.6.2 Protezione termica del
motore.
1.8.4 Conformità alle norme ADN
Le unità con classe di protezione IP55 (NEMA 12), o
superiore, impediscono la formazione di scintille e sono
classicate come apparecchi elettrici a limitato rischio di
esplosione, in conformità all'Accordo europeo relativo al
trasporto internazionale di merci pericolose per vie
navigabili interne (ADN),
Per unità con classe di protezione in ingresso IP20/Chassis,
IP21/NEMA 1 o IP54, impedire il rischio di formazione dei
scintille come segue:
Non installare un interruttore di rete.
•
Assicurarsi che parametro 14-50 Filtro RFIsia
•
impostato su [1] On.
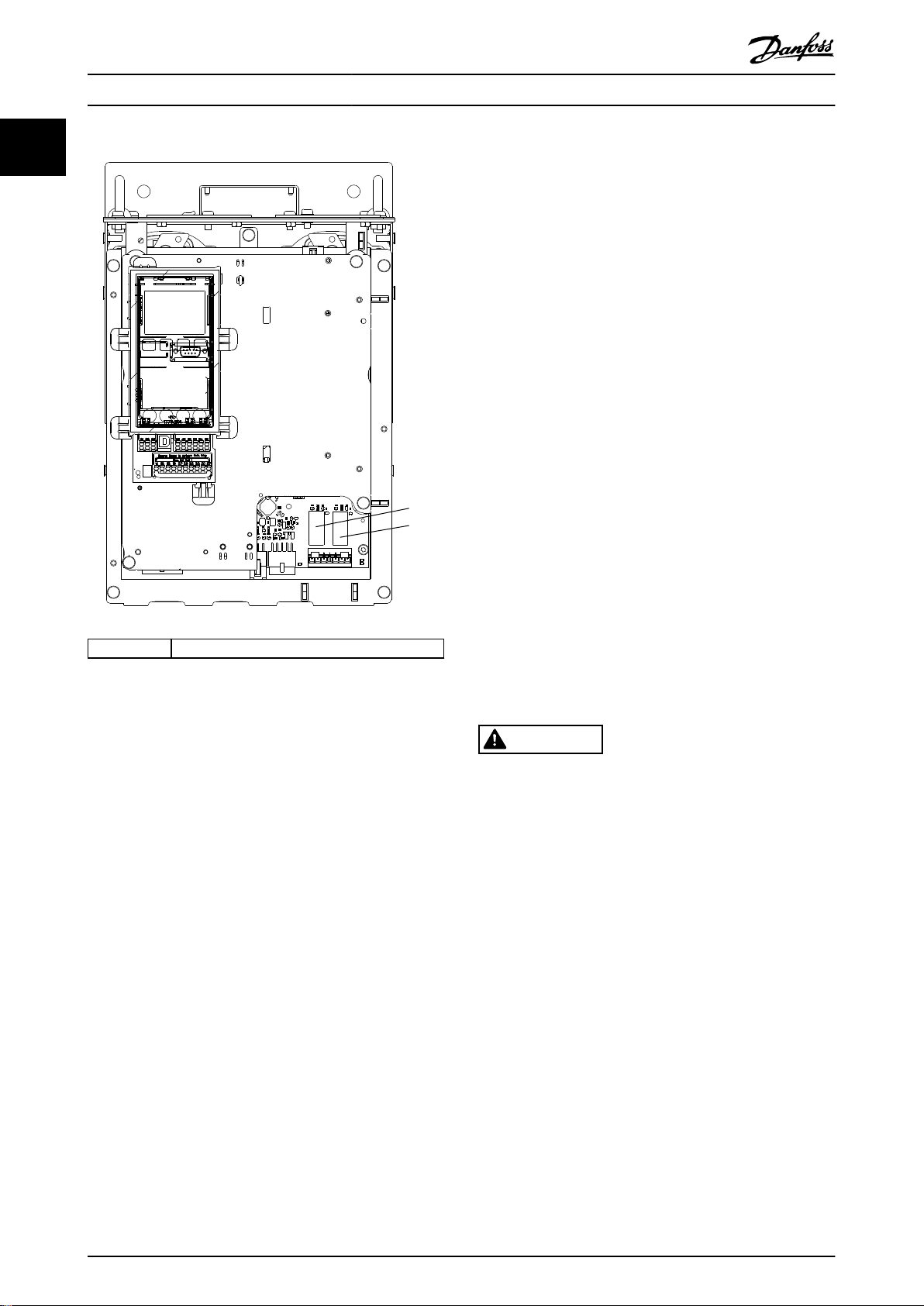
Rimuovere tutti i connettori relè contrassegnati
•
RELAY. Vedere Disegno 1.4.
Controllare quali opzioni relè sono installate, se
•
presenti. L'unica opzione relè consentita è la VLT
Extended Relay Card MCB 113.
Consultare vlt-marine.danfoss.com/support/type-approval-
certicates/ per ulteriori informazioni sulle certicazioni per
il settore marino.
1 1
®
La normativa C-tick riguarda le emissioni condotte e
irradiate. Per i convertitori di frequenza, applicare i limiti di
emissione specicati in EN/IEC 61800-3.
Una dichiarazione di conformità può essere fornita su
richiesta.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 11
1
2
130BD832.10
Introduzione
VLT® Refrigeration Drive FC 103
11
1.9
Sicurezza
1.9.1 Principi di sicurezza generali
Se gestiti scorrettamente, i convertitori di frequenza hanno
il potenziale di provocare lesioni letali perché contengono
componenti ad alta tensione. L'apparecchiatura dovrebbe
essere installata e fatta funzionare solo da personale
qualicato. Non tentate di eettuare lavori di riparazione
senza prima staccare il convertitore di frequenza dall'alimentazione elettrica e attendere il tempo prescritto no
alla dissipazione dell'energia elettrica accumulata.
È obbligatorio osservare rigorosamente le precauzioni di
sicurezza e le note sulla sicurezza per assicurare un funzionamento sicuro del convertitore di frequenza.
Il trasporto, l'immagazzinamento, l'installazione, l'uso e la
1, 2 Connettori relè
Disegno 1.4 Posizione dei connettori dei relè
manutenzione
essenziali per un funzionamento senza problemi e in
sicurezza del convertitore di frequenza. Solo il personale
qualicato è autorizzato a installare e a far funzionare
questa apparecchiatura.
Per personale
tamente formati che sono autorizzati a installare, mettere
in funzione ed eettuare la manutenzione su apparecchiature, sistemi e circuiti in conformità alle leggi e ai
regolamenti pertinenti. Inoltre, il personale qualicato deve
avere dimestichezza con le istruzioni e le misure di
sicurezza descritte in questo manuale di funzionamento.
eettuati in modo corretto e adabile sono
qualicato si intendono dipendenti adegua-
La dichiarazione del produttore è disponibile su richiesta.
1.8.5 Regolamentazioni sul controllo delle
esportazioni
I convertitori di frequenza possono essere soggetti a
regolamentazioni sul controllo delle esportazioni locali e/o
nazionali.
I convertitori di frequenza che sono soggetti a regolamentazioni sul controllo delle esportazioni sono classicati con
un numero ECCN.
Il numero ECCN è indicato nei documenti forniti insieme al
convertitore di frequenza.
In caso di riesportazione, l'esportatore è tenuto ad
assicurare la conformità con le regolamentazioni sul
controllo delle esportazioni pertinenti.
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
Solo il personale qualicato è autorizzato a
•
eettuare le operazioni di installazione, avvio e
manutenzione.
12 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Introduzione Guida alla progettazione
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore di frequenza è collegato alla rete
CA, all'alimentazione CC o alla condivisione del carico, il
motore può avviarsi in qualsiasi momento. L'avvio
involontario durante i lavori di programmazione,
manutenzione o riparazione può causare morte o lesioni
gravi alle persone oppure danni alle cose. Il motore può
essere avviato tramite un interruttore esterno, un
comando eldbus, un segnale di riferimento in ingresso
dall'LCP oppure dopo aver eliminato una condizione di
guasto.
Per prevenire un avvio involontario del motore,
procedere come segue.
Scollegare il convertitore di frequenza dalla
•
rete.
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
AVVISO
TEMPO DI SCARICA
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore di frequenza non è alimentato.
Può ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o
riparazione può causare lesioni gravi o mortali.
1. Arrestare il motore.
2. Scollegare la rete CA, i motori del tipo a
magneti permanenti e le alimentazioni del bus
CC, incluse le batterie di riserva, i gruppi di
continuità e i collegamenti bus CC ad altri
convertitori di frequenza.
3. Attendere che i condensatori si scarichino
completamente prima di eseguire qualsiasi
lavoro di manutenzione o di riparazione. La
durata del tempo di attesa è specicata in
Tabella 1.4.
Tensione [V] Tempo di attesa minimo (minuti)
4 15
200–240 1,1–3,7 kW 5,5–45 kW
380–480 1,1–7,5 kW 11–90 kW
525–600 1,1–7,5 kW 11–90 kW
Tabella 1.4 Tempo di scarica
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Un
collegamento a massa non corretto del convertitore di
frequenza può causare morte o lesioni gravi.
Assicurare il corretto collegamento a massa
•
dell'apparecchiatura da parte di un installatore
elettrico certicato.
AVVISO
PERICOLO APPARECCHIATURE
Il contatto con gli alberi rotanti e le apparecchiature
elettriche può causare morte o lesioni gravi.
Assicurarsi che solo il personale adeguatamente
•
formato e qualicato eettui l'installazione,
l'avviamento e la manutenzione.
Assicurarsi che il lavoro elettrico avvenga in
•
conformità alle norme elettriche nazionali e
locali.
Seguire le procedure illustrate in questo
•
manuale.
AVVISO
ROTAZIONE INVOLONTARIA DEL MOTORE
AUTOROTAZIONE
Una rotazione involontaria dei motori a magneti
permanenti crea tensione e può caricare l'unità,
provocando lesioni gravi o mortali o danni all'apparecchiatura.
Assicurarsi che i motori a magneti permanenti
•
siano bloccati per impedire una rotazione
involontaria.
ATTENZIONE
RISCHIO DI GUASTO INTERNO
Un guasto interno nel convertitore di frequenza può
provocare lesioni gravi quando questo non è chiuso
correttamente.
Prima di applicare la corrente elettrica,
•
assicurarsi che tutte le coperture di sicurezza
siano al loro posto e ssate in modo sicuro.
1 1
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 13
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
2 Panoramica dei prodotti
22
2.1 Introduzione
2.1.2 Risparmio energetico
Questo capitolo fornisce una panoramica dei gruppi e dei
circuiti primari del convertitore di frequenza. Descrive le
funzioni elettriche e di elaborazione del segnale interne. È
anche inclusa una descrizione della struttura di controllo
interna.
Sono anche descritte le funzioni automatizzate e opzionali
del convertitore di frequenza, disponibili per progettare
solidi sistemi operativi con un controllo
prestazioni di informazioni sullo stato.
2.1.1 Il prodotto è concepito per
applicazioni di refrigerazione.
Il VLT® Refrigeration Drive FC 103 è concepito per
applicazioni di refrigerazione. La procedura guidata
integrata guida l'utente attraverso il processo di messa in
funzione. La gamma delle caratteristiche standard e
opzionali comprende:
Regolazione in cascata multizona
•
Regolazione a zona neutra.
•
Controllo della temperatura di condensazione
•
uttuante.
Gestione ritorno olio.
•
Controllo evaporatore multiretroazione.
•
Regolazione in cascata.
•
Rilevamento del funzionamento a secco.
•
Rilevamento ne curva.
•
Alternanza del motore.
•
STO.
•
Modo pausa.
•
Protezione tramite password.
•
Protezione da sovraccarico.
•
Smart Logic Control.
•
Monitoraggio della velocità minima.
•
Testi liberamente programmabili per informazioni,
•
avvertenze e avvisi.
sosticato e
In confronto a tecnologie e sistemi di regolazione
alternativi, un convertitore di frequenza è il sistema di
controllo energetico ottimale per la regolazione di ventole
e pompe.
Utilizzando un convertitore di frequenza per controllare la
portata, una riduzione del 20% della velocità della pompa
consente risparmi energetici pari a circa il 50% in
applicazioni tipiche.
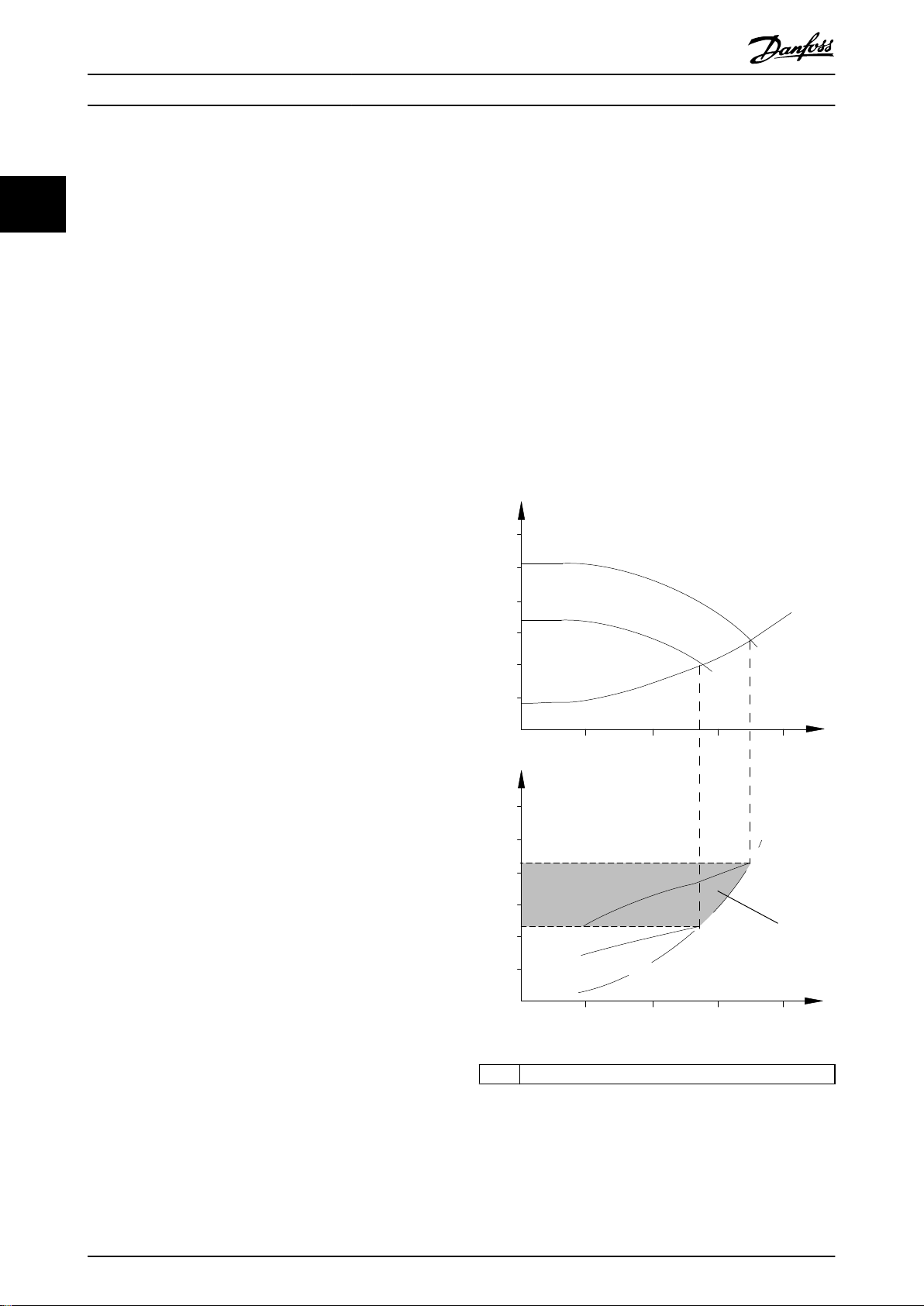
Disegno 2.1 mostra un esempio della riduzione di energia
ottenibile.
1 Risparmio energetico
14 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Disegno 2.1 Esempio: Risparmio energetico
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Panoramica dei prodotti Guida alla progettazione
2.1.3 Esempio di risparmi energetici
Come illustrato in Disegno 2.2, la portata viene regolata
modicando la velocità della pompa, misurata in giri/
minuto. Riducendo la velocità solo del 20% rispetto alla
velocità nominale, anche la portata viene ridotta del 20%.
La portata è direttamente proporzionale alla velocità. Il
consumo di energia elettrica viene ridotto no al 50%.
Se il sistema deve fornire solo una portata che corrisponda
al 100% per pochi giorni l'anno, mentre per il resto
dell'anno la media è inferiore all'80% della portata
nominale, i risparmi energetici sono addirittura superiori al
50%.
Disegno 2.2 descrive la dipendenza di portata, pressione e
consumo energetico dalla velocità della pompa in numero
di giri al minuto per le pompe centrifughe.
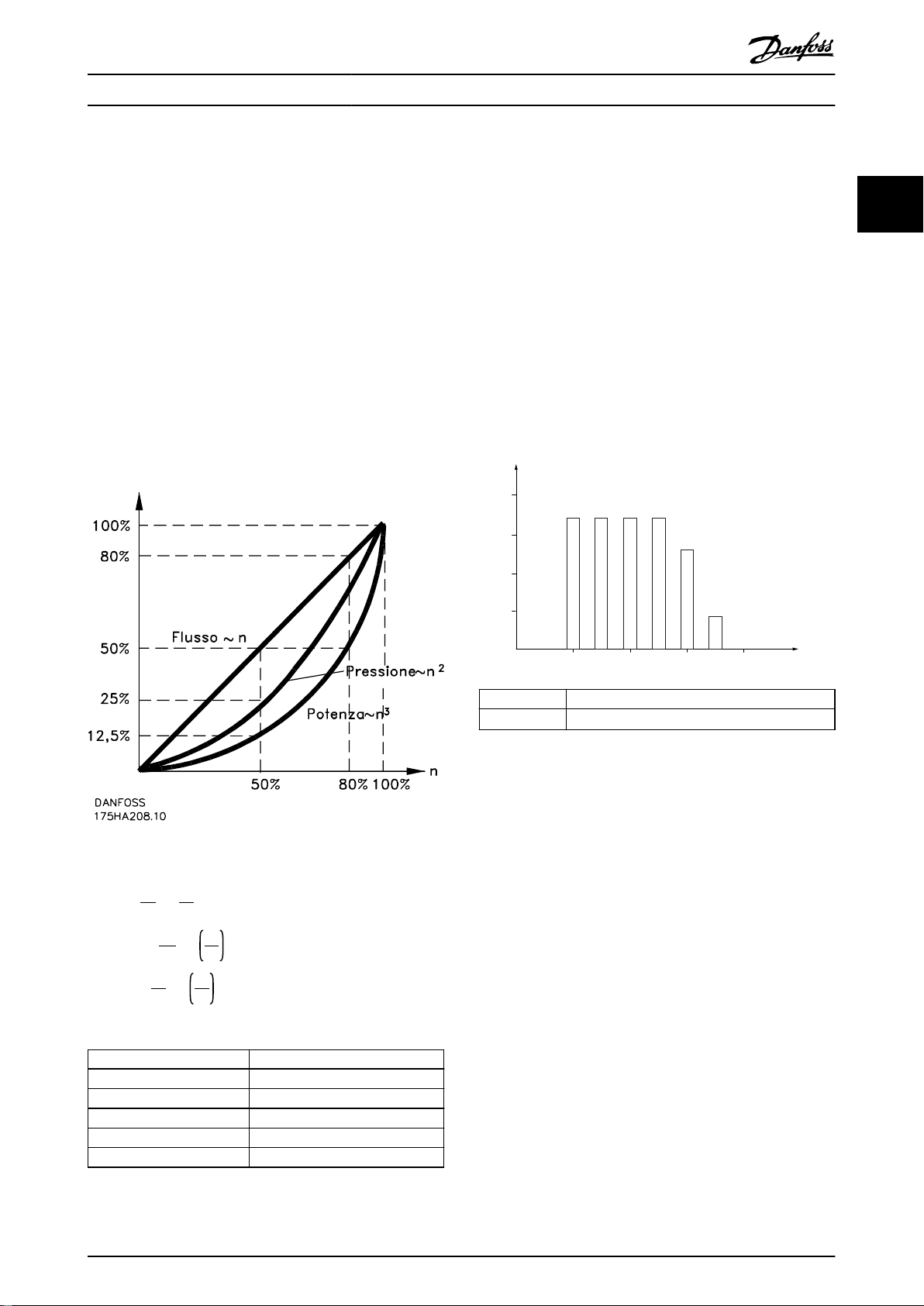
2.1.4 Esempio con portata variabile su un
periodo di un anno
Questo esempio viene calcolato sulla base delle caratteristiche della pompa ottenute da una scheda tecnica
relativa, mostrata in Disegno 2.4.
Il risultato ottenuto evidenzia risparmi energetici superiori
al 50% con la distribuzione della portata nel corso di un
anno,
vedi Disegno 2.3. Il periodo di ammortamento dipende dal
prezzo dell'elettricità e dal prezzo del convertitore di
frequenza. In questo esempio, il periodo di ammortamento
è inferiore a un anno se confrontato con valvole e velocità
costante.
2 2
t [h] Durata del usso. Vedere anche Tabella 2.2.
Portata
Disegno 2.2 Leggi di anità per pompe centrifughe
Q
n
1
Flusso:
Pressione:
Potenza:
1
=
Q
n
2
2
H
1
=
H
2
P
1
=
P
2
2
n
1
n
2
3
n
1
n
2
Q [m3/h]
Disegno 2.3 Distribuzione della portata nel corso di un anno
(durata rispetto a portata)
Assumendo un'ecienza uguale nell'intervallo di velocità.
Q=Portata P=Potenza
Q1=Portata 1 P1=Potenza 1
Q2=Portata ridotta P2=Potenza ridotta
H=Pressione n=Regolazione della velocità
H1=Pressione 1 n1=Velocità 1
H2=Pressione ridotta n2=Velocità ridotta
Tabella 2.1 Leggi di anità
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 15
Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
2.1.5 Controllo migliorato
22
controllo della portata o della pressione di un sistema.
Usare un convertitore di frequenza per variare la velocità di
un compressore, di una ventola o di una pompa,
assicurando il controllo variabile della portata e della
pressione.
Inoltre, un convertitore di frequenza può adattare
rapidamente la velocità del compressore, della ventola o
della pompa a nuove condizioni di portata o pressione nel
sistema.
Si può ottenere un semplice controllo del processo
(portata, livello o pressione) utilizzando il controllo PI
integrato.
2.1.6 Avviatore a stella/triangolo o
avviatore statico
Quando devono essere avviati motori grandi, in molti paesi
è necessario usare apparecchiature che limitino la corrente
di spunto. Nei sistemi più tradizionali viene impiegato un
avviatore a stella/triangolo o un avviatore statico. Se viene
usato un convertitore di frequenza, tali avviatori motore
non sono necessari.
L'utilizzo di un convertitore di frequenza per migliorare il
Disegno 2.4 Consumo energetico a velocità dierenti
PortataDistribuzione Regolazione
mediante valvole
% Durata PotenzaConsumoPotenzaConsu
[m3/h]
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
Σ
42,5
23,0
1)
18,615
2)
40,296
Controllo del
convertitore di
frequenza
1)
42,5
3,5
18,615
3)
6,132
mo
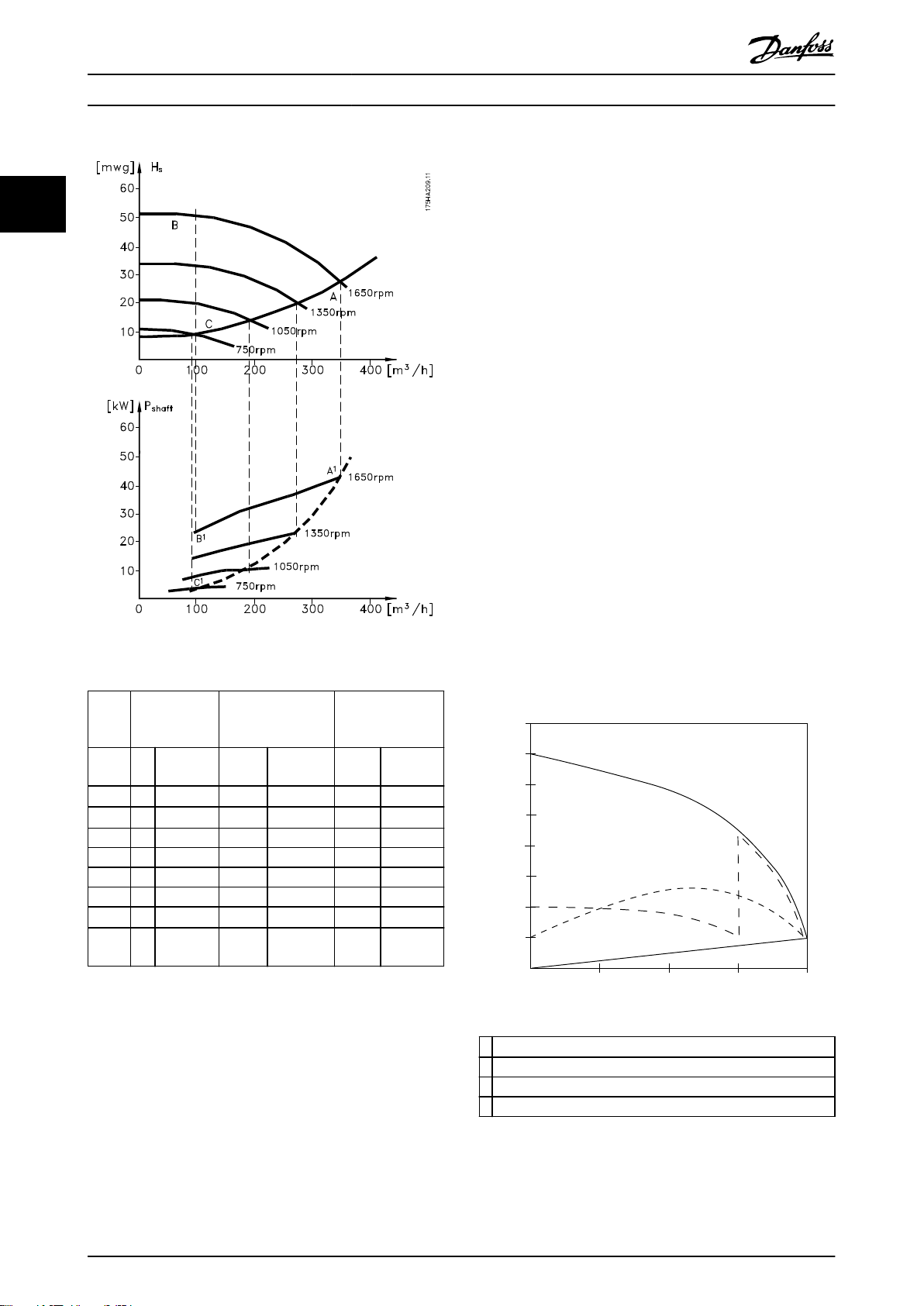
Come mostrato in Disegno 2.5, un convertitore di frequenza
non assorbe una corrente di spunto maggiore di quella
nominale e non richiede avviatori stella/ triangolo o soft
starter.
Tabella 2.2 Risultato
1) Valore di potenza al punto A1.
2) Valore di potenza al punto B1.
3) Valore di potenza al punto C1.
16 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
1
VLT® Refrigeration Drive FC 103
2 Avviatori a stella/triangolo
3 Avviatore statico
4 Avviamento diretto in rete
Disegno 2.5 Corrente di avviamento
Panoramica dei prodotti Guida alla progettazione
2.2 Descrizione del funzionamento
Il convertitore di frequenza fornisce una quantità regolata
di alimentazione di rete a un motore per controllarne la
velocità. Il convertitore di frequenza fornisce una frequenza
e una tensione variabili al motore.
Il convertitore di frequenza è suddiviso in quattro moduli
principali:
Raddrizzatore
•
Circuito del bus CC intermedio
•
Inverter
•
Controllo e regolazione
•
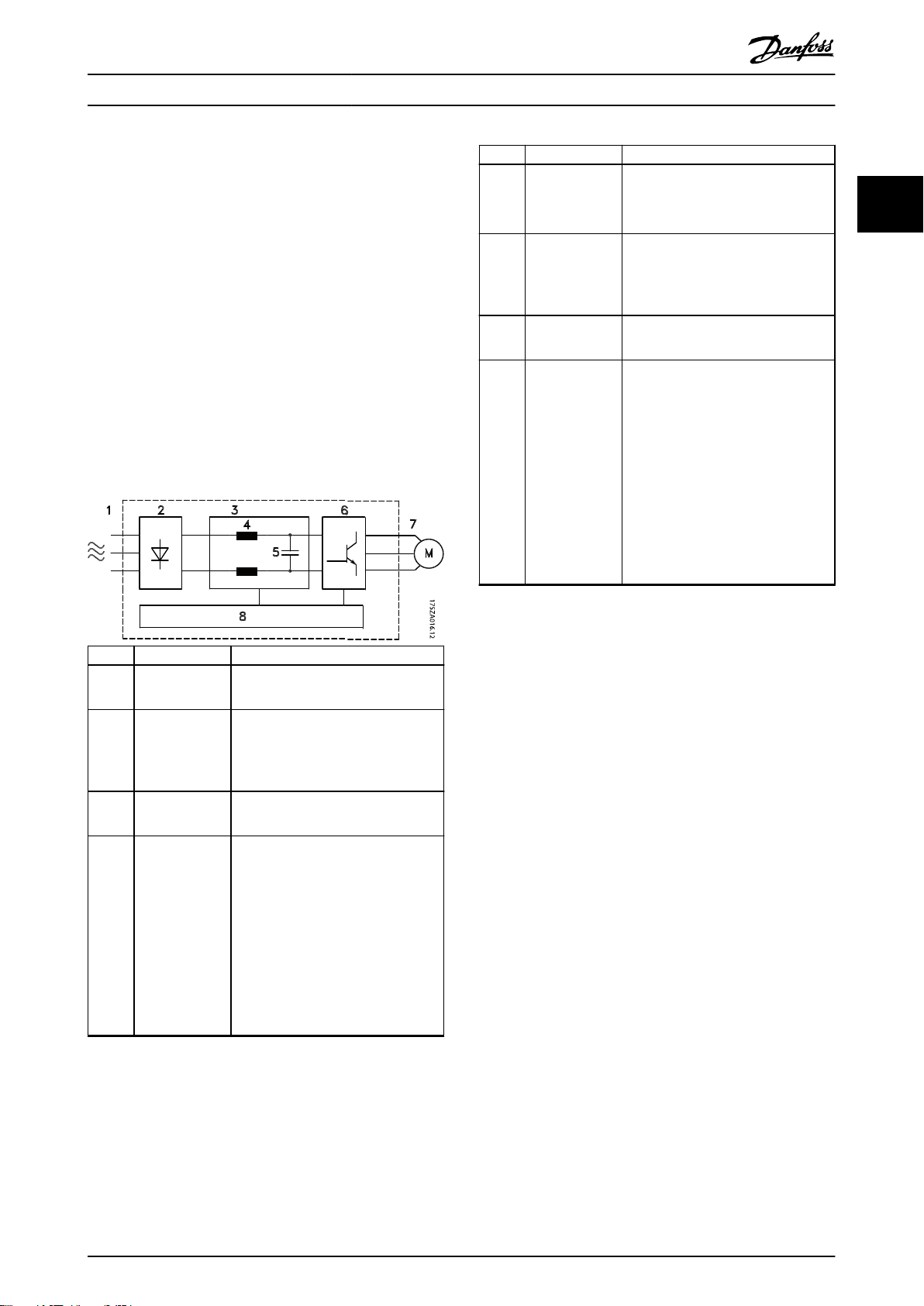
Disegno 2.6 è un diagramma a blocchi dei componenti
interni del convertitore di frequenza.
Area Titolo Funzioni
Immagazzina l'energia CC.
Banco di
5
condensatori
6 Inverter
7 Uscita al motore
Circuito di
8
comando
•
Fornisce autonomia per superare
•
brevi perdite di potenza.
Converte il segnale CC in una
•
forma d'onda CA PWM per
ottenere un'uscita variabile
controllata per il motore.
Potenza di uscita trifase regolata al
•
motore.
La potenza in ingresso, l'elabo-
•
razione interna, l'uscita e la
corrente motore vengono
monitorate per assicurare un
funzionamento e un controllo
ecienti.
L'interfaccia utente e i comandi
•
esterni vengono monitorati ed
eseguiti.
Sono disponibili anche l'uscita di
•
stato e il controllo.
2 2
Area Titolo Funzioni
Alimentazione di rete CA trifase al
1 Ingresso di rete
2 Raddrizzatore
3 Bus CC
4 Reattanze CC
•
convertitore di frequenza.
Il ponte raddrizzatore converte
•
l'alimentazione di ingresso CA in
una corrente CC per alimentare
l'inverter.
Il circuito del bus CC intermedio
•
gestisce la corrente CC.
Filtro di tensione del circuito CC
•
intermedio.
Assicurano la protezione dai
•
transitori di rete.
Riducono la corrente RMS.
•
Aumentano il fattore di potenza
•
che ritorna in linea.
Riducono le armoniche sull'in-
•
gresso CA.
Disegno 2.6 Diagramma a blocchi del convertitore di
frequenza
2.2.1 Principio della struttura di controllo
Il convertitore di frequenza raddrizza la tensione
•
CA dalla rete in tensione CC.
La tensione CC viene convertita in una corrente
•
CA con un'ampiezza e frequenza variabili.
Il convertitore di frequenza alimenta il motore con una
tensione/corrente e frequenza variabili che consentono il
controllo della velocità di motori trifase asincroni standard
e di motori PM non salienti.
Il convertitore di frequenza gestisce vari principi di
controllo motore come il modo motore speciale U/f e VVC
+
. La risposta al cortocircuito di questo convertitore di
frequenza si basa sui 3 trasduttori di corrente nelle fasi del
motore.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 17
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
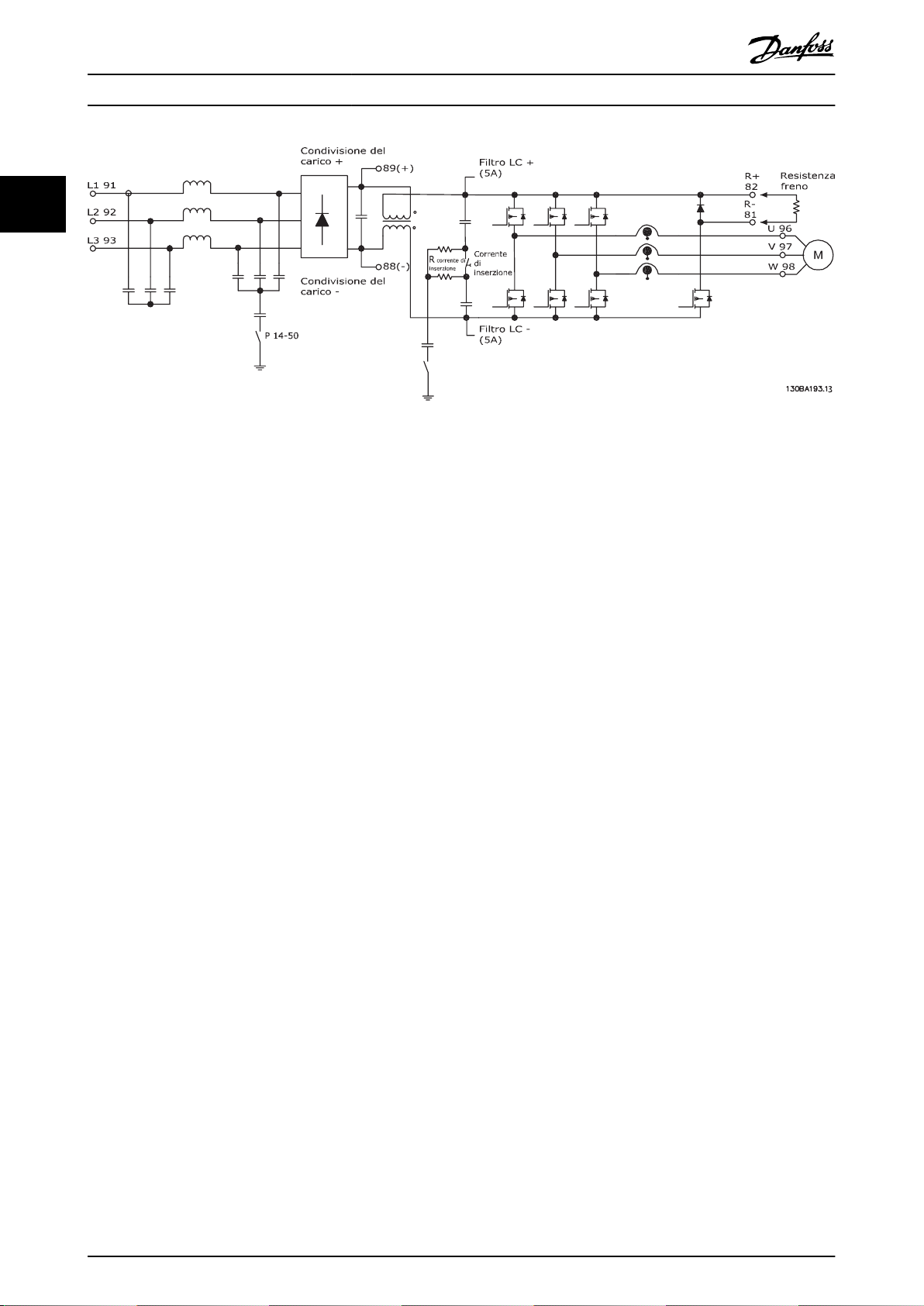
22
Disegno 2.7 Struttura del convertitore di frequenza
+
2.3 Sequenza di funzionamento
2.3.1 Sezione raddrizzatore
forma d'onda generata dal principio PWM VVC
nella scheda di controllo, fornisce prestazioni ottimali e
perdite minime nel motore.
di Danfoss
Quando il convertitore di frequenza viene alimentato, la
tensione entra attraverso i morsetti di rete (L1, L2 e L3). A
seconda della
sezionatore e/o all'opzione ltro RFI.
congurazione dell'unità, la tensione arriva al
2.3.2 Sezione intermedia
Dopo aver attraversato la sezione del raddrizzatore, la
tensione passa alla sezione intermedia. Un circuito del ltro
composto dall'induttanza del bus CC e dal banco condensatori bus CC stabilizza la tensione raddrizzata.
L'induttanza bus CC fornisce un'impedenza di serie alla
corrente variabile. Ciò aiuta il processo di ltraggio e allo
stesso tempo riduce le distorsioni armoniche alla forma
d'onda della corrente CA di ingresso normalmente inerente
ai circuiti raddrizzatore.
2.3.3 Sezione inverter
Una volta che è presente un comando di avvio e un
riferimento velocità nella sezione inverter, gli IGBT iniziano
a commutare per creare la forma d'onda di uscita. Questa
2.4 Strutture di controllo
2.4.1 Struttura di controllo ad anello aperto
Quando viene fatto funzionare nella modalità ad anello
aperto, il convertitore di frequenza risponde manualmente
a comandi di ingresso tramite tasti LCP o da remoto
tramite gli ingressi analogici/digitali o il bus seriale.
Nella congurazione mostrata in Disegno 2.8, il convertitore
di frequenza funziona nella modalità ad anello aperto.
Riceve l'input dall'LCP (modalità Manuale) o tramite un
segnale remoto (modalità Automatico). Il segnale
(riferimento velocità) viene ricevuto e condizionato con i
seguenti:
Limiti di velocità minimi e massimi programmati
•
del motore (in giri/min. e Hz).
Tempi rampa di accelerazione e di decelerazione.
•
Senso di rotazione del motore.
•
Il riferimento viene quindi usato per controllare il motore.
18 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
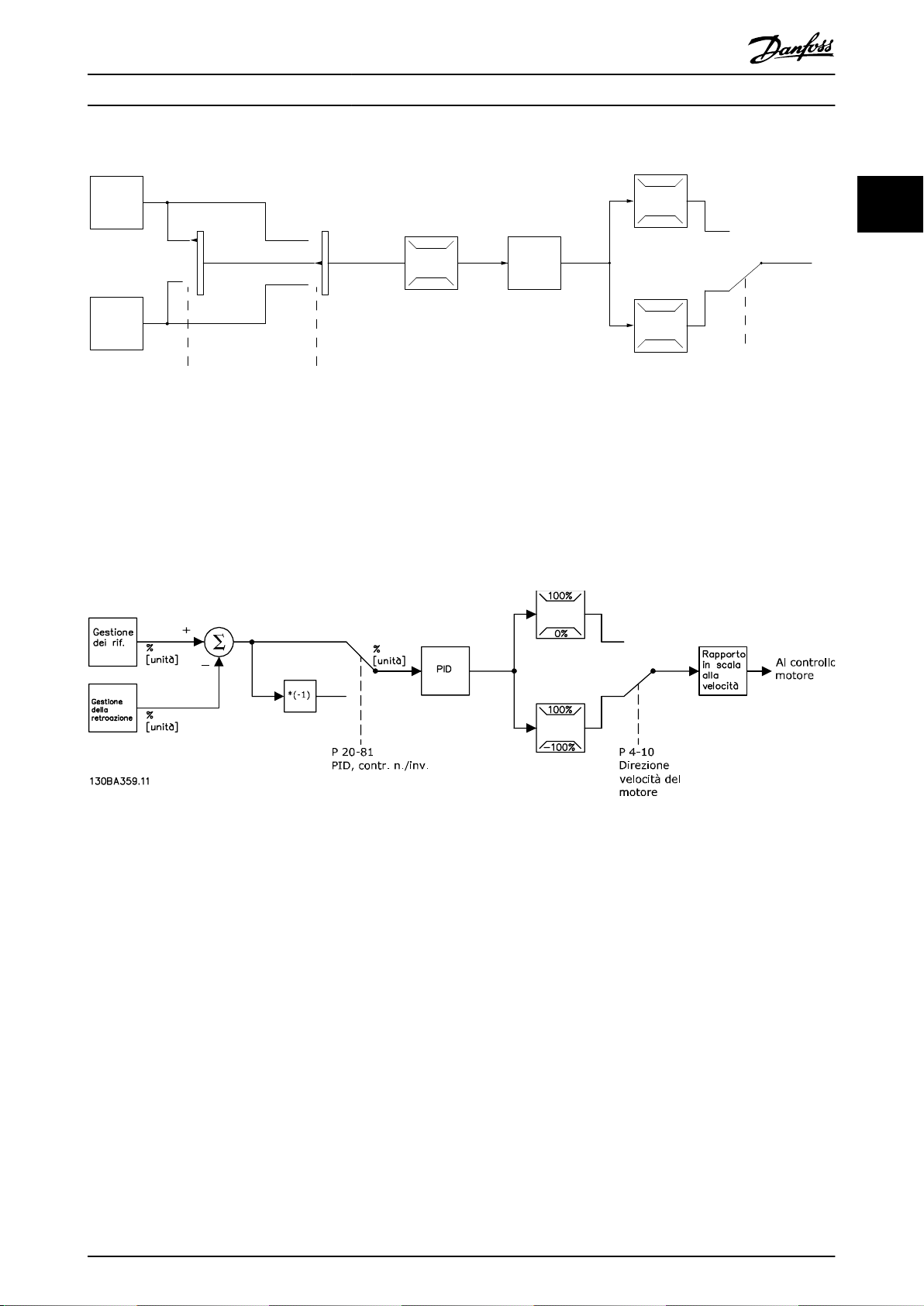
Panoramica dei prodotti Guida alla progettazione
Disegno 2.8 Diagramma a blocchi della modalità ad anello aperto.
2 2
2.4.2 Struttura di controllo ad anello chiuso
agiscano come unità di controllo indipendente. Il convertitore di frequenza può fornire messaggi di stato e di
Nella modalità ad anello chiuso, un controllore PID interno
consente al convertitore di frequenza di elaborare il
riferimento del sistema e i segnali di retroazione anché
Disegno 2.9 Diagramma a blocchi del controllore ad anello chiuso
Si consideri per esempio un'applicazione con pompe in cui
la velocità è controllata in modo tale da far sì che la
allarme, insieme a molte altre opzioni programmabili, per il
monitoraggio esterno del sistema durante il funzionamento
indipendente in anello chiuso.
riferimento del setpoint, il convertitore di frequenza
accelera per aumentare la pressione della pompa.
pressione statica in una conduttura sia costante (vedi
Disegno 2.9). Il convertitore di frequenza riceve un segnale
di retroazione da un sensore presente nel sistema.
Confronta questa retroazione con un valore di riferimento
setpoint e determina l'errore, qualora presente, tra questi
due segnali. Quindi adatta la velocità del motore per
Mentre i valori di default del convertitore di frequenza ad
anello chiuso assicurano spesso prestazioni soddisfacenti, il
controllo del sistema può spesso essere ottimizzato
regolando i parametri PID. Per questa ottimizzazione viene
messa a disposizione la Autoregolazione.
correggere questo errore.
Il setpoint di pressione statica è il segnale di riferimento al
convertitore di frequenza. Un sensore di pressione statica
misura la pressione statica eettiva nel condotto e fornisce
questa informazione al convertitore di frequenza come
segnale di retroazione. Se il segnale di retroazione è
superiore al riferimento del setpoint, il convertitore di
frequenza decelera per ridurre la pressione. Similmente, se
la pressione nella conduttura è inferiore al valore di
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 19
Altre caratteristiche programmabili includono:
Regolazione inversa - la velocità del motore
•
aumenta quando un segnale di retroazione è alto.
Questo è utile nelle applicazioni con compressori,
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
dove la velocità deve essere aumentata se la
pressione/temperatura è troppo alta.
Frequenza di avviamento - consente al sistema di
22
•
raggiungere rapidamente uno stato operativo
prima che prenda il controllo il controllore PID.
Filtro passa basso integrato - riduce il rumore del
•
segnale di retroazione.
2.4.3 Comando locale (Hand On) e remoto
(Auto On)
Far funzionare il convertitore di frequenza manualmente
tramite l'LCP o a distanza tramite gli ingressi analogici e
digitali e il bus seriale.
Riferimento attivo e modalità di congurazione
Il riferimento attivo è un riferimento locale o un
riferimento remoto. Il riferimento remoto è l'impostazione
di fabbrica.
Per usare il riferimento locale,
•
modalità Manuale. Per abilitare la modalità
Manuale, adattare le impostazioni parametri nel
gruppo di parametri 0–4* Tastierino LCP. Per
maggiori informazioni, fare riferimento alla Guida
alla Programmazione.
Per usare il riferimento remoto, congurare in
•
modalità Automatico che è la modalità di default.
In modalità Automatico è possibile controllare il
convertitore di frequenza tramite gli ingressi
digitali e varie interfacce seriali (RS485, USB o un
bus di campo opzionale).
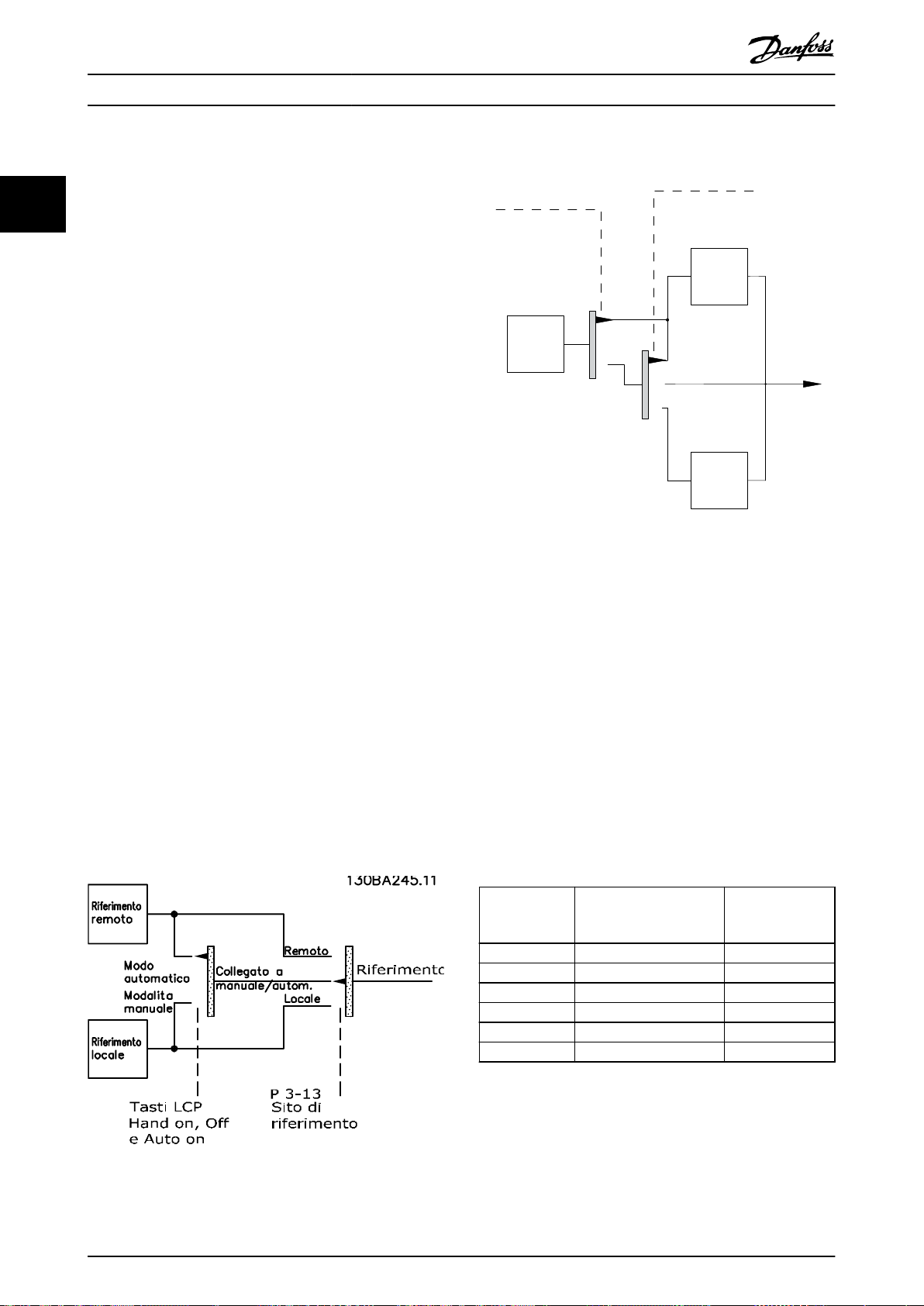
Disegno 2.10 illustra la modalità di congurazione
•
che risulta dalla selezione del riferimento attivo,
locale o remoto.
Disegno 2.11 illustra la modalità di congurazione
•
manuale per il riferimento locale.
congurare nella
Disegno 2.11 Modo di congurazione manuale
Principio di regolazione dell'applicazione
Il riferimento remoto oppure il riferimento locale sono
attivi in qualsiasi momento. Non possono essere entrambi
attivi simultaneamente. Impostare il principio di
regolazione dell'applicazione (cioè, anello aperto o anello
chiuso) in parametro 1-00 Modo congurazione, come
mostrato in Tabella 2.3.
Quando il riferimento locale è attivo, impostare il principio
di regolazione dell'applicazione in parametro 1-05 Local
Mode Conguration.
Impostare il sito di riferimento in parametro 3-13 Sito di
riferimento, come mostrato in Tabella 2.3.
Per maggiori informazioni, fare riferimento alla Guida alla
Programmazione.
[Hand On]
Disegno 2.10 Riferimento attivo
20 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
[Auto On]
Tasti dell'LCP
Hand Collegato Man./Auto Locale
Hand⇒O
Auto Collegato Man./Auto Remoto
Auto⇒O
Tutti i tasti Locale Locale
Tutti i tasti Remoto Remoto
Tabella 2.3 Congurazioni del riferimento locale e remoto
Parametro 3-13 Sito di
riferimento
Collegato Man./Auto Locale
Collegato Man./Auto Remoto
Riferimento attivo

Panoramica dei prodotti Guida alla progettazione
2.4.4 Gestione dei riferimenti
La gestione dei riferimenti è applicabile sia nel funzionamento ad anello aperto che ad anello chiuso.
Riferimenti interni ed esterni
Nel convertitore di frequenza possono essere programmati
no a 8 riferimenti preimpostati interni. Il riferimento
preimpostato interno attivo può essere selezionato
esternamente attraverso ingressi di controllo digitali o il
bus di comunicazione seriale.
I riferimenti esterni possono anche essere forniti al convertitore di frequenza, più comunemente attraverso un
ingresso di controllo analogico. Tutte le risorse di
riferimento e il riferimento bus vengono sommati per
produrre il riferimento esterno totale. Come riferimento
attivo, selezionare uno dei seguenti:
Il riferimento esterno
•
Il riferimento preimpostato
•
Il setpoint
•
La somma di tutti i 3 precedenti
•
Il riferimento attivo può essere scalato.
Il riferimento messo in scala viene calcolato come segue:
Riferimento = X + X ×
Dove X è il riferimento esterno, il riferimento preimpostato
o la somma di questi riferimenti e Y è parametro 3-14 Rif.
relativo preimpostato in [%].
Se Y, parametro 3-14 Rif. relativo preimpostato viene
impostato su 0%, la scala non inuisce sul riferimento.
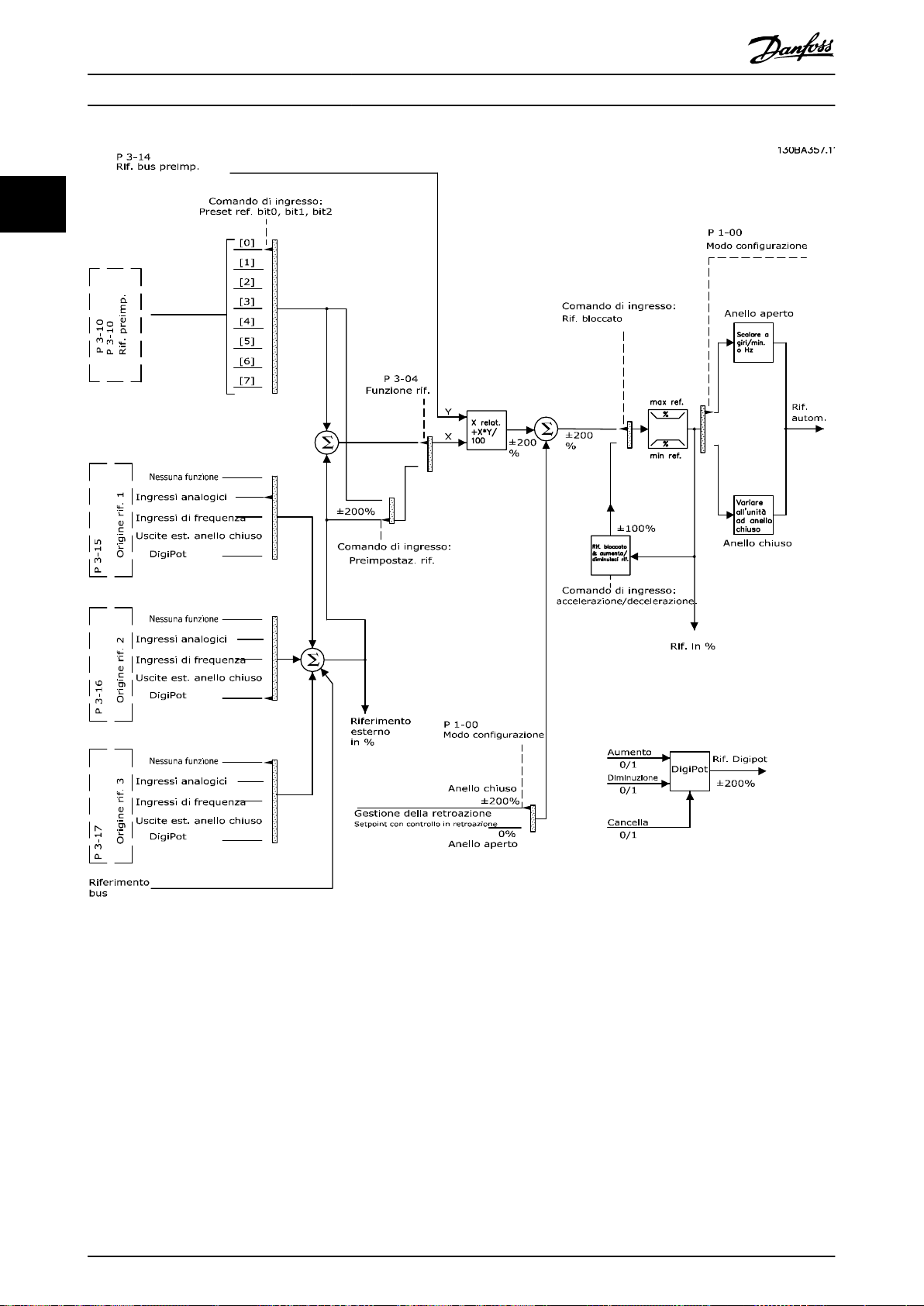
Riferimento remoto
Il riferimento remoto è composto dai seguenti (vedi
Disegno 2.12):
Riferimenti preimpostati
•
Riferimenti esterni:
•
- Ingressi analogici
- Ingressi di frequenza a impulsi
- Ingressi potenziometro digitale
- Riferimenti bus comunicazione seriale
Un riferimento relativo preimpostato
•
Un setpoint con controllo in retroazione
•
Y
100
2 2
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 21
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
22
Disegno 2.12 Gestione remota dei riferimenti
22 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Panoramica dei prodotti Guida alla progettazione
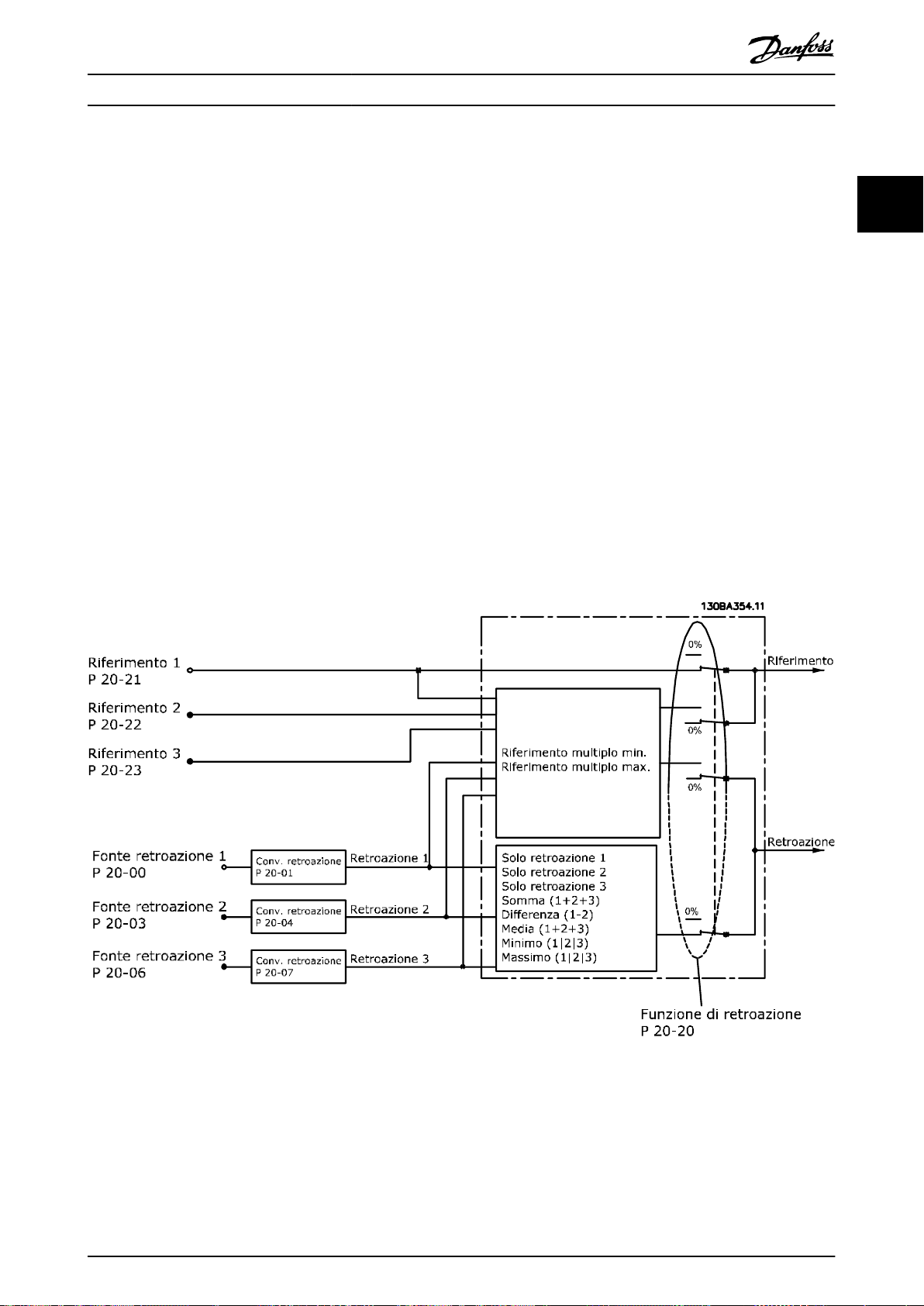
2.4.5 Gestione della retroazione
La gestione della retroazione può essere congurata per
funzionare con applicazioni che richiedono un controllo
avanzato come setpoint multipli e tipi multipli di
retroazioni (vedi Disegno 2.13).
Sono comuni tre tipi di controllo:
Zona singola, setpoint singolo
Questo tipo di controllo è una
retroazione di base. Il setpoint 1 viene sommato a qualsiasi
altro riferimento (se presente) e viene selezionato il
segnale di retroazione.
Multizona, setpoint singolo
Questo tipi di controllo usa 2 o 3 sensori di retroazione ma
un solo setpoint. La retroazione può essere aggiunta,
sottratta o mediata. Inoltre è possibile utilizzare il valore
massimo o minimo. Il setpoint 1 viene utilizzato esclusivamente in questa congurazione.
Multizona, setpoint/retroazione
La coppia setpoint/retroazione con la dierenza più grande
controlla la velocità del convertitore di frequenza. Il
massimo tenta di mantenere tutte le zone a un valore
congurazione di
minore o uguale ai rispettivi setpoint, mentre il minimo
tenta di mantenere tutte le zone a un valore superiore o
uguale ai rispettivi setpoint.
Esempio
Un'applicazione a 2 zone e a 2 setpoint. Il setpoint della
zona 1 è pari a 15 bar e la retroazione è pari a 5,5 bar. Il
setpoint della zona 2 è pari a 4,4 bar e la retroazione è pari
a 4,6 bar. Se viene selezionato massimo, il setpoint e la
retroazione della zona 2 vengono inviati al controllore PID,
poiché questo presenta la dierenza minore (la retroazione
è superiore al setpoint, il che determina una dierenza
negativa). Se viene selezionato minimo, il setpoint e la
retroazione della zona 1 vengono inviati al controllore PID,
poiché questo presenta la dierenza maggiore (la
retroazione è inferiore al setpoint, il che determina una
dierenza positiva).
2 2
Disegno 2.13 Diagramma a blocchi dell'elaborazione dei segnali di retroazione
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 23
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
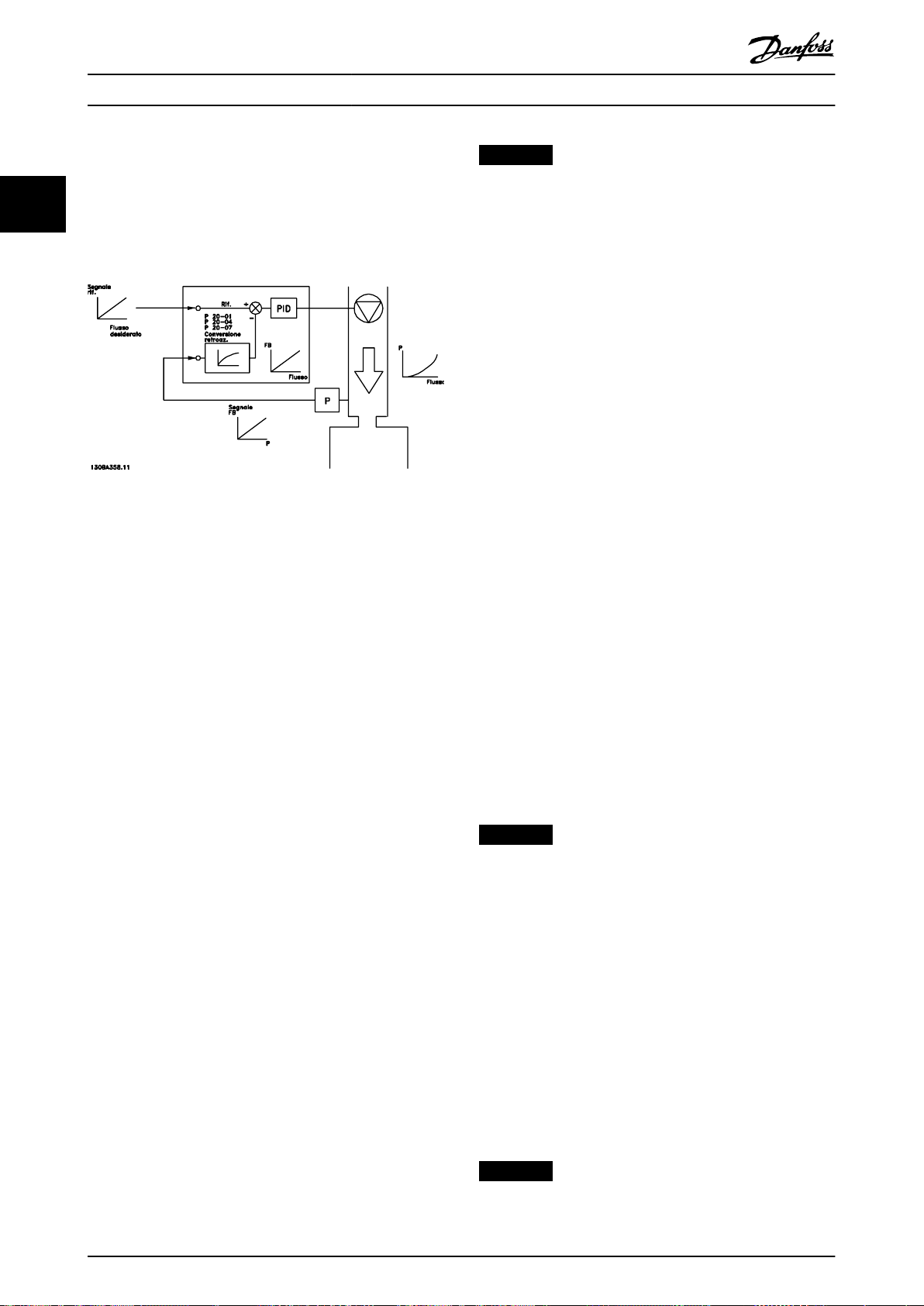
Conversione della retroazione
In alcune applicazioni è utile convertire il segnale di
retroazione. Un esempio è l'uso di un segnale di pressione
22
per fornire una retroazione del usso. Poiché la radice
quadrata della pressione è proporzionale alla portata, la
radice quadrata del segnale di pressione fornisce un valore
proporzionale alla portata, vedi Disegno 2.14.
Disegno 2.14 Conversione della retroazione
2.5 Funzioni operative automatizzate
Le caratteristiche di funzionamento automatizzate sono
attive non appena il convertitore di frequenza è operativo.
La maggior parte di essi non richiede alcuna programmazione o setup. Comprendere che queste caratteristiche
sono presenti ottimizzando il progetto di un sistema e,
eventualmente, consente di evitare l'introduzione di
componenti o funzionalità ridondanti.
Per dettagli sui setup richiesti, in particolare per quanto
riguarda i parametri del motore, fare riferimento alla Guida
alla Programmazione.
Il convertitore di frequenza dispone di una gamma di
funzioni di protezione integrate che proteggono il convertitore di frequenza stesso e il motore controllato.
2.5.1 Protezione contro i cortocircuiti
Motore (fase-fase)
Il convertitore di frequenza è protetto contro i cortocircuiti
sul lato motore tramite misurazioni della corrente in
ciascuna delle tre fasi del motore o nel bus CC. Un
cortocircuito tra due fasi di uscita provoca una
sovracorrente nell'inverter. L'inverter viene spento quando
la corrente di cortocircuito supera il valore consentito
(Allarme 16 Scatto blocc.).
Lato rete
Un convertitore di frequenza che funziona correttamente
limita la corrente che può assorbire dall'alimentatore. Usare
fusibili e/o interruttori sul lato di alimentazione come
protezione in caso di guasto di un componente all'interno
del convertitore di frequenza (primo guasto). Vedere
capitolo 7.8 Fusibili e interruttori per maggiori informazioni.
AVVISO!
Per assicurare la conformità alla norma IEC 60364 per CE
o NEC 2009 per UL, è obbligatorio l'uso di fusibili e/o di
interruttori.
2.5.2 Protezione da sovratensione
Sovratensione generata dal motore
Quando il motore funziona da generatore, la tensione del
collegamento CC aumenta. Questo comportamento si
verica nei seguenti casi:
Il carico fa funzionare il motore (con frequenza di
•
uscita costante dal convertitore di frequenza), per
esempio, il carico genera energia.
Durante la decelerazione (rampa di decelerazione)
•
con un momento d'inerzia elevato, l'attrito è
basso e il tempo rampa di decelerazione è troppo
breve per consentire la dissipazione dell'energia
sotto forma di perdite nel convertitore di
frequenza, nel motore e nell'impianto.
Un'impostazione non corretta della compen-
•
sazione dello scorrimento può causare una
maggiore tensione del collegamento CC.
Forza c.e.m. dal funzionamento del motore PM. Se
•
funziona a ruota libera ad alta velocità, la forza
c.e.m. del motore PM è potenzialmente in grado
di superare la massima tensione tollerata dal
convertitore di frequenza, causando dei danni. Per
prevenire questo problema, il valore di
parametro 4-19 Freq. di uscita max. viene automaticamente limitato in base a un calcolo interno
collegato al valore di parametro 1-40 Forza c.e.m.
a 1000 giri/minuto, parametro 1-25 Vel. nominale
motore e parametro 1-39 Poli motore.
AVVISO!
Per evitare che il motore raggiunga una velocità
eccessiva (per esempio a causa di un eetto di autorotazione eccessivo o un usso incontrollato d'acqua),
dotare il convertitore di frequenza di una resistenza di
frenatura.
La sovratensione può essere gestita usando una funzione
freno (parametro 2-10 Funzione freno) o usando un
controllo sovratensione (parametro 2-17 Controllo
sovratensione).
Controllo sovratensione (OVC)
L'OVC riduce il rischio che il convertitore di frequenza scatti
a causa di una sovratensione sul collegamento CC. Ciò
viene gestito estendendo automaticamente il tempo rampa
di decelerazione.
AVVISO!
L'OVC può essere attivato per motori PM (PM VVC+).
24 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Panoramica dei prodotti Guida alla progettazione
2.5.3 Rilevamento di una fase del motore
mancante
La funzione fase del motore mancante
(parametro 4-58 Funzione fase motore mancante) è abilitata
per default per evitare danni al motore nel caso in cui
manchi una fase del motore. L'impostazione di fabbrica è
1.000 ms, ma può essere regolata per un rilevamento più
rapido.
2.5.4 Rilevamento dello sbilanciamento
della fase di rete
Il funzionamento in condizioni di grave squilibrio di rete
riduce la durata del motore. Se il motore viene fatto
funzionare continuamente a valori vicini al carico nominale,
le condizioni sono considerate severe. L'impostazione di
fabbrica fa scattare il convertitore di frequenza in presenza
di uno squilibrio di rete (parametro 14-12 Funz. durante
sbilanciamento di rete).
2.5.5 Commutazione sull’uscita
L'aggiunta di un interruttore all'uscita tra il motore e il
convertitore di frequenza è consentita. Possono apparire
messaggi di guasto. Per agganciare un motore in rotazione,
abilitare il riaggancio al volo.
2.5.6 Protezione da sovraccarico
Limite di coppia
La funzione limite di coppia protegge il motore dal sovraccarico, indipendentemente dalla velocità. Il limite di coppia
controllato in parametro 4-16 Lim. di coppia in modo motore
o parametro 4-17 Lim. di coppia in modo generatore, mentre
il tempo prima che l'avviso limite di coppia scatti è
controllato in parametro 14-25 Ritardo scatto al limite di
coppia.
Limite di corrente
Il limite di corrente viene controllato in
parametro 4-18 Limite di corrente.
Limite di velocità
Denire i limiti inferiori e superiori per l'intervallo di
velocità di esercizio usando 1 o più dei seguenti parametri:
Parametro 4-11 Lim. basso vel. motore [giri/min].
•
Parametro 4-12 Limite basso velocità motore [Hz] e
•
parametro 4-13 Lim. alto vel. motore [giri/min].
Parametro 4-14 Motor Speed High Limit [Hz].
•
Per esempio, l'intervallo di velocità di esercizio può essere
denita come tra 30 e 50/60Hz.
Parametro 4-19 Freq. di uscita max. limita la velocità di
uscita massima che il convertitore di frequenza può fornire.
ETR
L'ETR è una caratteristica elettronica che simula un relè a
bimetallo sulla base di misure interne. La caratteristica
viene mostrata in Disegno 2.15.
Limite di tensione
Quando viene raggiunto un certo livello di tensione
codicato in modo sso, il convertitore di frequenza si
spegne per proteggere i transistor e i condensatori del
collegamento CC.
Sovratemperatura
Il convertitore di frequenza dispone di sensori di
temperatura integrati e reagisce immediatamente a valori
critici tramite limiti implementati in fase di progettazione.
2.5.7 Declassamento automatico
Un convertitore di frequenza controlla costantemente i
livelli critici:
alta temperatura sulla scheda di controllo o sul
•
dissipatore di calore
carico elevato del motore
•
alta tensione bus CC
•
bassa velocità del motore
•
In risposta a un livello critico, il convertitore di frequenza
adegua la frequenza di commutazione. In caso di alte
temperature interne e bassa velocità del motore, i convertitori di frequenza possono anche forzare lo schema PWM
a SFAVM.
AVVISO!
Il declassamento automatico è diverso quando
parametro 14-55 Output Filter è impostato su [2] Filtro
sinusoidale sso.
2.5.8 Ottimizzazione Automatica
dell’Energia (Funzione AEO)
L'ottimizzazione automatica dell'energia (AEO) ordina al
convertitore di frequenza di monitorare continuamente il
carico sul motore e di regolare la tensione di uscita al ne
di massimizzare il rendimento. In condizioni di carico
leggero, la tensione viene ridotta e la corrente motore
viene minimizzata. Il motore benecia di:
Maggiore ecienza.
•
Riscaldamento ridotto.
•
Funzionamento più silenzioso.
•
Non esiste alcuna necessità di selezionare una curva V/Hz
poiché il convertitore di frequenza regola automaticamente
la tensione motore.
2 2
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 25

Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
2.5.9 Modulazione Automatica della
2.5.12 Rampa automatica
Frequenza di Commutazione
22
Il convertitore di frequenza genera brevi impulsi elettrici
per formare un modello d'onda CA. La frequenza di
commutazione è la frequenza di questi impulsi. Una bassa
frequenza di commutazione (bassa frequenza di
pulsazione) provoca rumore nel motore, rendendo
preferibile una frequenza di commutazione più alta.
Tuttavia, un'elevata frequenza di commutazione genera
calore nel convertitore di frequenza che può limitare la
quantità di corrente disponibile per il motore.
La modulazione automatica della frequenza di
commutazione regola automaticamente queste condizioni
per fornire la massima frequenza di commutazione senza
surriscaldare il convertitore di frequenza. Fornendo un'alta
frequenza di commutazione controllata, riduce il rumore di
funzionamento del motore alle basse velocità quando il
controllo dei disturbi percettibili è critico, e produce la
piena potenza di uscita al motore quando necessario.
2.5.10 Declassamento per alta frequenza di
commutazione
Un motore che tenta di accelerare un carico troppo
velocemente per la corrente disponibile può provocare lo
scatto del convertitore di frequenza. Lo stesso vale per una
decelerazione troppo veloce. La rampa automatica
protegge da queste situazioni prolungando il tempo di
andata a regime del motore (accelerazione o decelerazione) per adattarsi alla corrente disponibile.
2.5.13 Circuito limite di corrente
Quando un carico supera la capacità di corrente del funzionamento normale del convertitore di frequenza (da un
convertitore o motore sottodimensionate), il limite di
corrente riduce la frequenza di uscita per decelerare il
motore e ridurre il carico. Un timer regolabile è disponibile
per limitare il funzionamento in queste condizioni per 60 s
o meno. Il limite predenito di fabbrica è 110% della
corrente nominale del motore per minimizzare lo stress da
sovracorrente.
2.5.14 Prestazioni con variazione della
potenza
Il convertitore di frequenza è progettato per il funzionamento continuo a pieno carico a frequenze di
commutazione comprese tra 3,0 e 4,5 kHz (questo
intervallo di frequenze dipende dalla taglia di potenza).
Una frequenza di commutazione superiore all'intervallo
massimo consentito genera maggiore calore nel convertitore di frequenza e richiede la riduzione della corrente di
uscita.
Una caratteristica automatica del convertitore di frequenza
è il controllo della di frequenza di commutazione
dipendente dal carico. Questa caratteristica consente al
motore di beneciare della massima frequenza di
commutazione consentita dal carico.
2.5.11 Declassamento automatico per
sovratemperatura
Il declassamento automatico per sovratemperatura ha lo
scopo di impedire lo scatto del convertitore di frequenza a
temperature elevate. Sensori di temperatura interni
misurano le condizioni per proteggere i componenti di
potenza dal surriscaldamento. Il convertitore di frequenza
può ridurre automaticamente la sua frequenza di
commutazione per mantenere la sua temperatura di
funzionamento entro limiti sicuri. Dopo aver ridotto la
frequenza di commutazione, il convertitore di frequenza
può anche ridurre la frequenza e corrente di uscita no al
30% per impedire uno scatto per sovratemperatura.
Il convertitore di frequenza resiste a uttuazioni di rete
come:
Transitori.
•
Interruzioni momentanee della rete.
•
Brevi cadute di tensione.
•
Sbalzi di corrente.
•
Il convertitore di frequenza compensa automaticamente le
tensioni di ingresso ±10% da quelle nominali per fornire
una tensione e coppia nominale del motore. Quando si
seleziona riavvio automatico, il convertitore di frequenza si
riaccende automaticamente dopo un blocco di tensione.
Con il riaggancio al volo, il convertitore di frequenza si
sincronizza con la rotazione del motore prima dell'avvio.
2.5.15 Avviamento morbido del motore
Il convertitore di frequenza fornisce la quantità corretta di
corrente al motore per superare l'inerzia del carico e
portare il motore a regime. Ciò evita che venga applicata
l'intera tensione di rete a un motore stazionario o a
rotazione lenta che genera un'elevata corrente e calore.
Questa caratteristica di avviamento dolce inerente riduce il
carico termico e la sollecitazione meccanica, aumenta la
durata di vita del motore e consente un funzionamento del
motore più silenzioso.
26 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Panoramica dei prodotti Guida alla progettazione
2.5.16 Smorzamento risonanza
Eliminare il rumore di risonanza ad alta frequenza del
motore usando lo smorzamento risonanza. È disponibile
uno smorzamento della frequenza selezionato automaticamente o manualmente.
2.5.17 Ventole controllate in temperatura
I sensori nel convertitore di frequenza controllano la
temperatura delle ventole di rareddamento interne.
Spesso le ventole di rareddamento non funzionano
durante il funzionamento a basso carico o durante il modo
pausa o in standby. Ciò riduce il rumore, aumenta l'e-
cienza e prolunga la durata di funzionamento della
ventola.
2.5.18 Conformità EMC
L'interferenza elettromagnetica (EMI) o l'interferenza delle
radiofrequenza (RFI, in caso di radiofrequenza) è un
disturbo che può inuire su un circuito elettrico a causa
dell'induzione o radiazione elettromagnetica da una
sorgente esterna. Il convertitore di frequenza è progettato
per soddisfare la norma di prodotto EMC per convertitori
di frequenza IEC 61800-3, nonché la norma europea EN
55011. Per soddisfare i livelli di emissione in EN 55011,
schermare il cavo motore e terminare correttamente il cavo
motore. Per maggiori informazioni relativi alle prestazioni
EMC, vedere capitolo 3.2.2 Risultati test EMC (emissione).
Alimentazione, incluso l'isolamento del segnale.
•
Comando gate per IGBT, trigger trasformatori e
•
fotoaccoppiatori.
I trasduttori di corrente di uscita a eetto Hall.
•
2.6 Funzioni applicative personalizzate
Le caratteristiche applicative personalizzate sono le caratteristiche più comuni programmate nel convertitore di
frequenza al ne di migliorare le prestazioni di sistema.
Richiedono una programmazione o un setup minimi.
Comprendere che queste caratteristiche sono disponibili
può contribuire a ottimizzare il progetto di un sistema ed
eventualmente a evitare l'introduzione di componenti o
funzionalità ridondanti. Vedere la Guida alla program-
mazione per istruzioni sull'attivazione di queste funzioni.
2.6.1 Adattamento automatico motore
L'adattamento automatico motore (AMA) è una procedura
di test automatico usato per misurare le caratteristiche
elettriche del motore. L'AMA fornisce un modello
elettronico accurato del motore. Consente al convertitore
di frequenza di calcolare le prestazioni ottimali e l'e-
cienza con il motore. L'esecuzione della procedura AMA
massimizza anche la caratteristica di ottimizzazione
automatica dell'energia del convertitore di frequenza.
L'AMA viene eseguita senza che il motore sia in rotazione e
senza disaccoppiare il carico dal motore.
2.6.2 Protezione termica del motore
2 2
2.5.19 Misurazioni della corrente su tutte e
tre le fasi del motore
La corrente di uscita al motore viene misurata
continuamente su tutte e 3 le fasi per proteggere il convertitore di frequenza e il motore da cortocircuiti, guasti verso
terra e la perdita di fase. I guasti verso terra dell'uscita
vengono rilevati immediatamente. Se viene persa una fase
del motore, il convertitore di frequenza si arresta immediatamente e segnala la fase mancante.
2.5.20 Isolamento galvanico di morsetti di
controllo
Tutti i morsetti di controllo e i morsetti dei relè di uscita
sono isolati galvanicamente dalla tensione di rete. Ciò
signica che il circuito di controllo è completamente
protetto dalla corrente di ingresso. I morsetti dei relè di
uscita richiedono un collegamento a massa proprio. Questo
isolamento soddisfa i severi requisiti di bassissima tensione
di protezione (PELV) per l'isolamento.
I componenti che costituiscono l'isolamento galvanico
sono:
La protezione termica del motore può essere fornita in 3
modi:
Tramite il rilevamento diretto della temperatura
•
per mezzo del sensore PTC negli avvolgimenti del
motore e collegato a un AI o DI standard.
Interruttore termomeccanico (tipo Klixon) su un
•
DI.
Tramite il relè termico elettronico integrato (ETR)
•
per motori asincroni.
L'ETR calcola la temperatura del motore misurando la
corrente, la frequenza e il tempo di funzionamento. Il
convertitore di frequenza visualizza il carico termico sul
motore in percentuale e può emettere un avviso al
raggiungimento di un setpoint di sovraccarico programmabile.
Le opzioni programmabili in caso di sovraccarico
consentono al convertitore di frequenza di arrestare il
motore, ridurre l'uscita o ignorare la condizione. Anche a
basse velocità, il convertitore di frequenza soddisfa le
norme di sovraccarico elettronico del motore I2t Classe 20.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 27
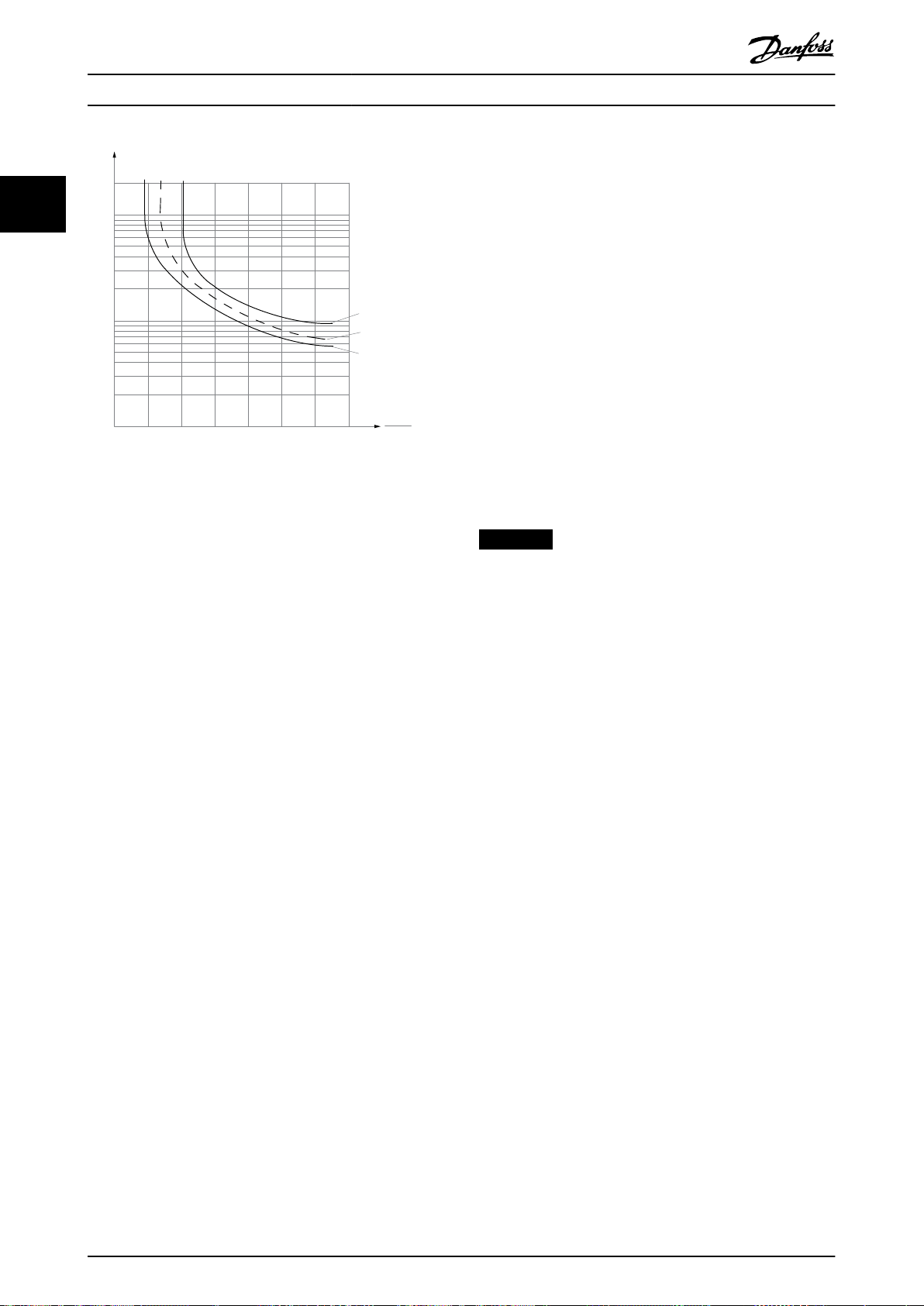
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
•
•
Backup dell'energia cinetica.
Rampa di decelerazione controllata.
22
Riaggancio al volo
Questa selezione consente di agganciare un motore che
gira liberamente a causa di una caduta di tensione di rete.
Questa opzione è importante per centrifughe e ventole.
Backup dell'energia cinetica
Questa selezione assicura che il convertitore di frequenza
funzioni ntantoché nel sistema è presente energia. Per
brevi cadute di tensione di rete, il funzionamento viene
ripristinato al ritorno dell'alimentazione di rete senza far
arrestare l'applicazione e senza mai perdere il controllo. E
possibile selezionare varie varianti di backup dell'energia
cinetica.
Disegno 2.15 Caratteristiche ETR
Congurare il comportamento del convertitore di
frequenza in occasione della caduta di tensione di rete in
parametro 14-10 Guasto di rete e parametro 1-73 Riaggancio
L'asse X in Disegno 2.15 mostra il rapporto tra I
motor
e I
motor
al volo.
nominale. L'asse Y mostra il tempo in secondi che precede
il momento in cui l'ETR si disinserisce e fa scattare il
convertitore di frequenza. Le curve illustrano la caratteristica a una velocità doppia della velocità nominale e a
una velocità pari a 0,2 volte la velocità nominale.
AVVISO!
La ruota libera è raccomandata per compressori poiché,
nella maggior parte delle situazioni, l'inerzia è troppo
piccola per il riaggancio al volo.
A velocità più bassa l'ETR si disinserisce a livelli di calore
inferiori a causa del minor rareddamento del motore. In
2.6.4 Controllori PID integrati
tal modo il motore è protetto dal surriscaldamento anche a
bassa velocità. La funzione ETR calcola la temperatura del
motore basandosi sull'eettiva corrente e velocità. La
temperatura calcolata è visibile come un parametro di
I 4 controllori (PID) proporzionali, integrali e derivati
integrati consentono di fare a meno di dispositivi di
controllo ausiliari.
lettura in parametro 16-18 Term. motore nel convertitore di
frequenza.
Il controllore PID mantiene il controllo costante dei sistemi
ad anello chiuso in cui devono essere mantenuti una
2.6.3 Caduta di tensione di rete
pressione, un usso e una temperatura regolati o altri
requisiti di sistema. Il convertitore di frequenza può fornire
Durante la caduta di tensione di rete, il convertitore di
frequenza continua a funzionare no a quando la tensione
del circuito intermedio non scende al di sotto del livello
minimo di funzionamento. Il livello di arresto minimo è di
norma il 15% al di sotto della tensione di alimentazione
nominale minima. La tensione di rete anteriore alla caduta
di tensione e il carico del motore determinano il tempo
un controllo autonomo della velocità del motore in
risposta ai segnali di retroazione dai sensori remoti. Il
convertitore di frequenza è dotato di 2 segnali di
retroazione da 2 dispositivi diversi. Questa caratteristica
consente un sistema con diversi requisiti di retroazione. Il
convertitore di frequenza regola il controllo confrontando i
due segnali per ottimizzare le prestazioni del sistema.
che precede l'arresto a ruota libera del convertitore di
frequenza.
Usare i 3 controllori addizionali e indipendenti per
controllare altre apparecchiature di processo quali le
Congurare il convertitore di frequenza
(parametro 14-10 Guasto di rete) per diversi tipi di comportamento durante una caduta di tensione di rete.
Scatto bloccato una volta che il collegamento CC
•
pompe di alimentazione chimiche, il comando valvole e
per la ventilazione con vari livelli.
2.6.5 Riavvio automatico
si è esaurito.
Ruota libera con riaggancio al volo ogniqualvolta
•
ritorna l'alimentazione di rete
(parametro 1-73 Riaggancio al volo).
28 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Il convertitore di frequenza può essere programmato per
riavviare automaticamente il motore dopo uno scatto
minore, come una perdita di potenza o una uttuazione
momentanea. Questa caratteristica elimina il fabbisogno di
un ripristino manuale e migliora il funzionamento automa-
tizzato per sistemi controllati in remoto. Il numero di

Panoramica dei prodotti Guida alla progettazione
tentativi di riavvio nonché la durata tra i tentativi può
essere limitata.
2.6.6 Riaggancio al volo
Il riaggancio al volo consente al convertitore di frequenza
di sincronizzarsi con un motore in funzione che gira a
piena velocità in entrambe le direzioni. Ciò impedisce scatti
a causa della sovracorrente. Minimizza le sollecitazioni
meccaniche al sistema poiché il motore non subisce una
variazione improvvisa di velocità all'avvio del convertitore
di frequenza.
2.6.7 Piena coppia a velocità ridotta
Il convertitore di frequenza segue una curva V/Hz variabile
per fornire una piena coppia motore anche a velocità
ridotte. La piena coppia di uscita può coincidere con la
massima velocità di esercizio di progetto del motore. Ciò
dierisce dai convertitori di frequenza a coppia variabile e
dai convertitori di frequenza a coppia costante. I convertitori di frequenza a coppia variabile forniscono una coppia
motore ridotta a bassa velocità. I convertitori di frequenza
a coppia costante forniscono tensione in eccesso, calore e
rumore del motore a meno della velocità inferiore.
2.6.8 Bypass di frequenza
In alcune applicazioni, il sistema può avere velocità di
funzionamento che creano una risonanza meccanica. Ciò
può generare un rumore eccessivo ed eventualmente
danneggiare i componenti meccanici nel sistema. Il convertitore di frequenza dispone di 4 larghezze di banda di
frequenza di bypass programmabili. Queste consentono al
motore di non operare a velocità che provocano la
risonanza del sistema.
2.6.9 Preriscaldamento del motore
Per preriscaldare un motore in un ambiente freddo o
umido, una piccola quantità di corrente CC può essere
immessa continuamente nel motore per proteggerlo dalla
condensazione e da una partenza a freddo. Ciò può
eliminare il fabbisogno di un riscaldatore.
2.6.10 Quattro setup programmabili
Il convertitore di frequenza dispone di 4 setup che
possono essere programmati indipendentemente.
Utilizzando il multi-setup, è possibile commutare tra
funzioni programmate indipendentemente attivate da
ingressi digitali o da un comando seriale. Vengono usati
setup indipendenti, per esempio, per modicare riferimenti
oppure per il funzionamento diurno/notturno o estivo/
invernale, o per controllare motori multipli. L'LCP visualizza
il setup attivo.
I dati del setup possono essere copiati dal convertitore di
frequenza a un altro convertitore di frequenza scaricando
le informazioni dall'LCP amovibile.
2.6.11 Frenatura in CC
Alcune applicazioni possono richiedere la frenatura del
motore no a rallentarlo o arrestarlo. L'applicazione di una
corrente CC al motore frena il motore e può eliminare la
necessità di un freno motore separato. La frenatura in CC
può essere impostata per attivarsi a una frequenza
predenita o al ricevimento di un segnale. È anche
possibile programmare l'intensità di frenatura.
2.6.12 Funzione Sleep Mode
Il modo pausa motore provoca l'arresto automatico del
motore quando il fabbisogno è basso per un periodo di
tempo specicato. Quando il fabbisogno del sistema
aumenta, il convertitore di frequenza riavvia il motore. Il
modo pausa fornisce risparmi energetici e riduce l'usura
del motore. Diversamente da un orologio ad arresto
programmato, il convertitore di frequenza è sempre
disponibile per il funzionamento se viene raggiunto il
fabbisogno di ne pausa preimpostato.
2.6.13 Abilitazione avviamento
Il convertitore di frequenza può attendere un segnale
remoto sistema pronto prima dell'avviamento. Quando
questa funzione è attiva, il convertitore di frequenza
rimane arrestato no a ricevere il permesso all'avviamento.
L'abilitazione avviamento assicura che il sistema o l'appa-
recchiatura ausiliaria è nello stato corretto prima che al
convertitore di frequenza venga consentito di avviare il
motore.
2.6.14 Smart Logic Control (SLC)
Lo Smart Logic Control (SLC) è una sequenza di azioni
denite dall'utente (vedere parametro 13-52 Azione regol. SL
[x]), le quali vengono eseguite dall'SLC quando l'evento
associato denito dall'utente (vedere
parametro 13-51 Evento regol. SL [x]) è valutato come true
dall'SLC.
La condizione per un evento può essere un particolare
stato, oppure il fatto che l'uscita generata da una regola
logica o da un operatore di comparatore diventa TRUE.
Questo dà luogo a un'azione associata come descritto in
Disegno 2.16.
2 2
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 29

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
22
Disegno 2.17 Ordine di esecuzione quando sono programmati
4 eventi/azioni
Comparatori
I comparatori vengono utilizzati per confrontare variabili
continue (vale a dire la frequenza di uscita, la corrente di
uscita, l'ingresso analogico e così via) con valori ssi
Disegno 2.16 Evento e azione SCL
preimpostati.
Tutti gli eventi e le azioni sono numerati e collegati
formando delle coppie (stati). Questo signica che quando
l'evento [0] è soddisfatto (raggiunge il valore TRUE), viene
eseguita l'azione [0] . In seguito a ciò, le condizioni
dell'evento [1] verranno valutate e, se verranno valutate
come TRUE, verrà eseguita l'azione [1] e cosi via. Verrà
valutato un solo evento alla volta. Se un evento viene
valutato come FALSE, durante l'intervallo di scansione
corrente non succede nulla (nell'SLC) e non vengono
valutati altri eventi. Questo signica che quando l'SLC
inizia, valuta ogni intervallo di scansione come evento [0]
(e solo evento [0]). Solo se l'evento [0] viene valutato TRUE,
l'SLC esegue l'azione [0] e inizia a valutare l'evento [1]. È
possibile programmare da 1 a 20 eventi e azioni.
Una volta eseguito l'ultimo evento / azione, la sequenza
inizia da capo con evento [0] / azione [0]. Disegno 2.17
mostra un esempio con 4 eventi / azioni:
Disegno 2.18 Comparatori
Regole logiche
Si possono combinare no a 3 ingr. booleani (ingressi
TRUE / FALSE) di timer, comparatori, ingr. digitali, bit di
stato ed eventi utilizzando gli operatori logici AND, OR e
NOT.
Disegno 2.19 Regole logiche
Le regole logiche, i timer, e i comparatori sono disponibili
anche per l'utilizzo all'esterno della sequenza SLC.
Per un esempio dell'SLC, dare riferimento a
30 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
capitolo 4.3 Esempi di setup dell'applicazione.

Panoramica dei prodotti Guida alla progettazione
2.6.15 Funzione Safe Torque O
Il convertitore di frequenza è disponibile con la funzionalità
Safe Torque O (STO) tramite il morsetto di controllo 37.
STO disabilita la tensione di controllo dei semiconduttori di
potenza dello stadio di uscita del convertitore di frequenza
al ne di impedire che venga generata la tensione
necessaria a far ruotare il motore. Quando viene attivato
STO (morsetto 37), il convertitore di frequenza emette un
allarme, fa scattare l'unità e fa procedere il motore in folle
no all'arresto. È necessario un riavvio manuale. La
funzione STO può essere usata come un arresto di
emergenza per il convertitore di frequenza. Nel modo di
funzionamento normale, quando STO non è necessario,
usare la funzione di arresto regolare. Quando si usa il
riavvio automatico, assicurarsi che siano soddisfatti i
requisiti della ISO 12100 paragrafo 5.3.2.5.
Condizioni di responsabilità
È responsabilità dell'utilizzatore garantire il personale
installando e utilizzando la funzione STO:
Leggere e comprendere le norme di sicurezza
•
riguardanti la salute, la sicurezza e la prevenzione
degli incidenti.
È necessario possedere un'adeguata conoscenza
•
delle norme generiche di sicurezza valide per
l'applicazione
Un utente è denito come:
Integratore.
•
Operatore.
•
Tecnico del servizio di assistenza.
•
Tecnico manutentore.
•
Norme
L'uso di STO sul morsetto 37 richiede che l'utente soddis
tutte le norme di sicurezza, incluse le leggi, i regolamenti e
le direttive vigenti. La funzione STO opzionale è conforme
alle seguenti norme:
EN 954-1: Categoria 3 1996
•
IEC 60204-1: Categoria 0 2005 – arresto non
•
controllato
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 – STO
•
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 Categoria 3 PL d
•
ISO 14118: 2000 (EN 1037) – prevenzione degli
•
avviamenti involontari
Le informazioni e le istruzioni elencate non sono sucienti
per assicurare un uso corretto e sicuro della funzionalità
STO. Per istruzioni sull'STO, fare riferimento al Manuale di
funzionamento VLT® Safe Torque O.
specica.
Misure di protezione
È necessario personale qualicato e capace per
•
l'installazione e la messa in funzione dei sistemi
di sicurezza.
Installare l'unità in un contenitore con una
•
protezione IP54 o in un ambiente equivalente. In
caso di applicazioni particolari è richiesto un
livello di protezione IP maggiore.
Il cavo tra il morsetto 37 e il dispositivo di
•
sicurezza esterno deve essere protetto dai
cortocircuiti secondo la ISO 13849-2 tabella D.4.
Quando forze esterne inuiscono sull'asse motore
•
(per esempio carichi sospesi), è necessario
adottare misure aggiuntive (per esempio un freno
di mantenimento di sicurezza) per eliminare i
potenziali rischi.
2.7 Guasto, funzioni di avviso e di allarme
Il convertitore di frequenza monitora molti aspetti del
funzionamento del sistema, incluse le condizioni di rete, il
carico del motore e le prestazioni, nonché lo stato del
convertitore. Un allarme o un avviso non indicano necessa-
riamente un problema dello stesso convertitore di
frequenza. Può essere una condizione di fuori del conver-
titore di frequenza che viene monitorato per i limiti di
prestazione. Il convertitore di frequenza possiede varie
risposte preprogrammate a guasti, avvisi e allarmi.
Selezionare ulteriori caratteristiche di allarme e di avviso
per migliorare o modicare le prestazioni del sistema.
Questa sezione descrive le caratteristiche di allarme e di
avviso comuni. La comprensione che queste caratteristiche
sono disponibili può ottimizzare un progetto di sistema e
possibilmente evitare l'introduzione di componenti o
funzionalità ridondanti.
2.7.1 Funzionamento in presenza di
sovratemperatura
Per default, il convertitore di frequenza emette un allarme
e scatta in caso di surriscaldamento. Se è selezionato
Declassamento automatico e avviso, il convertitore di
frequenza avverte della condizione ma continua a
funzionare e tenta di rareddarsi da solo riducendo per
prima cosa la frequenza di commutazione. Quindi, se
necessario, riduce la frequenza di uscita.
Il declassamento automatico non sostituisce le
impostazioni dell'utente per il declassamento in base alla
temperatura ambiente (vedi capitolo 5.4 Declassamento in
base alla temperatura ambiente).
2 2
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 31

Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
2.7.2 Avviso riferimento alto e basso
22
Nella modalità ad anello aperto, un segnale di riferimento
controlla direttamente la velocità del convertitore di
frequenza. Il display mostra un avviso lampeggiante
riferimento alto o basso quando viene raggiunto il
massimo o minimo programmato.
2.7.3 Avviso retroazione alta e bassa
Nel funzionamento ad anello chiuso, il convertitore di
frequenza monitora i valori di retroazione alti e bassi
selezionati. Il display mostra un avviso lampeggiante alto o
basso quando la situazione lo richiede. Il convertitore di
frequenza può anche monitorare i segnali di retroazione
nel funzionamento ad anello aperto. Mentre i segnali non
inuiscono sul funzionamento del convertitore di
frequenza in anello aperto, possono essere utili per l'indicazione dello stato del sistema localmente o tramite la
comunicazione seriale. Il convertitore di frequenza gestisce
39 diverse unità di misura.
quando viene arrestata né all'avvio nché non è stata
raggiunta la frequenza di esercizio.
2.7.7 Avviso corrente alta
Questa funzione è simile all'avviso alta frequenza, eccetto
per il fatto che viene usata un'impostazione corrente alta
per emettere un avviso e attivare apparecchiature
addizionali. La funzione non è attiva durante l'arresto o
all'avvio nché non è stata raggiunta la corrente di
esercizio impostata.
2.7.8 Avviso corrente bassa
Questa funzione è simile all'avviso bassa frequenza (vedi
capitolo 2.7.6 Avviso bassa frequenza), a parte il fatto che
viene usata un'impostazione corrente bassa per emettere
un avviso e disattivare l'apparecchiatura. La funzione non è
attiva durante l'arresto o all'avvio nché non è stata
raggiunta la corrente di esercizio impostata.
2.7.9 Avviso carico nullo/cinghia rotta
2.7.4 Sbilanciamento di fase o perdita di
fase
Eccessive oscillazioni di corrente nel bus CC indicano uno
sbilanciamento di fase o una perdita di fase nella rete.
Quando viene meno una fase di potenza al convertitore di
frequenza, l'azione predenita è quella di emettere un
allarme e far scattare l'unità per proteggere i condensatori
del bus CC. Altre opzioni sono l'emissione di un avviso e la
riduzione della corrente di uscita al 30% della corrente
complessiva oppure di emettere un avviso e continuare
con il funzionamento normale. Il funzionamento di un'unità
collegata a una linea sbilanciata può essere un'opzione no
alla correzione dello sbilanciamento.
2.7.5 Avviso di alta frequenza
Utile nell'attivazione di apparecchiature addizionali come
pompe o ventole di rareddamento, il convertitore di
frequenza può riscaldarsi quando la velocità del motore è
elevata. Nel convertitore di frequenza è possibile
immettere un'impostazione specica di alta frequenza. Se
l'uscita supera la frequenza di avviso impostata, l'unità
visualizza un avviso di alta frequenza. Un'uscita digitale dal
convertitore di frequenza può segnalare a dispositivi
esterni di attivarsi.
Questa funzione può essere usata per monitorare una
condizione di carico nullo, per esempio una cinghia
trapezoidale. Dopo che un limite di corrente bassa è stato
memorizzato nel convertitore di frequenza, nel caso in cui
è stata rilevata la perdita di un carico, il convertitore di
frequenza può essere programmato a emettere un allarme
e scattare o di continuare il funzionamento ed emettere un
avviso.
2.7.10 Interfaccia seriale persa
Il convertitore di frequenza può rilevare la perdita della
comunicazione seriale. Può essere selezionato un ritardo di
no a 99 s per evitare una risposta dovuta a interruzioni
sul bus di comunicazione seriale. Quando il tempo di
ritardo viene superato, le opzioni disponibili per l'unità
sono:
Mantenere la sua ultima velocità.
•
Andare alla velocità massima.
•
Andare ad una velocità preimpostata.
•
Arrestarsi ed emettere un avviso.
•
Interfacce utente e programmazione
2.8
2.7.6 Avviso bassa frequenza
Quando si disattivano delle apparecchiature, il convertitore
di frequenza può riscaldarsi quando la velocità del motore
è bassa. Un'impostazione specica di bassa frequenza può
essere selezionata per avvisare e disattivare dispositivi
esterni. L'unità non emette un avviso bassa frequenza né
32 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Il convertitore di frequenza usa parametro per
programmare le funzioni delle sue applicazioni. I parametri
forbiscono una descrizione di una funzione e un menu di
opzioni per selezionare tra valori numerici o immetterli. Un
menu di programmazione campione è mostrato in
Disegno 2.20.

130BP066.10
1107 giri/min.
0 - ** Funzionam./display
1 - ** Carico/Motore
2 - ** Freni
3 - ** Rif./rampe
3,84 A 1 (1)
Menu princ.
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
Panoramica dei prodotti Guida alla progettazione
numerico con opzioni di visualizzazione limitate.
Disegno 2.21 mostra l'LCP.
2 2
Disegno 2.20 Menu di programmazione campione
Interfaccia utente locale
Per la programmazione locale, i parametri sono accessibili
premendo [Quick Menu] o [Main Menu] sull'LCP.
Il menu rapido è concepito per l'avviamento iniziale e per
le caratteristiche del motore. Il menu principale dà accesso
a tutti i parametri e consente la programmazione di
applicazioni avanzati.
Interfaccia utente remota
Per la programmazione remota, Danfoss ore un
programma software per sviluppare, memorizzare e
trasferire le informazioni di programmazione. Software di
congurazione MCT 10 consente all'utente di collegare un
PC al convertitore di frequenza e eseguire una programmazione dal vivo invece di usare il tastierino LCP. Oppure la
programmazione può essere eettuata o-line e scaricata
sull'unità. L'intero prolo del convertitore di frequenza può
essere caricato sul PC per il backup o l'analisi. Per la
connessione al convertitore di frequenza sono disponibili
un connettore USB e il morsetto RS485.
Software di congurazione MCT 10 è disponibile per il
download gratuito all'indirizzo www.VLT-software.com. Su
richiesta è anche disponibile un CD con codice articolo
130B1000. Il manuale d'uso comprende istruzioni di funzionamento dettagliate. Vedere anche capitolo 2.8.2 Software
PC.
Programmazione di morsetti di controllo
Ciascun morsetto di controllo è in grado di
•
eseguire funzioni speciche.
I parametri associati al morsetto abilitano la
•
selezione della funzione.
Per un corretto funzionamento del convertitore di
•
frequenza usando morsetti di controllo, i morsetti
devono essere:
- collegati correttamente;
- programmati per la funzione desiderata.
2.8.1 Pannello di controllo locale
Il pannello di controllo locale LCP) è un display graco
sulla parte anteriore dell'unità che mette a disposizione
l'interfaccia utente attraverso comandi a pulsante e
visualizza messaggi di stato, avvisi e allarmi, programmazione parametri, e altro. È anche disponibile un display
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 33
Disegno 2.21 Pannello di controllo locale
2.8.2 Software PC
Il PC è collegato tramite un cavo (host/device) USB
standard, oppure tramite l'interfaccia RS485.
Il bus USB è un bus seriale che utilizza 4 li schermati, con
il pin di massa 4 collegato allo schermo nella porta USB
del PC. Collegando il PC a un convertitore di frequenza
tramite il cavo USB esiste il rischio potenziale di
danneggiare il controllore host USB del PC. Tutti i normali
PC sono costruiti senza isolamento galvanico nella porta
USB.
Qualsiasi dierenza del potenziale di massa causata dal
mancato rispetto delle raccomandazioni descritte nel
manuale di funzionamento può danneggiare il controllore
host USB attraverso lo schermo del cavo USB.
Quando si collega un PC a un convertitore di frequenza
utilizzando un cavo USB, utilizzare un isolatore USB con

130BT308.10
Panoramica dei prodotti
VLT® Refrigeration Drive FC 103
isolamento galvanico per proteggere il controllore host
USB del PC dalle dierenze di potenziale di massa.
Non utilizzare un cavo di potenza del PC con una spina di
22
terra quando il PC è collegato al convertitore di frequenza
tramite un cavo USB. Questo riduce le dierenze di
potenziale di massa ma non elimina completamente le
dierenze di potenziale dovute alla massa e allo schermo
collegati alla porta USB del PC.
Esempio 2: Trasferimento di dati dal PC al convertitore
di frequenza tramite Software di congurazione MCT 10
1. Collegare un PC all'unità mediante la porta USB o
tramite l'interfaccia RS485.
2. Aprire Software di congurazione MCT 10.
3. Selezionare Open – vengono visualizzati i le
memorizzati.
4. Aprire il le appropriato.
5. Selezionare Write to drive.
Ora tutti i parametri vengono trasferiti al convertitore di
frequenza.
È disponibile un manuale separato per il Software di
congurazione MCT 10. Scaricare il software e il manuale
da www.danfoss.com/BusinessAreas/DrivesSolutions/Software-
download/.
2.8.2.2 Software di calcolo delle armoniche
VLT® MCT 31
Lo strumento PC MCT 31, per il calcolo delle armoniche,
Disegno 2.22 Collegamento USB
2.8.2.1 Software di congurazione MCT 10
Il Software di congurazione MCT 10 è stato progettato
per mettere in funzione ed eseguire la manutenzione del
convertitore di frequenza, inclusa la programmazione
guidata del controllore in cascata, il real time clock, il
controllore smart logic e la manutenzione preventiva.
Questo software consente il facile controllo di dettagli e
fornisce una panoramica generale di sistemi, grandi o
piccoli. Questo strumento gestisce tutte le serie di conver-
titori di frequenza e i dati relativi ai VLT® Advanced Active
Filters AAF 006 e ai VLT® Soft Starter.
Esempio 1: Memorizzazione dei dati nel PC tramite via
Software di congurazione MCT 10
1. Collegare un PC all'unità tramite USB o tramite
l'interfaccia RS485.
2. Aprire Software di congurazione MCT 10.
3. Selezionare la porta USB o l'interfaccia RS485.
4. Selezionare copy.
5. Selezionare la sezione project.
6. Selezionare paste.
7. Selezionare save as.
Tutti i parametri sono ora memorizzati.
consente una facile valutazione della distorsione armonica
in una data applicazione. Possono essere calcolati sia la
distorsione armonica dei convertitori di frequenza Danfoss
che di quelli non Danfoss con dispositivi aggiuntivi per la
riduzione delle armoniche, come i ltri Danfoss VLT
Advanced Harmonic Filters AHF 005/AHF 010 e 12–18
raddrizzatori di impulso.
L'MCT 31 può anche essere scaricato da www.danfoss.com/
BusinessAreas/DrivesSolutions/Softwaredownload/.
®
2.8.2.3 Software per il calcolo delle
armoniche (HCS)
HCS è una versione avanzata dello strumento di calcolo
delle armoniche. I risultati calcolati vengono confrontati
con le norme pertinenti e possono essere stampate di
seguito.
Per ulteriori informazioni, vedere www.danfoss-hcs.com/
Default.asp?LEVEL=START
Manutenzione
2.9
I modelli di convertitore di frequenza Danfoss no a 90 kW
sono esenti da manutenzione. I convertitori di frequenza
ad alta potenza (con un valore nominale di 110 kw o
superiore) dispongono di tappeti ltranti che richiedono
una pulizia periodica da parte dell'operatore, in funzione
dell'esposizione alla polvere e ai contaminanti. Gli intervalli
di manutenzione per le ventole di rareddamento (circa 3
anni) e i condensatori (circa 5 anni) sono consigliati nella
maggior parte degli ambienti.
34 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Panoramica dei prodotti Guida alla progettazione
2.9.1 Immagazzinamento
Come tutte le apparecchiature elettroniche, i convertitori di
frequenza devono essere stoccati in un luogo asciutto. Non
è necessaria una formatura (carica del condensatore)
periodica durante l'immagazzinamento.
Si consiglia di mantenere l'apparecchiatura sigillata nella
sua confezione
no all'installazione.
2 2
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 35

Integrazione nel sistema
3 Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Questo capitolo descrive le considerazioni necessarie per
integrare il convertitore di frequenza in un progetto di
33
sistema. Il capitolo è suddiviso in tre sezioni:
Capitolo 3.1 Condizioni ambientali di funzio-
•
namento
Condizioni ambientali di funzionamento per il
convertitore di frequenza, tra cui:
- Ambiente.
- Contenitori.
- Temperatura.
- Declassamento.
- Altre considerazioni.
Capitolo 3.2 EMC, armoniche e protezione dalla
•
dispersione verso terra
Ingresso (rigenerazione) dal convertitore di
frequenza alla rete di alimentazione che
comprende potenza, armoniche, monitoraggio e
altre considerazioni.
Un progetto del sistema completo anticipa potenziali aree
problematiche e attua la combinazione più ecace delle
caratteristiche del convertitore di frequenza. L'informazione
che segue fornisce le direttive per pianicare e specicare
un sistema di controllo motore che comprende convertitori
di frequenza.
Le caratteristiche di funzionamento forniscono una varietà
di concetti progettuali, dal semplice controllo di velocità
del motore a un sistema di automazione completamente
integrato con, per esempio:
•
•
•
- Potenza.
•
- Armoniche.
- Monitoraggio.
- Altre considerazioni.
Capitolo 3.4 Integrazione della rete
•
Ingresso nel convertitore di frequenza dal lato
della rete che comprende:
- Potenza.
- Armoniche.
- Monitoraggio.
- Cablaggio.
- Fusibili.
- Altre considerazioni.
Capitolo 3.5 Integrazione del motore
•
Uscita dal convertitore di frequenza al motore tra
cui:
- Tipi di motore.
- Carico.
- Monitoraggio.
- Cablaggio.
- Altre considerazioni.
Capitolo 3.6 Ingressi e uscite supplementari,
•
capitolo 3.7 Pianicazione meccanica
Integrazione dell'ingresso e dell'uscita del convertitore di frequenza per un progetto ottimale del
sistema, tra cui:
Un completo concetto progettuale include
dettagliate delle necessità e dell'uso.
•
•
•
•
•
•
•
•
•
•
Vedi capitolo 3.10 Lista di controllo della progettazione per
una guida pratica per la selezione e la progettazione.
La comprensione delle caratteristiche e delle opzioni
strategiche può ottimizzare il progetto di un sistema e,
eventualmente, consente di evitare l'introduzione di
componenti o funzionalità ridondanti.
- Convertitore di frequenza/
corrispondenza motore.
- Caratteristiche del sistema.
- Altre considerazioni.
Gestione della retroazione.
Segnalazione dello stato di funzionamento.
Risposte automatizzate ai guasti.
Programmazione remota.
speciche
Tipi di convertitore di frequenza
Motori
Requisiti di rete
Struttura di controllo e programmazione
Comunicazione seriale
Taglia, forma e peso dell'apparecchiatura
Requisiti dei cavi di potenza e di comando; tipo e
lunghezza
Fusibili
Apparecchiatura ausiliaria
Trasporto e immagazzinamento
36 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.1 Condizioni ambientali di
funzionamento
3.1.1 Umidità
Sebbene il convertitore di frequenza può funzionare correttamente a un'umidità elevata (no al 95% di umidità
relativa), evitare la formazione di condensa. Esiste un
rischio specico di condensa quando il convertitore di
frequenza è più freddo dell'aria ambiente umida. L'umidità
nell'aria può anche condensare sui componenti elettronici
e provocare cortocircuiti. La condensazione avviene in
unità senza alimentazione. È consigliabile installare un
riscaldatore dell'armadio quando è possibile che si verichi
una condensazione a causa delle condizioni ambientali.
Evitare l'installazione in aree soggette a gelate.
In alternativa, far funzionare il convertitore di frequenza in
modalità stand-by (con l'unità sempre collegata alla rete)
riduce il rischio di condensa. Assicurarsi che la dissipazione
di potenza sia
umidità nel circuito del convertitore di frequenza.
suciente per impedire l'inltrazione di
3.1.2 Temperatura
I limiti minimi e massimi di temperatura ambiente sono
specicati per tutti i convertitori di frequenza. Evitare
temperature ambiente estreme prolunga la durate delle
apparecchiature e massimizza l'adabilità complessiva del
sistema. Seguire le raccomandazioni elencate per assicurare
prestazioni massime e la lunga durata delle apparecchiature.
Sebbene il convertitore di frequenza possano
•
funzionare a temperature
corretto funzionamento a carichi nominali viene
solo garantito a temperature di 0 °C o superiori.
Non superare il limite di temperatura massimo.
•
La durata dei componenti elettronici si riduce del
•
50% per ogni 10 °C quando vengono fatti
funzionare a temperature superiori alla loro
temperatura di progetto.
Persino i dispositivi con gradi di protezione IP54,
•
IP55 o IP66 devono rispettare gli intervalli di
temperatura ambiente specicati.
Può essere necessario un condizionamento
•
dell'aria supplementare dell'armadio o del luogo
di installazione.
no a -10 °C, un
3.1.3.1 Ventole
Il convertitore di frequenza è dotato di ventilatori integrati
per assicurare un rareddamento ottimale. La ventola
principale forza il usso d'aria lungo le alette di rared-
damento sul dissipatore di calore, assicurando il
rareddamento dell'aria interna. Alcune taglie di potenza
dispongono di una piccola ventola secondaria accanto alla
scheda di controllo, la quale assicura che l'aria interna
venga fatta circolare per evitare punti caldi.
La temperatura interna nel convertitore di frequenza
controlla la ventola principale. La ventola principale viene
controllata tramite la temperatura interna del convertitore
di frequenza e la velocità aumenta gradualmente insieme
alla temperatura, riducendo la rumorosità e il consumo di
energia quando il fabbisogno è basso, e assicurando il
massimo rareddamento quando è necessario. Il comando
ventola può essere regolato mediante
parametro 14-52 Comando ventola per adattarsi a qualsiasi
applicazione, anche per proteggere dagli eetti negativi
del rareddamento in climi freddi. In caso di sovratemperatura all'interno del convertitore di frequenza, questo
riduce la frequenza e il modello di commutazione. Vedere
capitolo 5.1 Declassamento per maggiori informazioni.
3.1.3.2 Calcolo del usso d'aria richiesto per
Il usso d'aria richiesto per rareddare un convertitore di
frequenza o più convertitori di frequenza in un contenitore
può essere calcolato come segue:
3.1.3 Rareddamento
I convertitori di frequenza dissipano potenza sotto forma di
calore. Le seguenti raccomandazioni sono necessarie per
un rareddamento ecace delle unità.
La temperatura massima dell'aria che penetra nel
•
contenitore non deve mai superare i 40 °C
(104 °F).
La temperatura media di giorno/notte non deve
•
superare i 35 °C (95 °F).
Montare l'unità per consentire un usso libero
•
d'aria di rareddamento attraverso le alette di
rareddamento. Vedere capitolo 3.7.1 Spazio per
gli spazi di montaggio corretti.
Fornire i requisiti minimi di spazio libero anteriore
•
e posteriore per il usso d'aria di rareddamento.
Vedere il manuale di funzionamento per i corretti
requisiti dell'impianto.
il rareddamento del convertitore di
frequenza
1. Determinare la perdita di potenza all'uscita
massima per tutti i convertitori di frequenza da
tabelle di dati in capitolo 7 Speciche.
2. Aggiungere i valori di perdita di potenza di tutti i
convertitori di frequenza che possono funzionare
allo stesso tempo. La somma risultante è il calore
Q da trasferire. Moltiplicare il risultato con il
fattore f, leggere da Tabella 3.1. Per esempio, f =
3,1 m3 x K/Wh a livello del mare.
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 37

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3. Determinare la massima temperatura dell'aria che
entra nel contenitore. Sottrarre questa
temperatura dalla temperatura necessaria
all'interno del contenitore, per esempio 45 °C
(113 °F).
33
4. Dividere il totale dal passo 2 per il totale dal
passo 3.
Il calcolo viene espresso dalla formula:
f xQ
V =
Ti − T A
dove
usso d'aria in m3/h
V =
f = fattore in m3 x K/Wh
Q = calore da trasferire in W
Ti = temperatura all'interno del contenitore in °C
TA = temperatura ambiente in °C
f = cp x ρ (calore specico dell'aria x densità dell'aria)
AVVISO!
Calore specico dell'aria (cp) e densità dell'aria (ρ) non
sono costanti, ma dipendono dalla temperatura, dall'umidità e dalla pressione atmosferica. Pertanto dipendono
dall'altitudine sopra il livello del mare.
Tabella 3.1 mostra valori tipici del fattore f, calcolato per
diverse altitudini.
Altitudine
Tabella 3.1 Fattore f, calcolato per diverse altitudini
Calore specico dell'ariacpDensità dell'ariaρFattore
[m] [kJ/kgK]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
[kg/m3] [m3⋅K/Wh]
f
Se il usso d'aria è richiesto in CFM, usare la conversione 1
m3/h = 0,589 CFM.
Per l'esempio in alto, 711,6 m3/h = 418,85 CFM.
3.1.4 Sovratensione generata dal motore
La tensione CC nel collegamento CC (bus CC) aumenta
quando il motore funziona da generatore. Questa
situazione può avvenire in 2 modi:
Il carico aziona il motore quando il convertitore di
•
frequenza viene fatto funzionare a una frequenza
di uscita costante. Questo è generalmente
chiamato un sovraccarico continuativo.
Durante la decelerazione, se l'inerzia del carico è
•
elevato e il tempo di decelerazione del convertitore di frequenza è impostato su un valore
breve.
Il convertitore di frequenza non può reimmettere l'energia
nell'ingresso. Pertanto limita l'energia accettata dal motore
quando è impostato per abilitare la rampa automatica. Se
durante la decelerazione si
convertitore di frequenza tenta di farlo prolungando
automaticamente il tempo rampa di decelerazione. Se ciò
non riesce o se il carico aziona il motore quando funziona
a una frequenza costante, il convertitore di frequenza si
spegne e visualizza un guasto quando viene raggiunto un
livello di tensione critico del bus CC.
verica una sovratensione, il
3.1.5 Rumorosità acustica
La rumorosità acustica del convertitore di frequenza
proviene da 3 fonti:
Bobine del collegamento CC (circuito intermedio)
•
Induttanza ltro RFI
•
Ventilatori interni
•
Vedere Tabella 7.40 per i gradi di rumorosità.
Esempio
Qual è il usso d'aria richiesto per rareddare 2 convertitori di frequenza (perdite di calore 295 W e 1430 W) che
funzionano simultaneamente, montati in un contenitore
con un picco della temperatura ambiente di 37 °C?
La somma delle perdite di calore di entrambi i
•
convertitori di frequenza è 1725 W.
La moltiplicazione di 1725 W per 3,3 m3 x K/Wh
•
dà 5693 m x K/h.
La sottrazione di 37 °C da 45 °C dà 8 °C (=8 K).
•
La divisione di 5693 m x K/h per 8 K dà: 711,6
•
m3h.
38 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
3.1.6 Vibrazioni e urti
Il convertitore di frequenza viene collaudato in base a una
procedura basata sulle norme IEC 68-2-6/34/35 e 36. Questi
test sottopongono l'unità a forze di 0,7 g per un campo da
18–1000 Hz casuali, in 3 direzioni per 2 ore. Tutti i convertitori di frequenza Danfoss soddisfano i requisiti che
corrispondono a queste condizioni quando l'unità è
montata alla parete o al suolo nonché quando è montata
all'interno di pannelli imbullonati alle pareti o ai pavimenti.

Integrazione nel sistema Guida alla progettazione
3.1.7 Atmosfere aggressive
3.1.7.1 Gas
I gas aggressivi, quali il solfuro di idrogeno, il cloro o
l'ammoniaca possono danneggiare i componenti elettrici e
meccanici del convertitore di frequenza. La contaminazione
dell'aria di rareddamento può anche causare la decomposizione graduale delle piste dei circuiti stampati e dei sigilli
delle porte. Contaminanti aggressivi sono spesso presenti
in impianti di trattamento delle acque grigie o in piscine.
Un chiaro segno della presenza di un'atmosfera aggressiva
è il rame corroso.
In atmosfere aggressive, sono consigliati contenitori IP
ristretti insieme a schede di circuito con rivestimento
conforme. Vedere Tabella 3.2 per i valori di rivestimento
conforme.
AVVISO!
Il convertitore di frequenza è dotato di serie con un
rivestimento di classe 3C2 delle schede elettroniche. Su
richiesta, è disponibile il rivestimento di classe 3C3.
Classe
3C1 3C2 3C3
Tipo di gas Unità
Sale marino n/a Nessuno Nebbia salina Nebbia salina
Ossidi di
zolfo
Solfuro di
idrogeno
Cloro mg/
Cloruro di
idrogeno
Fluoruro di
idrogeno
Ammoniaca mg/
Ozono mg/
Azoto mg/
Tabella 3.2 Valori nominali della classe di rivestimento
conforme
1) I valori massimi sono i valori dei picchi transitori che superano 30
minuti al giorno.
mg/
0,1 0,3 1,0 5,0 10
3
m
mg/
0,01 0,1 0,5 3,0 10
3
m
0,01 0,1 0,03 0,3 1,0
3
m
mg/
0,01 0,1 0,5 1,0 5,0
3
m
mg/
0,003 0,01 0,03 0,1 3,0
3
m
0,3 1,0 3,0 10 35
3
m
0,01 0,05 0,1 0,1 0,3
3
m
0,1 0,5 1,0 3,0 9,0
3
m
Valore
medio
Valore
massimo
1)
Valore
medio
Valore
massimo
1)
3.1.7.2 Esposizione alla polvere
Spesso è inevitabile dover installare i convertitori di
frequenza in ambienti con elevata esposizione alla polvere.
La polvere interessa le unità montate a parete o su telaio
con gradi di protezione IP55 o IP66 e anche dispositivi
montati nell'armadio con gradi di protezione IP21 o IP20.
Considerare i 3 aspetti descritti in questa sezione quando i
convertitori di frequenza vengono installati in tali ambienti.
Rareddamento ridotto
La polvere forma depositi sulla supercie del dispositivo e
all'interno delle schede di circuito stampato e dei
componenti elettronici. Questi depositi agiscono da strati
isolanti e impediscono il trasferimento del calore all'aria
ambiente, riducendo la capacità di rareddamento. I
componenti si riscaldano, il che causa un invecchiamento
accelerato dei componenti elettronici e una diminuzione
della durata di esercizio dell'unità. I depositi di polvere sul
dissipatore di calore nella parte posteriore dell'unità riduce
anche la durata utile dell'unità.
Ventole di
rareddamento
Il usso d'aria per il rareddamento dell'unità è generato
dalle ventole di rareddamento che si trovano sul retro del
dispositivo. I rotori delle ventole presentano piccoli
cuscinetti in cui la polvere può penetrare e agire da
abrasivo. La polvere nei cuscinetti provoca danni al
cuscinetto e il guasto del ventilatore.
Filtri
I convertitori di frequenza ad alta potenza sono dotati di
ventole di rareddamento che espellono l'aria calda
dall'interno del dispositivo. Oltre una certa taglia, queste
ventole sono dotate di teli ltranti. Questi ltri possono
intasarsi rapidamente quando vengono usati in ambienti
polverosi. In queste condizioni sono necessarie misure
preventive.
Manutenzione periodica
Nelle condizioni descritte in precedenza, durante la
manutenzione periodica, si consiglia di pulire il convertitore di frequenza e i ltri. Rimuovere la polvere dal
dissipatore di calore e dalle ventole e pulire i materassini
ltranti.
3.1.8 Denizioni del grado IP
Prima cifra
Contro la penetrazione
da corpi estranei solidi
0 (non protetto) (non protetto)
1
≥50 mm di diametro
2 Diametro 12,5 mm Dito
3 Diametro 2,5 mm Strumento
4
≥1,0 mm di diametro
5 Resistente alla polvere Filo
6 Tenuta alla polvere Filo
Contro l'accesso a
parti pericolose da
Dorso della mano
Filo
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 39
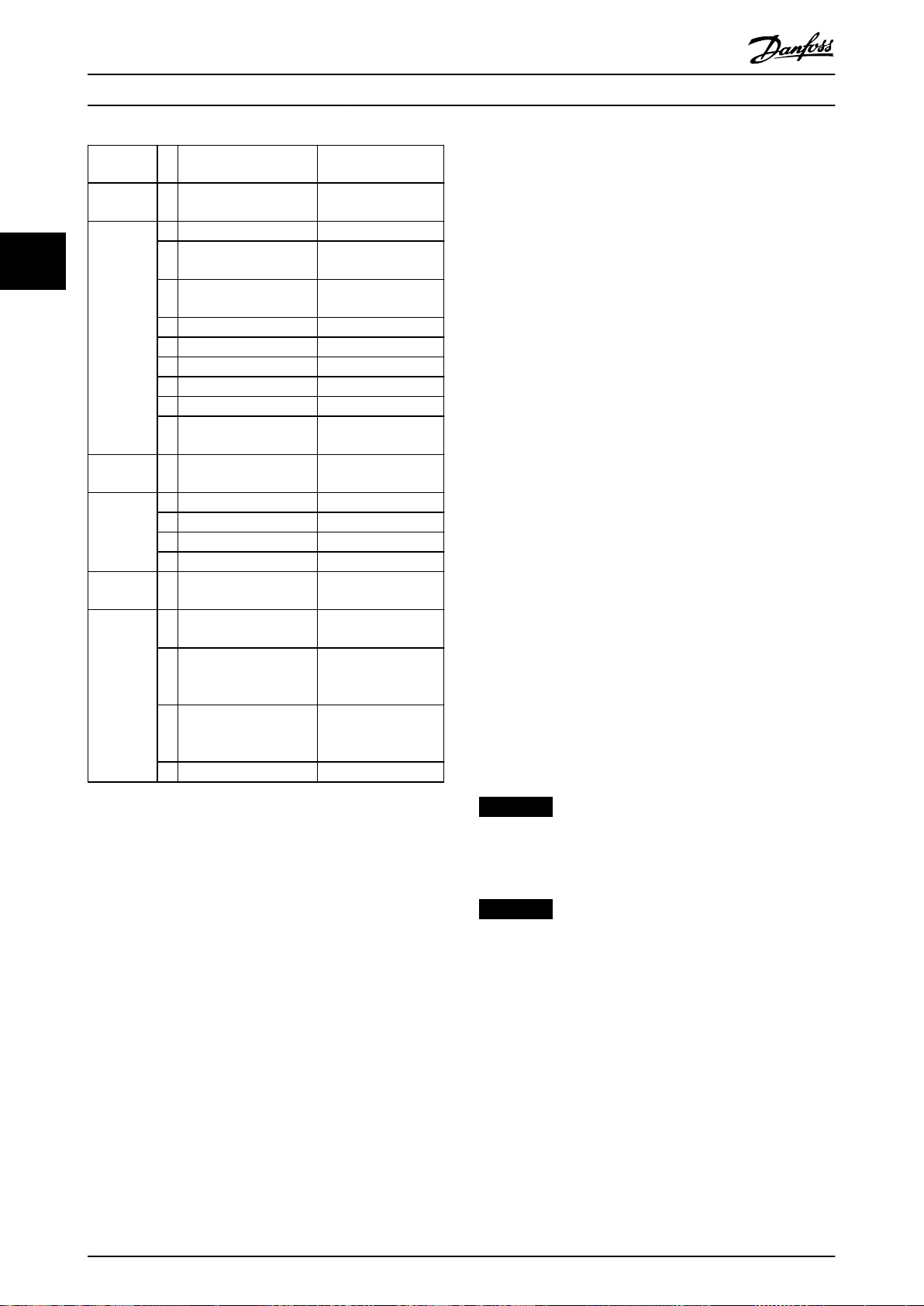
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Contro la penetrazione
da corpi estranei solidi
Contro la penetrazione
di acqua
0 (non protetto) –
33
Seconda
cifra
Prima
lettera
Lettera
supplementare
Tabella 3.3 IEC 60529 Denizioni per gradi IP
1 Gocce in caduta
verticale
2 Gocce a un angolo di
15°
3 Spruzzo d'acqua –
4 Forti spruzzi d'acqua –
5 Getti d'acqua –
6 Forti getti d'acqua –
7 Immersione temporanea –
8 Immersione a lungo
termine
Ulteriori informazioni
speciche per
A Dorso della mano
B Dito
C Strumento
D Filo
Ulteriori informazioni
speciche per
H Dispositivo ad alta
tensione
M Dispositivo in
movimento durante la
prova di tenuta all'acqua
S Dispositivo sso durante
la prova di tenuta
all'acqua
W Condizioni ambientali –
3.1.8.1 Opzioni e prestazioni dell'armadio
Contro l'accesso a
parti pericolose da
–
–
–
–
–
–
Utilizzare i ltri di categoria C1 specicati nella EN 61800-3
che sono conformi ai limiti della classe B dello standard EN
55011.
Apporre note di avviso sul convertitore di frequenza se i
ltri RFI non corrispondono alla categoria C1 (categoria C2
o inferiore). La responsabilità per l'etichettatura corretta è
dell'operatore.
Nella pratica, esistono due approcci ai
Integrati nell'apparecchiatura
•
ltri RFI:
- I ltri integrati occupano spazio
nell'armadio ma eliminano le spese
aggiuntive per l'installazione, il
cablaggio e il materiale. Tuttavia, il
vantaggio più importante è la perfetta
conformità EMC e il cablaggio dei ltri.
Opzioni esterne
•
ltri RFI esterni opzionali che sono
- I
installati sull'ingresso del convertitore di
frequenza provocano una caduta di
tensione. Nella pratica, ciò signica che
la piena tensione di rete non è presente
sull'ingresso del convertitore di
frequenza e potrebbe essere necessario
un convertitore di potenza maggiore. La
lunghezza massima del cavo motore per
assicurare la conformità ai limiti EMC
varia da 1 a 50 m. Devono essere
sostenuti costi per il materiale, il
cablaggio e il montaggio. La conformità
EMC non viene testata.
AVVISO!
Per assicurare un funzionamento senza interferenze del
sistema convertitore di frequenza/motore, usare sempre
un ltro RFI di categoria C1.
I convertitori di frequenza Danfoss sono disponibili con tre
diversi gradi di protezione:
IP00 o IP20 per l'installazione dell'armadio.
•
IP54 o IP55 per il montaggio locale.
•
IP66 per condizioni ambientali critiche, come
•
un'umidità (dell'aria) estremamente elevata o
elevate concentrazioni di polvere o gas aggressivi.
AVVISO!
Le unità VLT® Refrigeration Drive FC 103 vengono fornite
di serie con ltri RFI integrati conformi alla categoria C1
(EN 61800-3) per l'uso con sistemi di rete da 400 V e
potenze nominali no a 90 kW o alla categoria C2 per
potenze nominali da 110 a 630 kW. Le unità FC 103 sono
conformi a C1 con cavi motore schermati no a 50 m o
C2 con cavi motore schermati no a 150 m. Consultare
3.1.9 Interferenza in radiofrequenza
Tabella 3.4 per maggiori dettagli.
Nella pratica, l'obiettivo principale è ottenere sistemi che
funzionino in modo stabile senza interferenza delle
frequenze tra i componenti. Per ottenere un elevato livello
di immunità, si consiglia di utilizzare convertitori di
frequenza con ltri RFI di alta qualità.
40 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

130BA056.10
1325 4
6
ba
M
Integrazione nel sistema Guida alla progettazione
3.1.10 Conformità all'isolamento PELV e
galvanico
Assicurare la protezione da scosse elettriche quando
l'alimentazione elettrica è del tipo a bassissima tensione di
protezione (PELV) e l'impianto è conforme alle norme PELV
locali e nazionali.
Al
ne di mantenere i requisiti PELV nei morsetti di
controllo, tutte le connessioni devono essere PELV, come
per esempio termistori rinforzati/a doppio isolamento. Tutti
i morsetti di controllo e relè del convertitore di frequenza
Danfoss soddisfano PELV (con l'eccezione del collegamento
a triangolo a terra oltre 400 V).
L'isolamento galvanico (garantito) si ottiene ottemperando
ai requisiti relativi a un isolamento superiore e garantendo
le corrispondenti distanze in aria e distanze superciali.
Questi requisiti sono descritti nella norma EN 61800-5-1.
L'isolamento elettrico viene fornito come mostrato in
Disegno 3.1. I componenti descritti soddisfano sia i requisiti
PELV che quelli di isolamento galvanico.
Installazione ad altitudini elevate
AVVISO
SOVRATENSIONELe installazioni che superano i limiti
per altitudini elevate potrebbero non soddisfare i
requisiti PELV. L'isolamento tra i componenti e le parti
critiche potrebbe essere insuciente. Sussiste il rischio di
sovratensione. Ridurre il rischio di sovratensione usando
dispositivi di protezione esterni o l'isolamento galvanico.
Per impianti ad altitudini elevate, contattare Danfoss per
informazioni sulla conformità PELV.
380–500 V (custodie A, B e C): oltre i 2000 m
•
(6500 piedi)
380–500 V (contenitori D, E e F): Oltre i 3000 m
•
(9800 piedi)
525–690 V: oltre i 2000 m (6500 piedi)
•
3.2 EMC, armoniche e protezione dalla
dispersione verso terra
3.2.1 Considerazioni generali sulle
emissioni EMC
3 3
1 Alimentazione (SMPS) comprensiva dell'isolamento del
segnale di V CC che indica la tensione del circuito
intermedio.
2 Comando di gate per gli IGBT
3 Trasduttori di corrente
4 Isolatore ottico, modulo freno
5 Circuiti di misura della corrente di spunto interna, delle RFI e
della temperatura
6 Relè personalizzati
a Isolamento galvanico per l'opzione di backup da 24 V
b Isolamento galvanico per l'interfaccia bus standard RS485
Disegno 3.1 Isolamento galvanico
I convertitori di frequenza (e altri dispositivi elettrici)
generano campi elettronici o magnetici che possono
interferire con il loro ambiente La compatibilità elettromagnetica (EMC) di questi eetti dipende dalla potenza e
dalle caratteristiche armoniche dei dispositivi.
Un'interazione incontrollata tra dispositivi elettrici in un
sistema può ridurre la compatibilità e compromettere un
funzionamento adabile. L'interferenza può assumere la
forma di:
Distorsione armonica della rete.
•
Scariche elettrostatiche.
•
Rapide oscillazioni di tensione.
•
Interferenza ad alta frequenza.
•
I dispositivi elettrici generano interferenze e sono
interessati da interferenze da altre sorgenti generate.
Le interferenze elettriche si vericano solitamente a
frequenze appartenenti comprese tra 150 kHz e 30 MHz.
L'interferenza irradiata proveniente dal convertitore di
frequenza nel campo compreso tra 30 MHz e 1 GHz è
generata dall'inverter, dal cavo motore e dal motore.
Le correnti capacitive presenti nel cavo motore, accoppiate
con un elevato valore dU/dt nella tensione del motore,
generano correnti di dispersione, come mostrato in
Disegno 3.2.
L'uso di un cavo motore schermato aumenta la corrente di
dispersione (vedere Disegno 3.2), in quanto tali cavi sono
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 41

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
dotati di maggiore capacità verso massa rispetto ai cavi
non schermati. Se la corrente di dispersione non è ltrata,
provoca interferenze maggiori sulla rete nel campo di
radiofrequenza al di sotto di circa 5 MHz. Poiché la
corrente di dispersione (I1) viene ritrasportata all'unità
attraverso lo schermo (I3), all'inizio esisterà solo un piccolo
33
campo elettromagnetico (I4) dal cavo motore schermato
Nel caso in cui sia necessario posizionare lo schermo su
una piastra di installazione per il convertitore di frequenza,
tale piastra deve essere di metallo per ricondurre le
correnti dello schermo all'unità. Inoltre è necessario
assicurare un buon contatto elettrico dalla piastra di installazione attraverso le viti di montaggio al contenitore del
convertitore di frequenza.
secondo Disegno 3.2.
Quando si utilizzano cavi non schermati, è possibile che
Lo schermo riduce l'interferenza irradiata, ma aumenta
l'interferenza a bassa frequenza sulla rete. Collegare lo
schermo del cavo motore al contenitore del convertitore di
alcuni requisiti relativi alle emissioni non vengano
soddisfatti, nonostante la maggior parte dei requisiti
relativi all'immunità siano soddisfatti.
frequenza e a quello del motore. Il miglior modo di
realizzare il collegamento è quello di usare morsetti di
schermatura integrati in modo da evitare terminali dello
schermo attorcigliati (schermi attorcigliati). Questi
aumentano l'impedenza dello schermo alle frequenze più
alte, riducendo l'eetto di schermatura e aumentando la
corrente di dispersione (I4).
Per ridurre il livello di interferenza dell'intero sistema (unità
e impianto), è importante che i cavi motore e i cavi freno
siano più corti possibile. Evitare di installale i cavi con un
livello di segnale sensibile accanto i cavi motore e freno.
Soprattutto l'elettronica di comando genera interferenze
radio superiori a 50 MHz (aeree).
Se viene utilizzato un cavo schermato per relè, cavo di
comando, interfaccia di segnale e freno, montare lo
schermo a entrambe le estremità del contenitore. In alcune
situazioni è tuttavia necessario rimuovere lo schermo per
evitare anelli di corrente.
1 Cavo di massa 3 Alimentazione di rete CA 5 Cavo motore schermato
2 Schermo 4 Convertitore di frequenza 6 Motore
Disegno 3.2 Generazione di corrente di dispersione
42 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.2.2 Risultati test EMC (emissione)
I seguenti risultati sono stati ottenuti con un sistema composto da un convertitore di frequenza (con le opzioni
eventualmente pertinenti), un cavo di comando schermato, un dispositivo di comando con potenziometro nonché un
motore con relativo cavo motore.
Tipo di ltro
RFI
Norme
e
requisiti
EN/IEC 61800-3 Categoria C1
H1
1,1–22 kW 220–240 V 50 150 150 No Sì N/A
1,1–45 kW 200–240 V 50 150 150 No Sì Sì
1,1–90 kW 380–480 V 50 150 150 No Sì Sì
H2/H5
1,1–22 kW 220–240 V No No 25 No No N/A
1,1–3,7 kW 200–240 V No No 5 No No No
5,5–45 kW 200–240 V No No 25 No No No
1,1–7,5 kW 380–480 V No No 5 No No No
11–90 kW 380–480 V No No 25 No No No
HX
1,1–90 kW 525–600 V No No No No No No
EN 55011 Classe B
Domestico,
commerciale e
industrie
leggere
Primo ambiente
Casa e ucio
Emissione condotta Emissione irradiata
Lunghezza del cavo [m] Lunghezza del cavo [m]
Classe A
gruppo 1
Ambiente
industriale
Categoria C2
Primo ambiente
Casa e ucio
Classe A gruppo
2
Ambiente indus-
triale
Categoria C3
Secondo
ambiente
Industriale
Classe B
Domestico,
commerciale e
industrie
leggere
Categoria C1
Primo ambiente
Casa e ucio
Classe A
gruppo 1
Ambiente
industriale
Categoria C2
Primo
ambiente Casa
e ucio
Classe A
gruppo 2
Ambiente
industriale
Categoria C3
Secondo
ambiente
Industriale
3 3
Tabella 3.4 Risultati test EMC (emissione)
HX, H1 o H2 è
HX – Nessun ltro EMC integrato nel convertitore di frequenza (solo unità da 600 V).
H1 – Filtro EMC integrato. Soddisfa la classe A1/B.
H2 – Nessun ltro EMC addizionale. Soddisfa la classe A2.
H5 – versioni per il settore marino. Soddisfa gli stessi livelli di emissione delle versioni H2.
denito nei codici tipo pos. 16–17 per ltri EMC
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 43

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.2.3 Requisiti relativi alle emissioni
La norma di prodotto EMC per convertitori di frequenza
denisce 4 categorie (C1, C2, C3 e C4) con requisiti specici
per l'emissione e l'immunità. Tabella 3.5 indica la
33
denizione delle 4 categorie e la classicazione equivalente
da EN 55011.
3.2.4 Requisiti di immunità
I requisiti di immunità per i convertitori di frequenza
dipendono dall'ambiente nel quale sono installati. I
requisiti per l'ambiente industriale sono più severi dei
requisiti per l'ambiente domestico e di ucio. Tutti i
convertitori di frequenza Danfoss soddisfano i requisiti per
l'ambiente industriale. Pertanto, i convertitori di frequenza
Classe di
Categoria Denizione
C1 Convertitori di frequenza installati
nel primo ambiente (casa e ucio)
con una tensione di alimentazione
inferiore a 1000 V.
C2 Convertitori di frequenza installati
nel primo ambiente (casa e ucio)
con una tensione di alimentazione
inferiore a 1000 V che non sono né
di tipo plug-in né spostabili e sono
concepiti per essere installati e
messi in funzione da un professionista.
C3 Convertitori di frequenza installati
nel secondo ambiente (industriale)
con una tensione di alimentazione
inferiore a 1000 V.
C4 Convertitori di frequenza installati
nel secondo ambiente con una
tensione di alimentazione uguale o
superiore a 1000 V e una corrente
nominale uguale o superiore a 400
A oppure concepiti per l'uso in
sistemi complessi.
Tabella 3.5 Correlazione tra IEC 61800-3 e EN 55011
emissione
equivalente in
EN 55011
Classe B
Classe A
gruppo 1
Classe A
gruppo 2
Senza linea
limite.
Realizzare un
piano EMC.
soddisfano anche i requisiti meno severi per l'ambiente
domestico e di ucio con un ampio margine di sicurezza.
Allo scopo di documentare l'immunità contro le
interferenze elettriche, sono stati eseguiti i seguenti test di
immunità in conformità alle seguenti norme di base:
EN 61000-4-2 (IEC 61000-4-2): Scariche elettro-
•
statiche (ESD): Simulazione di scariche
elettrostatiche provocate da esseri umani.
EN 61000-4-3 (IEC 61000-4-3): Radiazione di un
•
campo elettromagnetico in entrata, a
modulazione di ampiezza Simulazione degli
eetti di apparecchiature di comunicazione radar
e radio e di dispositivi di comunicazione mobili.
EN 61000-4-4 (IEC 61000-4-4): Oscillazioni
•
transitorie da scoppio: Simulazione di interferenze
provocate dalla commutazione di contattori, relè
o dispositivi simili.
EN 61000-4-5 (IEC 61000-4-5): Oscillazioni
•
transitorie da sbalzi di corrente: Simulazione di
transitori causati, per esempio, da fulmini che
cadono vicino agli impianti.
EN 61000-4-6 (IEC 61000-4-6): Modalità comune
•
RF: Simulazione dell'impatto delle apparecchiature
di trasmissione radio collegate mediante cavi di
connessione.
Vedere Tabella 3.7.
Quando vengono adottate le norme generiche di
emissione (condotta), i convertitori di frequenza devono
rispettare i limiti in Tabella 3.6.
Classe di
Ambiente
Primo ambiente
(casa e ucio)
Secondo
ambiente
(ambiente
industriale)
Tabella 3.6 Correlazione tra le norme di emissione generiche
emissione EN 55011
44 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Norma di emissione
generica
EN/IEC 61000-6-3 Norma di
emissione per ambienti
residenziali, commerciali e di
industria leggera.
EN/IEC 61000-6-4 Norma di
emissione per ambienti
industriali.
emissione
equivalente in
EN 55011
Classe B
Classe A gruppo
1

Integrazione nel sistema Guida alla progettazione
Norma di base
Criterio di accettazione B B B A A
Intervallo di tensione: 200–240 V, 380–500 V, 525–600 V, 525–690 V
Linea
Motore 4 kV Modo
Fili di controllo 2 kV Modo
Bus standard 2 kV Modo
Fili relè 2 kV Modo
Applicazione e opzioni
eldbus
Cavo LCP 2 kV Modo
24 V CC esterni
Contenitore
Transitori veloci
IEC 61000-4-42)
4 kV Modo
Comune
Comune
Comune
Comune
Comune
2 kV Modo
Comune
Comune
2 V Modo Comune
— —
2)
Sbalzi di corrente
IEC 61000-4-5
2 kV/2 Ω modalità
dierenziale
4 kV/12 Ω Modo
Comune
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω modalità
dierenziale
1 kV/12 Ω Modo
Comune
2)
1)
1)
1)
1)
1)
1)
2)
ESD
IEC
61000-4-2
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
8 kV AD
6 kV CD
Campo elettromagnetico
irradiato
IEC 61000-4-3
10 V/m —
Tensione modalità
comune RF
IEC 61000-4-6
RMS
3 3
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tabella 3.7 Modulo di immunità EMC
1) Iniezione sullo schermo del cavo.
2) Valori tipicamente ottenuti tramite test.
3.2.5 Isolamento del motore
I motori moderni da usare con convertitori di frequenza
dispongono di un alto grado di isolamento per far fronte
alla nuova generazione di IGBT ad alta ecienza con un
dU/dt elevato. Per il retrot in motori vecchi, confermare
l'isolamento del motore o mitigare con il ltro dU/dt
oppure, se necessario, un ltro sinusoidale.
Per lunghezze del cavo motore ≤, è raccomandata la
lunghezza massima del cavo elencata in
capitolo 7 Speciche e i valori nominali di isolamento del
motore elencati in Tabella 3.8. Se un motore presenta un
grado di isolamento inferiore, utilizzare un ltro dU/dt o
sinusoidale.
Tensione di rete nominale
[V]
UN≤420
420 V< UN≤ 500 ULL rinforzato=1600
500 V< UN≤ 600 ULL rinforzato=1800
600 V< UN≤ 690 ULL rinforzato=2000
Isolamento motore [V]
U
standard =1300
LL
3.2.6 Correnti nei cuscinetti del motore
Per minimizzare le correnti nei cuscinetti e nell'albero,
collegare a massa le unità seguenti alla macchina azionata:
Convertitore di frequenza
•
Motore
•
Macchina azionata
•
Strategie standard di attenuazione
1. Utilizzare un cuscinetto isolato.
2. Applicare rigide procedure di installazione:
2a Assicurarsi che motore e carico motore
siano allineati.
2b Attenersi scrupolosamente alla guida di
installazione EMC.
2c Rinforzare il conduttore PE in modo tale
che l'impedenza ad alta frequenza sia
inferiore nel PE rispetto ai cavi di
alimentazione in ingresso.
Tabella 3.8 Isolamento del motore
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 45
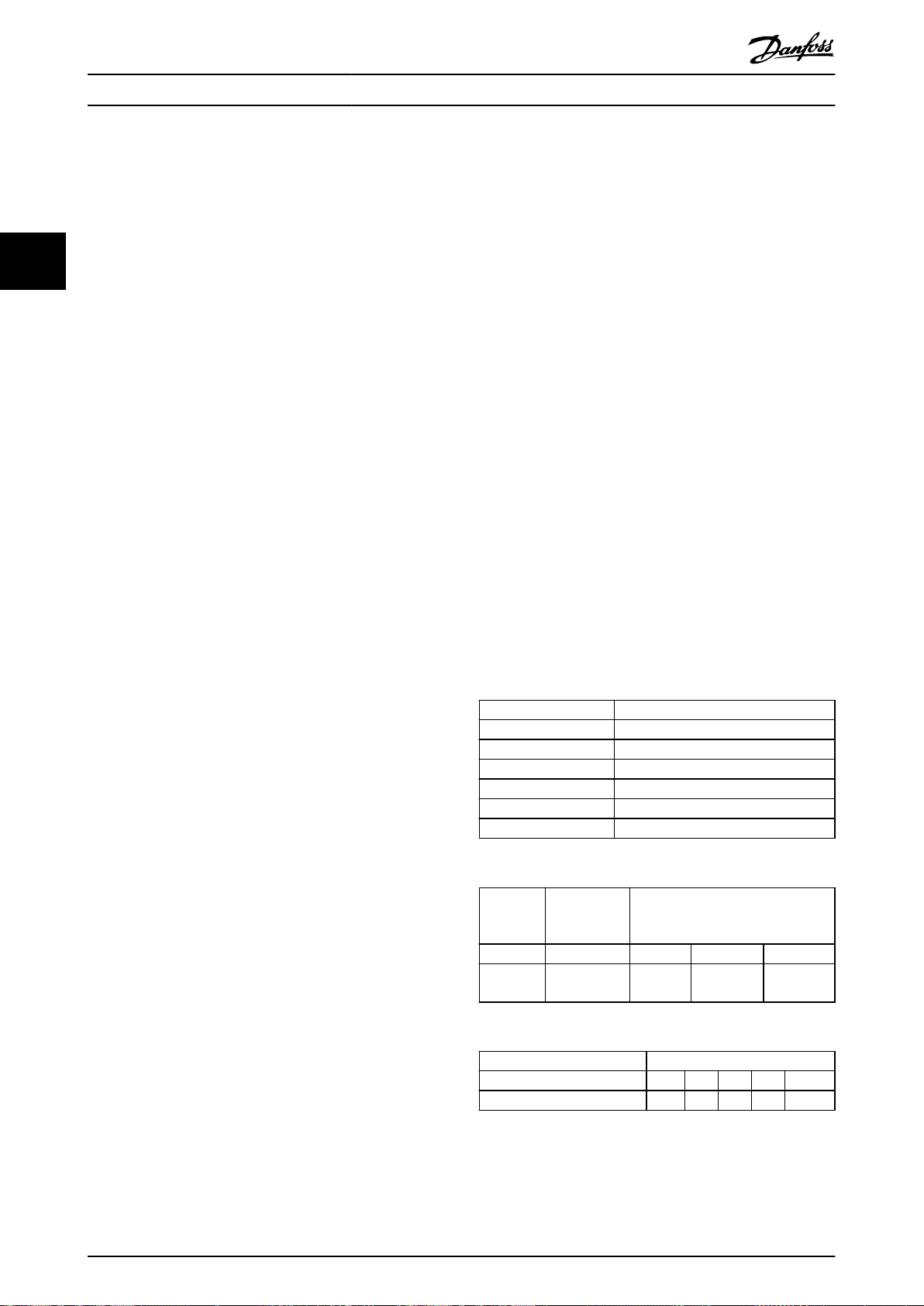
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
2d Assicurare una buona connessione ad
alta frequenza tra motore e convertitore
di frequenza, per esempio, mediante
calore nei cavi e nei trasformatori. Questa generazione di
calore può compromettere altri dispositivi sulla stessa linea
di alimentazione.
cavo schermato con una connessione a
360° nel motore e nel convertitore di
3.2.7.1 Analisi delle armoniche
frequenza.
33
2e Assicurarsi che l'impedenza dal conver-
titore di frequenza alla massa
dell'edicio sia inferiore rispetto all'impedenza di massa della macchina. Ciò
può essere dicile per pompe.
2f Eseguire un collegamento a massa
diretto tra il motore e il carico motore
(per esempio con una pompa).
3. Ridurre la frequenza di commutazione IGBT.
4. Modicare la forma d'onda dell'inverter, 60° AVM
rispetto a SFAVM.
5. Installare un sistema di messa a terra albero
oppure utilizzare un giunto isolante
6. Applicare lubricante conduttivo.
7. Utilizzare le impostazioni di velocità minima se
possibile.
8. Provare ad assicurare che la tensione di rete sia
bilanciata verso terra. Può essere dicoltoso per i
sistemi IT, TT, TN-CS o con una fase a terra del
triangolo.
9. Utilizzare un ltro dU/dt o sinusoidale.
3.2.7 Armoniche
Dispositivi elettrici con diodi raddrizzatori, come
Lampade
•
Computer
•
Copiatrici
•
Macchine fax
•
Varie apparecchiature di laboratorio e
•
sistemi di telecomunicazione
•
possono aggiungere distorsione armonica a un'alimentazione di rete. I convertitori di frequenza usano in
ingresso un ponte a diodi che può contribuire anch'esso
alla distorsione armonica.
uorescenti
Varie caratteristiche di un sistema elettrico di un edicio
determinano il contributo armonico esatto del convertitore
di frequenza al THD di un impianto e la sua capacità di
soddisfare le norme IEEE. È dicile fare generalizzazioni sul
contributo armonico di convertitori di frequenza in un
impianto specico. Quando necessario, eseguire un'analisi
delle armoniche del sistema per determinare gli eetti
sull'apparecchiatura.
Un convertitore di frequenza assorbe dalla rete una
corrente non sinusoidale che aumenta la corrente di
ingresso I
. Una corrente non sinusoidale viene
RMS
trasformata mediante l’analisi di Fourier e suddivisa in
forme d’onda di corrente sinusoidale con dierenti
frequenze, e quindi con dierenti correnti armoniche I
N
aventi una frequenza di base di 50 Hz o 60 Hz.
Le armoniche non contribuiscono direttamente al consumo
energetico, ma aumentano le perdite di calore nell’impianto (trasformatore, induttori, cavi). Di conseguenza, nelle
centrali elettriche con una percentuale elevata di carico del
raddrizzatore, le correnti armoniche dovrebbero essere
mantenute a un livello basso per evitare il sovraccarico del
trasformatore, degli induttori e dei cavi.
Abbreviazione Descrizione
f
1
I
1
U
1
I
n
U
n
n Ordine di un'armonica
Tabella 3.9 Abbreviazioni relative alle armoniche
Corrente
fondamentale
Corrente I
Frequenza
[Hz]
Tabella 3.10 Corrente non sinusoidale trasformata
Frequenza fondamentale
Corrente fondamentale
Tensione fondamentale
Correnti armoniche
Tensione armonica
Corrente armonica (In)
(I1)
1
50 250 350 550
I
5
I
7
I
11
Il convertitore di frequenza non assorbe corrente lineare
dalla linea di alimentazione. Questa corrente non
sinusoidale possiede componenti che sono multipli della
frequenza fondamentale della corrente. Queste componenti
vengono chiamati armoniche. È importante controllare la
Corrente Corrente armonica
I
Corrente di ingresso 1,0 0,9 0,4 0,2 < 0,1
Tabella 3.11 Correnti armoniche confrontate con la corrente
dell'ingresso RMS Corrente
RMSI1I5I7I11-49
distorsione armonica totale dell'alimentazione di rete.
Nonostante le correnti armoniche non inuiscano
direttamente sul consumo di energia elettrica, generano
46 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

175HA034.10
Integrazione nel sistema Guida alla progettazione
Disegno 3.3 Bobine del collegamento CC
AVVISO!
Alcune delle correnti armoniche possono generare
disturbi ai dispositivi di comunicazione collegati allo
stesso trasformatore o provocare risonanza al circuito
dei condensatori di correzione del fattore di potenza.
Per assicurare correnti armoniche basse, il convertitore di
frequenza è dotato di ltri passivi. Le bobine CC riducono
la distorsione armonica totale (THD) al 40%.
La distorsione di tensione sulla tensione di alimentazione
di rete dipende dalle dimensioni delle correnti armoniche
moltiplicate per l'impedenza di rete alla frequenza in
questione. La distorsione di tensione complessiva (THD)
viene calcolata in base alle singole armoniche di tensione
mediante questa formula:
2
2
+ U
THD
U
=
+ ... + U
5
7
U1
3.2.7.2 Requisiti relativi alle emissioni
armoniche
Apparecchiature collegate alla rete pubblica
Opzione Denizione
1 IEC/EN 61000-3-2 Classe A per apparati trifase
bilanciati (apparati professionali con potenze no a
1 kW in totale).
2 IEC/EN 61000-3-12 Apparati 16–75 A e apparati
professionali da 1 kW no a 16 A di corrente di fase.
Tabella 3.12 Norme relative alle emissioni armoniche
3.2.7.3 Risultati del test armoniche
(emissioni)
2
N
Attuale (tipica) 40 20 10 8
Limite per
R
≥120
sce
Attuale (tipica) 46 45
Limite per
R
≥120
sce
Tabella 3.13 Risultati del test armoniche (emissioni)
Corrente armonica individuale In/I1 (%)
I
5
40 25 15 10
Fattore di distorsione corrente armonica (%)
I
7
THD PWHD
48 46
I
11
I
13
È responsabilità dell'installatore o dell'utente dell'apparecchiatura di vericare, consultando se necessario l'operatore
della rete di distribuzione dell'energia elettrica, che l'apparecchiatura sia collegata a una rete con una potenza di
cortocircuito Ssc superiore o uguale a quella specicata
nell'equazione.
Consultare il gestore della rete di distribuzione per
collegare altre taglie di potenza alla rete di alimentazione
pubblica.
Conforme a varie linee direttive a livello di sistema:
I dati sulle correnti armoniche in Tabella 3.13 sono
conformi a IEC/EN 61000-3-12 con riferimento alle norme
di prodotto relative agli azionamenti elettrici. Possono
essere utilizzati come base di calcolo dell'inuenza delle
correnti armoniche sul sistema di alimentazione elettrica e
per la documentazione della conformità alle direttive
regionali in materia: IEEE 519 -1992; G5/4.
3.2.7.4 Eetto delle armoniche in un
sistema di distribuzione dell'energia
In Disegno 3.4, un trasformatore è collegato sul primario a
un punto di inserzione comune PCC1, sull'alimentazione a
media tensione. Il trasformatore ha un'impedenza Z
alimenta un certo numero di carichi. Il punto di inserzione
comune in cui sono collegati tutti i carichi è PCC2. Ogni
carico è collegato mediante cavi che hanno impedenza Z1,
Z2, Z3.
e
xfr
3 3
Taglie di potenza no a PK75 in T2 e T4 sono conformi a
IEC/EN 61000-3-2 Classe A. Taglie di potenza da P1K1 no
a P18K in T2 e no a P90K in T4 sono conformi a IEC/EN
61000-3-12, tabella 4. Anche le taglie P110–P450 in T4
sono conformi alla IEC/EN 61000-3-12 anche se questa
conformità non è richiesta, perché le correnti sono
superiori a 75 A.
Tabella 3.13 descrive che la potenza di cortocircuito dell'alimentazione Ssc in corrispondenza del punto di interfaccia
tra l'alimentazione dell'utente e il sistema pubblico (R
sce
) è
superiore o uguale a:
= 3 × R
S
SC
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 47
× U
× I
SCE
= 3 × 120 × 400 × I
rete
equ
equ

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
33
Disegno 3.5 Eetti negativi sulle armoniche
3.2.7.5 Standard e requisiti per la
limitazione delle armoniche
Disegno 3.4 Piccolo sistema di distribuzione
Le correnti armoniche assorbite dai carichi non lineari
causano una distorsione della tensione a causa della
caduta di tensione sull'impedenza del sistema di distribuzione. Con impedenze più elevate si hanno livelli
maggiori di distorsione di tensione.
La distorsione di corrente varia in funzione delle
prestazioni dell'apparato e dipende dai singoli carichi. La
distorsione di tensione varia in funzione delle prestazioni
del sistema. Non è possibile determinare la distorsione di
tensione nel PCC se sono note solamente le prestazioni del
carico in termini di armoniche. Per stimare la distorsione
nel PCC devono essere note la congurazione del sistema
di distribuzione e le relative impedenze.
Un termine comunemente usato per descrivere
l'impedenza di un sistema di distribuzione è il rapporto di
cortocircuito R
. Questo rapporto è denito come il
sce
rapporto tra la potenza apparente di cortocircuito al PCC
(Ssc) e la potenza apparente nominale del carico (S
S
ce
R
=
sce
S
dove
equ
Ssc=
2
U
Z
alimentazione
e
S
equ
= U × I
L'eetto negativo delle armoniche è doppio
Le correnti armoniche contribuiscono alle perdite
•
di sistema (nel cablaggio e nel trasformatore).
La distorsione armonica di tensione provoca
•
disturbi agli altri carichi e ne aumenta le perdite.
equ
equ
I requisiti per la limitazione delle armoniche possono
essere:
Requisiti specici dell'applicazione.
•
Norme che devono essere osservate.
•
I requisiti specici dell'applicazione sono relativi a una
specica installazione in condizioni in cui esistono ragioni
tecniche per imporre una limitazione delle armoniche.
Esempio
Se 1 dei motori è collegato direttamente online e l'altro è
alimentato da un convertitore di frequenza, un trasformatore con 250 kVA con 2 motori da 110 kW collegati è
suciente. Tuttavia, se entrambi I motori sono alimentati
dal convertitore di frequenza, il trasformatore è sottodimensionato. Usando ulteriori precauzioni per la riduzione
delle armoniche durante l'installazione o la selezione di un
convertitore di frequenza a basso contenuto di armoniche,
potrebbe essere possibile collegare entrambi i motori a
convertitori di frequenza.
Esistono varie norme, regolamenti e speciche per la
riduzione delle armoniche. Norme diverse valgono in aree
).
geograche diverse e per industrie diverse. Ecco le norme
più comuni:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Vedere la Guida alla progettazione VLT® Advanced Harmonic
Filter AHF 005/AHF 010 per ulteriori dettagli sulle singole
norme.
In Europa, il THDv massimo equivale all'8% se l'impianto è
collegato tramite la rete pubblica. Se l'impianto dispone di
un trasformatore proprio, il limite è il 10% di THDv. Il VLT
®
Refrigeration Drive FC 103 è progettato per resistere al
10% di THDv.
48 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Integrazione nel sistema Guida alla progettazione
3.2.7.6 Riduzione delle armoniche
Nel caso sia necessario sopprimere le armoniche, Danfoss
ore una vasta gamma di dispositivi di soppressione.
Questi sono:
convertitori di frequenza a 12 impulsi.
•
Filtri AHF.
•
Convertitori di frequenza a basso contenuto di
•
armoniche.
Filtri attivi.
•
La scelta della soluzione migliore dipende da molti fattori:
La rete (distorsione di fondo, sbilanciamento
•
dell'alimentazione di rete, risonanza, tipo di
alimentazione (trasformatore/generatore)).
Applicazione (prolo di carico, numero di carichi
•
e taglia dei carichi).
Norme e regolamenti locali e nazionali (IEEE519,
•
IEC, G5/4, ecc.).
Costo totale della proprietà (costo iniziale,
•
ecienza, manutenzione, ecc.).
Considerare sempre la riduzione delle armoniche se il
carico del trasformatore ha un contributo non lineare del
40% o superiore.
Danfoss ore strumenti per il calcolo delle armoniche, vedi
capitolo 2.8.2 Software PC.
Disegno 3.6 Inusso della lunghezza del cavo motore e della
potenza sulla corrente di dispersione. Taglia di potenza >
taglia di potenza b
La corrente di dispersione dipende anche dalla distorsione
in linea.
3 3
3.2.8 Corrente di dispersione verso massa
Rispettare le norme nazionali e locali relative alla messa a
terra di protezione di apparecchiature in cui le correnti di
dispersione superano i 3,5 mA.
La tecnologia dei convertitori di frequenza implica una
commutazione ad alta frequenza a elevati livelli di potenza.
Questo genera una corrente di dispersione nel
collegamento a massa.
La corrente di dispersione verso terra è costituita da vari
elementi e dipende da diverse congurazioni del sistema,
tra cui:
Filtraggio RFI.
•
Lunghezza del cavo motore.
•
Schermatura del cavo motore.
•
Potenza del convertitore di frequenza.
•
Disegno 3.7 La distorsione di linea inuisce sulla corrente di
dispersione
Se la corrente di dispersione supera 3,5 mA, la conformità
con EN/IEC61800-5-1 (azionamenti elettrici a velocità
variabile) richiede speciali cura. Potenziare la messa a terra
con i seguenti requisiti in materia di collegamenti a massa
di protezione:
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 49

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Integrazione nel sistema
Filo di terra (morsetto 95) con una sezione
•
VLT® Refrigeration Drive FC 103
trasversale di almeno 10 mm2.
Due cavi di massa separati, entrambi di
•
dimensioni adeguate a quanto previsto dalla
norma.
33
Per ulteriori informazioni vedere le norme EN/IEC61800-5-1
e EN 50178.
Utilizzo degli RCD
Quando si utilizzano dispositivi a corrente residua (RCD),
detti anche interruttore per le correnti di dispersione a
terra (ELCB), rispettare le seguenti regole:
Utilizzare solo RCD di tipo B, poiché questi sono
•
in grado di rilevare correnti CA e CC.
Utilizzare RCD con un ritardo per evitare guasti
•
dovuti a correnti di terra transitorie.
Dimensionare il RCD in funzione della
•
congu-
razione del sistema e di considerazioni ambientali.
La corrente di dispersione include varie frequenze
provenienti sia dalla frequenza di rete e la frequenza di
commutazione. Il rilevamento della frequenza di
Disegno 3.9 Inusso della frequenza di disinserimento RCD
sulla corrente di dispersione
commutazione dipende dal tipo di RCD usato.
Disegno 3.8 Principali contributi alla corrente di dispersione
La quantità di corrente di dispersione rilevata dall'RCD
dipende dalla frequenza di disinserimento dell'RCD.
50 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Extended product
Motor system
Drive system (PDS)
Complete drive module (CDM)
Infeed
section
Auxiliaries Auxiliaries Motor
Motor starter
contactors, soft starters, ...
Motor control system = CDM or starter
Driven equipment
Trans-
mission
Load
machine
Basic
drive
module
(BDM)
Mains
and
mains
cable
130BE604.11
Integrazione nel sistema Guida alla progettazione
3.3 Ecienza energetica
La norma EN 50598 Progettazione ecocompatibile (Ecodesign) di azionamenti elettrici, avviatori, elettronica di potenza e dell’ap-
plicazione controllata fornisce linee guida per valutare l'ecienza energetica dei convertitori di frequenza.
La norma fornisce un metodo neutro per determinare le classi di
parziale. La norma consente la combinazione di qualsiasi motore con un qualsiasi convertitore di frequenza.
Disegno 3.10 Azionamento elettrico (PDS) e modulo convertitore completo (CDM)
ecienza e le perdite di potenza a piano carico e a carico
3 3
Componenti ausiliari: ltro antiarmoniche avanzato AHF 005, AHF 010, reattanza di linea MCC 103, ltro sinusoidale MCC
101, ltro dU/dt MCC 102.
3.3.1 Classi IE e IES
Moduli convertitore completi (CDM)
In base allo standard EN 50598-2, il modulo convertitore
completo (CDM) comprende il convertitore di frequenza, la
sua sezione di alimentazione e i suoi componenti ausiliari.
Classi di ecienza energetica per il CDM:
IE0 = inferiore allo stato dell'arte.
•
IE1 = stato dell'arte.
•
IE2 = superiore allo stato dell'arte.
•
I convertitori di frequenza Danfoss soddisfano la classe di
ecienza energetica IE2. La classe di ecienza energetica
è denita al punto nominale del CDM.
Azionamenti elettrici (PDS)
Un azionamento elettrico (PDS) consiste di un modulo
convertitore completo (CDM) e di un motore.
Classi di ecienza energetica per il PDS:
•
•
•
IES0 = inferiore allo stato dell'arte.
IES1 = stato dell'arte.
IES2 = superiore allo stato dell'arte.
A seconda del rendimento del motore, i motori azionati da
un convertitore di frequenza Danfoss VLT® tipicamente
soddisfano la classe di ecienza energetica IES2.
La classe di ecienza energetica è denita al punto
nominale del PDS e può essere calcolata sulla base delle
perdite del CDM e del motore.
3.3.2 Dati sulla perdita di potenza e dati sul
rendimento
La perdita di potenza e il rendimento di un convertitore di
frequenza dipendono dalla congurazione e dalle apparecchiature ausiliarie. Per ottenere dati sulla perdita di potenza
e sul rendimento specici per la congurazione, usare il
DanfossDanfoss ecoSmart tool.
I dati sulla perdita di potenza sono forniti come % della
potenza di uscita apparente nominale e vengono
determinati in base alla EN 50598-2. Una volta determinati
i dati sulla perdita di potenza, il convertitore di frequenza
usa le impostazioni di fabbrica, fatta eccezione per i dati
del motore che servono per far funzionare il motore.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 51

T
f
100%
50%
50% 90%
25%
0%
0%
130BE605.10
130BD930.11
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0 10 20 30 40 50 60 70 80 90 100
n [%]
P
L,CDM
(freq,load)
[%]
1
2
3
130BD931.11
n [%]
0 20 40 60 80 100
100.00
98.00
96.00
94.00
92.00
90.00
η
CDM (freq,load)
[%]
1
2
3
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
33
1 100% di carico
2 50% di carico
3 25% di carico
T Coppia [%]
f Frequenza [%]
Disegno 3.11 Punti di funzionamento del convertitore di
frequenza in base alla EN 50598-2
Fare riferimento a www.danfoss.com/vltenergyeciency per i
dati sulla perdita di potenza e sul rendimento del convertitore di frequenza nei punti di funzionamento specicati
in Disegno 3.11.
Usare l'applicazione Danfoss ecoSmart per calcolare le
classi di rendimento IE e IES. L'applicazione è disponibile in
ecosmart.danfoss.com.
Esempio di dati disponibili
Il seguente esempio mostra i dati sulla perdita di potenza
e sul rendimento per un convertitore di frequenza con le
seguenti caratteristiche:
Potenza nominale 55 kW, tensione nominale a
•
400 V.
Potenza apparente nominale, Sr, 67,8 kVA.
•
Potenza di uscita nominale, P
•
Rendimento nominale, ηr, 98,3%.
•
Disegno 3.12 e Disegno 3.13 mostrano le curve di perdita di
potenza e di rendimento. La velocità è proporzionale alla
frequenza.
52 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Disegno 3.12 Dati sulla perdita di potenza del convertitore di
frequenza. Perdite relative CDM (P
velocità (n) [% della velocità nominale].
1 100% di carico
2 50% di carico
3 25% di carico
Disegno 3.13 Dati sul rendimento del convertitore di
frequenza. Rendimento CDM (η
velocità (n) [% della velocità nominale].
) [%] rispetto alla
L, CDM
CDM(freq, load)
) [%] rispetto alla
Interpolazione della perdita di potenza
, 59,2 kW.
CDM
Determinare la perdita di potenza in un punto di funzionamento arbitrario usando l'interpolazione bidimensionale.
3.3.3 Perdite e rendimento di un motore
Il rendimento di un motore che funziona al 50–100% della
velocità nominale del motore e al 75–100% della coppia
nominale è praticamente costante. Ciò è valido sia quando
il convertitore di frequenza controlla il motore sia quando
il motore è direttamente collegato alla rete.
Il rendimento dipende dal tipo di motore e dal livello di
magnetizzazione.
Per maggiori informazioni sui tipi di motore, fare
riferimento all'opuscolo sulla tecnologia del motore all'indirizzo www.vlt-drives.danfoss.com.

130BE107.10
25
20
15
10
5
0
0 2 4 6 8 10
[kHz]
[%]
1
2
3
Integrazione nel sistema Guida alla progettazione
Frequenza di commutazione
La frequenza di commutazione inuisce sulle perdite di
magnetizzazione nel motore e sulle perdite di
commutazione nel convertitore di frequenza come
mostrato in Disegno 3.14.
1 Motore e convertitore di frequenza
2 Solo motore
3 Solo convertitore di frequenza
Disegno 3.14 Perdite [%] rispetto alla frequenza di
commutazione [kHz]
Tipo di
sistema
Sistemi di
distribuzione TN
TN-S Un sistema a cinque li con conduttori di neutro
TN-C Un sistema a quattro li con conduttore di neutro
Sistemi di
distribuzione TT
Sistema di
distribuzione IT
Tabella 3.14 Tipi di sistema rete CA
Descrizione
Esistono 2 tipi di sistemi di distribuzione di rete TN:
TN-S e TN-C.
(N) e di messa terra di protezione (PE) separati.
Fornisce le migliori caratteristiche EMC ed evita la
trasmissione dell'interferenza.
e messa a terra di protezione (PE) comune lungo
l'intero sistema. La combinazione di conduttore
neutro e di messa a terra di protezione provoca
caratteristiche EMC insoddisfacenti.
Un sistema a quattro li con un conduttore di
neutro a terra e una messa a terra individuale delle
unità convertitore di frequenza. Possiede buone
caratteristiche EMC quando è messo a terra correttamente.
Un sistema isolato a 4 li con il conduttore neutro
non messo a terra o messo a terra tramite
un'impedenza.
3 3
3.4.2 Interferenza di rete a bassa frequenza
AVVISO!
Un convertitore di frequenza produce perdite armoniche
supplementari nel motore. Queste perdite si riducono
quando aumenta la frequenza di commutazione.
3.3.4 Perdite e rendimento di un sistema
motorizzato
Per stimare le perdite di potenza in diversi punti di funzionamento per un sistema motorizzato, sommare le perdite
di potenza nel punto di funzionamento per ciascun
componente del sistema:
Convertitore di frequenza.
•
Motore.
•
Apparecchiatura ausiliaria.
•
Integrazione della rete
3.4
3.4.1 Congurazioni di rete ed eetti EMC
Esistono vari tipi di sistemi di rete CA per alimentare i
convertitori di frequenza Ciascuno inuisce sulle caratteristiche EMC del sistema. Il sistemi TN-S a cinque li sono
considerati i migliori per l'EMC, mentre il sistema IT isolato
è quello meno consigliato.
3.4.2.1 Alimentazione di rete non
sinusoidale
La tensione di rete è raramente una tensione sinusoidale
uniforme con un'ampiezza e frequenza costante. Questo è
dovuto in parte ai carichi che assorbono correnti non
sinusoidali dalla rete o che presentano caratteristiche non
lineari quali:
Computer.
•
Televisori.
•
Alimentazioni a commutazione.
•
Lampade a ecienza energetica.
•
Convertitori di frequenza.
•
Scostamenti sono inevitabili e consentiti entro certi limiti.
3.4.2.2 Conformità alle direttive EMC
In quasi tutta Europa la base per la valutazione oggettiva
della qualità dell'alimentazione di rete sono le direttive di
compatibilità elettromagnetica (EMVG). La conformità a
questa norma assicura che tutti i dispositivi e le reti
collegate ai sistemi di distribuzione elettrica soddisno i
requisiti dell'utilizzo previsto senza generare problemi.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 53

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Standard Denizione
EN 61000-2-2, EN
61000-2-4, EN 50160
EN 61000-3-2,
61000-3-12
33
EN 50178 Monitora le apparecchiature elettroniche
Tabella 3.15 Norme di progetto EN per la qualità
dell'alimentazione di rete
Denisce i limiti della tensione di rete da
osservare in reti di alimentazione
pubbliche e industriali.
Regola l'interferenza di rete generata dai
dispositivi collegati.
usate in impianti di potenza.
3.4.2.3 Convertitore di frequenza esenti da
interferenze
Ogni convertitore di frequenza genera interferenza di rete.
Le norme attuali deniscono solo intervalli di frequenza
no a 2 kHz. Alcuni convertitori di frequenza spostano
l'interferenza di rete nella regione oltre i 2 kHz, cosa non
prevista dalla norma, e li etichettano come esenti da
interferenze. I limiti per questa regione sono in fase di
studio. I convertitori di frequenza non spostano l'interferenza di rete.
3.4.2.4 In che modo si genera l'interferenza
Avvisi in caso di sottotensione
Misure di tensione errate dovute alla distorsione
•
della tensione di rete sinusoidale.
Provocano misurazioni errate della potenza
•
poiché solo misurazioni in valore "True RMS"
prendono in considerazione il contenuto
armonico.
Maggiori perdite
Le armoniche riducono la potenza attiva, la
•
potenza apparente e la potenza reattiva.
Distorcono i carichi elettrici con conseguenti
•
interferenze udibili in altri dispositivi o, nel
peggiore dei casi, ne provocano addirittura la
distruzione.
Abbreviano la durata dei dispositivi come
•
conseguenza del riscaldamento.
AVVISO!
Un contenuto armonico eccessivo impone un carico
sull'apparecchiatura di correzione del fattore di potenza
e può addirittura causarne la distruzione. Per tale
ragione, è necessario prevedere induttanze per le
apparecchiature di correzione del fattore di potenza
quando è presente un contenuto armonico eccessivo.
di rete
3.4.3 Analisi dell'interferenza di rete
La distorsione della forma d'onda sinusoidale per
interferenza di rete di rete causata dalle correnti di
ingresso a impulsi viene denita come armoniche.
Partendo dall'analisi di Fourier, viene stimata a 2,5 kHz,
corrispondenti alla 50ma armonica della frequenza di rete.
I raddrizzatori di ingresso dei convertitori di frequenza
generano questa forma tipica d'interferenza armonica sulla
rete. Quando i convertitori di frequenza sono collegati ai
sistemi di distribuzione a 50 Hz, la terza armonica (150 Hz),
la quinta armonica (250 Hz) o la settima armonica (350 Hz)
mostrano gli eetti più forti. Il contenuto armonico totale è
denominato distorsione armonica totale (THD).
Per evitare un peggioramento della qualità dell'alimentazione di rete sono disponibili diversi metodi per
analizzare sistemi o dispositivi che generano correnti
armoniche. Programmi di analisi della rete come il software
di calcolo delle armoniche (HCS) analizzano i sistemi per la
presenza di armoniche. Contromisure speciche possono
essere testate in anticipo e assicurare la successiva
compatibilità del sistema.
Per l'analisi dei sistemi di rete, andare all'indirizzohttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START per il
download del software.
3.4.2.5 Eetti dell'interferenza di rete
AVVISO!
Le armoniche e le uttuazioni di tensione sono due forme
di interferenza di rete a bassa frequenza. Si presentano
diversamente in origine rispetto a qualsiasi altro punto nel
sistema di distribuzione in cui è connesso un carico.
Pertanto, è necessario determinare collettivamente vari
inussi quando si valutano gli eetti dell'interferenza di
rete. Questi inussi includono l'alimentazione di rete, la
struttura e i carichi.
Avvisi di sottotensione e perdite funzionali superiori
possono essere il risultato di un'interferenza di rete.
54 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Danfoss ha un livello molto elevato di esperienza EMC e
fornisce analisi EMC con una valutazione dettagliata o
calcoli di rete ai clienti oltre a corsi di addestramento,
seminari e workshop.
3.4.4 Opzioni per la riduzione
dell'interferenza di rete
In generale l'interferenza di rete dai convertitori di
frequenza viene ridotta limitando l'ampiezza delle correnti
a impulsi. Questa riduzione migliora il fattore di potenza λ
(lambda).

Integrazione nel sistema Guida alla progettazione
Sono consigliati vari metodi per evitare le armoniche di
rete:
Induttanze di ingresso o reattanze induttive del
•
collegamento CC nei convertitori di frequenza.
Filtri passivi.
•
Filtri attivi.
•
Circuiti intermedi compatti.
•
Convertitori di frequenza Active front end e a
•
basse armoniche.
Raddrizzatori con 12, 18 o 24 impulsi per ciclo.
•
3.4.5 Interferenza in radiofrequenza
I convertitori di frequenza generano interferenze in
radiofrequenza (RFI) a causa dei loro impulsi elettrici di
larghezza variabile. I convertitori di frequenza e i cavi
motore irradiano queste componenti e le conducono nel
sistema di alimentazione.
ltri RFI vengono usati per ridurre questa interferenza
I
sulla rete. Forniscono un'immunità ai disturbi per
proteggere i dispositivi dalle interferenze ad alta frequenza
condotte. Riducono anche le interferenze emesse verso il
cavo dell’alimentazione di rete o le irradiazioni dal cavo
dell’alimentazione di rete, I ltri sono concepiti per limitare
le interferenze a un livello specicato. I ltri integrati sono
spesso un'apparecchiatura standard idonea per
un'immunità specica.
AVVISO!
Tutti convertitori di frequenza VLT® Refrigeration Drive
FC 103 sono dotati di serie di induttanze integrate che
sopprimono le interferenze di rete.
Parcheggi.
•
Impianti ricreativi.
•
3.4.6.2 Ambiente 2/Classe A: Industriale
Gli ambienti industriali non sono collegati alla rete di
alimentazione pubblica. Invece dispongono di trasformatori
propri di distribuzione ad alta o a media tensione. Le
classicazioni ambientali valgono sia all'interno sia
all'esterno degli edici.
Sono deniti industriali e sono caratterizzati da speciche
condizioni elettromagnetiche:
La presenza di dispositivi scientici, medicali o
•
industriali;
la commutazione di grandi carichi induttivi e
•
capacitivi;
la presenza di forti campi magnetici (per esempio
•
a causa delle correnti elevate).
3.4.6.3 Ambienti speciali
In aree con i trasformatori a media tensione chiaramente
demarcati da altre aree, l'utente decide per quale tipo di
ambiente vanga classicato il loro impianto. L'utente è
responsabile nell'assicurare la compatibilità elettromagnetica necessaria per consentire un funzionamento senza
guasti di tutti dispositivi nelle condizioni specicate. Alcuni
esempi di ambienti speciali sono:
Centri commerciali.
•
Supermercati.
•
Stazioni di rifornimento.
•
Edici residenziali.
•
Magazzini.
•
3 3
3.4.6 Classicazione del sito operativo
3.4.6.4 Etichette di avvertenza
La conoscenza dei requisiti per l'ambiente in cui il convertitore di frequenza è destinato a funzionare è il fattore più
importante per quanto riguarda la conformità EMC.
3.4.6.1 Ambiente 1/Classe B: Residenziale
I siti operativi collegati alla rete pubblica di alimentazione
a bassa tensione, includendo le aree industriali, sono classicate come Ambiente 1/Classe B. Non dispongono di
trasformatori propri di distribuzione a media tensione o
alta tensione per un sistema di alimentazione separato. Le
classicazioni ambientali si applicano agli edici sia
all'interno sia all'esterno. Alcuni esempi generali sono:
Aree commerciali.
•
Edici residenziali.
•
Ristoranti.
•
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 55
Quando un convertitore di frequenza non soddisfa la
categoria C1, prevedere un'avvertenza. Questa è la responsabilità dell'utente. L'eliminazione dell'interferenza è basata
sulle classi A1, A2 e B nell'EN 55011. L'utente in denitiva è
responsabile per la classicazione appropriata dei
dispositivi e dei costi per rimediare ai problemi EMC.
3.4.7 Uso con sorgente d'ingresso isolata
La maggior parte dell’alimentazione fornita dalle società di
servizi pubblici negli Stati Uniti è riferita a massa. Anche se
non è d'uso comune negli Stati Uniti, la potenza di
ingresso potrebbe essere una sorgente isolata. È possibile
utilizzare tutti i convertitori di frequenza Danfoss con
un'alimentazione di ingresso isolata e con linee di alimentazione riferite a massa.

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.4.8 Correzione del fattore di potenza
L'apparecchiatura di correzione del fattore di potenza serve
per ridurre lo sfasamento (φ) tra la tensione e la corrente e
avvicina il fattore di potenza all'unità (cos φ). Ciò è
33
necessario quando in un sistema di distribuzione elettrico
si utilizzano molti carichi induttivi, per esempio motori o
ballast di lampade. Convertitori di frequenza con un
collegamento CC isolato non assorbono potenza reattiva
dal sistema di alimentazione né generano sfasamenti.
Presentano un cos φ di circa 1.
Per questa ragione i motori a velocità controllata non
necessitano di apparecchiature di correzione del fattore di
potenza durante il dimensionamento. Tuttavia, la corrente
assorbita dall'apparecchiatura di rifasamento aumenta
perché i convertitori di frequenza generano armoniche. Il
carico e il fattore di calore sui condensatori aumenta man
mano che aumenta il numero di generatori di armoniche.
Pertanto è necessario montare induttanze nell'apparecchiatura di correzione del fattore di potenza. Le induttanze
impediscono anche la risonanza tra i carichi induttivi e la
capacità. I convertitori di frequenza con cos φ <1
richiedono inoltre induttanze nell'apparecchiatura di
correzione del fattore di potenza. È anche necessario
considerare il maggiore livello di potenza reattiva per le
dimensioni di cavi.
3.4.9 Ritardo dell'alimentazione di ingresso
Per assicurare che il circuito di ingresso di soppressione
degli sbalzi di corrente funzioni correttamente, osservare
un ritardo tra le successive applicazioni di tensione di
ingresso.
Tabella 3.16 mostra il tempo minimo che deve essere
consentito tra le applicazioni della tensione di ingresso.
Tensione di ingresso [V] 380 415 460 600
Tempo di attesa [s] 48 65 83 133
Tabella 3.16 Ritardo dell'alimentazione di ingresso
3.4.10 Transitori di rete
I transitori sono brevi picchi di tensione nel campo di
qualche migliaia di volt. Possono vericarsi in tutti i tipi di
sistemi di distribuzione di energia elettrica, sia in ambiente
industriale sia in ambienti residenziali.
I fulmini sono una causa comune di transitori. Tuttavia, essi
sono causati anche dalla commutazione di grandi carichi in
linea o fuori linea o dalla commutazione di altre apparecchiature con oscillazioni transitorie di rete, quale
l'apparecchiatura di correzione del fattore di potenza. I
transitori possono anche essere causati da cortocircuiti,
dallo scatto di interruttori nei sistemi di distribuzione
dell'energia elettrica e dall'accoppiamento induttivo tra
cavi paralleli.
La norma EN 61000-4-1 descrive le forme di questi
transitori e il livello di energia immagazzinata. Esistono vari
modi per limitare gli eetti dannosi dei transitori. Si
utilizzano scaricatori di sovratensione a gas e spinterometri
per fornire la protezione di primo livello dai transitori a
energia elevata. Per il secondo livello di protezione, la
maggior parte dei dispositivi elettronici, inclusi i convertitori di frequenza, utilizzano resistori che dipendono dalla
tensione (varistori) per attenuare i transitori.
3.4.11 Funzionamento con un generatore
di stand-by
Usare sistemi di alimentazione di emergenza quando è
richiesto il funzionamento continuo nel caso di un guasto
di rete. Vengono anche usati in parallelo con la rete di
distribuzione pubblica per ottenere una potenza di rete
maggiore. Questa è una procedura comune per gruppi
termoelettrici combinati,
ecienza ottenuta con questa forma di conversione di
energia. Quando l'alimentazione di emergenza è fornita da
un generatore, l'impedenza di rete è di norma superiore
rispetto a quando l'alimentazione proviene da una rete
pubblica. Questo provoca un aumento della distorsione
armonica totale. Con un'adeguata progettazione, i
generatori possono funzionare in un sistema che contiene
dispositivi che generano armoniche.
Quando si progetta un sistema, valutare l'impiego di un
generatore stand-by.
Quando il sistema viene commutato dal funzio-
•
namento da rete al generatore, il carico armonico
generalmente aumenta.
I progettisti devono calcolare o misurare
•
l'aumento del carico delle armoniche per
assicurare che la qualità della potenza rispetti le
direttive ed evitare problemi e guasti alle
apparecchiature.
È necessario evitare il carico asimmetrico del
•
generatore poiché provoca un aumento delle
perdite e potrebbe far aumentare la distorsione
armonica totale.
Uno sfasamento 5/6 degli avvolgimenti del
•
generatore attenua la quinta e la settima
armonica ma permette l'aumento della terza
armonica. Uno sfasamento 2/3 riduce la terza
armonica.
aprottando dell'elevata
56 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
Dove possibile, l'operatore dovrebbe sconnettere
•
l'apparecchiatura di rifasamento poiché provoca
risonanze nel sistema.
Induttanze o ltri ad assorbimento attivo possono
•
attenuare le armoniche, nonché i carichi resistivi
azionati in parallelo.
I carichi capacitivi azionati in parallelo creano un
•
carico aggiuntivo dovuto a eetti di risonanza
non prevedibili.
Un'analisi più precisa è possibile utilizzando il software di
analisi della rete, quale l'HCS. Per l'analisi dei sistemi di
rete, andare all'indirizzo http://www.danfoss-hcs.com/
Default.asp?LEVEL=START per il download del software.
Quando si lavora con dispositivi che generano armoniche, i
carichi massimi che consentono un funzionamento senza
problemi dell'impianto sono mostrati nella tabella dei limiti
armoniche.
Limiti armoniche
Raddrizzatori B2 e B6⇒al massimo il 20% del
•
carico nominale del generatore.
Raddrizzatore B6 con induttanza⇒al massimo il
•
20–35% del carico nominale del generatore, in
funzione della composizione.
Raddrizzatore B6 controllato⇒al massimo il 10%
•
del carico nominale del generatore.
Per maggiori informazioni sulle opzioni dei ltri sinusoidali
e dU/dt, fare riferimento a capitolo 6.2.6 Filtri sinusoidali,
capitolo 3.8.3 Filtri sinusoidali e capitolo 6.2.7 Filtri dU/dt.
Per maggiori informazioni sui numeri d'ordine dei ltri
sinusoidali e dU/dt, fare riferimento a capitolo 3.8.3 Filtri
sinusoidali e capitolo 6.2.7 Filtri dU/dt.
3.5.3 Corretta messa a terra del motore
La corretta messa a terra del motore è imperativa per la
sicurezza personale e per soddisfare i requisiti elettrici EMC
per apparecchiature a bassa tensione. La corretta messa a
terra è necessaria per l'uso ecace della schermatura e dei
ltri. I dettagli di progetto devono essere vericati al ne
di assicurare la corretta attuazione delle norme EMC.
3.5.4 Cavi motore
Le raccomandazioni sui cavi motore e le speciche sono
fornite in capitolo 7.5 Speciche dei cavi.
Con un convertitore di frequenza possono essere utilizzati
tutti i tipi di motori standard asincroni trifase. L'impostazione di fabbrica prevede una rotazione in senso orario
se l'uscita del convertitore di frequenza è collegata come
segue:
3 3
Integrazione del motore
3.5
3.5.1 Considerazioni per la scelta del
motore
Il convertitore di frequenza può indurre stress elettrico su
un motore. Pertanto è necessario considerare i seguenti
eetti sul motore quando si abbina il motore con il convertitore di frequenza:
Sollecitazione dell'isolamento
•
Sollecitazione dei cuscinetti
•
Sollecitazione termica
•
3.5.2 Filtri sinusoidali e dU/dt
I ltri di uscita permettono ad alcuni motori di ridurre lo
stress elettrico e consentono lunghezze maggiori dei cavi.
Le opzioni di uscita comprendono ltri sinusoidali (anche
chiamati ltri LC) e ltri dU/dt. I ltri dU/dt riducono una
salita brusca dell'impulso. I ltri sinusoidali smorzano gli
impulsi di tensione per convertirli in una tensione di uscita
quasi sinusoidale. In alcuni convertitori di frequenza, i ltri
sinusoidali soddisfano la norma EN 61800-3 categoria RFI
C2 per cavi motore non schermati, vedere
capitolo 3.8.3 Filtri sinusoidali.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 57

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Anche una buona schermatura non elimina completamente la radiazione. I componenti di sistema situati in
ambienti soggetti a radiazioni devono funzionare senza
decadimenti.
33
Disegno 3.15 Collegamento del morsetto per la rotazione in
senso orario e antiorario
Invertire il senso di rotazione scambiando due fasi nel cavo
motore oppure cambiando l'impostazione di
parametro 4-10 Direz. velocità motore.
3.5.5 Schermatura del cavo motore
I convertitori di frequenza generano in uscita impulsi con
fronti di salita ripidi. Questi impulsi contengono
componenti ad alta frequenza (che si estendono nella
regione dei gigahertz) che causano una radiazione indesiderata proveniente dal cavo motore. I cavi motore
schermati riducono questa radiazione.
Gli scopi della schermatura sono:
•
•
Lo schermo cattura le componenti ad alta frequenza e li
riconduce alla sorgente dell'interferenza, in questo caso il
convertitore di frequenza. I cavi motore schermati
assicurano anche l'immunità alle interferenze delle sorgenti
esterne nelle vicinanze.
Ridurre l'ampiezza dell'interferenza irradiata.
Migliorare l'immunità alle interferenze di singoli
dispositivi.
3.5.6 Collegamento di motori multipli
AVVISO!
Potrebbero insorgere dei problemi all’avviamento e a
bassi regimi se le dimensioni dei motori si dierenziano
notevolmente, in quanto la resistenza ohmica relativamente elevata nello statore dei motori di piccole
dimensioni richiede una tensione superiore in fase di
avviamento e a bassi regimi.
Il convertitore di frequenza è in grado di controllare diversi
motori collegati in parallelo. Quando si utilizza il
collegamento del motore in parallelo, osservare quanto
segue:
La modalità VCC+ è utilizzabile in alcune
•
applicazioni.
L'assorbimento totale di corrente dei motori non
•
deve superare la corrente di uscita nominale I
del convertitore di frequenza.
Non usare il collegamento a un punto comune
•
per cavo lunghi, vedere Disegno 3.17.
La lunghezza totale del cavo motore specicata in
•
Tabella 3.4 è valida ntantoché i cavi paralleli
sono mantenuti corti (meno di 10 m ciascuno),
vedere Disegno 3.19 e Disegno 3.20.
Considerare la caduta di tensione attraverso il
•
cavo motore, vedere Disegno 3.20.
Per lunghi cavi paralleli, usare il ltro LC, vedere
•
Disegno 3.20.
Per lunghi cavi senza collegamento parallelo,
•
vedere Disegno 3.21.
INV
58 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

130BD774.10
130BD775.10
130BD776.10
130BD777.10
130BD778.10
130BD779.10
Integrazione nel sistema Guida alla progettazione
AVVISO!
Se i motori sono collegati in parallelo, impostare
parametro 1-01 Motor Control Principle su [0] U/f.
Disegno 3.19 Cavi paralleli con carico
Disegno 3.16 Collegamento a punto comune per cavi corti
3 3
Disegno 3.17 Collegamento a punto comune per cavi lunghi
Disegno 3.18 Cavi paralleli senza carico
Disegno 3.20 Filtro LC per lunghi cavi paralleli
Disegno 3.21 Cavi lunghi nel collegamento di serie
Consultare Tabella 7.7 per informazioni sulle lunghezze del
cavo per collegamenti in parallelo di motori multipli.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 59

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.5.7 Protezione termica del motore
Il convertitore di frequenza assicura la protezione termica
del motore in vari modi:
3.5.8 Contattore di uscita
Nonostante non sia in genere una pratica raccomandata, il
funzionamento di un contattore di uscita tra il motore e il
convertitore di frequenza non provoca danni al conver-
Il limite di coppia protegge il motore dal sovrac-
33
•
carico, indipendentemente dalla velocità.
La velocità minima limita l'intervallo di velocità di
•
esercizio minimo, per esempio tra 30 e 50/60 Hz.
Velocità massima limita la velocità di uscita
•
massima.
È disponibile un ingresso per un termistore
•
esterno.
Il relè termico elettronico (ETR) per motori
•
asincroni simula un relè a bimetallo sulla base di
misure interne. L'ETR misura la corrente, la
velocità e il tempo eettivi per calcolare la
temperatura del motore e proteggerlo dal
surriscaldamento emettendo un avviso o
interrompendo l'alimentazione al motore. Le
caratteristiche dell'ETR sono mostrate in
Disegno 3.22.
titore di frequenza. La chiusura di un contattore di uscita
precedentemente aperto può collegare un convertitore di
frequenza in funzione a un motore arrestato. Ciò può far sì
che il convertitore di frequenza scatti e visualizzi un
guasto.
3.5.9 Ecienza energetica
Rendimento dei convertitori di frequenza
Il carico applicato sul convertitore di frequenza ha poca
inuenza sul suo rendimento.
Ciò signica anche che il rendimento del convertitore di
frequenza non varia quando si scelgono caratteristiche U/f
diverse. Tuttavia le caratteristiche U/f inuenzano il
rendimento del motore.
Il rendimento degrada lievemente impostando la frequenza
di commutazione a un valore superiore a 5 kHz. Il
rendimento è leggermente ridotto quando il cavo motore
è più lungo di 30 m.
Calcolo del rendimento
Calcolare il rendimento del convertitore di frequenza a
dierenti in base a Disegno 3.23. Moltiplicare il
carichi
fattore in questo graco con il rendimento specico
riportato in capitolo 7.1 Dati elettrici.
Disegno 3.22 Caratteristiche del relè termico elettronico
L'asse X mostra il rapporto tra I
Y mostra il tempo in secondi che precede il momento in
cui l'ETR si disinserisce e scatta. Le curve illustrano la
caratteristica a una velocità doppia della velocità nominale
e a una velocità pari a 0,2 volte la velocità nominale.
A velocità più bassa l'ETR si disinserisce a livelli di calore
inferiori a causa del minor rareddamento del motore. In
tal modo il motore è protetto dal surriscaldamento anche a
bassa velocità. La funzione ETR calcola la temperatura del
motore basandosi sull'eettiva corrente e velocità.
60 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
e I
motor
motor
nominale. L'asse
Disegno 3.23 Curve di rendimento tipiche
Esempio: assumiamo un convertitore di frequenza da 55
kW, 380–480 V CA con il 25% del carico al 50% di velocità.
Il graco mostra un rendimento nominale di 0,97 per un
convertitore di frequenza da 55 kW è 0,98. Il rendimento
eettivo è in tal caso pari a: 0,97 x 0,98=0,95.

Integrazione nel sistema Guida alla progettazione
Rendimento del motore
Il rendimento di un motore collegato al convertitore di
frequenza dipende dal livello di magnetizzazione. Il
rendimento del motore dipende dal tipo di motore.
Nell'intervallo pari al 75–100% della coppia
•
nominale, il rendimento del motore è
praticamente costante, indipendentemente dal
fatto che il motore sia controllato da un convertitore di frequenza o che sia collegato
direttamente alla rete.
L'inusso della caratteristica U/f sui motori piccoli
•
è marginale. Tuttavia, nei motori da 11 kw e più,
il vantaggio in termini di rendimento è notevole.
La frequenza di commutazione non inuisce sul
•
rendimento dei motori di piccole dimensioni. Nei
motori da 11 kW e oltre, il rendimento migliora
dell'1–2%. Questo è dovuto alla forma sinusoidale
della corrente del motore che è quasi perfetta a
un'elevata frequenza di commutazione.
Rendimento del sistema
Per calcolare il rendimento del sistema, moltiplicare il
rendimento del convertitore di frequenza con il
rendimento del motore.
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 61

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.6 Ingressi e uscite supplementari
3.6.1 Schema di cablaggio
Quando è cablato e correttamente programmato, il morsetto di controllo fornisce:
retroazione, riferimento e altri segnali di ingresso al convertitore di frequenza.
33
•
Stato di uscita e condizioni di guasto dal convertitore di frequenza.
•
Relè che fanno funzionare le apparecchiature ausiliarie.
•
Un'interfaccia di comunicazione seriale.
•
24 V comune.
•
I morsetti di controllo sono programmabili per varie funzioni selezionando le opzioni di parametro attraverso il pannello di
controllo locale (LCP) sulla parte frontale dell'unità o tramite sorgenti esterne. La maggior parte dei cavi di controllo viene
fornita dal cliente a meno che non sia specicato diversamente nell'ordine di fabbrica.
Disegno 3.24 Schema di cablaggio di base
A = analogico, D = digitale
*Il morsetto 37 (opzionale) viene usato per STO. Per istruzioni sull'installazione dell'STO, fare riferimento al Manuale di funzio-
namento convertitori di frequenza VLT® - Safe Torque O.
**Non collegare lo schermo del cavo.
62 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.6.2 Collegamenti relè
3 3
Relè
1 1 Comune
2 4 Comune
1 01–02 Chiusura (normalmente
2 04–05 Chiusura (normalmente
Disegno 3.25 Uscite a relè 1 e 2, tensioni massime
Morsetto
1)
Descrizione
2 Normalmente aperto
Al massimo 240 V
3 Normalmente chiuso
Al massimo 240 V
5 Normalmente chiuso
Al massimo 240 V
6 Normalmente chiuso
Al massimo 240 V
aperto)
01–03 Apertura (normalmente
chiuso)
aperto)
04–06 Apertura (normalmente
chiuso)
1) Per aggiungere altre uscite a relè, installare il VLT® Relay
Option Module MCB 105 o il VLT® Relay Option Module MCB
113.
Per maggiori informazioni sui relè, consultare
capitolo 7 Speciche e capitolo 8.3 Disegni morsetto relè.
Per maggiori informazioni sulle opzioni relè, consultare
capitolo 3.8 Opzioni e accessori.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 63

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.6.3 Installazione elettrica conforme ai requisiti EMC
33
1 PLC 7 Motore, trifase e PE (schermato)
2 Convertitore di frequenza 8 Rete, trifase, e PE rinforzato (non schermato)
3 Contattore di uscita 9 Cablaggio di controllo (schermato)
4 Pressacavo 10
5 Isolamento del cavo (spelato)
6 Passacavo
Disegno 3.26 Collegamentoelettrico conforme alle norme EMC
64 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Cavo di collegamento equipotenziale con almeno 16 mm
(0,025 pollici)
Spazio libero tra il cavo di comando, il cavo motore e il cavo
11
dell’alimentazione di rete:
Almeno 200 mm
2

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Integrazione nel sistema Guida alla progettazione
Per ulteriori informazioni sull'EMC, vedi
capitolo 2.5.18 Conformità EMC e capitolo 3.2 EMC,
armoniche e protezione dalla dispersione verso terra.
AVVISO!
INTERFERENZA EMC
Usare cavi schermati per i cavi motore e i cavi di
controllo e usare cavi separati per l'alimentazione di
ingresso, i cavi motore e i cavi di controllo. Il mancato
isolamento dei cavi di alimentazione, motore e di
comando può provocare un comportamento accidentale
e prestazioni ridotte. È necessario uno spazio libero di
almeno 200 mm (7,9 pollici) tra i cavi di alimentazione,
del motore e di comando.
3.7 Pianicazione meccanica
3.7.1 Spazio
L'installazione anco a anco è adatta per tutte le
dimensioni di contenitore, eccetto nel caso in cui viene
usato un kit contenitore IP21/IP4X/TIPO 1 (vedere
capitolo 3.8 Opzioni e accessori).
Spazio libero orizzontale, kit contenitore IP21
Se si utilizza il kit contenitore IP21 con contenitori di taglia
A2 o A3, assicurare un distanza di almeno 50 mm tra i
convertitori di frequenza.
Spazio libero verticale
Al ne di ottenere condizioni di rareddamento ottimali,
assicurare uno spazio libero verticale per la libera
circolazione dell'aria sopra e sotto il convertitore di
frequenza. Vedere Disegno 3.28.
3 3
Spazio libero orizzontale, IP20
I contenitore IP20 di taglia A e B possono essere sistemati
anco a anco senza spazio libero. Tuttavia, la corretta
sequenza di montaggio è importante. Disegno 3.27 mostra
come eettuare un montaggio corretto.
NOTA
Per A2 e A3, assicurare uno spazio libero tra i convertitori
di frequenza di almeno 40 mm.
Dimensione
contenitore
a [mm] 100 200 225
b [mm] 100 200 225
Disegno 3.28 Spazio libero verticale
A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
3.7.2 Montaggio a muro
Quando il montaggio viene eettuato su una parete piana,
non è necessaria alcuna piastra posteriore.
Quando il montaggio viene eettuato su una parete non
piana, usare una piastra posteriore per assicurare il
passaggio di suciente aria di rareddamento sopra il
dissipatore di calore. Usare la piastra posteriore solo con i
contenitori A4, A5, B1, B2, C1 e C2.
Disegno 3.27 Montaggio anco a anco corretto senza spazio
libero
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 65

130BA219.11
1
130BA392.11
2
1
3
4
Integrazione nel sistema
33
1 Piastra posteriore
Disegno 3.29 Montaggio con pannello posteriore
Per convertitori di frequenza con grado di protezione IP66,
usare una rondella in bra o in nylon per proteggere il
rivestimento epossidico.
1 Piastra posteriore
2 Convertitore di frequenza con contenitore IP66
3 Piastra posteriore
4 Rondella in bra
Disegno 3.30 Montaggio con piastra posteriore per il grado di
protezione IP66
3.7.3 Accesso
Per pianicare l'accessibilità del cablaggio prima del
montaggio, fare riferimento ai disegni in
capitolo 8.1 Disegni collegamento di rete e
capitolo 8.2 Disegni collegamento del motore.
VLT® Refrigeration Drive FC 103
3.8
Opzioni
Per i numeri d'ordine, vedere capitolo 6 Codice tipo e guida
alla selezione
Schermatura principale
•
Filtri RFI
•
Dispositivo a corrente residua (RCD)
Utilizza protezioni dierenziali per monitorare le correnti di
guasto verso terra nei sistemi con messa a terra e messa a
terra tramite alta resistenza (sistemi TN e TT nella
terminologia IEC). È presente un preavviso (50% del
setpoint allarme principale) e un setpoint dell'allarme
principale. A ogni setpoint è associato un relè di allarme
SPDT per l'utilizzo esterno che richiede un trasformatore di
corrente esterno a nestra (fornito e installato dal cliente).
•
•
•
•
•
Controllo resistenza di isolamento (IRM)
Monitora la resistenza di isolamento nei sistemi senza
messa a terra (sistemi IT nella terminologia IEC) tra i
conduttori di fase del sistema e terra. È disponibile un
preavviso ohmico e un setpoint dell'allarme principale per
il livello di isolamento. A ogni setpoint è associato un relè
di allarme SPDT per l'utilizzo esterno.
AVVISO!
È possibile collegare solo un monitoraggio della
resistenza di isolamento a ogni sistema senza messa a
terra (IT).
•
•
•
•
Opzioni e accessori
Schermatura in Lexan® montata davanti ai
terminali di alimentazione in ingresso e piastra
d'ingresso per prevenire contatti accidentali
quando la porta del contenitore è aperta.
I convertitori di frequenza sono equipaggiati di
serie con
ulteriori livelli di protezione RFI/EMC, è possibile
ottenerli integrando ltri RFI opzionali di classe A1
che eliminano le interferenze delle radiofrequenze
e dell’irradiamento elettromagnetico in
conformità alla normativa EN 55011.
Integrato nel circuito safe torque o del convertitore di frequenza.
Il dispositivo IEC 60755 Tipo B monitora le
correnti CC a impulsi e correnti di guasto CC pure
verso terra.
Indicatore graco a barre a LED per il livello della
corrente di guasto verso terra dal 10% al 100%
del setpoint.
Memoria di guasto.
Tasto TEST/RESET.
Integrato nel circuito safe torque o del convertitore di frequenza.
Display LCD della resistenza di isolamento.
Memoria di guasto.
Tasti INFO, TEST e RESET.
ltri RFI classe A2. Se sono richiesti
66 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
Fusibili
I fusibili sono raccomandati per proteggere il
•
convertitore di frequenza da sovraccarichi di
corrente ad azione rapida. La protezione con
fusibili limita i danni al convertitore di frequenza
e minimizza il tempo di manutenzione in caso di
guasto. I fusibili sono necessari per soddisfare la
certicazione per il settore marino.
Sezionatore
Una maniglia montata a fronte quadro consente
•
un facile azionamento manuale del sezionatore, in
modo da fornire o interrompere, se necessario,
l’alimentazione al convertitore di frequenza,
aumentando la sicurezza durante la
manutenzione. Il sezionatore è interconnesso con
gli sportelli del contenitore in modo da evitare la
loro eventuale apertura quando è ancora
presente tensione.
Interruttori
È possibile far scattare da remoto un interruttore
•
automatico, ripristinabile però solo manualmente.
Gli interruttori sono interconnessi con gli sportelli
del contenitore in modo da evitare la loro
eventuale apertura quando è ancora presente
tensione. Quando si ordina un interruttore
automatico opzionale, sono inclusi anche i fusibili
per la protezione del convertitore di frequenza da
correnti da sovraccarico ad azione rapida.
Contattori
Un contattore a controllo elettrico consente di
•
fornire o interrompere da remoto l’alimentazione
elettrica al convertitore di frequenza. Se viene
ordinata l'opzione arresto di emergenza IEC, il relè
di sicurezza Pilz esegue il monitoraggio di un
contatto ausiliario sul contattore.
Avviatori manuali motore
Forniscono un’alimentazione trifase per i ventilatori ausiliari
di rareddamento spesso utilizzati sui motori di grossa
taglia. L'alimentazione agli avviatori viene assicurata dal
lato di carico di un qualsiasi contattore, interruttore o
sezionatore fornito e dal lato di carico del ltro RFI di
classe 1 (opzionale). L'alimentazione è protetta da fusibili
prima di ogni avviatore motore ed è scollegata quando
l'alimentazione in ingresso al convertitore di frequenza è
scollegata. Sono ammessi al massimo due avviatori (uno se
viene ordinato un circuito protetto da fusibili da 30 A). Gli
avviatori motore sono integrati nel circuito Safe Torque O
del convertitore di frequenza.
Le caratteristiche dell'unità comprendono:
Interruttore di funzionamento (on/o).
•
Protezione da cortocircuiti e sovraccarico con
•
funzione di test.
Funzione di ripristino manuale.
•
30 A, morsetti protetti da fusibile
Alimentazione trifase che corrisponde alla
•
tensione di rete in ingresso per alimentare
apparecchiature ausiliarie del cliente.
Non disponibile se vengono selezionati due
•
avviatori manuali motore.
I morsetti sono disattivati quando l'alimentazione
•
in ingresso al convertitore di frequenza è
disinserita.
L'alimentazione per i morsetti protetti da fusibili
•
viene assicurata dal lato di carico di un qualsiasi
contattore, interruttore o sezionatore fornito e dal
lato di carico del ltro RFI di classe 1 (opzionale).
Alimentazione a 24 V CC
5 A, 120 W, 24 V CC.
•
Protezione contro sovracorrenti in uscita, sovrac-
•
carichi, cortocircuiti e sovratemperature.
Per alimentare dispositivi accessori forniti dal
•
cliente, per esempio sensori, I/O di PLC,
contattori, sonde di temperatura, spie luminose
e/o altri articoli elettronici.
La diagnostica include un contatto pulito CC-ok,
•
un LED verde CC-ok e un LED rosso per sovraccarico.
Monitoraggio temperatura esterna
Progettato per controllare la temperatura dei
•
componenti esterni del sistema, per esempio gli
avvolgimenti motore e/o i cuscinetti. Include otto
moduli di ingresso universali oltre a due moduli
di ingresso specici per il termistore. Tutti i dieci
moduli sono integrati nel circuito STO e possono
essere controllati tramite una rete eldbus
(richiede l'acquisto di un modulo /
accoppiamento bus separato). Ordinare
un'opzione freno STO per selezionare un monitoraggio della temperatura esterna.
Comunicazioni seriali
VLT® PROFIBUS DP-V1 MCA 101
PROFIBUS DP-V1 assicura un'ampia compatibilità,
•
un elevato livello di disponibilità, assistenza per
tutti i principali fornitori di PLC e la compatibilità
con le versioni future.
Comunicazione rapida ed eciente, installazione
•
trasparente, diagnostica avanzata, parametrizzazione e autocongurazione dei dati di processo
tramite le GSD.
Parametrizzazione aciclica con PROFIBUS DP-V1,
•
PROFIdrive o macchina a stati del prolo FC
Danfoss, PROFIBUS DP-V1, master di classe 1 e 2
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 67

Integrazione nel sistema
Numeri d'ordine:
•
- 130B1100 senza rivestimento.
- 130B1200 con rivestimento (classe
G3/ISA S71.04-1985).
33
VLT® LonWorks per ADAP-KOOL® MCA 107
Scambio continuo di messaggi tra un numero di
•
processori.
Consente la comunicazione diretta tra singoli
•
dispositivi di rete.
VLT® PROFINET MCA 120
L'opzione PROFINET permette la connettività alle reti
PROFINET tramite il protocollo PROFINET. L'opzione è in
grado di gestire una singola connessione con un intervallo
di pacchetto
direzioni.
•
•
•
•
•
Ulteriori opzioni
VLT® General Purpose I/O MCB 101
L'opzione I/O ore un numero esteso di ingressi e uscite di
controllo.
•
•
•
•
•
•
•
eettivo minimo di 1 ms in entrambe le
Server Web integrato per la diagnostica e la
lettura remota dei parametri di base del convertitore di frequenza.
Se si vericano determinati avvisi o allarmi o se
sono stati nuovamente cancellati, è possibile
congurare una notica e-mail per inviare un
messaggio e-mail a uno o più destinatari.
TCP/IP per avere un accesso facilitato ai dati di
congurazione del convertitore di frequenza da
Software di congurazione MCT 10
Upload e download di le tramite FTP (File
Transfer Protocol).
Supporto di DCP (Discovery and Conguration
Protocol).
3 ingressi digitali 0-24 V: Logica 0< 5 V; Logica
1>10 V.
2 ingressi analogici 0-10 V: Risoluzione 10 bit più
segnale.
2 uscite digitali NPN/PNP push pull.
1 uscita analogica 0/4–20 mA.
Connessione a molla.
Impostazioni parametri separate.
Numeri d'ordine:
- 130B1125 senza rivestimento.
- 130B1212 con rivestimento (classe
G3/ISA S71.04-1985).
VLT® Refrigeration Drive FC 103
®
Relay Option MCB 105
VLT
Consente funzioni relè estese con 3 uscite a relè supplementari.
•
•
•
•
•
•
•
VLT® Analog I/O Option MCB 109
Questa opzione di ingresso/uscita analogica si installa
facilmente nel convertitore di frequenza per ottenere
funzioni e controlli avanzati utilizzando gli ingressi e le
uscite aggiuntivi. Questa opzione comprende anche un'alimentazione con una batteria tampone per l'orologio
integrato nel convertitore di frequenza. Questo permette
un uso stabile di tutte le funzioni del convertitore di
frequenza legate all'orologio, come le azioni temporizzate.
•
•
•
•
•
VLT® Extended Relay Card MCB 113
La scheda relè estesa MCB 113 aggiunge ingressi/uscite al
convertitore di frequenza per una maggiore essibilità.
•
•
•
•
Carico massimo sui morsetti: Carico resistivo AC-1:
240 V CA, 2 A, CA-15 .
Carico induttivo con cos ф 0,4: 240 V CA, 0,2 A,
CC-1.
Carico resistivo: 24 V CC, 1 A, CC-13.
Carico induttivo: con cos ф 0,4: 24 V CC, 0,1 A.
Carico minino sui morsetti: CC 5 V: 10 mA.
Sequenza di commutazione massima al carico
nominale/carico minimo: 6 min-1/20 s-1.
Numeri d'ordine:
- 130B1110 senza rivestimento.
- 130B1210 con rivestimento (classe
G3/ISA S71.04-1985).
3 ingressi analogici, ciascuno
ingresso di tensione o di temperatura.
Collegamento dei segnali analogici 0–10 V
nonché degli ingressi di temperatura PT1000 e
NI1000.
3 uscite analogiche, ciascuna congurabile come
uscita a 0–10 V.
Alimentazione di backup inclusa per la funzione
orologio standard nel convertitore di frequenza.
La batteria tampone in genere ha un'autonomia
di 10 anni, a seconda dell'ambiente.
Numeri d'ordine:
- 130B1143 senza rivestimento
- 130B1243 con rivestimento (classe
G3/ISA S71.04-1985)
7 ingressi digitali.
2 uscite analogiche.
4 relè SPDT.
Conforme alle raccomandazioni NAMUR.
congurabile come
68 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
Capacità di isolamento galvanico.
•
Numeri d'ordine:
•
- 130B1164 senza rivestimento.
- 130B1264 con rivestimento.
Opzione VLT® 24 V DC Supply MCB 107
L'opzione viene utilizzata per collegare un'alimentazione CC
esterno al ne di mantenere attive la sezione di controllo e
le eventuali opzioni installate quando è interrotta l'alimentazione di rete.
Intervallo della tensione di ingresso: 24 V CC
•
±15% (al massimo 37 V in 10 s).
Corrente di ingresso massima: 2,2 A.
•
Lunghezza massima del cavo: 75 m.
•
Capacità di ingresso carico: <10 uF.
•
Ritardo all'accensione: <0,6 s.
•
Facile da installare nei convertitori di frequenza in
•
macchinari esistenti.
Tiene attivi il quadro di comando e le opzioni
•
durante interruzioni dell'alimentazione.
Tiene attivi i bus di campo durante le interruzioni
•
dell'alimentazione.
Numeri d'ordine:
•
- 130B1108 senza rivestimento.
- 130B1208 con rivestimento (classe
G3/ISA S71.04-1985).
3.8.1 Opzioni di comunicazione
3.8.3 Filtri sinusoidali
Quando un motore è controllato da un convertitore di
frequenza, è soggetto a fenomeni di risonanza. Questo
disturbo, causato dalla struttura del motore, si verica a
ogni commutazione dell'inverter nel convertitore di
frequenza. La frequenza della risonanza acustica
corrisponde quindi alla frequenza di commutazione del
convertitore di frequenza.
Danfoss fornisce un
rumore acustico del motore.
Il ltro riduce il tempo del fronte di salita della tensione, la
tensione del carico di picco U
corrente ΔI al motore, il che signica che la corrente e la
tensione diventano quasi sinusoidali. In questo modo la
rumorosità acustica del motore viene ridotta al minimo.
Anche le oscillazioni di corrente nelle bobine del ltro
sinusoidale producono rumore. Risolvere il problema
integrando il ltro in un armadio o simili.
ltro sinusoidale per attenuare il
e le oscillazioni di
PEAK
3.8.4 Filtri dU/dt
Danfoss fornisce ltri dU/dt sono ltri in modalità
dierenziale, ltri passa-basso che riducono le tensioni di
picco fase-fase sul morsetto del motore e riducono il
tempo di salita a un livello che riduce la sollecitazione
sull'isolamento in corrispondenza degli avvolgimenti del
motore. Ciò è un problema soprattutto con cavi motore
corti.
3 3
VLT® PROFIBUS DP-V1 MCA 101
•
VLT® AK-LonWorks MCA 107
•
VLT® PROFINET MCA 120
•
Per ulteriori informazioni, fare riferimento a
capitolo 7 Speciche.
3.8.2 Opzioni di ingresso/uscita, retroazione
e sicurezza
Modulo VLT® General Purpose I/O MCB 101
•
VLT® Relay Card MCB 105
•
VLT® Extended Relay Card MCB 113
•
Per ulteriori informazioni, fare riferimento a
capitolo 7 Speciche.
Rispetto ai
sinusoidali), i ltri dU/dt hanno una frequenza di disinse-
rimento superiore alla frequenza di commutazione.
ltri sinusoidali (vedere capitolo 3.8.3 Filtri
3.8.5 Filtri antiarmoniche
Il VLT® Advanced Harmonic Filter AHF 005 e AHF 010 sono
ltri antiarmoniche avanzati, non paragonabili ai ltri
antiarmoniche tradizionali. I ltri antiarmoniche Danfoss
sono stati progettati appositamente per adattarsi ai convertitori di frequenza Danfoss.
Collegando i ltri antiarmoniche Danfoss AHF 005 o AHF
010 davanti a un convertitore di frequenza Danfoss, la
distorsione totale della corrente armonica ricondotta dalla
rete viene ridotta al 5% e al 10%.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 69

A
B
C
D
E
130BT323.10
B
A
E
C
D
130BT324.10
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.8.6 Kit contenitore IP21/NEMA Tipo 1
L'IP20/IP4X parte superiore/NEMA TIPO 1 è un elemento
contenitore opzionale disponibile per unità compatte IP20.
In caso di impiego del kit di contenitori, un'unità con
33
grado di protezione IP 20 viene potenziata per conformarsi
al contenitore con il livello di protezione IP21/ 4X parte
superiore/TIPO 1.
Il coperchio IP 4X può essere applicato a tutte le varianti
standard IP 20 FC 103.
Disegno 3.31 Contenitore di taglia A2
A Coperchio superiore
B Bordo
C Corpo base
D Coperchio base
E Viti
Disegno 3.32 Contenitore di taglia A3
1. Posizionare il coperchio superiore come mostrato.
Se viene usata un'opzione A o B è necessario
montare un bordo per coprire l'entrata superiore.
2. Posizionare il corpo base C nella parte inferiore
del convertitore di frequenza.
3. Usare i morsetti dalla busta per accessori per
serrare correttamente i cavi.
Fori per passacavi:
Taglia A2: 2x M25 e 3xM32.
•
Taglia A3: 3x M25 e 3xM32.
•
70 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

E
F
D
C
B
A
130BT620.12
130BT621.12
D
C
A
G
Integrazione nel sistema Guida alla progettazione
Tipo di contenitore
Altezza A
[mm]
Larghezza B
[mm]
Profondità C
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tabella 3.17 Dimensioni
1) Se si utilizza l'opzione A/B , la profondità aumenta (per i dettagli
vedere capitolo 7.9 Potenze nominali, peso e dimensioni)
1)
[mm]
3 3
Disegno 3.34 Contenitori di taglia B4, C3 e C4
A Coperchio superiore
B Bordo
Disegno 3.33 Contenitore di taglia B3
C Corpo base
D Coperchio base
E Viti
F Coperchio ventola
G Clip superiore
Tabella 3.18 Legenda per Disegno 3.33 e Disegno 3.34
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 71

PE U V W
130BD839.10
130BA138.11
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Se viene usato il modulo opzionale A e/o il modulo
opzionale B, è necessario montare il bordo (B) sul
coperchio superiore (A).
AVVISO!
33
L'installazione anco a anco non è possibile se si
utilizza il kit contenitore IP21/IP4X/TIPO 1
3.8.7 Filtri di modo - comune
I nuclei ad alta frequenza di modo - comune (nuclei HFCM) riducono le interferenze elettromagnetiche ed
eliminano i danni ai cuscinetti dovuti a scariche elettriche.
Si tratta di nuclei nanocristallini magnetici speciali che
orono prestazioni di ltraggio superiori rispetto ai normali
nuclei di ferrite. I nuclei HF-SM agiscono da induttore di
modo - comune tra le fasi e la massa.
Disegno 3.35 Nucleo HF-CM con fasi motore
Montati attorno alle tre fasi del motore (U, V, W), i ltri di
modo - comune riducono le correnti ad alta frequenza
di modo - comune. Ne risulta una riduzione dell’interferenza elettromagnetica ad alta frequenza attorno al cavo
motore.
Il numero di nuclei necessari dipende dalla lunghezza del
cavo motore e dalla tensione del convertitore di frequenza.
Ciascun kit dipende da 2 nuclei. Fare riferimento a
Tabella 3.19 per determinare il numero di nuclei richiesti.
Lunghezza del cavo
[m] A e B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
Tabella 3.19 Numero di nuclei
1) Dove sono necessari cavi più lunghi,
addizionali.
1)
Dimensione contenitore
T2/T4 T7 T2/T4 T7 T7
aancare nuclei HF-CM
Installare i nuclei HF-CM facendo passare i 3 cavi della fase
motore (U, V, W) attraverso ogni nucleo come mostrato in
Disegno 3.35.
3.8.8 Kit di montaggio remoto per LCP
L'LCP può essere spostato sul lato anteriore di un
contenitore utilizzando il kit per il montaggio remoto.
Stringere le viti di ssaggio con una coppia massima di
1Nm.
Il contenitore dell'LCP presenta il grado di protezione IP66.
Lato anteriore
Contenitore
Lunghezza massima del cavo tra LCP e unità 3 m
Standard di comunicazione RS485
Tabella 3.20 Dati tecnici
IP 66
72 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Disegno 3.36 Kit LCP con LCP graco, dispositivi di ssaggio,
cavo di 3 m e guarnizione Numero d'ordine 130B1113
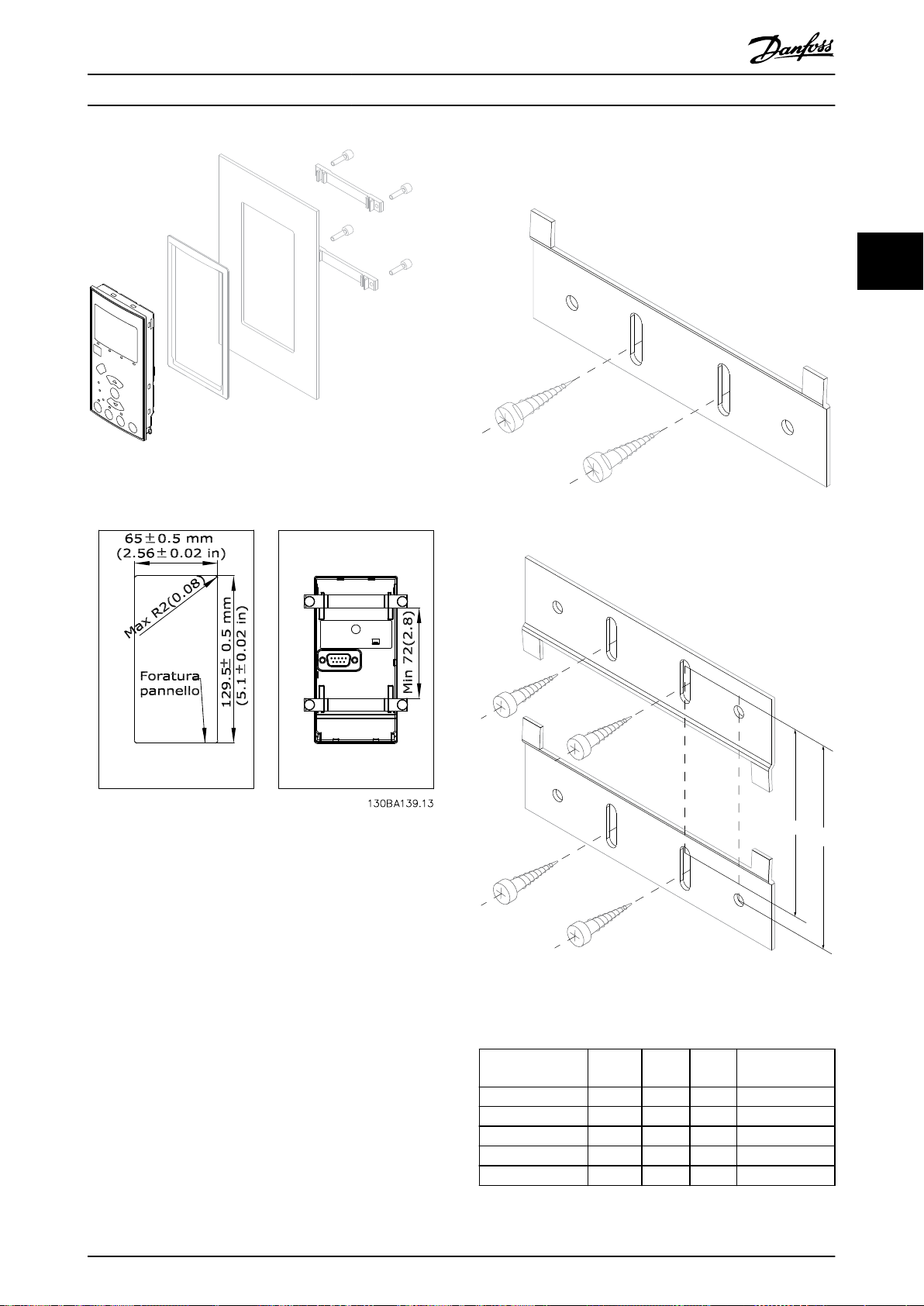
130BA200.10
130BA844.10
130BA845.10
A
B
Integrazione nel sistema Guida alla progettazione
3.8.9 Staa di montaggio per dimensioni
Disegno 3.37 Kit LCP con LCP numerico, dispositivi di ssaggio
e guarnizione Numero d'ordine 130B1114
Disegno 3.39 Staa inferiore
contenitore A5, B1, B2, C1 e C2
3 3
Disegno 3.38 Dimensioni del kit LCP
Disegno 3.40 Staa superiore
Vedere le dimensioni in Tabella 3.21.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 73
Dimensioni
contenitore
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tabella 3.21 Dettagli delle stae di montaggio
IP A [mm] B [mm] Numero
d'ordine

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.9 Interfaccia seriale RS485
schermato (STP) per il cablaggio del bus e, nell'eettuare
l'installazione, seguire sempre le procedure consigliate.
3.9.1 Panoramica
È importante assicurare un collegamento a massa a bassa
L'RS-485 è un'interfaccia bus a due li compatibile con
topologia di rete multi-drop. I nodi possono essere
33
collegati come un bus oppure tramite linee di discesa da
una linea dorsale comune. Un totale di 32 nodi possono
essere collegati a un segmento di rete.
I ripetitori separano i vari segmenti di rete, vedere
Disegno 3.41.
AVVISO!
Ciascun ripetitore funziona come un nodo all'interno del
segmento nel quale è installato. Ogni nodo collegato
all'interno di una data rete deve avere un indirizzo nodo
unico attraverso tutti i segmenti.
Terminare entrambe le estremità di ogni segmento
utilizzando lo switch di terminazione (S801) dei convertitori
di frequenza oppure una rete resistiva polarizzata di
terminazione. Utilizzare sempre un doppino intrecciato
impedenza dello schermo in corrispondenza di ogni nodo,
anche alle alte frequenze. Pertanto, collegare a massa
un'ampia supercie dello schermo, per esempio mediante
un pressacavo o un passacavo conduttivo. Può essere
necessario utilizzare cavi di equalizzazione del potenziale
per mantenere lo stesso potenziale di massa in tutta la
rete, soprattutto negli impianti in cui sono presenti cavi
lunghi.
Per prevenire un disadattamento d'impedenza, utilizzare
sempre lo stesso tipo di cavo in tutta la rete. Quando si
collega un motore al convertitore di frequenza, utilizzare
sempre un cavo motore schermato.
Cavo Doppino intrecciato schermato (STP)
Impedenza [Ω]
Lunghezza del
cavo [m]
Tabella 3.22 Speciche dei cavi
120
Al massimo 1200 m (incluse le derivazioni)
Al massimo 500 m da stazione a stazione
Disegno 3.41 Interfaccia bus RS485
74 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
130BB021.11
12 13 18 19 27 29 32
33
20
37
Remove jumper to enable Safe Stop
61
68
69 39 42 50 53 54 55
Integrazione nel sistema Guida alla progettazione
Parametri
Impostazion
Funzione
Parametro 8-30
Protocollo FC*
Parametro 8-31
1*
Indirizzo
Parametro 8-32
9600*
Baud rate
* = Valore predenito
Note/commenti:
selezionare il protocollo,
l'indirizzo e il baud rate nei
parametri summenzionati.
D IN 37 è opzionale.
Per evitare potenziali correnti di compensazione nello
schermo, cablare secondo Disegno 3.24.
e
3 3
Disegno 3.43 Morsetti della scheda di controllo
3.9.3 Terminazione bus RS485
Terminare il bus RS485 tramite una rete resistiva su
entrambe le estremità. A tale scopo, impostare l’interruttore S801 sulla scheda di controllo su ON.
Tabella 3.23 Collegamento in rete RS485
3.9.2 Collegamento in rete
Uno o più convertitori di frequenza possono essere
collegati a un controllore (o master) mediante l'interfaccia
standardizzata RS485. Il morsetto 68 viene collegato al
segnale P (TX+, RX+), mentre il morsetto 69 viene
collegato al segnale N (TX-, RX-). Vedere i disegni in
capitolo 3.6.1 Schema di cablaggio.
Se più di un convertitore di frequenza viene collegato a un
master, usare collegamenti paralleli.
Impostare il protocollo di comunicazione su
parametro 8-30 Protocollo.
3.9.4 Precauzioni EMC
Le seguenti precauzioni EMC sono consigliate per ottenere
un funzionamento senza interferenze della rete RS485.
Rispettare sempre le norme nazionali e locali in materia, ad
esempio quelle riguardanti la messa a terra di protezione.
Tenere il cavo di comunicazione RS485 lontano dai cavi
motore e dai cavi della resistenza di frenatura al
evitare l’accoppiamento di disturbi alle alte frequenze tra
cavi. Generalmente, è suciente una distanza di 200 mm
(8 pollici), ma è consigliato mantenere la maggiore
distanza possibile tra i cavi, specialmente dove i cavi sono
installati in parallelo per lunghe distanze. Quando la posa
incrociata è inevitabile, il cavo RS485 deve incrociare i cavi
motore con un angolo di 90°.
ne di
Disegno 3.42 Collegamenti paralleli
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 75

Fieldbus cable
90° crossing
130BE039.11
Minimum 200 mm (8 in)
STX LGE ADR D ATA BCC
195NA099.10
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.9.6 Congurazione della rete
Per abilitare il protocollo FC per il convertitore di
frequenza, impostare I seguenti parametri:
33
Numero di parametro Impostazione
Parametro 8-30 Protocollo FC
Parametro 8-31 Indirizzo 1–126
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di
stop
Tabella 3.24 Parametri del protocollo FC
Parità pari, 1 bit di stop
(default)
3.9.7 Struttura frame messaggio protocollo
FC
3.9.7.1 Contenuto di un carattere (byte)
Disegno 3.44 Instradamento dei cavi
3.9.5 Panoramica del protocollo FC
Il protocollo FC, chiamato anche bus FC o bus Standard, è
il bus di campo standard Danfoss. Denisce una tecnica di
accesso secondo il principio master/slave per comunicazioni tramite un bus di campo.
Un master e un numero massimo di 126 slave possono
essere collegati al bus. I singoli slave vengono selezionati
dal master tramite un carattere di indirizzo nel telegramma.
Uno slave non può mai trasmettere senza essere prima
attivato a tale scopo, e un trasferimento diretto di
messaggi tra i singoli slave non è possibile. Le comunicazioni avvengono in modalità half duplex.
La funzione master non può essere trasferita a un altro
nodo (sistema a master singolo).
Il livello
integrata nel convertitore di frequenza. Il protocollo FC
supporta diversi formati di telegramma;
sico è RS485, quindi utilizza la porta RS485
Un formato breve a 8 byte per i dati di processo.
•
Un formato lungo a 16 byte che include anche
•
un canale parametri.
Un formato utilizzato per testi.
•
Ogni carattere trasmesso inizia con un bit di start. In
seguito sono trasmessi 8 bit di dati, corrispondenti a un
byte. Ogni carattere è
Questo bit è impostato su 1 quando raggiunge la parità.
Parità signica un numero pari di 1 binari negli 8 bit di
dati più il bit di parità. Un carattere è completato da un bit
di stop ed è quindi formato da 11 bit.
Disegno 3.45 Contenuto di un carattere
vericato tramite un bit di parità.
3.9.7.2 Struttura del telegramma
Ogni telegramma ha la seguente struttura:
Carattere di start (STX)=02 hex.
•
Un byte che indica la lunghezza del telegramma
•
(LGE).
Un byte indicante l'indirizzo del convertitore di
•
frequenza (ADR).
Segue un numero di byte di dati (variabile in base al tipo
del telegramma) segue.
Il telegramma termina con un byte di controllo dati (BCC).
76 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Disegno 3.46 Struttura del telegramma

Integrazione nel sistema Guida alla progettazione
3.9.7.3 Lunghezza del telegramma (LGE)
La lunghezza del telegramma è costituita dal numero di
byte di dati, più il byte indirizzo ADR più il byte di
controllo dati BCC.
4 byte di dati LGE=4+1+1=6 byte
12 byte di dati LGE=12+1+1=14 byte
Telegrammi contenenti testo
Tabella 3.25 Lunghezza di telegrammi
1) 10 rappresenta i caratteri
lunghezza del testo).
ssi mentre n è variabile (dipende dalla
101)+n byte
3.9.7.4 Indirizzo del convertitore di
frequenza (ADR)
Vengono utilizzati 2 diversi formati di indirizzo.
Il campo di indirizzi del convertitore di frequenza è 1–31 o
1–126.
Formato indirizzo 1–31
•
- Bit 7=0 (formato indirizzi 1-31 attivo).
- Bit 6 non utilizzato.
- Bit 5=1: broadcast, i bit di indirizzo (0-4)
non vengono usati.
- Bit 5=0: nessun broadcast.
- Bit 0–4=indirizzo del convertitore di
frequenza 1–31.
Formato indirizzo 1–126
•
- Bit 7=1 (formato indirizzi 1-126 attivo).
- Bit 0–6=indirizzo del convertitore di
frequenza 1–126.
- Bit 0–6 =0 Broadcast.
Lo slave restituisce il byte di indirizzo al master senza
variazioni nel telegramma di risposta.
3 3
3.9.7.5 Byte di controllo dati (BCC)
La checksum viene calcolata come una funzione XOR.
Prima che venga ricevuto il primo byte nel telegramma, la
checksum calcolata è 0.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 77

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
3.9.7.6 Il campo dati
La struttura dei blocchi di dati dipende dal tipo di telegramma. Vi sono tre tipi di telegramma, utilizzati sia per la funzione
di controllo (master⇒slave) che di risposta (slave⇒master).
I 3 tipi di telegrammi sono:
33
Blocco processo (PCD)
Il PCD è costituito da un blocco di dati di quattro byte (2 parole) e contiene:
Parola di controllo e valore di riferimento (dal master allo slave).
•
La parola di stato e la frequenza di uscita attuale (dallo slave al master).
•
Disegno 3.47 Blocco processo
Blocco parametri
Il blocco parametri, usato per la trasmissione dei parametri fra master e slave. Il blocco di dati è costituito da 12 byte (6
parole) e contiene anche il blocco di processo.
Disegno 3.48 Blocco parametri
Blocco di testo
Il blocco di testo utilizzato per leggere o scrivere testi mediante il blocco di dati.
Disegno 3.49 Blocco di testo
78 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.9.7.7 Il campo PKE
Il campo PKE contiene due campi secondari:
Comando relativo ai parametri e risposta AK.
•
Numero di parametro PNU.
•
Disegno 3.50 Campo PKE
- ed emette una segnalazione di guasto (vedere
Tabella 3.28) nel valore del parametro (PWE):
PWE basso
(esadecimal
e)
11 La modica dei dati nel parametro denito non è
82 Non esiste alcun accesso del bus al parametro
83 La modica dei dati non è possibile in quanto è
Tabella 3.28 Valore del parametro rapporto di guasto
Messaggio di errore
0 Il numero di parametro usato non esiste.
1 Nessun accesso in scrittura al parametro denito.
2 Il valore dei dati supera i limiti del parametro.
3 Il sottoindice utilizzato non esiste.
4 Il parametro non è del tipo array.
5 Il tipo di dati non corrisponde al parametro
denito.
possibile nella modalità attuale del convertitore di
frequenza. Alcuni parametri possono essere
modicati solo se il motore è spento.
denito.
selezionata l'impostazione di fabbrica
3 3
I bit numero 12–15 trasferiscono i comandi relativi ai
parametri dal master allo slave e restituiscono le risposte
elaborate dallo slave al master.
Numero di bit Comando relativo ai parametri
15 14 13 12
0 0 0 0 Nessun comando.
0 0 0 1 Lettura valore del parametro.
0 0 1 0 Scrittura valore del parametro nella RAM
(parola).
0 0 1 1 Scrittura valore del parametro nella RAM
(parola doppia).
1 1 0 1 Scrittura valore del parametro nella RAM
e nella EEPROM (parola doppia).
1 1 1 0 Scrittura valore del parametro nella RAM
e nella EEPROM (parola).
1 1 1 1 Lettura/scrittura testo.
Tabella 3.26 Comandi relativi ai parametri master⇒slave
Numero di bit Risposta
15 14 13 12
0 0 0 0 Nessuna risposta.
0 0 0 1 Valore di parametro trasmesso (parola).
0 0 1 0 Valore di parametro trasmesso (parola
doppia).
0 1 1 1 Impossibile eseguire il comando.
1 1 1 1 Testo trasmesso.
Tabella 3.27 Risposta slave⇒master
Se il comando non può essere
eettuato, lo slave invia
questa risposta:
0111 Impossibile eseguire il comando
3.9.7.8 Numero di parametro (PNU)
I bit numero 0–11 trasmettono i numeri dei parametri. La
funzione del parametro in questione è denita nella
descrizione dei parametri della Guida alla Programmazione.
3.9.7.9 Indice (IND)
L'indice è usato insieme al numero di parametro per un
accesso di lettura/scrittura ai parametri con un indice, per
esempio parametro 15-30 Log allarme: Codice guasto.
L'indice consiste di 2 byte, un byte basso e un byte alto.
Solo il byte basso è utilizzato come un indice.
3.9.7.10 Valore del parametro (PWE)
Il blocco del valore di parametro consiste di 2 parole (4
byte) e il valore dipende dal comando denito (AK). Il
master richiede un valore di parametro quando il blocco
PWE non contiene alcun valore. Per cambiare un valore di
parametro (scrittura), scrivere il nuovo valore nel blocco
PWE e inviarlo dal master allo slave.
Se lo slave risponde alla richiesta di parametro (comando
di lettura), il valore di parametro corrente nel blocco PWE è
trasmesso e rinviato al master. Se un parametro non
contiene un valore numerico ma diverse opzioni dati, per
esempio parametro 0-01 Lingua, in cui [0] è Inglese e [4] è
Danese, selezionare il valore dati inserendone il valore nel
blocco PWE. La comunicazione seriale è solo in grado di
leggere parametri contenenti il tipo di dati 9 (stringa di
testo).
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 79

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Parametro 15-40 Tipo FC no a parametro 15-53 N. di serie
scheda di potenza contengono il tipo di dati 9.
Ad esempio, leggere le dimensioni dell'unità e l'intervallo
della tensione di rete in parametro 15-40 Tipo FC. Quando
viene trasmessa una stringa di testo (lettura), la lunghezza
del telegramma è variabile e i testi sono di lunghezza
33
variabile. La lunghezza del telegramma è denita nel
secondo byte del telegramma LGE. Quando si trasmettono
testi, il carattere indice indica se si tratta di un comando di
lettura o di scrittura.
conversione di 0,1 signica che il valore trasmesso è
moltiplicato per 0,1. Il valore 100 viene pertanto letto
come 10,0.
Esempi:
0 s⇒indice di conversione 0
0,00 s⇒indice di conversione -2
0 ms⇒indice di conversione -3
0,00 ms⇒indice di conversione -5
3.9.7.13 Parole di processo (PCD)
Per leggere un testo mediante il blocco PWE, impostare il
comando relativo ai parametri (AK) su F esadecimale. Il
carattere indice del byte alto deve essere 4.
Il blocco delle parole di processo è diviso in due blocchi di
16 bit, che si presentano sempre nella sequenza denita.
Alcuni parametri contengono testo che può essere
sovrascritto mediante il bus seriale. Per scrivere un testo
mediante il blocco PWE, impostare il comando relativo ai
parametri (AK) su F esadecimale. I caratteri indice a byte
alto devono essere 5.
PCD 1 PCD 2
Telegramma di controllo (parola di controllo
master⇒slave)
Telegramma di controllo (parola di stato
slave⇒master)
Tabella 3.30 Parole di processo (PCD)
Valore di
riferimento
Frequenza di
uscita attuale
3.9.8 Esempi del protocollo FC
Disegno 3.51 Testo tramite blocco PWE
3.9.7.11 Tipi di dati supportati
Senza rma signica che il telegramma non contiene alcun
segno operativo.
Tipi di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza segno 8
6 Senza segno 16
7 Senza segno 32
9 Stringa di testo
10 Stringa di byte
13 Dierenza di tempo
33 Riservato
35 Sequenza di bit
Tabella 3.29 Tipi di dati supportati
3.9.7.12 Conversione
I vari attributi di ciascun parametro sono riportati nell'impostazione di fabbrica. I valori dei parametri vengono
trasferiti solo come numeri interi. Pertanto i fattori di
conversione sono utilizzati per trasmettere i codici
decimali.
Parametro 4-12 Limite basso velocità motore [Hz] ha un
fattore di conversione di 0,1. Per preimpostare la frequenza
minima a 10 Hz, trasmettere il valore 100. Un fattore di
3.9.8.1 Scrittura di un valore di parametro
Cambiare parametro 4-14 Limite alto velocità motore [Hz] a
100 Hz.
Scrivere i dati nella EEPROM.
PKE=E19E hex - Scrittura parola singola in
parametro 4-14 Limite alto velocità motore [Hz].
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=03E8 hex - valore dati 1000, corrispondente a
100 Hz, vedere capitolo 3.9.7.12 Conversione.
Il telegramma avrà il seguente aspetto:
Disegno 3.52 Scrivere i dati nella EEPROM
AVVISO!
Parametro 4-14 Limite alto velocità motore [Hz] è una
parola singola e il comando relativo ai parametri per la
scrittura nell'EEPROM è E. Il numero di parametro 4-14 è
19E in caratteri esadecimali.
80 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Integrazione nel sistema Guida alla progettazione
La risposta dallo slave al master è:
Disegno 3.53 Risposta dallo slave
3.9.8.2 Lettura di un valore del parametro
Leggere il valore in parametro 3-41 Rampa 1 tempo di
accel..
PKE=1155 hex - Lettura valore del parametro in
parametro 3-41 Rampa 1 tempo di accel..
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=0000 hex
Disegno 3.54 Valore del parametro
Se il valore in
s, la risposta dallo slave al master è
Disegno 3.55 Risposta dallo slave
3E8 hex corrisponde a 1000 decimale. L'indice di
conversione per yparametro 3-41 Rampa 1 tempo di accel. è
-2, vale a dire 0,01.
Parametro 3-41 Rampa 1 tempo di accel. è del tipo
Senza segno 32.
parametro 3-41 Rampa 1 tempo di accel. è 10
3.9.9 Protocollo Modbus RTU
3.9.9.1 Presupposti
Danfoss presuppone che il controllore installato supporti le
interfacce descritte nel presente manuale e che vengano
osservati scrupolosamente tutti i requisiti richiesti dal
controllore nonché dal convertitore di frequenza.
Il Modbus RTU integrato (Remote Terminal Unit) è
progettato per comunicare con qualsiasi controllore che
supporta le interfacce denite nel presente manuale. Si
presuppone che l'utente abbia piena conoscenza delle
capacità e dei limiti del controllore.
3.9.9.2 Panoramica Modbus RTU
Indipendentemente dal tipo di reti di comunicazione
siche, la panoramica Modbus RTU descrive il processo che
un controllore utilizza per richiedere l'accesso a un altro
dispositivo. Ciò include il modo in cui il Modbus RTU
risponderà a richieste da un altro dispositivo e il modo in
gli errori cui verranno rilevati e segnalati. Stabilisce anche
un formato comune per il layout e i contenuti dei campi
dei messaggi.
Durante le comunicazioni su una rete Modbus RTU, il
protocollo:
Determina il modo in cui ogni controllore rileva
•
l'indirizzo di dispositivo.
Riconosce un messaggio indirizzato a esso.
•
Determina quali azioni eseguire.
•
Estrae i dati o altri informazioni contenute nel
•
messaggio.
Se è necessaria una risposta, il controllore crea il
messaggio di risposta e lo invia.
I controllori comunicano utilizzando la tecnica master/slave
nella quale solo il master può iniziare le transazioni
(chiamate interrogazioni). Gli slave rispondono fornendo al
master i dati richiesti oppure eseguendo l'azione richiesta
nell'interrogazione.
Il master può indirizzare degli slave individuali oppure
iniziare un messaggio di broadcast a tutti gli slave. Gli
slave restituiscono una risposta alle interrogazioni che sono
indirizzate a loro individualmente. Non vengono restituite
risposte alle interrogazioni broadcast dal master. Il
protocollo Modbus RTU stabilisce il formato per l'inter-
ruzione del master fornendo:
L'indirizzo del dispositivo (o broadcast).
•
Un codice di funzione che
•
richiesta.
Qualsiasi dato da inviare.
•
Un campo di controllo degli errori.
•
Anche il messaggio di risposta dello slave è costruito
usando il protocollo Modbus. Contiene campi che
confermano l'azione adottata, qualsiasi dato da restituire e
un campo per il controllo degli errori. Se si verica un
errore nella ricezione del messaggio o se lo slave non è in
grado di eettuare l’azione richiesta, lo slave restituisce un
messaggio di errore. In alternativa, si verica un timeout.
denisce un'azione
3.9.9.3 Convertitore di frequenza con
Modbus RTU
Il convertitore di frequenza comunica nel formato Modbus
RTU tramite l'interfaccia RS485 incorporata. Modbus RTU
consente l'accesso alla parola di controllo e riferimento bus
del convertitore di frequenza.
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 81

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
La parola di controllo consente al master Modbus di
controllare varie funzioni importanti del convertitore di
frequenza:
Avviamento
•
Arresto del convertitore di frequenza in vari modi:
•
33
•
•
•
•
•
Il riferimento bus è generalmente usato per il controllo di
velocità. È anche possibile accedere ai parametri, leggere i
loro valori e dove possibile, modicarli. Questo consente
una serie di opzioni di controllo, incluso il controllo del
setpoint del convertitore di frequenza quando viene
utilizzato il suo controllore PI interno.
- Arresto a ruota libera
- Arresto rapido
- Arresto freno CC
- Arresto normale (rampa)
Ripristino dopo uno scatto in caso di guasto
Funzionamento a varie velocità preimpostate
Marcia in senso inverso
Modicare il setup attivo.
Controllare il relè incorporato del convertitore di
frequenza
3.9.9.4 Congurazione della rete
Per attivare Modbus RTU sul convertitore di frequenza,
impostare i seguenti parametri:
Parametro Impostazione
Parametro 8-30 Protocollo Modbus RTU
Parametro 8-31 Indirizzo 1–247
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di
stop
Tabella 3.31 Parametri Modbus RTU
Parità pari, 1 bit di stop
(default)
Sistema di codica 8 bit binario, esadecimale 0–9, A–F.
Due caratteri esadecimali contenuti in ogni
campo a 8 bit del messaggio.
Bit per byte 1 bit di start.
8 bit dati, bit meno signicativo inviato per
primo;
1 bit per parità pari/dispari; nessun bit per
nessuna parità.
1 bit di stop se si utilizza parità; 2 bit in
caso di nessuna parità.
Campo di controllo
errori
Controllo di ridondanza ciclica (CRC).
3.9.10.2 Struttura dei messaggi Modbus
RTU
Il dispositivo trasmittente inserisce un messaggio Modbus
RTU in un frame con un punto di inizio e di ne noti.
Questo consente ai dispositivi riceventi di iniziare all'inizio
del messaggio, leggere la porzione di indirizzo,
determinare quale è il dispositivo indirizzato (o tutti i
dispositivi, se il messaggio viene inviato in broadcast), e
riconoscere quando il messaggio è stato completato. I
messaggi parziali vengono rilevati e come risultato
vengono impostati errori. I caratteri per la trasmissione
devono essere in formato esadecimale da 00 a FF in ogni
campo. Il convertitore di frequenza monitora
continuamente il bus di rete, anche durante gli intervalli
silenti. Quando viene ricevuto il primo campo (il campo di
indirizzo), ogni convertitore di frequenza o dispositivo lo
decodica al ne di determinare la periferica indirizzata. I
messaggi Modbus RTU con indirizzo zero sono messaggi
broadcast. Non è consentita alcuna risposta a messaggi
broadcast. Un message frame tipico è mostrato in
Tabella 3.33.
Avviame
T1-T2-T3-T48 bit 8 bit N x 8 bit 16 bit T1-T2-T3-
Indirizzo Funzione Dati Controllo
nto
Fine
CRC
T4
3.9.10 Struttura frame messaggio Modbus
Tabella 3.33 Struttura tipica dei messaggi Modbus RTU
RTU
3.9.10.3 Campo Start/Stop
3.9.10.1 Convertitore di frequenza con
Modbus RTU
I controllori sono impostati per comunicare sulla rete
Modbus usando la modalità RTU, con ogni byte in un
messaggio contenente 2 caratteri esadecimali a 4 bit. Il
formato per ogni byte è mostrato in Tabella 3.32.
Bit di
start
Tabella 3.32 Formato per ciascun byte
82 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Byte dati Stop/
parità
Arrest
o
I messaggi iniziano con una pausa di almeno 3,5 intervalli
di carattere. Questo è implementato come un multiplo di
intervalli di carattere al baud rate selezionato della rete
(mostrato come start T1-T2-T3-T4). Il primo campo che
deve essere trasmesso è l'indirizzo del dispositivo. In
seguito all'ultimo carattere trasmesso, un periodo simile di
almeno 3,5 intervalli di carattere segna la ne del
messaggio. Dopo questo periodo può iniziare un nuovo
messaggio. L'intero frame del messaggio deve essere
trasmesso come un usso continuo. Se si verica una
pausa di oltre 1,5 caratteri prima che il frame sia
completato, il dispositivo ricevente cancella il messaggio
incompleto e assume che il byte successivo sarà il campo

Integrazione nel sistema Guida alla progettazione
di indirizzo di un nuovo messaggio. Allo stesso modo, se
un nuovo messaggio inizia prima di 3,5 intervalli di
caratteri dopo un messaggio precedente, il dispositivo
ricevente lo considera una continuazione del messaggio
precedente. Ciò provoca un timeout (nessuna risposta dallo
slave) poiché il valore nel campo CRC nale non è valido
per i messaggi combinati.
3.9.10.4 Campo di indirizzo
Il campo di indirizzo di un frame messaggio contiene 8 bit.
Gli indirizzi validi del dispositivo slave sono compresi
nell'intervallo 0-247 decimale. Al singolo dispositivo slave
vengono assegnati indirizzi tra 1 e 247. (il valore 0 è
riservato per il modo broadcast, riconosciuto da tutti gli
slave). Un master indirizza uno slave inserendo l'indirizzo
slave nel campo di indirizzo del messaggio. Quando lo
slave invia la sua risposta, colloca il suo proprio indirizzo in
questo campo di indirizzo per segnalare al master quale
slave sta rispondendo.
3.9.10.5 Campo funzione
Il campo funzione di un frame messaggio contiene 8 bit. I
codici validi sono compresi nell'intervallo tra 1 e FF. I
campi funzione sono usati per la trasmissione di messaggi
tra master e slave. Quando un messaggio viene inviato da
un master a una periferica slave, il campo del codice
funzione segnala allo slave l'azione che deve eettuare.
Quando lo slave risponde al master, usa il campo codice
funzione per indicare una risposta normale (senza errori)
oppure per indicare che si è vericato un errore (chiamata
risposta di eccezione). Per una risposta normale lo slave
restituisce semplicemente il codice funzione originale. Per
una risposta di eccezione, lo slave restituisce un codice che
è equivalente al codice funzione originale con il suo bit più
signicativo impostato su 1 logico. Inoltre lo slave colloca
un codice unico nel campo dati del messaggio di risposta.
Questo codice segnala al master il tipo di errore occorso
oppure la ragione dell'eccezione. Consultare anche
capitolo 3.9.10.10 Codici funzione supportati da Modbus RTU
e capitolo 3.9.10.11 Codici di eccezione Modbus.
3.9.10.7 Campo di controllo CRC
I messaggi includono un campo per il controllo degli errori
basato su un metodo di un controllo di ridondanza ciclica
(CRC). Il campo CRC controlla i contenuti dell'intero
messaggio. Viene applicato indipendentemente da
qualsiasi metodo di controllo parità per i caratteri
individuali del messaggio. Il dispositivo trasmittente calcola
il valore CRC e quindi aggiunge il CRC come ultimo campo
nel messaggio. Il dispositivo ricevente ricalcola un CRC
durante la ricezione del messaggio e confronta il valore
calcolato con il valore eettivo ricevuto nel campo CRC. Se
i due valori non corrispondono, si verica un timeout del
bus. Il campo per il controllo degli errori contiene un
valore binario a 16 bit implementato come due byte a 8
bit. Una volta eettuato questo, il byte di ordine inferiore
del campo viene aggiunto per primo, seguito dal byte di
ordine superiore. Il byte di ordine superiore CRC è l'ultimo
byte inviato nel messaggio.
3.9.10.8 Indirizzamento del registro di
bobina
In Modbus, tutti i dati sono organizzati in bobine e registri
di mantenimento. Le bobine gestiscono un singolo bit,
mentre i registri di mantenimento gestiscono una parole a
2 byte (16 bit). Tutti gli indirizzi di dati nei messaggi
Modbus sono riferiti allo zero. Alla prima occorrenza di un
elemento dati viene assegnato l’indirizzo dell’elemento
numero 0. Per esempio: La bobina nota come bobina 1 in
un controllore programmabile viene indirizzata come il
campo di indirizzo dati di un messaggio Modbus. La
bobina 127 in codice decimale viene indirizzata come coil
007EHEX (126 in codice decimale).
Il registro di mantenimento 40001 viene indirizzato come
registro 0000 nel campo di indirizzo dati del messaggio. Il
campo codice funzione specica già un funzionamento
'registro di mantenimento'. Pertanto il riferimento 4XXXX è
implicito. Il registro di mantenimento 40108 viene indirizzato
come registro 006BHEX (107 in codice decimale).
3 3
3.9.10.6 Campo dati
Il campo dati è costruito usando serie di due cifre
esadecimali nell'intervallo compreso tra 00 e FF
esadecimale. Queste sono costituite da un carattere RTU. Il
campo dati di messaggi inviati da un master a una
periferica slave contiene informazioni che lo slave deve
usare per eettuare l'azione denita dal codice funzione.
Ciò può includere elementi come indirizzi di bobine o
indirizzi registro, la quantità di elementi da gestire e il
conteggio di byte di dati eettivi nel campo.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 83

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Numero
di
bobina
1–16 Convertitore di frequenza e parola di
17–32 Velocità del convertitore di frequenza
33
33–48 Parola di stato del convertitore di
49–64 Modalità ad anello aperto: frequenza
65 Controllo di scrittura parametro (dal
66–
65536
Tabella 3.34 Descrizioni delle bobine
Bobina 0 1
01 Riferimento preimpostato, lsb
02 Riferimento preimpostato, msb
03 Freno CC Nessun freno CC
04 Arresto a ruota libera Nessun arresto a ruota libera
05 Arresto rapido Nessun arresto rapido
06 Frequenza bloccata Nessuna freq. bloccata
07 Arresto rampa Avviamento
08 Nessun ripristino Ripristino
09 Nessuna marcia jog Jog
10 Rampa 1 Rampa 2
11 Dati non validi Dati validi
12 Relè 1 o Relè 1 on
13 Relè 2 o Relè 2 on
14 Setup LSB
15 Setup MSB
16 Nessuna inversione Inversione
Tabella 3.35 Parola di controllo convertitore di frequenza
(prolo FC)
Descrizione Direzione del
segnale
Dal master allo
controllo.
o intervallo di riferimento setpoint
0x0–0xFFFF (-200% ... ~200%).
frequenza (vedere Tabella 3.36).
di uscita del convertitore di
frequenza.
Modalità ad anello chiuso: segnale di
retroazione convertitore di frequenza.
master allo slave).
0=Le modiche ai parametri
vengono memorizzate nella RAM
del convertitore di frequenza.
1=Le modiche ai parametri
vengono memorizzate nella RAM
e nella EEPROM del convertitore
di frequenza.
Riservato.
slave
Dal master allo
slave
Dallo slave al
master
Dallo slave al
master
Dal master allo
slave
Bobina 0 1
33 Comando non pronto Comando pronto
34 Convertitore di frequenza
non pronto
35 Arresto a ruota libera Chiuso per sicurezza
36 Nessun allarme Allarme
37 Non utilizzato Non utilizzato
38 Non utilizzato Non utilizzato
39 Non utilizzato Non utilizzato
40 Nessun avviso Avviso
41 Non nel riferimento Nel riferimento
42 Modalità manuale Modalità Automatico
43 Fuori campo di freq. Nel campo di frequenza
44 Arrestato In funzione
45 Non utilizzato Non utilizzato
46 Nessun avviso tensione Avviso tensione
47 Non nel limite di corr. Limite di corrente
48 Nessun avviso termico Termica Avviso
Tabella 3.36 Parola di stato convertitore di frequenza
(prolo FC)
Numero di
registro
00001–00006 Riservato
00007 Ultimo codice di errore da un'interfaccia oggetto
00008 Riservato
00009
00010–00990 Gruppo di parametri 000 (parametri da 0-01 a
01000–01990 Gruppo di parametri 100 (parametri da 1-00 a
02000–02990 Gruppo di parametri 200 (parametri da 2-00 a
03000–03990 Gruppo di parametri 300 (parametri da 3-00 a
04000–04990 Gruppo di parametri 400 (parametri da 4-00 a
... ...
49000–49990 Gruppo di parametri 4900 (parametri da 49-00 a
50000 Dati di ingresso: registro parola di controllo
50010 Dati di ingresso: registro riferimento bus (REF).
... ...
50200 Dati di uscita: registro parola di stato convertitore
50210 Dati di uscita: registro valore eettivo principale
Descrizione
dati FC
Indice parametri
0-99)
1-99)
2-99)
3-99)
4-99)
49-99)
convertitore di frequenza (CTW).
di frequenza (STW).
convertitore di frequenza (MAV).
Convertitore di frequenza
pronto
1)
Tabella 3.37 Registri di mantenimento
1) Utilizzato per specicare il numero di indice da utilizzare quando si
accede a un parametro indicizzato.
84 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.9.10.9 Controllo del convertitore di
frequenza
I codici disponibili per l'uso nei campi funzione e nei campi
dati di un messaggio Modbus RTU sono elencati in
capitolo 3.9.10.10 Codici funzione supportati da Modbus RTU
e capitolo 3.9.10.11 Codici di eccezione Modbus.
3.9.10.10 Codici funzione supportati da
Modbus RTU
Modbus RTU supporta l'uso dei codici funzione (vedere
Tabella 3.38) nel campo funzione di un messaggio.
Funzione Codice funzione (hex)
Lettura bobine 1
Lettura registri di mantenimento 3
Scrittura bobina singola 5
Scrittura registro singolo 6
Scrittura bobine multiple F
Scrittura registri multipli 10
Ottieni comunicatore contatore eventi B
Riporta ID slave 11
Tabella 3.38 Codici funzione
Funzione Codice
funzione
Diagnostica 8 1 Riavvia comunicazione
Tabella 3.39 Codici funzione e codici sottofunzione
Codice
sottofunzio
ne
2 Restituisce il registro
10 Azzera i contatori e il
11 Restituisce il conteggio
12 Restituisce il conteggio
13 Restituisce il conteggio
14 Restituisce il conteggio
Sottofunzione
diagnostico
registro diagnostico
dei messaggi bus
degli errori di comunicazione bus
degli errori slave
dei messaggi slave
3.9.10.11 Codici di eccezione Modbus
Per una spiegazione completa della struttura di una
risposta del codice di eccezione, fare riferimento a
capitolo 3.9.10.5 Campo funzione.
CodiceNome Signicato
1 Funzione
illecita
2 Indirizzo dati
illecito
3 Valore dei
dati illecito
4 Guasto al
dispositivo
slave
Tabella 3.40 Codici di eccezione Modbus
Il codice funzione ricevuto nell'interrogazione non è un'azione consentita per il
server (o slave). La causa può essere il
fatto che il codice funzione è solo
applicabile ai dispositivi più nuovi e non è
stato implementato nell'unità selezionata.
Potrebbe anche indicare che il server (o
slave) è in uno stato sbagliato per
elaborare una richiesta di questo tipo, ad
esempio perché non è congurato ed è
stato sollecitato di indicare i valori di
registro.
L'indirizzo dati ricevuto nell'interrogazione
non è un indirizzo consentito per il server
(o slave). Più specicamente, non è valida
la combinazione di numero di riferimento
e lunghezza di trasferimento. Per un
controllore con 100 registri, una richiesta
con oset 96 e lunghezza 4 avrebbe
successo, mentre una richiesta con oset
96 e lunghezza 5 genera l'eccezione 02.
Un valore contenuto nel campo dati di
interrogazione non è un valore consentito
per un server (o slave). Questo indica un
guasto nella struttura della parte residua
di una richiesta complessa, ad esempio
che la lunghezza implicita è scorretta.
Specicatamente NON signica che un
elemento di dati trasmesso per la
memorizzazione in un registro abbia un
valore al di fuori dell'ambito del
programma applicativo poiché il
protocollo Modbus non conosce il
signicato dei singoli valori nei singoli
registri.
Si è vericato un errore irreversibile
mentre il server (o slave) tentava di
eseguire l'azione richiesta.
3.9.11 Accesso ai parametri
3.9.11.1 Gestione dei parametri
Il PNU (numero di parametro) viene tradotto dall'indirizzo
di registro contenuto nel messaggio di lettura o scrittura
Modbus. Il numero di parametro viene convertito in
Modbus come (10 x numero di parametro) decimale.
Esempio: Lettura parametro 3-12 Catch up/slow Down Value
(16 bit): Il registro di mantenimento 3120 contiene il valore
dei parametri. Un valore di 1352 (decimale) signica che il
parametro è impostato sul 12,52%
Lettura parametro 3-14 Rif. relativo preimpostato (32 bit): I
registri di mantenimento 3410 & 3411 contengono il valore
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 85

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
del parametro. Un valore di 11300 (decimale) signica che
il parametro è impostato su 1113,00.
Per informazioni sui parametri, dimensione e indice di
conversione, consultare la guida alla programmazione.
33
3.9.11.2 Memorizzazione di dati
La bobina 65 in codice decimale determina se i dati scritti
in un convertitore di frequenza vengono memorizzati
nell'EEPROM e nella RAM (bobina 65 = 1) oppure solo nella
RAM (bobina 65=0).
3.9.11.3 IND (Index)
Tipi di dati non standard
I tipi di dati non standard sono stringhe di testo e
vengono memorizzati come registri 4x (40001–4FFFF). I
parametri vengono letti usando la funzione 03 hex Read
Holding Registers (Lettura registri di mantenimento) e scritti
usando la funzione 10 hex Preset Multiple Registers
(Scrittura di uno o più registri). Le grandezze leggibili
vanno da 1 registro (2 caratteri) no a 10 registri (20
caratteri).
3.9.12 Prolo di controllo convertitore di
frequenza FC
3.9.12.1 Parola di controllo secondo il
Prolo FC (parametro 8-10 Prolo di
Alcuni parametri nel convertitore di frequenza sono
parametri array, per esempio parametro 3-10 Riferim
preimp.. Poiché il Modbus non supporta gli array nei
registri di mantenimento, il convertitore di frequenza ha
riservato il registro di mantenimento 9 come puntatore
all'array. Prima di leggere o scrivere un parametro array,
impostare il registro di mantenimento su 9. L'impostazione
del registro di mantenimento al valore di 2 fa sì che tutti i
seguenti parametri array di lettura/scrittura siano
nell'indice 2.
Disegno 3.56 Parola di controllo
controllo=prolo FC)
3.9.11.4 Blocchi di testo
Ai parametri memorizzati come stringhe di testo si accede
allo stesso modo come agli altri parametri. La grandezza
massima dei blocchi di testo è 20 caratteri. Se una richiesta
di lettura per un parametro prevede più caratteri di quelli
memorizzati dal parametro, la risposta viene troncata. Se la
richiesta di lettura per un parametro prevede meno
caratteri di quelli memorizzati dal parametro, la risposta
viene riempita con spazi.
3.9.11.5 Fattore di conversione
Siccome un valore parametrico può essere trasmesso solo
come numero intero, per trasmettere decimali è necessario
usare un fattore di conversione.
3.9.11.6 Valori dei parametri
Tipi di dati standard
I tipi di dati standard sono int 16, int 32, uint 8, uint 16 e
uint 32. Sono memorizzati come registri 4x (40001 –
4FFFF). I parametri vengono letti utilizzando la funzione 03
hex Read Holding Registers (Lettura registri di
mantenimento). I parametri vengono scritti usando la
funzione 6 hex Preset Single Register (Scrittura di un solo
registro) per 1 registro (16 bit) e la funzione 10 hex Preset
Multiple Registers (Scrittura di uno o più registri) per 2
registri (32 bit). Le grandezze leggibili vanno da 1 registro
(16 bit) no a 10 registri (20 caratteri).
86 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
Bit Valore del bit=0 Valore del bit=1
00 Valore di riferimento Selezione esterna lsb
01 Valore di riferimento Selezione esterna msb
02 Freno CC Rampa
03 Rotazione libera Nessuna rotazione libera
04 Arresto rapido Rampa
05 Mantenimento frequenza
di uscita
06 Arresto rampa Avviamento
07 Nessuna funzione Ripristino
08 Nessuna funzione Jog
09 Rampa 1 Rampa 2
10 Dati non validi Dati validi
11 Nessuna funzione Relè 01 attivo
12 Nessuna funzione Relè 02 attivo
13 Programmazione
parametri
14 Programmazione
parametri
15 Nessuna funzione Inversione
Tabella 3.41 Bit parola di controllo
Utilizzare rampa
Selezione lsb
Selezione msb

Integrazione nel sistema Guida alla progettazione
Spiegazione dei bit di controllo
Bit 00/01
I bit 00 e 01 vengono utilizzati per scegliere fra i quattro
valori di riferimento, preprogrammati in
parametro 3-10 Riferim preimp. secondo Tabella 3.42.
Valore di
riferimento
programmato
1 Parametro 3-10
2 Parametro 3-10
3 Parametro 3-10
4 Parametro 3-10
Tabella 3.42 Valori di riferimento
Parametro Bit 01 Bit 00
0 0
Riferim preimp.
[0]
0 1
Riferim preimp.
[1]
1 0
Riferim preimp.
[2]
1 1
Riferim preimp.
[3]
AVVISO!
Eettuare una selezione in parametro 8-56 Selezione rif.
preimpostato per denire come il bit 00/01 si colleghi
alla funzione corrispondente sugli ingressi digitali.
Bit 02, Freno CC
Bit 02=0 determina una frenatura in CC e l'arresto. La
corrente di frenata e la durata sono impostate in
parametro 2-01 Corrente di frenatura CC e
parametro 2-02 Tempo di frenata CC.
Bit 02=1 attiva la rampa.
Bit 03, Rotazione libera
Bit 03=0: Il convertitore di frequenza rilascia immediatamente il motore (i transistor di uscita sono spenti), e
decelera in evoluzione libera no all'arresto.
Bit 03=1: Se le altre condizioni di avviamento sono
soddisfatti, il convertitore di frequenza avvia il motore.
Eettuare una selezione in parametro 8-50 Selezione ruota
libera per denire in che modo il bit 03 è collegato alla
funzione corrispondente su un ingresso digitale.
Bit 04, Arresto rapido
Bit 04=0: Fa sì che la velocità del motore si riduca
gradualmente no ad arrestarsi (impostato in
parametro 3-81 Tempo rampa arr. rapido).
Bit 05, Mantenimento frequenza di uscita:
Bit 05=0: La frequenza di uscita attuale (in Hz) viene
bloccata. Cambiare la frequenza di uscita bloccata solo con
gli ingressi digitali (da parametro 5-10 Ingr. digitale morsetto
18 a parametro 5-15 Ingr. digitale morsetto 33) programmati
su Speed up e Slow-down.
AVVISO!
Se è attivo uscita congelata, arrestare il convertitore di
frequenza nel modo seguente:
Bit 03 arresto a ruota libera.
•
Bit 02 frenatura in CC.
•
Ingresso digitale (parametro 5-10 Ingr. digitale
•
morsetto 18 a parametro 5-15 Ingr. digitale
morsetto 33) programmato su Frenatura CC,
Arresto a ruota libera o Ripristino e arresto a
ruota libera.
Bit 06, Arresto/ avviamento rampa
Bit 06=0: Provoca un arresto e fa sì che la velocità del
motore eettui una rampa di discesa no all'arresto
mediante i parametri della rampa di discesa selezionati.
Bit 06=1: Se le altre condizioni di avviamento sono
soddisfatte, il convertitore di frequenza avvia il motore.
Eettuare una selezione in parametro 8-53 Selez. avvio per
denire in che modo il bit 06 Arresto/avviamento rampa è
collegato alla funzione corrispondente su un ingresso
digitale.
Bit 07, Ripristino
Bit 07=0: Nessun ripristino.
Bit 07=1: Ripristina uno scatto. Il ripristino è attivato sul
fronte di salita del segnale, ad esempio durante il
passaggio da 0 logico a 1 logico.
Bit 08, Jog
Bit 08=1: Parametro 3-19 Velocità marcia jog [RPM]
determina la frequenza di uscita.
Bit 09, Selezione della rampa 1/2
Bit 09=0: È attiva la rampa 1 (da parametro 3-41 Rampa 1
tempo di accel. a parametro 3-42 Rampa 1 tempo di decel.).
Bit 09=1: È attiva la rampa 2 (da parametro 3-51 Rampa 2
tempo di accel. a parametro 3-52 Rampa 2 tempo di decel.).
Bit 10, Dati non validi/dati validi
Comunicare al convertitore di frequenza se utilizzare o
ignorare la parola di controllo.
Bit 10=0: La parola di controllo viene ignorata.
Bit 10=1: La parola di controllo viene utilizzata. Questa
funzione è rilevante perché il telegramma contiene sempre
la parola di controllo, indipendentemente dal tipo di
telegramma. Disattivare la parola di controllo se non deve
essere usata in occasione dell'aggiornamento o della
lettura di parametri.
Bit 11, Relè 01
Bit 11=0: Relè non attivato.
Bit 11=1: Relè 01 attivato, a condizione che in
parametro 5-40 Funzione relè sia selezionato [36] Bit 11 par.
di contr..
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 87

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Bit 12, Relè 04
Bit 12=0: Il relè 04 non è attivato.
Bit 12=1: Relè 04 attivato, a condizione che in
parametro 5-40 Funzione relè sia selezionato [37] Bit 12 par.
di contr..
33
Bit 13/14, Selezione del setup
Utilizzare i bit 13 e 14 per scegliere fra i quattro setup di
menu in base a Tabella 3.43.
La funzione è solo possibile se in parametro 0-10 Setup
attivo è selezionato [9] Multi setup.
Eettuare una selezione in parametro 8-55 Selez. setup per
denire come il bit 13/14 si colleghi alla funzione
corrispondente sugli ingressi digitali.
Bit 15 Inversione
Bit 15=0: Nessuna inversione.
Bit 15=1: Inversione. Nell'impostazione di fabbrica,
l'inversione è impostata in parametro 8-54 Selez. inversione.
Il bit 15 determina un'inversione solo se viene selezionato
[1] Bus, [2] Logica AND o [3] Logica OR
3.9.12.2 Parola di stato in base al prolo
Setup Bit 14 Bit 13
1 0 0
2 0 1
3 1 0
4 1 1
Tabella 3.43 Specica dei setup di menu
(STW) (parametro 8-10 Prolo di
controllo=prolo FC)
Disegno 3.57 Parola di stato
Bit Bit=0 Bit=1
00 Comando non pronto Comando pronto
01 C. freq. n. pr. Conv. freq. pronto
02 Rotazione libera Abilitare
03 Nessun errore Scatto
04 Nessun errore Errore (nessuno scatto)
05 Riservato 06 Nessun errore Scatto bloccato
07 Nessun avviso Avviso
08 Velocità ≠ riferimento Velocità = riferimento
09 Funzionamento locale Controllo bus
10 Fuori dal limite di
frequenza
Limite di frequenza OK
Bit Bit=0 Bit=1
11 Nessuna funzione In funzione
12 Convertitore di frequenzaOKArrestato, avvio automatico
13 Tensione OK Tensione superata
14 Coppia OK Coppia superata
15 Temporizzatore OK Timer superato
Tabella 3.44 Bit parola di stato
Spiegazione dei bit di stato
Bit 00, Controllo non pronto/pronto
Bit 00=0: Il convertitore di frequenza scatta.
Bit 00=1: I comandi del convertitore di frequenza sono
pronti ma la sezione di potenza non è necessariamente
alimentata (in caso di alimentazione esterna a 24 V ai
comandi).
Bit 01, Convertitore di frequenza pronto
Bit 01=1: Il convertitore di frequenza è pronto per
funzionare ma è attivo il comando di rotazione libera
tramite gli ingressi digitali o tramite la comunicazione
seriale.
Bit 02, arresto a ruota libera
Bit 02=0: Il convertitore di frequenza rilascia il motore.
Bit 02=1: Il convertitore di frequenza avvia il motore con
un comando di avviamento.
Bit 03, Nessuno errore/scatto
Bit 03=0: Il convertitore di frequenza non è in modalità di
guasto.
Bit 03=1: Il convertitore di frequenza scatta. Per ripristinare
il funzionamento, immettere [Reset].
Bit 04, Nessun errore/errore (nessuno scatto)
Bit 04=0: Il convertitore di frequenza non è in modalità di
guasto.
Bit 04=1: Il convertitore di frequenza visualizza un errore
ma non scatta.
Bit 05, Non utilizzato
Il bit 05 non è utilizzato nella parola di stato.
Bit 06, Nessun errore/scatto bloccato
Bit 06=0: Il convertitore di frequenza non è in modalità di
guasto.
Bit 06=1: Il convertitore di frequenza è scattato e si è
bloccato.
Bit 07, No preallarme/avviso
Bit 07=0: Non sono presenti avvisi.
Bit 07=1: È stato inviato un avviso.
Bit 08, Velocità≠riferimento/velocità=riferimento
Bit 08=0: Il motore è in funzione, ma la velocità attuale è
diversa dalla velocità di riferimento preimpostata. Ciò può
ad esempio avvenire quando la velocità accelera/decelera
durante l'avviamento/arresto.
Bit 08=1: La velocità del motore corrisponde al riferimento
di velocità preimpostato.
88 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Integrazione nel sistema Guida alla progettazione
Bit 09, Funzionamento locale/controllo bus
Bit 09=0: [Stop/Reset] è attivato sull'unità di controllo
oppure [2] Controllo locale è selezionato in
parametro 3-13 Sito di riferimento. Il controllo tramite la
comunicazione seriale non è possibile.
Bit 09=1 È possibile controllare il convertitore di frequenza
mediante il bus di campo / la comunicazione seriale.
Bit 10, Fuori dal limite di frequenza
Disegno 3.58 Frequenza di uscita attuale (MAV)
Bit 10=0: La frequenza di uscita ha raggiunto il valore
impostato in parametro 4-11 Lim. basso vel. motore [giri/
min] oppure parametro 4-13 Lim. alto vel. motore [giri/min].
Bit 10=1: La frequenza di uscita rientra nei limiti deniti.
Il riferimento e il MAV vengono demoltiplicati nel modo
seguente:
Bit 11, Non in funzione/in funzione
Bit 11=0: Il motore non è in funzione.
Bit 11=1: Il convertitore di frequenza ha ricevuto un
segnale di avviamento oppure la frequenza di uscita è
maggiore di 0 Hz.
Bit 12, Convertitore di frequenza OK/arrestato,
avviamento automatico
Bit 12=0: L'inverter non è soggetto a temperatura eccessiva
temporanea.
Bit 12=1: L’inverter si arresta a causa della sovratemperatura ma l’unità non scatta e continua a funzionare una
volta cessata la sovratemperatura.
Disegno 3.59 Riferimento e MAV
Bit 13, Tensione OK/limite superato
Bit 13=0: Non ci sono avvisi relativi alla tensione.
Bit 13=1: La tensione CC nel collegamento CC del convertitore di frequenza è troppo bassa o troppo alta.
3.9.12.4 Parola di controllo secondo il
prolo PROFIdrive (CTW)
Bit 14, Coppia OK/limite superato
Bit 14=0: La corrente motore è inferiore rispetto al limite di
coppia selezionato in parametro 4-18 Limite di corrente.
Bit 14=1: Il limite di coppia in parametro 4-18 Limite di
corrente è stato superato.
Bit 15, Timer OK/limite superato
Bit 15=0: I timer per la protezione termica del motore e
per la protezione termica non hanno superato il 100%.
Bit 15=1: Uno dei timer ha superato il 100%.
Se il collegamento tra l'opzione InterBus e il convertitore di
frequenza va perso o si è vericato un problema di
comunicazione interno, tutti i bit nella parola di stato
vengono impostati su 0.
3.9.12.3 Valore di riferimento della velocità
bus
Il valore di riferimento della velocità viene trasmesso al
convertitore di frequenza come valore percentuale relativo.
Il valore viene trasmesso sotto forma di una parola di 16
bit; in numeri interi (0-32767) il valore 16384 (4000 hex)
corrisponde a 100%. I numeri negativi sono formattati con
un complemento a 2. La frequenza di uscita attuale (MAV)
viene messa in scala allo stesso modo del riferimento bus.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 89
La parola di controllo è utilizzata per inviare comandi da
un master (per esempio un PC) a uno slave.
Bit Bit=0 Bit=1
00 O 1 On 1
01 O 2 On 2
02 O 3 On 3
03 Rotazione libera Nessuna rotazione libera
04 Arresto rapido Rampa
05 Mantenimento frequenza di
uscita
06 Arresto rampa Avviamento
07 Nessuna funzione Ripristino
08 Marcia jog 1 O Marcia jog 1 On
09 Marcia jog 2 O Marcia jog 2 On
10 Dati non validi Dati validi
11 Nessuna funzione Slow down
12 Nessuna funzione Catch up
13 Programmazione parametri Selezione lsb
14 Programmazione parametri Selezione msb
15 Nessuna funzione Inversione
Tabella 3.45 Bit parola di controllo
Utilizzare rampa
3 3

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Spiegazione dei bit di controllo
Bit 00, OFF 1/ON 1
Arresti rampa normali che utilizzano i tempi di rampa della
rampa attualmente selezionata.
Bit 00=0 provoca l'arresto e l’attivazione del relè di uscita 1
33
o 2, se la frequenza di uscita è 0 Hz e se [31] Relè 123 è
stato selezionato in parametro 5-40 Funzione relè.
Quando il bit 0=1, il convertitore di frequenza è nello Stato
1: Accensione inibita.
Bit 01, O 2/On 2
Arresto a ruota libera
Quando il bit 01=0, si verica un arresto a ruota libera e si
attiva il relè di uscita 1 o 2, se la frequenza di uscita è 0 Hz
e se è stato selezionato [31] Relè 123 in
parametro 5-40 Funzione relè.
Bit 02, O 3/On 3
L'arresto rapido utilizza il tempo di rampa di
parametro 3-81 Tempo rampa arr. rapido. Quando il bit
02=0, si verica un arresto rapido e si attiva il relè di uscita
1 o 2, se la frequenza di uscita è 0 Hz e se è stato
selezionato [31] Relè 123 in parametro 5-40 Funzione relè.
Quando il bit 02=1, il convertitore di frequenza è nello
Stato 1: Accensione inibita.
Bit 03, Evoluzione libera/nessuna evoluzione libera
Arresto a ruota libera bit 03=0 provoca un arresto.
Se le altre condizioni sono soddisfatte quando il bit 03=1,
il convertitore di frequenza può avviarsi.
AVVISO!
La selezione in parametro 8-50 Selezione ruota libera
determina come il bit 03 si combina con la
corrispondente funzione degli ingressi digitali.
Bit 04, Arresto rapido/rampa
L'arresto rapido utilizza il tempo di rampa di
parametro 3-81 Tempo rampa arr. rapido.
Quando il bit 04=0, si verica un arresto rapido.
Se le altre condizioni di avvio sono soddisfatte quando il
bit 04=1, il convertitore di frequenza può avviarsi.
AVVISO!
La selezione in parametro 8-51 Quick Stop Select
determina come il bit 04 si combina con la
corrispondente funzione degli ingressi digitali.
Bit 05, Mantenimento frequenza di uscita /Utilizzo rampa
Quando il bit 05=0, la frequenza di uscita attuale viene
mantenuta anche se il valore di riferimento è cambiato.
Quando il bit 05=1, il convertitore di frequenza torna a
svolgere la sua funzione di regolazione; Il funzionamento
avviene secondo il rispettivo valore di riferimento.
Bit 06, Arresto/ avviamento rampa
Arresto rampa normale che utilizza i tempi di rampa della
rampa attuale come selezionati. Inoltre, attivazione del relè
di uscita 01 o 04 se la frequenza di uscita è 0 Hz e se il
[31] Relè 123 è stato selezionato in parametro 5-40 Funzione
relè.
Bit 06=0 determina un arresto.
Se le altre condizioni di avvio sono soddisfatte quando il
bit 06=1, il convertitore di frequenza può avviarsi.
AVVISO!
La selezione in parametro 8-53 Selez. avvio determina
come il bit 06 si combini con la funzione corrispondente
degli ingressi digitali.
Bit 07, Nessuna funzione/ripristino
Ripristino dopo il disinserimento.
Conferma l'evento nel buer di errori.
Quando il bit 07=0, non avviene nessun ripristino.
Quando c'è un cambiamento di pendenza del bit 07 a 1,
dopo lo spegnimento viene eettuato un ripristino.
Bit 08, Marcia jog 1 O/On
L'attivazione della velocità preprogrammata in
parametro 8-90 Bus Jog 1 velocità. JOG 1 è possibile solo se
bit 04=0 e bit 00–03=1.
Bit 09, Marcia jog 2 O/On
Attivazione della velocità preprogrammata in
parametro 8-91 Bus Jog 2 velocità. Jog 2 è possibile solo se
bit 04=0 e bit 00–03=1.
Bit 10, Dati non validi/validi
Viene usato per comunicare al convertitore di frequenza se
utilizzare o ignorare la parola di controllo.
Il bit 10=0 fa sì che la parola di controllo venga ignorata.
Il bit 10=1 fa sì che venga usata la parola di controllo.
Questa funzione è importante in quanto la parola di
controllo è sempre contenuta nel telegramma, indipendentemente dal tipo di telegramma usato. Se non dovrebbe
essere usato per aggiornare o leggere i parametri, è
possibile disattivare la parola di controllo.
Bit 11, Nessuna funzione/slow down
Viene utilizzato per ridurre il valore di riferimento di
velocità della quantità indicata in parametro 3-12 Catch up/
slow Down Value.
Quando il bit 11=0, non avviene alcuna modica del valore
di riferimento.
Quando il bit 11=1, viene ridotto il valore di riferimento.
Bit 12, Nessuna funzione/catch-up
Viene utilizzato per aumentare il valore di riferimento di
velocità della quantità indicata in parametro 3-12 Catch up/
slow Down Value.
Quando il bit 12=0, non avviene alcuna modica del valore
di riferimento.
Quando il bit 12=1, il valore di riferimento viene
aumentato.
90 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
Se sono attivate sia la decelerazione che l'accelerazione (bit
11 e 12=1), la decelerazione ha la priorità, vale a dire che il
valore di riferimento di velocità viene ridotto.
Bit 13/14, Selezione del setup
I bit 13 e 14 sono usati per selezionare tra quattro
programmazioni parametri in base a Tabella 3.46.
La funzione è solo possibile se [9] Multi setup è selezionato
in parametro 0-10 Setup attivo. La selezione in
parametro 8-55 Selez. setup determina in che modo i bit 13
e 14 vengono collegati con la rispettiva funzione degli
input digitali. La modica del setup durante il funzionamento è possibile solo se i setup sono stati collegati in
parametro 0-12 Questo setup collegato a.
Setup Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Tabella 3.46 Selezione del setup
Bit 15, Nessuna funzione/Inversione
Bit 15=0 non provoca alcuna inversione.
Bit 15=1 provoca l'inversione.
AVVISO!
Nell'impostazione di fabbrica, l'inversione è impostata su
[0] Ingr. digitale in parametro 8-54 Selez. inversione.
AVVISO!
Il bit 15 determina un'inversione solo se in
parametro 8-54 Selez. inversione viene selezionato [1] Bus,
[2] Logica AND o [3] Logica OR.
3.9.12.5 Parola di stato secondo il prolo
PROFIdrive (STW)
La parola di stato viene usata per informare il master (per
esempio un PC) sullo stato di uno slave.
Bit Bit=0 Bit=1
00 Comando non pronto Comando pronto
01 C. freq. n. pr. Conv. freq. pronto
02 Rotazione libera Abilitare
03 Nessun errore Scatto
04 O 2 On 2
05 O 3 On 3
06 Avviamento possibile Avviamento impossibile
07 Nessun avviso Avviso
08
09 Funzionamento locale Controllo bus
10 Fuori dal limite di
11 Nessuna funzione In funzione
Velocità≠riferimento
frequenza
Velocità=riferimento
Limite di frequenza OK
Bit Bit=0 Bit=1
12 Convertitore di
frequenza OK
13 Tensione OK Tensione superata
14 Coppia OK Coppia superata
15 Temporizzatore OK Timer superato
Tabella 3.47 Bit parola di stato
Arrestato, avvio automatico
Spiegazione dei bit di stato
Bit 00, Controllo non pronto/pronto
Quando il bit 00=0, il bit 00, 01 o 02 della parola di
controllo è 0 (OFF 1, OFF 2 o OFF 3) – altrimenti il convertitore di frequenza viene disinserito (scatta).
Quando il bit 00=1, il convertitore di frequenza è pronto,
ma non è necessariamente presente alimentazione elettrica
per l'unità (nel caso di un'alimentazione esterna a 24 V del
sistema di controllo).
Bit 01, convertitore di frequenza non pronto/pronto
Stesso signicato del bit 00, ma con alimentazione
dell'unità. Il convertitore di frequenza è pronto quando
riceve i necessari segnali di avviamento.
Bit 02, Rotazione libera/Abilitazione
Quando il bit 02=0, il bit 00, 01 o 02 della parola di
controllo è 0 (O 1, O 2 o O 3 o evoluzione libera) altrimenti il convertitore di frequenza viene disinserito
(scatta).
Quando il bit 02=1, il bit 00, 01 o 02 della parola di
controllo è 1; il convertitore di frequenza non è scattato.
Bit 03, nessuno errore/scatto:
Quando il bit 03=0, non esiste nessuna condizioni di errore
del convertitore di frequenza.
Quando il bit 03=1, il convertitore di frequenza è scattato e
richiede un segnale di ripristino prima di poter avviarsi.
Bit 04, On 2/O 2
Quando il bit 01 della parola di controllo è 0, il bit 04=0.
Quando il bit 01 della parola di controllo è 1, il bit bit
04=1.
Bit 05, On 3/O 3
Quando il bit 02 della parola di controllo è 0, il bit 05=0.
Quando il bit 02 della parola di controllo è 1, il bit 05=1.
Bit 06, Avvio possibile/avvio non possibile
Se in parametro 8-10 Prolo di controllo è stato selezionato
[1] PROFIdrive, il bit 06 sarà 1 dopo la conferma del disinse-
rimento, dopo l’attivazione di O2 or O3 e dopo
l'inserimento della tensione di rete, Avvio non possibile
viene resettato, con il bit 00 della parola di controllo
impostato su 0 ed i bit 01, 02 e 10 impostati su 1.
Bit 07, Nessun avviso/avviso
Bit 07=0 signica che non ci sono avvisi.
Bit 07=1 signica che è stato emesso un avviso.
Bit 08, Velocità≠riferimento/velocità=riferimento
Quando il bit 08=0, l'attuale velocità del motore si scosta
dal valore di riferimento della velocità impostato. Questo
può avvenire, per esempio, quando la velocità viene
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 91

Integrazione nel sistema
modicata durante l'avviamento/arresto attraverso la
rampa di accelerazione/decelerazione.
Quando il bit 08=1, l'attuale velocità del motore
corrisponde al valore di riferimento della velocità
impostato.
33
Bit 09, Funzionamento locale/controllo bus:
Bit 09=0 indica che il convertitore di frequenza è stato
arrestato tramite [Stop] sull'LCP, o che in
parametro 3-13 Sito di riferimento è stato selezionato [0]
Collegato Man./Auto or [2] Locale.
Quando il bit 09=1, il convertitore di frequenza può essere
controllato attraverso l'interfaccia seriale.
Bit 10, Fuori dal limite di frequenza/limite di frequenza
OK
Se bit 10=0, la frequenza di uscita è al di fuori dei limiti
impostati in parametro 4-52 Avviso velocità bassa e
parametro 4-53 Avviso velocità alta.
Quando il bit 10=1, la frequenza di uscita rientra nei limiti
indicati.
Bit 11, Nessuna funzione /Funzione
Quando il bit 11=0, il motore non gira.
Quando il bit 11=1, il convertitore di frequenza ha ricevuto
un segnale di avviamento oppure la frequenza di uscita
superiore a 0 Hz.
Bit 12, Convertitore di frequenza OK/stallo, avviamento
automatico
Quando il bit 12=0, l’inverter non è soggetto a un sovraccarico temporaneo.
Quando il bit 12=1, l'inverter si è arrestato a causa di un
sovraccarico. Tuttavia, il convertitore di frequenza non
viene disinserito (scatta) e si riavvia una volta terminato il
sovraccarico.
Bit 13, Tensione OK/tensione superata:
Quando il bit 13=0, non vengono superati i limiti di
tensione del convertitore di frequenza.
Quando il bit 13=1, la tensione diretta nel collegamento
CC del convertitore di frequenza è troppo bassa o troppo
alta.
Bit 14, Coppia OK/Coppia superata
Se bit 14=0, la coppia motore è inferiore al limite
selezionato in parametro 4-16 Lim. di coppia in modo
motore e parametro 4-17 Lim. di coppia in modo generatore.
Se il bit 14=1, il limite selezionato in parametro 4-16 Lim. di
coppia in modo motore o parametro 4-17 Lim. di coppia in
modo generatore è stato superato.
Bit 15, Timer OK/Timer superato
Quando il bit 15=0, i timer per la protezione termica del
motore e la protezione termica del convertitore di
frequenza non hanno superato il 100%.
Quando il bit 15=1, uno dei timer ha superato il 100%.
VLT® Refrigeration Drive FC 103
92 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Integrazione nel sistema Guida alla progettazione
3.10 Lista di controllo della progettazione
Tabella 3.48 fornisce una lista di controllo che integra un convertitore di frequenza in un sistema di controllo del motore. La
lista è intesa come promemoria delle categorie e opzioni generali necessarie per specicare i requisiti di sistema.
Categoria Dettagli Note
Modello FC
Potenza
Volt
Corrente
Fisica
Dimensioni
Peso
Condizioni ambientali di funzionamento
Temperatura
Altitudine
Umidità
Qualità dell'aria/polvere
Requisiti di declassamento
Dimensione
contenitore
Ingresso
Cavi
Tipo
Lunghezza
Fusibili
Tipo
Dimensioni
Potenza nominale
Opzioni
Connettori
Contatti
Filtri
Uscita
Cavi
Tipo
Lunghezza
Fusibili
Tipo
Dimensioni
Potenza nominale
Opzioni
Filtri
Controllo
Cablaggio
Tipo
Lunghezza
Collegamenti morsetti
Comunicazione
Protocollo
Collegamento
Cablaggio
Opzioni
Connettori
☑
3 3
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 93

Integrazione nel sistema
VLT® Refrigeration Drive FC 103
Categoria Dettagli Note
Contatti
Filtri
Motore
Tipo
33
Potenza nominale
Tensione
Opzioni
Attrezzi e apparecchiature speciali
Movimentazione e immagazzi-
namento
Montaggio
Collegamento della rete
Tabella 3.48 Lista di controllo della progettazione
☑
94 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Esempi applicativi Guida alla progettazione
4 Esempi applicativi
4.1 Esempi applicativi
Il VLT® Refrigeration Drive FC 103 è concepito per
applicazioni di refrigerazione. L'ampia gamma di caratteristiche standard e opzionali includono uno SmartStart
ottimizzato:
Alternanza del motore
•
La funzionalità di alternanza del motore è adatta
per applicazioni (per esempio applicazioni con
ventilatore o pompa) con 2 motori che
condividono 1 convertitore di frequenza.
AVVISO!
Non usare l'alternanza del motore con compressori.
Controllo centrale
•
La regolazione in cascata di base è installata di
serie, con una capacità di no a 3 compressori. Il
controllo centrale fornisce il controllo di velocità
di un singolo compressore in un gruppo
compressore. Per il controllo di no a 6
compressori, usare la VLT® Extended Relay Card
MCB 113.
Controllo temperatura di condensazione
•
uttuante
Fa risparmiare denaro monitorando la
temperatura esterna e consentendo alla
temperatura di condensazione di essere il più
bassa possibile, il che riduce la velocità della
ventola e il consumo energetico.
Gestione ritorno olio
•
La gestione ritorno olio migliora l'adabilità e la
durata del compressore e garantisce la corretta
lubricazione, monitorando il compressore a
velocità variabile. Se è stato in funzione per un
certo tempo, accelera per ritornare l'olio al
serbatoio dell'olio.
Monitoraggio alta e bassa pressione
•
Fa risparmiare denaro riducendo la necessità di
ripristini sul posto. Il convertitore di frequenza
monitora la pressione nel sistema e, se la
pressione raggiunge un livello prossimo al livello
che attiva la valvola di arresto, il convertitore di
frequenza eettua un arresto di sicurezza, e si
riavvia poco dopo.
STO
•
STO consente Safe Torque O (ruota libera)
quando si presenta una situazione critica.
4.2 Funzioni selezionate dell'applicazione
4.2.1 SmartStart
Per congurare il convertitore di frequenza nel modo più
eciente e logico, il testo e il linguaggio utilizzati nel
convertitore di frequenza sono perfettamente comprensibili
per i tecnici e gli installatori specializzati nel campo della
refrigerazione. Per rendere l'installazione ancor più
eciente, il menu della procedura guidata guida l'utente
nella
chiaro e strutturato.
Sono supportate le seguenti applicazioni:
La funzionalità viene attivata alla prima accensione, dopo
un ripristino di fabbrica oppure dal menu rapido. Quando
si attiva la procedura guidata, il convertitore di frequenza
richiede le informazioni necessarie per eseguire l'applicazione.
Modo pausa
•
La funzione modo pausa consente di risparmiare
energia arrestando la pompa quando non esiste
alcun fabbisogno.
Orologio in tempo reale.
•
Smart logic control (SLC)
•
L'SLC comprende la programmazione di un
sequenza formata da eventi e azioni. L'SLC ore
un'ampia gamma di funzioni PLC usando
comparatori, regole logiche e timer.
congurazione del convertitore di frequenza in modo
Controllo di più compressori.
•
Ventilatore con condensatori multipli, torre di
•
rareddamento / condensazione evaporativa.
Ventola e pompa singola.
•
Sistema di pompaggio.
•
4 4
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 95

Esempi applicativi
VLT® Refrigeration Drive FC 103
4.2.2 Avviamento/arresto
Morsetto 18 = Avviamento/arresto parametro 5-10 Ingr.
digitale morsetto 18 [8] Avviamento.
Morsetto 27 = Nessuna funzione parametro 5-12 Ingr.
digitale morsetto 27 [0] Nessuna funzione (per default [2]
Evol. libera neg.)
44
Parametro 5-10 Ingr. digitale morsetto 18 = [8]
Avviamento (default).
Parametro 5-12 Ingr. digitale morsetto 27 = [2] Evol.
libera neg. (default).
4.2.3 Avviamento/arresto a impulsi
Morsetto 18 = avviamento/arresto parametro 5-10 Ingr.
digitale morsetto 18 [9] Avv. a impulsi
Morsetto 27= Arresto parametro 5-12 Ingr. digitale morsetto
27 [6] Stop (negato).
Parametro 5-10 Ingr. digitale morsetto 18 = [9] Avv.
a impulsi.
Parametro 5-12 Ingr. digitale morsetto 27 = [6] Stop
(negato).
Disegno 4.1 Morsetto 37: Disponibile solo con la funzione Safe
Torque O (STO)
Disegno 4.2 Morsetto 37: disponibile solo con la funzione STO
96 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206

Esempi applicativi Guida alla progettazione
4.2.4 Riferimento del potenziometro
Riferimento tensione mediante potenziometro.
Parametro 3-15 Risorsa di rif. 1 [1] = Ingr. analog.
53
Parametro 6-10 Tens. bassa morsetto 53 = 0 V
Parametro 6-11 Tensione alta morsetto 53 = 10 V
Parametro 6-14 Rif.basso/val.retroaz.morsetto 53 =
0 giri/min.
Parametro 6-15 Rif. alto/valore retroaz. morsetto 53
= 1.500 giri/min.
Interruttore S201 = OFF (U)
Disegno 4.3 Riferimento tensione mediante potenziometro
4.3 Esempi di setup dell'applicazione
4 4
Gli esempi di questa sezione fungono da riferimento rapido per le applicazioni standard.
Le impostazioni dei parametri corrispondono ai valori locali predeniti (selezionati in parametro 0-03 Impostazioni
•
locali) se non diversamente
Accanto ai disegni sono mostrati i parametri associati ai morsetti e alle relative impostazioni.
•
Sono visualizzate anche le impostazioni richieste dell'interruttore per i morsetti analogici A53 o A54.
•
specicato.
AVVISO!
Quando viene usata la funzionalità opzionale STO, potrebbe essere necessario montare un ponticello tra il morsetto 12
(o 13) e il morsetto 37 per assicurare il funzionamento del convertitore di frequenza con i valori di programmazione
impostati in fabbrica.
Esempio applicativo SLC
Una sequenza 1:
1. Avviamento.
2. Accelerazione.
3. Funzionamento alla velocità di riferimento 2s.
4. Decelerazione.
5. Mantenere l'albero no all'arresto.
MG16G206 Danfoss A/S © 08/2015 Tutti i diritti riservati. 97

Esempi applicativi
VLT® Refrigeration Drive FC 103
44
Disegno 4.4 Accelerazione/Decelerazione
Impostare i tempi di rampa in parametro 3-41 Rampa 1 tempo di accel. e parametro 3-42 Rampa 1 tempo di decel. ai tempi
desiderati.
t
× n
acc
=
t
rampa
Impostare il morsetto 27 su [0] Nessuna funzione (parametro 5-12 Ingr. digitale morsetto 27)
Impostare il riferimento preimpostato 0 alla prima velocità preimpostata (parametro 3-10 Riferim preimp. [0]) come
percentuale della velocità di riferimento massima (parametro 3-03 Riferimento max.). Esempio: 60%
Impostare il riferimento preimpostato 1 alla seconda velocità preimpostata (parametro 3-10 Riferim preimp. [1] Ad esempio:
0% (zero).
Impostare il contatore 0 su velocità di funzionamento costante in parametro 13-20 Timer regolatore SL [0]. Esempio: 2 s
Impostare Evento 1 in parametro 13-51 Evento regol. SL [1] su [1] Vero.
Impostare Evento 2 in parametro 13-51 Evento regol. SL [2] su [4] Riferimento on.
Impostare Evento 3 in parametro 13-51 Evento regol. SL [30] Timeout 0.
Impostare Evento 4 in parametro 13-51 Evento regol. SL [4] su [0] Falso.
Impostare Azione 1 in parametro 13-52 Azione regol. SL [1] su [10] Selez. rif. preimp. 0.
Impostare Azione 2 in parametro 13-52 Azione regol. SL [2] su [29] Avvio timer 0.
Impostare Azione 3 in parametro 13-52 Azione regol. SL [3] su [11] Selez. rif. preimp.1.
Impostare Azione 4 parametro 13-52 Azione regol. SL [4] su [1] Nessun'azione.
Impostare il in parametro 13-00 Modo regol. SL su ON.
Il comando di avviamento/arresto viene applicato al morsetto 18. Se viene applicato un segnale di arresto, il convertitore di
frequenza eettua una rampa di discesa e fa girare il motore in evoluzione libera.
par . 1 − 25
norm
rif Giri/min.
98 Danfoss A/S © 08/2015 Tutti i diritti riservati. MG16G206
 Loading...
Loading...