

MAKING MODERN LIVING POSSIBLE
Guia de Design
VLT® Refrigeration Drive FC 103
1,1–90 kW
vlt-drives.danfoss.com

Índice Guia de Design
Índice
1 Introdução
1.1 Objetivo do Guia de Design
1.2 Organização
1.3 Recursos adicionais
1.4 Abreviações, Símbolos e Convenções
1.5 Símbolos de Segurança
1.6 Denições
1.7 Versão do Software e do Documento
1.8 Aprovações e certicações
1.8.1 Marcação CE 10
1.8.1.1 Diretiva de Baixa Tensão 10
1.8.1.2 Diretiva EMC 10
1.8.1.3 Diretiva de maquinaria 11
1.8.1.4 Diretiva ErP 11
1.8.2 Em conformidade com C-tick 11
1.8.3 Em conformidade com o UL 11
1.8.4 Conformidade marítima (ADN) 11
7
7
7
7
8
9
9
10
10
1.8.5 Exportar as normas de controle 12
1.9 Segurança
1.9.1 Princípios gerais de segurança 12
2 Visão Geral do Produto
2.1 Introdução
2.2 Descrição da Operação
2.3 Sequência de Operação
2.3.1 Seção do Reticador 18
2.3.2 Seção Intermediária 18
2.3.3 Seção do Inversor 18
2.4 Estruturas de Controle
2.4.1 Estrutura de Controle Malha Aberta 18
2.4.2 Estrutura de Controle, Malha Fechada 19
2.4.3 Controles Local (Hand On - Manual Ligado) e Remoto (Auto On - Automático Ligado) 20
2.4.4 Tratamento da Referência 21
2.4.5 Tratamento do Feedback 23
12
14
14
17
18
18
2.5 Funções operacionais automatizadas
2.5.1 Proteção contra Curto Circuito 24
2.5.2 Proteção de sobretensão 24
2.5.3 Detecção de fase ausente de motor 25
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 1
24
Índice
VLT® Refrigeration Drive FC 103
2.5.4 Detecção de desbalanceamento de fases de rede elétrica 25
2.5.5 Chaveamento na Saída 25
2.5.6 Proteção de Sobrecarga 25
2.5.7 Derating Automático 25
2.5.8 Otimização Automática de Energia 25
2.5.9 Modulação da frequência de chaveamento automática 26
2.5.10 Derating automático para frequência de chaveamento alta 26
2.5.11 Derating automático para superaquecimento 26
2.5.12 Rampa automática 26
2.5.13 Circuito de limite de corrente 26
2.5.14 Desempenho de utuação de potência 26
2.5.15 Motor de partida suave 26
2.5.16 Amortecimento de ressonância 27
2.5.17 Ventiladores controlados por temperatura 27
2.5.18 Conformidade com o EMC 27
2.5.19 Medição de corrente em todas as três fases do motor 27
2.5.20 Isolação galvânica dos terminais de controle 27
2.6 Funções de aplicação personalizada
2.6.1 Adaptação Automática do Motor 27
2.6.2 Proteção Térmica do Motor 27
2.6.3 Queda da Rede Elétrica 28
2.6.4 Controladores PID incorporados 28
2.6.5 Nova Partida Automática 28
2.6.6 Flying Start 29
2.6.7 Torque total em velocidade reduzida 29
2.6.8 Bypass de frequência 29
2.6.9 Pré-aquecimento do Motor 29
2.6.10 Quatro setups programáveis 29
2.6.11 Frenagem CC 29
2.6.12 Sleep Mode 29
2.6.13 Funcionamento permissivo 29
2.6.14 Smart Logic Control (SLC) 29
27
2.6.15 Função Safe Torque O 31
2.7 Funções de falha, advertência e alarme
31
2.7.1 Operação no superaquecimento 31
2.7.2 Advertência de referência alta e baixa 32
2.7.3 Advertência de feedback alto e baixo 32
2.7.4 Desbalanceamento da tensão de alimentação ou perda de fase 32
2.7.5 Advertência de alta frequência 32
2.7.6 Advertência de baixa frequência 32
2 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Índice Guia de Design
2.7.7 Advertência de alta corrente 32
2.7.8 Advertência de corrente baixa 32
2.7.9 Advertência de correia partida/sem carga 32
2.7.10 Interface serial perdida 32
2.8 Interfaces do usuário e programação
2.8.1 Painel de Controle Local 33
2.8.2 Software de PC 33
2.8.2.1 Software de Setup MCT 10 34
2.8.2.2 MCT 31 Software de Cálculo de Harmônicas VLT
2.8.2.3 Software de Cálculo de Harmônicas (HCS) 34
2.9 Manutenção
2.9.1 Armazenagem 34
3 Integração de Sistemas
3.1 Condições Operacionais Ambiente
3.1.1 Umidade 36
3.1.2 Temperatura 36
3.1.3 Resfriamento 36
3.1.4 Sobretensão Gerada pelo Motor 37
3.1.5 Ruído Acústico 37
3.1.6 Vibração e Choque 37
3.1.7 Atmosferas agressivas 37
32
®
34
34
35
36
3.1.8 Denições de características nominais de IP 38
3.1.9 Interferência de Radiofrequência 39
3.1.10 Conformidade de isolação galvânica e PELV 39
3.2 Proteção de EMC, harmônicas e de fuga para o terra
3.2.1 Aspectos Gerais das Emissões EMC 40
3.2.2 Resultados de teste de EMC (Emissão) 42
3.2.3 Requisitos de Emissão 43
3.2.4 Requisitos de Imunidade 43
3.2.5 Isolação do Motor 44
3.2.6 Correntes de Mancal do Motor 44
3.2.7 Harmônicas 45
3.2.8 Corrente de fuga para o terra 47
3.3 Eciência no uso da energia
3.3.1 Classes IE e IES 50
3.3.2 Dados de perda de energia e dados de eciência 50
3.3.3 Perdas e eciência de um motor 51
3.3.4 Perdas e eciência de um sistema de drive de potência 51
40
49
3.4 Integração com a rede elétrica
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 3
51
Índice
VLT® Refrigeration Drive FC 103
3.4.1 Congurações de rede elétrica e efeitos de EMC 51
3.4.2 Interferência de rede elétrica de baixa frequência 52
3.4.3 Análise de interferência de rede elétrica 53
3.4.4 Opções para redução da interferência de rede elétrica 53
3.4.5 Interferência de Radiofrequência 53
3.4.6 Classicação do local de operação 53
3.4.7 Uso com fonte de entrada isolada 54
3.4.8 Correção do Fator de Potência 54
3.4.9 Atraso da potência de entrada 54
3.4.10 Transientes da rede 54
3.4.11 Operação com um gerador de espera 55
3.5 Integração do motor
3.5.1 Considerações na seleção do motor 55
3.5.2 Filtros dU/dt e de onda senoidal 55
3.5.3 Aterramento correto do motor 56
3.5.4 Cabos de Motor 56
3.5.5 Blindagem do cabo de motor 56
3.5.6 Conexão de Vários Motores 56
3.5.7 Proteção Térmica do Motor 58
3.5.8 Contator de saída 58
3.5.9 Eciência no uso da energia 58
3.6 Entradas e saídas adicionais
3.6.1 Esquemático de ação 60
3.6.2 Ligações do Relé 61
3.6.3 Conexão Elétrica Compatível com EMC 62
3.7 Planejamento mecânico
3.7.1 Espaço livre 63
3.7.2 Montagem em Parede 63
55
60
63
3.7.3 Acesso 64
3.8 Opcionais e Acessórios
3.8.1 Opcionais de Comunicação 67
3.8.2 Opcionais de Entrada/Saída, Feedback e Segurança 67
3.8.3 Filtros de onda senoidal 67
3.8.4 Filtros dU/dt 67
3.8.5 Filtros de Harmônicas 67
3.8.6 Kit de gabinete metálico IP21/NEMA Tipo 1 68
3.8.7 Filtros de modo comum 70
3.8.8 Kit para Montagem Remota do LCP 70
3.8.9 Quadro de montagem para gabinetes metálicos tamanhos A5, B1, B2, C1 e C2 71
3.9 Interface Serial RS485
4 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
64
72
Índice Guia de Design
3.9.1 Visão Geral 72
3.9.2 Conexão de Rede 73
3.9.3 Terminação do Bus Serial da RS485 73
3.9.4 Cuidados com EMC 73
3.9.5 Visão Geral do Protocolo Danfoss FC 74
3.9.6 Conguração de Rede 74
3.9.7 Estrutura do Enquadramento de Mensagem do Protocolo Danfoss FC 74
3.9.8 Exemplos de Protocolo Danfoss FC 78
3.9.9 Protocolo do Modbus RTU 79
3.9.10 Estrutura do Enquadramento de Mensagem do Modbus RTU 80
3.9.11 Acesso a Parâmetros 83
3.9.12 Perl de Controle do Drive do CF 84
3.10 Lista de vericação de design do sistema
4 Exemplos de Aplicações
4.1 Exemplos de Aplicações
4.2 Recursos de aplicação selecionada
4.2.1 SmartStart 93
4.2.2 Partida/Parada 94
4.2.3 Parada/Partida por Pulso 94
4.2.4 Referência do Potenciômetro 95
4.3 Exemplos de Setup de Aplicações
5 Condições Especiais
5.1 Derating
5.2 Derating Manual
5.3 Derating de cabos de motor longos ou cabos com seção transversal maior
5.4 Derating para a Temperatura Ambiente
6 Código do Tipo e Seleção
91
93
93
93
95
101
101
101
102
102
107
6.1 Solicitação de pedido
6.1.1 Introdução 107
6.1.2 Código do Tipo 107
6.2 Opcionais, Acessórios e Peças de Reposição
6.2.1 Códigos de Compra: Opcionais e Acessórios 108
6.2.2 Códigos de Compra: Filtros de Harmônicas 110
6.2.3 Códigos de Compra: Módulos do Filtro de Onda Senoidal, 200-480 V CA 110
6.2.4 Códigos de Compra: Módulos do Filtro de Onda Senoidal, 525-600/690 V CA 111
6.2.5 Filtros de Harmônicas 112
6.2.6 Filtros de onda senoidal 114
6.2.7 Filtros dU/dt 116
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 5
107
108
Índice
VLT® Refrigeration Drive FC 103
6.2.8 Filtros de Modo Comum 117
7 Especicações
7.1 Dados Elétricos
7.1.1 Alimentação de Rede Elétrica 3x200–240 V CA 118
7.1.2 Alimentação de rede elétrica 3x380-480 V CA 120
7.1.3 Alimentação de Rede Elétrica 3x525–600 V CA 122
7.2 Alimentação de Rede Elétrica
7.3 Saída do Motor e dados do motor
7.4 Condições ambiente
7.5 Especicações de Cabo
7.6 Entrada/Saída de controle e dados de controle
7.7 Torque de Aperto de Conexão
7.8 Fusíveis e Disjuntores
7.9 Valor Nominal da Potência, Peso e Dimensões
7.10 Teste dU/dt
7.11 Características nominais de ruído acústico
7.12 Opcionais Selecionados
7.12.1 Módulo de E/S de Uso Geral MCB 101 do VLT
7.12.2 Placa de relé MCB 105 do VLT
7.12.3 Cartão de Relé Estendido MCB 113 do VLT
118
118
124
124
125
125
126
129
129
135
136
138
138
®
®
®
138
139
140
8 Apêndice - Desenhos Selecionados
8.1 Desenhos de Conexão de Rede Elétrica
8.2 Desenhos de Conexão do Motor
8.3 Desenhos de Terminal de Relé
8.4 Orifícios para Entrada de Cabos
Índice
143
143
146
148
149
153
6 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Introdução Guia de Design
1 Introdução
1.1 Objetivo do Guia de Design
Este guia de design dos conversores de frequência VLT
Refrigeration Drive FC 103 é destinado para:
Engenheiros de projetos e sistemas.
•
Consultores de design.
•
Especialistas em aplicação e produto.
•
O guia de design fornece informações técnicas para
entender as capacidades do conversor de frequência para
a integração no controle de motor e sistemas monitoramento.
O objetivo do guia de design é fornecer considerações de
design e dados de planejamento para a integração do
conversor de frequência em um sistema. O guia de design
fornece uma seleção de conversores de frequência e o
opcionais de uma diversidade de aplicações e instalações.
A revisão das informações detalhadas do produto no
estágio de design permite o desenvolvimento de um
sistema bem concebido com funcionalidade e
ótimas.
eciência
®
Capétulo 7 Especicações: Uma compilação dos dados
técnicos em formatos grácos e de tabela.
Capétulo 8 Apêndice - Desenhos Selecionados: Uma
compilação dos dados ilustrando:
Conexões do motor e de rede elétrica
•
Terminais do relé
•
Entradas de Cabos
•
1.3 Recursos adicionais
Recursos disponíveis para entender a operação avançada, a
programação e a conformidade com as diretivas do
conversor de frequência.
As VLT® Refrigeration Drive FC 103Instruções de
•
utilização (chamadas de instruções de utilização
neste manual) fornecem informações detalhadas
para a instalação e partida do conversor de
frequência.
O Guia de Design VLT® Refrigeration Drive FC 103
•
fornece as informações necessárias para planejar
e projetar a integração do conversor de
frequência em um sistema.
1 1
VLT® é marca registrada.
Organização
1.2
Capétulo 1 Introdução: O propósito geral do guia de design
é car em conformidade com as diretivas internacionais.
Capétulo 2 Visão Geral do Produto: A funcionalidade e a
estrutura interna do conversor de frequência e dos
recursos operacionais.
Capétulo 3 Integração de Sistemas: Condições ambientais;
EMC, harmônicas e fuga para o terra; entrada da rede
elétrica; motores e conexões do motor; outras conexões;
planejamento mecânico; e descrições de opcionais e
acessórios disponíveis.
Capétulo 4 Exemplos de Aplicações: Amostras de aplicações
de produto e diretrizes para uso.
Capétulo 5 Condições Especiais: Detalhes em ambientes
operacionais anormais.
Capétulo 6 Código do Tipo e Seleção: Procedimentos para
solicitação de pedido de equipamento e opcionais para
atender o uso pretendido do sistema.
O VLT® Refrigeration Drive FC 103 Guia de
•
Programação (chamado de guia de programação
neste manual) fornece mais detalhes sobre como
trabalhar com parâmetros e muitos exemplos de
aplicação.
As Instruções de Utilização de Safe Torque O do
•
VLT® descrevem como usar Danfoss conversores
de frequência em aplicações de segurança
funcional. Este manual é fornecido com o
conversor de frequência quando o opcional STO
estiver presente.
Publicações e manuais complementares estão disponíveis
para download em vlt-drives.danfoss.com/Products/Detail/
Technical-Documents.
AVISO!
Há equipamento opcional disponível que pode alterar
algumas das informações descritas nestas publicações.
Certique-se de vericar as instruções fornecidas com os
opcionais para saber os requisitos especícos.
Entre em contato com um fornecedor Danfoss ou acesse
www.danfoss.com para obter mais informações.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 7
Introdução
VLT® Refrigeration Drive FC 103
11
1.4 Abreviações, Símbolos e Convenções
mm Milímetro
ms Milissegundo
AVM de 60° 60° modulação vetorial assíncrona
A Ampère/AMP
CA Corrente alternada
AD Descarga aérea
AEO Otimização automática de energia
AI Entrada analógica
AMA Adaptação automática do motor
AWG American wire gauge
°C
Graus centígrados
CD Descarga constante
CDM Módulo do drive completo: o conversor de
frequência, seção de alimentação e auxiliares
CM Modo comum
TC Torque constante
CC Corrente contínua
DI Entrada digital
DM Módulo diferencial
TIPO D Depende do drive
EMC Compatibilidade eletromagnética
FEM Força
Força eletromotriz
Eletro Motriz
ETR Relé térmico eletrônico
f
JOG
Frequência do motor quando a função de jog
estiver ativada.
f
f
M
MAX
Frequência do motor
A frequência de saída máxima do conversor de
frequência aplica-se à sua saída.
f
MIN
A frequência do motor mínima do conversor de
frequência
f
M,N
Frequência do motor nominal
FC Conversor de frequência
g Gramme
®
Hiperface
Hiperface® é marca registrada da Stegmann
HO Sobrecarga Alta
hp Cavalos de força
HTL Encoder HTL (10-30 V) pulsos - Transistor lógico
de alta tensão
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
Corrente nominal de saída do inversor
Limite de Corrente
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida pelo
conversor de frequência
kHz kiloHertz
LCP Painel de controle local
lsb O bit menos signicativo
m Metro
mA Miliampère
MCM Mille circular mil
MCT Motion Control Tool
msb O bit mais signicativo
η
VLT
Eciência do conversor de frequência denida
como a relação entre a potência de saída e a
potência de entrada.
nF Capacitância em nano Farad
NLCP Painel de controle local numérico
Nm Newton metro
NO Sobrecarga normal
n
s
Parâmetros
Online/
Oine
P
br,cont.
Velocidade do motor síncrono
As alterações nos parâmetros online são ativadas
imediatamente após o valor dos dados ser
alterado.
Potência nominal do resistor de frenagem
(potência média durante frenagem contínua).
PCB Placa de circuito Impresso
PCD Dados do processo
PDS Sistema de drive de potência: um CDM e um
motor
PELV Tensão extra baixa protetiva
P
m
Potência de saída nominal do conversor de
frequência como sobrecarga alta (HO).
P
M,N
Potência do motor nominal
Motor PM Motor de ímã permanente
PID de
processo
O regulador do PID (Diferencial Integrado Propor-
cional) que mantém a velocidade, pressão,
temperatura etc.
R
br,nom
O valor nominal do resistor que garante potência
de frenagem do eixo do motor de 150/160%
durante 1 minuto
RCD Dispositivo de corrente residual
Regen Terminais regenerativos
R
min
Valor do resistor de frenagem mínimo permissível
por conversor de frequência
RMS Raiz quadrada média
RPM Rotações por minuto
R
rec
Resistência recomendada do resistor do freio de
Danfoss resistores do freio
s Segundo
SFAVM Modulação vetorial assíncrona orientada a uxo
do estator
STW Status Word
SMPS Fonte de alimentação com modo de comutação
THD Distorção harmônica total
T
LIM
Limite de torque
TTL Pulsos do encoder TTL (5 V) - lógica de transistor
U
M,N
Tensão do motor nominal
V Volts
VT Torque variável
VVC+
Controle vetorial de tensão plus
Tabela 1.1 Abreviações
mH Indutância em milli Henry
8 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Introdução Guia de Design
Convenções
Listas numeradas indicam os procedimentos.
Listas de itens indicam outras informações e a descrição
das ilustrações.
O texto em itálico indica:
Referência cruzada.
•
Link.
•
Rodapé.
•
Nome do parâmetro, nome do grupo do
•
parâmetro, opcional de parâmetro.
Todas as dimensões estão em mm (pol).
* indica uma conguração padrão de um parâmetro.
1.5 Símbolos de Segurança
Os seguintes símbolos são usados neste manual:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que pode
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que pode
resultar em ferimentos leves ou moderados. Também
podem ser usados para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, inclusive situações que
podem resultar em danos no equipamento ou na
propriedade.
1.6 Denições
Parada por inércia
O eixo do motor está em modo livre. Nenhum torque no
motor.
Características de TC
Características do torque constante usadas por todas as
aplicações, como:
Correias transportadoras.
•
Bombas de deslocamento.
•
Guindastes.
•
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação), o conversor de frequência retorna à
conguração padrão.
Ciclo útil intermitente
As características nominais intermitentes referem-se a uma
sequência de ciclos úteis. Cada ciclo consiste em um
período com carga e outro sem carga. A operação pode
ser de ciclo periódico ou de ciclo não periódico.
Fator de potência
O fator de potência real (lambda) considera todas as
harmônicas. O fator de potência real é sempre menor que
o fator de potência (cosphi) que considera somente a
primeira harmônica de corrente e tensão.
cosϕ =
Cosphi é conhecido também como fator de potência de
deslocamento.
Tanto lambda quanto cosphi são determinados para
conversores de frequência Danfoss VLT® em
capétulo 7.2 Alimentação de Rede Elétrica.
O fator de potência indica em que intensidade o conversor
de frequência oferece uma carga na alimentação de rede
elétrica.
Quanto menor o fator de potência, maior será a I
mesmo desempenho em kW.
Além disso, um fator de potência alto indica que as
correntes harmônicas são baixas.
Todos os conversores de frequência Danfoss têm bobinas
CC integradas no barramento CC. As bobinas garantem um
alto fator de potência e reduzem a THDi na alimentação
principal.
Setup
Salve a programação do parâmetro em 4 setups. Alterne
entre os quatro setups de parâmetro e edite um setup,
enquanto outro setup estiver ativo.
Compensação de escorregamento
O conversor de frequência compensa o deslizamento que
ocorre no motor, acrescentando um suplemento à
frequência que acompanha a carga do motor medida,
mantendo a velocidade do motor praticamente constante.
Smart logic control (SLC)
O SLC é uma sequência de ações
que é executada quando os eventos associados denidos
pelo usuário são avaliados como verdadeiros pelo SLC.
(Grupo do parâmetro 13-** Smart Logic).
Bus padrão do CF
Inclui o barramento RS485 protocolo Danfoss FC ou
protocolo MC. Consulte parâmetro 8-30 Protocolo.
Termistor
Um resistor que varia com a temperatura, instalado onde a
temperatura deve ser monitorada (conversor de frequência
ou motor).
Desarme
É um estado que ocorre em situações de falha, por
exemplo, se houver superaquecimento no conversor de
frequência ou quando ele estiver protegendo o motor, o
processo ou o mecanismo. Uma nova partida é impedida
até a causa da falha ser eliminada e o estado de desarme
ser cancelado. Cancelar o estado de desarme por:
P kW
P kVA
UλxIλxcosϕ
=
UλxIλ
para o
RMS
denidas pelo usuário
1 1
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 9
Introdução
VLT® Refrigeration Drive FC 103
11
Não use o desarme para segurança pessoal.
Bloqueio por desarme
É um estado que ocorre em situações de falha, quando o
conversor de frequência está se protegendo e requer
intervenção manual, por exemplo, em caso de curto
circuito na saída do conversor de frequência. Um bloqueio
por desarme somente pode ser cancelado desligando-se a
rede elétrica, eliminando-se a causa da falha e energizando
o conversor de frequência novamente. A reinicialização é
suspensa até que o desarme seja cancelado, pelo
acionamento do reset ou, em certas situações,
programando um reset automático. Não use o desarme
para segurança pessoal.
Características do TV
Características de torque variável das bombas e dos
ventiladores.
1.7 Versão do Software e do Documento
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas.
Tabela 1.2 mostra a versão do documento e a respectiva
versão de software.
Acionamento do reset ou
•
Programar o conversor de frequência para reset
•
automático
AVISO!
A marcação CE não regula a qualidade do produto.
Especicações técnicas não pode ser deduzidas da
marcação CE.
AVISO!
Conversores de frequência com função de segurança
integrada devem estar em conformidade com a diretiva
de maquinaria.
Diretiva da UE Versão
Diretiva de Baixa Tensão 2014/35/EU
Diretiva EMC 2014/30/EU
Diretiva de maquinaria
Diretiva ErP 2009/125/EC
Diretiva ATEX 2014/34/EU
Diretiva RoHS 2002/95/EC
Tabela 1.3 Diretivas da UE aplicáveis aos conversores de frequência
1) A conformidade com a diretiva de maquinaria é exigida somente
para conversores de frequência com uma função de segurança
integrada.
Declarações de conformidade estão disponíveis por
solicitação.
1)
1.8.1.1 Diretiva de Baixa Tensão
2014/32/EU
Edição Observações Versão do software
MG16G2xx Substitui MG16G1xx 1.4x
Tabela 1.2 Versão do Software e do Documento
Aprovações e certicações
1.8
Os conversores de frequência são projetados em conformidade com as diretivas descritas nesta seção.
Para obter mais informações sobre aprovações e
certicados, acesse a área de download em vlt-
-marine.danfoss.com/support/type-approval-certicates/.
1.8.1 Marcação CE
Ilustração 1.1 CE
A Marcação CE (Communauté Européenne) indica que
fabricante do produto atende todas as diretivas da UE
aplicáveis. As diretivas da UE aplicáveis ao projeto e à
fabricação de conversores de frequência estão listados em
Tabela 1.3.
A diretiva de baixa tensão é aplicável a todos os equipamentos elétricos nas faixas de tensão de 50-1.000 V CA e
75-1.600 V CC.
O objetivo da diretiva é garantir a segurança pessoal e
evitar danos à propriedade ao operar equipamentos
elétricos instalados e mantidos corretamente, na aplicação
pretendida.
1.8.1.2 Diretiva EMC
O objetivo da diretiva EMC (compatibilidade eletromagnética) é reduzir a interferência eletromagnética e melhorar
a imunidade do equipamento elétrico e das instalações. Os
requisitos básicos de proteção da Diretiva EMC
determinam que dispositivos que geram interferência
eletromagnética (EMI) ou cuja operação pode ser afetada
pela EMI devem ser projetados para limitar a geração de
interferência eletromagnética. Os dispositivos devem ter
grau adequado de imunidade a EMI quando corretamente
instalados, mantidos e usados como previsto.
Os dispositivos de equipamentos elétricos usados de
maneira independente ou como parte de um sistema
devem portar a marca CE. Os sistemas não precisam ter a
marcação CE, mas devem atender os requisitos básicos de
proteção da diretiva EMC.
10 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Introdução Guia de Design
1.8.1.3 Diretiva de maquinaria
O objetivo da Diretiva de Maquinaria é garantir a
segurança pessoal e evitar danos à propriedade, para
equipamentos mecânicos usados em sua aplicação
pretendida. A Diretiva de Maquinaria é aplicada a
máquinas que consistem em um agregado de
componentes ou dispositivos interconectados em que pelo
menos um é capaz de movimento mecânico.
Conversores de frequência com uma função de segurança
integrada devem estar em conformidade com a diretiva de
maquinaria. Conversores de frequência sem função de
segurança não são classicados sob a Diretiva de
Maquinaria. Se um conversor de frequência for integrado
no sistema da máquina, a Danfoss pode fornecer
informações sobre aspectos de segurança com relação ao
conversor de frequência.
Quando conversores de frequência são usados em
máquinas com pelo menos uma parte móvel, o fabricante
da máquina deve fornecer uma declaração em conformidade com todos os estatutos e medidas de segurança
relevantes.
1.8.1.4 Diretiva ErP
A diretiva ErP é a European Ecodesign Directive para
produtos relacionados à energia. A diretiva programa os
requisitos de ecodesign para produtos relacionados a
energia, incluindo conversores de frequência. O objetivo da
diretiva é aumentar a eciência energética e o nível de
proteção do ambiente, enquanto aumenta a segurança da
fonte de energia. O impacto ambiental de produtos
relacionados a energia inclui o consumo de energia através
de todo o ciclo útil do produto.
1.8.2 Em conformidade com C-tick
Ilustração 1.2 C-tick
1.8.3 Em conformidade com o UL
UL listados
Ilustração 1.3 UL
AVISO!
Os conversores de frequência de 525-690 V não são
certicados para UL.
O conversor de frequência atende os requisitos de
retenção de memória térmica UL 508C. Para obter mais
informações, consulte capétulo 2.6.2 Proteção Térmica do
Motor.
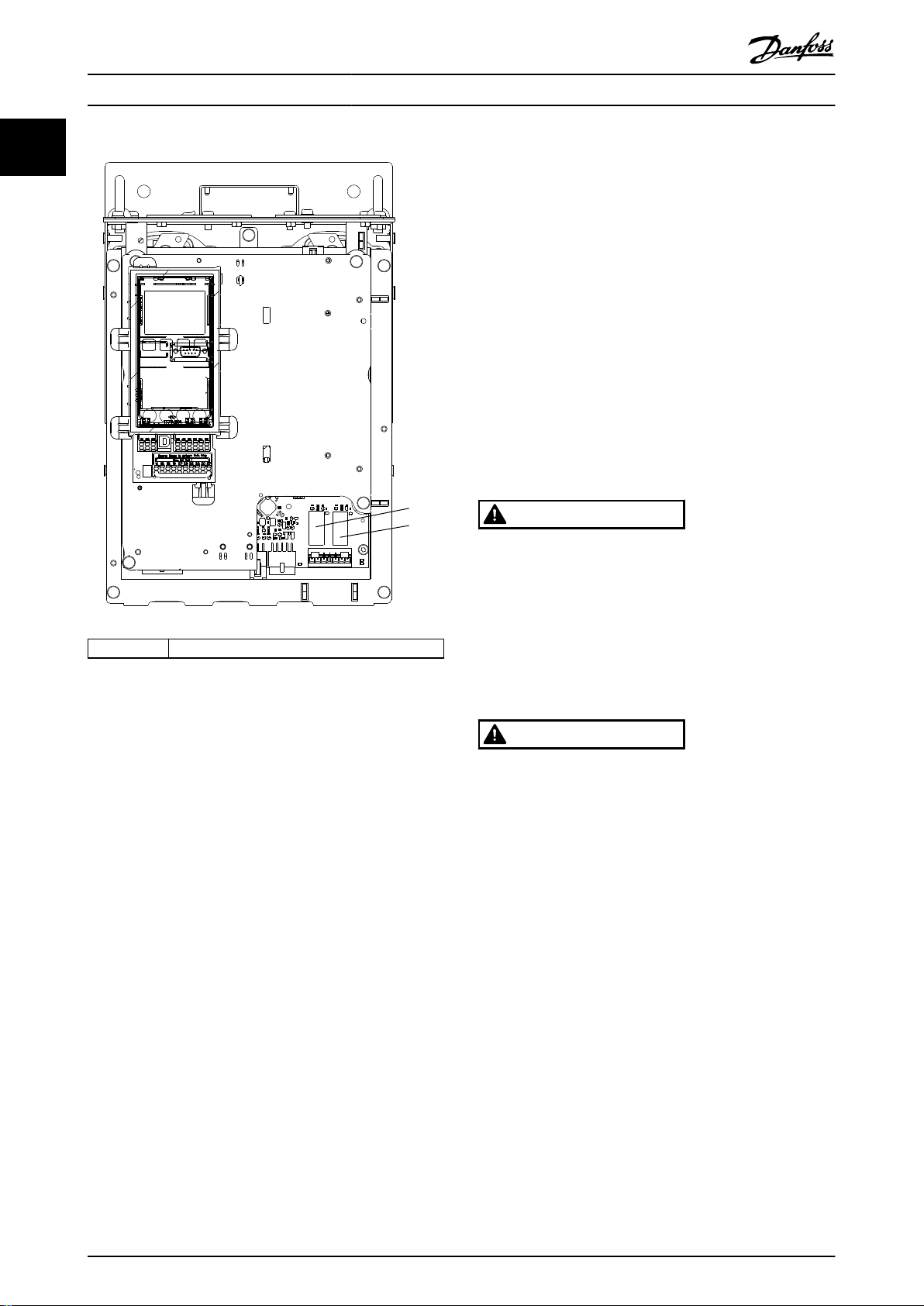
1.8.4 Conformidade marítima (ADN)
As unidades com características nominais de proteção de
entrada IP55 (NEMA 12) ou maior evitam a formação de
faíscas e são classicadas como aparelhos elétricos com
risco de explosão limitado de acordo com o Contrato
Europeu com relação ao Transporte Internacional de
Produtos Perigosos por Cursos d'Água Terrestres (ADN).
Para unidades com características nominais de proteção de
entrada IP20/Chassi, IP21/NEMA 1 ou IP54, evitar risco de
formação de faíscas da seguinte maneira:
Não instale um interruptor de rede elétrica.
•
Garanta que parâmetro 14-50 Filtro de RFI está
•
programado para [1] Ligado.
Remova todos os plugues de relé marcados RELÉ.
•
Consulte Ilustração 1.4.
Verique quais opcionais de relé estão instalados,
•
se houver. O único opcional de relé permitido é o
Cartão de Relé Estendido VLT® MCB 113.
Acesse vlt-marine.danfoss.com/support/type-approval-
-certicates/ para obter mais informações sobre aprovações
marítimas.
1 1
A etiqueta C-tick indica que está em conformidade com as
normas técnicas aplicáveis para Compatibilidade eletromagnética (EMC). A conformidade C-tick é necessária para
a colocação dos dispositivos elétricos e eletrônicos no
mercado na Austrália e Nova Zelândia.
O C-tick regulamentar é relacionado a emissão conduzida e
irradiada. Para conversores de frequência, aplique os limites
de emissão especicados no EN/IEC 61800-3.
Uma declaração de conformidade pode ser fornecida
mediante solicitação.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 11
1
2
130BD832.10
Introdução
VLT® Refrigeration Drive FC 103
11
conversor de frequência e aguardar o intervalo de tempo
designado para a energia elétrica armazenada dissipar.
Seguir estritamente os avisos e as precauções de
segurança é obrigatório para a operação segura do
conversor de frequência.
Transporte correto e conável, armazenagem, instalação,
operação e manutenção são necessários para a operação
segura e sem problemas do conversor de frequência.
Somente pessoal qualicado tem permissão para instalar e
operar este equipamento.
Pessoal
autorizado a instalar, comissionar e manter o equipamento,
sistemas e circuitos em conformidade com as leis e normas
pertinentes. Além disso, o pessoal deve estar familiarizado
com as instruções e as medidas de segurança descritas
nestas instruções de utilização.
qualicado é denido como pessoal treinado,
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
conectados à entrada da rede elétrica CA, alimentação
CC ou Load Sharing. Instalação, partida e manutenção
realizadas por pessoal não qualicado pode resultar em
1, 2 Plugues do relé
Ilustração 1.4 Localização dos plugues do relé
morte ou lesões graves.
Somente pessoal qualicado deve realizar
•
instalação, partida e manutenção.
A declaração do fabricante está disponível por solicitação.
1.8.5 Exportar as normas de controle
Os conversores de frequência podem estar sujeitos a
regulamentações de controle de exportação regionais e/ou
nacionais.
Os conversores de frequências que estiverem sujeitos a
regulamentações de controle de exportação são classicados por um número ECCN.
O número ECCN é fornecido nos documentos que
acompanham o conversor de frequência.
No caso de reexportação, é responsabilidade do
exportador garantir que está em conformidade com as
regulamentações de controle de exportação relevantes.
Segurança
1.9
1.9.1 Princípios gerais de segurança
Se manipulados incorretamente, os conversores de
frequência têm o potencial de lesão fatal, pois contêm
componentes de alta tensão. Somente pessoal qualicado
deve instalar e operar o equipamento. Não tente realizar o
serviço de manutenção sem antes remover a energia do
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor poderá dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de interruptor externo, comando do eldbus, sinal
de referência de entrada do LCP ou após uma condição
de falha resolvida.
Para impedir a partida do motor:
Desconecte o conversor de frequência da rede
•
elétrica.
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor de frequência, o motor e qualquer
equipamento acionado antes de o conversor de
frequência ser conectado à rede elétrica CA,
fonte de alimentação CC ou load sharing.
12 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Introdução Guia de Design
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor de frequência contém capacitores de
barramento CC que podem permanecer carregados
mesmo quando o conversor de frequência não estiver
ligado. Pode haver alta tensão presente mesmo quando
os indicadores luminosos de LED estiverem apagados! Se
não se aguardar o tempo especicado após a energia ser
removida para executar serviço de manutenção ou
reparo, o resultado poderá ser morte ou lesões graves.
1. Pare o motor.
2. Desconecte a rede elétrica CA, motores de ímã
permanente e fontes de alimentação do
barramento CC remotas, incluindo reservas de
bateria, UPS e conexões do barramento CC com
outros conversores de frequência.
3. Aguarde os capacitores fazerem descarga
completa antes de realizar qualquer serviço de
manutenção. O intervalo de tempo de espera
está especicado em Tabela 1.4.
Tensão [V] Tempo de espera mínimo (minutos)
4 15
200–240 1,1–3,7 kW 5,5–45 kW
380–480 1,1–7,5 kW 11–90 kW
525–600 1,1–7,5 kW 11–90 kW
ADVERTÊNCIA
ROTAÇÃO DO MOTOR ACIDENTAL
ROTAÇÃO LIVRE
A rotação acidental de motores de ímã permanente cria
tensão e pode carregar a unidade, resultando em
ferimentos graves, morte ou danos ao equipamento.
Certique-se que os motores de ímã
•
permanente estão bloqueados para impedir
rotação acidental.
CUIDADO
RISCO DE FALHA INTERNA
Uma falha interna no conversor de frequência pode
resultar em lesões graves quando o conversor de
frequência não estiver fechado corretamente.
Assegure que todas as tampas de segurança
•
estão no lugar e bem presas antes de aplicar
energia.
1 1
Tabela 1.4 Tempo de Descarga
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Se o conversor de
frequência não for aterrado corretamente, poderá
resultar em morte ou lesões graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
ADVERTÊNCIA
EQUIPAMENTO PERIGOSO
O contato com eixos rotativos e equipamento elétrico
pode resultar em morte ou ferimentos graves.
Assegure que somente pessoal qualicado e
•
treinado realize a instalação, partida inicial e
manutenção.
Garanta que os serviços elétricos estejam em
•
conformidade com os códigos elétricos locais e
nacionais.
Siga os procedimentos deste manual.
•
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 13
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
2 Visão Geral do Produto
22
2.1 Introdução
2.1.2 Economia de Energia
Este capítulo fornece uma visão geral dos principais
conjuntos e circuitos do conversor de frequência. Ela
descreve a eletricidade interna e as funções de processamento de sinais. Uma descrição da estrutura de controle
interno também é incluída.
Também estão descritas as funções automatizadas e
opcionais do conversor de frequência disponíveis para
projetar sistemas operacionais robustos com controle
sosticado e desempenho de relatório de status.
2.1.1 Dedicação do produto a aplicações
de refrigeração
O VLT® Refrigeration DriveFC 103 foi projetado para
aplicações de refrigeração. O assistente de aplicação
integrado orienta o usuário durante o processo de
colocação em funcionamento. A faixa de recursos padrão e
opcionais inclui:
Controle em cascata de múltiplas zonas
•
Controle de zona neutra.
•
Controle da temperatura de condensação
•
utuante.
Gerenciamento do retorno de óleo.
•
Controle do evaporador de feedback múltiplo.
•
Controle em cascata.
•
Detecção de funcionamento a seco.
•
Detecção de nal de curva.
•
Alternação do motor.
•
STO.
•
Sleep mode.
•
Proteção por senha.
•
Proteção de sobrecarga.
•
Smart Logic Control.
•
Monitor de velocidade mínima.
•
Textos programáveis livres para informações,
•
advertências e alertas.
Quando se compara com sistemas e tecnologias de
controle alternativos, o conversor de frequência é o
sistema ideal de controle de energia para controlar
sistemas de ventiladores e bombas.
Utilizando um conversor de frequência para controlar o
uxo, uma redução de velocidade de bomba de 20% leva
a economia de energia de aproximadamente 50% em
aplicações típicas.
Ilustração 2.1 mostra um exemplo da redução de energia
alcançável.
1 Economia de energia
14 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Ilustração 2.1 Exemplo: Economia de Energia
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Visão Geral do Produto Guia de Design
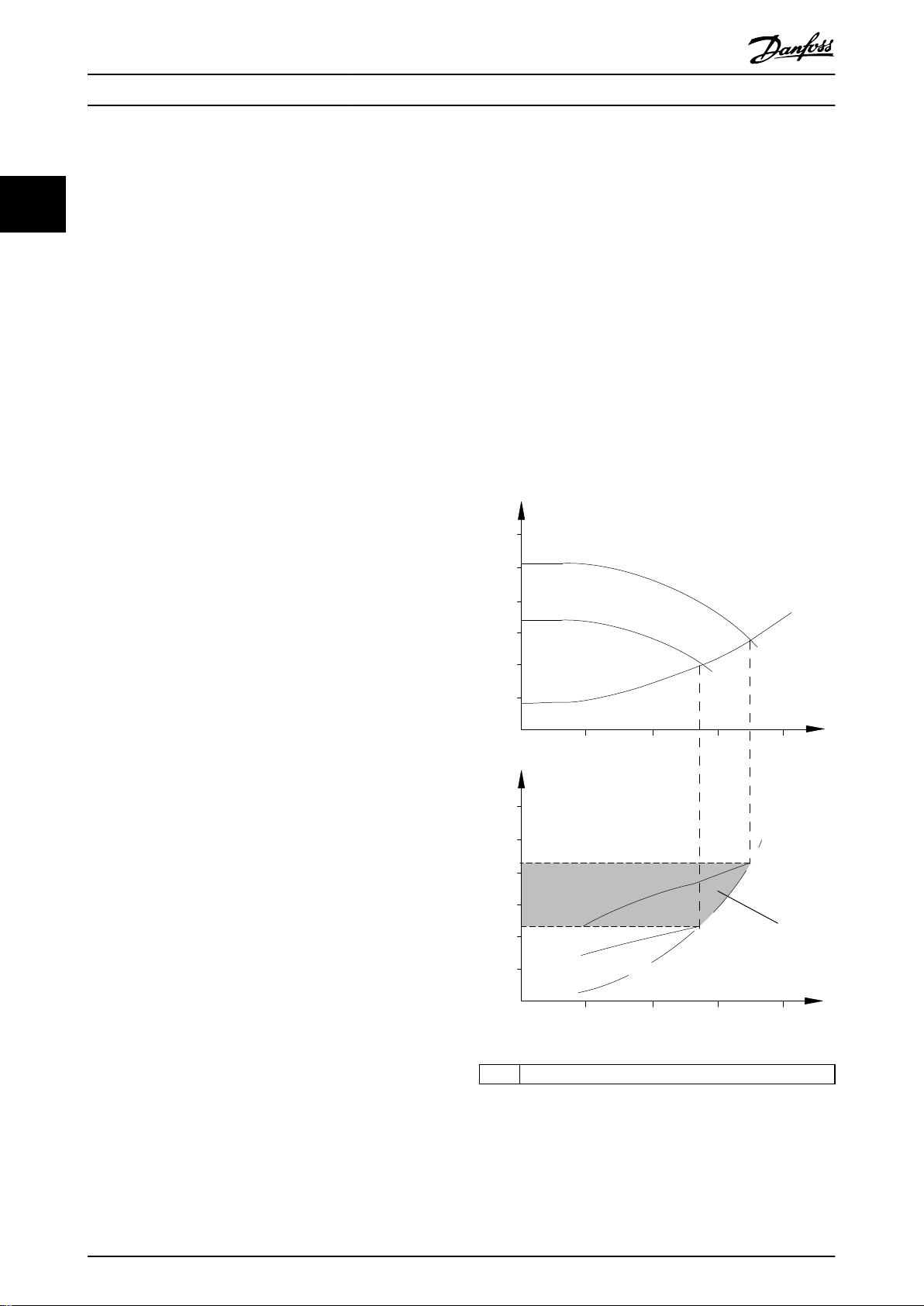
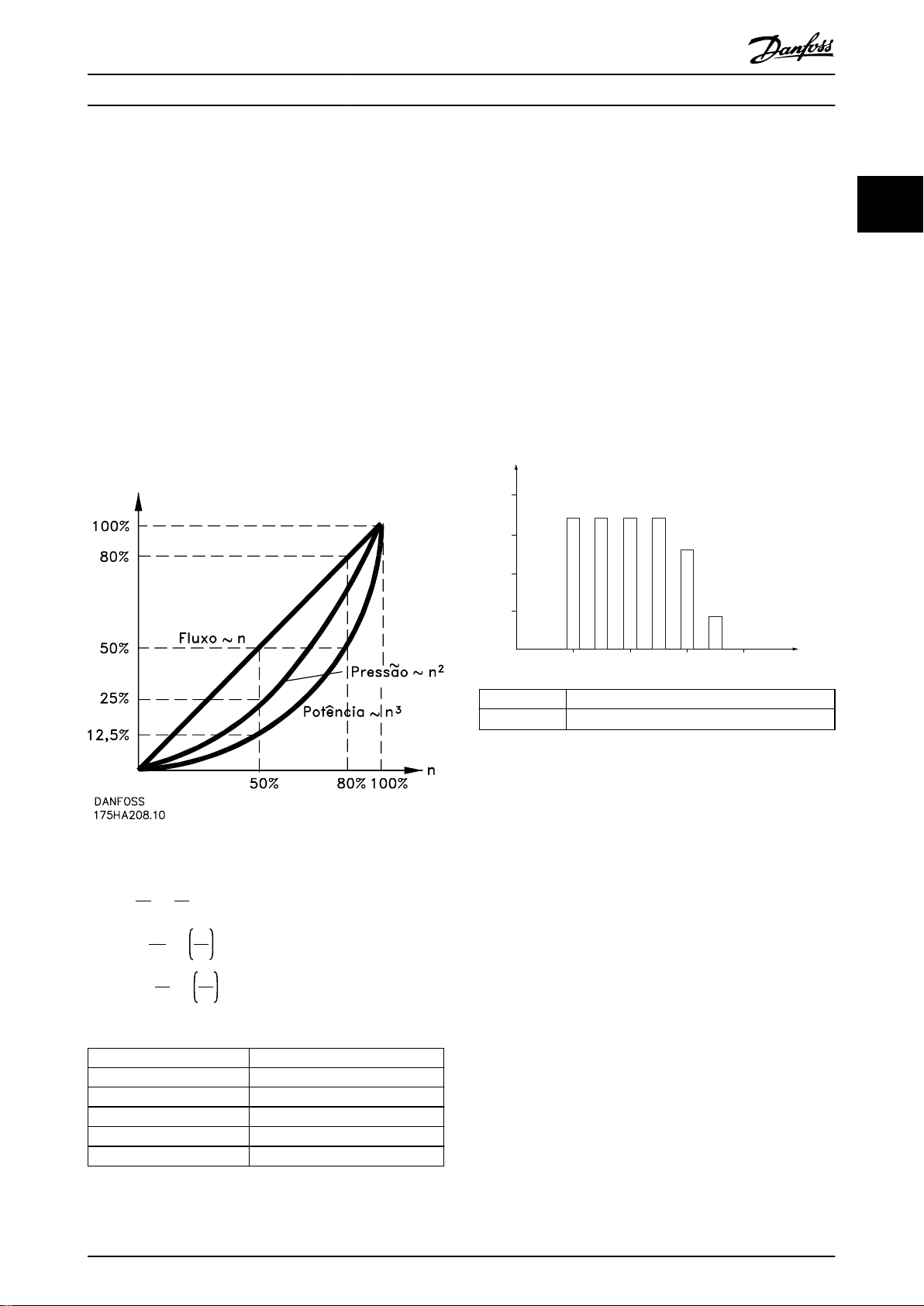
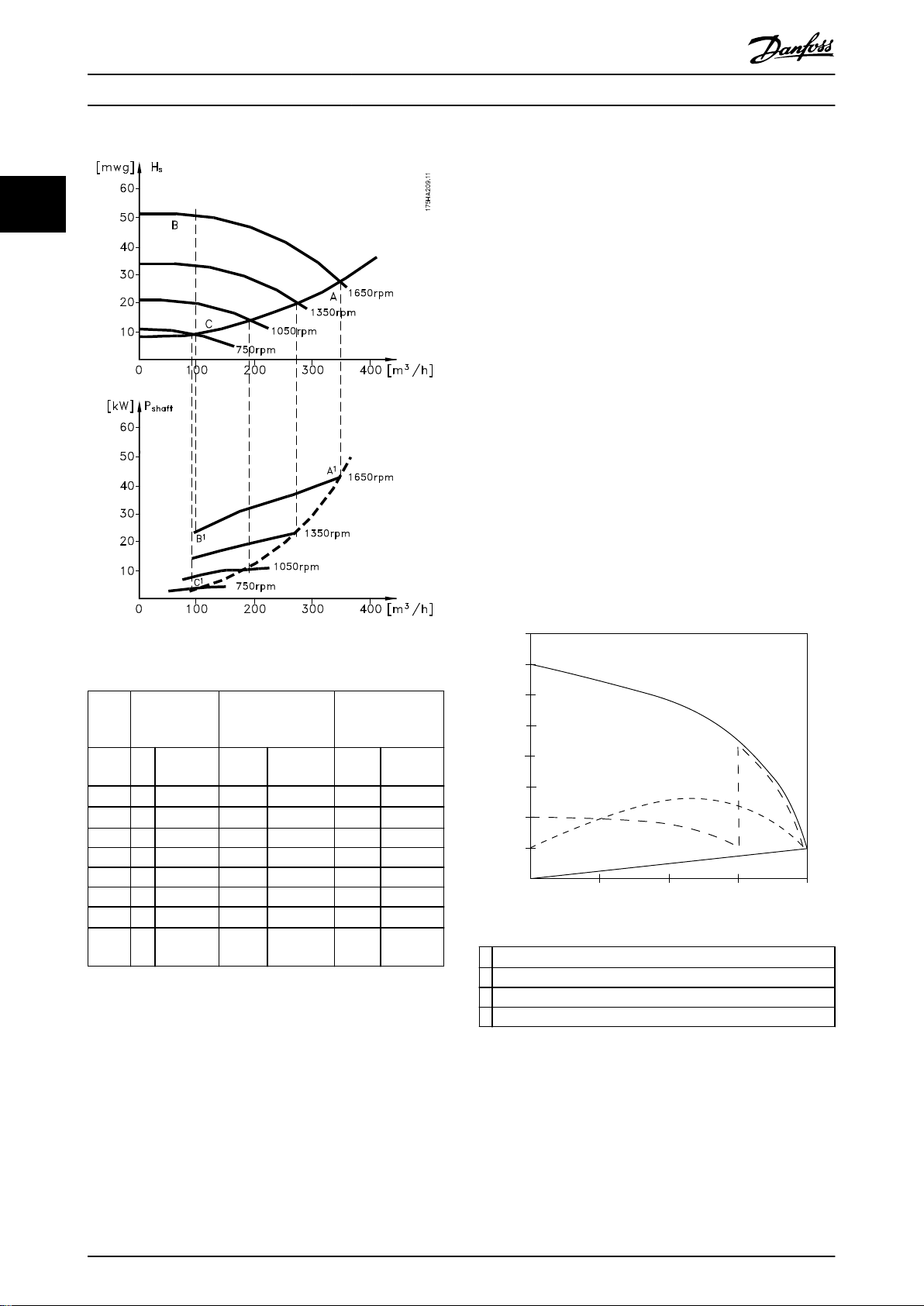
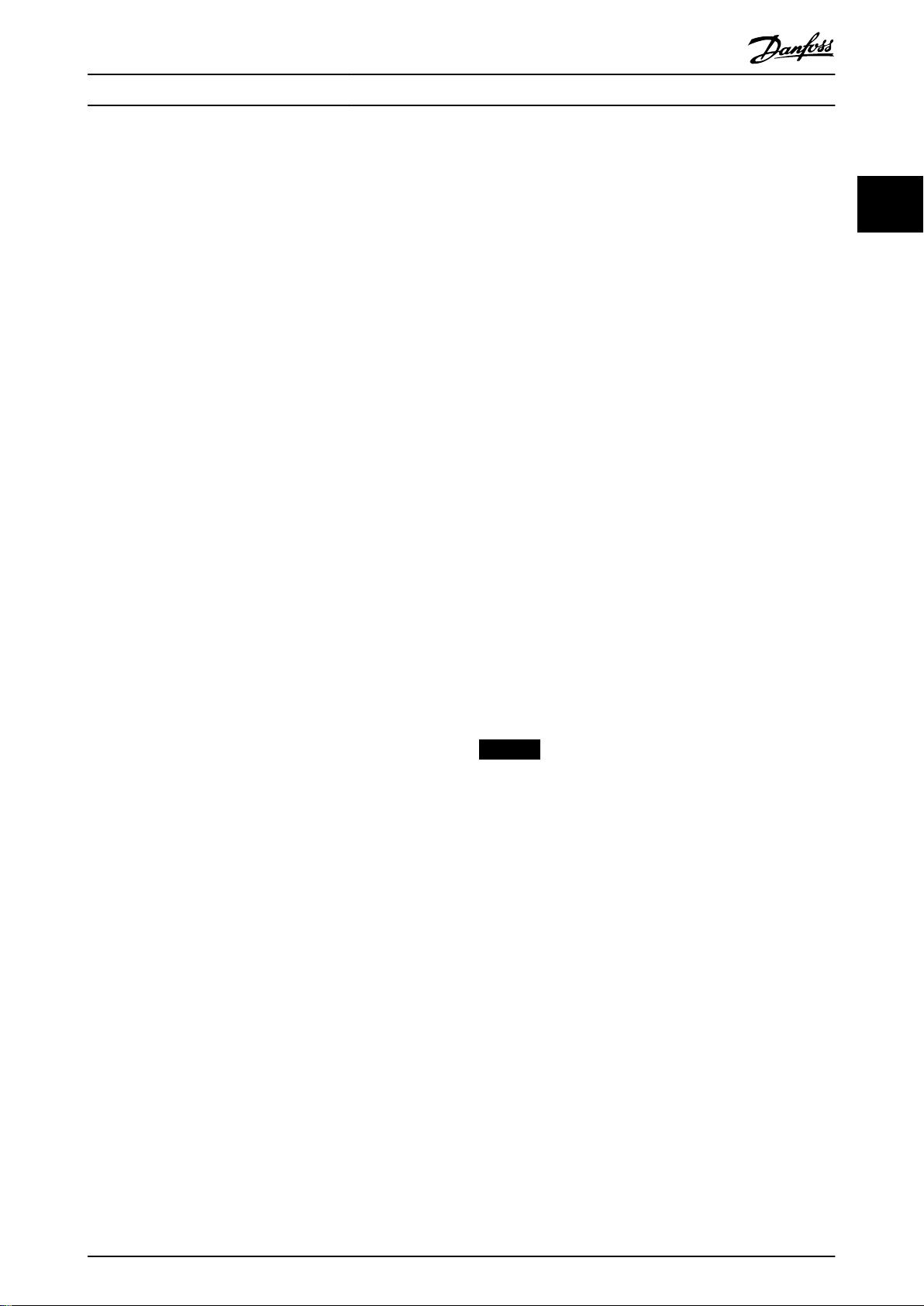
2.1.3 Exemplo de economia de energia
Como mostrado no Ilustração 2.2, o uxo é controlado
variando a velocidade da bomba, medida em RPM. Ao
reduzir a velocidade apenas 20% da velocidade nominal,
verica-se igualmente uma redução de 20% na vazão. O
uxo é diretamente proporcional à velocidade. Há redução
de até 50% no consumo de energia.
Se o sistema precisar fornecer um uxo que corresponde a
100% apenas alguns dias por ano, enquanto a média for
inferior a 80% do uxo nominal durante o resto do ano, a
quantidade de energia economizada é ainda mais que
50%.
Ilustração 2.2 descreve a dependência do
e do consumo de energia na velocidade da bomba em
RPM para bombas centrífugas.
uxo, da pressão
2.1.4 Exemplo com uxo variante ao longo
de 1 ano
Esse exemplo é calculado com base nas características da
bomba obtidas de uma folha de dados da bomba,
mostrada em Ilustração 2.4.
O resultado obtido mostra uma economia de energia
superior a 50% do consumo determinado para o
durante um ano,
consulte Ilustração 2.3. O período de retorno do
investimento depende do preço da eletricidade e do preço
do conversor de frequência. Neste exemplo, o retorno do
investimento é inferior a um ano, quando comparado com
válvulas e velocidades constantes.
uxo
2 2
t [h] Duração de uxo. Consulte também a Tabela 2.2.
Taxa de uxo
Ilustração 2.2 Leis de anidade para bombas centrífugas
Q
n
1
Fluxo:
Pressão:
Potência:
1
=
Q
n
2
2
=
2
n
1
n
2
3
n
1
n
2
H
1
=
H
2
P
1
P
2
Q [m3/h]
Ilustração 2.3 Distribuição de uxo durante 1 ano (duração
versus taxa de uxo)
Assumindo uma eciência igual na faixa de velocidade.
Q=Fluxo P=Potência
Q1=Fluxo 1 P1=Potência 1
Q2=Vazão reduzida P2=Potência reduzida
H=Pressão n=Regulação de velocidade
H1=Pressão 1 n1=Velocidade 1
H2=Pressão reduzida n2=Velocidade reduzida
Tabela 2.1 Leis de anidade
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 15
Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
2.1.5 Controle melhorado
22
de uxo ou pressão de um sistema.
Use um conversor de frequência para variar a velocidade
do compressor, ventilador ou da bomba, obtendo controle
variável do uxo e da pressão.
Além disso, um conversor de frequência pode adaptar
rapidamente a velocidade do compressor, ventilador ou da
bomba às novas condições de uxo ou pressão no sistema.
Obter controle simples do processo (uxo, nível ou
pressão) utilizando o controle PI integrado.
2.1.6 Partida Estrela/Delta ou Soft Starter
Em muitos países, ao dar partida em motores grandes é
necessário usar equipamento que limita a corrente de
partida. Em sistemas mais tradicionais, partida em estrela/
delta ou soft starter é amplamente usado. Se for usado um
conversor de frequência, esses starters do motor não são
necessários.
Como ilustrado em Ilustração 2.5, um conversor de
frequência não consome mais corrente do que a nominal.
Ilustração 2.4 Consumo de energia em velocidades diferentes
Use um conversor de frequência para melhorar o controle
Taxa
Distribuição Regulação por
de
uxo
% Duração PotênciaConsu-moPotênciaConsu-
[m3/h]
1) Leitura de potência no ponto A1.
2) Leitura de potência no ponto B1.
3) Leitura de potência no ponto C1.
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
Σ
Tabela 2.2 Resultado
42,5
23,0
válvulas
1)
2)
18,615
40,296
Controle do
conversor
de frequência
1)
42,5
3)
3,5
mo
18,615
6,132
1
VLT® Refrigeration Drive FC 103
2 Starter estrela/delta
3 Soft starter
4 Partida diretamente na rede elétrica
Ilustração 2.5 Corrente de partida
16 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Visão Geral do Produto Guia de Design
2.2 Descrição da Operação
O conversor de frequência fornece uma quantidade
regulada de energia CA da rede elétrica a um motor para
controlar sua velocidade do motor. O conversor de
frequência fornece frequência e tensão variáveis ao motor.
O conversor de frequência é dividido em quatro módulos
principais:
Reticador
•
Circuito do barramento CC intermediário
•
Inversor
•
Controle e regulagem
•
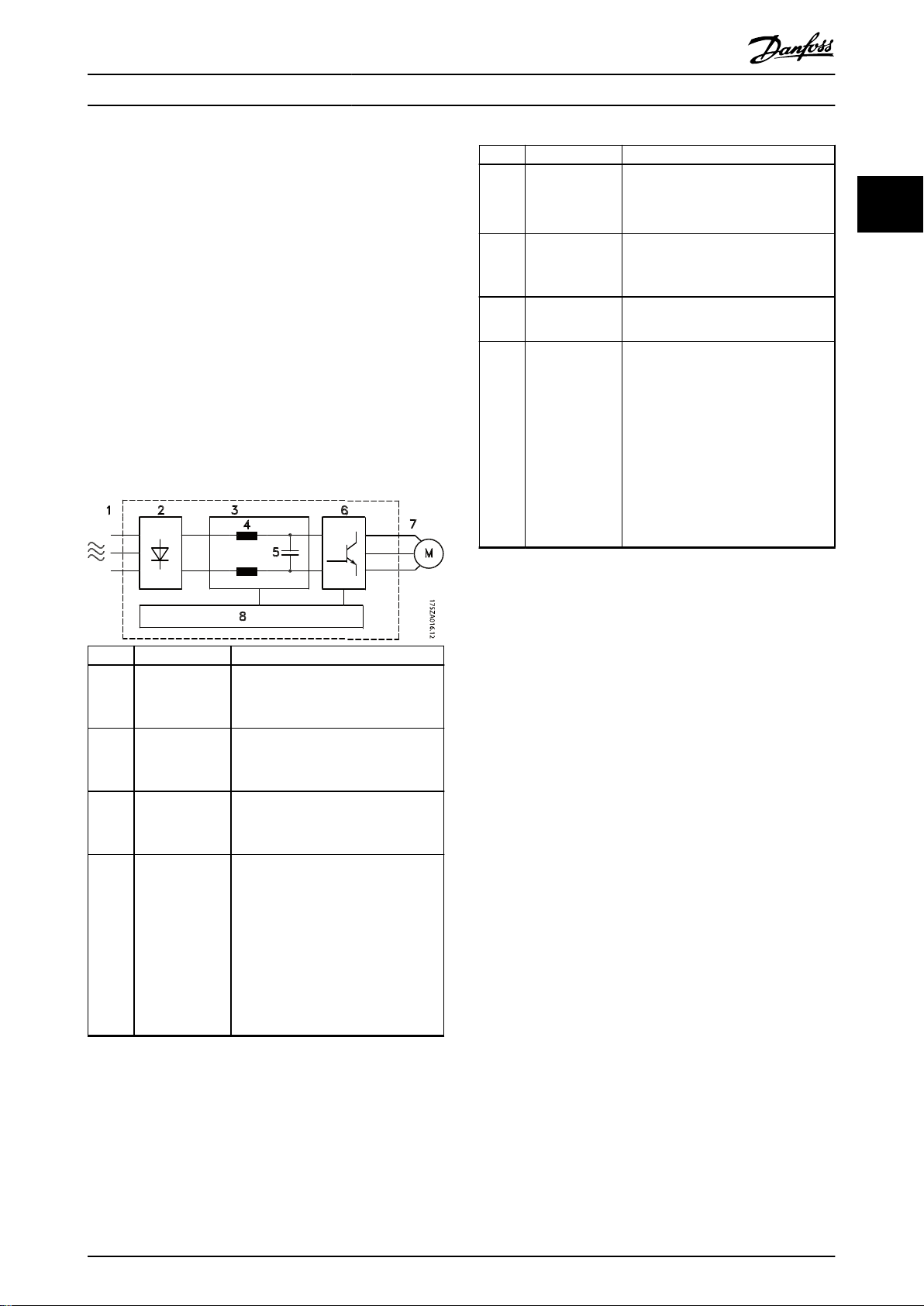
Ilustração 2.6 é um diagrama de blocos dos componentes
internos do conversor de frequência.
Área Título Funções
Armazena a alimentação CC.
Banco de
5
capacitores
6 Inversor
Saída para o
7
motor
Circuito de
8
controle
Ilustração 2.6 Diagrama de Blocos do Conversor de Frequência
•
Fornece proteção ride-through
•
para perdas de energia curtas.
Converte a CC em uma forma de
•
onda CA PWM para uma saída
variável controlada para o motor.
Potência de saída trifásica
•
regulada para o motor.
Potência de entrada, proces-
•
samento interno, saída e corrente
do motor são monitorados para
fornecer operação e controle
ecientes.
A interface do usuário e os
•
comandos externos são
monitorados e executados.
A saída e o controle do status
•
podem ser fornecidos.
2 2
Área Título Funções
Alimentação de rede elétrica CA
Entrada da rede
1
elétrica
2 Reticador
3 Barramento CC
4 Reatores CC
•
trifásica para o conversor de
frequência.
A ponte reticadora converte a
•
entrada CA para corrente CC para
alimentação do inversor.
O circuito do barramento CC
•
intermediário manipula a corrente
CC.
Filtrar a tensão do circuito CC
•
intermediário.
Testar a proteção do transiente de
•
rede elétrica.
Reduzir a corrente RMS.
•
Aumentar o fator de potência
•
reetido de volta para a linha.
Reduzir harmônicas na entrada CA.
•
2.2.1 Princípio da estrutura de controle
O conversor de frequência retica a tensão CA da
•
rede elétrica para tensão CC.
A tensão CC é convertida na corrente CA com
•
amplitude e frequência variáveis.
O conversor de frequência é fornecido com tensão/
corrente e frequência variáveis, o que permite controle de
velocidade variável de motores trifásicos assíncronos
padrão e de motores PM não salientes.
O conversor de frequência gerencia diversos princípios de
controle do motor, como o modo especial do motor U/f e
VVC+. O comportamento de curto circuito do conversor de
frequência depende de 3 transdutores de corrente nas
fases do motor.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 17
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
22
Ilustração 2.7 Estrutura do conversor de frequência
2.3 Sequência de Operação
2.3.1 Seção do Reticador
Quando energia é aplicada ao conversor de frequência, ala
entra através dos terminais de rede elétrica (L1, L2 e L3).
Dependendo da
para o opcional de ltro de RFI e/ou desconexão.
conguração da unidade, a energia muda
2.3.2 Seção Intermediária
Após a seção do reticador, a tensão passa para a seção
intermediária. Um circuito do ltro que consiste no indutor
do barramento CC e no banco de capacitores do
barramento CC suaviza a tensão reticada.
O indutor do bus CC fornece impedância em série para
alterar o valor da corrente. Isto ajuda no processo da
ltragem, ao mesmo tempo que reduz a distorção devido
as harmônicas da forma de onda de corrente CA de
entrada, normalmente inerente em circuitos reticadores.
2.3.3 Seção do Inversor
de saída. Essa forma de onda, conforme gerada pelo
princípio Danfoss VVC+ PWM no cartão de controle,
fornece desempenho ideal e perdas mínimas no motor.
2.4 Estruturas de Controle
2.4.1 Estrutura de Controle Malha Aberta
Ao operar no modo malha aberta, o conversor de
frequência responde aos comandos manualmente por
meio das teclas do LCP ou remotamente por meio das
entradas digitais/analógicas ou do barramento serial.
Na conguração mostrada em Ilustração 2.8, o conversor
de frequência funciona no modo malha aberta. Ele recebe
entrada do LCP (modo Manual) ou por meio de um sinal
remoto (modo Automático). O sinal (referência de
velocidade) é recebido e condicionado com o seguinte:
Limites de velocidade do motor mínimos e
•
máximos programados (em RPM e Hz).
Tempo de desaceleração e aceleração.
•
Sentido de rotação do motor.
•
A referência é passada para controlar o motor.
Na seção do inversor, quando houver um comando de
execução e uma referência de velocidade presentes, os
IGBTs começam o chaveamento para criar a forma de onda
18 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Visão Geral do Produto Guia de Design
Ilustração 2.8 Diagrama de bloco do modo malha aberta
2 2
2.4.2 Estrutura de Controle, Malha Fechada
unidade de controle independente. O conversor pode
fornecer mensagens de alarme e de status, junto com
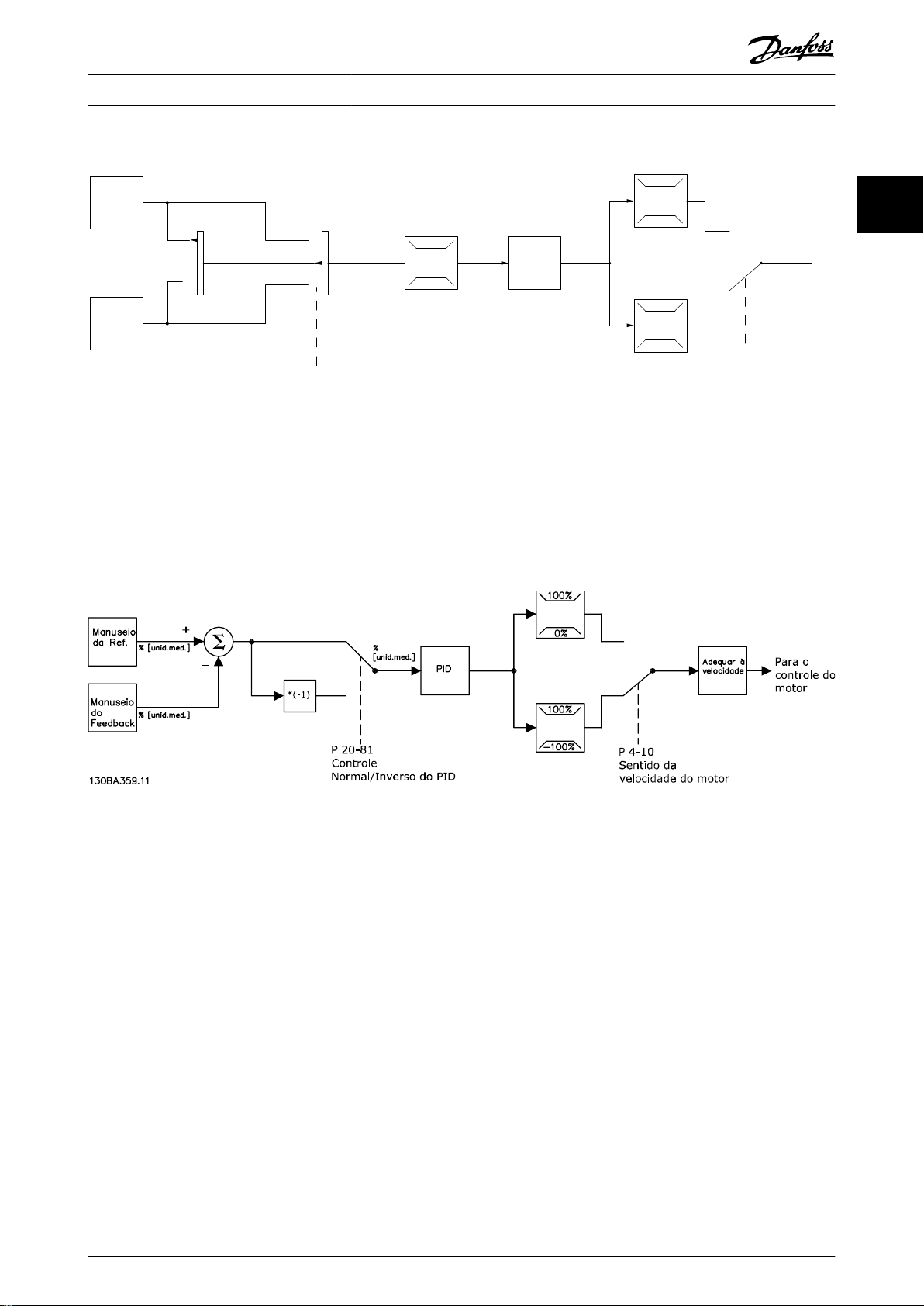
No modo de malha fechada, um controlador PID interno
permite ao conversor de frequência processar a referência
do sistema e os sinais de feedback para atuar como uma
Ilustração 2.9 Diagrama do bloco do controlador de malha fechada
Por exemplo, considere uma aplicação de bomba em que a
velocidade de uma bomba é controlada de modo que a
pressão estática em um cano é constante (consulte
Ilustração 2.9). O conversor de frequência recebe um sinal
de feedback de um sensor do sistema. Ele compara esse
muitas outras opções programáveis, para o monitoramento
externo enquanto opera de maneira independente em
malha fechada.
Embora os valores padrão do conversor de frequência em
malha fechada frequentemente fornecem desempenho
satisfatório, o controle do sistema pode ser otimizado com
frequência ajustando os parâmetros do PID. Auto tune é
fornecida para essa otimização.
sinal de feedback com um valor de referência de setpoint
e determina o erro, se houver, entre esses dois sinais. Para
Outros recursos programáveis incluem:
corrigir este erro, o PID ajusta a velocidade do motor.
Regulagem de inversão - a velocidade do motor
O setpoint de pressão estática é o sinal de referência para
o conversor de frequência. Um sensor de pressão mede a
pressão real estática no tubo e envia informação ao
conversor de frequência como sinal de feedback. Se o sinal
de feedback for maior que a referência de setpoint, o
conversor de frequência reduz a velocidade para reduzir a
pressão. De maneira semelhante, se a pressão no tubo for
menor do que a referência de setpoint, o conversor de
frequência acelera para aumentar a pressão da bomba.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 19
•
aumenta quando um sinal de feedback estiver
alto. Isso é útil em aplicação de compressor, onde
a velocidade precisa ser aumentada se a pressão/
temperarure estiver muito alta.
Frequência de partida - permite ao sistema
•
alcançar rapidamente um status operacional antes
do controlador PID assumir.
Filtro passa-baixa integrado - reduz o ruído do
•
sinal de feedback.
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
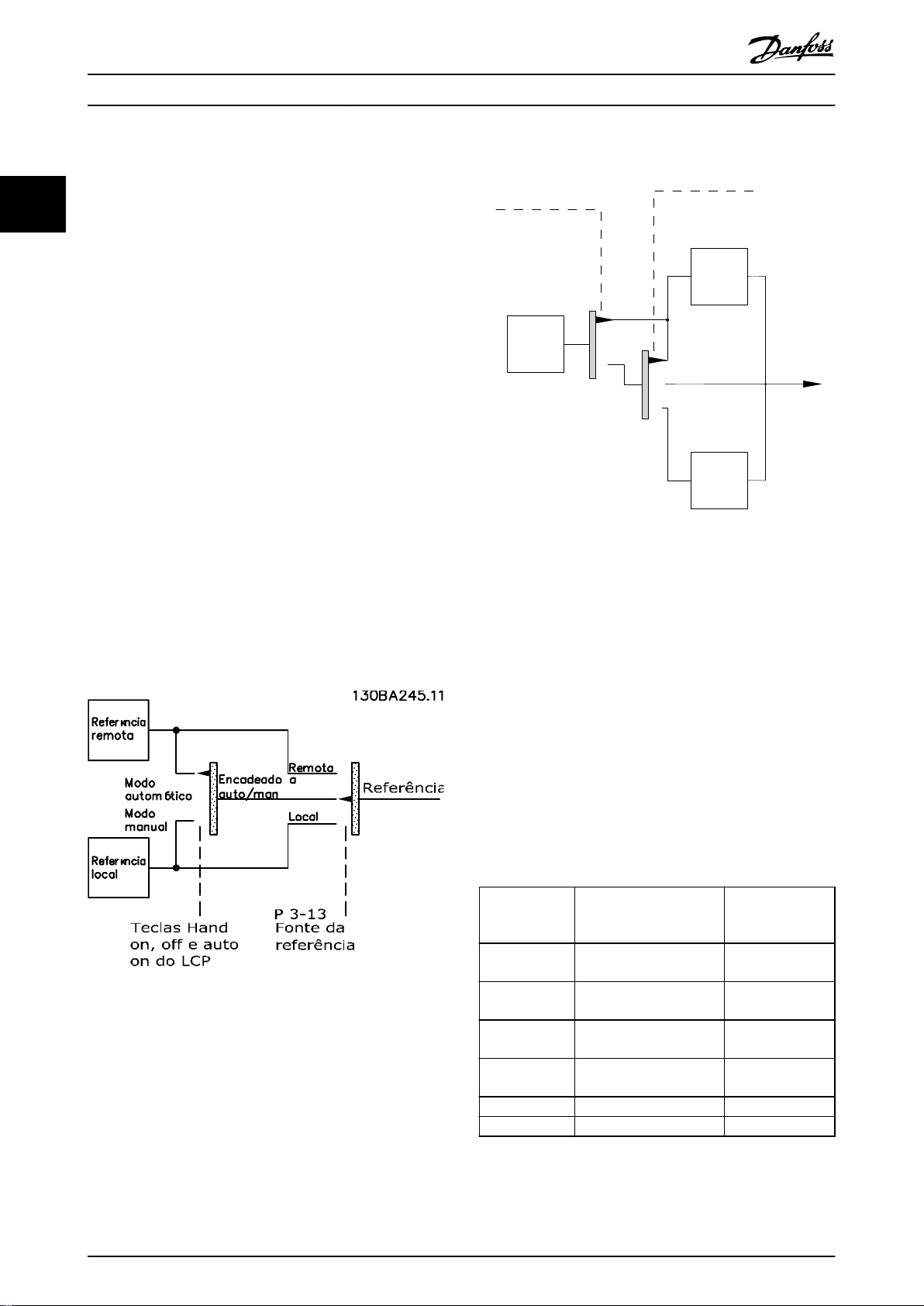
2.4.3 Controles Local (Hand On - Manual
Ligado) e Remoto (Auto On Automático Ligado)
22
Opere o conversor de frequência manualmente por meio
do LCP ou remotamente por meio de entradas analógicas
ou digitais e do barramento serial.
Referência ativa e modo
conguração
A referência ativa é uma referência local ou uma referência
remota. Uma referência remota é a conguração padrão.
Para usar a referência local, congure no modo
•
Manual. Para ativar o modo Manual, adapte a
programação do parâmetro no grupo do
parâmetro 0-4* Teclado do LCP. Para obter mais
informações, consulte o guia de programação.
Para usar a referência remota, congure no modo
•
Automático, que é o modo padrão. No modo
Automático é possível controlar o conversor de
frequência através das entradas digitais e das
diversas interfaces seriais (RS485, USB ou um
opcional de eldbus).
O Ilustração 2.10 ilustra o modo de conguração
•
resultante da seleção de referência ativa, local ou
remota.
Ilustração 2.11 ilustra o modo de conguração
•
manual da referência local.
Ilustração 2.11 Modo de conguração manual
Princípio de controle da aplicação
A referência remota ou a referência local está ativa a
qualquer momento. Ambas não podem estar ativas
simultaneamente. Programe o princípio de controle de
aplicação (isso é, malha aberta ou malha fechada) no
parâmetro 1-00 Modo Conguração, como mostrado no
Tabela 2.3.
Quando a referência local estiver ativa, ajuste o princípio
de controle de aplicação em parâmetro 1-05 Local Mode
Conguration.
Ajuste a fonte da referência em parâmetro 3-13 Tipo de
Referência, como mostrado em Tabela 2.3.
Para obter mais informações, consulte o guia de
programação.
[Hand on]
Ilustração 2.10 Referência Ativa
20 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
[Auto On]
Teclas do LCP
Hand (Manual) Encadeado a Manual/
Manual⇒Desliga
do
Automática Encadeado a Manual/
Automático⇒De
sligado
Todas as teclas Local Local
Todas as teclas Remota Remota
Tabela 2.3 Congurações de referência remota e local
Parâmetro 3-13 Tipo de
Referência
Automático
Encadeado a Manual/
Automático
Automático
Encadeado a Manual/
Automático
Referência Ativa
Local
Local
Remota
Remota

Visão Geral do Produto Guia de Design
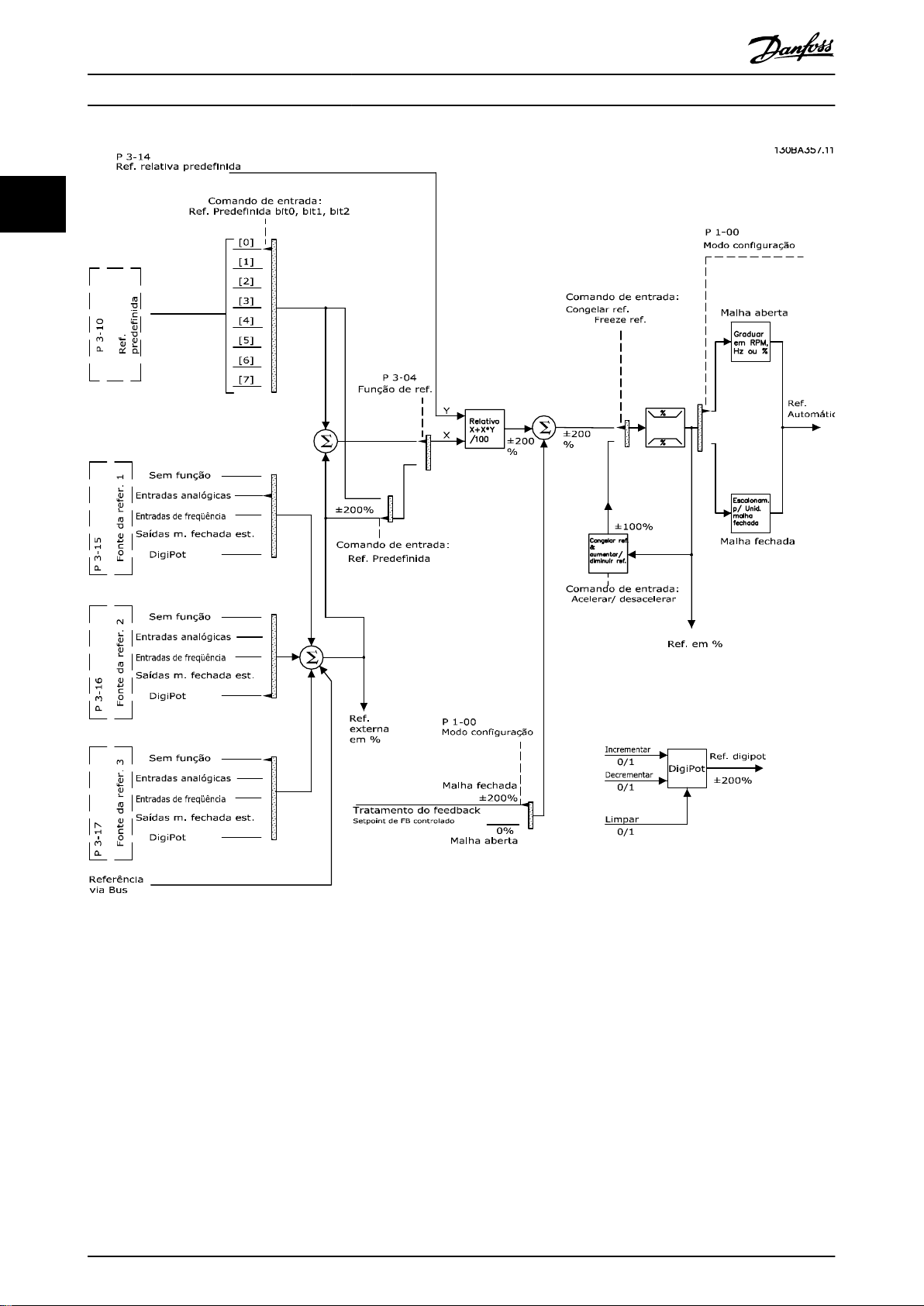
2.4.4 Tratamento da Referência
O tratamento da referência é aplicável na operação de
malha fechada e aberta.
Referências externas e internas
Até 8 referências predenidas podem ser programadas no
conversor de frequência. A referência predenida interna
ativa pode ser selecionada externamente usando as
entradas digitais ou o barramento de comunicação serial.
Referências externas também podem ser fornecidas ao
conversor, tipicamente através de uma entrada de controle
analógico. Todas as fontes da referência e a referência de
barramento são adicionadas para produzir a referência
externa total. Como referência ativa, selecione um dos
seguintes:
A referência externa
•
A referência predenida
•
O setpoint
•
A soma de todos os 3 acima
•
A referência pode ser graduada.
A referência graduada é calculada da seguinte forma:
Referência = X + X ×
Onde X é a referência externa, a referência predenida ou
a soma delas e Y é parâmetro 3-14 Referência Relativa Pré-
-denida em [%].
Se Y, parâmetro 3-14 Referência Relativa Pré-denida, está
congurado para 0%, a escala não afeta a referência.
Referência Remota
Uma referência remota é composta pelo seguinte (consulte
Ilustração 2.12):
Referências predenidas
•
Referências externas:
•
- Entradas analógicas
- Entradas de frequência de pulso
- Entradas do potenciômetro digital
- Referências de barramento de
Uma referência relativa predenida
•
Um setpoint de feedback controlado
•
Y
100
comunicação serial
2 2
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 21
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
22
Ilustração 2.12 Tratamento da Referência Remota
22 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Visão Geral do Produto Guia de Design
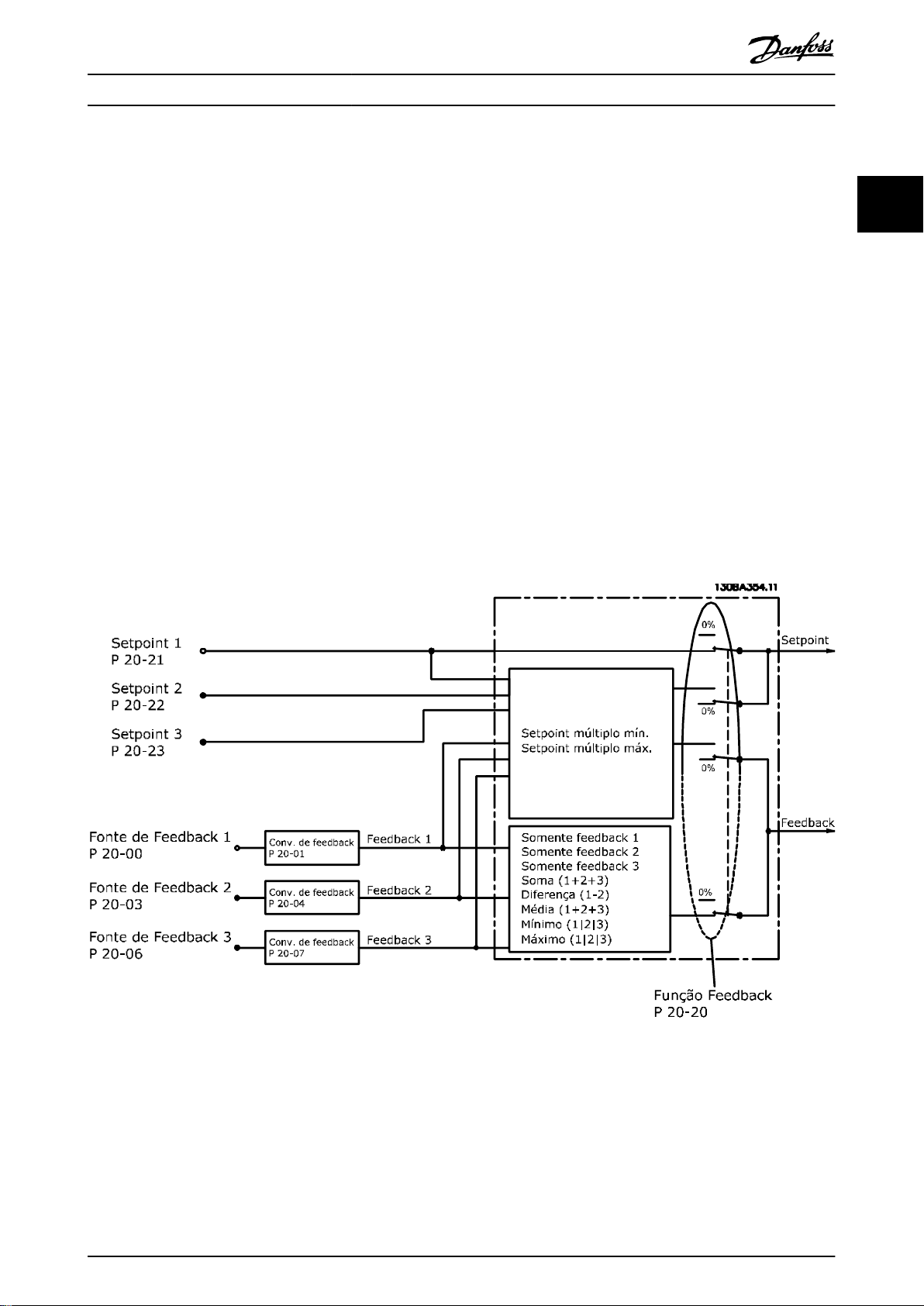
2.4.5 Tratamento do Feedback
O tratamento de feedback pode ser congurado para
trabalhar com aplicações que requerem controle avançado,
como no caso de setpoints múltiplos e feedbacks de tipos
múltiplos (consulte Ilustração 2.13.
Três tipos de controle são comuns.
Zona única, setpoint único
Este tipo do controle é uma
básico. O setpoint 1 é adicionado a qualquer outra
referência (se houver) e o sinal de feedback é selecionado.
Multizonas, setpoint único
Este tipo de controle usa 2 ou 3 sensores de feedback, mas
somente um setpoint. O feedback pode ser adicionado,
subtraído ou ter o valor médio calculado. Além disso, é
possível utilizar o valor máximo ou mínimo. O setpoint 1 é
utilizado exclusivamente nesta conguração.
Multizonas, setpoint/feedback
O par setpoint/feedback com a maior diferença controlará
a velocidade do conversor de frequência. As tentativas
máximas em manter todas as zonas nos/ou abaixo de seus
conguração de feedback
respectivos setpoints, enquanto que as tentativas mínimas
em manter todas as zonas em/ou acima de seus
respectivos setpoints.
Exemplo
Uma aplicação de 2 zonas e 2 setpoints. O setpoint da
zona 1 é 15 bar e o feedback é 5,5 bar. O setpoint da Zona
2 está em 4,4 bar e o feedback em 4,6 bar. Se o máximo
estiver selecionado, o setpoint e o feedback da zona 2 são
enviados para o controlador PID, pois tem a menor
diferença (o feedback é maior que o setpoint, resultando
em uma diferença negativa). Se mínimo estiver
selecionado, o setpoint e o feedback da zona 1 são
enviados para o controlador PID, pois tem a maior
diferença (o feedback é menor que o setpoint, resultando
em uma diferença positiva).
2 2
Ilustração 2.13 Diagrama de Blocos de Processamento de Sinal de Feedback
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 23
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
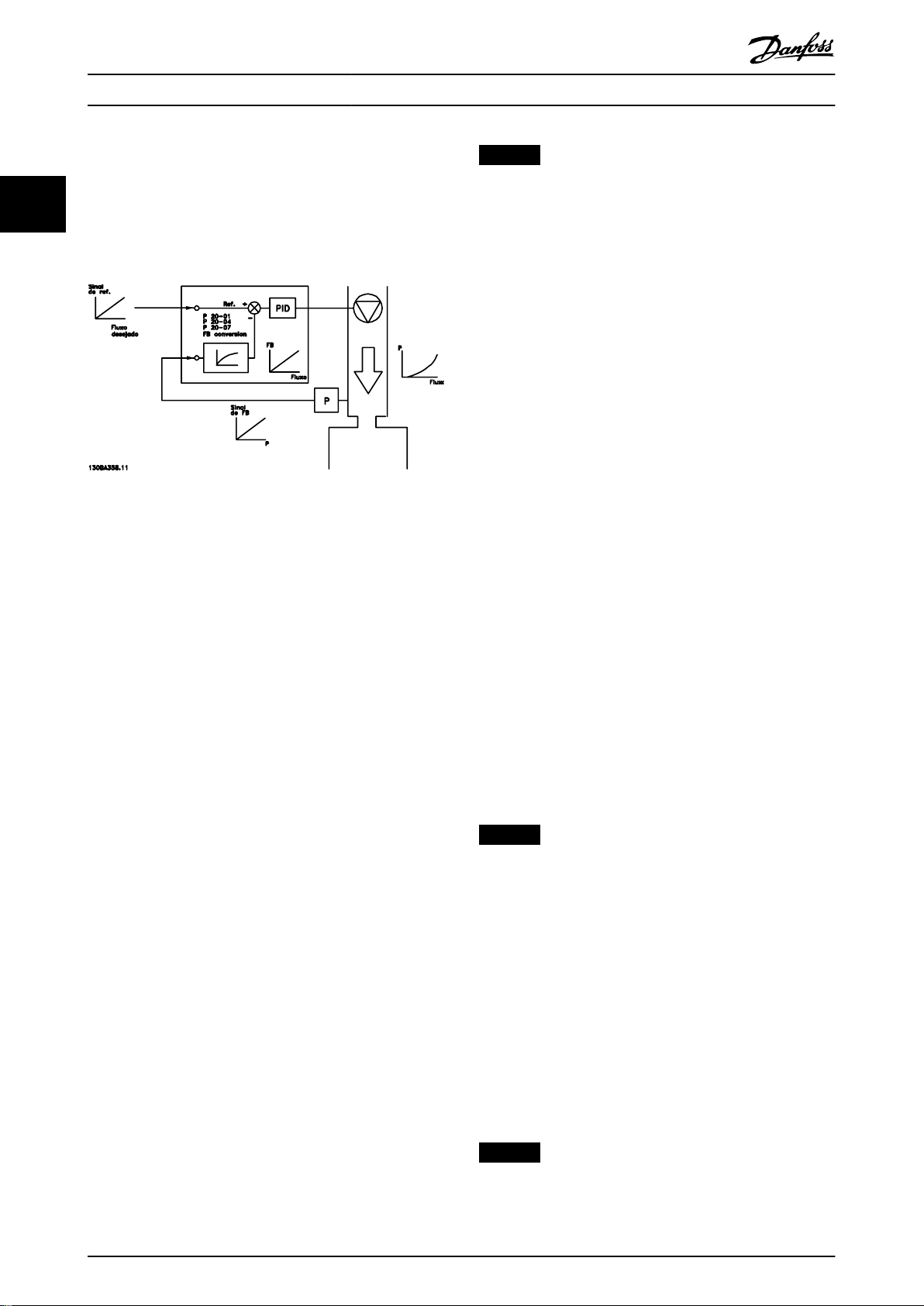
Conversão de feedback
Em algumas aplicações, é útil converter o sinal de
feedback. Um exemplo é usar um sinal de pressão para
22
fornecer feedback do uxo. Uma vez que a raiz quadrada
da pressão é proporcional à vazão, essa raiz quadrada
produz um valor que é proporcional à vazão, consulte
Ilustração 2.14.
Ilustração 2.14 Conversão de Feedback
2.5 Funções operacionais automatizadas
Os recursos operacionais automatizados cam ativos assim
que o conversor de frequência estiver operando. A maioria
deles não requerem programação ou setup. Entender que
esses recursos estão presentes pode otimizar um projeto
de sistema e, possivelmente, evitar introduzir componentes
ou funcionalidade redundante.
Para obter detalhes sobre qualquer setup necessário,
particularmente parâmetros do motor, consulte o guia de
programação.
O conversor de frequência possui uma série de funções de
proteção integradas para proteger o conversor e o motor
quando em funcionamento.
AVISO!
Para assegurar que está em conformidade com o IEC
60364 para CE ou NEC 2009 para UL, é obrigatório o uso
de fusíveis e/ou disjuntores.
2.5.2 Proteção de sobretensão
Sobretensão gerada pelo motor
Quando o motor atuar como gerador, a tensão do
barramento CC aumenta. Esse comportamento ocorre nas
seguintes situações:
A carga aciona o motor (em frequência de saída
•
constante do conversor de frequência), por
exemplo, a carga gera energia.
Durante a desaceleração (desaceleração) com
•
momento de inércia alto, baixo atrito e tempo de
desaceleração muito curto para a energia ser
dissipada como perda no conversor de
frequência, no motor e na instalação.
conguração incorreta da compensação de
A
•
escorregamento pode causar maior tensão no
barramento CC.
Força Contra Eletro Motriz da operação do motor
•
PM. Se houver parada por inércia em alta rpm, a
Força Contra Eletro Motriz do motor PM pode
exceder potencialmente a tolerância de tensão
máxima do conversor de frequência e causar
danos. Para prevenir essa situação, o valor de
parâmetro 4-19 Freqüência Máx. de Saída é
limitado automaticamente por meio de um
cálculo interno baseado no valor de
parâmetro 1-40 Força Contra Eletromotriz em
1000RPM, parâmetro 1-25 Velocidade nominal do
motor e parâmetro 1-39 Pólos do Motor.
2.5.1 Proteção contra Curto Circuito
Motor (fase-fase)
O conversor de frequência é protegido contra curtos
circuitos no lado do motor por meio da medição de
corrente em cada uma das fases do motor ou no
barramento CC. Um curto circuito entre duas fases de saída
causa uma sobrecarga de corrente no inversor. O inversor é
desligado quando a corrente de curto circuito ultrapassa o
valor permitido (Alarme 16 Bloqueio por Desarme).
Lado da rede elétrica
Um conversor de frequência que funciona corretamente
limita a corrente que pode retirar da alimentação. Use
fusíveis e/ou disjuntores no lado da alimentação como
proteção em caso de falha de componente interno do
conversor de frequência (primeira falha). Consulte
capétulo 7.8 Fusíveis e Disjuntores para obter mais
informações.
24 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Para evitar excesso de velocidade (por exemplo, devido a
efeitos rotação livre em excesso ou uxo de água
descontrolado), equipe o conversor de frequência com
um resistor do freio.
A sobretensão pode ser manipulada usando uma função
de frenagem (parâmetro 2-10 Função de Frenagem) ou
usando controle de sobretensão (parâmetro 2-17 Controle
de Sobretensão).
Controle de sobretensão (OVC)
O OVC reduz o risco de desarme do conversor de
frequência devido a sobretensão no barramento CC. Isto é
conseguido por estender automaticamente o tempo de
desaceleração.
AVISO!
O OVC pode ser ativado por motores PM (PM VVC+).
AVISO!
Visão Geral do Produto Guia de Design
2.5.3 Detecção de fase ausente de motor
A função fase ausente de motor (parâmetro 4-58 Função de
Fase do Motor Ausente) está ativada por padrão para evitar
danos no motor em caso de fase ausente de motor. A
conguração padrão é 1.000 ms, mas pode ser ajustada
para uma detecção mais rápida.
2.5.4 Detecção de desbalanceamento de
fases de rede elétrica
A operação em condições de desbalanceamento de rede
crítico reduz a vida útil do motor. Se o motor for operado
continuamente próximo da carga nominal, as condições
são consideradas severas. A conguração padrão desarma
o conversor de frequência no caso de desbalanceamento
de rede (parâmetro 14-12 Função no Desbalanceamento da
Rede).
2.5.5 Chaveamento na Saída
É permitido adicionar uma chave à saída entre o motor e o
conversor de frequência. É possível que apareçam
mensagens de falha. Para capturar um motor em rotação,
ative o ying start.
2.5.6 Proteção de Sobrecarga
Limite de torque
O recurso de limite de torque protege o motor contra
sobrecarga, independentemente da velocidade. O limite de
torque é controlado em parâmetro 4-16 Limite de Torque do
Modo Motor ou parâmetro 4-17 Limite de Torque do Modo
Gerador e o tempo antes do desarme da advertência do
limite de torque é controlado em parâmetro 14-25 Atraso
do Desarme no Limite de Torque.
Limite de Corrente
O limite de corrente é controlado no parâmetro 4-18 Limite
de Corrente.
Limite de velocidade
Denir limites inferior e superior da faixa de velocidade
operacional usando um ou mais dos seguintes parâmetros:
Parâmetro 4-11 Lim. Inferior da Veloc. do Motor
•
[RPM].
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz]
•
e parâmetro 4-13 Lim. Superior da Veloc. do Motor
[RPM].
Parâmetro 4-14 Motor Speed High Limit [Hz].
•
Por exemplo, a faixa de velocidade operacional pode ser
denida como entre 30 e 50/60 Hz.
Parâmetro 4-19 Freqüência Máx. de Saída limita a velocidade
de saída máxima que o conversor de frequência pode
fornecer.
ETR
O ETR é um recurso eletrônico que simula um relé
bimetálico com base em medições internas. A característica
está mostrada em Ilustração 2.15.
Limite de tensão
Quando um determinado nível de tensão predenido é
atingido, o conversor de frequência desliga para proteger
os transistores e os capacitores do barramento CC.
Sobretemperatura
O conversor de frequência possui sensores de temperatura
integrados e reage imediatamente a valores críticos por
meio dos limites codicados no hardware.
2.5.7 Derating Automático
O conversor de frequência verica constantemente os
níveis críticos:
Alta temperatura no cartão de controle ou no
•
dissipador de calor
Carga do motor alta
•
Alta tensão do barramento CC
•
Velocidade do motor baixa
•
Como resposta a um nível crítico, o conversor de
frequência ajusta a frequência de chaveamento. Para
temperaturas internas altas e velocidade do motor baixa,
os conversores de frequência também podem forçar o
padrão PWM para SFAVM.
AVISO!
O derating automático é diferente quando
parâmetro 14-55 Filtro de Saída estiver programado para
[2] Filtro de Onda Senoidal Fixado.
2.5.8 Otimização Automática de Energia
A otimização automática de energia (AEO) orienta o
conversor de frequência para monitorar a carga do motor
continuamente e ajustar a tensão de saída para maximizar
a eciência. Sob carga leve, a tensão é reduzida e a
corrente do motor é minimizada. O motor é beneciado
por:
Maior eciência.
•
Aquecimento reduzido.
•
Operação mais silenciosa.
•
Não há necessidade de selecionar uma curva V/Hz porque
o conversor de frequência ajusta automaticamente a
tensão do motor.
2 2
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 25

Visão Geral do Produto
VLT® Refrigeration Drive FC 103
2.5.9 Modulação da frequência de
2.5.12 Rampa automática
chaveamento automática
22
O conversor de frequência gera pulsos elétricos curtos para
formar um padrão de onda CA. A frequência de
chaveamento é a taxa desses pulsos. Uma frequência de
chaveamento baixa (taxa de pulso baixa) causa ruído
audível no motor, tornando preferível uma frequência de
chaveamento mais alta. Uma frequência de chaveamento
alta, no entanto, gera calor no conversor de frequência, o
que pode limitar a quantidade de corrente disponível ao
motor.
A modulação de frequência de chaveamento automática
regula essas condições automaticamente para fornecer a
frequência de chaveamento mais alta sem causar sobreaquecimento ao conversor de frequência. Fornecendo uma
frequência de chaveamento alta regulada, isso silencia o
ruído de operação do motor em velocidades baixas
quando o controle de ruído for crítico e produz potência
de saída total para o motor quando for necessário.
2.5.10 Derating automático para frequência
de chaveamento alta
Um motor tentando acelerar uma carga muito rapidamente
para a corrente disponível pode causar o desarme do
conversor de frequência. O mesmo é verdadeiro para uma
desaceleração muito rápida. A rampa automática protege
contra essas situações estendendo a taxa de rampa do
motor (aceleração ou desaceleração) para corresponder
com a corrente disponível.
2.5.13 Circuito de limite de corrente
Quando uma carga exceder a capacidade da corrente de
operação normal do conversor de frequência (de um
conversor ou motor subdimensionado), o limite de
corrente reduz a frequência de saída para desacelerar o
motor e reduzir a carga. Um temporizador ajustável está
disponível para limitar a operação nessa condição durante
60 s ou menos. O limite padrão da fábrica é 110% da
corrente nominal do motor para minimizar a tensão da
sobrecarga de corrente.
2.5.14 Desempenho de utuação de
potência
O conversor de frequência foi projetado para a operação
de carga total contínua em frequências de chaveamento
entre 3,0 e 4,5 kHz (essa faixa de frequência depende do
tamanho da potência. Uma frequência de chaveamento
superior à faixa permissível máxima gera mais calor no
conversor de frequência e exige a redução da corrente de
saída.
Um recurso automático do conversor de frequência é o
controle da frequência de chaveamento dependente da
carga. Esse recurso permite ao motor ser beneciado com
a frequência de chaveamento mais alta permitida pela
carga.
2.5.11 Derating automático para
superaquecimento
O derating de superaquecimento automático funciona para
evitar o desarme do conversor de frequência em alta
temperatura. Os sensores de temperatura interna medem
as condições para proteger os componentes de potência
de superaquecimento. O conversor pode reduzir automaticamente a frequência de chaveamento para manter sua
temperatura operacional dentro dos limite de segurança.
Após a redução da frequência de chaveamento, o
conversor de frequência também pode reduzir a frequência
de saída e a corrente em até 30% para evitar um desarme
por superaquecimento.
O conversor de frequência resiste às utuações da rede
elétrica, como:
Transientes.
•
Quedas momentâneas.
•
Quedas de tensão curtas.
•
Surtos.
•
O conversor de frequência compensa automaticamente
para tensões de entrada de ± 10% da nominal para
fornecer torque e tensão nominal do motor total. Com a
nova partida automática selecionada, o conversor de
frequência é energizado automaticamente após um
desarme da tensão. Com o ying start, o conversor de
frequência sincroniza a rotação do motor antes da partida.
2.5.15 Motor de partida suave
O conversor de frequência fornece a quantidade correta de
corrente para o motor para superar a inércia da carga e
fazer o motor adquirir velocidade. Isso evita que a tensão
de rede total seja aplicada a um motor parado ou em
funcionamento lento, o que gera uma corrente alta e calor.
Este recurso de partida suave herdado reduz a carga
térmica e o estresse mecânico, prolonga a vida útil do
motor e fornece uma operação do sistema mais silenciosa.
26 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Visão Geral do Produto Guia de Design
2.5.16 Amortecimento de ressonância
Eliminar o ruído de ressonância do motor de alta
frequência por meio de amortecimento de ressonância.
Está disponível o amortecimento de frequência selecionado
manualmente ou automaticamente.
2.5.17 Ventiladores controlados por
temperatura
Sensores no conversor de frequência controlam a
temperatura do ventiladores de resfriamento interno.
Frequentemente, os ventiladores de resfriamento não
funcionam durante a operação com carga baixa ou quando
estiver no sleep mode ou em espera. Isso reduz o ruído,
aumenta eciência e prolonga a vida operacional do
ventilador.
2.5.18 Conformidade com o EMC
A Interferência eletromagnética (EMI) ou a interferência de
radiofrequência (RFI, no caso de frequência de rádio) é um
distúrbio que pode afetar um circuito elétrico devido a
indução eletromagnética ou radiação ou de uma fonte
externa. O conversor de frequência foi projetado para
atender a norma para produtos de EMC para conversores
de frequência IEC 61800-3 e também com a norma
europeia EN 55011. Para estar em conformidade com os
níveis de emissões da EN 55011, o cabo de motor deve ser
adequadamente terminado e blindado. Para obter mais
informações sobre o desempenho de EMC, consulte
capétulo 3.2.2 Resultados de teste de EMC (Emissão).
Os componentes que formam a isolação galvânica são:
Fonte de alimentação, incluindo isolação de sinal.
•
Drive do gate para os IGBTs, acionador, transfor-
•
madores e acopladores opto.
Os transdutores de efeito Hall de corrente de
•
saída.
2.6 Funções de aplicação personalizada
Recursos de aplicação personalizados são os recursos mais
comuns programados no conversor de frequência para
desempenho melhorado do sistema. Eles exigem o mínimo
de programação ou conguração. Saber que essas funções
estão disponíveis pode otimizar o projeto do sistema e
possivelmente evitar a introdução de componentes ou
funcionalidades redundantes. Consulte o guia de
programação para obter instruções sobre a ativação dessas
funções.
2.6.1 Adaptação Automática do Motor
A Adaptação Automática do Motor (AMA) é um
procedimento de teste automatizado usado para medir as
características do motor. A AMA fornece um modelo
eletrônico preciso do motor. Isso permite que o conversor
de frequência calcule o desempenho ideal e a eciência do
motor. Realizar o procedimento AMA também maximiza o
recurso de otimização de energia automática do conversor
de frequência. A AMA é realizada sem o motor em rotação
e sem desacoplar a carga do motor.
2.6.2 Proteção Térmica do Motor
2 2
2.5.19 Medição de corrente em todas as
três fases do motor
A corrente de saída para o motor é continuamente medida
em todas as 3 fases para proteger o conversor de
frequência contra curtos circuitos, falhas de aterramento e
perda de fase. As falhas de aterramento de saída são
detectada instantaneamente. Se uma das fases do motor
for perdida, o conversor de frequência para imediatamente
e reporta qual fase está ausente.
2.5.20 Isolação galvânica dos terminais de
controle
Todos os terminais de controle e terminais de relé de saída
são isolados galvanicamente da energia da rede elétrica.
Isso signica que os circuitos do controlador são completamente protegidos da corrente de entrada. Os terminais
do relé de saída requerem seus próprios aterramentos. Esse
isolamento atende aos requisitos de proteção rígidos de
tensão ultrabaixa (PELV) de isolamento.
A proteção térmica do motor pode ser fornecida de três
maneiras:
Por meio de detecção direta de temperatura por
•
meio do sensor PTC nos enrolamentos do motor
e conectado em um AI ou DI padrão.
Interruptor térmico mecânico (tipo Klixon) em um
•
DI.
Via o relé térmico eletrônico (ETR) integrado para
•
motores assíncronos.
O ETR calcula a temperatura do motor medindo a corrente,
a frequência e o tempo de operação. O conversor de
frequência exibe a carga térmica no motor em
porcentagem e pode emitir uma advertência em um
setpoint de sobrecarga programável.
As opções programáveis na sobrecarga permitem ao
conversor de frequência parar o motor, reduzir a saída ou
ignorar a condição. Mesmo em velocidades baixas, o
conversor de frequência atende os padrões de sobrecarga
do motor eletrônica I2t Classe 20.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 27
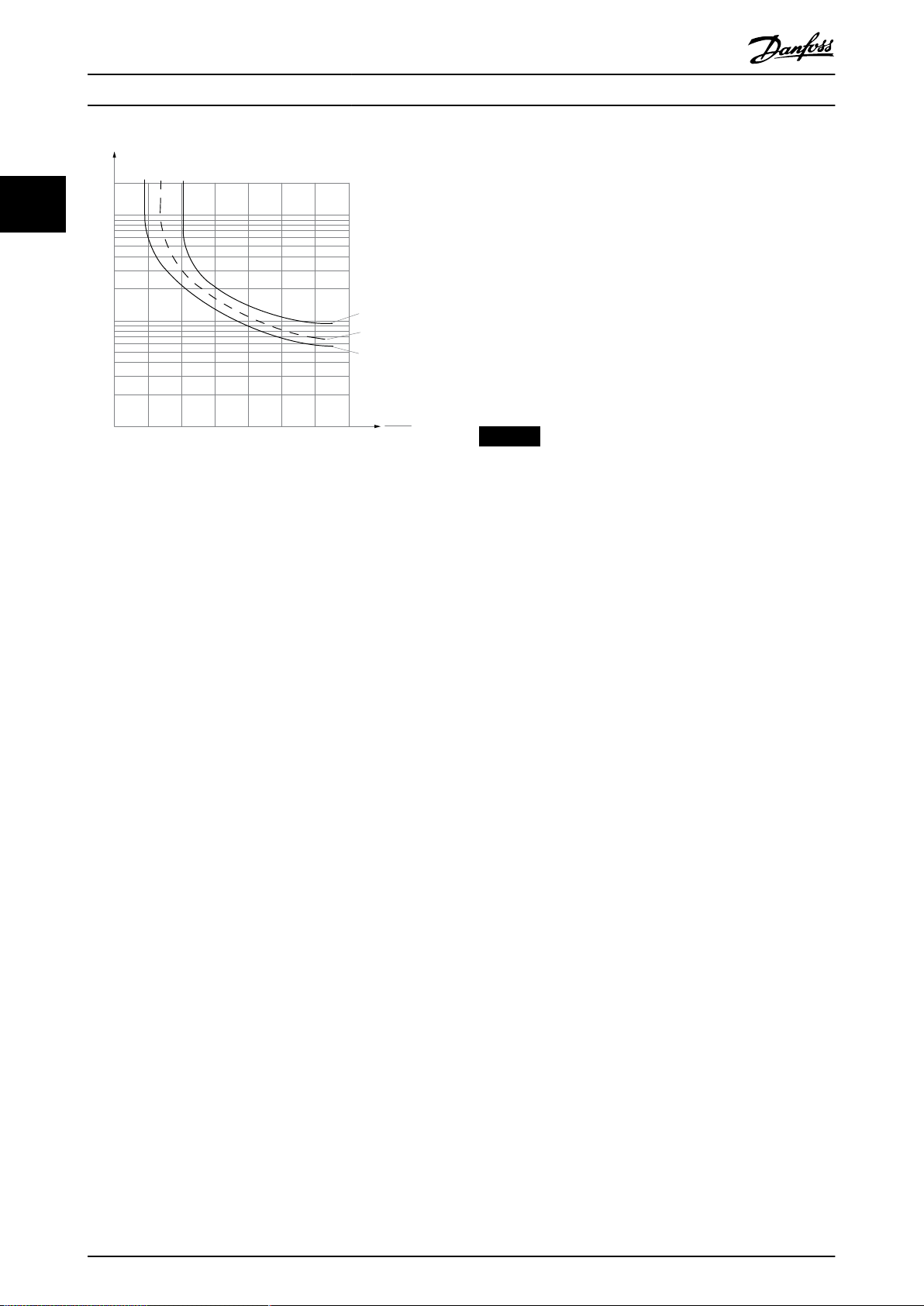
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
Flying start
Essa seleção permite assumir o controle de um motor
girando livremente devido a uma queda da rede elétrica.
22
Essa opção é relevante para centrífugas e ventiladores.
Backup cinético
Essa seleção assegura que o conversor de frequência
funciona enquanto houver energia no sistema. Em queda
da rede elétrica curta, a operação é restaurada após o
retorno da rede elétrica, sem interromper a aplicação ou
perder controle em nenhum momento. Diversas variantes
de backup cinético podem ser selecionadas.
O comportamento do conversor de frequência na queda
da rede elétrica pode ser congurado em
parâmetro 14-10 Falh red elétr e parâmetro 1-73 Flying Start.
Ilustração 2.15 Características ETR
O eixo X no Ilustração 2.15 mostra a relação entre I
I
nominal. O eixo Y exibe o tempo em segundos antes
motor
motor
e
de o ETR desativar e desarmar o conversor de frequência.
As curvas mostram a velocidade nominal característica, no
dobro da velocidade nominal e em 0,2 x a velocidade
nominal.
Em velocidade menor, o ETR desativa em um valor de
aquecimento menor devido ao resfriamento menor do
motor. Desse modo, o motor é protegido de car superaquecido, mesmo em velocidade baixa. O recurso do ETR
calcula a temperatura do motor com base na corrente e
velocidade reais. A temperatura calculada ca visível como
um parâmetro de leitura em parâmetro 16-18 Térmico
Calculado do Motor.
2.6.3 Queda da Rede Elétrica
Durante uma queda da rede elétrica, o conversor de
frequência continua funcionando até a tensão no
barramento CC cair abaixo do nível mínimo de parada. O
nível mínimo de parada normalmente é 15% abaixo da
tensão de alimentação nominal mais baixa. A tensão de
rede, antes da queda e da carga do motor determina
quanto tempo o conversor de frequência levará para fazer
parada por inércia.
AVISO!
A parada por inércia é recomendada para compressores,
uma vez que a inércia é muito baixa para ying start na
maioria das situações.
2.6.4 Controladores PID incorporados
Os quatro controladores proporcionais, integrais,
derivativos (PID) integrados eliminam a necessidade de
dispositivos de controle auxiliares.
Um dos controladores PID mantém controle constante dos
sistemas de malha fechada em que pressão, temperatura e
uxo regulados ou outros requisitos do sistema são
mantidos. O conversor de frequência pode fornecer
controle autoconante da velocidade do motor em
resposta aos sinais de feedback de sensores remotos. O
conversor de frequência acomoda dois sinais de feedback
de dois dispositivos diferentes. Esse recurso permite regular
um sistema com diferentes requisitos de feedback. O
conversor de frequência toma decisões de controle
comparando os 2 sinais para otimizar o desempenho do
sistema.
Use os 3 controladores adicionais e independentes para
controlar outros equipamentos de processo, como bombas
de alimentação química, válvula de controle ou para
aeração com diferentes níveis.
O conversor de frequência pode ser congurado
(parâmetro 14-10 Falh red elétr) para diferentes tipos de
comportamento durante a queda da rede elétrica,
Bloqueado por desarme quando o barramento CC
•
for exaurido.
Parada por inércia com ying start quando a rede
•
elétrica retornar (parâmetro 1-73 Flying Start).
Backup cinético.
•
Desaceleração controlada.
•
28 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
2.6.5 Nova Partida Automática
O conversor de frequência pode ser programado para
reiniciar o motor automaticamente após um desarme de
pouca gravidade, como utuação ou perda de energia
momentânea. Esse recurso elimina a necessidade de reset
manual e melhora a operação automatizada de sistemas
controlados remotamente. O número de tentativas de
novas partidas, bem como a duração entre as tentativas
pode ser limitada.

Visão Geral do Produto Guia de Design
2.6.6 Flying Start
O ying start permite ao conversor de frequência
sincronizar com um motor em operação girando em
velocidade até total, em qualquer sentido. Isso evita
desarme devido à retirada de sobrecarga de corrente. Ele
minimiza a tensão mecânica para o sistema, pois o motor
não recebe mudança repentina de velocidade quando o
conversor de frequência inicia.
2.6.7 Torque total em velocidade reduzida
O conversor de frequência segue uma curva V/Hz variável
para fornecer torque total do motor mesmo em
velocidades reduzidas. O torque de saída total pode
coincidir com a velocidade operacional nominal máxima
do motor. Isso é diferente de conversores de frequência de
torque variável e de torque constante. Conversores de
frequência de torque variável fornecem torque do motor
reduzido em velocidade baixa. Conversores de frequência
de torque constante fornecem excesso de tensão, calor e
ruído do motor com menos da velocidade total.
2.6.8 Bypass de frequência
Em algumas aplicações, o sistema pode ter velocidades
operacionais que criam uma ressonância mecânica. Isso
pode gerar ruído excessivo e possivelmente danicar os
componentes mecânicos do sistema. O conversor de
frequência tem 4 larguras de banda de frequência de
bypass programáveis. Isso permite que o motor desenvolva
velocidades que induzem ressonância do sistema.
2.6.9 Pré-aquecimento do Motor
Para pré-aquecer um motor em ambiente frio ou molhado,
uma pequena quantidade de corrente CC pode escoar
continuamente para o motor para proteger contra
condensação e partida a frio. Isso pode eliminar a
necessidade de um aquecedor de espaço.
2.6.11 Frenagem CC
Algumas aplicações podem exigir a frenagem de um motor
até reduzir ou parar. Aplicar corrente CC ao motor freia o
motor e pode eliminar a necessidade de um freio de motor
separado. O freio CC pode ser programado para ser ativado
em uma frequência predeterminada ou ao receber um
sinal. A taxa de frenagem também pode ser programada.
2.6.12 Sleep Mode
O Sleep mode para o motor automaticamente quando a
demanda estiver baixa durante um intervalo de tempo
especicado. Quando a demanda do sistema aumentar, o
conversor reinicia o motor. O sleep mode fornece
economia de energia e reduz o desgaste do motor. Ao
contrário de um relógio setback, o conversor está sempre
disponível para operar quando a demanda de despertar
predenida for alcançada.
2.6.13 Funcionamento permissivo
O conversor pode aguardar por um sinal de sistema pronto
antes de iniciar. Quando este recurso estiver ativo, o
conversor permanece parado até receber permissão para
iniciar. O funcionamento permissivo garante que o sistema
ou equipamento auxiliar está no estado adequado antes
do conversor ter permissão para dar partida no motor.
2.6.14 Smart Logic Control (SLC)
O Smart Logic Control (SLC) é uma sequência de ações
denidas pelo usuário (consulte o parâmetro 13-52 Ação do
SLC [x]) executada pelo SLC quando o evento associado
denido pelo usuário (consulte o parâmetro 13-51 Evento
do SLC [x]) for avaliado como TRUE (Verdadeiro) pelo SLC.
A condição para um evento pode ser um status em
particular ou que a saída de uma regra lógica ou operando
um comparador se torne TRUE (Verdadeira). Isso leva a
uma ação associada, como mostrado em Ilustração 2.16.
2 2
2.6.10 Quatro setups programáveis
O conversor de frequência tem 4 setups que podem ser
programados de forma independente. Usando setup
múltiplo é possível alternar entre funções programadas de
forma independente ativadas por entradas digitais ou
comando serial. Setups independentes são usados, por
exemplo, para alterar referências ou para operação dia/
noite ou verão/inverno ou para controlar vários motores. O
LCP exibe a conguração ativa.
Os dados de setup podem ser copiados de conversor de
frequência para conversor de frequência por download das
informações do LCP removível.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 29

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
22
Ilustração 2.17 Ordem de execução quando 4 eventos/ações
são programados
Comparadores
Comparadores são utilizados para comparar variáveis
contínuas (frequência de saída, corrente de saída, entrada
analógica etc.) com valores
Ilustração 2.16 Evento e ação do SLC
xos predenidos.
Eventos e ações são numerados e conectados em pares
(estados). Isto signica que, quando o evento [0] estiver
completo (atinge o valor TRUE (Verdadeiro)), a ação [0] é
executada. Após isso, as condições do evento [1] são
avaliadas e, se resultarem TRUE (Verdadeiro), a ação [1]
será executada e assim sucessivamente. Apenas um evento
é avaliado a qualquer momento. Se um evento for avaliado
como FALSE (Falso), não acontece nada (no SLC) durante o
intervalo de varredura atual e nenhum outro evento é
avaliado. Isto signica que, quando o SLC é iniciado, ele
avalia o evento [0] (e unicamente o evento [0]) a cada
intervalo de varredura. Somente quando o evento [0] for
avaliado como TRUE, o SLC executa a ação [0] e começa a
avaliar o evento [1]. É possível programar de 1 a 20
eventos e ações.
Quando o último evento/ação tiver sido executado, a
sequência recomeça desde evento [0]/ação [0].
Ilustração 2.17 mostra um exemplo com quatro eventos/
ações:
Ilustração 2.18 Comparadores
Regras lógicas
Combine até três entradas booleanas (entradas TRUE/
FALSE) (Verdadeiro/Falso) de temporizadores,
comparadores, entradas digitais, bits de status e eventos
usando os operadores lógicos AND, OR e NOT.
Ilustração 2.19 Regras Lógicas
As regras lógicas, temporizadores e comparadores são
também disponíveis para uso fora da sequência SLC.
Para um exemplo de SLC, consulte capétulo 4.3 Exemplos de
Setup de Aplicações.
30 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Visão Geral do Produto Guia de Design
2.6.15 Função Safe Torque O
O conversor de frequência está disponível com funcionalidade Safe Torque O (STO) via terminal de controle 37.
STO desativa a tensão de controle dos semicondutores de
potência do estágio de saída do conversor de frequência.
Isso, consequentemente, impede a geração da tensão
necessária para girar o motor. Quando a função de STO
(terminal 37) for ativada, o conversor de frequência emite
um alarme, desarma a unidade e realiza a parada por
inércia do motor. É necessário nova partida manual. A
função STO pode ser usada como uma parada de
emergência do conversor de frequência. No modo de
operação normal, quando o STO não for necessário, use a
função de parada normal. Ao usar nova partida automática,
assegure que os requisitos da ISO 12100-2 parágrafo 5.3.2.5
sejam atendidos.
Condições de disponibilidade
É responsabilidade do usuário garantir que os técnicos que
instalam e operam a função STO:
Leram e entenderam as normas de segurança
•
com relação à saúde, segurança e prevenção de
acidentes.
Têm bom conhecimento das normas genéricas e
•
de segurança aplicáveis à aplicação
Um usuário denido como:
Integrador.
•
Operador.
•
Técnico de serviço.
•
Técnico de manutenção.
•
Normas
O uso do STO no terminal 37 exige que o usuário atenda
todas as determinações de segurança, incluindo as leis,
regulamentações e diretrizes relevantes. A função STO
opcional atende às seguintes normas:
EN 954-1: 1996 Categoria 3
•
IEC 60204-1: 2005 categoria 0 – parada não
•
controlada
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: Função 2007 – STO
•
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 Categoria 3 PL d
•
ISO 14118: 2000 (EN 1037) – prevenção de
•
partida inesperada
As informações e instruções do manual de instruções não
são sucientes para o uso correto e seguro da funcionalidade STO. Para obter informações completas sobre STO,
consulte as Instruções de utilização do Safe Torque O do
®
.
VLT
especíca.
Medidas de proteção
Técnicos qualicados e competentes são
•
necessários para a instalação e colocação em
funcionamento de sistemas de engenharia
seguros.
Instale a unidade em um gabinete IP54 ou em
•
ambiente equivalente. Em aplicações especiais, é
necessário um grau de IP mais alto.
O cabo entre o terminal 37 e o dispositivo de
•
segurança externo deve ser protegido contra
curto circuito de acordo com a ISO 13849-2
tabela D.4.
Quando forças externas inuenciam o eixo do
•
motor (por exemplo, cargas suspensas), medidas
adicionais (por exemplo, um freio de holding de
segurança) são necessárias para eliminar riscos
em potencial.
2.7 Funções de falha, advertência e alarme
O conversor de frequência monitora muitos aspectos da
operação do sistema, incluindo as condições da rede
elétrica, a carga do motor e desempenho, bem como o
status do conversor. Uma advertência ou um alarme não
indica necessariamente um problema no próprio conversor
de frequência. Pode ser uma condição fora do conversor
que está sendo monitorada para limites de desempenho. O
conversor de frequência possui diversas respostas de falha,
advertência e alarme pré-programadas. Selecione recursos
de alarme e advertência adicionais para melhorar ou
modicar o desempenho do sistema.
Esta seleção descreve o alarme comum e os recursos de
advertência. A compreensão de que esses recursos estão
disponíveis pode otimizar um projeto de sistema e
possivelmente evitar a introdução de componentes ou
funcionalidades redundantes.
2.7.1 Operação no superaquecimento
Por padrão, o conversor de frequência emite um alarme e
desarma com superaquecimento. Se Derate automático e
Advertência estiver selecionado, o conversor de frequência
alerta sobre a condição, mas continua funcionando e tenta
se resfriar primeiro reduzindo sua frequência de
chaveamento. Em seguida, se necessário, ele reduz a
frequência de saída.
O derate automático não substitui as congurações do
usuário para o derating para a temperatura ambiente
(consulte capétulo 5.4 Derating para a Temperatura
Ambiente).
2 2
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 31

Visão Geral do Produto
VLT® Refrigeration Drive FC 103
2.7.2 Advertência de referência alta e baixa
22
Em operação de malha aberta, o sinal de referência
determina diretamente a velocidade do conversor de
frequência. A tela mostra uma advertência de referência
alta ou baixa piscando quando o máximo ou o mínimo for
atingido.
2.7.7 Advertência de alta corrente
Esta função é semelhante à advertência de alta frequência,
exceto uma conguração de alta corrente que é usada
para emitir uma advertência e o escalonamento do
equipamento adicional. A função não está ativa quando
parado ou na partida até a corrente de operação denida
ser alcançada.
2.7.3 Advertência de feedback alto e baixo
2.7.8 Advertência de corrente baixa
Em operação de malha fechada, o conversor de frequência
monitora os valores de feedback alto e baixo. A tela mostra
uma advertência piscando alto ou baixo quando
apropriado. O conversor também pode monitorar sinais de
feedback em operação de malha aberta. Enquanto os
sinais não afetam a operação do conversor em malha
aberta, podem ser úteis para a indicação do status do
sistema localmente ou via comunicação serial. O conversor
de frequência manipula 39 unidades de medida diferentes.
Essa função é semelhante à advertência de baixa
frequência (consulte capétulo 2.7.6 Advertência de baixa
frequência), exceto uma conguração de corrente baixa é
usada para emitir uma advertência e desescalonar o
equipamento. A função não está ativa quando parado ou
na partida até a corrente de operação denida ser
alcançada.
2.7.9 Advertência de correia partida/sem
carga
2.7.4 Desbalanceamento da tensão de
alimentação ou perda de fase
Ripple de corrente excessivo no barramento CC indica um
desbalanceamento de fases de rede elétrica ou perda de
fase. Quando uma fase de potência para o conversor for
perdida, a ação padrão é emitir um alarme e desarmar a
unidade para proteger os capacitores do barramento CC.
Outras opções são emitir uma advertência e reduzir a
corrente de saída para 30% da corrente total ou emitir
uma advertência e continuar a operação normal. Operar
uma unidade conectada a uma linha desbalanceada pode
ser desejável até o desbalanceamento ser corrigido.
2.7.5 Advertência de alta frequência
Ao escalonar equipamento adicional como compressores
ou ventiladores de resfriamento, o conversor de frequência
pode aquecer quando a velocidade do motor estiver alta.
Uma conguração de alta frequência especíca pode ser
inserida no conversor. Se a saída exceder a frequência de
advertência denida, a unidade exibe uma advertência de
alta frequência. Uma saída digital do conversor pode
sinalizar dispositivos externos para escalonar.
Este recurso pode ser usado para monitorar uma condição
sem carga, por exemplo, uma V-correia. Após um limite de
corrente baixa ser armazenado no conversor, se perda da
carga for detectada, o conversor pode ser programado
para emitir um alarme e desarmar ou para continuar a
operação e emitir uma advertência.
2.7.10 Interface serial perdida
O conversor de frequência pode detectar perda de
comunicação serial. Um atraso de tempo de até 99 s é
selecionável para evitar uma resposta devido a
interrupções no barramento de comunicação serial.
Quando o atraso é excedido, há opções disponíveis
incluídas na unidade para:
Manter sua última velocidade.
•
Acessar a velocidade máxima.
•
Acessar a velocidade
•
Parar e emitir uma advertência.
•
Interfaces do usuário e programação
2.8
predenida.
2.7.6 Advertência de baixa frequência
Ao desescalonar o equipamento, o conversor pode alertar
quando a velocidade do motor estiver baixa. Uma
conguração de baixa frequência especíca pode ser
selecionada para alertar e desativar dispositivos externos. A
unidade não emite uma advertência de baixa frequência
quando parar ou após a partida até atingir a frequência de
operação.
32 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
O conversor de frequência usa parâmetros para programar
suas funções de aplicação. Os parâmetros fornecem uma
descrição de uma função e um menu de opcionais para
serem selecionados ou para inserir valores numéricos. Um
menu de programação de amostra é mostrado em
Ilustração 2.20.

130BP066.10
1107 RPM
0 - ** Operação/Display
1 - ** Carga/Motor
2 - ** Freios
3 - ** Referência / Rampas
3,84 A 1 (1)
Menu principal
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
Visão Geral do Produto Guia de Design
2 2
Ilustração 2.20 Menu de programação de amostra
Interface do usuário local
Para a programação local, os parâmetros podem ser
acessados pressionando [Quick Menu] ou [Main Menu] no
LCP.
O Quick menu é destinado à partida inicial e características
do motor. O Menu principal acessa todos os parâmetros e
permite a programação de aplicações avançadas.
Interface do usuário remoto
Para a programação remota, Danfoss oferece um programa
de software para desenvolver, armazenar e transferir
informações de programação. O Software de Setup MCT 10
permite ao usuário conectar um PC ao conversor de
frequência e realizar programação ativa em vez de usar o
teclado do LCP. Ou a programação pode ser feita oine e
transferida para a unidade. O perl inteiro do conversor de
frequência pode ser carregado para o PC para
armazenagem de backup ou análise. Um conector USB ou
o terminal RS485 está disponível para conexão ao
conversor de frequência.
Software de Setup MCT 10 está disponível para download
gratuito em www.VLT-software.com. Também existe um CD
disponível solicitando o número de peça 130B1000. Um
manual do usuário fornece instruções de Utilização
detalhadas. Consulte também capétulo 2.8.2 Software de PC.
Programação de terminais de controle
Cada terminal de controle tem funções
•
especícas que é capaz de executar.
Os parâmetros associados ao terminal habilitam
•
as seleções da função.
Para o funcionamento correto do conversor
•
usando os terminais de controle, os terminais
devem estar:
- Com a ação correta.
- Programados para a função pretendida.
2.8.1 Painel de Controle Local
O painel de controle local (LCP) é uma tela gráca na
frente da unidade, que fornece a interface do usuário
através dos controles de botão e exibe mensagens de
status, advertências e alarmes, parâmetros de programação
e mais. Um display numérico também está disponível com
opcionais de display limitados. Ilustração 2.21 mostra o LCP.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 33
Ilustração 2.21 Painel de Controle Local
2.8.2 Software de PC
O PC é conectado por meio de um cabo USB padrão (host/
dispositivo) ou por meio da interface RS485.
USB é um barramento serial que utiliza 4 os blindados
com o pino de aterramento 4 conectado na blindagem da
porta USB do PC. Ao conectar o PC a um conversor de
frequência por meio do cabo USB existe um risco potencial
de danicar o controlador do host USB do PC. Todos os
PCs padrão são fabricados sem isolação galvânica na porta
USB.
Qualquer diferença de potencial de aterramento causada
pela não observação das recomendações descritas nas
instruções de utilização pode danicar o controlador do
host USB através da blindagem do cabo USB.
Ao conectar o PC a um conversor de frequência por meio
de um cabo USB, utilize um isolador USB com isolação
galvânica para proteger o controlador USB host do PC
contra diferenças potenciais de aterramento.
Não use um cabo de energia do PC com plugue de
aterramento quando o PC estiver conectado ao conversor

130BT308.10
Visão Geral do Produto
VLT® Refrigeration Drive FC 103
de frequência por meio de um cabo USB. Isso reduz a
diferença do potencial de aterramento, mas não elimina
todas as diferenças de potencial devido ao aterramento e à
22
blindagem conectados na porta USB do PC.
4. Abra o arquivo apropriado.
5. Selecione Write to drive.
Todos os parâmetros agora estão transferidos para o
conversor de frequência.
Há um manual separado disponível para Software de Setup
MCT 10. Baixe o software e o manual em
www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/.
2.8.2.2 MCT 31 Software de Cálculo de
®
Ilustração 2.22 Conexão USB
2.8.2.1 Software de Setup MCT 10
O Software de Setup MCT 10 foi projetado para colocação
em funcionamento e serviço do conversor de frequência,
incluindo a programação guiada do controlador em
cascata, do relógio de tempo real, do smart logic controller
e da manutenção preventiva.
O software fornece fácil controle de detalhes, assim como
uma visão geral de sistemas grandes ou pequenos. A
ferramenta trata todas as séries de conversores de
frequência, VLT® Advanced Active Filters AAF 006 e dados
relacionados ao VLT® Soft Starter.
Exemplo 1: Armazenagem de dados no PC via Software
de Setup MCT 10
1. Conecte um PC à unidade através de USB ou da
interface RS485.
2. Abra o Software de Setup MCT 10.
3. Selecione a porta USB ou a interface RS485.
4. Selecione copy.
5. Selecione a seção project.
6. Selecione paste.
7. Selecione save as.
Todos os parâmetros são armazenados nesse instante.
Exemplo 2: Transferência de dados do PC para o
conversor de frequência via Software de Setup MCT 10
1. Conecte um PC à unidade por meio da porta USB
ou por meio da interface RS485.
2. Abra o Software de Setup MCT 10.
3. Selecione Open – os arquivos armazenados são
exibidos.
Harmônicas VLT
A ferramenta de PC para cálculo de harmônicas do MCT 31
permite estimar facilmente a distorção de harmônicas em
uma determinada aplicação. Tanto a distorção de
harmônicas dos conversores de frequência Danfoss quanto
a dos conversores de frequência não Danfoss com
dispositivos de redução adicional de harmônicas como os
ltros Danfoss VLT® Advanced Harmonics Filters AHF
005/AHF 010 e os reticadores de 12-18 pulsos podem ser
calculadas.
MCT 31 também pode ser baixado de www.danfoss.com/
BusinessAreas/DrivesSolutions/Softwaredownload/.
2.8.2.3 Software de Cálculo de Harmônicas
(HCS)
HCS é uma versão avançada da ferramenta de cálculo de
harmônicas. Os resultados calculados são comparados com
normas relevantes e podem ser impressos posteriormente.
Para obter mais informações, consulte www.danfoss-
-hcs.com/Default.asp?LEVEL=START
Manutenção
2.9
Modelos de conversores de frequência Danfoss de até 90
kW são livres de manutenção. Conversor de frequência de
alta potência (classicados como 110 kW ou mais)
possuem telas do ltro integradas que necessitam de
limpeza periódica pelo operador, dependendo da
exposição a poeira e contaminantes. Os intervalos de
manutenção para os ventiladores de resfriamento (aproximadamente 3 anos) e capacitores (aproximadamente 5
anos) são recomendados na maioria dos ambientes.
2.9.1 Armazenagem
Como todos os equipamentos eletrônicos, os conversores
de frequência devem ser armazenados em um local seco. A
formação periódica (carregamento do capacitor) não é
necessário durante a armazenagem.
Recomenda-se manter o equipamento selado em sua
embalagem até a instalação.
34 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3 Integração de Sistemas
Este capítulo descreve as considerações necessárias
integrar o conversor de frequência em um projeto de
sistema. O capítulo está dividido em três seções:
Capétulo 3.1 Condições Operacionais Ambiente
•
Condições operacionais do ambiente para o
conversor de frequência, incluindo:
- Ambiente.
- Gabinetes.
- Temperatura.
- Derating.
- Outras considerações.
Capétulo 3.2 Proteção de EMC, harmônicas e de
•
fuga para o terra
Entrada (regeneração) do conversor de frequência
para a grade de potência, incluindo:
- Potência.
- Harmônicas.
- Monitoramento.
- Outras considerações.
Capétulo 3.4 Integração com a rede elétrica
•
Conectar ao conversor de frequência no lado da
rede elétrica, incluindo:
- Potência.
- Harmônicas.
- Monitoramento.
- Cabeamento.
- Fusíveis.
- Outras considerações.
Capétulo 3.5 Integração do motor
•
Saída do conversor de frequência para o motor,
incluindo:
- Tipos de motor.
- Carga.
- Monitoramento.
- Cabeamento.
- Outras considerações.
Capétulo 3.6 Entradas e saídas adicionais,
•
capétulo 3.7 Planejamento mecânico
Integração da entrada e saída do conversor de
frequência para o projeto ideal do sistema,
incluindo:
- Combinação de conversor de
frequência/motor.
- Características do sistema.
- Outras considerações.
Um projeto de sistema abrangente antecipa as áreas de
problema potenciais enquanto implementa a combinação
mais efetiva dos recursos do conversor de frequência. As
informações a seguir fornecem orientações para o
planejamento e especicam um sistema de controle motor
incorporando conversores de frequência.
Recursos operacionais fornecem uma gama de conceitos
de design, desde um simples controle da velocidade do
motor até um sistema de automação totalmente integrado
com, por exemplo:
Tratamento do feedback.
•
Relatório de status operacional.
•
Respostas de falha automatizadas.
•
Programação remota.
•
Um conceito de projeto completo inclui
detalhadas das necessidades e uso.
Tipos de conversores de frequência
•
Motores
•
Requisitos de rede elétrica
•
Programação e estrutura de controle
•
Comunicação serial
•
Tamanho, forma e peso do equipamento
•
Requisitos de cabos de controle e de energia;
•
tipo e comprimento
Fusíveis
•
Equipamento auxiliar
•
Transporte e armazenagem
•
Consulte capétulo 3.10 Lista de
sistema para um guia prático para seleção e projeto.
Entender os recursos e as opções de estratégia podem
otimizar um projeto de sistema e, possivelmente, evitar
introduzir componentes ou funcionalidades redundantes.
vericação de design do
especicações
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 35

Integração de Sistemas
3.1 Condições Operacionais Ambiente
3.1.1 Umidade
Embora o conversor de frequência possa operar adequadamente em umidade alta (umidade relativa de até 95%), a
33
condensação deve ser evitada. Existe o risco
condensação quando o conversor de frequência estiver
mais frio que o ar ambiente úmido. A umidade do ar
também podem condensar nos componentes eletrônicos e
causar curtos circuitos. A condensação ocorre em unidades
sem energia. Instale um aquecedor de gabinete quando
condensação for possível devido à condições ambiente.
Evite instalação em áreas sujeitas a geada.
VLT® Refrigeration Drive FC 103
•
•
•
especíco de
•
A temperatura do ar máxima para inserir o
gabinete nunca deve exceder 40 °C (104 °F).
A temperatura média diurna/noturna não deve
exceder 35 °C (95 °F).
Monte a unidade para permitir a passagem livre
do uxo de ar de resfriamento pelas aletas de
resfriamento. Consulte capétulo 3.7.1 Espaço livre
para a montagem correta dos espaços livres.
Forneça os requisitos de espaçamento livre
mínimo frontal e traseiro para o uxo de ar de
resfriamento. Consulte as instruções de utilização
para saber os requisitos de instalação
apropriados.
Alternativamente, o funcionamento do conversor de
frequência em modo de espera (com a unidade conectada
à rede elétrica) reduz o risco de condensação.
de que a dissipação de energia é suciente para manter o
circuito do conversor de frequência isento de umidade.
Certique-se
3.1.2 Temperatura
Os limites máximos e mínimos de temperatura ambiente
são especicados para todos os conversores de frequência.
Evitar temperaturas ambiente extremas prolonga a vida útil
do equipamento e maximiza a conabilidade geral do
sistema. Siga as recomendações indicadas para obter o
máximo desempenho e vida útil do equipamento.
Embora os conversores de frequência possam
•
operar em temperaturas de até -10 °C, a
operação correta com carga nominal é garantida
somente a 0 °C ou mais.
Não exceda o limite de temperatura máxima.
•
A vida útil dos componentes eletrônicos diminui
•
em 50% a cada 10 °C quando operados acima da
temperatura de projeto.
Até mesmo os dispositivos com características
•
nominais de proteção IP54, IP55 ou IP66 devem
seguir as faixas de temperatura ambiente especi-
cadas.
Poderá ser necessário condicionamento adicional
•
dor ar do gabinete ou do local de instalação.
3.1.3 Resfriamento
Os conversores de frequência dissipam a potência na
forma de calor. As recomendações a seguir são necessárias
para o resfriamento ecaz das unidades.
3.1.3.1 Ventiladores
O conversor de frequência é equipado com ventiladores
integrados para assegurar o resfriamento ideal. O
ventilador principal força o uxo de ar nas aletas de
resfriamento do dissipador de calor, assegurando
resfriamento do ar interno. Algumas potências têm um
pequeno ventilador secundário próximo do cartão de
controle, assegurando que o ar interno seja circulado para
evitar pontos quentes.
A temperatura interna no conversor de frequência controla
o ventilador principal. A velocidade aumenta gradualmente
junto com a temperatura, reduzindo o ruído e o consumo
de energia quando a necessidade é baixa e garantindo
resfriamento máximo quando houver necessidade. O
controle do ventilador pode ser adaptado via
parâmetro 14-52 Controle do Ventilador para acomodar
qualquer aplicação, também para proteger contra efeitos
negativos da refrigeração em climas frios. Em caso de
excesso de temperatura dentro do conversor de
frequência, ele faz derate da frequência de chaveamento e
padrão. Consulte capétulo 5.1 Derating para obter mais
informações.
3.1.3.2 Cálculo de uxo de ar requerido
para resfriamento do conversor de
frequência
O uxo de ar necessário para resfriar um conversor de
frequência ou múltiplos conversores de frequência em um
gabinete, pode ser calculado da seguinte maneira:
1. Determina as perdas de energia na saída máxima
para todos os conversores de frequência das
tabelas de dados em capétulo 7 Especicações.
2. Adicionar valores de perda de energia a todos os
conversores de frequência que possam operar ao
mesmo tempo. A soma resultante é o calor Q a
ser transferido. Multiplique o resultado com o
fator f, ler do Tabela 3.1. Por exemplo, f = 3,1 m3 x
K/Wh ao nível do mar.
36 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3. Determinar a temperatura máxima do ar que
entra no gabinete metálico. Subtraia essa
temperatura da temperatura necessária dentro do
gabinete, por exemplo 45 °C (113 °F).
4. Dividir o total da etapa 2 pelo total da etapa 3.
O cálculo é expresso pela fórmula:
f xQ
V =
Ti − T A
onde
uxo de ar em m3/h
V =
f = fator em m3 x K/Wh
Q = calor a ser transferido em W
Ti = temperatura dentro do gabinete em °C
TA = temperatura ambiente °C
f = cp x ρ (calor especíco do ar x densidade do ar)
AVISO!
Calor de ar especíco (cp) e densidade do ar (ρ) não são
constantes, mas dependem da temperatura, umidade e
pressão atmosférica. Portanto, dependem de altitude
acima do nível do mar.
Tabela 3.1 mostra os valores típicos do fator f, calculado
para diferentes altitudes.
Altitude
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Calor especíco do arcpDensidade do arρFator
[m] [kJ/kgK]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
[kg/m3] [m3⋅K/Wh]
f
3.1.4 Sobretensão Gerada pelo Motor
A tensão CC no barramento CC aumenta quando o motor
funciona como um gerador. Essa situação pode ocorrer de
2 maneiras:
A carga aciona o motor quando o conversor de
•
frequência for operado em uma frequência de
saída constante. Isso é referido como uma carga
de revisão.
Durante a desaceleração, se a inércia da carga for
•
alta e o tempo de desaceleração do conversor de
frequência estiver programado para um valor
curto.
O conversor de frequência não pode regenerar a energia
de volta à entrada. Portanto, se limitar a energia aceita do
motor quando programado para ativar autoramping. Se a
sobretensão ocorrer durante a desaceleração, o conversor
de frequência tenta isso prolongando automaticamente o
tempo de desaceleração. Se isso não tiver êxito ou se a
carga acionar o motor ao operar com frequência constante,
o conversor desliga e exibe uma falha quando um nível de
tensão do barramento CC crítico for atingido.
3.1.5 Ruído Acústico
O ruído acústico do conversor de frequência provém de
três fontes:
Bobinas do barramento CC (circuito intermediário)
•
Obstrução do ltro de RFI
•
Ventiladores Internos
•
Consulte Tabela 7.40 para saber as características nominais
de ruído acústico.
3 3
Tabela 3.1 Fator f, calculado para diferentes altitudes
Exemplo
Qual é o uxo de ar necessário para resfriar 2 conversores
de frequência (perdas de calor de 295 W e 1.430 W)
funcionando simultaneamente, montado em um gabinete
com um pico de temperatura ambiente de 37 °C?
A soma das perdas de calor de ambos os
•
conversores de frequência é 1.725 W.
Multiplicando 1.725 W por 3,3 m3 x K/Wh fornece
•
5.693 m x K/h.
Subtraindo 37 °C de 45 °C fornece 8 °C (=8 K).
•
Dividindo 5693 m x K/h por 8 K fornece: 711,6
•
m3h.
uxo de ar for necessário no CFM, use a conversão 1
Se o
m3/h = 0,589 CFM.
Para o exemplo acima, 711, 6 m3/h = 418,85 CFM.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 37
3.1.6 Vibração e Choque
O conversor de frequência foi testado de acordo com um
procedimento baseado nas IEC 68-2-6/34/35 e 36. Esses
testes submetem a unidade a forças de 0,7 g na faixa de
18 a 1.000 Hz de forma aleatória em três sentidos durante
duas horas. Todos os conversores de frequência Danfoss
estão em conformidade com os requisitos que correspondem a essas condições quando a unidade é montada
na parede ou no piso, como também em painéis ou
parafusados na parede ou no piso.
3.1.7 Atmosferas agressivas
3.1.7.1 Gases
Gases corrosivos como sulfeto de hidrogênio, cloro ou
amônia podem danicar os componentes elétricos e
mecânicos do conversor de frequência. Contaminação do

Integração de Sistemas
VLT® Refrigeration Drive FC 103
ar de refrigeração também pode causar decomposição
gradual de faixas e vedações da porta do PCB. Contaminantes agressivos estão frequentemente presentes em
usinas de tratamento de esgoto ou piscinas. Um sinal claro
de atmosfera agressiva é cobre corroído.
33
Em atmosfera agressivas, gabinetes IP restritos são
recomendados junto com placas de circuito revestidas de
maneira conforme. Consulte Tabela 3.2 para saber os
valores do revestimento conforme.
AVISO!
O conversor de frequência vem por padrão com
revestimento classe 3C2 das placas de circuitos. Por
solicitação, revestimento classe 3C3 está disponível.
Classe
Tipo de
gás
Sal
marinho
Óxidos de
enxofre
Sulfeto de
hidrogênio
Cloro
Cloreto de
hidrogênio
Fluoreto
de
hidrogênio
Amônia
Ozônio
Nitrogênio
Tabela 3.2 Características nominais da classe de revestimento
conforme
1) Os valores máximos são valores de pico transientes que não
devem exceder 30 minutos por dia.
Unidade
n/a Nenhum Névoa de sal Névoa de sal
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3.1.7.2 Exposição à poeira
A instalação de conversores de frequência em ambientes
com grande exposição à poeira geralmente é inevitável. A
poeira afeta as unidades montadas na parede ou na
estrutura com características nominais de proteção IP55 ou
IP66 e também dispositivos montados no gabinete com
características nominais de proteção IP21 ou IP20.
Considere os três aspectos descritos a seguir quando os
conversores do frequência estiverem instalados nesses
ambientes.
Resfriamento reduzido
A poeira forma depósitos na superfície do dispositivo e
dentro de placas de circuito e componentes eletrônicos.
3C1 3C2 3C3
Valor
Valor
médio
máximo
1)
3
0,1 0,3 1,0 5,0 10
3
0,01 0,1 0,5 3,0 10
3
0,01 0,1 0,03 0,3 1,0
3
0,01 0,1 0,5 1,0 5,0
3
0,003 0,01 0,03 0,1 3,0
3
0,3 1,0 3,0 10 35
3
0,01 0,05 0,1 0,1 0,3
3
0,1 0,5 1,0 3,0 9,0
Valor
médio
Valor
máximo
1)
prejudicam a transferência térmica ao ar ambiente,
reduzindo a capacidade de resfriamento. Os componentes
cam mais quentes, o que causa envelhecimento
prematuro dos componentes eletrônicos e a vida útil da
unidade diminui. Depósitos de poeira no dissipador de
calor na parte de trás da unidade diminuem a vida útil da
unidade.
Ventiladores de resfriamento
O uxo de ar de resfriamento a unidade é produzido por
ventiladores de resfriamento, geralmente localizados na
parte traseira do dispositivo. Os rotores do ventilador têm
pequenos rolamentos em que poeira pode penetrar e
atuar como abrasivo. Poeira no rolamentos causa danos no
rolamento e falha do ventilador.
Filtros
Conversores de frequência de alta potência são equipados
com ventiladores de resfriamento que expelem ar quente
do interior do dispositivo. Acima de um determinado
tamanho, esses ventiladores são equipados com esteiras de
ltro. Esses ltros podem entupir rapidamente quando
forem usados em ambientes muito empoeirados. Medidas
preventivas são necessárias nessas condições.
Manutenção periódica
Nas condições descritas acima, é aconselhável limpar o
conversor de frequência durante a manutenção periódica.
Remova a poeira do dissipador de calor e dos ventiladores
e limpe as esteiras dos ltros.
3.1.8 Denições de características nominais
de IP
Primeiro
dígito
Segundo
dígito
Contra penetração por
objetos estranhos
sólidos
0 (não protegido) (não protegido)
1
≥50 mm de diâmetro
2 12,5 mm de diâmetro Dedos
3 2,5 mm de diâmetro Controle em Cascata
4
≥1,0 mm de diâmetro
5 Protegido de poeira Fio
6 Vedado contra poeira Fio
Contra penetração de
água com efeito nocivo
0 (não protegido) –
1 Fuga cai na vertical –
2 Cai a um ângulo de 15º –
3 Água borrifada –
4 Água salpicada –
5 Jatos de água –
6 Jatos de água potentes –
7 Imersão temporária –
8 Imersão de longo termo –
Mais informações
especicamente para
Contra o acesso a
peças perigosas por
Parte de trás da mão
Fio
Esses depósitos atuam como camadas de isolação e
38 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
Contra penetração por
objetos estranhos
sólidos
A Parte de trás da mão
Primeira
letra
Letra extra
Tabela 3.3 Denições IEC 60529 para características nominais
de IP
B Dedos
C Controle em Cascata
D Fio
Mais informações
especicamente para
H Dispositivo de alta
tensão
M Dispositivo em
movimento durante o
teste de água
S Dispositivo parado
durante o teste de água
W Condições climáticas –
Contra o acesso a
peças perigosas por
–
–
–
3.1.8.1 Opcionais e características nominais
do gabinete
é a conformidade perfeita ao EMC e
cabeamento dos ltros integrados.
Opcionais externos
•
- Os ltros de RFI opcionais externos que
são instalados na saída do conversor de
frequência provocam uma queda de
tensão. Na prática, isso signica que a
tensão de rede completa não está
presente na entrada do conversor de
frequência e pode ser necessário um
conversor de classicação maior. O
comprimento máximo do cabo de
motor em conformidade com a faixa de
limites do EMC de 1–50 m. Os custos
são causados por material cabeamento
e montagem. O desempenho do EMC
não é testado.
AVISO!
Para garantir a operação livre de interferência-do
conversor de frequência/sistema do motor, sempre use
um ltro de RFI de categoria C1.
3 3
Os conversores de frequência Danfoss estão disponíveis
com 3 características nominais de proteção diferentes:
IP00 ou IP20 para instalação em gabinete.
•
IP54 ou IP55 para montagem local.
•
IP66 para condições ambiente críticas, como
•
umidade extremamente alta (ar) ou altas concentrações de poeira ou gases agressivos.
3.1.9 Interferência de Radiofrequência
O objetivo principal na prática é obter sistemas que
operem de maneira estável sem interferência de radiofrequência entre os componentes. Para atingir um nível alto
de imunidade, use conversores de frequência com ltros
de RFI de alta qualidade. Use os ltros de Categoria C1
especicados na EN 61800-3 que estão em conformidade
com os limites da Classe B do padrão geral EN 55011.
Coloque noticações de advertência no conversor de
frequência se os ltros de RFI não corresponderem à
Categoria C1 (Categoria C2 ou menor). A responsabilidade
para a etiquetagem adequada é do operador.
Na prática, há 2 abordagens para ltros de RFI:
Integrado no equipamento
•
- Filtros integrados ocupam espaço no
gabinete mas eliminam custos adicionais
para instalação, conexão e material.
Entretanto, a vantagem mais importante
AVISO!
As unidades VLT® Refrigeration Drive FC 103 são
fornecidas como padrão com ltros de RFI integrados,
em conformidade com a categoria C1 (EN 61800-3) para
uso com sistemas de rede elétrica de 400 V e valor
nominal da potência de até 90 kW ou categoria C2 para
valor nominal da potência de 110 a 630 kW. As unidades
FC 103 possuem conformidade com a C1 com cabos de
motor blindados de até 50 m ou a C2 com cabos de
motor blindados de até 150 m. Consulte Tabela 3.4 para
obter detalhes..
3.1.10 Conformidade de isolação galvânica
e PELV
Garantir a proteção contra choque elétrico, quando a
alimentação elétrica é tipo de tensão ultrabaixa protetiva
(PELV) e a instalação atende as normas da PELV locais e
nacionais aplicáveis.
Para manter a PELV nos terminais de controle, todas as
conexões deverão ser PELV, como o termistor deverá ter
isolamento reforçado/duplo. Todos os controles de
conversor de frequência Danfoss estão em conformidade
com a PELV (Tensão Extra Baixa Protetiva)(com exceção do
ponto Delta aterrado acima de 400 V).
A isolação galvânica (garantida) é obtida atendendo os
requisitos de isolação mais alta e fornecendo as distâncias
de espaço livre/perda gradativa de corrente relevantes.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 39

130BA056.10
1325 4
6
ba
M
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Estes requisitos encontram-se descritos na norma EN
61800-5-1.
O isolamento elétrico é fornecido como mostrado em
Ilustração 3.1. Os componentes descritos estão em conformidade com os requisitos da PELV e da isolação galvânica.
33
1 Fonte de alimentação (SMPS) incluindo isolação de sinal de V
CC, indicando a tensão de corrente intermediária.
2 Drive do gate para os IGBTs
3 Transdutores de corrente
4 Acoplador óptico, módulo de freio
5 Inrush interno, RFI e circuitos de medição de temperatura.
6 Relés personalizados
a Isolação galvânica para o opcional de backup de 24 V
b Isolação galvânica para a interface de barramento padrão
RS485
Ilustração 3.1 Isolação Galvânica
Instalação em altitudes elevadas
ADVERTÊNCIA
SOBRETENSÃOInstalações que excedem os limites de
altitudes elevadas podem não estar em conformidade
com os requisitos PELV. A isolação entre os componentes
e as peças críticas pode não ser suciente. Há um risco
de sobretensão. Para reduzir o risco de sobretensão, use
dispositivos de proteção externos ou isolação galvânica.
Para instalações em altitudes elevadas, entre em contato
com Danfoss em relação à conformidade PELV.
380–500 V (gabinetes A, B e C): Acima de 2.000 m
•
(6.500 pés)
380–500 V (gabinetes D, E e F): Acima de 3.000 m
•
(9.800 pés)
525–690 V: Acima de 2.000 m (6.500 pés)
•
Proteção de EMC, harmônicas e de fuga
3.2
para o terra
3.2.1 Aspectos Gerais das Emissões EMC
Conversores de frequência (e outros dispositivos elétricos)
geram campos magnéticos ou eletrônicos que podem
interferir em seus ambientes. A compatibilidade eletromagnética (EMC) desses efeitos depende da potência e das
características harmônicas do dispositivo.
A falta de controle de interação entre os dispositivos
elétricos em um sistema pode prejudicar a compatibilidade
e
danicar a operação conável. Interferência poderá
tomar a forma de:
Distorção de harmônicas de rede elétrica.
•
Descargas eletrostáticas.
•
Flutuações rápidas de tensão.
•
Interferência de alta frequência.
•
Dispositivos elétricos geram interferência e são afetados
pela interferência gerada por outras fontes.
Geralmente, a transiente por faísca elétrica ocorre em
frequências na faixa de 150 kHz a 30 MHz. Interferência em
suspensão no ar proveniente do sistema do conversor de
frequência na faixa de 30 MHz a 1 GHz é gerada pelo
inversor, cabo de motor e motor.
As correntes capacitivas do cabo de motor acopladas a um
alto dU/dt da tensão do motor geram correntes de fuga,
como mostrado em Ilustração 3.2.
O uso de um cabo de motor blindado aumenta a corrente
de fuga (consulte Ilustração 3.2) porque cabos blindados
têm capacitância mais alta em relação ao ponto de
aterramento que cabos não-blindados. Se a corrente de
fuga não for ltrada, ela causará maior interferência na
rede elétrica na faixa de frequência de rádio abaixo de 5
MHz aproximadamente. Uma vez que a corrente de fuga
(I1) é direcionada de volta para a unidade por meio da
malha (I3), haverá em princípio somente um pequeno
campo eletromagnético (I4) a partir do cabo de motor
blindado, consulte Ilustração 3.2.
A malha reduz a interferência irradiada mas aumenta a
interferência de baixa frequência na rede elétrica. Conecte
a blindagem do cabo de motor ao gabinete metálico do
conversor de frequência, bem como ao gabinete do motor.
A melhor maneira de fazer isso é usando braçadeiras de
malha de blindagem integradas para evitar extremidades
de malha torcidas (rabichos). Rabichos aumenta a
impedância da blindagem em frequências mais altas, o que
reduz o efeito de blindagem e aumenta a corrente de fuga
(I4).
40 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Integração de Sistemas Guia de Design
Se for usado cabo blindado para relé, cabos de controle,
interface de sinal e freio, monte a blindagem no gabinete
em ambas as extremidades. No entanto, em algumas
situações é necessário romper a blindagem para evitar
loops de corrente.
Ao colocar a blindagem em uma placa de montagem do
conversor de frequência, use uma placa metálica para
conduzir as correntes da blindagem de volta à unidade.
Além disso, garanta um bom contato elétrico da placa de
montagem, por meio dos parafusos de montagem com o
gabinete do conversor de frequência.
Quando cabos não blindados são usados, alguns requisitos
de emissão não são cumpridos, embora a maioria dos
requisitos de imunidade o sejam.
Para reduzir o nível de interferência de todo o sistema
(unidade e instalação), use cabo de motor e cabo do freio
tão curtos quanto possível. Evite colocar cabos com nível
de sinal sensível junto com o cabo do freio e do motor.
Especialmente a eletrônica de controle gera interferência
nas frequências de rádio acima de 50 MHz (em suspensão
no ar).
3 3
1 Fio terra 3 Alimentação de rede elétrica CA 5 Cabo de motor blindado
2 Blindagem 4 Conversor de frequência 6 Motor
Ilustração 3.2 Geração de correntes de fuga
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 41

Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.2.2 Resultados de teste de EMC (Emissão)
Os seguintes resultados de testes foram obtidos utilizando um sistema com um conversor de frequência (com opcionais, se
for o caso), um cabos de controle blindado, uma caixa de controle com potenciômetro, bem como um motor e o seu
respectivo cabo blindado.
33
Tipo do ltro
de RFI
Normas
e
requisitos
EN/IEC 61800-3 Categoria C1
H1
1,1–22 kW 220–240 V 50 150 150 Não Sim N/A
1,1–45 kW 200–240 V 50 150 150 Não Sim Sim
1,1–90 kW 380–480 V 50 150 150 Não Sim Sim
H2/H5
1,1–22 kW 220–240 V Não Não 25 Não Não N/A
1,1–3,7 kW 200–240 V Não Não 5 Não Não Não
5,5–45 kW 200–240 V Não Não 25 Não Não Não
1,1–7,5 kW 380–480 V Não Não 5 Não Não Não
11–90 kW 380–480 V Não Não 25 Não Não Não
HX
1,1–90 kW 525–600 V Não Não Não Não Não Não
EN 55011 Classe B
Residências,
comércio e
indústrias leves
Ambiente
inicial
Residencial e
Escritório
Emissão conduzida Emissão irradiada
Comprimento de cabo [m] Comprimento de cabo [m]
Classe A Grupo
1
Ambiente
industrial
Categoria C2
Ambiente
inicial
Residencial e
Escritório
Classe B Grupo
2
Ambiente
industrial
Categoria C3
Segundo
ambiente
Industrial
Classe B
Residências,
comércio e
indústrias leves
Categoria C1
Ambiente inicial
Residencial e
Escritório
Classe A Grupo
1
Ambiente
industrial
Categoria C2
Ambiente
inicial
Residencial e
Escritório
Categoria C3
Classe B
Grupo 2
Ambiente
industrial
Segundo
ambiente
Industrial
Tabela 3.4 Resultados de teste de EMC (Emissão)
HX, H1 ou H2 está
HX - Nenhum ltro de EMC instalado no conversor de frequência (somente para unidades de 600 V)
H1 – Filtro de EMC integrado. Atende Classe A1/B.
H2 - Sem ltro de EMC adicional. Atende Classe A2.
H5 – Versões marítimas. Atendem os mesmos níveis de emissões que as versões H2.
denido no código do tipo, pos. 16 - 17 para ltros de EMC.
42 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3.2.3 Requisitos de Emissão
A norma para produtos de EMC para conversores de
frequência dene 4 categorias (C1, C2, C3 e C4) com
requisitos de emissão e imunidade especicados. Tabela 3.5
indica a denição das 4 categorias e a classicação
equivalente de EN 55011.
Classe de
Categoria Denição
C1 Conversores de frequência
instalados no Ambiente inicial
(residencial e escritório) com
tensão de alimentação inferior a
1.000 V.
C2 Conversores de frequência
instalados no ambiente inicial
(residencial e escritório) com
tensão de alimentação inferior a
1.000 V, que não são conectados
nem móveis e são destinados a ser
instalados e colocados em funcionamento por um prossional.
C3 Conversores de frequência
instalados no segundo ambiente
(industrial) com tensão de
alimentação inferior a 1.000 V.
C4 Conversores de frequência
instalados no segundo ambiente
com tensão de alimentação igual
ou superior a 1.000 V ou corrente
nominal igual ou superior a 400 A
ou destinados para uso em
sistemas complexos.
Tabela 3.5 Correlação entre IEC 61800-3 e EN 55011
Quando normas de emissão (conduzida) genéricas forem
usadas, é exigido que os conversores de frequência
estejam em conformidade com os limites em Tabela 3.6.
emissão
equivalente em
EN 55011
Classe B
Classe A Grupo
1
Classe B Grupo
2
Sem linha
limite.
Faça um plano
de EMC.
Classe de
Ambiente
Ambiente inicial
(residência e
escritório)
Segundo
ambiente
(ambiente
industrial)
Tabela 3.6 Correlação entre normas de emissão genéricas e
EN 55011
Norma de emissão
genérica
EN/IEC 61000-6-3 Norma de
emissão para ambientes
residenciais, comerciais e
industriais leves.
EN/IEC 61000-6-4 Norma de
emissão para ambiente
industrial.
emissão
equivalente em
EN 55011
Classe B
Classe A Grupo 1
3.2.4 Requisitos de Imunidade
Os requisitos de imunidade para conversores de frequência
dependem do ambiente onde são instalados. Os requisitos
para ambiente industrial são mais rigorosos que os
requisitos para ambientes residencial e de escritório. Todos
os conversores de frequência Danfoss estão em conformidade com os requisitos para ambiente industrial.
Portanto, os conversores de frequência também estão em
conformidade com os requisitos inferiores para ambientes
domésticos e comerciais com ampla margem de
segurança.
Para documentar a imunidade contra transiente por faísca
elétrica, os testes de imunidade a seguir foram realizados
de acordo com as seguintes normas:
EN 61000-4-2 (IEC 61000-4-2): Descargas eletro-
•
státicas (ESD): Simulação de descargas
eletrostáticas de seres humanos.
EN 61000-4-3 (IEC 61000-4-3): Radiação de
•
campo magnético de incidência, modulado em
amplitude, simulação dos efeitos de radar e de
equipamentos de radiocomunicação bem como
de comunicações móveis.
EN 61000-4-4 (IEC 61000-4-4): Transiente por
•
faísca elétrica: Simulação da interferência
originada pelo chaveamento de um contator, relé
ou dispositivos semelhantes.
EN 61000-4-5 (IEC 61000-4-5): Transientes de
•
sobretensão: Simulação de transientes originados,
por exemplo, por instalações próximas atingidas
por raios.
EN 61000-4-6 (IEC 61000-4-6): Modo comum de
•
RF: Simulação do efeito de equipamento de
radiotransmissão, ligado aos cabos de conexão.
Consulte Tabela 3.7.
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 43

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Padrão básico
IEC 61000-4-42)
Critério de aceitação B B B A A
Faixa da tensão: 200–240 V, 380–500 V, 525–600 V, 525–690 V
Linha
33
Motor
Fios de controle
Barramento padrão 2 kV CM
Fios de relé 2 kV CM
Aplicação e opcionais de
Fieldbus
Cabo do LCP
24 V CC externa
Gabinete metálico
Tabela 3.7 Formulário de Imunidade EMC
1) Injeção na blindagem do cabo.
2) Valores normalmente obtidos por meio de teste.
2)
Ruptura
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
Sobretensão
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
3.2.5 Isolação do Motor
2)
1)
1)
1)
1)
1)
1)
2)
ESD
IEC
61000-4-2
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
8 kV AD
6 kV CD
•
Campo eletromagnético
irradiado
IEC 61000-4-3
10 V/m —
Máquina acionada
Tensão do modo
comum de RF
IEC 61000-4-6
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Os motores modernos para utilização com conversores de
frequência possuem um alto grau de isolamento para
contar para os IGBTs de alta eciência da nova geração
com alto dU/dt. Para adaptação em motores antigos,
assegurar a isolação ou atenuar com um ltro dU/dt ou, se
necessário, um ltro de onda senoidal.
Para comprimentos de cabo de motor ≤ que o
comprimento de cabo máximo indicado no
capétulo 7 Especicações, as características nominais de
isolação do motor indicadas em Tabela 3.8 são recomendáveis. Se um motor possuir características nominais de
isolação baixas, use um dU/dt ou um ltro de onda
senoidal.
Tensão de rede nominal [V] Isolação do motor [V]
UN≤420
420 V< UN≤ 500 Reforçado ULL=1600
500 V< UN≤ 600 Reforçado ULL=1800
600 V< UN≤ 690 Reforçado ULL=2000
Tabela 3.8 Isolação do Motor
Padrão U
LL
=1300
3.2.6 Correntes de Mancal do Motor
Para minimizar as correntes de mancal e de eixo, faça o
aterramento seguinte à máquina acionada:
Conversor de frequência
•
Motor
•
Estratégias atenuantes padrão
1. Utilize um mancal isolado.
2. Aplique procedimentos de instalação rigorosos:
2a Certique-se de que o motor e a carga
do motor estão alinhados.
2b Siga estritamente a orientação de
instalação de EMC.
2c Reforce o PE de modo que a
impedância de alta frequência seja
inferior no PE do que nos cabos
condutores de energia de entrada
2d Forneça uma boa conexão de alta
frequência entre o motor e o conversor
de frequência, por exemplo, com um
cabo blindado com conexão de 360° no
motor e no conversor de frequência.
2e Assegure-se de que a impedância do
conversor de frequência para o terra do
prédio é menor que a impedância de
aterramento da máquina. Isso pode ser
difícil para bombas.
2f Faça uma conexão do terra direta entre
o motor e a carga do motor (por
exemplo, bomba).
3. Diminua a frequência de chaveamento do IGBT.
4.
Modique a forma de onda do inversor, 60° AVM
vs. SFAVM.
44 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

175HA034.10
Integração de Sistemas Guia de Design
5. Instale um sistema de aterramento do eixo ou
utilize um acoplamento isolante
6. Aplique graxa lubricante que seja condutiva.
7. Se possível, utilize as congurações de velocidade
mínima.
8. Tente garantir que a tensão de rede que
balanceada em relação ao terra. Isso pode ser
difícil para IT, TT, TN-CS ou para sistemas com
ponto aterrado.
9. Use um ltro de onda senoidal ou dU/dt.
3.2.7 Harmônicas
Dispositivos elétricos com reticadores de diodo, como
Luzes uorescentes
•
Computadores
•
Copiadoras
•
Máquinas de fax
•
Diversos equipamentos de laboratório e
•
Sistemas de telecomunicações
•
pode adicionar distorção de harmônica a uma alimentação
de rede elétrica. Conversores de frequência usam uma
entrada de ponte de diodo, que também pode contribuir
com a distorção de harmônicas.
O conversor de frequência não puxa corrente de maneira
desigual da rede de energia. Essa corrente não senoidal
possui componentes que são múltiplos da frequência
fundamental da corrente. Esses componentes são
chamados de harmônicas. É importante controlar a
distorção de harmônica total na alimentação de rede
elétrica. Apesar das correntes harmônicas não afetarem
diretamente o consumo de energia elétrica, geram calor na
ação a em transformadores. Essa geração de calor pode
afetar outros dispositivos na mesma rede elétrica.
3.2.7.1 Análise de harmônicas
é, diversas correntes harmônicas IN com 50 ou 60 Hz como
a frequência fundamental.
As harmônicas não afetam diretamente o consumo de
energia, porém, aumentam as perdas de calor instalação
(transformador, indutores, cabos). Desse modo, em usinas
elétricas com alta porcentagem de carga de reticador, as
correntes harmônicas devem ser mantidas em um nível
baixo para evitar sobrecarga do transformador, indutores e
cabos.
Abreviações Descrição
f
1
I
1
U
1
Entrada Correntes harmônicas
U
n
n Ordem de harmônicas
Tabela 3.9 Abreviações relacionadas a harmônicas
Corrente
fundamental
Corrente I
Frequência
[Hz]
Tabela 3.10 Corrente não senoidal transformada
Corrente Correntes harmônicas
I
Corrente de entrada 1,0 0,9 0,4 0,2 < 0,1
Tabela 3.11 Correntes Harmônicas Comparadas com a Entrada
RMS Corrente
Ilustração 3.3 Bobinas de barramento CC
Frequência fundamental
Corrente fundamental
Tensão fundamental
Tensão harmônica
Correntes harmônicas (In)
(I1)
1
50 250 350 550
I
5
RMSI1I5I7I11-49
I
7
I
11
3 3
Diversas características do sistema elétrico de um prédio
determinam a contribuição exata de harmônicas do
conversor para o THD de uma fábrica e sua capacidade de
atender às normas IEEE. Generalizações sobre a contribuição de harmônicas de conversores de frequência em
AVISO!
Algumas das correntes harmônicas podem interferir em
equipamentos de comunicação conectados ao mesmo
transformador ou causar ressonância com capacitores de
correção do fator de potência.
uma determinada fábrica são difíceis. Quando necessário,
realize uma análise das harmônicas do sistema para
determinar efeitos no equipamento.
Um conversor de frequência recebe uma corrente não
senoidal da rede elétrica, o que aumenta a corrente de
entrada I
. Uma corrente não senoidal é transformada
RMS
por meio de uma análise de série Fourier e dividida em
correntes de ondas senoidais com diversas frequências, isto
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 45
Para garantir correntes harmônicas baixas, o conversor de
frequência é equipado com ltros passivos. Bobinas CC
reduzem a distorção harmônica total (THD) para 40%.
A distorção de tensão de alimentação de rede elétrica
depende da amplitude das correntes harmônicas,
multiplicada pela impedância de rede elétrica, para a
frequência em questão. A distorção de tensão total (THD) é

Integração de Sistemas
VLT® Refrigeration Drive FC 103
calculada com base nas harmônicas de tensão individuais
usando a seguinte fórmula:
2
THD =
2
+ U
U
+ ... + U
5
7
U1
2
N
Em conformidade com diversas orientações no nível de
sistema:
Os dados de correntes harmônicas em Tabela 3.13 são
fornecidos de acordo com a norma IEC/EN61000-3-12 com
referência à norma de produto sistemas de drive de
potência. Podem ser usados como base de cálculo da
33
3.2.7.2 Requisitos de Emissão de
Harmônicas
inuência das correntes harmônicas sobre o sistema de
fonte de alimentação e da documentação em conformidade com diretrizes regionais relevantes: IEEE 519 -1992;
Equipamento conectado à rede de alimentação pública
Opcional Denição
1 IEC/EN 61000-3-2 Classe A para equipamento
trifásico balanceado (somente para equipamento
prossional de até 1 kW de potência total).
2 IEC/EN 61000-3-12 Equipamento 16 A-75 A e
equipamento prossional a partir de 1 kW até 16 A
de corrente na fase.
Tabela 3.12 Normas de Emissão de Harmônicas
G5/4.
3.2.7.4 O efeito de harmônicas em um
sistema de distribuição de energia
No Ilustração 3.4 um transformador está conectado no lado
primário a um ponto de acoplamento comum PCC1, na
alimentação de tensão média. O transformador tem uma
impedância Z
acoplamento comum em que todas as cargas são
e alimenta diversas cargas. O ponto de
xfr
conectadas é o PCC2. Cada carga é conectada através de
3.2.7.3 Resultados de teste de Harmônicas
cabos que têm uma impedância Z1, Z2, Z3.
(Emissão)
Potências de até PK75 em T2 e T4 em conformidade com
IEC/EN 61000-3-2 Classe A. As potências de P1K1 a P18K
em T2 e até P90K em T4 estão em conformidade com
IEC/EN 61000-3-12, Tabela 4. Potências de P110 - P450 em
T4 também estão em conformidade com IEC/EN
61000-3-12 mesmo que isso não seja exigido, pois as
correntes estão acima de 75 A.
Tabela 3.13 descreve que a potência de curto circuito da
alimentação Ssc no ponto de interface entre a alimentação
do usuário e o sistema público (R
S
= 3 × R
SC
Real (típica) 40 20 10 8
Limite para
R
sce
Real (típica) 46 45
Limite para
R
sce
Tabela 3.13 Resultados de teste de Harmônicas (Emissão)
≥120
≥120
× U
SCE
× I
rede elétrica
Correntes harmônicas individuais In/I1 (%)
Fator de distorção de correntes harmônicas
= 3 × 120 × 400 × I
equ
I
5
40 25 15 10
THD PWHD
48 46
É responsabilidade do instalador ou usuário do
equipamento garantir, mediante consulta ao operador da
rede de distribuição, se necessário, que o equipamento
está conectado somente a uma alimentação com potência
de curto circuito Ssc igual ou maior que a especicada na
equação.
Para conectar outros tamanhos de potência na rede
pública de alimentação, consulte o operador da rede de
distribuição.
) é igual ou maior que:
sce
equ
I
7
(%)
I
11
I
13
Ilustração 3.4 Sistema de Distribuição Pequeno
Correntes harmônicas produzidas por cargas não lineares
causam distorção da tensão devido à queda de Tensão nas
impedâncias do sistema de distribuição. Impedâncias mais
altas resultam em níveis mais altos de distorção de tensão.
A distorção de corrente está relacionada ao desempenho
do dispositivo e à carga individual. A distorção de tensão
está relacionada ao desempenho do sistema. Não é
possível determinar a distorção de tensão no PCC sabendo
conhecendo o desempenho harmônico da carga. Para
prever a distorção no PCC, a conguração do sistema de
distribuição e as impedâncias relevantes devem ser
conhecidas.
Um termo usado comumente para descrever a impedância
de uma grade é a relação de curto circuito R
sce
. Essa
relação é denida como a proporção entre a potência
46 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Integração de Sistemas Guia de Design
aparente do curto circuito no PCC (Ssc) e a potência
nominal aparente da carga (S
S
ce
R
=
sce
S
equ
onde S
sc
O efeito negativo das harmônicas é duplo
•
•
Ilustração 3.5 Efeitos Negativos das Harmônicas
2
U
=
Z
alimentação
As correntes harmônicas contribuem para as
perdas do sistema (no cabeamento,
transformador).
A distorção de tensão harmônica causa distúrbio
em outras cargas e aumenta as perdas em outras
cargas.
e
S
equ
equ
= U × I
).
equ
3.2.7.5 Normas e Requisitos de Limitação
de Harmônicas
Os requisitos para a limitação de harmônicas podem ser:
Requisitos especícos da aplicação.
•
Normas de que devem ser observadas
•
Os requisitos especícos da aplicação estão relacionados a
uma instalação especíca onde houver motivos técnicos
para limitar as harmônicas.
Exemplo
Se um dos motores estiver conectado diretamente online e
o outro for alimentado através de um conversor de
frequência, um transformador de 250 kVA com dois
motores de 110 kW conectados serão sucientes. Se os
dois motores forem alimentados por conversor de
frequência, o transformador é subdimensionado. Usando
meios adicionais de redução de harmônicas dentro da
instalação ou escolhendo variantes de drive de harmônicas
baixas é possível os dois motores funcionarem com
conversores de frequência.
Há vários padrões, regulamentações e recomendações de
atenuação de harmônicas. Padrões diferentes são aplicados
a áreas geográcas e setores de mercado diferentes. Os
seguintes padrões são os mais comuns:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Consulte o Guia de Design do VLT® Advanced Harmonic Filter
AHF 005/AHF 010 para obter detalhes especícos de cada
norma.
Na Europa, o THDv máximo é 8% se a fábrica for
conectada por meio da grade pública. Se a fábrica tiver
seu próprio transformador, o limite é 10% THDv. O VLT
Refrigeration Drive FC 103 foi projetado para suportar 10%
THDv.
®
3.2.7.6 Atenuação de Harmônicas
Nos casos em que for necessária supressão adicional de
harmônicas, a Danfoss oferece uma ampla linha de
equipamento de atenuação. Esses são:
Drives de 12 pulsos.
•
Filtros AHF.
•
Drive de harmônicas baixas.
•
Filtros ativos.
•
A escolha da solução certa depende de diversos fatores:
A grade (distorção de segundo plano, desbalance-
•
amento da rede elétrica, ressonância e tipo de
alimentação (transformador/gerador).
Aplicação (perl de carga, número de cargas e
•
tamanho da carga).
Requisitos/regulamentações locais/nacionais (IEEE
•
519, IEC, G5/4 etc.).
Custo total de propriedade (custo inicial,
•
eciência, manutenção etc.).
Sempre considere a atenuação de harmônicas se o
transformador tem uma contribuição não linear de 40% ou
mais.
Danfoss oferece ferramentas para o cálculo de harmônicas,
consulte capétulo 2.8.2 Software de PC.
3.2.8 Corrente de fuga para o terra
Siga os códigos locais e nacionais com relação ao ponto de
aterramento de proteção de equipamento com corrente de
fuga acima de 3,5 mA.
A tecnologia do conversor de frequência implica no
chaveamento de alta frequência em alta potência. Isso gera
uma corrente de fuga na conexão do terra.
Uma corrente de fuga para o terra é composta por várias
contribuições e depende de diversas congurações do
sistema, incluindo:
Filtragem de RFI.
•
Comprimento de cabo de motor.
•
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 47

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Blindagem do cabo de motor.
•
Potência do conversor de frequência.
•
Fio de aterramento (terminal 95) com seção
•
transversal de pelo menos 10 mm2.
Dois os de aterramento separados, em confor-
•
midade com as regras de dimensionamento.
Consulte EN/IEC61800-5-1 e EN50178 para obter mais
33
informações.
Usando RCDs
Onde forem usados dispositivos de corrente residual
(RCDs), também conhecidos como disjuntores para a
corrente de fuga à terra (ELCBs), atenda o seguinte:
Use RCDs do tipo B, que conseguem detectar
•
correntes CA e CC.
Use RCDs com atraso para impedir falhas
•
decorrentes de correntes transientes do terra.
Dimensione os RCDs de acordo com a
Ilustração 3.6 A inuência do comprimento de cabo de motor
e do tamanho da potência na corrente de fuga. Tamanho de
potência a > tamanho de potência b
•
conguração do sistema e considerações
ambientais.
A corrente de fuga inclui vários frequências originárias
tanto da frequência da rede elétrica quanto da frequência
de chaveamento. Se a frequência de chaveamento é
A corrente de fuga também depende da distorção da
detectada depende do tipo de RCD usado.
linha.
Ilustração 3.8 Principais Contribuições para a Corrente de Fuga
A quantidade de corrente de fuga detectada pelo RCD
depende da frequência de desativação do RCD.
Ilustração 3.7 Distorção da Linha Inuencia a Corrente de Fuga
Se a corrente de fuga exceder 3,5 mA, car em conformidade com a EN/IEC61800-5-1 (norma de produto de
sistema de drive de potência) exige cuidado especial.
Reforce o aterramento com os seguintes requisitos de
conexão do ponto de aterramento de proteção:
48 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Extended product
Motor system
Drive system (PDS)
Complete drive module (CDM)
Infeed
section
Auxiliaries Auxiliaries Motor
Motor starter
contactors, soft starters, ...
Motor control system = CDM or starter
Driven equipment
Trans-
mission
Load
machine
Basic
drive
module
(BDM)
Mains
and
mains
cable
130BE604.11
Integração de Sistemas Guia de Design
3 3
3.3
A norma EN 50598 Ecodesign para sistemas de drive de potência, starters do motor, eletrônica de potência e suas aplicativos
acionados fornecem orientações para avaliação da eciência energética dos conversores de frequência.
A norma fornece um método neutro para determinar as classes de eciência e as perda de energia em carga total e em
carga parcial. A norma permite a combinação de qualquer motor com qualquer conversor de frequência.
Ilustração 3.9 Inuência da frequência de corte de RCD na
corrente de fuga
Eciência no uso da energia
Ilustração 3.10 Sistema de Drive de potência (PDS) e Módulo de Drive Completo (CDM)
Auxiliares: Filtro de harmônicas avançado AHF 005, AHF 010, Reator de Linha MCC 103, Filtro de Onda Senoidal MCC 101,
Filtro dU/dt MCC 102.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 49

T
f
100%
50%
50% 90%
25%
0%
0%
130BE605.10
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.3.1 Classes IE e IES
Módulos de drive completos (CDM)
De acordo com a norma EN 50598-2, o módulo de drive
completo (CDM) compreende o conversor de frequência,
33
sua seção de alimentação e seus auxiliares.
Classes de eciência energética do CDM:
IE0 = abaixo da última geração.
•
IE1 = de última geração.
•
IE2 = acima da última geração.
•
Os conversores de frequência Danfoss atendem a classe de
eciência energética IE2. A classe de eciência energética é
denida no ponto nominal do CDM.
Sistemas de drive de potência (PDS)
Um sistema de drive de potência (PDS) consiste em um
módulo de drive completo (CDM) e um motor.
Classes de eciência energética do PDS:
IES0 = Abaixo da última geração.
•
IES1 = De última geração.
•
IES2 = Acima da última geração.
•
Dependendo da
por um conversor de frequência Danfoss VLT® geralmente
atendem a classe de eciência energética IES2.
A classe de eciência energética é denida no ponto
nominal do PDS e pode ser calculada com base no CDM e
nas perdas do motor.
eciência do motor, motores acionados
T Torque [%]
f Frequência [%]
Ilustração 3.11 Pontos operacionais do conversor de
frequência em conformidade com a EN 50598-2
Consulte www.danfoss.com/vltenergyeciency para a perda
de energia e dados de eciência do conversor de
frequência em pontos de utilização especicados em
Ilustração 3.11.
Utilize a aplicação Danfoss ecoSmart para calcular as
classes de eciência IE e IES. A aplicação está disponível
em ecosmart.danfoss.com.
3.3.2 Dados de perda de energia e dados
de eciência
A perda de energia e a eciência de um conversor de
frequência dependem da conguração e do equipamento
auxiliar. Para obter uma conguração especíca da perda
de energia e dos dados de eciência, use a ferramenta
DanfossDanfoss ecoSmart.
Os dados da perda de energia são fornecidos em % da
potência de saída aparente nominal e são determinados
em conformidade com a EN 50598-2. Quando os dados de
perda de energia são determinados, o conversor de
frequência usa as congurações de fábrica, exceto para os
dados do motor que são necessários para o funcionamento
do motor.
Exemplo de dados disponíveis
O exemplo a seguir mostra a perda de energia e os dados
de eciência de um conversor de frequência com as
seguintes características:
Valor nominal da potência de 55 kW, tensão
•
nominal a 400 V.
Potência aparente nominal Sr, 67,8 kVA.
•
Potência de saída nominal, P
•
Eciência nominal, ηr, 98,3%.
•
Ilustração 3.12 e Ilustração 3.13 mostram a perda de energia
e as curvas de eciência. A velocidade é proporcional à
frequência.
, 59,2 kW.
CDM
50 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

130BD930.11
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0 10 20 30 40 50 60 70 80 90 100
n [%]
P
L,CDM
(freq,load)
[%]
1
2
3
130BD931.11
n [%]
0 20 40 60 80 100
100.00
98.00
96.00
94.00
92.00
90.00
η
CDM (freq,load)
[%]
1
2
3
130BE107.10
25
20
15
10
5
0
0 2 4 6 8 10
[kHz]
[%]
1
2
3
Integração de Sistemas Guia de Design
1 100% da carga
2 50% da carga
3 25% da carga
Ilustração 3.12 Dados da perda de energia do conversor de
frequência. Perdas relativas ao CDM (P
velocidade (n) [% da velocidade nominal].
L, CDM
) [%] versus
frequência de chaveamento
A frequência de chaveamento inuencia as perdas de
magnetização no motor e as perdas de chaveamento no
conversor de frequência, como mostrado em
Ilustração 3.14.
3 3
1 Motor e conversor de frequência
2 Somente motor
3 Somente o conversor de frequência
1 100% da carga
2 50% da carga
3 25% da carga
Ilustração 3.13 Dados de eciência do conversor de
frequência. Eciência do CDM (η
velocidade (n) [% da velocidade nominal].
CDM(freq, carga)
Interpolação da perda de energia
Determine a perda de energia em um ponto operacional
arbitrário usando uma interpolação bidimensional.
3.3.3 Perdas e eciência de um motor
A eciência de um motor funcionando em 50–100% da
velocidade nominal do motor e em 75–100% do torque
nominal é praticamente constante. Isto é válido quando a
conversor de frequência controla o motor ou quando o
motor funciona conectado diretamente à rede elétrica.
A eciência depende do tipo do motor e do nível da
magnetização.
Para obter mais informações sobre tipos de motor,
consulte o folheto de tecnologia do motor em www.vlt-
-drives.danfoss.com.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 51
Ilustração 3.14 Perdas [%] em relação à frequência de
chaveamento [kHz]
AVISO!
Um conversor de frequência produz perdas harmônicas
adicionais no motor. Essas perdas diminuem quando a
frequência de chaveamento diminui.
3.3.4 Perdas e eciência de um sistema de
drive de potência
) [%] versus a
Para estimar as perdas de energia em diferentes pontos de
operação em um sistema de drive de potência, some as
perdas de energia no ponto de operação de cada
componente do sistema:
Conversor de frequência.
•
Motor.
•
Equipamento auxiliar.
•
Integração com a rede elétrica
3.4
3.4.1 Congurações de rede elétrica e
efeitos de EMC
Existem diversos tipos de sistemas de rede elétrica CA para
alimentação de energia a conversores de frequência. Cada
um afeta as características de EMC do sistema. Os sistemas
TN-S de cinco os são considerados melhores para EMC,
enquanto o sistema de TI isolado é o menos
recomendável.

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Tipo de
sistema
Sistemas de
rede elétrica
TN
TN-S Um sistema de cinco os com condutores neutro
33
TN-C Um sistema de quatro os com um condutor
Sistemas de
rede elétrica
TT
Sistema de
rede elétrica
de TI
Tabela 3.14 Tipos de sistema de rede elétrica CA
Descrição
Existem dois tipos de sistemas de distribuição de
rede elétrica TN: TN-S e TN-C.
(N) e ponto de aterramento de proteção (PE)
separados. Fornece as melhores propriedades de
EMC e evita a transmissão de interferência.
comum para neutro e ponto de aterramento de
proteção (PE) por todo o sistema. O condutor
combinado de neutro e ponto de aterramento de
proteção resulta em características de EMC
inadequadas.
Um sistema de quatro os com condutor neutro
aterrado e aterramento individual das unidades
do conversor de frequência. Apresenta boas
características de EMC quando aterrado
corretamente.
Um sistema isolado de quatro os com condutor
neutro aterrado ou não através de uma
impedância.
Padrão Denição
EN 61000-2-2, EN
61000-2-4, EN 50160
EN 61000-3-2,
61000-3-12
EN 50178 Monitora equipamentos eletrônicos para
Tabela 3.15 Normas de design EN de qualidade da rede
elétrica
Dene os limites da tensão de rede
observados em grades de energia públicas
e industriais.
Regula a interferência de rede elétrica
gerada por dispositivos conectados.
uso em instalações elétricas.
3.4.2.3 Conversores de frequência livres de
interferência
Todo conversor de frequência gera interferência de rede
elétrica. Normas atuais denem apenas faixas de
frequência de até 2 kHz. Alguns conversores alternam a
interferência de rede elétrica na região acima de 2 kHz,
que não é tratada pela norma e, os rotulam como livres de
interferência. Os limites dessa região estão atualmente
sendo estudados. Conversores de frequência não alternam
interferência de rede elétrica.
3.4.2.4 Como ocorre a interferência de rede
elétrica
3.4.2 Interferência de rede elétrica de baixa
frequência
3.4.2.1 Alimentação de rede elétrica não
senoidal
A tensão de rede raramente é uma tensão senoidal
uniforme com amplitude e frequência constantes. Isso
ocorre parcialmente devido a cargas que puxam correntes
não senoidais da rede elétrica ou que apresentam características não lineares, como:
Computadores.
•
Aparelhos de TV.
•
Fontes de alimentação de chaveamento.
•
Lâmpadas econômicas.
•
Conversores de frequência.
•
Desvios são inevitáveis e permissíveis dentro de
determinados limites.
3.4.2.2 Conformidade com diretivas EMC
Na maior parte da Europa, a base da avaliação objetiva da
qualidade da rede elétrica é a Lei de Compatibilidade
Eletromagnética de Dispositivos (EMVG). Estar em conformidade com essa regulamentação garante que todos os
dispositivos e redes conectados a sistemas de distribuição
elétrica atendem seus propósitos sem causar problemas.
A distorção de interferência de rede elétrica da forma de
onda senoidal causada pelas correntes de entrada pulsante
é chamada geralmente de harmônicas. Derivada da análise
Fourier, é avaliada até 2,5 kHz, correspondente à 50ª
harmônica da frequência da rede elétrica. Os reticadores
de entrada ou conversores de frequência geram essa típica
forma de interferência harmônica na rede elétrica. Quando
conversores de frequência estão conectados a sistemas de
rede elétrica de 50 Hz, a 3ª harmônica (150 Hz), a 5ª
harmônica (250 Hz) ou a 7ª harmônica (350 Hz) mostram
os efeitos mais fortes. O conteúdo geral de harmônicas é
chamado de distorção de harmônica total (THD).
3.4.2.5 Efeitos da interferência de rede
elétrica
Flutuações de tensão e harmônicas são duas formas de
interferência de rede elétrica de baixa frequência. Possuem
aparência diferente na origem do que em qualquer outro
ponto no sistema da rede elétrica quando houver uma
carga conectada. Assim, diversas inuências devem ser
determinadas coletivamente ao avaliar os efeitos da
interferência de rede elétrica. Estas inuências incluem a
alimentação, a estrutura e as cargas da rede elétrica.
Advertências de sub tensão e maiores perdas funcionais
podem ocorrer como resultado da interferência de rede
elétrica.
52 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
Advertências de sub tensão
Medições de tensão incorretas devido a distorção
•
da tensão de rede elétrica senoidal.
Causa medições de energia incorretas uma vez
•
que apenas a medição de RMS real considera o
conteúdo de harmônicas.
Maiores perdas
Harmônicas reduzem a potência ativa, a potência
•
aparente e a potência reativa.
Distorce cargas elétricas resultando em interfe-
•
rência audível em outros dispositivos ou, no pior
caso, até mesmo na destruição.
Reduz a vida útil de dispositivos como resultado
•
do aquecimento.
AVISO!
O conteúdo de harmônicas excessivo adiciona uma carga
em equipamentos de correção do fator de potência e
pode até causar sua destruição. Por esse motivo, forneça
afogadores para equipamento de correção do fator de
potência quando houver a presença de conteúdo de
harmônicas em excesso.
3.4.3 Análise de interferência de rede
elétrica
Para evitar prejudicar a qualidade da energia da rede
elétrica, existem diversos métodos disponíveis para análise
de sistemas ou dispositivos que geram correntes
harmônicas. Programas de análise de rede elétrica, como
software de cálculo de harmônicas (HCS), analisam designs
de sistema de harmônicas. Contramedidas especícas
podem ser testadas com antecedência e garantir a
subsequente compatibilidade do sistema.
Afogadores de entrada ou afogadores de
•
barramento CC nos conversores de frequência.
Filtros passivos.
•
Filtros ativos.
•
Barramentos CC slim.
•
Drives de extremidade frontal ativa e harmônicas
•
baixas.
Reticadores com 12, 18 ou 24 pulsos por ciclo.
•
3.4.5 Interferência de Radiofrequência
Conversores de frequência geram interferência de radiofrequência (RFI) devido aos seus pulsos de corrente de
largura variável. Conversores de frequência e cabos de
motor irradiam esses componentes e os conduzem para o
sistema da rede elétrica.
Filtros de RFI são usados para reduzir essa interferência na
rede elétrica. Fornecem imunidade a ruídos para proteger
dispositivos contra interferência conduzida por alta
frequência. Também reduzem a interferência emitida para
o cabo de rede elétrica ou a irradiação do cabo de rede
elétrica. Os
até um nível especicado. Filtros integrados geralmente
são equipamento padrão nominal para imunidade
especíca.
ltros são destinados a limitar a interferência
AVISO!
Todos os conversores de frequência da VLT
Refrigeration DriveFC 103 são equipados com afogadores
de interferência de rede elétrica como padrão.
3.4.6 Classicação do local de operação
®
3 3
Para sistemas de análise de rede elétrica, acessehttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START para
download de software.
AVISO!
A Danfoss possui um alto nível de experiência em EMC e
fornece análise de EMC com avaliação detalhada ou
cálculos de rede elétrica para clientes, além de cursos de
treinamento, seminários e ocinas.
3.4.4 Opções para redução da interferência
de rede elétrica
De modo geral, a interferência de rede elétrica de
conversores é reduzida limitando a amplitude de correntes
pulsadas. Essa redução melhora o fator de potência λ
(lambda).
Vários métodos são recomendados para evitar harmônicas
de rede elétrica:
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 53
Conhecer os requisitos do ambiente onde o conversor de
frequência será operado é um dos fatores mais
importantes na conformidade com EMC.
3.4.6.1 Ambiente 1/Classe B: Residenciais
Locais de operação conectados à grade elétrica pública de
baixa tensão, incluindo áreas industriais leves, são classicados como Ambiente 1/Classe B. Não possuem seus
próprios transformadores de distribuição de alta tensão ou
média tensão para um sistema de rede elétrica separado.
As classicações do ambiente são aplicáveis a interiores e
exteriores de prédios. Alguns exemplos comuns são:
Áreas comerciais.
•
Construções residenciais.
•
Restaurantes.
•
Estacionamentos de carros.
•
Instalações de entretenimento.
•

Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.4.6.2 Ambiente 2/Classe A: Industrial
Ambientes industriais não conectados à grade da rede
pública. Ao invés, possuem seus próprios transformadores
de distribuição de alta tensão ou média tensão. As classi-
33
cações do ambiente são aplicáveis a interiores e exteriores
de prédios.
São denidos como industriais e caracterizados por
condições eletromagnéticas especícas:
A presença de dispositivos cientícos, médicos ou
•
industriais.
Comutação de grandes cargas indutivas e
•
capacitivas.
Ocorrência de fortes campos magnéticos (por
•
exemplo, devido a altas correntes).
3.4.6.3 Ambientes especiais
Em áreas com transformadores de média tensão
claramente demarcados de outras áreas, o usuário decide
qual tipo de ambiente
é responsável por garantir a compatibilidade eletromagnética necessária para permitir a operação livre de
problemas de todos os dispositivos dentro das condições
especicadas. Alguns exemplos de ambientes especiais são:
Shoppings.
•
Supermercados.
•
Postos de combustíveis.
•
Prédios comerciais.
•
Armazéns.
•
classicar sua instalação. O usuário
3.4.8 Correção do Fator de Potência
Equipamento de correção do fator de potência serve para
reduzir a alternação de fases (φ) entre a tensão e a
corrente para mover o fator de potência mais próximo da
unidade (cos φ). Isso é necessário quando um grande
número de cargas indutivas, como motores ou lastros de
lâmpada, são usadas em um sistema de distribuição
elétrica. Conversores de frequência com um barramento CC
isolado não puxam potência reativa do sistema de rede
elétrica nem geram qualquer alternação de correção do
fator de potência de fase. Possuem um cos φ de aproximadamente 1.
Por esse motivo, motores controlados por velocidade não
precisam ser considerados ao dimensionar equipamento de
correção do fator de potência. No entanto, a corrente
puxada pelo equipamento de correção de fase é elevada
porque o conversor de frequência gera harmônicas. O fator
de carga e de calor nos capacitores aumenta conforme o
número de geradores de harmônicas aumentar. Como
resultado, conecte afogadores no equipamento de correção
do fator de potência. Os afogadores também evitam
ressonância entre indutâncias de carga e a capacitância.
Conversores com cos φ <1 também exigem afogadores no
equipamento de correção do fator de potência. Também
considere o nível de potência reativa maior, para
dimensões do cabo.
3.4.9 Atraso da potência de entrada
Para garantir que o circuito de supressão de surto de
entrada desempenhe corretamente, observe um atraso de
tempo entre aplicações sucessivas de potência de entrada.
3.4.6.4 Rótulos de advertência
Tabela 3.16 mostra o tempo mínimo que deve ser
Quando um conversor de frequência não estiver em
conformidade com a Categoria C1, forneça um aviso de
advertência. Isso é responsabilidade do usuário. A
eliminação de interferência é baseada nas classes A1, A2 e
B na EN 55011. O usuário é nalmente responsável pela
classicação adequada de dispositivos e pelo custo de
remediar problemas de EMC.
permitido entre aplicações de potência de entrada.
Tensão de entrada [V] 380 415 460 600
Tempo de espera [s] 48 65 83 133
Tabela 3.16 Atraso da potência de entrada
3.4.10 Transientes da rede
3.4.7 Uso com fonte de entrada isolada
Transientes são curtos picos de tensão na faixa de alguns
A maioria da potência de serviços públicos têm como
referência o terra. Apesar de não ser uso comum nos
Estados Unidos, a potência de entrada pode ser uma fonte
isolada. Todos os conversores de frequência da Danfoss
podem ser usados com fonte de entrada isolada, bem
como com linhas de potência com referência no
aterramento do terra.
milhares de volts. Podem ocorrem em todos os tipos de
sistemas de distribuição, incluindo ambientes industriais e
residenciais.
Raios são uma causa comum de transiente. No entanto,
também são causados ao comutar grandes cargas ligadas e
desligadas ou ao comutar outro equipamento de
transientes da rede, como equipamento de correção do
fator de potência. Transientes também podem ser
54 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
causados por curto-circuitos, por desarme de disjuntores
em sistemas de distribuição de energia e por acoplamento
indutivo entre cabos paralelos.
A norma EN 61000-4-1 descreve as formas desses
transientes e quanta energia contêm. Há várias maneiras
para limitar os efeitos prejudiciais de transientes.
Retentores de surto preenchidos com gás e lacunas de
faíscas fornecem o primeiro nível de proteção contra
transientes de alta energia. Para a proteção de segundo
nível, a maioria dos dispositivos eletrônicos, incluindo
conversores de frequência, usam resistores dependentes de
tensão (varistores) para atenuar transientes.
3.4.11 Operação com um gerador de
espera
Use sistemas de reserva de energia, quando for necessária
a operação contínua em caso de falha de rede elétrica.
Também são usados em paralelo com a grade de energia
pública para obter maior potência de rede elétrica. Isso é
prática comum para unidades combinadas de calor e
potência, aproveitando a alta
forma de conversão de energia. Quando um gerador
fornece energia de reserva, a impedância da rede elétrica
geralmente é maior do que quando a energia é puxada da
grade pública. Isso causa o aumento da distorção de
harmônica total. Com o design correto, geradores podem
operar em um sistema contendo dispositivos que induzem
harmônicas.
Ao projetar um sistema, considere o uso de um gerador
reserva.
Quando o sistema é alternado entre a operação
•
da rede elétrica e do gerador, a carga de
harmônica geralmente aumenta.
Os designers devem calcular ou medir o aumento
•
na carga harmônica para garantir que a qualidade
da energia está em conformidade com as regulamentações para prevenir problemas de
harmônicas e falha de equipamento.
Evite o carregamento assimétrico do gerador pois
•
pode causar perdas aumentadas e pode
aumentar a distorção de harmônica total.
Um escalonador de 5/6 do enrolamento do
•
gerador atenua a 5ª e a 7ª harmônicas, porém,
permite o aumento da 3ª harmônica. Um
escalonador de 2/3 reduz a 3ª harmônica.
Quando possível, o operador deve desconectar o
•
equipamento de correção do fator de potência,
pois causa ressonância no sistema.
Afogadores ou ltros de absorção ativa e cargas
•
resistivas operadas em paralelo podem atenuar
harmônicas.
eciência obtida com essa
Cargas capacitivas operadas em paralelo criam
•
uma carga adicional devido a efeitos de
ressonância imprevisíveis.
Uma análise mais precisa é possível usando software de
análise de rede elétrica, como o HCS. Para sistemas de
análise de rede elétrica, acesse http://www.danfoss-hcs.com/
Default.asp?LEVEL=START para download de software.
Ao operar dispositivos indutores de harmônicas, as cargas
máximas com base na operação de instalação livre de
problemas são mostradas na tabela de limites de
harmônicas.
Limites de harmônicas
Reticadores B2 e B6 ⇒máximo de 20% da carga
•
nominal do gerador.
Reticador B6 com afogador⇒máximo 20–35% da
•
carga nominal do gerador, dependendo da
composição.
Reticador B6 controlado⇒máximo de 10% da
•
carga nominal do gerador.
Integração do motor
3.5
3.5.1 Considerações na seleção do motor
O conversor de frequência pode induzir tensão elétrica em
um motor. Considere, portanto, os seguintes efeitos sobre
o motor ao corresponder o motor ao conversor de
frequência:
Tensão de isolação
•
Tensão do mancal
•
Tensão térmica
•
3.5.2 Filtros dU/dt e de onda senoidal
Filtros de saída fornecem benefícios a alguns motores para
reduzir a tensão elétrica e permitir maior comprimento de
cabo. Opções de saída incluem ltros de onda senoidal
(também chamados de ltros LC) e ltros dU/dt. Os ltros
dU/dt reduzem a taxa de elevação rápida do pulso. Filtros
de onda senoidal suavizam os pulsos da tensão para
convertê-los em uma tensão de saída praticamente
senoidal. Com alguns conversores de frequência, ltros de
onda senoidal estão em conformidade com a EN 61800-3
RFI categoria C2 para cabos de motor não blindados,
consulte capétulo 3.8.3 Filtros de onda senoidal.
Para obter mais informações sobre opções de
onda senoidal e dU/dt, consulte capétulo 6.2.6 Filtros de
onda senoidal, capétulo 3.8.3 Filtros de onda senoidal e
capétulo 6.2.7 Filtros dU/dt.
Para obter mais informações sobre códigos de compra de
ltros de onda senoidal e dU/dt, consulte
ltro de
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 55

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Integração de Sistemas
VLT® Refrigeration Drive FC 103
capétulo 3.8.3 Filtros de onda senoidal e capétulo 6.2.7 Filtros
3.5.5 Blindagem do cabo de motor
dU/dt.
Conversores de frequência geram pulsos quadrados nas
3.5.3 Aterramento correto do motor
saídas. Esses pulsos contém componentes de alta
frequência (estendendo para a faixa de gigahertz), que
33
O aterramento correto do motor é imperativo para a
segurança pessoal e para atender aos requisitos elétricos
causa irradiação indesejada do cabo de motor. Cabos de
motor blindados reduzem essa irradiação.
de EMC para equipamento de baixa tensão. O aterramento
correto é necessário para o uso ecaz de blindagens e
ltros. Os detalhes de design devem ser vericados para a
implementação correta de EMC.
3.5.4 Cabos de Motor
Os objetivos da blindagem são:
Reduzir a magnitude da interferência irradiada.
•
Melhorar a imunidade de interferência em
•
dispositivos individuais.
A blindagem captura os componentes de alta frequência e
Recomendações de cabo de motor e especicações são
fornecidas em capétulo 7.5 Especicações de Cabo.
os conduz de volta à origem da interferência, nesse caso, o
conversor de frequência. Cabos de motor blindados
também fornecem imunidade a interferência de fontes
Todos os tipos de motores trifásicos assíncronos padrão
externas próximas.
podem ser usados com uma unidade de conversor de
frequência. A
conguração de fábrica é para a rotação no
sentido horário, com a saída do conversor de frequência
conectado da seguinte maneira:
Até mesmo boa blindagem não elimina completamente a
irradiação. Componentes de sistema localizados em
ambientes de irradiação devem operar sem degradação.
3.5.6 Conexão de Vários Motores
Ilustração 3.15 Conexão de terminal para rotação em sentido
horário e anti-horário
Mude o sentido da rotação alternando duas fases no cabo
de motor ou mudando a conguração de
parâmetro 4-10 Sentido de Rotação do Motor.
AVISO!
Podem surgir problemas na partida e em baixos valores
de RPM se os tamanhos dos motores forem muito
diferentes, porque a resistência ôhmica relativamente
alta do estator nos motores menores requer uma tensão
mais alta na partida e em baixos valores de RPM.
O conversor de frequência pode controlar diversos motores
ligados em paralelo. Ao usar conexão do motor paralela,
observe o seguinte:
O modo VCC+ pode ser utilizado em algumas
•
aplicações.
O consumo total de corrente dos motores não
•
deve ultrapassar a corrente de saída nominal I
do conversor de frequência.
Não use conexão de junta comum para longo
•
comprimento de cabo, consulte Ilustração 3.17.
O comprimento de cabo de motor total especi-
•
cado em Tabela 3.4 é válido desde que os cabos
paralelos sejam mantidos curtos (menos que 10
m cada), consulte Ilustração 3.19 e Ilustração 3.20.
Considere a queda de tensão no cabo de motor,
•
consulte Ilustração 3.20.
Para cabos paralelos longos, use um ltro LC,
•
consulte Ilustração 3.20.
Para cabos longos sem conexão em paralelo,
•
consulte Ilustração 3.21.
INV
56 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

130BD774.10
130BD775.10
130BD776.10
130BD777.10
130BD778.10
130BD779.10
Integração de Sistemas Guia de Design
AVISO!
Quando motores estiverem conectados em paralelo,
programe parâmetro 1-01 Motor Control Principle para [0]
U/f.
Ilustração 3.16 Conexão de Junta Comum para Comprimento
de Cabo Curto
3 3
Ilustração 3.19 Cabos Paralelos com Carga
Ilustração 3.17 Conexão de Junta Comum para Comprimento
de Cabo Longo
Ilustração 3.18 Cabos Paralelos sem Carga
Ilustração 3.20 Filtro LC para cabos paralelos longos
Ilustração 3.21 Cabos longos em conexão em série
Consulte Tabela 7.7 para obter informações sobre compri-
mentos de cabo para múltiplas conexões do motor
paralelas.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 57

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.5.7 Proteção Térmica do Motor
O conversor de frequência fornece proteção térmica do
motor de várias maneiras:
3.5.8 Contator de saída
Apesar de não ser uma prática geralmente recomendada,
operar um contator de saída entre o motor e o conversor
de frequência não causa danos ao conversor de frequência.
O limite de torque protege o motor contra
33
•
sobrecarga independentemente da velocidade.
A velocidade mínima limita a faixa de velocidade
•
máxima operacional, por exemplo, entre 30 e
Fechar um contator de saída aberto anteriormente pode
conectar um conversor de frequência em funcionamento a
um motor parado. Isso pode causar com que o conversor
de frequência desarme e exiba uma falha.
50/60 Hz.
3.5.9 Eciência no uso da energia
A velocidade máxima limita a velocidade de saída
•
máxima.
Há entrada disponível para um termistor externo.
•
O relé térmico eletrônico (ETR) para motores
•
assíncronos simula um relé bimetálico com base
em medições internas. O ETR mede a corrente, a
velocidade e o tempo reais para calcular a
temperatura do motor e proteger o motor contra
superaquecimento emitindo uma advertência ou
cortando a energia do motor. As características
do ETR são mostradas em Ilustração 3.22.
Eciência do conversor de frequência
A carga do conversor de frequência não inui muito na sua
eciência.
Isso também signica que a eciência do conversor de
frequência não muda, mesmo ao escolher outras características U/f. No entanto, as características U/f inuem na
eciência do motor.
A eciência diminui um pouco quando a frequência de
chaveamento for
denida com um valor superior a 5 kHz.
A eciência também é ligeiramente reduzida se o cabo de
motor for maior que 30 m.
Cálculo da eciência
Calcule a eciência do conversor de frequência com cargas
diferentes com base em Ilustração 3.23. Multiplique o fator
neste gráco pelo fator de eciência especíco indicado
em capétulo 7.1 Dados Elétricos.
Ilustração 3.22 Características do relé térmico eletrônico
O eixo X mostra a relação entre I
eixo Y exibe o tempo em segundos antes de o ETR
desativar e desarmar. As curvas mostram a velocidade
nominal característica, no dobro da velocidade nominal e
em 0,2 x a velocidade nominal.
Em velocidade menor, o ETR desativa em um valor de
aquecimento menor devido ao resfriamento menor do
motor. Desse modo o motor é protegido de superaquecimento, mesmo em velocidade baixa. O recurso do ETR
calcula a temperatura do motor com base na corrente e
velocidade reais.
58 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
e I
motor
motor
Ilustração 3.23 Curvas de Eciência Típicas
nominal. O
Exemplo: Presuma um conversor de frequência de 55 kW,
380-480 V CA, com carga de 25% e 50% da velocidade. O
gráco exibe 0,97, a eciência nominal para um conversor
de frequência de 55 kW é de 0,98. Assim, a eciência real
é: 0,97 x 0,98=0,95.

Integração de Sistemas Guia de Design
Eciência do motor
A eciência de um motor conectado ao conversor de
frequência depende do nível de magnetização. A eciência
do motor depende do tipo do motor.
Na faixa de 75-100% do torque nominal, a
•
eciência do motor é praticamente constante
quando controlado pelo conversor de frequência
e também quando conectado diretamente à rede
elétrica.
A inuência da característica U/f em motores
•
pequenos é marginal. Entretanto, nos motores
acima de 11 kW as vantagens de eciência são
signicativas.
A frequência de chaveamento não afeta a
•
eciência de motores pequenos. Os motores
acima de 11 kW têm a sua eciência melhorada
em 1–2%. Isso se deve à forma senoidal da
corrente do motor quase perfeita em alta
frequência de chaveamento.
Eciência do sistema
Para calcular a eciência do sistema, multiplique a
eciência do conversor de frequência pela eciência do
motor.
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 59

Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.6 Entradas e saídas adicionais
3.6.1 Esquemático de ação
Quando conectado e programado corretamente, os terminais de controle fornecem:
Sinais de feedback, referência e outros sinais de entrada para o conversor de frequência.
33
•
Status de saída e condições de falha do conversor de frequência.
•
Relés para operar equipamento auxiliar.
•
Uma interface de comunicação serial.
•
24 V comum.
•
Os terminais de controle são programáveis para várias funções selecionando opções de parâmetro através do painel de
controle local (LCP) na frente da unidade ou em fontes externas. A maioria da ação de controle é fornecida pelo cliente,
exceto quando especicado no pedido da fábrica.
Ilustração 3.24 Esquemático de ação básica
A = analógica, D = digital
*Terminal 37 (opcional) é usado para STO. Para obter instruções de instalação de STO, consulte as Instruções de utilização do
Safe Torque O para Conversores de frequência VLT®.
**Não conectar a blindagem do cabo.
60 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3.6.2 Ligações do Relé
3 3
Relé
1 1 Comum
2 4 Comum
1 01–02 Freio desativado
2 04–05 Freio desativado
Ilustração 3.25 Saídas de relé 1 e 2, tensões máximas
Terminal
1)
Descrição
2 Normalmente aberto
Máximo 240 V
3 Normalmente fechado
Máximo 240 V
5 Normalmente fechado
Máximo 240 V
6 Normalmente fechado
Máximo 240 V
(normalmente aberto)
01–03 Freio (normalmente fechado)
(normalmente aberto)
04–06 Freio (normalmente fechado)
1) Para adicionar mais saídas de relé, instale o Módulo
opcional de relé VLT® MCB 105 ou o Módulo opcional de relé
VLT® MCB 113.
Para obter mais informações sobre relés, consulte
capétulo 7 Especicações e capétulo 8.3 Desenhos de
Terminal de Relé.
Para obter mais informações sobre opcionais de relé,
consulte capétulo 3.8 Opcionais e Acessórios.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 61

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.6.3 Conexão Elétrica Compatível com EMC
33
1 PLC 7 Motor, trifásico, e PE (blindado)
2 Conversor de frequência 8 Rede elétrica, trifásica, e PE reforçado (não blindado)
3 Contatorde saída 9 Fiação de controle (blindado)
4 Braçadeira de cabo 10
5 Isolamento do cabo (descascado)
6 Bucha de cabo
Equalização potencial mínimo 16 mm2 (0,025 pol)
Espaço livre entre cabos de controle, cabo de motor e cabo de
11
rede elétrica:
Mínimo 200 mm
Ilustração 3.26 Compatível-com EMC Conexão Elétrica
62 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Integração de Sistemas Guia de Design
Para obter mais informações sobre EMC, consulte
capétulo 2.5.18 Conformidade com o EMC e
capétulo 3.2 Proteção de EMC, harmônicas e de fuga para o
terra.
AVISO!
INTERFERÊNCIA DE EMC
Use cabos blindados para o motor e a ação de controle
e cabos separados para potência de entrada, ação do
motor e ação de controle. A falha em isolar a potência,
o motor e os cabos de controle pode resultar em
comportamento acidental ou desempenho reduzido. É
necessário espaço livre de no mínimo 200 mm (7,9 pol)
entre os cabos de controle, de potência e do motor.
3.7 Planejamento mecânico
3.7.1 Espaço livre
A instalação lado a lado é adequada para todos os
tamanhos de gabinete metálico, exceto ao usar um kit de
gabinete IP21/IP4X/TIPO 1 (consulte capétulo 3.8 Opcionais
e Acessórios ).
Espaço livre horizontal, kit de gabinete metálico IP21
Ao usar o kit de gabinete metálico IP21 nos tamanhos de
gabinete metálico A2 ou A3, garanta um espaço livre de
no mínimo 50 mm entre os conversores de frequência.
Espaço livre vertical
Para obter condições de resfriamento ideais, garanta
espaço livre para circulação de ar acima e abaixo do
conversor de frequência. Consulte Ilustração 3.28.
3 3
Espaço livre horizontal, IP20
Os tamanhos de gabinete metálico IP20 A e B podem ser
dispostos lado a lado sem espaço livre. No entanto, a
ordem de montagem correta é importante. Ilustração 3.27
mostra como montar corretamente.
NOTA
Para A2 e A3, garanta um espaço livre entre os conversores
de frequência de no mínimo 40 mm.
Tamanho
do
gabinete
metálico
a [mm] 100 200 225
b [mm] 100 200 225
Ilustração 3.28 Espaço livre vertical
A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
3.7.2 Montagem em Parede
Ao montar em uma parede plana, não é necessária uma
placa traseira.
Ao montar em uma parede desigual, use uma placa
traseira para garantir ar de resfriamento suciente acima
do dissipador de calor. Use a placa traseira apenas com os
gabinetes A4, A5, B1, B2, C1 e C2.
Ilustração 3.27 Montagem lado a lado correta sem espaço livre
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 63

130BA219.11
1
130BA392.11
2
1
3
4
Integração de Sistemas
33
1 Placa traseira
Ilustração 3.29 Montagem com placa traseira
Para conversores de frequência com características
nominais de proteção IP66, use uma arruela de bra ou
nylon para proteger o revestimento de epoxi.
1 Placa traseira
2 Conversor de frequência com gabinete metálico IP66
3 Placa traseira
4 Arruela de bra
Ilustração 3.30 Montagem com placa traseira para características nominais de proteção IP66
3.7.3 Acesso
Para planejar a acessibilidade ao cabeamento antes da
montagem, consulte os desenhos em capétulo 8.1 Desenhos
de Conexão de Rede Elétrica e capétulo 8.2 Desenhos de
Conexão do Motor.
VLT® Refrigeration Drive FC 103
3.8
Opcionais
Para saber os códigos de compra, consulte
capétulo 6 Código do Tipo e Seleção
Blindagem da rede elétrica
•
Filtros de RFI
•
Dispositivo de corrente residual (RCD)
Usa o método da estabilidade do núcleo para monitorar as
correntes de falha de aterramento e os sistemas aterrados
de alta resistência (sistemas TN e TT na terminologia IEC).
Há uma pré-advertência (50% do setpoint do alarme
principal) e um setpoint de alarme principal. Associado a
cada setpoint há um relé de alarme SPDT para uso externo,
que exige um transformador de corrente externo tipo
janela (fornecido e instalado pelo cliente).
•
•
•
•
•
Monitor de resistência de isolação (IRM)
Monitora a resistência de isolação em sistemas sem
aterramento (sistemas IT na terminologia IEC) entre os
condutores de fase do sistema e o terra. Há uma pré-
-advertência ôhmica e um setpoint de alarme principal do
nível de isolação. Associado a cada setpoint há um relé de
alarme SPDT para uso externo.
AVISO!
Somente um monitor de resistência de isolamento pode
ser conectado a cada sistema (IT) sem aterramento.
•
•
•
•
Opcionais e Acessórios
Blindagem Lexan® montada em frente a
terminais de entrada de energia e placa de
entrada para proteger contra contato acidental
quando a porta do gabinete estiver aberta.
O conversor de frequência possui ltro de RFI
Classe A2 como padrão. Se níveis adicionais de
RFI/proteção de EMC forem necessários, podem
ser obtidos com ltros de RFI classe A1 opcionais,
que fornecem supressão de interferência de
radiofrequência e eletromagnética de acordo com
EN 55011.
Integrado no circuito de Safe Torque O do
conversor de frequência.
O dispositivo IEC 60755 Tipo B monitora correntes
de falha de aterramento com CC pulsada e CC
pura.
Indicador gráco de barra de LED do nível de
corrente de falha de aterramento de 10-100% do
setpoint.
Falha de memória
Tecla TEST/RESET.
Integrado no circuito de Safe Torque O do
conversor de frequência.
Display de LCD de resistência de isolamento.
Falha de memória
Teclas INFO, TEST e RESET.
64 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
Fusíveis
Fusíveis são recomendados para proteção de
•
sobrecarga de corrente de ação rápida do
conversor de frequência. O fusível de proteção
limita os danos do conversor de frequência e
minimiza o tempo de serviço no caso de uma
falha. Fusíveis são necessários para atender a
certicação marítima.
Desconexão
Uma alavanca montada na porta permite a
•
operação manual de uma chave de desconexão
de energia para ativar e desabilitar energia para o
conversor de frequência, aumentando a
segurança durante a manutenção. A desconexão
é bloqueada com as portas do gabinete metálico
para evitar que sejam abertas enquanto ainda
houver energia aplicada.
Disjuntores
Um disjuntor pode ser desarmado remotamente,
•
mas devem ser reinicializado manualmente.
Disjuntores estão bloqueados com as portas do
gabinete metálico para evitar que sejam abertas
enquanto ainda houver energia aplicada. Quando
um disjuntor é adquirido como opcional, fusíveis
de ação rápida são também incluídos para
proteção de sobrecarga de corrente do conversor
de frequência.
Contatores
Um interruptor do contator controlado eletri-
•
camente permite ativação e desativação remota
de energia para o conversor de frequência. Se o
opcional de parada de emergência IEC for
encomendado, a Pilz Safety monitora um contato
auxiliar no contator.
Starter de motor manual
Fornecem energia trifásica para ventiladores elétricos de
resfriamento frequentemente necessários para motores
maiores. A energia para os starters é fornecida pelo lado
da carga de qualquer contator, disjuntor ou chave de
desconexão fornecido e pelo lado de entrada do ltro de
RFI classe 1 (opcional). A energia passa por um fusível
antes de cada starter do motor e está desligada quando a
energia de entrada para o conversor de frequência estiver
desligada. São permitidos até dois starters (um se for
encomendado um circuito protegido por fusível de 30 A).
Starters do motor são integrados no circuito de Safe
Torque O do conversor de frequência.
Os recursos da unidade incluem:
Chave de operação (liga/desliga).
•
Proteção de sobrecarga e curto-circuito com
•
função de teste.
Função reset manual.
•
Terminais de potência protegidos por fusível de 30 A
Energia trifásica correspondente à tensão de rede
•
de entrada para energizar equipamento auxiliar
de cliente.
Não disponível se forem selecionados dois
•
starters de motor manuais.
Os terminais estão desligados quando a energia
•
de entrada para o conversor de frequência estiver
desligada.
A energia para os terminais protegidos por fusível
•
é fornecida pelo lado da carga de qualquer
contator, disjuntor ou chave de desconexão
fornecido e pelo lado da entrada do ltro de RFI
Classe 1 (opcional).
Alimentação de 24 V CC
5 A, 120 W, 24 V CC.
•
Protegido contra sobrecorrente de saída,
•
sobrecarga, curtos-circuitos e superaquecimento.
Para energizar dispositivos acessórios fornecidos
•
pelo cliente, como sensores, E/S de PLC,
contatores, sondas de temperatura, luzes
indicadoras e/ou outros hardware eletrônicos.
Os diagnósticos incluem um contato CC-ok seco,
•
um LED verde para CC-ok e um LED vermelho
para sobrecarga.
Monitoramento da temperatura externa
Projetado para monitorar temperaturas de
•
componente de sistema externo, como enrolamentos e/ou rolamentos de motor. Inclui oito
módulos de entrada universal mais dois módulos
de entrada do termistor dedicados. Todos os 10
módulos estão integrados no circuito de parada
segura e podem ser monitorados por meio de
uma rede de eldbus (requer a aquisição de um
acoplador de módulo/barramento separado).
Encomende um opcional de freio de torque
seguro desligado para selecionar monitoramento
da temperatura externa.
Comunicação serial
VLT® PROFIBUS DP-V1 MCA 101
O PROFIBUS DP-V1 fornece ampla compatibi-
•
lidade, alto nível de disponibilidade, suporte para
todos os principais fornecedores de PLC e
compatibilidade com versões futuras.
Comunicação rápida e eciente, instalação
•
transparente, diagnóstico avançado e denição de
parâmetros e conguração automática dos dados
de processo via arquivo GSD.
Denição de parâmetros acíclica usando
•
PROFIBUS DP-V1, PROFIdrive ou máquinas de
estado de perl do FC Danfoss, PROFIBUS DP-V1,
Classe Mestre 1 e 2
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 65

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Códigos de compra:
•
- 130B1100 sem camada de verniz.
- 130B1200 revestido (Classe G3/ISA
S71.04-1985).
33
VLT® LonWorks para ADAP-KOOL® MCA 107
Troca contínua de mensagens entre vários proces-
•
sadores.
Permite a comunicação direta entre dispositivos
•
de rede individuais.
VLT® PROFINET MCA 120
O opcional de PROFINET oferece conectividade a redes
baseadas em PROFINET através do protocolo PROFINET. O
opcional é capaz de tratar uma única conexão com um
intervalo de pacotes real de até 1 ms em ambas as
direções.
Servidor da web integrado para diagnóstico
•
remoto e leitura de parâmetros básicos do
conversor de frequência.
Se determinadas advertências ou alarmes
•
ocorrerem ou forem eliminadas novamente, é
possível
para ser enviada para um ou mais destinatários.
TCP/IP para fácil acesso a dados de conguração
•
do conversor de frequência da Software de Setup
MCT 10.
Upload e download de arquivo por FTP
•
(Protocolo de Transferência de Arquivos).
Suporte de DCP (protocolo de descoberta e
•
conguração).
Mais opcionais
VLT® General Purpose I/O MCB 101
O opcional de E/S oferece um número estendido de
entradas e saídas de controle.
3 entradas digitais 0-24 V: Lógica 0<5 V; Lógica
•
1>10 V
2 entradas analógicas 0-10 V: Resolução de 10
•
bits sinal de mais.
2 saídas digitais NPN/PNP push-pull.
•
1 saída analógica 0/4–20 mA.
•
Conexão xada por mola.
•
Programações do parâmetro separadas.
•
Códigos de compra:
•
congurar uma noticação por e-mail
- 130B1125 sem camada de verniz.
- 130B1212 revestido (Classe G3/ISA
S71.04-1985).
®
Opcional de Relé MCB 105
VLT
Permite estender as funções do relé com três saídas de relé
adicionais.
Carga do terminal máxima: Carga resistiva CA 1:
•
240 V CA, 2 A, CA-15 .
Carga indutiva cos ф 0,4: 240 V CA, 0,2 A, CC-1.
•
Carga resistiva: 24 V CC, 1 A, CC-13 .
•
Carga indutiva: @cos ф 0,4: 24 V CC, 0,1 A.
•
Carga do terminal mínima: CC 5 V: 10 mA.
•
Velocidade de chaveamento máxima com carga
•
nominal/mínima: 6 min-1/20 s-1.
Códigos de compra:
•
- 130B1110 sem camada de verniz.
- 130B1210 revestido (Classe G3/ISA
S71.04-1985).
VLT® Opcional de E/S Analógica MCB 109
Este opcional de entrada/saída analógica é facilmente
encaixada no conversor de frequência para atualização
para desempenho e controle avançados usando as
entradas/saídas adicionais. Este opcional também atualiza o
conversor de frequência com uma alimentação de bateria
de reserva para o relógio instalado no conversor de
frequência. Isso fornece uso estável de todas as funções do
relógio do conversor de frequência como ações
temporizadas.
Três entradas analógicas, cada uma
•
tanto como entrada de tensão quanto de
temperatura.
Conexão de sinais analógicos de 0–10 V , bem
•
como entradas de temperatura PT1000 e NI1000.
Três saídas analógicas, cada uma congurável
•
como saídas de 0–10 V.
Incluído alimentação de reserva para a função
•
relógio padrão no conversor de frequência.
Geralmente, a bateria de reserva dura 10 anos,
dependendo ambiente.
Códigos de compra:
•
- 130B1143 sem camada de verniz.
- 130B1243 revestido (Classe G3/ISA
S71.04-1985).
VLT® Extended Relay Card MCB 113
O Cartão de relé estendido MCB 113 adiciona entradas/
saídas ao conversor de frequência para maior exibilidade.
7 entradas digitais.
•
2 saídas analógicas.
•
4 relés SPDT.
•
Atende às recomendações NAMUR.
•
congurável
66 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
Recurso de isolação galvânica.
•
Códigos de compra:
•
- 130B1164 sem camada de verniz.
- 130B1264 revestido.
VLT® Opcional de alimentação de 24 V CC MCB 107
Esse opcional é utilizado para conectar uma alimentação
CC externa para manter a seção de controle e qualquer
opção instalada ativa durante uma falha de alimentação.
Faixa da tensão de entrada: 24 V CC ±15%
•
(máximo 37 V em 10 s).
Corrente de entrada máxima: 2,2 A.
•
Comprimento de cabo máximo: 75 m.
•
Carga de capacitância de entrada: <10 uF.
•
Atraso na energização: <0,6 s.
•
Fácil de instalar em conversores de frequência em
•
máquinas existentes.
Mantém a placa de controle e os opcionais ativos
•
durante quedas de energia.
Mantém
•
energia.
Códigos de compra:
•
eldbuses ativos durante quedas de
- 130B1108 sem camada de verniz.
- 130B1208 revestido (Classe G3/ISA
S71.04-1985).
3.8.1 Opcionais de Comunicação
3.8.3 Filtros de onda senoidal
Quando um conversor de frequência controla um motor, é
possível ouvir ruído de ressonância do motor. Esse ruído,
resultante do projeto do motor, ocorre cada vez que uma
chave do inversor é ativada no conversor de frequência.
Dessa forma a frequência do ruído de ressonância
corresponde à frequência de chaveamento do conversor de
frequência.
Danfoss fornece um
o ruído do motor.
O ltro reduz o tempo de aceleração da tensão, da tensão
da carga de pico U
motor, o que signica que a corrente e a tensão tornam-se
quase senoidais. Desse modo, o ruído do motor é reduzido
ao mínimo.
O ripple de corrente nas bobinas do ltro de onda
senoidal também causa ruído. Resolva o problema
integrando o ltro a um gabinete ou similar.
ltro de onda senoidal para amortecer
e do ripple de corrente ΔI no
PEAK
3.8.4 Filtros dU/dt
Danfoss alimenta os ltros dU/dt que são ltros passa-
-baixa de módulo diferencial que reduzem a tensão de
pico de fase para fase no terminal do motor e reduzem o
tempo de subida até um nível que reduz a tensão
mecânica no isolamento dos enrolamentos do motor. Isso
é um problema especialmente com cabos de motor curtos.
3 3
VLT® PROFIBUS DP-V1 MCA 101
•
VLT® AK-LonWorks MCA 107
•
VLT® PROFINET MCA 120
•
Para obter mais informações, consulte capétulo 7 Especi-
cações.
3.8.2 Opcionais de Entrada/Saída, Feedback
e Segurança
VLT® General Purpose I/O Module MCB 101
•
VLT® Placa de relé MCB 105
•
VLT® Extended Relay Card MCB 113
•
Para obter mais informações, consulte capétulo 7 Especi-
cações.
Em comparação com
capétulo 3.8.3 Filtros de onda senoidal), ltros dU/dt têm
uma frequência de desativação acima da frequência de
chaveamento.
ltros de onda senoidal (consulte
3.8.5 Filtros de Harmônicas
O VLT® Advanced Harmonic Filter AHF 005 e AHF 010 são
ltros de harmônicas avançados que não devem ser
comparados com os ltros de harmônicas tradicionais. Os
ltros de harmônicas Danfoss foram especialmente
projetados para se ajustar aos conversores de frequência
Danfoss.
Conectando os ltros de harmônicas Danfoss AHF 005 ou
AHF 010 na frente de um conversor de frequência Danfoss,
a distorção total de correntes harmônicas gerada de volta
para a rede elétrica é reduzida para 5% e 10%.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 67

A
B
C
D
E
130BT323.10
B
A
E
C
D
130BT324.10
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.8.6 Kit de gabinete metálico IP21/NEMA
Tipo 1
IP20/IP4X superior/NEMA TIPO 1 é um elemento opcional
do gabinete metálico para unidades compactas IP20.
33
Se for usado o kit de gabinete metálico, uma unidade IP20
é atualizada para estar em conformidade com o gabinete
metálico IP21/4x superior/TIPO 1.
O IP4X superior pode ser aplicado a todas as variações FC
103 do IP20 padrão.
Ilustração 3.31 Gabinete metálico tamanho A2
A Tampa superior
B Borda
C Parte da base
D Tampa da base
E Parafuso(s)
Ilustração 3.32 Gabinete metálico tamanho A3
1. Coloque a tampa superior, como mostrado. Se for
utilizado um opcional A ou B, a borda deve ser
instalada para cobrir a entrada superior.
2. Coloque a parte C da base na parte inferior do
conversor de frequência.
3. Use as braçadeiras da sacola de acessórios para
apertar os cabos corretamente.
Furos para as buchas do cabo:
Tamanho A2: 2x M25 e 3xM32.
•
Tamanho A3: 3xM25 e 3xM32.
•
68 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

E
F
D
C
B
A
130BT620.12
130BT621.12
D
C
A
G
Integração de Sistemas Guia de Design
Tipo de gabinete
metálico
Altura A
[mm]
Largura B
[mm]
Profundidade C
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tabela 3.17 Dimensões
1) Se for usado o opcional A/B, a profundidade aumenta (ver
capétulo 7.9 Valor Nominal da Potência, Peso e Dimensões para
obter detalhes)
1)
[mm]
3 3
Ilustração 3.34 Gabinete metálico tamanhos B4, C3 e C4
A Tampa superior
B Borda
Ilustração 3.33 Tamanho do Gabinete Metálico B3
C Parte da base
D Tampa da base
E Parafuso(s)
F Tampa do ventilador
G Presilha superior
Tabela 3.18 Legenda para Ilustração 3.33 e Ilustração 3.34
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 69

PE U V W
130BD839.10
130BA138.11
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Quando o módulo opcional A e/ou módulo opcional B
for(em) utilizado(s), instale a borda (B) na cobertura
superior (A).
AVISO!
33
A instalação lado a lado não é possível quando for usado
o Kit de Gabinete Metálico IP21/ IP4X/TIPO 1
3.8.7 Filtros de modo comum
Núcleos de modo comum de alta frequência (Núcleos HF-
-CM) reduzem a interferência eletromagnética e eliminam
danos no mancal por descarga elétrica. São núcleos
magnéticos nanocristalinos especiais que apresentam
desempenho de ltragem superior em comparação com os
núcleos de ferrita comuns. O núcleo HF-CM age como um
indutor de modo comum entre fases e aterramento.
Ilustração 3.35 Núcleo HF-CM com Fases do Motor
Instalados em torno das três fases do motor (U, V, W), os
ltros de modo comum reduzem as correntes de modo
comum de alta frequência. Como resultado, a interferência
eletromagnética de alta frequência do cabo de motor é
reduzida.
O número de núcleos necessários depende do
comprimento de cabo de motor e da tensão do conversor
de frequência. Cada kit consiste em dois núcleos. Para
determinar o número de núcleos necessário, consulte
Tabela 3.19.
1)
Comprimento de cabo
[m] A e B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
Tabela 3.19 Número de Núcleos
1) Onde cabos mais longos forem necessários, empilhe núcleos HF-
-CM adicionais.
Tamanho do gabinete metálico
T2/T4 T7 T2/T4 T7 T7
Instale os núcleos HF-CM passando os 3 cabos de fases do
motor (U, V, W) através cada núcleo, como mostrado em
Ilustração 3.35.
3.8.8 Kit para Montagem Remota do LCP
O LCP pode ser movido para frente de um gabinete
metálico usando o kit integrado remoto. Aperte os
parafusos de xação com torque máximo de 1 Nm.
O gabinete metálico do LCP é classicado IP66.
Gabinete metálico IP66 front
Comprimento de cabo máxima entre o LCP e a
unidade 3 m
Comunicação padrão RS485
Tabela 3.20 Dados Técnicos
70 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Ilustração 3.36 Kit de LCP com LCP Gráco, Presilhas, Cabo de
3 m e Guarnição Código de Compra 130B1113

130BA200.10
130BA844.10
130BA845.10
A
B
Integração de Sistemas Guia de Design
Ilustração 3.37 Kit de LCP com LCP numérico, presilhas e
gaxeta Código de Compra 130B1114
3.8.9 Quadro de montagem para gabinetes
metálicos tamanhos A5, B1, B2, C1 e
C2
3 3
Ilustração 3.39 Suporte Inferior
Ilustração 3.38 Dimensões do Kit do LCP
Ilustração 3.40 Suporte Superior
Consulte as dimensões em Tabela 3.21.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 71

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Tamanho do
Gabinete Metálico
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
33
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tabela 3.21 Detalhes dos Quadros de Montagem
3.9 Interface Serial RS485
3.9.1 Visão Geral
RS485 é uma interface de barramento de par de os,
compatível com topologia de rede de perdas múltiplas.
Nós podem ser conectados como bus ou através de uma
queda de cabos de uma linha tronco comum. Um total de
32 nós podem ser conectados a um segmento de rede.
Repetidores dividem segmentos de rede, consulte
Ilustração 3.41.
AVISO!
Cada repetidor funciona como um nó dentro do
segmento em que está instalado. Cada nó conectado em
uma rede especíca deve ter um endereço do nó
exclusivo em todos os segmentos.
IP A [mm] B [mm] Código de
compra
Cada segmento deve estar com terminação em ambas as
extremidades; para isso use o interruptor de terminação
(S801) dos conversores de frequência ou um banco de
resistores de terminação polarizado. Use sempre par
trançado blindado (STP) para cabeamento de barramento e
siga boas práticas de instalação comuns.
A conexão do terra de baixa impedância da malha de
blindagem em cada nó é muito importante, inclusive em
altas frequências. Assim, conecte uma superfície grande da
blindagem ao aterramento, por exemplo, com uma
braçadeira de cabo ou uma bucha de cabo condutiva. É
possível que seja necessário aplicar cabos equalizadores de
potencial para manter o mesmo potencial de aterramento
ao longo da rede de comunicação, particularmente em
instalações com cabos longos.
Para prevenir descasamento de impedância, use sempre o
mesmo tipo de cabo ao longo da rede inteira. Ao conectar
um motor a um conversor de frequência, use sempre um
cabo de motor que seja blindado.
Comprimento Par trançado blindado (STP)
Impedância [Ω]
Comprimento
de cabo [m]
Tabela 3.22 Especicações de Cabo
120
Máximo 1200 (incluindo drop lines)
Máximo 500 de estação a estação
Ilustração 3.41 Interface do Barramento da RS485
72 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
130BB021.11
12 13 18 19 27 29 32
33
20
37
Remove jumper to enable Safe Stop
61
68
69 39 42 50 53 54 55
Integração de Sistemas Guia de Design
Parâmetros
Conguraçã
Função
Parâmetro 8-30
Protocolo FC*
Parâmetro 8-31
1*
Endereço
Parâmetro 8-32
9600*
Baud Rate
* = Valor padrão
Notas/comentários:
Selecione protocolo, endereço
e baud rate nos parâmetros
mencionados acima.
D na 37 é opcional.
Para evitar correntes de equalização potencial na tela, o
de acordo com Ilustração 3.24.
o
3 3
Ilustração 3.43 Terminais do cartão de controle
3.9.3 Terminação do Bus Serial da RS485
Faça a terminação do barramento da RS485 usando uma
rede de resistor nas duas extremidades. Para essa
nalidade, ajuste o interruptor S801 no cartão de controle
Tabela 3.23 Conexão de Rede da RS-485
3.9.2 Conexão de Rede
Um ou mais conversores de frequência podem ser
conectados a um controle (ou mestre) usando a interface
padronizada RS485. O terminal 68 é conectado ao sinal P
(TX+, RX+), enquanto que o terminal 69 é conectado ao
sinal N (TX-,RX-). Ver desenhos em
capétulo 3.6.1 Esquemático de ação.
Se houver mais de um conversor de frequência conectado
a um determinado mestre, use conexões paralelas.
Ilustração 3.42 Conexões Paralelas
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 73
para Ligado.
Programe o protocolo de comunicação para
parâmetro 8-30 Protocolo.
3.9.4 Cuidados com EMC
As seguintes precauções com EMC são recomendadas para
obter operação da rede RS485 isenta de interferências.
Observe os regulamentos locais e nacionais relevantes, por
exemplo, com relação à conexão do ponto de aterramento
de proteção. Mantenha o cabo de comunicação da RS485
distante dos cabos de motor e do resistor do freio para
evitar acoplamento do ruído de alta frequência de um
cabo para outro. Normalmente uma distância de 200 mm
(8 polegadas) é
maior distância possível entre os cabos, principalmente se
forem instalados em paralelo ao longo de grandes
distâncias. Se o cruzamento for inevitável, o cabo da RS485
deve cruzar com os cabos de motor em um ângulo de 90°.
suciente, mas é recomendável manter a

Fieldbus cable
90° crossing
130BE039.11
Minimum 200 mm (8 in)
STX LGE ADR D ATA BCC
195NA099.10
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.9.6 Conguração de Rede
Para ativar o Protocolo Danfoss FC do conversor de
frequência, programe os seguintes parâmetros:
33
Número do parâmetro Conguração
Parâmetro 8-30 Protocolo FC
Parâmetro 8-31 Endereço 1–126
Parâmetro 8-32 Baud Rate 2400–115200
Parâmetro 8-33 Bits de
Paridade / Parada
Tabela 3.24 Parâmetros do Protocolo Danfoss FC
Paridade par, 1 bit de parada
(padrão)
3.9.7 Estrutura do Enquadramento de
Mensagem do Protocolo Danfoss FC
3.9.7.1 Conteúdo de um Caractere (byte)
Ilustração 3.44 Estendendo Cabos
3.9.5 Visão Geral do Protocolo Danfoss FC
O Protocolo Danfoss FC, também conhecido como Bus do
FC ou Bus padrão, é o Danfoss eldbus padrão. Ele dene
uma técnica de acesso, de acordo com o princípio mestre/
escravo para comunicações via eldbus.
Um mestre e o máximo de 126 escravos podem ser
conectados ao barramento. O mestre seleciona os escravos
individuais por meio de um caractere de endereço no
telegrama. Um escravo por si só nunca pode transmitir
sem que primeiramente seja solicitado a fazê-lo e não é
permitido que um escravo transra a mensagem para
outro escravo. A comunicação ocorre no modo Half duplex.
A função do mestre não pode ser transferida para outro nó
(sistema de mestre único).
Cada caractere transferido começa com um bit de início.
Em seguida, são transmitidos 8 bits de dados, que correspondem a um byte. Cada caractere é protegido por um bit
de paridade. Esse bit é
paridade. Paridade é quando houver um número igual de
1s nos 8 bits de dados e no bit de paridade no total. Um
bit de parada completa um caractere, assim é composto
por 11 bits no total.
Ilustração 3.45 Conteúdo de um Caractere
denido para 1 ao atingir a
3.9.7.2 Estrutura do Telegrama
A camada física é a RS485, usando, assim a porta da RS485
integrada ao conversor de frequência. O Protocolo Danfoss
FC suporta diferentes formatos de telegrama:
Um formato curto de 8 bytes para dados de
•
processo.
Um formato longo de 16 bytes que também
•
inclui um canal de parâmetro.
Um formato usado para textos.
•
74 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Cada telegrama tem a seguinte estrutura:
Caractere de partida (STX)=02 hex.
•
Um byte representando o comprimento do
•
telegrama (LGE).
Um byte representando o endereço do conversor
•
de frequência (ADR).
Seguem inúmeros bytes de dados (variável, dependendo
do tipo de telegrama).
Um byte de controle dos dados (BCC) completa o
telegrama.
Ilustração 3.46 Estrutura do Telegrama

Integração de Sistemas Guia de Design
3.9.7.3 Comprimento do Telegrama (LGE)
O comprimento do telegrama é o número de bytes de
dados, mais o byte de endereço ADR e o byte de controle
dos dados BCC.
4 bytes de dados LGE=4+1+1=6 bytes
12 bytes de dados LGE=12+1+1=14 bytes
Telegramas contendo textos
Tabela 3.25 Comprimento dos telegramas
1) 10 representa os caracteres
do comprimento do texto).
101)+n bytes
xos, enquanto n é variável (depende
3.9.7.4 Endereço (ADR) do conversor de
frequência.
São usados dois formatos de endereço diferentes.
A faixa de endereços do conversor de frequência é 1-31 ou
1-126.
Formato de endereço 1-31
•
- Bit 7=0 (formato de endereço 1-31
ativo).
- Bit 6 não é usado.
- Bit 5=1: Broadcast, bits de endereço
(0-4) não são usados.
- Bit 5=0: Sem Broadcast.
- Bit 0-4=endereço do conversor de
frequência 1-31.
Formato de endereço 1-126
•
- Bit 7=1 (formato de endereço 1–126
ativo).
- Bit 0-6=endereço do conversor de
frequência 1-126.
- Bit 0–6 =0 Broadcast.
O escravo envia o byte de endereço de volta, sem
alteração, no telegrama de resposta ao mestre.
3 3
3.9.7.5 Byte de Controle dos Dados (BCC)
O checksum é calculado como uma função lógica XOR (OU
exclusivo). Antes de o primeiro byte do telegrama ser
recebido, o CheckSum calculado é 0.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 75

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Integração de Sistemas
VLT® Refrigeration Drive FC 103
3.9.7.6 O Campo de Dados
A estrutura dos blocos de dados depende do tipo de telegrama. Há três tipos de telegramas e o tipo aplica-se tanto aos
telegramas de controle (mestre⇒escravo) quanto aos telegramas de resposta (escravo⇒mestre).
Os 3 tipos de telegrama são:
33
Bloco de processo (PCD)
O PCD é composto por um bloco de dados de 4 bytes (2 palavras) e contém:
Control word e valor de referência (do mestre para o escravo).
•
Status word e a frequência de saída atual (do escravo para o mestre).
•
Ilustração 3.47 Bloco de Processo
Bloco de parâmetro
Bloco de parâmetros, usado para transmitir parâmetros entre mestre e escravo. O bloco de dados é composto de 12 bytes (6
words) e também contém o bloco de processo.
Ilustração 3.48 Bloco de parâmetro
Bloco de texto
O bloco de texto é usado para ler ou gravar textos, via bloco de dados.
Ilustração 3.49 Bloco de texto
76 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3.9.7.7 O Campo PKE
O campo PKE contém dois subcampos:
Comando de parâmetro e resposta AK.
•
Número do parâmetro PNU.
•
Ilustração 3.50 Campo PKE
- e emite um relatório de falha (ver Tabela 3.28) no valor
do parâmetro (PWE):
PWE baixo
(Hex)
11 A alteração de dados no parâmetro denido não é
82 Não há acesso ao bus para o parâmetro denido.
83 A alteração de dados não é possível porque a
Tabela 3.28 Relatório de falha do valor do parâmetro
Relatório de falha
0 O número do parâmetro usado não existe.
1 Não há nenhum acesso de gravação para o
parâmetro denido.
2 O valor dos dados ultrapassa os limites do
parâmetro.
3 O sub-índice usado não existe.
4 O parâmetro não é do tipo matriz
5 O tipo de dados não corresponde ao parâmetro
denido
possível no modo atual do conversor de
frequência. Determinados parâmetros podem ser
alterados somente quando o motor estiver
desligado.
programação de fábrica está selecionada
3 3
Os números de bits 12-15 transferem comandos de
parâmetro do mestre para o escravo e retornam respostas
do escravo processadas para o mestre.
Número de bits Comando de parâmetro
15 14 13 12
0 0 0 0 Sem comando.
0 0 0 1 Ler valor do parâmetro.
0 0 1 0 Gravar valor do parâmetro na RAM
(word).
0 0 1 1 Gravar valor do parâmetro na RAM (word
dupla).
1 1 0 1 Gravar valor do parâmetro na RAM e na
EEPROM (word dupla).
1 1 1 0 Gravar valor do parâmetro na RAM e na
EEPROM (word).
1 1 1 1 Ler/gravar texto.
Tabela 3.26 Comandos de Parâmetro Mestre⇒Escravo
Número de bits Resposta
15 14 13 12
0 0 0 0 Nenhuma resposta.
0 0 0 1 Valor de parâmetro transferido (word).
0 0 1 0 Valor do parâmetro transferido (word
dupla).
0 1 1 1 O comando não pode ser executado.
1 1 1 1 texto transferido.
Tabela 3.27 Resposta do Escravo⇒Mestre
Se o comando não puder ser executado, o escravo envia
esta resposta:
0111 O comando não pode ser executado
3.9.7.8 Número do Parâmetro (PNU)
Os bits 0-11 transferem números de parâmetro. A função
do parâmetro importante é denida na descrição do
parâmetro no guia de programação.
3.9.7.9 Índice (IND)
O índice é usado em conjunto com o número do
parâmetro, para parâmetros de acesso de leitura/gravação
com um índice, por exemplo, parâmetro 15-30 Log Alarme:
Cód Falha. O índice é formado por 2 bytes, um byte baixo
e um alto.
Somente o byte baixo é usado como índice.
3.9.7.10 Valor do Parâmetro (PWE)
O bloco de valor de parâmetro consiste em 2 words (4
bytes) e o seu valor depende do comando denido (AK).
Se o mestre solicita um valor de parâmetro quando o
bloco PWE não contiver nenhum valor. Para alterar um
valor de parâmetro (gravar), grave o novo valor no bloco
PWE e envie-o do mestre para o escravo.
Se um escravo responder a uma solicitação de parâmetro
(comando de leitura), o valor do parâmetro atual no bloco
PWE é transferido e devolvido ao mestre. Se um parâmetro
não contiver um valor numérico, mas várias opções de
dados, por exemplo, parâmetro 0-01 Idioma em que [0] é
Inglês e [4] é Dinamarquês, selecione o valor de dados
digitando o valor no bloco PWE. Através da comunicação
serial somente é possível ler parâmetros com tipo de
dados 9 (sequência de texto).
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 77

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Parâmetro 15-40 Tipo do FC a parâmetro 15-53 Nº. Série
Cartão de Potência contêm o tipo de dados 9.
Por exemplo, pode-se ler a potência da unidade e a faixa
de tensão de rede elétrica no par. parâmetro 15-40 Tipo do
FC. Quando uma sequência de texto é transferida (lida), o
Exemplos:
0 s⇒índice de conversão 0
0,00 s⇒índice de conversão -2
0 ms⇒índice de conversão -3
0,00 ms⇒índice de conversão -5
comprimento do telegrama é variável, porque os textos
33
têm comprimentos diferentes. O comprimento do
3.9.7.13 Words do Processo (PCD)
telegrama é denido no segundo byte do telegrama, LGE.
Ao usar a transferência de texto, o caractere do índice
indica se o comando é de leitura ou gravação. Para ler um
texto via bloco PWE, programe o comando do parâmetro
(AK) para F hex. O byte alto do caractere do índice deve
ser 4. Alguns parâmetros contêm textos que podem ser
gravados por meio do eldbus. Para gravar um texto via
bloco PWE, dena o comando do parâmetro (AK) para hex
F. O byte alto dos caracteres do índice deve ser 5.
O bloco de words de processo está dividido em dois
blocos de 16 bits, que sempre ocorrem na sequência
denida.
PCD 1 PCD 2
Telegrama de controle (mestre⇒control word
do escravo)
Status word do telegrama de controle
(escravo⇒mestre)
Tabela 3.30 Words do Processo (PCD)
Valor de
referência
Frequência de
saída atual
3.9.8 Exemplos de Protocolo Danfoss FC
Ilustração 3.51 Texto via bloco PWE
3.9.8.1 Gravando um Valor de Parâmetro
3.9.7.11 Tipos de Dados Suportados
Sem designação signica que não há sinal de operação no
telegrama.
Tipos de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem designação
6 16 sem designação
7 32 sem designação
9 String de texto
10 String de byte
13 Diferença de tempo
33 Reservado
35 Sequência de bits
Tabela 3.29 Tipos de Dados Suportados
3.9.7.12 Conversão
Os diversos atributos de cada parâmetro são exibidos em
conguração de fábrica. Os valores de parâmetro são
transferidos somente como números inteiros. Os fatores de
conversão são, portanto, usados para transferir decimais.
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] tem um
fator de conversão de 0,1. Para predenir a frequência
mínima em 10 Hz, deve-se transferir o valor 100. Um fator
de conversão 0,1 signica que o valor transferido é
multiplicado por 0,1. Portanto, o valor 100 será lido como
10,0.
Mude o par. parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz] para 100 Hz.
Grave os dados na EEPROM.
PKE = E19E hex - Gravar word única em
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz]:
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=03E8 hex - Valor de dados 1000, correspondendo
a 100 Hz, ver capétulo 3.9.7.12 Conversão.
O telegrama terá a seguinte aparência:
Ilustração 3.52 Grave Dados na EEPROM
AVISO!
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
uma palavra única e o comando do parâmetro para
gravar na EEPROM é E. O número de parâmetro 4-14 é
19E em hexadecimal.
A resposta do escravo para o mestre será:
Ilustração 3.53 Resposta do Escravo
78 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Integração de Sistemas Guia de Design
3.9.8.2 Lendo um Valor de Parâmetro
Ler o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1.
PKE = 1155 Hex - Ler o valor do parâmetro em
parâmetro 3-41 Tempo de Aceleração da Rampa 1.
IND=0000 hex
PWEHIGH=0000 hex
PWELOW=0000 hex
Ilustração 3.54 Parameter Value (Valor do parâmetro)
Se o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1 for 10 s, a resposta do escravo para o mestre é
Ilustração 3.55 Resposta do Escravo
Hex 3E8 corresponde ao decimal 1000. O índice de
conversão de yparâmetro 3-41 Tempo de Aceleração da
Rampa 1 é -2, ou seja, 0,01.
Parâmetro 3-41 Tempo de Aceleração da Rampa 1 é do tipo
32 sem designação.
3.9.9 Protocolo do Modbus RTU
3.9.9.1 Premissas
Danfoss supõe que o controlador instalado suporta as
interfaces neste manual e observa rigidamente todos os
requisitos e limitações estipulados no controlador e no
conversor de frequência.
O Modbus RTU (Unidade de Terminal Remoto) integrado
foi projetado para comunicar com qualquer controlador
que suportar as interfaces denidas neste manual. É
suposto que o usuário tem conhecimento pleno das
capacidades bem como das limitações do controlador.
3.9.9.2 Visão Geral do Modbus RTU
Independentemente do tipo de rede física de
comunicação, a visão geral do Modbus RTU descreve o
processo usado por um controlador para solicitar acesso a
outro dispositivo. Esse processo inclui como o Modbus RTU
responde às solicitações de outro dispositivo e como erros
são detectados e relatados. O documento também
estabelece um formato comum para o leiaute e para o
conteúdo dos campos de mensagem.
Durante a comunicação por uma rede Modbus RTU, o
protocolo:
Determina como cada controlador aprende seu
•
endereço de dispositivo.
Reconhece uma mensagem endereçada a ele.
•
Determina quais ações tomar.
•
Extrai quaisquer dados ou outras informações
•
contidas na mensagem.
Se uma resposta for solicitada, o controlador constrói a
mensagem de resposta e a envia.
Os controladores comunicam-se usando uma técnica
mestre/escravo em que somente o mestre pode iniciar
transações (denominadas consultas). Os escravos
respondem fornecendo os dados solicitados ao mestre ou
executando a ação solicitada na consulta.
O mestre pode endereçar escravos individuais ou pode
iniciar uma mensagem de broadcast a todos os escravos.
Os escravos devolvem uma resposta às consultas
endereçadas a eles individualmente. Nenhuma resposta é
devolvida às solicitações de broadcast do mestre. O
protocolo do Modbus RTU estabelece o formato para a
consulta do mestre fornecendo:
O endereço do dispositivo (ou broadcast).
•
Um código da função denindo a ação solicitada.
•
Quaisquer dados a serem enviados.
•
Um campo de vericação de erro.
•
A mensagem de resposta do escravo também é elaborada
usando o protocolo do Modbus. Ela contém campos que
conrmam a ação tomada, quaisquer tipos de dados a
serem devolvidos e um campo de vericação de erro. Se
ocorrer um erro na recepção da mensagem ou se o
escravo for incapaz de executar a ação solicitada, o escravo
retorna uma mensagem de erro. Alternativamente, ocorre
um timeout.
3.9.9.3 Conversor de Frequência com
Modbus RTU
O conversor de frequência comunica-se no formado do
Modbus RTU através da interface RS485 integrada. O
Modbus RTU fornece o acesso à control word e à
referência de bus do conversor de frequência.
A control word permite ao Modbus mestre controlar
diversas funções importantes do conversor de frequência:
Partida
•
É possível parar o conversor de frequência por
•
diversos meios:
- Parada por inércia
- Parada rápida
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 79

Integração de Sistemas
VLT® Refrigeration Drive FC 103
- Parada por freio CC
- Parada (de rampa) normal
Reset após um desarme por falha
•
Operação em diversas velocidades predenidas
•
Funcionamento em reversão
33
•
Alterar a conguração ativa
•
Controlar o relé integrado do conversor de
•
frequência
A referência de bus é comumente usada para controle da
velocidade. Também é possível acessar os parâmetros, ler
seus valores e quando possível, inserir valores. Isto permite
uma variedade de opções de controle, inclusive controlar o
setpoint do conversor de frequência quando o seu
controlador PI interno for utilizado.
3.9.9.4 Conguração de Rede
Para ativar o Modbus RTU no conversor de frequência,
programe os seguintes parâmetros:
Parâmetro Conguração
Parâmetro 8-30 Protocolo Modbus RTU
Parâmetro 8-31 Endereço 1–247
Parâmetro 8-32 Baud Rate 2400–115200
Parâmetro 8-33 Bits de Paridade /
Parada
Tabela 3.31 Parâmetros do Modbus RTU
Paridade par, 1 bit de parada
(padrão)
3.9.10 Estrutura do Enquadramento de
Mensagem do Modbus RTU
3.9.10.1 Conversor de Frequência com
Modbus RTU
Os controladores são congurados para se comunicar na
rede do Modbus usando o modo RTU com cada byte em
uma mensagem que contém dois caracteres hexadecimais
de 4 bits. O formato de cada byte é mostrado em
Tabela 3.32.
Sistema de
codicação
Bits por byte 1 bit de partida.
Campo de
vericação de erro
3.9.10.2 Estrutura do telegrama do Modbus
O dispositivo de transmissão coloca uma mensagem do
Modbus RTU em um quadro, com um ponto de início e
outro de término conhecidos. Isto permite aos dispositivos
de recepção começar no inicio da mensagem, ler a porção
do endereço, determinar qual dispositivo está sendo
endereçado (ou todos os dispositivos, se a mensagem for
do tipo broadcast) e a reconhecer quando a mensagem for
completada. As mensagens parciais são detectadas e os
erros programados, em consequência. Os caracteres para
transmissão devem estar no formato hexadecimal de 00 a
FF, em cada campo. O conversor de frequência monitora
continuamente o barramento da rede, inclusive durante os
intervalos silenciosos. Quando o primeiro campo (o campo
de endereço) é recebido, cada conversor de frequência ou
dispositivo decodica esse campo, para determinar qual
dispositivo está sendo endereçado. As mensagens do
Modbus RTU, endereçadas como zero, são mensagens de
broadcast. Não é permitida nenhuma resposta para
mensagens de broadcast. Um quadro de mensagem típico
é mostrado em Tabela 3.33.
Partida Endereço Função Dados Vericaçã
T1-T2-T3-
-T4
Tabela 3.33 Estrutura do Telegrama Típica do Modbus RTU
Binário de 8 bits, hexadecimal 0–9, A–F.
Dois caracteres hexadecimais contidos em
cada campo de 8 bits da mensagem.
8 bits de dados, o bit menos signicativo é
enviado primeiro;
1 bit para paridade par/ímpar; nenhum bit
para sem paridade.
1 bit de parada se for usada a paridade; 2
bits se for sem paridade.
Vericação de redundância cíclica (CRC).
RTU
Final da
o de CRC
8 bits 8 bits N x 8 bits 16 bits T1-T2-T3-
Acel.
-T4
Start
bit
Tabela 3.32 O formato de cada byte
80 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Byte de dados Parada
/
parida
de
Parad
a
3.9.10.3 Campo Partida/Parada
As mensagens iniciam com um período de silêncio com
intervalos de no mínimo 3,5 caracteres. Isso é
implementado como um múltiplo de intervalos de
caractere, na baud rate da rede selecionada (mostrado
como Início T1-T2-T3-T4). O primeiro campo a ser
transmitido é o endereço do dispositivo. Após a
transmissão do último caractere, um período semelhante
de intervalos de no mínimo 3,5 caracteres marca o m da
mensagem. Após este período, pode-se começar uma
mensagem nova. O quadro completo da mensagem deve
ser transmitido como um uxo contínuo. Se ocorrer um
período de silêncio com intervalos maiores que 1,5

Integração de Sistemas Guia de Design
caracteres antes de completar o quadro, o dispositivo
receptor livra-se da mensagem incompleta e assume que o
byte seguinte é um campo de endereço de uma nova
mensagem. De forma semelhante, se uma nova mensagem
começar antes de intervalos de 3,5 caracteres após uma
mensagem anterior, o dispositivo receptor o considera uma
continuação da mensagem anterior. Isso causa timeout
(nenhuma resposta do escravo), uma vez que o valor no
m do campo de CRC não é válido para as mensagens
combinadas.
3.9.10.4 Campo de Endereço
O campo de endereço de um quadro de mensagem
contém 8 bits. Os endereços de dispositivos escravo
válidos estão na faixa de 0–247 decimal. Aos dispositivos
escravos individuais são designados endereços na faixa de
1-247. (0 é reservado para o modo broadcast, que todos os
escravos reconhecem.) Um mestre endereça um escravo
colocando o endereço do escravo no campo de endereço
da mensagem. Quando o escravo envia a sua resposta, ele
insere o seu próprio endereço neste campo de endereço
para que o mestre identique qual escravo está
respondendo.
3.9.10.5 Campo da Função
ou endereços de registradores, a quantidade de itens a ser
manuseada e a contagem dos bytes de dados reais no
campo.
3.9.10.7 Campo de Vericação de CRC
As mensagens incluem um campo de vericação de erro
que opera com base em um método de vericação de
redundância cíclica (CRC). O campo de CRC verica o
conteúdo da mensagem inteira. Ele é aplicado independentemente de qualquer método de vericação de
paridade usado pelos caracteres individuais da mensagem.
O dispositivo de transmissão calcula o valor do CRC e
insere o CRC como o último campo na mensagem. O
dispositivo receptor recalcula um CRC, durante a recepção
da mensagem, e compara o valor calculado com o valor
real recebido no campo da CRC. Se os dois valores forem
diferentes, ocorrerá timeout do bus. O campo de
vericação de erro contém um valor binário de 16 bits
implementado como dois bytes de 8 bits. Quando isso é
feito, o byte de ordem baixa do campo é inserido primeiro,
seguido pelo byte de ordem alta. O byte de ordem alta da
CRC é o último byte enviado na mensagem.
3.9.10.8 Endereçamento do Registrador da
Bobina
3 3
O campo da função de um quadro de mensagem contém
8 bits. Os códigos válidos estão na faixa de 1-FF. Os
campos de função são usados para enviar mensagens
entre o mestre e o escravo. Quando uma mensagem é
enviada de um mestre para um dispositivo escravo, o
campo do código da função informa ao escravo a ação a
ser executada. Quando o escravo responde ao mestre, usa
o campo do código da função para indicar uma resposta
normal (sem erros) ou informar que ocorreu um erro
(chamados de resposta de exceção). Para uma resposta
normal, o escravo simplesmente retorna o código de
função original. Para uma resposta de exceção, o escravo
retorna um código que é equivalente ao código da função
original com o bit mais signicativo programado para 1
lógico. Além disso, o escravo insere um código único no
campo dos dados da mensagem- reposta. Esse código
informa ao mestre qual erro ocorreu ou o motivo da
exceção. Consulte também capétulo 3.9.10.10 Códigos de
Função Suportados pelo Modbus RTU e
capétulo 3.9.10.11 Códigos de Exceção do Modbus.
3.9.10.6 Campo dos Dados
O campo dos dados é construído usando conjuntos de
dois dígitos hexadecimais, na faixa de 00-FF hexadecimal.
Estes são constituídos de um caractere RTU. O campo de
dados das mensagens enviadas de um mestre para um
dispositivo escravo contém informações complementares
que o escravo deve usar para realizar a ação denida pelo
código da função. Isto pode incluir itens como uma bobina
No Modbus, todos os dados estão organizados em bobinas
e registradores de retenção. As bobinas retêm um único
bit, enquanto que os registradores de retenção retêm uma
palavra de 2 bytes (16 bits). Todos os endereços de dados,
em mensagens do Modbus, são referenciadas em zero. A
primeira ocorrência de um item de dados é endereçada
como item número 0. Por exemplo: A bobina conhecida
como bobina 1 em um controlador programável é
endereçada como o campo de endereço de dados de uma
mensagem do Modbus. A bobina decimal 127 é endereçada
como bobina 007EHEX (126 decimal).
O registrador de retenção 40001 é endereçado como
registrador 0000 no campo de endereço de dados da
mensagem. O campo do código da função já especica
uma operação de registrador de retenção. Portanto, a
referência 4XXXX ca implícita. O registrador de retenção
40108 é endereçado como registrador 006BHEX (decimal
107).
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 81

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Número
da
bobina
1–16 Control word do conversor de
17–32 Velocidade do conversor de
33
33–48 Status word do conversor de
49–64 Modo malha aberta: Frequência de
65 Controle de gravação de parâmetro
66–
65536
Tabela 3.34 Descrições da bobina
Bobina 0 1
01 Referência predenida lsb
02 Referência predenida msb
03 Freio CC S/ freio CC
04 Parada por inércia S/ parada por inércia
05 Parada rápida S/ parada rápida
06 Congelar frequência S/ congelar frequência
07 Parada de rampa Partida
08 Sem reset Reinicializar
09 Sem jog Jog
10 Rampa 1 Rampa 2
11 Dados inválidos Dados válidos
12 Relé 1 desligado Relé 1 ligado
13 Relé 2 desligado Relé 2 ligado
14 LSB do Setup
15 MSB do Setup
16 Sem reversão Reversão
Tabela 3.35 Control word do conversor de frequência
(Perl do FC)
Descrição Direção do
sinal
Mestre para
frequência.
frequência ou faixa de referência do
setpoint de 0x0–0xFFFF (-200% ...
~200%).
frequência (consulte Tabela 3.36).
saída do conversor de frequência.
Modo malha fechada: Sinal de
feedback do conversor de frequência.
(mestre para escravo).
0=As alterações de parâmetros são
gravadas na RAM do conversor
de frequência.
1=As alterações de parâmetros são
gravadas na RAM e EEPROM do
conversor de frequência.
Reservado.
escravo
Mestre para
escravo
Escravo para
mestre
Escravo para
mestre
Mestre para
escravo
Bobina 0 1
33 Controle não pronto Controle pronto
34 O conversor de frequência
não está pronto para
funcionar.
35 Parada por inércia Segurança fechada
36 Sem alarme Alarme
37 Não usado Não usado
38 Não usado Não usado
39 Não usado Não usado
40 Sem advertência Advertência
41 Não na referência Na referência
42 Modo manual Modo Automático
43 Fora da faixa de
frequência
44 Parado Em funcionamento
45 Não usado Não usado
46 Sem advertência de
tensão
47 Não no limite de corrente Limite de Corrente
48 Sem advertência térmica Advertência térmica
Tabela 3.36 Status word do conversor de frequência
(Perl do FC)
№ do
Registrador
00001–00006 Reservado
00007 Código do último erro de uma interface do
00008 Reservado
00009
00010–00990 Grupo do parâmetro 000 (parâmetros 0-01 a 0-99)
01000–01990 Grupo do parâmetro 100 (parâmetros 1-00 a 1-99)
02000–02990 Grupo do parâmetro 200 (parâmetros 2-00 a 2-99)
03000–03990 Grupo do parâmetro 300 (parâmetros 3-00 a 3-99)
04000–04990 Grupo do parâmetro 400 (parâmetros 4-00 a 4-99)
... ...
49000–49990 Grupo do parâmetro 4900 (parâmetros 49-00 a
50000 Dados de entrada: Registrador da control word do
50010 Dados de entrada: Registrador da referência do
... ...
50200 Dados de saída: Registrador da status word do
50210 Dados de saída: Registrador do valor real
Descrição
objeto de dados do Conversor de Frequência
Índice de parâmetro
49-99)
conversor de frequência (CTW).
bus (REF).
conversor de frequência (STW).
principal do conversor de frequência (MAV).
O conversor de frequência
está pronto
Na faixa de frequência
Advertência de tensão
1)
Tabela 3.37 Registradores de Retenção
1) usado para especicar o número de índice a ser usado ao acessar
um parâmetro indexado.
82 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3.9.10.9 Como controlar o Conversor de
Frequência
Os códigos disponível para uso nos campos de função e
de dados de uma mensagem do Modbus RTU estão
listados em capétulo 3.9.10.10 Códigos de Função
Suportados pelo Modbus RTU e capétulo 3.9.10.11 Códigos de
Exceção do Modbus.
3.9.10.10 Códigos de Função Suportados
pelo Modbus RTU
O Modbus RTU suporta o uso dos códigos de função (ver
Tabela 3.38) no campo de função de uma mensagem.
Função Código da função (hex)
Ler bobinas 1
Ler registradores de retenção 3
Gravar bobina única 5
Gravar registrador único 6
Gravar bobinas múltiplas F
Gravar registradores múltiplos 10
Obter comunicação do contador de
eventos
Relatar ID do escravo 11
Tabela 3.38 Códigos de Função
Função Código
da
Função
Diagnósticos8 1 Reiniciar a comunicação
Tabela 3.39 Códigos de função e subfunção
Código de
subfunção
2 Retornar registrador de
10 Limpar contadores e
11 Retornar contador de
12 Retornar contador de
13 Retornar contador de
14 Retornar contador de
B
Subfunção
diagnósticos
registrador de
diagnósticos
mensagem do bus
erros de comunicação do
bus
erros do escravo
mensagem do escravo
3.9.10.11 Códigos de Exceção do Modbus
Para obter uma explicação completa da estrutura de uma
resposta do código de exceção, consulte
capétulo 3.9.10.5 Campo da Função.
CódigoNome Signicado
1 Função
inválida
2 Endereço de
dados
inválido
3 Valor de
dados
inválido
4 Falha do
dispositivo
escravo
Tabela 3.40 Códigos de Exceção do Modbus
O código de função recebido na consulta
não é uma ação permitida para o servidor
(ou escravo). Isso pode ser porque o
código de função é aplicável somente em
dispositivos mais recentes e ainda não foi
implementado na unidade selecionada.
Isso também pode indicar que o servidor
(ou escravo) está no estado incorreto para
processar um pedido desse tipo, por
exemplo, em virtude de não estar
congurado e por estar sendo requisitado
a retornar valores de registro.
O endereço dos dados recebido na
consulta não é um endereço permitido
para o servidor (ou escravo). Mais especi-
camente, a combinação do número de
referência e o comprimento de transferência não é válido. Para um controlador
com 100 registradores, um pedido com
oset 96 e comprimento 4 teria êxito, um
pedido com oset 96 e comprimento 5
gera exceção 02.
Um valor contido no campo de dados da
consulta não é um valor permitido para o
servidor (ou escravo). Isso indica uma
falha na estrutura do restante de um
pedido complexo, como o do
comprimento implícito estar incorreto.
NÃO signica especicamente que um
item de dados submetido para
armazenagem em um registrador
apresenta um valor fora da expectativa do
programa de aplicação, uma vez que o
protocolo do Modbus não está ciente do
signicado de qualquer valor particular de
qualquer registrador particular.
Ocorreu um erro irrecuperável enquanto o
servidor (ou escravo) tentava executar a
ação requisitada.
3.9.11 Acesso a Parâmetros
3.9.11.1 Tratamento de Parâmetros
O PNU (número de parâmetro) é traduzido do endereço de
registrador contido na mensagem de leitura ou gravação
do Modbus. O número de parâmetro é convertido para o
Modbus como (10 x número do parâmetro) decimal.
Exemplo: Leitura parâmetro 3-12 Catch up/slow Down Value
(16 bits): O registrador de retenção 3120 mantém o valor
dos parâmetros. Um valor de 1352 (Decimal) signica que
o parâmetro está programado para 12,52%
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 83

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Leitura parâmetro 3-14 Referência Relativa Pré-denida (32
bits): Os registradores de retenção 3410 e 3411 mantêm o
valor do parâmetro. Um valor de 11300 (decimal) signica
que o parâmetro está programado para 1113.00.
Para obter informações sobre os parâmetros, tamanho e
33
índice de conversão, consulte o guia de programação.
3.9.11.2 Armazenagem de Dados
A bobina 65 decimal determina se os dados gravados no
Tipos de dados não padrão
Os tipos de dados não padrão são sequências de textos e
são armazenados como registradores 4x (40001 – 4FFFF).
Os parâmetros são lidos usando a função 03 hex Ler
Registradores de Retenção e gravados usando a função 10
hex Predenir Múltiplos Registradores. Os tamanhos legíveis
variam de 1 registrador (2 caracteres) a 10 registradores (20
caracteres).
3.9.12 Perl de Controle do Drive do CF
conversor de frequência são armazenados na EEPROM e
RAM (bobina 65=1) ou somente na RAM (bobina 65=0).
3.9.12.1 Control Word de Acordo com o
Perl do FC (parâmetro 8-10 Perl
3.9.11.3 IND (Índice)
Alguns parâmetros do conversor de frequência são
parâmetros de matriz, por exemplo
parâmetro 3-10 Referência Predenida. Como o Modbus não
suporta matrizes nos registradores de retenção, o
conversor de frequência reservou o registrador de retenção
9 como apontador da matriz. Antes de ler ou gravar um
parâmetro de matriz, programe o registrador de retenção
9. Congurar o registrador de retenção para o valor de 2
faz com que todos os parâmetros de matriz de leitura/
gravação seguintes sejam para o índice 2.
3.9.11.4 Blocos de Texto
Os parâmetros armazenados como sequências de texto são
acessados do mesmo modo que os demais parâmetros. O
tamanho máximo do bloco de texto é 20 caracteres. Se
uma solicitação de leitura de um parâmetro for maior que
o número de caracteres que este comporta, a resposta será
truncada. Se uma solicitação de leitura de um parâmetro
for menor que o número de caracteres que este comporta,
a resposta será preenchida com brancos.
3.9.11.5 Fator de conversão
Uma vez que um valor de parâmetro só pode ser
transferido como um número inteiro, um fator de
conversão deve ser usado para a transferência de números
decimais.
Ilustração 3.56 Control Word
Bit Valor do bit = 0 Valor do bit = 1
00 Valor de referência Seleção externa lsb
01 Valor de referência Seleção externa msb
02 Freio CC Rampa
03 Parada por inércia Sem parada por inércia
04 Parada rápida Rampa
05 Manter a frequência de
06 Parada de rampa Partida
07 Sem função Reinicializar
08 Sem função Jog
09 Rampa 1 Rampa 2
10 Dados inválidos Dados válidos
11 Sem função Relé 01 ativo
12 Sem função Relé 02 ativo
13 Conguração de
14 Conguração de
15 Sem função Reversão
de Controle=perl do FC)
Utilizar a rampa de
saída
parâmetros
parâmetros
velocidade
Seleção do lsb
Seleção do msb
3.9.11.6 Valores de Parâmetros
Tipos de dados padrão
Os tipos de dados padrão são int 16, int 32, uint 8, uint 16
e uint 32. Eles são armazenados como registradores 4x
(40001–4FFFF). Os parâmetros são lidos usando a função
03 hex Ler Registradores de Retenção. Os parâmetros são
gravados usando a função 6 hex Predenir Registrador
Único para 1 registrador (16 bits) e a função 10 hex
Predenir Múltiplos Registradores para 2 registradores (32
bits). Os tamanhos legíveis variam desde 1 registrador (16
bits) a 10 registradores (20 caracteres).
84 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
Tabela 3.41 Bits da Control Word

Integração de Sistemas Guia de Design
Explicação dos Bits de Controle
Bits 00/01
Os bits 00 e 01 são usados para fazer a seleção entre os
quatro valores de referência, que são pré-programados em
parâmetro 3-10 Referência Predenida de acordo com
Tabela 3.42.
Valor de
referência
programado
1 Parâmetro 3-10
2 Parâmetro 3-10
3 Parâmetro 3-10
4 Parâmetro 3-10
Tabela 3.42 Valores de Referência
Parâmetro Bit 01 Bit 00
0 0
Referência
Predenida [0]
0 1
Referência
Predenida [1]
1 0
Referência
Predenida [2]
1 1
Referência
Predenida [3]
AVISO!
Faça uma seleção em parâmetro 8-56 Seleção da
Referência Pré-denida para denir como o bit 00/01
sincroniza com a função correspondente nas entradas
digitais.
Bit 02, Freio CC:
Bit 02=0 conduz à frenagem CC e parada. A corrente e a
duração de frenagem foram denidas nos par.
parâmetro 2-01 Corrente de Freio CC e
parâmetro 2-02 Tempo de Frenagem CC.
Bit 02=1 conduz à rampa.
Bit 03, Parada por inércia
Bit 03=0: O conversor de frequência libera o motor imediatamente (os transistores de saída são desligados) e faz
parada por inércia.
Bit 03=1: Se as outras condições de partida forem
atendidas, o conversor de frequência dá partida no motor.
Escolha em parâmetro 8-50 Seleção de Parada por Inércia
para denir como o bit 03 sincroniza com a função correspondente em uma entrada digital.
Bit 04, Parada rápida
Bit 04=0: Faz a velocidade do motor desacelerar até parar
(programado em parâmetro 3-81 Tempo de Rampa da
Parada Rápida).
Bit 05, Reter a frequência de saída
Bit 05=0: A frequência de saída atual (em Hz) congela.
Altere a frequência de saída congelada somente por meio
das entradas digitais (parâmetro 5-10 Terminal 18 Entrada
Digital a parâmetro 5-15 Terminal 33 Entrada Digital)
programadas para Aceleração e Redução de velocidade.
AVISO!
Se congelar frequência de saída estiver ativo, pare o
conversor de frequência usando:
Bit 03 Parada por inércia .
•
Bit 02 frenagem CC.
•
Entrada digital (parâmetro 5-10 Terminal 18
•
Entrada Digital a parâmetro 5-15 Terminal 33
Entrada Digital) programada para Frenagem CC,
Parada por inércia ou Reset e parada por inércia.
Bit 06, Parada/partida de rampa
Bit 06=0: Provoca uma parada e faz a velocidade do motor
desacelerar até parar por meio do parâmetro de desaceleração selecionado.
Bit 06=1: Se as outras condições de partida forem
atendidas, permite ao conversor de frequência dar partida
no motor.
Faça uma seleção em parâmetro 8-53 Seleção da Partida
para denir como o bit 06 Parada/partida de rampa
sincroniza com a função correspondente em uma entrada
digital.
Bit 07, Reset
Bit 07=0: Sem reset.
Bit 07=1: Reinicializa um desarme. A reinicialização é
ativada na borda dianteira do sinal, por exemplo, na
transição de 0 lógico para 1 lógico.
Bit 08, Jog
Bit 08=1: Parâmetro 3-19 Velocidade de Jog [RPM] determina
a frequência de saída.
Bit 09, Seleção de rampa 1/2
Bit 09=0: Rampa 1 está ativa (parâmetro 3-41 Tempo de
Aceleração da Rampa 1 para parâmetro 3-42 Tempo de
Desaceleração da Rampa 1).
Bit 09=1: Rampa 2 (parâmetro 3-51 Tempo de Aceleração da
Rampa 2 para parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) está ativa.
Bit 10, Dados inválidos/Dados válidos
Informa o conversor de frequência se a control word deve
ser utilizada ou ignorada.
Bit 10=0: A control word é ignorada.
Bit 10=1: A control word é usada. Esta função é importante
porque o telegrama sempre contém a control word,
qualquer que seja o telegrama. Desligue a control word se
não for utilizá-la ao atualizar ou ler parâmetros.
Bit 11, Relé 01
Bit 11=0: O relé não está ativo.
Bit 11=1: Relé 01 ativado desde que o [36] Bit 11 da control
word tenha sido selecionado no parâmetro 5-40 Função do
Relé.
Bit 12, Relé 04
Bit 12=0: O relé 04 não está ativado.
Bit 12=1: O relé 04 é ativado se [37] Bit 12 da control word
estiver selecionado em parâmetro 5-40 Função do Relé.
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 85

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Integração de Sistemas
VLT® Refrigeration Drive FC 103
Bit 13/14, Seleção de setup
Utilize os bits 13 e 14 para selecionar entre os quatro
setups de menu de acordo com Tabela 3.43.
Setup Bit 14 Bit 13
1 0 0
33
Tabela 3.43 Especicação de Setups de Menu
2 0 1
3 1 0
4 1 1
A função só é possível somente quando [9] Setups Múltiplos
estiver selecionado em parâmetro 0-10 Setup Ativo. Faça
uma seleção em parâmetro 8-55 Seleção do Set-up para
denir como os bits 13/14 sincronizam com a função
correspondente nas entradas digitais.
Bit 15 Reversão
Bit 15=0: Sem reversão.
Bit 15=1: Reversão. Na conguração padrão, a reversão é
programada como digital em parâmetro 8-54 Seleção da
Reversão. Bit 15 causa reversão somente quando [1] Bus, [2]
Lógica E ou [3] Lógica OU for selecionada.
Bit Bit=0 Bit=1
13 Tensão OK Tensão excedida
14 Torque OK Torque excedido
15 Temporizador OK Temporizador expirado
Tabela 3.44 Bits da Status Word
Explicação dos bits de status
Bit 00, Controle não pronto/pronto
Bit 00=0: O conversor de frequência desarma.
Bit 00=1: Os controles do conversor de frequência estão
prontos, mas o componente de energia não recebe
necessariamente qualquer energia da fonte de alimentação
(no caso de alimentação de 24 V externa para os
controles).
Bit 01, Drive pronto
Bit 01=1: O conversor de frequência está pronto para
operação, mas existe um comando de parada por inércia
ativo, nas entradas digitais ou na comunicação serial.
Bit 02, Parada por inércia
Bit 02=0: O conversor de frequência libera o motor.
Bit 02=1: O conversor de frequência dá partida no motor
com um comando de partida.
3.9.12.2 Status Word de acordo com Perl
do FC (STW) (parâmetro 8-10 Perl
de Controle=perl do FC)
Bit 03, Sem erro/desarme
Bit 03=0: O conversor de frequência não está no modo de
defeito.
Bit 03=1: O conversor de frequência desarma. Para
restabelecer a operação, pressione [Reset].
Bit 04, Sem erro/com erro (sem desarme)
Bit 04=0: O conversor de frequência não está no modo de
defeito.
Bit 04=1: O conversor de frequência exibe um erro mas
não desarma.
Ilustração 3.57 Status Word
Bit 05, Sem uso
Bit 05 não é usado na status word.
Bit Bit=0 Bit=1
00 Controle não pronto Controle pronto
01 Drive não pronto Drive pronto
02 Parada por inércia Ativado
03 Sem erro Desarme
04 Sem erro Erro (sem desarme)
05 Reservado 06 Sem erro Bloqueio por desarme
07 Sem advertência Advertência
08 Velocidade ≠ referência Velocidade = referência
09 Operação local Controle do bus
10 Fora do limite de
frequência
11 Sem operação Em operação
12 Drive OK Parado, partida automática
Limite de frequência OK
Bit 06, Sem erro/bloqueio por desarme
Bit 06=0: O conversor de frequência não está no modo de
defeito.
Bit 06=1: O conversor de frequência está desarmado e
bloqueado.
Bit 07, Sem advertência/com advertência
Bit 07=0: Não há advertências.
Bit 07=1: Signica que ocorreu uma advertência.
Bit 08, Velocidade≠referência/velocidade=referência
Bit 08=0: O motor está funcionando, mas a velocidade
atual é diferente da referência de velocidade predenida.
Pode ser o caso, por exemplo, quando a velocidade subir/
descer durante a partida/parada.
Bit 08=1: A velocidade do motor corresponde à referência
de velocidade predenida.
86 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Integração de Sistemas Guia de Design
Bit 09, Operação local/controle do bus
Bit 09=0: [Parada/Reset] está ativo na unidade de controle
ou [2] Controle local em parâmetro 3-13 Tipo de Referência
está selecionado. O controle via comunicação serial não é
possível.
Bit 09=1 É possível controlar o conversor de frequência por
meio do eldbus/comunicação serial.
Bit 10, Fora do limite de frequência
Ilustração 3.58 Frequência de saída real (MAV)
Bit 10=0: A frequência de saída alcançou o valor
programado noparâmetro 4-11 Lim. Inferior da Veloc. do
Motor [RPM] ou parâmetro 4-13 Lim. Superior da Veloc. do
Motor [RPM].
A referência e a MAV são escalonadas como a seguir:
Bit 10=1: A frequência de saída está dentro dos limites
denidos.
Bit 11, Fora de funcionamento/em operação
Bit 11=0: O motor não está funcionando.
Bit 11=1: O conversor de frequência tem um sinal de
partida ou a frequência de saída é maior que 0 Hz.
Bit 12, Drive OK/parado, partida automática
Bit 12=0: Não há superaquecimento temporário no
inversor.
Bit 12=1: O inversor parou devido ao superaquecimento,
mas a unidade não desarma e retomará a operação, assim
Ilustração 3.59 Referência e MAV
que o superaquecimento cessar.
Bit 13, Tensão OK/limite excedido
Bit 13=0: Não há advertências de tensão.
Bit 13=1: A tensão CC no barramento CC do conversor de
3.9.12.4 Control Word de acordo com o
Perl do PROFIdrive (CTW)
frequência está muito baixa ou muito alta.
Bit 14, Torque OK/limite excedido
Bit 14=0: A corrente do motor está abaixo do limite de
torque selecionado em parâmetro 4-18 Limite de Corrente.
Bit 14=1: O limite de torque no parâmetro 4-18 Limite de
Corrente foi ultrapassado.
Bit 15, Temporizador OK/limite excedido
Bit 15=0: Os temporizadores para proteção térmica do
motor e a proteção térmica não ultrapassaram 100%.
Bit 15=1: Um dos temporizadores ultrapassou 100%.
Se a conexão entre o opcional de InterBus e o conversor
de frequência for perdida ou ocorrer um problema de
comunicação interna, todos os bits no STW são
programados para 0.
3.9.12.3 Valor de Referência de Velocidade
Via Bus Serial
O valor de referência de velocidade é transmitido ao
conversor de frequência como valor relativo, em %. O valor
é transmitido no formato de uma word de 16 bits; em
números inteiros (0-32767) o valor 16384 (4000 hex)
corresponde a 100%. Os valores negativos são formatados
com complementos de 2. A frequência de Saída real (MAV)
é escalonada do mesmo modo que a referência de bus.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 87
A control word é usada para enviar comandos de um
mestre (por exemplo, um PC) para um escravo.
Bit Bit=0 Bit=1
00 Desligado 1 Ligado 1
01 Desligado 2 Ligado 2
02 Desligado 3 Ligado 3
03 Parada por inércia Sem parada por inércia
04 Parada rápida Rampa
05 Mantenha a saída de
frequência
06 Parada de rampa Partida
07 Sem função Reinicializar
08 Jog 1 Desligado Jog 1 Ligado
09 Jog 2 Desligado Jog 2 Ligado
10 Dados inválidos Dados válidos
11 Sem função Redução de velocidade
12 Sem função Catch-up
13 Conguração de parâmetros Seleção do lsb
14 Conguração de parâmetros Seleção do msb
15 Sem função Reversão
Tabela 3.45 Bits da Control Word
Utilizar a rampa de
velocidade
3 3

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Explicação dos bits de controle
Bit 00,OFF 1/ON 1
A rampa normal para de usar os tempos de rampa da
rampa real selecionada. Bit 00=0 leva a parada e ativação
do relé de saída 1 ou 2 se a frequência de saída for 0 Hz e
33
se [31] Relé 123 estiver selecionado em
parâmetro 5-40 Função do Relé.
Quando bit 0=1, o conversor de frequência está no Estado
1: Chaveamento inibido.
Bit 01, Desligado 2/Ligado 2
Parada por inércia
Se a frequência de saída for 0 Hz e se [31] Relé 123 tiver
sido selecionado em parâmetro 5-40 Função do Relé,
quando bit 01=0, ocorrem parada por inércia e ativação do
relé de saída 1 ou 2.
Bit 02, Desligado 3/Ligado 3
Parada rápida utilizando o tempo de rampa do par.
parâmetro 3-81 Tempo de Rampa da Parada Rápida. Se a
frequência de saída for 0 Hz e se [31] Relé 123 tiver sido
selecionado em parâmetro 5-40 Função do Relé, quando bit
02=0, ocorrem parada rápida e ativação do relé de saída 1
ou 2.
Quando bit 02=1, o conversor de frequência está no
Estado 1: Chaveamento inibido.
Bit 03, Parada por inércia/Sem parada por inércia
Parada por inércia bit 03=0 leva a uma parada.
Se as condições para início forem atendidas, quando bit
03=1, o conversor de frequência pode iniciar.
AVISO!
A seleção no parâmetro 8-50 Seleção de Parada por
Inércia determina como o bit 03 está conectado com a
função correspondente das entradas digitais.
Bit 04, Parada rápida/Rampa
Parada rápida utilizando o tempo de rampa do par.
parâmetro 3-81 Tempo de Rampa da Parada Rápida.
Quando bit 04=0, ocorre uma parada rápida.
Se as demais condições para início forem atendidas
quando bit 04=1, o conversor de frequência pode iniciar.
AVISO!
A seleção no par. parâmetro 8-51 Quick Stop Select
determina como o bit 04 se conecta com a função
correspondente das entradas digitais.
Bit 05, Manter a saída de frequência/Utilizar rampa
Quando bit 05=0, a frequência de saída atual é mantida,
mesmo se o valor de referência for modicado.
Quando o bit 05=1, o conversor de frequência pode
executar a sua função reguladora novamente; a operação
ocorre de acordo com o respectivo valor de referência.
Bit 06, Parada/partida de rampa
Parada de rampa normal utilizando os tempos de rampa
selecionados da rampa real. Além disso, a ativação do relé
de saída 01 ou 04 ocorre se a frequência de saída for 0 Hz
e se [31] Relé 123 for selecionado em
parâmetro 5-40 Função do Relé.
Bit 06=0 acarreta uma parada.
Se as demais condições para início forem atendidas
quando bit 06=1, o conversor de frequência pode iniciar.
AVISO!
A seleção no par. parâmetro 8-53 Seleção da Partida
determina como o bit 06 se conecta com a função
correspondente das entradas digitais.
Bit 07, Sem função/Reset
Reset após desligar.
Reconhece o evento no buer de defeito.
Quando o bit 07=0, não ocorre nenhum reset.
Quando houver uma mudança de inclinação do bit 07 para
1, ocorrerá um reset, após o desligamento.
Bit 08, Jog 1 O/On
Ativação da velocidade pré-programada em
parâmetro 8-90 Velocidade de Jog 1 via Bus. JOG 1 é
possível somente se bit 04=0 e bit 00–03=1.
Bit 09, Jog 2 O/On
Ativação da velocidade pré-programada em
parâmetro 8-91 Velocidade de Jog 2 via Bus. Jog 2 é possível
somente se bit 04=0 e bit 00–03=1.
Bit 10, Dados não válidos/válidos
É usado para informar o conversor de frequência se deve
usar ou ignorar a control word.
Bit 10=0 faz com que a control word seja ignorada.
Bit 10=1 faz com que a control word seja usada. Esta
função é relevante porque a control word está sempre
contida no telegrama, independentemente do tipo de
telegrama que for usado. Não ser usada para atualizar ou
ler parâmetros, é possível desligar a control word.
Bit 11, Sem função/Redução de velocidade
É utilizada para reduzir o valor de referência da velocidade
pela quantidade denida em parâmetro 3-12 Catch up/slow
Down Value .
Quando o bit 11=0, não ocorre nenhuma alteração no
valor de referência.
Quando o bit 11=1, o valor de referência é reduzido.
Bit 12, Sem função/catch-up
É utilizado para aumentar o valor de referência da
velocidade pela quantidade fornecida em
parâmetro 3-12 Catch up/slow Down Value.
Quando o bit 12=0, não ocorre nenhuma alteração no
valor de referência.
Quando o bit 12= 1, o valor de referência é aumentado.
Se tanto a redução de velocidade quanto a aceleração
estiverem ativadas (bit 11 e 12 = 1) a redução de
velocidade tem prioridade, ou seja, o valor de referência de
velocidade é reduzido.
Bits 13/14, Seleção de setup
Os bits 13 e 14 são usados para selecionar entre as 4
congurações de parâmetros de acordo com Tabela 3.46.
88 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
A função é possível somente quando [9] Setup Múltiplo
estiver selecionado em parâmetro 0-10 Setup Ativo. A
seleção no par. parâmetro 8-55 Seleção do Set-up determina
como os bits 13 e 14 se conectam com a função correspondente das entradas digitais. Alterar setup, enquanto em
funcionamento, somente é possível se os setups foram
conectados no par. parâmetro 0-12 Este Set-up é dependente
de.
Setup Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Tabela 3.46 Seleção de Setup
Bit 15, Sem função/reversão
Bit 15=0 não causa reversão.
Bit 15=1 causa reversão.
AVISO!
Na conguração de fábrica, a reversão é programada
para [0] Entrada digital em parâmetro 8-54 Seleção da
Reversão.
AVISO!
Bit 15 causa reversão somente quando [1] Bus, [2] Lógica
E ou [3] Lógica OU for selecionada em
parâmetro 8-54 Seleção da Reversão.
3.9.12.5 Status Word de acordo com o
Perl do PROFIdrive (STW)
A status word é usada para informar um mestre (por
exemplo, um PC) sobre o status de um escravo.
Bit Bit=0 Bit=1
00 Controle não pronto Controle pronto
01 Drive não pronto Drive pronto
02 Parada por inércia Ativado
03 Sem erro Desarme
04 Desligado 2 Ligado 2
05 Desligado 3 Ligado 3
06 Partida possível Partida impossível
07 Sem advertência Advertência
08
09 Operação local Controle do bus
10 Fora do limite de
11 Sem operação Em operação
12 Drive OK Parado, partida automática
13 Tensão OK Tensão excedida
14 Torque OK Torque excedido
15 Temporizador OK Temporizador expirado
Velocidade≠referência
frequência
Velocidade=referência
Limite de frequência OK
Explicação dos bits de status
Bit 00, Controle não pronto/pronto
Quando bit 00=0, bit 00, 01 ou 02 da control word é 0
(OFF 1,OFF 2 ou OFF 3) – ou o conversor de frequência é
desligado (desarme).
Quando bit 00=1, o controle do conversor de frequência
está pronto, mas não há necessariamente fonte de
alimentação na unidade atual (no caso de alimentação de
24 V externa do sistema de controle).
Bit 01, Drive não pronto/pronto
Mesmo signicado que o do bit 00, no entanto, com a
unidade sendo alimentada de energia. O conversor de
frequência está pronto quando recebe os sinais de partida
necessários.
Bit 02, Parada por inércia/Ativar
Quando bit 02=0, bit 00, 01 ou 02 da control word é 0 (O
1,O 2 ou O 3 ou parada por inércia) – ou o conversor de
frequência é desligado (desarme).
Quando bit 02=1, bit 00, 01 ou 02 da control word é 1; o
conversor de frequência não desarmou.
Bit 03, Sem erro/Desarme:
Quando o bit 03=0, não há nenhuma condição de erro no
conversor de frequência.
Quando o bit 03=1, o conversor de frequência desarmou e
requer um sinal de reset, antes de restabelecer o seu
funcionamento.
Bit 04, On 2/O 2
Quando o bit 01 da Control word é 0, bit 04=0.
Quando o bit 01 da control word é 1, o bit 04=1.
Bit 05, On 3/O 3
Quando o bit 02 da control word é 0, bit 05=0.
Quando o bit 02 da control word é 1, o bit 05=1.
Bit 06, Partida possível/partida impossível
Se [1] PROFIdrive foi selecionado em parâmetro 8-10 Perl
de Controle, o bit 06 é 1 após um reconhecimento de
desligamento, após a ativação de O2 ou O3 e após ligar
a tensão de rede, Partida não é possível é reinicializada,
com bit 00 da control word está programado para 0 e bits
01, 02 e 10 são programados para 1.
Bit 07, Sem advertência/Com advertência:
Bit 07=0 signica que não há advertências.
Bit 07=1 signica que ocorreu uma advertência.
Bit 08, Velocidade≠referência/Velocidade=referência
Quando o bit 08=0, a velocidade atual do motor apresenta
desvio em relação ao valor de referência de velocidade
programado. Isto pode ocorrer, por exemplo, quando a
velocidade é alterada durante a partida/parada por meio
da aceleração/desaceleração de rampa.
Quando o bit 08=1, a velocidade atual do motor é igual ao
valor de referência da velocidade programado.
3 3
Tabela 3.47 Bits da Status Word
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 89

Integração de Sistemas
Bit 09, Operação local/Controle do bus
Bit 09=0 indica que o conversor de frequência foi parado
com a tecla [Stop] no LCP ou que [0] Vinculado a manual/
automático ou [2] Local foi selecionado em
parâmetro 3-13 Tipo de Referência.
Quando o bit 09=1, o conversor de frequência pode ser
33
controlado através da interface serial.
Bit 10, Fora do limite de frequência/Limite de frequência
OK
Quando o bit 10=0, a frequência de saída está fora dos
limites programados nos parâmetro 4-52 Advertência de
Velocidade Baixa e parâmetro 4-53 Advertência de Velocidade
Alta.
Quando o bit 10=1, a frequência de saída está dentro dos
limites denidos.
Bit 11, Fora de operação/Em operação
Quando o bit 11=0, o motor não gira.
Quando o bit 11=1, o conversor de frequência tem um
sinal de partida ou que a frequência de saída é maior que
0 Hz.
Bit 12, Drive OK/parado, partida automática
Quando o bit 12=0, não há sobrecarga temporária no
inversor.
Quando o bit 12=1, o inversor parou devido à sobrecarga.
No entanto, o conversor de frequência não é desligado
(desarme) e dá partida novamente assim que a sobrecarga
terminar.
Bit 13, Tensão OK/Tensão excedida
Quando o bit 13=0, os limites de tensão do conversor de
frequência não foram excedidos.
Quando bit 13=1, a tensão CC no barramento CC do
conversor de frequência está muito baixa ou muito alta.
Bit 14, Torque OK/Torque excedido
Quando o bit 14=0, o torque do motor está abaixo do
limite selecionado nos parâmetro 4-16 Limite de Torque do
Modo Motor e parâmetro 4-17 Limite de Torque do Modo
Gerador.
Bit 14=1: O limite de torque selecionado no
parâmetro 4-16 Limite de Torque do Modo Motor ou
parâmetro 4-17 Limite de Torque do Modo Gerador foi
excedido.
Bit 15, Temporizador OK/Temporizador excedido
Quando o bit 15=0, os temporizadores para a proteção
térmica do motor e proteção térmica do conversor de
frequência não excederam 100%.
Quando bit 15=1, um dos temporizadores excedeu 100%.
VLT® Refrigeration Drive FC 103
90 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Integração de Sistemas Guia de Design
3.10 Lista de vericação de design do sistema
Tabela 3.48 fornece uma lista de vericação para integrar um conversor de frequência em um sistema de controle de motor.
A lista tem a intenção de ser lembrete das categorias gerais e opcionais necessários para especicar os requisitos do
sistema.
Categoria Detalhes Notas
Modelo FC
Potência
Volts
Corrente
Física
Dimensões
Peso
Condições operacionais ambiente
Temperatura
Altitude
Umidade
Qualidade do ar/poeira
Requisitos de derating
Tamanho do
gabinete metálico
Entrada
Cabos
Tipo
Comprimento
Fusíveis
Tipo
Tamanho
Características nominais
Opcionais
Conectores
Contatos
Filtros
Saída
Cabos
Tipo
Comprimento
Fusíveis
Tipo
Tamanho
Características nominais
Opcionais
Filtros
Controle
Fiação
Tipo
Comprimento
Ligações do terminal
Comunicação
Protocolo
Conexão
Fiação
Opcionais
☑
3 3
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 91

Integração de Sistemas
VLT® Refrigeration Drive FC 103
Categoria Detalhes Notas
Conectores
Contatos
Filtros
Motor
33
Tipo
Características nominais
Tensão
Opcionais
Ferramentas e equipamentos especiais
Transporte e armazenagem
Montagem
Conexão de rede elétrica
Tabela 3.48 Lista de vericação de design do sistema
☑
92 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Exemplos de Aplicações Guia de Design
4 Exemplos de Aplicações
4.1 Exemplos de Aplicações
O VLT® Refrigeration DriveFC 103 foi projetado para
aplicações de refrigeração. A ampla faixa de recursos
padrão e opcionais inclui SmartStart otimizado:
Alternação do motor
•
A funcionalidade de alternação do motor é
adequada para aplicações (por exemplo,
aplicações de bomba ou ventilador) com dois
motores compartilhando um conversor de
frequência.
AVISO!
Não use a alternação do motor com compressores.
Controle de pacotes
•
O controle de pacotes básico é integrado por
padrão, com capacidade de até três
compressores. Controle de pacotes fornece
controle da velocidade de um compressor único
em um conjunto de compressores. Para controlar
até 6 compressores, use o VLT® Extended Relay
CardMCB 113.
Controle da temperatura de condensação
•
utuante
Economiza dinheiro monitorando a temperatura
externa e permitindo que a temperatura de
condensação seja a mais baixa possível, o que
reduz a velocidade do ventilador e o consumo de
energia.
Gerenciamento de retorno de óleo
•
O gerenciamento do retorno de óleo melhora a
conabilidade e a vida útil do compressor e
garante lubricação apropriada, monitorando o
compressor de velocidade variável. Se tiver
funcionando durante um período determinado,
ela toma velocidade para retornar óleo ao
reservatório de óleo
Monitoramento de baixa e alta pressão
•
Economiza dinheiro ao reduzir a necessidade de
reinicializações no local. O conversor de
frequência monitora a pressão no sistema e se a
pressão atingir um nível perto do nível que
aciona a válvula de encerramento, o conversor de
frequência faz um encerramento e reinicia logo
após.
STO
•
STO ativa Safe Torque O (parada por inércia)
quando ocorre uma situação crítica.
Sleep mode
•
O recurso sleep mode economiza energia
parando a bomba quando não houver demanda.
Relógio de tempo real.
•
Smart logic control (SLC)
•
O SLC compreende a programação de uma
sequência que consiste em eventos e ações. O
SLC oferece uma ampla variedade de funções do
PLC usando comparadores, regras lógica e
temporizadores.
4.2 Recursos de aplicação selecionada
4.2.1 SmartStart
Para congurar o conversor de frequência da maneira mais
eciente e lógica, a linguagem e o texto usados no
conversor de frequência fazem completo sentido para os
engenheiros e instaladores na área de refrigeração. Para
tornar a instalação ainda mais eciente, o menu do
assistente de setup integrado conduz o usuário pelo setup
do conversor de frequência de maneira clara e estruturada.
As seguintes aplicações são suportadas:
Controle de múltiplos compressores.
•
Ventilador de múltiplos condensadores, torre de
•
resfriamento/ condensação evaporativa.
Bomba e ventilador único.
•
Sistema de bombas.
•
O recurso é ativado na primeira energização, após um reset
de fábrica ou no quick menu. Ao ativar o assistente, o
conversor de frequência pede as informações necessárias
para funcionar a aplicação.
4 4
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 93

Exemplos de Aplicações
VLT® Refrigeration Drive FC 103
4.2.2 Partida/Parada
Terminal 18 = Partida/parada parâmetro 5-10 Terminal 18
Entrada Digital [8] Partida.
Terminal 27 = Sem operação parâmetro 5-12 Terminal 27,
Entrada Digital [0] Sem operação (Padrão [2] parada por
inércia inversa).
44
Parâmetro 5-10 Terminal 18 Entrada Digital = [8]
Partida (padrão).
Parâmetro 5-12 Terminal 27, Entrada Digital = [2]
Parada por inércia inversa (padrão).
4.2.3 Parada/Partida por Pulso
Terminal 18 = Partida/parada parâmetro 5-10 Terminal 18
Entrada Digital [9] Partida por pulso.
Terminal 27= Parada parâmetro 5-12 Terminal 27, Entrada
Digital [6] Parada por inércia inversa.
Parâmetro 5-10 Terminal 18 Entrada Digital = [9]
Partida por pulso.
Parâmetro 5-12 Terminal 27, Entrada Digital = [6]
Parada por inércia inversa.
Ilustração 4.1 Terminal 37: Disponível somente com a função
Safe Torque O (STO)
Ilustração 4.2 Terminal 37: Disponível somente com função
STO
94 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

Exemplos de Aplicações Guia de Design
4.2.4 Referência do Potenciômetro
Referência de tensão por meio de um potenciômetro.
Parâmetro 3-15 Fonte da Referência 1 [1] = Entrada
Analógica 53
Parâmetro 6-10 Terminal 53 Tensão Baixa = 0 V
Parâmetro 6-11 Terminal 53 Tensão Alta = 10 V
Parâmetro 6-14 Terminal 53 Ref./Feedb. Valor Baixo
= 0 RPM
Parâmetro 6-15 Terminal 53 Ref./Feedb. Valor Alto =
1.500 RPM
Interruptor S201 = OFF (U)
4.3 Exemplos de Setup de Aplicações
4 4
Ilustração 4.3 Tensão de referência via potenciômetro
Os exemplos nesta seção têm a nalidade de referência rápida para aplicações comuns.
A programação do parâmetro são os valores padrão regionais, a menos que indicado de outro modo (selecionados
•
em parâmetro 0-03
Os parâmetros associados aos terminais e suas congurações estão mostrados ao lado dos desenhos
•
Os ajustes de interruptor necessários para os terminais analógicos A53 ou A54 também são mostrados.
•
Denições Regionais).
AVISO!
Ao usar o recurso STO opcional, um o de jumper pode ser necessário entre o terminal 12 (ou 13) e o terminal 37 para
o conversor de frequência operar com valores de programação padrão de fábrica.
Exemplo de aplicação do SLC
Uma sequência 1:
1. Partida
2. Aceleração.
3. Opere com referência de velocidade de 2 s.
4. Desaceleração.
5. Manter eixo até parar.
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 95

Exemplos de Aplicações
VLT® Refrigeration Drive FC 103
44
Ilustração 4.4 Aceleração/Desaceleração
Programe os tempos de rampa em parâmetro 3-41 Tempo de Aceleração da Rampa 1 e parâmetro 3-42 Tempo de Desace-
leração da Rampa 1 com os tempos desejados.
t
× n
acc
=
t
rampa
Programe o terminal 27 para [0] Sem operação (parâmetro 5-12 Terminal 27, Entrada Digital)
Programe a referência predenida 0 para a primeira velocidade predenida (parâmetro 3-10 Referência Predenida [0]) em
porcentagem da velocidade de referência máxima (parâmetro 3-03 Referência Máxima). Exemplo: 60%
Programe a referência predenida 1 para a segunda velocidade predenida (parâmetro 3-10 Referência Predenida [1]
Exemplo: 0% (zero).
Programe o temporizador 0 para velocidade de funcionamento constante, no parâmetro 13-20 Temporizador do SLC [0].
Exemplo: 2 s
Programe o Evento 1 em parâmetro 13-51 Evento do SLC [1] para [1] Verdadeiro.
Programe o Evento 2 em parâmetro 13-51 Evento do SLC [2] para [4] Na Referência.
Programe o Evento 3 em parâmetro 13-51 Evento do SLC [3] apara [30] Timeout 0.
Programe o Evento 4 em parâmetro 13-51 Evento do SLC [4] para [0] Falso.
Programe a Ação 1 em parâmetro 13-52 Ação do SLC [1] para [10] Selecionar predenido 0.
Programe a Ação 2 em parâmetro 13-52 Ação do SLC [2] para [29] Iniciar Temporizador 0.
Programe a Ação 3 em parâmetro 13-52 Ação do SLC [3] para [11] Selecionar predenido1.
Programe a Ação 4 em parâmetro 13-52 Ação do SLC [4] para [1] Nenhuma ação.
Programe o em parâmetro 13-00 Modo do SLC para LIGADO.
O comando de partida/parada é aplicado no terminal 18. Se o sinal de parada for aplicado, o conversor de frequência
desacelera e entra no modo livre.
par . 1 − 25
norm
ref RPM
96 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228

FC
4-20 mA
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A
54
U - I
+
-
130BB675.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A54
U - I
0 - 10V
+
-
130BB676.10
Exemplos de Aplicações Guia de Design
4 4
Ilustração 4.5 Exemplo de Aplicação do SLC
4.3.1 Feedback
Parâmetros
Congur
Parâmetros
Função Congura
ção
Parâmetro 6-22
4 mA*
Terminal 54
Corrente Baixa
Parâmetro 6-23
20 mA*
Terminal 54
Corrente Alta
Parâmetro 6-24
0*
Terminal 54 Ref./
Tabela 4.1 Transdutor de Feedback de Corrente Analógica
Feedb. Valor
Baixo
Parâmetro 6-25
Terminal 54 Ref./
Feedb. Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
50*
Tabela 4.2 Transdutor analógico de feedback de tensão (3 os)
Função
Parâmetro 6-20
Terminal 54
Tensão Baixa
Parâmetro 6-21
Terminal 54
Tensão Alta
Parâmetro 6-24
Terminal 54
Ref./Feedb.
Valor Baixo
Parâmetro 6-25
Terminal 54
Ref./Feedb.
Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
ação
0,07 V*
10 V*
0*
50*
MG16G228 Danfoss A/S © 08/2015 Todos os direitos reservados. 97

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A54
U - I
0 - 10V
+
-
130BB677.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130BB926.10
130BB927.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130BB683.10
Exemplos de Aplicações
VLT® Refrigeration Drive FC 103
Parâmetros
Congur
Função
Parâmetro 6-20
ação
0,07 V*
Terminal 54
Tensão Baixa
Parâmetro 6-21
10 V*
Terminal 54
Tensão Alta
44
Parâmetro 6-24
0*
Terminal 54
Ref./Feedb.
Valor Baixo
Parâmetro 6-25
50*
Terminal 54
Ref./Feedb.
Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
Tabela 4.3 Transdutor analógico de feedback de tensão (4 os)
Tabela 4.5 Referência de Velocidade Analógica (Corrente)
Parâmetros
Função
Parâmetro 6-12
Terminal 53
Corrente Baixa
Parâmetro 6-13
Terminal 53
Corrente Alta
Parâmetro 6-14
Terminal 53
Ref./Feedb.
Valor Baixo
Parâmetro 6-15
Terminal 53
Ref./Feedb.
Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
Congur
ação
4 mA*
20 mA*
0 Hz
50 Hz
4.3.2 Velocidade
Parâmetros
Congur
Parâmetros
Congur
Função
Parâmetro 6-10
ação
0,07 V*
Terminal 53
Tensão Baixa
Parâmetro 6-11
10 V*
Terminal 53
Tensão Alta
Parâmetro 6-14
0 Hz
Terminal 53
Ref./Feedb.
Valor Baixo
Parâmetro 6-15
50 Hz
Terminal 53
Ref./Feedb.
Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
Tabela 4.6 Referência de Velocidade (utilizando um
Potenciômetro Manual)
Função
Parâmetro 6-10
Terminal 53
Tensão Baixa
Parâmetro 6-11
Terminal 53
Tensão Alta
Parâmetro 6-14
Terminal 53
Ref./Feedb.
Valor Baixo
Parâmetro 6-15
Terminal 53
Ref./Feedb.
Valor Alto
* = Valor padrão
Notas/comentários:
D na 37 é opcional.
ação
0,07 V*
10 V*
0 Hz
50 Hz
Tabela 4.4 Referência de Velocidade Analógica (Tensão)
98 Danfoss A/S © 08/2015 Todos os direitos reservados. MG16G228
 Loading...
Loading...