

Page 1

ENGINEERING TOMORROW
操作ガイド
VLT® Refrigeration Drive FC 103
355–800 kW、エンクロージャー・サイズ E1h–E4h
www.DanfossDrives.com
Page 2

Page 3
Page 4

Page 5
目次 操作ガイド
目次
1 はじめに
1.1 取扱説明書の目的
1.2 補助的リソース
1.3 取扱説明書ならびにソフトウェア・バージョン
1.4 承認および認証
1.5 廃棄
2 安全性
2.1 安全記号
2.2 有資格技術者
2.3 安全予防措置
3 製品概要
3.1 使用目的
3.2 電力規格、重量、寸法
3.3 エンクロージャー E1h および E2h のインテリアビュー
3.4 エンクロージャー E3h および E4h のインテリアビュー
3.5 制御棚
3
3
3
3
3
3
4
4
4
4
6
6
6
7
8
9
3.6 ローカル・コントロール・パネル (LCP)
4 機械的設置
4.1 納入物
4.2 必要な工具
4.3 保存
4.4 動作環境
4.5 設置及び冷却の要件
4.6 ユニットの持ち上げ
4.7 E1h/E2h 機械的設置
4.8 E3h/E4h 機械的設置
5 電気的設置
5.1 安全指示
5.2 EMC 対策設置
5.3 配線図
5.4 モーターへの接続
5.5 交流主電源への接続
10
12
12
12
12
13
14
15
15
17
21
21
21
24
25
27
5.6 接地接続
5.7 端子寸法
5.8 コントロール配線
5.9 始動前チェックリスト
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 1
29
31
41
46
Page 6

目次
VLT® Refrigeration Drive FC 103
6 設定
6.1 安全指示
6.2 電源の供給
6.3 LCP メニュー
6.4 ドライブのプログラミング
6.5 システム・スタートアップ前のテスト
6.6 システム・スタートアップ
6.7 パラメーター設定
7 配線構成例
7.1 開ループ速度コントロールの配線
7.2 スタート/ストップの配線
7.3 外部警報リセットの配線
7.4 モーター・サーミスターの配線
7.5 回生の配線
8 メンテナンス、診断およびトラブルシューティング
8.1 メンテナンスとサービス
48
48
48
49
50
53
54
54
56
56
57
59
59
59
60
60
8.2 ヒートシンクアクセスパネル
8.3 状態メッセージ
8.4 警告と警報の種類
8.5 警告と警報のリスト
8.6 トラブルシューティング
9 仕様
9.1 電気データ
9.2 主電源
9.3 モーター出力とモーター・データ
9.4 周囲条件
9.5 ケーブル仕様
9.6 コントロール入力/出力とコントロールデータ
9.7 ヒューズ
9.8 エンクロージャー寸法
9.9 エンクロージャー・エアフロー
9.10 ファスナー・トルク定格
60
61
64
65
75
78
78
82
82
82
83
83
86
87
103
104
10 付属資料
10.1 略語と標準
10.2 国際/北米デフォルト・パラメーター設定
10.3 パラメーター・メニュー構造
インデックス
2 Danfoss A/S © 04/2018 All rights reserved. MG16P240
105
105
106
106
111
Page 7

はじめに 操作ガイド
1 はじめに
1.1 取扱説明書の目的
この操作ガイドには、 エンクロージャー・サイズ E
(E1h, E2h, E3h, and E4h) における VLT®ドライブの設
置と設定を安全に行うための情報が記載されています。
操作ガイドは、有資格技術者による利用を前提としていま
す。機器を安全かつ専門的に使用するため、操作ガイドを
良く読み、その内容に従ってください。安全指示と一般警
告については、特に注意して読むようにしてください。こ
の操作ガイドは、ドライブの操作時にいつでも取り出して
読めるよう大切に保管してください。
VLT® は登録商標です。
1.2 補助的リソース
高度な E1h–E4h ドライブの機能やプログラミングを理解
するために、様々な補助的リソースが利用できます。
VLT® Refrigeration Drive FC 103 プログラ
•
ミング・ガイドにより、パラメーターの使い方や
冷凍用途例について詳細に学習できます。
VLT® HVAC Drive FC 102
•
ンガイド
ムを設計するための詳細な性能や機能が記載さ
れています。
Safe Torque Off 操作ガイド
•
Off 機能に関する詳細な仕様、要件および設置説
明が記載されています。
Danfoss は補足的な情報と取扱説明書を提供しています。
をご参照ください。
filter=type%3Adocumentation
1.3
取扱説明書ならびにソフトウェア・
には、冷凍用途向けモーター制御システ
www.danfoss.com/en/search/?
バージョン
, 90–1200 kW デザイ
には、Safe Torque
をご参照ください。
承認および認証
1.4
表 1.2 承認および認証
他の承認および認証も受けています。最寄の Danfoss 代
理店までご連絡ください。電圧 T7 (525–690 V)のドラ
イブは、525–690 V でのみ UL 規格を取得しています。
ドライブは、UL 61800-5-1 熱記憶保持の要件を遵守して
います。詳細については、製品別
ー熱保護
のセクションをご参照ください。
デザインガイドのモータ
注記
出力周波数で課せられている制限
ソフトウェアバージョン 1.10 から、輸出管理規制を理由
として、ドライブの出力周波数は 590 Hz に制限されてい
ます。
1.4.1 ADN の遵守
内国水路での危険物の国際輸送に関する欧州協定(ADN)の
遵守に関しては、デザインガイドの「
置
」をご参照ください。
廃棄
1.5
電装品を組み込んでいる装置を一般廃棄
物とともに処理することは禁止されてい
ます。
地域で現在施行されている法律に従っ
て、分別回収してください。
ADN を遵守した設
1 1
この取扱説明書には、定期的な見直しと更新が行われま
す。改善のあらゆるご提案を歓迎いたします。
取扱説明書のバージョンと、対応するソフトウェアのバー
ジョンを示しています。
取扱説明書バージ
ョン
MG16P2xx 出力接触器に関する警告
およびその他の修正を追
表 1.1 取扱説明書ならびにソフトウェア・バージョン
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 3
注釈 ソフトウェア・
加。
表 1.1
バージョン
1.51
は
Page 8

安全性
VLT® Refrigeration Drive FC 103
2 安全性
22
2.1 安全記号
安全予防措置
2.3
以下は、このガイドで使用されている記号です:
警告
死亡事故や深刻な傷害事故を招く可能性のある危険な状
況を示します。
注意
軽微あるいは中小程度の傷害を招く危険性のある状況を
示します。これは安全ではないやり方に対する警告とし
ても使用される場合があります。
注記
重要情報を示します。装置や所有物などの損害を招く可
能性のある状況が含まれます。
2.2 有資格技術者
ドライブを無故障かつ安全に動作させるためには、正確か
つ信頼性の高い輸送、保管、設置、操作、メンテナンスが
必要です。機器の設置や操作は、有資格技術者のみが行う
ことができます。
有資格技術者とは、訓練を受けたスタッフであって、関連
する法律と規則に従って設備、システム、回路の設置、設
定、メンテナンスを行うことを許された者のことをいいま
す。また、有資格技術者は、この取扱説明書に記載する指
示と安全措置を熟知する必要があります。
警告
高電圧
AC 主電源、DC 電源、 ロードシェア、又は永久モーター
に接続されているときは、ドライブには高電圧が印加され
ています。有資格技術者でない人が、ドライブの設置、ス
タートアップ、メンテナンスを行った場合、死亡事故や重
大な傷害事故を招くおそれがあります。
ドライブの設置、スタートアップ、保守は、必ず
•
有資格技術者のみが行ってください。
警告
予期しない始動
ドライブが AC 主電源、直流電源、あるいはロードシェア
に接続されている場合、モーターはいつでも始動できま
す。プログラミング、サービス、あるいは修理中の予期し
ない始動は、死亡、深刻な傷害、あるいは物損事故を招く
恐れがあります。モーターは MCT 10 設定ソフトウェア
を使用したリモート操作からの外部スイッチ、フィールド
バスコマンド、入力速度指令信号によって、または不具合
状態のクリア後にスタートします。
予期しないモーターのスタートを防止するには:
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
ドライブを主電源から切り離してください。
•
ドライブを AC 主電源、直流電源、あるいはロー
•
ドシェアに接続する前に、ドライブ、モーター、
運転機器は、配線及び組み立てが完了している必
要があります。
4 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 9
安全性 操作ガイド
警告
放電時間
ドライブの直流リンク・キャパシターは、ドライブの電源
が入っていないときでも充電されています。警告 LED
が点灯していない場合でも、高電圧が存在する可能性があ
ります。サービスや修理の実施前に、電源を切ってから
40 分間待たないと、死亡事故または重大な傷害事故を招
くことがあります。
1. モーターを停止します。
2. バッテリーバックアップ、UPS 及び他のドライブ
に接続されている直流リンク接続も含めて、AC
電源、リモート直流リンク電源の接続をすべて外
してください。
3. モーターの接続を外すか、ロックしてください。
4. キャパシターが完全に放電されるまで 40 分間お
待ちください。
5. サービスや修理を実施する前に、キャパシターが
完全に放電していることを確認するために、適切
な電圧測定機器を使用してください。
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。接地
を正しく行わない場合、死亡又は重大な傷害を招くことが
あります。
機器の接地は、有資格の電気工事者が正しく行う
•
必要があります。
警告
機器の危険性
回転するシャフトや電気機器に接触すると、死亡事故また
は重大な傷害事故を招くことがあります。
訓練を受けた有資格者のみが、設置、始動、保守
•
を行うようにしてください。
電気作業は、国内および地域の電気工事規則に準
•
拠する必要があります。
本ガイドの手順に従ってください。
•
注意
高温の表面
ドライブには、ドライブの電源がオフになった後でも高温
を保ち続ける金属部品があります。ドライブの高温を示
すマーク(黄色の三角)に違反したときは、重大なやけど
を引き起こすことがあります。
母線などの内部部品には、ドライブの電源がオフ
•
になった後でも非常に高温であり続けるものが
あります。
高温マーク(黄色の三角)で表示された外側部分
•
は、ドライブの使用中はもとより、電源をオフに
した直後において、高温となります。
警告
内部故障により危険
一定の状況下では、内部故障がコンポーネントの爆発を引
き起こすことがあります。エンクロージャーを閉鎖せず、
かつ、適切に固定しない場合、死亡事故や重大な傷害事故
を招くおそれがあります。
ドアが開いた状態、又はパネルがオフの状態で、
•
ドライブを操作しないでください。
運転中は、エンクロージャーが適切に閉鎖され、
•
かつ、固定されていることを確認してください。
注記
主電源シールド安全オプション
主電源シールドのオプションは、IP21/IP54 (タイプ 1/タ
イプ 12)の保護定格を有するエンクロージャーに利用で
きます。主電源シールドは、BGV A2、VBG 4 に準拠して、
電源端子に誤って接触することを防止するためにエンク
ロージャーの内側へ設置されるカバーです。
2 2
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 5
Page 10

製品概要
3 製品概要
3.1 使用目的
VLT® Refrigeration Drive FC 103
33
ドライブは、 AC 主電源入力を可変 AC 波形出力へ変換する電動モーターコントローラーです。出力の周波数と電圧は、
モーターの速度とトルクを制御するために調整されています。ドライブは以下に従って設計されています:
システムフィードバック、または外部コントローラーのリモートコマンドに対応して、モーター速度を制御しま
•
す。
システムとモーターの状況を監視します。
•
モーター過負荷保護を提供します。
•
ドライブは、地域の法規に従って、工業環境及び商業環境における使用を前提としています。構成によっては、ドライブ
を独立的な用途に用いることができる一方で、より大きなシステムや設置物の一部として用いることも可能です。
注記
住居環境では、この製品は無線干渉を生じさせる可能性があり、追加的な緩和措置が必要になる場合があります。
予期される誤用
ドライブを、指定の動作条件・動作環境に準拠していない用途に使用しないでください。
守してください。
3.2 電力規格、重量、寸法
表 3.1
に、標準構成の寸法が記載されています。オプション構成の寸法については、
エンクロージャー・サイズ E1h E2h E3h E4h
380–480 V [kW (hp)] における定格
電力
525–690 V [kW (hp)] における定格
電力
エンクロージャー保護等級 IP21/タイプ 1
ユニット寸法
高さ [mm (in)] 2043 (80.4) 2043 (80.4) 1578 (62.1) 1578 (62.1)
幅 [mm (in)] 602 (23.7) 698 (27.5) 506 (19.9) 604 (23.89)
奥行き [mm (in)] 513 (20.2) 513 (20.2) 482 (19.0) 482 (19.0)
重量 [kg (lb)] 295 (650) 318 (700) 272 (600) 295 (650)
積荷寸法
高さ [mm (in)] 2191 (86.3) 2191 (86.3) 1759 (69.3) 1759 (69.3)
幅 [mm (in)] 768 (30.2) 768 (30.2) 746 (29.4) 746 (29.4)
奥行き [mm (in)] 870 (34.3) 870 (34.3) 794 (31.3) 794 (31.3)
重量 [kg (lb)] – – – –
355–450
(500–600)
450–630
(450–650)
IP54/タイプ 12
500–560
(650–750)
710–800
(750–950)
IP21/タイプ 1
IP54/タイプ 12
355–450
(500–600)
450–630
(450–650)
IP20/
シャーシ
章 9 仕様
章 9 仕様
に指定する条件を遵
を参照してください。
500–560
(650–750)
710–800
(750–950)
IP20/
シャーシ
表 3.1 エンクロージャー電力規格及び寸法
6 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 11

130BF206.11
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
- REGEN 83
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
+ REGEN 82
2
6
4
5
11
12
9
1
7
10
8
3
製品概要 操作ガイド
3.3 エンクロージャー E1h および E2h のインテリアビュー
3 3
1 制御棚 (
図 3.3
をご参照ください) 7 ファン電力カード
2 ローカル・コントロール・パネル (LCP) クレードル 8 スペース・ヒーター (オプション)
3 RFI フィルター (オプション) 9 主電源切断 (オプション)
4 主電源フューズ (UL 準拠に必要ですが、それ以外の場合に
10 ブレーキ/回生端子 (オプション)
はオプションです)
5 主電源端子 11 モーター端子
6 RFI シールド終端 12 接地端子
図 3.1 エンクロージャー E1h のインテリアビュー (エンクロージャー E2h も同様)
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 7
Page 12

FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
+ DC 89
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
- BRAKE 83
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
+ BRAKE 82
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
- DC 88
130BF211.11
1
6
2
5
9
12
13
11
7
8
3
10
4
製品概要
VLT® Refrigeration Drive FC 103
3.4 エンクロージャー E3h および E4h のインテリアビュー
33
1 ロードシェア/回生端子 (オプション) 8 RFI シールド終端 (オプション。ただし RFI フィルターを
ご注文のときは標準で付属します)
2 制御棚 (
図 3.3
をご参照ください) 9 ファン (エンクロージャーの前部を冷却するために使用し
ます)
3 ローカル・コントロール・パネル (LCP) クレードル 10 ファン電力カード
4 RFI フィルター (オプション) 11 スペース・ヒーター (オプション)
5 主電源フューズ (オプション) 12 ブレーキ端子 (オプション)
6 主電源端子 13 モーター端子
7 接地端子 – –
図 3.2 エンクロージャー E3h のインテリアビュー (エンクロージャー E4h も同様)
8 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 13

130BF148.11
Remove Jumper to activate Safe Stop
12 13 18 19 27 29 32 33 20 37
39 42 50 53 54 55
61 68 69
1
3
4
12
9
8
RELAY 1 RELAY 2
01 02 0304 05 06
2
6
10
7
5
11
13
製品概要 操作ガイド
3.5 制御棚
3 3
を参照)
を参照)
1 LCP クレードル (LCP は非表示) 8 制御棚
2 バス端子スイッチ
3 シリアル通信端子 (
(
章 5.8.6 RS485 シリアル通信の構成
表 5.1
を参照) 10 アナログ入力スイッチ A53/A54
を参照)
4 ディジタル入力/出力端子 (
5 ケーブル/EMC クランプ 12 ブレーキ抵抗器端子, 104–106
6 リレー 1 及びリレー 2 (
7 コントロール・カード (LCP 及びコントロール端子の下) – –
表 5.2
図 5.19
を参照) 11 アナログ入力/出力端子 (
を参照) 13 電力カード (制御棚の下)
9 USB ポート
(
章 5.8.11 電圧/電流入力の選択
(制御棚下の電力カード上)
表 5.3
図 3.3 制御棚のビュー
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 9
Page 14

130BF153.11
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
0.00 kW
0.0 Hz
On
Alarm
Warn.
0.00 A
0.0 %
2605 kWh
A1.1
A1.2
A1.3
A2
A3
B1
B2
B4
B3
C1
C2
C3
C4
C5
D1
D2
D3
E1
E2
E3
E4
Off Remote Stop
製品概要
VLT® Refrigeration Drive FC 103
3.6 ローカル・コントロール・パネル (LCP)
ローカル・コンロール・パネル (LCP) は、ドライブの前面にディスプレイとキーパッドが一体化されています。
LCP は以下の目的に使用します:
ドライブとモーターの制御。
33
•
ドライブパラメータへのアクセスおよびドライブのプログラミング。
•
動作データ、ドライブ状態、警告の表示。
•
数値ローカル・コンロール・パネル(NLCP)がオプションとして利用可能です。NLCP は、LCP と同様の方法で操作できま
すが、異なる部分もあります。NLCP の使用に関する詳細については、製品に関係する
てください。
プログラミング・ガイド
を参照し
図 3.4 グラフィカル・ローカル・コンロール・パネル(LCP)
A. ディスプレイ・エリア
ディスプレイに表示される読み出し値には、パラメーターが関連付けられています。
に表示される情報は、具体的な用途に応じてカスタマイズ可能です。
ナル・メニュー)
10 Danfoss A/S © 04/2018 All rights reserved. MG16P240
呼び出し パラメーター デフォルト設定
A1.1
A1.2
A1.3
表 3.2 LCP ディスプレイ・エリア
を参照してください。
A2
A3
パラメーター 0-20 表示行 1.1 小
パラメーター 0-21 表示行 1.2 小
パラメーター 0-22 表示行 1.3 小
パラメーター 0-23 表示行 2 大
パラメーター 0-24 表示行 3 大
章 6.3.1.2 Q1 My Personal Menu (マイ・パーソ
速度指令信号 [%]
モーター電流 [A]
電力 [KW]
周波数 [Hz]
kWh カウンター
表 3.2
を参照してください。LCP
Page 15

製品概要 操作ガイド
B. メニュー・キー
メニュー・キーは、パラメーター設定メニューへのアクセ
ス、通常操作時の状況ディスプレイ・モードの変更、ある
いは故障ログ・データの表示などに使用します。
呼び出
し
B1 状態 操作に関する情報を表示します。
B2 Quick
B3 Main
B4 Alarm
表 3.3 LCP メニュー・キー
キー 機能
Menu(クイッ
ク・メニュ
ー)
Menu(メイ
ン・メニュ
ー)
Log(警報ロ
グ)
初期設定説明のためのパラメーターに
アクセスできます。用途に応じた詳細
な手順も提供します。
イック・メニュー モード
ださい。
すべてのパラメーターにアクセスでき
ます。
章 6.3.1.8 メイン・メニュー・
モード
を参照してください。
現在の警告のリスト、及び最後の 10 個
の警報を表示します。
章 6.3.1.1 ク
を参照してく
C. ナビゲーション・キー
ナビゲーション・キーは、機能のプログラミングやディス
プレイ・カーソルの移動に使用します。ナビゲーション・
キーは、ローカル (手動)操作での速度コントロールにも
使用できます。ディスプレイの輝度は、[Status] と
[▲]/[▼] キーを押すことで調整できます。
呼び出しキー 機能
C1 Back(戻る)メニュー構成の 1 つ前のステップ又はリ
ストに戻ります。
C2 Cancel(
キャン
セル)
C3 Info(情報)表示されている機能の意味を表示します。
表示モードが変更されない限り、最後に実
行した変更やコマンドが取り消されます。
D. 表示ランプ
表示ランプは、ドライブのステータスを特定し、警告又は
故障状態について視覚的に通知します。
呼び出し表示 表示ランプ機能
D1 オン 緑色 ドライブが主電源又は 24V 直流
外部電源から電力供給を受ける
とアクティブになります。
D2 警告 黄色 警告状態がアクティブになると
作動します。ディスプレイ・エ
リアに問題を特定したテキスト
が表示されます。
D3 警報 赤色 不具合状態が発生すると作動し
ます。ディスプレイ・エリアに
問題を特定したテキストが表示
されます。
表 3.5 LED 表示ランプ
E. 操作キー及びリセット
操作キーはコントロールパネルの下部にあります。
呼び出
し
E1 Hand
E2 オフ モーターを停止しますが、ドライブへの
E3 Auto
E4 リセット 不具合がリセットされた後に、ドライブ
表 3.6 LCP 操作キー及びリセット
キー 機能
On(手動オ
ン)
On(自動オ
ン)
ローカル・コントロールでドライブをス
タートします。コントロール入力やシリ
アル通信による外部停止信号は、ローカ
ルの[Hand On]を重ね書きします。
電力は供給します。
システムを遠隔操作モードにして、コン
トロール端末またはシリアル通信による
外部スタート・コマンドに反応できるよ
うにします。
を手動でリセットします。
3 3
C4 OK(確定)パラメーター・グループにアクセスします。
またはオプションを有効にします。
C5
▲ ▼
表 3.4 LCP ナビゲーション・キー
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 11
メニュー内の項目間を移動します。
◄
►
Page 16

OUT: 3x0-Vin 0-590Hz 880/780 A
IN: 3x380-480V 50/60Hz 848/752 A
500 kW / 650 HP
VLT
T/C: FC-103N500T4E20H2XGC7XXSXXXXAXBXCXXXXDX
P/N: 135N6991 S/N:
R
Refrigeration Drive
www.danfoss.com
130BF733.11
ASSEMBLED IN USA
Max Tamb. 55
C/131
F at Full Output Current Derating
Tamb. 40
C/104
F at Full Output Current
SCCR 100 kA at UL Voltage range 380-480 V
Listed 36U0 E70524 IND. CONT. EQ.
UL Voltage range 380-480 V
CAUTION - ATTENTION:
Stored charge, wait 40 min.
Charge residuelle, attendez 40 min.
See manual for special condition / prefuses
Voir manuel de conditions speciales / fusibles
WARNING - AVERTISSEMENT:
`
`
123456H123
1
2
3
4
5
6
Danfoss A/S
6430 Nordborg
Denmark
CHASSIS/IP20
機械的設置
4 機械的設置
VLT® Refrigeration Drive FC 103
4.1 納入物
納入物は、機器構成によって異なります。
納入物と銘板上の情報が、注文確認書に対応して
•
44
いることを確認してください。
梱包とを目視検査して、輸送中の不適切な取扱に
•
よって損傷が発生していないか確認します。損
害については、運送業者に請求を行なってくださ
い。説明のために、損傷のあった部品を保管して
ください。
4.2 必要な工具
受け取り/積み下ろし
ドライブ重量の吊り下げについて定格を有する
•
ビーム及びフック
法
をご参照ください。
機器を設置するためのクレーン又はその他の吊
•
り下げ装置。
設置
10 mm 又は 12 mm のドリルビットを備えたド
•
章 3.2 電力規格、重量、寸
リル
テープ式メジャー。
•
多様なサイズのプラスドライバーとマイナスド
•
ライバー。
メトリック・ソケット (7-17 mm) を備えたレン
•
チ
レンチ・エクステンション。
•
トルクス・ドライブ (T25 及び T50)。
•
コンジット又はケーブル・グランド用のシート金
•
属パンチ
ドライブ重量吊り下げ用のビーム及びフック。
•
章 3.2 電力規格、重量、寸法
をご参照くださ
い。
ドライブを台座上及び定位置に設置するための
•
クレーン又はその他の吊り下げ装置。
保存
4.3
1 タイプ・コード
2 コード番号
3 電力規格
4 入力電圧、周波数、電流(低/高電圧時)
5 出力電圧、周波数、電流 (低/高電圧時)
6 放電時間
図 4.1 E4h エンクロージャーの製品銘板(例)
注記
銘板をドライブから取り外すと保証が無効になることが
あります。
12 Danfoss A/S © 04/2018 All rights reserved. MG16P240
乾燥した場所にドライブを保管してください。設置まで
は、機器をその梱包材に密閉して保管してください。推奨
される周囲温度については、
章 9.4 周囲条件
をご参照く
ださい。
保管期間が 12 か月を超えない場合には、保管している間、
定期的なフォーミング(キャパシターの充電)は不要で
す。
Page 17

機械的設置 操作ガイド
4.4 動作環境
空気(中)の水分、粒子、腐食性ガスが存在する環境で
は、機器の IP/定格が設置環境に適合していることを確認
してください。周囲条件の仕様については、
条件
をご参照ください。
章 9.4 周囲
注記
結露
水分もまた、電子部品上に結露を発生させて、短絡を引き
起こすことがあります。凍結する場所への設置は避けて
ください。ドライブ温度が周囲の空気よりも低いときは、
オプションのスペース・ヒーターを取り付けます。スタン
バイ・モードで運転すると、ワット損失により回路が水分
から免れている間、結露のリスクが減少します。
注記
過酷な周囲条件
高温または低温過ぎることにより、機器の性能と寿命が低
下します。
周囲温度が 55 °C (131 °F)を超える環境で運転
•
させないでください。
ドライブの運転が可能な最低温度は、10 °C
•
(14 °F)です。しかし、定格負荷における適切な
動作は、0 °C (32 °F)以上の温度でのみ保証さ
れます。
温度が周囲温度制限を超える場合は、キャビネッ
•
トまたは設置場所で空調設備を追加する必要が
あります。
4.4.1 ガス
硫化水素、塩素、アンモニア等の刺激性ガスは、電気及び
機械部品の損傷を与える恐れがあります。機器は、刺激性
ガスの影響を減少させるため、コンフォーマル・コーティ
ングされた回路基板を使用しています。コンフォーマ
ル・コーティングのクラス仕様及び定格については、
章 9.4 周囲条件
4.4.2 塵埃
ドライブを塵埃(ダスト)の多い環境に設置するときは、
以下に注意してください:
定期保全
塵埃が電子部品に蓄積すると、これが絶縁層の働きをしま
す。この層により、部品の冷却能力が低下し、部品の温度
が高くなります。高熱環境により、電子部品の寿命が短縮
します。
ヒートシンクとファンに、塵埃が蓄積しないようにしてく
ださい。サービスと保守の詳細については、
ナンス、診断およびトラブルシューティング
さい。
をご参照ください。
章 8 メンテ
をご参照くだ
冷却ファン
ファンはドライブ冷却のためのエアフローを提供します。
ファンが塵埃の多い環境にさらされると、塵埃のファンの
軸受けに損傷を与え、ファンの早期故障を生じさせること
があります。塵埃はファンのブレードにも蓄積すること
があり、ファンのバランスを失わせて、ファンが適切に機
器を冷却しなくなる恐れがあります。
4.4.3 潜在的爆発性雰囲気
警告
爆発性雰囲気
潜在的爆発性雰囲気にドライブを設置しないでください。
このエリア外のキャビネット内にドライブを設置してく
ださい。これらのガイドラインに従わないと、死亡や重大
な傷害事故をのリスクが増大します。
潜在的爆発性雰囲気でシステムを運転するには、特殊な条
件を満足する必要があります。EU 指令 94/9/EC (ATEX
95)には、潜在的な爆発環境における電子機器の動作が規
定されています。
d 分類では、火花が発生した場合、保護エリアに
•
封じ込めることが規定されています。
e 分類では、火花の発生を禁じています。
•
d 分類保護を備えたモーター
承認を必要としません。特殊な配線と封じ込めが必要に
なります。
e 分類保護を備えたモーター
VLT® PTC Thermistor Card MCB 112 など、ATEX 承認済
みの PTC モニタリング機器を併用するときは、設置にあた
り、承認機関からの個別承認は必要ありません。
クラス d/e 保護を備えたモーター
モーター自体が発火保護クラス e に準拠しているのに対
して、モーター配線や接続環境は d 分類に準拠していま
す。高ピーク電圧を減衰させるには、サイン波フィルター
をドライブ出力に使用します。
潜在的爆発性雰囲気にドライブを使用するときは、以下を
使用してください:
発火保護分類 d 又は e を備えたモーター。
•
モーター温度を監視するための PTC 温度センサ
•
ー。
短いモーター・ケーブル。
•
シールドされたモーター・ケーブルが使用されて
•
いない場合、正弦波出力フィルター。
4 4
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 13
Page 18

機械的設置
VLT® Refrigeration Drive FC 103
注記
モーター・サーミスター・センサーによる監視
VLT® PTC Thermistor Card MCB 112 オプションを備え
た機器は、潜在的爆発性雰囲気に関して PTB 認証を受けて
います。
4.5 設置及び冷却の要件
44
注記
誤った取り付けは、過熱や性能の低下を招く場合がありま
す。
設置要件
ユニットは、モーターのできる限り近くに置いて
•
ください。最大モーター・ケーブル長について
は、
章 9.5 ケーブル仕様
ユニットを堅固な表面に取り付けて安定させま
•
す。
エンクロージャー E3h 及び E4h は以下のよう
•
に取り付けできます:
- パネルの背板へ垂直に取り付け(標準的
な設置)。
- パネルの背板へ上下逆に垂直取り付け。
1)
をご参照ください。
冷却条件
上部と下部に冷却用空きスペースを確保してく
•
ださい。空きスペース要件: 225 mm (9 in)
十分なエアフローを提供します。
•
してください。
温度の定格低減 は、45 °C (113 °F) と 50 °C
•
(122 °F)の間から開始し、1000m(3300ft)を超え
ると始まるように考慮してください。詳細情報
設計ガイド
は、
ドライブでは、ヒートシンク冷却エアを必要としない背面
チャンネル冷却コンセプトを採用しています。ヒートシ
ンク冷却エアはドライブの背面チャンネルの熱を約 90%
逃がします。以下のキットを用いて、背面チャンネルエア
をパネル又はルームから直接取り込むことができます。
ダクト冷却
•
IP20/シャーシドライブが Rittal エンクロージ
ャーに設置されているとき、パネルからヒートシ
ンク冷却エアを流すのに背面チャンネル冷却キ
ットが利用できます。このキットを使用すると、
パネル内の熱を減らし、ドアファンを小さくする
ことができます。
背面冷却
•
上部カバーと底部カバーをユニットに取り付け
ることで、背面チャンネル冷却エアを、室内から
排気することができます。
をご参照ください。
表 4.1
を参照
- ユニットの背面を取り付け面として水
平に、パネルの背板へ取り付け。
- ユニットの側面を取り付け面として、パ
ネルの床面に取り付け。
取り付け位置の強度がユニットの重量を支えら
•
れることを確認してください。
適切な冷却ができるように、ユニット周囲に十分
•
なスペースがあることを確認します。
章 9.9 エンクロージャー・エアフロー
てください。
ドアを開くための十分なアクセスエリアを確保
•
してください。
底部からのケーブル挿入を確認してください。
•
1) 標準的ではない設置を行うには、工場に問い合わせて
ください
。
1)
1)
を参照し
注記
E3h 及び E4h エンクロージャー(IP20/シャーシ)の場合、
ドライブの背面チャンネルで除去できなかった熱を取り
除くため、少なくとも 1 つのドアファンが必要です。さら
に、ドアファンはドライブ内部の部品によって生成される
損失も除去できます。適切なサイズのファンを選択する
ため、必要な合計エアフローを計算してください。
ヒートシンクに対して必要なエアフローを確保してくだ
さい。
フレーム ドアファン/
上部ファン
[m3/hr (cfm)]
E1h 510 (300) 994 (585)
E2h 552 (325) 1053–1206 (620–710)
E3h 595 (350) 994 (585)
E4h 629 (370) 1053–1206 (620–710)
表 4.1 エアフロー率
ヒートシンク・ファン
[m3/hr (cfm)]
14 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 19

130BF685.10
130BF208.10
機械的設置 操作ガイド
4.6 ユニットの持ち上げ
ドライブは、常に専用吊り下げ用アイボルトを用いて、吊
り下げるようにしてください。吊り下げ用ホールの変形
を防止するために、バーを使用します。
警告
怪我や死亡のリスク
重量物の吊り下げに関する地域の安全規則に従ってくだ
さい。推奨事項及び地域の安全基準に従わない場合、死亡
事故や重大な傷害事故を招くおそれがあります。
吊り下げ機器が適切な動作状態にあることを確
•
認します。
さまざまなエンクロージャー・サイズの重量につ
•
いては、
ください。
バーの最大直径: 20 mm (0.8 in)。
•
ドライブの最上面と吊り下げケーブルが作る角
•
度: 60° 以上。
章 3.2 電力規格、重量、寸法
をご参照
4.7 E1h/E2h 機械的設置
E1h 及び E2h エンクロージャー・サイズは、フロア設置の
みを念頭に置いたものであり、台座とグランドプレートが
付属します。台座とグランドプレートは、正しく設置する
必要があります。
台座は 200 mm (7.9 in)であり、前面に開口部を備え、
ドライブの電源部品を冷却するために必要なエアフロー
を確保します。
グランドプレートは、ドアファンを通じてドライブの制御
部品に冷却空気を送り、IP21/タイプ 1 又は IP54/タイプ
12 保護定格を維持するために必要です。
4.7.1 フロアへの台座の取り付け
エンクロージャーを設置する前に、6 個のボルトを使用し
てフロアに台座を固定する必要があります。
1. 動作条件とケーブルのアクセスを考慮して、ユニ
ットを適切に配置します。
2. 台座の前面部を取り外して取付穴を使用できる
ようにします。
3. フロアに台座を設置して、取付穴に 6 つのボルト
を使用して固定します。
分をご参照ください。
図 4.3
の丸で囲った部
4 4
図 4.2 推奨する吊り下げ方法
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 15
図 4.3 台座からフロアへの取り付けポイント
Page 20

130BF225.10
1
2
5
4
6
3
130BF207.10
1
2
3
機械的設置
VLT® Refrigeration Drive FC 103
4.7.2 E1h/E2h の台座への取り付け
1. ドライブを持ち上げて台座に設置します。台座
の背部には 2 つのボルトがあり、これらをエンク
ロージャー後部の 2 つのスロット穴にスライド
させます。ボルトを上下させて調整し、ドライブ
の位置決めをします。2 つの M10 ネジとロック・
ブラケットでゆるめに固定します。
照してください。
44
2. 排気のため、225 mm (9 in)の空きスペースが上
部にあることを確認します。
3. ユニットの底部前面にある吸気口がふさがれて
いないことを確認します。
4. 台座の上部周囲に、6 つの M10x30 ファスナーを
使用してエンクロージャーを固定します。
図 4.5
締めながら、すべてのボルトを取り付けます。
5. 各ボルトを 19 Nm (169 in-lb)のトルクで固く
締めます。
6. エンクロージャー後部で、2 つの M10 ネジを 19
Nm (169 in-lb)のトルクで締めます。
を参照してください。各ボルトをゆるく
図 4.4
を参
1 エンクロージャー 3 M10x30 ファスナー
(後部隅のボルトは非表示)
2 台座 – –
図 4.5 台座からエンクロージャーへの取り付けポイント
4.7.3 ケーブル開口部の作成
グランドプレートは、外縁に沿ってスタッドを備えた金属
シートです。グランドプレートは、ケーブルの挿入口とケ
ーブル終端ポイントを提供します。これは、IP21/IP54
(Type 1/Type 12)保護定格を維持するために設置が必要
です。プレートは、ドライブのエンクロージャーと台座と
の間に設置します。スタッドの方向に応じて、プレートを
エンクロージャー又は台座の内部から取り付けることが
できます。グランドプレートの寸法については、
章 9.8.1 E1h 外装寸法
以下の手順については、
1. シート金属パンチを使用して、グランドプレート
にケーブル挿入穴を開けます。
2. 以下の方法のうち 1 つを使用して、グランドプレ
ートを挿入します:
1 エンクロージャー 4 エンクロージャーのスロッ
ト穴
2 台座 5 台座後部のボルト
3 M10 ネジ 6 ロックブラケット
図 4.4 台座からエンクロージャーへの背部取り付けポイント
16 Danfoss A/S © 04/2018 All rights reserved. MG16P240
3. グランドプレート上のスタッドを台座の穴に合
4. 各ネジを 2.3 Nm (20 in-lb)のトルクで締めま
2a 台座を通してグランドプレートを挿入
2b グランドプレートを通してグランドプ
わせて、10 個の M5 ネジ(2)で固定します。
す。
をご参照ください。
図 4.6
するには、台座前面のスロット(4)を通
してグランドプレートをスライドさせ
ます。
レートを挿入するには、スロットのある
ブラケットの下にグランドプレートを
スライドさせることができるように、グ
ランドプレートを傾けます。
をご参照ください。
Page 21

130BF209.10
1
3
4
2
機械的設置 操作ガイド
4.8.2 ケーブル開口部の作成
グランドプレートは、ドライブ・エンクロージャーの底部
を覆います。これは、IP20/シャーシ保護定格を維持する
ために設置が必要です。グランドプレートは、ケーブルが
端子にアクセスできるように切り抜きが可能な四角いプ
ラスチックでできています。
い。
図 4.7
を参照してくださ
1 ケーブル挿入穴 4 台座基部のスロット
2 M5 ネジ 5 前面カバー/グリル
3 グランドプレート – –
図 4.6 グランドプレートの設置
4.8
E3h 及び E4h エンクロージャー・サイズは、壁への取り付
け、またはエンクロージャー内の取り付けパネルへの取り
付けを念頭に置いています。プラスチック製グランドプ
レートは、エンクロージャー上に設置します。IP20/保護
シャーシ・ユニット内の端子への意図しないアクセスを防
止するために設計されています。
E3h/E4h 機械的設置
注記
回生/ロードシェアオプション
エンクロージャー上部で端子が露出することにより、回生
/ロードシェアオプションを備えたユニットは IP00 保護
定格を有しています。
1. 底部パネルと端子カバーを取 り 外 します。
図 4.8
2. モーター、主電源、接地ケーブルのサイズと位置
を決定します。位置と測定値を記録します。
3. ケーブルの測定値と位置に基づいて、プラスチッ
ク製グランドプレートに必要な大きさの四角い
開口部を開けます。
4. プラスチック製グランドプレート(7)を端子カバ
ーの底部レール上にスライドさせます。
5. 端子カバーの前面部を下方に傾けて、ファスナー
ポイント(8)をスロット穴のあるドライブ・ブラ
ケット(6)の上に配置します。
6. 端子カバーの側面パネルが、外部トラックガイド
(5)の上に配置されるようにします。
7. スロット穴のあるドライブ・ブラケットに端子カ
バーが接触するまで、端子カバーを押し込みま
す。
8. 端子カバーの前面を上方に傾けて、ドライブ底部
のファスナー穴 (9) が端子のキーホールと合
わさるようにします。2 つの T25 ネジで固定し、
2.3 Nm (20 in-lb)のトルクで締めます。
9. 底部パネルを 3 つの T25 ネジで固定し、2.3 Nm
(20 in-lb)のトルクで締めます。
を参照してください。
1a 4 つの T25 ネジを外し、底部パネルを取
り外します。
1b ドライブ底部を端子カバーに固定 して
いる 5 つの T20 ネジを外し、端子カバー
をまっすぐ引き抜きます。
4 4
4.8.1 E3h/E4h の実装版又は壁への取り
付け
1. エンクロージャー・サイズに従って、実装穴をド
リルで開けます。
法
を参照してください。
2. ドライブ・エンクロージャーの上部を、実装版又
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 17
は壁に固定します。
3. ドライブ・エンクロージャーの基部を、実装版又
は壁に固定します。
章 9.8 エンクロージャー寸
Page 22

1
130BF662.10
2
機械的設置
VLT® Refrigeration Drive FC 103
44
1 四角形のプラスチック
2 ケーブルがアクセスできるように切り抜いた四角形
図 4.7 プラスチック製グランドプレート
18 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 23

6
7
9
5
8
4
130BF688.10
2
3
1
機械的設置 操作ガイド
4 4
1 ロードシェア/回生端子 (オプション) 6 スロット穴のあるドライブ・ブラケット
2 底部パネル 7 プラスチック製グランドプレート(設置済み)
3 端子カバー 8 ファスナーポイント
4 制御配線用のグロメット・アクセス穴 9 キーホール開口部
5 トラックガイド – –
図 4.8 グランドプレートと端子カバーの組み立て
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 19
Page 24

130BF697.10
3
5
4
1
2
機械的設置
VLT® Refrigeration Drive FC 103
4.8.3 ロードシェア/回生端子の設置
ロードシェア/回生端子は、ドライブの上部にあり、輸送
中に破損することを防ぐため、工場出荷時点では装着され
ていません。以下の手順については、
ださい。
図 4.9
をご参照く
44
1 ラベルファスナー、M4
2 ラベル
3 ロードシェア/回生端子
4 端子ファスナー、M10
5 2 つの開口部を備えた端子プレート
図 4.9 ロードシェア/回生端子
1. 端子プレート、2 つの端子、ラベル、ファスナー
を、ドライブに付属するアクセサリーバッグ・か
ら取り出します。
2. ドライブ上部のロードシェア/回生用の開口部
からカバーを取り外します。2 つの M5 ファスナ
ーは後で使用するので、保管しておきます。
3. プラスチック製のバッキングを取り外し、ロード
シェア/回生用の開口部に端子プレートを取り
付けます。2 つの M5 ファスナーで固定し、2.3
Nm (20 in-lb)のトルクで締めます。
4. 1 つの端子ごとに 1 つの M10 ファスナーを使用
して、両方の端子を端子プレートに取り付けま
す。19 Nm (169 in-lb)のトルクで締めます。
5.
図 4.9
ルを取り付けます。2 つの M4 ネジで固定し、1.2
Nm (10 in-lb)のトルクで締めます。
に示されるように、端子の前面部にラベ
20 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 25

電気的設置 操作ガイド
5 電気的設置
5.1 安全指示
章 2 安全性
をご参照ください。 をご参照ください。
警告
誘導電圧
共に動作する異なるドライブの出力モーター・ケーブルか
らの誘導電圧は、共に機器のキャパシターを充電します。
これは機器がオフの場合、ロックアウトの場合でも同様で
す。出力ケーブルを別にせず動作させた場合、又はシール
ド・ケーブルを使用しなかった場合、死亡事故又は深刻な
傷害事故を招くことがあります。
出力モーター・ケーブルを別に配線するか、又は
•
シールド・ケーブルを使用します。
ドライブをすべて同時にロックアウトします。
•
警告
ショックの危険
このドライブは接地導体に直流電流を引き起こすことが
あり、死亡事故又は深刻な傷害事故を招くことがありま
す。
残留電流で動作する保護デバイス (RCD) が電
•
気ショック保護のために使用されているときは、
供給側でタイプ B の RCD のみが許容されま
す。
推奨事項に従わない場合、RCD が意図された保護を行わな
い可能性があります。
過電流保護
複数のモーターを用いる用途には、ドライブとモ
•
ーター間の短絡保護やモーター熱保護など、追加
的な保護機器が必要です。
短絡と過電流保護を行うため、入力ヒューズが必
•
要です。工場で装備されない場合、設置作業者が
ヒューズの取り付けを行う必要があります。
章 9.7 ヒューズ
ください
ケーブルの種類と定格
すべてのケーブルが、ケーブル断面積と周囲温度
•
の国内及び地域の規制に準拠していなければな
りません。
推奨される電力接続ケーブル: 最低 75 °C
•
(167 °F) 定格の銅線。
推奨ワイヤサイズおよびタイプについては、
章 9.5.1 ケーブル仕様
の最大ヒューズ定格をご参照
をご参照ください。
注意
物的損害
モーターの過負荷に対する保護は、デフォルト設定に含ま
れていません。この機能を追加するには、
ー 1-90 モーター熱保護を[ETR トリップ]
警告]
に設定します。北米市場において、ETR 機能は、
NEC に準拠したクラス 20 モーター過負荷保護を提供し
ます。
パラメーター 1-90 モーター熱保護を [ETR トリ
ップ] 又は [ETR 警告]
ター過負荷保護が提供されず、モーターが過熱すると物的
損害が発生することがあります。
に設定しなかったときは、モー
5.2 EMC 対策設置
EMC 対策設置を行う際は、以下の指示をご参照ください。
章 5.3 配線図
•
章 5.4 モーターへの接続
•
章 5.6 接地接続
•
章 5.8 コントロール配線
•
.
.
.
.
注記
ケーブル端のねじれ (ピッグテール)
シールド端のねじれは高周波数でのシールドのインピー
ダンスを増加させるため、シールド効果が低下し漏洩電流
が増加します。一体型シールド・クランプを使用して、シ
ールド端のねじれを防ぎます。
リレー、コントロール・ケーブル、信号インター
•
フェース、フィールドバス、又はブレーキととも
に使用するときは、シールドを両端でエンクロー
ジャーに接続します。接地経路のインピーダン
スが高いとき、騒音を出しているとき、又は電流
を伝導しているときは、1 つの端でシールド接続
を切断し、接地電流ループを回避します。
金属取付プレートを使用して電流をユニットに
•
戻します。取付板から取付ネジを通ってドライ
ブのシャーシまでの間に適切な電気的接触を実
現してください。
モーター入力ケーブルにはシールド・ケーブルを
•
使用します。別の方法としては、金属導管内でシ
ールドされていないモーター・ケーブルを使用す
る方法があります。
注記
シールド・ケーブル
シールド・ケーブル又は金属導管を使用しないと、ユニッ
ト及び設置が無線周波数(RF)放出レベルに関する規制上
の制限に合致しません。
パラメータ
又は
[ETR
5 5
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 21
Page 26

電気的設置
モーター・ケーブルとブレーキ・ケーブルを可能
•
な限り短くして、システム全体の干渉レベルを低
減するようにしてください。
敏感な信号レベルを持つケーブルをモーターや
•
ブレーキ・ケーブルの脇に配置しないでくださ
い。
通信及びコマンド/制御ラインに関しては、特定
•
の通信プロトコル基準に従います。例えば、USB
はシールド・ケーブルを使用する必要があります
が、RS485/イーサネットは、シールドされた UTP
ケーブルでも、シールドされていない UTP ケーブ
55
ルでも使用することができます。
すべての制御端子接続が PELV であることを確認
•
します。
VLT® Refrigeration Drive FC 103
注記
EMC 妨害
モーターとコントロール配線にはシールド・ケーブルを使
用し、主電源入力、モーター配線及びコントロール配線に
はセパレートケーブルを使用します。 電力、モーター、
コントロール・ケーブルの隔離を行わないと、予期しない
動作、又は性能の減少が発生することがあります。主電源
入力、モーター、コントロール・ケーブル間には、最低
200 mm (7.9 インチ)の空きスペースを確保します。
注記
高々度での設置
過電圧の危険があります。コンポーネントと重要な部品
間の絶縁では不十分である可能性があるので、PELV 要件
に適合していない可能性があります。外付けの保護装置
または電気絶縁を用いて、過電圧の危険を緩和してくださ
い。
2000 m (6500 ft)を超える高度に設置する場合、PELV 適
合について Danfoss にお問い合わせください。
注記
PELV 適合
保護特別低電圧(PELV)電源供給を使用して、地域と国の
PELV 規制に準拠することにより、感電を防ぎます。
22 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 27

e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
電気的設置 操作ガイド
5 5
1 PLC 10 主電源ケーブル (シールドなし)
2
最小 16 mm2 (6 AWG) 等価ケーブル。
3 コントロール・ケーブル 12 絶縁はく離ケーブル上のクランプ
4 制御ケーブル、モーターケーブル、主電源ケーブル間には、
最低 200 mm (7.9 in)が必要です。
5 主電源 14 ブレーキ抵抗器
6 露出 (未塗装) 表面 15 金属ボックス
7 スター・ワッシャー 16 モーターへの接続
8 ブレーキ・ケーブル (シールドあり) 17 モーター
9 モーター・ケーブル (シールドあり) 18 EMC ケーブル・グランド
図 5.1 適切な EMC 設置の例
11 出力接触器および類似のオプション
13 標準接地母線。地域及び国のエンクロージャー接地に関す
る要件に従ってください。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 23
Page 28

e30bf111.12
230 V AC
50/60 Hz
TB5R1Regen +
Regen -
83
Regen (optional)
12Brake temperature
(NC)
Space heater (optional)
91 (L1)
92 (L2)
93 (L3)PE88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20
(COM D IN)
15 mA
200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
+10 V DC
-10 V DC to +10 V DC
0/4-20 mA
24 V DC
02
01
05
04
06
240 V AC, 2A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1
2
ON
A53 U-I (S201)
ON
2
1
A54 U-I (S202)
ON=0/4-20 mA
OFF=0 to ±10 V
95
400 V AC, 2A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
2)
+-+
-
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V5VS801
RS485
RS485
2
1
ON
S801/Bus Term.
OFF-ON
3-phase
power
input
Load share
Switch mode
power supply
Motor
Analog output
interface
Relay1
Relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
===
240 V AC, 2A
400 V AC, 2A
-10 V DC to +10 V DC
10 V DC
(optional)
(optional)
TB6 Contactor
1)
電気的設置
VLT® Refrigeration Drive FC 103
5.3 配線図
55
図 5.2 基本配線図
A = アナログ、D = ディジタル
1) Safe Torque Off は端子 37(オプション)を使用します。Safe Torque Off の設置説明については、VLT® 周波数変換
器 - Safe Torque Off 取扱説明書をご参照ください。。
24 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 29

電気的設置 操作ガイド
5.4 モーターへの接続
警告
誘導電圧
出力モーター・ケーブルからの誘導電圧は、共に機器のキャパシターを充電します。これは機器がオフの場合、ロックア
ウトの場合でも同様です。出力ケーブルを別にせず動作させた場合、又はシールド・ケーブルを使用しなかった場合、死
亡事故又は深刻な傷害事故を招くことがあります。
ケーブル・サイズについては、国内及び地域の電気法規を遵守してください。最大ワイヤサイズは
•
データ
を参照してください。
モーターのメーカーの配線条件に従ってください。
•
モーター配線ノックアウト又はアクセスパネルは、IP21/IP54 (Type 1/Type 12)ユニットの台座に載せた状態
•
で提供されます。
ドライブとモーターの間に始動器あるいは極数可変機器(例えば、ダランダーモーターやスリップリング非同期
•
モーター)を接続しないでください。
手順
1. 外部ケーブル絶縁の一部分をはく離します。
2. はく離ワイヤをケーブル・クランプの下に設置して、ケーブルシールドと接地との間で機械的固定と電気的接触
を確立します。
3.
章 5.6 接地接続
を参照してください。
4. 3 相モーター配線を端子 96(U)、97(V)、98(W) に接続します。
5.
章 9.10.1 ファスナー・トルク定格
に記載されている接地に関する指示に従って、最も近接した接地端子に接地線を接続します。
図 5.3
に記載されている内容に従って、端子を締めます。
を参照してください。
章 9.1 電気
5 5
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 25
Page 30

130BF150.10
U/T1 96 V/T2 97
W/T3 98
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
U/T1 96 V/T2 97
W/T3 98
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (14FT-LB)
+ REGEN 82
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
- REGEN 83
FASTENER TORQUE:
M10 19Nm (14FT-LB)
M12 35Nm (26FT-LB)
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.3 交流モーター端子 (E1h 表示)。端子の詳細ビューについては、
章 5.7 端子寸法
を参照してください
26 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 31

電気的設置 操作ガイド
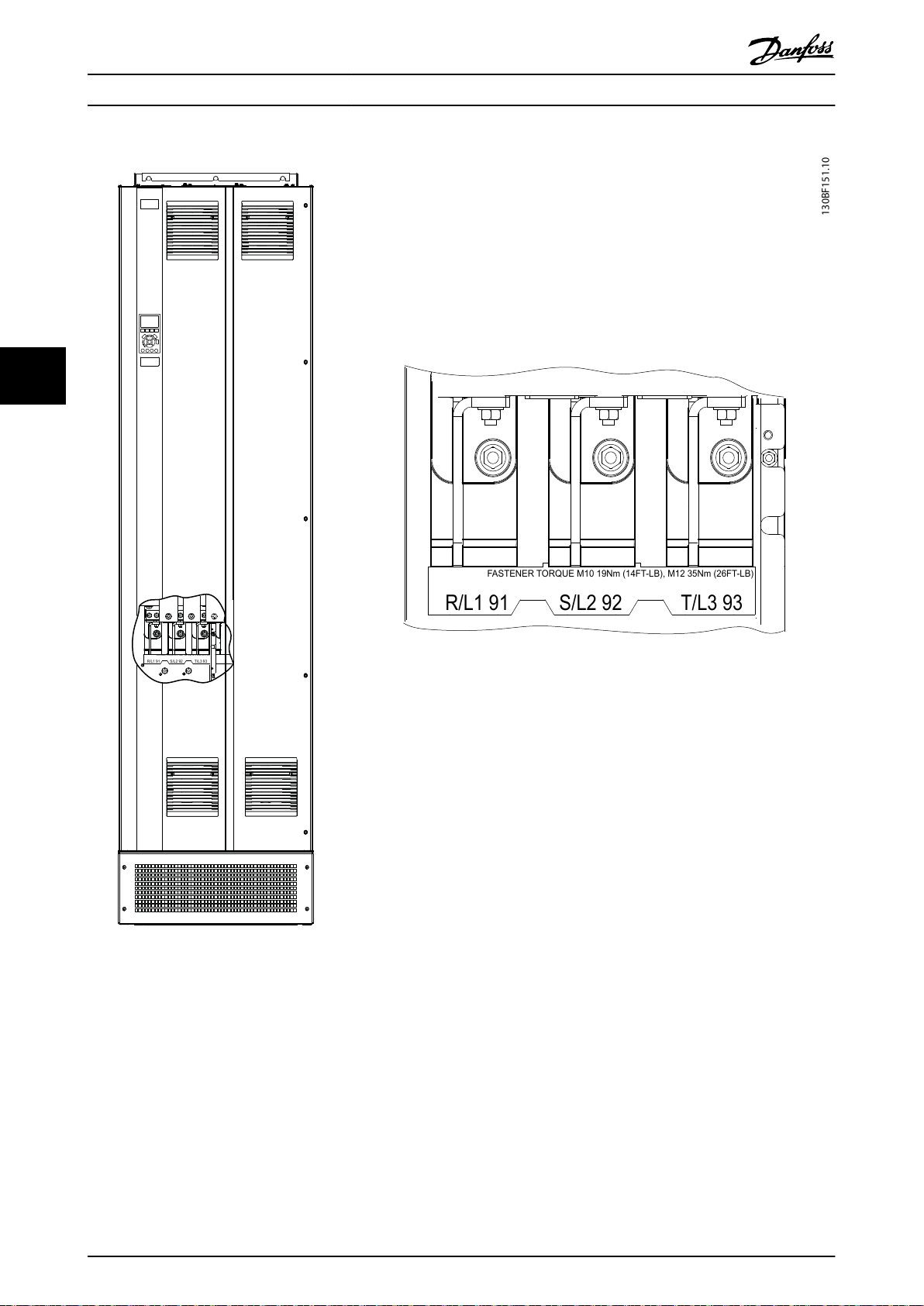
5.5 交流主電源への接続
ドライブの入力電流に従ってワイヤのサイズを決めます。最大ワイヤサイズは
•
ください。
ケーブル・サイズについては、国内及び地域の電気法規を遵守してください。
•
手順
1. 外部ケーブル絶縁の一部分をはく離します。
2. はく離ワイヤをケーブル・クランプの下に設置して、ケーブルシールドと接地との間で機械的固定と電気的接触
を確立します。
3.
章 5.6 接地接続
を参照してください。
4. 3 相交流入力電力のワイヤを端子 R、S、T に接続します(
5.
章 9.10.1 ファスナー・トルク定格
6. 絶縁された主電源(IT 主電源やフローティング・デルタ)、又は接地脚を有する TT/TN-S 主電源(接地デルタ)か
ら供給するときは、
傷を回避するとともに、接地容量電流を減少させます。
に記載されている接地に関する指示に従って、最も近接した接地端子に接地線を接続します。
図 5.4
に記載されている内容に従って、端子を締めます。
パラメーター 14-50 RFI フィルターを [0] Off(オフ)
を参照)。
章 9.1 電気データ
に設定して、DC リンクに対する損
を参照して
注記
出力接触器
Danfoss は、IT 主電源ネットワークに接続されている 525–690 V ドライブ上で出力接触器を使用することは推奨してい
ません。
5 5
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 27
Page 32
130BF151.10
T/L3 93
S/L2 92
R/L1 91
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
T/L3 93
S/L2 92
R/L1 91
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.4 交流主電源端子 (E1h 表示)。端子の詳細ビューについては、
28 Danfoss A/S © 04/2018 All rights reserved. MG16P240
章 5.7 端子寸法
を参照してください
Page 33

電気的設置 操作ガイド
5.6 接地接続
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。接地を正しく行わない場合、死亡又は重大な傷害を招くことがあり
ます。
機器の接地は、有資格の電気工事者が正しく行う必要があります。
•
電気的安全のために
適用される基準と指令に従って、ドライブを接地してください。
•
入力電力、モーター電源、およびコントロール配線用に専用アース線が必要です。
•
1 つのドライブ他のドライブにディジーチェーン接続して、接地しないでください。
•
接地ワイヤ接続をできるだけ短くします。
•
モーターのメーカーの配線条件に従ってください。
•
最小ケーブル断面積は、 10 mm2 (6 AWG) (又は別々に終端処理した 2 本の定格接地線)。
•
章 9.10.1 ファスナー・トルク定格
•
に記載されている内容に従って、端子を締めます。
5 5
EMC 対策接地のために
金属ケーブル・グランド、又は機器に付属するクランプを使用して、ケーブル・シールドとドライブのエンクロ
•
ージャーとの間で電気的接触を確立します 。
高品質撚り線を使用して、バースト・トランジエントを低減します。
•
ピッグテールを使用しないでください。
•
注記
等電位
ドライブとコントロールシステムとの間の接地電位が異なる場合には、バースト・トランジエントのリスクが生じます。
システム・コンポーネント間に平衡ケーブルを設置します。推奨されるケーブル断面積: 16 mm2 (5 AWG)。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 29
Page 34

130BF152.10
U/T1 96 V/T2 97
W/T3 98
T/L3 93S/L2 92R/L1 91
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
U/T1 96 V/T2 97
W/T3 98
T/L3 93S/L2 92R/L1 91
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
FASTENER TORQUE M10 19Nm (14FT-LB), M12 35Nm (26FT-LB)
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.5 接地端子 (E1h 表示)。端子の詳細ビューについては、
章 5.7 端子寸法
を参照してください
30 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 35

130BF683.10
6X 613 (24.1)
383 (15.1)
472 (18.6)
423 (16.7)
165 (6.5)
0 (0.0)
101 (4.0)
82 (3.2)
721 (28.4)
0 (0.0)
1
2
3
200 (7.9)
515 (20.3)
485 (19.1)
248 (9.8)
241 (9.5)
171 (6.7)
414 (16.3)
361 (14.2)
331 (13.0)
501 (19.7)
497 (19.6)
431 (17.0)
512 (20.2)
4
電気的設置 操作ガイド
5.7 端子寸法
5.7.1 E1h 端子寸法
5 5
1 主電源端子 3 モーター端子
2 ブレーキ又は回生端子 4 接地端子、M10 ネジ
図 5.6 E1h 端子寸法 (正面図)
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 31
Page 36

130BF650.10
A
A
649 (25.5)649 (25.5)
0 (0.0)
0 (0.0)
0 (0.0)
164 (6.4)
290 (11.4)
377 (14.8)
0 (0.0)
164 (6.4)
290 (11.4)
18 (0.7)
0 (0.0)
84 (3.3)
42 (1.7)
5X
0 (0.0)
36 (1.4)
44 (1.8)
14 (0.5)
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.7 E1h 端子寸法 (側面図)
32 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 37

130BF689.10
721 (28.4)
6X 613 (24.1)
1
515 (20.3)
485 (19.1)
0 (0.0)
200 (7.9)
185 (7.3)
0 (0.0)
101 (4.0)
89 (3.5)
289 (11.4)
281 (11.1)
195 (7.7)
483 (19.0)
409 (16.1)
387 (15.2)
597 (23.5)
579 (22.8)
503 (19.8)
479 (18.9)
568 (22.4)
519 (20.4)
608 (23.9)
2
3
4
電気的設置 操作ガイド
5.7.2 E2h 端子寸法
5 5
1 主電源端子 3 モーター端子
2 ブレーキ又は回生端子 4 接地端子、M10 ネジ
図 5.8 E2h 端子寸法 (正面図)
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 33
Page 38

649 (25.5)649 (25.5)
0 (0.0)
0 (0.0)
0 (0.0)
164 (6.4)
290 (11.4)
377 (14.8)
0 (0.0)
164 (6.4)
290 (11.4)
130BF690.10
A
18 (0.7)
0 (0.0)
84 (3.3)
42 (1.7)
5X
0 (0.0)
36 (1.4)
44 (1.8)
14 (0.5)
A
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.9 E2h 端子寸法 (側面図)
34 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 39

130BF660.10
336 (13.2)
425 (16.7)
376 (14.8)
465 (18.3)
256 (10.1)
33 (1.3)
6X 148 (5.8)
90 (3.5)
50 (2.0)
0 (0.0)
0 (0.0)
64 (2.5)
35 (1.4)
91 (3.6)
118 (4.6)
194 (7.6)
174 (6.9)
201 (7.9)
284 (11.2)
340 (13.4)
314 (12.3)
367 (14.4)
444 (17.5)
423 (16.7)
450 (17.7)
2
3
4
1
電気的設置 操作ガイド
5.7.3 E3h 端子寸法
5 5
1 主電源端子 3 モーター端子
2 ブレーキ又は回生端子 4 接地端子、M8 及び M10 ネジ
図 5.10 E3h 端子寸法 (正面図)
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 35
Page 40

130BF661.10
0 (0.0)
0 (0.0)
160 (6.3)
0 (0.0)
373 (14.7)
287 (11.3)
287 (11.3)
160 (6.3)
0 (0.0)
184
(7.2)
184
(7.2)
A
5X
14 (0.5)
44 (1.8)
0 (0.0)
36 (1.4)
18 (0.7)
0 (0.0)
84 (3.3)
42 (1.7)
A
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.11 E3h 主電源、モーター、及び接地端子寸法 (側面図)
36 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 41

130BF663.10
0 (0.0)
234 (9.2)
314 (12.4)
0 (0.0)
176 (6.9)
A
A
8X 14 (0.5)
20 (0.8)
0 (0.0)
35(1.4)
0 (0.0)
15 (0.6)
35 (1.4)
50 (2.0)
75 (3.0)
90 (3.5)
125 (4.9)
140 (5.5)
2X 125 (4.9)
0 (0.0)
電気的設置 操作ガイド
5 5
図 5.12 E3h ロードシェア/回生端子寸法
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 37
Page 42

130BF668.10
6X 148 (5.8)
90 (3.5)
50 (2.0)
0 (0.0)
1
0 (0.0)
64 (2.5)
41 (1.6)
105 (4.1)
137 (5.4)
194 (7.6)
200 (7.9)
233 (9.2)
402 (15.8)
339 (13.4)
410 (16.1)
499 (19.6)
435 (17.1)
531 (20.9)
256 (10.1)
33 (1.3)
2
3
4
540 (21.2)
432 (17.0)
521 (20.5)
472 (18.6)
561 (22.1)
電気的設置
VLT® Refrigeration Drive FC 103
5.7.4 E4h 端子寸法
55
1 主電源端子 3 モーター端子
2 ブレーキ又は回生端子 4 接地端子、M8 及び M10 ネジ
図 5.13 E4h 端子寸法 (正面図)
38 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 43

130BF681.10
5X 14 (0.5)
44 (1.8)
0 (0.0)
36 (1.4)
0 (0.0)
373 (14.7)
287 (11.3)
160 (6.3)
0 (0.0)
0 (0.0)
160 (6.3)
0 (0.0)
287 (11.3)
184
(7.2)
184
(7.2)
A
18 (0.7)
0 (0.0)
84 (3.3)
42 (1.7)
電気的設置 操作ガイド
5 5
図 5.14 E4h 主電源、モーター、及び接地端子寸法 (側面図)
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 39
Page 44

130BF682.10
A
20 (0.8)
0 (0.0)
35(1.4)
0 (0.0)
15 (0.6)
35 (1.4)
50 (2.0)
75 (3.0)
90 (3.5)
125 (4.9)
140 (5.5)
8X 14 (0.5)
2X 125 (4.9)
0 (0.0)
0 (0.0)
234 (9.2)
314 (12.4)
0 (0.0)
219 (8.6)
A
電気的設置
VLT® Refrigeration Drive FC 103
55
図 5.15 E4h ロードシェア/回生端子寸法
40 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 45

130BF715.10
130BF144.10
12 13 18 19 27 29 32 33 20 37
39696861 42 50 53 54 55
130BF145.10
1
2
3
電気的設置 操作ガイド
5.8 コントロール配線
コントロール・ケーブルへのすべての端子は、ドライブ内
部の LCP の下にあります。アクセスするには、ドア (E1h
及び E2h) を開くか、前面パネル (E3h 及び E4h) を取り
外します。
5.8.1 コントロール・ケーブルルーティン
グ(配線)
図 5.16
して、経路を設定してください。最適な電気耐性を確保す
るため、適切にシールドを接続するようにしてください。
フィールドバス接続
接続は、コントロール・カード上の該当するオプションに
対して行われます。詳細は、フィールドバスの説明をご参
照ください。ケーブルは、ユニット内の他のコントロール
配線と共に固定して、経路を設定する必要があります。
図 5.16
に示すとおり、すべてのコントロール配線を固定
コントロール配線は、 ドライブの高電力ケーブ
•
ルから絶縁してください。
ドライブがサーミスターに接続されている場合、
•
サーミスターコントロール配線をシールドで保
護し、強化/二重に絶縁する必要があります。A
24 V DC 供給電圧 が推奨されています。
をご参照ください。
5.8.2 コントロール端子の種類
図 5.17
ます。端子機能およびデフォルト設定は
表 5.3
は取り外し可能なドライブ・コネクタを示してい
で要約されています。
図 5.17 コントロール端子位置
表 5.1
–
5 5
1 シリアル通信端子
図 5.16 コントロール・カード配線パス
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 41
2 ディジタル入力/出力端子
3 アナログ入力/出力端子
図 5.18 コネクタ上に表示されている端子番号
Page 46

電気的設置
VLT® Refrigeration Drive FC 103
端子 パラメーター デフォルト
設定
61 – – ケーブル・シールド用
の統合 RC フィルタ
ー。EMC に問題があ
る場合のシールド接
続専用。
68 (+)
69 (-)
55
表 5.1 シリアル通信端子の説明
端子 パラメーター デフォルト
12, 13 – +24 V 直流ディジタル入力及び
18
パラメーター・
グループ 8-3*
FC ポート設定
パラメーター・
グループ 8-3*
FC ポート設定
ディジタル入力/出力端子
パラメータ
[8] スター
ー 5-10 端末
– RS485 インターフェ
イス。スイッチ (バ
ス終端) が、バス終
端抵抗のコントロー
–
ル・カードに提供され
ています。
を参照してください。
設定
外部変換器に対して、
24 V DC 供給電圧。
すべての 24V 負荷に
ついて、最大出力電流
は 200mA です。
ディジタル入力
ト
18 ディジタル
入力
19
パラメータ
[10] 逆転
ー 5-11 端末
19 ディジタル
入力
32
パラメータ
ー 5-14 端末
[0] 動作な
し
32 ディジタル
入力
33
パラメータ
ー 5-15 端末
[0] 動作な
し
説明
図 5.23
説明
ディジタル入力/出力端子
端子 パラメーター デフォルト
設定
37 – STO オプションの STO 機
能を使用する際、端子
12(又は 13)と端子 37
の間にジャンパー線
を必要とします。こ
の設定により、ドライ
ブが工場出荷時デフ
ォルト・プログラミン
グ値で動作できるよ
うになります。
表 5.2 ディジタル入力/出力端子の説明
アナログ入力/出力端子
端子 パラメーター デフォルト
設定
39 – – アナログ出力用共通
42
50 – +10 V 直流ポテンショメーター
53
54
パラメータ
ー 6-50 端末
42 出力
パラメーター・
グループ 6-1*
アナログ入力
1
パラメーター・
グループ 6-2*
[0] 動作な
速度指令信号アナログ入力 電圧
フィードバ
ック
プログラマブル・アナ
し
ログ出力。最大
500 Ω にて 0~20mA
あるいは 4~20mA。
やサーミスターに対
する 10 VDC アナロ
グ供給電圧。最大
15mA。
又は電流。A53 及び
A54 切り替え、mA 又
は V を選択。
説明
説明
アナログ入力
2
55 – – アナログ入力用共通。
表 5.3 アナログ入力/出力端子の説明
33 ディジタル
入力
27
29
パラメータ
ー 5-12 端末
27 ディジタル
入力
パラメータ
ー 5-13 端末
[2] 逆フリ
ーラン
[14] ジョ
グ
ディジタル入力又は
ディジタル出力用。
デフォルト設定は入
力機能です。
29 ディジタル
入力
20 – – 24V 供給についてデ
ィジタル入力及び 0V
ポテンシャル用共通。
42 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 47

RELAY 1 RELAY 2
01 02 03 04 05 06
130BF156.10
e30bg283.10
10 mm (0.4)
12 13 18 19 27 29 32 33
130BD546.11
2
1
10 mm
[0.4 inches]
12 13 18 19 27 29 32 33
電気的設置 操作ガイド
5.8.3 リレー端子
図 5.19 リレー 1 及びリレー 2 端子
リレー 1 及びリレー 2。出力の場所は、ドライブ
•
構成によって決定されます。
参照
ビルトイン・オプションに内臓の端子。機器のオ
•
プションとともに提供された取扱説明書を参照
してください。
端子 パラメーター デフォルト
01, 02,
03
04, 05,
06
パラメータ
ー 5-40 機能
リレー
[0]
パラメータ
ー 5-40 機能
リレー
[1]
[0] 動作な
[0] 動作な
設定
し
し
章 3.5 制御棚
説明
Form C リレー出力。
交流、直流電圧どちら
でも利用でき、抵抗あ
るいは誘導負荷をか
けることができます。
を
て接点を開きます。
図 5.21
をご参照
ください。次に、剥き出しのワイヤを接
点に挿入 し、ドライバーを取り外しま
す。
3. ワイヤを静かに引っ張って、接点がしっかりと固
定され、緩んでいないことを確認します。コント
ロール配線が緩むと、機器故障や性能の低下を招
くことがあります。
図 5.20 ソリッドコントロールワイヤの接続
5 5
表 5.4 リレー端子の説明
5.8.4 コントロール端子への配線
コントロール端子は LCP の近くにあります。コントロー
ル端子コネクターは、配線を容易にするために、ドライブ
から取り外すことができます。
い。ソリッドワイヤまたはフレキシブルワイヤのいずれ
かをコントロール端子に接続することができます。コン
トロールワイヤを接続または切断するには、次の手順に
従ってください。
注記
コントロール配線を可能な限り短くし、高電力ケーブルか
ら離すことにより、干渉を最小限にします。
ワイヤをコントロール端子に接続
1. ワイヤの端から外側のプラスチック層を 10 mm
(0.4 インチ)はぎ取ります。
2. コントロール・ワイヤを端子に挿入します。
図 5.17
ソリッドワイヤの場合は、裸のワイヤー
•
をご参照くださ
を接点に押し込みます。
照してください。
フレキシブルワイヤの場合は、端子の穴
•
の間のスロットに小さなドライバーを
挿入し、ドライバーを内側に向けて押し
図 5.20
を参
図 5.21 フレキシブルコントロールワイヤの接続
コントロール端子からのワイヤの切断
1. 接点を開くには、端子の穴の間のスロットに小さ
なドライバーを挿入し、ドライバーを内側に向け
て押します。
2. ワイヤを静かに引っ張ってコントロール端子の
接点から離します。
コントロール端子配線のサイズについては、
ブル仕様
線接続については、
をご参照ください。 一般的なコントロール配
章 7 配線構成例
章 9.5 ケー
を参照してくださ
い。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 43
Page 48

61
68
69
+
130BB489.10
RS485
電気的設置
VLT® Refrigeration Drive FC 103
5.8.5 モーター動作を有効化(端子 27)
工場出荷時のプログラミング値を使用する際、ドライブを
動作させるには、端子 12(又は 13)と端子 27 の間にジャン
パー線を必要とします。
ディジタル入力端子 27 は、24VDC 外部インター
•
ロック・コマンドを受信できるよう設計されてい
ます。
インターロック・デバイスが使用されてない場
•
合、コントロール端子 12(推奨)又は 13 と端子 27
55
にジャンパー線を接続します。この配線は、端子
27 に内部 24V 信号を供給します。
LCP の下部にある状態行に、
•
が表示されている場合、ユニットが動作可能状態
になっていますが、端子 27 には入力信号があり
ません。
工場で設置されたオプション機器として端子 27
•
に配線されている場合、配線をはずさないで下さ
い。
自動遠隔フリーラン
基本的なシリアル通信設定については、以下の手順に従い
ます:
1. RS485 シリアル通信の配線を端子(+)68 と
(-)69 に接続します。
1a シールドされたシリアル通信ケーブル
の使用を推奨します。
1b 正しい接地については、
続
をご参照ください。
2. 以下のパラメーター設定を選択します:
2a
パラメーター 8-30 プロトコール
ロトコル形式。
2b
パラメーター 8-31 アドレス
ブ・アドレス。
2c
パラメーター 8-32 ボーレート
レート。
章 5.6 接地接
のプ
のドライ
のボー
注記
パラメーター 5-12 端末 27 ディジタル入力
端子 27 が再プログラムされた場合を除き、端子 27 上の信
号なしでドライブは動作できません。
を使用して
5.8.6 RS485 シリアル通信の構成
RS-485 は、マルチドロップ・ネットワーク・トポロジー
と互換性がある 2 線バス・インターフェイスです。
ドライブに内蔵されている DanfossFC 又は
•
Modbus RTU 通信プロトコルを使用することがで
きます。
諸機能は、プロトコルソフトウエアと RS485 接
•
続、あるいは、
信とオプショ
特定の通信プロトコルを選択することにより、様
•
々なデフォルト・パラメーターを変更して、プロ
トコルの仕様に合致させ、よりプロトコルに特化
したパラメーターが利用できます。
追加の通信プロトコルをサポートするために、ド
•
ライブ用オプション・カードが用意されていま
す。設置と動作説明については、オプション・カ
ードのドキュメントをご覧ください。
スイッチ (バス終端) が、バス終端抵抗のコン
•
トロール・カードに提供されています。
を参照してください。
パラメーター・グループ 8-** 通
ンを使用してプログラムできます。
図 5.23
図 5.22 シリアル通信 配線図
5.8.7 Safe Torque Off (STO) の配線
Safe Torque Off (STO) 機能は、安全制御システムのコ
ンポーネントです。STO は、ユニットがモーター回転に
必要な電圧を生成するのを阻止します。
STO を実行するには、ドライブの追加配線が必要です。詳
細については、
さい。
Safe Torque Off 操作ガイド
をご参照くだ
5.8.8 スペース・ヒーターの配線
スペース・ヒーターは、ユニットをオフにしているときに
エンクロージャーの内側に結露するのを防止するために
使用するオプションです。フィールド配線をして、HVAC
管理システムにより制御されることを想定しています。
仕様
公称電圧: 100–240
•
ワイヤサイズ: 12–24 AWG
•
44 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 49

130BF146.10
BUS TER.
OFF-ON
A53 A54
U- I U- I
1
2
N O
1
2
N O
1
2
N O
1
2
N O
電気的設置 操作ガイド
5.8.9 補助コンタクトを切断機構に配線
断路機構は、工場で取り付けるオプションです。補助コン
タクトは、断路機構とともに使用する信号アクセサリであ
り、取り付け時の柔軟性を高めるために工場での取り付け
は行いません。コンタクトは、工具を必要とせずにはめ込
みが可能です。
コンタクトは、機能に従って、断路機構の特定の位置に設
置する必要があります。ドライブに付属するアクセサリ
ー・バッグに含まれるデータシートをご参照ください。
仕様
Ui/[V]: 690
•
U
/[kV]: 4
imp
•
汚染度: 3
•
Ith/[A]: 16
•
ケーブル・サイズ: 1...2x0.75...2.5 mm
•
最大ヒューズ: 16 A/gG
•
NEMA: A600, R300, ワイヤサイズ: 18–14
•
2
AWG, 1(2)
5.8.10 ブレーキ抵抗器の温度スイッチを
配線
5.8.11 電圧/電流入力の選択
アナログ入力端子 53 と 54 は、電圧(0-10 V) 又は 電流
(0/4-20 mA)入力信号の設定が可能です。
デフォルト・パラメーター設定:
端子 53: 開ループにおける速度指令信号(
•
メーター 16-61 端末 53 スイッチ設定
パラ
を参
照)。
端子 54: 閉ループにおけるフィードバック信号
•
(
パラメーター 16-63 端末 54 スイッチ設定
参照)。
注記
スイッチ位置を変更する前にドライブの電源接続を切り
ます。
1. LCP(ローカル・コントロール・パネル)を外しま
す。
章 6.3 LCP メニュー
2. スイッチをカバーするオプション機器を削除し
ます。
3. スイッチを A53 と A54 に設定して、信号の種類を
選択します (U = 電圧, I = 電流)。
を参照してください。
を
5 5
ブレーキ抵抗器端子ブロックは、電力カード上に配置して
あり、外部ブレーキ抵抗器温度スイッチの接続を可能にし
ます。スイッチは、通常は閉じた状態、または通常は開い
た状態として構成可能です。入力値に変化があったとき
は、信号がドライブをトリップして、LCP ディスプレイに
警報 27、ブレーキ・チョッパー不具合
が表示されます。
同時に、ドライブがブレーキを停止して、モーターがフリ
ーランを行います。
1. 電力カード上のブレーキ抵抗器端子ブロックを
確認します (端子 104–106)。
図 3.3
を参照し
てください。
2. ジャンパーを電力カードに固定する M3 ネジを外
します。
3. ジャンパーを取り外し、以下の構成のうち 1 つに
おいて、ブレーキ抵抗器温度スイッチの配線を行
います:
3a 通常は閉。端子 104 及び 106 に接続。
3b 通常は開。端子 104 及び 105 に接続。
4. M3 ネジでスイッチ配線を固定します。0.5-0.6
Nm (5 in-lb)のトルクで締めます。
図 5.23 端子 53 と 54 スイッチの位置
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 45
Page 50

電気的設置
5.9 始動前チェックリスト
VLT® Refrigeration Drive FC 103
ユニットの設置を完了する前に、
の項目をチェックしてください。
検査項目 説明
モーター
スイッチ類
補助機器
55
ケーブルルーティ
ング(配線)
コントロール配線
入力及び出力電力
配線
接地
フューズと遮断器
冷却用空きスペー
ス
周囲条件
ドライブ内部
振動
U–V (96–97)、V–W (97–98)、及び W–U (98–96)の ohm 値を測定して、モーターの継続性を確認し
•
ます。
供給電圧がドライブとモーターの電圧に一致するかを確認します。
•
スイッチや切断設定が全て、正常な位置にあることを確保します。
•
ドライブの入力電力側やモーターの出力側に接続されている補助機器、スイッチ、切断装置、入力ヒュ
•
ーズ/遮断器などを確認します。フルスピード動作の用意ができていることを確認してください。
使用されているセンサーの機能と設置状態をチェックし、ドライブへフィードバックします。
•
モーターの力率改善コンデンサーを外します。
•
主電源側の力率改善コンデンサーを調整して、それらを減衰させます。
•
高周波干渉から隔離するために、モーター配線、ブレーキ配線 (装備されている場合)、及びコントロー
•
ル配線が分離もしくはシールドされていること、又は 3 つの金属導管に各々が通っていることを確認し
ます。
破損や損傷のあるワイヤや不適切な接続をチェックします。
•
コントロール配線が高電力配線から絶縁され、ノイズの干渉を受けていないか確認します。
•
必要に応じて、信号の電圧源をチェックします。
•
シールドケーブルまたはツイストペアを使用し、シールドが正しく終端されていることを確認してくだ
•
さい。
接続が緩んでないかチェックします。
•
モーターと主電源が別々の導管を使用していること、又は分離したシールド・ケーブルを使用している
•
ことを確認します。
接地の接続が、しっかりと固定されて、酸化されてないことをチェックします。
•
導管への接地や金属表面へ取り付けられたバックパネルは、適切な接地ではありません。
•
適切なヒューズと遮断器であることをチェックします。
•
全ヒューズはしっかりと挿入されて動作状態にあり、全遮断器 (使用されている場合) がオープン位置
•
にあることをチェックします。
通気経路に障害物がないか調べます。
•
ドライブの上部及び下部の空きスペースを測定し、十分な冷却空気の流れを確保します。
•
置及び冷却の要件
周囲条件を満たしているか確認してください。
•
ユニット内部に、汚れ、金属片、湿気、及び腐食がないか検査します。
•
すべての設置工具がユニット内部から取り除かれていることを確認します。
•
E3h 及び E4h エンクロージャーにおいては、ユニットが、未塗装の金属表面に取り付けられていること
•
を確認してください。
ユニットがしっかりと取り付けられていることを確認し、必要に応じて緩衝台を使用します。
•
異常な量の振動がないか検査してください。
•
表 5.5
に記載されているとおり、設置全体を検査します。完了したときには、これら
をご参照ください。
章 9.4 周囲条件
☑
章 4.5.1 設
を参照
表 5.5 始動前チェックリスト
46 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 51

電気的設置 操作ガイド
注意
内部故障が発生したときの潜在的危険
ドライブがカバーで適切に固定されていない場合、傷害事故が発生する恐れがあります。
電力を供給する前に、すべての安全カバー (ドアとパネル) が適切に配置され、しっかりと固定されているこ
•
とを確認します。
章 9.10.1 ファスナー・トルク定格
を参照してください。
5 5
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 47
Page 52

設定
6 設定
VLT® Refrigeration Drive FC 103
6
6.1 安全指示
安全指示の全般については、
ださい。
章 2 安全性
を参照してく
警告
高電圧
AC 主電源に接続されている限り、ドライブは高電圧が印
加されています。有資格技術者でない人が、ドライブの設
置、スタートアップ、メンテナンスを行った場合、死亡事
故や重大な傷害事故を招くおそれがあります。
ドライブの設置、スタートアップ、保守は、必ず
•
有資格技術者のみが行ってください。
電力供給前に:
1. ユニットへの入力電力はオフにして、ロックアウ
トしてください。ドライブで入力電力を遮断す
るためのスイッチがオフにされていても安心し
ないでください。
2. 入力端子 L1 (91)、 L2 (92)、 及び L3 (93)に
て、相間、あるいは相と接地間に電圧が印加され
ていないことを検証します。
3. 出力端子 96 (U)、 97 (V)、 及び 98 (W)にて、
相間、あるいは相と接地間に電圧が印加されてい
ないことを検証します。
4. U – V (96 –97) 、 V – W (97– 98) 、 及 び W–U
(98–96)の ohm 値を測定して、モーターの継続性
を確認します。
5. ドライブとモーターの接地が正しく行われてい
るか確認します。
6. 端子の接続が緩んでないかドライブを検査しま
す。
7. すべてのケーブル・グランドが固く締められてい
るか確認します。
8. 供給電圧がドライブとモーターの電圧に一致す
るかを確認します。
9. 前面カバーを閉じて、しっかり固定してくださ
い。
電源の供給
6.2
警告
予期しない始動
ドライブが AC 主電源、直流電源、またはロードシェアに
接続されているときは、モーターがいつでも始動する可能
性があり、死亡、重大な傷害、設備・財産の損害を招くこ
とがあります モーターは外部スイッチ、フィールドバス
コマンド、LCP または LOP からの入力速度指令信号によっ
て、MCT 10 ソフトウェアを用いたリモート操作を介して、
または不具合状態のクリア後にスタートします。
予期しないモーターのスタートを防止するには:
パラメーターのプログラミング前に、LCP 上の
•
[Off]を押します。
個人の安全を考慮して不意なモーターの始動を
•
避ける必要があるときは、必ず、ドライブを主電
源から切断してください。
ドライブ、モーター、および運転機器の動作準備
•
ができていることを確認してください。
1. 相と相の間の入力電圧が 3%内で平衡を保ってい
ることを確認します。そうでない場合、入力電圧
の不均衡を補正してから作業を進めてください。
電圧補正以降の手順を繰り返します。
2. オプション機器の配線がある場合、それが設置ア
プリケーションに合っていることを確保します。
3. 動作機器全てが、OFF 位置であることを確保しま
す。
4. すべてのパネルドアを閉じて、カバーをしっかり
固定してください。
5. ユニットに電力を供給します。この時、絶対にド
ライブをスタートしないでください。切断スイ
ッチを備えたユニットの場合、ON 位置にしてド
ライブに電力を供給します。
注記
LCP の下部にある状態行に、自動遠隔フリーラン、又は
報 60、外部インターロック
ットが動作可能状態になっていることを示しますが、端子
27 には入力信号がありません。詳細は、
ー動作を有効化(端子 27)
が表示されている場合、ユニ
章 5.8.5 モータ
をご参照ください。
警
48 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 53

130BF241.10
01 My Personal Menu
02 Quick Setup
05 Changes Made
06 Loggings
0.0% 0.00
Quick Menus
1(1)
03 Function Setups
04 Smart Start
e30bg272.10
O-** Operation / Display
1-** Load and Motor
2-** Brakes
3-** Reference / Ramps
0 RPM 0.00 A
Main Menu
1(1)
設定 操作ガイド
6.3 LCP メニュー
6.3.1.1 クイック・メニュー モード
クイック・メニュー・モードは、ドライブの設定と操作に
使用するメニューのリストを表示します。クイック・メニ
ュー・モードを選択するには、[Quick Menu] キーを押し
ます。結果として得られる読み出しが LCP ディスプレイ
に表示されます。
図 6.1 クイック・メニュー・ビュー
6.3.1.2 Q1 My Personal Menu (マイ・パ
ーソナル・メニュー)
パーソナル・メニューは、ディスプレイ・エリアに表示す
る内容を決定するために使用します。
コントロール・パネル (LCP)
ニューは、最大 50 までの事前プログラム済みパラメータ
ーも表示可能です。これらの 50 のパラメーターは、
メーター 0-25 マイ・パーソナル・メニュー
手入力します。
をご参照ください。このメ
章 3.6 ローカル・
パラ
を使用して
6.3.1.3 Q2 クイック設定
Q2 クイック設定
構成に必ず必要となる基本システムとモーターのデータ
が含まれます。設定手順については、
情報の入力
に表示するパラメーターには、ドライブ
章 6.4.2 システム
をご参照ください。
6.3.1.5 Q4Smart Start( スマートスター
ト)
Q4 スマートセットアップは、モーターと選択されたポン
プ/ファン用途を構成するために使用される典型的なパ
ラメーター設定について、ユーザーにガイドを提供しま
す。[Info]キーを使用して、さまざまな選択、設定及びメ
ッセージに関するヘルプ情報を表示できます。
6.3.1.6 Q5 変更履歴
Q5 変更履歴
•
•
を選択して、次の情報を取得してください。
最近行われた 10 の変更。
デフォルト設定以後行われた変更。
6.3.1.7 Q6 Loggings (ロギング)
Q6 ロギング
し値に関する情報を取得するには、
す。この情報はグラフとして表示されます。
ー 0-20 表示行 1.1 小からパラメーター 0-24 表示行
3 大
において選択された表示パラメーターのみを見るこ
とができます。後で参照できるよう最大で 120 個のサ
ンプルをメモリーに保存できます。
Q6 Loggings (ロギング)
パラメーター 0-20 表示行 1.1 小
パラメーター 0-21 表示行 1.2 小
パラメーター 0-22 表示行 1.3 小
パラメーター 0-23 表示行 2 大
パラメーター 0-24 表示行 3 大
表 6.1 ロギング・パラメーターの例
は、不具合検索に使用します。表示行読み出
ロギング
を選択しま
パラメータ
速度指令信号 [%]
モーター電流 [A]
電力 [KW]
周波数 [Hz]
KWh カウンター
6.3.1.8 メイン・メニュー・モード
メイン・メニュー・
てのパラメーターを表示します。メイン・メニュー・モー
ドを選択するには、[Main Menu] キーを押します。結果
として得られる読み出しが LCP ディスプレイに表示され
ます。
モードは、ドライブで利用できるすべ
6
6
6.3.1.4 Q3 機能設定
Q3 機能設定
ッサー、ポンプ機能のデータが含まれます。このメニュー
には、LCP ディスプレイ、ディジタル・プリセット速度、
アナログ速度指令信号のスケール、閉ループ単一ゾーンお
よび複数ゾーン・アプリケーションのパラメーターも含ま
れます。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 49
に示すパラメーターには、ファン、コンプレ
図 6.2 メイン・メニュー・ビュー
Page 54

130BT112.12
Q1 My Personal Menu
Q2 Quick Setup
Q3 Function Setups
Q5 Changes Made
69.3% 5.20A 1(1)
Quick Menus
130BF725.10
Q3
Q3-1 General Settings
Q3-2 Open Loop Settings
Q3-3 Closed Loop Settings
Q3-4 Application Settings
28.4% 2.05A 1(1)
Function Setups
設定
VLT® Refrigeration Drive FC 103
6
すべてのパラメーターは、メイン・メニューから変更でき
ます。オプション・カードをユニットに追加すると、オプ
ション装置に関連する追加のパラメーターが使用できま
す。
6.4 ドライブのプログラミング
ローカル・コントロール・パネル (LCP) 上のキー機能に
関する詳細情報は、
ネル (LCP)
る情報は、
パラメーターの概要
パラメーター設定はドライブの運転を制御し、LCP を通じ
てアクセスできます。これらの設定には工場出荷時にデ
フォルト値が割り当てられていますが、固有の用途に従っ
て構成可能です。各パラメーターの名前と数値は、いずれ
のプログラム・モードでも同一です。
メイン・メニュー
に区分されています。パラメーター番号の最初 (左端)
の桁は、パラメーター・グループ番号を示します。パラメ
ーター・グループは、必要であれば、サブグルーブに分割
されます。例えば:
0-** 操作/表示
0-0* 基本設定
パラメーター 0-01 言語
パラメーター 0-02 モーター速度
単位
パラメーター 0-03 地域設定
をご参照ください。パラメーター設定に関す
プログラミング・ガイド
章 3.6 ローカル・コントロール・パ
をご参照ください。
・モードでは、パラメーターはグループ
パラメーター・グループ
パラメーター・サブグルー
プ
パラメーター
パラメーター
パラメーター
6.4.1 開ループ・アプリケーションのプロ
グラミング例
標準的な開ループ・アプリケーションを構成するために使
用するこの手順を通じ、入力端子 53 から 0-10 V DC アナ
ログコントロール信号を受けるようにドライブがプログ
ラムされます。ドライブは、入力信号 (0–10 V DC=20–
50 Hz)に比例した 20–50 Hz の出力をモーターへ供給し
て、対応します。
[Quick Menu]を押して、以下の手順を完了します:
1.
Q3 機能設定
2.
パラメーター・データ
す。
図 6.3 Q3 機能設定
3.
Q3-2 開ループ設定
を選択し、[OK]を押します。
を選択し、[OK]を押しま
を選択し、[OK]を押します。
表 6.2 パラメーター・グループのヒエラルキー例
パラメーター間の移動
以下の LCP キーを使用してパラメーター間を移動します:
[▲] [▼]を押して上下にスクロールします。
•
小数パラメーター値を編集するときに、[◄] [►]
•
を押して、小数点の左右のスペースを切り替えま
す。
[OK] を押して変更を受け入れます。
•
[Cancel]を押して、変更を破棄して編集モードを
•
終了します。
ステータス・ビューを表示するには、[Back] を
•
2 回押します。
[Main Menu] を 1 回押して、メイン・メニュー
•
に戻ります。
図 6.4 Q3-2 開ループ設定
50 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 55

130BF726.10
Q3-2
Q3-20 Digital Reference
Q3-21 Analog Reference
14.7% 0.00A 1(1)
Open Loop Settings
130BF727.10
Q3-21
3-02 Minimum Reference
0.000 Hz
14.7% 0.00A 1(1)
Analog Reference
130BF728.11
Q3-21
3-03 Maximum Reference
60.000 Hz
14.7% 0.00A 1(1)
Analog Reference
130BF729.10
Q3-21
6-10 Terminal 53 Low
Voltage
0.00 V
14.7% 0.00A 1(1)
Analog Reference
130BF730.10
Q3-21
6-11 Terminal 53 High
Voltage
10.00 V
14.7% 0.00A 1(1)
Analog Reference
130BF731.10
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 14 Terminal 53 Low
Ref./Feedb. Value
000020.000
設定 操作ガイド
4.
Q3-21 アナログ速度指令信号
します。
図 6.5 Q3-21 アナログ速度指令信号
5.
パラメーター 3-02 最低速度指令信号
ます。
ドライブ内部の最小速度指令信号を 0Hz に設定
し、[OK]を押します。
を選択し、[OK]を押
を選択し
7.
図 6.8
8.
パラメーター 6-10 端末 53 低電圧
す。
端子 53 の最小外部電圧速度指令信号を 0V に設
定し、[OK]を押します。
パラメーター 6-10 端末 53 低電圧
パラメーター 6-11 端末 53 高電圧
す。端子 53 の 最大外部電圧速度指令信号を
10V に設定し、[OK]を押します。
を選択しま
を選択しま
6
6
図 6.6
パラメーター 3-02 最低速度指令信号
6.
パラメーター 3-03 最大速度指令信号
ます。
ドライブ内部の最大速度指令信号を 60Hz に設定
し、[OK]を押します。
図 6.7
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 51
パラメーター 3-03 最大速度指令信号
を選択し
図 6.9
9.
図 6.10
パラメーター 6-11 端末 53 高電圧
パラメーター 6-14 端末 53 低速信/FB 値
択します。端子 53 の最小速度指令信号を 20Hz
に設定し、[OK]を押します。
パラメーター 6-14 端末 53 低速信/FB 値
を選
Page 56

130BF732.10
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 15 Terminal 53 High
Ref./Feedb. Value
50.000
53
55
6-1*
+
A53
U - I
130BB482.10
0-10V
6
設定
10.
図 6.11
VLT® Refrigeration Drive FC 103
パラメーター 6-15 端末 53 高速信/FB 値
択します。端子 53 の最小速度指令信号を 50Hz
に設定し、[OK]を押します。
パラメーター 6-15 端末 53 高速信/FB 値
を選
6.4.2 システム情報の入力
注記
ソフトウェアのダウンロード
PC から設定するには、MCT 10 設定ソフトウェアをインス
トールします。ソフトウェアは、ダウンロードが可能です
(基本バージョン)。又は、注文も可能です(アドバンス
ト・バージョン、コード番号 130B1000)。詳細情報につい
ては、 次をご参照ください。
service-and-support/downloads/dds/vlt-motioncontrol-tool-mct-10/
ドライブに基本的なシステム情報を入力するには、以下の
手順を使用します。推奨されるパラメーター設定はスタ
ートアップとチェックアウトを目的としたものです。ア
プリケーション設定は異なる場合があります。
.
www.danfoss.com/en/
0–10 V コントロール信号 を供給する外部機器がドライ
ブ端子 53 に接続されることにより、システムは動作でき
る状態になります。
注記
図 6.11
が最下部に位置しています。これは、設定手順が完了して
いることを意味しています。
図 6.12
線接続を示します。
で、ディスプレイの右側にあるスクロール・バー
は、外部機器設定を実施するために使用される配
図 6.12 0–10 V コントロール信号を提供する外部デバイス
の配線例
注記
これらの手順は、非同期モーターの使用を前提としていま
すが、永久磁石モーターも使用可能です。特定のモーター
タイプについては、製品固有の
ご参照ください。
1. LCP 上の[Main Menu]を押します。
2.
0-** 動作/ディスプレイ
ます。
3.
0-0* 基本設定
4.
パラメーター 0-03 地域設定
(確定)を押します。
5.
[0] 国際
ます。(これは、いくつかの基本パラメーターの
デフォルト設定を変更します。)
6. LCP で[Quick Menu] を押して、
を選択します。
7. 必要であれば、
ーター設定を変更します。モーターデータは、モ
ーターの銘板に表示されています。
パラメーター デフォルト設定
パラメーター 0-01 言語
パラメーター 1-20 モーター電力[kW]
パラメーター 1-22 モーター電圧
パラメーター 1-23 モーター周波数
パラメーター 1-24 モーター電流
パラメーター 1-25 モーター公称速度
パラメーター 5-12 端末 27 ディジタル
入力
パラメーター 3-02 最低速度指令信号
パラメーター 3-03 最大速度指令信号
パラメーター 3-41 ランプ 1 立ち上が
り時間
パラメーター 3-42 ランプ 1 立ち下が
り時間
または
プログラミング・ガイド
を選択し、[OK]を押し
を選択し、[OK]を押します。
を選択して、 [OK]
[1] 北米
を選択し、[OK]を押し
Q2 クイック設定
表 6.3
に記載する以下のパラメ
English
4.00 kW
400V
50 Hz
9.00 A
1420 RPM
逆フリーラン
0.000 RPM
1500.000 RPM
3.00 s
3.00 s
を
52 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 57

設定 操作ガイド
パラメーター デフォルト設定
パラメーター 3-13 速度指令信号サイト
パラメーター 1-29 自動モーター適合
(AMA)
表 6.3 クイック・セットアップ設定
手動/自動へリン
ク
オフ
注記
入力信号の喪失
LCP が自動遠隔フリーラン、又は
ック
を表示している場合、ユニットは動作可能状態にあり
ますが、入力信号がありません。詳細は、
ター動作を有効化(端子 27)
警報 60、外部インターロ
章 5.8.5 モー
を参照してください。
6.4.3 自動エネルギー最適化の構成
自動エネルギー最適化 (AEO) は、モーターに対する電圧
を最小化して、エネルギー消費、熱、およびノイズを低減
します。
1. [Main Menu]を押します。
2.
1-** 負荷とモーター
す。
3.
1-0* 基本設定
4.
パラメーター 1-03 トルク特性
[OK](確定)を押します。
5.
[2] 自動エネルギー最適化 CT
ネルギー最適化 VT
を選択し、[OK]を押します。
を選択し、[OK]を押しま
を選択して、
又は
[3] 自動エ
を選択し、[OK]を押します。
6.4.4 自動モーター適合の構成
自動モーター適合(AMA)は、ドライブとモーターとの間に
おける適合性を最適化する手順です。
ドライブは、出力モーター電流を安定させるために、モー
ターの数学的モデルを構築します。この手順では、電力の
1-20
入力相バランスも検査します。パラメーター
1-25
で入力されたデータとモーター特性が比較されま
す。
から
注記
警告や警報が発生した場合、
ト
を参照してください。モーターによっては、テストを完
全なバージョンで実施できない場合があります。その場
合、又は出力フィルターがモーターに接続されている場
合、
[2] 簡略 AMA を有効化
最良の結果を得るため、この手順は冷たいモーターで実施
します。
1. [Main Menu]を押します。
2.
1-** 負荷とモーター
す。
章 8.5 警告と警報のリス
を選択します。
を選択し、[OK]を押しま
3.
1-2* モーターデータ
す。
4.
パラメーター 1-29 自動モーター適合(AMA)
選択して、 [OK](確定)を押します。
5.
[1] 完全 AMA を有効化
す。
6. [Hand On]を押してから、[OK]を押します。
テストが自動的に実施され、終了するとその指示
があります。
を選択し、[OK]を押しま
を
を選択して [OK]を押しま
6.5 システム・スタートアップ前のテス
ト
警告
モーターの始動
モーター、システム、および付属機器などが起動状態にな
っていないにもかかわらず運転を開始した場合、怪我や機
器の損傷を招くことがあります。始動前に、
機器がどのような状態でも安全に動作できるよ
•
うにします。
モーター、システム、及び付属機器が全て、起動
•
できる状態になっていることを確認します。
6.5.1 モーター回転
注記
モーターが間違った方向に回転していると、設備に損傷を
与える恐れがあります。ユニットを作動する前に、 モー
ターを短時間回転させて、モーターの回転をチェックして
ください。モーターは、5 Hz 又は
ーター速度下限[Hz]
間、動作します。
1. [Hand ON](手動オン)を押します。
2. 左の矢印を使用して、左のカーソルを小数点の左
に動かし、モーターをゆっくりと回転させる RPM
をを入力します。
3. [OK] を押します。
4. モーターが間違った方向に回転しているときは、
パラメーター 1-06 時計回り方向を[1] 反転
設定します。
で設定された最低周波数で、少しの
6.5.2 エンコーダーの回転
エンコーダー・フィードバックを使用するには、以下の手
順に従ってください:
1.
パラメーター 1-00 構成モードで[0] 開ループ
を選択します。
2.
パラメーター 7-00 速度 PID フィードバッ
ク・ソースで [1] 24 V エンコーダー
ます。
3. [Hand ON](手動オン)を押します。
パラメーター 4-12 モ
に
を選択し
6
6
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 53
Page 58
設定
VLT® Refrigeration Drive FC 103
6
4. プラス速度基準(
ー 1-06 時計回り方向
押します。
パラメーター 16-57 Feedback [RPM]
5.
ドバックがプラスになっていることを確認しま
す。
エンコーダー・オプションの詳細については、オプショ
ン・マニュアルをご参照ください。
[0]* 通常
)については、 [►] を
で
パラメータ
で、フィー
注記
ネガティブフィードバック
フィードバックがマイナスの場合は、エンコーダー接続が
間違っています。
コーダー方向
ク方向
を用いて方向を反転させるか、エンコーダーケーブ
ルを逆にします。
方向
は VLT® Encoder Input MCB 102 オプションでのみ
利用できます。
パラメーター 5-71 端末 32/33 エン
または
パラメーター 17-60 フィードバッ
パラメーター 17-60 フィードバック
6.6 システム・スタートアップ
警告
モーターの始動
モーター、システム、および付属機器などが起動状態にな
っていないにもかかわらず運転を開始した場合、怪我や機
器の損傷を招くことがあります。始動前に、
機器がどのような状態でも安全に動作できるよ
•
うにします。
モーター、システム、及び付属機器が全て、起動
•
できる状態になっていることを確認します。
パラメーター設定
6.7
注記
地域設定
いくつかのパラメーターでは、国際又は北米向けデフォル
ト設定が異なる場合があります。さまざまなデフォルト
値のリストについては、
パラメーター設定
アプリケーションに対する正しいプログラミングを実現
するには、いくつかのパラメーター機能設定が必要となり
ます。パラメーターの詳細は、
記載しています。
パラメーター設定はドライブ内部に保存され、これには以
下のような利点があります:
パラメーター設定を、LCP メモリーにアップロー
•
ドして、バックアップとして保存することができ
ます。
LCP をユニットに接続して、保存されたパラメー
•
ター設定をダウンロードすることにより、複数ユ
ニットを迅速にプログラムすることができます。
LCP に保存された設定は、工場出荷時設定に戻し
•
たときも変更されません。
デフォルト設定に対する変更と、パラメーターへ
•
入力されたプログラミングは、保存してクイッ
ク・メニューで表示することができます。
章 3.6 ローカル・コントロール・パネル (LCP)
を参照
6.7.1 パラメーター設定のアップロード
及びダウンロード
章 10.2 国際/北米デフォルト・
をご参照ください。
プログラミング・ガイド
に
このセクションの手順書では、ユーザー配線やアプリケー
ションプログラムについて学びます。アプリケーショ
ン・セットアップが完了したら、以下の手順を推奨しま
す。
1. [Auto On](自動オン)を押します。
2. 外部運転指令を適用します。
外部運転指令の例は、スイッチ、ボタン、又はプ
ログラム可能論理コントローラー (PLC) です。
3. 速度範囲全体にわたって、速度指令値を調整しま
す。
4. モーターの音や振動レベルをチェックして、シス
テムが意図したとおりに動作しているか確認し
ます。
5. 外部運転指令を除きます。
警告や警報が発生した場合、
ト
を参照してください。
章 8.5 警告と警報のリス
ドライブは、ドライブ内にあるコントロール・カード上に
保存されたパラメーターを使用して運転することができ
ます。アップロード及びダウンロード機能は、パラメータ
ーを、コントロール・カードと LCP の間で移動させます。
1. [Off](オフ)を押します。
2.
パラメーター 0-50 LCP コピー
押します。
3. 以下のうち 1 つを選択します:
3a コントロール・カードから LCP にデータ
をアップロードするには、
を LCP へを選択します。
3b LCP からコントロール・カードにデータ
をダウンロードするには、
を LCP から
4. [OK] を押します。プログレス・バーは、アップ
ロードまたはダウンロードの状況を示します。
5. [Hand On] 又は [Auto On] を押します。
を選択します。
へ進み、[OK]を
[1] すべて
[2] すべて
54 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 59

設定 操作ガイド
6.7.2 工場出荷時設定の回復
注記
データ喪失
デフォルト設定の回復によって、プログラム、モーター・
データ、ローカリゼーション、監視記録が失われます。バ
ックアップを残すには、初期化前に LCP へデータをアップ
ロードします。
ード及びダウンロード
ユニットを初期化して、デフォルト・パラメーター設定を
回復します。初期化は、
又は手動で実施します。
章 6.7.1 パラメーター設定のアップロ
を参照してください。
パラメーター 14-22 動作モード
パラメーター 14-22 動作モード
リセットしません:
運転時間
•
シリアル通信オプション。
•
パーソナル・メニュー設定。
•
不具合ログ、警報ログ、及びその他の監視機能。
•
推奨される初期化
1. [Main Menu](メイン・メニュー)を 2 回押すと、
パラメーターにアクセスします。
2.
パラメーター 14-22 動作モード
押します。
3.
初期化
へスクロールして[OK]を押します。
4. ユニットの電源を切って、表示が消えるまで待ち
ます。
5. ユニットの電源を投入します。スタートアップ
の間に、パラメーターがデフォルト設定に戻りま
す。スタートアップは、通常よりも少し時間がか
かります。
6.
警報 80、デフォルト値に初期化されたドライブ
が表示された後、[Reset] を押します。
手動による初期化
手動による初期化により、以下のものを除き、すべてが工
場出荷時設定にリセットされます:
パラメーター 15-00 動作時間
•
パラメーター 15-03 電源投入回数
•
パラメーター 15-04 過温度回数
•
パラメーター 15-05 過電圧回数
•
手動による初期化を実施するには:
1. ユニットの電源を切って、表示が消えるまで待ち
ます。
2. ユニットに電力を供給している間、[Status]、
[Main Menu]、[OK]を同時に押し続けます(約 5
秒、又は音がし始めて、ファンが開始するまで)。
スタートアップは、通常よりも少し時間がかかり
ます。
は、以下のような設定を
へ進み、[OK]を
.
.
.
.
6
6
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 55
Page 60

+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
A53
U - I
0 – 10 V
+
-
e30bb926.11
FC
+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
+
-
FC
e30bb927.11
A53
U - I
4 - 20mA
+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
e30bb683.11
FC
配線構成例
7 配線構成例
VLT® Refrigeration Drive FC 103
このセクションに記載されている事例は、一般的なアプリ
ケーションのためのクイック・リファレンスとして利用す
ることを目的としています。
パラメーター
機能 設定
パラメータ
4mA*
ー 6-12 端末 53
パラメーター設定については、特に指定しなけれ
•
ば (
パラメーター 0-03 地域設定
で選択)地域
のデフォルト設定になります。
端子に関連付けられたパラメーターとその設定
•
は、図の次に示されています。
アナログ端子 A53 又は A54 に必要なスイッチ設
•
定も示されています。
注記
オプションの STO 機能を使用する際、工場出荷時のプログ
77
ラミング値でドライブを動作させるためには、端子 12(又
は 13)と端子 37 の間にジャンパー線を必要とします。
7.1 開ループ速度コントロールの配線
パラメーター
機能 設定
パラメータ
ー 6-10 端末 53
低電圧
パラメータ
ー 6-11 端末 53
高電圧
パラメータ
ー 6-14 端末 53 低
速信/FB 値
パラメータ
ー 6-15 端末 53 高
速信/FB 値
* = デフォルト値
注意/コメント:
0 V DC 入力 = 0 Hz 速度及
び 10 V DC 入力 = 50 Hz
速度を前提とします。
表 7.1 アナログ速度指令信号(電圧)
0.07 V*
10 V*
0 Hz
50 Hz
表 7.2 アナログ速度指令信号(電流)
パラメーター
低電流
パラメータ
20mA*
ー 6-13 端末 53
高電流
パラメータ
0 Hz
ー 6-14 端末 53
低速信/FB 値
パラメータ
50 Hz
ー 6-15 端末 53
高速信/FB 値
* = デフォルト値
注意/コメント:
4 mA 入力 = 0 Hz 速度及
び 20 mA 入力 = 50 Hz 速
度を前提とします。
機能 設定
パラメータ
4mA*
ー 6-12 端末 53
低電流
パラメータ
20mA*
ー 6-13 端末 53
高電流
パラメータ
0 Hz
ー 6-14 端末 53
低速信/FB 値
パラメータ
50 Hz
ー 6-15 端末 53
高速信/FB 値
* = デフォルト値
注意/コメント:
0 V DC 入力 = 0 RPM 速度
及び 10 V DC 入力 = 1500
RPM 速度を前提とします。
表 7.3 速度指令信号(手動ポテンショメーターを使用)
56 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 61

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
12
13
18
19
20
27
29
32
33
37
e30bb804.12
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB802.10
130BB805.12
Speed
Start/Stop (18)
配線構成例 操作ガイド
パラメーター
機能 設定
パラメータ
ー 5-10 端末 18 デ
ィジタル入力
パラメータ
ー 5-12 端末 27 デ
ィジタル入力
パラメータ
ー 5-13 端末 29 デ
ィジタル入力
パラメータ
ー 5-14 端末 32 デ
ィジタル入力
* = デフォルト値
注意/コメント:
表 7.4 加速/減速
[8] ス
タート*
[19] 速
度指令
信号凍
結
[21] 加
速
[22] 減
速
7.2 スタート/ストップの配線
パラメーター
機能 設定
パラメータ
ー 5-10 端末
18 ディジタル
入力
パラメータ
ー 5-12 端末
27 ディジタル
入力
パラメータ
ー 5-19 端末
37 安全停止
* = デフォルト値
注意/コメント:
パラメーター 5-12 端末 27
ディジタル入力が [0] 操作な
し
に設定された場合、端子 27
へのジャンパー線は不要です。
表 7.5 安全 Torque Off オプションスタート/停止コマンド
[8] スタート
*
[0] 動作なし
[1] 安全停止
警報
7 7
図 7.1 加速/減速
図 7.2 安全 Torque Off オプションスタート/停止コマンド
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 57
Page 62

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB803.10
Speed
130BB806.10
Latched Start (18)
Stop Inverse (27)
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
130BB934.11
配線構成例
VLT® Refrigeration Drive FC 103
パラメーター
機能 設定
パラメータ
ー 5-10 端
[9] ラッチ・
スタート
末 18 ディ
ジタル入力
パラメータ
[6] 逆停止
ー 5-12 端
末 27 ディ
ジタル入力
* = デフォルト値
注意/コメント:
パラメーター
機能 設定
パラメータ
[8] スター
ー 5-10 端末
18 ディジタ
ル入力
パラメータ
[10] 逆転*
ー 5-11 端末
19 ディジタ
ル入力
パラメータ
[0] 動作な
ー 5-12 端末
ト
し
27 ディジタ
ル入力
パラメータ
ー 5-14 端末
[16] プリ速
信ビット 0
32 ディジタ
ル入力
77
パラメータ
ー 5-15 端末
[17] プリ速
信ビット 1
33 ディジタ
ル入力
パラメータ
ー 3-10 プリ
セット速度指
表 7.6 パルス・スタート/ストップ
令信号
プリ速信ビッ
ト 0
プリ速信ビッ
ト 1
25%
50%
75%
100%
プリ速信ビッ
ト 2
プリ速信ビッ
ト 3
* = デフォルト値
注意/コメント:
表 7.7 逆転および 4 プリセット速度付きスタート/停止
図 7.3 ラッチ・スタート/逆停止
58 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 63
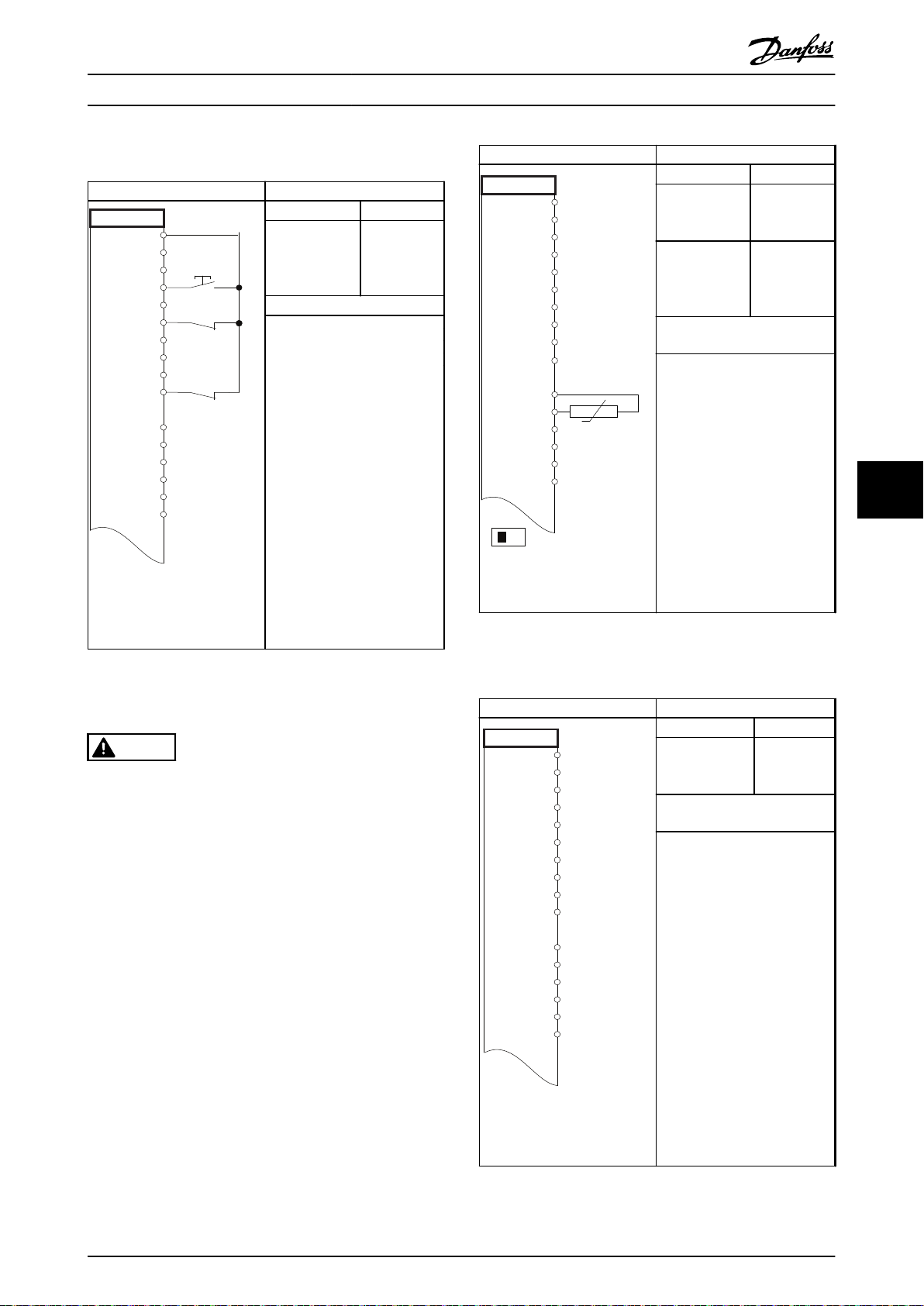
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB928.11
130BB686.12
VLT
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
A53
U - I
D IN
37
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BD667.11
配線構成例 操作ガイド
7.3 外部警報リセットの配線
パラメーター
機能 設定
パラメータ
ー 5-11 端末
19 ディジタル
入力
* = デフォルト値
注意/コメント:
[1] リセット
パラメーター
機能 設定
パラメータ
ー 1-90 モー
[2] サーミス
ター・トリッ
ター熱保護
パラメータ
ー 1-93 サー
[1] アナログ
入力 53
ミスター・リソ
ース
* = デフォルト値
注意/コメント:
警告のみが必要な場合は、
ラメーター 1-90 モーター熱
保護を [1] サーミスター警告
に設定する必要があります。
プ
パ
7 7
表 7.8 外部警報リセット
7.4
モーター・サーミスターの配線
警告
サーミスター絶縁
人身事故や設備損害の危険があります。
PELV 絶縁条件を満足させるために、強化あるい
•
は二重絶縁を備えたサーミスターのみを使用す
る必要があります。
表 7.9 モーター・サーミスター
回生の配線
7.5
パラメーター
機能 設定
パラメータ
100%*
ー 1-90 モータ
ー熱保護
* = デフォルト値
注意/コメント:
回生を無効にするには、
パラメ
ーター 1-90 モーター熱保護
を 0%まで低下させます。用途
がモーター・ブレーキ電力を使
用し、回生が無効になっている
ときは、ユニットがトリップし
ます。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 59
表 7.10 回生
Page 64

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
8 メンテナンス、診断およびトラブルシューティング
8.1 メンテナンスとサービス
この章では次のことを説明します。
メンテナンスとサービス ガイドライン。
•
状態メッセージ。
•
警告および警報。
•
基本的なトラブルシューティング。
•
通常の動作条件と負荷プロファイルの下では、ドライブの
寿命として指定された期間中、メンテナンスの必要はあり
ません。故障、危険及び損傷を防ぐために、動作条件に従
い、ドライブを定期的に検査してください。損耗や損傷し
た部品は、純正スペア部品又は標準部品と交換してくださ
い。修理とサポートは、こちらにご連絡ください。
www.danfoss.com/en/service-and-support/
.
8.2 ヒートシンクアクセスパネル
ドライブをご注文いただくとき、ユニット背面にアクセ
ス・パネルをオプションで付属させることも可能です。こ
のアクセス・パネルは、ヒートシンクへのアクセスを提供
し、ヒートシンクに蓄積した塵埃を清掃することができま
す。
8.2.1 ヒートシンクアクセスパネルの取
り外し
注記
ヒートシンクの損傷
ヒートシンク・パネルにもともと付属していたファスナー
よりも長いファスナーを使用すると、ヒートシンクの冷却
フィンを損傷することがあります。
警告
88
予期しない始動
ドライブが AC 主電源、直流電源、あるいはロードシェア
に接続されている場合、モーターはいつでも始動できま
す。プログラミング、サービス、あるいは修理中の予期し
ない始動は、死亡、深刻な傷害、あるいは物損事故を招く
恐れがあります。モーターは MCT 10 設定ソフトウェア
を使用したリモート操作からの外部スイッチ、フィールド
バスコマンド、入力速度指令信号によって、または不具合
状態のクリア後にスタートします。
予期しないモーターのスタートを防止するには:
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
ドライブを主電源から切り離してください。
•
ドライブを AC 主電源、直流電源、あるいはロー
•
ドシェアに接続する前に、ドライブ、モーター、
運転機器は、配線及び組み立てが完了している必
要があります。
1. ドライブへの電力供給を停止して、キャパシター
が完全に放電されるまで 40 分間お待ちくださ
い。
章 2 安全性
2. ドライブ背面に十分なアクセスができるように、
ドライブを配置します。
3. 3 mm の六角ビットを使用して、アクセスパネル
をエンクロージャー背面に固定している 8 つの
M5 ファスナーを外します。
4. ヒートシンクの先端を検査して、損傷や破片の付
着がないか確認します。
5. 掃除機で物質や破片を取り除きます。
6. パネルを再び取り付けて、エンクロージャーの背
面に 8 つのファスナーを使用して固定します。
章 9.10.1 ファスナー・トルク定格
ァスナーを締めます。
をご参照ください。
に従ってフ
60 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 65

130BF210.10
Status
799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
Auto
Hand
O
Remote
Local
Ramping
Stop
Running
Jogging
.
.
.
Stand-by
130BB037.11
1
2
3
メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
図 8.1 ドライブ後部から取り外したヒートシンク・アクセ
ス・パネル
8.3
状態メッセージ
ドライブが状態モードにある場合、状態メッセージが LCP
ディスプレイの下部に自動的に表示されます。
参照してください。状態メッセージは、
表 8.3
に定義されています。
表 8.1
図 8.2
–
を
1 スタート/ストップ・コマンドの送信元。
てください。
2 速度制御の送信元。
3 ドライブ状態の提供。
図 8.2 状態ディスプレイ
表 8.2
を参照してください。
表 8.3
を参照してください。
表 8.1
を参照し
注記
自動/リモート・モードでは、ドライブは機能を実行する
ために外部指令を必要とします。
表 8.1から表 8.3
の意味を示します。
オフ ドライブは、[Auto On] 又は [Hand On]を押
自動 スタート/ストップ・コマンドは、制御端子
手動 LCP 上のナビゲーション・キーはドライブを
までは、 表示される状態メッセージ
すまで、どんな制御信号にも反応しません。
及び/又はシリアル通信を介して送信されま
す。
制御するのに使用します。コントロール端子
に適用される停止コマンド、リセット、逆転、
直流ブレーキ、その他の信号は、ローカル・
コントロールを重ね書きします。
8 8
表 8.1 動作モード
リモート 速度指令信号の送信元
外部信号。
•
シリアル通信
•
内部プリセット速度指令信号。
•
ローカル ドライブは、LCP からの指令信号値を使用し
ます。
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 61
表 8.2 速度指令信号サイト
Page 66

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
交流ブレーキ
AMA 成功(AMA
finish OK)
AMA 準備完了
(AMA ready)
AMA 運転中(AMA
running)
ブレーキ ブレーキ・チョッパーが作動中です。ブレー
最大ブレーキ ブレーキ・チョッパーが作動中です。
フリーラン
88
Ctrl. 立ち下が
り
電流高 ドライブ出力電流は、
電流低 ドライブ出力電流は、
直流保留 直流保持が
パラメーター 2-10 ブレーキ機能
レーキが選択されました。交流ブレーキが、
制御によりスローダウンを行うために、モー
ターが過励磁します。
自動モーター適合化(AMA)は成功しました。
AMA のスタート準備ができています。スター
トするには、[Hand On] を押してください。
AMA プロセスが進行中です。
キ抵抗器が発生エネルギーを吸収します。
ーター 2-12 ブレーキ電力制限(kW)
されているブレーキ抵抗器が電力制限値に達
しています。
[2] 逆フリーラン
•
能として選択されました(パ
グループ 5-1* ディジタル入力
る端子は接続されていません。
フリーランはシリアル通信により起動さ
•
れます。
[1] コントロール・ランプ・ダウンがパラメ
ーター 14-10 主電源異常
た。
主電源の不具合により、主電源電圧
•
が
パラメーター 14-11 主電源不具
合時の主電源電圧
なっています。
ドライブはコントロール・ランプ・
•
ダウンを使用してモーターをラン
プ・ダウンします。
告電流高
す。
告速度低
す。
能
なっています。モーターは、
ー 2-00 直流保留電流
により停止状態になっています。
で設定された制限値を超えていま
で設定された制限値を超えていま
パラメーター 1-80 停止時の機
で選択され、停止コマンドがアクティブに
がディジタル入力の機
パラメーター 4-51 警
パラメーター 4-52 警
で設定された DC 電流
で交流ブ
パラメ
で定義
ラメーター・
)。対応す
で選択されまし
の設定値より低く
パラメータ
直流停止 モーターは、指定時間(
ー 2-02 直流ブレーキ時間
(
パラメーター 2-01 直流ブレーキ電流
より停止状態になります。
直流ブレーキが
•
ブレーキ作動速度 [RPM]
停止コマンドがアクティブになります。
直流ブレーキ(反転)が、ディジタル入力の
•
機能として選択されます(
グループ 5-1* ディジタル入力
する端子がアクティブではありません。
直流ブレーキがシリアル通信経由で起動
•
されます。
フィードバック高アクティブな全フィードバックの合計が、
ラメーター 4-57 高フィードバック信号警
告
で設定された制限値を上回っています。
フィードバック低アクティブな全フィードバックの合計が、
ラメーター 4-56 低フィードバック信号警
告
で設定された制限値を下回っています。
出力凍結 リモート基準がアクティブになっていて、現
在の速度を保持します。
[20] 出力凍結
•
として選択されました(
ループ 5-1* ディジタル入力
端子がアクティブです。速度コントロー
ルは、端子機能の減速と加速によってのみ
可能です。
ランプ保留はシリアル通信経由でアクテ
•
ィブにされます。
出力凍結要求 出力凍結コマンドが与えられても、モーター
は 運転許可信号を受け取るまで停止状態の
ままです。
凍結速度指令信
号
ジョグ要求 ジョグコマンドが与えられても、運転許可信
ジョグ モーターは
[19] 速度指令信号凍結
機能として選択されました(
ループ 5-1* ディジタル入力
子がアクティブです。ドライブは実際の速度
指令信号を保存します。速度指令信号の変更
は現在、端子機能の減速と加速によって可能
です。
号がディジタル入力を介して受け取られるま
で、モーターは停止状態のままです。
パラメーター 3-19 ジョグ速度
[RPM]
のプログラムに従って動いています。
[14] ジョグ
•
して選択されました(
ープ 5-1* ディジタル入力
端子(例:端子 29)はアクティブです。
ジョグ機能はシリアル通信経由でアクテ
•
ィブにされます。
ジョグ機能は、監視機能へのリアクション
•
として選択されました(例: 信号なし)。
監視機能はアクティブです。
パラメータ
)の間、直流電流
)に
パラメーター 2-03 直流
により起動され、
パラメーター・
)。対応
が、ディジタル入力の機能
パラメーター・グ
)。対応する
が、ディジタル入力の
パラメーター・グ
)。対応する端
が、ディジタル入力の機能と
パラメーター・グル
)。対応する
パ
パ
62 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 67

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
モーター確認
OVC コントロール過電圧コントロールは、
電源ユニットオフ(24 V 直流外部供給を装備したドライブの
保護モード 火災モードはアクティブです。ユニットは危
クイック停止 モーターは
ランピング モーターは、アクティブなランプ・アップ/ダ
速度指令高 アクティブな速度指令信号の合計は、
速度指令低 アクティブな速度指令信号の合計は、
速度指令信号に
よる運転
パラメーター 1-80 停止時の機能
モーター確認
ド が有効です。モーターがドライブへ接続
されていることを確認するため、パラメータ
ー・テスト電流をモーターに供給します。
ー 2-17 過電圧コントロール, [2] 有効
起動されました。接続モーターは、ドライブ
に発生エネルギーを供給しています。過電圧
制御は V/Hz 比を調整して、制御モードによ
りモーターを運転し、ドライブのトリップを
防ぎます。
み。) ドライブに対する主電源の供給が停止
されますが、コントロール・カードには 24 V
直流外部電源から供給されます。
険な状態を検出しました(過電流又は過電
圧)。
トリップを防ぐため、
•
ー 14-55 出力フィルターが [2] 正弦波
フィルター固定
スイッチ周波数は 1500 kHz まで下げられ
ます。その他の場合には、スイッチ周波数
は 1000 Hz まで下げられます。
可能な場合、保護モードは約 10 秒後に終
•
了します。
保護モードは、
•
不具合時トリップ遅延
止ランプ時間
[4] クイック停止反転
•
の機能として選択されました(
ー・グループ 5-1* ディジタル入力
応する端子がアクティブではありません。
クイック停止機能は、シリアル通信ポート
•
を介してアクティブにされました。
ウンを使用して加速又は減速されます。速度
指令信号で、制限値や停止状態に達していま
せん。
ーター 4-55 高警告速度指令信号
れた速度指令信号の制限値を上回っていま
す。
ーター 4-54 低警告速度指令信号
れた速度指令信号の制限値を下回っていま
す。
ドライブは、指令信号範囲で動作しています。
フィードバック値は設定値に一致していま
す。
が選択されました。停止コマン
パラメータ
パラメータ
に設定されているときは、
パラメーター 14-26 Inv
で制限できます。
パラメーター 3-81 クイック停
を使用して減速されます。
で、
[2]
で
が、ディジタル入力
パラメータ
)。対
パラメ
で設定さ
パラメ
で設定さ
稼動要求 スタート・コマンドが与えられても、モータ
ーは Run permissive signal(許容運転信
号)がディジタル入力を介して受け取るまで
停止されます。
運転中 ドライブはモーターを運転しています。
スリープ・モードエネルギー保存機能がアクティブになりま
す。この機能が有効になっているときは、現
在モーターが停止していることを意味してい
ますが、必要なときには自動的に再スタート
します。
速度高 モーター速度は
度高
で設定された値を上回っています。
速度低 モーター速度は
度低
で設定された値を上回っています。
スタンバイ 自動オン・モードでは、ドライブはディジタ
ル入力又はシリアル通信からのスタート信号
により、モーターをスタートさせます。
スタート遅延
正転/逆転スタ
ート
停止 ドライブが、以下のうち 1 つから停止コマン
トリップ 警報が発生し、モーターが停止します。警報
トリップ・ロック警報が発生し、モーターが停止します。警報
表 8.3 動作状態
パラメーター 1-71 スタート遅延
開始時間が設定されました。スタート・コマ
ンドが起動され、スタート遅延時間が過ぎる
とモーターがスタートします。
[12] 正転スタート有効
ート有効
して選択されました (
プ 5-1* ディジタル入力
対応する端子がアクティブになっているかに
より、正転または逆転を開始します。
ドを受け取りました:
LCP。
•
ディジタル入力。
•
シリアル通信
•
の原因が解決されたときは、以下のうち 1 つ
を使用してドライブをリセットします:
[Reset] を押す。
•
制御端子で遠隔操作する。
•
シリアル通信を使う。
•
[Reset]を押すか、 コントロール端子または
シリアル通信による遠隔操作を行います。
の原因が解決されたときは、ドライブの電源
を切ってすぐに入れ直してください。手動に
よるドライブのリセットは、以下のうち 1 つ
によって行います:
[Reset] を押す。
•
制御端子で遠隔操作する。
•
シリアル通信を使う。
•
パラメーター 4-53 警告速
パラメーター 4-52 警告速
では、遅延
、及び
[13] 逆転スタ
が、2 つのディジタル入力の機能と
パラメーター・グルー
)。モーターは、どの
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 63
Page 68

130BP086.12
Status
0.0Hz 0.000kW 0.00A
0.0Hz
0
Earth Fault [A14]
Auto Remote Trip
1(1)
Back
Cancel
Info
OK
On
Alarm
Warn.
130BB467.11
メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
8.4 警告と警報の種類
ドライブソフトウェアは、問題の診断に役立つ警告と警報
を発行します。警告または警報の番号が LCP に表示され
ます。
警告
警告は、ドライブに警報を引き起こす異常な動作状態が発
生したことを示します。異常な状態が除去または解決さ
れると警告は停止します。
警報
警報は、迅速な注意喚起を必要とする障害を示します。障
害は常にトリップやトリップ・ロックを作動させます。警
報の後にドライブをリセットしてください。
以下の 4 つの方法のいずれかでドライブをリセットしま
す:
[Reset]/[Off/Reset]を押します。
•
ディジタル・リセット入力コマンド。
•
シリアル通信リセット入力コマンド。
•
自動リセット。
88
•
トリップ
トリップ時、ドライブや他の装置が損傷するのを防ぐため
に、ドライブは動作を停止します。トリップが発生する
と、モーターはフリーランして停止します。ドライブのロ
ジックは動作を続け、ドライブの状態を監視します。不具
合状態が解消されるとドライブはリセットできる状態に
なります。
トリップ・ロック
トリップ・ロック時、ドライブや他の装置が損傷するのを
防ぐために、ドライブは動作を停止します。トリップ・ロ
ックが発生すると、モーターはフリーランして停止しま
す。ドライブのロジックは動作を続け、ドライブの状態を
監視します。ドライブは、ドライブやその他の装置を損傷
させる恐れのある深刻な障害が発生したときにのみトリ
ップ・ロックを開始します。不具合が解消された後、ドラ
イブをリセットする前に、入力電源を再投入してくださ
い。
警報と警告の表示
警報は、警報番号と共に LCP に表示されます。
•
警報は、警報番号と共に点滅します。
•
図 8.3 警報例
LCP 上のテキストと警報コードに加えて、3 つの状態表示
ランプがあります。
警告 インジケータランプ警報 インジケータラ
ンプ
警告 オン オフ
警報 オフ On (フラッシュ)
トリップ・ロ
ック
図 8.4 状態表示ランプ
オン On (フラッシュ)
64 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 69

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
8.5 警告と警報のリスト
以下の警告および警報情報は、各警告および警報状態を定
義し、その状態について考えられる原因を提供し、修正方
法またはトラブルシューティング手順を詳述します。
警告 1, 10 ボルト低
コントロール・カード電圧は、端子 50 において 10 V 未
満になっています。
10 V 電源が過負荷になっているので、端子 50 から負荷
の一部を取り除いてください。最大 15 mA 又は 最小
590 Ω。
この状態は、接続されたポテンショメーターにおける短
絡、あるいはポテンショメーターの不適切な配線によって
生じます。
トラブルシューティング
端子 50 から配線を取り外します。警告がクリア
•
される場合、問題は配線にあります。警告がクリ
アされない場合、コントロール・カードを交換し
ます。
警告/警報 2, ライブ・ゼロ・エラー
この警告あるいは警報は、
ゼロ・タイムアウト機能
のみ表示されます。アナログ入力の 1 つの信号は、入力の
ためにプログラムされた最小値の 50%を下回ります。こ
の状態は、破損した配線、あるいは信号を送る装置の故障
によって発生します。
トラブルシューティング
全てのアナログ主電源端子上の接続を確認しま
•
す。
- 端子 55 共通、信号用コントロール・カ
ード端子 53 及び 54。
-
端子 10 共通、信号用 VLT® General
Purpose I/O MCB 101 端子 11 及び
12。
-
端子 2、4、6 共通、信号用 VLT® Analog
I/O Option MCB 109 端子 1、3、5。
ドライブプログラムとスイッチ設定がアナロ
•
グ・シグナル・タイプと一致することを確認しま
す。
入力端子信号テストを実行します。
•
警告/警報 3, モーターなし
ドライブの出力にモーターが接続されていません。
パラメーター 6-01 ライブ・
においてプログラムされた場合に
警告/警報 4, 主電源相損失
相が電源側で損失しているか、あるいは主電源電圧アンバ
ランスが高すぎます。このメッセージはの入力整流器に
不具合が生じたときにも表示されます。オプションは、
ラメーター 14-12 主電源アンバランス時の機能
てプログラムされます。
トラブルシューティング
ドライブへの供給電圧と供給電流をチェックし
•
て下さい。
警告 5, 直流リンク電圧高
直流リンク電圧(DC)は高電圧警告制限より高くなってい
ます。制限は、ドライブ電圧定格に依存します。ユニット
はまだアクティブです。
警告 6, 直流リンク電圧低
直流リンク電圧(DC)は低電圧警告制限より低くなってい
ます。制限は、ドライブ電圧定格に依存します。ユニット
はまだアクティブです。
警告/警報 7, 直流過電圧
直流リンク電圧が制限を超える場合、しばらくするとドラ
イブがトリップします。
トラブルシューティング
立ち上がり/立ち下がり時間を延長する。
•
立ち上がり/立ち下がりタイプを変更します。
•
パラメーター 14-26 Inv 不具合時トリップ遅延
•
を増加します。
供給電圧がアクティブなフロントエンド・ドライ
•
ブ電圧に一致するかを確認します。
入力電圧テストを実施します。
•
警告/警報 8, 直流電圧低下
直流リンク電圧が電圧低下制限を下回る場合には、ドライ
ブが、24 V 直流バックアップ電源を確認します。24 V
DC バックアップ電源が接続されていない場合には、ドラ
イブが決められた時間遅延の後にトリップします。時間
遅延はユニットサイズによって異なります。
トラブルシューティング
供給電圧がドライブ電圧に一致するかを確認し
•
ます。
入力電圧テストを実施します。
•
ソフトチャージ回路テストを実施します。
•
警告/警報 9, インバーター過負荷
ドライブが 100% を超える過負荷で長時間動作し、カット
アウトしようとしています。電子サーマル・インバータ保
護用カウンターは 98% で警告を発し、100% で警報を発
しながらトリップします。ドライブは、カウンターが
90% 未満になるまでリセットできません。
トラブルシューティング
LCP 上に表示される出力電流と、ドライブ定格電
•
流を比較します。
LCP 上に表示される出力電流と、測定モーター電
•
流を比較します。
パ
におい
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 65
Page 70

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
LCP 上のサーマル・ドライブ負荷を表示し、数値
•
を監視します。ドライブ継続電流定格を超えて
動作するときは、カウンターが増加します。ドラ
イブ継続電流定格を下回った状態で動作すると
きは、カウンターが減少します。
警告/警報 10, モーター過負荷温度
電子サーマル・インバータ保護(ETR) によってモーター
が過熱しています。
これらのオプションのうち 1 つを選択します:
パラメーター 1-90 モーター熱保護
•
ションに設定されている場合に、カウンターが
>90%であるときは、ドライブが警告又は警報を出
します。
パラメーター 1-90 モーター熱保護
•
プ・オプションに設定されている場合、カウンタ
ーが 100%に到達すると、ドライブがトリップし
ます。
モーターに 100%を超える過負荷を長時間掛けると不具合
が発生します。
88
トラブルシューティング
モーターが過熱されていないか確認します。
•
モーターが機械的に過負荷であるか確認します。
•
パラメーター 1-24 モーター電流
•
モーター電流が正しいことを確認します。
パラメーター 1-20 から 1-25
•
ー・データが正しく設定されていることを確認し
ます。
外部ファンが使用されている場合、
•
ー 1-91 モーター外部ファン
ているか確認します。
パラメーター 1-29 自動モーター適合(AMA)
•
おいて AMA を動作させることで、ドライブをモー
ターに対してより正確に調整でき、熱負荷を減少
させることができます。
警告/警報 11, モーター・サーミスター過熱
サーミスター接続が切断されているかどうかチェックし
てください。ドライブがに
熱保護
おいて警告又は警報を出すよう、選択をします。
トラブルシューティング
モーターが過熱されていないか確認します。
•
モーターが機械的に過負荷であるか確認します。
•
端子 53 又は 54 を使用する場合、サーミスタ
•
ーが端子 53 又は 54(アナログ電圧入力)と端
子 50(+ 10 V 電源)との間で正しく接続されて
いることを確認してください。さらに、53 又は
54 の端子スイッチが電圧設定されていることを
確認します。
ー・リソース
とを確認します。
端子 18、19、31、32 又は 33 (ディジタル入
•
力)を使用する場合、サーミスターが使用済みデ
ィジタル入力端子(ディジタル入力 PNP のみ)と
パラメーター 1-90 モーター
パラメーター 1-93 サーミスタ
が端子 53 又は 54 を選択しているこ
が警告オプ
がトリッ
で設定された
におけるモータ
パラメータ
でそれが選択され
に
警告/警報 12, トルク制限
トルクが、
ード
ター・モード
ー 14-25 トルク制限時のトリップ遅延
のみの状態から、警報を伴う警告に変更するために使用す
ることができます。
トラブルシューティング
警告/警報 13, 過電流
インバーター・ピーク電流制限 (定格電流の約 200%)を
超えています。警告は約 1.5 秒続きます。その後、ドラ
イブがトリップし警報が発せられます。この不具合は、衝
撃負荷、あるいは高度な慣性負荷を伴う高速度加速によっ
て発生することがあります。立ち上がりの間の加速が素
早い場合、不具合が速度バックアップの後に発生すること
があります。
拡張機械的ブレーキ・コントロールが選択されている場合
には、トリップを外部からリセットできます。
トラブルシューティング
警報 14, 地絡
ドライブとモーター間のケーブル又はモーター自体に、出
力相から接地への電流があります。電流変換器は、ドライ
ブから出る電流とモーターからドライブに入る電流を測
定して地絡を検出します。2 つの電流の偏差が大きすぎ
るときに、地絡が通知されます。ドライブから出る電流
は、ドライブに入る電流と同じである必要があります。
トラブルシューティング
端子 50 の間で正しく接続されていることを確
認してください。使用する端子を
ー 1-93 サーミスター・リソース
パラメーター 4-16 トルク制限モーター・モ
の値又は
•
•
•
•
•
•
•
•
•
•
パラメーター 4-17 トルク制限ジェネレー
の値を超えています。
立ち上がり中にモータートルク制限を超過した
場合、立ち上がり時間を延長します。
立ち下がり中に回生トルク制限を超過した場合、
立ち下がり時間を延長します。
トルク制限が動作中に発生した場合、トルク制限
を増加させます。システムがより高いトルクで
安全に運転出来るように確認してください。
モーターの電流が過剰でないか、アプリケーショ
ンを確認します。
電源を切り、モーター・シャフトが回転可能か確
認します。
モーターサイズがドライブと一致するか確認し
ます。
パラメーター
ータが適正であることを確認します。
ドライブの電源を切り、地絡を修理してくださ
い。
モーター・ケーブルと絶縁抵抗計を有するモータ
ーの接地に対する抵抗を測定し、モーターの地絡
を確認します。
ドライブの電流変換器(3 個)で潜在的な個々の
オフセットをリセットします。手動による初期
1-20
から
パラメータ
で選択します。
パラメータ
は、これを、警告
1-25
でモーター・デ
66 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 71

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
化又は完全 AMA を実行します。電力カードを変
更した後、この方法は最も有効です。
警報 15, ハードウェア不整合
現在のコントロール・カード ハードウェア又はソフトウ
ェアでは、取り付けられたオプションは動作しません。
パラメーターに従った値を記録し、Danfoss 代理店にお問
い合わせください。
パラメーター 15-40 FC タイプ
•
パラメーター 15-41 電力セクション
•
パラメーター 15-42 電圧
•
パラメーター 15-43 ソフトウェア・バージョ
•
ン
.
パラメーター 15-45 実際タイプ・コード文字
•
列
.
パラメーター 15-49 SW ID コントロール・カー
•
ド
.
パラメーター 15-50 SW ID 電力カード
•
パラメーター 15-60 オプション実装済み
•
パラメーター 15-61 Opt SW バージョン
•
オプションスロット用)。
警報 16, 短絡
モーター又はモーター配線に短絡があります。
トラブルシューティング
ドライブの電源を切り、短絡を修理してくださ
•
い。
.
.
.
.
.
(各
警告
高電圧
AC 主電源、DC 電源、 あるいはロードシェアに接続され
ている限り、ドライブには高電圧が印加されています。有
資格技術者でない人が、ドライブの設置、スタートアッ
プ、メンテナンスを行った場合、死亡事故や重大な傷害事
故を招くおそれがあります。
作業を進める前に電源を切断します。
•
警告/警報 17, コントロール・メッセージ文タイムアウ
ト
ドライブへの通信がありません。
この警告は、
[0] オフ
ります。
パラメーター 8-04 コント Mss 文タイムが [5] 停止し
てトリップ
イブは立ち下がった後、警報を表示します。
トラブルシューティング
•
•
•
•
パラメーター 8-04 コント Mss 文タイム
に設定されていない場合にのみアクティブにな
に設定されている場合、警告が表示され、ドラ
シリアル通信ケーブル上の接続を確認します。
パラメーター 8-03 コント Mss 文タイム
します。
通信設備の動作を確認します。
EMC 設置が正しく実行されたことを確認します。
が
を増加
警告/警報 20, 温度入力エラー
温度センサーが接続されていません。
警告/警報 21, パラメーター・エラー
パラメータが範囲外です。パラメーター番号はディスプ
レイに表示されます。
トラブルシューティング
関連パラメーターを有効な値に設定してくださ
•
い。
警告/警報 22、巻き上げ機械的ブレーキ
0 = タイムアウトの前に、トルク値まで到達しませんで
した。
1 = タイムアウトの前に、ブレーキフィードバックがあ
りませんでした。
警告 23, 内部ファン不具合
ファン警告機能は、ファンが運転されているか、あるいは
ファンが取り付けられているかを確認する保護機能です。
ファン警告は、
(
[0] 無効に設定
ファンにはフィードバック・センサーが取り付けられてい
ます。ファンに運転の命令が発せられても、センサーから
フィードバックがない場合、このアラームが表示されま
す。このアラームは、ファン電力カードとコントロール・
カードとの間で通信エラーが発生したときにも表示され
ます。
この警報に関連する報告値については、警報ログを確認し
てください (
(LCP)
をご参照ください。)。
報告値が 2 である場合、ファンのうち 1 つにハードウェア
上の問題が発生しています。報告値が 12 である場合、フ
ァン電力カードとコントロール・カードとの間で通信エラ
ーが発生しています。
ファンのトラブルシューティング
•
•
ファン電力カードのトラブルシューティング
•
•
•
パラメーター 14-53 ファン・モニター
)で無効に出来ます。
章 3.6 ローカル・コントロール・パネル
ドライブへの電力をサイクルし、ファンがスター
トアップ時に一時的に動作することを確認しま
す。
ファン動作が適切か確認します。パラメータ
ー・グループ
て、各ファンの速度を表示します。
ファン電力カードとコントロール・カードとの間
の配線を確認します。
ファン電力カードの交換が必要である可能性が
あります。
コントロール・カードの交換が必要である可能性
があります。
43-** ユニット読み出し
を使用し
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 67
Page 72

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
警告 24, 外部ファン不具合
ファン警告機能は、ファンが運転されているか、あるいは
ファンが取り付けられているかを確認する保護機能です。
ファン警告は、
(
[0] 無効に設定
ファンにはフィードバック・センサーが取り付けられてい
ます。ファンに運転の命令が発せられても、センサーから
フィードバックがない場合、このアラームが表示されま
す。このアラームは、電力カードとコントロール・カード
との間で通信エラーが発生したときにも表示されます。
この警報に関連する報告値については、警報ログを確認し
てください (
(LCP)
をご参照ください。)。
報告値が 1 である場合、ファンのうち 1 つにハードウェア
上の問題が発生しています。報告値が 11 である場合、電
力カードとコントロール・カードとの間で通信エラーが発
生しています。
ファンのトラブルシューティング
•
88
•
電力カードのトラブルシューティング
•
•
•
警告 25, ブレーキ抵抗器短絡
ブレーキ抵抗器は動作中監視されています。短絡した場
合には、ブレーキ機能が無効化され、警告が表示されま
す。ドライブは引き続き動作しますが、ブレーキ機能は動
作しません。
トラブルシューティング
•
警告/警報 26, ブレーキ抵抗器電力制限
ブレーキ抵抗器に伝送される電力が、動作時間の最終 120
秒の平均値として計算されます。計算は、
ー 2-16 交流ブレーキ最大電流
リンク電圧とブレーキ抵抗値を基本とします。ブレーキ
放熱電力が ブレーキ抵抗電力の 90% より高くなると警
告がアクティブになります。
キ電力監視
いる場合、ブレーキ放熱電力が 100% より大きいと、ド
ライブはトリップします。
パラメーター 14-53 ファン・モニター
)で無効に出来ます。
章 3.6 ローカル・コントロール・パネル
ドライブへの電力をサイクルし、ファンがスター
トアップ時に一時的に動作することを確認しま
す。
ファン動作が適切か確認します。パラメータ
ー・グループ
て、各ファンの速度を表示します。
電力カードとコントロール・カードとの間の配線
を確認します。
電力カードの交換が必要である可能性がありま
す。
コントロール・カードの交換が必要である可能性
があります。
ドライブへの電力供給を停止して、ブレーキ抵抗
器を交換してください(
レーキ確認
においてオプション
43-** ユニット読み出し
パラメーター 2-15 ブ
をご参照ください)。
パラメータ
において設定された直流
パラメーター 2-13 ブレー
[2]トリップ
を使用し
が選択されて
警告/警報 27, ブレーキ・チョッパー不具合
動作中はブレーキ抵抗器が監視され、短絡すると、ブレー
キ機能が無効化され、警告が表示されます。ドライブは引
き続き動作可能ですが、ブレーキ・トランジスタが短絡し
ているため、ブレーキ抵抗器が非アクティブである場合で
も、そのブレーキ抵抗器に多量の電力が伝達されます。
警告
過熱リスク
電力が急増すると、ブレーキ抵抗器が過熱し、火災が発生
する可能性があります。ドライブの電源を切ってブレー
キ抵抗器を取り外さないときは、装置が損傷するおそれが
あります。
トラブルシューティング
ドライブの電源を切り、ブレーキ抵抗器を取り外
•
してください。
警告/警報 28, ブレーキ確認失敗
ブレーキ抵抗器が接続されていないか、動作していませ
ん。
トラブルシューティング
パラメーター 2-15 ブレーキ確認
•
てください。
警報 29, ヒートシンク温度
ヒートシンクの最大温度を超えています。警報は IGBT モ
ジュール内部に実装されたヒートシンクセンサーによっ
て測定された温度を基本とします。温度の不具合は、温度
が一定のヒートシンク温度以下になるまで、リセットされ
ません。トリップおよびリセットのポイントは、ドライブ
電力サイズによって異なります。
トラブルシューティング
以下の条件を確認します:
•
- 周囲温度が高すぎる。
- モーター・ケーブルが長すぎる。
- ドライブの上下における不適切な通気
用スペース。
- ドライブ周囲の空気の流れの阻害。
- ヒートシンクファンの損傷。
- ヒートシンクの汚れ。
ファンの抵抗を確認します。
•
ソフトチャージフューズを確認します。
•
IGBT サーマルを確認してください。
•
をチェックし
68 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 73

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報 30, モーター相 U 損失
ドライブとモーター間のモーター相 U が喪失しています。
警告
高電圧
AC 主電源、DC 電源、 あるいはロードシェアに接続され
ている限り、ドライブには高電圧が印加されています。有
資格技術者でない人が、設置、スタートアップ、メンテナ
ンスを誤って行った場合、死亡事故や重大な傷害事故を招
くことがあります。
設置、始動、メンテナンスは、有資格技術者のみ
•
が行ってください。
サービスや修理を実施する前に、ドライブ上に残
•
存電圧がないことを確認するために、適切な電圧
測定機器を使用してください。
トラブルシューティング
ドライブへの電力を停止し、モーター相 U を確認
•
してください。
警報 31, モーター相 V 損失
ドライブとモーター間のモーター相 V が喪失しています。
警告
高電圧
AC 主電源、DC 電源、 あるいはロードシェアに接続され
ている限り、ドライブには高電圧が印加されています。有
資格技術者でない人が、設置、スタートアップ、メンテナ
ンスを誤って行った場合、死亡事故や重大な傷害事故を招
くことがあります。
設置、始動、メンテナンスは、有資格技術者のみ
•
が行ってください。
サービスや修理を実施する前に、ドライブ上に残
•
存電圧がないことを確認するために、適切な電圧
測定機器を使用してください。
トラブルシューティング
ドライブへの電力を停止し、モーター相 V を確認
•
してください。
警報 32, モーター相 W 損失
ドライブとモーター間のモーター相 W が喪失しています。
警告
高電圧
AC 主電源、DC 電源、 あるいはロードシェアに接続され
ている限り、ドライブには高電圧が印加されています。有
資格技術者でない人が、設置、スタートアップ、メンテナ
ンスを誤って行った場合、死亡事故や重大な傷害事故を招
くことがあります。
設置、始動、メンテナンスは、有資格技術者のみ
•
が行ってください。
サービスや修理を実施する前に、ドライブ上に残
•
存電圧がないことを確認するために、適切な電圧
測定機器を使用してください。
トラブルシューティング
ドライブへの電力を停止し、モーター相 W を確認
•
してください。
警報 33, インラッシュ不具合
短期間のうちに多数の電源投入が行われました。
トラブルシューティング
ユニットを動作温度まで冷却させます。
•
直流リンク地絡の可能性を確認します。
•
警告/警報 34, フィールドバス通信不具合
通信オプション・カード上のフィールドバスが動作してい
ません。
警告/警報 35, オプション不具合
オプション警報を受信します。警報はオプション別です。
もっとも考えられる原因は出力アップか、または通信不良
です。
警告/警報 36, 主電源異常
この警告/警報は、ドライブへの供給電圧 が失われ、
ラメーター 14-10 主電源異常
し
に設定されていない場合にのみアクティブになります。
ドライブへのフューズと、ユニットへの主電源電
•
力を確認します。
主電源電圧が製品仕様に適合することを確認し
•
ます。
以下の状態が存在しないことを確認します:
•
記載された条件のうち、いずれかが実際に存在す
るときは 、警報 307, 過剰 THD(V)、警報 321,
電圧アンバランス、警報 417, 主電源低電圧、又
は警報 418, 主電源過電圧
- 3 相電圧振幅が、公称主電源電圧の 25%
を下回っています。
- 単相電圧が、公称主電源電圧の 10%を超
えています。
- 相又は振幅アンバランスのパーセント
が 8%を超えています。
- 電圧総高調波が 10%を超えています。
がオプション
が報告されます。
[0] 機能無
パ
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 69
Page 74

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
警報 37, 供給電圧のアンバランス
電源ユニット間に、電流の不均衡があります。
警報 38, 内部不具合
内部不具合が発生した場合、
表 8.4
で定義されたコード
番号が表示されます。
トラブルシューティング
サイクル電力
•
オプションが正しく設置されていることを確認
•
します。
接続が緩んでいたり、失われていないか確認しま
•
す。
Danfoss 代理店又はサービス部門に連絡することが必要
な場合もあります。問題解決の指示を受けるため、コード
番号を確認してください。
番号 テキスト
0 リシアル・ポートを初期化できません。Danfoss
代理店又は Danfoss サービス部門にお問い合わ
せください。
88
256–259,
266, 268
512–519 内部不具合。Danfoss 代理店又は Danfoss サー
783 パラメーター値が上下限の範囲外です。
1024–1284 内部不具合。Danfoss 代理店又は Danfoss サー
1299 スロット A の オプション SW が古すぎます。
1300 スロット B の オプション SW が古すぎます。
1301 スロット C0 の オプション SW が古すぎます。
1302 スロット C1 の オプション SW が古すぎます。
1315 スロット A の オプション SW はサポートされ
1316 スロット B の オプション SW はサポートされ
1317 スロット C0 の オプション SW はサポートさ
1318 スロット C1 の オプション SW はサポートさ
1360–2819 内部不具合。Danfoss 代理店又は Danfoss サー
2561 コントロール・カードを交換します。
2820 LCP オーバーフロースタック。
2821 シリアル・ポート・オーバーフロー。
2822 USB ポート・オーバーフロー
3072–5122 パラメーター値がその限度外です。
5123 スロット A のオプション: コントロール・ボー
5124 スロット B のオプション: コントロール・ボー
5125 スロット C0 のオプション: コントロール・ボ
5126 スロット C1 のオプション: コントロール・ボ
電力 EEPROM データに欠陥があるか、古すぎま
す。電力カードを交換します。
ビス部門にお問い合わせください。
ビス部門にお問い合わせください。
ていません(使用が許されていません)。
ていません(使用が許されていません)。
れていません(使用が許されていません)。
れていません(使用が許されていません)。
ビス部門にお問い合わせください。
ドのハードウェアと互換性のないハードウェア
ドのハードウェアと互換性のないハードウェア
ードのハードウェアと互換性のないハードウェア
ードのハードウェアと互換性のないハードウェア
番号 テキスト
5127 不正なオプションの組み合わせ (同一種類の 2
つのオプションが実装されたとき、又は E0 にエン
コーダー及び E1 にレゾルバーを実装したときな
ど)。
5168 安全停止/安全トルクオフが、安全停止/安全ト
ルクオフを備えていないコントロール・カードで
検出されました。
5376–
65535
表 8.4 内部不具合コード
内部不具合。Danfoss 代理店又は Danfoss サー
ビス部門にお問い合わせください。
警報 39, ヒートシンク・センサー
ヒートシンク温度センサーから何らのフィードバックも
ありません。
IGBT サーマルセンサーからの信号は、電力カード上で利
用できません。問題は、パワーカード上、ゲートドライブ
カード、あるいは、パワーカードとゲートドライブカード
間のリボンケーブルの可能性があります。
警告 40, ディジタル出力端子 27 の過負荷
端子 27 に接続されている負荷を確認するか、短絡接続
を取り除いてください。
I/O モード
及び
パラメーター 5-00 ディジタル
パラメーター 5-01 端末 27 モード
を確認します。
警告 41, ディジタル出力端子 29 の過負荷
端子 29 に接続されている負荷を確認するか、短絡接続
を取り除いてください。さらに、
ィジタル I/O モード
モード
をチェックしてください。
と
パラメーター 5-00 デ
パラメーター 5-02 端末 29
警告 42, X30/6 のディジタル出力の過負荷または
X30/7 のディジタル出力の過負荷
端子 X30/6 については、端子 X30/6 に接続されている負荷
を確認するか、短絡接続を取り除いてください。
ター 5-32 端末 X30/6 ディジ出(MCB 101)
(VLT
パラメー
®
General Purpose I/O MCB 101)もチェックしてくださ
い。
端子 X30/7 については、端子 X30/7 に接続されている負荷
(VLT
パラメー
®
を確認するか、短絡接続を取り除いてください。
ター 5-33 端末 X30/7 ディジ出(MCB 101)
General Purpose I/O MCB 101)もチェックしてくださ
い。
警報 43, 外部供給
VLT® Extended Relay Option ン MCB 113 は、外部 24V
DC なしで取り付けます。外部 24V DC 電源に接続する
か、又は
ション, [0] No
を確認します。
給オプション
パラメーター 14-80 外部 24VDC から供給オプ
を介して外部電源を使用していないこと
パラメーター 14-80 外部 24VDC から供
の変更には電力サイクルが必要です。
70 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 75

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報 45, 地絡 2
地絡。
トラブルシューティング
接地が適切か、接続が緩んでないか確認します。
•
ワイヤサイズが適切か確認します。
•
短絡又は漏洩電流が生じていないかモーター・ケ
•
ーブルを確認します。
警報 46, 電力カードの供給
電力カードの供給が、レンジ外です。他の理由としては、
ヒートサインクファンの故障が考えられます。
電力カード上のスイッチ・モード供給電源 (SMPS)によっ
て生成される電源には 3 つあります:
24 V.
•
5 V.
•
±18 V.
•
VLT® 24 V DC Supply MCB 107 によって電力が供給され
たとき、24 V 及び 5 V 電源のみが監視されます。3 相に
よる電源により供給されたとき、3 つの供給電圧すべてが
監視されます。
トラブルシューティング
電力カードの不良を確認します。
•
コントロール・カードの不良を確認します。
•
オプション・カードの不良を確認します。
•
24 V 直流電源が使用されている場合、適切な電
•
源供給が行われているか確認します。
ヒートサインクファンに故障がないかチェック
•
します。
警告 47, 24 V 電源低
電力カードの供給が、レンジ外です。
電力カード上のスイッチ・モード供給電源 (SMPS)によっ
て生成される電源には 3 つあります:
24 V.
•
5 V.
•
±18 V.
•
トラブルシューティング
電力カードの不良を確認します。
•
警告 48, 1.8 V 電源低
コントロール・カード上で使用される 1.8 V 直流電源は、
許容可能な制限外にあります。電源は、コントロール・カ
ード上で測定されます。
トラブルシューティング
コントロール・カードの不良を確認します。
•
オプション・カードが存在する場合、過電圧を確
•
認します。
警告 49, 速度制限
速度が
パラメーター 4-11 モーター速度下限[RPM]
び
パラメーター 4-13 モーター速度上限[RPM]
された範囲内にないとき、警告が表示されます。速度が、
パラメーター 1-86 トリップ速度ロー [RPM]
定制限を下回る時(開始または停止の場合を除く)、ドラ
イブがトリップします。
警報 50, AMA 較正失敗
Danfoss 代理店又は Danfoss サービス部門にお問い合
わせください。
警報 51, AMA チェック U
モーター電圧、モーター電流、及びモーター電力の設定が
間違っています。
トラブルシューティング
パラメーター 1-20 から 1-25
•
ます。
警報 52, AMA 低 I
モーター電流が低すぎます。
トラブルシューティング
パラメーター 1-24 モーター電流
•
してください。
警報 53, AMA モーター過大
AMA を動作させるには、モーターが大きすぎます。
警報 54, AMA モーター過小
AMA 自動調整を実行するには、モーターが小さすぎます。
警報 55, AMA パラメーター範囲外
モーターのパラメーター値は、許容範囲の外にあるため、
AMA は動作できません。
警報 56, ユーザーによる AMA 中断
AMA が手動で中断されます。
警報 57, AMA 内部不具合
AMA の再スタートを試みてください。再スタートを繰り
返すとモーターが過熱する場合があります。
警報 58, AMA 内部不具合
代理店に Danfoss お問い合わせください。
警告 59, 電流制限
電流が
ます。
ータが正しく設定されていることを確認します。必要な
らば電流制限を増加します。システムがより高いリミッ
トにおいて安全に動作可能か確認します。
警告 60, 外部インターロック
ディジタル入力信号が、ドライブの外部における不具合状
態を示します。外部インターロックがドライブにトリッ
プの指示を出しました。外部不具合状態をクリアにしま
す。通常動作を再開するには 24 V 直流を外部インター
ロックにプログラムされた端子に印加した後、ドライブを
リセットしてください。
パラメーター 4-18 電流制限
パラメーター 1-20 から 1-25
nom
および I
nom
の値を上回ってい
におけるモーター・デ
における指
nom
の設定を確認し
の設定を確認
及
で指定
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 71
Page 76
メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
警告 61、追跡エラー
計算されたモーター速度とフィードバック・デバイスから
の測定速度間のエラーが検知されました。警告/警報/無
効の機能は、
ック損失機能
ー 4-31 モータ FB 速度エラー
れたエラー時間は
イムアウト
この機能が有効である可能性があります。
警告 62, 上限時の出力周波数
出力周波数が
した値に到達したとき、ドライブは警告を発します。出力
が上限未満まで減少したとき、警告は停止します。ドライ
ブが周波数を制限できない場合は、トリップして警報を発
します。後者は、ドライブがモーターの制御を失った場合
に、磁束モードで発生することがあります。
トラブルシューティング
•
•
88
警報 63, 機械的ブレーキ低
実際のモーター電流がスタート遅延時間中にブレーキ解
除電流値を超えませんでした。
警告 64, 電圧制限
この負荷及び速度の組み合わせによって、実際の直流リン
ク電圧より高いモーター電圧が要求されます。
警告/警報 65, コントロール・カード過熱
コントロールカードの切断温度は 85 °C(185 °F)です。
トラブルシューティング
•
•
•
•
警告 66, ヒートシンク温度低
ドライブが低温すぎるため作動しません。この警告は、
IGBT モジュールの温度センサーを基本としています。ユ
ニット周囲温度を上昇させます。さらに、
ー 2-00 直流保留/予加熱電流
ー 1-80 停止時の機能
止するたびに少量の電流がドライブに供給されます。
警報 67, オプション・モジュール構成が変更されました
最後の電源切断後に 1 つあるいはそれ以上のオプション
が追加又は取り外されました。構成の変更が意図的なも
のであること確認し、ユニットをリセットしてください。
パラメーター 4-30 モーター・フィードバ
で設定されます。エラー設定は
で確認できます。許容さ
パラメーター 4-32 モータ FB 損失タ
で確認できます。コミッショニング手続き中、
パラメーター 4-19 最高出力周波数
原因を特定するため、アプリケーションを確認し
ます。
出力周波数リミットを増加させます。システム
がより高い出力周波数において安全に動作可能
か確認します。
周囲動作温度が制限内であることを確認してく
ださい。
フィルターの詰まりがないか確認します。
ファンの動作を確認します。
コントロール・カードを確認します。
を[5%] 及び
に設定することで、モーターが停
パラメータ
で設定
パラメータ
パラメータ
警報 68, 安全停止作動
Safe Torque Off (STO)が有効にされました。通常動作
を再開するには 24 V 直流を端子 37 に印加した後、
(バス、ディジタル I/O を介すか、[Reset] (リセット)
キーを押して) リセット信号を送信してください。
警報 69, 電力カード温度
パワーカード上の温度センサーは、温度が高すぎるか、低
すぎます。
トラブルシューティング
周囲動作温度が制限内であることを確認してく
•
ださい。
フィルターの詰まりがないか確認します。
•
ファンの動作を確認します。
•
電力カードを確認します。
•
警報 70, 違法な FC 構成
コントロール・カードと電力カードに互換性がありませ
ん。互換性を確認するには、銘板上のユニットのタイプ・
コードと、カードのパーツ番号を Danfoss 代理店に伝え
てください。
警告/警報 71、PTC 1 安全停止
モーターが過熱したため、Safe torque off (STO)が、
VLT® PTC Thermistor Card MCB 112 から起動しました。
モーターが冷却し、MCB 112 からのディジタル入力が非ア
クティブになった場合は、MCB 112 が再び端子 37 に 24 V
DC を印加すると、通常動作が再開します。モーターで通
常動作の準備が整うと、 (シリアル通信、ディジタル
I/O を介して、又は LCP で [Reset] を押すことにより)リ
セット信号が送信されます 自動再スタートが有効な場
合、モーターは不具合が解消されるとスタートできます。
警報 72, 危険な故障
トリップ・ロックによる Safe Torque Off (STO) 。
VLT® PTC Thermistor CardMCB 112 からの Safe Torque
Off (STO)とディジタル入力での期待されない信号レベ
ル。
警告 73, 安全停止自動再スタート
Safe Torque Off (STO)が有効にされました。自動再ス
タートが有効であるとき、モーターは不具合が解消される
とスタートします。
警報 74, PTC サーミスター
VLT® PTC Thermistor Card MCB 112 に関するアラーム。
PTC が作動していません。
警報 75, 違法なプロファイル選択
モーターの運転中は、パラメーター値を書き込まないでく
ださい。MCO プロファイルを
Mss 文タイムプロフ
す。
に書き込む前に、モーターを停止しま
パラメーター 8-10 コント
72 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 77

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警告 76, 電源ユニット設定
電力ユニットの要求された数が、アクティブな電力ユニッ
トの検知数と一致しません。エンクロージャーサイズ F
モジュールを交換する際、モジュールパワーカードの電力
特定データが残りのドライブと一致しないときに、この警
告が発生します。電力カード接続が失われたときにも、ユ
ニットはこの警告を起動します。
トラブルシューティング
交換部品と、電力カードの部品番号が正しいこと
•
を確認してください。
MDCIC とパワーカードの間の 44 ピンケーブルが
•
正しく取り付けられていることを確認してくだ
さい。
警告 77, 低電力モード
この警告は、ドライブが低電力モードで動作していること
を示します(つまり、許容されたインバーターセクション
数を下回る数)。この警告は、ドライブが少ない数のイン
バーターと動作するよう設定され、それが継続するとき
に、電力サイクル上で生成されます。
警報 78, 追跡エラー
設定値と実際の値の偏差が、
ラー
で設定されている値を超えています。
トラブルシューティング
機能を無効にするか、
•
エラー機能
負荷とモーターの周囲の機構を検査します。モ
•
ーター・エンクロージャーからドライブへのフィ
ードバック接続を確認します。
パラメーター 4-30 モーター・フィードバック
•
損失機能
機能を選択します。
パラメーター 4-35 追跡エラー
•
ター 4-37 追跡エラーランピング
ッキング・エラーバンドを調整します。
警報 79, 違法な出力セクション構成
スケーリングカードが不正なパーツ数、あるいは取り付け
られていません。また、パワーカード上の MK102 コネクタ
ーの取り付けができませんでした。
警報 80, ドライブがデフォルト値に初期化されました
手動リセット後に、パラメーター設定が デフォルト設定
に初期化されます。警報をクリアするには、ユニットをリ
セットします。
警報 81、CSIV コラプト
CSIV ファイルにシンタックスエラーがあります。
警報 82, CSIV パラメーター・エラー
CSIV がパラメーターの初期化に失敗。
警報 83, 違法なオプション組合せ
取り付けたオプションとの間で互換性がありません。
警報 84, 安全オプションなし
安全オプションは、一般リセットを適用しないで、削除さ
れました。安全オプションを再接続します。
で警報/警告を選択します。
においてモーター・フィードバック信号
パラメーター 4-35 追跡エ
パラメーター 4-34 追跡
および
パラメー
においてトラ
警報 85, 危険な故障 PB
プロフィバス/プロフィセーフ・エラー。
警報 88, オプション検出
オプションレイアウトの変更が検知されます。
ター 14-89 Option Detectionが [0] 停止構成
され、オプションレイアウトが変更されました。
変更を適用するには、
•
ー 14-89 Option Detection
アウトの変更を有効にしてください。
別の方法として、正しいオプション設定を回復し
•
てください。
警告 89, 機械的ブレーキ・スライド
ホイストブレーキモニタは、モーター速度が 10 RPM を超
えているのを検出します。
警報 90, フィードバック・モニター
エンコーダー/レゾルバーオプションへの接続をチェッ
クして、必要に応じて VLT® Encoder Input MCB 102 又
は VLT® Resolver Input MCB 103 を交換してください。
警報 91, アナログ 入力 54 の設定が不正
KTY センサーがアナログ入力端子 54 に接続されている
場合には、スイッチ S202 を OFF 位置 (電圧入力) に設
定してください。
警告 98, クロック不具合
時間が設定されていないか、RTC に不具合があります。
トラブルシューティング
パラメーター 0-70 日時
•
します。
警報 99, ロックされた回転子
ローターがブロックされました。
警告/警報 104, ミキシングファン不具合
ファンが動作していません。ファン・モニターは、電源投
入時あるいはミキシングファンがオンにされた時にファ
ンが回転することをチェックします。ミキシングファン
の故障は、
て警告あるいは警報トリップとして設定できます。
トラブルシューティング
•
警告/警報 122, 不意のモーター回転
ドライブはモーターが停止状態になるために必要とされ
る機能を実行します(例えば、PM モーターの直流保留な
ど)。
警告 163, ATEX ETR 電流制限警告
ドライブが特性曲線を超えて 50 秒よりも長く動作してい
ます。警告は、許容熱過剰負荷の 83%で有効になり、65%
で無効になります。
警報 164, ATEX ETR 電流制限警報
特性曲線を超える動作が、
600 秒中に 60 秒を超える場合、警報が起動してドライブ
がトリップします。
パラメーター 14-53 ファン・モニター
警告/警報を戻すかどうかを決定するためにドラ
イブへ供給されるサイクル電力。
パラメータ
でオプションレイ
でクロックをリセット
パラメー
に設定
によっ
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 73
Page 78

メンテナンス、診断およびトラブルシュー
ティング
VLT® Refrigeration Drive FC 103
警告 165, ATEX ETR 周波数制限警告
ドライブが、50 秒よりも長く、許容最小周波数以下で動
作しています (
interpol. points freq.
警報 166, ATEX ETR 周波数制限警報
ドライブが、(600 秒間に) 60 秒よりも長く、許容最小周
波数以下で動作しました(
interpol. points freq.
警報 244, ヒートシンク温度
ヒートシンクの最大温度を超えています。温度の不具合
は、温度が一定のヒートシンク温度以下になるまで、リセ
ットできません。トリップおよびリセットのポイントは、
電力サイズによって異なります。この警報は、
ヒートシンク温度
トラブルシューティング
以下の条件を確認します:
•
•
•
88
•
•
•
警告 251, 新しいタイプ・コード
電力カード又は他の部品が交換され、タイプ・コードが変
更されました。
警報 421, 温度不具合
オンボードの温度センサーによって発生した不具合が、フ
ァン電力カード上で検出されました。
トラブルシューティング
•
•
•
警報 423, FPC 更新
ファン電力カードが無効な PUD の存在を報告したときに、
警報が生成されます。コントロール・カードが、PUD の更
新を試みます。更新の結果により、次の警報が生成される
ことがあります。A424 及び A425 をご参照ください。
警報 424, FPC の更新に成功
コントロール・カードがファン電力カード PUD の更新に成
功したときに、この警報が生成されます。警報を停止する
には、ドライブをリセットする必要があります。
パラメーター 1-98 ATEX ETR
)。
パラメーター 1-98 ATEX ETR
)。
警報 29、
と同様です。
周囲温度が高すぎる。
モーター・ケーブルが長すぎる。
AC ドライブの上又は下における不適切な通気用
スペース。
ユニット周囲の通気が遮られています。
ヒートシンクファンの損傷。
ヒートシンクの汚れ。
配線を確認します。
センサーを確認します。
ファン電力カードを交換します。
警報 425, FPC の更新に失敗
コントロール・カードがファン電力カード PUD の更新に失
敗したときに、この警報が生成されます。
トラブルシューティング
ファン電力カード配線を確認します。
•
ファン電力カードを交換します。
•
代理店にお問い合わせください。
•
警報 426, FPC 構成
識別されたファン電力カードの数が、構成済みファン電力
カードの数と一致しません。構成済みファン電力カード
の数については、
ョン識別
トラブルシューティング
警報 427, FPC 供給
ファン電力カード上で供給電圧の不具合 (5 V、24 V、又
は 48 V) が検出されました。
トラブルシューティング
をご参照ください。
ファン電力カード配線を確認します。
•
ファン電力カードを交換します。
•
ファン電力カード配線を確認します。
•
ファン電力カードを交換します。
•
パラメーター・グループ 15-6* オプシ
74 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 79

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
8.6 トラブルシューティング
症状 考えられる原因 テスト 解決方法
ディスプレイ
暗/機能無し
表示が断続的
です。
モーターが動
作しない
入力電力がない。
ヒューズ喪失、又はヒューズ開。可能性のある原因については、この表の「
LCP の電源が入っていない。 LCP ケーブルが正しく接続されているか、損
コントロール電圧(端子 12 又
は 50)又はコントロール端子
のショートカット。
互換性のない LCP (VLT
2800 又は 5000/6000/8000/
FCD 又は FCM の LCP)
間違ったコントラスト設定。 –
ディスプレイ (LCP) の不良。 別の LCP を使用して検査してください。 不具合のある LCP 又は接続ケーブルを交
内部電圧供給の不具合又は
SMPS に問題がある。
不適切なコントロール配線又
は AC ドライブ内の故障による
過負荷電力供給(SMPS)。
表 5.5
を参照してください。 入力電源を確認します。
放型電力ヒューズ
傷がないか確認します。
端子 12/13 から 20-39 への 24V コントロ
ール電圧供給、又は端子 50-55 の 10V 供給を
確認します。
®
コントロール配線内の問題を解消するには、
端子ブロックを外してすべてのコントロー
ル配線を切断します。
」を参照します。
– LCP 101 (部品番号 130B1124) 又は
– 代理店にお問い合わせください。
開
推奨事項に従います。
不具合のある LCP 又は接続ケーブルを交
換します。
端子を正しく配線します。
LCP 102 (部品番号 130B1107)のみご使
用ください。
[Status] (状態)と [▲]/[▼]を押して、
コントラストを調整します。
換します。
ディスプレイにまだ問題があるときは、
コントロール配線に問題があります。配
線にショートや不適切な接続がないか確
認します。ディスプレイが切れたままで
あるときは、
ない場合
サービススイッチが開いてい
るか、モーター接続がない。
24V DC オプション・カードで
主電源が供給されていない。
LCP 停止。 [Off](オフ)が押されているか確認します。 [Auto On] 又は [Hand ON] (動作モー
スタート信号(スタンバイ)が
ない。
モーター・フリーラン信号アク
ティブ(フリーラン)。
間違った速度指令信号ソース。 速度指令信号を確認します:
モーターが接続されており、接続がサービス
スイッチ又はその他のデバイスにより切断
されていないことを確認します。
ディスプレイが機能しているが出力がない
ときは、主電源が AC ドライブに適用されて
いることを確認します。
端子 18 が正しく設定されているか、
ーター 5-10 端末 18 ディジタル入力
認します。デフォルト設定を使用します。
端子 27 が正しく設定されているか
ーター 5-12 端末 27 ディジタル入力
認します(デフォルト設定を使用)。
ローカル。
•
リモート、又はバス速度指令信号?
•
プリセット速度指令信号がアクティブで
•
すか?
端子接続は正しく行われていますか?
•
端子のスケーリングは正しく行われてい
•
ますか?
最小速度指令信号がアクティブですか?
•
パラメ
を確
パラメ
を確
モーターを接続し、サービススイッチを
確認します。
主電源を供給します。
ドによる)を押します。
有効なスタート信号を適用します。
端子 27 に 24 V を供給するか、この端
子を
[0] 動作なし
正しい設定をプログラムします。
ーター 3-13 速度指令信号サイト
ェックしてください。プリセット速度指
令信号を
速度指令信号
す。配線が正しく行われているか確認し
ます。端子のスケーリングを確認しま
す。速度指令信号を確認します。
8 8
ディスプレイが暗い/機能し
の手順に従ってください。
にプログラムします
パラメ
をチ
パラメーター・グループ 3-1*
でアクティブに設定しま
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 75
Page 80
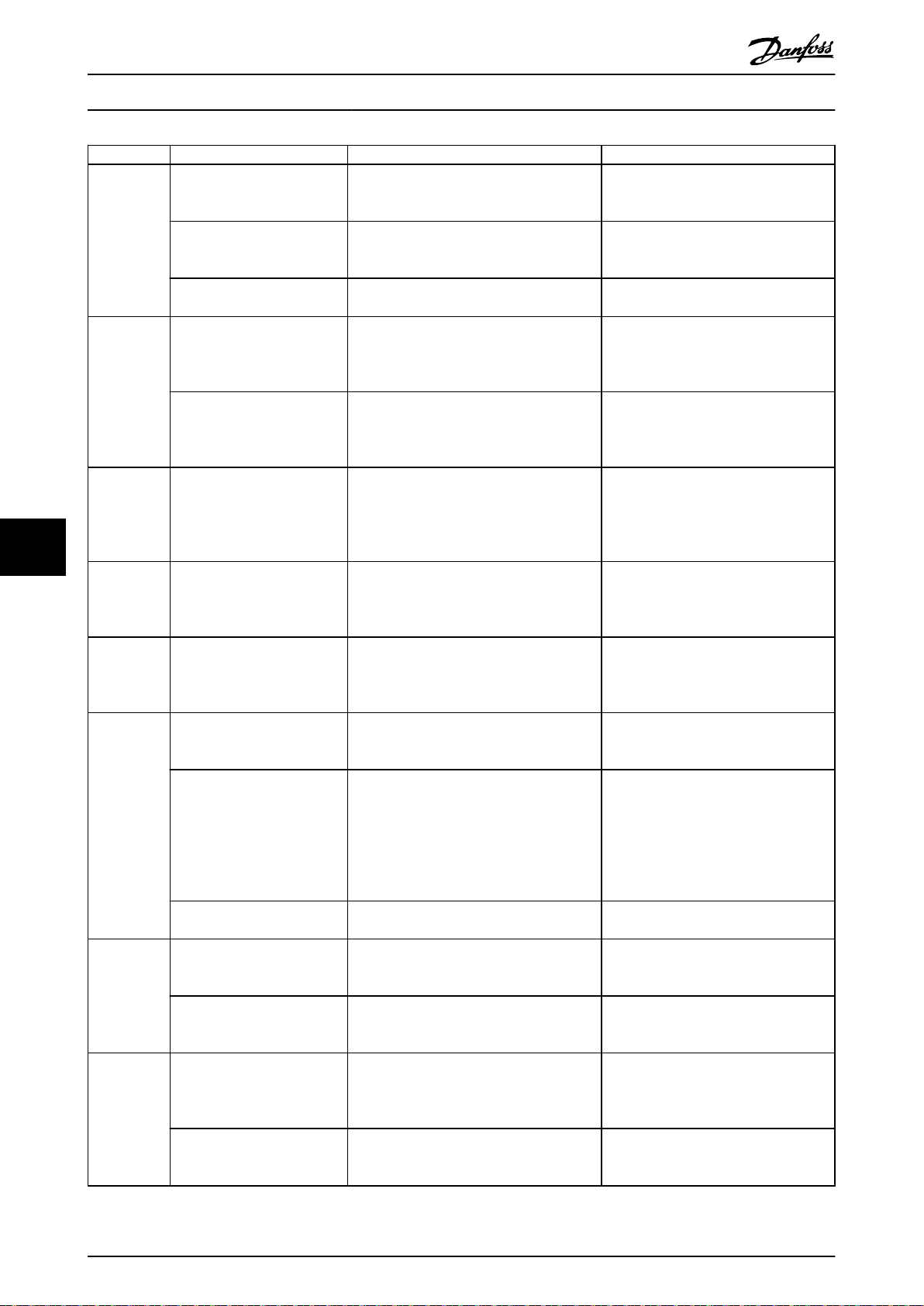
メンテナンス、診断およびトラブルシュー
ティング
症状 考えられる原因 テスト 解決方法
モーターが間
違った方向に
回転している
モーターが最
大速度に達し
ない
モーター速度
が不安定
モーター回転制限
アクティブな逆転信号。 逆転コマンドが
間違ったモーター相接続。 –
周波数リミットの設定が間違
っている。
速度指令入力信号が正しくス
ケーリングされていない。
不正なパラメーター設定の可
能性。
88
モーター動作
が滑らかでな
い
モーターのブ
レーキがきか
ない
開放型電力ヒ
ューズ
主電源電流ア
ンバランスが
3%以上
モーター電流
アンバランス
が 3%以上
過剰な磁化の可能性があります。すべてのモーターパラメーターにおいて間
ブレーキ・パラメーターの設定
が間違っている可能性があり
ます。立ち下り時間が短すぎ
る可能性があります。
相間が短絡。 モーター又はパネルの相間が短絡します。
モーター過負荷。 アプリケーションに対してモーターが過負
接続が緩んでいる。 事前スタートアップ・チェックを実施し、接
主電源の問題(
相損失
い).
AC ドライブの問題。 入力電力リード線を AC ドライブの別の位置
モーター又はモーター配線の
問題。
AC ドライブの問題。 出力モーター・ケーブル 1 の位置を移動: U
警報 4、主電源
の説明をご参照くださ
VLT® Refrigeration Drive FC 103
パラメーター 4-10 モーター速度方向
しくプログラムされていることを確認して
ください。
が正
パラメーター・グループ
5-1* ディジタル入力
ラムされているか確認します。
において端子にプログ
パラメーター 4-13 モーター速度上限
[RPM]、パラメーター 4-14 モーター速度上
限[Hz]
力周波数
および
パラメーター 4-19 最高出
で出力制限をチェックします。
パラメーター・グループ 6-0* アナログ
I/O モード及びパラメーター・グループ
3-1* 速度指令信号
号スケーリングを確認します。
すべてのモーター補償設定を含め、全モータ
ーパラメーターの設定を確認します。閉ル
ープ動作については、PID 設定を確認します。
違ったモーター設定がないか確認します。
ブレーキ・パラメーターを確認します。立ち
上がり/立ち下り時間設定を確認します。
モーターとパネルの相間が短絡していない
か確認します。
荷状態になっています。
続の緩みをチェックします。
入力電力リード線をの 1 つの位置へ移動: A
から B、B から C、C から A。
へ移動: A から B、B から C、C から A。
出力モーター・ケーブル 1 の位置を移動: U
から V、V から W、W から U。
から V、V から W、W から U。
において速度指令入力信
正しい設定をプログラムします。
逆転信号を無効にします。
章 6.5.1 警告 - モーター・スタート
ご参照ください。
正しい制限をプログラムします。
正しい設定をプログラムします。
を
パラメーター・グループ 1-6* 負荷依存
設定
の設定を確認します。閉ループ動作
については
20-0* フィードバック
認します。
パラメーター・グループ
における設定を確
パラメーター・グループ 1-2* モーター
データ、1-3* 高度モーターデータ、
1-5* 負荷独立設定
します。
における設定を確認
及び
パラメーター・グループ 2-0* 直流ブレ
ーキ及び3-0* 速度指令信号リミット
確認します。
検出された短絡を全て解消します。
スタートアップ検査を実施して、モータ
ー電流が仕様の範囲に入っているかを確
認します。モーター電流が銘板の定格電
流値を超えている場合、モーターは負荷
を減少させない限り動作しない場合があ
ります。アプリケーションの仕様を確認
してください。
緩んでいる接続を締めなおします。
アンバランスなレグがワイヤによる場
合、電力に問題があります。主電源を確
認します。
アンバランス・レグが同じ入力端子に発
生する場合、AC ドライブに問題がありま
す。代理店にお問い合わせください。
アンバランスなレグがワイヤによる場
合、モーター又はモーター配線に問題が
あります。モーター及びモーター配線を
確認します。
アンバランス・レグが同じ出力端子に発
生する場合、ユニットに問題があります。
代理店にお問い合わせください。
を
76 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 81

メンテナンス、診断およびトラブルシュー
ティング
症状 考えられる原因 テスト 解決方法
AC ドライブ
における加速
の問題
AC ドライブ
における減速
の問題
表 8.5 トラブルシューティング
モーター・データが正しく入力
されていません。
モーター・データが正しく入力
されていません。
操作ガイド
警告や警報が発生した場合、
警報のリスト
モーター・データが正しく入力されているこ
とをチェックします。
警告や警報が発生した場合、
警報のリスト
モーター・データが正しく入力されているこ
とをチェックします。
をご覧ください。
をご覧ください。
章 8.5 警告と
章 8.5 警告と
パラメーター 3-41 ランプ 1 立ち上が
り時間
パラメーター 4-18 電流制限
限を増加します。
ー 4-16 トルク制限モーター・モード
トルク制限を増加します。
パラメーター 3-42 ランプ 1 立ち下が
り時間
パラメーター 2-17 過電圧コントロー
ル
で過電圧コントロールをアクティブに
します。
で立ち上がり時間を増加します。
で電流制
パラメータ
で
で立ち下がり時間を増加します。
8 8
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 77
Page 82

仕様
VLT® Refrigeration Drive FC 103
9 仕様
9.1 電気データ
9.1.1 主電源 3x380~480 V AC
N355 N400 N450
通常過負荷 NO NO NO
(通常過負荷=60 秒間で 110%の電流)
400 V におけるシャフト出力[kW](代表値) 355 400 450
460 V でのシャフト出力[hp](代表値) 500 600 600
480 V [kW]における代表的シャフト出力 400 500 530
エンクロージャー・サイズ E1h/E3h E1h/E3h E1h/E3h
出力電流 (3 相)
連続(400 V) [A] 658 745 800
断続 (60 秒過負荷)
(400 V) [A]
連続(460/480 V) [A] 590 678 730
断続 (60 秒過負荷)
(460/480 V) [A]
連続 KVA(400 V) [KVA] 456 516 554
連続 KVA(460 V) [KVA] 470 540 582
99
連続 KVA(480 V) [kVA] 511 587 632
最大入力電流
連続(400 V) [A] 634 718 771
連続(460/480 V) [A] 569 653 704
フェーズごとのケーブルの最大数とサイズ (E1h)
- ブレーキなしでの主電源とモーター [mm2 (AWG)]
- ブレーキありでの主電源とモーター [mm2 (AWG)]
- ブレーキ又は回生 [mm2 (AWG)]
フェーズごとのケーブルの最大数とサイズ (E3h)
- 主電源とモーター [mm2 (AWG)]
- ブレーキ [mm2 (AWG)]
- ロードシェア又は回生 [mm2 (AWG)]
最大外部主電源ヒューズ [A]
400 V における推定電力損失 [W]
460 V における推定電力損失 [W]
4)
効率
出力周波数 0~590 Hz 0~590 Hz 0~590 Hz
ヒートシンク過熱トリップ [°C (°F)]
コントロール・カード過熱トリップ [°C (°F)]
電力カード過熱トリップ [°C (°F)]
ファン電力カード過熱トリップ [°C (°F)]
アクティブ突入カード過熱トリップ [°C (°F)]
1)
1)
1)
1)
2)
3), 4
3), 4
1)
1)
724 820 880
649 746 803
5x240 (5x500 mcm) 5x240 (5x500 mcm) 5x240 (5x500 mcm)
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
6x240 (6x500 mcm) 6x240 (6x500 mcm) 6x240 (6x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm)
800 800 800
6928 8036 8783
5910 6933 7969
0.98 0.98 0.98
110 (230) 110 (230) 110 (230)
80 (176) 80 (176) 80 (176)
85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185)
表 9.1 技術仕様、主電源 3x380–480 V AC
78 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 83

仕様 操作ガイド
N500 N560
通常過負荷 NO NO
(通常過負荷=60 秒間で 110%の電流)
400 V におけるシャフト出力[kW](代表値) 500 560
460 V でのシャフト出力[hp](代表値) 650 750
480 V [kW]における代表的シャフト出力 560 630
エンクロージャー・サイズ E2h/E4h E2h/E4h
出力電流 (3 相)
連続(400 V) [A] 880 990
断続 (60 秒過負荷)
(400 V) [A]
連続(460/480 V) [A] 780 890
断続 (60 秒過負荷)
(460/480 V) [A]
連続 KVA(400 V) [KVA] 610 686
連続 KVA(460 V) [KVA] 621 709
連続 KVA(480 V) [kVA] 675 771
最大入力電流
連続(400 V) [A] 848 954
連続(460/480 V) [A] 752 848
フェーズごとのケーブルの最大数とサイズ (E2h)
- ブレーキなしでの主電源とモーター [mm2 (AWG)]
- ブレーキありでの主電源とモーター [mm2 (AWG)]
- ブレーキ又は回生 [mm2 (AWG)]
1)
1)
1)
フェーズごとのケーブルの最大数とサイズ (E4h)
- 主電源とモーター [mm2 (AWG)]
- ブレーキ [mm2 (AWG)]
1)
- ロードシェア又は回生 [mm2 (AWG)]
最大外部主電源ヒューズ [A]
400 V における推定電力損失 [W]
460 V における推定電力損失 [W]
4)
効率
1)
1)
2)
3), 4
3), 4
出力周波数 0~590 Hz 0~590 Hz
ヒートシンク過熱トリップ [°C (°F)]
コントロール・カード過熱トリップ [°C (°F)]
電力カード過熱トリップ [°C (°F)]
ファン電力カード過熱トリップ [°C (°F)]
アクティブ突入カード過熱トリップ [°C (°F)]
968 1089
858 979
6x240 (6x500 mcm) 6x240 (6x500 mcm)
5x240 (5x500 mcm) 5x240 (5x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm)
6x240 (6x500 mcm) 6x240 (6x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm)
1200 1200
9473 11102
7809 9236
0.98 0.98
110 (230) 100 (212)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
9 9
表 9.2 技術仕様、主電源 3x380–480 V AC
1) アメリカ式ワイヤ規格。
2) ヒューズ定格については、章 9.7 ヒューズを参照してください。
3) 代表的な電力損失は通常条件におけるものであり、 ±15%以内と予想されます (電圧とケーブル条件の変化に関係する公差)。値は
モーター効率(IE2/IE3 境界線)の代表値に基づきます。モーターが低効率であればドライブの電力損失も増大します。ドライブ冷却の
寸法設定に適用。スイッチ周波数がデフォルト設定よりも高い場合は、電力損失が増加する可能性があります。LCP および代表的なコ
ントロール・カードの電力消費が含まれます。EN 50598-2 に従った電力損失データについては、以下を参照してください:
drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/. オプションとカスタマー負荷で損失が最大 30 W 増加する
ことがあります。ただし、フルロードのコントロール・カード及びスロット A と B のオプションは、通常、それぞれ 4W の増加のみで
す。
4) 定格負荷及び定格周波数にて、5 m (16.4 ft) のシールドされたモーター・ケーブルを用いて測定。公称電流で測定された効率。
エネルギー効率クラスについては、章 9.4 周囲条件を参照してください。. 部分負荷損失については、以下を参照してください:
drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 79
Page 84

仕様
VLT® Refrigeration Drive FC 103
9.1.2 主電源 3x525~690 V AC
N450 N500 N560 N630
通常過負荷 NO NO NO NO
(通常過負荷=60 秒間で 110%の電流)
550 V におけるシャフト出力 [kW](代表値) 355 400 450 500
575 V でのシャフト出力[hp](代表値) 450 500 600 650
690 V におけるシャフト出力 [kW](代表値) 450 500 560 630
エンクロージャー・サイズ E1h/E3h E1h/E3h E1h/E3h E1h/E3h
出力電流 (3 相)
定常(550 V) [A] 470 523 596 630
断続 (60 秒過負荷) (550 V) [A] 517 575 656 693
定常 (575/690 V) [A] 450 500 570 630
断続 (60 秒負荷) (575/690 V) [A] 495 550 627 693
定常 kVA (550 V) [kVA] 448 498 568 600
定常 kVA (575 V) [kVA] 448 498 568 627
定常 kVA (690 V) [kVA] 538 598 681 753
最大入力電流
定常(550 V) [A] 453 504 574 607
定常(575 V) [A] 434 482 549 607
定常(690 V) [A] 434 482 549 607
フェーズごとのケーブルの最大数とサイズ (E1h)
1)
1)
5x240 (5x500
mcm)
4x240 (4x500
- ブレーキなしでの主電源とモーター [mm2 (AWG)]
99
- ブレーキありでの主電源とモーター [mm2 (AWG)]
mcm)
- ブレーキ又は回生 [mm2 (AWG)]
1)
2x185 (2x350
mcm)
フェーズごとのケーブルの最大数とサイズ (E3h)
- 主電源とモーター [mm2 (AWG)]
1)
6x240 (6x500
mcm)
- ブレーキ [mm2 (AWG)]
1)
2x185 (2x350
mcm)
- ロードシェア又は回生 [mm2 (AWG)]
1)
4x185 (4x350
mcm)
最大外部主電源ヒューズ [A]
2)
600 V における推定電力損失 [W]
690 V における推定電力損失 [W]
4)
効率
3), 4
3), 4
800 800 800 800
6062 6879 8076 9208
5939 6715 7852 8921
0.98 0.98 0.98 0.98
出力周波数 [Hz] 0–590 0–590 0–590 0–590
ヒートシンク過熱トリップ [°C (°F)]
コントロール・カード過熱トリップ [°C (°F)]
電力カード過熱トリップ [°C (°F)]
ファン電力カード過熱トリップ [°C (°F)]
アクティブ突入カード過熱トリップ [°C (°F)]
110 (230) 110 (230) 110 (230) 110 (230)
80 (176) 80 (176) 80 (176) 80 (176)
85 (185) 85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185) 85 (185)
85 (185) 85 (185) 85 (185) 85 (185)
5x240 (5x500
mcm)
4x240 (4x500
mcm)
2x185 (2x350
mcm)
6x240 (6x500
mcm)
2x185 (2x350
mcm)
4x185 (4x350
mcm)
5x240 (5x500
mcm)
4x240 (4x500
mcm)
2x185 (2x350
mcm)
6x240 (6x500
mcm)
2x185 (2x350
mcm)
4x185 (4x350
mcm)
6x240 (6x500
mcm)
5x240 (5x500
mcm)
2x185 (2x350
mcm)
6x240 (6x500
mcm)
2x185 (2x350
mcm)
4x185 (4x350
mcm)
表 9.3 技術仕様、主電源 3x525–690 V AC
80 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 85

仕様 操作ガイド
N710 N800
通常過負荷 NO NO
(通常過負荷=60 秒間で 110%の電流)
550 V におけるシャフト出力 [kW](代表値) 560 670
575 V でのシャフト出力[hp](代表値) 750 950
690 V におけるシャフト出力 [kW](代表値) 710 800
エンクロージャー・サイズ E2h/E4h E2h/E4h
出力電流 (3 相)
定常(550 V) [A] 763 889
断続 (60 秒過負荷) (550 V) [A] 839 978
定常 (575/690 V) [A] 730 850
断続 (60 秒負荷) (575/690 V) [A] 803 935
定常 kVA (550 V) [kVA] 727 847
定常 kVA (575 V) [kVA] 727 847
定常 kVA (690 V) [kVA] 872 1016
最大入力電流
定常(550 V) [A] 735 857
定常(575 V) [A] 704 819
定常(690 V) [A] 704 819
フェーズごとのケーブルの最大数とサイズ (E2h)
- ブレーキなしでの主電源とモーター [mm2 (AWG)]
- ブレーキありでの主電源とモーター [mm2 (AWG)]
- ブレーキ又は回生 [mm2 (AWG)]
1)
1)
1)
フェーズごとのケーブルの最大数とサイズ (E4h)
- 主電源とモーター [mm2 (AWG)]
- ブレーキ [mm2 (AWG)]
1)
- ロードシェア又は回生 [mm2 (AWG)]
最大外部主電源ヒューズ [A]
600 V における推定電力損失 [W]
690 V における推定電力損失 [W]
4)
効率
1)
1)
2)
3), 4
3), 4
出力周波数 [Hz] 0–590 0–590
ヒートシンク過熱トリップ [°C (°F)]
コントロール・カード過熱トリップ [°C (°F)]
電力カード過熱トリップ [°C (°F)]
ファン電力カード過熱トリップ [°C (°F)]
アクティブ突入カード過熱トリップ [°C (°F)]
6x240 (6x500 mcm) 6x240 (6x500 mcm)
5x240 (5x500 mcm) 5x240 (5x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm)
6x240 (6x500 mcm) 6x240 (6x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm)
1200 1200
10346 12723
10066 12321
0.98 0.98
110 (230) 110 (230)
80 (176) 80 (176)
85 (185) 85 (185)
85 (185) 85 (185)
85 (185) 85 (185)
9 9
表 9.4 技術仕様、主電源 3x525–690 V AC
1) アメリカ式ワイヤ規格。
2) 最大ヒューズ定格は章 9.7 ヒューズを参照してください。
3) 代表的な電力損失は通常条件におけるものであり、 ±15%以内と予想されます (電圧とケーブル条件の変化に関係する公差)。値は
モーター効率(IE2/IE3 境界線)の代表値に基づきます。モーターが低効率であればドライブの電力損失も増大します。ドライブ冷却の
寸法設定に適用。スイッチ周波数がデフォルト設定よりも高い場合は、電力損失が増加する可能性があります。LCP および代表的なコ
ントロール・カードの電力消費が含まれます。EN 50598-2 に従った電力損失データについては、以下を参照してください:
drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/. オプションとカスタマー負荷で損失が最大 30 W 増加する
ことがあります。ただし、フルロードのコントロール・カード及びスロット A と B のオプションは、通常、それぞれ 4W の増加のみで
す。
4) 定格負荷及び定格周波数にて、5 m のシールドされたモーター・ケーブルを用いて測定。公称電流で測定された効率。エネルギー効
率クラスについては、章 9.4 周囲条件を参照してください。. 部分負荷損失については、以下を参照してください:
drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 81
Page 86

仕様
VLT® Refrigeration Drive FC 103
9.2 主電源
主電源 (L1、L2、L3)
供給電圧 380–500 V ±10%、525–690 V ±10%
主電源電圧低/主電源降下:
低い主電源電圧又は主電源降下の間、ドライブは、DC リンク電圧が最低停止レベル以下に落ちるまで稼働します。それ
は通常、ドライブの最低定格供給電圧の 15% 降下時となります。起動及び最高トルクは、 ドライブの最低定格供給電
圧を 10%下回る主電源電圧においては期待できません。
供給周波数 50/60 Hz ±5%
主電源相間の一時的最大アンバランス 定格供給電圧の 3.0%
真の力率 (λ) ≥0.9 定格負荷での公称値
1 に近い変位力率 (cos Φ ) (>0.98)
入力点スイッチング電源 L1、L2、L3(電源投入) 最大 1 回/2 分
EN60664-1 に準じた環境 過電圧カテゴリー III/汚染度 2
1)
ドライブは、480/600 V で、100kA までの短絡電流定格 (SCCR) を供給できる回路での使用に適しています。
1) 計算は、UL/IEC61800-3 に準拠しています。
9.3 モーター出力とモーター・データ
モーター出力 (U、V、W):
出力電圧 供給電圧の 0–100%
出力周波数 0–590 Hz
磁束モードでの出力周波数 0–300 Hz
99
出力側スイッチング 無制限
立ち上がり/立ち下がり時間 0.01–3600 s
1) 電圧及び電力に依存。
1)
トルク特性
始動トルク (一定トルク) 60 秒で最大 150%
過負荷トルク (一定トルク) 60 秒で最大 150%
1), 2)
1), 2)
1) パーセントはドライブの公称トルクに関連します。
2) 10 分ごと。
9.4 周囲条件
環境
E1h/E2h エンクロージャー IP21/タイプ 1、IP54/タイプ 12
E3h/E4h エンクロージャー IP20/シャーシ
振動テスト (標準/高耐久化) 0.7 g/1.0 g
相対湿度 動作時 5% - 95% (IEC 721-3-3; クラス 3K3 (非凝縮)
劣悪な環境(IEC 60068-2-43) H2S テスト
刺激性気体 (IEC 60721-3-3) クラス 3C3
IEC 60068-2-43 に準拠した試験方法 H2S (10 日)
周囲温度(SFAVM スイッチ・モードにて)
- 定格低減付きの場合
- 一般的な EFF2 モーターのフル出力による (最大 90% 出力電流)
- フル継続 FC 出力電流の場合
フルスケール動作時の最低周囲温度
性能低下時の最低周囲温度
保管/輸送時の温度
最大海抜高度 (定格低減なし) 1000 m (3281 ft)
最大海抜高度 (定格低減あり) 3000 m (9842 ft)
-25 ~ +65/70 °C (13 ~ 149/158 °F)
最高 55 °C (最高 131 °F)
最高 50 °C (最高 122 °F)
最高 45 °C (最高 113 °F)
1) 定格値の低減に関する詳細については、製品別デザインガイドをご参照ください。
クラス Kd
0 °C (32 °F)
-10 °C (14 °F)
1)
1)
1)
82 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 87

仕様 操作ガイド
EMC 規格、エミッション EN 61800-3
EMC 規格、イミュニティ EN 61800-3
エネルギー効率クラス
2)
IE2
2) 以下では EN 50598-2 に従って決定されます:
定格負荷。
•
90% 定格周波数。
•
スイッチ周波数工場出荷時設定。
•
スイッチ・パターン工場出荷時設定。
•
9.5 ケーブル仕様
ケーブル長とコントロール・ケーブルの断面積
シールドされたモーター・ケーブルの最大長さ 150 m (492 ft)
シールドされていないモーター・ケーブルの最大長さ 300 m (984 ft)
モーター、主電源、ロードシェア及びブレーキに対する最大ケーブル断面積
コントロール端子、剛性ワイヤーに対する最大断面積 1.5 mm2/16 AWG (2x0.75 mm2)
コントロール端子、フレキシブル・ケーブルに対する最大断面積 1 mm2/18 AWG
コントロール端子、密閉線心入りケーブルへの最大断面積 0.5 mm2/20 AWG
コントロール端子に対する最小断面積。 0.25 mm2/23 AWG
1)
章 9.1 電気データ
をご参照ください。
1) 電力ケーブルについては、章 9.1 電気データの電気的データ表をご参照ください。
9.6 コントロール入力/出力とコントロールデータ
ディジタル入力
プログラマブル・ディジタル入力 4 (6)
端子番号 18, 19, 271), 291), 32, 33
論理 PNP または NPN
電圧レベル 0–24 V 直流
電圧レベル、論理 0 PNP <5 V DC
電圧レベル、論理 1 PNP >10 V DC
電圧レベル、論理 0 NPN >19 V DC
電圧レベル、論理 1 NPN <14 V DC
入力の最大電圧 28 V 直流
入力抵抗、R
i
すべてのディジタル入力は供給電圧 (PELV) と他の高電圧端子から電気絶縁されています。
1) 端子 27 と 29 は出力としてもプログラムできます。
約 4 kΩ
9 9
アナログ入力
アナログ入力の数 2
端子番号 53, 54
モード 電圧又は電流
モード選択 A53 と A54 の切り替え
電圧モード スイッチ A53/A54 = (U)
電圧レベル -10 V~+10 V (スケーラブル)
入力抵抗、R
最大電圧
電流モード スイッチ A53/A54 = (I)
電流レベル 0/4~20 mA (スケーラブル)
入力抵抗、R
最大電流 30 mA
アナログ入力の分解能 10 ビット (+ 符号)
アナログ入力の精度 最大エラー、全スケールの 0.5%
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 83
i
i
約 10 kΩ
±20 V
約 200 Ω
Page 88

Mains
Functional
isolation
PELV isolation
Motor
DC-bus
High
voltage
Control
+24 V
RS485
18
37
130BA117.10
仕様
VLT® Refrigeration Drive FC 103
帯域幅 100 Hz
アナログ入力は、供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
図 9.1 PELV 絶縁
パルス入力
プログラマブル・パルス入力 2
端子番号パルス 29, 33
端子 29、33 での最大周波数 110 kHz (プッシュプル駆動)
端子 29、33 での最大周波数 5 kHz (オープン・コレクター)
端子 29、33 での最小周波数 4 Hz
電圧レベル
章 9.6 コントロール入力/出力とコントロールデータ のディジタル入力
をご参照ください。
入力の最大電圧 28 V 直流
99
パルス入力精度 (0.1–1 kHz) 最大エラー: 全スケールの 0.1%
入力抵抗、R
i
約 4 kΩ
アナログ出力
プログラマブル・アナログ出力の数 1
端子番号 42
アナログ出力の電流範囲 0/4-20 mA
アナログ出力から共通側への最大負荷
アナログ出力の精度 最大エラー: 全スケールの 0.8%
アナログ出力の分解能 8 ビット
アナログ出力は供給電圧 (PELV)などの高電圧端子から電気絶縁されています。
コントロール・カード、RS-485 シリアル通信
端子番号 68 (P、TX+、RX+)、69 (N、TX-、RX-)
端子番号 61 端子 68 と 69 に共通
RS485 シリアル通信回路は他の中央回路から機能的に分離され、供給電圧 (PELV) から電気絶縁されています。
ディジタル出力
プログラマブル・ディジタル/パルス出力 2
端子番号 27, 29
ディジタル/周波数出力の電圧レベル 0–24 V
最大出力電流 (シンク又はソース) 40 mA
周波数出力時の最大負荷
周波数出力時の最大容量負荷 10 nF
周波数出力時の最低出力周波数 0 Hz
周波数出力時の最大出力周波数 32 kHz
周波数出力の精度 最大エラー: 全スケールの 0.1%
周波数出力の分解能 12 ビット
1) 端子 27 と 29 は入力としてもプログラムできます。
ディジタル出力は、供給電圧 (PELV) とその他の高電圧端子から電気絶縁されています。
500 Ω
1)
1 kΩ
84 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 89

仕様 操作ガイド
コントロール・カード、24 V 直流出力
端子番号 12, 13
最大負荷 200 mA
24 V 直流電源は供給電圧 (PELV) から電気絶縁されていますが、アナログ及びディジタル入出力と同じ電位がありま
す。
リレー出力
プログラマブル・リレー出力 2
リレー端子に対する最大断面積 2.5 mm2 (12 AWG)
リレー端子に対する最小断面積 0.2 mm2 (30 AWG)
剥き線の長さ 8 mm (0.3 in)
リレー 01 端子番号 1-3 (B 接点) 、1-2 (A 接点)
1–2 (NO)の最大端子負荷 (AC-1)1) (抵抗負荷)2),
1–2 (NO)の最大端子負荷(AC-15)1) (誘導負荷、 cosφ 0.4 にて)
1–2 (NO)の最大端子負荷 (DC-1)1) (抵抗負荷) 80 V DC、2 A
1–2 (NO)の最大端子負荷(DC-13)1) (誘導負荷) 24 V 直流、0.1 A
1–3 (NC)の最大端子負荷(AC-1)1) (抵抗負荷) 240 V AC、2 A
1–3 (NC)の最大端子負荷(AC-15)1) (誘導負荷、 cosφ 0.4 にて)
1–3 (NC)の最大端子負荷 DC-1)1) (抵抗負荷) 50 V DC、2 A
1–3 (NC)の最大端子負荷(DC-13)1) (誘導負荷) 24 V 直流、0.1 A
1–3 (NC)、1–2 (NO)の最大端子負荷 24 V DC 10 mA、24 V AC 2 mA
EN 60664-1 に準じた環境 過電圧カテゴリー III/汚染度 2
リレー 02 端子番号 4–6 (B 接点) 、4–5 (A 接点)
4–5 (NO)の最大端子負荷 (AC-1)1) (抵抗負荷)2),
4–5 (NO)の最大端子負荷(AC-15)1) (誘導負荷、 cosφ 0.4 にて)
4–5 (NO)の最大端子負荷 (DC-1)1) (抵抗負荷) 80 V DC、2 A
4–5 (NO)の最大端子負荷(DC-13)1) (誘導負荷) 24 V 直流、0.1 A
4–6 (NC)の最大端子負荷(AC-1)1) (抵抗負荷) 240 V AC、2 A
4–6 (NC)の最大端子負荷(AC-15)1) (誘導負荷、 cosφ 0.4 にて)
4–6 (NC)の最大端子負荷 DC-1)1) (抵抗負荷) 50 V DC、2 A
4–6 (NC)の最大端子負荷(DC-13)1) (誘導負荷) 24 V 直流、0.1 A
4–6 (NC)、4–5 (NO)の最大端子負荷 24 V DC 10 mA、24 V AC 2 mA
EN 60664-1 に準じた環境 過電圧カテゴリー III/汚染度 2
3)
3)
400 V AC、2 A
240 V AC、0.2 A
240 V AC、0.2 A
400 V AC、2 A
240 V AC、0.2 A
240 V AC、0.2 A
1) IEC 60947 パート 4 及び 5。
リレー接点は補強絶縁 (PELV) により他の回路から電気絶縁されています。
2) 過電圧カテゴリー II。
3) Ul アプリケーション 300 V AC 2 A。
9 9
コントロール・カード、+10 V 直流出力
端子番号 50
出力電圧
最大負荷 25 mA
10.5 V ±0.5 V
10 V 直流電源は供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
コントロール特性
出力周波数 0~1000 Hz での分解能
システム応答時間 (端子 18、19、27、29、32、33)
速度コントロール範囲 (開ループ) 同期速度の 1:100
速度精度 (開ループ)
30–4000 RPM: ±8 RPM の最大エラー
±0.003 Hz
≤2 m/s
すべてのコントロール特性は、4 極非同期モーターに基づいています。
コントロール・カード性能
スキャン間隔 5 M/S
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 85
Page 90

仕様
コントロール・カード、USB シリアル通信
USB 標準 1.1 (全速)
USB プラグ USB タイプ B デバイスプラグ
VLT® Refrigeration Drive FC 103
注記
PC への接続は、標準ホスト/デバイス USB ケーブルを介して行われます。
USB 接続は、供給電圧 (PELV) などの高電圧端子から電気的に絶縁されています。
USB 接続は、接地からは電気的に絶縁されていません。絶縁されたラップトップ/ PC のみをドライブの USB コネクタ
ー又は独立の USB ケーブル/コンバーターに接続して使用してください。
9.7 ヒューズ
ヒューズが、ドライブ破損の可能性をユニット内の破損に限定します。EN 50178 への準拠を確実にするため、交換にあ
たっては同一の Bussmann ヒューズを使用してください。
表 9.5
を参照してください。
注記
IEC 60364 (CE) およ び NEC 2009 (UL) に準拠した設置においては、供給側でのヒューズ使用は必須です。
入力電圧 (V) Bussmann 部品番号
380–500 170M7309
525–690 170M7342
表 9.5 ヒューズオプション
99
表 9.5
ます。適切なヒューズにより、ドライブ短絡電流定格(SCCR) は 100000
100 kA SCCR に適合する内部ドライブヒューズが付属しています。E3h 及び E4h ドライブには、100 kA SCCR に適合する
タイプ aR ヒューズを取り付ける必要があります。
に示されるヒューズは、ドライブの電圧定格に応じて、100000
(同期)を供給できる回路での使用に適してい
Arms
になります。E1h 及び E2h ドライブには、
Arms
注記
断路器
注文時に工場取付け済み遮断器が付属するユニットのすべては、ドライブの 100 kA SCCR に適合するクラス L 分岐回路
を必要とします。遮断器が使用されるときは、SCCR 定格は 42 kA です。クラス L ヒューズは、ドライブの入力電圧と電
力定格によって決定されます。入力電圧と電力定格は、製品の銘板に表示されています。
入力電圧 (V) 電力定格 (kW) 短絡定格 (A) 必要な保護
380–480 355–450 42000 遮断器
100000 クラス L ヒューズ、800 A
380–480 500–560 42000 遮断器
100000 クラス L ヒューズ、1200 A
525–690 450–630 42000 遮断器
10000 クラス L ヒューズ、800 A
525–690 710–800 42000 遮断器
100000 クラス L ヒューズ、1200 A
章 4.1 納入物
を参照
86 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 91

130BF648.10
22 (0.8)
393 (15.5)
602 (23.7)
2043
(80.4)
2002
(78.8)
1553
(61.1)
1393
(54.9)
912
(35.9)
13 (0.5)
3X
仕様 操作ガイド
9.8 エンクロージャー寸法
9.8.1 E1h 外装寸法
9 9
図 9.2 E1h の正面図
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 87
Page 92
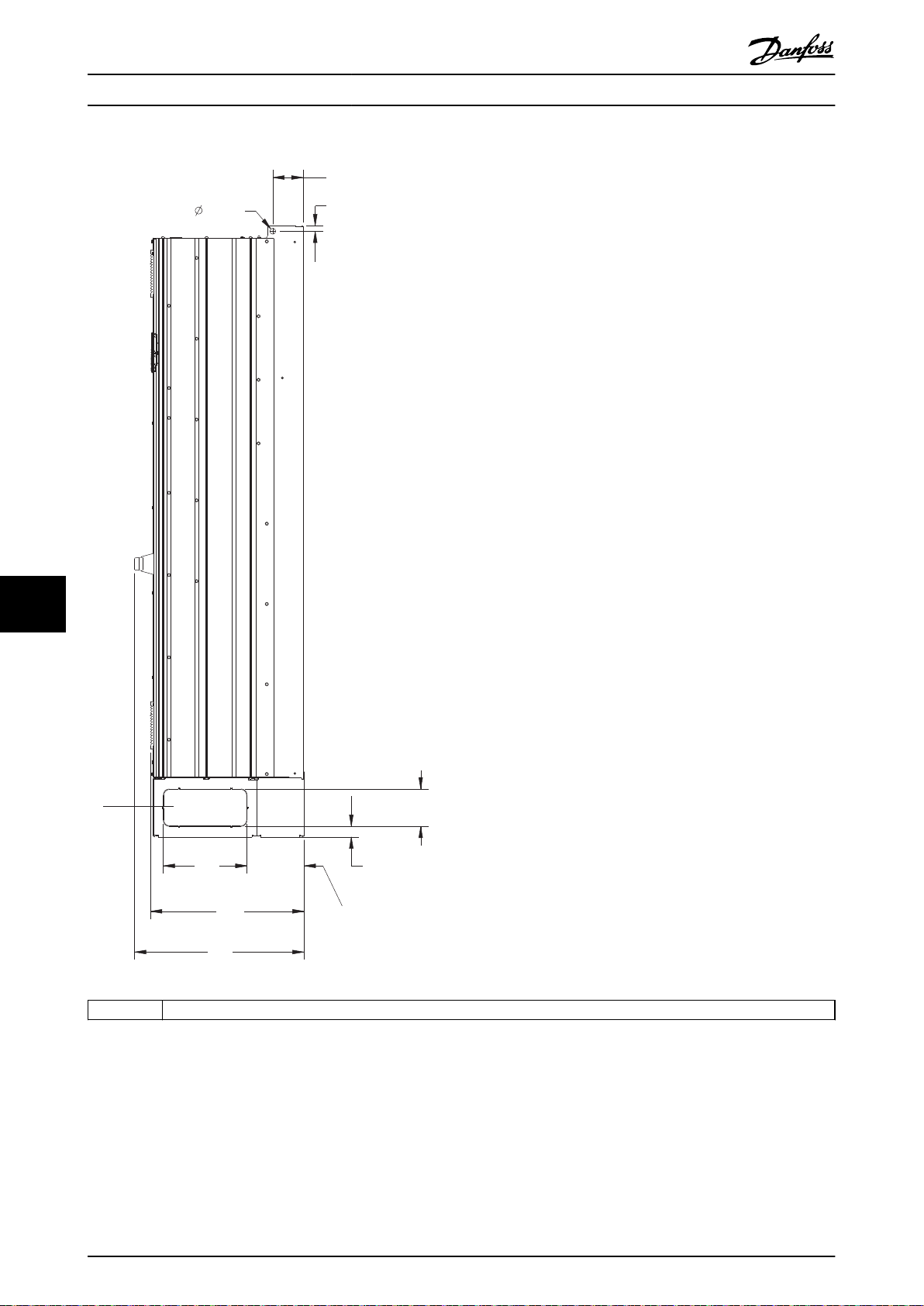
130BF649.10
20 (0.8)
2X
2X 101 (4.0)
2X 9 (0.7)
2X
35 (1.4)
2X
125 (4.9)
2X
280 (11.0)
2X
190 (7.5)
1
513
(20.2)
567
(22.3)
仕様
VLT® Refrigeration Drive FC 103
99
1 ノックアウト・パネル
図 9.3 E1h の側面図
88 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 93

130BF684.10
168 (6.6)
18 (0.7)
412 (16.2)
154 (6.1)
206
(8.1)
1209 (47.6)
168 (6.6)
1800 (70.9)
601 (23.7)
69 (2.7)
464 (18.3)
4X 457 (18.0)
4X 73 (2.8)
1
96 (3.8)
仕様 操作ガイド
9 9
1 ヒートシンク・アクセス・パネル (オプション)
図 9.4 E1h の背面図
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 89
Page 94

130BF651.10
1
A
293 (11.5)
173 (6.8)
560 (22.0)
22 (0.8)
17 (0.7)
14 (0.6)
A
11 (0.4)
750 (29.5)
558
(22.0)
75
22 (0.8)
137
(5.4)
560 (22.0)
412 (16.2)
184
(7.3)
424
(16.7)
仕様
VLT® Refrigeration Drive FC 103
99
1 グランドプレート
図 9.5 E1h のドア空きスペース及びグランドプレート寸法
90 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 95

2043
(80.4)
2002
(78.8)
1553
(61.1)
1393
(54.9)
912
(35.9)
394
(15.5)
698
(27.5)
97
(3.8)
13 (0.5)
3X
130BF654.10
仕様 操作ガイド
9.8.2 E2h 外装寸法
9 9
図 9.6 E2h の正面図
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 91
Page 96

2X 101 (4.0)
2X 9 (0.7)
20 (0.8)
2X
1
513
(20.2)
567
(22.3)
2X
280 (11.0)
2X
190 (7.5)
2X
35 (1.4)
2X
125 (4.9)
130BF653.10
仕様
VLT® Refrigeration Drive FC 103
99
1 ノックアウト・パネル
図 9.7 E2h の側面図
92 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 97
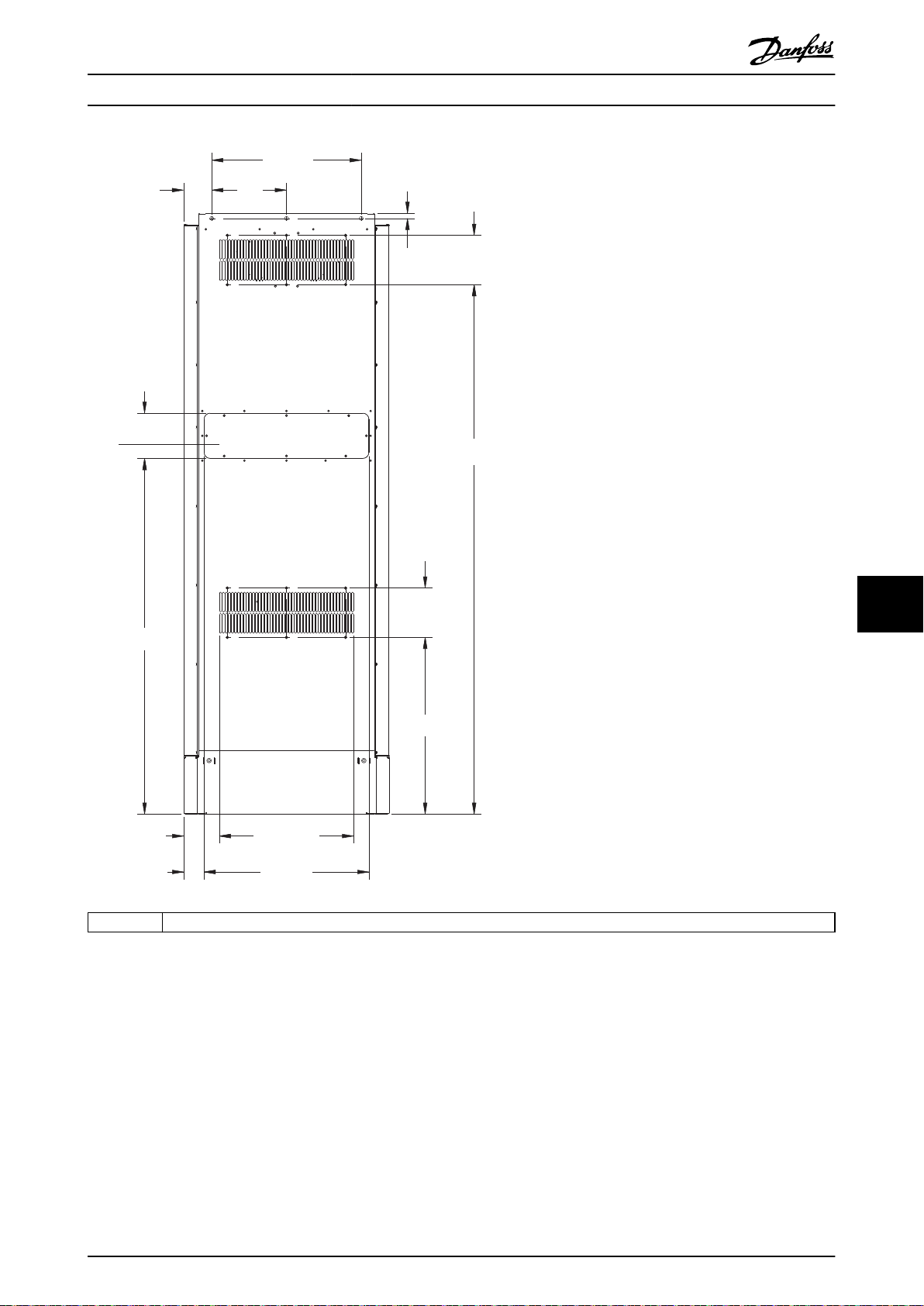
130BF655.10
168 (6.6)
18 (0.7)
96 (3.8)
154 (6.1)
1800 (70.9)
168 (6.6)
601 (23.7)
69 (2.7)
4X 121 (4.8)
560 (22.0)
4X 457 (18.0)
1209 (47.6)
508 (20.0)
254
(10.0)
1
仕様 操作ガイド
9 9
1 ヒートシンク・アクセス・パネル (オプション)
図 9.8 E2h の背面図
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 93
Page 98

75
14 (0.6)
A
11 (0.4)
130BF652.10
A
871 (34.3)
424
(16.7)
184
(7.3)
17 (0.7)
137
(5.4)
653
(25.7)
22 (0.8)
508 (20.0)
656 (25.8)
1
293 (11.5)
173 (6.8)
656 (25.8)
22 (0.8)
仕様
VLT® Refrigeration Drive FC 103
99
1 グランドプレート
図 9.9 E2h のドア空きスペース及びグランドプレート寸法
94 Danfoss A/S © 04/2018 All rights reserved. MG16P240
Page 99

130BF656.10
1578
(62.1)
1537
(60.5)
1348
(53.1)
13 (0.5)
3X
506
(19.9)
30
(1.2)
13 (0.5)
10 (0.4)
10 (0.4)
15 (0.6)
A
A
仕様 操作ガイド
9.8.3 E3h 外装寸法
9 9
図 9.10 E3h の正面図
MG16P240 Danfoss A/S © 04/2018 All rights reserved. 95
Page 100

130BF658.10
20 (0.8)
2X
2X 101 (4.0)
2X 19 (0.7)
2X 18 (0.7)
2X 21 (0.8)
482 (19.0)
仕様
VLT® Refrigeration Drive FC 103
99
図 9.11 E3h の側面図
96 Danfoss A/S © 04/2018 All rights reserved. MG16P240
 Loading...
Loading...