


ENGINEERING TOMORROW
Guida alla Progettazione
VLT® HVAC Basic Drive FC 101
www.danfoss.it/vlt-drives

Sommario Guida alla Progettazione
Sommario
1 Introduzione
1.1 Scopo della Guida alla Progettazione
1.2 Versione del documento e software
1.3 Simboli di sicurezza
1.4 Abbreviazioni
1.5 Risorse aggiuntive
1.6 Denizioni
1.7 Fattore di potenza
1.8 Conformità alle norme
1.8.1 Marchio CE 10
1.8.2 Conformità UL 11
1.8.3 Conformità al Marchio RCM 11
1.8.4 EAC 11
1.8.5 UkrSEPRO 11
2 Sicurezza
2.1 Personale qualicato
2.2 Precauzioni di sicurezza
6
6
6
7
7
7
8
10
10
12
12
12
3 Panoramica dei prodotti
3.1 Vantaggi
3.1.1 Perché usare un convertitore di frequenza per controllare ventole e pompe? 14
3.1.2 Un vantaggio evidente - risparmio energetico 14
3.1.3 Esempio di risparmi energetici 14
3.1.4 Confronto dei risparmi energetici 15
3.1.5 Esempio con portata variabile su un periodo di un anno 16
3.1.6 Migliore controllo 17
3.1.7 Gli avviatori a stella/triangolo o gli avviatori statici non sono necessari 17
3.1.8 L'utilizzo di un convertitore di frequenza fa risparmiare denaro 17
3.1.9 Senza convertitore di frequenza 18
3.1.10 Con un convertitore di frequenza 19
3.1.11 Esempi applicativi 19
3.1.12 Portata d'aria variabile 19
3.1.13 La soluzione VLT 20
3.1.14 Portata d'aria costante 20
3.1.15 La soluzione VLT 21
14
14
3.1.16 Ventola della torre di rareddamento 21
3.1.17 La soluzione VLT 22
3.1.18 Pompe del condensatore 23
3.1.19 La soluzione VLT 23
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 1

Sommario
VLT® HVAC Basic Drive FC 101
3.1.20 Pompe primarie 24
3.1.21 La soluzione VLT 24
3.1.22 Pompe secondarie 25
3.1.23 La soluzione VLT 26
3.2 Strutture di controllo
3.2.1 Struttura di controllo ad anello aperto 27
3.2.2 PM/EC+ Controllo del motore 27
3.2.3 Comando locale (Hand On) e remoto (Auto On) 27
3.2.4 Struttura di controllo ad anello chiuso 28
3.2.5 Conversione della retroazione 28
3.2.6 Gestione dei riferimenti 29
3.2.7 Regolazione del controllore ad anello chiuso del convertitore di frequenza 30
3.2.8 Regolazione PI manuale 30
3.3 Condizioni ambientali di funzionamento
3.4 Considerazioni generali sull'EMC
3.4.1 Panoramica sulle emissioni EMC 37
3.4.2 Requisiti relativi alle emissioni 38
3.4.3 Risultati del test sulle emissioni EMC 39
3.4.4 Panoramica sulle emissioni armoniche 40
3.4.5 Requisiti relativi alle emissioni armoniche 41
3.4.6 Risultati del test armoniche (emissioni) 41
27
30
37
3.4.7 Requisiti di immunità 43
3.5 Isolamento galvanico (PELV)
3.6 Corrente di dispersione verso terra
3.7 Condizioni di funzionamento estreme
3.7.1 Protezione termica del motore (ETR) 45
3.7.2 Ingressi termistore 45
4 Selezione e ordine
4.1 Codice identicativo
4.2 Opzioni e accessori
4.2.1 Pannello di controllo locale (LCP) 48
4.2.2 Montaggio dell'LCP nel pannello frontale 48
4.2.3 Kit frame IP21/NEMA Tipo 1 49
4.2.4 Piastra di disaccoppiamento 51
4.3 Numeri d'ordine
4.3.1 Opzioni e accessori 52
4.3.2 Filtri antiarmoniche 53
4.3.3 Filtro RFI esterno 54
43
44
44
47
47
48
52
5 Installazione
2 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
55
Sommario Guida alla Progettazione
5.1 Installazione elettrica
5.1.1 Collegamento della rete e del motore 57
5.1.2 Installazione elettrica conforme ai requisiti EMC 62
5.1.3 Morsetti di controllo 64
6 Programmazione
6.1 Introduzione
6.2 Pannello di controllo locale (LCP)
6.3 Menu
6.3.1 Menu Status 66
6.3.2 Menu rapido 66
6.3.3 Menu principale 81
6.4 Trasferimento rapido delle impostazioni parametri tra diversi convertitori di frequenza
6.5 Visualizzazione e programmazione dei parametri indicizzati
6.6 Inizializzazione alle impostazioni di fabbrica
7 Installazione e setup dell'RS485
55
65
65
65
66
82
82
82
84
7.1 RS485
7.1.1 Panoramica 84
7.1.2 Collegamento in rete 84
7.1.3 Setup hardware del convertitore di frequenza 84
7.1.4 Impostazione parametri per comunicazione Modbus 85
7.1.5 Precauzioni EMC 85
7.2 Protocollo FC
7.2.1 Panoramica 86
7.2.2 FC con Modbus RTU 86
7.3 Impostazioni parametri per abilitare il protocollo
7.4 Struttura frame messaggio protocollo FC
7.4.1 Contenuto di un carattere (byte) 86
7.4.2 Struttura del telegramma 86
7.4.3 Lunghezza del telegramma (LGE) 87
7.4.4 Indirizzo del convertitore di frequenza (ADR) 87
7.4.5 Byte di controllo dati (BCC) 87
7.4.6 Il campo dati 87
84
86
86
86
7.4.7 Il campo PKE 87
7.4.8 Numero di parametro (PNU) 88
7.4.9 Indice (IND) 88
7.4.10 Valore del parametro (PWE) 88
7.4.11 Tipi di dati supportati dal convertitore di frequenza 89
7.4.12 Conversione 89
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 3
Sommario
VLT® HVAC Basic Drive FC 101
7.4.13 Parole di processo (PCD) 89
7.5 Esempi
7.5.1 Scrittura di un valore di parametro 89
7.5.2 Lettura di un valore del parametro 89
7.6 Panoramica Modbus RTU
7.6.1 Introduzione 90
7.6.2 Panoramica 90
7.6.3 Convertitore di frequenza con Modbus RTU 90
7.7 Congurazione della rete
7.8 Struttura frame messaggio Modbus RTU
7.8.1 Introduzione 91
7.8.2 Struttura del telegramma Modbus RTU 91
7.8.3 Campo Start/Stop 91
7.8.4 Campo di indirizzo 92
7.8.5 Campo funzione 92
7.8.6 Campo dati 92
7.8.7 Campo di controllo CRC 92
7.8.8 Indirizzamento del registro di bobina 92
89
90
91
91
7.8.9 Accesso mediante lettura/scrittura PCD 94
7.8.10 Controllo del convertitore di frequenza 95
7.8.11 Codici funzione supportati da Modbus RTU 95
7.8.12 Codici di eccezione Modbus 96
7.9 Come accedere ai parametri
7.9.1 Gestione dei parametri 96
7.9.2 Memorizzazione di dati 96
7.9.3 IND (Index) 96
7.9.4 Blocchi di testo 96
7.9.5 Fattore di conversione 96
7.9.6 Valori dei parametri 97
7.10 Esempi
7.10.1 Lettura stato bobine (01 hex) 97
7.10.2 Forza/Scrivi bobina singola (05 hex) 97
7.10.3 Forza/Scrivi bobine multiple (0F hex) 98
7.10.4 Lettura dei registri di mantenimento (03 hex) 98
7.10.5 Preimposta registro singolo (06 hex) 99
96
97
7.10.6 Preimposta registri multipli (10 hex) 99
7.10.7 Lettura/Scrittura registri multipli (17 hex) 100
7.11 Prolo di controllo FC Danfoss
7.11.1 Parola di controllo secondo il Prolo FC (Protocollo 8-10 = Prolo FC) 100
7.11.2 Parola di stato secondo il prolo FC (STW) 102
4 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
100
Sommario Guida alla Progettazione
7.11.3 Valore di riferimento della velocità bus 103
8 Speciche generali
8.1 Dimensioni meccaniche
8.1.1 Installazione anco a anco 104
8.1.2 Dimensioni del convertitore di frequenza 105
8.1.3 Dimensioni di spedizione 108
8.1.4 Montaggio in sito 109
8.2 Specica dell'alimentazione di rete
8.2.1 3x200–240 V CA 109
8.2.2 3x380–480 V CA 110
8.2.3 3x525–600 V CA 114
8.3 Fusibili e interruttori
8.4 Dati tecnici generali
8.4.1 Alimentazione di rete (L1, L2, L3) 117
8.4.2 Uscita motore (U, V, W) 117
8.4.3 Lunghezza e sezione trasversale dei cavi 117
8.4.4 Ingressi digitali 118
8.4.5 Ingressi analogici 118
104
104
109
115
117
Indice
8.4.6 Uscita analogica 118
8.4.7 Uscita digitale 118
8.4.8 Scheda di controllo, comunicazione seriale RS485 119
8.4.9 Scheda di controllo, tensione di uscita a 24 V CC 119
8.4.10 Uscita a relè 119
8.4.11 Scheda di controllo, tensione di uscita a 10 V CC 120
8.4.12 Condizioni ambientali 120
8.5 dU/Dt
121
124
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 5
Introduzione
VLT® HVAC Basic Drive FC 101
11
1 Introduzione
1.1 Scopo della Guida alla Progettazione
La presente Guida alla Progettazione è concepita per
progettisti e sistemisti, consulenti di progettazione e
specialisti delle applicazioni e di prodotto. Questo
documento fornisce informazioni tecniche per
comprendere le capacità del convertitore di frequenza per
l'integrazione nel controllo del motore e nei sistemi di
monitoraggio. Sono inoltre presenti descrizioni dettagliate
del funzionamento, i requisiti e i suggerimenti per l'integrazione del sistema. È possibile trovare informazioni sulle
caratteristiche della potenza di ingresso, sull'uscita per il
controllo del motore e sulle condizioni dell'ambiente di
esercizio per il convertitore di frequenza.
Sono altresì presenti:
caratteristiche di sicurezza
•
monitoraggio delle condizioni di guasto
•
segnalazione dello stato di funzionamento
•
capacità di comunicazione seriale
•
opzioni e caratteristiche programmabili.
•
Sono inoltre fornite informazioni dettagliate sulla progettazione come:
requisiti del luogo di installazione
•
cavi
•
fusibili
•
cavi di controllo
•
dimensioni e pesi dell'unità
•
altre informazioni essenziali necessarie per la
•
pianicazione dell'integrazione del sistema.
Il riesame delle informazioni di prodotto dettagliate nella
fase di progettazione consente di sviluppare un sistema
ben concepito con funzionalità ed ecienza ottimali.
VLT® è un marchio registrato.
Versione del documento e software
1.2
A partire dalla versione software 4.0x e successive
(settimana di produzione 33 2017 e successive), la funzione
della ventola di rareddamento del dissipatore a velocità
variabile è stata implementata nel convertitore di
frequenza per taglie di potenza da 22 kW (30 cv) 400 V
IP20 e inferiori e 18,5 kW (25 cv) 400 V IP54 e inferiori.
Questa funzione necessita di aggiornamenti software e
hardware e introduce limitazioni inerenti alla retrocompatibilità per dimensioni del frame H1-H5 e I2-I4. Fare
riferimento alla Tabella 1.2 per le limitazioni.
Scheda di controllo
Compatibilità
software
Vecchio software
(le OSS versione
3.xx e inferiori)
Nuovo software
(le OSS versione
4.xx o superiori)
Compatibilità
hardware
Scheda di potenza
obsoleta
(settimana di
produzione 33 2017
o precedenti)
Scheda di potenza
nuova
(settimana di
produzione 34 2017
o successive)
Tabella 1.2 Compatibilità software e hardware
obsoleta (settimana
di produzione 33
2017 o precedenti)
Sì No
No Sì
Scheda di controllo
obsoleta (settimana
di produzione 33
2017 o precedenti)
Sì (solo software
versione 3.xx o
inferiori)
Sì (NECESSARIO
aggiornare il
software alla
versione 3.xx o
inferiori, la ventola è
continuamente in
funzione a piena
velocità)
Scheda di controllo
nuova (settimana di
produzione 34 2017
o successive)
Scheda di controllo
nuova (settimana di
produzione 34 2017
o successive)
Sì (NECESSARIO
aggiornare il
software alla
versione 4.xx o
superiori)
Sì (solo software
versione 4.xx o
superiori)
Il presente manuale è revisionato e aggiornato
regolarmente. Tutti i suggerimenti per migliorare sono ben
accetti.
Edizione Osservazioni Versione
software
MG18C8xx Aggiornamento a una nuova versione
di SW e HW.
Tabella 1.1 Versione del documento e del software
6 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
4.2x
Introduzione Guida alla Progettazione
1.3 Simboli di sicurezza
Nella presente guida vengono usati i seguenti simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
1.4 Abbreviazioni
°C
°F
A Ampere/AMP
CA Corrente alternata
AMA Adattamento automatico motore
AWG American Wire Gauge
CC Corrente continua
EMC Compatibilità elettromagnetica
ETR Relè termico elettronico
FC Convertitore di frequenza
f
M,N
kg Chilogrammo
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
kHz Kilohertz
LCP Pannello di controllo locale
m Metro
mA Milliampere
MCT Motion Control Tool
mH Induttanza in milli henry
min. Minuto
ms Millisecondo
nF Nanofarad
Nm Newton metri
n
s
P
M,N
PCB Scheda di circuito stampato
Gradi Celsius
Gradi Fahrenheit
Frequenza motore nominale
Corrente nominale di uscita dell'inverter
Limite di corrente
Corrente nominale del motore
Corrente di uscita massima
Corrente di uscita nominale fornita dal
convertitore di frequenza
Velocità del motore sincrono
Potenza motore nominale
PELV Tensione di protezione bassissima
Regen Morsetti rigenerativi
RPM Giri al minuto
s Secondo
T
LIM
U
M,N
V Volt
Tabella 1.3 Abbreviazioni
Limite di coppia
Tensione motore nominale
1.5 Risorse aggiuntive
La Guida rapida VLT® HVAC Basic Drive FC 101
•
fornisce informazioni di base sulle dimensioni
meccaniche, l'installazione e la programmazione.
®
La Guida alla Programmazione VLT
•
Drive FC 101 fornisce informazioni sulla programmazione e comprende descrizioni complete dei
parametri.
Software Danfoss VLT® Energy Box. Selezionare PC
•
Software Download all'indirizzo
www.danfoss.com/en/service-and-support/
downloads/dds/vlt-energy-box/.
Il software VLT® Energy Box consente confronti
del consumo energetico di ventole HVAC e
pompe azionate da convertitori di frequenza
Danfoss e metodi alternativi di controllo del
usso. Usare questo tool per progettare i costi, i
risparmi e il recupero del capitale investito legato
all'uso di convertitori di frequenza Danfoss sulle
ventole, pompe e torri di rareddamento HVAC.
La documentazione tecnica Danfoss è disponibile in forma
elettronica sul CD di documentazione fornito insieme al
prodotto oppure in forma cartacea dal vostro ucio
vendite Danfoss locale.
Assistenza Software di
congurazione MCT 10
Scaricare il software all'indirizzo www.danfoss.com/en/
service-and-support/downloads/dds/vlt-motion-control-toolmct-10/.
Durante il processo di installazione del software, inserire il
codice di accesso 81463800 per attivare la funzionalità FC
101. Per usare la funzionalità FC 101 non è necessario
alcun codice licenza.
Il software più recente non contiene sempre gli aggiornamenti più recenti per convertitori di frequenza.
Contattare l'ucio vendite locale per gli aggiornamenti più
recenti del convertitore di frequenza (le *.upd) oppure
scaricarli all'indirizzo www.danfoss.com/en/service-and-
support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
HVAC Basic
1 1
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 7
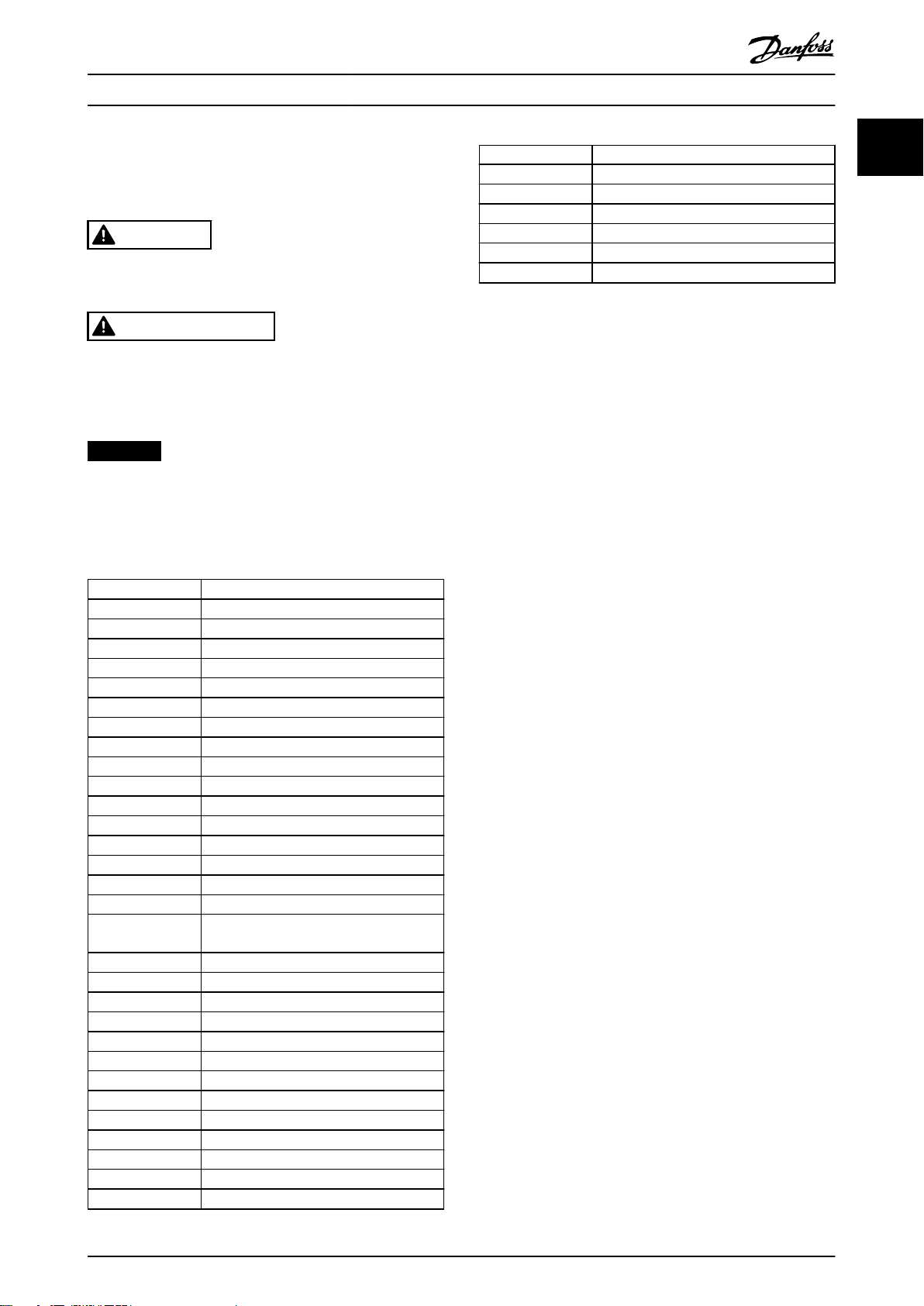
175ZA078.10
Coppia massima
Giri / min.
Coppia
Introduzione
VLT® HVAC Basic Drive FC 101
11
1.6 Denizioni
Coppia di interruzione
Convertitore di frequenza
I
VLT, MAX
La massima corrente di uscita.
I
VLT,N
La corrente di uscita nominale fornita dal convertitore di
frequenza.
U
VLT, MAX
La massima tensione di uscita.
Ingresso
Il motore collegato può avviarsi e arrestarsi tramite l'LCP e
gli ingressi digitali. Le funzioni sono suddivise in due
gruppi come descritto nella Tabella 1.4. Le funzioni nel
gruppo 1 hanno una priorità maggiore rispetto a quelle nel
gruppo 2.
Ripristino, arresto a ruota libera, ripristino e
Gruppo 1
Gruppo 2
Tabella 1.4 Comandi di controllo
arresto a ruota libera, arresto rapido, frenatura
CC, arresto e [O].
Avvio, avviamento a impulsi, inversione, avvio
inverso, jog e uscita congelata.
Motore
f
JOG
La frequenza motore quando viene attivata la funzione jog
(mediante i morsetti digitali).
f
M
La frequenza motore.
f
MAX
La frequenza motore massima.
f
MIN
La frequenza motore minima.
f
M,N
La frequenza nominale del motore (dati di targa).
I
M
La corrente motore.
I
M,N
La corrente nominale del motore (dati di targa).
n
M,N
La velocità nominale del motore (dati di targa).
Disegno 1.1 Coppia di interruzione
η
VLT
L'ecienza del convertitore di frequenza è denita come il
rapporto tra la potenza di uscita e quella di ingresso.
Comando per disabilitare l'avviamento
Un comando di arresto appartenente ai comandi di
controllo del gruppo 1, vedere la Tabella 1.4.
Comando di arresto
Vedere la Tabella 1.4.
Riferimento analogico
Un segnale trasmesso agli ingressi analogici 53 o 54. Può
essere in tensione o in corrente.
Ingresso in corrente: 0–20 mA e 4–20 mA
•
Ingresso in tensione: 0–10 V CC
•
Riferimento bus
Un segnale trasmesso alla porta di comunicazione seriale
(porta FC).
Riferimento preimpostato
Un riferimento preimpostato
denito che può essere
impostato tra -100% e +100% dell'intervallo di riferimento.
Selezione di otto riferimenti preimpostati mediante i
morsetti digitali.
Ref
MAX
Determina la relazione tra l'ingresso di riferimento al 100%
del valore di fondo scala (tipicamente 10 V, 20 mA) e il
riferimento risultante. Il valore di riferimento massimo è
P
M,N
impostato nel parametro 3-03 Riferimento max.
La potenza motore nominale (dati di targa).
Ref
U
M
La tensione motore istantanea.
U
M,N
La tensione nominale del motore (dati di targa).
MIN
Determina la relazione tra l'ingresso di riferimento allo 0%
del valore (tipicamente 0 V, 0 mA, 4 mA) e il riferimento
risultante. Il valore di riferimento minimo è impostato nel
parametro 3-02 Riferimento minimo.
8 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Introduzione Guida alla Progettazione
Ingressi analogici
Gli ingressi analogici vengono utilizzati per controllare varie
funzioni del convertitore di frequenza.
Esistono due tipi di ingressi analogici:
ingresso in corrente: 0–20 mA e 4–20 mA;
•
ingresso in tensione: 0–10 V CC.
•
Uscite analogiche
Le uscite analogiche sono in grado di fornire un segnale di
0–20 mA, 4–20 mA o un segnale digitale.
Adattamento automatico motore, AMA
L'algoritmo AMA determina i parametri elettrici per il
motore collegato a fermo e compensa la resistenza in base
alla lunghezza del cavo motore.
Ingressi digitali
Gli ingressi digitali consentono di controllare varie funzioni
del convertitore di frequenza.
Uscite digitali
Il convertitore di frequenza fornisce due stadi di uscita a
stato solido che sono in grado di fornire un segnale a 24 V
CC (massimo 40 mA).
Uscite a relè
Il convertitore di frequenza mette a disposizione due uscite
a relè programmabili.
ETR
Il relè termico elettronico è un calcolo del carico termico
basato sul carico presente e sul tempo. Lo scopo consiste
nello stimare la temperatura del motore e impedire il
surriscaldamento.
Inizializzazione
Se viene eseguita un'inizializzazione (parametro 14-22 Modo
di funzionamento), i parametri programmabili del conver-
titore di frequenza ritornano alle rispettive impostazioni di
fabbrica. Il
Parametro 14-22 Modo di funzionamento non inizializza i
parametri di comunicazione, il log guasti né il log modalità
incendio.
Duty cycle intermittente
Un grado di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire con servizio intermittente periodico sia
aperiodico.
LCP
Il Pannello di Controllo Locale (LCP) rappresenta un'interfaccia completa per il controllo e la programmazione del
convertitore di frequenza. Il pannello di comando è
estraibile sulle unità IP20 e sso sulle unità IP54. Può
essere installato a una distanza massima di 3 m (9,8 piedi)
dal convertitore di frequenza, vale a dire in un pannello
frontale mediante il kit di montaggio opzionale.
Lsb
Bit meno signicativo.
MCM
Abbreviazione di Mille Circular Mil, un'unità di misura
americana della sezione trasversale dei cavi. 1 MCM ≡
0,5067 mm2.
Msb
Bit più signicativo.
Parametri on-line/o-line
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei dati.
Premere [OK] per attivare i parametri o-line.
Controllore PI
Il controllore PI mantiene la velocità, pressione,
temperatura ecc. desiderata, regolando la frequenza di
uscita in base alle variazioni del carico.
RCD
Dispositivo a corrente residua.
Setup
Le impostazioni parametri possono essere salvate in due
setup. Cambiare tra le due programmazioni parametri e
modicarne una mentre è attivo un altro setup.
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico del
motore rilevato, mantenendo costante la velocità del
motore.
Smart logic control (SLC)
L'SLC è una sequenza di azioni denite dall'utente, che
vengono eseguite quando gli eventi associati deniti
dall'utente sono valutati come TRUE dall'SLC.
Termistore
Una resistenza dipendente dalla temperatura, installata nei
punti in cui deve essere controllata la temperatura (convertitore di frequenza o motore).
Scatto
Uno stato che si verica in situazioni di guasto, ad esempio
se il convertitore di frequenza è soggetto a surriscaldamento o quando lo stesso interviene per proteggere il
motore, un processo o un meccanismo. Il riavvio viene
impedito nché la causa del guasto non è scomparsa e lo
stato di scatto viene annullato attivando il ripristino
oppure, talvolta, tramite la programmazione di un ripristino
automatico. Non usare lo scatto per la sicurezza personale.
1 1
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 9
Introduzione
VLT® HVAC Basic Drive FC 101
11
Scatto bloccato
Conformità alle norme
1.8
Uno stato che si verica in situazioni di guasto quando il
convertitore di frequenza entra in autoprotezione e che
richiede un intervento manuale, ad esempio se nel conver-
I convertitori di frequenza sono progettati in conformità
alle direttive descritte in questa sezione.
titore di frequenza si verica un cortocircuito sull'uscita. È
possibile annullare uno scatto bloccato scollegando la rete,
1.8.1 Marchio CE
eliminando la causa del guasto e ricollegando il convertitore di frequenza all'alimentazione. Il riavvio viene
impedito no a che lo stato di scatto non viene annullato
attivando il ripristino o, talvolta, tramite programmazione
di ripristino automatico. Non usare lo scatto bloccato per la
Il marchio CE (Comunità Europea) indica che il fabbricante
del prodotto rispetta tutte le direttive UE pertinenti. Le
direttive UE applicabili alla progettazione e alla produzione
di convertitori di frequenza sono elencate nella Tabella 1.5
sicurezza personale.
Caratteristiche VT
Caratteristiche coppia variabile utilizzate per pompe e
ventole.
+
VVC
AVVISO!
Il marchio CE non regola la qualità del prodotto. Le
speciche tecniche non possono essere dedotte dal
marchio CE.
Rispetto a una regolazione a rapporto tensione/frequenza
tradizionale, il controllo vettoriale della tensione (VVC+)
migliora sia la dinamica che la stabilità, anche nel caso di
variazioni della velocità di riferimento e della coppia di
carico.
1.7 Fattore di potenza
Il fattore di potenza indica in che misura il convertitore di
frequenza impone un carico sull'alimentazione di rete. Il
fattore di potenza è il rapporto tra I1 e I
rappresenta la corrente fondamentale e I
, dove I
RMS
rappresenta la
RMS
1
AVVISO!
I convertitori di frequenza con una funzione di sicurezza
integrata devono soddisfare la Direttiva macchine.
Direttiva UE Versione
Direttiva bassa tensione 2014/35/EU
Direttiva EMC 2014/30/EU
Direttiva ErP
Tabella 1.5 Direttive UE applicabili ai convertitori di frequenza
corrente RMS totale comprese le correnti armoniche.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
per lo stesso rendimento in kW.
RMS
Le dichiarazioni di conformità sono disponibili su richiesta.
1.8.1.1 Direttiva bassa tensione
Fattoredipotenza =
Il fattore di potenza per la regolazione trifase:
Fattoredi potenza =
2
I
RMS
= I
+ I
1
2
+ I
5
Un fattore di potenza elevato indica che le dierenti
correnti armoniche sono basse.
Le bobine CC incorporate nei convertitori di frequenza
producono un elevato fattore di potenza, il quale
minimizza il carico applicato sull'alimentazione di rete.
3 × U × I1× cosϕ
3 × U × I
I1 × cosϕ1
I
RMS
2
+ . . + I
7
2
n
RMS
I
1
=
da cuicosϕ1 = 1
I
RMS
La direttiva sulla bassa tensione concerne tutte le apparecchiature elettriche funzionanti negli intervalli di tensione
compresi fra 50 e 1.000 V CA e fra 75 e 1.600 V CC.
L'obiettivo della direttiva è garantire la sicurezza personale
ed evitare danni alla proprietà quando vengono fatte
funzionare apparecchiature elettriche installate e
manutenute correttamente nella rispettiva applicazione
prevista.
1.8.1.2 Direttiva EMC
Lo scopo della direttiva EMC (compatibilità elettromagnetica) è quello di ridurre l'interferenza elettromagnetica
e migliorare l'immunità delle apparecchiature e degli
impianti elettrici. Il requisito di protezione di base della
Direttiva EMC 2014/30/UE aerma che i dispositivi che
generano interferenza elettromagnetica (EMI), o il cui
funzionamento potrebbe essere soggetto a interferenze
elettromagnetiche, devono essere progettati per limitare la
generazione di interferenze elettromagnetiche e devono
presentare un livello adeguato di immunità alle
interferenze elettromagnetiche quando sono installati,
10 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
089
Introduzione Guida alla Progettazione
sottoposti a manutenzione e usati correttamente come
previsto.
I dispositivi elettrici usati da soli o come parte di un
sistema devono recare il marchio CE. I sistemi non
richiedono il marchio CE ma devono soddisfare i requisiti
di protezione di base della direttiva EMC.
1.8.1.3 Direttiva ErP
La direttiva ErP è la direttiva europea Eco-design per
prodotti connessi all'energia. La direttiva impone requisiti
ecodesign per prodotti connessi all'energia, inclusi i
convertitori di frequenza. La direttiva mira ad accrescere
l'ecienza energetica e il livello di protezione dell'ambiente, aumentando allo stesso tempo la garanzia
dell'alimentazione energetica. L'impatto ambientale dei
prodotti connessi all'energia include il consumo energetico
attraverso l'intero ciclo di vita del prodotto.
1.8.2 Conformità UL
Certicato UL
1.8.4 EAC
Disegno 1.4 Marchio EAC
Il marchio EurAsian Conformity (Conformità eurasiatica,
EAC) indica che il prodotto è conforme a tutti i requisiti e
alle normative tecniche applicabili al prodotto per
l'EurAsian Customs Union (Unione doganale eurasiatica), la
quale è composta dagli stati membri dell'EurAsian
Economic Union (Unione economica eurasiatica).
Il logo EAC deve essere apposto sia sull'etichetta del
prodotto sia su quella del confezionamento. Tutti i prodotti
utilizzati all'interno dell'area EAC devono essere acquistati
presso Danfoss all'interno dell'area EAC.
1.8.5 UkrSEPRO
1 1
Disegno 1.2 UL
AVVISO!
Le unità IP54 non sono certicate UL.
Il convertitore di frequenza soddisfa i requisiti UL 508C di
protezione termica. Per maggiori informazioni fare
riferimento alla sezione Protezione termica del motore nella
Guida alla Progettazione specica del prodotto.
1.8.3 Conformità al Marchio RCM
Disegno 1.3 Marchio RCM
L'etichetta del Marchio RCM indica la conformità alle
norme tecniche applicabili alla compatibilità elettromagnetica (EMC). L'etichetta del Marchio RCM è necessaria per
immettere i dispositivi elettrici ed elettronici sul mercato in
Australia e in Nuova Zelanda. Le disposizioni regolamentari
previste dal Marchio RCM disciplinano esclusivamente le
emissioni condotte e irradiate. Per i convertitori di
frequenza si applicano i limiti di emissione specicati nella
EN/IEC 61800-3. Una dichiarazione di conformità può
essere fornita su richiesta.
Disegno 1.5 UkrSEPRO
Il certicato UKrSEPRO garantisce qualità e sicurezza di
prodotti e servizi, oltre a stabilità produttiva conformemente alle norme di regolamentazione ucraine. Il
certicato UkrSepro è un documento richiesto per lo
sdoganamento di qualunque prodotto in ingresso e in
uscita dal territorio ucraino.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 11
Sicurezza
VLT® HVAC Basic Drive FC 101
2 Sicurezza
22
2.1 Personale qualicato
Il trasporto, l'immagazzinamento, l'installazione, il funzionamento e la manutenzione eettuati in modo corretto e
adabile sono essenziali per un funzionamento senza
problemi e sicuro del convertitore di frequenza. Solo il
personale qualicato è autorizzato a installare o a far
funzionare questa apparecchiatura.
Per personale
tamente formati, autorizzati a installare, mettere in
funzione ed eettuare la manutenzione su apparecchiature,
sistemi e circuiti in conformità alle leggi e ai regolamenti
pertinenti. Inoltre, il personale deve avere dimestichezza
con tutte le istruzioni e le misure di sicurezza descritte in
questa guida.
qualicato si intendono i dipendenti adegua-
2.2 Precauzioni di sicurezza
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eettuati esclusivamente da
personale qualicato.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che non sia presente
tensione residua nel convertitore di frequenza.
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore è collegato alla rete CA, all'alimentazione CC o alla condivisione del carico, il motore
può avviarsi in qualsiasi momento. L'avvio involontario
durante le operazioni di programmazione o i lavori di
manutenzione o riparazione può causare morte, lesioni
gravi o danni alle cose. Il motore può essere avviato
tramite un interruttore esterno, un comando bus di
campo, un segnale di riferimento in ingresso dall'LCP o
dall'LOP, da remoto utilizzando Software di
congurazione MCT 10 oppure a seguito del ripristino di
una condizione di guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Scollegare il convertitore di frequenza dalla
•
rete.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
12 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Sicurezza Guida alla Progettazione
AVVISO
TEMPO DI SCARICA
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore di frequenza non è alimentato.
Può ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o di
riparazione può causare lesioni gravi o mortali.
Arrestare il motore.
•
Scollegare la rete CA e gli alimentatori remoti
•
del collegamento CC, incluse le batterie di
backup, i gruppi di continuità e le connessioni
del collegamento CC ad altri convertitori di
frequenza.
Scollegare o bloccare il motore PM.
•
Attendere che i condensatori si scarichino
•
completamente. La durata minima del tempo di
attesa è specicata nella Tabella 2.1.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che i condensatori siano
completamente scarichi.
AVVISO
PERICOLO APPARECCHIATURE
Il contatto con gli alberi rotanti e le apparecchiature
elettriche può causare morte o lesioni gravi.
Assicurarsi che soltanto personale adegua-
•
tamente formato e qualicato eettui
l'installazione, l'avviamento e la manutenzione.
Assicurarsi che i lavori elettrici siano eseguiti in
•
conformità alle norme elettriche nazionali e
locali.
Seguire le procedure illustrate in questo
•
manuale.
ATTENZIONE
RISCHIO DI GUASTO INTERNO
Un guasto interno nel convertitore di frequenza può
provocare lesioni gravi quando questo non è chiuso
correttamente.
Prima di applicare la corrente elettrica,
•
assicurarsi che tutte le coperture di sicurezza
siano al loro posto e ssate in modo sicuro.
2 2
Tensione [V] Gamma di potenza [kW
(cv)]
3x200 0,25–3,7 (0,33–5) 4
3x200 5,5–11 (7–15) 15
3x400 0,37–7,5 (0,5–10) 4
3x400 11–90 (15–125) 15
3x600 2,2–7,5 (3–10) 4
3x600 11–90 (15–125) 15
Tabella 2.1 Tempo di scarica
Tempo di attesa
minimo (minuti)
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Un
collegamento a terra non corretto del convertitore di
frequenza può causare morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 13
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Panoramica dei prodotti
3 Panoramica dei prodotti
3.1 Vantaggi
VLT® HVAC Basic Drive FC 101
33
3.1.1 Perché usare un convertitore di
frequenza per controllare ventole e
pompe?
Un convertitore di frequenza si basa sul principio che
ventole e pompe centrifughe seguono le relative leggi di
proporzionalità. Per ulteriori informazioni vedere il
capitolo 3.1.3 Esempio di risparmi energetici.
3.1.2 Un vantaggio evidente - risparmio
energetico
L'evidente vantaggio derivante dall'utilizzo di un convertitore di frequenza per regolare la velocità di ventole o
pompe è rappresentato dalla possibilità di risparmiare
energia elettrica.
In confronto a tecnologie e sistemi di regolazione
alternativi, un convertitore di frequenza è il sistema di
controllo energetico ottimale per la regolazione di ventole
e pompe.
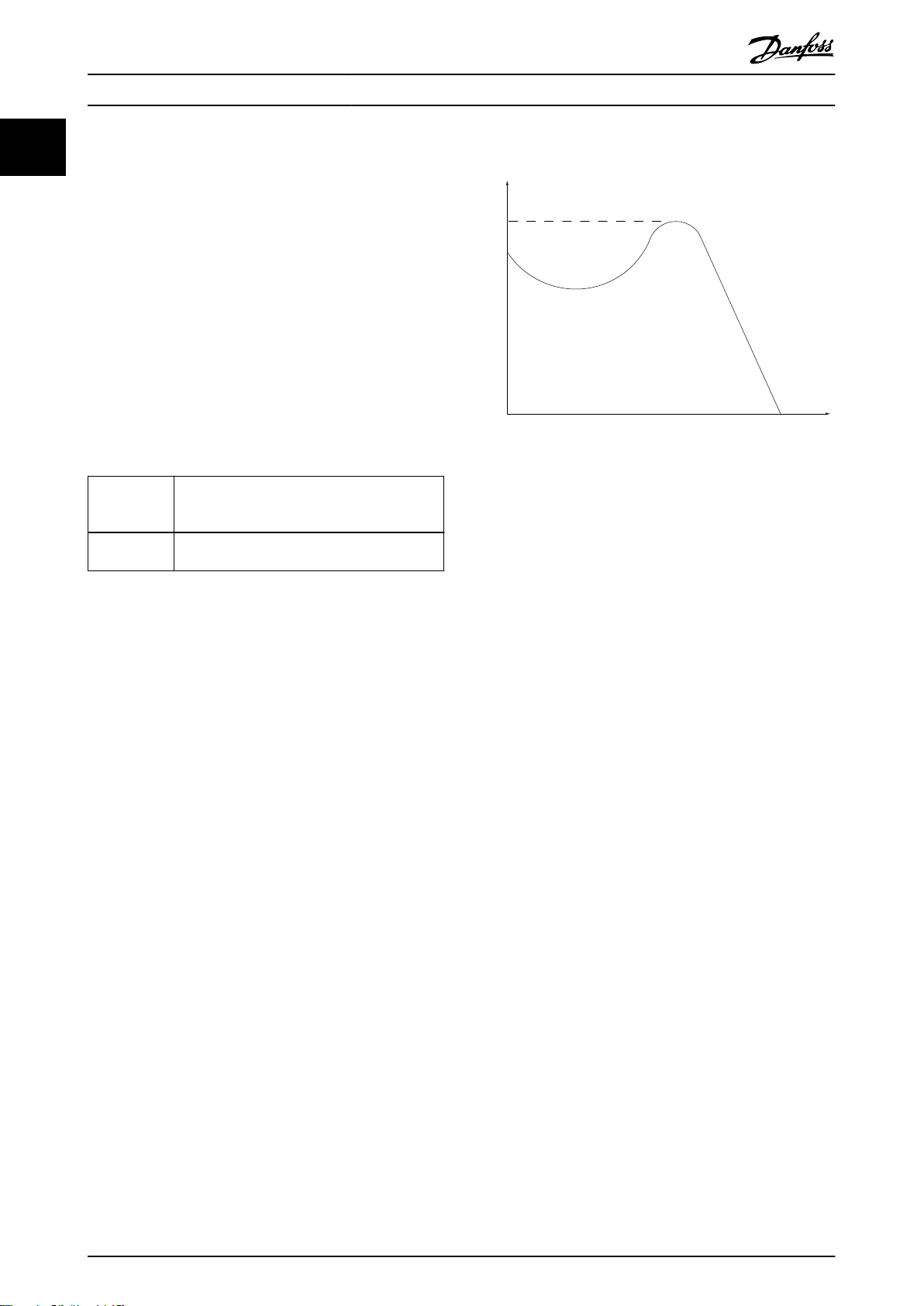
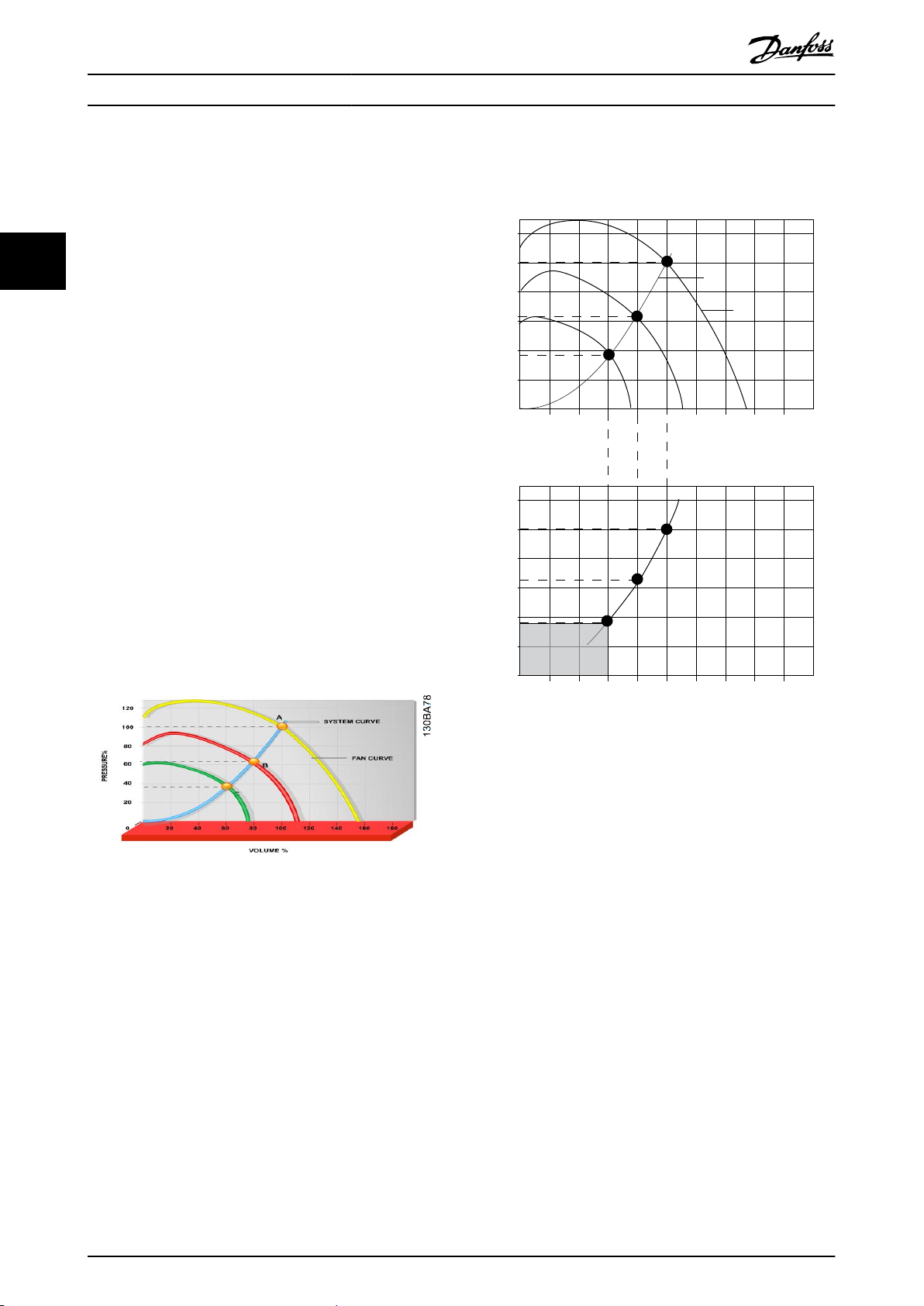
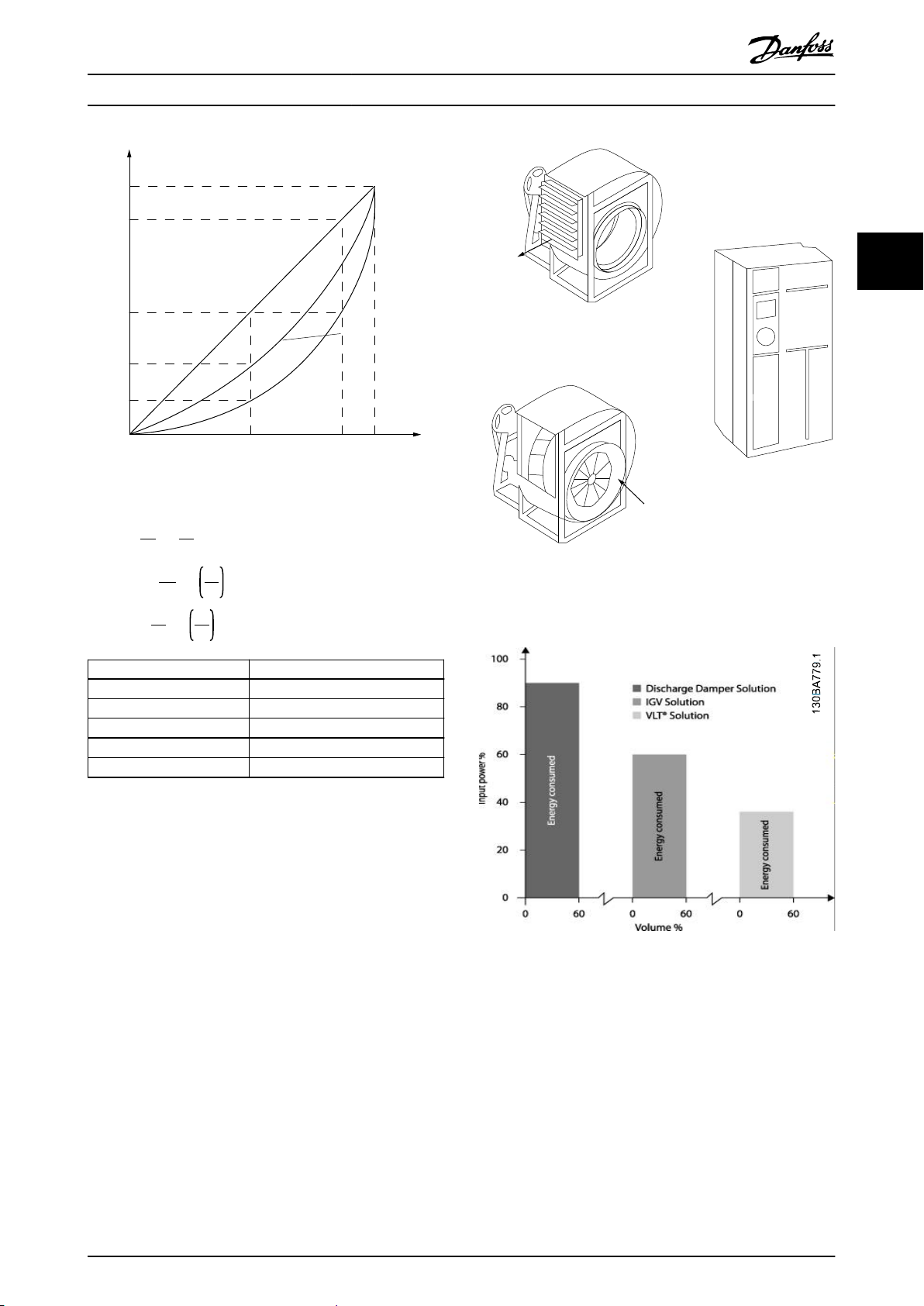
Disegno 3.1 Curve della ventola (A, B e C) per portate
ridotte della stessa.
Disegno 3.2 Soluzione di risparmi energetici con
convertitore di frequenza
Quando si utilizza un convertitore di frequenza per ridurre
la capacità della ventola al 60%, in applicazioni tipiche
possono essere ottenuti oltre il 50% di risparmi energetici.
3.1.3 Esempio di risparmi energetici
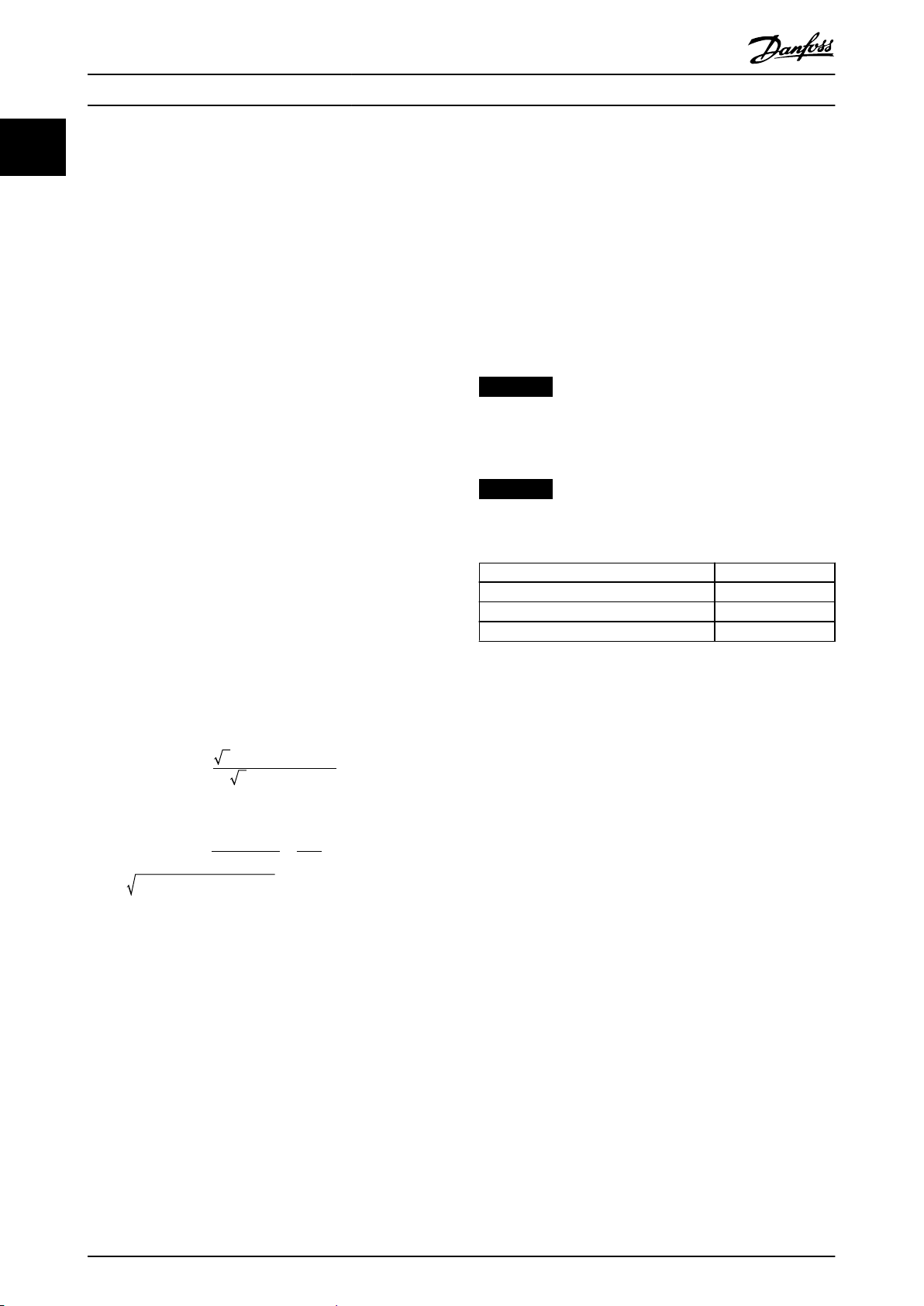
Come illustrato nell'Disegno 3.3, la portata viene regolata
riducendo il numero di Giri/min. Riducendo la velocità
soltanto del 20% rispetto alla velocità nominale, anche la
portata viene ridotta del 20%. Ciò è dovuto al fatto che la
portata è direttamente proporzionale al numero di Giri/
min. Il consumo di energia elettrica viene in tal modo
ridotto del 50%.
Se il sistema in questione deve essere in grado di fornire
una portata che corrisponde al 100% solo per pochi giorni
l'anno, mentre per il resto dell'anno la media della portata
fornita è inferiore all'80% della portata nominale, la
quantità di energia risparmiata supera addirittura il 50%.
La Disegno 3.3 descrive la dipendenza di portata, pressione
e consumo di potenza dal numero di Giri/min.
14 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
n
100%
50%
25%
12,5%
50% 100%
80%
80%
175HA208.10
Potenza ~n
3
Pressione ~n
2
Flusso ~n
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Panoramica dei prodotti Guida alla Progettazione
Disegno 3.3 Legge di proporzionalità
Q
n
1
Flusso:
Q
Pressione:
Potenza:
2
P
P
=
H
H
1
2
1
=
2
=
1
n
2
2
n
1
n
2
3
n
1
n
2
3 3
Disegno 3.4 I tre sistemi di risparmio energetico comuni
Q = Portata P = Potenza
Q1 = Portata nominale P1 = Potenza nominale
Q2 = Portata ridotta P2 = Potenza ridotta
H = Pressione n = Controllo di velocità
H1 = Pressione nominale n1 = Velocità nominale
H2 = Pressione ridotta n2 = Velocità ridotta
Tabella 3.1 Le leggi di proporzionalità
3.1.4 Confronto dei risparmi energetici
La soluzione con il convertitore di frequenza Danfoss ore
risparmi maggiori rispetto alle soluzioni di risparmio
energetico tradizionali come quella con ammortizzatore di
scarica e quella con palette regolabili di aspirazione (IGV).
La ragione sta nel fatto che il convertitore di frequenza è
capace di regolare la velocità della ventola in base al carico
termico del sistema, ed è dotato di una funzione integrata
che gli consente di funzionare come un sistema di
gestione per edici, (Building Management System) BMS.
La Disegno 3.3 illustra i tipici risparmi energetici ottenibili
con tre soluzioni ben conosciute quando la portata della
ventola viene ridotta al 60%.
Come il graco dimostra, in applicazioni tipiche possono
essere ottenuti risparmi energetici superiori al 50%.
Disegno 3.5 Risparmio energetico
Le valvole di scarico riducono il consumo di potenza. Le
palette regolabili in aspirazione consentono una riduzione
del 40%, ma la loro installazione è costosa. La soluzione
del convertitore di frequenza Danfoss riduce il consumo
energetico di oltre il 50% ed è facile da installare. Riduce
anche i disturbi, la sollecitazione meccanica e l'usura e
aumenta la durata di vita dell'intera applicazione.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 15
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
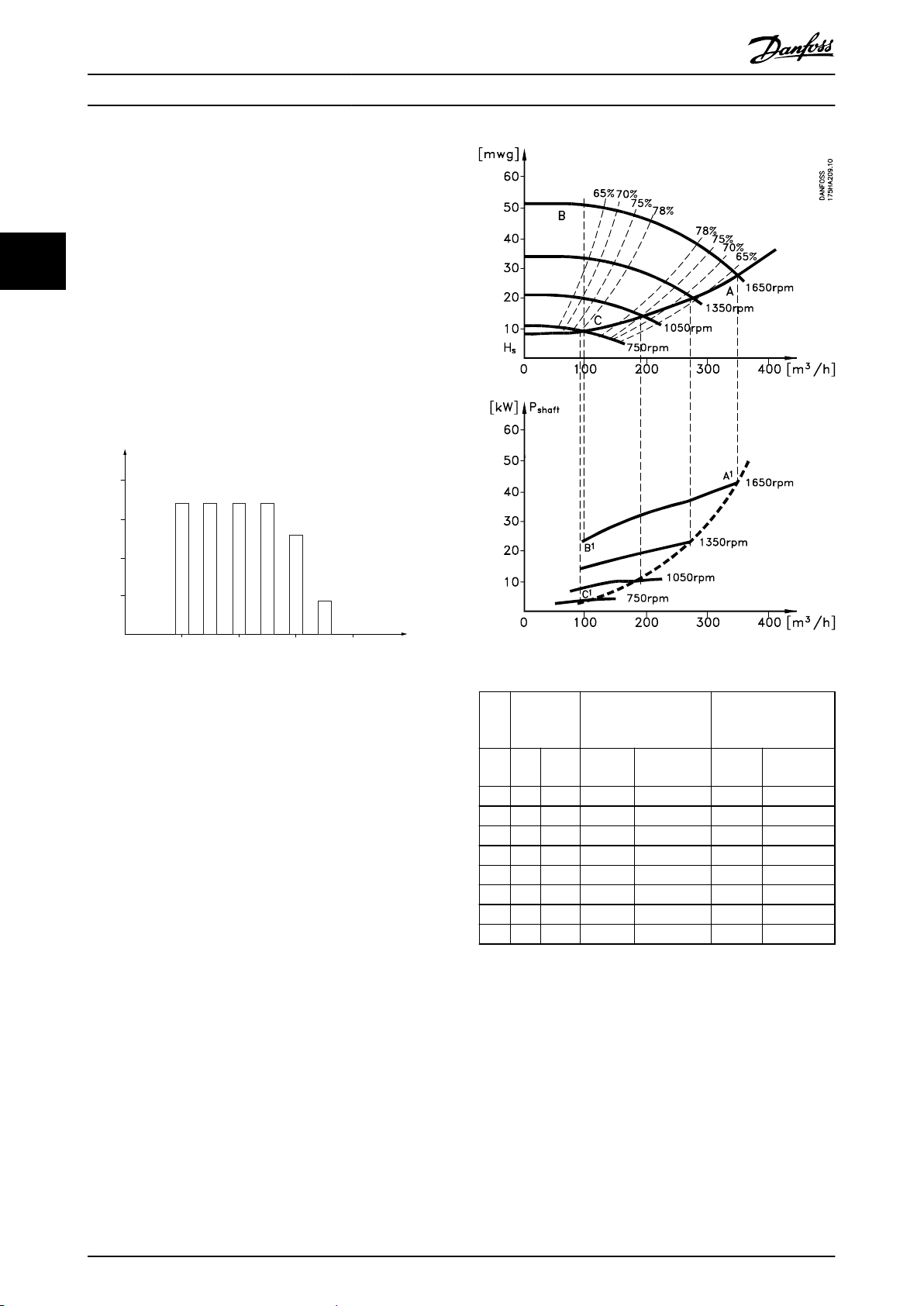
3.1.5 Esempio con portata variabile su un
periodo di un anno
Questo esempio viene calcolato sulla base delle caratteristiche della pompa ottenute da una scheda tecnica
33
relativa.
Il risultato ottenuto evidenzia nel corso di un anno risparmi
energetici superiori al 50% con la distribuzione della
portata data. Il periodo di ammortamento dipende dal
prezzo per kWh e da quello del convertitore di frequenza.
In questo esempio è inferiore a un anno se confrontato
con valvole e velocità costante.
Risparmio energetico
P
= P
shaft
shaft output
Disegno 3.6 Distribuzione della portata nel corso di un anno
Disegno 3.7 Energia
3
Distri-
m
/
buzione
h
% Ore Potenza
A1 - B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabella 3.2 Risultato
Regolazione mediante
valvole
Consu
mo
kWh A1 - C
1
Regolazione tramite
convertitore di
frequenza
Potenza
Consu
mo
kWh
1
16 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Panoramica dei prodotti Guida alla Progettazione
3.1.6 Migliore controllo
Mediante l'impiego di un convertitore di frequenza per
controllare la portata o la pressione di un sistema, si
ottiene un migliore controllo.
Un convertitore di frequenza può variare all'innito la
velocità di una ventola o di una pompa, assicurando il
controllo variabile di portata e pressione.
Inoltre, un convertitore di frequenza modica rapidamente
la velocità della ventola o della pompa, in modo da
adattarla alle nuove condizioni di portata o pressione del
sistema.
Semplice controllo di processo (usso, livello o pressione)
utilizzando il controllo PI integrato.
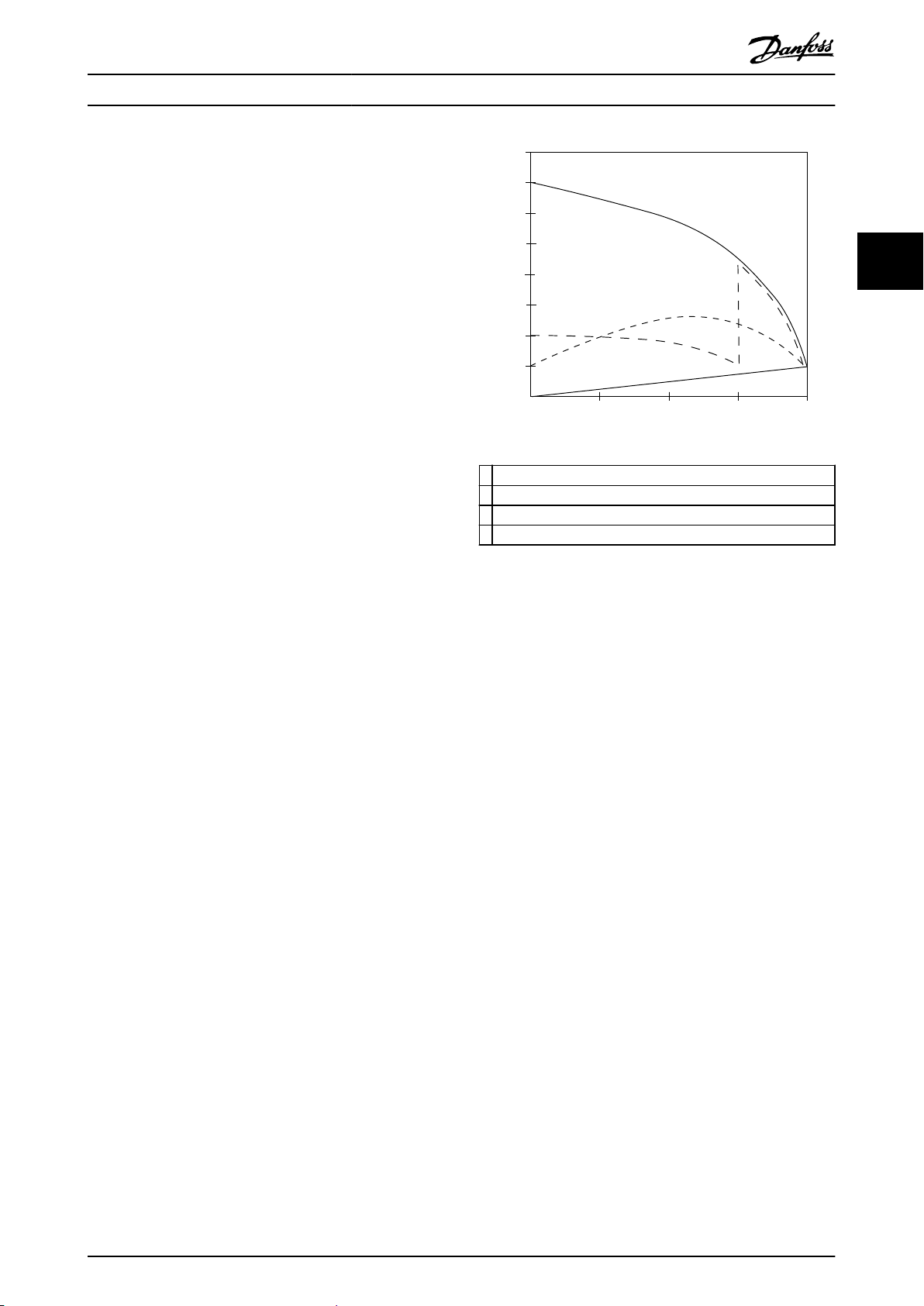
3.1.7 Gli avviatori a stella/triangolo o gli
avviatori statici non sono necessari
1
Quando devono essere avviati motori relativamente grandi,
in molti Paesi è necessario usare apparecchiature che
limitino la corrente di spunto. Nei sistemi più tradizionali
viene impiegato un avviatore a stella/triangolo o un
avviatore statico. Tali avviatori motore non sono necessari
se viene utilizzato un convertitore di frequenza.
2 Avviatori a stella/triangolo
3 Avviatore statico
4 Avviamento diretto in rete
3 3
VLT® HVAC Basic Drive FC 101
Disegno 3.8 Corrente di avviamento
Come mostrato nella Disegno 3.8, il convertitore di
frequenza non assorbe una corrente di spunto maggiore di
quella nominale e non richiede avviatori stella/ triangolo o
soft starter.
3.1.8 L'utilizzo di un convertitore di
frequenza fa risparmiare denaro
L'esempio nel capitolo 3.1.9 Senza convertitore di frequenza
mostra che un convertitore di frequenza sostituisce le altre
apparecchiature. È possibile calcolare il costo di installazione dei due sistemi diversi. Nell'esempio, è possibile
stabilire che i due sistemi hanno all'incirca lo stesso prezzo.
Usare un software VLT® Energy Box presentato nel
capitolo 1.5 Risorse aggiuntive per calcolare il risparmio di
costi che è possibile ottenere utilizzando un convertitore di
frequenza.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 17
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
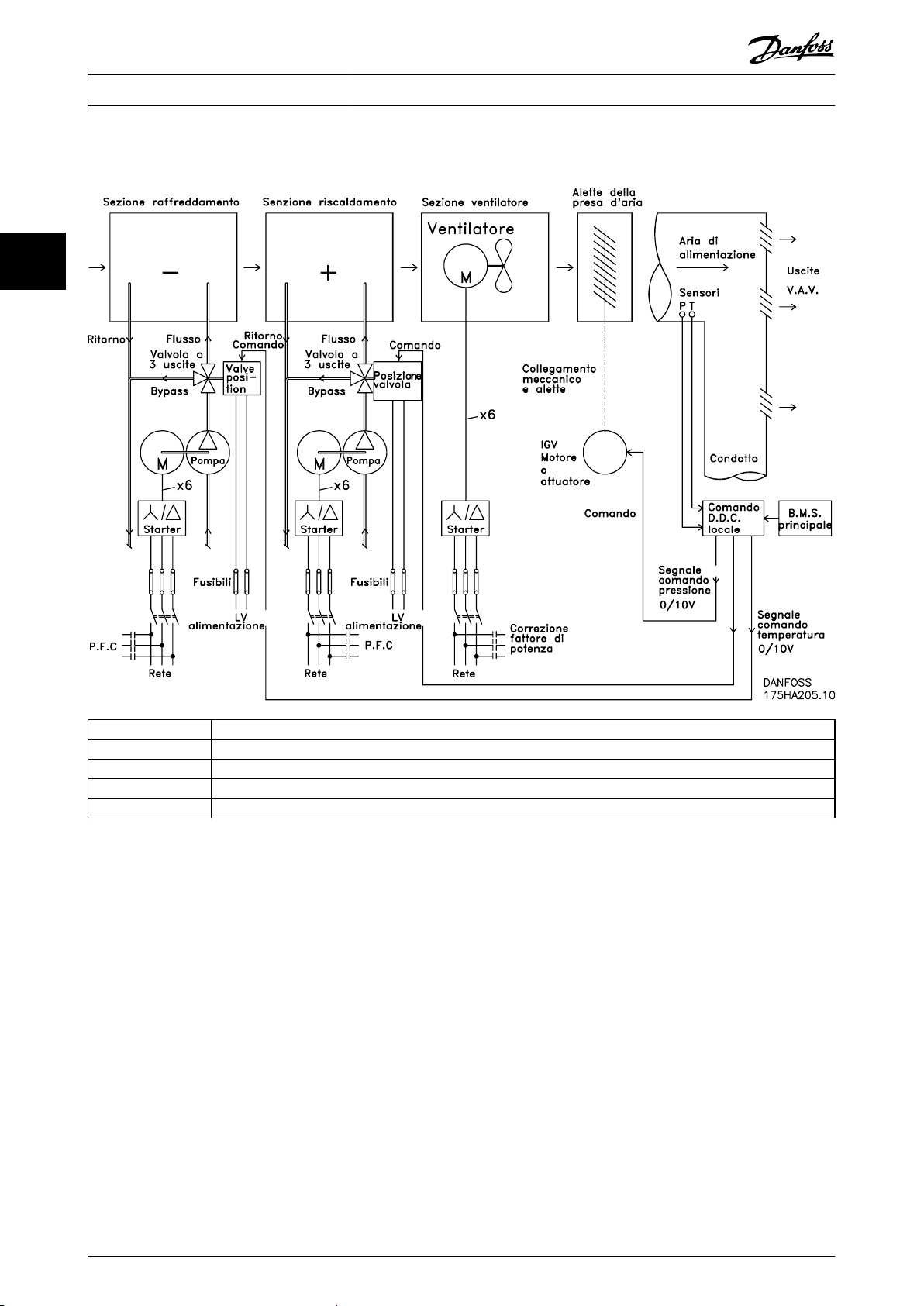
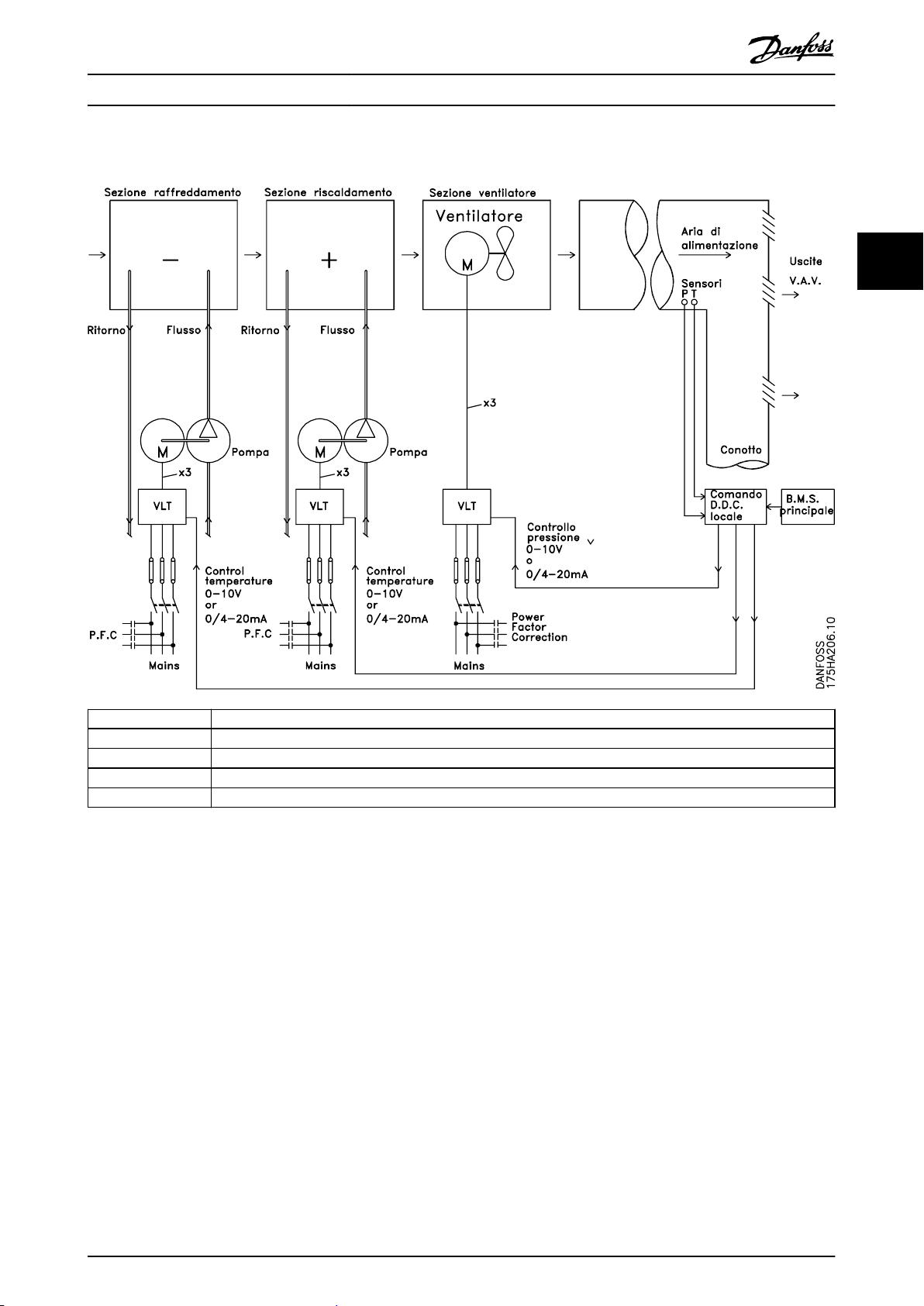
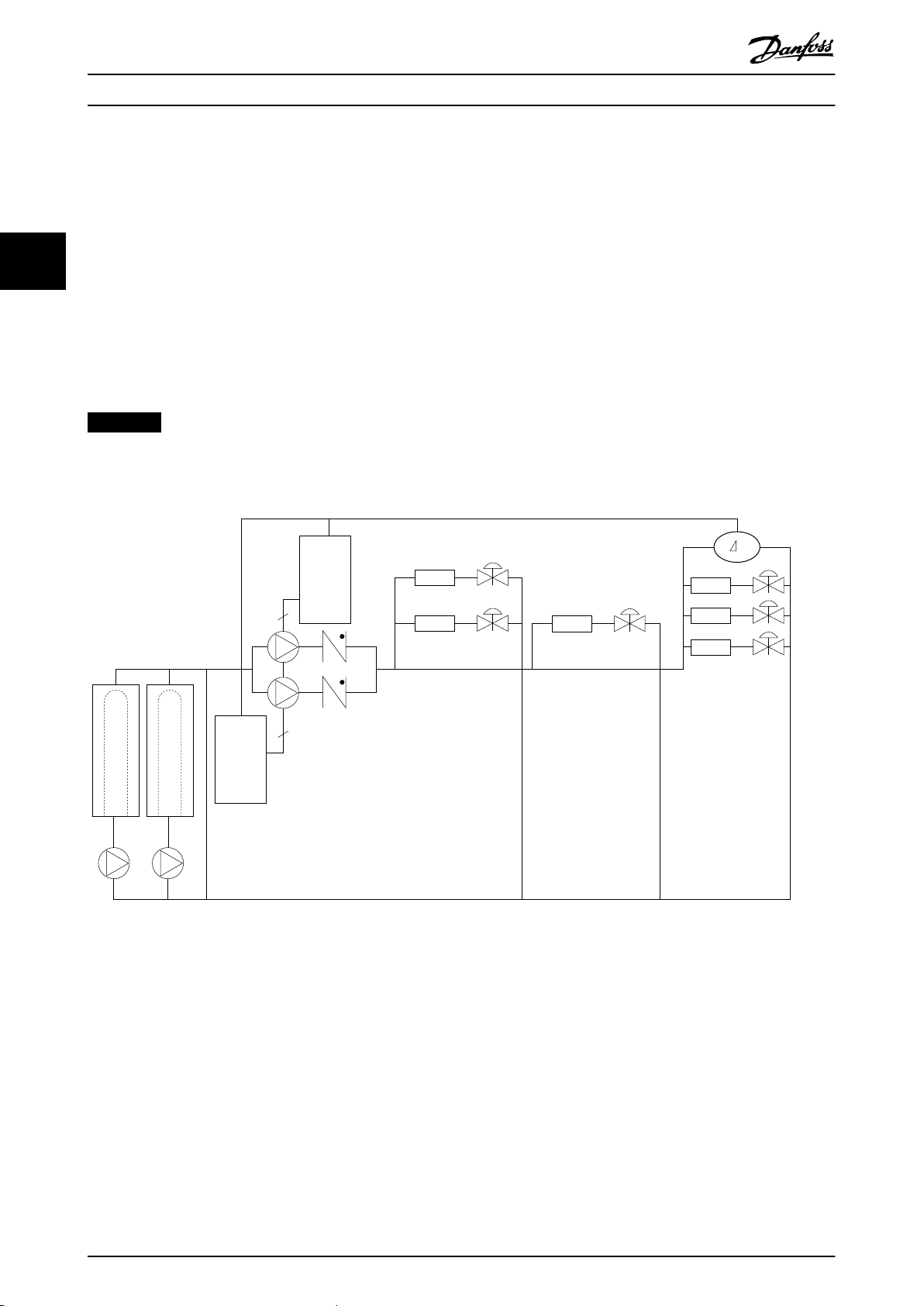
3.1.9 Senza convertitore di frequenza
33
D.D.C. Direct Digital Control (Controllo digitale diretto)
E.M.S. Sistema di gestione dell'energia
V.A.V. Portata d'aria variabile (VAV)
Sensore P Pressione
Sensore T Temperatura
Disegno 3.9 Sistema di ventilazione tradizionale
18 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Panoramica dei prodotti Guida alla Progettazione
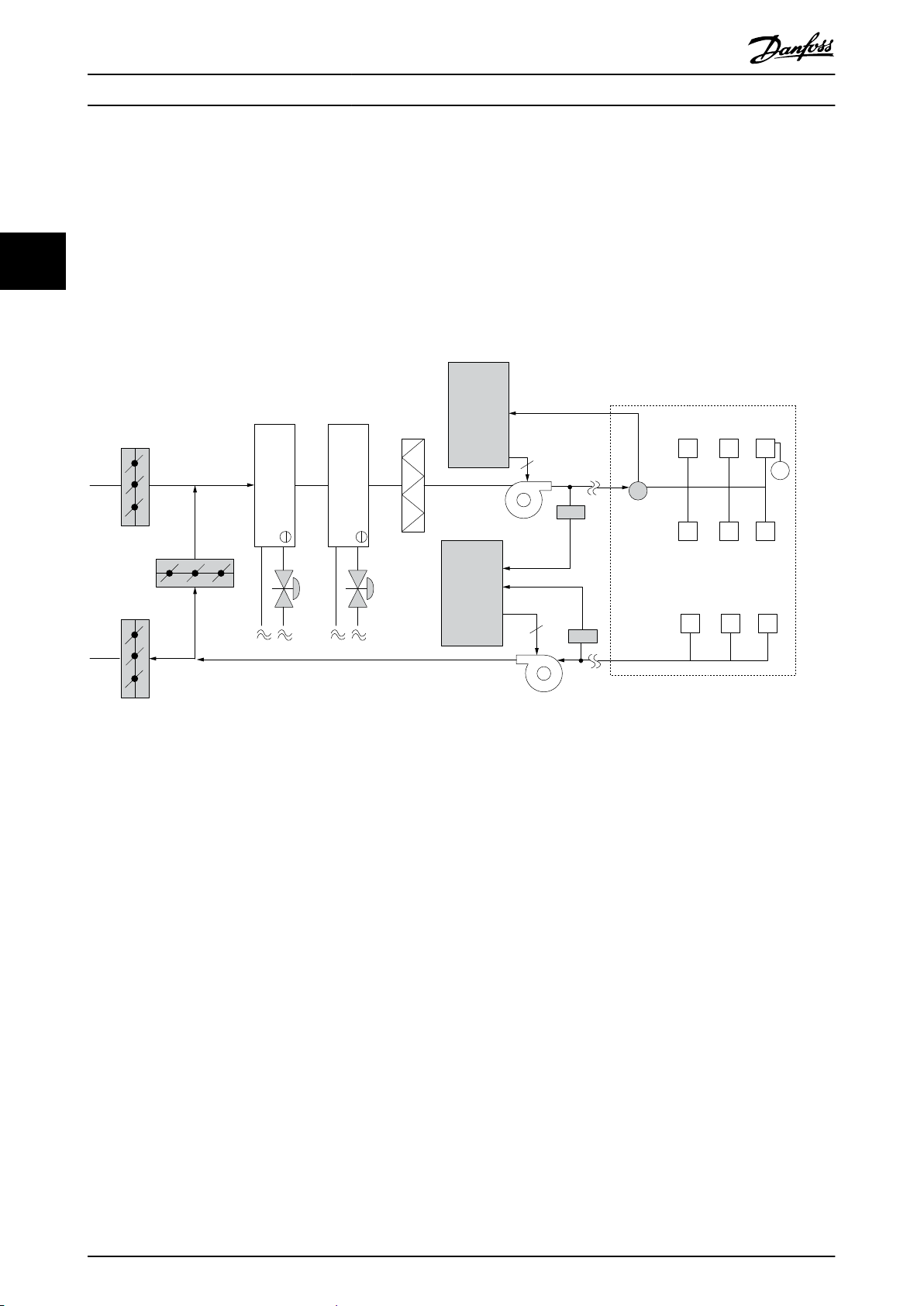
3.1.10 Con un convertitore di frequenza
3 3
D.D.C. Direct Digital Control (Controllo digitale diretto)
E.M.S. Sistema di gestione dell'energia
V.A.V. Portata d'aria variabile (VAV)
Sensore P Pressione
Sensore T Temperatura
Disegno 3.10 Sistema di ventilazione controllato da convertitori di frequenza
3.1.11 Esempi applicativi
Le seguenti sessioni forniscono esempi tipici di applicazioni all'interno dell'HVAC.
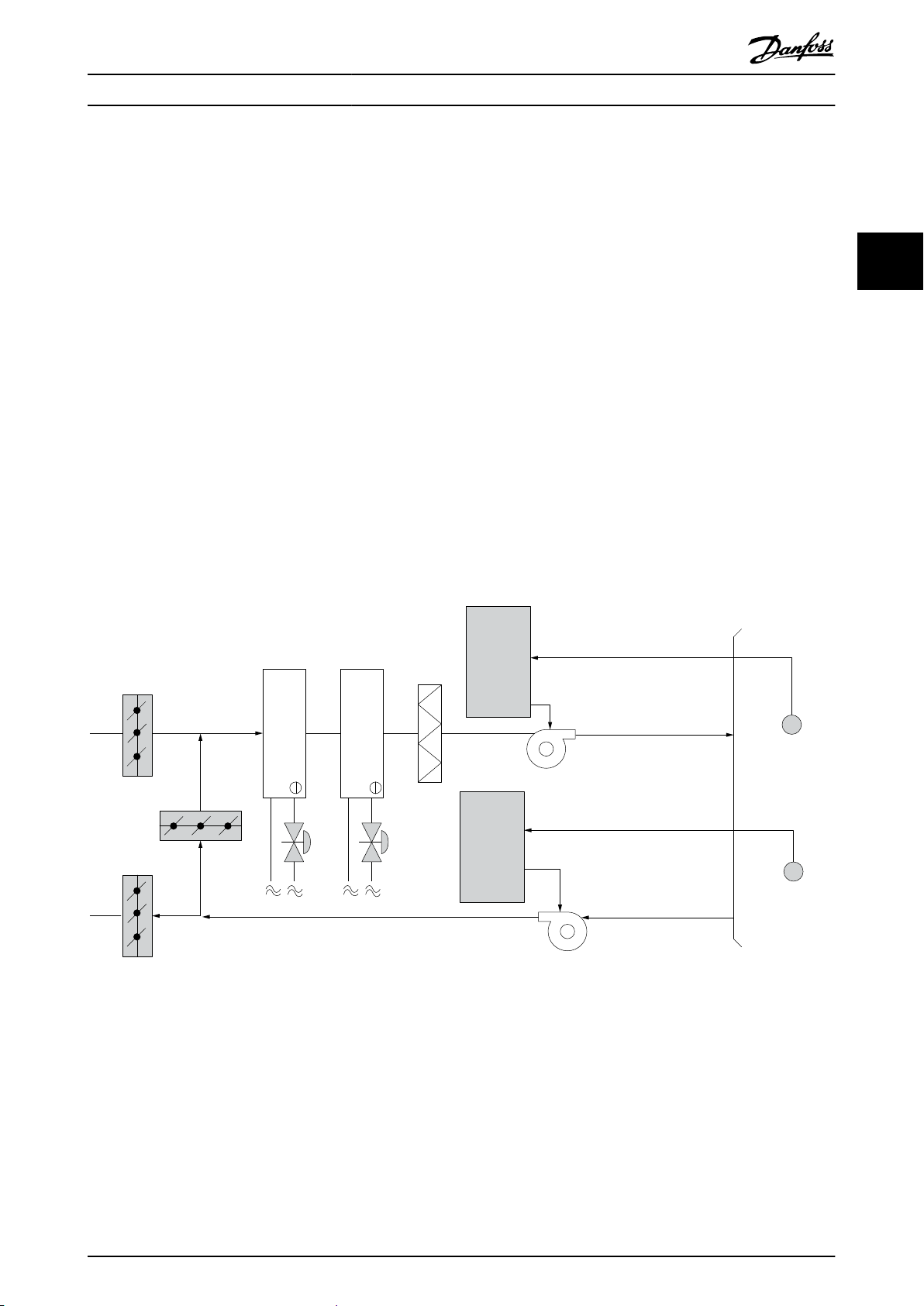
3.1.12 Portata d'aria variabile
I sistemi a portata d'aria VAV o variabile controllano la conformità ai requisiti di ventilazione e di temperatura all'interno di
un edicio. I sistemi VAV centralizzati sono considerati il metodo di condizionamento dell'aria negli edici più eciente dal
punto di vista energetico. Realizzando sistemi centralizzati invece di sistemi distribuiti, è possibile ottenere un maggiore
rendimento.
L'ecienza deriva dall'utilizzo di ventole e chiller di maggiori dimensioni con rendimenti molto superiori rispetto ai motori
piccoli e ai chiller rareddati ad aria centralizzati. Anche le ridotte esigenze di manutenzione consentono un ulteriore
risparmio.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 19
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
3.1.13 La soluzione VLT
Mentre serrande e IGV lavorano per mantenere una pressione costante nelle condutture, una soluzione con convertitore di
frequenza consente di risparmiare molta più energia e riduce la complessità dell'installazione. Invece di creare una caduta di
pressione articiale o ridurre il rendimento del ventilatore, il convertitore di frequenza ne limita la velocità per garantire la
33
portata e la pressione richiesti dal sistema.
I dispositivi centrifughi come le ventole si comportano secondo le leggi di anità (proporzionalità). Ciò signica che per
diminuire la pressione e/o la portata è suciente limitare la velocità di rotazione della macchina. Si ottiene così anche un
notevole taglio del consumo di potenza.
Il controllore PI del VLT® HVAC Basic Drive FC 101 può essere usato per eliminare la necessità di controllori supplementari.
Disegno 3.11 Portata d'aria variabile
3.1.14 Portata d'aria costante
I sistemi CAV o a portata d'aria costante sono sistemi di ventilazione centralizzati che di norma vengono usati per fornire a
grandi zone comuni quantità minime di aria fresca temperata. Erano i predecessori dei sistemi a portata d'aria variabile e
pertanto si possono trovare anche in edici adibiti a grandi magazzini meno recenti. Questi sistemi preriscaldano l'aria fresca
utilizzando climatizzatori (AHU) dotati di batteria riscaldante; inoltre, molti sono anche usati per condizionare edici e
dispongono di una bobina di rareddamento. Le unità termoventilanti sono frequentemente usate per soddisfare i requisiti
di riscaldamento e rareddamento di singole zone.
20 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Panoramica dei prodotti Guida alla Progettazione
3.1.15 La soluzione VLT
Un convertitore di frequenza consente di ottenere un signicativo risparmio energetico pur mantenendo un discreto
controllo dell'edicio. I sensori di temperatura o i sensori di CO2 possono essere usati come segnali di retroazione per i
convertitori di frequenza. Indipendentemente dal fatto che controlli temperatura, qualità dell'aria o entrambi, un sistema
CAV può essere regolato per funzionare sulla base delle reali condizioni dell'edicio. Man mano che il numero di persone
nell'area controllata si riduce, diminuisce anche il fabbisogno di aria fresca. Il sensore di CO2 ne rileva livelli inferiori e riduce
la velocità delle ventole di alimentazione. La ventola di ritorno si adatta per mantenere il setpoint della pressione statica o
una dierenza ssa fra le portate d'aria d'alimentazione e di ritorno.
Con il controllo della temperatura, usato in special modo negli impianti di condizionamento dell'aria, al variare della
temperatura esterna e del numero di persone nelle zone controllate, cambiano le richieste di
temperatura scende sotto il setpoint, la ventola di alimentazione può ridurre la sua velocità. La ventola di ritorno si adatta
per mantenere un setpoint di pressione statico. Riducendo la portata dell'aria, si riduce anche l'energia usata per riscaldare o
rareddare l'aria fresca, contribuendo al risparmio.
È possibile utilizzare numerose funzioni dei convertitori di frequenza Danfoss dedicati all'HVAC per migliorare le prestazioni
del sistema CAV. Uno dei problemi da arontare nel controllo dei sistemi di ventilazione è la scarsa qualità dell'aria. La
frequenza minima programmabile può essere impostata per mantenere una quantità minima di aria di alimentazione
indipendentemente dalla retroazione o dal segnale di riferimento. Il convertitore di frequenza include anche un controllore
PI che consente il monitoraggio della temperatura e della qualità dell'aria. Anche se i requisiti di temperatura sono
soddisfatti, il convertitore di frequenza mantiene un'alimentazione d'aria suciente a soddisfare il sensore della qualità
dell'aria. Il controllore è in grado di monitorare e confrontare due segnali di retroazione e di controllare la ventola di ritorno
anché mantenga una portata d'aria dierenziale ssa anche fra le condutture di alimentazione e di ritorno.
rareddamento. Non appena la
3 3
Disegno 3.12 Portata d'aria costante
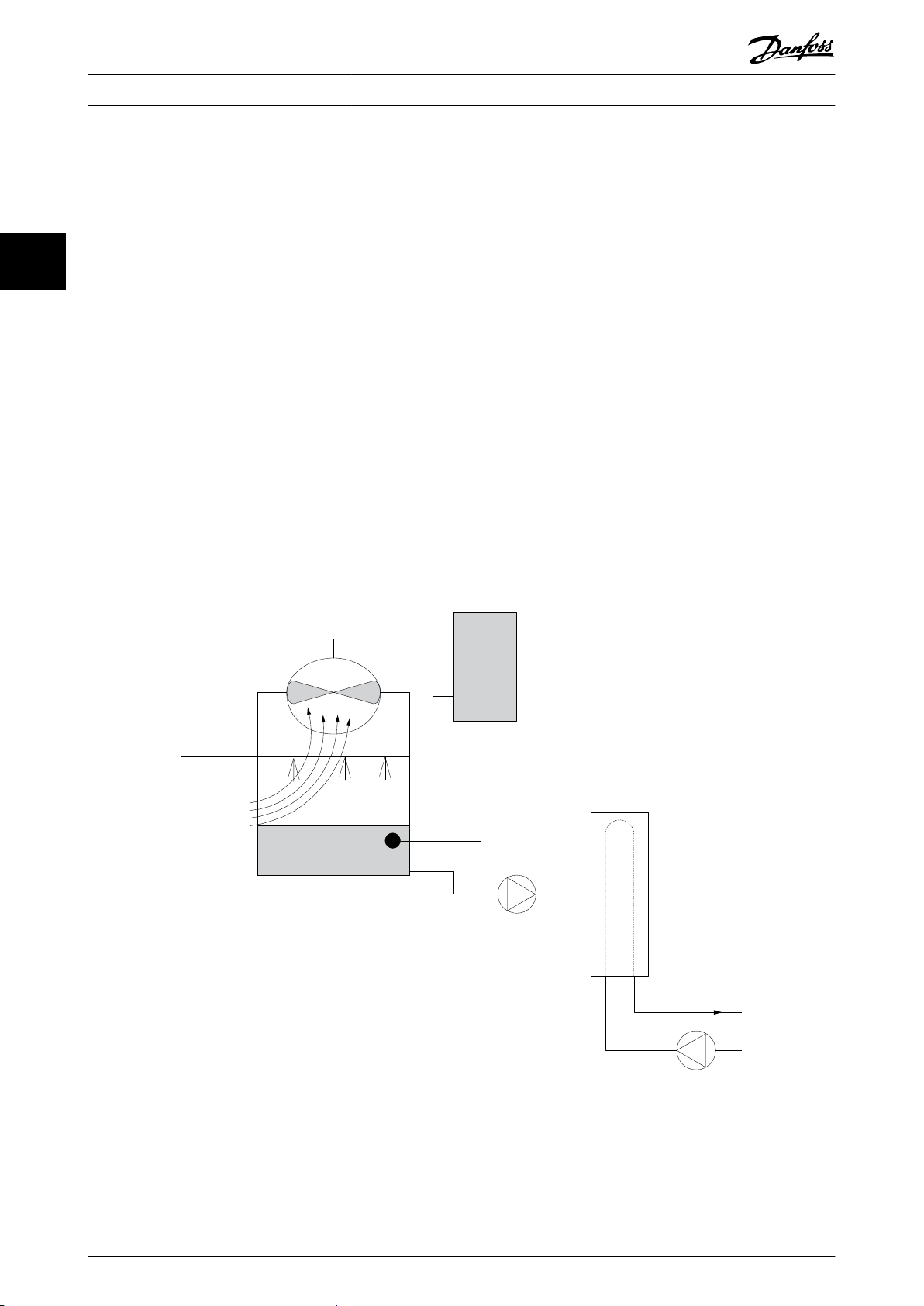
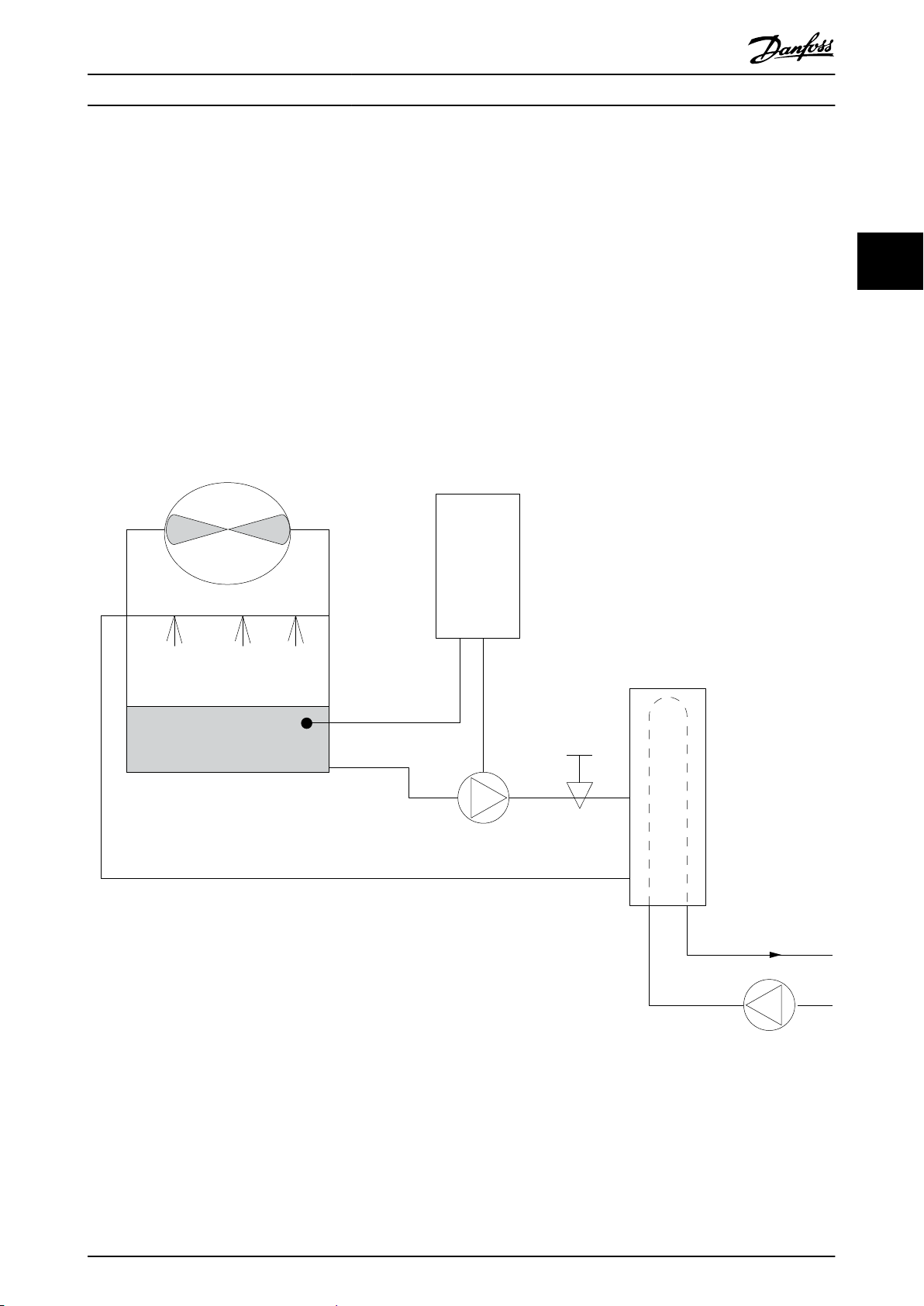
3.1.16 Ventola della torre di rareddamento
Ventole delle torri di rareddamento rareddano l'acqua del condensatore nei sistemi chiller rareddati ad acqua. I chiller
rareddati ad acqua forniscono il mezzo più ecace per creare acqua fredda. Sono più ecienti del 20% rispetto ai chiller
rareddati ad aria. A seconda del clima, le torri di rareddamento costituiscono spesso il metodo più eciente dal punto di
vista energetico per rareddare l'acqua del condensatore dei chiller.
L'acqua del condensatore viene rareddata mediante evaporazione.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 21
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
L'acqua del condensatore viene spruzzata nella parte interna della torre di rareddamento, sui materiali di riempimento
delle torri per aumentarne l'area superciale. La ventola della torre soa aria attraverso i materiali di riempimento e l'acqua
nebulizzata per agevolarne l'evaporazione. L'evaporazione toglie energia all'acqua abbassandone la temperatura. L'acqua
rareddata si raccoglie nel serbatoio della torre di rareddamento da dove viene pompata indietro nel condensatore dei
chiller e il ciclo viene ripetuto.
33
3.1.17 La soluzione VLT
Con un convertitore di frequenza le ventole delle torri di rareddamento possono essere regolate alla velocità desiderata
per mantenere costante la temperatura dell'acqua di condensa. I convertitori di frequenza possono anche essere usati per
accendere o spegnere le ventole in base alle necessità.
È possibile utilizzare numerose funzioni dei convertitori di frequenza Danfoss dedicati all'HVAC per migliorare le prestazioni
di applicazioni con ventole delle torri di rareddamento. Quando la velocità delle ventole scende al di sotto di un
determinato valore, la capacità della ventola di rareddare l'acqua si riduce. Allo stesso modo, quando si utilizza un riduttore
per controllare in frequenza la ventola delle torri è necessaria una velocità di rotazione minima del 40-50%.
L'impostazione della frequenza minima programmabile dall'utente consente di mantenere la frequenza minima anche se la
retroazione o il riferimento di velocità richiedono velocità inferiori.
Sempre come funzione standard, è possibile programmare il convertitore di frequenza anché entri in un modo pausa
motore e arresti la ventola no a quando non è necessaria una velocità maggiore. Inoltre, alcuni ventilatori delle torri di
rareddamento presentano frequenze indesiderabili che possono causare vibrazioni. Queste frequenze possono essere
facilmente evitate programmando i campi di frequenza di bypass nel convertitore di frequenza.
Disegno 3.13 Ventola della torre di rareddamento
22 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Panoramica dei prodotti Guida alla Progettazione
3.1.18 Pompe del condensatore
Le pompe per acqua del condensatore sono usate principalmente per far circolare l'acqua attraverso il condensatore di
chiller rareddati ad acqua e le loro rispettive torri di rareddamento. L'acqua fredda del condensatore assorbe il calore nel
condensatore del chiller e lo rilascia nell'atmosfera all'interno della torre di rareddamento. Questi sistemi sono il mezzo più
eciente per ottenere acqua fredda, garantendo un rendimento del 20% superiore rispetto ai chiller rareddati ad aria.
3.1.19 La soluzione VLT
I convertitori di frequenza possono essere aggiunti a pompe per acqua del condensatore invece di bilanciare le pompe con
una valvola di strozzamento o tarare la girante della pompa.
Usare un convertitore di frequenza invece di una valvola di regolazione è un metodo semplice di risparmiare energia
riducendo l'assorbimento elettrico della pompa quando questa deve erogare portate inferiori alla nominale. In questo modo
sono possibili risparmi pari o superiori al 15–20%. La taratura della girante della pompa è irreversibile, quindi è necessario
sostituire la girante quando le condizioni cambiano ed è necessaria una maggiore portata.
3 3
Disegno 3.14 Pompe del condensatore
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 23

Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
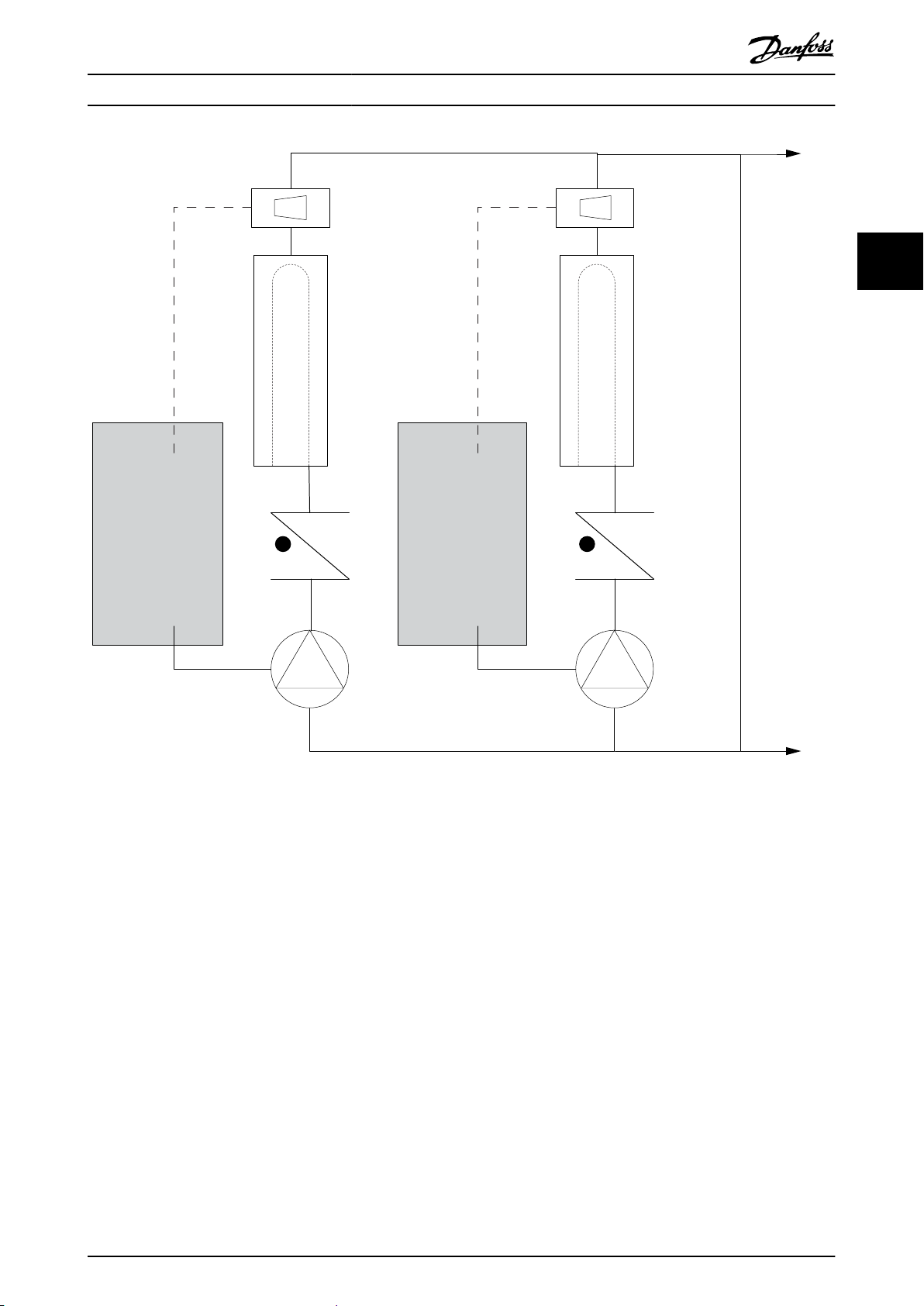
3.1.20 Pompe primarie
Le pompe primarie in un sistema che prevede pompe primarie e secondarie possono essere utilizzate per mantenere una
portata costante attraverso dispositivi che incontrano dicoltà di funzionamento o di regolazione in caso di usso variabile.
Per soddisfare queste opposte esigenze vengono realizzati gli impianti con circuito primario regolato a portata costante e
33
con circuito secondario regolato a portata variabile. Ciò consente a dispositivi come i chiller di mantenere un usso d'acqua
costante e di funzionare correttamente mentre il resto del sistema può funzionare a usso variabile.
Man mano che la portata dell'evaporatore nel chiller diminuisce, l'acqua
il chiller tenta di ridurre la propria potenza frigorifera. Se la portata diminuisce troppo o troppo velocemente, il chiller non
riesce a cedere il carico abbastanza rapidamente e interviene il dispositivo di sicurezza che fa scattare il chiller ed è
necessario un ripristino manuale. Questa è una situazione comune nei grandi impianti, in special modo quando sono
installati due o più chiller collegati in parallelo e qualora non venga usato un sistema che prevede pompe primarie e
secondarie.
rareddata inizia a essere troppo fredda. In tal caso
3.1.21 La soluzione VLT
In base alle dimensioni del sistema e del circuito primario, il consumo d'energia del circuito primario può diventare considerevole.
È possibile aggiungere un convertitore di frequenza al sistema primario per sostituire le valvole di strozzamento o la taratura
delle giranti, consentendo di ridurre considerevolmente il consumo di energia elettrica della pompa. Sono comunemente
utilizzati due metodi di controllo:
Flussometro
Siccome la portata desiderata è nota e costante, è possibile installare un misuratore di portata allo scarico di ogni chiller per
un controllo diretto della pompa. Con il controllore PI incorporato, il convertitore di frequenza manterrà sempre la portata
corretta, compensando anche le variazioni di resistenza nel circuito primario in conseguenza dell'attivazione e disattivazione
dei chiller e delle relative pompe.
Determinazione della velocità locale
L'operatore riduce semplicemente la frequenza di uscita no a raggiungere la portata prevista.
Usare un convertitore di frequenza per ridurre la velocità della pompa è molto simile a tarare la girante della pompa, tranne
per il fatto che non è richiesto alcun intervento e che il rendimento della pompa rimane superiore. L'addetto al
bilanciamento riduce semplicemente la velocità della pompa no a raggiungere la portata corretta, lasciando la velocità
ssa. La pompa funziona a questa velocità ogni volta che il chiller viene attivato. Siccome il circuito primario non dispone di
valvole di controllo o altri dispositivi che possano causare una variazione nella curva del sistema e la variazione dovuta
all'attivazione e disattivazione di pompe e chiller è di norma ridotta, questa velocità ssa rimane appropriata. Nel caso in cui
la portata debba essere aumentata successivamente durante l'utilizzo del sistema, il convertitore di frequenza può semplicemente aumentare la velocità delle pompe invece di richiedere una nuova girante della pompa.
24 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Panoramica dei prodotti Guida alla Progettazione
3 3
Disegno 3.15 Pompe primarie
3.1.22 Pompe secondarie
Le pompe secondarie in un sistema che prevede pompe primarie e secondarie rareddato ad acqua servono per la distribuzione dell'acqua rareddata dal circuito di produzione primario ai settori di carico. Il sistema con pompe primarie/
secondarie serve per il disaccoppiamento idraulico di un circuito di tubazioni da un altro. In questo caso, la pompa primaria
è utilizzata per mantenere un usso costante attraverso i chiller consentendo valori di usso variabili nelle pompe
secondarie e, quindi, un miglior controllo e un minore consumo di energia.
Se non viene utilizzato nessun sistema primario/secondario e ne viene progettato uno con volume variabile, nel caso in cui
la portata diminuisca troppo o troppo velocemente il chiller non riesce a cedere il carico abbastanza rapidamente. Quindi il
dispositivo di sicurezza fa scattare il chiller in caso di temperatura dell'evaporatore troppo bassa ed è necessario un ripristino
manuale. Questa situazione è comune nei grandi impianti, in special modo quando due o più chiller sono collegati in
parallelo.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 25
Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
3.1.23 La soluzione VLT
Anche se un sistema con pompe primarie e secondarie e con valvole a due vie migliora il risparmio energetico e consente
di superare meglio problemi legati al controllo del sistema, è possibile ottenere un vero risparmio energetico e uno
sfruttamento completo del potenziale di controllo soltanto integrando convertitori di frequenza.
Con una corretta disposizione dei sensori, l'aggiunta dei convertitori di frequenza consente alle pompe di variare la loro
33
velocità in base alla curva dell'impianto invece che alla curva della pompa.
In tal modo, si eliminano lo spreco di energia e la maggior parte dei casi di pressione eccessiva a cui possono essere
soggette le valvole a due vie.
Non appena vengono raggiunti i carichi predeniti, le valvole a due vie si chiudono. In questo modo, aumenta la pressione
dierenziale misurata fra il carico e la valvola a due vie. Non appena questa pressione dierenziale comincia ad aumentare,
la pompa decelera per mantenere il valore del setpoint, che viene calcolato sommando il calo di pressione del carico e della
valvola a due vie in presenza delle condizioni di progetto.
AVVISO!
Quando pompe multiple vengono fatte funzionare in parallelo, devono funzionare alla stessa velocità per massimizzare i
risparmi energetici, con convertitori di frequenza individuali dedicati o con un unico convertitore di frequenza preposto
a farle funzionare in parallelo.
Disegno 3.16 Pompe secondarie
26 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Panoramica dei prodotti Guida alla Progettazione
3.2 Strutture di controllo
Selezionare [0] An. aperto o [1] Anello chiuso nel parametro 1-00 Modo congurazione.
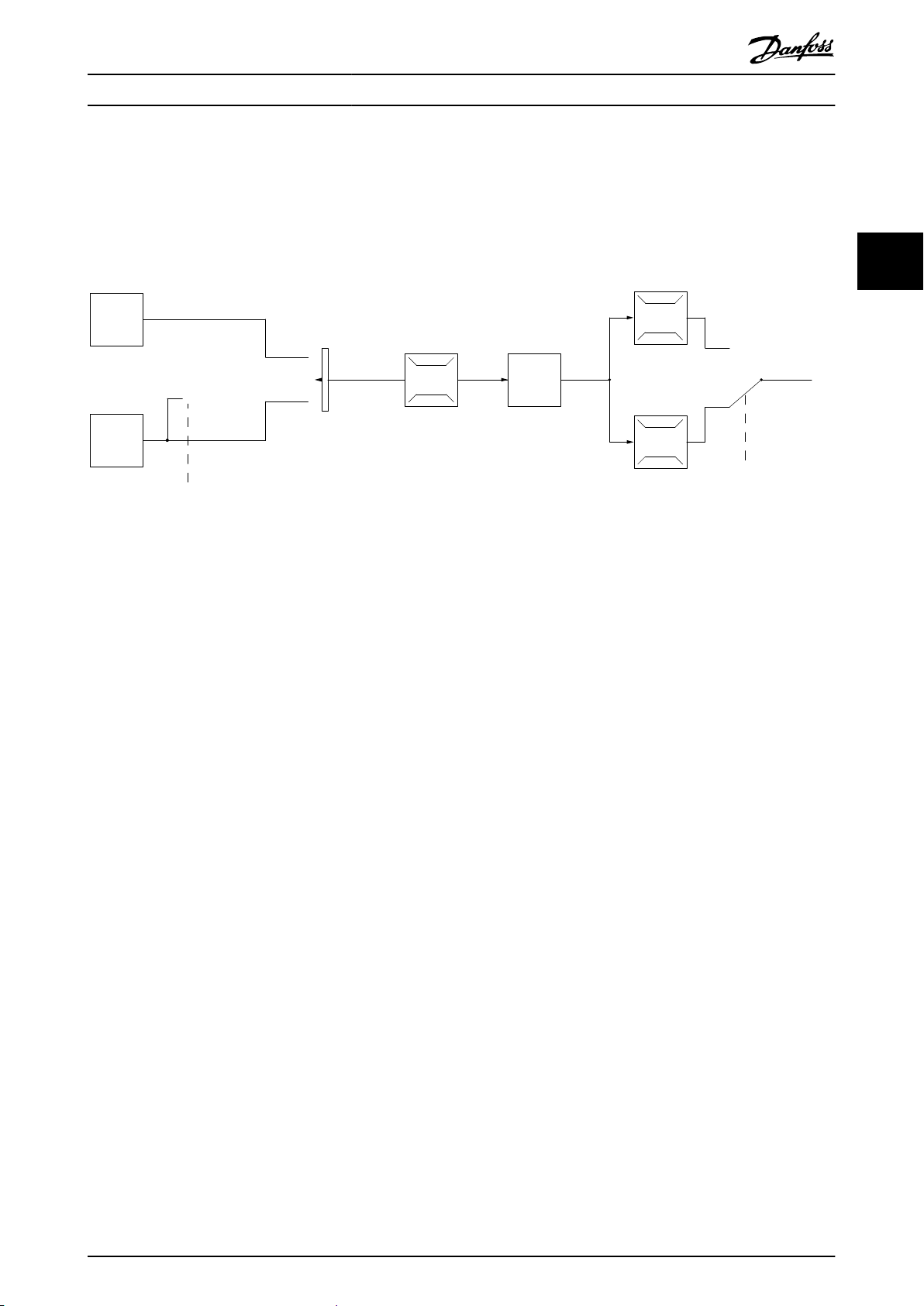
3.2.1 Struttura di controllo ad anello aperto
Disegno 3.17 Struttura ad anello aperto
3 3
Nella congurazione mostrata nell'Disegno 3.17, il
parametro 1-00 Modo congurazione è impostato su [0] An.
aperto. Il segnale di riferimento risultante dal sistema
gestione dei riferimenti o dal riferimento locale viene
ricevuto e alimentato attraverso la limitazione di rampa e
di velocità prima di essere inviato al controllo del motore.
L'uscita dal controllo motore viene poi limitata dal limite di
frequenza massima.
3.2.2 PM/EC+ Controllo del motore
Il principio EC+ Danfoss ore la possibilità di usare motori
PM estremamente ecienti (motori a magneti permanenti)
con un frame di dimensioni IEC standard azionati da
convertitori di frequenza Danfoss.
La procedura di messa in funzione è paragonabile a quella
prevista per motori asincroni (a induzione) utilizzando la
strategia di controllo per motori PM Danfoss VVC
Vantaggi per i clienti:
libera scelta della tecnologia del motore (motore
•
a magnete permanente o a induzione)
l'installazione e il funzionamento corrispondono a
•
quelli noti dei motori a induzione
indipendenza dal produttore nella selezione dei
•
componenti del sistema (ad es. motori)
migliore ecienza del sistema selezionando i
•
migliori componenti
+.
possibilità di retrot di impianti esistenti
•
gamma di potenza: 45 kW (60 cv) (200 V), 0,37–
•
90 kW (0,5–121 cv) (400 V), 90 kW (121 cv) (600
V) per motori a induzione e 0,37–22 kW (0,5–30
cv) (400 V) per motori PM.
Limitazioni correnti per motori PM:
attualmente supportati soltanto no a 22 Kw (30
•
cv)
ltri LC non supportati con motori PM
•
l'algoritmo a backup dell'energia cinetica non è
•
supportato con motori PM
supporta soltanto l'AMA completo della resistenza
•
di statore Rs nel sistema
nessun rilevamento di stallo (supportato dalla
•
versione 2.80).
3.2.3 Comando locale (Hand On) e remoto
(Auto On)
Il convertitore di frequenza può essere comandato
manualmente tramite il pannello di controllo locale (LCP) o
a distanza tramite gli ingressi analogici e digitali o il bus
seriale. Se è consentito nel parametro 0-40 Tasto [Hand on]
sull'LCP, nel parametro 0-44 Tasto [O / Reset] Key sull'LCP e
nel parametro 0-42 Tasto [Auto on] sull'LCP, è possibile
avviare e arrestare il convertitore di frequenza tramite l'LCP
premendo i tasti [Hand On] e [O/Reset]. Gli allarmi
possono essere ripristinati tramite il tasto [O/Reset].
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 27
Hand
On
Off
Reset
Auto
On
130BB893.10
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
da un sensore presente nel sistema. Quindi confronta
questa retroazione con un valore di riferimento del
setpoint e determina l'errore, qualora presente, tra questi
due segnali. Di conseguenza, adatta la velocità del motore
per correggere questo errore.
Disegno 3.18 Tasti dell'LCP
33
Si consideri per esempio un'applicazione con pompe nella
quale la velocità della pompa deve essere controllata per
Il riferimento locale commuta la modalità di congurazione
ad anello aperto, indipendentemente dall'impostazione del
parametro 1-00 Modo congurazione.
garantire una pressione statica costante nella conduttura. Il
valore di pressione statica viene fornito al convertitore di
frequenza come valore di riferimento del setpoint. Un
sensore di pressione statica misura la pressione statica
Il riferimento locale viene ripristinato allo spegnimento.
eettiva nel tubo e fornisce questo valore al convertitore di
frequenza come segnale di retroazione. Se il segnale di
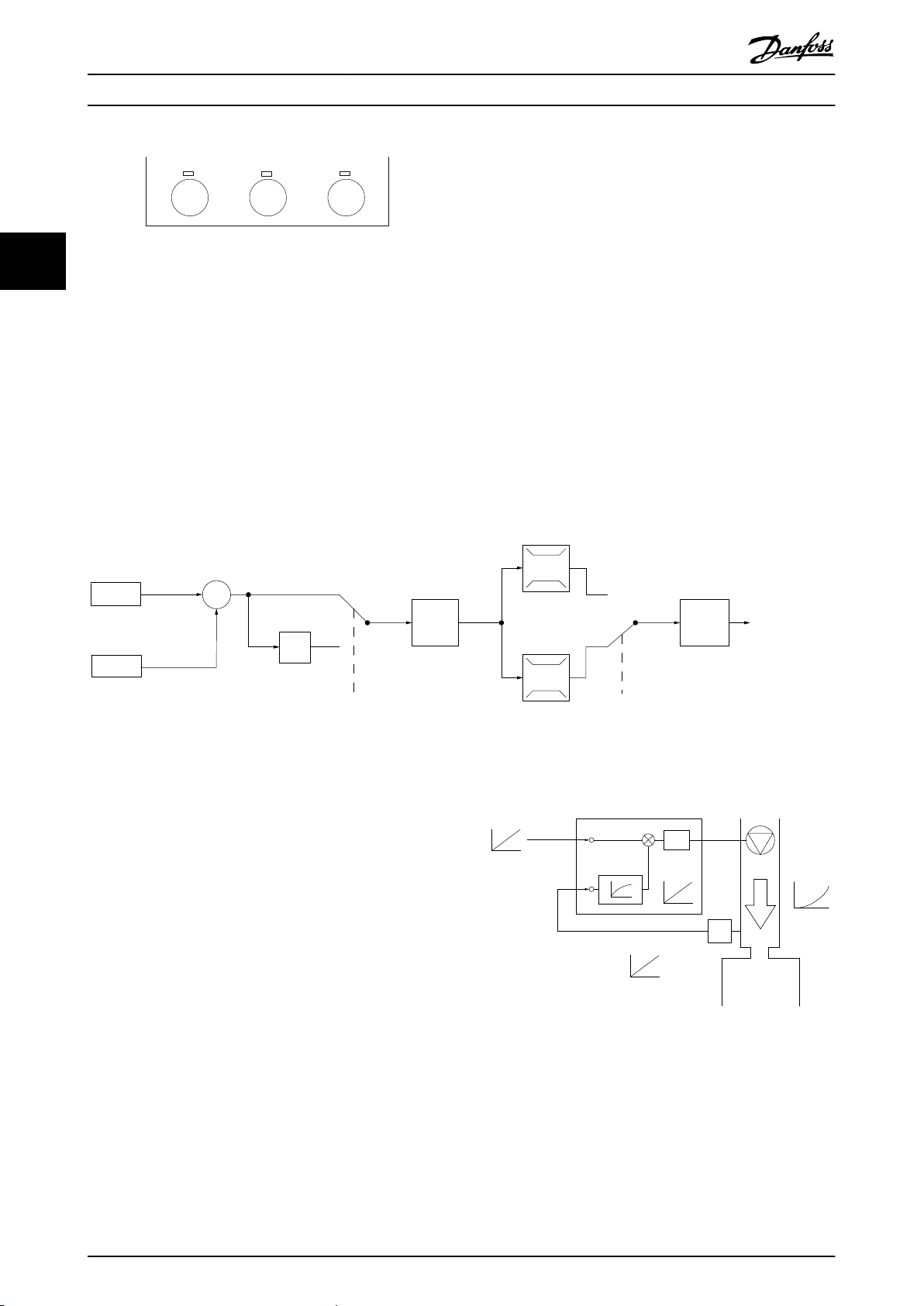
3.2.4 Struttura di controllo ad anello chiuso
retroazione è superiore al riferimento del setpoint, il
convertitore di frequenza decelera per ridurre la pressione.
Il controllore interno consente al convertitore di frequenza
di diventare una parte integrante del sistema controllato. Il
convertitore di frequenza riceve un segnale di retroazione
Similmente, se la pressione nella conduttura è inferiore al
setpoint, il convertitore di frequenza accelera automaticamente per aumentare la pressione fornita dalla pompa.
Disegno 3.19 Struttura di controllo ad anello chiuso
Mentre i valori di default del controllore ad anello chiuso
assicurano spesso prestazioni soddisfacenti del convertitore
di frequenza, il controllo del sistema può essere ottimizzato
regolando i parametri.
3.2.5 Conversione della retroazione
In alcune applicazioni può essere utile convertire il segnale
di retroazione. Un esempio di tale conversione lo si ottiene
usando un segnale di pressione per fornire una retroazione
della portata. Poiché la radice quadrata della pressione è
proporzionale alla portata, la radice quadrata del segnale
di pressione fornisce un valore proporzionale alla portata.
Vedere la Disegno 3.20.
28 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Disegno 3.20 Conversione del segnale di retroazione

Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Panoramica dei prodotti Guida alla Progettazione
3.2.6 Gestione dei riferimenti
Dettagli per un funzionamento ad anello aperto o chiuso.
3 3
Disegno 3.21 Diagramma riferimento remoto o locale
Il riferimento remoto comprende:
•
•
•
•
Nel convertitore di frequenza possono essere programmati
no a otto riferimenti preimpostati. Il riferimento
preimpostato attivo può essere selezionato usando ingressi
digitali o il bus di comunicazione seriale. Il riferimento può
anche essere fornito esternamente, di solito da un ingresso
analogico. Questa fonte esterna viene selezionata da uno
dei tre parametri risorsa di riferimento
(parametro 3-15 Risorsa di rif. 1, parametro 3-16 Risorsa di
riferimento 2 e parametro 3-17 Risorsa di riferimento 3). Tutte
le risorse di riferimento e il riferimento bus vengono
sommati per produrre il riferimento esterno totale. Il
riferimento esterno, il riferimento preimpostato o la somma
dei due possono essere selezionati per formare il
riferimento attivo. Inne, questo riferimento può essere
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 29
riferimenti preimpostati
riferimenti esterni (ingressi analogici e riferimenti
bus di campo)
il riferimento relativo preimpostato
setpoint con controllo in retroazione.
ridimensionato usando il parametro 3-14 Rif. relativo
preimpostato.
Il riferimento messo in scala viene calcolato come segue:
Riferimento = X + X ×
Dove X è il riferimento esterno, il riferimento preimpostato
Y
100
o la somma di questi e Y è il parametro 3-14 Rif. relativo
preimpostato in [%].
Se Y, il parametro 3-14 Rif. relativo preimpostato viene
impostato su 0%, il riferimento non è interessato dalla
scala.

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
3.2.7 Regolazione del controllore ad anello
chiuso del convertitore di frequenza
Una volta che il controllore ad anello chiuso del convertitore di frequenza è stato congurato, testare le
33
prestazioni del controllore. Spesso, le sue prestazioni
possono essere accettabili se si usano i valori del
parametro 20-93 Guadagno proporz. PI e del
parametro 20-94 Tempo di integrazione PID. Tuttavia, talvolta
può essere utile ottimizzare questi valori dei parametri per
Condizioni ambientali di
3.3
funzionamento
Il convertitore di frequenza è stato progettato a norma
IEC/EN 60068-2-3, EN 50178 pt. 9.4.2.2 a 50 °C (122 °F).
La temperatura ambiente misurata nelle 24 ore deve essere
inferiore di almeno 5 °C (41 °F) rispetto alla temperatura
ambiente massima. Se il convertitore di frequenza viene
fatto funzionare in presenza di temperature ambiente
elevate è necessario ridurre la corrente continua di uscita.
fornire una risposta più rapida del sistema, controllando
allo stesso tempo la sovraelongazione della velocità.
3.2.8 Regolazione PI manuale
1. Avviare il motore.
2. Impostare il parametro 20-93 Guadagno proporz. PI
a 0,3 e aumentarlo nché il segnale di retroazione
non comincia a oscillare. Se necessario, avviare e
arrestare il convertitore di frequenza o eettuare
modiche
provocare oscillazioni.
3. Ridurre il guadagno proporzionale PI nché il
segnale di retroazione non si stabilizza.
4. Ridurre il guadagno proporzionale del 40–60%.
5. Impostare il parametro 20-94 Tempo di
integrazione PID a 20 s e ridurre il valore nché il
segnale di retroazione non comincia a oscillare.
Se necessario, avviare e arrestare il convertitore di
frequenza o eettuare modiche graduali nel
setpoint per tentare di provocare oscillazioni.
6. Aumentare il tempo di integrazione PI nché il
segnale di retroazione non si stabilizza.
7. Aumentare il tempo di integrazione del 15-50%.
graduali nel setpoint per tentare di
Disegno 3.22 0,25–0,75 kW (0,34–1,0 cv), 200 V,
frame di taglia H1, IP20
Disegno 3.23 0,37–1,5 kW (0,5–2,0 cv), 400 V,
frame di taglia H1, IP20
30 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
Panoramica dei prodotti Guida alla Progettazione
3 3
Disegno 3.24 2,2 kW (3,0 cv), 200 V, frame di taglia H2,
IP20
Disegno 3.25 2,2–4,0 kW (3,0–5,4 cv), 400 V,
frame di taglia H2, IP20
Disegno 3.27 5,5–7,5 kW (7,4–10 cv), 400 V,
frame di taglia H3, IP20
Disegno 3.28 5,5–7,5 kW (7,4–10 cv), 200 V,
frame di taglia H4, IP20
Disegno 3.26 3,7 kW (5,0 cv), 200 V, frame di taglia H3,
IP20
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 31
Disegno 3.29 11–15 kW (15–20 cv), 400 V,
frame di taglia H4, IP20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
33
Disegno 3.30 11 kW (15 cv), 200 V,
frame di taglia H5, IP20
Disegno 3.31 18,5–22 kW (25–30 cv), 400 V,
frame di taglia H5, IP20
Disegno 3.33 30–37 kW (40–50 cv), 400 V,
frame di taglia H6, IP20
Disegno 3.34 45 kW (60 cv), 400 V,
frame di taglia H6, IP20
Disegno 3.32 15–18,5 kW (20–25 cv), 200 V,
frame di taglia H6, IP20
32 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Disegno 3.35 22–30 kW (30–40 cv), 600 V,
frame di taglia H6, IP20

I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
Panoramica dei prodotti Guida alla Progettazione
3 3
Disegno 3.36 22–30 kW (30–40 cv), 200 V,
frame di taglia H7, IP20
Disegno 3.37 55–75 kW (74–100 cv), 400 V,
frame di taglia H7, IP20
Disegno 3.39 37–45 kW (50–60 cv), 200 V,
frame di taglia H8, IP20
Disegno 3.40 90 kW (120 cv), 400 V, frame di taglia H8,
IP20
Disegno 3.38 45–55 kW (60–74 cv), 600 V,
frame di taglia H7, IP20
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 33
Disegno 3.41 75–90 kW (100–120 cv), 600 V,
frame di taglia H8, IP20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
33
Disegno 3.42 2,2–3 kW (3,0–4,0 cv), 600 V,
frame di taglia H9, IP20
Disegno 3.43 5,5–7,5 kW (7,4–10 cv), 600 V,
frame di taglia H9, IP20
Disegno 3.45 0,75–4,0 kW (1,0–5,4 cv), 400 V,
frame di taglia I2, IP54
Disegno 3.46 5,5–7,5 kW (7,4–10 cv), 400 V,
frame di taglia I3, IP54
Disegno 3.44 11–15 kW (15–20 cv), 600 V,
frame di taglia H10, IP20
34 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Disegno 3.47 11–18,5 kW (15–25 cv), 400 V, frame di taglia I4,
IP54

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Panoramica dei prodotti Guida alla Progettazione
3 3
Disegno 3.48 22–30 kW (30–40 cv), 400 V,
frame di taglia I6, IP54
Disegno 3.49 37 kW (50 cv), 400 V, frame di taglia I6,
IP54
Disegno 3.51 75–90 kW (100–120 cv), 400 V,
frame di taglia I8, IP54
Se il motore o l'equipaggiamento azionato dal motore, ad
es. una ventola, genera disturbi o vibrazioni a determinate
frequenze, congurare i seguenti parametri o gruppi di
parametri per ridurli o eliminarli.
Gruppo di parametri 4-6* Bypass di velocità.
•
Impostare il parametro 14-03 Sovramodulazione su
•
[0] O.
Modello di commutazione e frequenza di
•
commutazione nel gruppo di parametri 14-0*
Commut.inverter.
Parametro 1-64 Smorzamento risonanza.
•
Il disturbo acustico del convertitore di frequenza proviene
da tre fonti:
bobine del collegamento CC
•
ventola integrata
•
bobine del ltro RFI.
•
Disegno 3.50 45–55 kW (60–74 cv), 400 V,
frame di taglia I7, IP54
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 35

Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
Dimensione del frame
H1 43,6
H2 50,2
H3 53,8
H4 64
33
Tabella 3.3 I valori tipici, misurati a una distanza di 1 m
(3,28 piedi) dall'unità:
1) I valori vengono misurati con un disturbo di fondo di 35 dBA e il
funzionamento della ventola a pieno regime.
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 cv) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Livello [dBA]
1)
I liquidi possono essere trasportati attraverso l'aria e
condensarsi all'interno del convertitore di frequenza,
generando un processo di corrosione dei componenti e
delle parti metalliche. Vapore, olio e acqua salata possono
causare la corrosione di componenti e parti metalliche. In
questi ambienti, utilizzare unità con grado di protezione
IP54. Come ulteriore protezione si possono ordinare,
opzionalmente, circuiti stampati con rivestimento (standard
su alcune taglie).
Le particelle trasportate dall'aria, come la polvere, possono
causare guasti meccanici, elettrici o termici nel convertitore
di frequenza. Un tipico indicatore di un livello eccessivo di
particelle trasportate dall'aria è la presenza di particelle di
polvere intorno alla ventola del convertitore di frequenza.
In ambienti polverosi, utilizzare unità con grado di
protezione IP54 o un armadio per apparecchiature IP20/
TIPO 1.
In ambienti con temperature e tassi di umidità elevati, i
gas corrosivi, quali ad esempio i composti di zolfo, azoto e
cloro, generano dei processi chimici sui componenti del
convertitore di frequenza.
Il convertitore di frequenza è stato testato in base a una
procedura basata sulle norme indicate, Tabella 3.4.
Tali reazioni chimiche danneggiano in breve tempo i
componenti elettronici. In tali ambienti, installare l'apparec-
Il convertitore di frequenza è conforme ai requisiti esistenti
per unità installate a muro o sul pavimento di stabilimenti
di produzione e su pannelli
IEC/EN 60068-2-6 Vibrazioni (sinusoidali) - 1970
IEC/EN 60068-2-64 Vibrazioni persistenti su frequenze a
Tabella 3.4 Norme
ssati al muro o al pavimento.
larga banda
chiatura in un armadio a circolazione d'aria (a ventilazione
forzata), in modo da tenere lontani dal convertitore di
frequenza i gas aggressivi.
Una protezione ulteriore in simili aree la orono circuiti
stampati con rivestimento, ordinabili come opzione.
Prima di installare il convertitore di frequenza, vericare la
presenza di liquidi, particelle e gas in atmosfera. Ciò viene
fatto osservando lo stato delle unità installate precedentemente nello stesso ambiente. Indicatori tipici della
Un convertitore di frequenza contiene numerosi
componenti meccanici ed elettronici. Tutti sono in varia
misura vulnerabili all'impatto ambientale.
presenza di liquidi dannosi trasportati dall'aria sono ad
esempio l'acqua o il petrolio, oppure segni di corrosione
sulle parti metalliche.
ATTENZIONE
AMBIENTI DI INSTALLAZIONE
Non installare il convertitore di frequenza in ambienti in
cui sono presenti liquidi, particelle o gas trasportati
rilevati sugli armadi di installazione e sulle installazioni
elettriche esistenti. Un indicatore di gas aggressivi
trasportati dall'aria è l'annerimento delle guide di rame e
delle estremità dei cavi.
dall'aria che possono compromettere e danneggiare i
componenti elettronici. La mancata adozione di misure
protettive adeguate aumenta il rischio di interruzioni del
servizio, con conseguenti danni alle apparecchiature e
lesioni personali.
36 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Livelli eccessivi di particelle di polvere vengono spesso

Panoramica dei prodotti Guida alla Progettazione
3.4 Considerazioni generali sull'EMC
3.4.1 Panoramica sulle emissioni EMC
I convertitori di frequenza (e altri dispositivi elettrici)
generano campi elettronici o magnetici che possono
interferire con il loro ambiente La compatibilità elettromagnetica (EMC) di questi
dalle caratteristiche armoniche dei dispositivi.
Un'interazione incontrollata tra dispositivi elettrici in un
sistema può ridurre la compatibilità e compromettere il
funzionamento. L'interferenza può assumere la forma della
distorsione armonica di rete, scariche elettrostatiche, rapide
uttuazioni di tensione o interferenze ad alta frequenza. I
dispositivi elettrici generano interferenze e sono interessati
da interferenze da altre sorgenti generate.
Le oscillazioni transitorie da scoppio solitamente vengono
generate a frequenze nell'intervallo compreso tra 150 kHz
e 30 MHz. L'interferenza trasportata dall'aria proveniente
dal convertitore di frequenza nel campo compreso tra 30
MHz e 1 GHz è generata dall'inverter, dal cavo motore e
dal motore.
Le correnti capacitive presenti nel cavo motore, accoppiate
a un elevato valore dU/dt nella tensione motore, generano
correnti di dispersione, come mostrato nell'Disegno 3.52.
L'uso di un cavo motore schermato accresce la corrente di
dispersione (vedere la Disegno 3.52), poiché i cavi
schermati sono dotati di una maggiore capacità verso terra
rispetto a quelli non schermati. Se la corrente di
dispersione non è ltrata, provoca interferenze maggiori
sulla rete nel campo di radiofrequenza al di sotto di circa 5
MHz. Poiché la corrente di dispersione (I1) viene
ritrasportata all'unità attraverso lo schermo (I3), è presente
soltanto un piccolo campo elettromagnetico (I4) dal cavo
motore schermato al Disegno 3.52.
eetti dipende dalla potenza e
Lo schermo riduce l'interferenza irradiata, ma aumenta
l'interferenza a bassa frequenza sulla rete. Collegare lo
schermo del cavo motore al frame del convertitore di
frequenza e a quello del motore. A tal ne è consigliabile
utilizzare morsetti schermati integrati in modo da evitare
terminali degli schermi attorcigliati. Gli schermi attorcigliati
aumentano l'impedenza dello schermo alle frequenze più
elevate, riducendo l'eetto di schermatura e aumentando
la corrente di dispersione (I4).
Se viene utilizzato un cavo schermato per relè, cavo di
comando, interfaccia di segnale e freno, montare lo
schermo su entrambe le estremità del frame. In alcune
situazioni è tuttavia necessario rimuovere lo schermo per
evitare anelli di corrente.
Nel caso in cui sia necessario posizionare lo schermo su
una piastra di installazione del convertitore di frequenza,
tale piastra deve essere di metallo per ricondurre le
correnti dello schermo all'unità. Inoltre è necessario
assicurare un buon contatto elettrico dalla piastra di installazione tramite le viti di montaggio allo chassis del
convertitore di frequenza.
Quando si utilizzano cavi non schermati, è possibile che
alcuni requisiti relativi alle emissioni non vengano
soddisfatti mentre gran parte dei requisiti relativi all'immunità lo è.
Per ridurre il livello di interferenza dell'intero sistema (unità
e impianto), è importante che i cavi motore e i cavi freno
siano più corti possibile. Evitare di installare i cavi con un
livello di segnale sensibile accanto ai cavi motore e freno.
Interferenze radio superiori a 50 MHz (trasportate dall'aria)
vengono generate in particolare dall'elettronica di
controllo.
3 3
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 37

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
33
1 Filo di terra 2 Schermo 3 Alimentazione di rete CA
4 Convertitore di frequenza 5 Cavo motore schermato 6 Motore
Disegno 3.52 Generazione di corrente di dispersione
3.4.2 Requisiti relativi alle emissioni
La norma di prodotto EMC per convertitori di frequenza denisce quattro categorie (C1, C2, C3 e C4) con requisiti specici
per le emissioni e l'immunità. La Tabella 3.5 indica la denizione delle quattro categorie e la classicazione equivalente da
EN 55011.
Categoria EN/IEC
61800-3
C1
Convertitori di frequenza installati nel primo ambiente (casa e ucio) con
una tensione di alimentazione inferiore a 1.000 V.
Denizione
Convertitori di frequenza installati nel primo ambiente (casa e ucio) con
C2
una tensione di alimentazione inferiore a 1.000 V che non sono né di tipo
plug-in né spostabili e sono concepiti per essere installati e messi in
funzione da un professionista.
C3
Convertitori di frequenza installati nel secondo ambiente (industriale) con
una tensione di alimentazione inferiore a 1.000 V.
Convertitori di frequenza installati nel secondo ambiente con una tensione
C4
di alimentazione uguale o superiore a 1.000 V e una corrente nominale
uguale o superiore a 400 A oppure concepiti per l'uso in sistemi complessi.
Tabella 3.5 Correlazione tra IEC 61800-3 e EN 55011
Quando vengono adottate le norme generiche sulle emissioni (condotte), i convertitori di frequenza devono rispettare i
limiti nella Tabella 3.6.
Classe di emissione equivalente
in EN 55011
Classe B
Classe A gruppo 1
Classe A gruppo 2
Senza linea limite.
Realizzare un piano EMC.
Ambiente
Primo ambiente
(casa e ucio)
Secondo ambiente
(ambiente industriale)
Tabella 3.6 Correlazione tra le norme generiche sulle emissioni ed EN 55011
EN/IEC 61000-6-3 Norma di emissione per ambienti
residenziali, commerciali e di industria leggera.
EN/IEC 61000-6-4 Norma sulle emissioni per ambienti
industriali.
Norma sulle emissioni
generica
Classe di emissione equivalente in
EN 55011
Classe B
Classe A gruppo 1
38 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Panoramica dei prodotti Guida alla Progettazione
3.4.3 Risultati del test sulle emissioni EMC
I seguenti risultati dei test sono stati ottenuti usando un sistema composto da un convertitore di frequenza, un cavo di
comando schermato, un quadro di controllo con potenziometro e un cavo motore schermato.
Tipo di ltro
RFI
Ambiente industriale
EN 55011
EN/IEC
61800-3
Filtro RFI H4 (EN55011 A1, EN/IEC61800-3 C2)
0,25–11 kW
(0,34–15 cv)
3x200–240 V
IP20
0,37–22 kW
(0,5–30 cv)
3x380–480 V
IP20
Filtro RFI H2 (EN 55011 A2, EN/IEC 61800-3 C3)
15–45 kW
(20–60 cv)
3x200–240 V
IP20
30–90 kW
(40–120 cv)
3x380–480 V
IP20
0,75–18,5 kW
(1–25 cv)
3x380–480 V
IP54
22–90 kW
(30–120 cv)
3x380–480 V
IP54
Filtro RFI H3 (EN55011 A1/B, EN/IEC 61800-3 C2/C1)
15–45 kW
(20–60 cv)
3x200–240 V
IP20
30–90 kW
(40–120 cv)
3x380–480 V
IP20
Emissione condotta. Lunghezza massima del cavo schermato [m (piedi)] Emissione irradiata
Classe B
Classe A gruppo 2
Ambiente industriale
Categoria C3
Secondo ambiente
Industriale
Senza
ltro
esterno
25 (82) – – – – – No – No –
25 (82) – – – – – No – No –
25 (82) – – – – – Sì – – –
25 (82) – – – – – No – No –
Con ltro
esterno
– – 25 (82) 50 (164) – 20 (66) Sì Sì – No
– – 25 (82) 50 (164) – 20 (66) Sì Sì – No
– – 50 (164) – 20 (66) – Sì – No –
– – 50 (164) – 20 (66) – Sì – No –
Classe A gruppo 1
Ambiente industriale
Categoria C2
Primo ambiente
Casa e ucio
Senza
ltro
esterno
Con ltro
esterno
Domestico,
commerciale e industrie
leggere
Categoria C1
Primo ambiente
Casa e ucio
Senza
ltro
esterno
Con ltro
esterno
Classe A gruppo 1
Ambiente industriale
Categoria C2
Primo ambiente
Casa e ucio
Senza
ltro
esterno
Con ltro
esterno
Classe B
Domestico,
commerciale e
industrie leggere
Categoria C1
Primo ambiente
Casa e ucio
Senza
ltro
esterno
Con ltro
esterno
3 3
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 39

175HA034.10
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
Tipo di ltro
RFI
Ambiente industriale
0,75–18,5 kW
(1–25 cv)
3x380–480 V
33
IP54
22–90 kW
(30–120 cv)
3x380–480 V
IP54
Tabella 3.7 Risultati del test sulle emissioni EMC
3.4.4 Panoramica sulle emissioni armoniche
Emissione condotta. Lunghezza massima del cavo schermato [m (piedi)] Emissione irradiata
– – 25 (82) – 10 (33) – Sì – – –
– – 25 (82) – 10 (33) – Sì – No –
AVVISO!
Alcune delle correnti armoniche potrebbero generare
Un convertitore di frequenza assorbe dalla rete una
corrente non sinusoidale che aumenta la corrente di
ingresso I
. Una corrente non sinusoidale viene
RMS
disturbi per i dispositivi di comunicazione collegati allo
stesso trasformatore o provocare risonanza con
correzione del fattore di potenza.
trasformata con l'analisi di Fourier e suddivisa in forme
d'onda di corrente sinusoidali con dierenti frequenze, vale
a dire con dierenti correnti armoniche In aventi una
frequenza di base di 50 Hz:
I
Hz 50 250 350
Tabella 3.8 Correnti armoniche
1
I
5
I
7
Le armoniche non contribuiscono direttamente al consumo
di potenza, ma aumentano le perdite di calore nell'impianto (trasformatore, cavi). Quindi, negli impianti con
Per assicurare un basso contenuto di correnti armoniche, il
convertitore di frequenza è dotato di serie di bobine del
collegamento CC. Ciò riduce di norma la corrente di
ingresso I
del 40%.
RMS
La distorsione di tensione di alimentazione di rete dipende
dalle dimensioni delle correnti armoniche moltiplicate per
l'impedenza di rete alla frequenza in questione. La
distorsione di tensione complessiva, THDv, viene calcolata
in base alle singole armoniche di tensione mediante
questa formula:
un'elevata percentuale di carico dei raddrizzatori è
2
necessario mantenere le correnti armoniche a un livello
basso per evitare il sovraccarico del trasformatore e
temperature elevate nei cavi.
THD % =
(UN% di U)
5
+ U
2
+ ... + U
7
U
2
N
Disegno 3.53 Bobine del collegamento CC
40 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Panoramica dei prodotti Guida alla Progettazione
3.4.5 Requisiti relativi alle emissioni
armoniche
Apparecchiature collegate alla rete di alimentazione
pubblica
Opzioni Denizione
IEC/EN 61000-3-2 Classe A per apparecchiature trifase
1
bilanciate (apparecchiature professionali con potenze
no a 1 kW (1,3 cv) in totale).
IEC/EN 61000-3-12 Apparecchiature 16–75 A e
2
apparecchiature professionali da 1 kW (1,3 cv) no a
16 A di corrente di fase.
Tabella 3.9 Apparecchiature collegate
3.4.6 Risultati del test armoniche
(emissioni)
Le taglie di potenza no a PK75 in T4 e P3K7 in T2 sono
conformi a IEC/EN 61000-3-2 Classe A. Le taglie di potenza
da P1K1 e no a P18K in T2 e no a P90K in T4 sono
conformi a IEC/EN 61000-3-12, tabella 4.
Eettiva 0,25-11
kW (0,34-15 cv),
IP20, 200 V
(tipica)
Limite per
R
≥120
sce
Eettiva 0,25-11
kW (0,34-15 cv),
200 V (tipica)
Limite per
R
≥120
sce
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
I
13
32,6 16,6 8,0 6,0
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
39 41,4
48 46
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
Eettiva 0,37–22
kW (0,5–30 cv),
IP20, 380–480 V
36,7 20,8 7,6 6,4
(tipica)
Limite per
R
≥120
sce
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
Eettiva 0,37–22
kW (0,5–30 cv),
380–480 V
44,4 40,8
(tipica)
Limite per
R
≥120
sce
48 46
Tabella 3.11 Corrente armonica 0,37–22 kW (0,5–30 cv),
380-480 V
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
Eettiva 30–90
kW (40–120 cv),
IP20, 380–480 V
36,7 13,8 6,9 4,2
(tipica)
Limite per
R
≥120
sce
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
Eettiva 30–90
kW (40–120 cv),
380–480 V
40,6 28,8
(tipica)
Limite per
R
≥120
sce
48 46
Tabella 3.12 Corrente armonica 30–90 kW (40–120 cv),
380–480 V
I
13
3 3
I
13
Tabella 3.10 Corrente armonica 0,25-11 kW (0,34-15 cv), 200 V
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
I
13
Eettiva 2,2–15
kW (3,0–20 cv),
IP20, 525–600 V
48 25 7 5
(tipica)
Fattore di distorsione corrente armonica (%)
THDi PWHD
Eettiva 2,2–15
kW (3,0–20 cv),
525–600 V
55 27
(tipica)
Tabella 3.13 Corrente armonica 2,2–15 kW (3,0–20 cv),
525–600 V
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 41

Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
Eettiva 18,5–90
kW (25–120 cv),
IP20, 525–600 V
(tipica)
33
Eettiva 18,5–90
kW (25–120 cv),
525–600 V
(tipica)
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
I
13
48,8 24,7 6,3 5
Fattore di distorsione corrente armonica (%)
THDi PWHD
55,7 25,3
Eettiva 15–45
kW (20–60 cv),
IP20, 200 V
(tipica)
Limite per
R
Eettiva 15–45
kW (20–60 cv),
sce
≥120
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
I
13
26,7 9,7 7,7 5
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
30,3 27,6
200 V (tipica)
Tabella 3.14 Corrente armonica 18,5–90 kW (25–120 cv),
525–600 V
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
I
13
Eettiva 22–90
kW (30–120 cv),
IP54, 400 V
36,3 14 7 4,3
(tipica)
Limite per
R
≥120
sce
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
Eettiva 22–90
kW (30–120 cv),
IP54 400 V
40,1 27,1
(tipica)
Limite per
R
≥120
sce
48 46
Tabella 3.15 Corrente armonica 22–90 kW (30–120 cv), 400 V
Limite per
R
≥120
sce
48 46
Tabella 3.17 Corrente armonica 15–45 kW (20–60 cv), 200 V
Sempre che la potenza di cortocircuito dell'alimentazione
Ssc sia maggiore o uguale a:
S
= 3 × R
SC
SCE
× U
rete
× I
= 3 × 120 × 400 × I
equ
equ
nel punto di interfaccia tra la rete elettrica pubblica e
l'alimentazione dell'utenza (R
sce
).
L'installatore o l'utilizzatore hanno la responsabilità di
vericare, consultando se necessario il distributore di
energia, che l'apparato sia collegato a una rete con
potenza di cortocircuito Ssc maggiore o uguale al valore
specicato in precedenza.
Apparecchiature con potenze diverse possono essere
collegate alla rete di alimentazione pubblica soltanto dopo
avere consultato il gestore della rete di distribuzione.
Corrente armonica individuale In/I1 (%)
I
5
I
7
I
11
Eettiva 0,75–
18,5 kW (1,0–25
cv), IP54, 380-480
36,7 20,8 7,6 6,4
V (tipica)
Limite per
R
≥120
sce
40 25 15 10
Fattore di distorsione corrente armonica (%)
THDi PWHD
Eettiva 0,75–
18,5 kW (1,0–25
cv), IP54, 380-480
44,4 40,8
V (tipica)
Limite per
R
≥120
sce
48 46
Tabella 3.16 Corrente armonica 0,75–18,5 kW (1,0–25 cv),
380–480 V
Conforme a varie linee direttive a livello di sistema:
I
13
i dati sulle correnti armoniche dalla Tabella 3.10 alla
Tabella 3.17 sono conformi a IEC/EN 61000-3-12 con
riferimento alle norme di prodotto relative ai sistemi di
azionamenti elettrici. Possono essere utilizzati come base di
dell'inuenza delle correnti armoniche sul sistema
calcolo
di alimentazione elettrica e per la documentazione della
conformità alle direttive regionali in materia: IEEE 519
-1992; G5/4.
42 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

SMPS
130BB896.10
1
2
3
a
M
130BB901.10
1324
5
a
M
Panoramica dei prodotti Guida alla Progettazione
3.4.7 Requisiti di immunità
I requisiti di immunità per i convertitori di frequenza
dipendono dall'ambiente nel quale sono installati. I
requisiti per l'ambiente industriale sono più severi dei
requisiti per l'ambiente domestico e di ucio. Tutti i
convertitori di frequenza Danfoss soddisfano i requisiti per
l'ambiente industriale e, di conseguenza, soddisfano anche
i requisiti meno severi per l'ambiente domestico e di ucio
con un ampio margine di sicurezza.
3.5 Isolamento galvanico (PELV)
PELV ore protezione mediante bassissima tensione. La
protezione contro le scosse elettriche è garantita se
l'alimentazione elettrica è del tipo PELV e l'installazione è
eettuata come descritto nelle norme locali e nazionali
relative all'isolamento PELV.
Tutti i morsetti di controllo e i morsetti relè 01-03/04-06
sono conformi allo standard PELV (Tensione di protezione
bassissima) (non valido per le unità con collegamento a
triangolo a terra oltre 440 V).
L'isolamento galvanico (garantito) si ottiene ottemperando
ai requisiti relativi a un isolamento superiore e garantendo
le corrispondenti distanze in aria e distanze superciali.
Questi requisiti sono descritti nella norma EN 61800-5-1.
0,25–22 kW (0,34-30 cv)
3 3
1 Alimentazione (SMPS)
2 Fotoaccoppiatori, comunicazione tra AOC e BOC
3 Relè personalizzati
a Morsetti della scheda di controllo
Disegno 3.54 Isolamento galvanico
30–90 kW (40–120 cv)
I componenti che costituiscono l'isolamento elettrico, come
descritto, sono inoltre conformi ai requisiti relativi all'isolamento di classe superiore e al test corrispondente
descritto nella norma EN 61800-5-1.
L'isolamento galvanico PELV può essere mostrato
nell'Disegno 3.55.
ne di mantenere i requisiti PELV tutte le connessioni
Al
con i morsetti di controllo devono essere PELV, per
esempio il termistore deve essere rinforzato/a doppio
isolamento.
1 Alimentazione (SMPS) comprensiva di isolamento del segnale
di UDC, che indica la tensione del circuito intermedio
2 Convertitore di frequenza di gate che aziona gli IGBT (trasfor-
matori di innesco/fotoaccoppiatori).
3 Trasduttori di corrente
4 Ciclo di carica intelligente, RFI e circuiti di misura della
temperatura.
5 Relè personalizzati
a Morsetti della scheda di controllo
Disegno 3.55 Isolamento galvanico
L'isolamento galvanico funzionale (vedere la Disegno 3.54) è
per l'interfaccia bus standard RS485.
ATTENZIONE
INSTALLAZIONE AD ALTITUDINI ELEVATE
Ad altitudini superiori ai 2.000 m (6.500 piedi) contattare
Danfoss in merito al PELV.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 43

Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
3.6 Corrente di dispersione verso terra
AVVISO
TEMPO DI SCARICA
Toccare le parti elettriche può avere conseguenze letali,
33
anche dopo avere disinserito l'alimentazione di rete.
Vericare anche che siano stati scollegati gli altri ingressi
della tensione, quali condivisione del carico
(collegamento del collegamento CC), e il collegamento
del motore per il backup dell'energia cinetica.
Prima di toccare qualsiasi componente elettrico
attendere almeno l'intervallo di tempo indicato nella
Tabella 2.1.
Un tempo più breve è consentito solo se indicato sulla
targa dell'unità specica.
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Un
collegamento a terra non corretto del convertitore di
frequenza può causare morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
AVVISO
PROTEZIONE CON DISPOSITIVO A CORRENTE
RESIDUA
Questo prodotto può causare una corrente CC nel
conduttore di protezione. Laddove si utilizzi un
dispositivo a corrente residua (RCD) per una maggiore
protezione in caso di contatti indiretti, andrà utilizzato
solo un RCD di Tipo B sul lato alimentazione di questo
prodotto. In alternativa, adottare altre misure precauzionali, ad esempio garantendo la separazione
dall'ambiente circostante tramite un doppio isolamento
oppure isolando l'alimentazione tramite un trasformatore. Vedere anche le note sull'applicazione Protezione
contro i rischi di folgorazione.
La messa a terra di protezione del convertitore di
frequenza e l'impiego di RCD devono seguire sempre le
norme nazionali e locali.
3.7 Condizioni di funzionamento estreme
Cortocircuito (motore fase-fase)
La misurazione della corrente in ciascuna delle tre fasi del
motore o nel collegamento CC protegge il convertitore di
frequenza dai cortocircuiti. Un cortocircuito tra due fasi di
uscita provoca una sovracorrente nell'inverter. L'inverter
viene disinserito quando la corrente di cortocircuito supera
il valore consentito (allarme 16, Trip Lock (Scatto bloccato)).
Per informazioni sulla protezione del convertitore di
frequenza dal cortocircuito tra le uscite per la condivisione
del carico e quelle del freno vedere il capitolo 8.3.1 Fusibili
e interruttori.
Commutazione sull'uscita
È consentita la commutazione sull’uscita tra motore e
convertitore di frequenza. Il convertitore di frequenza non
viene danneggiato in alcun modo da una commutazione
sull'uscita. Tuttavia, è possibile che vengano visualizzati
messaggi di guasto.
Sovratensione generata dal motore
La tensione nel collegamento CC subisce un aumento
quando il motore funziona da generatore. Ciò avviene nei
seguenti casi:
Il carico fa funzionare il motore (con una
•
frequenza di uscita costante dal convertitore di
frequenza), vale a dire che il carico genera
energia.
Durante la decelerazione (rampa di decele-
•
razione), se il momento d'inerzia è elevato l'attrito
è basso e il tempo rampa di decelerazione è
troppo breve per consentire la dissipazione dell'energia sotto forma di perdite nel convertitore di
frequenza, nel motore e nell'impianto.
Un'impostazione non corretta della compen-
•
sazione dello scorrimento
(parametro 1-62 Compens. scorrim.) può causare
una maggiore tensione del collegamento CC.
L'unità di controllo potrebbe tentare di correggere il valore
di rampa, se il parametro 2-17 Controllo sovratensione è
abilitato.
Il convertitore di frequenza si disinserisce per proteggere i
transistor e i condensatori del collegamento CC quando
viene raggiunto un determinato livello di tensione.
44 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Panoramica dei prodotti Guida alla Progettazione
Caduta di tensione di rete
Durante la caduta di tensione di rete il convertitore di
frequenza continua a funzionare no a quando la tensione
del collegamento CC non scende al di sotto del livello
minimo di funzionamento, di norma il 15% al di sotto della
tensione di alimentazione nominale minima del convertitore di frequenza. La tensione di rete anteriore alla caduta
di tensione e il carico del motore determinano il tempo
che precede l'arresto a ruota libera del convertitore di
frequenza.
3.7.1 Protezione termica del motore (ETR)
Danfoss utilizza ETR per proteggere il motore dal surriscaldamento. Si tratta di una funzione elettronica che simula
un relè a bimetallo basandosi su misure interne. La caratteristica viene mostrata nell'Disegno 3.56.
3.7.2 Ingressi termistore
Il valore di disinserimento del termistore è >3 kΩ.
Integrare un termistore (sensore PTC) nel motore come
protezione degli avvolgimenti.
La protezione del motore può essere implementata con
una gamma di tecniche:
sensore PTC sull'avvolgimento del motore
•
interruttore termomeccanica (tipo Klixon )
•
relè termico elettronico (ETR)
•
3 3
Disegno 3.57 Scatto dovuto all'alta temperatura del motore
Disegno 3.56 Caratteristiche di protezione termica del motore
L'asse X mostra il rapporto tra I
motor
e I
motor
nominale. L'asse
Y mostra il tempo in secondi che precede il momento in
cui l'ETR si disinserisce e fa scattare il convertitore di
frequenza. Le curve illustrano la velocità nominale caratteristica a una velocità doppia della velocità nominale e a
una velocità pari a 0,2 volte la velocità nominale.
Risulta evidente che a velocità più bassa l'ETR si
disinserisce in presenza di minor calore a causa del minor
rareddamento del motore. In tal modo il motore è
protetto dal surriscaldamento anche a bassa velocità. La
funzione ETR calcola la temperatura del motore basandosi
sull'eettiva corrente e velocità.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 45

P
OFF
ON
<800 Ω >2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
COMM. GND
+24V
0/4-20mA A OUT / DIG OUT 0/4-20mA A OUT / DIG OUT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V OUT
MORS. BUS
OFF ON
130BB898.10
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
COMM. GND
+24V
0/4-20mA A OUT / DIG OUT 0/4-20mA A OUT / DIG OUT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V OUT
MORS. BUS
OFF ON
130BB897.10
P
<3,0 kΩ
>2,9 kΩ
OFF
ON
Panoramica dei prodotti
VLT® HVAC Basic Drive FC 101
Esempio con ingresso digitale e alimentazione da 10 V
il convertitore di frequenza scatta quando la temperatura
del motore è eccessiva.
Programmazione parametri:
impostare il parametro 1-90 Protezione termica motore su [2]
Termistore, scatto.
33
Impostare il parametro 1-93 Fonte termistore su [6] Ingresso
digitale 29
Disegno 3.58 Ingresso digitale/alimentazione a 10 V
Esempio con ingresso analogico e alimentazione da 10 V
il convertitore di frequenza scatta quando la temperatura
del motore è eccessiva.
Programmazione parametri:
impostare il parametro 1-90 Protezione termica motore su [2]
Termistore, scatto.
Impostare parametro 1-93 Fonte termistore su [1] Ingr.
analog. 53.
AVVISO!
Non impostare Ingresso analogico 54 come risorsa di
riferimento.
Disegno 3.59 Ingresso analogico/alimentazione 10 V
Ingresso
Tensione di
alimentazione [V]
Digitale 10
Analogico 10
valori di disinserimento [Ω]
Soglia
<800⇒2,9 k
<800⇒2,9 k
Tabella 3.18 Tensione di alimentazione
AVVISO!
Assicurarsi che la tensione di alimentazione selezionata
corrisponda alle speciche dell'elemento termistore
usato.
L'ETR è attivato nel parametro 1-90 Protezione termica
motore.
46 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Selezione e ordine Guida alla Progettazione
4 Selezione e ordine
4.1 Codice identicativo
Il codice identicativo denisce una congurazione specica del convertitore di frequenza VLT® HVAC Basic Drive FC 101.
Utilizzare la Disegno 4.1 per creare un codice identicativo per la congurazione desiderata.
Disegno 4.1 Codice identicativo
Descrizione Posizione Scelta possibile
Gruppo prodotti e serie FC 1–6 FC 101
Potenza nominale 7–10 0,25–90 kW (0,34–120 cv) (PK25-P90K)
Numero di fasi 11 Tre fasi (T)
T2: 200-240 V CA
Tensione di rete 11–12
Frame 13–15
Filtro RFI 16–17
Freno 18 X: senza chopper di frenatura
Display 19
Rivestimento PCB 20
Opzione di rete 21 X: senza opzione di rete
Adattamento 22 X: senza adattamento
Adattamento 23 X: senza adattamento
Software release 24–27 SXXXX: ultima release - software standard
Lingua 28 X: standard
Opzioni A 29–30 AX: opzioni A mancanti
Opzioni B 31–32 BX: opzioni B mancanti
Opzioni C0 MCO 33–34 CX: opzioni C mancanti
Opzioni C1 35 X: opzioni C1 mancanti
Software opzione C 36–37 XX: nessuna opzione
Opzioni D 38–39 DX: opzioni D0 mancanti
T4: 380-480 V CA
T6: 525-600 V CA
E20: IP20/chassis
P20: IP20/chassis con piastra posteriore
E5A: IP54
P5A: IP54 con piastra posteriore
H1: ltro RFI classe A1/B
H2: ltro RFI classe A2
H3: ltro RFI classe A1/B (lunghezza del cavo ridotta)
H4: ltro RFI classe A1
A: pannello di controllo locale alfanumerico
X: senza pannello di controllo locale
X: circuito stampato senza rivestimento
C: PCB con rivestimento
4 4
Tabella 4.1 Descrizione del codice identicativo
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 47

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
Selezione e ordine
VLT® HVAC Basic Drive FC 101
4.2 Opzioni e accessori
Fase 2
Posizionare l'LCP sul pannello, vedere le dimensioni del
4.2.1 Pannello di controllo locale (LCP)
Numero d'ordine Descrizione
132B0200 LCP per tutte le unità IP20
Tabella 4.2 Numero d'ordine dell'LCP
44
Frame IP55 montato sul pannello
frontale
Lunghezza massima del cavo per
3 m (10 piedi)
l'unità
Standard di comunicazione RS485
Tabella 4.3 Dati tecnici dell'LCP
foro nella Disegno 4.3.
4.2.2 Montaggio dell'LCP nel pannello
frontale
Fase 1
Inserire la guarnizione sull'LCP.
48 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
Disegno 4.2 Inserire la guarnizione
1 Pannello disinserito. Spessore del pannello 1–3 mm
(0,04–0,12 pollici)
2 Pannello
3 Guarnizione
4 LCP
Disegno 4.3 Posizionare l'LCP sul pannello (montato sul
pannello anteriore)

130BB777.10
130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
Selezione e ordine Guida alla Progettazione
Fase 3
Posizionare le stae sul retro dell'LCP, quindi farle scorrere
verso il basso.
Serrare le viti e collegare il lato femmina del cavo all'LCP.
Disegno 4.4 Posizionare la staa sull'LCP
Fase 4
Collegare il cavo al convertitore di frequenza.
4.2.3 Kit frame IP21/NEMA Tipo 1
L'IP21/NEMA Tipo 1 è un elemento frame opzionale
disponibile per unità IP20.
In caso di impiego del kit frame, un'unità con grado di
protezione IP20 viene potenziata conformandosi al livello
di protezione IP21/NEMA Tipo 1.
4 4
Disegno 4.6 H1–H5 (vedere i dati nella Tabella 4.4)
Disegno 4.5 Collegare il cavo
AVVISO!
Utilizzare le viti autolettanti in dotazione per ssare il
passacavo al convertitore di frequenza. La coppia di
serraggio è 1,3 Nm (11,5 pollici-lb).
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 49

130BB903.10
Selezione e ordine
VLT® HVAC Basic Drive FC 101
44
Disegno 4.7 Dimensioni (vedere i dati nella Tabella 4.4)
Telaio
H10 IP20 – –
Classe
IP
3x200–240 V
[kW (cv)]
H1 IP20
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
0,25–1,5
(0,34–2,0)
5,5-7,5
(7,4–10)
15–18,5
(20–25)
22–30
(30–40)
37–45
(50–60)
Potenza
3x380–480 V
[kW (cv)]
0,37–1,5
(0,5–2,0)
(3,0–5,4)
(7,4–10)
(15–20)
18,5–22
(25–30)
(40–60)
(74–100)
90 (120)
2,2-4,0
5,5-7,5
11–15
30–45
55–75
Altezza
[mm
(pollici)] A
3x525–600 V
[kW (cv)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5–30
(25–40)
37–55
(50–74)
75–90
(100–120)
2,2–7,5
(3,0–10)
11–15
(15–20)
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Larghezza
[mm
(pollici)] B
Profondità
[mm
(pollici)] C
Numero
d'ordine kit
IP21
Numero
d'ordine kit
NEMA Tipo
1
Tabella 4.4 Speciche kit frame
50 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

130BB793.10
99 99
Selezione e ordine Guida alla Progettazione
4.2.4 Piastra di disaccoppiamento
Utilizzare la piastra di disaccoppiamento per installazione elettrica conforme ai requisiti EMC.
La Disegno 4.8 mostra la piastra di disaccoppiamento su un frame H3.
Disegno 4.8 Piastra di disaccoppiamento
Potenza [kW(cv)] Numeri d'ordine della
Telaio Classe IP 3x200–240 V 3x380–480 V 3x525–600 V
H1 IP20 0,25–1,5 (0,33–2,0) 0,37–1,5 (0,5–2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2–4 (3,0–5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) – 132B0204
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5–22 (25–30) – 130B0205
H6 IP20 15–18,5 (20–25) 30 (40) 18,5–30 (25–40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
4 4
piastra di disaccop-
piamento
Tabella 4.5 Speciche della piastra di disaccoppiamento
AVVISO!
Per i frame di taglia H9 e H10 le piastre di disaccoppiamento sono incluse nella busta per accessori.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 51

Selezione e ordine
VLT® HVAC Basic Drive FC 101
4.3 Numeri d'ordine
4.3.1 Opzioni e accessori
Dimens–
ione
del frame
Tensione
di rete
44
Descrizione
1)
LCP
Kit di
montaggio a
pannello per
l'LCP IP55
con cavo di
3 m (9,8
piedi)
Kit conver-
titore da LCP
31 a RJ 45
Kit di
montaggio a
pannello per
l'LCP IP55
con cavo di
3 m (9,8
piedi)
Piastra di
disaccoppiamento
Opzione IP21 132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
Kit NEMA
Tipo 1
T2
(200-240
V CA)
T4
(380-480
V CA)
T6
(525-600
V CA)
132B0200
H1
[kW (cv)]H2[kW (cv)]H3[kW (cv)]H4[kW (cv)]H5[kW (cv)]
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
2,2 (3,0) 3,7 (5,0)
2,2–4,0
(3,0–5,4)
– – – – –
5,5–7,5
(7,5–10)
5,5–7,5
(7,5–10)
11–15
(15–20)
11 (15)
18,5–22
(25–30)
132B0201
132B0203
132B0206
[kW (cv)]
15–18,5
(20–25)
30 (40)
18,5–30
(25–40)
H6
–
37–45
(50–60)
–
H7
[kW (cv)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (cv)]
37–45
(50–60)
75–90
(100–125)
Tabella 4.6 Opzioni e accessori
1) Per le unità IP20 l'LCP viene ordinato separatamente. Per le unità IP54 l'LCP è incluso nella
di frequenza.
52 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
congurazione standard e montato sul convertitore

Selezione e ordine Guida alla Progettazione
4.3.2 Filtri antiarmoniche
Potenza
[kW
(cv)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
3x380-480 V 50 Hz
Corrente
di
ingresso
continua
conver-
titore di
frequenza
[A]
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
Frequenza di
commutazione
predenita
[kHz]
Livello
THDi
[%]
Numero
d'ordine
ltro
IP00
numerico
Codice
ltro
IP20
Potenza
[kW
(cv)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
3x440-480 V 60 Hz
Corrente
di
ingresso
continua
conver-
titore di
frequenza
[A]
34,6 4 3 130B1792 130B1757
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
Frequenza di
commutazione
predenita
[kHz]
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
Livello
THDi
[%]
Numero
d'ordine
ltro
IP00
numerico
Codice
ltro
IP20
4 4
Tabella 4.7 Filtri AHF (5% di distorsione di corrente)
3x380-480 V 50 Hz
Corrente
di
Potenza
[kW
(cv)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
ingresso
continua
conver-
titore di
frequenza
[A]
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
Frequenza di
commutazione
predenita
[kHz]
Livello
THDi
[%]
Numero
d'ordine
ltro
IP00
Codice
numerico
ltro
IP20
Tabella 4.9 Filtri AHF (5% di distorsione di corrente)
3x440-480 V 60 Hz
Corrente
di
Potenza
[kW
(cv)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
ingresso
continua
conver-
titore di
frequenza
[A]
34,6 4 6 130B1775 130B1487
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
Frequenza di
commutazione
predenita
[kHz]
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
Livello
THDi
[%]
Numero
d'ordine
ltro
IP00
Codice
numerico
ltro
IP20
Tabella 4.8 Filtri AHF (10% di distorsione di corrente)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 53
Tabella 4.10 Filtri AHF (10% di distorsione di corrente)

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Selezione e ordine
VLT® HVAC Basic Drive FC 101
4.3.3 Filtro RFI esterno
Con ltri EMC esterni elencati nella Tabella 4.11 è possibile ottenere la lunghezza massima del cavo schermato di 50 m (164
piedi) secondo la norma EN/IEC 61800-3 C2 (EN 55011 A1) o 20 m (65,6 piedi) secondo la norma EN/IEC 61800-3 C1 (EN
55011 B).
Potenza [kW (cv)]
Taglia 380-480 V
44
0,37–2,2
(0,5–3,0)
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
Tabella 4.11 Filtri RFI - dettagli
Tipo A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Coppia
[Nm (pollici-lb)]
0,7–0,8
(6,2–7,1)
0,7–0,8
(6,2–7,1)
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Peso [kg (libbre)]
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
Numero
d'ordine
132B0244
132B0245
132B0246
132B0247
Disegno 4.9 Filtro RFI - Dimensioni
54 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Installazione Guida alla Progettazione
5 Installazione
5.1 Installazione elettrica
5 5
Disegno 5.1 Schema di cablaggio base
AVVISO!
Non vi è modo di accedere a UCC- e UCC+ nelle unità seguenti:
•
•
•
•
Tutto il cablaggio deve rispettare sempre le norme nazionali e locali relative alle sezioni trasversali dei cavi e alla
temperatura ambiente. Sono richiesti conduttori di rame. Sono consigliati 75 °C (167 °F).
IP20, 380–480 V, 30–90 kW (40–125 cv)
IP20, 200–240 V, 15–45 kW (20–60 cv)
IP20, 525–600 V, 2,2–90 kW (3,0–125 cv)
IP54, 380–480 V, 22–90 kW (30–125 cv)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 55

Installazione
VLT® HVAC Basic Drive FC 101
Potenza [kW (cv)] Coppia [Nm (pollici-libbre)]
Dimens–
ione
del frame
H1 IP20
Classe IP 3x200–240 V 3x380–480 V Rete Motore
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
Collegamen
to in CC
Morsetti di
controllo
Terra Relè
H2 IP20 2,2 (3,0) 2,2–4,0 (3,0–5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5–22 (25–30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15–18,5 (20–25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
55
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
24 (212)
1)
24 (212)
1)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabella 5.1 Coppie di serraggio per il frame di taglia H1–H8, 3x200–240 V e 3x380–480 V
Potenza [kW (cv)] Coppia [Nm (pollici-libbre)]
Dimens–
ione
del frame
I2 IP54
Classe IP 3x380–480 V Rete Motore
0,75–4,0
(1,0–5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
Collegamento
in CC
Morsetti di
controllo
Terra Relè
I3 IP54 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11–18,5 (15–25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
(212)
2)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,6 (5,0)
Tabella 5.2 Coppie di serraggio per i frame di taglia I2-I8
Potenza [kW (cv)] Coppia [Nm (pollici-libbre)]
Dimens–
ione
Classe IP 3x525–600 V Rete Motore
del frame
H9 IP20 2,2–7,5 (3,0–10) 1,8 (16) 1,8 (16)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16)
Collegamento
in CC
Non
consigliato
Non
consigliato
Morsetti di
controllo
Terra Relè
0,5 (4,0) 3 (27) 0,6 (5,0)
0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5–30 (25–40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
(212)
2)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabella 5.3 Coppie di serraggio per i frame di taglia H6-H10, 3x525-600 V
1) Dimensioni dei cavi >95 mm
2) Dimensioni dei cavi ≤95 mm
2
2
56 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Installazione Guida alla Progettazione
5.1.1 Collegamento della rete e del motore
Il convertitore di frequenza è progettato per l'uso con tutti
i motori asincroni trifase standard. Per la sezione
trasversale massima dei cavi, vedere il capitolo 8.4 Dati
tecnici generali.
Utilizzare un cavo motore schermato per garantire
•
la conformità alle
EMC e collegarlo sia alla piastra di disaccoppiamento sia al motore.
Il cavo motore deve essere mantenuto il più corto
•
possibile per ridurre al minimo il livello di rumore
e le correnti di dispersione.
Per altri dettagli sul montaggio della piastra di
•
disaccoppiamento, consultare le Istruzioni di
montaggio della piastra di disaccoppiamento FC
101 .
Consultare anche Installazione conforme ai requisiti
•
EMC nella capitolo 5.1.2 Installazione elettrica
conforme ai requisiti EMC.
Per i dettagli su come collegare il convertitore di
•
frequenza alla rete e al motore vedere il capitolo
Collegamento alla rete e al motore nella Guida
rapida VLT® HVAC Basic Drive FC 101.
speciche relative alle emissioni
Relè e morsetti su frame di taglia H1–H5
5 5
1 Rete
2 Terra
3 Motore
4 Relè
Disegno 5.2 Frame di taglia H1-H5
IP20, 200-240 V, 0,25–11 kW (0,33–15 cv)
IP20, 380–480 V, 0,37–22 kW (0,5–30 cv)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 57

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Installazione
VLT® HVAC Basic Drive FC 101
Relè e morsetti sul frame di taglia H6
Relè e morsetti sul frame di taglia H7
55
1 Rete
2 Motore
3 Terra
4 Relè
Disegno 5.3 Frame di taglia H6
IP20, 380–480 V, 30–45 kW (40–60 cv)
IP20, 200-240 V, 15-18,5 kW (20-25 cv)
IP20, 525–600 V, 22–30 kW (30–40 cv)
1 Rete
2 Relè
3 Terra
4 Motore
Disegno 5.4 Frame di taglia H7
IP20, 380–480 V, 55–75 kW (70–100 cv)
IP20, 200–240 V, 22–30 kW (30–40 cv)
IP20, 525–600 V, 55–45 kW (70–60 cv)
58 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Installazione Guida alla Progettazione
Relè e morsetti sul frame di taglia H8
1 Rete
2 Relè
3 Terra
4 Motore
Assicurarsi che i cavi dell'alimentazione di rete per i frame
di taglia H9 siano collegati correttamente. Per i dettagli
vedere il capitolo Collegamento alla rete e al motore nella
Guida rapida VLT® HVAC Basic Drive FC 101 . Utilizzare le
coppie di serraggio descritte nel capitolo 5.1.1 Installazione
elettrica generale.
Relè e morsetti sul frame di taglia H10
5 5
Disegno 5.5 Frame di taglia H8
IP20, 380-480 V, 90 kW (125 cv)
IP20, 200–240 V, 37–45 kW (50–60 cv)
IP20, 525–600 V, 75–90 kW (100–125 cv)
Collegamento della rete e del motore per frame di taglia
H9
Disegno 5.7 Frame di taglia H10
IP20, 600 V, 11–15 kW (15–20 cv)
Disegno 5.6 Collegamento del motore per frame di taglia H9
IP20, 600 V, 2,2-7,5 kW (3,0-10 cv)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 59

130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Installazione
VLT® HVAC Basic Drive FC 101
Frame di taglia I2
Frame di taglia I3
55
1 RS485
2 Rete
3 Terra
4 Pressacavi
1 RS485
2 Rete
3 Terra
4 Pressacavi
5 Motore
6 UDC
7 Relè
8 I/O
Disegno 5.8 Frame di taglia I2
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 cv)
5 Motore
6 UDC
7 Relè
8 I/O
Disegno 5.9 Frame di taglia I3
IP54, 380–480 V, 5,5–7,5 kW (7,5–10 cv)
60 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

130BD011.10
130BC203.10
130BT326.10
130BT325.10
Installazione Guida alla Progettazione
Frame di taglia I4
1 RS485
2 Rete
3 Terra
4 Pressacavi
5 Motore
6 UDC
7 Relè
8 I/O
Frame di taglia I6
5 5
Disegno 5.12 Collegamento di rete per frame di taglia I6
IP54, 380–480 V, 22–37 kW (30–50 cv)
Disegno 5.10 Frame di taglia I4
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 cv)
Disegno 5.11 Frame IP54 di taglia I2, I3, I4
Disegno 5.13 Collegamento del motore per frame di taglia I6
IP54, 380–480 V, 22–37 kW (30–50 cv)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 61

311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Installazione
VLT® HVAC Basic Drive FC 101
5.1.2 Installazione elettrica conforme ai
requisiti EMC
Prestare attenzione alle seguenti raccomandazioni per
assicurare un'installazione elettrica conforme ai requisiti
EMC.
Usare esclusivamente cavi motore e cavi di
•
comando schermati.
Collegare lo schermo a terra su entrambe le
•
estremità.
55
Disegno 5.14 Relè sul frame di taglia I6
IP54, 380–480 V, 22–37 kW (30–50 cv)
Evitare un'installazione con estremità dello
•
schermo attorcigliate (schermi attorcigliati) poiché
ciò riduce
l'eetto di schermatura alle alte
frequenze. Usare invece i pressacavi forniti in
dotazione.
È importante garantire un buon contatto elettrico
•
dalla piastra di installazione attraverso le viti di
installazione del contenitore metallico del convertitore di frequenza.
Usare rondelle a stella e piastre di installazione
•
galvanicamente conduttive.
Non usare cavi motore non schermati negli
•
armadi di installazione.
Frame di taglia I7, I8
Disegno 5.15 Frame di taglia I7, I8
IP54, 380–480 V, 45–55 kW (60–70 cv)
IP54, 380–480 V, 75–90 kW (100–125 cv)
62 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

L1
L2
L3
PE
Corrente 16 mm
2
Cavo di equalizzazione
Cavi di comando
Tutti gli ingressi dei cavi
su un parte del pannello
Sbarra di messa a terra
Isolamento del
cavo spelato
Contattore di
uscita ecc.
Cavo motore
Motore, trifase e
PLC ecc.
Pannello
Alimentazione di rete
Min. 200mm
tra il cavo di
comando, cavo di rete
e tra il cavo di alimentazione motore
PLC
Messa a terra di protezione
Messa a terra di protezione rinforzata
130BB761.10
Installazione Guida alla Progettazione
5 5
Disegno 5.16 Installazione elettrica conforme ai requisiti EMC
AVVISO!
Per il Nord America utilizzare canaline metalliche anziché cavi schermati.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 63

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Installazione
VLT® HVAC Basic Drive FC 101
5.1.3 Morsetti di controllo
Fare riferimento alla Guida rapida VLT® HVAC Basic Drive FC
101 e assicurarsi che il coprimorsetti sia rimosso correttamente.
La Disegno 5.17 mostra tutti i morsetti di controllo del
convertitore di frequenza. Applicare il comando
di avviamento (morsetto 18) connettere i morsetti 12-27 e
un riferimento analogico (morsetto 53 o 54 e 55) per
avviare il convertitore di frequenza.
55
La modalità di ingresso digitale dei morsetti 18, 19 e 27
viene impostata nel parametro 5-00 Modo ingr. dig. (PNP è
il valore
predenito). La modalità di ingresso digitale 29
viene impostata nel parametro 5-03 Mod. ingresso dig. 29
(PNP è il valore predenito).
Disegno 5.17 Morsetti di controllo
64 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmazione Guida alla Progettazione
6 Programmazione
6.1 Introduzione
È possibile programmare il convertitore di frequenza
dall'LCP o da un PC tramite una porta COM RS485
installando il Software di congurazione MCT 10. Per
ulteriori dettagli sul software consultare il
capitolo 1.5 Risorse aggiuntive.
6.2 Pannello di controllo locale (LCP)
L'LCP è suddiviso in quattro gruppi funzionali.
A. Display
B. Tasto menu
C. Tasti di navigazione e spie luminose
D. Tasti di funzionamento e spie luminose
1 Numero e nome del parametro.
2 Valore del parametro.
Il numero del setup mostra il setup attivo e quello di
modica. Se lo stesso setup funge da setup attivo e da
setup di modica, viene visualizzato solo quel numero di
3
setup (impostazione di fabbrica). Se il setup attivo e il setup
di modica sono diversi, sul display vengono visualizzati
entrambi i numeri (setup 12). Il numero che lampeggia
indica il setup di modica.
La direzione del motore è mostrata nella parte bassa a
4
sinistra del display e segnalata da una piccola freccia rivolta
in senso orario o antiorario.
Il triangolo indica se l'LCP è nel menu di stato, nel menu
5
rapido o nel menu principale.
Tabella 6.1 Legenda per la Disegno 6.1, parte I
B. Tasto menu
Premere [Menu] per selezionare tra Status, Quick Menu e
Main Menu.
C. Tasti di navigazione e spie luminose
6 LED Com.: lampeggia durante la comunicazione bus.
LED verde/On: la sezione di comando funziona corret-
7
tamente.
8 LED giallo/Avviso: indica un avviso.
9 LED rosso lampeggiante/Allarme: indica un allarme.
[Back]: per spostarsi alla fase o al livello precedente nella
10
struttura di navigazione.
[▲] [▼] [►]: per spostarsi tra gruppi di parametri, tra
11
parametri e all'interno dei parametri. Possono anche essere
usati per impostare il riferimento locale.
[OK]: per selezionare un parametro e accettare le modiche
12
alle impostazioni parametri.
6
6
Tabella 6.2 Legenda per la Disegno 6.1, parte II
Disegno 6.1 Pannello di controllo locale (LCP)
A. Display
Il display LCD è illuminato con due linee alfanumeriche.
Tutti i dati sono visualizzati sull'LCP.
Disegno 6.1 descrive le informazioni che possono essere
lette dal display.
D. Tasti di funzionamento e spie luminose
[Hand On]: avvia il motore e abilita il controllo del conver-
titore di frequenza tramite LCP.
AVVISO!
[2] Evol. libera neg. è l'opzione predenita per il
13
parametro 5-12 Ingr. digitale morsetto 27. Se non è
presente un'alimentazione di 24 V al morsetto 27,
[Hand On] non avvia il motore. Collegare il
morsetto 12 al morsetto 27.
[O/Reset]: arresta il motore (O). Se è in modalità allarme,
14
l'allarme viene ripristinato.
[Auto On]: il convertitore di frequenza è controllato tramite
15
morsetti di controllo o comunicazione seriale.
Tabella 6.3 Legenda per la Disegno 6.1, parte III
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 65

FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Potenza
Avvio
+10V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Prem. OK per avviare la proc. guidata
Premere Indietro per saltarla
Setup 1
6
Programmazione
6.3 Menu
6.3.1 Menu Status
Nel menu Status, le opzioni di selezione sono:
frequenza motore [Hz], parametro 16-13 Frequenza
•
corrente motore [A], parametro 16-14 Corrente
•
motore
riferimento velocità del motore come percentuale
•
[%], parametro 16-02 Riferimento [%]
retroazione, parametro 16-52 Retroazione [unità]
•
potenza motore, parametro 16-10 Potenza [kW ]
•
per kW, parametro 16-11 Potenza [hp] per cv. Se il
parametro 0-03 Impostazioni locali è impostato su
[1] Nord America la potenza motore viene
visualizzata in cv invece che in kW.
visualizzazione personalizzata,
•
parametro 16-09 Visual. personaliz.
velocità del motore [Giri/min.],
•
parametro 16-17 Velocità [giri/m].
6.3.2 Menu rapido
VLT® HVAC Basic Drive FC 101
Disegno 6.2 Cablaggio del convertitore di frequenza
La procedura guidata viene visualizzata al momento
dell'accensione,
cambiato. Comunque si può sempre accedere alla
procedura guidata dal menu rapido. Premere [OK] per
avviare la procedura guidata. Premere [Back] per tornare
alla schermata di stato.
nché qualche parametro non viene
Usare il Menu rapido per programmare le funzioni più
comuni. Il Menu rapido comprende:
procedura guidata per applicazioni ad anello
•
aperto Per i dettagli vedere la Disegno 6.4
procedura guidata per applicazioni ad anello
•
chiuso. Per i dettagli vedere la Disegno 6.5
setup del motore. Per i dettagli vedere la
•
Tabella 6.6
modiche eettuate.
•
La procedura guidata integrata aiuta l'installatore nel setup
del convertitore di frequenza procedendo in modo
ordinato e coerente al ne di predisporre applicazioni ad
anello aperto, ad anello chiuso e impostazioni rapide per il
motore.
Disegno 6.3 Avvio/uscita dalla procedura guidata
66 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmazione Guida alla Progettazione
6
6
Disegno 6.4 Procedura guidata di setup per applicazioni ad anello aperto
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 67

Programmazione
VLT® HVAC Basic Drive FC 101
Procedura guidata di setup per applicazioni ad anello aperto
Parametro Opzione Predenito Uso
Parametro 0-03 Impostazioni
locali
[0] Internaz.
[1] Nord America
[0] Internaz. –
6
Parametro 0-06 Tipo di rete [0] 200–240V/50Hz/rete IT
[1] 200–240V/50Hz/Delta
[2] 200–240V/50Hz
[10] 380–440V/50Hz/rete
IT
[11] 380–440V/50Hz/Delta
[12] 380–440V/50Hz
[20] 440–480V/50Hz/rete
IT
[21] 440–480V/50Hz/Delta
[22] 440–480V/50Hz
[30] 525–600V/50Hz/rete
IT
[31] 525–600V/50Hz/Delta
[32] 525–600V/50Hz
[100] 200–240V/60Hz/rete
IT
[101] 200–240V/60Hz/
Delta
[102] 200–240V/60Hz
[110] 380–440V/60Hz/rete
IT
[111] 380–440V/60Hz/
Delta
[112] 380–440V/60Hz
[120] 440–480V/60Hz/rete
IT
[121] 440–480V/60Hz/
Delta
[122] 440–480V/60Hz
[130] 525–600V/60Hz/rete
IT
[131] 525–600V/60Hz/
Delta
[132] 525–600V/60Hz
In funzione della
dimensione
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
68 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Opzione Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz.
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont.
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv.
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max.
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 69

6
Programmazione
Parametro Opzione Predenito Uso
Parametro 1-20 Potenza motore 0,12-110 kW/0,16-150 cv In funzione della
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0,01–10.000,00 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-29 Adattamento
Automatico Motore (AMA)
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Vedere il
parametro 1-29 Adattame
nto Automatico Motore
(AMA).
0,000–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
Disattivato L'esecuzione di un AMA ottimizza le prestazioni del
motore.
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d.
Vedere la scheda tecnica del motore a magneti
permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
70 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Opzione Predenito Uso
Parametro 1-49 Corrente a
indutt. min. per asse q
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
Parametro 1-73 Riaggancio al
volo
Parametro 3-02 Riferimento
minimo
Parametro 3-03 Riferimento
max.
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 5-40 Funzione relè Vedere il
Parametro 5-40 Funzione relè Vedere il
Parametro 6-10 Tens. bassa
morsetto 53
Parametro 6-11 Tensione alta
morsetto 53
Parametro 6-12 Corr. bassa
morsetto 53
Parametro 6-13 Corrente alta
morsetto 53
20–200% 100% Questo parametro specica la curva di saturazione dei
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
[0] Rilevamento del
[1] Parcheggio
[0] Disattivato
[1] Abilitato
-4.999,000–4.999,000 0 Il riferimento minimo è il valore minimo ottenuto dalla
-4.999,000–4.999,000 50 Il riferimento massimo è il valore massimo ottenuto dalla
0,05–3.600,00 s In funzione della
0,05–3.600,00 s In funzione della
0,0–400,0 Hz 0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100 Hz Immettere il valore massimo di frequenza di uscita. Se il
parametro 5-40 Funzione
relè.
parametro 5-40 Funzione
relè.
0,00–10,00 V 0,07 V Immettere la tensione che corrisponde al valore di
0,00–10,00 V 10 V Immettere la tensione che corrisponde al valore di
0,00–20,00 mA 4 mA Immettere la corrente che corrisponde al valore di
0,00–20,00 mA 20 mA Immettere la corrente che corrisponde al valore di
rotore
[0] Disattivato Selezionare [1] Abilitato per consentire al convertitore di
dimensione
dimensione
[9] All. Selezionare la funzione per controllare il relè di uscita 1.
[5] In funzione Selezionare la funzione per controllare il relè di uscita 2.
Selezionare la modalità di avviamento del motore PM.
frequenza di agganciare un motore in rotazione in seguito
a una caduta di tensione di rete. Selezionare [0] Disattivato
se questa funzione non è necessaria. Quando questo
parametro è impostato su [1] Abilitato,
parametro 1-71 Ritardo avv. e parametro 1-72 Funz. di avv.
non hanno alcuna funzione. Parametro 1-73 Riaggancio al
volo è solo attivo nella modalità VVC+.
somma di tutti i riferimenti.
somma di tutti i riferimenti.
Se è selezionato il motore asincrono, il tempo rampa di
accelerazione è da 0 a parametro 1-23 Frequen. motore
nominale. Se è selezionato il motore PM, il tempo rampa
di accelerazione è da 0 a parametro 1-25 Vel. nominale
motore.
Per motori asincroni, il tempo rampa di decelerazione va
da parametro 1-23 Frequen. motore nominale a 0. Per
motori PM, il tempo rampa di decelerazione va da
parametro 1-25 Vel. nominale motore a 0.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max.
riferimento basso.
riferimento alto.
riferimento basso.
riferimento alto.
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 71

6
Programmazione
Parametro Opzione Predenito Uso
Parametro 6-19 Terminal 53
mode
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
Tabella 6.4 Procedura guidata di setup per applicazioni ad anello aperto
[0] Mod. corrente
[1] Mod. tensione
[0] O
[1] On
0,05–1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[1] Mod. tensione Selezionare se il morsetto 53 viene utilizzato per ingresso
di corrente o di tensione.
[0] O
–
–
72 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmazione Guida alla Progettazione
Procedura guidata di setup per applicazioni ad anello chiuso
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 73
Disegno 6.5 Procedura guidata di setup per applicazioni ad anello chiuso

6
Programmazione
Parametro Gamma Predenito Uso
Parametro 0-03 Impostazioni
locali
Parametro 0-06 Tipo di rete [0]–[132] vedere la
Parametro 1-00 Modo congu-
razione
[0] Internaz.
[1] Nord America
Tabella 6.4.
[0] An. aper to
[3] Anello chiuso
VLT® HVAC Basic Drive FC 101
[0] Internaz. –
Dimensione
selezionata
[0] An. aper to Selezionare [3] Anello chiuso.
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
74 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Gamma Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz.
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont.
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv.
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max.
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 75

6
Programmazione
Parametro Gamma Predenito Uso
Parametro 1-20 Potenza motore 0,09–110 kW In funzione della
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0–10.000 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-29 Adattamento
Automatico Motore (AMA)
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Parametro 1-49 Corrente a
indutt. min. per asse q
Disattivato L'esecuzione di un AMA ottimizza le prestazioni del
motore.
0–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
20–200% 100% Questo parametro specica la curva di saturazione dei
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d.
Vedere la scheda tecnica del motore a magneti
permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
76 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Gamma Predenito Uso
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
[1] Parcheggio
Parametro 1-73 Riaggancio al
volo
Parametro 3-02 Riferimento
minimo
Parametro 3-03 Riferimento
max.
Parametro 3-10 Riferim preimp. -100–100% 0 Immettere il setpoint.
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 6-20 Tens. bassa
morsetto 54
Parametro 6-21 Tensione alta
morsetto 54
Parametro 6-22 Corr. bassa
morsetto 54
Parametro 6-23 Corrente alta
morsetto 54
Parametro 6-24 Rif.basso/
val.retroaz.morsetto 54
Parametro 6-25 Rif. alto/valore
retroaz. morsetto 54
Parametro 6-26 Tempo Cost.
ltro morsetto 54
Parametro 6-29 Modo morsetto54[0] Mod. corrente
Parametro 20-81 Controllo
Norm./Inverso PI
Parametro 20-83 Velocità
avviam. PI [Hz]
[0] Disattivato
[1] Abilitato
-4.999,000–4.999,000 0 Il riferimento minimo è il valore minimo ottenuto dalla
-4.999,000–4.999,000 50 Il riferimento massimo è il valore massimo ottenuto dalla
0,05–3.600,0 s In funzione della
0,05–3.600,0 s In funzione della
0,0–400,0 Hz 0,0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100 Hz Immettere il valore massimo di frequenza di uscita. Se il
0,00–10,00 V 0,07 V Immettere la tensione che corrisponde al valore di
0,00–10,00 V 10,00 V Immettere la tensione che corrisponde al valore di
0,00–20,00 mA 4,00 mA Immettere la corrente che corrisponde al valore di
0,00–20,00 mA 20,00 mA Immettere la corrente che corrisponde al valore di
-4999–4999 0 Immettere il valore di retroazione che corrisponde alla
-4999–4999 50 Immettere il valore di retroazione che corrisponde alla
0,00–10,00 s 0,01 Immettere la costante di tempo del ltro.
[1] Mod. tensione
[0] Norm.
[1] Inverso
0–200 Hz 0 Hz Impostare la velocità del motore da raggiungere come
[0] Rilevamento del
rotore
[0] Disattivato Selezionare [1] Abilitato per abilitare il convertitore di
dimensione
dimensione
[1] Mod. tensione Selezionare se il morsetto 54 viene utilizzato per ingresso
[0] Norm. Selezionare [0] Norm. per impostare un controllo di
Selezionare la modalità di avviamento del motore PM.
frequenza ad agganciare un motore in rotazione, ad es. in
applicazioni con ventole. Questo parametro viene abilitato
se viene selezionato il motore PM.
somma di tutti i riferimenti.
somma di tutti i riferimenti.
Tempo rampa di accelerazione da 0 a
parametro 1-23 Frequen. motore nominale per motori
asincroni. Tempo rampa di accelerazione da 0 a
parametro 1-25 Vel. nominale motore per motori PM.
Tempo rampa di decelerazione da parametro 1-23 Frequen.
motore nominale a 0 per motori asincroni. Tempo rampa
di decelerazione da parametro 1-25 Vel. nominale motore a
0 per motori PM.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max.
riferimento basso.
riferimento alto.
riferimento basso.
riferimento alto.
tensione o corrente impostata nel parametro 6-20 Tens.
bassa morsetto 54/parametro 6-22 Corr. bassa morsetto 54.
tensione o corrente impostata nel parametro 6-21 Tensione
alta morsetto 54/parametro 6-23 Corrente alta morsetto 54.
di corrente o di tensione.
processo che aumenta la velocità di uscita se l'errore del
processo è positivo. Selezionare [1] Inverso per impostare il
regolatore di processo che diminuisce la velocità di uscita.
segnale di avviamento per avviare la regolazione PI.
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 77

Programmazione
Parametro Gamma Predenito Uso
Parametro 20-93 Guadagno
proporz. PI
Parametro 20-94 PI Integral
Time
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
0,00–10,00 0,01 Impostare il guadagno proporzionale del regolatore di
0,1–999,0 s 999,0 s Immettere il tempo di integrazione del controllo di
[0] O
[1] On
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
processo. Una regolazione rapida si ottiene con un'amplicazione elevata. Tuttavia se l'amplicazione è troppo
elevata, il processo può diventare instabile.
processo. Una regolazione rapida si ottiene con un tempo
di integrazione breve, se questo è troppo breve il processo
diventa instabile. Un tempo di integrazione troppo lungo
disabilita l'azione di integrazione.
[0] O
–
–
6
Tabella 6.5 Procedura guidata di setup per applicazioni ad anello chiuso
Setup motore
La procedura guidata setup motore guida gli utenti attraverso i parametri motore necessari.
Parametro Gamma Predenito Uso
Parametro 0-03 Impostazioni
locali
Parametro 0-06 Tipo di rete [0]–[132] vedere la
[0] Internaz.
[1] Nord America
Tabella 6.4.
0 –
In funzione della
dimensione
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
78 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Gamma Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz.
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont.
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv.
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max.
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 79

6
Programmazione
Parametro Gamma Predenito Uso
Parametro 1-20 Potenza motore 0,12-110 kW/0,16-150 cv In funzione della
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0,01–10.000,00 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Parametro 1-49 Corrente a
indutt. min. per asse q
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
0–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
20–200% 100% Questo parametro specica la curva di saturazione dei
[1] Parcheggio
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
[0] Rilevamento del
rotore
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d. Vedere la scheda
tecnica del motore a magneti permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
Selezionare la modalità di avviamento del motore PM.
80 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Parametro Gamma Predenito Uso
Parametro 1-73 Riaggancio al
volo
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
[0] Disattivato
[1] Abilitato
0,05–3.600,0 s In funzione della
0,05–3.600,0 s In funzione della
0,0–400,0 Hz 0,0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100,0 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100,0 Hz Immettere il valore massimo di frequenza di uscita. Se il
[0] O
[1] On
0,05–1,00 s 0,10 s
[0] Disattivato Selezionare [1] Abilitato per abilitare il convertitore di
frequenza ad agganciare un motore in rotazione.
Tempo rampa di accelerazione da 0 a
dimensione
dimensione
[0] O
parametro 1-23 Frequen. motore nominale.
Tempo rampa di decelerazione da parametro 1-23 Frequen.
motore nominale a 0.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max.
–
–
6
6
Tabella 6.6 Impostazioni procedura guidata di setup del motore
Modiche eettuate
La funzione Modiche eettuate elenca tutti i parametri
modicati rispetto alle impostazioni di fabbrica.
L'elenco mostra solo parametri che sono stati
•
modicati nel setup di modica attuale.
I parametri che sono stati ripristinati ai valori
•
predeniti non sono elencati.
Il messaggio Vuoto indica che non è stato
•
modicato alcun parametro.
Modica delle impostazioni parametri
1. Per accedere al Menu rapido, premere il tasto
[Menu] no a quando l'indicatore nel display non
si trova posizionato sopra Menu rapido.
2.
Premere [▲] [▼] per selezionare la procedura
guidata, setup anello chiuso, setup motore
oppure modiche eettuate.
3. Premere [OK].
4.
Premere [▲] [▼] per scorrere tra i parametri nel
menu rapido.
5. Premere [OK] per selezionare un parametro.
6.
Premere [▲] o [▼] per modicare il valore di
impostazione parametri.
7. Premere [OK] per accettare la modica.
8. Premere due volte [Back] per accedere allo Stato
oppure premere [Menu] una volta per accedere al
menu principale.
Il menu principale consente di accedere a tutti i
parametri
1. Premere il tasto [Menu] nché l'indicatore nel
display non si trova sopra Menu principale.
2.
Premere [▲] e [▼] per spostarsi tra i gruppi di
parametri.
3. Premere [OK] per selezionare un gruppo di
parametri.
4.
Premere [▲] e [▼] per scorrere tra i parametri nel
gruppo prescelto.
5. Premere [OK] per selezionare il parametro.
6.
Premere [▲] e [▼] per impostare/modicare il
valore del parametro.
7. Premere [OK] per accettare la modica.
6.3.3 Menu principale
Premere [Menu] per accedere al menu principale e
programmare tutti i parametri. È possibile accedere ai
parametri del menu principale immediatamente, a meno
che sia stata creata una password tramite il
parametro 0-60 Passw. menu princ.
Per la maggior parte delle applicazioni non è necessario
accedere ai parametri del menu principale. Il menu rapido
fornisce un accesso più rapido e semplice ai parametri
solitamente necessari.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 81

Programmazione
VLT® HVAC Basic Drive FC 101
6
6.4 Trasferimento rapido delle impostazioni
parametri tra diversi convertitori di
frequenza
Una volta completato il setup di un convertitore di
frequenza, memorizzare i dati nell'LCP o su un PC tramite
Software di congurazione MCT 10.
Trasferimento di dati dal convertitore di frequenza
all'LCP
1. Andare al parametro 0-50 Copia LCP.
2. Premere [OK].
3. Selezionare [1] Tutti a LCP.
4. Premere [OK].
Collegare l'LCP a un altro convertitore di frequenza e
copiare le impostazioni parametri anche su questo convertitore.
Trasferimento di dati dall'LCP al convertitore di
frequenza.
1. Andare al parametro 0-50 Copia LCP.
2. Premere [OK].
3. Selezionare [2] Tutti da LCP.
4. Premere [OK].
Visualizzazione e programmazione dei
6.5
parametri indicizzati
Selezionare il parametro, premere [OK] e premere [▲]/[▼]
per scorrere i valori indicizzati. Per modicare il valore del
parametro, selezionare il valore indicizzato e premere [OK].
Cambiare il valore premendo [▲]/[▼]. Premere [OK] per
accettare la nuova impostazione. Premere [Cancel] per
annullare. Premere [Back] per uscire dal parametro.
Inizializzazione alle impostazioni di
6.6
fabbrica
Esistono due modi per inizializzare il convertitore di
frequenza alle impostazioni di fabbrica.
Inizializzazione consigliata
1. Selezionare il parametro 14-22 Modo di funzionamento.
2. Premere [OK].
3. Selezionare [2] Inizializzazione e premere [OK].
4. Spegnere il convertitore di frequenza e attendere
che il display si spenga.
5. Ricollegare l'alimentazione di rete. A questo
punto il convertitore di frequenza è ripristinato,
tranne i seguenti parametri:
Parametro 1-06 Senso orario
•
Parametro 8-30 Protocollo
•
Parametro 8-31 Indirizzo
•
Parametro 8-32 Baud rate
•
Parametro 8-33 Parità / bit di stop
•
Parametro 8-35 Ritardo minimo risposta
•
Parametro 8-36 Ritardo max. risposta
•
Parametro 8-37 Ritardo max. intercar.
•
Parametro 8-70 Istanza della periferica
•
BACnet
Parametro 8-72 Master max. MS/TP
•
Parametro 8-73 Frame di inform. max.
•
MS/TP
Parametro 8-74 Servizio "I-Am"
•
Parametro 8-75 Password di inizializ-
•
zazione
dal Parametro 15-00 Ore di funzio-
•
namento al
parametro 15-05 Sovratensioni
Parametro 15-03 Accensioni
•
Parametro 15-04 Sovratemp.
•
Parametro 15-05 Sovratensioni
•
Parametro 15-30 Log allarme: Codice
•
guasto
Gruppo di parametri 15-4* Identif. conv.
•
freq.
Parametro 18-10 Log mod. incendio:
•
Evento
82 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Programmazione Guida alla Progettazione
Inizializzazione con due dita
L'altro modo per inizializzare il convertitore di frequenza
alle impostazione di fabbrica è tramite l'inizializzazione con
due dita:
1. Spegnere il convertitore di frequenza.
2. Premere [OK] e [Menu].
3. Accendere il convertitore di frequenza premendo
i tasti per 10 s.
4. A questo punto il convertitore di frequenza è
ripristinato, tranne i seguenti parametri:
Parametro 1-06 Senso orario
•
Parametro 15-00 Ore di funzionamento
•
Parametro 15-03 Accensioni
•
Parametro 15-04 Sovratemp.
•
Parametro 15-05 Sovratensioni
•
Gruppo di parametri 15-4* Identif. conv.
•
freq.
Parametro 18-10 Log mod. incendio:
•
Evento
L'inizializzazione di parametri viene confermata dall'allarme
80, Conv. iniz. nel display dopo lo spegnimento e la
riaccensione.
6
6
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 83

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
7 Installazione e setup dell'RS485
7.1 RS485
7.1.1 Panoramica
L'RS485 è un'interfaccia bus a due li compatibile con
topologia di rete multi-drop, vale a dire che i nodi possono
essere collegati come un bus oppure tramite cavi di
discesa da una linea dorsale comune. A un segmento di
rete possono essere collegati no a 32 nodi.
I ripetitori separano i vari segmenti di rete.
AVVISO!
Ciascun ripetitore funziona come un nodo all'interno del
segmento nel quale è installato. Ogni nodo collegato
77
all'interno di una data rete deve avere un indirizzo nodo
unico attraverso tutti i segmenti.
Terminare entrambe le estremità di ogni segmento
utilizzando l'interruttore di terminazione (S801) dei convertitori di frequenza oppure una rete resistiva polarizzata di
terminazione. Utilizzare sempre un doppino intrecciato
schermato (STP) per il cablaggio del bus e attenersi alle
buone prassi di installazione.
7.1.2 Collegamento in rete
Collegare il convertitore di frequenza alla rete RS485 nel
modo seguente (vedere anche la Disegno 7.1):
1. Collegare i li di segnale al morsetto 68 (P+) e al
morsetto 69 (N-) sul quadro di comando
principale del convertitore di frequenza.
2. Collegare lo schermo del cavo ai pressacavi.
AVVISO!
Per ridurre il disturbo tra i conduttori, utilizzare doppini
intrecciati schermati.
Disegno 7.1 Collegamento in rete
7.1.3 Setup hardware del convertitore di
Il collegamento a massa a bassa impedenza dello schermo
è importante per ciascun nodo. Collegare a terra un'ampia
supercie dello schermo, per esempio mediante un
pressacavo o un passacavo conduttivo. Utilizzare cavi di
equalizzazione del potenziale per mantenere lo stesso
potenziale di terra in tutta la rete, soprattutto negli
impianti in cui sono presenti cavi lunghi.
Per prevenire un disadattamento d'impedenza, utilizzare
sempre lo stesso tipo di cavo in tutta la rete. Quando si
collega un motore al convertitore di frequenza, utilizzare
sempre un cavo motore schermato.
frequenza
Usare il DIP-switch di terminazione sul quadro di comando
principale del convertitore di frequenza per terminare il
bus RS485.
Cavo Doppino intrecciato schermato (STP)
Impedenza [Ω]
Lunghezza del
cavo
[m (piedi)]
Tabella 7.1 Speciche dei cavi
84 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
120
Al massimo 1.200 (3.937) (comprese le
derivazioni).
Al massimo 500 (1.640) da stazione a stazione.
Disegno 7.2 Impostazione di fabbrica dell'interruttore di
terminazione
L'impostazione di fabbrica del DIP-switch è OFF.

195NA493.11
1
2
90°
Installazione e setup dell'... Guida alla Progettazione
7.1.4 Impostazione parametri per
comunicazione Modbus
Parametro Funzione
Parametro 8-30 Pro
tocollo
Parametro 8-31 Indi
rizzo
Selezionare il protocollo dell'applicazione da
utilizzare sull'interfaccia RS485.
Impostare l'indirizzo nodo.
AVVISO!
L'intervallo di indirizzi dipende dal
protocollo selezionato nel
parametro 8-30 Protocollo.
Parametro 8-32 Bau
d rate
Impostare il baud rate.
AVVISO!
Il baud rate predenito dipende dal
protocollo selezionato nel
parametro 8-30 Protocollo.
Parametro 8-33 Pari
tà / bit di stop
Impostare la parità e il numero di bit di
stop.
AVVISO!
La selezione predenita dipende dal
protocollo selezionato nel
parametro 8-30 Protocollo.
7.1.5 Precauzioni EMC
AVVISO!
Rispettare le norme nazionali e locali in materia, ad
esempio quelle riguardanti la messa a terra di
protezione. Un collegamento a terra non corretto può
provocare una degradazione della comunicazione e
danni all'apparecchiatura. Tenere il cavo di comunicazione RS485 lontano dai cavi motore e dalla resistenza
di frenatura al ne di evitare l'accoppiamento di disturbi
ad alta frequenza tra gli stessi. Normalmente è
suciente una distanza di 200 mm (8 pollici). Mantenere
la massima distanza possibile tra i cavi, in particolare
quando sono posati in parallelo per lunghe distanze.
Quando la posa incrociata è inevitabile, il cavo RS485
deve incrociare i cavi motore e i cavi della resistenza di
frenatura con un angolo di 90°.
7 7
Parametro 8-35 Rita
rdo minimo
risposta
Parametro 8-36 Rita
rdo max. risposta
Parametro 8-37 Rita
rdo max. intercar.
Specicare un tempo di ritardo minimo tra
la ricezione di una richiesta e la trasmissione
di una risposta. La funzione è destinata a
superare i tempi di attesa del modem.
Specicare un tempo di ritardo massimo tra
la trasmissione di una richiesta e la ricezione
di una risposta.
In caso di interruzione della trasmissione,
specicare un ritardo massimo tra la
ricezione di due byte per assicurare la
temporizzazione.
AVVISO!
La selezione predenita dipende dal
protocollo selezionato nel
parametro 8-30 Protocollo.
Tabella 7.2 Impostazione parametri comunicazione Modbus
1 Cavo bus di campo
2 Distanza minima 200 mm (8 pollici)
Disegno 7.3 Distanza minima tra i cavi di comunicazione e i
cavi di potenza
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 85

0 1 32 4 5 6 7
195NA036.10
Bit di
start
Parità Bit di
stop
STX LGE ADR D ATA BCC
195NA099.10
Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
7.2 Protocollo FC
7.2.1 Panoramica
Il protocollo FC, chiamato anche bus FC o bus Standard, è
il bus di campo standard Danfoss.
accesso secondo il principio master-slave per comunicazioni tramite un bus seriale.
Un master e un numero massimo di 126 slave possono
essere collegati al bus. I singoli slave vengono selezionati
dal master tramite un carattere di indirizzo nel telegramma.
Uno slave non può mai trasmettere senza essere prima
attivato a tale scopo, e un trasferimento diretto di
messaggi tra i singoli slave non è possibile. Le comunicazioni avvengono in modalità half duplex.
La funzione master non può essere trasferita a un altro
nodo (sistema a master singolo).
77
Il livello
integrata nel convertitore di frequenza. Il protocollo FC
supporta diversi formati di telegramma:
sico è RS485, quindi utilizza la porta RS485
un formato breve a 8 byte per i dati di processo
•
un formato lungo a 16 byte che comprende
•
anche un canale parametri
un formato utilizzato per testi.
•
Denisce una tecnica di
Impostazioni parametri per abilitare il
7.3
protocollo
Per abilitare il protocollo FC per il convertitore di
frequenza, impostare i seguenti parametri.
Parametro Impostazione
Parametro 8-30 Protocollo FC
Parametro 8-31 Indirizzo 1–126
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di stop
Tabella 7.3 Parametri per abilitare il protocollo
Parità pari, 1 bit di stop
(default)
7.4 Struttura frame messaggio protocollo
FC
7.4.1 Contenuto di un carattere (byte)
Ogni carattere trasmesso inizia con un bit di start. In
seguito sono trasmessi 8 bit di dati, corrispondenti a un
byte. Ogni carattere è vericato tramite un bit di parità.
Questo bit è impostato su 1 quando raggiunge la parità.
Parità signica un numero pari di 1 s negli 8 bit di dati più
il bit di parità. Un carattere è completato da un bit di stop
ed è quindi formato da 11 bit.
7.2.2 FC con Modbus RTU
Il protocollo FC consente l'accesso alla parola di controllo e
al riferimento bus del convertitore di frequenza.
La parola di controllo consente al master Modbus di
controllare varie funzioni importanti del convertitore di
frequenza:
avviamento
•
arresto del convertitore di frequenza in vari modi:
•
- arresto a ruota libera
- arresto rapido
- arresto freno CC
- arresto normale (rampa).
ripristino dopo uno scatto in caso di guasto
•
funzionamento a varie velocità preimpostate
•
marcia in senso inverso
•
modica del setup attivo
•
controllo dei due relè integrati nel convertitore di
•
frequenza.
Il riferimento bus è generalmente usato per il controllo di
velocità. È anche possibile accedere ai parametri, leggere i
loro valori e dove possibile, modicarli. Accedendo ai
parametri è possibile una serie di opzioni di controllo,
come il controllo del setpoint del convertitore di frequenza
quando viene utilizzato il controllore PI interno.
Disegno 7.4 Contenuto di un carattere
7.4.2 Struttura del telegramma
Ogni telegramma ha la seguente struttura:
carattere di start (STX) = 02 hex
•
byte che indica la lunghezza del telegramma
•
(LGE)
byte che indica l'indirizzo del convertitore di
•
frequenza (ADR).
Seguono numerosi byte di dati (variabili in base al tipo di
telegramma).
Il telegramma termina con un byte di controllo dati (BCC).
Disegno 7.5 Struttura del telegramma
86 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 B CCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installazione e setup dell'... Guida alla Progettazione
7.4.3 Lunghezza del telegramma (LGE)
La lunghezza del telegramma è costituita dal numero di
byte di dati, più il byte indirizzo ADR più il byte di
controllo dati BCC.
4 byte di dati LGE = 4 + 1 + 1 = 6 byte
12 byte di dati LGE = 12 + 1 + 1 = 14 byte
Telegrammi contenenti testo
Tabella 7.4 Lunghezza di telegrammi
1) Il valore 10 rappresenta i caratteri ssi, mentre n è variabile (in
funzione della lunghezza del testo).
101)+n byte
7.4.4 Indirizzo del convertitore di frequenza
(ADR)
Formato indirizzo 1–126
Bit 7 = 1 (formato indirizzi 1–126 attivo).
•
Bit 0–6 = indirizzo del convertitore di frequenza
•
1–126.
Bit 0–6 = 0 broadcast.
•
Lo slave restituisce il byte di indirizzo al master senza
variazioni nel telegramma di risposta.
Blocco parametri
Il blocco parametri è usato per la trasmissione dei
parametri fra master e slave. Il blocco di dati è costituito
da 12 byte (sei parole) e contiene anche il blocco di
processo.
Disegno 7.7 Blocco parametri
Blocco di testo
Il blocco di testo è utilizzato per leggere o scrivere testi
mediante il blocco di dati.
Disegno 7.8 Blocco di testo
7.4.7 Il campo PKE
Il campo PKE contiene due campi secondari:
comando relativo ai parametri e risposta (AK)
•
numeri dei parametri (PNU).
•
7 7
7.4.5 Byte di controllo dati (BCC)
La checksum viene calcolata come una funzione XOR.
Prima che venga ricevuto il primo byte nel telegramma, la
checksum calcolata è 0.
7.4.6 Il campo dati
La struttura dei blocchi di dati dipende dal tipo di
telegramma. Vi sono tre tipi di telegramma, utilizzati sia
per la funzione di controllo (master⇒slave) che di risposta
(slave⇒master).
I tre tipi di telegrammi sono:
Blocco processo (PCD)
Il PCD è costituito da un blocco di dati di 4 byte (due
parole) e contiene:
parola di controllo e valore di riferimento (dal
•
master allo slave)
la parola di stato e la frequenza di uscita attuale
•
(dallo slave al master).
Disegno 7.9 Campo PKE
I bit 12–15 trasferiscono i comandi relativi ai parametri dal
master allo slave e restituiscono le risposte elaborate dallo
slave al master.
Disegno 7.6 Blocco processo
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 87

Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
Comandi relativi ai parametri master⇒slave
Numero di bit Comando relativo ai parametri
15 14 13 12
0 0 0 0 Nessun comando.
0 0 0 1 Lettura valore del parametro.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Lettura testo.
Tabella 7.5 Comandi relativi ai parametri
77
Numero di bit Risposta
15 14 13 12
0 0 0 0 Nessuna risposta.
0 0 0 1 Valore di parametro trasmesso (parola).
0 0 1 0
0 1 1 1 Impossibile eseguire il comando.
1 1 1 1 Testo trasmesso.
Tabella 7.6 Risposta
Scrittura valore del parametro nella RAM
(parola).
Scrittura valore del parametro nella RAM
(parola doppia).
Scrittura valore del parametro nella RAM
e nella EEPROM (parola doppia).
Scrittura valore del parametro nella RAM
e nella EEPROM (parola).
Risposta slave⇒master
Valore di parametro trasmesso (parola
doppia).
Codice di guasto Specica FC
254 Attributo sconosciuto.
255 Nessun errore.
Tabella 7.7 Rapporto di slave
7.4.8 Numero di parametro (PNU)
I bit numero 0–11 trasmettono i numeri dei parametri. La
funzione del parametro in questione è denita nella
descrizione dei parametri nel capitolo 6 Programmazione.
7.4.9 Indice (IND)
L'indice è usato insieme al numero di parametro per un
accesso di lettura/scrittura ai parametri con un indice, ad
esempio, il parametro 15-30 Log allarme: Codice guasto.
L'indice consiste di 2 byte: un byte basso e un byte alto.
Solo il byte basso è utilizzato come indice.
7.4.10 Valore del parametro (PWE)
Il blocco del valore di parametro consiste di due parole (4
byte) e il valore dipende dal comando denito (AK). Il
master richiede un valore di parametro quando il blocco
PWE non contiene alcun valore. Per cambiare un valore di
parametro (scrittura), scrivere il nuovo valore nel blocco
Se il comando non può essere eseguito, lo slave invia la
PWE e inviarlo dal master allo slave.
risposta 0111 Impossibile eseguire il comando ed emette i
messaggi di errore seguenti nella Tabella 7.7.
Se lo slave risponde alla richiesta di parametro (comando
di lettura), il valore di parametro corrente nel blocco PWE è
Codice di guasto Specica FC
0 Numero parametro non consentito.
1 Il parametro non può essere modicato.
2 Limiti superiore o inferiore superati.
3 Indice secondario corrotto.
4 Nessun array.
5 Tipo di dati errato.
6 Non utilizzato.
7 Non utilizzato.
9 Elemento descrittivo non disponibile.
11 Nessun accesso scrittura parametro.
15 Nessun testo disponibile.
17 Non applicabile quando in funzione.
18 Altri errori.
100 –
>100 –
130
131 Ripristino setup di fabbrica impossibile.
132 Nessun accesso all'LCP.
252 Visualizzatore sconosciuto.
253 Richiesta non supportata.
Nessun accesso al bus per questo
parametro.
trasmesso e rinviato al master. Se un parametro contiene
diverse opzioni dati, ad esempio parametro 0-01 Lingua,
selezionare il valore dei dati inserendone il valore nel
blocco PWE. La comunicazione seriale è in grado di leggere
solo i parametri contenenti il tipo di dati 9 (stringa di
testo).
I parametri dal Parametro 15-40 Tipo FC al
parametro 15-53 N. di serie scheda di potenza contengono il
tipo di dati 9.
Ad esempio, leggere le dimensioni dell'unità e l'intervallo
della tensione di rete nel parametro 15-40 Tipo FC. Quando
viene trasmessa una stringa di testo (lettura), la lunghezza
del telegramma e dei testi è variabile. La lunghezza del
telegramma è
denita nel secondo byte del telegramma
(LGE). Quando si trasmettono testi, il carattere indice indica
se si tratta di un comando di lettura o di scrittura.
Per leggere un testo mediante il blocco PWE, impostare il
comando relativo ai parametri (AK) su F esadecimale. Il
carattere indice del byte alto deve essere 4.
88 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Installazione e setup dell'... Guida alla Progettazione
7.4.11 Tipi di dati supportati dal
convertitore di frequenza
Senza rma signica che il telegramma non contiene alcun
segno operativo.
Tipi di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza rma 8
6 Senza rma 16
7 Senza rma 32
9 Stringa di testo
Tabella 7.8 Tipi di dati
7.4.12 Conversione
La Guida alla Programmazione contiene le descrizioni degli
attributi di ciascun parametro. I valori dei parametri
vengono trasferiti solo come numeri interi. I fattori di
conversione sono utilizzati per trasmettere i decimali.
Il Parametro 4-12 Limite basso velocità motore [Hz] ha un
fattore di conversione di 0,1. Per preimpostare la frequenza
minima a 10 Hz, trasmettere il valore 100. Un fattore di
conversione di 0,1
moltiplicato per 0,1. Il valore 100 è quindi percepito come
10,0.
Indice di conversione Fattore di conversione
signica che il valore trasmesso è
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Esempi
7.5
7.5.1 Scrittura di un valore di parametro
Cambiare il parametro 4-14 Limite alto velocità motore [Hz] a
100 Hz.
Scrivere i dati nella EEPROM.
PKE = E19E hex - Scrittura parola singola nel
parametro 4-14 Limite alto velocità motore [Hz]:
IND = 0000 hex
•
PWEHIGH = 0000 hex
•
PWELOW = 03E8 hex.
•
Valore dati 1.000, corrispondente a 100 Hz, vedere il
capitolo 7.4.12 Conversione.
Il telegramma avrà l'aspetto della Disegno 7.10.
Disegno 7.10 Telegramma
AVVISO!
Il Parametro 4-14 Limite alto velocità motore [Hz] è una
parola singola e il comando relativo ai parametri per la
scrittura nell'EEPROM è E. Il Parametro 4-14 Limite alto
velocità motore [Hz] è 19E in esadecimale.
La risposta dallo slave al master è mostrata
nell'Disegno 7.11.
Disegno 7.11 Risposta dal master
7 7
Tabella 7.9 Conversione
7.4.13 Parole di processo (PCD)
Il blocco delle parole di processo è diviso in due blocchi di
16 bit, che si presentano sempre nella sequenza denita.
Telegramma di controllo (parola di
controllo master⇒slave)
Telegramma di controllo parola di stato
(slave⇒master)
Tabella 7.10 Parole di processo (PCD)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 89
PCD 1 PCD 2
Valore di riferimento
Frequenza di uscita
attuale
7.5.2 Lettura di un valore del parametro
Leggere il valore nel parametro 3-41 Rampa 1 tempo di
accel.
PKE = 1.155 hex - Lettura valore del parametro nel
parametro 3-41 Rampa 1 tempo di accel.:
IND = 0000 hex
•
PWE
•
PWE
•
= 0000 hex
HIGH
= 0000 hex.
LOW

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installazione e setup dell'...
Disegno 7.12 Telegramma
Se il valore nel parametro 3-41 Rampa 1 tempo di accel. è
10 s, la risposta dallo slave al master è mostrata
nell'Disegno 7.13.
Disegno 7.13 Risposta
77
3E8 hex corrisponde a 1.000 decimale. L'indice di
conversione per il parametro 3-41 Rampa 1 tempo di accel.
è -2, vale a dire 0,01. Il
Parametro 3-41 Rampa 1 tempo di accel. è del tipo Senza
rma 32.
Panoramica Modbus RTU
7.6
7.6.1 Introduzione
Danfoss presuppone che il controllore installato supporti le
interfacce descritte nel presente documento e che
vengano osservati scrupolosamente tutti i requisiti richiesti
dal controllore nonché dal convertitore di frequenza,
insieme a tutte le restrizioni relative.
VLT® HVAC Basic Drive FC 101
•
Se è necessaria una risposta, il controllore crea il
telegramma di risposta e lo invia.
I controllori comunicano utilizzando la tecnica master/slave
nella quale solo il master può iniziare le transazioni
(chiamate interrogazioni). Gli slave rispondono fornendo al
master i dati richiesti oppure eseguendo l'azione richiesta
nell'interrogazione.
Il master può indirizzare singoli slave oppure iniziare un
telegramma di broadcast a tutti gli slave. Gli slave
restituiscono una risposta alle interrogazioni che sono
indirizzate a loro singolarmente. Non vengono restituite
risposte alle interrogazioni broadcast dal master.
Il protocollo Modbus RTU stabilisce il formato per l'interrogazione del master fornendo le informazioni seguenti:
•
•
•
•
Il telegramma di risposta del dispositivo slave è costruito
anche usando il protocollo Modbus. Contiene campi che
confermano l'azione adottata, eventuali dati da restituire e
un campo per il controllo degli errori. Se si verica un
errore nella ricezione del telegramma o se lo slave non è in
grado di eettuare l'azione richiesta, lo slave genera un
messaggio di errore e lo invia. In alternativa, si verica una
temporizzazione.
Estrae dati o altre informazioni contenuti nel
telegramma.
l'indirizzo del dispositivo (o broadcast)
un codice di funzione che denisce un'azione
richiesta
qualsiasi dato da inviare
un campo di controllo degli errori.
Il Modbus RTU (Remote Terminal Unit) integrato è
progettato per comunicare con qualsiasi controllore che
supporta le interfacce denite nel presente documento. Si
presuppone che l'utente abbia piena conoscenza delle
capacità e dei limiti del controllore.
7.6.2 Panoramica
Indipendentemente dal tipo di reti di comunicazione
siche, la presente sezione descrive il processo che un
controllore utilizza per richiedere l'accesso a un altro
dispositivo. Ciò include il modo in cui il Modbus RTU
risponderà a richieste da un altro dispositivo e il modo in
cui gli errori verranno rilevati e segnalati. Stabilisce anche
un formato comune per il layout e i contenuti dei campi
dei telegrammi.
Durante le comunicazioni su una rete Modbus RTU, il
protocollo:
Determina il modo in cui ogni controllore rileva
•
l'indirizzo di dispositivo.
Riconosce un telegramma indirizzato a esso.
•
Determina quali azioni eseguire.
•
7.6.3 Convertitore di frequenza con
Modbus RTU
Il convertitore di frequenza comunica nel formato Modbus
RTU tramite l'interfaccia RS485 incorporata. Modbus RTU
consente l'accesso alla parola di controllo e riferimento bus
del convertitore di frequenza.
La parola di controllo consente al master Modbus di
controllare varie funzioni importanti del convertitore di
frequenza:
avviamento
•
diversi arresti:
•
- arresto a ruota libera
- arresto rapido
- arresto freno CC
- arresto normale (rampa).
ripristino dopo uno scatto in caso di guasto
•
funzionamento a varie velocità preimpostate
•
marcia in senso inverso
•
90 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Installazione e setup dell'... Guida alla Progettazione
modica del setup attivo
•
controllo del relè incorporato del convertitore di
•
frequenza.
Il riferimento bus è generalmente usato per il controllo di
velocità. È anche possibile accedere ai parametri, leggere i
loro valori e, dove possibile, modicarli. Accedendo ai
parametri è possibile una serie di opzioni di controllo,
come il controllo del setpoint del convertitore di frequenza
quando viene utilizzato il controllore PI interno.
7.7 Congurazione della rete
Per abilitare Modbus RTU sul convertitore di frequenza,
impostare i seguenti parametri:
Parametro Impostazione
Parametro 8-30 Protocollo Modbus RTU
Parametro 8-31 Indirizzo 1–247
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di stop
Tabella 7.11 Congurazione della rete
Struttura frame messaggio Modbus RTU
7.8
Parità pari, 1 bit di stop
(default)
7.8.1 Introduzione
7.8.2 Struttura del telegramma Modbus
RTU
Il dispositivo trasmittente inserisce un telegramma Modbus
RTU in un telaio con un punto di inizio e di ne noti.
Questo consente ai dispositivi riceventi di iniziare all'inizio
del telegramma, leggere la porzione di indirizzo,
determinare quale è il dispositivo di destinazione (o tutti i
dispositivi, se il telegramma viene inviato in broadcast) e
riconoscere quando il telegramma è stato completato. I
telegrammi parziali vengono rilevati e di conseguenza
vengono impostati gli errori. I caratteri per la trasmissione
devono essere in formato esadecimale 00–FF in ogni
campo. Il convertitore di frequenza monitora
continuamente il bus di rete, anche durante gli intervalli
silenti. Quando viene ricevuto il primo campo (il campo di
indirizzo), ogni convertitore di frequenza o dispositivo lo
decodica al ne di determinare la periferica indirizzata. I
telegrammi Modbus RTU con indirizzo 0 sono telegrammi
broadcast. Non è consentita alcuna risposta a telegrammi
broadcast. Un telegramma telaio tipico è mostrato nella
Tabella 7.14.
Avvia–
mento
T1-T2-T3-
T4
Indirizzo Funzione Dati
8 bit 8 bit N x 8 bit 16 bit
Controllo
CRC
Fine
T1-T2-T3-
T4
7 7
I controllori sono impostati per comunicare sulla rete
Modbus usando la modalità RTU (Remote Terminal Unit),
con ogni byte nel telegramma contenente due caratteri
esadecimali a 4 bit. Il formato per ogni byte è mostrato
nella Tabella 7.12.
Bit di
start
Tabella 7.12 Formato per ciascun byte
Sistema di codica 8 bit binario, esadecimale 0–9, A–F.
Bit per byte
Campo di controllo
errori
Tabella 7.13 Dettagli relativi ai byte
Byte dati Stop/
parità
Due caratteri esadecimali contenuti in ogni
campo a 8 bit del telegramma.
1 bit di start.
•
8 bit dati, bit meno signicativo inviato
•
per primo.
1 bit per parità pari/dispari; nessun bit
•
per nessuna parità.
1 bit di stop se si utilizza parità; 2 bit in
•
caso di nessuna parità.
Controllo di ridondanza ciclica (CRC).
Stop
Tabella 7.14 Tipica struttura del telegramma Modbus RTU
7.8.3 Campo Start/Stop
I telegrammi iniziano con una pausa di almeno 3,5
intervalli di carattere. Il periodo silente è implementato
come un multiplo di intervalli di caratteri al baud rate della
rete selezionato (mostrato come Start T1-T2-T3-T4). Il primo
campo che deve essere trasmesso è l'indirizzo del
dispositivo. In seguito all'ultimo carattere trasmesso, un
periodo simile di almeno 3,5 intervalli di carattere segna la
ne del telegramma. Dopo questo periodo può iniziare un
nuovo telegramma.
Trasmettere l'intero telaio del telegramma come un usso
continuo. Se si verica una pausa di oltre 1,5 caratteri
prima che il telaio sia completato, il dispositivo ricevente
cancella il telegramma incompleto e presume che il byte
successivo sarà il campo di indirizzo di un nuovo
telegramma. Allo stesso modo, se un nuovo telegramma
inizia prima di 3,5 intervalli di caratteri dopo un
telegramma precedente, il dispositivo ricevente lo
considera una continuazione di quest'ultimo. Ciò provoca
una temporizzazione (nessuna risposta dallo slave), poiché
il valore nel campo CRC nale non è valido per i
telegrammi combinati.
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 91

Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
7.8.4 Campo di indirizzo
Il campo di indirizzo di un telaio telegramma contiene 8
bit. Gli indirizzi validi del dispositivo slave sono compresi
nell'intervallo 0-247 decimale. Ai singoli dispositivi slave
vengono assegnati indirizzi nell'intervallo compreso tra 1 e
247. Il valore 0 è riservato al modo broadcast, riconosciuto
da tutti gli slave. Un master indirizza uno slave inserendo
l'indirizzo slave nel campo di indirizzo del telegramma.
Quando lo slave invia la sua risposta, colloca il suo proprio
indirizzo in questo campo di indirizzo per segnalare al
master quale slave sta rispondendo.
7.8.5 Campo funzione
Il campo funzione di un telaio telegramma contiene 8 bit. I
codici validi sono compresi nell'intervallo tra 1 e FF. I
77
campi funzione sono usati per la trasmissione di
telegrammi tra master e slave. Quando un telegramma
viene inviato da un dispositivo master a uno slave, il
campo del codice funzione segnala allo slave il tipo di
azione da
usa il campo codice funzione per indicare una risposta
normale (senza errori) oppure per indicare che si è
vericato un errore (risposta di eccezione).
Per una risposta normale lo slave restituisce semplicemente
il codice funzione originale. Per una risposta di eccezione,
lo slave restituisce un codice che è equivalente al codice
funzione originale con il suo bit più signicativo impostato
su 1 logico. Inoltre lo slave colloca un codice unico nel
campo dati del telegramma di risposta. Questo codice
segnala al master il tipo di errore che si è vericato oppure
la ragione dell'eccezione. Fare riferimento anche al
capitolo 7.8.11 Codici funzione supportati da Modbus RTU e
al capitolo 7.8.12 Codici di eccezione Modbus.
eettuare. Quando lo slave risponde al master,
7.8.6 Campo dati
Il campo dati è costruito usando serie di due cifre
esadecimali nell'intervallo compreso tra 00 e FF
esadecimale. Queste cifre sono costituite da un carattere
RTU. Il campo dati di telegrammi inviati da un master a un
dispositivo slave contiene ulteriori informazioni che lo slave
deve usare per eettuare l'intervento previsto.
7.8.7 Campo di controllo CRC
I telegrammi includono un campo per il controllo degli
errori basato sul metodo di un controllo di ridondanza
ciclica (CRC). Il campo CRC controlla i contenuti dell'intero
telegramma. Viene applicato indipendentemente da
qualsiasi metodo di controllo parità per i caratteri
individuali del telegramma. Il dispositivo trasmittente
calcola il valore CRC e, quindi, aggiunge il CRC come
ultimo campo nel telegramma. Il dispositivo ricevente
ricalcola un CRC durante la ricezione del telegramma e
confronta il valore calcolato con il valore eettivo ricevuto
nel campo CRC. Nel timeout del bus risultano due valori
diversi. Il campo per il controllo degli errori contiene un
valore binario a 16 bit implementato come due byte a 8
bit. Dopo l'implementazione, il byte di ordine inferiore del
campo viene aggiunto per primo, seguito dal byte di
ordine superiore. Il byte di ordine superiore CRC è l'ultimo
byte inviato nel telegramma.
7.8.8 Indirizzamento del registro di bobina
In Modbus, tutti i dati sono organizzati in bobine e registri
di mantenimento. Le bobine gestiscono un singolo bit,
mentre i registri di mantenimento gestiscono una parola a
2 byte (vale a dire 16 bit). Tutti gli indirizzi di dati nei
telegrammi Modbus sono riferiti allo 0. Alla prima
occorrenza di un elemento dati viene assegnato l'indirizzo
dell'elemento numero 0. Per esempio: la bobina nota come
coil 1 in un controllore programmabile viene indirizzata
come bobina 0000 nel campo di indirizzo dati di un
telegramma Modbus. La bobina 127 in codice decimale
viene indirizzata come coil 007Ehex (126 in codice
decimale).
Il registro di mantenimento 40001 viene indirizzato come
registro 0000 nel campo di indirizzo dati del telegramma. Il
campo codice funzione specica già un funzionamento
'registro di mantenimento'. Pertanto il riferimento 4XXXX è
implicito. Il registro di mantenimento 40108 viene
indirizzato come registro 006Bhex (107 in codice decimale).
Le informazioni possono includere elementi come:
indirizzi di bobina o di registro
•
quantità di elementi da gestire
•
conteggio dei byte di dati eettivi nel campo.
•
92 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Installazione e setup dell'... Guida alla Progettazione
Numero di bobina Descrizione Direzione del segnale
1–16 Parola di controllo del convertitore di frequenza (vedere la Tabella 7.16). Dal master allo slave
17–32
33–48 Parola di stato del convertitore di frequenza (vedere la Tabella 7.17). Dallo slave al master
49–64
65
66–65536 Riservato. –
Tabella 7.15 Registro bobina
Bobina 0 1
01 Riferimento preimpostato, lsb
02 Riferimento preimpostato, msb
03 Freno CC Nessun freno CC
04 Arresto a ruota libera Nessun arresto a ruota libera
05 Arresto rapido Nessun arresto rapido
06 Frequenza congelata Nessuna frequenza congelata
07 Arresto rampa Avviamento
08 Nessun ripristino Ripristino
09 Nessun jog Jog
10 Rampa 1 Rampa 2
11 Dati non validi Dati validi
12 Relè 1 o Relè 1 on
13 Relè 2 o Relè 2 on
14 Setup LSB
15 –
16 Nessuna inversione Inversione
Velocità del convertitore di frequenza o intervallo di riferimento setpoint 0x0–
0xFFFF (-200% ... ~200%).
Modalità ad anello aperto: frequenza di uscita del convertitore di frequenza.
Modalità ad anello chiuso: segnale di retroazione convertitore di frequenza.
Controllo di scrittura parametro (dal master allo slave).
0 = Le modiche ai parametri vengono memorizzate nella RAM del convertitore di frequenza.
1 = Le modiche ai parametri vengono memorizzate nella RAM e
nell'EEPROM del convertitore di frequenza.
Dal master allo slave
Dallo slave al master
Dal master allo slave
7 7
Tabella 7.16 Parola di controllo convertitore di frequenza (prolo FC)
Bobina 0 1
33 Comando non pronto Comando pronto
34 Convertitore di frequenza non pronto Convertitore di frequenza pronto
35 Arresto a ruota libera Chiuso per sicurezza
36 Nessun allarme Allarme
37 Non utilizzato Non utilizzato
38 Non utilizzato Non utilizzato
39 Non utilizzato Non utilizzato
40 Nessun avviso Avviso
41 Non nel riferimento Nel riferimento
42 Modalità manuale Modalità Automatico
43 Fuori campo di frequenza Nel campo di frequenza
44 Arrestato In funzione
45 Non utilizzato Non utilizzato
46 Nessun avviso tensione Tensione superata
47 Non nel limite di corrente Limite di corrente
48 Livello termico OK Livello termico superato
Tabella 7.17 Parola di stato convertitore di frequenza (prolo FC)
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 93

Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
Indirizzo
bus
77
19 20 40020 Libero – –
29 30 40030
Registro
bus
0 1 40001 Riservato –
1 2 40002 Riservato –
2 3 40003 Riservato –
3 4 40004 Libero – –
4 5 40005 Libero – –
5 6 40006 Comunicazione Modbus
6 7 40007 Ultimo codice di guasto Sola lettura
7 8 40008 Registro ultimo errore Sola lettura
8 9 40009 Puntatore indice
9 10 40010 Parametro 0-01 Lingua
Registro
1)
PLC
Contenuto Accesso Descrizione
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Soltanto TCP. Riservato per Modbus TCP
Parametro 0-03 Impostazioni
locali
Lettura/
scrittura
Lettura/
scrittura
Dipendente
dall'accesso al
parametro
Dipendente
dall'accesso al
parametro
(parametro 12-28 Memorizzare i valori di dati e
parametro 12-29 Memorizzare sempre - memorizzato in,
ad esempio, EEPROM).
Codice di guasto ricevuto dal database parametri, per i
dettagli vedere WHAT 38295.
Indirizzo del registro in cui si è vericato l'ultimo errore,
per i dettagli vedere WHAT 38296.
Sottoindice del parametro a cui accedere. Per i dettagli
vedere WHAT 38297.
Parametro 0-01 Lingua (Registro Modbus = numero
parametro 10)
20 byte di spazio riservati al parametro nella mappa
Modbus.
Parametro 0-03 Impostazioni locali
20 byte di spazio riservati al parametro nella mappa
Modbus.
Tabella 7.18 Indirizzo/registri
1) Il valore scritto nel telegramma Modbus RTU deve essere uno o inferiore al numero di registro. Ad esempio, Lettura registro Modbus 1 scrivendo
il valore 0 nel telegramma.
7.8.9 Accesso mediante lettura/scrittura
PCD
Il vantaggio di utilizzare la congurazione scrittura/lettura
PCD risiede nel fatto che il controllore può scrivere o
leggere più dati in un telegramma. Mediante la funzione
Lettura registri di mantenimento è possibile scrivere o
leggere no a 63 registri oppure scrivere registri multipli in
L'elenco di scrittura PCD è impostato nel
parametro 8-42 Cong. scrittura PCD.
L'elenco di lettura PCD è costituito dai dati inviati dal
convertitore di frequenza al controllore quali, ad esempio,
la parola di stato, il valore eettivo principale e i dati
dipendenti dall'applicazione come le ore di esercizio, la
corrente motore e la parola di allarme.
un telegramma. Inoltre, la struttura è essibile e, pertanto,
è possibile scrivere soltanto due registri e leggerne 10 dal
controllore.
AVVISO!
La parola di stato e il valore eettivo principale sono
sempre inviati nell'elenco dal convertitore di frequenza al
L'elenco di scrittura PCD è costituito dai dati inviati dal
controllore.
controllore al convertitore di frequenza, quali ad esempio
la parola di controllo, il riferimento e i dati dipendenti
dall'applicazione come il riferimento minimo e i tempi di
rampa e così via.
AVVISO!
La parola di controllo e il riferimento sono sempre inviati
nell'elenco dal controllore al convertitore di frequenza.
94 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Installazione e setup dell'... Guida alla Progettazione
7.8.11 Codici funzione supportati da
Modbus RTU supporta l'uso dei seguenti codici funzione
nel campo funzione del telegramma.
Lettura bobine 1
Lettura registri di mantenimento 3
Scrittura bobina singola 5
Scrittura registro singolo 6
Scrittura bobine multiple F
Scrittura registri multipli 10
Ottieni contatore eventi com. B
Riporta ID slave 11
Leggi scrivi registri multipli 17
Modbus RTU
Funzione Codice funzione (hex)
Disegno 7.14 Accesso mediante lettura/scrittura PCD
AVVISO!
Le caselle in grigio non possono essere modicate, in
quanto sono valori predeniti.
AVVISO!
Mappare i parametri a 32 bit entro i limiti di 32 bit
(PCD2 e PCD3 oppure PCD4 e PCD5 e così via), dove il
numero del parametro è mappato due volte per il
parametro 8-42 Cong. scrittura PCD o il
parametro 8-43 Cong. lettura PCD.
7.8.10 Controllo del convertitore di
frequenza
Questa sezione descrive i codici che possono essere
utilizzati nei campi funzione e nei campi dati del
telegramma Modbus RTU.
Tabella 7.19 Codici funzione
Funzione
Codice
funzione
sottofunzio
Diagnostica 8
Tabella 7.20 Codici funzione
Codice
Sottofunzione
ne
1 Riavvia comunicazione.
Restituisce il registro
2
diagnostico.
10
11
Azzera i contatori e il
registro diagnostico.
Restituisce il conteggio
messaggi bus.
Restituisce il conteggio
12
degli errori di comunicazione bus.
13
14
Restituisce il conteggio
degli errori slave.
Restituisce il conteggio
messaggi slave.
7 7
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 95

Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
7.8.12 Codici di eccezione Modbus
Per una spiegazione completa della struttura di una
Come accedere ai parametri
7.9
7.9.1 Gestione dei parametri
risposta del codice di eccezione consultare il
capitolo 7.8.5 Campo funzione.
Il PNU (numero di parametro) viene tradotto dall'indirizzo
di registro contenuto nel messaggio di lettura o scrittura
Codice Nome Signicato
Il codice funzione ricevuto nell'interrogazione non è un'azione consentita per il
server (o slave). La causa può essere il
fatto che il codice funzione è applicabile
soltanto ai dispositivi più nuovi e non è
Funzione non
1
consentita
77
Indirizzo dati
2
3
4
non
consentito
Valore dei
dati non
consentito
Guasto al
dispositivo
slave
stato implementato nell'unità selezionata.
Potrebbe anche indicare che il server (o
lo slave) si trova in uno stato sbagliato
per elaborare una richiesta di questo
tipo, ad esempio perché non è
congurato e gli è stato richiesto di
indicare i valori di registro.
L'indirizzo dati ricevuto nell'interrogazione non è un indirizzo consentito
per il server (o slave). Più specicamente,
non è valida la combinazione di numero
di riferimento e lunghezza di trasferimento. Per un controllore con 100
registri, una richiesta con oset 96 e
lunghezza 4 va a buon ne, mentre una
richiesta con oset 96 e lunghezza 5
genera l'eccezione 02.
Un valore contenuto nel campo dati di
interrogazione non è un valore
consentito per un server (o slave). Questo
indica un guasto nella struttura della
parte residua di una richiesta complessa,
ad esempio che la lunghezza implicita è
scorretta. NON signica che un elemento
di dati trasmesso per la memorizzazione
in un registro abbia un valore al di fuori
dell'ambito del programma di
applicazione, poiché il protocollo Modbus
non conosce il signicato dei valori nei
registri.
Si è vericato un errore irreversibile
mentre il server (o slave) tentava di
eseguire l'azione richiesta.
Modbus. Il numero di parametro viene convertito in
Modbus come (10 x numero di parametro) decimale.
Esempio: lettura parametro 3-12 Valore di catch-up/slow
down (16 bit): il registro di mantenimento 3120 contiene il
valore dei parametri. Un valore di 1.352 (decimale)
signica
che il parametro è impostato sul 12,52%.
Lettura parametro 3-14 Rif. relativo preimpostato (32 bit): i
registri di mantenimento 3410 e 3411 contengono i valori
dei parametri. Un valore di 11300 (decimale)
signica che il
parametro è impostato su 1113.00.
Per informazioni su parametri, dimensione e indice di
conversione consultare il capitolo 6 Programmazione.
7.9.2 Memorizzazione di dati
La bobina 65 in codice decimale determina se i dati scritti
nel convertitore di frequenza vengono memorizzati
nell'EEPROM e nella RAM (bobina 65 = 1) oppure soltanto
nella RAM (bobina 65 = 0).
7.9.3 IND (Index)
Alcuni parametri nel convertitore di frequenza sono
parametri array, ad esempio parametro 3-10 Riferim preimp.
Poiché il Modbus non supporta gli array nei registri di
mantenimento, il convertitore di frequenza ha riservato il
registro di mantenimento 9 come puntatore all'array. Prima
di leggere o scrivere un parametro array, impostare il
registro di mantenimento su 9. L'impostazione del registro
di mantenimento al valore di 2 fa sì che tutti i seguenti
parametri array di lettura/scrittura siano nell'indice 2.
7.9.4 Blocchi di testo
Ai parametri memorizzati come stringhe di testo si accede
allo stesso modo come agli altri parametri. La grandezza
massima dei blocchi di testo è 20 caratteri. Se una richiesta
Tabella 7.21 Codici di eccezione Modbus
di lettura per un parametro prevede più caratteri di quelli
memorizzati dal parametro, la risposta viene troncata. Se la
richiesta di lettura per un parametro prevede meno
caratteri di quelli memorizzati dal parametro, la risposta
viene riempita con spazi.
7.9.5 Fattore di conversione
Un valore parametrico può essere trasmesso solo sotto
forma di numero intero. Per trasmettere i decimali, usare
un fattore di conversione.
96 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806

Installazione e setup dell'... Guida alla Progettazione
7.9.6 Valori dei parametri
Tipi di dati standard
I tipi di dati standard sono int 16, int 32, uint 8, uint 16 e
uint 32. Sono memorizzati come registri 4x (40001 –
4FFFF). I parametri vengono letti utilizzando la funzione 03
hex lettura registri di mantenimento. I parametri vengono
scritti usando la funzione 6 hex preimposta un registro
singolo per un registro (16 bit) e la funzione 10 hex
preimposta registri multipli per due registri (32 bit). Le
grandezze leggibili vanno da un registro (16 bit) no a 10
registri (20 caratteri).
Tipi di dati non standard
I tipi di dati non standard sono stringhe di testo e
vengono memorizzati come registri 4x (40001–4FFFF). I
parametri vengono letti usando la funzione 03 hex lettura
registri di mantenimento e scritti usando la funzione 10
hex preimposta registri multipli. Le grandezze leggibili
vanno da un registro (due caratteri) no a 10 registri (20
caratteri).
7.10 Esempi
I seguenti esempi illustrano i vari comandi Modbus RTU.
Risposta
Lo stato nel telegramma di risposta è composto da 1 bit
per ogni bobina impaccata nel campo dati. Lo stato è
indicato come: 1 = ON; 0 = OFF. L'lsb meno signicativo
del primo byte dati restituito contiene la bobina indirizzata
nell'interrogazione. Le altre bobine seguono nei bit più
signicativi questo byte e nell'ordine da meno signicativo
a più signicativo nei byte successivi.
Se la quantità di bobine restituite non è un multiplo di
otto, i rimanenti bit nel byte di dati nale sono completati
con valori pari a 0 (in direzione dei bit più signicativi del
byte). Il campo conteggio byte specica il numero di byte
di dati completi.
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 01 (lettura bobina)
Conteggio byte 02 (2 byte di dati)
Dati (bobine 40–33) 07
Dati (bobine 48–41) 06 (STW = 0607hex)
Controllo errori (CRC) –
Tabella 7.23 Risposta
7 7
7.10.1 Lettura stato bobine (01 hex)
Descrizione
Questa funzione legge lo stato ON/OFF di uscite discrete
(bobine) nel convertitore di frequenza. Il broadcast non
viene mai supportato per letture.
Interrogazione
Il telegramma di interrogazione specica la bobina di
partenza e la quantità di bobine che devono essere lette.
Gli indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 33 viene indirizzata come 32.
Esempio di una richiesta di lettura delle bobine 33-48
(parola di stato) dal dispositivo slave 01.
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 01 (lettura bobina)
Indirizzo iniziale HI 00
Indirizzo iniziale LO 20 (32 decimale) bobina 33
Numero di punti HI 00
Numero di punti LO 10 (16 decimale)
Controllo errori (CRC) –
Tabella 7.22 Interrogazione
AVVISO!
Bobine e registri sono indirizzati in maniera esplicita con
un oset -1 in Modbus.
La bobina 33 viene ad esempio indirizzata come bobina
32.
7.10.2 Forza/Scrivi bobina singola (05 hex)
Descrizione
Questa funzione permette di forzare lo stato della bobina
su ON o su OFF. Nel modo broadcast, la funzione forza gli
stessi riferimenti bobina in tutti gli slave collegati.
Interrogazione
Il telegramma di interrogazione stabilisce che la bobina 65
(controllo scrittura parametri) deve essere forzata. Gli
indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 65 viene indirizzata come 64. Settaggio dati = 00
00 hex (OFF) oppure FF 00 hex (ON).
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 05 (scrittura bobina singola)
Indirizzo bobina HI 00
Indirizzo bobina LO 40 (64 decimale) bobina 65
Settaggio dati HI FF
Settaggio dati LO 00 (FF 00 = ON)
Controllo errori (CRC) –
Tabella 7.24 Interrogazione
MG18C806 Danfoss A/S © 04/2018 Tutti i diritti riservati. 97

Installazione e setup dell'...
VLT® HVAC Basic Drive FC 101
Risposta
La risposta normale è un'eco dell'interrogazione, restituita
dopo aver forzato lo stato della bobina.
Risposta
La risposta normale restituisce l'indirizzo dello slave, il
codice funzione, l'indirizzo di avvio e la quantità di bobine
forzate.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 05
Settaggio dati HI FF
Settaggio dati LO 00
Quantità di bobine HI 00
Quantità di bobine LO 01
Controllo errori (CRC) –
Tabella 7.25 Risposta
7.10.3 Forza/Scrivi bobine multiple (0F hex)
Descrizione
77
Questa funzione forza ogni bobina in una sequenza di
7.10.4 Lettura dei registri di mantenimento
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 0F (scrittura di bobine multiple)
Indirizzo bobina HI 00
Indirizzo bobina LO 10 (indirizzo bobina 17)
Quantità di bobine HI 00
Quantità di bobine LO 10 (16 bobine)
Controllo errori (CRC) –
Tabella 7.27 Risposta
(03 hex)
bobine su on oppure o. Durante il broadcast, la funzione
forza gli stessi riferimenti bobina in tutti gli slave collegati.
Interrogazione
Il telegramma di interrogazione specica che le bobine da
17 a 32 (setpoint velocità) debbano essere forzate.
AVVISO!
Gli indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 17 viene indirizzata come 16.
Nome campo Esempio (hex)
Indirizzo slave
Funzione 0F (scrittura di bobine multiple)
Indirizzo bobina HI 00
Indirizzo bobina LO 10 (indirizzo bobina 17)
Quantità di bobine HI 00
Quantità di bobine LO 10 (16 bobine)
Conteggio byte 02
Settaggio dati HI
(bobine 8–1)
Settaggio dati LO
(bobine 16–9)
Controllo errori (CRC) –
Tabella 7.26 Interrogazione
01 (indirizzo del convertitore di
frequenza)
20
00 (riferimento = 2.000 hex)
Descrizione
Questa funzione legge i contenuti dei registri di
mantenimento nello slave.
Interrogazione
Il telegramma di interrogazione identica il registro iniziale
e la quantità di registri che devono essere letti. Gli indirizzi
di registro iniziano da zero, vale a dire che i registri 1–4
vengono indirizzati come 0–3.
Esempio: lettura parametro 3-03 Riferimento max., registro
03030.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 03 (Lettura registri di mantenimento)
Indirizzo iniziale HI 0B (Indirizzo registro 3029)
Indirizzo iniziale LO D5 (Indirizzo registro 3029)
Numero di punti HI 00
Numero di punti LO
Controllo errori (CRC) –
Tabella 7.28 Interrogazione
02 – (parametro 3-03 Riferimento max. è
lungo 32 bit, cioè due registri)
Risposta
I dati di registro nel telegramma di risposta sono impaccati
come 2 byte per registro, con i contenuti binari allineati a
destra all'interno di ogni byte. In ogni registro il primo byte
contiene i bit più signicativi e il secondo quelli meno
signicativi.
Esempio: hex 000088B8 = 35.000 = 35 Hz.
98 Danfoss A/S © 04/2018 Tutti i diritti riservati. MG18C806
 Loading...
Loading...