


ENGINEERING TOMORROW
Design Guide
VLT® HVAC Basic Drive FC 101
www.danfoss.se/vlt

Innehåll Design Guide
Innehåll
1 Inledning
1.1 Syftet med Design Guide
1.2 Dokument- och programversion
1.3 Säkerhetssymboler
1.4 Förkortningar
1.5 Ytterligare dokumentation
1.6 Denitioner
1.7 Eektfaktor
1.8 Överensstämmelse med föreskrifter
1.8.1 CE-märkning 10
1.8.2 Uppfyller UL 10
1.8.3 Uppfyller RCM-märkning 11
1.8.4 EAC 11
1.8.5 UkrSEPRO 11
2 Säkerhet
2.1 Behörig personal
2.2 Säkerhetsåtgärder
6
6
6
7
7
7
8
10
10
12
12
12
3 Produktöversikt
3.1 Fördelar
3.1.1 Varför använda frekvensomriktare för varvtalsreglering av äktar och pumpar? 14
3.1.2 Den största fördelen – minskad energiförbrukning 14
3.1.3 Exempel på minskad energiåtgång 14
3.1.4 Jämförelse av energibesparingar 15
3.1.5 Exempel med varierande öde under 1 år 16
3.1.6 Bättre kontroll 17
3.1.7 Stjärn-/deltastart eller mjukstartare krävs inte 17
3.1.8 Att använda en frekvensomriktare sparar pengar 17
3.1.9 Utan frekvensomriktare 18
3.1.10 Med frekvensomriktare 19
3.1.11 Tillämpningsexempel 20
3.1.12 Variabel luftvolym 20
3.1.13 Lösning med VLT 20
3.1.14 Konstant öde 21
3.1.15 Lösning med VLT 21
14
14
3.1.16 Kyltornsäkt 22
3.1.17 Lösning med VLT 22
3.1.18 Kondensatorpumpar 23
3.1.19 Lösning med VLT 23
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 1
Innehåll
VLT® HVAC Basic Drive FC 101
3.1.20 Primärpumpar 24
3.1.21 Lösning med VLT 24
3.1.22 Sekundärpumpar 26
3.1.23 Lösning med VLT 26
3.2 Styrstrukturer
3.2.1 Styrstruktur utan återkoppling 27
3.2.2 PM/EC+ motorstyrning 27
3.2.3 Lokalstyrning (Hand On) och Fjärrstyrning (Auto On) 27
3.2.4 Styrstrukturer med återkoppling 28
3.2.5 Återkopplingskonvertering 28
3.2.6 Referenshantering 29
3.2.7 Justera frekvensomriktarens regulator med återkoppling 30
3.2.8 Manuell PI-justering 30
3.3 Omgivande miljöförhållanden
3.4 Allmänt om EMC
3.4.1 Allmänt om EMC-emission 36
3.4.2 Emissionskrav 38
3.4.3 Testresultat för EMC-emission 38
3.4.4 Allmänt om utstrålning av övertoner 40
3.4.5 Emissionskrav gällande övertoner 40
3.4.6 Övertoner, testresultat (emission) 40
27
30
36
3.4.7 Immunitetskrav 42
3.5 Galvanisk isolation (PELV)
3.6 Läckström till jord
3.7 Extrema driftförhållanden
3.7.1 Termiskt motorskydd (ETR) 44
3.7.2 Termistoringång 44
4 Välja och beställa
4.1 Typkod
4.2 Tillval och tillbehör
4.2.1 Lokal manöverpanel (LCP) 47
4.2.2 Montering av LCP i panelfronten 47
4.2.3 IP21/NEMA typ 1-kapslingssats 48
4.2.4 Jordningsplåt 49
4.3 Beställningsnummer
4.3.1 Tillval och tillbehör 50
4.3.2 Övertonslter 51
4.3.3 Externa RFI-lter 53
42
43
43
46
46
47
50
5 Installation
2 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
54
Innehåll Design Guide
5.1 Elektrisk installation
5.1.1 Nät och motoranslutning 56
5.1.2 Korrekt elektrisk installation enligt EMC 61
5.1.3 Styrplintar 63
6 Programmering
6.1 Inledning
6.2 Lokal manöverpanel (LCP)
6.3 Menyer
6.3.1 Statusmeny 65
6.3.2 Snabbmeny 65
6.3.3 Huvudmeny 79
6.4 Snabböverföring av parameterinställningar mellan era frekvensomriktare
6.5 Avläsning och programmering av indexerade parametrar
6.6 Initiering av fabriksinställningar
7 Installation och konguration av RS485
7.1 RS485
54
64
64
64
65
79
80
80
81
81
7.1.1 Översikt 81
7.1.2 Nätverks anslutning 81
7.1.3 Maskinvaruinstallation för frekvensomriktare 81
7.1.4 Parameterinställningar för Modbus-kommunikation 82
7.1.5 EMC -säkerhetsåtgärder 82
7.2 FC-protokoll
7.2.1 Översikt 83
7.2.2 FC med Modbus RTU 83
7.3 Parameterinställningar för att aktivera FC-protokollet
7.4 Grundstruktur för meddelanden inom FC-protokollet
7.4.1 Innehållet i ett tecken (en byte) 83
7.4.2 Telegramstruktur 83
7.4.3 Telegram längd (LGE) 84
7.4.4 Frekvensomriktarens adress (ADR) 84
7.4.5 Datakontrollbyte (BCC) 84
7.4.6 Datafältet 84
7.4.7 PKE-fältet 84
83
83
83
7.4.8 Parameternummer (PNU) 85
7.4.9 Index (IND) 85
7.4.10 Parametervärde (PWE) 85
7.4.11 Datatyper som stöds av frekvensomriktaren 86
7.4.12 Konvertering 86
7.4.13 Processord (PCD) 86
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 3
Innehåll
VLT® HVAC Basic Drive FC 101
7.5 Exempel
7.5.1 Skriva ett parametervärde 86
7.5.2 Läsa ett parametervärde 87
7.6 Översikt över Modbus RTU
7.6.1 Inledning 87
7.6.2 Översikt 87
7.6.3 Frekvensomriktare med Modbus RTU 88
7.7 Nätverkskonguration
7.8 Grundstruktur för Modbus RTU-meddelanden
7.8.1 Inledning 88
7.8.2 Telegramstruktur för Modbus RTU 88
7.8.3 Start-/stoppfält 89
7.8.4 Adressfält 89
7.8.5 Funktionsfält 89
7.8.6 Datafält 89
7.8.7 Fältet CRC-kontroll 89
7.8.8 Adressering av spolregister 90
86
87
88
88
7.8.9 Åtkomst via PCD skriv/läs 91
7.8.10 Styra frekvensomriktaren 92
7.8.11 Funktionskoder som stöds av Modbus RTU 92
7.8.12 Undantagskoder i Modbus 92
7.9 Åtkomst till parametrar
7.9.1 Parameterhantering 93
7.9.2 Datalagring 93
7.9.3 IND (Index) 93
7.9.4 Textblock 93
7.9.5 Konverterings faktor 93
7.9.6 Parametervärden 93
7.10 Exempel
7.10.1 Läs spolstatus (01 hex) 94
7.10.2 Tvinga/skriv enskild spole (05 hex) 94
7.10.3 Tvinga/skriv era spolar (0F hex) 95
7.10.4 Läs inforegister (03 hex) 95
7.10.5 Förinställt enskilt register (06 hex) 96
93
94
7.10.6 Flera förinställda register (10 hex) 96
7.10.7 Läs/skriv era register (17 hex) 96
7.11 Danfoss FC-styrprol
7.11.1 Styrord enligt FC-prolen (8–10 protokoll = FC-prol) 97
7.11.2 Statusord enligt FC-prolen (STW) 99
7.11.3 Referensvärde för bussvarvtal 100
4 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
97
Innehåll Design Guide
8 Allmänna specikationer
8.1 Mekaniska dimensioner
8.1.1 Installation sida vid sida 101
8.1.2 Frekvensomriktarens mått 102
8.1.3 Fraktmått 105
8.1.4 Öppet montage 106
8.2 Specikationer för nätförsörjning
8.2.1 3 x 200–240 V AC 107
8.2.2 3 x 380–480 V AC 108
8.2.3 3 x 525–600 V AC 112
8.3 Säkringar och maximalbrytare
8.4 Allmänna tekniska data
8.4.1 Nätförsörjning (L1, L2, L3) 115
8.4.2 Motoreekt (U, V, W) 115
8.4.3 Kabellängd och ledararea 115
8.4.4 Digitala ingångar 116
8.4.5 Analoga ingångar 116
101
101
107
113
115
Index
8.4.6 Analog utgång 116
8.4.7 Digital utgång 117
8.4.8 Styrkort, RS485-seriell kommunikation 117
8.4.9 Styrkort, 24 V DC-utgång 117
8.4.10 Reläutgång 117
8.4.11 Styrkort, 10 V DC-utgång 118
8.4.12 Omgivande miljöförhållanden 118
8.5 dU/Dt
119
122
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 5
Inledning
VLT® HVAC Basic Drive FC 101
11
1 Inledning
1.1 Syftet med Design Guide
Denna Design Guide är avsedd för projekt- och systemingenjörer, konstruktionsbyggare samt tillämpnings- och
produktspecialister. Den tekniska informationen ges för att
förstå frekvensomriktarens kapacitet för integrering i
motorstyrnings- och övervakningssystem. Även detaljer om
drift, kravspecikationer och systemrekommendationer
nns med. Information om frekvensomriktarens egenskaper
för ingångseekt, utgång för motorstyrning och
omgivande driftförhållande tillhandahålls.
Följande
Det nns även designinformation tillgänglig, som:
Genom att läsa den detaljerade produktinformation i
utformningsstadiet är det möjligt att utveckla ett väl
uttänkt system med optimal funktionalitet och
verkningsgrad.
VLT® är ett registrerat varumärke.
1.2
Den här handboken granskas och uppdateras regelbundet.
Alla förslag på förbättringar är välkomna.
nnas också beskrivet:
Säkerhetsfunktioner.
•
Felstatusövervakning.
•
Driftstatusrapportering.
•
Seriell kommunikationkapacitet.
•
Programmerbara alternativ och funktioner.
•
Platskrav.
•
Kablar.
•
Säkringar.
•
Styrkablar.
•
Enhetsstorlekar och vikt.
•
Övrig kritisk information nödvändigt för att
•
planera systemintegration.
Dokument- och programversion
Från och med programvaruversion 4.0x (produktionsvecka
33, 2017 och senare) är kylplattans kyläktsfunktion med
variabel hastighet implementerad i frekvensomriktare för
eektstorlekarna 22 kW (30 hk) 400 V IP20 och under, samt
för 18,5 kW (25 hk) 400 V IP54 och under. Funktionen
kräver programvaru- och maskinvaruuppdateringar och
inför begränsningar vad gäller bakåtkompatibilitet för
kapslingsstorlekarna H1–H5 och I2–I4. Se Tabell 1.2
angående begränsningarna.
Gammalt styrkort
Programvaru-
kompatibilitet
Gammal
programvara
(OSS-lversion 3.xx
och tidigare)
Ny programvara
(OSS-lversion 4.xx
och senare)
Maskinvaru-
kompatibilitet
Gammalt eektkort
(produktionsvecka
33, 2017 eller
tidigare)
Nytt eektkort
(produktionsvecka
34, 2017 eller
senare)
Tabell 1.2 Programvaru- och maskinvarukompatibilitet
(produktionsvecka
33, 2017 eller
tidigare)
Ja Nej
Nej Ja
Gammalt styrkort
(produktionsvecka
33, 2017 eller
tidigare)
Ja (endast program-
varuversion 3.xx och
tidigare)
Ja (MÅSTE
uppdatera
programvaran till
version 3.xx eller
tidigare, och äkten
körs kontinuerligt
vid full hastighet)
Nytt styrkort
(produktionsvecka
34, 2017 eller
senare)
Nytt styrkort
(produktionsvecka
34, 2017 eller
senare)
Ja (MÅSTE
uppdatera
programvara till
version 4.xx eller
senare)
Ja (endast program-
varuversion 4.xx och
senare)
Utgåva Anmärkningar Program-
version
MG18C8xx Uppdaterad med ny program- och
maskinvaruversion
Tabell 1.1 Dokument- och programversion
6 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
4,2x
Inledning Design Guide
1.3 Säkerhetssymboler
Följande symboler används i denna handbok:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
mindre eller måttliga personskador. Symbolen kan även
användas för att uppmärksamma farligt handhavande.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
1.4 Förkortningar
°C
°F
A Ampere/AMP
AC Växelström
AMA Automatisk motoranpassning
AWG American Wire Gauge
DC Likström
EMC Elektromagnetisk kompatibilitet
ETR Elektronisk-termiskt relä
FC Frekvensomriktare
f
M,N
kg Kilogram
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
kHz Kilohertz
LCP Lokal manöverpanel
m Meter
mA Milliampere
MCT Rörelsekontrollverktyg
mH Millihenry-induktans
min Minut
ms Millisekund
nF Nanofarad
Nm Newtonmeter
n
s
P
M,N
PCB Ytbehandlat kretskort
PELV Protective Extra Low Voltage
Regen Regenerativa plintar
Grader Celsius
Grader Fahrenheit
Nominell motorfrekvens
Nominell växelriktarutström
Strömbegränsning
Nominell motorström
Den maximala utströmmen
Den nominella utströmmen från frekvensomriktaren
Synkront motorvarvtal
Nominell motoreekt
varv/minut Varv per minut
s Sekund
T
LIM
U
M,N
V Volt
Tabell 1.3 Förkortningar
Momentgräns
Nominell motorspänning
1.5 Ytterligare dokumentation
Snabbinstallationsguiden för VLT® HVAC Basic
•
DriveFC 101 innehåller grundläggande
information om dimensioner, installation och
programmering.
Programmeringshandboken för VLT® HVAC Basic
•
DriveFC 101 innehåller information om programmering och fullständiga parameterbeskrivningar.
Programvaran DanfossVLT® Energy Box. Välj PC
•
Software Download (Hämta programvara) på
www.danfoss.com/en/service-and-support/
downloads/dds/vlt-energy-box/.
VLT® Energy Box Software kan användas för att
jämföra energiförbrukningen för
-pumpar som drivs av Danfoss frekvensomriktare
med alternativa ödesregleringsmetoder. Med det
här verktyget får du total kontroll över kostnader,
energiåtgång och återbetalning när du använder
frekvensomriktare från Danfoss på HVAC-äktar,
pumpar och kyltorn.
Danfoss tekniska dokumentation nns tillgänglig i
elektronisk form på CD-skivan som medföljer produkten,
eller i tryckt form på ditt lokala Danfoss-försäljningskontor.
MCT 10 Set-up Software-support
Hämta programvaran från www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Under installationsprocessen av programmet anger du
koden 81463800 för att aktivera funktionaliteten för FC
101. Det behövs ingen licensnyckel för att använda FC 101funktionalitet.
Den senaste programvaran innehåller inte alltid de senaste
uppdateringarna för frekvensomriktaren. Kontakta din
lokala återförsäljare för de senaste uppdateringarna för
frekvensomriktaren (*.upd-ler), eller hämta uppdateringarna från www.danfoss.com/en/service-and-support/
downloads/dds/vlt-motion-control-tool-mct-10/#Overview.
HVAC-äktar och
1 1
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 7
Inledning
VLT® HVAC Basic Drive FC 101
11
1.6 Denitioner
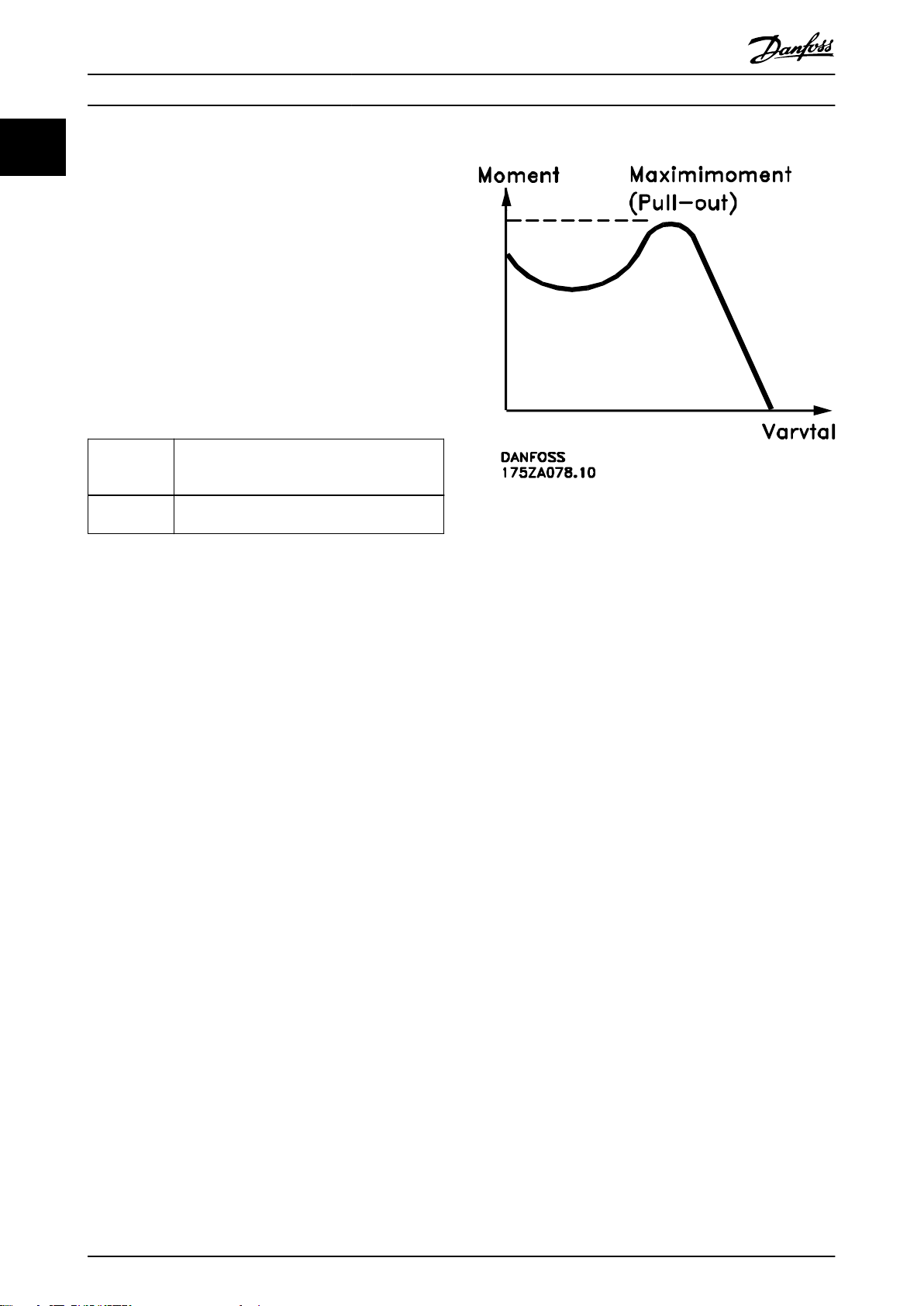
Startmoment
Frekvensomriktare
I
VLT, MAX
Den maximala utströmmen.
I
VLT,N
Den nominella utströmmen från frekvensomriktaren.
U
VLT, MAX
Den maximala utspänningen.
Ingång
Den anslutna motorn kan startas och stoppas med LCP och
de digitala insignalerna. Funktionerna är uppdelade i två
grupper och beskrivs i Tabell 1.4. Funktionerna i grupp 1
har högre prioritet än de i grupp 2.
Återställning, utrullningsstopp, återställning och
Grupp 1
Grupp 2
Tabell 1.4 Styrkommandon
Motor
f
JOG
Motorfrekvensen när jogg-funktionen är aktiverad (via
digitala plintar).
f
M
Motorfrekvensen.
f
MAX
Den maximala motorfrekvensen.
f
MIN
Den minimala motorfrekvensen.
f
M,N
Den nominella motorfrekvensen (märkskyltsdata).
I
M
Motorströmmen.
I
M,N
Den nominella motorströmmen (märkskyltsdata).
n
M,N
Nominellt motorvarvtal (märkskyltsdata).
P
M,N
Den nominella motoreekten (märkskyltsdata).
utrullningsstopp, snabbstopp, DC-broms, stopp
och [O].
Start, pulsstart, reversering, startreversering, jogg
och frys utfrekvens.
Bild 1.1 Startmoment
η
VLT
Frekvensomriktarens verkningsgrad denieras som förhållandet mellan utgående och ingående eekt.
Inaktivera start-kommando
Ett stoppkommando som tillhör grupp 1 av styrkommandon. Se Tabell 1.4.
Stoppkommando
Se Tabell 1.4.
Analog referens
En signal som skickas till de analoga ingångarna 53 eller
54. Det kan vara spänning eller ström.
Inström: 0–20 mA eller 4–20 mA
•
Spänningsingång: 0–10 V DC
•
Bussreferens
En signal överförd till seriell kommunikationsport (FCporten).
förinställd referens
En förinställd referens som har ett värde mellan -100 %
och +100 % av referensområdet. Val mellan 8 förinställda
referenser via de digitala plintarna.
Ref
MAX
Avgör sambandet mellan referensingången på 100 %
fullskalsvärde (normalt 10 V, 20 mA) och resulterande
U
M
Den momentana motorspänningen.
U
M,N
Den nominella motorspänningen (märkskyltsdata).
referens. Maximireferensvärdet som angetts i
parameter 3-03 Maximireferens.
Ref
MIN
Avgör sambandet mellan referensingången vid 0 % värde
(normalt 0 V, 0 mA, 4 mA) och resulterande referens.
Minimalt referensvärde anges i parameter 3-02 Minimire-
ferens.
8 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Inledning Design Guide
Analoga ingångar
De analoga ingångarna används för att styra olika
funktioner i frekvensomriktaren.
Det nns 2 typer av analoga ingångar:
Inström: 0–20 mA eller 4–20 mA
•
Spänningsingång: 0–10 V DC
•
Analoga utgångar
De analoga utgångarna kan leverera en signal på 0-20 mA,
4-20 mA eller en digital signal.
Automatisk motoranpassning, AMA
AMA-algoritmen beräknar de elektriska parametrarna för
den anslutna motorn när motorn är stoppad och
kompenserar för motståndet baserat på motorkabelns
längd.
Digitala ingångar
De digitala ingångarna kan användas för att styra olika
funktioner i frekvensomriktaren.
Digitala utgångar
Frekvensomriktaren har två halvledarutgångar som kan ge
en signal på 24 V DC (max. 40 mA).
Reläutgångar
Frekvensomriktaren har 2 programmerbara reläutgångar.
ETR
Elektronisk-termiskt relä är en beräkning av termisk
belastning baserad på aktuell belastning och tid. Dess syfte
är att göra en uppskattning av motortemperaturen.
Initiering
Om initiering utförs (parameter 14-22 Driftläge) återställs
frekvensomriktarens programmerbara parametrar till fabriksinställningarna.
Parameter 14-22 Driftläge initierar inte kommunikationsparametrar, fellogg eller re mode-logg.
Intermittent driftcykel
En intermittent driftcykel avser en serie driftcykler. Varje
cykel består av en period med belastning och en period
utan belastning. Driften kan vara endera periodisk eller
icke-periodisk.
LCP
Den lokala manöverpanelen (LCP) utgör ett komplett
gränssnitt för manövrering och programmering av frekvensomriktaren. Knappsatsen är borttagningsbar på IP20enheter och fasta på IP54-enheter. Den kan monteras upp
till 3 meter (9,8 ft) från frekvensomriktaren, t.ex. i en
frontpanel med hjälp av monteringssatsen (tillval).
Lsb
Den minst betydelsefulla biten.
MCM
Står för Mille Circular Mil, en amerikansk måttenhet för
ledararea. 1 MCM = 0,5067 mm2.
Msb
Den mest betydelsefulla biten.
Online-/oineparametrar
Ändringar till onlineparametrar aktiveras omedelbart efter
det att datavärdet ändrats. Tryck på [OK] för att aktivera
oineparametrar.
PI-regulator
PI-regulatorn upprätthåller önskat varvtal, tryck, temperatur
osv. genom att justera utfrekvensen så att den matchar
den varierande belastningen.
RCD
Jordfelsbrytare.
Meny
Parameterinställningarna kan sparas i två menyer. Växla
mellan de två parametermenyerna och redigera en meny
medan en annan är aktiv.
Eftersläpningskompensation
Frekvensomriktaren kompenserar eftersläpningen med ett
frekvenstillskott som följer den uppmätta motorbelastningen vilket håller motorvarvtalet närmast konstant.
Smart Logic Control (SLC)
SLC är en serie användardenierade åtgärder som utförs
när tillhörande användardenierade händelser utvärderas
som sanna av SLC.
Termistor
Ett temperaturberoende motstånd som placeras där
temperaturen ska övervakas (frekvensomriktare eller
motor).
Tripp
Ett tillstånd som uppstår vid felsituationer, till exempel när
frekvensomriktaren utsätts för överhettning eller när
frekvensomriktaren skyddar motorn, processen eller
mekanismen. Omstart förhindras tills orsaken till felet har
försvunnit och trippläget annulleras genom återställning
eller genom att den programmeras för automatisk
återställning. Trippfunktionen får inte användas för personsäkerhet.
Tripplås
Ett läge som uppstår vid felsituationer när frekvensomriktaren skyddar sig själv, och som kräver fysiska ingrepp,
exempelvis om frekvensomriktaren utsatts för kortslutning
vid utgången. En låst tripp kan bara annulleras genom att
slå av huvudströmmen, eliminera felorsaken och ansluta
frekvensomriktare på nytt. Omstart förhindras tills
trippläget annulleras genom återställning eller genom att
den programmeras för automatisk återställning. Använd
inte fastlåst tripp för personlig säkerhet.
VT-kurva
Variabel momentkurva används för pumpar och äktar.
1 1
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 9
Inledning
VLT® HVAC Basic Drive FC 101
11
+
VVC
Jämfört med standardstyrning, som bygger på spännings-/
Försäkran om överensstämmelse nns tillgänglig på
begäran.
frekvensförhållande, ger Voltage Vector Control (VVC+)
bättre dynamik och stabilitet både vid ändringar i varvtals-
1.8.1.1 Lågspänningsdirektivet
referens och i relation till belastningsmomentet.
1.7 Eektfaktor
Eektfaktorn
belastar nätförsörjningen. Eekfaktorn är förhållandet
mellan I1 och I
total RMS -spänning inklusive övertonsströmmar. Ju lägre
eektfaktor, desto högre I
indikerar i vilken grad frekvensomriktare
, där I1 är grundsspänning, och I
RMS
vid samma kW-eekt.
RMS
RMS
är
Lågspänningsdirektivet omfattar all elektrisk utrustning
avsedd för 50–1000 V AC och 75–1600 V DC.
Målet med direktivet är att säkerställa personlig säkerhet
och att undvika skador på egendom vid drift av elektrisk
utrustning som installeras och underhålls korrekt, och som
används som avsetts.
1.8.1.2 EMC-direktivet
Effektfaktor =
Eektfaktorn för 3-fasnät:
Effekt faktor =
= I
2
1
I
RMS
En hög eektfaktor innebär att övertonsströmmarna är
låga.
Frekvensomriktarnas inbyggda likströmsspolar ger en hög
eektfaktor vilket minimerar belastningen på nätet.
Överensstämmelse med föreskrifter
1.8
Frekvensomriktare är konstruerade i överensstämmelse
med de direktiv som beskrivs i detta avsnitt.
3 × U × I1× cosϕ
I1 × cosϕ1
I
2
+ I
5
2
7
+ I
3 × U × I
=
RMS
+ . . + I
RMS
I
1
eftersomcosϕ1 = 1
I
RMS
2
n
Syftet med EMC-direktivet (elektromagnetisk kompatibilitet)
är att reducera elektromagnetisk störning och förbättra
immuniteten hos elektrisk utrustning och installationer. Det
grundläggande skyddskravet i EMC-direktivet 2014/30/EG
anger att enheter som genererar elektromagnetiska
störningar (EMI), eller vars drift kan påverkas av EMI, måste
vara konstruerade för att begränsa generering av elektromagnetiska störningar och ska ha en lämplig
immunitetsklass för EMI när de installeras korrekt,
underhålls och används som avsett.
Elektrisk utrustning som används fristående eller som en
del av ett system måste vara CE-märkta. System måste inte
vara CE-märkta, men måste uppfylla EMC-direktivets
grundläggande skyddskrav.
1.8.1 CE-märkning
CE-märket (Conformité Européenne) anger att produkttillverkaren följer alla gällande EU-direktiv. De EU-direktiv som
gäller för utformning och tillverkning av frekvensomriktare
nns i Tabell 1.5.
OBS!
CE-märkningen avser inte produktens kvalitet.
Märkningen ger inte heller någon information om
produktens tekniska specikationer.
OBS!
Frekvensomriktare som har en inbyggd säkerhetsfunktion måste uppfylla kraven i maskindirektivet.
EU-direktiv Version
Lågspänningsdirektivet 2014/35/EU
EMC-direktivet 2014/30/EU
ErP-direktivet
Tabell 1.5 EU-direktiv som gäller frekvensomriktare
1.8.1.3 ErP-direktivet
ErP-direktivet är det europeiska ekodesigndirektivet för
energirelaterade produkter. Direktivet anger
ekodesignkraven för energirelaterade produkter, inklusive
frekvensomriktare. Direktivets mål är att öka energieekti-
viteten och miljöskyddet och samtidigt öka säkerheten
kring strömförsörjning. Miljöpåverkan av energirelaterade
produkter inkluderar energiförbrukningen under hela
produktens livscykel.
1.8.2 Uppfyller UL
UL-listad
Bild 1.2 UL
OBS!
IP54-enheter är inte UL-certierade.
Frekvensomriktaren uppfyller kraven i UL 508C. Mer
information nns i avsnittet Termiskt motorskydd i Design
Guide för den specika produkten.
10 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
089
Inledning Design Guide
1.8.3 Uppfyller RCM-märkning
Bild 1.3 RCM-märkning
RCM-märkningen indikerar överensstämmelse med
gällande tekniska standarder för elektromagnetisk kompatibilitet (EMC). En RCM-märkning krävs för elektriska och
elektroniska enheter på marknaden i Australien och på Nya
Zeeland. RCM-märkningens regelverk berör ledningsburen
och luftburen emission. För frekvensomriktare gäller
emissionsgränserna som anges i SS-EN/IEC 61800-3. En
försäkran om överensstämmelse kan tillhandahållas på
begäran.
1.8.4 EAC
Bild 1.4 EAC-märkning
1 1
Märkningen EurAsian Conformity (EAC) indikerar att
produkten uppfyller alla krav och tekniska föreskrifter som
gäller för produkten enligt den eurasiska tullunionen, som
utgörs av medlemsstaterna i den eurasiska ekonomiska
unionen.
EAC-logotypen måste nnas både på produktens och
förpackningens etikett. Alla produkter som används inom
EAC-området måste köpas från Danfoss inom EAC-området.
1.8.5 UkrSEPRO
Bild 1.5 UkrSEPRO
UKrSEPRO-certikatet säkerställer kvalitet och säkerhet
båda på produkter och tjänster samt tillverkningsstabilitet
enligt ukrainska standarder. UkrSepro-certikatet krävs för
tullklarering för alla produkter som importeras till och
exporteras från Ukraina.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 11
Säkerhet
VLT® HVAC Basic Drive FC 101
2 Säkerhet
22
2.1 Behörig personal
Korrekt och säker transport, lagring, installation, drift och
underhåll krävs för problemfri och säker drift av frekvensomriktaren. Endast behörig personal får installera och
använda denna utrustning.
Behörig personal
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Personalen måste dessutom vara
införstådd med de instruktioner och säkerhetsåtgärder som
beskrivs i den här handboken.
denieras som utbildade medarbetare
2.2 Säkerhetsåtgärder
VARNING
HÖG SPÄNNING
Frekvensomriktare innehåller hög spänning när de är
anslutna till växelströmsnätet, likströmsförsörjning eller
lastdelning. Om installation, driftsättning och underhåll
inte utförs av behörig personal kan det leda till dödsfall
eller allvarliga personskador.
Endast behörig personal får utföra installation,
•
driftsättning och underhåll.
Innan underhålls- eller reparationsarbete utförs
•
ska ett lämpligt verktyg för att mäta spänning
användas för att säkerställa att ingen spänning
föreligger i frekvensomriktaren.
VARNING
OAVSIKTLIG START
När frekvensomriktaren är ansluten till växelströmsnät,
DC-försörjning eller lastdelning kan motorn starta när
som helst. Oavsiktlig start vid programmering, underhåll
eller reparationsarbete kan leda till dödsfall, allvarliga
personskador eller materiella skador. Motorn kan starta
med hjälp av en extern brytare, ett seriellt fältbusskommando, en ingångsreferenssignal från LCP:n eller
LOP, via ärrstyrning med MCT 10 Set-up Software eller
efter ett uppklarat feltillstånd.
Så här förhindrar du oavsiktlig motorstart:
Tryck på [O/Reset] på LCP:n innan du
•
programmerar parametrar.
Koppla bort frekvensomriktaren från nätet.
•
Frekvensomriktaren, motorn och all annan
•
elektrisk utrustning måste vara driftklara när
frekvensomriktaren ansluts till växelströmsnät,
DC-försörjning eller lastdelning.
VARNING
URLADDNINGSTID
Frekvensomriktaren har DC-busskondensatorer som kan
behålla sin spänning även när nätspänningen kopplats
från. Hög spänning kan nnas kvar även om varningslamporna är släckta. Om du inte väntar den angivna
tiden efter att strömmen bryts innan underhålls- eller
reparationsarbete utförs, kan det leda till dödsfall eller
allvarliga personskador.
Stanna motorn.
•
Koppla från växelströmsnät och externa DC-
•
bussförsörjningar, inklusive reservbatterier, UPS
och DC-bussanslutningar till andra frekvensomriktare.
Koppla från eller lås PM-motorn.
•
Vänta tills kondensatorerna laddats ur.
•
Information om väntetider nns i Tabell 2.1
Innan underhålls- eller reparationsarbete utförs
•
ska ett lämpligt verktyg för att mäta spänning
användas för att säkerställa att kondensatorerna
är helt urladdade.
Spänning [V] Eektområde [kW (hk)] Minsta väntetid
(minuter)
3 x 200 0,25–3,7 (0,33–5) 4
3 x 200 5,5–11 (7–15) 15
3 x 400 0,37–7,5 (0,5–10) 4
3 x 400 11–90 (15–125) 15
3 x 600 2,2–7,5 (3–10) 4
3 x 600 11–90 (15–125) 15
Tabell 2.1 Urladdningstid
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om frekvensomriktaren
inte jordas korrekt kan det leda till dödsfall eller
allvarliga personskador.
En behörig elinstallatör måste säkerställa att
•
utrustningen är korrekt jordad.
12 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Säkerhet Design Guide
VARNING
FARLIG UTRUSTNING
Kontakt med roterande axlar och elektrisk utrustning kan
leda till dödsfall eller allvarliga personskador.
Säkerställ att endast utbildad och behörig
•
personal utför installation, driftsättning och
underhåll.
Kontrollera att elektriskt arbete följer gällande
•
nationella och lokala elsäkerhetsföreskrifter.
Följ procedurerna i denna handbok.
•
FÖRSIKTIGT
RISK FÖR INTERNT FEL
Om frekvensomriktaren inte stängs av på rätt sätt kan
ett internt fel leda till dödsfall eller allvarliga
personskador.
Innan du kopplar på strömmen ska du
•
säkerställa att alla skyddskåpor sitter på plats
och är säkrade.
2 2
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 13
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Produktöversikt
3 Produktöversikt
3.1 Fördelar
VLT® HVAC Basic Drive FC 101
33
3.1.1 Varför använda frekvensomriktare för
varvtalsreglering av äktar och
pumpar?
Frekvensomriktaren utnyttjar det faktum att centrifugal-
äktar och -pumpar följer proportionalitetskurvorna för
centrifugaläktar och -pumpar. Mer information nns i
kapitel 3.1.3 Exempel på minskad energiåtgång.
3.1.2 Den största fördelen – minskad
energiförbrukning
Energibesparingen är den mest självklara fördelen med att
använda sig av frekvensomriktare för varvtalsreglering av
äktar och pumpar.
I jämförelse med andra tillgängliga tekniker och system för
varvtalsreglering av äktar och pumpar är metoden med
frekvensomriktare den optimala ur energisynpunkt.
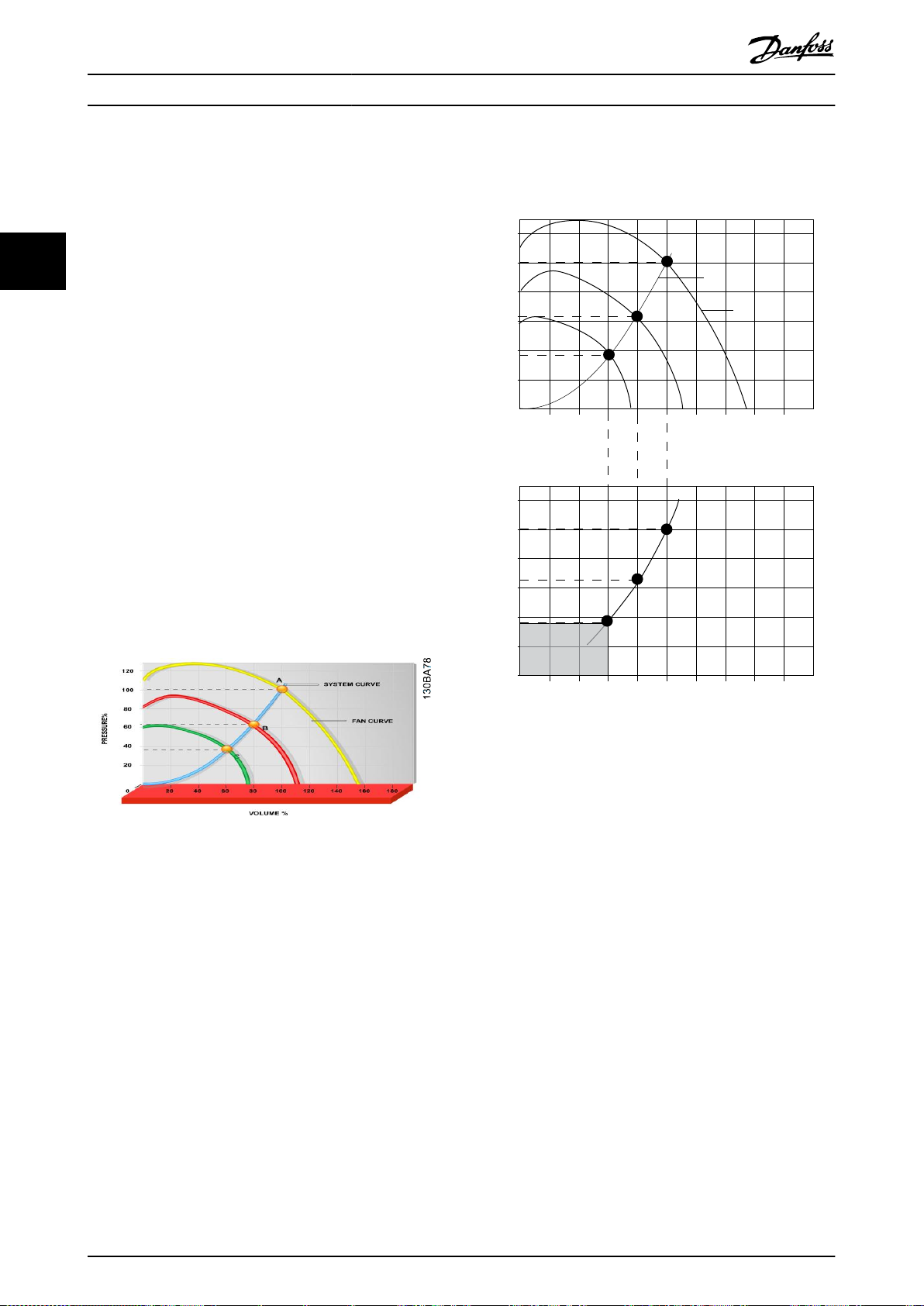
Bild 3.1 Fläktkurvorna (A, B och C) för reducerade
äktvolymer.
Bild 3.2 Energibesparingar med frekvensomriktarlösning
När en frekvensomriktare används för att minska äktkapaciteten till 60 % kan energibesparingar på mer än 50 %
uppnås i vanliga tillämpningar.
3.1.3 Exempel på minskad energiåtgång
Flödet kan ändras genom reglering av varv per minut, som
visas i Bild 3.3. Genom att reducera varvtalet med endast
20 % av det nominella varvtalet reduceras även ödet med
20 %. Detta visar att ödet är linjärt i förhållande till
varvtalet. Den elektriska energiförbrukningen minskar
däremot med 50 %.
Om vi t.ex. tänker oss en anläggning där 100 % öde
behövs endast några få dagar om året och där det räcker
med mindre än 80 % öde under resten av året, kan man
uppnå en minskning av energiåtgången på mer än 50 %.
14 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Produktöversikt Design Guide
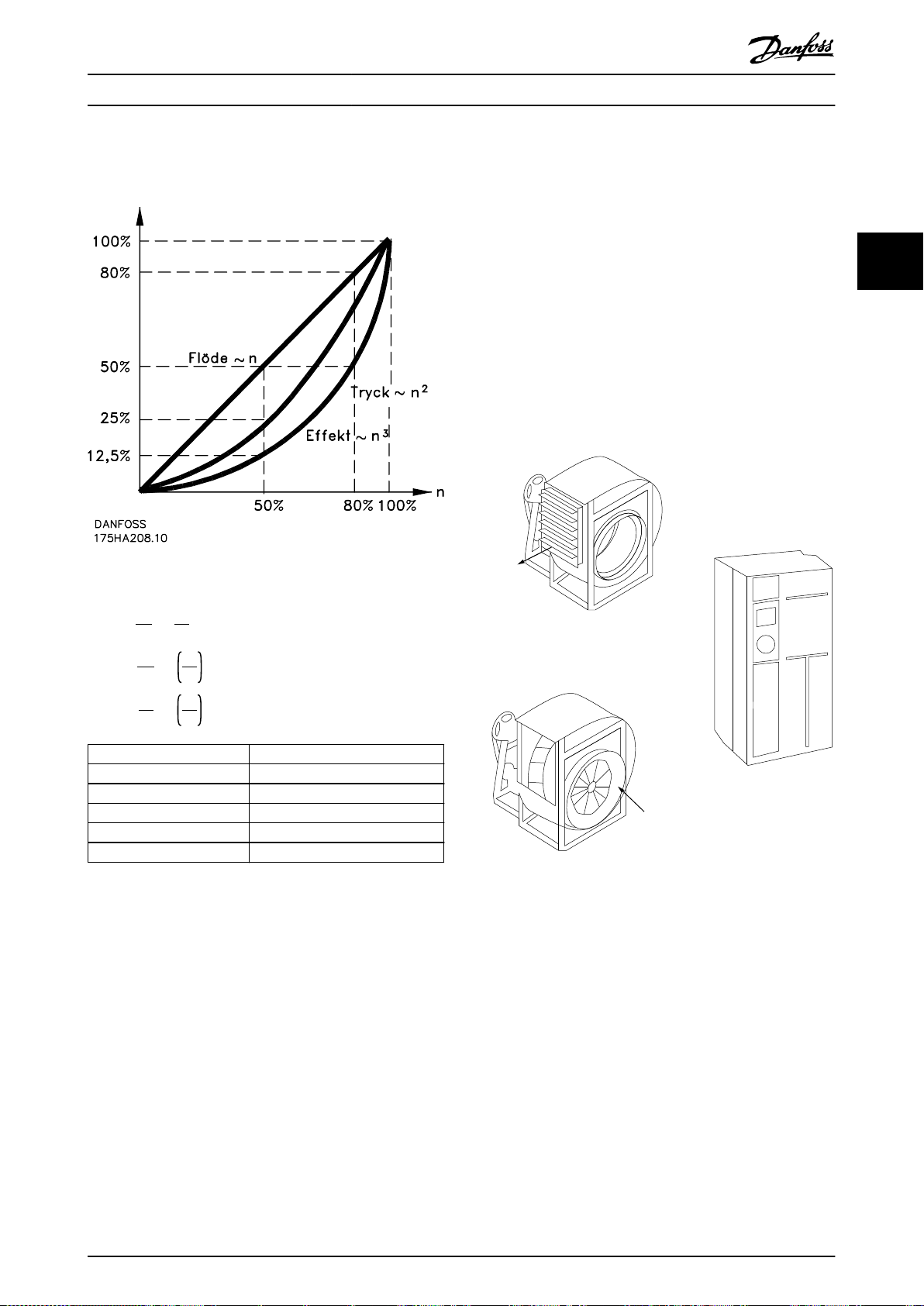
Bild 3.3 beskriver påverkan av öde, tryck och eektför-
brukningen på antal varv/minut.
Bild 3.3 Proportionalitetskurvor
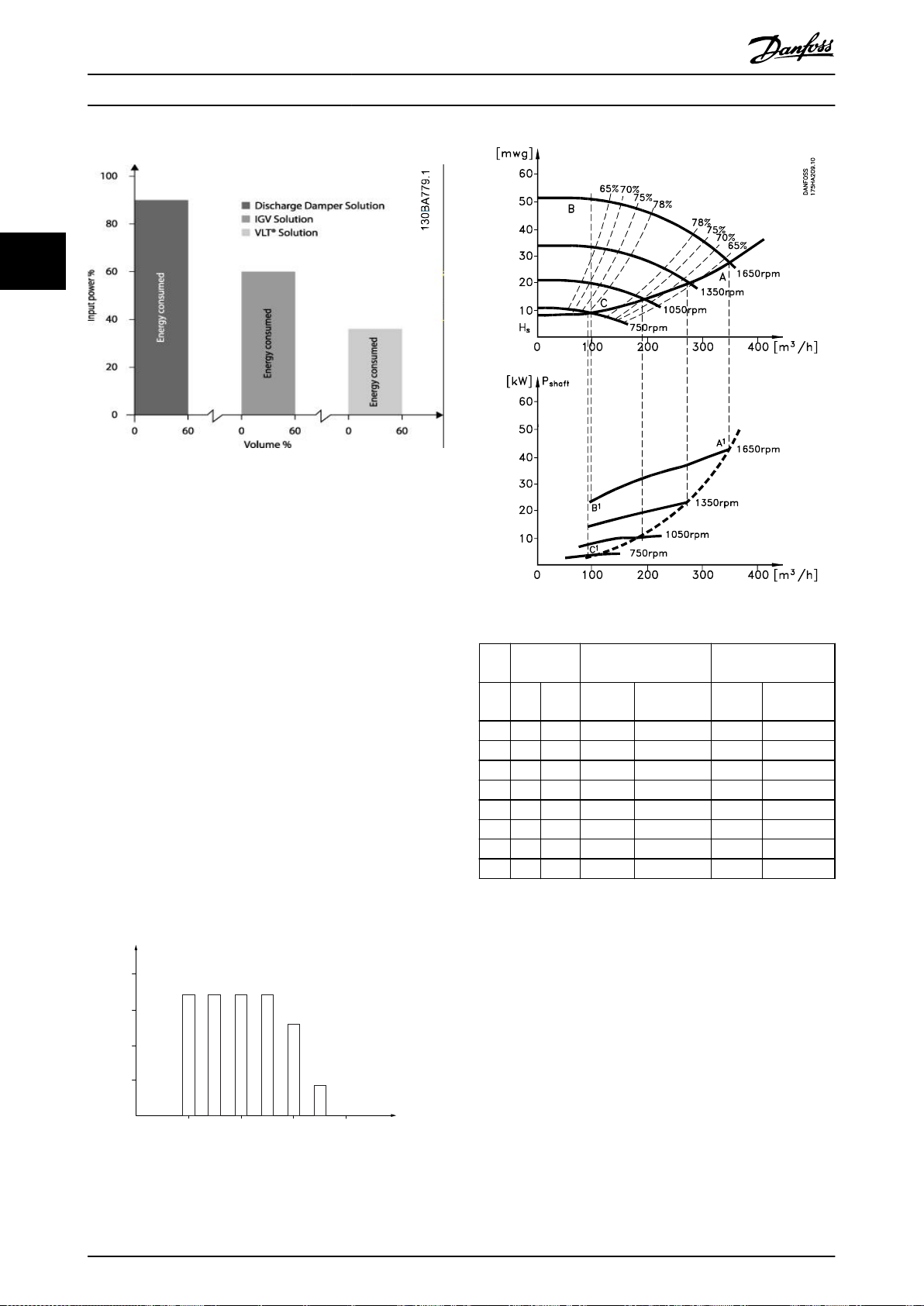
3.1.4 Jämförelse av energibesparingar
Danfoss frekvensomriktarlösningen ger stora besparingar
jämfört med traditionella energibesparningslösningar som
urladdningsspjäll och inloppsledskenor (IGV). Detta beror
på att frekvensomriktaren kan styra äkthastigheten enligt
systemets termiska belastning och att frekvensomriktaren
har en inbyggd funktion som tillåter att frekvensomriktaren
kan fungera som ett BMS (Building Management System).
Bild 3.3 illustrerar de typiska energibesparingar som kan
uppnås med hjälp av tre välkända lösningar när
äktvolymen reduceras till exempelvis 60 %.
Diagrammet visar att besparingar på 50 % kan uppnås i
vanliga tillämpningar.
3 3
Q
n
1
Flöde:
Tryck:
Effekt:
Q = Flöde P = Eekt
Q1 = Nominellt öde P1 = Nominell eekt
Q2 = Reducerat öde P2 = Reducerad eekt
H = Tryck n = varvtalsreglering
H1 = Nominellt tryck n1 = Nominellt varvtal
H2 = Reducerat tryck n2 = Reducerat varvtal
Tabell 3.1 Proportionalitetslagarna
1
=
Q
n
2
2
H
1
=
H
2
P
1
=
P
2
2
n
1
n
2
3
n
1
n
2
Bild 3.4 Tre vanliga energisbesparingssystem
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 15
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Produktöversikt
VLT® HVAC Basic Drive FC 101
33
Bild 3.5 Minskad energiåtgång
Urladdningsspjäll reducerar eektförbrukningen. Inloppsledskenor ger en reducering på 40 % men är dyra att
installera. Danfoss-frekvensomriktarlösning minskar energiförbrukningen med mer än 50 % och är lätt att installera.
Det minskar även bullret, den mekaniska stressen och
slitaget, och ökar tillämpnings livslängd.
3.1.5 Exempel med varierande öde under
1 år
Exemplet är beräknat på pumpegenskaper hämtade från
ett pumpdatablad.
Resultatet visar energibesparingar på mer än 50 % vid den
antagna ödesfördelningen över ett år. Återbetalningstiden
för investeringen beror på priset per kWh och på
inköpspriset för frekvensomriktaren. I detta exempel är den
kortare än ett år jämfört med strypreglering och drift med
fast varvtal.
Bild 3.7 Energi
m3/
Fördelning Ventilreglering
h
%
A1 - B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
Σ
Timm
100 8760 – 275,064 – 26,801
Eekt
ar
Förbruk-
1
ning
kWh A1 - C
Frekvensomriktarreg-
lering
1
Förbruk-
ning
kWh
Eekt
Minskad energiåtgång
P
= P
axel
ut
Bild 3.6 Flödesfördelning över 1 år
16 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Tabell 3.2 Resultat
Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Produktöversikt Design Guide
3.1.6 Bättre kontroll
Med frekvensomriktare fås en bättre reglering av öde eller
tryck i en anläggning.
En frekvensomriktare kan ändra äktens eller pumpens
varvtal, vilket ger en steglös reglering av öde och tryck.
Dessutom kan du med frekvensomriktaren snabbt anpassa
äktens eller pumpens varvtal till förändrade ödes- eller
tryckbehov i systemet.
Enkel styrning av processer (öde, nivå eller tryck) med
hjälp av den inbyggda PID-styrningen.
3.1.7 Stjärn-/deltastart eller mjukstartare
krävs inte
För start av relativt stora motorer är det i många länder
nödvändigt att använda utrustning som begränsar
startströmmen. I traditionella system används normalt
stjärn-/deltastartare eller mjukstartare. Denna typ av
motorstartare behövs inte när frekvensomriktare används.
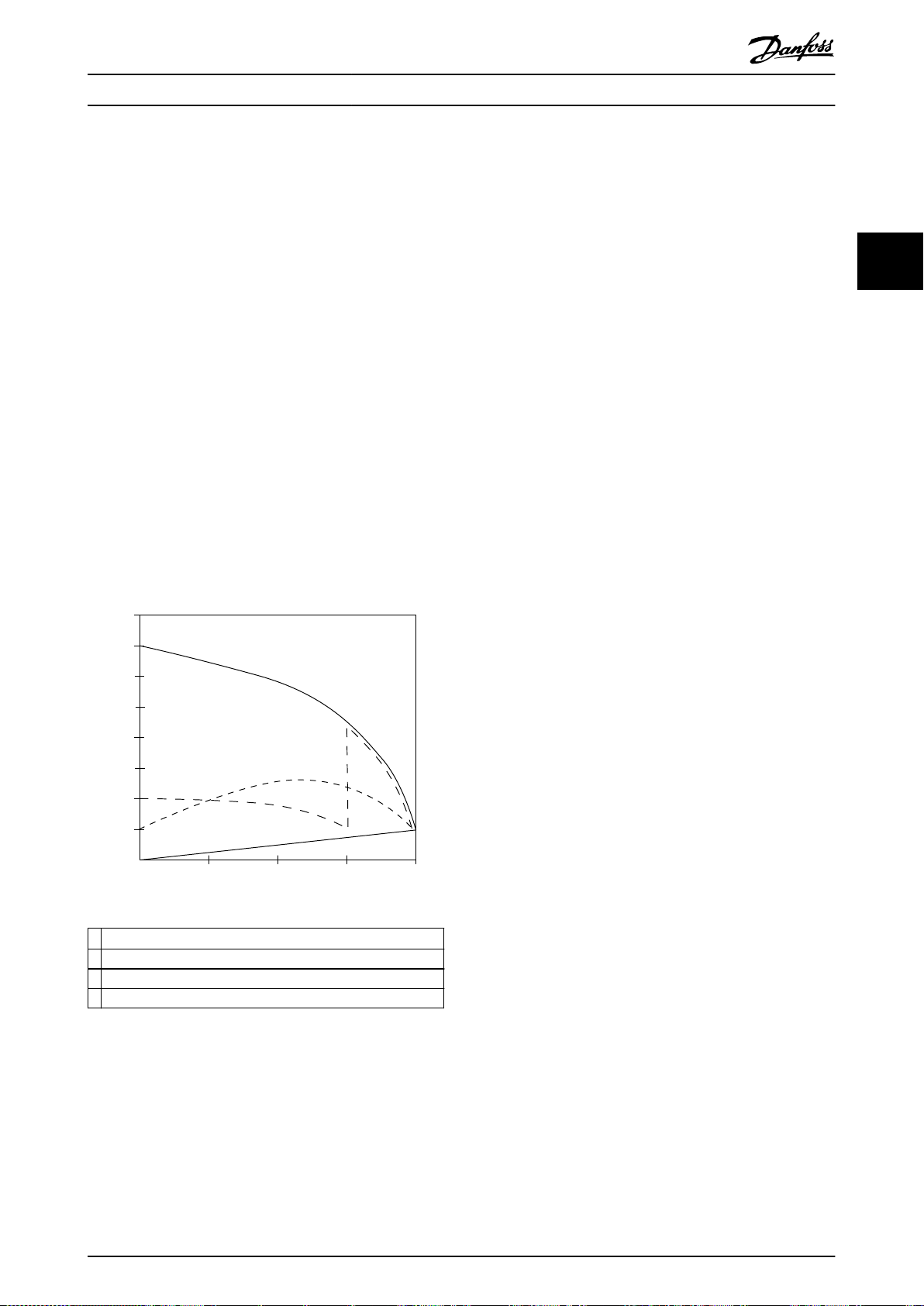
Som Bild 3.8 visar förbrukar frekvensomriktaren inte högre
ström än den nominella strömmen.
3.1.8 Att använda en frekvensomriktare
sparar pengar
Exemplet i kapitel 3.1.9 Utan frekvensomriktare visar att
frekvensomriktaren ersätter annan utrustning. Det går att
beräkna installationskostnaden för de två olika anläggningarna. I exemplet kan de båda anläggningarna
upprättas till ungefär samma kostnad.
Använd VLT® Energy Box-programvaran som presenterades
i kapitel 1.5 Ytterligare dokumentation för att beräkna
besparingar som uppnås genom att använda en frekvensomriktare.
3 3
1
VLT® HVAC Basic Drive FC 101
2 Y/D-startare
3 Mjukstartare
4 Direktstart vid nätspänning
Bild 3.8 Startström
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 17
Produktöversikt
VLT® HVAC Basic Drive FC 101
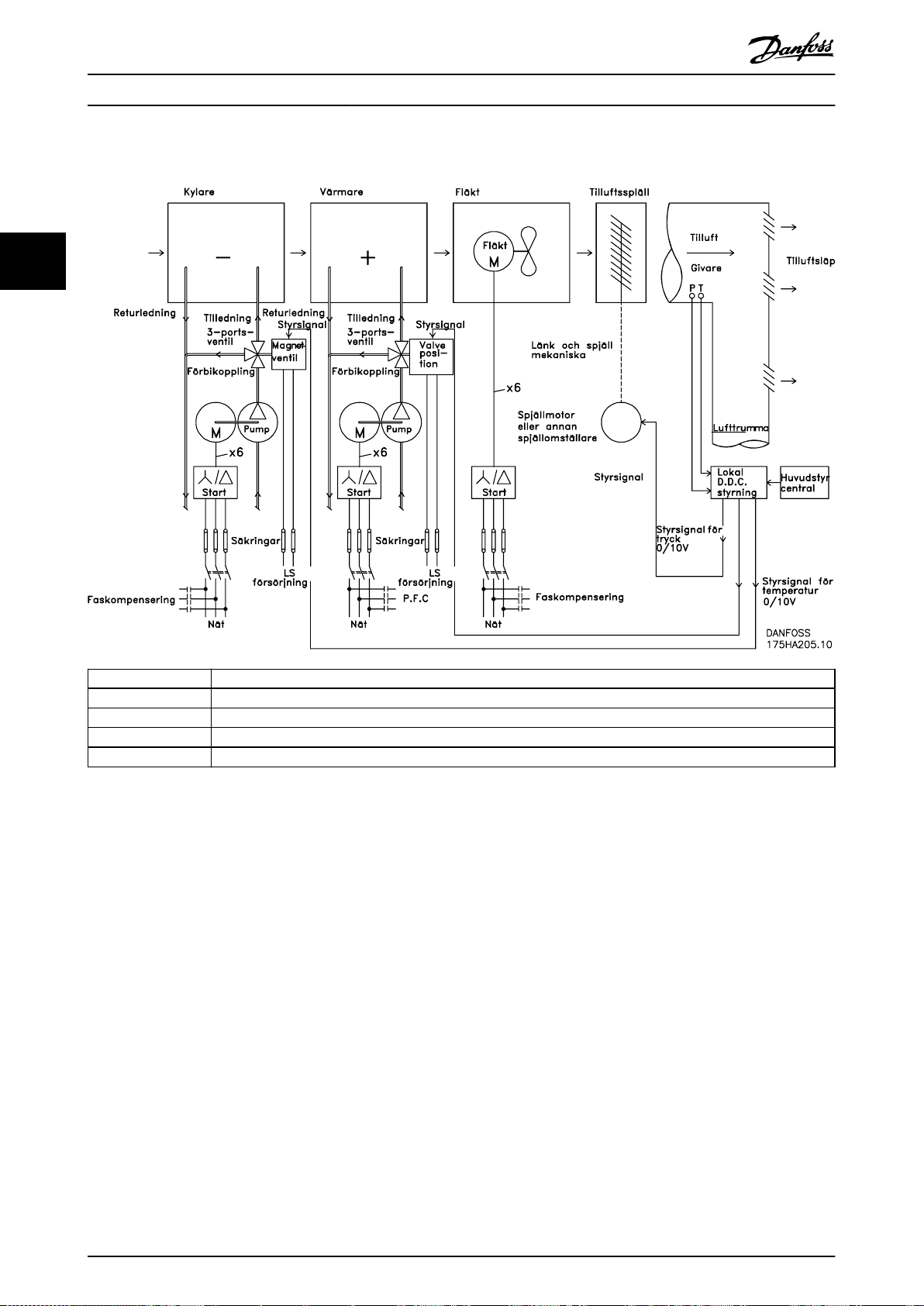
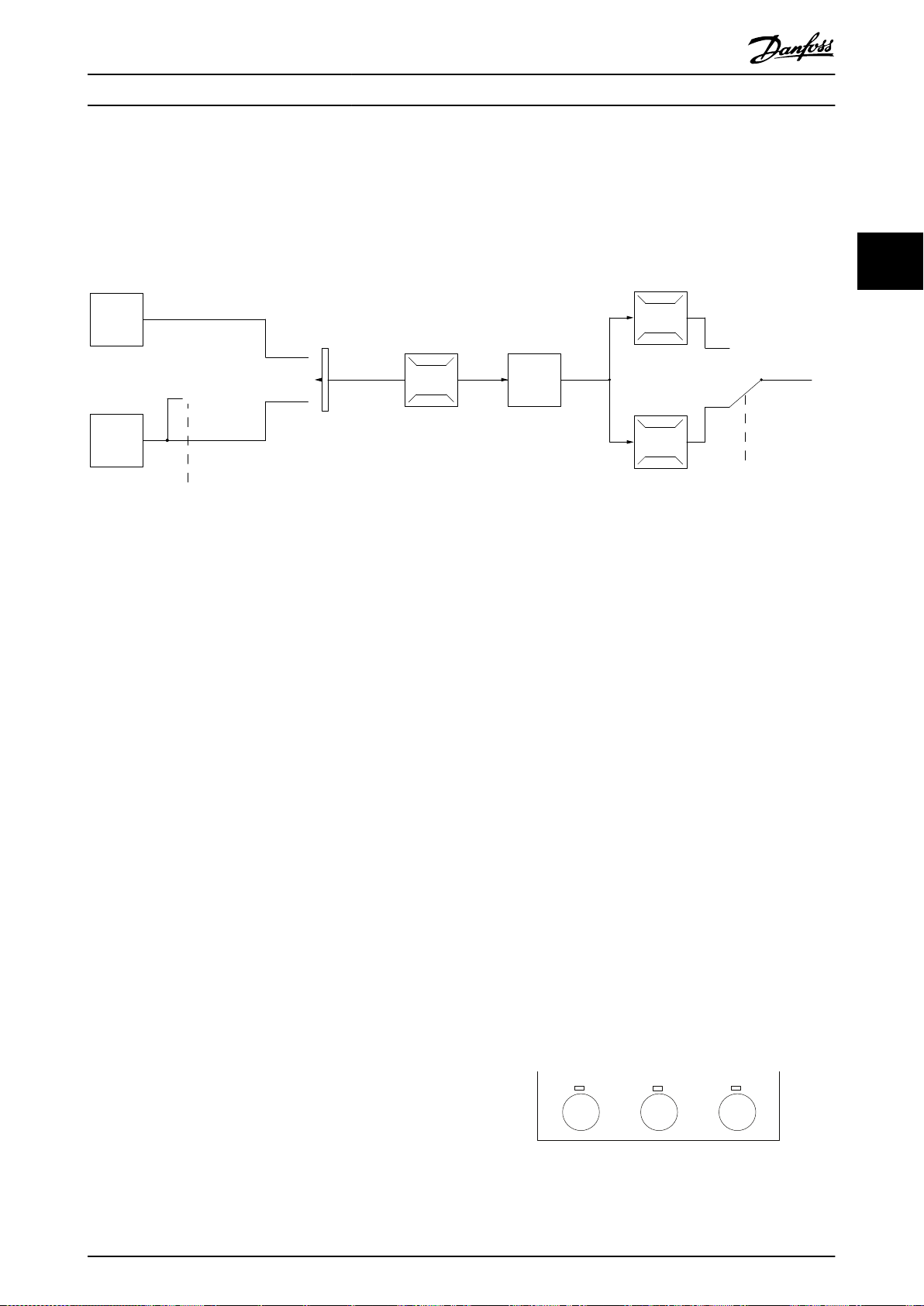
3.1.9 Utan frekvensomriktare
33
D.D.C. Direkt digitalstyrning
C.T.S. Energihanteringssystem
V.A.V. Variabel luftvolym
Givare P Tryck
Givare T Temperatur
Bild 3.9 Traditionellt äktsystem
18 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Produktöversikt Design Guide
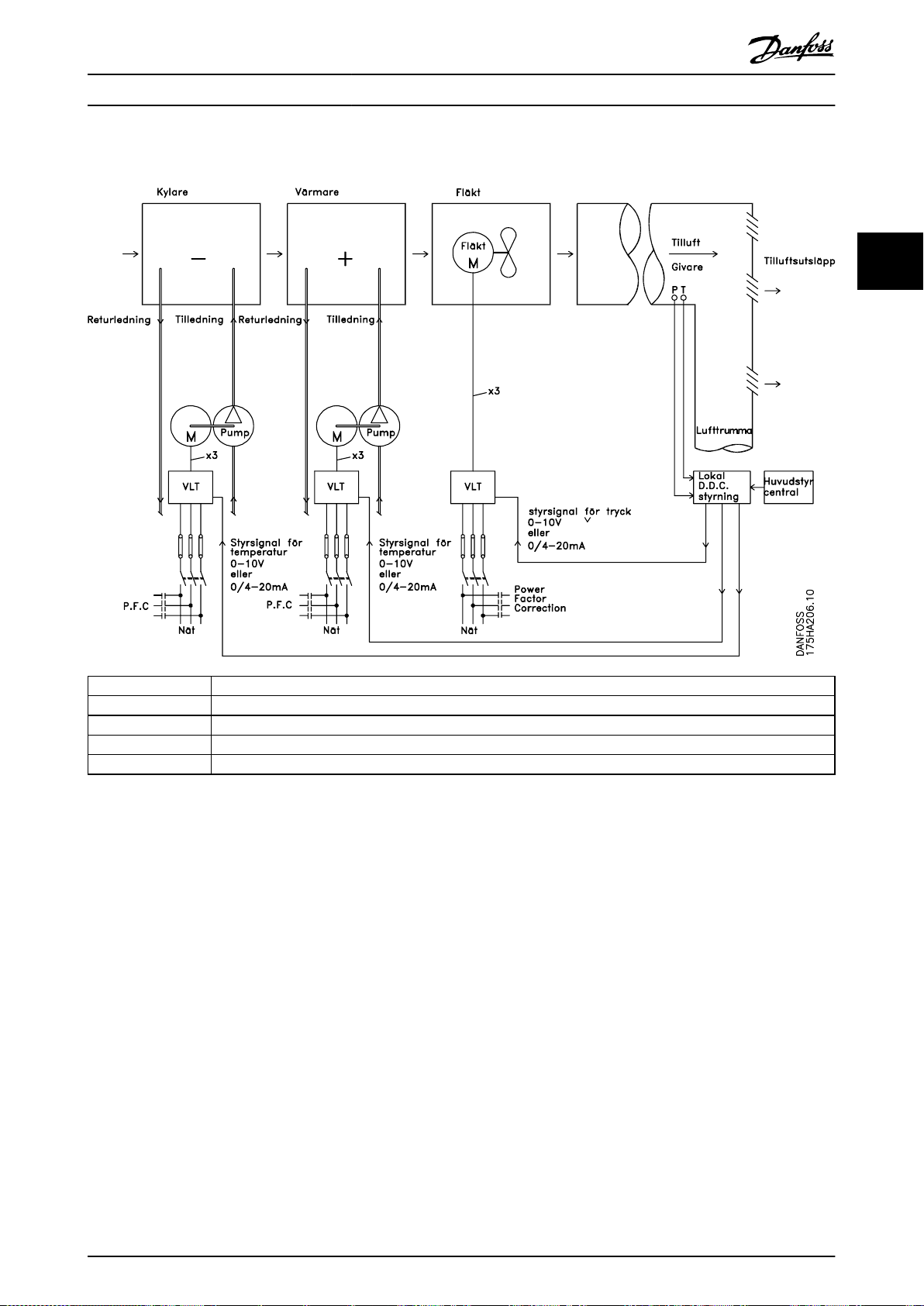
3.1.10 Med frekvensomriktare
3 3
D.D.C. Direkt digitalstyrning
C.T.S. Energihanteringssystem
V.A.V. Variabel luftvolym
Givare P Tryck
Givare T Temperatur
Bild 3.10 Fläktsystem som styrs av frekvensomriktare
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 19
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Produktöversikt
VLT® HVAC Basic Drive FC 101
3.1.11 Tillämpningsexempel
I följande avsnitt hittar du vanliga exempel på HVAC-tillämpningar.
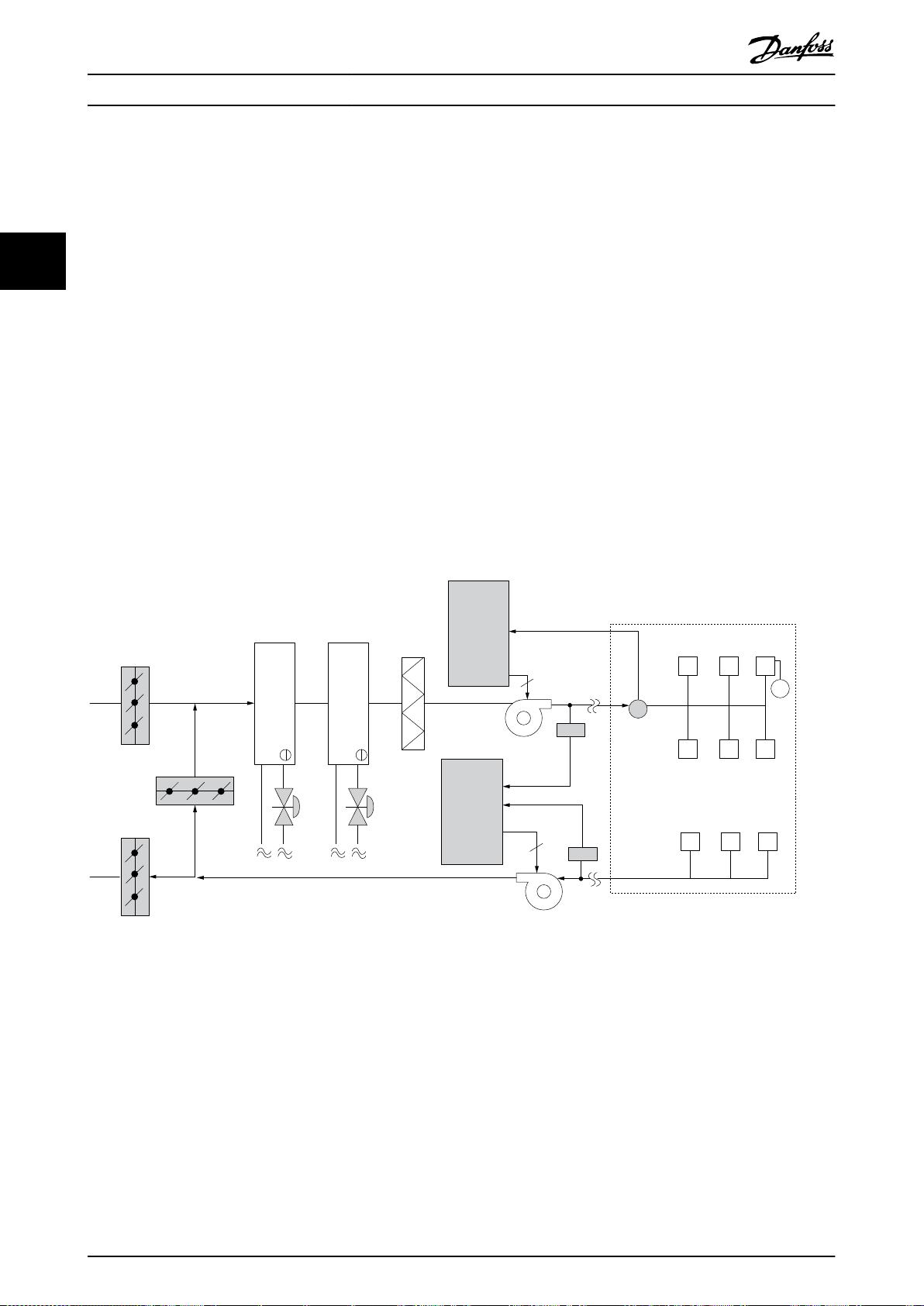
3.1.12 Variabel luftvolym
33
System med variabel luftvolym eller VAV används för att styra både ventilationen och temperaturen för att uppfylla kraven
för en byggnad. Centrala VAV-system anses vara mest energieektivt för luftkonditionering av en byggnad. System med
variabel luftvolym (VAV, Variable Air Volume) används för att styra såväl ventilation som temperatur i en byggnad.
För luftkonditionering av en byggnad anses centralventilation vara mer energieektivt än ett distribuerat system, eftersom
mycket högre verkningsgrad kan uppnås då man använder ett fåtal stora äktar och kylare i stället för ett stort antal mindre
enheter fördelade över byggnaden. Besparingarna märks också i form av minskade underhållsbehov.
3.1.13 Lösning med VLT
Strypänsar och spjäll arbetar för att hålla ett konstant tryck i lufttrummorna. När en VLT-frekvensomriktare används blir
anläggningen både enklare och mer energisnål. I stället för att reglera trycket genom strypning eller genom sänkning av
äktverkningsgraden, anpassar VLT-frekvensomriktaren äktens varvtal till systemets tryck- och ödesbehov.
Centrifugalenheter, som t.ex. äktar, lyder under anitetslagarna. Det innebär att när en äkts varvtal sänks, minskar både
tryck och öde. Därmed minskar även deras eektförbrukning avsevärt.
PI-regulatorn i VLT® HVAC Basic DriveFC 101 kan användas för att eliminera behovet av ytterligare regulatorer.
Bild 3.11 Variabel luftvolym
20 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Produktöversikt Design Guide
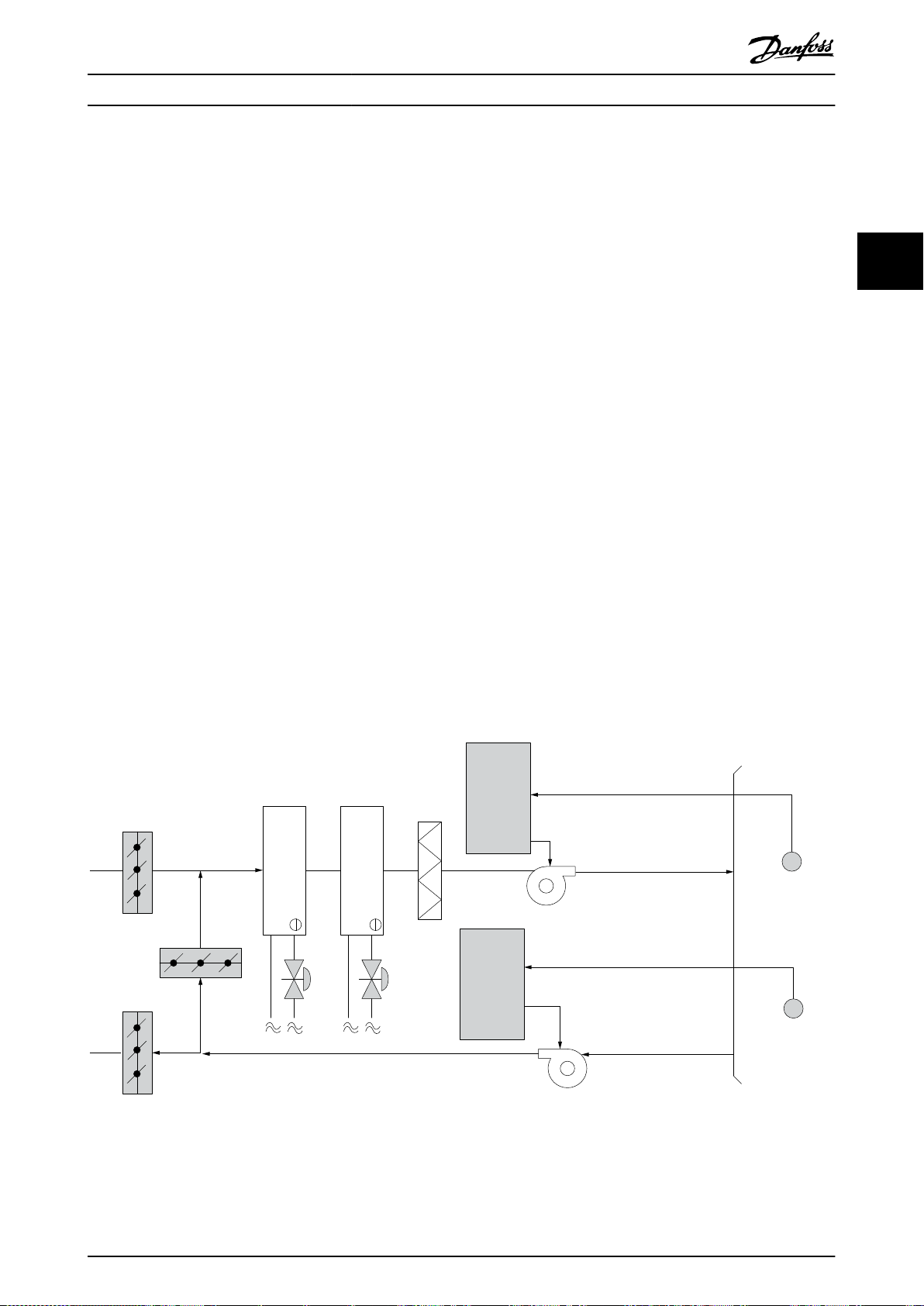
3.1.14 Konstant öde
System med CAV, eller konstant öde, är centralventilationssystem som vanligen används för att tillgodose minimibehovet
av tempererad friskluft i större lokaler, hallar med mera. Konstantvolymsystem är föregångare till system med variabel
luftvolym och därför träar man ibland också på dem i äldre oentliga byggnader med erzonsventilation. I de här
systemen förvärms friskluften i luftbehandlingsenheter (AHU, Air Handling Units) försedda med värmeslinga. Luftbehandlingsenheter används också i luftkonditioneringssystem och är då också försedda med kylslinga. Fläktspolenheter används
ofta för att få uppvärmning och kylning i de olika zonerna att fungera bättre.
3.1.15 Lösning med VLT
Med VLT-frekvensomriktare kan betydande energibesparingar uppnås utan att kontrollen över klimatet i byggnaden
påverkas nämnvärt. En temperaturgivare eller en CO2 -givare kan användas för att ge återkopplingssignal till frekvensomriktarna. Oavsett om det är inomhustemperaturen, luftkvaliteten eller båda delarna som ska upprätthållas, kan regleringen av
ett konstantvolymsystem baseras på de verkliga förhållandena i byggnaden. När antalet personer som uppehåller sig i den
klimatreglerade zonen minskar, sjunker behovet av friskluft. CO2-givaren registrerar lägre nivåer och minskar äktarnas
hastighet. Frånluftäkten regleras mot ett statiskt tryckbörvärde eller mot en förinställd skillnad mellan till- och frånluft-
öden.
I temperaturreglerade byggnader och särskilt i luftkonditionerade byggnader, varierar kylbehovet med utomhustemperatur
och antal personer som uppehåller sig i den reglerade zonen. När temperaturen sjunker under börvärdet kan tilluftäkten
minska sitt varvtal. Frånluftäktens varvtal regleras mot ett statiskt tryckbörvärde. Genom minskning av luftödet minskas
behovet av energi för uppvärmning eller kylning, vilket ytterligare sänker driftkostnaderna.
Flera av funktionerna i Danfoss HVAC särskilt anpassade frekvensomriktare kan utnyttjas för att ge ett bentligt CAV-system
bättre prestanda. Ett problem som kan uppstå vid reglering av ventilationssystem är dålig luftkvalitet. Därför medger
systemet programmering av en minimifrekvens som aldrig får underskridas oavsett värdet på återkopplings- eller referenssignalen. Frekvensomriktaren har dessutom en PI-regulator. Detta möjliggör övervakning av både temperatur och luftkvalitet.
Även om temperaturvillkoret är uppfyllt levererar frekvensomriktaren friskluft tills luftkvalitetsgivaren signalerar OK.
Regulatorn kan övervaka och jämföra två återkopplingssignaler och utifrån dessa styra frånluftäkten, genom att dessutom
upprätthålla en bestämd skillnad mellan öden i till- och frånluftkanalen.
3 3
Bild 3.12 Konstant öde
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 21
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Produktöversikt
VLT® HVAC Basic Drive FC 101
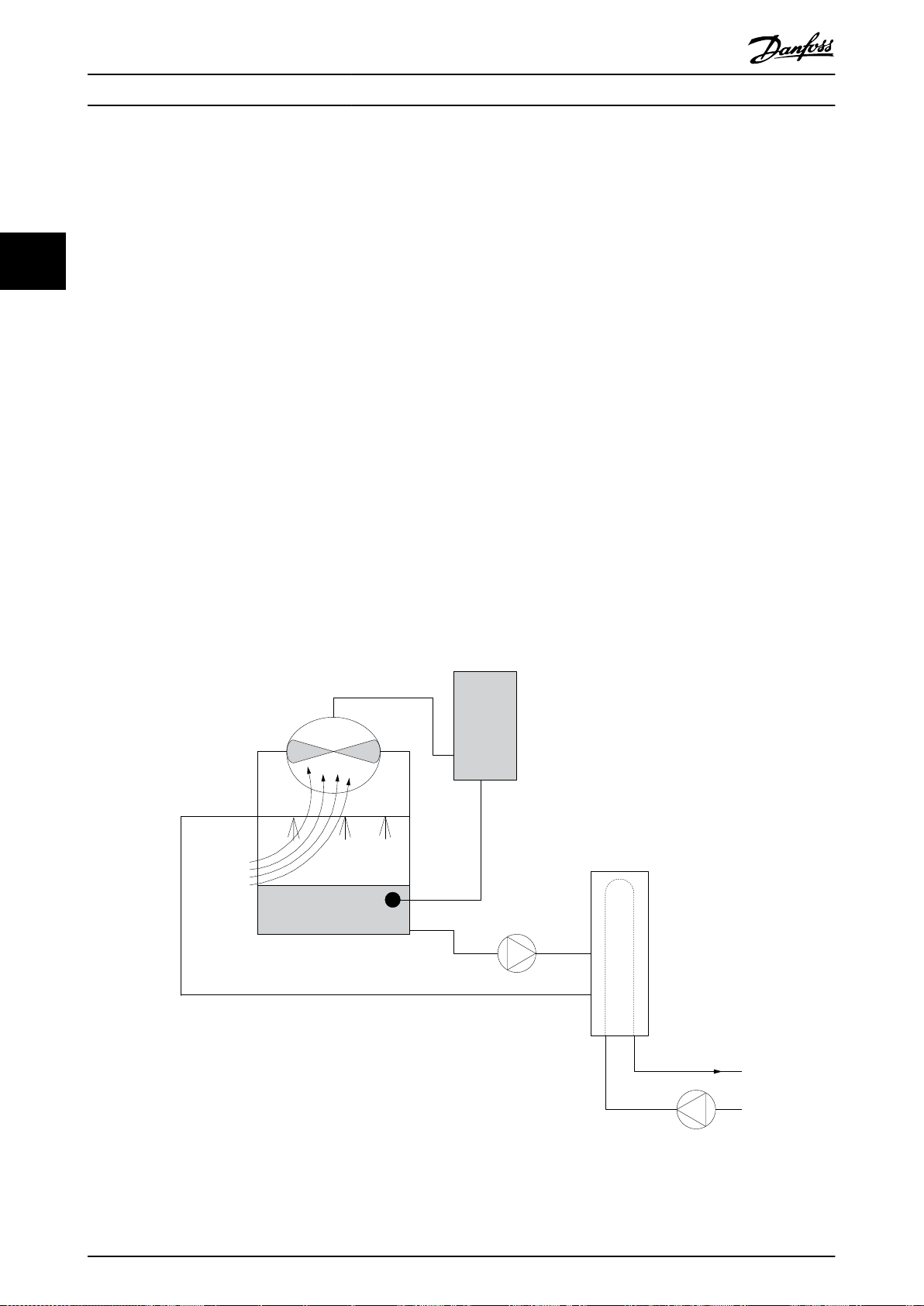
3.1.16 Kyltornsäkt
Kyltornsäktar används för att kyla kondensorkylvattnet i vattenkylda system. Vattenkylda system är det eektivaste sättet
att få fram kylt vatten. Sådana system är upp till 20 % eektivare än luftkylda system. Beroende på klimatet, är kyltorn ofta
det mest energieektiva sättet att kyla kondensatorvattnet från kylaren.
De kyler kondensatorvattnet med hjälp av förångning.
33
Kyltornet är försett med en ytförstorande fyllkropp och över denna sprutas kondensatorvattnet ut. Kyltornsäkten blåser luft
genom fyllkroppen och det strömmande vattnet, varvid en del av vattnet förångas. Förångningsvärmen tas från den del av
vattnet som inte förångas, varvid temperaturen sjunker. Det kylda vattnet samlas upp i kyltornsbassängen och pumpas
tillbaka till kylaren och cykeln upprepas.
3.1.17 Lösning med VLT
Med VLT-frekvensomriktare kan kyltornsäktarna varvtalsregleras så att önskad kylvattentemperatur upprätthålls. Frekvensomriktaren kan också användas för att slå på och av äkten vid behov.
Flera av funktionerna i Danfoss HVAC särskilt anpassade frekvensomriktare kan utnyttjas för att ge ett bentligt CAV-system
bättre prestanda. Under ett visst varvtal har kyltornsäkten endast obetydlig inverkan på kylningsförloppet. Om en växellåda
dessutom används tillsammans med VLT-frekvensstyrningen för kyltornsäkten, kan ett minimivarvtal av 40-50 % erfordras.
Det är därför möjligt att programmera en minimifrekvens så att denna minimifrekvens aldrig underskrids, även om värdena
för återkopplings- eller varvtalsreferenssignalen åberopar lägre varvtal.
En annan standardfunktion är möjligheten att programmera frekvensomriktaren att gå till ”viloläge” och stoppa äkten helt
tills ett högre varvtal krävs. Dessutom har vissa kyltornsäktar problem med oönskade frekvenser som kan orsaka
vibrationer. Det är enkelt att undvika dessa frekvenser genom att programmera frekvensomriktaren för förbikoppling av
frekvensområden.
Bild 3.13 Kyltornsäkt
22 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Produktöversikt Design Guide
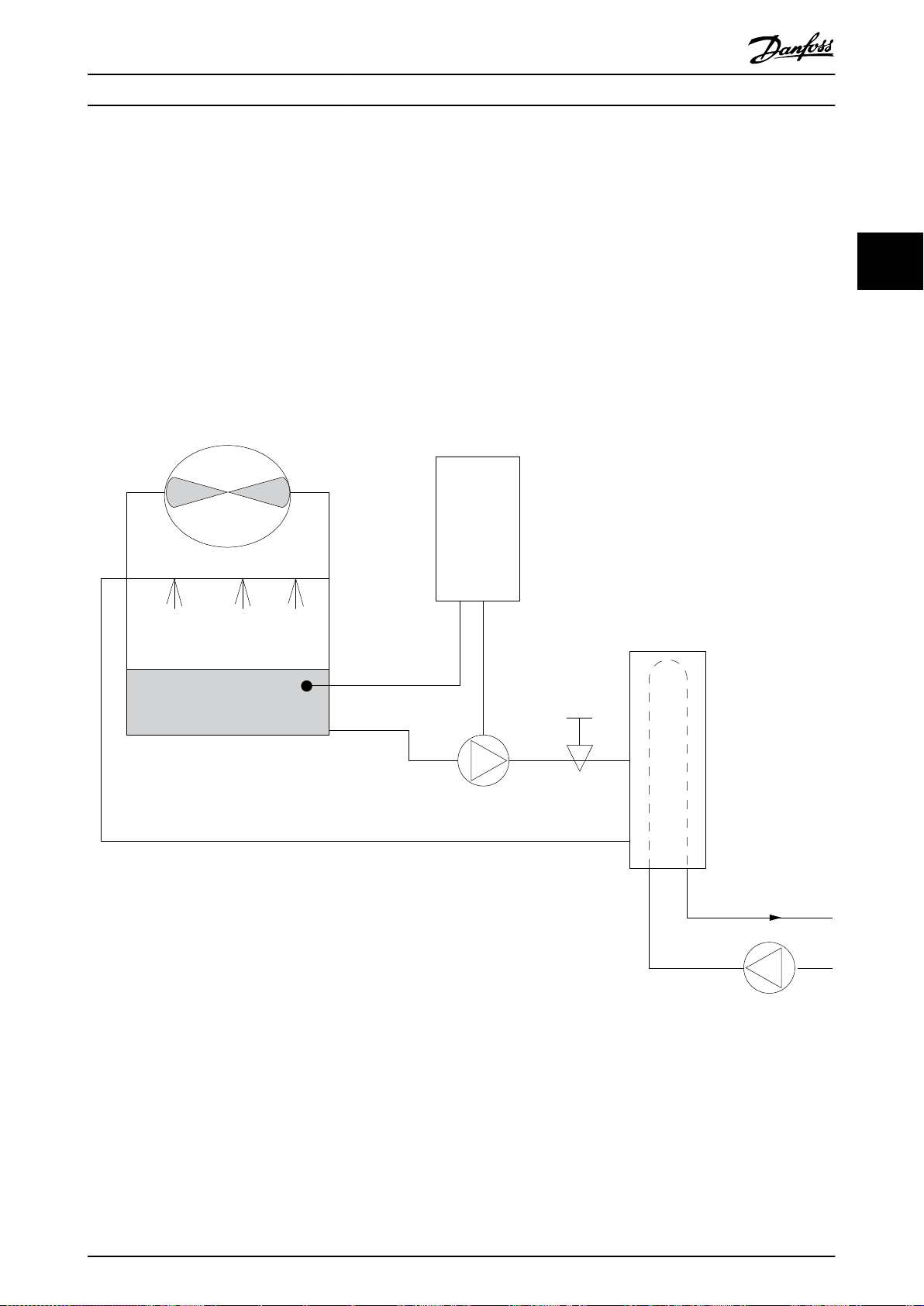
3.1.18 Kondensatorpumpar
Kondensatorpumpar används främst för att upprätthålla vattencirkulationen genom kondensordelen i vattenkylda kylare och
genom det tillhörande kyltornet. Kondensvattnet upptar värmen från kylarens kondensor och avger det till atmosfären i
kyltornet. System av denna typ är upp till 20 % eektivare än system där kylaren direktkyls med luft.
3.1.19 Lösning med VLT
Det går att använda frekvensomriktare till kondensatorpumpar, istället för att balansera pumparna med en strypventil eller
trimning av impellern.
Med en frekvensomriktare istället för en strypventil sparar man enkelt den energi som annars skulle ha gått förlorad i
strypventilen. Det kan röra sig om besparingar på 15-20 % eller mer. Det går inte att återställa trimning av pumpens
impeller. Om förhållandena ändras och det krävs ett högre
öde, måste alltså impellern bytas ut.
3 3
Bild 3.14 Kondensatorpumpar
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 23
Produktöversikt
VLT® HVAC Basic Drive FC 101
3.1.20 Primärpumpar
Primärpumpar i tvåkretssystem kan användas för att upprätthålla ett konstant öde genom enheter som är svåra att reglera
eller inte fungerar tillfredsställande då de utsätts för ett varierande öde. Med primär-/sekundärpumpteknik är processen
uppdelad i en primär produktionsslinga och en sekundär distributionsslinga. Därigenom blir det möjligt att låta kylare och
33
andra enheter som kan vara ödeskänsliga att arbeta vid ett konstant, optimalt öde, medan ödet i resten av systemet kan
få variera.
När
ödet av kylt medium genom en kylare minskar, kan temperaturen på kylvattnet bli för lågt. När detta inträar försöker
kylaren minska sin eekt. Om ödet minskar tillräckligt mycket eller för fort föreligger risk att kylarens vakt trippar och
måste återställas manuellt. Detta inträar ganska ofta i stora anläggningar där två eller era kylare är parallellkopplade, om
inte tvåkretssystem används.
3.1.21 Lösning med VLT
Beroende på anläggningens och primärslingans storlek, kan primärslingans energiförbrukning vara avsevärd.
Om en frekvensomriktare läggs till i primärsystemet för att ersätta spjällventilen och/eller trimning av äkthjulen, vilket
sänker driftkostnaderna. Det nns två vanliga sätt att göra detta:
Flödesmätare
Eftersom det önskade
för att styra pumpen direkt. Med hjälp av sin inbyggda PI-regulator kommer frekvensomriktaren att upprätthålla rätt öde
och till och med kompensera för de ändringar i strömningsmotståndet i primärkretsen som uppstår när kylare och deras
pumpar kopplas i och ur.
Lokal varvtalsbestämning
Operatören minskar helt enkelt den utgående frekvensen tills rätt öde inställer sig.
Att minska varvtalet med hjälp av en VLT-frekvensomriktare påminner mycket om att trimma pumpens impeller, förutom att
det inte krävs någon arbetsinsats och att pumpens verkningsgrad höjs. Driftsättningsteknikern minskar helt enkelt
pumpvarvtalet tills rätt öde uppnås och låter varvtalet vara fast inställt. Pumpen kommer att gå med det inställda varvtalet
varje gång kylaren den betjänar kopplas in. Eftersom primärslingan saknar strypventiler eller andra komponenter som kan
orsaka förändringar i anläggningskarakteristiken och eftersom variationer p.g.a. in- och urkoppling av pumpar och kylare
vanligen är små, kommer detta fasta varvtal att vara tillfyllest. Skulle ödet behöva ändras senare under anläggningens
livstid behöver man inte byta impeller, utan ställer bara om frekvensomriktaren för ett annat varvtal.
ödet är känt och konstant, kan en ödesmätare installerad vid utloppet från varje kylare användas
24 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Produktöversikt Design Guide
3 3
Bild 3.15 Primärpumpar
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 25

Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Produktöversikt
VLT® HVAC Basic Drive FC 101
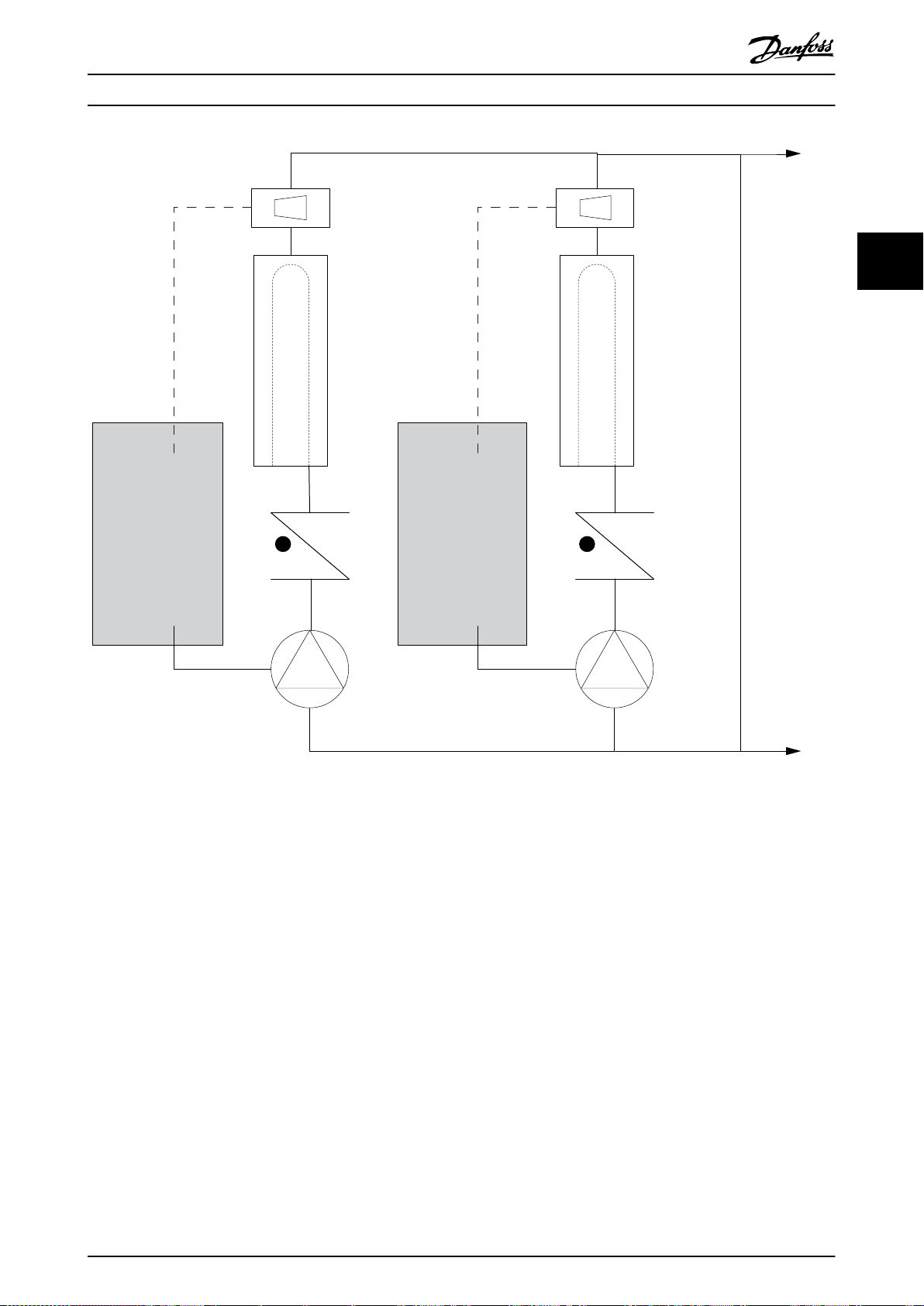
3.1.22 Sekundärpumpar
Sekundärpumpar i tvåkretssystem för kylvatten används för att pumpa runt vattnet i sekundärkretsen, från primärkylkretsen
till de belastningar som ska kylas. Tvåkretssystem används för att hydrauliskt separera en rörslinga från en annan. I det här
fallet används primärpumpen för att upprätthålla ett konstant öde genom kylarna, medan sekundärpumparna kan köras
med varierande öden för bättre reglerkarakteristik och energieektivitet.
33
I anläggningar som inte är byggda enligt tvåkretsprincipen kan funktionsproblem uppstå i kylaren när ödet minskar för
mycket eller för snabbt. Kylarens undertemperaturvakt kan då trippa och måste sedan återställas manuellt. Detta inträar
ganska ofta i stora anläggningar där två eller era kylare är parallellkopplade.
3.1.23 Lösning med VLT
Tvåkretssystem med tvåvägsventiler är ett första steg mot bättre energiekonomi och bättre reglerkarakteristik, men den
stora skillnaden märks först när frekvensomriktare installerats.
Med lämpligt placerade givare kan frekvensomriktaren reglera pumpvarvtalet så att pumparna följer anläggningskarakteristiken istället för pumpkarakteristikan.
Resultatet blir eliminerade energiförluster och att onödigt hög trycksättning av tvåvägsventilerna undviks.
När de övervakade belastningarna nås stängs respektive tvåvägsventil ned. Detta ökar dierentialtrycket som mäts över
lasten och tvåvägsventilen. När dierentialtrycket börjar att stiga, minskas pumpvarvtalet för att bibehålla börvärdet.
Börvärdet beräknas som summan av tryckfallet över belastningen och dess tvåvägsventil i konstruktionspunkten.
OBS!
När era pumpar är parallellkopplade, måste de köras med samma varvtal för att minimera energiförbrukningen. Det
åstadkoms antingen med separata frekvensomriktare eller en gemensam frekvensomriktare till vilken alla pumparna
ansluts parallellt.
Bild 3.16 Sekundärpumpar
26 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Hand
On
Off
Reset
Auto
On
130BB893.10
Produktöversikt Design Guide
3.2 Styrstrukturer
Välj [0] Med återkoppling eller [1] Utan återkoppling i parameter 1-00 Kongurationsläge.
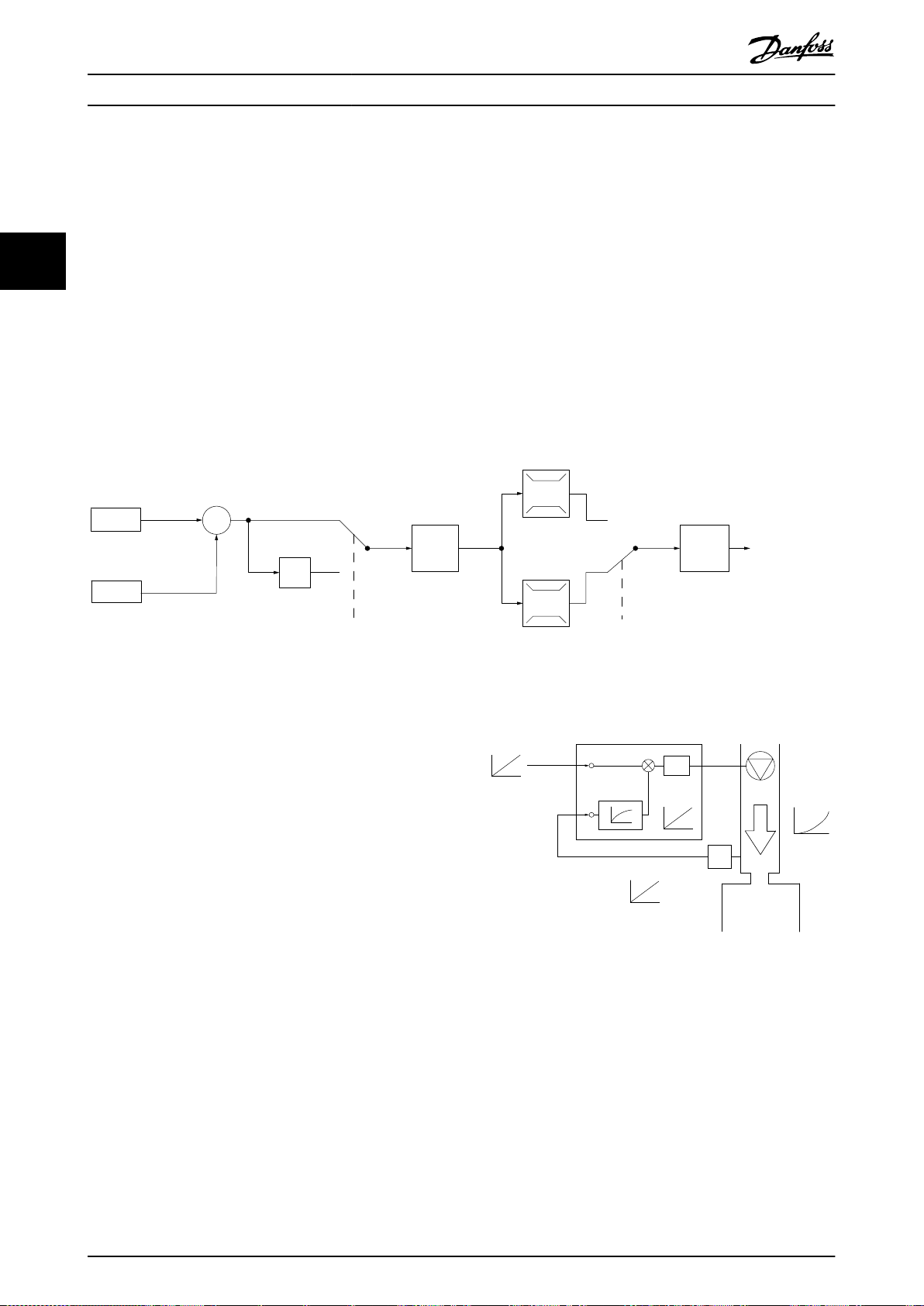
3.2.1 Styrstruktur utan återkoppling
Bild 3.17 Struktur utan återkoppling
3 3
I den konguration som visas i Bild 3.17, är
parameter 1-00 Kongurationsläge inställd på [0] Utan
återkoppling. Resulterande referens från referenshanterings-
systemet eller den lokal referensen tas emot och matas
genom ramp- och varvtalsgränsen innan den skickas till
motorstyrningen. Utgående värde från motorstyrningen
begränsas sedan av den maximala frekvensgränsen.
3.2.2 PM/EC+ motorstyrning
Danfoss EC+ är en produktserie som gör det möjligt att
använda högeektiva PM-motorer (permanentmagnet-
Strömbegränsningar för PM-motorer:
induktionsmotorer och 0,37–22 kW (0,5–30 hk)
(400 V) för PM-motorer.
Stöds i dagsläget endast upp till 22 kW (30 hk).
•
LC-lter stöds inte för PM-motorer.
•
Kinetisk back-up fungerar inte med PM-motorer.
•
Stöder endast reducerad AMA av statormot-
•
ståndet Rs i systemet
Ingen stoppdetektering (nns stöd för det från
•
och med programvaruversion 2.80).
motorer) i IEC-standardkapslingar som drivs av
frekvensomriktare från Danfoss.
Idrifttagningen kan jämföras med den procedur som
3.2.3 Lokalstyrning (Hand On) och
Fjärrstyrning (Auto On)
används för asynkrona motorer med Danfoss VVC+ PMstyrningsmetoder.
Frekvensomriktaren kan drivas manuellt via den lokal
manöverpanelen (LCP) eller ärrstyras med analoga eller
Fördelar för kunden:
Motorteknik kan väljas fritt (permanentmagnet
•
eller induktionsmotor).
Installation och drift på samma sätt som för
•
induktionsmotorer.
Oberoende av tillverkare när systemkomponenter
•
ska väljas (t.ex. motorer).
Bästa systemeektivitet tack vare optimerade
•
komponenter.
Möjlig uppgradering av bentliga anläggningar.
•
Eektområde: 45 kW (60 hk) (200 V), 0,37–90 kW
•
(0,5–121 hk) (400 V), 90 kW (121 hk) (600 V) för
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 27
digitala ingångar och seriell buss. Om parameter 0-40 [Hand
on]-knapp på LCP, parameter 0-44 [O/Reset]-knapp på LCP
och parameter 0-42 [Auto on]-knapp på LCP tillåter detta,
går det att starta och stoppa frekvensomriktaren via LCP
med knapparna [Hand On] och [O/Reset]. Larm kan
återställas med knappen [O/Reset].
Bild 3.18 LCP-knappar
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Produktöversikt
VLT® HVAC Basic Drive FC 101
Lokal referens tvingar kongurationsläget till utan
återkoppling, oberoende av inställningen i
parameter 1-00 Kongurationsläge.
Ta till exempel en pumptillämpning där pumpens varvtal
ska regleras för att säkerställa att det statiska trycket i röret
kan hållas konstant. Det statiska trycket ställs in i frekvensomriktaren som börvärdesreferens. En givare som avläser
Den lokala referensen återställs vid strömavbrott.
det statiska trycket avläser det faktiska trycket i kanalen
och informerar frekvensomriktaren via en återkopplings-
33
3.2.4 Styrstrukturer med återkoppling
Den interna regulatorn gör att frekvensomriktaren kan
fungera som en del i det reglerade systemet. Frekvensomriktaren får en återkopplingssignal från en givare i
systemet. Därefter jämförs denna återkoppling med ett
signal. Om återkopplingssignalen överstiger
börvärdesreferensen kommer frekvensomriktaren att sakta
in för att minska trycket. På samma sätt kommer frekvensomriktaren automatiskt att öka varvtalet, så att det tryck
som pumpen ger ökar, om rörtrycket är lägre än börvärdesreferensen.
referensbörvärde och avgör avvikelsen, om en sådan
föreligger, mellan de två signalerna. Därefter justeras
motorvarvtalet för att korrigera felet.
Bild 3.19 Styrstrukturer med återkoppling
Även om standardvärdena för frekvensomriktarens
regulator med återkoppling ofta ger nöjaktig prestanda går
det ofta att optimera systemstyrningen genom att justera
parametrarna.
3.2.5 Återkopplingskonvertering
I vissa tillämpningar kan det vara praktiskt att konvertera
återkopplingssignalen. Ett exempel på detta är när en
trycksignal används för att ge ödesåterkoppling. Eftersom
kvadratroten ur trycket är proportionellt mot ödet ger
kvadratroten ur trycksignalen ett värde som är proportionellt mot ödet. Se Bild 3.20.
28 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Bild 3.20 Konvertering av återkopplingssignal
Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Produktöversikt Design Guide
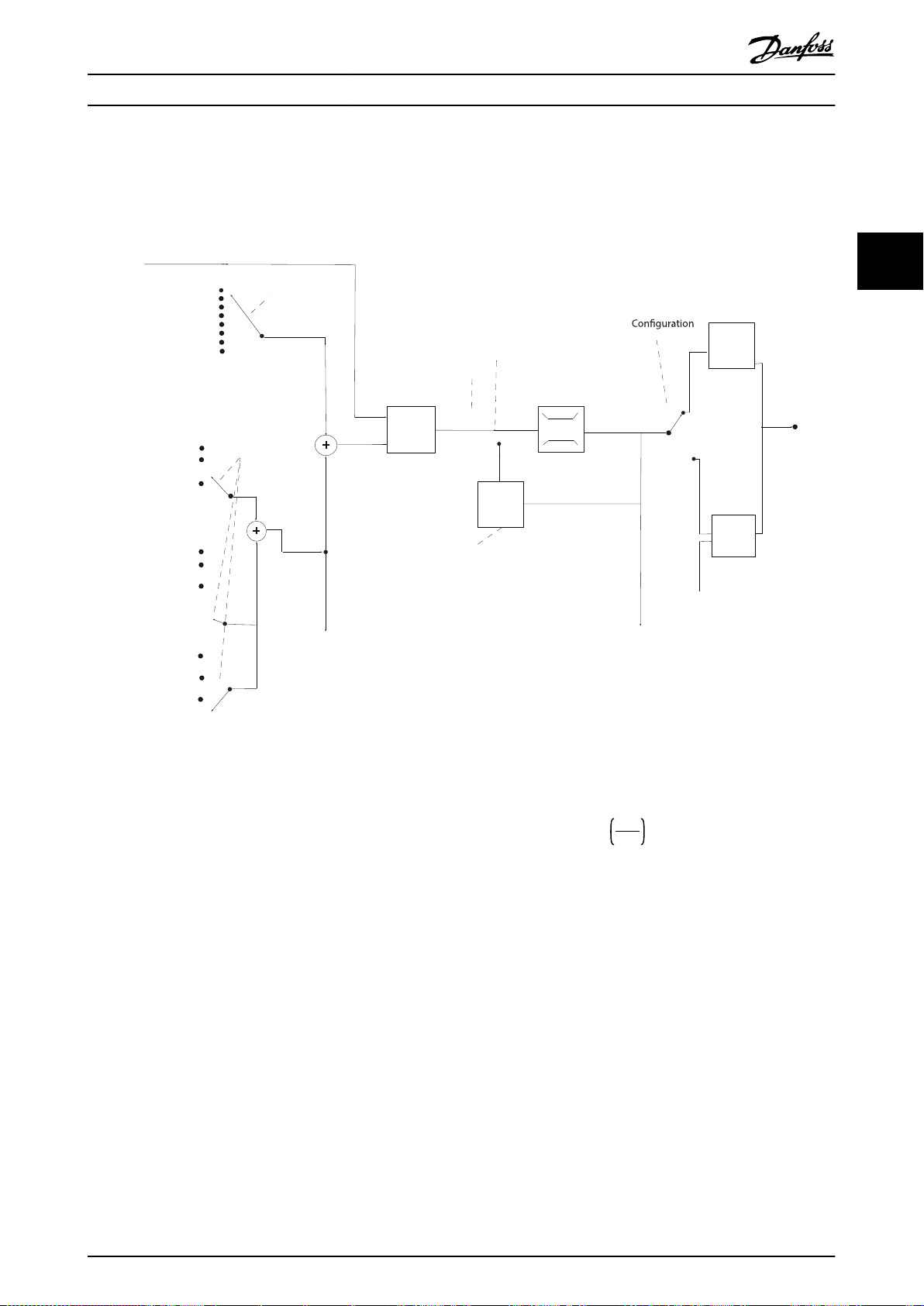
3.2.6 Referenshantering
Information för drift med eller utan återkoppling.
3 3
Bild 3.21 Blockdiagram som visar extern referens
Fjärreferensen består av:
•
•
•
•
Upp till 8 förinställda referenser kan programmeras i
frekvensomriktaren. Den aktiva förinställda referensen kan
väljas via digitala ingångar eller den seriella kommunikationsbussen. Referensen kan också komma utifrån, vanligen
via en analog ingång. Den externa källan väljs med en av
de tre parametrarna för referenskällor
(parameter 3-15 Referens 1, källa, parameter 3-16 Referens 2,
källa och parameter 3-17 Referens 3, källa). Alla referensresurser och bussreferensen adderas för att skapa den totala
externa referensen. Den externa referensen, den
förinställda referensen eller summan av båda kan väljas
som aktiv referens. Slutligen kan denna referens skalas
med hjälp av parameter 3-14 Förinställd relativ referens.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 29
Förinställda referenser.
Externa referenser (analoga ingångar och bussreferenser för seriell kommunikation).
Förinställd relativ referens.
Återkopplingsstyrt börvärde.
Den skalade referensen beräknas på följande sätt:
Referens = X + X ×
Här är X den externa referensen, den förinställda
referensen eller summan av dem, och Y är den förinställda
relativa referensen parameter 3-14 Förinställd relativ referens
i [%].
Om Y parameter 3-14 Förinställd relativ referens är angiven
till 0 % kommer referensen inte att påverkas av skalningen.
Y
100

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
Produktöversikt
VLT® HVAC Basic Drive FC 101
3.2.7 Justera frekvensomriktarens regulator
Omgivande miljöförhållanden
3.3
med återkoppling
Frekvensomriktaren är konstruerad i överensstämmelse
När frekvensomriktarens regulator med återkoppling har
kongurerats bör regulatorns funktion kontrolleras.
Funktionen kan ofta vara godtagbar genom att standard-
33
värdena för parameter 20-93 PI Proportionell förstärkningoch
parameter 20-94 PI Integraltid används. I vissa fall kan det
dock vara bättre att optimera parametervärdena för att få
med standarden IEC/SS-EN 60068-2-3, SS-EN 50178 9.4.2.2
vid 50 °C (122 °F).
Omgivningstemperaturen mätt över 24 timmar måste vara
minst 5 °C (41 °F) lägre än max. omgivningstemperatur.
Om frekvensomriktaren körs där omgivningstemperaturen
är hög, ska den konstanta utströmmen minskas.
snabbare systemreaktioner utan att för den skull mista
kontrollen över varvtalstoppspänningen.
3.2.8 Manuell PI-justering
1. Starta motorn.
2. Ställ in parameter 20-93 PI Proportionell
förstärkning på 0,3 och öka den tills återkopplingssignalen börjar pendla. Vid behov startas och
stoppas frekvensomriktaren eller så görs stegvisa
förändringar av börvärdesreferensen för att
försöka få fram svängningar.
3. Minska den proportionella PI-förstärkningen tills
återkopplingssignalen stabiliseras.
4. Minska den proportionella förstärkningen med
40-60 %.
5. Ställ in parameter 20-94 PI Integraltid på 20 s och
minska värdet tills återkopplingssignalen börjar
oscillera. Vid behov startas och stoppas frekvensomriktaren eller så görs stegvisa förändringar av
börvärdesreferensen för att försöka få fram
svängningar.
6. Öka sedan PI-integraltiden tills återkopplingssignalen stabiliseras.
7. Öka integraltiden med 15-50 %.
Bild 3.22 0,25–0,75 kW (0,34–1,0 hk), 200 V, kapslingsstorlek
H1, IP20
Bild 3.23 0,37–1,5 kW (0,5–2,0 hk), 400 V, kapslingsstorlek H1,
IP20
30 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
Produktöversikt Design Guide
3 3
Bild 3.24 2,2 kW (3,0 hk), 200 V, kapslingsstorlek H2, IP20
Bild 3.25 2,2–4,3 kW (3,0–5,4 hk), 400 V, kapslingsstorlek H2,
IP20
Bild 3.27 5,5–7,5 kW (7,4–10 hk), 400 V, kapslingsstorlek H3,
IP20
Bild 3.28 5,5–7,5 kW (7,4–10 hk), 200 V, kapslingsstorlek H4,
IP20
Bild 3.26 3,7 kW (5,0 hk), 200 V, kapslingsstorlek H3, IP20
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 31
Bild 3.29 11–15 kW (15–20 hk), 400 V, kapslingsstorlek H4,
IP20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Produktöversikt
VLT® HVAC Basic Drive FC 101
33
Bild 3.30 11 kW (15 hk), 200 V, kapslingsstorlek H5, IP20
Bild 3.31 18,5–22 kW (25–30 hk), 400 V, kapslingsstorlek H5,
IP20
Bild 3.33 30–37 kW (40–50 hk), 400 V, kapslingsstorlek H6,
IP20
Bild 3.34 45 kW (60 hk), 400 V, kapslingsstorlek H6, IP20
Bild 3.32 15–18,5 kW (20–25 hk), 200 V, kapslingsstorlek H6,
IP20
32 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Bild 3.35 22–30 kW (30–40 hk), 600 V, kapslingsstorlek H6,
IP20

I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
Produktöversikt Design Guide
3 3
Bild 3.36 22–30 kW (30–40 hk), 200 V, kapslingsstorlek H7,
IP20
Bild 3.37 55–75 kW (74–100 hk), 400 V, kapslingsstorlek H7,
IP20
Bild 3.39 37–45 kW (50–60 hk), 200 V, kapslingsstorlek H8,
IP20
Bild 3.40 90 kW (120 hk), 400 V, kapslingsstorlek H8, IP20
Bild 3.41 75–90 kW (100–120 hk), 600 V, kapslingsstorlek H8,
Bild 3.38 45–55 kW (60–74 hk), 600 V, kapslingsstorlek H7,
IP20
IP20
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 33

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Produktöversikt
VLT® HVAC Basic Drive FC 101
33
Bild 3.42 2,2–3 kW (3,0–4,0 hk), 600 V, kapslingsstorlek H9,
IP20
Bild 3.43 5,5–7,5 kW (7,4–10 hk), 600 V, kapslingsstorlek H9,
IP20
Bild 3.45 0,75–4,0 kW (1,0–5,4 hk), 400 V, kapslingsstorlek I2,
IP54
Bild 3.46 5,5–7,5 kW (7,4–10 hk), 400 V, kapslingsstorlek I3,
IP54
Bild 3.44 11–15 kW (15–20 hk), 600 V, kapslingsstorlek H10,
IP20
34 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Bild 3.47 11–18,5 kW (15–25 hk), 400 V, kapslingsstorlek I4,
IP54

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Produktöversikt Design Guide
3 3
Bild 3.48 22–30 kW (30–40 hk), 400 V, kapslingsstorlek I6,
IP54
Bild 3.51 75–90 kW (100–120 hk), 400 V, kapslingsstorlek I8,
IP54
Om motorn eller utrustningen som körs av motorn, till
exempel en äkt, för oväsen eller vibrerar vid en särskild
frekvens, ska följande parametrar eller parametergrupper
kongureras för att reducera eller eliminera ljud eller
vibrationer:
Parametergrupp 4–6* Varvtal, förbik.
•
Ställ in parameter 14-03 Övermodulering på [0] Av.
•
Ändra switchmönstret och switchfrekvensen i
•
parametergrupp 14–0* Växelriktarswitch.
Parameter 1-64 Resonansdämpning.
•
Ljudnivån från frekvensomriktaren kan komma från tre
Bild 3.49 37 kW (50 hk), 400 V, kapslingsstorlek I6, IP54
Bild 3.50 45–55 kW (60–74 hk), 400 V, kapslingsstorlek I7,
IP54
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 35
källor:
Likströmsspolar.
•
Inbyggd äkt.
•
RFI-lterdrossel
•
Kapslingsstorlek
Nivå [dBA]
H1 43,6
H2 50,2
H3 53,8
H4 64
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 hk) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Tabell 3.3 Typiska ljudnivåer uppmätta 1 m (3,28 ft)
från enheten.
1) Värdena är uppmätta med ett bakgrundsljud på 35 dBA och
äkten på full hastighet.
1)

Produktöversikt
VLT® HVAC Basic Drive FC 101
Frekvensomriktaren är testad enligt ett förfarande som
bygger på följande standarder, Tabell 3.4.
Frekvensomriktaren uppfyller de krav som gäller för
enheter monterade på vägg eller golv, samt i panel fast
monterad på vägg eller golv, i industrilokaler.
33
IEC/SS-EN 60068-2-6 Sinusvibration – 1970
IEC/SS-EN 60068-2-64 Bredbandig brusvibration
Tabell 3.4 Standarder
En frekvensomriktare innehåller ett stort antal mekaniska
och elektroniska komponenter. De är alla mer eller mindre
känsliga för miljöpåverkan.
Det går att beställa ytbehandlade kretskort som tillvalsalternativ för extra skydd i sådana miljöer.
Innan frekvensomriktaren installeras bör den omgivande
luften kontrolleras beträande fukt, partiklar och gaser.
Detta görs genom kontroll av bentliga installationer i den
aktuella miljön. Typiska tecken på luftburna vätskor är
vatten eller olja på metalldelar eller korrosionsskador på
metalldelar.
Höga dammhalter hittas ofta i apparatskåp och i
existerande elektriska installationer. Ett tecken på
aggressiva luftburna gaser är svärtade kopparskenor och
kabeländar på
bentliga installationer.
3.4 Allmänt om EMC
FÖRSIKTIGT
INSTALLATIONSMILJÖER
Frekvensomriktaren ska inte installeras i omgivningar
med luftburen fukt, partiklar eller gaser som kan påverka
eller skada de elektriska komponenterna. Om inte
lämpliga skyddsåtgärder vidtas ökar risken för driftstopp
och kan medföra en ökad risk för personskador och att
utrustningen skadas.
Vätskor kan överföras via luften och fällas ut eller
kondensera i frekvensomriktaren och kan därigenom
orsaka korrosion på komponenter och metalldelar. Ånga,
olja och saltvatten kan orsaka korrosion på komponenter
och metalldelar. I sådana fuktiga/korrosiva driftmiljöer bör
utrustning med kapslingsklass IP 54 användas. Som ett
extra skydd går det att beställa ytbehandlade kretskort
som tillvalsalternativ (standard på vissa storlekar).
Luftburna partiklar, exempelvis damm, kan orsaka både
mekaniska och elektriska fel och överhettning i frekvensomriktaren. Ett typiskt tecken på allt för höga halter av
luftburna partiklar är nedsmutsning av området kring
frekvensomriktarens kyläkt. I dammiga miljöer
rekommenderas utrustning med kapslingsklass IP54 eller
apparatskåp för IP20/typ 1-utrustning.
Om hög temperatur och luftfuktighet förekommer i
driftmiljön kommer korrosiva gaser som svavel-, kväve- och
klorföreningar att orsaka kemiska reaktioner på frekvensomriktarens komponenter.
3.4.1 Allmänt om EMC-emission
Frekvensomriktare (och andra elektriska enheter) genererar
elektriska eller magnetiska fält som kan störa deras miljö.
Den elektromagnetisk kompatibiliteten (EMC) av denna
påverkan beror på enhetens eekt och övertonsegenskaper.
Okontrollerad växelverkan mellan elektriska enheter i ett
system kan försämra kompatibilitet och minska driftens
pålitlighet. Störningarna kan till exempel vara övertonsströmmar på nätet, elektrostatiska urladdningar, snabba
spänningsuktueringar eller högfrekventa störningar.
Elektriska enheter både genererar störningar och påverkas
av störningar från andra genererande källor.
Elektriska störningar uppstår vanligtvis på frekvenser
mellan 150 kHz och 30 MHz. Luftburen störning från
frekvensomriktaren på mellan 30 MHz och 1 GHz genereras
av växelriktaren, motorkabeln och motorsystemet.
Kapacitiva strömmar i motorkabeln tillsammans med ett
högt dU/dt från motorspänningen genererar läckströmmar,
så som visas i Bild 3.52.
Användning av skärmade motorkablar ökar läckströmmen
(se Bild 3.52), eftersom skärmade kablar har högre
kapacitans till jord än oskärmade kablar. Om läckströmmen
inte ltreras orsakar den större störning på nätströmmen i
radiofrekvensområdet under ca 5 MHz. Eftersom
läckströmmen (I1) förs tillbaka till enheten via skärmen (I3),
nns i princip bara ett litet elektromagnetiskt fält (I4) från
den skärmade motorkabeln i enlighet med Bild 3.52.
Dessa reaktioner leder snabbt till driftstörningar och
skador. I sådana korrosiva driftmiljöer monteras utrustningen i apparatskåp försedda med friskluftsventilation, så
att de aggressiva gaserna hålls borta från frekvensomriktaren.
36 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Skärmen reducerar luftburen störning, men ökar den
lågfrekventa störningen i nätet. Motorkabelns skärm ska
anslutas både till frekvensomriktarens kapsling och
motorns kapsling. Använd de inbyggda skärmklämmorna
för att undvika tvinnade skärmändar. Tvinnade skärmändar
ökar skärmimpedansen vid högre frekvenser, vilket minskar
skärmeekten och ökar läckströmmen (I4).

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktöversikt Design Guide
Om du använder en skärmad kabel till relä, styrkabel, signalgränssnitt och broms ska du ansluta skärmen till kapslingen i
båda slutpunkterna. I vissa situationer kan det dock vara nödvändigt att göra ett avbrott på skärmen för att undvika strömslingor.
Om skärmen ska anslutas till en monteringsplåt i frekvensomriktaren måste monteringsplåten vara av metall så att
skärmströmmen kan gå tillbaka till enheten. Se också till att det blir god elektrisk kontakt från monteringsplåten via monteringsskruvarna till frekvensomriktarens chassi.
3 3
Om oskärmade kablar används uppfylls de
esta immunitetskrav, men inte vissa emissionskrav.
För att reducera den totala störningsnivån från hela systemet (enhet och installation) ska motor- och bromskablarna vara så
korta som möjligt. Undvik att lägga kablar med känsliga signalnivåer längs med motor- eller bromskablar. Radiostörningar
över 50 MHz (luftburen) genereras i synnerhet av styrelektroniken.
1 Jordledning 2 Skärm 3 Växelströmsnätförsörjning
4 Frekvensomriktare 5 Skärmad motorkabel 6 Motor
Bild 3.52 Generering av läckströmmar
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 37

Produktöversikt
VLT® HVAC Basic Drive FC 101
3.4.2 Emissionskrav
EMC-produktstandarden för frekvensomriktare denierar fyra kategorier (C1, C2, C3 och C4) med specicerade krav för
emission och immunitet. Tabell 3.5 visar denitionen av de fyra kategorierna och motsvarande klassicering från SS-EN
55011.
33
EN/IEC 61800-3
kategori
C1
C2
C3
C4
Tabell 3.5 Förhållande mellan IEC 61800-3 och SS-EN 55011
Frekvensomriktare som är installerade i "rst environment" (publika nät, hem
och kontor) med en nätspänning som understiger 1 000 V.
Frekvensomriktare som är installerade i "rst environment" (publika nät, hem
och kontor) med en nätspänning som understiger 1 000 V, som varken är
yttbara eller utrustade med kontakter och som är avsedda för installation
och idrifttagning av en fackman.
Frekvensomriktare som är installerade i "second environment" (industrinät)
med en nätspänning som understiger 1 000 V.
Frekvensomriktare som är installerade i "second environment" (industrinät)
med en nätspänning som är lika med eller överstiger 1 000 V, med en
märkspänning som är lika med eller överstiger 400 A eller som är avsedda
att användas i komplexa system.
Denition
Motsvarande emissionsklass i SS-
EN 55011
Klass B
Klass A Grupp 1
Klass A Grupp 2
Ingen begränsning.
Gör en EMC-plan.
När de generella (ledningsburna) emissionsstandarderna används måste frekvensomriktarna uppfylla gränsvärdena i
Tabell 3.6.
Miljö
First environment
(publika nät, hem och kontor)
Second environment
(industrinät)
Allmän emissions-
standard
SS-EN/IEC 61000-6-3 Emissionsstandard för bostads- och
kontorsmiljöer samt lätt industrimiljö.
SS-EN/IEC 61000-6-4 Emissionsstandard för industrimiljö. Klass A Grupp 1
Motsvarande emissionsklass i SS-EN
55011
Klass B
Tabell 3.6 Samband mellan allmänna emissionsstandarder och SS-EN 55011
3.4.3 Testresultat för EMC-emission
Följande testresultat har erhållits vid tester utförda med ett system bestående av en frekvensomriktare, en skärmad
styrkabel, en manöverlåda med potentiometer samt en skärmad motorkabel.
RFI-
ltertyp
Industrimiljö
SS-EN
55011
SS-
EN/IEC
61800-3
Second environment
Utan
externt
lter
Ledningsemission. Maximal längd på skärmad kabel
[m (ft)]
Klass A Grupp 2
Industrimiljö
Kategori C3
(industrinät)
Industri
Med
externt
lter
Klass A Grupp 1
Industrimiljö
Kategori C2
First environment
(publika nät)
Hem och kontor
Utan
externt
lter
Med
externt
lter
Klass B
Bostäder, handel och lätt
industri
Kategori C1
First environment
(publika nät)
Hem och kontor
Utan
externt
lter
Med
externt
lter
Luftburen emission
Klass A Grupp 1
Industrimiljö
Kategori C2
First environment
(publika nät)
Hem och kontor
Utan
externt
lter
Med
externt
lter
Klass B
Bostäder, handel och
lätt industri
Kategori C1
First environment
(publika nät)
Hem och kontor
Utan
externt
lter
Med
externt
lter
38 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Produktöversikt Design Guide
RFI-ltertyp
Industrimiljö
H4 RFI-lter (SS-EN 55011 A1, SS-EN/IEC 61800–3 C2)
0,25–11 kW
(0,34–15 hk)
3 x 200–240 V IP20
0,37–22 kW
(0,5–30 hk)
3 x 380–480 V IP20
H2 RFI-lter (SS-EN 55011 A2, SS-EN/IEC 61800-3 C3)
15–45 kW
(20–60 hk)
3 x 200–240 V IP20
30–90 kW
(40–120 hk)
3 x 380–480 V IP20
0,75–18,5 kW
(1–25 hk)
3 x 380–480 V IP54
22–90 kW
(30–120 hk)
3 x 380–480 V IP54
H3 RFI-lter (SS-EN 55011 A1/B, SS-EN/IEC 61800-3 C2/C1)
15–45 kW
(20–60 hk)
3 x 200–240 V IP20
30–90 kW
(40–120 hk)
3 x 380–480 V IP20
0,75–18,5 kW
(1–25 hk)
3 x 380–480 V IP54
22–90 kW
(30–120 hk)
3 x 380–480 V IP54
25 (82) – – – – – Nej – Nej –
25 (82) – – – – – Nej – Nej –
25 (82) – – – – – Ja – – –
25 (82) – – – – – Nej – Nej –
Ledningsemission. Maximal längd på skärmad kabel
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nej
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nej
– – 50 (164) – 20 (66) – Ja – Nej –
– – 50 (164) – 20 (66) – Ja – Nej –
– – 25 (82) – 10 (33) – Ja – – –
– – 25 (82) – 10 (33) – Ja – Nej –
[m (ft)]
Luftburen emission
3 3
Tabell 3.7 Testresultat för EMC-emission
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 39
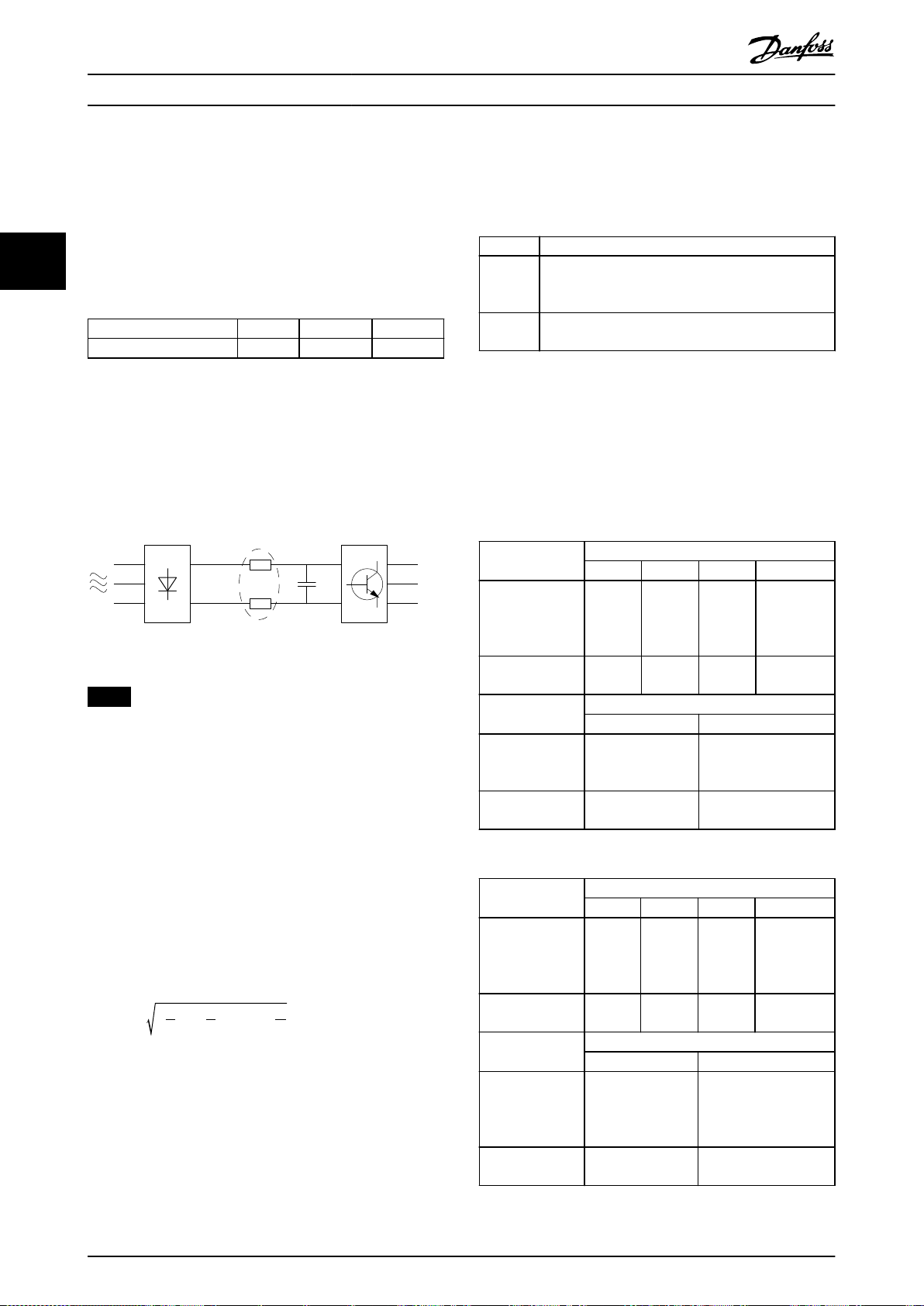
175HA034.10
Produktöversikt
VLT® HVAC Basic Drive FC 101
3.4.4 Allmänt om utstrålning av övertoner
En frekvensomriktare drar en icke sinusformad ström från
nätet, vilket ökar ingångsströmmen I
. En icke
RMS
3.4.5 Emissionskrav gällande övertoner
Utrustning som är ansluten till det allmänna strömförsörjningsnätet
sinusformad ström omvandlas genom Fourier-analys och
33
vill säga olika övertonsströmmar In med 50 Hz som
grundfrekvens:
delas upp i sinusformade strömmar med olika frekvens, det
I
Hz 50 250 350
Tabell 3.8 Övertonsströmmar
1
I
5
I
7
Övertonerna påverkar inte den direkta eektförbrukningen
Tillval Denition
IEC/SS-EN 61000-3-2 Klass A för 3-fasbalanserad
1
utrustning (för professionell utrustning upp till 1 kW
(1,3 hk) total eekt).
IEC/SS-EN 61000-3-12 Utrustning 16–75 A och profes-
2
sionell utrustning från 1 kW upp till 16 A-fasström.
Tabell 3.9 Ansluten utrustning
3.4.6 Övertoner, testresultat (emission)
men ökar värmeförlusterna i installationen (transformatorer,
kablar). I anläggningar med hög likriktarbelastning är det
viktigt att hålla övertonsströmmarna på en låg nivå för att
undvika överbelastning i transformatorn och hög
temperatur i kablarna.
Bild 3.53 Likströmsspolar
OBS!
Vissa övertonsströmmar kan eventuellt störa kommunikationsutrustning som är ansluten till samma
transformator eller orsaka resonans med batterier för
eektfaktorkorrigering.
För att säkerställa låga övertonsströmmar är frekvensom-
Eektstorlekar upp till PK75 i T4 och P3K7 i T2 uppfyller
också IEC/SS-EN 61000-3-2 klass A. Eektstorlekar från P1K1
och upp till P18K i T2 och upp till P90K i T4 uppfyller
IEC/SS-EN 61000-3-12, tabell 4.
Faktiska 0,25–11
kW (0,34–15 hk),
IP20, 200 V
(normal)
Begränsa för
R
≥120
sce
Faktiska 0,25–11
kW (0,34–15 hk),
200 V (normal)
Begränsa för
R
≥120
sce
Individuell övertonsström In/I1 (%)
I
5
32,6 16,6 8,0 6,0
40 25 15 10
Övertonsström, distortionsfaktor (%)
I
7
THDi PWHD
39 41,4
48 46
I
11
I
13
riktare utrustade med likströmsspolar som standard.
Därmed minskar ingångsströmmen I
normalt med 40 %.
RMS
Tabell 3.10 Övertonsström 0,25–11 kW (0,34–15 hk), 200 V
Spänningsdistortionen på nätspänningen är en funktion av
övertonsströmmen multiplicerad med nätimpedansen för
den aktuella frekvensen. Den totala spänningsdistortionen
THD beräknas ur de enskilda övertonsspänningarna med
formeln:
THD
% = U
5
+ U
2
+ ... + U
7
2
N
2
(UN% av U)
40 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Faktiska 0,37–22
kW (0,5–30 hk),
IP20, 380–480 V
(normal)
Begränsa för
R
≥120
sce
Faktiska 0,37–22
kW (0,5–30 hk),
380–480 V
(normal)
Begränsa för
R
≥120
sce
Tabell 3.11 Övertonsström 0,37–22 kW (0,5–30 hk), 380-480 V
Individuell övertonsström In/I1 (%)
I
5
36,7 20,8 7,6 6,4
40 25 15 10
Övertonsström, distortionsfaktor (%)
I
7
THDi PWHD
44,4 40,8
48 46
I
11
I
13

Produktöversikt Design Guide
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
I
13
Faktiska 30–90
kW (40–120 hk),
IP20, 380–480 V
36,7 13,8 6,9 4,2
(normal)
Begränsa för
R
≥120
sce
40 25 15 10
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 30–90
kW (40–120 hk),
380–480 V
40,6 28,8
(normal)
Begränsa för
R
≥120
sce
48 46
Tabell 3.12 Övertonsström 30–90 kW (40–120 hk), 380–480 V
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
I
13
Faktiska 2,2–15
kW (3,0–20 hk),
IP20, 525–600 V
48 25 7 5
(normal)
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 2,2–15
kW (3,0–20 hk),
525–600 V
55 27
(normal)
Tabell 3.13 Övertonsström 2,2–15 kW (3,0–20 hk), 525–600 V
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
I
13
Faktiska 18,5–90
kW (25–120 hk),
IP20, 525–600 V
48,8 24,7 6,3 5
(normal)
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 18,5–90
kW (25–120 hk),
525–600 V
55,7 25,3
(normal)
Tabell 3.14 Övertonsström 18,5–90 kW (25–120 hk), 525–600 V
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
Faktiska 22–90
kW (30–120 hk),
IP54, 400 V
36,3 14 7 4,3
(normal)
Begränsa för
R
≥120
sce
40 25 15 10
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 22–90
kW (30–120 hk),
IP54, 400 V
40,1 27,1
(normal)
Begränsa för
R
≥120
sce
48 46
Tabell 3.15 Övertonsström 22–90 kW (30–120 hk), 400 V
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
Faktiska 0,75–
18,5 kW (1,0–25
hk), IP54,
36,7 20,8 7,6 6,4
380-480 V
(normal)
Begränsa för
R
≥120
sce
40 25 15 10
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 0,75–
18,5 kW (1,0–25
hk), IP54, 380–
44,4 40,8
480 V (normal)
Begränsa för
R
≥120
sce
48 46
Tabell 3.16 Övertonsström 0,75–18,5 kW (1,0–25 hk),
380–480 V
Individuell övertonsström In/I1 (%)
I
5
I
7
I
11
Faktiska 15–45
kW (20–60 hk),
IP20, 200 V
26,7 9,7 7,7 5
(normal)
Begränsa för
R
≥120
sce
40 25 15 10
Övertonsström, distortionsfaktor (%)
THDi PWHD
Faktiska 15–45
kW (20–60 hk),
30,3 27,6
200 V (normal)
Begränsa för
R
≥120
sce
48 46
I
13
3 3
I
13
I
13
Tabell 3.17 Övertonsström 15–45 kW (20–60 hk), 200 V
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 41

SMPS
130BB896.10
1
2
3
a
M
130BB901.10
1324
5
a
M
Produktöversikt
VLT® HVAC Basic Drive FC 101
Givet att kortslutningsströmmen Ssc är större eller lika med:
För att PELV-isoleringen ska bibehållas måste alla
komponenter som ansluts till styrplintarna vara PELV-
S
= 3 × R
SC
SCE
× U
nät
× I
= 3 × 120 × 400 × I
equ
vid kopplingen mellan användarens system och det
allmänna systemet (R
sce
).
equ
isolerande, det vill säga en termistor måste vara förstärkt/
dubbelisolerad.
0,25–22 kW (0,34–30 hk)
33
Det åligger installatören eller användaren av utrustningen
att säkerställa, efter konsultation med det lokala elbolaget
om nödvändigt, att utrustningen bara är ansluten till en
källa med en kortslutningsström Ssc som är större än eller
lika med det som anges ovan.
Andra eektstorlekar kan anslutas till det allmänna elnätet
efter överenskommelse med nätägaren.
Uppfyller olika systemnivåriktlinjer:
De övertonsströmsdata som nns i Tabell 3.10 till
Tabell 3.17 ges enligt IEC/SS-EN 61000-3-12 med referens
till produktstandarden Power Drive Systems. De kan
användas som grund för beräkning av övertonströmmarnas
påverkan på strömförsörjningssystemet, och för dokumentation av uppfyllandet av relevanta regionala riktlinjer: IEEE
519-1992; G5/4.
3.4.7 Immunitetskrav
1 Försörjning (SMPS)
2 Optokopplare, kommunikation mellan AOC och BOC
3 Anpassade reläer
a Styrkortsplintar
Bild 3.54 Galvanisk isolation
Immunitetskraven för frekvensomriktare beror på miljön
där de installeras. Kraven på industrimiljön är högre än
kraven för hem- och kontorsmiljöer. Alla frekvensomriktare
från Danfoss uppfyller kraven för industrimiljö och
uppfyller således också de lägre kraven för hem- och
kontorsmiljöer med en bred säkerhetsmarginal.
Galvanisk isolation (PELV)
3.5
PELV ger skydd via extra låg spänning. Skydd mot
elektriska stötar säkerställs när elförsörjningen är av PELVtyp och när installationen har utförts enligt lokala och
nationella bestämmelser för PELV-elförsörjning.
Alla styrplintar och reläplintar 01-03/04-06 uppfyller kraven
i PELV (Protective Extra Low Voltage) (gäller inte vid jordat
deltaben över 440 V).
Du uppnår galvanisk (säker) isolering genom att uppfylla
kraven för förstärkt isolering och iaktta det föreskrivna
krypavståndet. Dessa krav beskrivs i standarden SS-EN
61800-5-1.
De enskilda komponenterna som ingår i den elektriska
isoleringen som beskrivs uppfyller också kraven för
förstärkt isolering enligt test som beskrivs i SS-EN
61800-5-1.
Galvanisk isolation (PELV) kan visas i Bild 3.55.
30–90 kW (40–120 hk)
1 Försörjning (SMPS) inkluderar signalisolering av UDC som
indikerar mellanliggande strömnivå.
2 Växelriktare som styr IGBT-enheterna (triggtransformatorer/
optokopplare).
3 Strömomvandlare
4 Kretsar för mätning av mjukladdning, RFI och temperaturer.
5 Anpassade reläer
a Styrkortsplintar
Bild 3.55 Galvanisk isolation
Den funktionella galvaniska isolationen (se Bild 3.54) avser
standardbussgränssnittet RS485.
42 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Produktöversikt Design Guide
FÖRSIKTIGT
INSTALLATION PÅ HÖG HÖJD
För höjder över 2 000 m (6500 ft) över havet kontaktar
du Danfoss angående PELV.
3.6 Läckström till jord
VARNING
URLADDNINGSTID
Att vidröra strömförande delar kan vara förenat med
livsfara, även när nätströmmen är frånkopplad.
Se även till att andra spänningsanslutningar har kopplats
från, till exempel lastdelning (sammankoppling av DCbuss) samt motoranslutning vid kinetisk back-up.
Innan du rör några elektriska delar måste du vänta den
tid som anges i Tabell 2.1.
Kortare tid är endast tillåtet om detta anges på enhetens
märkskylt.
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om frekvensomriktaren
inte jordas korrekt kan det leda till dödsfall eller
allvarliga personskador.
En behörig elinstallatör måste säkerställa att
•
utrustningen är korrekt jordad.
VARNING
JORDFELSBRYTARSKYDD
Denna produkt kan orsaka en likström i skyddsledaren.
Om en jordfelsbrytare (RCD) används för extra skydd ska
endast en jordfelsbrytare av typ B (tidsfördröjd)
användas på ingångssidan på denna produkt. Annars ska
ett annat skyddsätt användas, till exempel separation
från omgivningen med dubbel eller förstärkt isolering,
eller isolering från försörjningssystemet med en
transformator. Se också tillämpningsnoteringen Skydd
mot elfaror.
Skyddsjordning av frekvensomriktaren och användningen av RCD-enheter måste alltid följa nationella och
lokala bestämmelser.
3.7 Extrema driftförhållanden
Kortslutning (motorfas – fas)
Frekvensomriktaren skyddas mot kortslutning genom
strömmätning i de tre motorfaserna eller i DC-bussen. Vid
kortslutning mellan två utfaser uppstår överström i
växelriktaren. Växelriktaren stängs av så snart kortslutningsströmmen överstiger det tillåtna värdet (Alarm 16, Trip Lock
(Larm 16 Tripplås)).
Mer information om hur frekvensomriktaren kan skyddas
mot kortslutning vid lastdelning och uteekt från
bromsning nns i kapitel 8.3.1 Säkringar och maximal-
brytare.
Koppling på utgången
In- och urkoppling på utgången mellan motorn och
frekvensomriktaren tillåts. Du kan inte på något sätt skada
frekvensomriktaren genom sådana in- och urkopplingar. De
kan emellertid orsaka felmeddelanden.
Motorgenererad överspänning
Spänningen i DC-bussen ökar när motorn fungerar som
generator. Detta sker vid följande tillfällen:
Belastningen driver motorn (vid konstant
•
utfrekvens från frekvensomriktaren), vilket alltså
innebär att belastningen alstrar energi.
Vid deceleration (nedrampning) när tröghetsmo-
•
mentet är högt, är friktionen låg och
nedramptiden för kort för att energin ska avsättas
som en förlust i frekvensomriktaren, motorn och
installationen.
Felaktigt inställd eftersläpningskompensation
•
parameter 1-62 Eftersläpningskomp. kan ge
upphov till en högre DC-busspänning.
Styrenheten försöker att korrigera rampen om
parameter 2-17 Överspänningsstyrning är aktiverad.
Frekvensomriktaren kopplas från så att transistorerna och
DC-busskondensatorerna skyddas när en viss
spänningsnivå nås.
Nätavbrott
Vid nätavbrott fortsätter frekvensomriktaren driften tills
likspänningen är lägre än den lägsta gränsspänningen, som
normalt är 15 % under frekvensomriktarens lägsta
nominella nätspänning. Nätspänningen före avbrottet och
motorbelastningen bestämmer hur lång tid som går innan
frekvensomriktaren utrullar.
3 3
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 43
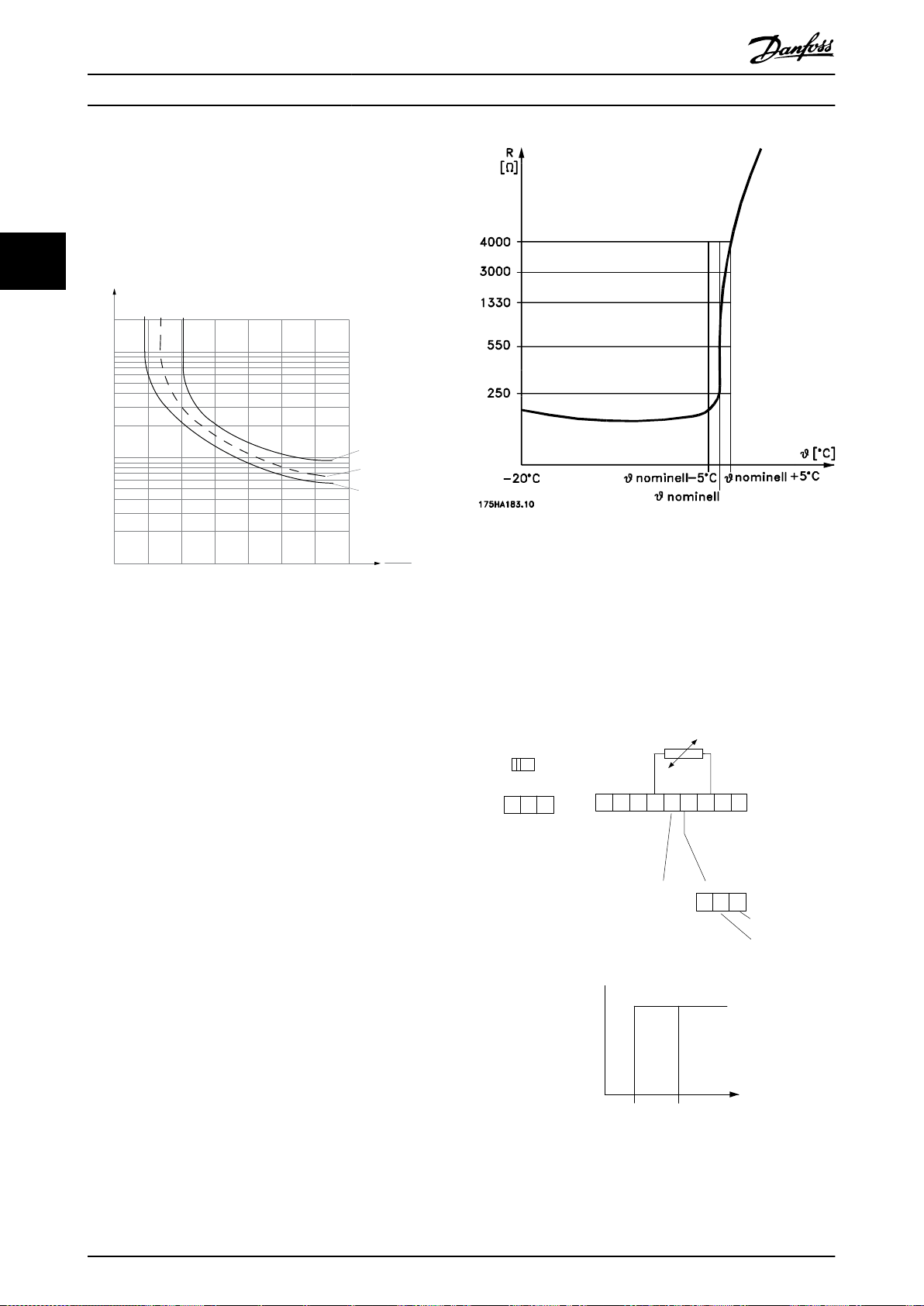
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
R
OFF
PÅ
<800 Ω >2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
JORD
+24V
0/4-20mA A UT / DIG UT 0/4-20mA A UT / DIG UT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V UT
BUSSKOPPL.
OFF PÅ
130BB898.10
Produktöversikt
VLT® HVAC Basic Drive FC 101
3.7.1 Termiskt motorskydd (ETR)
Danfoss använder ETR för att skydda motorn från att
överhettas. Det är en elektronisk funktion som simulerar ett
bimetallrelä baserat på interna mätningar. Kurvan visas i
Bild 3.56.
33
Bild 3.57 Tripp på grund av hög motortemperatur
Bild 3.56 Egenskaper för termiskt motorskydd
Exempel med digital ingång och 10 V-strömförsörjning
Frekvensomriktaren trippar när motortemperaturen blir för
hög.
Parameterinställning:
X-axeln visar förhållandet mellan I
Y-axeln visar tiden i sekunder innan ETR stänger av och
trippar frekvensomriktaren. Kurvorna visar det karaktäristiska nominella varvtalet vid dubbla det nominella
motor
och I
motor
nominellt.
Ställ in parameter 1-90 Termiskt motorskydd till [2] Termis-
tortripp.
Ställ in parameter 1-93 Termistorkälla till [6] Digital ingång
29.
varvtalet och vid 0,2 x det nominella varvtalet.
Vid lägre motorvarvtal stänger ETR av vid lägre belastning
eftersom motorn kyls sämre. På så sätt skyddas motorn
från överhettning även vid låga varvtal. ETR-funktionen
beräknar motortemperaturen baserat på faktisk ström och
faktiskt varvtal.
3.7.2 Termistoringång
Termistorns urkopplingsvärde är 3 kΩ.
Integrera en termistor (PTC-sensor) i motorn för skydd av
lindningen.
Motorskydd kan implementeras med hjälp av olika
tekniker:
44 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
PTC-sensor i motorlindningarna.
•
Mekanisk termisk brytare (av Klixon-typ).
•
Elektronisk-termiskt relä (ETR).
•
Bild 3.58 Digital ingång/10 V-strömförsörjning
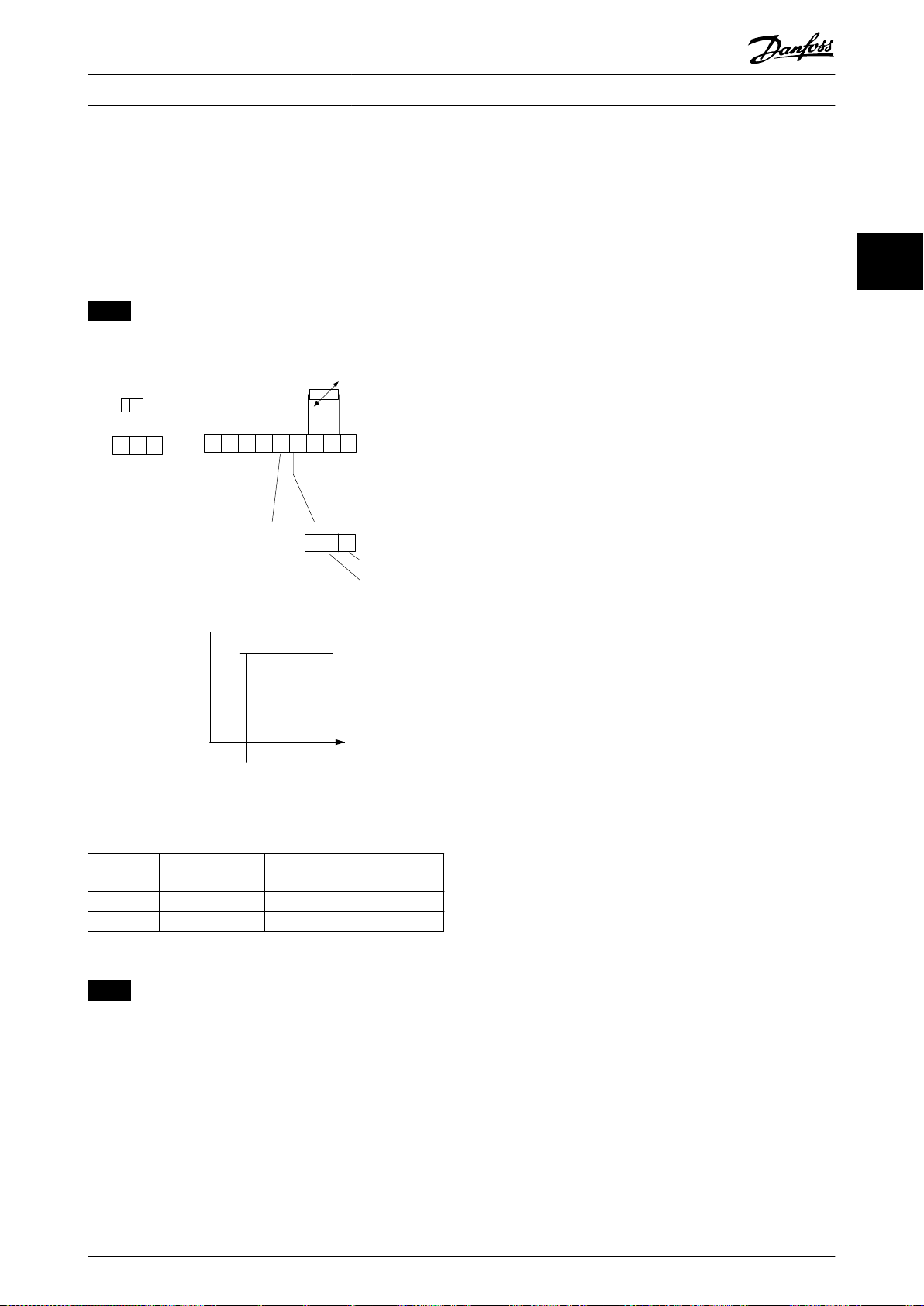
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
JORD
+24V
0/4-20mA A UT / DIG UT 0/4-20mA A UT / DIG UT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V UT
BUSSKOPPL.
OFF PÅ
130BB897.10
R
<3,0 kΩ
>2,9 kΩ
OFF
PÅ
Produktöversikt Design Guide
Exempel med Analog ingång och 10 V-strömförsörjning
Frekvensomriktaren trippar när motortemperaturen blir för
hög.
Parameterinställning:
Ställ in parameter 1-90 Termiskt motorskydd till [2] Termis-
tortripp.
Ställ in parameter 1-93 Termistorkälla till [1] Analog ingång
53.
OBS!
Ställ inte in Analog ingång 54 som referenskälla.
3 3
Bild 3.59 Analog ingång/10 V-strömförsörjning
Ingång Nätspänning [V]
Digital 10
Analog 10
Tabell 3.18 Nätspänning
Tröskel
Urkopplingsvärden [Ω]
<800⇒2,9 k
<800⇒2,9 k
OBS!
Kontrollera att vald nätspänning följer specikationen för
det termistorelement som används.
ETR är aktiverad i parameter 1-90 Termiskt motorskydd.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 45

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Välja och beställa
VLT® HVAC Basic Drive FC 101
4 Välja och beställa
4.1 Typkod
En typkod denierar en specik konguration för VLT® HVAC Basic Drive FC 101 frekvensomriktaren. Använd Bild 4.1 för att
skapa en typkod för önskad konguration.
44
Bild 4.1 Typkod
Beskrivning Position Möjligt val
Produktgrupp och FC-serier 1–6 FC 101
Märkeekt 7–10 0,25–90 kW (0,34–120 hk) (PK25-P90K)
Antal faser 11 3-fas (T)
T2: 200-240 V AC
Nätspänning 11–12
Kapsling 13–15
RFI-lter 16–17
Broms 18 X: Bromschopper ingår ej
Display 19
Ytbeläggning PCB 20
Nättillval 21 X: Inget nättillval
Anpassning 22 X: Ingen anpassning
Anpassning 23 X: Ingen anpassning
Programvaruversion 24–27 SXXXX: Senaste version – standardprogramvara
Programvaruspråk 28 X: Standard
A-tillval 29–30 AX: Inga A-tillval
B-tillval 31–32 BX: Inga B-tillval
C0-tillval MCO 33–34 CX: Inga C-tillval
C1-tillval 35 X: Inga C1-tillval
C-tillval, programvara 36–37 XX: Inget tillval
D-tillval 38–39 DX: Inga D0-tillval
T4: 380-480 V AC
T6: 525-600 V AC
E20: IP20/chassi
P20: IP20/chassi med bakre plåt
E5A: IP54
P5A: IP54 med bakre plåt
H1: RFI-lter klass A1/B
H2: RFI-lter klass A2
H3: RFI-lterklass A1/B (reducerad kabellängd)
H4: RFI-lter klass A1
A: Alfanumerisk lokal manöverpanel (NLCP)
X: Ingen lokal manöverpanel
X: Ej ytbehandlad PCB
C: PCB-ytbehandlad
Tabell 4.1 Typkodsbeskrivning
46 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
130BB777.10
Välja och beställa Design Guide
4.2 Tillval och tillbehör
4.2.1 Lokal manöverpanel (LCP)
Beställningsnummer Beskrivning
132B0200 LCP för alla IP20-enheter
Tabell 4.2 Beställningsnummer, LCP
Kapsling IP55 frontmonterad
Maximal kabellängd till enhet+ 3 m (10 ft)
Kommunikationsstandard RS485
Tabell 4.3 Tekniska data för LCP
4.2.2 Montering av LCP i panelfronten
Steg 1
Sätt packningen på LCP:n.
Bild 4.2 Sätt i packningen
4 4
1 Panelens utsnitt. Panelens tjocklek 1–3 mm (0,04–0,12 in)
2 Panel
3 Packning
4 LCP
Bild 4.3 Placera LCP:n på panelen (frontmonterad)
Steg 2
Placera LCP:n på manöverpanelen, hålens mått visas i
Bild 4.3.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 47
Steg 3
Placera fästet på baksidan av LCP:n och skjut sedan ned.
Dra åt skruvarna och anslut kabelns honsida till LCP:n.
Bild 4.4 Placera fästet på LCP:n

130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
130BB903.10
Välja och beställa
VLT® HVAC Basic Drive FC 101
Steg 4
Anslut kabeln till frekvensomriktaren.
44
Bild 4.5 Ansluta kabel
OBS!
Använd de medföljande gängpressade skruvarna till att
fästa anslutningen till frekvensomriktaren. Åtdragningsmoment 1,3 Nm (11,5 in-lb).
Bild 4.6 H1–H5 (Se data i Tabell 4.4)
4.2.3 IP21/NEMA typ 1-kapslingssats
IP21/NEMA typ 1 är ett kapslingstillval för IP20-enheter.
Om kapslingssatsen används uppgraderas en IP20-enhet så
att den uppfyller kraven för kapsling IP21/NEMA typ 1.
Bild 4.7 Mått (se data i Tabell 4.4)
48 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
130BB793.10
99 99
Välja och beställa Design Guide
Kapsling IP-klass
3x200–240 V
[kW (hk)]
H1 IP20
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
H10 IP20 – –
0,25–1,5
(0,34–2,0)
5,5-7,5
(7,4–10)
15–18,5
(20–25)
22–30
(30–40)
37–45
(50–60)
Eekt
3x380–480 V
[kW (hk)]
0,37–1,5
(0,5–2,0)
2,2-4,0
(3,0–5,4)
5,5-7,5
(7,4–10)
11–15
(15–20)
18,5–22
(25–30)
30–45
(40–60)
55–75
(74–100)
90 (120)
Beställ-
Höjd
[mm (in)] A
3x525–600 V
[kW (hk)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5–30
(25–40)
37–55
(50–74)
75–90
(100–120)
2,2–7,5
(3,0–10)
11–15
(15–20)
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Bredd
[mm (in)] B
Djup
[mm (in)] C
ningsnumm
er för IP21-
sats.
NEMA typ
1-satsens
beställ-
ningsnumm
er
4 4
Tabell 4.4 Specikationer för kapslingssats
4.2.4 Jordningsplåt
Använd jordningsplåt för EMC-korrekt installation.
Bild 4.8 visar jordningsplåten på en H3-kapsling.
Bild 4.8 Jordningsplåt
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 49

Välja och beställa
Eekt [kW (hk)] Jordningsplåt
Kapsling IP-klass 3x200–240 V 3x380–480 V 3x525–600 V
H1 IP20 0,25–1,5 (0,33–2,0) 0,37–1,5 (0,5–2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2–4 (3,0–5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) – 132B0204
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5–22 (25–30) – 130B0205
44
H6 IP20 15–18,5 (20–25) 30 (40) 18,5–30 (25–40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
Tabell 4.5 Specikationer för jordningsplåt
VLT® HVAC Basic Drive FC 101
beställningsnummer
OBS!
För kapslingsstorlekarna H9 och H10 nns jordningsplåten i tillbehörspåsen.
4.3 Beställningsnummer
4.3.1 Tillval och tillbehör
Kapslings
Beskrivning
1)
LCP
LCP-monteringssats IP55
inklusive 3 m
(9,8 ft) kabel
LCP 31 till RJ
45 konverteringssats
LCP-monteringssats IP55
utan 3 m
(9,8 ft) kabel
Jordningsplå
t
IP21-tillval 132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
Nema typ 1sats
storlek
Nätspänn
ing
T2 (200–
240 V AC)
T4 (380–
480 V AC)
T6 (525–
600 V AC)
132B0200
H1
[kW (hk)]H2[kW (hk)]H3[kW (hk)]H4[kW (hk)]H5[kW (hk)]
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
2,2 (3,0) 3,7 (5,0)
2,2–4,0
(3,0–5,4)
– – – – –
5,5–7,5
(7,5–10)
5,5–7,5
(7,5–10)
11–15
(15–20)
11 (15)
18,5–22
(25–30)
132B0201
132B0203
132B0206
[kW (hk)]
15–18,5
(20–25)
30 (40)
18,5–30
(25–40)
H6
–
37–45
(50–60)
–
H7
[kW (hk)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (hk)]
37–45
(50–60)
75–90
(100–125)
Tabell 4.6 Tillval och tillbehör
1) För IP20-enheter beställs LCP separat. För IP54-enheter ingår LCP i standardkongurationen och monteras på frekvensomriktaren.
50 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Välja och beställa Design Guide
4.3.2 Övertonslter
3x380–480 V 50 Hz
Eekt [kW (hk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabell 4.7 AHF-lter (5 % nätstörningar)
Frekvensomriktarens
kontinuerliga inström [A]
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
Standardswitchfrekvens
[kHz]
THDi-nivå [%]
Beställningsnummerlter
IP00
Kodnummerlter
IP20
4 4
Eekt [kW (hk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabell 4.8 AHF-lter (10 % nätstörningar)
Frekvensomriktarens
kontinuerliga inström [A]
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
3x380–480 V 50 Hz
Standardswitchfrekvens
[kHz]
THDi-nivå [%]
Beställningsnummerlter
IP00
Kodnummerlter
IP20
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 51

Välja och beställa
Eekt [kW (hk)]
22
(30)
30
(40)
37
44
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabell 4.9 AHF-lter (5 % nätstörningar)
Eekt [kW (hk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Frekvensomriktarens
kontinuerliga inström [A]
34,6 4 3 130B1792 130B1757
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
Frekvensomriktarens
kontinuerliga inström [A]
34,6 4 6 130B1775 130B1487
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
VLT® HVAC Basic Drive FC 101
3x440–480 V 60 Hz
Standardswitchfrekvens
[kHz]
3x440–480 V 60 Hz
Standardswitchfrekvens
[kHz]
THDi-nivå [%]
THDi-nivå [%]
Beställningsnummerlter
IP00
Beställningsnummerlter
IP00
Kodnummerlter
IP20
Kodnummerlter
IP20
Tabell 4.10 AHF-lter (10 % nätstörningar)
52 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Välja och beställa Design Guide
4.3.3 Externa RFI-lter
Med externa lter, uppräknade i Tabell 4.11, kan maximal skärmad kabellängd på 50 m (164 ft) enligt SS-EN/IEC 61800-3 C2
(EN 55011 A1) eller 20 m (65,6 ft) enligt SS-EN/IEC 61800-3 C1(EN 55011 B) uppnås.
Eekt [kW (hk)]
Storlek 380–480 V
0,37–2,2
(0,5–3,0)
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
Tabell 4.11 RFI-lter – information
Typ A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Moment
[Nm (in-lb)]
0,7–0,8
(6,2–7,1)
0,7–0,8
(6,2–7,1)
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Vikt [kg] Beställningsnummer hos
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
132B0244
132B0245
132B0246
132B0247
4 4
Bild 4.9 RFI-lter - mått
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 53

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Installation
VLT® HVAC Basic Drive FC 101
5 Installation
5.1 Elektrisk installation
55
Bild 5.1 Kopplingsschema för grundläggande ledningsdragning
OBS!
Det nns ingen åtkomst till UDC- och UDC+ på följande enheter:
•
•
•
•
All kabeldragning måste följa nationella och lokala bestämmelser för ledarareor och omgivningstemperatur. Kopparledare
krävs. 75 °C (167 °F) rekommenderas.
IP20, 380–480 V, 30–90 kW (40–125 hk)
IP20, 200–240 V, 15–45 kW (20–60 hk)
IP20, 525–600 V, 2,2–90 kW (3,0–125 hk)
IP54, 380–480 V, 22–90 kW (30–125 hk)
54 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Installation Design Guide
Eekt [kW (hk)] Moment [Nm (in-lb)]
Kapslings
storlek
IP-klass 3 x 200–240 V 3 x 380–480 V Nät Motor
H1 IP20
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H2 IP20 2,2 (3,0) 2,2–4,0 (3,0–5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5–22 (25–30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15–18,5 (20–25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
24 (212)
1)
24 (212)
Tabell 5.1 Åtdragningsmoment för kapsling H1–H8, 3 x 200–240 V och 3 x 380–480 V
Eekt [kW (hk)] Moment [Nm (in-lb)]
Kapslings-
storlek
I2 IP54
IP-klass 3 x 380–480 V Nät Motor
0,75–4,0
(1,0–5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
Likströmsans-
I3 IP54 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11–18,5 (15–25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
1)
lutning
Likströmsanslutning
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Styrplintar Jord Relä
Styrplintar Jord Relä
– 0,5 (4,0) 3 (27) 0,6 (5,0)
5 5
Tabell 5.2 Åtdragningsmoment för kapsling I2–I8
Eekt [kW (hk)] Moment [Nm (in-lb)]
Kapslings-
storlek
IP-klass 3 x 525–600 V Nät Motor
H9 IP20 2,2–7,5 (3,0–10) 1,8 (16) 1,8 (16)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16)
Likströmsans-
lutning
Rekommender
as ej
Rekommender
as ej
Styrplintar Jord Relä
0,5 (4,0) 3 (27) 0,6 (5,0)
0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5–30 (25–40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabell 5.3 Åtdragningsmoment för kapslingstorlekar H6–H10, 3 x 525–600 V
1) Kabeldimensioner > 95 mm
2) Kabeldimensioner ≤95 mm
2
2
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 55
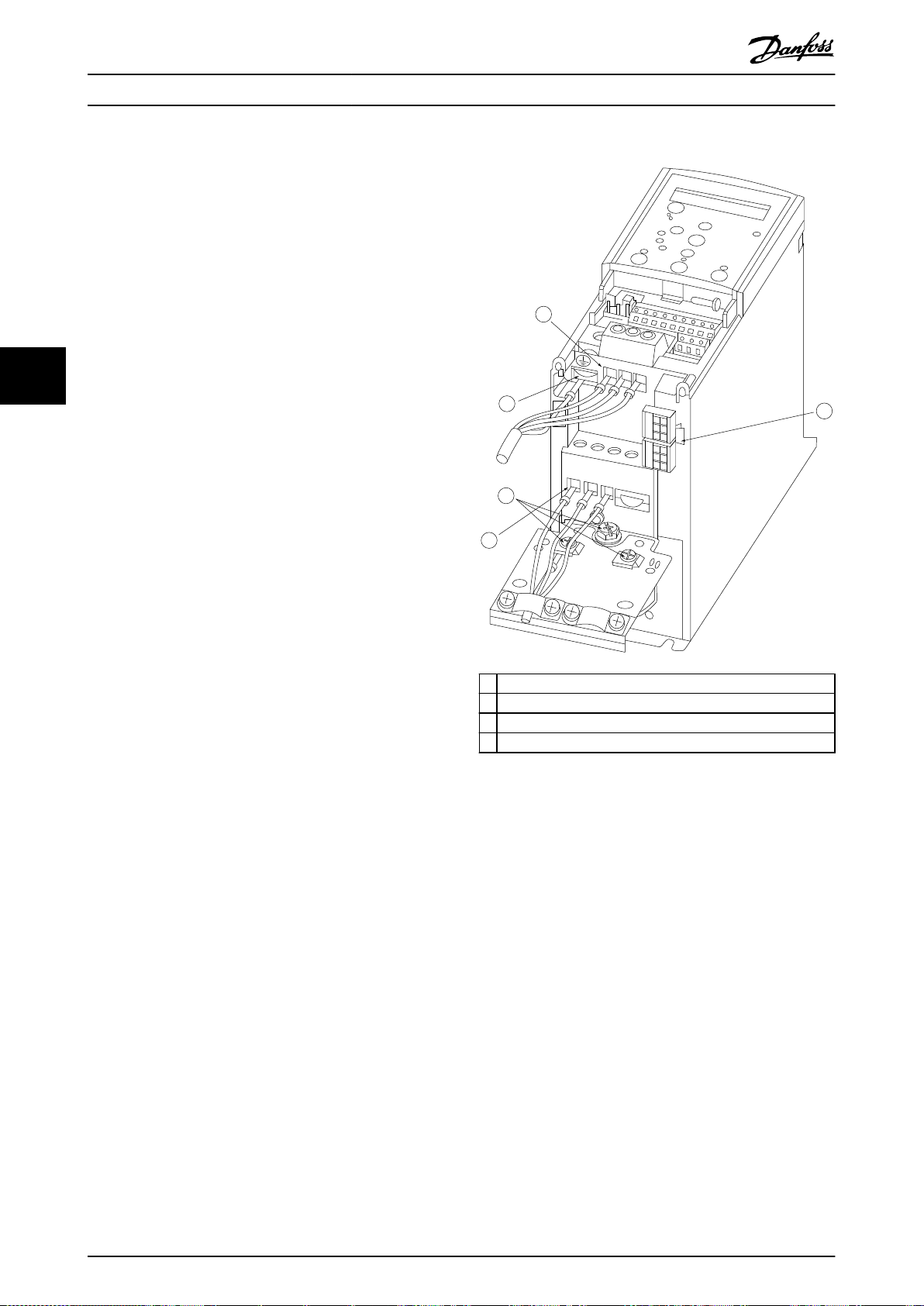
130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Installation
VLT® HVAC Basic Drive FC 101
5.1.1 Nät och motoranslutning
Reläer och plintar på kapslingsstorlek H1–H5
Frekvensomriktaren är utformad för att kunna driva alla
typer av asynkrona trefasmotorer av standardmodell.
Information om maximal ledararea för kablar nns i
kapitel 8.4 Allmänna tekniska data.
Använd en skärmad motorkabel som uppfyller
•
bestämmelser för EMC-emission och anslut kabeln
till både jordningsplåten och motorn.
Det är viktigt att motorkabeln är så kort som
•
55
möjligt för att hålla störningar och läckströmmar
på låg nivå.
Mer information om montering av jordningsplåt
•
nns i FC 101 Monteringsinstruktion för
jordningsplåt.
Se även EMC-korrekt installation i
•
kapitel 5.1.2 Korrekt elektrisk installation enligt EMC.
Information om hur frekvensomriktaren ansluts till
•
nät och motor nns i avsnittet Ansluta till nät och
motor i snabbinstallationsguiden för VLT® HVAC
Basic Drive FC 101.
1 Nät
2 Jord
3 Motor
4 Reläer
Bild 5.2 Kapslingsstorlekar H1–H5
IP20, 200–240 V, 0,25–11 kW (0,33–15 hk)
IP20, 380–480 V, 0,37–22 kW (0,5–30 hk)
56 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Installation Design Guide
Reläer och plintar på kapslingsstorlek H6
1 Nät
2 Motor
3 Jord
4 Reläer
Bild 5.3 Kapslingsstorlek H6
IP20, 380–480 V, 30–45 kW (40–60 hk)
IP20, 200–240 V, 15–18,5 kW (20–25 hk)
IP20, 525–600 V, 22–30 kW (30–40 hk)
Reläer och plintar på kapslingsstorlek H7
5 5
1 Nät
2 Reläer
3 Jord
4 Motor
Bild 5.4 Kapslingsstorlek H7
IP20, 380–480 V, 55–75 kW (70–100 hk)
IP20, 200–240 V, 22–30 kW (30–40 hk)
IP20, 525–600 V, 55–45 kW (70–60 hk)
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 57
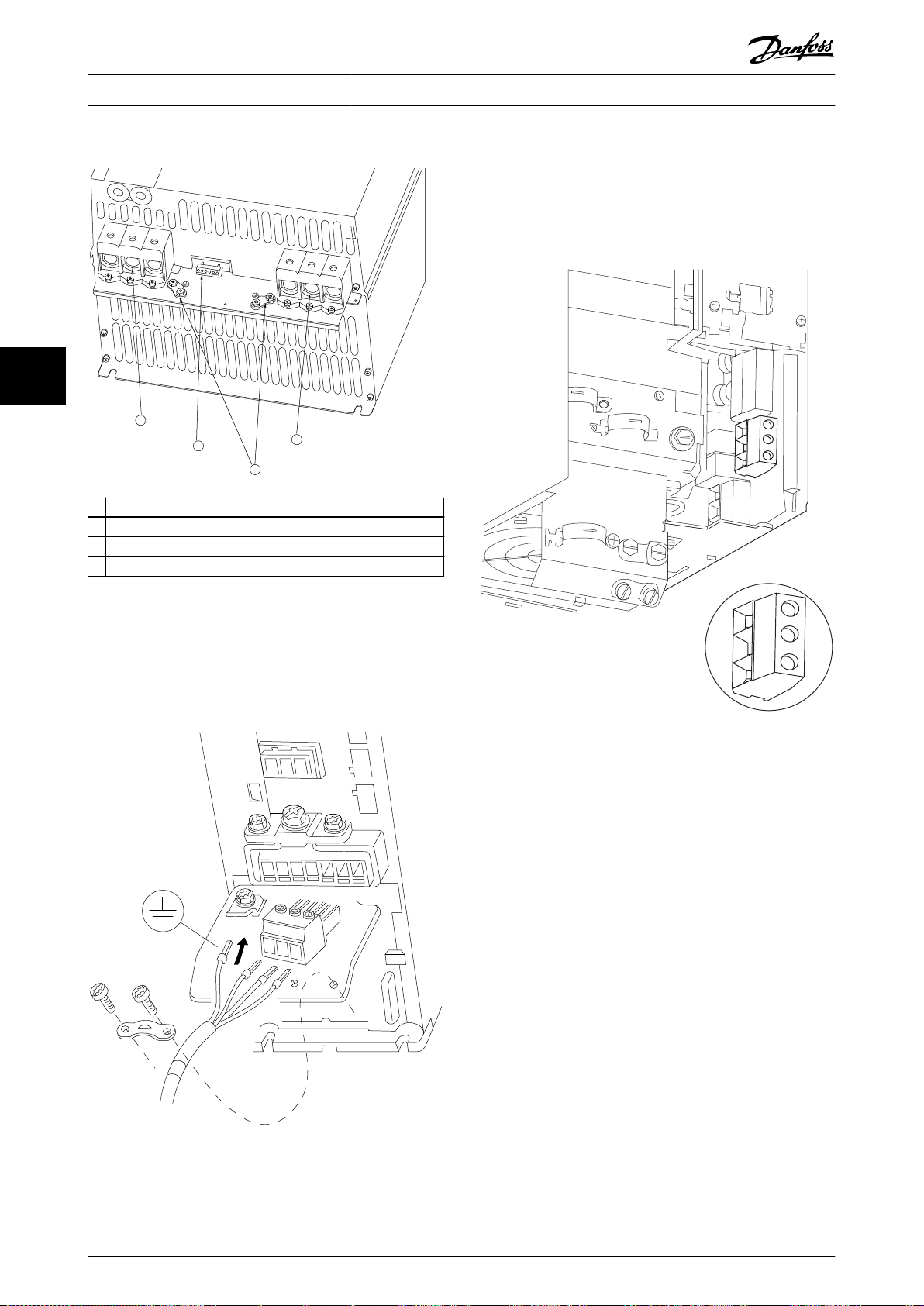
130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Installation
VLT® HVAC Basic Drive FC 101
Reläer och plintar på kapslingsstorlek H8
Se till att kablarna till kapslingsstorlek H9 ansluts korrekt,
mer information nns i Ansluta till nät och motor i snabbin-
stallationsguiden för VLT® HVAC Basic Drive FC 101. Använd
de åtdragningsmoment som anges i kapitel 5.1.1 Allmän
information om elektrisk installation.
Reläer och plintar på kapslingsstorlek H10
55
1 Nät
2 Reläer
3 Jord
4 Motor
Bild 5.5 Kapslingsstorlek H8
IP20, 380–480 V, 90 kW (125 hk)
IP20, 200–240 V, 37–45 kW (50–60 hk)
IP20, 525–600 V, 75–90 kW (100–125 hk)
Anslutning till nät och motor för kapslingsstorlek H9
Bild 5.7 Kapslingsstorlek H10
IP20, 600 V, 11–15 kW (15–20 hk)
Bild 5.6 Motoranslutning för kapsling H9
IP20, 600 V, 2,2–7,5 kW (3,0–10 hk)
58 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
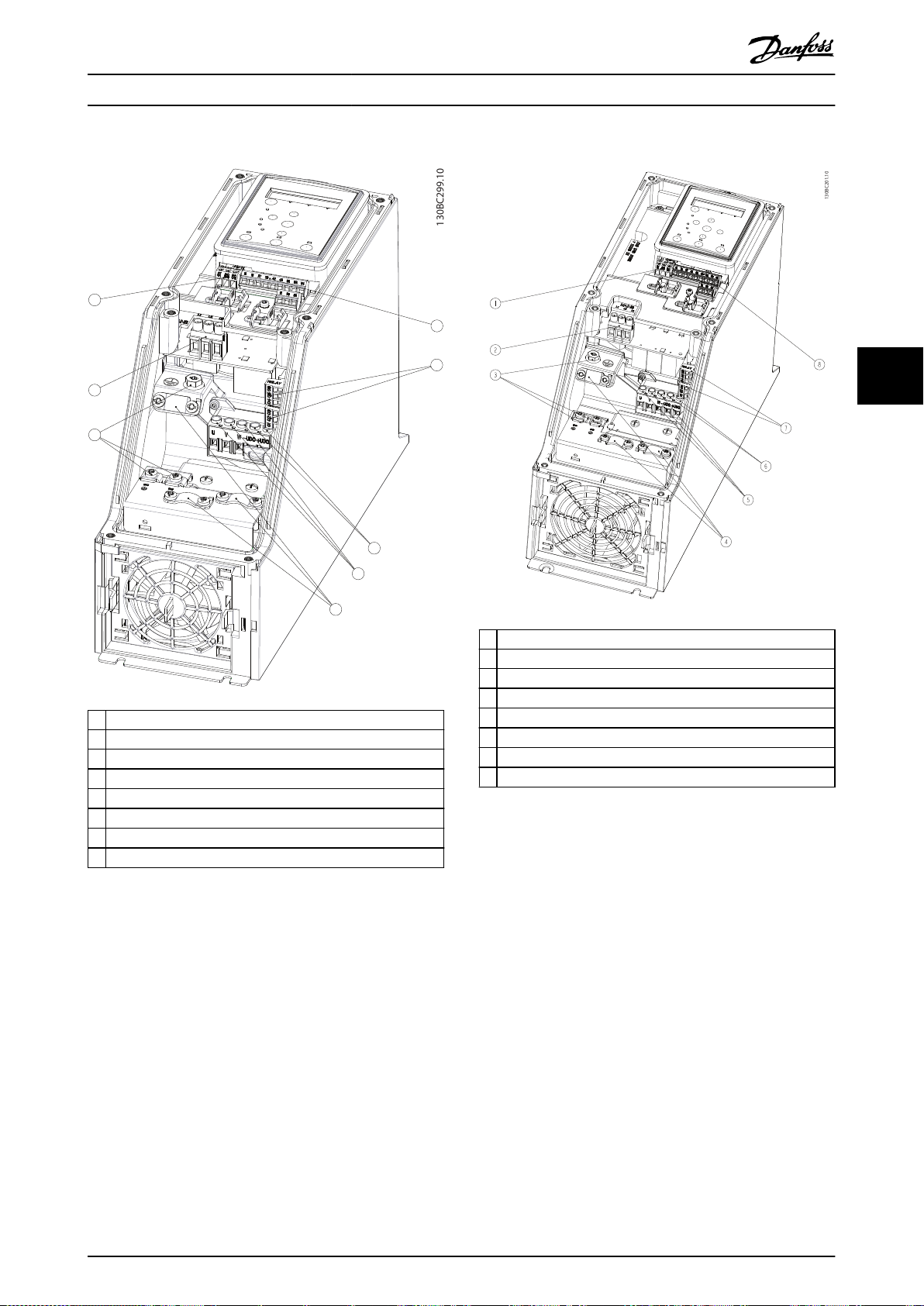
130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Installation Design Guide
Kapslingsstorlek I2
Kapslingsstorlek I3
5 5
1 RS485
2 Nät
3 Jord
4 Kabelklämmor
1 RS485
2 Nät
3 Jord
4 Kabelklämmor
5 Motor
6 UDC
7 Reläer
8 I/O
5 Motor
6 UDC
7 Reläer
Bild 5.9 Kapslingsstorlek I3
IP54, 380–480 V, 5,5–7,5 kW (7,5–10 hk)
8 I/O
Bild 5.8 Kapslingsstorlek I2
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hk)
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 59
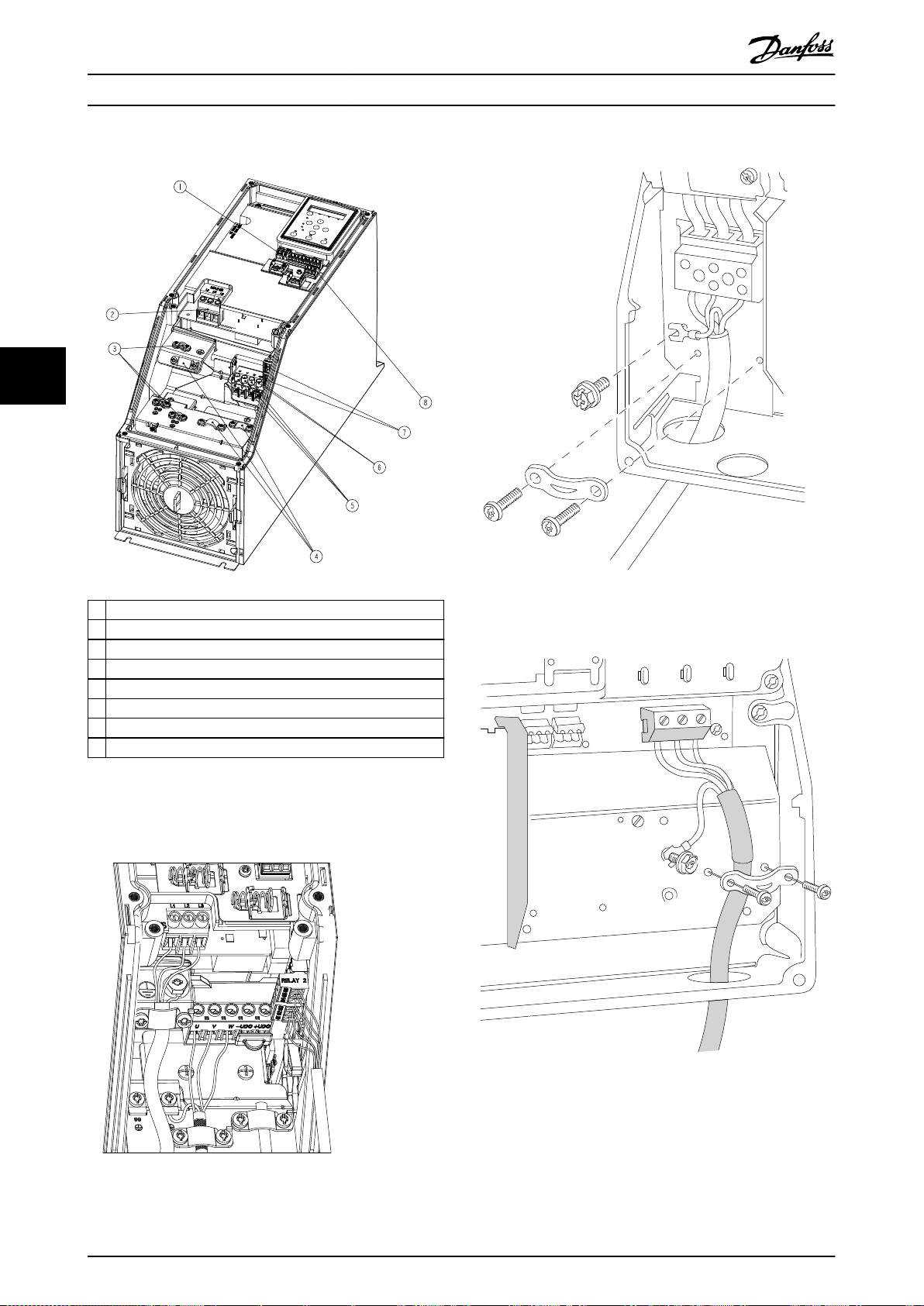
130BD011.10
130BC203.10
130BT326.10
130BT325.10
Installation
VLT® HVAC Basic Drive FC 101
Kapslingsstorlek I4
Kapslingsstorlek I6
55
Bild 5.12 Nätanslutning för kapslingsstorlek I6
1 RS485
2 Nät
3 Jord
4 Kabelklämmor
5 Motor
6 UDC
7 Reläer
8 I/O
IP54, 380–480 V, 22–37 kW (30–50 hk)
Bild 5.10 Kapslingsstorlek I4
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hk)
Bild 5.11 IP54 kapslingsstorlek I2, I3, I4
Bild 5.13 Motoranslutning för kapslingstorlek I6
IP54, 380–480 V, 22–37 kW (30–50 hk)
60 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
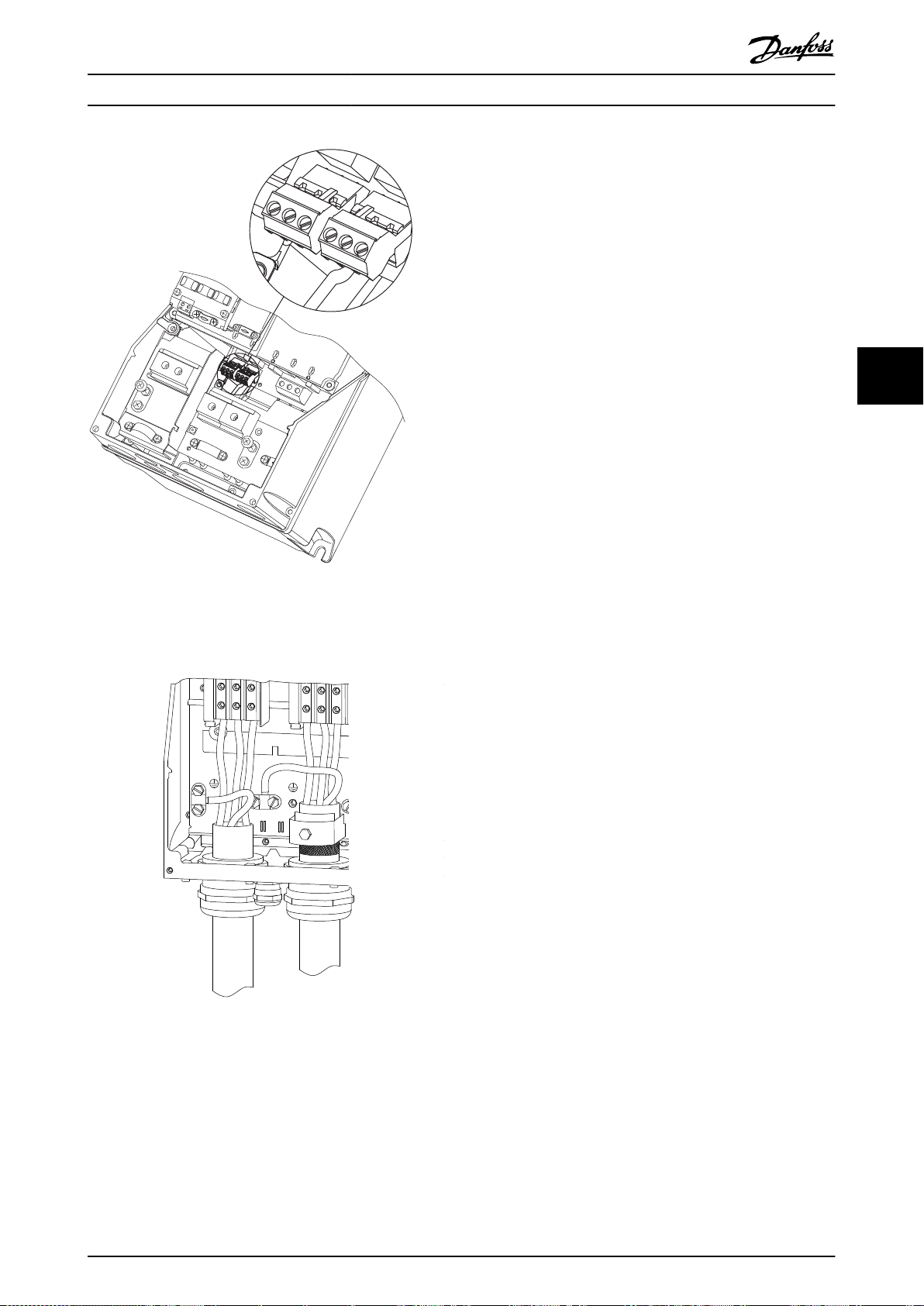
311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Installation Design Guide
5.1.2 Korrekt elektrisk installation enligt
EMC
Var uppmärksam på följande rekommendationer för att
säkerställa EMC-korrekt installation.
Använd enbart skärmade motorkablar och
•
skärmade styrkablar.
Skärmen ska anslutas till jord i båda ändarna.
•
Undvik tvinnade skärmändar eftersom det
•
innebär en minskad skärmning vid höga
frekvenser. Använd i stället de medföljande
kabelklämmorna.
Det är viktigt att uppnå god elektrisk kontakt från
•
fästplåten via fästskruvarna till frekvensomriktarens apparatskåp i metall.
Använd tandbrickor och elektriskt ledande
•
monteringsplåtar.
Undvik att använda oskärmade motorkablar i
•
apparatskåp.
5 5
Bild 5.14 Reläer på kapslingsstorlek I6
IP54, 380–480 V, 22–37 kW (30–50 hk)
Kapslingsstorlek I7, I8
Bild 5.15 Kapslingsstorlek I7, I8
IP54, 380–480 V, 55–45 kW (70–60 hk)
IP54, 380–480 V, 75–90 kW (100–125 hk)
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 61

L1
L2
L3
PE
Min. 16 mm
2
Utjämningskabel
Styrkablar
Alla kabelingångar på
ena sidan av panelen
Jordskena
isolering avskalad
Utgång,
kontaktor etc.
Motorkabel
Motor, 3-fas och Skyddsjord
PLC etc.
Panel
Nätförsörjning
Min. 200 mm
mellan styrkabel
och nätkabel
och mellan huvudmotorkabel
PLC
Förstärkt skyddsjord
130BB761.10
Installation
VLT® HVAC Basic Drive FC 101
55
Bild 5.16 EMC-korrekt installation
OBS!
Vid användning i Nordamerika ska metallskyddsrör användas i stället för skärmade kablar.
62 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Installation Design Guide
5.1.3 Styrplintar
Se snabbinstallationsguiden för VLT® HVAC Basic Drive FC
101 och se till att plintskyddet tas bort korrekt.
Bild 5.17 visar frekvensomriktarens alla styrplintar. Med
Start (plint 18), en anslutning mellan plintarna 12–27 och
en analog referens (plint 53, 54 eller 55), startar frekvensomriktaren.
Inställning av de digitala ingångarna på plint 18, 19 och 27
görs i parameter 5-00 Digital Input Mode (PNP är
standardvärde). Digitala ingången 29 ställs in i
parameter 5-03 Digital ingång 29 (PNP är standardvärde).
5 5
Bild 5.17 Styrplintar
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 63

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmering
6 Programmering
VLT® HVAC Basic Drive FC 101
6
6.1 Inledning
Frekvensomriktaren kan programmeras från LCP:n eller en
dator via RS485 COM-porten genom att installera MCT 10
Set-up Software. Mer information om programvaran nns i
kapitel 1.5 Ytterligare dokumentation.
6.2 Lokal manöverpanel (LCP)
LCP:n är indelad i fyra funktionsgrupper.
A. Display
B. Menyknapp
C. Navigeringsknappar och indikeringslampor
D. Manöverknappar och indikeringslampor
1 Parameternummer och namn.
2 Parametervärde.
Menynummer visar den aktiva menyn och den redigerade
menyn. Om den aktiva och den redigerade menyn är
densamma, visas endast det menynumret (fabriksin-
3
ställning). När den aktiva och den redigerade menyn är
olika visas båda numren i displayen (meny 12). Det
blinkande numret anger den redigerade menyn.
Motorriktning visas längst ned i displayens vänstra del med
4
en liten pil som pekar i medurs eller moturs riktning.
Triangeln visar om LCP:n är i statusmenyn, snabbmenyn
5
eller huvudmenyn.
Tabell 6.1 Förklaring till Bild 6.1, del I
B. Menyknapp
Tryck på [Menu] för att växla mellan statusmeny,
snabbmeny och huvudmeny.
C. Navigeringsknappar och indikeringslampor
6 Com-lysdioden: Blinkar vid busskommunikation.
7 Grön lysdiod (On): Manöverdelen fungerar korrekt.
8 Gul lysdiod (Warn.): Indikerar en varning.
9 Blinkande röd lysdiod (Alarm): Indikerar ett larm.
[Back]: Används för att återgå till föregående steg eller nivå
10
i navigationsstrukturen.
[▲] [▼] [►]: Används för att navigera mellan parameter-
11
grupper och parametrar samt inom parametrar. De kan
även användas för inställning av lokal referens.
[OK]: Används för att välja en parameter och godkänna
12
ändringar i parameterinställningarna.
Tabell 6.2 Förklaring till Bild 6.1, del II
D. Manöverknappar och indikeringslampor
Bild 6.1 Lokal manöverpanel (LCP)
A. Display
LCD-displayen är belyst med två alfanumeriska rader. Alla
data visas på LCP:n.
Bild 6.1 beskriver den information som kan läsas från
[Hand On]: Startar motorn och aktiverar styrningen av
frekvensomriktaren via LCP:n.
OBS!
[2] Utrullning, invert. är förvald för
13
parameter 5-12 Plint 27, digital ingång. Om det inte
nns 24 V-matning till plint 27, startar [Hand On]
inte motorn. Anslut plint 12 till plint 27.
displayen.
[O/Reset]: Stoppar motorn (O). Om den är i larmläge
14
återställs larmet.
[Auto On]: Frekvensomriktaren styrs antingen via
15
styrplintarna eller via seriell kommunikation.
Tabell 6.3 Förklaring till Bild 6.1, del II
64 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

FC
+24 V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A UT/D UT
A UT/D UT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Referens
Start
+10 V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Press OK to start Wizard
Push Back to skip it
Setup 1
Programmering Design Guide
6.3 Menyer
6.3.1 Statusmeny
I statusmenyn nns följande tillvalsalternativ:
Motorfrekvens [Hz], parameter 16-13 Frekvens.
•
Motorström [A], parameter 16-14 Motorström.
•
Motorns referensvarvtal i procent [%],
•
parameter 16-02 Referens [%].
Återkoppling, parameter 16-52 Återkoppling [enhet]
•
Motoreekt, parameter 16-10 Eekt [kW] för kW,
•
parameter 16-11 Eekt [hk] för hk. Om
parameter 0-03 Regionala inställningar ställs in på
[1] Nordamerika, visas motoreekten i hk istället
för kW.
Anpassad avläsning, parameter 16-09 Anpassad
•
avläsning.
Motorvarvtal [v/m], parameter 16-17 Varvtal [v/m].
•
6.3.2 Snabbmeny
Använd snabbmenyn för att programmera de vanligaste
funktionerna. Snabbmenyn består av följande:
Guide för tillämpningar utan återkoppling. Mer
•
information nns i Bild 6.4.
Guide för tillämpningar med återkoppling. Mer
•
information nns i Bild 6.5.
Motorkonguration. Mer information nns i
•
Tabell 6.6.
Gjorda ändringar.
•
Den inbyggda guiden vägleder installatören genom
kongurationen av frekvensomriktaren på ett enkelt och
strukturerat sätt vid tillämpningar med eller utan
återkoppling och snabba motorinställningar.
Guiden visas efter start fram till dess att en parameter har
ändrats. Det går alltid att komma åt guiden via
snabbmenyn. Tryck på [OK] för att starta guiden. Tryck på
[Back] för att återgå till statusvyn.
Bild 6.3 Starta/avsluta guiden
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 65
Bild 6.2 Kabeldragning för frekvensomriktare

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmering
VLT® HVAC Basic Drive FC 101
6
Bild 6.4 Kongurationsguide för tillämpningar utan återkoppling
66 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Programmering Design Guide
Kongurationsguide för tillämpningar utan återkoppling
Parameter Tillval Fabriksinställning Användning
Parameter 0-03 Regionala
inställningar
[0] Internationellt
[1] Nordamerika
[0] Internationellt –
Parameter 0-06 GridType [0] 200–240 V/50 Hz/IT-
nät
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/ITnät
[11] 380–440 V/50 Hz/
Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/ITnät
[21] 440–480 V/50 Hz/
Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/ITnät
[31] 525–600 V/50 Hz/
Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/ITnät
[101] 200–240 V/60 Hz/
Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/ITnät
[111] 380–440 V/60 Hz/
Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/ITnät
[121] 440–480 V/60 Hz/
Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/ITnät
[131] 525–600 V/60 Hz/
Delta
[132] 525–600 V/60 Hz
Storleksrelaterad Välj driftläge för omstart vid återanslutning av frekvensom-
riktaren till nätspänning efter en avstängning.
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 67

6
Programmering
Parameter Tillval Fabriksinställning Användning
Parameter 1-10 Motorkonstruktion
*[0] Asynkront
[1] PM, ej utpräg. SPM
[3] PM, salient IPM (PM,
utpräglad IPM)
VLT® HVAC Basic Drive FC 101
[0] Asynkront Inställning av parametervärdet kan ändra följande
parametrar:
Parameter 1-01 Motorstyrningsprincip.
•
Parameter 1-03 Momentegenskaper.
•
Parameter 1-08 Motor Control Bandwidth.
•
Parameter 1-14 Dämpningsförstärkning.
•
Parameter 1-15 Lågt varvtal ltertidkonst.
•
Parameter 1-16 Högt varvtal ltertidkonst.
•
Parameter 1-17 Spänning ltertidkonst.
•
Parameter 1-20 Motor Power.
•
Parameter 1-22 Motorspänning.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorström.
•
Parameter 1-25 Nominellt motorvarvtal.
•
Parameter 1-26 Märkmoment motor.
•
Parameter 1-30 Statorresistans (Rs).
•
Parameter 1-33 Stator Läck Reaktans (X1).
•
Parameter 1-35 Huvudreaktans (Xh).
•
Parameter 1-37 Induktans för d-axel (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Mot-Emk vid 1 000 RPM.
•
Parameter 1-44 d-axis Inductance Sat. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Läge detekteringsförstärk.
•
Parameter 1-48 Current at Min Inductance for d-axis.
•
Parameter 1-49 Current at Min Inductance for q-axis.
•
Parameter 1-66 Min. ström vid lågt varvtal.
•
Parameter 1-70 Startläge.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flygande start.
•
Parameter 1-80 Funktion vid stopp.
•
Parameter 1-82 Minsta varvtal för funktion v. stopp [Hz].
•
Parameter 1-90 Termiskt motorskydd.
•
Parameter 2-00 DC Hold/Motor Preheat Current.
•
Parameter 2-01 DC-bromsström.
•
Parameter 2-02 DC-bromstid.
•
Parameter 2-04 DC Brake Cut In Speed.
•
Parameter 2-10 Bromsfunktion.
•
Parameter 4-14 Motorvarvtal, övre gräns [Hz].
•
Parameter 4-19 Max. utfrekvens.
•
Parameter 4-58 Motorfasfunktion saknas.
•
Parameter 14-65 Speed Derate Dead Time Compensation.
•
68 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Programmering Design Guide
Parameter Tillval Fabriksinställning Användning
Parameter 1-20 Motor Power 0,12–110 kW/0,16–150 hk Storleksrelaterad Ange motoreekten enligt märkskyltsdata.
Parameter 1-22 Motorspänning 50–1000 V Storleksrelaterad Ange motorspänningen enligt märkskyltsdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Storleksrelaterad Ange motorfrekvensen enligt märkskyltsdata.
Parameter 1-24 Motorström 0,01–10000,00 A Storleksrelaterad Ange motorströmmen enligt märkskyltsdata.
Parameter 1-25 Nominellt
motorvarvtal
Parameter 1-26 Märkmoment
motor
50–9 999 varv/minut Storleksrelaterad Ange nominell motorhastighet enligt märkskyltsdata.
0,1–1 000,0 Nm Storleksrelaterad Den här parametern är tillgänglig om
parameter 1-10 Motorkonstruktion har angetts till ett
alternativ som aktiverar drift med permanentmagnetmotor.
OBS!
Om den här parametern ändras kommer det även
att påverka inställningarna i andra parametrar.
Parameter 1-29 Automatic
Motor Adaption (AMA)
Parameter 1-30 Statorresistans
(Rs)
Parameter 1-37 Induktans för daxel (Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpoler 2–100 4 Ange antalet motorpoler.
Parameter 1-40 Mot-Emk vid 1
000 RPM
Parameter 1-42 Motor Cable
Length
Parameter 1-44 d-axis
Inductance Sat. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Läge detekteringsförstärk.
Parameter 1-48 Current at Min
Inductance for d-axis
Parameter 1-49 Current at Min
Inductance for q-axis
Parameter 1-70 Startläge [0] Rotordetektering
Se
parameter 1-29 Automatic
Motor Adaption (AMA).
0,000–99,990 Ω
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för d-axelns induktans.
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för q-axelns induktans.
10–9000 V Storleksrelaterad Fas-till-fas-RMS, mot-Emk-spänning vid 1 000 varv/minut
0–100 m 50 m Ange motorkabellängd.
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Ld. Helst
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Lq. Helst
20–200% 100% Justerar testpulsens höjd under lägesdetektering vid start.
20–200% 100% Ange värdet för induktansmättnaden.
20–200% 100% Parametern anger mättnadskurvan för d- och q-induktans-
[1] Parkering
Av AMA optimerar motorns prestanda.
Storleksrelaterad Ställ in statormotståndsvärdet.
Hämta värdet från permanentmagnetmotorns datablad.
ska parametern ha samma värde som
parameter 1-37 Induktans för d-axel (Ld). Om motorleverantören däremot tillhandahåller en induktanskurva ska
induktansvärdet anges. Induktansvärdet är 200 % av den
nominella strömmen.
ska parametern ha samma värde som parameter 1-38 q-
axis Inductance (Lq). Om motorleverantören däremot
tillhandahåller en induktanskurva ska induktansvärdet
anges. Induktansvärdet är 200 % av den nominella
strömmen.
värdena. Från 20–100 % av parametern är induktansen
linjär på grund av parameter 1-37 Induktans för d-axel (Ld),
parameter 1-38 q-axis Inductance (Lq), parameter 1-44 d-axis
Inductance Sat. (LdSat) och parameter 1-45 q- axis
Inductance Sat. (LqSat).
[0] Rotordetektering Välj startläge för PM-motor.
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 69

6
Programmering
Parameter Tillval Fabriksinställning Användning
Parameter 1-73 Flygande start [0] Inaktiverad
[1] Aktiverad
Parameter 3-02 Minimireferens -4999,000–4999,000 0 Minimireferensen är det minsta värdet som summan av
Parameter 3-03 Maximireferens -4999,000–4999,000 50 Maximireferensen är det högsta värde som summan av alla
Parameter 3-41 Ramp 1,
uppramptid
Parameter 3-42 Ramp 1,
nedramptid
Parameter 4-12 Motorvarvtal,
nedre gräns [Hz]
Parameter 4-14 Motorvarvtal,
övre gräns [Hz]
Parameter 4-19 Max. utfrekvens 0,0–400,0 Hz 100 Hz Ange det maximala utfrekvensvärdet. Om
Parameter 5-40 Funktionsrelä Se
Parameter 5-40 Funktionsrelä Se
Parameter 6-10 Plint 53, låg
spänning
Parameter 6-11 Plint 53, hög
spänning
Parameter 6-12 Plint 53, svag
ström
Parameter 6-13 Plint 53, stark
ström
Parameter 6-19 Terminal 53
mode
Parameter 30-22 Låst rotorfunktion
Parameter 30-23 Locked Rotor
Detection Time [s]
0,05–3600,00 s Storleksrelaterad Om asynkronmotor har valts är uppramptiden från 0 till
0,05–3600,00 s Storleksrelaterad Om asynkronmotor har valts, är uppramptiden från
0,0–400,0 Hz 0 Hz Ange minimigränsen för lågt varvtal.
0,0–400,0 Hz 100 Hz Ange den maximala gränsen för högt varvtal.
parameter 5-40 Funktionsr
elä.
parameter 5-40 Funktionsr
elä.
0,00–10,00 V 0,07 V Ange spänningen som motsvarar det låga referensvärdet.
0,00–10,00 V 10 V Ange spänningen som motsvarar det höga referensvärdet.
0,00–20,00 mA 4 mA Ange strömmen som motsvarar det låga referensvärdet.
0,00–20,00 mA 20 mA Ange strömmen som motsvarar det höga referensvärdet.
[0] Current (Ström)
[1] Voltage (Spänning)
[0] Av
[1] På
0,05–1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[0] Inaktiverad Välj [1] Aktiverad för att aktivera frekvensomriktaren till att
fånga upp en roterande motor som orsakats av nätavbrott.
Välj [0] Inaktiverad om du inte önskar denna funktion. När
parametern är inställd på [1] Aktiverad har
parameter 1-71 Startfördr. och parameter 1-72 Startfunktion
ingen funktion. Parameter 1-73 Flygande start är endast
aktiv i VVC+-läge.
alla referenser kan anta.
referenser kan anta.
nominell parameter 1-23 Motorfrekvens. Om PM-motor har
valts är uppramptiden från 0 till parameter 1-25 Nominellt
motorvarvtal.
nominell parameter 1-23 Motorfrekvens till 0. För PMmotorer är nedramptiden från parameter 1-25 Nominellt
motorvarvtal till 0.
parameter 4-19 Max. utfrekvens är inställd lägre än
parameter 4-14 Motorvarvtal, övre gräns [Hz], ställs
parameter 4-14 Motorvarvtal, övre gräns [Hz] automatiskt in
till samma värde som parameter 4-19 Max. utfrekvens.
[9] Larm Välj funktion för att styra utgångsrelä 1.
[5] Kör Välj funktion för att styra utgångsrelä 2.
[1] Voltage
(Spänning)
[0] Av
Välj om plint 53 ska användas som ström- eller spänningsingång.
–
–
Tabell 6.4 Kongurationsguide för tillämpningar utan återkoppling
70 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmering Design Guide
Kongurationsguide för tillämpningar med återkoppling
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 71
Bild 6.5 Kongurationsguide för tillämpningar med återkoppling
6
Programmering
Parameter Område Fabriksinställning Användning
Parameter 0-03 Regionala
inställningar
Parameter 0-06 GridType [0]–[132] Se Tabell 6.4. Storlek vald Välj driftläge för omstart vid återanslutning av frekvensom-
Parameter 1-00 Kongura-
tionsläge
[0] Internationellt
[1] Nordamerika
[0] Utan återkoppling
[3] Med återkoppling
VLT® HVAC Basic Drive FC 101
[0] Internationellt –
riktaren till nätspänning efter en avstängning.
[0] Utan
återkoppling
Välj [3] Med återkoppling.
72 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Programmering Design Guide
Parameter Område Fabriksinställning Användning
Parameter 1-10 Motorkonstruktion
*[0] Asynkront
[1] PM, ej utpräg. SPM
[3] PM, salient IPM (PM,
utpräglad IPM)
[0] Asynkront Inställning av parametervärdet kan ändra följande
parametrar:
Parameter 1-01 Motorstyrningsprincip.
•
Parameter 1-03 Momentegenskaper.
•
Parameter 1-08 Motor Control Bandwidth.
•
Parameter 1-14 Dämpningsförstärkning.
•
Parameter 1-15 Lågt varvtal ltertidkonst.
•
Parameter 1-16 Högt varvtal ltertidkonst.
•
Parameter 1-17 Spänning ltertidkonst.
•
Parameter 1-20 Motor Power.
•
Parameter 1-22 Motorspänning.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorström.
•
Parameter 1-25 Nominellt motorvarvtal.
•
Parameter 1-26 Märkmoment motor.
•
Parameter 1-30 Statorresistans (Rs).
•
Parameter 1-33 Stator Läck Reaktans (X1).
•
Parameter 1-35 Huvudreaktans (Xh).
•
Parameter 1-37 Induktans för d-axel (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Mot-Emk vid 1 000 RPM.
•
Parameter 1-44 d-axis Inductance Sat. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Läge detekteringsförstärk.
•
Parameter 1-48 Current at Min Inductance for d-axis.
•
Parameter 1-49 Current at Min Inductance for q-axis.
•
Parameter 1-66 Min. ström vid lågt varvtal.
•
Parameter 1-70 Startläge.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flygande start.
•
Parameter 1-80 Funktion vid stopp.
•
Parameter 1-82 Minsta varvtal för funktion v. stopp [Hz].
•
Parameter 1-90 Termiskt motorskydd.
•
Parameter 2-00 DC Hold/Motor Preheat Current.
•
Parameter 2-01 DC-bromsström.
•
Parameter 2-02 DC-bromstid.
•
Parameter 2-04 DC Brake Cut In Speed.
•
Parameter 2-10 Bromsfunktion.
•
Parameter 4-14 Motorvarvtal, övre gräns [Hz].
•
Parameter 4-19 Max. utfrekvens.
•
Parameter 4-58 Motorfasfunktion saknas.
•
Parameter 14-65 Speed Derate Dead Time Compensation.
•
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 73
Programmering
Parameter Område Fabriksinställning Användning
Parameter 1-20 Motor Power 0,09–110 kW Storleksrelaterad Ange motoreekten enligt märkskyltsdata.
Parameter 1-22 Motorspänning 50–1000 V Storleksrelaterad Ange motorspänningen enligt märkskyltsdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Storleksrelaterad Ange motorfrekvensen enligt märkskyltsdata.
Parameter 1-24 Motorström 0–10000 A Storleksrelaterad Ange motorströmmen enligt märkskyltsdata.
Parameter 1-25 Nominellt
motorvarvtal
Parameter 1-26 Märkmoment
motor
50–9 999 varv/minut Storleksrelaterad Ange nominell motorhastighet enligt märkskyltsdata.
0,1–1 000,0 Nm Storleksrelaterad Den här parametern är tillgänglig om
VLT® HVAC Basic Drive FC 101
parameter 1-10 Motorkonstruktion har angetts till ett
alternativ som aktiverar drift med permanentmagnetmotor.
OBS!
Om den här parametern ändras kommer det även
att påverka inställningarna i andra parametrar.
6
Parameter 1-29 Automatic
Motor Adaption (AMA)
Parameter 1-30 Statorresistans
(Rs)
Parameter 1-37 Induktans för daxel (Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpoler 2–100 4 Ange antalet motorpoler.
Parameter 1-40 Mot-Emk vid 1
000 RPM
Parameter 1-42 Motor Cable
Length
Parameter 1-44 d-axis
Inductance Sat. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Läge detekteringsförstärk.
Parameter 1-48 Current at Min
Inductance for d-axis
Parameter 1-49 Current at Min
Inductance for q-axis
Parameter 1-70 Startläge [0] Rotordetektering
Parameter 1-73 Flygande start [0] Inaktiverad
Av AMA optimerar motorns prestanda.
0–99,990 Ω
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för d-axelns induktans.
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för q-axelns induktans.
10–9000 V Storleksrelaterad Fas-till-fas-RMS, mot-Emk-spänning vid 1 000 varv/minut
0–100 m 50 m Ange motorkabellängd.
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Ld. Helst
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Lq. Helst
20–200% 100% Justerar testpulsens höjd under lägesdetektering vid start.
20–200% 100% Ange värdet för induktansmättnaden.
20–200% 100% Parametern anger mättnadskurvan för d- och q-induktans-
[1] Parkering
[1] Aktiverad
Storleksrelaterad Ställ in statormotståndsvärdet.
Hämta värdet från permanentmagnetmotorns datablad.
ska parametern ha samma värde som
parameter 1-37 Induktans för d-axel (Ld). Om motorleverantören däremot tillhandahåller en induktanskurva ska
induktansvärdet anges. Induktansvärdet är 200 % av den
nominella strömmen.
ska parametern ha samma värde som parameter 1-38 q-
axis Inductance (Lq). Om motorleverantören däremot
tillhandahåller en induktanskurva ska induktansvärdet
anges. Induktansvärdet är 200 % av den nominella
strömmen.
värdena. Från 20–100 % av parametern är induktansen
linjär på grund av parameter 1-37 Induktans för d-axel (Ld),
parameter 1-38 q-axis Inductance (Lq), parameter 1-44 d-axis
Inductance Sat. (LdSat) och parameter 1-45 q- axis
Inductance Sat. (LqSat).
[0] Rotordetektering Välj startläge för PM-motor.
[0] Inaktiverad Välj [1] Aktiverad för att aktivera frekvensomriktaren till att
fånga upp en roterande motor i till exempel äkttillämpningar. Om PM väljs, aktiveras den här parametern.
74 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Programmering Design Guide
Parameter Område Fabriksinställning Användning
Parameter 3-02 Minimireferens -4999,000–4999,000 0 Minimireferensen är det minsta värdet som summan av
alla referenser kan anta.
Parameter 3-03 Maximireferens -4999,000–4999,000 50 Maximireferensen är det högsta värde som summan av
alla referenser kan anta.
Parameter 3-10 Förinställd
referens
Parameter 3-41 Ramp 1,
uppramptid
Parameter 3-42 Ramp 1,
nedramptid
Parameter 4-12 Motorvarvtal,
nedre gräns [Hz]
Parameter 4-14 Motorvarvtal,
övre gräns [Hz]
Parameter 4-19 Max. utfrekvens 0,0–400,0 Hz 100 Hz Ange det maximala utfrekvensvärdet. Om
Parameter 6-20 Plint 54, låg
spänning
Parameter 6-21 Plint 54, hög
spänning
Parameter 6-22 Plint 54, svag
ström
Parameter 6-23 Plint 54, stark
ström
Parameter 6-24 Plint 54, lågt
ref.-/återkopplings värde
Parameter 6-25 Plint 54, högt
ref.-/återkopplings värde
Parameter 6-26 Plint 54,
tidskonstant för lter
Parameter 6-29 Terminal 54läge
Parameter 20-81 Normal/
inverterad PI-reglering
Parameter 20-83 PI-startvarvtal
[Hz]
Parameter 20-93 PI Proportionell förstärkning
Parameter 20-94 PI Integral
Time
Parameter 30-22 Låst rotorfunktion
-100–100% 0 Ange börvärdet.
0,05–3600,0 s Storleksrelaterad Uppramptiden från 0 till nominell
parameter 1-23 Motorfrekvens för asynkronmotorer.
Uppramptiden från 0 till parameter 1-25 Nominellt
motorvarvtal för PM-motorer.
0,05–3600,0 s Storleksrelaterad Nedramptiden från nominell parameter 1-23 Motorfrekvens
till 0 för asynkronmotorer. Nedramptiden från
parameter 1-25 Nominellt motorvarvtal till 0 för PMmotorer.
0,0–400,0 Hz 0,0 Hz Ange minimigränsen för lågt varvtal.
0,0–400,0 Hz 100 Hz Ange den maximala gränsen för högt varvtal.
parameter 4-19 Max. utfrekvens är inställd lägre än
parameter 4-14 Motorvarvtal, övre gräns [Hz], ställs
parameter 4-14 Motorvarvtal, övre gräns [Hz] automatiskt in
till samma värde som parameter 4-19 Max. utfrekvens.
0,00–10,00 V 0,07 V Ange spänningen som motsvarar det låga referensvärdet.
0,00–10,00 V 10,00 V Ange spänningen som motsvarar det höga referensvärdet.
0,00–20,00 mA 4,00 mA Ange strömmen som motsvarar det låga referensvärdet.
0,00–20,00 mA 20,00 mA Ange strömmen som motsvarar det höga referensvärdet.
-4999–4999 0 Ange återkopplingsvärdet som motsvarar värdet av den
spänning eller ström som anges i parameter 6-20 Plint 54,
låg spänning/parameter 6-22 Plint 54, svag ström.
-4999–4999 50 Ange återkopplingsvärdet som motsvarar värdet av den
spänning eller ström som anges i parameter 6-21 Plint 54,
hög spänning/parameter 6-23 Plint 54, stark ström.
0,00–10,00 s 0,01 Ange ltertidskonstant
[0] Current (Ström)
[1] Voltage (Spänning)
[0] Normalt
[1] Inverterat
0–200 Hz 0 Hz Ange det motorvarvtal som ska uppnås som startsignal för
0,00–10,00 0,01 Ange proportionell förstärkning för processregleringen.
0,1–999,0 s 999,0 s Ange processregleringens integraltid. Uppnå snabbstyrning
[0] Av
[1] På
[1] Voltage
(Spänning)
[0] Normalt Välj [0] Normalt för att ange processregleringen till att öka
[0] Av
Välj om plint 54 ska användas som ström- eller spänningsingång.
utvarvtalet när processfelet är positivt. Välj [1] Inverterad
för att reducera utvarvtalet.
att påbörja PI-styrning.
Snabbstyrning uppnås med hög förstärkning. Om förstärkningen blir för hög, kan processen dock bli instabil.
med en kort integraltid. Om integraltiden är för kort, blir
processen dock instabil. En överdrivet lång integraltid
inaktiverar integralåtgärden.
–
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 75
6
Programmering
Parameter Område Fabriksinställning Användning
Parameter 30-23 Locked Rotor
Detection Time [s]
Tabell 6.5 Kongurationsguide för tillämpningar med återkoppling
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
–
Motorkonguration
Kongurationsguiden för motorn vägleder användaren genom de nödvändiga motorparametrarna.
Parameter Område Fabriksinställning Användning
Parameter 0-03 Regionala
inställningar
Parameter 0-06 GridType [0]–[132] Se Tabell 6.4. Storleksrelaterad Välj driftläge för omstart vid återanslutning av frekvensom-
[0] Internationellt
[1] Nordamerika
0 –
riktaren till nätspänning efter en avstängning.
76 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Programmering Design Guide
Parameter Område Fabriksinställning Användning
Parameter 1-10 Motorkonstruktion
*[0] Asynkront
[1] PM, ej utpräg. SPM
[3] PM, salient IPM (PM,
utpräg. IPM)
[0] Asynkront Inställning av parametervärdet kan ändra följande
parametrar:
Parameter 1-01 Motorstyrningsprincip.
•
Parameter 1-03 Momentegenskaper.
•
Parameter 1-08 Motor Control Bandwidth.
•
Parameter 1-14 Dämpningsförstärkning.
•
Parameter 1-15 Lågt varvtal ltertidkonst.
•
Parameter 1-16 Högt varvtal ltertidkonst.
•
Parameter 1-17 Spänning ltertidkonst.
•
Parameter 1-20 Motor Power.
•
Parameter 1-22 Motorspänning.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorström.
•
Parameter 1-25 Nominellt motorvarvtal.
•
Parameter 1-26 Märkmoment motor.
•
Parameter 1-30 Statorresistans (Rs).
•
Parameter 1-33 Stator Läck Reaktans (X1).
•
Parameter 1-35 Huvudreaktans (Xh).
•
Parameter 1-37 Induktans för d-axel (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Mot-Emk vid 1 000 RPM.
•
Parameter 1-44 d-axis Inductance Sat. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Läge detekteringsförstärk.
•
Parameter 1-48 Current at Min Inductance for d-axis.
•
Parameter 1-49 Current at Min Inductance for q-axis.
•
Parameter 1-66 Min. ström vid lågt varvtal.
•
Parameter 1-70 Startläge.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flygande start.
•
Parameter 1-80 Funktion vid stopp.
•
Parameter 1-82 Minsta varvtal för funktion v. stopp [Hz].
•
Parameter 1-90 Termiskt motorskydd.
•
Parameter 2-00 DC Hold/Motor Preheat Current.
•
Parameter 2-01 DC-bromsström.
•
Parameter 2-02 DC-bromstid.
•
Parameter 2-04 DC Brake Cut In Speed.
•
Parameter 2-10 Bromsfunktion.
•
Parameter 4-14 Motorvarvtal, övre gräns [Hz].
•
Parameter 4-19 Max. utfrekvens.
•
Parameter 4-58 Motorfasfunktion saknas.
•
Parameter 14-65 Speed Derate Dead Time Compensation.
•
6
6
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 77

Programmering
Parameter Område Fabriksinställning Användning
Parameter 1-20 Motor Power 0,12–110 kW/0,16–150hkStorleksrelaterad Ange motoreekten enligt märkskyltsdata.
Parameter 1-22 Motorspänning 50–1000 V Storleksrelaterad Ange motorspänningen enligt märkskyltsdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Storleksrelaterad Ange motorfrekvensen enligt märkskyltsdata.
Parameter 1-24 Motorström 0,01–10000,00 A Storleksrelaterad Ange motorströmmen enligt märkskyltsdata.
Parameter 1-25 Nominellt
motorvarvtal
Parameter 1-26 Märkmoment
motor
50–9 999 varv/minut Storleksrelaterad Ange nominell motorhastighet enligt märkskyltsdata.
0,1–1 000,0 Nm Storleksrelaterad Den här parametern är tillgänglig om
VLT® HVAC Basic Drive FC 101
parameter 1-10 Motorkonstruktion har angetts till ett
alternativ som aktiverar drift med permanentmagnetmotor.
OBS!
Om den här parametern ändras kommer det även
att påverka inställningarna i andra parametrar.
6
Parameter 1-30 Statorresistans
(Rs)
Parameter 1-37 Induktans för daxel (Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpoler 2–100 4 Ange antalet motorpoler.
Parameter 1-40 Mot-Emk vid 1
000 RPM
Parameter 1-42 Motor Cable
Length
Parameter 1-44 d-axis
Inductance Sat. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Läge detekteringsförstärk.
Parameter 1-48 Current at Min
Inductance for d-axis
Parameter 1-49 Current at Min
Inductance for q-axis
Parameter 1-70 Startläge [0] Rotordetektering
Parameter 1-73 Flygande start [0] Inaktiverad
Parameter 3-41 Ramp 1,
uppramptid
0–99,990 Ω
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för d-axelns induktans. Hämta värdet från
0,000–1 000,000 mH Storleksrelaterad Mata in värdet för q-axelns induktans.
10–9000 V Storleksrelaterad Fas-till-fas-RMS, mot-Emk-spänning vid 1 000 varv/minut
0–100 m 50 m Ange motorkabellängd.
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Ld. Helst
0,000–1 000,000 mH Storleksrelaterad Parametern motsvarar induktansmättnaden för Lq. Helst
20–200% 100% Justerar testpulsens höjd under lägesdetektering vid start.
20–200% 100% Ange värdet för induktansmättnaden.
20–200% 100% Parametern anger mättnadskurvan för d- och q-induktans-
[1] Parkering
[1] Aktiverad
0,05–3600,0 s Storleksrelaterad Uppramptid från 0 till nominell
Storleksrelaterad Ställ in statormotståndsvärdet.
permanentmagnetmotorns datablad.
ska parametern ha samma värde som
parameter 1-37 Induktans för d-axel (Ld). Om motorleverantören däremot tillhandahåller en induktanskurva ska
induktansvärdet anges. Induktansvärdet är 200 % av den
nominella strömmen.
ska parametern ha samma värde som parameter 1-38 q-
axis Inductance (Lq). Om motorleverantören däremot
tillhandahåller en induktanskurva ska induktansvärdet
anges. Induktansvärdet är 200 % av den nominella
strömmen.
värdena. Från 20–100 % av parametern är induktansen
linjär på grund av parameter 1-37 Induktans för d-axel (Ld),
parameter 1-38 q-axis Inductance (Lq), parameter 1-44 d-axis
Inductance Sat. (LdSat) och parameter 1-45 q- axis
Inductance Sat. (LqSat).
[0] Rotordetektering Välj startläge för PM-motor.
[0] Inaktiverad Välj [1] Aktiverad för att aktivera frekvensomriktaren till att
fånga upp en roterande motor.
parameter 1-23 Motorfrekvens.
78 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Programmering Design Guide
Parameter Område Fabriksinställning Användning
Parameter 3-42 Ramp 1,
nedramptid
Parameter 4-12 Motorvarvtal,
nedre gräns [Hz]
Parameter 4-14 Motorvarvtal,
övre gräns [Hz]
Parameter 4-19 Max. utfrekvens 0,0–400,0 Hz 100,0 Hz Ange det maximala utfrekvensvärdet. Om
Parameter 30-22 Låst rotorfunktion
Parameter 30-23 Locked Rotor
Detection Time [s]
Tabell 6.6 Inställningar för kongurationsguide för motorn
0,05–3600,0 s Storleksrelaterad Nedramptid från nominellt parameter 1-23 Motorfrekvens
till 0
0,0–400,0 Hz 0,0 Hz Ange minimigränsen för lågt varvtal.
0,0–400,0 Hz 100,0 Hz Ange den maximala gränsen för högt varvtal.
parameter 4-19 Max. utfrekvens är inställd lägre än
parameter 4-14 Motorvarvtal, övre gräns [Hz], ställs
parameter 4-14 Motorvarvtal, övre gräns [Hz] automatiskt in
till samma värde som parameter 4-19 Max. utfrekvens.
[0] Av
[1] På
0,05–1,00 s 0,10 s
[0] Av
–
–
6
6
Gjorda ändringar
I Gjorda ändringar nns alla parametrar som ändrats från
fabriksinställningarna.
Listan visar endast parametrar som har ändrats i
•
aktuell redigeringsmeny.
Parametrar som har återställts till fabriksvärdena
•
är inte angivna.
Meddelandet Empty indikerar att inga parametrar
•
har ändrats.
Ändra parameterinställningar
1. Gå till snabbmenyn genom att trycka på knappen
[Menu] tills indikatorn i displayen placeras
ovanför snabbmenyn.
2.
Tryck på [▲] [▼] om du vill välja guiden, tillämpningar med återkoppling, motorkongurering
eller gjorda ändringar.
3. Tryck på [OK].
4.
Tryck på [▲] [▼] om du vill bläddra genom
parametrarna i snabbmenyn.
5. Tryck på [OK] om du vill välja en parameter.
6.
Tryck på [▲] [▼] om du vill ändra värdet på en
parameterinställning.
7. Tryck på [OK] för att godkänna ändringen.
8. Tryck på [Back] två gånger om du vill gå till
Status, eller tryck på [Menu] en gång om du vill
gå till huvudmenyn.
Från huvudmenyn kommer du åt alla parametrar
1. Tryck på knappen [Menu] tills indikatorn i
displayen placeras ovanför huvudmenyn.
2.
Använd [▲] [▼] om du vill bläddra genom
parametergrupperna.
3. Tryck på [OK] om du vill välja en parametergrupp.
4.
Tryck på [▲] [▼] om du vill bläddra genom
parametrarna i den specika gruppen.
5. Tryck på [OK] om du vill välja en parameter.
6.
Tryck på [▲] [▼] om du vill ställa in/ändra ett
parametervärde.
7. Tryck på [OK] för att godkänna ändringen.
6.3.3 Huvudmeny
Tryck på [Menu] för komma åt huvudmenyn och
programmera alla parametrar. Du kommer åt huvudmenyparametrarna direkt, om inte ett lösenord har skapats via
parameter 0-60 Huvudmenylösenord.
I de esta tillämpningar är det inte nödvändigt att komma
åt huvudmenyparametrarna. Med snabbmenyn kommer du
snabbt och enkelt åt alla vanliga parametrar som man kan
behöva.
6.4 Snabböverföring av
parameterinställningar mellan era
frekvensomriktare
När kongurationen av frekvensomriktaren är slutförd
rekommenderar vi att du lagrar data i LCP eller på en dator
med hjälp av MCT 10 Set-up Software.
Dataöverföring från frekvensomriktare till LCP
1. Gå till parameter 0-50 LCP-kopiering.
2. Tryck på [OK].
3. Välj [1] Alla till LCP.
4. Tryck på [OK].
Anslut LCP:n till en annan frekvensomriktare och kopiera
parameterinställningarna även till den frekvensomriktaren.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 79

Programmering
VLT® HVAC Basic Drive FC 101
6
Dataöverföring från LCP till frekvensomriktaren
1. Gå till parameter 0-50 LCP-kopiering.
2. Tryck på [OK].
3. Välj [2] Alla från LCP.
4. Tryck på [OK].
6.5 Avläsning och programmering av
indexerade parametrar
Välj en parameter, tryck på [OK] och använd [
bläddra igenom de indexerade värdena. Du ändrar parametervärdet genom att välja det indexerade värdet och trycka
på [OK]. Ändra värdet genom att trycka på [▲] [▼]. Tryck på
[OK] för att godkänna den nya inställningen. Tryck på
[Cancel] för att avbryta. Tryck på [Back] för att lämna
parametern.
]/[▼] för att
▲
6.6 Initiering av fabriksinställningar
Det nns två sätt att initiera frekvensomriktaren till
standardinställningarna:
Rekommenderad initiering
1. Välj parameter 14-22 Driftläge.
2. Tryck på [OK].
3. Välj [2] Initialisation och tryck på [OK].
4. Slå från strömmen till frekvensomriktaren och
vänta tills displayen har stängts av.
5. Slå på nätförsörjningen igen. Frekvensomriktaren
har nu återställts, förutom följande parametrar:
Parameter 1-06 Medurs
•
Parameter 8-30 Protokoll
•
Parameter 8-31 Adress
•
Parameter 8-32 Baudhastighet
•
Parameter 8-33 Paritet/stoppbitar
•
Parameter 8-35 Min. svarsfördröjning
•
Parameter 8-36 Maximum Response Delay
•
Parameter 8-37 Maximum Inter-char delay
•
Parameter 8-70 BACnet, enhetsinstans
•
Parameter 8-72 MS/TP, max. master
•
Parameter 8-73 MS/TP, maxinfo stommar
•
Parameter 8-74 "Jag är" service
•
Parameter 8-75 Initiering av lösenord
•
Parameter 15-00 Drifttimmar
•
tillparameter 15-05 Överspänningar
Parameter 15-03 Nättillslag
•
Parameter 15-04 Överhettningar
•
Parameter 15-05 Överspänningar
•
Parameter 15-30 Larmlogg: Felkod
•
Parametergrupp 15-4* Drive identiering
•
Parameter 18-10 FireMode-logg: händelse
•
Initiering med två ngrar
Det andra sättet att initiera frekvensomriktaren till standardinställningarna är initiering med två ngrar:
1. Stäng av frekvensomriktaren.
2. Tryck på [OK] och [Menu].
3. Starta frekvensomriktaren medan du håller inne
knapparna i 10 sek.
4. Frekvensomriktaren har nu återställts, förutom
följande parametrar:
Parameter 1-06 Medurs
•
Parameter 15-00 Drifttimmar
•
Parameter 15-03 Nättillslag
•
Parameter 15-04 Överhettningar
•
Parameter 15-05 Överspänningar
•
Parametergrupp 15-4* Drive identiering
•
Parameter 18-10 FireMode-logg: händelse
•
Parameterinitieringen bekräftas av larm 80, frekvensomriktare initierad på displayen efter eektcykeln.
80 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Installation och kongurat... Design Guide
7 Installation och konguration av RS485
7.1 RS485
7.1.1 Översikt
RS485 är ett bussgränssnitt med två ledningar som är
kompatibelt med en nätverkstopologi med multidropp,
dvs. där noder kan anslutas som bussar, eller via
droppkablar från en gemensam förbindelseledning. Totalt
kan 32 noder anslutas till ett nätverkssegment.
Förstärkare delar nätverkssegmenten.
OBS!
Varje förstärkare fungerar som en nod i det segment där
den är installerad. Varje nod som är ansluten inom ett
visst nätverk måste också ha en unik nodadress, inom
alla segment.
Avsluta alla segment i båda ändar, antingen med frekvensomrikatrnas termineringsbrytare (S801) eller med ett
obalanserat nät med slutmotstånd. Använd alltid skärmade
tvinnade parkablar (STP) vid busskabeldragning, och följ
alltid god installationspraxis.
Det är viktigt att skärmens jordanslutning har låg
impedans vid varje nod. Anslut därför en stor yta av
skärmen till jord, exempelvis med en kabelklämma eller en
ledande kabelförskruvning. Du kan använda potentialutjämnande kablar för att bibehålla samma
jordningspotential i hela nätverket, speciellt i installationer
med långa kablar.
Undvik felmatchande impedans genom att alltid använda
samma kabeltyp i hela nätverket. Använd alltid en skärmad
motorkabel när du ansluter motorn till frekvensomriktaren.
7.1.2 Nätverks anslutning
Anslut frekvensomriktaren till RS-485-nätverket på följande
sätt (se även Bild 7.1):
1. Anslut signalledningarna till plint 68 (P+) och
plint 69 (N-) på huvudstyrkortet till frekvensomriktaren.
2. Anslut kabelskärmningen till kabelklämmorna.
OBS!
Använd partvinnade kablar för att minska störningen
mellan ledarna.
7 7
Bild 7.1 Nätverks anslutning
7.1.3 Maskinvaruinstallation för
frekvensomriktare
Använd DIP-omkopplaren på huvudstyrkortet på frekvensomriktaren för att terminera RS485-bussen.
Kabel Skärmade tvinnade parkablar (STP)
Impedans [Ω]
Kabellängd
[m (ft)]
Tabell 7.1 Kabelspecikationer
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 81
120
Max. 1 200 (3 937 ft) (inklusive droppledningar).
Max. 500 (1 640) station till station.
Bild 7.2 Fabriksinställning för termineringsswitch
DIP-omkopplare är fabriksinställd på OFF (av).

195NA493.11
1
2
90°
Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.1.4 Parameterinställningar för Modbus-
7.1.5 EMC -säkerhetsåtgärder
kommunikation
OBS!
Parameter Funktion
Parameter 8-30 Prot
okoll
Parameter 8-31 Adr
ess
Välj det programprotokoll som ska köras för
RS485-gränssnittet.
Ange nodadressen.
OBS!
Adressintervallet beror på vilket
protokoll som är valt i
parameter 8-30 Protokoll.
Parameter 8-32 Bau
dhastighet
Ange baudhastigheten.
OBS!
Den förinställda baudhastigheten
beror på vilket protokoll som är valt i
parameter 8-30 Protokoll.
Följ gällande nationella och lokala regelverk gällande
jordanslutning. Om jordningen av kablarna inte
genomförs korrekt kan det medföra sämre kommunikation och skador på utrustningen. Om du vill undvika
koppling av högfrekventa störningar mellan kablarna ska
du hålla RS485-kommunikationskabeln borta från motoroch bromsmotståndskablage. Normalt är ett avstånd på
200 mm (8 in) tillräckligt. Försöka ha största möjliga
avstånd mellan kablarna, speciellt där kablarna löper
parallellt över ett längre avstånd. När det är oundvikligt
att kablarna korsar varandra måste RS485-kabeln korsa
motor- och bromsmotståndskablarna i 90° vinkel.
77
Parameter 8-33 Pari
tet/stoppbitar
Ange paritet och antal stoppbitar.
OBS!
Den förvalda inställningen beror på
vilket protokoll som är valt i
parameter 8-30 Protokoll.
Parameter 8-35 Min
. svarsfördröjning
Parameter 8-36 Ma
ximum Response
Delay
Parameter 8-37 Ma
ximum Inter-char
delay
Ange minimal fördröjningstid mellan
mottagandet av en begäran och
överföringen av ett svar. Denna funktion
används för att lösa uppkomsten av fördröjningar i modemets reaktionstid.
Ange den maximala fördröjningstiden
mellan överföring av en begäran och ett
mottaget svar.
Om överföringen avbryts, ska du ange den
maximala fördröjningstiden mellan två
mottagna byte för att kunna etablera en
timeout.
OBS!
Den förvalda inställningen beror på
vilket protokoll som är valt i
parameter 8-30 Protokoll.
Tabell 7.2 Parameterinställningar för Modbus-kommunikation
1 Fältbusskabel
2 Minst 200 mm (8 in)
Bild 7.3 Minsta avstånd mellan kommunikations- och
kraftkablar
82 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Installation och kongurat... Design Guide
7.2 FC-protokoll
7.2.1 Översikt
FC-protokollet, som även kallas FC-bussen eller standardbussen, är standardfältbussen från Danfoss. Protokollet
denierar en åtkomstteknik enligt master/slav-principen för
kommunikation via en seriell buss.
Det går att ansluta en master och maximalt 126 slavar till
bussen. De enskilda slavarna väljs ut av mastern via ett
adresstecken i telegrammet. En slav kan aldrig sända ut
data om den inte blir ombedd att göra det, och det är inte
möjligt med ett direkt utbyte av meddelanden mellan de
enskilda slavarna. Kommunikationen sker i halv duplexläge.
Masterfunktionen kan inte överföras till en annan nod
(system med en master).
Det fysiska lagret utgörs av RS485, och därmed går det att
använda frekvensomriktarens inbyggda RS485-port. FCprotokollet stöder
Ett kort format om 8 byte för processdata.
•
Ett långt format om 16 byte som även omfattar
•
en parameterkanal.
Ett format som används för texter.
•
era telegramformat:
Bussreferensen används vanligen för varvtalsreglering. Det
går även att nå parametrarna, läsa av deras värden och
även, där så är tillåtet, ange värden för dem. Detta
erbjuder en mängd styrmöjligheter, inklusive att styra
börvärdet för frekvensomriktaren när dess interna PIregulator används.
7.3 Parameterinställningar för att aktivera
FC-protokollet
Om du vill aktivera FC-protokollet för frekvensomriktaren
ska följande parametrar ställas in.
Parameter Inställning
Parameter 8-30 Protokoll FC
Parameter 8-31 Adress 1–126
Parameter 8-32 Baudhastighet 2400–115200
Parameter 8-33 Paritet/stoppbitar
Tabell 7.3 Parametrar aktiverar protokollet
Jämn paritet, 1 stoppbit
(standard)
7.4 Grundstruktur för meddelanden inom
FC-protokollet
7.4.1 Innehållet i ett tecken (en byte)
7 7
7.2.2 FC med Modbus RTU
FC-protokollet ger tillgång till funktionerna för styrord och
bussreferens i frekvensomriktaren.
Styrordet gör att Modbus-mastern kan styra era viktiga
funktioner i frekvensomriktaren:
Start.
•
Stoppa frekvensomriktaren på era sätt:
•
- Utrullningsstopp.
- Snabbstopp.
- DC -bromsstopp.
- Normalt (ramp) stopp.
Återställning efter en tripp på grund av fel.
•
Körning vid olika förinställda varvtal.
•
Körning bakåt.
•
Ändra aktiv meny.
•
Styra de två reläer som nns inbyggda i frekven-
•
somriktaren.
Varje byte som överförs börjar med en startbit. Därefter
överförs 8 databitar, vilket motsvarar en byte. Varje tecken
kontrolleras med hjälp av en paritetsbit. Denna bit anges
till 1 när den når paritet. Paritet innebär att det nns ett
jämnt antal binära 1:or i gruppen med 8 databitar och hela
paritetsbiten. Varje tecken avslutas med en stoppbit, och
består således av totalt 11 bitar.
Bild 7.4 Innehållet i ett tecken
7.4.2 Telegramstruktur
Alla telegram har följande struktur:
Starttecken (STX) = 02 hex.
•
En byte som anger telegramlängden (LGE).
•
En byte betecknar frekvensomriktarens adress
•
(ADR).
Ett antal databyte (varierar beroende på telegramtyp) följer.
Telegrammet slutar med en datakontrollbyte (BCC).
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 83

STX LGE ADR DATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installation och kongurat...
Bild 7.5 Telegramstruktur
VLT® HVAC Basic Drive FC 101
Parameterblock
Parameterblocket används för överföring av parametrar
mellan master och slav. Ett datablock är uppbyggt av 12
byte (6 ord) och innehåller även processblocket.
7.4.3 Telegram längd (LGE)
Med telegramlängd menas antalet databyte plus
adressbyten ADR och datakontrollbyten BCC.
Bild 7.7 Parameterblock
Textblock
Textblocket används för att läsa eller skriva text via
datablocket.
4 databyte LGE = 4+1+1 = 6 byte
12 databyte LGE = 12+1+1 = 14 byte
Telegram som innehåller text
Tabell 7.4 Längden på telegram
1) 10 anger antalet fasta tecken, medan "n" varierar (beroende på
77
textens längd).
7.4.4 Frekvensomriktarens adress (ADR)
Adressformat 1-126
Bit 7 = 1 (adressformat 1–126 aktivt).
•
Bit 0-6 = frekvensomriktaradress 1-126.
•
Bit 0–6 = 0 broadcast.
•
101)+n byte
Bild 7.8 Textblock
7.4.7 PKE-fältet
PKE-fältet innehåller två delfält:
Parameterkommando och svar (AK)
•
Parameternummer (PNU)
•
Slaven sänder tillbaka adressbyten oförändrad i svarstelegrammet till mastern.
7.4.5 Datakontrollbyte (BCC)
Kontrollsumman beräknas med en XOR-funktion. Innan
första byten i telegrammet tas emot är den beräknade
kontrollsumman lika med 0.
7.4.6 Datafältet
Databyteblockens struktur beror på telegramtypen. Det
nns tre telegramtyper. De gäller för både styrtelegram
(master ⇒ slav) och svarstelegram (slav ⇒ master).
De tre telegramtyperna är:
Processblock (PCD)
PCD består av ett datablock på 4 byte (2 ord) och
omfattar:
•
•
Bild 7.6 Processblock
Styrord och referensvärde (från master till slav).
Statusord och aktuell utfrekvens (från slav till
master).
Bild 7.9 PKE-fält
Bit 12-15 överför parameterkommandon från mastern till
slaven och skickar tillbaka slavens bearbetade svar till
mastern.
84 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Installation och kongurat... Design Guide
Parameterkommandon master⇒slav
Bit nummer Parameterkommando
15 14 13 12
0 0 0 0 Inget kommando.
0 0 0 1 Läs parametervärde.
0 0 1 0 Skriv parametervärde i RAM (ord).
0 0 1 1 Skriv parametervärde i RAM (dubbelord).
1 1 0 1
1 1 1 0
1 1 1 1 Läs text.
Tabell 7.5 Parameterkommandon
Bit nummer Svar
15 14 13 12
0 0 0 0 Inget svar.
0 0 0 1 Parametervärde överfört (ord).
0 0 1 0 Parametervärde överfört (dubbelord).
0 1 1 1 Kommando kan inte utföras.
1 1 1 1 Text överförd.
Skriv parametervärde i RAM och EEPROM
(dubbelord).
Skriv parametervärde i RAM och EEPROM
(ord).
Svar slav⇒master
7.4.8 Parameternummer (PNU)
Bit nummer 0–11 överför parameternummer. Den aktuella
parameterns funktion denieras i parameterbeskrivningen i
kapitel 6 Programmering.
7.4.9 Index (IND)
Index används med parameternumret för läs-/skrivåtkomst
till indexerade parametrar, t.ex. parameter 15-30 Larmlogg:
Felkod. Indexet består av 2 byte: ett lågt och ett högt byte.
Endast den låga byten används som index.
7.4.10 Parametervärde (PWE)
Parametervärdeblocket består av två ord (fyra byte) och
värdet beror på det givna kommandot (AK). Mastern frågar
efter ett parametervärde om PWE-blocket inte innehåller
något värde. Om du vill ändra ett parametervärde (skriv)
skriver du det nya värdet i PWE-blocket och skickar det
från mastern till slaven.
7 7
Tabell 7.6 Svar
Om kommandot inte kan utföras sänder slaven svaret 0111
Command cannot be performed (Kommandot kan inte
utföras) och skickar följande felrapport i Tabell 7.7.
Felkod Specikation för FC
0 Ogiltigt parameternummer.
1 Parameter kan inte ändras.
2 Övre eller nedre gräns har överskridits.
3 Underindex korrupt.
4 Ingen matris.
5 Felaktig datatyp.
6 Används inte.
7 Används inte.
9
11 Det går inte att skriva till parametern.
15 Ingen text tillgänglig.
17 Inte vid körning.
18 Andra fel.
100 –
>100 –
130 Ingen bussåtkomst för denna parameter.
131 Det går inte att skriva till fabriksinställning.
132 Ingen LCP-åtkomst.
252 Okänd användare.
253 Begäran stöds inte.
254 Okänt attribut.
255 Inget fel.
Beskrivningskomponenter är inte
tillgängliga.
När en slav svarar på en parameterförfrågan
(läskommando) överförs det aktuella parametervärdet i
PWE-blocket och skickas tillbaka till mastern. Om en
parameter innehåller
era dataalternativ, till exempel
parameter 0-01 Språk, väljer du det datavärdet genom att
ange värdet i PWE-blocket. Det går endast att läsa av
parametrar som innehåller datatyp 9 (textsträng) med
seriell kommunikation.
Parameter 15-40 FC-typ till parameter 15-53 Serienummer för
nätkort är av datatyp 9.
Det går t.ex. att läsa av enhetsstorleken och nätspänningsområdet i parameter 15-40 FC-typ. När en textsträng
överförs (läses) är telegramlängden variabel och texterna är
olika långa. Telegramlängden anges med telegrammets
andra byte (LGE). Vid textöverföring anger indextecknet om
det är ett läs- eller skrivkommando.
Om du vill läsa av en text via PWE-blocket anger du
parameterkommandot (AK) till F-hex. Indextecknets höga
byte måste vara 4.
Tabell 7.7 Slavrapport
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 85

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.4.11 Datatyper som stöds av
7.5
Exempel
frekvensomriktaren
7.5.1 Skriva ett parametervärde
Osignerad betyder att det inte nns något förtecken i
telegrammet.
Ändra parameter 4-14 Motorvarvtal, övre gräns [Hz] till 100
Hz.
Datatyper Beskrivning
3 Heltal 16
4 Heltal 32
5 Osignerat 8
6 Osignerat, 16 bitar
7 Osignerat 32
9 Textsträng
Tabell 7.8 Datatyper
Skriv data till EEPROM.
PKE = E19E Hex – Skriv enskilt ord i
parameter 4-14 Motorvarvtal, övre gräns [Hz]:
IND = 0000 hex.
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 hex.
•
Datavärde 1 000 motsvarar 100 Hz, se kapitel 7.4.12 Konvertering.
7.4.12 Konvertering
77
Programmeringshandboken innehåller beskrivningar av
parametrarna i de olika parametergrupperna. Parametervärden överförs endast som heltal. Konverteringsfaktorer
används för att överföra decimaler.
Parameter 4-12 Motorvarvtal, nedre gräns [Hz] har konverteringsfaktorn 0,1. Om du vill ställa in minimifrekvensen till 10
Hz måste värdet 100 överföras. En konverteringsfaktor på
0,1 betyder att det överförda värdet multipliceras med 0,1.
Värdet 100 tolkas således som 10,0.
Konverteringsindex Konverterings faktor
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Telegrammet ser ut så här Bild 7.10.
Bild 7.10 Telegram
OBS!
Parameter 4-14 Motorvarvtal, övre gräns [Hz] är ett enda
ord och parameterkommandot för att skriva in EEPROM
är E. Parameter 4-14 Motorvarvtal, övre gräns [Hz] är 19E i
hexadecimal.
Svaret från slaven till mastern visas i Bild 7.11.
Bild 7.11 Svar från master
Tabell 7.9 Konvertering
7.4.13 Processord (PCD)
Blocket med processord är indelat i två block om 16 bitar
vardera, som alltid kommer i den angivna ordningsföljden.
Styrtelegram (master ⇒ styrord slav)
Styrtelegram (slav ⇒ master) statusord
Tabell 7.10 Processord (PCD)
86 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
PCD 1 PCD 2
Referensvärde
Aktuell utfrekvens

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installation och kongurat... Design Guide
7.5.2 Läsa ett parametervärde
Läs värdet i parameter 3-41 Ramp 1, uppramptid.
PKE = 1155 Hex - Läs parametervärdet i
parameter 3-41 Ramp 1, uppramptid:
IND = 0000 hex.
•
PWE
•
PWE
•
Bild 7.12 Telegram
Om värdet i
visas svaret från slaven till mastern i Bild 7.13.
Bild 7.13 Svar
3E8 hex motsvarar1 000 decimal. Konverteringsindex för
parameter 3-41 Ramp 1, uppramptid är -2, dvs. 0,01.
Parameter 3-41 Ramp 1, uppramptid är av typen Osignerad
32.
Översikt över Modbus RTU
7.6
= 0000 hex.
HIGH
= 0000 hex.
LOW
parameter 3-41 Ramp 1, uppramptid är 10 s,
7.6.2 Översikt
Oberoende av fysisk nätverkskommunikationstyp, beskriver
det här avsnittet den process som en regulator använder
för att begära åtkomst till en annan enhet. Processen
omfattar hur Modbus RTU reagerar på förfrågningar från
en annan enhet, samt hur fel identieras och rapporteras.
Här denieras även ett gemensamt format för fältens
layout och innehåll.
Vid kommunikation via ett Modbus RTU-nätverk gör
protokollet följande:
Bestämmer hur varje regulator får reda på sin
•
adress.
Känner igen ett telegram som är adresserat till
•
den.
Avgör vilka åtgärder som ska vidtas.
•
Utvinner alla data eller all annan information som
•
nns i telegrammet.
Om ett svar krävs kommer regulatorn att utforma ett
svarstelegram och skicka iväg det.
Regulatorer kommunicerar enligt en master/slav-princip där
endast mastern kan initiera transaktioner (som kallas
förfrågningar). Slavarna svarar genom att skicka
efterfrågade data till mastern, eller genom att vidta den
åtgärd som efterfrågades.
Mastern kan kommunicera med enskilda slavar, eller
initiera ett broadcasttelegram till samtliga slavar. Slavar
returnerar ett svar på förfrågningar som är riktade till just
dem. Inga svar skickas vid broadcastförfrågningar från
mastern.
7 7
7.6.1 Inledning
Danfoss förutsätter att det installerade styrsystemet stöder
gränssnitten i detta dokument, och att alla krav och
begränsningar som anges för regulatorn och frekvensomriktaren efterföljs noga.
Den inbyggda Modbus RTU (Remote Terminal Unit) är
utformad för att kommunicera med alla regulatorer som
stöder de gränssnitt som nns denierade i detta
dokument. Läsaren förutsätts ha goda kunskaper om
regulatorns möjligheter och begränsningar.
Modbus RTU-protokollet anger formatet för masterns
förfrågan genom att ge följande information:
Enhetens (eller broadcastens) adress.
•
En funktionskod som
•
åtgärden.
Data som ska skickas.
•
Ett felkontrollfält.
•
Slavens svarstelegrammet utformas också enligt Modbusprotokollet. Det innehåller fält som bekräftar vidtagen
åtgärd, eventuella data som ska returneras och ett felkontrollfält. Om ett fel inträar vid mottagningen av
telegrammet, eller om slaven inte kan utföra den begärda
åtgärden, skapar och skickar slaven ett felmeddelande.
Alternativt inträar en timeout.
denierar den begärda
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 87
Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.6.3 Frekvensomriktare med Modbus RTU
Grundstruktur för Modbus RTU-
7.8
meddelanden
Frekvensomriktaren kommunicerar i Modbus RTU-formatet
via det inbyggda RS485-gränssnittet. Modbus RTU ger
tillgång till funktionerna för styrord och bussreferens i
frekvensomriktaren.
Styrordet gör att Modbus-mastern kan styra
funktioner i frekvensomriktaren:
Start.
•
Olika stopp:
•
- Utrullningsstopp.
- Snabbstopp.
- DC -bromsstopp.
- Normalt (ramp) stopp.
Återställning efter en tripp på grund av fel.
77
•
Körning vid olika förinställda varvtal.
•
Körning bakåt.
•
Ändra den aktiva menyn.
•
Styra frekvensomriktarens inbyggda relä.
•
Bussreferensen används vanligen för varvtalsreglering. Det
går även att nå parametrarna, läsa av deras värden och,
där så är tillåtet, ange värden för dem. Detta erbjuder en
mängd styrmöjligheter, inklusive att styra börvärdet för
frekvensomriktaren när dess interna PI-regulator används.
Nätverkskonguration
7.7
era viktiga
7.8.1 Inledning
Regulatorerna är kongurerade för att kommunicera i
Modbus-nätverket i RTU-läge (Remote Terminal Unit), där
varje byte i ett meddelande innehåller två 4-bitars hexadecimala tecken. Formatet för varje byte visas i Tabell 7.12.
Start
bit
Tabell 7.12 Format för varje byte
Kodningssystem 8-bitars binärt, hexadecimalt 0-9, A-F.
Bitar per byte
Felkontrollfält Cyklisk redundanskonroll (CRC).
Tabell 7.13 Byteinformation
Databyte Stopp/
Två hexadecimala tecken i varje 8-bitarsfält i
telegrammet.
En startbit.
•
Åtta databitar, där den minst signikanta
•
biten sänds först.
En bit för jämn/udda paritet; ingen bit
•
då paritet saknas.
En stoppbit om paritet används; två bitar
•
om paritet saknas.
Stopp
paritet
Du aktiverar Modbus RTU på frekvensomriktaren genom
att ange följande parametrar:
Parameter Inställning
Parameter 8-30 Protokoll Modbus RTU
Parameter 8-31 Adress 1–247
Parameter 8-32 Baudhastighet 2400–115200
Parameter 8-33 Paritet/stoppbitar
Tabell 7.11 Nätverkskonguration
Jämn paritet, 1 stoppbit
(standard)
7.8.2 Telegramstruktur för Modbus RTU
Den sändande enheten infogar ett Modbus RTU-telegram i
en mall med känd start- och slutpunkt. Detta gör att de
mottagande enheterna kan börja där telegrammet startar,
läsa adressdelen, avgöra vilken enhet som är mottagare
(eller alla enheter om det är ett broadcasttelegram) och
avgöra när telegrammet är slut. Partiella telegram identieras och fel anges som resultat. Tecknen som ska
överföras måste anges i hexadecimalt format, 00–FF, i varje
fält. Frekvensomriktaren övervakar hela tiden nätverksbussen, även under tysta intervall. När det första fältet
(adressfältet) tas emot avkodar alla frekvensomriktare och
enheter detta för att avgöra om de är mottagare. Modbus
RTU-telegram som är adresserade till 0 är broadcasttelegram. Det går inte att besvara broadcasttelegrammet. En
typisk telegrammall visas i Tabell 7.14.
Start Adress Funktion Data
T1-T2-T3-
Tabell 7.14 Typiskt telegramstruktur för Modbus RTU
T4
8 bitar 8 bitar
N x 8
bitar
CRC-
kontroll
16 bitar
Slut
T1-T2-T3-
T4
88 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Installation och kongurat... Design Guide
7.8.3 Start-/stoppfält
Telegrammet inleds med en tyst period på minst 3,5
teckenintervall. Den tysta perioden implementeras i
intervall med era tecken i det valda nätverkets baudhastighet (visas som Start T1-T2-T3-T4). Det första fältet som
överförs är enhetsadressen. Efter det sist överförda tecknet
följer en liknande period på minst 3,5 teckenintervall som
indikerar telegrammets slut. Ett nytt telegram kan börja
efter denna period.
Överför hela telegrammet som en kontinuerlig ström. Om
en tyst period på mer än 1,5 teckenintervall uppstår innan
hela telegrammet slutförts kommer mottagande enhet att
radera hela det ofullständiga telegrammet och förutsätta
att nästa byte är adressfältet i ett nytt telegram. Om ett
nytt telegrammet börjar innan 3,5 teckenintervall efter
föregående meddelande, kommer mottagande enhet att
identiera det som en fortsättning av föregående telegram.
Detta ger upphov till en timeout (ingen reaktion från
slaven) eftersom värdet i det sista CRC-fältet inte är giltigt
för de kombinerade telegrammen.
7.8.4 Adressfält
Adressfältet i en telegrammall består av åtta bitar. Giltiga
adresser till slavenheter nns inom intervallet 0–247
decimaler. De enskilda slavenheterna tilldelas adresser
inom intervallet 1-247 0 är reserverat för broadcastläget,
som alla slavar känner igen. En master kommunicerar med
en slav genom att ange slavens adress i telegrammets
adressfält. När slaven skickar sitt svar placerar den sin egen
adress i detta adressfält för att låta mastern veta vilken slav
som svarar.
7.8.5 Funktionsfält
Funktionsfältet i en telegrammall består av åtta bitar.
Giltiga koder nns i intervallet 1–FF. Funktionsfält används
för att skicka telegram mellan master och slav. När ett
telegram skickas från en master till en slavenhet är det
funktionskodfältet som informerar slaven om vilken åtgärd
som ska utföras. När slaven svarar mastern används
funktionskodfältet för att ange endera ett normalt (felfritt)
svar, eller för att informera om att någon typ av fel
inträade (ett så kallat undantagssvar).
Vid ett normalt svar ekar slaven helt enkelt den
ursprungliga funktionskoden. Vid ett undantagssvar
returnerar slaven en kod som motsvarar den ursprungliga
funktionskoden med den mest signikanta biten angiven
till logisk 1. Dessutom lägger slaven in en unik kod i
svarstelegrammets datafält. Detta informerar mastern om
vilken typ av fel som inträade, eller orsaken till
undantaget. Mer information nns i
kapitel 7.8.11 Funktionskoder som stöds av Modbus RTU och
kapitel 7.8.12 Undantagskoder i Modbus.
7.8.6 Datafält
Datafältet utgörs av uppsättningar av två hexadecimala tal,
inom intervallet 00–FF hexadecimalt. Dessa består av ett
RTU-tecken. Datafältet i telegrammet som skickas från en
master till slavenheter innehåller ytterligare information
som slaven måste utnyttja för att kunna vidta den åtgärd
som funktionskoden denierar.
Informationen kan innehålla objekt som:
Spol- eller registeradresser.
•
Antalet objekt att hantera.
•
Antal faktiska databyte i fältet.
•
7.8.7 Fältet CRC-kontroll
Telegrammet innehåller ett fält för felkontroll som fungerar
enligt CRC-principen (Cyclical Redundancy Check). CRCfältet kontrollerar innehållet i hela telegrammet. Det
tillämpas oberoende av eventuell paritetskontrollmetod
som används för de enskilda tecknen i telegrammet. CRCvärdet beräknas av den sändande enheten, som lägger till
CRC som det sista fältet i telegrammet. Den mottagande
enheten räknar om ett CRC-värde vid mottagning av
telegrammet, och jämför det beräknade värdet med det
faktiska värde som mottogs i CRC-fältet. Två olika värden
resulterar i busstimeout. Felkontrollfältet innehåller ett 16bitars binärt värde som uttrycks med två 8-bitars byte.
Efter implementering läggs lågbytedelen av fältet till först,
och därefter högbytedelen. Högbytedelen med CRC är den
sista byte som skickas i telegrammet.
7 7
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 89
Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.8.8 Adressering av spolregister
I Modbus är alla data ordnade i spolar och inforegister.
Spolar innehåller en enda bit, medan inforegister rymmer
ett ord på 2 byte (dvs. 16 bitar). Alla dataadresser i
Modbus-telegrammen refereras till 0. Den första
förekomsten av ett dataobjekt adresseras som objekt noll.
Till exempel: Spolen som kallas spole 1 i en programmerbar regulator benämns spole 0000 i dataadressfältet i
ett Modbus-telegram. Spole 127 decimalt benämns spole
007EHEX (126 decimalt).
Inforegister 40001 benämns register 0000 i telegrammets
dataadressfält. Fältet för funktionskoden anger redan en
åtgärd av typen inforegister. Därför är referensen 4XXXX
implicit. Inforegister 40108 benämns register 006Bhex (107
decimalt).
Spolnu–
77
mmer
1–16
17–32
33–48
49–64
66–65536 Reserverad. –
Tabell 7.15 Spolregister
Styrord för frekvensomriktare (se
Tabell 7.16).
Referensområdet för frekvensomriktarens varvtal eller börvärde är 0 x
0–0 x FFFF (-200 % ... ~200 %)
Statusord för frekvensomriktare (se
Tabell 7.17).
Drift-utan återkoppling: Frekvensomriktarens utfrekvens.
Drift med återkoppling: Frekvensomriktarens återkopplingssignal.
Styrning av parameterskrivning
(master till slav).
0 = Parameterändringar skrivs till
65
frekvensomriktarens RAM-minne.
1 = Parameterändringar skrivs till
frekvensomriktarens RAM-minne och
EEPROM.
Beskrivning Signalriktning
Master till slav
Master till slav
Slav till master
Slav till master
Master till slav
Spole 0 1
01 Förinställd referens, lsb
02 Förinställd referens, msb
03 DC-broms Ingen DC-broms
04 Utrullningsstopp Inget utrullningsstopp
05 Snabb stopp Inget snabbstopp
06 Frysfrekvens Ingen frysfrekvens
07 Rampstopp Start
08 Ingen återställning Återställning
09 Ingen jogg Jogg
10 Ramp 1 Ramp 2
11 Ogiltiga data Giltiga data
12 Relä 1 från Relä 1 till
13 Relä 2 från Relä 2 till
14 Ställ in lsb
15 –
16 Ingen reversering Reversering
Tabell 7.16 Styrord för frekvensomriktare (FC-prol)
Spole 0 1
33 Styrning inte klar Styrning klar
Frekvensomriktaren är inte
34
driftklar
35 Utrullningsstopp Säkerhet sluten
36 Inget larm Larm
37 Används inte Används inte
38 Används inte Används inte
39 Används inte Används inte
40 Ingen varning Varning
41 Ej på referens På referens
42 Hand-läge Läget Auto
43 Utanför frekvensområden Inom frekvensområden
44 Stoppad Kör
45 Används inte Används inte
46 Ingen spänningsvarning Spänningen överskrider
47 Ej på strömbegränsning Strömbegränsning
48 Termisk nivå är OK Termisk nivå överskrids
Tabell 7.17 Statusord för frekvensomriktare (FC-prol)
Frekvensomriktaren är
driftklar
90 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Installation och kongurat... Design Guide
Bussadress
19 20 40020 Fri – –
29 30 40030
Bussregister
0 1 40001 Reserverad –
1 2 40002 Reserverad –
2 3 40003 Reserverad –
3 4 40004 Fri – –
4 5 40005 Fri – –
5 6 40006 Modbus-konguration Skrivbar
6 7 40007 Senaste felkod Skrivskyddad
7 8 40008 Senaste felregister Skrivskyddad
8 9 40009 Indexvisare Skrivbar
9 10 40010 Parameter 0-01 Språk
1)
PLC-
register
Innehåll Åtkomst Beskrivning
Reserverat för äldre frekvensomriktare VLT® 5000 och
VLT® 2800.
Reserverat för äldre frekvensomriktare VLT® 5000 och
VLT® 2800.
Reserverat för äldre frekvensomriktare VLT® 5000 och
VLT® 2800.
Endast TCP. Reserverat för Modbus TCP
(parameter 12-28 Lagra datavärden och
parameter 12-29 Lagra alltid - sparade i, till exempel,
EEPROM).
Felkod togs emot från parameterdatabasen, mer
information nns i WHAT 38295.
Registeradressen med det senaste felet som uppstod,
mer information nns i WHAT 38296.
Åtkomst till parameterunderindex. Mer information nns
i WHAT 38297.
Parameter 0-01 Språk (Modbus-register = 10 parameternummer)
20 byte utrymme reserverat per parameter i Modbus
Map.
Parameter 0-03 Regionala inställningar
20 byte utrymme reserverat per parameter i Modbus
Map.
Parameter 0-03 Regionala
inställningar
Beroende på
paramete-
råtkomst
Beroende på
paramete-
råtkomst
7 7
Tabell 7.18 Adress/Register
1) Värdet skrivet i Modbus RTU-telegrammet måste vara 1 eller mindre än registernumret. Till exempel, läs Modbus-register 1 genom att skriva
värde 0 i telegrammet.
7.8.9 Åtkomst via PCD skriv/läs
OBS!
Styrordet och referens skickas alltid i listan från
Fördelen med att använda PCD skriv/läs-konguration är
regulatorn till frekvensomriktaren.
att regulatorn kan skriva eller läsa mer data i ett telegram.
Upp till 63 register kan läsas eller skriva till via
funktionskoden läs inforegister eller skriva era register i
PCD-skrivlistan skapas alltid i parameter 8-42 PCD, skrivkon-
guration.
ett telegram. Strukturen är även exibel så att endast två
register kan skrivas till och tio register kan läsas från
regulatorn.
PCD-skrivlistan är data som skickats från regulatorn till
frekvensomriktaren som statusord, faktiskt huvudvärde och
tillämpningsberoende data som drifttimmar, motorström
PCD-skrivlistan är data som skickats från regulatorn till
och larmord.
frekvensomriktaren. Informationen innehåller styrord,
referens och tillämpningsberoende data som minimumreferens, ramptider och så vidare.
OBS!
Statusordet och faktiskt huvudvärde skickats alltid i
listan från frekvensomriktaren till regulatorn.
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 91
CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Installation och kongurat...
VLT® HVAC Basic Drive FC 101
Funktion Funktionskod (hex)
Läs spolar 1
Läs inforegister 3
Skriv enskild spole 5
Skriv enskilt register 6
Skriv era spolar F
Skriv era register 10
Hämta händelseräknare för komm. B
Rapportera slav-ID 11
Läs/skriv era register 17
Tabell 7.19 Funktionskoder
77
Bild 7.14 Åtkomst via PCD skriv/läs
OBS!
De grå rutorna går inte att ändra, de är standardvärden.
OBS!
32 bit-parameterar måste mappas i 32 bit-mallar (PCD2
och PCD3 eller PCD4 och PCD5 och så.), där parameternumret är mappad två gånger till parameter 8-42 PCD,
skrivkonguration eller parameter 8-43 PCD, läskonguration.
7.8.10 Styra frekvensomriktaren
Det här avsnittet beskriver de koder som kan användas i
funktions- och datafälten i ett Modbus RTU-telegram.
7.8.11 Funktionskoder som stöds av
Modbus RTU stöder användningen av följande
funktionskoder i telegrammets funktionsfält.
Modbus RTU
kod
Underfunkti
ons
kod
1
2
10
11
12
Underfunktion
Starta om kommunikation.
Returnera diagnostikregister.
Rensa räknare och
diagnostiskt register.
Returnera antalet
bussmeddelanden.
Returnera antalet fel vid
busskommunikation.
Funktion
Funktions
Diagnostik 8
13 Returnera slavfel, antal.
14
Returnera antalet
slavmeddelanden.
Tabell 7.20 Funktionskoder
7.8.12 Undantagskoder i Modbus
En fullständig förklaring av strukturen i ett undantagsreturvärde nns i kapitel 7.8.5 Funktionsfält.
Kod Namn Betyder
Funktionskoden som mottogs i frågan är
inte en tillåten åtgärd för servern (eller
slaven). Detta kan ske på grund av att
funktionskoden endast är tillämpbar på
Ogiltig
1
funktion
nyare enheter och inte nns på den valda
enheten. Det kan också indikera att
servern (eller slaven) är i fel tillstånd för
att bearbeta en förfrågan av denna typ.
Till exempel är den kanske inte
kongurerad och får en förfrågan om att
returnera registervärden.
92 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Installation och kongurat... Design Guide
Kod Namn Betyder
Dataadressen som togs emot i frågan är
inte en tillåten adress för servern (eller
slaven). Kombination av referensnummer
Ogiltig
2
dataadress
Ogiltigt
3
datavärde
4 Fel på slav
Tabell 7.21 Undantagskoder i Modbus
Åtkomst till parametrar
7.9
och överföringslängd är ogiltig. I en
regulator med 100 poster kan en
förfrågan med oset 96 och längd 4
lyckas, men en med oset 96 och längd 5
returnerar fel 02.
Ett värde som nns i frågedatafältet är
inte ett tillåtet värde för servern (eller
slaven). Detta indikerar ett fel i strukturen
på den återstående delen av en komplex
förfrågan, till exempel att den implicerade
längden är inkorrekt. Det innebär INTE att
ett dataobjektet som skickats för lagring i
ett register har ett värde utanför tillämpningsprogrammets undantag, eftersom
Modbus-protokollet inte förstår betydelsen
av värdet i register.
Ett oåterkalleligt fel inträade när servern
(eller slaven) försökte utföra den begärda
åtgärden.
7.9.1 Parameterhantering
PNU (parameternumret) översätts från registeradressen i
Modbus läs- eller skrivmeddelandet. Parameternumret
översätts till Modbus som (10 x parameternumret) decimal.
Exempel: Avläsning av parameter 3-12 Öka/minska-värde (16
bitar): Inforegister 3120 innehåller parametervärdet. Ett
värde 1352 (decimalt) innebär att parametern är inställd på
12,52 %.
Avläsning av parameter 3-14 Förinställd relativ referens (32
bitar): Inforegister 3410 och 3411 innehåller parametervärdet. Värdet 11300 (decimalt) innebär att parametern är
inställd på 1 113,00.
Information om parametrar, storlek och konverteringsindex
nns i kapitel 6 Programmering.
7.9.3 IND (Index)
Vissa parametrar i frekvensomriktaren är matrisparametrar,
till exempel parameter 3-10 Förinställd referens. Eftersom
Modbus inte stöder matriser i inforegister har frekvensomriktaren reserverat inforegister 9 som pekare till matrisen.
Innan du avläser eller skriver en matrisparameter ska
inforegister 9 anges. Om inforegistret anges till värdet 2
sker alla efterföljande läsningar/skrivningar till matrisparametrar till index 2.
7.9.4 Textblock
Parametrar lagrade som textsträngar nås på samma sätt
som andra parametrar. Maximal textblockstorlek är 20
tecken. Om en läsbegäran för en parameter består av er
tecken än vad som nns i parametern avkortas svaret. Om
läsbegäran för en parameter avser färre tecken än vad som
nns i parametern utfylls svaret med blanksteg.
7.9.5 Konverterings faktor
Ett parametervärde kan endast överföras som ett helt
nummer. Om du vill överföra decimaler ska du använda en
konverteringsfaktor.
7.9.6 Parametervärden
Standarddatatyper
Standarddatatyperna är int 16, int 32, uint 8, uint 16 och
uint 32. De lagras som 4x register (40001–4FFFF).
Parametrarna läses med hjälp av funktionen 03 hex Läs
inforegister. Parametrarna skrivs med hjälp av funktionen 6
hex Förinställt enskilt register för ett register (16 bitar), och
funktionen 10 hex Flera förinställda register för två register
(32 bitar). Läsbara storlekar från ett register (16 bitar) upp
till tio register (20 tecken).
Icke standarddatatyper
Icke standarddatatyper är textsträngar och lagras som 4x
register (40001–4FFFF). Parametrarna läses med hjälp av
funktionen 03 hex Läs inforegister och skrivs med hjälp av
funktionen 10 hex Förinställ era register. De läsbara
storlekarna varierar från ett register (2 tecken) upp till tio
register (20 tecken).
7 7
7.9.2 Datalagring
Spole 65 decimalt avgör om data som skrivs till frekvensomriktaren lagras i EEPROM och RAM-minne (spole 65 =
1) eller endast i RAM-minnet (spole 65 = 0).
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 93

Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.10 Exempel
Nedan hittar du exempel på olika Modbus RTUkommandon.
7.10.1 Läs spolstatus (01 hex)
Beskrivning
Den här funktionen läser av TILL/FRÅN-status för diskreta
utsignaler (spolar) i frekvensomriktaren. Broadcast stöds
aldrig för avläsningar.
Förfrågan
Ett telegram med en förfrågan anger första spole och
antalet spolar som ska läsas av. Spoladresserna börjar med
0, vilket innebär att spole 33 benämns 32.
Exempel på en begäran om att läsa spole 33-48 (statusord)
OBS!
Spolar och poster adresseras explicit med en förskjutning
på -1 i Modbus.
Spole 33 benämns som spole 32, till exempel.
7.10.2 Tvinga/skriv enskild spole (05 hex)
Beskrivning
Denna funktion tvingar spolen till antingen TILL eller FRÅN.
När denna funktion ingår i ett broadcastmeddelande
framtvingas samma spolreferenser i alla anslutna slavar.
Förfrågan
Förfrågningsmeddelandet anger att spole 65 (styrning av
parameterskrivning) ska tvingas. Spoladresserna börjar med
0, vilket innebär att spole 65 benämns 64 Tvångsdata = 00
00 hex (FRÅN) eller FF 00 hex (TILL).
från slavenhet 01.
77
Fältnamn Exempel (hex)
Slavadress 01 (frekvensomriktarens adress)
Funktion 01 (lässpolar)
Startadress HÖG 00
Startadress LÅG 20 (32 decimaler) spole 33
Antal punkter HÖG 00
Antal punkter LÅG 10 (16 decimalt)
Felkontroll (CRC) –
Tabell 7.22 Förfrågan
Svar
Spolstatus i svarstelegrammet packas så att en spole
Slavadress 01 (frekvensomriktarens adress)
Funktion 05 (skriv enskild spole)
Spoladress HÖG 00
Spoladress LÅG 40 (64 decimal) spole 65
Tvångsdata HÖG FF
Tvingad data LÅG 00 (FF 00 = PÅ)
Felkontroll (CRC) –
Svar
Det normala svaret är ett eko av förfrågan som returneras
när spolstatus har framtvingats.
representeras av en bit i datafältet. Status anges som: 1 =
TILL; 0 = FRÅN. lsb i den första databyten innehåller den
spole som avses med förfrågan. Övriga spolar följer mot
den höga delen av detta byte, och från låg till hög i
efterföljande byte.
Om returnerat spolantal inte är en multipel av åtta
kommer resterande bitar i den sista databyten att fyllas ut
med värdet 0 (mot den höga delen av byten). Fältet för
byteantal specicerar antalet fullständiga databyte.
Slavadress 01
Funktion 05
Tvångsdata HÖG FF
Tvingad data LÅG 00
Antal spolar HÖG 00
Antal spolar LÅG 01
Felkontroll (CRC) –
Fältnamn Exempel (hex)
Tabell 7.24 Förfrågan
Fältnamn Exempel (hex)
Fältnamn Exempel (hex)
Slavadress 01 (frekvensomriktarens adress)
Funktion 01 (lässpolar)
Antal byte 02 (2 byte data)
Data (spole 40-33) 07
Data (spole 48-41) 06 (STW = 0607hex)
Felkontroll (CRC) –
Tabell 7.23 Svar
94 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
Tabell 7.25 Svar

Installation och kongurat... Design Guide
7.10.3 Tvinga/skriv era spolar (0F hex)
Beskrivning
Denna funktion tvingar varje spole i en spolsekvens till
antingen till eller från. När denna funktion ingår i ett
broadcastmeddelande framtvingas samma spolreferenser i
alla anslutna slavar.
Förfrågan
Frågemeddelandet anger att spole 17 till 32 (varvtalsbörvärde) ska tvingas.
OBS!
Spoladresserna börjar med 0, vilket innebär att spole 17
benämns som 16.
Fältnamn Exempel (hex)
Slavadress 01 (frekvensomriktarens adress)
Funktion 0F (skriv till era spolar)
Spoladress HÖG 00
Spoladress LÅG 10 (spoladress 17)
Antal spolar HÖG 00
Antal spolar LÅG 10 (16 spolar)
Antal byte 02
Tvinga data HI
(spole 8-1)
Tvinga data LO
(spole 16–9)
Felkontroll (CRC) –
Tabell 7.26 Förfrågan
Svar
Normalsvaret returnerar slavens adress, funktionskod,
startadress och antal tvingade spolar.
Fältnamn Exempel (hex)
Slavadress 01 (frekvensomriktarens adress)
Funktion 0F (skriv till era spolar)
Spoladress HÖG 00
Spoladress LÅG 10 (spoladress 17)
Antal spolar HÖG 00
Antal spolar LÅG 10 (16 spolar)
Felkontroll (CRC) –
20
00 (referens = 2000 hex)
7.10.4 Läs inforegister (03 hex)
Beskrivning
Denna funktion läser av innehållet i slavens inforegister.
Förfrågan
Meddelandet med förfrågan anger första register och antal
register som ska läsas. Registeradresserna börjar vid noll,
vilket innebär att register 1-4 benämns 0-3.
Exempel: Läs parameter 3-03 Maximireferens, register 03030.
Fältnamn Exempel (hex)
Slavadress 01
Funktion 03 (läs inforegister)
Startadress HÖG 0B (Registeradress 3029)
Startadress LÅG D5 (Registeradress 3029)
Antal punkter HÖG 00
Antal punkter LÅG
Felkontroll (CRC) –
Tabell 7.28 Förfrågan
Svar
Registerdata i svarstelegrammet packas som 2 byte per
register med det binära innehållet högerjusterat inom varje
byte. För varje register innehåller byte 1 de höga bitarna,
och byte 2 innehåller de låga.
Exempel: hex 000088B8 = 35,000 = 35 Hz.
Slavadress 01
Funktion 03
Antal byte 04
Data HÖG (register 3030) 00
Data LÅG (register 3030) 16
Data HÖG (register 3031) E3
Data LÅG (register 3031) 60
Felkontroll (CRC) –
Tabell 7.29 Svar
02 – (parameter 3-03 Maximireferens är
32 bitar lång, alltså 2 register)
Fältnamn Exempel (hex)
7 7
Tabell 7.27 Svar
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 95

Installation och kongurat...
VLT® HVAC Basic Drive FC 101
7.10.5 Förinställt enskilt register (06 hex)
Slavadress 01
Beskrivning
Denna funktion förinställer ett värde i ett enskilt inforegister.
Förfrågan
Telegrammet med förfrågan anger den registerreferens
som ska förinställas. Registeradresserna börjar vid 0, vilket
innebär att register 1 benämns 0.
Exempel: Skriv till parameter 1-00 Kongurationsläge,
register 1000.
Fältnamn Exempel (hex)
Slavadress 01
Funktion 06
Registeradress HÖG 03 (registeradress 999)
Registeradress LÅG E7 (registeradress 999)
77
Förinställda data HÖG 00
Förinställda data LÅG 01
Felkontroll (CRC) –
Tabell 7.30 Förfrågan
Svar
Det normala svaret är ett eko av förfrågan som returneras
när registerinnehållet har överförts.
Fältnamn Exempel (hex)
Slavadress 01
Funktion 06
Registeradress HÖG 03
Registeradress LÅG E7
Förinställda data HÖG 00
Förinställda data LÅG 01
Felkontroll (CRC) –
Funktion 10
Startadress HÖG 04
Startadress LÅG 07
Antal punkter HÖG 00
Antal register LÅG 02
Antal byte 04
Skriv data HÖG (register 4: 1049) 00
Skriv data LÅG (register 4: 1049) 00
Skriv data HÖG (register 4: 1050) 02
Skriv data LÅG (register 4: 1050) E2
Felkontroll (CRC) –
Tabell 7.32 Förfrågan
Svar
Ett normalt svar returnerar slavens adress, funktionskod,
startadress och antal förinställda register.
Slavadress 01
Funktion 10
Startadress HÖG 04
Startadress LÅG 19
Antal punkter HÖG 00
Antal register LÅG 02
Felkontroll (CRC) –
Tabell 7.33 Svar
7.10.7 Läs/skriv era register (17 hex)
Beskrivning
Den här funktionskoden utför en kombination av 1
Fältnamn Exempel (hex)
Fältnamn Exempel (hex)
lässtyrning och 1 skrivstyrning i en enkel MODBUS-
Tabell 7.31 Svar
transaktion. Skrivkommandot har utförts innan läsning.
Förfrågan
7.10.6 Flera förinställda register (10 hex)
Frågemeddelandet anger startadressen och antal inforegister som ska läsas, och startadress, antal inforegister och
Beskrivning
Denna funktion förinställer värden i en sekvens inforegister.
Förfrågan
Telegrammet med förfrågan anger den registerreferens
som ska förinställas. Registeradresserna börjar vid 0, vilket
den data som ska skrivas. Inforegister har adresser som
startar på noll. Exempel på en förfrågan som förinställer
parameter 1-24 Motorström till 738 (7,38 A) och läser
parameter 3-03 Maximireferens som har värdet 50000
(50,000 Hz):
innebär att register 1 benämns 0. Exempel på en förfrågan
som förinställer två register (ange
parameter 1-24 Motorström till 738 (7,38 A)):
96 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Installation och kongurat... Design Guide
Fältnamn Exempel (hex)
Slavadress 01
Funktion 17
Läser startadress HÖG 0B (Registeradress 3029)
Läs startadress LÅG D5 (Registeradress 3029)
Antal för att läsa HÖG 00
02
Antal för att läsa LÅG
Skriv startadress HÖG 04 (registeradress 1239)
Skriv startadress LÅG D7 (registeraddress 1239)
Antal för att skriva HÖG 00
Antal för att skriva LÅG 02
Skriv byteantal 04
Skriv registervärde HÖG 00
Skriv registervärde LÅG 00
Skriv registervärde HÖG 02
Skriv registervärde LÅG 0E
Felkontroll (CRC) –
Tabell 7.34 Förfrågan
(Parameter 3-03 Maximireferens är
32 bitar lång, det vill säga, 2
register)
Svar
Normalt svar innehåller data från den grupp register som
lästes. Fältet för byteantal
specicerar antalet byte som
kommer i Läs datafältet.
Fältnamn Exempel (hex)
Slavadress 01
Funktion 17
Antal byte 04
Läs registervärde HÖG 00
Läs registervärde LÅG 00
Läs registervärde HÖG C3
Läs registervärde LÅG 50
Felkontroll (CRC) –
Tabell 7.35 Svar
Danfoss FC-styrprol
7.11
7.11.1 Styrord enligt FC-prolen (8–
10 protokoll = FC-prol)
Bild 7.15 Styrord enligt FC-prol
Bit Bitvärde = 0 Bitvärde = 1
00 Referensvärde Externt val lsb
01 Referensvärde Externt val msb
02 DC-broms Ramp
03 Utrullning Ingen utrullning
04 Snabb stopp Ramp
05 Frys utfrekvens Använd ramp
06 Rampstopp Start
07 Ingen funktion Återställning
08 Ingen funktion Jogg
09 Ramp 1 Ramp 2
10 Ogiltiga data Giltiga data
11 Relä 01 från Relä 01 aktivt
12 Relä 02 från Relä 02 aktivt
13 Parameterinställning Val lsb
15 Ingen funktion Reversering
Tabell 7.36 Styrord enligt FC-prol
Förklaring av styrbitar
Bit 00/01
Bit 00 och 01 används för att välja mellan de fyra referensvärdena som nns förprogrammerade i
parameter 3-10 Förinställd referens enligt Tabell 7.37.
Programmerat
referensvärde
1
2
3
4
Parameter
Parameter 3-10 Förinställd referens
[0]
Parameter 3-10 Förinställd referens
[1]
Parameter 3-10 Förinställd referens
[2]
Parameter 3-10 Förinställd referens
[3]
Bit01Bit
00
0 0
0 1
1 0
1 1
7 7
MG18C807 Danfoss A/S © 04/2018 Med ensamrätt. 97
Tabell 7.37 Styrbitar

Installation och kongurat...
VLT® HVAC Basic Drive FC 101
OBS!
Deniera i parameter 8-56 Välj förinställd referens hur bit
00/01 ska sammanföras med motsvarande funktion på
de digitala ingångarna.
Bit 02, DC-broms
Bit 02 = 0: Medför likströmsbroms och stopp. Bromsström
och varaktighet ställs in i parameter 2-01 DC-bromsström
och parameter 2-02 DC-bromstid.
Bit 02 = 1: Ger ramp.
Bit 03, Utrullning
Bit 5 = 0: Frekvensomriktaren släpper omedelbart motorn
(utgångstransistorerna stängs av) så att den utrullar och
stannar.
Bit 03 = 1: Frekvensomriktaren startar motorn om övriga
startvillkor är uppfyllda.
Deniera i parameter 8-50 Välj utrullning hur bit 03 ska
77
sammanföras med motsvarande funktion på de digitala
ingångarna.
Bit 04, Snabbstopp
Bit 04 = 0: Gör att motorvarvtalet rampar ned till stopp
(angivet i parameter 3-81 Snabbstopp, ramptid).
Bit 05, Frys utfrekvens
Bit 05 = 0: Fryser den aktuella utfrekvensen (i Hz). Ändra
den frysta utgångsfrekvensen enbart med hjälp av de
digitala ingångarna [21] Öka varvtal och [22] Minska varvtal
parameter 5-10 Plint 18, digital ingång till
parameter 5-13 Plint 29, digital ingång.
Bit 07, Återställning
Bit 07 = 0: Ingen återställning.
Bit 07 = 1: Återställning efter tripp. Återställning aktiveras
på signalens framank, dvs. vid växling från logisk 0 till
logisk 1.
Bit 08, Jogg
Bit 08 = 1: Parameter 3-11 Joggvarvtal [Hz] bestämmer
utfrekvens.
Bit 09, Val av ramp 1/2
Bit 09 = 0: Ramp 1 är aktiv (parameter 3-41 Ramp 1,
uppramptid till parameter 3-42 Ramp 1, nedramptid).
Bit 09 = 1: Ramp 2 (parameter 3-51 Ramp 2, uppramptid till
parameter 3-52 Ramp 2, nedramptid) är aktiv.
Bit 10, Ogiltiga data/giltiga data
Används för att bestämma om frekvensomriktaren ska
använda eller ignorera styrordet.
Bit 10 = 0: Styrordet ignoreras.
Bit 10 = 1: Styrordet används. Denna funktion är relevant
eftersom telegrammet alltid innehåller styrordet oavsett
vilken typ av telegram det är. Stäng av styrordet om det
inte används vid uppdatering eller läsning av parametrar.
Bit 11, relä 01
Bit 11 = 0: Reläet är inte aktivt.
Bit 11 = 1: Relä 01 aktiveras om [36] Styrord bit 11 har valts
i parameter 5-40 Funktionsrelä.
Bit 12, relä 02
Bit 12 = 0: Relä 02 är inte aktivt.
Bit 12 = 1: Relä 02 aktiveras om [37] Styrord bit 12 har valts
i parameter 5-40 Funktionsrelä.
OBS!
Om Frys utfrekvens är aktivt kan frekvensomriktaren
endast stoppas på följande sätt:
Bit 03 utrullningsstopp.
•
Bit 02, DC-broms.
•
Digital ingång programmerad till [5] DC-broms,
•
inv., [2] Utrullning, inv. eller [3] Utr. och återst.,
inv (parameter 5-10 Plint 18, digital ingång till
parameter 5-13 Plint 29, digital ingång).
Bit 06, Ramp stopp/start
Bit 06 = 0: Orsakar ett stopp och gör att motorvarvtalet
rampas ned till stopp via den valda nedrampparametern.
Bit 06 = 1: Bit 06 tillåter frekvensomriktaren att starta
motorn om övriga startvillkor är uppfyllda.
Deniera i parameter 8-53 Välj start hur bit 06 ska
sammanföras med motsvarande funktion på de digitala
ingångarna.
Bit 13, Menyval
Bit 13 används för att välja mellan de två menykongurationerna enligt Tabell 7.38.
Meny Bit 13
1 0
2 1
Tabell 7.38 Menyval
Funktionen är bara tillgänglig när [9] Ext menyval har valts i
parameter 0-10 Aktiv meny.
Deniera i parameter 8-55 Menyval hur bit 13 ska
sammanföras med motsvarande funktion på de digitala
ingångarna.
Bit 15, Reversering
Bit 15 = 0: Ingen reversering.
Bit 15 = 1: Reversering. I fabriksinställningen är reversering
angett till digital i parameter 8-54 Välj reversering. Bit 15
medför reversering endast när seriell kommunikation, [2]
Logisk ELLER eller [3] Logiskt OCH har valts.
98 Danfoss A/S © 04/2018 Med ensamrätt. MG18C807
 Loading...
Loading...