


ENGINEERING TOMORROW
Design Guide
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com
Inhoud Design Guide
Inhoud
1 Inleiding
1.1 Doel van de design guide
1.2 Document- en softwareversie
1.3 Veiligheidssymbolen
1.4 Afkortingen
1.5 Aanvullende informatiebronnen
1.6 Denities
1.7 Arbeidsfactor
1.8 Conformiteit met regelgeving
1.8.1 CE-markering 10
1.8.2 UL-conformiteit 11
1.8.3 Conformiteit RCM-markering 11
1.8.4 EAC 11
1.8.5 UkrSEPRO 11
2 Veiligheid
2.1 Gekwaliceerd personeel
2.2 Veiligheidsmaatregelen
6
6
6
7
7
7
8
10
10
12
12
12
3 Productoverzicht
3.1 Voordelen
3.1.1 Wat is het voordeel van het gebruik van een frequentieregelaar voor het regelen
van ventilatoren en pompen? 14
3.1.2 Het grote voordeel – energiebesparing 14
3.1.3 Voorbeeld van energiebesparing 14
3.1.4 Vergelijking van energiebesparing 15
3.1.5 Voorbeeld met wisselende ow gedurende 1 jaar 16
3.1.6 Betere regeling 17
3.1.7 Ster-driehoekschakeling of softstarter niet vereist 17
3.1.8 Het gebruik van een frequentieregelaar bespaart geld 17
3.1.9 Zonder frequentieregelaar 18
3.1.10 Met een frequentieregelaar 19
3.1.11 Toepassingsvoorbeelden 20
3.1.12 Variabel luchtvolume 20
3.1.13 De VLT-oplossing 20
3.1.14 Constant luchtvolume 21
3.1.15 De VLT-oplossing 21
14
14
3.1.16 Koeltorenventilator 22
3.1.17 De VLT-oplossing 22
3.1.18 Condensaatpompen 23
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 1
Inhoud
VLT® HVAC Basic Drive FC 101
3.1.19 De VLT-oplossing 23
3.1.20 Primaire pompen 24
3.1.21 De VLT-oplossing 24
3.1.22 Secundaire pompen 26
3.1.23 De VLT-oplossing 26
3.2 Regelingsstructuren
3.2.1 Regelstructuur zonder terugkoppeling 27
3.2.2 PM/EC+-motorbesturing 27
3.2.3 Lokale (Hand On) en externe (Auto On) besturing 27
3.2.4 Regelstructuur met terugkoppeling 28
3.2.5 Terugkoppelingsconversie 28
3.2.6 Gebruik van referenties 29
3.2.7 De terugkoppelingsregelaar van de frequentieregelaar optimaliseren 30
3.2.8 Handmatige aanpassing PI 30
3.3 Omgevingscondities tijdens bedrijf
3.4 Algemene EMC-aspecten
3.4.1 Overzicht van EMC-emissies 36
3.4.2 Emissie-eisen 38
3.4.3 Resultaten EMC-emissietest 38
3.4.4 Overzicht van emissie van harmonischen 40
3.4.5 Emissie-eisen m.b.t. harmonischen 40
3.4.6 Testresultaten harmonischen (emissie) 40
27
30
36
3.4.7 Immuniteitseisen 42
3.5 Galvanische scheiding (PELV)
3.6 Aardlekstroom
3.7 Extreme bedrijfsomstandigheden
3.7.1 Thermische motorbeveiliging (ETR) 44
3.7.2 Thermistoringangen 45
4 Selectie en bestellen
4.1 Typecode
4.2 Opties en accessoires
4.2.1 Lokaal bedieningspaneel (LCP) 48
4.2.2 Montage van LCP in paneelfront 48
4.2.3 IP 21/NEMA type 1-behuizingsset 49
4.2.4 Ontkoppelingsplaat 51
4.3 Bestelnummers
4.3.1 Opties en accessoires 52
4.3.2 Harmonischenlters 53
4.3.3 Extern RFI-lter 55
42
43
44
47
47
48
52
2 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Inhoud Design Guide
5 Installatie
5.1 Elektrische installatie
5.1.1 Aansluiting netvoeding en motor 58
5.1.2 EMC-correcte elektrische installatie 63
5.1.3 Stuurklemmen 65
6 Programmeren
6.1 Inleiding
6.2 Lokaal bedieningspaneel (LCP)
6.3 Menu's
6.3.1 Statusmenu 67
6.3.2 Quick Menu 67
6.3.3 Main Menu 85
6.4 Snel overzetten van parameterinstellingen naar andere frequentieomvormers
6.5 Geïndexeerde parameters uitlezen en programmeren
6.6 Initialiseren naar standaardinstellingen
7 Installatie en setup RS485
56
56
66
66
66
67
86
86
86
87
7.1 RS485
7.1.1 Overzicht 87
7.1.2 Netwerkaansluiting 87
7.1.3 Hardwaresetup voor frequentieregelaar 87
7.1.4 Parameterinstellingen voor Modbus-communicatie 88
7.1.5 EMC-voorzorgsmaatregelen 88
7.2 FC-protocol
7.2.1 Overzicht 89
7.2.2 FC met Modbus RTU 89
7.3 Parameterinstellingen om het protocol in te schakelen
7.4 Berichtframingstructuur FC-protocol
7.4.1 Inhoud van een teken (byte) 89
7.4.2 Telegramstructuur 89
7.4.3 Telegramlengte (LGE) 90
7.4.4 Adres frequentieregelaar (ADR) 90
7.4.5 Datastuurbyte (BCC) 90
7.4.6 Het dataveld 90
87
89
89
89
7.4.7 Het PKE-veld 90
7.4.8 Parameternummer (PNU) 91
7.4.9 Index (IND) 91
7.4.10 Parameterwaarde (PWE) 91
7.4.11 Datatypen die door de frequentieregelaar worden ondersteund 92
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 3
Inhoud
VLT® HVAC Basic Drive FC 101
7.4.12 Conversie 92
7.4.13 Proceswoorden (PCD) 92
7.5 Voorbeelden
7.5.1 Een parameterwaarde schrijven 92
7.5.2 Een parameterwaarde lezen 93
7.6 Overzicht Modbus RTU
7.6.1 Inleiding 93
7.6.2 Overzicht 93
7.6.3 Frequentieregelaar met Modbus RTU 94
7.7 Netwerkconguratie
7.8 Berichtframingstructuur Modbus RTU
7.8.1 Inleiding 94
7.8.2 Telegramstructuur Modbus RTU 95
7.8.3 Start-/stopveld 95
7.8.4 Adresveld 95
7.8.5 Functieveld 95
7.8.6 Dataveld 95
7.8.7 CRC-controleveld 96
7.8.8 Adressering spoelregister 96
92
93
94
94
7.8.9 Toegang via PCD schrijven/lezen 98
7.8.10 De frequentieregelaar besturen 98
7.8.11 Door Modbus RTU ondersteunde functiecodes 99
7.8.12 Uitzonderingscodes Modbus 99
7.9 Toegang krijgen tot parameters
7.9.1 Parameterafhandeling 99
7.9.2 Dataopslag 99
7.9.3 IND (index) 100
7.9.4 Tekstblokken 100
7.9.5 Conversiefactor 100
7.9.6 Parameterwaarden 100
7.10 Voorbeelden
7.10.1 Spoelstatus lezen (01 hex) 100
7.10.2 Eén spoel forceren/schrijven (05 hex) 101
7.10.3 Meerdere spoelen forceren/schrijven (0F hex) 101
7.10.4 Registers lezen (03 hex) 101
7.10.5 Eén register schrijven (06 hex) 102
99
100
7.10.6 Meerdere registers schrijven (10 hex) 102
7.10.7 Meerdere registers lezen/schrijven (17 hex) 103
7.11 Danfoss FC-stuurproel
7.11.1 Stuurwoord volgens het FC-proel (8-10 Control Prole = FC prole) 103
4 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
103
Inhoud Design Guide
7.11.2 Statuswoord volgens FC-proel (STW) 105
7.11.3 Referentiewaarde bussnelheid 106
8 Algemene specicaties
8.1 Mechanische afmetingen
8.1.1 Installatie naast elkaar 107
8.1.2 Afmetingen frequentieregelaar 108
8.1.3 Afmetingen voor transport 111
8.1.4 Externe installatie 112
8.2 Specicaties netvoeding
8.2.1 3 x 200-240 V AC 113
8.2.2 3 x 380-480 V AC 114
8.2.3 3 x 525-600 V AC 118
8.3 Zekeringen en circuitbreakers
8.4 Algemene technische gegevens
8.4.1 Netvoeding (L1, L2, L3) 121
8.4.2 Motoruitgang (U, V, W) 121
8.4.3 Kabellengte en dwarsdoorsnede 121
8.4.4 Digitale ingangen 122
8.4.5 Analoge ingangen 122
107
107
113
119
121
8.4.6 Analoge uitgang 122
8.4.7 Digitale uitgang 122
8.4.8 Stuurkaart, RS485 seriële communicatie 123
8.4.9 Stuurkaart, 24 V DC-uitgang 123
8.4.10 Relaisuitgang 123
8.4.11 Stuurkaart, 10 V DC-uitgang 124
8.4.12 Omgevingscondities 124
8.5 dU/dt
Trefwoordenregister
125
128
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 5
Inleiding
VLT® HVAC Basic Drive FC 101
11
1 Inleiding
1.1 Doel van de design guide
Deze design guide is bedoeld voor project- en systeemengineers, ontwerpadviseurs en toepassings- en
productspecialisten. De handleiding bevat technische
informatie die u helpt om inzicht te krijgen in de
mogelijkheden van de frequentieregelaar voor integratie in
motorregel- en bewakingssystemen. Gegevens over de
bediening, vereisten en aanbevelingen voor systeemintegratie worden beschreven. Er wordt informatie gegeven
over ingangsvermogenskenmerken, uitgang voor motorregeling en omgevingsomstandigheden bij gebruik van de
frequentieregelaar.
Daarnaast worden de volgende zaken besproken:
Veiligheidsfuncties
•
Bewaking van foutcondities
•
Rapportage van de bedrijfsstatus
•
Seriële-communicatieopties
•
Programmeerbare opties en functies
•
Ook ontwerpgegevens komen aan bod, zoals:
Locatievereisten
•
Kabels
•
Zekeringen
•
Stuurkabels
•
Grootte en gewicht van eenheden
•
Andere kritische informatie die nodig is voor het
•
plannen van de systeemintegratie
Op basis van de uitgebreide productgegevens kunt u in de
ontwerpfase een goed doordacht systeem ontwikkelen met
optimale functionaliteit en maximaal rendement.
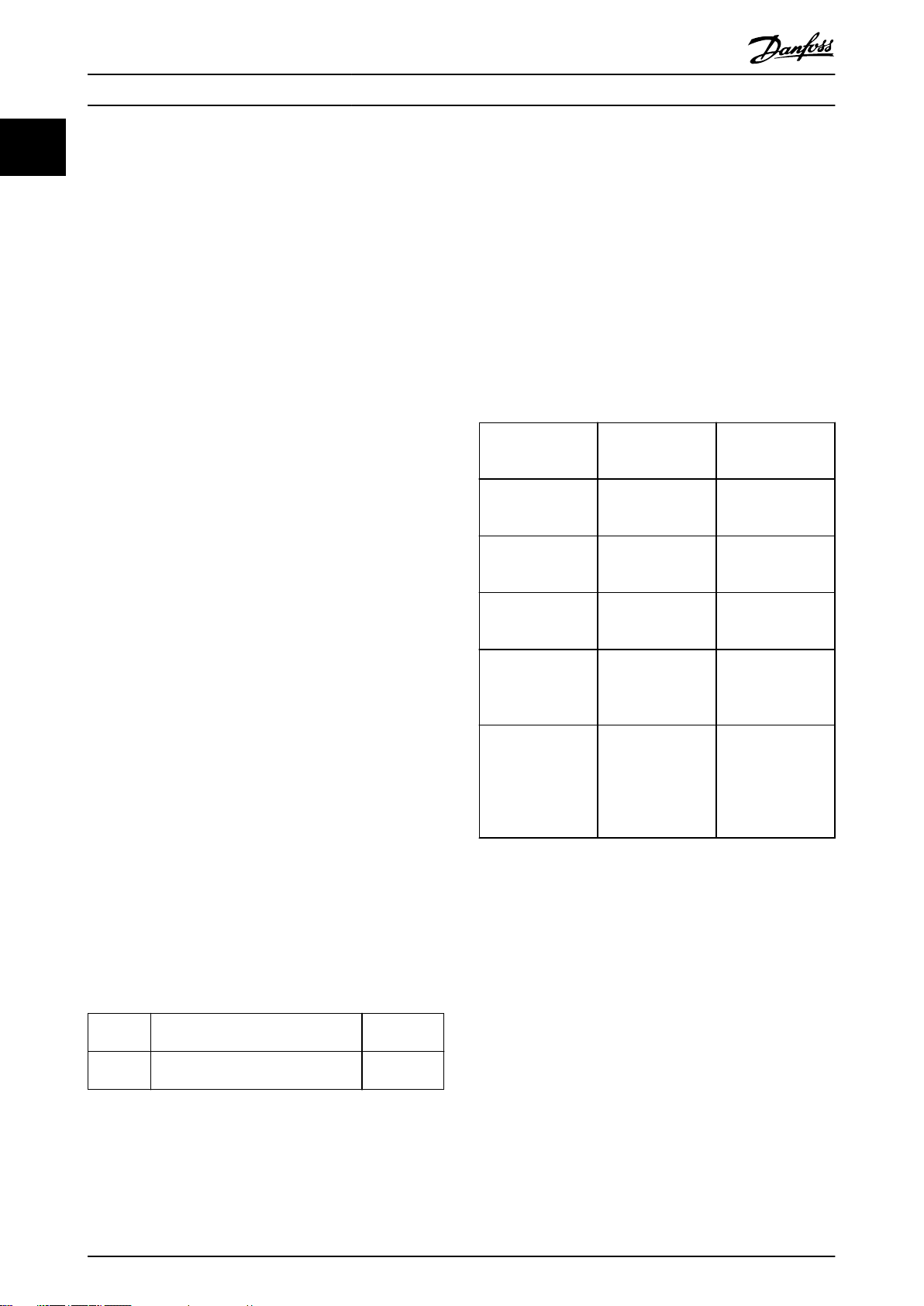
Vanaf softwareversie 4.0x (productieweek 33 2017 en later)
is de variabeltoerentalfunctie voor de koelventilator van
het koellichaam geïmplementeerd in frequentieregelaars
met een vermogensklasse tot 22 kW (30 pk) 400 V IP 20 en
een vermogensklasse tot 18,5 kW (25 pk) 400 V IP 54. Voor
gebruik van deze functie moeten de software en hardware
worden bijgewerkt. De functie legt ook beperkingen op
ten aanzien van achterwaartse compatibiliteit voor
behuizingsgrootte H1-H5 en I2-I4. Zie Tabel 1.2 voor de
beperkingen.
Software-
compatibiliteit
Oude software
(OSS-bestand versie
3.xx en lager)
Nieuwe software
(OSS-bestand versie
4.xx of hoger)
Hardware-
compatibiliteit
Oude voedingskaart
(productieweek 33
2017 of eerder)
Nieuwe
voedingskaart
(productieweek 34
2017 of later)
Tabel 1.2 Software- en hardwarecompatibiliteit
Oude stuurkaart
(productieweek 33
2017 of eerder)
Ja Nee
Nee Ja
Oude stuurkaart
(productieweek 33
2017 of eerder)
Ja (alleen softwareversie 3.xx of lager)
Ja (software MOET
worden bijgewerkt
naar versie 3.xx of
lager, ventilator
werkt continu op
volle toeren)
Nieuwe stuurkaart
(productieweek 34
2017 of later)
Nieuwe stuurkaart
(productieweek 34
2017 of later)
Ja (software MOET
worden bijgewerkt
naar versie 4.xx of
hoger)
Ja (alleen software-
versie 4.xx of hoger)
VLT® is een gedeponeerd handelsmerk.
Document- en softwareversie
1.2
Deze handleiding wordt regelmatig herzien en bijgewerkt.
Alle suggesties voor verbetering zijn welkom.
Versie Opmerkingen Software-
versie
MG18C8xx Bijgewerkt voor nieuwe software- en
hardwareversie.
Tabel 1.1 Document- en softwareversie
6 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
4.2x
Inleiding Design Guide
1.3 Veiligheidssymbolen
In dit document worden de volgende symbolen gebruikt:
WAARSCHUWING
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot ernstig of dodelijk letsel.
VOORZICHTIG
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot licht of matig letsel. Kan tevens worden
gebruikt om te waarschuwen tegen onveilige werkpraktijken.
LET OP
Geeft belangrijke informatie aan, waaronder situaties die
kunnen leiden tot schade aan apparatuur of
eigendommen.
1.4 Afkortingen
°C
°F
A Ampère
AC Wisselstroom
AMA Automatische aanpassing motorgegevens
AWG American Wire Gauge
DC Gelijkstroom
EMC Elektromagnetische compatibiliteit
ETR Elektronisch thermisch relais
FC Frequentieregelaar
f
M,N
kg Kilogram
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
kHz Kilohertz
LCP Lokaal bedieningspaneel
m Meter
mA Milliampère
MCT Motion Control Tool
mH Inductantie in millihenry
min Minuut
ms Milliseconde
nF Nanofarad
Nm Newtonmeter
n
s
P
M,N
PCB Printed Circuit Board – printkaart
Graden Celsius
Graden Fahrenheit
Nominale motorfrequentie
Nominale uitgangsstroom van de inverter
Stroomgrens
Nominale motorstroom
De maximale uitgangsstroom
De nominale uitgangsstroom die door de
frequentieregelaar wordt geleverd
Synchroonmotortoerental
Nominaal motorvermogen
PELV Protective Extra Low Voltage
Regeneratie Regeneratieklemmen
tpm Toeren per minuut
s Seconde
T
LIM
U
M,N
V Volt
Tabel 1.3 Afkortingen
Koppelbegrenzing
Nominale motorspanning
1.5 Aanvullende informatiebronnen
De VLT® HVAC Basic Drive FC 101 Snelgids bevat
•
basisinformatie over mechanische afmetingen,
installatie en programmering.
®
De VLT
•
handleiding geeft informatie over het
programmeren en bevat een uitgebreide
beschrijving van de parameters.
Danfoss VLT® Energy Box-software. Selecteer PC
•
Software Download op www.danfoss.com/en/
service-and-support/downloads/dds/vlt-energy-box/.
Met de VLT® Energy Box-software kunt u het
energieverbruik van HVAC-ventilatoren en pompen die met behulp van Danfoss
frequentieregelaars worden geregeld, vergelijken
met het energieverbruik van andere debietregelingsmethoden. Gebruik dit hulpmiddel voor een
nauwkeurige prognose van de kosten,
besparingen en terugverdientijd bij gebruik van
Danfoss frequentieregelaars voor HVACventilatoren, -pompen en -koeltorens.
De technische documentatie van Danfoss is in elektronische vorm beschikbaar op de documentatie-cd die bij
het product wordt geleverd. Een gedrukte versie is te
verkrijgen bij de lokale verkoopkantoren van Danfoss.
Ondersteuning voor MCT 10 setupsoftware
Download de software op www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Voer tijdens het installatieproces van de software de
toegangscode 81463800 in om de FC 101-functionaliteit te
activeren. Om de FC 101-functionaliteit te gebruiken is
geen licentiecode vereist.
De nieuwste software bevat niet altijd de laatste updates
voor frequentieregelaars. Neem voor de laatste updates (in
de vorm van *.upd-bestanden) contact op met een
verkoopkantoor bij u in de buurt of download de frequentieregelaarupdates op www.danfoss.com/en/service-and-
support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
HVAC Basic Drive FC 101 Programmeer-
1 1
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 7
Inleiding
VLT® HVAC Basic Drive FC 101
11
1.6 Denities
Losbreekkoppel
Frequentieregelaar
I
VLT, MAX
De maximale uitgangsstroom.
I
VLT,N
De nominale uitgangsstroom die door de frequentieregelaar wordt geleverd.
U
VLT, MAX
De maximale uitgangsspanning.
Ingang
De aangesloten motor kan worden gestart en gestopt via
het LCP en de digitale ingangen. Functies zijn in 2 groepen
verdeeld, zoals beschreven in Tabel 1.4. De functies in
groep 1 hebben een hogere prioriteit dan de functies in
groep 2.
Groep 1
Groep 2
Tabel 1.4 Stuurcommando's
Reset, vrijloop na stop, reset en vrijloop na stop,
snelle stop, DC-rem, stop en de [O]-toets.
Start, pulsstart, omkeren, start omkeren, jog en
uitgang vasthouden.
Afbeelding 1.1 Losbreekkoppel
η
VLT
Het rendement van de frequentieregelaar wordt gedenieerd als de verhouding tussen het uitgangsvermogen en
Motor
f
JOG
De motorfrequentie wanneer de jogfunctie is geactiveerd
(via digitale klemmen).
f
M
De motorfrequentie.
f
MAX
De maximale motorfrequentie.
f
MIN
De minimale motorfrequentie.
f
M,N
De nominale motorfrequentie (gegevens typeplaatje).
I
M
De motorstroom.
I
M,N
De nominale motorstroom (gegevens typeplaatje).
n
M,N
Het nominale motortoerental (gegevens typeplaatje).
P
M,N
Het nominale motorvermogen (gegevens typeplaatje).
U
M
De momentele motorspanning.
U
M,N
De nominale motorspanning (gegevens typeplaatje).
het ingangsvermogen.
Startdeactiveercommando
Een stopcommando behorend tot groep 1 van de
stuurcommando's; zie Tabel 1.4.
Stopcommando
Zie Tabel 1.4.
Analoge referentie
Een signaal dat naar analoge ingang 53 of 54 wordt
gestuurd, Dit kan spanning of stroom zijn.
Stroomingang: 0-20 mA en 4-20 mA
•
Spanningsingang: 0-10 V DC
•
Busreferentie
Een signaal dat naar de seriële-communicatiepoort (FCpoort) wordt gestuurd.
Digitale referentie
Een gedenieerde, vooraf ingestelde referentie die kan
worden ingesteld van -100% tot +100% van het referentiebereik. Selectie van 8 vooraf ingestelde referenties via de
digitale klemmen.
Ref
MAX
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 100% van de volledige schaal (gewoonlijk 10 V,
20 mA) en de totale referentie. De maximumreferentie die
is ingesteld in parameter 3-03 Max. referentie.
Ref
MIN
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 0% (gewoonlijk 0 V, 0 mA, 4 mA) en de totale
referentie. De minimumreferentiewaarde wordt ingesteld in
parameter 3-02 Minimumreferentie.
8 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Inleiding Design Guide
Analoge ingangen
De analoge ingangen worden gebruikt om diverse functies
van de frequentieregelaar te besturen.
Er zijn 2 typen analoge ingangen:
Stroomingang: 0-20 mA en 4-20 mA
•
Spanningsingang: 0-10 V DC
•
Analoge uitgangen
De analoge uitgangen kunnen een signaal van 0-20 mA,
4-20 mA of een digitaal signaal leveren.
Automatische aanpassing motorgegevens, AMA
Het AMA-algoritme bepaalt de elektrische parameters van
de aangesloten motor bij stilstand en compenseert de
weerstand op basis van de lengte van de motorkabel.
Digitale ingangen
De digitale ingangen kunnen worden gebruikt voor het
besturen van diverse functies van de frequentieregelaar.
Digitale uitgangen
De frequentieregelaar bevat 2 halfgeleideruitgangen die
een signaal van 24 V DC (maximaal 40 mA) kunnen
leveren.
Relaisuitgangen
De frequentieregelaar heeft 2 programmeerbare relaisuitgangen.
ETR
Elektronisch thermisch relais is een berekening van de
thermische belasting op basis van de actuele belasting en
de tijd. Het doel hiervan is het schatten van de motortemperatuur en het voorkomen van oververhitting van de
motor.
Initialisatie
Bij initialisatie (parameter 14-22 Bedrijfsmodus) worden de
programmeerbare parameters van de frequentieregelaar
teruggezet naar de standaardinstellingen.
Communicatieparameters, de foutlog of de brandmoduslog
worden niet geïnitialiseerd via
Parameter 14-22 Bedrijfsmodus.
Intermitterende belastingscyclus
De nominale intermitterende belasting heeft betrekking op
een reeks belastingscycli. Elke cyclus bestaat uit een
belaste en een onbelaste periode. De werking kan een
periodieke cyclus of een niet-periodieke cyclus zijn.
LCP
Het lokale bedieningspaneel (LCP) biedt een complete
interface voor de bediening en programmering van de
frequentieregelaar. Het bedieningspaneel is afneembaar op
IP 20-eenheden en vast op IP 54-eenheden. Het kan op
maximaal 3 m (9,8 ft) van de frequentieregelaar worden
geïnstalleerd, d.w.z. op een frontpaneel, met behulp van de
optionele installatieset.
lsb
Minst signicante bit.
MCM
Staat voor Mille Circular Mil, een Amerikaanse meeteenheid
voor de doorsnede van kabels. 1 MCM = 0,5067 mm².
msb
Meest signicante bit.
Online-/oineparameters
Wijzigingen van onlineparameters worden meteen na het
wijzigen van de gegevenswaarde geactiveerd. Druk op [OK]
om oineparameters te activeren.
PI-regelaar
De PI-regelaar handhaaft de gewenste snelheid, druk,
temperatuur en dergelijke door de uitgangsfrequentie aan
te passen aan wijzigingen in de belasting.
RCD
Reststroomapparaat.
Setup
Parameterinstellingen kunnen worden opgeslagen in 2
setups. Het is mogelijk om tussen de 2 parametersetups te
schakelen en 1 setup te bewerken terwijl de andere setup
actief is.
Slipcompensatie
De frequentieregelaar compenseert voor het slippen van
de motor door verhoging van de frequentie op basis van
de gemeten motorbelasting, waardoor het motortoerental
vrijwel constant wordt gehouden.
Smart Logic Control (SLC)
De SLC is een reeks door de gebruiker gedenieerde acties
die wordt uitgevoerd wanneer de bijbehorende, door de
gebruiker gedenieerde gebeurtenissen door de SLC
worden geëvalueerd als TRUE
Thermistor
Een temperatuurafhankelijke weerstand die geplaatst
wordt op plaatsen waar de temperatuur moet worden
bewaakt (frequentieregelaar of motor).
Uitschakeling (trip)
Een toestand die zich voordoet in foutsituaties,
bijvoorbeeld als de frequentieregelaar te maken krijgt met
overtemperatuur of wanneer de frequentieregelaar de
motor, het proces of het mechanisme beschermt. Een
herstart is niet mogelijk totdat de oorzaak van de fout is
weggenomen en de uitschakelingsstatus is opgeheven
door het activeren van de reset of, in sommige gevallen,
doordat een automatische reset is geprogrammeerd.
Gebruik een uitschakeling (trip) niet voor persoonlijke
veiligheid.
1 1
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 9
Inleiding
VLT® HVAC Basic Drive FC 101
11
Uitschakeling met blokkering
Conformiteit met regelgeving
1.8
Een toestand die zich voordoet in foutsituaties waarbij de
frequentieregelaar zichzelf beschermt en fysiek ingrijpen
noodzakelijk is, bijvoorbeeld als de frequentieregelaar
Frequentieregelaars worden ontworpen volgens de
richtlijnen in deze sectie.
wordt kortgesloten op de uitgang. Een uitschakeling met
blokkering kan alleen worden opgeheven door de
1.8.1 CE-markering
netvoeding te onderbreken, de oorzaak van de fout weg te
nemen en de frequentieregelaar opnieuw aan te sluiten op
het net. Een herstart is niet mogelijk totdat de uitschakelingsstatus is opgeheven door het activeren van de reset of,
in sommige gevallen, doordat een automatische reset is
geprogrammeerd. Gebruik een uitschakeling met
De CE-markering (Communauté Européenne) geeft aan dat
de fabrikant van het product voldoet aan alle relevante EUrichtlijnen. De EU-richtlijnen die van toepassing zijn op het
ontwerp en de productie van frequentieregelaars, staan
vermeld in Tabel 1.5.
blokkering niet voor persoonlijke veiligheid.
VT-karakteristieken
Variabel-koppelkarakteristieken die worden gebruikt voor
pompen en ventilatoren.
+
VVC
LET OP
De CE-markering heeft geen betrekking op de kwaliteit
van het product. Het is niet mogelijk om technische
specicaties af te leiden uit de CE-markering.
In vergelijking met een standaardregeling van de
spanning-frequentieverhouding zorgt Voltage Vector
Control (VVC+) voor betere dynamische prestaties en
stabiliteit, zowel bij een wijziging van de toerentalreferentie als met betrekking tot het belastingskoppel.
Arbeidsfactor
1.7
De arbeidsfactor geeft aan in hoeverre een frequentieregelaar de netvoeding belast. De arbeidsfactor is de
verhouding tussen I1 en I
en I
de totale RMS-stroom met inbegrip van
RMS
, waarbij I1 de basisstroom is
RMS
harmonische stromen. Hoe lager de arbeidsfactor, hoe
hoger de I
voor dezelfde kW-prestatie.
RMS
LET OP
Frequentieregelaars met een ingebouwde veiligheidsfunctie moeten voldoen aan de Machinerichtlijn.
EU-richtlijn Versie
Laagspanningsrichtlijn 2014/35/EU
EMC-richtlijn 2014/30/EU
ErP-richtlijn
Tabel 1.5 EU-richtlijnen die van toepassing zijn op
frequentieregelaars
Conformiteitsverklaringen zijn leverbaar op aanvraag.
Arbeids−factor =
3 × U × I1× cosϕ
3 × U × I
RMS
1.8.1.1 Laagspanningsrichtlijn
De arbeidsfactor voor 3-faseregeling:
De Laagspanningsrichtlijn is van toepassing op alle
Arbeids− factor =
2
I
RMS
= I
+ I
1
2
+ I
5
I1 × cosϕ1
I
RMS
2
+ . . + I
7
I
1
=
aangeziencosϕ1 = 1
I
RMS
2
n
Een hoge arbeidsfactor betekent dat de verschillende
harmonische stromen zwak zijn.
De ingebouwde DC-spoelen van de frequentieregelaar
zorgen voor een hoge arbeidsfactor, waardoor de belasting
elektrische apparaten in het spanningsbereik van 50-1000
V AC en 75-1600 V DC.
De richtlijn heeft tot doel om de persoonlijke veiligheid te
waarborgen en schade aan eigendommen te voorkomen
bij gebruik van elektrische apparatuur die correct is
geïnstalleerd en correct wordt onderhouden, in de
toepassing waarvoor de apparatuur is bedoeld.
op de netvoeding wordt geminimaliseerd.
10 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
089
Inleiding Design Guide
1.8.1.2 EMC-richtlijn
De EMC-richtlijn (elektromagnetische compatibiliteit) heeft
tot doel om de elektromagnetische interferentie te
beperken en de immuniteit van elektrische apparatuur en
installaties te verbeteren. De basiseis voor bescherming
van EMC-richtlijn 2014/30/EU stelt dat apparaten die
elektromagnetische interferentie (EMI) genereren, of
waarvan de werking door EMI kan worden beïnvloed, zo
moeten zijn ontworpen dat het genereren van elektromagnetische interferentie wordt beperkt en dat ze een
adequaat niveau van ongevoeligheid ten opzichte van EMI
bieden wanneer ze correct worden geïnstalleerd en
onderhouden, en worden gebruikt zoals bedoeld.
Elektrische apparaten die zelfstandig worden gebruikt of
deel uitmaken van een systeem, moeten zijn voorzien van
de CE-markering. Systemen hoeven niet te zijn voorzien
van de CE-markering, maar moeten wel voldoen aan de
basiseisen voor bescherming volgens de EMC-richtlijn.
1.8.1.3 ErP-richtlijn
De ErP-richtlijn is de Europese Ecodesignrichtlijn voor
energiegerelateerde producten. De richtlijn denieert de
eisen voor ecologisch ontwerp voor energiegerelateerde
producten, inclusief frequentieregelaars. De richtlijn heeft
tot doel om het energierendement en het milieubeschermingsniveau te verhogen, waarbij tevens de zekerheid van
de energievoorziening wordt versterkt. De milieueecten
van energiegerelateerde producten omvatten het energieverbruik gedurende de volledige levensduur van het
product.
1.8.2 UL-conformiteit
UL Listed
1.8.3 Conformiteit RCM-markering
Afbeelding 1.3 RCM-markering
De RCM-markering geeft aan dat het product voldoet aan
de relevante technische normen voor elektromagnetische
compatibiliteit (EMC). Een RCM-markering is vereist voor
elektrische en elektronische producten die op de markt
worden gebracht in Australië en Nieuw-Zeeland. De RCMregelgeving heeft alleen betrekking op emissies via
geleiding en straling. Voor frequentieregelaars zijn de in
EN-IEC 61800-3 gespeciceerde emissielimieten van
toepassing. Op verzoek kan een conformiteitsverklaring
worden afgegeven.
1.8.4 EAC
Afbeelding 1.4 EAC-markering
De EurAsian Conformity (EAC)-markering geeft aan dat het
product voldoet aan alle vereisten en technische
voorschriften die op het product van toepassing zijn
volgens de Eurasian Customs Union, een douane-unie die
bestaat uit de lidstaten van de Euraziatische Economische
Unie.
Het EAC-logo moet zowel op het productlabel als op het
verpakkingslabel worden aangebracht. Alle producten die
binnen de EAC-zone worden gebruikt, moeten bij Danfoss
in de EAC-zone worden aangeschaft.
1 1
Afbeelding 1.2 UL
1.8.5 UkrSEPRO
LET OP
IP 54-eenheden zijn niet gecerticeerd voor UL.
De frequentieregelaar voldoet aan de eisen van UL 508C
ten aanzien van het behoud van het thermische geheugen.
Zie de sectie Thermische motorbeveiliging in de productspecieke design guide voor meer informatie.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 11
Afbeelding 1.5 UkrSEPRO
Het UKrSEPRO-certicaat garandeert de kwaliteit en
veiligheid van zowel producten als diensten, naast productiestabiliteit, volgens de Oekraïense regelgevingsnormen.
Het UkrSepro-certicaat is een verplicht douanedocument
voor alle producten die het grondgebied van Oekraïne
binnenkomen of verlaten.
Veiligheid
VLT® HVAC Basic Drive FC 101
2 Veiligheid
22
2.1 Gekwaliceerd personeel
Een probleemloze en veilige werking van de frequentieregelaar is alleen mogelijk als de frequentieregelaar op
correcte en betrouwbare wijze wordt vervoerd, opgeslagen,
geïnstalleerd, gebruikt en onderhouden. Deze apparatuur
mag uitsluitend worden geïnstalleerd of bediend door
gekwaliceerd personeel.
Gekwaliceerd personeel is gedenieerd als opgeleide
medewerkers die bevoegd zijn om apparatuur, systemen
en circuits te installeren, in bedrijf te stellen en te
onderhouden volgens relevante wetten en voorschriften.
Het personeel moet tevens bekend zijn met de instructies
en veiligheidsmaatregelen die in deze handleiding staan
beschreven.
2.2 Veiligheidsmaatregelen
WAARSCHUWING
HOGE SPANNING
Frequentieregelaars bevatten hoge spanning wanneer ze
zijn aangesloten op een netingang, DC-voeding of
loadsharing. Als installatie, opstarten en onderhoud niet
worden uitgevoerd door gekwaliceerd personeel, kan
dat leiden tot ernstig of dodelijk letsel.
Installatie, opstarten en onderhoud mogen
•
uitsluitend worden uitgevoerd door gekwaliceerd personeel.
Controleer met een geschikt spanningsmeetap-
•
paraat of er geen spanning meer op de
frequentieregelaar staat voordat u service- of
reparatiewerkzaamheden gaat uitvoeren.
WAARSCHUWING
ONBEDOELDE START
Wanneer de frequentieregelaar is aangesloten op de
netvoeding, DC-voeding of loadsharing, kan de motor op
elk moment starten. Een onbedoelde start tijdens
programmeer-, onderhouds- of reparatiewerkzaamheden
kan leiden tot ernstig of dodelijk letsel of tot schade aan
apparatuur of eigendommen. De motor kan worden
gestart door een externe schakelaar, een veldbuscommando, een ingangsreferentiesignaal vanaf het LCP
of LOP, via externe bediening met MCT 10 setupsoftware
of door het opheen van een foutconditie.
Om een onbedoelde motorstart te voorkomen:
Druk op [O/Reset] op het LCP voordat u
•
parameters gaat programmeren.
Onderbreek de netvoeding naar de frequentie-
•
regelaar.
Zorg dat de frequentieregelaar, motor en
•
eventuele door de motor aangedreven
werktuigen volledig bedraad en gemonteerd
zijn voordat u de frequentieregelaar aansluit op
de netvoeding, DC-voeding of loadsharing.
WAARSCHUWING
ONTLADINGSTIJD
De frequentieregelaar bevat DC-tussenkringcondensatoren waarop spanning kan blijven staan, ook wanneer
de frequentieregelaar niet van spanning wordt voorzien.
Er kan hoge spanning aanwezig zijn, ook wanneer de
waarschuwingsleds uit zijn. Als u de aangegeven
wachttijd na afschakeling niet in acht neemt voordat u
onderhouds- of reparatiewerkzaamheden uitvoert, kan
dat leiden tot ernstig of dodelijk letsel.
Stop de motor.
•
Schakel de netvoeding en externe DC-tussen-
•
kringvoedingen af, inclusief backupvoedingen,
UPS-eenheden en DC-tussenkringaansluitingen
naar andere frequentieregelaars.
Onderbreek de voeding naar de PM-motor of
•
vergrendel de motor.
Wacht tot de condensatoren volledig ontladen
•
zijn. De vereiste minimale wachttijd staat
vermeld in Tabel 2.1.
Controleer met een geschikt spanningsmeetap-
•
paraat of de condensatoren volledig ontladen
zijn voordat u service- of reparatiewerkzaamheden gaat uitvoeren.
12 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Veiligheid Design Guide
Spanning [V] Vermogensbereik [kW
(pk)]
3 x 200 0,25-3,7 (0,33-5) 4
3 x 200 5,5-11 (7-15) 15
3 x 400 0,37-7,5 (0,5-10) 4
3 x 400 11–90 (15–125) 15
3 x 600 2,2-7,5 (3-10) 4
3 x 600 11–90 (15–125) 15
Tabel 2.1 Ontladingstijd
Minimale wachttijd
(minuten)
WAARSCHUWING
GEVAAR VOOR LEKSTROOM
De aardlekstroom bedraagt meer dan 3,5 mA. Een
onjuiste aarding van de frequentieregelaar kan leiden tot
ernstig of dodelijk letsel.
Zorg dat de apparatuur correct is geaard door
•
een erkende elektrisch installateur.
WAARSCHUWING
GEVAARLIJKE APPARATUUR
Het aanraken van draaiende assen en elektrische
apparatuur kan leiden tot ernstig of dodelijk letsel.
Installatie, opstarten en onderhoud mogen
•
uitsluitend worden uitgevoerd door hiervoor
opgeleid en gekwaliceerd personeel.
Zorg dat alle elektrische werkzaamheden
•
worden uitgevoerd volgens de nationale en
lokale elektriciteitsvoorschriften.
Volg de procedures in deze handleiding.
•
2 2
VOORZICHTIG
GEVAAR BIJ INTERNE FOUT
Een interne fout in de frequentieregelaar kan leiden tot
ernstig letsel als de frequentieregelaar niet goed is
gesloten.
Controleer voordat u de spanning inschakelt of
•
alle veiligheidsafdekkingen op hun plaats zitten
en stevig zijn vastgezet.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 13
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Productoverzicht
3 Productoverzicht
3.1 Voordelen
VLT® HVAC Basic Drive FC 101
33
3.1.1 Wat is het voordeel van het gebruik
van een frequentieregelaar voor het
regelen van ventilatoren en pompen?
Een frequentieregelaar maakt gebruik van het feit dat
centrifugaalventilatoren en -pompen de proportionaliteitswetten voor dergelijke ventilatoren en pompen volgen. Zie
hoofdstuk 3.1.3 Voorbeeld van energiebesparing voor meer
informatie.
3.1.2 Het grote voordeel –
energiebesparing
Het grootste voordeel van het gebruik van een frequentieregelaar voor het regelen van het toerental van
ventilatoren en pompen is de besparing op de energiekosten.
In vergelijking met alternatieve regelsystemen en technieken is een frequentieregelaar hét
energiebesparingssysteem voor het regelen van ventilatoren pompsystemen.
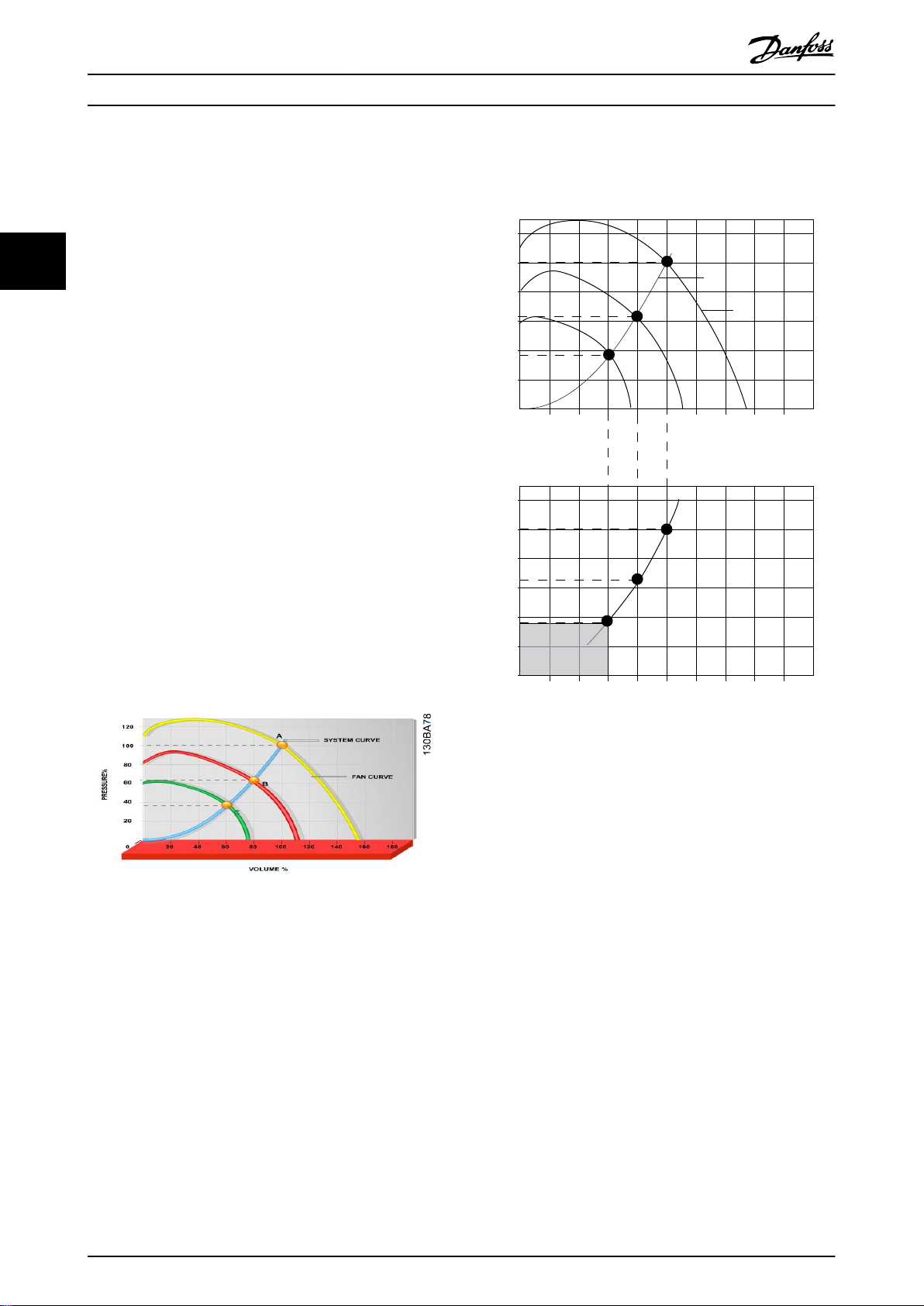
Afbeelding 3.1 Ventilatorcurves (A, B en C) voor
gereduceerde ventilatorvolumes
Afbeelding 3.2 Energiebesparingen met een frequentieregelaaroplossing
In typische toepassingen is een energiebesparing van meer
dan 50% haalbaar wanneer een frequentieregelaar wordt
gebruikt om de ventilatorcapaciteit te verlagen naar 60%.
3.1.3 Voorbeeld van energiebesparing
In Afbeelding 3.3 is te zien dat de ow wordt geregeld door
wijziging van het toerental. Bij een toerentalreductie van
slechts 20% ten opzichte van het nominale toerental wordt
ook de ow met 20% verlaagd. Dat komt omdat de ow
recht evenredig is aan het toerental. Het stroomverbruik
neemt echter af met 50%.
Als het betreende systeem slechts een paar dagen per
jaar een ow hoeft te leveren die gelijk is aan 100%, terwijl
het gemiddelde de rest van het jaar onder de 80% van de
nominale ow ligt, bedraagt de hoeveelheid bespaarde
energie zelfs meer dan 50%.
14 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
n
100%
50%
25%
12,5%
50% 100%
80%
80%
175HA208.10
Power ~n
3
Pressure ~n
2
Flow ~n
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Productoverzicht Design Guide
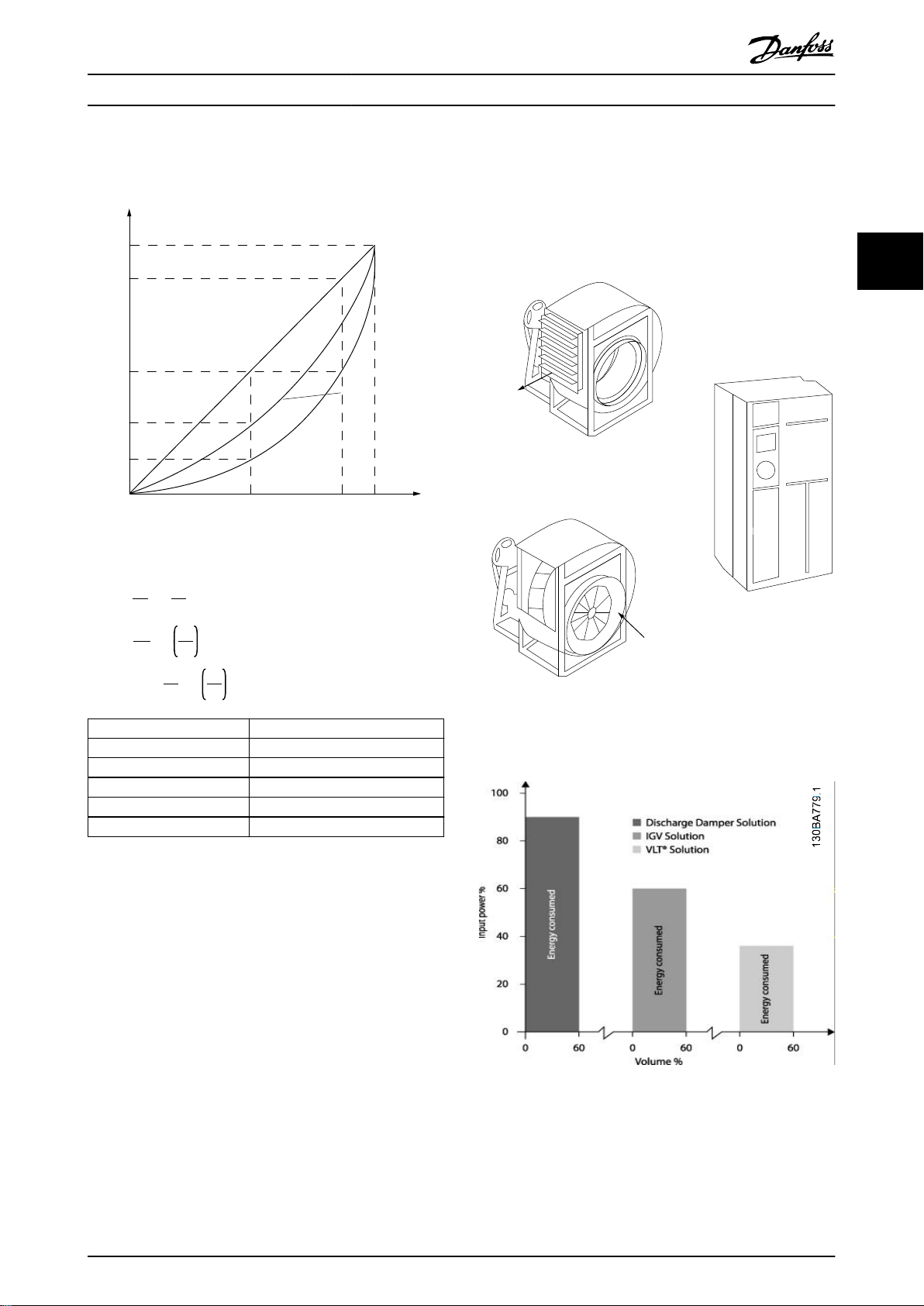
Afbeelding 3.3 laat zien hoe ow, druk en energieverbruik
afhankelijk zijn van het toerental.
Afbeelding 3.3 Proportionaliteitswetten
Q
n
1
Flow:
Druk:
Vermogen:
Q = ow P = vermogen
Q1 = nominale ow P1 = nominaal vermogen
Q2 = gereduceerde ow P2 = gereduceerd vermogen
H = druk n = snelheidsregeling
H1 = nominale druk n1 = nominaal toerental
H2 = gereduceerde druk n2 = gereduceerd toerental
1
=
Q
n
2
2
H
1
=
H
2
2
n
1
n
2
P
1
=
P
2
3
n
1
n
2
Afbeelding 3.3 toont de typische energiebesparing die kan
worden behaald met behulp van 3 bekende oplossingen
waarbij het ventilatorvolume wordt verlaagd tot 60%.
Zoals in de graek is af te lezen, kan in typische toepassingen een energiebesparing van meer dan 50% worden
behaald.
3 3
Afbeelding 3.4 De 3 standaardsystemen voor energiebesparing
Tabel 3.1 De proportionaliteitswetten
3.1.4 Vergelijking van energiebesparing
De frequentieregelaaroplossing van Danfoss biedt
aanzienlijke besparingen ten opzichte van traditionele
energiebesparende oplossingen, zoals een oplossing met
regelkleppen of inlaatschoepen (IGV). Dat komt doordat de
frequentieregelaar in staat is om het ventilatortoerental te
regelen op basis van de thermische belasting op het
systeem en omdat de frequentieregelaar een ingebouwde
functie heeft waardoor de frequentieregelaar kan fungeren
als een gebouwbeheersysteem (GBS).
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 15
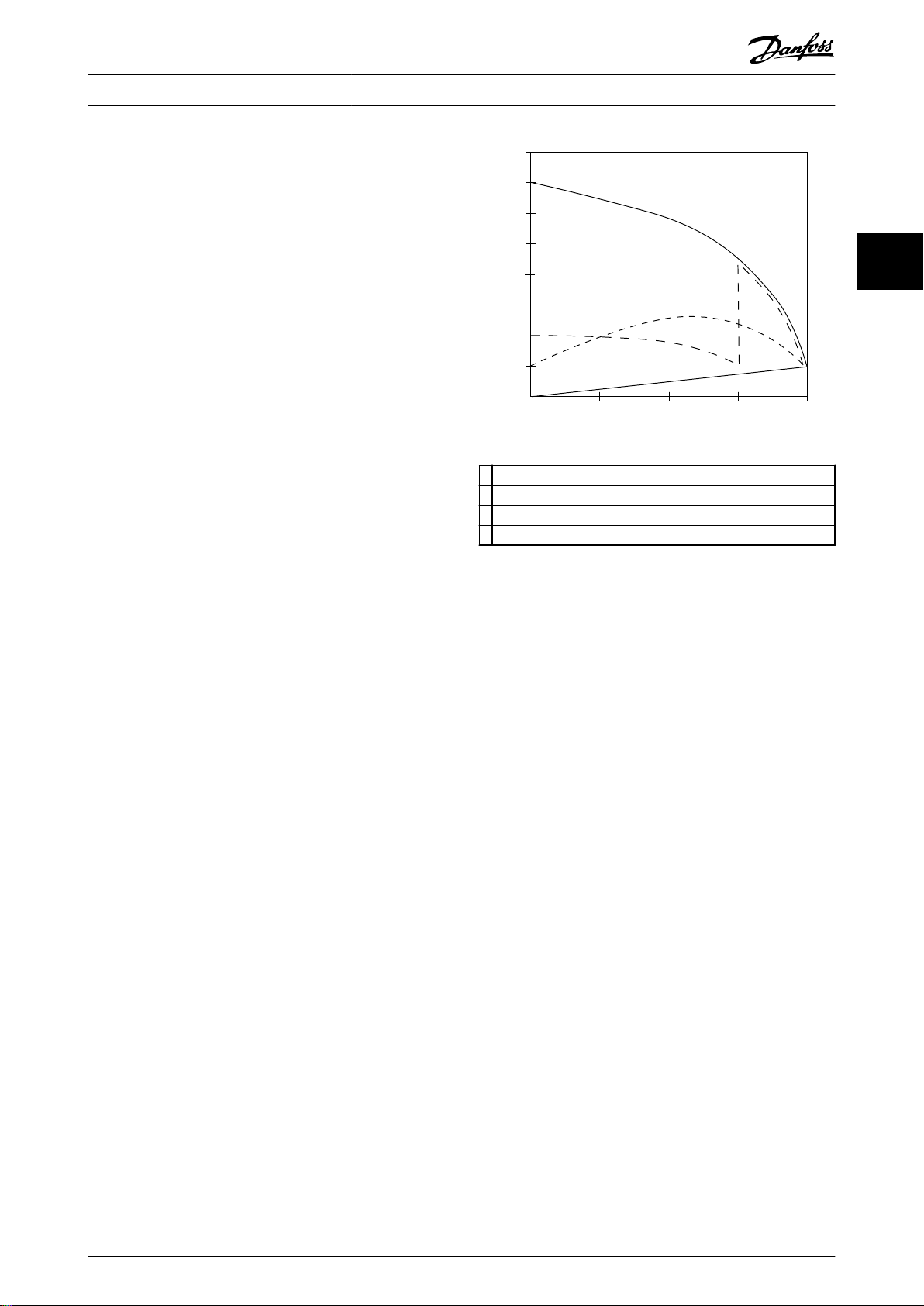
Afbeelding 3.5 Energiebesparing

500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Productoverzicht
VLT® HVAC Basic Drive FC 101
Regelkleppen verlagen het energieverbruik. Inlaatschoepen
zorgen voor een besparing van 40% maar zijn duur om te
installeren. De frequentieregelaaroplossing van Danfoss
verlaagt het energieverbruik met meer dan 50% en is
eenvoudig te installeren. Ook het geluid, de mechanische
belasting en de slijtage worden beperkt, terwijl de de
33
levensduur van de volledige toepassing wordt verlengd.
3.1.5 Voorbeeld met wisselende ow
gedurende 1 jaar
De berekeningen in dit voorbeeld zijn gebaseerd op
pompkarakteristieken die staan vermeld op een pompdatablad.
Het verkregen resultaat toont een energiebesparing van
meer dan 50% bij de gegeven owverdeling over een jaar.
De terugverdientijd is afhankelijk van de prijs per kWh en
de prijs van de frequentieregelaar. In dit voorbeeld is het
minder dan een jaar in vergelijking met een systeem met
kleppen en een constant toerental.
Energiebesparing
Pas = P
asvermogen
Afbeelding 3.6 Flowverdeling over 1 jaar
Afbeelding 3.7 Energiekosten
m³/
Verdeling Regeling met kleppen
h
% Uren
A1-B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabel 3.2 Resultaat
Vermog
en
1
Verbruik
kWh A1-C
Regeling met
frequentieregelaar
Vermog
en
1
Verbruik
kWh
16 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Productoverzicht Design Guide
3.1.6 Betere regeling
Bij gebruik van een frequentieregelaar is een betere
regeling van de ow of druk van een systeem mogelijk.
Een frequentieregelaar kan het toerental van de ventilator
of pomp variëren, wat een variabele regeling van ow en
druk oplevert.
Bovendien kan een frequentieregelaar het toerental van de
ventilator of de pomp snel aanpassen aan nieuwe ow- of
drukcondities in het systeem.
Eenvoudige procesregeling (ow, niveau of druk) met
behulp van de ingebouwde PI-regelaar.
3.1.7 Ster-driehoekschakeling of softstarter
niet vereist
3 3
Wanneer relatief grote motoren moeten worden gestart, is
het in veel landen nodig om apparatuur te gebruiken die
de opstartstroom beperkt. In meer traditionele systemen
wordt vaak een ster-driehoekschakeling of softstarter
gebruikt. Dergelijke motorstarters zijn niet meer nodig bij
gebruik van een frequentieregelaar.
Zoals in Afbeelding 3.8 te zien is, verbruikt een frequentieregelaar niet meer stroom dan de nominale stroom.
1
VLT® HVAC Basic Drive FC 101
2 Ster-driehoekschakeling
3 Softstarter
4 Direct op het net starten
Afbeelding 3.8 Startstroom
3.1.8 Het gebruik van een
frequentieregelaar bespaart geld
Het voorbeeld in hoofdstuk 3.1.9 Zonder frequentieregelaar
laat zien dat het gebruik van een frequentieregelaar
andere apparatuur overbodig maakt. Het is mogelijk om de
installatiekosten van de 2 verschillende systemen te
berekenen. In het voorbeeld kunnen de 2 systemen
grofweg voor dezelfde prijs worden geïnstalleerd.
Met behulp van de VLT® Energy Box-software, waarover u
meer kunt lezen in hoofdstuk 1.5 Aanvullende informatie-
bronnen, kunt u de kostenbesparing berekenen die
haalbaar is bij gebruik van een frequentieregelaar.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 17
M
- +
M
M
x6 x6
x6
175HA205.12
Valve
position
Starter
Fuses
LV
supply
P.F.C
Flow
3-Port
valve
Bypass
Return
Control
Supply
air
V.A.V
outlets
Duct
P.F.C
Mains
Fuses
Starter
Bypass
supply
LV
Return
valve
3-Port
Flow
Control
Valve
position
Starter
Power
Factor
Correction
Mains
IGV
Mechanical
linkage
and vanes
Fan
Motor
or
actuator
Main
B.M.S
Local
D.D.C.
control
Sensors
PT
Pressure
control
signal
0/10V
Temperature
control
signal
0/10V
Control
Mains
Cooling section Heating section
Fan sectionInlet guide vane
Pump Pump
Productoverzicht
VLT® HVAC Basic Drive FC 101
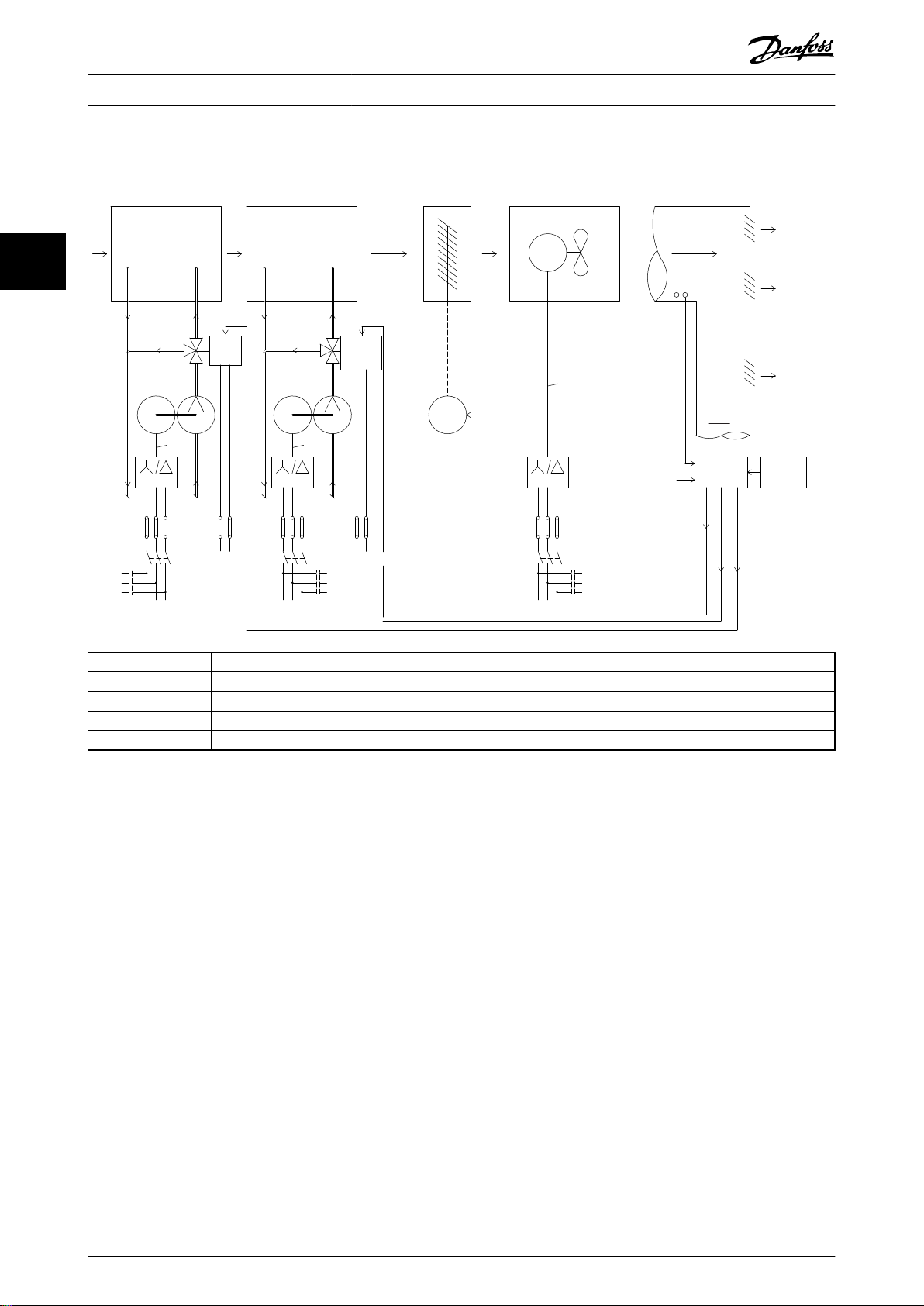
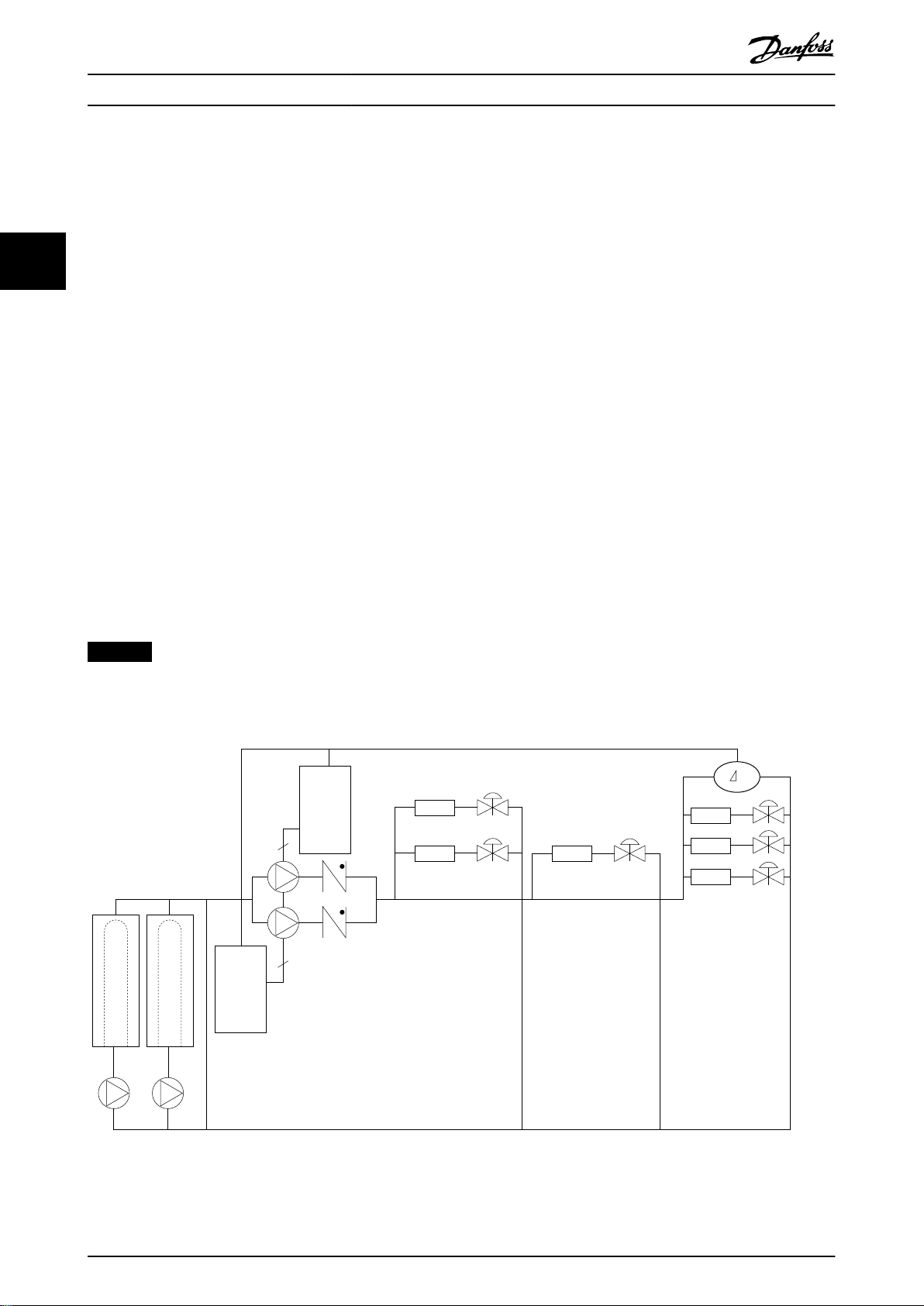
3.1.9 Zonder frequentieregelaar
33
DDC Direct Digital Control (directe digitale regeling)
EMS Energy Management System (energiebeheersysteem)
VAV Variabel luchtvolume
Sensor P Druk
Sensor T Temperatuur
Afbeelding 3.9 Traditioneel ventilatorsysteem
18 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
175HA206.11
Pump
Flow
Return
Supply
air
V.A.V
outlets
Duct
Mains
Pump
Return
Flow
Mains
Fan
Main
B.M.S
Local
D.D.C.
control
Sensors
Mains
Cooling section Heating section
Fan section
Pressure
control
0-10V
or
0/4-20mA
Control
temperature
0-10V
or
0/4-20mA
Control
temperature
0-10V
or
0/4-20mA
VLT
M
- +
VLT
M
M
P
T
VLT
x3 x3
x3
Productoverzicht Design Guide
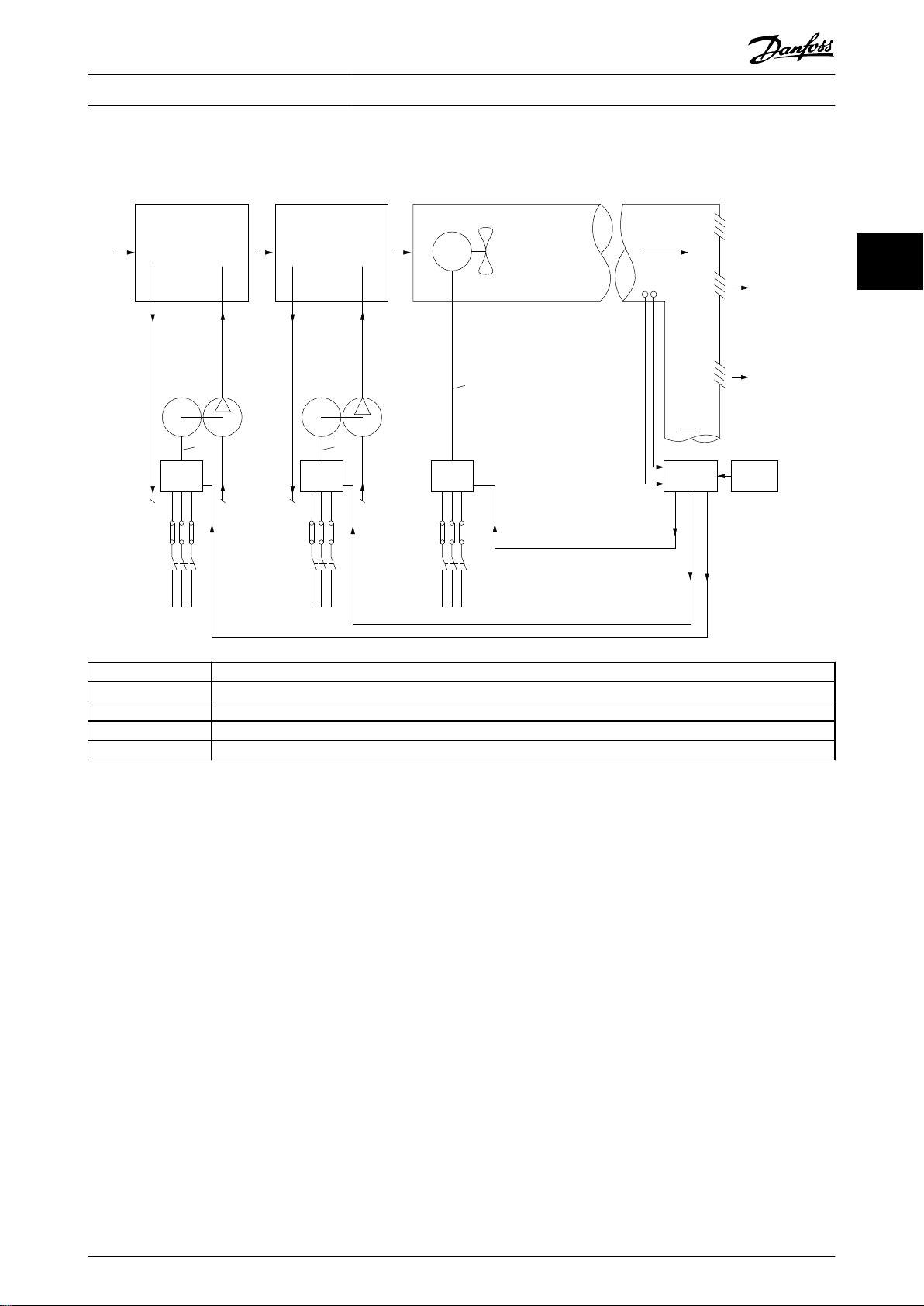
3.1.10 Met een frequentieregelaar
3 3
DDC Direct Digital Control (directe digitale regeling)
EMS Energy Management System (energiebeheersysteem)
VAV Variabel luchtvolume
Sensor P Druk
Sensor T Temperatuur
Afbeelding 3.10 Ventilatorsysteem dat wordt geregeld door frequentieregelaars
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 19
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
3.1.11 Toepassingsvoorbeelden
In de volgende secties vindt u een aantal typische voorbeelden van HVAC-toepassingen.
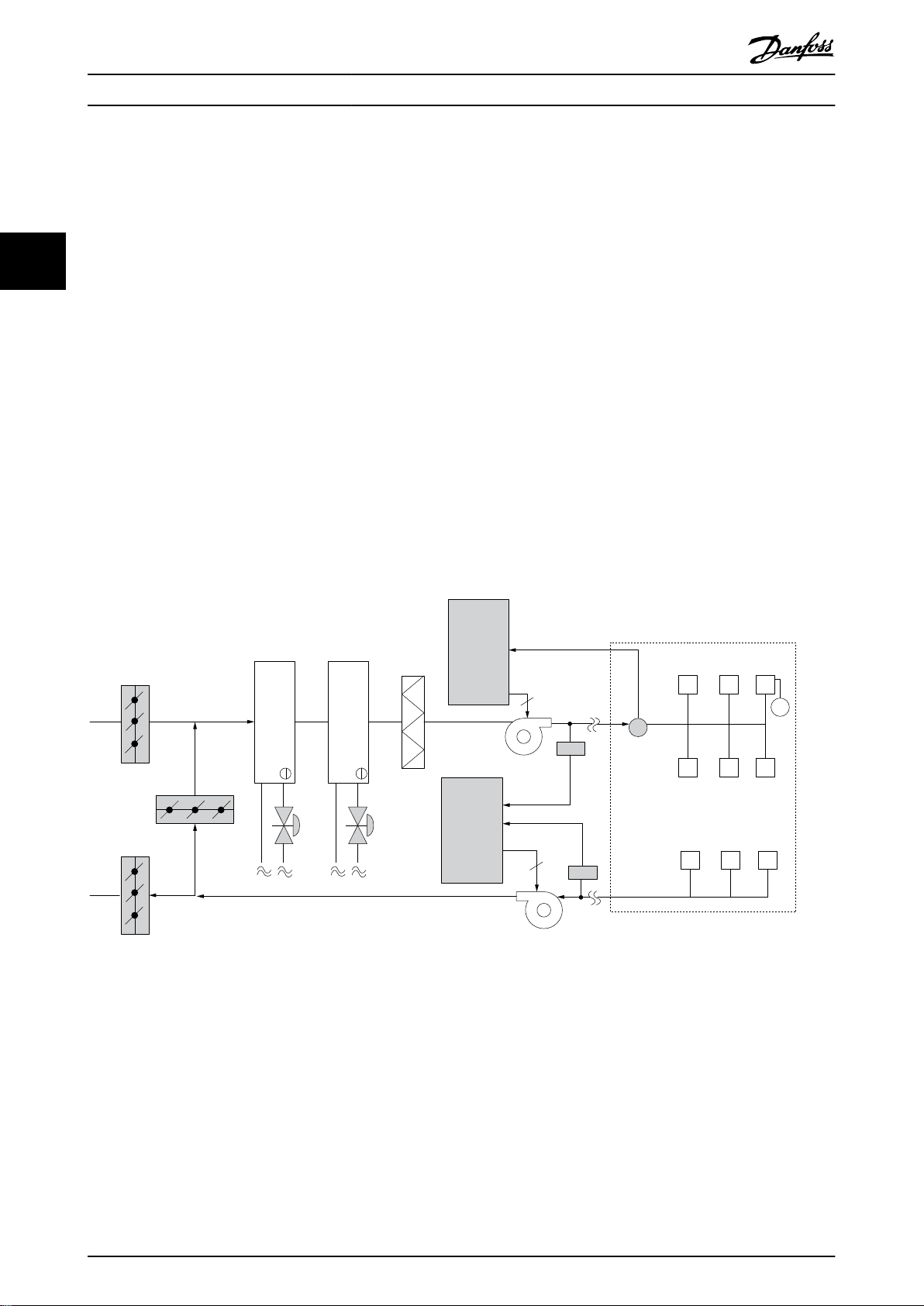
3.1.12 Variabel luchtvolume
33
VAV- of variabel-luchtvolumesystemen worden gebruikt om de ventilatie en de temperatuur in gebouwen te regelen.
Centrale VAV-systemen worden beschouwd als de energiezuinigste methode om het klimaat in gebouwen te regelen. Door
het gebruik van centrale systemen in plaats van gedistribueerde systemen kan een hoger rendement worden behaald.
Dit rendement wordt behaald door gebruik te maken van grotere ventilatoren en grotere koeleenheden met een hoger
rendement dan kleine motoren en gedistribueerde luchtgekoelde eenheden. Ook is voor deze installaties minder onderhoud
nodig.
3.1.13 De VLT-oplossing
Hoewel regelkleppen en inlaatschoepen een constante druk in het leidingsysteem handhaven, bespaart een oplossing met
een frequentieregelaar meer energie, terwijl de installatie ook minder complex wordt. In plaats van een kunstmatige drukval
te veroorzaken of het rendement van de ventilator te verminderen, verlaagt de frequentieregelaar het toerental van de
ventilator en levert zo de ow en druk die het systeem nodig heeft.
Ventilatoren gedragen zich volgens de wetten van centrifugale aniteit. Dat betekent dat de ventilatoren een lagere druk
en ow produceren bij een lager toerental. Hun energieverbruik neemt daardoor aanzienlijk af.
Door de PI-regelaar van de VLT® HVAC Basic Drive FC 101 te gebruiken, zijn geen extra regelaars meer nodig.
Afbeelding 3.11 Variabel luchtvolume
20 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Productoverzicht Design Guide
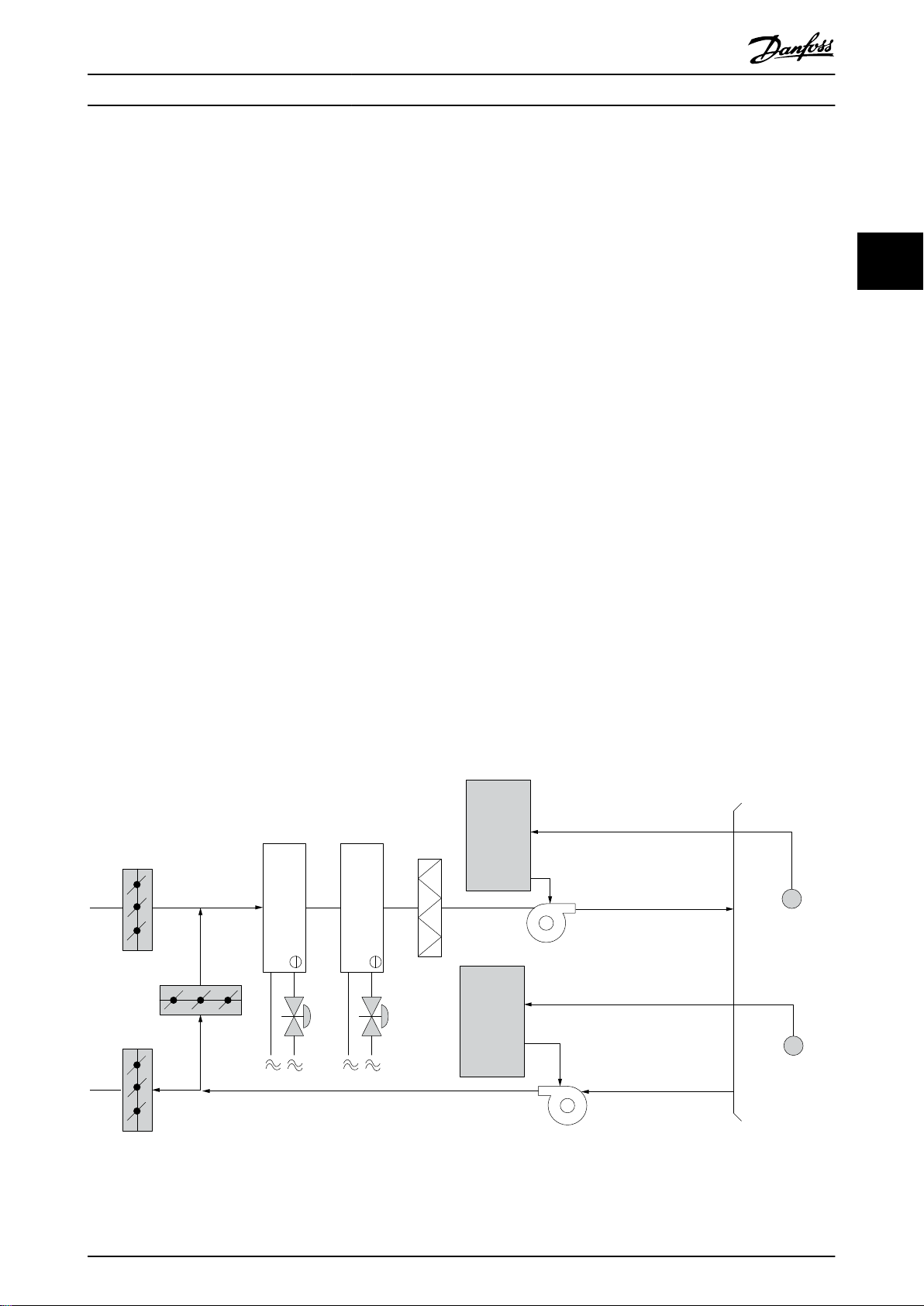
3.1.14 Constant luchtvolume
CAV- of constant-luchtvolumesystemen zijn centrale ventilatiesystemen die gewoonlijk worden gebruikt om grote, gemeenschappelijke zones te voorzien van een minimumhoeveelheid verse, op temperatuur gebrachte lucht. Ze bestaan al langer
dan VAV-systemen en komen dus ook voor in oudere gebouwen met meerdere zones. Deze systemen behandelen de verse
lucht in de luchtbehandelingkasten (LBK's). Veel van deze systemen worden ook gebruikt om de lucht in gebouwen te
verversen en hebben een koelspiraal. Voor het verwarmen en koelen van de individuele zones worden vaak ventilatorluchtkoelers gebruikt.
3.1.15 De VLT-oplossing
Met een frequentieregelaar kan een aanzienlijke hoeveelheid energie worden bespaard, terwijl de lucht in het gebouw toch
goed geregeld wordt. Als terugkoppelingssignaal naar de frequentieregelaars kunnen temperatuursensoren of CO2-sensoren
worden gebruikt. Bij het regelen van de temperatuur, de luchtkwaliteit of beide gaat een CAV-systeem uit van de actuele
situatie in het gebouw. Wanneer het aantal mensen in de betreende zone afneemt, neemt ook de behoefte aan verse lucht
af. De CO2-sensor detecteert lagere niveaus en verlaagt het toerental van de toevoerventilatoren. De retourventilator wordt
aangepast om een statisch druksetpoint of een vast verschil tussen de toevoerluchtow en de retourluchtow te
handhaven.
Bij een temperatuurregeling, vooral gebruikt in airconditioningsystemen, hangen de vereisten af van de buitentemperatuur
en het aantal mensen in de zone. Als de temperatuur tot onder het setpoint daalt, kan de toevoerventilator met een lager
toerental gaan werken. De retourventilator wordt aangepast om een statisch druksetpoint te handhaven. Door de luchtow
te verminderen, wordt ook de hoeveelheid energie voor het verwarmen of koelen van de verse lucht verminderd, wat een
verdere besparing oplevert.
Diverse functies van de toepassingsgerichte HVAC-frequentieregelaar van Danfoss kunnen bijdragen tot een verbeterde
werking van uw CAV-systeem. Een van de problemen bij het regelen van een ventilatiesysteem is gebrekkige luchtkwaliteit.
De programmeerbare minimumfrequentie kan worden ingesteld om een minimumhoeveelheid toevoerlucht te handhaven,
onafhankelijk van het terugkoppelings- of referentiesignaal. De frequentieregelaar bevat ook een PI-regelaar, waarmee zowel
de temperatuur als de luchtkwaliteit kan worden bewaakt. Ook als aan de temperatuurvraag wordt voldaan, zorgt de
frequentieregelaar voor voldoende luchttoevoer om de luchtkwaliteit te garanderen. De regelaar kan 2 terugkoppelingssignalen bewaken en vergelijken voor het regelen van de retourventilator, door handhaving van een vaste dierentiële
luchtow tussen de toevoer- en retourkanalen.
3 3
Afbeelding 3.12 Constant luchtvolume
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 21
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
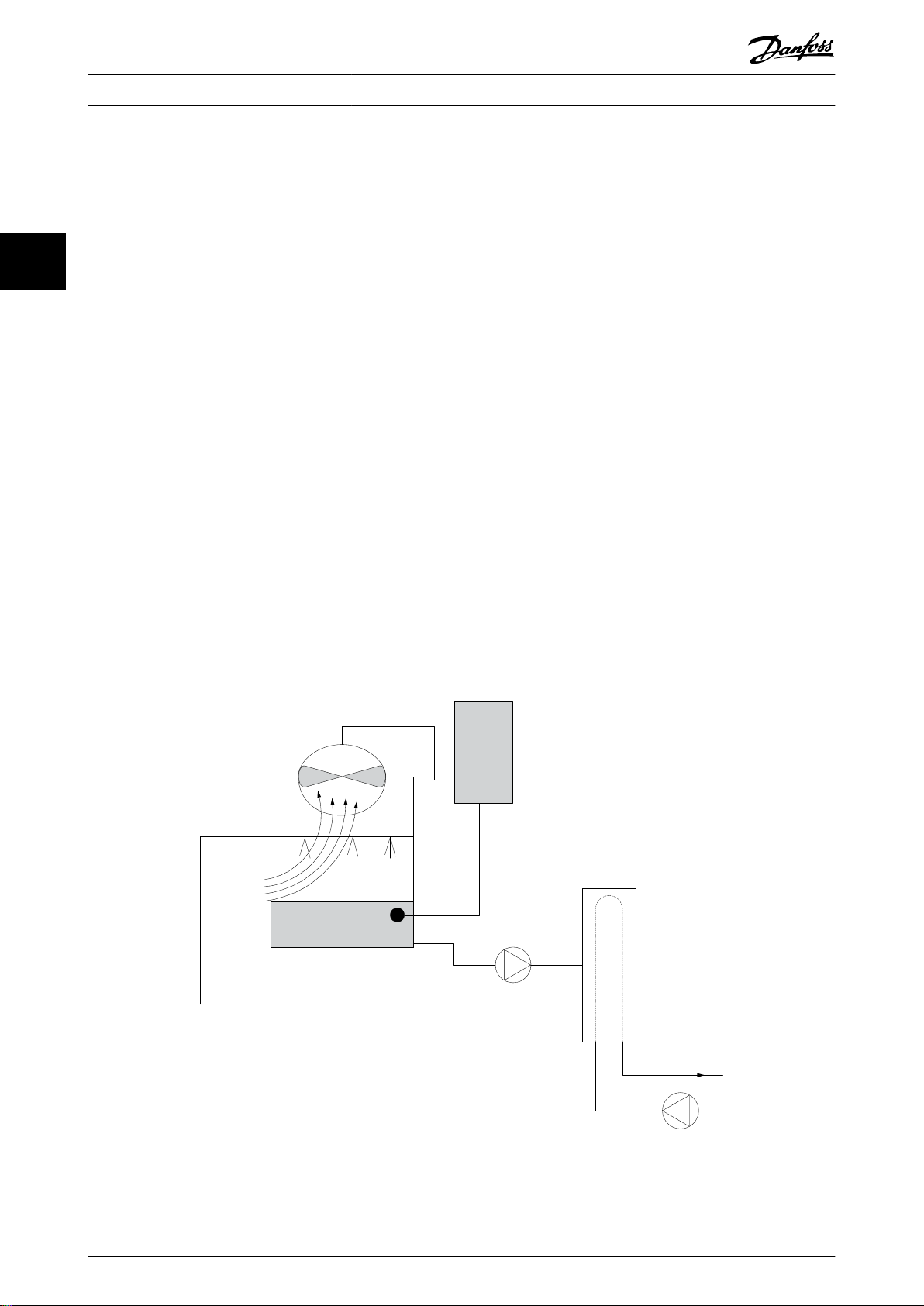
3.1.16 Koeltorenventilator
Koeltorenventilatoren koelen het condenswater in watergekoelde koelsystemen. Watergekoelde koeleenheden zijn de
eciëntste methode om gekoeld water te produceren. Ze zijn maar liefst 20% zuiniger dan luchtgekoelde koeleenheden.
Koeltorens bieden vaak de energiezuinigste methode om het condenswater van koeleenheden te koelen, afhankelijk van het
klimaat.
33
Deze torens koelen het condenswater door verdamping.
Het condenswater wordt boven in de koeltoren verneveld op het koelpakket om het koeloppervlak te vergroten. De
torenventilator blaast lucht door het koelpakket en het vernevelde water om de verdamping te bevorderen. Door de
verdamping wordt warmte aan het water onttrokken en daalt de temperatuur. Het gekoelde water wordt opgevangen in
het koeltorenreservoir. Vanuit het reservoir wordt het water teruggepompt naar de condensor van de koeleenheden, waarna
een nieuwe cyclus begint.
3.1.17 De VLT-oplossing
Met een frequentieregelaar kunnen de ventilatoren van de koeltorens op het gewenste toerental worden geregeld, zodat de
temperatuur van het condenswater constant blijft. De frequentieregelaars kunnen ook worden gebruikt om de ventilator
waar nodig in en uit te schakelen.
Diverse functies van de toepassingsgerichte HVAC-frequentieregelaar van Danfoss kunnen bijdragen tot een verbeterde
werking van uw koeltorenventilatortoepassingen. Als het toerental van de koeltorenventilatoren tot onder een bepaalde
waarde daalt, vermindert het eect van de ventilator op het koelen van het water. Bij gebruik van een tandwielkast met
spatsmering voor het regelen van de torenventilator is een minimumtoerental van 40-50% nodig.
De door de klant programmeerbare minimumfrequentie-instelling kan deze minimumfrequentie handhaven, ook als de
terugkoppeling of de snelheidsreferentie vraagt om een lager toerental.
Een standaardfunctie van de frequentieregelaar is de mogelijkheid om een slaapmodus te programmeren en de ventilator
stil te zetten totdat een hoger toerental vereist is. Daarnaast hebben sommige koeltorenventilatoren ongewenste frequenties
die trillingen kunnen veroorzaken. U kunt deze frequenties gemakkelijk vermijden door de bypassfrequentiebereiken in de
frequentieregelaar te programmeren.
Afbeelding 3.13 Koeltorenventilator
22 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Productoverzicht Design Guide
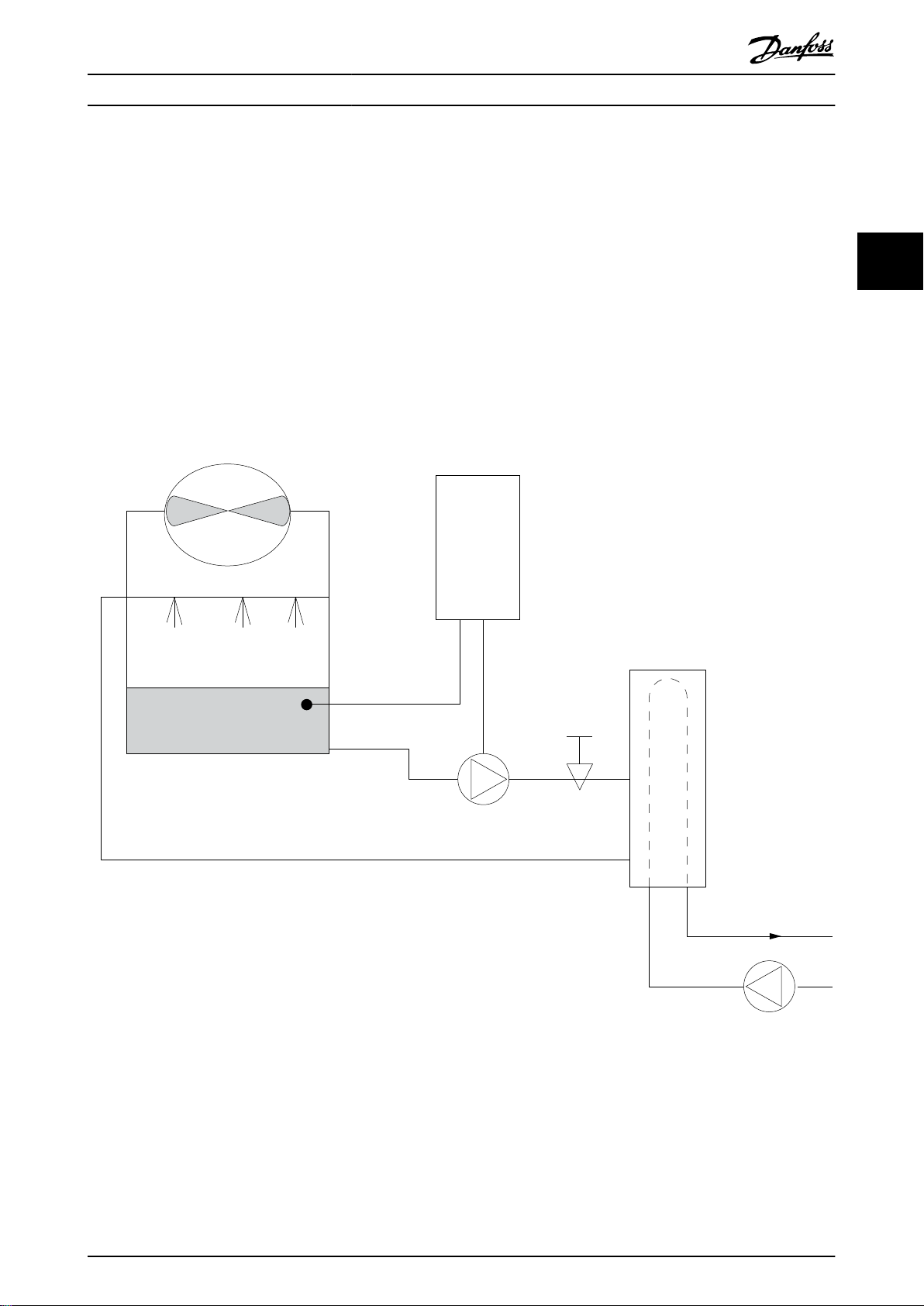
3.1.18 Condensaatpompen
Condensaatpompen worden hoofdzakelijk gebruikt om water te laten circuleren in de condensor van watergekoelde
koeleenheden en de bijbehorende koeltorens. Het condenswater neemt de warmte uit de condensor van de koeleenheden
op en geeft het af aan de lucht in de koeltoren. Deze systemen bieden de eciëntste methode voor het koelen van water.
Ze zijn maar liefst 20% zuiniger dan luchtgekoelde koeleenheden.
3.1.19 De VLT-oplossing
Frequentieregelaars worden toegepast bij condensaatpompen, waardoor die niet hoeven te worden geregeld via een
smoorklep of door het afdraaien van de pompwaaier.
Door in plaats van een smoorklep een frequentieregelaar te gebruiken, wordt de energie bespaard die anders door de klep
zou zijn opgenomen. Dat kan een besparing van 15-20% of meer opleveren. Het afdraaien van de pompwaaier is
onomkeerbaar, dus wanneer de omstandigheden wijzigen en een hogere ow vereist is, moet de waaier worden vervangen.
3 3
Afbeelding 3.14 Condensaatpompen
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 23
Productoverzicht
VLT® HVAC Basic Drive FC 101
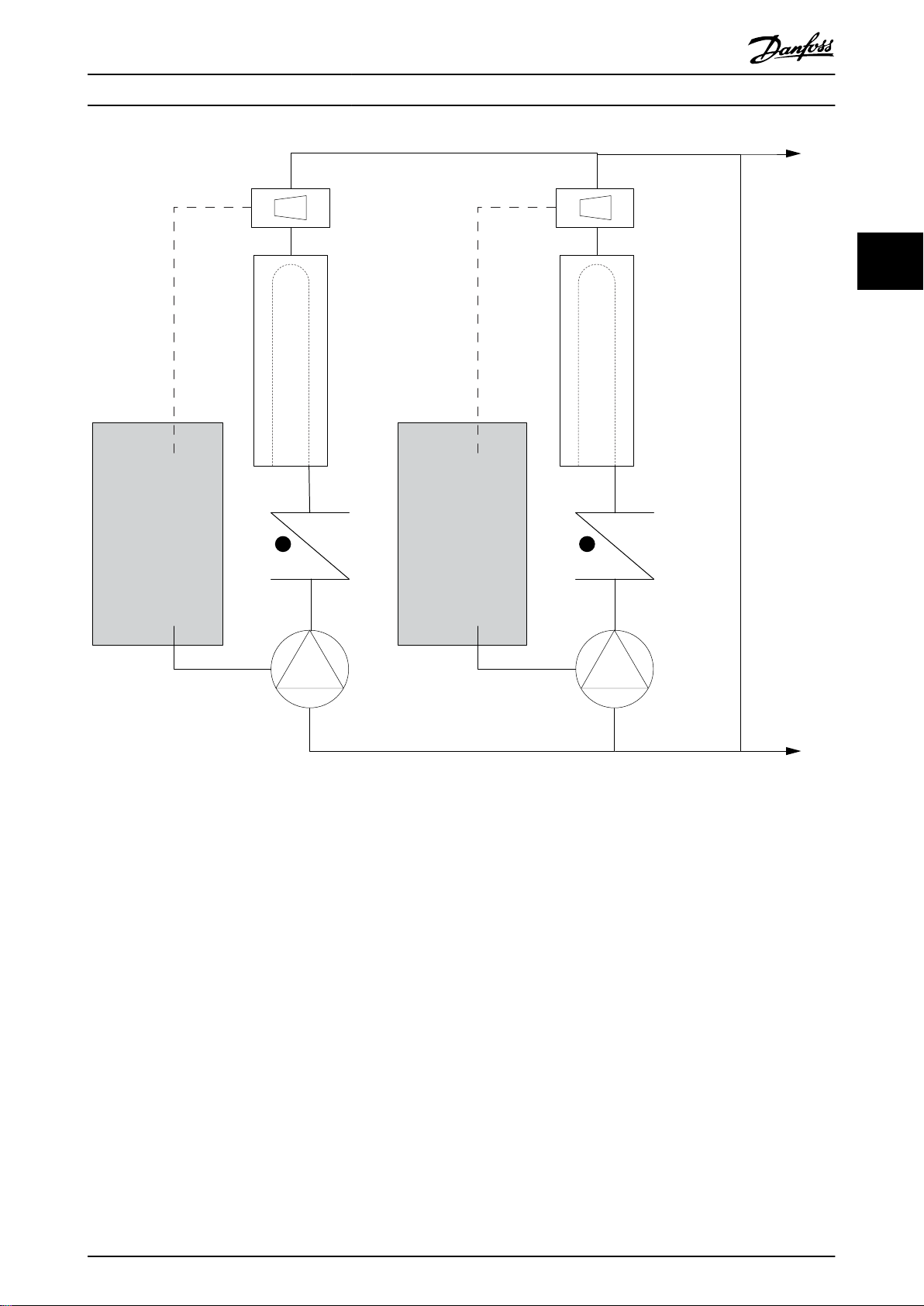
3.1.20 Primaire pompen
Primaire pompen in een systeem met primaire/secundaire pompen kunnen worden gebruikt om een constante ow te
handhaven in apparaten die bedienings- of regelproblemen vertonen bij een variabele ow. De techniek met primaire/
secundaire pompen koppelt de primaire productiekringloop los van de secundaire distributiekringloop. Hierdoor kunnen
33
apparaten zoals koeleenheden een constante ontwerpow aannemen en goed functioneren, terwijl de ow in de rest van
het systeem kan variëren.
Wanneer de
Wanneer dat gebeurt, probeert de koeleenheid zijn koelcapaciteit te verminderen. Als de ow ver genoeg of te snel daalt,
kan de koeleenheid zijn belasting niet voldoende afvoeren en wordt die door de beveiliging van de koeleenheid
uitgeschakeld, waarna een handmatige reset nodig is. Deze situatie komt regelmatig voor in grote installaties, met name
wanneer 2 of meer koeleenheden parallel zijn geïnstalleerd en er geen primaire/secundaire pompen worden toegepast.
ow door de verdamper in een koeleenheid afneemt, begint het gekoelde water overgekoeld te raken.
3.1.21 De VLT-oplossing
Het energieverbruik van de primaire kringloop kan aanzienlijk zijn, afhankelijk van de omvang van het systeem en van de
primaire kringloop.
Een frequentieregelaar kan aan het primaire systeem worden toegevoegd in plaats van een smoorklep en/of het afdraaien
van de pompwaaiers, waardoor de bedrijfskosten lager worden. De volgende 2 besturingsmethoden worden het vaakst
toegepast:
Flowmeter
Omdat de gewenste ow bekend en constant is, kan de pomp rechtstreeks worden geregeld via een owmeter op de
uitlaat van elke koeleenheid. Met behulp van de ingebouwde PI-regelaar handhaaft de frequentieregelaar altijd de juiste
ow en compenseert hij zelfs de veranderende weerstand in de primaire kringloopleiding bij het gefaseerd in- en
uitschakelen van koeleenheden en bijbehorende pompen.
Lokale bepaling toerental
De bediener verlaagt de uitgangsfrequentie totdat de ontwerpow bereikt is.
Het gebruik van een frequentieregelaar om het pomptoerental te verlagen, lijkt op het afdraaien van de pompwaaier; het
vergt echter geen enkele inspanning en het pomprendement blijft hoger. De inbedrijfsteller verlaagt het toerental van de
pomp totdat de juiste ow bereikt is en zet dit toerental vast. De pomp werkt bij elke inschakeling van de koeleenheid met
dit toerental. Omdat de primaire kringloop geen regelkleppen of andere mechanismen bevat waardoor de systeemcurve kan
veranderen en de variatie als gevolg van het gefaseerd in- en uitschakelen van pompen en koeleenheden doorgaans gering
is, blijft dit vaste toerental geschikt. Als het later tijdens de levensduur van het systeem nodig is om de ow te verhogen,
dan hoeft de frequentieregelaar enkel het pomptoerental te verhogen en hoeft er geen nieuwe pompwaaier te worden
geïnstalleerd.
24 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Productoverzicht Design Guide
3 3
Afbeelding 3.15 Primaire pompen
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 25
Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
3.1.22 Secundaire pompen
Secundaire pompen in een watergekoeld systeem met primaire/secundaire pompen verdelen het gekoelde water over de
belastingen van de primaire productiekringloop. Het systeem met primaire/secundaire pompen wordt gebruikt om de
kringloopleidingen hydronisch van elkaar los te koppelen. In dat geval wordt de primaire pomp gebruikt om een constante
ow in de koeleenheden te handhaven, terwijl de secundaire pompen de ow kunnen variëren, meer kunnen regelen en
33
energie kunnen besparen.
Als het concept met primaire/secundaire pompen niet wordt gebruikt bij het ontwerp van een variabel-volumesysteem, kan
de koeleenheid zijn belasting niet goed afvoeren wanneer de ow ver genoeg is afgenomen of te snel afneemt. De
beveiliging voor een te lage verdampingstemperatuur van de koeleenheid schakelt de koeleenheid in dat geval uit, waarna
een handmatige reset nodig is. Deze situatie komt regelmatig voor in grote installaties, met name wanneer 2 of meer
koeleenheden parallel zijn geïnstalleerd.
3.1.23 De VLT-oplossing
Hoewel het systeem met primaire/secundaire pompen en 2-wegkleppen minder energie verbruikt en regelproblemen
verlicht, worden de werkelijke energiebesparingen en het regelpotentieel gerealiseerd door het toevoegen van frequentieregelaars.
Wanneer de sensoren op de juiste plaats zijn geïnstalleerd, kunnen de pompen dankzij de frequentieregelaars hun toerental
variëren en de systeemcurve volgen in plaats van de pompcurve.
Hierdoor wordt geen energie meer verspild en verdwijnt de meeste overdruk, waar 2-wegkleppen gevoelig voor zijn.
Wanneer de bewaakte belastingen de gewenste waarde hebben bereikt, worden de 2-wegkleppen gesloten. Hierdoor neemt
het drukverschil tussen de belasting en de 2-wegklep toe. Wanneer dit drukverschil begint toe te nemen, wordt de pomp
afgeremd om de gewenste opvoerhoogte (ook wel de setpointwaarde genoemd) te handhaven. Deze setpointwaarde wordt
berekend door de drukval van de belasting en de 2-wegklep onder ontwerpomstandigheden bij elkaar op te tellen.
LET OP
Bij gebruik van meerdere parallel werkende pompen moeten die allemaal hetzelfde toerental hebben om te zorgen voor
een hogere energiebesparing, met een afzonderlijke frequentieregelaar voor elke pomp of met 1 frequentieregelaar die
meerdere pompen parallel aandrijft.
Afbeelding 3.16 Secundaire pompen
26 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Productoverzicht Design Guide
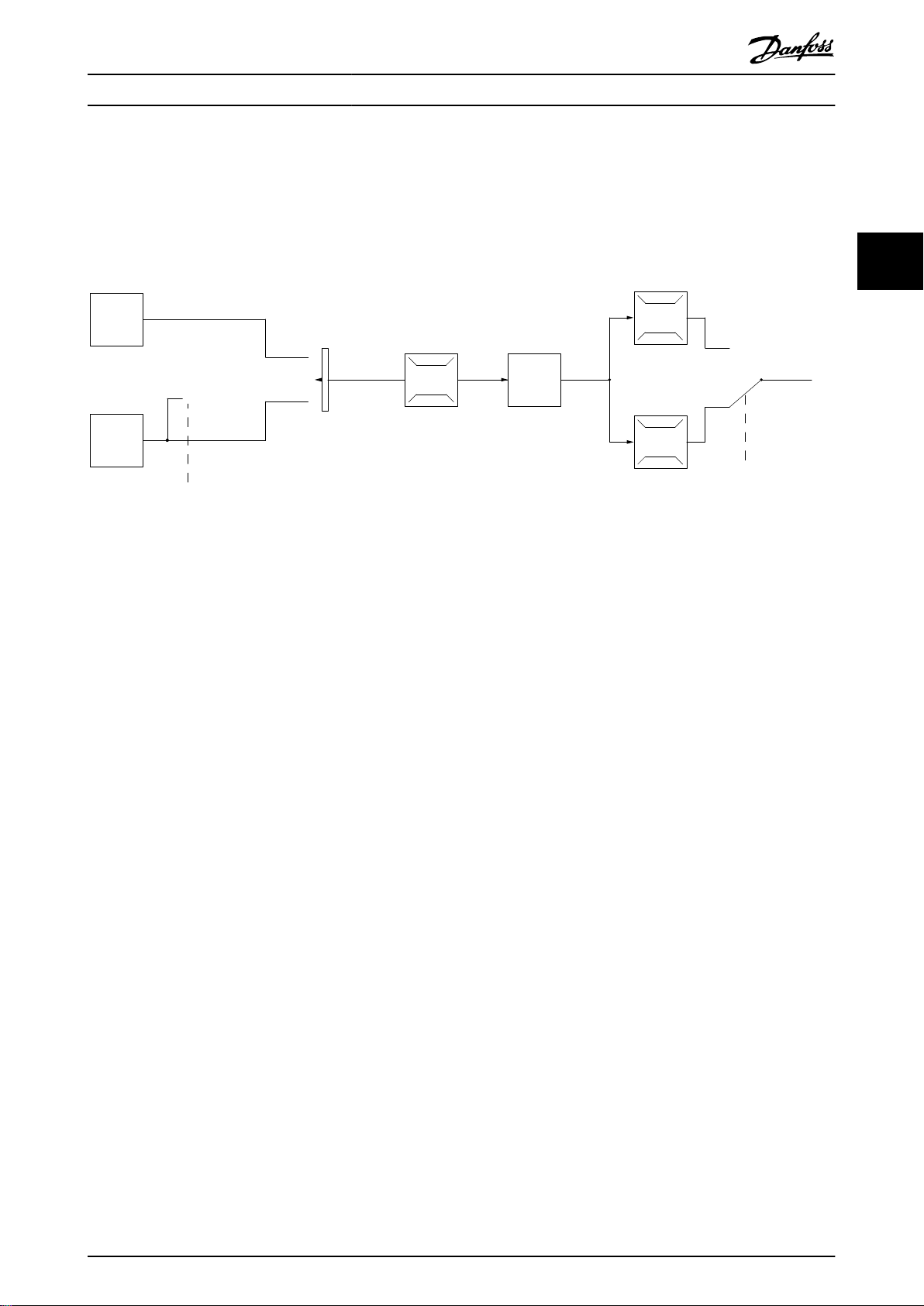
3.2 Regelingsstructuren
Selecteer [0] Open loop (Geen terugk.) of [1] Closed loop (Met terugk.) in parameter 1-00 Conguratiemodus.
3.2.1 Regelstructuur zonder terugkoppeling
Afbeelding 3.17 Regeling zonder terugkoppeling
3 3
Bij de getoonde conguratie in Afbeelding 3.17 is
parameter 1-00 Conguratiemodus ingesteld op [0] Open
loop (Geen terugk.). De totale referentie van het referentie-
beheersysteem of de lokale referentie loopt via de aan-/
uitloopbegrenzing en snelheidsbegrenzing voordat die
naar de motorregeling wordt gestuurd. De uitgang vanaf
de motorregeling wordt vervolgens begrensd door de
maximumfrequentie.
3.2.2 PM/EC+-motorbesturing
Het EC+-concept van Danfoss biedt de mogelijkheid om
hoogeciënte PM-motoren (permanentmagneetmotoren)
in standaard behuizingsgroottes volgens IEC te besturen
met frequentieregelaars van Danfoss.
De inbedrijfstellingsprocedure is vergelijkbaar met de
bestaande procedure voor asynchrone (inductie-) motoren
met gebruikmaking van het Danfoss PM-besturingsprincipe
VVC+.
Voordelen voor de klant:
Onafhankelijk van de motortechnologie
•
(permanentmagneetmotor of inductiemotor)
Installatie en bediening zoals bij inductiemotoren
•
Merkonafhankelijke keuze ten aanzien van
•
systeemcomponenten (zoals motoren)
Het beste systeemrendement door het selecteren
•
van de beste componenten
Geschikt voor het aanpassen van bestaande
•
installaties
Vermogensbereik: 45 kW (60 pk) (200 V), 0,37-90
•
kW (0,5-121 pk) (400 V), 90 kW (121 pk) (600 V)
voor inductiemotoren en 0,37-22 kW (0,5-30 pk)
(400 V) voor PM-motoren.
Huidige beperkingen voor PM-motoren:
Op dit moment enkel ondersteuning tot 22 kW
•
(30 pk).
LC-lters worden niet ondersteund in combinatie
•
met PM-motoren.
Het algoritme voor kinetische backup wordt niet
•
ondersteund voor PM-motoren.
Biedt alleen ondersteuning voor een volledige
•
AMA, waarbij de statorweerstand Rs in het
systeem wordt bepaald.
Geen blokkeringsdetectie (ondersteund vanaf
•
softwareversie 2.80).
3.2.3 Lokale (Hand On) en externe (Auto
On) besturing
De frequentieregelaar kan handmatig worden bestuurd via
het lokale bedieningspaneel (LCP) of extern worden
bestuurd via analoge/digitale ingangen of een seriële bus.
Als dit wordt toegestaan in parameter 0-40 [Hand on]-toets
op LCP, parameter 0-44 [O/Reset]-toets LCP en
parameter 0-42 [Auto on]-toets op LCP, is het mogelijk om
de frequentieregelaar te starten en te stoppen door te
drukken op [Hand On] en [O/Reset] op het LCP. Alarmen
kunnen worden gereset via de [O/Reset]-toets.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 27
Hand
On
Off
Reset
Auto
On
130BB893.10
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Productoverzicht
VLT® HVAC Basic Drive FC 101
vergelijkt de terugkoppeling met een referentiewaarde van
een setpoint en bepaalt of en in hoeverre deze 2 signalen
van elkaar verschillen. Vervolgens wordt het motortoerental aangepast om dit verschil op te heen.
Afbeelding 3.18 LCP-toetsen
33
Denk bijvoorbeeld aan een pomptoepassing waarbij het
toerental van de pomp moet worden geregeld om te
zorgen voor een constante statische druk in een leiding.
De lokale referentie forceert de conguratiemodus naar
een regeling zonder terugkoppeling, ongeacht de instelling
van parameter 1-00 Conguratiemodus.
De statische-drukwaarde wordt aan de frequentieregelaar
doorgegeven als de setpointreferentie. Een statischedruksensor meet de actuele statische druk in de leiding en
levert deze data in de vorm van een terugkoppelings-
Bij het uitschakelen wordt de lokale referentie hersteld.
signaal terug aan de frequentieregelaar. Als het
terugkoppelingssignaal hoger is dan de setpointreferentie,
3.2.4 Regelstructuur met terugkoppeling
vertraagt de frequentieregelaar de pomp om de druk te
verlagen. Omgekeerd geldt dat wanneer de leidingdruk
De interne regelaar stelt de frequentieregelaar in staat om
deel uit te maken van het te besturen systeem. De
frequentieregelaar ontvangt een terugkoppelingssignaal
lager is dan de setpointreferentie, de frequentieregelaar de
pomp automatisch versnelt om de door de pomp
geleverde druk te verhogen.
van een sensor in het systeem. De frequentieregelaar
Afbeelding 3.19 Regelstructuur met terugkoppeling
Hoewel de standaardwaarden voor de terugkoppelingsregelaar van de frequentieregelaar in veel gevallen
aanvaardbare prestaties opleveren, kunt u de regeling van
het systeem vaak optimaliseren door een aantal
parameters aan te passen.
3.2.5 Terugkoppelingsconversie
In sommige toepassingen kan het nuttig zijn om het
terugkoppelingssignaal te converteren. Een voorbeeld
hiervan is het gebruik van een druksignaal om een
terugkoppeling van de ow te leveren. Aangezien de
vierkantswortel van druk evenredig is aan ow, levert de
vierkantswortel van het druksignaal een waarde op die
evenredig is aan de ow. Zie Afbeelding 3.20.
28 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Afbeelding 3.20 Conversie van terugkoppelingssignalen

Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Productoverzicht Design Guide
3.2.6 Gebruik van referenties
Informatie over een regeling met of zonder terugkoppeling.
3 3
Afbeelding 3.21 Blokschema voor externe referentie
De externe referentie bestaat uit:
•
•
•
•
In de frequentieregelaar kunnen maximaal 8 vooraf
ingestelde (digitale) referenties worden geprogrammeerd.
De actieve, vooraf ingestelde referentie kan worden
geselecteerd via digitale ingangen of de seriële-communicatiebus. De referentie kan ook extern worden gegeven,
meestal via een analoge ingang. Deze externe bron wordt
geselecteerd door middel van 1 van de 3 referentiebronparameters (parameter 3-15 Referentiebron 1,
parameter 3-16 Referentiebron 2 en parameter 3-17 Referentiebron 3). Alle referentiebronnen en de busreferentie
worden bij elkaar opgeteld om de totale externe referentie
te bepalen. De externe referentie, de vooraf ingestelde
referentie of de som van die 2 kan worden geselecteerd als
de actieve referentie. Tot slot kan deze referentie worden
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 29
digitale referenties
externe referenties (analoge ingangen en
referenties uit een seriële-communicatiebus)
de ingestelde relatieve referentie
setpoint op basis van terugkoppeling.
geschaald door middel van parameter 3-14 Ingestelde
relatieve ref.
De geschaalde referentie wordt als volgt berekend:
Referentie = X + X ×
waarbij X de externe referentie, de vooraf ingestelde
Y
100
referentie of de som van deze twee is, en Y
parameter 3-14 Ingestelde relatieve ref. in [%] is.
Als Y, parameter 3-14 Ingestelde relatieve ref., is ingesteld op
0% wordt de referentie niet beïnvloed door de schaling.

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
3.2.7 De terugkoppelingsregelaar van de
frequentieregelaar optimaliseren
Test de prestaties van de terugkoppelingsregelaar van de
frequentieregelaar nadat de regelaar is ingesteld. Vaak
33
zullen de prestaties op basis van de standaardwaarden
voor parameter 20-93 PI prop. versterking en
parameter 20-94 PI integratietijd acceptabel zijn. In sommige
gevallen kan het echter nuttig zijn om deze parameterwaarden te optimaliseren om te komen tot een snellere
systeemreactie waarbij doorschieten van het toerental
onder controle blijft.
3.2.8 Handmatige aanpassing PI
1. Start de motor.
2. Stel parameter 20-93 PI prop. versterking in op 0,3
en verhoog deze waarde totdat het terugkoppelingssignaal begint te oscilleren. Start en stop de
frequentieregelaar zo nodig om de stapgrootte
voor de setpointreferentie te wijzigen om
oscillatie te veroorzaken.
3. Verlaag de PI proportionele versterking totdat het
terugkoppelingssignaal zich stabiliseert.
4. Verlaag de proportionele versterking met 40-60%.
5. Stel parameter 20-94 PI integratietijd in op 20 s en
verlaag de waarde totdat het terugkoppelingssignaal begint te oscilleren. Start en stop de
frequentieregelaar zo nodig om de stapgrootte
voor de setpointreferentie te wijzigen om
oscillatie te veroorzaken.
6. Verhoog de PI integratietijd totdat het terugkoppelingssignaal zich stabiliseert.
7. Verhoog de integratietijd met 15-50%.
Omgevingscondities tijdens bedrijf
3.3
Afbeelding 3.22 0,25-0,75 kW (0,34-1,0 pk), 200 V, behuizingsgrootte H1, IP 20
Afbeelding 3.23 0,37-1,5 kW (0,5-2,0 pk), 400 V, behuizingsgrootte H1, IP 20
De frequentieregelaar is ontworpen volgens de norm ENIEC 60068-2-3, EN 50178 § 9.4.2.2 bij 50 °C (122 °F).
De gemiddelde temperatuur over 24 uur moet minstens
5 °C (9 °F) lager zijn dan de maximale omgevingstemperatuur. Als de frequentieregelaar in bedrijf is bij hoge
omgevingstemperaturen, moet u de continue uitgangsstroom verlagen.
Afbeelding 3.24 2,2 kW (3,0 pk), 200 V, behuizingsgrootte H2,
IP 20
30 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
Productoverzicht Design Guide
3 3
Afbeelding 3.25 2,2-4,0 kW (3,0-5,4 pk), 400 V, behuizingsgrootte H2, IP 20
Afbeelding 3.26 3,7 kW (5,0 pk), 200 V, behuizingsgrootte H3,
IP 20
Afbeelding 3.28 5,5-7,5 kW (7,4-10 pk), 200 V, behuizingsgrootte H4, IP 20
Afbeelding 3.29 11-15 kW (15-20 pk), 400 V,
behuizingsgrootte H4, IP 20
Afbeelding 3.27 5,5-7,5 kW (7,4-10 pk), 400 V, behuizingsgrootte H3, IP 20
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 31
Afbeelding 3.30 11 kW (15 pk), 200 V, behuizingsgrootte
H5, IP 20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Productoverzicht
VLT® HVAC Basic Drive FC 101
33
Afbeelding 3.31 18,5-22 kW (25-30 pk), 400 V, behuizingsgrootte H5, IP 20
Afbeelding 3.32 15-18,5 kW (20-25 pk), 200 V, behuizingsgrootte H6, IP 20
Afbeelding 3.34 45 kW (60 pk), 400 V, behuizingsgrootte H6,
IP 20
Afbeelding 3.35 22-30 kW (30-40 pk), 600 V,
behuizingsgrootte H6, IP 20
Afbeelding 3.33 30-37 kW (40-50 pk), 400 V, behuizingsgrootte
H6, IP 20
32 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Afbeelding 3.36 22-30 kW (30-40 pk), 200 V,
behuizingsgrootte H7, IP 20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
Productoverzicht Design Guide
3 3
Afbeelding 3.37 55-75 kW (74-100 pk), 400 V, behuizingsgrootte H7, IP 20
Afbeelding 3.38 45-55 kW (60-74 pk), 600 V,
behuizingsgrootte H7, IP 20
Afbeelding 3.40 90 kW (120 pk), 400 V, behuizingsgrootte
H8, IP 20
Afbeelding 3.41 75-90 kW (100-120 pk), 600 V, behuizingsgrootte H8, IP 20
Afbeelding 3.39 37-45 kW (50-60 pk), 200 V,
behuizingsgrootte H8, IP 20
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 33
Afbeelding 3.42 2,2-3 kW (3,0-4,0 pk), 600 V, behuizingsgrootte H9, IP 20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
33
Afbeelding 3.43 5,5-7,5 kW (7,4-10 pk), 600 V, behuizingsgrootte H9, IP 20
Afbeelding 3.44 11-15 kW (15-20 pk), 600 V,
behuizingsgrootte H10, IP 20
Afbeelding 3.46 5,5-7,5 kW (7,4-10 pk), 400 V, behuizingsgrootte I3, IP 54
Afbeelding 3.47 11-18,5 kW (15-25 pk), 400 V, behuizingsgrootte I4, IP 54
Afbeelding 3.45 0,75-4,0 kW (1,0-5,4 pk), 400 V, behuizingsgrootte I2, IP 54
34 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
Afbeelding 3.48 22-30 kW (30-40 pk), 400 V,
behuizingsgrootte I6, IP 54

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Productoverzicht Design Guide
Afbeelding 3.49 37 kW (50 pk), 400 V, behuizingsgrootte I6,
IP 54
Als de motor of de door de motor aangedreven
apparatuur, zoals een ventilator, bij bepaalde frequenties
ruis of trillingen veroorzaakt, kunt u de volgende
parameters of parametergroepen congureren om de ruis
of trillingen te beperken of te elimineren:
Parametergroep 4-6* Snelh.-bypass.
•
Stel parameter 14-03 Overmodulatie in op [0] Uit.
•
Schakelpatroon en schakelfrequentie in parame-
•
tergroep 14-0* Inverterschakeling.
Parameter 1-64 Resonantiedemping.
•
De akoestische ruis van de frequentieregelaar is afkomstig
uit 3 bronnen:
DC-tussenkringspoelen
•
Ingebouwde ventilator
•
RFI-lter (smoorspoel)
•
3 3
Afbeelding 3.50 45-55 kW (60-74 pk), 400 V,
behuizingsgrootte I7, IP 54
Behuizingsgrootte
Niveau [dBA]
1)
H1 43,6
H2 50,2
H3 53,8
H4 64
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 pk) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Tabel 3.3 Karakteristieke waarden gemeten op een afstand
van 1 m (3,28 ft) vanaf de eenheid
1) De waarden worden gemeten bij een achtergrondgeluid van 35
dBA en met een ventilator die op volle toeren draait.
De frequentieregelaar is getest volgens een procedure die
is gebaseerd op de normen die staan vermeld in Tabel 3.4.
De frequentieregelaar voldoet aan de vereisten die gelden
Afbeelding 3.51 75-90 kW (100-120 pk), 400 V, behuizingsgrootte I8, IP 54
als de eenheid aan de wand of op de vloer van een
productiehal is gemonteerd of in panelen die met bouten
aan de wand of de vloer zijn bevestigd.
EN-IEC 60068-2-6 Trilling (sinusvormig) – 1970
EN-IEC 60068-2-64 Trilling, breedband willekeurig
Tabel 3.4 Normen
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 35

Productoverzicht
VLT® HVAC Basic Drive FC 101
Een frequentieregelaar bevat veel mechanische en elektronische componenten. Deze zijn tot op zekere hoogte
gevoelig voor omgevingsfactoren.
Grote hoeveelheden stof worden vaak aangetroen op
installatiekasten en aanwezige elektrische installaties. Een
aanwijzing voor agressieve, in de lucht aanwezige gassen is
de zwarte verkleuring van koperen rails en kabeluiteinden
van bestaande installaties.
VOORZICHTIG
33
INSTALLATIEOMGEVING
Installeer de frequentieregelaar niet in omgevingen waar
vloeistoen, deeltjes of gassen in de lucht aanwezig zijn
die de elektrische componenten kunnen beïnvloeden of
beschadigen. Als men geen beschermende maatregelen
treft, neemt de kans op uitval toe, waarbij schade aan
apparatuur en letsel bij personeel kan ontstaan.
Vloeistoen kunnen via de lucht worden overgedragen en
in de frequentieregelaar condenseren, wat kan leiden tot
corrosie van de componenten en metalen onderdelen.
Stoom, olie en zout water kunnen corrosie van
componenten en metalen delen veroorzaken. Gebruik in
dergelijke omgevingen apparatuur met een IP 54behuizing. Voor extra bescherming in een dergelijke
omgeving kunnen gecoate printplaten als optie worden
besteld (standaard voor bepaalde vermogensklassen).
In de lucht aanwezige deeltjes, zoals stof, kunnen leiden
tot mechanische, elektrische of thermische storingen in de
frequentieregelaar. Een goede aanwijzing voor een te hoge
concentratie stof in de lucht zijn stofdeeltjes in de buurt
van de ventilator van de frequentieregelaar. Gebruik in
stoge omgevingen apparatuur met een IP 54-behuizing
of een kast voor IP 20/Type 1-apparatuur.
In omgevingen met een hoge temperatuur en luchtvochtigheidsgraad leiden corrosieve gassen als zwavel, stikstof
en chloorverbindingen tot chemische processen op
componenten van de frequentieregelaar.
Dergelijke chemische reacties hebben al snel een negatief
eect op de elektronische onderdelen en kunnen die
beschadigen. Als de apparatuur in een dergelijke
omgeving moet worden gebruikt, wordt aanbevolen deze
in een kast met toevoer van verse lucht te monteren om te
voorkomen dat agressieve gassen in de buurt van de
frequentieregelaar kunnen komen.
Voor extra bescherming in een dergelijke omgeving
kunnen gecoate printplaten worden besteld als optie.
3.4 Algemene EMC-aspecten
3.4.1 Overzicht van EMC-emissies
Frequentieregelaars (en andere elektrische apparaten)
genereren elektronische of magnetische velden die
storingen kunnen veroorzaken in de omgeving. De elektromagnetische compatibiliteit (EMC) van deze eecten hangt
af van het vermogen en de harmonische kenmerken van
de apparatuur.
Onbeheerste interactie tussen elektrische apparaten in een
systeem kan de compatibiliteit aantasten en een
betrouwbare werking verstoren. Interferentie kan optreden
in de vorm van harmonische vervorming op het net,
elektrostatische ontladingen, snelle spanningsschommelingen of hoogfrequente interferentie. Elektrische
apparaten genereren niet alleen interferentie, maar worden
ook beïnvloed door interferentie van andere gegenereerde
bronnen.
Elektrische verstoringen ontstaan meestal bij frequenties in
het bereik van 150 kHz tot 30 MHz. Via de lucht verspreide
interferentie vanuit het frequentieregelaarsysteem in het
bereik van 30 MHz tot 1 GHz wordt gegenereerd door de
omvormer, de motorkabel en de motor.
Capacitieve stromen in de motorkabel in combinatie met
een hoge dU/dt van de motorspanning genereren
lekstromen, zoals te zien is in Afbeelding 3.52.
Het gebruik van een afgeschermde motorkabel verhoogt
de lekstroom (zie Afbeelding 3.52), omdat afgeschermde
kabels een hogere capaciteit naar aarde hebben dan nietafgeschermde kabels. Als de lekstroom niet wordt gelterd,
zal die meer interferentie in het net veroorzaken in het
frequentiebereik lager dan ongeveer 5 MHz. Omdat de
lekstroom (I1) via de afscherming (I3) naar de eenheid
wordt teruggevoerd, wekt de afgeschermde motorkabel
slechts een klein elektromagnetisch veld (I4) op, zoals te
zien is in Afbeelding 3.52.
Voordat de frequentieregelaar wordt geïnstalleerd, moet de
omgevingslucht worden gecontroleerd op de
aanwezigheid van vloeistoen, deeltjes en gassen door
bestaande installaties in de omgeving te bestuderen.
Typische aanwijzingen voor schadelijke vloeistofnevel zijn
bijvoorbeeld water of olie op metalen delen of corrosie
van metalen delen.
36 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
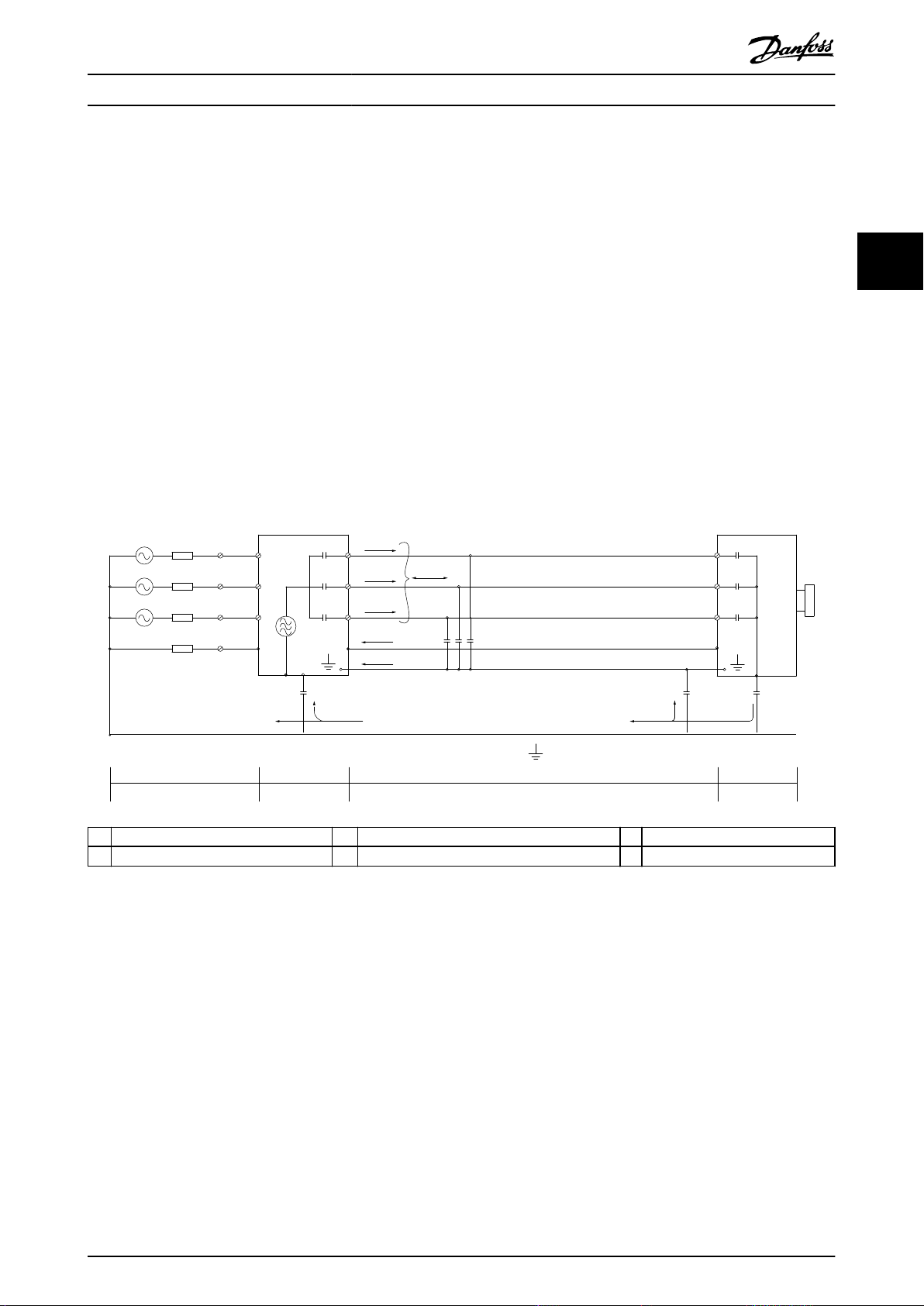
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Productoverzicht Design Guide
De afscherming vermindert de interferentie door straling,
maar verhoogt de laagfrequente interferentie op het net.
Sluit de afscherming van de motorkabel aan op zowel de
behuizing van de frequentieregelaar als de motorbehuizing. De beste manier om dat te doen, is door
geïntegreerde afschermingsklemmen te gebruiken om
gedraaide afschermingsuiteinden (pigtails) te vermijden.
Pigtails verhogen de impedantie van de afscherming bij
hogere frequenties, waardoor het eect van de
afscherming afneemt en de lekstroom (I4) toeneemt.
Als voor relais, stuurkabel, signaalinterface en rem een
afgeschermde kabel wordt gebruikt, moet u de
afscherming aan beide uiteinden aan de behuizing
monteren. In enkele situaties zal het echter noodzakelijk
zijn de afscherming te onderbreken om stroomlussen te
vermijden.
Als de afscherming op een montageplaat voor de frequentieregelaar moet worden geplaatst, moet die montageplaat
van metaal zijn, om de afschermstromen naar de eenheid
terug te leiden. Zorg ook voor een goed elektrisch contact
van de montageplaat, via de montagebouten, naar het
chassis van de frequentieregelaar.
3 3
Bij gebruik van niet-afgeschermde kabels wordt niet
voldaan aan bepaalde emissievereisten, hoewel er wel aan
de meeste immuniteitsvereisten wordt voldaan.
Om het interferentieniveau van het totale systeem
(eenheid + installatie) zo veel mogelijk te beperken, moet
de bekabeling van de motor en remweerstand zo kort
mogelijk zijn. Voorkom dat signaalgevoelige kabels naast
motorkabels en remweerstandskabels worden
geïnstalleerd. Radiostoring van meer dan 50 MHz (via de
lucht) wordt met name gegenereerd door de besturingselektronica.
1 Aarddraad 2 Afscherming 3 Netvoeding
4 Frequentieregelaar 5 Afgeschermde motorkabel 6 Motor
Afbeelding 3.52 Genereren van lekstromen
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 37

Productoverzicht
VLT® HVAC Basic Drive FC 101
3.4.2 Emissie-eisen
De EMC-productnorm voor frequentieregelaars denieert 4 categorieën (C1, C2, C3 en C4) met specieke eisen voor emissie
en immuniteit. Tabel 3.5 geeft de denitie van de 4 categorieën en de corresponderende classicatie van EN 55011.
33
Categorie EN-IEC
61800-3
C1
C2
C3
C4
Tabel 3.5 Correlatie tussen IEC 61800-3 en EN 55011
Frequentieregelaars geïnstalleerd in de 1e omgeving (woonhuizen en
kantoren) met een voedingsspanning van minder dan 1000 V.
Frequentieregelaars geïnstalleerd in de 1e omgeving (woonhuizen en
kantoren) met een voedingsspanning van minder dan 1000 V die niet
ingeplugd of verplaatst kunnen worden en die bedoeld zijn om
geïnstalleerd en in bedrijf gesteld te worden door een vakman.
Frequentieregelaars geïnstalleerd in de 2e omgeving (industrieel) met een
voedingsspanning van minder dan 1000 V.
Frequentieregelaars geïnstalleerd in de 2e omgeving (industrieel) met een
voedingsspanning van 1000 V of hoger of een nominale stroom van 400 A
of hoger of bedoeld voor gebruik in complexe systemen.
Denitie
Corresponderende emissieklasse
in EN 55011
Klasse B
Klasse A groep 1
Klasse A groep 2
Geen emissielimiet.
Stel een EMC-plan op.
Bij toepassing van de algemene emissienormen (m.b.t. geleide emissies) moeten de frequentieregelaars voldoen aan de
limieten in Tabel 3.6.
Omgeving
Eerste omgeving
(woonhuizen en kantoren)
Tweede omgeving
(industriële omgeving)
Algemene
emissienorm
EN-IEC 61000-6-3 Emissienormen voor huishoudelijke,
handels- en licht-industriële omgevingen.
EN-IEC 61000-6-4 Emissienorm voor industriële omgevingen. Klasse A groep 1
Corresponderende emissieklasse in
EN 55011
Klasse B
Tabel 3.6 Correlatie tussen algemene emissienormen en EN 55011
3.4.3 Resultaten EMC-emissietest
De volgende testresultaten zijn verkregen bij gebruik van een systeem met een frequentieregelaar, een afgeschermde
stuurkabel, een besturingskast met potentiometer en een afgeschermde motorkabel.
RFI-
ltertype
Industriële omgeving
EN 55011
EN-IEC
61800-3
Emissie via geleiding. Maximale lengte van afgeschermde kabel [m (ft)] Emissie via straling
Klasse A groep 2
Industriële omgeving
Categorie C3
Tweede omgeving
Industrieel
Zonder
extern lter
Met extern
lter
Klasse A groep 1
Industriële omgeving
Categorie C2
Eerste omgeving
Woonhuizen en kantoren
Zonder
extern lter
Met extern
lter
Klasse B
Woonhuizen, kantoren en
lichte industrie
Categorie C1
Eerste omgeving
Woonhuizen en kantoren
Zonder
extern lter
Met extern
lter
Klasse A groep 1
Industriële omgeving
Categorie C2
Eerste omgeving
Woonhuizen en
kantoren
Zonder
extern
lter
Met
extern
lter
Woonhuizen, kantoren
Klasse B
en lichte industrie
Categorie C1
Eerste omgeving
Woonhuizen en
kantoren
Zonder
extern
lter
Met
extern
lter
38 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Productoverzicht Design Guide
RFI-ltertype Emissie via geleiding. Maximale lengte van afgeschermde kabel [m (ft)] Emissie via straling
Industriële omgeving
H4 RFI-lter (EN 55011 A1, EN-IEC 61800-3 C2)
0,25-11 kW
(0,34-15 pk)
3 x 200-240 V IP 20
0,37-22 kW
(0,5-30 pk)
3 x 380-480 V IP 20
H2 RFI-lter (EN 55011 A2, EN-IEC 61800-3 C3)
15-45 kW
(20-60 pk)
3 x 200-240 V IP 20
30-90 kW
(40-120 pk)
3 x 380-480 V IP 20
0,75-18,5 kW
(1-25 pk)
3 x 380-480 V IP 54
22-90 kW
(30-120 pk)
3 x 380-480 V IP 54
H3 RFI-lter (EN 55011 A1/B, EN-IEC 61800-3 C2/C1)
15-45 kW
(20-60 pk)
3 x 200-240 V IP 20
30-90 kW
(40-120 pk)
3 x 380-480 V IP 20
0,75-18,5 kW
(1-25 pk)
3 x 380-480 V IP 54
22-90 kW
(30-120 pk)
3 x 380-480 V IP 54
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nee
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nee
25 (82) – – – – – Nee – Nee –
25 (82) – – – – – Nee – Nee –
25 (82) – – – – – Ja – – –
25 (82) – – – – – Nee – Nee –
– – 50 (164) – 20 (66) – Ja – Nee –
– – 50 (164) – 20 (66) – Ja – Nee –
– – 25 (82) – 10 (33) – Ja – – –
– – 25 (82) – 10 (33) – Ja – Nee –
3 3
Tabel 3.7 Resultaten EMC-emissietest
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 39

175HA034.10
Productoverzicht
VLT® HVAC Basic Drive FC 101
3.4.4 Overzicht van emissie van
3.4.5 Emissie-eisen m.b.t. harmonischen
harmonischen
Apparatuur die is aangesloten op het openbare net.
Een frequentieregelaar neemt een niet-sinusvormige
stroom af van het net, waardoor de ingangsstroom I
RMS
wordt verhoogd. Een niet-sinusvormige stroom wordt door
33
middel van een Fourier-analyse getransformeerd en
opgesplitst in sinus-golfstromen met verschillende
frequenties, d.w.z. verschillende harmonische stromen I
n
met 50 Hz als basisfrequentie:
I
Hz 50 250 350
Tabel 3.8 Harmonische stromen
1
I
5
I
7
Opties Denitie
EN-IEC 61000-3-2 klasse A voor gebalanceerde 3-
1
faseapparatuur (voor professionele apparatuur met
een totaalvermogen van maximaal 1 kW (1,3 pk)).
EN-IEC 61000-3-12 Apparatuur met een ingangsstroom van 16-75 A per fase en professionele
2
apparatuur vanaf 1 kW (1,3 pk) met een ingangsstroom tot 16 A per fase.
Tabel 3.9 Aangesloten apparatuur
3.4.6 Testresultaten harmonischen (emissie)
De harmonische stromen dragen niet rechtstreeks bij aan
de vermogensopname, maar verhogen de warmteverliezen
in de installatie (transformator, kabels). Houd de
harmonische stromen bij installaties met een hoog
percentage gelijkrichterbelasting daarom op een laag peil
om overbelasting van de transformator en een hoge
temperatuur in de kabels te vermijden.
Afbeelding 3.53 DC-tussenkringspoelen
LET OP
Sommige harmonische stromen kunnen storingen
veroorzaken in communicatieapparatuur die op dezelfde
transformator is aangesloten, of resonantie veroorzaken
bij gebruik van condensatorbatterijen voor correctie van
de arbeidsfactor.
Om te zorgen voor lage harmonische stromen is de
frequentieregelaar standaard voorzien van DC-tussenkringspoelen. Gewoonlijk reduceert dit de ingangsstroom I
met 40%.
RMS
De vermogensklassen tot PK75 in T4 en P3K7 in T2
voldoen aan EN-IEC 61000-3-2, klasse A. Vermogensklassen
vanaf P1K1 en tot P18K in T2 en tot P90K in T4 voldoen
aan EN-IEC 61000-3-12, tabel 4.
Actueel 0,25-11
kW (0,34-15 pk),
IP 20, 200 V
(typisch)
Limiet voor R
120
Actueel 0,25-11
kW (0,34-15 pk),
200 V (typisch)
Limiet voor R
120
Tabel 3.10 Harmonische stroom 0,25-11 kW (0,34-15 pk), 200 V
Individuele harmonische stroom In/I1 (%)
I
5
32,6 16,6 8,0 6,0
≥
sce
sce
40 25 15 10
≥
I
7
Harmonische vervorming (%)
THDi PWHD
39 41,4
48 46
I
11
I
13
De spanningsvervorming op de netvoeding hangt af van
de grootte van de harmonische stromen vermenigvuldigd
met de interne netimpedantie voor de betreende
frequentie. De totale spanningsvervorming THDv wordt op
basis van de harmonischen van de individuele spanningswaarden berekend met behulp van de volgende formule:
THD
% = U
5
+ U
2
+ ... + U
7
2
N
2
(UN% van U)
40 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Productoverzicht Design Guide
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
Actueel 0,37-22
kW (0,5-30 pk), IP
20, 380-480 V
36,7 20,8 7,6 6,4
(typisch)
Limiet voor R
120
sce
≥
40 25 15 10
Harmonische vervorming (%)
THDi PWHD
Actueel 0,37-22
kW (0,5-30 pk),
380-480 V
44,4 40,8
(typisch)
Limiet voor R
120
sce
≥
48 46
Tabel 3.11 Harmonische stroom 0,37-22 kW (0,5-30 pk),
380-480 V
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
Actueel 30-90 kW
(40-120 pk), IP
20, 380-480 V
36,7 13,8 6,9 4,2
(typisch)
Limiet voor R
120
sce
≥
40 25 15 10
Harmonische vervorming (%)
THDi PWHD
Actueel 30-90 kW
(40-120 pk),
380-480 V
40,6 28,8
(typisch)
Limiet voor R
120
sce
≥
48 46
Tabel 3.12 Harmonische stroom 30-90 kW (40-120 pk),
380-480 V
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
Actueel 2,2-15
kW (3,0-20 pk), IP
20, 525-600 V
48 25 7 5
(typisch)
Harmonische vervorming (%)
THDi PWHD
Actueel 2,2-15
kW (3,0-20 pk),
525-600 V
55 27
(typisch)
Tabel 3.13 Harmonische stroom 2,2-15 kW (3,0-20 pk),
525-600 V
I
13
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
I
13
Actueel 18,5-90
kW (25-120 pk),
IP 20, 525-600 V
48,8 24,7 6,3 5
(typisch)
Harmonische vervorming (%)
THDi PWHD
3 3
Actueel 18,5-90
kW (25-120 pk),
525-600 V
55,7 25,3
(typisch)
Tabel 3.14 Harmonische stroom 18,5-90 kW (25-120 pk),
525-600 V
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
I
13
Actueel 22-90 kW
(30-120 pk), IP
54, 400 V
I
13
(typisch)
Limiet voor R
120
36,3 14 7 4,3
≥
sce
40 25 15 10
Harmonische vervorming (%)
THDi PWHD
Actueel 22-90 kW
(30-120 pk), IP 54
40,1 27,1
400 V (typisch)
Limiet voor R
120
sce
≥
48 46
Tabel 3.15 Harmonische stroom 22-90 kW (30-120 pk), 400 V
Individuele harmonische stroom In/I1 (%)
I
5
I
7
I
11
I
13
Actueel 0,75-18,5
kW (1,0-25 pk), IP
54, 380-480 V
36,7 20,8 7,6 6,4
(typisch)
Limiet voor R
I
13
120
sce
≥
40 25 15 10
Harmonische vervorming (%)
THDi PWHD
Actueel 0,75-18,5
kW (1,0-25 pk), IP
54, 380-480 V
44,4 40,8
(typisch)
Limiet voor R
120
sce
≥
48 46
Tabel 3.16 Harmonische stroom 0,75-18,5 kW (1,0-25 pk),
380-480 V
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 41

SMPS
130BB896.10
1
2
3
a
M
Productoverzicht
VLT® HVAC Basic Drive FC 101
Actueel 15-45 kW
(20-60 pk), IP 20,
200 V (typisch)
33
Limiet voor R
120
Actueel 15-45 kW
(20-60 pk), 200 V
(typisch)
Limiet voor R
120
Individuele harmonische stroom In/I1 (%)
I
5
26,7 9,7 7,7 5
≥
sce
sce
40 25 15 10
≥
I
7
Harmonische vervorming (%)
THDi PWHD
30,3 27,6
48 46
I
11
I
13
Galvanische scheiding (PELV)
3.5
PELV biedt bescherming door middel van een extra lage
spanning. Bescherming tegen elektrische schokken is
gegarandeerd wanneer de voeding van het PELV-type is en
de installatie is uitgevoerd volgens de lokale/nationale
voorschriften met betrekking tot PELV-voedingen.
Alle stuurklemmen en relaisklemmen 01-03/04-06 voldoen
aan de PELV-eisen (Protective Extra Low Voltage) (geldt
niet voor geaarde driehoekschakelingen (één zijde geaard)
boven 440 V).
(Gegarandeerde) galvanische scheiding wordt verkregen
door te voldoen aan de eisen voor hogere isolatie en door
Tabel 3.17 Harmonische stroom 15-45 kW (20-60 pk), 200 V
de relevante kruip-/spelingafstanden in acht te nemen.
Deze eisen worden beschreven in de norm EN-IEC
Op voorwaarde dat het kortsluitvermogen van de voeding
61800-5-1.
Ssc groter is dan of gelijk is aan:
De componenten die de elektrische scheiding vormen,
S
= 3 × R
SC
op het interfacepunt tussen de voeding van de gebruiker
en het openbare net (R
SCE
× U
voeding
sce
× I
= 3 × 120 × 400 × I
equ
).
equ
zoals aangegeven, voldoen ook aan de eisen voor hogere
isolatie en de relevante test zoals beschreven in EN-IEC
61800-5-1.
De galvanische PELV-scheiding kan worden getoond in
Het is de verantwoordelijkheid van de installateur of de
Afbeelding 3.55.
gebruiker van de apparatuur om ervoor te zorgen dat de
apparatuur uitsluitend wordt aangesloten op een voeding
met een kortsluitvermogen Ssc dat groter is dan of gelijk is
aan bovenstaande waarde. Vraag de netbeheerder zo
nodig om advies.
Om aan de PELV-eisen te voldoen, moet elke afzonderlijke
aansluiting op de stuurklemmen aan PELV voldoen.
Thermistoren moeten bijvoorbeeld versterkt/dubbel
geïsoleerd zijn.
Andere vermogensklassen kunnen in overleg met de
netbeheerder worden aangesloten op het openbare net.
0,25-22 kW (0,34-30 pk)
Conformiteit met diverse richtlijnen op systeemniveau:
De vermelde gegevens over harmonische stromen in
Tabel 3.10 tot Tabel 3.17 zijn in overeenstemming met ENIEC 61000-3-12 met betrekking tot de productnorm voor
aandrijfsystemen. Ze kunnen worden gebruikt als basis
voor het berekenen van de invloed van harmonische
stromen op het voedingssysteem voor de documentatie
met betrekking tot de naleving van de relevante regionale
richtlijnen: IEEE 519-1992; G5/4.
3.4.7 Immuniteitseisen
1 Voeding (SMPS)
De immuniteitseisen voor frequentieregelaars hangen af
van de omgeving waarin ze geïnstalleerd zijn. De eisen
voor industriële omgevingen zijn zwaarder dan de eisen
voor woon- en kantooromgevingen. Alle Danfoss frequentieregelaars voldoen aan de eisen voor industriële
omgevingen en voldoen hiermee automatisch aan de
lagere eisen voor woon- en kantooromgevingen, met een
hoge veiligheidsmarge.
2 Optische koppelingen, communicatie tussen AOC en BOC
3 Eigen relais
a Stuurkaartklemmen
Afbeelding 3.54 Galvanische scheiding
42 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

130BB901.10
1324
5
a
M
Productoverzicht Design Guide
30-90 kW (40-120 pk)
1 Voeding (SMPS) inclusief scheiding van het UDC-signaal, dat
de tussenkringspanning aangeeft.
2 Poortschakeling die de IGBT's aanstuurt (triggertransfor-
matoren/optische koppelingen).
3 Stroomtransductoren
4 Interne soft-charge-, RFI- en temperatuurmeetcircuits.
5 Eigen relais
a Stuurkaartklemmen
Afbeelding 3.55 Galvanische scheiding
De functionele galvanische scheiding (zie Afbeelding 3.54)
geldt voor de RS485-standaardbusinterface.
3.6 Aardlekstroom
WAARSCHUWING
ONTLADINGSTIJD
Het aanraken van elektrische onderdelen kan fatale
gevolgen hebben – ook nadat de apparatuur is
afgeschakeld van het net.
Zorg er ook voor dat de andere spanningsingangen,
zoals loadsharing (koppeling van de DC-tussenkring) en
de motoraansluiting voor kinetische backup zijn
afgeschakeld.
Wacht minimaal de tijd die is aangegeven in Tabel 2.1,
voordat u elektrische onderdelen aanraakt.
Een kortere tijd is alleen toegestaan als dat op het
typeplaatje van de betreende frequentieregelaar wordt
aangegeven.
WAARSCHUWING
GEVAAR VOOR LEKSTROOM
De aardlekstroom bedraagt meer dan 3,5 mA. Een
onjuiste aarding van de frequentieregelaar kan leiden tot
ernstig of dodelijk letsel.
Zorg dat de apparatuur correct is geaard door
•
een erkende elektrisch installateur.
3 3
VOORZICHTIG
INSTALLATIE OP GROTE HOOGTE
Voor hoogtes boven 2000 m (6500 ft) moet u contact
opnemen met Danfoss in verband met PELV.
WAARSCHUWING
BESCHERMING VIA RESTSTROOMAPPARAAT
Dit product kan een DC-stroom veroorzaken in de
beschermende geleider. Bij gebruik van een reststroomapparaat (RCD) als extra beveiliging mag aan de
voedingszijde van dit product uitsluitend een RCD van
type B (met vertraging) worden gebruikt. Pas anders een
andere beschermende maatregel toe, zoals het
afschermen van de omgeving door middel van dubbele
of versterkte isolatie of isolatie via een transformator
vanaf het voedingssysteem. Zie ook de toepassingsnotitie Protection against Electrical Hazards.
De aarding van de frequentieregelaar en het gebruik van
RCD's moeten altijd voldoen aan de nationale en lokale
voorschriften.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 43

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Productoverzicht
VLT® HVAC Basic Drive FC 101
3.7 Extreme bedrijfsomstandigheden
Kortsluiting (motorfase-fase)
De frequentieregelaar is beveiligd tegen kortsluiting door
middel van stroommetingen in elk van de 3 motorfasen of
in de DC-tussenkring. Een kortsluiting tussen 2
33
uitgangsfasen veroorzaakt een overstroom in de omvormer.
3.7.1 Thermische motorbeveiliging (ETR)
Danfoss maakt gebruik van ETR om de motor te
beschermen tegen oververhitting. Het betreft een elektronische functie die een bimetaalrelais simuleert op basis
van interne metingen. De karakteristieken worden getoond
in Afbeelding 3.56.
De omvormer wordt afzonderlijk uitgeschakeld als de
kortsluitstroom de toegestane waarde (alarm 16, Trip Lock
(Uit & blokk.)) overschrijdt.
Zie hoofdstuk 8.3.1 Zekeringen en circuitbreakers voor
informatie over het beveiligen van de frequentieregelaar
tegen kortsluiting aan de loadsharing- en remuitgangen.
Schakelen aan de uitgang
Schakelen aan de uitgang tussen de motor en de frequentieregelaar is toegestaan. De frequentieregelaar wordt op
geen enkele wijze beschadigd door aan de uitgang te
schakelen. Er kunnen echter wel foutmeldingen worden
gegenereerd.
Door de motor gegenereerde overspanning
De spanning in de DC-tussenkring neemt toe wanneer de
motor als generator werkt. Dat gebeurt in de volgende
gevallen:
De belasting drijft de motor aan (bij een
•
Afbeelding 3.56 Karakteristiek thermische motorbeveiliging
constante uitgangsfrequentie vanuit de frequentieregelaar), wat betekent dat de belasting
energie opwekt.
Als gedurende het vertragen (uitlopen) het
•
traagheidsmoment hoog is, de wrijving laag is en
de uitlooptijd te kort is om de energie te kunnen
afvoeren als een verlies in de frequentieregelaar,
de motor en de installatie.
Een onjuiste instelling van de slipcompensatie
•
(parameter 1-62 Slipcompensatie) kan leiden tot
een hogere DC-tussenkringspanning.
De besturingseenheid kan proberen om de uitloop te
corrigeren als parameter 2-17 Overspanningsreg. is
ingeschakeld.
Om de transistoren en de tussenkringcondensatoren te
De X-as toont de verhouding tussen I
motor
en I
motor
nominaal. De Y-as toont de tijd in seconden voordat het
ETR afvalt en de frequentieregelaar uitschakelt. De curves
tonen het karakteristieke nominale toerental bij twee keer
het nominale toerental en bij 0,2 keer het nominale
toerental.
Bij lagere toertentallen valt het ETR af bij een lagere
warmteontwikkeling, vanwege de verminderde koeling van
de motor. Op die manier wordt de motor beschermd tegen
oververhitting, ook bij lage toerentallen. De ETR-functie
berekent de motortemperatuur op basis van de actuele
stroom en het actuele toerental.
beschermen, wordt de frequentieregelaar uitgeschakeld
wanneer een bepaald spanningsniveau is bereikt.
Netstoring
Bij een netstoring blijft de frequentieregelaar in bedrijf
totdat de DC-tussenkringspanning daalt tot onder het
minimale stopniveau. Dat ligt gewoonlijk 15% onder de
minimale nominale netspanning van de frequentieregelaar.
De netspanning vóór de storing en de motorbelasting
bepalen hoe lang het duurt voordat de frequentieregelaar
gaat vrijlopen.
44 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

R
UIT
AAN
< 800 Ω > 2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
DIG IN
DIG IN
DIG IN
DIG IN
61 68 69
N
P
GEM. GND
+24 V
0/4-20 mA A UIT/DIG UIT 0/4-20 mA A UIT/DIG UIT
COM A IN
COM DIG IN
10 V/20 mA IN
10 V/20 mA IN
10 V UIT
BUSAFSL.
UIT AAN
130BB898.10
Productoverzicht Design Guide
3.7.2 Thermistoringangen
De uitschakelwaarde van de thermistor is > 3 kΩ.
Integreer een thermistor (PTC-sensor) in de motor om de
wikkelingen te beschermen.
Motorbeveiliging kan met behulp van diverse technieken
worden geïmplementeerd:
PTC-sensor in motorwikkelingen
•
thermomechanische schakelaar (type Klixon)
•
elektronisch thermisch relais (ETR);
•
3 3
Afbeelding 3.57 Uitschakeling (trip) wegens hoge motortemperatuur
Voorbeeld met digitale ingang en 10 V-voeding
De frequentieregelaar wordt uitgeschakeld (trip) wanneer
de motortemperatuur te hoog is.
Parametersetup:
Stel parameter 1-90 Thermische motorbeveiliging in op [2]
Thermistoruitsch.
Stel parameter 1-93 Thermistorbron in op [6] Digital Input 29
(Dig. ingang 29).
Afbeelding 3.58 Digitale ingang/10 V-voeding
Voorbeeld met analoge ingang en 10 V-voeding
De frequentieregelaar wordt uitgeschakeld (trip) wanneer
de motortemperatuur te hoog is.
Parametersetup:
Stel parameter 1-90 Thermische motorbeveiliging in op [2]
Thermistoruitsch.
Stel parameter 1-93 Thermistorbron in op [1] Anal. ingang
53.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 45

18
19
12 20 55
27 29 42 45 50 53 54
DIG IN
DIG IN
DIG IN
DIG IN
61 68 69
N
P
GEM. GND
+24 V
0/4-20 mA A UIT/DIG UIT 0/4-20 mA A UIT/DIG UIT
COM A IN
COM DIG IN
10 V/20 mA IN
10 V/20 mA IN
10 V UIT
BUSAFSL.
UIT AAN
130BB897.10
R
< 3,0 kΩ
> 2,9 kΩ
UIT
AAN
Productoverzicht
VLT® HVAC Basic Drive FC 101
LET OP
Stel Anal. ingang 54 niet in als een referentiebron.
33
Afbeelding 3.59 Analoge ingang/10 V-voeding
Ingang
Voedings-
spanning [V]
Digitaal 10
Analoog 10
Drempelwaarden
voor uitschakeling [Ω]
< 800 ⇒ 2,9 k
< 800 ⇒ 2,9 k
Tabel 3.18 Voedingsspanning
LET OP
Verzeker u ervan dat de geselecteerde voedingsspanning
overeenkomt met de specicatie van het gebruikte
thermistorelement.
ETR is in te schakelen via parameter 1-90 Thermische
motorbeveiliging.
46 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Selectie en bestellen Design Guide
4 Selectie en bestellen
4.1 Typecode
Een typecode denieert een specieke conguratie van de VLT® HVAC Basic Drive FC 101 frequentieregelaar. Gebruik
Afbeelding 4.1 om een typecodereeks voor de gewenste conguratie aan te maken.
Afbeelding 4.1 Typecode
Beschrijving Positie Mogelijke keuze
Productgroep en FC-serie 1–6 FC 101
Vermogensklasse 7–10 0,25-90 kW (0,34-120 pk) (PK25-P90K)
Aantal fasen 11 3 fasen (T)
T2: 200-240 V AC
Netspanning 11–12
Behuizing 13–15
RFI-lter 16–17
Rem 18 X: zonder remchopper
Display 19
Coating printplaat 20
Netvoedingsoptie 21 X: geen netvoedingsoptie
Aanpassing 22 X: geen aanpassing
Aanpassing 23 X: geen aanpassing
Softwareversie 24–27 SXXXX: nieuwste versie – standaardsoftware
Softwaretaal 28 X: standaard
A-opties 29–30 AX: geen A-opties
B-opties 31–32 BX: geen B-opties
C0-opties MCO 33–34 CX: geen C-opties
C1-opties 35 X: geen C1-opties
Software voor C-optie 36–37 XX: geen opties
D-opties 38–39 DX: geen D0-opties
T4: 380-480 V AC
T6: 525-600 V AC
E20: IP 20/Chassis
P20: IP 20/Chassis met achterwand
E5A: IP 54
P5A: IP 54 met achterwand
H1: RFI-lter, klasse A1/B
H2: RFI-lter, klasse A2
H3: RFI-lter A1/B (beperkte kabellengte)
H4: RFI-lter, klasse A1
A: alfanumeriek lokaal bedieningspaneel
X: geen lokaal bedieningspaneel
X: ongecoate printplaat
C: gecoate printplaat
4 4
Tabel 4.1 Beschrijving typecode
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 47

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
Selectie en bestellen
VLT® HVAC Basic Drive FC 101
4.2 Opties en accessoires
Stap 2
Plaats LCP in paneel; zie gatafmetingen in Afbeelding 4.3.
4.2.1 Lokaal bedieningspaneel (LCP)
Bestelnummer Beschrijving
132B0200 LCP voor alle IP 20-eenheden
Tabel 4.2 Bestelnummer LCP
44
Behuizing IP 55 met frontmontage
Maximale kabellengte naar eenheid 3 m (10 ft)
Communicatiestandaard RS485
Tabel 4.3 Technische gegevens LCP
4.2.2 Montage van LCP in paneelfront
Stap 1
Bevestig pakking op LCP.
Afbeelding 4.2 Pakking bevestigen
1 Uitsparing in paneel. Paneeldikte 1-3 mm (0,04-0,12 in)
2 Paneel
3 Pakking
4 LCP
Afbeelding 4.3 LCP in paneel plaatsen (frontmontage)
48 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

130BB777.10
130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
Selectie en bestellen Design Guide
Stap 3
Plaats beugel aan achterzijde van het LCP; schuif
vervolgens omlaag.
Draai schroeven vast en sluit het kabeluiteinde met de
contrastekker aan op het LCP.
Afbeelding 4.4 Beugel op LCP plaatsen
Stap 4
Sluit de kabel aan op de frequentieregelaar.
4.2.3 IP 21/NEMA type 1-behuizingsset
IP 21/NEMA type 1 is een optioneel behuizingselement dat
leverbaar is voor IP 20-eenheden.
Door gebruik van de behuizingsset wordt een IP 20eenheid opgewaardeerd om te voldoen aan behuizing IP
21/NEMA type 1.
4 4
Afbeelding 4.6 H1-H5 (zie gegevens in Tabel 4.4)
Afbeelding 4.5 Kabel aansluiten
LET OP
Gebruik de bijgeleverde zelftappende schroeven om de
connector aan te sluiten op de frequentieregelaar. Het
aanhaalmoment bedraagt 1,3 Nm (11,5 in-lb).
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 49

130BB903.10
Selectie en bestellen
VLT® HVAC Basic Drive FC 101
44
Afbeelding 4.7 Afmetingen (zie gegevens in Tabel 4.4)
Frame
H1 IP20
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
H10 IP20 – –
IP-
klasse
3 x 200-240 V
[kW (pk)]
0,25-1,5
(0,34-2,0)
5,5-7,5
(7,4-10)
15-18,5
(20-25)
22–30
(30–40)
37–45
(50–60)
Vermogen
3 x 380-480 V
[kW (pk)]
(74–100)
0,37-1,5
(0,5-2,0)
2,2-4,0
(3,0-5,4)
5,5-7,5
(7,4-10)
11–15
(15–20)
18,5-22
(25-30)
30–45
(40–60)
55–75
90 (120)
Hoogte
[mm (in)] A
3 x 525-600 V
[kW (pk)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5-30
(25-40)
37–55
(50–74)
75–90
(100–120)
2,2-7,5
(3,0-10)
11–15
(15–20)
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Breedte
[mm (in)] B
Diepte
[mm (in)] C
Bestel-
nummer IP
21-set
Bestel-
nummer
NEMA type
1-set
Tabel 4.4 Specicaties behuizingsset
50 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

130BB793.10
99 99
Selectie en bestellen Design Guide
4.2.4 Ontkoppelingsplaat
Gebruik de ontkoppelingsplaat voor een EMC-correcte installatie.
Afbeelding 4.8 toont de ontkoppelingsplaat op een H3-behuizing.
Afbeelding 4.8 Ontkoppelingsplaat
Vermogen [kW (pk)] Bestelnummers
Frame IP-klasse 3 x 200-240 V 3 x 380-480 V 3 x 525-600 V
H1 IP20 0,25-1,5 (0,33-2,0) 0,37-1,5 (0,5-2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2-4 (3,0-5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5-7,5 (7,5-10) – 132B0204
H4 IP20 5,5-7,5 (7,5-10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5-22 (25-30) – 130B0205
H6 IP20 15-18,5 (20-25) 30 (40) 18,5-30 (25-40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
4 4
ontkoppelingsplaten
Tabel 4.5 Specicaties ontkoppelingsplaat
LET OP
Voor de frequentieregelaars H9 en H10 zijn de ontkoppelingsplaten opgenomen in de accessoiretas.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 51

Selectie en bestellen
VLT® HVAC Basic Drive FC 101
4.3 Bestelnummers
4.3.1 Opties en accessoires
Behuizin
gsgrootte
44
Beschrijving
1)
LCP
LCP-paneelmontageset
IP 55
inclusief 3 m
(9,8 ft) kabel
Conversieset
LCP 31 naar
RJ45
LCP-paneelmontageset
IP 55
inclusief 3 m
(9,8 ft) kabel
Ontkoppelingsplaat
IP 21-optie 132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
NEMA type
1-set
Netspa–
nning
T2
(200-240
V AC)
T4
(380-480
V AC)
T6
(525-600
V AC)
132B0200
H1
[kW (pk)]H2[kW (pk)]H3[kW (pk)]H4[kW (pk)]H5[kW (pk)]
0,25-1,5
(0,33-2,0)
0,37-1,5
(0,5-2,0)
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
2,2 (3,0) 3,7 (5,0)
2,2-4,0
(3,0-5,4)
– – – – –
5,5-7,5
(7,5-10)
5,5-7,5
(7,5-10)
11–15
(15–20)
11 (15)
18,5-22
(25-30)
132B0201
132B0203
132B0206
[kW (pk)]
15-18,5
(20-25)
30 (40)
18,5-30
(25-40)
H6
–
37–45
(50–60)
–
H7
[kW (pk)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (pk)]
37–45
(50–60)
75–90
(100–125)
Tabel 4.6 Opties en accessoires
1) Voor IP 20- eenheden wordt het LCP afzonderlijk besteld. Voor IP 54-eenheden is het LCP inbegrepen in de standaardconguratie en op de
frequentieregelaar gemonteerd.
52 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Selectie en bestellen Design Guide
4.3.2 Harmonischenlters
3 x 380-480 V 50 Hz
Vermogen [kW (pk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabel 4.7 AHF-lters (5% stroomvervorming)
Ingangsstroom frequentie-
regelaar, continu [A]
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
Standaard schakelfre-
quentie [kHz]
THDi-niveau [%]
Bestelnummer lter
IP 00
Bestelnummer lter
IP 20
4 4
Vermogen [kW (pk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabel 4.8 AHF-lters (10% stroomvervorming)
Ingangsstroom frequentie-
regelaar, continu [A]
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
3 x 380-480 V 50 Hz
Standaard schakelfre-
quentie [kHz]
THDi-niveau [%]
Bestelnummer lter
IP 00
Bestelnummer lter
IP 20
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 53

Selectie en bestellen
Vermogen [kW (pk)]
22
(30)
30
(40)
37
44
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabel 4.9 AHF-lters (5% stroomvervorming)
Vermogen [kW (pk)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Ingangsstroom frequentie-
regelaar, continu [A]
34,6 4 3 130B1792 130B1757
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
Ingangsstroom frequentie-
regelaar, continu [A]
34,6 4 6 130B1775 130B1487
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
VLT® HVAC Basic Drive FC 101
3 x 440-480 V 60 Hz
Standaard schakelfre-
quentie [kHz]
3 x 440-480 V 60 Hz
Standaard schakelfre-
quentie [kHz]
THDi-niveau [%]
THDi-niveau [%]
Bestelnummer lter
IP 00
Bestelnummer lter
IP 00
Bestelnummer lter
IP 20
Bestelnummer lter
IP 20
Tabel 4.10 AHF-lters (10% stroomvervorming)
54 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Selectie en bestellen Design Guide
4.3.3 Extern RFI-lter
Bij gebruik van de in Tabel 4.11 vermelde externe lters kan worden voldaan aan de maximale afgeschermde kabellengte
van 50 m (164 ft) volgens EN-IEC 61800-3 C2 (EN 55011 A1) of 20 m (65,6 ft) volgens EN-IEC 61800-3 C1 (EN 55011 B).
Vermogen [kW (pk)]
Grootte 380-480 V
0,37-2,2
(0,5-3,0)
3,0-7,5
(4,0-10)
11–15
(15–20)
18,5-22
(25-30)
Tabel 4.11 RFI-lters – details
Type A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Aanhaalmoment
[Nm (in-lb)]
0,7-0,8
(6,2-7,1)
0,7-0,8
(6,2-7,1)
1,9-2,2
(16,8-19,5)
1,9-2,2
(16,8-19,5)
Gewicht [kg
(lb)]
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
Bestel-
nummer
132B0244
4 4
132B0245
132B0246
132B0247
Afbeelding 4.9 RFI-lter – afmetingen
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 55

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Installatie
VLT® HVAC Basic Drive FC 101
5 Installatie
5.1 Elektrische installatie
55
Afbeelding 5.1 Eenvoudig bedradingsschema
LET OP
Houd er rekening mee dat UDC- en UDC+ niet toegankelijk zijn op de volgende eenheden:
•
•
•
•
Alle bekabeling moet voldoen aan de nationale en lokale voorschriften ten aanzien van kabeldoorsneden en omgevingstemperatuur. Koperen geleiders zijn vereist. 75 °C (167 °F) wordt aanbevolen.
IP 20, 380-480 V, 30-90 kW (40-125 pk)
IP 20, 200-240 V, 15-45 kW (20-60 pk)
IP 20, 525-600 V, 2,2-90 kW (3,0-125 pk)
IP 54, 380-480 V, 22-90 kW (30-125 pk)
56 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Installatie Design Guide
Vermogen [kW (pk)] Aanhaalmoment [Nm (in-lb)]
Behuizing
sgrootte
IP-klasse 3 x 200-240 V 3 x 380-480 V Net Motor
H1 IP20
0,25-1,5
(0,33-2,0)
0,37-1,5
(0,5-2,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H2 IP20 2,2 (3,0) 2,2-4,0 (3,0-5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5-7,5 (7,5-10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5-7,5 (7,5-10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5-22 (25-30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15-18,5 (20-25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
24 (212)
1)
24 (212)
Tabel 5.1 Aanhaalmomenten voor behuizingsgrootte H1-H8, 3 x 200-240 V en 3 x 380-480 V
Vermogen [kW (pk)] Aanhaalmoment [Nm (in-lb)]
Behuizing
sgrootte
IP-klasse 3 x 380-480 V Net Motor DC-aansluiting
I2 IP54
0,75-4,0
(1,0-5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I3 IP54 5,5-7,5 (7,5-10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11-18,5 (15-25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
(212)
2)
14 (124)/24
2)
(212)
1)
DC-
aansluiting
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Stuurkle–
Stuurkle–
mmen
mmen
Aarde Relais
Aarde Relais
– 0,5 (4,0) 3 (27) 0,6 (5,0)
5 5
Tabel 5.2 Aanhaalmomenten voor behuizingsgrootte I2-I8
Vermogen [kW (pk)] Aanhaalmoment [Nm (in-lb)]
Behuizing
sgrootte
IP-klasse 3 x 525-600 V Net Motor DC-aansluiting
H9 IP20 2,2-7,5 (3,0-10) 1,8 (16) 1,8 (16)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16)
Niet
aanbevolen
Niet
aanbevolen
Stuurkle–
mmen
Aarde Relais
0,5 (4,0) 3 (27) 0,6 (5,0)
0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5-30 (25-40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabel 5.3 Aanhaalmomenten voor behuizingsgrootte H6-H10, 3 x 525-600 V
1) Kabelmaten > 95 mm²
≤
2) Kabelmaten
95 mm²
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 57

130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Installatie
VLT® HVAC Basic Drive FC 101
5.1.1 Aansluiting netvoeding en motor
Relais en klemmen op behuizingsgrootte H1-H5
De frequentieregelaar is ontworpen voor gebruik met alle
standaard 3-fasige asynchrone motoren. Zie
hoofdstuk 8.4 Algemene technische gegevens voor de
maximale kabeldoorsneden.
Gebruik een afgeschermde/gewapende
•
motorkabel om te voldoen aan de EMC-emissienormen en sluit deze kabel aan op zowel de
ontkoppelingsplaat als de motor.
Houd de motorkabel zo kort mogelijk, om interfe-
55
•
rentieniveau en lekstromen te beperken.
Zie FC 101 De-coupling Plate Mounting Instruction
•
voor meer informatie over het monteren van de
ontkoppelingsplaat.
Zie ook EMC-correcte installatie in
•
hoofdstuk 5.1.2 EMC-correcte elektrische installatie.
Zie het hoofdstuk Aansluiting op net en motor in
•
®
de VLT
HVAC Basic Drive FC 101 Snelgids voor
meer informatie over het aansluiten van de
frequentieregelaar op de netvoeding en de
motor.
1 Net
2 Aarde
3 Motor
4 Relais
Afbeelding 5.2 Behuizingsgrootte H1-H5
IP 20, 200-240 V, 0,25-11 kW (0,33-15 pk)
IP 20, 380-480 V, 0,37-22 kW (0,5-30 pk)
58 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Installatie Design Guide
Relais en klemmen op behuizingsgrootte H6
1 Net
2 Motor
3 Aarde
4 Relais
Afbeelding 5.3 Behuizingsgrootte H6
IP 20, 380-480 V, 30-45 kW (40-60 pk)
IP 20, 200-240 V, 15-18,5 kW (20-25 pk)
IP 20, 525-600 V, 22-30 kW (30-40 pk)
Relais en klemmen op behuizingsgrootte H7
5 5
1 Net
2 Relais
3 Aarde
4 Motor
Afbeelding 5.4 Behuizingsgrootte H7
IP 20, 380-480 V, 55-75 kW (70-100 pk)
IP 20, 200-240 V, 22-30 kW (30-40 pk)
IP 20, 525-600 V, 45-55 kW (60-70 pk)
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 59

130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Installatie
VLT® HVAC Basic Drive FC 101
Relais en klemmen op behuizingsgrootte H8
Zorg dat de netkabels voor behuizingsgrootte H9 op de
juiste wijze worden aangesloten. Zie het hoofdstuk
Aansluiting op net en motor in de VLT® HVAC Basic Drive FC
101 Snelgids voor meer informatie. Gebruik de aanhaalmo-
menten die zijn gespeciceerd in hoofdstuk 5.1.1 Elektrische
installatie in het algemeen.
Relais en klemmen op behuizingsgrootte H10
55
1 Net
2 Relais
3 Aarde
4 Motor
Afbeelding 5.5 Behuizingsgrootte H8
IP 20, 380-480 V, 90 kW (125 pk)
IP 20, 200-240 V, 37-45 kW (50-60 pk)
IP 20, 525-600 V, 75-90 kW (100-125 pk)
Aansluiting op net en motor voor behuizingsgrootte H9
Afbeelding 5.7 Behuizingsgrootte H10
IP 20, 600 V, 11-15 kW (15-20 pk)
Afbeelding 5.6 Motoraansluiting voor behuizingsgrootte H9
IP 20, 600 V, 2,2-7,5 kW (3,0-10 pk)
60 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Installatie Design Guide
Behuizingsgrootte I2
Behuizingsgrootte I3
5 5
1 RS485
2 Net
3 Aarde
4 Kabelklemmen
1 RS485
2 Net
3 Aarde
4 Kabelklemmen
5 Motor
6 UDC
7 Relais
8 I/O
5 Motor
6 UDC
7 Relais
Afbeelding 5.9 Behuizingsgrootte I3
IP 54, 380-480 V, 5,5-7,5 kW (7,5-10 pk)
8 I/O
Afbeelding 5.8 Behuizingsgrootte I2
IP54, 380-480 V, 0,75-4,0 kW (1,0-5,0 pk)
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 61

130BD011.10
130BC203.10
130BT326.10
130BT325.10
Installatie
VLT® HVAC Basic Drive FC 101
Behuizingsgrootte I4
Behuizingsgrootte I6
55
Afbeelding 5.12 Netvoeding voor behuizingsgrootte I6
1 RS485
2 Net
3 Aarde
4 Kabelklemmen
5 Motor
6 UDC
7 Relais
8 I/O
IP 54, 380-480 V, 22-37 kW (30-50 pk)
Afbeelding 5.10 Behuizingsgrootte I4
IP54, 380-480 V, 0,75-4,0 kW (1,0-5,0 pk)
Afbeelding 5.11 IP 54, behuizingsgrootte I2, I3, I4
Afbeelding 5.13 Motoraansluiting voor behuizing I6
IP 54, 380-480 V, 22-37 kW (30-50 pk)
62 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Installatie Design Guide
Afbeelding 5.14 Relais op behuizingsgrootte I6
IP 54, 380-480 V, 22-37 kW (30-50 pk)
5.1.2 EMC-correcte elektrische installatie
Let op de volgende aanbevelingen om een EMC-correcte
elektrische installatie te waarborgen.
Gebruik uitsluitend afgeschermde/gewapende
•
motorkabels en afgeschermde/gewapende
stuurkabels.
Sluit de afscherming aan beide uiteinden aan op
•
aarde.
Vermijd het gebruik van kabelafschermingen met
•
gedraaide uiteinden (pigtails), omdat dit het
afschermingseect bij hoge frequenties kan
verlagen. Gebruik in plaats daarvan de
meegeleverde kabelklemmen.
Zorg voor een goed elektrisch contact van de
•
montageplaat, via de montagebouten, naar de
metalen kast van de frequentieregelaar.
Gebruik tandveerringen en elektrisch geleidende
•
montageplaten.
Gebruik geen niet-afgeschermde/niet-gewapende
•
motorkabels in de installatiekasten.
5 5
Behuizingsgrootte I7, I8
Afbeelding 5.15 Behuizingsgrootte I7, I8
IP 54, 380-480 V, 45-55 kW (60-70 pk)
IP 54, 380-480 V, 75-90 kW (100-125 pk)
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 63
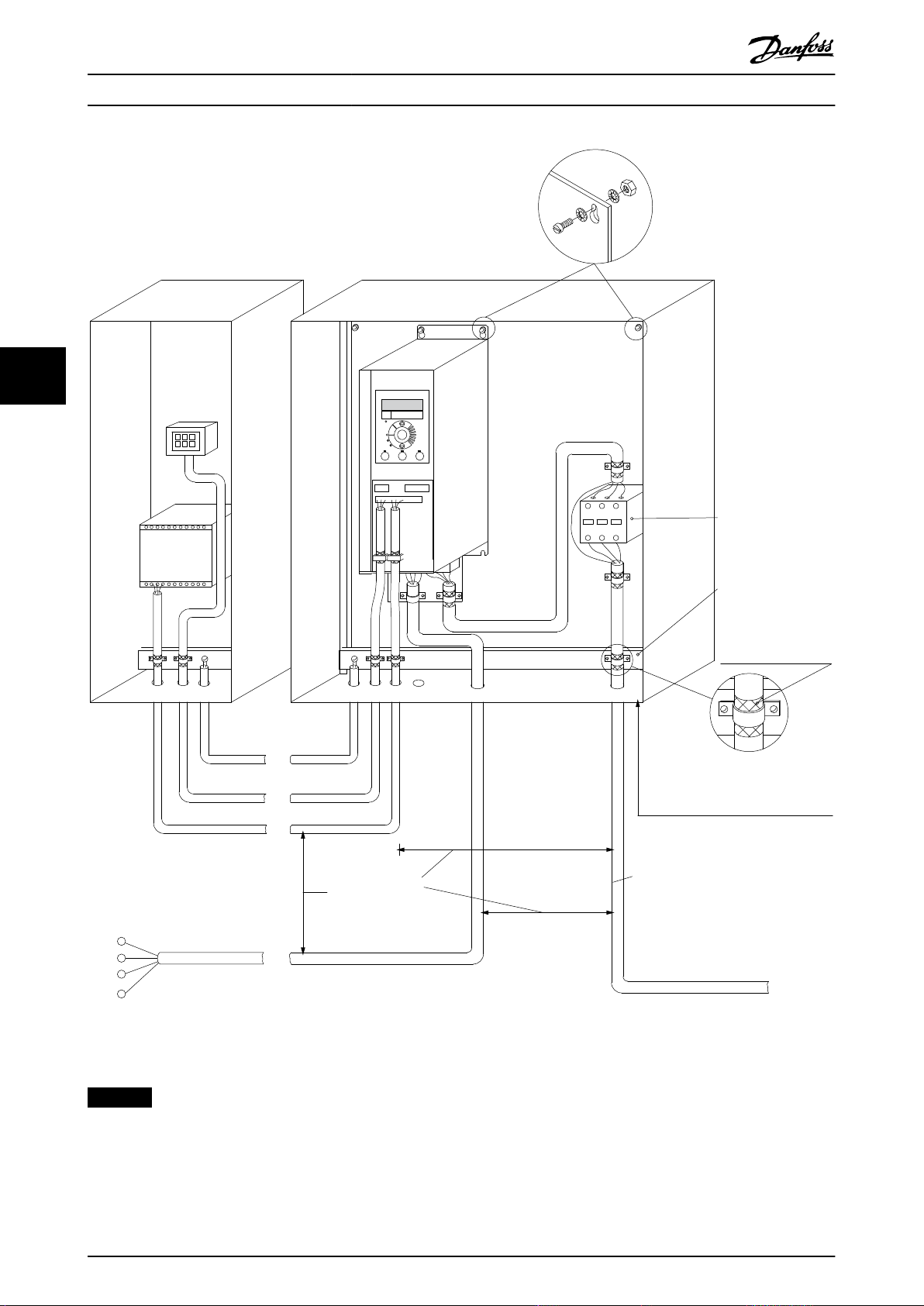
L1
L2
L3
PE
Min. 16 mm
2
vereeningskabel
Stuurkabels
Alle kabelingangen aan
één zijde van het paneel
Aardingsrail
Kabelisolatie
gestript
Uitgangsschakelaar enz.
Motorkabel
Motor, 3 fasen en aardverbinding
PLC enz.
Paneel
Netvoeding
Min. 200 mm
tussen stuurkabel, netkabel
en tussen netmotorkabel
PLC
Versterkte aardverbinding
130BB761.10
Installatie
VLT® HVAC Basic Drive FC 101
55
Afbeelding 5.16 EMC-correcte elektrische installatie
LET OP
Gebruik voor Noord-Amerika metalen kabelgoten in plaats van afgeschermde kabels.
64 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Installatie Design Guide
5.1.3 Stuurklemmen
Raadpleeg de VLT® HVAC Basic Drive FC 101 Snelgids en zorg
ervoor dat de klemafdekking op de juiste wijze wordt
verwijderd.
Afbeelding 5.17 toont alle stuurklemmen van de frequentieregelaar. De frequentieregelaar wordt gestart via een
startsignaal (klem 18), een verbinding tussen klem 12 en
27 en een analoge referentie (klem 53 of 54, en 55).
De modus voor digitale ingang 18, 19 en 27 wordt
ingesteld in parameter 5-00 Dig. I/O-modus (PNP is de
standaardwaarde). De modus voor digitale ingang 29
wordt ingesteld in parameter 5-03 Modus dig. ingang 29
(PNP is de standaardwaarde).
Afbeelding 5.17 Stuurklemmen
5 5
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 65

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmeren
6 Programmeren
VLT® HVAC Basic Drive FC 101
6
6.1 Inleiding
De frequentieregelaar kan worden geprogrammeerd via
het LCP of vanaf een pc via de RS485-COM-poort. Voor dit
laatste moet u MCT 10 setupsoftware installeren. Zie
hoofdstuk 1.5 Aanvullende informatiebronnen voor meer
informatie over de software.
6.2 Lokaal bedieningspaneel (LCP)
De functies van het LCP zijn onderverdeeld in 4 groepen.
A. Display
B. Menutoets
C. Navigatietoetsen en indicatielampjes
D. Bedieningstoetsen en indicatielampjes
1 Nummer en naam van de parameter.
2 Parameterwaarde.
Het setupnummer toont het nummer van de actieve setup
en het nummer van de setup die wordt gewijzigd. Als de
actieve setup ook de setup is die wordt bewerkt, wordt
alleen het nummer van deze setup getoond (fabrieksin-
3
stelling). Als de actieve en de te wijzigen setup niet
dezelfde zijn, worden beide nummers op het display
weergegeven (setup 12). Het nummer van de te bewerken
setup zal knipperen.
De draairichting van de motor wordt linksonder op het
4
display aangegeven door middel van een pijltje dat
rechtsom of linksom wijst.
Het driehoekje geeft aan of het LCP de status, het
5
snelmenu of het hoofdmenu weergeeft.
Tabel 6.1 Legenda bij Afbeelding 6.1, deel I
B. Menutoets
Druk op [Menu] om te schakelen tussen status, snelmenu
en hoofdmenu.
C. Navigatietoetsen en indicatielampjes
6 Com.-led: knippert tijdens buscommunicatie.
7 Groene led/On: de besturingssectie werkt correct.
8 Gele led/Warn.: geeft een waarschuwing aan.
9 Knipperende rode led/Alarm: geeft een alarm aan.
[Back]: dient om terug te keren naar de vorige stap of laag
10
in de navigatiestructuur.
[▲] [▼] [►]: dienen om te navigeren tussen parametergroepen en parameters en binnen parameters. Ze kunnen
11
ook worden gebruikt voor het instellen van de lokale
referentie.
[OK]: dient om een parameter te selecteren en wijzigingen
12
van de parameterinstelling te accepteren.
Tabel 6.2 Legenda bij Afbeelding 6.1, deel II
Afbeelding 6.1 Lokaal bedieningspaneel (LCP)
D. Bedieningstoetsen en indicatielampjes
[Hand On]: start de motor en maakt het mogelijk om de
A. Display
Het lcd-display is verlicht en heeft 2 alfanumerieke regels.
Alle gegevens worden op het LCP weergegeven.
Afbeelding 6.1 beschrijft de gegevens die kunnen worden
uitgelezen via het display.
frequentieregelaar via het LCP te besturen.
LET OP
[2] Coast inverse (Vrijloop geïnverteerd) is de
13
standaardoptie voor parameter 5-12 Klem 27 digitale
ingang. [Hand On] start de motor niet als er geen
24 V is aangesloten op klem 27. Verbind klem 12
met klem 27.
[O/Reset]: stopt de motor (O). Een eventueel aanwezig
14
alarm wordt gereset.
[Auto On]: de frequentieregelaar wordt bestuurd via
15
stuurklemmen of seriële communicatie.
Tabel 6.3 Legenda bij Afbeelding 6.1, deel III
66 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

FC
+24 V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A UIT / D UIT
A UIT / D UIT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Referentie
Start
+10 V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Press OK to start Wizard
Push Back to skip it
Setup 1
Programmeren Design Guide
6.3 Menu's
6.3.1 Statusmenu
De selectiemogelijkheden in het menu Status zijn:
Motorfrequentie [Hz], parameter 16-13 Frequentie.
•
Motorstroom [A], parameter 16-14 Motorstroom.
•
Referentie motortoerental als percentage [%],
•
parameter 16-02 Referentie [%].
Terugkoppeling, parameter 16-52 Terugk. [Eenh].
•
Motorvermogen, parameter 16-10 Verm. [kW] voor
•
kW, parameter 16-11 Verm. [pk] voor pk. Als
parameter 0-03 Regionale instellingen is ingesteld
op [1] Noord-Amerika, wordt het motorvermogen
niet in kW maar in pk weergegeven.
Uitlezing gebruiker, parameter 16-09 Standaard
•
uitlez.
Motortoerental [tpm], parameter 16-17 Snelh.
•
[RPM].
6.3.2 Quick Menu
Afbeelding 6.2 Bedrading frequentieregelaar
De wizard wordt na inschakeling weergegeven totdat er
een parameter is gewijzigd. De wizard kan altijd opnieuw
worden opgestart via het snelmenu. Druk op [OK] om de
wizard te starten. Druk op [Back] om terug te keren naar
de statusweergave.
6
6
Gebruik het snelmenu om de meestgebruikte functies te
programmeren. Via [Quick Menu] hebt u toegang tot de
volgende onderdelen:
Opstartwizard voor toepassingen zonder
•
terugkoppeling. Zie Afbeelding 6.4 voor meer
informatie.
Wizard voor toepassingen met terugkoppeling.
•
Zie Afbeelding 6.5 voor meer informatie.
Motorsetup. Zie Tabel 6.6 voor meer informatie.
•
Gemaakte wijzigingen.
•
De ingebouwde wizard leidt de installateur op duidelijke
en gestructureerde wijze door de setup van de frequentieregelaar voor het congureren van toepassingen met of
zonder terugkoppeling en voor een snelle conguratie van
de motorinstellingen.
Afbeelding 6.3 Wizard voor opstarten/afsluiten
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 67

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmeren
VLT® HVAC Basic Drive FC 101
6
Afbeelding 6.4 Setupwizard voor toepassingen zonder terugkoppeling
68 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Setupwizard voor toepassingen zonder terugkoppeling
Para–
meter
Parameter
0-03 Regi
onale
instellingen
Parameter
0-06 Type
net
Optie Stand–
ard
[0] International
(Internationaal)
[1] US ( VS)
[0] 200–240 V/50
Hz/IT-grid
[1] 200–240 V/50
Hz/Delta
[2] 200–240 V/50
Hz
[10] 380–440
V/50 Hz/IT-grid
[11] 380–440
V/50 Hz/Delta
[12] 380–440
V/50 Hz
[20] 440–480
V/50 Hz/IT-grid
[21] 440–480
V/50 Hz/Delta
[22] 440–480
V/50 Hz
[30] 525–600
V/50 Hz/IT-grid
[31] 525–600
V/50 Hz/Delta
[32] 525–600
V/50 Hz
[100] 200–240
V/60 Hz/IT-grid
[101] 200–240
V/60 Hz/Delta
[102] 200–240
V/60 Hz
[110] 380–440
V/60 Hz/IT-grid
[111] 380–440
V/60 Hz/Delta
[112] 380–440
V/60 Hz
[120] 440–480
V/60 Hz/IT-grid
[121] 440–480
V/60 Hz/Delta
[122] 440–480
V/60 Hz
[130] 525–600
V/60 Hz/IT-grid
[131] 525–600
V/60 Hz/Delta
[132] 525–600
V/60 Hz
[0]
Internationaal
Afhankel
ijk van
grootte
Gebruik
–
Selecteer de bedieningsmodus die bij het starten actief moet zijn wanneer de frequentieregelaar
na een uitschakeling weer wordt aangesloten op de netvoeding.
6
6
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 69

Programmeren
VLT® HVAC Basic Drive FC 101
6
Para–
meter
Parameter
1-10 Mot
orconstruc
tie
Optie Stand–
ard
*[0] Asynchron
(Asynchroon)
[1] PM, nonsalient SPM (PM,
nietuitspringende
SPM)
[3] PM, salient
IPM (PM,
uitspringende
IPM)
[0]
Asynchr
on
(Asynchr
oon)
Gebruik
Door het instellen van deze parameter kan de instelling van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte motorregeling).
•
Parameter 1-14 Verst. demping.
•
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm.
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis (Stroom bij min. inductantie voor d- as).
•
Parameter 1-49 Current at Min Inductance for q-axis (Stroom bij min. inductantie voor q- as).
•
Parameter 1-66 Min. stroom bij lage snelh.
•
Parameter 1-70 Startmodus.
•
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq.
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
70 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Para–
meter
Parameter
1-20 Mot
orverm.
Parameter
1-22 Mot
orspannin
g
Parameter
1-23 Mot
orfrequent
ie
Parameter
1-24 Mot
orstroom
Parameter
1-25 Nom
.
motorsnel
heid
Parameter
1-26 Cont
. nom.
motorkop
pel
Optie Stand–
ard
0,12-110 kW/
0,16-150 pk
50-1000 V Afhankel
20-400 Hz Afhankel
0,01-10000,00 A Afhankel
50-9999 tpm Afhankel
0,1-1000,0 Nm Afhankel
Afhankel
ijk van
grootte
ijk van
grootte
ijk van
grootte
ijk van
grootte
ijk van
grootte
ijk van
grootte
Gebruik
Stel het motorvermogen in volgens de gegevens van het typeplaatje
Stel de motorspanning in volgens de gegevens van het typeplaatje.
Voer de motorfrequentie in volgens de gegevens van het typeplaatje.
Stel de motorstroom in volgens de gegevens van het typeplaatje.
Voer het nominale motortoerental in volgens de gegevens van het typeplaatje.
Deze parameter is alleen beschikbaar als parameter 1-10 Motorconstructie is ingesteld op een optie
die het gebruik van een permanentmagneetmotor mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde beïnvloedt de instelling van andere
parameters.
6
6
Parameter
1-29 Auto
m.
aanpassin
g
motorgeg.
(AMA)
Parameter
1-30 Stat
orweersta
nd (Rs)
Parameter
1-37 Indu
ctantie das (Ld)
Parameter
1-38 qaxis
Inductanc
e (Lq)
Parameter
1-39 Mot
orpolen
Parameter
1-40 Tege
n-EMK bij
1000 TPM
Zie
parameter 1-29 A
utom.
aanpassing
motorgeg. (AMA).
0,000-99,990 Ω
0,000-1000,000mHAfhankel
0,000-1000,000mHAfhankel
2–100 4 Stel het aantal motorpolen in.
10-9000 V Afhankel
O (Uit) Het uitvoeren van een AMA optimaliseert de motorprestaties.
Afhankel
ijk van
grootte
ijk van
grootte
ijk van
grootte
ijk van
grootte
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in.
Raadpleeg het datablad voor de permanentmagneetmotor voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 71
Programmeren
VLT® HVAC Basic Drive FC 101
6
Para–
meter
Parameter
1-42 Leng
te
motorkab
el:
Parameter
1-44 Indu
ctantie das verz.
(LdSat)
Parameter
1-45 qaxis
Inductanc
e Sat.
(LqSat)
Parameter
1-46 Verst
. positiedetectie
Parameter
1-48 Curr
ent at Min
Inductanc
e for daxis
(Stroom
bij min.
inductanti
e voor das)
Parameter
1-49 Curr
ent at Min
Inductanc
e for qaxis
(Stroom
bij min.
inductanti
e voor qas)
Parameter
1-70 Start
modus
Parameter
1-73 Vlieg
. start
Optie Stand–
ard
0-100 m 50 m Voer de lengte van de motorkabel in.
0,000-1000,000mHAfhankel
ijk van
grootte
0,000-1000,000mHAfhankel
ijk van
grootte
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij het starten aan.
20–200% 100% Voer het verzadigingspunt van de inductantie in.
20–200% 100% Deze parameter speciceert de verzadigingscurve van de d- en q-inductantiewaarden. Bij een
[0] Rotor
Detection
(Rotordetectie)
[1] Parking
(Parkeren)
[0] Disabled
(Uitgesch.)
[1] Enabled
(Ingesch.)
[0] Rotor
Detectio
n
(Rotorde
tectie)
[0]
Disabled
(Uitgesc
h.)
Gebruik
Deze parameter komt overeen met de inductantieverzadiging van Ld. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-37 Inductantie d-as (Ld). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-38 q-axis Inductance (Lq). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
waarde van deze parameter van 20-100% wordt een lineaire benadering van de inductanties
toegepast, vanwege de parameters parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz. (LdSat) en parameter 1-45 q-axis Inductance
Sat. (LqSat).
Selecteer de startmodus voor de PM-motor.
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in staat moet zijn een draaiende motor op
te vangen bij een netstoring. Selecteer [0] Disabled (Uitgesch.) als deze functie niet vereist is. Als
deze parameter is ingesteld op [1] Enabled (Ingesch.), zijn parameter 1-71 Startvertraging en
parameter 1-72 Startfunctie niet van toepassing. Parameter 1-73 Vlieg. start is alleen actief in de
modus VVC+.
72 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Para–
meter
Parameter
3-02 Mini
mumreferentie
Parameter
3-03 Max.
referentie
Parameter
3-41 Ram
p 1
aanlooptij
d
Parameter
3-42 Ram
p 1
uitlooptijd
Parameter
4-12 Mot
orsnelh.
lage begr.
[Hz]
Parameter
4-14 Mot
orsnelh.
hoge
begr. [Hz]
Parameter
4-19 Max.
uitgangsfr
eq.
Parameter
5-40 Func
tierelais
Parameter
5-40 Func
tierelais
Parameter
6-10 Kle
m 53 lage
spanning
Parameter
6-11 Kle
m 53
hoge
spanning
Parameter
6-12 Kle
m 53 lage
stroom
Optie Stand–
ard
-4999,000-4999,0000 De minimumreferentie is de laagste waarde die wordt bepaald door de som van alle referenties.
-4999,000-4999,00050 De maximumreferentie is de hoogste waarde die wordt bepaald door de som van alle referenties.
0,05-3600,00 s Afhankel
ijk van
grootte
0,05-3600,00 s Afhankel
ijk van
grootte
0,0-400,0 Hz 0 Hz Stel de minimumbegrenzing voor een laag toerental in.
0,0-400,0 Hz 100 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100 Hz Stel de waarde voor de maximale uitgangsfrequentie in. Als parameter 4-19 Max. uitgangsfreq.
Zie
parameter 5-40 F
unctierelais.
Zie
parameter 5-40 F
unctierelais.
0,00-10,00 V 0,07 V Voer de spanning in die overeenkomt met de lage referentiewaarde.
0,00-10,00 V 10 V Voer de spanning in die overeenkomt met de hoge referentiewaarde.
0,00-20,00 mA 4 mA Voer de stroom in die overeenkomt met de lage referentiewaarde.
[9]
Alarm
[5] Drive
running
(Frequen
tieregela
ar
actief)
Gebruik
Bij gebruik van een asynchrone motor bedraagt de aanlooptijd 0 tot de nominale waarde in
parameter 1-23 Motorfrequentie. Bij gebruik van een PM-motor bedraagt de aanlooptijd 0 tot
parameter 1-25 Nom. motorsnelheid.
Voor asynchrone motoren geldt een uitlooptijd vanaf de nominale waarde in
parameter 1-23 Motorfrequentie tot 0. Voor PM-motoren geldt een uitlooptijd vanaf
parameter 1-25 Nom. motorsnelheid tot 0.
wordt ingesteld op een waarde lager dan parameter 4-14 Motorsnelh. hoge begr. [Hz], wordt
parameter 4-14 Motorsnelh. hoge begr. [Hz] automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq.
Selecteer de functie voor het besturen van uitgangsrelais 1.
Selecteer de functie voor het besturen van uitgangsrelais 2.
6
6
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 73

Programmeren
VLT® HVAC Basic Drive FC 101
6
Para–
meter
Parameter
6-13 Kle
m 53
hoge
stroom
Parameter
6-19 Ter
minal 53
mode
Parameter
30-22 Bev
eiliging
geblokkeerde
rotor
Parameter
30-23 Loc
ked Rotor
Detection
Time [s]
Tabel 6.4 Setupwizard voor toepassingen zonder terugkoppeling
Optie Stand–
ard
0,00-20,00 mA 20 mA Voer de stroom in die overeenkomt met de hoge referentiewaarde.
[0] Current
(Stroom)
[1] Voltage
(Spanning)
[0] O (Uit)
[1] On (Aan)
0,05-1 s 0,10 s
[1]
Spannin
g
[0] O
(Uit)
Gebruik
Selecteer of klem 53 wordt gebruikt als stroom- of als spanningsingang.
–
–
74 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmeren Design Guide
Setupwizard voor toepassingen met terugkoppeling
6
6
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 75
Afbeelding 6.5 Setupwizard voor toepassingen met terugkoppeling

Programmeren
VLT® HVAC Basic Drive FC 101
6
Parameter Bereik Stand–
ard
Parameter
0-03 Regio
nale instellingen
Parameter
0-06 Type
net
Parameter
1-00 Con
guratiemo
dus
[0] International
(Internationaal)
[1] US ( VS)
[0]–[132] Zie
Tabel 6.4.
[0] Open loop
(Zonder
terugkoppeling)
[3] Closed loop
(Met terugkoppeling)
[0]
Internationaal
Geselecteerde
grootte
[0] Open
loop
(Zonder
terugkoppeling)
Gebruik
–
Selecteer de bedieningsmodus die bij het starten actief moet zijn wanneer de frequentieregelaar
na een uitschakeling weer wordt aangesloten op de netvoeding.
Selecteer [3] Closed loop (Met terugkoppeling).
76 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Parameter Bereik Stand–
ard
Parameter
1-10 Moto
rconstructi
e
*[0] Asynchron
(Asynchroon)
[1] PM, nonsalient SPM (PM,
nietuitspringende
SPM)
[3] PM, salient
IPM (PM,
uitspringende
IPM)
[0]
Asynchro
n
(Asynchro
on)
Gebruik
Door het instellen van deze parameter kan de instelling van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte motorregeling).
•
Parameter 1-14 Verst. demping.
•
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm.
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis (Stroom bij min. inductantie voor d- as).
•
Parameter 1-49 Current at Min Inductance for q-axis (Stroom bij min. inductantie voor q- as).
•
Parameter 1-66 Min. stroom bij lage snelh.
•
Parameter 1-70 Startmodus.
•
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq.
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
6
6
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 77

Programmeren
VLT® HVAC Basic Drive FC 101
6
Parameter Bereik Stand–
ard
Parameter
1-20 Moto
rverm.
Parameter
1-22 Moto
rspanning
Parameter
1-23 Moto
rfrequentie
Parameter
1-24 Moto
rstroom
Parameter
1-25 Nom.
motorsnel
heid
Parameter
1-26 Cont.
nom.
motorkopp
el
0,09-110 kW Afhankelij
k van
grootte
50-1000 V Afhankelij
k van
grootte
20-400 Hz Afhankelij
k van
grootte
0-10000 A Afhankelij
k van
grootte
50-9999 tpm Afhankelij
k van
grootte
0,1-1000,0 Nm Afhankelij
k van
grootte
Gebruik
Stel het motorvermogen in volgens de gegevens van het typeplaatje
Stel de motorspanning in volgens de gegevens van het typeplaatje.
Voer de motorfrequentie in volgens de gegevens van het typeplaatje.
Stel de motorstroom in volgens de gegevens van het typeplaatje.
Voer het nominale motortoerental in volgens de gegevens van het typeplaatje.
Deze parameter is alleen beschikbaar als parameter 1-10 Motorconstructie is ingesteld op een
optie die het gebruik van een permanentmagneetmotor mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde beïnvloedt de instelling van andere
parameters.
Parameter
1-29 Auto
m.
aanpassin
g
motorgeg.
(AMA)
Parameter
1-30 Stato
rweerstan
d (Rs)
Parameter
1-37 Induc
tantie d-as
(Ld)
Parameter
1-38 qaxis
Inductance
(Lq)
Parameter
1-39 Moto
rpolen
Parameter
1-40 Tegen
-EMK bij
1000 TPM
Parameter
1-42 Lengt
e
motorkabe
l:
O (Uit) Het uitvoeren van een AMA optimaliseert de motorprestaties.
0-99,990 Ω
0,000-1000,000mHAfhankelij
0,000-1000,000mHAfhankelij
2–100 4 Stel het aantal motorpolen in.
10-9000 V Afhankelij
0-100 m 50 m Voer de lengte van de motorkabel in.
Afhankelij
k van
grootte
k van
grootte
k van
grootte
k van
grootte
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in.
Raadpleeg het datablad voor de permanentmagneetmotor voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
78 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Parameter Bereik Stand–
ard
Parameter
1-44 Induc
tantie d-as
verz.
(LdSat)
Parameter
1-45 qaxis
Inductance
Sat.
(LqSat)
Parameter
1-46 Verst.
positiedetectie
Parameter
1-48 Curre
nt at Min
Inductance
for d-axis
(Stroom
bij min.
inductanti
e voor das)
Parameter
1-49 Curre
nt at Min
Inductance
for q-axis
(Stroom
bij min.
inductanti
e voor qas)
Parameter
1-70 Start
modus
Parameter
1-73 Vlieg.
start
Parameter
3-02 Mini
mumreferentie
Parameter
3-03 Max.
referentie
Parameter
3-10 Inges
telde ref.
0,000-1000,000mHAfhankelij
k van
grootte
0,000-1000,000mHAfhankelij
k van
grootte
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij het starten aan.
20–200% 100% Voer het verzadigingspunt van de inductantie in.
20–200% 100% Deze parameter speciceert de verzadigingscurve van de d- en q-inductantiewaarden. Bij een
[0] Rotor
Detection
(Rotordetectie)
[1] Parking
(Parkeren)
[0] Disabled
(Uitgesch.)
[1] Enabled
(Ingesch.)
-4999,000-4999,
000
-4999,000-4999,
000
-100–100% 0 Voer het setpoint in.
[0] Rotor
Detection
(Rotordetectie)
[0]
Disabled
(Uitgesch.
)
0 De minimumreferentie is de laagste waarde die wordt bepaald door de som van alle referenties.
50 De maximumreferentie is de hoogste waarde die wordt bepaald door de som van alle referenties.
Gebruik
Deze parameter komt overeen met de inductantieverzadiging van Ld. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-37 Inductantie d-as (Ld). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-38 q-axis Inductance (Lq). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
waarde van deze parameter van 20-100% wordt een lineaire benadering van de inductanties
toegepast, vanwege de parameters parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz. (LdSat) en parameter 1-45 q-axis Inductance
Sat. (LqSat).
Selecteer de startmodus voor de PM-motor.
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in staat moet zijn een draaiende motor
op te vangen, bijvoorbeeld in ventilatortoepassingen. Als PM is geselecteerd, is deze parameter
ingeschakeld.
6
6
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 79

Programmeren
VLT® HVAC Basic Drive FC 101
6
Parameter Bereik Stand–
ard
Parameter
3-41 Ramp
1
aanlooptij
d
Parameter
3-42 Ramp
1
uitlooptijd
Parameter
4-12 Moto
rsnelh.
lage begr.
[Hz]
Parameter
4-14 Moto
rsnelh.
hoge begr.
[Hz]
Parameter
4-19 Max.
uitgangsfr
eq.
Parameter
6-20 Klem
54 lage
spanning
Parameter
6-21 Klem
54 hoge
spanning
Parameter
6-22 Klem
54 lage
stroom
Parameter
6-23 Klem
54 hoge
stroom
Parameter
6-24 Klem
54 lage
ref./
terugkopp.
waarde
Parameter
6-25 Klem
54 hoge
ref./
terugkopp.
waarde
0,05-3600,0 s Afhankelij
k van
grootte
0,05-3600,0 s Afhankelij
k van
grootte
0,0-400,0 Hz 0,0 Hz Stel de minimumbegrenzing voor een laag toerental in.
0,0-400,0 Hz 100 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100 Hz Stel de waarde voor de maximale uitgangsfrequentie in. Als parameter 4-19 Max. uitgangsfreq.
0,00-10,00 V 0,07 V Voer de spanning in die overeenkomt met de lage referentiewaarde.
0,00-10,00 V 10,00 V Voer de spanning in die overeenkomt met de hoge referentiewaarde.
0,00-20,00 mA 4,00 mA Voer de stroom in die overeenkomt met de lage referentiewaarde.
0,00-20,00 mA 20,00 mA Voer de stroom in die overeenkomt met de hoge referentiewaarde.
-4999–4999 0 Voer de terugkoppelingswaarde in die overeenkomt met de in parameter 6-20 Klem 54 lage
-4999–4999 50 Voer de terugkoppelingswaarde in die overeenkomt met de in parameter 6-21 Klem 54 hoge
Gebruik
Aanlooptijd vanaf 0 tot de nominale waarde in parameter 1-23 Motorfrequentie voor asynchrone
motoren. Aanlooptijd vanaf 0 tot parameter 1-25 Nom. motorsnelheid voor PM-motoren.
Uitlooptijd vanaf de nominale waarde in parameter 1-23 Motorfrequentie tot 0 voor asynchrone
motoren. Uitlooptijd vanaf parameter 1-25 Nom. motorsnelheid tot 0 voor PM-motoren.
wordt ingesteld op een waarde lager dan parameter 4-14 Motorsnelh. hoge begr. [Hz], wordt
parameter 4-14 Motorsnelh. hoge begr. [Hz] automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq.
spanning/parameter 6-22 Klem 54 lage stroom ingestelde spanning of stroom.
spanning/parameter 6-23 Klem 54 hoge stroom ingestelde spanning of stroom.
80 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Parameter Bereik Stand–
ard
Parameter
6-26 Klem
54 lter
tijdconstante
Parameter
6-29 Klem
54 modus
Parameter
20-81 PI
normaal/i
nv
regeling
Parameter
20-83 PI
startsnelhe
id [Hz]
Parameter
20-93 PI
prop.
versterking
Parameter
20-94 PI
Integral
Time
Parameter
30-22 Beve
iliging
geblokkeerde
rotor
Parameter
30-23 Lock
ed Rotor
Detection
Time [s]
0,00-10,00 s 0,01 Stel de ltertijdconstante in.
[0] Current
(Stroom)
[1] Voltage
(Spanning)
[0] Normal
(Normaal)
[1] Inverse
(Geïnverteerd)
0-200 Hz 0 Hz Stel het motortoerental in dat moet worden bereikt als startsignaal voor de PI-regeling.
0,00-10,00 0,01 Stel de proportionele versterking voor de procesregelaar in. Een hoge versterking zorgt voor een
0,1-999,0 s 999,0 s
[0] O (Uit)
[1] On (Aan)
0,05-1,00 s 0,10 s
[1]
Spanning
[0]
Normal
(Normaal)
[0] O
(Uit)
Gebruik
Selecteer of klem 54 wordt gebruikt als stroom- of als spanningsingang.
Selecteer [0] Normal (Normaal) om de procesregeling zo in te stellen dat de uitgangssnelheid
wordt verhoogd wanneer de procesfout positief is. Selecteer [1] Inverse (Geïnverteerd) om de
uitgangssnelheid te verlagen.
snelle regeling. Als de versterking echter te hoog is, kan het proces instabiel worden.
Stel de integratietijd voor de procesregelaar in. Een korte integratietijd zorgt voor een snelle
regeling. Als de integratietijd echter te kort is, kan het proces instabiel worden. Een extreem
lange integratietijd schakelt de integratieactie uit.
–
–
6
6
Tabel 6.5 Setupwizard voor toepassingen met terugkoppeling
Motorsetup
De motorsetupwizard leidt gebruikers stap voor stap door de benodigde motorparameters.
Parameter Bereik Stand–
ard
Parameter
0-03 Regio
nale instellingen
Parameter
0-06 Type
net
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 81
[0] International
(Internationaal)
[1] US ( VS)
[0]–[132] Zie
Tabel 6.4.
0 –
Afhankelij
k van
grootte
Gebruik
Selecteer de bedieningsmodus die bij het starten actief moet zijn wanneer de frequentieregelaar
na een uitschakeling weer wordt aangesloten op de netvoeding.

Programmeren
VLT® HVAC Basic Drive FC 101
6
Parameter Bereik Stand–
ard
Parameter
1-10 Moto
rconstructi
e
*[0] Asynchron
(Asynchroon)
[1] PM, nonsalient SPM (PM,
nietuitspringende
SPM)
[3] PM, salient
IPM (PM,
uitspringende
IPM)
[0]
Asynchro
n
(Asynchro
on)
Gebruik
Door het instellen van deze parameter kan de instelling van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte motorregeling).
•
Parameter 1-14 Verst. demping.
•
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm.
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis (Stroom bij min. inductantie voor d- as).
•
Parameter 1-49 Current at Min Inductance for q-axis (Stroom bij min. inductantie voor q- as).
•
Parameter 1-66 Min. stroom bij lage snelh.
•
Parameter 1-70 Startmodus.
•
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq.
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
82 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Parameter Bereik Stand–
ard
Parameter
1-20 Moto
rverm.
Parameter
1-22 Moto
rspanning
Parameter
1-23 Moto
rfrequentie
Parameter
1-24 Moto
rstroom
Parameter
1-25 Nom.
motorsnel
heid
Parameter
1-26 Cont.
nom.
motorkopp
el
0,12-110 kW/
0,16-150 pk
50-1000 V Afhankelij
20-400 Hz Afhankelij
0,01-10000,00 A Afhankelij
50-9999 tpm Afhankelij
0,1-1000,0 Nm Afhankelij
Afhankelij
k van
grootte
k van
grootte
k van
grootte
k van
grootte
k van
grootte
k van
grootte
Gebruik
Stel het motorvermogen in volgens de gegevens van het typeplaatje
Stel de motorspanning in volgens de gegevens van het typeplaatje.
Voer de motorfrequentie in volgens de gegevens van het typeplaatje.
Stel de motorstroom in volgens de gegevens van het typeplaatje.
Voer het nominale motortoerental in volgens de gegevens van het typeplaatje.
Deze parameter is alleen beschikbaar als parameter 1-10 Motorconstructie is ingesteld op een
optie die het gebruik van een permanentmagneetmotor mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde beïnvloedt de instelling van andere
parameters.
6
6
Parameter
1-30 Stato
rweerstan
d (Rs)
Parameter
1-37 Induc
tantie d-as
(Ld)
Parameter
1-38 q-axis
Inductance
(Lq)
Parameter
1-39 Moto
rpolen
Parameter
1-40 Tegen
-EMK bij
1000 TPM
Parameter
1-42 Lengt
e
motorkabe
l:
Parameter
1-44 Induc
tantie d-as
verz.
(LdSat)
0-99,990 Ω
0,000-1000,000mHAfhankelij
0,000-1000,000mHAfhankelij
2–100 4 Stel het aantal motorpolen in.
10-9000 V Afhankelij
0-100 m 50 m Voer de lengte van de motorkabel in.
0,000-1000,000mHAfhankelij
Afhankelij
k van
grootte
k van
grootte
k van
grootte
k van
grootte
k van
grootte
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in. Raadpleeg het datablad voor de permanentmagneetmotor voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
Deze parameter komt overeen met de inductantieverzadiging van Ld. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-37 Inductantie d-as (Ld). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 83

Programmeren
VLT® HVAC Basic Drive FC 101
6
Parameter Bereik Stand–
ard
Parameter
1-45 q-axis
Inductance
Sat.
(LqSat)
Parameter
1-46 Verst.
positiedetectie
Parameter
1-48 Curre
nt at Min
Inductance
for d-axis
(Stroom
bij min.
inductanti
e voor das)
Parameter
1-49 Curre
nt at Min
Inductance
for q-axis
(Stroom
bij min.
inductanti
e voor qas)
Parameter
1-70 Start
modus
Parameter
1-73 Vlieg.
start
Parameter
3-41 Ramp
1
aanlooptij
d
Parameter
3-42 Ramp
1
uitlooptijd
Parameter
4-12 Moto
rsnelh.
lage begr.
[Hz]
0,000-1000,000mHAfhankelij
k van
grootte
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij het starten aan.
20–200% 100% Voer het verzadigingspunt van de inductantie in.
20–200% 100% Deze parameter speciceert de verzadigingscurve van de d- en q-inductantiewaarden. Bij een
[0] Rotor
Detection
(Rotordetectie)
[1] Parking
(Parkeren)
[0] Disabled
(Uitgesch.)
[1] Enabled
(Ingesch.)
0,05-3600,0 s Afhankelij
0,05-3600,0 s Afhankelij
0,0-400,0 Hz 0,0 Hz Stel de minimumbegrenzing voor een laag toerental in.
[0] Rotor
Detection
(Rotordetectie)
[0]
Disabled
(Uitgesch.
)
k van
grootte
k van
grootte
Gebruik
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft
deze parameter dezelfde waarde als parameter 1-38 q-axis Inductance (Lq). Als de motorfabrikant
echter een inductiecurve heeft vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
waarde van deze parameter van 20-100% wordt een lineaire benadering van de inductanties
toegepast, vanwege de parameters parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz. (LdSat) en parameter 1-45 q-axis Inductance
Sat. (LqSat).
Selecteer de startmodus voor de PM-motor.
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in staat moet zijn een draaiende motor
op te vangen.
Aanlooptijd vanaf 0 tot de nominale waarde in parameter 1-23 Motorfrequentie.
Uitlooptijd vanaf de nominale waarde in parameter 1-23 Motorfrequentie tot 0.
84 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Programmeren Design Guide
Parameter Bereik Stand–
ard
Parameter
4-14 Moto
rsnelh.
hoge begr.
[Hz]
Parameter
4-19 Max.
uitgangsfr
eq.
Parameter
30-22 Beve
iliging
geblokkeerde
rotor
Parameter
30-23 Lock
ed Rotor
Detection
Time [s]
Tabel 6.6 Instellingen Motorsetupwizard
0,0-400,0 Hz 100,0 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100,0 Hz Stel de waarde voor de maximale uitgangsfrequentie in. Als parameter 4-19 Max. uitgangsfreq.
[0] O (Uit)
[1] On (Aan)
0,05-1,00 s 0,10 s
[0] O
(Uit)
Gebruik
wordt ingesteld op een waarde lager dan parameter 4-14 Motorsnelh. hoge begr. [Hz], wordt
parameter 4-14 Motorsnelh. hoge begr. [Hz] automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq.
–
–
6
6
Gemaakte wijzigingen
De functie Changes Made (Gemaakte wijzigingen) toont
alle parameters die zijn gewijzigd ten opzichte van de
standaardinstelling.
De lijst toont alleen parameters die zijn gewijzigd
•
in de huidige, te bewerken setup.
Parameters die weer op de standaardwaarde zijn
•
ingesteld, worden niet vermeld.
De melding Empty (Leeg) geeft aan dat geen van
•
de parameters is gewijzigd.
Parameterinstellingen wijzigen
1. Om het snelmenu te activeren, drukt u herhaaldelijk op de [Menu]-toets totdat het lampje
boven Quick Menu brandt.
2.
Gebruik [▲] [▼] voor het selecteren van de wizard,
de setup voor een regeling met terugkoppeling,
de motorsetup of de gemaakte wijzigingen.
3. Druk op [OK].
4.
Gebruik [▲] [▼] om door de parameters in het
snelmenu te navigeren.
5. Druk op [OK] om een parameter te selecteren.
6.
Gebruik [▲] [▼] om de waarde van de geselecteerde parameter te wijzigen.
7. Druk op [OK] om de wijziging op te slaan.
8. Druk twee keer op [Back] om naar Status te gaan
of druk één keer op [Menu] om naar Main Menu
te gaan.
Het hoofdmenu biedt toegang tot alle parameters
1. Druk herhaaldelijk op de [Menu]-toets totdat het
lampje boven Main Menu brandt.
2.
Gebruik [▲] [▼] om door de parametergroepen te
navigeren.
3. Druk op [OK] om een parametergroep te
selecteren.
4.
Gebruik [▲] [▼] om door de parameters binnen
een bepaalde groep te navigeren.
5. Druk op [OK] om de parameter te selecteren.
6.
Gebruik [▲] [▼] om de waarde van de geselecteerde parameter in te stellen of te wijzigen.
7. Druk op [OK] om de wijziging op te slaan.
6.3.3 Main Menu
Druk op [Menu] om toegang te krijgen tot het hoofdmenu
en alle parameters te programmeren. De parameters van
het hoofdmenu zijn direct toegankelijk, tenzij er een
wachtwoord is ingesteld via parameter 0-60 Wachtw.
hoofdmenu.
Voor de meeste toepassingen is het niet nodig om
parameters te selecteren via het hoofdmenu. Het snelmenu
biedt de snelste en eenvoudigste manier om toegang te
krijgen tot de typisch vereiste parameters.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 85

6
Programmeren
VLT® HVAC Basic Drive FC 101
6.4 Snel overzetten van
parameterinstellingen naar andere
frequentieomvormers
Wanneer de setup van een frequentieregelaar voltooid is,
kunt u de gegevens het beste in het LCP of met behulp
van de MCT 10 setupsoftware op een pc opslaan.
Gegevens overzetten van frequentieregelaar naar LCP
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op [OK].
3. Selecteer [1] Alles naar LCP.
4. Druk op [OK].
Sluit het LCP aan op een andere frequentieregelaar en
kopieer de parameterinstellingen ook naar die frequentieregelaar.
Gegevens overzetten van LCP naar frequentieregelaar
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op [OK].
3. Selecteer [2] Alles vanaf LCP.
4. Druk op [OK].
Geïndexeerde parameters uitlezen en
6.5
programmeren
Selecteer de parameter, druk op [OK] en gebruik [▲]/[▼]
om door de geïndexeerde waarden te schuiven. Wijzig de
waarde van de parameter door de geïndexeerde waarde te
selecteren en op [OK] te drukken. Wijzig de waarde met
behulp van [▲]/[▼]. Druk op [OK] om de nieuwe instelling
op te slaan. Druk op [Cancel] om te annuleren. Druk op
[Back] om de parameter te verlaten.
Initialiseren naar standaardinstellingen
6.6
Er zijn 2 manieren om de standaardinstellingen van de
frequentieregelaar te herstellen.
Aanbevolen initialisatie
1. Selecteer parameter 14-22 Bedrijfsmodus.
2. Druk op [OK].
3. Selecteer [2] Initialisatie en druk op [OK].
4. Onderbreek de voeding naar de frequentieregelaar en wacht totdat het display uitgaat.
5. Sluit de netvoeding weer aan. De frequentieregelaar is nu gereset, met uitzondering van de
volgende parameters:
Parameter 1-06 Richting rechtsom
•
Parameter 8-30 Protocol
•
Parameter 8-31 Adres
•
Parameter 8-32 Baudsnelheid
•
Parameter 8-33 Par./stopbits
•
Parameter 8-35 Min. responsvertr.
•
Parameter 8-36 Max. responsvertr.
•
Parameter 8-37 Max. tss.-tekenvertr.
•
Parameter 8-70 BACnet Device Voorbld
•
Parameter 8-72 MS/TP Max Masters (Max.
•
masters MS/TP)
Parameter 8-73 MS/TP Max Info Frames
•
(Max. informatieframes MS/TP)
Parameter 8-74 "Startup I am"
•
Parameter 8-75 Initialisatie wachtw.
•
Parameter 15-00 Bedrijfsuren tot
•
parameter 15-05 x Overspann.
Parameter 15-03 Inschakelingen
•
Parameter 15-04 x Overtemp.
•
Parameter 15-05 x Overspann.
•
Parameter 15-30 Alarmlog: foutcode
•
Parameter group 15-4* Drive identication
•
(ID frequentieregelaar)
Parameter 18-10 Brandmoduslog: event
•
2-vingerige initialisatie
De andere manier om de frequentieregelaar terug te
zetten naar de standaardinstellingen is door middel van 2vingerige initialisatie:
1. Schakel de frequentieregelaar uit.
2. Druk op [OK] en [Menu].
3. Schakel de frequentieregelaar in terwijl u deze
toetsen 10 s ingedrukt houdt.
4. De frequentieregelaar is nu gereset, met uitzondering van de volgende parameters:
Parameter 1-06 Richting rechtsom
•
Parameter 15-00 Bedrijfsuren
•
Parameter 15-03 Inschakelingen
•
Parameter 15-04 x Overtemp.
•
Parameter 15-05 x Overspann.
•
Parameter group 15-4* Drive identication
•
(ID frequentieregelaar)
Parameter 18-10 Brandmoduslog: event
•
De initialisatie van de parameters wordt na inschakeling
bevestigd door de melding alarm 80, Drive initialised (Omv.
geïnitial.) op het display.
86 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Installatie en setup RS485 Design Guide
7 Installatie en setup RS485
7.1 RS485
7.1.1 Overzicht
RS485 is een 2-draads businterface die compatibel is met
de multi-droptopologie, d.w.z. dat busdeelnemers kunnen
worden aangesloten als bus of via dropkabels vanaf een
gemeenschappelijke hoofdlijn. Op 1 netwerksegment
kunnen in totaal 32 busdeelnemers worden aangesloten.
De netwerksegmenten worden onderling gekoppeld door
middel van repeaters.
LET OP
Elke repeater fungeert als een busdeelnemer binnen het
segment waarin deze geïnstalleerd is. Elke busdeelnemer
in een bepaald netwerk moet een (bus)adres hebben dat
binnen alle segmenten uniek is.
Sluit elk segment aan beide uiteinden af met behulp van
de eindschakelaar (S801) van de frequentieregelaars of een
afsluitweerstandsnetwerk. Gebruik altijd afgeschermde
kabels met gedraaide paren (STP – screened twisted pair)
voor de busbekabeling en werk volgens goede standaard
installatiepraktijken.
Het is belangrijk om ervoor te zorgen dat de afscherming
voor elke busdeelnemer is voorzien van een aardverbinding met lage impedantie. Verbind een groot oppervlak
van de afscherming met aarde, bijvoorbeeld door middel
van een kabelklem of een geleidende kabelwartel. Gebruik
potentiaalvereeningskabels om in het gehele netwerk
dezelfde aardpotentiaal te handhaven, met name in installaties met lange kabels.
Gebruik altijd hetzelfde type kabel binnen het gehele
netwerk om problemen met verschillende impedanties te
voorkomen. Gebruik altijd een afgeschermde motorkabel
om een motor aan te sluiten op de frequentieregelaar.
7.1.2 Netwerkaansluiting
Sluit de frequentieregelaar als volgt aan op het RS485netwerk (zie tevens Afbeelding 7.1):
1. Sluit de signaaldraden aan op klem 68 (P+) en
klem 69 (N-) op de hoofdstuurkaart van de
frequentieregelaar.
2. Sluit de kabelafscherming aan op de
kabelklemmen.
LET OP
Gebruik afgeschermde kabels met gedraaide paren om
ruis tussen geleiders te beperken.
Afbeelding 7.1 Netwerkaansluiting
7.1.3 Hardwaresetup voor
frequentieregelaar
Gebruik de afsluiter-DIP-switch op de hoofdstuurkaart van
de frequentieregelaar om de RS485-bus af te sluiten.
7 7
Kabel Afgeschermd met gedraaide paren (STP)
Impedantie [Ω]
Kabellengte
[m (ft)]
Tabel 7.1 Kabelspecicaties
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 87
120
Maximaal 1200 m (3937 ft) (inclusief
dropkabels).
Maximaal 500 m (1640 ft) van station naar
station.
Afbeelding 7.2 Fabrieksinstelling eindschakelaar
De fabrieksinstelling voor de DIP-switch is UIT.

195NA493.11
1
2
90°
Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
7.1.4 Parameterinstellingen voor Modbus-
7.1.5 EMC-voorzorgsmaatregelen
communicatie
LET OP
Parameter Functie
Parameter 8-30 Prot
ocol
Parameter 8-31 AdresStel het (bus)adres in.
Selecteer het voor de RS485-interface te
gebruiken toepassingsprotocol.
LET OP
Het adresbereik is afhankelijk van het
protocol dat is geselecteerd in
parameter 8-30 Protocol.
Parameter 8-32 Bau
dsnelheid
77
Parameter 8-33 Par.
/stopbits
Stel de baudsnelheid in.
LET OP
De standaard baudsnelheid is
afhankelijk van het protocol dat is
geselecteerd in
parameter 8-30 Protocol.
Stel de pariteit en het aantal stopbits in.
LET OP
De standaardinstelling is afhankelijk
van het protocol dat is geselecteerd in
parameter 8-30 Protocol.
Zorg dat relevante nationale en lokale voorschriften ten
aanzien van aardverbindingen worden nageleefd. Een
onjuiste aarding van de kabels kan leiden tot aantasting
van de communicatie en schade aan apparatuur. Houd
de RS485-communicatiekabel uit de buurt van kabels
voor motor en remweerstand, om koppeling van
hoogfrequente ruis tussen de kabels te vermijden.
Gewoonlijk is een afstand van 200 mm (8 in) voldoende.
Houd een zo groot mogelijke afstand tussen de kabels
aan, vooral wanneer kabels parallel lopen over lange
afstanden. Als kruisen onvermijdelijk is, moet de RS485kabel de kabels voor motor en remweerstand kruisen
onder een hoek van 90°.
Parameter 8-35 Min
. responsvertr.
Parameter 8-36 Ma
x. responsvertr.
Parameter 8-37 Ma
x. tss.-tekenvertr.
Speciceer de minimale vertragingstijd
tussen het ontvangen van een verzoek en
het verzenden van een respons. Deze
functie wordt gebruikt om responsvertragingen van het modem af te handelen.
Speciceer de maximaal toegestane vertragingstijd tussen het verzenden van een
verzoek en het ontvangen van een respons.
Speciceer de maximaal toegestane vertragingstijd tussen 2 ontvangen bytes om te
zorgen voor een time-out wanneer het
zenden wordt onderbroken.
LET OP
De standaardinstelling is afhankelijk
van het protocol dat is geselecteerd in
Tabel 7.2 Parameterinstellingen Modbus-communicatie
parameter 8-30 Protocol.
1 Veldbuskabel
2 Afstand van minimaal 200 mm (8 in)
Afbeelding 7.3 Minimumafstand tussen communicatiekabels
en voedingskabels
88 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Installatie en setup RS485 Design Guide
7.2 FC-protocol
7.2.1 Overzicht
Het FC-protocol, ook wel aangeduid als FC-bus of
standaardbus, is de standaard veldbus van Danfoss. Het
speciceert een toegangsmethode op basis van het
master-slaveprincipe voor communicatie via een seriële
bus.
Op de bus kunnen één master en maximaal 126 slaves
worden aangesloten. De master selecteert de afzonderlijke
slaves via een adresteken in het telegram. Een slave kan
zelf nooit zenden zonder een verzoek hiertoe, en
rechtstreeks berichtenverkeer tussen afzonderlijke slaves is
dan ook niet mogelijk. Communicatie vindt plaats in de
halfduplexmodus.
De masterfunctie kan niet worden overgedragen aan een
andere busdeelnemer (systeem met één master).
De fysieke laag wordt gevormd door RS485. Hiervoor
wordt dus de RS485-poort gebruikt die is ingebouwd in de
frequentieregelaar. Het FC-protocol ondersteunt diverse
telegramindelingen:
Een korte gegevensindeling met 8 bytes voor
•
procesdata.
Een lange gegevensindeling van 16 bytes
•
inclusief een parameterkanaal.
Een gegevensindeling die wordt gebruikt voor
•
tekst.
7.2.2 FC met Modbus RTU
Het FC-protocol biedt toegang tot het stuurwoord en de
busreferentie van de frequentieregelaar.
De busreferentie wordt gewoonlijk gebruikt voor een
snelheidsregeling. Het is ook mogelijk om toegang te
krijgen tot deze parameters, deze uit te lezen en, waar
mogelijk, er waarden naartoe te schrijven. Toegang tot
deze parameters biedt een reeks besturingsopties,
waaronder het regelen van het setpoint van de frequentieregelaar als gebruik wordt gemaakt van de interne PIregelaar.
7.3 Parameterinstellingen om het protocol
in te schakelen
Stel de volgende parameters in om het FC-protocol voor
de frequentieregelaar in te schakelen.
Parameter Instelling
Parameter 8-30 Protocol FC
Parameter 8-31 Adres 1–126
Parameter 8-32 Baudsnelheid 2400–115200
Even Parity, 1 Stop Bit
Parameter 8-33 Par./stopbits
Tabel 7.3 Parameters om het protocol in te schakelen
Berichtframingstructuur FC-protocol
7.4
(Even pariteit, 1 stopbit)
(standaard)
7.4.1 Inhoud van een teken (byte)
Elk overgedragen teken begint met een startbit. Dan
volgen 8 databits, dat wil zeggen één byte. Elk teken
wordt beveiligd via een pariteitsbit. Deze bit wordt op 1
ingesteld wanneer pariteit wordt bereikt. Pariteit houdt in
dat het aantal binaire enen in de 8 databits en de
pariteitsbit samen even is. Het teken eindigt met een
stopbit en bestaat in totaal dus uit 11 bits.
7 7
Het stuurwoord stelt de Modbus-master in staat om
diverse belangrijke functies van de frequentieregelaar te
besturen.
Start
•
De frequentieregelaar kan op verschillende
•
manieren worden gestopt:
- Vrijloop
- Snelle stop
- Stop via DC-rem
- Normale (ramp)stop
Reset na een uitschakeling (trip)
•
Draaien op diverse vooraf ingestelde toerentallen
•
Omgekeerd draaien
•
Wijziging van de actieve setup
•
Besturing van de 2 in de frequentieregelaar
•
ingebouwde relais
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 89
Afbeelding 7.4 Inhoud van een teken
7.4.2 Telegramstructuur
Elk telegram heeft de volgende structuur:
Startteken (STX) = 02 hex
•
Een byte die de telegramlengte aangeeft (LGE)
•
Een byte die het adres van de frequentieregelaar
•
aangeeft (ADR)
Dan volgt een aantal databytes (variabel, afhankelijk van
het telegramtype).

STX LGE ADR DATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
Het telegram eindigt met een datastuurbyte (BCC).
Afbeelding 7.6 Procesblok
Afbeelding 7.5 Telegramstructuur
Het parameterblok wordt gebruikt voor het overdragen
van parameters tussen master en slave. Het datablok
bestaat uit 12 bytes (6 woorden) en bevat ook het
Parameterblok
7.4.3 Telegramlengte (LGE)
procesblok.
De telegramlengte is het aantal databytes plus de
adresbyte ADR en de datastuurbyte BCC.
4 databytes LGE = 4 + 1 + 1 = 6 bytes
12 databytes LGE = 12 + 1 + 1 = 14 bytes
Telegrammen die tekst bevatten
101)+n bytes
Afbeelding 7.7 Parameterblok
Tekstblok
Het tekstblok wordt gebruikt om teksten te lezen of te
schrijven via het datablok.
77
Tabel 7.4 Telegramlengte
1) De 10 staat voor de vaste tekens, terwijl n variabel is (afhankelijk
van de lengte van de tekst).
Afbeelding 7.8 Tekstblok
7.4.4 Adres frequentieregelaar (ADR)
7.4.7 Het PKE-veld
Adresindeling 1-126
Bit 7 = 1 (adresindeling 1-126 actief)
•
Bit 0-6 = frequentieregelaaradres 1-126
•
Bit 0-6 = 0 broadcast
•
De slave zendt de ongewijzigde adresbyte terug naar de
master in het antwoordtelegram.
Het PKE-veld bevat 2 subvelden:
parametercommando en antwoord (AK)
•
Parameternummer (PNU)
•
7.4.5 Datastuurbyte (BCC)
De checksum wordt berekend als een XOR-functie. Voordat
de eerste byte van het telegram ontvangen is, is de
berekende checksum 0.
7.4.6 Het dataveld
De structuur van datablokken hangt af van het type
telegram. Er zijn 3 telegramtypen; het type telegram geldt
voor zowel stuurtelegrammen (master ⇒ slave) als
antwoordtelegrammen (slave ⇒ master).
De 3 telegramtypen zijn:
Procesblok (PCD)
Het PCD bestaat uit een datablok van 4 bytes (2 woorden)
en bevat:
•
•
stuurwoord en referentiewaarde (van master naar
slave)
statuswoord en actuele uitgangsfrequentie (van
slave naar master).
Afbeelding 7.9 PKE-veld
De bits 12-15 worden gebruikt voor het overdragen van
parametercommando's van master naar slave en voor de
verwerkte antwoorden van de slave terug naar de master.
90 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Installatie en setup RS485 Design Guide
Parametercommando's master ⇒ slave
Bitnummer Parametercommando
15 14 13 12
0 0 0 0 Geen commando
0 0 0 1 Lezen parameterwaarde
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Lezen tekst
Tabel 7.5 Parametercommando's
Bitnummer Antwoord
15 14 13 12
0 0 0 0 Geen antwoord
0 0 0 1 Parameterwaarde overgedragen (woord)
0 0 1 0
0 1 1 1 Commando kan niet worden uitgevoerd
1 1 1 1 Tekst overgedragen
Tabel 7.6 Antwoord
Schrijven parameterwaarde in RAM
(woord)
Schrijven parameterwaarde in RAM
(dubbel woord)
Schrijven parameterwaarde in RAM en
EEPROM (dubbel woord)
Schrijven parameterwaarde in RAM en
EEPROM (woord)
Antwoord slave ⇒ master
Parameterwaarde overgedragen (dubbel
woord)
Als het commando niet kan worden uitgevoerd, stuurt de
slave het antwoord 0111 Commando kan niet worden
uitgevoerd en wordt de volgende foutmelding
weergegeven in Tabel 7.7.
Foutcode Specicatie FC
0 Ongeldig parameternummer
1 Parameter kan niet worden gewijzigd
2
3 Subindex is beschadigd
4 Geen array
5 Verkeerd datatype
6 Niet gebruikt
7 Niet gebruikt
9 Beschrijving element is niet beschikbaar
11
15 Geen tekst beschikbaar
17 Niet van toepassing tijdens bedrijf
18 Overige fouten
100 –
>100 –
130 Geen bustoegang voor deze parameter
131 Schrijven naar fabriekssetup is niet mogelijk
132 Geen LCP-toegang
Bovenste of onderste begrenzing is
overschreden
Geen toegang voor schrijven van
parameters
Foutcode Specicatie FC
252 Onbekende viewer
253 Verzoek wordt niet ondersteund
254 Onbekend attribuut
255 Geen fout
Tabel 7.7 Slaverapport
7.4.8 Parameternummer (PNU)
De bitnummers 0-11 dragen parameternummers over. De
functie van de betreende parameter wordt toegelicht in
de parameterbeschrijving in hoofdstuk 6 Programmeren.
7.4.9 Index (IND)
De index wordt samen met het parameternummer
gebruikt voor lees-/schrijftoegang tot parameters met een
index, bijvoorbeeld parameter 15-30 Alarmlog: foutcode. De
index bestaat uit 2 bytes: een lage byte en een hoge byte.
Alleen de lage byte wordt gebruikt als index.
7.4.10 Parameterwaarde (PWE)
Het parameterwaardeblok bestaat uit 2 woorden (4 bytes)
en de waarde hangt af van het gegeven commando (AK).
De master vraagt om een parameterwaarde wanneer het
PWE-blok geen waarde bevat. Om een parameterwaarde te
wijzigen (schrijven), schrijft u de nieuwe waarde in het
PWE-blok en verzendt u dit van de master naar de slave.
Als de slave antwoordt op een parameterverzoek
(leescommando), wordt de actuele parameterwaarde naar
het PWE-blok overgedragen en teruggezonden naar de
master. Als een parameter geen numerieke waarde bevat
maar verschillende dataopties, bijvoorbeeld
parameter 0-01 Taal, selecteert u de gewenste datawaarde
door de waarde in te voeren in het PWE-blok. Via seriële
communicatie is het alleen mogelijk om parameters met
datatype 9 (tekstreeks) te lezen.
Parameter 15-40 FC-type tot parameter 15-53 Serienr.
voedingskaart bevatten datatype 9.
Zo kunt u bijvoorbeeld het vermogen van de eenheid en
het netspanningsbereik uitlezen via parameter 15-40 FC-
type. Wanneer een tekstreeks wordt overgedragen (lezen),
is de lengte van het telegram variabel, aangezien de
teksten in lengte variëren. De telegramlengte wordt
nieerd in de 2e byte van het telegram (LGE). Bij
tekstoverdracht geeft het indexteken aan of het om een
lees- of een schrijfcommando gaat.
Om een tekst via het PWE-blok te lezen, stelt u het
parametercommando (AK) in op F hex. De hoge byte van
het indexteken moet 4 zijn.
gede-
7 7
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 91

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
7.4.11 Datatypen die door de
7.4.13 Proceswoorden (PCD)
frequentieregelaar worden
ondersteund
Zonder teken betekent dat er geen teken in het telegram
opgenomen is.
Datatypen Beschrijving
3 Integer 16
4 Integer 32
5 Zonder teken 8
6 Zonder teken 16
7 Zonder teken 32
9 Tekstreeks
Tabel 7.8 Datatypen
77
7.4.12 Conversie
De programmeerhandleiding bevat een beschrijving van de
attributen van elke parameter. Parameterwaarden worden
enkel als gehele getallen overgedragen. Om decimalen
over te dragen, worden conversiefactoren gebruikt.
Parameter 4-12 Motorsnelh. lage begr. [Hz] heeft een conversiefactor van 0,1. Om de minimumfrequentie op 10 Hz in
te stellen, moet de waarde 100 worden overgedragen. Een
conversiefactor van 0,1 betekent dat de overgebrachte
waarde met 0,1 vermenigvuldigd zal worden. Een waarde
van 100 wordt dus geïnterpreteerd als 10,0.
Het blok proceswoorden is verdeeld in 2 blokken van 16
bits, die altijd in de gegeven volgorde voorkomen.
PCD 1 PCD 2
Stuurtelegram (master ⇒ slave)
Stuurwoord
Stuurtelegram (slave ⇒ master)
Statuswoord
Tabel 7.10 Proceswoorden (PCD)
Referentiewaarde
Actuele uitgangsfrequentie
7.5 Voorbeelden
7.5.1 Een parameterwaarde schrijven
Stel parameter 4-14 Motorsnelh. hoge begr. [Hz] in op 100
Hz.
Schrijf de gegevens in EEPROM.
PKE = E19E hex – schrijf één woord in
parameter 4-14 Motorsnelh. hoge begr. [Hz]:
IND = 0000 hex
•
PWEHIGH = 0000 hex
•
PWELOW = 03E8 hex
•
Datawaarde 1000, komt overeenkomt met 100 Hz; zie
hoofdstuk 7.4.12 Conversie.
Afbeelding 7.10 toont hoe het telegram eruitziet.
Conversie-index Conversiefactor
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabel 7.9 Conversie
Afbeelding 7.10 Telegram
LET OP
Parameter 4-14 Motorsnelh. hoge begr. [Hz] is één woord
en het parametercommando voor het schrijven naar
EEPROM is E. Parameter 4-14 Motorsnelh. hoge begr. [Hz]
komt overeen met 19E hex.
92 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installatie en setup RS485 Design Guide
Het antwoord van de slave aan de master wordt
weergegeven in Afbeelding 7.11.
Afbeelding 7.11 Antwoord van master
7.5.2 Een parameterwaarde lezen
Lees de waarde in parameter 3-41 Ramp 1 aanlooptijd.
PKE = 1155 hex – lees parameterwaarde in
parameter 3-41 Ramp 1 aanlooptijd:
IND = 0000 hex
•
PWE
•
PWE
•
Afbeelding 7.12 Telegram
= 0000 hex
HIGH
= 0000 hex
LOW
Overzicht Modbus RTU
7.6
7.6.1 Inleiding
Danfoss gaat ervan uit dat de geïnstalleerde regelaar de
interfaces in dit document ondersteunt en dat strikt wordt
voldaan aan de vereisten voor de regelaar en de frequentieregelaar, inclusief de
gespeciceerde beperkingen.
De ingebouwde Modbus RTU (Remote Terminal Unit) dient
om te communiceren met elke mogelijke regelaar die de in
dit document vermelde interfaces ondersteunt. Er is
aangenomen dat de gebruiker volledig op de hoogte is
van de functies en beperkingen van de regelaar.
7.6.2 Overzicht
In deze sectie wordt het proces beschreven dat een
regelaar gebruikt om toegang te vragen tot een ander
apparaat. Dit proces is hetzelfde voor alle netwerktypen
voor fysieke communicatie. Dit proces bepaalt bijvoorbeeld
hoe de Modbus RTU reageert op verzoeken van een ander
apparaat en de wijze waarop fouten worden gedetecteerd
en gerapporteerd. Het zorgt tevens voor een standaard
formaat voor de indeling en inhoud van telegramvelden.
7 7
Als de waarde in parameter 3-41 Ramp 1 aanlooptijd 10 s is,
is het antwoord van de slave aan de master zoals
aangegeven in Afbeelding 7.13.
Afbeelding 7.13 Antwoord
3E8 hex komt overeen met 1000 decimaal. De conversieindex voor parameter 3-41 Ramp 1 aanlooptijd is -2, oftewel
0,01.
Parameter 3-41 Ramp 1 aanlooptijd is van het type Zonder
teken 32.
Tijdens communicatie over een Modbus RTU-netwerk
bepaalt het protocol hoe elke regelaar
het adres van het apparaat verkrijgt
•
een aan de regelaar geadresseerd telegram
•
herkent
bepaalt welke acties moeten worden
•
ondernomen
gegevens of andere informatie uit het telegram
•
haalt.
Als een antwoord nodig is, zal de regelaar het antwoordtelegram opstellen en verzenden.
Regelaars communiceren via een master-slavemethode
waarbij enkel de master transacties (zogenaamde query's)
kan initiëren. Slaves reageren door de gevraagde data aan
de master te leveren of de via de query gevraagde actie
uit te voeren.
De master kan afzonderlijke slaves aanspreken of een
broadcasttelegram naar alle slaves sturen. Wanneer een
slave een query ontvangt die speciek aan hem is
geadresseerd, zendt hij een antwoord terug. Na een
broadcastquery van de master wordt geen antwoord
teruggezonden.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 93

Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
Het Modbus RTU-protocol bepaalt de indeling voor de
master-query door de volgende gegevens aan te leveren:
het adres van het apparaat (of de broadcast)
•
een functiecode die de gevraagde actie denieert
•
eventuele te verzenden data
•
een foutcontroleveld.
•
Ook het antwoordtelegram van het slaveapparaat wordt
gedenieerd op basis van het Modbus-protocol. Het bevat
velden voor het bevestigen van de uitgevoerde actie,
eventuele terug te zenden data, en een foutcontroleveld.
Als bij de ontvangst van het telegram een fout optreedt, of
als de slave niet in staat is om de gevraagde actie uit te
voeren, zal de slave een foutmelding genereren en die als
antwoord terugzenden. In plaats hiervan kan er ook een
time-out optreden.
77
7.6.3 Frequentieregelaar met Modbus RTU
De frequentieregelaar communiceert in Modbus RTUindeling over de ingebouwde RS485-interface. Modbus RTU
biedt toegang tot het stuurwoord en de busreferentie van
de frequentieregelaar.
Netwerkconguratie
7.7
Stel de volgende parameters in om Modbus RTU op de
frequentieregelaar in te schakelen:
Parameter Instelling
Parameter 8-30 Protocol Modbus RTU
Parameter 8-31 Adres 1–247
Parameter 8-32 Baudsnelheid 2400–115200
Parameter 8-33 Par./stopbits
Tabel 7.11 Netwerkconguratie
Even Parity, 1 Stop Bit (Even
pariteit, 1 stopbit) (standaard)
7.8 Berichtframingstructuur Modbus RTU
7.8.1 Inleiding
De regelaars zijn ingesteld voor communicatie op het
Modbus-netwerk via de RTU (Remote Terminal Unit)
modus, waarbij elke byte in een telegram 2 hexadecimale
tekens van 4 bits bevat. De gegevensindeling voor elke
byte wordt aangegeven in Tabel 7.12.
Het stuurwoord stelt de Modbus-master in staat om
diverse belangrijke functies van de frequentieregelaar te
besturen.
Start
•
Diverse stops:
•
- Vrijloop
- Snelle stop
- Stop via DC-rem
- Normale (ramp)stop
Reset na een uitschakeling (trip)
•
Draaien op diverse vooraf ingestelde toerentallen
•
Omgekeerd draaien
•
Wijzigen van de actieve setup
•
Besturen van het ingebouwde relais van de
•
frequentieregelaar
De busreferentie wordt gewoonlijk gebruikt voor een
snelheidsregeling. Het is ook mogelijk om toegang te
krijgen tot deze parameters, deze uit te lezen en, waar
mogelijk, er waarden naartoe te schrijven. Toegang tot
deze parameters biedt een reeks besturingsopties,
waaronder het regelen van het setpoint van de frequentieregelaar als gebruik wordt gemaakt van de interne PIregelaar.
Start
bit
Tabel 7.12 Gegevensindeling voor elke byte
Coderingssysteem 8-bits binair, hexadecimaal 0-9, A-F
Bits per byte
Foutcontroleveld Cyclical Redundancy Check (CRC)
Tabel 7.13 Bytegegevens
Databyte Stop/
pariteit
2 hexadecimale tekens in elk 8-bits veld van
het telegram
1 startbit
•
8 databits; de minst signicante bit
•
wordt het eerst verzonden
1 bit voor even/oneven pariteit; geen bit
•
voor geen pariteit
1 stopbit bij gebruik pariteit; 2 bits bij
•
geen pariteit
Stop
94 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Installatie en setup RS485 Design Guide
7.8.2 Telegramstructuur Modbus RTU
Het zendende apparaat plaatst een Modbus RTU-telegram
in een frame met een bekend start- en eindpunt. Hierdoor
kunnen ontvangende apparaten aan het begin van het
telegram beginnen, het adresgedeelte lezen, bepalen aan
welk apparaat (of alle apparaten bij een broadcasttelegram) het telegram geadresseerd is en herkennen
wanneer het telegram volledig is. Onvolledige
telegrammen worden gedetecteerd en fouten worden als
resultaat gezonden. Tekens voor verzending moeten voor
elk veld in hexadecimale notatie 00-FF zijn gesteld. De
frequentieregelaar bewaakt de netwerkbus continu, ook
tijdens stille intervallen. Wanneer het eerste veld (het
adresveld) wordt ontvangen, wordt het door elke frequentieregelaar of apparaat gedecodeerd om te bepalen welk
apparaat wordt geadresseerd. Modbus RTU-telegrammen
die aan 0 zijn geadresseerd, zijn broadcasttelegrammen.
Voor broadcasttelegrammen is geen antwoord toegestaan.
In Tabel 7.14 wordt een typisch telegramframe
weergegeven.
Start Adres Functie Data
T1-T2-T3-
T4
Tabel 7.14 Typische telegramstructuur Modbus RTU
8 bits 8 bits N x 8 bits 16 bits
CRC-
controle
Einde
T1-T2-T3-
T4
7.8.3 Start-/stopveld
Telegrammen starten met een stille periode met een
tijdsduur van minstens 3,5 tekens. De stille periode wordt
geïmplementeerd als een meervoud van tekenintervallen
bij de geselecteerde baudsnelheid van het netwerk
(aangegeven als Start T1-T2-T3-T4). Het eerste veld dat
moet worden verzonden, is het apparaatadres. Na het
laatste verzonden teken volgt een vergelijkbare periode
met een tijdsduur van minstens 3,5 tekens om het einde
van het telegram aan te geven. Na deze periode kan er
een nieuw telegram beginnen.
Verzend het gehele telegramframe als een continue
stroom. Als er vóór voltooiing van het frame een stilte valt
met een interval van meer dan 1,5 tekens, gooit het
ontvangende apparaat het onvolledige telegram weg en
gaat het ervan uit dat de volgende byte het adresveld van
een nieuw telegram zal bevatten. En als een nieuw
telegram begint binnen een interval van 3,5 tekens na een
voorgaand telegram, gaat het ontvangende apparaat ervan
uit dat dit telegram een vervolg is op het eerdere
telegram. Dit gedrag veroorzaakt een time-out (geen
antwoord van de slave), omdat de waarde in het laatste
CRC-veld niet geldig is voor de gecombineerde
telegrammen.
7.8.4 Adresveld
Het adresveld van een telegramframe bevat 8 bits. Geldige
adressen voor slaveapparaten liggen in het bereik van
0-247 decimaal. De individuele slaveapparaten krijgen
adressen toegewezen in het bereik van 1-247. 0 is
gereserveerd voor de broadcastmodus en wordt door alle
slaves herkend. Een master adresseert een slave door het
slaveadres in het adresveld van het telegram te plaatsen.
Wanneer de slave zijn antwoord zendt, plaatst hij het eigen
adres in dit adresveld om de master te laten weten welke
slave reageert.
7.8.5 Functieveld
Het functieveld van een telegramframe bevat 8 bits.
Geldige codes liggen in het bereik van 1-FF. Functievelden
worden gebruikt om telegrammen te verzenden tussen
master en slave. Wanneer een telegram van een master
naar een slaveapparaat wordt verzonden, vertelt het
functiecodeveld de slave wat voor actie hij moet uitvoeren.
Wanneer de slave antwoord geeft aan de master, gebruikt
hij het functiecodeveld om een normaal (foutvrij) antwoord
te geven dan wel aan te geven dat er een fout is
opgetreden (uitzonderingsantwoord genoemd).
Voor een normaal antwoord zendt de slave simpelweg de
originele functiecode terug. Voor een uitzonderingsantwoord zendt de slave een code terug die overeenkomt
met de originele functiecode, maar waarbij de meest
signicante bit op logische 1 is ingesteld. Bovendien
plaatst de slave een unieke code in het dataveld van het
antwoordtelegram. Deze code vertelt de master wat voor
type fout is opgetreden of de reden voor de uitzondering.
Zie ook hoofdstuk 7.8.11 Door Modbus RTU ondersteunde
functiecodes en hoofdstuk 7.8.12 Uitzonderingscodes Modbus.
7.8.6 Dataveld
Het dataveld wordt opgebouwd met behulp van 2 hexadecimale getallen, in het bereik van 00-FF hex. Deze getallen
bestaan uit 1 RTU-teken. Het dataveld van telegrammen
die van een master naar een slaveapparaat worden
gezonden, bevat aanvullende informatie die de slave moet
gebruiken om overeenkomstig te handelen.
De informatie kan items omvatten zoals:
spoel- of registeradressen
•
het aantal items dat moet worden afgehandeld
•
het daadwerkelijke aantal databytes in het veld.
•
7 7
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 95

Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
7.8.7 CRC-controleveld
Telegrammen bevatten een controleveld dat werkt op basis
van de Cyclical Redundancy Check (CRC)-methode. Het
CRC-veld controleert de inhoud van het volledige telegram.
Deze controle wordt ook toegepast als voor afzonderlijke
tekens van het telegram al een pariteitscontrolemethode
wordt uitgevoerd. Het zendende apparaat berekent de
CRC-waarde en voegt de CRC vervolgens als laatste veld
toe aan het telegram. Het ontvangende apparaat berekent
opnieuw een CRC bij ontvangst van het telegram en
vergelijkt de berekende waarde met de actuele waarde die
werd ontvangen in het CRC-veld. 2 ongelijke waarden
resulteren in een bus time-out. Het controleveld bevat een
16-bits binaire waarde die wordt geïmplementeerd als 2
bytes van 8 bits. Na implementatie wordt eerst de lage
byte van het veld toegevoegd, gevolgd door de hoge byte.
7.8.8 Adressering spoelregister
In Modbus zijn alle data georganiseerd in spoelen en
registers. Een spoel bevat één bit, terwijl een register een
woord van 2 bytes (d.w.z. 16 bits) bevat. Alle data-adressen
in Modbus-telegrammen worden berekend vanaf 0. De
eerste keer dat een data-item voorkomt, wordt hieraan
itemnummer 0 toegewezen. Bijvoorbeeld: de spoel die in
een programmeerbare regelaar bekend is als spoel 1,
wordt in het adresveld van een Modbus-telegram
geadresseerd als spoel 0000. Spoel 127 decimaal wordt
geadresseerd als spoel 007E hex (126 decimaal).
Register 40001 wordt in het data-adresveld van het
telegram geadresseerd als register 0000. Het functiecodeveld speciceert al een registeractie. Daarom is de
referentie 4XXXX impliciet. Register 40108 wordt
geadresseerd als register 006B hex (107 decimaal).
De hoge byte van de CRC is de laatste byte die in het
77
telegram wordt verzonden.
Spoelnummer Beschrijving Signaalrichting
1–16 Stuurwoord frequentieregelaar (zie Tabel 7.16) Master naar slave
17–32
33–48 Statuswoord frequentieregelaar (zie Tabel 7.17) Slave naar master
49–64
65
66–65536 Gereserveerd –
Bereik toerental of setpointreferentie frequentieregelaar 0x0-0xFFFF (-200% ...
~200%)
Modus zonder terugkoppeling: uitgangsfrequentie frequentieregelaar.
Modus met terugkoppeling: terugkoppelingssignaal frequentieregelaar.
Besturing voor schrijven parameter (master naar slave)
0 = wijzigingen van parameterwaarden worden geschreven naar het RAM van
de frequentieregelaar
1 = wijzigingen van parameterwaarden worden geschreven naar het RAM en
EEPROM van de frequentieregelaar
Master naar slave
Slave naar master
Master naar slave
Tabel 7.15 Spoelregister
Spoel 0 1
01 Digitale referentie, lsb
02 Digitale referentie, msb
03 DC-rem Geen DC-rem
04 Vrijloop na stop Geen vrijloop na stop
05 Snelle stop Geen snelle stop
06 Frequentie vasthouden Frequentie niet vasthouden
07 Rampstop Start
08 Niet resetten Reset
09 Geen jog Jog
10 Ramp 1 Ramp 2
11 Data niet geldig Data geldig
12 Relais 1 uit Relais 1 aan
13 Relais 2 uit Relais 2 aan
14 Setup lsb
15 –
16 Niet omkeren Omkeren
Tabel 7.16 Stuurwoord frequentieregelaar (FC-proel)
96 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810

Installatie en setup RS485 Design Guide
Spoel 0 1
33 Besturing niet gereed Besturing gereed
34 Frequentieregelaar niet gereed Frequentieregelaar gereed
35 Vrijloop na stop Veiligheidsvergrendeling
36 Geen alarm Alarm
37 Niet gebruikt Niet gebruikt
38 Niet gebruikt Niet gebruikt
39 Niet gebruikt Niet gebruikt
40 Geen waarschuwing Waarschuwing
41 Niet op referentie Op referentie
42 Handmodus Automodus
43 Buiten frequentiebereik Binnen frequentiebereik
44 Gestopt Actief
45 Niet gebruikt Niet gebruikt
46 Geen spanningswaarschuwing Spanning overschreden
47 Niet binnen stroomgrens Stroomgrens
48 Thermisch niveau is OK Thermisch niveau overschreden
Tabel 7.17 Statuswoord frequentieregelaar (FC-proel)
PLC-
Busadres
Busregister
0 1 40001 Gereserveerd –
1 2 40002 Gereserveerd –
2 3 40003 Gereserveerd –
3 4 40004 Vrij – –
4 5 40005 Vrij – –
5 6 40006 Modbus-conguratie
6 7 40007 Laatste foutcode Alleen lezen
7 8 40008 Laatste foutregister Alleen lezen
8 9 40009 Indexverwijzing
9 10 40010 Parameter 0-01 Taal
19 20 40020 Vrij – –
29 30 40030
1)
register
Inhoud Toegang Beschrijving
Gereserveerd voor oudere frequentieregelaars van het
type VLT® 5000 en VLT® 2800.
Gereserveerd voor oudere frequentieregelaars van het
type VLT® 5000 en VLT® 2800.
Gereserveerd voor oudere frequentieregelaars van het
type VLT® 5000 en VLT® 2800.
Alleen TCP. Gereserveerd voor Modbus TCP
Parameter 0-03 Regionale
instellingen
Lezen/
schrijven
Lezen/
schrijven
Afhankelijk
van toegang
tot parameter
Afhankelijk
van toegang
tot parameter
(parameter 12-28 Datawaarden opsl. en
parameter 12-29 Altijd opslaan – bijvoorbeeld opgeslagen
in EEPROM).
Ontvangen foutcode van parameterdatabase; zie WHAT
38295 voor meer informatie.
Adres van het register waar de laatste fout zich voordeed;
zie WHAT 38296 voor meer informatie.
Subindex van parameter waarvoor toegang nodig is. Zie
WHAT 38297 voor meer informatie.
Parameter 0-01 Taal (Modbus-register = 10 parameternummer)
Ruimte van 20 bytes gereserveerd voor parameter in
Modbus Map.
Parameter 0-03 Regionale instellingen
Ruimte van 20 bytes gereserveerd voor parameter in
Modbus Map.
7 7
Tabel 7.18 Adres/registers
1) De waarde die in een Modbus RTU-telegram wordt geschreven, moet 1 cijfer lager zijn dan het registernummer. Zo moet u bijvoorbeeld de
waarde 0 in het telegram schrijven om Modbus-register 1 uit te lezen.
MG18C810 Danfoss A/S © 04/2018 Alle rechten voorbehouden. 97

CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Installatie en setup RS485
VLT® HVAC Basic Drive FC 101
7.8.9 Toegang via PCD schrijven/lezen
Het gebruik van de PCD-schrijf/lees-conguratie heeft het
voordeel dat de regelaar meer gegevens in 1 telegram kan
schrijven of lezen. Via de functiecode Register lezen of
Meerdere registers schrijven kunnen tot 63 registers
worden geschreven of gelezen in 1 telegram. Ook de
opbouw is exibel, zodat er slechts 2 registers naar de
regelaar kunnen worden geschreven, terwijl er 10 registers
kunnen worden uitgelezen uit de regelaar.
De
PCD-schrijijst bestaat uit data die vanuit de regelaar
naar de frequentieregelaar worden verzonden. Deze data
omvatten het stuurwoord, de referentie en toepassingsspecieke data zoals minimumreferentie en ramp-tijden,
enzovoort.
77
LET OP
Het stuurwoord en de referentie worden altijd verzonden
in de lijst vanuit de regelaar naar de frequentieregelaar.
Afbeelding 7.14 Toegang via PCD schrijven/lezen
De PCD-schrijijst is te congureren in parameter 8-42 PCD-
schrijfcong.
De PCD-leeslijst bestaat uit data die vanuit de frequentieregelaar naar de regelaar worden verzonden, zoals
LET OP
De grijs gemarkeerde velden geven standaardwaarden
aan en kunnen niet worden gewijzigd.
statuswoord, voornaamste huidige waarde en toepassingsspecieke data zoals draaiuren, motorstroom en
alarmwoord.
LET OP
De 32-bits parameters moeten worden gemapt binnen
de grenzen van 32 bits (PCD2 & PCD3 of PCD4 & PCD5,
LET OP
Het statuswoord en de voornaamste huidige waarde
worden altijd verzonden in de lijst vanuit de frequentieregelaar naar de regelaar.
enzovoort), waarbij het parameternummer twee keer
wordt gemapt naar parameter 8-42 PCD-schrijfcong. of
parameter 8-43 PCD-leescong.
7.8.10 De frequentieregelaar besturen
Deze sectie beschrijft de codes die kunnen worden
gebruikt in de functie- en datavelden van een Modbus
RTU-telegram.
98 Danfoss A/S © 04/2018 Alle rechten voorbehouden. MG18C810
 Loading...
Loading...