


ENGINEERING TOMORROW
Guia de Design
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com

Índice Guia de Design
Índice
1 Introdução
1.1 Objetivo do Guia de Design
1.2 Versão do Software e do Documento
1.3 Símbolos de Segurança
1.4 Abreviações
1.5 Recursos adicionais
1.6 Denições
1.7 Fator de Potência
1.8 Conformidade regulatória
1.8.1 Marcação CE 10
1.8.2 Conformidade com o UL 11
1.8.3 Conformidade com a marcação RCM 11
1.8.4 EAC 11
1.8.5 UkrSEPRO 11
2 Segurança
2.1 Pessoal qualicado
2.2 Precauções de segurança
6
6
6
7
7
7
8
10
10
12
12
12
3 Visão Geral do Produto
3.1 Vantagens
3.1.1 Por que utilizar um conversor de frequência para controlar ventiladores e bombas? 14
3.1.2 A vantagem óbvia - economia de energia 14
3.1.3 Exemplo de economia de energia 14
3.1.4 Comparação de economia de energia 15
3.1.5 Exemplo com uxo variante ao longo de 1 ano 16
3.1.6 Melhor controle 17
3.1.7 Starter ou soft starter estrela/delta não são necessários 17
3.1.8 Ao Usar um Conversor de Frequência Faz-se Economia 17
3.1.9 Sem Conversor de Frequência 18
3.1.10 Com um Conversor de Frequência 19
3.1.11 Exemplos de aplicações 20
3.1.12 Volume de ar variável 20
3.1.13 A solução VLT 20
3.1.14 Volume de ar constante 21
3.1.15 A solução VLT 21
14
14
3.1.16 Ventilador de torre de resfriamento 22
3.1.17 A solução VLT 22
3.1.18 Bombas para condensador 23
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 1
Índice
VLT® HVAC Basic Drive FC 101
3.1.19 A solução VLT 23
3.1.20 Bombas primárias 24
3.1.21 A solução VLT 24
3.1.22 Bombas secundárias 26
3.1.23 A solução VLT 26
3.2 Estruturas de Controle
3.2.1 Estrutura de Controle Malha Aberta 27
3.2.2 Controle do motor PM/EC+ 27
3.2.3 Controles local manual ligado (Hand On) e remoto automático ligado (Auto On) 27
3.2.4 Estrutura de controle em malha fechada 28
3.2.5 Conversão de feedback 28
3.2.6 Tratamento das Referências 29
3.2.7 Sintonizando o controlador de malha fechada do conversor 30
3.2.8 Ajuste manual do PI 30
3.3 Condições de funcionamento ambiente
3.4 Aspectos Gerais da EMC
3.4.1 Visão geral das emissões EMC 36
3.4.2 Requisitos de emissão 38
3.4.3 Resultados de teste de emissão EMC 38
3.4.4 Visão geral de emissão de harmônicas 40
3.4.5 Requisitos de Emissão de Harmônicas 40
3.4.6 Resultados do teste de Harmônicas (Emissão) 40
27
30
36
3.4.7 Requisitos de imunidade 42
3.5 Isolação galvânica (PELV)
3.6 Corrente de Fuga para o Terra
3.7 Condições de Funcionamento Extremas
3.7.1 Proteção térmica do motor (ETR) 44
3.7.2 Entradas do termistor 44
4 Seleção e solicitação de pedido
4.1 Código de tipo
4.2 Opcionais e Acessórios
4.2.1 Painel de Controle Local (LCP) 47
4.2.2 Montagem do LCP na parte frontal do painel 47
4.2.3 Kit de gabinete IP21/NEMA Tipo 1 48
4.2.4 Placa de desacoplamento 49
4.3 Códigos de Compra
4.3.1 Opcionais e Acessórios 50
4.3.2 Filtros de harmônicas 51
4.3.3 Filtro de RFI externo 53
42
43
44
46
46
47
50
2 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Índice Guia de Design
5 Instalação
5.1 Instalação Elétrica
5.1.1 Conexão da rede elétrica e do motor 57
5.1.2 Instalação elétrica em conformidade com a EMC 62
5.1.3 Terminais de controle 64
6 Programação
6.1 Introdução
6.2 Painel de Controle Local (LCP)
6.3 Menus
6.3.1 Menu Status 66
6.3.2 Menu Rápido 66
6.3.3 Menu Principal 81
6.4 Transferência Rápida da Programação do Parâmetro entre Múltiplos Conversores de
Frequência
6.5 Leitura e Programação de Parâmetros Indexados
6.6 Inicialização para as congurações padrão
55
55
65
65
65
66
82
82
82
7 Instalação e setup do RS485
7.1 RS485
7.1.1 Visão Geral 83
7.1.2 Conexão de rede 83
7.1.3 Setup do hardware do conversor de frequência 83
7.1.4 Programação dos parâmetros da comunicação do Modbus 84
7.1.5 Precauções com EMC 84
7.2 Protocolo FC
7.2.1 Visão Geral 85
7.2.2 FC com Modbus RTU 85
7.3 Programação dos parâmetros para ativar o protocolo
7.4 Estrutura do enquadramento de mensagem do protocolo FC
7.4.1 Conteúdo de um caractere (Byte) 85
7.4.2 Estrutura do telegrama 85
7.4.3 Comprimento do telegrama (LGE) 86
7.4.4 Endereço do conversor de frequência (ADR) 86
7.4.5 Byte de controle dos dados (BCC) 86
83
83
85
85
85
7.4.6 O Campo de Dados 86
7.4.7 O Campo PKE 86
7.4.8 Número do parâmetro (PNU) 87
7.4.9 Índice (IND) 87
7.4.10 Valor do Parâmetro (PWE) 87
7.4.11 Tipos de dados suportados pelo conversor de frequência 88
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 3
Índice
VLT® HVAC Basic Drive FC 101
7.4.12 Conversão 88
7.4.13 Palavras do processo (PCD) 88
7.5 Exemplos
7.5.1 Gravação de um valor de parâmetro 88
7.5.2 Leitura de um valor de parâmetro 89
7.6 Visão geral do Modbus RTU
7.6.1 Introdução 89
7.6.2 Visão Geral 89
7.6.3 Conversor de Frequência com Modbus RTU 90
7.7 Conguração de Rede
7.8 Estrutura do Enquadramento de Mensagem do Modbus RTU
7.8.1 Introdução 90
7.8.2 Estrutura do telegrama do Modbus RTU 91
7.8.3 Campo de início/parada 91
7.8.4 Campo de endereço 91
7.8.5 Campo de função 91
7.8.6 Campo de dados 91
7.8.7 Campo de vericação CRC 92
7.8.8 Endereçamento do registrador da bobina 92
88
89
90
90
7.8.9 Acesso via gravação/leitura do PCD 94
7.8.10 Como controlar o Conversor de Frequência 94
7.8.11 Códigos de função suportados pelo Modbus RTU 95
7.8.12 Códigos de exceção do Modbus 95
7.9 Como Acessar os Parâmetros
7.9.1 Tratamento de parâmetros 96
7.9.2 Armazenagem de dados 96
7.9.3 IND (Índice) 96
7.9.4 Blocos de texto 96
7.9.5 Fator de conversão 96
7.9.6 Valores de parâmetros 96
7.10 Exemplos
7.10.1 Ler o status da bobina (01 hex) 96
7.10.2 Forçar/gravar bobina única (05 hex) 97
7.10.3 Forçar/gravar múltiplas bobinas (0F hex) 97
7.10.4 Ler registradores de retenção (03 hex) 98
7.10.5 Registrador único predenido (06 hex) 98
96
96
7.10.6 Vários registros predenidos (10 hex) 99
7.10.7 Ler/gravar vários registradores (17 hex) 99
7.11 Perl de Controle do FC da Danfoss
7.11.1 Control word de acordo com o perl do FC (Protocolo 8–10 = Perl do FC) 100
4 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
100
Índice Guia de Design
7.11.2 Status word de acordo com o perl do FC (STW) 102
7.11.3 Valor de referência da velocidade do barramento 103
8 Especicações Gerais
8.1 Dimensões mecânicas
8.1.1 Instalação lado a lado 104
8.1.2 Dimensões dos conversores de frequência 105
8.1.3 Dimensões de Transporte 108
8.1.4 Montagem no campo 109
8.2 Especicações da alimentação de rede elétrica
8.2.1 3x200–240 V CA 110
8.2.2 3x380–480 V CA 111
8.2.3 3x525–600 V CA 115
8.3 Fusíveis e disjuntores
8.4 Dados Técnicos Gerais
8.4.1 Alimentação de rede elétrica (L1, L2, L3) 118
8.4.2 Saída do motor (U, V, W) 118
8.4.3 Comprimento e seção transversal do cabo 118
8.4.4 Entradas digitais 119
8.4.5 Entradas Analógicas 119
104
104
110
116
118
Índice
8.4.6 Saída Analógica 119
8.4.7 Saída digital 119
8.4.8 Cartão de controle, comunicação serial RS485 120
8.4.9 Cartão de controle, saída 24 V CC 120
8.4.10 Saída do relé 120
8.4.11 Cartão de controle, Saída 10 V CC 121
8.4.12 Condições ambientais 121
8.5 dU/Dt
122
125
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 5
Introdução
VLT® HVAC Basic Drive FC 101
11
1 Introdução
1.1 Objetivo do Guia de Design
Este guia de design destina-se a engenheiros de projetos e
sistemas, consultores de design e especialistas em
aplicações e produtos. Informações técnicas são fornecidas
para entender as capacidades do conversor de frequência
para integração com sistemas de controle e monitoramento do motor. São descritos detalhes referentes a
operação, requisitos e recomendações para integração de
sistemas. Informações são mostradas quanto às características da energia de entrada, saída para controle do
motor e condições de operação ambiente para o conversor
de frequência.
Também estão inclusos:
Recursos de segurança.
•
Monitoramento das condições de falha.
•
Relatório de status operacional.
•
Recursos de comunicação serial.
•
Opcionais e recursos programáveis.
•
Também são fornecidos detalhes de design como:
Requisitos de local.
•
Cabos.
•
Fusíveis.
•
Fiação de controle.
•
Tamanhos e pesos da unidade.
•
Outras informações importantes necessárias para
•
planejar a integração do sistema.
A análise das informações detalhadas do produto durante
a fase de projeto permite desenvolver um sistema bem
concebido com funcionalidade e eciência ideais.
VLT® é uma marca registrada.
Versão do Software e do Documento
1.2
Este manual é revisado e atualizado regularmente. Todas as
sugestões de melhoria são bem-vindas.
A partir da versão de software 4.0x (semana de produção
33 2017), a função do ventilador de resfriamento do
dissipador de calor de velocidade variável foi
implementada no conversor de frequência para as
potências abaixo de 22 kW (30 HP) 400 V IP20 e abaixo de
18,5 kW (25 hp) 400 V IP54. Esta função requer atualizações de software e hardware, e introduz restrições em
relação à compatibilidade retroativa para gabinetes de
tamanho H1–H5 e I2–I4. Consulte Tabela 1.2 para obter
informações sobre as limitações.
Cartão de controle
Compatibilidade de
software
Software antigo
(versão do arquivo
OSS 3.xx e
inferiores)
Software novo
(versão do arquivo
OSS 4.xx e
superiores)
Compatibilidade de
hardware
Cartão de potência
antigo
(semana de
produção 33 2017
ou anterior)
Cartão de potência
novo
(semana de
produção 34 2017
ou posterior)
Tabela 1.2 Compatibilidade de software e hardware
antigo (semana de
produção 33 2017
ou anterior)
Sim Não
Não Sim
Cartão de controle
antigo (semana de
produção 33 2017
ou anterior)
Sim (somente versão
de software 3.xx e
inferiores)
Sim (DEVE atualizar
o software para a
versão 3.xx ou
inferior, o ventilador
funciona
continuamente na
velocidade máxima)
Cartão de controle
novo (semana de
produção 34 2017
ou posterior)
Cartão de controle
novo (semana de
produção 34 2017
ou posterior)
Sim (DEVE atualizar
o software para
versão 4.xx ou
superior)
Sim (somente versão
de software 4.xx ou
superior)
Edição Observações Versão de
software
MG18C8xx Atualização para nova versão de
SW e HW.
Tabela 1.1 Versão de software e documento
6 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
4.2x
Introdução Guia de Design
1.3 Símbolos de Segurança
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que possa
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que possa
resultar em ferimentos menores ou moderados. Também
pode ser usado para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, incluindo situações que
podem resultar em danos ao equipamento ou à
propriedade.
1.4 Abreviações
°C
°F
A Ampère/AMP
CA Corrente alternada
AMA Adaptação automática do motor
AWG American Wire Gauge
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
FC Conversor de frequência
f
M,N
kg Quilograma
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
kHz kiloHertz
LCP Painel de controle local
m Metro
mA Milliampere
MCT Ferramenta de controle de movimento
mH Indutância em millihenry
min Minuto
ms Milissegundo
nF Nanofarad
Nm Newton por metro
n
s
P
M,N
PCB Placa de circuito impresso
PELV Tensão de proteção extremamente baixa
Graus Celsius
Graus Fahrenheit
Frequência nominal do motor
Corrente nominal de saída do inversor
Limite de corrente
Corrente nominal do motor
A máxima corrente de saída
A corrente de saída nominal fornecida pelo
conversor de frequência
Velocidade de sincronização do motor
Potência nominal do motor
Regen Terminais regenerativos
RPM Rotações por minuto
s Segundo
T
LIM
U
M,N
V Volts
Tabela 1.3 Abreviações
Limite de torque
Tensão nominal do motor
1.5 Recursos adicionais
O Guia Rápido VLT® HVAC Basic Drive FC 101
•
fornece informações básicas sobre dimensões
mecânicas, instalação e programação.
®
O Guia de Programação VLT
•
101 fornece as informações sobre como
programar e inclui descrições completas dos
parâmetros.
Software Danfoss VLT® Energy Box. Selecione
•
Download Software de PC em
www.danfoss.com/en/service-and-support/
downloads/dds/vlt-energy-box/.
O software VLT® Energy Box permite comparações
de consumo de energia de ventiladores de HVAC
e bombas acionadas por conversores de
frequência Danfoss e métodos alternativos de
controle de vazão. Use essa ferramenta para
projetar com precisão os custos, as economias e o
retorno do uso dos conversores de frequência
Danfoss em ventiladores de HVAC, bombas e
torres de resfriamento.
A literatura técnica Danfoss está disponível em formato
eletrônico no CD de documentação enviado com o
produto ou no formato impresso no escritório de vendas
Danfoss local.
Software de Setup MCT 10 suporte
Faça o download do software em www.danfoss.com/en/
service-and-support/downloads/dds/vlt-motion-control-tool-
-mct-10/.
Durante o processo de instalação do software, insira o
código de acesso 81463800 para ativar a funcionalidade FC
101. Não é necessária uma chave de licença para usar a
funcionalidade FC 101.
O software mais recente nem sempre contém as últimas
atualizações para os conversores de frequência. Entre em
contato com o escritório de vendas local para obter as
últimas atualizações do conversor de frequência (na forma
de arquivos *.upd) ou faça o download das atualizações do
conversor de frequência www.danfoss.com/en/service-and-
-support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
HVAC Basic Drive FC
1 1
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 7
175ZA078.10
Arranque
RPM
Torque
Introdução
VLT® HVAC Basic Drive FC 101
11
1.6 Denições
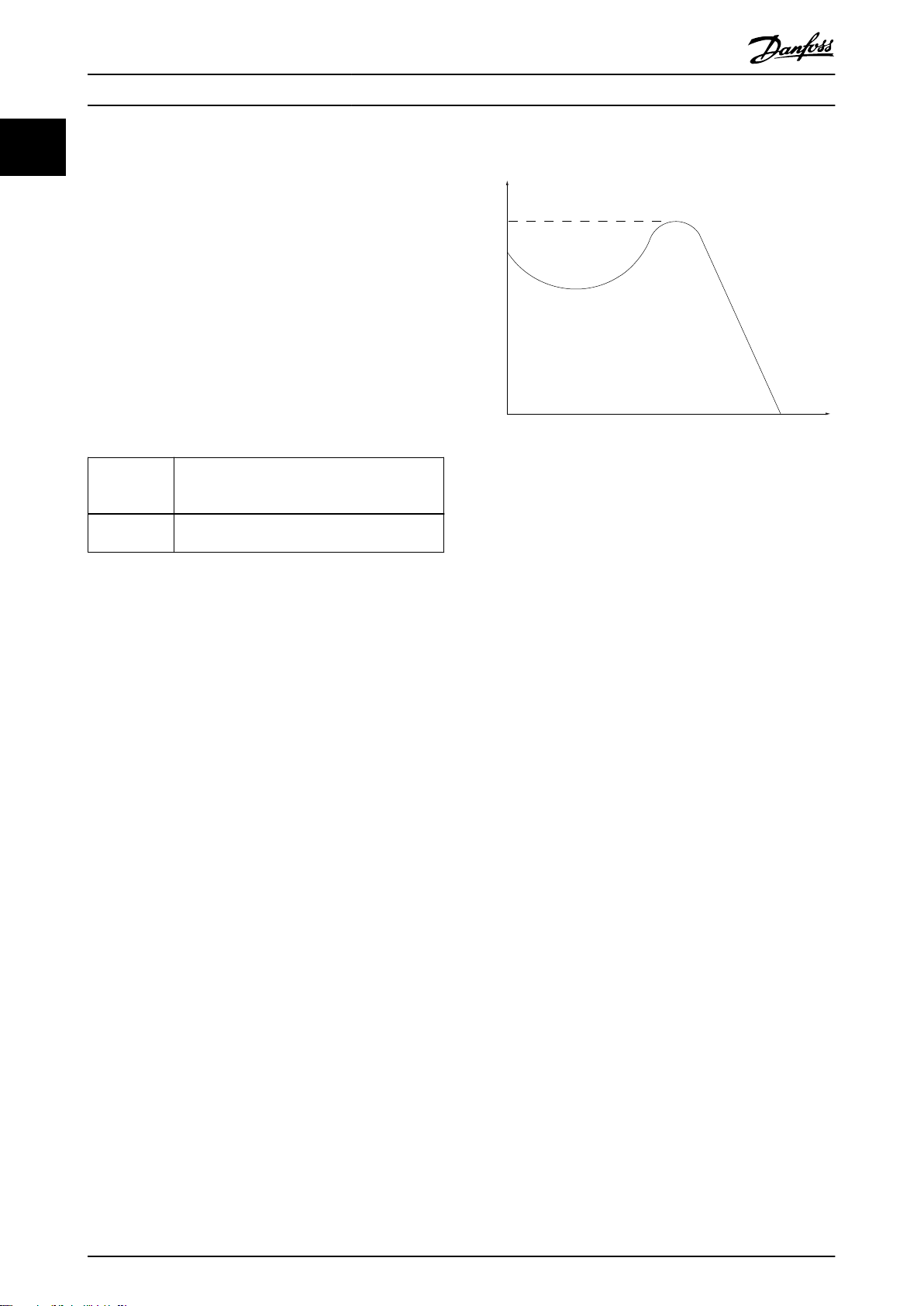
Torque de segurança
Conversor de frequência
I
VLT, MAX
A corrente de saída máxima.
I
VLT,N
A corrente de saída nominal fornecida pelo conversor de
frequência.
U
VLT, MAX
A tensão máxima de saída.
Entrada
O motor conectado pode iniciar e parar por meio do LCP e
das entradas digitais. As funções são divididas em 2
grupos, conforme descrito em Tabela 1.4. As funções do
grupo 1 têm prioridade mais alta que as do grupo 2.
Reset, parada por inércia, reset e parada por
Grupo 1
Grupo 2
Tabela 1.4 Comandos de controle
inércia, parada rápida, freio CC, parada e [OFF]
(desligado).
Partida, partida por pulso, reversão, partida
inversa, jog e congelar frequência de saída.
Motor
f
JOG
A frequência do motor quando a função jog é ativada
(através dos terminais digitais).
f
M
A frequência do motor.
f
MAX
A frequência máxima do motor.
f
MIN
A frequência mínima do motor.
f
M,N
A frequência nominal do motor (dados da plaqueta de
identicação).
I
M
A corrente do motor.
I
M,N
A corrente nominal do motor (dados da plaqueta de
identicação).
n
M,N
A velocidade nominal do motor (dados da plaqueta de
identicação).
P
M,N
A potência nominal do motor (dados da plaqueta de
identicação).
Ilustração 1.1 Torque de segurança
η
VLT
A eciência do conversor de frequência é denida como a
relação entre a potência de saída e a de entrada.
Comando inibidor da partida
Um comando de parada pertencente aos comandos de
controle do grupo 1; consulte Tabela 1.4.
Comando de parada
Consulte o Tabela 1.4.
Referência analógica
Um sinal transmitido para as entradas analógicas 53 ou 54.
Pode ser tensão ou corrente.
Entrada de corrente: 0 a 20 mA e 4 a 20 mA
•
Entrada de tensão: 0 a 10 V CC
•
Referência de barramento
Um sinal transmitido para a porta de comunicação serial
(Porta do FC).
Referência
predenida
Uma referência predenida a ser programada de -100% a
+100% da faixa de referência. Seleção de 8 referências
predenidas via terminais digitais.
Ref
MAX
Determina a relação entre a entrada de referência com
valor de escala total de 100% (tipicamente 10 V, 20 mA) e
a referência resultante. O valor de referência máximo é
programado no parâmetro 3-03 Referência Máxima.
Ref
MIN
Determina a relação entre a entrada de referência com
valor de escala total de 0% (tipicamente 0 V, 0 mA, 4 mA)
e a referência resultante. O valor mínimo de referência está
programado em parâmetro 3-02 Referência Mínima.
U
M
A tensão instantânea do motor.
U
M,N
A tensão nominal do motor (dados da plaqueta de identi-
cação).
8 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Introdução Guia de Design
Entradas analógicas
As entradas analógicas são utilizadas para controlar várias
funções do conversor de frequência.
Há 2 tipos de entradas analógicas:
Entrada de corrente: 0 a 20 mA e 4 a 20 mA
•
Entrada de tensão: 0 a 10 V CC
•
Saídas analógicas
As saídas analógicas podem fornecer um sinal de 0 a 20
mA, 4 a 20 mA ou um sinal digital.
Adaptação automática do motor, AMA
O algoritmo AMA determina os parâmetros elétricos para o
motor conectado na parada, e compensa a resistência com
base no comprimento do cabo do motor.
Entradas digitais
As entradas digitais podem ser utilizadas para controlar
várias funções do conversor de frequência.
Saídas digitais
O conversor de frequência fornece 2 saídas de estado
sólido que podem fornecer um sinal de 24 V CC (máxima
de 40 mA).
Saídas do relé
O conversor de frequência fornece 2 saídas de relé programáveis.
ETR
O relé térmico eletrônico é um cálculo da carga térmica
baseado na carga atual e no tempo. Sua nalidade é
estimar a temperatura do motor e evitar seu superaquecimento.
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação), os parâmetros programáveis do conversor de
frequência retornam às suas congurações padrão.
Parâmetro 14-22 Modo Operação não inicializa os
parâmetros de comunicação, o registro de falhas ou o
registro do modo de incêndio.
Ciclo útil intermitente
Uma característica útil intermitente refere-se a uma
sequência de ciclos úteis. Cada ciclo consiste de um
período com carga e outro sem carga. A operação pode
ser de funcionamento periódico ou de funcionamento
aperiódico.
LCP
O painel de controle local (LCP) constitui uma interface
completa para controle e programação do conversor de
frequência. O painel de controle é desacoplável nas
unidades IP20, e xo nas unidades IP54. Ele pode ser
instalado a até 3 m (9,8 pés) do conversor de frequência,
ou seja, em um painel frontal com o kit de instalação
opcional.
Lsb
É o bit menos signicativo.
MCM
Curto para mille circular em milésimo, uma unidade de
medição americana para seção transversal do cabo. 1 MCM
= 0,5067 mm2.
Msb
É o bit mais signicativo.
Parâmetros on-line/o-line
As alterações nos parâmetros on-line são ativadas imediatamente após a mudança no valor dos dados. Pressione
[OK] para ativar os parâmetros o-line.
Controlador PI
O controlador PI mantém a velocidade, a pressão, a
temperatura desejadas e assim por diante, ajustando a
frequência de saída para corresponder à carga variável.
RCD
Dispositivo de corrente residual.
Setup
As congurações de parâmetros em 2 setups podem ser
salvas. Alterne entre os 2 setups de parâmetros e edite 1
setup enquanto o outro setup estiver ativo.
Compensação de escorregamento
O conversor de frequência compensa o deslizamento do
motor, acrescentando um suplemento à frequência que
acompanha a carga medida do motor, mantendo a
velocidade do motor praticamente constante.
Smart logic control (SLC)
O SLC é uma sequência de ações denidas pelo usuário
executadas quando os eventos denidos pelo usuário
associado são avaliados como verdadeiros pelo SLC.
Termistor
Um resistor que varia com a temperatura, instalado onde a
temperatura deve ser monitorada (conversor de frequência
ou motor).
Desarme
Um estado inserido em situações de falha, por exemplo, se
o conversor de frequência estiver sujeito a um superaquecimento ou quando o conversor de frequência estiver
protegendo o motor, processo ou mecanismo. A reinicialização é evitada até que a causa da falha não exista e o
estado de desarme seja cancelado ativando a reinicialização ou, às vezes, sendo programado para reinicializar
automaticamente. Não use o desarme para segurança
pessoal.
1 1
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 9
Introdução
VLT® HVAC Basic Drive FC 101
11
Bloqueio por desarme
Conformidade regulatória
1.8
Um estado inserido em situações de falha quando o
conversor de frequência está se protegendo e requer
intervenção física, por exemplo, se o conversor de
Os conversores de frequência foram projetados em conformidade com as diretivas descritas nesta seção.
frequência estiver sujeito a um curto-circuito na saída. Um
desarme bloqueado só pode ser cancelado desconectando
1.8.1 Marcação CE
a rede elétrica, removendo a causa da falha e
reconectando o conversor de frequência. A reinicialização é
impedida até que o estado de desarme seja cancelado,
ativando a reinicialização ou, às vezes, sendo programado
para reinicializar automaticamente. Não use o bloqueio por
desarme para segurança pessoal.
A marcação CE (Conformité Européenne) indica que o
fabricante do produto está em conformidade com todas as
diretivas aplicáveis da UE. As diretivas da UE aplicáveis ao
projeto e à fabricação dos conversores de frequência estão
listadas em Tabela 1.5.
Características de VT
Características de torque variável, utilizado em bombas e
ventiladores.
+
VVC
AVISO!
A marcação CE não regula a qualidade do produto. Não
se pode deduzir especicações técnicas da marcação CE.
Se comparado com o controle padrão da relação tensão/
frequência, o controle vetorial de tensão (VVC+) melhora a
dinâmica e a estabilidade, tanto quando a referência da
velocidade é mudada quanto em relação ao torque de
carga.
AVISO!
Conversores de frequência com uma função de
segurança integrada devem estar em conformidade com
a diretiva de maquinaria.
1.7 Fator de Potência
O fator de potência indica em que intensidade o conversor
de frequência oferece uma carga na alimentação de rede
elétrica. O fator de potência é a relação entre I1 e I
onde I1 é a corrente fundamental e I
é a corrente RMS
RMS
RMS
,
total, incluindo as correntes harmônicas. Quanto menor o
fator de potência, maior será a I
para o mesmo
RMS
desempenho em kW.
Potênciapotência =
3 × U × I1× cosϕ
3 × U × I
RMS
O fator de potência para controle trifásico:
Diretiva da UE Versão
Diretiva de baixa tensão 2014/35/EU
Diretiva EMC 2014/30/EU
Diretiva ErP
Tabela 1.5 Diretivas da UE aplicáveis aos conversores de
frequência
Declarações de conformidade estão disponíveis mediante
solicitação.
1.8.1.1 Diretiva de baixa tensão
Potênciapotência =
2
I
RMS
= I
+ I
1
2
+ I
5
I1 × cosϕ1
I
RMS
2
+ . . + I
7
I
1
=
desdecosϕ1 = 1
I
RMS
2
n
Um fator de potência alta indica que as diferentes
correntes harmônicas são baixas.
As bobinas CC integradas dos conversores de frequência
produzem um fator de potência alta, o que minimiza a
A diretiva de baixa tensão é aplicável a todos os equipamentos elétricos nas faixa de tensão de 50 a 1.000 V CA e
de 75 a 1.600 V CC.
O objetivo da diretiva é garantir a segurança pessoal e
evitar danos à propriedade ao operar equipamentos
elétricos que são instalados e mantidos corretamente na
aplicação adequada.
carga imposta na alimentação de rede elétrica.
1.8.1.2 Diretiva EMC
O objetivo da diretiva de EMC (compatibilidade eletromagnética) é reduzir a interferência eletromagnética e
aumentar a imunidade de equipamentos e instalações
elétricas. O requisito básico de proteção da Diretiva EMC
2014/30/UE determina que os dispositivos que geram
interferência eletromagnética (EMI) ou cuja operação possa
ser afetada pela EMI devem ser projetados para limitar a
geração de interferência eletromagnética, e devem ter um
grau adequado de imunidade à EMI quando instalado,
mantido e usado adequadamente.
10 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
089
Introdução Guia de Design
Dispositivos de equipamentos elétricos usados
isoladamente, ou como parte de um sistema, devem
conter a marcação CE. Os sistemas não precisam ter a
marcação CE, mas devem cumprir os requisitos básicos de
proteção da diretiva EMC.
1.8.1.3 Diretiva ErP
A diretiva ErP é a Diretiva Europeia de Ecodesign para
produtos relacionados à energia. A diretiva estabelece
requisitos de concepção ecológica para produtos
relacionados com energia, incluindo conversores de
frequência. A diretiva visa aumentar a eciência energética
e o nível de proteção do meio ambiente, aumentando
simultaneamente a segurança da alimentação de energia.
O impacto ambiental de produtos relacionados com
energia inclui o consumo de energia ao longo de todo o
ciclo de vida útil do produto.
1.8.2 Conformidade com o UL
Listado no UL
1.8.4 EAC
Ilustração 1.4 Marcação EAC
A marcação da EurAsiana Conformity (EAC) indica que o
produto está em conformidade com todos os requisitos e
regulamentos técnicos aplicáveis ao produto, de acordo
com a União Aduaneira EurAsian, que é composta pelos
estados membros da União Econômica EurAsian.
O logotipo da EAC deve estar na etiqueta do produto e no
rótulo da embalagem. Todos os produtos utilizados na área
da EAC devem ser comprados na Danfoss dentro da área
da EAC.
1.8.5 UkrSEPRO
1 1
Ilustração 1.2 UL
AVISO!
Unidades IP54 não são certicadas para UL.
O conversor de frequência está em conformidade com os
requisitos de retenção de memória térmica UL 508C. Para
obter mais informações, consulte a seção Proteção Térmica
do Motor no Guia de Design especíco do produto.
1.8.3 Conformidade com a marcação RCM
Ilustração 1.3 Marcação RCM
A etiqueta de marcação RCM indica a conformidade com
os padrões técnicos aplicáveis para Compatibilidade Eletromagnética (EMC). Uma etiqueta de marcação RCM é
necessária para colocar dispositivos elétricos e eletrônicos
no mercado australiano e neozelandês. Os contratos
regulatórios da marcação RCM lidam somente com
emissão conduzida e irradiada. Para conversores de
frequência, aplicam-se os limites de emissão especicados
na norma EN/IEC 61800-3. Uma declaração de conformidade pode ser fornecida mediante solicitação.
Ilustração 1.5 UkrSEPRO
O certicado UKrSEPRO garante a qualidade e a segurança
de produtos e serviços, além da estabilidade de fabricação
de acordo com os padrões regulamentares ucranianos. O
certicado UkrSepro é um documento obrigatório para o
desembaraço alfandegário de qualquer produto entrando e
saindo do território ucraniano.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 11
Segurança
VLT® HVAC Basic Drive FC 101
2 Segurança
22
2.1 Pessoal qualicado
São necessários transporte, armazenagem, instalação,
operação e manutenção corretos e conáveis para a
operação sem problemas e segura do conversor de
frequência. Somente pessoal qualicado tem permissão
para instalar ou operar este equipamento.
O pessoal
qual está autorizado a instalar, comissionar e manter
equipamentos, sistemas e circuitos de acordo com as leis e
regulamentos pertinentes. Além disso, o pessoal deve estar
familiarizado com as instruções e medidas de segurança
descritas neste guia.
qualicado é denido como pessoal treinado, o
2.2 Precauções de segurança
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Negligenciar em
realizar a instalação, partida e manutenção por pessoal
qualicado pode resultar em ferimentos graves ou fatais.
Somente pessoal qualicado deverá realizar a
•
instalação, partida e manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou outro serviço, use um
dispositivo de medição de tensão apropriado
para assegurar que não há tensão restante no
conversor de frequência.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor estiver conectado à rede elétrica CA,
alimentação CC ou Load Sharing, o motor pode ser
iniciado a qualquer momento. Partida acidental durante
a programação, serviço ou serviço de manutenção
podem resultar em morte, lesões graves ou danos à
propriedade. O motor pode dar partida com um
interruptor externo, um comando eldbus, um sinal de
referência de entrada do LCP ou LOP, por meio de
operação remota usando Software de Setup MCT 10, ou
após uma condição de falha corrigida.
Para impedir a partida do motor acidental:
Pressione [O/Reset] no LCP antes de programar
•
os parâmetros.
Desconecte o conversor da rede elétrica.
•
Conecte completamente os os e monte o
•
conversor, o motor e todos os equipamentos
acionados antes de conectar o conversor à rede
elétrica CA, alimentação CC ou Load Sharing.
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes LED de advertência estiverem apagadas.
Se o tempo especicado após a energia ter sido
desligada não for aguardado para executar ou serviço de
manutenção, isto pode resultar em morte ou ferimentos
graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. A duração mínima do tempo de
espera é especicada em Tabela 2.1.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
12 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Segurança Guia de Design
Tensão [V] Faixa de potência [kW
(hp)]
3x200 0,25–3,7 (0,33–5) 4
3x200 5,5–11 (7–15) 15
3x400 0,37–7,5 (0,5–10) 4
3x400 11–90 (15–125) 15
3x600 2,2–7,5 (3–10) 4
3x600 11–90 (15–125) 15
Tabela 2.1 Tempo de descarga
Tempo de espera
mínimo (minutos)
ADVERTÊNCIA
PERIGO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor de frequência corretamente pode resultar em
morte ou ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
ADVERTÊNCIA
PERIGO PARA O EQUIPAMENTO
Contato com eixos rotativos e equipamentos elétricos
pode resultar em morte ou ferimentos graves.
Garanta que apenas pessoal treinado e
•
qualicado realize a instalação, inicialização e
manutenção.
Garanta que o trabalho elétrico esteja em
•
conformidade com os códigos elétricos
nacionais e locais.
Siga os procedimentos contidos neste manual.
•
2 2
CUIDADO
PERIGO DE FALHA INTERNA
Uma falha interna no conversor de frequência pode
resultar em ferimentos graves quando o conversor de
frequência não estiver devidamente fechado.
Garanta que todas as tampas de segurança
•
estejam no lugar e rmemente presas antes de
energizar.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 13
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Visão Geral do Produto
3 Visão Geral do Produto
3.1 Vantagens
VLT® HVAC Basic Drive FC 101
33
3.1.1 Por que utilizar um conversor de
frequência para controlar ventiladores
e bombas?
Um conversor de frequência aproveita o fato dos
ventiladores e bombas centrífugas seguirem as leis da
proporcionalidade. Para obter mais informações, consulte
capétulo 3.1.3 Exemplo de economia de energia.
3.1.2 A vantagem óbvia - economia de
energia
A vantagem óbvia de usar um conversor de frequência
para o controle da velocidade de ventiladores e bombas
está na economia de eletricidade.
Quando se compara com sistemas e tecnologias de
controle alternativos, o conversor de frequência é o
sistema ideal de controle de energia para controlar
sistemas de ventiladores e bombas.
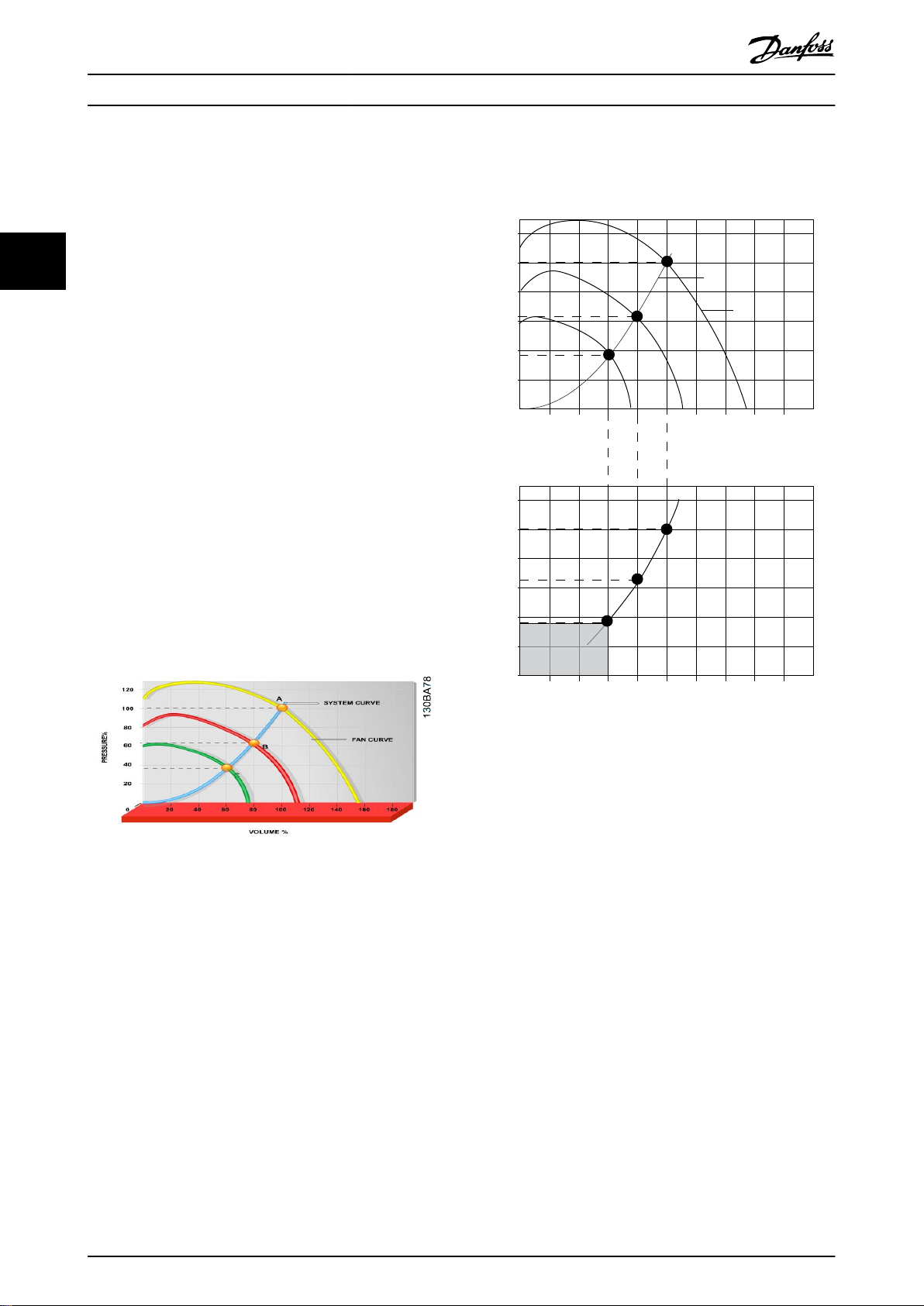
Ilustração 3.1 Curvas do ventilador (A, B e C) para volumes
de ventilação menores
Ilustração 3.2 Economia de energia com solução de
conversor de frequência
Em aplicações típicas, a utilização de um conversor de
frequência para reduzir a capacidade do ventilador para
60% pode economizar mais de 50% da energia.
3.1.3 Exemplo de economia de energia
Conforme mostrado em Ilustração 3.3, a vazão é controlada
alterando a rotação. Ao reduzir a velocidade em apenas
20% da velocidade nominal, a vazão também é reduzida
em 20%. Isto porque a vazão é diretamente proporcional à
rotação. No entanto, verica-se uma redução de 50% no
consumo de energia.
Se o sistema em questão necessitar fornecer uma vazão
que corresponda a 100% apenas alguns dias por ano,
enquanto a média for inferior a 80% da vazão nominal,
durante o resto do ano, a quantidade de energia
economizada será superior a 50%.
14 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
n
100%
50%
25%
12,5%
50% 100%
80%
80%
175HA208.10
Poder ~ n
3
Pressão ~ n
2
Fluxo ~ n
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Visão Geral do Produto Guia de Design
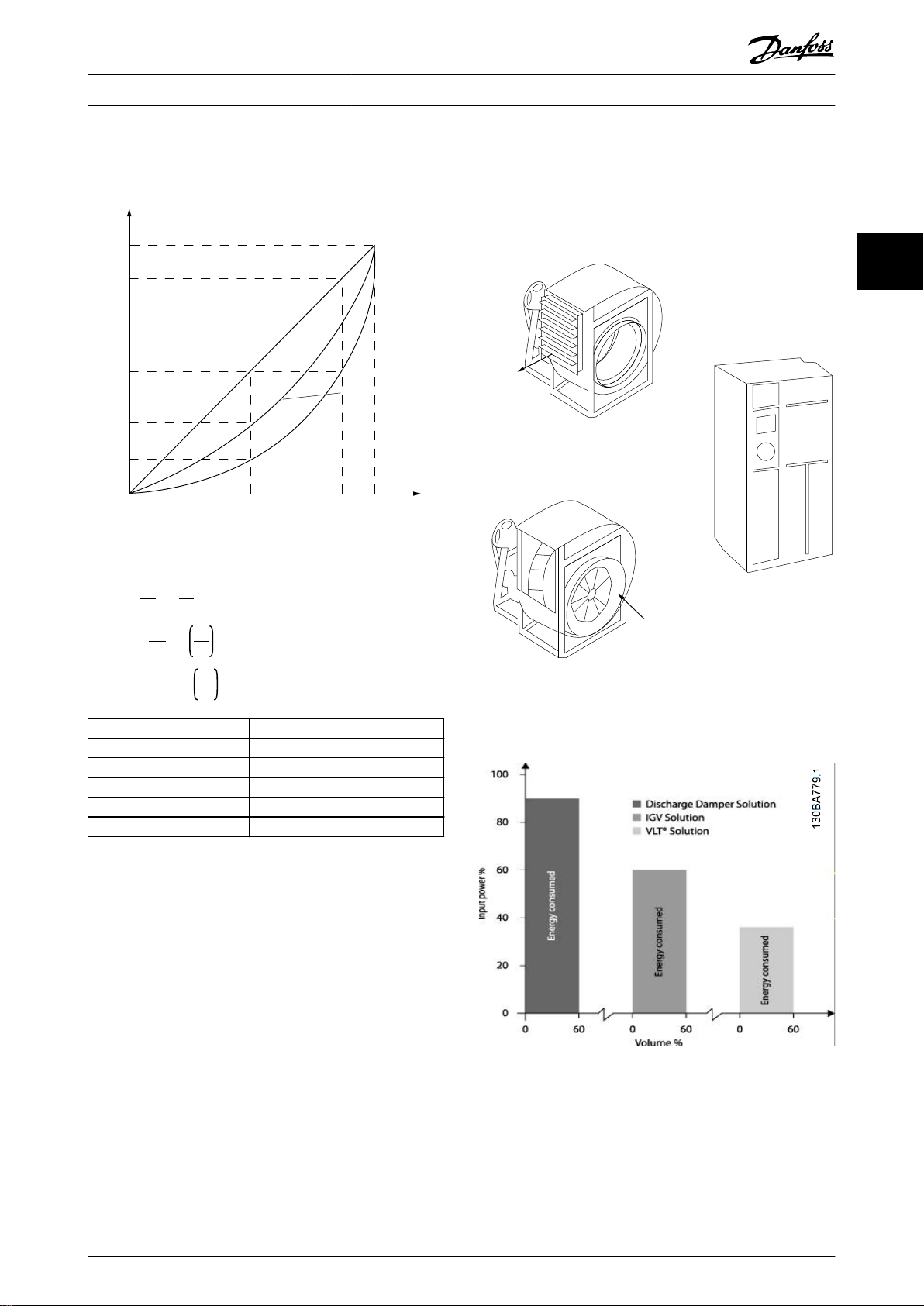
A Ilustração 3.3 descreve a dependência de vazão, pressão
e consumo de energia em rpm.
Ilustração 3.3 Leis da proporcionalidade
Q
n
1
Vazão:
Q
Pressão:
Potência:
2
H
H
=
1
2
P
1
P
2
=
=
1
n
2
2
n
1
n
2
3
n
1
n
2
Ilustração 3.3 mostra a economia de energia típica obtida
com 3 soluções conhecidas quando o volume do
ventilador é reduzido para 60%.
Como mostra o gráco, mais de 50% de economia de
energia pode ser alcançada em aplicações típicas.
3 3
Ilustração 3.4 Os 3 sistemas comuns de economia de energia
Q = Vazão P = Potência
Q1 = Vazão nominal P1 = Potência nominal
Q2 = Vazão reduzida P2 = Potência reduzida
H = Pressão n = Controle da velocidade
H1 = Pressão nominal n1 = Velocidade nominal
H2 = Pressão reduzida n2 = Velocidade reduzida
Tabela 3.1 As leis da proporcionalidade
3.1.4 Comparação de economia de energia
A solução de conversor de frequência Danfoss oferece uma
grande economia em comparação com as soluções
tradicionais de economia de energia, como a solução de
amortecedores de descarga e a solução das palhetas de
guia de entrada (IGV). Isso ocorre porque o conversor de
frequência é capaz de controlar a velocidade do ventilador
de acordo com a carga térmica no sistema, e tem uma
facilidade integrada que permite que ele funcione como
um sistema de gerenciamento predial, o BMS.
Ilustração 3.5 Economia de energia
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 15
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
Os amortecedores de descarga reduzem o consumo de
energia. Palhetas de guia de entrada oferecem uma
redução de 40%, mas são caras para instalar. A solução do
conversor de frequência Danfoss reduz o consumo de
energia em mais de 50% e é fácil de instalar. Também
reduz o ruído, a tensão mecânica e o desgaste, e prolonga
33
a vida útil de toda a aplicação.
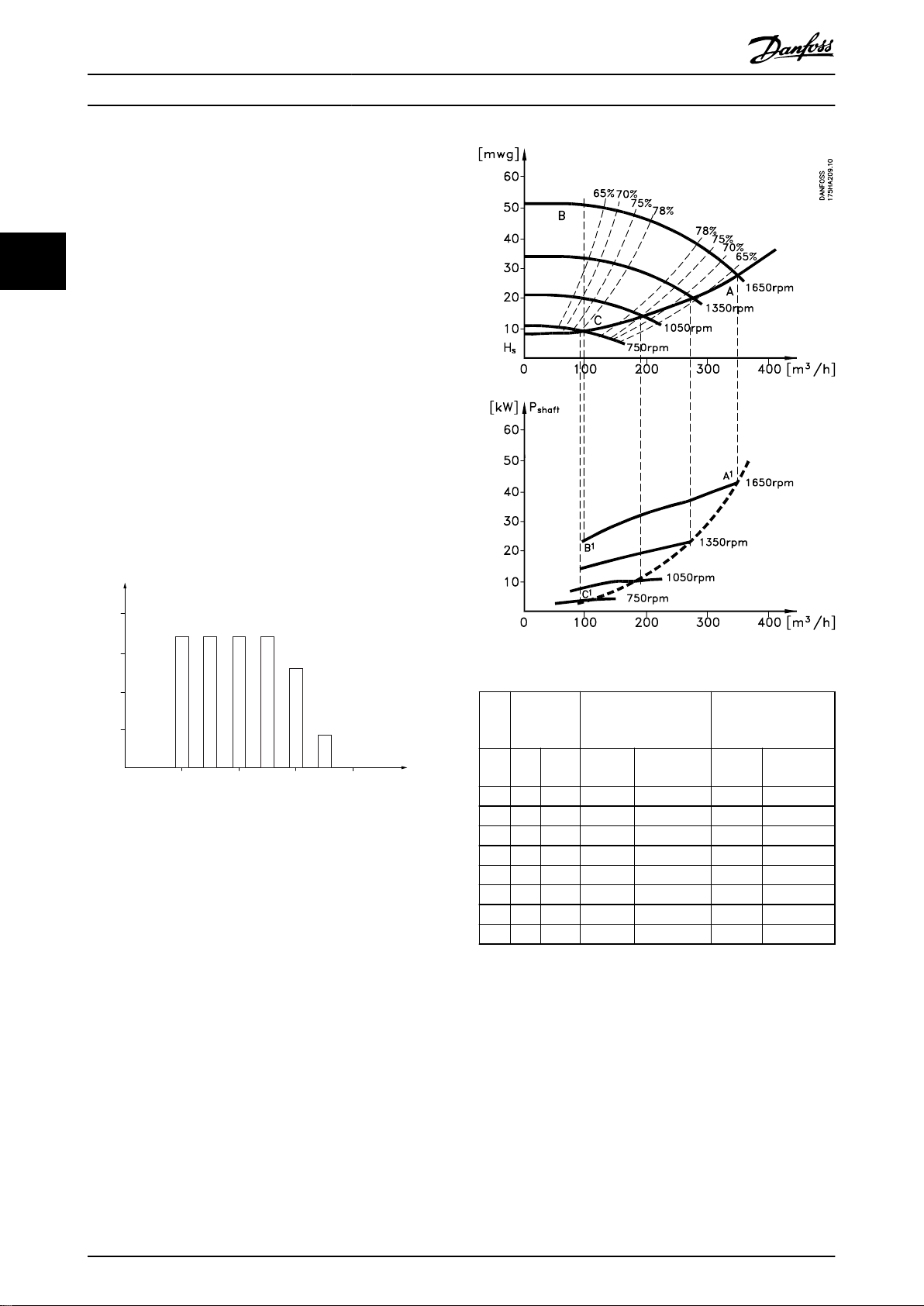
3.1.5 Exemplo com uxo variante ao longo
de 1 ano
Este exemplo é calculado com base nas características da
bomba obtidas de uma folha de dados da bomba.
O resultado obtido mostra uma economia de energia de
mais de 50% na distribuição do uxo dado ao longo de
um ano. O período de retorno depende do preço por kWh
e do preço do conversor de frequência. Neste exemplo, é
menos de um ano quando comparado com válvulas e
velocidade constante.
Economia de energia
P
= P
shaft
shaft output
Ilustração 3.6 Distribuição de vazão ao longo de 1 ano
Ilustração 3.7 Energia
3
Distri-
m
/
buição
h
% Horas Potência Consumo
A1 - B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabela 3.2 Resultado
Regulagem por
válvulas
kWh A1 - C
1
Controle por
conversor de
frequência
Potênci
a
1
Consumo
kWh
16 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Visão Geral do Produto Guia de Design
3.1.6 Melhor controle
Se um conversor de frequência for utilizado para controlar
a vazão ou a pressão de um sistema, obtém-se um
controle melhorado.
Um conversor de frequência pode variar a velocidade do
ventilador ou da bomba, obtendo controle variável de
vazão e pressão.
Além disso, um conversor de frequência pode adaptar
rapidamente a velocidade do ventilador ou da bomba às
novas condições de vazão ou pressão no sistema.
Controle simples do processo (vazão, nível ou pressão)
utilizando o controle PI integrado.
3.1.7 Starter ou soft starter estrela/delta
não são necessários
Em muitos países, ao dar a partida em motores grandes, é
necessário utilizar equipamento que limite a corrente de
partida. Em sistemas mais tradicionais, um starter ou soft
starter estrela/delta é amplamente utilizado. Esses
dispositivos de partida de motores não são necessários
quando for utilizado um conversor de frequência.
1
VLT® HVAC Basic Drive FC 101
2 Starter estrela/delta
3 Soft starter
4 Partida diretamente pela rede elétrica
Ilustração 3.8 Corrente de partida
3 3
Conforme ilustrado em Ilustração 3.8, um conversor de
frequência não consome mais do que a corrente nominal.
3.1.8 Ao Usar um Conversor de Frequência
Faz-se Economia
O exemplo em capétulo 3.1.9 Sem Conversor de Frequência
mostra que um conversor de frequência substitui outro
equipamento. É possível calcular o custo de instalação dos
2 sistemas diferentes. No exemplo, os 2 sistemas podem
ser estabelecidos aproximadamente pelo mesmo preço.
Use o software VLT® Energy Box apresentado em
capétulo 1.5 Recursos adicionais para calcular as economias
de custo que podem ser obtidas com o uso de um
conversor de frequência.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 17
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
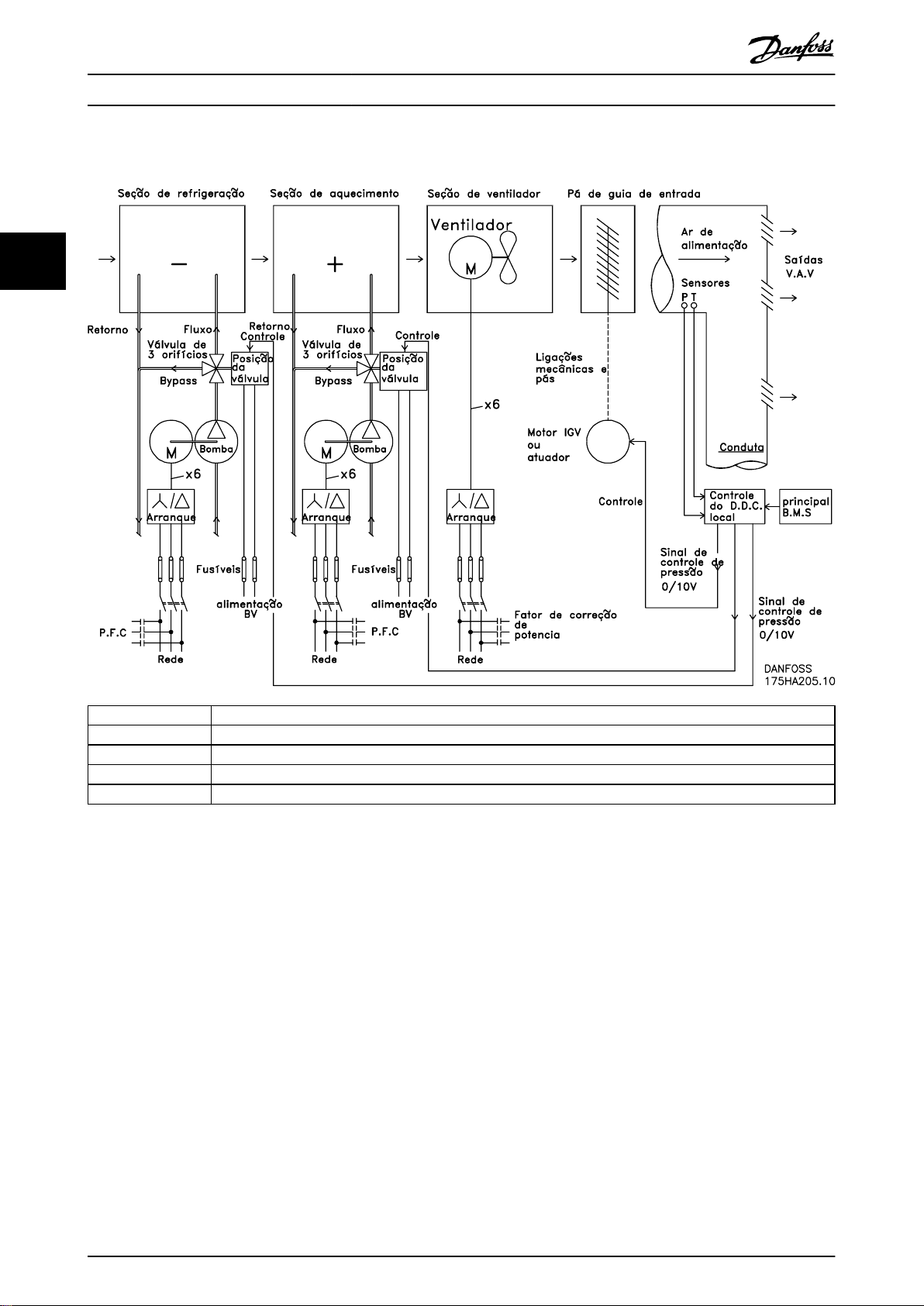
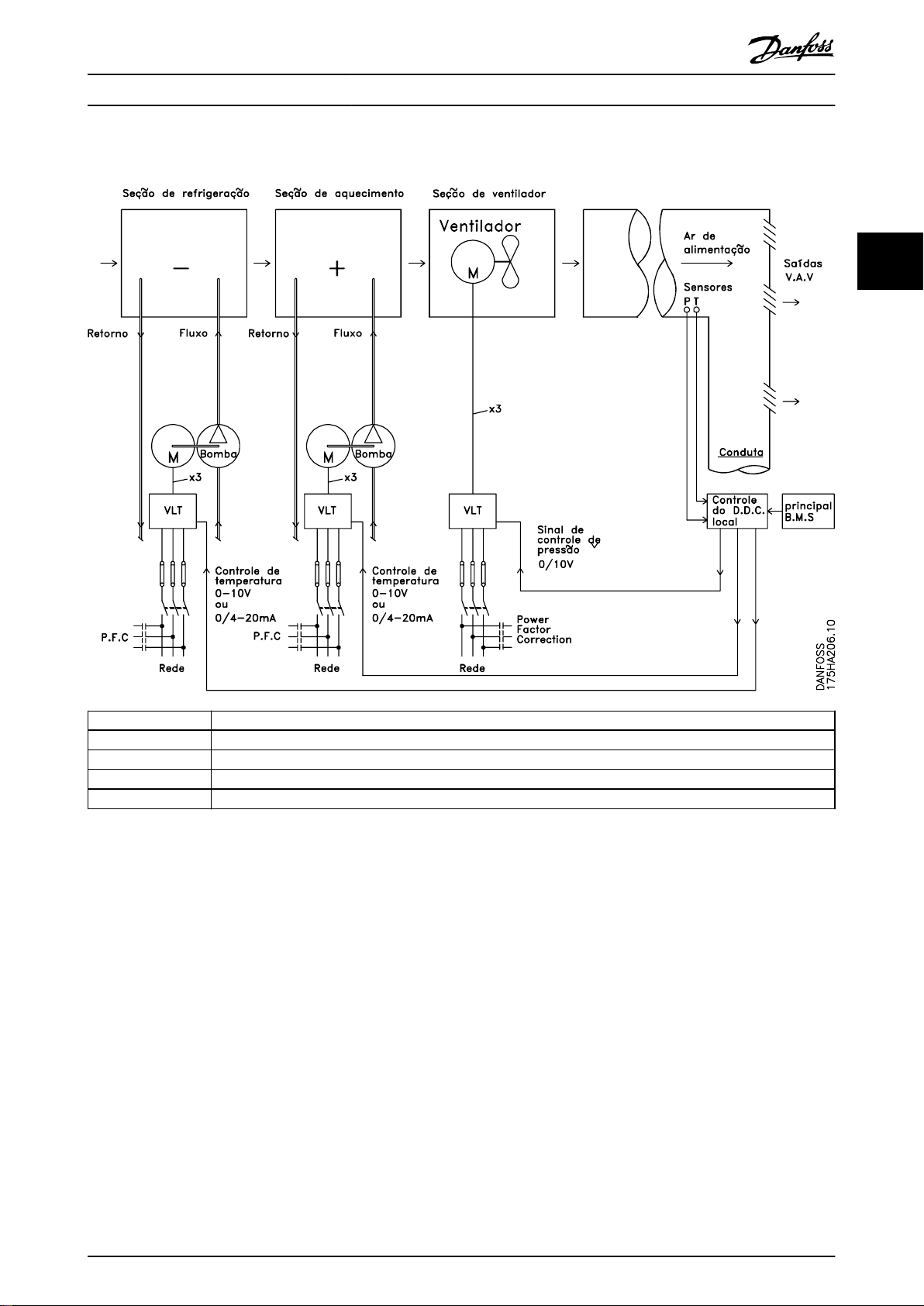
3.1.9 Sem Conversor de Frequência
33
D.D.C. Controle digital direto
E.M.S. Sistema de gerenciamento de energia
V.A.V. Volume de ar variável
Sensor P Pressão
Sensor T Temperatura
Ilustração 3.9 Sistema tradicional de ventilador
18 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Visão Geral do Produto Guia de Design
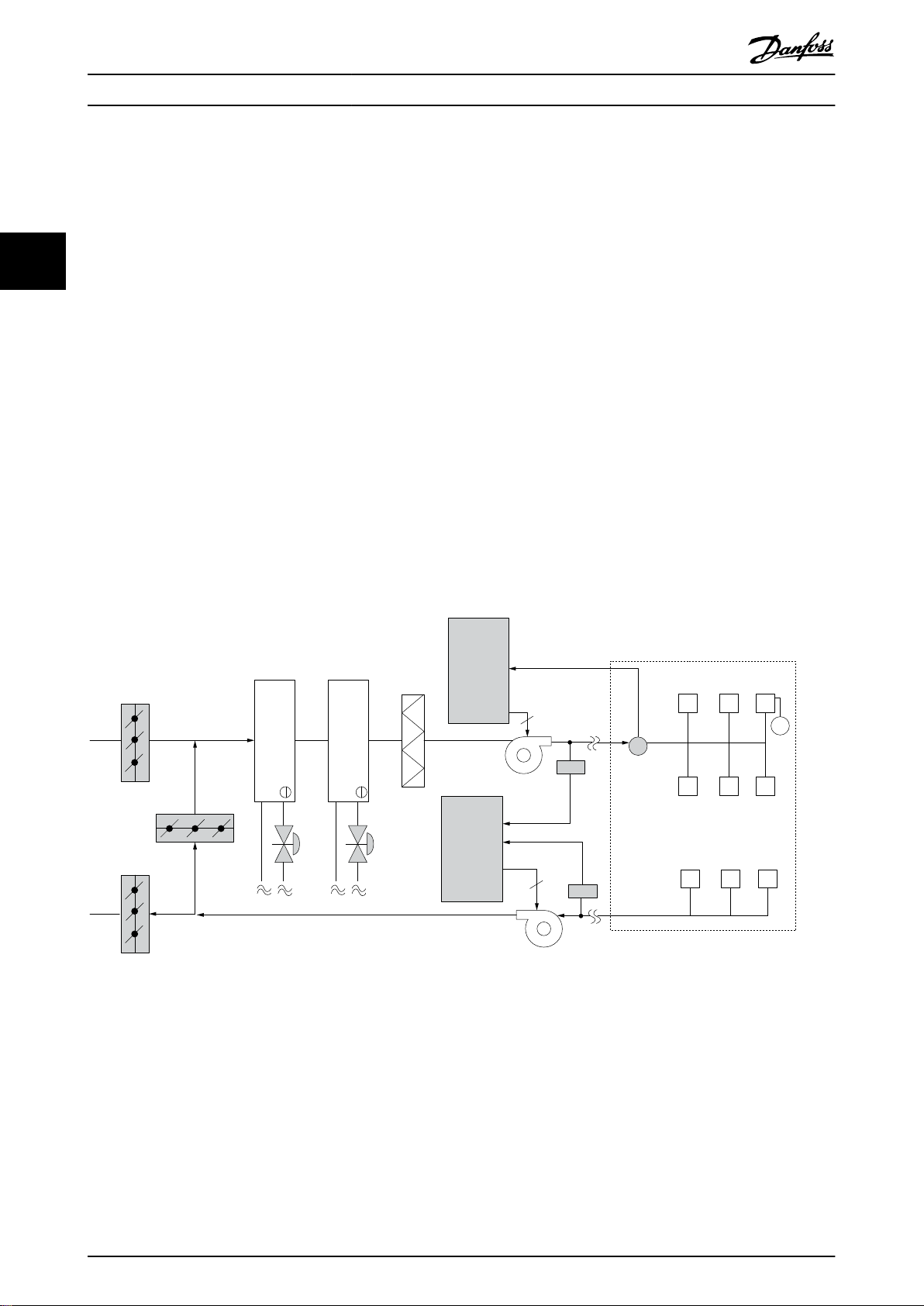
3.1.10 Com um Conversor de Frequência
3 3
D.D.C. Controle digital direto
E.M.S. Sistema de gerenciamento de energia
V.A.V. Volume de ar variável
Sensor P Pressão
Sensor T Temperatura
Ilustração 3.10 Sistema de ventiladores controlado por conversores de frequência
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 19
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
3.1.11 Exemplos de aplicações
As seções a seguir fornecem exemplos típicos de aplicações para o HVAC.
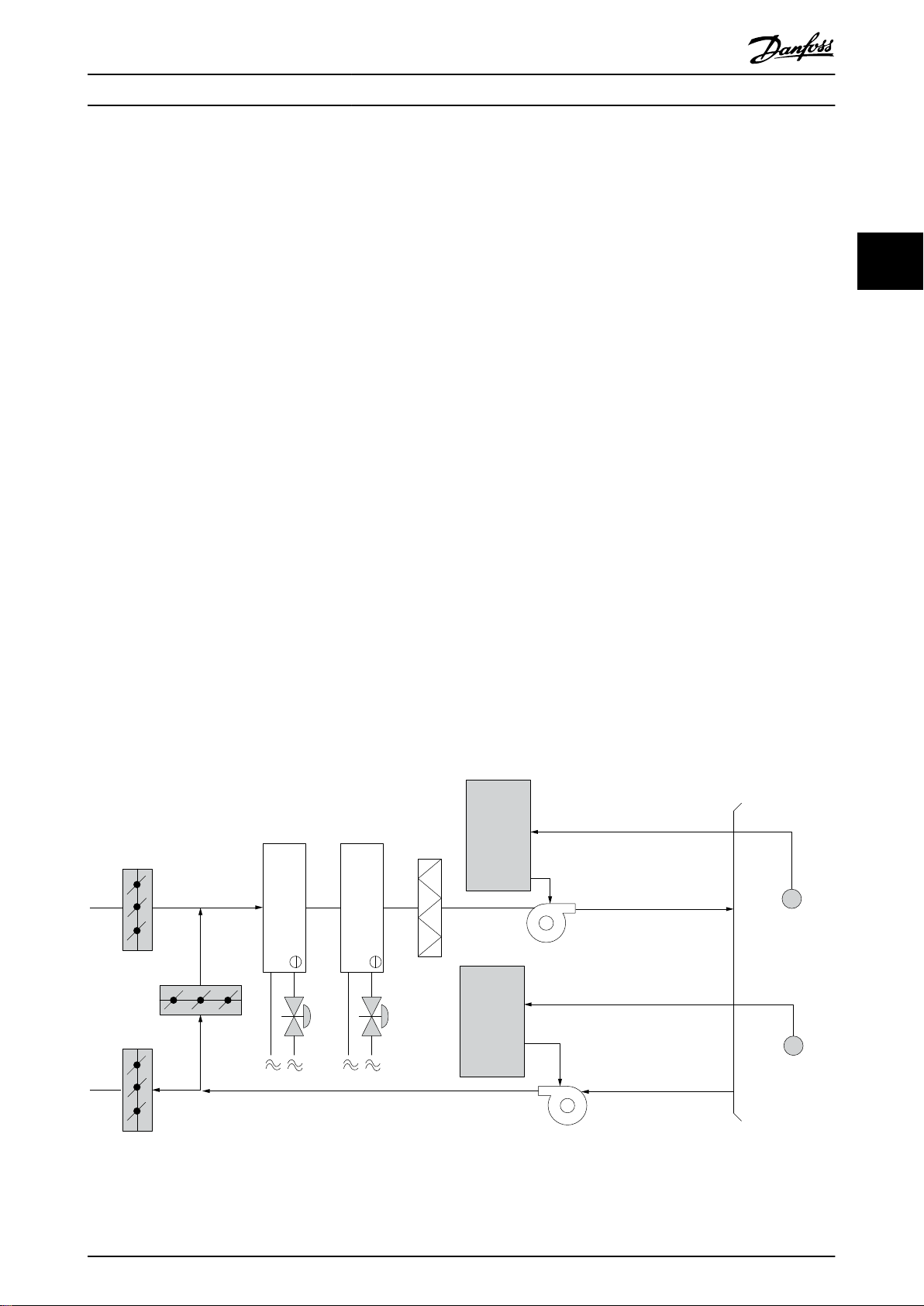
3.1.12 Volume de ar variável
33
Os sistemas de volume de ar variável, ou VAV, controlam a ventilação e a temperatura para atender às necessidades de um
edifício. Os sistemas centrais VAV são considerados o método mais eciente em termos de energia para edifícios com ar
condicionado. Pode-se obter uma maior eciência, projetando-se sistemas centrais ao invés de sistemas distribuídos.
A eciência provém da utilização de ventiladores e resfriadores maiores, os quais apresentam uma eciência muito superior
à dos motores pequenos e resfriadores para refrigeração distribuída de ar. Economiza-se também com a redução nos
requisitos de manutenção.
3.1.13 A solução VLT
Enquanto os amortecedores e IGVs atuam para manter uma pressão constante na tubulação, uma solução com conversor de
frequência economiza muito mais energia e reduz a complexidade da instalação. Ao invés de criar uma queda articial de
pressão ou causar uma diminuição na eciência do ventilador, o conversor de frequência reduz a velocidade do ventilador,
para proporcionar a vazão e a pressão requeridas pelo sistema.
Dispositivos de centrifugação, como os ventiladores, comportam-se de acordo com as leis de centrifugação. Isto signica
que os ventiladores reduzem a pressão e a vazão que produzem, na medida em que a sua velocidade é reduzida. Seu
consumo de energia, por conseguinte, é drasticamente reduzido.
O controlador PI do VLT® HVAC Basic Drive FC 101 pode ser usado para eliminar a necessidade de controladores adicionais.
Ilustração 3.11 Volume de ar variável
20 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Visão Geral do Produto Guia de Design
3.1.14 Volume de ar constante
CAV, ou sistemas de volume de ar constante, são sistemas de ventilação central geralmente usados para abastecer grandes
áreas comuns com quantidades mínimas de ar fresco e temperado. Eles precederam os sistemas VAV e também são
encontrados em edifícios comerciais mais antigos em vários setores. Estes sistemas pré-aquecem o ar fresco, utilizando as
Unidades de tratamento de ar (Air Handling Units, AHUs) com serpentinas de aquecimento; muitas são também utilizadas
para refrigerar prédios e têm uma serpentina de resfriamento. As unidades de serpentina com ventilador são geralmente
utilizadas para ajudar nos requisitos de aquecimento e resfriamento, nas áreas individuais.
3.1.15 A solução VLT
Com um conversor de frequência, uma economia signicativa de energia pode ser obtida, ao mesmo tempo em que se
mantém um adequado controle do prédio. Sensores de temperatura ou sensores de CO2 podem ser utilizados como sinais
de feedback para os conversores de frequência. Seja para o controle da temperatura, da qualidade do ar ou de ambos, um
CAV system pode ser controlado para funcionar com base nas condições reais do prédio. À medida que diminui a
quantidade de pessoas na área controlada, a necessidade de ar fresco diminui. O sensor CO2 detecta níveis mais baixos e
diminui a velocidade dos ventiladores de alimentação. O ventilador de retorno é modulado para manter um setpoint de
pressão estática ou uma diferença xa entre os uxos de ar de entrada e de retorno.
Com o controle da temperatura, especialmente utilizado nos sistemas de ar condicionado, à medida que a temperatura
externa varia, bem como a variação do número de pessoas na área sob controle, os requisitos de resfriamento também
variam. À medida que a temperatura diminui abaixo do setpoint, o ventilador de alimentação pode diminuir a velocidade. O
ventilador de retorno é modulado para manter um setpoint de pressão estática. Pela redução da vazão de ar, a energia
utilizada para aquecer ou resfriar o ar fresco é também reduzida, agregando uma economia ainda maior.
Vários recursos do conversor de frequência dedicado de HVAC Danfoss podem ser utilizados para melhorar o desempenho
do sistema CAV. Uma das preocupações quanto ao controle de um sistema de ventilação é a baixa qualidade do ar. A
frequência mínima programável pode ser congurada para manter uma quantidade mínima de ar, independente do sinal de
feedback ou de referência. O conversor de frequência também contém um controlador PI, que permite monitorar a
temperatura e a qualidade do ar. Mesmo que o requisito de temperatura seja atendido, o conversor de frequência mantém
ar de abastecimento suciente para satisfazer o sensor de qualidade do ar. O controlador é capaz de monitorar e comparar
dois sinais de feedback para controlar o ventilador de retorno, mantendo uma vazão de ar diferencial xa entre os dutos de
alimentação e de retorno.
3 3
Ilustração 3.12 Volume de ar constante
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 21
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
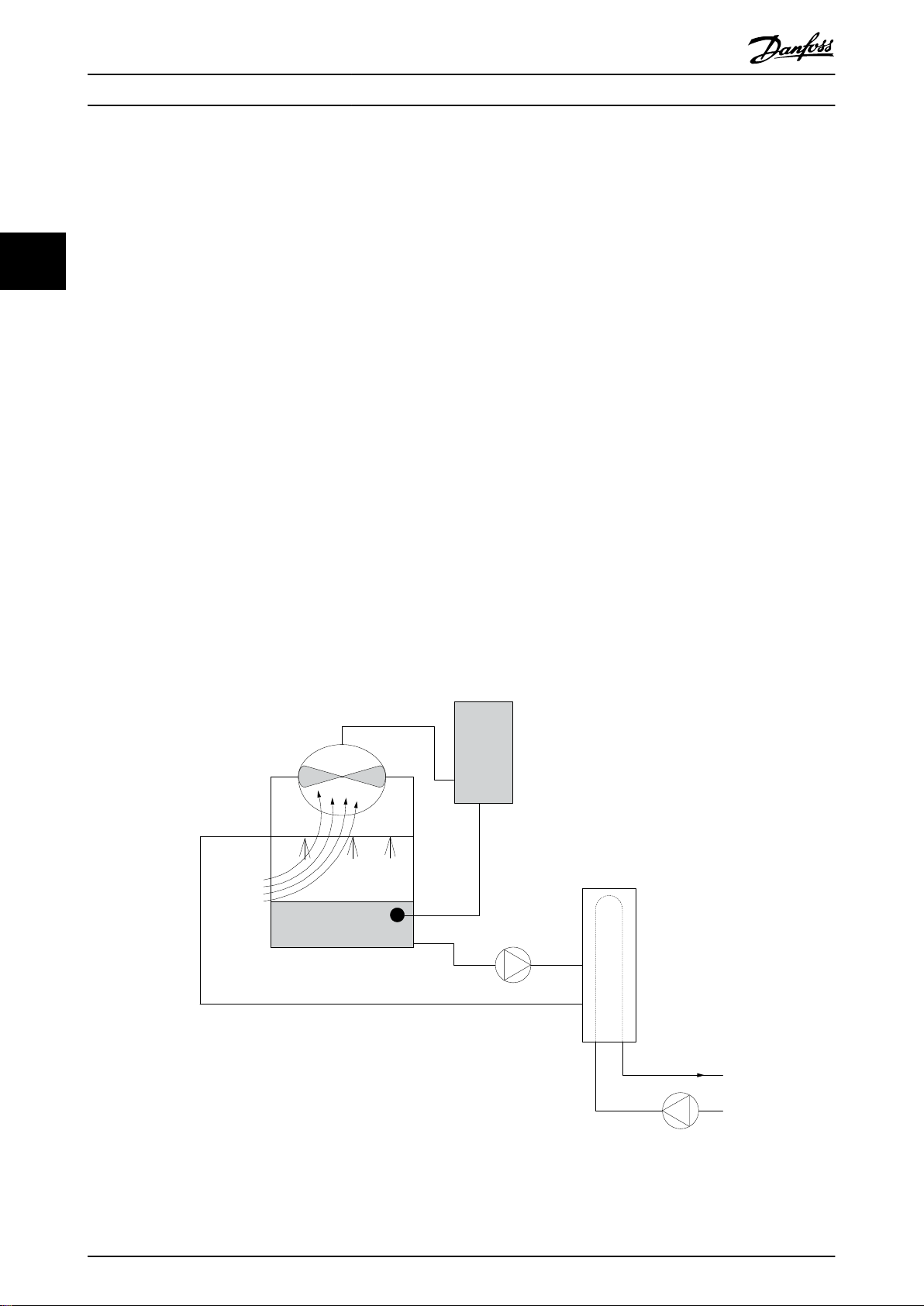
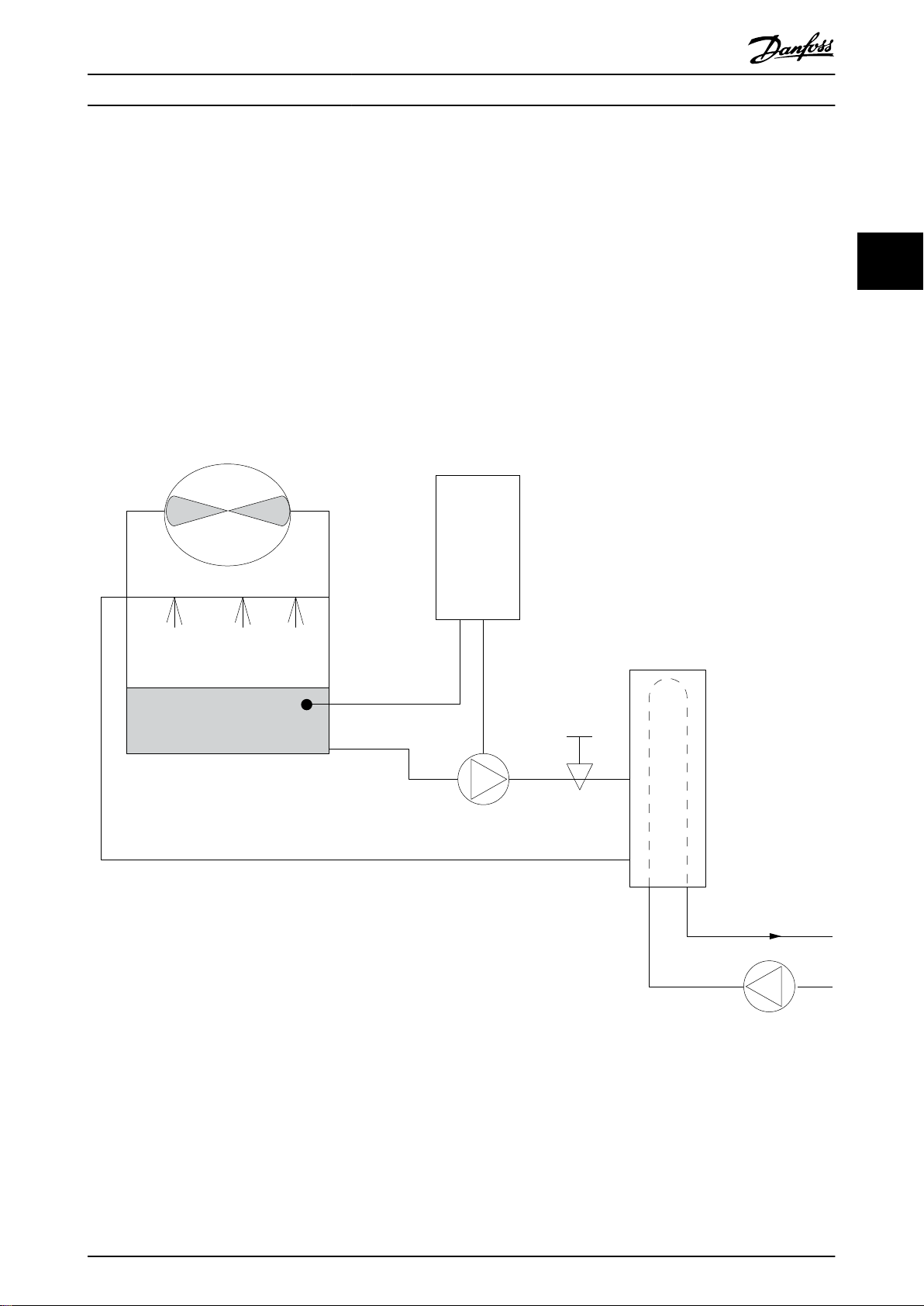
3.1.16 Ventilador de torre de resfriamento
Os ventiladores da torre de resfriamento resfriam a água do condensador em sistemas resfriados a água. Os resfriadores à
água fornecem o meio mais eciente para a obtenção de água resfriada. Eles são até 20% mais ecientes que os
resfriadores a ar. Dependendo do clima, as torres de resfriamento costumam ser o método mais eciente no uso de energia
para resfriar a água do condensador dos resfriadores.
33
Eles resfriam a água do condensador por evaporação.
A água do condensador é pulverizada na torre de resfriamento até que encham para aumentar sua área de superfície. O
ventilador da torre injeta água nebulizada e ar nas superfícies de evaporação para auxiliar no processo de evaporação. A
evaporação remove a energia da água, baixando a sua temperatura. A água resfriada é coletada no tanque das torres de
refrigeração, de onde é bombeada de volta ao condensador dos resfriadores e o processo se repete.
3.1.17 A solução VLT
Com um conversor de frequência, os ventiladores da torre de resfriamento podem ser controlados na velocidade necessária
para manter a temperatura da água do condensador. Os conversores de frequência também podem ser utilizados para ligar
e desligar o ventilador, na medida do necessário.
Vários recursos do conversor de frequência dedicado de HVAC Danfoss podem ser utilizados para melhorar o desempenho
das aplicações dos ventiladores da torre de resfriamento. À medida que os ventiladores da torre de resfriamento caem
abaixo de uma determinada velocidade, o efeito do ventilador no resfriamento da água torna-se pequeno. Além disso, ao
utilizar uma caixa de engrenagens no controle de frequência do ventilador da torre, é necessária uma velocidade mínima de
40 a 50%.
conguração da frequência mínima programável do usuário está disponível para manter esta frequência mínima, mesmo
A
que o feedback ou a referência de velocidade exija velocidades mais baixas.
Além disso, como recurso padrão, o conversor de frequência pode ser programado para entrar no modo de suspensão e
parar o ventilador até que seja necessária uma velocidade maior. Além disso, alguns ventiladores da torre de resfriamento
possuem frequências indesejáveis que podem causar vibrações. Estas frequências podem ser facilmente evitadas, por meio
da programação das faixas de frequências de bypass, no conversor de frequência.
Ilustração 3.13 Ventilador de torre de resfriamento
22 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Visão Geral do Produto Guia de Design
3.1.18 Bombas para condensador
As bombas de água para condensador são usadas principalmente para circular água através da seção do condensador de
refrigeradores a água e torre de resfriamento associada. A água do condensador absorve o calor da seção do condensador
dos resfriadores e o libera para a atmosfera da torre de resfriamento. Esses sistemas são utilizados pois proporcionam o
meio mais ecaz de produzir água resfriada, sendo até 20% mais ecientes que os resfriadores a ar.
3.1.19 A solução VLT
Os conversores de frequência podem ser adicionados às bombas de água do condensador, em lugar de balancear as
bombas com válvulas reguladoras ou por compensação do impulsor da bomba.
A utilização de um conversor de frequência em lugar de uma válvula reguladora simplesmente economiza a energia que
seria absorvida pela válvula. Esta economia pode chegar a 15-20% ou mais. O desbaste do impulsor da bomba é irreversível;
desse modo se as condições mudarem e for necessária uma vazão maior, o impulsor deve ser substituído.
3 3
Ilustração 3.14 Bombas para condensador
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 23
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
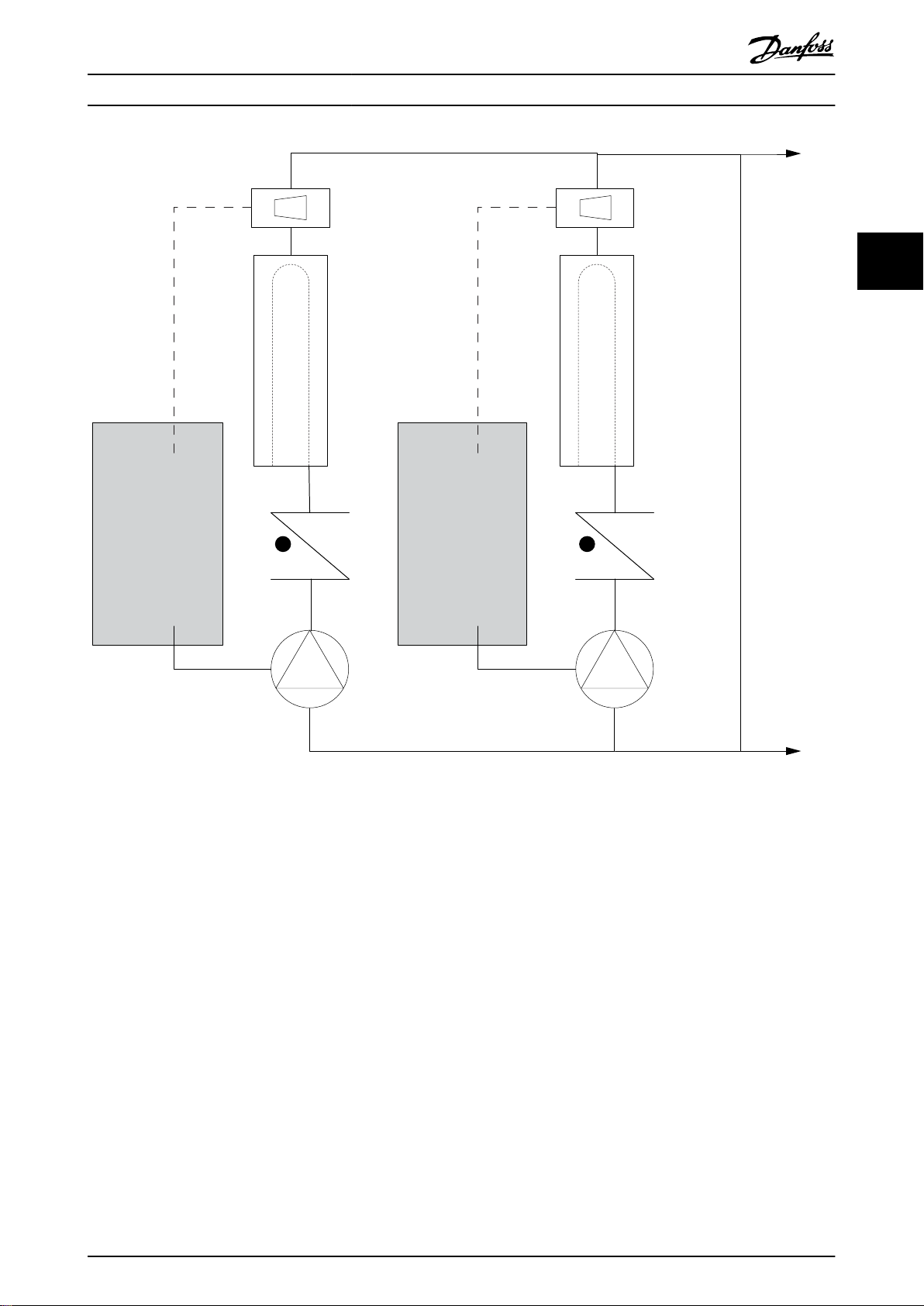
3.1.20 Bombas primárias
As bombas primárias de um sistema de bombeamento primário/secundário podem ser utilizadas para manter uma vazão
constante, por meio de dispositivos que encontram diculdades de operação ou de controle, quando sujeitos a uma vazão
variável. A técnica de bombeamento primário/secundário desacopla o ciclo de produção primária do ciclo de distribuição
33
secundária. Isto permite que dispositivos como resfriadores obtenham uma vazão projetada constante e funcionem adequadamente, ao mesmo tempo em que permitem o restante do sistema variar a vazão.
Conforme a vazão do evaporador diminui em um resfriador, a água resfriada começa a
isto ocorre, o resfriador tenta diminuir a sua capacidade de resfriamento. Se a vazão cair mais do que o suciente, ou muito
rapidamente, o resfriador não poderá reduzir sua carga o suciente e a segurança do resfriador interromperá o resfriamento,
exigindo uma reinicialização manual. Essa situação é comum em grandes instalações, especialmente quando dois ou mais
resfriadores em paralelo estão instalados, se o bombeamento primário/secundário não for utilizado.
car excessivamente fria. Quando
3.1.21 A solução VLT
Dependendo do tamanho do sistema e do porte do ciclo primário, o consumo de energia deste ciclo pode se tornar
considerável.
Um conversor de frequência pode ser adicionado ao sistema primário para substituir a válvula reguladora e/ou o corte dos
impulsores, levando a despesas operacionais reduzidas. Existem dois métodos comuns de controle:
Fluxômetro
Pelo fato da velocidade da vazão desejada ser conhecida e constante, um medidor de vazão instalado na saída de cada
resfriador pode ser utilizado para controlar a bomba diretamente. Utilizando o controlador PI integrado, o conversor de
frequência sempre mantém a vazão adequada, compensando inclusive variações na resistência do circuito de tubulação
primária, pois os resfriadores e suas bombas são ligados e desligados.
Determinação da velocidade local
O operador simplesmente diminui a frequência de saída até que a velocidade de vazão planejada seja atingida.
O uso de um conversor de frequência para diminuir a velocidade da bomba é muito semelhante ao ajuste do impulsor da
bomba, exceto que não exige mão de obra e a eciência da bomba permanece maior. O contrativo do balanceamento
simplesmente reduz a velocidade da bomba, até que a velocidade apropriada da vazão seja alcançada, deixando a
velocidade xa. A bomba opera nessa velocidade sempre que o resfriador estiver ativado. Como o ciclo primário não possui
válvulas de controle ou outros dispositivos que possam alterar a curva do sistema, e a variação devida à ativação e
desativação de bombas e resfriadores de preparo é geralmente pequena, essa velocidade xa permanece adequada. Se for
preciso aumentar a vazão posteriormente durante a vida útil do sistema, o conversor de frequência pode simplesmente
aumentar a velocidade da bomba em vez de exigir um novo impulsor da bomba.
24 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Visão Geral do Produto Guia de Design
3 3
Ilustração 3.15 Bombas primárias
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 25
Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
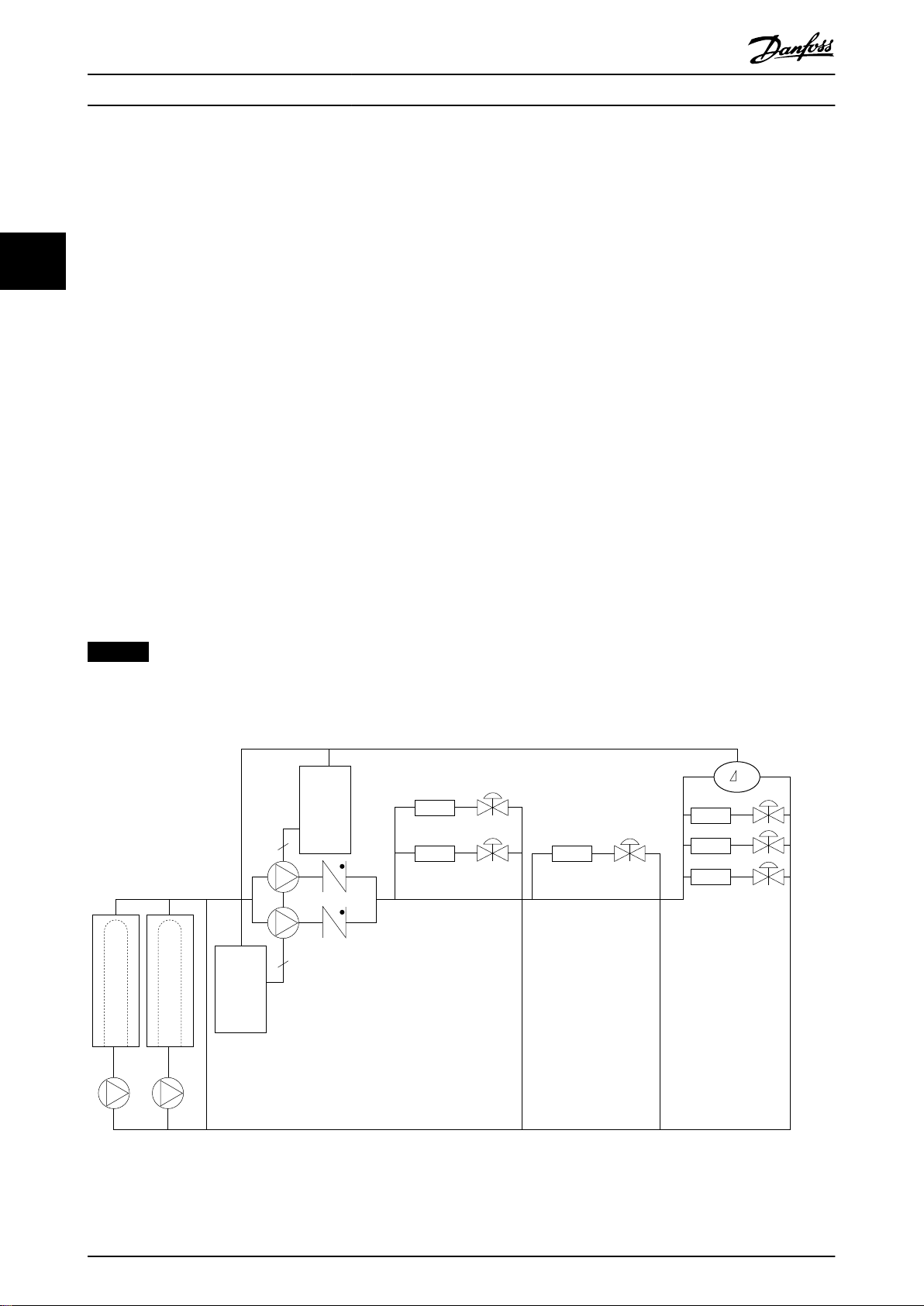
3.1.22 Bombas secundárias
Bombas secundárias em um sistema primário/secundário de bombeamento de água resfriada distribuem a água resfriada
para as cargas do ciclo de produção primária. O sistema de bombeamento primário/secundário é usado para separar
hidronicamente um circuito de tubulação de outro. Neste caso, a bomba primária é usada para manter uma vazão constante
através dos resfriadores, permitindo que as bombas secundárias variem na vazão, aumentem o controle e economizem
33
energia.
Se o conceito primário/secundário não for usado no projeto de um sistema de volume variável quando a vazão cair o
suciente ou muito rapidamente, o resfriador não poderá reduzir a carga adequadamente. A proteção contra temperatura
baixa do evaporador do resfriador desarma o resfriador, necessitando de um reset manual. Essa situação é comum em
grandes instalações, principalmente quando 2 ou mais resfriadores estão instalados em paralelo.
3.1.23 A solução VLT
Enquanto o sistema primário-secundário com válvulas bidirecionais melhora a economia de energia e diminui os problemas
de controle do sistema, a real economia de energia e o potencial de controle são obtidos pela incorporação de conversores
de frequência.
Com o posicionamento adequado dos sensores, a incorporação dos conversores de frequência permite variar a velocidade
das bombas, de forma a acompanhar a curva do sistema e não a curva da bomba.
Isto resulta na eliminação da energia desperdiçada e elimina a maior parte do excesso de pressurização à qual as válvulas
bidirecionais também podem estar sujeitas.
Conforme as cargas monitoradas são atingidas, as válvulas bidirecionais são fechadas. Isso aumenta a pressão diferencial
medida através da carga e da válvula bidirecional. Quando esta pressão diferencial começa a aumentar, a bomba é desacelerada de forma a manter a pressão de saturação de controle, também chamada de valor de setpoint. Este valor de setpoint
é calculado somando a queda de pressão da carga e da válvula bidirecional em condições de design.
AVISO!
Quando houver várias bombas funcionando em paralelo, elas devem funcionar na mesma velocidade para maximizar a
economia de energia, seja com conversores de frequência dedicados individuais ou com um conversor de frequência
funcionando várias bombas em paralelo.
Ilustração 3.16 Bombas secundárias
26 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Visão Geral do Produto Guia de Design
3.2 Estruturas de Controle
Selecione [0] Malha aberta ou [1] Malha fechada em parâmetro 1-00 Modo Conguração.
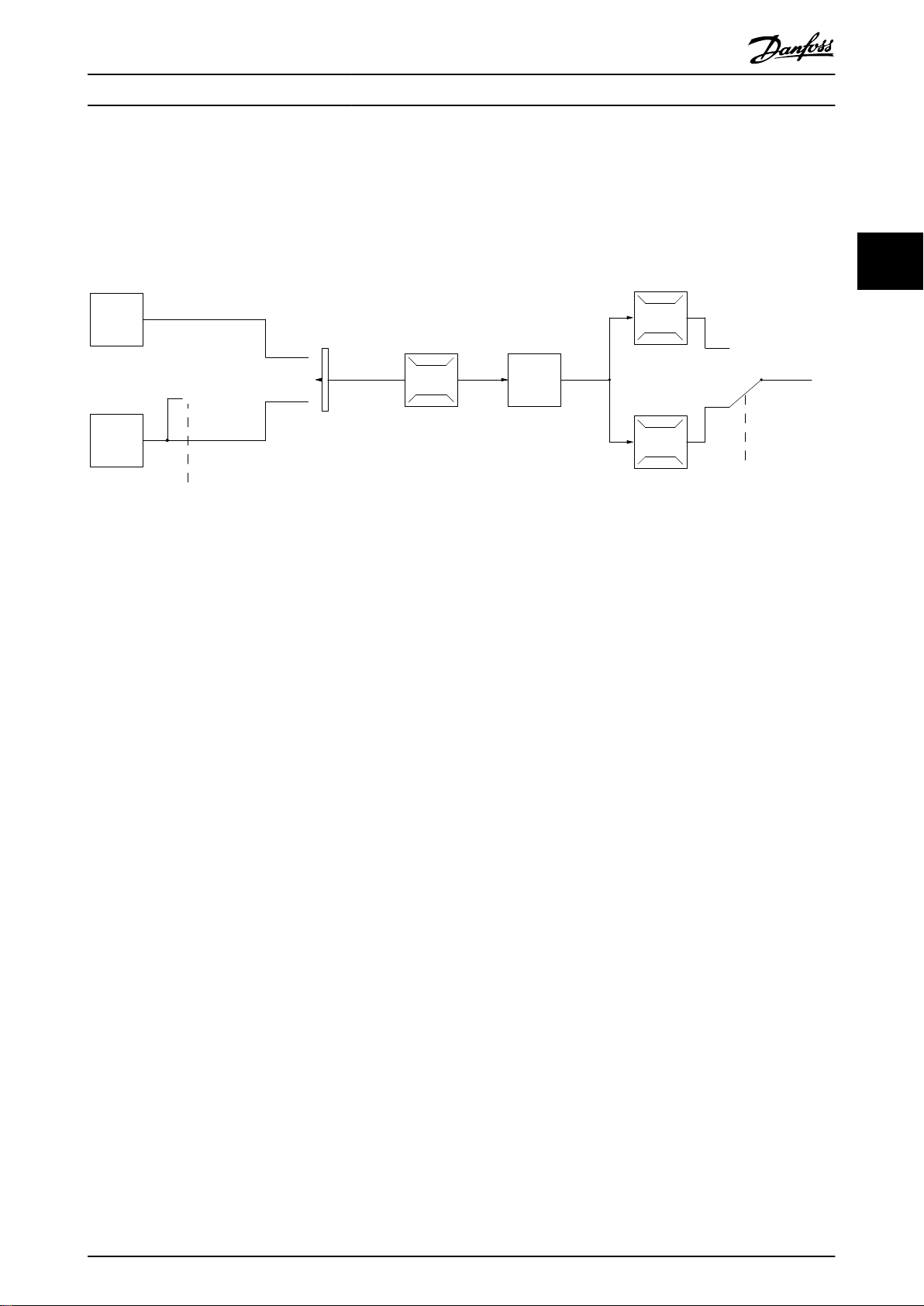
3.2.1 Estrutura de Controle Malha Aberta
Ilustração 3.17 Estrutura de malha aberta
3 3
Na conguração mostrada em Ilustração 3.17,
parâmetro 1-00 Modo Conguração está programado para
[0] Malha aberta. A referência resultante do sistema de
tratamento de referências ou referência local é recebida e
alimentada por meio da limitação de rampa e da limitação
de velocidade, antes de ser enviada para o controle do
motor. A saída do controle do motor ca então restrita
pelo limite de frequência máxima.
Limite de corrente para motores PM:
3.2.2 Controle do motor PM/EC+
O conceito de Danfoss EC+ fornece a possibilidade de usar
motores PM de alta eciência (motores de ímã
permanente) em tamanhos de gabinetes padrão IEC
operados por conversores de frequência Danfoss.
O procedimento de colocação em funcionamento é
comparável ao existente para motores assíncronos
(indução) utilizando a estratégia de controle Danfoss VVC
PM.
Vantagens para o cliente:
Livre escolha da tecnologia de motor (motor de
•
ímã permanente ou motor de indução).
Instalação e operação conforme conhecido em
•
motores de indução.
Independente do fabricante ao selecionar
•
componentes do sistema (por exemplo, motores).
Melhor eciência do sistema, selecionando os
•
melhores componentes.
Possível modernização das instalações existentes.
•
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 27
+
3.2.3 Controles local manual ligado (Hand
O conversor de frequência pode ser operado manualmente
através do painel de controle local (LCP) ou remotamente
via entradas analógicas/digitais ou barramento serial. Se
permitido em parâmetro 0-40 Tecla [Hand on] (Manual
ligado) do LCP, parâmetro 0-44 Tecla [O/Reset] no LCP e
parâmetro 0-42 Tecla [Auto on] (Automát. ligado) do LCP, é
possível iniciar e parar o conversor de frequência via LCP
pressionando [Hand On] e [O/Reset]. Os alarmes podem
ser reinicializados com a tecla [O/Reset].
Faixa de potência: 45 kW (60 hp) (200 V), 0,37–90
•
kW (0,5–121 hp) (400 V), 90 kW (121 hp) (600 V)
para motores de indução e 0,37–22 kW (0,5–30
hp) (400 V) para motores PM.
Atualmente suportado apenas até 22 kW (30 hp).
•
Filtros LC não são suportados com motores PM.
•
O algoritmo de backup cinético não é suportado
•
com motores PM.
Suporta apenas AMA completa da resistência do
•
estator Rs no sistema.
Nenhuma detecção de estolagem (suportada a
•
partir da versão de software 2.80).
On) e remoto automático ligado
(Auto On)
Hand
On
Off
Reset
Auto
On
130BB893.10
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
sistema. Em seguida, compara esse feedback com um valor
de referência de setpoint e determina o erro, se houver,
entre estes 2 sinais. Para corrigir este erro, o PID ajusta a
velocidade do motor.
Ilustração 3.18 Teclas do LCP
33
Por exemplo, considere uma aplicação de bomba em que a
velocidade de uma bomba deve ser controlada de modo
que a pressão estática em uma tubulação seja constante. O
A referência local força o modo de conguração para
malha aberta, independentemente da conguração de
parâmetro 1-00 Modo Conguração.
valor da pressão estática é fornecido ao conversor de
frequência como uma referência de setpoint. Um sensor de
pressão estática mede a pressão estática real no tubo e
fornece esta informação ao conversor de frequência como
A referência local é restaurada no desligamento.
um sinal de feedback. Se o sinal de feedback for maior que
a referência de setpoint, o conversor de frequência
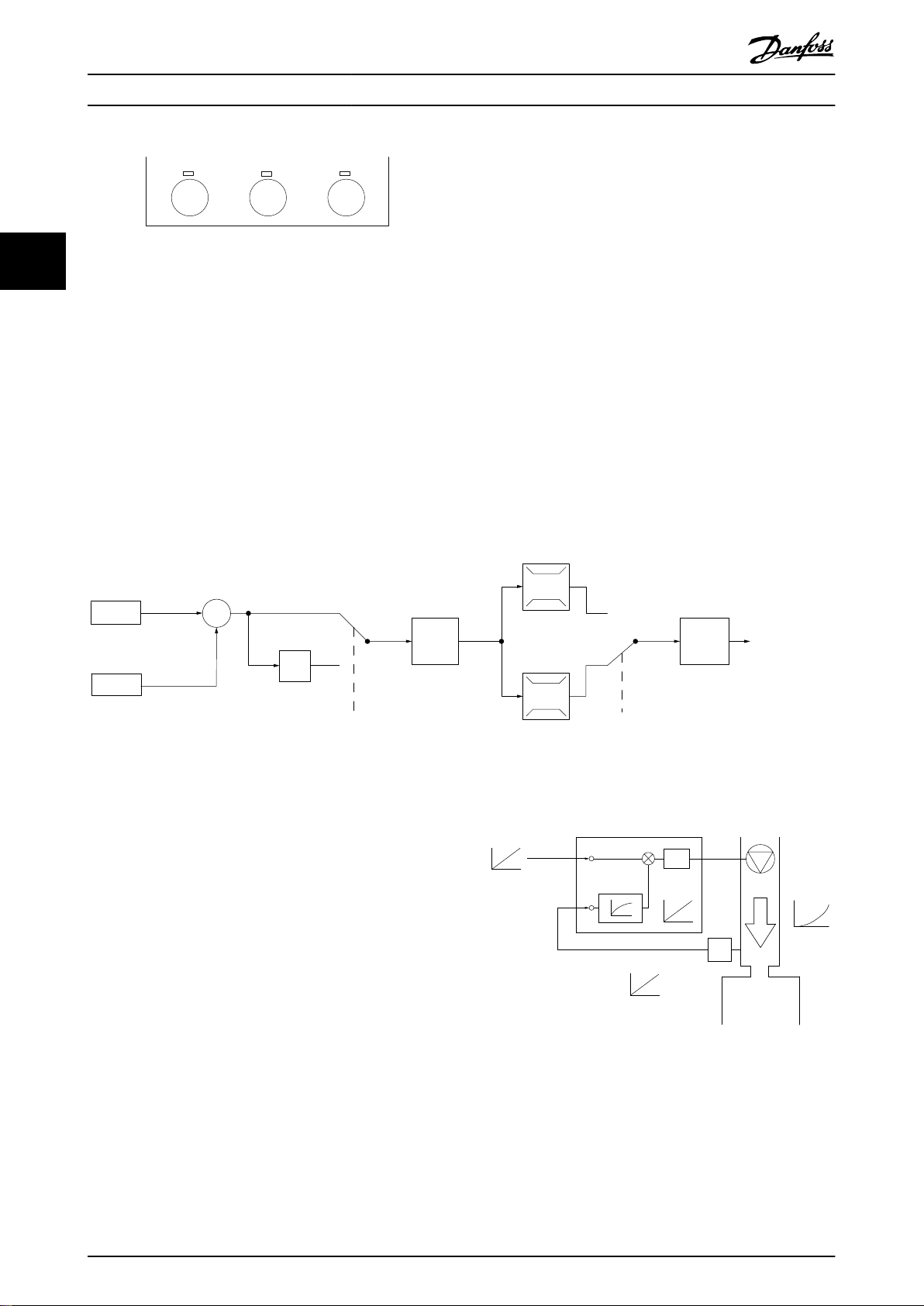
3.2.4 Estrutura de controle em malha
fechada
desacelera para reduzir a pressão. De forma semelhante, se
a pressão do tubo for menor do que a referência do
setpoint, o conversor de frequência automaticamente
O controlador interno permite ao conversor de frequência
se tornar parte do sistema controlado. O conversor de
acelera a bomba para aumentar a pressão fornecida pela
mesma.
frequência recebe um sinal de feedback de um sensor do
Ilustração 3.19 Estrutura de controle de malha fechada
Enquanto os valores padrão para o controlador de malha
fechada do conversor de frequência geralmente fornecem
desempenho satisfatório, o controle do sistema pode ser
otimizado frequentemente ajustando os parâmetros.
3.2.5 Conversão de feedback
Em algumas aplicações, pode ser útil converter o sinal de
feedback. Um exemplo disso é o uso de um sinal de
pressão para fornecer o feedback da vazão. Uma vez que a
raiz quadrada da pressão é proporcional à vazão, essa raiz
quadrada redunda em um valor que é proporcional à
vazão. Consulte o Ilustração 3.20.
28 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Ilustração 3.20 Conversão do sinal de feedback

Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Visão Geral do Produto Guia de Design
3.2.6 Tratamento das Referências
Detalhes para operação de malha aberta e malha fechada.
3 3
Ilustração 3.21 Diagrama em bloco mostrando a referência remota
A referência remota consiste em:
•
•
•
•
Até 8 referências predenidas podem ser programadas no
conversor de frequência. A referência predenida ativa
pode ser selecionada utilizando as entradas digitais ou o
barramento de comunicação serial. A referência também
pode ser fornecida externamente, normalmente a partir de
uma entrada analógica. Esta fonte externa é selecionada
por um dos 3 parâmetros de fonte de referência
(parâmetro 3-15 Fonte da Referência 1, parâmetro 3-16 Fonte
da Referência 2 e parâmetro 3-17 Fonte da Referência 3).
Todos os recursos de referência e a referência de
barramento são adicionados para produzir a referência
externa total. A referência externa, a referência predenida,
ou a soma delas, pode ser estabelecida como a referência
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 29
Referências predenidas.
Referências externas (entradas analógicas e
referências de barramento de comunicação serial).
A referência relativa predenida.
Setpoint controlado por feedback.
ativa. Finalmente, esta referência pode ser graduada
utilizando a parâmetro 3-14 Referência Relativa Pré-denida.
A referência escalonada é calculada da seguinte forma:
Referência = X + X ×
Onde X é a referência externa, a referência predenida ou
Y
100
a soma delas, e Y é a parâmetro 3-14 Referência Relativa
Pré-denida em [%].
Se Y, parâmetro 3-14 Referência Relativa
denido para 0%, a referência não é afetada pela escala.
Pré-denida, está

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
3.2.7 Sintonizando o controlador de malha
fechada do conversor
Assim que o controlador de malha fechada do conversor
de frequência for congurado, teste o desempenho do
33
controlador. Frequentemente, seu desempenho pode ser
aceitável utilizando os valores padrão de
parâmetro 20-93 Ganho Proporcional do PI e
parâmetro 20-94 Tempo de Integração do PID. No entanto,
às vezes, pode ser útil otimizar esses valores de parâmetros
para que haja uma resposta mais rápida do sistema e, ao
mesmo tempo, controlar o excesso de velocidade.
3.2.8 Ajuste manual do PI
1. Dar partida no motor.
2. Programe o parâmetro 20-93 Ganho Proporcional
do PI para 0,3 e aumente-o até que o sinal de
feedback comece a oscilar. Se necessário, dê
partida e pare o conversor de frequência ou
execute alterações incrementais na referência de
setpoint para tentar causar essa oscilação.
3. Reduza o ganho proporcional do PI até que o
sinal de feedback estabilize.
4. Reduza o ganho proporcional de 40 a 60%.
5. Programe parâmetro 20-94 Tempo de Integração do
PID para 20 s e reduza-o até que o sinal de
feedback comece a oscilar. Se necessário, dê
partida e pare o conversor de frequência ou
execute alterações incrementais na referência de
setpoint para tentar causar essa oscilação.
6. Aumente o tempo integrado do PI até que o sinal
de feedback estabilize.
7. Aumente o tempo integrado de 15 a 50%.
Condições de funcionamento ambiente
3.3
Ilustração 3.22 0,25–0,75 kW (0,34–1,0 hp), 200 V, gabinete
de tamanho H1, IP20
Ilustração 3.23 0,37–1,5 kW (0,5–2,0 hp), 400 V, gabinete de
tamanho H1, IP20
O conversor de frequência foi projetado para atender à
norma IEC/EN 60068-2-3, EN 50178 9.4.2.2 a 50 °C (122 °F).
A temperatura ambiente medida durante 24 horas deve ser
pelo menos 5 °C (41 °F) menor do que a temperatura
ambiente máxima. Se o conversor de frequência estiver
funcionando a temperatura ambiente elevada, diminua a
corrente de saída contínua.
Ilustração 3.24 2,2 kW (3,0 hp), 200 V, gabinete de tamanho
H2, IP20
30 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
Visão Geral do Produto Guia de Design
3 3
Ilustração 3.25 2,2–4,0 kW (3,0–5,4 hp), 400 V, gabinete de
tamanho H2, IP20
Ilustração 3.26 3,7 kW (5,0 hp), 200 V, gabinete de tamanho
H3, IP20
Ilustração 3.28 5,5-7,5 kW (7,4-10 hp), 200 V, gabinete de
tamanho H4, IP20
Ilustração 3.29 11-15 kW (15-20 hp), 400 V, gabinete de
tamanho H4, IP20,
Ilustração 3.27 5,5-7,5 kW (7,4-10 hp), 400 V, gabinete de
tamanho H3, IP20
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 31
Ilustração 3.30 11 kW (15 hp), 200 V, gabinete de tamanho
H5, IP20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
33
Ilustração 3.31 18,5–22 kW (25–30 hp), 400 V, gabinete de
tamanho H5, IP20
Ilustração 3.32 15-18,5 kW (20-25 hp), 200 V, gabinete de
tamanho H6, IP20
Ilustração 3.34 45 kW (60 hp), 400 V, gabinete de tamanho
H6, IP20
Ilustração 3.35 22–30 kW (30-40 hp), 600 V, gabinete de
tamanho H6, IP20
Ilustração 3.33 30–37 kW (40–50 hp), 400 V, gabinete de
tamanho H6, IP20
32 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Ilustração 3.36 22-30 kW (30-40 hp), 200 V, gabinete de
tamanho H7, IP20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
Visão Geral do Produto Guia de Design
3 3
Ilustração 3.37 55–75 kW (74–100 hp), 400 V, gabinete de
tamanho H7, IP20
Ilustração 3.38 45–55 kW (60–74 hp), 600 V, gabinete de
tamanho H7, IP20
Ilustração 3.40 90 kW (120 hp), 400 V, gabinete de
tamanho H8, IP20
Ilustração 3.41 75–90 kW (100–120 hp), 600 V, gabinete de
tamanho H8, IP20
Ilustração 3.39 37–45 kW (50–60 hp), 200 V, gabinete de
tamanho H8, IP20
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 33
Ilustração 3.42 2,2–3 kW (3,0–4,0 hp), 600 V, gabinete de
tamanho H9, IP20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
33
Ilustração 3.43 5,5-7,5 kW (7,4-10 hp), 600 V, gabinete de
tamanho H9, IP20
Ilustração 3.44 11-15 kW (15-20 hp), 600 V, gabinete de
tamanho H10, IP20
Ilustração 3.46 5,5–7,5 kW (7,4–10 hp), 400 V, gabinete de
tamanho I3, IP54
Ilustração 3.47 11-18,5 kW (15-25 hp), 400 V, gabinete de
tamanho I4, IP54
Ilustração 3.45 0,75–4,0 kW (1,0–5,4 hp), 400 V, gabinete de
tamanho I2, IP54
34 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Ilustração 3.48 22–30 kW (30-40 hp), 400 V, gabinete de
tamanho I6, IP54

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Visão Geral do Produto Guia de Design
Ilustração 3.49 37 kW (50 hp), 400 V, gabinete de
tamanho I6, IP54
Se o motor ou o equipamento acionado pelo motor - por
exemplo, um ventilador - estiver emitindo ruído ou
vibrações em determinadas frequências, congure os
seguintes parâmetros ou grupos do parâmetro para reduzir
ou eliminar o ruído ou as vibrações:
Grupo do parâmetro 4-6* Bypass de velocidade.
•
Programe parâmetro 14-03 Sobremodulação para
•
[0] O (Desligado).
Padrão de chaveamento e frequência de
•
chaveamento no grupo do parâmetro 14-0 *
Chaveamento do Inversor.
Parâmetro 1-64 Amortecimento da Ressonância.
•
O ruído acústico do conversor de frequência é proveniente
de 3 fontes:
Bobinas de barramento CC.
•
Ventilador interno.
•
Bloqueador do ltro de RFI.
•
3 3
Ilustração 3.50 45–55 kW (60–74 hp), 400 V, gabinete de
tamanho I7, IP54
Tamanho do gabinete
Nível [dBA]
1)
H1 43,6
H2 50,2
H3 53,8
H4 64
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 hp) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Tabela 3.3 Valores típicos medidos a uma distância de 1 m
(3,28 pés) da Unidade
1) Os valores são medidos em segundo plano com um ruído de 35
dBA e o ventilador funcionando na velocidade máxima.
O conversor de frequência foi testado de acordo com o
procedimento baseado nas normas abaixo, Tabela 3.4.
Ilustração 3.51 75–90 kW (100–120 hp), 400 V, gabinete
de tamanho I8, IP54
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 35

Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
O conversor de frequência está em conformidade com os
requisitos existentes para unidades montadas em paredes
e pisos de instalações de produção, assim como em
painéis parafusados na parede ou no piso.
33
IEC/EN 60068-2-6 Vibração (senoidal) - 1970
IEC/EN 60068-2-64 Vibração, aleatória de banda larga
Tabela 3.4 Normas
Um conversor de frequência contém muitos componentes
eletrônicos e mecânicos. Todos são, em algum grau,
vulneráveis aos efeitos ambientais.
CUIDADO
AMBIENTES DE INSTALAÇÃO
Não instale o conversor de frequência em ambientes com
líquidos, partículas ou gases em suspensão no ar que
possam afetar ou danicar os componentes eletrônicos.
Não tomar as medidas de proteção necessárias aumenta
o risco de paradas, podendo causar danos ao
equipamento e lesões pessoais.
Antes de instalar o conversor de frequência, deve-se
vericar a presença de líquidos, partículas e gases
suspensos no ar ambiente. Isto pode ser feito observando-
-se as instalações já existentes nesse ambiente. A presença
de água ou óleo sobre peças metálicas ou a corrosão nas
partes metálicas, são indicadores típicos de líquidos
nocivos em suspensão no ar.
Com frequência, detectam-se níveis excessivos de
partículas de poeira em gabinetes de instalação e em
instalações elétricas existentes. Um indicador de gases
agressivos em suspensão no ar é o enegrecimento de
barras de cobre e extremidades de cabos de cobre em
instalações existentes.
3.4 Aspectos Gerais da EMC
3.4.1 Visão geral das emissões EMC
Os conversores de frequência (e outros dispositivos
elétricos) geram campos eletrônicos ou magnéticos que
podem interferir em seu ambiente. A compatibilidade
eletromagnética (EMC) desses efeitos depende da potência
e das características harmônicas dos dispositivos.
Líquidos podem ser transportados pelo ar e condensar no
conversor de frequência, e podem causar corrosão dos
componentes e peças metálicas. Vapor, óleo e água
salgada podem causar corrosão em componentes e peças
metálicas. Em tais ambientes, use equipamentos com
classicação de gabinete IP54. Como uma proteção
adicional, placas de circuito impresso revestidas podem ser
encomendadas como uma opção (padrão em
determinadas potências).
Partículas em suspensão no ar, como poeira, podem causar
falhas mecânicas, elétricas ou térmicas no conversor de
frequência. Um indicador típico dos níveis excessivos de
partículas em suspensão no ar são partículas de poeira em
volta do ventilador do conversor de frequência. Em
ambientes empoeirados, use equipamentos com classicação de gabinete IP54 ou um gabinete para
equipamentos IP20/TIPO 1.
Em ambientes com altas temperaturas e umidade, gases
corrosivos, como compostos de enxofre, nitrogênio e cloro,
desencadeiam processos químicos nos componentes do
conversor de frequência.
Tais reações químicas rapidamente afetam e danicam os
componentes eletrônicos. Nesses ambientes, recomenda-se
que o equipamento seja montado em um gabinete
ventilado, impedindo o contato do conversor de frequência
com gases agressivos.
Pode-se encomendar, como opção de proteção adicional,
placas de circuito impresso com revestimento externo.
A interação não controlada entre dispositivos elétricos em
um sistema pode degradar a compatibilidade e prejudicar
a operação conável. A interferência pode assumir a forma
de distorção harmônica da rede elétrica, descargas eletrostáticas, utuações rápidas de tensão ou interferência de
alta frequência. Dispositivos elétricos geram interferência e
são afetados pela interferência de outras fontes geradas.
Geralmente, a interferência elétrica surge em frequências
na faixa de 150 kHz a 30 MHz. A interferência aérea
proveniente do sistema do conversor de frequência, na
faixa de 30 MHz a 1 GHz, é gerada pelo inversor, pelo cabo
do motor e pelo motor.
Correntes capacitivas no cabo do motor acoplado a um
dU/dt alto da tensão do motor geram correntes de fuga,
conforme mostrado em Ilustração 3.52.
O uso de um cabo de motor blindado aumenta a corrente
de fuga (consulte Ilustração 3.52), pois os cabos blindados
têm maior capacitância para o ponto de aterramento do
que os cabos não blindados. Se a corrente de fuga não for
ltrada, haverá uma maior interferência na rede elétrica na
faixa de frequência de rádio, abaixo de aproximadamente 5
MHz. Como a corrente de fuga (I1) é levada de volta à
unidade através da blindagem (I3), existe apenas um
pequeno campo eletromagnético (I4) do cabo do motor
blindado de acordo com Ilustração 3.52.
36 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Visão Geral do Produto Guia de Design
A blindagem reduz a interferência irradiada, mas aumenta
a interferência de baixa frequência na rede elétrica.
Conecte a blindagem do cabo do motor ao gabinete do
conversor de frequência, bem como ao gabinete do motor.
A melhor maneira de se fazer isso é usando braçadeiras de
blindagem integradas para evitar extremidades de
blindagem torcidas (rabichos). Rabichos aumentam a
impedância da blindagem em frequências mais altas, o que
reduz o efeito da blindagem e aumenta a corrente de fuga
(I4).
Se um cabo blindado for usado para relés, cabos de
controle, interfaces de sinal e freio, monte a blindagem no
gabinete, nas duas extremidades. No entanto, em algumas
situações é necessário romper a blindagem para evitar
malhas de corrente.
Se a blindagem for colocada em uma placa de montagem
para o conversor de frequência, a placa de montagem
deve ser feita de metal, para transportar as correntes de
blindagem de volta para a unidade. Além disso, garanta
que haja um bom contato elétrico da placa de suporte, por
meio dos parafusos de montagem com o chassi do
conversor de frequência.
Ao usar cabos não blindados, alguns requisitos de emissão
não são cumpridos, embora a maioria dos requisitos de
imunidade sejam observados.
Para reduzir o nível de interferência de todo o sistema
(unidade+instalação), deixe os cabos do motor e do freio o
mais curtos possível. Evite colocar cabos com nível de sinal
sensível junto com os cabos do motor e do freio. A interferência nas frequências de rádio superior a 50 MHz (pelo ar)
é produzida especialmente por sistemas eletrônicos de
controle.
3 3
1 Fio terra 2 Blindagem 3 Alimentação de rede elétrica CA
4 Conversor de frequência 5 Cabo de motor blindado 6 Motor
Ilustração 3.52 Geração de correntes de fuga
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 37

Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
3.4.2 Requisitos de emissão
O padrão de produto EMC para conversores de frequência dene quatro categorias (C1, C2, C3 e C4) com requisitos
especícos de emissão e imunidade. Tabela 3.5 indica a denição das 4 categorias e a classicação equivalente da norma EN
55011.
33
Categoria EN/IEC
61800-3
C1
C2
C3
C4
Tabela 3.5 Correlação entre IEC 61800-3 e EN 55011
Conversores de frequência instalados no 1º ambiente (residencial e
escritório) com uma tensão de alimentação inferior a 1000 V.
Conversores de frequência instalados no 1º ambiente (residencial e
escritório) com uma tensão de alimentação inferior a 1000 V, que não são
plug-in nem móveis e devem ser instalados e comissionados por um pros-
sional.
Conversores de frequência instalados no 2º ambiente (industrial) com uma
tensão de alimentação inferior a 1000 V.
Conversores de frequência instalados no 2º ambiente com uma tensão de
alimentação igual ou superior a 1000 V ou corrente nominal igual ou
superior a 400 A ou destinada a uso em sistemas complexos.
Denição
Classe de emissão equivalente
em EN 55011
Classe B
Classe A Grupo 1
Classe A Grupo 2
Sem linha limite.
Prepare um plano de EMC.
Quando os padrões de emissão genéricos (conduzidos) são
usados, os conversores de frequência são obrigados a
cumprir os limites em Tabela 3.6.
Ambiente
Ambiente inicial
(residencial e escritório)
Segundo ambiente
(ambiente industrial)
Norma
de emissão genérica
Padrão de emissão EN/IEC 61000-6-3 para ambientes
residenciais, comerciais e industriais leves.
Padrão de emissão EN/IEC 61000-6-4 para ambientes
industriais.
Classe de emissão equivalente em
EN 55011
Classe B
Classe A Grupo 1
Tabela 3.6 Correlação entre normas de emissão genéricas e EN 55011
3.4.3 Resultados de teste de emissão EMC
Os seguintes resultados de teste foram obtidos usando um sistema com um conversor de frequência, um cabo de controle
blindado, uma caixa de controle com potenciômetro e um cabo de motor blindado.
Tipo do
ltro de
RFI
Ambiente industrial
EN 55011
EN/IEC
61800-3
Conduzir emissão. Comprimento máximo do cabo blindado [m (pés)] Emissão irradiada
Classe A Grupo 2
Ambiente industrial
Categoria C3
Segundo ambiente
Industrial
Sem ltro
externo
Com ltro
externo
Classe A Grupo 1
Ambiente industrial
Categoria C2
Primeiro ambiente
Residencial e escritório
Sem ltro
externo
Com ltro
externo
Classe B
Residências, comércio e
indústrias leves
Categoria C1
Primeiro ambiente
Residencial e escritório
Sem ltro
externo
Com ltro
externo
Classe A Grupo 1
Ambiente industrial
Categoria C2
Primeiro ambiente
Residencial e
escritório
Sem ltro
externo
Com ltro
externo
Classe B
Residências, comércio
e indústrias leves
Categoria C1
Primeiro ambiente
Residencial e escritório
Sem ltro
externo
Com ltro
externo
38 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Visão Geral do Produto Guia de Design
Tipo do ltro de RFI Conduzir emissão. Comprimento máximo do cabo blindado [m (pés)] Emissão irradiada
Ambiente industrial
Filtro de RFI H4 (EN55011 A1, EN/IEC61800-3 C2)
0,25–11 kW
(0,34–15 hp)
3x200–240 V IP20
0,37–22 kW
(0,5–30 hp)
3x380–480 V IP20
Filtro de RFI H2 (EN55011 A2, EN/IEC 61800-3 C3)
15–45 kW
(20–60 hp)
3x200–240 V IP20
30–90 kW
(40–120 hp)
3x380–480 V IP20
0,75–18,5 kW
(1–25 hp)
3x380–480 V IP54
22–90 kW
(30–120 hp)
3x380–480 V IP54
Filtro de RFI H3 (EN55011 A1/B, EN/IEC 61800-3 C2/C1)
15–45 kW
(20–60 hp)
3x200–240 V IP20
30–90 kW
(40–120 hp)
3x380–480 V IP20
0,75–18,5 kW
(1–25 hp)
3x380–480 V IP54
22–90 kW
(30–120 hp)
3x380–480 V IP54
– – 25 (82) 50 (164) – 20 (66) Sim Sim – Não
– – 25 (82) 50 (164) – 20 (66) Sim Sim – Não
25 (82) – – – – – Não – Não –
25 (82) – – – – – Não – Não –
25 (82) – – – – – Sim – – –
25 (82) – – – – – Não – Não –
– – 50 (164) – 20 (66) – Sim – Não –
– – 50 (164) – 20 (66) – Sim – Não –
– – 25 (82) – 10 (33) – Sim – – –
– – 25 (82) – 10 (33) – Sim – Não –
3 3
Tabela 3.7 Resultados de teste de emissão EMC
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 39

175HA034.10
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
3.4.4 Visão geral de emissão de harmônicas
Um conversor de frequência recebe uma corrente não
3.4.5 Requisitos de Emissão de Harmônicas
Equipamento conectado à rede elétrica pública
senoidal da rede, o que aumenta a corrente de entrada
I
. Uma corrente não senoidal é transformada com uma
RMS
análise de Fourier e dividida em correntes de onda
33
senoidal com diferentes frequências, ou seja, diferentes
correntes harmônicas In com frequência básica de 50 Hz:
I
Hz 50 250 350
Tabela 3.8 Correntes harmônicas
1
I
5
I
7
As harmônicas não afetam diretamente o consumo de
energia, mas aumentam as perdas por calor na instalação
Opcionais Denição
IEC/EN 61000-3-2 Classe A para equipamento trifásico
1
balanceado (somente para equipamento prossional
de até 1 kW (1,3 hp) de potência total).
IEC/EN 61000-3-12 Equipamento 16-75 A e
2
equipamento prossional a partir de 1 kW (1,3 hp)
até corrente de fase de 16 A.
Tabela 3.9 Equipamento conectado
3.4.6 Resultados do teste de Harmônicas
(Emissão)
(transformador, cabos). Assim, em instalações com uma alta
porcentagem de carga reticadora, mantenha as correntes
harmônicas em um nível baixo para evitar sobrecarga do
transformador e alta temperatura nos cabos.
Capacidades de potência de até PK75 em T4 e P3K7 em T2
estão em conformidade com a IEC/EN 61000-3-2 Classe A.
Capacidades de potência desde P1K1 e até P18K em T2 e
até P90K em T4 estão em conformidade com a IEC/EN
61000-3-12 Tabela 4.
Corrente harmônica individual In/I1 (%)
I
5
32,6 16,6 8,0 6,0
40 25 15 10
Fator de distorção de corrente da
I
7
harmônica (%)
THDi PWHD
39 41,4
48 46
I
11
I
13
Ilustração 3.53 Bobinas de barramento CC
AVISO!
Algumas correntes harmônicas podem interferir em
equipamentos de comunicação conectados ao mesmo
transformador, ou podem causar ressonância com
baterias de correção do fator de potência.
Para garantir baixas correntes harmônicas, o conversor de
frequência é equipado com bobinas de barramento CC
como padrão. Isso normalmente reduz a corrente de
entrada I
em 40%.
RMS
0,25–11 kW real
(0,34–15 HP),
IP20, 200 V
(típica)
Limite para
R
≥120
sce
0,25–11 kW real
(0,34–15 HP), 200
V (típico)
Limite para
R
≥120
sce
A distorção na tensão de alimentação de rede elétrica
depende da amplitude das correntes harmônicas,
Tabela 3.10 Corrente harmônica de 0,25–11 kW (0,34–15 hp),
200 V
multiplicada pela impedância de rede elétrica, para a
frequência em questão. A distorção de tensão total THDv é
calculada com base nas harmônicas de tensão individuais
usando a seguinte fórmula:
THD
% = U
5
+ U
2
+ ... + U
7
2
N
2
(UN% de U)
40 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Visão Geral do Produto Guia de Design
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
0,37–22 kW real
(0,5–30 HP), IP20,
36,7 20,8 7,6 6,4
380-480 V (típica)
Limite para
R
≥120
sce
40 25 15 10
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
0,37–22 kW real
(0,5–30 HP),
44,4 40,8
380-480 V (típica)
Limite para
R
≥120
sce
48 46
Tabela 3.11 Corrente harmônica de 0,37–22 kW (0,5–30 hp),
380-480 V
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
30-90 kW real
(40-120 hp), IP20,
36,7 13,8 6,9 4,2
380-480 V (típica)
Limite para
R
≥120
sce
40 25 15 10
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
30-90 kW real
(40-120 hp),
40,6 28,8
380-480 V (típica)
Limite para
R
≥120
sce
48 46
Tabela 3.12 Corrente harmônica de 30-90 kW (40-120 hp),
380-480 V
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
2,2–15 kW real
(3,0–20 HP), IP20,
48 25 7 5
525-600 V (típica)
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
2,2–15 kW real
(3,0–20 HP),
55 27
525-600 V (típica)
Tabela 3.13 Corrente harmônica de 2,2–15 kW (3,0–20 hp),
525-600 V
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
18,5–90 kW real
(25-120 HP), IP20,
48,8 24,7 6,3 5
525-600 V (típica)
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
18,5–90 kW real
(25-120 HP),
55,7 25,3
525-600 V (típica)
Tabela 3.14 Corrente harmônica de 18,5–90 kW (25,120 hp),
525-600 V
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
22-90 kW real
(30-120 hp), IP54,
36,3 14 7 4,3
400 V (típica)
Limite para
R
≥120
sce
40 25 15 10
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
22-90 kW real
(30-120 hp), IP54,
40,1 27,1
400 V (típica)
Limite para
R
≥120
sce
48 46
Tabela 3.15 Corrente harmônica de 22-90 kW (30-120 hp),
400 V
Corrente harmônica individual In/I1 (%)
I
5
I
7
I
11
I
13
0,75–18,5 kW real
(1,0–25 HP), IP54,
36,7 20,8 7,6 6,4
380-480 V (típica)
Limite para
R
≥120
sce
40 25 15 10
Fator de distorção de corrente da
harmônica (%)
THDi PWHD
0,75–18,5 kW real
(1,0–25 HP), IP54,
44,4 40,8
380-480 V (típica)
Limite para
R
≥120
sce
48 46
Tabela 3.16 Corrente harmônica de 0,75–18,5 kW (1,0–25 hp),
380–480 V
3 3
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 41

Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
15-45 kW real
(20-60 HP), IP20,
200 V (típica)
33
Limite para
R
≥120
sce
15-45 kW real
(20-60 HP), 200 V
(típica)
Limite para
R
≥120
sce
Corrente harmônica individual In/I1 (%)
I
5
26,7 9,7 7,7 5
40 25 15 10
Fator de distorção de corrente da
I
7
harmônica (%)
THDi PWHD
30,3 27,6
48 46
I
11
I
13
3.4.7 Requisitos de imunidade
Os requisitos de imunidade para conversores de frequência
dependem do ambiente onde são instalados. Os requisitos
para ambiente industrial são mais rigorosos que os
requisitos para ambientes residencial e de escritório. Todos
os conversores de frequência Danfoss cumprem os
requisitos para o ambiente industrial e, portanto, também
atendem aos requisitos mais baixos do ambiente
residencial e de escritório, com uma grande margem de
segurança.
3.5 Isolação galvânica (PELV)
A PELV oferece proteção através de tensão ultrabaixa. A
proteção contra choque elétrico é garantida quando a
alimentação elétrica é do tipo PELV e a instalação é
Tabela 3.17 Corrente harmônica de 15-45 kW (20-60 hp),
200 V
Desde que o a potência de curto-circuito da fonte de
alimentação Ssc seja maior do que ou igual a:
efetuada como descrito nas normas locais/nacionais sobre
alimentações PELV.
Todos os terminais de controle e terminais de relés
01-03/04-06 estão em conformidade com a PELV (tensão
protetora extremamente baixa) (não se aplica às unidades
S
= 3 × R
SC
SCE
× U
rede elétrica
× I
= 3 × 120 × 400 × I
equ
equ
com fase do Delta aterrada acima de 440 V).
no ponto da interface entre a alimentação do usuário e a
rede pública (R
sce
).
A isolação galvânica (assegurada) é obtida cumprindo os
requisitos para maior isolamento e fornecendo as
É responsabilidade do instalador ou usuário do
equipamento garantir, mediante consulta ao operador da
distâncias de fuga/desvio relevantes. Estes requisitos
encontram-se descritos na norma EN 61800-5-1.
rede de distribuição, caso necessário, que o equipamento
esteja conectado somente a uma fonte com uma potência
de curto-circuito Ssc maior do que ou igual a especicada
acima.
Outras capacidades de potência podem ser conectadas a
uma rede de alimentação pública mediante consulta ao
operador da rede de distribuição.
Os componentes que compõem o isolamento elétrico,
conforme descrito, também estão em conformidade com
os requisitos para maior isolamento e o teste relevante,
conforme descrito na EN 61800-5-1.
O isolamento galvânico PELV pode ser mostrado em
Ilustração 3.55.
Conformidade com diversas orientações a nível de sistema:
Os dados de correntes harmônicas em Tabela 3.10 a
Tabela 3.17 são fornecidos de acordo com a norma IEC/EN
Para manter a PELV, todas as conexões feitas nos terminais
de controle devem ser PELV, por exemplo, os termistores
devem ser reforçados/duplamente isolados.
61000-3-12 com referência ao padrão de produto de
Sistemas de conversor de potência. Podem ser usados
como base para o cálculo da
inuência das correntes
harmônicas no sistema de fonte de alimentação e para a
documentação de conformidade com diretrizes regionais
relevantes: IEEE 519 -1992; G5/4.
42 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

SMPS
130BB896.10
1
2
3
a
M
130BB901.10
1324
5
a
M
Visão Geral do Produto Guia de Design
0,25–22 kW (0,34–30 hp)
1 Alimentação (SMPS)
2 Optoacopladores, comunicação entre o AOC e o BOC
3 Relés personalizados
a Terminais do cartão de controle
Ilustração 3.54 Isolação galvânica
30–90 kW (40–120 hp)
3.6 Corrente de Fuga para o Terra
ADVERTÊNCIA
TEMPO DE DESCARGA
Tocar as partes elétricas pode ser fatal - mesmo após o
equipamento ter sido desconectado da rede elétrica.
Certique-se também de que outras entradas de tensão
tenham sido desconectadas, como Load Sharing (ligação
do barramento CC) e a conexão do motor para backup
cinético.
Antes de tocar em qualquer parte elétrica, aguarde pelo
menos o tempo indicado em Tabela 2.1.
Um tempo menor somente será permitido, se estiver
especicado na plaqueta de identicação da unidade em
questão.
ADVERTÊNCIA
PERIGO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor de frequência corretamente pode resultar em
morte ou ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
3 3
1 Alimentação (SMPS), incluindo o isolamento do sinal de UDC,
indicando a tensão de corrente intermediária
2 Unidade de gate que executa os IGBTs (transformadores de
disparo/optoacopladores)
3 Transdutores de corrente
4 Circuitos internos de carga suave, RFI e de medição da
temperatura
5 Relés personalizados
a Terminais do cartão de controle
Ilustração 3.55 Isolação galvânica
O isolamento galvânico funcional (consulte Ilustração 3.54)
é para a interface de barramento padrão RS485.
ADVERTÊNCIA
PROTEÇÃO DE DISPOSITIVO DE CORRENTE
RESIDUAL
Este produto pode originar uma corrente CC no condutor
de proteção. Onde for utilizado um dispositivo de
corrente residual (RCD) para proteção em caso de
contato direto ou indireto, somente um RCD do Tipo B
poderá ser usado do lado da alimentação deste produto.
Caso contrário, aplique outra medida de proteção, como
separação do ambiente por isolamento duplo ou
reforçado, ou isolamento do sistema de alimentação por
um transformador. Consulte também as notas de
aplicação Proteção contra riscos elétricos.
O ponto de aterramento de proteção do conversor de
frequência e o uso de RCDs devem sempre obedecer às
normas nacional e local.
CUIDADO
INSTALAÇÃO EM ALTITUDES ELEVADAS
Em altitudes acima de 2.000 m (6.500 pés), entre em
contato com Danfoss com relação à PELV.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 43

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Visão Geral do Produto
VLT® HVAC Basic Drive FC 101
3.7 Condições de Funcionamento Extremas
Curto-circuito (entre fases do motor)
Medição de corrente em cada uma das 3 fases do motor
ou no barramento CC, protege o conversor de frequência
contra curtos-circuitos. Um curto-circuito entre 2 fases de
33
saída causa uma sobrecorrente no inversor. O inversor será
3.7.1 Proteção térmica do motor (ETR)
Danfoss usa o ETR para proteger o motor contra superaquecimento. É um recurso eletrônico que simula um relé
bimetálico com base em medições internas. A característica
é mostrada na Ilustração 3.56.
desligado individualmente quando a corrente de curto-
-circuito ultrapassar o valor permitido (alarme 16, Bloqueio
por desarme).
Para obter informações sobre como proteger o conversor
de frequência contra um curto-circuito nas saídas de Load
Sharing e freio, consulte capétulo 8.3.1 Fusíveis e disjuntores.
Chaveamento na saída
É permitido o chaveamento na saída entre o motor e o
conversor de frequência. O conversor de frequência não é
danicado de forma alguma pelo chaveamento na saída.
No entanto, é possível que apareçam mensagens de falha.
Sobretensão gerada pelo motor
A tensão no barramento CC aumenta quando o motor
funciona como um gerador. Isto ocorre nas seguintes
situações:
A carga aciona o motor (com frequência de saída
•
Ilustração 3.56 Característica de proteção térmica do motor
constante do conversor de frequência), ou seja, a
carga gera energia.
Durante a desaceleração (desaceleração), se o
•
momento de inércia for alto, o atrito é baixo e o
tempo de desaceleração é muito curto para que a
energia seja dissipada como uma perda no
conversor de frequência, no motor e na
O eixo X mostra a relação entre I
motor
e I
nominal. O
motor
eixo Y mostra o tempo em segundos antes de o ETR
desativar e desarmar o conversor de frequência. As curvas
mostram a velocidade nominal característica no dobro da
velocidade nominal, e a 0,2 vezes a velocidade nominal.
instalação.
Uma conguração de compensação de escorre-
•
gamento incorreta (parâmetro 1-62 Compensação
de Escorregamento) pode resultar em uma tensão
de barramento CC mais alta.
A unidade de controle pode tentar corrigir a rampa se
parâmetro 2-17 Controle de Sobretensão está ativada.
É claro que, em velocidades mais baixas, o ETR corta a
uma temperatura mais baixa devido ao menor
resfriamento do motor. Desse modo, o motor é protegido
contra superaquecimento, mesmo em velocidades baixas.
O recurso do ETR calcula a temperatura do motor baseado
na corrente e velocidade reais.
O conversor de frequência é desligado para proteger os
transistores e os capacitores do barramento CC quando um
3.7.2 Entradas do termistor
determinado nível de tensão é atingido.
O valor de desativação do termistor é >3 kΩ.
Queda da rede elétrica
Durante uma queda da rede elétrica, o conversor de
frequência continua funcionando até que a tensão do
Instale um termistor (sensor PTC) no motor para proteção
do enrolamento.
barramento CC caia abaixo do nível mínimo de parada,
que é tipicamente 15% abaixo da tensão de alimentação
mais baixa do conversor de frequência. A tensão de rede
antes da queda e a carga do motor determinam quanto
tempo leva para o conversor de frequência parar.
A proteção do motor pode ser implementada utilizando
diversas técnicas:
Sensor PTC nos enrolamentos do motor.
•
Interruptor térmico mecânico (tipo Klixon).
•
Relé térmico eletrônico (ETR).
•
44 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

R
O (Desligado)
LIGADO
<800 Ω >2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
COMM. GND
+24V
0/4-20mA A OUT / DIG OUT 0/4-20mA A OUT / DIG OUT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V OUT
BUS TER.
O (Desligado) ON (Ligado)
130BB898.10
18
19
12 20 55
27 29 42 45 50 53 54
DIGI IN
DIGI IN
DIGI IN
DIGI IN
61 68 69
N
P
COMM. GND
+24V
0/4-20mA A OUT / DIG OUT 0/4-20mA A OUT / DIG OUT
COM A IN
COM DIG IN
10V/20mA IN
10V/20mA IN
10V OUT
BUS TER.
O (Desligado) ON (Ligado)
130BB897.10
R
<3,0 kΩ
>2,9 kΩ
O (Desligado)
LIGADO
Visão Geral do Produto Guia de Design
Ilustração 3.57 Desarme devido à alta temperatura do motor
Exemplo com entrada analógica e fonte de alimentação
de 10 V
O conversor de frequência desarma quando a temperatura
do motor estiver muito alta.
Setup do parâmetro:
Programe parâmetro 1-90 Proteção Térmica do Motor para
[2] Desrm por Termistor.
Programe parâmetro 1-93 Fonte do Termistor para [1]
Entrada analógica 53.
AVISO!
Não programe a Entrada analógica 54 como fonte da
referência.
3 3
Exemplo com entrada digital e fonte de alimentação de
10 V
O conversor de frequência desarma quando a temperatura
do motor estiver muito alta.
Setup do parâmetro:
Programe parâmetro 1-90 Proteção Térmica do Motor para
[2] Desrm por Termistor.
Programe parâmetro 1-93 Fonte do Termistor para [6]
Entrada Digital 29.
Ilustração 3.59 Entrada analógica/fonte de alimentação de
10 V
Entrada
Tensão de
alimentação [V]
Digital 10
Analógica 10
Valores limites
de corte [Ω]
<800⇒2.9 k
<800⇒2.9 k
Tabela 3.18 Tensão de Alimentação
AVISO!
Certique-se de que a tensão de alimentação
selecionada esteja de acordo com a especicação do
elemento termistor usado.
Ilustração 3.58 Entrada digital/Fonte de alimentação de 10 V
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 45
ETR é ativado em parâmetro 1-90 Proteção Térmica do
Motor.

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Seleção e solicitação de pe...
VLT® HVAC Basic Drive FC 101
4 Seleção e solicitação de pedido
4.1 Código de tipo
Um código de tipo dene uma conguração especíca do conversor de frequência VLT® HVAC Basic Drive FC 101. Use
Ilustração 4.1 para criar uma string do código do tipo para a conguração desejada.
44
Ilustração 4.1 Código de tipo
Descrição Posição Escolha possível
Grupo de produtos e série FC 1–6 FC 101
Valor nominal da potência 7–10 0,25–90 kW (0,34–120 hp) (PK25-P90K)
Número de fases 11 Trifásico (T)
T2: 200-240 V CA
Tensão de rede 11–12
Gabinete 13–15
Filtro de RFI 16–17
Freio 18 X: Circuito de frenagem não incluso
Display 19
Revestimento de PCB 20
Opcional de rede elétrica 21 X: Sem opcional de rede elétrica
Adaptação 22 X: Sem adaptação
Adaptação 23 X: Sem adaptação
Lançamento do software 24–27 SXXXX: Lançamento mais recente - software padrão
Idioma do software 28 X: Standard
Opcionais A 29–30 AX: Sem opcionais A
Opcionais B 31–32 BX: Sem opcionais B
Opcionais C0 do MCO 33–34 CX: Sem opcionais C
Opcionais C1 35 X: Sem opcionais C1
Software do opcional C 36–37 XX: Sem opcionais
Opcionais D 38–39 DX: Sem opcionais D0
T4: 380-480 V CA
T6: 525-600 V CA
E20: IP20/chassi
P20: IP20/chassi com placa traseira
E5A: IP54
P5A: IP54 com placa traseira
H1: Filtro de RFI classe A1/B
H2: Filtro de RFI classe A2
H3: Filtro de RFI classe A1/B (comprimento de cabo reduzido)
H4: Filtro de RFI classe A1
A: Painel de controle local alfanumérico
X: Sem painel de controle local
X: Sem revestimento de PCB
C: Revestido de PCB
Tabela 4.1 Descrição do código de tipo
46 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
130BB777.10
Seleção e solicitação de pe... Guia de Design
4.2 Opcionais e Acessórios
4.2.1 Painel de Controle Local (LCP)
Número da solicitação de
Descrição
pedido
132B0200 LCP para todas as unidades IP20
Tabela 4.2 Número de solicitação de pedido do LCP
Gabinete Montagem frontal do IP55
Comprimento de cabo máximo para
3 m (10 pés)
unidade
Padrão de comunicação RS485
Tabela 4.3 Dados técnicos do LCP
4.2.2 Montagem do LCP na parte frontal do
painel
Passo 1
Encaixe a gaxeta no LCP.
4 4
1 Corte do painel. Espessura do painel de 1-3 mm (0,04–
0,12 pol.)
2 Painel
3 Gaxeta
4 LCP
Passo 2
Coloque o LCP no painel; consulte as dimensões de furo
em Ilustração 4.3.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 47
Ilustração 4.2 Encaixe a gaxeta
Ilustração 4.3 Coloque o LCP no painel (montagem frontal)
Passo 3
Coloque o suporte na parte traseira do LCP e deslize-o
para baixo.
Aperte os parafusos e conecte o lado fêmea do cabo ao
LCP.
Ilustração 4.4 Coloque o suporte no LCP

130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
130BB903.10
Seleção e solicitação de pe...
VLT® HVAC Basic Drive FC 101
Passo 4
Conecte o cabo ao conversor de frequência.
44
Ilustração 4.5 Conectar o cabo
AVISO!
Use os parafusos autorroscantes fornecidos para prender
o conector ao conversor de frequência. O torque de
aperto é de 1,3 Nm (11,5 pol-lb).
Ilustração 4.6 H1–H5 (Consulte os dados em Tabela 4.4)
4.2.3 Kit de gabinete IP21/NEMA Tipo 1
IP21/NEMA Tipo 1 é um elemento opcional do gabinete
disponível para unidades IP20.
Se o kit de gabinete for utilizado, uma unidade IP20 é
incrementada para estar em conformidade com o gabinete
IP21/NEMA Tipo 1.
Ilustração 4.7 Dimensões (Consulte os dados em Tabela 4.4)
48 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

130BB793.10
99 99
Seleção e solicitação de pe... Guia de Design
Chassi
H10 IP20 – –
Classe
IP
3x200–240 V
[kW (hp)]
H1 IP20
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
0,25–1,5
(0,34–2,0)
5,5-7,5
(7,4–10)
15–18,5
(20–25)
22–30
(30–40)
37–45
(50–60)
Potência
3x380–480 V
[kW (hp)]
0,37–1,5
(0,5–2,0)
2,2-4,0
(3,0–5,4)
5,5-7,5
(7,4–10)
11–15
(15–20)
18,5–22
(25–30)
30–45
(40–60)
55–75
(74–100)
90 (120)
3x525–600 V
[kW (hp)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5–30
(25–40)
37–55
(50–74)
75–90
(100–120)
2,2–7,5
(3,0–10)
11–15
(15–20)
Número de
Altura
[mm (pol)]
A
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Largura
[mm (pol)]
B
Profundidade
[mm (pol)]
C
Número de
solicitação
de pedido
do kit IP21
solicitação
de pedido
do kit
NEMA Tipo
1
4 4
Tabela 4.4 Especicações do kit do gabinete
4.2.4 Placa de desacoplamento
Use a placa de desacoplamento para obter uma instalação em conformidade com a EMC.
Ilustração 4.8 mostra a placa de desacoplamento em um gabinete H3.
Ilustração 4.8 Placa de desacoplamento
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 49

Seleção e solicitação de pe...
Potência [kW (hp)] Números de solicitação
Chassi Classe IP 3x200–240 V 3x380–480 V 3x525–600 V
H1 IP20 0,25–1,5 (0,33–2,0) 0,37–1,5 (0,5–2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2–4 (3,0–5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) – 132B0204
44
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5–22 (25–30) – 130B0205
H6 IP20 15–18,5 (20–25) 30 (40) 18,5–30 (25–40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
Tabela 4.5 Especicações da placa de desacoplamento
VLT® HVAC Basic Drive FC 101
de pedido
de placas de desaco-
plamento
AVISO!
Para gabinetes de tamanho H9 e H10, as placas de desacoplamento estão incluídas na sacola de acessórios.
4.3 Códigos de Compra
4.3.1 Opcionais e Acessórios
Tamanho
Descrição
1)
LCP
Kit de
montagem
do painel do
LCP IP55
incluindo
cabo de 3 m
(9,8 pés)
Kit do
conversor de
LCP 31 para
RJ 45
Kit de
montagem
do painel do
LCP IP55 sem
cabo de 3 m
(9,8 pés)
do
gabinete
Tensão
de rede
T2 (200–
240 V CA)
T4 (380–
480 V CA)
T6 (525–
600 V CA)
132B0200
H1
[kW (hp)]H2[kW (hp)]H3[kW (hp)]H4[kW (hp)]H5[kW (hp)]
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
2,2 (3,0) 3,7 (5,0)
(3,0–5,4)
– – – – –
2,2–4,0
5,5–7,5
(7,5–10)
5,5–7,5
(7,5–10)
11–15
(15–20)
11 (15)
18,5–22
(25–30)
132B0201
132B0203
132B0206
[kW (hp)]
15–18,5
(20–25)
30 (40)
18,5–30
(25–40)
H6
–
37–45
(50–60)
–
H7
[kW (hp)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (hp)]
37–45
(50–60)
75–90
(100–125)
50 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Seleção e solicitação de pe... Guia de Design
Tamanho
do
Placa de
desacoplamento
Opcional
IP21
Kit NEMA
Tipo 1
Tabela 4.6 Opcionais e Acessórios
1) Para unidades IP20, o LCP é encomendado separadamente. Para unidades IP54, o LCP está incluído na conguração padrão e montado no
conversor de frequência.
gabinete
Tensão
de rede
H1
[kW (hp)]H2[kW (hp)]H3[kW (hp)]H4[kW (hp)]H5[kW (hp)]
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
H6
[kW (hp)]
H7
[kW (hp)]
H8
[kW (hp)]
4.3.2 Filtros de harmônicas
3x380–480 V 50 Hz
Potência [kW (hp)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Corrente contínua de
entrada [A] do conversor
de frequência
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
Frequência de
chaveamento padrão
[kHz]
Nível THDi [%]
Número de pedido
do ltro IP00
Número de código do
ltro IP20
4 4
Tabela 4.7 Filtros AHF (5% de distorção de corrente)
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 51

Seleção e solicitação de pe...
Corrente contínua de
Potência [kW (hp)]
22
(30)
30
(40)
44
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabela 4.8 Filtros AHF (10% de distorção de corrente)
entrada [A] do conversor
de frequência
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
VLT® HVAC Basic Drive FC 101
3x380–480 V 50 Hz
Frequência de
chaveamento padrão
[kHz]
Nível THDi [%]
Número de pedido
do ltro IP00
Número de código do
ltro IP20
Corrente contínua de
Potência [kW (hp)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabela 4.9 Filtros AHF (5% de distorção de corrente)
entrada [A] do conversor
de frequência
34,6 4 3 130B1792 130B1757
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
3x440–480 V 60 Hz
Frequência de
chaveamento padrão
[kHz]
Nível THDi [%]
Número de pedido
do ltro IP00
Número de código do
ltro IP20
52 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Seleção e solicitação de pe... Guia de Design
3x440–480 V 60 Hz
Corrente contínua de
Potência [kW (hp)]
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
Tabela 4.10 Filtros AHF (10% de distorção de corrente)
entrada [A] do conversor
de frequência
34,6 4 6 130B1775 130B1487
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
Frequência de
chaveamento padrão
[kHz]
Nível THDi [%]
Número de pedido
do ltro IP00
Número de código do
ltro IP20
4 4
4.3.3 Filtro de RFI externo
Com os ltros externos listados em Tabela 4.11, o comprimento de cabo blindado máximo de 50 m (164 pés) de acordo com
EN/IEC 61800-3 C2 (EN 55011 A1), ou de 20 m (65,6 pés) de acordo com EN/IEC 61800-3 C1 (EN 55011 B) pode ser
alcançado.
Potência [kW (hp)]
Tamanho 380-480 V
0,37–2,2
(0,5–3,0)
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
Tabela 4.11 Filtros de RFI - Detalhes
Tipo A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Torque
[Nm (pol-lb)]
0,7–0,8
(6,2–7,1)
0,7–0,8
(6,2–7,1)
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Peso [kg (lb)] Código de Compra
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
132B0244
132B0245
132B0246
132B0247
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 53

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Seleção e solicitação de pe...
VLT® HVAC Basic Drive FC 101
44
Ilustração 4.9 Filtro de RFI - Dimensões
54 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Instalação Guia de Design
5 Instalação
5.1 Instalação Elétrica
5 5
Ilustração 5.1 Diagrama esquemático de ação básica
AVISO!
Não existe acesso para UDC- e UDC+ nas seguintes unidades:
•
•
•
•
Todo cabeamento deve estar sempre em conformidade com as normas nacionais e locais, sobre seções transversais do cabo
e temperatura ambiente. São necessários condutores de cobre. Recomenda-se 75 °C (167 °F).
IP20, 380–480 V, 30–90 kW (40–125 hp)
IP20, 200–240 V, 15–45 kW (20–60 hp)
IP20, 525–600 V, 2,2–90 kW (3,0–125 hp)
IP54, 380–480 V, 22–90 kW (30–125 hp)
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 55

Instalação
VLT® HVAC Basic Drive FC 101
Potência [kW (hp)] Torque [Nm (in-lb)] (NM (pol-pés))
Tamanho
do
gabinete
H1 IP20
Classe IP 3x200–240 V 3x380–480 V
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
Rede
elétrica
Motor Conexão CC
Terminais
de controle
Ponto de
aterramento
Relé
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H2 IP20 2,2 (3,0) 2,2–4,0 (3,0–5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5–22 (25–30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15–18,5 (20–25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
55
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
24 (212)
1)
24 (212)
1)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabela 5.1 Torques de aperto para gabinetes de tamanho H1–H8, 3x200–240 V e 3x380–480 V
Potência [kW (hp)] Torque [Nm (in-lb)] (NM (pol-pés))
Tamanho
do
gabinete
I2 IP54
Classe IP 3x380–480 V Rede elétrica Motor Conexão CC
0,75–4,0
(1,0–5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
Terminais de
controle
Ponto de
aterramento
Relé
I3 IP54 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11–18,5 (15–25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,6 (5,0)
Tabela 5.2 Torques de aperto para gabinetes de tamanho I2-I8
Potência [kW (hp)] Torque [Nm (in-lb)] (NM (pol-pés))
Tamanho
do
Classe IP 3x525–600 V Rede elétrica Motor Conexão CC
gabinete
H9 IP20 2,2–7,5 (3,0–10) 1,8 (16) 1,8 (16)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16)
Não
recomendado
Não
recomendado
Terminais de
controle
Ponto de
aterramento
0,5 (4,0) 3 (27) 0,6 (5,0)
0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5–30 (25–40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabela 5.3 Torques de aperto para gabinetes de tamanho H6–H10, 3x525–600 V
1) Dimensões de cabo > 95 mm
2) Dimensões de cabo ≤ 95 mm
2
2
Relé
56 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Instalação Guia de Design
5.1.1 Conexão da rede elétrica e do motor
O conversor de frequência foi projetado para operar todos
os motores assíncronos trifásicos padrão. Para obter
informações sobre a seção transversal máxima nos cabos,
consulte capétulo 8.4 Dados Técnicos Gerais.
Use um cabo de motor blindado/reforçado para
•
atender às
conecte este cabo à placa de desacoplamento e
ao motor.
Mantenha o cabo do motor o mais curto possível,
•
a m de reduzir o nível de ruído e correntes de
fuga.
Para obter mais detalhes sobre a montagem da
•
placa de desacoplamento, consulte FC 101
Instrução sobre a montagem da placa de desacoplamento.
Consulte também Instalação em conformidade
•
com a EMC em capétulo 5.1.2 Instalação elétrica
em conformidade com a EMC.
Para obter detalhes sobre como conectar o
•
conversor de frequência à rede elétrica e ao
motor, consulte o capítulo Conexão à rede elétrica
e ao motor no Guia Rápido do VLT® HVAC Basic
Drive FC 101 .
especicações de emissão EMC e
Relés e terminais nos gabinetes de tamanho H1-H5
5 5
1 Rede elétrica
2 Ponto de aterramento
3 Motor
4 Relés
Ilustração 5.2 Gabinetes de tamanho H1-H5
IP20, 200–240 V, 0,25–11 kW (0,33–15 hp)
IP20, 380–480 V, 0,37–22 kW (0,5–30 hp)
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 57

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Instalação
VLT® HVAC Basic Drive FC 101
Relés e terminais no gabinete de tamanho H6
Relés e terminais no gabinete de tamanho H7
55
1 Rede elétrica
2 Motor
3 Ponto de aterramento
4 Relés
Ilustração 5.3 Gabinete de tamanho H6
IP20, 380–480 V, 30–45 kW (40–60 hp)
IP20, 200–240 V, 15–18,5 kW (20–25 hp)
IP20, 525–600 V, 22–30 kW (30–40 hp)
1 Rede elétrica
2 Relés
3 Ponto de aterramento
4 Motor
Ilustração 5.4 Gabinete de tamanho H7
IP20, 380–480 V, 55–75 kW (70–100 hp)
IP20, 200–240 V, 22–30 kW (30–40 hp)
IP20, 525–600 V, 45–55 kW (60–70 hp)
58 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Instalação Guia de Design
Relés e terminais no gabinete de tamanho H8
1 Rede elétrica
2 Relés
3 Ponto de aterramento
4 Motor
Ilustração 5.5 Gabinete de tamanho H8
IP20, 380–480 V, 90 kW (125 hp)
IP20, 200–240 V, 37–45 kW (50–60 hp)
IP20, 525–600 V, 75–90 kW (100–125 hp)
Certique-se de que os cabos de rede elétrica para o
gabinete de tamanho H9 estejam conectados
corretamente; para obter detalhes, consulte o capítulo
Conexão à rede elétrica e ao motor no Guia Rápido do VLT
®
HVAC Basic Drive FC 101. Use os torques de aperto descritos
em capétulo 5.1.1 Instalação Elétrica em Geral.
Relés e terminais no gabinete de tamanho H10
5 5
Conexão da rede elétrica e do motor para o gabinete de
tamanho H9
Ilustração 5.7 Gabinete de tamanho H10
IP20, 600 V, 11–15 kW (15–20 hp)
Ilustração 5.6 Conexão do motor para o gabinete de tamanho
H9
IP20, 600 V, 2,2–7,5 kW (3,0–10 hp)
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 59

130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Instalação
VLT® HVAC Basic Drive FC 101
Gabinete de tamanho I2
Gabinete de tamanho I3
55
1 RS485
2 Rede elétrica
3 Ponto de aterramento
4 Braçadeiras de cabo
1 RS485
2 Rede elétrica
3 Ponto de aterramento
4 Braçadeiras de cabo
5 Motor
6 UDC
7 Relés
8 E/S
Ilustração 5.8 Gabinete de tamanho I2
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hp)
5 Motor
6 UDC
7 Relés
8 E/S
Ilustração 5.9 Gabinete de tamanho I3
IP54, 380–480 V, 5,5–7,5 kW (7,5–10 hp)
60 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

130BD011.10
130BC203.10
130BT326.10
130BT325.10
Instalação Guia de Design
Gabinete de tamanho I4
1 RS485
2 Rede elétrica
3 Ponto de aterramento
4 Braçadeiras de cabo
5 Motor
6 UDC
7 Relés
8 E/S
Gabinete de tamanho I6
5 5
Ilustração 5.12 Conexão à rede elétrica para o gabinete de
tamanho I6
IP54, 380–480 V, 22–37 kW (30–50 hp)
Ilustração 5.10 Gabinete de tamanho I4
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hp)
Ilustração 5.11 IP54 gabinetes de tamanho I2, I3, I4
Ilustração 5.13 Conexão do motor para o gabinete de
tamanho I6
IP54, 380–480 V, 22–37 kW (30–50 hp)
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 61

311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Instalação
VLT® HVAC Basic Drive FC 101
5.1.2 Instalação elétrica em conformidade
com a EMC
Preste atenção às seguintes recomendações para garantir a
instalação elétrica em conformidade com a EMC:
Use somente cabos de motor e cabos de controle
•
blindados/reforçados.
Conecte a blindagem ao ponto de aterramento
•
nas duas extremidades.
Evite a instalação com as extremidades da
•
55
Ilustração 5.14 Relés no gabinete de tamanho I6
IP54, 380–480 V, 22–37 kW (30–50 hp)
blindagem torcidas (rabichos), porque isto pode
reduzir o efeito de blindagem em altas
frequências. Use as braçadeiras de cabo
fornecidas.
É importante assegurar bom contato elétrico
•
entre a placa de instalação, os parafusos de
instalação e o gabinete metálico do conversor de
frequência.
Utilize arruelas tipo estrela e placas de instalação
•
galvanicamente condutoras.
Não utilize cabos do motor que não sejam
•
blindados/reforçados nos gabinetes de instalação.
Gabinete de tamanho I7, I8
Ilustração 5.15 Gabinete de tamanho I7, I8
IP54, 380–480 V, 45–55 kW (60–70 hp)
IP54, 380–480 V, 75–90 kW (100–125 hp)
62 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

L1
L2
L3
PE
Velocidade 16 mm
2
Cabo de equalização
Os cabos de controle
Entradas para todos os cabos
de um lado do painel
Barra de aterramento
Isolamento do cabo
descascado
Saída do contator etc.
Cabo do motor
Motor, trifásico e
PLC etc.
Painel
Alimentação elétrica
Mín. 200 mm
entre cabos de
controle, cabos elétricos
e entre cabos de
alimentação elétrica do motor
PLC
Aterramento de proteção
Aterramento de proteção reforçado
130BB761.10
Instalação Guia de Design
5 5
Ilustração 5.16 Instalação elétrica em conformidade com a EMC
AVISO!
Para América do Norte, use conduítes metálicos em vez de cabos blindados.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 63

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Instalação
VLT® HVAC Basic Drive FC 101
5.1.3 Terminais de controle
Consulte o Guia Rápido do VLT® HVAC Basic Drive FC 101 e
garanta que a tampa de terminal seja removida
corretamente.
Ilustração 5.17 mostra todos os terminal de controle do
conversor de frequência. Aplicar partida (terminal 18),
conexão entre os terminais 12-27 e uma referência
analógica (terminal 53 ou 54 e 55) faz o conversor de
frequência funcionar.
55
O modo de entrada digital dos terminais 18, 19 e 27 é
programado em parâmetro 5-00 Modo Entrada Digital (PNP
é o valor padrão). O modo de entrada digital 29 é
programado em parâmetro 5-03 Modo Entrada Digital 29
(PNP é o valor padrão).
Ilustração 5.17 Terminais de controle
64 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programação Guia de Design
6 Programação
6.1 Introdução
O conversor de frequência pode ser programado no LCP
ou em um PC através da porta COM RS485, instalando o
Software de Setup MCT 10. Consulte capétulo 1.5 Recursos
adicionais para obter mais detalhes sobre o software.
6.2 Painel de Controle Local (LCP)
O LCP é dividido em 4 seções funcionais.
A. Display
B. Tecla Menu
C. Teclas de navegação e luzes indicadoras
D. Teclas de operação e luzes indicadoras
1 Número e nome do parâmetro.
2 Valor do parâmetro.
Número do Setup exibe a conguração ativa e a
conguração de edição. Caso o mesmo setup atue tanto
como setup ativo e como setup de edição, somente esse
3
setup é mostrado (conguração de fábrica). Quando o
setup ativo e de edição forem diferentes, ambos os
números são mostrados no display (setup 12). O número
piscando indica o setup de edição.
O sentido do motor é mostrado na parte inferior esquerda
4
do display - indicado por uma pequena seta apontando
sentido horário ou anti-horário.
O triângulo indica se o LCP está em Status, Quick Menu ou
5
Menu Principal.
Tabela 6.1 Legenda para Ilustração 6.1, Parte I
B. Tecla Menu
Pressione [Menu] para selecionar entre Status, Quick Menu
ou Menu Principal.
C. Teclas de navegação e luzes indicadoras
6 LED Com.: Pisca durante a comunicação do barramento.
LED Verde/Aceso: A seção de controle está funcionando
7
corretamente.
8 LED Amarelo/Advert.: Indica que há uma advertência.
9 LED Vermelho piscando/Alarme: Indica que há um alarme.
[Back] (Voltar): Para retornar à etapa ou camada anterior, na
10
estrutura de navegação.
[▲] [▼] [►]: Para navegar entre grupos do parâmetro e
11
parâmetros, e dentro dos parâmetros. Podem também ser
usados para programar a referência local.
[OK]: Para selecionar um parâmetro e para conrmar as
12
modicações nas programações de parâmetros.
6
6
Tabela 6.2 Legenda para Ilustração 6.1, Parte II
Ilustração 6.1 Painel de Controle Local (LCP)
D. Teclas de operação e luzes indicadoras
[Hand On] (Manual ligado): Dá partida no motor e permite
A. Display
O display LCD é iluminado com 2 linhas alfanuméricas.
Todos os dados são mostrados no LCP.
Ilustração 6.1 descreve as informações que podem ser lidas
no display.
controlar o conversor de frequência por meio do LCP.
AVISO!
[2] Parada por inércia é a opção padrão para
13
parâmetro 5-12 Terminal 27, Entrada Digital. Se não
houver alimentação de 24 V para o terminal 27,
[Hand On] não liga o motor. Conecte o terminal 12
ao terminal 27.
[O/Reset] (Desligar/Reinicializar): Para o motor (Desligar).
14
Se estiver em modo de alarme, o alarme é redenido.
[Auto On] (Automático ligado): O conversor de frequência
15
será controlado por meio dos terminais de controle ou pela
comunicação serial.
Tabela 6.3 Legenda para Ilustração 6.1, Parte III
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 65

FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Referência
Partida
+10V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Pressione OK para iniciar o Assistente
Aperte Voltar para pular isso
Setup 1
6
Programação
6.3 Menus
6.3.1 Menu Status
No menu Status, as opções de seleção são:
Frequência do motor [Hz],
•
parâmetro 16-13 Freqüência.
Corrente do motor [A], parâmetro 16-14 Corrente
•
do motor.
Referência da velocidade do motor em
•
porcentagem [%], parâmetro 16-02 Referência [%].
Feedback, parâmetro 16-52 Feedback [Unidade].
•
Potência do motor, parâmetro 16-10 Potência [kW]
•
para kW, parâmetro 16-11 Potência [hp] para hp.
Se parâmetro 0-03 Denições Regionais estiver
programado para [1] América do Norte, a potência
do motor é mostrada em hp em vez de kW.
Leitura personalizada,
•
parâmetro 16-09 Leit.Personalz.
Velocidade do motor [RPM],
•
parâmetro 16-17 Velocidade [RPM].
VLT® HVAC Basic Drive FC 101
Ilustração 6.2 Fiação do conversor de frequência
O assistente é mostrado após a energização até que algum
parâmetro seja alterado. O assistente pode sempre ser
acessado novamente através do quick menu. Pressione
[OK] para iniciar o assistente. Pressione [Back] para retornar
à visualização do status.
6.3.2 Menu Rápido
Use o Quick Menu para programar as funções mais
comuns. O Quick Menu consiste em:
Assistente para aplicações em malha aberta.
•
Consulte Ilustração 6.4 para obter detalhes.
Assistente para aplicações em malha fechada.
•
Consulte Ilustração 6.5 para obter mais detalhes.
Setup do motor. Consulte Tabela 6.6 para obter
•
mais detalhes.
Alterações feitas.
•
O menu de assistente incorporado guia o instalador pelo
setup do conversor de frequência de maneira clara e
estruturada para aplicações de malha aberta, aplicações de
malha fechada e congurações rápidas do motor.
Ilustração 6.3 Assistente de partida/sair
66 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programação Guia de Design
6
6
Ilustração 6.4 Assistente de setup para aplicações em malha aberta
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 67

Programação
VLT® HVAC Basic Drive FC 101
Assistente de setup para aplicações em malha aberta
Parâmetro Opcional Padrão Uso
Parâmetro 0-03 Denições
Regionais
[0] Internacional
[1] EUA
[0] Internacional –
6
Parâmetro 0-06 Tipo de Grade [0] 200–240 V/50 Hz/IT-
-grid
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/IT-
-grid
[11] 380–440 V/50 Hz/
Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/IT-
-grid
[21] 440–480 V/50 Hz/
Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/IT-
-grid
[31] 525–600 V/50 Hz/
Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/IT-
-grid
[101] 200–240 V/60 Hz/
Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/IT-
-grid
[111] 380–440 V/60 Hz/
Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/IT-
-grid
[121] 440–480 V/60 Hz/
Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/IT-
-grid
[131] 525–600 V/60 Hz/
Delta
[132] 525–600 V/60 Hz
Relacionado à
potência
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
68 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Opcional Padrão Uso
Parâmetro 1-10 Construção do
Motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 69

6
Programação
Parâmetro Opcional Padrão Uso
Parâmetro 1-20 Potência do
Motor
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,12–110 kW/0,16–150hpRelacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0,01–10000,00 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do Motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-29 Adaptação
Automática do Motor (AMA)
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
Consulte o
parâmetro 1-29 Adaptaçã
o Automática do Motor
(AMA).
0,000–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
O (Desligado) Executar uma AMA otimiza o desempenho do motor.
Relacionado à
potência
potência
potência
potência
potência
potência
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d.
Obtenha o valor da folha de dados do motor de ímã
permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-37 Indutância do eixo-d (Ld). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-38 Indutância do eixo-q (Lq). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
70 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Opcional Padrão Uso
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
Parâmetro 1-73 Flying Start [0] Desativado
Parâmetro 3-02 Referência
Mínima
Parâmetro 3-03 Referência
Máxima
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 5-40 Função do Relé Consulte o
Parâmetro 5-40 Função do Relé Consulte o
Parâmetro 6-10 Terminal 53
Tensão Baixa
Parâmetro 6-11 Terminal 53
Tensão Alta
Parâmetro 6-12 Terminal 53
Corrente Baixa
Parâmetro 6-13 Terminal 53
Corrente Alta
20–200% 100% Este parâmetro especica a curva de saturação dos valores
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
[0] Detecção do rotor
[1] Estacionamento
[1] Ativado
-4999,000–4999,000 0 A referência mínima é o menor valor que pode ser obtido
-4999,000–4999,000 50 A referência máxima é o maior valor que pode ser obtido
0,05–3600,00 s Relacionado à
0,05–3600,00 s Relacionado à
0,0–400,0 Hz 0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100 Hz Inserir o valor da frequência máxima de saída. Se
parâmetro 5-40 Função
do Relé.
parâmetro 5-40 Função
do Relé.
0,00–10,00 V 0,07 V Insira a tensão que corresponde ao valor de referência
0,00–10,00 V 10 V Insira a tensão que corresponde ao valor de referência
0,00–20,00 mA 4 mA Insira a corrente que corresponde ao valor de referência
0,00–20,00 mA 20 mA Insira a corrente que corresponde ao valor de referência
[0] Detecção do
rotor
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
potência
potência
[9] Alarme Selecione a função para controlar o relé de saída 1.
[5] Conversor
funcionando
Selecione o modo de partida do motor PM.
para pegar um motor girando devido à queda da rede
elétrica. Selecione [0] Desativado se a função não for
necessária. Quando este parâmetro estiver programado
para [1] Ativado, parâmetro 1-71 Atraso da Partida e
parâmetro 1-72 Função de Partida não são funcionais.
Parâmetro 1-73 Flying Start é ativado somente no modo
VVC+.
através da soma de todas as referências.
através da soma de todas as referências.
Se o motor assíncrono for selecionado, o tempo de
aceleração será de 0 a parâmetro 1-23 Freqüência do Motor
nominal. Se o motor assíncrono for selecionado, o tempo
de aceleração será de 0 a parâmetro 1-25 Velocidade
nominal do motor.
Para motores assíncronos, o tempo de desaceleração será
de parâmetro 1-23 Freqüência do Motor a 0. Para motores
PM, o tempo de desaceleração será de
parâmetro 1-25 Velocidade nominal do motor a 0.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
Selecione a função para controlar o relé de saída 2.
baixa.
alta.
baixa.
alta.
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 71

6
Programação
Parâmetro Opcional Padrão Uso
Parâmetro 6-19 Terminal 53
mode
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
Tabela 6.4 Assistente de setup para aplicações em malha aberta
[0] Corrente
[1] Tensão
[0] O (Desligado)
[1] On (Ligado)
0,05 –1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[1] Tensão Selecione se o terminal 53 é usado para entrada de
corrente ou tensão.
[0] O (Desligado)
–
–
72 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programação Guia de Design
Assistente de setup para aplicações em malha fechada
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 73
Ilustração 6.5 Assistente de setup para aplicações em malha fechada

6
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 0-03 Denições
Regionais
Parâmetro 0-06 Tipo de Grade [0]–[132] consulte
Parâmetro 1-00 Modo
Conguração
[0] Internacional
[1] EUA
Tabela 6.4.
[0] Malha aberta
[3] Malha fechada
VLT® HVAC Basic Drive FC 101
[0] Internacional –
Tamanho
selecionado
[0] Malha aberta Selecione [3] Malha fechada.
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
74 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Intervalo Padrão Uso
Parâmetro 1-10 Construção do
Motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 75

6
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-20 Potência do
Motor
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,09–110 kW Relacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0–10000 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do Motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-29 Adaptação
Automática do Motor (AMA)
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
O (Desligado) Executar uma AMA otimiza o desempenho do motor.
0–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
Relacionado à
potência
potência
potência
potência
potência
potência
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d.
Obtenha o valor da folha de dados do motor de ímã
permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-37 Indutância do eixo-d (Ld). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-38 Indutância do eixo-q (Lq). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
76 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Intervalo Padrão Uso
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
Parâmetro 1-73 Flying Start [0] Desativado
Parâmetro 3-02 Referência
Mínima
Parâmetro 3-03 Referência
Máxima
Parâmetro 3-10 Referência
Predenida
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior
da Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 6-20 Terminal 54
Tensão Baixa
Parâmetro 6-21 Terminal 54
Tensão Alta
Parâmetro 6-22 Terminal 54
Corrente Baixa
Parâmetro 6-23 Terminal 54
Corrente Alta
Parâmetro 6-24 Terminal 54
Ref./Feedb. Valor Baixo
Parâmetro 6-25 Terminal 54
Ref./Feedb. Valor Alto
Parâmetro 6-26 Terminal 54
Const. de Tempo do Filtro
Parâmetro 6-29 Modo do
terminal 54
20–200% 100% Este parâmetro especica a curva de saturação dos valores
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
[0] Detecção do rotor
[1] Estacionamento
[1] Ativado
-4999,000–4999,000 0 A referência mínima é o menor valor que pode ser obtido
-4999,000–4999,000 50 A referência máxima é o maior valor que pode ser obtido
-100–100% 0 Insira o setpoint.
0,05–3600,0 s Relacionado à
0,05–3600,0 s Relacionado à
0,0–400,0 Hz 0,0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100 Hz Inserir o valor da frequência máxima de saída. Se
0,00–10,00 V 0,07 V Insira a tensão que corresponde ao valor de referência
0,00–10,00 V 10,00 V Insira a tensão que corresponde ao valor de referência
0,00–20,00 mA 4,00 mA Insira a corrente que corresponde ao valor de referência
0,00–20,00 mA 20,00 mA Insira a corrente que corresponde ao valor de referência
-4999–4999 0 Insira o valor de feedback que corresponde à tensão ou
-4999–4999 50 Insira o valor de feedback que corresponde à tensão ou
0,00–10,00 s 0,01 Insira a constante de tempo do ltro.
[0] Corrente
[1] Tensão
[0] Detecção do
rotor
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
potência
potência
[1] Tensão Selecione se o terminal 54 é usado para entrada de
Selecione o modo de partida do motor PM.
para capturar um motor girando, por exemplo, em
aplicações de ventilador. Ao selecionar PM, este parâmetro
será ativado.
através da soma de todas as referências.
através da soma de todas as referências.
Tempo de aceleração de 0 a parâmetro 1-23 Freqüência do
Motor nominal para motores assíncronos. Tempo de
aceleração de 0 a parâmetro 1-25 Velocidade nominal do
motor para motores PM.
Tempo de desaceleração de parâmetro 1-23 Freqüência do
Motor nominal a 0 para motores assíncronos. Tempo de
desaceleração de parâmetro 1-25 Velocidade nominal do
motor a 0 para motores PM.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
baixa.
alta.
baixa.
alta.
corrente programada em parâmetro 6-20 Terminal 54
Tensão Baixa/parâmetro 6-22 Terminal 54 Corrente Baixa.
corrente programada em parâmetro 6-21 Terminal 54
Tensão Alta/parâmetro 6-23 Terminal 54 Corrente Alta.
corrente ou tensão.
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 77

6
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 20-81 Controle
Normal/Inverso do PI
Parâmetro 20-83 Velocidade de
Partida do PI [Hz]
Parâmetro 20-93 Ganho Proporcional do PI
Parâmetro 20-94 PI Integral
Time
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
[0] Normal
[1] Inverso
0–200 Hz 0 Hz Insira a velocidade do motor a ser atingida como um sinal
0,00–10,00 0,01 Insira o ganho proporcional do controlador de processo. O
0,1–999,0 s 999,0 s Inserir o tempo de integração do controlador de processo.
[0] O (Desligado)
[1] On (Ligado)
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
[0] Normal Selecione [0] Normal para denir o controle de processo
para aumentar a velocidade de saída quando o erro de
processo for positivo. Selecione [1] Inverso para reduzir a
velocidade de saída.
de partida para o início do controle PI.
controle rápido é obtido em amplicação alta. No entanto,
se a amplicação for muito alta, o processo pode car
instável.
Obtém-se um controle rápido por meio de um tempo
integrado curto, muito embora, se este tempo for curto
demais, o processo pode tornar-se instável. Um tempo de
integração excessivamente longo desativa a ação da
integração.
[0] O (Desligado)
–
–
Tabela 6.5 Assistente de setup para aplicações em malha fechada
Setup do motor
O assistente de setup do motor orienta os usuários através dos parâmetros do motor necessários.
Parâmetro Intervalo Padrão Uso
Parâmetro 0-03 Denições
Regionais
Parâmetro 0-06 Tipo de Grade [0]–[132] consulte
[0] Internacional
[1] EUA
Tabela 6.4.
0 –
Relacionado à
potência
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
78 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Intervalo Padrão Uso
Parâmetro 1-10 Construção do
Motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
6
6
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 79

6
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-20 Potência do
Motor
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,12–110 kW/0,16–150hpRelacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0,01–10000,00 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do Motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
0–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
20–200% 100% Este parâmetro especica a curva de saturação dos valores
[0] Detecção do rotor
[1] Estacionamento
Relacionado à
potência
potência
potência
potência
potência
potência
[0] Detecção do
rotor
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d. Obtenha o valor da
folha de dados do motor de ímã permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do
que parâmetro 1-37 Indutância do eixo-d (Ld). No entanto,
se o fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do
que parâmetro 1-38 Indutância do eixo-q (Lq). No entanto,
se o fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
Selecione o modo de partida do motor PM.
80 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Programação Guia de Design
Parâmetro Intervalo Padrão Uso
Parâmetro 1-73 Flying Start [0] Desativado
[1] Ativado
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
0,05–3600,0 s Relacionado à
0,05–3600,0 s Relacionado à
0,0–400,0 Hz 0,0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100,0 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100,0 Hz Inserir o valor da frequência máxima de saída. Se
[0] O (Desligado)
[1] On (Ligado)
0,05–1,00 s 0,10 s
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
para pegar um motor girando.
Tempo de aceleração de 0 a parâmetro 1-23 Freqüência do
potência
potência
[0] O (Desligado)
Motor nominal.
Tempo de desaceleração de parâmetro 1-23 Freqüência do
Motor a 0.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
–
–
6
6
Tabela 6.6 Congurações do assistente de setup do motor
Alterações feitas
A função de alterações feitas lista todos os parâmetros
alterados a partir das congurações padrão.
A lista mostra somente os parâmetros que foram
•
alterados no setup de edição atual.
Parâmetros que foram reinicializados para os
•
valores padrão não são listados.
A mensagem Vazio indica que nenhum parâmetro
•
foi alterado.
Alteração das congurações de parâmetros
1. Para entrar no Quick Menu, pressione a tecla
[Menu] até o indicador no display car sobre
Quick Menu.
2.
Pressione [▲] [▼] para selecionar o assistente,
setup de malha fechada, setup do motor ou
alterações feitas.
3. Pressione [OK]
4.
Pressione [▲] [▼] para navegar pelos parâmetros
no Quick Menu.
5. Pressione [OK] para selecionar um parâmetro.
6.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
7. Pressione [OK] para aceitar a alteração.
8. Pressione [Back] duas vezes para acessar o Status,
ou pressione [Menu] uma vez para acessar o
Menu Principal.
O menu principal acessa todos os parâmetros
1. Pressione a tecla [Menu] até o indicador no
display car sobre o Menu Principal.
2.
Pressione [▲] [▼] para navegar pelos grupos do
parâmetro.
3. Pressione [OK] para selecionar um grupo de
parâmetros.
4.
Pressione [▲] [▼] para navegar pelos parâmetros
no grupo especíco.
5. Pressione [OK] para selecionar o parâmetro.
6.
Pressione [▲] [▼] para denir/alterar o valor do
parâmetro.
7. Pressione [OK] para aceitar a alteração.
6.3.3 Menu Principal
Pressione [Menu] para acessar o menu principal e
programe todos os parâmetros. Os parâmetros do menu
principal podem ser acessados rapidamente a menos que
uma senha tenha sido criada via parâmetro 0-60 Senha do
Menu Principal.
Para a maioria das aplicações, não é necessário acessar os
parâmetros do menu principal. O quick menu fornece o
acesso mais simples e rápido aos parâmetros normalmente
exigidos.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 81

6
Programação
VLT® HVAC Basic Drive FC 101
6.4 Transferência Rápida da Programação
do Parâmetro entre Múltiplos
Conversores de Frequência
Uma vez concluído o setup de um conversor de
frequência, armazene os dados no LCP ou em um PC via
Software de Setup MCT 10.
Transferência de dados do conversor de frequência para
o LCP
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK]
3. Selecione [1] Tudo para o LCP.
4. Pressione [OK]
Conecte o LCP a outro conversor de frequência e copie as
programações de parâmetro para esse conversor de
frequência também.
Transferência de dados do LCP para o conversor de
frequência
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK]
3. Selecione [2] Todos a partir d LCP.
4. Pressione [OK]
Leitura e Programação de Parâmetros
6.5
Indexados
Selecione o parâmetro, pressione [OK] e pressione [▲]/[▼]
para percorrer os valores indexados. Para alterar o valor do
parâmetro, selecione o valor indexado e pressione a tecla
[OK]. Altere o valor pressionando [▲]/[▼]. Pressione [OK]
para aceitar a nova conguração. Pressione [Cancel] para
abortar. Pressione [Back] (Voltar) para sair do parâmetro.
Inicialização para as congurações
6.6
padrão
Há duas maneiras de inicializar o conversor de frequência
para as congurações padrão.
Inicialização recomendada
1. Selecione parâmetro 14-22 Modo Operação.
2. Pressione [OK]
3. Selecione [2] Inicialização e pressione [OK].
4. Desligue o conversor de frequência e aguarde o
display apagar.
5. Reconecte a alimentação de rede elétrica. O
conversor de frequência foi reinicializado, exceto
pelos seguintes parâmetros:
Parâmetro 1-06 Sentido Horário
•
Parâmetro 8-30 Protocolo
•
Parâmetro 8-31 Endereço
•
Parâmetro 8-32 Baud Rate da Porta do FC
•
Parâmetro 8-33 Bits de Paridade / Parada
•
Parâmetro 8-35 Atraso Mínimo de
•
Resposta
Parâmetro 8-36 Atraso de Resposta
•
Mínimo
Parâmetro 8-37 Atraso Máximo Entre
•
Caracteres
Parâmetro 8-70 Instânc Dispos BACnet
•
Parâmetro 8-72 Masters Máx MS/TP
•
Parâmetro 8-73 Chassi Info Máx.MS/TP
•
Parâmetro 8-74 Serviço "I-Am"
•
Parâmetro 8-75 Senha de Inicialização
•
Parâmetro 15-00 Horas de funcionamento
•
a parâmetro 15-05 Sobretensões
Parâmetro 15-03 Energizações
•
Parâmetro 15-04 Superaquecimentos
•
Parâmetro 15-05 Sobretensões
•
Parâmetro 15-30 Log Alarme: Cód Falha
•
Grupo do parâmetro 15-4* Identic. do
•
VLT
Parâmetro 18-10 Log de Fire Mode: Evento
•
Inicialização com 2 dedos
A outra maneira de inicializar o conversor de frequência
para as congurações padrão é através da inicialização
com 2 dedos:
1. Desligue o conversor de frequência.
2. Pressione [OK] e [Menu].
3. Energize o conversor de frequência enquanto
pressiona as teclas por 10 s.
4. O conversor de frequência foi reinicializado,
exceto pelos seguintes parâmetros:
Parâmetro 1-06 Sentido Horário
•
Parâmetro 15-00 Horas de funcionamento
•
Parâmetro 15-03 Energizações
•
Parâmetro 15-04 Superaquecimentos
•
Parâmetro 15-05 Sobretensões
•
Grupo do parâmetro 15-4* Identic. do
•
VLT
Parâmetro 18-10 Log de Fire Mode: Evento
•
A inicialização dos parâmetros é conrmada pelo alarme
80, Conversor inicializado no display após o ciclo de
energização.
82 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Instalação e setup do RS485 Guia de Design
7 Instalação e setup do RS485
7.1 RS485
7.1.1 Visão Geral
RS485 é uma interface de barramento de 2 os compatível
com a topologia de rede multiponto, ou seja, os nós
podem ser conectados como um barramento ou através de
cabos de dispositivo de uma linha de tronco comum. 32
nós no total podem ser conectados a um segmento de
rede.
Os repetidores dividem os segmentos de rede.
AVISO!
Cada repetidor funciona como um nó dentro do
segmento em que está instalado. Cada nó conectado em
uma rede especíca deve ter um endereço do nó único
entre todos os segmentos.
Cada segmento deve estar com terminação em ambas as
extremidades; para isso utilize a chave de terminação
(S801) dos conversores de frequência ou um banco de
resistores de terminação polarizado. Use sempre cabo de
par trançado blindado (STP) para o cabeamento de
barramento, e siga as boas práticas comuns de instalação.
A conexão do terra de baixa impedância da blindagem em
cada nó é importante. Conecte uma grande superfície da
blindagem ao ponto de aterramento, por exemplo, com
uma braçadeira de cabo ou uma bucha de cabo
condutora. Aplique cabos equalizadores de potencial para
manter o mesmo potencial de aterramento em toda a
rede, particularmente em instalações com cabos longos.
Para prevenir descasamento de impedância, utilize sempre
o mesmo tipo de cabo ao longo da rede inteira. Ao
conectar um motor ao conversor de frequência, utilize
sempre um cabo de motor blindado.
7.1.2 Conexão de rede
Conecte o conversor de frequência à rede RS485 da
seguinte forma (consulte também Ilustração 7.1):
1. Conecte os os de sinal aos terminais 68 (P+) e
69 (N-), na placa de controle principal do
conversor de frequência.
2. Conecte a blindagem do cabo às braçadeiras de
cabo.
AVISO!
Para reduzir o ruído entre os condutores, use cabos de
par trançado blindados.
Ilustração 7.1 Conexão de rede
7.1.3 Setup do hardware do conversor de
frequência
Use a chave tipo DIP do terminador na placa de controle
principal do conversor de frequência para terminar o
barramento RS485.
7 7
Cabo Par trançado blindado (STP)
Impedância [Ω]
Comprimento
de cabo
[m (pés)]
Tabela 7.1 Especicações de cabo
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 83
120
Máximo 1.200 m (3.937 pés), incluindo linhas
de dispositivo.
Máximo 500 m (1.640 pés) entre estações.
Ilustração 7.2 Conguração de Fábrica da Chave de
Terminação
A conguração de fábrica da chave tipo dip é OFF
(Desligada).

195NA493.11
1
2
90°
Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
7.1.4 Programação dos parâmetros da
7.1.5 Precauções com EMC
comunicação do Modbus
AVISO!
Parâmetro Função
Parâmetro 8-30 Pro
tocolo
Parâmetro 8-31 End
ereço
Selecione o protocolo da aplicação a ser
executado para a interface RS485.
Programe o endereço do nó.
AVISO!
O intervalo de endereços depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Parâmetro 8-32 Bau
d Rate da Porta do
FC
Programe a baud rate.
AVISO!
A baud rate padrão depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Observe as normas nacionais e locais relevantes
relacionadas à conexão do ponto de aterramento de
proteção. Não aterrar os cabos corretamente pode
resultar na degradação da comunicação e danos ao
equipamento. Para evitar o acoplamento de ruído de alta
frequência entre os cabos, mantenha o cabo de
comunicação RS485 longe dos cabos do motor e do
resistor de frenagem. Normalmente, uma distância de
200 mm (8 pol.) é suciente. Mantenha a maior distância
possível entre os cabos, especialmente onde os cabos
correm paralelamente por longas distâncias. Quando o
cruzamento for inevitável, o cabo RS485 deve cruzar os
cabos de motor e do resistor de frenagem em um ângulo
de 90°.
77
Parâmetro 8-33 Bits
de Paridade /
Parada
Programe os bits de paridade e do número
de paradas.
AVISO!
A seleção padrão depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Parâmetro 8-35 Atr
aso Mínimo de
Resposta
Parâmetro 8-36 Atr
aso de Resposta
Mínimo
Parâmetro 8-37 Atr
aso Máximo Entre
Caracteres
Especique o tempo de atraso mínimo,
entre o recebimento de uma solicitação e a
transmissão de uma resposta. Esta função é
para contornar atrasos de retorno do
modem.
Especique um tempo de atraso máximo
entre a transmissão de uma solicitação e o
recebimento de uma resposta.
Se a transmissão for interrompida,
especique um tempo de atraso máximo
entre 2 bytes recebidos para garantir o
tempo limite.
AVISO!
A seleção padrão depende do
protocolo selecionado em
Tabela 7.2 Programação dos parâmetros da comunicação do
Modbus
parâmetro 8-30 Protocolo.
1 Cabo Fieldbus
2 Distância de 200 mm (8 pol.)
Ilustração 7.3 Distância mínima entre cabos de comunicação e
potência
84 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

0 1 32 4 5 6 7
195NA036.10
Start
bit
Pridade Stop
Par bit
Instalação e setup do RS485 Guia de Design
7.2 Protocolo FC
7.2.1 Visão Geral
O Protocolo Danfoss FC, também conhecido como
barramento FC ou barramento padrão, é o
padrão. Ele dene uma técnica de acesso, de acordo com o
princípio mestre-escravo para comunicações através de um
barramento serial.
Um mestre e um máximo de 126 escravos podem ser
conectados ao barramento. O mestre seleciona os escravos
individuais por meio de um caractere de endereço no
telegrama. Um escravo por si só nunca pode transmitir
sem que primeiramente seja solicitado a fazê-lo e não é
permitido que um escravo transra a mensagem para
outro escravo. A comunicação ocorre no modo semi-
-duplex.
A função do mestre não pode ser transferida para um
outro nó (sistema de mestre único).
A camada física é RS485, utilizando, assim, a porta RS485
embutida no conversor de frequência. O Protocolo Danfoss
FC suporta diferentes formatos de telegrama:
Um formato curto de 8 bytes para dados de
•
processo.
Um formato longo de 16 bytes que também
•
inclui um canal de parâmetro.
Um formato usado para textos.
•
eldbus Danfoss
7.2.2 FC com Modbus RTU
O protocolo FC fornece acesso à palavra de controle e à
referência de barramento do conversor de frequência.
A palavra de controle permite ao mestre do Modbus
controlar diversas funções importantes do conversor de
frequência:
Partida.
•
É possível parar o conversor de frequência por
•
diversos meios:
- Parada por inércia.
- Parada rápida.
- Parada por freio CC.
- Parada normal (rampa).
Reinicializar após um desarme por falha.
•
Funcionar em várias velocidades predenidas.
•
Funcionar em reverso.
•
Alteração da conguração ativa.
•
Controle dos 2 relés embutidos no conversor de
•
frequência.
A referência de barramento é comumente usada para
controle de velocidade. Também é possível acessar os
parâmetros, ler seus valores e, onde for possível, inserir
valores neles. O acesso aos parâmetros oferece uma gama
de opções de controle, incluindo o controle do setpoint do
conversor de frequência quando o controlador PI interno é
usado.
7.3 Programação dos parâmetros para
ativar o protocolo
Para ativar o protocolo FC do conversor de frequência,
programe os parâmetros a seguir.
Parâmetro Conguração
Parâmetro 8-30 Protocolo FC
Parâmetro 8-31 Endereço 1–126
Parâmetro 8-32 Baud Rate da Porta do
FC
Parâmetro 8-33 Bits de Paridade /
Parada
Tabela 7.3 Parâmetros para ativar o protocolo
Estrutura do enquadramento de
7.4
2400–115200
Paridade par, 1 bit de
parada (padrão)
mensagem do protocolo FC
7.4.1 Conteúdo de um caractere (Byte)
Cada caractere transferido começa com um bit de início.
Em seguida, são transmitidos 8 bits de dados, que correspondem a um byte. Cada caractere é garantido por meio
de um bit de paridade. Este bit é denido como 1 quando
atinge a paridade. Paridade é quando há um número igual
de 1s nos 8 bits de dados e o bit de paridade no total. Um
bit de parada completa um caractere, formando, assim, 11
bits no total.
Ilustração 7.4 Conteúdo de um caractere
7.4.2 Estrutura do telegrama
Cada telegrama tem a seguinte estrutura:
Caractere de partida (STX) = 02 hex.
•
Um byte representando o comprimento do
•
telegrama (LGE).
Um byte representando o endereço do conversor
•
de frequência (ADR).
Seguem vários bytes de dados (variável, dependendo do
tipo de telegrama).
7 7
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 85

STX LGE ADR DATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 B CCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
Um byte de controle dos dados (BCC) completa o
telegrama.
Bloco de processo (PCD)
O PCD é constituído por um bloco de dados de 4 bytes (2
palavras) e contém:
Control word e valor de referência (de mestre
•
para escravo).
Status word e a frequência de saída atual (do
•
Ilustração 7.5 Estrutura do telegrama
7.4.3 Comprimento do telegrama (LGE)
Ilustração 7.6 Bloco de processo
escravo para o mestre).
O comprimento do telegrama é o número de bytes de
dados mais o ADR do byte de endereço e o BCC do byte
de controle dos dados.
Bloco de parâmetros
O bloco de parâmetros é usado para transferir parâmetros
entre mestre e escravo. O bloco de dados é composto de
4 bytes de dados LGE = 4+1+1 = 6 bytes
77
12 bytes de dados LGE = 12+1+1 = 14 bytes
Telegramas contendo textos
Tabela 7.4 Comprimento dos telegramas
1) O 10 representa os caracteres xos, enquanto o n é variável
(dependendo do comprimento do texto).
101)+n bytes
12 bytes (6 words) e também contém o bloco de processo.
Ilustração 7.7 Bloco de parâmetros
Bloco de texto
O bloco de texto é usado para ler ou gravar textos, via
7.4.4 Endereço do conversor de frequência
bloco de dados.
(ADR)
Formato de endereço 1–126
Bit 7 = 1 (formato do endereço 1–126 ativo).
•
Bit 0–6 = endereço do conversor de frequência 1–
•
126.
Bit 0–6 = 0 broadcast.
•
O escravo retorna o byte de endereço inalterado ao mestre
no telegrama de resposta.
7.4.5 Byte de controle dos dados (BCC)
A soma de vericação é calculada como uma função XOR.
Antes de receber o primeiro byte no telegrama, a soma de
vericação calculada é 0.
7.4.6 O Campo de Dados
A estrutura dos blocos de dados depende do tipo de
telegrama. Existem 3 tipos de telegrama e o tipo se aplica
para os telegramas de controle (mestre⇒escravo) e os
telegramas de resposta (escravo⇒mestre).
Os 3 tipos de telegrama são:
Ilustração 7.8 Bloco de texto
7.4.7 O Campo PKE
O campo PKE contém 2 subcampos:
Comando de parâmetro e resposta (AK)
•
Número do parâmetro (PNU)
•
Ilustração 7.9 Campo PKE
86 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
Os bits 12-15 transferem os comandos de parâmetro do
mestre para o escravo, e retornam as respostas dos
escravos processados ao mestre.

Instalação e setup do RS485 Guia de Design
Comandos de parâmetro mestre⇒escravo
Número do bit Comando de parâmetro
15 14 13 12
0 0 0 0 Sem comando.
0 0 0 1 Leitura do valor do parâmetro.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Leitura de texto.
Tabela 7.5 Comandos de parâmetro
Número do bit Resposta
15 14 13 12
0 0 0 0 Nenhuma resposta.
0 0 0 1 Valor do parâmetro transferido (palavra).
0 0 1 0
0 1 1 1 Comando não pode ser executado.
1 1 1 1 Texto transferido.
Tabela 7.6 Resposta
Gravação do valor do parâmetro na RAM
(palavra).
Gravação do valor do parâmetro na RAM
(palavra dupla).
Gravação do valor do parâmetro na RAM
e EEPROM (palavra dupla).
Gravação do valor do parâmetro na RAM
e EEPROM (palavra).
Resposta do escravo⇒mestre
Valor do parâmetro transferido (palavra
dupla).
Se o comando não puder ser executado, o escravo envia a
resposta 0111 Comando não pode ser executado e emite os
seguintes relatórios de falha em Tabela 7.7.
Código de falha Especicação do FC
0 Número de parâmetro ilegal.
1 Parâmetro não pode ser alterado.
2 Limite superior ou inferior excedido.
3 O sub-índice está corrompido.
4 Sem matriz.
5 Tipo de dados errado.
6 Não usado.
7 Não usado.
9
11 Sem acesso a gravação de parâmetro.
15 Sem texto disponível.
17 Não aplicável durante o funcionamento.
18 Outros erros.
100 –
>100 –
130
131 Não é possível gravar no setup de fábrica.
132 Sem acesso ao LCP.
252 Visualizador desconhecido.
O elemento da descrição não está
disponível.
Sem acesso ao barramento para este
parâmetro.
Código de falha Especicação do FC
253 Solicitação não suportada.
254 Atributo desconhecido.
255 Sem erro.
Tabela 7.7 Relatório do escravo
7.4.8 Número do parâmetro (PNU)
Os números dos bits 0–11 transferem os números do
parâmetro. A função do parâmetro relevante é denida na
descrição do parâmetro no capétulo 6 Programação.
7.4.9 Índice (IND)
O índice é usado com o número do parâmetro para
parâmetros com acesso de leitura/gravação com um índice,
por exemplo, parâmetro 15-30 Log Alarme: Cód Falha. O
índice consiste em 2 bytes: um byte baixo e um byte alto.
Somente o byte baixo é utilizado como índice.
7.4.10 Valor do Parâmetro (PWE)
O bloco de valor de parâmetro consiste em 2 palavras (4
bytes) e o seu valor depende do comando denido (AK).
Se o mestre solicita um valor de parâmetro quando o
bloco PWE não contiver nenhum valor. Para alterar um
valor de parâmetro (gravar), grave o novo valor no bloco
PWE e envie-o do mestre para o escravo.
Se um escravo responder a uma solicitação de parâmetro
(comando de leitura), o valor do parâmetro atual no bloco
PWE é transferido e devolvido ao mestre. Se um parâmetro
contém várias opções de dados, por exemplo
parâmetro 0-01 Idioma, selecione o valor de dados
inserindo o valor no bloco PWE. Através da comunicação
serial somente é possível ler parâmetros com tipo de
dados 9 (sequência de texto).
Parâmetro 15-40 Tipo do FC a parâmetro 15-53 Nº. Série
Cartão de Potência contêm o tipo de dados 9.
Por exemplo, pode-se ler a potência da unidade e a faixa
de tensão de rede elétrica no par. parâmetro 15-40 Tipo do
FC. Quando uma sequência de texto é transferida (lida), o
comprimento do telegrama é variável, porque os textos
têm comprimentos diferentes. O comprimento do
telegrama é
usar a transferência de texto, o caractere de índice indica
se é um comando de leitura ou gravação.
denido no 2º byte do telegrama (LGE). Ao
7 7
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 87

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
Para ler um texto por meio do bloco PWE, congure o
7.4.13 Palavras do processo (PCD)
comando de parâmetro (AK) para F hex. O caractere de
índice de byte alto deve ser 4.
O bloco de palavras do processo é dividido em 2 blocos
de 16 bits, que sempre ocorrem na sequência denida.
7.4.11 Tipos de dados suportados pelo
conversor de frequência
Telegrama de controle (control word de
Sem sinal algébrico signica que não há sinal operacional
no telegrama.
Tipos de dados Descrição
3 Inteiro 16
4 Inteiro 32
5 Sem designação 8
6 Sem designação 16
7 Sem designação 32
9 String de texto
77
Tabela 7.8 Tipos de Dados
7.4.12 Conversão
O guia de programação contém as descrições dos atributos
de cada parâmetro. Os valores de parâmetro são
transferidos somente como números inteiros. Os fatores de
conversão são usados para transferir decimais.
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] tem um
fator de conversão de 0,1. Para predenir a frequência
mínima em 10 Hz, deve-se transferir o valor 100. Um fator
de conversão 0,1 signica que o valor transferido é
multiplicado por 0,1. O valor 100, portanto, será recebido
como 10,0.
mestre⇒escravo)
Status word do telegrama de controle
(escravo⇒mestre)
Tabela 7.10 Palavras do processo (PCD)
7.5 Exemplos
7.5.1 Gravação de um valor de parâmetro
Mude o par. parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz] para 100 Hz.
Grave os dados na EEPROM.
PKE = E19E hex - Gravar palavra única em
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz]:
•
•
•
Valor dos dados 1000, correspondente a 100 Hz, consulte
capétulo 7.4.12 Conversão.
O telegrama parece com Ilustração 7.10.
PCD 1 PCD 2
Valor de referência
Frequência de saída
atual
IND = 0000 hex.
PWEHIGH = 0000 hex.
PWELOW = 03E8 hex.
Índice de conversão Fator de conversão
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabela 7.9 Conversão
Ilustração 7.10 Telegrama
AVISO!
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
uma palavra única, e o comando de parâmetro para
gravar em EEPROM é E. Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz] é 19E em hexadecimal.
88 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Instalação e setup do RS485 Guia de Design
A resposta do escravo para o mestre é mostrada em
Ilustração 7.11.
Ilustração 7.11 Resposta do mestre
7.5.2 Leitura de um valor de parâmetro
Leia o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1.
PKE = 1155 hex - Leitura do valor do parâmetro em
parâmetro 3-41 Tempo de Aceleração da Rampa 1:
IND = 0000 hex.
•
PWE
•
PWE
•
= 0000 hex.
HIGH
= 0000 hex.
LOW
Visão geral do Modbus RTU
7.6
7.6.1 Introdução
Danfoss assume que o controlador instalado suporta as
interfaces contidas neste documento e observa rigorosamente todos os requisitos e limitações estipulados no
controlador e no conversor de frequência.
O Modbus RTU (Unidade Terminal Remota) é projetado
para se comunicar com qualquer controlador que suporte
as interfaces denidas neste documento. Supõe-se que o
usuário tenha pleno conhecimento das capacidades e
limitações do controlador.
7.6.2 Visão Geral
Independentemente do tipo de redes de comunicação
física, esta seção descreve o processo que um controlador
usa para solicitar o acesso a outro dispositivo. Este
processo inclui como o Modbus RTU responde a solicitações de outro dispositivo e como erros são detectados e
reportados. Também estabelece um formato comum para
o layout e conteúdo dos campos de telegramas.
7 7
Ilustração 7.12 Telegrama
Se o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1 for 10 s, a resposta do escravo para o mestre é
mostrada em Ilustração 7.13.
Ilustração 7.13 Resposta
3E8 hex corresponde ao 1.000 decimal. O índice de
conversão para parâmetro 3-41 Tempo de Aceleração da
Rampa 1 é -2, ou seja, 0,01.
Parâmetro 3-41 Tempo de Aceleração da Rampa 1 é o tipo
Sem designação 32.
Durante as comunicações através de uma rede Modbus
RTU, o protocolo:
Determina como cada controlador toma
•
conhecimento do seu endereço de dispositivo.
Reconhece um telegrama endereçado a ele.
•
Determina quais as ações a serem tomadas.
•
Extrai todos os dados ou outras informações
•
contidas no telegrama.
Se for necessária uma resposta, o controlador monta o
telegrama de resposta e o envia.
Os controladores se comunicam utilizando uma técnica
mestre/escravo em que apenas o mestre pode iniciar
transações (chamadas de consultas). Os escravos
respondem fornecendo os dados solicitados ao mestre ou
atuando conforme solicitado na consulta.
O mestre pode abordar escravos individuais ou iniciar um
telegrama de broadcast para todos os escravos. Os
escravos retornam uma resposta a consultas endereçadas a
eles individualmente. Nenhuma resposta é devolvida às
solicitações de broadcast do mestre.
O protocolo Modbus RTU estabelece o formato da consulta
do mestre fornecendo as seguintes informações:
O endereço do dispositivo (ou broadcast).
•
Um código de função denindo a ação solicitada.
•
Todos os dados a serem enviados.
•
Um campo de vericação de erro.
•
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 89

Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
O telegrama de resposta do dispositivo escravo é
elaborado também usando o protocolo Modbus. Ela
contém campos que conrmam a ação tomada, quaisquer
tipos de dados a serem devolvidos e um campo de
vericação de erro. Se ocorrer um erro no recebimento do
telegrama, ou se o escravo for incapaz de executar a ação
solicitada, o escravo monta e envia uma mensagem de
erro. Como alternativa, ocorre um timeout.
7.6.3 Conversor de Frequência com
Modbus RTU
O conversor de frequência se comunica no formato
Modbus RTU através da interface RS485 embutida. O
Modbus RTU fornece acesso à palavra de controle e à
referência de barramento do conversor de frequência.
Conguração de Rede
7.7
Para ativar o Modbus RTU no conversor de frequência,
programe os seguintes parâmetros:
Parâmetro Conguração
Parâmetro 8-30 Protocolo Modbus RTU
Parâmetro 8-31 Endereço 1–247
Parâmetro 8-32 Baud Rate da
Porta do FC
Parâmetro 8-33 Bits de Paridade /
Parada
Tabela 7.11 Conguração de Rede
2400–115200
Paridade par, 1 bit de parada
(padrão)
7.8 Estrutura do Enquadramento de
Mensagem do Modbus RTU
77
A palavra de controle permite ao mestre do Modbus
controlar diversas funções importantes do conversor de
frequência:
Partida.
•
Várias paradas:
•
- Parada por inércia.
- Parada rápida.
- Parada por freio CC.
- Parada normal (rampa).
Reinicializar após um desarme por falha.
•
Funcionar em várias velocidades
•
Funcionar em reverso.
•
Alterar a conguração ativa.
•
Controlar o relé embutido do conversor de
•
frequência.
A referência de barramento é comumente usada para
controle de velocidade. Também é possível acessar os
parâmetros, ler seus valores e quando possível, inserir
valores. O acesso aos parâmetros oferece uma gama de
opções de controle, incluindo o controle do setpoint do
conversor de frequência quando o controlador PI interno é
usado.
predenidas.
7.8.1 Introdução
Os controladores são congurados para se comunicarem
na rede Modbus usando o modo RTU (unidade terminal
remota), com cada byte em um telegrama contendo 2
caracteres hexadecimais de 4 bits. O formato para cada
byte é mostrado em Tabela 7.12.
Bit de
partida
Tabela 7.12 Formato para cada byte
Sistema de
codicação
Bits por byte
Campo de
vericação de erro
Byte de dados Parada/
paridade
binário de 8 bits, hexadecimal 0–9, A–F.
2 caracteres hexadecimais contidos em cada
campo de 8 bits do telegrama.
1 bit de partida.
•
8 bits de dados, bit menos signicativo
•
enviado primeiro.
1 bit para paridade par/ímpar; nenhum
•
bit para sem paridade.
1 bit de parada se paridade for usada; 2
•
bits se for sem paridade.
Vericação de redundância cíclica (CRC).
Parada
Tabela 7.13 Detalhes do byte
90 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Instalação e setup do RS485 Guia de Design
7.8.2 Estrutura do telegrama do Modbus
RTU
O dispositivo transmissor coloca um telegrama Modbus
RTU em um quadro com um ponto de início e um ponto
de término conhecidos. Isso permite que os dispositivos de
recepção comecem a leitura no início do telegrama, leiam
a parte que contém o endereço, determinem a qual
dispositivo está endereçado (ou a todos os dispositivos se
o telegrama for de broadcast) e reconheçam o término do
telegrama. Telegramas parciais são detectados e os erros
são denidos como resultado. Os caracteres para
transmissão devem estar em formato hexadecimal 00-FF
em cada campo. O conversor de frequência monitora
continuamente o barramento da rede, também durante os
intervalos de silêncio. Quando o primeiro campo (o campo
de endereço) é recebido, cada conversor de frequência ou
dispositivo decodica esse campo, para determinar qual
dispositivo está sendo endereçado. Os telegramas do
Modbus RTU endereçados para 0 são telegramas de
broadcast. Nenhuma resposta é permitida para telegramas
de broadcast. Um quadro de telegrama típico é mostrado
em Tabela 7.14.
Inicial Endereço Função Dados
T1-T2-T3-
-T4
Tabela 7.14 Estrutura do telegrama do Modbus RTU
8 bits 8 bits N x 8 bits 16 bits
Vericaçã
o de CRC
Acel.
T1-T2-T3-
-T4
7.8.3 Campo de início/parada
Os telegramas começam com um período de silêncio de
pelo menos 3,5 intervalos de caracteres, O período de
silêncio é implementado como um múltiplo de intervalos
de caracteres na baud rate da rede selecionada (mostrado
como Início T1-T2-T3-T4). O primeiro campo a ser
transmitido é o endereço do dispositivo. Após a
transmissão do último caractere, um período similar de
pelo menos 3,5 caracteres marca o término do telegrama.
Um novo telegrama pode começar depois desse período.
Transmite todo o quadro do telegrama como um uxo
contínuo. Se ocorrer um período de silêncio de mais de 1,5
caractere antes da conclusão do quadro, o dispositivo de
recepção descarta o telegrama incompleto e assume que o
próximo byte é o campo de endereço de um novo
telegrama. Da mesma forma, se um novo telegrama
começar antes do intervalo de 3,5 caracteres após um
telegrama anterior, o dispositivo de recepção o considera
uma continuação do telegrama anterior. Esse comportamento causa um timeout (sem resposta do escravo), uma
vez que o valor no campo nal de CRC não é válido para
os telegramas combinados.
7.8.4 Campo de endereço
O campo de endereço de um quadro de telegrama contém
8 bits. Os endereços de dispositivos escravos válidos estão
na faixa de 0 a 247 decimais. Os dispositivos escravos
individuais recebem endereços no intervalo de 1 a 247. 0 é
reservado para o modo de broadcast, que todos os
escravos reconhecem. Um mestre endereça um escravo
colocando o endereço do escravo no campo de endereço
do telegrama. Quando o escravo envia sua resposta, ele
coloca seu próprio endereço neste campo de endereço
para permitir ao mestre saber qual o escravo está
respondendo.
7.8.5 Campo de função
O campo de função de um quadro de telegrama contém 8
bits. Os códigos válidos estão na faixa de 1–FF. Os campos
de função são usados para enviar telegramas entre mestre
e escravo. Quando um telegrama é enviado de um
dispositivo mestre para um escravo, o campo de código de
função informa ao escravo que tipo de ação executar.
Quando o escravo responde ao mestre, ele usa o campo
de código de função para indicar que se trata de uma
resposta normal (sem erros) ou que ocorreu algum tipo de
erro (chamado de resposta de exceção).
Para uma resposta normal, o escravo simplesmente retorna
o código de função original. Para uma resposta de exceção,
o escravo retorna um código que é equivalente ao código
de função original com o bit mais
para 1 lógico. Além disso, o escravo coloca um código
único no campo de dados do telegrama de resposta. Este
código informa ao mestre qual o tipo do erro ocorrido ou
o motivo da exceção. Consulte também
capétulo 7.8.11 Códigos de função suportados pelo Modbus
RTU e capétulo 7.8.12 Códigos de exceção do Modbus.
signicativo congurado
7.8.6 Campo de dados
O campo de dados é construído usando conjuntos de 2
dígitos hexadecimais, na faixa de 00-FF hexadecimal. Esses
dígitos são compostos por 1 caractere de RTU. O campo de
dados dos telegramas enviados de um dispositivo mestre
para um escravo contém informações complementares que
o escravo deve usar para executar adequadamente.
As informações podem incluir itens, tais como:
Endereços de bobinas ou registradores.
•
A quantidade de itens a serem tratados.
•
A contagem de bytes de dados reais no campo.
•
7 7
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 91

Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
7.8.7 Campo de vericação CRC
7.8.8 Endereçamento do registrador da
bobina
Os telegramas incluem um campo de vericação de erros,
operando com base em um método de vericação de
redundância cíclica (CRC). O campo CRC verica o
conteúdo de todo o telegrama. É aplicado independentemente de qualquer método de vericação de paridade
usado para os caracteres individuais do telegrama. O
dispositivo de transmissão calcula o valor do CRC e
acrescenta o CRC como o último campo no telegrama. O
dispositivo de recepção recalcula um CRC durante o
recebimento do telegrama e compara o valor calculado
com o valor real recebido no campo CRC. 2 valores
diferentes resultam em um timeout do bus. O campo de
vericação de erros contém um valor binário de 16 bits
implementado como 2 bytes de 8 bits. Após a
implementação, o byte inferior do campo é acrescido
primeiro, seguido pelo byte superior. O byte superior do
77
CRC é o último byte enviado no telegrama.
Número da bobina Descrição Direção do sinal
1–16 Control word do conversor de frequência (consulte Tabela 7.16). Mestre para escravo
17–32
33–48 Status word do conversor de frequência (consulte Tabela 7.17). Escravo para mestre
49–64
65
66–65536 Reservado. –
Velocidade do conversor de frequência ou faixa de referência do setpoint
0x0–0xFFFF (-200% ... ~ 200%).
Modo de-malha aberta: Frequência de saída do conversor de frequência.
Modo de malha fechada: Sinal de feedback do conversor de frequência.
Controle de gravação do parâmetro (mestre para escravo).
0 = Alterações de parâmetros são gravadas na RAM do conversor de
frequência.
1 = Alterações de parâmetros são gravadas em RAM e EEPROM do conversor
de frequência.
No Modbus, todos os dados são organizados em bobinas e
registradores de retenção. As bobinas retêm um único bit,
enquanto os registradores de retenção mantêm uma
palavra de 2 bytes (isto é, 16 bits). Todos os endereços de
dados nos telegramas Modbus são referenciados como 0. A
primeira ocorrência de um item de dados é endereçada
como item número 0. Por exemplo: A bobina conhecida
como bobina 1, em um controlador programável, é
endereçada como bobina 0000, no campo de endereço de
dados de um telegrama do Modbus. A bobina 127 decimal
é endereçada como bobina 007Ehex (126 decimal).
O registrador de retenção 40001 é endereçado como
registro 0000 no campo de endereço de dados do
telegrama. O campo de código de função já especica
uma operação de registrador de retenção. Portanto, a
referência 4XXXX ca implícita. O registrador de retenção
40108 é endereçado como registro 006Bhex (107 decimal).
Mestre para escravo
Escravo para mestre
Mestre para escravo
Tabela 7.15 Registrador de bobinas
Bobina 0 1
01 Referência predenida lsb
02 Referência predenida msb
03 Freio CC Sem freio CC
04 Parada por inércia Sem parada por inércia
05 Parada rápida Sem parada rápida
06 Congelar frequência Sem congelar frequência
07 Parada de rampa Inicial
08 Sem reset Reset
09 Sem jog Jog
10 Rampa 1 Rampa 2
11 Dados inválidos Dados válidos
12 Relé 1 desligado Relé 1 ligado
13 Relé 2 desligado Relé 2 ligado
14 Setup do lsb
15 –
16 Sem reversão Reversão
Tabela 7.16 Control word do conversor de frequência (perl do FC)
92 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Instalação e setup do RS485 Guia de Design
Bobina 0 1
33 Controle não preparado Controle pronto
34 O conversor de frequência não está pronto para funcionar O conversor de frequência está pronto
35 Parada por inércia Segurança fechada
36 Sem alarme Alarme
37 Não usado Não usado
38 Não usado Não usado
39 Não usado Não usado
40 Sem advertência Advertência
41 Não na referência Na referência
42 Modo manual Modo automático
43 Fora da faixa de frequência Na faixa de frequência
44 Parado Em funcionamento
45 Não usado Não usado
46 Sem advertência de tensão Tensão excede
47 Fora do limite de corrente Limite de corrente
48 Nível térmico OK Nível térmico excede
Tabela 7.17 Status word do conversor de frequência (perl do FC)
7 7
Endereço do
barramento
0 1 40001 Reservado –
1 2 40002 Reservado –
2 3 40003 Reservado –
3 4 40004 Gratuito – –
4 5 40005 Gratuito – –
5 6 40006 Conguração do Modbus
6 7 40007 Último código de falha
7 8 40008 Último registro de erro
8 9 40009 Ponteiro do índice
9 10 40010 Parâmetro 0-01 Idioma
19 20 40020 Gratuito – –
29 30 40030
Registrador
do
barramento
Registrador
1)
PLC
Conteúdo Acesso Descrição
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Somente TCP. Reservado para Modbus TCP
Parâmetro 0-03 Denições
Regionais
Leitura/
Gravação
Somente
leitura
Somente
leitura
Leitura/
Gravação
Dependente
do acesso ao
parâmetro
Dependente
do acesso ao
parâmetro
(parâmetro 12-28 Armazenar Valores dos Dados e
parâmetro 12-29 Gravar Sempre armazenado em,
por exemplo, EEPROM).
Código de falha recebido do banco de dados
de parâmetros; consulte o documento WHAT
38295 para obter detalhes.
Endereço do registrador com o qual o último
erro ocorreu; consulte WHAT 38296 para obter
detalhes.
Sub-índice do parâmetro a ser acessado.
Consulte WHAT 38297 para obter detalhes.
Parâmetro 0-01 Idioma (Registrador do Modbus
= 10 número de parâmetro)
Espaço de 20 bytes reservado para o parâmetro
no mapa Modbus.
Parâmetro 0-03 Denições Regionais
Espaço de 20 bytes reservado para o parâmetro
no mapa Modbus.
Tabela 7.18 Endereço/Registradores
1) O valor escrito no telegrama Modbus RTU deve ser 1 ou menor que o número do registrador. Por exemplo, leia o Registrador do Modbus 1
escrevendo o valor 0 no telegrama.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 93

CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
7.8.9 Acesso via gravação/leitura do PCD
A vantagem de usar a conguração de gravação/leitura do
PCD é que o controlador pode gravar ou ler mais dados
em 1 telegrama. Até 63 registradores podem ser lidos ou
gravados por meio do código de função ler registrador de
retenção ou gravar vários registradores em 1 telegrama. A
estrutura é também exível de modo que apenas 2
registradores podem ser gravados e 10 registradores
podem ser lidos a partir do controlador.
A lista de gravação do PCD são dados enviados do
controlador para o conversor de frequência; os dados
incluem a palavra de controle, referência e dados
dependentes da aplicação, como referência mínima e
tempos de rampa, e assim por diante.
77
AVISO!
A palavra de controle e a referência são sempre enviadas
na lista do controlador para o conversor de frequência.
Ilustração 7.14 Acesso via gravação/leitura do PCD
O lista de gravação do PCD é programada no
parâmetro 8-42 Conguração de gravação do PCD.
A lista de leitura do PCD são dados enviados do conversor
de frequência para o controlador, como a palavra de
AVISO!
As caixas marcadas em cinza não podem ser alteradas,
elas são valores padrão.
status, o valor real principal e dados dependentes da
aplicação, como horas de funcionamento, corrente do
motor e alarm word.
AVISO!
Os parâmetros de 32 bits devem ser mapeados dentro
dos limites de 32 bits (PCD2 e PCD3 ou PCD4 e PCD5,
AVISO!
O status word e o valor real principal são sempre
enviados na lista do conversor de frequência para o
controlador.
etc.), onde o número do parâmetro é mapeado duas
vezes para parâmetro 8-42 Conguração de gravação do
PCD ou parâmetro 8-43 Conguração de Leitura do PCD.
7.8.10 Como controlar o Conversor de
Frequência
Esta seção descreve os códigos que podem ser usados nos
campos de função e de dados de um telegrama do
Modbus RTU.
94 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Instalação e setup do RS485 Guia de Design
7.8.11 Códigos de função suportados pelo
Modbus RTU
O Modbus RTU suporta o uso dos seguintes códigos de
função no campo de função de um telegrama.
Função Código da função (hex)
Ler bobinas 1
Ler registradores de retenção 3
Gravar bobina única 5
Gravar registrador único 6
Gravar bobinas múltiplas F
Gravar registradores múltiplos 10
Ler o contador de evento de
comunicação.
Relatar ID do escravo 11
Ler e gravar registradores múltiplos 17
Tabela 7.19 Códigos de função
Função
Diagnóstico 8
Tabela 7.20 Códigos de função
Código
de função
Código da
sub-função
1 Reiniciar a comunicação.
Retornar o registrador de
2
diagnóstico.
Limpar os contadores e o
10
11
12
13
14
registrador de
diagnóstico.
Retornar o contador de
mensagem do
barramento.
Retornar o contador de
erros de comunicação do
barramento.
Retornar a contagem de
erro do escravo.
Retornar o contador de
mensagem do escravo.
B
Sub-função
7.8.12 Códigos de exceção do Modbus
Para obter uma explicação completa da estrutura de uma
resposta de código de exceção, consulte
capétulo 7.8.5 Campo de função.
Código Nome Signicado
O código de função recebido na consulta
não é uma ação permitida para o
servidor (ou escravo). Isso pode ser
porque o código de função só é
aplicável a dispositivos mais recentes e
não foi implementado na unidade
selecionada. Também também pode
indicar que o servidor (ou escravo) está
no estado errado para processar uma
solicitação deste tipo, por exemplo
porque não está congurado e está
sendo solicitado a retornar os valores do
registro.
O endereço dos dados recebido na
consulta não é um endereço permitido
para o servidor (ou escravo). Mais especicamente, a combinação do número de
referência e o comprimento de transferência não é válido. Para um controlador
com 100 registros, uma solicitação com
deslocamento 96 e comprimento 4 é
bem-sucedida, enquanto uma solicitação
com deslocamento 96 e comprimento 5
gera uma exceção 02.
Um valor contido no campo de dados da
consulta não é um valor permitido para
o servidor (ou escravo). Isto indica uma
falha na estrutura do restante de um
pedido complexo, como o do
comprimento implícito estar incorreto.
Isso NÃO signica que um item de dados
enviado para armazenamento em um
registrador tenha um valor fora da
expectativa do programa de aplicação,
uma vez que o protocolo Modbus não
está ciente da signicância de qualquer
valor de qualquer registro.
Ocorreu um erro irrecuperável enquanto
o servidor (ou escravo) tentava executar
a ação requisitada.
1
2
3
4
Função
inválida
Endereço de
dados
inválido
Valor de
dados
inválido
Falha do
dispositivo
escravo
7 7
Tabela 7.21 Códigos de exceção do Modbus
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 95

Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
7.9 Como Acessar os Parâmetros
7.9.1 Tratamento de parâmetros
O PNU (número do parâmetro) é traduzido a partir do
endereço do registro contido na mensagem de leitura ou
gravação Modbus. O número do parâmetro é traduzido
para Modbus como (10 x número do parâmetro) decimal.
Exemplo: Leitura parâmetro 3-12 Valor de Catch Up/Slow
Down (16 bits): O registrador de retenção 3120 retém o
valor dos parâmetros. Um valor de 1352 (decimal)
que o parâmetro está denido como 12,52%.
Leitura parâmetro 3-14 Referência Relativa
bits): Os registradores de retenção 3410 e 3411 mantêm os
valores dos parâmetros. Um valor de 11300 (decimal)
signica que o parâmetro está denido como 1113,00.
77
Para obter informações sobre os parâmetros, tamanho e
índice de conversão, consulte capétulo 6 Programação.
Pré-denida (32
signica
7.9.2 Armazenagem de dados
A bobina 65 decimal determina se os dados gravados no
conversor de frequência são armazenados em EEPROM e
RAM (bobina 65 = 1) ou somente na RAM (bobina 65=0).
7.9.5 Fator de conversão
Um valor de parâmetro pode ser transferido somente
como um número inteiro. Para transferir decimais, use um
fator de conversão.
7.9.6 Valores de parâmetros
Tipo de dados padrão
Os tipos de dados padrão são int 16, int 32, uint 8, uint 16
e uint 32. Eles são armazenados como registradores 4x
(40001–4FFFF). Os parâmetros são lidos usando a função
03 hex ler registradores de retenção. Os parâmetros são
gravados usando a função 6 hexadecimal de registro único
predenido para 1 registro (16 bits), e a função 10
hexadecimal de vários registros predenidos para 2
registros (32 bits). Os tamanhos legíveis variam desde 1
registrador (16 bits) a 10 registradores (20 caracteres).
Tipo de dados não padronizados
Os tipo de dados não padronizados são strings de texto, e
são armazenados como registradores 4x (40001–4FFFF). Os
parâmetros são lidos usando a função 03 hex de leitura de
registradores de retenção e gravados usando a função 10
hex de vários registradores predenidos. Os tamanhos
legíveis variam de 1 registro (2 caracteres) até 10 registros
(20 caracteres).
7.9.3 IND (Índice)
Alguns parâmetros no conversor de frequência são
parâmetros de matriz, por exemplo
parâmetro 3-10 Referência Predenida. Como o Modbus não
suporta matrizes nos registradores de retenção, o
conversor de frequência reservou o registrador de retenção
9 como ponteiro para a matriz. Antes de ler ou gravar um
parâmetro de matriz, programe o registrador de retenção
9. Denir o registrador de retenção com o valor 2 faz com
que todos os seguintes parâmetros de matriz de leitura/
gravação sejam do índice 2.
7.9.4 Blocos de texto
Os parâmetros armazenados como strings de texto são
acessados da mesma forma que os outros parâmetros. O
tamanho máximo do bloco de texto é de 20 caracteres. Se
uma solicitação de leitura de um parâmetro for para mais
caracteres do que o parâmetro armazena, a resposta será
truncada. Se a solicitação de leitura de um parâmetro for
para menos caracteres do que o parâmetro armazena, a
resposta é preenchida.
Exemplos
7.10
Os exemplos a seguir mostram diversos comandos do
Modbus RTU.
7.10.1 Ler o status da bobina (01 hex)
Descrição
Esta função lê o status ON/OFF (Ligado/Desligado) das
saídas discretas (bobinas) no conversor de frequência. O
broadcast nunca é suportado para leituras.
Consulta
O telegrama de consulta especica a bobina de início e a
quantidade de bobinas a serem lidas. Os endereços das
bobinas começam em 0, ou seja, a bobina 33 é
endereçada como 32.
Exemplo de um pedido para ler as bobinas 33–48 (status
word) do dispositivo escravo 01.
96 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828

Instalação e setup do RS485 Guia de Design
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 01 (ler bobinas)
Endereço inicial HI 00
Endereço inicial LO 20 (decimal 32) bobina 33
Número de pontos HI 00
Número de pontos LO 10 (decimal 16)
Vericação de erro (CRC) –
Tabela 7.22 Consulta
Resposta
O status da bobina no telegrama de resposta é
empacotado como 1 bobina por bit do campo de dados. O
status é indicado como: 1 = ON (ligado); 0 = OFF
(Desligado). O lsb do primeiro byte de dados contém a
bobina endereçada na consulta. As outras bobinas seguem
para o nal de ordem alta deste byte, e da ordem baixa
para a ordem alta nos bytes subsequentes.
Se a quantidade de bobina retornada não for um múltiplo
de 8, os bits restantes no byte de dados nal serão
preenchidos com valores 0 (em direção ao nal de maior
ordem do byte). O campo de contagem de bytes especica
o número de bytes completos de dados.
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 01 (ler bobinas)
Contagem de bytes 02 (2 bytes de dados)
Dados (bobinas 40–33) 07
Dados (bobinas 48–41) 06 (STW = 0607hex)
Vericação de erro (CRC) –
Tabela 7.23 Resposta
AVISO!
Bobinas e registradores são endereçados explicitamente
com um deslocamento de -1 no Modbus.
Por exemplo, a bobina 33 é endereçada como bobina 32.
7.10.2 Forçar/gravar bobina única (05 hex)
Descrição
Esta função força a bobina para ON (ligado) ou OFF
(desligado). Quando for broadcast, a função força as
mesmas referências de bobina em todos os escravos
anexados.
Consulta
O telegrama de consulta especica a bobina 65 (controle
de gravação do parâmetro) a ser forçada. Os endereços das
bobinas começam em 0, ou seja, a bobina 65 é
endereçada como 64. Forçar dados = 00 00 hex (OFF) ou
FF 00 hex (ON).
Nome do campo Exemplo (hex)
Endereço do escravo 01 (Endereço do conversor de
frequência)
Função 05 (gravar bobina única)
Endereço de bobina HI 00
Endereço de bobina LO 40 (64 decimal) Bobina 65
Forçar dados HI FF
Forçar dados LO 00 (FF 00 = ON)
Vericação de erro (CRC) –
Tabela 7.24 Consulta
Resposta
A resposta normal é um eco da consulta, devolvida depois
que o estado da bobina foi forçado.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 05
Forçar dados HI FF
Forçar dados LO 00
Quantidade de bobinas HI 00
Quantidade de bobinas LO 01
Vericação de erro (CRC) –
Tabela 7.25 Resposta
7.10.3 Forçar/gravar múltiplas bobinas (0F
hex)
7 7
Descrição
Esta função força cada bobina em uma sequência de
bobinas para ligado ou desligado. Quando for broadcast, a
função força as mesmas referências de bobina em todos os
escravos anexados.
Consulta
O telegrama de consulta especica as bobinas 17-32
(setpoint de velocidade) a serem forçadas.
MG18C828 Danfoss A/S © 04/2018 Todos os direitos reservados. 97

Instalação e setup do RS485
VLT® HVAC Basic Drive FC 101
AVISO!
Os endereços das bobinas começam em 0, ou seja, a
bobina 17 é endereçada como 16.
Nome do campo Exemplo (hex)
Endereço do escravo
Função 0F (gravar bobinas múltiplas)
Endereço de bobina HI 00
Endereço de bobina LO 10 (endereço de bobina 17)
Quantidade de bobinas HI 00
Quantidade de bobinas LO 10 (16 bobinas)
Contagem de bytes 02
Forçar dados HI
(bobinas 8–1)
Forçar dados LO
(bobinas 16–9)
77
Vericação de erro (CRC) –
01 (endereço do conversor de
frequência)
20
00 (referência = 2000 hex)
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03 (Ler registradores de retenção)
Endereço inicial HI 0B (Endereço do registrador 3029)
Endereço inicial LO D5 (Endereço do registrador 3029)
Número de pontos HI 00
02 – (parâmetro 3-03 Referência Máxima
Número de pontos LO
Vericação de erro
(CRC)
Tabela 7.28 Consulta
tem 32 bits de comprimento, isto é, 2
registradores)
–
Resposta
Os dados do registrador no telegrama de resposta são
empacotados como 2 bytes por registrador, com o
conteúdo binário justicado à direita dentro de cada byte.
Para cada registro, o primeiro byte contém os bits de
ordem alta e o segundo contém os bits de ordem baixa.
Tabela 7.26 Consulta
Resposta
A resposta normal retorna o endereço do escravo, o código
da função, o endereço inicial e a quantidade de bobinas
forçadas.
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 0F (gravar bobinas múltiplas)
Endereço de bobina HI 00
Endereço de bobina LO 10 (endereço de bobina 17)
Quantidade de bobinas HI 00
Quantidade de bobinas LO 10 (16 bobinas)
Vericação de erro (CRC) –
Tabela 7.27 Resposta
Exemplo: hex 000088B8 = 35.000 = 35 Hz.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03
Contagem de bytes 04
Dados HI (registrador 3030) 00
Dados LO (registrador 3030) 16
Dados HI (registrador 3031) E3
Dados LO (registrador 3031) 60
Vericação de erro (CRC) –
Tabela 7.29 Resposta
7.10.5 Registrador único predenido (06
hex)
Descrição
7.10.4 Ler registradores de retenção (03
hex)
Esta função predene um valor em um registrador de
retenção único.
Consulta
Descrição
Esta função lê o conteúdo dos registradores de retenção
no escravo.
Consulta
O telegrama de consulta especica o registrador de início e
a quantidade de registradores a serem lidos. Os endereços
de registro começam em 0, isto é, os registros 1 a 4 são
endereçados como 0 a 3.
Exemplo: Ler parâmetro 3-03 Referência Máxima, registrador
03030.
O telegrama de consulta especica a referência do
registrador a ser predenida. Os endereços de registro
começam em 0, isto é, o registro 1 é endereçado como 0.
Exemplo: Gravar em parâmetro 1-00 Modo Conguração,
registrador 1000.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 06
Endereço do registrador HI 03 (endereço do registrador 999)
Endereço do registrador LO E7 (endereço do registrador 999)
Dados HI predenidos 00
Dados LO predenidos 01
Vericação de erro (CRC) –
Tabela 7.30 Consulta
98 Danfoss A/S © 04/2018 Todos os direitos reservados. MG18C828
 Loading...
Loading...