

Page 1

ENGINEERING TOMORROW
Programmierhandbuch
VLT® HVAC Basic Drive FC 101
www.danfoss.de/vlt
Page 2

Page 3
Inhaltsverzeichnis Programmierhandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zielsetzung des Handbuchs
1.2 Dokument- und Softwareversion
1.3 Sicherheitssymbole
1.4 Sicherheitsmaßnahmen
1.5 Zusätzliche Materialien
1.6 Definitionen
1.7 Elektrische Anschlussübersicht
2 Programmieren
2.1 Einführung
2.2 LCP Bedienteil
2.3 Menüs
2.3.1 Statusmenü 10
2.3.2 Quick Menu 10
2.3.3 Hauptmenü 24
2.4 Schnelle Übertragung von Parametereinstellungen zwischen mehreren Frequenzumrichtern
3
3
3
3
4
5
5
8
9
9
9
10
25
2.5 Anzeigen und Programmieren von indizierten Parametern
2.6 Initialisierung auf Werkseinstellungen
3 Parameter
3.1 Hauptmenü - Betrieb und Display - Gruppe 0
3.2 Hauptmenü - Motor/Last - Gruppe 1
3.3 Hauptmenü - Bremsen - Gruppe 2
3.4 Hauptmenü - Sollwert/Rampen - Gruppe 3
3.5 Hauptmenü - Grenzen/Warnungen - Gruppe 4
3.6 Hauptmenü - Digit. Ein-/Ausgänge - Gruppe 5
3.7 Hauptmenü - Analoge Ein-/Ausg. - Gruppe 6
3.8 Hauptmenü - Kommunikation und Optionen - Gruppe 8
3.9 Hauptmenü - Smart Logic - Parametergruppe 13
3.10 Hauptmenü - Sonderfunktionen - Parametergruppe 14
3.11 Hauptmenü - Info/Wartung - Gruppe 15
3.12 Hauptmenü - Datenanzeigen - Parametergruppe 16
3.13 Hauptmenü - Datenanzeigen 2 - Gruppen 18
3.14 Hauptmenü - PID-Regler - Gruppe 20
25
25
27
27
32
42
44
47
50
59
64
69
78
83
85
90
90
3.15 Hauptmenü - Anw. Funktionen - Gruppe 22
3.16 Hauptmenü - Anwendungsfunktionen 2 - Gruppe 24
3.17 Hauptmenü - Spezielle Merkmale - Gruppe 30
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 1
93
100
103
Page 4
Inhaltsverzeichnis
VLT® HVAC Basic Drive FC 101
4 Fehlersuche und -behebung
4.1 Einführung zu Alarm- und Warnmeldungen
4.2 Alarmworte
4.3 Warnworte
4.4 Erweiterte Zustandswörter
4.5 Warnungen und Alarmmeldungen
4.6 Liste der LCP-Fehler
5 Parameterlisten
5.1 Parameteroptionen
5.1.1 Werkseinstellungen 112
5.1.2 0-** Betrieb/Display 113
5.1.3 1-** Motor/Last 113
5.1.4 2-** Bremsfunktionen 115
5.1.5 3-** Sollwert/Rampen 115
5.1.6 4-** Grenzen/Warnungen 116
5.1.7 5-** Digit. Ein-/Ausgänge 116
5.1.8 6-** Analoge Ein-/Ausg. 117
104
104
106
106
107
107
111
112
112
Index
5.1.9 8-** Opt./Schnittstellen 118
5.1.10 13-** Smart Logic 119
5.1.11 14-** Sonderfunktionen 120
5.1.12 15-** Info/Wartung 121
5.1.13 16-** Datenanzeigen 121
5.1.14 18-** Info/Anzeigen 123
5.1.15 20-** PID-Regler 123
5.1.16 22-** Anw.- Funktionen 124
5.1.17 24-** Anw.- Funktionen 2 125
5.1.18 30-** Spezielle Merkmale 125
126
2 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 5

Einführung Programmierhandbuch
1 Einführung
1.1 Zielsetzung des Handbuchs
Dieses Programmierhandbuch enthält Informationen zur
erweiterten Programmierung des Frequenzumrichters. Es
liefert eine umfassende Übersicht über alle Parameter und
deren vollständige Beschreibungen.
Dieses Programmierhandbuch richtet sich ausschließlich an
qualifiziertes Personal.
Lesen und beachten Sie dieses Programmierhandbuch, um
sicher und professionell mit dem Frequenzumrichter zu
arbeiten. Berücksichtigen Sie insbesondere die Sicherheitshinweise und allgemeinen Warnungen.
1.2 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Verbesserungsvorschläge sind jederzeit willkommen.
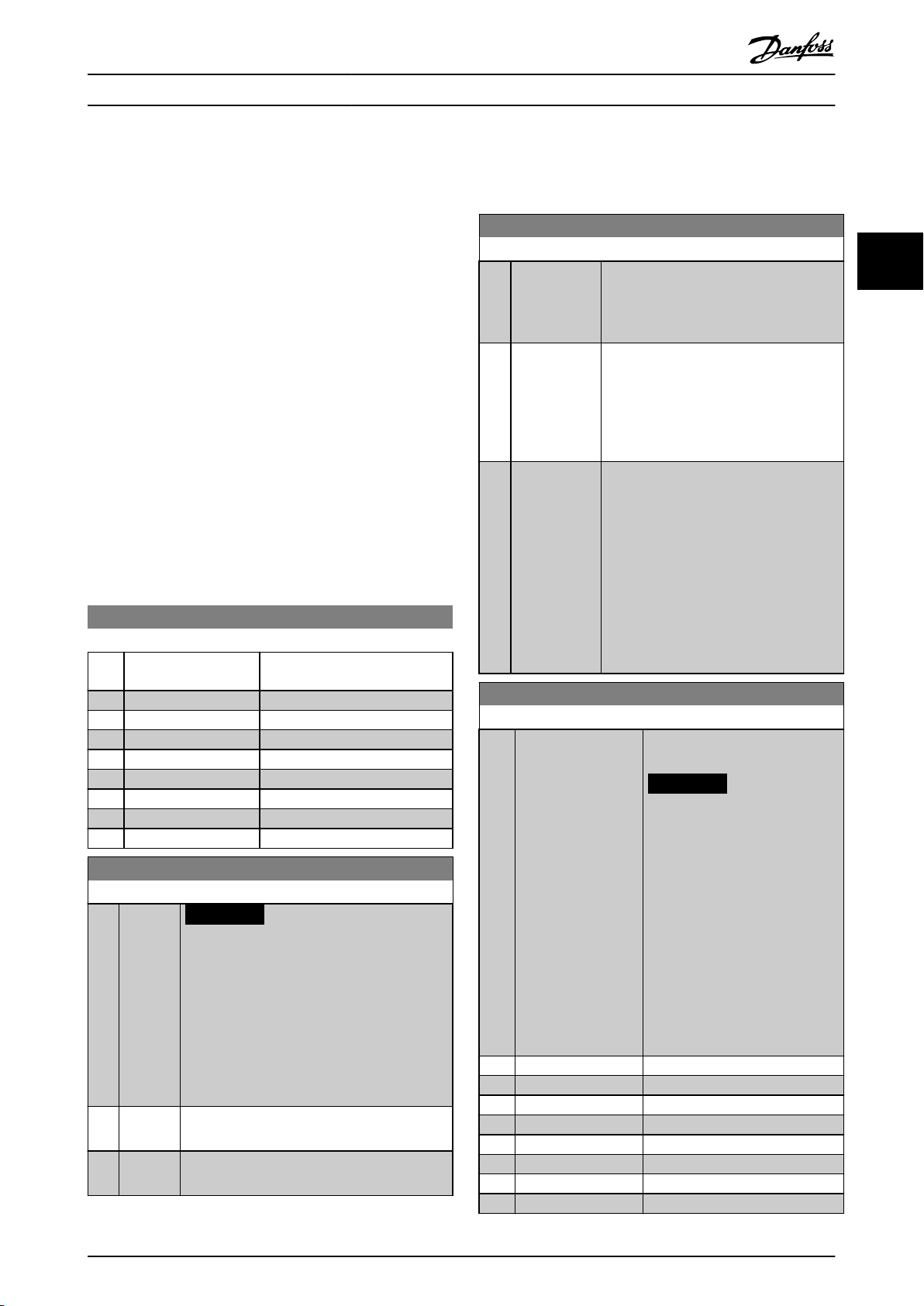
Ausgabe Anmerkungen Softwareversion
MG18B5xx Update auf eine
neue Software-
version.
Tabelle 1.1 Dokument- und Softwareversion
4.2x
Alte Steuerkarte
Software-
Kompatibilität
Alte Software
(OSS-Dateiversion
3.xx und niedriger)
Neue Software
(OSS-Dateiversion
4.xx oder höher)
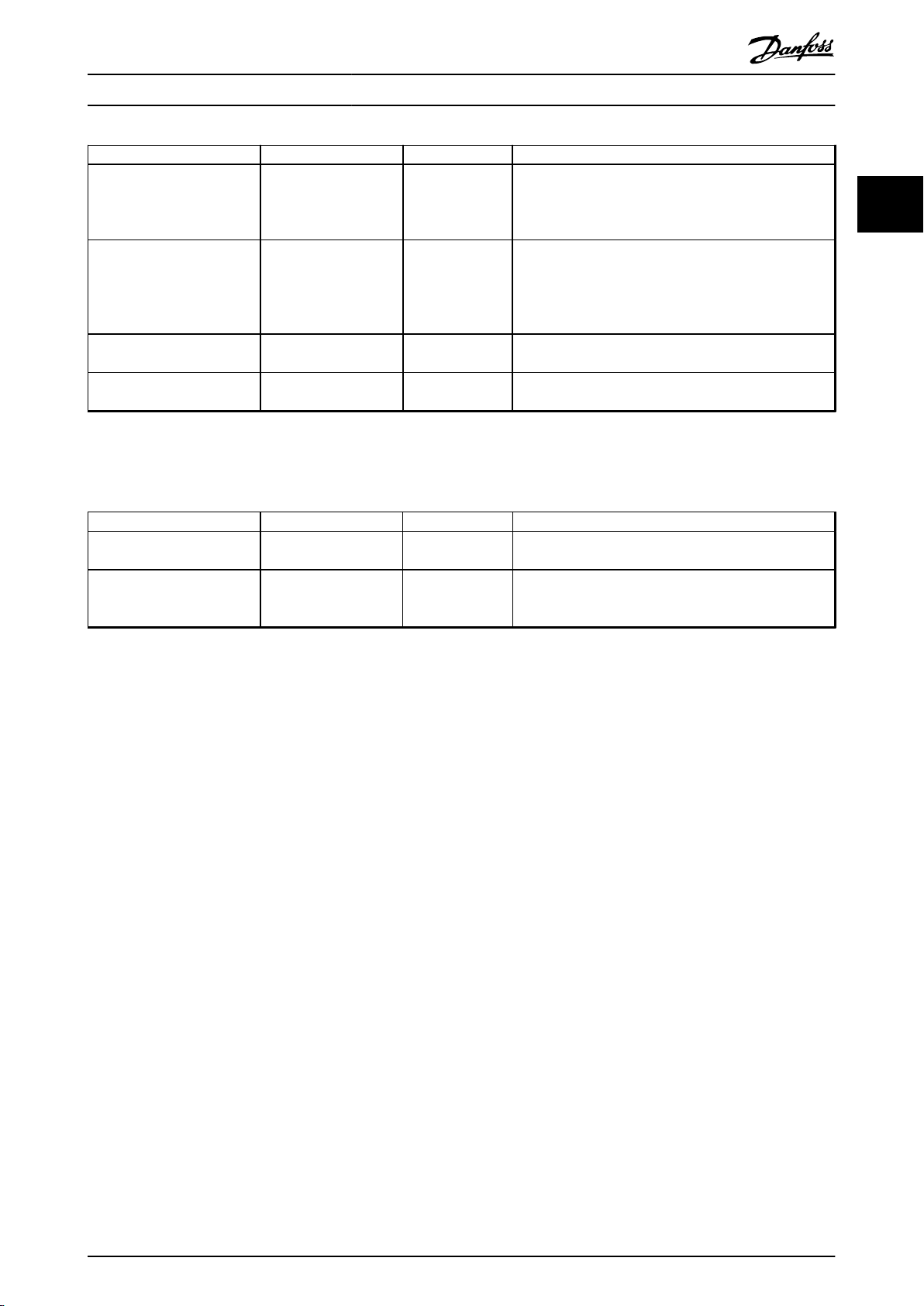
Hardware-
Kompatibilität
Alte Leistungskarte
(Produktionswoche
33 2017 oder früher)
Neue Leistungskarte
(Produktionswoche
34 2017 oder später)
Tabelle 1.2 Software- und Hardware-Kompatibilität
(Produktionswoche
33 2017 oder
früher)
Ja Nein
Nein Ja
Alte Steuerkarte
(Produktionswoche
33 2017 oder
früher)
Ja (nur Softwareversion 3.xx oder
niedriger)
Ja (Software-Update
auf 3.xx oder
niedriger
erforderlich, der
Lüfter läuft kontinu-
ierlich bei voller
Drehzahl)
Neue Steuerkarte
(Produktionswoche
34 2017 oder
Neue Steuerkarte
(Produktionswoche
34 2017 oder
Ja (Software-Update
auf Version 4.xx
oder höher)
Ja (nur Softwareversion 4.xx oder
1 1
später)
später)
höher)
Ab Softwareversion 4.0x (Produktionswoche 33 2017 und
später) ist die Lüfterfunktion für den Kühlkörper mit
variabler Drehzahl in Frequenzumrichter bis Leistungsgröße
22 kW (30 hp) 400 V IP20 und 18,5 kW (25 hp) 400 V IP54
integriert. Für diese Funktion sind Software- und HardwareUpdates erforderlich, daraus ergeben sich Einschränkungen
hinsichtlich der Abwärtskompatibilität für die Gehäusegrößen H1–H5 und I2–I4. Informationen zu den
Einschränkungen finden Sie in Tabelle 1.2.
Sicherheitssymbole
1.3
Folgende Symbole kommen in diesem Handbuch zum
Einsatz:
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die zu
schweren Verletzungen oder sogar zum Tod führen kann!
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittelschweren Verletzungen führen kann.
Die Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 3
Page 6
Einführung
VLT® HVAC Basic Drive FC 101
11
1.4 Sicherheitsmaßnahmen
WARNUNG
ENTLADEZEIT
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung führen Frequenzumrichter
Hochspannung. Erfolgen Installation, Inbetriebnahme
und Wartung nicht durch qualifiziertes Personal, kann
dies zu schweren Verletzungen oder sogar zum Tod
führen!
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass der Frequenzumrichter keine
Spannung mehr führt.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zum Tod, zu schweren Verletzungen oder zu
Sachschäden führen! Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder LOP, eine Fernbedienung
per MCT 10 Konfigurationssoftware oder nach einem
quittierten Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Trennen Sie den Frequenzumrichter von der
•
Netzversorgung.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Netzversorgung, DC-Versorgung oder Zwischenkreiskopplung anschließen.
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zu schweren Verletzungen oder sogar zum
Tod führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und
Zwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die minimale
Wartezeit finden Sie in Tabelle 1.3.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
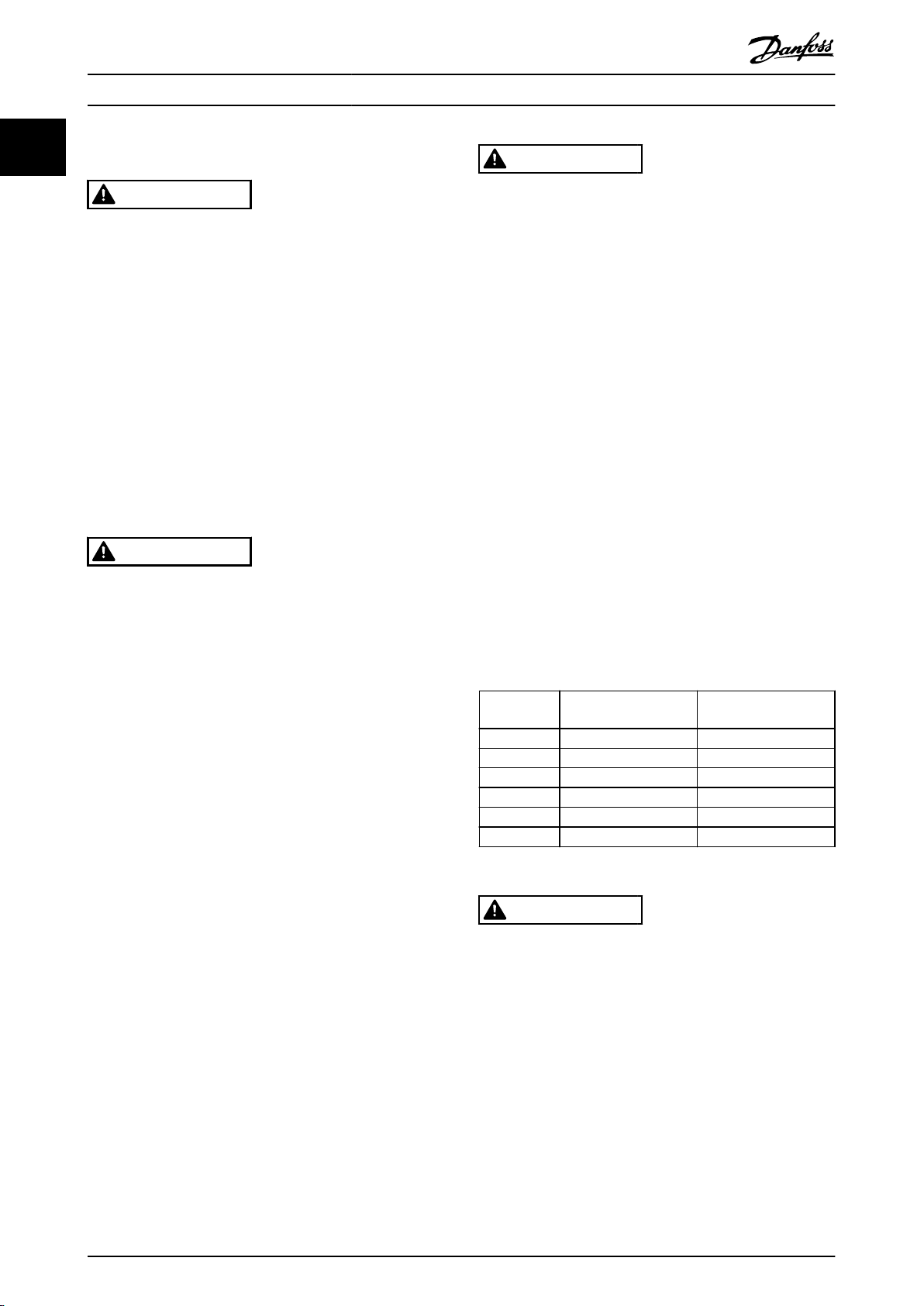
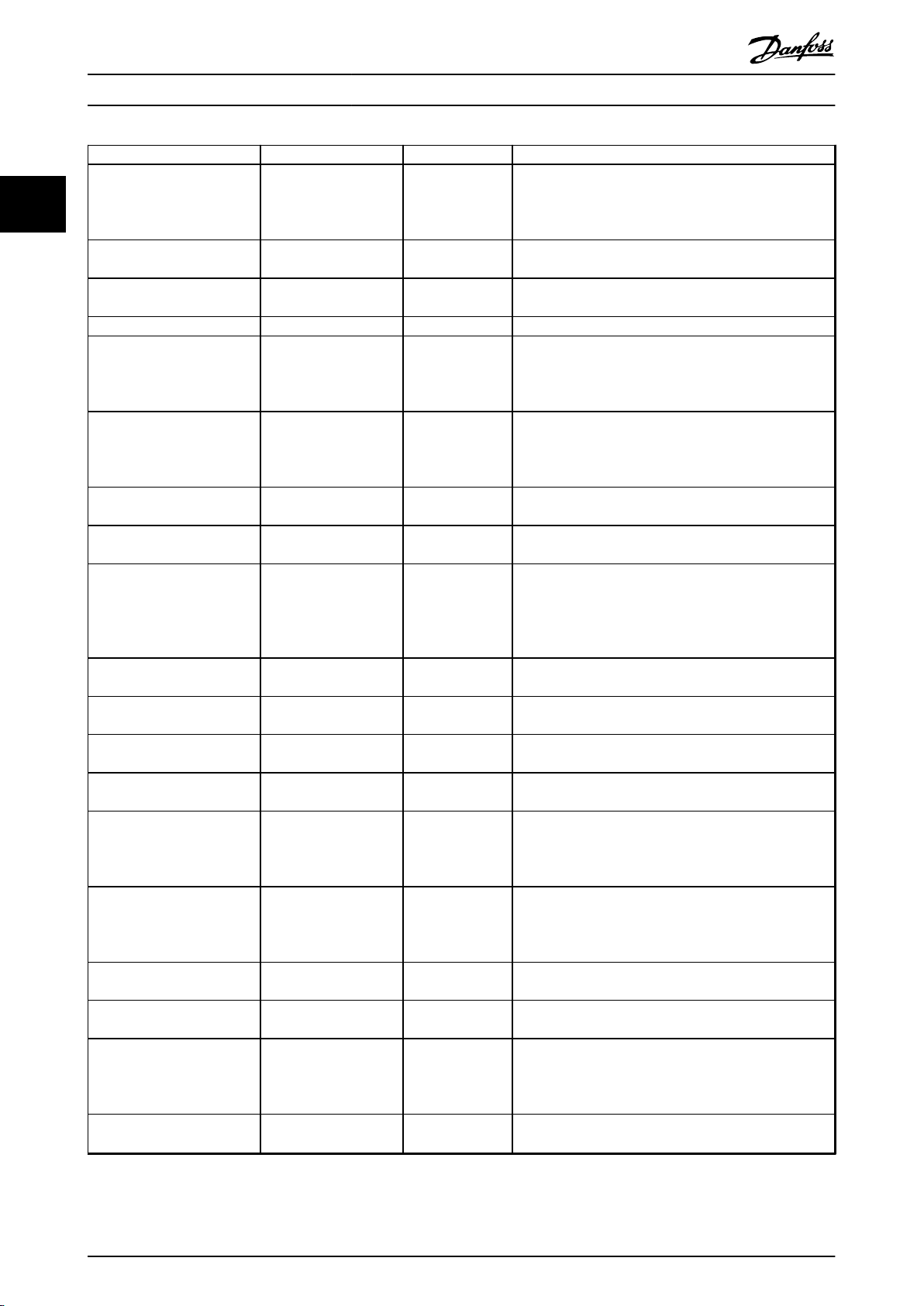
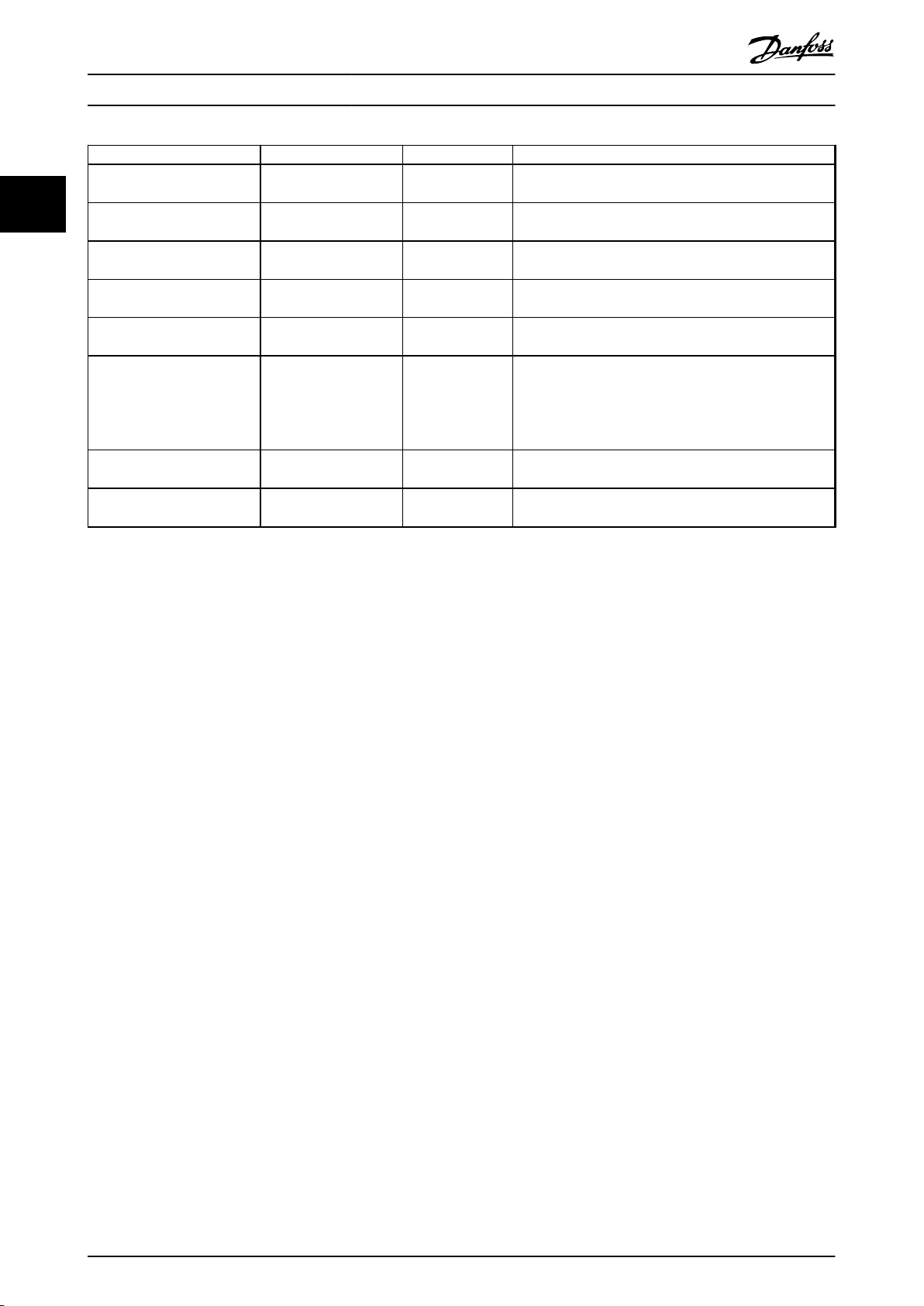
Spannung
[V]
3x200 0,25–3,7 (0,33–5) 4
3x200 5,5–11 (7–15) 15
3x400 0,37–7,5 (0,5–10) 4
3x400 11–90 (15–125) 15
3x600 2,2–7,5 (3–10) 4
3x600 11–90 (15–125) 15
Tabelle 1.3 Entladezeit
Leistungsbereich [kW
(HP)]
Mindestwartezeit
(Minuten)
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
4 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 7
Einführung Programmierhandbuch
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zum Tod oder zu schweren Verletzungen führen!
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in diesem Handbuch.
•
VORSICHT
GEFAHR BEI EINEM INTERNEN FEHLER
Ein interner Fehler im Frequenzumrichter kann zu
schweren Verletzungen führen, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Stellen Sie vor dem Anlegen von Netzspannung
•
sicher, dass alle Sicherheitsabdeckungen
angebracht und ordnungsgemäß befestigt sind.
1.5 Zusätzliche Materialien
Die VLT® HVAC Basic DriveFC101-Kurzanleitung
•
enthält grundlegende Informationen zu
mechanischen Abmessungen, Installation und
Programmierung.
Das VLT® HVAC Basic Drive FC101-Projektierungs-
•
handbuch enthält Informationen zur Auslegung
von Steuerungssystemen für Motoren.
Danfoss VLT® Energy Box-Software. Wählen Sie
•
PC-Software Download unter vltdrives.danfoss.com/products/engineering-software/
software-download/vlt-energy-box-software/.
Die VLT®Energy Box-Software ermöglicht den
Vergleich des Energieverbrauchs von mit DanfossFrequenzumrichtern angetriebenen HLK-Lüftern
und Pumpen sowie alternativen Verfahren zur
Durchflussregelung. Das Tool können Sie zu einer
möglichst genauen Projektierung von Kosten,
Einsparungen und Amortisierungszeit bei der
Nutzung von Danfoss-Frequenzumrichtern für
HLK-Lüfter, -Pumpen und -Kühltürme verwenden.
Die technische Literatur ist auch online verfügbar unter
drives.danfoss.com/knowledge-center/technical-documentation/.
MCT 10 Konfigurationssoftware-Support
Laden Sie die Software herunter www.danfoss.com/en/
service-and-support/downloads/dds/vlt-motion-control-toolmct-10/.
Geben Sie während des Software-Installationsvorgangs den
Zugangscode 81463800 ein, um die Funktion FC101 zu
aktivieren. Zur Nutzung der Funktion FC101 ist kein Lizenzschlüssel erforderlich.
Die aktuellste Software enthält nicht immer die neuesten
Frequenzumrichter-Aktualisierungen. Wenden Sie sich an
Ihre Vertriebsniederlassung vor Ort, um die neuesten
Frequenzumrichter-Aktualisierungen (Dateityp *.upd) zu
erhalten, oder laden Sie diese herunter:
www.danfoss.com/en/service-and-support/downloads/dds/vltmotion-control-tool-mct-10/#Overview.
1.6 Definitionen
Frequenzumrichter
I
VLT, MAX
Der maximale Ausgangsstrom des Frequenzumrichters.
I
VLT,N
Der vom Frequenzumrichter gelieferte Ausgangsnennstrom.
U
VLT, MAX
Die maximale Ausgangsspannung des Frequenzumrichters.
Eingang
Sie können den angeschlossenen Motor über das LCP und
die Digitaleingänge starten und stoppen. Die Funktionen
sind in zwei Gruppen unterteilt, wie in Tabelle 1.4
beschrieben. Funktionen in Gruppe 1 haben eine höhere
Priorität als Funktionen in Gruppe 2.
Gruppe 1
Gruppe 2
Tabelle 1.4 Steuerbefehle
Motor
f
JOG
Die Motorfrequenz (Festfrequenz „Jog“), wählbar über
Digitaleingang oder Bus, wenn die Funktion Festdrehzahl
JOG aktiviert ist.
f
M
Die Motorfrequenz.
f
MAX
Die maximale Motorfrequenz.
f
MIN
Die minimale Motorfrequenz.
f
M,N
Die Motornennfrequenz (Typenschilddaten).
I
M
Der Motorstrom.
Reset, Freilaufstopp, Reset und Freilaufstopp,
Schnellstopp, DC-Bremse, Stopp und [Off].
Start, Puls-Start, Reversierung, Start Rücklauf,
Festdrehzahl JOG und Ausgangsfrequenz
speichern.
1 1
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 5
Page 8
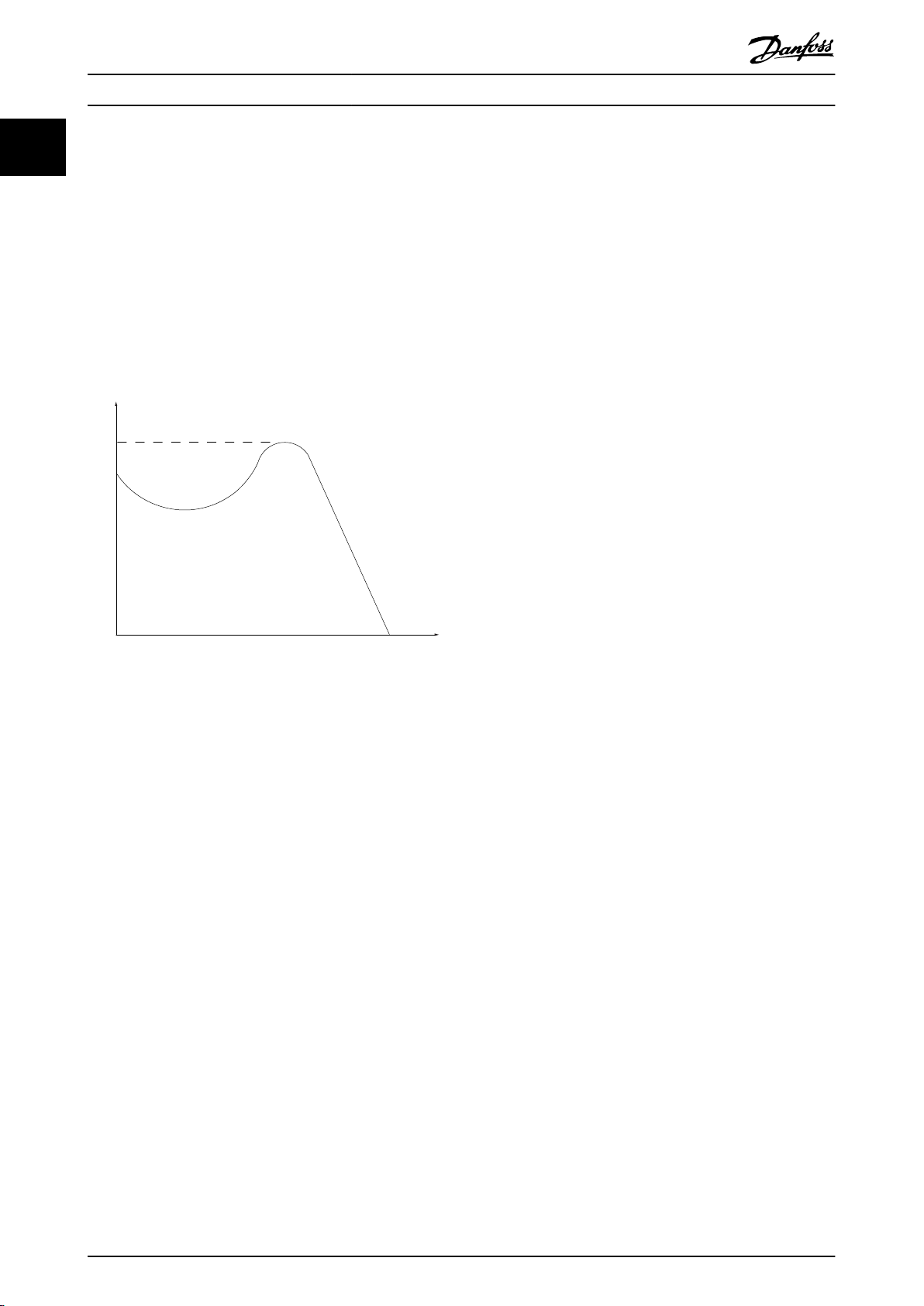
175ZA078.10
Kippgrenze
Drehzahi
Moment
Einführung
VLT® HVAC Basic Drive FC 101
11
I
M,N
Der Motornennstrom (Typenschilddaten).
n
M,N
Die Motornenndrehzahl (Typenschilddaten).
P
M,N
Die Motornennleistung (Typenschilddaten).
U
M
Die momentane Motorspannung.
U
M,N
Die Motornennspannung (Typenschilddaten).
Losbrechmoment
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.4.
Stoppbefehl
Siehe Tabelle 1.4.
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54. Es
kann sich um Spannung oder Strom handeln.
Eingangsstrom: 0–20 mA und 4–20 mA
•
Spannungseingang: 0–10 V DC
•
Bussollwert
Ein an die serielle Kommunikationsschnittstelle (FC-Schnittstelle) übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen.
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der in
Parameter 3-03 Maximaler Sollwert eingestellte maximale
Sollwert.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der minimale Sollwert wird in
Parameter 3-02 Minimaler Sollwert eingestellt.
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt zwei Arten von Analogeingängen:
Eingangsstrom: 0–20 mA und 4–20 mA
•
Spannungseingang: 0–10 V DC
•
Analogausgang
Die Analogausgänge können ein Signal von 0–20 mA, 4–20
mA oder ein Digitalsignal ausgeben.
Automatische Motoranpassung, AMA
Der AMA-Algorithmus bestimmt die elektrischen Parameter
für den angeschlossenen Motor bei Stillstand und gleicht
basierend auf der Länge des Motorkabels den Widerstand
aus.
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24 V-DC-Signal (max. 40 mA) liefern
können.
Relaisausgang
Der Frequenzumrichter verfügt über 2 programmierbare
Relaisausgänge.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen und ein Überhitzen des Motors vermeiden.
Initialisierung
Die Initialisierung (Parameter 14-22 Betriebsart) stellt die
Parameter des Frequenzumrichters auf Werkseinstellungen
zurück.
Parameter 14-22 Betriebsart initialisiert nicht die Kommunikationsparameter, den Fehlerspeicher oder den
Notfallbetriebsspeicher.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder aperiodisch sein.
6 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 9

Einführung Programmierhandbuch
LCP
Das LCP ist ein Bedienteil mit kompletter Benutzeroberfläche zum Steuern und Programmieren des
Frequenzumrichters. Die Bedieneinheit ist an IP20-Einheiten
abnehmbar und an IP54-Einheiten fest. Sie können es
mithilfe des optionalen Einbausatzes bis zu 3 m (9,8 ft)
entfernt vom Frequenzumrichter montieren (z. B. an einer
Schaltschranktür).
Lsb
Steht für „Least Significant Bit“; bei binärer Codierung das
Bit mit der niedrigsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Leitungsquerschnitt. 1 MCM = 0,5067 mm2.
Msb
Steht für „Most Significant Bit“; bei binärer Codierung das
Bit mit der höchsten Wertigkeit.
Online-/Offline-Parameter
Änderungen der Online-Parameter werden sofort nach
Änderung des Datenwertes aktiviert. Drücken Sie [OK], um
die Offline-Parameter zu aktivieren.
PI-Regler
Der PI-Regler sorgt durch Anpassung der Ausgangsfrequenz an wechselnde Belastungen für die
Aufrechterhaltung der gewünschten Prozessleistung (Druck,
Temperatur usw.).
Fehlerstromschutzschalter
Fehlerstromschutzschalter.
Parametersatz
Sie können Parametereinstellungen in zwei Parametersätzen speichern. Sie können zwischen den zwei
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorbelastung die Ausgangsfrequenz anpasst (nahezu konstante
Motordrehzahl).
Smart Logic Control (SLC)
SLC ist eine Folge benutzerdefinierter Aktionen, die der
Frequenzumrichter ausführt, wenn die SLC die zugehörigen
benutzerdefinierten Ereignisse als TRUE (WAHR) auswertet.
Thermistor
Ein temperaturabhängiger Widerstand, mit dem die
Temperatur des Frequenzumrichters oder des Motors
überwacht wird.
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Übertemperatur des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, den Prozess oder den
Mechanismus schützt. Der Neustart wird verzögert, bis der
Fehler nicht mehr ansteht und der Alarmzustand über die
[Reset]-Taste am LCP quittiert wird. Manchmal erfolgt die
Aufhebung automatisch (durch vorherige Programmierung). Sie dürfen die Abschaltung nicht zu Zwecken der
Personensicherheit verwenden.
Abschaltblockierung
Ein Zustand, der in Fehlersituationen eintritt, wenn sich der
Frequenzumrichter selbst schützt und ein Eingriff
erforderlich ist, z. B. bei einem Kurzschluss am Ausgang
des Frequenzumrichters. Sie können eine Abschaltblockierung nur durch Unterbrechen der Netzversorgung,
Beheben der Fehlerursache und erneuten Anschluss des
Frequenzumrichters aufheben. Der Neustart wird verzögert,
bis der Fehlerzustand über die [Reset]-Taste am LCP
quittiert wird. In einigen Fällen erfolgt die Aufhebung
automatisch (durch vorherige Programmierung). Sie dürfen
die Abschaltblockierung nicht zu Zwecken der Personensicherheit verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
+
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet die
Spannungsvektorsteuerung (VVC+) eine verbesserte
Dynamik und Stabilität, sowohl bei Änderung des
Drehzahlsollwerts als auch in Bezug auf das LastDrehmoment.
1 1
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 7
Page 10
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Einführung
VLT® HVAC Basic Drive FC 101
11
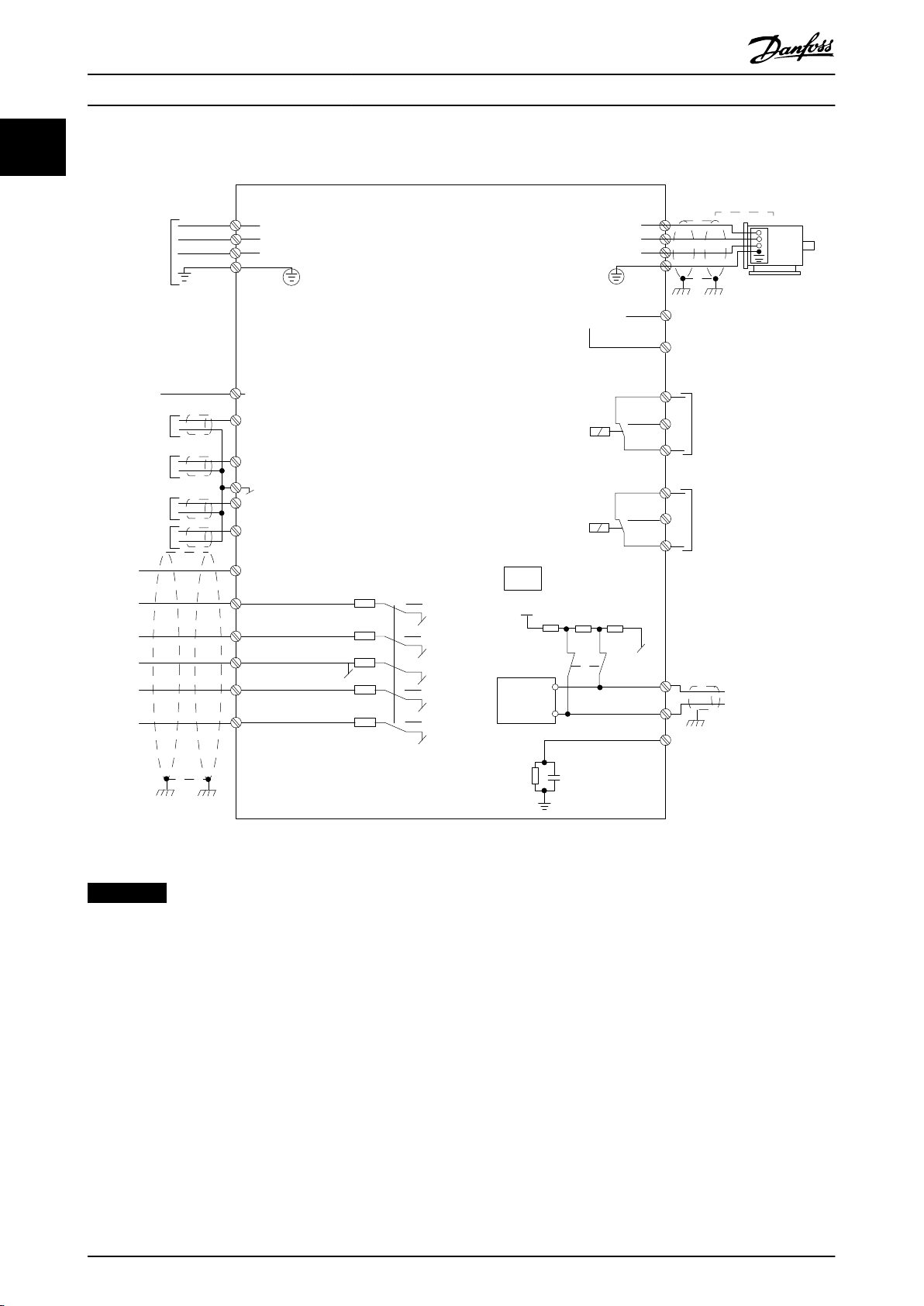
1.7 Elektrische Anschlussübersicht
Abbildung 1.2 Anschlussdiagramm des Grundgeräts
HINWEIS
Folgende Einheiten können nicht an UDC- und UDC+ angeschlossen werden:
•
•
•
•
IP20, 380–480 V, 30–90 kW (40–125 HP)
IP20, 200–240 V, 15–45 kW (20–60 HP)
IP20, 525–600 V, 2,2–90 kW (3,0–125 hp)
IP54, 380–480 V, 22–90 kW (30–125 HP)
8 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 11
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmieren Programmierhandbuch
2 Programmieren
2.1 Einführung
Sie können den Frequenzumrichter mit dem LCP, mit
einem PC über den RS485-Anschluss programmieren. Dazu
müssen Sie die MCT 10 Konfigurationssoftware installieren.
Weitere Informationen über die Software finden Sie unter
Kapitel 1.5 Zusätzliche Materialien.
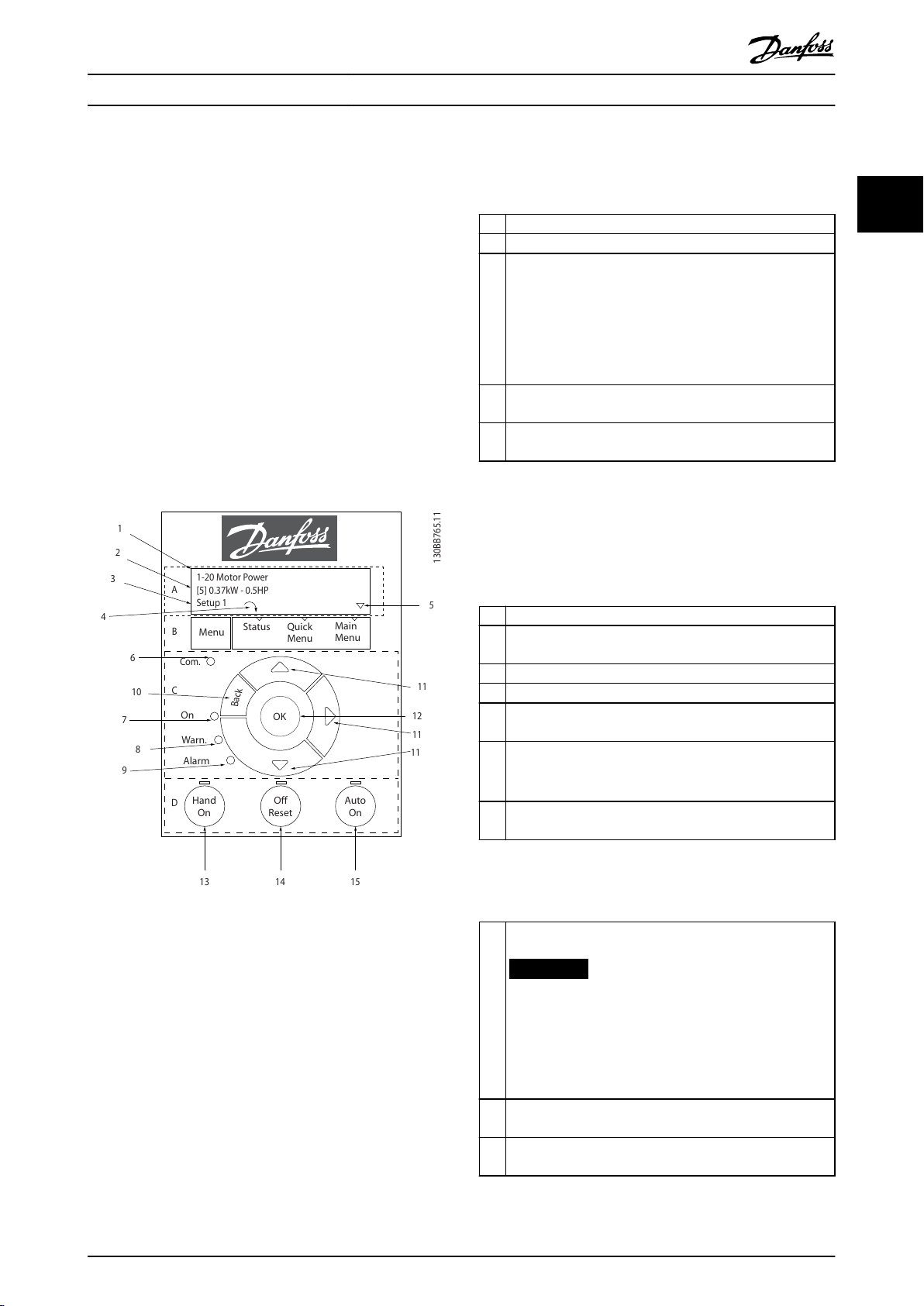
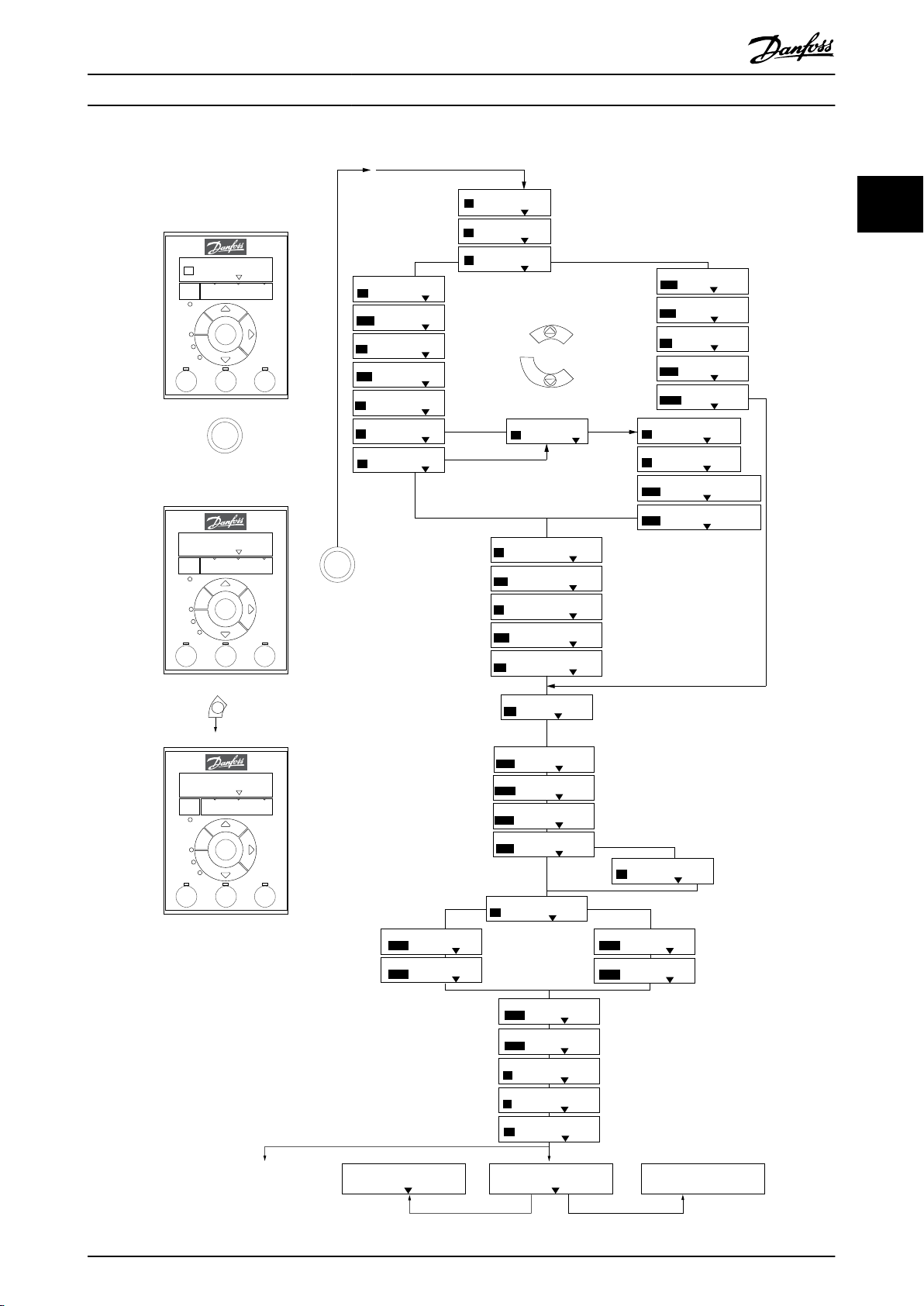
2.2 LCP Bedienteil
Das LCP ist in 4 funktionelle Gruppen unterteilt.
A. Display
B. Menütaste
C. Navigationstasten und Anzeigeleuchten
D. Bedientasten mit Anzeigeleuchten
1 Nummer und Name des Parameters.
2 Parameterwert.
Die Satznummer zeigt den aktiven Parametersatz und den
Programm-Satz an. Stimmen der aktive Satz und ProgrammSatz überein, wird nur diese Satznummer gezeigt
3
(Werkseinstellung). Bei unterschiedlichem aktiven Satz und
Programm-Satz zeigt das Display beide Satznummern (Satz
12) an. Die blinkende Zahl kennzeichnet den editierbaren
Parametersatz.
Die Motorlaufrichtung erscheint unten links im Display
4
durch einen kleinen Pfeil, der nach rechts oder links zeigt.
Das Dreieck zeigt an, ob sich das LCP in der Statusanzeige,
5
im Quick-Menü oder im Hauptmenü befindet.
Tabelle 2.1 Legende zu Abbildung 2.1, Teil I
B. Menütaste
Drücken Sie die Taste [Menu], um zwischen Status, QuickMenü oder Hauptmenü zu wählen.
C. Navigationstasten und Anzeigeleuchten
6 Verbindungs-LED: Blinkt bei aktiver Buskommunikation.
Grüne LED/On (An): Das Steuerteil funktioniert
7
ordnungsgemäß.
8 Gelbe LED/Warn. (Warnung): Zeigt eine Warnung an.
9 Blinkende rote LED/Alarm: Zeigt einen Alarm an.
[Back]: Zum Zurücknavigieren zum vorherigen Schritt oder
10
zur vorherigen Ebene in der Navigationsstruktur.
[▲] [▼] [►]: Zum Navigieren zwischen Parametergruppen,
11
Parametern und innerhalb von Parametern. Mit den
Pfeiltasten können Sie auch den Ortsollwert festlegen.
[OK]: Für die Parameterauswahl und die Annahme von
12
Änderungen an Parametereinstellungen.
2 2
Tabelle 2.2 Legende zu Abbildung 2.1, Teil II
Abbildung 2.1 Bedieneinheit (LCP)
A. Display
Die LCD-Anzeige verfügt über eine Hintergrundbeleuchtung und zwei alphanumerische Zeilen. Das LCP zeigt
alle Daten an.
In Abbildung 2.1 werden die Informationen beschrieben,
die vom Display abgelesen werden können.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 9
D. Bedientasten mit Anzeigeleuchten
[Hand on]: Startet den Motor und ermöglicht die Steuerung
des Frequenzumrichters über die LCP-Bedieneinheit.
HINWEIS
[2] Motorfreilauf invers ist die Standardoption für
13
Parameter 5-12 Klemme 27 Digitaleingang. Wenn
keine 24-V-Versorgung an Klemme 27 anliegt,
startet der Motor nicht durch Drücken von [Hand
On]. Schließen Sie Klemme 12 an Klemme 27 an.
[Off/Reset]: Hält den Motor an (Abschaltung). Quittiert im
14
Alarmmodus den Alarm.
[Auto on]: Der Frequenzumrichter wird entweder über
15
Steuerklemmen oder per serieller Kommunikation gesteuert.
Tabelle 2.3 Legende zu Abbildung 2.1, Teil III
Page 12
+24 V
DIG EIN
DIG EIN
DIG EIN
DIG EIN
COM DIG EIN
A AUS / D AUS
A AUS / D AUS
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Sollwert
Start
+10 V
A EIN
A EIN
COM
130BB674.10
45
+
-
130BB629.10
Assistent mit [OK] starten
Mit [Back] übergehen
Satz 1
Programmieren
VLT® HVAC Basic Drive FC 101
2.3 Menüs
2.3.1 Statusmenü
22
Die Auswahloptionen im Statusmenü sind:
Motorfrequenz [Hz], Parameter 16-13 Frequenz.
•
Motorstrom [A], Parameter 16-14 Motorstrom.
•
Motordrehzahlsollwert in Prozent [%],
•
Parameter 16-02 Sollwert [%].
Istwert, Parameter 16-52 Istwert [Einheit].
•
Motorleistung Parameter 16-10 Leistung [kW] für
•
kW, Parameter 16-11 Leistung [PS] für HP. Wenn
Parameter 0-03 Ländereinstellungen auf [1] NordAmerika eingestellt ist, wird die Motorleistung in
der Einheit HP anstelle von kW angezeigt.
Kundenspezifische Auswahl der Anzeige,
•
Parameter 16-09 Benutzerdefinierte Anzeige.
Motordrehzahl [UPM], Parameter 16-17 Drehzahl
•
[UPM].
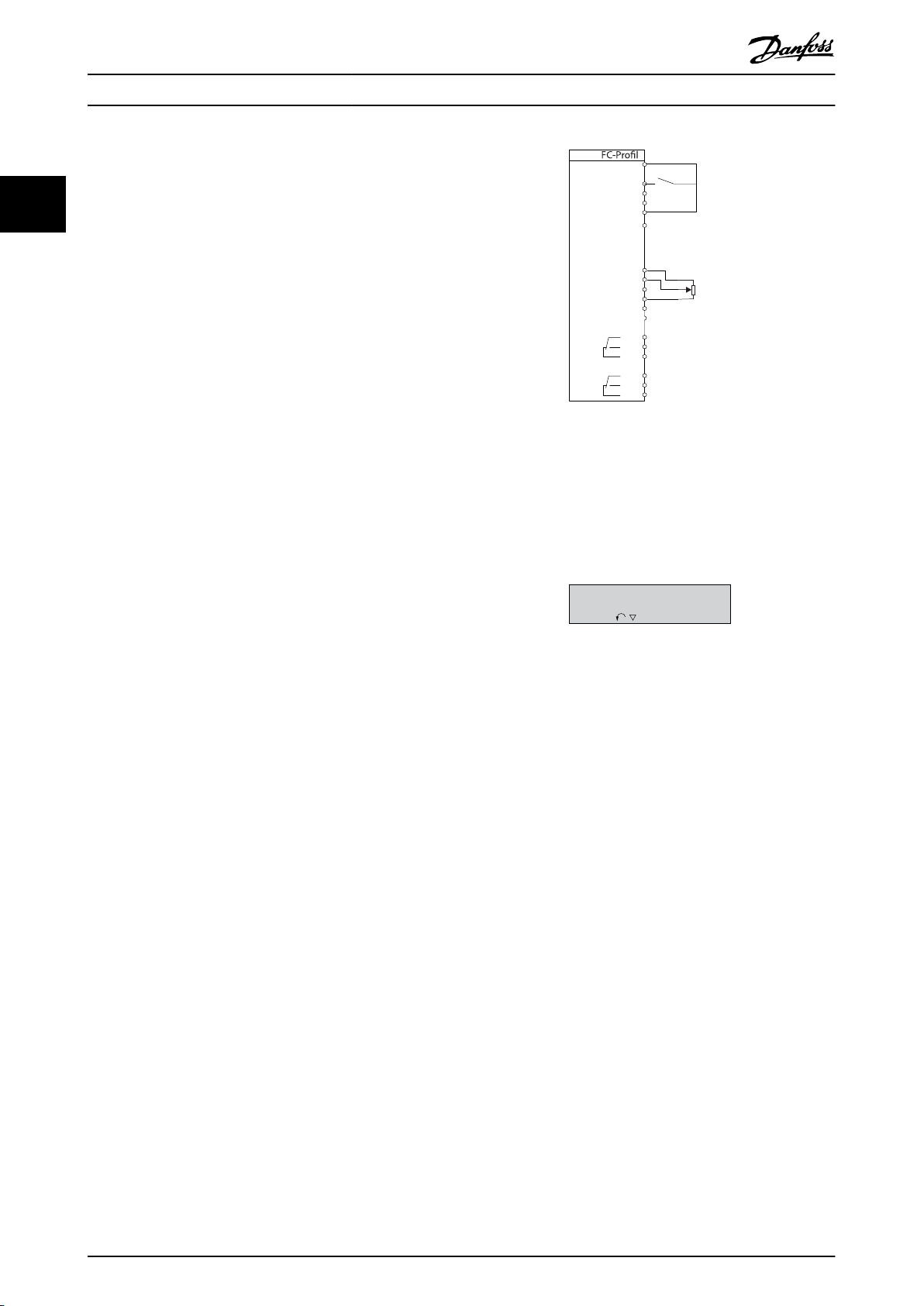
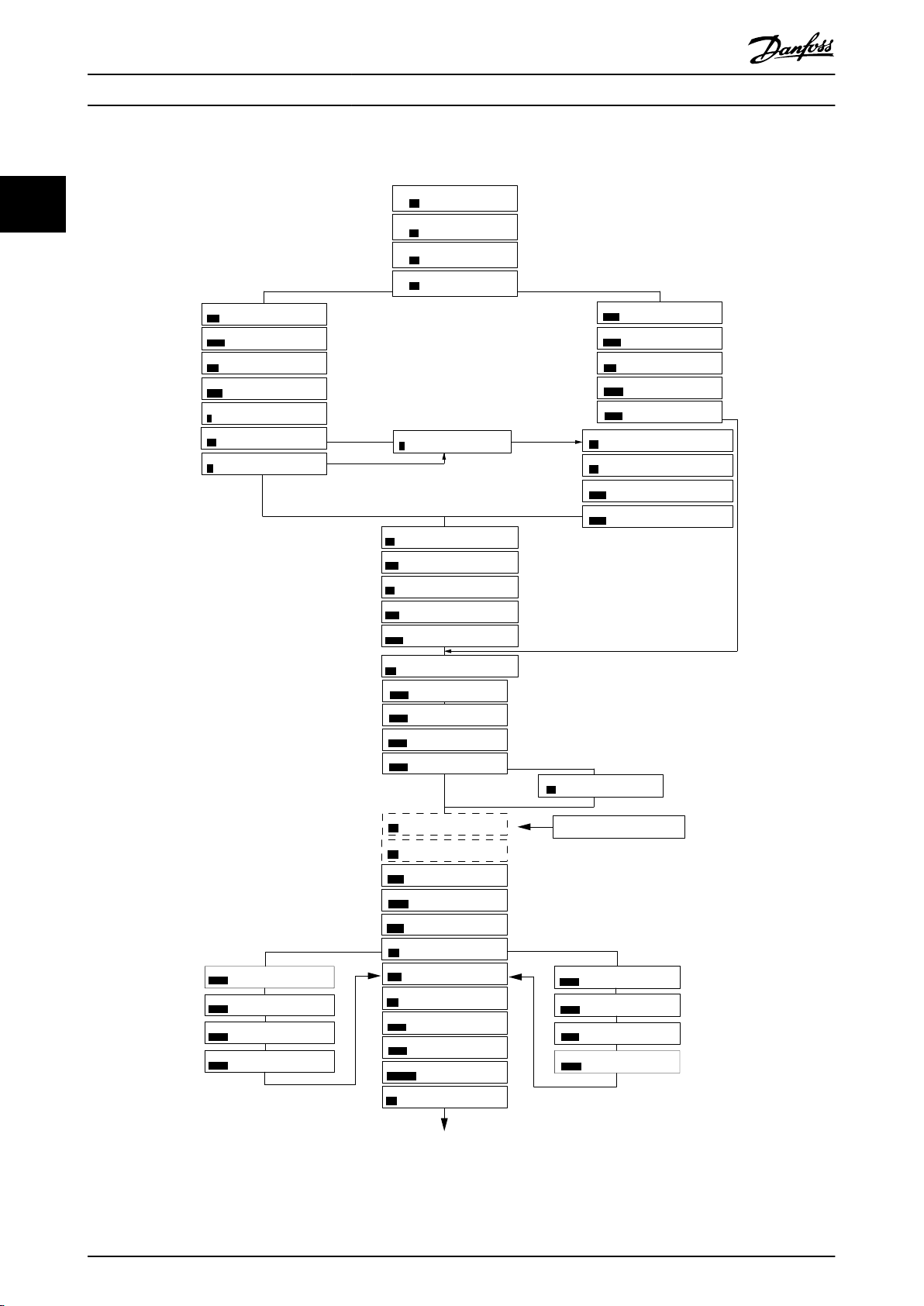
2.3.2 Quick Menu
Abbildung 2.2 Verdrahtung des Frequenzumrichters
Der Assistent wird nach dem Netz-Ein zunächst angezeigt,
bis ein Parameter geändert wird. Sie können den Assistent
jederzeit über das Quick-Menü aufrufen. Drücken Sie [OK],
um den Assistenten zu starten. Drücken Sie [Back], um zur
Statusanzeige zurückzukehren.
Programmieren Sie über das Quick-Menü die gängigsten
Funktionen. Das Quick-Menü umfasst:
Assistent für Anwendungen mit Regelung ohne
•
Rückführung. Nähere Angaben finden Sie in
Abbildung 2.4.
Assistent für Anwendungen mit Regelung mit
•
Rückführung. Nähere Angaben finden Sie in
Abbildung 2.5.
Motoreinstellung. Nähere Angaben finden Sie in
•
Tabelle 2.6.
Liste geänderter Parameter.
•
Der Inbetriebnahmeassistent führt den Installateur
übersichtlich und strukturiert durch die Schritte zur
Inbetriebnahme des Frequenzumrichters, um eine
Anwendung mit Regelung mit und ohne Rückführung
einzurichten und schnelle Motoreinstellungen
vorzunehmen.
Abbildung 2.3 Assistenten starten/beenden
10 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 13
Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
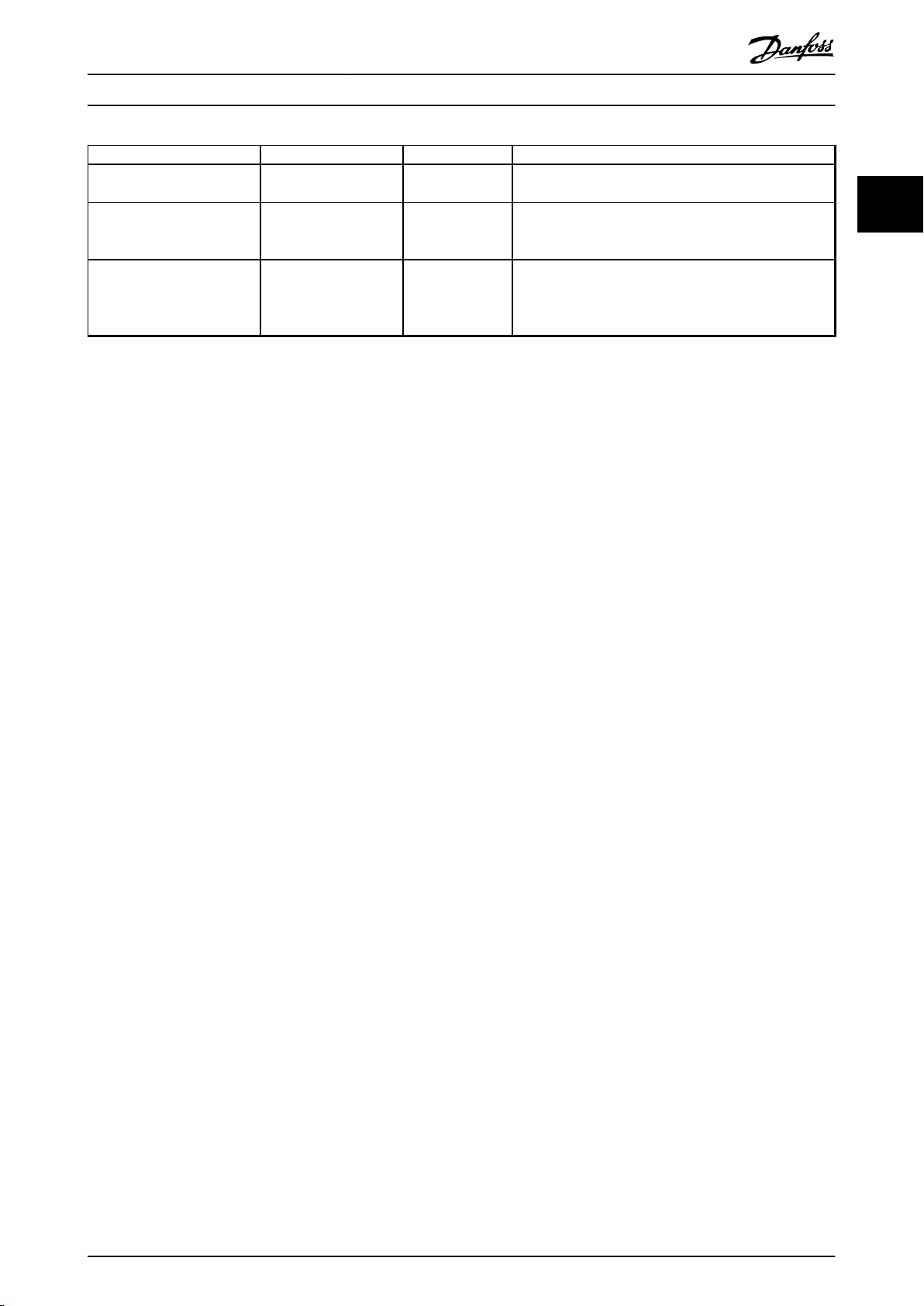
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmieren Programmierhandbuch
2 2
Abbildung 2.4 Inbetriebnahmeassistent für Anwendungen ohne Rückführung
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 11
Page 14
Programmieren
VLT® HVAC Basic Drive FC 101
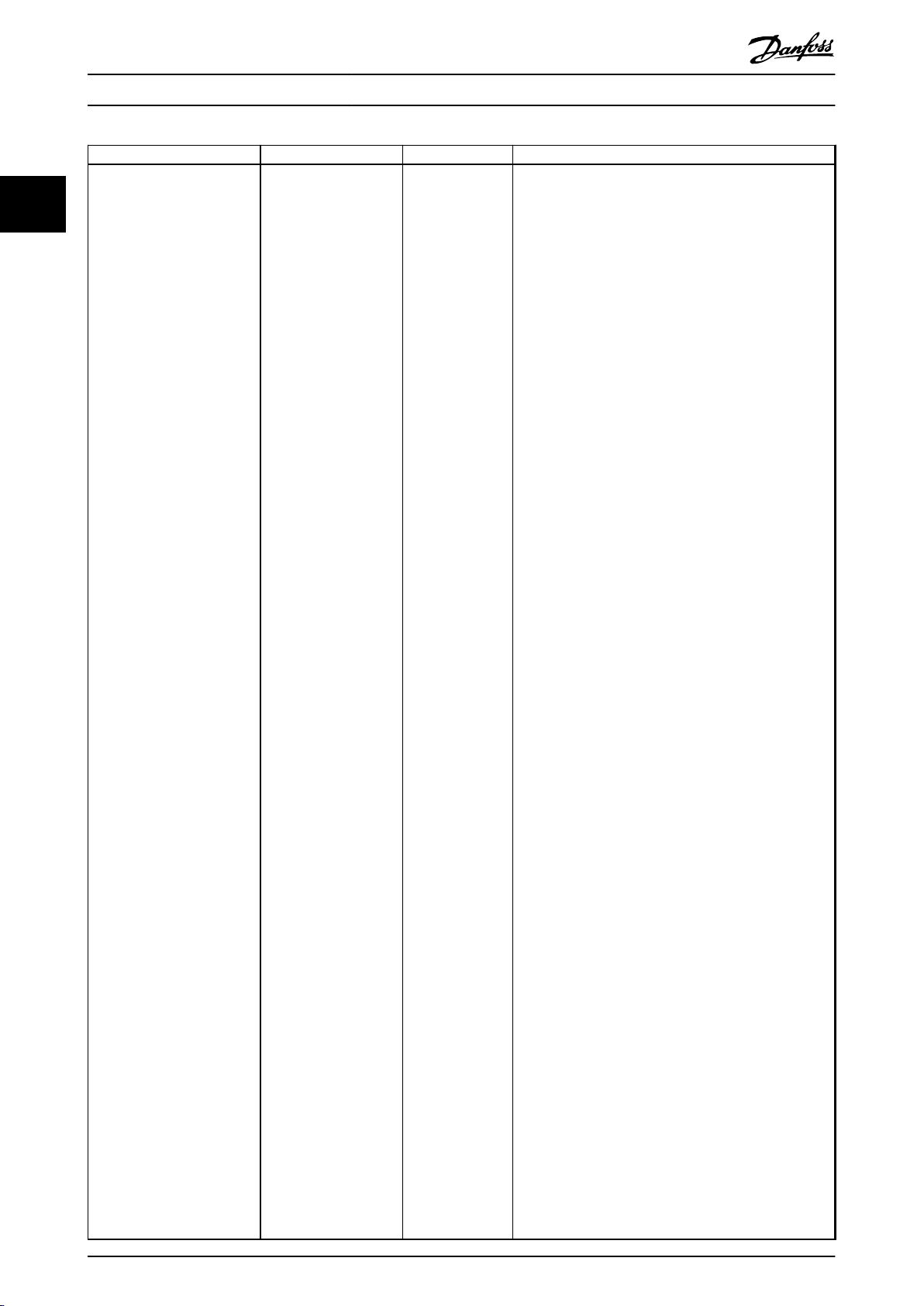
Inbetriebnahmeassistent für Anwendungen ohne Rückführung
Parameter Option Werkseinstellung Nutzung
22
Parameter 0-03 Ländereinstellungen
[0] International
[1] Nord-Amerika
[0] International –
Parameter 0-06 Netztyp [0] 200–240 V/50 Hz/IT-
Netz
[1] 200–240 V/50 Hz/
Dreieck
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/ITNetz
[11] 380–440 V/50 Hz/
Dreieck
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/ITNetz
[21] 440–480 V/50 Hz/
Dreieck
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/ITNetz
[31] 525–600 V/50 Hz/
Dreieck
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/ITNetz
[101] 200–240 V/60 Hz/
Dreieck
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/ITNetz
[111] 380–440 V/60 Hz/
Dreieck
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/ITNetz
[121] 440–480 V/60 Hz/
Dreieck
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/ITNetz
[131] 525–600 V/60 Hz/
Dreieck
[132] 525–600 V/60 Hz
Größenabhängig Auswahl der Betriebsart nach Wiederzuschalten der
Netzspannung zum Frequenzumrichter nach einem NetzAus.
12 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 15
Programmieren Programmierhandbuch
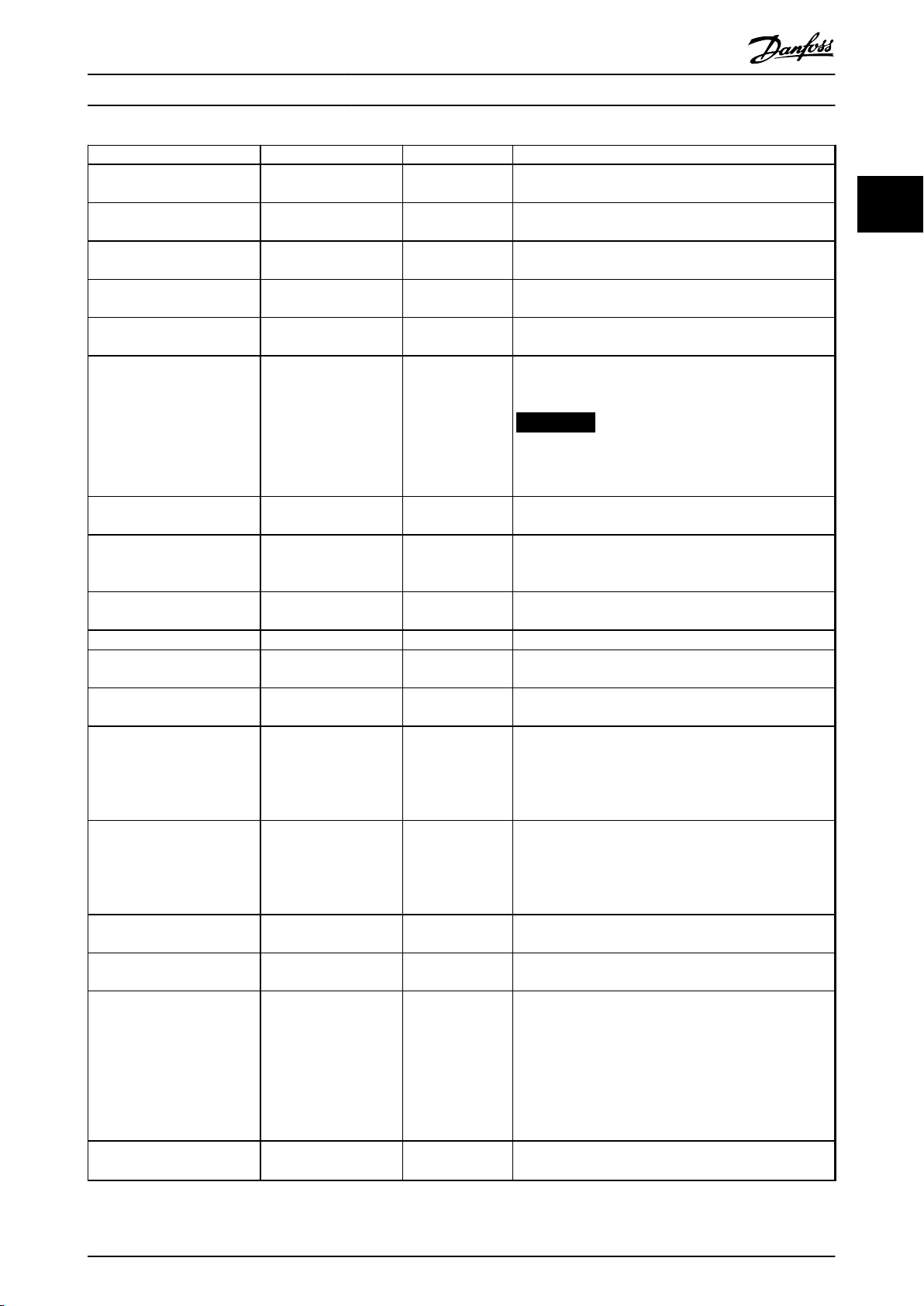
Parameter Option Werkseinstellung Nutzung
Parameter 1-10 Motorart *[0] Asynchron
[1] PM, non-salient SPM
[3] PM, salient IPM
[0] Asynchron Durch die Einstellung des Parameterwerts können sich die
folgenden Parameter ändern:
Parameter 1-01 Steuerprinzip.
•
Parameter 1-03 Drehmomentverhalten der Last.
•
Parameter 1-08 Bandbreite der Motorsteuerung.
•
Parameter 1-14 Dämpfungsfaktor.
•
Parameter 1-15 Filter niedrige Drehzahl
•
Parameter 1-16 Filter hohe Drehzahl
•
Parameter 1-17 Spannungskonstante
•
Parameter 1-20 Motorleistung.
•
Parameter 1-22 Motornennspannung.
•
Parameter 1-23 Motornennfrequenz.
•
Parameter 1-24 Motornennstrom.
•
Parameter 1-25 Motornenndrehzahl.
•
Parameter 1-26 Dauer-Nenndrehmoment.
•
Parameter 1-30 Statorwiderstand (Rs).
•
Parameter 1-33 Statorstreureaktanz (X1).
•
Parameter 1-35 Hauptreaktanz (Xh).
•
Parameter 1-37 Indukt. D-Achse (Ld).
•
Parameter 1-38 Indukt. Q-Achse (Lq).
•
Parameter 1-39 Motorpolzahl.
•
Parameter 1-40 Gegen-EMK bei 1000 UPM.
•
Parameter 1-44 Induktivitätssät. D-Achse (LdSat).
•
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat).
•
Parameter 1-46 Verstärkung Positionserkennung.
•
Parameter 1-48 Strom bei min. Induktivität für D-Achse.
•
Parameter 1-49 Strom bei min. Induktivität für Q-Achse.
•
Parameter 1-66 Min. Strom bei niedr. Drz..
•
Parameter 1-70 Startfunktion.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Motorfangschaltung.
•
Parameter 1-80 Funktion bei Stopp.
•
Parameter 1-82 Ein.-Frequenz für Stoppfunktion [Hz].
•
Parameter 1-90 Thermischer Motorschutz.
•
Parameter 2-00 DC-Halte-/Vorwärmstrom.
•
Parameter 2-01 DC-Bremsstrom.
•
Parameter 2-02 DC-Bremszeit.
•
Parameter 2-04 DC-Bremse Ein.
•
Parameter 2-10 Bremsfunktion.
•
Parameter 4-14 Max Frequenz [Hz].
•
Parameter 4-19 Max. Ausgangsfrequenz.
•
Parameter 4-58 Motorphasen Überwachung.
•
Parameter 14-65 Drehzahl-Reduzierung, Totzeit-
•
Kompensat.
2 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 13
Page 16

Programmieren
Parameter Option Werkseinstellung Nutzung
Parameter 1-20 Motorleistung 0,12–110 kW/0,16–150 PS Größenabhängig Eingabe der Motornennleistung von den Typenschilddaten.
22
Parameter 1-22 Motornennspannung
Parameter 1-23 Motornennfrequenz
Parameter 1-24 Motornennstrom0,01–10000,00 A Größenabhängig Eingabe des Motornennstroms von den Typenschilddaten.
50–1000 V Größenabhängig Eingabe der Motornennspannung von den
20–400 Hz Größenabhängig Eingabe der Motornennfrequenz von den
VLT® HVAC Basic Drive FC 101
Typenschilddaten.
Typenschilddaten.
Parameter 1-25 Motornenndrehzahl
Parameter 1-26 DauerNenndrehmoment
50–9999 U/min Größenabhängig Eingabe der Motornenndrehzahl von den
Typenschilddaten.
0,1–1000,0 Nm Größenabhängig Dieser Parameter ist verfügbar, wenn
Parameter 1-10 Motorart auf Optionen eingestellt ist, die
den Permanentmagnetmotormodus aktivieren.
HINWEIS
Eine Änderung des Wertes in diesem Parameter
beeinflusst die Einstellung anderer Parameter.
Parameter 1-29 Autom.
Motoranpassung (AMA)
Parameter 1-30 Statorwiderstand (Rs)
Parameter 1-37 Indukt. D-Achse
(Ld)
Parameter 1-38 Indukt. Q-Achse
(Lq)
Parameter 1-39 Motorpolzahl 2–100 4 Geben Sie die Anzahl der Motorpole ein.
Parameter 1-40 Gegen-EMK bei
1000 UPM
Parameter 1-42 Motorkabellänge
Parameter 1-44 Induktivitätssät.
D-Achse (LdSat)
Parameter 1-45 Induktivitätssät.
Q-Achse (LqSat)
Parameter 1-46 Verstärkung
Positionserkennung
Parameter 1-48 Strom bei min.
Induktivität für D-Achse
Parameter 1-49 Strom bei min.
Induktivität für Q-Achse
Siehe
Parameter 1-29 Autom.
Motoranpassung (AMA).
0,000–99,990 Ω
0,000–1000,000 mH Größenabhängig Eingabe des Werts der D-Achsen-Induktivität.
0,000–1000,000 mH Größenabhängig Eingabe des Werts der Q-Achsen-Induktivität.
10–9000 V Größenabhängig Gegen-EMK-Spannung zwischen Phasen bei 1000 UPM.
0–100 m 50 m Eingabe der Motorkabellänge.
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
20–200% 100% Zur Einstellung der Höhe des Testimpulses während der
20–200% 100% Eingabe der Induktivitätssättigungsgrenze.
20–200% 100% In diesem Parameter wird die Sättigungskurve der D- und
Aus Ausführen einer AMA optimiert die Motorleistung.
Größenabhängig Stellen Sie den Wert des Statorwiderstands ein.
Den Wert können Sie dem Datenblatt des Permanentmagnetmotors entnehmen.
Ld. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-37 Indukt. D-Achse (Ld). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Lq. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-38 Indukt. Q-Achse (Lq). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Positionserkennung beim Start.
Q-Induktivitätswerte festgelegt. Von 20 % bis 100 % dieses
Parameters werden die Induktivitäten anhand der
Parameter Parameter 1-37 Indukt. D-Achse (Ld),
Parameter 1-38 Indukt. Q-Achse (Lq), Parameter 1-44 Induktivitätssät. D-Achse (LdSat) und
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat) linear
genähert.
14 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 17
Programmieren Programmierhandbuch
Parameter Option Werkseinstellung Nutzung
Parameter 1-70 Startfunktion [0] Rotorlageerkennung
[1] Parken
Parameter 1-73 Motorfangschaltung
Parameter 3-02 Minimaler
Sollwert
Parameter 3-03 Maximaler
Sollwert
Parameter 3-41 Rampenzeit Auf10,05–3600,00 s Größenabhängig Wenn Asynchronmotor ausgewählt ist, verläuft die Rampe-
Parameter 3-42 Rampenzeit Ab10,05–3600,00 s Größenabhängig Bei Asynchronmotoren wird die Rampe-Ab-Zeit von
Parameter 4-12 Min. Frequenz
[Hz]
Parameter 4-14 Max Frequenz
[Hz]
Parameter 4-19 Max. Ausgangsfrequenz
Parameter 5-40 Relaisfunktion Siehe
Parameter 5-40 Relaisfunktion Siehe
Parameter 6-10 Klemme 53 Skal.
Min.Spannung
Parameter 6-11 Klemme 53 Skal.
Max.Spannung
Parameter 6-12 Klemme 53 Skal.
Min.Strom
Parameter 6-13 Klemme 53 Skal.
Max.Strom
Parameter 6-19 Terminal 53
mode
Parameter 30-22 Blockierter
Rotorschutz
Parameter 30-23 Erkennungszeit
blockierter Rotor [s]
[0] Deaktiviert
[1] Aktiviert
-4999,000–4999,000 0 Der minimale Sollwert bestimmt den Mindestwert aus der
-4999,000–4999,000 50 Der maximale Sollwert bestimmt den Höchstwert aus der
0,0–400,0 Hz 0 Hz Eingabe der Untergrenze der min. Drehzahl.
0,0–400,0 Hz 100 Hz Eingabe der Obergrenze der max. Drehzahl.
0,0–400,0 Hz 100 Hz Eingabe des maximalen Ausgangsfrequenzwerts. Wenn
Parameter 5-40 Relais-
funktion.
Parameter 5-40 Relais-
funktion.
0,00–10,00 V 0,07 V Eingabe der Spannung, die dem minimalen Sollwert
0,00–10,00 V 10 V Eingabe der Spannung, die dem maximalen Sollwert
0,00–20,00 mA 4 mA Eingabe des Stroms, der dem minimalen Sollwert
0,00–20,00 mA 20 mA Eingabe des Stroms, der dem maximalen Sollwert
[0] Strom
[1] Spannung
[0] Aus
[1] An
0,05–1 s 0,10 s
[0] Rotorlageerkennung
[0] Deaktiviert Durch Auswahl von [1] Aktiviert kann der Frequenzum-
[9] Alarm Auswahl der Funktion zur Steuerung von Ausgangsrelais 1.
[5] Motor dreht Auswahl der Funktion zur Steuerung von Ausgangsrelais 2.
[1] Spannung Auswahl, ob Klemme 53 für Strom- oder Spannungs-
[0] Aus
Wählen Sie den Startmodus des PM-Motors.
richter einen durch Netzausfall drehenden Motor fangen.
Wählen Sie [0] Deaktiviert, wenn Sie diese Funktion nicht
wünschen. Wenn dieser Parameter auf [1] Aktiviert gesetzt
wird, haben Parameter 1-71 Startverzög. und
Parameter 1-72 Startfunktion keine Funktion.
Parameter 1-73 Motorfangschaltung ist nur im VVC+-Modus
aktiv.
Summe aller Sollwerte.
Summe aller Sollwerte.
Auf Zeit von 0 bis zur nominellen
Parameter 1-23 Motornennfrequenz. Wenn PM-Motor
ausgewählt ist, verläuft die Rampe-Auf Zeit von 0 bis zur
nominellen Parameter 1-25 Motornenndrehzahl.
Parameter 1-23 Motornennfrequenz bis 0 bemessen. Bei PMMotoren beträgt die Rampe-Ab-Zeit zwischen
Parameter 1-25 Motornenndrehzahl und 0.
Parameter 4-19 Max. Ausgangsfrequenz niedriger als
Parameter 4-14 Max Frequenz [Hz] eingestellt ist, wird
Parameter 4-14 Max Frequenz [Hz] automatisch identisch zu
Parameter 4-19 Max. Ausgangsfrequenz eingestellt.
entspricht.
entspricht.
entspricht.
entspricht.
eingang verwendet wird.
–
–
2 2
Tabelle 2.4 Inbetriebnahmeassistent für Anwendungen ohne Rückführung
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 15
Page 18
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
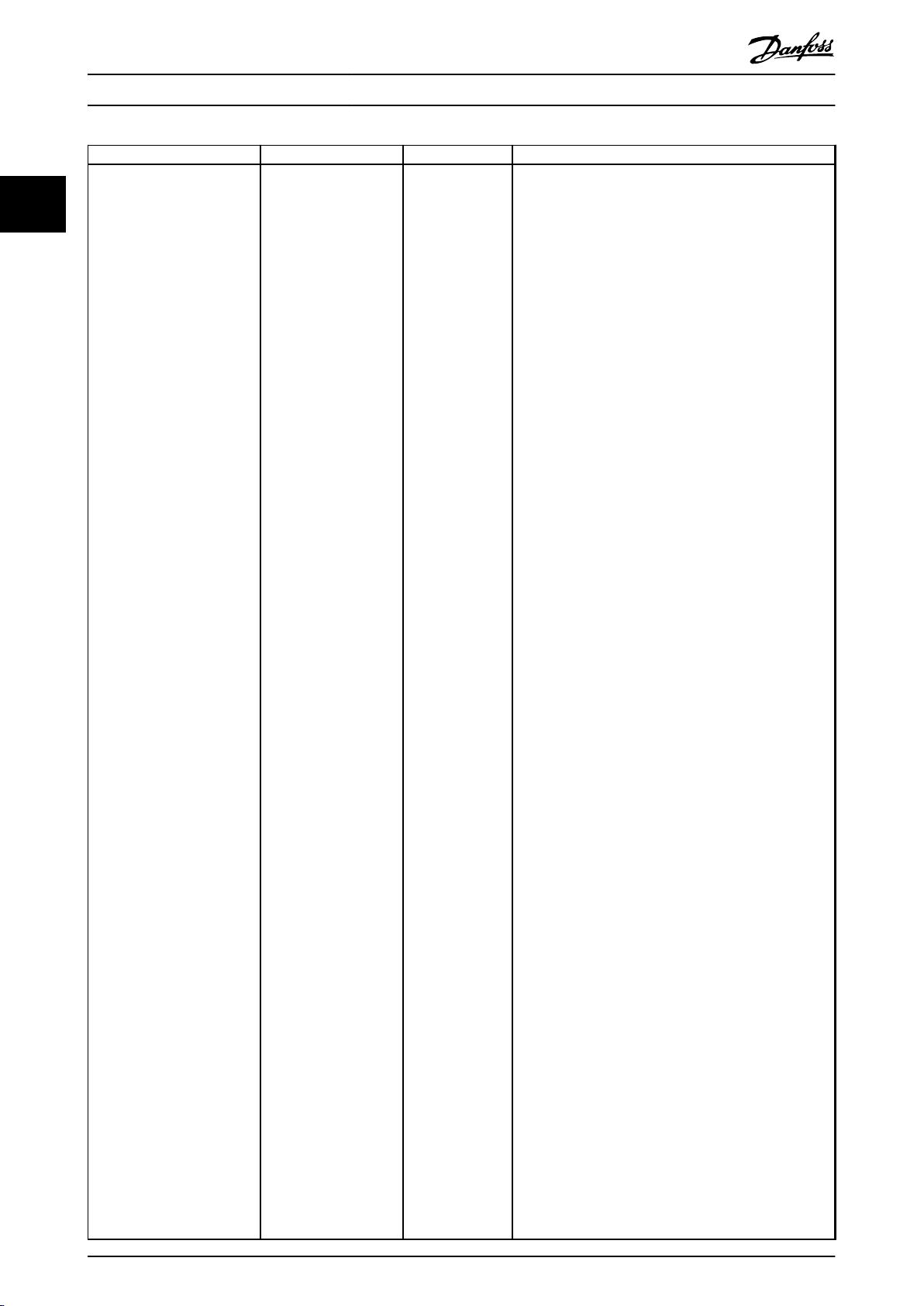
Programmieren
Einrichtungsassistent für Anwendungen mit Regelung mit Rückführung
22
VLT® HVAC Basic Drive FC 101
16 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Abbildung 2.5 Einrichtungsassistent für Anwendungen mit Regelung mit Rückführung
Page 19
Programmieren Programmierhandbuch
Parameter Bereich Werkseinstellung Nutzung
Parameter 0-03 Ländereinstellungen
Parameter 0-06 Netztyp [0]–[132] siehe
Parameter 1-00 Regelverfahren [0] Regelung ohne
[0] International
[1] Nord-Amerika
Tabelle 2.4.
Rückführung
[3] Regelung mit
Rückführung
[0] International –
Größe ausgewählt Auswahl der Betriebsart nach Wiederzuschalten der
Netzspannung zum Frequenzumrichter nach einem NetzAus.
[0] Regelung ohne
Rückführung
Auswahl von [3] Regelung mit Rückführung.
2 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 17
Page 20
Programmieren
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-10 Motorart *[0] Asynchron
[1] PM, non-salient SPM
22
[3] PM, salient IPM
VLT® HVAC Basic Drive FC 101
[0] Asynchron Durch die Einstellung des Parameterwerts können sich die
folgenden Parameter ändern:
Parameter 1-01 Steuerprinzip.
•
Parameter 1-03 Drehmomentverhalten der Last.
•
Parameter 1-08 Bandbreite der Motorsteuerung.
•
Parameter 1-14 Dämpfungsfaktor.
•
Parameter 1-15 Filter niedrige Drehzahl
•
Parameter 1-16 Filter hohe Drehzahl
•
Parameter 1-17 Spannungskonstante
•
Parameter 1-20 Motorleistung.
•
Parameter 1-22 Motornennspannung.
•
Parameter 1-23 Motornennfrequenz.
•
Parameter 1-24 Motornennstrom.
•
Parameter 1-25 Motornenndrehzahl.
•
Parameter 1-26 Dauer-Nenndrehmoment.
•
Parameter 1-30 Statorwiderstand (Rs).
•
Parameter 1-33 Statorstreureaktanz (X1).
•
Parameter 1-35 Hauptreaktanz (Xh).
•
Parameter 1-37 Indukt. D-Achse (Ld).
•
Parameter 1-38 Indukt. Q-Achse (Lq).
•
Parameter 1-39 Motorpolzahl.
•
Parameter 1-40 Gegen-EMK bei 1000 UPM.
•
Parameter 1-44 Induktivitätssät. D-Achse (LdSat).
•
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat).
•
Parameter 1-46 Verstärkung Positionserkennung.
•
Parameter 1-48 Strom bei min. Induktivität für D-Achse.
•
Parameter 1-49 Strom bei min. Induktivität für Q-Achse.
•
Parameter 1-66 Min. Strom bei niedr. Drz..
•
Parameter 1-70 Startfunktion.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Motorfangschaltung.
•
Parameter 1-80 Funktion bei Stopp.
•
Parameter 1-82 Ein.-Frequenz für Stoppfunktion [Hz].
•
Parameter 1-90 Thermischer Motorschutz.
•
Parameter 2-00 DC-Halte-/Vorwärmstrom.
•
Parameter 2-01 DC-Bremsstrom.
•
Parameter 2-02 DC-Bremszeit.
•
Parameter 2-04 DC-Bremse Ein.
•
Parameter 2-10 Bremsfunktion.
•
Parameter 4-14 Max Frequenz [Hz].
•
Parameter 4-19 Max. Ausgangsfrequenz.
•
Parameter 4-58 Motorphasen Überwachung.
•
Parameter 14-65 Drehzahl-Reduzierung, Totzeit-
•
Kompensat.
18 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 21
Programmieren Programmierhandbuch
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-20 Motorleistung 0,09–110 kW Größenabhängig Eingabe der Motornennleistung von den Typenschilddaten.
Parameter 1-22 Motornennspannung
Parameter 1-23 Motornennfrequenz
Parameter 1-24 Motornennstrom0–10000 A Größenabhängig Eingabe des Motornennstroms von den Typenschilddaten.
50–1000 V Größenabhängig Eingabe der Motornennspannung von den
Typenschilddaten.
20–400 Hz Größenabhängig Eingabe der Motornennfrequenz von den
Typenschilddaten.
2 2
Parameter 1-25 Motornenndrehzahl
Parameter 1-26 DauerNenndrehmoment
50–9999 U/min Größenabhängig Eingabe der Motornenndrehzahl von den
Typenschilddaten.
0,1–1000,0 Nm Größenabhängig Dieser Parameter ist verfügbar, wenn
Parameter 1-10 Motorart auf Optionen eingestellt ist, die
den Permanentmagnetmotormodus aktivieren.
HINWEIS
Eine Änderung des Wertes in diesem Parameter
beeinflusst die Einstellung anderer Parameter.
Parameter 1-29 Autom.
Motoranpassung (AMA)
Parameter 1-30 Statorwiderstand (Rs)
Parameter 1-37 Indukt. D-Achse
(Ld)
Parameter 1-38 Indukt. Q-Achse
(Lq)
Parameter 1-39 Motorpolzahl 2–100 4 Geben Sie die Anzahl der Motorpole ein.
Parameter 1-40 Gegen-EMK bei
1000 UPM
Parameter 1-42 Motorkabellänge
Parameter 1-44 Induktivitätssät.
D-Achse (LdSat)
Parameter 1-45 Induktivitätssät.
Q-Achse (LqSat)
Parameter 1-46 Verstärkung
Positionserkennung
Parameter 1-48 Strom bei min.
Induktivität für D-Achse
Parameter 1-49 Strom bei min.
Induktivität für Q-Achse
Parameter 1-70 Startfunktion [0] Rotorlageerkennung
Aus Ausführen einer AMA optimiert die Motorleistung.
0–99,990 Ω
0,000–1000,000 mH Größenabhängig Eingabe des Werts der D-Achsen-Induktivität.
0,000–1000,000 mH Größenabhängig Eingabe des Werts der Q-Achsen-Induktivität.
10–9000 V Größenabhängig Gegen-EMK-Spannung zwischen Phasen bei 1000 UPM.
0–100 m 50 m Eingabe der Motorkabellänge.
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
20–200% 100% Zur Einstellung der Höhe des Testimpulses während der
20–200% 100% Eingabe der Induktivitätssättigungsgrenze.
20–200% 100% In diesem Parameter wird die Sättigungskurve der D- und
[1] Parken
Größenabhängig Stellen Sie den Wert des Statorwiderstands ein.
Den Wert können Sie dem Datenblatt des Permanentmagnetmotors entnehmen.
Ld. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-37 Indukt. D-Achse (Ld). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Lq. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-38 Indukt. Q-Achse (Lq). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Positionserkennung beim Start.
Q-Induktivitätswerte festgelegt. Von 20 % bis 100 % dieses
Parameters werden die Induktivitäten anhand der
Parameter Parameter 1-37 Indukt. D-Achse (Ld),
Parameter 1-38 Indukt. Q-Achse (Lq), Parameter 1-44 Induktivitätssät. D-Achse (LdSat) und
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat) linear
genähert.
[0] Rotorlageerkennung
Wählen Sie den Startmodus des PM-Motors.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 19
Page 22
Programmieren
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-73 Motorfangschaltung
[0] Deaktiviert
[1] Aktiviert
22
Parameter 3-02 Minimaler
Sollwert
Parameter 3-03 Maximaler
Sollwert
Parameter 3-10 Festsollwert -100–100% 0 Eingabe des Sollwerts.
Parameter 3-41 Rampenzeit Auf10,05–3600,0 s Größenabhängig Rampe-Auf-Zeit von 0 bis zur nominellen
Parameter 3-42 Rampenzeit Ab10,05–3600,0 s Größenabhängig Rampe-Ab-Zeit von der nominellen
Parameter 4-12 Min. Frequenz
[Hz]
Parameter 4-14 Max Frequenz
[Hz]
Parameter 4-19 Max. Ausgangsfrequenz
Parameter 6-20 Klemme 54 Skal.
Min.Spannung
Parameter 6-21 Klemme 54 Skal.
Max.Spannung
Parameter 6-22 Klemme 54 Skal.
Min.Strom
Parameter 6-23 Klemme 54 Skal.
Max.Strom
Parameter 6-24 Klemme 54 Skal.
Min.-Soll/Istwert
Parameter 6-25 Klemme 54 Skal.
Max.-Soll/Istwert
Parameter 6-26 Klemme 54
Filterzeit
Parameter 6-29 Klemme 54
Funktion
Parameter 20-81 Auswahl
Normal-/Invers-Regelung
Parameter 20-83 PIStartfrequenz [Hz]
-4999,000–4999,000 0 Der minimale Sollwert bestimmt den Mindestwert aus der
-4999,000–4999,000 50 Der maximale Sollwert bestimmt den Höchstwert aus der
0,0–400,0 Hz 0,0 Hz Eingabe der Untergrenze der min. Drehzahl.
0,0–400,0 Hz 100 Hz Eingabe der Obergrenze der max. Drehzahl.
0,0–400,0 Hz 100 Hz Eingabe des maximalen Ausgangsfrequenzwerts. Wenn
0,00–10,00 V 0,07 V Eingabe der Spannung, die dem minimalen Sollwert
0,00–10,00 V 10,00 V Eingabe der Spannung, die dem maximalen Sollwert
0,00–20,00 mA 4,00 mA Eingabe des Stroms, der dem minimalen Sollwert
0,00–20,00 mA 20,00 mA Eingabe des Stroms, der dem maximalen Sollwert
-4999–4999 0 Eingabe des Istwerts, der dem in Parameter 6-20 Klemme
-4999–4999 50 Eingabe des Istwerts, der dem in Parameter 6-21 Klemme
0,00–10,00 s 0,01 Geben Sie die Filterzeitkonstante ein.
[0] Strom
[1] Spannung
[0] Normal
[1] Invers
0–200 Hz 0 Hz Eingabe der Motordrehzahl, die als Startsignal für eine PI-
VLT® HVAC Basic Drive FC 101
[0] Deaktiviert Durch Auswahl von [1] Aktiviert kann der Frequenzum-
richter einen drehenden Motor abfangen, z. B. in
Lüfteranwendungen. Wenn Sie PM auswählen, wird dieser
Parameter aktiviert.
Summe aller Sollwerte.
Summe aller Sollwerte.
Parameter 1-23 Motornennfrequenz für Asynchronmotoren.
Rampe-Auf-Zeit von 0 bis Parameter 1-25 Motornennd-
rehzahl bei Auswahl eines PM-Motors.
Parameter 1-23 Motornennfrequenz bis 0 für Asynchron-
motoren. Rampe-Ab-Zeit von
Parameter 1-25 Motornenndrehzahl bis 0 für PM-Motoren.
Parameter 4-19 Max. Ausgangsfrequenz niedriger als
Parameter 4-14 Max Frequenz [Hz] eingestellt ist, wird
Parameter 4-14 Max Frequenz [Hz] automatisch identisch zu
Parameter 4-19 Max. Ausgangsfrequenz eingestellt.
entspricht.
entspricht.
entspricht.
entspricht.
54 Skal. Min.Spannung/Parameter 6-22 Klemme 54 Skal.
Min.Strom eingestellten Wert für Spannung oder Strom
entspricht.
54 Skal. Max.Spannung/Parameter 6-23 Klemme 54 Skal.
Max.Strom eingestellten Wert für Spannung oder Strom
entspricht.
[1] Spannung Auswahl, ob Klemme 54 für Strom- oder Spannungs-
eingang verwendet wird.
[0] Normal Auswahl von [0] Normal zur Einstellung der Prozessre-
gelung, um die Ausgangsdrehzahl zu erhöhen, wenn der
Prozessfehler positiv ist. Auswahl von [1] Invers zur
Reduzierung der Ausgangsdrehzahl.
Regelung erreicht werden muss.
20 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 23
Programmieren Programmierhandbuch
Parameter Bereich Werkseinstellung Nutzung
Parameter 20-93 PI-Proportionalverstärkung
Parameter 20-94 PI Integral
Time
Parameter 30-22 Blockierter
Rotorschutz
Parameter 30-23 Erkennungszeit
blockierter Rotor [s]
Tabelle 2.5 Einrichtungsassistent für Anwendungen mit Regelung mit Rückführung
0,00–10,00 0,01 Eingabe der Proportionalverstärkung des Prozessreglers.
Eine schnelle Regelung wird bei hoher Verstärkung
erreicht. Ist die Verstärkung jedoch zu hoch, so kann der
Prozess instabil werden.
0,1–999,0 s 999,0 s Eingabe der Integrationszeit des Prozessreglers. Sie
erreichen eine schnelle Regelung durch eine kurze Integrationszeit; bei zu kurzer Integrationszeit wird der Prozess
jedoch instabil. Eine zu lange Integrationszeit deaktiviert
die Integrationsaktion.
[0] Aus
[1] An
0,05–1,00 s 0,10 s
[0] Aus
–
–
Motoreinstellung
Der Motoreinstellungsassistent führt Benutzer durch die benötigten Motorparameter.
Parameter Bereich Werkseinstellung Nutzung
Parameter 0-03 Ländereinstellungen
Parameter 0-06 Netztyp [0]–[132] siehe
[0] International
[1] Nord-Amerika
Tabelle 2.4.
0 –
Größenabhängig Auswahl der Betriebsart nach Wiederzuschalten der
Netzspannung zum Frequenzumrichter nach einem NetzAus.
2 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 21
Page 24
Programmieren
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-10 Motorart *[0] Asynchron
[1] PM, Rotor mit
22
aufgesetzten Magneten
[3] PM ( Vergr. Magnete)
VLT® HVAC Basic Drive FC 101
[0] Asynchron Durch die Einstellung des Parameterwerts können sich die
folgenden Parameter ändern:
Parameter 1-01 Steuerprinzip.
•
Parameter 1-03 Drehmomentverhalten der Last.
•
Parameter 1-08 Bandbreite der Motorsteuerung.
•
Parameter 1-14 Dämpfungsfaktor.
•
Parameter 1-15 Filter niedrige Drehzahl
•
Parameter 1-16 Filter hohe Drehzahl
•
Parameter 1-17 Spannungskonstante
•
Parameter 1-20 Motorleistung.
•
Parameter 1-22 Motornennspannung.
•
Parameter 1-23 Motornennfrequenz.
•
Parameter 1-24 Motornennstrom.
•
Parameter 1-25 Motornenndrehzahl.
•
Parameter 1-26 Dauer-Nenndrehmoment.
•
Parameter 1-30 Statorwiderstand (Rs).
•
Parameter 1-33 Statorstreureaktanz (X1).
•
Parameter 1-35 Hauptreaktanz (Xh).
•
Parameter 1-37 Indukt. D-Achse (Ld).
•
Parameter 1-38 Indukt. Q-Achse (Lq).
•
Parameter 1-39 Motorpolzahl.
•
Parameter 1-40 Gegen-EMK bei 1000 UPM.
•
Parameter 1-44 Induktivitätssät. D-Achse (LdSat).
•
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat).
•
Parameter 1-46 Verstärkung Positionserkennung.
•
Parameter 1-48 Strom bei min. Induktivität für D-Achse.
•
Parameter 1-49 Strom bei min. Induktivität für Q-Achse.
•
Parameter 1-66 Min. Strom bei niedr. Drz..
•
Parameter 1-70 Startfunktion.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Motorfangschaltung.
•
Parameter 1-80 Funktion bei Stopp.
•
Parameter 1-82 Ein.-Frequenz für Stoppfunktion [Hz].
•
Parameter 1-90 Thermischer Motorschutz.
•
Parameter 2-00 DC-Halte-/Vorwärmstrom.
•
Parameter 2-01 DC-Bremsstrom.
•
Parameter 2-02 DC-Bremszeit.
•
Parameter 2-04 DC-Bremse Ein.
•
Parameter 2-10 Bremsfunktion.
•
Parameter 4-14 Max Frequenz [Hz].
•
Parameter 4-19 Max. Ausgangsfrequenz.
•
Parameter 4-58 Motorphasen Überwachung.
•
Parameter 14-65 Drehzahl-Reduzierung, Totzeit-
•
Kompensat.
22 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 25
Programmieren Programmierhandbuch
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-20 Motorleistung 0,12–110 kW/0,16–150PSGrößenabhängig Eingabe der Motornennleistung von den Typenschilddaten.
Parameter 1-22 Motornennspannung
Parameter 1-23 Motornennfrequenz
Parameter 1-24 Motornennstrom0,01–10000,00 A Größenabhängig Eingabe des Motornennstroms von den Typenschilddaten.
Parameter 1-25 Motornenndrehzahl
Parameter 1-26 DauerNenndrehmoment
50–1000 V Größenabhängig Eingabe der Motornennspannung von den
Typenschilddaten.
20–400 Hz Größenabhängig Eingabe der Motornennfrequenz von den
Typenschilddaten.
50–9999 U/min Größenabhängig Eingabe der Motornenndrehzahl von den
Typenschilddaten.
0,1–1000,0 Nm Größenabhängig Dieser Parameter ist verfügbar, wenn
Parameter 1-10 Motorart auf Optionen eingestellt ist, die
den Permanentmagnetmotormodus aktivieren.
HINWEIS
Eine Änderung des Wertes in diesem Parameter
beeinflusst die Einstellung anderer Parameter.
Parameter 1-30 Statorwiderstand (Rs)
Parameter 1-37 Indukt. D-Achse
(Ld)
Parameter 1-38 Indukt. Q-Achse
(Lq)
Parameter 1-39 Motorpolzahl 2–100 4 Geben Sie die Anzahl der Motorpole ein.
Parameter 1-40 Gegen-EMK bei
1000 UPM
Parameter 1-42 Motorkabellänge
Parameter 1-44 Induktivitätssät.
D-Achse (LdSat)
Parameter 1-45 Induktivitätssät.
Q-Achse (LqSat)
Parameter 1-46 Verstärkung
Positionserkennung
Parameter 1-48 Strom bei min.
Induktivität für D-Achse
Parameter 1-49 Strom bei min.
Induktivität für Q-Achse
Parameter 1-70 Startfunktion [0] Rotorlageerkennung
0–99,990 Ω
0,000–1000,000 mH Größenabhängig Eingabe des Werts der D-Achsen-Induktivität. Den Wert
0,000–1000,000 mH Größenabhängig Eingabe des Werts der Q-Achsen-Induktivität.
10–9000 V Größenabhängig Gegen-EMK-Spannung zwischen Phasen bei 1000 UPM.
0–100 m 50 m Eingabe der Motorkabellänge.
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
0,000–1000,000 mH Größenabhängig Dieser Parameter entspricht der Induktivitätssättigung von
20–200% 100% Zur Einstellung der Höhe des Testimpulses während der
20–200% 100% Eingabe der Induktivitätssättigungsgrenze.
20–200% 100% In diesem Parameter wird die Sättigungskurve der D- und
[1] Parken
Größenabhängig Stellen Sie den Wert des Statorwiderstands ein.
können Sie dem Datenblatt des Permanentmagnetmotors
entnehmen.
Ld. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-37 Indukt. D-Achse (Ld). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Lq. Idealerweise hat dieser Parameter denselben Wert wie
Parameter 1-38 Indukt. Q-Achse (Lq). Wenn der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des Nennwerts ein.
Positionserkennung beim Start.
Q-Induktivitätswerte festgelegt. Von 20 % bis 100 % dieses
Parameters werden die Induktivitäten anhand der
Parameter Parameter 1-37 Indukt. D-Achse (Ld),
Parameter 1-38 Indukt. Q-Achse (Lq), Parameter 1-44 Induktivitätssät. D-Achse (LdSat) und
Parameter 1-45 Induktivitätssät. Q-Achse (LqSat) linear
genähert.
[0] Rotorlageerkennung
Wählen Sie den Startmodus des PM-Motors.
2 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 23
Page 26
Programmieren
Parameter Bereich Werkseinstellung Nutzung
Parameter 1-73 Motorfangschaltung
22
Parameter 3-41 Rampenzeit Auf10,05–3600,0 s Größenabhängig Rampe-Auf-Zeit von 0 bis zur nominellen
Parameter 3-42 Rampenzeit Ab10,05–3600,0 s Größenabhängig Rampe-Ab-Zeit von Nenn-Parameter 1-23 Motornenn-
Parameter 4-12 Min. Frequenz
[Hz]
Parameter 4-14 Max Frequenz
[Hz]
Parameter 4-19 Max. Ausgangsfrequenz
Parameter 30-22 Blockierter
Rotorschutz
Parameter 30-23 Erkennungszeit
blockierter Rotor [s]
[0] Deaktiviert
[1] Aktiviert
0,0–400,0 Hz 0,0 Hz Eingabe der Untergrenze der min. Drehzahl.
0,0–400,0 Hz 100,0 Hz Eingabe der Obergrenze der max. Drehzahl.
0,0–400,0 Hz 100,0 Hz Eingabe des maximalen Ausgangsfrequenzwerts. Wenn
[0] Aus
[1] An
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
[0] Deaktiviert Wählen Sie [1] Aktiviert, um dem Frequenzumrichter zu
ermöglichen, einen drehenden Motor zu fangen.
Parameter 1-23 Motornennfrequenz.
frequenz bis 0.
Parameter 4-19 Max. Ausgangsfrequenz niedriger als
Parameter 4-14 Max Frequenz [Hz] eingestellt ist, wird
Parameter 4-14 Max Frequenz [Hz] automatisch identisch zu
Parameter 4-19 Max. Ausgangsfrequenz eingestellt.
[0] Aus
–
–
Tabelle 2.6 Einstellungen des Motoreinstellungsassistenten
Liste geänderter Parameter
Liste geänd. Param. listet alle Parameter auf, die von der
Werkseinstellung abweichen.
Die Liste zeigt nur Parameter, die im aktuellen
•
Programm-Satz geändert wurden.
Parameter, die auf die Werkseinstellung zurück-
•
gesetzt wurden, werden nicht aufgelistet.
Die Meldung Empty zeigt an, dass keine
•
Parameter geändert wurden.
Ändern von Parametereinstellungen
1. Drücken Sie zum Aufrufen des Quick-Menüs die
[Menu]-Taste, bis der Anzeiger im Display auf dem
Quick-Menü steht.
2.
Drücken Sie die Tasten [▲] [▼] zur Auswahl des
Assistenten, PI-Einstellungen, Motoreinstellung
oder Liste geänd. Param.
3. Drücken Sie [OK].
4.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parameter im Quick-Menü.
5. Drücken Sie zur Auswahl eines Parameters [OK].
6.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
7. Drücken Sie [OK], um die Änderung zu
akzeptieren.
8. Drücken Sie zweimal [Back], um zum Statusmenü
zu wechseln, oder drücken Sie [Menu], um das
Hauptmenü zu öffnen.
Über das Hauptmenü können Sie auf alle Parameter
zugreifen
1. Drücken Sie die Taste [Menu], bis die Option
Hauptmenü hervorgehoben ist.
2.
Verwenden Sie die Tasten [▲] [▼], um durch die
Parametergruppen zu navigieren.
3. Drücken Sie [OK], um eine Parametergruppe
auszuwählen.
4.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parameter der jeweiligen Gruppe.
5. Drücken Sie zur Auswahl des Parameters [OK].
6.
Mit den Tasten [▲] [▼] können Sie den Parameterwert einstellen oder ändern.
7. Drücken Sie [OK], um die Änderung zu
akzeptieren.
2.3.3 Hauptmenü
Drücken Sie auf [Menu], um auf das Hauptmenü
zuzugreifen und alle Parameter zu programmieren. Sie
können direkt auf die Hauptmenüparameter zugreifen,
sofern kein Passwort über Parameter 0-60 Hauptmenü
Passwort erstellt wurde.
Für den Großteil der Anwendungen ist es nicht notwendig,
auf die Hauptmenüparameter zuzugreifen. Das Quick-Menü
bietet den einfachsten und schnellsten Zugriff zu den
gängigsten Parametern.
24 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 27

Programmieren Programmierhandbuch
2.4 Schnelle Übertragung von
Parametereinstellungen zwischen
mehreren Frequenzumrichtern
Sobald die Konfiguration eines Frequenzumrichters
abgeschlossen ist, speichern Sie die Daten im LCP oder
mithilfe der MCT 10 Konfigurationssoftware auf einem PC.
Daten vom Frequenzumrichter zum LCP übertragen
1. Gehen Sie zu Parameter 0-50 LCP-Kopie.
2. Drücken Sie [OK].
3. Wählen Sie [1] Speichern in LCP.
4. Drücken Sie [OK].
Schließen Sie nun das LCP an einen anderen Frequenzumrichter an, und kopieren Sie die Parametereinstellungen
ebenfalls auf diesen Frequenzumrichter.
Datenübertragung vom LCP zum Frequenzumrichter
1. Gehen Sie zu Parameter 0-50 LCP-Kopie.
2. Drücken Sie [OK].
3. Wählen Sie [2] Lade von LCP, Alle.
4. Drücken Sie [OK].
Anzeigen und Programmieren von
2.5
indizierten Parametern
Wählen Sie einen Parameter aus, drücken Sie [OK], und
verwenden Sie [▲]/[▼], um durch die indizierten Werte zu
blättern. Wenn Sie einen Parameterwert ändern möchten,
wählen Sie den indizierten Wert und drücken Sie [OK].
Ändern Sie den Wert mithilfe der Tasten [▲]/[▼]. Drücken
Sie [OK], um die neue Einstellung zu akzeptieren. Drücken
Sie [Cancel], um abzubrechen. Drücken Sie [Back], um den
Parameter zu verlassen.
Initialisierung auf Werkseinstellungen
2.6
Sie können die Werkseinstellungen des Frequenzumrichters
auf zwei Weisen initialisieren.
Empfohlene Initialisierung
1. Wählen Sie Parameter 14-22 Betriebsart aus.
2. Drücken Sie [OK].
3. Wählen Sie [2] Initialisierung aus, und drücken Sie
[OK].
4. Unterbrechen Sie die Netzversorgung des
Frequenzumrichters und warten Sie, bis die
Anzeige erlischt.
5. Stellen Sie die Verbindung zur Netzversorgung
wieder her. Der Frequenzumrichter ist nun zurückgesetzt, mit Ausnahme der folgenden Parameter:
Die andere Möglichkeit, die Werkseinstellungen des
Frequenzumrichters zu initialisieren, ist die Zwei-FingerInitialisierung:
Parameter 1-06 Rechtslauf
•
Parameter 8-30 Protokoll
•
Parameter 8-31 Adresse
•
Parameter 8-32 Baudrate
•
Parameter 8-33 Parität/Stoppbits
•
Parameter 8-35 FC-Antwortzeit Min.-Delay
•
Parameter 8-36 FC-Antwortzeit Max.-Delay
•
Parameter 8-37 FC Interchar. Max.-
•
Verzögerung
Parameter 8-70 BACnet-Gerätebereich
•
Parameter 8-72 MS/TP Max. Masters
•
Parameter 8-73 MS/TP Max. Info-Frames
•
Parameter 8-74 "Startup I am"
•
Parameter 8-75 Initialisierungspasswort
•
Parameter 15-00 Betriebsstunden bis
•
Parameter 15-05 Anzahl Überspannungen
Parameter 15-03 Anzahl Netz-Ein
•
Parameter 15-04 Anzahl Übertempe-
•
raturen
Parameter 15-05 Anzahl Überspannungen
•
Parameter 15-30 Fehlerspeicher:
•
Fehlercode
Parametergruppe 15-4* Typendaten
•
Parameter 18-10 Notfallbetriebspeicher:
•
Ereignis
Zwei-Finger-Initialisierung
1. Schalten Sie den Frequenzumrichter aus.
2. Drücken Sie [OK] und [Menu].
3. Schalten Sie den Frequenzumrichter ein, während
Sie die zuvor genannten Tasten 10 s lang
gedrückt halten.
4. Der Frequenzumrichter ist nun zurückgesetzt, mit
Ausnahme der folgenden Parameter:
Parameter 1-06 Rechtslauf
•
Parameter 15-00 Betriebsstunden
•
Parameter 15-03 Anzahl Netz-Ein
•
Parameter 15-04 Anzahl Übertempe-
•
raturen
Parameter 15-05 Anzahl Überspannungen
•
Parametergruppe 15-4* Typendaten
•
Parameter 18-10 Notfallbetriebspeicher:
•
Ereignis
2 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 25
Page 28

Programmieren
Die Initialisierung der Parameter wird nach dem Aus- und
Einschaltzyklus durch Alarm 80, Frequenzumrichter initial-
isiert im Display bestätigt.
VLT® HVAC Basic Drive FC 101
22
26 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 29
Parameter Programmierhandbuch
3 Parameter
Das Sternchen * in den Parameternummern zeigt eine
Gruppe oder Subgruppe der Parameter an, bei der die
erste bzw. die ersten beiden Ziffern gleich sind.
Beispielsweise zeigt 0-** die mit 0 beginnende Parametergruppe an. 0-0* zeigt die Subgruppe der Parameter an, bei
der die ersten 2 Ziffern identisch sind, d. h. 0-0.
Ein Sternchen (*) nach einer Optionsnummer zeigt an, dass
es sich bei dieser um die Standardoption handelt.
Beispielsweise ist [0]* Englisch (English) die Standardoption
für Parameter 0-01 Sprache.
3.1 Hauptmenü - Betrieb und Display Gruppe 0
Parametergruppe zum Einstellen der allgemeinen
Grundfunktionen des Frequenzumrichters, zur Funktion der
LCP-Tasten und zur Konfiguration des LCP-Displays.
3.1.1 0-0* Grundeinstellungen
0-01 Sprache
Option: Funktion:
Dieser Parameter bestimmt die im
Display verwendete Sprache.
[0] * Englisch (English)
[1] Deutsch
[2] Francais
[3] Dansk
[4] Espanol
[5] Italiano
[28] Bras. Port.
[255] Numerisches Programm
0-03 Ländereinstellungen
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Um die Anforderung nach unterschiedlichen
Werkseinstellungen in unterschiedlichen Teilen
der Welt zu erfüllen, wird Parameter 0-03 Länder-
einstellungen im Frequenzumrichter realisiert. Mit
der ausgewählten Einstellung ändern Sie die
Werkseinstellung der Motornennfrequenz.
[0]*Interna-
tional
[1] Nord-
Amerika
Stellt den Standardwert von
Parameter 1-23 Motornennfrequenz auf 50 Hz ein.
Stellt den Standardwert von
Parameter 1-23 Motornennfrequenz auf 60 Hz ein.
0-04 Netz-Ein Modus (Hand)
Option: Funktion:
Wählt die Betriebsart des Frequenzumrichters nach Wiederzuschalten der
Netzspannung nach einem Netz-Aus im
Hand-Betrieb (Ortsteuerung) aus.
[0]*Wiederanlauf Setzt den Betrieb des Frequenzumrichters
wie vor dem Netz-Aus fort und behält
dabei den gleichen Ortsollwert und die
gleiche Start/Stopp-Bedingung (angelegt
über [Hand On]/[Off] oder Handstart über
einen Digitaleingang) bei.
[1] LCP
Stop,Letz.Soll.
Verwendet den gespeicherten Sollwert [1]
zum Stoppen des Frequenzumrichters,
jedoch wird vor dem Abschalten gleichzeitig der lokale Drehzahlsollwert im
Speicher behalten. Nach Wiederzuschalten
der Netzspannung und Empfang eines
Startbefehls (Drücken von [Hand On] oder
Anlegen eines Handstart-Befehls über
einen Digitaleingang) startet der Frequenzumrichter wieder und läuft mit dem
gespeicherten Drehzahlsollwert.
0-06 Netztyp
Option: Funktion:
Wählen Sie den Netztyp der
Netzspannung/-frequenz.
HINWEIS
Nicht alle Optionen werden in
allen Leistungsgrößen
unterstützt.
Das IT-Netz ist ein Versorgungsnetz,
bei dem keine Erdanschlüsse
vorhanden sind.
Das Dreieck-Netz ist ein Versorgungsnetz, bei dem sich das
Sekundärteil des Transformators in
einer Dreieckschaltung befindet
und ein Anschluss mit der Erde
verbunden ist.
[0] 200-240V/50Hz/IT-Grid
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/IT-Grid
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/IT-Grid
[21] 440-480V/50Hz/Delta
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 27
Page 30
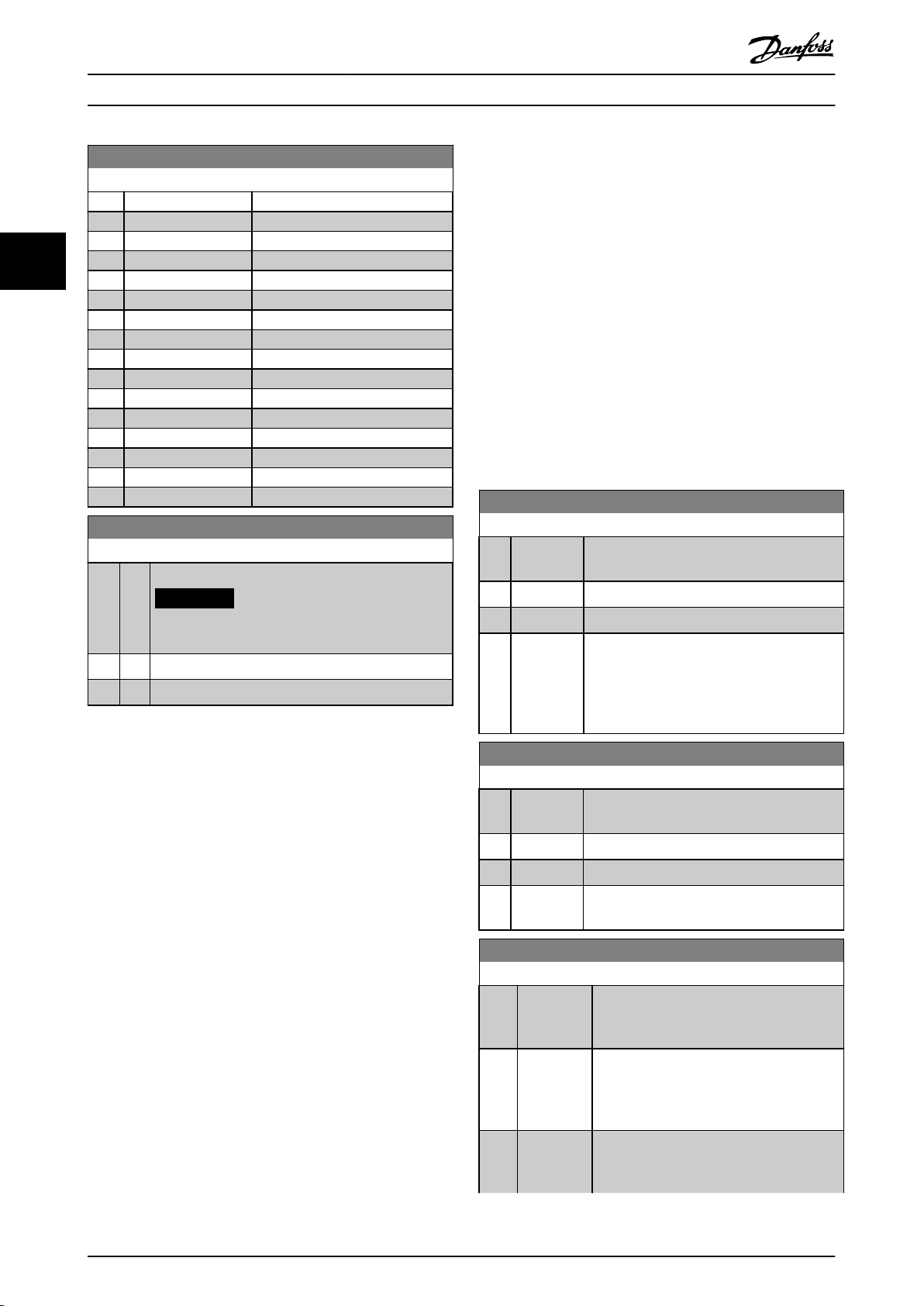
Parameter
VLT® HVAC Basic Drive FC 101
0-06 Netztyp
Option: Funktion:
[22] 440-480V/50Hz
[30] 525-600V/50Hz/IT-Grid
[31] 525-600V/50Hz/Delta
33
[32] 525-600V/50Hz
[100] 200-240V/60Hz/IT-Grid
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/IT-Grid
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/IT-Grid
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
[130] 525-600V/60Hz/IT-Grid
[131] 525-600V/60Hz/Delta
[132] 525-600V/60Hz
0-07 Auto DC-Bremse IT
Option: Funktion:
Schutzfunktion gegen Überspannung bei Freilauf.
HINWEIS
Kann bei Freilauf eine PWM verursachen.
[0] Aus Diese Funktion ist nicht aktiv.
[1] * Ein Diese Funktion ist aktiv.
Sie können den aktiven Satz auf Externe Anwahl einstellen.
Dies bedeutet, dass der aktive Parametersatz über einen
Eingang an einer Digitaleingangsklemme und/oder über
das Bussteuerwort ausgewählt wird.
Um Parametersatz 1 zu Parametersatz 2 oder Parametersatz
2 zu Parametersatz 1 zu kopieren, verwenden Sie
Parameter 0-51 Parametersatz-Kopie. Wenn Sie bei der
Definition von Parametern in zwei verschiedenen Parametersätzen Konflikte vermeiden möchten, verknüpfen Sie die
Sätze mit Parameter 0-12 Satz verknüpfen mit. Stoppen Sie
den Frequenzumrichter, bevor Sie zwischen Parametersätzen wechseln, bei denen Parameter, die als nicht
während des Betriebs änderbar gekennzeichnet sind,
verschiedene Werte aufweisen.
Parameter, die während des Betriebs nicht geändert werden
können, sind in den Parameterlisten in Kapitel 5 Parameter-
listen mit falsch markiert.
0-10 Aktiver Satz
Option: Funktion:
Wählen Sie den Parametersatz für den Betrieb
des Frequenzumrichters.
[1] * Satz 1 Satz 1 ist aktiv.
[2] Satz 2 Satz 2 ist aktiv.
[9] Externe
Anwahl
Diese Option dient zur externen Konfigurationsauswahl mit Hilfe von Digitaleingängen
und der seriellen Kommunikationsschnittstelle.
Dieser Satz verwendet die Einstellungen aus
Parameter 0-12 Satz verknüpfen mit.
3.1.2 0-1* Parametersätze
0-11 Programm-Satz
Ein vollständiger Satz aller Parameter zur Steuerung des
Frequenzumrichters wird auch als Parametersatz
bezeichnet. Der Frequenzumrichter enthält 2 Parametersätze, Parametersatz 1 und Parametersatz 2. Des
Weiteren können Sie einen festen Satz Werkseinstellungen
in einen oder beide Parametersätze kopieren.
Einige Vorteile mehrerer Parametersätze im Frequenzumrichter sind:
Betrieb des Motors in einem Satz (Aktiver
•
Parametersatz), während Parameter in einem
anderen Satz (Programm Satz) aktualisiert werden.
Sie können zwei Motoren (nacheinander) an den
•
Frequenzumrichter anschließen. Sie können die
Motordaten für zwei Motoren in den zwei
Parametersätzen speichern.
Schnelles Umschalten zwischen Einstellungen für
•
Frequenzumrichter und/oder Motor, während der
Motor läuft. Beispielsweise Rampenzeit oder
Festsollwert über Bus-Schnittstelle oder Digitaleingänge.
Option: Funktion:
Die Nummer der bearbeiteten Konfiguration
wird blinkend am LCP angezeigt.
[1] Satz 1 Programm Satz 1.
[2] Satz 2 Programm Satz 2.
[9] * Aktiver Satz Bearbeiten Sie die Parameter in der über die
Digital-I/Os ausgewählten Konfiguration.
0-12 Satz verknüpfen mit
Option: Funktion:
Um bei laufendem Motor zwischen den
Parametersätzen umschalten zu können,
müssen Sie diese zuvor verknüpfen.
[0] Nicht
verknüpft
[20] * Verknüpft Kopiert während des Betriebs nicht änderbare
Wenn ein anderer Parametersatz für den
Betrieb ausgewählt wird, findet die
Umschaltung erst statt, wenn der Motor im
Freilauf ist.
Parametersätze von einer Inbetriebnahme
zur nächsten. Bei laufendem Motor kann
28 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 31

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parameter Programmierhandbuch
0-12 Satz verknüpfen mit
Option: Funktion:
3.1.3 0-3* LCP-Benutzerdef
Die Displayelemente können für verschiedene Zwecke
angepasst werden.
Benutzerdefinierte Anzeige
Der anzuzeigende berechnete Wert basiert auf den Einstellungen in Parameter 0-30 Einheit, Parameter 0-31 Freie
Anzeige Min.-Wert (nur linear), Parameter 0-32 Freie Anzeige
Max. Wert, Parameter 4-14 Max Frequenz [Hz] und der
aktuellen Drehzahl.
Abbildung 3.1 Benutzerdefinierte Anzeige
Die Beziehung hängt von der Art der in
Parameter 0-30 Einheit ausgewählten Maßeinheit ab:
Gerätetyp Drehzahlbeziehung
Dimensionslos
Drehzahl
Durchfluss, Volumen
Durchfluss, Masse
Velocity (Pos. Geschwindigkeit)
Länge
Temperatur
Druck Quadratisch
Leistungs- Kubisch
Tabelle 3.1 Drehzahlbeziehung
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 29
zwischen den Parametersätzen umgeschaltet
werden.
Linear
0-30 Einheit
Option: Funktion:
Wählen Sie die gewünschte Einheit für die
benutzerdefinierte Anzeige am LCP. Die
ausgewählte Einheit ergibt automatisch eine
lineare, quadratische oder kubische Skalierungsbeziehung zur Ausgangsdrehzahl. Diese
Beziehung hängt von der gewählten Einheit
ab (siehe Tabelle 3.1). Der tatsächlich
berechnete Wert kann in
Parameter 16-09 Benutzerdefinierte Anzeige
abgelesen werden.
[0] Kein
[1] * %
[5] PPM
[10] l/min
[11] U/min [UPM]
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Grad Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m wg
[80] kW
[120] GPM
[121] Gal/s
[122] Gal/min
[123] Gal/h
[124] cfm
[127] ft3/h
[140] Fuß/s
[141] Fuß/min
[160] Grad Fahr
[170] psi
[171] lb/in2
[172] inch wg
[173] ft wg
[180] HP
3 3
Page 32

Parameter
VLT® HVAC Basic Drive FC 101
0-31 Freie Anzeige Min.-Wert
Range: Funktion:
0 CustomReadoutUnit*
33
[ 0 -
999999.99
CustomReadoutUnit]
Über diesen Parameter wird der
Mindestwert der benutzerdefinierten Anzeige (liegt bei
Drehzahl 0 vor) festgelegt. Eine
Einstellung ungleich 0 ist nur
möglich, wenn Sie in
Parameter 0-30 Einheit eine
lineare Einheit gewählt haben.
Für Einheiten mit 2. und 3.
Potenz ist der Mindestwert 0.
0-32 Freie Anzeige Max. Wert
Range: Funktion:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Dieser Parameter gibt den
maximalen Wert an, der
angezeigt werden soll, wenn
die Drehzahl des Motors den
eingestellten Wert für
Parameter 4-14 Max Frequenz
[Hz] erreicht hat.
0-37 Displaytext 1
Range: Funktion:
[0 - 0 ] In diesem Parameter können Sie eine einzelne
Textzeichenfolge zum Auslesen über serielle
Kommunikation schreiben. Die Geräte-ID kann
integriert werden.
Nur beim Ausführen von BACnet verwendet.
0-40 [Hand On]-LCP Taste
Option: Funktion:
[0] Alle Deaktivieren Wählen Sie [0] Alle Deaktivieren, um ein
unbeabsichtigtes Starten des Frequenzumrichters im Hand-Betrieb zu
vermeiden.
[1] * Alle aktivieren [Hand on]-Taste ist aktiviert.
0-42 [Auto On]-LCP Taste
Option: Funktion:
[0] Alle Deaktivieren Wählen Sie [0] Alle Deaktivieren, um ein
unbeabsichtigtes Starten des Frequenzumrichters im Hand-Betrieb zu
vermeiden.
[1] * Alle aktivieren Die Taste [Auto On] ist aktiviert.
0-44 [Off/Reset]-LCP Taste
Option: Funktion:
[0] Alle Deaktivieren Die Off/Reset-Taste deaktivieren.
[1] * Alle aktivieren Sowohl die Aus- aus auch die Quittier-
funktion aktivieren.
[7] Nur Reset
aktivieren
Die Quittierfunktion aktivieren und AusFunktion deaktivieren, um ein
versehentliches Stoppen des Frequenzumrichters zu vermeiden.
3.1.5 0-5* Kopie/Speichern
Kopieren Sie die Parametereinstellungen zwischen Parame-
0-38 Displaytext 2
Range: Funktion:
[0 - 0 ] In diesem Parameter können Sie eine einzelne
Textzeichenfolge zum Auslesen über serielle
Kommunikation schreiben.
Nur beim Ausführen von BACnet verwendet.
0-39 Displaytext 3
Range: Funktion:
[0 - 0 ] In diesem Parameter können Sie eine einzelne
Textzeichenfolge zum Auslesen über serielle
Kommunikation schreiben.
Nur beim Ausführen von BACnet verwendet.
3.1.4 0-4* LCP-Tasten
Mit diesen Parametern können Sie einzelne Tasten des LCP
aktivieren, deaktivieren und mit einem Kennwortschutz
versehen.
tersätzen und vom bzw. zum LCP.
0-50 LCP-Kopie
Option: Funktion:
[0] * Keine Kopie
[1] Speichern in
LCP
[2] Lade von LCP,
Alle
[3] Lade von
LCP,nur Fkt.
[10] Delete LCP
copy data
Kopiert alle Parameter in allen Parametersätzen aus dem Speicher des
Frequenzumrichters in den LCP-Speicher.
Kopieren Sie zu Wartungszwecken nach der
Inbetriebnahme alle Parameter in das LCP.
Kopiert alle Parameter in allen Parametersätzen vom LCP-Speicher in den Speicher
des Frequenzumrichters.
Kopiert nur Parameter, die von der
Motorgröße unabhängig sind. Sie können
die letzte Auswahl zur Programmierung
mehrerer Frequenzumrichter mit der
gleichen Funktion verwenden, ohne die
Motordaten zu beeinträchtigen.
Löscht kopierte Parameter in LCP. Diese
Funktion setzt voraus, dass die LCP-Version
größer oder gleich V11.00 ist.
30 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 33

Parameter Programmierhandbuch
0-51 Parametersatz-Kopie
Option: Funktion:
[0] * Keine Kopie Keine Funktion.
[1] Kopieren aus
Parametersatz 1
[2] Kopieren aus
Parametersatz 2
[9] Kopieren aus
werkseitigem
Parametersatz
Kopieren Sie Parametersatz 1 zu
Parametersatz 2.
Kopieren Sie Parametersatz 2 zu
Parametersatz 1.
Kopieren Sie die Werkseinstellung in
den Programm-Satz (ausgewählt in
Parameter 0-11 Programm-Satz).
3.1.6 0-6* Passwort
0-60 Hauptmenü Passwort
Range: Funktion:
0* [0 -
999 ]
Dieser Parameter definiert das Passwort zum
Zugriff auf das Hauptmenü über die Taste [Main
Menu]. Durch die Einstellung des Werts auf 0
wird die Passwortfunktion deaktiviert. Nachdem
ein Passwort festgelegt wurde, wird dieser
Parameter ausgegraut.
3 3
0-61 Hauptmenü Zugriff ohne PW
Option: Funktion:
[0] * Vollständig Deaktiviert das unter
Parameter 0-60 Hauptmenü Passwort
festgelegt Passwort.
[1] LCP: Nur Lesen Verhindert das unbefugte Bearbeiten von
Hauptmenüparametern.
[2] LCP: Kein Zugriff Verhindert das unbefugte Anzeigen und
Bearbeiten von Hauptmenüparametern.
[3] Bus: Nur Lesen
[5] Alle: Nur Lesen
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 31
Page 34

Parameter
VLT® HVAC Basic Drive FC 101
3.2 Hauptmenü - Motor/Last - Gruppe 1
Parameter mit Bezug zum Lastausgleich des MotorTypenschilds und zum Anwendungslasttyp.
3.2.1 1-0* Grundeinstellungen
33
1-01 Steuerprinzip
Option: Funktion:
Normale Betriebsart, einschließlich Schlupf- und
Lastausgleiche.
1-03 Drehmomentverhalten der Last
Option: Funktion:
1-00 Regelverfahren
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
[0]*Regelung
ohne
Rückführung
[3] PID-Regler
Die Motordrehzahl wird durch Anwenden
eines Drehzahlsollwerts oder Festlegen der
Drehzahl im Hand-Betrieb bestimmt.
Die Regelung ohne Rückführung wird
ebenfalls verwendet, wenn der Frequenzumrichter Teil eines Steuerungssystems mit
Regelung ohne Rückführung ist, die auf
einem externen PI-Regler beruht, der ein
Drehzahlsollwertsignal als Ausgang bereitstellt.
HINWEIS
[1] * Variables
Drehmoment
[3] Autom.
Energieoptim.
VT
Zur Drehzahlsteuerung von Zentrifugalpumpen und -lüftern. Auch bei
Parallelbetrieb mehrerer Motoren über
den gleichen Frequenzumrichter zu
verwenden (z. B. mehrere Kondensatorlüfter oder Kühlturmgebläse). Stellt eine
Spannung bereit, die für eine quadratische
Drehmomentlastkennlinie des Motors
optimiert ist.
Zur optimal energieeffizienten Drehzahlregelung von Kreiselpumpen und Lüftern
liefert sie eine Spannung, die für eine
quadratische Drehmomentlastkennlinie
des Motors optimiert ist. Die AEOFunktion passt die Spannung zusätzlich
genau an die aktuelle Lastsituation an
und verringert damit Verbrauch und
Störgeräusche vom Motor.
Bei Einstellung auf Mit Rückführung
kehren die Befehle Reversierung und
Start Reversierung die Drehrichtung
des Motors nicht um.
1-06 Rechtslauf
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht einstellen.
Dieser Parameter definiert den Begriff Rechtslauf
entsprechend dem LCP-Richtungspfeil. Wird für
einfachen Wechsel der Laufrichtung der Wellendrehung ohne Umstecken der Motordrähte
verwendet.
Verbindung des Frequenzumrichters im Rechtslauf:
U⇒U; V⇒V; und W⇒W zu Motor.
Verbindung des Frequenzumrichters im Linkslauf:
U⇒U; V⇒V; und W⇒W zu Motor.
1-01 Steuerprinzip
Option: Funktion:
[0] U/f
HINWEIS
Bei der U/f-Steuerung sind Schlupf- und
Lastausgleich nicht enthalten.
Die Motordrehzahl wird durch einen Sollwert
vom integrierten PI-Regler bestimmt. Der
integrierte PI-Regler ändert die
Motordrehzahl als Teil eines Prozessregelsystems mit Rückführung (z. B. konstanter
Druck oder konstanter Durchfluss). Konfigurieren Sie den PI-Regler in Parametergruppe
20-** PID-Regler.
[0] * Normal Die Motorwelle dreht im Rechtslauf bei folgender
[1] Invers Die Motorwelle dreht im Linkslauf bei folgender
Für parallel angeschlossene Motoren und/oder
Sondermotoranwendungen. Stellen Sie die U/fEinstellungen in Parameter 1-55 U/f-Kennlinie - U und
Parameter 1-56 U/f-Kennlinie - F ein.
[1] * VVC+
HINWEIS
Wenn Parameter 1-10 Motorart auf PMaktivierte Optionen eingestellt ist, ist nur die
VVC+-Option verfügbar.
32 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
1-08 Bandbreite der Motorsteuerung
Option: Funktion:
[0] Hoch Geeignet für hohe dynamische Ansprache.
[1] * Mittel Geeignet für ruckfreien stationären Betrieb.
[2] Niedrig Geeignet für ruckfreien stationären Betrieb mit
der geringsten dynamischen Ansprache.
[3] Adaptiv 1 Geeignet für ruckfreien stationären Betrieb mit
zusätzlicher aktiver Dämpfung.
Page 35

Parameter Programmierhandbuch
1-08 Bandbreite der Motorsteuerung
Option: Funktion:
[4] Adaptiv 2 Dies ist eine Alternative zu [3] Adaptiv 1, die
speziell an induktionsarme PM-Motoren
angepasst ist.
3.2.2 1-10 bis 1-13 Motorauswahl
HINWEIS
Sie können diese Parametergruppe bei laufendem Motor
nicht ändern.
Die folgenden Parameter sind je nach der Einstellung von
Parameter 1-10 Motorart aktiv („x”).
[3] PM
[0]
Parameter 1-10 Motorart
Parameter 1-00 Regelverfahren x x x
Parameter 1-03 Drehmomentverhalten der Last
Parameter 1-06 Drehrichtung
rechts
Parameter 1-08 Bandbreite der
Motorsteuerung
Parameter 1-14 Dämpfungsfaktor x x
Parameter 1-15 Filter niedrige
Drehzahl
Parameter 1-16 Filter hohe
Drehzahl
Parameter 1-17 Spannungskonstante
Parameter 1-20 Motornennleistung [kW]
Parameter 1-22 Motornennspannung
Parameter 1-23 Motornennfrequenz
Parameter 1-24 Motornennstrom x x x
Parameter 1-25 Motornenndrehzahl
Parameter 1-26 Dauer-Nenndrehmoment
Parameter 1-29 Autom. Motoranpassung (AMA)
Parameter 1-30 Statorwiderstand
(Rs)
Parameter 1-33 Statorstreureaktanz (X1)
Parameter 1-35 Hauptreaktanz
(Xh)
Parameter 1-37 Indukt. D-Achse
(Ld)
Asynchron
[1] PM,
Vollpol
x
x x x
x x x
x x
x x
x x
x
x
x
x x x
x x
x x x
x x x
x
x
x x
(Vergr.
Magnete),
Sat.
[3] PM
[0]
Parameter 1-10 Motorart
Parameter 1-38 Indukt. Q-Achse
(Lq)
Parameter 1-39 Motorpolzahl x x x
Parameter 1-40 Gegen-EMK bei
1000 UPM
Parameter 1-42 Motorkabellänge x x x
Parameter 1-43 Motorkabellänge
in Fuß
Parameter 1-44 Induktivitätssät.
D-Achse (LdSat)
Parameter 1-45 Induktivitätssät.
Q-Achse (LqSat)
Parameter 1-46 Verstärkung
Positionserkennung
Parameter 1-48 Strom bei min.
Induktivität für D-Achse
Parameter 1-49 Strom bei min.
Induktivität für Q-Achse
Parameter 1-50 Motormagnetisierung bei 0 UPM.
Parameter 1-52 Min. Drehzahl
norm. Magnetis. [Hz]
Parameter 1-55 U/f-Kennlinie - U x
Parameter 1-56 U/f-Kennlinie - F x
Parameter 1-62 Schlupfausgleich x
Parameter 1-63 Schlupfausgleich
Zeitkonstante
Parameter 1-64 Resonanzdämpfung
Parameter 1-65 Resonanzdämpfung Zeitkonstante
Parameter 1-66 Min. Strom bei
niedr. Drz.
Parameter 1-70 Startfunktion x x
Parameter 1-71 Startverzög. x x x
Parameter 1-72 Startfunktion x x x
Parameter 1-73 Motorfangschaltung
Parameter 1-80 Funktion bei
Stopp
Parameter 1-90 Thermischer
Motorschutz
Parameter 2-00 DC-Haltestrom x x x
Parameter 2-01 DC-Bremsstrom x x x
Parameter 2-02 DC-Bremszeit x x x
Parameter 2-04 DC-Bremse Ein
[Hz]
Parameter 2-06 Parken Strom x x
Parameter 2-07 Parkdauer x x
Parameter 2-10 Bremsfunktion x x x
Asynchron
[1] PM,
Vollpol
x
x x
x x x
x
x
x x
x
x
x
x
x
x
x
x x
x x x
x x x
x x x
x x x
(Vergr.
Magnete),
Sat.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 33
Page 36

Parameter
VLT® HVAC Basic Drive FC 101
[3] PM
[0]
Parameter 1-10 Motorart
Parameter 2-16 AC-Bremse max.
Strom
33
Parameter 2-17 Überspannungssteuerung
Parameter 4-10 Motor
Drehrichtung
Parameter 4-14 Max Frequenz
[Hz]
Parameter 4-18 Stromgrenze x x x
Parameter 4-19 Max. Ausgangsfrequenz
Parameter 4-58 Motorphasen
Überwachung
Parameter 14-01 Taktfrequenz x x x
Parameter 14-03 Übermodulation x x x
Parameter 14-07 Totzeit-Kompensationsniveau
Parameter 14-08 Dämpfungsfaktor
Parameter 14-09 Totzeit
Vorspannungs-Strompegel
Parameter 14-10 Netzausfall x x x
Parameter 14-11 NetzausfallSpannung
Parameter 14-12 Funktion bei
Netzphasenfehler
Parameter 14-27 Aktion bei
Wechselrichterstörung
Parameter 14-40 Quadr.Mom.
Anpassung
Parameter 14-41 Minimale AEOMagnetisierung
Parameter 14-44 Stromoptimierung D-Achse für IPM
Parameter 14-50 EMV-Filter x
Parameter 14-51 ZwischenkreisSpannungskompensation
Parameter 14-55 Ausgangsfilter x x x
Parameter 14-64 Totzeit-Kompensation, Nullstrom-Pegel
Parameter 14-65 DrehzahlReduzierung, Totzeit-Kompensat
Parameter 30-22 Blockierter
Rotorschutz
Parameter 30-23 Erkennungszeit
blockierter Rotor [s]
Tabelle 3.2 Aktive Parameter
Asynchron
[1] PM,
Vollpol
x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x
x x
(Vergr.
Magnete),
Sat.
1-10 Motorart
Option: Funktion:
[0] * Asynchron Für Asynchronmotoren.
[1] PM, Vollpol Für Permanentmagnetmotoren (PM) mit
oberflächenmontierten (Vollpol-) Magneten.
Siehe Parameter 1-14 Damping Gain bis
Parameter 1-17 Voltage filter time const. für
detaillierte Informationen zur Optimierung
des Motorbetriebs.
[3] PM (Vergr.
Magnete), Sat.
3.2.3
1-14 bis 1-17 VVC+ PM
Für Permanentmagnetmotoren (PM) mit
innen montierten (Schenkelpol-) Magneten,
mit Induktivitätssättigungsgrenze.
Die Standardsteuerparameter für VVC+ PM-Motorsteuerung
sind für Anwendungen und eine Trägheitslast im Bereich
von 50>Jl/Jm>5 optimiert. Dabei ist Jl die Lastträgheit der
Anwendung und Jm die Maschinenträgheit.
Bei Anwendungen mit niedrigem Trägheitsmoment (Jl/
Jm<5) wird empfohlen, Parameter 1-17 Spannungskonstante
mit einem Faktor von 5-10 zu erhöhen. In einigen Fällen
müssen Sie Parameter 14-08 Dämpfungsfaktor auch
reduzieren, um Leistung und Stabilität zu verbessern.
Bei Anwendungen mit hohem Trägheitsmoment von Jl/
Jm>50 wird empfohlen, Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter hohe Drehzahl zu
erhöhen, um Leistung und Stabilität zu verbessern.
Bei hoher Last mit niedriger Drehzahl (<30 % der
Nenndrehzahl) wird empfohlen, Parameter 1-17 Filter-
zeitkonst. Spannung durch Nichtlinearität im Wechselrichter
bei niedriger Drehzahl zu erhöhen.
1-14 Dämpfungsfaktor
Range: Funktion:
120%* [0 -
250 %]
Der Parameter stabilisiert den PM-Motor, damit
dieser ruhig und stabil läuft. Der Wert der
Dämpfungsverstärkung regelt die dynamische
Leistung des PM-Motors. Eine niedrige
Dämpfungsverstärkung ergibt hohe Dynamik, ein
hoher Wert ergibt geringe dynamische Leistung.
Die dynamische Leistung steht in Bezug zu den
Motordaten und zum Lasttyp. Wenn die
Dämpfungsverstärkung zu hoch oder zu niedrig
ist, wird die Regelung instabil.
1-15 Filter niedrige Drehzahl
Range: Funktion:
Size
related*
[0.01 20 s]
Die Dämpfungszeitkonstante des
Tiefpassfilters bestimmt die Antwortzeit
auf Lastschritte. Schnelle Regelung
erhalten Sie durch eine kurze
Dämpfungszeitkonstante. Wenn Sie
jedoch diesen Wert zu kurz wählen, wird
die Regelung instabil. Diese Zeitkonstante
34 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 37

Parameter Programmierhandbuch
1-15 Filter niedrige Drehzahl
Range: Funktion:
wird unter 10 % Nenndrehzahl
verwendet.
1-16 Filter hohe Drehzahl
Range: Funktion:
Size
related*
[0.01 20 s]
Die Dämpfungszeitkonstante des
Tiefpassfilters bestimmt die Antwortzeit
auf Lastschritte. Schnelle Regelung
erhalten Sie durch eine kurze
Dämpfungszeitkonstante. Wenn Sie
jedoch diesen Wert zu kurz wählen, wird
die Regelung instabil. Diese Zeitkonstante
wird über 10 % Nenndrehzahl verwendet.
1-17 Spannungskonstante
Range: Funktion:
Size
related*
[0.001 1 s]
Die Filterzeitkonstante der Maschinenversorgungsspannung dient dazu, den Einfluss von
welligen Hochfrequenzüberlagerungen und
Systemresonanzen bei der Berechnung der
Maschinenversorgungsspannung zu
verringern. Ohne dieses Filter können
Unwelligkeiten in den Strömen die
berechnete Spannung verzerren und die
Stabilität des Systems beeinträchtigen.
3.2.4 1-2* Motordaten I
Diese Parametergruppe enthält Parameter zum Eingeben
der Motornenndaten entsprechend dem Typenschild des
angeschlossenen Motors.
HINWEIS
Sie können diese Parameter bei laufendem Motor nicht
einstellen.
HINWEIS
Eine Änderung der Werte dieser Parameter beeinflusst
die Einstellung anderer Parameter.
1-20 Motorleistung
Eingabe der Motornennleistung in kW gemäß den MotorTypenschilddaten. Die Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
Diesen Parameter können Sie bei laufendem Motor nicht
einstellen.
Option: Funktion:
[2] 0,12 kW - 0,16 HP
[3] 0,18 kW - 0,25 HP
[4] 0,25 kW - 0,33 PS
[5] 0,37 kW - 0,50 PS
1-20 Motorleistung
Eingabe der Motornennleistung in kW gemäß den MotorTypenschilddaten. Die Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
Diesen Parameter können Sie bei laufendem Motor nicht
einstellen.
Option: Funktion:
[6] 0,55 kW - 0,75 HP
[7] 0,75 kW - 1,00 PS
[8] 1,10 kW - 1,50 PS
[9] 1,50 kW - 2,00 PS
[10] 2,20 kW - 3,00 PS
[11] 3,00 kW - 4,00 PS
[12] 3,70 kW - 5,00 PS
[13] 4,00 kW - 5,40 PS
[14] 5,50 kW - 7,50 PS
[15] 7,50 kW - 10,0 PS
[16] 11,00 kW - 15,00 PS
[17] 15,00 kW - 20 PS
[18] 18,5 kW - 25 PS
[19] 22 kW - 30 PS
[20] 30 kW - 40 PS
[21] 37 kW - 50 PS
[22] 45 kW - 60 PS
[23] 55 kW - 75 PS
[24] 75 kW - 100 PS
[25] 90 kW - 120 PS
[26] 110 kW - 150 PS
1-22 Motornennspannung
Range: Funktion:
Size
related*
[50 - 1000V]Geben Sie die Motornennspannung
von den Motor-Typenschilddaten ein.
Die Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
1-23 Motornennfrequenz
Range: Funktion:
Size
related*
[20 400
Hz]
Stellen Sie einen Motorfrequenzwert ein, der
den Motor-Typenschilddaten entspricht.
Stellen Sie für 87-Hz-Betrieb bei 230/400-VMotoren die Typenschilddaten für 230 V/50 Hz
ein. Passen Sie Parameter 4-14 Max Frequenz
[Hz] und Parameter 3-03 Maximaler Sollwert an
die 87-Hz-Anwendung an.
1-24 Motornennstrom
Range: Funktion:
Size
related*
[ 0.01 -
1000.00 A]
Geben Sie den Motornennstrom von
den Motor-Typenschilddaten ein. Der
Frequenzumrichter verwendet diese
Daten zur Berechnung von Motordrehmoment, thermischem Motorschutz
usw.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 35
Page 38

Parameter
VLT® HVAC Basic Drive FC 101
1-25 Motornenndrehzahl
Range: Funktion:
Size
related*
33
1-26 Dauer-Nenndrehmoment
Range: Funktion:
Size
related*
1-29 Autom. Motoranpassung (AMA)
Option: Funktion:
[50 60000 RPM]
[0.1 10000 Nm]
Geben Sie die Motornenndrehzahl von
den Motor-Typenschilddaten ein. Der
Frequenzumrichter verwendet diese
Daten zur Berechnung des automatischen Schlupfausgleichs.
HINWEIS
Eine Änderung des Wertes in
diesem Parameter beeinflusst die
Einstellung anderer Parameter.
Dieser Parameter ist verfügbar, wenn
Parameter 1-10 Motorart auf Optionen
eingestellt ist, die den Permanentmotormodus aktivieren.
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Wird die AMA-Funktion aktiviert, so misst der
Frequenzumrichter bei stehendem Motor
automatisch die benötigten Motorparameter,
um die dynamische Motorleistung zu
optimieren.
[0]*Aus Ohne Funktion
1-29 Autom. Motoranpassung (AMA)
Option: Funktion:
[2] Reduz.
Anpassung
Führt nur eine reduzierte AMA des Statorwiderstands Rs im System durch. Wählen Sie
diese Option, wenn Sie ein LC-Filter zwischen
dem Frequenzumrichter und dem Motor
einsetzen.
HINWEIS
Wenn Sie Parameter 1-10 Motorart auf Optionen
einstellen, mit denen der Permanentmotor-Modus
aktiviert wird, ist die einzige verfügbare Option [1]
Komplette AMA.
Aktivieren Sie die AMA-Funktion durch Drücken von [Hand
On] nach Auswahl von [1] Komplette AMA oder [2] Reduz.
Anpassung. Nach einer normalen Sequenz zeigt das Display
Folgendes an: Drücken Sie [OK], um die AMA abzuschließen.
Nach dem Drücken der [OK]-Taste ist der Frequenzumrichter betriebsbereit.
HINWEIS
Führen Sie zur bestmöglichen Anpassung des
•
Frequenzumrichters eine AMA an einem kalten
Motor durch.
Sie können eine AMA nicht bei laufendem
•
Motor durchführen.
Sie können eine AMA nicht an einem Motor mit
•
höherer Nennleistung als der des Frequenzumrichters durchführen, zum Beispiel wenn ein 5,5kW-Motor an einen 4-kW-Frequenzumrichter
angeschlossen ist.
[1] Komplette
Anpassung
36 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Wenn Sie Parameter 1-10 Motorart auf [0]
Asynchron einstellen, wird eine AMA von
Parameter 1-30 Statorwiderstand (Rs),
Parameter 1-33 Statorstreureaktanz (X1) und
Parameter 1-35 Hauptreaktanz (Xh)
durchgeführt.
Wenn Sie Parameter 1-10 Motorart auf
Optionen einstellen, die Permanentmotoren
aktivieren, führen Sie eine AMA von
Parameter 1-30 Statorwiderstand (Rs) und
Parameter 1-37 Indukt. D-Achse (Ld) durch.
HINWEIS
Die Werkseinstellung von Klemme 27
Digitaleingang (Parameter 5-12 Klemme
27 Digitaleingang) ist Motorfreilauf
invers. Dies bedeutet, dass keine AMA
durchgeführt werden kann, wenn keine
24 V an Klemme 27 anliegen.
HINWEIS
Während der AMA dürfen Sie kein externes Drehmoment
erzeugen.
HINWEIS
Wenn eine der Einstellungen in Parametergruppe 1-2*
Motordaten geändert wird, kehren die erweiterten
Motorparameter Parameter 1-30 Statorwiderstand (Rs) bis
Parameter 1-39 Motorpolzahl auf ihre Werkseinstellung
zurück.
HINWEIS
Führen Sie eine komplette AMA nur ohne Filter durch,
während die reduzierte AMA mit Filter durchgeführt
werden sollte.
Page 39

Parameter Programmierhandbuch
3.2.5 1-3* Motordaten II
Diese Parametergruppe enthält Parameter zum Eingeben
der Motornenndaten entsprechend dem Typenschild des
angeschlossenen Motors.
HINWEIS
Sie können diese Parameter bei laufendem Motor nicht
einstellen.
1-30 Statorwiderstand (Rs)
Range: Funktion:
Size
related*
1-33 Statorstreureaktanz (X1)
Range: Funktion:
Size related* [ 0.0 - 9999.000
[ 0.0 -
9999.000 Ohm]
Ohm]
Stellen Sie den Wert des Statorwiderstands ein. Geben Sie den Wert
von einem Motordatenblatt ein
oder führen Sie eine AMA an einem
kalten Motor aus.
Stellen Sie die Statorstreureaktanz des Motors ein.
1-39 Motorpolzahl
Range: Funktion:
Size
related*
[2 100 ]
Geben Sie die Anzahl der Motorpole ein.
Der Motorpolwert ist immer eine gerade
Zahl, da sie sich auf die Gesamtpolzahl
bezieht, nicht auf Polpaare.
3.2.6 1-4* Erw. Motordaten II
Diese Parametergruppe enthält Parameter zum Eingeben
der Motornenndaten entsprechend dem Typenschild des
angeschlossenen Motors.
HINWEIS
Sie können diese Parameter bei laufendem Motor nicht
einstellen.
1-40 Gegen-EMK bei 1000 UPM
Range: Funktion:
Size related* [1 - 9000 V] Gegen-EMK-Spannung zwischen
Phasen bei 1000 UPM.
3 3
1-35 Hauptreaktanz (Xh)
Range: Funktion:
Size
related*
[ 0.0 -
9999.00
Ohm]
Stellen Sie die Hauptreaktanz des Motors
mit Hilfe einer der folgenden Methoden ein:
Führen Sie eine AMA an einem
•
kalten Motor durch. Der Frequenzumrichter misst den Wert am
Motor.
Geben Sie den Wert Xh manuell
•
ein. Den Wert erhalten Sie vom
Motorhersteller.
Verwenden Sie die Werksein-
•
stellung Xh. Der Frequenzumrichter
ermittelt anhand der MotorTypenschilddaten automatisch
einen Standardwert.
1-37 Indukt. D-Achse (Ld)
Range: Funktion:
Size related* [ 0 - 65535 mH] Den Wert können Sie dem
Datenblatt des Permanentmagnetmotors entnehmen.
1-38 Indukt. Q-Achse (Lq)
Range: Funktion:
Size
related*
[ 0.000 65535 mH]
Legen Sie den Wert der Induktivität
der Q-Achse fest. Den Wert können
Sie dem Datenblatt des Permanentmagnetmotors entnehmen. Sie
können diesen Wert bei laufendem
Motor nicht ändern.
1-42 Motorkabellänge
Range: Funktion:
50 m* [0 - 100 m] Legen Sie die Motorkabellänge bei der
Inbetriebnahme fest.
1-43 Motorkabellänge in Fuß
Range: Funktion:
164 ft* [0 - 328 ft] Legen Sie die Motorkabellänge bei der
Inbetriebnahme fest.
1-44 Induktivitätssät. D-Achse (LdSat)
Range: Funktion:
Size
related*
[ 0 65535
mH]
Dieser Parameter entspricht der Induktivitätssättigung von Ld. Idealerweise hat
dieser Parameter denselben Wert wie
Parameter 1-37 Indukt. D-Achse (Ld). Wenn
der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert hier bei 200 % des
Nennwerts ein.
1-45 Induktivitätssät. Q-Achse (LqSat)
Range: Funktion:
Size
related*
[ 0 65535
mH]
Dieser Parameter entspricht der Induktivitätssättigung von Lq. Idealerweise hat
dieser Parameter denselben Wert wie
Parameter 1-38 Indukt. Q-Achse (Lq). Wenn
der Motorhersteller jedoch eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert hier bei 200 % des
Nennwerts ein.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 37
Page 40

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Parameter
VLT® HVAC Basic Drive FC 101
1-46 Verstärkung Positionserkennung
Range: Funktion:
100 %* [ 20 -
200 %]
33
Verwenden Sie diesen Parameter zur
Einstellung der Höhe des Testimpulses
während der Positionserkennung beim
Start. Dieser Parameter gilt ab Softwareversion 2.80.
1-48 Strom bei min. Induktivität für D-Achse
Range: Funktion:
100 %* [ 20 - 200 %] Verwenden Sie diesen Parameter zur
Einstellung des Induktivitätssättigungspunktes.
1-49 Strom bei min. Induktivität für Q-Achse
Range: Funktion:
100 %* [ 20 -
200 %]
In diesem Parameter wird die Sättigungskurve
der Q-Induktivitätswerte festgelegt. Von 20 % bis
100 % dieses Parameters werden die Induktivitäten anhand der Parameter
Parameter 1-37 Indukt. D-Achse (Ld),
Parameter 1-38 Indukt. Q-Achse (Lq),
Parameter 1-44 Induktivitätssät. D-Achse (LdSat)
und Parameter 1-45 Induktivitätssät. Q-Achse
(LqSat) linear genähert. Nach- und vorstehend
werden sie durch die entsprechenden Parameter
festgelegt. Die Parameter beziehen sich auf den
Lastausgleich des Motor-Typenschilds, auf den
Anwendungslasttyp und auf die elektronische
Bremsfunktion für den Schnellstopp/das Halten
des Motors.
3.2.7 1-5* Lastunabh. Einstellung
1-52 Min. Drehzahl norm. Magnetis. [Hz]
Range: Funktion:
1 Hz* [0.1 -
10.0 Hz]
Stellen Sie die erforderliche Frequenz für de
normalen Magnetisierungsstrom ein.
Verwenden Sie diesen Parameter zusammen
mit Parameter 1-50 Motormagnetisierung bei 0
UPM.. Siehe Abbildung 3.2.
1-55 U/f-Kennlinie - U
Array [6]
Range: Funktion:
Size
related*
[0 - 999V]Mit diesem Parameter können Sie die
Spannung an jedem Frequenzpunkt
einstellen, um eine an den Motor
angepasste U/f-Kennlinie zu bilden. Die
zugehörigen Frequenzen sind in
Parameter 1-56 U/f-Kennlinie - F definiert.
1-56 U/f-Kennlinie - F
Array[6]
Range: Funktion:
Size
related*
[ 0 -
400.0
Hz]
Mit diesem Parameter können Sie
Frequenzpunkte einstellen, um eine an den
Motor angepasste U/f-Kennlinie zu bilden.
Die zugehörige Spannung definieren Sie in
Parameter 1-55 U/f-Kennlinie - U.
Erstellen Sie eine U/f-Kennlinie anhand von
6 definierbaren Spannungen und
Frequenzen, siehe Abbildung 3.3.
Vereinfachen Sie die U/f-Kennlinien durch
Zusammenfassen von 2 oder mehr Punkten
(Spannungen und Frequenzen). Legen Sie
die Punkt bei gleichen Werten fest.
Parameter für lastunabhängige Motoreinstellungen.
1-50 Motormagnetisierung bei 0 UPM.
Range: Funktion:
100%* [0 -
38 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Verwenden Sie diesen Parameter zusammen mit
300 %
Parameter 1-52 Min. Drehzahl norm. Magnetis. [Hz],
]
wenn beim Betrieb mit niedriger Drehzahl eine
angepasste thermische Belastung des Motors
gewünscht wird.
Geben Sie den Wert als Prozentsatz des Magnetisierungsnennstroms ein. Eine zu niedrige
Einstellung kann ein reduziertes Drehmoment an
der Motorwelle bewirken.
Abbildung 3.2 Motormagnetisierung
Abbildung 3.3 U/f-Kennlinie
Page 41

Parameter Programmierhandbuch
3.2.8 1-6* Lastabh. Einstellung
Parameter zum Einstellen der lastabhängigen Kompensationen für den Motor.
1-62 Schlupfausgleich
Range: Funktion:
Size
related*
1-63 Schlupfausgleich Zeitkonstante
Range: Funktion:
0.1s* [0.05 -
1-64 Resonanzdämpfung
Range: Funktion:
100%* [0 -
1-65 Resonanzdämpfung Zeitkonstante
Range: Funktion:
0.005 s* [0.001 -
1-66 Min. Strom bei niedr. Drz.
Range: Funktion:
50 %* [0 - 120 %] Gilt nur für PM-Motoren. Ein Erhöhen des
5 s]
500 %]
0.050 s]
[-400 400 %]
Geben Sie den Prozentwert für den
Schlupfausgleich ein, um eine Kompensation für Toleranzen im Wert von n
vorzunehmen. Der Schlupfausgleich wird
automatisch u. a. in Abhängigkeit von der
Motornenndrehzahl n
Geben Sie die Schlupfausgleichsreaktionsgeschwindigkeit ein. Ein hoher Wert führt zu einer
langsamen, ein niedriger Wert zu einer schnellen
Reaktion. Verwenden Sie bei Niederfrequenzresonanzproblemen die längere Zeiteinstellung.
Geben Sie den Wert für die Resonanzdämpfung
ein. Legen Sie Parameter 1-64 Resonanzdämpfung
und Parameter 1-65 Resonanzdämpfung Zeitkon-
stante fest, um Probleme mit
Hochfrequenzresonanzen zu eliminieren. Zum
Reduzieren der Resonanzschwankungen erhöhen
Sie den Wert von Parameter 1-64 Resonanz-
dämpfung.
Legen Sie Parameter 1-64 Resonanz-
dämpfung und
Parameter 1-65 Resonanzdämpfung Zeitkonstante fest, um Probleme mit
Hochfrequenzresonanzen zu eliminieren.
Geben Sie die Zeitkonstante mit der besten
Dämpfung ein.
minimalen Stroms verbessert das
Motordrehmoment bei niedriger Drehzahl,
jedoch reduziert dies auch die Effizienz.
berechnet.
M,N
M,N
3.2.9 1-7* Startfunktion
Parameter zur Konfiguration von Sondermotor-Startfunktionen.
1-70 Startfunktion
Dieser Parameter gilt für die Softwareversion 2.80 und spätere
Versionen. Verwenden Sie diesen Parameter zur Auswahl des PMMotor-Startmodus, mit dem der VVC+-Steuerungskern für die
zuvor freilaufenden PM-Motoren initialisiert wird. Dieser
Parameter ist nur für PM-Motoren im VVC+-Modus aktiv, wenn
der Motor gestoppt wird (oder bei einem Betrieb mit niedriger
Drehzahl).
Option: Funktion:
[0] Rotorlageer-
kennung
[1] * Parken Durch die Parkfunktion wird ein
1-71 Startverzög.
Range: Funktion:
0 s* [0 - 10s]Dieser Parameter ermöglicht eine Verzögerung der
Anlaufzeit. Der Frequenzumrichter beginnt mit der
in Parameter 1-72 Startfunktion ausgewählten
Startfunktion. Stellen Sie die Anlaufverzögerungszeit bis zum Beginn der Beschleunigung ein.
Die Rotorlageerkennungsfunktion dient
zur Schätzung des elektrischen Winkels
des Rotors und zu dessen Verwendung
als Startpunkt. Diese Option ist die
Standardauswahl für AutomationFrequenzumrichter-Anwendungen.
Wenn die Motorfangschaltungsfunktion
erkennt, dass der Motor bei niedriger
Drehzahl läuft oder gestoppt wurde,
kann der Frequenzumrichter die
Rotorposition (den Winkel) erkennen.
Der Frequenzumrichter startet dann
den Motor aus diesem Winkel.
Gleichstrom an der Statorwicklung
angelegt und der Rotor dreht sich zum
elektrischen Nullpunkt. Diese Funktion
wird in der Regel bei HLKAnwendungen ausgewählt. Wenn die
Motorfangschaltungsfunktion erkennt,
dass der Motor bei niedriger Drehzahl
läuft oder gestoppt wurde, sendet der
Frequenzumrichter einen DC-Strom, um
den Motor in einem bestimmten
Winkel zu parken. Der Frequenzumrichter startet dann den Motor aus
diesem Winkel.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 39
Page 42

Parameter
VLT® HVAC Basic Drive FC 101
1-72 Startfunktion
Option: Funktion:
[0] DC Halten/
Verzögerung
33
[2] * Freilauf/Verz.zeit Der Frequenzumrichter läuft während
Dem Motor wird mit Parameter 2-00 DC-
Halte-/Vorwärmstrom Zeitverzögerung
während des Starts Spannung zugeführt.
Zeitverzögerung während des Starts im
Freilauf (Frequenzumrichter aus).
1-73 Motorfangschaltung
Mit dieser Funktion kann der Frequenzumrichter einen Motor, der
aufgrund eines Netzausfalls unkontrolliert läuft, „fangen“. Suche
für die Motorfangschaltung nur im Rechtslauf. Bei erfolgloser
Suche wird eine DC-Bremsung aktiviert. Wenn Sie PM-aktivierte
Optionen auswählen, wird Parken ausgeführt, wenn die Drehzahl
im in Parameter 2-07 Parkdauer eingestellten Zeitraum unter 2,5–
5 % liegt.
Wenn die Drehzahlberechnung einen Wert unter 2,5 % bis 5 %
der Nenndrehzahl ergibt, wird die Parkfunktion aktiviert (siehe
Parameter 2-06 Parken Strom und Parameter 2-07 Parkdauer).
Andernfalls fängt der Frequenzumrichter den Motor bei dieser
Drehzahl und setzt den Normalbetrieb fort.
Die Motorfangschaltung für PM-Motoren basiert auf einer
anfänglichen Drehzahlberechnung. Die Drehzahl wird immer als
Erstes nach einem aktiven Startsignal berechnet.
Stromgrenzen des Motorfangschaltprinzips für PM-Motoren:
Der Drehzahlbereich beträgt bis zu 100 % Nenndrehzahl
•
oder die Feldschwächungsdrehzahl (der niedrigste der
beiden Werte).
Bei Anwendungen mit hohem Trägheitsmoment (d. h.,
•
wenn die Lastträgheit mehr als das 30-Fache des
Motorträgheitsmoments ist).
Option: Funktion:
[0] Deaktiviert
[1] Aktiviert
3.2.10 1-8* Stoppfunktion
Parameter zur Konfiguration der Sondermotor-Stoppfunktionen.
1-80 Funktion bei Stopp
Option: Funktion:
Wählen Sie diese Funktion, die nach
einem Stoppsignal und dem Erreichen der
in Parameter 1-82 Ein.-Frequenz für
Stoppfunktion [Hz] eingestellten Drehzahl
ausgeführt wird.
[0] * Motorfreilauf Belässt den Motor im Motorfreilauf.
[1] DC-Halten/
MotorVorheizung
Versorgt den Motor mit einem DCHaltestrom (siehe Parameter 2-00 DC-
Halte-/Vorwärmstrom).
1-82 Ein.-Frequenz für Stoppfunktion [Hz]
Range: Funktion:
0 Hz* [0 - 20 Hz] Stellen Sie die Ausgangsfrequenz ein, bei der
Parameter 1-80 Funktion bei Stopp aktiviert
werden soll.
1-88 Verstärkung AC-Bremse
Range: Funktion:
1.4* [1.0 -
2.0 ]
Mit diesem Parameter stellen Sie die AC-Bremsleistungsfähigkeit ein (stellen Sie die Rampe-Ab-Zeit
ein, wenn die Trägheit konstant ist). Wenn die
Zwischenkreisspannung nicht höher als der
Warnwert für die Zwischenkreisspannung ist,
können Sie das Generatordrehmoment über
diesen Parameter anpassen.
3.2.11 1-9* Motortemperatur
Parameter zur Konfiguration der Temperaturschutzfunktionen für den Motor.
1-90 Thermischer Motorschutz
Option: Funktion:
Über ein elektronisches Thermorelais (ETR)
wird die Motortemperatur basierend auf
Frequenz, Strom und Zeit berechnet.
Danfoss empfiehlt die Verwendung der
ETR-Funktion, wenn kein Thermistor
vorhanden ist. Die Funktion ist bei
Asynchron- und PM-Motoren identisch.
HINWEIS
Die ETR-Berechnung erfolgt anhand
der Motordaten aus Parametergruppe
1-2* Motordaten.
[0] Kein
Motorschutz
[1] Thermistor
Warnung
[2] Thermistor
Abschalt.
[3] ETR Warnung1Wenn die berechnete Obergrenze des
[4] * ETR-Alarm 1 Die thermische Motorberechnung wird
Deaktiviert die Temperaturüberwachung.
Ein Thermistor gibt eine Warnung aus,
wenn die Maximalgrenze des Motortemperaturbereichs überschritten wird.
Wenn die Obergrenze des Motortemperaturbereichs überschritten wird, löst ein
Thermistor aus und der Frequenzumrichter
schaltet ab.
Motortemperaturbereichs überschritten
wird, gibt der Frequenzumrichter eine
Warnung aus.
anhand der tatsächlichen Last und Uhrzeit
sowie anhand der Motorfrequenz gestartet,
wenn der Motorstrom über 110 % des
Motornennstroms liegt.
40 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 43

Parameter Programmierhandbuch
1-90 Thermischer Motorschutz
Option: Funktion:
[22] ETR-Alarm -
Erweiterte
Erkennung
Die thermische Motorberechnung wird
anhand der tatsächlichen Last und Uhrzeit
sowie anhand der Motorfrequenz gestartet,
wenn der Motorstrom über 110 % des
Motornennstroms liegt. Eine weitere
Möglichkeit besteht darin, die thermische
Motorberechnung zu starten, wenn der
Motorstrom unter 110 % des
Motornennstroms liegt und das aktuelle
Limit ausgelöst wird.
1-93 Thermistoranschluss
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
HINWEIS
Stellen Sie den Digitaleingang in
Parameter 5-03 Digitaleingang 29 Funktion
auf [0] PNP - Aktiv bei 24 V ein.
3 3
Wählen Sie den Eingang für den Anschluss des
Thermistors (PTC-Sensor) aus. Bei der
Verwendung eines Analogeingangs kann
dasselbe Analogsignal nicht als Sollwert in
Parameter 3-15 Variabler Sollwert 1 bis
Parameter 3-17 Variabler Sollwert 3,
Parameter 20-00 Istwertanschluss 1,
Parameter 20-03 PID-Prozess Istwer t 2,
Parameter 24-06 Fire Mode Reference Source und
Parameter 24-07 Istwertquelle Notfallbetrieb
verwendet werden.
[0]*Ohne Stellen Sie die Thermistorquelle nicht ein.
[1] Analog-
eingang
53
[6] Digital-
eingang
29
Verwenden Sie Analogeingang 53 als Thermistorquelle.
Verwenden Sie Digitaleingang 29 als Thermistorquelle.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 41
Page 44

Parameter
VLT® HVAC Basic Drive FC 101
3.3 Hauptmenü - Bremsen - Gruppe 2
3.3.1 2-0* DC Halt/DC Bremse
2-04 DC-Bremse Ein
Range: Funktion:
Parameter zur Konfiguration der DC-Brems- und DCHaltefunktionen.
33
2-00 DC-Halte-/Vorwärmstrom
Range: Funktion:
50%* [0 -
HINWEIS
160
MOTOR ÜBERHITZT
%]
Der maximale Wert hängt vom
Motornennstrom ab.
Lassen Sie den Motor zur Vermeidung von
Motorschäden durch Überhitzung nicht zu
lange bei 100 % laufen.
Stellen Sie den Haltestrom als Prozentwert des
Motornennstroms I
Parameter 1-24 Motornennstrom ein.
Parameter 2-00 DC-Halte-/Vorwärmstrom definiert die
Intensität der Gleichspannungs-Halten-Funktion
(auch zum Vorwärmen des Motors geeignet). Dieser
Parameter ist aktiv, wenn DC-Halten in
Parameter 1-72 Startfunktion [0] DC-Halten/
Verzögerung oder Parameter 1-80 Funktion bei Stopp
[1] DC-Halten/Motor-Vorheizung ausgewählt wurde.
M,N
2-01 DC-Bremsstrom
Range: Funktion:
50%* [0 -
HINWEIS
150
MOTOR ÜBERHITZT
%]
Der maximale Wert hängt vom
Motornennstrom ab.
Lassen Sie den Motor zur Vermeidung von
0 Hz* [ 0 - 500
Hz]
Dieser Parameter dient zur Einstellung der
Einschaltdrehzahl für die DC-Bremsfunktion,
bei der Parameter 2-01 DC-Bremsstrom in
Verbindung mit einem Stoppsignal aktiv sein
soll.
2-06 Parking Strom
Range: Funktion:
100%* [0 -
150 %]
Stellen Sie den Strom in Prozent des
Motornennstroms ein,
Parameter 1-24 Motornennstrom. Aktiv mit
Parameter 1-73 Motorfangschaltung. Der
Parkstrom ist während der Zeitdauer aus
Parameter 2-07 Parkdauer aktiv.
HINWEIS
Parameter 2-06 Parken Strom ist nur aktiv,
wenn in Parameter 1-10 Motorart
ausgewählt ist.
2-07 Parkdauer
Range: Funktion:
3 s* [0.1 - 60s]Definiert die Dauer der Parkstromzeit aus
Parameter 2-06 Parken Strom. Aktiv mit
Parameter 1-73 Motorfangschaltung.
HINWEIS
Parameter 2-07 Parkdauer ist nur aktiv,
wenn die Optionen von
Parameter 1-10 Motorart so eingestellt
sind, dass sie PM-Motoren aktivieren.
Motorschäden durch Überhitzung nicht zu
lange bei 100 % laufen.
3.3.2 2-1* Generator. Bremsen
Stellen Sie den Strom in Prozent des
Motornennstroms ein,
Parameter 1-24 Motornennstrom. Wenn die Drehzahl
unter der in Parameter 2-04 DC-Bremse Ein
eingestellten Grenze liegt oder wenn die Funktion
„DC-Bremse invers“ aktiv ist (in Parametergruppe 5-1*
Digitaleingänge eingestellt auf [5] DC Bremse (invers)
oder über die serielle Schnittstelle), wird ein DCBremsstrom bei einem Stoppbefehl angelegt. Siehe
Parameter 2-02 DC-Bremszeit für die Dauer.
2-02 DC-Bremszeit
Range: Funktion:
10 s* [0 - 60 s] Legen Sie die Dauer des DC-Bremsstroms in
Parameter 2-01 DC-Bremsstrom fest, sobald
dieser aktiviert wurde.
Parametergruppe zur Auswahl der dynamischen Bremsparameter.
2-10 Bremsfunktion
Option: Funktion:
[0] * Aus Der Bremswiderstand ist nicht aktiv.
[2] AC-Bremse AC-Bremse ist aktiv.
2-16 AC-Bremse, max. Strom
Range: Funktion:
100 %* [0 - 160 %] Geben Sie den max. zulässigen Motorstrom
während der AC-Bremsfunktion ein. Zu
hohe Ströme können die Motorwicklung
überhitzen.
42 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 45

Parameter Programmierhandbuch
2-17 Überspannungssteuerung
Option: Funktion:
Wählen Sie aus, ob bei der Rampe ab die
Überspannungssteuerung aktiviert werden
soll, die die Gefahr einer Abschaltung des
Frequenzumrichters aufgrund von
Überspannung im Zwischenkreis durch
generatorische Leistung von der Last
reduziert.
[0] Deaktiviert Keine Überspannungssteuerung erforderlich.
[1] Aktiv (ohne
Stopp)
[2] * Aktiviert Aktiviert Überspannungssteuerung.
Aktiviert die Überspannungssteuerung, wenn
sich der Frequenzumrichter nicht im
Stoppzustand befindet.
HINWEIS
Die Rampenzeit wird automatisch
angepasst, um eine Abschaltung des
Frequenzumrichters zu vermeiden.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 43
Page 46

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parameter
VLT® HVAC Basic Drive FC 101
3.4 Hauptmenü - Sollwert/Rampen Gruppe 3
3.4.1 3-0* Sollwertgrenzen
33
Parameter zum Einstellen der Sollwerteinheit, Grenzen und
Bereiche.
Siehe auch Parametergruppe 20-0* Istwert für Informa-
3-10 Festsollwert
Range: Funktion:
0 %* [-100 -
100 %]
Geben Sie bis zu acht unterschiedliche
Festsollwerte (0-7) mittels Array-Programmierung in diesen Parameter ein. Wählen Sie
zur Auswahl von dedizierten Sollwerten
Festsollwert Bit 0/1/2 [16], [17] oder [18] für die
entsprechenden Digitaleingänge in Parametergruppe 5-1* Digitaleingänge aus.
tionen zu den Einstellungen bei Regelung mit
Rückführung.
3-02 Minimaler Sollwert
Range: Funktion:
0* [-4999–4999] Der minimale Sollwert bestimmt den
Mindestwert aus der Summe aller Sollwerte.
3-11 Festdrehzahl Jog [Hz]
Range: Funktion:
5 Hz* [ 0 - 500.0
Hz]
Die Festdrehzahl JOG ist eine feste Ausgangsdrehzahl, mit der der Frequenzumrichter läuft,
wenn die JOG-Funktion aktiviert ist.
Siehe auch Parameter 3-80 Rampenzeit JOG.
3-03 Maximaler Sollwert
Range: Funktion:
Size
related*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
Der maximale Sollwert bestimmt
den Höchstwert aus der Summe
aller Sollwerte. Die Einheit für den
maximalem Sollwert entspricht
der Konfigurationsauswahl in
Parameter 1-00 Regelverfahren.
3.4.2 3-1* Sollwerteinstellung
3-14 Relativer Festsollwert
Range: Funktion:
0%* [-100
100 %]
Definiert den Festsollwert (in %), der als variabler
Wert (definiert in Parameter 3-18 Relativ. Skalie-
rungssollw. Ressource) zum momentanen Sollwert
addiert wird.
Die Summe des variablen und des relativen
Festsollwert (mit Y in Abbildung 3.5 markiert) wird
mit dem aktuellen Sollwert (mit X in Abbildung 3.5
markiert) multipliziert. Dieses Produkt wird zum
tatsächlichen Sollwert addiert. X + X ×
100
Y
Abbildung 3.4 Sollwerteinstellung
Abbildung 3.5 Relativer Festsollwert
3-15 Variabler Sollwert 1
Option: Funktion:
Wählen Sie die Quelle aus, die für das
erste Sollwertsignal verwendet werden
soll. Parameter 3-15 Variabler Sollwert 1,
Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3
definieren bis zu drei verschiedene
Sollwertsignale. Die Summe der Sollwertsignale legt die aktuellen Sollwerte fest.
[0] Deaktiviert
[1] * Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
[11] Bus Sollwert
44 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 47

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parameter Programmierhandbuch
3-16 Variabler Sollwert 2
Option: Funktion:
Wählen Sie die Quelle aus, die für das
zweite Sollwertsignal verwendet werden
soll. Parameter 3-15 Variabler Sollwert 1,
Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3
definieren bis zu drei verschiedene
Sollwertsignale. Die Summe der Sollwertsignale legt die aktuellen Sollwerte fest.
Siehe auch Parameter 1-93 Thermistoran-
schluss.
[0] Deaktiviert
[1] Analogeingang
53
[2] * Analogeingang
54
[7] Pulseingang 29
[11] Bus Sollwert
3-17 Variabler Sollwert 3
Option: Funktion:
Dieser Parameter bestimmt die Quelle
des dritten Sollwertsignals. Es ist
möglich, bis zu drei variable Sollwertsignale zu definieren
(Parameter 3-15 Variabler Sollwert 1,
Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3), die
den Gesamtsollwert bilden. Die Summe
der Sollwertsignale legt die aktuellen
Sollwerte fest.
[0] Deaktiviert
[1] Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
[11] * Bus Sollwert
3.4.3 3-4* Rampe 1
Abbildung 3.6 Rampen
3-41 Rampenzeit Auf 1
Range: Funktion:
Size
related*
[0.05
- 3600
s]
Geben Sie die Beschleunigungszeit von 0 Hz
bis Parameter 1-23 Motornennfrequenz ein,
wenn Asynchronmotor ausgewählt ist. Geben
Sie die Beschleunigungszeit von 0 U/min bis
Parameter 1-25 Motornenndrehzahl ein, wenn
PM-Motor ausgewählt ist. Wählen Sie die
Rampe-auf-Zeit so, dass der Ausgangsstrom
die in Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Beschleunigens
nicht überschreitet. Beachten Sie auch die
Hinweise zur Rampe-Ab-Zeit unter
Parameter 3-42 Rampenzeit Ab 1.
3-42 Rampenzeit Ab 1
Range: Funktion:
Size
related*
[0.05
- 3600
s]
Wenn Asynchronmotor ausgewählt ist, geben
Sie die Verzögerungszeit von
Parameter 1-23 Motornennfrequenz bis 0 Hz
ein. Wenn PM-Motor ausgewählt ist, geben
Sie die Verzögerungszeit von
Parameter 1-25 Motornenndrehzahl bis 0
U/min ein. Wählen Sie eine Rampe-Ab-Zeit,
um eine Abschaltung aufgrund einer
Überspannung im Zwischenkreis zu
vermeiden.
3 3
Konfiguriert die Rampenparameter für jede der beiden
Rampen (Parametergruppe 3-4* Rampe 1 und Parameter-
gruppe 3-5* Rampe 2). Die Rampenzeit wird für alle
Leistungsgrößen auf einen Mindestwert von 10 ms voreingestellt.
3.4.4 3-5* Rampe 2
Mit dieser Parametergruppe können Sie die Parameter von
Rampe 2 konfigurieren.
3-51 Rampenzeit Auf 2
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 45
Range: Funktion:
Size
related*
[0.05
- 3600
s]
Wenn Asynchronmotor ausgewählt ist, geben
Sie die Beschleunigungszeit von 0 Hz bis
Parameter 1-23 Motornennfrequenz ein. Wen
PM-Motor ausgewählt ist, geben Sie die
Beschleunigungszeit von 0 U/min bis
Parameter 1-25 Motornenndrehzahl ein.
Page 48

Parameter
VLT® HVAC Basic Drive FC 101
3-51 Rampenzeit Auf 2
Range: Funktion:
Wählen Sie die Rampe-auf-Zeit so, dass der
Ausgangsstrom die in
Parameter 4-18 Stromgrenze festgelegte
33
Stromgrenze während des Beschleunigens
nicht überschreitet.
3-52 Rampenzeit Ab 2
Range: Funktion:
Size
related*
[0.05 3600 s]
Geben Sie die Verzögerungszeit von
Parameter 1-25 Motornenndrehzahl bis 0
U/min ein. Wählen Sie die Rampe-Ab-Zeit
so, dass der Ausgangsstrom die in
Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Verzögerns nicht
überschreitet
3.4.5 3-8* Weitere Rampen
3-80 Rampenzeit JOG
Range: Funktion:
Size
related*
[0.05
- 3600
s]
Geben Sie die Rampenzeit JOG ein, d. h. die
Beschleunigungs-/Verzögerungszeit zwischen 0
Hz bis Parameter 1-23 Motornennfrequenz.
Vergewissern Sie sich, dass der resultierende
für die vorliegende Rampenzeit JOG
erforderliche Ausgangsstrom nicht die unter
Parameter 4-18 Stromgrenze festgelegte
Stromgrenze überschreitet. Die Rampenzeit
JOG beginnt bei Aktivierung eines Jog-Signals
über die Bedieneinheit, einen ausgewählten
Digitaleingang oder die serielle Kommunikationsschnittstelle.
3-81 Rampenzeit Schnellstopp
Range: Funktion:
Size
related*
[0.05
- 3600
s]
Geben Sie die Rampenzeit Schnellstopp von
Parameter 1-23 Motornennfrequenz mit 0 Hz
ein. Während der Rampe kann im Wechselrichter weder Überspannung auftreten, noch
kann der erzeugte Strom die in
Parameter 4-18 Stromgrenze Stromgrenze
festgelegte Grenze überschreiten. Der
Schnellstopp wird über ein Signal an einem
ausgewählten Digitaleingang oder über die
serielle Kommunikationsschnittstelle aktiviert.
46 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 49

Parameter Programmierhandbuch
3.5 Hauptmenü - Grenzen/Warnungen Gruppe 4
3.5.1 4-1* Motor Grenzen
Definieren Sie Strom- und Drehzahlgrenzen für den Motor
und die Reaktion des Frequenzumrichters, wenn die
Grenzen überschritten werden.
4-10 Motor Drehrichtung
Option: Funktion:
[0] Nur Rechts
[2] * Beide
Richtungen
4-12 Min. Frequenz [Hz]
Range: Funktion:
0 Hz* [ 0 -
400.0 Hz]
4-14 Max Frequenz [Hz]
Range: Funktion:
Size
related*
[ 0.1 -
400.0
Hz]
4-18 Stromgrenze
Range: Funktion:
110%* [0 -
1000
%]
HINWEIS
Die Einstellung in
Parameter 4-10 Motor Drehrichtung
hat Einfluss auf
Parameter 1-73 Motorfangschaltung.
Der Betrieb ist nur im Rechtslauf zulässig.
Der Betrieb ist sowohl in Rechtslauf als auch
in Linkslauf zulässig.
Geben Sie die Untergrenze für die
Motordrehzahl ein. Sie können die min.
Motordrehzahl so einstellen, dass sie der
minimalen Ausgangsfrequenz der Motorwelle
entspricht. Die untere Drehzahlgrenze darf die
in Parameter 4-14 Max Frequenz [Hz] nicht
überschreiten.
Geben Sie die Obergrenze für die
Motordrehzahl ein. Sie kann so eingestellt
werden, dass sie der empfohlenen
maximalen Motordrehzahl entspricht. Die
max. Motordrehzahl darf den Wert in
Parameter 4-12 Min. Frequenz [Hz]
überschreiten.
Die Obergrenze der Motordrehzahl kann
nicht höher als Parameter 4-19 Max.
Ausgangsfrequenz eingestellt werden.
Geben Sie die Stromgrenze für den Motor- und
Generatorbetrieb ein (in % des Motornennstroms).
Wenn der Wert höher als der maximale
Nennausgang des Frequenzumrichters ist, wird der
Strom weiterhin auf den maximalen
Ausgangsstrom des Frequenzumrichters begrenzt.
Wenn eine Einstellung in Parameter 1-00 Regelver-
fahren bis Parameter 1-25 Motornenndrehzahl
geändert wird, wird Parameter 4-18 Stromgrenze
4-18 Stromgrenze
Range: Funktion:
nicht automatisch auf die Werkseinstellung zurückgesetzt.
4-19 Max. Ausgangsfrequenz
Range: Funktion:
Size
related*
[ 0 -
Geben Sie den maximalen Ausgangsfre-
400
quenzwert ein, die das absolute Limit der
Hz]
Ausgangsfrequenz des Frequenzumrichters
angibt. Dies gewährleistet eine erhöhte
Sicherheit in Anwendungen, in denen eine
versehentliche Überdrehzahl unbedingt
vermieden werden muss. Dieses absolute Limit
gilt für alle Konfigurationen und ist unabhängig
von der Einstellung in Parameter 1-00 Regelver-
fahren.
Wenn Sie Parameter 1-10 Motorart auf eine der
Optionen setzen, die die Konstruktion eines
PM-Motors ermöglicht, kann die maximale
Grenze von Parameter 4-19 Max. Ausgangs-
frequenz begrenzt werden, indem Sie
Parameter 1-40 Gegen-EMK bei 1000 UPM
einstellen. Damit vermeiden Sie eine GegenEMK, die den Frequenzumrichter beschädigen
kann. Wenn Sie Parameter 4-19 Max. Ausgangs-
frequenz niedriger als Parameter 4-14 Max
Frequenz [Hz] eingestellt haben, wird der Wert
Parameter 4-14 Max Frequenz [Hz] automatisch
an denselben Wert wie Parameter 4-19 Max.
Ausgangsfrequenz angepasst.
3.5.2 4-4* Einstellbare Warnungen 2
4-40 Warnung Frequenz Niedrig
Range: Funktion:
Size
related*
[ 0 -
Mithilfe dieses Parameters können Sie eine
500
minimale Grenze für den Frequenzbereich
Hz]
einstellen.
Wenn die Motordrehzahl diese Grenze
unterschreitet, zeigt das Display die Meldung
DREHZAHL NIEDRIG an. Warnbit 10 wird
eingestellt in Parameter 16-94 Erw.
Zustandswort. Sie können das Ausgangsrelais
so konfigurieren, dass es diese Warnung
anzeigt. Die Warn-LED am LCP leuchtet nicht
auf, wenn der eingestellte Grenzwert dieses
Parameters erreicht wird.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 47
Page 50

Parameter
VLT® HVAC Basic Drive FC 101
4-41 Warnung Frequenz Hoch
Range: Funktion:
Size
related*
33
[ 0 -
Dieser Parameter stellt eine höhere Grenze für
500
den Frequenzbereich ein.
Hz]
Wenn die Motordrehzahl diese Grenze
überschreitet, zeigt das Display die Meldung
DREHZAHL HOCH an. Warnbit 9 wird in
Parameter 16-94 Erw. Zustandswort eingestellt.
Sie können das Ausgangsrelais so konfigurieren, dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht auf, wenn
der eingestellte Grenzwert dieses Parameters
erreicht wird.
3.5.3 4-5* Warnungen Grenzen
Definieren Sie die einstellbaren Warngrenzen für den
Strom. Warnungen werden auf dem Display, am programmierten Ausgang oder am Feldbus angezeigt.
4-50 Warnung Strom niedrig
Range: Funktion:
0 A [ 0 - 500A]Geben Sie den Min.-Stromwert I
der Motorstrom unter diesen Grenzwert fällt,
wird ein Bit im Zustandswort eingestellt. Sie
können diesen Wert auch für die Erzeugung
eines Signals am Digitalausgang oder Relaisausgang programmieren.
4-51 Warnung Strom hoch
Range: Funktion:
Size
related*
[ 0.0 -
500.00 A]
Geben Sie den Max.-Stromwert I
ein. Wenn der Motorstrom diese Grenze
überschreitet, wird ein Bit im
Zustandswort festgelegt. Sie können
diesen Wert auch für die Erzeugung
eines Signals am Digitalausgang oder
Relaisausgang programmieren.
4-54 Warnung Sollwert niedr.
Range: Funktion:
-4999* [-4999 4999 ]
Geben Sie den minimalen Sollwert ein. Wenn
der tatsächliche Sollwert diese Grenze
unterschreitet, wird auf dem Display „Sollwert
niedrig“ angezeigt. Warnbit 20 wird in
Parameter 16-94 Erw. Zustandswort eingestellt.
Sie können das Ausgangsrelais so konfigurieren, dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht auf, wenn der
eingestellte Grenzwert dieses Parameters
erreicht wird.
ein. Wenn
LOW
HIGH
4-55 Warnung Sollwert hoch
Range: Funktion:
4999* [-4999 -
4999 ]
Mithilfe dieses Parameters können Sie eine
maximale Grenze für den Sollwertbereich
einstellen.
Wenn der tatsächliche Sollwert diesen
Grenzwert überschreitet, zeigt das Display
Sollwert hoch an. Warnbit 19 wird in
Parameter 16-94 Erw. Zustandswort eingestellt.
Sie können das Ausgangsrelais so konfigurieren, dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht auf, wenn der
eingestellte Grenzwert dieses Parameters
erreicht wird.
4-56 Warnung Istwert niedr.
Range: Funktion:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Mithilfe dieses Parameters
können Sie eine minimale
Grenze für den Istwertbereich
einstellen.
Wenn der Istwert unter diese
Grenze fällt, zeigt das Display
Istwert niedrig an. Warnbit 6
wird in Parameter 16-94 Erw.
Zustandswort eingestellt. Sie
können das Ausgangsrelais
so konfigurieren, dass es
diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet
nicht auf, wenn der
eingestellte Grenzwert dieses
Parameters erreicht wird.
4-57 Warnung Istwert hoch
Range: Funktion:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Mithilfe dieses Parameters
können Sie eine maximale
Grenze für den Istwertbereich
einstellen.
Wenn die Motordrehzahl
diesen Grenzwert
überschreitet, zeigt das
Display die Meldung Istwert
hoch an. Warnbit 5 wird in
Parameter 16-94 Erw.
Zustandswort eingestellt. Sie
können das Ausgangsrelais so
konfigurieren, dass es diese
Warnung anzeigt. Die WarnLED am LCP leuchtet nicht
auf, wenn der eingestellte
Grenzwert dieses Parameters
erreicht wird.
48 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 51

Parameter Programmierhandbuch
4-58 Motorphasen Überwachung
Option: Funktion:
[0] Aus Bei Auftreten einer fehlenden Motorphase wird kein
Alarm angezeigt.
[1] * Ein Bei Auftreten einer fehlenden Motorphase wird kein
Alarm angezeigt.
3.5.4 4-6* Drehz.ausblendung
Definieren Sie die Drehzahlausblendungsbereiche für die
Rampen. Es können drei Frequenzbereiche vermieden
werden.
4-61 Ausbl. Drehzahl von [Hz]
Array[3]
Range: Funktion:
0 Hz [ 0 - 500
Hz]
4-63 Ausbl. Drehzahl bis [Hz]
Array[3]
Range: Funktion:
0 Hz* [ 0 - 500
Hz]
Geben Sie hier die unteren Grenzen der zu
vermeidenden Drehzahlen ein. Bei einigen
Systemen kann es notwendig sein, bestimmte
Ausgangsdrehzahlen zu vermeiden, um
Resonanzprobleme im System zu verhindern.
Bei einigen Systemen kann es notwendig
sein, bestimmte Ausgangsdrehzahlen zu
vermeiden, um Resonanzprobleme im
System zu verhindern. Geben Sie hier die
Maximalgrenzen der zu vermeidenden
Drehzahlen ein.
3.5.5 Halbautomatische BypassDrehzahlkonfiguration
Verwenden Sie die halbautomatische Bypass-Drehzahlkonfiguration, um die Programmierung der Frequenzen, die
aufgrund von Resonanzen im System übersprungen
werden sollen, zu vereinfachen.
Verfahrensweise:
1. Stoppen Sie den Motor.
HINWEIS
Stellen Sie die Rampenzeiten in
Parameter 3-41 Rampenzeit Auf 1 und
Parameter 3-42 Rampenzeit Ab 1 auf die gewünschten
Werte ein.
2. Wählen Sie [1] Aktiviert in
Parameter 4-64 Halbautom. Ausbl.-Konfig..
3. Drücken Sie [Hand On] , um die Suche nach
Resonanzen verursachenden Frequenzbändern zu
starten. Der Motor beginnt gemäß der
eingestellten Rampe die Rampe auf.
HINWEIS
Die Werkseinstellung von Klemme 27 Digitaleingang
(Parameter 5-12 Klemme 27 Digitaleingang) ist [2]
Motorfreilauf invers. Wenn an Klemme 27 nicht 24 V
anliegen, wird der Motor durch Drücken auf [Hand On]
nicht gestartet. Ist dies der Fall, schließen Sie Klemme 12
an Klemme 27 an.
4. Drücken Sie während des Durchlaufs eines
Resonanzbandes beim Verlassen des Bandes die
Taste [OK]. Die tatsächliche Frequenz wird als
erstes Element in Parameter 4-63 Ausbl. Drehzahl
bis [Hz] (Array) gespeichert. Wiederholen Sie
diesen Vorgang für jeden erkannten Resonanzbereich beim Anfahren der Rampe (maximal drei
Bereiche können angepasst werden).
5. Wenn die maximale Drehzahl erreicht wurde,
beginnt der Motor automatisch mit der Rampe
ab. Wiederholen Sie diesen Vorgang, wenn die
Drehzahl die Resonanzbänder während der
Verzögerung verlässt. Die beim Drücken der Taste
[OK] tatsächlich registrierten Frequenzen werden
in Parameter 4-61 Ausbl. Drehzahl von [Hz]
gespeichert.
6. Wenn der Motor eine Rampe zum Stopp
vorgenommen hat, drücken Sie [OK]. Der
Parameter 4-64 Halbautom. Ausbl.-Konfig. wird
automatisch auf Aus quittiert. Der Frequenzumrichter bleibt im Handbetrieb, bis [Off] oder [Auto
On] gedrückt werden.
Wenn die Frequenzen für ein bestimmtes Resonanzband
nicht in der richtigen Reihenfolge registriert werden (in
Parameter 4-63 Ausbl. Drehzahl bis [Hz] gespeicherte
Frequenzwerte sind ≥ die Werte in Parameter 4-61 Ausbl.
Drehzahl von [Hz]) oder wenn sie nicht dieselbe Anzahl an
Registrierungen für Parameter 4-61 Ausbl. Drehzahl von [Hz]
und Parameter 4-63 Ausbl. Drehzahl bis [Hz] aufweisen,
werden alle Registrierungen abgebrochen und die
folgende Meldung wird angezeigt: Die erfassten Drehzahl-
bereiche überlappen oder sind nicht bestimmt. Drücken Sie
[Cancel], um abzubrechen.
4-64 Halbautom. Ausbl.-Konfig.
Option: Funktion:
[0] * Aus
[1] Aktivieren Wenn diese Option ausgewählt ist, werden die
Drehzahlbereiche automatisch durchsucht, damit
Resonanzbänder erkannt werden.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 49
Page 52

Parameter
VLT® HVAC Basic Drive FC 101
3.6 Hauptmenü - Digit. Ein-/Ausgänge Gruppe 5
3.6.1 5-0* Grundeinstellungen
Funktion des Digitaleingangs
[4] Schnellst. inv. Invertierter Eingang (NC). Es wird ein
Parameter zum Konfigurieren von Ein- und Ausgängen
33
mithilfe von NPN und PNP.
[5] DC-Bremse invers Invertierter Eingang für DC-Bremse
HINWEIS
Sie können diese Parameter bei laufendem Motor nicht
einstellen.
5-00 Arbeitsweise der Digitaleingänge
Option: Funktion:
Stellen Sie den NPN- oder PNP-Modus für die Digitaleingänge 18, 19 und 27 ein. Schaltlogik.
[0] * PNP Aktion bei positiven Richtungspulsen (0). PNP-Systeme
werden an Masse (GND) geschaltet.
[1] NPN Aktion bei negativen Richtungspulsen (1). NPN-
Systeme werden an +24 V geschaltet (intern im
Frequenzumrichter).
5-03 Digitaleingang 29 Funktion
Option: Funktion:
[0] * PNP Stellen Sie den PNP-Modus für die Digitaleingänge 29
ein.
[1] NPN Stellen Sie den NPN-Modus für die Digitaleingänge 29
ein.
3.6.2 5-1* Digitaleingänge
Parameter zur Konfiguration der Eingangsfunktionen für
die Eingangsklemmen.
Die Digitaleingänge dienen zur Auswahl verschiedener
Funktionen im Frequenzumrichter. Sie können alle Digitaleingänge auf die folgenden Funktionen einstellen:
Funktion des Digitaleingangs
[0] Ohne Funktion Keine Reaktion auf Signale, die an die
[1] Reset Setzt den Frequenzumrichter nach dem
[2] Motorfreilauf (inv.) Belässt den Motor im Motorfreilauf.
[3] Mot.freil./Res. inv. Reset und Freilaufstopp, invertierter
Beschreibung
Klemme übertragen werden.
Ausschalten/nach einem Alarm zurück.
Alarme zur Abschaltblockierung können
quittiert werden.
Logisch „0“⇒Freilaufstopp.
Eingang (NC). Motor bleibt im
Motorfreilauf und Frequenzumrichter wird
quittiert. Logisch „0“⇒Motorfreilaufstopp
und Reset.
[6] Stopp (invers) Wenn das Signal an der zugewiesenen
[7] Externe Verriegelung
[8] Start Wählen Sie Start, um die ausgewählte
[9] Puls-Start Wenn ein Puls für 2 ms aktiviert wird,
[10] Reversierung Ändert die Drehrichtung der Motorwelle.
[11] Start +
Reversierung
Beschreibung
Stopp gemäß Schnellstopp-Rampenzeit
Parameter 3-81 Rampenzeit Schnellstopp
ausgeführt. Nach der Rampe ab dreht die
Welle im Motorfreilauf.
(öffnen). Hält den Motor durch Anlegen
einer DC-Spannung für einen bestimmten
Zeitraum an, siehe Parameter 2-01 DC-
Bremsstrom. Die Funktion ist nur aktiv,
wenn der Wert in Parameter 2-02 DC-
Bremszeit ungleich 0 ist. Diese Auswahl ist
nicht möglich, wenn
Parameter 1-10 Motorart auf [1] PM (Oberfl.
mon.) gesetzt ist.
Klemme von 1 auf 0 wechselt (kein PulsStart), wird ein Rampenstopp aktiviert. Der
Stopp wird gemäß der gewählten
Rampenzeit ausgeführt.
Hat die gleichen Funktionen wie
Motorfreilaufstopp invers, aber externe
Verriegelung generiert die Alarmmeldung
externer Fehler auf dem Bildschirm, wenn
die für Motorfreilauf invers programmierte
Klemme logisch „0“ ist. Wenn auf die
externe Verriegelung programmiert, ist die
Alarmmeldung auch über die Digitalausgänge und die Relaisausgänge aktiv.
Wenn die Ursache für die externe Verriegelung beseitigt wurde, können Sie den
Alarm unter Verwendung eines Digitaleingangs, eines Feldbusses oder der Taste
[Reset] quittieren.
Klemme für einen Start/Stopp-Befehl zu
konfigurieren. Logisch „1“ = Start, logisch
„0“ = Stopp. (Werkseinstellung Digitaleingang 18).
startet der Motor. Bei Aktivierung von
Stopp (invers) wird der Motor gestoppt.
Das Reversierungssignal ändert nur die
Drehrichtung, es aktiviert nicht die
Startfunktion. Wählen Sie [2] Beide
Richtungen in Parameter 4-10 Motor
Drehrichtung. 0 = normal, 1 =
Reversierung.
Wird für Start/Stopp und gleichzeitige
Reversierung verwendet. Signale beim [8]
Start sind nicht gleichzeitig möglich. 0 =
Stopp, 1 = Reversierung starten.
50 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 53

Parameter Programmierhandbuch
Funktion des Digitaleingangs
[14] Festdrehzahl JOG Aktiviert für die zugewiesene Klemme die
[16] Festsollwert Bit 0 Ermöglicht entsprechend Tabelle 3.4 die
[17] Festsollwert Bit 1 Ermöglicht entsprechend Tabelle 3.4 die
[18] Festsollwert Bit 2 Ermöglicht entsprechend Tabelle 3.4 die
[19] Sollw. speich. Speichert den aktuellen Sollwert. Der
[20] Drehz. speich. Speichert den aktuellen Sollwert. Der
[21] Drehzahl auf Zur digitalen Steuerung der Drehzahl
[22] Drehzahl ab Wie bei [21] Drehzahl auf, Sollwert nimmt
[23] Satzanwahl Bit 0 Wählen Sie einen der zwei Sätze. Program-
[32] Pulseingang Pulseingang ist zu wählen, wenn die
[34] Rampe Bit 0 Wählen Sie die zu verwendende Rampe.
Beschreibung
JOG-Funktion. Siehe
Parameter 3-11 Festdrehzahl Jog [Hz].
(Werkseinstellung Digitaleingang 29).
Auswahl eines der acht Festsollwerte.
Auswahl eines der acht Festsollwerte.
Auswahl eines der acht Festsollwerte.
gespeicherte Sollwert ist jetzt der
Ausgangspunkt bzw. die Bedingung für
Drehzahl auf und Drehzahl ab. Wird
Drehzahl auf/ab benutzt, richtet sich die
Drehzahländerung immer nach Rampe 2
(Parameter 3-51 Rampenzeit Auf 2 und
Parameter 3-52 Rampenzeit Ab 2) im
Bereich von Parameter 3-02 Minimaler
Sollwert - Parameter 3-03 Maximaler
Sollwert.
gespeicherte Sollwert ist jetzt der
Ausgangspunkt bzw. die Bedingung für
Drehzahl auf und Drehzahl ab. Wird
Drehzahl auf/ab verwendet, richtet sich
die Drehzahländerung immer nach Rampe
2.
auf/ab (Motorpotenziometer). Aktivieren
Sie diese Funktion durch Auswahl von
Sollwert speichern oder Ausgangsfrequenz
speichern. Wird Drehzahl ab weniger als
400 ms aktiviert, wird der resultierende
Sollwert um 0,1 % erhöht. Falls Drehzahl
auf länger als 400 ms aktiviert ist, erfolgt
Rampe auf/ab des resultierenden Sollwerts
gemäß Rampe 1 in
Parameter 3-41 Rampenzeit Auf 1.
jedoch ab.
mieren Sie Parameter 0-10 Aktiver Satz auf
externe Anwahl.
zugewiesene Klemme als Frequenzeingang
(Pulssignal) konfiguriert werden soll. Die
Skalierung erfolgt in Parametergruppe 5-5*
Pulseingang. Nur für Klemme 29 verfügbar.
Logisch 0 bewirkt Rampe 1 und logisch 1
Rampe 2.
Funktion des Digitaleingangs
[37] Notfallbetrieb Ein angelegtes Signal bringt den Frequen-
[52] Startfreigabe Es muss ein aktives Startsignal über die
Beschreibung
zumrichter in den Notfallbetrieb und alle
weiteren Befehle werden nicht berücksichtigt. Siehe Parametergruppe 24-0*
Notfallbetrieb.
Eingangsklemme vorliegen, über die Sie
Startfreigabe programmiert haben, bevor
ein Startbefehl angenommen werden
kann. Die Startfreigabe verfügt über eine
logische UND-Funktion in Bezug auf die
Klemme, die für [8] Start, [14] Festdrehzahl
JOG oder [20] Ausgangsfrequenz speichern
programmiert ist. Zum Start des Motors
müssen beide Bedingungen erfüllt sein.
Wenn Startfreigabe auf verschiedenen
Klemmen programmiert ist, darf
Startfreigabe nur auf einer der Klemmen
logisch 1 sein, damit die Funktion
ausgeführt wird. Das digitale Ausgangssignal für Startbefehl ([8] Start, [14]
Festdrehzahl JOG oder [20] Ausgangsfrequenz speichern), das in
Parametergruppe 5-3* Digitalausgänge oder
Parametergruppe 5-4* Relais programmiert
ist, wird von Startfreigabe nicht
beeinflusst.
HINWEIS
Wenn kein Startfreigabesignal durch
die Befehle Betrieb, Festdrehzahl JOG
oder Speichern aktiviert wird, zeigt
die Statuszeile im Display Betrieb
erforderlich, Festdrehzahl JOG
erforderlich oder Speichern
erforderlich an.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 51
Page 54

Parameter
VLT® HVAC Basic Drive FC 101
Funktion des Digitaleingangs
[53] Hand Start Ein angelegtes Signal versetzt den
33
[54] Auto Start Ein angelegtes Signal versetzt den
[60] Zähler A (+1) Eingang zum Erhöhen der Zählung im
[61] Zähler A (-1) Eingang zum Verringern der Zählung im
[62] Reset Zähler A Eingang zum Reset von Zähler A.
[63] Zähler B (+1) Eingang zum Erhöhen der Zählung im
[64] Zähler B (-1) Eingang zum Verringern der Zählung im
[65] Reset Zähler B Eingang zum Reset von Zähler B.
[101] Energiesparmodus
Tabelle 3.3 Digitaleingangsfunktionen
Ausgewählter
Festsollwert
Festsollwert 0 0 0 0
Festsollwert 1 0 0 1
Festsollwert 2 0 1 0
Festsollwert 3 0 1 1
Festsollwert 4 1 0 0
Festsollwert 5 1 0 1
Festsollwert 6 1 1 0
Festsollwert 7 1 1 1
Tabelle 3.4 Ausgewählter Festsollwert
Beschreibung
Frequenzumrichter in den Hand-Betrieb,
als ob Sie [Hand On] gedrückt haben, und
ein normaler Stoppbefehl wird
übergangen. Beim Trennen des Signals
stoppt der Motor. Für andere gültige
Startbefehle müssen Sie einem anderen
Digitaleingang Auto Start zuordnen und
an diesen ein Signal anlegen. Die Tasten
[Hand On] und [Auto On] haben keine
Wirkung. Die Taste [Off] setzt Hand Start
und Auto Start außer Kraft. Aktivieren Sie
Hand Start bzw. Auto Start wieder über die
Taste [Hand On] bzw. [Auto On]. Ohne
Signal an Hand Start oder Auto Star t
stoppt der Motor unabhängig von jedem
normalen Befehl Start, der angelegt wird.
Liegt ein Signal an Hand Start und auch
Auto Start an, ist die Funktion Auto Start
wirksam.
Frequenzumrichter in den Auto-Modus, als
ob Sie [Auto On] gedrückt haben. Siehe
auch [53] Hand Start.
SLC-Zähler.
SLC-Zähler.
SLC-Zähler.
SLC-Zähler.
Ein angelegtes Signal versetzt den
Frequenzumrichter in den Ruhezustand.
Festsollwert
Bit 2
Festsollwert
Bit 1
Festsollwert
Bit 0
5-10 Klemme 18 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 18. Siehe Tabelle 3.3 für Einstelloptionen.
Option: Funktion:
[0] Ohne Funktion
[1] Alarm quittieren
[2] Motorfreilauf (inv.)
[3] Mot.freil./Res. inv.
[4] Schnellst. inv.
[5] DC Bremse (invers)
[6] Stopp (invers)
[7] Externe Verriegelung
[8] * Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[14] Festdrehzahl JOG
[16] Festsollwert Bit 0
[17] Festsollwert Bit 1
[18] Festsollwert Bit 2
[19] Sollw. speich.
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[34] Rampe Bit 0
[37] Notfallbetrieb
[52] Startfreigabe
[53] Hand Start
[54] Auto Start
[60] Zähler A (+1)
[61] Zähler A (-1)
[62] Reset Zähler A
[63] Zähler B (+1)
[64] Zähler B (-1)
[65] Reset Zähler B
[101] Energiesparmodus
[120] Führungspumpenstart
[121] Führungspumpen-Wechsel
[130] Pumpe 1 Verriegelung
[131] Pumpe 2 Verriegelung
[132] Pumpe 3 Verriegelung
[133] Pumpe 4 Verriegelung
[134] Pumpe 5 Verriegelung
5-11 Klemme 19 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 19.
Option: Funktion:
[0] * Ohne Funktion
[1] Alarm quittieren
[2] Motorfreilauf (inv.)
[3] Mot.freil./Res. inv.
[4] Schnellst. inv.
52 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 55

Parameter Programmierhandbuch
5-11 Klemme 19 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 19.
Option: Funktion:
[5] DC Bremse (invers)
[6] Stopp (invers)
[7] Externe Verriegelung
[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[14] Festdrehzahl JOG
[16] Festsollwert Bit 0
[17] Festsollwert Bit 1
[18] Festsollwert Bit 2
[19] Sollw. speich.
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[34] Rampe Bit 0
[37] Notfallbetrieb
[52] Startfreigabe
[53] Hand Start
[54] Auto Start
[60] Zähler A (+1)
[61] Zähler A (-1)
[62] Reset Zähler A
[63] Zähler B (+1)
[64] Zähler B (-1)
[65] Reset Zähler B
[101] Energiesparmodus
[120] Führungspumpenstart
[121] Führungspumpen-Wechsel
[130] Pumpe 1 Verriegelung
[131] Pumpe 2 Verriegelung
[132] Pumpe 3 Verriegelung
[133] Pumpe 4 Verriegelung
[134] Pumpe 5 Verriegelung
5-12 Klemme 27 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 27. Wenn Parameter 0-03 Ländereinstellungen auf [0]
International eingestellt ist, ist die Werkseinstellung [2]
Motorfreilauf invers. Wenn Parameter 0-03 Ländereinstellungen auf
[1] Nord-Amerika eingestellt ist, ist die Werkseinstellung [7]
Externe Verriegelung.
Option: Funktion:
[0] Ohne Funktion
[1] Alarm quittieren
[2] Motorfreilauf (inv.)
[3] Mot.freil./Res. inv.
[4] Schnellst. inv.
[5] DC Bremse (invers)
5-12 Klemme 27 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 27. Wenn Parameter 0-03 Ländereinstellungen auf [0]
International eingestellt ist, ist die Werkseinstellung [2]
Motorfreilauf invers. Wenn Parameter 0-03 Ländereinstellungen auf
[1] Nord-Amerika eingestellt ist, ist die Werkseinstellung [7]
Externe Verriegelung.
Option: Funktion:
[6] Stopp (invers)
[7] Externe Verriegelung
[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[14] Festdrehzahl JOG
[16] Festsollwert Bit 0
[17] Festsollwert Bit 1
[18] Festsollwert Bit 2
[19] Sollw. speich.
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[34] Rampe Bit 0
[37] Notfallbetrieb
[52] Startfreigabe
[53] Hand Start
[54] Auto Start
[60] Zähler A (+1)
[61] Zähler A (-1)
[62] Reset Zähler A
[63] Zähler B (+1)
[64] Zähler B (-1)
[65] Reset Zähler B
[101] Energiesparmodus
[120] Führungspumpenstart
[121] Führungspumpen-Wechsel
[130] Pumpe 1 Verriegelung
[131] Pumpe 2 Verriegelung
[132] Pumpe 3 Verriegelung
[133] Pumpe 4 Verriegelung
[134] Pumpe 5 Verriegelung
5-13 Klemme 29 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 29.
Option: Funktion:
[0] Ohne Funktion
[1] Alarm quittieren
[2] Motorfreilauf (inv.)
[3] Mot.freil./Res. inv.
[4] Schnellst. inv.
[5] DC Bremse (invers)
[6] Stopp (invers)
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 53
Page 56

Parameter
VLT® HVAC Basic Drive FC 101
5-13 Klemme 29 Digitaleingang
Parameter zur Konfiguration der Eingangsfunktion an Eingangsklemme 29.
Option: Funktion:
[7] Externe Verriegelung
33
[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[14] * Festdrehzahl JOG
[16] Festsollwert Bit 0
[17] Festsollwert Bit 1
[18] Festsollwert Bit 2
[19] Sollw. speich.
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[32] Pulseingang
[34] Rampe Bit 0
[37] Notfallbetrieb
[52] Startfreigabe
[53] Hand Start
[54] Auto Start
[60] Zähler A (+1)
[61] Zähler A (-1)
[62] Reset Zähler A
[63] Zähler B (+1)
[64] Zähler B (-1)
[65] Reset Zähler B
[101] Energiesparmodus
[120] Führungspumpenstart
[121] Führungspumpen-Wechsel
[130] Pumpe 1 Verriegelung
[131] Pumpe 2 Verriegelung
[132] Pumpe 3 Verriegelung
[133] Pumpe 4 Verriegelung
[134] Pumpe 5 Verriegelung
3.6.3 5-3* Digitalausgänge
Parameter zur Konfiguration der Ausgangsfunktionen für
die Ausgangsklemmen.
5-34 Ein Verzögerung, Digitalausgang
Range: Funktion:
0.01 s* [0 - 600 s] Eingabe der Verzögerungszeit, bevor der
Digitalausgang eingeschaltet wird. Die
Bedingung des Digitalausgangs (Klemme
42/45) darf während der Verzögerungszeit
nicht unterbrochen sein.
5-35 Aus Verzögerung, Digitalausgang
Range: Funktion:
0.01 s* [0 - 600 s] Eingabe der Verzögerung, bevor der Digitalausgang ausgeschaltet wird. Die Bedingung
des Digitalausgangs (Klemme 42/45) darf
während der Verzögerungszeit nicht
unterbrochen sein.
3.6.4 5-4* Relais
Parameter zur Konfiguration der Timing- und Ausgangsfunktionen des Relais.
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
[0] Ohne Funktion
[1] Steuer. bereit Die Steuerkarte erhält eine Versor-
gungsspannung.
[2] Bereit Der Frequenzumrichter ist betriebs-
bereit und legt ein
Versorgungssignal an der Steuerkarte
an.
[3] Bereit/Fern-Betrieb Der Frequenzumrichter ist betriebs-
bereit für den Auto-Betrieb.
[4] Standby/keine
Warn.
[5] Motor dreht Motor läuft.
[6] Motor ein/k.
Warnung
[7] Grenzen OK,
k.Warn.
[8] Ist=Sollw., k.Warn. Die Motordrehzahl entspricht dem
[9] Alarm Ein Alarm aktiviert den Ausgang.
[10] Alarm oder
Warnung
[12] Außerh.Stromber. Der Motorstrom liegt außerhalb des
Der Frequenzumrichter ist betriebsbereit. Es wurde kein Start-/
Stoppbefehl gegeben. Es liegen
keine Warnungen vor.
Der Motor läuft, und es liegen keine
Warnungen vor.
Der Motor läuft innerhalb der
programmierten Strombereiche,
siehe Parameter 4-50 Warnung Strom
niedrig und Parameter 4-51 Warnung
Strom hoch. Es liegen keine
Warnungen vor.
Sollwert und es sind keine
Warnungen vorhanden.
Ein Alarm oder eine Warnung
aktiviert den Ausgang.
in Parameter 4-50 Warnung Strom
54 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 57

Parameter Programmierhandbuch
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
niedrig und Parameter 4-51 Warnung
Strom hoch eingestellten Bereichs.
[13] Unter Min.-Strom Der Motorstrom liegt unter dem in
Parameter 4-50 Warnung Strom
niedrig eingestellten Wert.
[14] Über Max.-Strom Der Motorstrom liegt über dem in
Parameter 4-51 Warnung Strom hoch
eingestellten Wert.
[16] Unter Min.-
Drehzahl
[17] Über Max.-
Drehzahl
[19] Unter Min.-Istwert Der Istwert ist niedriger als der in
[20] Über Max.-Istwert Der Istwert ist höher als der in
[21] Warnung
Übertemp.
[22] Bereit, keine
Übertemperaturwarnung
[23] Fern, Ber., k. therm. Der Frequenzumrichter ist betriebs-
[24] Bereit, k.Über-/
Untersp.
[25] Reversierung Der Motor läuft bzw. ist bereit, im
Die Ausgangsdrehzahl des Frequenzumrichters ist niedriger als der in
Parameter 4-40 Warnung Frequenz
Niedrig eingestellte Grenzwert.
Die Ausgangsdrehzahl des Frequenzumrichters ist höher als der in
Parameter 4-41 Warnung Frequenz
Hoch eingestellte Grenzwert.
Parameter 4-56 Warnung Istwert niedr.
eingestellte Grenzwert.
Parameter 4-57 Warnung Istwert hoch
eingestellte Grenzwert.
Die Übertemperaturwarnung wird
aktiviert, wenn die Temperatur die
Grenze im Motor, im Frequenzumrichter oder im Thermistor
überschreitet.
Der Frequenzumrichter ist betriebsbereit, und es liegt keine
Übertemperaturwarnung vor.
bereit im Autobetrieb, und es liegt
keine Übertemperaturwarnung vor.
Der Frequenzumrichter ist betriebsbereit, und die Netzspannung liegt
innerhalb des festgelegten
Spannungsbereichs.
Rechtslauf zu drehen, wenn logisch
= 0 und im Linkslauf bei logisch = 1.
Der Ausgang ändert sich, sobald das
Reversierungssignal angelegt wird.
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
[26] Bus OK Aktive Kommunikation (kein
Timeout) über die serielle Kommunikationsschnittstelle.
[35] Ext. Verriegelung Siehe Digitaleingang.
[36] Steuerwort Bit 11 Bit 11 in Steuerwort steuert das
Relais.
[37] Steuerwort Bit 12 Bit 12 in Steuerwort steuert das
Relais.
[41] Unter Min.-Sollwert Der Sollwert ist niedriger als der in
Parameter 4-54 Warnung Sollwert
niedr. eingestellte Grenzwert.
[42] Über Max.-Sollwert Der Sollwert ist höher als der in
Parameter 4-55 Warnung Sollwert
hoch eingestellte Grenzwert.
[45] Bussteuerung Der Ausgang wird in
Parameter 5-90 Dig./Relais Ausg.
Bussteuerung konfiguriert.
[60] Vergleicher 0 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
0 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
[61] Vergleicher 1 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
1 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
[62] Vergleicher 2 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
2 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
[63] Vergleicher 3 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
3 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
[64] Vergleicher 4 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
4 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 55
Page 58

Parameter
VLT® HVAC Basic Drive FC 101
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
33
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
[65] Vergleicher 5 Siehe Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
5 als wahr ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
[70] Logikregel 0 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 0 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[71] Logikregel 1 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 1 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[72] Logikregel 2 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 2 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[73] Logikregel 3 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 3 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[74] Logikregel 4 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 4 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[75] Logikregel 5 Siehe Parametergruppe 13-4*
Logikregeln. Ergibt Logikregel 5 wahr,
aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[80] SL-DigitalausgangASiehe Parameter 13-52 SL-Controller-
Aktion. Der Eingang ist EIN, wenn die
Smart Logic Action [38] Digital-
ausgang A-EIN ausgeführt wird. Der
Eingang ist AUS, wenn die SLController [32] Aktion Digitalausgang
A ausgeführt wird.
[81] SL-DigitalausgangBSiehe Parameter 13-52 SL-Controller-
Aktion. Der Eingang ist EIN, wenn die
Smart Logic Action [39] Digital-
ausgang B-EIN ausgeführt wird. Der
Eingang ist AUS, wenn die SLController [33] Aktion Digitalausgang
B-AUS ausgeführt wird.
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
[82] SL-DigitalausgangCSiehe Parameter 13-52 SL-Controller-
Aktion. Der Eingang ist EIN, wenn die
Smart Logic Action [40] Digitalausgang C-EIN ausgeführt wird. Der
Eingang ist AUS, wenn die SLController [34] Aktion Digitalausgang
C-AUS ausgeführt wird.
[83] SL-DigitalausgangDSiehe Parameter 13-52 SL-Controller-
Aktion. Der Eingang ist EIN, wenn die
SL-Controller [41] Aktion Digital-
ausgang D-EIN ausgeführt wird. Der
Eingang ist AUS, wenn die SLController [35] Aktion Digitalausgang
D-AUS ausgeführt wird.
[160] Kein Alarm Der Ausgang ist aktiv, wenn kein
Alarm vorliegt.
[161] Reversierung aktiv Der Ausgang ist aktiv, wenn der
Frequenzumrichter den Motor im
Linkslauf betreibt (das logische
Produkt der Statusbits „Betrieb“ UND
„Reversierung“).
[165] Hand-Sollwert aktiv Der Ausgang ist aktiv, wenn der
Ortssollwert durch die [Hand On]Taste des LCP oder durch den HandOn-Befehl des Digitaleingangs
aktiviert wird.
[166] Fern-Sollwert aktiv Der Ausgang ist aktiv, wenn der
Fernsollwert durch die [Auto On]Taste des LCP oder durch den [AutoOn]-Befehl des Digitaleingangs
aktiviert wird.
[167] Startbefehl aktiv Der Ausgang ist aktiv, wenn ein
Startbefehl ausgeführt wird (z. B.
über einen DigitaleingangBusanschluss oder [Hand On] oder
[Auto On]) und kein Stoppbefehl
aktiv ist.
[168] Hand-Betrieb Der Ausgang ist aktiv, wenn sich der
Frequenzumrichter im Hand-Betrieb
befindet (angezeigt durch LED über
[Hand on]).
[169] Autobetrieb Der Ausgang ist aktiv, wenn sich der
Frequenzumrichter im Auto-Betrieb
56 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 59

Parameter Programmierhandbuch
5-40 Relaisfunktion
Array (Relais 1 [0], Relais 2 [1])
Wählen Sie Optionen, um die Funktion der Relais zu definieren.
Die Auswahl der einzelnen mechanischen Relais erfolgt in einem
Arrayparameter. Wenn Sie Parameter 0-03 Ländereinstellungen auf
[0] International einstellen, ist der Standardwert [9] Alarm. Wenn
Sie Parameter 0-03 Ländereinstellungen auf [1] Nord-Amerika
einstellen, ist der Standardwert [160] Kein Alarm.
Option: Funktion:
befindet (angezeigt durch LED über
[Auto on]).
[190] Kein Durchfluss Der Frequenzumrichter hat einen
fehlenden Durchfluss erfasst. Siehe
Parametergruppe 22-2* No-Flow
Erkennung.
[193] Energiesparmodus Der Frequenzumrichter/das System
befindet sich im Energiesparmodus.
Siehe Parametergruppe 22-4* Energie-
sparmodus.
[194] Riemenbruch-
funktion
[196] Notfallbetrieb Der Frequenzumrichter wird im
[198] FU-Bypass Als Signal zur Aktivierung einer
[211] Kaskadenpumpe 1
[212] Kaskadenpumpe 2
[213] Kaskadenpumpe 3
[214] Kaskadenpumpe 4
[215] Kaskadenpumpe 5
Eine Riemenbruchbedingung wurde
erkannt. Aktivieren Sie die Funktion
in Parameter 22-60 Riemenbruch-
funktion.
Notfallbetrieb betrieben. Siehe
Parametergruppe 24-0* Notfallbetrieb.
externen elektromechanischen
Überbrückung zur direkten
Schaltung des Motors ans Netz.
Siehe auch Parametergruppe 24-1*
FU-Bypass.
Abbildung 3.7 Ein Verzögerung, Relais
5-42 Aus Verzög., Relais
Array[2]
Range: Funktion:
0.01 s* [0.01 -
600 s]
Geben Sie die Einschaltverzögerung des Relais
ein. Wählen Sie eines der zwei internen
mechanischen Relais in einer Reihenfunktion
aus. Nähere Angaben finden Sie in
Parameter 5-40 Relaisfunktion. Ändert sich die
ausgewählte Ereignisbedingung vor Ablauf
einer Einschaltverzögerung, bleibt der Relaisausgang unverändert.
3 3
5-41 Ein Verzög., Relais
Array [2]
Abbildung 3.8 Aus Verzögerung, Relais
Range: Funktion:
0.01 s* [0.01 - 600s]Eingabe der Einschaltverzögerung des
Relais. Wählen Sie eines der zwei internen
mechanischen Relais in einer Reihenfunktion aus. Nähere Angaben finden Sie in
Parameter 5-40 Relaisfunktion.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 57
Ändert sich die ausgewählte Ereignisbedingung vor Ablauf
der Ein-/Ausschaltverzögerung, bleibt der Relaisausgang
unverändert.
Page 60

Parameter
VLT® HVAC Basic Drive FC 101
3.6.5 5-5* Pulseingänge
5-53 Klemme 29 Max. Soll-/Istwert
Range: Funktion:
Die Impulseingangsparameter dienen dazu, ein entsprechendes Fenster für den Impulsreferenzbereich zu
definieren, indem die Skalierungs- und Filtereinstellungen
für die Impulseingänge konfiguriert werden. Pulseingänge
33
sind Klemmen 29 und 33. Programmieren Sie Klemme 29
(Parameter 5-13 Klemme 29 Digitaleingang) oder Klemme 33
(Parameter 5-15 Klemme 33 Digitaleingang) auf [32]
Size
related*
[-4999 4999 ]
Eingabe des maximalen Sollwerts [U/
min] für die Motorwellendrehzahl und
des maximalen Istwerts. Wählen Sie
Klemme 29 als Digitaleingang
(Parameter 5-13 Klemme 29 Digital-
eingang = gültiger Wert).
Pulseingang. Wird Klemme 29 als Eingang verwendet,
stellen Sie Parameter 5-01 Klemme 27 Funktion auf [0]
3.6.6 5-9* Bussteuerung
Eingang.
Diese Parametergruppe wählt Digital- und Relaisausgänge
über eine Feldbus-Einstellung.
5-90 Dig./Relais Ausg. Bussteuerung
Range: Funktion:
0* [0 -
0xFFFFFFFF ]
Dieser Parameter speichert den Zustand
der busgesteuerten Digitalausgänge und
Relais.
Eine logische 1 gibt an, dass der Ausgang
hoch oder aktiv ist.
Eine logische 0 gibt an, dass der Ausgang
niedrig oder inaktiv ist.
Abbildung 3.9 Pulseingang
5-50 Klemme 29 Min. Frequenz
Range: Funktion:
20 Hz* [20 - 31999
Hz]
Geben Sie die untere Frequenzgrenze
entsprechend der unteren Motorwellendrehzahl (d. h. unterer Sollwert) in
Parameter 5-52 Klemme 29 Min. Soll-/Istwert
ein. Siehe Abbildung 3.9.
5-51 Klemme 29 Max. Frequenz
Range: Funktion:
32000 Hz* [21 -
32000 Hz]
Geben Sie die obere Frequenzgrenze
entsprechend der oberen Motorwellendrehzahl (d. h. oberer Sollwert) in
Parameter 5-53 Klemme 29 Max. Soll-/
Istwert ein.
5-52 Klemme 29 Min. Soll-/Istwert
Range: Funktion:
0* [-4999 -
4999 ]
Geben Sie die untere Sollwertgrenze für die
Motorwellendrehzahl [U/min] ein. Dies ist auch
der minimale Istwert. Setzen Sie Klemme 29 auf
Digitaleingang (Parameter 5-13 Klemme 29
Digitaleingang = gültiger Wert).
Bit 0–3 Reserviert
Bit 4 Relais 1 Ausgangsklemme
Bit 6–23 Reserviert
Bit 24 Klemme 42 Digitalausgang
Bit 26–31 Reserviert
Tabelle 3.5 Bitfunktionen
58 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 61

Soll-/Istwert
[UPM]
Analogeingang
Max.
Soll-/ Istwert
Min.
Soll-/ Istwert
Min. Spannung oder
Min. Strom
Max. Spannung oder
Max. Strom
130BA038.13
1 V 5 V 10 V
300
600
900
1.200
1.500
[V]
150
Par. 6-xx
Par. 6-xx
Par. 6-xx
Par. 6-xx
Parameter Programmierhandbuch
3.7 Hauptmenü - Analoge Ein-/Ausg. Gruppe 6
Parametergruppe zur Einrichtung der analogen I/OKonfiguration und des Digitalausgangs.
Der Frequenzumrichter ist mit 2 Analogeingängen
ausgestattet:
Klemme 53.
•
Klemme 54.
•
Die Analogeingänge sind frei für Spannung (0-10 V) oder
Stromeingang (0/4-20 mA) konfigurierbar.
3.7.1 6-0* Grundeinstellungen
6-00 Signalausfall Zeit
Range: Funktion:
10 s* [1 - 99 s] Eingabe der Signalausfall-Zeit.
6-01 Signalausfall Funktion
Option: Funktion:
Wählen Sie die Timeout-Funktion aus. Die
unter Parameter 6-01 Signalausfall Funktion
eingestellte Funktion wird aktiviert, wenn
das Eingangssignal an Klemme 53 oder 54
weniger als 50 % des unter
Parameter 6-10 Klemme 53 Skal.
Min.Spannung, Parameter 6-12 Klemme 53
Skal. Min.Strom, Parameter 6-20 Klemme 54
Skal. Min.Spannung oder
Parameter 6-22 Klemme 54 Skal.
Min.Stromdefinierten Werts beträgt, und
zwar für einen Zeitraum, der unter
Parameter 6-00 Signalausfall Zeit definiert
wurde.
[0] * Aus
[1] Drehz. speich.
[2] Stopp
[3] Festdrehzahl
JOG
[4] Max. Drehzahl
[5] Stopp und
Alarm
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 59
Abbildung 3.10 Signalausfall Zeit Funktion
6-02 Notfallbetrieb Signalausfall Funktion
Option: Funktion:
Wählen Sie die Timeout-Funktion, wenn
der Notfallbetrieb aktiv ist. Die in diesem
Parameter eingestellte Funktion wird
aktiviert, wenn das Eingangssignal an
den Analogeingängen weniger als 50 %
des in Parameter 6-00 Signalausfall Zeit
definierten Werts beträgt.
[0] * Aus
[1] Drehz. speich.
[2] Stopp
[3] Festdrehzahl
JOG
[4] Max. Drehzahl
3.7.2 6-1* Analogeingang 53
Parameter zum Skalieren und Konfigurieren der Grenzwerte
für Analogeingang 53 (Klemme 53).
6-10 Klemme 53 Skal. Min.Spannung
Range: Funktion:
0.07 V* [0 - 10V]Geben Sie die Spannung (V) ein, die
Parameter 6-14 Klemme 53 Skal. Min.-Soll/
Istwert entspricht. Stellen Sie den Wert zur
Aktivierung von Parameter 6-01 Signalausfall
Funktion auf >1 V ein.
6-11 Klemme 53 Skal. Max.Spannung
Range: Funktion:
10 V* [0 - 10 V] Geben Sie die Spannung (V) ein, die dem
maximalen Sollwert entspricht (eingestellt in
Parameter 6-15 Klemme 53 Skal. Max.-Soll/
Istwert).
3 3
Page 62

Parameter
VLT® HVAC Basic Drive FC 101
6-12 Klemme 53 Skal. Min.Strom
3.7.3 6-2* Analogeingang 54
Range: Funktion:
4 mA* [0 - 20
mA]
33
Geben Sie den minimalen Stromwert ein.
Dieses Sollwertsignal sollte dem in
Parameter 6-14 Klemme 53 Skal. Min.-Soll/Istwert
eingestellten Min. Soll-/Istwert entsprechen.
Stellen Sie den Wert zur Aktivierung von
Parameter 6-01 Signalausfall Funktion auf >2
mA ein.
6-13 Klemme 53 Skal. Max.Strom
Range: Funktion:
20 mA* [0 - 20
mA]
Parameter zum Skalieren des Max.-Stroms
des Analogeingangs. Der angegebene Wert
bezieht sich auf die Festlegung in
Parameter 6-15 Klemme 53 Skal. Max.-Soll/
Istwert.
6-14 Klemme 53 Skal. Min.-Soll/Istwert
Parameter zum Skalieren und Konfigurieren der Grenzwerte
für Analogeingang 54 (Klemme 54).
6-20 Klemme 54 Skal. Min.Spannung
Range: Funktion:
0.07 V* [0 - 10V]Geben Sie die Spannung (V) ein, die dem
minimalen Sollwert entspricht (eingestellt in
Parameter 6-24 Klemme 54 Skal. Min.-Soll/
Istwert). Stellen Sie den Wert zur Aktivierung
von Parameter 6-01 Signalausfall Funktion auf
>1 V ein.
6-21 Klemme 54 Skal. Max.Spannung
Range: Funktion:
10 V* [0 - 10 V] Geben Sie die Spannung (V) ein, die dem
maximalen Sollwert entspricht (eingestellt in
Parameter 6-25 Klemme 54 Skal. Max.-Soll/
Istwert).
Range: Funktion:
0* [-4999 -
4999 ]
6-15 Klemme 53 Skal. Max.-Soll/Istwert
Range: Funktion:
Size
related*
6-16 Klemme 53 Filterzeit
Geben Sie den Soll- oder Istwert ein, der dem
in Parameter 6-10 Klemme 53 Skal.
Min.Spannung bis Parameter 6-12 Klemme 53
Skal. Min.Strom eingestellten Wert für
Spannung oder Strom entspricht.
[-4999 4999 ]
Geben Sie den Soll- oder Istwert ein,
der dem in Parameter 6-11 Klemme 53
Skal. Max.Spannung bis
Parameter 6-13 Klemme 53 Skal.
Max.Strom eingestellten Wert für
Spannung oder Strom entspricht.
6-22 Klemme 54 Skal. Min.Strom
Range: Funktion:
4 mA* [0 - 20
mA]
Geben Sie den minimalen Stromwert ein.
Dieses Sollwertsignal entspricht dem in
Parameter 6-24 Klemme 54 Skal. Min.-Soll/Istwert
eingestellten Min. Soll-/Istwert. Zur Aktivierung
der Signalausfall Zeit-Funktion in
Parameter 6-01 Signalausfall Funktion müssen
Sie den Wert auf >2 mA einstellen.
6-23 Klemme 54 Skal. Max.Strom
Range: Funktion:
20 mA* [0 - 20
mA]
Zur Eingabe des max.-Stroms
entsprechend dem in
Parameter 6-25 Klemme 54 Skal. Max.-Soll/
Istwert festgelegten max. Soll-/Istwert.
Range: Funktion:
0.01 s* [0.01 10 s]
Geben Sie die Zeitkonstante ein. Dies ist eine
Filterzeitkonstante für das digitale Tiefpassfilter erster Ordnung, um Rauschen an
Klemme 53 zu unterdrücken. Ein hoher Wert
für die Zeitkonstante verbessert die
Dämpfung, erhöht jedoch auch die Zeitverzögerung durch das Filter.
6-24 Klemme 54 Skal. Min.-Soll/Istwert
Range: Funktion:
0* [-4999 -
4999 ]
Geben Sie den Soll- oder Istwert ein, der dem
in Parameter 6-21 Klemme 54 Skal.
Max.Spannung/Parameter 6-22 Klemme 54 Skal.
Min.Strom eingestellten Wert für Spannung
oder Strom entspricht.
6-19 Klemme 53 Modus
Option: Funktion:
Wählen Sie aus, ob Klemme 53 für
Strom- oder Spannungseingang
verwendet wird.
[0] Strom
[1] * Einstellung
Spannung
60 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
6-25 Klemme 54 Skal. Max.-Soll/Istwert
Range: Funktion:
Size
related*
[-4999 4999 ]
Geben Sie den Soll- oder Istwert ein,
der dem in Parameter 6-21 Klemme 54
Skal. Max.Spannung/
Parameter 6-23 Klemme 54 Skal.
Max.Strom eingestellten Wert für
Spannung oder Strom entspricht.
Page 63

Parameter Programmierhandbuch
6-26 Klemme 54 Filterzeit
Range: Funktion:
0.01 s* [0.01 10 s]
Geben Sie die Zeitkonstante ein; dies ist eine
Filterzeitkonstante für das digitale Tiefpassfilter erster Ordnung, um Rauschen an
Klemme 54 zu unterdrücken Ein hoher Wert
für die Zeitkonstante verbessert die
Dämpfung, erhöht jedoch auch die Zeitverzögerung durch das Filter.
6-29 Klemme 54 Funktion
Option: Funktion:
Wählen Sie aus, ob Klemme 54 für
Strom- oder Spannungseingang
verwendet wird.
[0] Strom
[1] * Einstellung
Spannung
3.7.4 6-7* Analog-/Digitalausgang 45
Parameter zum Konfigurieren und Skalieren der Funktion
für Analog-/Digitalausgang, Klemme 45. Analogausgänge
sind Stromausgänge: 0/4–20 mA. Die Auflösung am
Analogausgang ist 12 Bit. Analogausgangsklemmen
können auch als Digitalausgang konfiguriert werden.
6-70 Klemme 45 Funktion
Option: Funktion:
Konfigurieren Sie Klemme 45 als Analogoder Digitalausgang.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digitalausgang
6-71 Klemme 45 Analogausgang
Option: Funktion:
Wählen Sie die Funktion von
Klemme 45 als analogen
Stromausgang aus. Siehe auch
Parameter 6-70 Klemme 45
Funktion.
[254] Zwischenkreisspannung
[0] * Ohne Funktion
[100] Ausgangsfrequenz 0–100 Hz
[101] Sollwert Min
[102] Istwert MinFB–Max
[103] Motorstrom 0–I
[106] Leistungs- 0–P
[139] Bussteuerung 0–100%
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1000 V
•
T6, 500–1000 V
•
–Max
Ref.
Ref.
FB
max
nom
6-71 Klemme 45 Analogausgang
Option: Funktion:
[254] DC-Zwischenkreis-
spannung
0–65535 V
6-72 Klemme 45 Digitalausgang
Option: Funktion:
Wählen Sie die Funktion
von Klemme 45 als
digitalen Stromausgang
aus. Siehe auch
Parameter 6-70 Klemme 45
Funktion. Eine
Beschreibung der
Optionen finden Sie unter
Parameter 5-40 Relaisfunktion.
[0] * Ohne Funktion
[1] Steuer. bereit
[2] Bereit
[3] Bereit/Fern-Betrieb
[4] Standby/keine Warn.
[5] Motor dreht
[6] Motor ein/k. Warnung
[7] Grenzen OK, k.Warn.
[8] Ist=Sollw., k.Warn.
[9] Alarm
[10] Alarm oder Warnung
[12] Außerh.Stromber.
[13] Unter Min.-Strom
[14] Über Max.-Strom
[16] Unter Min.-Drehzahl
[17] Über Max.-Drehzahl
[19] Unter Min.-Istwert
[20] Über Max.-Istwert
[21] Warnung Übertemp.
[22] Bereit, keine Übertemperatur-
warnung
[23] Fern, Ber., k. therm.
[24] Bereit, k.Über-/Untersp.
[25] Reversierung
[26] Bus OK
[35] Ext. Verriegelung
[36] Steuerwort Bit 11
[37] Steuerwort Bit 12
[41] Unter Min.-Sollwert
[42] Über Max.-Sollwert
[45] Bussteuerung
[60] Vergleicher 0
[61] Vergleicher 1
[62] Vergleicher 2
[63] Vergleicher 3
[64] Vergleicher 4
[65] Vergleicher 5
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 61
Page 64

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Parameter
VLT® HVAC Basic Drive FC 101
6-72 Klemme 45 Digitalausgang
Option: Funktion:
[70] Logikregel 0
[71] Logikregel 1
[72] Logikregel 2
33
[73] Logikregel 3
[74] Logikregel 4
[75] Logikregel 5
[80] SL-Digitalausgang A
[81] SL-Digitalausgang B
[82] SL-Digitalausgang C
[83] SL-Digitalausgang D
[160] Kein Alarm
[161] Reversierung aktiv
[165] Hand-Sollwert aktiv
[166] Fern-Sollwert aktiv
[167] Startbefehl aktiv
[168] Hand-Betrieb
[169] Autobetrieb
[190] Kein Durchfluss
[193] Energiesparmodus
[194] Riemenbruchfunktion
[196] Notfallbetrieb
[198] FU-Bypass
6-73 Kl. 45, Ausgang min. Skalierung
Range: Funktion:
0 %* [0 -
200 %]
Dieser Parameter skaliert das Min.-Signal (0 mA
oder 4 mA) des Analogsignals an Ausgangsklemme 45. Stellen Sie den Wert auf den
Prozentwert des Gesamtbereichs der in
Parameter 6-71 Klemme 45 Analogausgang
ausgewählten Variable ein.
6-74 Kl. 45, Ausgang max. Skalierung
Range: Funktion:
100%* [0 -
200 %]
Dieser Parameter skaliert das Max.-Signal (20 mA)
des Analogsignals an Ausgangsklemme 45.
Stellen Sie den Wert auf den Prozentwert des
Gesamtbereichs der in Parameter 6-71 Klemme 45
Analogausgang ausgewählten Variable ein.
6-76 Kl. 45, Wert bei Bussteuerung
Range: Funktion:
0* [0 - 16384 ] Hält den Strom an Analogausgang auf
konstantem Niveau, sofern er busgesteuert ist.
3.7.5 6-9* Analog-/Digitalausgang 42
Parameter zur Konfiguration der Grenzen für Analog-/
Digitalausgang Klemme 42. Analogausgänge sind
Stromausgänge: 0/4–20 mA. Die Auflösung an den
Analogausgängen beträgt 12 Bit. Analogausgangsklemmen
können auch als Digitalausgang konfiguriert werden.
6-90 Klemme 42 Funktion
Option: Funktion:
Konfigurieren Sie Klemme 42 für die
Funktion als Analog- oder Digitalausgang.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digitalausgang
6-91 Klemme 42 Analogausgang
Option: Funktion:
Wählen Sie die Funktion von
Klemme 42 als analogen
Stromausgang aus. Siehe auch
Parameter 6–90 Terminal 42
Mode.
[254] Zwischenkreisspannung
[0] * Ohne Funktion
[100] Ausgangsfrequenz 0–100 Hz
[101] Sollwert Min
[102] Istwert MinFB – Max
[103] Motorstrom 0–I
[106] Leistungs- 0–P
[139] Bussteuerung 0–100%
[184] Spiegel AI53 mA 0–20
[185] Spiegel AI54 mA 0–20
[254] DC-Zwischenkreisspannung 0–65535 V
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1000 V
•
T6, 500–1000 V
•
– Max
Ref.
max
nom
Ref.
FB
6-92 Klemme 42 Digitalausgang
Option: Funktion:
Wählen Sie die Funktion
von Klemme 42 als
analogen Stromausgang
aus. Siehe auch
Parameter 6-90 Terminal 42
Abbildung 3.11 Ausgang max. Skalierung
62 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Mode. Siehe
Parameter 5-40 Relais-
Page 65

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Parameter Programmierhandbuch
6-92 Klemme 42 Digitalausgang
Option: Funktion:
funktion für eine
Beschreibung der Auswahl.
[0] * Ohne Funktion
[1] Steuer. bereit
[2] Bereit
[3] Bereit/Fern-Betrieb
[4] Standby/keine Warn.
[5] Motor dreht
[6] Motor ein/k. Warnung
[7] Grenzen OK, k.Warn.
[8] Ist=Sollw., k.Warn.
[9] Alarm
[10] Alarm oder Warnung
[12] Außerh.Stromber.
[13] Unter Min.-Strom
[14] Über Max.-Strom
[16] Unter Min.-Drehzahl
6-92 Klemme 42 Digitalausgang
Option: Funktion:
[166] Fern-Sollwert aktiv
[167] Startbefehl aktiv
[168] Hand-Betrieb
[169] Autobetrieb
[190] Kein Durchfluss
[193] Energiesparmodus
[194] Riemenbruchfunktion
[196] Notfallbetrieb
[198] FU-Bypass
6-93 Kl. 42, Ausgang min. Skalierung
Range: Funktion:
0 %* [0 -
200 %]
Dieser Parameter skaliert das Min.-Signal (0 mA
oder 4 mA) des Analogsignals an Ausgangsklemme 42. Stellen Sie den Wert auf den
Prozentwert des Gesamtbereichs der in
Parameter 6-91 Klemme 42 Analogausgang
ausgewählten Variable ein.
[17] Über Max.-Drehzahl
[19] Unter Min.-Istwert
[20] Über Max.-Istwert
[21] Warnung Übertemp.
[22] Bereit, keine Übertemperatur-
warnung
[23] Fern, Ber., k. therm.
[24] Bereit, k.Über-/Untersp.
6-94 Kl. 42, Ausgang max. Skalierung
Range: Funktion:
100%* [0 -
200 %]
Dieser Parameter skaliert das Max.-Signal (20 mA)
an Klemme 42. Stellen Sie den Wert auf den
Prozentwert des Gesamtbereichs der in
Parameter 6-91 Klemme 42 Analogausgang
ausgewählten Variable ein.
[25] Reversierung
[26] Bus OK
[35] Ext. Verriegelung
[36] Steuerwort Bit 11
[37] Steuerwort Bit 12
[41] Unter Min.-Sollwert
[42] Über Max.-Sollwert
[45] Bussteuerung
[60] Vergleicher 0
[61] Vergleicher 1
[62] Vergleicher 2
[63] Vergleicher 3
Abbildung 3.12 Ausgang max. Skalierung
[64] Vergleicher 4
[65] Vergleicher 5
[70] Logikregel 0
[71] Logikregel 1
[72] Logikregel 2
[73] Logikregel 3
6-96 Kl. 42, Wert bei Bussteuerung
Range: Funktion:
0* [0 - 16384 ] Hält den Analogausgang an Klemme 42 auf
konstantem Niveau, sofern er busgesteuert ist.
[74] Logikregel 4
[75] Logikregel 5
[80] SL-Digitalausgang A
[81] SL-Digitalausgang B
[82] SL-Digitalausgang C
[83] SL-Digitalausgang D
[160] Kein Alarm
[161] Reversierung aktiv
[165] Hand-Sollwert aktiv
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 63
3 3
Page 66

Parameter
VLT® HVAC Basic Drive FC 101
3.8 Hauptmenü - Kommunikation und
3.8.2 8-3* Ser. FC-Schnittst.
Optionen - Gruppe 8
8-30 Protokoll
3.8.1 8-0* Grundeinstellungen
33
8-01 Führungshoheit
Option: Funktion:
Dieser Parameter setzt die Einstellungen in
Parameter 8-50 Motorfreilauf bis
Parameter 8-56 Festsollwertanwahl außer
Kraft.
[0] * Klemme und
Steuerw.
[1] Nur Klemme Steuerung nur über Digitaleingänge.
[2] Nur
Steuerwort
Steuerung über Klemme und Steuerwort.
Steuerung nur über das Steuerwort.
8-02 Steuerquelle
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Wählen Sie die Quelle des Steuerworts aus.
[0] Deaktiviert
[1] * FC-Schnittstelle
8-03 Steuerwort Timeout-Zeit
Range: Funktion:
Size
related*
8-04 Steuerwort Timeout-Funktion
Option: Funktion:
[0] * Aus
[1] Drehz. speich.
[2] Stopp
[3] Festdrehzahl JOG
[4] Max. Drehzahl
[5] Stopp und Alarm
[20] N2-Rückfallzeit Diese Option ist nur gültig, wenn das
[0.1 6500 s]
Geben Sie die maximale erwartete Dauer
zwischen dem Empfang von 2 aufeinander
folgenden Telegrammen ein. Wenn diese
Dauer überschritten wird, weist dies darauf
hin, dass die serielle Kommunikation
beendet wurde. Die in
Parameter 8-04 Steuerwort Timeout-Funktion
ausgewählte Funktion wird ausgeführt.
Wählen Sie die Timeout-Funktion aus. Die
Timeout-Funktion wird aktiviert, wenn
das Steuerwort nicht innerhalb des unter
Parameter 8-03 Steuerwort Timeout-Zeit
angegebenen Zeitraums aktualisiert wird.
Protokoll N2 ist.
Option: Funktion:
Auswahl des Protokolls für die integrierte
Schnittstelle RS485.
[0] * FC Kommunikation gemäß FC-Protokoll.
[2] Modbus
RTU
[3] Metasys N2 Kommunikationsprotokoll. Das N2-Software-
[4] FLN Kommunikation gemäß FLN-Protokoll.
[5] BACNet Kommunikation gemäß BACNet-Protokoll.
Kommunikation gemäß Modbus RTU-
Protokoll.
protokoll ist auf die allgemeinen,
einzigartigen Eigenschaften jedes Gerätetyps
ausgelegt.
8-31 Adresse
Range: Funktion:
Size
related*
[ 0.0 247 ]
Geben Sie die Adresse für den RS485Port ein. Gültiger Bereich: 1-126 für
FC-Bus ODER 1-247 für Modbus.
8-32 Baudrate
Option: Funktion:
Wählen Sie die Baudrate für die Schnittstelle
RS485.
Die Werkseinstellung bezieht sich auf das FCProtokoll. Durch eine Änderung des Protokolls
in Parameter 8-30 Protokoll wird ggf. die
Baudrate geändert.
Durch eine Änderung des Protokolls in
Parameter 8-30 Protokoll wird ggf. die Baudrate
geändert.
[0] 2400 Baud
[1] 4800 Baud Werkseinstellung für FLN.
[2] 9600 Baud Werkseinstellung für:
BACnet.
•
Metasys N2.
•
[3] 19200 Baud Werkseinstellung für Modbus RTU.
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Parität/Stoppbits
Option: Funktion:
Parität und Stoppbits für das Protokoll
mittels FC-Schnittstelle. Bei einigen
Protokollen sind nicht alle Optionen
verfügbar.
Die Werkseinstellung bezieht sich auf
das FC-Protokoll. Durch eine Änderung
64 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 67

Parameter Programmierhandbuch
8-33 Parität/Stoppbits
Option: Funktion:
des Protokolls inParameter 8-30 Protocol
wird ggf. die Baudrate geändert.
[0] Ger. Parität, 1
Stoppbit
[1] Unger. Parität, 1
Stoppbit
[2] Ohne Parität, 1
Stoppbit
[3] Ohne Parität, 2
Stoppbits
8-35 FC-Antwortzeit Min.-Delay
Range: Funktion:
Size
related*
[ 0.0010 -
0.5 s]
Definiert die minimale Verzögerung,
welche der Frequenzumrichter nach
dem Empfangen eines FC-Telegramms
wartet, bevor sein Antworttelegramm
gesendet wird. Diese Funktion dient
dem Umgehen von Modem-Umsteuerzeiten.
8-36 FC-Antwortzeit Max.-Delay
Range: Funktion:
Size
related*
[ 0.1 -
10.0 s]
Geben Sie die maximal zulässige
Verzögerung zwischen dem Eingang
einer Anfrage und der Übermittlung
der Antwort ein. Wenn diese Zeit
überschritten wird, wird keine Antwort
zurückgegeben.
8-37 FC Interchar. Max.-Verzögerung
Range: Funktion:
Size related* [ 0.005 -
0.025 s]
Definiert die maximale Zeitverzögerung zwischen zwei Zeichen in
einer Meldung. Nach Überschreiten
der Verzögerung wird die Meldung
verworfen.
3.8.3 8-4* FC/MC-Protokoll
Diese Parametergruppe dient zum Schreiben von PCD und
zum Einlesen von Konfigurationen.
8-42 PCD-Schreibkonfiguration
Verschiedene Parameter können PCD 3-10 der PPOs zugewiesen
werden (die Anzahl der PCDs hängt vom PPO-Typ ab). Die Werte
in den PCD 3–10 werden anschließend als Datenwerte in die
ausgewählten Parameter geschrieben.
Option: Funktion:
[0] Kein
[1] [302] Minimaler Sollwert
[2] [303] Maximaler Sollwert
[3] [341] Rampenzeit Auf 1
8-42 PCD-Schreibkonfiguration
Verschiedene Parameter können PCD 3-10 der PPOs zugewiesen
werden (die Anzahl der PCDs hängt vom PPO-Typ ab). Die Werte
in den PCD 3–10 werden anschließend als Datenwerte in die
ausgewählten Parameter geschrieben.
Option: Funktion:
[4] [342] Rampenzeit Ab 1
[5] [351] Rampenzeit Auf 2
[6] [352] Rampenzeit Ab 2
[7] [380] Rampenzeit JOG
[8] [381] Schnellstopp-Zeit
[9] [412] Min. Motorfrequenz [Hz]
[10] [414] Max. Frequenz [Hz]
[11] [590] Dig./Relais Ausg.
Bussteuerung
[12] [676] Klemme 45, Wert bei
Bussteuerung
[13] [696] Klemme 42, Wert bei
Bussteuerung
[14] [894] Bus-Rückmeldung 1
[15] FC Steuerwort
[16] FC Sollwert
[17] [2021] Sollwert 1
8-43 PCD-Konfiguration Lesen
Verschiedene Parameter können PCD 3-10 der PPOs zugewiesen
werden (die Anzahl der PCDs hängt vom PPO-Typ ab). PCD 3-10
erfassen den Echtzeit-Datenwert der ausgewählten Parameter.
Option: Funktion:
[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1652] Feedback [Unit]
[23] [1660] Digital Input 18,19,27,33
[24] [1661] Terminal 53 Switch Setting
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 65
Page 68

Parameter
VLT® HVAC Basic Drive FC 101
8-43 PCD-Konfiguration Lesen
Verschiedene Parameter können PCD 3-10 der PPOs zugewiesen
werden (die Anzahl der PCDs hängt vom PPO-Typ ab). PCD 3-10
erfassen den Echtzeit-Datenwert der ausgewählten Parameter.
Option: Funktion:
33
[25] [1662] Analog input 53
[26] [1663] Terminal 54 Switch Setting
[27] [1664] Analog input 54
[28] [1665] Analog output 42 [mA]
[29] [1671] Relay output
[30] [1672] Counter A
[31] [1673] Counter B
[32] [1690] Alarm Word
[33] [1692] Warning Word
[34] [1694] Ext. Status Word
3.8.4 8-5* Betr. Bus/Klemme
8-51 Schnellstopp
Option: Funktion:
[0] Klemme Aktiviert den Schnellstopp über einen Digital-
eingang.
[1] Bus Aktiviert den Schnellstopp über die serielle
Kommunikationsschnittstelle.
[2] Bus UND
Klemme
[3]*Bus ODER
Klemme
Aktiviert den Schnellstopp über die serielle
Kommunikationsschnittstelle und über einen
der Digitaleingänge.
Aktiviert den Schnellstopp über die serielle
Kommunikationsschnittstelle oder über einen
der Digitaleingänge.
8-52 DC Bremse
Option: Funktion:
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Definiert für grundsätzliche Funktionen individuell die
Priorität zwischen Klemme (Digitaleingänge) und Bus
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerw. eingestellt haben.
(Steuerwort Bus/FC Seriell).
8-50 Motorfreilauf
Option: Funktion:
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerw. eingestellt haben.
Definiert für die Funktion Motorfreilauf die
Priorität zwischen Klemme (Digitaleingänge)
und Bus.
[0] Klemme Aktiviert den Freilauf über einen Digitaleingang.
[1] Bus Aktiviert den Freilauf über die serielle
Kommunikationsschnittstelle.
[2] Bus UND
Klemme
[3]*Bus ODER
Klemme
Aktiviert den Freilauf über den Feldbus/die
serielle Kommunikationsschnittstelle und über
einen der Digitaleingänge.
Aktiviert den Freilauf über die serielle
Kommunikationsschnittstelle oder über einen
der Digitaleingänge.
8-51 Schnellstopp
Option: Funktion:
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerwort eingestellt
haben.
Definiert für die Funktion Schnellstopp die
Priorität zwischen Klemme (Digitaleingänge)
und Bus.
[0] Klemme Aktiviert die DC-Bremse über einen Digital-
[1] Bus Aktiviert die DC-Bremse über die serielle
[2] Bus UND
Klemme
[3] Bus ODER
Klemme
8-53 Start
Option: Funktion:
[0] Klemme Aktiviert einen Startbefehl über einen Digital-
[1] Bus Aktiviert einen Startbefehl über die serielle
[2] Bus UND
Klemme
Auswahl der Steuerung der DC-Bremse über die
Klemmen (Digitaleingang).
eingang.
Kommunikationsschnittstelle.
Aktiviert die DC-Bremse über die serielle
Kommunikationsschnittstelle und über einen der
Digitaleingänge.
Aktiviert die DC-Bremse über die serielle
Kommunikationsschnittstelle oder über einen der
Digitaleingänge.
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerw. eingestellt haben.
Auswahl der Regelung der Startfunktion des
Frequenzumrichters über die Klemmen (Digitaleingang).
eingang.
Kommunikationsschnittstelle oder die FeldbusOptionen.
Aktiviert einen Startbefehl über die serielle
Kommunikationsschnittstelle und über einen
der Digitaleingänge.
66 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 69

Parameter Programmierhandbuch
8-53 Start
Option: Funktion:
[3]*Bus ODER
Klemme
Aktiviert einen Startbefehl über die serielle
Kommunikationsschnittstelle ODER über einen
der Digitaleingänge.
8-54 Reversierung
Option: Funktion:
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerw. eingestellt haben.
Auswahl der Regelung der Reversierungsfunktion des Frequenzumrichters über die
Klemmen (Digitaleingang) und/oder über die
serielle Kommunikationsschnittstelle.
[0]*Klemme Aktiviert einen Reversierungsbefehl über einen
Digitaleingang.
[1] Bus Aktiviert einen Reversierungsbefehl über die
serielle Kommunikationsschnittstelle.
[2] Bus UND
Klemme
[3] Bus ODER
Klemme
Aktiviert einen Reversierungsbefehl über die
serielle Kommunikationsschnittstelle und über
einen der Digitaleingänge.
Aktiviert einen Reversierungsbefehl über die
serielle Kommunikationsschnittstelle oder über
einen der Digitaleingänge.
8-55 Satzanwahl
Option: Funktion:
HINWEIS
Dieser Parameter ist nur aktiv, wenn Sie
Parameter 8-01 Führungshoheit auf [0]
Klemme und Steuerw. eingestellt haben.
Auswahl der Regelung der FrequenzumrichterKonfigurationsauswahl über die Klemmen
(Digitaleingang) und/oder über die serielle
Kommunikationsschnittstelle.
[0] Klemme Aktiviert die Konfigurationsauswahl über einen
Digitaleingang.
[1] Bus Aktiviert die Konfigurationsauswahl über die
serielle Kommunikationsschnittstelle.
[2] Bus UND
Klemme
[3]*Bus ODER
Klemme
Aktiviert die Konfigurationsauswahl über die
serielle Kommunikationsschnittstelle und über
einen der Digitaleingänge.
Aktiviert die Konfigurationsauswahl über die
serielle Kommunikationsschnittstelle oder über
einen der Digitaleingänge.
8-56 Festsollwertanwahl
Option: Funktion:
Definiert für die Festsollwertanwahl des
Frequenzumrichters die Priorität zwischen den
Klemmen (Digitaleingänge) und/oder die
serielle Kommunikationsschnittstelle.
[0] Klemme Aktiviert die Funktion Festsollwertanwahl über
einen Digitaleingang.
[1] Bus Aktiviert die Festsollwertanwahl über die
serielle Kommunikationsschnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktiviert die Festsollwertanwahl über die
serielle Kommunikationsschnittstelle und über
einen der Digitaleingänge.
Aktiviert die Festsollwertanwahl über die
serielle Kommunikationsschnittstelle oder über
einen der Digitaleingänge.
3.8.5 8-7* BACnet
8-70 BACnet-Gerätebereich
Range: Funktion:
1* [0 - 4194303 ] Geben Sie eine eindeutige Ident.-Nummer
für das BACnet-Gerät ein.
8-72 MS/TP Max. Masters
Range: Funktion:
127* [0 - 127 ] Definieren Sie die Adresse des Masters, der die
höchste Adresse im Netzwerk besitzt. Durch die
Reduzierung dieses Werts kann die Abfrage des
Tokens optimiert werden.
8-73 MS/TP Max. Info-Frames
Range: Funktion:
1* [1 - 65534 ] Definieren Sie, wie viele Info/Daten-Frames das
Gerät beim Halten des Token senden darf.
8-74 "Startup I am"
Option: Funktion:
[0] * Senden bei
Netz-Ein
[1] Kontinuierlich Wählen Sie aus, wenn das Gerät die „I-Am“-
8-75 Initialisierungspasswort
Range: Funktion:
admin* [1 - 1 ] Geben Sie das Passwort ein, das für die
Wählen Sie aus, wenn das Gerät die „I-Am“Dienstmeldung nur bei einer NetzEinschaltung senden soll.
Dienstmeldung mit einem Intervall von ca. 1
Min. kontinuierlich senden soll.
Ausführung der erneuten Initialisierung des
Frequenzumrichters aus BACnet erforderlich ist.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 67
Page 70

Parameter
VLT® HVAC Basic Drive FC 101
8-79 Protokoll-Firmwareversion
Array[5]
Range: Funktion:
Size
related*
33
[0 655 ]
Die Firmware-Revision des Frequenzumrichters ist in Index 0, Modbus ist in
Index 1, Metasys N2 ist in Index 2, FLN
ist in Index 3, BACnet ist in Index 4.
3.8.6 8-8* FC-Anschlussdiagnose
3.8.7 8-9* Bus-Rückmeldung
8-94 Bus Istwert 1
Range: Funktion:
0* [-32768 -
32767 ]
Schreiben Sie einen Istwert über die serielle
Kommunikationsschnittstelle. Sie müssen diesen
Parameter in Parameter 20-00 Istwertanschluss 1
oder Parameter 20-03 PID-Prozess Istwer t 2 als
Istwertanschluss auswählen. Der Hex-Wert 4000
h, der 100 % des Istwerts/Bereichs ist, entspricht
±200 %.
Diese Parameter dienen zur Überwachung der Buskommunikation über die FC-Schnittstelle.
8-80 Zähler Busmeldungen
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die Zahl der am
Bus erfassten gültigen Telegramme.
8-81 Zähler Busfehler
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die Zahl der am
Bus erfassten Telegramme mit Fehlern (z.
B. CRC-Fehler).
8-95 Bus Istwert 2
Range: Funktion:
0* [-32768 -
32767 ]
Schreiben Sie einen Istwert über die serielle
Kommunikationsschnittstelle. Sie müssen diesen
Parameter in Parameter 20-00 Istwertanschluss 1
oder Parameter 20-03 PID-Prozess Istwer t 2 als
Istwertanschluss auswählen. Der Hexadezimalwert 4000 h entspricht ±200 % in 100 % des
Istwerts/Bereichs.
8-82 Zähler Slavemeldungen
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die vom Frequen-
zumrichter an den Follower gesendete
Zahl gültiger Telegramme.
8-83 Zähler Slavefehler
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die Zahl von
Fehlertelegrammen, die der Frequenzumrichter nicht ausführen konnte.
8-84 Gesendete Slavemeldungen
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die vom Follower
gesendete Zahl der Meldungen.
8-85 Slave-Timeout-Fehler
Range: Funktion:
0* [0 - 4294967295 ] Dieser Parameter zeigt die Anzahl der
Follower-Timeout-Fehler an.
8-88 FC-Anschlussdiagnose
Option: Funktion:
[0] * Kein Reset
[1] Reset
68 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 71

130BA062.13
Zustand 1
Ereignis 1/
Aktion 1
Zustand 2
Ereignis 2/
Aktion 2
Start
Ereignis P13-01
Zustand 3
Ereignis 3/
Aktion 3
Zustand 4
Ereignis 4/
Aktion 4
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Parameter Programmierhandbuch
3.9 Hauptmenü - Smart Logic -
3.9.2 13-0*SLC-Einstellungen
Parametergruppe 13
Zum Aktivieren und Definieren der Smart Logic Control
3.9.1 13-** Smart Logic
Die Smart Logic Control (SLC) ist eine Folge benutzerdefinierter Aktionen (siehe Parameter 13-52 SL-Controller-Aktion
[x]), die durch den SLC ausgeführt werden, wenn das
zugehörige Ereignis (siehe Parameter 13-51 SL-Controller
Ereignis [x]) durch den SLC als WAHR ermittelt wird. Die
Ereignisse und Aktionen sind nummeriert und paarweise
geordnet. Wenn also [0] Ereignis erfüllt ist (d. h. wahr ist),
wird [0] Aktion ausgeführt. Nach Ausführung dieser Aktion
werden die Bedingungen von [1] Ereignis bewertet. Wird
sie als wahr bewertet, wird [1] Aktion ausgeführt usw. Es
wird jeweils nur ein Ereignis ausgewertet. Ist das Ereignis
FALSCH, wird während des aktuellen Abtastintervalls keine
Aktion (im SLC) ausgeführt und es werden keine anderen
Ereignisse ausgewertet. Dies bedeutet, dass der SLC, wenn
er startet, [0] Ereignis (und nur [0] Ereignis) in jedem
Abtastintervall auswertet. Nur wenn [0] Ereignis als wahr
bewertet wird, führt der SLC [0] Aktion aus und beginnt,
[1] Ereignis auszuwerten. Sie können 1–20 Ereignisse und
Aktionen programmieren. Wenn das letzte Ereignis/die
letzte Aktion durchgeführt wurde, startet die Sequenz
ausgehend von [0] Ereignis/[0] Aktion erneut.
Abbildung 3.13 Beispiel mit 3 Ereignissen/Aktionen
Starten und Stoppen des SLC
Um den SLC zu starten oder zu stoppen, wählen Sie [1] Ein
oder [2] Aus in Parameter 13-00 Smart Logic Controller. Der
SLC startet immer in Zustand 0 (in dem er [0] Ereignis
auswertet). Der SLC startet, wenn das Startereignis
(definiert unter Parameter 13-01 SL-Controller Start) als wahr
ausgewertet wird (vorausgesetzt, dass [1] Ein
unterParameter 13-00 Smart Logic Controller ausgewählt ist).
Der SLC stoppt, wenn das Stoppereignis
(Parameter 13-02 SL-Controller Stopp) WAHR ist.
Parameter 13-03 Reset SLC setzt alle SLC-Parameter zurück
und startet die Programmierung von Neuem.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 69
(SLC Ablaufsteuerung) verwenden Sie die SLC-Einstellungen. Der Frequenzumrichter führt die Logikfunktionen
und Vergleicher immer im Hintergrund aus. Dies
ermöglicht getrennte Steuerung von Digitaleingängen und
-ausgängen.
13-00 Smart Logic Controller
Option: Funktion:
Um Smart Logic Control zu starten, wenn ein
Startbefehl vorhanden ist, z. B. über den Digitaleingang, wählen Sie [1] Ein. Um Smart Logic Control
zu deaktivieren. wählen Sie [0] Aus.
[0] * Aus Deaktiviert den Smart Logic Controller.
[1] Ein Aktiviert den Smart Logic Controller.
13-01 SL-Controller Start
Option: Funktion:
Zum Aktivieren der Smart Logic
Control wählen Sie den Boolschen
Eingangswert (WAHR oder FALSCH)
aus.
[0] FALSCH Gibt den Festwert FALSCH in die
Logikregel ein.
[1] WAHR Gibt den Festwert „wahr“ in die
Logikregel ein.
[2] Motor ein Motor läuft.
[3] Im Bereich Der Motor läuft innerhalb der
programmierten Strombereiche
(Parameter 4-50 Warnung Strom
niedrig und Parameter 4-51 Warnung
Strom hoch)
[4] Ist=Sollwert Die Motordrehzahl entspricht dem
Sollwert.
[7] Außerh.Stromber. Der Motorstrom liegt außerhalb des
in Parameter 4-18 Stromgrenze
definierten Bereichs.
[8] Unter Min.-Strom Der Motorstrom liegt unter dem in
Parameter 4-50 Warnung Strom niedrig
eingestellten Wert.
[9] Über Max.-Strom Der Motorstrom liegt über dem in
Parameter 4-51 Warnung Strom hoch
eingestellten Wert.
[16] Warnung Übertemp. Der Frequenzumrichter aktiviert die
Übertemperaturwarnung, wenn die
Temperatur den Grenzwert für Motor,
Frequenzumrichter oder Thermistor
überschreitet.
[17] Netzsp.auss.Bereich Warnung oder Alarm aufgrund einer
Netzasymmetrie, wenn
3 3
Page 72

Parameter
VLT® HVAC Basic Drive FC 101
13-01 SL-Controller Start
Option: Funktion:
Parameter 14-12 Funktion bei Netzphasenfehler nicht auf [2] Deaktiviert
eingestellt ist.
33
[18] Reversierung Der Frequenzumrichter reversiert.
[19] Warnung Es liegt eine Warnung vor.
[20] Alarm (Abschaltung) Es liegt ein Alarm vor.
[21] Alarm (Absch.verrgl.) Ein Alarm mit Abschaltblockierung
liegt vor.
[22] Vergleicher 0 Verwendet das Ergebnis von
Vergleicher 0 in der Logikregel.
[23] Vergleicher 1 Verwendet das Ergebnis von
Vergleicher 1 in der Logikregel.
[24] Vergleicher 2 Verwendet das Ergebnis von
Vergleicher 2 in der Logikregel.
[25] Vergleicher 3 Verwendet das Ergebnis von
Vergleicher 3 in der Logikregel.
[26] Logikregel 0 Verwendet das Ergebnis von
Logikregel 0 in der Logikregel.
[27] Logikregel 1 Verwendet das Ergebnis von
Logikregel 1 in der Logikregel.
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel (Ein =
wahr).
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel (Ein =
wahr).
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel (Ein =
wahr).
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel (Ein =
wahr).
[39]*Startbefehl Dieses Ereignis ist WAHR, wenn der
Frequenzumrichter gestartet wurde
(über Digitaleingang, Feldbus oder
andere Methoden).
[40] FU gestoppt Dieses Ereignis ist WAHR, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digitaleingang, Feldbus oder andere
Methoden).
[42] Auto-Reset-Absch. Dieses Ereignis ist wahr, wenn der
Frequenzumrichter abgeschaltet ist
13-01 SL-Controller Start
Option: Funktion:
(aber keine Abschaltblockierung
vorliegt) und ein automatischer
Quittierbefehl gesendet wird.
[50] Vergleicher 4 Verwendet das Ergebnis von
Vergleicher 4 in der Logikregel.
[51] Vergleicher 5 Verwendet das Ergebnis von
Vergleicher 5 in der Logikregel.
[60] Logikregel 4 Verwendet das Ergebnis von
Logikregel 4 in der Logikregel.
[61] Logikregel 5 Verwendet das Ergebnis von
Logikregel 5 in der Logikregel.
[83] Riemenbruch Eine Riemenbruchbedingung wurde
erkannt. Aktivieren Sie diese Funktion
in Parameter 22-60 Riemenbruch-
funktion.
13-02 SL-Controller Stopp
Option: Funktion:
Wählen Sie den Zustand (wahr oder
falsch), bei dem der Smart Logic
Controller deaktiviert wird.
[0] FALSCH Gibt den Festwert FALSCH in die
Logikregel ein.
[1] WAHR Gibt den Festwert „wahr“ in die
Logikregel ein.
[2] Motor ein Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[3] Im Bereich Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[4] Ist=Sollwert Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[7] Außerh.Stromber. Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[8] Unter Min.-Strom Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[9] Über Max.-Strom Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[16] Warnung Übertemp. Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[17] Netzsp.auss.Bereich Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[18] Reversierung Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[19] Warnung Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[20] Alarm (Abschaltung) Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
70 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 73

Parameter Programmierhandbuch
13-02 SL-Controller Stopp
Option: Funktion:
[21] Alarm (Absch.verrgl.) Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[22] Vergleicher 0 Verwendet das Ergebnis von
Vergleicher 0 in der Logikregel.
[23] Vergleicher 1 Verwendet das Ergebnis von
Vergleicher 1 in der Logikregel.
[24] Vergleicher 2 Verwendet das Ergebnis von
Vergleicher 2 in der Logikregel.
[25] Vergleicher 3 Verwendet das Ergebnis von
Vergleicher 3 in der Logikregel.
[26] Logikregel 0 Verwendet das Ergebnis von
Logikregel 0 in der Logikregel.
[27] Logikregel 1 Verwendet das Ergebnis von
Logikregel 1 in der Logikregel.
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[30] Timeout 0 Verwendet das Ergebnis von Timer 0
in der Logikregel.
[31] Timeout 1 Verwendet das Ergebnis von Timer 1
in der Logikregel.
[32] Timeout 2 Verwendet das Ergebnis von Timer 2
in der Logikregel.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel (Ein =
wahr).
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel (Ein =
wahr).
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel (Ein =
wahr).
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel (Ein =
wahr).
[39] Startbefehl Dieses Ereignis ist wahr, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digitaleingang, Feldbus oder andere
Methoden).
[40]*FU gestoppt Dieses Ereignis ist wahr, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digitaleingang, Feldbus oder andere
Methoden).
[42] Auto-Reset-Absch. Dieses Ereignis ist wahr, wenn der
Frequenzumrichter abgeschaltet ist
13-02 SL-Controller Stopp
Option: Funktion:
(aber keine Abschaltblockierung
vorliegt) und ein automatischer
Quittierbefehl gesendet wird.
[50] Vergleicher 4 Verwendet das Ergebnis von
Vergleicher 4 in der Logikregel.
[51] Vergleicher 5 Verwendet das Ergebnis von
Vergleicher 5 in der Logikregel.
[60] Logikregel 4 Verwendet das Ergebnis von
Logikregel 4 in der Logikregel.
[61] Logikregel 5 Verwendet das Ergebnis von
Logikregel 5 in der Logikregel.
[70] Timeout 3 Verwendet das Ergebnis von Timer 3
in der Logikregel.
[71] Timeout 4 Verwendet das Ergebnis von Timer 4
in der Logikregel.
[72] Timeout 5 Verwendet das Ergebnis von Timer 5
in der Logikregel.
[73] Timeout 6 Verwendet das Ergebnis von Timer 6
in der Logikregel.
[74] Timeout 7 Verwendet das Ergebnis von Timer 7
in der Logikregel.
[83] Riemenbruch Eine Riemenbruchbedingung wurde
erkannt. Aktivieren Sie diese Funktion
in Parameter 22-60 Riemenbruch-
funktion.
13-03 Reset SLC
Option: Funktion:
[0] * Kein Reset Die programmierten Einstellungen werden in
Parametergruppe 13-** Smart Logic beibehalten.
[1] Reset SLC Setzt alle Parameter in der Parametergruppe 13-
** Smart Logic auf die Standardeinstellungen
zurück.
3.9.3 13-1* Vergleicher
Vergleicher dienen zum Vergleichen von stetigen Variablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang)
mit voreingestellten Festwerten.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 71
Page 74

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parameter
VLT® HVAC Basic Drive FC 101
13-11 Vergleicher-Funktion
Array [6]
Option: Funktion:
Festwert in Parameter 13-12 Vergleicher-Wert
ist.
33
Abbildung 3.14 Vergleicher
[2] Größer als
(>)
Wählen Sie [2] > für die inverse Logik von
Option [0] <.
13-12 Vergleicher-Wert
Zusätzlich gibt es Digitalwerte, die mit festgelegten
Zeitwerten verglichen werden. Siehe Erklärung unter
Parameter 13-10 Vergleicher-Operand. Vergleicher werden
einmal pro Abtastintervall ausgewertet. Sie können das
Ergebnis (wahr oder falsch) direkt benutzen. Alle Parameter
in dieser Parametergruppe sind Arrayparameter mit einem
Array [6]
Range: Funktion:
0* [-9999 -
9999 ]
Definiert den Auslösepegel für die von
diesem Vergleicher überwachte Variable.
Dies ist ein Arrayparameter, der die
Vergleicheroperatorwerte 0–5 enthält.
Index von 0–5. Wählen Sie Index 0, um Vergleicher 0 zu
programmieren, Index 1, um Vergleicher 1 zu programmieren usw.
3.9.4 13-2* Timer
[0] * Deaktiviert
[1] Sollw. 0-20 mA
[2] Istwert
[3] Motordrehz. 0-20 mA
[4] Motorstr. 0-20 mA
[6] Motorleistung
[7] Motorspannung
[12] Analogeingang 53
[13] Analogeingang 54
[20] Alarmnummer
[30] Zähler A
[31] Zähler B
[0] Kleiner als
[1]*Annähernd
72 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
13-10 Vergleicher-Operand
Array [6]
Option: Funktion:
Wählen Sie die vom Vergleicher zu
überwachende Variable aus.
13-11 Vergleicher-Funktion
Array [6]
Option: Funktion:
Wählen Sie [0] <, damit das Ergebnis der
(<)
gleich (~)
Bewertung wahr ist, wenn die in
Parameter 13-10 Vergleicher-Operand
ausgewählte Variable kleiner ist als der
Festwert in Parameter 13-12 Vergleicher-Wert.
Das Ergebnis ist falsch, wenn die in
Parameter 13-10 Vergleicher-Operand
ausgewählte Variable größer ist als der
Festwert in Parameter 13-12 Vergleicher-Wert.
Wählen Sie [1] ≈, damit das Ergebnis der
Bewertung wahr ist, wenn die in
Parameter 13-10 Vergleicher-Operand
ausgewählte Variable ungefähr gleich dem
Verwenden Sie das Ergebnis (WAHR oder FALSCH) der
Timer direkt, um ein Ereignis zu definieren (siehe
Parameter 13-51 SL-Controller Ereignis), oder als boolesche
Verknüpfung in einer Logikregel (siehe
Parameter 13-40 Logikregel Boolsch 1,
Parameter 13-42 Logikregel Boolsch 2 oder
Parameter 13-44 Logikregel Boolsch 3). Ein Timer ist nur
falsch, wenn er durch eine Aktion gestartet wurde (z. B.
[29] Start Timer 1), bis der in diesen Parameter
eingegebene Timer-Wert abgelaufen ist. Daraufhin wird der
Timer wieder als wahr ausgewertet.
Alle Parameter in dieser Parametergruppe sind Arrayparameter mit einem Index von 0–2 Wählen Sie Index 0, um
Timer 0 zu programmieren, Index 1, um Timer 1 zu
programmieren usw.
13-20 SL-Timer
Array [8]
Range: Funktion:
0 s* [0 -
3600 s]
Der Wert definiert die Dauer der Falsch-Ausgabe
vom programmierten Timer. Ein Timer ist nur
FALSCH, wenn er durch eine Aktion gestartet
wurde (siehe Parameter 13-52 SL-Controller Aktion
[29-31] und Parameter 13-52 SL-Controller Aktion
[70-74] Start Timer X) und bis der Timer-Wert
abgelaufen ist. Arrayparameter enthalten die
Timer 0-7.
3.9.5 13-4* Logikregeln
Parameter zur freien Definition von binären Verknüpfungen
(boolesch). Es ist möglich, 3 boolesche Zustände in einer
Logikregel über UND, ODER und NICHT miteinander zu
verknüpfen. Das Ergebnis (WAHR/FALSCH) können Sie von
Timern, Vergleichern, Digitaleingängen, Statusbits und
Ereignissen verwenden. Wählen Sie boolesche Eingänge für
Page 75

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parameter Programmierhandbuch
die Berechnung unter Parameter 13-40 Logikregel Boolsch 1,
Parameter 13-42 Logikregel Boolsch 2 und
Parameter 13-44 Logikregel Boolsch 3 aus. Definieren Sie die
logischen Verknüpfungen für die ausgewählten Eingänge
unter Parameter 13-41 Logikregel Verknüpfung 1 und
Parameter 13-43 Logikregel Verknüpfung 2.
Abbildung 3.15 Logikregeln
Priorität der Berechnung
Die Ergebnisse von Parameter 13-40 Logikregel Boolsch 1,
Parameter 13-41 Logikregel Verknüpfung 1 und
Parameter 13-42 Logikregel Boolsch 2 werden zuerst
berechnet. Das Ergebnis (wahr/falsch) der Berechnung wird
mit den Einstellungen unter Parameter 13-43 Logikregel
Verknüpfung 2 und Parameter 13-44 Logikregel Boolsch 3
kombiniert und ergibt so das Endergebnis (wahr/falsch) der
Logikregel.
13-40 Logikregel Boolsch 1
Array [6]
Option: Funktion:
[0] * FALSCH Gibt den Festwert FALSCH in die
Logikregel ein.
[1] WAHR Gibt den Festwert WAHR in die
Logikregel ein.
[2] Motor ein Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[3] Im Bereich Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[4] Ist=Sollwert Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[7] Außerh.Stromber. Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[8] Unter Min.-Strom Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[9] Über Max.-Strom Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[16] Warnung Übertemp. Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[17] Netzsp.auss.Bereich Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[18] Reversierung Zur weiteren Beschreibung siehe
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 73
Parameter 13-01 SL-Controller Start.
13-40 Logikregel Boolsch 1
Array [6]
Option: Funktion:
[19] Warnung Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[20] Alarm (Abschaltung) Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[21] Alarm (Absch.verrgl.) Zur weiteren Beschreibung siehe
Parameter 13-01 SL-Controller Start.
[22] Vergleicher 0 Verwendet das Ergebnis von
Vergleicher 0 in der Logikregel.
[23] Vergleicher 1 Verwendet das Ergebnis von
Vergleicher 1 in der Logikregel.
[24] Vergleicher 2 Verwendet das Ergebnis von
Vergleicher 2 in der Logikregel.
[25] Vergleicher 3 Verwendet das Ergebnis von
Vergleicher 3 in der Logikregel.
[26] Logikregel 0 Verwendet das Ergebnis von
Logikregel 0 in der Logikregel.
[27] Logikregel 1 Verwendet das Ergebnis von
Logikregel 1 in der Logikregel.
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[30] Timeout 0 Verwendet das Ergebnis von Timer 0
in der Logikregel.
[31] Timeout 1 Verwendet das Ergebnis von Timer 1
in der Logikregel.
[32] Timeout 2 Verwendet das Ergebnis von Timer 2
in der Logikregel.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel (Ein =
wahr).
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel (Ein =
wahr).
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel (Ein =
wahr).
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel (Ein =
wahr).
[39] Startbefehl Diese Logikregel ist wahr, wenn der
Frequenzumrichter gestartet wurde
(über Digitaleingang oder andere
Methoden).
[40] FU gestoppt Diese Logikregel ist wahr, wenn der
Frequenzumrichter gestoppt oder in
3 3
Page 76

Parameter
VLT® HVAC Basic Drive FC 101
13-40 Logikregel Boolsch 1
Array [6]
Option: Funktion:
Freilauf versetzt wurde (über Digitaleingang oder andere Methoden).
33
[42] Auto-Reset-Absch. Diese Logikregel ist wahr, wenn der
Frequenzumrichter abgeschaltet ist
(aber keine Abschaltblockierung
vorliegt) und ein automatischer
Quittierbefehl gesendet wurde.
[50] Vergleicher 4 Verwendet das Ergebnis von
Vergleicher 4 in der Logikregel.
[51] Vergleicher 5 Verwendet das Ergebnis von
Vergleicher 5 in der Logikregel.
[60] Logikregel 4 Verwendet das Ergebnis von
Logikregel 4 in der Logikregel.
[61] Logikregel 5 Verwendet das Ergebnis von
Logikregel 5 in der Logikregel.
[70] Timeout 3 Verwendet das Ergebnis von Timer 3
in der Logikregel.
[71] Timeout 4 Verwendet das Ergebnis von Timer 4
in der Logikregel.
[72] Timeout 5 Verwendet das Ergebnis von Timer 5
in der Logikregel.
[73] Timeout 6 Verwendet das Ergebnis von Timer 6
in der Logikregel.
[74] Timeout 7 Verwendet das Ergebnis von Timer 7
in der Logikregel.
[83] Riemenbruch Eine Riemenbruchbedingung wurde
erkannt. Aktivieren Sie diese Funktion
in Parameter 22-60 Riemenbruch-
funktion.
13-41 Logikregel Verknüpfung 1
Option: Funktion:
[0] * Deaktiviert
[1] UND
[2] ODER
[3] UND NICHT
[4] ODER NICHT
[5] NICHT UND
[6] NICHT ODER
[7] NICHT UND NICHT
[8] NICHT ODER NICHT
13-42 Logikregel Boolsch 2
Array [6]
Option: Funktion:
Wählen Sie den zweiten booleschen
Eingangswert (wahr oder falsch) für
die ausgewählte Logikregel aus.
13-42 Logikregel Boolsch 2
Array [6]
Option: Funktion:
Siehe Parameter 13-40 Logikregel
Boolsch 1 für nähere Beschreibungen
der Auswahloptionen und ihrer
Funktionen.
[0] * FALSCH
[1] WAHR
[2] Motor ein
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp.
[17] Netzsp.auss.Bereich
[18] Reversierung
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Absch.verrgl.)
[22] Vergleicher 0
[23] Vergleicher 1
[24] Vergleicher 2
[25] Vergleicher 3
[26] Logikregel 0
[27] Logikregel 1
[28] Logikregel 2
[29] Logikregel 3
[30] Timeout 0
[31] Timeout 1
[32] Timeout 2
[33] Digitaleingang 18
[34] Digitaleingang 19
[35] Digitaleingang 27
[36] Digitaleingang 29
[39] Startbefehl
[40] FU gestoppt
[42] Auto-Reset-Absch.
[50] Vergleicher 4
[51] Vergleicher 5
[60] Logikregel 4
[61] Logikregel 5
[70] Timeout 3
[71] Timeout 4
[72] Timeout 5
[73] Timeout 6
[74] Timeout 7
[83] Riemenbruch Eine Riemenbruchbedingung wurde
erkannt. Aktivieren Sie diese Funktion
in Parameter 22-60 Riemenbruch-
funktion.
74 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 77

Parameter Programmierhandbuch
13-43 Logikregel Verknüpfung 2
Array [6]
Option: Funktion:
Wählen Sie die zweite logische
Verknüpfung aus, die für den Boolschen
Eingangswert, berechnet in
Parameter 13-40 Logikregel Boolsch 1,
Parameter 13-41 Logikregel Verknüpfung 1
und Parameter 13-42 Logikregel Boolsch 2,
und den Boolschen Eingangswert aus
Parameter 13-42 Logikregel Boolsch 2
anzuwenden ist.
[13–44] steht dabei für den Booleschen
Eingangswert
aus .Parameter 13-44 Logikregel Boolsch 3
[13-40/13-42] steht für den Booleschen
Eingangswert berechnet in
Parameter 13-40 Logikregel Boolsch 1,
Parameter 13-41 Logikregel Verknüpfung 1
und Parameter 13-42 Logikregel Boolsch 2.
[0] Deaktiviert (Werkseinstellung): Wählen
Sie diese Option, um
Parameter 13-44 Logikregel Boolsch 3 zu
ignorieren.
[0] * Deaktiviert
[1] UND
[2] ODER
[3] UND NICHT
[4] ODER NICHT
[5] NICHT UND
[6] NICHT ODER
[7] NICHT UND
NICHT
[8] NICHT ODER
NICHT
13-44 Logikregel Boolsch 3
Array [6]
Option: Funktion:
Wählen Sie den dritten booleschen
Eingangswert (WAHR oder FALSCH)
für die ausgewählte Logikregel aus.
Siehe Parameter 13-40 Logikregel
Boolsch 1 für nähere Beschreibungen
der Auswahloptionen und ihrer
Funktionen.
[0] * FALSCH
[1] WAHR
[2] Motor ein
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp.
13-44 Logikregel Boolsch 3
Array [6]
Option: Funktion:
[17] Netzsp.auss.Bereich
[18] Reversierung
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Absch.verrgl.)
[22] Vergleicher 0
[23] Vergleicher 1
[24] Vergleicher 2
[25] Vergleicher 3
[26] Logikregel 0
[27] Logikregel 1
[28] Logikregel 2
[29] Logikregel 3
[30] Timeout 0
[31] Timeout 1
[32] Timeout 2
[33] Digitaleingang 18
[34] Digitaleingang 19
[35] Digitaleingang 27
[36] Digitaleingang 29
[39] Startbefehl
[40] FU gestoppt
[42] Auto-Reset-Absch.
[50] Vergleicher 4
[51] Vergleicher 5
[60] Logikregel 4
[61] Logikregel 5
[70] Timeout 3
[71] Timeout 4
[72] Timeout 5
[73] Timeout 6
[74] Timeout 7
[83] Riemenbruch
3.9.6 13-5* SL-Programm
13-51 SL-Controller Ereignis
Array [20]
Option: Funktion:
Wählen Sie den Booleschen
Eingangswert (WAHR oder FALSCH)
zur Definition des Smart Logic
Controller-Ereignisses aus.
Siehe Parameter 13-02 SL-Controller
Stopp für nähere Beschreibungen der
Auswahloptionen und ihrer
Funktionen.
[0] * FALSCH
[1] WAHR
[2] Motor ein
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 75
Page 78

Parameter
VLT® HVAC Basic Drive FC 101
13-51 SL-Controller Ereignis
Array [20]
Option: Funktion:
[3] Im Bereich
[4] Ist=Sollwert
33
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp.
[17] Netzsp.auss.Bereich
[18] Reversierung
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Absch.verrgl.)
[22] Vergleicher 0
[23] Vergleicher 1
[24] Vergleicher 2
[25] Vergleicher 3
[26] Logikregel 0
[27] Logikregel 1
[28] Logikregel 2
[29] Logikregel 3
[30] Timeout 0
[31] Timeout 1
[32] Timeout 2
[33] Digitaleingang 18
[34] Digitaleingang 19
[35] Digitaleingang 27
[36] Digitaleingang 29
[39] Startbefehl
[40] FU gestoppt
[42] Auto-Reset-Absch.
[50] Vergleicher 4
[51] Vergleicher 5
[60] Logikregel 4
[61] Logikregel 5
[70] Timeout 3
[71] Timeout 4
[72] Timeout 5
[73] Timeout 6
[74] Timeout 7
[83] Riemenbruch
13-52 SL-Controller-Aktion
Array [20]
Option: Funktion:
Wählen Sie die dem SLC-Ereignis
entsprechende Aktion aus. Aktionen
werden ausgeführt, wenn das entsprechende Ereignis (definiert in
Parameter 13-51 SL-Controller Ereignis)
als wahr ausgewertet wird. Folgende
Aktionen stehen zur Auswahl:
[100] Alarm quittieren
13-52 SL-Controller-Aktion
Array [20]
Option: Funktion:
[0] * Deaktiviert
[1] Normal Betrieb
[2] Anwahl Datensatz1Ändert den aktiven Parametersatz
(Parameter 0-10 Aktiver Satz) in
Parametersatz 1.
[3] Anwahl Datensatz2Ändert den aktiven Parametersatz
(Parameter 0-10 Aktiver Satz) in
Parametersatz 2.
[10] Anwahl Festsollw.0Wählt Festsollwert 0 aus.
[11] Anwahl Festsollw.1Wählt Festsollwert 1 aus.
[12] Anwahl Festsollw.2Wählt Festsollwert 2 aus.
[13] Anwahl Festsollw.3Wählt Festsollwert 3 aus.
[14] Anwahl Festsollw.4Wählt Festsollwert 4 aus.
[15] Anwahl Festsollw.5Wählt Festsollwert 5 aus.
[16] Anwahl Festsollw.6Wählt Festsollwert 6 aus.
[17] Anwahl Festsollw.7Wählt Festsollwert 7 aus. Wenn Sie
den aktiven Festsollwert ändern, wird
er mit anderen Festsollwertbefehlen
zusammengeführt, die entweder von
Digitaleingängen oder über einen
Feldbus gesendet werden.
[18] Anwahl Rampe 1 Wählt Rampe 1 aus.
[19] Anwahl Rampe 2 Wählt Rampe 2 aus.
[22] Betrieb Sendet einen Startbefehl an den
Frequenzumrichter.
[23] Start+Reversierung Sendet einen Start Rücklauf-Befehl an
den Frequenzumrichter.
[24] Stopp Sendet einen Stoppbefehl an den
Frequenzumrichter.
[25] Schnellstopp Sendet einen Schnellstoppbefehl an
den Frequenzumrichter.
[26] DC-Bremse Sendet einen DC-Stoppbefehl an den
Frequenzumrichter.
[27] Motorfreilauf Der Frequenzumrichter geht sofort in
Freilauf über. Alle Stoppbefehle,
einschließlich Freilaufbefehl, stoppen
den SLC.
[28] Drehz. speich. Speichert die Ausgangsfrequenz des
Frequenzumrichters.
[29] Start Timer 0 Startet Timer 0, weitere Beschreibung
siehe Parameter 13-20 SL-Timer.
[30] Start Timer 1 Startet Timer 1, weitere Beschreibung
siehe Parameter 13-20 SL-Timer.
[31] Start Timer 2 Startet Timer 2, weitere Beschreibung
siehe Parameter 13-20 SL-Timer.
76 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 79

Parameter Programmierhandbuch
13-52 SL-Controller-Aktion
Array [20]
Option: Funktion:
[32] Digitalausgang A-
AUS
[33] Digitalausgang B-
AUS
[34] Digitalausgang C-
AUS
[35] Digitalausgang D-
AUS
[38] Digitalausgang A-
EIN
[39] Digitalausgang B-
EIN
[40] Digitalausgang C-
EIN
[41] Digitalausgang D-
EIN
[60] Reset Zähler A Zähler A wird auf 0 gesetzt.
[61] Reset Zähler B Zähler B wird auf 0 gesetzt.
[70] Start Timer 3 Startet Timer 3, weitere Beschreibung
[71] Start Timer 4 Startet Timer 4, weitere Beschreibung
[72] Start Timer 5 Startet Timer 5, weitere Beschreibung
[73] Start Timer 6 Startet Timer 6, weitere Beschreibung
[74] Start Timer 7 Startet Timer 7, weitere Beschreibung
[100] Alarm quittieren Quittiert den Alarm.
Jeder als Digitalausgang 1 definierte
Ausgang wird auf „0“ (AUS) gesetzt.
Jeder als Digitalausgang 2 definierte
Ausgang wird auf „0“ (AUS) gesetzt.
Jeder als Digitalausgang 3 definierte
Ausgang wird auf „0“ (AUS) gesetzt.
Jeder als Digitalausgang 4 definierte
Ausgang wird auf „0“ (AUS) gesetzt.
Jeder als Digitalausgang 1 definierte
Ausgang wird auf „1“ (EIN) gesetzt.
Jeder als Digitalausgang 2 definierte
Ausgang wird auf „1“ (EIN) gesetzt.
Jeder als Digitalausgang 3 definierte
Ausgang wird auf „1“ (EIN) gesetzt.
Jeder als Digitalausgang 4 definierte
Ausgang wird auf „1“ (EIN) gesetzt.
siehe Parameter 13-20 SL-Timer.
siehe Parameter 13-20 SL-Timer.
siehe Parameter 13-20 SL-Timer.
siehe Parameter 13-20 SL-Timer.
siehe Parameter 13-20 SL-Timer.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 77
Page 80

Parameter
VLT® HVAC Basic Drive FC 101
3.10 Hauptmenü - Sonderfunktionen Parametergruppe 14
3.10.1 14-0* IGBT-Ansteuerung
33
14-01 Taktfrequenz
Option: Funktion:
Auswahl der Taktfrequenz des Wechselrichters.
Durch eine Änderung der Taktfrequenz können
Störgeräusche vom Motor verringert werden.
HINWEIS
Die Ausgangsfrequenz des Frequenzumrichters darf 1/10 der Taktfrequenz nicht
überschreiten. Bei laufendem Motor muss
die Taktfrequenz in
Parameter 14-01 Taktfrequenz eingestellt
werden, bis ein möglichst geringes
Motorgeräusch erreicht ist.
HINWEIS
Hohe Taktfrequenzen erwärmen den
Frequenzumrichter und können dessen
14-03 Übermodulation
Option: Funktion:
Nenndrehzahl mit einer Steigerung auf ca. 12 % bei
doppelter Nenndrehzahl).
14-07 Totzeit-Kompensationsniveau
Range: Funktion:
Size
related*
[0 100 ]
Niveau der angewendeten PausenzeitKompensation in Prozent. Bei einem hohen
Niveau (>90 %) wird die dynamische
Motoransprache optimiert. Ein Niveau
zwischen 50 und 90 % ist sowohl für einen
Minimierung des Drehmoment-Rippels als
auch der Dynamik des Motors geeignet. Bei
einem Niveau von 0 wird die Totzeit-Kompensation deaktiviert.
14-08 Dämpfungsfaktor
Range: Funktion:
Size
related*
[0 100 %]
Einstellung des Dämpfungsfaktors für
Zwischenkreis-Spannungskompensation.
Siehe Parameter 14-51 Zwischenkreis-
Spannungskompensation.
Lebensdauer reduzieren.
14-09 Totzeit Vorspannungs-Strompegel
HINWEIS
Nicht alle Optionen sind für alle Leistungsgrößen verfügbar.
[0] Ran3 3 kHz wahr zufällige PWM (Weißrauschenmodu-
lation).
[1] Ran5 5 kHz wahr zufällige PWM (Weißrauschenmodu-
lation).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Übermodulation
Option: Funktion:
[0] * Aus Keine Auswahl einer Übermodulation der Ausgangs-
spannung zur Vermeidung von Drehmoment-Rippel an
der Motorwelle.
[1] Ein Die Übermodulationsfunktion erzeugt eine zusätzliche
Spannung von bis zu 8 % der Ausgangsspannung
U
ohne Übermodulation, woraus sich ein zusätz-
max
liches Drehmoment von 10 bis 12 % in der Mitte des
übersynchronen Bereichs ergibt (von 0 % bei der
Range: Funktion:
Size related* [0 -
100 %]
Zum Hinzufügen des Stromabtastsignals für eine Totzeit-Kompensation
an bestimmten Motoren stellen Sie
ein Vorspannungssignal (in Prozent)
ein.
3.10.2 14-1* Netzausfall
Parameter zur Konfiguration der Überwachung und des
Betriebsverhaltens bei Netzausfall.
14-10 Netzausfall
Konfiguration der Aktion des Frequenzumrichters, wenn die
Netzspannung unter der in Parameter 14-11 Netzausfall-Spannung
konfigurierten Netzspannungsgrenze liegt.
Option: Funktion:
[0] * Ohne Funktion
[1] Rampenstopp
[3] Motorfreilauf
[4] Kinetischer Speicher
[5] Kinet. Speich./Alarm
[6] Alarm
[7] Kin. back-up, trip w recovery
78 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 81

Parameter Programmierhandbuch
14-11 Netzausfall-Spannung
Range: Funktion:
Size
related*
[100 800 V]
Dieser Parameter definiert, bei welcher
AC-Spannung die in
Parameter 14-10 Netzausfall ausgewählte
Funktion aktiviert werden soll.
14-12 Funktion bei Netzphasenfehler
Option: Funktion:
HINWEIS
Durch die Auswahl dieser Option wird
die Lebensdauer des Frequenzumrichters verkürzt.
Betrieb bei starkem Netzphasenfehler kann
die Lebensdauer des Motors reduzieren. Die
Bedingungen gelten als schwer, wenn der
Motor bei nahezu nomineller Last kontinuierlich betrieben wird.
Wählen Sie eine der verfügbare Funktionen,
wenn ein schwerwiegender Netzphasenfehler
erkannt wird.
[0] * Abschaltung Der Frequenzumrichter wird abgeschaltet.
[1] Warnung Es wird eine Warnung ausgegeben.
[2] Deaktiviert Ohne Funktion
[3] Reduzieren Der Frequenzumrichter führt eine Leistungsre-
duzierung durch.
3.10.3 14-2* Reset/Initialisieren
14-20 Quittierfunktion
Wählen Sie die Quittierfunktion nach einer Abschaltung aus.
Nach dem Quittieren können Sie den Frequenzumrichter neu
starten.
Option: Funktion:
[0] * Manuell Quittieren Wählen Sie [0] Manuell Quittieren, um
den Frequenzumrichter über die
[Reset]-Taste oder die Digitaleingänge
zu quittieren.
[1] 1x Autom. Quittieren Wählen Sie [1]-[12] Autom. Quittieren
x 1…x20, um nach einer Abschaltung
1 bis 20 automatische Quittierungen
durchzuführen.
[2] 2x Autom. Quittieren
[3] 3x Autom. Quittieren
[4] 4x Autom. Quittieren
[5] 5x Autom. Quittieren
[6] 6x Autom. Quittieren
[7] 7x Autom. Quittieren
[8] 8x Autom. Quittieren
[9] 9x Autom. Quittieren
[10] 10x Autom. Quitt.
[11] 15x Autom. Quitt.
[12] 20x Autom. Quitt.
14-20 Quittierfunktion
Wählen Sie die Quittierfunktion nach einer Abschaltung aus.
Nach dem Quittieren können Sie den Frequenzumrichter neu
starten.
Option: Funktion:
[13] Unbegr.Autom.Quitt. Wählen Sie [13] Unbegr. Autom. Quitt.
zum kontinuierlichen Quittieren nach
einer Abschaltung.
14-21 Autom. Quittieren Zeit
Range: Funktion:
10 s* [0 -
600 s]
Zum Start der automatischen Quittierfunktion
geben Sie das Zeitintervall von der Abschaltung
bis zum Start ein. Dieser Parameter ist aktiv,
wenn Sie Parameter 14-20 Quittierfunktion auf [1]
- [13] Autom. Quittieren einstellen.
14-22 Betriebsart
Option: Funktion:
Um alle Parameterwerte auf die Werkseinstellung
zurückzusetzen, wählen Sie [2] Initialisierung.
[0]*Normal
Betrieb
[2] Initiali-
sierung
Wählen Sie [0] Normal Betrieb für den Normalbetrieb des Frequenzumrichters mit dem Motor
in der ausgewählten Anwendung.
Wählen Sie [2] Initialisierung, um alle Parameterwerte auf die Werkseinstellungen
zurückzusetzen, mit Ausnahme der Buskommunikationsparameter in den Parametergruppen 15-0*
Betriebsdaten und 15-3* Alarm Log. Der Frequenzumrichter wird bei der nächsten NetzEinschaltung zurückgesetzt.
Parameter 14-22 Betriebsart kehrt ebenfalls zur
Werkseinstellung [0] Normal Betrieb zurück.
14-27 Aktion bei Wechselrichterstörung
Wählen Sie aus, wie der Frequenzumrichter im Falle von
Überspannung, Überstrom, Kurzschluss oder Erdungsfehlern
reagieren soll.
Option: Funktion:
[0] Abschaltung
[1] * Warnung
14-29 Servicecode
Range: Funktion:
0* [0 - 0x7FFFFFFF ] Verwendung ausschließlich durch den
Kundendienst.
3.10.4 14-3* Stromgrenze
Parameter zur Konfiguration des Stromgrenzenreglers, der
aktiviert wird, wenn der Motorstrom die eingestellten
Stromgrenzen überschreitet (siehe
Parameter 4-18 Stromgrenze). Diese Parameter werden
verwendet, um das Drehmoment so schnell wie möglich zu
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 79
Page 82

Parameter
VLT® HVAC Basic Drive FC 101
reduzieren, ohne dabei die Kontrolle über den Motor zu
verlieren.
14-30 Current Lim Ctrl, Proportional Gain
Range: Funktion:
100 %* [0 -
33
500 %]
Eingabe des Werts der Proportionalverstärkung für den Stromgrenzenregler. Bei
einem höheren Wert reagiert der Regler
schneller. Eine zu hohe Einstellung führt
zur Instabilität des Reglers.
14-31 Current Lim Ctrl, Integration Time
Range: Funktion:
0.020 s* [0.002 - 2 s] Zur Einstellung der Integrationszeit des
Stromgrenzenreglers. Die Einstellung auf
einen niedrigeren Wert verkürzt die
Reaktionszeiten. Eine zu niedrige
Einstellung führt zu Regelungsinstabilität.
14-32 Current Lim Ctrl, Filter Time
Range: Funktion:
5 ms* [1 - 100 ms] Einstellung einer Zeitkonstante für den
Tiefpassfilter des Stromgrenzenreglers.
3.10.5 14-4* Energieoptimierung
Parameter zur Leistungsoptimierung bei Betrieb mit
variablem Drehmoment (VT) bzw. bei aktivierter automatischer Energie Optimierung (AEO).
14-44 Stromoptimierung D-Achse für IPM
Range: Funktion:
100 %* [0 - 200 %] Parametergruppe zum Einstellen von
Sonderfunktionen des Frequenzumrichters.
3.10.6 14-5* Umgebung
Parameter, um den Frequenzumrichter an besondere
Gegebenheiten der Einsatzumgebung (EMV-Filter, IT-Netz,
Ausgangsfilter usw.) anzupassen.
14-50 EMV-Filter
Dieser Parameter ist nur bei Frequenzumrichtern der folgenden
Baugrößen gültig:
IP20, 3x200–240 V, Baugrößen H6–H8
•
IP20, 3x380–480 V, Baugrößen H6–H8
•
IP54, 3x380–480 V, Baugrößen I6–I8
•
IP20, 3x525–600 V, Baugrößen H6–H10
•
Option: Funktion:
[0] Aus Wählen Sie [0] Aus nur dann, wenn der Frequenzum-
richter von einer isolierten Netzstromquelle gespeist
wird (IT-Netz).
In diesem Modus werden die internen EMV-Filterkondensatoren zwischen dem Gehäuse und der EMVFilterschaltung ausgeschaltet, um die Erdungskapazität
zu verringern.
[1] * Ein Wählen Sie [1] Ein, um sicherzustellen, dass der
Frequenzumrichter EMV-Normen einhält.
Die Automatische Energieoptimierung ist nur aktiv, wenn
Parameter 1-03 Drehmomentverhalten der Last auf [3]
Autom. Energieoptim. eingestellt ist.
14-40 Quadr.Mom. Anpassung
Range: Funktion:
90 %* [40 -
90 %]
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Geben Sie den Grad der Motormagnetisierung
bei niedriger Drehzahl ein. Bei niedrigen
Werten wird der Energieverlust im Motor
reduziert. Allerdings gilt dies auch für die
Lastkapazität.
14-41 Minimale AEO-Magnetisierung
Range: Funktion:
66 %* [40 -
75 %]
Geben Sie die minimal zulässige Magnetisierung für AEO ein. Ein niedriger Wert
verringert den Energieverlust im Motor, senkt
jedoch auch die Widerstandsfähigkeit
gegenüber plötzlichen Lastwechseln.
14-51 Zwischenkreis-Spannungskompensation
Option: Funktion:
[0] Aus Die Übermodulation der Ausgangsspannung ist
ausgeschaltet, um Drehmoment-Rippel an der
Motorwelle zu vermeiden.
[1] * Ein Aktiviert die Übermodulation der Ausgangs-
spannung, damit eine Ausgangsspannung erzielt
werden kann, die höher als die Netzspannung ist
(bis 15 %).
14-52 Lüftersteuerung
Mit diesem Parameter wählen Sie die Betriebsart der Lüftersteuerung. Je nach mit Betrieb mit hoher Last (hohe
Kühlkörpertemperatur) oder mit geringer Last bis hin zum Standby-Betrieb gibt der Frequenzumrichter ein unterschiedliches
Betriebsgeräusch von sich.
Option: Funktion:
[0] Auto Der Lüfter läuft kurzzeitig mit voller
Drehzahl und passt die Drehzahl dann
automatisch an die Last und die
Umgebungstemperatur an. Der Lüfter läuft
auch dann mit minimaler Drehzahl, wenn
der Sollwert aufgrund der vom IGBT
80 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 83

Parameter Programmierhandbuch
14-52 Lüftersteuerung
Mit diesem Parameter wählen Sie die Betriebsart der Lüftersteuerung. Je nach mit Betrieb mit hoher Last (hohe
Kühlkörpertemperatur) oder mit geringer Last bis hin zum Standby-Betrieb gibt der Frequenzumrichter ein unterschiedliches
Betriebsgeräusch von sich.
Option: Funktion:
erzeugten Wärme 0 Hz beträgt. Der Lüfter
stoppt, wenn die EnergiesparmodusFunktion aktiviert ist. Dies ist die
Standardeinstellung für alle Frequenzumrichter mit Ausnahme der Baugröße H1.
[4] Autom. niedr.
Temp.-Bereich
[5] Modus
Konstant-ein
[6] Modus
Konstant-aus
[7] Mod Ein-w.-
Wechselr.-einsonst-aus
Nur gültig für die Gehäusegrößen H6-H10
und I6-I8.
Für die Vor-Ort-Prüfung des Lüfters oder
wenn der Lüfter konstant mit maximaler
Drehzahl laufen muss. Nur gültig für die
Gehäusegrößen H1-H5 und I2-I4.
Bei ausreichender Konvektionskühlung oder
Einbau des Frequenzumrichters in einen
Demonstrationsschaltschrank, Ausstellungen
usw. Der Frequenzumrichter schaltet bei
Übertemperatur des Kühlkörpers ab, wenn
die Belastung höher ist als die Konvektionskühlung zulässt. Nur gültig für die
Gehäusegrößen H1-H5 und I2-I4.
Der Lüfter läuft mit maximaler Drehzahl,
wenn er sich im Handbetrieb befindet oder
der Sollwert über 0 Hz liegt. Der Lüfter
stoppt, wenn der Energiesparmodus aktiv
ist. Dies ist die Standardeinstellung nur für
Baugröße H1. Sie können diese jedoch auch
für die Baugrößen H2-H5 und I2-I4 wählen.
14-53 Lüfterüberwachung
Definiert das Verhalten des Frequenzumrichters bei Erkennung
eines Lüfterfehlers. Dieser Parameter ist nur bei Frequenzumrichtern der folgenden Baugrößen gültig:
IP20, 3x200–240 V, Baugrößen H6–H8.
•
IP20, 3x380–480 V, Baugrößen H6–H8.
•
IP54, 3x380–480 V, Baugrößen I6–I8.
•
IP20, 3x525–600 V, Baugrößen H6–H10.
•
Option: Funktion:
[0] Deaktiviert
[1] * Warnung
[2] Abschaltung
14-55 Ausgangsfilter
Wählen Sie aus, ob ein Ausgangsfilter vorhanden ist.
Option: Funktion:
[0] * Kein Filter
[1] Sinusfilter
[3] Sinusfilter mit
Istwert
14-55 Ausgangsfilter
Wählen Sie aus, ob ein Ausgangsfilter vorhanden ist.
Option: Funktion:
[4] dv/dt Diese Option ist nur für Frequenzum-
richter der folgenden Baugrößen gültig:
IP20, 3x200-240 V, Baugrößen
•
H6-H8
IP20, 3x380-480 V, Baugrößen
•
H6-H8
IP54, 3x380-480 V, Baugrößen
•
I6-I8
IP20, 3x525-600 V, Baugrößen
•
H6-H10
3.10.7 14-6* Auto-Reduzier.
Parametergruppe zur Konfiguration der automatischen
Leistungsreduzierung basierend auf der Ausgangsfrequenz
des Frequenzumrichters.
14-63 Min. Taktfrequenz
Stellen Sie die zulässige minimale Taktfrequenz des Ausgangsfilters ein.
Option: Funktion:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-64 Totzeit-Kompensation, Nullstrom-Pegel
Wenn Sie ein langes Motorkabel verwenden, stellen Sie den
Parameter auf [0] Deaktiviert ein, um den Motordrehmomentrippel zu minimieren.
Option: Funktion:
[0] * Deaktiviert
[1] Aktiviert
14-65 Drehzahl-Reduzierung, Totzeit-Kompensat
Range: Funktion:
Size
related*
[ 20 1000 Hz]
Das Niveau der Totzeit-Kompensation wird
linear zum maximalen Pegel der in
Parameter 14-07 Totzeit-Kompensationsniveau eingestellten Ausgangsfrequenz
auf die minimale Ausgangsfrequenz
reduziert, die in diesem Parameter
eingestellt ist.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 81
Page 84

Parameter
VLT® HVAC Basic Drive FC 101
3.10.8 14-9* Fehlereinstellungen
Die Parametergruppe für Fehleranpassungseinstellungen.
14-90 Fehlerebenen
Mit diesem Parameter können Sie Fehlerebenen anpassen. Nur
33
Index 7, der Überstromfehler anzeigt, wird unterstützt.
Option: Funktion:
[3] * Abschaltblo-
ckierung
[4] Abschaltung
zeitverzögertes wReset
[5] Fangschaltung Der Frequenzumrichter versucht beim
Der Alarm wir auf ein Abschaltblockierungsniveau eingestellt.
Der Alarm wird als Abschaltalarm
konfiguriert, den Sie nach einer
Verzögerung quittieren können. Wenn
der Überstromalarm beispielsweise für
diese Option konfiguriert wird, kann er
3 Minuten nach Meldung des Alarms
quittiert werden.
Starten, einen drehenden Motor zu
fangen. Wenn diese Option ausgewählt
ist, wird Parameter 1-73 Motorfang-
schaltung auf [1] Aktiviert eingestellt.
82 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 85

Parameter Programmierhandbuch
3.11 Hauptmenü - Info/Wartung - Gruppe
15
Parametergruppe, die Frequenzumrichterinformationen wie
Betriebsvariablen, Hardwarekonfiguration und Softwareversionen enthält.
3.11.1 15-0* Betriebsdaten
15-00 Betriebsstunden
Range: Funktion:
0 h* [0 - 0x7fffffff. h] Anzeigen der Laufstunden des Frequen-
zumrichters. Die Speicherung des Werts
erfolgt beim Ausschalten des Frequenzumrichters.
15-01 Motorlaufstunden
Range: Funktion:
0 h* [0 - 0x7fffffff.h]Anzeigen der Laufstunden des Motors.
Setzen Sie den Zähler in
Parameter 15-07 Reset Betriebsstundenzähler
zurück. Die Speicherung des Werts erfolgt
beim Ausschalten des Frequenzumrichters.
15-02 Zähler-kWh
Range: Funktion:
0 kWh* [0 - 65535
kWh]
Zeigt die Ausgangsleistung des Frequenzumrichters in kWh als Mittelwert über 1
Stunde an. Setzen Sie den Zähler in
Parameter 15-06 Reset Zähler-kWh zurück.
15-06 Reset Zähler-kWh
Option: Funktion:
[1] Reset Wählen Sie zum Zurücksetzen des kWh-Zählers
[1] Reset und drücken Sie [OK] (siehe
Parameter 15-02 Zähler-kWh).
15-07 Reset Betriebsstundenzähler
Option: Funktion:
[0] * Kein
Reset
[1] Reset Um den Motorlaufstundenzähler zurückzusetzen,
wählen Sie [1] Zähler zurücksetzen und drücken
Sie [OK] (Parameter 15-01 Motorlaufstunden), um
den Wert auf 0 zu stellen (siehe
Parameter 15-01 Motorlaufstunden).
3.11.2 15-3* Alarm Log
Parameter in dieser Parametergruppe sind Arrayparameter,
in denen bis zu 10 Fehlerspeicher angezeigt werden
können. Die neuesten Daten stehen unter [0] und die
ältesten Daten unter [9]. Fehlercodes, Werte und
Zeitstempel können für alle protokollierten Daten
angezeigt werden
15-30 Fehlerspeicher: Fehlercode
Range: Funktion:
0* [0 - 255 ] Zeigt den Fehlercode an. Die jeweilige Bedeutung
können Sie unter Kapitel 4 Fehlersuche und -
behebung nachschlagen.
3 3
15-03 Anzahl Netz-Ein
Range: Funktion:
0* [0 - 2147483647 ] Anzeigen der Anzahl der Einschalt-
vorgänge des Frequenzumrichters.
15-04 Anzahl Übertemperaturen
Range: Funktion:
0* [0 - 65535 ] Anzeigen der Anzahl der aufgetretenen
Übertemperaturfehler des Frequenzumrichters.
15-05 Anzahl Überspannungen
Range: Funktion:
0* [0 - 65535 ] Anzeigen der Anzahl aufgetretener Überspan-
nungen im Frequenzumrichter.
15-06 Reset Zähler-kWh
Option: Funktion:
HINWEIS
Drücken Sie zum Quittieren auf [OK].
[0] * Kein Reset
15-31 Ursache Interner Fehler
Range: Funktion:
0* [-32767 - 32767 ] Zeigt eine Beschreibung des Fehlers.
Dieser Parameter wird in Verbindung mit
Alarm 38, Interner Fehler verwendet.
3.11.3 15-4* Typendaten
Parameter mit schreibgeschützten Informationen zur
Hardware- und Softwarekonfiguration des Frequenzumrichters.
15-40 FC-Typ
Range: Funktion:
0* [0 - 6 ] Zeigt den FU-Typencode an. Die Anzeige ist
identisch mit den ersten sechs Zeichen im Feld
„Leistung“ der Typencode-Definition der Frequenzumrichter-Serie.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 83
Page 86

Parameter
VLT® HVAC Basic Drive FC 101
15-41 Leistungsteil
Range: Funktion:
0* [0 - 20 ] Zeigt den FU-Typencode an. Die Anzeige ist
identisch mit den Zeichen 7-10 im Feld „Leistung“
der Typencode-Definition der Frequenzumrichter-
33
Serie.
15-42 Nennspannung
15-53 Leistungsteil Seriennummer
Range: Funktion:
0* [0 - 0 ] Zeigt die Seriennummer der Leistungskarte an.
15-59 Dateiname
Range: Funktion:
0 [0 - 16 ] Anzeige des aktuellen CSIV-Dateinamens.
Range: Funktion:
0* [0 - 20 ] Zeigt den FU-Typencode an. Die Anzeige ist
identisch mit den Zeichen 11-12 im Feld
„Leistung“ der Typencode-Definition der
Frequenzumrichter-Serie.
15-43 Softwareversion
Range: Funktion:
0* [0 - 0 ] Zeigt die Softwareversion des Frequenzumrichters
an.
15-44 Typencode (original)
Range: Funktion:
0* [0 - 40 ] Zeigt den Typencode zur Nachbestellung des
Frequenzumrichters ohne nachgerüstete Optionen
an.
15-45 Typencode (aktuell)
Range: Funktion:
0 [0 - 40 ] Zeigt den tatsächlichen Typencode an.
15-46 Typ Bestellnummer
Range: Funktion:
0* [0 - 8 ] Zeigt die 8-stellige Bestellnummer zur Nachbe-
stellung des Frequenzumrichters ohne
nachgerüstete Optionen an.
15-48 LCP-Version
Range: Funktion:
0* [0 - 0 ] Zeigt die Ident.-Nummer des LCP an.
15-49 Steuerkarte SW-Version
Range: Funktion:
0* [0 - 0 ] Zeigt die Software-Versionsnummer der Steuerkarte
an.
15-50 Leistungsteil SW-Version
Range: Funktion:
0* [0 - 0 ] Zeigt die Software-Versionsnummer der
Leistungskarte an.
15-51 Typ Seriennummer
Range: Funktion:
0* [0 - 10 ] Zeigt die Seriennummer des Frequenzumrichters
an.
84 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 87

Parameter Programmierhandbuch
3.12 Hauptmenü - Datenanzeigen Parametergruppe 16
3.12.1 16-0* Anzeigen-Allgemein
16-00 Steuerwort
Range: Funktion:
0* [0 - 65535 ] Anzeigen des Steuerworts, das als Hex-Code
über die serielle Kommunikationsschnittstelle
vom Frequenzumrichter gesendet wurde.
Bit Bit = 0 Bit = 1
00 Festsollwertanwahl lsb –
01 Festsollwertanwahl des zweiten Bits der
Festsollwerte
02 DC-Bremse Rampe
03 Motorfreilauf Aktivieren
04 Schnellstopp Rampe
05 Drehz. speich. Rampe
06 Rampenstopp Start
07 Ohne Funktion Reset
08 Ohne Funktion Festdrehzahl JOG
09 Rampe 1 Rampe 2
10 Daten nicht gültig Gültig
11 Relais_A nicht aktiv Relais_A aktiviert
12 Relais_B nicht aktiv Relais_B aktiviert
13 Konfigurationsanwahl lsb –
14 Ohne Funktion Ohne Funktion
15 Ohne Funktion Reversierung
Tabelle 3.6 Control Word
–
16-03 Zustandswort
Range: Funktion:
0* [0 - 65535 ] Anzeigen des Zustandsworts, das als Hex-Code
über die serielle Kommunikationsschnittstelle
vom Frequenzumrichter gesendet wurde.
Bit Bit = 0 Bit = 1
00 Steuerung nicht bereit Bereit
01
VLT® nicht bereit
02 Motorfreilauf Aktivieren
03 Kein Fehler Abschaltung
04 Keine Warnung Warnung
05 Reserviert –
06 Keine Abschaltblockierung Abschaltblockierung
07 Keine Warnung Warnung
08
Drehzahl ≠ Sollw.
09 Ort-Steuerung Bussteuerung
10 Außerh.Drehzahlber. Frequenz OK
11 Kein Betrieb In Betrieb
12 Ohne Funktion Ohne Funktion
13 Spannung OK Über Grenze
14 Strom OK Über Grenze
15 Thermisches Verhalten i. O. Über Grenze
Tabelle 3.7 Status Word
Bereit
Drehzahl = Sollw.
16-05 Hauptistwert [%]
Range: Funktion:
0 %* [-200 -
200 %]
Zeigt das 2-Byte-Wort an, das mit dem
Zustandswort an den Bus-Master gesendet
wurde und den Hauptistwert übermittelt.
3 3
16-01 Sollwert [Einheit]
Range: Funktion:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
Zeigt den sich aus der in
Parameter 1-00 Regelverfahren (Hz) gewählten
Konfiguration ergebenden
vorhandenen Sollwert an,
der auf Puls- oder analoger
Basis in der Einheit
angewendet wird.
16-02 Sollwert [%]
Range: Funktion:
0 %* [-200 -
200 %]
Zeigt den Gesamtsollwert an. Der Gesamtsollwert ist die Summe aus den Sollwerten
Digital, Analog, Fest, Bus und Sollwert
speichern.
16-09 Benutzerdefinierte Anzeige
Range: Funktion:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
Ansicht der benutzerdefinierten Anzeigen laut
Festlegung in
Parameter 0-30 Einheit,
Parameter 0-31 Freie Anzeige
Min.-Wert und
Parameter 0-32 Freie Anzeige
Max. Wert.
3.12.2 16-1* Anzeigen-Motor
16-10 Leistung [kW]
Range: Funktion:
0 kW* [0 - 1000
kW]
Zeigt die tatsächliche Motorleistung in kW
an. Der angezeigte Wert wird auf Basis der
tatsächlichen Motorspannung und des
tatsächlichen Motorstroms berechnet.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 85
Page 88

Parameter
VLT® HVAC Basic Drive FC 101
16-11 Leistung [PS]
Range: Funktion:
0 hp* [0 - 1000
hp]
33
Anzeige der tatsächlichen Motorleistung in
HP. Der angezeigte Wert wird anhand der
aktuellen Motorspannung/des aktuellen
Motorstroms berechnet.
16-12 Motorspannung
Range: Funktion:
0 V* [0 - 65535 V] Zeigt die Motorspannung an; dies ist ein
berechneter Wert zur Regelung des Motors.
16-18 Therm. Motorschutz
Range: Funktion:
0 %* [0 -
100 %]
Zeigt die berechnete Motortemperatur in Prozent
des zulässigen Maximalwerts an. Bei 100 % findet
eine Abschaltung statt, falls in
Parameter 1-90 Thermischer Motorschutz
ausgewählt. Grundlage für die Berechnung bildet
die unter Parameter 1-90 Thermischer Motorschutz
ausgewählte ETR-Funktion.
16-22 Drehmoment [%]
Range: Funktion:
16-13 Frequenz
Range: Funktion:
0 Hz* [0 - 6553.5 Hz] Zeigt die Motorfrequenz an, ohne
Resonanzdämpfung.
0 %* [-200 - 200 %] Zeigt das an der Motorwelle anliegende
Drehmoment in Prozent des Nenndrehmoments an.
3.12.3 16-3* Anzeigen-FU
16-14 Motorstrom
Range: Funktion:
0 A* [0 - 655.35 A] Zeigt den Motorstrom als gemessenen
Mittelwert an, I
.
eff
16-15 Frequenz [%]
Range: Funktion:
0 %* [0 - 6553.5 %]
0 %* [0 – 6553,5 %] Zeigt ein 2-Byte-Wort zur Übermittlung
der tatsächlichen Motorfrequenz (ohne
Resonanzdämpfung) als Prozentwert
(Skala 0000-4000 Hex) von
Parameter 4-19 Max. Ausgangsfrequenz an.
16-16 Drehmoment [Nm]
Range: Funktion:
0 Nm* [-30000 -
30000 Nm]
Zeigt das an der Motorwelle anliegende
Drehmoment an. Einige Motoren
unterstützen mehr als 160 %
Drehmoment. Daher hängen Minimal- und
Maximalwert vom minimalen/maximalen
Motorstrom sowie vom verwendeten
Motor ab.
16-30 DC-Spannung
Range: Funktion:
0 V* [0 - 65535 V] Anzeige der tatsächlichen DC-Zwischen-
kreisspannung.
16-34 Kühlkörpertemp.
Range: Funktion:
0 °C* [-128 - 127 °C] Zeigt die Temperatur des Kühlkörpers des
Frequenzumrichters an.
16-35 FC Überlast
Range: Funktion:
0 %* [0 - 255 %] Zeigt den Prozentwert der thermischen
Belastung des Frequenzumrichters an. Bei
100 % findet eine Abschaltung statt.
16-36 Nenn-WR-Strom
Range: Funktion:
0 A* [0 - 655.35 A] Zeigt den Wechselrichter-Nennstrom an.
Diese Daten werden für den Motorüberlastschutz usw.verwendet.
16-17 Drehzahl [UPM]
Range: Funktion:
0 RPM* [-30000 -
30000 RPM]
Zeigt die aktuelle Motordrehzahl an. Die
Motordrehzahl wird bei der Prozessregelung mit oder ohne Rückführung
geschätzt und die Motordrehzahl bei
Drehzahlregelung mit Rückführung
gemessen.
16-37 Max.-WR-Strom
Range: Funktion:
0 A* [0 - 655.35 A] Zeigt den maximalen Strom des Wechsel-
richters an. Die Daten werden zur
Berechnung des Frequenzumrichterschutzes
usw. verwendet.
16-38 SL Contr.Zustand
Range: Funktion:
0* [0 - 20 ] Zeigt den Istzustand des Smart Logic Controller
(SLC) an.
86 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 89

Parameter Programmierhandbuch
3.12.4 16-5* Soll- & Istwerte
16-50 Externer Sollwert
Range: Funktion:
0 %* [-200 - 200 %] Zeigt den Gesamtsollwert an (die Summe
aus Digital-/Analogeingang/
Festsollwert/Bus und Sollwert speichern).
16-52 Istwert [Einheit]
Range: Funktion:
0
ProcessCtrlUnit*
16-54 Istwert 1 [Einheit]
Range: Funktion:
0
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
[-999999.999 -
999999.999
ProcessCtrlUnit]
Zeigt den sich aus der
Auswahl der Skalierung in
Parameter 3-02 Minimaler
Sollwert und
Parameter 3-03 Maximaler
Sollwert ergebenden Istwert
an.
Zeigt den sich aus der
Auswahl der Skalierung in
Parameter 3-02 Minimaler
Sollwert und
Parameter 3-03 Maximaler
Sollwert ergebenden Istwert
an.
16-61 Klemme 53 Modus
Option: Funktion:
Zeigt die Einstellung der Eingangsklemme 53 an.
Strom = 0
•
Spannung = 1
•
[0] * Strom
[1] Einstellung
Spannung
16-62 Analogeingang 53
Range: Funktion:
1* [0 - 20 ] Zeigt den Istwert an Eingang 53 an.
16-63 Klemme 54 Modus
Zeigt die Einstellung der Eingangsklemme 54 an.
Strom = 0
•
Spannung = 1
•
Option: Funktion:
[0] * Strom
[1] Einstellung Spannung
16-64 Analogeing. 54
Range: Funktion:
1* [0 - 20 ] Zeigt den Istwert an Eingang 54 an.
3 3
16-55 Istwert 2 [Einheit]
Range: Funktion:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Zeigt den sich aus der
Auswahl der Skalierung in
Parameter 3-02 Minimaler
Sollwert und
Parameter 3-03 Maximaler
Sollwert ergebenden Istwert
2 an.
3.12.5 16-6* Anzeig. Ein-/Ausg.
16-60 Digitaleingänge
Range: Funktion:
0* [0 -
4095 ]
Zeigt den Istzustand der Digitaleingänge 18, 19,
27 und 29 an.
Bit 0 Nicht verwendet
Bit 1 Nicht verwendet
Bit 2 Digitaleingangsklemme 29
Bit 3 Digitaleingangsklemme 27
Bit 4 Digitaleingangsklemme 19
Bit 5 Digitaleingangsklemme 18
Bit 6–15 Nicht verwendet
16-65 Analogausgang 42 [mA]
Range: Funktion:
0 mA* [0 - 20
mA]
Zeigt den Istwert an Ausgang 42 in mA an.
Der angezeigte Wert gibt die Auswahl in
Parameter 6–90 Terminal 42 Mode und
Parameter 6-91 Klemme 42 Analogausgang an.
16-66 Digitalausgang
Range: Funktion:
0* [0 -
15 ]
Zeigt den Binärwert aller Digitalausgänge an.
Definition:
X: Unbenutzt
0: Niedrig
1: Hoch
Tabelle 3.8 Bits-Definition
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 87
Page 90

Parameter
VLT® HVAC Basic Drive FC 101
16-66 Digitalausgang
Range: Funktion:
XX Keine verwendet
X0 Klemme 42 nicht verwendet,
Klemme 45 deaktiviert.
33
X1 Klemme 42 nicht verwendet,
Klemme 45 aktiv.
0X Klemme 42 deaktiviert, Klemme 45
nicht verwendet.
0 Klemme 42 deaktiviert, Klemme 45
deaktiviert.
1 Klemme 42 deaktiviert, Klemme 45
aktiv.
1X Klemme 42 aktiviert, Klemme 45
nicht verwendet.
10 Klemme 42 aktiviert, Klemme 45
deaktiviert.
11 Klemme 42 aktiviert, Klemme 45
aktiviert.
Tabelle 3.9 Binärwert der Digitalausgänge
16-73 Zähler B
Range: Funktion:
0* [-32768 -
32767 ]
Zeigt den aktuellen Wert von Zähler B. Zähler
eignen sich gut als Vergleicher-Operand
(Parameter 13-10 Vergleicher-Operand).
Sie können den Wert entweder über Digitaleingänge (Parametergruppe 5-1* Digitaleingänge)
oder SL Controller-Aktion (Parameter 13-52 SL-
Controller-Aktion) ändern.
16-79 Analogausgang 45
Range: Funktion:
0 mA* [0 - 20
mA]
Zeigt den Istwert an Ausgang 45 in mA an.
Der angezeigte Wert gibt die Auswahl in
Parameter 6-70 Klemme 45 Funktion und
Parameter 6-71 Klemme 45 Analogausgang an.
3.12.6 16-8* Anzeig. Schnittst.
Parameter zum Melden der Bus-Sollwerte und -Steuerwörter.
16-67 Pulseingang 29 [Hz]
Range: Funktion:
0* [0 - 130000 ] Zeigt die tatsächliche Frequenzrate an
Klemme 29 an.
16-86 FC Sollwert 1
Range: Funktion:
0* [-32768 - 32767 ] Zeigt den zuletzt an der FC Schnittstelle
empfangenen Sollwert an.
16-71 Relaisausgang
Range: Funktion:
0* [0 - 31 ] Zeigt die Einstellung des Relais an.
Bit 0~2 Nicht verwendet
Bit 3 Relais 02
Bit 4 Relais 01
Bit 5~15 Nicht verwendet
Tabelle 3.10 Bits-Definition
16-72 Zähler A
Range: Funktion:
0* [-32768 -
32767 ]
Zeigt den aktuellen Wert von Zähler A. Zähler
eignen sich gut als Vergleicher-Operand, siehe
Parameter 13-10 Vergleicher-Operand.
Sie können den Wert entweder über Digitaleingänge (Parametergruppe 5-1* Digitaleingänge)
oder SL Controller-Aktion (Parameter 13-52 SL-
Controller-Aktion) ändern.
3.12.7 16-9* Bus Diagnose
16-90 Alarmwort
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Zeigt das über die serielle Kommunika-
tionsschnittstelle gesendete Alarmwort
in Hex-Code an.
16-91 Alarmwort 2
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Zeigt das aktuell gültige Alarmwort 2
des Frequenzumrichters in Hex-Code
an.
16-92 Warnwort
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Anzeige des über die serielle Kommuni-
kationsschnittstelle gesendeten
Warnworts in Hex-Code.
16-93 Warnwort 2
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Zeigt das aktuell gültige Warnwort 2
des Frequenzumrichters in Hex-Code
an.
88 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 91

Parameter Programmierhandbuch
16-94 Erw. Zustandswort
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Gibt das erweiterte Zustandswort
zurück, das in hexadezimaler Form über
die serielle Schnittstelle gesendet wird.
16-95 Erw. Zustandswort 2
Range: Funktion:
0* [0 - 0xFFFFFFFFUL ] Gibt das erweiterte Zustandswort 2
zurück, das in hexadezimaler Form über
die serielle Schnittstelle gesendet wird.
16-97 Alarmwort 3
Range: Funktion:
0* [0 - 4294967295] Zeigt das über die serielle Kommunikati-
onsschnittstelle gesendete aktuell gültige
Alarmwort 3 des Frequenzumrichters in
Hex-Code an.
16-98 Warnwort 3
Range: Funktion:
0* [0 - 4294967295] Zeigt das aktuell gültige Warnwort 3 des
Frequenzumrichters in Hex-Code an.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 89
Page 92

Parameter
VLT® HVAC Basic Drive FC 101
3.13 Hauptmenü - Datenanzeigen 2 Gruppen 18
Parameter in dieser Parametergruppe sind Arrayparameter,
in denen bis zu 10 Fehlerspeicher angezeigt werden
können. Die neuesten Daten finden Sie unter [0] und die
33
ältesten Daten unter [9]. Fehlercodes, Werte und
Zeitstempel können für alle protokollierten Daten
angezeigt werden
20-01 Istwertumwandl. 1
Option: Funktion:
Dieser Parameter ermöglicht die Verwendung
einer Umrechnungsfunktion für Istwert 1.
[0] * Linear [0] Linear hat keine Auswirkung auf den Istwert.
[1] Radiziert [1] Quadratwurzel wird in der Regel verwendet,
wenn ein Druckgeber zur Ermittlung eines
Durchflussistwerts verwendet wird.
((Durchfluss ∝ Druck)).
3.13.1 18-1* Notfallbetriebsprotokoll
20-03 PID-Prozess Istwert 2
18-10 Notfallbetriebspeicher: Ereignis
Range: Funktion:
0* [0 - 255 ] Zeigt das Notfallbetrieb-Ereignis an.
3.13.2 18-5* Soll- & Istwerte
18-50 Anzeige ohne Geber [Einheit]
Range: Funktion:
0 SensorlessUnit*
[-999999.999 -
999999.999
SensorlessUnit]
Zeigt den Druck oder Durchfluss
aus Berechnungen ohne Geber
an. Dieser Wert ist nicht der zur
Regelung verwendete Wert. Der
Wert wird nur aktualisiert, wenn
die Daten ohne Geber Durchfluss
und Druck unterstützen.
3.14 Hauptmenü - PID-Regler - Gruppe 20
Diese Parametergruppe wird zur Konfiguration des PIReglers verwendet, der die Ausgangsfrequenz des
Frequenzumrichters regelt.
3.14.1 20-0* Istwert
Diese Parametergruppe wird zur Konfiguration des Istwertsignals für den PI-Regler des Frequenzumrichters mit
Rückführung verwendet.
20-00 Istwertanschluss 1
Option: Funktion:
Dieser Parameter definiert, welcher
Eingang als Quelle des Istwertsignals
verwendet wird.
[0] * Keine Funktion
[1] Analogeingang 53
[2] Analogeingang 54
[3] Pulseingang 29
[100] Bus-Istwert 1
[101] Bus-Istwert 2
[104] Durchfl. ohne Sensor
[105] Druck ohne Sensor
Option: Funktion:
[0] * Keine Funktion
[1] Analogeingang 53
[2] Analogeingang 54
[3] Pulseingang 29
[100] Bus-Istwert 1
[101] Bus-Istwert 2
20-04 Istwertumwandl. 2
Option: Funktion:
[0] * Linear
[1] Radiziert
20-12 Soll-/Istwerteinheit
Option: Funktion:
Wählen Sie die Einheit, die mit Soll-/Istwerten für
die Regelung mit Rückführung verwendet werden
soll.
[0] * None
[20] l/s
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m wg
[75] mm Hg
[120] GPM
[121] Gal/s
[122] Gal/min
[123] Gal/h
[124] cfm
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] lb/in2
[172] inch wg
[173] ft wg
[174] in Hg
90 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 93

Parameter Programmierhandbuch
3.14.2 20-2* Istwert/Sollwert
Parametergruppe für Istwertfunktion und Sollwerte. Wählen
Sie, welcher Soll- und Istwert verwendet werden soll. Sollund Istwert können einen festes Paar sein oder basierend
auf logischen Vergleichen separat ausgewählt werden.
20-20 Istwertfunktion
Auswahl, wie der Istwert berechnet werden soll. Der Istwert kann
ein einzelner Istwertanschluss oder eine Kombination aus
mehreren Istwerten sein.
Option: Funktion:
[0] Addierend
[1] Differenz
[2] Mittelwert
[3] * Minimum
[4] Maximum
3.14.3 20-6* Ohne Geber
Parameter ohne Geber. Siehe auch Parameter 16-26 Leistung
gefiltert [kW], Parameter 16-27 Leistung gefiltert [PS],
Parameter 18-50 Anzeige ohne Geber [Einheit]und
Parameter 20-00 Istwertanschluss 1.
20-60 Einheit ohne Geber
Option: Funktion:
Wählt die für Parameter 18-50 Anzeige
ohne Geber [Einheit] zu verwendende
Einheit aus.
[0] Keine
[20] * l/s Expressionlimit
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m wg
[75] mm Hg
[120] GPM
[121] Gal/s
[122] Gal/min
[123] Gal/h
[124] cfm
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] lb/in2
[172] inch wg
[173] ft wg
[174] in Hg
20-69 Informationen ohne Geber
Array [8]
Range: Funktion:
0* [0 - 25 ] Zeigt Informationen zu den Daten ohne Geber an.
3.14.4 20-7* PID Auto-Anpassung
Parameter zum Aktivieren des PID-Autotuning
20-70 Typ mit Rückführung
Option: Funktion:
Zur Auswahl der erwarteten
Anwendungsreaktion.
[0] * Auto
[1] Schneller Druck
[2] Langsamer Druck
[3] Schnelle Temperatur
[4] Langsame Temperatur
20-71 Abstimm-Modus
Option: Funktion:
Zur Auswahl der relativen Reaktionsgeschwindigkeit für die Anwendung.
[0] * Normal
[1] Schnell
20-72 PID-Ausgangsänderung
Range: Funktion:
0.10* [0.01 - 0.50 ] Zur Festlegung der Größe der Änderungsschritte während der automatischen
Anpassung.
20-73 Min. Istwerthöhe
Range: Funktion:
-4999,000* [-4999,000 - Expressi-
onlimit (4999,000)]
20-74 Maximale Istwerthöhe
Range: Funktion:
4999,000* [Expressionlimit
(-4999,000) - 4999,000]
20-79 PID Auto-Anpassung
Option: Funktion:
[0] * Deaktiviert Zur Auswahl der Deaktivierung des PID-
Autotuning.
[1] Aktiviert Zur Auswahl der Aktivierung des PID-
Autotuning.
Zur Festlegung des
zulässigen Mindestistwerts
während der AutoAnpassung.
Zur Festlegung des zulässigen
Maximalistwerts während der
Auto-Anpassung.
3 3
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 91
Page 94

Parameter
VLT® HVAC Basic Drive FC 101
3.14.5 20-8* PID-Grundeinstell.
20-93 PI-Proportionalverstärkung
Range: Funktion:
Parameter zur Konfiguration der Prozess-PI-Regelung.
20-81 Auswahl Normal-/Invers-Regelung
Option: Funktion:
33
[0] * Normal Führt dazu, dass sich die Ausgangsfrequenz des
Frequenzumrichters reduziert, wenn der Istwert
höher als der Sollwert ist. Dieses Verhalten ist bei
der druckgeregelten Versorgung von Lüfter- und
Pumpenanwendungen die Regel.
[1] Invers Führt dazu, dass sich die Ausgangsfrequenz des
Frequenzumrichters erhöht, wenn der Istwert
höher als der Sollwert ist. Dieses Verhalten ist bei
temperaturgeregelten Kühlanwendungen, z. B. bei
Kühltürmen, die Regel.
20-83 PI-Startfrequenz [Hz]
Range: Funktion:
0 Hz* [ 0 -
200.0 Hz]
Eingabe der Motordrehzahl, die als Startsignal
für eine PI-Regelung erreicht werden muss.
Nach der Netz-Einschaltung arbeitet der
Frequenzumrichter mittels Drehzahlregelung
ohne Rückführung. Wenn die Prozess-PIStartdrehzahl erreicht ist, wechselt der
Frequenzumrichter zur PI-Regelung.
0.50* [0 - 10 ] Eingabe der Proportionalverstärkung des
Prozessreglers. Eine schnelle Regelung wird bei
hoher Verstärkung erreicht. Ist die Verstärkung
jedoch zu hoch, so kann der Prozess instabil
werden.
20-94 PID Integrationszeit
Range: Funktion:
20 s* [0.10 -
9999 s]
Eingabe der Integrationszeit des Prozessreglers. Sie erreichen eine schnelle Regelung
durch eine kurze Integrationszeit; bei zu
kurzer Integrationszeit wird der Prozess
jedoch instabil. Eine zu lange Integrationszeit
deaktiviert die Integrationsaktion.
20-97 PI-Prozess Vorsteuerung
Range: Funktion:
0 %* [0 -
400 %]
Eingabe des PI-Vorwärtsschubfaktors. Der
Vorwärtsschubfaktor sendet einen konstanten
Teil des Sollwertsignals an die Bypass-PIRegelung. Daher kann der PI nur den
verbleibenden Teil des Steuerungssignals
beeinflussen. Der Vorwärtsschubfaktor kann die
dynamische Leistung erhöhen.
20-84 Bandbreite Ist=Sollwert
Range: Funktion:
5 %* [0 -
Wenn die PID-Regelabweichung (die Abweichung
200 %]
zwischen Sollwert und Istwert) unter dem festgelegten Wert dieses Parameters liegt, zeigt das
Display des Frequenzumrichters Ist=Sollwert.
Diesen Zustand können Sie extern durch Programmierung der Funktion eines Digitalausgangs auf [8]
Ist=Sollwert/keine Warnung anzeigen. Bei serieller
Kommunikation ist außerdem das Zustandsbit
Ist=Sollwert des Zustandsworts des Frequenzumrichters hoch (1).
Die Bandbreite Ist=Sollwert wird als Prozentsatz
des Sollwerts berechnet.
3.14.6 20-9* PI-Regler
20-91 PI-Prozess Anti-Windup
Option: Funktion:
[0] Aus Setzt die Regelung einer Abweichung auch fort, wenn
die Ausgangsfrequenz nicht erhöht oder verringert
werden kann.
[1] * Ein Stoppt die Integration einer Abweichung, wenn die
Ausgangsfrequenz nicht mehr weiter nachgeregelt
werden kann.
92 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 95

Detection
timer
Low Power
No-ow
detection
Warning
Alarm
External
sleep mode
command
Min run
timer
Min sleep
timer
Sleep
mode
Cascade
controller
(destaging
command)
speed detection
Sleep mode
O
No ow/low
130BE841.10
P 22-24
1
P 22-40
P 22-41
P 25-26
P 22-23
Parameter Programmierhandbuch
3.15 Hauptmenü - Anw. Funktionen Gruppe 22
3.15.1 22-0* Sonstiges
Parametergruppe für zusätzliche Einstellungen.
22-01 Filterzeit Leistung
Range: Funktion:
0.50 s* [0.02 - 10s]Stellen Sie die Zeitkonstante für die
gefilterte Leistungsanzeige ein. Ein höherer
Wert liefert eine genauere Anzeige, jedoch
3.15.2 22-2* No-Flow Erkennung
22-01 Filterzeit Leistung
Range: Funktion:
eine langsamere Reaktion des Systems auf
Änderungen.
22-02 Energiesparmodus CL-Steuerungsmodus
Option: Funktion:
[0] Normal Der Istwert wird erkannt. Einige Parameter
werden überprüft.
[1] Vereinfacht Der Istwert wird nicht erkannt. Es werden nur
Energiespardrehzahl und -zeit überprüft.
Dieser Parameter dient dazu, den Energiesparmodus im
Regelverfahren mit Rückführung auszuführen. Verwenden
Sie diesen Parameter, um zu konfigurieren, ob der Istwert
für den Energiesparmodus durchgeführt wird.
3 3
Abbildung 3.16 No-Flow-Erkennung
Der Frequenzumrichter umfasst Funktionen, über die ermittelt wird, ob die Lastbedingungen im System einen Stopp des
Motors zulassen:
Eines dieser 2 Signale muss über eine festgelegte Dauer (Parameter 22-24 No-Flow Verzögerung) aktiv sein, bevor die
ausgewählte Aktion ausgeführt wird. Mögliche auswählbare Aktionen (Parameter 22-23 No-Flow Funktion):
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 93
Erfassung Leistung tief.
•
Normal Betrieb
•
Warnung
•
Alarm
•
Energiesparmodus
•
Page 96

FC
130BA253.10
P
130BA254.10
Druckhöhe
1
2
Durchuss
Parameter
No-Flow-Erkennung
Diese Funktion erfasst eine Situation in Pumpenanlagen, in der kein Durchfluss vorliegt und alle Ventile geschlossen werden
können. Die Verwendung ist sowohl bei Regelung über den integrierten PI-Regler im Frequenzumrichter als auch über einen
externen PI-Regler möglich. Programmieren Sie die tatsächliche Konfiguration in Parameter 1-00 Regelverfahren.
Regelverfahren für
Integrierten PI-Regler: Regelung mit Rückführung.
33
•
Externen PI-Regler: Regelung ohne Rückführung.
•
VLT® HVAC Basic Drive FC 101
HINWEIS
Vor der Einstellung der PI-Reglerparameter müssen Sie die No-Flow-Anpassung ausführen.
Tabelle 3.11 No-Flow-Erkennung
Die No-Flow-Erkennung basiert auf der Messung von Drehzahl und Leistung. Der Frequenzumrichter berechnet für eine
bestimmte Drehzahl die Leistung bei fehlendem Durchfluss.
Dieser Zusammenhang basiert auf der Einstellung von 2 Drehzahlen mit zugehöriger Leistung bei fehlendem Durchfluss.
Durch Überwachung der Leistung können Sie Bedingungen, in denen kein Durchfluss vorliegt, in Systemen mit
schwankendem Saugdruck oder bei einer flachen Pumpenkurve im niedrigen Drehzahlbereich erkennen.
Die 2 Datensätze müssen auf der Messung der Leistung mit ca. 50 % und 85 % der maximalen Drehzahl bei geschlossenen
Ventilen beruhen. Sie können die Daten in Parametergruppe 22-3* No-Flow Leistungsanpassung programmieren.
Aktivieren Sie die No-Flow-Erkennung in Parameter 22-23 No-Flow Funktion und in Parametergruppe 22-3* No-Flow Leistungs-
anpassung und nehmen Sie diese in Betrieb.
94 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 97

Parameter Programmierhandbuch
22-23 No-Flow Funktion
Option: Funktion:
[0] * Aus
[1] Energiesparmodus
[2] Warnung
[3] Alarm
22-24 No-Flow Verzögerung
Range: Funktion:
10 s* [1 - 600 s] Zum Einstellen einer Verzögerung, bevor eine
in Parameter 22-23 No-Flow Funktion
eingestellte Aktion stattfindet, wenn eine NoFlow-Bedingung erkannt wird.
3.15.3 22-3* No-Flow Leistungsanpassung
Anpassungssequenz:
1. Um den Durchfluss zu stoppen, schließen Sie das
Hauptventil.
2. Lassen Sie den Motor laufen, bis das System die
normale Betriebstemperatur erreicht hat.
3. Drücken Sie die [Hand On]-Taste des LCP und
stellen Sie die Drehzahl auf 85 % der
Nenndrehzahl. Notieren Sie die genaue Drehzahl.
4. Lesen Sie die Leistungsaufnahme entweder in der
Datenzeile der tatsächlichen Leistung auf dem
LCP ab oder rufen Sie Parameter 16-10 Leistung
[kW] im Hauptmenü auf. Notieren Sie die
angezeigte Leistung.
5. Ändern Sie die Drehzahl auf ca. 50 % der
Nenndrehzahl. Notieren Sie die genaue Drehzahl.
6. Lesen Sie die Leistungsaufnahme entweder in der
Datenzeile der tatsächlichen Leistung auf dem
LCP ab oder rufen Sie Parameter 16-10 Leistung
[kW] im Hauptmenü auf. Notieren Sie die
angezeigte Leistung.
7. Programmieren Sie die in
Parameter 22-33 Frequenz tief [Hz] und
Parameter 22-37 Freq. hoch [Hz] verwendeten
Drehzahlen.
8. Programmieren Sie dazugehörigen Leistungswerte
in Parameter 22-34 Leistung Drehzahl tief [kW] und
Parameter 22-38 Leistung Drehzahl hoch [kW].
9. Wechseln Sie zurück, indem Sie [Auto On] oder
[Off] drücken.
22-30 No-Flow Leistung
Range: Funktion:
0 kW* [0 - 1000 kW] Zeigt die berechnete No-Flow-Leistung
bei Istdrehzahl an.
22-31 Leistungskorrekturfaktor
Range: Funktion:
100 %* [1 -
400 %]
Legen Sie hier einen Korrekturwert fest,
falls die No-Flow-Erkennung auf einen zu
niedrigen oder zu hohen Leistungswert
reagiert.
22-33 Frequenz tief [Hz]
Range: Funktion:
0 Hz* [ 0 - 400 Hz] Stellen Sie hier die Ausgangsdrehzahl zur
Erfassung der No-Flow-Leistung bei
niedriger Drehzahl ein.
22-34 Leistung Drehzahl tief [kW]
Range: Funktion:
0 kW* [ 0 - 5.50 kW] Stellen Sie hier die No-Flow-Leistung bei
niedriger Drehzahl ein.
22-37 Freq. hoch [Hz]
Range: Funktion:
0 Hz* [ 0 - 400 Hz] Stellen Sie hier die Ausgangsdrehzahl zur
Erfassung der No-Flow-Leistung bei hoher
Drehzahl ein.
22-38 Leistung Drehzahl hoch [kW]
Range: Funktion:
0 kW* [ 0 - 5.50 kW] Stellen Sie hier die No-Flow-Leistung bei
hoher Drehzahl ein.
3.15.4 22-4* Energiesparmodus
Im Energiesparmodus kann der Frequenzumrichter in
Situationen eigenständig stoppen, in denen das System
ausgeglichen ist. Hierdurch wird Energie gespart und es
lassen sich ein zu hoher Druck, zu stark gekühltes Wasser
in den Kühltürmen sowie Probleme beim Druckausgleich in
Gebäuden vermeiden. Dies ist auch wichtig, da bei einigen
Anwendungen das Herunterregeln der Motordrehzahl
durch den Frequenzumrichter verhindert wird. Hierdurch
können die Pumpen beschädigt, die Getriebe unzureichend
geschmiert und die Lüfter destabilisiert werden.
3 3
HINWEIS
Stellen Sie Parameter 1-03 Drehmomentverhalten der Last
Der Regler des Energiesparmodus hat 2 wichtige
Funktionen:
ein, bevor Sie die Anpassung starten.
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 95
Page 98

Parameter
VLT® HVAC Basic Drive FC 101
1. Die Fähigkeit, zum richtigen Zeitpunkt in den
Energiesparmodus zu wechseln.
2. Die Fähigkeit, zum richtigen Zeitpunkt den
Energiesparmodus zu verlassen.
Ziel ist es, den Frequenzumrichter so lange wie möglich im
33
Energiesparmodus zu halten, um ein häufiges Drehen des
Motors zu vermeiden und die geregelte Systemvariable
zugleich in einem annehmbaren Bereich zu halten.
Die Sequenz beim Ausführen des Energiesparmodus
ohne Rückführung:
1. Die Motordrehzahl ist geringer als die in
Parameter 22-47 Sleep-Frequenz [Hz] eingestellte
Drehzahl. Der Motor ist für eine längere Dauer
gelaufen, als in Parameter 22-40 Min. Laufzeit
eingestellt. Die Energiesparbedingung dauert
länger als die in Parameter 22-48 Energiesparverzö-
gerung eingestellte Zeit.
2. Der Frequenzumrichter führt eine Rampe ab der
Motordrehzahl zum Stoppen auf
Parameter 1-82 Ein.-Frequenz für Stoppfunktion [Hz]
durch.
3. Der Frequenzumrichter aktiviert
Parameter 1-80 Funktion bei Stopp. Der Frequenzumrichter befindet sich jetzt im
Energiesparmodus.
4. Der Frequenzumrichter vergleicht den Drehzahlsollwert mit Parameter 22-43 Energiespar-Startfreq.
[Hz], um eine Wiederanlaufsituation zu erkennen.
5. Der Drehzahlsollwert ist größer als
Parameter 22-43 Energiespar-Startfreq. [Hz]. Die
Energiesparbedingung hat die in
Parameter 22-41 Min. Energiespar-Stoppzeit
eingestellte Zeit überschritten. Die Wiederanlaufbedingung hat die in
Parameter 22-49 Wiederanlaufverzögerung
eingestellte Zeit überschritten. Der Frequenzumrichter hat jetzt den Energiesparmodus verlassen.
6. Gehen Sie zurück zur Drehzahlregelung ohne
Rückführung (Rampe auf der Motordrehzahl zum
Drehzahlsollwert).
Die Sequenz bei Aktivierung des Energiesparmodus mit
Rückführung:
1. Der Frequenzumrichter wechselt in den Verstärkungsstatus, wenn die folgenden Bedingungen
erfüllt sind.
1a Wenn Parameter 22-02 Energiesparmodus
CL-Steuerungsmodus auf [0] Normal
eingestellt ist:
a. Die Motordrehzahl ist geringer
als der in
1b Wenn Parameter 22-02 Energiesparmodus
CL-Steuerungsmodus auf [1] Vereinfacht
eingestellt ist:
Wenn Parameter 22-45 Sollwert-Boost
nicht eingestellt ist, wechselt der
Frequenzumrichter in den Energiesparmodus.
2. Nachdem die in Parameter 22-46 Max. Boost-Zeit
eingestellte Zeit verstrichen ist, reduziert der
Frequenzumrichter die Motordrehzahl auf die in
Parameter 1-82 Ein.-Frequenz für Stoppfunktion [Hz]
eingestellte Drehzahl.
3. Der Frequenzumrichter aktiviert
Parameter 1-80 Funktion bei Stopp. Der Frequenzumrichter befindet sich jetzt im
Energiesparmodus.
4. Der Frequenzumrichter ist nicht mehr im Energiesparmodus, wenn:
4a der Fehler zwischen Soll- und Istwert
größer als Parameter 22-44 Soll-/Istw.-Diff.
Energie-Start ist und
4b die Energiespar-Stoppzeit länger als die
in Parameter 22-41 Min. Energiespar-
Stoppzeit eingestellte Zeit ist und
4c die Wiederanlaufbedingung die in
Parameter 22-48 Energiesparverzögerung
eingestellte Zeit überschritten hat.
Parameter 22-47 Sleep-Frequenz
[Hz] eingestellte Wert.
b. Wenn der Istwert über dem
Sollwert liegt.
c. Der Motor ist für eine längere
Dauer gelaufen, als in
Parameter 22-40 Min. Laufzeit
eingestellt.
d. Die Energiesparbedingung
überschreitet die in
Parameter 22-48 Energiesparverzögerung eingestellte Zeit.
a. Die Motordrehzahl ist geringer
als der in
Parameter 22-47 Sleep-Frequenz
[Hz] eingestellte Wert.
b. Der Motor ist für eine längere
Dauer gelaufen, als in
Parameter 22-40 Min. Laufzeit
eingestellt.
c. Die Energiesparbedingung
überschreitet die in
Parameter 22-48 Energiesparverzögerung eingestellte Zeit.
96 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
Page 99

Parameter Programmierhandbuch
5. Der Frequenzumrichter wechselt wieder zur
Regelung mit Rückführung.
HINWEIS
Der Energiesparmodus ist nicht bei aktivem Ortsollwert
aktiv (stellen Sie die Drehzahl manuell über die Navigationstasten am LCP ein).
Der Energiesparmodus funktioniert nicht im HandBetrieb. Führen Sie die automatische Konfiguration bei
Drehzahlsteuerung durch, bevor der Ein-/Ausgang über
PID-Regler eingestellt wird.
22-40 Min. Laufzeit
Range: Funktion:
10 s* [0 - 600 s] Stellen Sie die gewünschte minimale
Betriebszeit für den Motor nach einem
Startbefehl (Digitaleingang oder Bus) ein,
bevor Sie den Energiesparmodus aufrufen.
22-41 Min. Energiespar-Stoppzeit
Range: Funktion:
10 s* [0 - 600 s] Zur Einstellung der gewünschten Mindestzeit
für den Verbleib im Energiesparmodus. Diese
Zeit überschreibt die Wiederanlaufbedingungen.
22-43 Energiespar-Startfreq. [Hz]
Range: Funktion:
10* [ 0 -
400.0 ]
22-44 Soll-/Istw.-Diff. Energie-Start
Range: Funktion:
10 %* [0 -
Wird nur verwendet, wenn Sie
Parameter 1-00 Regelverfahren auf [0] Regelung
ohne Rückführung einstellen und ein externer
Regler den Drehzahlsollwert anlegt. Legen Sie
den Drehzahlsollwert fest, bei dem der Energiesparmodus deaktiviert werden soll.
Die Energiespar-Startdrehzahl darf die in
Parameter 4-14 Motor Speed High Limit [Hz] nicht
überschreiten.
Wird nur verwendet, wenn
100 %]
Parameter 1-00 Regelverfahren mit Rückführung
eingestellt ist und der integrierte PI-Regler zur
Regelung des Drucks verwendet wird.
Stellen Sie den zulässigen Druckabfall in
Prozent des Drucksollwerts (P
den Energiesparmodus deaktivieren.
) ein, bevor Sie
set
22-45 Sollwert-Boost
Range: Funktion:
vor dem Motorstopp zu erhöhen. Hierdurch
verlängern Sie die Zeit, in der der Motor gestoppt
wird, und verhindern ein häufiges Starten/Stoppen.
Stellen Sie den gewünschten Überdruck/die
gewünschte Übertemperatur in Prozent des
Sollwerts für den Druck (P
bevor Sie den Energiesparmodus aktivieren.
Bei einer Einstellung von 5 % ist der Verstärkungsdruck P
Sie zur Regelung eines Kühlturms einsetzen, bei
dem Änderungen im negativen Bereich erforderlich
sind.
*1,05. Die negativen Werte können
set
)/die Temperatur ein,
set
22-46 Max. Boost-Zeit
Range: Funktion:
60s* [0 -
600 s]
Wird nur verwendet, wenn Parameter 1-00 Regelver-
fahren auf [3] PID-Regler eingestellt sein und der
integrierte PI-Regler zur Regelung des Drucks
verwendet wird.
Stellen Sie die maximale Zeit ein, in der der
Verstärkungsmodus zulässig ist. Wenn die
eingestellte Zeit überschritten wird, wechselt der
Frequenzumrichter in den Energiesparmodus und
wartet nicht, bis der eingestellte Boost-Druck
erreicht ist.
22-47 Sleep-Frequenz [Hz]
Range: Funktion:
0* [ 0 - 400.0 ] Stellt die Drehzahl ein, bei der der Frequen-
zumrichter in den Energiesparmodus wechselt.
22-48 Energiesparverzögerung
Range: Funktion:
0 s [0 - 3600 s] Stellen Sie die Verzögerung ein, die der Motor
wartet, bevor er in den Energiesparmodus
wechselt, wenn die Bedingung zum Wechseln
in den Energiesparmodus erfüllt ist.
22-49 Wiederanlaufverzögerung
Range: Funktion:
0 s [0 - 3600 s] Stellen Sie die Verzögerung ein, die der Motor
wartet, bevor er aus dem Energiesparmodus
wiederanläuft, wenn die Bedingung für den
Wiederanlauf erfüllt ist.
3 3
22-45 Sollwert-Boost
Range: Funktion:
0 %* [-100
100 %]
MG18B503 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 97
Wird nur verwendet, wenn Parameter 1-00 Regelver-
fahren mit Rückführung eingestellt ist und der
integrierte PI-Regler verwendet wird. In Systemen,
in denen z. B. eine konstante Druckregelung
vorhanden ist, ist es von Vorteil, den Systemdruck
3.15.5 22-6* Riemenbrucherkennung
Verwenden Sie die Riemenbrucherkennung für Pumpen
und Lüfter in Systemen mit und ohne Rückführung. Wenn
das geschätzte Motordrehmoment (Strom) unter dem Wert
des Riemenbruchdrehmoments (Strom) liegt
(Parameter 22-61 Riemenbruchmoment) und die Ausgangsfrequenz des Frequenzumrichters größer oder gleich 15 Hz
Page 100

130BA383.11
Parameter
VLT® HVAC Basic Drive FC 101
ist, wird Parameter 22-60 Riemenbruchfunktion
3.15.6 22-8* Durchflussausgleich
durchgeführt.
22-60 Riemenbruchfunktion
Wählt die Aktion, die ausgeführt werden soll, wenn eine Riemenbruchbedingung erkannt wird.
33
Option: Funktion:
[0] * Aus
[1] Warnung Der Frequenzumrichter läuft weiter, aktiviert
jedoch eine Riemenbruchwarnung Warnung
95, Riemenbruch. Ein Digitalausgang des
Frequenzumrichters oder eine serielle Schnittstelle kann eine Warnung an andere Geräte
senden.
[2] Abschaltung Der Frequenzumrichter stellt den Betrieb ein
und aktiviert einen Riemenbruchalarm Alarm
95, Riemenbruch. Ein Digitalausgang des
Frequenzumrichters oder eine serielle Schnittstelle kann einen Alarm an andere Geräte
senden.
Bei einigen Anwendungen ist es nicht möglich, einen
Druckaufnehmer an einem weiter entfernten Punkt in der
Anlage anzubringen, sodass Sie diesen nur nahe am
Lüfter-/Pumpenauslass anbringen können. Der Durchflussausgleich arbeitet, indem er den Sollwert gemäß der
Ausgangsfrequenz ändert, die fast proportional zum
Durchfluss ist. Damit gleicht er höhere Verluste bei
höheren Durchflussmengen aus.
H
AUSLEGUNG
(Solldruck) ist der Sollwert für Betrieb mit
Rückführung (PI) des Frequenzumrichters und wird wie bei
Betrieb mit Rückführung ohne Durchflussausgleich
eingestellt.
HINWEIS
Programmieren Sie Parameter 14-20 Quittierfunktion nicht
auf [13] Unbegr. Autom. Quitt., wenn
Parameter 22-60 Riemenbruchfunktion auf [2] Alarm
eingestellt ist. In diesem Fall würde der Frequenzumrichter ständig zwischen Betrieb und Stopp umschalten,
wenn eine Riemenbruchbedingung erkannt wird.
HINWEIS
Wenn die automatische Bypass-Funktion aktiviert ist,
startet der Bypass, wenn der Frequenzumrichter einen
anhaltenden Alarmzustand hat. Deaktivieren Sie in
diesem Fall die automatische Bypass-Funktion, wenn [2]
Abschaltung als Riemenbruchfunktion ausgewählt ist.
22-61 Riemenbruchmoment
Range: Funktion:
10 %* [5 - 100 %] Legt das Riemenbruchmoment in Prozent
des Motornenndrehmoments fest.
22-62 Riemenbruchverzögerung
Range: Funktion:
10 s* [0 - 600s]Legt die Zeit fest, in der die Riemenbruchbe-
dingungen aktiv sein müssen, bevor die in
Parameter 22-60 Riemenbruchfunktion
ausgewählte Aktion ausgeführt wird.
Abbildung 3.17 Konfiguration des Durchflussausgleichs
Sie können 2 Methoden einsetzen. Die Wahl der
geeigneten Methode hängt davon ab, ob die Drehzahl am
Systemauslegungspunkt bekannt ist oder nicht.
98 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG18B503
 Loading...
Loading...