

Page 1

ENGINEERING TOMORROW
Guide de programmation
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com
Page 2

Page 3
Table des matières Guide de programmation
Table des matières
1 Introduction
1.1 Objet de ce manuel
1.2 Version de document et de logiciel
1.3 Symboles de sécurité
1.4 Précautions de sécurité
1.5 Ressources supplémentaires
1.6 Dénitions
1.7 Schéma électrique
2 Programmation
2.1 Introduction
2.2 Panneau de commande local (LCP)
2.3 Menus
2.3.1 Menu d'état 10
2.3.2 Menu rapide 10
2.3.3 Menu principal 25
2.4 Transfert rapide du réglage des paramètres entre plusieurs variateurs de fréquence
2.5 Lecture et programmation des paramètres indexés
3
3
3
3
4
5
5
8
9
9
9
10
26
26
2.6 Initialisation aux réglages par défaut
3 Paramètres
3.1 Menu principal - Fonction./Achage - Groupe 0
3.2 Menu principal - Charge et moteur - Groupe 1
3.3 Menu principal - Freins - Groupe 2
3.4 Menu principal - Référence / rampes - Groupe 3
3.5 Menu principal - Limites/avertis. - Groupe 4
3.6 Menu principal - E/S Digitale - Groupe 5
3.7 Menu principal - E/S ana. - Groupe 6
3.8 Menu principal - Comm. et options - Groupe 8
3.9 Menu principal - Logique avancée - Groupe 13
3.10 Menu principal - Fonct.particulières - Groupe 14
3.11 Menu principal - Info.variateur - Groupe 15
3.12 Menu principal - Lecture données - Groupe 16
3.13 Menu principal - Lecture données 2 - Groupe 18
3.14 Menu principal - Boucl.fermé.variat. - Groupe 20
3.15 Menu principal - Fonctions application - Groupe 22
26
27
27
32
42
44
47
50
59
64
69
78
83
85
89
89
92
3.16 Menu principal - Fonct. application 2 - Groupe 24
3.17 Menu principal - Caract.spéciales - Groupe 30
4 Dépannage
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 1
99
102
103
Page 4
Table des matières
VLT® HVAC Basic Drive FC 101
4.1 Introduction aux alarmes et avertissements
4.2 Mots d'alarme
4.3 Mots d'avertissement
4.4 Mots d'état élargi
4.5 Liste des avertissements et alarmes
4.6 Liste des erreurs LCP
5 Listes des paramètres
5.1 Options des paramètres
5.1.1 Réglages par défaut 110
5.1.2 0-** Fonction./Achage 111
5.1.3 1-** Charge et moteur 111
5.1.4 2-** Freins 113
5.1.5 3-** Référence / rampes 113
5.1.6 4-** Limites/avertis. 114
5.1.7 5-** E/S Digitale 114
5.1.8 6-** E/S ana. 115
5.1.9 8-** Comm. et options 116
103
105
105
106
106
109
110
110
Indice
5.1.10 13-** Logique avancée 117
5.1.11 14-** Fonct.particulières 117
5.1.12 15-** Info.variateur 118
5.1.13 16-** Lecture données 119
5.1.14 18-** Info & lectures 120
5.1.15 20-** Boucl.fermé.variat. 121
5.1.16 22-** Fonctions application 121
5.1.17 24-** Fonct. application 2 122
5.1.18 30-** Caract.spéciales 123
124
2 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 5
Introduction Guide de programmation
1 Introduction
1.1 Objet de ce manuel
Ce guide de programmation contient des informations
pour la programmation avancée du variateur de fréquence.
Il ore un aperçu complet de l’ensemble des paramètres
ainsi que leurs descriptions.
Ce guide de programmation est réservé à du personnel
qualié.
Pour utiliser le variateur de fréquence en sécurité et professionnellement, lire et suivre le guide de programmation et
faire particulièrement attention aux consignes de sécurité
et aux avertissements d’ordre général.
1.2 Version de document et de logiciel
Ce manuel est régulièrement révisé et mis à jour. Toutes
les suggestions d’amélioration sont les bienvenues.
Édition Remarques Version logicielle
MG18B5xx Dernière mise à jour
de la version
logicielle.
Tableau 1.1 Version de document et de logiciel
À partir de la version 4.0x (à partir de la semaine de
production 33 2017), la fonction de vitesse variable du
ventilateur de refroidissement du dissipateur de chaleur
équipe les variateurs de fréquence jusqu’à la puissance de
22 kW (30 HP) 400 V IP20 et jusqu’à la puissance 18,5 kW
(25 HP) 400 V IP54. Cette fonction requiert des mises à
niveau des logiciels et du matériel et impose des
restrictions en matière de compatibilité avec les versions
antérieures pour les boîtiers de tailles H1-H5 et I2-I4. Voir
le Tableau 1.2 pour les restrictions.
4.2x
Ancienne carte de
Compatibilité
des logiciels
Ancien logiciel
(jusqu’à la version
3.xx du chier OSS)
Nouveau logiciel
(à partir de la
version 4.xx du
chier OSS)
Compatibilité
du matériel
Ancienne carte de
puissance
(jusqu’à la semaine
de production 33
2017)
Nouvelle carte de
puissance
(à partir de la
semaine de
production 34 2017)
Tableau 1.2 Compatibilité des logiciels et du matériel
Symboles de sécurité
1.3
commande (jusqu’à
la semaine de
production 33
2017)
Oui Non
Non Oui
Ancienne carte de
commande (jusqu’à
la semaine de
production 33
2017)
Oui (uniquement
jusqu’à la version
3.xx du logiciel)
Oui (mise à niveau
IMPÉRATIVE du
logiciel vers la
version 3.xx ou
inférieure, le
ventilateur
fonctionne à pleine
vitesse en
permanence)
Nouvelle carte de
commande (à partir
de la semaine de
production 34
2017)
Nouvelle carte de
commande (à partir
de la semaine de
production 34
2017)
Oui (mise à niveau
IMPÉRATIVE du
logiciel vers la
version 4.xx ou
supérieure)
Oui (uniquement à
partir de la version
4.xx du logiciel)
Les symboles suivants sont utilisés dans ce manuel :
1 1
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures supercielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Fournit des informations importantes, notamment sur les
situations qui peuvent entraîner des dégâts matériels.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 3
Page 6
Introduction
VLT® HVAC Basic Drive FC 101
11
1.4 Précautions de sécurité
AVERTISSEMENT
TEMPS DE DÉCHARGE
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA,
à l'alimentation CC ou à la répartition de la charge. Le
non-respect de la réalisation de l'installation, du
démarrage et de la maintenance par du personnel
qualié peut entraîner la mort ou des blessures graves.
L'installation, le démarrage et la maintenance ne
•
doivent être eectués que par du personnel
qualié.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que le variateur de fréquence est
complètement déchargé.
AVERTISSEMENT
DÉMARRAGE IMPRÉVU
Lorsque le variateur est connecté au secteur CA, à
l'alimentation CC ou est en répartition de la charge, le
moteur peut démarrer à tout moment. Un démarrage
imprévu pendant la programmation, une opération
d'entretien ou de réparation peut entraîner la mort, des
blessures graves ou des dégâts matériels. Le moteur peut
être démarré par un commutateur externe, un ordre du
bus de terrain, un signal de référence d'entrée à partir
du LCP ou du LOP, par commande à distance à l'aide du
Logiciel de programmation MCT 10 ou suite à la
suppression d'une condition de panne.
Pour éviter un démarrage imprévu du moteur :
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Déconnecter le variateur du secteur.
•
Câbler et assembler entièrement le variateur, le
•
moteur et tous les équipements entraînés avant
de connecter le variateur au secteur CA, à
l'alimentation CC ou en répartition de la charge.
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n’est pas
alimenté. Une haute tension peut être présente même
lorsque les voyants d’avertissement sont éteints. Le nonrespect du temps d’attente spécié après la mise hors
tension avant un entretien ou une réparation peut
entraîner le décès ou des blessures graves.
Arrêter le moteur.
•
Déconnecter le secteur CA et les alimentations à
•
distance du circuit intermédiaire, y compris les
batteries de secours, les alimentations sans
interruption et les connexions du circuit
intermédiaire aux autres variateurs de
fréquence.
Déconnecter ou verrouiller le moteur PM.
•
Attendre que les condensateurs soient complè-
•
tement déchargés. Le temps d’attente minimum
est indiqué dans le Tableau 1.3.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s’assurer que les condensateurs sont
complètement déchargés.
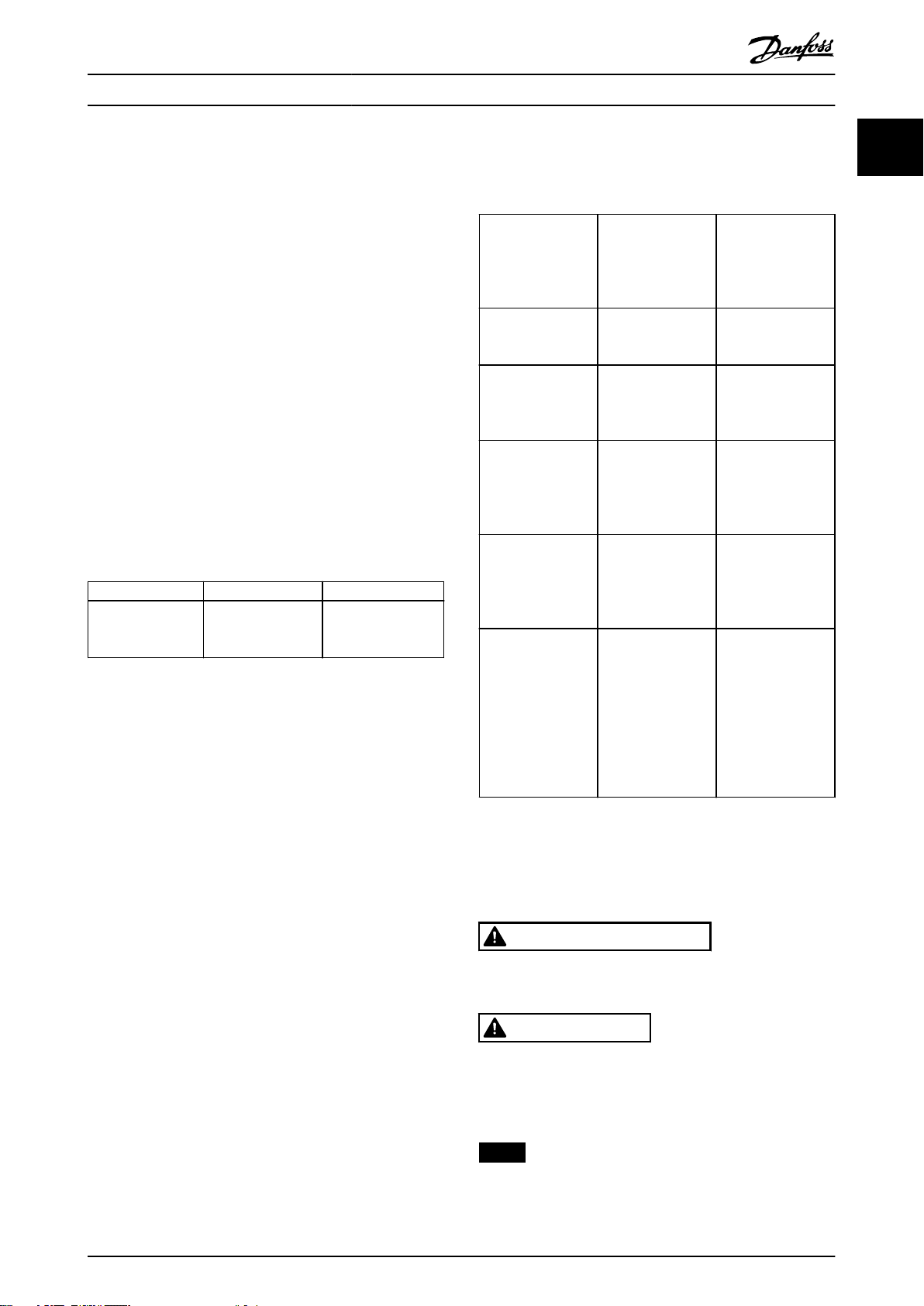
Tension [V] Plage de puissance [kW
(HP)]
3 x 200 0,25–3,7 (0,33–5) 4
3 x 200 5,5–11 (7–15) 15
3 x 400 0,37–7,5 (0,5–10) 4
3 x 400 11–90 (15–125) 15
3 x 600 2,2–7,5 (3–10) 4
3 x 600 11–90 (15–125) 15
Tableau 1.3 Temps de décharge
Temps d’attente
minimum (minutes)
AVERTISSEMENT
RISQUE DE COURANT DE FUITE
Les courants de fuite à la terre dépassent 3,5 mA. Le fait
de ne pas mettre le variateur de fréquence à la terre
peut entraîner le décès ou des blessures graves.
L'équipement doit être correctement mis à la
•
terre par un installateur électrique certié.
4 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 7
Introduction Guide de programmation
AVERTISSEMENT
DANGERS LIÉS À L’ÉQUIPEMENT
Tout contact avec les arbres tournants et les matériels
électriques peut entraîner des blessures graves voire
mortelles.
L’installation, le démarrage et la maintenance
•
doivent être eectués par du personnel qualié
uniquement.
Veiller à ce que tous les travaux électriques
•
soient conformes aux réglementations
électriques locales et nationales.
Suivre les procédures décrites dans ce manuel.
•
ATTENTION
DANGER DE PANNE INTERNE
Une panne interne dans le variateur de fréquence peut
entraîner des blessures graves si le variateur de
fréquence n’est pas correctement fermé.
Avant d’appliquer de la puissance, s’assurer que
•
tous les caches de sécurité sont en place et
fermement xés.
1.5 Ressources supplémentaires
Le Guide rapide du VLT® HVAC Basic Drive FC 101
•
contient des informations de base sur l’encombrement, l’installation et la programmation.
Assistance technique Logiciel de programmation MCT 10
Télécharger le logiciel sur www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Pendant l’installation du logiciel, saisir le code d’accès
81463800 an d’activer la fonctionnalité FC 101. Une clé de
licence n’est pas nécessaire pour utiliser la fonctionnalité
FC 101.
La dernière version du logiciel ne contient pas toujours les
dernières mises à jour de variateur de fréquence. Contacter
le service commercial local pour obtenir les dernières mises
à jour de variateur de fréquence (chiers *.upd) ou les
télécharger sur www.danfoss.com/en/service-and-support/
downloads/dds/vlt-motion-control-tool-mct-10/#Overview.
1.6 Dénitions
Variateur de fréquence
I
VLT, MAX
Courant de sortie maximal
I
VLT,N
Courant nominal de sortie fourni par le variateur de
fréquence.
U
VLT, MAX
Tension de sortie maximale.
Entrée
Le moteur raccordé peut être lancé et arrêté à l'aide du
LCP et des entrées digitales. Les fonctions sont réparties en
deux groupes, comme indiqué dans le Tableau 1.4. Les
fonctions du groupe 1 ont une priorité supérieure aux
fonctions du groupe 2.
1 1
Le Manuel de
•
Drive FC 101 fournit des informations sur la
conguration des systèmes de contrôle de
moteurs.
Logiciel Danfoss VLT® Energy Box. Sélectionner
•
Software Downloads (téléchargement logiciels) sur
vlt-drives.danfoss.com/products/engineeringsoftware/software-download/vlt-energy-boxsoftware/.
Le logiciel VLT® Energy Box permet d’eectuer
des comparaisons de consommation d’énergie
entre applications de pompes et de ventilateurs
HVAC entraînées par des variateurs de fréquence
Danfoss, avec diérentes méthodes de contrôle
du débit. Utiliser cet outil pour prévoir les coûts,
les économies et la période de récupération liés à
l’utilisation de variateurs de fréquence Danfoss
sur des ventilateurs HVAC, des pompes et des
tours de refroidissement.
Les documents techniques sous format numérique sont
disponibles en ligne sur drives.danfoss.com/knowledge-
center/technical-documentation/.
conguration du VLT® HVAC Basic
Réinitialisation, arrêt en roue libre, réinitialisation
Groupe 1
Groupe 2
Tableau 1.4 Ordres de commande
Moteur
f
JOG
Fréquence du moteur lorsque la fonction jogging est
activée (via des bornes digitales).
f
M
Fréquence du moteur.
f
MAX
Fréquence maximale du moteur.
f
MIN
Fréquence minimale du moteur.
f
M,N
Fréquence nominale du moteur (données de la plaque
signalétique).
I
M
Courant du moteur.
et arrêt en roue libre, arrêt rapide, freinage par
injection de courant continu, arrêt et [O].
Démarrage, impulsion de démarrage, inversion,
démarrage avec inversion, jogging et gel sortie
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 5
Page 8
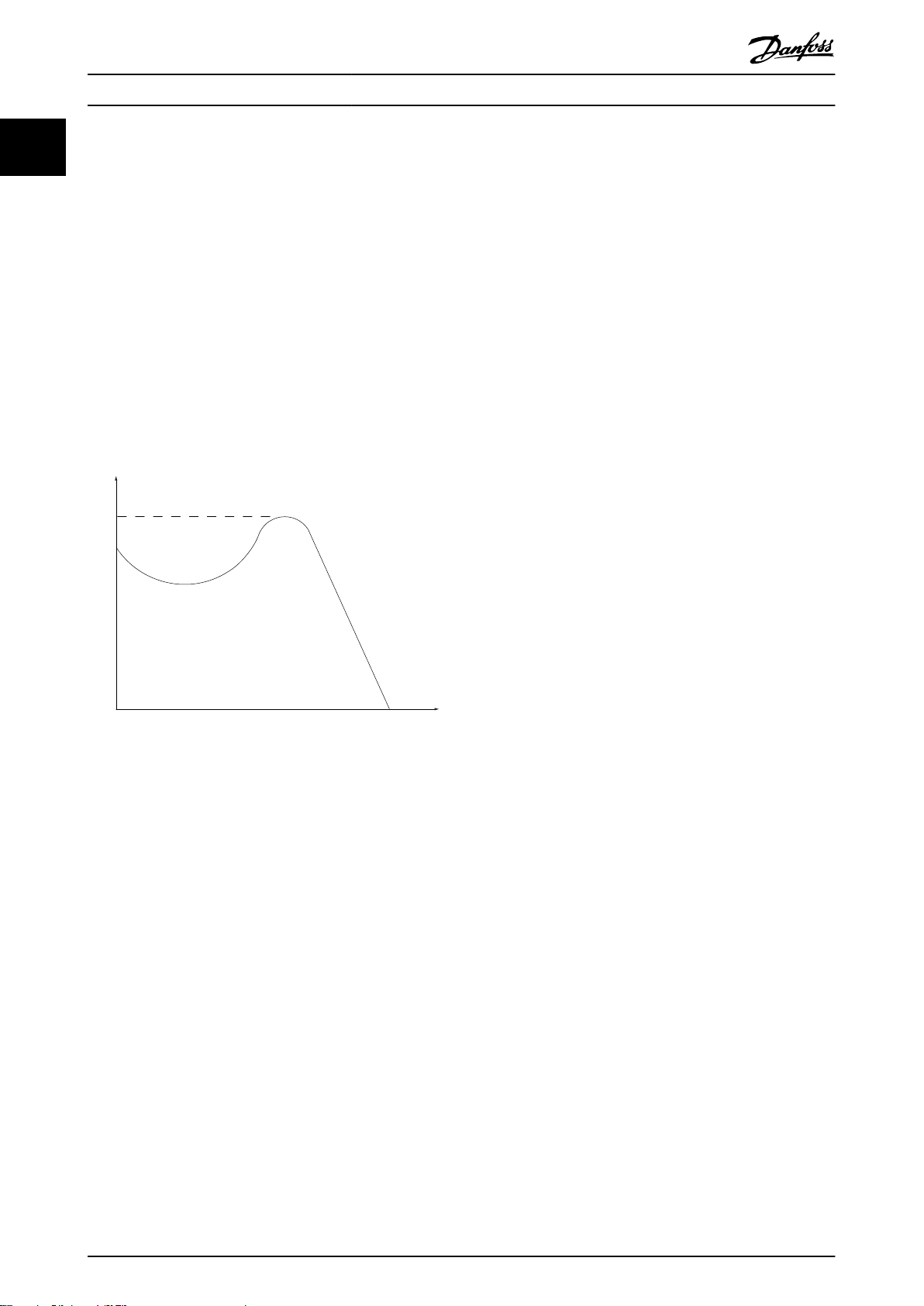
175ZA078.10
couple de décrochage
tr / mn
couple
Introduction
VLT® HVAC Basic Drive FC 101
11
I
M,N
Courant nominal du moteur (données de la plaque
signalétique).
n
M,N
Vitesse nominale du moteur (données de la plaque
signalétique).
P
M,N
Puissance nominale du moteur (données de la plaque
signalétique).
U
M
Tension instantanée du moteur.
U
M,N
Tension nominale du moteur (données de la plaque
signalétique).
Couple de décrochage
Réf
MAX
Détermine la relation entre l'entrée de référence à 100 %
de la valeur de l'échelle complète (généralement 10 V,
20 mA) et la référence résultante. Valeur de référence
maximum dénie au paramétre 3-03 Réf. max..
Réf
MIN
Détermine la relation entre l'entrée de référence à la valeur
0 % (généralement 0 V, 0 mA, 4 mA) et la référence
résultante. Valeur de référence minimum dénie au
paramétre 3-02 Référence minimale.
Entrées analogiques
Les entrées analogiques permettent de contrôler diverses
fonctions du variateur de fréquence.
Il en existe 2 types :
Entrée de courant : 0-20 mA et 4-20 mA
•
Entrée de tension : 0-10 V CC
•
Sorties analogiques
Les sorties analogiques peuvent fournir un signal de
0-20 mA, 4-20 mA ou un signal numérique.
Adaptation automatique au moteur, AMA
L'algorithme d'AMA détermine, à l'arrêt, les paramètres
électriques du moteur raccordé et compense la résistance
en fonction de la longueur du câble moteur.
Entrées digitales
Les entrées digitales permettent de contrôler diverses
fonctions du variateur de fréquence.
Sorties digitales
Le variateur de fréquence est doté de deux sorties à semi-
Illustration 1.1 Couple de décrochage
conducteurs qui peuvent fournir un signal 24 V CC (max.
40 mA).
Sorties relais
η
VLT
Le rendement du variateur de fréquence est déni comme
le rapport entre la puissance dégagée et la puissance
absorbée.
Ordre de démarrage désactivé
Ordre d'arrêt faisant partie du groupe 1 d'ordres de
commande, voir le Tableau 1.4.
Ordre d'arrêt
Voir le Tableau 1.4.
Référence analogique
Un signal transmis vers les entrées analogiques 53 ou 54. Il
peut prendre la forme de tension ou de courant.
Entrée de courant : 0-20 mA et 4-20 mA
•
Entrée de tension : 0-10 V CC
•
Référence bus
Signal appliqué au port de communication série (port FC).
Référence prédénie
Le variateur de fréquence est doté de deux sorties relais
programmables.
ETR
Le relais thermique électronique constitue un calcul de
charge thermique basé sur une charge et un temps
instantanés. Il permet d'estimer la température du moteur
et d'empêcher le moteur de surchauer.
Initialisation
Si l'on eectue une initialisation (paramétre 14-22 Mod.
exploitation), les paramètres programmables du variateur
de fréquence reviennent à leurs valeurs par défaut.
Le Paramétre 14-22 Mod. exploitation n'initialise pas les
paramètres de communication, la mémoire des défauts ou
le journal mode incendie.
Cycle d'utilisation intermittent
Une utilisation intermittente fait référence à une séquence
de cycles d'utilisation. Chaque cycle est composé d'une
période en charge et d'une période à vide. Le fonctionnement peut être périodique ou non périodique.
Référence prédénie réglable entre -100 % et +100 % de la
plage de référence. Huit références prédénies peuvent
être sélectionnées par l'intermédiaire des bornes digitales.
6 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 9

Introduction Guide de programmation
LCP
Le panneau de commande local (LCP) constitue une
interface complète de commande et de programmation du
variateur de fréquence. Le panneau de commande est
amovible sur les unités IP20 et xe sur les unités IP54. Il
peut être installé, à l'aide d'un kit de montage, à une
distance maximale de 3 m (9,8 pi) du variateur de
fréquence, par exemple dans un panneau frontal.
Lsb
Bit de poids faible.
MCM
Abréviation de Mille Circular Mil, unité de mesure
américaine de la section de câble. 1 MCM = 0,5067 mm².
Msb
Bit de poids fort.
Paramètres en ligne/hors ligne
Les modications apportées aux paramètres en ligne sont
activées directement après modication de la valeur de
données. Appuyer sur [OK] pour activer les paramètres
hors ligne.
Régulateur PI
Le régulateur PI maintient la vitesse, la pression, la
température, etc. souhaitées en adaptant la fréquence de
sortie à la variation de charge.
RCD
Relais de protection diérentielle.
Conguration
On peut enregistrer les réglages des paramètres dans 2
process. Changement d'un process à l'autre et édition d'un
process pendant qu'un autre est actif.
Compensation du glissement
Le variateur de fréquence compense le glissement du
moteur en augmentant la fréquence en fonction de la
charge du moteur mesurée, la vitesse du moteur restant
ainsi quasiment constante.
Contrôleur logique avancé (SLC)
Le SLC est une séquence d'actions dénies par l'utilisateur
exécutées lorsque les événements associés dénis par
l'utilisateur sont évalués comme étant TRUE (vrai) par le
SLC.
Thermistance
Résistance dépendant de la température placée à l'endroit
où l'on souhaite surveiller la température (variateur de
fréquence ou moteur).
Trip (arrêt)
État résultant de situations de panne, p. ex. en cas de
surchaue du variateur de fréquence ou lorsque celui-ci
protège le moteur, le process ou le mécanisme. Le
redémarrage est impossible tant que l'origine de la panne
n'a pas été résolue ; l'état d'alarme est annulé par un reset
ou, parfois, grâce à un reset programmé automatiquement.
Ne pas utiliser l'alarme à des ns de sécurité des
personnes.
Alarme verrouillée
État résultant de situations de panne lorsque le variateur
de fréquence assure sa propre protection et nécessitant
une intervention physique, p. ex. si la sortie du variateur
fait l'objet d'un court-circuit. Un déclenchement verrouillé
peut être annulé par coupure de l'alimentation secteur,
résolution de l'origine de la panne et reconnexion du
variateur de fréquence. Le redémarrage est impossible tant
que l'état d'arrêt n'a pas été annulé par un reset ou, dans
certains cas, grâce à un reset programmé automatiquement. Ne pas utiliser l'alarme verrouillée à des ns de
sécurité des personnes.
Caractéristique Couple Variable
Caractéristiques de couple variable que l'on utilise pour les
pompes et les ventilateurs.
+
VVC
Si on la compare au contrôle standard de proportion
tension/fréquence, la commande vectorielle de tension
(VVC+) améliore la dynamique et la stabilité, à la fois
lorsque la référence de vitesse est
est associée au couple de charge.
modiée et lorsqu'elle
1 1
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 7
Page 10
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Introduction
VLT® HVAC Basic Drive FC 101
11
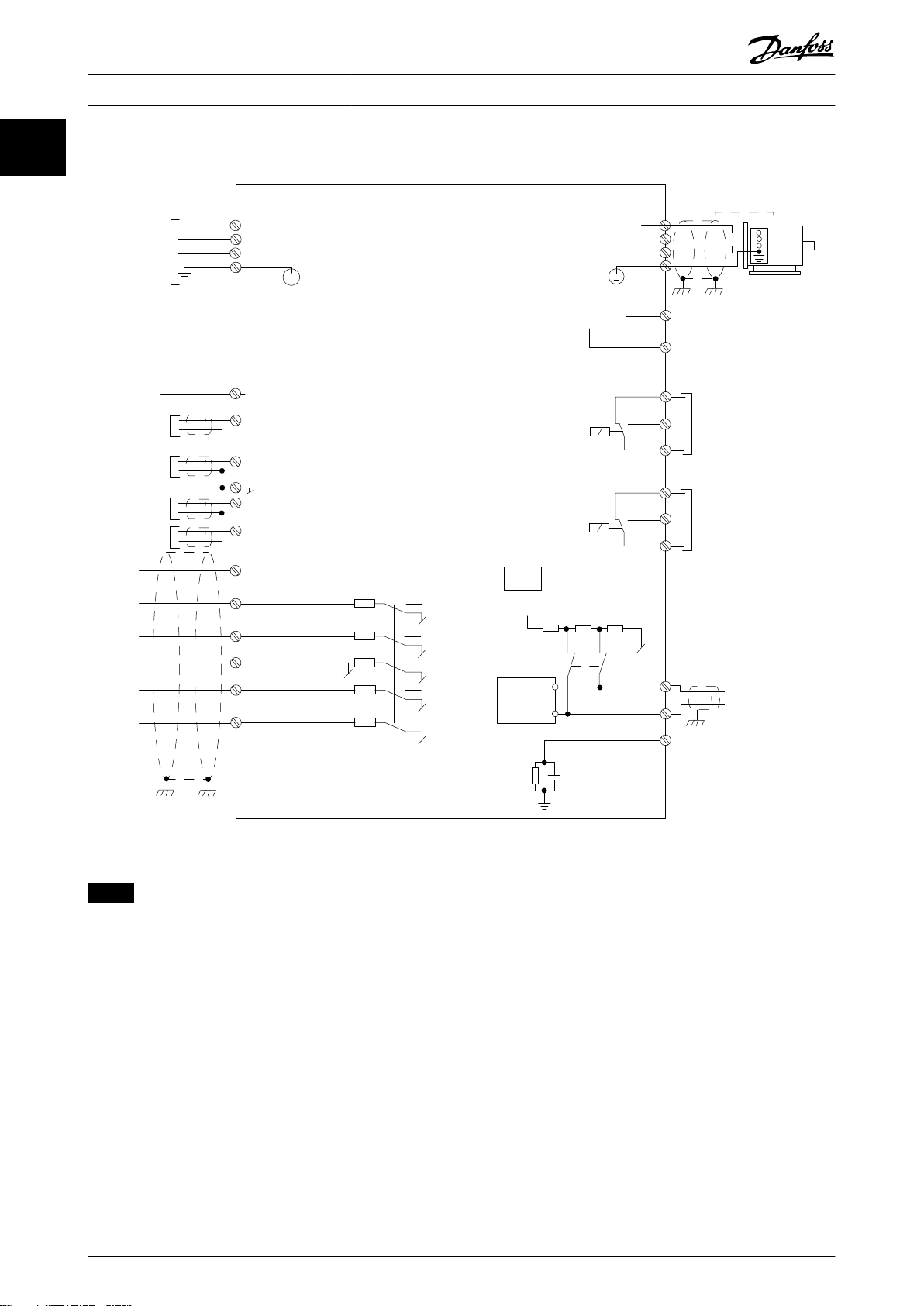
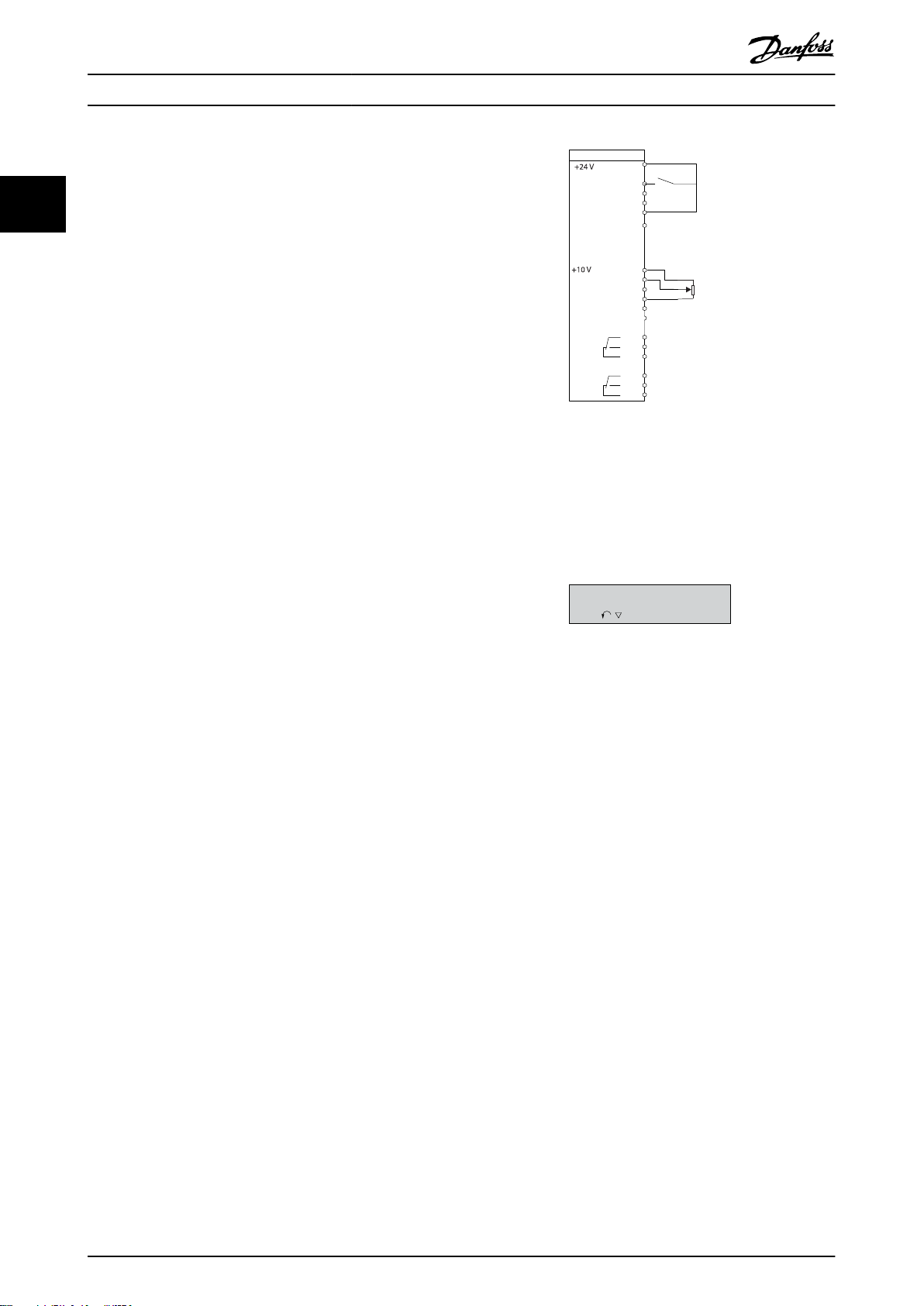
1.7 Schéma électrique
Illustration 1.2 Dessin schématique du câblage de base
AVIS!
Il n’y a pas d’accès aux bornes UDC- et UDC+ sur les unités suivantes :
•
•
•
•
IP20, 380–480 V, 30–90 kW (40–125 HP)
IP20, 200–240 V, 15–45 kW (20–60 HP)
IP20, 525–600 V, 2,2–90 kW (3,0–125 HP)
IP54, 380–480 V, 22–90 kW (30–125 HP)
8 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 11
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmation Guide de programmation
2 Programmation
2.1 Introduction
Le variateur de fréquence peut être programmé à partir du
LCP ou d’un PC via le port COM RS485 en installant le
Logiciel de programmation MCT 10. Se reporter au
chapitre 1.5 Ressources supplémentaires pour plus de détails
sur le logiciel.
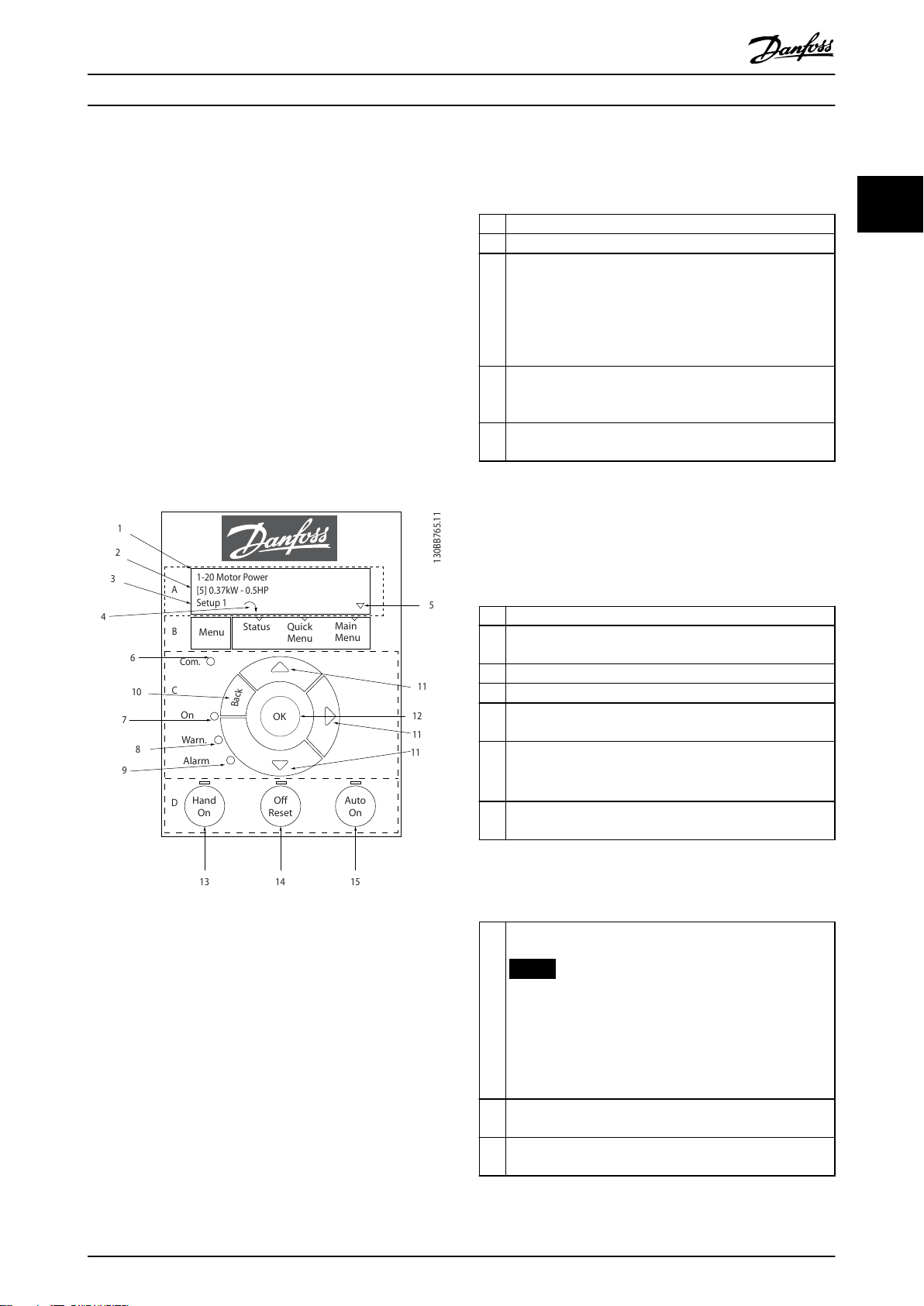
2.2 Panneau de commande local (LCP)
Le LCP est divisé en quatre sections fonctionnelles :
A. Achage
B. Touche Menu
C. Touches de navigation et voyants
D. Touches d’exploitation et voyants
1 Numéro et nom du paramètre.
2 Valeur de paramètre.
Le numéro de process montre le process actif et le process
modié. Lorsque le même process est à la fois actif et
modié, seul le numéro de ce process apparaît (réglage
3
d’usine). Lorsque les process dièrent, les deux numéros
apparaissent à l’écran (process 12). Le numéro qui clignote
indique le process modié.
Le sens du moteur est indiqué en bas à gauche de l’écran
4
par une petite èche désignant le sens horaire ou le sens
antihoraire.
Le triangle indique si le LCP est sur le menu d’état, menu
5
rapide ou menu principal.
Tableau 2.1 Légende de l’Illustration 2.1, partie I
B. Touche Menu
Appuyer sur la touche [Menu] pour alterner entre menu
d’état, menu rapide et menu principal.
C. Touches de navigation et voyants
6 LED Com. : clignote pendant la communication du bus.
LED verte/On : indique que la section de contrôle
7
fonctionne correctement.
8 LED jaune/Warn. : indique un avertissement.
9 LED rouge clignotante/Alarm : indique une alarme.
[Back] : renvoie à l’étape ou au niveau précédent de la
10
structure de navigation.
[▲] [▼] [►] : pour se déplacer entre les groupes de
11
paramètres ou paramètres et au sein des paramètres. Elles
peuvent aussi être utilisées pour régler la référence locale.
[OK] : pour sélectionner un paramètre et pour accepter les
12
changements des réglages des paramètres.
2 2
Tableau 2.2 Légende de l’Illustration 2.1, partie II
Illustration 2.1 Panneau de commande local (LCP)
A. Achage
L’écran LCD est éclairé et comprend 2 lignes alphanumériques. Toutes les données sont achées sur le LCP.
L’Illustration 2.1 indique les informations pouvant s’acher
à l’écran.
D. Touches d’exploitation et voyants
[Hand On] : démarre le moteur et permet de commander le
variateur de fréquence via le LCP.
AVIS!
[2] Lâchage constitue l’option par défaut pour le
13
paramétre 5-12 E.digit.born.27. S’il n’y a pas une
tension de 24 V sur la borne 27, [Hand On] ne fait
pas démarrer le moteur. Connecter la borne 12 à la
borne 27.
[O/Reset] : arrête le moteur (O). En mode alarme, l’alarme
14
est réinitialisée.
[Auto On] : le variateur de fréquence peut être commandé
15
via les bornes de commande ou via la communication série.
Tableau 2.3 Légende de l’Illustration 2.1, partie III
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 9
Page 12
FC
ENTRÉE DIG
ENTRÉE DIG
ENTRÉE DIG
ENTRÉE DIG
COM ENTRÉE DIG
SORTIE ANA/DIG
SORTIE ANA/DIG
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Référence
Démarrage
ENTRÉE ANA
ENTRÉE ANA
COM
130BB674.10
45
+
-
130BB629.10
Appuyez sur OK pour lancer l'assistant
Appuyer sur Back pour le passer
Proc.1
Programmation
VLT® HVAC Basic Drive FC 101
2.3 Menus
2.3.1 Menu d'état
22
Dans le menu État, les options de sélection sont :
Fréquence du moteur [Hz],
•
paramétre 16-13 Fréquence moteur.
Courant du moteur [A], paramétre 16-14 Courant
•
moteur.
Référence de vitesse du moteur en pourcentage
•
[%], paramétre 16-02 Réf. %.
Signal de retour, paramétre 16-52 Signal de retour
•
[Unité].
Puissance du moteur, paramétre 16-10 Puissance
•
moteur [kW] pour les kW,
paramétre 16-11 Puissance moteur[CV] pour les HP.
Si le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la puissance du moteur est
achée en HP et non en kW.
Lect. paramétr., paramétre 16-09 Lect.paramétr..
•
Vitesse du moteur [tr/min],
•
paramétre 16-17 Vitesse moteur [tr/min].
Illustration 2.2 Câblage du variateur de fréquence
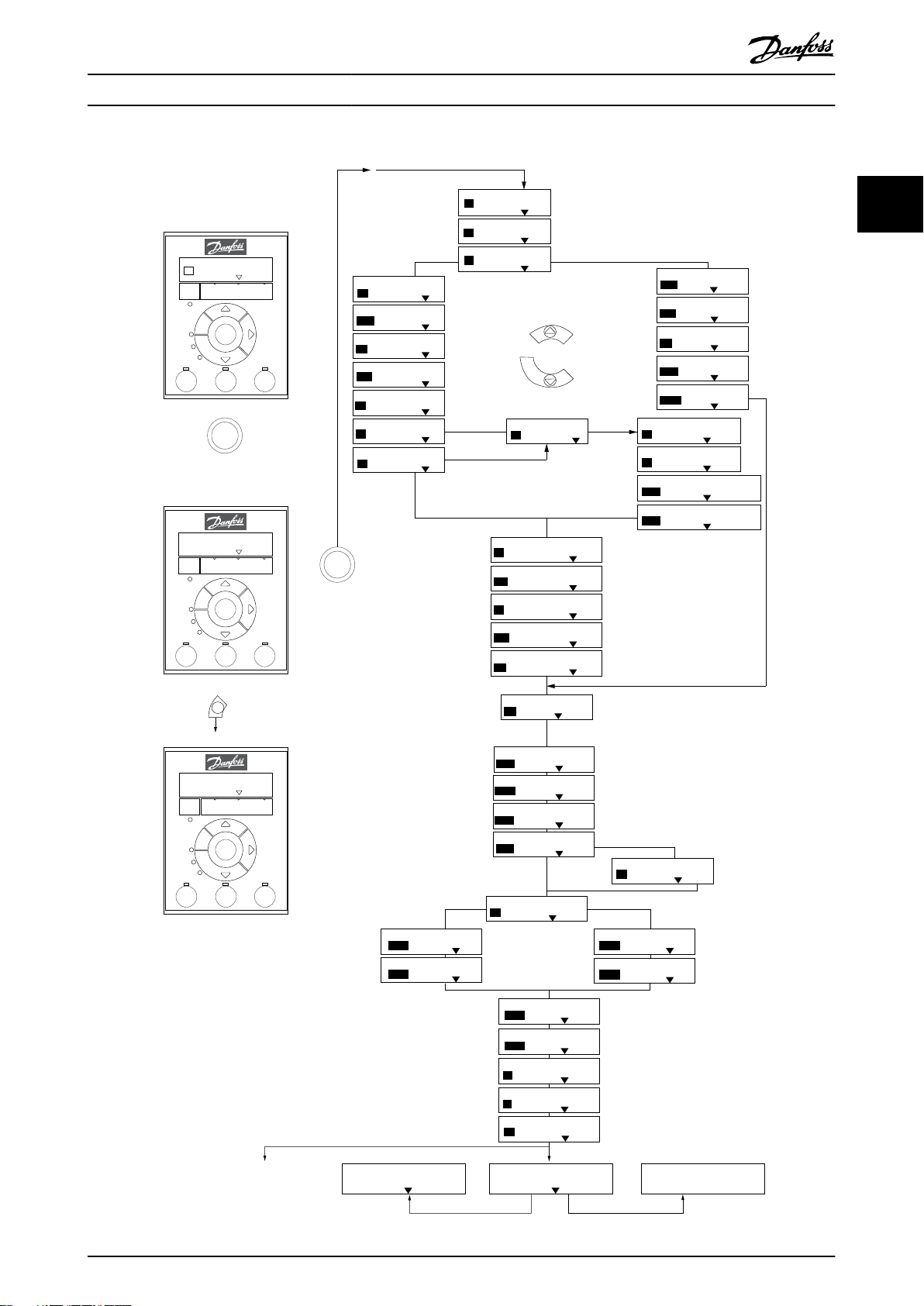
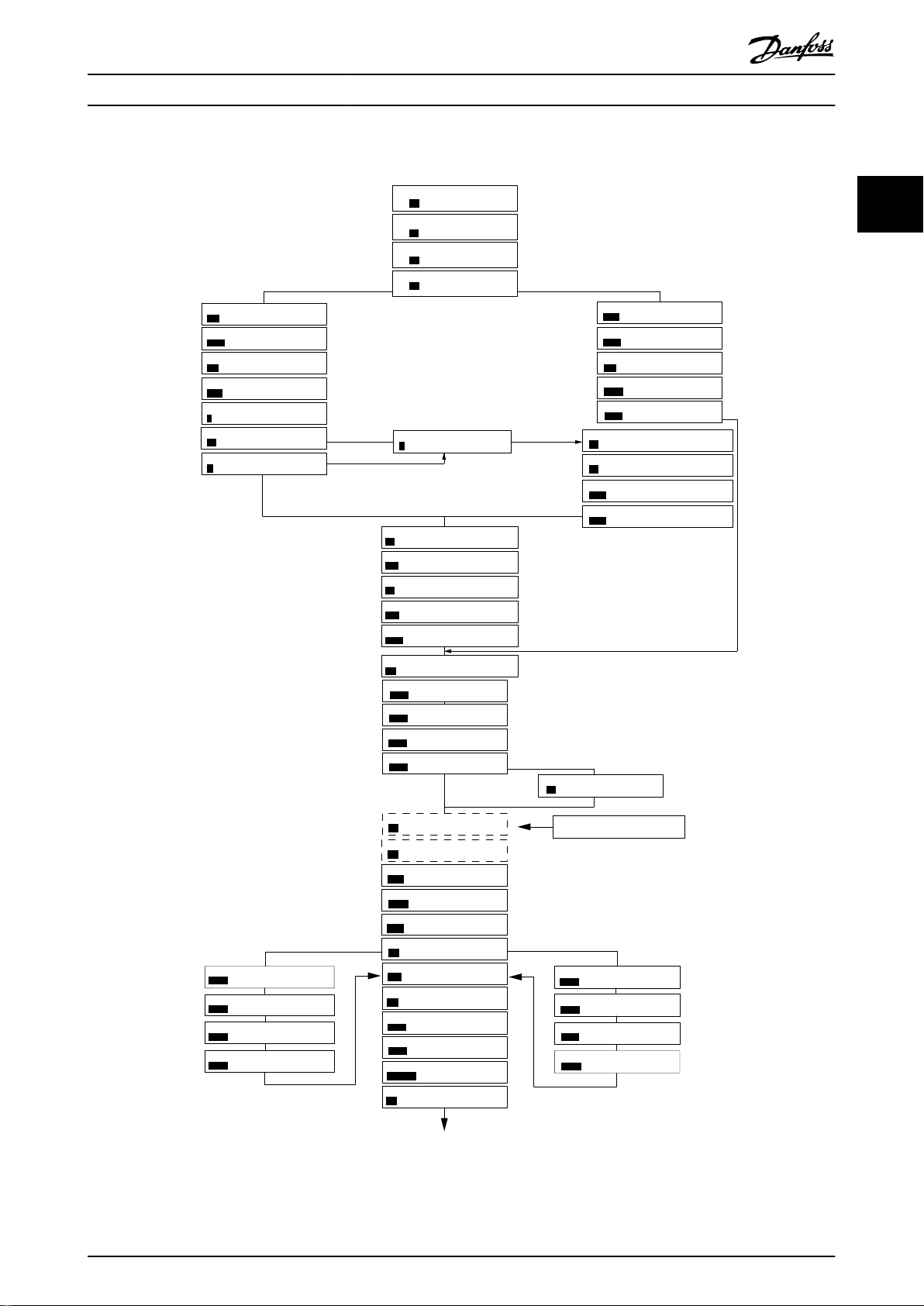
L'assistant apparaît après la mise sous tension tant
qu'aucun paramètre n'a été
modié. L'assistant est toujours
accessible via le menu rapide. Appuyer sur [OK] pour
lancer l'assistant. Appuyer sur [Back] pour revenir à l'écran
d'état.
2.3.2 Menu rapide
Utiliser le menu rapide pour programmer les fonctions les
plus courantes. Le menu rapide est composé de :
Assistant pour les applications en boucle ouverte.
•
Voir l'Illustration 2.4 pour obtenir plus de détails.
Assistant pour les applications en boucle fermée.
•
Voir l'Illustration 2.5 pour obtenir plus de détails.
Conguration du moteur. Voir l'Tableau 2.6 pour
•
obtenir plus de détails.
Modications eectuées
•
Le menu assistant intégré guide l'installateur dans la
conguration du variateur de fréquence d'une manière
claire et structurée pour les applications en boucle ouverte
et boucle fermée et pour les réglages rapides du moteur.
Illustration 2.3 Assistant de démarrage/sortie
10 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 13
Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmation Guide de programmation
2 2
Illustration 2.4 Assistant de conguration pour les applications en boucle ouverte
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 11
Page 14
Programmation
VLT® HVAC Basic Drive FC 101
Assistant de conguration pour les applications en boucle ouverte
Paramètre Option Par défaut Utilisation
22
Paramétre 0-03 Réglages
régionaux
[0] International
[1] Amérique Nord
[0] International –
Paramétre 0-06 Type réseau [0] 200-240 V/50 Hz/grille
IT
[1] 200-240 V/50 Hz/
triangle
[2] 200-240 V/50 Hz
[10] 380-440 V/50 Hz/grille
IT
[11] 380-440 V/50 Hz/
triangle
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/grille
IT
[21] 440-480 V/50 Hz/
triangle
[22] 440-480 V/50 Hz
[30] 525-600 V/50 Hz/grille
IT
[31] 525-600 V/50 Hz/
triangle
[32] 525-600 V/50 Hz
[100] 200-240 V/60 Hz/
grille IT
[101] 200-240 V/60 Hz/
triangle
[102] 200-240 V/60 Hz
[110] 380-440 V/60 Hz/
grille IT
[111] 380-440 V/60 Hz/
triangle
[112] 380-440 V/60 Hz
[120] 440-480 V/60 Hz/
grille IT
[121] 440-480 V/60 Hz/
triangle
[122] 440-480 V/60 Hz
[130] 525-600 V/60 Hz/
grille IT
[131] 525-600 V/60 Hz/
triangle
[132] 525-600 V/60 Hz
Dépend de la
taille
Sélectionner le mode d’exploitation pour le redémarrage
après la reconnexion du variateur de fréquence à la
tension secteur après une mise hors tension.
12 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 15
Programmation Guide de programmation
Paramètre Option Par défaut Utilisation
Paramétre 1-10 Construction
moteur
*[0] Asynchron
[1] PM, non-salient SPM
[3] PM, salient IPM, Sat
[0] Asynchron La dénition de cette valeur de paramètre peut modier
les paramètres suivants :
Paramétre 1-01 Principe Contrôle Moteur.
•
Paramétre 1-03 Caract.couple.
•
Paramétre 1-08 Motor Control Bandwidth.
•
Paramétre 1-14 Amort. facteur gain.
•
Paramétre 1-15 Const. temps de ltre faible vitesse
•
Paramétre 1-16 Const. temps de ltre vitesse élevée
•
Paramétre 1-17 Const. temps de ltre tension
•
Paramétre 1-20 Puissance moteur.
•
Paramétre 1-22 Tension moteur.
•
Paramétre 1-23 Fréq. moteur.
•
Paramétre 1-24 Courant moteur.
•
Paramétre 1-25 Vit.nom.moteur.
•
Paramétre 1-26 Couple nominal cont. moteur.
•
Paramétre 1-30 Résistance stator (Rs).
•
Paramétre 1-33 Réactance fuite stator (X1).
•
Paramétre 1-35 Réactance principale (Xh).
•
Paramétre 1-37 Inductance axe d (Ld).
•
Paramétre 1-38 Inductance axe q(Lq).
•
Paramétre 1-39 Pôles moteur.
•
Paramétre 1-40 FCEM à 1000 tr/min..
•
Paramétre 1-44 d-axis Inductance Sat. (LdSat).
•
Paramétre 1-45 q-axis Inductance Sat. (LqSat).
•
Paramétre 1-46 Gain détection position.
•
Paramétre 1-48 Current at Min Inductance for d-axis.
•
Paramétre 1-49 Courant à inductance min..
•
Paramétre 1-66 Courant min. à faible vitesse.
•
Paramétre 1-70 Mode de démarrage PM.
•
Paramétre 1-72 Fonction au démar..
•
Paramétre 1-73 Démarr. volée.
•
Paramétre 1-80 Fonction à l'arrêt.
•
Paramétre 1-82 Vit. min. pour fonct. à l'arrêt [Hz].
•
Paramétre 1-90 Protect. thermique mot..
•
Paramétre 2-00 I maintien/préchau.CC.
•
Paramétre 2-01 Courant frein CC.
•
Paramétre 2-02 Temps frein CC.
•
Paramétre 2-04 Vitesse frein CC [Hz].
•
Paramétre 2-10 Fonction Frein et Surtension.
•
Paramétre 4-14 Vitesse moteur limite haute [Hz].
•
Paramétre 4-19 Frq.sort.lim.hte.
•
Paramétre 4-58 Surv. phase mot..
•
Paramétre 14-65 Speed Derate Dead Time Compensation.
•
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 13
Page 16

Programmation
Paramètre Option Par défaut Utilisation
Paramétre 1-20 Puissance
moteur
22
Paramétre 1-22 Tension moteur 50–1000 V Dépend de la
Paramétre 1-23 Fréq. moteur 20–400 Hz Dépend de la
Paramétre 1-24 Courant moteur 0.01–10000.00 A Dépend de la
Paramétre 1-25 Vit.nom.moteur 50–9999 RPM Dépend de la
Paramétre 1-26 Couple nominal
cont. moteur
0.12–110 kW/0.16–150hpDépend de la
0.1–1000.0 Nm Dépend de la
VLT® HVAC Basic Drive FC 101
Entrer la puissance du moteur à partir des données de la
taille
taille
taille
taille
taille
taille
plaque signalétique.
Entrer la tension du moteur à partir des données de la
plaque signalétique.
Entrer la fréquence du moteur à partir des données de la
plaque signalétique.
Entrer le courant du moteur à partir des données de la
plaque signalétique.
Entrer la vitesse nominale du moteur à partir des données
de la plaque signalétique.
Ce paramètre est disponible lorsque le
paramétre 1-10 Construction moteur est réglé sur les
options activant le mode de moteur à magnétisation
permanente.
AVIS!
La modication de ce paramètre aecte les
réglages des autres paramètres.
Paramétre 1-29 Adaptation
auto. au moteur (AMA)
Paramétre 1-30 Résistance
stator (Rs)
Paramétre 1-37 Inductance axe
d (Ld)
Paramétre 1-38 Inductance axe
q(Lq)
Paramétre 1-39 Pôles moteur 2–100 4 Saisir le nombre de pôles du moteur.
Paramétre 1-40 FCEM à 1000 tr/
min.
Paramétre 1-42 Longueur câble
moteur
Paramétre 1-44 d-axis
Inductance Sat. (LdSat)
Paramétre 1-45 q-axis
Inductance Sat. (LqSat)
Paramétre 1-46 Gain détection
position
Paramétre 1-48 Current at Min
Inductance for d-axis
Voir le
paramétre 1-29 Adaptatio
n auto. au moteur (AMA).
0.000–99.990 Ω
0.000–1000.000 mH Dépend de la
0.000–1000.000 mH Dépend de la
10–9000 V Dépend de la
0–100 m 50 m Entrer la longueur du câble moteur.
0.000–1000.000 mH Dépend de la
0.000–1000.000 mH Dépend de la
20–200% 100% Règle l'amplitude de l'impulsion d'essai pendant la
20–200% 100% Entrer le point de saturation de l'inductance.
Inactif L'exécution d'une AMA optimise les performances du
moteur.
Dépend de la
taille
taille
taille
taille
taille
taille
Régler la valeur de la résistance du stator.
Saisir la valeur d'inductance de l'axe d.
Celle-ci se trouve sur la che technique des moteurs à
magnétisation permanente.
Saisir la valeur d'inductance de l'axe q.
Tension FCEM ecace phase à phase à 1 000 tr/min.
Ce paramètre correspond à la saturation de l'inductance
de Ld. Idéalement, ce paramètre a la même valeur que le
paramétre 1-37 Inductance axe d (Ld). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
Ce paramètre correspond à la saturation de l'inductance
de Lq. Idéalement, ce paramètre a la même valeur que le
paramétre 1-38 Inductance axe q(Lq). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
détection de position au début.
14 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 17
Programmation Guide de programmation
Paramètre Option Par défaut Utilisation
Paramétre 1-49 Courant à
inductance min.
Paramétre 1-70 Mode de
démarrage PM
Paramétre 1-73 Démarr. volée [0] Désactivé
Paramétre 3-02 Référence
minimale
Paramétre 3-03 Réf. max. -4999.000–4999.000 50 La référence maximale est la valeur maximale obtenue par
Paramétre 3-41 Temps d'accél.
rampe 1
Paramétre 3-42 Temps décél.
rampe 1
Paramétre 4-12 Vitesse moteur
limite basse [Hz]
Paramétre 4-14 Vitesse moteur
limite haute [Hz]
Paramétre 4-19 Frq.sort.lim.hte 0.0–400.0 Hz 100 Hz Entrer la valeur de fréquence de sortie max. Si le
Paramétre 5-40 Fonction relais Voir le
Paramétre 5-40 Fonction relais Voir le
Paramétre 6-10 Ech.min.U/born.530.00–10.00 V 0.07 V Saisir la tension correspondant à la valeur de référence
Paramétre 6-11 Ech.max.U/born.530.00–10.00 V 10 V Saisir la tension correspondant à la valeur de référence
Paramétre 6-12 Ech.min.I/born.530.00–20.00 mA 4 mA Saisir le courant correspondant à la valeur de référence
Paramétre 6-13 Ech.max.I/born.530.00–20.00 mA 20 mA Saisir le courant correspondant à la valeur de référence
20–200% 100% Ce paramètre spécie la courbe de saturation des valeurs
d'inductance des axes d et q. De 20 % à 100 % de ce
paramètre, les inductances sont assimilées linéairement à
des valeurs approximatives à cause du
paramétre 1-37 Inductance axe d (Ld), du
paramétre 1-38 Inductance axe q(Lq), du paramétre 1-44 daxis Inductance Sat. (LdSat) et du paramétre 1-45 q-axis
Inductance Sat. (LqSat).
[0] Détection position
rotor
[1] Parking
[1] Activé
-4999.000–4999.000 0 La référence minimum est la valeur minimale pouvant être
0.05–3600.00 s Dépend de la
0.05–3600.00 s Dépend de la
0.0–400.0 Hz 0 Hz Entrer la limite minimale pour la vitesse basse.
0.0–400.0 Hz 100 Hz Entrer la limite maximale pour la vitesse haute.
paramétre 5-40 Fonction
relais.
paramétre 5-40 Fonction
relais.
[0] Détection
position rotor
[0] Désactivé Sélectionner [1] Activé pour permettre au variateur de
taille
taille
[9] Alarme Sélectionner la fonction pour contrôler le relais de sortie 1.
[5] Fonctionne Sélectionner la fonction pour contrôler le relais de sortie 2.
Sélectionner le mode de démarrage du moteur PM.
fréquence de rattraper un moteur qui tourne à vide, en
cas de chute de la tension secteur. Sélectionner [0]
Désactivé si la fonction n'est pas souhaitée. Lorsque ce
paramètre est réglé sur [1] Activé, le paramétre 1-71 Retard
démar. et le paramétre 1-72 Fonction au démar. n'ont
aucune fonction. Le Paramétre 1-73 Démarr. volée est actif
en mode VVC+ uniquement.
obtenue en additionnant toutes les références.
la somme de toutes les références.
Si un moteur asynchrone est sélectionné, la rampe d'accélération va de 0 à la valeur nominale du
paramétre 1-23 Fréq. moteur. Si un moteur PM est
sélectionné, la rampe d'accélération va de 0 à la valeur du
paramétre 1-25 Vit.nom.moteur.
Pour les moteurs asynchrones, la rampe de décélération va
de la valeur nominale du paramétre 1-23 Fréq. moteur à 0.
Pour les moteurs PM, la rampe de décélération va de la
valeur du paramétre 1-25 Vit.nom.moteur à 0.
paramétre 4-19 Frq.sort.lim.hte est réglé sur une valeur
inférieure au paramétre 4-14 Vitesse moteur limite haute
[Hz], le paramétre 4-14 Vitesse moteur limite haute [Hz] sera
automatiquement égal au paramétre 4-19 Frq.sort.lim.hte.
basse.
haute.
basse.
haute.
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 15
Page 18
Programmation
Paramètre Option Par défaut Utilisation
Paramétre 6-19 Terminal 53
mode
22
Paramétre 30-22 Protec. rotor
verr.
Paramétre 30-23 Tps détect°
rotor bloqué [s]
Tableau 2.4 Assistant de conguration pour les applications en boucle ouverte
[0] Courant
[1] Tension
[0] Inactif
[1] Actif
0.05–1 s 0.10 s
VLT® HVAC Basic Drive FC 101
[1] Tension Sélectionner si la borne 53 est utilisée pour l'entrée de
courant ou de tension.
[0] Inactif
–
–
16 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 19
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmation Guide de programmation
Assistant de conguration pour les applications en boucle fermée
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 17
Illustration 2.5 Assistant de conguration pour les applications en boucle fermée
Page 20
Programmation
Paramètre Plage Par défaut Utilisation
Paramétre 0-03 Réglages
régionaux
22
Paramétre 0-06 Type réseau [0]–[132] Voir le
Paramétre 1-00 Mode Cong. [0] Boucle ouverte
[0] International
[1] Amérique Nord
Tableau 2.4.
[3] Boucle fermée
VLT® HVAC Basic Drive FC 101
[0] International –
En fonction de la
taille
[0] Boucle ouverte Sélectionner [3] Boucle fermée.
Sélectionner le mode d’exploitation pour le redémarrage
après la reconnexion du variateur de fréquence à la
tension secteur après une mise hors tension.
18 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 21
Programmation Guide de programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-10 Construction
moteur
*[0] Asynchron
[1] PM, non-salient SPM
[3] PM, salient IPM, Sat
[0] Asynchron La dénition de cette valeur de paramètre peut modier
les paramètres suivants :
Paramétre 1-01 Principe Contrôle Moteur.
•
Paramétre 1-03 Caract.couple.
•
Paramétre 1-08 Motor Control Bandwidth.
•
Paramétre 1-14 Amort. facteur gain.
•
Paramétre 1-15 Const. temps de ltre faible vitesse
•
Paramétre 1-16 Const. temps de ltre vitesse élevée
•
Paramétre 1-17 Const. temps de ltre tension
•
Paramétre 1-20 Puissance moteur.
•
Paramétre 1-22 Tension moteur.
•
Paramétre 1-23 Fréq. moteur.
•
Paramétre 1-24 Courant moteur.
•
Paramétre 1-25 Vit.nom.moteur.
•
Paramétre 1-26 Couple nominal cont. moteur.
•
Paramétre 1-30 Résistance stator (Rs).
•
Paramétre 1-33 Réactance fuite stator (X1).
•
Paramétre 1-35 Réactance principale (Xh).
•
Paramétre 1-37 Inductance axe d (Ld).
•
Paramétre 1-38 Inductance axe q(Lq).
•
Paramétre 1-39 Pôles moteur.
•
Paramétre 1-40 FCEM à 1000 tr/min..
•
Paramétre 1-44 d-axis Inductance Sat. (LdSat).
•
Paramétre 1-45 q-axis Inductance Sat. (LqSat).
•
Paramétre 1-46 Gain détection position.
•
Paramétre 1-48 Current at Min Inductance for d-axis.
•
Paramétre 1-49 Courant à inductance min..
•
Paramétre 1-66 Courant min. à faible vitesse.
•
Paramétre 1-70 Mode de démarrage PM.
•
Paramétre 1-72 Fonction au démar..
•
Paramétre 1-73 Démarr. volée.
•
Paramétre 1-80 Fonction à l'arrêt.
•
Paramétre 1-82 Vit. min. pour fonct. à l'arrêt [Hz].
•
Paramétre 1-90 Protect. thermique mot..
•
Paramétre 2-00 I maintien/préchau.CC.
•
Paramétre 2-01 Courant frein CC.
•
Paramétre 2-02 Temps frein CC.
•
Paramétre 2-04 Vitesse frein CC [Hz].
•
Paramétre 2-10 Fonction Frein et Surtension.
•
Paramétre 4-14 Vitesse moteur limite haute [Hz].
•
Paramétre 4-19 Frq.sort.lim.hte.
•
Paramétre 4-58 Surv. phase mot..
•
Paramétre 14-65 Speed Derate Dead Time Compensation.
•
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 19
Page 22
Programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-20 Puissance
moteur
22
Paramétre 1-22 Tension moteur 50–1000 V Dépend de la taille Entrer la tension du moteur à partir des données de la
Paramétre 1-23 Fréq. moteur 20–400 Hz Dépend de la taille Entrer la fréquence du moteur à partir des données de la
Paramétre 1-24 Courant moteur 0–10000 A Dépend de la taille Entrer le courant du moteur à partir des données de la
Paramétre 1-25 Vit.nom.moteur 50–9999 RPM Dépend de la taille Entrer la vitesse nominale du moteur à partir des données
Paramétre 1-26 Couple nominal
cont. moteur
0.09–110 kW Dépend de la taille Entrer la puissance du moteur à partir des données de la
0.1–1000.0 Nm Dépend de la taille Ce paramètre est disponible lorsque le
VLT® HVAC Basic Drive FC 101
plaque signalétique.
plaque signalétique.
plaque signalétique.
plaque signalétique.
de la plaque signalétique.
paramétre 1-10 Construction moteur est réglé sur les
options activant le mode de moteur à magnétisation
permanente.
AVIS!
La modication de ce paramètre aecte les
réglages des autres paramètres.
Paramétre 1-29 Adaptation
auto. au moteur (AMA)
Paramétre 1-30 Résistance
stator (Rs)
Paramétre 1-37 Inductance axe
d (Ld)
Paramétre 1-38 Inductance axe
q(Lq)
Paramétre 1-39 Pôles moteur 2–100 4 Saisir le nombre de pôles du moteur.
Paramétre 1-40 FCEM à 1000 tr/
min.
Paramétre 1-42 Longueur câble
moteur
Paramétre 1-44 d-axis
Inductance Sat. (LdSat)
Paramétre 1-45 q-axis
Inductance Sat. (LqSat)
Paramétre 1-46 Gain détection
position
Paramétre 1-48 Current at Min
Inductance for d-axis
Inactif L'exécution d'une AMA optimise les performances du
moteur.
0–99.990 Ω
0.000–1000.000 mH Dépend de la taille Saisir la valeur d'inductance de l'axe d.
0.000–1000.000 mH Dépend de la taille Saisir la valeur d'inductance de l'axe q.
10–9000 V Dépend de la taille Tension FCEM ecace phase à phase à 1 000 tr/min.
0–100 m 50 m Entrer la longueur du câble moteur.
0.000–1000.000 mH Dépend de la taille Ce paramètre correspond à la saturation de l'inductance
0.000–1000.000 mH Dépend de la taille Ce paramètre correspond à la saturation de l'inductance
20–200% 100% Règle l'amplitude de l'impulsion d'essai pendant la
20–200% 100% Entrer le point de saturation de l'inductance.
Dépend de la taille Régler la valeur de la résistance du stator.
Celle-ci se trouve sur la che technique des moteurs à
magnétisation permanente.
de Ld. Idéalement, ce paramètre a la même valeur que le
paramétre 1-37 Inductance axe d (Ld). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
de Lq. Idéalement, ce paramètre a la même valeur que le
paramétre 1-38 Inductance axe q(Lq). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
détection de position au début.
20 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 23
Programmation Guide de programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-49 Courant à
inductance min.
Paramétre 1-70 Mode de
démarrage PM
Paramétre 1-73 Démarr. volée [0] Désactivé
Paramétre 3-02 Référence
minimale
Paramétre 3-03 Réf. max. -4999.000–4999.000 50 La référence maximale est la valeur maximale obtenue par
Paramétre 3-10 Réf.prédénie -100–100% 0 Saisir la consigne.
Paramétre 3-41 Temps d'accél.
rampe 1
Paramétre 3-42 Temps décél.
rampe 1
Paramétre 4-12 Vitesse moteur
limite basse [Hz]
Paramétre 4-14 Vitesse moteur
limite haute [Hz]
Paramétre 4-19 Frq.sort.lim.hte 0.0–400.0 Hz 100 Hz Entrer la valeur de fréquence de sortie max. Si le
Paramétre 6-20 Ech.min.U/born.540.00–10.00 V 0.07 V Saisir la tension correspondant à la valeur de référence
Paramétre 6-21 Ech.max.U/born.540.00–10.00 V 10.00 V Saisir la tension correspondant à la valeur de référence
Paramétre 6-22 Ech.min.I/born.540.00–20.00 mA 4.00 mA Saisir le courant correspondant à la valeur de référence
Paramétre 6-23 Ech.max.I/born.540.00–20.00 mA 20.00 mA Saisir le courant correspondant à la valeur de référence
Paramétre 6-24 Val.ret./
Réf.bas.born.54
Paramétre 6-25 Val.ret./
Réf.haut.born.54
Paramétre 6-26 Const.tps.l.born
.54
20–200% 100% Ce paramètre spécie la courbe de saturation des valeurs
d'inductance des axes d et q. De 20 % à 100 % de ce
paramètre, les inductances sont assimilées linéairement à
des valeurs approximatives à cause du
paramétre 1-37 Inductance axe d (Ld), du
paramétre 1-38 Inductance axe q(Lq), du paramétre 1-44 daxis Inductance Sat. (LdSat) et du paramétre 1-45 q-axis
Inductance Sat. (LqSat).
[0] Détection position
rotor
[1] Parking
[1] Activé
-4999.000–4999.000 0 La référence minimum est la valeur minimale pouvant être
0.05–3600.0 s Dépend de la taille Rampe d'accélération de 0 à la valeur nominale du
0.05–3600.0 s Dépend de la taille Rampe de décélération de la valeur nominale du
0.0–400.0 Hz 0.0 Hz Entrer la limite minimale pour la vitesse basse.
0.0–400.0 Hz 100 Hz Entrer la limite maximale pour la vitesse haute.
-4999–4999 0 Saisir la valeur du signal de retour correspondant à la
-4999–4999 50 Saisir la valeur du signal de retour correspondant à la
0.00–10.00 s 0.01 Saisir la constante de temps du ltre.
[0] Détection
position rotor
[0] Désactivé Sélectionner [1] Activé pour permettre au variateur de
Sélectionner le mode de démarrage du moteur PM.
fréquence de rattraper un moteur qui tourne à vide (p. ex.
applications de ventilateur). Lorsque PM est sélectionné, ce
paramètre est activé.
obtenue en additionnant toutes les références.
la somme de toutes les références.
paramétre 1-23 Fréq. moteur pour les moteurs
asynchrones ; rampe d'accélération de 0 à la valeur du
paramétre 1-25 Vit.nom.moteur pour les moteurs PM.
paramétre 1-23 Fréq. moteur à 0 pour les moteurs
asynchrones ; Rampe de décélération de la valeur du
paramétre 1-25 Vit.nom.moteur à 0 pour les moteurs PM.
paramétre 4-19 Frq.sort.lim.hte est réglé sur une valeur
inférieure au paramétre 4-14 Vitesse moteur limite haute
[Hz], le paramétre 4-14 Vitesse moteur limite haute [Hz] sera
automatiquement égal au paramétre 4-19 Frq.sort.lim.hte.
basse.
haute.
basse.
haute.
tension ou au courant déni aux paramétre 6-20 Ech.min.U/
born.54/paramétre 6-22 Ech.min.I/born.54.
tension ou au courant déni aux
paramétre 6-21 Ech.max.U/born.54/paramétre 6-23 Ech.max.I/
born.54.
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 21
Page 24
Programmation
Paramètre Plage Par défaut Utilisation
Paramétre 6-29 Mode born.54 [0] Courant
[1] Tension
22
Paramétre 20-81 Contrôle
normal/inversé PID
Paramétre 20-83 Vit.de dém. PID
[Hz]
Paramétre 20-93 Gain proportionnel PID
Paramétre 20-94 PI Integral
Time
Paramétre 30-22 Protec. rotor
verr.
Paramétre 30-23 Tps détect°
rotor bloqué [s]
[0] Normal
[1] Inverse
0–200 Hz 0 Hz Entrer la vitesse du moteur à atteindre comme signal de
0.00–10.00 0.01 Entrer le gain proportionnel du régulateur de process. Un
0.1–999.0 s 999.0 s Entrer le temps intégral du régulateur de process. Un
[0] Inactif
[1] Actif
0.05–1.00 s 0.10 s
VLT® HVAC Basic Drive FC 101
[1] Tension Sélectionner si la borne 54 est utilisée pour l'entrée de
courant ou de tension.
[0] Normal Sélectionner [0] Normal pour que le contrôle de process
augmente la fréquence de sortie lorsque l'erreur de
process est positive. Sélectionner [1] Inverse pour réduire la
fréquence de sortie.
démarrage du régulateur PI.
gain élevé se traduit par régulation rapide. Cependant un
gain trop important peut aecter la régularité du process.
temps intégral de courte durée se traduit par une
régulation rapide, mais si cette durée est trop courte, le
process devient instable. Un temps intégral trop long
désactive l'action intégrale.
[0] Inactif
–
–
Tableau 2.5 Assistant de conguration pour les applications en boucle fermée
Conguration du moteur
L'assistant de conguration du moteur guide l'utilisateur pour le réglage des paramètres du moteur nécessaires.
Paramètre Plage Par défaut Utilisation
Paramétre 0-03 Réglages
régionaux
Paramétre 0-06 Type réseau [0]–[132] Voir le
[0] International
[1] Amérique Nord
Tableau 2.4.
0 –
Dépend de la taille Sélectionner le mode d’exploitation pour le redémarrage
après la reconnexion du variateur de fréquence à la
tension secteur après une mise hors tension.
22 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 25
Programmation Guide de programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-10 Construction
moteur
*[0] Asynchron
[1] PM, non-salient SPM
[3] PM, salient IPM
[0] Asynchron La dénition de cette valeur de paramètre peut modier
les paramètres suivants :
Paramétre 1-01 Principe Contrôle Moteur.
•
Paramétre 1-03 Caract.couple.
•
Paramétre 1-08 Motor Control Bandwidth.
•
Paramétre 1-14 Amort. facteur gain.
•
Paramétre 1-15 Const. temps de ltre faible vitesse
•
Paramétre 1-16 Const. temps de ltre vitesse élevée
•
Paramétre 1-17 Const. temps de ltre tension
•
Paramétre 1-20 Puissance moteur.
•
Paramétre 1-22 Tension moteur.
•
Paramétre 1-23 Fréq. moteur.
•
Paramétre 1-24 Courant moteur.
•
Paramétre 1-25 Vit.nom.moteur.
•
Paramétre 1-26 Couple nominal cont. moteur.
•
Paramétre 1-30 Résistance stator (Rs).
•
Paramétre 1-33 Réactance fuite stator (X1).
•
Paramétre 1-35 Réactance principale (Xh).
•
Paramétre 1-37 Inductance axe d (Ld).
•
Paramétre 1-38 Inductance axe q(Lq).
•
Paramétre 1-39 Pôles moteur.
•
Paramétre 1-40 FCEM à 1000 tr/min..
•
Paramétre 1-44 d-axis Inductance Sat. (LdSat).
•
Paramétre 1-45 q-axis Inductance Sat. (LqSat).
•
Paramétre 1-46 Gain détection position.
•
Paramétre 1-48 Current at Min Inductance for d-axis.
•
Paramétre 1-49 Courant à inductance min..
•
Paramétre 1-66 Courant min. à faible vitesse.
•
Paramétre 1-70 Mode de démarrage PM.
•
Paramétre 1-72 Fonction au démar..
•
Paramétre 1-73 Démarr. volée.
•
Paramétre 1-80 Fonction à l'arrêt.
•
Paramétre 1-82 Vit. min. pour fonct. à l'arrêt [Hz].
•
Paramétre 1-90 Protect. thermique mot..
•
Paramétre 2-00 I maintien/préchau.CC.
•
Paramétre 2-01 Courant frein CC.
•
Paramétre 2-02 Temps frein CC.
•
Paramétre 2-04 Vitesse frein CC [Hz].
•
Paramétre 2-10 Fonction Frein et Surtension.
•
Paramétre 4-14 Vitesse moteur limite haute [Hz].
•
Paramétre 4-19 Frq.sort.lim.hte.
•
Paramétre 4-58 Surv. phase mot..
•
Paramétre 14-65 Speed Derate Dead Time Compensation.
•
2 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 23
Page 26
Programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-20 Puissance
moteur
22
Paramétre 1-22 Tension moteur 50–1000 V Dépend de la taille Entrer la tension du moteur à partir des données de la
Paramétre 1-23 Fréq. moteur 20–400 Hz Dépend de la taille Entrer la fréquence du moteur à partir des données de la
Paramétre 1-24 Courant moteur 0.01–10000.00 A Dépend de la taille Entrer le courant du moteur à partir des données de la
Paramétre 1-25 Vit.nom.moteur 50–9999 RPM Dépend de la taille Entrer la vitesse nominale du moteur à partir des données
Paramétre 1-26 Couple nominal
cont. moteur
0.12–110 kW/0.16–150hpDépend de la taille Entrer la puissance du moteur à partir des données de la
0.1–1000.0 Nm Dépend de la taille Ce paramètre est disponible lorsque le
VLT® HVAC Basic Drive FC 101
plaque signalétique.
plaque signalétique.
plaque signalétique.
plaque signalétique.
de la plaque signalétique.
paramétre 1-10 Construction moteur est réglé sur les
options activant le mode de moteur à magnétisation
permanente.
AVIS!
La modication de ce paramètre aecte les
réglages des autres paramètres.
Paramétre 1-30 Résistance
stator (Rs)
Paramétre 1-37 Inductance axe
d (Ld)
Paramétre 1-38 Inductance axe
q(Lq)
Paramétre 1-39 Pôles moteur 2–100 4 Saisir le nombre de pôles du moteur.
Paramétre 1-40 FCEM à 1000 tr/
min.
Paramétre 1-42 Longueur câble
moteur
Paramétre 1-44 d-axis
Inductance Sat. (LdSat)
Paramétre 1-45 q-axis
Inductance Sat. (LqSat)
Paramétre 1-46 Gain détection
position
Paramétre 1-48 Current at Min
Inductance for d-axis
Paramétre 1-49 Courant à
inductance min.
0–99.990 Ω
0.000–1000.000 mH Dépend de la taille Saisir la valeur d'inductance de l'axe d. Celle-ci se trouve
0.000–1000.000 mH Dépend de la taille Saisir la valeur d'inductance de l'axe q.
10–9000 V Dépend de la taille Tension FCEM ecace phase à phase à 1 000 tr/min.
0–100 m 50 m Entrer la longueur du câble moteur.
0.000–1000.000 mH Dépend de la taille Ce paramètre correspond à la saturation de l'inductance
0.000–1000.000 mH Dépend de la taille Ce paramètre correspond à la saturation de l'inductance
20–200% 100% Règle l'amplitude de l'impulsion d'essai pendant la
20–200% 100% Entrer le point de saturation de l'inductance.
20–200% 100% Ce paramètre spécie la courbe de saturation des valeurs
Dépend de la taille Régler la valeur de la résistance du stator.
sur la che technique des moteurs à magnétisation
permanente.
de Ld. Idéalement, ce paramètre a la même valeur que le
paramétre 1-37 Inductance axe d (Ld). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
de Lq. Idéalement, ce paramètre a la même valeur que le
paramétre 1-38 Inductance axe q(Lq). Cependant, si le
fabricant du moteur fournit une courbe d'induction, saisir
la valeur d'induction, c'est-à-dire 200 % du courant
nominal.
détection de position au début.
d'inductance des axes d et q. De 20 % à 100 % de ce
paramètre, les inductances sont assimilées linéairement à
des valeurs approximatives à cause du
paramétre 1-37 Inductance axe d (Ld), du
paramétre 1-38 Inductance axe q(Lq), du paramétre 1-44 daxis Inductance Sat. (LdSat) et du paramétre 1-45 q-axis
Inductance Sat. (LqSat).
24 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 27
Programmation Guide de programmation
Paramètre Plage Par défaut Utilisation
Paramétre 1-70 Mode de
démarrage PM
Paramétre 1-73 Démarr. volée [0] Désactivé
Paramétre 3-41 Temps d'accél.
rampe 1
Paramétre 3-42 Temps décél.
rampe 1
Paramétre 4-12 Vitesse moteur
limite basse [Hz]
Paramétre 4-14 Vitesse moteur
limite haute [Hz]
Paramétre 4-19 Frq.sort.lim.hte 0.0–400.0 Hz 100.0 Hz Entrer la valeur de fréquence de sortie max. Si le
Paramétre 30-22 Protec. rotor
verr.
Paramétre 30-23 Tps détect°
rotor bloqué [s]
[0] Détection position
rotor
[1] Parking
[1] Activé
0.05–3600.0 s Dépend de la taille Rampe d'accélération de 0 à la valeur nominale du
0.05–3600.0 s Dépend de la taille Rampe de décélération de la valeur nominale du
0.0–400.0 Hz 0.0 Hz Entrer la limite minimale pour la vitesse basse.
0.0–400.0 Hz 100.0 Hz Entrer la limite maximale pour la vitesse haute.
[0] Inactif
[1] Actif
0.05–1.00 s 0.10 s
[0] Détection
position rotor
[0] Désactivé Sélectionner [1] Activé pour permettre au variateur de
[0] Inactif
Sélectionner le mode de démarrage du moteur PM.
fréquence de rattraper un moteur qui tourne à vide.
paramétre 1-23 Fréq. moteur.
paramétre 1-23 Fréq. moteur à 0.
paramétre 4-19 Frq.sort.lim.hte est réglé sur une valeur
inférieure au paramétre 4-14 Vitesse moteur limite haute
[Hz], le paramétre 4-14 Vitesse moteur limite haute [Hz] sera
automatiquement égal au paramétre 4-19 Frq.sort.lim.hte.
–
–
2 2
Tableau 2.6 Réglages de l'assistant de conguration du moteur
Modications eectuées
La fonction Modications eectuées répertorie tous les
paramètres modiés par rapport aux réglages par défaut.
La liste indique uniquement les paramètres qui
•
ont été modiés dans la modication en cours.
Les paramètres restaurés aux valeurs par défaut
•
ne sont pas répertoriés.
Le message Vide indique qu’aucun paramètre n’a
•
été modié.
Modication des réglages des paramètres
1. Pour entrer dans le menu rapide, appuyer sur la
touche [Menu] jusqu'à ce que l'indicateur à
l'écran se place sur Menu rapide.
2.
Appuyer sur [▲] [▼] pour sélectionner l'assistant,
la conguration en boucle fermée, la congu-
ration du moteur ou les modications eectuées.
3. Appuyer sur [OK].
4.
Appuyer sur [▲] [▼] pour se déplacer d'un
paramètre à l'autre dans le menu rapide.
5. Appuyer sur [OK] pour sélectionner un paramètre.
6.
Appuyer sur [▲] [▼] pour modier la valeur de
réglage d’un paramètre.
7. Appuyer sur [OK] pour accepter la modication.
8. Appuyer deux fois sur [Back] pour entrer dans
Status, ou appuyer sur [Menu] une fois pour
accéder au menu principal.
Le menu principal permet d'accéder à tous les
paramètres.
1. Appuyer sur la touche [Menu] jusqu'à ce que
l'indicateur à l'écran se place au-dessus de Menu
principal.
2.
Appuyer sur [▲] [▼] pour se déplacer dans les
groupes de paramètres.
3. Appuyer sur [OK] pour sélectionner un groupe de
paramètres.
4.
Appuyer sur [▲] [▼] pour se déplacer entre les
paramètres d’un groupe spécique.
5. Appuyer sur [OK] pour sélectionner le paramètre.
6.
Appuyer sur [▲] [▼] pour régler/modier la valeur
du paramètre.
7. Appuyer sur [OK] pour accepter la modication.
2.3.3 Menu principal
Appuyer sur [Menu] pour accéder au menu principal et
programmer tous les paramètres. Les paramètres du menu
principal sont accessibles immédiatement, à moins qu'un
mot de passe n'ait été créé via le paramétre 0-60 Mt de
passe menu princ..
Pour la plupart des applications, il n'est pas nécessaire
d'accéder aux paramètres du menu principal. Le menu
rapide ore un accès rapide et simple aux paramètres
généralement requis.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 25
Page 28

Programmation
2.4 Transfert rapide du réglage des
paramètres entre plusieurs variateurs de
22
fréquence
Une fois la conguration d'un variateur de fréquence
terminée, mémoriser les données dans le LCP ou sur un PC
via le Logiciel de programmation MCT 10.
Transfert de données du variateur de fréquence vers le
LCP
1. Aller au paramétre 0-50 Copie LCP.
2. Appuyer sur [OK].
3. Sélectionner [1] Lect.PAR.LCP.
4. Appuyer sur [OK].
Connecter le LCP à un autre variateur de fréquence et
copier aussi les réglages des paramètres vers ce variateur
de fréquence.
Transfert de données du LCP vers le variateur de
fréquence
1. Aller au paramétre 0-50 Copie LCP.
2. Appuyer sur [OK].
3. Sélectionner [2] Ecrit.PAR. LCP.
4. Appuyer sur [OK].
Lecture et programmation des
2.5
paramètres indexés
Choisir un paramètre, appuyer sur [OK] et utiliser les
touches [▲]/[▼] pour naviguer entre les valeurs indexées.
Pour modier la valeur du paramètre, sélectionner la valeur
indexée et appuyer sur [OK]. Modier la valeur en
appuyant sur [▲]/[▼]. Pour accepter la nouvelle valeur,
appuyer sur [OK]. Appuyer sur [Cancel] pour annuler.
Appuyer sur [Back] pour quitter le paramètre.
Initialisation aux réglages par défaut
2.6
Il existe deux moyens d'initialiser le variateur de fréquence
aux valeurs par défaut.
Initialisation recommandée
1. Sélectionner le paramétre 14-22 Mod. exploitation.
2. Appuyer sur [OK].
3. Sélectionner [2] Restaura° régl.usine puis appuyer
sur [OK].
4. Mettre le variateur de fréquence hors tension et
attendre que l'achage s'éteigne.
5. Rebrancher l'alimentation secteur. Le variateur de
fréquence est maintenant réinitialisé, à l'exception
des paramètres suivants :
VLT® HVAC Basic Drive FC 101
Initialisation manuelle
Le variateur de fréquence peut également être initialisé
aux réglages par défaut via l'initialisation manuelle :
1. Éteindre le variateur de fréquence.
2. Appuyer sur [OK] et sur [Menu].
3. Mettre le variateur de fréquence sous tension
4. Le variateur de fréquence est maintenant
L'initialisation des paramètres est conrmée par l'alarme 80,
Init. variateur sur l'achage après le cycle de puissance.
Paramétre 1-06 Sens horaire
•
Paramétre 8-30 Protocole
•
Paramétre 8-31 Adresse
•
Paramétre 8-32 Vit. transmission
•
Paramétre 8-33 Parité/bits arrêt
•
Paramétre 8-35 Retard réponse min.
•
Paramétre 8-36 Retard réponse max
•
Paramétre 8-37 Retard inter-char max
•
Paramétre 8-70 Instance dispositif BACnet
•
Paramétre 8-72 Maîtres max MS/TP
•
Paramétre 8-73 Cadres info max MS/TP
•
Paramétre 8-74 "Startup I am"
•
Paramétre 8-75 Initialis. mot de passe
•
Paramétre 15-00 Heures mises ss tension à
•
paramétre 15-05 Surtension
Paramétre 15-03 Mise sous tension
•
Paramétre 15-04 Surtemp.
•
Paramétre 15-05 Surtension
•
Paramétre 15-30 Journal alarme : code
•
Groupe de paramètres 15-4* Type.VAR.
•
Paramétre 18-10 Journal mode incendie:
•
événement
tout en maintenant les touches enfoncées
pendant 10 s.
réinitialisé, à l'exception des paramètres suivants :
Paramétre 1-06 Sens horaire
•
Paramétre 15-00 Heures mises ss tension
•
Paramétre 15-03 Mise sous tension
•
Paramétre 15-04 Surtemp.
•
Paramétre 15-05 Surtension
•
Groupe de paramètres 15-4* Type.VAR.
•
Paramétre 18-10 Journal mode incendie:
•
événement
26 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 29
Paramètres Guide de programmation
3 Paramètres
Le * dans les numéros de paramètre indique un groupe ou
un sous-groupe de paramètres dont le premier ou les deux
premiers chires sont similaires. Par exemple, 0-** indique
le groupe des paramètres commençant par 0. 0-0* désigne
le sous-groupe de paramètres partageant les deux
premiers chires, c’est-à-dire 0-0.
L’astérisque (*) après le numéro d’une option signale qu’il
s’agit de l’option par défaut. Par exemple, [0]* Anglais est
l’option par défaut du paramétre 0-01 Langue.
3.1 Menu principal - Fonction./Achage Groupe 0
Paramètres liés aux fonctions de base du variateur de
fréquence, à la fonction des touches du LCP et à la
conguration de l’achage du LCP.
3.1.1 0-0* Réglages de base
0-01 Langue
Option: Fonction:
Dénit la langue qui sera utilisée pour
l’achage.
[0] * Anglais
[1] Allemand
[2] Français
[3] Danois
[4] Espagnol
[5] Italien
[28] Portugais
[255] Pas de texte
0-03 Réglages régionaux
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
An de répondre aux besoins de plusieurs
diérentes régions du
[0]*Interna-
tional
[1] Amérique
Nord
réglages par défaut dans
monde, le paramétre 0-03 Réglages régionaux
est mis en œuvre dans le variateur de
fréquence. Le choix fait inuence le réglage par
défaut de la fréquence nominale du moteur.
Règle la valeur par défaut du
paramétre 1-23 Fréq. moteur sur 50 Hz.
Règle la valeur par défaut du
paramétre 1-23 Fréq. moteur sur 60 Hz.
0-04 État exploi. à mise ss tension
Option: Fonction:
Sélectionner le mode d’exploitation après la
reconnexion du variateur de fréquence à la
tension secteur après une mise hors tension
en mode Hand (local).
[0] * Redém auto Reprend le fonctionnement du variateur de
fréquence avec la même référence locale et
les mêmes conditions de marche/arrêt
(appliquées par les touches [Hand On]/[O]
du LCP ou un démarrage local via une entrée
digitale) qu’avant la mise hors tension.
[1] Arr.forcé,
réf.mémor
Utilise la référence sauvegardée [1] pour
arrêter le variateur de fréquence, mais
simultanément, conserve en mémoire la
référence de vitesse locale antérieure à la
mise hors tension. Une fois la tension secteur
reconnectée et après réception d’un ordre de
démarrage (à l’aide de la touche [Hand On]
ou d’un ordre de démarrage local via une
entrée digitale), le variateur de fréquence
redémarre et fonctionne à la référence de
vitesse conservée en mémoire.
0-06 Type réseau
Option: Fonction:
Sélectionner le type de réseau de
la tension d’alimentation/
fréquence.
AVIS!
Tous les choix ne
conviennent pas à tous les
modèles de puissance.
Le réseau IT est une alimentation
secteur ne comprenant aucun
raccordement à la terre.
Le triangle est une alimentation
secteur où le secondaire du
transformateur est raccordé en
triangle et où une phase est
raccordée à la terre.
[0] 200-240 V/50 Hz/
grille IT
[1] 200-240 V/50 Hz/
triangle
[2] 200-240 V/50 Hz
[10] 380-440 V/50 Hz/
grille IT
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 27
Page 30
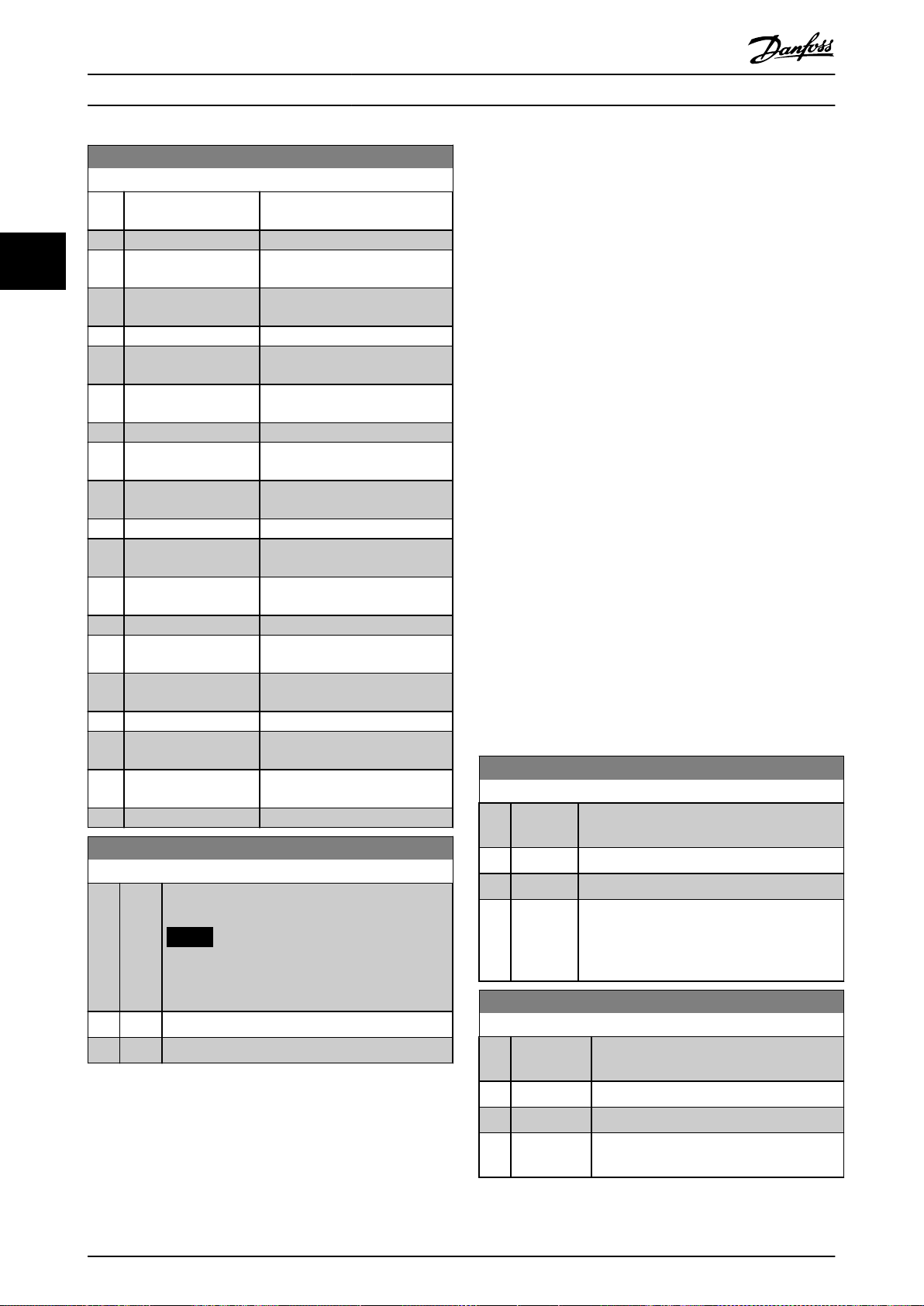
Paramètres
VLT® HVAC Basic Drive FC 101
0-06 Type réseau
Option: Fonction:
[11] 380-440 V/50 Hz/
triangle
[12] 380-440 V/50 Hz
33
[20] 440-480 V/50 Hz/
grille IT
[21] 440-480 V/50 Hz/
triangle
[22] 440-480 V/50 Hz
[30] 525-600 V/50 Hz/
grille IT
[31] 525-600 V/50 Hz/
triangle
[32] 525-600 V/50 Hz
[100] 200-240 V/60 Hz/
grille IT
[101] 200-240 V/60 Hz/
triangle
[102] 200-240 V/60 Hz
[110] 380-440 V/60 Hz/
grille IT
[111] 380-440 V/60 Hz/
triangle
[112] 380-440 V/60 Hz
[120] 440-480 V/60 Hz/
grille IT
[121] 440-480 V/60 Hz/
triangle
[122] 440-480 V/60 Hz
[130] 525-600 V/60 Hz/
grille IT
[131] 525-600 V/60 Hz/
triangle
[132] 525-600 V/60 Hz
0-07 Freinage CC auto IT
Option: Fonction:
Fonction de protection contre les surtensions en
roue libre.
AVIS!
Peut entraîner une modulation d’impulsions
process 1 et process 2. De plus, un ensemble xe de
réglages d’usine peut être copié dans un ou deux process.
Le fait d’avoir plusieurs process dans un variateur de
fréquence présente des avantages tels que :
Faire fonctionner le moteur sur un process
•
(process actif) tout en mettant à jour les
paramètres d’un autre process (process modié).
Connecter les 2 moteurs (un à la fois) au variateur
•
de fréquence. Les données des 2 moteurs
peuvent être saisies dans les 2 process.
Modier rapidement les réglages du variateur de
•
fréquence et/ou du moteur alors que le moteur
est en marche. Par exemple, temps de rampe ou
références prédénies via le bus ou les entrées
digitales.
Le process actif peut être réglé sur Multi process lorsque le
process actif est sélectionné via une entrée sur une borne
d’entrée digitale et/ou via le mot de contrôle par bus.
Utiliser le paramétre 0-51 Copie process pour copier le
process 1 vers le process 2 ou l’inverse. Pour éviter tout
conit de réglages d’un même paramètre dans deux
process diérents, lier les process à l’aide du
paramétre 0-12 Ce réglage lié à. Arrêter le variateur de
fréquence avant de passer d’un process à un autre lorsque
les paramètres signalés comme non modiables en cours de
fonctionnement présentent des valeurs diérentes.
Les paramètres qui ne sont pas modiables en cours de
fonctionnement sont signalés faux dans le chapitre 5 Listes
des paramètres.
0-10 Process actuel
Option: Fonction:
Sélectionner le process sur lequel fonctionne le
variateur de fréquence.
[1] * Proc.1 Le process 1 est actif.
[2] Proc.2 Le process 2 est actif.
[9] Multi
process
Utilisé pour les sélections à distance des
process via des entrées digitales et le port de
communication série. Ce process utilise les
réglages du paramétre 0-12 Ce réglage lié à.
en durée en roue libre.
0-11 Programmer process
[0] Inactif Cette fonction n’est pas active.
[1] * Actif Cette fonction est active.
3.1.2 0-1* Gestion process
Un ensemble complet de tous les paramètres qui
commandent le variateur de fréquence est appelé un
process. Le variateur de fréquence comprend 2 process :
Option: Fonction:
Le numéro du process en cours de programmation clignote sur le LCP.
[1] Proc.1 Modier le process 1.
[2] Proc.2 Modier le process 2.
[9] * Process
actuel
Modie les paramètres du process
sélectionné via les E/S digitales.
28 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 31
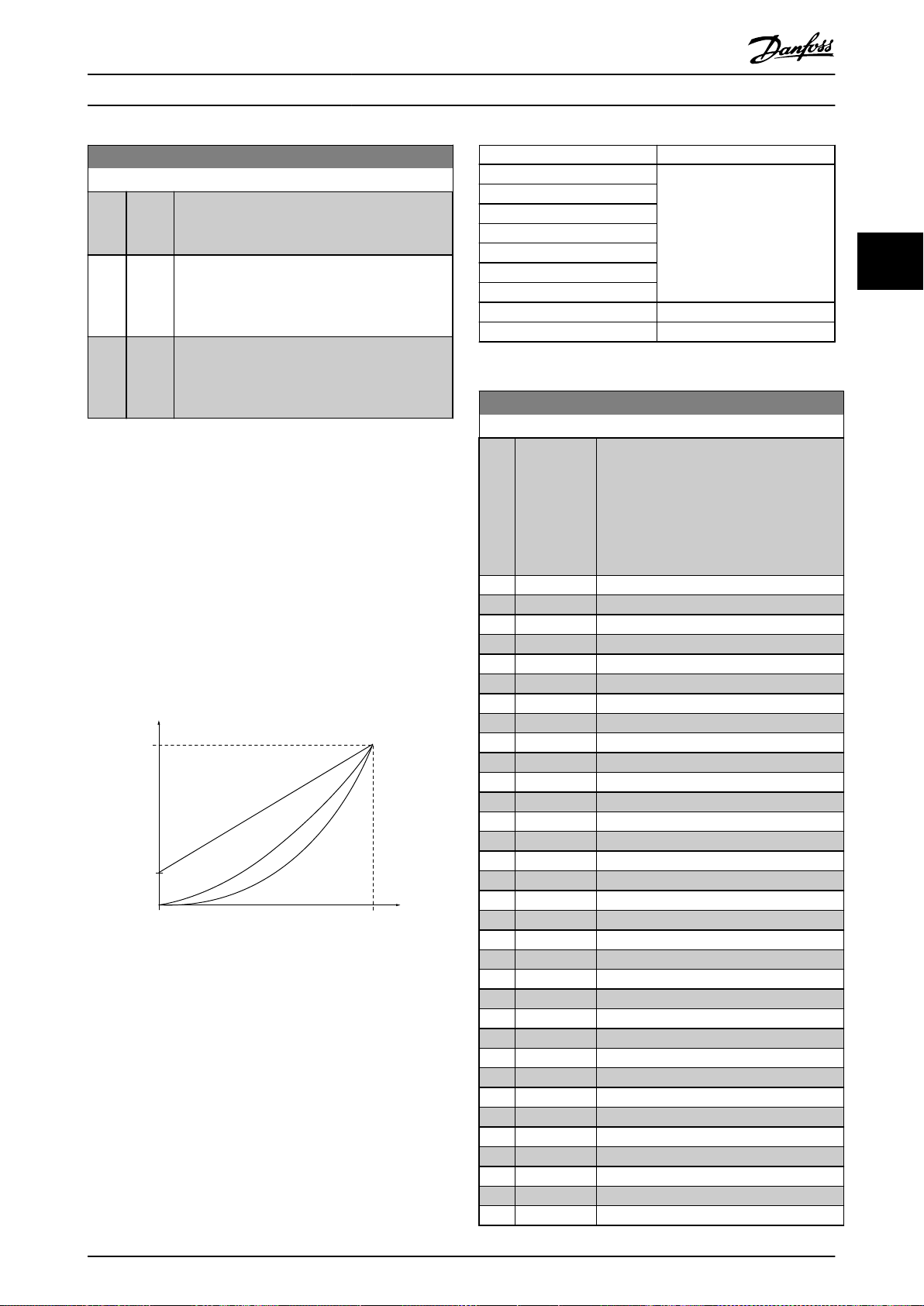
0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Paramètres Guide de programmation
0-12 Ce réglage lié à
Option: Fonction:
[0] Non
[20] * Lié Copie les paramètres non modiables en cours de
3.1.3 0-3* Lecture LCP
Il est possible de personnaliser les éléments d’achage à
des ns diverses.
Lect.paramétr.
La valeur calculée à
paramétre 0-30 Unité lect. déf. par utilisateur, du
paramétre 0-31 Val.min.lecture déf.par utilis. (linéaire
uniquement), du paramétre 0-32 Val.max. déf. par utilis., du
paramétre 4-14 Vitesse moteur limite haute [Hz] et de la
vitesse réelle.
Illustration 3.1 Lect.paramétr.
La relation dépend du type d’unité sélectionné au
paramétre 0-30 Unité lect. déf. par utilisateur :
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 29
Si les process ne sont pas liés, un passage de l’un
à l’autre n’est pas possible lorsque le moteur est
en marche.
Quand on sélectionne un process diérent pour
lié
le fonctionnement, le changement de process ne
se produit que lorsque le moteur est en roue
libre.
fonctionnement d’un process à l’autre. Un passage
de l’un à l’autre est possible lorsque le moteur est
en marche.
acher s’appuie sur les réglages du
Type d’unité Relation de vitesse
Sans dimension
Vitesse
Débit, volume
Débit, masse
Vitesse
Longueur
Température
Pression Quadratique
Alimentation Cubique
Tableau 3.1 Relation de vitesse
Linéaire
0-30 Unité lect. déf. par utilisateur
Option: Fonction:
Programmer une valeur à acher sur l’écran
du LCP. La valeur sélectionnée présente une
relation linéaire, carrée ou cubique par
rapport à la vitesse. Cette relation dépend
de l’unité sélectionnée (voir le Tableau 3.1).
La valeur calculée eective peut être lue
dans le paramétre 16-09 Lect.paramétr..
[0] Aucun
[1] * %
[5] PPM
[10] l/min
[11] Tr/min
[12] IMPULSION/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Degré Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m Wg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft3/h
3 3
Page 32

Paramètres
VLT® HVAC Basic Drive FC 101
0-30 Unité lect. déf. par utilisateur
Option: Fonction:
[140] ft/s
[141] ft/min
[160] Degré Fahr
33
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] hp
0-31 Val.min.lecture déf.par utilis.
Range: Fonction:
0 CustomReadoutUnit*
[ 0 -
999999.99
CustomReadoutUnit]
Ce paramètre dénit la valeur
minimale de la lecture dénie
par l’utilisateur (à vitesse nulle). Il
est possible de sélectionner une
valeur diérente de 0
uniquement lors de la sélection
d’une unité linéaire au
paramétre 0-30 Unité lect. déf. par
utilisateur. Pour les unités
quadratique et cubique, la valeur
minimale est 0.
0-32 Val.max. déf. par utilis.
Range: Fonction:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Ce paramètre dénit la valeur
maximale à acher lorsque la
vitesse du moteur a atteint la
valeur réglée pour le
paramétre 4-14 Vitesse moteur
limite haute [Hz].
0-37 Ach. texte 1
Range: Fonction:
[0 - 0 ] Utiliser ce paramètre pour écrire une chaîne de
texte individuelle pouvant être lue via la communication série. L’identiant du dispositif peut être
inclus.
Uniquement utilisé en cas de fonctionnement avec
BACnet.
0-39 Ach. texte 3
Range: Fonction:
[0 - 0 ] Utiliser ce paramètre pour écrire une chaîne de
texte individuelle pouvant être lue via la communication série.
Uniquement utilisé en cas de fonctionnement avec
BACnet.
3.1.4 0-4* LCP
Activer, désactiver et protéger par mot de passe les
touches individuelles sur le LCP.
0-40 Touche [Hand on] sur LCP
Option: Fonction:
[0] Tout désactiver Sélectionner [0] Tout désactiver an d’éviter
tout démarrage imprévu du variateur de
fréquence en mode Hand on.
[1] * Tout activer La touche [Hand On] est activée.
0-42 Touche [Auto on] sur LCP
Option: Fonction:
[0] Tout désactiver Sélectionner [0] Tout désactiver an d’éviter
tout démarrage imprévu du variateur de
fréquence depuis le LCP.
[1] * Tout activer La touche [Auto On] est activée.
0-44 Touche [O/Reset] sur LCP
Option: Fonction:
[0] Tout désactiver Désactiver la touche O/Reset.
[1] * Tout activer Activer les fonctions O et Reset.
[7] Enable Reset Only Activer la fonction Reset et désactiver la
fonction O pour éviter tout arrêt
imprévu du variateur de fréquence.
3.1.5 0-5* Copie/Sauvegarde
Copier les réglages des paramètres entre process et vers/
depuis le LCP.
0-50 Copie LCP
0-38 Ach. texte 2
Range: Fonction:
[0 - 0 ] Utiliser ce paramètre pour écrire une chaîne de
texte individuelle pouvant être lue via la communication série.
Uniquement utilisé en cas de fonctionnement avec
BACnet.
Option: Fonction:
[0] * Pas de copie
[1] Lect.PAR.LCP Copie tous les paramètres de tous les
process de la mémoire du variateur de
fréquence vers la mémoire du LCP. À des
ns de maintenance, copier tous les
paramètres vers le LCP après la mise en
service.
[2] Ecrit.PAR. LCP Copie tous les paramètres de tous les
process de la mémoire du LCP vers celle
du variateur de fréquence.
30 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 33

Paramètres Guide de programmation
0-50 Copie LCP
Option: Fonction:
[3] Ecrit.LCP sans
puis.
[10] Delete LCP
copy data
Copie uniquement les paramètres qui sont
indépendants de la taille du moteur. La
dernière sélection peut servir à
programmer plusieurs variateurs de
fréquence avec la même fonction sans
altérer les données du moteur qui sont
déjà dénies.
Eacer les paramètres copiés dans le LCP.
Cette fonction nécessite une version de
LCP supérieure ou égale à V11.00.
0-51 Copie process
Option: Fonction:
[0] * Pas de copie Pas de fonction.
[1] Copie dans
process 1
[2] Copie dans
process 2
[9] Copie vers
tous
Copier le process 1 vers le process 2.
Copier le process 2 vers le process 1.
Copier les réglages d’usine vers le process à
programmer (choisi au
paramétre 0-11 Programmer process).
3 3
3.1.6 0-6* Mot de passe
0-60 Mt de passe menu princ.
Range: Fonction:
0* [0 - 999 ] Dénir le mot de passe pour accéder au menu
principal via la touche [Main Menu]. Le réglage de
la valeur sur 0 désactive la fonction du mot de
passe. Ce paramètre se masque une fois un mot
de passe déni.
0-61 Accès menu princ. ss mt de passe
Option: Fonction:
[0] * Accès complet Désactiver le mot de passe déni au
paramétre 0-60 Mt de passe menu princ..
[1] LCP: lecture seule Empêche toute modication non
autorisée des paramètres du menu
principal.
[2] LCP: pas d'accès Évite les visualisations et modications
non autorisées des paramètres du menu
principal.
[3] Bus: lecture seule
[5] Tous: lecture seule
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 31
Page 34

Paramètres
VLT® HVAC Basic Drive FC 101
3.2 Menu principal - Charge et moteur Groupe 1
Par. liés à la plaque signalétique du moteur, aux compensations de charge et à l'application.
33
3.2.1 1-0* Réglages généraux
1-00 Mode Cong.
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
[0]*Boucle
ouverte
[3] Boucle
fermée
La vitesse du moteur est déterminée par l’application d’une référence de vitesse ou par le
réglage de la vitesse souhaitée en mode Hand on.
La boucle ouverte est également utilisée si le
variateur de fréquence fait partie d’un système de
commande en boucle fermée basé sur un
régulateur PI externe fournissant un signal de
référence de vitesse comme sortie.
AVIS!
Lorsque ce paramètre est réglé sur Boucle
1-01 Principe Contrôle Moteur
Option: Fonction:
Mode de fonctionnement normal, incluant les
compensations de glissement et de charge.
1-03 Caract.couple
Option: Fonction:
[1]*Couple
variable
[3] Optim.AUTO
énergie VT
Pour la commande de vitesse des pompes
centrifuges et ventilateurs. À utiliser
également en cas de contrôle de plusieurs
moteurs par le même variateur de fréquence
(p. ex. ventilateurs de condenseur multiples
ou ventilateurs de tour de refroidissement).
Fournit une tension optimisée pour une
caractéristique de charge au carré du moteur.
Pour une commande de vitesse avec
ecacité énergétique optimale des pompes
centrifuges et ventilateurs, ce paramètre
fournit une tension optimisée pour une
caractéristique de charge au carré du moteur.
La caractéristique d’optimisation automatique
de l’énergie (AEO) adapte aussi la tension à
la situation exacte de la charge de courant,
réduisant ainsi la consommation et le bruit
du moteur.
fermée, les ordres Inversion et Démarrage
avec inversion n’inversent pas le sens du
moteur.
Une référence provenant du régulateur PI intégré
détermine la vitesse du moteur. Le régulateur PI
intégré varie la vitesse du moteur comme un
process de commande en boucle fermée (par
exemple, pression ou débit constant). Congurer
le régulateur PI dans le groupe de paramètres 20-
** Boucl.fermé.variat.
1-01 Principe Contrôle Moteur
Option: Fonction:
[0] U/f
AVIS!
En cas de fonctionnement U/f, les compensations de charge et de glissement ne sont
pas incluses.
Utilisé pour les moteurs connectés en parallèle et
les applications moteur spéciales. Régler les
valeurs U/f dans les paramétre 1-55 Caract. V/f - U
et paramétre 1-56 Caract. V/f - f.
[1] * VVCplus
AVIS!
Lorsque le paramétre 1-10 Construction
moteur est réglé sur des options de type
PM, seule l'option VVC+ est disponible.
1-06 Sens horaire
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être réglé lorsque
le moteur est en marche.
Ce paramètre dénit le terme sens horaire correspondant à la
changer facilement le sens de rotation de l’arbre
sans intervertir les ls du moteur.
[0] * Normal L’arbre moteur tourne dans le sens horaire lorsque
le variateur de fréquence est raccordé au moteur
comme suit : U⇒U ; V⇒V ; et W⇒W vers le moteur.
[1] Inverse L’arbre moteur tourne dans le sens antihoraire
lorsque le variateur de fréquence est raccordé au
moteur comme suit : U⇒U ; V⇒V ; et W⇒W vers le
moteur.
1-08 Motor Control Bandwidth
Option: Fonction:
[0] High Convient à une réponse ultra-dynamique.
[1] * Medium Convient à un fonctionnement en état stable
régulier.
[2] Low Convient à un fonctionnement en état stable
régulier avec la réponse dynamique la plus
faible.
èche de direction du LCP. Permet de
32 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 35

Paramètres Guide de programmation
1-08 Motor Control Bandwidth
Option: Fonction:
[3] Adaptive 1 Convient à un fonctionnement en état stable
régulier avec une atténuation extra active.
[4] Adaptive 2 Solution de rechange à [3] Adaptive 1 axée sur
les moteurs PM à faible inductance.
3.2.2 1-10 à 1-13 Sélection Moteur
AVIS!
Ce groupe de paramètres ne peut pas être réglé quand
le moteur est en marche.
Les paramètres suivants sont actifs (x) en fonction du
réglage du paramétre 1-10 Construction moteur.
[1] PM,
Paramétre 1-10 Construction
moteur
Paramétre 1-00 Mode Cong. x x x
Paramétre 1-03 Caract.couple x
Paramétre 1-06 Sens horaire x x x
Paramétre 1-08 Motor Control
Bandwidth
Paramétre 1-14 Amort. facteur gain x x
Paramétre 1-15 Const. temps de
ltre faible vitesse
Paramétre 1-16 Const. temps de
ltre vitesse élevée
Paramétre 1-17 Const. temps de
ltre tension
Paramétre 1-20 Puissance moteur
[kW]
Paramétre 1-22 Tension moteur x
Paramétre 1-23 Fréq. moteur x
Paramétre 1-24 Courant moteur x x x
Paramétre 1-25 Vit.nom.moteur x x x
Paramétre 1-26 Couple nominal
cont. moteur
Paramétre 1-29 Adaptation auto. au
moteur (AMA)
Paramétre 1-30 Résistance stator
(Rs)
Paramétre 1-33 Réactance fuite
stator (X1)
Paramétre 1-35 Réactance
principale (Xh)
Paramétre 1-37 Inductance axe d
(Ld)
Paramétre 1-38 Inductance axe
q(Lq)
Paramétre 1-39 Pôles moteur x x x
[0]
Asynchron
x x x
x x
x x
x x
x
x x
x x x
x x x
x
x
x x
x
non-
salient
SPM
[3] PM,
salient
IPM,
Sat
[1] PM,
Paramétre 1-10 Construction
moteur
Paramétre 1-40 FCEM à 1000 tr/
min.
Paramétre 1-42 Longueur câble
moteur
Paramétre 1-43 Longueur câble
moteur (pieds)
Paramétre 1-44 d-axis Inductance
Sat. (LdSat)
Paramétre 1-45 q-axis Inductance
Sat. (LqSat)
Paramétre 1-46 Gain détection
position
Paramétre 1-48 Current at Min
Inductance for d-axis
Paramétre 1-49 Courant à
inductance min.
Paramétre 1-50 Magnétisation
moteur à vitesse nulle
Paramétre 1-52 Magnétis. normale
vitesse min [Hz]
Paramétre 1-55 Caract. V/f - U x
Paramétre 1-56 Caract. V/f - f x
Paramétre 1-62 Comp. gliss. x
Paramétre 1-63 Cste tps comp.gliss. x
Paramétre 1-64 Amort. résonance x
Paramétre 1-65 Tps
amort.resonance
Paramétre 1-66 Courant min. à
faible vitesse
Paramétre 1-70 Mode de démarrage
PM
Paramétre 1-71 Retard démar. x x x
paramétre 1-72 Fonction au
démar.
Paramétre 1-73 Démarr. volée x x x
Paramétre 1-80 Fonction à l'arrêt x x x
Paramétre 1-90 Protect. thermique
mot.
paramétre 2-00 I maintien CC x x x
Paramétre 2-01 Courant frein CC x x x
Paramétre 2-02 Temps frein CC x x x
Paramétre 2-04 Vitesse frein CC [Hz] x x x
Paramétre 2-06 Courant de parking x x
Paramétre 2-07 Temps de parking x x
Paramétre 2-10 Fonction Frein et
Surtension
Paramétre 2-16 Courant max. frein
CA
Paramétre 2-17 Contrôle Surtension x x x
Paramétre 4-10 Direction vit.
moteur
[0]
Asynchron
x x
x x x
x x x
x
x
x x
x
x
x
x
x
x x
x x
x x x
x x x
x x x
x
x x x
non-
salient
SPM
[3] PM,
salient
IPM,
Sat
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 33
Page 36

Paramètres
VLT® HVAC Basic Drive FC 101
[1] PM,
Paramétre 1-10 Construction
moteur
Paramétre 4-14 Vitesse moteur
limite haute [Hz]
33
Paramétre 4-18 Limite courant x x x
Paramétre 4-19 Frq.sort.lim.hte x x x
Paramétre 4-58 Surv. phase mot. x x x
Paramétre 14-01 Fréq. commut. x x x
Paramétre 14-03 Surmodulation x x x
Paramétre 14-07 Dead Time
Compensation Level
Paramétre 14-08 Amort. facteur
gain
Paramétre 14-09 Dead Time Bias
Current Level
Paramétre 14-10 Panne secteur x x x
Paramétre 14-11 Tension secteur si
panne secteur
Paramétre 14-12 Fonct.sur
désiqui.réseau
Paramétre 14-27 Action en U limit. x x x
Paramétre 14-40 Niveau VT x x x
Paramétre 14-41 Magnétisation
AEO minimale
Paramétre 14-44 d-axis current
optimization for IPM
Paramétre 14-50 Filtre RFI x
Paramétre 14-51 Compensation
tension bus CC
Paramétre 14-55 Filtre de sortie x x x
Paramétre 14-64 Dead Time
Compensation Zero Current Level
Paramétre 14-65 Speed Derate
Dead Time Compensation
Paramétre 30-22 Protec. rotor verr. x x
Paramétre 30-23 Tps détect° rotor
bloqué [s]
Tableau 3.2 Paramètres actifs
[0]
Asynchron
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x
1-10 Construction moteur
Option: Fonction:
[0] * Asynchron Pour les moteurs asynchrones.
[1] PM, non-
salient SPM
[3] PM, salient
IPM, Sat
Pour les moteurs à aimant permanent (PM)
avec aimants montés en surface (non
saillants). Se reporter aux
paramétre 1-14 Damping Gain à
paramétre 1-17 Voltage lter time const. pour
plus d’informations sur l’optimisation du
fonctionnement du moteur.
Pour les moteurs à aimant permanent (PM)
avec aimants intérieurs (saillants), avec
contrôle de saturation de l’inductance.
non-
salient
SPM
[3] PM,
salient
IPM,
Sat
3.2.3
1-14 à 1-17 VVC+ PM
Les paramètres de commande par défaut du noyau de
contrôle du moteur PM VVC+ sont optimisés pour les
applications ainsi que pour les charges d’inertie dans une
plage de 50 > Jl/Jm > 5, où Jl est l’inertie de la charge de
l’application et Jm l’inertie de la machine.
Pour les applications à faible inertie (Jl/Jm < 5), il est
recommandé d’augmenter le paramétre 1-17 Const. temps
de ltre tension d’un facteur compris entre 5 et 10. Dans
certains cas, le paramétre 14-08 Amort. facteur gain doit
également être réduit pour améliorer les performances et
renforcer la stabilité.
Pour les applications à forte inertie (Jl/Jm > 50), augmenter
le paramétre 1-15 Const. temps de ltre faible vitesse et le
paramétre 1-16 Const. temps de ltre vitesse élevée pour
améliorer les performances et la stabilité.
Pour une charge élevée à faible vitesse (< 30 % de la
vitesse nominale), il est recommandé d’augmenter le
paramétre 1-17 Const. temps de ltre tension en raison de la
non-linéarité de l’onduleur à basse vitesse.
1-14 Amort. facteur gain
Range: Fonction:
120%* [0 -
250 %]
Le paramètre stabilise le moteur PM pour
garantir un fonctionnement uide et stable. La
valeur de l’amortissement de gain contrôle la
performance dynamique du moteur PM. Un gain
d’amortissement faible se traduit par une
performance dynamique élevée et une valeur
haute par une performance dynamique faible. La
performance dynamique est liée aux données du
moteur et au type de la charge. Si le gain
d’amortissement est trop important ou trop
faible, la commande devient irrégulière.
1-15 Const. temps de ltre faible vitesse
Range: Fonction:
Size
related*
[0.01 20 s]
Une constante de temps d’amortissement
du ltre passe-haut détermine le temps
de réponse aux étapes de charge. Une
constante de temps d’amortissement de
courte durée se traduit par une
régulation rapide. Cependant, si cette
valeur est trop courte, la régulation
devient instable. Cette constante de
temps est utilisée en dessous de 10 % de
la vitesse nominale.
1-16 Const. temps de ltre vitesse élevée
Range: Fonction:
Size
related*
[0.01 20 s]
Une constante de temps d’amortissement
du ltre passe-haut détermine le temps
de réponse aux étapes de charge. Une
constante de temps d’amortissement de
courte durée se traduit par une
34 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 37

Paramètres Guide de programmation
1-16 Const. temps de ltre vitesse élevée
Range: Fonction:
régulation rapide. Cependant, si cette
valeur est trop courte, la régulation
devient instable. Cette constante de
temps est utilisée au-dessus de 10 % de
la vitesse nominale.
1-17 Const. temps de ltre tension
Range: Fonction:
Size
related*
[0.001 1 s]
La constante de temps de ltre de
tension d’alimentation de la machine
permet de réduire l’inuence des
ondulations haute fréquence et des
résonances du système dans le calcul de
la tension d’alimentation de la machine.
Sans ce ltre, les ondulations présentes
dans les courants peuvent déformer la
tension calculée et nuire à la stabilité du
système.
3.2.4 1-2* Données moteur I
Ce groupe de paramètres contient les données d’entrée de
la plaque signalétique apposée sur le moteur raccordé.
AVIS!
Ces paramètres ne peuvent pas être réglés lorsque le
moteur est en marche.
1-20 Puissance moteur
Entrer la puissance nominale du moteur en kW/HP conformément aux données de la plaque signalétique du moteur. La
valeur par défaut correspond à la puissance nominale de sortie
de l’unité.
Ce paramètre ne peut pas être réglé lorsque le moteur est en
marche.
Option: Fonction:
[13] 4.00 kW - 5.40 hp
[14] 5.50 kW - 7.50 hp
[15] 7.50 kW - 10.0 hp
[16] 11.00 kW - 15.00 hp
[17] 15.00kW - 20 hp
[18] 18.5kW - 25 hp
[19] 22kW - 30 hp
[20] 30kW - 40 hp
[21] 37kW - 50 hp
[22] 45kW - 60 hp
[23] 55kW - 75 hp
[24] 75kW - 100 hp
[25] 90kW - 120 hp
[26] 110kW - 150 hp
1-22 Tension moteur
Range: Fonction:
Size
related*
[50 1000 V]
Saisir la tension nominale du moteur
conformément aux données de la
plaque signalétique du moteur. La
valeur par défaut correspond à la
puissance nominale de sortie de l'unité.
3 3
AVIS!
Un changement de valeur dans ces paramètres a un eet
sur le réglage d’autres paramètres.
1-20 Puissance moteur
Entrer la puissance nominale du moteur en kW/HP conformément aux données de la plaque signalétique du moteur. La
valeur par défaut correspond à la puissance nominale de sortie
de l’unité.
Ce paramètre ne peut pas être réglé lorsque le moteur est en
marche.
Option: Fonction:
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
[4] 0.25 kW - 0.33Hp
[5] 0.37 kW - 0.50 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1.00 hp
[8] 1.10 kW - 1.50 hp
[9] 1.50 kW - 2.00 hp
[10] 2.20 kW - 3.00 hp
[11] 3.00 kW - 4.00 hp
[12] 3.70 kW - 5.00 hp
1-23 Fréq. moteur
Range: Fonction:
Size
related*
[20 -
Sélectionner la valeur de fréquence du moteur
400
indiquée dans les données de la plaque
Hz]
signalétique du moteur. Pour un fonctionnement à 87 Hz avec des moteurs à 230/400
V, dénir les données de la plaque
signalétique pour 230 V/50 Hz. Adapter le
paramétre 4-14 Vitesse moteur limite haute [Hz]
et le paramétre 3-03 Réf. max. à l’application 87
Hz.
1-24 Courant moteur
Range: Fonction:
Size
related*
[ 0.01 -
1000.00 A]
Saisir le courant nominal du moteur
indiqué sur la plaque signalétique du
moteur. Ces données sont utilisées
pour calculer le couple moteur, la
protection thermique du moteur, etc.
1-25 Vit.nom.moteur
Range: Fonction:
Size
related*
[50 60000 RPM]
Saisir la vitesse nominale du moteur en
fonction des données de la plaque
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 35
Page 38

Paramètres
VLT® HVAC Basic Drive FC 101
1-25 Vit.nom.moteur
Range: Fonction:
signalétique du moteur. Ces données
sont utilisées pour calculer les compensations du moteur.
33
1-26 Couple nominal cont. moteur
Range: Fonction:
Size
related*
1-29 Adaptation auto. au moteur (AMA)
Option: Fonction:
[0.1 10000
Nm]
AVIS!
La modication de ce paramètre
aecte les réglages des autres
paramètres.
Ce paramètre est disponible uniquement
lorsque le paramétre 1-10 Construction
moteur est réglé sur les options activant
le mode de moteur permanent.
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
AVIS!
Lorsque le paramétre 1-10 Construction moteur est réglé
sur les options activant le mode de moteur permanent,
la seule option disponible est [1] AMA activée compl.
Activer la fonction AMA en appuyant sur la touche [Hand
On] après avoir sélectionné [1] AMA activée compl. ou [2]
AMA activée réduite. Après le parcours normal, l’écran
ache : Press.OK pour arrêt AMA. Après avoir appuyé sur
[OK], le variateur de fréquence est prêt à l’exploitation.
AVIS!
Réaliser l’AMA sur un moteur froid an d’obtenir
•
la meilleure adaptation du variateur de
fréquence.
L’AMA ne peut pas être réalisée lorsque le
•
moteur fonctionne.
Il n’est pas possible d’exécuter une AMA sur un
•
moteur ayant une puissance nominale
supérieure à celle du variateur de fréquence,
par exemple lorsqu’un moteur de 5,5 kW
(7,4 HP) est raccordé à un variateur de
fréquence de 4 kW (5,4 HP).
La fonction AMA maximise le rendement
dynamique du moteur en optimisant automatiquement les paramètres avancés du moteur alors
que le moteur est
[0]*Inactif Pas de fonction
[1] AMA
activée
compl.
Si le paramétre 1-10 Construction moteur est réglé
sur [0] Asynchron, générer une AMA du
paramétre 1-30 Résistance stator (Rs), du
paramétre 1-33 Réactance fuite stator (X1) et du
paramétre 1-35 Réactance principale (Xh).
Lorsque le paramétre 1-10 Construction moteur est
réglé sur des options qui activent les moteurs
permanents, générer une AMA du
paramétre 1-30 Résistance stator (Rs) et du
paramétre 1-37 Inductance axe d (Ld).
AVIS!
La borne d’entrée digitale 27
(paramétre 5-12 E.digit.born.27) est réglée
par défaut sur Lâchage. Cela signie que
l’AMA ne peut pas être eectuée s’il n’y a
pas une tension de 24 V sur la borne 27.
[2] AMA
activée
réduite
Eectue une AMA réduite de la résistance du
stator Rs dans le système uniquement.
Sélectionner cette option si un ltre LC est utilisé
entre le variateur de fréquence et le moteur.
AVIS!
Éviter de générer un couple extérieur pendant l’AMA.
xe.
AVIS!
Si l’un des réglages du groupe de paramètres 1-2*
Données moteur est modié, les paramètres avancés du
moteur, du paramétre 1-30 Résistance stator (Rs) au
paramétre 1-39 Pôles moteur, reviennent à leur réglage
par défaut.
AVIS!
L’AMA complète doit s’eectuer uniquement sans ltre
tandis que l’AMA réduite doit s’eectuer avec ltre.
3.2.5 1-3* Données moteur II
Ce groupe de paramètres contient les données d’entrée de
la plaque signalétique apposée sur le moteur raccordé.
AVIS!
Ces paramètres ne peuvent pas être réglés lorsque le
moteur est en marche.
36 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 39

Paramètres Guide de programmation
1-30 Résistance stator (Rs)
Range: Fonction:
Size
related*
[ 0.0 -
9999.000 Ohm]
Régler la valeur de la résistance du
stator. Entrer la valeur de la che
technique du moteur ou eectuer
une AMA sur un moteur froid.
1-33 Réactance fuite stator (X1)
Range: Fonction:
Size related* [ 0.0 - 9999.000
Ohm]
Régler la réactance de fuite
du stator sur le moteur.
1-35 Réactance principale (Xh)
Range: Fonction:
Size
related*
[ 0.0 -
9999.00
Ohm]
Régler la réactance principale du moteur à
l’aide de l’une des méthodes suivantes :
Réaliser une AMA sur moteur
•
froid. Le variateur de fréquence
mesure la valeur à partir du
moteur.
Saisir la valeur Xh manuellement.
•
Se procurer la valeur auprès du
fournisseur du moteur.
Utiliser le réglage par défaut de
•
Xh. Le variateur de fréquence
dénit le réglage en fonction des
données de la plaque signalétique
du moteur.
1-37 Inductance axe d (Ld)
Range: Fonction:
Size related* [ 0 - 65535 mH] Celle-ci se trouve sur la che
technique des moteurs à
magnétisation permanente.
3.2.6 1-4* Données moteur III
Ce groupe de paramètres contient les données d’entrée de
la plaque signalétique apposée sur le moteur raccordé.
AVIS!
Ces paramètres ne peuvent pas être réglés lorsque le
moteur est en marche.
1-40 FCEM à 1000 tr/min.
Range: Fonction:
Size related* [1 - 9000 V] Tension FCEM ecace phase à phase
à 1 000 tr/min.
1-42 Longueur câble moteur
Range: Fonction:
50 m* [0 - 100 m] Régler la longueur du câble moteur
pendant la mise en service.
1-43 Longueur câble moteur (pieds)
Range: Fonction:
164 ft* [0 - 328 ft] Régler la longueur du câble moteur
pendant la mise en service.
1-44 d-axis Inductance Sat. (LdSat)
Range: Fonction:
Size
related*
[ 0 65535
mH]
Ce paramètre correspond à la saturation de
l’inductance de Ld. Idéalement, ce
paramètre a la même valeur que le
paramétre 1-37 Inductance axe d (Ld).
Cependant, si le fabricant du moteur
fournit une courbe d’induction, saisir la
valeur d’induction ici, c’est-à-dire 200 % du
courant nominal.
3 3
1-38 Inductance axe q(Lq)
Range: Fonction:
Size
related*
[ 0.000 65535 mH]
Régler la valeur d’inductance de l’axe
q. Celle-ci se trouve sur la che
technique des moteurs à magnétisation permanente. La valeur ne peut
pas être modiée lorsque le moteur
fonctionne.
1-39 Pôles moteur
1-45 q-axis Inductance Sat. (LqSat)
Range: Fonction:
Size
related*
[ 0 65535
mH]
Ce paramètre correspond à la saturation de
l'inductance de Lq. Idéalement, ce
paramètre a la même valeur que le par.
paramétre 1-38 Inductance axe q(Lq).
Cependant, si le fabricant du moteur
fournit une courbe d'induction, saisir la
valeur d'induction ici, c'est-à-dire 200 % du
courant nominal.
Range: Fonction:
Size
related*
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 37
[2 100 ]
Saisir le nombre de pôles du moteur. La
valeur des pôles de moteur doit toujours
être paire puisqu’elle fait référence au
nombre total de pôles du moteur (et non
des paires).
1-46 Gain détection position
Range: Fonction:
100 %* [ 20 -
200 %]
Utiliser ce paramètre pour ajuster
l'amplitude de l'impulsion d'essai pendant
la détection de position au début. Ce
paramètre est valide à partir de la version
logicielle 2.80.
Page 40

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Paramètres
VLT® HVAC Basic Drive FC 101
1-48 Current at Min Inductance for d-axis
Range: Fonction:
100 %* [ 20 - 200 %] Utiliser ce paramètre pour dénir le point
de saturation de l’inductance.
33
1-49 Courant à inductance min.
Range: Fonction:
100%* [ 20
Ce paramètre spécie la courbe de saturation des
-
valeurs d’inductance de l’axe q. De 20 % à 100 %
200
de ce paramètre, les inductances sont assimilées
%]
linéairement à des valeurs approximatives à cause
du paramétre 1-37 Inductance axe d (Ld), du
paramétre 1-38 Inductance axe q(Lq), du
paramétre 1-44 d-axis Inductance Sat. (LdSat) et du
paramétre 1-45 q-axis Inductance Sat. (LqSat). Elles
sont spéciées dans les paramètres correspondants
ci-avant et ci-après. Les paramètres sont liés à la
plaque signalétique du moteur, aux compensations
de charge, au type de charge de l’application et à
la fonction de freinage électronique pour l’arrêt
rapide/maintien du moteur.
3.2.7 1-5* Proc.indép. charge
1-55 Caract. V/f - U
Tableau [6]
Range: Fonction:
Size
related*
[0 - 999V]Saisir la tension à chaque point de
fréquence pour former une caractéristique U/f correspondant au moteur.
Les points de fréquence sont dénis au
paramétre 1-56 Caract. V/f - f.
1-56 Caract. V/f - f
Tableau[6]
Range: Fonction:
Size
related*
[ 0 -
400.0
Hz]
Entrer les points de fréquence pour former
une caractéristique U/f correspondant au
moteur. La tension de chaque point est
dénie au paramétre 1-55 Caract. V/f - U.
Obtenir une caractéristique U/f à partir de
six tensions et fréquences dénissables, voir
l’Illustration 3.3.
Simplier la courbe caractéristique U/f en
fusionnant 2 ou plusieurs points (tensions
et fréquences). Dénir les points à des
valeurs égales.
Paramètres de dénition des réglages indépendants de la
charge du moteur.
1-50 Magnétisation moteur à vitesse nulle
Range: Fonction:
100%* [0 -
À utiliser avec le paramétre 1-52 Magnétis. normale
300 %
vitesse min [Hz] an d'obtenir une autre charge
]
thermique du moteur quand celui-ci tourne à
faible vitesse.
Entrer une valeur en pourcentage du courant
nominal de magnétisation. Si le réglage est trop
bas, le couple sur l'arbre moteur peut être réduit.
Illustration 3.3 Caractéristique U/f
3.2.8 1-6* Proc.dépend. charge
Paramètres de dénition des réglages du moteur
dépendant de la charge.
1-62 Comp. gliss.
Illustration 3.2 Magnétisation du moteur
1-52 Magnétis. normale vitesse min [Hz]
Range: Fonction:
1 Hz* [0.1 - 10.0
Hz]
38 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Dénir la fréquence requise pour un courant
de magnétisation normal.
À utiliser avec le paramétre 1-50 Magnéti-
sation moteur à vitesse nulle. Voir
l’Illustration 3.2.
Range: Fonction:
Size
related*
[-400 400 %]
Entrer la valeur en % de la compensation
du glissement pour corriger les
tolérances inhérentes à la valeur n
compensation du glissement est calculée
automatiquement en utilisant la vitesse
nominale du moteur n
M,N.
1-63 Cste tps comp.gliss.
Range: Fonction:
0.1 s* [0.05 - 5s]Saisir le temps de réaction de la compensation du glissement. Une valeur élevée se
traduit par une réaction lente, une valeur
basse par une réaction rapide. Allonger ce
M,N
. La
Page 41

Paramètres Guide de programmation
1-63 Cste tps comp.gliss.
Range: Fonction:
temps si des résonances interviennent à
basses fréquences.
1-64 Amort. résonance
Range: Fonction:
100%* [0 -
500 %]
Saisir la valeur d’atténuation des résonances.
Régler le paramétre 1-64 Amort. résonance et le
paramétre 1-65 Tps amort.resonance pour aider à
éliminer les problèmes de résonance à haute
fréquence. Pour réduire l’oscillation des
résonances, augmenter la valeur du
paramétre 1-64 Amort. résonance.
1-65 Tps amort.resonance
Range: Fonction:
0.005 s* [0.001 -
0.050 s]
Régler le paramétre 1-64 Amort. résonance
et le paramétre 1-65 Tps amort.resonance
pour aider à éliminer les problèmes de
résonance à haute fréquence. Saisir la
constante de temps permettant une
atténuation maximale.
1-66 Courant min. à faible vitesse
Range: Fonction:
50 %* [0 - 120 %] S’applique uniquement aux moteurs PM.
L’augmentation du courant minimal
améliore le couple du moteur à basse
vitesse, mais réduit également le
rendement.
3.2.9 1-7* Réglages dém.
Paramètres de conguration des fonctions de démarrage
spéciales du moteur.
1-70 Mode de démarrage PM
Ce paramètre est valable pour les versions logicielles supérieures
ou égales à 2.80. Utiliser ce paramètre pour sélectionner le mode
de démarrage du moteur PM qui consiste à initialiser la
commande VVC+ pour des moteurs PM fonctionnant librement
précédemment. Ce paramètre est actif pour les moteurs PM en
mode VVC+ uniquement si le moteur est arrêté (ou tourne à
faible vitesse).
Option: Fonction:
[0] Détection position
rotor
La fonction de détection du rotor
estime l’angle électrique du rotor et
s’en sert comme point de départ. Il
s’agit de la sélection standard pour les
applications de variateur de fréquence
d’automatisation. Si la fonction de
démarrage à la volée détecte que le
moteur tourne à faible vitesse ou est
arrêté, le variateur de fréquence peut
1-70 Mode de démarrage PM
Ce paramètre est valable pour les versions logicielles supérieures
ou égales à 2.80. Utiliser ce paramètre pour sélectionner le mode
de démarrage du moteur PM qui consiste à initialiser la
commande VVC+ pour des moteurs PM fonctionnant librement
précédemment. Ce paramètre est actif pour les moteurs PM en
mode VVC+ uniquement si le moteur est arrêté (ou tourne à
faible vitesse).
Option: Fonction:
détecter la position du rotor (l’angle).
Le variateur de fréquence démarre alors
le moteur à partir de cet angle.
[1] * Parking La fonction Parking applique un
courant CC dans l’enroulement du
stator et fait tourner le rotor jusqu’à sa
position de zéro électrique. Cette
fonction est généralement sélectionnée
pour les applications HVAC. Si la
fonction de démarrage à la volée
détecte que le moteur tourne à faible
vitesse ou est arrêté, le variateur de
fréquence envoie un courant CC pour
stationner le moteur à un angle. Le
variateur de fréquence démarre alors le
moteur à partir de cet angle.
1-71 Retard démar.
Range: Fonction:
0 s* [0 - 10s]Ce paramètre permet de temporiser le
démarrage. Le variateur de fréquence démarre en
adoptant le mode sélectionné au
paramétre 1-72 Fonction au démar.. Régler la
durée précédant le début de l'accélération.
1-72 Fonction au démar.
Option: Fonction:
[0] Tempo.maintien CC Le moteur est alimenté en courant
selon le paramétre 2-00 I maintien/
préchau.CC durant la temporisation
du démarrage.
[2] * Roue libre
temporisé
Le variateur de fréquence est en roue
libre durant la temporisation du
démarrage (variateur de fréquence
éteint).
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 39
Page 42

Paramètres
VLT® HVAC Basic Drive FC 101
1-73 Démarr. volée
Cette fonction permet de rattraper un moteur, à la volée, p. ex. à
cause d’une chute de tension secteur. Recherche du démarrage à
la volée dans une direction horaire. En cas d’échec, un arrêt CC
est activé. Lorsque les options activant le mode PM sont
33
sélectionnées, le parking est eectué si la vitesse est inférieure à
2,5-5 % de la vitesse nominale dans la période dénie au
paramétre 2-07 Temps de parking.
Si l’estimation de la vitesse est inférieure à 2,5-5 % de la vitesse
nominale, la fonction de freinage est enclenchée (voir
paramétre 2-06 Courant de parking et paramétre 2-07 Temps de
parking). Sinon, le variateur de fréquence rattrape le moteur à
cette vitesse et reprend un fonctionnement normal.
La fonction de démarrage à la volée utilisée pour les moteurs PM
repose sur une estimation de vitesse initiale. La vitesse est
toujours estimée en premier après un signal de démarrage actif.
Limites de courant du principe de démarrage à la volée utilisé
pour les moteurs PM :
La plage de vitesses s’étend jusqu’à 100 % de la vitesse
•
nominale ou l’aaiblissement de champ (le plus bas).
Pour les applications à inertie élevée (c.-à-d. lorsque
•
l’inertie de la charge est plus de 30 fois supérieure à
celle du moteur).
1-88 AC Brake Gain
Range: Fonction:
condition que la tension du circuit intermédiaire
soit inférieure à sa valeur d’avertissement, le
couple du générateur peut être ajusté à l’aide de
ce paramètre.
3.2.11 1-9* T° moteur
Paramètres de conguration des fonctions de protection
thermique du moteur.
1-90 Protect. thermique mot.
Option: Fonction:
Grâce à l’ETR (relais thermique
électronique), la température du moteur
est calculée en fonction de la fréquence,
du courant et du temps. Danfoss
recommande l’utilisation de la fonction ETR
si aucune thermistance n’est installée. La
fonctionnalité est la même pour les
moteurs asynchrones et les moteurs PM.
AVIS!
Option: Fonction:
[0] Désactivé
[1] Activé
Le calcul de l’ETR s’appuie sur les
données du moteur du groupe de
paramètres 1-2* Données moteur.
3.2.10 1-8* Réglages arrêts
Paramètres de conguration des fonctions spéciales d'arrêt
du moteur.
1-80 Fonction à l'arrêt
Option: Fonction:
Sélectionner cette fonction après un
ordre d’arrêt ou quand la vitesse a connu
une descente de rampe jusqu’aux
réglages du paramétre 1-82 Vit. min. pour
fonct. à l'arrêt [Hz].
[0] * Roue libre Laisse le moteur en fonctionnement libre.
[1] Maintien/
préchauf.mot.
CC
1-82 Vit. min. pour fonct. à l'arrêt [Hz]
Range: Fonction:
0 Hz* [0 - 20 Hz] Régler la fréquence de sortie à laquelle le
1-88 AC Brake Gain
Range: Fonction:
1.4* [1.0 -
2.0 ]
Applique au moteur un courant continu
de maintien (voir le paramétre 2-00 I
maintien/préchau.CC).
paramétre 1-80 Fonction à l'arrêt est activé.
Ce paramètre sert à dénir la capacité de
puissance de freinage CA (dénir la rampe de
décélération lorsque l’inertie est constante). À
[0] Absence
protection
[1] Avertis.
Thermist.
[2] Arrêt
thermistance
[3] ETR Avertis. 1 Si la limite supérieure calculée de la plage
[4] * ETR Alarme Commencer le calcul de la charge
[22] ETR Trip -
Extended
Detection
Désactive la surveillance de la température.
Une thermistance émet un avertissement
lorsque la limite supérieure de la plage de
température du moteur est dépassée.
Si la limite supérieure de la plage de
température du moteur est dépassée, une
thermistance émet une alarme et provoque
l’arrêt du variateur de fréquence.
de température du moteur est dépassée,
un avertissement apparaît.
thermique du moteur en fonction de la
charge et du temps réels, ainsi que de la
fréquence du moteur uniquement lorsque
le courant du moteur est supérieur à
110 % du courant nominal du moteur.
Commencer le calcul de la charge
thermique du moteur en fonction de la
charge et du temps réels, ainsi que de la
fréquence du moteur lorsque le courant du
moteur est supérieur à 110 % du courant
nominal du moteur. Il est également
possible de commencer le calcul de la
charge thermique du moteur lorsque le
courant du moteur est inférieur à 110 % du
40 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 43

Paramètres Guide de programmation
1-90 Protect. thermique mot.
Option: Fonction:
courant nominal du moteur et de
déclencher la limite de courant.
1-93 Source Thermistance
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
AVIS!
Régler l’entrée digitale sur [0] PNP - Actif à
24 V au paramétre 5-03 Mode entrée dig.
29.
Choisir l’entrée de raccordement à la
thermistance (capteur PTC). En cas d’utilisation
d’une entrée analogique, la même entrée
analogique ne peut être utilisée comme
référence du paramétre 3-15 Ress.? Réf. 1 au
paramétre 3-17 Ress.? Réf. 3, au
paramétre 20-00 Source retour 1, au
paramétre 20-03 PID proc./2 retours, au
paramétre 24-06 Source réf. mode incendie et au
paramétre 24-07 Source retour mode incendie.
[0]*Aucun Ne dénit pas la source thermistance.
3 3
[1] Entrée
ANA 53
[6] Entrée
digitale
29
Utiliser l’entrée analogique 53 comme source
thermistance.
Utiliser l’entrée digitale 29 comme source
thermistance.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 41
Page 44

Paramètres
VLT® HVAC Basic Drive FC 101
3.3 Menu principal - Freins - Groupe 2
3.3.1 2-0* Frein-CC
Paramètres de conguration des fonctions Frein CC et
Maintien CC.
33
2-00 I maintien/préchau.CC
Range: Fonction:
50%* [0 -
AVIS!
160 %
MOTEUR EN SURCHAUFFE
]
La valeur maximale dépend du courant
nominal du moteur.
Pour éviter d’endommager le moteur à
cause d'une surchaue, ne pas faire
fonctionner à 100 % pendant trop
longtemps.
2-04 Vitesse frein CC [Hz]
Range: Fonction:
0 Hz* [ 0 - 500
Hz]
Ce paramètre permet de régler la vitesse
d’application du frein CC à laquelle le
paramétre 2-01 Courant frein CC doit être actif
lors d’un ordre d’arrêt.
2-06 Courant de parking
Range: Fonction:
100%* [0 -
150 %]
Dénir le courant sous forme de pourcentage du
courant nominal du moteur
(paramétre 1-24 Courant moteur). Actif avec le
paramétre 1-73 Démarr. volée. Le courant de
freinage est actif pendant la période dénie au
paramétre 2-07 Temps de parking.
AVIS!
Le Paramétre 2-06 Courant de parking est
Dénir le courant de maintien en % du courant
nominal du moteur I
moteur). Le Paramétre 2-00 I maintien/préchau.CC
permet de garder le moteur à l’arrêt (couple de
maintien) ou de le préchauer. Ce paramètre est
actif si le maintien CC est sélectionné au
paramétre 1-72 Fonction au démar. [0]
Tempo.maintien CC ou au paramétre 1-80 Fonction à
l'arrêt [1] Maintien/préchauf.mot. CC.
(paramétre 1-24 Courant
M,N
2-07 Temps de parking
Range: Fonction:
3 s* [0.1 -
60 s]
actif uniquement si l’une des options de
construction moteur PM est sélectionnée
au paramétre 1-10 Construction moteur.
Régler la durée du courant de parking déni au
paramétre 2-06 Courant de parking. Actif avec le
paramétre 1-73 Démarr. volée.
2-01 Courant frein CC
Range: Fonction:
50%* [0 -
AVIS!
150 %
MOTEUR EN SURCHAUFFE
]
La valeur maximale dépend du courant
AVIS!
Le Paramétre 2-07 Temps de parking n’est
actif que si le paramétre 1-10 Construction
moteur est réglé sur les options activant
les moteurs PM.
nominal du moteur.
Pour éviter d’endommager le moteur à
cause d'une surchaue, ne pas faire
fonctionner à 100 % pendant trop
longtemps.
3.3.2 2-1* Fonct.Puis.Frein.
Groupe de paramètres de sélection des réglages de
freinage dynamique.
Dénir le courant en % de courant nominal du
moteur, paramétre 1-24 Courant moteur. Quand la
vitesse est inférieure à la limite dénie au
paramétre 2-04 Vitesse frein CC [Hz] ou quand la
fonction de freinage CC est active (dans le groupe
de paramètres 5-1* Entrées digitales, régler sur [5]
Frein NF-CC ou via le port série), un courant continu
de freinage est appliqué sur un ordre d’arrêt. Voir le
paramétre 2-02 Temps frein CC pour la durée.
2-02 Temps frein CC
Range: Fonction:
10 s* [0 - 60 s] Régler la durée du courant continu de freinage
au paramétre 2-01 Courant frein CC, une fois le
freinage activé.
2-10 Fonction Frein et Surtension
Option: Fonction:
[0] * Inactif La résistance de freinage n’est pas active.
[2] Frein CA Le frein CA est actif.
2-16 Courant max. frein CA
Range: Fonction:
100 %* [0 - 160 %] Saisir le courant maximum autorisé lors de
l’utilisation du frein CA pour éviter la
surchaue des enroulements du moteur.
42 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 45

Paramètres Guide de programmation
2-17 Contrôle Surtension
Option: Fonction:
Activer ou non l’OVC pendant la décélération,
pour éviter que le variateur de fréquence ne
s’arrête en raison d’une surtension sur le
circuit intermédiaire, provoquée par la
puissance génératrice de la charge.
[0] Désactivé Le contrôle de surtension (OVC) n’est pas
souhaité.
[1] Activé (pas
à l'arrêt)
[2] * Activé Active le contrôle de surtension.
Active la fonction OVC lorsque le variateur de
fréquence n’est pas en arrêt.
AVIS!
Le temps de rampe est automatiquement ajusté pour éviter que le
variateur de fréquence ne s’arrête.
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 43
Page 46
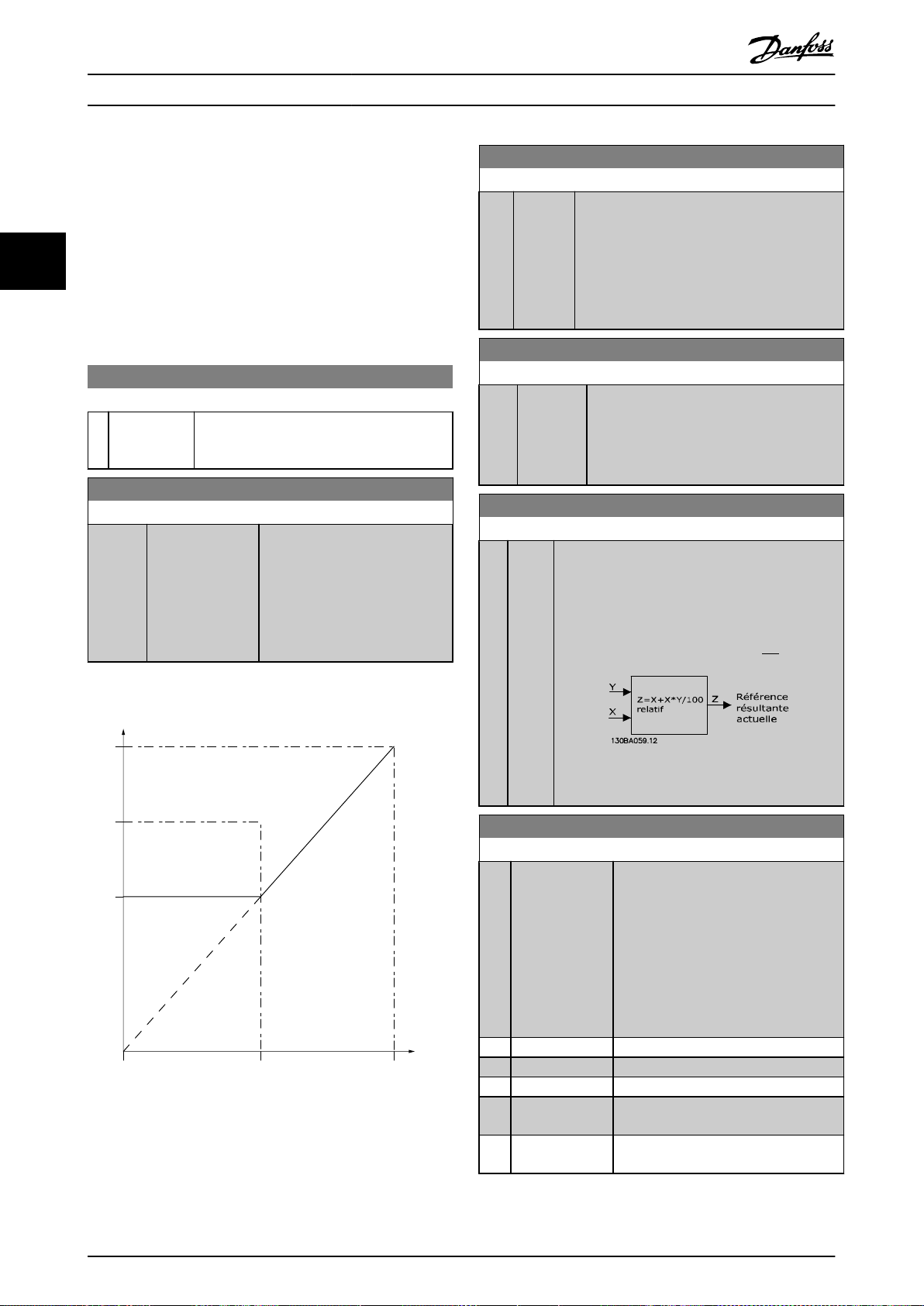
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Paramètres
VLT® HVAC Basic Drive FC 101
3.4 Menu principal - Référence / rampes Groupe 3
3.4.1 3-0* Limites de réf.
33
Paramètres de réglage de l’unité, des limites et des plages
de référence.
Se reporter également au groupe de paramètres 20-0*
3-10 Réf.prédénie
Range: Fonction:
0 %* [-100 -
100 %]
Saisir jusqu’à huit références prédénies (0-7)
dans ce paramètre en utilisant une programmation de type tableau. Pour sélectionner les
références dédiées, sélectionner Réf. prédéf. bit
0/1/2 [16], [17] ou [18] pour les entrées digitales
correspondantes dans le groupe de paramètres
5-1* Entrées digitales.
Retour pour obtenir des informations sur les réglages en
boucle fermée.
3-02 Référence minimale
Range: Fonction:
0* [-4999–4999] La référence minimale est la valeur minimum
pouvant être obtenue en additionnant toutes
les références.
3-11 Fréq.Jog. [Hz]
Range: Fonction:
5 Hz* [ 0 -
500.0 Hz]
La vitesse de jogging est la fréquence de
sortie xe à laquelle le variateur de fréquence
fonctionne lorsque la fonction Jogging est
activée.
Voir aussi le paramétre 3-80 Tps rampe Jog..
3-03 Réf. max.
Range: Fonction:
Size
related*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
La référence maximale est la
valeur maximum obtenue par la
somme de toutes les références.
L’unité de la référence maximale
correspond au choix de congu-
ration eectué au
paramétre 1-00 Mode Cong..
3-14 Réf.prédéf.relative
Range: Fonction:
0%* [-100
Dénir la valeur xe en % à ajouter à la valeur
-
variable dénie au paramétre 3-18 Echelle réf.relative.
100 %
La somme des valeurs xe et variable (appelée Y
]
sur l’Illustration 3.5) est multipliée par la référence
réelle (appelée X sur l’Illustration 3.5). Ce produit est
ajouté à la référence eective. X + X ×
100
Y
3.4.2 3-1* Consignes
Illustration 3.4 Consignes
Illustration 3.5 Réf.prédéf.relative
3-15 Source référence 1
Option: Fonction:
Sélectionner l’entrée à utiliser comme 1
signal de référence. Le
Paramétre 3-15 Source référence 1, le
paramétre 3-16 Source référence 2 et le
paramétre 3-17 Source référence 3
dénissent jusqu’à trois signaux de
référence diérents. La somme de ces
signaux de référence dénit la référence
eective.
[0] Pas de fonction
[1] * Entrée ANA 53
[2] Entrée ANA 54
[7] Entrée Fréquence
29
[11] Référence bus
locale
er
44 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 47

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Paramètres Guide de programmation
3-16 Source référence 2
Option: Fonction:
Sélectionner l’entrée à utiliser comme 2
signal de référence. Le
Paramétre 3-15 Source référence 1, le
paramétre 3-16 Source référence 2 et le
paramétre 3-17 Source référence 3
dénissent jusqu’à trois signaux de
référence diérents. La somme de ces
signaux de référence dénit la référence
eective. Voir aussi le
paramétre 1-93 Source Thermistance.
[0] Pas de fonction
[1] Entrée ANA 53
[2] * Entrée ANA 54
[7] Entrée
Fréquence 29
[11] Référence bus
locale
e
Illustration 3.6 Rampes
3-41 Temps d'accél. rampe 1
Range: Fonction:
Size
related*
3-17 Source référence 3
Option: Fonction:
Sélectionner l’entrée de référence à
utiliser comme 3e signal de référence. Le
Paramétre 3-15 Source référence 1, le
paramétre 3-16 Source référence 2 et le
paramétre 3-17 Source référence 3
dénissent jusqu’à 3 signaux de
référence diérents. La somme de ces
signaux de référence dénit la référence
eective.
[0] Pas de fonction
[1] Entrée ANA 53
[2] Entrée ANA 54
[7] Entrée
Fréquence 29
[11] * Référence bus
locale
3-42 Temps décél. rampe 1
Range: Fonction:
Size
related*
3.4.3 3-4* Rampe 1
Congurer les paramètres de temps de rampe pour
chacune des 2 rampes (groupe de paramètres 3-4* Rampe 1
et groupe de paramètres 3-5* Rampe 2). Le temps de rampe
est prédéni sur la valeur minimale de 10 ms pour toutes
les puissances.
3.4.4 3-5* Rampe 2
Ce groupe de paramètres congure les paramètres de la
rampe 2.
[0.05
- 3600
s]
[0.05
- 3600
s]
3 3
Entrer le temps d’accélération pour passer de
0 Hz à la fréquence dénie au
paramétre 1-23 Fréq. moteur si Moteur
asynchrone est sélectionné. Entrer le temps
d’accélération pour passer de 0 tr/min à la
vitesse dénie au
paramétre 1-25 Vit.nom.moteur si Moteur PM
est sélectionné. Choisir une rampe d’accélération telle que le courant de sortie ne
dépasse pas la limite de courant au
paramétre 4-18 Limite courant au cours de la
rampe. Voir la rampe de décélération au
paramétre 3-42 Temps décél. rampe 1.
Si un moteur asynchrone est sélectionné,
dénir le temps de décélération au
paramétre 1-23 Fréq. moteur à 0 Hz. Si un
moteur PM est sélectionné, dénir le temps
de décélération au
paramétre 1-25 Vit.nom.moteur à 0 tr/min.
Sélectionner une rampe de décélération pour
éviter un arrêt à cause d’une surtension dans
le circuit intermédiaire.
3-51 Temps d'accél. rampe 2
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 45
Range: Fonction:
Size
related*
[0.05
- 3600
s]
Si un moteur asynchrone est sélectionné,
dénir le temps d’accélération à partir de 0 Hz
au paramétre 1-23 Fréq. moteur. Si un moteur
PM est sélectionné, dénir le temps d’accélération à partir de 0 tr/min au
paramétre 1-25 Vit.nom.moteur. Choisir une
Page 48

Paramètres
VLT® HVAC Basic Drive FC 101
3-51 Temps d'accél. rampe 2
Range: Fonction:
rampe d’accélération telle que le courant de
sortie ne dépasse pas la limite de courant au
paramétre 4-18 Limite courant au cours de la
33
rampe.
3-52 Temps décél. rampe 2
Range: Fonction:
Size
related*
[0.05
- 3600
s]
Entrer le temps de décélération pour passer
de la vitesse dénie au
paramétre 1-25 Vit.nom.moteur à 0 tr/min.
Choisir une rampe de décélération telle que
le courant de sortie ne dépasse pas la limite
de courant au paramétre 4-18 Limite courant
au cours de la rampe.
3.4.5 3-8* Autres rampes
3-80 Tps rampe Jog.
Range: Fonction:
Size
related*
[0.05
- 3600
s]
Entrer le temps de la rampe de jogging, c.-à-d.
le temps d’accélération ou de décélération
entre 0 Hz et le paramétre 1-23 Fréq. moteur.
S’assurer que le courant de sortie qui en
résulte, nécessaire pour le temps de la rampe
de jogging donné, ne dépasse pas la limite de
courant dénie au paramétre 4-18 Limite
courant. Le temps de rampe de jogging est
déclenché par l’activation d’un signal dédié au
niveau du panneau de commande, d’une
entrée digitale sélectionnée ou du port de
communication série.
3-81 Temps rampe arrêt rapide
Range: Fonction:
Size
related*
[0.05 3600 s]
Entrer le temps de rampe à arrêt rapide pour
passer de la fréquence dénie au
paramétre 1-23 Fréq. moteur à 0 Hz. En cours
de rampe, aucune surtension ne peut se
produire dans l’onduleur et le courant généré
ne peut pas dépasser la limite dénie au
paramétre 4-18 Limite courant. L’arrêt rapide
est activé à l’aide d’un signal sur une entrée
digitale sélectionnée ou via le port de
communication série.
46 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 49

Paramètres Guide de programmation
3.5 Menu principal - Limites/avertis. Groupe 4
3.5.1 4-1* Limites moteur
Dénir les limites de couple et de vitesse du moteur ainsi
que la réaction du variateur de fréquence lorsque les
limites sont dépassées.
4-10 Direction vit. moteur
Option: Fonction:
[0] Sens horaire
[2] * Les deux
directions
4-12 Vitesse moteur limite basse [Hz]
Range: Fonction:
0 Hz* [ 0 -
400.0 Hz]
4-14 Vitesse moteur limite haute [Hz]
Range: Fonction:
Size
related*
[ 0.1 -
400.0
Hz]
4-18 Limite courant
Range: Fonction:
110%* [0 -
1000
%]
AVIS!
Le réglage du
paramétre 4-10 Direction vit. moteur a
une inuence sur le
paramétre 1-73 Démarr. volée.
Seul un fonctionnement en sens horaire est
autorisé.
Le fonctionnement en sens horaire et
antihoraire est permis.
Entrer la limite minimale pour la vitesse du
moteur. Peut être réglée pour correspondre à
la fréquence de sortie minimale de l’arbre
moteur. La limite basse de vitesse ne doit pas
dépasser le réglage au paramétre 4-14 Vitesse
moteur limite haute [Hz].
Saisir la limite maximale pour la vitesse du
moteur. Elle peut être réglée pour correspondre à la vitesse de moteur maximale
recommandée. La limite haute de vitesse du
moteur doit dépasser la valeur du
paramétre 4-12 Vitesse moteur limite basse
[Hz].
La limite haute de vitesse du moteur ne peut
dépasser le réglage du
paramétre 4-19 Frq.sort.lim.hte.
Saisir la limite de courant pour le fonctionnement
en mode moteur et générateur (en % du courant
nominal du moteur). Si la valeur est supérieure à
la sortie nominale maximum du variateur de
fréquence, le courant reste limité au courant
maximum de sortie du variateur de fréquence. Si
un réglage du paramétre 1-00 Mode Cong. au
paramétre 1-25 Vit.nom.moteur est modié, le
4-18 Limite courant
Range: Fonction:
paramétre 4-18 Limite courant n’est pas automatiquement réinitialisé au réglage par défaut.
4-19 Frq.sort.lim.hte
Range: Fonction:
Size
related*
[ 0
Entrer la valeur de fréquence de sortie maximale,
- 400
qui dénit la limite absolue de la fréquence de
Hz]
sortie du variateur de fréquence pour améliorer
la sécurité dans les applications où il est
nécessaire d’éviter une vitesse excessive
imprévue. Cette limite absolue s’applique à
toutes les congurations, indépendamment du
réglage du paramétre 1-00 Mode Cong..
Si le paramétre 1-10 Construction moteur est
réglé sur l’une des options permettant une
construction de moteur PM, la limite maximale
du paramétre 4-19 Frq.sort.lim.hte peut être
limitée par le réglage du paramétre 1-40 FCEM à
1000 tr/min. an d’éviter une force contre-
électromotrice trop élevée qui pourrait
endommager le variateur de fréquence. Si le
paramétre 4-19 Frq.sort.lim.hte est réglé sur une
valeur inférieure au paramétre 4-14 Vitesse
moteur limite haute [Hz], la valeur du
paramétre 4-14 Vitesse moteur limite haute [Hz]
est réglée automatiquement à la même valeur
du paramétre 4-19 Frq.sort.lim.hte.
3.5.2 4-4* Adjustable Warnings 2
4-40 Warning Freq. Low
Range: Fonction:
Size
related*
4-41 Warning Freq. High
Range: Fonction:
Size
related*
[ 0 -
Utiliser ce paramètre pour dénir une limite
500
inférieure pour la plage de fréquences.
Hz]
Lorsque la vitesse du moteur tombe audessous de cette limite, l’achage indique VIT.
BASSE. Le bit d’avertissement 10 est réglé au
paramétre 16-94 Mot état élargi. Le relais de
sortie ou la sortie digitale peuvent être
congurés pour indiquer cet avertissement. Le
voyant d’avertissement du LCP ne s’allume pas
lorsque la limite dénie à ce paramètre est
atteinte.
[ 0 -
Utiliser ce paramètre pour dénir une limite
500
supérieure pour la plage de fréquences.
Hz]
Lorsque la vitesse du moteur dépasse cette
limite, VIT. HAUTE apparaît. Le bit d’avertissement 9 est réglé au paramétre 16-94 Mot
état élargi. Le relais de sortie ou la sortie
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 47
Page 50

Paramètres
VLT® HVAC Basic Drive FC 101
4-41 Warning Freq. High
Range: Fonction:
digitale peuvent être congurés pour indiquer
cet avertissement. Le voyant d’avertissement
du LCP ne s’allume pas lorsque la limite
33
dénie à ce paramètre est atteinte.
3.5.3 4-5* Rég. Avertis.
Dénir les limites d'avertissement réglables pour le
courant. Les avertissements sont achés sur l'écran, la
sortie programmée ou le bus de terrain.
4-50 Avertis. courant bas
Range: Fonction:
0 A [ 0 - 500A]Saisir la valeur I
moteur tombe sous cette limite, un bit est déni
dans le mot d’état. Cette valeur peut également
être programmée pour générer un signal sur la
sortie digitale ou sur la sortie relais.
4-51 Avertis. courant haut
Range: Fonction:
Size
related*
[ 0.0 -
500.00 A]
Saisir la valeur I
du moteur dépasse cette limite, un bit
du mot d’état est déni. Cette valeur
peut également être programmée pour
générer un signal sur la sortie digitale
ou sur la sortie relais.
4-54 Avertis. référence basse
Range: Fonction:
-4999* [-4999 4999 ]
Saisir la limite inférieure de référence. Lorsque
la référence eective tombe au-dessous de
cette limite, l’achage indique Réf
d’avertissement 20 est réglé au
paramétre 16-94 Mot état élargi. Le relais de
sortie ou la sortie digitale peuvent être
congurés pour indiquer cet avertissement. Le
voyant d’avertissement du LCP ne s’allume pas
lorsque la limite dénie à ce paramètre est
atteinte.
4-55 Avertis. référence haute
. Lorsque le courant du
BAS
. Lorsque le courant
HAUT
basse
. Le bit
4-56 Avertis.retour bas
Range: Fonction:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utiliser ce paramètre pour
dénir une limite inférieure
pour la plage de retour.
Lorsque le signal de retour
tombe sous cette limite,
l’achage indique Retour bas.
Le bit d’avertissement 6 est
réglé au paramétre 16-94 Mot
état élargi. Le relais de sortie
ou la sortie digitale peuvent
être congurés pour indiquer
cet avertissement. Le voyant
d’avertissement du LCP ne
s’allume pas lorsque la limite
dénie à ce paramètre est
atteinte.
4-57 Avertis.retour haut
Range: Fonction:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utiliser ce paramètre pour
dénir une limite supérieure
pour la plage de retour.
Lorsque le signal dépasse
cette limite, Retour haut
apparaît. Le bit d’avertissement 5 est réglé au
paramétre 16-94 Mot état
élargi. Le relais de sortie ou la
sortie digitale peuvent être
congurés pour indiquer cet
avertissement. Le voyant
d’avertissement du LCP ne
s’allume pas lorsque la limite
dénie à ce paramètre est
atteinte.
4-58 Surv. phase mot.
Option: Fonction:
[0] Désactivé Aucune alarme ne s'ache en cas d'absence de
phase moteur.
[1] * Activé Une alarme s'ache en cas d'absence de phase
moteur.
Range: Fonction:
4999* [-4999 -
4999 ]
Utiliser ce paramètre pour dénir une limite
supérieure pour la plage de référence.
Lorsque la référence eective dépasse cette
limite, Réf haute apparaît. Le bit d’avertissement
19 est réglé au paramétre 16-94 Mot état élargi.
Le relais de sortie ou la sortie digitale peuvent
être congurés pour indiquer cet avertissement.
Le voyant d’avertissement du LCP ne s’allume
pas lorsque la limite dénie à ce paramètre est
atteinte.
3.5.4 4-6* Bipasse vit.
Dénir les zones de bipasse de la vitesse des rampes. Trois
plages de fréquences peuvent être écartées.
4-61 Bipasse vitesse de [Hz]
Tableau[3]
Range: Fonction:
0 Hz [ 0 - 500
Hz]
Saisir les limites inférieures des fréquences à
éviter. Certains systèmes imposent de ne pas
48 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 51

Paramètres Guide de programmation
4-61 Bipasse vitesse de [Hz]
Tableau[3]
Range: Fonction:
utiliser certaines fréquences de sortie an
d’éviter des problèmes de résonance dans le
système.
4-63 Bipasse vitesse à [Hz]
Tableau[3]
Range: Fonction:
0 Hz* [ 0 - 500
Hz]
Certains systèmes imposent de ne pas
utiliser certaines fréquences de sortie an
d’éviter des problèmes de résonance dans le
système. Saisir les limites supérieures des
fréquences à éviter.
3.5.5 Process de bipasse vitesse semiautomatique
Ce réglage de la vitesse de bipasse semi-automatique
permet de faciliter la programmation des fréquences à
ignorer suite à des résonances dans le système.
Procédure à suivre :
1. Arrêter le moteur.
AVIS!
Ajuster les temps de rampe au paramétre 3-41 Temps
d'accél. rampe 1 et au paramétre 3-42 Temps décél. rampe
1.
2. Sélectionner [1] Activé au paramétre 4-64 Régl.
bipasse semi-auto.
3. Appuyer sur la touche [Hand On] pour démarrer
la recherche des bandes de fréquence à l’origine
des résonances. Le moteur accélère conformément à la rampe dénie.
résonance identiée à l’accélération (réglage
possible pour 3 bandes maximum).
5. Une fois la vitesse maximale atteinte, le moteur
amorce automatiquement la rampe de décélération. Répéter cette procédure lorsque la vitesse
quitte les bandes de résonance au cours de la
décélération. Les fréquences réelles enregistrées
lors de l’activation de la touche [OK] sont
stockées au paramétre 4-61 Bipasse vitesse de [Hz].
6. Lorsque le moteur a décéléré jusqu’à l’arrêt,
appuyer sur [OK]. Le paramétre 4-64 Régl. bipasse
semi-auto se réinitialise automatiquement sur
Inactif. Le variateur de fréquence reste en mode
Hand On jusqu’à l’activation de la touche [O] ou
[Auto On].
Si les fréquences d’une bande de résonance spécique ne
sont pas enregistrées dans le bon ordre (les valeurs de
fréquence mémorisées dans le paramétre 4-63 Bipasse
vitesse à [Hz] sont ≥ à celles du paramétre 4-61 Bipasse
vitesse de [Hz]) ou si elles ne présentent pas les mêmes
numéros d’enregistrement pour le paramétre 4-61 Bipasse
vitesse de [Hz] et le paramétre 4-63 Bipasse vitesse à [Hz],
tous les enregistrements sont annulés et le message
suivant s’ache : Chevauchement des zones de vitesse
collectées ou absence de détermination. Appuyer sur [Cancel]
pour annuler.
4-64 Régl. bipasse semi-auto
Option: Fonction:
[0] * Inactif
[1] Activé Si cette option est sélectionnée, les plages de
vitesse sont automatiquement balayées pour
identier les bandes de résonance.
3 3
AVIS!
La borne d’entrée digitale 27 paramétre 5-12 E.digit.born.
27 est réglée par défaut sur [2] Lâchage. S’il n’y a pas
une tension de 24 V sur la borne 27, [Hand On] ne fait
pas démarrer le moteur. Dans ce cas, connecter la borne
12 à la borne 27.
4. Lors du passage d’une bande de résonance à une
autre, appuyer sur la touche [OK] du LCP au
moment de quitter la bande. La fréquence réelle
est enregistrée comme le premier élément du
paramétre 4-63 Bipasse vitesse à [Hz] (tableau).
Répéter cette procédure pour chaque bande de
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 49
Page 52

Paramètres
VLT® HVAC Basic Drive FC 101
3.6 Menu principal - E/S Digitale - Groupe 5
Fonction d’entrée
digitale
Description
3.6.1 5-0* Mode E/S digitales
[4] Arrêt rapide NF Entrée inversée (NF). Génère un arrêt en
Paramètres de conguration de l’entrée et de la sortie à
l’aide de NPN et PNP.
33
AVIS!
Ces paramètres ne peuvent pas être réglés lorsque le
moteur est en marche.
5-00 Mode E/S digital
Option: Fonction:
Régler sur mode NPN ou PNP pour les
entrées digitales 18, 19 et 27. Mode entrée
digitale.
[0] * PNP - Actif à
24 V
[1] NPN - Actif à
0 V
Action sur les impulsions directionnelles
positives (0). Systèmes PNP ramenés à GND.
Action sur les impulsions directionnelles
négatives (1). Les systèmes NPN sont réglés
sur +24 V (interne au variateur de
fréquence).
5-03 Mode entrée dig. 29
Option: Fonction:
[0] * PNP - Actif à 24 V Régler sur le mode PNP pour les entrées
digitales 29.
[1] NPN - Actif à 0 V Régler sur le mode NPN pour les
entrées digitales 29
3.6.2 5-1* Entrées digitales
Paramètres de conguration des fonctions d’entrée aux
bornes d’entrée.
Les entrées digitales permettent de sélectionner diverses
fonctions du variateur de fréquence. Toutes les entrées
digitales peuvent assumer les fonctions suivantes :
Fonction d’entrée
digitale
[0] Inactif Pas de réaction aux signaux transmis à la
[1] Réinitialisation
alarme
[2] Lâchage Laisse le moteur en fonctionnement libre.
[3] Roue libre NF Entrée inversée Reset et arrêt en roue
Description
borne.
Réinitialise le variateur de fréquence après
une alarme/un arrêt. Les alarmes
verrouillées peuvent être réinitialisées.
Logique 0 ⇒ arrêt en roue libre.
libre (NF). Laisse le moteur en fonctionnement libre, puis le variateur de
fréquence est réinitialisé. Logique 0 ⇒
arrêt en roue libre et reset.
[5] Frein NF-CC Entrée inversée pour freinage par injection
[6] Arrêt Génère une fonction d’arrêt lorsque la
[7] Verrouilla ext. Présente la même fonction qu’arrêt en
[8] Démarrage Sélectionner Démarrage pour un ordre de
[9] Impulsion
démarrage
[10] Inversion Changer le sens de rotation de l’arbre
fonction du temps de rampe de l’arrêt
rapide au paramétre 3-81 Temps rampe
arrêt rapide. Après la rampe de décélération, l’arbre se trouve en
fonctionnement libre.
de courant continu (NF). Arrête le moteur
par injection de courant CC durant un
certain temps, voir le
paramétre 2-01 Courant frein CC. La
fonction n’est active que lorsque la valeur
du paramétre 2-02 Temps frein CC dière
de 0. Cette sélection est impossible
lorsque le paramétre 1-10 Construction
moteur est réglé sur [1] PM non-salient
SPM.
borne sélectionnée passe du niveau
logique 1 à 0 (non verrouillé). L’arrêt est
réalisé en fonction du temps de rampe
sélectionné.
roue libre (Contact NF), mais le
verrouillage externe génère le message
d’alarme panne externe sur l’achage
lorsque la borne programmée pour le
lâchage est la logique 0. En cas de
programmation pour verrouillage externe,
le message d’alarme est aussi actif via les
sorties digitales et les sorties relais. Si le
problème à l’origine du verrouillage
externe est corrigé, l’alarme peut être
réinitialisée à l’aide d’une entrée digitale,
d’un bus de terrain ou de la touche
[Reset].
démarrage/arrêt. Niveau logique 1 =
démarrage, niveau logique 0 = arrêt.
(Entrée digitale par défaut 18)
Si une impulsion est appliquée pendant
au moins 2 ms, le moteur démarre. Il
s’arrête si l’on active Arrêt NF.
moteur. Le signal d’inversion change
seulement le sens de rotation. Il n’active
pas la fonction de démarrage.
Sélectionner [2] Les deux directions au
paramétre 4-10 Direction vit. moteur. 0 =
normal, 1 = inversion.
50 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 53

Paramètres Guide de programmation
Fonction d’entrée
digitale
[11] Démarrage avec
inv.
[14] Jogging Utilisé pour activer la fréquence de
[16] Réf prédénie bit0Permet de choisir l’une des 8 références
[17] Réf prédénie bit1Permet de choisir l’une des 8 références
[18] Réf prédénie bit2Permet de choisir l’une des 8 références
[19] Gel référence Geler la référence eective. La référence
[20] Gel sortie Gèle la référence eective. La référence
[21] Accélération Pour contrôler de manière numérique
[22] Décélération Identique à [21] Accélération mais la
[23] Sélect.proc.bit 0 Sélectionne l’un des 2 process. Régler le
Description
À utiliser pour un démarrage/arrêt et pour
l’inversion au même moment. Aucun
signal sur [8] Démarrage n’est autorisé en
même temps. 0 = arrêt, 1 = démarrage
avec inversion.
jogging. Voir le paramétre 3-11 Fréq.Jog.
[Hz]. (Entrée digitale par défaut 29)
prédénies, conformément au Tableau 3.4.
prédénies, conformément au Tableau 3.4.
prédénies, conformément au Tableau 3.4.
gelée représente maintenant le point
activé/la condition an qu’Accélération et
Décélération puissent être utilisées. En cas
d’utilisation de l’accélération/décélération,
le changement de vitesse suit toujours la
rampe 2 (paramétre 3-51 Temps d'accél.
rampe 2 et paramétre 3-52 Temps décél.
rampe 2) dans la plage
paramétre 3-02 Référence minimale paramétre 3-03 Réf. max..
gelée représente maintenant le point
activé/la condition an qu’Accélération et
Décélération puissent être utilisées. En cas
d’utilisation de l’accélération/décélération,
le changement de vitesse suit toujours la
rampe 2.
l’accélération et la décélération
(potentiomètre moteur). Pour activer cette
fonction, sélectionner Gel référence ou Gel
sortie. Lorsque Accélération est activée
pendant moins de 400 ms, la référence
résultante augmente de 0,1 %. Si Accélération est activée pendant plus de 400 ms,
la référence résultante accélère conformément à la rampe 1 au
paramétre 3-41 Temps d'accél. rampe 1.
référence diminue.
paramétre 0-10 Process actuel sur Multi
process.
Fonction d’entrée
digitale
[32] Entrée impulsions Sélectionner Entrée impulsions si l’on
[34] Bit rampe 0 Sélectionner la rampe à utiliser. Le niveau
[37] Mode incendie L’application d’un signal active le variateur
[52] Fct autorisé La borne d’entrée pour laquelle l’autori-
Description
utilise une séquence d’impulsions comme
référence ou signal de retour. La mise à
l’échelle est eectuée via le groupe de
paramètres 5-5* Entrée impulsions.
Disponible uniquement pour la borne 29.
logique 0 sélectionne rampe 1, alors que
le niveau logique 1 sélectionne rampe 2.
de fréquence en mode incendie et tous
les autres ordres sont ignorés. Voir le
groupe de paramètres 24-0* Mode incendie.
sation de marche est programmée doit
être de logique 1 pour qu’un ordre de
démarrage puisse être accepté. L’autorisation de marche présente une fonction
logique ET en rapport avec la borne
programmée pour [8] Démarrage, [14]
Jogging ou [20] Gel sortie. Les deux
conditions doivent être remplies pour que
le moteur puisse démarrer. Si l’autorisation
de marche est programmée sur plusieurs
bornes, elle ne doit être de niveau logique
1 que sur l’une des bornes pour pouvoir
exécuter la fonction. L’autorisation de
marche n’aecte pas le signal de sortie
digitale de demande de marche ([8]
Démarrage, [14] Jogging ou [20] Gel sortie)
programmé au groupe de paramètres 5-3*
Sorties digitales ou au groupe de
paramètres 5-4* Relais.
AVIS!
Si aucun signal d’autorisation de
marche n’est appliqué mais qu’un
ordre de fonctionnement, jogging
ou gel est activé, la ligne d’état de
l’achage indique soit Demande de
fonctionnement, Demande de jogging
ou Demande de gel.
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 51
Page 54

Paramètres
VLT® HVAC Basic Drive FC 101
Fonction d’entrée
digitale
[53] Démar. mode
local
33
[54] Démar.auto L’application d’un signal place le variateur
[60] Compteur A
(augm.)
[61] Compteur A
(dimin.)
[62] Reset compteur A Entrée servant à la réinitialisation du
[63] Compteur B
(augm.)
[64] Compteur B
(dimin.)
[65] Reset compteur B Entrée servant à la réinitialisation du
[101] Veille L’application d’un signal place le variateur
Tableau 3.3 Fonctions d’entrée digitale
Description
L’application d’un signal place le variateur
de fréquence en mode Hand on comme si
la touche [Hand On] était enfoncée, et un
ordre d’arrêt normal est annulé. En cas de
déconnexion du signal, le moteur s’arrête.
Pour que les autres ordres de démarrage
soient valides, attribuer une autre entrée
digitale à Démar.auto et appliquer un
signal. Les touches [Hand On] et [Auto
On] n’ont pas d’incidence. La touche [O]
annule Démar. mode local et Démar.auto.
Appuyer sur [Hand On] ou [Auto On] pour
réactiver Démar. mode local et Démar.auto.
En l’absence de signal sur Démar. mode
local ou Démar.auto, le moteur s’arrête
même si un ordre de démarrage normal a
été appliqué. Si un signal est appliqué à la
fois à Démar. mode local et Démar.auto, la
fonction activée est Démar.auto.
de fréquence en mode Auto comme si la
touche [Auto On] était enfoncée. Voir
également [53] Démar. mode local.
Entrée servant à l’incrémentation du
compteur SLC.
Entrée servant à la décrémentation du
compteur SLC.
compteur A.
Entrée servant à l’incrémentation du
compteur SLC.
Entrée servant à la décrémentation du
compteur SLC.
compteur B.
de fréquence en mode veille.
Référence
prédénie
sélectionnée :
Référence
prédénie 0
Référence
prédénie 1
Référence
prédénie 2
Référence
prédénie 3
Référence
prédénie 4
Référence
prédénie 5
Référence
prédénie 6
Référence
prédénie 7
Tableau 3.4 Référence prédénie sélectionnée
Référence
prédénie bit
2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Référence
prédénie bit
1
Référence
prédénie bit
0
5-10 E.digit.born.18
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 18. Se reporter au Tableau 3.3 pour le réglage des
options.
Option: Fonction:
[0] Inactif
[1] Réinitialisation alarme
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
[6] Arrêt
[7] Verrouilla ext.
[8] * Démarrage
[9] Impulsion démarrage
[10] Inversion
[11] Démarrage avec inv.
[14] Jogging
[16] Réf prédénie bit 0
[17] Réf prédénie bit 1
[18] Réf prédénie bit 2
[19] Gel référence
[20] Gel sortie
[21] Accélération
[22] Décélération
[23] Sélect.proc.bit 0
[34] Bit rampe 0
[37] Mode incendie
[52] Fct autorisé
[53] Démar. mode local
[54] Démar.auto
[60] Compteur A (augm.)
[61] Compteur A (dimin.)
52 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 55

Paramètres Guide de programmation
5-10 E.digit.born.18
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 18. Se reporter au Tableau 3.3 pour le réglage des
options.
Option: Fonction:
[62] Reset compteur A
[63] Compteur B (augm.)
[64] Compteur B (dimin.)
[65] Reset compteur B
[101] Veille
[120] Démar.pomp.princ.
[121] Altern.pompe princ.
[130] Verrouill. pomp1
[131] Verrouill. pomp2
[132] Verrouill. pomp3
[133] Verrouill. pompe 4
[134] Verrouill. pompe 5
5-11 E.digit.born.19
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 19.
Option: Fonction:
[0] * Inactif
[1] Réinitialisation alarme
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
[6] Arrêt
[7] Verrouilla ext.
[8] Démarrage
[9] Impulsion démarrage
[10] Inversion
[11] Démarrage avec inv.
[14] Jogging
[16] Réf prédénie bit 0
[17] Réf prédénie bit 1
[18] Réf prédénie bit 2
[19] Gel référence
[20] Gel sortie
[21] Accélération
[22] Décélération
[23] Sélect.proc.bit 0
[34] Bit rampe 0
[37] Mode incendie
[52] Fct autorisé
[53] Démar. mode local
[54] Démar.auto
[60] Compteur A (augm.)
[61] Compteur A (dimin.)
[62] Reset compteur A
[63] Compteur B (augm.)
[64] Compteur B (dimin.)
[65] Reset compteur B
5-11 E.digit.born.19
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 19.
Option: Fonction:
[101] Veille
[120] Démar.pomp.princ.
[121] Altern.pompe princ.
[130] Verrouill. pomp1
[131] Verrouill. pomp2
[132] Verrouill. pomp3
[133] Verrouill. pompe 4
[134] Verrouill. pompe 5
5-12 E.digit.born.27
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 27. Si le paramétre 0-03 Réglages régionaux est réglé sur
[0] International, la valeur par défaut est [2] Lâchage. Si le
paramétre 0-03 Réglages régionaux est réglé sur [1] Amérique Nord,
la valeur par défaut est [7] Verrouilla ext.
Option: Fonction:
[0] Inactif
[1] Réinitialisation alarme
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
[6] Arrêt
[7] Verrouilla ext.
[8] Démarrage
[9] Impulsion démarrage
[10] Inversion
[11] Démarrage avec inv.
[14] Jogging
[16] Réf prédénie bit 0
[17] Réf prédénie bit 1
[18] Réf prédénie bit 2
[19] Gel référence
[20] Gel sortie
[21] Accélération
[22] Décélération
[23] Sélect.proc.bit 0
[34] Bit rampe 0
[37] Mode incendie
[52] Fct autorisé
[53] Démar. mode local
[54] Démar.auto
[60] Compteur A (augm.)
[61] Compteur A (dimin.)
[62] Reset compteur A
[63] Compteur B (augm.)
[64] Compteur B (dimin.)
[65] Reset compteur B
[101] Veille
[120] Démar.pomp.princ.
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 53
Page 56

Paramètres
VLT® HVAC Basic Drive FC 101
5-12 E.digit.born.27
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 27. Si le paramétre 0-03 Réglages régionaux est réglé sur
[0] International, la valeur par défaut est [2] Lâchage. Si le
paramétre 0-03 Réglages régionaux est réglé sur [1] Amérique Nord,
33
la valeur par défaut est [7] Verrouilla ext.
Option: Fonction:
[121] Altern.pompe princ.
[130] Verrouill. pomp1
[131] Verrouill. pomp2
[132] Verrouill. pomp3
[133] Verrouill. pompe 4
[134] Verrouill. pompe 5
5-13 E.digit.born.29
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 29.
Option: Fonction:
[0] Inactif
[1] Réinitialisation alarme
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
[6] Arrêt
[7] Verrouilla ext.
[8] Démarrage
[9] Impulsion démarrage
[10] Inversion
[11] Démarrage avec inv.
[14] * Jogging
[16] Réf prédénie bit 0
[17] Réf prédénie bit 1
[18] Réf prédénie bit 2
[19] Gel référence
[20] Gel sortie
[21] Accélération
[22] Décélération
[23] Sélect.proc.bit 0
[32] Entrée impulsions
[34] Bit rampe 0
[37] Mode incendie
[52] Fct autorisé
[53] Démar. mode local
[54] Démar.auto
[60] Compteur A (augm.)
[61] Compteur A (dimin.)
[62] Reset compteur A
[63] Compteur B (augm.)
[64] Compteur B (dimin.)
[65] Reset compteur B
[101] Veille
[120] Démar.pomp.princ.
[121] Altern.pompe princ.
[130] Verrouill. pomp1
5-13 E.digit.born.29
Paramètre de conguration de la fonction d’entrée de la borne
d’entrée 29.
Option: Fonction:
[131] Verrouill. pomp2
[132] Verrouill. pomp3
[133] Verrouill. pompe 4
[134] Verrouill. pompe 5
3.6.3 5-3* Sorties digitales
Paramètres de conguration des fonctions de sortie pour
les bornes de sortie.
5-34 On Delay, Digital Output
Range: Fonction:
0.01 s* [0 - 600 s] Saisir la temporisation avant que la sortie
digitale ne soit allumée. La condition de la
sortie digitale (borne 42/45) ne doit pas être
interrompue pendant la temporisation.
5-35 O Delay, Digital Output
Range: Fonction:
0.01 s* [0 - 600 s] Saisir la temporisation avant que la sortie
digitale ne soit éteinte. La condition de la
sortie digitale (borne 42/45) ne doit pas être
interrompue pendant la temporisation.
3.6.4 5-4* Relais
Paramètres de conguration des fonctions de temporisation et de sortie des relais.
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
[0] Inactif
[1] Comm.prete La carte de commande reçoit la tension
d’alimentation.
[2] Variateur prêt Le variateur de fréquence est prêt à
fonctionner et applique un signal
d’alimentation sur la carte de
commande.
[3] Var.prêt en
ctrl.dist.
[4] Attente/pas
d'avert.
Le variateur de fréquence est prêt à
fonctionner en mode Auto on.
Le variateur de fréquence est prêt à
fonctionner. Aucun ordre de démarrage
54 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 57

Paramètres Guide de programmation
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
ou d’arrêt n’a été donné. Aucun avertissement n’a été émis.
[5] Fonctionne Le moteur fonctionne.
[6] Fonction./pas
d'avert.
[7] F.dans gam/pas
avert
[8] F.sur réf/pas
avert.
[9] Alarme Une alarme active la sortie.
[10] Alarme ou
avertis.
[12] Hors gamme
courant
[13] Courant inf. bas Le courant du moteur est inférieur à la
[14] Courant sup.
haut
[16] Vitesse inf.
basse
[17] Vitesse sup.
haute
[19] Inf.retour bas Le signal de retour est inférieur à la
[20] Sup.retour haut Le signal de retour est supérieur à la
[21] Avertis.thermiq. L’avertissement thermique s’allume
Le moteur tourne et aucun avertissement n’a été émis.
Le moteur fonctionne dans les plages de
courant programmées, voir le
paramétre 4-50 Avertis. courant bas et le
paramétre 4-51 Avertis. courant haut.
Aucun avertissement n’a été émis.
Le moteur fonctionne à la vitesse de
référence et sans avertissement.
La sortie est activée par une alarme ou
un avertissement.
Le courant du moteur est en dehors des
plages dénies au paramétre 4-50 Avertis.
courant bas et au paramétre 4-51 Avertis.
courant haut.
limite dénie au paramétre 4-50 Avertis.
courant bas.
Le courant du moteur est supérieur à la
limite dénie au paramétre 4-51 Avertis.
courant haut.
La vitesse de sortie du variateur de
fréquence est inférieure à la limite
dénie au paramétre 4-40 Warning Freq.
Low.
La vitesse de sortie du variateur de
fréquence est supérieure à la limite
dénie au paramétre 4-41 Warning Freq.
High.
limite dénie au
paramétre 4-56 Avertis.retour bas.
limite dénie au
paramétre 4-57 Avertis.retour haut.
lorsque la limite de température est
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
dépassée dans le moteur, le variateur de
fréquence ou la thermistance.
[22] Prêt,ss
avert.therm
[23] Dist.Prêt,Pas
Therm.
[24] Prt, tension OK Le variateur de fréquence est prêt à
[25] Inverse Le moteur fonctionne/est prêt à
[26] Bus OK Active un échange de données au
[35] Verrouillage ext. Voir entrée digitale.
[36] Mot contrôle bit11Le bit 11 du mot de contrôle commande
[37] Mot contrôle bit12Le bit 12 du mot de contrôle commande
[41] Inf. réf., bas La référence est inférieure à la limite
[42] Sup. réf., haut La référence est supérieure à la limite
[45] Ctrl bus La sortie est congurée au
[60] Comparateur 0 Voir le groupe de paramètres 13-1*
[61] Comparateur 1 Voir le groupe de paramètres 13-1*
Le variateur de fréquence est prêt à
fonctionner et il n’y a pas d’avertissement thermique.
Le variateur de fréquence est prêt à
fonctionner en mode Auto et il n’y a pas
d’avertissement thermique.
fonctionner et la tension secteur se situe
dans la plage spéciée.
fonctionner dans le sens horaire lorsque
le niveau logique est 0 et dans le sens
antihoraire lorsque le niveau logique est
1. La sortie change dès que le signal
d’inversion est appliqué.
niveau du port de communication série
(absence de temporisation).
le relais.
le relais.
dénie au paramétre 4-54 Avertis.
référence basse.
dénie au paramétre 4-55 Avertis.
référence haute.
paramétre 5-90 Ctrl bus sortie dig.&relais.
Comparateurs. Si Comparateur 0 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 1 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 55
Page 58

Paramètres
VLT® HVAC Basic Drive FC 101
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
33
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
[62] Comparateur 2 Voir le groupe de paramètres 13-1*
Comparateurs. Si Comparateur 2 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
[63] Comparateur 3 Voir le groupe de paramètres 13-1*
Comparateurs. Si Comparateur 3 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
[64] Comparateur 4 Voir le groupe de paramètres 13-1*
Comparateurs. Si Comparateur 4 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
[65] Comparateur 5 Voir le groupe de paramètres 13-1*
Comparateurs. Si Comparateur 5 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
[70] Règle logique 0 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 0 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[71] Règle logique 1 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 1 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[72] Règle logique 2 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 2 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[73] Règle logique 3 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 3 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[74] Règle logique 4 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 4 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[75] Règle logique 5 Voir le groupe de paramètres 13-4* Règles
de Logique. Si Règle logique 5 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
[80] Sortie digitale A Voir le paramétre 13-52 Action contr.
logique avancé. L’entrée augmente dès
lors que l’action logique avancée [38]
Déf. sort. dig. A haut est exécutée.
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
L’entrée diminue dès lors que l’action de
logique avancée [32] Déf. sort. dig. A bas
est exécutée.
[81] Sortie digitale B Voir le paramétre 13-52 Action contr.
logique avancé. L’entrée augmente dès
lors que l’action logique avancée [39]
Déf. sort. dig. B haut est exécutée.
L’entrée diminue dès lors que l’action de
logique avancée [33] Déf. sort. dig. B bas
est exécutée.
[82] Sortie digitale C Voir le paramétre 13-52 Action contr.
logique avancé. L’entrée augmente dès
lors que l’action logique avancée [40]
Déf. sort. dig. C haut est exécutée.
L’entrée diminue dès lors que l’action de
logique avancée [34] Déf. sort. dig. C bas
est exécutée.
[83] Sortie digitale D Voir le paramétre 13-52 Action contr.
logique avancé. L’entrée augmente dès
lors que l’action de logique avancée [41]
Déf. sort. dig. D haut est exécutée.
L’entrée diminue dès lors que l’action de
logique avancée [35] Déf. sort. dig. D bas
est exécutée.
[160] Pas d'alarme La sortie est haute en l’absence
d’alarmes.
[161] Fonct. inversé La sortie est haute dès lors que le
variateur de fréquence fonctionne dans
le sens antihoraire (produit logique des
bits d’état fonct. et inversé).
[165] Référence locale
act.
[166] Réf.dist.active La sortie est haute dès lors que la
[167] Ordre dém. actif La sortie est haute dès lors qu’il existe
La sortie est haute dès lors que la
référence locale est activée par la touche
[Hand On] du LCP ou par un ordre hand
on de l’entrée digitale.
référence distante est activée par la
touche [Auto On] du LCP ou par un
ordre auto on de l’entrée digitale.
un ordre de démarrage actif (à savoir via
le raccordement du bus de l’entrée
digitale ou [Hand On] ou [Auto On]) et
qu’aucun ordre d’arrêt n’est actif.
56 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 59

Paramètres Guide de programmation
5-40 Fonction relais
Tableau (Relais 1 [0], Relais 2 [1])
Sélectionner des options pour dénir la fonction des relais.
La sélection de chaque relais mécanique est eectuée dans un
paramètre de tableau. Lorsque le paramétre 0-03 Réglages
régionaux est réglé sur [0] International, la valeur par défaut est
[9] Alarme. Lorsque le paramétre 0-03 Réglages régionaux est réglé
sur [1] Amérique Nord, la valeur par défaut est [160] Pas d’alarme.
Option: Fonction:
[168] Mode manuel La sortie est haute dès lors que le
variateur de fréquence est en mode
Hand on (comme indiqué par le voyant
au-dessus de [Hand On]).
[169] Mode
automatique
[190] Absence de
débit
[193] Mode veille Le variateur de fréquence/système est
[194] Courroie cassée Une condition de courroie cassée a été
[196] Mode incendie Le variateur de fréquence fonctionne en
[198] Bipasse mode
actif
[211] Pompe cascade
1
[212] Pompe cascade
2
[213] Pompe cascade
3
[214] Pompe cascade
4
[215] Pompe cascade
5
La sortie est haute dès lors que le
variateur de fréquence est en mode
Auto on (comme indiqué par le voyant
au-dessus de [Auto On]).
Une condition d’absence de débit a été
détectée. Voir le groupe de paramètres
22-2* Détect.abs. débit.
passé en mode veille. Voir le groupe de
paramètres 22-4* Mode veille.
détectée. Activer la fonction au
paramétre 22-60 Fonct.courroi.cassée.
mode incendie. Voir le groupe de
paramètres 24-0* Mode incendie.
À utiliser comme signal pour activer le
bipasse électromécanique externe qui
commute le moteur directement sur le
secteur.
Voir le groupe de paramètres 24-1*
Contourn. variateur.
5-41 Relais, retard ON
Tableau [2]
Range: Fonction:
paramétre 5-40 Fonction relais pour plus de
précisions.
Illustration 3.7 Relais, retard ON
5-42 Relais, retard OFF
Tableau[2]
Range: Fonction:
0.01s* [0.01 -
600 s]
Saisir le délai de désactivation des relais.
Choisir un des 2 relais mécaniques internes
dans une fonction de tableau. Voir le
paramétre 5-40 Fonction relais pour plus de
précisions. Si la condition Événement
sélectionné est modiée avant l’expiration
d’une temporisation, la sortie relais n’est pas
aectée.
3 3
5-41 Relais, retard ON
Tableau [2]
Range: Fonction:
0.01 s* [0.01 600 s]
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 57
Saisir le délai d’activation des relais. Choisir
un des 2 relais mécaniques internes dans
une fonction de tableau. Voir le
Illustration 3.8 Relais, retard OFF
Page 60
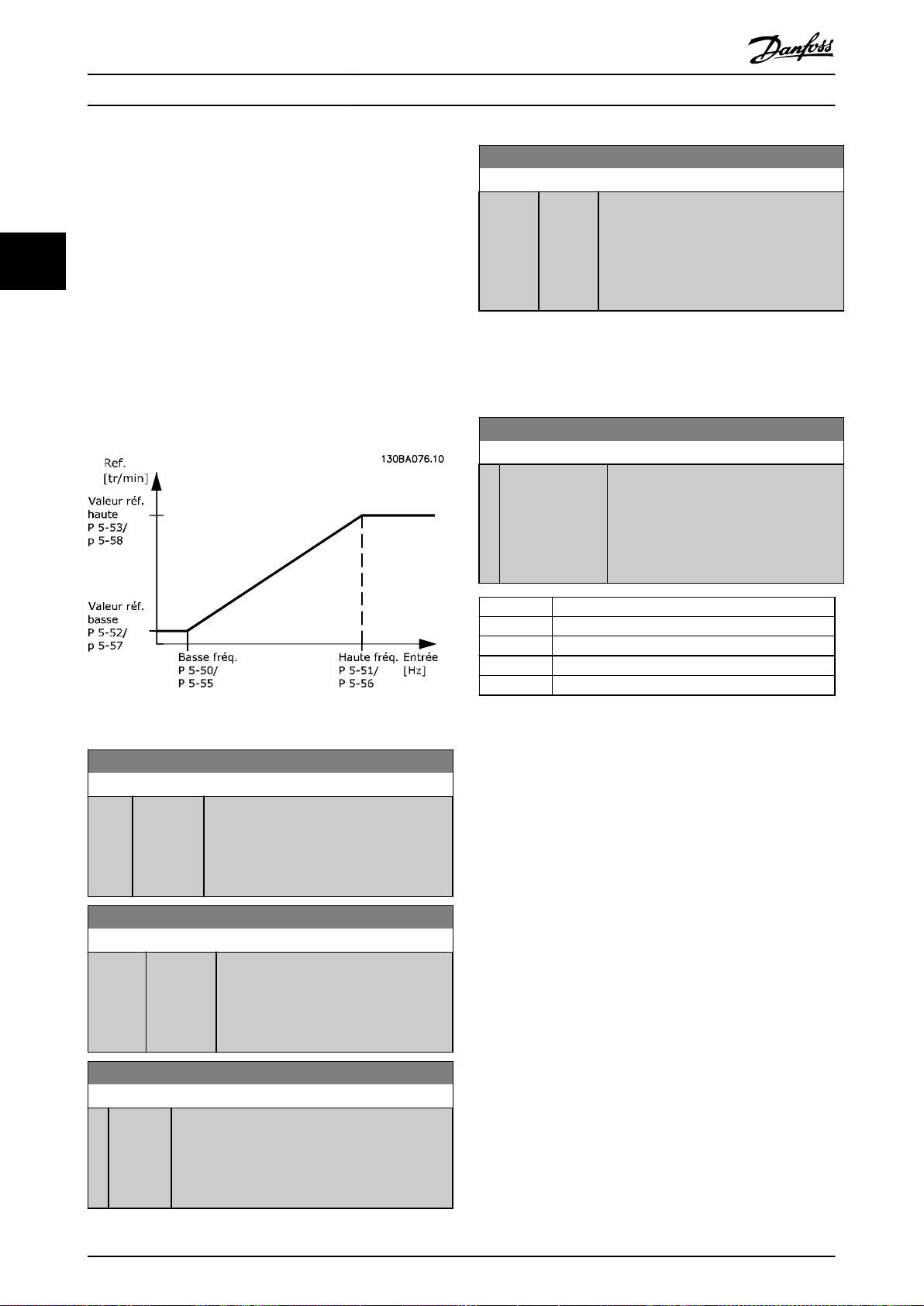
Paramètres
VLT® HVAC Basic Drive FC 101
Si la condition Événement sélectionné est modiée avant
l’expiration du retard ON ou OFF, la sortie relais n’est pas
aectée.
3.6.5 5-5* Entrée impulsions
33
Paramètres d’entrées d’impulsions servant à dénir une
fenêtre adaptée à la zone de référence des impulsions
5-53 Val.ret./Réf.haut.born.29
Range: Fonction:
Size
related*
[-4999 4999 ]
Saisir la valeur de référence élevée [tr/min]
pour la vitesse de l’arbre moteur et la
valeur de signal de retour élevée.
Sélectionner la borne 29 comme entrée
digitale (paramétre 5-13 E.digit.born.29 =
valeur applicable).
(conguration mise à l’échelle et ltre pour entrées
d’impulsions). Les bornes d’entrée 29 ou 33 agissent
comme des entrées de référence de fréquence. Régler la
3.6.6 5-9* Contrôle par bus
borne 29 (paramétre 5-13 E.digit.born.29) ou la borne 33
(paramétre 5-15 E.digit.born.33) sur [32] Entrée impulsions. Si
la borne 29 est utilisée comme entrée, régler le
paramétre 5-01 Mode born.27 sur [0] Entrée.
Ce groupe de paramètres sélectionne les sorties relais et
digitales à l’aide du réglage du bus de terrain.
5-90 Ctrl bus sortie dig.&relais
Range: Fonction:
0* [0 - 0xFFFFFFFF ] Ce paramètre contient l'état des sorties
digitales et des relais contrôlé par bus.
Une logique 1 indique que la sortie est
haute ou active.
Une logique 0 indique que la sortie est
basse ou inactive.
Illustration 3.9 Entrée impulsions
5-50 F.bas born.29
Range: Fonction:
20
Hz*
[20 31999 Hz]
Saisir la limite de fréquence basse correspondant à la vitesse de l’arbre moteur basse
(c.-à-d. la valeur de référence basse) au
paramétre 5-52 Val.ret./Réf.bas.born.29. Voir
l’Illustration 3.9.
5-51 F.haute born.29
Range: Fonction:
32000
Hz*
[21 32000 Hz]
Saisir la limite de fréquence haute correspondant à la vitesse de l’arbre moteur
élevée (c.-à-d. la valeur de référence
haute) au paramétre 5-53 Val.ret./
Réf.haut.born.29.
Bit 0–3 Réservé
Bit 4 Borne sortie relais 1
Bit 6–23 Réservé
Bit 24 Sortie digitale borne 42
Bit 26–31 Réservé
Tableau 3.5 Fonctions de bit
5-52 Val.ret./Réf.bas.born.29
Range: Fonction:
0* [-4999 -
4999 ]
58 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Saisir la limite de la valeur de référence basse
pour la vitesse de l’arbre moteur [tr/min]. C’est
également la valeur du signal de retour la plus
basse. Régler la borne 29 sur entrée digitale
(paramétre 5-13 E.digit.born.29 = valeur applicable).
Page 61

Réf./signal de retour
[tr/min]
Entrée analogique
Réf. haute/
valeur sign. retour'
Réf. basse/
valeur sign. retour'
'Basse tension' ou
'courant faible'
'Haute tension' ou
'courant élevé'
130BA038.13
1V 5 V 10 V
300
600
900
1 200
1 500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Paramètres Guide de programmation
3.7 Menu principal - E/S ana. - Groupe 6
Groupe de paramètres permettant de congurer les E/S
analogiques et la sortie digitale.
Le variateur de fréquence fournit 2 entrées
analogiques :
borne 53 ;
•
borne 54.
•
Les entrées analogiques peuvent être librement attribuées
à la tension (0–10 V) ou à l’entrée de courant (0/4–20 mA).
3.7.1 6-0* Mode E/S ana.
6-00 Temporisation/60
Range: Fonction:
10 s* [1 - 99 s] Saisir la durée de la temporisation.
6-01 Fonction/Tempo60
Option: Fonction:
Sélectionner la fonction de temporisation. La
fonction dénie au paramétre 6-01 Fonction/
Tempo60 est activée si le signal d’entrée sur la
borne 53 ou 54 est inférieur à 50 % de la
valeur du paramétre 6-10 Ech.min.U/born.53, du
paramétre 6-12 Ech.min.I/born.53, du
paramétre 6-20 Ech.min.U/born.54 ou du
paramétre 6-22 Ech.min.I/born.54 pendant une
durée dénie au
paramétre 6-00 Temporisation/60.
[0] * Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse
max.
[5] Arrêt et
alarme
Illustration 3.10 Fonction/Tempo60
6-02 Fonction/tempo60 mode incendie
Option: Fonction:
[0] * Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse
3.7.2 6-1* Entrée ANA 53
Paramètres de conguration de la mise à l'échelle et des
limites de l'entrée analogique 53 (borne 53).
3 3
Sélectionner la fonction de temporisation
quand le mode incendie est actif. La fonction
dénie dans ce paramètre est activée si le
signal d’entrée sur les entrées analogiques est
inférieur à 50 % de la valeur basse pendant
une durée dénie au paramétre 6-00 Tempori-
sation/60.
max.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 59
6-10 Ech.min.U/born.53
Range: Fonction:
0.07 V* [0 - 10V]Saisir la tension (V) correspondant à la valeur
du paramétre 6-14 Val.ret./Réf.bas.born.53. Pour
activer le paramétre 6-01 Fonction/Tempo60,
régler sur une valeur > 1 V.
6-11 Ech.max.U/born.53
Range: Fonction:
10 V* [0 - 10 V] Saisir la tension (V) correspondant à la valeur
de référence haute (dénie au
paramétre 6-15 Val.ret./Réf.haut.born.53).
Page 62

Paramètres
VLT® HVAC Basic Drive FC 101
6-12 Ech.min.I/born.53
Range: Fonction:
4 mA* [0 - 20
mA]
33
Saisir la valeur de courant faible. Ce signal de
référence correspond à la valeur de référence/
signal de retour basse dénie au
paramétre 6-14 Val.ret./Réf.bas.born.53. Pour
activer le paramétre 6-01 Fonction/Tempo60,
régler sur une valeur > 2 mA.
6-20 Ech.min.U/born.54
Range: Fonction:
0.07 V* [0 -
10 V]
Saisir la tension (V) correspondant à la valeur
de référence basse (dénie au
paramétre 6-24 Val.ret./Réf.bas.born.54). Pour
activer le paramétre 6-01 Fonction/Tempo60,
régler sur une valeur > 1 V.
6-21 Ech.max.U/born.54
6-13 Ech.max.I/born.53
Range: Fonction:
20 mA* [0 - 20
mA]
Saisir la valeur de courant haut correspondant à la référence ou au signal de
retour haut déni au paramétre 6-15 Val.ret./
Réf.haut.born.53.
Range: Fonction:
10 V* [0 - 10 V] Saisir la tension (V) correspondant à la valeur
de référence haute (dénie au
paramétre 6-25 Val.ret./Réf.haut.born.54).
6-22 Ech.min.I/born.54
Range: Fonction:
6-14 Val.ret./Réf.bas.born.53
Range: Fonction:
0* [-4999 -
4999 ]
Saisir valeur de référence ou de signal de retour
correspondant à la tension ou au courant déni
du paramétre 6-10 Ech.min.U/born.53 au
paramétre 6-12 Ech.min.I/born.53.
4
mA*
[0 20 mA]
Saisir la valeur de courant faible. Ce signal de
référence correspondre à la valeur de référence/
signal de retour basse dénie au
paramétre 6-24 Val.ret./Réf.bas.born.54. Pour
activer la fonction de temporisation zéro signal
au paramétre 6-01 Fonction/Tempo60, régler la
valeur sur plus de 2 mA.
6-15 Val.ret./Réf.haut.born.53
Range: Fonction:
Size
related*
[-4999 4999 ]
Saisir valeur de référence ou de signal de
retour correspondant à la tension ou au
courant déni du
paramétre 6-11 Ech.max.U/born.53 au
paramétre 6-13 Ech.max.I/born.53.
6-23 Ech.max.I/born.54
Range: Fonction:
20 mA* [0 - 20
mA]
Saisir la valeur de courant haut correspondant à la valeur de référence ou de
signal de retour haute dénie au
paramétre 6-25 Val.ret./Réf.haut.born.54.
6-16 Const.tps.l.born.53
Range: Fonction:
0.01 s* [0.01 10 s]
Saisir la constante de temps (constante de
temps du ltre passe-bas digital de 1er ordre
pour la suppression du bruit électrique sur la
borne 53). Une valeur élevée améliore l'atténuation mais accroît le retard via le ltre.
6-19 Terminal 53 mode
Option: Fonction:
Sélectionner si la borne 53 est utilisée pour
l’entrée de courant ou de tension.
[0] Courant
[1] * Tension
3.7.3 6-2* Entrée ANA 54
Paramètres de conguration de la mise à l'échelle et des
limites de l'entrée analogique 54 (borne 54).
6-24 Val.ret./Réf.bas.born.54
Range: Fonction:
0* [-4999 -
4999 ]
Saisir valeur de réf. ou de signal de retour
correspondant à la tension ou au courant déni
au paramétre 6-21 Ech.max.U/born.54/
paramétre 6-22 Ech.min.I/born.54.
6-25 Val.ret./Réf.haut.born.54
Range: Fonction:
Size
related*
[-4999 4999 ]
Saisir valeur de réf. ou de signal de retour
correspondant à la tension ou au courant
déni au paramétre 6-21 Ech.max.U/born.
54/paramétre 6-23 Ech.max.I/born.54.
6-26 Const.tps.l.born.54
Range: Fonction:
0.01 s* [0.01 10 s]
Saisir la constante de temps, qui est une
constante de temps de ltre passe-bas digital
de premier ordre pour la suppression du
bruit électrique sur la borne 54. Une valeur
élevée améliore l’atténuation mais accroît le
retard via le ltre.
60 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 63

Paramètres Guide de programmation
6-29 Mode born.54
Option: Fonction:
Sélectionner si la borne 54 est utilisée pour
l'entrée de courant ou de tension.
[0] Courant
[1] * Tension
3.7.4 6-7* Sortie analog./dig. 45
Paramètres de conguration de la mise à l’échelle et des
limites de sortie analogique/digitale de la borne 45. Les
sorties analogiques sont des sorties de courant : 0/4–
20 mA. La résolution sur la sortie analogique est de 12 bits.
Les bornes de sortie analogique peuvent être réglées en
tant que sortie digitale.
6-70 Mode born.45
Option: Fonction:
Régler la borne 45 comme une sortie
analogique ou digitale.
[0] * 0-20 mA
[1] 4-20 mA
[2] Sortie digitale
6-71 Sortie ANA borne 45
Option: Fonction:
Sélectionner la fonction de la borne 45
comme sortie de courant analogique.
Voir aussi le paramétre 6-70 Mode born.
45.
[254] Tension bus-CC
[0] * Inactif
[100] Fréquence sortie 0–100 Hz
[101] Référence Min
[102] Retour MinFB–Max
[103] Courant moteur 0–I
[106] Puissance 0–P
[139] Ctrl bus 0–100%
[254] Tension bus-CC 0–65535 V
6-72 S.digit.born.45
Option: Fonction:
[0] * Inactif
[1] Comm.prete
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1 000 V
•
T6, 500–1 000 V
•
–Max
Réf.
Réf.
FB
max
nom
Sélectionner la fonction de la borne
45 comme sortie de courant
digitale. Voir aussi le
paramétre 6-70 Mode born.45. Voir le
paramétre 5-40 Fonction relais pour
obtenir une description des options.
6-72 S.digit.born.45
Option: Fonction:
[2] Variateur prêt
[3] Var.prêt en ctrl.dist.
[4] Attente/pas d'avert.
[5] Fonctionne
[6] Fonction./pas d'avert.
[7] F.dans gam/pas avert
[8] F.sur réf/pas avert.
[9] Alarme
[10] Alarme ou avertis.
[12] Hors gamme courant
[13] Courant inf. bas
[14] Courant sup. haut
[16] Vitesse inf. basse
[17] Vitesse sup. haute
[19] Inf.retour bas
[20] Sup.retour haut
[21] Avertis.thermiq.
[22] Prêt,ss avert.therm
[23] Dist.Prêt,Pas Therm.
[24] Prt, tension OK
[25] Inverse
[26] Bus OK
[35] Verrouillage ext.
[36] Mot contrôle bit 11
[37] Mot contrôle bit 12
[41] Inf. réf., bas
[42] Sup. réf., haut
[45] Ctrl bus
[60] Comparateur 0
[61] Comparateur 1
[62] Comparateur 2
[63] Comparateur 3
[64] Comparateur 4
[65] Comparateur 5
[70] Règle logique 0
[71] Règle logique 1
[72] Règle logique 2
[73] Règle logique 3
[74] Règle logique 4
[75] Règle logique 5
[80] Sortie digitale A
[81] Sortie digitale B
[82] Sortie digitale C
[83] Sortie digitale D
[160] Pas d'alarme
[161] Fonct. inversé
[165] Référence locale act.
[166] Réf.dist.active
[167] Ordre dém. actif
[168] Mode manuel
[169] Mode automatique
[190] Absence de débit
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 61
Page 64

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Paramètres
VLT® HVAC Basic Drive FC 101
6-72 S.digit.born.45
Option: Fonction:
[193] Mode veille
[194] Courroie cassée
[196] Mode incendie
33
[198] Bipasse mode actif
6-73 Echelle min s.born.45
Range: Fonction:
0 %* [0 -
200 %]
Mettre à l’échelle la valeur minimale de sortie (0
ou 4 mA) du signal analogique à la borne 45.
Régler la valeur de façon à ce qu’elle
corresponde au pourcentage de la plage entière
de la variable sélectionnée au
paramétre 6-71 Sortie ANA borne 45.
6-74 Echelle max s.born.45
Range: Fonction:
100%* [0 -
Mettre à l’échelle la valeur maximale de sortie (20
200
mA) du signal analogique à la borne 45. Régler la
%]
valeur de façon à ce qu’elle corresponde au
pourcentage de la plage entière de la variable
sélectionnée au paramétre 6-71 Sortie ANA borne
45.
6-90 Terminal 42 Mode
Option: Fonction:
Régler la borne 42 comme une sortie
analogique ou digitale.
[0] * 0-20 mA
[1] 4-20 mA
[2] Sortie digitale
6-91 Sortie ANA borne 42
Option: Fonction:
Sélectionner la fonction de la borne 42
comme sortie de courant analogique.
Voir aussi le paramétre 6–90 Terminal 42
Mode.
[254] Tension bus-CC
[0] * Inactif
[100] Fréquence sortie 0–100 Hz
[101] Référence Min
[102] Retour MinFB – Max
[103] Courant moteur 0–I
[106] Puissance 0–P
[139] Ctrl bus 0–100%
[184] Mirror AI53 mA 0–20
[185] Mirror AI54 mA 0–20
[254] Tension bus-CC 0–65535 V
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1 000 V
•
T6, 500–1 000 V
•
– Max
Réf.
max
nom
Réf.
FB
6-92 Terminal 42 Digital Output
Option: Fonction:
Sélectionner la fonction de la borne
42 comme sortie de courant
Illustration 3.11 Échelle maximale de sortie
6-76 Ctrl bus sortie born. 45
Range: Fonction:
0* [0 - 16384 ] Maintient le niveau de la sortie analogique si
contrôlée par le bus.
3.7.5 6-9* Sortie analog./dig. 42
Paramètres de conguration des limites pour la sortie
analogique/digitale à la borne 42. Les sorties analogiques
sont des sorties de courant : 0/4–20 mA. La résolution sur
les sorties analogiques est de 12 bits. Les bornes de sortie
analogique peuvent être réglées en tant que sortie digitale.
62 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
[0] * Inactif
[1] Comm.prete
[2] Variateur prêt
[3] Var.prêt en ctrl.dist.
[4] Attente/pas d'avert.
[5] Fonctionne
[6] Fonction./pas d'avert.
[7] F.dans gam/pas avert
[8] F.sur réf/pas avert.
[9] Alarme
[10] Alarme ou avertis.
[12] Hors gamme courant
[13] Courant inf. bas
[14] Courant sup. haut
[16] Vitesse inf. basse
[17] Vitesse sup. haute
analogique. Voir aussi le
paramétre 6-90 Terminal 42 Mode.
Voir le paramétre 5-40 Fonction relais
pour la description des choix.
Page 65

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Paramètres Guide de programmation
6-92 Terminal 42 Digital Output
Option: Fonction:
[19] Inf.retour bas
[20] Sup.retour haut
[21] Avertis.thermiq.
[22] Prêt,ss avert.therm
[23] Dist.Prêt,Pas Therm.
[24] Prt, tension OK
[25] Inverse
[26] Bus OK
[35] Verrouillage ext.
[36] Mot contrôle bit 11
[37] Mot contrôle bit 12
[41] Inf. réf., bas
[42] Sup. réf., haut
[45] Ctrl bus
[60] Comparateur 0
[61] Comparateur 1
[62] Comparateur 2
[63] Comparateur 3
[64] Comparateur 4
[65] Comparateur 5
[70] Règle logique 0
[71] Règle logique 1
[72] Règle logique 2
[73] Règle logique 3
[74] Règle logique 4
[75] Règle logique 5
[80] Sortie digitale A
[81] Sortie digitale B
[82] Sortie digitale C
[83] Sortie digitale D
[160] Pas d'alarme
[161] Fonct. inversé
[165] Référence locale act.
[166] Réf.dist.active
[167] Ordre dém. actif
[168] Mode manuel
[169] Mode automatique
[190] Absence de débit
[193] Mode veille
[194] Courroie cassée
[196] Mode incendie
[198] Bipasse mode actif
6-94 Echelle max s.born.42
Range: Fonction:
100%* [0 -
Dénir la valeur maximale de sortie (20 mA) de la
200
mise à l’échelle à la borne 42. Régler la valeur de
%]
façon à ce qu’elle corresponde au pourcentage de
la plage entière de la variable sélectionnée au
paramétre 6-91 Sortie ANA borne 42.
Illustration 3.12 Échelle maximale de sortie
6-96 Ctrl bus sortie born. 42
Range: Fonction:
0* [0 - 16384 ] Maintient la sortie analogique à la borne 42 si
contrôlée par le bus.
3 3
6-93 Echelle min s.born.42
Range: Fonction:
0 %* [0 -
200 %]
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 63
Mise à l’échelle de la valeur minimale de sortie (0
ou 4 mA) du signal analogique à la borne 42.
Régler la valeur de façon à ce qu’elle
corresponde au pourcentage de la plage entière
de la variable sélectionnée au
paramétre 6-91 Sortie ANA borne 42.
Page 66

Paramètres
VLT® HVAC Basic Drive FC 101
3.8 Menu principal - Comm. et options -
3.8.2 8-3* Réglage Port FC
Groupe 8
8-30 Protocole
3.8.1 8-0* Réglages généraux
33
8-01 Type contrôle
Option: Fonction:
Ce paramètre annule les réglages du
paramétre 8-50 Sélect.roue libre au
paramétre 8-56 Sélect. réf. par défaut.
[0] * Digital. et mot
ctrl.
[1] Seulement
digital
[2] Mot Contr.
seulement
Contrôle utilisant à la fois entrée digitale et
mot de contrôle.
Contrôle utilisant des entrées digitales
uniquement.
Contrôle utilisant uniquement le mot de
contrôle.
8-02 Source contrôle
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
Sélectionner la source du mot de contrôle.
[0] Aucun
[1] * FC RS485
8-03 Ctrl.Action dépas.tps
Range: Fonction:
Size
related*
8-04 Contrôle Fonct.dépas.tps
Option: Fonction:
[0] * Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse max.
[5] Arrêt et alarme
[20] Déclench.
[0.1 6500 s]
dépass.N2
Saisir le temps maximal théorique séparant
la réception de 2 télégrammes consécutifs.
Si ce délai est dépassé, cela indique que la
communication série s’est arrêtée. La
fonction sélectionnée au
paramétre 8-04 Contrôle Fonct.dépas.tps est
alors exécutée.
Sélectionner la fonction de temporisation.
Celle-ci s’active si le mot de contrôle n’est
pas mis à jour dans le laps de temps
spécié au paramétre 8-03 Ctrl.Action
dépas.tps.
Cette option n'est valable que lorsqu’il
s’agit du protocole N2.
Option: Fonction:
Sélectionner le protocole pour le port RS485
intégré.
[0] * FC Communication conforme au protocole FC.
[2] Modbus
RTU
[3] Metasys N2 Protocole de communication. Le protocole
[4] FLN Communication conforme au protocole FLN.
[5] BACNet Communication conforme au protocole
Communication conforme au protocole
Modbus RTU.
logiciel N2 est conçu pour être général an de
s’adapter aux propriétés uniques de chaque
dispositif.
BACNet.
8-31 Adresse
Range: Fonction:
Size
related*
[ 0.0 - 247 ] Entrer l'adresse du port RS485. Plage
valide : 1-126 pour bus FC OU 1-247
pour Modbus.
8-32 Vit. transmission
Option: Fonction:
Choisir la vitesse de transmission du port
RS485.
La valeur par défaut fait référence au protocole
FC. Le changement de protocole au
paramétre 8-30 Protocole peut modier la
vitesse de transmission.
Le changement de protocole au
paramétre 8-30 Protocole peut modier la
vitesse de transmission.
[0] 2400 bauds
[1] 4800 bauds Valeur par défaut pour FLN
[2] 9600 Bauds Réglage par défaut pour :
BACnet.
•
Metasys N2.
•
[3] 19200 bauds Réglage par défaut pour Modbus RTU.
[4] 38400 bauds
[5] 57600 Bauds
[6] 76800 Bauds
[7] 115200
bauds
8-33 Parité/bits arrêt
Option: Fonction:
Dénit la parité et les bits d’arrêt du
protocole à l’aide du port FC. Pour
certains protocoles, les options ne sont
pas toutes disponibles.
64 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 67

Paramètres Guide de programmation
8-33 Parité/bits arrêt
Option: Fonction:
La valeur par défaut fait référence au
protocole FC. Le changement de
protocole au paramétre 8-30 Protocol
peut modier la vitesse de transmission.
[0] Parité paire, 1 bit
d'arrêt
[1] Parité impaire, 1 bit
d'arrêt
[2] Pas de parité, 1 bit
d'arrêt
[3] Pas de parité, 2 bits
d'arrêt
8-35 Retard réponse min.
Range: Fonction:
Size
related*
[ 0.0010 - 0.5s]Spécier un retard minimum entre
la réception d’une demande et la
transmission d’une réponse. Cela
permet de surmonter les délais
d’exécution du modem.
8-36 Retard réponse max
Range: Fonction:
Size
related*
[ 0.1 -
10.0 s]
Spécier le retard maximum autorisé
entre la réception d’une demande et la
transmission de la réponse. Si ce temps
est dépassé, aucune réponse n’est
envoyée.
8-37 Retard inter-char max
Range: Fonction:
Size related* [ 0.005 -
0.025 s]
Spécier le retard maximum entre
deux caractères dans un message.
Le dépassement de ce retard
entraîne le rejet du message.
3.8.3 8-4* Déf. protocol FC MC
Ce groupe de paramètres sert pour la conguration de la
lecture et de l'écriture des PCD.
8-42 Cong. écriture PCD
Diérents paramètres peuvent être attribués aux PCD 3–10 des
PPO (le nombre de PCD dépend du type de PPO). Les valeurs
contenues dans les PCD 3–10 sont écrites dans les paramètres
sélectionnés sous forme de valeurs de données.
Option: Fonction:
[0] None
[1] [302] Minimum Reference
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
[4] [342] Ramp 1 Ramp down time
[5] [351] Ramp 2 Ramp up time
8-42 Cong. écriture PCD
Diérents paramètres peuvent être attribués aux PCD 3–10 des
PPO (le nombre de PCD dépend du type de PPO). Les valeurs
contenues dans les PCD 3–10 sont écrites dans les paramètres
sélectionnés sous forme de valeurs de données.
Option: Fonction:
[6] [352] Ramp 2 Ramp down time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[9] [412] Motor Speed Low Limit
[Hz]
[10] [414] Motor Speed High Limit
[Hz]
[11] [590] Digital & Relay Bus
Control
[12] [676] Terminal45 Output Bus
Control
[13] [696] Terminal 42 Output Bus
Control
[14] [894] Bus Feedback 1
[15] FC Port CTW
[16] FC Port REF
[17] [2021] Consigne 1
8-43 Cong. lecture PCD
Diérents paramètres peuvent être attribués aux PCD 3–10 des
PPO (le nombre de PCD dépend du type de PPO). Les PCD 3–10
maintiennent la valeur des données actuelle des paramètres
sélectionnés.
Option: Fonction:
[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1652] Feedback [Unit]
[23] [1660] Digital Input 18,19,27,33
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 65
Page 68

Paramètres
VLT® HVAC Basic Drive FC 101
8-43 Cong. lecture PCD
Diérents paramètres peuvent être attribués aux PCD 3–10 des
PPO (le nombre de PCD dépend du type de PPO). Les PCD 3–10
maintiennent la valeur des données actuelle des paramètres
sélectionnés.
33
Option: Fonction:
[24] [1661] Terminal 53 Switch Setting
[25] [1662] Analog input 53
[26] [1663] Terminal 54 Switch Setting
[27] [1664] Analog input 54
[28] [1665] Analog output 42 [mA]
[29] [1671] Relay output
[30] [1672] Counter A
[31] [1673] Counter B
[32] [1690] Alarm Word
[33] [1692] Warning Word
[34] [1694] Ext. Status Word
8-51 Sélect. arrêt rapide
Option: Fonction:
[0] Entrée
dig.
[1] Bus Active l’arrêt rapide via le port de communi-
[2] Digital et
bus
[3] * Digital ou
bus
Active l’arrêt rapide via une entrée digitale.
cation série.
Active l’arrêt rapide via le port de communication série et via l’une des entrées digitales.
Active l’arrêt rapide via le port de communication série ou via l’une des entrées digitales.
8-52 Sélect.frein CC
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
3.8.4 8-5* Digital/Bus
Paramètres de conguration de la fusion digitale/bus du
mot de contrôle.
8-50 Sélect.roue libre
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
[0] Entrée
dig.
[1] Bus Active le freinage CC via le port de communi-
[2] Digital et
bus
[3] Digital ou
bus
Sélectionner la commande du frein CC à l’aide
des bornes (entrées digitales).
Active le freinage CC via une entrée digitale.
cation série.
Active le freinage CC via le port de communication série et via l’une des entrées digitales.
Active le freinage CC via le port de communication série ou via l’une des entrées digitales.
Sélectionner la commande de la fonction roue
libre via les bornes (entrées digitales) et/ou le
bus.
[0] Entrée
dig.
[1] Bus Active la roue libre via le port de communi-
[2] Digital et
bus
[3] * Digital
ou bus
Active la roue libre via une entrée digitale.
cation série.
Active la roue libre via le bus de terrain/port de
communication série et via l’une des entrées
digitales.
Active la roue libre via le port de communication série ou via l’une des entrées digitales.
8-51 Sélect. arrêt rapide
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
Sélectionner la commande de la fonction d’arrêt
rapide via les bornes (entrées digitales) et/ou le
bus.
8-53 Sélect.dém.
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
Sélectionner la commande de la fonction au
démarrage du variateur de fréquence via les
bornes (entrées digitales).
[0] Entrée
dig.
[1] Bus Active l’ordre de démarrage via le port de
[2] Digital et
bus
[3]*Digital
ou bus
Active l’ordre de démarrage via une entrée
digitale.
communication série ou les options bus.
Active l’ordre de démarrage via le port de
communication série et via l’une des entrées
digitales.
Active l’ordre de démarrage via le port de
communication série ou via l’une des entrées
digitales.
66 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 69

Paramètres Guide de programmation
8-54 Sélect.Invers.
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
Sélectionner la commande de la fonction
d’inversion du variateur de fréquence via les
bornes (entrée digitale) et/ou le port de
communication série.
[0]*Entrée
dig.
[1] Bus Active la commande d’inversion via le port de
[2] Digital et
bus
[3] Digital
ou bus
Active la commande d’inversion via une entrée
digitale.
communication série.
Active la commande d’inversion via le port de
communication série et via l’une des entrées
digitales.
Active la commande d’inversion via le port de
communication série ou via l’une des entrées
digitales.
8-55 Sélect.proc.
Option: Fonction:
AVIS!
Ce paramètre n’est actif que si le
paramétre 8-01 Type contrôle est réglé sur
[0] Digital. et mot ctrl.
Sélectionner la commande de sélection de
process du variateur de fréquence à l’aide des
bornes (entrée digitale) et/ou du port de
communication série.
[0] Entrée
dig.
[1] Bus Active la sélection de process via le port de
[2] Digital
et bus
[3]*Digital
ou bus
Active la sélection de process à l’aide d’une
entrée digitale.
communication série.
Active la sélection de process via le port de
communication série et via l’une des entrées
digitales.
Active la sélection de process via le port de
communication série ou via l’une des entrées
digitales.
8-56 Sélect. réf. par défaut
Option: Fonction:
[1] Bus Active la sélection de référence prédénie via
le port de communication série.
[2] Digital et
bus
[3] * Digital ou
bus
Active la sélection de la référence prédénie
via le port de communication série et via l’une
des entrées digitales.
Active la sélection de la référence prédénie
via le port de communication série ou via l’une
des entrées digitales.
3.8.5 8-7* BACnet
8-70 Instance dispositif BACnet
Range: Fonction:
1* [0 - 4194303 ] Saisir un numéro d’ID unique pour le
dispositif BACnet.
8-72 Maîtres max MS/TP
Range: Fonction:
127* [0 - 127 ] Dénir l’adresse du maître qui détient l’adresse
la plus haute sur ce réseau. Faire baisser cette
valeur pour optimiser l’invitation à émettre
pour le jeton.
8-73 Cadres info max MS/TP
Range: Fonction:
1* [1 - 65534 ] Dénir le nombre de trames d’info./de données
que le dispositif est autorisé à envoyer lorsqu’il
détient le jeton.
8-74 "Startup I am"
Option: Fonction:
[0] * Vers mise ss
tens°
[1] En continu Sélectionner si le dispositif doit envoyer le
8-75 Initialis. mot de passe
Range: Fonction:
admin* [1 - 1 ] Saisir mot de passe requis pour l'exécution de
Sélectionner si le dispositif doit envoyer le
message de service I-Am uniquement à la
mise sous tension.
message de service I-Am en continu avec
un intervalle d’environ 1 minute.
la réinitialisation du variateur depuis BACnet.
3 3
8-56 Sélect. réf. par défaut
Option: Fonction:
Sélectionner la commande de sélection de la
référence prédénie du variateur de fréquence
à l’aide des bornes (entrées digitales) et/ou du
port de communication série.
[0] Entrée dig. Active la sélection de la référence prédénie
via une entrée digitale.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 67
8-79 Protocol Firmware version
Tableau[5]
Range: Fonction:
Size
related*
[0 - 655 ] La révision du micrologiciel du variateur
de fréquence se trouve dans l’indice 0,
Modbus dans l’indice 1, Metasys N2
Page 70

Paramètres
VLT® HVAC Basic Drive FC 101
8-79 Protocol Firmware version
Tableau[5]
Range: Fonction:
dans l’indice 2, FLN dans l’indice 3,
BACnet dans l’indice 4.
33
3.8.6 8-8* Diagnostics port FC
Ces paramètres permettent de surveiller la communication
par bus via le port FC.
3.8.7 8-9* Retour bus
8-94 Retour bus 1
Range: Fonction:
0* [-32768 -
32767 ]
Écrire un signal de retour dans ce paramètre via
le port de communication série. Sélectionner ce
paramètre au paramétre 20-00 Source retour 1 ou
au paramétre 20-03 PID proc./2 retours en tant
que source du retour. La valeur hexadécimale
4 000 h correspond à 100 % du signal de
retour ; la plage est ±200 %.
8-80 Compt.message bus
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre de
télégrammes valides détectés sur le bus.
8-81 Compt.erreur bus
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre de
télégrammes avec erreurs (p. ex. erreur
CRC) détectés sur le bus.
8-95 Retour bus 2
Range: Fonction:
0* [-32768 -
32767 ]
Écrire un signal de retour à ce paramètre via le
port de communication série. Ce paramètre doit
être sélectionné au paramétre 20-00 Source retour
1 ou au paramétre 20-03 PID proc./2 retours en
tant que source du retour. La valeur hexadécimale 4 000 h correspond à ±200 % sur 100 %
de la plage/signal de retour.
8-82 Messages esclaves reçus
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre de
télégrammes valides envoyés à l’esclave
par le variateur de fréquence.
8-83 Compt.erreur esclave
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre de
télégrammes d’erreur que le variateur de
fréquence n’a pas pu exécuter.
8-84 Mess. esclaves envoyés
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre de
messages envoyés par l’esclave.
8-85 Erreurs tempo esclave
Range: Fonction:
0* [0 - 4294967295 ] Ce paramètre indique le nombre d’erreurs
de temporisation de l’esclave.
8-88 Reset diagnostics port FC
Option: Fonction:
[0] * Pas de reset
[1] Reset compteur
68 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 71

130BA062.13
Etat 1
Événement 1/
Action 1
Etat 2
Événement 2/
Action 2
Événement de
démarrage P13-01
Etat 3
Événement 3/
Action 3
Etat 4
Événement 4/
Action 4
Événement
d'arrêt P13-02
Événement
d'arrêt P13-02
Événement
d'arrêt P13-02
Paramètres Guide de programmation
3.9 Menu principal - Logique avancée -
3.9.2 13-0* Réglages SLC
Groupe 13
Pour activer, désactiver et réinitialiser la séquence du
3.9.1 13-** Caractéristiques prog.
Le contrôleur logique avancé (SLC) est une séquence
d’actions dénies par l’utilisateur (voir le
paramétre 13-52 Action contr. logique avancé [x]) exécutées
par le SLC lorsque l’événement associé déni par l’utilisateur (voir le paramétre 13-51 Événement contr. log avancé
[x]) est évalué comme étant vrai par le SLC. Les
événements et actions sont numérotés et liés par paires.
Cela signie que lorsque [0] événement est satisfait (atteint
la valeur vrai), [0] action est exécutée. Après l’exécution de
cette action, les conditions de [1] événement sont
évaluées. Si elles sont évaluées comme étant vraies, [1]
action est alors exécutée, et ainsi de suite. Un seul
événement est évalué à chaque fois. Si un événement est
évalué comme étant faux, rien ne se passe (dans le SLC)
pendant l’intervalle de balayage en cours et aucun autre
événement n’est évalué. Cela signie que lorsque le SLC
démarre, il évalue [0] événement (et uniquement [0]
événement) à chaque intervalle de balayage. Ce n’est que
lorsque [0] événement est évalué comme étant vrai que le
SLC exécute [0] action et commence l’évaluation de [1]
événement. Il est possible de programmer de 1 à 20
événements et actions. Lorsque le dernier événement/la
dernière action ont été exécutés, la séquence recommence
à partir des [0] événement/[0] action.
Illustration 3.13 Exemple avec trois événements/actions
Démarrage et arrêt du SLC
Pour démarrer ou arrêter le SLC, sélectionner [1] Actif ou [0]
Inactif au paramétre 13-00 Mode contr. log avancé. Le SLC
démarre toujours à l’état 0 (où il évalue [0] événement). Le
SLC démarre lorsque l’événement de démarrage (déni au
paramétre 13-01 Événement de démarrage) est évalué
comme étant vrai (à condition que [1] Actif soit sélectionné
au paramétre 13-00 Mode contr. log avancé). Le SLC s’arrête
lorsque l’événement d’arrêt (paramétre 13-02 Événement
d'arrêt) est vrai. Le Paramétre 13-03 Reset SLC réinitialise
tous les paramètres SLC et démarre la programmation à
partir de zéro.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 69
contrôleur logique avancé, utiliser les réglages SLC. Les
fonctions logiques et les comparateurs fonctionnent
toujours en arrière-plan, ce qui permet un contrôle séparé
des entrées et sorties digitales.
13-00 Mode contr. log avancé
Option: Fonction:
Pour permettre au contrôleur logique avancé de
démarrer en présence d’un ordre de démarrage, p.
ex. via une entrée digitale, sélectionner [1] Actif.
Pour désactiver le contrôleur logique avancé,
sélectionner [0] Inactif.
[0] * Inactif Désactive le contrôleur logique avancé.
[1] Actif Active le contrôleur logique avancé.
13-01 Événement de démarrage
Option: Fonction:
Pour activer le contrôleur logique
avancé, sélectionner l’entrée booléenne
(vrai ou faux).
[0] Faux Saisit la valeur xe faux dans la règle
logique.
[1] Vrai Saisit la valeur xe vrai dans la règle
logique.
[2] En fonction Le moteur fonctionne.
[3] Dans gamme Le moteur fonctionne dans les plages
de courant programmées
(paramétre 4-50 Avertis. courant bas et
paramétre 4-51 Avertis. courant haut).
[4] Sur réf. Le moteur fonctionne à la vitesse de
référence.
[7] Hors gamme
courant
[8] I inf. basse Le courant du moteur est inférieur à la
[9] I sup. haute Le courant du moteur est supérieur à
[16] Avertis.thermiq. L’avertissement thermique s’allume
[17] Tens.sect.horsplage Avertissement ou alarme de perte de
[18] Inversion Le variateur de fréquence s’inverse.
Le courant du moteur est hors de la
plage dénie au paramétre 4-18 Limite
courant.
valeur dénie au
paramétre 4-50 Avertis. courant bas.
la valeur dénie au
paramétre 4-51 Avertis. courant haut.
lorsque la limite de température est
dépassée dans le moteur, le variateur
de fréquence ou la thermistance.
phase secteur, si le
paramétre 14-12 Fonct.sur désiqui.réseau
n’est pas réglé sur [2] Désactivé.
3 3
Page 72

Paramètres
VLT® HVAC Basic Drive FC 101
13-01 Événement de démarrage
Option: Fonction:
[19] Avertissement Un avertissement est présent.
[20] Alarme(Déf.) Une alarme est présente.
[21] Alarme(Verrou déf.) Une alarme verrouillée est présente.
33
[22] Comparateur 0 Utiliser le résultat du comparateur 0
dans la règle logique.
[23] Comparateur 1 Utiliser le résultat du comparateur 1
dans la règle logique.
[24] Comparateur 2 Utiliser le résultat du comparateur 2
dans la règle logique.
[25] Comparateur 3 Utiliser le résultat du comparateur 3
dans la règle logique.
[26] Règle logique 0 Utiliser le résultat de la règle logique 0
dans la règle logique.
[27] Règle logique 1 Utiliser le résultat de la règle logique 1
dans la règle logique.
[28] Règle logique 2 Utiliser le résultat de la règle logique 2
dans la règle logique.
[29] Règle logique 3 Utiliser le résultat de la règle logique 3
dans la règle logique.
[33] Entrée dig. DI18 Utiliser la valeur de DI18 dans la règle
logique (élevé = vrai).
[34] Entrée dig. DI19 Utiliser la valeur de DI19 dans la règle
logique (élevé = vrai).
[35] Entrée dig. DI27 Utiliser la valeur de DI27 dans la règle
logique (élevé = vrai).
[36] Entrée dig. DI29 Utiliser la valeur de DI29 dans la règle
logique (élevé = vrai).
[39]*Ordre de
démarrage
[40] Variateur arrêté Cet événement est vrai si le variateur
[42] Arrêt reset auto Cet événement est vrai si le variateur
[50] Comparateur 4 Utiliser le résultat du comparateur 4
[51] Comparateur 5 Utiliser le résultat du comparateur 5
[60] Règle logique 4 Utiliser le résultat de la règle logique 4
Cet événement est vrai si le variateur
de fréquence est démarré (via une
entrée digitale, un bus de terrain ou
autre).
de fréquence est arrêté ou mis en roue
libre (via une entrée digitale, un bus
de terrain ou autre).
de fréquence est déclenché (mais non
verrouillé par déclenchement) et si une
réinitialisation automatique est émise.
dans la règle logique.
dans la règle logique.
dans la règle logique.
13-01 Événement de démarrage
Option: Fonction:
[61] Règle logique 5 Utiliser le résultat de la règle logique 5
dans la règle logique.
[83] Courroie cassée Une condition de courroie cassée est
détectée. Activer cette fonction au
paramétre 22-60 Fonct.courroi.cassée.
13-02 Événement d'arrêt
Option: Fonction:
Sélectionner la condition (vrai ou faux)
qui désactive le contrôleur logique
avancé.
[0] Faux Saisit la valeur xe faux dans la règle
logique.
[1] Vrai Saisit la valeur xe vrai dans la règle
logique.
[2] En fonction Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[3] Dans gamme Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[4] Sur réf. Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[7] Hors gamme
courant
[8] I inf. basse Voir le paramétre 13-01 Événement de
[9] I sup. haute Voir le paramétre 13-01 Événement de
[16] Avertis.thermiq. Voir le paramétre 13-01 Événement de
[17] Tens.sect.horsplage Voir le paramétre 13-01 Événement de
[18] Inversion Voir le paramétre 13-01 Événement de
[19] Avertissement Voir le paramétre 13-01 Événement de
[20] Alarme(Déf.) Voir le paramétre 13-01 Événement de
Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
70 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 73

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Paramètres Guide de programmation
[21] Alarme(Verrou déf.) Voir le paramétre 13-01 Événement de
[22] Comparateur 0 Utiliser le résultat du comparateur 0
[23] Comparateur 1 Utiliser le résultat du comparateur 1
[24] Comparateur 2 Utiliser le résultat du comparateur 2
[25] Comparateur 3 Utiliser le résultat du comparateur 3
[26] Règle logique 0 Utiliser le résultat de la règle logique 0
[27] Règle logique 1 Utiliser le résultat de la règle logique 1
[28] Règle logique 2 Utiliser le résultat de la règle logique 2
[29] Règle logique 3 Utiliser le résultat de la règle logique 3
[30] Temporisation 0 Utiliser le résultat de la temporisation
[31] Temporisation 1 Utiliser le résultat de la temporisation
[32] Temporisation 2 Utiliser le résultat de la temporisation
[33] Entrée dig. DI18 Utiliser la valeur de DI18 dans la règle
[34] Entrée dig. DI19 Utiliser la valeur de DI19 dans la règle
[35] Entrée dig. DI27 Utiliser la valeur de DI27 dans la règle
[36] Entrée dig. DI29 Utiliser la valeur de DI29 dans la règle
[39] Ordre de
[40]*Variateur arrêté Cet événement est vrai si le variateur
[42] Arrêt reset auto Cet événement est vrai si le variateur
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 71
13-02 Événement d'arrêt
Option: Fonction:
démarrage pour une description plus
complète.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
0 dans la règle logique.
1 dans la règle logique.
2 dans la règle logique.
logique (élevé = vrai).
logique (élevé = vrai).
logique (élevé = vrai).
logique (élevé = vrai).
Cet événement est vrai si le variateur
démarrage
de fréquence est démarré par quelque
moyen que ce soit (via une entrée
digitale, un bus de terrain ou autre).
de fréquence est arrêté ou mis en roue
libre par quelque moyen que ce soit
(via une entrée digitale, un bus de
terrain ou autre).
de fréquence est déclenché (mais non
verrouillé par déclenchement) et si une
réinitialisation automatique est émise.
13-02 Événement d'arrêt
Option: Fonction:
[50] Comparateur 4 Utiliser le résultat du comparateur 4
dans la règle logique.
[51] Comparateur 5 Utiliser le résultat du comparateur 5
dans la règle logique.
[60] Règle logique 4 Utiliser le résultat de la règle logique 4
dans la règle logique.
[61] Règle logique 5 Utiliser le résultat de la règle logique 5
dans la règle logique.
[70] Temporisation 3 Utiliser le résultat de la temporisation
3 dans la règle logique.
[71] Temporisation 4 Utiliser le résultat de la temporisation
4 dans la règle logique.
[72] Temporisation 5 Utiliser le résultat de la temporisation
5 dans la règle logique.
[73] Temporisation 6 Utiliser le résultat de la temporisation
6 dans la règle logique.
[74] Temporisation 7 Utiliser le résultat de la temporisation
7 dans la règle logique.
[83] Courroie cassée Une condition de courroie cassée a été
détectée. Activer cette fonction au
paramétre 22-60 Fonct.courroi.cassée.
13-03 Reset SLC
Option: Fonction:
[0] * Pas de reset
SLC
[1] Reset SLC Réinitialise tous les paramètres du groupe de
Conserve les réglages de tous les paramètres
du groupe de paramètres 13-** Logique
avancée.
paramètres 13-** Logique avancée aux valeurs
par défaut.
3.9.3 13-1* Comparateurs
Les comparateurs sont utilisés pour comparer des variables
continues (comme la fréquence de sortie, le courant de
sortie et l’entrée analogique) à des valeurs prédénies
xes.
Illustration 3.14 Comparateurs
3 3
Page 74

Paramètres
VLT® HVAC Basic Drive FC 101
De plus, les valeurs digitales sont comparées à des valeurs
de temps xes. Voir l’explication du
paramétre 13-10 Opérande comparateur. Les comparateurs
sont évalués une fois par intervalle de balayage. Utiliser le
résultat (vrai ou faux) directement. Tous les paramètres de
ce groupe sont des paramètres de tableau avec un indice
33
de 0 à 5. Choisir l’indice 0 pour programmer le
comparateur 0, l’indice 1 pour programmer le comparateur
1, etc.
13-10 Opérande comparateur
Tableau [6]
Option: Fonction:
Sélectionner la variable qui doit être
surveillée par le comparateur.
[0] * Désactivé
[1] Référence
[2] Retour
[3] Vit. moteur
[4] Courant moteur
[6] Puiss. moteur
[7] Tension moteur
[12] Entrée ANA AI53
[13] Entrée ANA AI54
[20] Numéro alarme
[30] Compteur A
[31] Compteur B
13-11 Opérateur comparateur
Tableau [6]
Option: Fonction:
[0] Less Than
(<)
[1] * ~ (égal) Sélectionner [1] ~ pour que le résultat de
[2] Greater
Than (>)
Sélectionner [0] < pour que le résultat de
l’évaluation soit vrai, lorsque la variable
sélectionnée au paramétre 13-10 Opérande
comparateur est inférieure à la valeur xe du
paramétre 13-12 Valeur comparateur. Le résultat
est faux si la variable sélectionnée au
paramétre 13-10 Opérande comparateur est
supérieure à la valeur xe du
paramétre 13-12 Valeur comparateur.
l’évaluation soit vrai lorsque la variable
sélectionnée au paramétre 13-10 Opérande
comparateur est à peu près égale à la valeur xe
du paramétre 13-12 Valeur comparateur.
Sélectionner [2] > pour la logique inversée de
l’option [0] <.
13-12 Valeur comparateur
Tableau [6]
Range: Fonction:
d’un paramètre de tableau qui contient les
valeurs des comparateurs 0 à 5.
3.9.4 13-2* Temporisations
Utiliser le résultat (vrai ou faux) des temporisations pour
dénir directement un événement (voir le
paramétre 13-51 Événement contr. log avancé) ou comme
entrée booléenne dans une règle logique (voir le
paramétre 13-40 Règle de Logique Booléenne 1, le
paramétre 13-42 Règle de Logique Booléenne 2 ou le
paramétre 13-44 Règle de Logique Booléenne 3). Une
temporisation a pour valeur faux uniquement lorsqu’elle
est déclenchée par une action (p. ex. [29] Tempo dém. 1), à
l’expiration du temps saisi dans ce paramètre. Elle reprend
ensuite la valeur vrai.
Tous les paramètres de ce groupe sont des paramètres de
tableau avec un indice de 0 à 2. Sélectionner l’indice 0
pour programmer la temporisation 0, l’indice 1 pour
programmer la temporisation 1 et ainsi de suite.
13-20 Tempo.contrôleur de logique avancé
Tableau [8]
Range: Fonction:
0 s* [0 -
3600 s]
Saisir la valeur de durée de la temporisation
programmée (sortie faux). Une temporisation est
fausse uniquement si elle est déclenchée par une
action (voir le paramétre 13-52 Action contr.
logique avancé [29-31] et paramétre 13-52 Action
contr. logique avancé [70-74] Tempo début X) et
jusqu’à l’expiration de la temporisation. Les
paramètres de tableau contiennent les temporisations 0 à 7.
3.9.5 13-4* Règles de Logique
Associer jusqu’à trois entrées booléennes (entrées TRUE/
FALSE, VRAI/FAUX) à partir des temporisateurs,
comparateurs, entrées digitales, bits d’état et événements à
l’aide des opérateurs logiques ET, OU, PAS. Sélectionner des
entrées booléennes pour le calcul au paramétre 13-40 Règle
de Logique Booléenne 1, au paramétre 13-42 Règle de
Logique Booléenne 2 et au paramétre 13-44 Règle de Logique
Booléenne 3. Dénir les opérateurs utilisés pour associer de
manière logique les entrées sélectionnées au
13-12 Valeur comparateur
Tableau [6]
paramétre 13-41 Opérateur de Règle Logique 1 et au
paramétre 13-43 Opérateur de Règle Logique 2.
Range: Fonction:
0* [-9999 -
9999 ]
Saisir le « niveau de déclenchement » de la
variable surveillée par ce comparateur. Il s’agit
72 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 75

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Paramètres Guide de programmation
13-40 Règle de Logique Booléenne 1
Tableau [6]
Option: Fonction:
[18] Inversion Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
Illustration 3.15 Règles de Logique
Priorité de calcul
Les résultats du paramétre 13-40 Règle de Logique
Booléenne 1, du paramétre 13-41 Opérateur de Règle Logique
1 et du paramétre 13-42 Règle de Logique Booléenne 2 sont
calculés en premier. Le résultat (vrai/faux) de ce calcul est
associé aux réglages du paramétre 13-43 Opérateur de Règle
Logique 2 et du paramétre 13-44 Règle de Logique Booléenne
3, conduisant au résultat nal (vrai/faux) de la règle
logique.
13-40 Règle de Logique Booléenne 1
Tableau [6]
Option: Fonction:
[0]*Faux Saisit la valeur xe faux dans la règle
logique.
[1] Vrai Saisit la valeur xe vrai dans la règle
logique.
[2] En fonction Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[3] Dans gamme Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[4] Sur réf. Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[7] Hors gamme
courant
[8] I inf. basse Voir le paramétre 13-01 Événement de
[9] I sup. haute Voir le paramétre 13-01 Événement de
[16] Avertis.thermiq. Voir le paramétre 13-01 Événement de
[17] Tens.sect.horsplage Voir le paramétre 13-01 Événement de
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 73
Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
démarrage pour une description plus
complète.
[19] Avertissement Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[20] Alarme(Déf.) Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[21] Alarme(Verrou déf.) Voir le paramétre 13-01 Événement de
démarrage pour une description plus
complète.
[22] Comparateur 0 Utiliser le résultat du comparateur 0
dans la règle logique.
[23] Comparateur 1 Utiliser le résultat du comparateur 1
dans la règle logique.
[24] Comparateur 2 Utiliser le résultat du comparateur 2
dans la règle logique.
[25] Comparateur 3 Utiliser le résultat du comparateur 3
dans la règle logique.
[26] Règle logique 0 Utiliser le résultat de la règle logique 0
dans la règle logique.
[27] Règle logique 1 Utiliser le résultat de la règle logique 1
dans la règle logique.
[28] Règle logique 2 Utiliser le résultat de la règle logique 2
dans la règle logique.
[29] Règle logique 3 Utiliser le résultat de la règle logique 3
dans la règle logique.
[30] Temporisation 0 Utiliser le résultat de la temporisation
0 dans la règle logique.
[31] Temporisation 1 Utiliser le résultat de la temporisation
1 dans la règle logique.
[32] Temporisation 2 Utiliser le résultat de la temporisation
2 dans la règle logique.
[33] Entrée dig. DI18 Utiliser la valeur de DI18 dans la règle
logique (élevé = vrai).
[34] Entrée dig. DI19 Utiliser la valeur de DI19 dans la règle
logique (élevé = vrai).
[35] Entrée dig. DI27 Utiliser la valeur de DI27 dans la règle
logique (élevé = vrai).
[36] Entrée dig. DI29 Utiliser la valeur de DI29 dans la règle
logique (élevé = vrai).
[39] Ordre de
démarrage
Cette règle logique est vraie si le
variateur de fréquence est démarré par
quelque moyen que ce soit (via une
entrée digitale ou autre).
3 3
Page 76
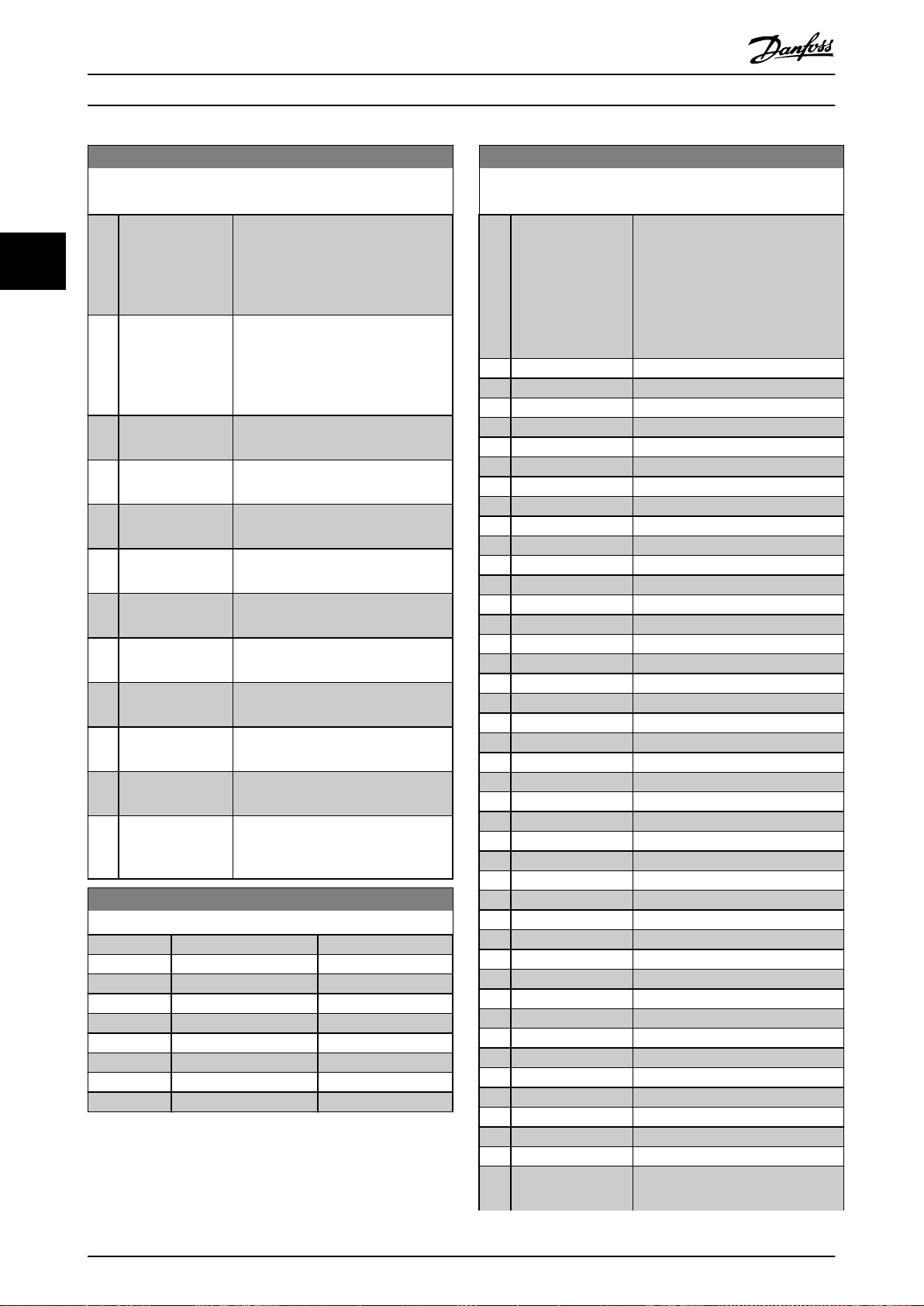
Paramètres
VLT® HVAC Basic Drive FC 101
13-40 Règle de Logique Booléenne 1
Tableau [6]
Option: Fonction:
[40] Variateur arrêté Cette règle logique est vraie si le
variateur de fréquence est arrêté ou
33
[42] Arrêt reset auto Cette règle logique est vraie si le
[50] Comparateur 4 Utiliser le résultat du comparateur 4
[51] Comparateur 5 Utiliser le résultat du comparateur 5
[60] Règle logique 4 Utiliser le résultat de la règle logique 4
[61] Règle logique 5 Utiliser le résultat de la règle logique 5
[70] Temporisation 3 Utiliser le résultat de la temporisation
[71] Temporisation 4 Utiliser le résultat de la temporisation
[72] Temporisation 5 Utiliser le résultat de la temporisation
[73] Temporisation 6 Utiliser le résultat de la temporisation
[74] Temporisation 7 Utiliser le résultat de la temporisation
[83] Courroie cassée Une condition de courroie cassée a été
mis en roue libre par quelque moyen
que ce soit (via une entrée digitale ou
autre).
variateur de fréquence est déclenché
(mais non verrouillé par le déclenchement) et si une réinitialisation
automatique est émise.
dans la règle logique.
dans la règle logique.
dans la règle logique.
dans la règle logique.
3 dans la règle logique.
4 dans la règle logique.
5 dans la règle logique.
6 dans la règle logique.
7 dans la règle logique.
détectée. Activer cette fonction au
paramétre 22-60 Fonct.courroi.cassée.
13-41 Opérateur de Règle Logique 1
Option: Fonction:
[0] * Désactivé
[1] ET
[2] Ou
[3] ET PAS
[4] OU PAS
[5] NON ET
[6] NON OU
[7] PAS ET PAS
[8] PAS OU PAS
13-42 Règle de Logique Booléenne 2
Tableau [6]
Option: Fonction:
Sélectionner la deuxième entrée
booléenne (VRAI ou FAUX) pour la
règle logique sélectionnée.
Voir le paramétre 13-40 Règle de
Logique Booléenne 1 pour une
description complète des choix et de
leurs fonctions.
[0] * Faux
[1] Vrai
[2] En fonction
[3] Dans gamme
[4] Sur réf.
[7] Hors gamme courant
[8] I inf. basse
[9] I sup. haute
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[18] Inversion
[19] Avertissement
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[22] Comparateur 0
[23] Comparateur 1
[24] Comparateur 2
[25] Comparateur 3
[26] Règle logique 0
[27] Règle logique 1
[28] Règle logique 2
[29] Règle logique 3
[30] Temporisation 0
[31] Temporisation 1
[32] Temporisation 2
[33] Entrée dig. DI18
[34] Entrée dig. DI19
[35] Entrée dig. DI27
[36] Entrée dig. DI29
[39] Ordre de démarrage
[40] Variateur arrêté
[42] Arrêt reset auto
[50] Comparateur 4
[51] Comparateur 5
[60] Règle logique 4
[61] Règle logique 5
[70] Temporisation 3
[71] Temporisation 4
[72] Temporisation 5
[73] Temporisation 6
[74] Temporisation 7
[83] Courroie cassée Une condition de courroie cassée a
été détectée. Activer cette fonction
74 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 77

Paramètres Guide de programmation
13-42 Règle de Logique Booléenne 2
Tableau [6]
Option: Fonction:
au
paramétre 22-60 Fonct.courroi.cassée.
13-43 Opérateur de Règle Logique 2
Tableau [6]
Option: Fonction:
Sélectionner le 2e opérateur logique à utiliser
sur l’entrée booléenne calculée au
paramétre 13-40 Règle de Logique Booléenne 1,
au paramétre 13-41 Opérateur de Règle Logique
1 et au paramétre 13-42 Règle de Logique
Booléenne 2, et l’entrée booléenne du
paramétre 13-42 Règle de Logique Booléenne 2.
[13-44] correspond à l’entrée booléenne du
paramétre 13-44 Règle de Logique Booléenne 3.
[13-40/13-42] correspond à l’entrée booléenne
calculée au paramétre 13-40 Règle de Logique
Booléenne 1, au paramétre 13-41 Opérateur de
Règle Logique 1 et au paramétre 13-42 Règle de
Logique Booléenne 2. [0] Désactivé (réglage
d’usine) : sélectionner cette option pour
ignorer le paramétre 13-44 Règle de Logique
Booléenne 3.
[0] * Désactivé
[1] ET
[2] Ou
[3] ET PAS
[4] OU PAS
[5] NON ET
[6] NON OU
[7] PAS ET PAS
[8] PAS OU PAS
13-44 Règle de Logique Booléenne 3
Tableau [6]
Option: Fonction:
Sélectionner la troisième entrée
booléenne (VRAI ou FAUX) pour la
règle logique sélectionnée.
Voir le paramétre 13-40 Règle de
Logique Booléenne 1 pour une
description complète des choix et de
leurs fonctions.
[0] * Faux
[1] Vrai
[2] En fonction
[3] Dans gamme
[4] Sur réf.
[7] Hors gamme courant
[8] I inf. basse
[9] I sup. haute
13-44 Règle de Logique Booléenne 3
Tableau [6]
Option: Fonction:
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[18] Inversion
[19] Avertissement
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[22] Comparateur 0
[23] Comparateur 1
[24] Comparateur 2
[25] Comparateur 3
[26] Règle logique 0
[27] Règle logique 1
[28] Règle logique 2
[29] Règle logique 3
[30] Temporisation 0
[31] Temporisation 1
[32] Temporisation 2
[33] Entrée dig. DI18
[34] Entrée dig. DI19
[35] Entrée dig. DI27
[36] Entrée dig. DI29
[39] Ordre de démarrage
[40] Variateur arrêté
[42] Arrêt reset auto
[50] Comparateur 4
[51] Comparateur 5
[60] Règle logique 4
[61] Règle logique 5
[70] Temporisation 3
[71] Temporisation 4
[72] Temporisation 5
[73] Temporisation 6
[74] Temporisation 7
[83] Courroie cassée
3.9.6 13-5* États
13-51 Événement contr. log avancé
Tableau [20]
Option: Fonction:
Sélectionner l’entrée booléenne (vrai
ou faux) pour dénir l’événement de
contrôleur logique avancé.
Voir le paramétre 13-02 Événement
d'arrêt pour une description
complète des choix et de leurs
fonctions.
[0] * Faux
[1] Vrai
[2] En fonction
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 75
Page 78

Paramètres
VLT® HVAC Basic Drive FC 101
13-51 Événement contr. log avancé
Tableau [20]
Option: Fonction:
[3] Dans gamme
[4] Sur réf.
33
[7] Hors gamme courant
[8] I inf. basse
[9] I sup. haute
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[18] Inversion
[19] Avertissement
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[22] Comparateur 0
[23] Comparateur 1
[24] Comparateur 2
[25] Comparateur 3
[26] Règle logique 0
[27] Règle logique 1
[28] Règle logique 2
[29] Règle logique 3
[30] Temporisation 0
[31] Temporisation 1
[32] Temporisation 2
[33] Entrée dig. DI18
[34] Entrée dig. DI19
[35] Entrée dig. DI27
[36] Entrée dig. DI29
[39] Ordre de démarrage
[40] Variateur arrêté
[42] Arrêt reset auto
[50] Comparateur 4
[51] Comparateur 5
[60] Règle logique 4
[61] Règle logique 5
[70] Temporisation 3
[71] Temporisation 4
[72] Temporisation 5
[73] Temporisation 6
[74] Temporisation 7
[83] Courroie cassée
13-52 Action contr. logique avancé
Tableau [20]
Option: Fonction:
Sélectionner l’action correspondant à
l’événement SLC. Les actions sont exécutées
lorsque l’événement correspondant (déni
au paramétre 13-51 Événement contr. log
avancé) est évalué comme étant vrai. La
liste d’actions suivantes est disponible pour
la sélection :
13-52 Action contr. logique avancé
Tableau [20]
Option: Fonction:
[100] Réinit.
alarmes
[0] * Désactivé
[1] Aucune
action
[2] Sélect.proc.1 Remplace le process actif
(paramétre 0-10 Process actuel) par le
process 1.
[3] Sélect.proc.2 Remplace le process actif
(paramétre 0-10 Process actuel) par le
process 2
[10] Réf. prédéf. 0 Sélectionne la référence prédénie 0.
[11] Réf. prédéf. 1 Sélectionne la référence prédénie 1.
[12] Réf. prédéf. 2 Sélectionne la référence prédénie 2.
[13] Réf. prédéf. 3 Sélectionne la référence prédénie 3.
[14] Réf. prédéf. 4 Sélectionne la référence prédénie 4.
[15] Réf. prédéf. 5 Sélectionne la référence prédénie 5.
[16] Réf. prédéf. 6 Sélectionne la référence prédénie 6.
[17] Réf. prédéf. 7 Sélectionne la référence prédénie 7. Si l’on
modie la référence prédénie active, elle
fusionne avec d’autres ordres de référence
prédénie provenant des entrées digitales
ou d’un bus de terrain.
[18] Sélect. Rampe1Sélectionne la rampe 1.
[19] Sélect. Rampe2Sélectionne la rampe 2.
[22] Fonctionne Émet un ordre de démarrage à destination
du variateur de fréquence.
[23] Fonction sens
antihor
[24] Arrêt Émet un ordre d’arrêt à destination du
[25] Arrêt rapide Émet un ordre d’arrêt rapide à destination
[26] Arrêt CC Émet un ordre d’arrêt CC à destination du
[27] Roue libre Le variateur de fréquence passe en roue
[28] Gel sortie Gèle la fréquence de sortie du variateur de
[29] Tempo début0Démarre la temporisation 0, voir le
[30] Tempo début1Démarre la temporisation 1, voir le
[31] Tempo début2Démarre la temporisation 2, voir le
Émet un ordre de démarrage inversé à
destination du variateur de fréquence.
variateur de fréquence.
du variateur de fréquence.
variateur de fréquence.
libre immédiatement. Tous les ordres
d’arrêt, y compris celui de roue libre,
arrêtent le SLC.
fréquence.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
76 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 79

Paramètres Guide de programmation
13-52 Action contr. logique avancé
Tableau [20]
Option: Fonction:
[32] Déf. sort. dig.
A bas
[33] Déf. sort. dig.
B bas
[34] Déf. sort. dig.
C bas
[35] Déf. sort. dig.
D bas
[38] Déf. sort. dig.
A haut
[39] Déf. sort. dig.
B haut
[40] Déf. sort. dig.
C haut
[41] Déf. sort. dig.
D haut
[60] Reset
compteur A
[61] Reset
compteur B
[70] Dém. Tempo.3Démarre la temporisation 3, voir le
[71] Dém. Tempo.4Démarre la temporisation 4, voir le
[72] Dém. Tempo.5Démarre la temporisation 5, voir le
[73] Dém. Tempo.6Démarre la temporisation 6, voir le
[74] Dém. Tempo.7Démarre la temporisation 7, voir le
[100] Réinit.
alarmes
Toute sortie avec sortie digitale 1
sélectionnée est basse (inactive).
Toute sortie avec sortie digitale 2
sélectionnée est basse (inactive).
Toute sortie avec sortie digitale 3
sélectionnée est basse (inactive).
Toute sortie avec sortie digitale 4
sélectionnée est basse (inactive).
Toute sortie avec sortie digitale 1
sélectionnée est haute (fermée).
Toute sortie avec sortie digitale 2
sélectionnée est haute (fermée).
Toute sortie avec sortie digitale 3
sélectionnée est haute (fermée).
Toute sortie avec sortie digitale 4
sélectionnée est haute (fermée).
Remet le compteur A à 0.
Remet le compteur B à 0.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
paramétre 13-20 Tempo.contrôleur de logique
avancé pour une description plus détaillée.
Réinitialiser l’alarme
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 77
Page 80

Paramètres
VLT® HVAC Basic Drive FC 101
3.10 Menu principal - Fonct.particulières Groupe 14
3.10.1 14-0* Commut.onduleur
33
14-01 Fréq. commut.
Option: Fonction:
Sélectionner la fréquence de commutation de
l’onduleur. Il est possible de minimiser le bruit
acoustique du moteur en réglant la fréquence de
commutation.
AVIS!
La valeur de la fréquence de sortie du
variateur de fréquence ne peut jamais être
14-03 Surmodulation
Option: Fonction:
plage hypersynchrone (de 0 % à vitesse nominale
jusqu’à environ 12 % à vitesse nominale double).
14-07 Dead Time Compensation Level
Range: Fonction:
Size
related*
[0 100 ]
Niveau de compensation de temps mort
appliquée en pourcentage. Un haut niveau
(> 90 %) optimise la réponse dynamique
du moteur. Un niveau compris entre 50 %
et 90 % convient à la minimisation de
l’ondulation du couple moteur et à la
dynamique du moteur. Un niveau 0
désactive la compensation du temps mort.
supérieure à 1/10e de la fréquence de
commutation. Régler la fréquence de
commutation au paramétre 14-01 Fréq.
commut. jusqu’à ce que le moteur tourne à
son niveau sonore min.
AVIS!
14-08 Amort. facteur gain
Range: Fonction:
Size
related*
[0 100 %]
Régler le coecient d’amortissement pour
la compensation de la tension du bus CC.
Voir le paramétre 14-51 Compensation
tension bus CC.
Les fréquences de commutation élevées
augmentent la génération de chaleur dans
le variateur de fréquence et peuvent
réduire sa durée de vie.
AVIS!
Tous les choix ne sont pas disponibles dans
toutes les tailles.
14-09 Dead Time Bias Current Level
Range: Fonction:
Size related* [0 -
100 %]
Pour ajouter au signal du sens du
courant pour la compensation du
temps mort de certains moteurs,
dénir un signal de polarité (en
pourcentage).
[0] Ran3 Modulation d’impulsions en durée réellement
aléatoire 3 kHz (bruit blanc).
[1] Ran5 Modulation d’impulsions en durée réellement
aléatoire 5 kHz (bruit blanc).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0kHz
[10] 16,0kHz
14-03 Surmodulation
Option: Fonction:
[0] * Inactif Sélectionne l’absence de surmodulation de la
tension de sortie an d’éviter toute ondulation du
couple sur l’arbre moteur.
[1] Actif La fonction de surmodulation génère une tension
supplémentaire allant jusqu’à 8 % de la tension de
sortie U
couple supplémentaire de 10-12 % au milieu de la
sans surmodulation, ce qui entraîne un
max
3.10.2 14-1* Secteur On/o
Paramètres de conguration de surveillance et de gestion
des pannes secteur.
14-10 Panne secteur
Congurer l’action du variateur de fréquence lorsque la tension
secteur est inférieure à la limite de tension secteur congurée au
paramétre 14-11 Tension secteur si panne secteur.
Option: Fonction:
[0] * Pas de fonction
[1] Décélération ctrlée
[3] Roue libre
[4] Sauvegarde cinétique
[5] Sauv. cinétiq&alarm
[6] Alarme
[7] Kin. back-up, trip w recovery
14-11 Tension secteur si panne secteur
Range: Fonction:
Size related* [100 -
800 V]
Utiliser ce paramètre pour dénir la
tension CA à laquelle la fonction
78 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 81

Paramètres Guide de programmation
14-11 Tension secteur si panne secteur
Range: Fonction:
sélectionnée au paramétre 14-10 Panne
secteur doit être activée.
14-12 Fonct.sur désiqui.réseau
Option: Fonction:
AVIS!
La sélection de cette option peut
réduire la durée de vie du variateur de
fréquence.
Un fonctionnement dans des conditions de
déséquilibre important réduit la durée de vie
de l’unité. Les conditions sont considérées
comme sévères si le moteur fonctionne
continuellement à hauteur de la charge
nominale.
Si un déséquilibre important du secteur est
détecté, sélectionner l’une des fonctions
disponibles.
[0] * Alarme Déclenchement du variateur de fréquence.
[1] Avertis-
sement
[2] Désactivé Aucune action.
[3] Déclasser Le variateur de fréquence peut déclasser.
3.10.3 14-2* Reset alarme
14-20 Mode reset
Sélectionner le mode de reset à l’issue d’un déclenchement. Il est
possible de redémarrer le variateur de fréquence après avoir
procédé à la remise à zéro.
Option: Fonction:
[0] * Reset manuel Sélectionner [0] Reset manuel pour
[1] Reset auto. x 1 Sélectionner [1]-[12] Reset auto. x 1...x 20
[2] Reset auto. x 2
[3] Reset auto. x 3
[4] Reset auto. x 4
[5] Reset auto. x 5
[6] Reset auto. x 6
[7] Reset auto. x 7
[8] Reset auto. x 8
[9] Reset auto. x 9
[10] Reset auto. x 10
[11] Reset auto x 15
[12] Reset auto. x 20
Émission d’un avertissement.
réinitialiser le variateur de fréquence au
moyen de la touche [Reset] ou via les
entrées digitales.
pour eectuer entre une et vingt réinitialisations automatiques après un arrêt.
14-20 Mode reset
Sélectionner le mode de reset à l’issue d’un déclenchement. Il est
possible de redémarrer le variateur de fréquence après avoir
procédé à la remise à zéro.
Option: Fonction:
[13] Reset auto. inni Sélectionner [13] Reset auto. inni pour
une réinitialisation en continu après un
arrêt.
14-21 Temps reset auto.
Range: Fonction:
10 s* [0 - 600s]Pour démarrer le mode de reset automatique,
saisir l’intervalle de temps depuis le déclenchement. Ce paramètre est actif lorsque le
paramétre 14-20 Mode reset est réglé sur [1]-[13]
Reset auto.
14-22 Mod. exploitation
Option: Fonction:
Pour revenir aux valeurs par défaut pour tous
les paramètres, sélectionner [2] Restaura°
régl.usine.
[0]*Fonction.
normal
[2] Restaura°
régl.usine
Sélectionner [0] Fonction. normal pour le
fonctionnement normal du variateur de
fréquence avec le moteur dans l’application
choisie.
Sélectionner [2] Restaura° régl.usine pour
réinitialiser toutes les valeurs des paramètres
aux réglages par défaut, sauf les paramètres de
communication bus, et les groupes de
paramètres 15-0* Données exploit. et 15-3*
Journal alarme. Le variateur de fréquence se
réinitialise à la prochaine mise sous tension.
Le Paramétre 14-22 Mod. exploitation revient
également au réglage par défaut [0] Fonction.
normal.
14-27 Action en U limit.
Sélectionner comment le variateur de fréquence agit en cas de
surtension, surcourant, court-circuit ou erreurs de mise à la terre.
Option: Fonction:
[0] Alarme
[1] * Avertissement
14-29 Code service
Range: Fonction:
0* [0 - 0x7FFFFFFF ] Réservé à l’intervention.
3.10.4 14-3* Ctrl I lim. courant
Paramètres de conguration du contrôleur de limite de
courant, qui est activé lorsque le courant du moteur
dépasse les limites de courant prédénies (voir le
paramétre 4-18 Limite courant). Ces paramètres sont utilisés
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 79
Page 82
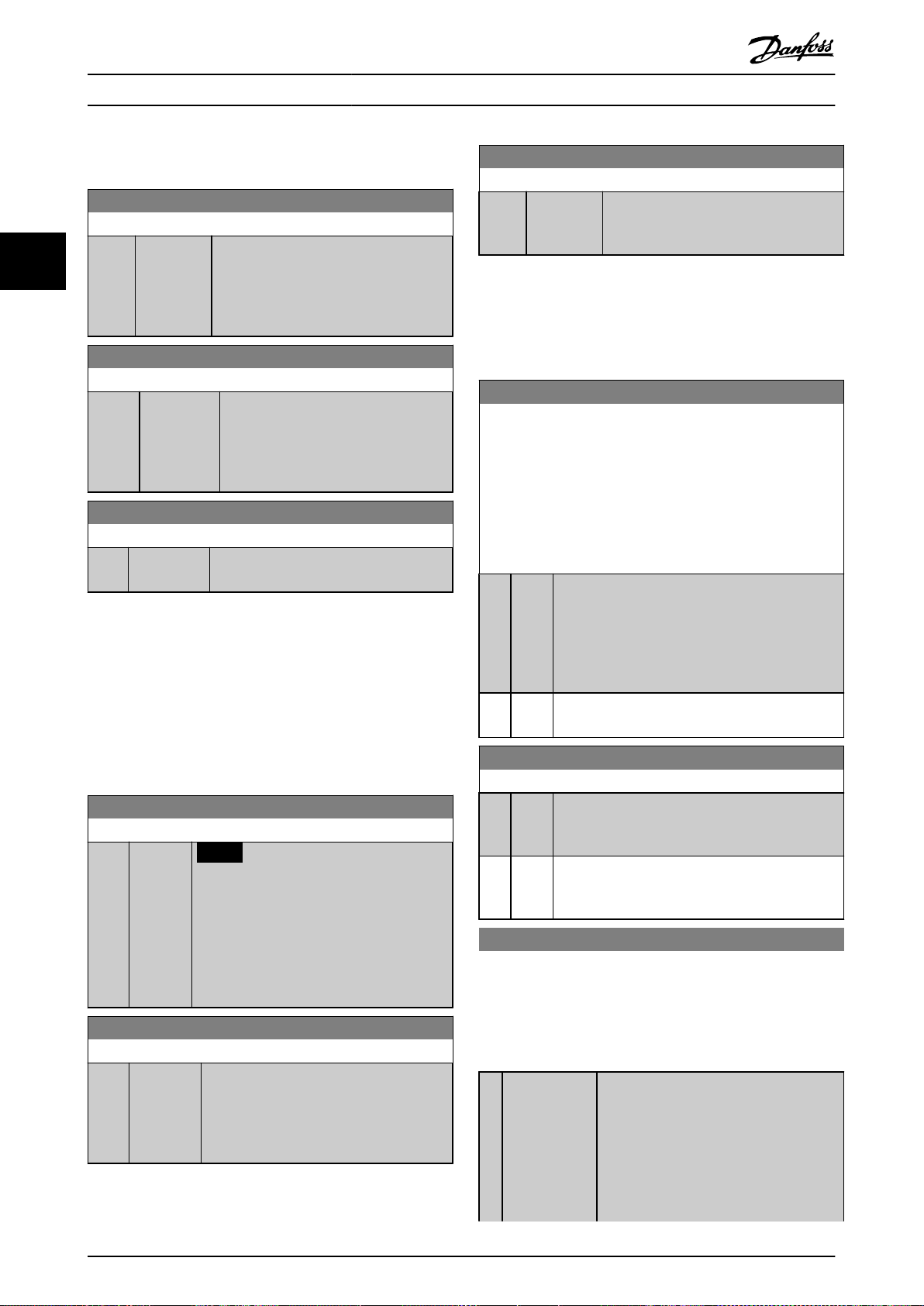
Paramètres
VLT® HVAC Basic Drive FC 101
pour réduire le couple aussi vite que possible sans perdre
le contrôle du moteur.
14-30 Current Lim Ctrl, Proportional Gain
Range: Fonction:
100 %* [0 - 500 %] Saisir le gain proportionnel du contrôleur
33
de limite de courant. Plus la valeur est
élevée, plus le contrôleur réagit
rapidement. Un réglage trop élevé entraîne
une instabilité du contrôleur.
14-31 Current Lim Ctrl, Integration Time
Range: Fonction:
0.020 s* [0.002 - 2 s] Contrôle le temps d'intégration du
contrôleur de limite de courant. En lui
donnant une valeur plus faible, cela le
fait réagir plus vite. Une valeur trop faible
entraîne une instabilité du contrôleur.
14-32 Current Lim Ctrl, Filter Time
Range: Fonction:
5 ms* [1 - 100 ms] Régler constante de tps pour ltre passe-
bas du contrôleur de limite de courant.
3.10.5 14-4* Optimisation énerg.
Paramètres d’adaptation du niveau d’optimisation de
l’énergie en mode Couple variable (VT) et Optimisation
automatique de l’énergie (AEO).
14-44 d-axis current optimization for IPM
Range: Fonction:
100 %* [0 - 200 %] Groupe de paramètres de conguration
des fonctions spéciales du variateur de
fréquence.
3.10.6 14-5* Environnement
Ces paramètres contribuent au fonctionnement du
variateur de fréquence dans des conditions environnementales spéciales.
14-50 Filtre RFI
Ce paramètre est valable uniquement pour les variateurs de
fréquence aux boîtiers de tailles suivantes :
IP20, 3 x 200–240 V, boîtiers de tailles H6–H8
•
IP20, 3 x 380–480 V, boîtiers de tailles H6–H8
•
IP54, 3 x 380–480 V, boîtiers de tailles I6–I8
•
IP20, 3 x 525–600 V, boîtiers de tailles H6–H10
•
Option: Fonction:
[0] Inactif Sélectionner [0] Inactif si le variateur de fréquence
est alimenté par une source secteur isolée (secteur
IT).
Dans ce mode, les condensateurs internes du ltre
RFI entre le châssis et le circuit du ltre RFI sont
coupés pour réduire les courants à eet de masse.
[1] * Actif Sélectionner [1] Actif pour s’assurer que le variateur
de fréquence est conforme aux normes CEM.
L’optimisation automatique de l’énergie est active
uniquement si le paramétre 1-03 Caract.couple est déni sur
[3] Optim.AUTO énergie VT.
14-40 Niveau VT
Range: Fonction:
90 %* [40 -
90 %]
AVIS!
Ce paramètre ne peut pas être réglé
lorsque le moteur est en marche.
14-51 Compensation tension bus CC
Option: Fonction:
[0] Inactif La surmodulation de la tension de sortie est
inactive an d’éviter toute ondulation du couple sur
l’arbre moteur.
[1] * Actif Active la surmodulation pour la tension de sortie
an d’obtenir une tension de sortie de 15 %
supérieure à celle du secteur.
Saisir le niveau de magnétisation du moteur à
faible vitesse. Les valeurs faibles réduisent les
pertes d’énergie dans le moteur, mais
également la capacité de charge.
14-41 Magnétisation AEO minimale
Range: Fonction:
66 %* [40 -
75 %]
80 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Saisir la magnétisation minimale autorisée
pour l’AEO. Les valeurs faibles réduisent les
pertes d’énergie dans le moteur, mais
également la résistance aux changements
soudains de charge.
14-52 Contrôle ventil
Ce paramètre permet de sélectionner le mode d’exploitation de
la commande du ventilateur. Le bruit acoustique du variateur de
fréquence est diérent lors d’un fonctionnement à charge lourde
(haute température du dissipateur de chaleur) et à charge légère
ou en mode veille.
Option: Fonction:
[0] Auto Le ventilateur fonctionne à pleine vitesse
pendant une courte durée, puis règle
automatiquement la vitesse en fonction de
la charge et de la température ambiante. Le
ventilateur fonctionne également à la
vitesse minimum même si la référence est
de 0 Hz en raison de la chaleur générée par
l’IGBT. Le ventilateur s’arrête si la fonction
Page 83

Paramètres Guide de programmation
14-52 Contrôle ventil
Ce paramètre permet de sélectionner le mode d’exploitation de
la commande du ventilateur. Le bruit acoustique du variateur de
fréquence est diérent lors d’un fonctionnement à charge lourde
(haute température du dissipateur de chaleur) et à charge légère
ou en mode veille.
Option: Fonction:
de mode veille est activée. Il s’agit du
réglage par défaut pour tous les variateurs
de fréquence, sauf les boîtiers de taille H1.
[4] Env. temp.
basse auto
[5] Constant-on
mode
[6] Constant-o
mode
[7] On-when-
Inverter-is-onelse-o Mode
Uniquement valable pour les boîtiers de
tailles H6-H10 et I6-I8.
Pour tester le ventilateur sur site ou si le
ventilateur doit fonctionner constamment à
une vitesse de 100 %. Uniquement valable
pour les boîtiers de tailles H1-H5 et I2-I4.
Si le refroidissement par convection est
susant ou si le variateur de fréquence est
monté sur un panneau de démonstration,
d’exhibition, etc. Le variateur de fréquence
s’arrête en cas de surtempérature du
dissipateur de chaleur si sa charge est
supérieure à la charge autorisée par le
refroidissement par convection. Uniquement
valable pour les boîtiers de tailles H1-H5 et
I2-I4.
Le ventilateur fonctionne à vitesse
maximum en mode Hand on ou si la
référence est supérieure à 0 Hz. Le
ventilateur s’arrête si le mode veille est actif.
Il s’agit du réglage par défaut pour les
boîtiers de taille H1, mais il peut également
être sélectionné pour les boîtiers de tailles
H2-H5 et I2-I4.
14-53 Surveillance ventilateur
Sélectionner la réaction du variateur de fréquence en cas de
défaillance du ventilateur. Ce paramètre est valable uniquement
pour les variateurs de fréquence aux boîtiers de tailles suivantes :
IP20, 3 x 200–240 V, boîtiers de tailles H6–H8.
•
IP20, 3 x 380–480 V, boîtiers de tailles H6–H8.
•
IP54, 3 x 380–480 V, boîtiers de tailles I6–I8.
•
IP20, 3 x 525–600 V, boîtiers de tailles H6–H10.
•
Option: Fonction:
[0] Désactivé
[1] * Avertissement
[2] Alarme
14-55 Filtre de sortie
Dénir si un ltre de sortie est présent.
Option: Fonction:
[0] * Pas de ltre
[1] Filtre sinus
14-55 Filtre de sortie
Dénir si un ltre de sortie est présent.
Option: Fonction:
[3] Filtre sinus
avec retour
[4] dv/dt Cette option est valable uniquement pour
les variateurs de fréquence aux boîtiers de
tailles suivantes :
IP20, 3 x 200-240 V, boîtiers de
•
tailles H6-H8
IP20, 3 x 380-480 V, boîtiers de
•
tailles H6-H8
IP54, 3 x 380-480 V, boîtiers de
•
tailles I6-I8
IP20, 3 x 525-600 V, boîtiers de
•
tailles H6-H10
3.10.7 14-6* Déclasst auto
Groupe de paramètres pour congurer le déclassement
automatique en fonction de la fréquence de sortie du
variateur de fréquence.
14-63 Fréq. commutat° min.
Régler la fréquence de commutation minimale permise par le
ltre de sortie.
Option: Fonction:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0kHz
[10] 16,0kHz
14-64 Dead Time Compensation Zero Current Level
Si un câble de moteur long est utilisé, régler le paramètre sur [0]
Désactivé pour minimiser l’ondulation du couple moteur.
Option: Fonction:
[0] * Désactivé
[1] Activé
14-65 Speed Derate Dead Time Compensation
Range: Fonction:
Size
related*
[ 20 1000 Hz]
Le niveau de compensation du temps
mort est réduit linéairement du niveau
maximal de la fréquence de sortie déni
au paramétre 14-07 Dead Time Compen-
sation Level au niveau minimal de la
fréquence de sortie dénie dans ce
paramètre.
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 81
Page 84

Paramètres
VLT® HVAC Basic Drive FC 101
3.10.8 14-9* Régl. panne
Le groupe de paramètres pour les réglages personnalisés
des pannes.
14-90 Niveau panne
33
Utiliser ce paramètre pour personnaliser les niveaux de panne.
Seul l’indice 7, signe de pannes de surcourant, est pris en charge.
Option: Fonction:
[3] * Alarme verr. L’alarme est réglée sur le niveau d’alarme
verrouillée.
[4] Arrêt & reset
retardé
[5] Flystart Le variateur de fréquence essaie de rattraper
L’alarme est conguré en alarme d’arrêt,
pouvant être réinitialisée après une temporisation. Par exemple, si l’alarme de
surcourant est dénie sur cette option, elle
peut être réinitialisée 3 minutes après le
report de l’alarme.
un moteur en rotation lors du démarrage. Si
cette option est sélectionnée,
paramétre 1-73 Démarr. volée est réglé sur
[1] Activé.
82 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 85

Paramètres Guide de programmation
3.11 Menu principal - Info.variateur Groupe 15
Groupe de paramètres contenant des informations sur le
variateur de fréquence, notamment les variables d’exploitation, la conguration du matériel, les versions logicielles.
3.11.1 15-0* Données exploit.
15-00 Heures mises ss tension
Range: Fonction:
0 h* [0 - 0x7f. h] Indiquer le nombre d’heures de fonction-
nement du variateur de fréquence. Valeur
enregistrée à la mise hors tension du
variateur de fréquence.
15-01 Heures fonction.
Range: Fonction:
0 h* [0 -
0x7f. h]
Indiquer le nombre d’heures de fonctionnement du moteur. Remettre le compteur à
zéro au paramétre 15-07 Reset compt. heures
de fonction.. Valeur enregistrée à la mise hors
tension du variateur de fréquence.
15-06 Reset comp. kWh
Option: Fonction:
[1] Reset
compteur
Pour remettre le compteur kWh à 0,
sélectionner [1] Reset et appuyer sur [OK]
(voir le paramétre 15-02 Compteur kWh).
15-07 Reset compt. heures de fonction.
Option: Fonction:
[0] * Pas de reset
[1] Reset
compteur
Pour réinitialiser le compteur d’heures de
fonctionnement, sélectionner [1] Reset
compteur et appuyer sur [OK]
(paramétre 15-01 Heures fonction.) pour le
remettre à 0 (voir également le
paramétre 15-01 Heures fonction.).
3.11.2 15-3* Journal alarme
Paramètres de tableau où 10 mémoires des défauts max.
sont visualisables, [0] correspondant aux dernières données
consignées et [9] aux plus anciennes. Les codes de défaut,
les valeurs et l’horodatage peuvent être visualisés pour
toutes les données enregistrées.
3 3
15-02 Compteur kWh
Range: Fonction:
0 kWh* [0 - 65535
kWh]
Indiquer la puissance de sortie moyenne
du variateur de fréquence par heure en
kWh. Remettre le compteur à zéro au
paramétre 15-06 Reset comp. kWh.
15-03 Mise sous tension
Range: Fonction:
0* [0 - 2147483647 ] Indique le nombre de mises sous tension
du variateur de fréquence.
15-04 Surtemp.
Range: Fonction:
0* [0 - 65535 ] Indique le nombre d’erreurs de température du
variateur de fréquence.
15-05 Surtension
Range: Fonction:
0* [0 - 65535 ] Indique le nombre de surtensions pour le
variateur de fréquence.
15-06 Reset comp. kWh
Option: Fonction:
AVIS!
Réinitialiser en appuyant sur [OK].
[0] * Pas de reset
15-30 Journal alarme : code
Range: Fonction:
0* [0 - 255 ] Indique le code de défaut : sa signication se
trouve dans le chapitre 4 Dépannage.
15-31 Journal alarme : valeur
Range: Fonction:
0* [-32767 - 32767 ] Acher une description de l’erreur. Ce
paramètre est utilisé avec l’alarme 38
Erreur interne.
3.11.3 15-4* Type.VAR.
Paramètres contenant des informations en lecture seule sur
la conguration matérielle et logicielle du variateur de
fréquence.
15-40 Type. FC
Range: Fonction:
0* [0 - 6 ] Indique le code de type de FC. L’achage est
identique au champ de puissance de la gamme de
variateurs de fréquence de la dénition du code de
type, caractères 1-6.
15-41 Partie puiss.
Range: Fonction:
0* [0 - 20 ] Indique le code de type de FC. L’achage est
identique au champ de puissance de la gamme
de variateurs de fréquence de la dénition du
code de type, caractères 7-10.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 83
Page 86

Paramètres
VLT® HVAC Basic Drive FC 101
15-42 Tension
Range: Fonction:
0* [0 - 20 ] Indique le code de type de FC. L’achage est
identique au champ de puissance de la gamme
de variateurs de fréquence de la dénition du
33
code de type, caractères 11-12.
15-59 Nom du chier
Range: Fonction:
0 [0 - 16 ] Acher le nom du chier CSIV actuel.
15-43 Version logiciel
Range: Fonction:
0* [0 - 0 ] Acher la version logicielle du variateur de
fréquence.
15-44 Code type commandé
Range: Fonction:
0* [0 - 40 ] Indiquer le type de code string utilisé pour
commander à nouveau le variateur de fréquence
dans sa conguration d’origine.
15-45 Code composé var
Range: Fonction:
0 [0 - 40 ] Indiquer le type de code string réel.
15-46 Code variateur
Range: Fonction:
0* [0 - 8 ] Acher le numéro de commande à 8 chires
permettant de commander à nouveau le variateur
de fréquence dans sa conguration d’origine.
15-48 Version LCP
Range: Fonction:
0* [0 - 0 ] Indiquer le numéro d’identication du LCP.
15-49 N°logic.carte ctrl.
Range: Fonction:
0* [0 - 0 ] Indiquer le numéro de version du logiciel de la
carte de commande.
15-50 N°logic.carte puis
Range: Fonction:
0* [0 - 0 ] Indiquer le numéro de version du logiciel de la
carte de puissance.
15-51 N° série variateur
Range: Fonction:
0* [0 - 10 ] Indiquer le numéro de série du variateur de
fréquence.
15-53 N° série carte puissance
Range: Fonction:
0* [0 - 0 ] Indiquer le numéro de série de la carte de
puissance.
84 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 87

Paramètres Guide de programmation
3.12 Menu principal - Lecture données Groupe 16
3.12.1 16-0* État général
16-00 Mot contrôle
Range: Fonction:
0* [0 - 65535 ] Acher le mot de contrôle transmis au
variateur de fréquence via le port de communication série en code hexadécimal.
Bit Bit = 0 Bit = 1
00 Option de référence prédénie LSB –
01
Option de référence prédénie, 2e bit
des références prédénies
02 Freinage CC Rampe
03 Roue libre Activé
04 Arrêt rapide Rampe
05 Gel sortie Rampe
06 Arrêt rampe Démarrage
07 Pas de fonction Réinitialisation
08 Pas de fonction Jogging
09 Rampe 1 Rampe 2
10 Données non valides Valides
11 Relais_A inactif Relais_A activé
12 Relais_B inactif Relais_B activé
13 Sélection du process (lsb) –
14 Pas de fonction Pas de fonction
15 Pas de fonction Inversion
Tableau 3.6 Mot contrôle
–
16-03 Mot état [binaire]
Range: Fonction:
0* [0 - 65535 ] Indiquer le mot d’état transmis en code
hexadécimal par le variateur de fréquence via
le port de communication série.
Bit Bit = 0 Bit = 1
00 Commande non prête Prête
01
VLT® non prêt
02 Roue libre Activé
03 Pas de panne Alarme
04 Absence d’avertissement Avertissement
05 Réservé –
06 Pas d’arrêt verrouillé Alarme verr.
07 Absence d’avertissement Avertissement
08
Vitesse ≠ réf.
09 Commande locale Ctrl bus
10 Hors gamme Fréquence OK
11 Non lancé En fonction
12 Pas de fonction Pas de fonction
13 Tension OK Au-dessus de la limite
14 Courant OK Au-dessus de la limite
15 Niveau thermique OK Au-dessus de la limite
Tableau 3.7 Mot état [binaire]
Prêt
Vitesse = réf.
16-05 Valeur réelle princ. [%]
Range: Fonction:
0 %* [-200 -
200 %]
Acher le mot de 2 octets envoyé avec le
mot d’état au maître bus communiquant
la valeur réelle principale.
3 3
16-01 Réf. [unité]
Range: Fonction:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
Indiquer la valeur de
référence actuelle
appliquée à la base
impulsionnelle ou
analogique de l’unité
résultant du choix de
conguration au
paramétre 1-00 Mode
Cong. (Hz).
16-02 Réf. %
Range: Fonction:
0 %* [-200 -
200 %]
Indiquer la référence totale. La référence
totale est la somme des références
digitales, analogiques, prédénies, bus et
gel.
16-09 Lect.paramétr.
Range: Fonction:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
Acher les lectures dénies par
l’utilisateur au
paramétre 0-30 Unité lect. déf. par
utilisateur, au
paramétre 0-31 Val.min.lecture
déf.par utilis. et au
paramétre 0-32 Val.max. déf. par
utilis..
3.12.2 16-1* État Moteur
16-10 Puissance moteur [kW]
Range: Fonction:
0 kW* [0 - 1000
kW]
Ache la puissance du moteur en kW. La
valeur achée est calculée sur la base de
la tension et du courant moteur réels.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 85
Page 88

Paramètres
VLT® HVAC Basic Drive FC 101
16-11 Puissance moteur[CV]
Range: Fonction:
0 hp* [0 - 1000
hp]
33
16-12 Tension moteur
Indiquer la puissance moteur réelle en HP.
La valeur achée est calculée sur la base
de la tension et du courant moteur réels.
Range: Fonction:
0 V* [0 - 65535 V] Indiquer la tension du moteur, une valeur
calculée utilisée pour contrôler le moteur.
16-13 Fréquence moteur
Range: Fonction:
0 Hz* [0 - 6553.5 Hz] Indiquer la fréquence du moteur, sans
amortissement des résonances.
16-18 Thermique moteur
Range: Fonction:
thermique mot.. Le calcul s’appuie sur la fonction
ETR dénie au paramétre 1-90 Protect. thermique
mot..
16-22 Couple [%]
Range: Fonction:
0 %* [-200 - 200 %] Ache le couple en % du couple nominal,
appliqué à l’arbre moteur.
3.12.3 16-3* Etat variateur
16-30 Tension DC Bus
Range: Fonction:
16-14 Courant moteur
Range: Fonction:
0 A* [0 - 655.35 A] Acher le courant du moteur mesuré
comme valeur moyenne I
RMS
.
16-15 Fréquence [%]
Range: Fonction:
0 %* [0 -
6553.5 %]
Mot de 2 octets indiquant la fréquence
eective du moteur (sans atténuation des
résonances) sous forme de % (échelle
0000-4000 Hex) du
paramétre 4-19 Frq.sort.lim.hte.
0 V* [0 - 65535 V] Ache la tension réelle du circuit intermé-
diaire.
16-34 Temp. radiateur
Range: Fonction:
0 °C* [-128 - 127 °C] Indiquer la température du radiateur du
variateur de fréquence.
16-35 Thermique onduleur
Range: Fonction:
0 %* [0 - 255 %] Acher le pourcentage de charge thermique
du variateur de fréquence. À 100 %, un
déclenchement se produit.
16-16 Couple [Nm]
Range: Fonction:
0 Nm* [-30000 -
30000 Nm]
Indiquer la valeur du couple appliqué à
l’arbre moteur. Certains moteurs fournissent
un couple supérieur à 160 %. Par
conséquent, la valeur minimum et la valeur
maximum dépendent du courant
minimum/maximum du moteur ainsi que
du moteur utilisé.
16-17 Vitesse moteur [tr/min]
Range: Fonction:
0 RPM* [-30000 -
30000 RPM]
Indiquer la vitesse réelle de l’arbre moteur
en tr/min. La vitesse de l’arbre moteur en
tr/min est estimée dans les modes de
contrôle de process en boucle ouverte ou
boucle fermée, et est mesurée dans les
modes de vitesse en boucle fermée.
16-36 InomVLT
Range: Fonction:
0 A* [0 - 655.35 A] Acher courant nominal onduleur. Les
données sont utilisées pour la protection
du moteur contre la surcharge, etc.
16-37 ImaxVLT
Range: Fonction:
0 A* [0 - 655.35 A] Acher courant max. de l’onduleur. Les
données sont utilisées pour calculer la
protection du variateur de fréquence, etc.
16-38 Etat ctrl log avancé
Range: Fonction:
0* [0 - 20 ] Indiquer l’état réel du contrôleur logique avancé
(SLC).
16-18 Thermique moteur
Range: Fonction:
0 %* [0 -
100 %]
86 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Indiquer la température du moteur calculée sous
forme de pourcentage de la valeur maximale
autorisée. À 100 %, un déclenchement se produit
s’il est sélectionné au paramétre 1-90 Protect.
Page 89

Paramètres Guide de programmation
3.12.4 16-5* Réf.& retour
16-50 Réf.externe
Range: Fonction:
0 %* [-200 -
200 %]
16-52 Signal de retour [Unité]
Range: Fonction:
0
ProcessCtrlUnit*
16-54 Retour 1 [Unité]
Range: Fonction:
0
ProcessCtrlUnit*
Indiquer la référence totale, c.-à-d. la
somme des références digitales,
analogiques, prédénies, bus et gel.
[-4999 - 4999
ProcessCtrlUnit]
[-999999.999 -
999999.999
ProcessCtrlUnit]
Indique le signal de retour
résultant de la mise à
l’échelle choisie au
paramétre 3-02 Référence
minimale et au
paramétre 3-03 Réf. max..
Indiquer la valeur du signal
de retour 1 résultant de la
mise à l’échelle choisie au
paramétre 3-02 Référence
minimale et au
paramétre 3-03 Réf. max..
16-61 Régl.commut.born.53
Option: Fonction:
Indiquer le réglage de la borne d’entrée 53.
Courant = 0
•
Tension = 1
•
[0] * Courant
[1] Tension
16-62 Entrée ANA 53
Range: Fonction:
1* [0 - 20 ] Indiquer la valeur eective sur l’entrée 53.
16-63 Régl.commut.born.54
Indiquer le réglage de la borne d’entrée 54.
Courant = 0
•
Tension = 1
•
Option: Fonction:
[0] * Courant
[1] Tension
16-64 Entrée ANA 54
Range: Fonction:
1* [0 - 20 ] Indiquer la valeur eective sur l’entrée 54.
3 3
16-55 Retour 2 [Unité]
Range: Fonction:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Indiquer la valeur du signal
de retour 2 résultant de la
mise à l’échelle choisie au
paramétre 3-02 Référence
minimale et au
paramétre 3-03 Réf. max..
3.12.5 16-6* Entrée et sorties
16-60 Entrée dig.
Range: Fonction:
0* [0 -
4095 ]
Indiquer l’état réel des entrées digitales 18, 19, 27
et 29.
Bit 0 Inutilisé
Bit 1 Inutilisé
Bit 2 Borne d’entrée digitale 29
Bit 3 Borne d’entrée digitale 27
Bit 4 Borne d’entrée digitale 19
Bit 5 Borne d’entrée digitale 18
Bit 6–15 Inutilisé
Tableau 3.8 Dénition des bits
16-65 Sortie ANA 42 [ma]
Range: Fonction:
0 mA* [0 - 20
mA]
Indiquer la valeur eective en mA sur la
sortie 42. La valeur indiquée dépend du
choix fait au paramétre 6–90 Terminal 42
Mode et au paramétre 6-91 Sortie ANA borne
42.
16-66 Sortie digitale [bin]
Range: Fonction:
0* [0 -
15 ]
Indiquer la valeur binaire de toutes les sorties
digitales.
Dénition :
X : Inutilisé
0 : Bas
1 : Haut
XX Aucune utilisée
X0 Borne 42 inutilisée, borne 45 basse.
X1 Borne 42 inutilisée, borne 45 haute.
0X Borne 42 basse, borne 45 inutilisée.
0 Borne 42 basse, borne 45 basse.
1 Borne 42 basse, borne 45 haute.
1X Borne 42 haute, borne 45 inutilisée.
10 Borne 42 haute, borne 45 basse.
11 Borne 42 haute, borne 45 haute.
Tableau 3.9 Valeur binaire des sorties digitales
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 87
Page 90

Paramètres
VLT® HVAC Basic Drive FC 101
16-67 Entrée impulsions 29 [Hz]
3.12.7 16-9* Ach. diagnostics
Range: Fonction:
0* [0 - 130000 ] Indiquer la fréquence eective sur la borne
29.
33
16-71 Sortie relais [bin]
Range: Fonction:
0* [0 - 31 ] Acher le réglage du relais.
16-90 Mot d'alarme
Range: Fonction:
0* [0 - 0xFFFFFFFFUL ] Indiquer le mot d’alarme transmis via le
port de communication série en code
hexadécimal.
16-91 Mot d'alarme 2
Bit 0~2 Inutilisé
Bit 3 Relais 02
Bit 4 Relais 01
Bit 5~15 Inutilisé
Tableau 3.10 Dénition des bits
Range: Fonction:
0* [0 - 0xFFFFFFFFUL ] Indiquer le mot d’alarme 2 transmis via
le port de communication série en
code hexadécimal.
16-92 Mot avertis.
Range: Fonction:
16-72 Compteur A
Range: Fonction:
0* [-32768 -
32767 ]
Acher la valeur actuelle du compteur A. Les
compteurs sont utiles en tant qu’opérandes
comparateurs (voir paramétre 13-10 Opérande
comparateur).
La valeur peut être réinitialisée ou modiée via
les entrées digitales (groupe de paramètres 5-1*
Entrées digitales) ou via une action SLC
(paramétre 13-52 Action contr. logique avancé).
16-73 Compteur B
Range: Fonction:
0* [-32768 -
32767 ]
Acher la valeur actuelle du compteur B. Les
compteurs sont utiles en tant qu’opérandes
comparateurs (paramétre 13-10 Opérande
comparateur).
La valeur peut être réinitialisée ou modiée via
les entrées digitales (groupe de paramètres 5-1*
Entrées digitales) ou via une action SLC
(paramétre 13-52 Action contr. logique avancé).
0* [0 - 0xFFFFFFFFUL ] Indiquer le mot d’avertissement
transmis via le port de communication
série en code hexadécimal.
16-93 Mot d'avertissement 2
Range: Fonction:
0* [0 - 0xFFFFFFFFUL ] Indiquer le mot d’avertissement 2
transmis via le port de communication
série en code hexadécimal.
16-94 Mot état élargi
Range: Fonction:
0* [0 - 0xFFFFFFFFUL ] Ache le mot d’état élargi transmis via
le port de communication série en
code hexadécimal.
16-95 Mot état élargi 2
Range: Fonction:
0* [0 - 0xFFFFFFFFUL ] Ache le mot d’état élargi 2 transmis
via le port de communication série en
code hexadécimal.
16-79 Sortie ANA AO45
Range: Fonction:
0 mA* [0 - 20
mA]
Indiquer la valeur eective en mA sur la
sortie 45. La valeur indiquée dépend du choix
fait au paramétre 6-70 Mode born.45 et au
paramétre 6-71 Sortie ANA borne 45.
16-97 Alarm Word 3
Range: Fonction:
0* [0 - 4294967295] Indiquer le mot d’alarme 3 transmis via le
port de communication série en code
hexadécimal.
16-98 Warning Word 3
3.12.6 16-8* Port FC et bus
Paramètres de report des références bus et des mots de
contrôle.
Range: Fonction:
0* [0 - 4294967295] Indiquer le mot d’avertissement 3
transmis via le port de communication
série en code hexadécimal.
16-86 Réf.1 port FC
Range: Fonction:
0* [-32768 - 32767 ] Acher la dernière référence reçue du
port FC.
88 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 91

Paramètres Guide de programmation
3.13 Menu principal - Lecture données 2 Groupe 18
Paramètres de tableau où 10 mémoires des défauts max.
sont visualisables, [0] correspondant aux dernières données
consignées et [9] aux plus anciennes. Les codes de défaut,
les valeurs et l’horodatage peuvent être visualisés pour
toutes les données enregistrées.
3.13.1 18-1* Journal mode incendie
18-10 Journal mode incendie: événement
Range: Fonction:
0* [0 - 255 ] Acher l’événement du mode incendie.
3.13.2 18-5* Réf.& retour
18-50 Achage ss capt. [unité]
Range: Fonction:
0 SensorlessUnit*
[-999999.999 -
999999.999
SensorlessUnit]
Indiquer la pression ou le débit
découlant des calculs sans
capteur. Cette valeur ne sert pas
pour le contrôle. Elle n’est
actualisée que si les données
sans capteur prennent en charge
le débit et la pression.
3.14 Menu principal - Boucl.fermé.variat. Groupe 20
Ce groupe de paramètres est utilisé pour congurer le
régulateur PI en boucle fermée qui contrôle la fréquence
de sortie du variateur de fréquence.
3.14.1 20-0* Retour
Ce groupe de paramètres permet de congurer le signal
de retour du régulateur PI en boucle fermée du variateur
de fréquence.
20-00 Source retour 1
Option: Fonction:
Ce paramètre dénit l’entrée à
utiliser comme source du signal de
retour.
[0] * Pas de fonction
[1] Entrée ANA 53
[2] Entrée ANA 54
[3] Entrée Fréquence 29
[100] Retour du bus 1
[101] Retour du bus 2
[104] Débit ss capteur
[105] Pression ss capteur
20-01 Conversion retour 1
Option: Fonction:
Ce paramètre permet d’appliquer une fonction
de conversion à Retour 1.
[0] * Linéaire [0] Linéaire n’a pas d’eet sur le signal de
retour.
[1] Racine
carrée
[1] Racine carrée est généralement utilisée
lorsqu’un capteur de pression fournit un signal
de retour de débit.
((débit ∝ pression)).
20-03 PID proc./2 retours
Option: Fonction:
[0] * Pas de fonction
[1] Entrée ANA 53
[2] Entrée ANA 54
[3] Entrée Fréquence 29
[100] Retour du bus 1
[101] Retour du bus 2
20-04 Conversion retour 2
Option: Fonction:
[0] * Linéaire
[1] Racine carrée
20-12 Unité référence/retour
Option: Fonction:
Sélectionner l'unité à utiliser dans les
références et retours en boucle
fermée.
[0] * None Expressionlimit
[20] l/s
[23] m³/s
[24] m³/min
[25] m³/h
[71] bar
[73] kPa
[74] m WG
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 89
Page 92

Paramètres
VLT® HVAC Basic Drive FC 101
3.14.2 20-2* Retour et consigne
Groupe de paramètres de fonction de retour et consignes.
Sélection des retour et consigne utilisés. La consigne et le
signal de retour peuvent constituer une paire xe ou être
sélectionnés séparément en fonction de comparaisons
33
logiques.
20-20 Fonction de retour
Sélectionner la manière de calculer le retour. Le retour peut être
une source de retour simple ou une combinaison de plusieurs
retours.
Option: Fonction:
[0] Somme
[1] Diérence
[2] Moyenne
[3] * Minimum
[4] Maximum
3.14.3 20-6* Abs. capteur
Paramètres en l’absence de capteur. Voir aussi
paramétre 16-26 Puissance ltrée[kW],
paramétre 16-27 Puissance ltrée[CV],
paramétre 18-50 Achage ss capt. [unité] et
paramétre 20-00 Source retour 1.
20-60 Unité ss capteur
Option: Fonction:
Choisir l’unité à utiliser avec
paramétre 18-50 Achage ss capt.
[unité].
[0] Aucun
[20] * l/s Expressionlimit
[23] m³/s
[24] m³/min
[25] m³/h
[71] bar
[73] kPa
[74] m WG
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
20-69 Informations ss capteur
Tableau [8]
Range: Fonction:
0* [0 - 25 ] Acher les infos concernant les données sans
capteur.
3.14.4 20-7* Régl. auto PID
Paramètres d’activation du réglage automatique PID.
20-70 Type boucle fermée
Option: Fonction:
Choisir la réponse d’application
attendue.
[0] * Auto
[1] Pression rapide
[2] Pression lente
[3] Température rapide
[4] Température lente
20-71 Mode réglage
Option: Fonction:
Choisir la vitesse de réponse relative pour l’application.
[0] * Normal
[1] Rapide
20-72 Modif. sortie PID
Range: Fonction:
0.10* [0.01 - 0.50 ] Régler la magnitude du changement de
pas lors de la séquence de réglage
automatique.
20-73 Niveau de retour min.
Range: Fonction:
-4999.000* [-4999.000 -
Expressionlimit
(4999.000)]
20-74 Niveau de retour max.
Range: Fonction:
4999.000* [Expressionlimit
(-4999.000) -
4999.000]
20-79 Régl. auto PID
Option: Fonction:
[0] * Désactivé Sélectionner pour désactiver le réglage
automatique PID.
[1] Activé Sélectionner pour activer le réglage automatique
PID.
Régler la valeur de signal de
retour minimum autorisée lors
de la séquence de réglage
automatique.
Régler la valeur de signal de
retour maximum autorisée lors
de la séquence de réglage
automatique.
90 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 93

Paramètres Guide de programmation
3.14.5 20-8* Régl. basiq. PI
Paramètres de conguration du régulateur PI de process.
20-81 Contrôle normal/inversé PID
Option: Fonction:
[0] * Normal Ce réglage entraîne la diminution de la fréquence
de sortie du variateur de fréquence lorsque le
signal de retour est supérieur à la référence de
consigne. Ce comportement est courant pour les
applications de pompe et de ventilateur à alimentation pressostatique.
[1] Inverse Ce réglage entraîne l’augmentation de la fréquence
de sortie du variateur de fréquence lorsque le
signal de retour est supérieur à la référence de
consigne. Ce comportement est courant pour les
applications de refroidissement à commande de
température, telles que les tours de refroidissement.
20-83 Vit.de dém. PID [Hz]
Range: Fonction:
0 Hz* [ 0 -
200.0 Hz]
Entrer la vitesse du moteur à atteindre comme
signal de démarrage du régulateur PI. Après la
mise sous tension, le variateur de fréquence
fonctionne en contrôle de vitesse en boucle
ouverte. Lorsque la vitesse de démarrage du
régulateur PI de process est atteinte, le
variateur de fréquence commute sur le
régulateur PI.
20-93 Gain proportionnel PID
Range: Fonction:
0.50* [0 - 10 ] Entrer le gain proportionnel du régulateur de
process. Un gain élevé se traduit par régulation
rapide. Cependant un gain trop important peut
aecter la régularité du process.
20-94 Tps intégral PID
Range: Fonction:
20 s* [0.10 -
9999 s]
Entrer le temps intégral du régulateur de
process. Un temps intégral de courte durée se
traduit par une régulation rapide, mais si cette
durée est trop courte, le process devient
instable. Un temps intégral trop long
désactive l’action intégrale.
20-97 Facteur d'anticipation PID process
Range: Fonction:
0 %* [0 -
400 %]
Entrer le facteur d’anticipation PI. Le facteur
d’anticipation émet une fraction constante du
signal de référence pour contourner la
régulation PI. Par conséquent, le PI n’aecte
que la fraction restante du signal de
commande. Le facteur d’anticipation peut
accroître la performance dynamique.
3 3
20-84 Largeur de bande sur réf.
Range: Fonction:
5 %* [0 -
200 %]
Lorsque la diérence entre le signal de retour et
la référence de consigne est inférieure à la valeur
de ce paramètre, l’achage du variateur de
fréquence mentionne F.sur réf. Cet état peut être
communiqué en externe en programmant la
fonction d’une sortie digitale sur [8] F.sur réf/pas
avertis. De plus, pour les communications série, le
bit d’état sur réf. du mot d’état du variateur de
fréquence est élevé (1).
La largeur de bande sur réf. est calculée en
pourcentage de la référence du point de
consigne.
3.14.6 20-9* Régulateur PI
20-91 Anti-satur. PID
Option: Fonction:
[0] Inactif Continue à réguler une erreur même si la fréquence
de sortie ne peut pas être augmentée ou réduite.
[1] * Actif Stopper la régulation d’une erreur lorsque la
fréquence de sortie ne peut plus être ajustée.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 91
Page 94

Detection
timer
Low Power
No-ow
detection
Warning
Alarm
External
sleep mode
command
Min run
timer
Min sleep
timer
Sleep
mode
Cascade
controller
(destaging
command)
speed detection
Sleep mode
O
No ow/low
130BE841.10
P 22-24
1
P 22-40
P 22-41
P 25-26
P 22-23
Paramètres
VLT® HVAC Basic Drive FC 101
3.15 Menu principal - Fonctions application
- Groupe 22
3.15.1 22-0* Divers
Groupe de paramètres pour des réglages supplémentaires.
33
22-01 Tps ltre puissance
Range: Fonction:
0.50 s* [0.02 - 10s]Régler constante de tps pour achage
puiss. ltrée. Une valeur plus élevée assure
22-01 Tps ltre puissance
Range: Fonction:
un achage plus stable mais une réponse
plus lente du système aux changements.
22-02 Sleepmode CL Control Mode
Option: Fonction:
[0] Normal Le signal de retour est détecté. Certains
paramètres sont contrôlés.
[1] Simplied Le signal de retour n’est pas détecté. Seule la
vitesse en veille et le temps sont contrôlés.
En cas de fonctionnement en mode veille, en mode
process en boucle fermée. Utiliser ce paramètre pour
indiquer si le signal de retour est détecté en mode veille.
3.15.2 22-2* Détect.abs. débit
Illustration 3.16 Détection d’absence de débit
Le variateur de fréquence inclut des fonctions de détection des conditions de charge du système permettant d’arrêter le
moteur :
L’un de ces 2 signaux doit être actif pendant un temps déterminé (paramétre 22-24 Retard abs. débit) avant que l’action
sélectionnée ne s’exécute. Sélections d’actions possibles (paramétre 22-23 Fonct. abs débit) :
Détection d’absence de débit
Cette fonction permet de détecter l’absence de débit dans des systèmes de pompe où toutes les soupapes peuvent être
fermées. Elle peut être utilisée lorsqu’elle est contrôlée par le régulateur PI intégré au variateur de fréquence ou par un
régulateur PI externe. Programmer la conguration réelle au paramétre 1-00 Mode Cong..
92 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
détection de puissance faible.
•
Aucune action
•
Avertissement
•
Alarme
•
Mode veille
•
Page 95

FC
130BA253.10
P
130BA254.10
Hauteur
Débit
2
1
Paramètres Guide de programmation
Mode de conguration du
régulateur PI intégré : Boucle fermée
•
régulateur PI externe : Boucle ouverte
•
AVIS!
Procéder à l’ajustement d’absence de débit avant de congurer les paramètres du régulateur PI.
3 3
Tableau 3.11 Détection d’absence de débit
La détection d’absence de débit repose sur la mesure de la vitesse et de la puissance. À une certaine vitesse, le variateur de
fréquence calcule la puissance sans débit.
Cette cohérence est établie selon le réglage de 2 ensembles de vitesse et de leur puissance associée sans débit. En
surveillant la puissance, il est possible de détecter des conditions d’absence de débit dans des systèmes présentant une
pression d’aspiration variable ou si la courbe de la pompe est plate à basse vitesse.
Les 2 ensembles de données doivent être basés sur la mesure de la puissance à environ 50 % et 85 % de la vitesse
maximum avec les soupapes fermées. Les données sont programmées dans le groupe de paramètres 22-3* Régl.puiss.abs
débit.
Activer et mettre en service la détection d’absence de débit au paramétre 22-23 Fonct. abs débit et dans le groupe de
paramètres 22-3* Régl.puiss.abs débit.
22-23 Fonct. abs débit
Option: Fonction:
[0] * Inactif
[1] Mode veille
[2] Avertissement
[3] Alarme
22-24 Retard abs. débit
Range: Fonction:
10 s* [1 - 600 s] Régler le retard avant le début de l'action
réglée au paramétre 22-23 Fonct. abs débit si
détection de condition d’absence de débit.
3.15.3 22-3* Régl.puiss.abs débit
Séquence de réglage :
1. Pour arrêter le débit, fermer la vanne principale.
2. Faire fonctionner le moteur jusqu’à ce que le
système atteigne la température de service
normale.
3. Appuyer sur la touche [Hand On] du LCP et régler
la vitesse à environ 85 % de la vitesse nominale.
Noter la vitesse exacte.
4. Relever la puissance consommée en consultant la
puissance réelle dans la ligne de données du LCP
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 93
Page 96

Paramètres
VLT® HVAC Basic Drive FC 101
ou appeler le paramétre 16-10 Puissance moteur
[kW] dans le menu principal. Noter la puissance
achée.
5. Modier la vitesse à environ 50 % de la vitesse
nominale. Noter la vitesse exacte.
33
6. Relever la puissance consommée en consultant la
puissance réelle dans la ligne de données du LCP
ou appeler le paramétre 16-10 Puissance moteur
[kW] dans le menu principal. Noter la puissance
achée.
7. Programmer les vitesses utilisées au
paramétre 22-33 Vit. faible [Hz] et au
paramétre 22-37 Vit.élevée [Hz].
8. Programmer les valeurs de puissance associées au
paramétre 22-34 Puiss.vit.faible [kW] et au
paramétre 22-38 Puiss.vit.élevée [kW].
9. Revenir en arrière en appuyant sur [Auto On] ou
[O].
AVIS!
Régler le paramétre 1-03 Caract.couple avant que le
réglage ne s’eectue.
22-30 Puiss. sans débit
Range: Fonction:
0 kW* [0 - 1000 kW] Lecture de puissance sans débit calculée
à vitesse réelle.
22-31 Correct. facteur puiss.
Range: Fonction:
100 %* [1 - 400 %] Régler une correction si la détection
d'absence de débit réagit à une valeur de
puissance trop basse ou haute.
22-33 Vit. faible [Hz]
Range: Fonction:
0 Hz* [ 0 - 400 Hz] Régler la vitesse de sortie utilisée pour
enregistrer la puissance sans débit à vitesse
faible.
22-34 Puiss.vit.faible [kW]
Range: Fonction:
0 kW* [ 0 - 5.50 kW] Régler la puissance sans débit à vitesse
faible.
22-37 Vit.élevée [Hz]
Range: Fonction:
0 Hz* [ 0 - 400 Hz] Régler la vitesse de sortie utilisée pour
enregistrer la puissance sans débit à vitesse
élevée.
22-38 Puiss.vit.élevée [kW]
Range: Fonction:
0 kW* [ 0 - 5.50 kW] Régler la puissance sans débit à vitesse
élevée.
3.15.4 22-4* Mode veille
Le mode veille permet au variateur de fréquence de
s’arrêter de lui-même dans les situations où le système est
équilibré. Cette fonction économise de l’énergie et
empêche des problèmes de pression trop haute, d’eau trop
froide dans les tours de refroidissement et de pressurisation des bâtiments dans le système. Ceci est également
important car certaines applications empêchent le
variateur de fréquence de ramener le moteur à une vitesse
basse. Cela entraîne un risque de dommage pour les
pompes, de lubrication insusante des multiplicateurs et
d’instabilité des ventilateurs.
Le contrôleur de veille a 2 fonctions importantes :
1. la capacité de se mettre en veille au bon
moment ;
2. la capacité d’abandonner le mode veille au bon
moment.
L’objectif est de laisser le variateur de fréquence en mode
veille le plus longtemps possible pour éviter un cycle de
marche/arrêt fréquent du moteur tout en maintenant les
variables du système contrôlé dans une plage acceptable.
Séquence en cas de fonctionnement en mode veille en
boucle ouverte :
1. La vitesse du moteur est inférieure à la vitesse
dénie au paramétre 22-47 Vitesse veille [Hz]. Le
moteur fonctionne depuis plus longtemps que la
durée dénie au paramétre 22-40 Tps de fct min..
L’état de veille dure plus longtemps que la
période dénie au paramétre 22-48 Sleep Delay
Time.
2. Le variateur de fréquence fait décélérer le moteur
jusqu’à l’arrêt via le paramétre 1-82 Vit. min. pour
fonct. à l'arrêt [Hz].
3. Le variateur de fréquence active le
paramétre 1-80 Fonction à l'arrêt. Le variateur de
fréquence est maintenant en mode veille.
4. Le variateur de fréquence compare la consigne de
vitesse au paramétre 22-43 Vit. réveil [Hz] pour
détecter une situation de réveil.
5. La consigne de vitesse est supérieure au
paramétre 22-43 Vit. réveil [Hz]. L’état de veille a
duré plus longtemps que la période dénie au
paramétre 22-41 Tps de veille min.. L’état de réveil
dure plus longtemps que la période dénie au
94 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
Page 97

Paramètres Guide de programmation
paramétre 22-49 Wake-Up Delay Time. Le variateur
de fréquence est désormais sorti du mode veille.
6. Revenir à un contrôle de vitesse en boucle
ouverte (vitesse du moteur accélérant jusqu’à la
consigne de vitesse).
Séquence en cas de fonctionnement en mode veille en
boucle fermée :
1. Le variateur de fréquence passe en état de
surpression si l’une des quatre conditions
suivantes se vérie :
1a Si le paramétre 22-02 Sleepmode CL
Control Mode est réglé sur [0] Normal :
a. La vitesse du moteur est
inférieure à la valeur dénie au
paramétre 22-47 Vitesse veille
[Hz].
b. Le signal de retour est
supérieur à la référence.
c. Le moteur fonctionne depuis
plus longtemps que la durée
dénie au paramétre 22-40 Tps
de fct min..
d. L’état de veille dure plus
longtemps que la période
dénie au
paramétre 22-48 Sleep Delay
Time.
1b Si le paramétre 22-02 Sleepmode CL
Control Mode est réglé sur [1] Simplied :
a. La vitesse du moteur est
inférieure à la valeur dénie au
paramétre 22-47 Vitesse veille
[Hz].
b. Le moteur fonctionne depuis
plus longtemps que la durée
dénie au paramétre 22-40 Tps
de fct min..
c. L’état de veille dure plus
longtemps que la période
dénie au
paramétre 22-48 Sleep Delay
Time.
Si le paramétre 22-45 Consign.surpres.
n’est pas déni, le variateur de
fréquence passe en mode veille.
2. Une fois la période indiquée au
paramétre 22-46 Tps surpression max. écoulée, le
variateur de fréquence fait décélérer le moteur
jusqu’à la vitesse spéciée au paramétre 1-82 Vit.
min. pour fonct. à l'arrêt [Hz].
3. Le variateur de fréquence active le
paramétre 1-80 Fonction à l'arrêt. Le variateur de
fréquence est maintenant en mode veille.
4. Le variateur de fréquence sort du mode veille
lorsque :
4a l’erreur entre la référence et le signal de
retour est supérieure au
paramétre 22-44 Diérence réf/ret. réveil,
4b l’état de veille dure plus longtemps que
la période dénie au
paramétre 22-41 Tps de veille min., et
4c l’état de réveil dure plus longtemps que
la période dénie au
paramétre 22-48 Sleep Delay Time.
5. Le variateur de fréquence revient à un contrôle
en boucle fermée.
AVIS!
Le mode veille n’est pas actif tant que la référence locale
l’est (régler manuellement la vitesse à l’aide des touches
de navigation du LCP).
Le mode veille ne fonctionne pas en mode local.
Eectuer la conguration auto en boucle ouverte avant
de régler l’entrée/sortie en boucle fermée.
22-40 Tps de fct min.
Range: Fonction:
10 s* [0 - 600 s] Régler la durée de fonctionnement minimum
souhaitée pour le moteur après un ordre de
démarrage (entrée digitale ou bus) avant
l'accès au mode veille.
22-41 Tps de veille min.
Range: Fonction:
10 s* [0 - 600 s] Régler le temps de maintien minimum en
mode veille. Ce paramètre est prioritaire sur
les conditions de réveil.
22-43 Vit. réveil [Hz]
Range: Fonction:
10* [ 0 -
400.0 ]
À utiliser uniquement si le paramétre 1-00 Mode
Cong. est réglé sur [0] Boucle ouverte et si la
référence de vitesse est appliquée par un
régulateur externe. Régler la vitesse de référence
au niveau correspondant à la désactivation du
mode veille.
La vitesse de réveil ne doit pas dépasser le
réglage au paramétre 4-14 Motor Speed High Limit
[Hz].
3 3
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 95
Page 98

Paramètres
VLT® HVAC Basic Drive FC 101
22-44 Diérence réf/ret. réveil
Range: Fonction:
10 %* [0 -
100 %]
33
À utiliser uniquement si le paramétre 1-00 Mode
Cong. est réglé sur Boucle fermée et si le
régulateur PI intégré est utilisé pour contrôler la
pression.
Régler la chute de pression admissible en
pourcentage du point de consigne de la
pression (P
) avant d’annuler le mode veille.
set
22-49 Wake-Up Delay Time
Range: Fonction:
0 s [0 - 3600 s] Régler la durée pendant laquelle le moteur
attend avant de sortir du mode veille lorsque
la condition de réveil est satisfaite.
3.15.5 22-6* Détect.courroi.cassée
Utiliser la détection de courroie cassée aussi bien dans des
22-45 Consign.surpres.
Range: Fonction:
0%* [-100
100 %]
À utiliser uniquement si le paramétre 1-00 Mode
Cong. est réglé sur boucle fermée et si le
régulateur PI intégré est utilisé. Dans les systèmes
avec contrôle permanent de la pression par
exemple, il est avantageux d’augmenter la pression
du système avant l’arrêt du moteur. Le temps
d’arrêt du moteur est alors allongé, ce qui évite
d’arrêter/démarrer fréquemment.
Régler la surpression/surtempérature requise en
pourcentage de la consigne de pression (P
température avant d’accéder au mode veille.
Si le réglage équivaut à 5 %, la pression de suralimentation correspond à P
d’utiliser des valeurs négatives, pour le contrôle de
tour de refroidissement par exemple, où un
changement négatif est nécessaire.
22-46 Tps surpression max.
Range: Fonction:
60s* [0 -
600 s]
À utiliser uniquement si le paramétre 1-00 Mode
Cong. est réglé sur [3] Boucle fermée et si le
régulateur PI intégré est utilisé pour contrôler la
pression.
Régler la durée maximum admissible du mode de
suralimentation. Si la durée dénie est dépassée,
le variateur de fréquence passe en mode veille
sans attendre l’obtention de la pression de suralimentation établie.
set
x 1,05. Il est possible
set
)/
systèmes en boucle fermée qu’en boucle ouverte pour des
pompes et des ventilateurs. Si le couple moteur estimé
(courant) est inférieur à la valeur de couple de courroie
cassée (courant) (paramétre 22-61 Coupl.courroi.cassée) et
que la fréquence de sortie du variateur de fréquence est
supérieure ou égale à 15 Hz, le
paramétre 22-60 Fonct.courroi.cassée s’exécute.
22-60 Fonct.courroi.cassée
Sélectionne l’action à exécuter si la condition de courroie cassée
est détectée.
Option: Fonction:
[0] * Inactif
[1] Avertissement Le variateur de fréquence continue de
fonctionner, mais il émet un avertissement
de courroie cassée, avertissement 95,
Courroie cassée. Une sortie digitale du
variateur de fréquence ou un bus de
communication série peut transmettre un
avertissement à un autre équipement.
[2] Arrêt Le variateur de fréquence cesse de
fonctionner et émet une alarme de courroie
cassée, alarme 95, Courroie cassée. Une sortie
digitale du variateur de fréquence ou un
bus de communication série peut
transmettre une alarme à un autre
équipement.
AVIS!
Ne pas régler le paramétre 14-20 Mode reset sur [13]
Reset auto. inni lorsque le
22-47 Vitesse veille [Hz]
Range: Fonction:
0* [ 0 - 400.0 ] Régler la vitesse sous laquelle le variateur
bascule en mode veille.
paramétre 22-60 Fonct.courroi.cassée est réglé sur [2]
Arrêt car cela entraîne un cycle continu de fonction-
nement et d’arrêt du variateur de fréquence en cas de
détection d’une condition de courroie cassée.
22-48 Sleep Delay Time
Range: Fonction:
0 s [0 - 3600 s] Régler la durée pendant laquelle le moteur
attend avant de passer en mode veille lorsque
la condition d’accès au mode veille est
satisfaite.
96 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
AVIS!
Si la fonction de bipasse automatique est activée, le
bipasse démarre quand le variateur de fréquence connaît
une condition d’alarme durable. Dans ce cas, désactiver
la fonction de bipasse automatique si [2] Arrêt est
sélectionné dans la fonction de courroie cassée.
Page 99

130BA383.11
Paramètres Guide de programmation
H
22-61 Coupl.courroi.cassée
Range: Fonction:
10 %* [5 - 100 %] Règle le couple de courroie cassée sous
forme de pourcentage du couple moteur
nominal.
DESIGN
fonctionnement en boucle fermée (PI) du variateur de
fréquence et est déni pour un fonctionnement en boucle
fermée sans compensation du débit.
(pression requise) est le point de consigne pour le
22-62 Retar.courroi.cassée
Range: Fonction:
10s* [0 -
600 s]
Règle le temps pendant lequel les conditions de
courroie cassée doivent être actives avant que
l’action sélectionnée au
paramétre 22-60 Fonct.courroi.cassée n’intervienne.
3.15.6 22-8* Compensa° du débit
Dans certaines applications, il n’est pas possible de placer
un capteur de pression à un point distant du système : le
capteur ne peut être placé que près de la sortie de
ventilateur/pompe. La compensation du débit se fait en
réglant la consigne en fonction de la fréquence de sortie
qui est pratiquement proportionnelle au débit. Cela
compense ainsi les pertes plus élevées à des débits plus
élevés.
Paramètre utilisé
Paramétre 22-80 Compensat. débit + +
Paramétre 22-81 Approx. courbe linéaire- quadratique + +
Paramétre 22-82 Calcul pt de travail + +
Paramétre 22-84 Vit. abs. débit [Hz] + +
Paramétre 22-86 Vit. à pt de fonctionnement [Hz] + Paramétre 22-87 Pression à vit. ss débit + +
Paramétre 22-88 Pression à vit. nominal - +
Paramétre 22-89 Débit pt de fonctionnement - +
Paramétre 22-90 Débit à vit. nom. - +
Illustration 3.17 Conguration de la compensation du débit
Deux méthodes peuvent être employées, selon que l’on
connaît ou non la vitesse au point de travail de conception
du système.
Vitesse au point de fonction-
nement
CONNUE
Vitesse au point de fonction-
nement
INCONNUE
3 3
Tableau 3.12 Vitesse au point de conception connu/inconnu
22-80 Compensat. débit
Option: Fonction:
[0] * Désactivé Désactive la compensation du débit de la
consigne.
[1] Activé Active la compensation du débit de la consigne.
22-82 Calcul pt de travail
Option: Fonction:
[0] * Désactivé Désactive le calcul du point de travail à vitesse
nominale.
[1] Activé Active le calcul du point de travail à vitesse
nominale.
22-81 Approx. courbe linéaire-quadratique
Range: Fonction:
100 %* [0 - 100 %] Règle la forme de courbe de contrôle. 0 %
= ligne droite, 100 % = parabole max.
MG18B504 Danfoss A/S © 05/2018 Tous droits réservés. 97
22-84 Vit. abs. débit [Hz]
Range: Fonction:
Size related* [ 0 - 400.0
Hz]
Régler la vitesse du moteur en Hz
à laquelle débit = 0 et la pression
min. est obtenue.
Page 100

Paramètres
22-86 Vit. à pt de fonctionnement [Hz]
Range: Fonction:
Size related* [ 0.0 - 400.0
Hz]
Régler la vitesse du moteur en Hz
à laquelle est obtenu le point de
travail de conception du système.
VLT® HVAC Basic Drive FC 101
33
22-87 Pression à vit. ss débit
Range: Fonction:
0* [ 0 - 4999.000 ] Régler la valeur de pression correspondant
à la vitesse sans débit.
22-88 Pression à vit. nominal
Range: Fonction:
4999.000* [ 0 - 4999.000 ] Régler la valeur de pression correspondant à la pression à vitesse
nominale.
22-89 Débit pt de fonctionnement
Range: Fonction:
0* [0 - 4999.000 ] Régler la valeur du débit correspondant au
débit au point de conception.
98 Danfoss A/S © 05/2018 Tous droits réservés. MG18B504
 Loading...
Loading...