


ENGINEERING TOMORROW
Guía de diseño
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com

Índice Guía de diseño
Índice
1 Introducción
1.1 Propósito de la Guía de diseño
1.2 Versión de documento y software
1.3 Símbolos de seguridad
1.4 Abreviaturas
1.5 Recursos adicionales
1.6 Deniciones
1.7 Factor de potencia
1.8 Cumplimiento de las normas
1.8.1 Marca CE 10
1.8.2 Conformidad con UL 11
1.8.3 Marcado RCM de conformidad 11
1.8.4 EAC 11
1.8.5 UkrSEPRO 11
2 Seguridad
2.1 Personal cualicado
2.2 Medidas de seguridad
6
6
6
6
7
7
7
10
10
12
12
12
3 Vista general del producto
3.1 Ventajas
3.1.1 ¿Por qué utilizar un convertidor de frecuencia para controlar ventiladores y
bombas? 14
3.1.2 Una clara ventaja: el ahorro de energía 14
3.1.3 Ejemplo de ahorro de energía 14
3.1.4 Comparación de ahorro de energía 15
3.1.5 Ejemplo con caudal variable durante 1 año 16
3.1.6 Control mejorado 17
3.1.7 No es necesario un arrancador en estrella / triángulo ni un arrancador suave 17
3.1.8 El uso de un convertidor de frecuencia ahorra energía. 17
3.1.9 Sin un convertidor de frecuencia 18
3.1.10 Con un convertidor de frecuencia 19
3.1.11 Ejemplos de aplicaciones 20
3.1.12 Volumen de aire variable 20
3.1.13 La solución VLT
3.1.14 Volumen de aire constante 21
3.1.15 La solución VLT
®
®
14
14
20
21
3.1.16 Ventilador de torre de refrigeración 22
3.1.17 La solución VLT
3.1.18 Bombas del condensador 23
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 1
®
22
Índice
VLT® HVAC Basic Drive FC 101
3.1.19 La solución VLT
®
3.1.20 Bombas primarias 24
3.1.21 La solución VLT
®
3.1.22 Bombas secundarias 26
3.1.23 La solución VLT
®
3.2 Estructuras de control
3.2.1 Estructura de control de lazo abierto 27
3.2.2 Control de motor PM / EC+ 27
3.2.3 Control Local (Hand On) y Remoto (Auto On) 27
3.2.4 Estructura de control de lazo cerrado 28
3.2.5 Conversión de realimentación 28
3.2.6 Manejo de referencias 29
3.2.7 Optimización del controlador de lazo cerrado del convertidor de frecuencia 30
3.2.8 Ajuste manual del PI 30
3.3 Condiciones ambientales de funcionamiento
3.4 Aspectos generales de la CEM
3.4.1 Descripción general de las emisiones CEM 36
23
24
26
27
30
36
3.4.2 Requisitos en materia de emisiones 38
3.4.3 Resultados de la prueba de emisión CEM 39
3.4.4 Aspectos generales de la emisión de armónicos 40
3.4.5 Requisitos en materia de emisión de armónicos 40
3.4.6 Resultados de la prueba de armónicos (emisión) 40
3.4.7 Requisitos de inmunidad 42
3.5 Aislamiento galvánico (PELV)
3.6 Corriente de fuga a tierra
3.7 Condiciones de funcionamiento extremas
3.7.1 Protección térmica del motor (ETR) 44
3.7.2 Entradas de termistor 45
4 Selección y pedido
4.1 Código descriptivo
4.2 Opciones y accesorios
4.2.1 Panel de control local (LCP) 48
4.2.2 Montaje del LCP en el panel frontal 48
4.2.3 Kit de protección IP21 / NEMA tipo 1 49
43
43
44
47
47
48
4.2.4 Placa de desacoplamiento 50
4.3 Números de pedido
51
4.3.1 Opciones y accesorios 51
4.3.2 Filtros armónicos 52
4.3.3 Filtro RFI externo 54
2 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Índice Guía de diseño
5 Instalación
5.1 Instalación eléctrica
5.1.1 Conexión de alimentación y del motor 57
5.1.2 Instalación eléctrica conforme a CEM 62
5.1.3 Terminales de control 64
6 Programación
6.1 Introducción
6.2 Panel de control local (LCP)
6.3 Menús
6.3.1 Menú de estado 66
6.3.2 Menú rápido 66
6.3.3 Menú principal 81
6.4 Transferencia rápida de ajustes de parámetros entre varios convertidores de frecuencia
6.5 Lectura de datos y programación de parámetros indexados
6.6 Inicialización a los ajustes predeterminados
55
55
65
65
65
66
82
82
82
7 Instalación y ajuste de RS485
7.1 RS485
7.1.1 Descripción general 84
7.1.2 Conexión de red 84
7.1.3 Ajuste del hardware del convertidor de frecuencia 84
7.1.4 Ajustes de parámetros para la comunicación Modbus 85
7.1.5 Precauciones de compatibilidad electromagnética (EMC) 85
7.2 Protocolo FC
7.2.1 Descripción general 86
7.2.2 FC con Modbus RTU 86
7.3 Ajustes de parámetros para activar el protocolo
7.4 Estructura de formato de mensaje del protocolo FC
7.4.1 Contenido de un carácter (byte) 86
7.4.2 Estructura de telegramas 86
7.4.3 Longitud del telegrama (LGE) 87
7.4.4 Dirección del convertidor de frecuencia (ADR) 87
7.4.5 Byte de control de datos (BCC) 87
84
84
86
86
86
7.4.6 El campo de datos 87
7.4.7 El campo PKE 87
7.4.8 Número de parámetro (PNU) 88
7.4.9 Índice (IND) 88
7.4.10 Valor de parámetro (PWE) 88
7.4.11 Tipos de datos admitidos por el convertidor de frecuencia 89
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 3
Índice
VLT® HVAC Basic Drive FC 101
7.4.12 Conversión 89
7.4.13 Códigos de proceso (PCD) 89
7.5 Ejemplos
7.5.1 Escritura del valor de un parámetro. 89
7.5.2 Lectura del valor de un parámetro 90
7.6 Visión general de Modbus RTU
7.6.1 Introducción 90
7.6.2 Descripción general 90
7.6.3 Convertidor de frecuencia con Modbus RTU 91
7.7 Conguración de red
7.8 Estructura de formato de mensaje de Modbus RTU
7.8.1 Introducción 91
7.8.2 Estructura de telegrama Modbus RTU 91
7.8.3 Campo de arranque/parada 92
7.8.4 Campo de dirección 92
7.8.5 Campo de función 92
7.8.6 Campo de datos 92
7.8.7 Campo de comprobación CRC 92
7.8.8 Direccionamiento de bobinas 93
89
90
91
91
7.8.9 Acceso mediante PCD de escritura/lectura 94
7.8.10 Control del convertidor de frecuencia 95
7.8.11 Códigos de función admitidos por Modbus RTU 95
7.8.12 Códigos de excepción Modbus 95
7.9 Cómo acceder a los parámetros
7.9.1 Gestión de parámetros 96
7.9.2 Almacenamiento de datos 96
7.9.3 IND (índice) 96
7.9.4 Bloques de texto 96
7.9.5 Factor de conversión 96
7.9.6 Valores de parámetros 96
7.10 Ejemplos
7.10.1 Lectura de estado de la bobina (01 hex) 97
7.10.2 Forzar/escribir una sola bobina (05 hex) 97
7.10.3 Forzar/escribir múltiples bobinas (0F hex) 98
7.10.4 Lectura de registros de retención (03 hex) 98
7.10.5 Preajuste de un solo registro (06 hex) 99
96
97
7.10.6 Preajuste de múltiples registros (10 hex) 99
7.10.7 Leer/escribir múltiples registros (17 hex) 99
7.11 Perl de control FC de Danfoss
7.11.1 Código de control conforme al perl FC (Protocolo 8-10 = perl FC) 100
4 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
100
Índice Guía de diseño
7.11.2 Código de estado según el perl FC (STW) 102
7.11.3 Valor de referencia de velocidad de bus 103
8 Especicaciones generales
8.1 Dimensiones mecánicas
8.1.1 Montaje lado a lado 104
8.1.2 Dimensiones del convertidor de frecuencia 105
8.1.3 Dimensiones de envío 108
8.1.4 Instalación de campo 109
8.2 Especicaciones de alimentación de red
8.2.1 3 × 200-240 V CA 109
8.2.2 3 × 380-480 V CA 110
8.2.3 3 × 525-600 V CA 114
8.3 Fusibles y magnetotérmicos
8.4 Especicaciones técnicas generales
8.4.1 Fuente de alimentación de red (L1, L2 y L3) 117
8.4.2 Salida del motor (U, V y W) 117
8.4.3 Longitud y sección transversal del cable 117
8.4.4 Entradas digitales 118
8.4.5 Entradas analógicas 118
104
104
109
115
117
Índice
8.4.6 Salida analógica 118
8.4.7 Salida digital 118
8.4.8 Tarjeta de control, comunicación serie RS485 119
8.4.9 Tarjeta de control, salida de 24 V CC 119
8.4.10 Salida de relé 119
8.4.11 Tarjeta de control, salida de 10 V CC 120
8.4.12 Condiciones ambientales 120
8.5 dU / Dt
120
123
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 5
Introducción
VLT® HVAC Basic Drive FC 101
11
1 Introducción
1.1 Propósito de la Guía de diseño
La presente Guía de diseño ha sido confeccionada para
ingenieros de proyectos y sistemas, asesores de diseño y
especialistas en aplicaciones y productos. Se facilita
información técnica para entender la capacidad del
convertidor de frecuencia e integrarlo en los sistemas de
control y seguimiento del motor. Se ofrecen detalles sobre
el funcionamiento, los requisitos y las recomendaciones
para la integración en el sistema. Se facilita información
sobre las características de alimentación de entrada, la
salida de control del motor y las condiciones ambientales
de funcionamiento del convertidor de frecuencia.
También se incluyen:
Funciones de seguridad.
•
Control de situaciones de fallo.
•
Información del estado operativo.
•
Capacidades de comunicación serie.
•
Opciones y funciones programables.
•
También se suministra información sobre el diseño, como:
Las necesidades de las instalaciones.
•
Los cables.
•
Los fusibles.
•
El cableado de control.
•
El tamaño y el peso de las unidades.
•
Otra información fundamental para planicar la
•
integración del sistema.
Revisar la información detallada del producto en la fase de
diseño permite el desarrollo de un sistema bien concebido,
con una funcionalidad y un rendimiento óptimos.
aplicará al convertidor de frecuencia para potencias de 22
kW (30 CV) 400 V IP20, de 18,5 kW (25 CV) 400 V IP54 e
inferiores. Esta función requiere actualizaciones de software
y hardware e introduce restricciones de retrocompatibilidad para los alojamientos de tipo H1-H5 e I2-I4.
Consulte la Tabla 1.2 para conocer las limitaciones.
Compatibilidad
del software
Software antiguo
(versión 3.xx y
anteriores del
archivo OSS)
Software nuevo
(versión 4.xx o
posterior del archivo
OSS)
Compatibilidad
del hardware
Tarjeta de potencia
antigua
(semana de
producción 33/2017
o anterior)
Nueva tarjeta de
potencia
(semana de
producción 34/2017
o posterior)
Tarjeta de control
antigua (semana de
producción 33/2017
o anterior)
Sí No
No Sí
Tarjeta de control
antigua (semana de
producción 33/2017
o anterior)
Sí (solo con la
versión de software
3.xx o anteriores)
Sí (DEBE actualizarse
el software a la
versión 3.xx o
anteriores; el
ventilador funciona
continuamente a la
velocidad máxima)
Tarjeta de control
nueva (semana de
producción 34/2017
o posterior)
Tarjeta de control
nueva (semana de
producción 34/2017
o posterior)
Sí (DEBE actualizarse
el software a la
versión 4.xx o
superior)
Sí (solo con la
versión de software
4.xx o posterior)
VLT® es una marca registrada.
Versión de documento y software
1.2
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras.
Edición Comentarios Versión de
software
MG18C8xx Actualización a la nueva versión del
software y el hardware.
Tabla 1.1 Versión del documento y del software
A partir de la versión 4.0x del software (semana de
producción 33/2017 y posteriores), la función de ventilador
de refrigeración del disipador de velocidad variable se
6 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
4.2x
Tabla 1.2 Compatibilidad del software y el hardware
Símbolos de seguridad
1.3
En esta guía se han utilizado los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
Introducción Guía de diseño
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
1.4 Abreviaturas
°C
°F
A Amperio
CA Corriente alterna
AMA Adaptación automática del motor
AWG Calibre de cables estadounidense
CC Corriente continua
CEM Compatibilidad electromagnética
ETR Relé termoelectrónico
FC Convertidor de frecuencia
f
M,N
kg Kilogramo
Hz Hercio
I
INV
I
LÍM.
I
M,N
I
VLT, MÁX.
I
VLT, N
kHz Kilohercio
LCP Panel de control local
m Metro
mA Miliamperio
MCT Herramienta de control de movimientos
mH Milihenrio (inductancia)
min Minuto
ms Milisegundo
nF Nanofaradio
Nm Newton metro
n
s
P
M,N
PCB Placa de circuito impreso
PELV Tensión de protección muy baja
Regen Terminales regenerativos
RPM Revoluciones por minuto
s Segundo
T
LÍM.
U
M,N
V Voltios
Tabla 1.3 Abreviaturas
Grados Celsius
Grados Fahrenheit
Frecuencia nominal del motor
Intensidad nominal de salida del
convertidor
Límite intensidad
Corriente nominal del motor
Intensidad máxima de salida
Corriente nominal de salida suministrada
por el convertidor de frecuencia
Velocidad del motor síncrono
Potencia nominal del motor
Límite de par
Tensión nominal del motor
Recursos adicionales
1.5
La Guía rápida del VLT® HVAC Basic Drive FC 101
•
proporciona información básica sobre las
dimensiones mecánicas, la instalación y la programación.
La Guía de programación del VLT® HVAC Basic Drive
•
FC 101 proporciona información acerca de cómo
programar el equipo e incluye descripciones
completas de los parámetros.
Software Danfoss VLT® Energy Box. Seleccione
•
Descarga de software para PC en
www.danfoss.com/en/service-and-support/
downloads/dds/vlt-energy-box/.
El software VLT® Energy Box permite realizar
comparaciones de consumo energético de
ventiladores y bombas HVAC accionados por
convertidores de frecuencia de Danfoss y
métodos alternativos de control de caudal. Utilice
esta herramienta para proyectar con exactitud los
costes, los ahorros y la amortización del uso de
convertidores de frecuencia de Danfoss en
ventiladores, bombas y torres de refrigeración
HVAC.
La documentación técnica de Danfoss está disponible en
formato electrónico en el CD de documentación que se
suministra junto al producto, o en formato impreso en su
ocina local de ventas de Danfoss.
Soporte Software de
conguración MCT 10
Descargue el software desde www.danfoss.com/en/service-
-and-support/downloads/dds/vlt-motion-control-tool-mct-10/.
Durante el proceso de instalación del software, introduzca
el código de acceso 81463800 para activar la función FC
101. No se necesita ninguna clave de licencia para utilizar
la función FC 101.
El software más actualizado no siempre contiene las
últimas actualizaciones de los convertidores de frecuencia.
Diríjase a su ocina local de ventas para conseguir las
últimas actualizaciones del convertidor de frecuencia (en
forma de archivos *.upd), o descárguelas desde
www.danfoss.com/en/service-and-support/downloads/dds/vlt-
-motion-control-tool-mct-10/#Overview.
Deniciones
1.6
Convertidor de frecuencia
I
VLT, MÁX.
Intensidad de salida máxima
I
VLT, N
Corriente nominal de salida suministrada por el convertidor
de frecuencia.
U
VLT, MÁX.
La tensión de salida máxima
1 1
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 7
175ZA078.10
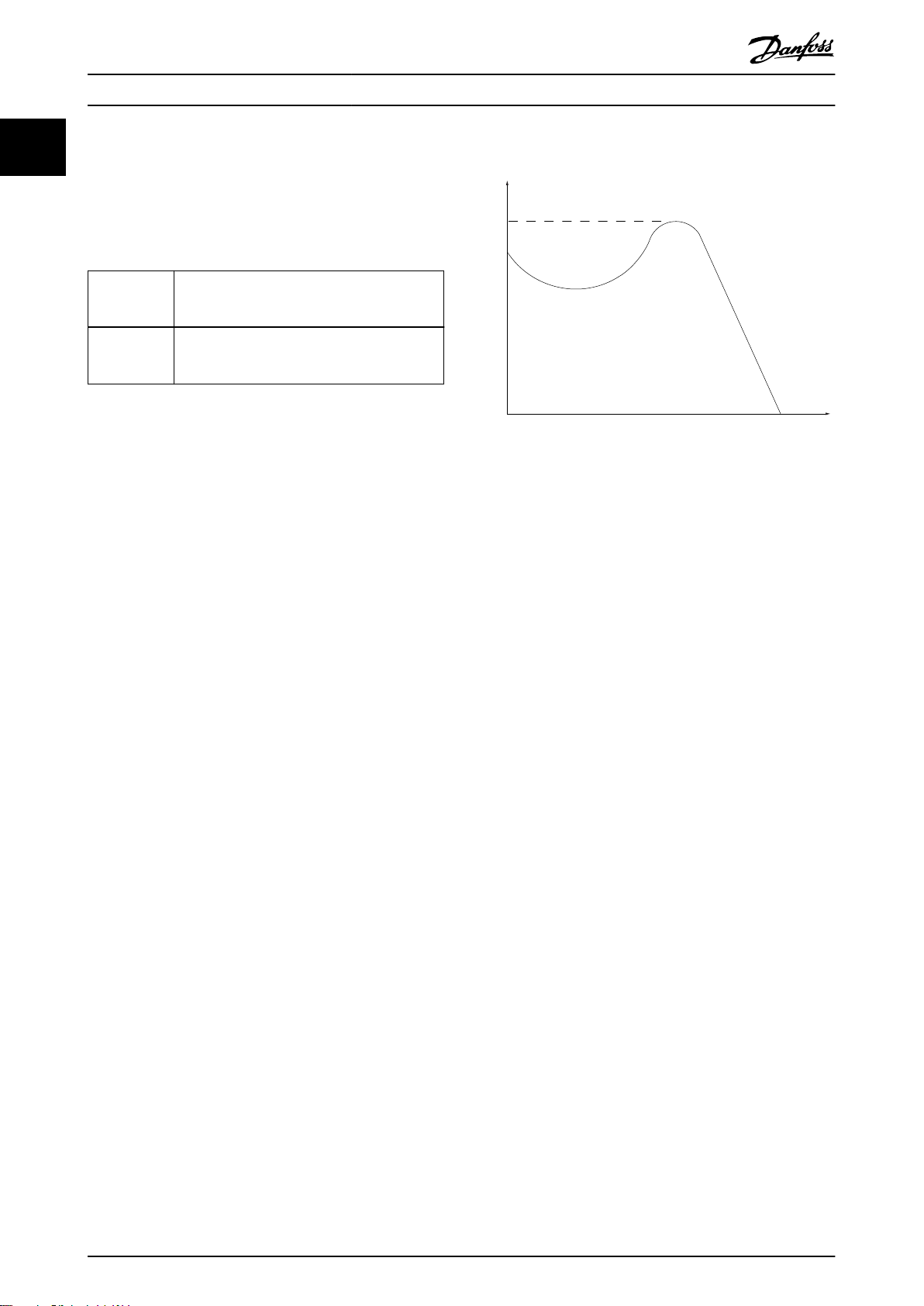
Par max.
0 / min.
Par
Introducción
VLT® HVAC Basic Drive FC 101
11
Entrada
Par de arranque
El motor conectado puede arrancarse y detenerse
mediante un LCP y entradas digitales. Las funciones se
dividen en dos grupos, tal y como se describe en la
Tabla 1.4. Las funciones del grupo 1 tienen mayor prioridad
que las funciones del grupo 2.
Reinicio, paro por inercia, reinicio y paro por
Grupo 1
Grupo 2
Tabla 1.4 Orden de control
Motor
f
VELOCIDAD FIJA
inercia, parada rápida, freno de CC, parada, y
[O].
Arranque, Arranque de pulsos, Cambio de
sentido, Arranque e inversión, Velocidad ja y
Mantener salida.
Ilustración 1.1 Par de arranque
La frecuencia del motor cuando se activa la función de
velocidad ja (mediante terminales digitales).
f
M
La frecuencia del motor.
f
MÁX.
La frecuencia máxima del motor.
f
MÍN.
La frecuencia mínima del motor.
f
M,N
La frecuencia nominal del motor (datos de la placa de
características).
I
M
La intensidad del motor.
I
M,N
La corriente nominal del motor (datos de la placa de
características).
n
M,N
La velocidad nominal del motor (datos de la placa de
características).
P
M,N
La potencia nominal del motor (datos de la placa de
características).
U
M
La tensión instantánea del motor.
U
M,N
La tensión nominal del motor (datos de la placa de
características).
η
VLT
El rendimiento del convertidor de frecuencia se dene
como la relación entre la potencia de salida y la potencia
de entrada.
Orden de desactivación de arranque
Una orden de parada que pertenece al grupo 1 de las
órdenes de control. Consulte la Tabla 1.4.
Orden de parada
Consulte el Tabla 1.4.
Referencia analógica
Señal transmitida a las entradas analógicas 53 o 54. Puede
ser tensión o intensidad.
Entrada de corriente: 0-20 mA y 4-20 mA
•
Entrada de tensión: 0-10 V CC
•
Referencia de bus
Señal transmitida al puerto de comunicación en serie
(puerto FC).
Referencia interna
Una referencia interna denida que puede ajustarse a un
valor comprendido entre el –100 % y el +100 % del
intervalo de referencias. Pueden seleccionarse ocho
referencias internas mediante los terminales digitales.
Ref
MÁX.
Determina la relación entre la entrada de referencia a un
100 % de escala completa (normalmente, 10 V y 20 mA) y
la referencia resultante. El valor de referencia máximo se
ajusta en parámetro 3-03 Referencia máxima.
Ref
MÍN.
Determina la relación entre la entrada de referencia a un
valor del 0 % (normalmente, 0 V, 0 mA y 4 mA) y la
referencia resultante. El valor de referencia mínimo se
ajusta en el parámetro 3-02 Referencia mínima.
Entradas analógicas
Las entradas analógicas se utilizan para controlar varias
funciones del convertidor de frecuencia.
8 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Introducción Guía de diseño
Hay dos tipos de entradas analógicas:
Entrada de corriente: 0-20 mA y 4-20 mA
•
Entrada de tensión: 0-10 V CC
•
Salidas analógicas
Las salidas analógicas pueden proporcionar una señal de
0-20 mA, 4-20 mA o una señal digital.
Adaptación automática del motor (AMA)
El algoritmo AMA determina los parámetros eléctricos del
motor conectado cuando se encuentra parado, y
compensa la resistencia en función de la longitud del cable
de motor.
Entradas digitales
Las entradas digitales pueden utilizarse para controlar
distintas funciones del convertidor de frecuencia.
Salidas digitales
El convertidor de frecuencia dispone de dos salidas de
estado sólido que pueden proporcionar una señal de 24 V
CC (máximo 40 mA).
Salidas de relé
El convertidor de frecuencia presenta dos salidas de relé
programables.
ETR
El relé termoelectrónico es un cálculo de carga térmica
basado en la carga presente y el tiempo transcurrido. Su
nalidad es calcular la temperatura del motor y evitar su
sobrecalentamiento.
Inicialización
Si se lleva a cabo una inicialización (parámetro 14-22 Modo
funcionamiento), los parámetros programables del
convertidor de frecuencia se restablecen a los ajustes
predeterminados.
El Parámetro 14-22 Modo funcionamiento no inicializa los
parámetros de comunicación, el registro de fallos ni el
registro del modo incendio.
Ciclo de trabajo intermitente
Una clasicación de trabajo intermitente es una secuencia
de ciclos de trabajo. Cada ciclo está formado por un
periodo en carga y un periodo sin carga. El funcionamiento
puede ser de trabajo periódico o de trabajo no periódico.
LCP
El panel de control local (LCP) constituye una completa
interfaz para el control y la programación del convertidor
de frecuencia. El panel de control es extraíble en las
unidades IP20 y jo en las unidades IP54. Puede instalarse
a una distancia máxima de 3 m (9,8 ft) del convertidor de
frecuencia, p. ej., en un panel frontal con el kit de
instalación opcional.
Bit menos signicativo (lsb)
Bit menos signicativo.
MCM
Sigla en inglés de Mille Circular Mil, una unidad norteamericana de sección transversal de cable. 1 MCM =
0,5067 mm2.
Bit más signicativo (msb)
Bit más signicativo.
Parámetros en línea / fuera de línea
Los cambios realizados en los parámetros en línea se
activan inmediatamente después de cambiar el valor de
dato. Pulse [OK] para activar los parámetros fuera de línea.
Controlador PI
El controlador PI mantiene la velocidad, la presión, la
temperatura y demás parámetros que desee ajustando la
frecuencia de salida para adaptarla a la carga variable.
RCD
Dispositivo de corriente diferencial.
Ajuste
Los ajustes de parámetros se pueden guardar en dos
conguraciones. Alterne entre estos dos ajustes de
parámetros y edite uno de los ajustes mientras el otro está
activo.
Compensación de deslizamiento
El convertidor de frecuencia compensa el deslizamiento del
motor añadiendo un suplemento a la frecuencia que sigue
a la carga medida del motor, manteniendo la velocidad del
mismo casi constante.
Smart logic control (SLC)
SLC es una secuencia de acciones denidas por el usuario
que se ejecuta cuando el SLC evalúa como verdaderos los
eventos asociados denidos por el usuario.
Termistor
Resistencia que depende de la temperatura y que se
coloca en el punto donde ha de controlarse la temperatura
(convertidor de frecuencia o motor).
Desconexión
Estado al que se pasa en situaciones de fallo; por ejemplo,
si el convertidor de frecuencia se sobrecalienta, o cuando
está protegiendo el motor, el proceso o el mecanismo del
motor. Se impide el rearranque hasta que desaparece la
causa del fallo y se anula el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación de un reinicio automático. La
desconexión no debe utilizarse para la seguridad personal.
Bloqueo por alarma
Estado al que se pasa en situaciones de fallo cuando el
convertidor de frecuencia está protegiéndose a sí mismo y
requiere una intervención física; por ejemplo, si el
convertidor de frecuencia se cortocircuita en la salida. Un
bloqueo por alarma solo puede cancelarse cortando la
alimentación, eliminando la causa del fallo y volviendo a
conectar el convertidor de frecuencia. Se impide el
rearranque hasta que se cancela el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación del reinicio automático. El
bloqueo por alarma no debe utilizarse para la seguridad
personal.
1 1
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 9
Introducción
VLT® HVAC Basic Drive FC 101
11
Características VT
Características de par variable utilizadas en bombas y
ventiladores.
+
VVC
Comparado con el control estándar de la proporción de
tensión/frecuencia, el control vectorial de la tensión (VVC+)
mejora la dinámica y la estabilidad, tanto cuando se
cambia la velocidad de referencia como en relación con el
par de carga.
Directiva de la UE Versión
Directiva de tensión baja 2014/35/EU
Directiva CEM 2014/30/EU
Directiva ErP
Tabla 1.5 Directivas de la UE aplicables a los convertidores de
frecuencia
Las declaraciones de conformidad están disponibles previa
solicitud.
1.7 Factor de potencia
1.8.1.1 Directiva de tensión baja
El factor de potencia indica hasta qué punto el convertidor
de frecuencia impone una carga a la alimentación de red.
El factor de potencia se dene como la proporción entre I
e I
, siendo I1 la corriente fundamental e I
RMS
la corriente
RMS
RMS total, que incluye las corrientes armónicas. Cuanto
menor es el factor de potencia, mayor es I
RMS
para el
mismo rendimiento en kW.
Potenciapotencia =
3 × U × I1× cosϕ
3 × U × I
RMS
El factor de potencia para el control trifásico es:
Potenciapotencia =
2
I
RMS
= I
+ I
1
2
+ I
5
I1 × cosϕ1
I
RMS
2
+ . . + I
7
I
1
=
puesto quecosϕ1 = 1
I
RMS
2
n
Un factor de potencia elevado indica que las distintas
corrientes armónicas son bajas.
Las bobinas de CC integradas en los convertidores de
frecuencia producen un alto factor de potencia que
minimiza la carga impuesta a la alimentación de red.
Cumplimiento de las normas
1.8
Los convertidores de frecuencia están diseñados conforme
a las directivas descritas en este apartado.
1.8.1 Marca CE
La marca CE (Comunidad Europea) indica que el fabricante
del producto cumple todas las directivas aplicables de la
UE. Las directivas europeas aplicables al diseño y a la
fabricación de convertidores de frecuencia se enumeran en
la Tabla 1.5.
AVISO!
La marca CE no regula la calidad del producto. Las
especicaciones técnicas no pueden deducirse de la
marca CE.
AVISO!
Los convertidores de frecuencia que tengan una función
de seguridad integrada deben cumplir la directiva de
máquinas.
La directiva de tensión baja se aplica a todos los equipos
1
eléctricos situados en los intervalos de tensión de 50-1000
V CA y 75-1600 V CC.
La nalidad de esta directiva es garantizar la seguridad
personal y evitar los daños materiales cuando se manejen,
para su aplicación prevista, equipos eléctricos correctamente instalados y mantenidos.
1.8.1.2 Directiva CEM
El propósito de la Directiva CEM (compatibilidad electromagnética) es reducir las interferencias electromagnéticas y
mejorar la inmunidad de los equipos e instalaciones
eléctricos. Los requisitos de protección básicos de la
Directiva CEM 2014/30/UE indican que los dispositivos que
generan interferencias electromagnéticas (EMI) o los
dispositivos cuyo funcionamiento pueda verse afectado por
las EMI deben diseñarse para limitar la generación de
interferencias electromagnéticas y deben tener un grado
adecuado de inmunidad a las EMI cuando se instalan
correctamente, se mantienen y se usan conforme a lo
previsto.
Los dispositivos eléctricos que se utilizan independientemente o como parte de un sistema deben disponer de la
marca CE. Los sistemas no necesitan la marca CE pero
deben cumplir con los requisitos básicos de protección de
la directiva CEM.
1.8.1.3 Directiva ErP
La directiva ErP es la directiva europea de diseño ecológico
de productos relacionados con la energía. Esta directiva
establece requisitos de diseño ecológico para los
productos relacionados con la energía, incluidos los
convertidores de frecuencia. El objetivo de la directiva es
incrementar el rendimiento energético y el nivel de
protección del medio ambiente, mientras se aumenta la
seguridad del suministro energético. El impacto medioambiental de los productos relacionados con la energía
incluye el consumo de energía en todo el ciclo de vida útil
del producto.
10 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
089
Introducción Guía de diseño
1.8.2 Conformidad con UL
Listado como UL
Ilustración 1.2 UL
AVISO!
Las unidades IP54 no cuentan con certicación UL.
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Si desea
obtener más información, consulte el apartado Protección
térmica del motor en la Guía de diseño especíca del
producto.
1.8.3 Marcado RCM de conformidad
1.8.5 UkrSEPRO
Ilustración 1.5 UkrSEPRO
El certicado UKrSEPRO garantiza la calidad y seguridad
tanto de los productos como de los servicios, así como la
estabilidad del proceso de fabricación conforme a la
normativa ucraniana. El certicado UkrSepro es necesario
para el despacho de aduana de cualquier producto que
entre o salga del territorio de Ucrania.
1 1
Ilustración 1.3 Marca RCM
El sello RCM indica el cumplimiento de los estándares
técnicos aplicables de compatibilidad electromagnética
(CEM). El sello RCM es necesario para la distribución de
dispositivos eléctricos y electrónicos en el mercado
australiano y en el neozelandés. Las disposiciones
normativas de la marca RCM solo conciernen a las
emisiones por conducción y radiación. En el caso de los
convertidores de frecuencia, se aplicarán los límites de
emisiones especicados en la norma EN/CEI 61800-3. Podrá
emitirse una declaración de conformidad si así se solicita.
1.8.4 EAC
Ilustración 1.4 Sello EAC
El sello de conformidad EAC (EurAsian Conformity) indica
que el producto cumple todos los requisitos y normas
técnicas aplicables al producto por parte de la Unión
Aduanera Euroasiática, que está compuesta por los estados
miembros de la Unión Económica Euroasiática.
El logotipo de la EAC debe constar tanto en la etiqueta del
producto como en la del embalaje. Todos los productos
utilizados dentro del área de la EAC deberán comprarse a
Danfoss dentro del área de la EAC.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 11
Seguridad
VLT® HVAC Basic Drive FC 101
2 Seguridad
22
2.1 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser manejado o
instalado por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en esta
guía.
2.2 Medidas de seguridad
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que el convertidor de
frecuencia se haya descargado por completo.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o el LOP, por
funcionamiento remoto mediante el Software de
conguración MCT 10 o por la eliminación de una
condición de fallo.
Para evitar un arranque accidental del motor:
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Desconecte el convertidor de frecuencia de la
•
alimentación.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor a la red de CA, al suministro de CC
o a una carga compartida.
12 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Seguridad Guía de diseño
ADVERTENCIA
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores en
el bus de corriente continua que pueden seguir cargados
incluso cuando el convertidor de frecuencia está
apagado. Puede haber tensión alta presente aunque las
luces del indicador LED de advertencia estén apagadas.
Si, después de desconectar la alimentación, no espera el
tiempo especicado antes de realizar cualquier trabajo
de reparación o tarea de mantenimiento, pueden
producirse lesiones graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, entre las
que se incluyen baterías de emergencia, SAI y
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo de espera mínimo se
especica en la Tabla 2.1.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes en movimiento y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos de este manual.
•
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
2 2
Tensión [V] Gama de potencias
[kW (CV)]
3 × 200 0,25-3,7 (0,33-5) 4
3 × 200 5,5-11 (7-15) 15
3 × 400 0,37-7,5 (0,5-10) 4
3 × 400 11–90 (15–125) 15
3 × 600 2,2-7,5 (3-10) 4
3 × 600 11–90 (15–125) 15
Tabla 2.1 Tiempo de descarga
Tiempo de espera
mínimo (minutos)
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 13
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Vista general del producto
VLT® HVAC Basic Drive FC 101
3 Vista general del producto
3.1 Ventajas
33
3.1.1 ¿Por qué utilizar un convertidor de
frecuencia para controlar ventiladores
y bombas?
Un convertidor de frecuencia saca partido de que las
bombas centrífugas y los ventiladores siguen las leyes de
proporcionalidad que les son propias. Para obtener más
información, consulte el capétulo 3.1.3 Ejemplo de ahorro de
energía.
3.1.2 Una clara ventaja: el ahorro de
energía
La gran ventaja de emplear un convertidor de frecuencia
para controlar la velocidad de ventiladores o bombas está
en el ahorro de electricidad.
Si se compara con sistemas de control y tecnologías
alternativos, un convertidor de frecuencia es el sistema de
control de energía óptimo para controlar sistemas de
ventiladores y bombas.
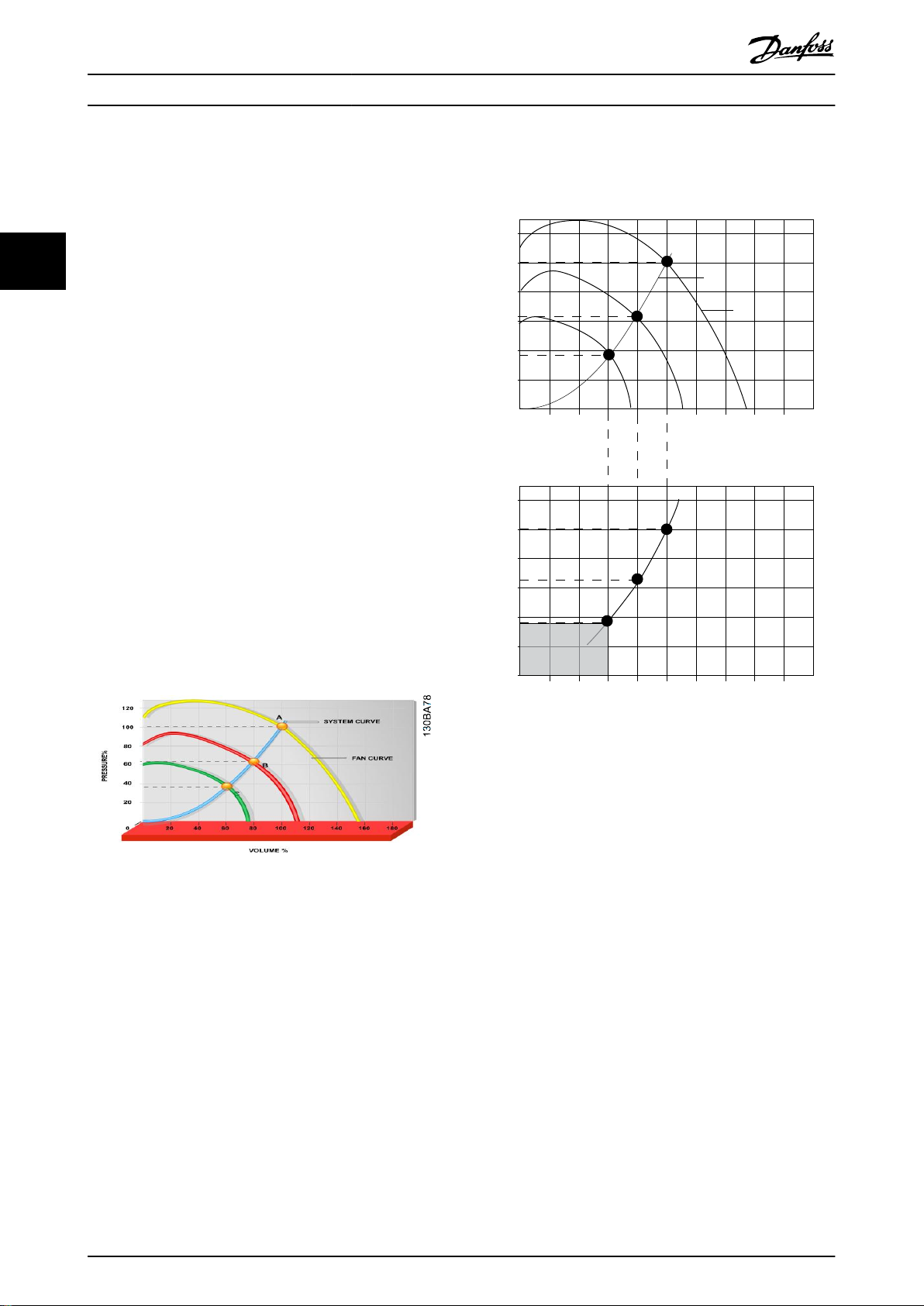
Ilustración 3.1 Curvas de ventilador (A, B y C) para caudales
bajos de ventilador
Ilustración 3.2 Ahorro energético con una solución de
convertidor de frecuencia
Cuando se utiliza un convertidor de frecuencia para reducir
la capacidad del ventilador al 60 %, es posible obtener más
del 50 % de ahorro en equipos convencionales.
3.1.3 Ejemplo de ahorro de energía
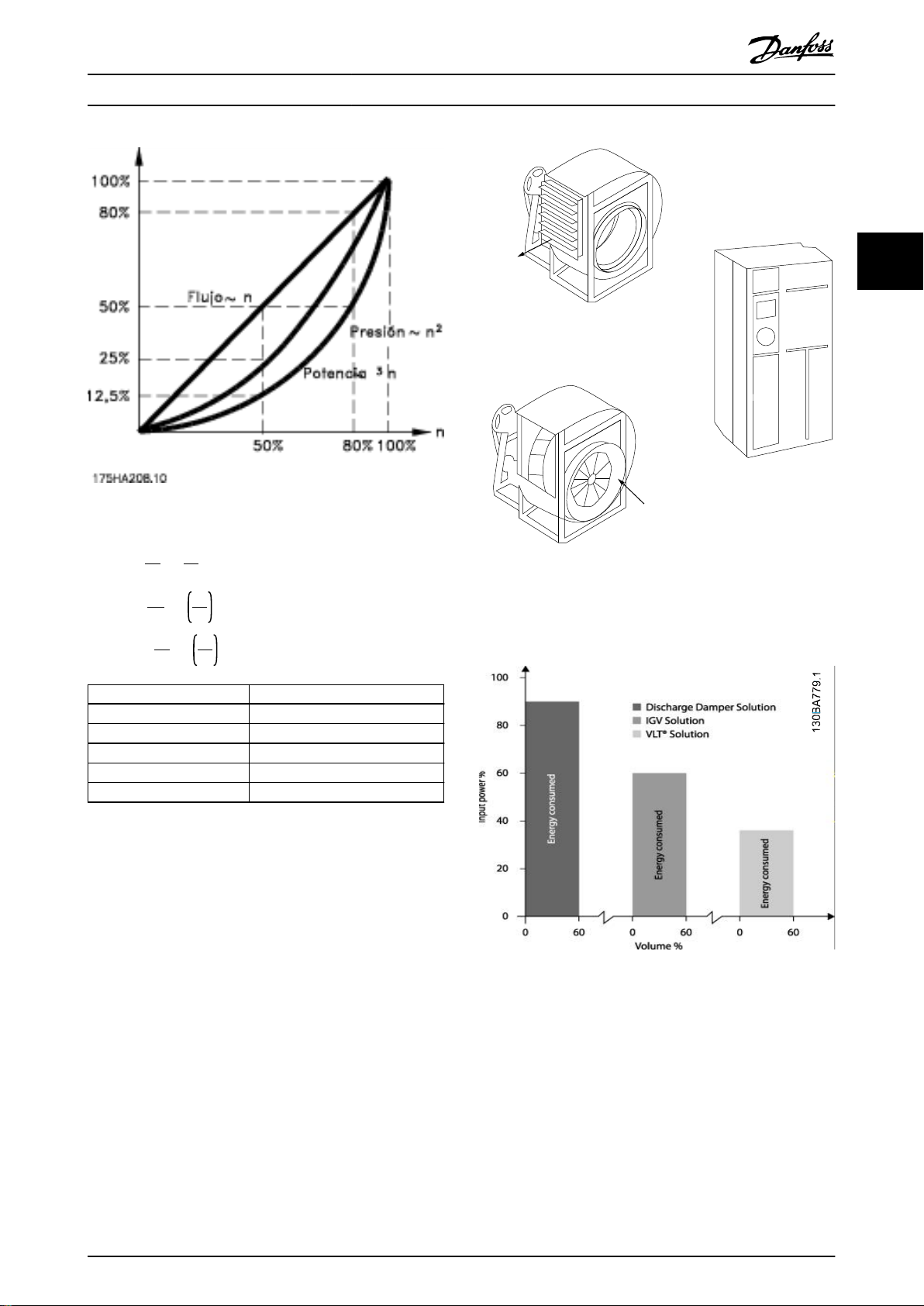
Tal y como se muestra en Ilustración 3.3, el ujo se controla
cambiando las r/min. Al reducir la velocidad solo un 20 %
respecto a la velocidad nominal, el caudal también se
reduce en un 20 %. Esto se debe a que el caudal es
directamente proporcional a las r/min. El consumo
eléctrico, sin embargo, se reduce en un 50 %.
Si el sistema en cuestión solo tiene que suministrar un
caudal correspondiente al 100 % durante unos días al año,
mientras que el promedio es inferior al 80 % del caudal
nominal para el resto del año, el ahorro de energía es
incluso superior al 50 %.
La Ilustración 3.3 describe la dependencia del caudal, la
presión y el consumo de energía de las r/min.
14 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Vista general del producto Guía de diseño
Ilustración 3.3 Leyes de proporcionalidad
3 3
Q
n
1
Caudal:
Presión:
Potencia:
Q = Caudal P = Energía
Q1 = Caudal nominal P1 = Potencia nominal
Q2 = Caudal reducido P2 = Potencia reducida
H = Presión n = Control de velocidad
H1 = Presión nominal n1 = Velocidad nominal
H2 = Presión reducida n2 = Velocidad reducida
Tabla 3.1 Leyes de proporcionalidad
1
=
Q
n
2
2
=
2
n
1
n
2
3
n
1
n
2
H
1
=
H
2
P
1
P
2
3.1.4 Comparación de ahorro de energía
El sistema de convertidor de frecuencia de Danfoss ofrece
un gran ahorro en comparación con los productos
tradicionales de ahorro de energía, como los sistemas de
compuerta de descarga y los sistemas de álabes de
entrada (en inglés, IGV). Esto se debe a que este
convertidor de frecuencia es capaz de controlar la
velocidad del ventilador en función de la carga térmica del
sistema, y también a que el convertidor de frecuencia
posee una instalación integrada que le permite funcionar
como un sistema de gestión de edicios (en inglés, BMS).
Ilustración 3.3 ilustra el ahorro de energía habitual que
puede obtenerse con tres productos conocidos cuando el
volumen del ventilador se reduce al 60 %.
Como muestra el gráco, puede conseguirse en equipos
convencionales más del 50 % del ahorro energético.
Ilustración 3.4 Los tres sistemas de ahorro de energía convencionales
Ilustración 3.5 Ahorro energético
Los amortiguadores de descarga reducen el consumo de
energía. Los álabes de entrada ofrecen una reducción del
40 %, pero su instalación es costosa. El sistema de
convertidor de frecuencia de Danfoss reduce el consumo
de energía en más de un 50 % y es fácil de instalar.
Asimismo, reduce el ruido, el estrés mecánico y el
desgaste, y prolonga la vida útil de toda la aplicación.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 15
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Vista general del producto
VLT® HVAC Basic Drive FC 101
3.1.5 Ejemplo con caudal variable durante
1 año
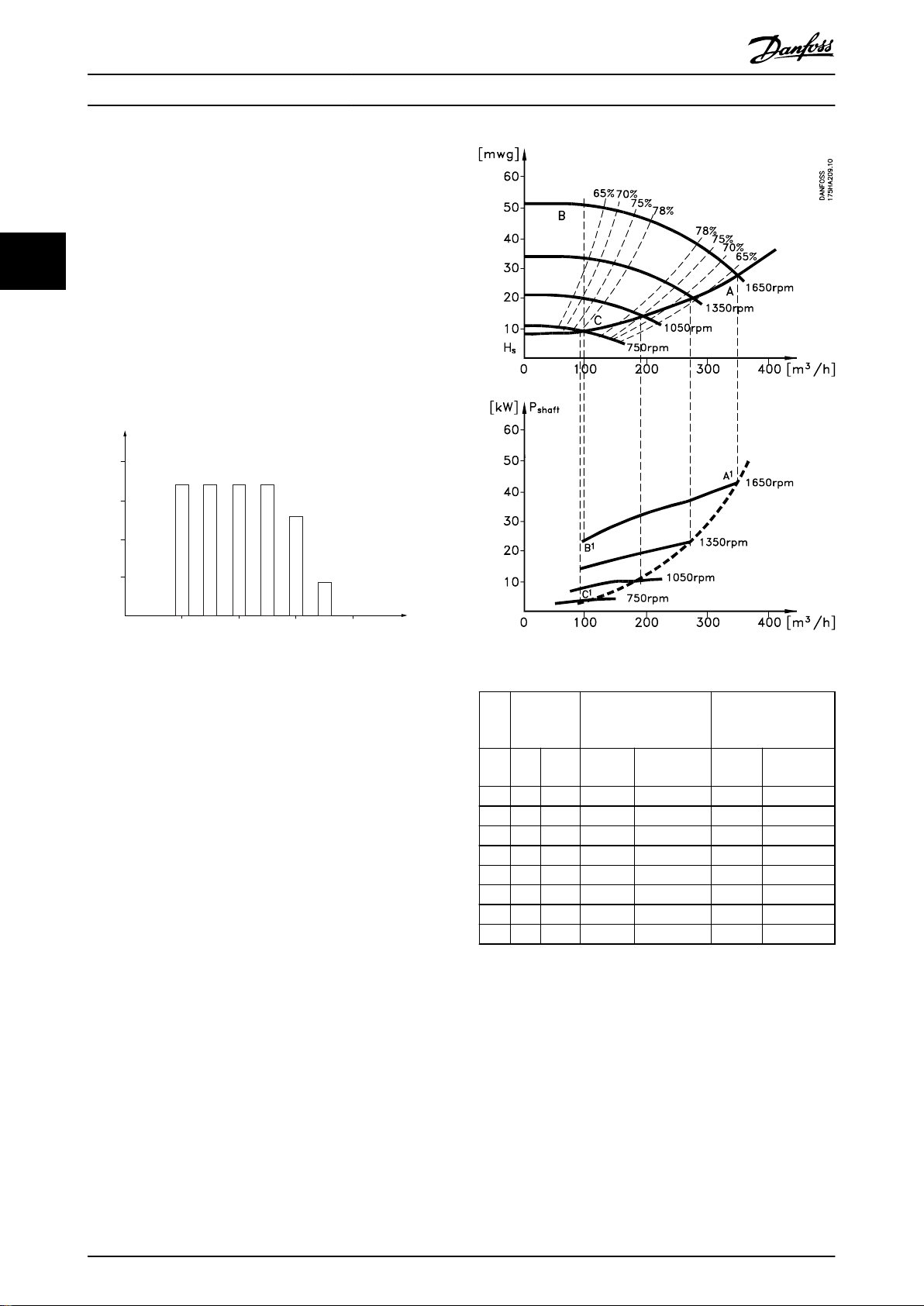
Este ejemplo está calculado en base a las características de
una bomba según su hoja de datos.
33
El resultado obtenido muestra un ahorro de energía
superior al 50 % para el caudal dado, durante un año. El
periodo de amortización depende del precio del kWh y del
precio del convertidor de frecuencia. En este ejemplo, es
inferior a un año comparado con las válvulas y la velocidad
constante.
Ahorro de energía
P
= P
eje
salida de eje
Ilustración 3.6 Distribución del caudal durante 1 año
Ilustración 3.7 Energía
3
Distri-
m
/
bución
h
% Horas Potencia Consumo
A1 - B1kWh (kWh) A1 - C1kWh (kWh)
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabla 3.2 Resultado
Regulación por
válvula
Control por
convertidor de
frecuencia
Potenci
a
Consumo
16 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Vista general del producto Guía de diseño
3.1.6 Control mejorado
Si se utiliza un convertidor de frecuencia para controlar el
caudal o la presión de un sistema, se obtiene un control
mejorado.
Un convertidor de frecuencia puede variar la velocidad de
un ventilador o una bomba, lo que permite obtener un
control variable del caudal y la presión.
Además, adapta rápidamente la velocidad de un ventilador
o de una bomba a las nuevas condiciones de caudal o
presión del sistema.
Control simple del proceso (caudal, nivel o presión)
mediante el control de PI integrado.
3.1.7 No es necesario un arrancador en
estrella / triángulo ni un arrancador
suave
Cuando se necesita arrancar motores relativamente
grandes, en muchos países es necesario usar equipos que
limitan la tensión de arranque. En sistemas más
tradicionales, se suele utilizar un arrancador en estrella/
triángulo o un arrancador suave. Estos arrancadores del
motor no se necesitan si se usa un convertidor de
frecuencia.
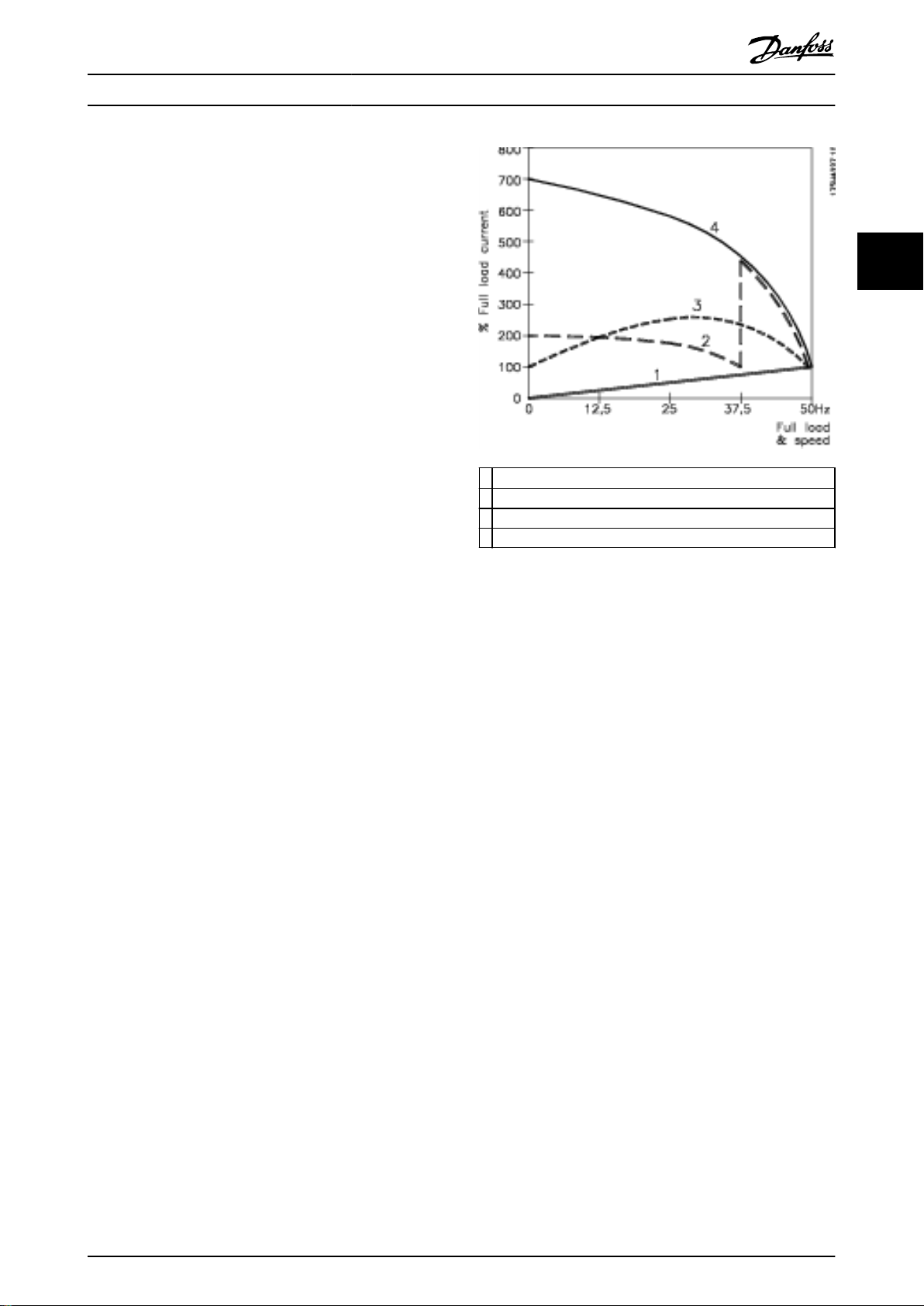
Como se muestra en la Ilustración 3.8, un convertidor de
frecuencia no consume más intensidad que la nominal.
1
VLT® HVAC Basic Drive FC 101
2 Arrancador en estrella/triángulo
3 Arrancador suave
4 Arranque directamente con la alimentación de red
Ilustración 3.8 Intensidad de arranque
3.1.8 El uso de un convertidor de
frecuencia ahorra energía.
En el ejemplo del capétulo 3.1.9 Sin un convertidor de
frecuencia se muestra cómo un convertidor de frecuencia
sustituye a otros equipos. Es posible calcular el coste de
instalación de los dos sistemas. En dicho ejemplo, el precio
de ambos sistemas es aproximadamente el mismo.
3 3
Utilice el software VLT® Energy Box descrito en el
capétulo 1.5 Recursos adicionales para calcular el ahorro de
costes que puede obtenerse mediante el uso de un
convertidor de frecuencia.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 17
Sección de refrigeración
Sección de colefacción Pale de guidage d’entré
Sección de ventilador
Aire entrante
Sensores
PT
Salidas
VAV
Conducto
BMS.
principal
Control digital
de datos local
Señal de control
de temperatura
0/10 V
Señal de control
de presión 0/10 V
Alimentación de red
Corrección del factor
de potencia
Arranque
Control
x6
Motor IGV
o activador
Conexión mecánicas
y paleñas
x6 x6
ArranqueArranque
BombasBombas
Alimentación de redAlimentación de red
FusiblesFusibles
Alimentación
L V
Alimentación
L V
P.F.C. P.F.C.
Control
Posición
de
válvula
Posición
de
válvula
Return Control
Flujo
Flujo
Válvula de
3 bocas
Válvula de
3 bocas
Retorno
Ventilador
M
Bypass
Bypass
M
M
175HA205.12
Vista general del producto
VLT® HVAC Basic Drive FC 101
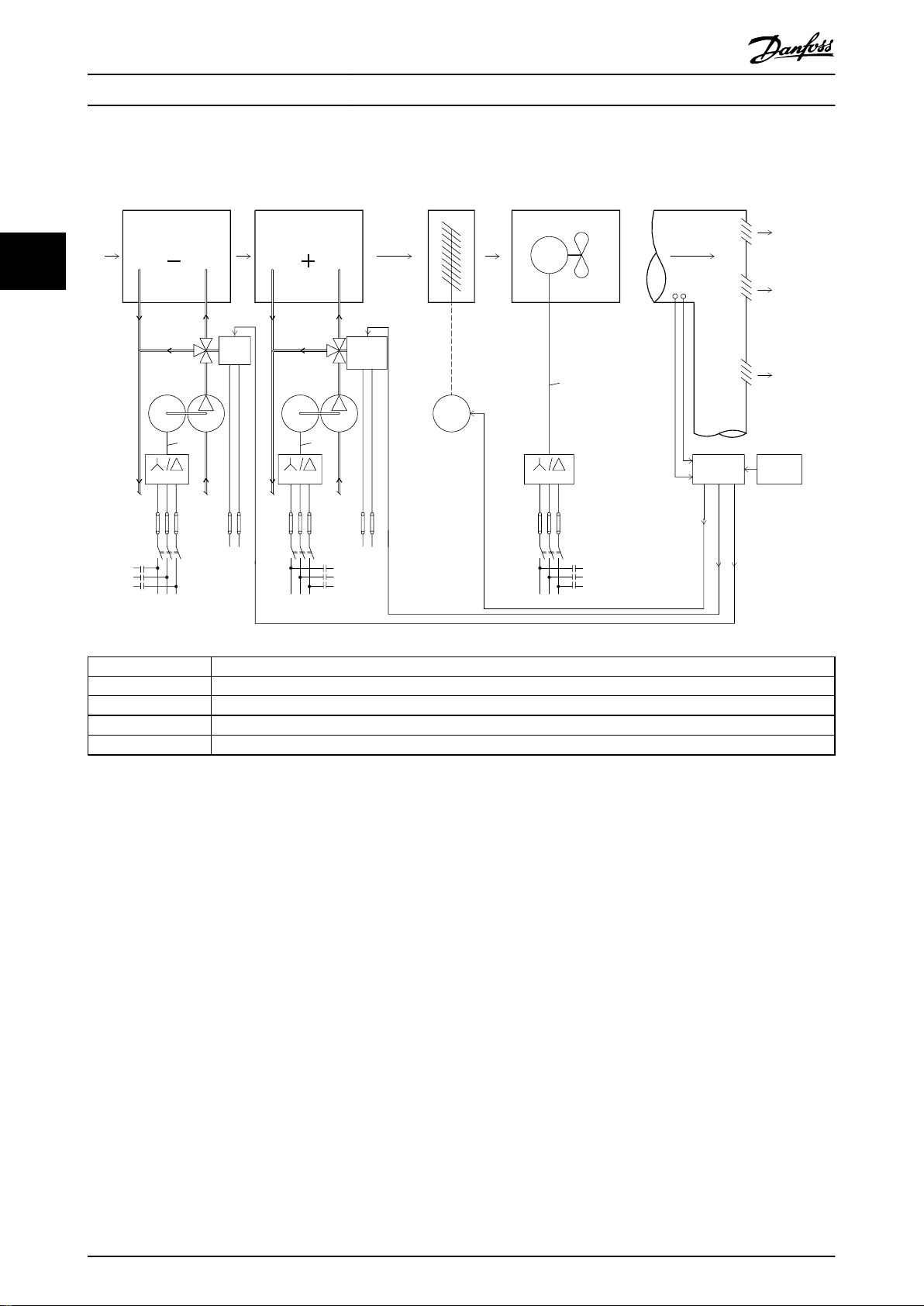
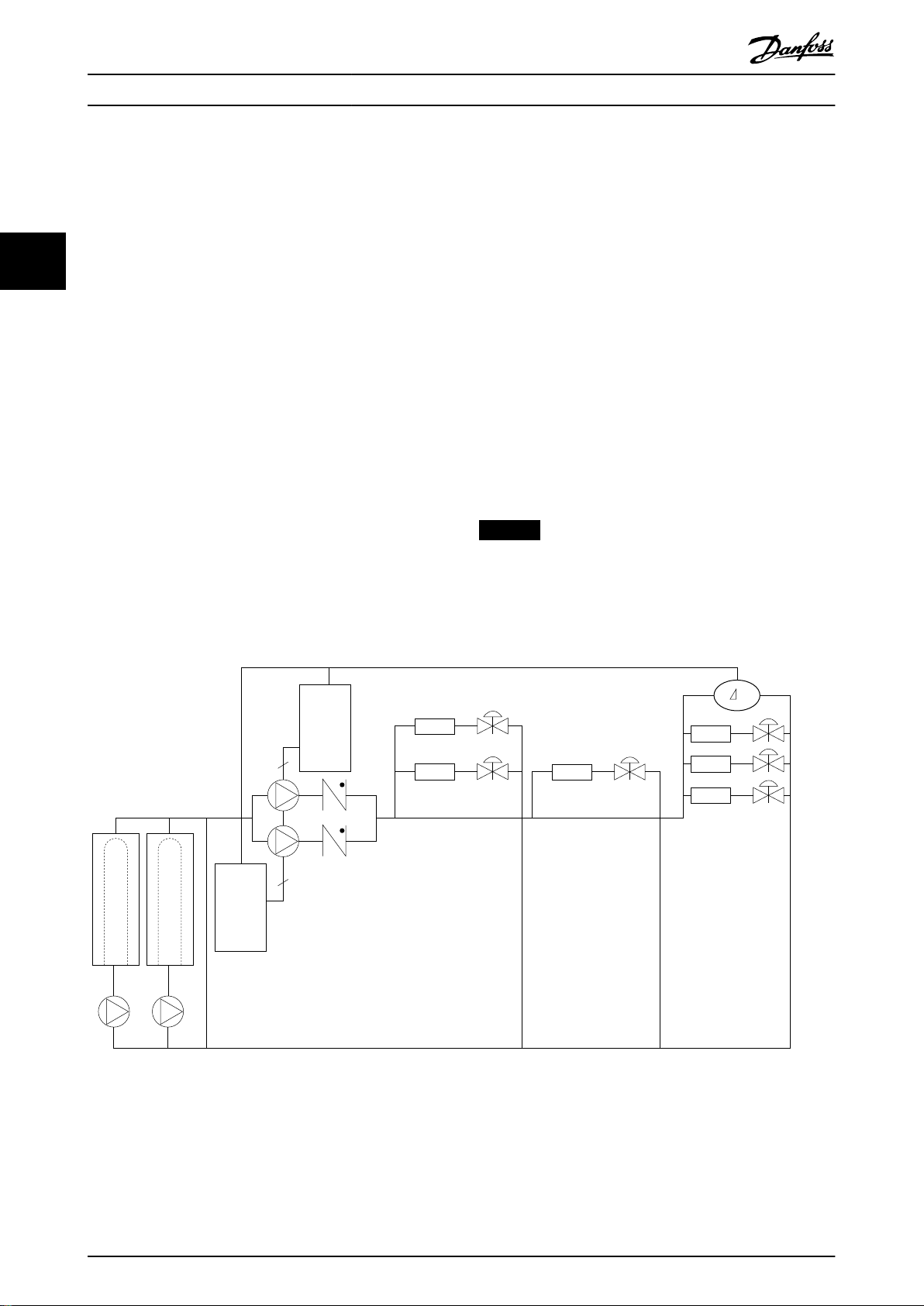
3.1.9 Sin un convertidor de frecuencia
33
D.D.C. Control digital directo
E.M.S. Sistema de gestión de energía
V.A.V. Volumen de aire variable
Sensor P Presión
Sensor T Temperatura
Ilustración 3.9 Sistema de ventilador tradicional
18 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Vista general del producto Guía de diseño
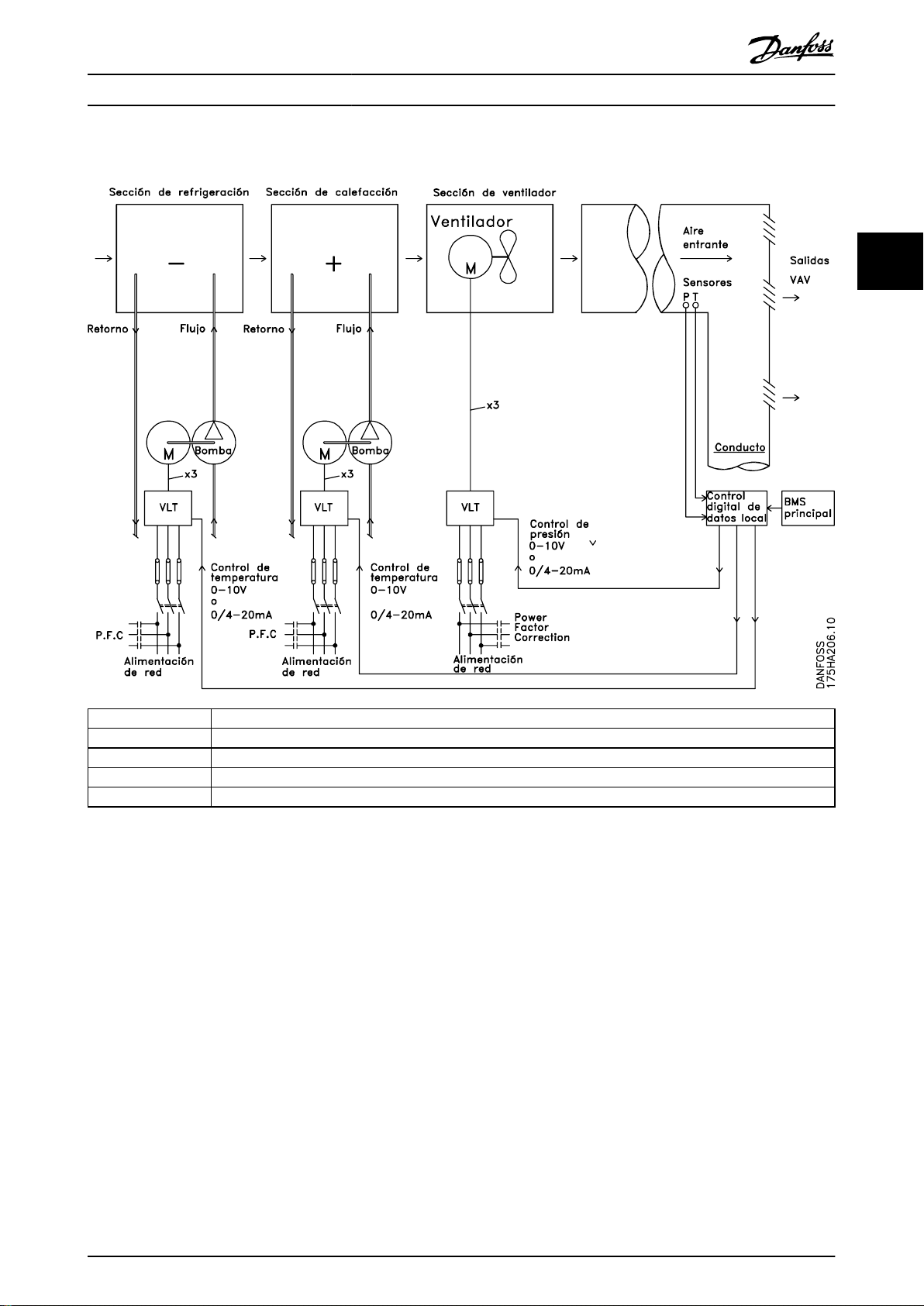
3.1.10 Con un convertidor de frecuencia
3 3
D.D.C. Control digital directo
E.M.S. Sistema de gestión de energía
V.A.V. Volumen de aire variable
Sensor P Presión
Sensor T Temperatura
Ilustración 3.10 Sistema de ventiladores controlado por convertidores de frecuencia
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 19
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
3.1.11 Ejemplos de aplicaciones
En los siguientes apartados se muestran ejemplos típicos
de aplicaciones de HVAC.
3.1.13
La solución VLT
Los amortiguadores y los IGV sirven para mantener una
presión constante en las tuberías, mientras que una
®
solución que utilice un convertidor de frecuencia ahorrará
33
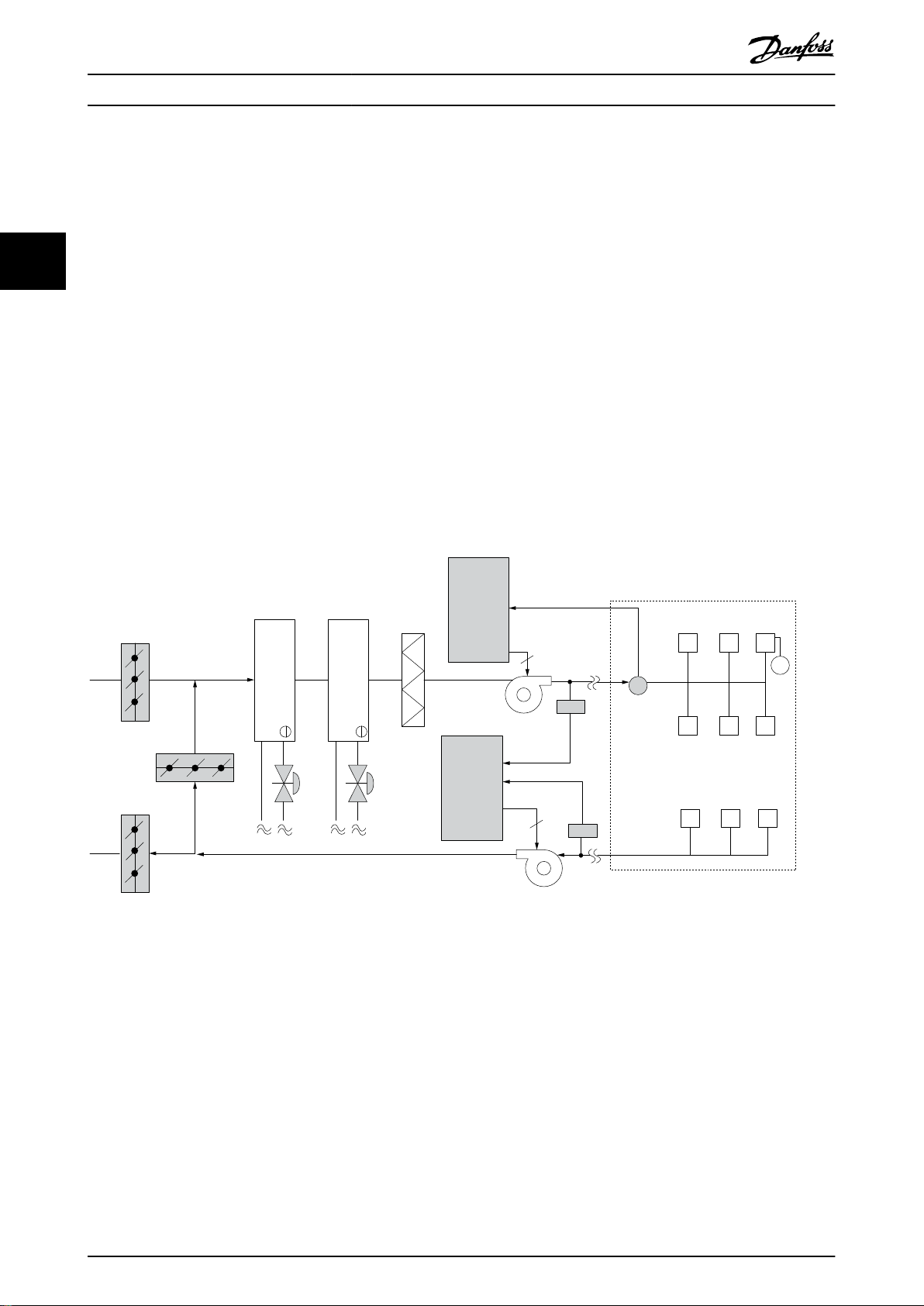
3.1.12 Volumen de aire variable
Los sistemas de volumen de aire variable (VAV) sirven para
controlar la ventilación y la temperatura de un edicio en
función de sus necesidades especícas. Se considera que
los sistemas centrales VAV constituyen el método de mayor
rendimiento energético para el acondicionamiento de aire
en edicios. Se puede obtener un mayor rendimiento
diseñando sistemas centralizados en lugar de sistemas
distribuidos.
Este rendimiento se deriva del uso ventiladores y
enfriadores de mayor tamaño, cuyo rendimiento es muy
superior al de los enfriadores de aire distribuidos y
motores pequeños. También se produce un ahorro como
consecuencia de la disminución de los requisitos de
mucha más energía y reducirá la complejidad de la
instalación. En lugar de crear un descenso de presión
articial o provocar una reducción en el rendimiento del
ventilador, el convertidor de frecuencia reduce la velocidad
del ventilador para proporcionar el caudal y la presión que
precisa el sistema.
Los dispositivos centrífugos, como los ventiladores,
funcionan según las leyes de anidad centrífuga. Esto
signica que los ventiladores reducen la presión y el caudal
que producen a medida que disminuye su velocidad. Por
lo tanto, el consumo de energía se reduce signicati-
vamente.
El controlador PI del VLT® HVAC Basic Drive FC 101 puede
utilizarse para eliminar la necesidad de controladores
adicionales.
mantenimiento.
Ilustración 3.11 Volumen de aire variable
20 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Vista general del producto Guía de diseño
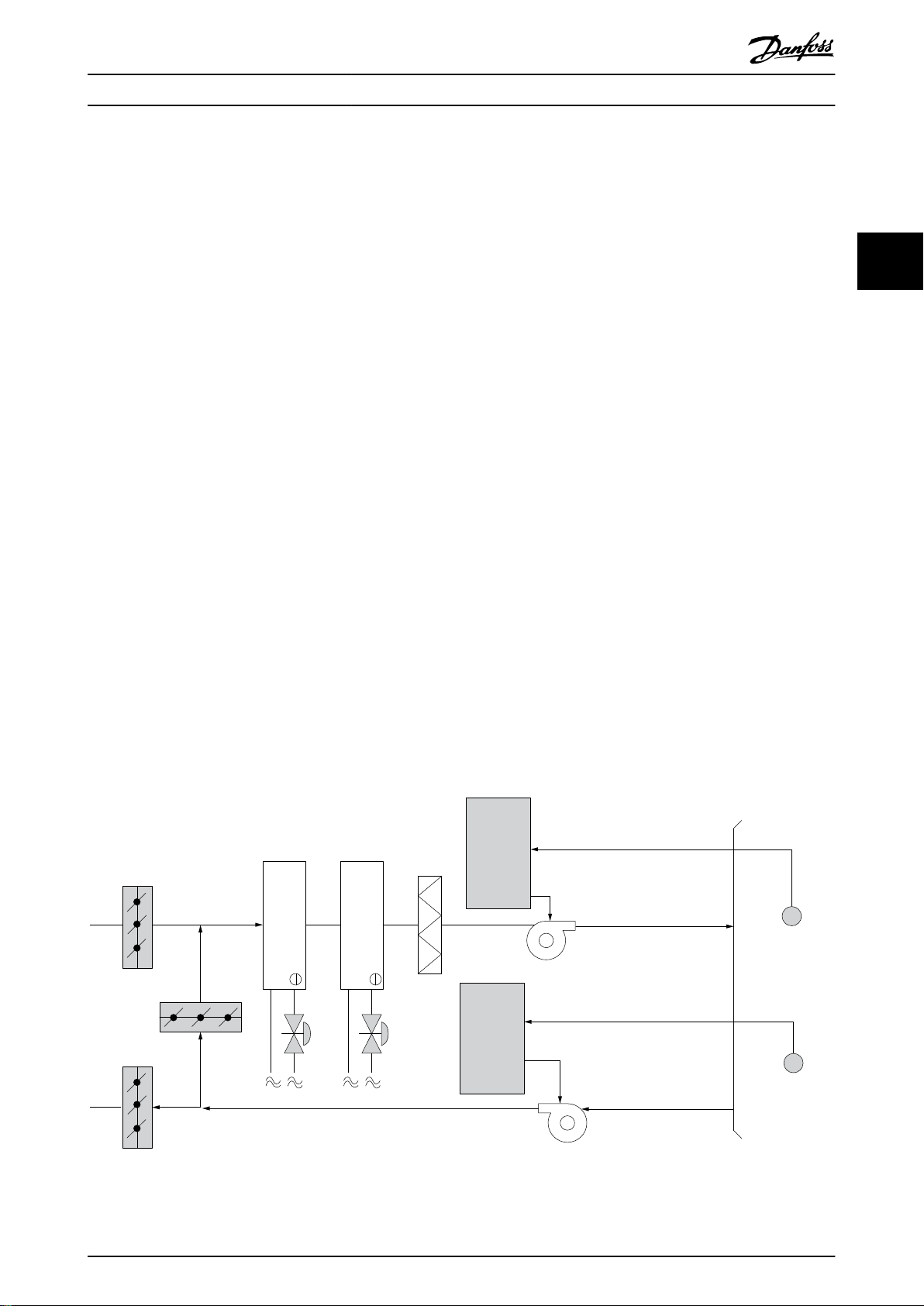
3.1.14 Volumen de aire constante
Los sistemas de volumen de aire constante (CAV) son
sistemas centralizados de ventilación que se utilizan
normalmente para abastecer grandes zonas comunes con
una cantidad mínima de aire acondicionado. Estos sistemas
son anteriores a los sistemas VAV y, por tanto, también
pueden encontrarse en edicios comerciales antiguos
divididos en varias zonas. Estos sistemas precalientan el
aire mediante unidades de tratamiento del aire (UTA) con
un serpentín calentador, y muchos de ellos poseen
también un intercambiador de frío y se utilizan para
refrigerar edicios. Los ventiloconvectores suelen
emplearse para satisfacer los requisitos de calefacción y
refrigeración de zonas individuales.
3.1.15
La solución VLT
Un convertidor de frecuencia permite obtener importantes
ahorros energéticos y, al mismo tiempo, mantener un
control adecuado del
y de CO2 pueden utilizarse como señales de realimentación
para los convertidores. Tanto si se utiliza para controlar la
temperatura como la calidad del aire, o ambas cosas, un
sistema CAV puede controlarse para funcionar de acuerdo
con las condiciones reales del edicio. A medida que
disminuye el número de personas en el área controlada,
disminuye la necesidad de aire nuevo. El sensor de CO
detecta niveles inferiores y reduce la velocidad de los
ventiladores de alimentación. El ventilador de retorno se
modula para mantener un valor de consigna de presión
estática o una diferencia ja entre los caudales de aire de
alimentación y de retorno.
®
edicio. Los sensores de temperatura
2
Con el control de la temperatura, que se utiliza
especialmente en sistemas de aire acondicionado, hay
varios requisitos de refrigeración que hay que tener en
cuenta, ya que la temperatura exterior varía, así como el
número de personas de la zona controlada. Cuando la
temperatura desciende por debajo del valor de consigna,
el ventilador de alimentación puede disminuir su
velocidad. El ventilador de retorno se modula para
mantener un valor de consigna de presión estática. Si se
reduce el caudal de aire, también se reduce la energía
utilizada para calentar o enfriar el aire nuevo, lo que
supone un ahorro adicional.
Varias de las características del convertidor de frecuencia
especíco para HVAC de Danfoss pueden emplearse para
mejorar el rendimiento de un sistema CAV. Uno de los
aspectos que hay que tener en cuenta para controlar un
sistema de ventilación es la mala calidad del aire. Es
posible ajustar la frecuencia mínima programable para
mantener un mínimo de alimentación de aire, al margen
de la señal de realimentación o de referencia. El
convertidor de frecuencia también incluye un controlador
PI, que permite controlar la temperatura y la calidad del
aire. Aunque se alcance una temperatura adecuada, el
convertidor de frecuencia mantendrá una alimentación de
aire suciente para ajustarse a los requisitos del sensor de
calidad del aire. El controlador es capaz de vericar y
comparar dos señales de realimentación para controlar el
ventilador de retorno manteniendo un diferencial de
caudal de aire jo entre los conductos de alimentación y
de retorno.
3 3
Ilustración 3.12 Volumen de aire constante
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 21
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
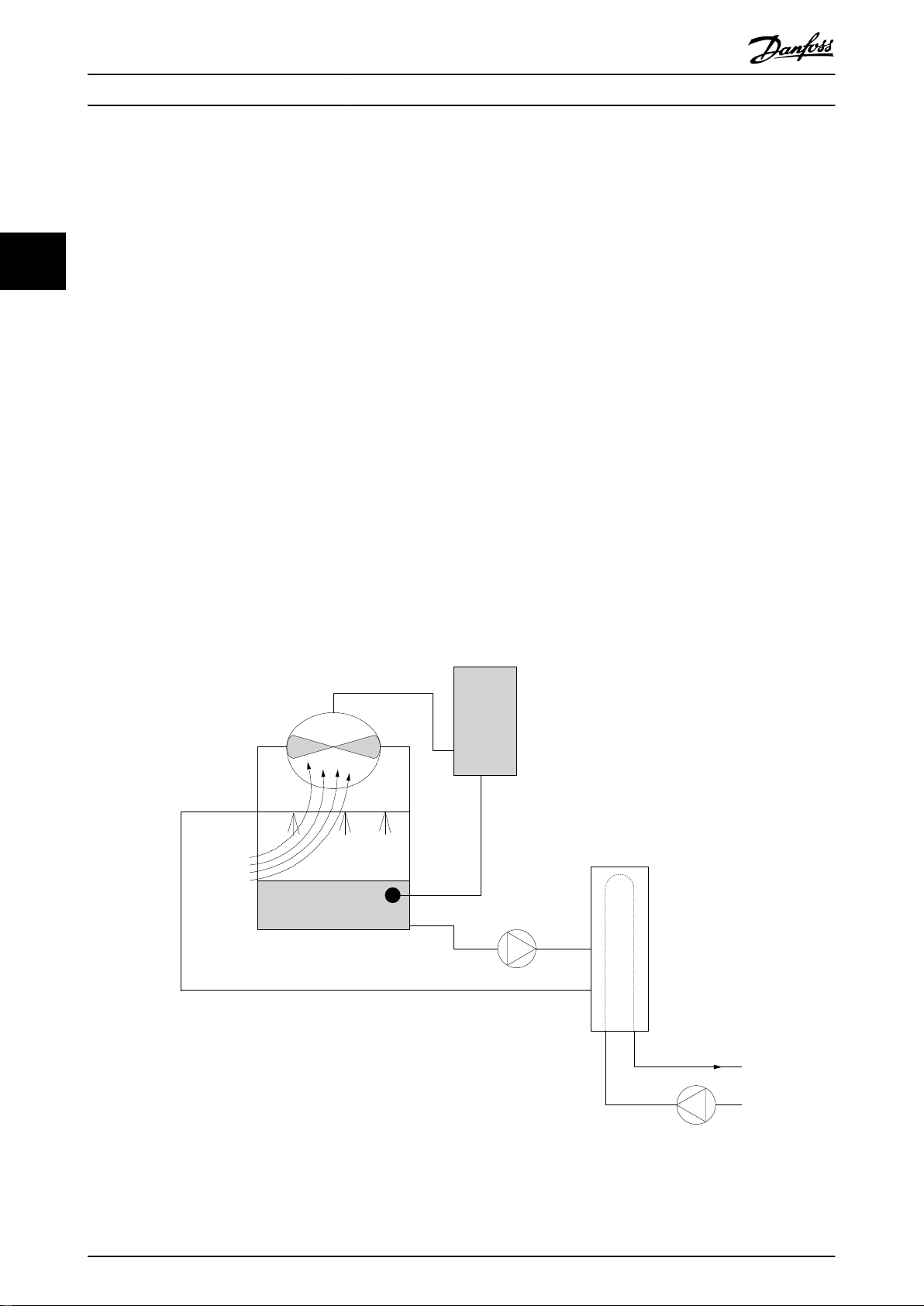
3.1.16 Ventilador de torre de refrigeración
También pueden utilizarse convertidores de frecuencia para
encender y apagar el ventilador cuando sea necesario.
Los ventiladores de torre de refrigeración refrigeran el agua
del condensador en los sistemas enfriadores refrigerados
por agua. Estos enfriadores refrigerados por agua
constituyen el medio más ecaz para obtener agua fría.
33
Son hasta un 20 % más ecaces que los enfriadores de
aire. Según el clima, las torres de refrigeración a menudo
constituyen el método de mayor rendimiento energético
para refrigerar el agua del condensador de un enfriador.
Enfrían el agua del condensador por evaporación.
El agua del condensador se esparce con un pulverizador
en la bandeja de la torre de refrigeración para ocupar una
mayor supercie. El ventilador de la torre distribuye el aire
a la bandeja y al agua rociada para ayudar a que esta se
evapore. La evaporación extrae energía del agua
reduciendo su temperatura. El agua enfriada se recoge en
Varias de las características del convertidor de frecuencia
especíco para HVAC de Danfoss pueden emplearse para
mejorar el rendimiento de las aplicaciones de los
ventiladores de torre de refrigeración. Cuando la velocidad
de un ventilador de torre de refrigeración desciende por
debajo de un valor determinado, también disminuye su
capacidad para refrigerar el agua. Además, si se utiliza una
caja de engranajes para controlar la frecuencia del
ventilador de torre, se requiere una velocidad mínima del
40-50 %.
El ajuste de frecuencia mínima programable por el usuario
está disponible para mantener esta frecuencia mínima,
incluso si la realimentación o la velocidad de referencia
solicita una velocidad inferior.
el depósito de las torres de refrigeración, donde vuelve a
bombearse al condensador de los enfriadores, y el ciclo
vuelve a empezar.
Otra de las funciones estándar del convertidor de
frecuencia es que puede programarse para entrar en modo
de reposo y detener el ventilador hasta que se requiera
3.1.17
La solución VLT
®
una mayor velocidad. Por otro lado, algunos ventiladores
de torre de refrigeración tienen frecuencias no deseadas
Con un convertidor de frecuencia, es posible controlar la
velocidad de los ventiladores de torre de refrigeración para
mantener la temperatura del agua del condensador.
que pueden provocar vibraciones. Estas frecuencias
pueden suprimirse fácilmente programando los rangos de
frecuencias de bypass en el convertidor de frecuencia.
Ilustración 3.13 Ventilador de torre de refrigeración
22 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Vista general del producto Guía de diseño
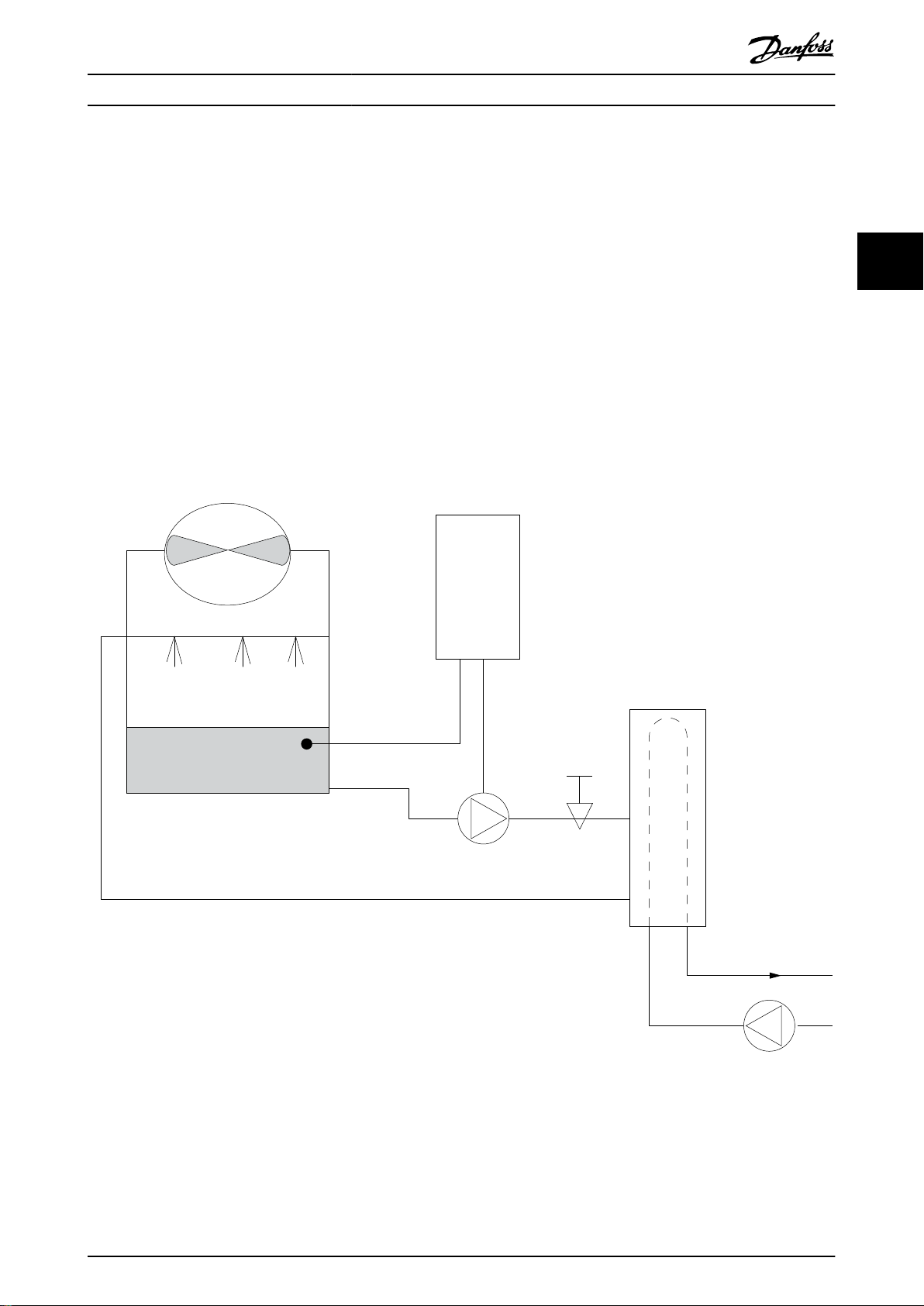
3.1.18 Bombas del condensador
Las bombas de agua del condensador se usan principalmente para impulsar la circulación del agua a través de la sección de
condensación de los enfriadores refrigerados por agua fría y sus respectivas torres de refrigeración. El agua del condensador
absorbe el calor de la sección de condensación del enfriador y lo libera a la atmósfera en la torre de refrigeración. Estos
sistemas constituyen el medio más ecaz de enfriar agua y son hasta un 20 % más ecaces que los enfriadores refrigerados
por aire.
3 3
3.1.19
La solución VLT
®
Se pueden añadir convertidores de frecuencia a las bombas de agua del condensador en lugar de equilibrarlas con una
válvula de estrangulamiento o de calibrar el rodete de la bomba.
El uso de un convertidor de frecuencia en lugar de una válvula de estrangulamiento permite ahorrar la energía que
absorbería la válvula. Esto puede suponer un ahorro de entre un 15 y un 20 %, o incluso mayor. La calibración del rodete de
la bomba es irreversible, de modo que, si las condiciones cambian y se necesita un caudal mayor, será necesario cambiar el
rodete.
Ilustración 3.14 Bombas del condensador
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 23
Vista general del producto
VLT® HVAC Basic Drive FC 101
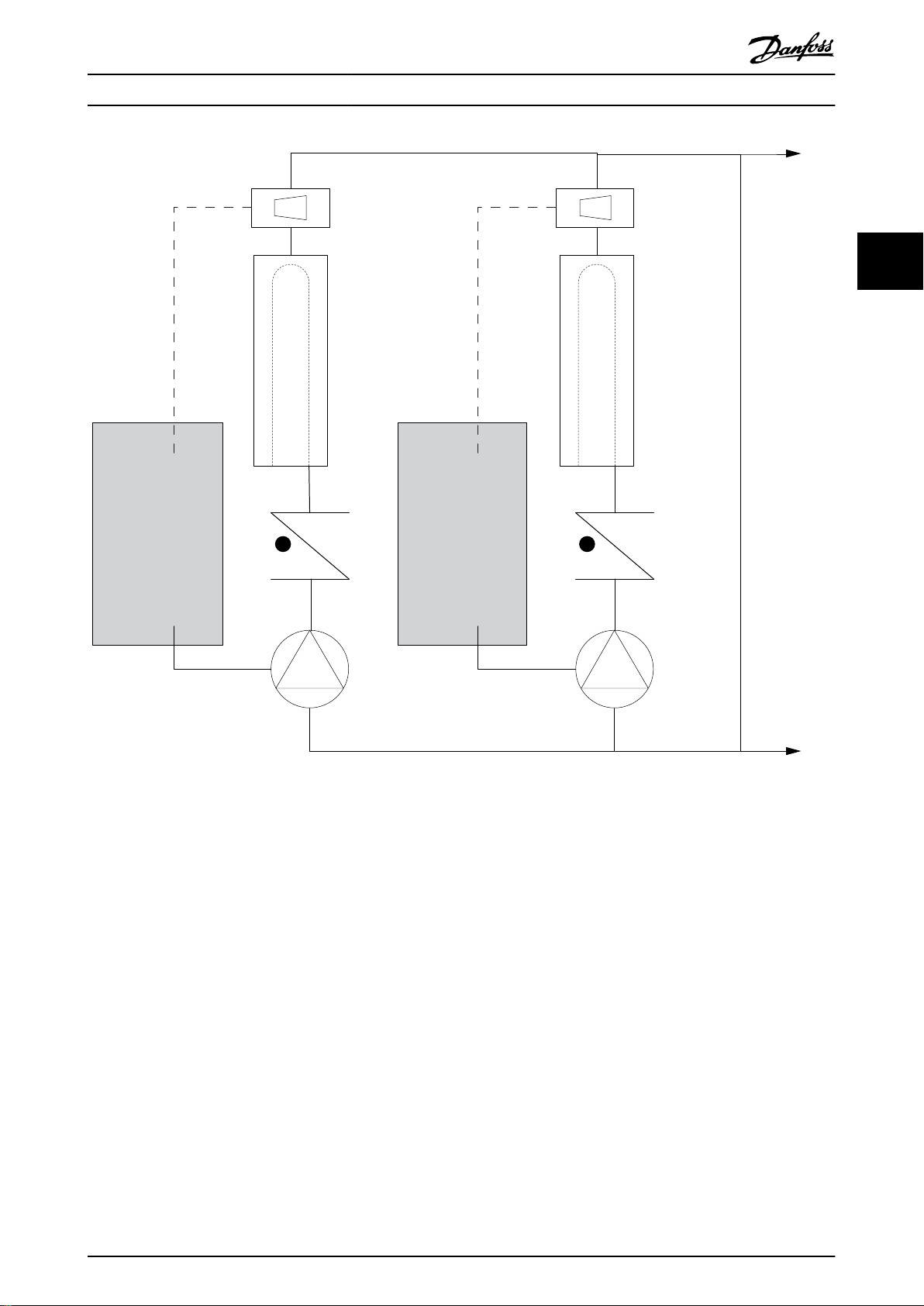
3.1.20 Bombas primarias
Las bombas primarias de un sistema de bombeo primario /
secundario pueden utilizarse para mantener un caudal
constante a través de dispositivos que presentan
33
dicultades de funcionamiento o control cuando se
exponen a un caudal variable. La técnica de bombeo
primario/secundario desacopla el lazo de producción
primario del lazo de distribución secundario. De esta
forma, algunos dispositivos, como los enfriadores, pueden
mantener un caudal de diseño uniforme y funcionar
correctamente aunque el caudal varíe en el resto del
sistema.
A medida que disminuye el caudal del evaporador de un
enfriador, el agua refrigerada comienza a enfriarse en
exceso. Cuando esto ocurre, el enfriador intenta reducir su
capacidad de refrigeración. Si el caudal disminuye
demasiado o con demasiada rapidez, el enfriador no podrá
esparcir
seguridad desconectará el enfriador, lo que requerirá un
reinicio manual. Esta situación es habitual en grandes
instalaciones, especialmente cuando se instalan dos o más
enfriadores en paralelo y no se utiliza un bombeo primario
ni secundario.
3.1.21
Según el tamaño del sistema y del lazo primario, el
consumo energético del lazo primario puede ser sustancial.
Para reducir los gastos de funcionamiento, puede
incorporarse al sistema primario un convertidor de
frecuencia que sustituya la válvula de estrangulamiento y/o
sucientemente la carga y el dispositivo de
La solución VLT
®
la calibración de los rodetes. Existen dos métodos de
control comunes:
Caudalímetro
Dado que se conoce el caudal deseado y que este es
uniforme, puede utilizarse un medidor de caudal en la
descarga de cada enfriador para controlar la bomba
directamente. Mediante el uso del controlador PI
incorporado, el convertidor de frecuencia mantiene
siempre el caudal adecuado e incluso compensa la
resistencia cambiante del lazo de tuberías primario cuando
se activen y desactiven los enfriadores y sus bombas.
Determinación de la velocidad local
El operador simplemente disminuye la frecuencia de salida
hasta que se alcanza el caudal de diseño.
Utilizar un convertidor de frecuencia para reducir la
velocidad de las bombas es muy parecido a equilibrar los
rodetes de las bombas, salvo que no se requiere mano de
obra y que el rendimiento de las bombas es superior. El
compensador de contracción simplemente disminuye la
velocidad de la bomba hasta que se alcanza el caudal
correcto y, entonces,
esta velocidad siempre que el enfriador entre en funciona-
miento. Dado que el lazo primario no tiene válvulas de
control ni otros dispositivos que puedan provocar cambios
en la curva del sistema y que la variación procedente de la
conexión y desconexión por etapas de bombas y
enfriadores normalmente es pequeña, dicha velocidad ja
sigue siendo correcta. Si hay que aumentar posteriormente
el caudal del sistema, bastará con que el convertidor de
frecuencia aumente la velocidad de la bomba en lugar de
tener que cambiar el rodete.
ja la velocidad. La bomba funciona a
24 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Vista general del producto Guía de diseño
3 3
Ilustración 3.15 Bombas primarias
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 25
Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
3.1.22 Bombas secundarias
Las bombas secundarias de un sistema de bombeo
primario / secundario de agua fría sirven para distribuir el
agua refrigerada a las cargas procedentes del lazo de
33
producción primario. El sistema de bombeo primario/
secundario sirve para desacoplar hidráulicamente dos lazos
de tuberías. En este caso, la bomba primaria se usa para
mantener constante el caudal de los enfriadores mientras
permite que el caudal de las bombas secundarias varíe, lo
cual aumenta el control y ahorra energía.
Si no se emplea el concepto de diseño primario/secundario
en un sistema de volumen variable, cuando el caudal
descienda demasiado o demasiado rápidamente, el
enfriador no podrá distribuir la carga correctamente. El
dispositivo de seguridad de baja temperatura del
evaporador desconectará el enfriador, lo que requerirá un
reinicio manual. Esta situación es habitual en grandes
instalaciones, especialmente cuando se instalan dos o más
enfriadores en paralelo.
consigue un verdadero ahorro energético y potencial de
control con la incorporación de convertidores de
frecuencia.
Con la incorporación de convertidores de frecuencia, y
colocando el sensor adecuado en el lugar adecuado, las
bombas pueden cambiar de velocidad para seguir la curva
del sistema en lugar de la curva de la bomba.
De este modo, se malgasta menos energía y se elimina la
mayor parte de la sobrepresurización a la que pueden
verse sometidas las válvulas bidireccionales.
Cuando se alcanzan las cargas controladas, se cierran las
válvulas bidireccionales. Esto aumenta la presión diferencial
calculada en toda la carga y en la válvula bidireccional.
Cuando esta presión diferencial comienza a subir, se
aminora la velocidad de la bomba para mantener el
cabezal de control o valor de consigna. Este valor de
consigna se calcula sumando la caída de presión conjunta
de la carga y de la válvula bidireccional en las condiciones
de diseño.
AVISO!
3.1.23
Aunque el sistema primario/secundario con válvulas
bidireccionales permite aumentar el ahorro energético y
aliviar los problemas de control del sistema, solo se
La solución VLT
®
Si se utilizan varias bombas en paralelo, deben funcionar
a la misma velocidad para maximizar el ahorro
energético, ya sea con varios convertidores de frecuencia
individuales o con uno solo controlando varias bombas
en paralelo.
Ilustración 3.16 Bombas secundarias
26 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Vista general del producto Guía de diseño
3.2 Estructuras de control
Seleccione [0] Veloc. lazo abierto o [1] Lazo cerrado en el parámetro 1-00 Modo Conguración.
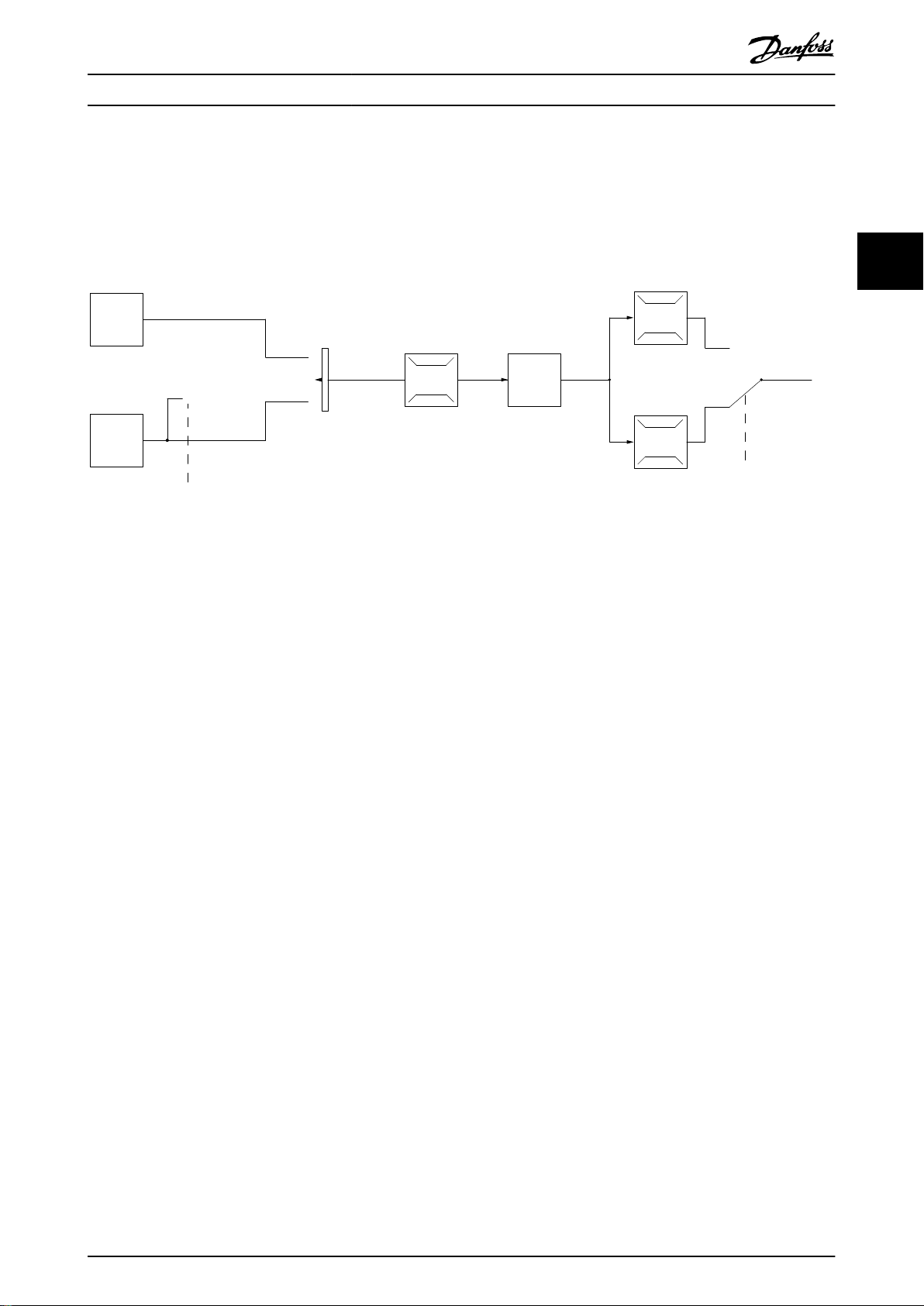
3.2.1 Estructura de control de lazo abierto
Ilustración 3.17 Estructura de lazo abierto
3 3
En la conguración mostrada en la Ilustración 3.17,
parámetro 1-00 Modo Conguración está ajustado en [0]
Veloc. lazo abierto. Se recibe la referencia resultante del
sistema de manejo de referencias, o la referencia local, y se
transere a la limitación de rampa y de velocidad antes de
enviarse al control del motor. La salida del control del
motor se limita entonces según el límite de frecuencia
máxima.
3.2.2 Control de motor PM / EC+
El concepto EC+ de Danfoss ofrece la posibilidad de que
los convertidores de frecuencia de Danfoss funcionen con
motores PM de alto rendimiento (motores de magnetización permanente) en un alojamiento de tamaño
estándar, según lo establecido en la norma CEI.
La puesta en servicio se puede comparar a la de los
motores asíncronos (de inducción) que utilizan la estrategia
de control VVC+ PM de Danfoss.
Limitaciones de intensidad para motores PM:
Gama de potencias: 45 kW (60 CV) (200 V),
•
0,37-90 kW (0,5-121 CV) (400 V), 90 kW (121 CV)
(600 V) en el caso de motores de inducción y
0,37-22 kW (0,5-30 CV) (400 V) en el caso de
motores PM.
Actualmente, compatible solo hasta 22 kW
•
(30 CV).
Los ltros LC no son compatibles con motores
•
PM.
El algoritmo de energía regenerativa no es
•
compatible con motores PM.
Solo se admite AMA completo de la resistencia
•
del estátor Rs en el sistema.
Sin detección de bloqueo (admitida a partir de la
•
versión 2.80 del software).
3.2.3 Control Local (Hand On) y Remoto
Ventajas para el cliente:
Libre elección de la tecnología del motor (motor
•
de magnetización permanente o de inducción).
Instalación y funcionamiento similares a los de los
•
motores de inducción.
Independencia del fabricante al elegir los
•
componentes del sistema (por ejemplo, los
motores).
Rendimiento mejorado del sistema gracias a la
•
elección de los mejores componentes.
Posibilidad de actualizar instalaciones existentes.
•
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 27
(Auto On)
El convertidor de frecuencia puede accionarse
manualmente a través del panel de control local (LCP) o de
forma remota mediante entradas analógicas y digitales o
un bus serie. Si se permite en el parámetro 0-40 Botón
(Hand on) en LCP, en el parámetro 0-44 Tecla [O/Reset] en
LCP y en el parámetro 0-42 [Auto activ.] llave en LCP, será
posible arrancar y detener el convertidor de frecuencia
mediante el LCP pulsando las teclas [Hand On] y [O/
Reset]. Las alarmas pueden reiniciarse mediante la tecla
[O/Reset].
Hand
On
Off
Reset
Auto
On
130BB893.10
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Vista general del producto
VLT® HVAC Basic Drive FC 101
tación desde un sensor en el sistema. A continuación,
compara esta señal con un valor de referencia y determina
el error, si lo hay, entre las dos señales. A continuación,
ajusta la velocidad del motor para corregir el error.
Ilustración 3.18 Teclas del LCP
33
Por ejemplo, consideremos una aplicación de bombas en la
que la velocidad de una bomba deba ser controlada para
que la presión en una tubería sea constante. El valor de
La referencia local hace que el modo de conguración se
ajuste a lazo abierto, independientemente del ajuste del
parámetro 1-00 Modo Conguración.
presión estática se suministra al convertidor de frecuencia
como referencia de consigna. Un sensor de presión estática
mide la presión estática real en la tubería y suministra este
dato al convertidor en forma de señal de realimentación. Si
La referencia local se restaura con la desconexión.
la señal de realimentación es mayor que el valor de
consigna, el convertidor de frecuencia disminuye la
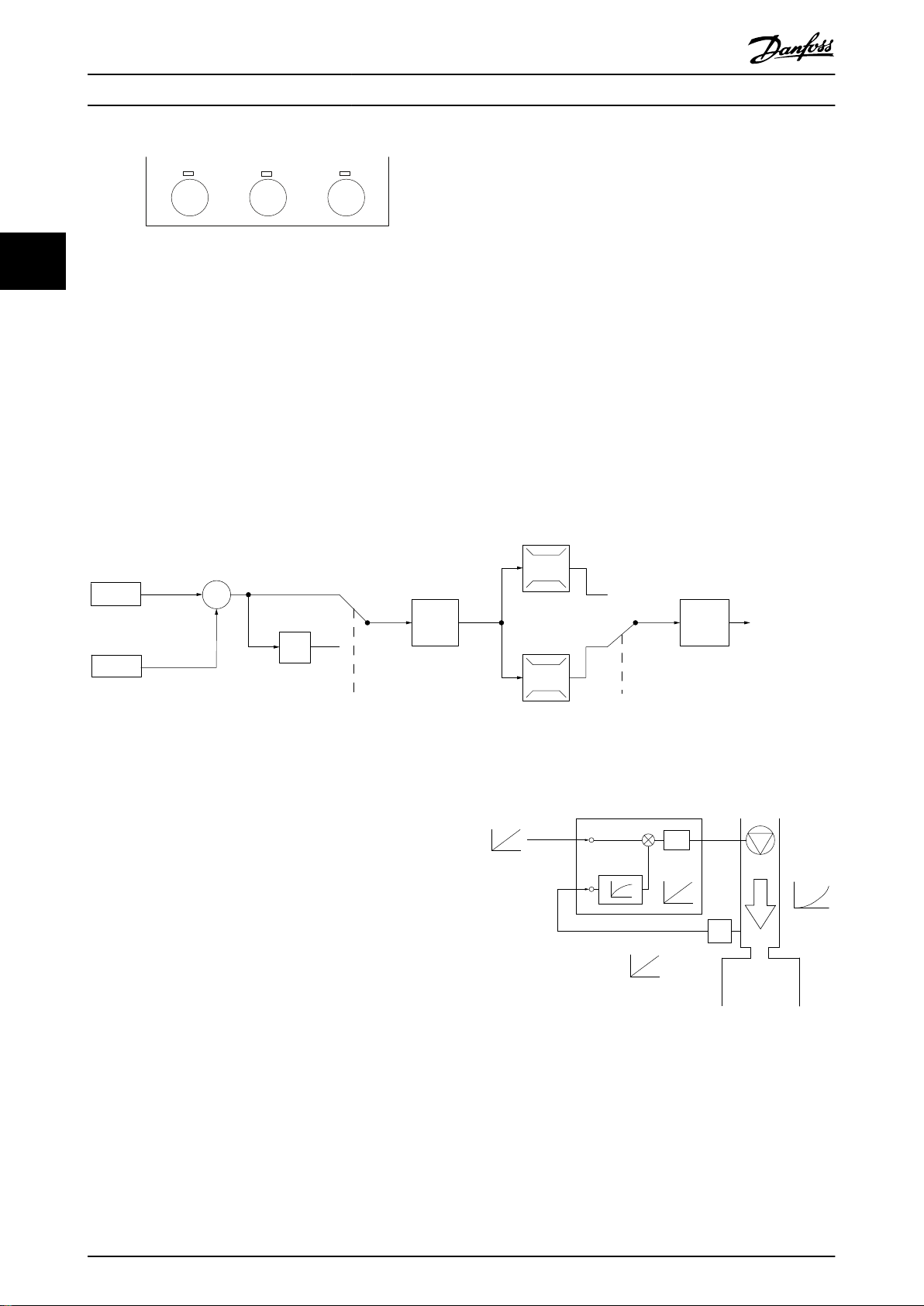
3.2.4 Estructura de control de lazo cerrado
velocidad de la bomba para reducir la presión. De la
misma forma, si la presión de la tubería es inferior al valor
El controlador interno permite que el convertidor de
frecuencia se convierta en parte del sistema controlado. El
convertidor de frecuencia recibe una señal de realimen-
de consigna, el convertidor de frecuencia acelera automáti-
camente la bomba para aumentar la presión que esta
suministra.
Ilustración 3.19 Estructura de control de lazo cerrado
Aunque los valores predeterminados del controlador de
lazo cerrado del convertidor de frecuencia proporcionan
normalmente un rendimiento satisfactorio, a menudo
puede optimizarse el control del sistema ajustando algunos
de estos parámetros.
3.2.5 Conversión de realimentación
En algunas aplicaciones, puede resultar de utilidad
convertir la señal de realimentación. Un ejemplo de ello es
el uso de una señal de presión para proporcionar realimentación de caudal. Puesto que la raíz cuadrada de la presión
es proporcional al caudal, la raíz cuadrada de la señal de
presión suministra un valor proporcional al caudal.
Consulte el Ilustración 3.20.
28 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Ilustración 3.20 Conversión de la señal de realimentación
Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Vista general del producto Guía de diseño
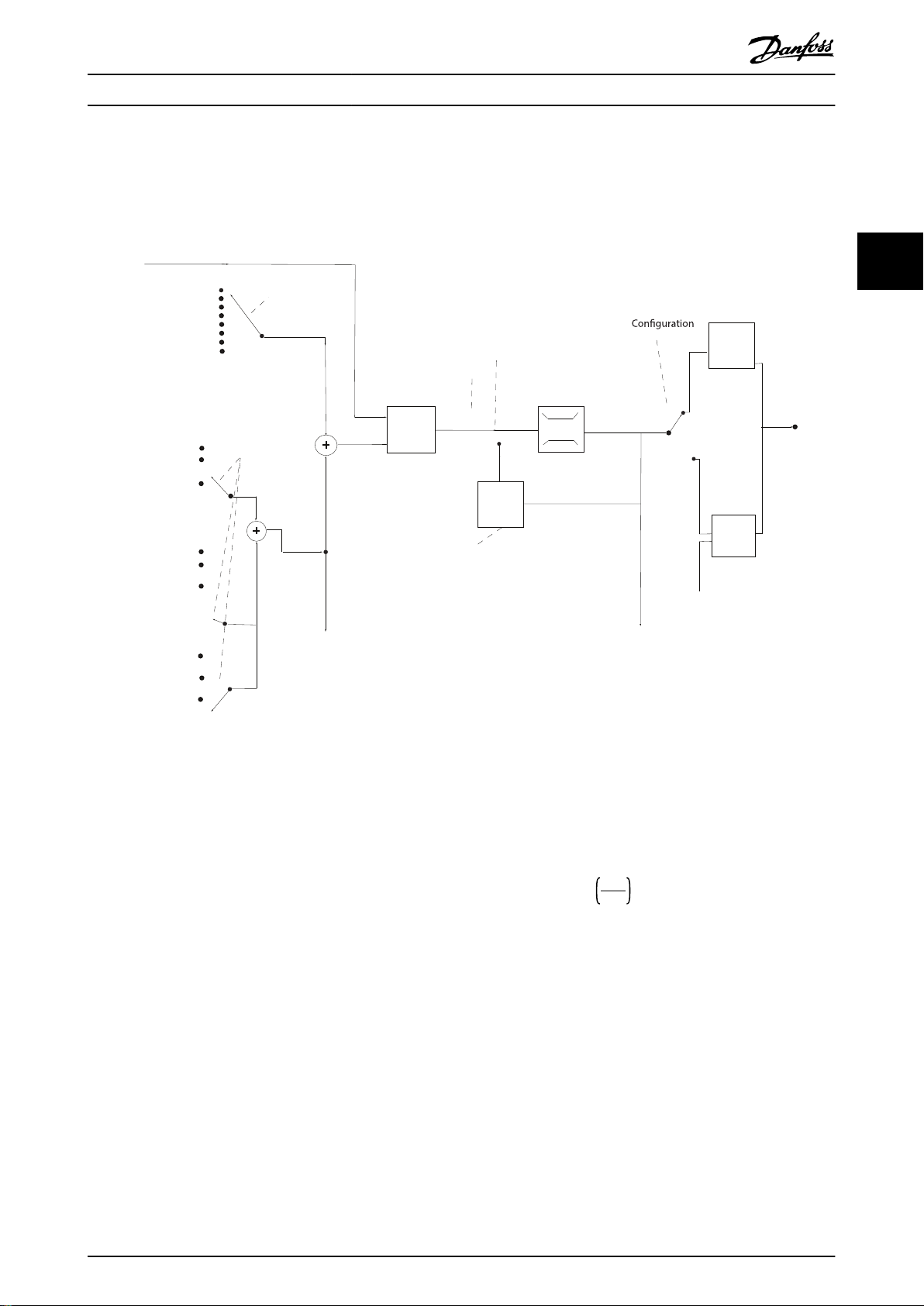
3.2.6 Manejo de referencias
Detalles sobre el funcionamiento en lazo abierto y en lazo cerrado.
3 3
Ilustración 3.21 Diagrama de bloque que muestra la referencia remota
La referencia remota consiste en:
•
•
•
•
Es posible programar hasta 8 referencias internas distintas
en el convertidor de frecuencia. La referencia interna activa
puede seleccionarse utilizando entradas digitales o el bus
de comunicación serie. La referencia también puede
suministrarse externamente, generalmente desde una
entrada analógica. Esta fuente externa se selecciona
mediante uno de los tres parámetros de fuente de
referencia (parámetro 3-15 Fuente 1 de referencia,
parámetro 3-16 Fuente 2 de referencia y
parámetro 3-17 Fuente 3 de referencia). Todos los recursos
de referencias y la referencia de bus se suman para
producir la referencia externa total. Como referencia activa,
puede seleccionarse la referencia externa, la referencia
interna o la suma de las dos. Finalmente, esta referencia
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 29
Referencias internas.
Referencias externas (entradas analógicas y
referencias de bus de comunicación serie).
La referencia relativa interna.
Valor de consigna controlado por realimentación.
puede escalarse utilizando parámetro 3-14 Referencia
interna relativa.
La referencia escalada se calcula de la siguiente forma:
activa = X + X ×
Donde X es la referencia externa, la interna o la suma de
Y
100
ambas, e Y es la parámetro 3-14 Referencia interna relativa
en [%].
Si Y, parámetro 3-14 Referencia interna relativa, se ajusta a
0 %, la referencia no se verá afectada por el escalado.

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
3.2.7 Optimización del controlador de lazo
cerrado del convertidor de frecuencia
Una vez congurado el controlador de frecuencia de lazo
cerrado, deberá comprobarse el rendimiento del
33
controlador. A menudo, su rendimiento puede ser
aceptable utilizando los valores predeterminados del
parámetro 20-93 Ganancia proporc. PID y el
parámetro 20-94 Tiempo integral PID. No obstante, a veces
puede resultar útil optimizar los valores de estos
parámetros para proporcionar una respuesta más rápida
del sistema y al tiempo que se mantiene bajo control la
sobremodulación de velocidad.
3.2.8 Ajuste manual del PI
1. Ponga en marcha el motor.
2. Ajuste el parámetro 20-93 Ganancia proporc. PID a
0,3 e increméntelo hasta que la señal de
realimentación empiece a oscilar. Si es necesario,
arranque y pare el convertidor de frecuencia o
haga cambios paso a paso en la consigna de
referencia para intentar que se produzca la
oscilación.
3. Reduzca la ganancia proporcional de PI hasta que
se estabilice la señal de realimentación.
4. Después, reduzca la ganancia proporcional entre
un 40 y un 60 %.
5. Ajuste parámetro 20-94 Tiempo integral PID a 20 s
y reduzca el valor hasta que la señal de realimentación empiece a oscilar. Si es necesario, arranque
y pare el convertidor de frecuencia o haga
cambios paso a paso en la consigna de referencia
para intentar que se produzca la oscilación.
6. Aumente el tiempo integral de PI hasta que se
estabilice la señal de realimentación.
7. Después, aumente el tiempo integral entre un 15
y un 50 %.
Ilustración 3.22 0,25-0,75 kW (0,34-1 CV), 200 V, tamaño de
alojamiento H1, IP20
Ilustración 3.23 0,37-1,5 kW (0,5-2 CV), 400 V, tamaño de
alojamiento H1, IP20
Condiciones ambientales de
3.3
funcionamiento
El convertidor de frecuencia ha sido diseñado para cumplir
las normas CEI/EN 60068-2-3 y EN 50178 9.4.2.2 a 50 °C
(122 °F).
La temperatura ambiente medida a lo largo de 24 horas
debe ser al menos 5 °C (41 °F) inferior a la máxima
temperatura ambiente. Si el convertidor de frecuencia se
utiliza a una temperatura ambiente elevada, reduzca la
intensidad de salida constante.
30 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Ilustración 3.24 2,2 kW (3 CV), 200 V, tamaño de alojamiento
H2, IP20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
Vista general del producto Guía de diseño
3 3
Ilustración 3.25 2,2-4 kW (3-5,4 CV), 400 V, tamaño de
alojamiento H2, IP20
Ilustración 3.26 3,7 kW (5 CV), 200 V, tamaño de alojamiento
H3, IP20
Ilustración 3.28 5,5-7,5 kW (7,4-10 CV), 200 V, tamaño de
alojamiento H4, IP20
Ilustración 3.29 11-15 kW (15-20 CV), 400 V, tamaño de
alojamiento H4, IP20
Ilustración 3.27 5,5-7,5 kW (7,4-10 CV), 400 V, tamaño de
alojamiento H3, IP20
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 31
Ilustración 3.30 11 kW (15 CV), 200 V, tamaño de alojamiento
H5, IP20

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Vista general del producto
VLT® HVAC Basic Drive FC 101
33
Ilustración 3.31 18,5-22 kW (25-30 CV), 400 V, tamaño de
alojamiento H5, IP20
Ilustración 3.32 15-18,5 kW (20-25 CV), 200 V, tamaño de
alojamiento H6, IP20
Ilustración 3.34 45 kW (60 CV), 400 V, tamaño de alojamiento
H6, IP20
Ilustración 3.35 22-30 kW (30-40 CV), 600 V, tamaño de
alojamiento H6, IP20
Ilustración 3.33 30-37 kW (40-50 CV), 400 V, tamaño de
alojamiento H6, IP20
32 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Ilustración 3.36 22-30 kW (30-40 CV), 200 V, tamaño de
alojamiento H7, IP20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
Vista general del producto Guía de diseño
3 3
Ilustración 3.37 55-75 kW (74-100 CV), 400 V, tamaño de
alojamiento H7, IP20
Ilustración 3.38 45-55 kW (60-74 CV), 600 V, tamaño de
alojamiento H7, IP20
Ilustración 3.40 90 kW (120 CV), 400 V, tamaño de alojamiento
H8, IP20
Ilustración 3.41 75-90 kW (100-120 CV), 600 V, tamaño de
alojamiento H8, IP20
Ilustración 3.39 37-45 kW (50-60 CV), 200 V, tamaño de
alojamiento H8, IP20
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 33
Ilustración 3.42 2,2-3 kW (3-4 CV), 600 V, tamaño de
alojamiento H9, IP20

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
33
Ilustración 3.43 5,5-7,5 kW (7,4-10 CV), 600 V, tamaño de
alojamiento H9, IP20
Ilustración 3.44 11-15 kW (15-20 CV), 600 V, tamaño de
alojamiento H10, IP20
Ilustración 3.46 5,5-7,5 kW (7,4-10 CV), 400 V, tamaño de
alojamiento I3, IP54
Ilustración 3.47 11-18,5 kW (15-25 CV), 400 V, tamaño de
alojamiento I4, IP54
Ilustración 3.45 0,75-4 kW (1-5,4 CV), 400 V, tamaño de
alojamiento I2, IP54
34 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Ilustración 3.48 22-30 kW (30-40 CV), 400 V, tamaño de
alojamiento I6, IP54

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Vista general del producto Guía de diseño
Ilustración 3.49 37 kW (50 CV), 400 V, tamaño de alojamiento
I6, IP54
Ilustración 3.50 45-55 kW (60-74 CV), 400 V, tamaño de
alojamiento I7, IP54
Grupo de parámetros 4-6* Bypass veloc.
•
Ajuste el parámetro 14-03 Sobremodulación a [0]
•
O.
Patrón de conmutación y frecuencia de
•
conmutación, grupo de parámetros 14-0* Conmut.
inversor
Parámetro 1-64 Amortiguación de resonancia.
•
El ruido acústico del convertidor de frecuencia procede de
tres fuentes:
Bobinas de enlace de CC.
•
El ventilador incorporado.
•
La bobina de choque del ltro RFI.
•
Tamaño del alojamiento
H1 43,6
H2 50,2
H3 53,8
H4 64
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 CV) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Nivel [dBA]
1)
3 3
Tabla 3.3 Valores habituales calculados a una distancia de
1 m (3,28 ft) de la unidad
1) Los valores se miden con un ruido de fondo de 35 dBA y con el
ventilador funcionando a toda velocidad.
El convertidor de frecuencia ha sido probado según un
procedimiento basado en las normas indicadas, Tabla 3.4.
El convertidor de frecuencia cumple los requisitos relativos
a estas condiciones cuando se monta en las paredes y
suelos de instalaciones de producción, o en paneles atornillados a paredes o suelos.
Ilustración 3.51 75-90 kW (100-120 CV), 400 V, tamaño de
alojamiento I8, IP54
Si el motor o el equipo propulsado por el motor (por
ejemplo, un ventilador), hace ruido o produce vibraciones
a determinadas frecuencias, congure los siguientes
parámetros o grupos de parámetros para reducir o eliminar
el ruido o las vibraciones:
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 35
CEI/EN 60068-2-6 Vibración (senoidal) – 1970
CEI/EN 60068-2-64 Vibración aleatoria de banda ancha
Tabla 3.4 Normas
Un convertidor de frecuencia consta de varios
componentes mecánicos y electrónicos. Todos ellos son,
hasta cierto punto, vulnerables a los efectos ambientales.

Vista general del producto
PRECAUCIÓN
ENTORNOS DE INSTALACIÓN
No instale el convertidor de frecuencia en lugares en los
que haya partículas, gases o líquidos transmitidos por el
aire que puedan afectar a los componentes electrónicos
33
o dañarlos. Si no se toman las medidas de protección
necesarias, aumentará el riesgo de paradas y podrían
producirse daños en los equipos o lesiones personales.
Los líquidos pueden ser transportados por el aire y
condensarse en el convertidor de frecuencia, provocando
la corrosión de los componentes y las partes metálicas. El
vapor, la grasa y el agua salada pueden ocasionar la
corrosión de componentes y de piezas metálicas. En tales
entornos, utilice equipos con clasicación de protección IP
54. Como protección adicional, se puede pedir
opcionalmente el barnizado de las placas de circuito
impreso (suministrado de serie en algunos tamaños de
potencia).
VLT® HVAC Basic Drive FC 101
Aspectos generales de la CEM
3.4
3.4.1 Descripción general de las emisiones
Los convertidores de frecuencia (y otros dispositivos
eléctricos) generan campos magnéticos o electrónicos que
pueden interferir con su entorno. La compatibilidad
electromagnética (CEM) de estos efectos depende de la
potencia y de las características armónicas de los
dispositivos.
La interacción incontrolada entre dispositivos eléctricos en
un sistema puede degradar la compatibilidad y perjudicar
su funcionamiento
adoptar la forma de distorsión de armónicos del suministro
de red, descargas electrostáticas, uctuaciones de tensión
rápidas o interferencia de alta frecuencia. Los dispositivos
eléctricos generan interferencias y además se ven
afectados por las interferencias de otras fuentes.
CEM
able. Las interferencias pueden
Las partículas transmitidas por el aire, como el polvo,
pueden provocar fallos mecánicos, eléctricos o térmicos en
el convertidor de frecuencia. Un indicador habitual de los
niveles excesivos de partículas transmitidas por el aire son
las partículas de polvo alrededor del ventilador del
convertidor de frecuencia. En entornos polvorientos, se
recomienda el uso de un equipo con clasicación de
protección IP 54 o un armario para equipos IP 20 / TIPO 1.
En ambientes con altos niveles de temperatura y humedad,
los gases corrosivos, como los compuestos de azufre,
nitrógeno y cloro, originan procesos químicos en los
componentes del convertidor de frecuencia.
Dichas reacciones químicas afectan a los componentes
electrónicos y los dañarán con rapidez. En esos ambientes,
monte el equipo en un armario con ventilación de aire
fresco, manteniendo los gases agresivos alejados del
convertidor de frecuencia.
Como protección adicional, en estas zonas se puede pedir
opcionalmente el barnizado de las placas de circuitos
impresos.
Antes de instalar el convertidor de frecuencia, compruebe
la presencia de líquidos, partículas y gases en el aire. Para
ello, observe las instalaciones existentes en este entorno.
Signos habituales de líquidos dañinos transmitidos por el
aire son la existencia de agua o aceite en las piezas
metálicas o su corrosión.
Los niveles excesivos de partículas de polvo suelen
encontrarse en los armarios de instalación y en las instalaciones eléctricas existentes. Un indicador de la presencia
de gases corrosivos transmitidos por el aire es el ennegrecimiento de los conductos de cobre y los extremos de los
cables de las instalaciones existentes.
Normalmente, aparecen interferencias eléctricas a
frecuencias situadas en el intervalo de 150 kHz a 30 MHz.
Las interferencias transmitidas por el aire generadas por el
convertidor de frecuencia, con frecuencias en el rango de
30 MHz a 1 GHz, tienen su origen en el inversor, el cable
de motor y el motor.
Las intensidades capacitivas en el cable de motor, junto
con una alta dU/dt de la tensión del motor, generan
corrientes de fuga, como se muestra en la Ilustración 3.52.
El uso de un cable de motor apantallado aumenta la
corriente de fuga (consulte la Ilustración 3.52), porque los
cables apantallados tienen una mayor capacitancia a tierra
que los cables no apantallados. Si la corriente de fuga no
ltra, provoca una mayor interferencia en la alimen-
se
tación de red, en el rango de radiofrecuencia inferior a 5
MHz. Puesto que la corriente de fuga (I1) se reconduce a la
unidad a través del apantallamiento (I3), solo habrá un
pequeño campo electromagnético (I4) desde el cable
apantallado del motor, conforme a lo indicado en la
Ilustración 3.52.
El apantallamiento reduce la interferencia radiada, pero
incrementa la interferencia de baja frecuencia en la alimentación. Conecte el apantallamiento del cable de motor al
alojamiento del convertidor de frecuencia, así como al
alojamiento del motor. El mejor procedimiento consiste en
utilizar abrazaderas de apantallamiento integradas para
evitar extremos de apantallamiento en espiral (cables de
pantalla retorcidos y embornados). Los cables de pantalla
retorcidos y embornados aumentan la impedancia de la
pantalla a las frecuencias superiores, lo que reduce el
efecto de pantalla y aumenta la corriente de fuga (I4).
Si se emplea un cable apantallado para el relé, el cable de
control, la interfaz de señales y el freno, conecte la pantalla
al alojamiento en ambos extremos. En algunas situaciones,
36 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
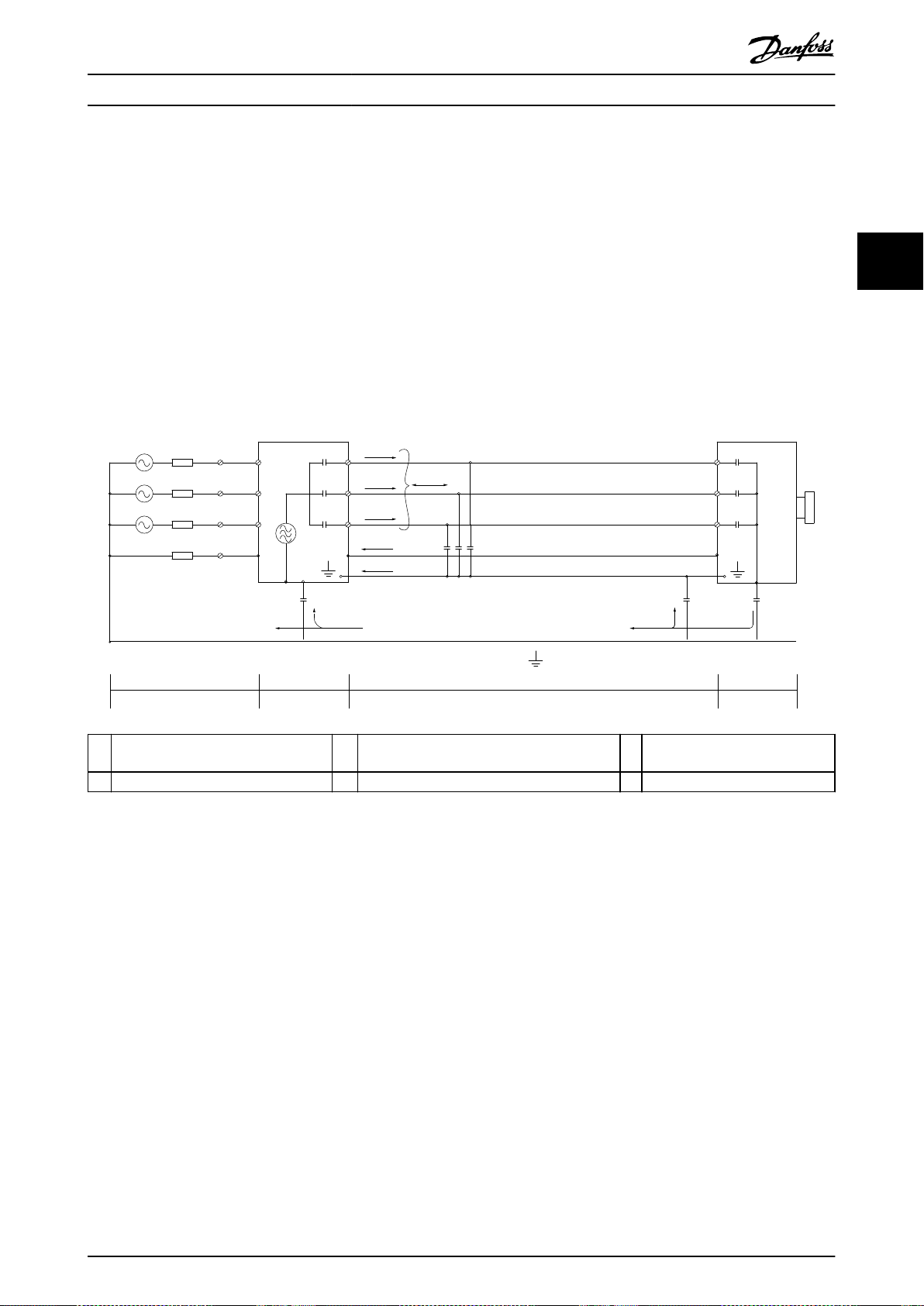
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Vista general del producto Guía de diseño
sin embargo, es necesario romper el apantallamiento para
evitar lazos de intensidad.
Si la pantalla debe colocarse en una placa de montaje para
el convertidor de frecuencia, dicha placa deberá estar
fabricada en metal para conducir las intensidades de la
pantalla de vuelta a la unidad. Asegúrese, además, de que
la placa de montaje y el chasis del convertidor de
frecuencia hacen buen contacto eléctrico a través de los
tornillos de montaje.
Si se utilizan cables no apantallados, no se cumplirán
algunos de los requisitos de emisiones, aunque sí se
respetarán la mayor parte de los requisitos de inmunidad.
Para reducir el nivel de interferencia del sistema completo
(unidad + instalación), haga que los cables de motor y de
freno sean lo más cortos posibles. Los cables con un nivel
de señal sensible no deben colocarse junto a los cables de
motor y de freno. La radiointerferencia superior a 50 MHz
(transmitida por el aire) es generada especialmente por los
elementos electrónicos de control.
3 3
1 Cable de conexión toma a tierra 2 Pantalla 3 Fuente de alimentación de red de
CA
4 Convertidor de frecuencia 5 Cable de motor apantallado 6 Motor
Ilustración 3.52 Generación de corrientes de fuga
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 37

Vista general del producto
VLT® HVAC Basic Drive FC 101
3.4.2 Requisitos en materia de emisiones
Cuando se utilizan normas de emisiones generales
(conducidas), los convertidores de frecuencia deben
La norma de productos CEM para convertidores de
cumplir los límites de la Tabla 3.6.
frecuencia dene cuatro categorías (C1, C2, C3 y C4) con
requisitos especicados para la emisión e inmunidad. La
33
clasicación equivalente de la norma EN 55011.
EN/CEI
61800-3
Categoría
C1
C2
C3
C4
Convertidores de frecuencia
instalados en el primer ambiente
(hogar y ocina) con una tensión
de alimentación inferior a 1000 V.
Convertidores de frecuencia
instalados en el primer ambiente
(hogar y ocina), con una tensión
de alimentación inferior a 1000 V,
que no son ni enchufables ni
desplazables y están previstos para
su instalación y puesta en marcha
por profesionales.
Convertidores de frecuencia
instalados en el segundo ambiente
(industrial) con una tensión de
alimentación inferior a 1000 V.
Convertidores de frecuencia
instalados en el segundo ambiente
con una tensión de alimentación
igual o superior a 1000 V y una
intensidad nominal igual o superior
a 400 A o prevista para su uso en
sistemas complejos.
Denición
equivalente en
Clase B
Clase A, grupo
1
Clase A, grupo
2
Sin límite.
Realice un plan
de CEM.
Clase de
emisiones
EN 55011
Tabla 3.5 indica la denición de las cuatro categorías y la
Entorno
Primer ambiente
(hogar y ocina)
Segundo
ambiente
(entorno
industrial)
Tabla 3.6 Correlación entre las normas genéricas de emisiones
y la norma EN 55011
Norma de emisiones
generales
Norma de emisiones para
entornos residenciales,
comerciales e industria
ligera EN/CEI 61000-6-3.
Norma de emisiones para
entornos industriales EN/CEI
61000-6-4.
Clase de
emisiones
equivalente en
EN 55011
Clase B
Clase A, grupo 1
Tabla 3.5 Correlación entre las normas CEI 61800-3 y
EN 55011
38 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Vista general del producto Guía de diseño
3.4.3 Resultados de la prueba de emisión CEM
Los siguientes resultados se obtuvieron utilizando un sistema con un convertidor de frecuencia, un cable de control
apantallado, un cuadro de control con potenciómetro, y un cable de motor apantallado.
Tipo de ltro
RFI
Entorno industrial
EN 55011
EN/CEI
61800-3
Filtro RFI H4 (EN55011 A1, EN/CEI61800-3 C2)
0,25-11 kW
(0,34-15 CV)
3 × 200-240 V
IP20
0,37-22 kW
(0,5-30 CV)
3 × 380-480 V
IP20
Filtro RFI H2 (EN 55011 A2, EN/CEI 61800-3 C3)
15-45 kW
(20-60 CV)
3 × 200-240 V
IP20
30-90 kW
(40-120 CV)
3 × 380-480 V
IP20
0,75-18,5 kW
(1-25 CV)
3 × 380-480 V
IP54
22-90 kW
(30-120 CV)
3 × 380-480 V
IP54
Filtro RFI H3 (EN55011 A1/B, EN/CEI 61800-3 C2/C1)
15-45 kW
(20-60 CV)
3 × 200-240 V
IP20
30-90 kW
(40-120 CV)
3 × 380-480 V
IP20
Emisión del conductor. Longitud máxima de cable apantallado [m (ft)] Emisión irradiada
Clase B
Clase A, grupo 2
Entorno industrial
Categoría C3
Segundo ambiente
Industrial
Sin ltro
externo
25 (82) – – – – – No – No –
25 (82) – – – – – No – No –
25 (82) – – – – – Sí – – –
25 (82) – – – – – No – No –
Con ltro
externo
– – 25 (82) 50 (164) – 20 (66) Sí Sí – No
– – 25 (82) 50 (164) – 20 (66) Sí Sí – No
– – 50 (164) – 20 (66) – Sí – No –
– – 50 (164) – 20 (66) – Sí – No –
Clase A, grupo 1
Entorno industrial
Categoría C2
Primer ambiente
Hogar y ocina
Sin ltro
externo
Con ltro
externo
Entorno doméstico,
establecimientos
comerciales e industria
ligera
Categoría C1
Primer ambiente
Hogar y ocina
Sin ltro
externo
Con ltro
externo
Clase A, grupo 1
Entorno industrial
Categoría C2
Primer ambiente
Hogar y ocina
Sin ltro
externo
Con ltro
externo
Clase B
Entorno doméstico,
establecimientos
comerciales e
industria ligera
Categoría C1
Primer ambiente
Hogar y ocina
Sin ltro
externo
Con ltro
externo
3 3
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 39

175HA034.10
Vista general del producto
VLT® HVAC Basic Drive FC 101
Tipo de ltro
RFI
Entorno industrial
0,75-18,5 kW
(1-25 CV)
3 × 380-480 V
33
IP54
22-90 kW
(30-120 CV)
3 × 380-480 V
IP54
Tabla 3.7 Resultados de la prueba de emisión CEM
3.4.4 Aspectos generales de la emisión de
armónicos
Emisión del conductor. Longitud máxima de cable apantallado [m (ft)] Emisión irradiada
– – 25 (82) – 10 (33) – Sí – – –
– – 25 (82) – 10 (33) – Sí – No –
La distorsión de la tensión de alimentación de red
depende de la magnitud de las corrientes armónicas
multiplicada por la impedancia interna de la red para la
El convertidor de frecuencia acepta una intensidad no
senoidal de la alimentación, lo que aumenta la intensidad
de entrada I
. Se transforma una intensidad no senoidal
RMS
frecuencia dada. La distorsión de tensión total (THDv) se
calcula a partir de los distintos armónicos de tensión
individual, mediante esta fórmula:
por medio de un análisis Fourier y se separa en
intensidades senoidales con diferentes frecuencias, es decir,
con diferentes corrientes armónicas In con 50 Hz de
frecuencia básica:
THD % = U
(UN% de U)
2
5
+ U
2
+ ... + U
7
2
N
I
Hz 50 250 350
Tabla 3.8 Corrientes armónicas
1
I
5
I
7
Los armónicos no afectan directamente al consumo de
energía, aunque aumentan las pérdidas de calor en la
instalación (transformador, cables). Así, en instalaciones con
un porcentaje alto de carga recticada, mantenga las
corrientes armónicas en un nivel bajo para evitar la
sobrecarga del transformador y una alta temperatura de
los cables.
Ilustración 3.53 Bobinas de enlace de CC
AVISO!
Algunas corrientes armónicas pueden perturbar el
equipo de comunicación conectado al mismo
transformador o causar resonancias con baterías con
corrección del factor de potencia.
3.4.5 Requisitos en materia de emisión de
armónicos
Equipos conectados a la red pública de suministro
eléctrico
Opciones Denición
CEI/EN 61000-3-2 Clase A para equipo trifásico
1
equilibrado (solo para equipos profesionales de hasta
1 kW [1,3 CV] de potencia total).
Equipo CEI/EN 61000-3-12 de 16-75 A y equipo
2
profesional a partir de 1 kW (1,3 CV) hasta una
corriente de fase de 16 A.
Tabla 3.9 Equipo conectado
3.4.6 Resultados de la prueba de
armónicos (emisión)
Los tamaños de potencia de hasta PK75 en T4 y P3K7 en
T2 cumplen con CEI/EN 61000-3-2 Clase A. Los tamaños de
potencia desde P1K1 y hasta P18K en T2 y P90K en T4
cumple con CEI/EN 61000-3-12, tabla 4.
Para asegurar unas corrientes armónicas bajas, el
convertidor de frecuencia está equipado de serie con
bobinas de enlace de CC. Normalmente, esto reduce la
intensidad de entrada I
40 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
en un 40 %.
RMS
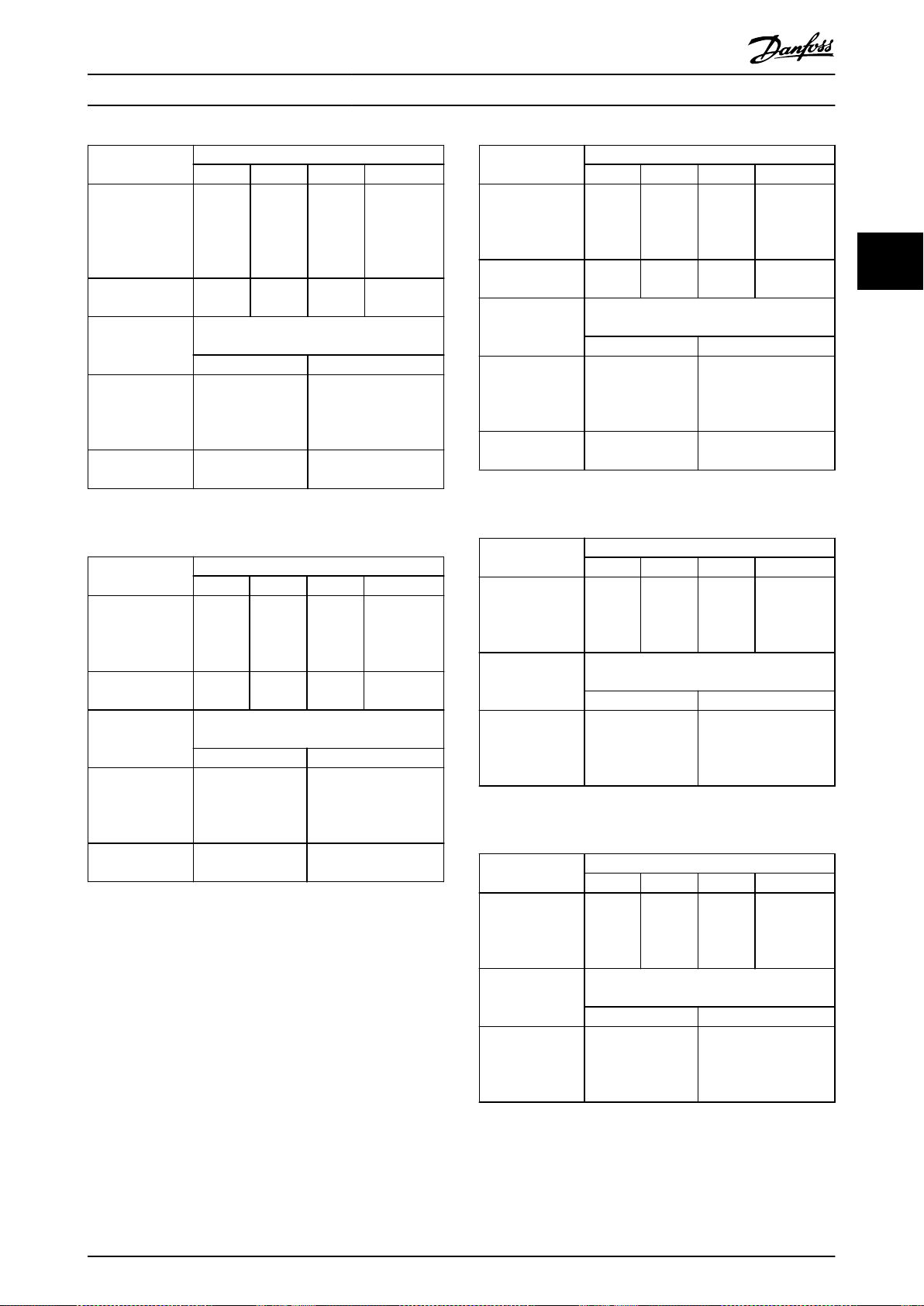
Vista general del producto Guía de diseño
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
Valor real de
0,25-11 kW
(0,34-15 CV),
32,6 16,6 8,0 6,0
IP20, 200 V
(típica)
Límite para
R
≥120
sce
40 25 15 10
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
0,25-11 kW
(0,34-15 CV)
39 41,4
200 V (típica)
Límite para
R
≥120
sce
48 46
Tabla 3.10 Corriente armónica de 0,25-11 kW (0,34-15 CV),
200 V
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
Real de
0,37-22 kW
(0,5-30 CV), IP20,
36,7 20,8 7,6 6,4
380-480 V (típica)
Límite para
R
≥120
sce
40 25 15 10
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
0,37-22 kW
(0,5-30 CV),
44,4 40,8
380-480 V (típica)
Límite para
R
≥120
sce
48 46
Tabla 3.11 Corriente armónica de 0,37-22 kW (0,5-30 CV),
380-480 V
I
13
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
Valor real de
30-90 kW
(40-120 CV), IP20,
36,7 13,8 6,9 4,2
380-480 V (típica)
Límite para
R
≥120
sce
40 25 15 10
3 3
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
30-90 kW
(40-120 CV),
40,6 28,8
380-480 V (típica)
Límite para
R
≥120
sce
48 46
Tabla 3.12 Corriente armónica de 30-90 kW (40-120 CV),
380-480 V
I
13
Valor real de
2,2-15 kW
(3-20 CV), IP20,
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
48 25 7 5
525-600 V (típica)
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
2,2-15 kW
(3-20 CV),
55 27
525-600 V (típica)
Tabla 3.13 Corriente armónica de 2,2-15 kW (3-20 CV),
525-600 V
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
Valor real de
18,5-90 kW
(25-120 CV), IP20,
48,8 24,7 6,3 5
525-600 V (típica)
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
18,5-90 kW
(25-120 CV),
55,7 25,3
525-600 V (típica)
Tabla 3.14 Corriente armónica de 18,5-90 kW (25-120 CV),
525-600 V
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 41
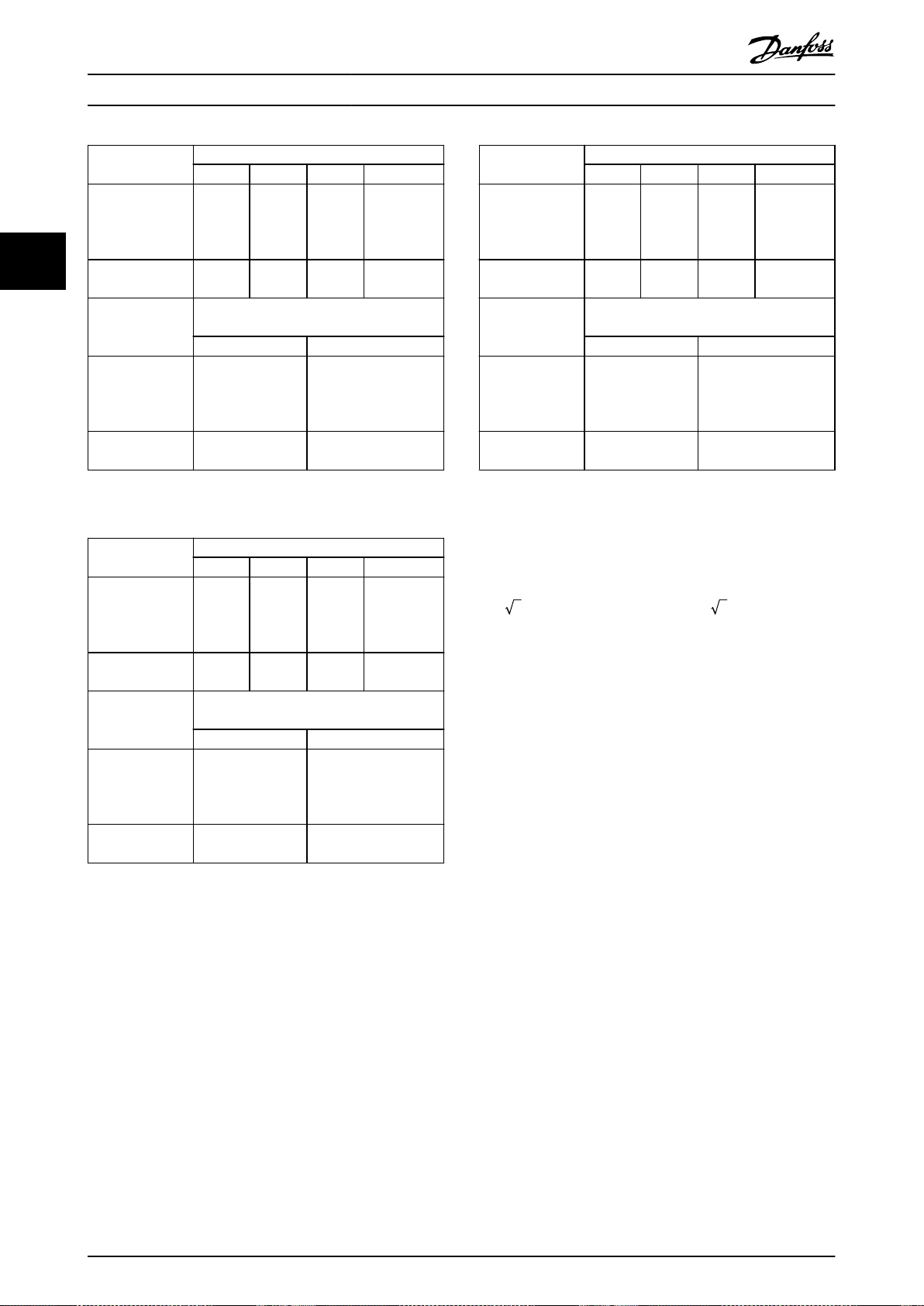
Vista general del producto
VLT® HVAC Basic Drive FC 101
Valor real de
22-90 kW
(30-120 CV), IP54,
400 V (típica)
33
Límite para
R
≥120
sce
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
36,3 14 7 4,3
40 25 15 10
Valor real de
15-45 kW
(20-60 CV), IP20,
200 V (típica)
Límite para
R
≥120
sce
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
22-90 kW
(30-120 CV), IP54,
40,1 27,1
400 V (típica)
Límite para
R
≥120
sce
48 46
Tabla 3.15 Corriente armónica de 22-90 kW (30-120 CV),
400 V
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
Valor real de
15-45 kW
(20-60 CV), 200 V
(típica)
Límite para
R
≥120
sce
Tabla 3.17 Corriente armónica de 15-45 kW (20-60 CV),
200 V
Siempre que la potencia de cortocircuito de la fuente de
alimentación Ssc sea superior o igual a:
Corriente armónica individual In/I1 (%)
I
5
I
7
I
11
I
13
26,7 9,7 7,7 5
40 25 15 10
Factor de distorsión de corriente armónica
(%)
THDi PWHD
30,3 27,6
48 46
Valor real de
0,75-18,5 kW
(1-25 CV), IP54,
36,7 20,8 7,6 6,4
380-480 V (típica)
Límite para
R
≥120
sce
40 25 15 10
Factor de distorsión de corriente armónica
(%)
THDi PWHD
Valor real de
0,75-18,5 kW
(1-25 CV), IP54,
44,4 40,8
380-480 V (típica)
Límite para
R
≥120
sce
48 46
Tabla 3.16 Corriente armónica de 0,75-18,5 kW (1,0-25 CV),
380-480 V
S
=
3 × R
SC
SCE
× U
alimentación
× I
= 3 × 120 × 400 × I
equ
en el punto de conexión entre la fuente de alimentación
del usuario y la red pública (R
sce
).
Es responsabilidad del instalador o del usuario del equipo
asegurar, mediante consulta con la compañía de distribución si fuera necesario, que el equipo está conectado
únicamente a una fuente de alimentación con una
potencia de cortocircuito S
superior o igual a la especi-
sc
cada arriba.
Es posible conectar otros tamaños de potencia a la red
eléctrica pública previa consulta con la compañía distribuidora operadora de la red.
Conformidad con varias directrices de nivel de sistema:
Los datos de corriente armónica de las tablas de la
Tabla 3.10 a la Tabla 3.17 se proporcionan de acuerdo con
equ
la norma CEI / EN 61000-3-12 con referencia al estándar de
producto de Power Drive Systems. Pueden utilizarse como
base para el cálculo de la
inuencia de las corrientes
armónicas en la fuente de alimentación del sistema y para
la documentación del cumplimiento de las directrices
regionales aplicables: IEEE 519-1992; G5/4.
3.4.7 Requisitos de inmunidad
Los requisitos de inmunidad para convertidores de
frecuencia dependen del entorno en el que estén
instalados. Los requisitos para el entorno industrial son
más exigentes que los del entorno doméstico y de ocina.
Todos los convertidores de frecuencia de Danfoss cumplen
con los requisitos para el entorno industrial y, por lo tanto,
42 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

SMPS
130BB896.10
1
2
3
a
M
130BB901.10
1324
5
a
M
Vista general del producto Guía de diseño
cumplen también con los requisitos mínimos del entorno
doméstico y de ocina con un amplio margen de
seguridad.
3.5 Aislamiento galvánico (PELV)
La PELV ofrece protección mediante una tensión muy baja.
Se considera garantizada la protección contra descargas
eléctricas cuando la fuente de alimentación eléctrica es de
tipo PELV y la instalación se realiza de acuerdo con las
reglamentaciones locales o nacionales sobre equipos PELV.
Todos los terminales de control y de relé 01-03/04-06
cumplen con la tensión de protección muy baja (PELV) (no
aplicable a la conexión a tierra en triángulo por encima de
440 V).
El aislamiento galvánico (garantizado) se consigue
cumpliendo los requisitos relativos a un mayor aislamiento
y proporcionando las distancias necesarias en los circuitos.
Estos requisitos se describen en la norma EN 61800-5-1.
Los componentes que constituyen el aislamiento eléctrico,
como se describe, también se ajustan a los requisitos de
aislamiento superior y a las pruebas descritas en la norma
EN 61800-5-1.
El aislamiento galvánico PELV puede mostrarse en
Ilustración 3.55.
30-90 kW(40-120 CV)
3 3
1 Fuente de alimentación (SMPS), que incluye aislamiento de la
señal de UCC e indica la tensión de corriente intermedia.
2 Circuito para disparo de los IGBT (transformadores de
disparo / optoacopladores).
3 Transductores de corriente
4 Circuitos de carga suave interna, RFI y de medición de
temperatura.
5 Relés congurables
a Terminales de la tarjeta de control
Ilustración 3.55 Aislamiento galvánico
El aislamiento galvánico funcional (véase la Ilustración 3.54)
es para la interfaz de bus estándar RS485.
Para mantener el estado PELV, todas las conexiones
realizadas a los terminales de control deben ser PELV, por
ejemplo, los termistores deben disponer de un aislamiento
reforzado/doble.
0,25-22 kW(0,34-30 CV)
1 Fuente de alimentación (SMPS)
2 Optoacopladores, comunicación entre AOC y BOC
3 Relés congurables
a Terminales de la tarjeta de control
Ilustración 3.54 Aislamiento galvánico
PRECAUCIÓN
INSTALACIÓN EN ALTITUDES ELEVADAS
A altitudes superiores a los 2000 m (6500 ft), póngase en
contacto con Danfoss en relación con la PELV.
3.6 Corriente de fuga a tierra
ADVERTENCIA
TIEMPO DE DESCARGA
El contacto con los componentes eléctricos podría llegar
a provocar la muerte, incluso una vez desconectado el
equipo de la red de alimentación.
Además, asegúrese de que se han desconectado las
demás entradas de tensión, como la carga compartida
(enlace de CC) y la conexión del motor para energía
regenerativa.
Antes de tocar cualquier componente eléctrico, espere
como mínimo el tiempo indicado en la Tabla 2.1.
Solo se permite un intervalo de tiempo inferior si así se
indica en la placa de características de un equipo
especíco.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 43

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fSAL = 0,2 x f M,N
fSAL = 2 x f M,N
fSAL = 1 x f M,N
IMN
IM
Vista general del producto
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
33
de muerte.
•
La correcta conexión a tierra del equipo debe
estar garantizada por un instalador eléctrico
certicado.
ADVERTENCIA
PROTECCIÓN MEDIANTE DISPOSITIVO DE
CORRIENTE DIFERENCIAL
Este producto puede originar corriente CC en el
conductor de protección. Cuando se utiliza un dispositivo
de corriente diferencial (RCD) para protección en caso de
contacto directo o indirecto, solo debe utilizarse un RCD
de tipo B en la alimentación de este producto. En caso
contrario, se deberá aplicar otra medida de protección,
como una separación del entorno mediante aislamiento
doble o reforzado, o un aislamiento del sistema de
alimentación con un transformador. Consulte también la
nota sobre la aplicación Protección contra riesgos
eléctricos.
La conexión protectora a tierra del convertidor de
frecuencia y el uso de relés diferenciales RCD debe
realizarse siempre conforme a las normas nacionales y
locales.
VLT® HVAC Basic Drive FC 101
•
•
•
La unidad de control puede intentar corregir la rampa si
está activado el parámetro 2-17 Control de sobretensión.
El convertidor de frecuencia se apaga para proteger los
transistores y los condensadores del enlace de CC cuando
se alcanza un determinado nivel de tensión.
Corte de red
Durante un corte de alimentación, el convertidor de
frecuencia sigue funcionando hasta que la tensión del
circuito de CC desciende por debajo del nivel mínimo de
parada. Generalmente, dicho nivel es un 15 % inferior a la
tensión de alimentación nominal más baja del convertidor
de frecuencia. La tensión de red antes del corte y la carga
del motor determinan el tiempo necesario para la parada
de inercia del convertidor de frecuencia.
3.7.1 Protección térmica del motor (ETR)
La carga arrastra al motor (a una frecuencia de
salida constante del convertidor de frecuencia), es
decir, la carga genera energía.
Durante la desaceleración (rampa de deceleración), si el momento de inercia es alto, la
fricción es baja y el tiempo de deceleración es
demasiado corto para que la energía se disipe
como una pérdida en el convertidor de
frecuencia, el motor y la instalación.
Un ajuste de compensación de deslizamiento
incorrecto (parámetro 1-62 Compensación
deslizam.) podría provocar una tensión de enlace
de CC más elevada.
3.7 Condiciones de funcionamiento
extremas
Cortocircuito (fase-fase motor)
El convertidor de frecuencia está protegido contra cortocircuitos con la lectura de la intensidad en cada una de las
tres fases del motor o en el enlace de CC. Un cortocircuito
entre dos fases de salida provoca una sobreintensidad en
el inversor. El inversor se apaga individualmente cuando la
corriente de cortocircuito excede el valor permitido
(alarma 16, Trip Lock).
Para obtener información sobre la protección del
convertidor de frecuencia contra un cortocircuito en la
carga compartida y en las salidas de freno, consulte el
capétulo 8.3.1 Fusibles y magnetotérmicos.
Conmutación en la salida
Se permite la conmutación a la salida entre el motor y el
convertidor de frecuencia. No se puede dañar de ningún
modo al convertidor de frecuencia conmutando la salida.
Sin embargo, es posible que aparezcan mensajes de fallo.
Sobretensión generada por el motor
La tensión del enlace de CC aumenta cuando el motor
actúa como generador. Esto ocurre en los siguientes casos:
44 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Danfoss utiliza la ETR para proteger el motor del sobrecalentamiento. Se trata de una función electrónica que
simula un relé bimetálico basado en mediciones internas.
Las características se muestran en la Ilustración 3.56.
Ilustración 3.56 Característica de la protección térmica del
motor

R
OFF
ON
<800 Ω >2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
ENT DIG
ENT DIG
ENT DIG
ENT DIG
61 68 69
N
P
COM GND
+24V
0 / 4-20 mA SAL AN / SAL DIG 0 / 4-20 mA SAL AN / SAL DIG
COM ENT AN
COM ENT DIG
10V/20mA ENT
10V/20mA ENT
10V SAL
TER. BUS
OFF ON
130BB898.10
Vista general del producto Guía de diseño
El eje X muestra la relación entre los valores I
motor
e I
motor
nominal. El eje Y muestra el intervalo en segundos que
transcurre antes de que el ETR se corte y desconecte el
convertidor de frecuencia. Las curvas muestran la
velocidad nominal característica al doble de la velocidad
nominal y a 0,2 veces la velocidad nominal.
Se ve claramente que a una velocidad inferior, el ETR se
desconecta con un calentamiento inferior debido a un
menor enfriamiento del motor. De ese modo, el motor
queda protegido frente a un posible sobrecalentamiento,
incluso a baja velocidad. La función ETR calcula la
temperatura del motor en función de la intensidad y la
velocidad reales.
3.7.2 Entradas de termistor
El valor de desconexión del termistor es >3 kΩ.
Integre un termistor (sensor PTC) en el motor para la
protección del bobinado.
La protección contra sobrecarga del motor se puede
aplicar utilizando una serie de técnicas:
Un sensor PTC en los bobinados del motor.
•
Un interruptor termomecánico (tipo Klixon).
•
Relé termoelectrónico (ETR).
•
Ejemplo con entrada digital y fuente de alimentación de
10 V
el convertidor de frecuencia produce una desconexión
cuando la temperatura del motor es demasiado alta.
Ajustes de parámetros:
ajuste el parámetro 1-90 Protección térmica motor en [2]
Descon. termistor.
Ajuste el parámetro 1-93 Fuente de termistor a [6] Entrada
digital 29.
3 3
Ilustración 3.57 Desconexión debida a una temperatura del
motor elevada
Ilustración 3.58 Entrada digital / fuente de alimentación de 10
V
Ejemplo con entrada analógica y fuente de alimentación
de 10 V
el convertidor de frecuencia produce una desconexión
cuando la temperatura del motor es demasiado alta.
Ajustes de parámetros:
ajuste el parámetro 1-90 Protección térmica motor en [2]
Descon. termistor.
Ajuste el parámetro 1-93 Fuente de termistor como [1]
Entrada analógica 53.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 45

18
19
12 20 55
27 29 42 45 50 53 54
ENT DIG
ENT DIG
ENT DIG
ENT DIG
61 68 69
N
P
COM GND
+24V
0 / 4-20 mA SAL AN / SAL DIG 0 / 4-20 mA SAL AN / SAL DIG
COM ENT AN
COM ENT DIG
10V/20mA ENT
10V/20mA ENT
10V SAL
TER. BUS
OFF ON
130BB897.10
R
<3,0 kΩ
>2,9kΩ
OFF
ON
Vista general del producto
VLT® HVAC Basic Drive FC 101
AVISO!
No ajuste Entrada analógica 54 como fuente de
referencia.
33
Ilustración 3.59 Entrada analógica / fuente de alimentación de
10 V
Entrada
Tensión de
alimentación [V]
Digital 10
Analógica 10
Valores umbral
de desconexión [Ω]
<800⇒2,9 k
<800⇒2,9 k
Tabla 3.18 Tensión de alimentación
AVISO!
Asegúrese de que la tensión de alimentación
seleccionada cumple las especicaciones del elemento
termistor utilizado.
ETR se activa en parámetro 1-90 Protección térmica motor.
46 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Selección y pedido Guía de diseño
4 Selección y pedido
4.1 Código descriptivo
Un código descriptivo dene la conguración especíca del convertidor de frecuencia VLT® HVAC Basic Drive FC 101. Utilice
la Ilustración 4.1 para crear un código descriptivo con la conguración deseada.
Ilustración 4.1 Código descriptivo
Descripción Posición Elección posible
Grupo de producto y serie FC 1–6 FC 101
Potencia de salida 7–10 0,25-90 kW (0,34-120 CV) (PK25-P90K)
Número de fases 11 3 fases (T)
T2: 200-240 V CA
Tensión de red 11–12
Protección 13–15
Filtro RFI 16–17
Freno 18 X: sin chopper de frenado
Pantalla 19
PCB barnizada 20
Opción de alimentación 21 X: sin opción de alimentación
Adaptación 22 X: sin adaptación
Adaptación 23 X: sin adaptación
Versión de software 24–27 SXXXX: ultima edición - software estándar
Idioma del software 28 X: estándar
Opciones A 29–30 AX: no hay opciones A
Opciones B 31–32 BX: no hay opciones B
Opciones C0 MCO 33–34 CX: no hay opciones C
Opciones C1 35 X: no hay opciones C1
Software de opción C 36–37 XX: sin opciones
Opciones D 38–39 DX: no hay opciones D0
T4: 380-480 V CA
T6: 525-600 V CA
E20: IP20 / chasis
P20: IP20 / chasis con placa posterior
E5A: IP54
P5A: IP54 con placa posterior
H1: ltro RFI clase A1/B
H2: ltro RFI clase A2
H3: ltro RFI clase A1/B (longitud de cable reducida)
H4: ltro RFI clase A1
A: panel de control local alfanumérico
X: sin panel de control local
X: PCB no barnizada
C: PCB barnizada
4 4
Tabla 4.1 Descripción del código
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 47

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
130BB777.10
Selección y pedido
VLT® HVAC Basic Drive FC 101
4.2 Opciones y accesorios
4.2.1 Panel de control local (LCP)
Número de pedido Descripción
132B0200 LCP para todas las unidades IP20
Tabla 4.2 Número de pedido del LCP
44
Protección IP55 de montaje frontal
Longitud máxima del cable a la unidad 3 m (10 ft)
Comunicación serie RS485
Tabla 4.3 Datos técnicos del LCP
4.2.2 Montaje del LCP en el panel frontal
Paso 1
Encaje la junta en el LCP.
1 Desconexión del panel. Grosor del panel: 1-3 mm
(0,04-0,12 in)
2 Panel
3 Junta
Ilustración 4.2 Encaje la junta
4 LCP
Ilustración 4.3 Coloque el LCP en el panel (montaje frontal)
Paso 2
Coloque el LCP en el panel, consulte las dimensiones del
agujero en la Ilustración 4.3.
48 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Paso 3
Coloque la abrazadera en la parte posterior del LCP, a
continuación, deslícela hacia abajo.
Apriete los tornillos y conecte el lado femenino del cable
al LCP.
Ilustración 4.4 Coloque el soporte en el LCP

130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
130BB903.10
Selección y pedido Guía de diseño
Paso 4
Conecte el cable al convertidor de frecuencia.
4 4
Ilustración 4.5 Conecte el cable
AVISO!
Utilice los tornillos de rosca cortante para sujetar el
conector al convertidor de frecuencia. El par de apriete
es de 1,3 Nm (11,5 in-lb).
Ilustración 4.6 H1-H5 (consulte los datos de la Tabla 4.4)
4.2.3 Kit de protección IP21 / NEMA tipo 1
IP21/NEMA tipo 1 es un elemento de alojamiento opcional
disponible para las unidades IP20.
Si se utiliza el kit de alojamiento, se actualiza la unidad
IP20 para cumplir los requisitos del alojamiento IP21/NEMA
Tipo 1.
Ilustración 4.7 Dimensiones (consulte los datos de la Tabla 4.4)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 49

130BB793.10
99 99
Selección y pedido
VLT® HVAC Basic Drive FC 101
Potencia
Bastidor Clase IP
3 × 200-240 V
[kW (CV)]
H1 IP20
44
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
H10 IP20 – –
0,25-1,5
(0,34-2,0)
5,5-7,5
(7,4-10)
15-18,5
(20-25)
22–30
(30–40)
37–45
(50–60)
3 × 380-480 V
[kW (CV)]
0,37-1,5
(0,5-2,0)
2,2-4,0
(3,0-5,4)
5,5-7,5
(7,4-10)
11–15
(15–20)
18,5-22
(25-30)
30–45
(40–60)
55–75
(74–100)
90 (120)
3 × 525-600 V
[kW (CV)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5-30
(25-40)
37–55
(50–74)
75–90
(100–120)
2,2-7,5
(3,0-10)
11–15
(15–20)
Altura
[mm (in)] A
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Anchura
[mm (in)] B
Profundidad
[mm (in)] C
Número de
pedido del
kit IP21
Número de
pedido del
kit NEMA
tipo 1
Tabla 4.4 Especicaciones del kit de protección
4.2.4 Placa de desacoplamiento
Utilice la placa de desacoplamiento para una instalación correcta en cuanto a CEM.
La Ilustración 4.8 muestra la placa de desacoplamiento en un alojamiento H3.
Ilustración 4.8 Placa de desacoplamiento
50 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Selección y pedido Guía de diseño
Potencia [kW (CV)] Placa de desacopla-
miento
números de pedido
Bastidor Clase IP 3 × 200-240 V 3 × 380-480 V 3 × 525-600 V
H1 IP20 0,25-1,5 (0,33-2,0) 0,37-1,5 (0,5-2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2-4 (3,0-5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5-7,5 (7,5-10) – 132B0204
H4 IP20 5,5-7,5 (7,5-10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5-22 (25-30) – 130B0205
H6 IP20 15-18,5 (20-25) 30 (40) 18,5-30 (25-40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
Tabla 4.5 Especicaciones de la placa de desacoplamiento
AVISO!
En los tamaños de alojamiento H9 y H10, las placas de desacoplamiento se incluyen en la bolsa de accesorios.
4 4
4.3 Números de pedido
4.3.1 Opciones y accesorios
Tamaño
del
Descripción
1)
LCP
Kit de
montaje IP55
para el panel
LCP con 3 m
(9,8 ft) de
cable
Kit de
convertidor
de LCP 31 a
RJ 45
alojamie
nto
Tensión
de red
T2
(200-240
V CA)
T4
(380-480
V CA)
T6
(525-600
V CA)
132B0200
H1
[kW (CV)]H2[kW (CV)]H3[kW (CV)]H4[kW (CV)]H5[kW (CV)]
0,25-1,5
(0,33-2,0)
0,37-1,5
(0,5-2,0)
– – – – –
2,2 (3,0) 3,7 (5,0)
2,2-4,0
(3,0-5,4)
5,5-7,5
(7,5-10)
5,5-7,5
(7,5-10)
11–15
(15–20)
11 (15)
18,5-22
(25-30)
132B0201
132B0203
[kW (CV)]
15-18,5
(20-25)
30 (40)
18,5-30
(25-40)
H6
–
37–45
(50–60)
–
H7
[kW (CV)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (CV)]
37–45
(50–60)
75–90
(100–125)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 51
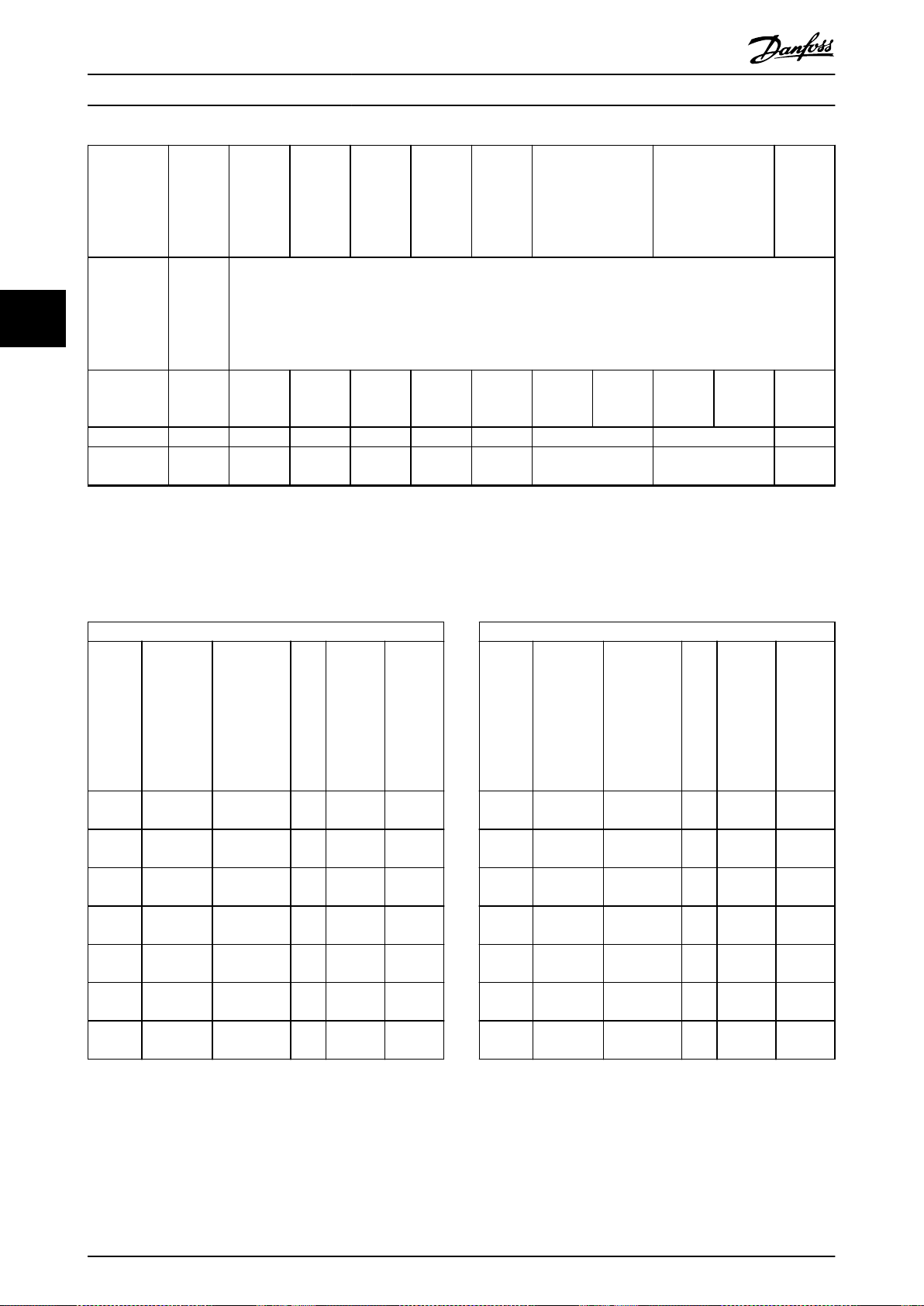
Selección y pedido
Tamaño
del
Kit de
montaje IP55
para el panel
44
LCP sin 3 m
(9,8 ft) de
cable
Placa de
desacoplamiento
Opción IP21 132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
Kit NEMA
Tipo 1
Tabla 4.6 Opciones y accesorios
1) Para las unidades IP20, el LCP se encarga por separado. En las unidades IP54, el LCP está incluido en la conguración estándar y se monta en
el convertidor de frecuencia.
alojamie
nto
Tensión
de red
H1
[kW (CV)]H2[kW (CV)]H3[kW (CV)]H4[kW (CV)]H5[kW (CV)]
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
VLT® HVAC Basic Drive FC 101
132B0206
H6
[kW (CV)]
H7
[kW (CV)]
H8
[kW (CV)]
4.3.2 Filtros armónicos
3 × 380-480 V 50 Hz
Intensidad
Potencia
(kW
[CV])
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
de entrada
continua
del
convertidor
de
frecuencia
[A]
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
Frecuencia
de
conmutación
predeter-
minada
[kHz]
Nivel
de
THDi
[%]
Número
de
pedido
del ltro
IP00
Número
de
código
del ltro
IP20
Potencia
(kW
[CV])
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
3 × 380-480 V 50 Hz
Intensidad
de entrada
continua
del
convertidor
de
frecuencia
[A]
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
Frecuencia
de
conmutación
predeter-
minada
[kHz]
Nivel
de
THDi
[%]
Número
de
pedido
del ltro
IP00
Número
de
código
del ltro
IP20
Tabla 4.7 Filtros de AHF (distorsión de la corriente del 5 %)
52 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Tabla 4.8 Filtros de AHF (distorsión de la corriente del 10 %)

Selección y pedido Guía de diseño
3 × 440-480 V 60 Hz
Intensidad
Potencia
(kW
[CV])
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
de entrada
continua
del
convertidor
de
frecuencia
[A]
34,6 4 3 130B1792 130B1757
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
Frecuencia
de
conmutación
predeter-
minada
[kHz]
Nivel
de
THDi
[%]
Número
de
pedido
del ltro
IP00
Número
de
código
del ltro
IP20
4 4
Tabla 4.9 Filtros de AHF (distorsión de la corriente del 5 %)
3 × 440-480 V 60 Hz
Intensidad
Potencia
(kW
[CV])
22
(30)
30
(40)
37
(50)
45
(60)
55
(74)
75
(100)
90
(120)
de entrada
continua
del
convertidor
de
frecuencia
[A]
34,6 4 6 130B1775 130B1487
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
Frecuencia
de
conmutación
predeter-
minada
[kHz]
Nivel
de
THDi
[%]
Número
de
pedido
del ltro
IP00
Número
código
del ltro
de
IP20
Tabla 4.10 Filtros de AHF (distorsión de la corriente del 10 %)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 53

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Selección y pedido
VLT® HVAC Basic Drive FC 101
4.3.3 Filtro RFI externo
Con los ltros externos descritos en la Tabla 4.11, puede alcanzarse una longitud máxima de cable apantallado de 50 m
(164 ft) conforme a la norma EN/CEI 61800-3 C2 (EN 55011 A1), o de 20 m (65,6 ft) conforme a la norma EN/CEI 61800-3 C1
(EN 55011 B).
Potencia (kW [CV])
Tamaño 380-480 V
44
0,37-2,2
(0,5-3,0)
3,0-7,5
(4,0-10)
11–15
(15–20)
18,5-22
(25-30)
Tabla 4.11 Filtros RFI (detalles)
Tipo A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Par
[Nm (in-lb)]
0,7-0,8
(6,2-7,1)
0,7-0,8
(6,2-7,1)
1,9-2,2
(16,8-19,5)
1,9-2,2
(16,8-19,5)
Peso [kg (lb)] Número de pedido
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
132B0244
132B0245
132B0246
132B0247
Ilustración 4.9 Filtro RFI: dimensiones
54 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Instalación Guía de diseño
5 Instalación
5.1 Instalación eléctrica
5 5
Ilustración 5.1 Dibujo esquemático del cableado básico
AVISO!
No hay acceso a UDC– y UDC+ en las siguientes unidades:
•
•
•
•
Todos los cableados deben cumplir las normas locales y nacionales sobre las secciones transversales de cables y la
temperatura ambiente. Se requieren conductores de cobre. Se recomienda una temperatura de 75 °C (167 °F).
IP20, 380-480 V, 30-90 kW (40-125 CV)
IP20, 200-240 V, 15-45 kW (20-60 CV)
IP20, 525-600 V, 2,2-90 kW (3,0-125 CV)
IP54, 380-480 V, 22-90 kW (30-125 CV)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 55

Instalación
VLT® HVAC Basic Drive FC 101
Potencia (kW [CV]) Par [Nm (in-lb)]
Tamaño
del
alojamien
Clase IP 3 × 200-240 V 3 × 380-480 V
Alimen-
tación
Motor
Conexión
de CC
Terminales
de control
Tierra Relé
to
H1 IP20
0,25-1,5
(0,33-2,0)
0,37-1,5
(0,5-2,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H2 IP20 2,2 (3,0) 2,2-4,0 (3,0-5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5-7,5 (7,5-10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5-7,5 (7,5-10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5-22 (25-30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15-18,5 (20-25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
55
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
24 (212)
1)
24 (212)
1)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabla 5.1 Pares de apriete para protecciones de tamaño H1-H8, 3 × 200-240 V y 3 × 380-480 V
Potencia (kW [CV]) Par [Nm (in-lb)]
Tamaño
del
alojamien
Clase IP 3 × 380-480 V Alimentación Motor
Conexión deCCTerminales de
control
Tierra Relé
to
I2 IP54
0,75-4,0
(1,0-5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I3 IP54 5,5-7,5 (7,5-10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11-18,5 (15-25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,6 (5,0)
Tabla 5.2 Pares de apriete para protecciones de tamaño I2-I8
Potencia (kW [CV]) Par [Nm (in-lb)]
Tamaño
del
alojamien
Clase IP 3 × 525-600 V Alimentación Motor
Conexión deCCTerminales de
control
Tierra Relé
to
H9 IP20 2,2-7,5 (3,0-10) 1,8 (16) 1,8 (16)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16)
No
recomendado
No
recomendado
0,5 (4,0) 3 (27) 0,6 (5,0)
0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5-30 (25-40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabla 5.3 Pares de apriete para protecciones de tamaño H6-H10, 3 × 525-600 V
1) Dimensiones de los cables >95 mm
2) Dimensiones de los cables ≤95 mm
2
2
56 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Instalación Guía de diseño
5.1.1 Conexión de alimentación y del
motor
El convertidor de frecuencia está diseñado para controlar
todos los motores asíncronos trifásicos estándar. Para
conocer la sección transversal máxima de los cables,
consulte el capétulo 8.4 Especicaciones técnicas generales.
Utilice un cable de motor apantallado/blindado
•
para cumplir con las
CEM y conecte dicho cable tanto a la placa de
desacoplamiento como al motor.
Mantenga el cable de motor tan corto como sea
•
posible para reducir el nivel de interferencias y las
corrientes de fuga.
Para obtener más información sobre el montaje
•
de la placa de desacoplamiento, consulte las
Instrucciones de montaje de la placa de desacoplamiento de FC 101.
Consulte también el apartado «Instalación correcta
•
en cuanto a CEM» en el capétulo 5.1.2 Instalación
eléctrica conforme a CEM.
Para obtener detalles sobre cómo conectar el
•
convertidor de frecuencia a la alimentación y al
motor, consulte el capítulo «Conexión a la red y al
motor» de la Guía rápida del VLT® HVAC Basic
Drive FC 101.
especicaciones de emisión
Relés y terminales de las protecciones de tamaño H1-H5
5 5
1 Alimentación
2 Tierra
3 Motor
4 Relés
Ilustración 5.2 Tamaños de protección H1-H5
IP20, 200-240 V, 0,25-11 kW (0,33-15 CV)
IP20, 380-480 V, 0,37-22 kW (0,5-30 CV)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 57

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Instalación
VLT® HVAC Basic Drive FC 101
Relés y terminales de la protección de tamaño H6
Relés y terminales de la protección de tamaño H7
55
1 Alimentación
2 Motor
3 Tierra
4 Relés
Ilustración 5.3 Protección de tamaño H6
IP20, 380-480 V, 30-45 kW (40-60 CV)
IP20, 200-240 V, 15-18,5 kW (20-25 CV)
IP20, 525-600 V, 22-30 kW (30-40 CV)
1 Alimentación
2 Relés
3 Tierra
4 Motor
Ilustración 5.4 Protección de tamaño H7
IP20, 380-480 V, 55-75 kW (70-100 CV)
IP20, 200-240 V, 22-30 kW (30-40 CV)
IP20, 525-600 V, 45-55 kW (60-70 CV)
58 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Instalación Guía de diseño
Relés y terminales de la protección de tamaño H8
1 Alimentación
2 Relés
3 Tierra
4 Motor
Asegúrese de que se conecten correctamente los cables de
red del alojamiento de tamaño H9. Para obtener más
detalles, consulte el capítulo «Conexión a la alimentación y
al motor» de la Guía rápida del VLT® HVAC Basic Drive FC
101. Utilice los pares de apriete descritos en el
capétulo 5.1.1 Instalación eléctrica en general.
Relés y terminales de la protección de tamaño H10
5 5
Ilustración 5.5 Protección de tamaño H8
IP20, 380-480 V, 90 kW (125 CV)
IP20, 200-240 V, 37-45 kW (50-60 CV)
IP20, 525-600 V, 75-90 kW (100-125 CV)
Conexión de la alimentación y el motor en alojamientos
de tamaño H9
Ilustración 5.7 Protección de tamaño H10
IP20, 600 V, 11-15 kW (15-20 CV)
Ilustración 5.6 Conexión del motor en alojamientos de tamaño
H9 IP20, 600 V, 2,2-7,5 kW (3-10 CV)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 59
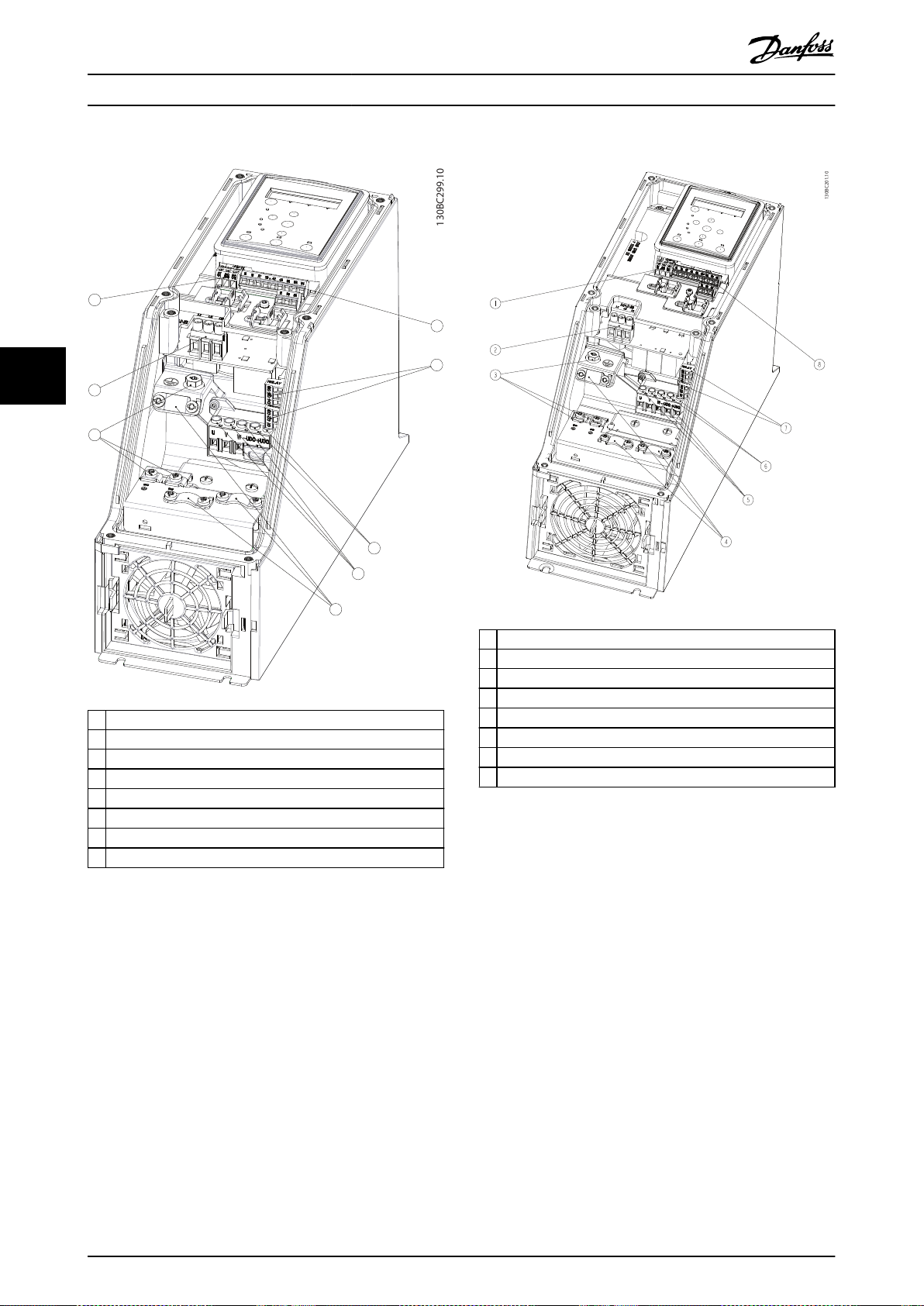
130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Instalación
VLT® HVAC Basic Drive FC 101
Tamaño de protección I2
Tamaño de protección I3
55
1 RS485
2 Alimentación
3 Tierra
4 Abrazaderas de los cables
1 RS485
2 Alimentación
3 Tierra
4 Abrazaderas de los cables
5 Motor
6 UDC
7 Relés
8 E/S
Ilustración 5.8 Tamaño de protección I2
IP54, 380-480 V, 0,75-4 kW (1-5 CV)
5 Motor
6 UDC
7 Relés
8 E/S
Ilustración 5.9 Tamaño de protección I3
IP54, 380-480 V, 5,5-7,5 kW (7,5-10 CV)
60 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

130BD011.10
130BC203.10
130BT326.10
130BT325.10
Instalación Guía de diseño
Tamaño de protección I4
1 RS485
2 Alimentación
3 Tierra
4 Abrazaderas de los cables
5 Motor
6 UDC
7 Relés
8 E/S
Tamaño de protección I6
5 5
Ilustración 5.12 Conexión de red en alojamientos de tamaño I6
IP54, 380-480 V, 22-37 kW (30-50 CV)
Ilustración 5.10 Tamaño de protección I4
IP54, 380-480 V, 0,75-4 kW (1-5 CV)
Ilustración 5.11 IP54, tamaños de protección I2, I3 e I4
Ilustración 5.13 Conexión del motor en alojamientos de
tamaño I6 IP54, 380-480 V, 22-37 kW (30-50 CV)
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 61

311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Instalación
VLT® HVAC Basic Drive FC 101
5.1.2 Instalación eléctrica conforme a CEM
Preste atención a las siguientes recomendaciones para
garantizar una correcta instalación eléctrica en cuanto a
CEM.
Utilice solo cables de motor y de control
•
blindados y apantallados.
Conecte la pantalla a tierra en ambos extremos.
•
Evite una instalación con cables de pantalla
•
retorcidos y embornados (en espiral), ya que
55
Ilustración 5.14 Relés para protección de tamaño I6
IP54, 380-480 V, 22-37 kW (30-50 CV)
puede limitar el efecto del apantallamiento a
altas frecuencias. Utilice en su lugar las
abrazaderas de cable suministradas.
Es importante asegurar que la placa de
•
instalación tiene un buen contacto eléctrico con
el armario metálico del convertidor de frecuencia
a través de los tornillos de instalación.
Utilice arandelas de seguridad y placas de
•
instalación conductoras galvánicamente.
No utilice cables de motor no apantallados / no
•
blindados en los armarios de la instalación.
Tamaños de protección I7 e I8
Ilustración 5.15 Tamaños de protección I7 e I8
IP54, 380-480 V, 45-55 kW (60-70 CV)
IP54, 380-480 V, 75-90 kW (100-125 CV)
62 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
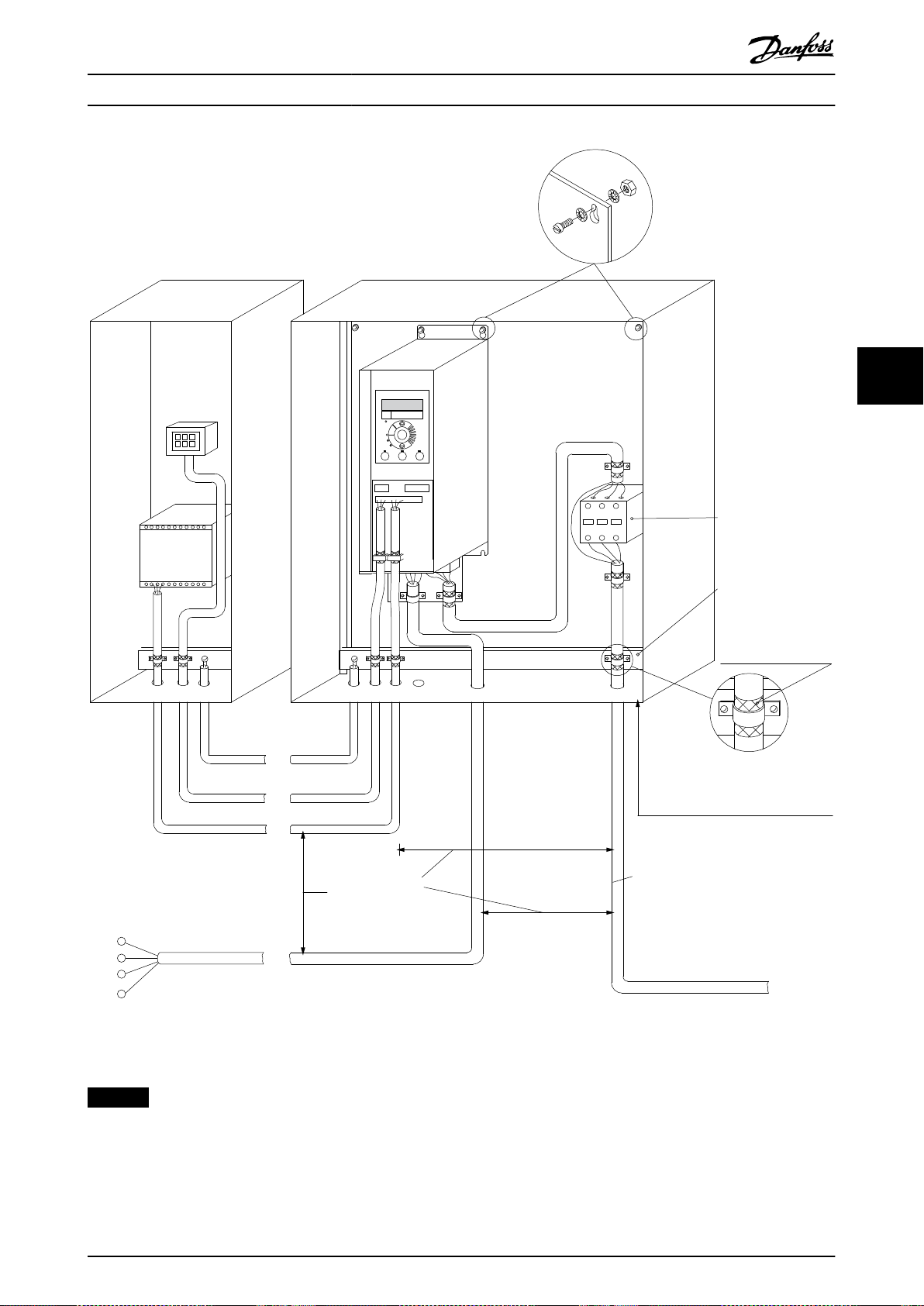
L1
L2
L3
PE
Cable ecualizador de
16mm mín.
Cables de control
Todas las entradas de cables
en un lado del panel
Raíl de conexión a tierra
Aislamiento del cable
pelado
Contactor de
salida, etc.
Cable del motor
Motor, trifásico y
PLC, etc.
Panel
Alimentación de red
Mín. 200mm
entre el cable de control,
el cable de red
y el cable de red
del motor
PLC
Conexión a tierra de protección
Conexión a tierra de protección reforzada
130BB761.10
Instalación Guía de diseño
5 5
Ilustración 5.16 Correcta instalación eléctrica en cuanto a CEM
AVISO!
Para Norteamérica, utilice conductos de metal en lugar de cables apantallados.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 63

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Instalación
VLT® HVAC Basic Drive FC 101
5.1.3 Terminales de control
Consulte la Guía rápida del VLT® HVAC Basic Drive FC 101 y
asegúrese de extraer correctamente la tapa del terminal.
La Ilustración 5.17 muestra todos los terminales de control
del convertidor de frecuencia. Al aplicar Arrancar (terminal
18), la conexión entre los terminales 12-27 y una referencia
analógica (terminal 53 o 54 y 55), el convertidor de
frecuencia se pondrá en funcionamiento.
55
El modo de entrada digital de los terminales 18, 19 y 27 se
ajusta en parámetro 5-00 Modo E/S digital (PNP es el valor
predeterminado). El modo de entrada digital 29 se ajusta
en parámetro 5-03 Modo entrada digital 29 (PNP es el valor
predeterminado).
Ilustración 5.17 Terminales de control
64 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programación Guía de diseño
6 Programación
6.1 Introducción
El convertidor de frecuencia puede programarse desde el
LCP o desde un ordenador a través del puerto de comunicaciones RS485, instalando el Software de conguración
MCT 10. Consulte el capétulo 1.5 Recursos adicionales para
obtener más detalles acerca del software.
6.2 Panel de control local (LCP)
El LCP se divide en cuatro grupos funcionales.
A. Pantalla
B. Tecla de menú
C. Teclas de navegación y luces indicadoras
D. Teclas de funcionamiento y luces indicadoras
1 Número y nombre del parámetro.
2 Valor del parámetro.
El número de ajuste muestra el ajuste activo y el ajuste
editado. Si el mismo ajuste actúa como ajuste activo y
editado, solo se mostrará ese número de ajuste (ajustes de
3
fábrica). Cuando dieren el ajuste activo y el editado,
ambos números se muestran en la pantalla (ajuste 12). El
número intermitente indica el ajuste editado.
El sentido de giro del motor aparece en la parte inferior
4
izquierda de la pantalla, con una pequeña echa al lado
que señala en sentido horario o en el sentido contrario.
El triángulo indica si el LCP está en Status (Estado), Quick
5
Menu (Menú rápido) o Main Menu (Menú principal).
Tabla 6.1 Leyenda de la Ilustración 6.1, Parte I
B. Tecla de menú
Pulse [Menu] para seleccionar Status (Estado), Quick Menu
(Menú rápido) o Main Menu (Menú principal).
C. Teclas de navegación y luces indicadoras
6 LED Com.: parpadea durante la comunicación de bus.
LED verde / encendido: la sección de control funciona
7
correctamente.
8 LED amarillo / advertencia: indica una advertencia.
9 LED rojo intermitente / alarma: indica una alarma.
[Back]: para ir al paso o nivel anterior en la estructura de
10
navegación.
[▲] [▼] [►]: para navegar entre grupos de parámetros, entre
11
parámetros y dentro de estos. También pueden usarse para
ajustar la referencia local.
[OK]: para seleccionar un parámetro y aceptar los cambios
12
en ajustes de parámetros.
6
6
Tabla 6.2 Leyenda de la Ilustración 6.1, Parte II
D. Teclas de funcionamiento y luces indicadoras
Ilustración 6.1 Panel de control local (LCP)
A. Pantalla
La pantalla LCD dispone de iluminación y cuenta con dos
líneas alfanuméricas. Todos los datos se muestran en el
LCP.
En la Ilustración 6.1 se describe la información que puede
leerse en la pantalla.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 65
[Hand On]: arranca el motor y activa el control del
convertidor de frecuencia a través del LCP.
AVISO!
[2] Inercia inversa es la opción predeterminada para
13
el parámetro 5-12 Terminal 27 Entrada digital. Si no
hay una fuente de alimentación de 24 V en el
terminal 27, [Hand On] no arrancará el motor.
Conecte el terminal 12 al terminal 27.
[O / Reset]: detiene el motor (O). Si está en modo de
14
alarma, la alarma se reinicia.
[Auto On]: el convertidor de frecuencia puede controlarse
15
mediante terminales de control o mediante comunicación
serie.
Tabla 6.3 Leyenda de la Ilustración 6.1, Parte III

FC
ENT DIG
ENT DIG
ENT DIG
ENT DIG
COM ENT DIG
SAL AN / SAL DIG
SAL AN / SAL DIG
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Referencia
Arranque
ENT AN
ENT AN
COM
130BB674.10
45
+
-
130BB629.10
Pulse [OK] para iniciar el asistente
Pulse [Back] para ignorarlo
Ajuste 1
6
Programación
VLT® HVAC Basic Drive FC 101
6.3 Menús
6.3.1 Menú de estado
En el menú de estado, las opciones de selección son:
Frecuencia del motor [Hz]:
•
parámetro 16-13 Frecuencia.
Intensidad del motor [A]:
•
parámetro 16-14 Intensidad motor.
Velocidad de referencia del motor en porcentaje
•
[%]: parámetro 16-02 Referencia %.
Realimentación: parámetro 16-52 Realimentación
•
[Unit].
Potencia del motor: parámetro 16-10 Potencia [kW]
•
para kW, parámetro 16-11 Potencia [hp] para CV. Si
el parámetro 0-03 Ajustes regionales se ajusta
como [1] Norteamérica, la potencia del motor se
mostrará en CV en lugar de kW.
Lectura personalizada: parámetro 16-09 Lectura
•
personalizada.
Velocidad del motor [RPM]:
•
parámetro 16-17 Velocidad [RPM].
Ilustración 6.2 Cableado del convertidor de frecuencia
El asistente aparecerá después del encendido hasta que se
modique algún parámetro. Siempre se puede volver a
acceder al asistente a través del menú rápido. Pulse [OK]
para iniciar el asistente. Pulse [Back] para volver a la vista
de estado.
6.3.2 Menú rápido
Utilice el menú rápido para programar las funciones más
comunes. El menú rápido está formado por:
El asistente para aplicaciones de lazo abierto.
•
Consulte el Ilustración 6.4 para obtener más
detalles.
El asistente para aplicaciones de lazo cerrado.
•
Consulte Ilustración 6.5 para obtener mas
información.
Conguración del motor. Consulte Tabla 6.6 para
•
obtener mas información.
Cambios realizados.
•
De un modo claro y estructurado, el menú «asistente»
integrado guía al instalador a través de la conguración
del convertidor de frecuencia, para ajustar aplicaciones de
lazo abierto y lazo cerrado y para el ajuste rápido del
motor.
Ilustración 6.3 Asistente de arranque / salida
66 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programación Guía de diseño
6
6
Ilustración 6.4 Asistente de conguración para aplicaciones de lazo abierto
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 67

Programación
VLT® HVAC Basic Drive FC 101
Asistente de conguración para aplicaciones de lazo abierto
6
Parámetro Opción Valor predeter-
minado
Parámetro 0-03 Ajustes
regionales
Parámetro 0-06 Tipo red [0] 200-240 V / 50 Hz /
[0] Internacional
[1] Norteamérica
red IT
[1] 200-240 V / 50 Hz /
triáng.
[2] 200-240 V / 50 Hz
[10] 380-440 V/ 50 Hz /
red IT
[11] 380-440 V / 50 Hz /
triángulo
[12] 380-440 V / 50 Hz
[20] 440-480 V / 50 Hz /
red IT
[21] 440-480 V /50 Hz /
triángulo
[22] 440-480 V / 50 Hz
[30] 525-600 V / 50 Hz /
red IT
[31] 525-600 V / 50 Hz /
triángulo
[32] 525-600 V / 50 Hz
[100] 200-240 V / 60 Hz /
red IT
[101] 200-240 V /60 Hz /
triángulo
[102] 200-240 V / 60 Hz
[110] 380-440 V / 60 Hz /
red IT
[111] 380-440 V / 60 Hz /
triángulo
[112] 380-440 V / 60 Hz
[120] 440-480 V / 60 Hz /
red IT
[121] 440-480 V / 60 Hz /
triángulo
[122] 440-480 V / 60 Hz
[130] 525-600 V / 60 Hz /
red IT
[131] 525-600 V / 60 Hz /
triángulo
[132] 525-600 V / 60 Hz
[0] Internacional –
Depende del
tamaño.
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
68 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Programación Guía de diseño
Parámetro Opción Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM, Sat
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 69

Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Opción Valor predeter-
minado
Parámetro 1-20 Potencia motor
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,12-110 kW / 0,16-150CVDepende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0,01-10000,00 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-29 Adaptación
automática del motor (AMA)
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
Consulte el
parámetro 1-29 Adaptació
n automática del motor
(AMA).
0,000-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
O La realización de un procedimiento AMA optimiza el
rendimiento del motor.
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d.
Obtenga el valor de la hoja de datos del motor de
magnetización permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
70 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
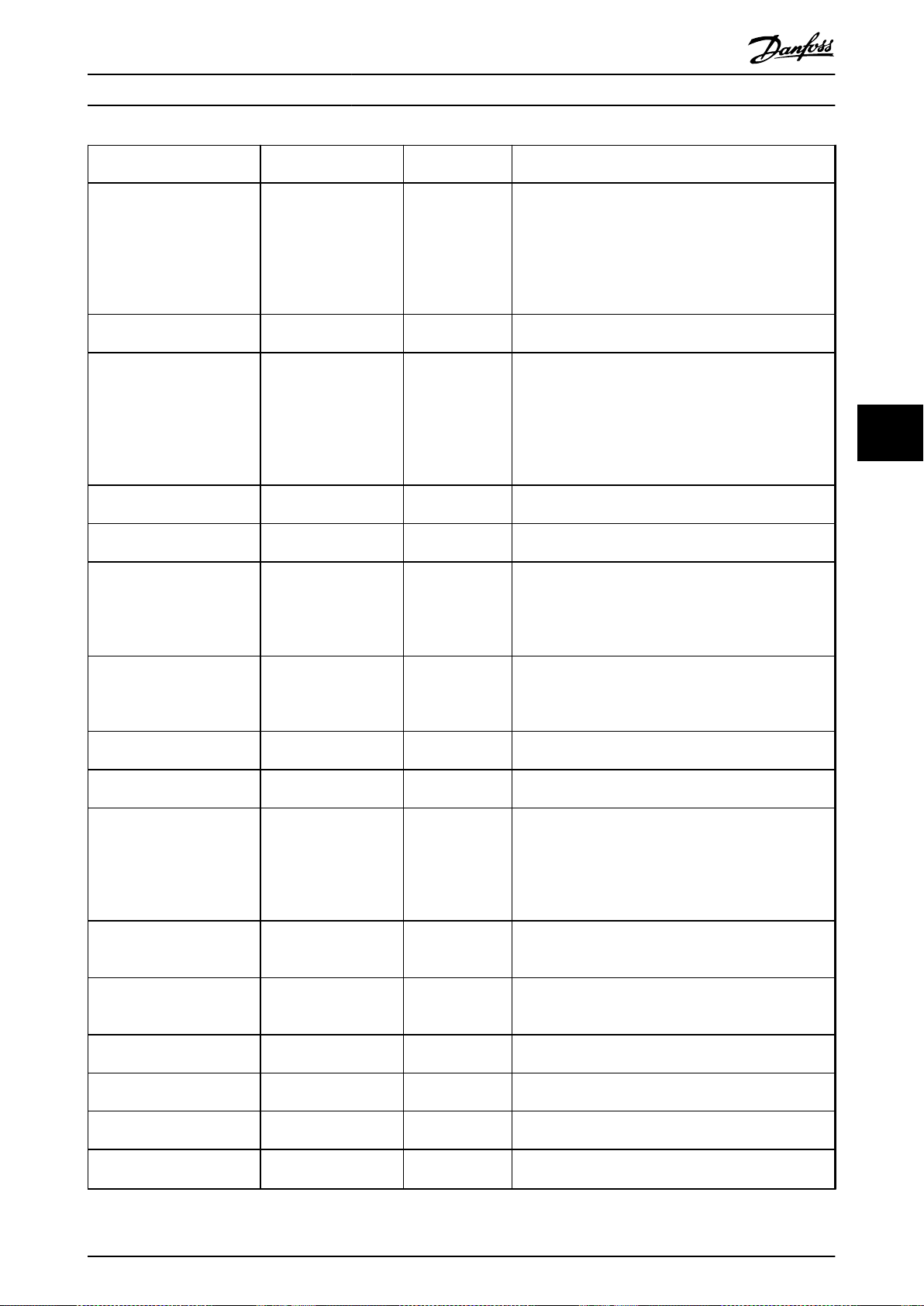
Programación Guía de diseño
Parámetro Opción Valor predeter-
minado
Parámetro 1-49 Corriente en
inductancia mín.
Parámetro 1-70 Modo de inicio [0] Detección de rotor
Parámetro 1-73 Motor en giro [0] Desactivado
Parámetro 3-02 Referencia
mínima
Parámetro 3-03 Referencia
máxima
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 5-40 Relé de función Consulte el
Parámetro 5-40 Relé de función Consulte el
Parámetro 6-10 Terminal 53
escala baja V
Parámetro 6-11 Terminal 53
escala alta V
Parámetro 6-12 Terminal 53
escala baja mA
Parámetro 6-13 Terminal 53
escala alta mA
20–200% 100% Este parámetro especica la curva de saturación de los
[0] Detección de
[1] Parking
[1] Activado
–4999,000-4999,000 0 La referencia mínima es el valor mínimo que puede
–4999,000-4999,000 50 La referencia máxima es el valor más alto que puede
0,05-3600,00 s Depende del
0,05-3600,00 s Depende del
0,0-400,0 Hz 0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100 Hz Introducir el valor máximo de frecuencia de salida. Si el
parámetro 5-40 Relé de
función.
parámetro 5-40 Relé de
función.
0,00-10,00 V 0,07 V Introduzca la tensión que corresponda al valor de
0,00-10,00 V 10 V Introduzca la tensión que corresponda al valor de
0,00-20,00 mA 4 mA Introduzca la intensidad que corresponda al valor de
0,00-20,00 mA 20 mA Introduzca la intensidad que corresponda al valor de
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
[9] Alarma Seleccione la función para controlar el relé de salida 1.
[5] Funcionamiento Seleccione la función para controlar el relé de salida 2.
Uso
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d (Ld),
el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
Seleccione el modo de arranque del motor PM.
frecuencia atrape al motor en giro por corte de red.
Seleccione [0] Desactivado si no se requiere esta función.
Cuando este parámetro se ajusta a [1] Activado, el
parámetro 1-71 Retardo arr. y el parámetro 1-72 Función de
arranque carecen de función. Parámetro 1-73 Motor en giro
solo se activa en modo VVC+.
obtenerse sumando todas las referencias.
obtenerse sumando todas las referencias.
Si se selecciona motor asíncrono, el tiempo de aceleración
será desde 0 hasta el parámetro 1-23 Frecuencia motor
nominal. Si se selecciona motor PM, el tiempo de
aceleración será desde 0 hasta el parámetro 1-25 Veloc.
nominal motor.
En motores asíncronos, el tiempo de deceleración va
desde el parámetro 1-23 Frecuencia motor nominal hasta 0.
En motores PM, el tiempo de deceleración va desde el
parámetro 1-25 Veloc. nominal motor hasta 0.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
referencia bajo.
referencia alto.
referencia bajo.
referencia alto.
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 71
Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Opción Valor predeter-
minado
Parámetro 6-19 Terminal 53
mode
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
Tabla 6.4 Asistente de conguración para aplicaciones de lazo abierto
[0] Modo de intensidad
[1] Modo tensión
[0] Desactivado
[1] Activado
0,05-1 s 0,10 s
[1] Modo tensión Seleccione si el terminal 53 se utiliza para entrada de
[0] Desactivado
Uso
intensidad o de tensión.
–
–
72 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
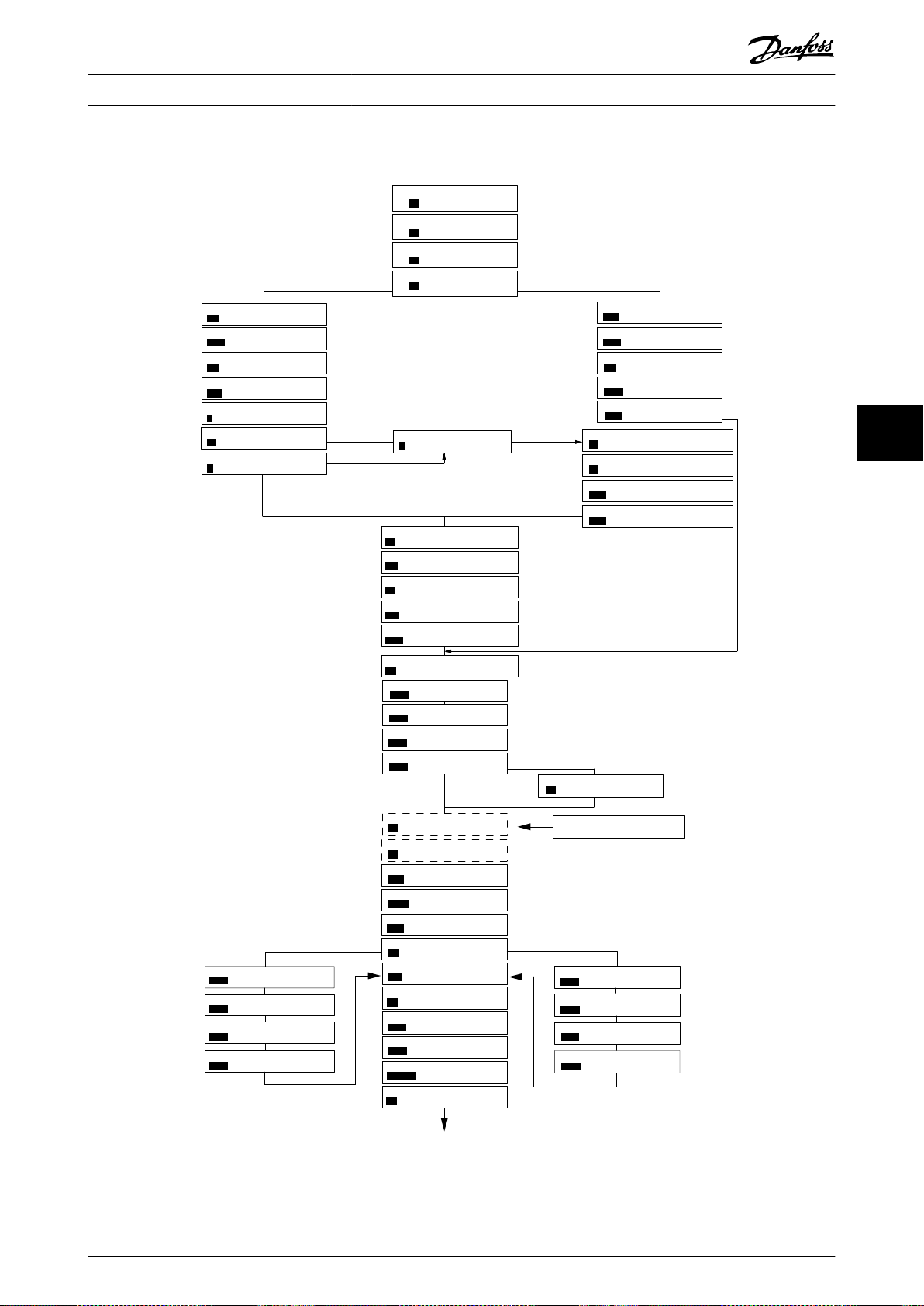
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programación Guía de diseño
Asistente de conguración para aplicaciones de lazo cerrado
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 73
Ilustración 6.5 Asistente de conguración para aplicaciones de lazo cerrado

Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Rango Valor predeter-
minado
Parámetro 0-03 Ajustes
regionales
Parámetro 0-06 Tipo red [0]–[132] consulte la
Parámetro 1-00 Modo Congu-
ración
[0] Internacional
[1] Norteamérica
Tabla 6.4.
[0] Veloc. lazo abierto
[3] Lazo cerrado
[0] Internacional –
Tamaño
seleccionado
[0] Veloc. lazo
abierto
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
Seleccione [3] Lazo cerrado.
74 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Programación Guía de diseño
Parámetro Rango Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM, Sat
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 75
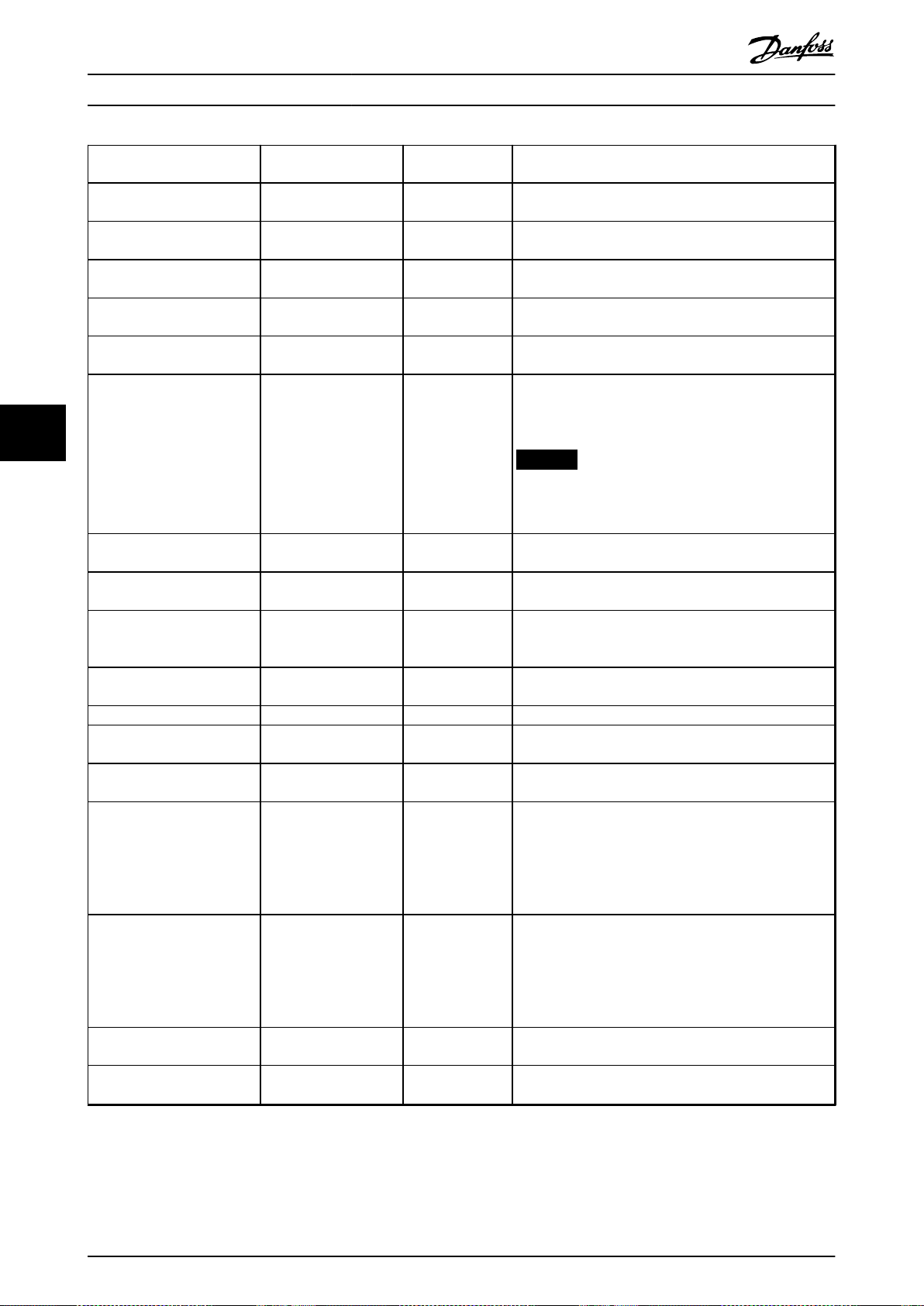
Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Rango Valor predeter-
minado
Parámetro 1-20 Potencia motor
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,09-110 kW Depende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0-10 000 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-29 Adaptación
automática del motor (AMA)
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
O La realización de un procedimiento AMA optimiza el
rendimiento del motor.
0-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d.
Obtenga el valor de la hoja de datos del motor de
magnetización permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
76 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Programación Guía de diseño
Parámetro Rango Valor predeter-
minado
Parámetro 1-49 Corriente en
inductancia mín.
Parámetro 1-70 Modo de inicio [0] Detección de rotor
Parámetro 1-73 Motor en giro [0] Desactivado
Parámetro 3-02 Referencia
mínima
Parámetro 3-03 Referencia
máxima
Parámetro 3-10 Referencia
interna
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 6-20 Terminal 54
escala baja V
Parámetro 6-21 Terminal 54
escala alta V
Parámetro 6-22 Terminal 54
escala baja mA
Parámetro 6-23 Terminal 54
escala alta mA
Parámetro 6-24 Term. 54 valor
bajo ref./realim
Parámetro 6-25 Term. 54 valor
alto ref./realim
20–200% 100% Este parámetro especica la curva de saturación de los
[0] Detección de
[1] Parking
[1] Activado
–4999,000-4999,000 0 La referencia mínima es el valor mínimo que puede
–4999,000-4999,000 50 La referencia máxima es el valor más alto que puede
-100–100% 0 Especique el valor de consigna.
0,05–3600,0 s Depende del
0,05–3600,0 s Depende del
0,0-400,0 Hz 0,0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100 Hz Introducir el valor máximo de frecuencia de salida. Si el
0,00-10,00 V 0,07 V Introduzca la tensión que corresponda al valor de
0,00-10,00 V 10,00 V Introduzca la tensión que corresponda al valor de
0,00-20,00 mA 4,00 mA Introduzca la intensidad que corresponda al valor de
0,00-20,00 mA 20,00 mA Introduzca la intensidad que corresponda al valor de
-4999–4999 0 Introduzca el valor de realimentación que corresponda a la
-4999–4999 50 Introduzca el valor de realimentación que corresponda a la
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
Uso
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d
(Ld), el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
Seleccione el modo de arranque del motor PM.
frecuencia pueda atrapar un motor en giro, por ejemplo
en aplicaciones de ventilador. Si PM está seleccionado,
este parámetro estará activado.
obtenerse sumando todas las referencias.
obtenerse sumando todas las referencias.
Tiempo de aceleración desde 0 hasta el
parámetro 1-23 Frecuencia motor nominal en motores
asíncronos. Tiempo de aceleración desde 0 hasta el
parámetro 1-25 Veloc. nominal motor en motores PM.
Tiempo de deceleración de rampa desde el
parámetro 1-23 Frecuencia motor nominal hasta 0 en
motores asíncronos. Tiempo de deceleración de rampa
desde el parámetro 1-25 Veloc. nominal motor hasta 0 en
motores PM.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
referencia bajo.
referencia alto.
referencia bajo.
referencia alto.
tensión o la intensidad ajustada en
parámetro 6-20 Terminal 54 escala baja V/
parámetro 6-22 Terminal 54 escala baja mA.
tensión o la intensidad ajustada en
parámetro 6-21 Terminal 54 escala alta V/
parámetro 6-23 Terminal 54 escala alta mA.
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 77

Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Rango Valor predeter-
minado
Parámetro 6-26 Terminal 54
tiempo ltro constante
Parámetro 6-29 Modo terminal54[0] Modo de intensidad
Parámetro 20-81 Ctrl. normal/
inverso de PID
Parámetro 20-83 Veloc.
arranque PID [Hz]
Parámetro 20-93 Ganancia
proporc. PID
Parámetro 20-94 PI Integral
Time
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
0,00-10,00 s 0,01 Introduzca la constante del tiempo de ltro.
[1] Modo tensión Seleccione si el terminal 54 se utiliza para entrada de
[1] Modo tensión
[0] Normal
[1] Inversa
0-200 Hz 0 Hz Introduzca la velocidad del motor que se debe alcanzar
0,00-10,00 0,01 Introduzca la ganancia proporcional del controlador de
0,1-999,0 s 999,0 s Introduzca el tiempo integral del controlador de procesos.
[0] Desactivado
[1] Activado
0,05-1,00 s 0,10 s
[0] Normal Seleccione [0] Normal para ajustar el control de proceso
[0] Desactivado
Uso
intensidad o de tensión.
para aumentar la velocidad de salida cuando el error de
proceso sea positivo. Seleccione [1] Inversa para reducir la
velocidad de salida.
como señal de arranque para iniciar el control de PI.
procesos. Se obtiene un control rápido con una ampli-
cación alta. Sin embargo, si la amplicación es demasiado
alta, puede que el proceso se vuelva inestable.
Obtenga control rápido mediante un tiempo integral
corto, aunque si es demasiado corto, el proceso es
inestable. Un tiempo integral demasiado largo desactiva la
acción de la integral.
–
–
Tabla 6.5 Asistente de conguración para aplicaciones de lazo cerrado
Conguración del motor
El asistente de conguración del motor le guía a través de los parámetros del motor necesarios.
Parámetro Rango Valor predeter-
minado
Parámetro 0-03 Ajustes
regionales
Parámetro 0-06 Tipo red [0]–[132] consulte la
[0] Internacional
[1] Norteamérica
Tabla 6.4.
0 –
Depende del
tamaño.
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
78 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Programación Guía de diseño
Parámetro Rango Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 79
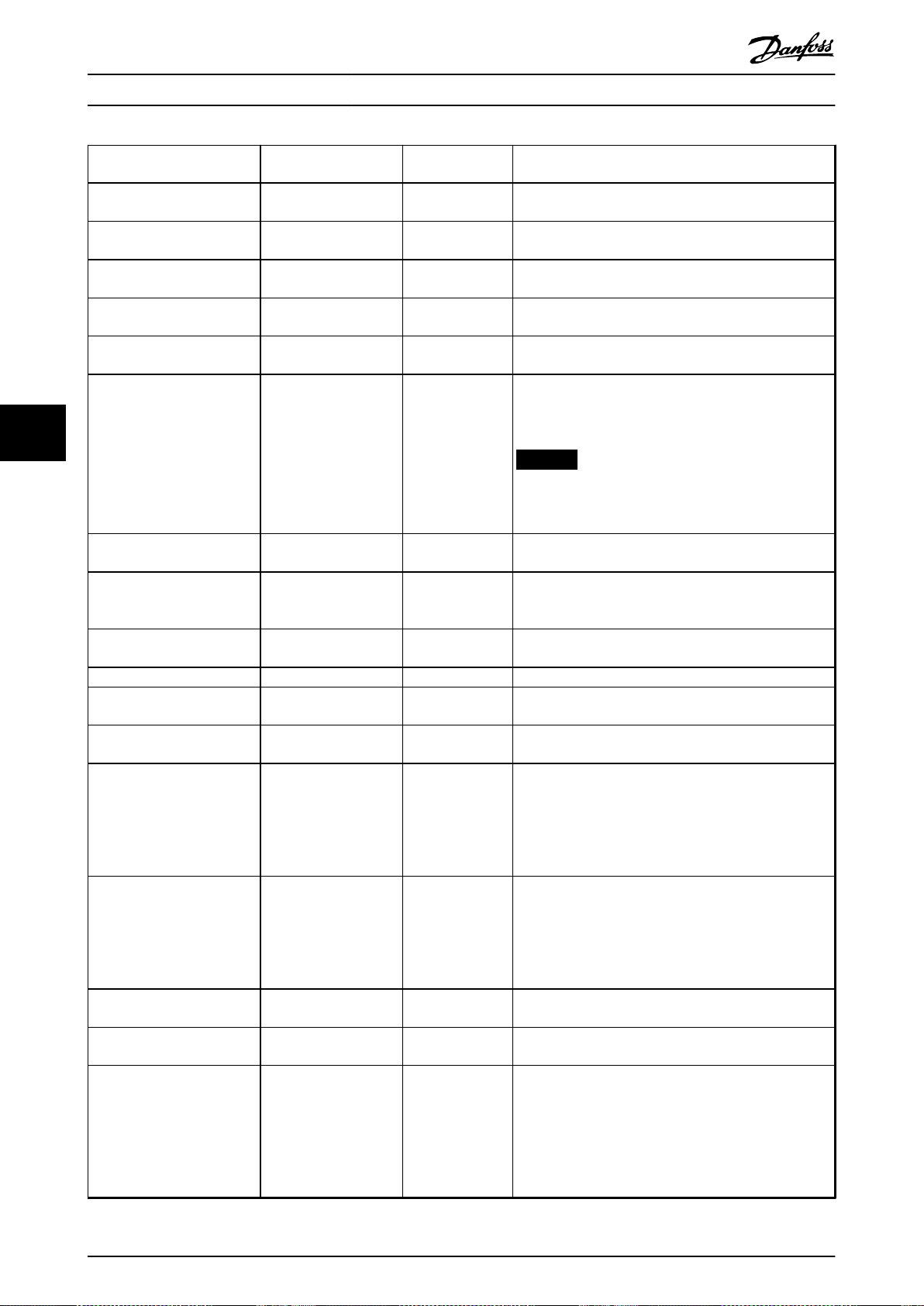
Programación
VLT® HVAC Basic Drive FC 101
6
Parámetro Rango Valor predeter-
minado
Parámetro 1-20 Potencia motor
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,12-110 kW / 0,16-150CVDepende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0,01-10000,00 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
Parámetro 1-49 Corriente en
inductancia mín.
0-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
20–200% 100% Este parámetro especica la curva de saturación de los
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d. Obtenga el
valor de la hoja de datos del motor de magnetización
permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d
(Ld), el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
80 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Programación Guía de diseño
Parámetro Rango Valor predeter-
minado
Parámetro 1-70 Modo de inicio [0] Detección de rotor
[1] Parking
Parámetro 1-73 Motor en giro [0] Desactivado
[1] Activado
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
0,05–3600,0 s Depende del
0,05–3600,0 s Depende del
0,0-400,0 Hz 0,0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100,0 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100,0 Hz Introducir el valor máximo de frecuencia de salida. Si el
[0] Desactivado
[1] Activado
0,05-1,00 s 0,10 s
[0] Detección de
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
[0] O
Uso
Seleccione el modo de arranque del motor PM.
frecuencia pueda atrapar un motor en giro.
Tiempo de aceleración desde 0 hasta el
parámetro 1-23 Frecuencia motor nominal.
Tiempo de deceleración desde el
parámetro 1-23 Frecuencia motor nominal a 0.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
–
–
6
6
Tabla 6.6 Ajustes del asistente de conguración del motor
Cambios realizados
En la función de cambios realizados se enumeran todos los
parámetros modicados desde los ajustes predeterminados.
La lista muestra únicamente los parámetros que
•
se han cambiado en el ajuste de edición actual.
No se indican los parámetros que se han
•
restablecido a los valores predeterminados.
El mensaje Vacío indica que no se ha cambiado
•
ningún parámetro.
Cambio de los ajustes de parámetros
1. Para entrar en Quick Menu (Menú rápido), pulse
la tecla [Menu] hasta que el indicador de la
pantalla se coloque encima de Quick Menu.
2.
Pulse [▲] [▼] para seleccionar el asistente, el
ajuste de lazo cerrado, los ajustes de motor o los
cambios realizados.
3. Pulse [OK].
4.
Pulse [▲] [▼] para desplazarse por los parámetros
del Menú rápido.
5. Pulse [OK] para seleccionar un parámetro.
6.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
7. Pulse [OK] para aceptar el cambio.
8. Pulse [Back] dos veces para entrar en Estado, o
bien pulse [Menu] una vez para entrar en el
Menú principal.
El menú principal proporciona acceso a todos los
parámetros
1. Pulse la tecla [Menu] hasta que el indicador de la
pantalla se coloque sobre Menú principal.
2.
Pulse [▲] [▼] para desplazarse por los grupos de
parámetros.
3. Pulse [OK] para seleccionar un grupo de
parámetros.
4.
Pulse [▲] [▼] para desplazarse por los parámetros
de ese grupo en concreto.
5. Pulse [OK] para seleccionar el parámetro.
6.
Pulse [▲] [▼] para ajustar/cambiar el valor del
parámetro.
7. Pulse [OK] para aceptar el cambio.
6.3.3 Menú principal
Pulse [Menu] para acceder al menú principal y programar
todos los parámetros. Se puede acceder cómodamente a
los parámetros del menú principal, salvo que se haya
creado una contraseña mediante el
parámetro 0-60 Contraseña menú principal.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 81

Programación
VLT® HVAC Basic Drive FC 101
6
Para la mayoría de aplicaciones, no es necesario acceder a
los parámetros del menú principal. El menú rápido
proporciona el acceso más rápido y sencillo a los
parámetros más habituales.
6.4 Transferencia rápida de ajustes de
parámetros entre varios convertidores
de frecuencia
Una vez
convertidor de frecuencia, almacene los datos en el LCP o
en un PC mediante el Software de conguración MCT 10.
Transferencia de datos del convertidor de frecuencia al
LCP
Conecte el LCP a otro convertidor de frecuencia y copie los
ajustes de parámetros en dicho convertidor.
Transferencia de datos del LCP al convertidor de
frecuencia
6.5
nalizado el proceso de conguración de un
1. Vaya al parámetro 0-50 Copia con LCP.
2. Pulse [OK].
3. Seleccione [1] Trans. LCP tod. par.
4. Pulse [OK].
1. Vaya al parámetro 0-50 Copia con LCP.
2. Pulse [OK].
3. Seleccione [2] Tr d LCP tod. par.
4. Pulse [OK].
Lectura de datos y programación de
parámetros indexados
Seleccione el parámetro, pulse [OK] y pulse [▲] / [▼] para
desplazarse por los valores indexados. Para cambiar el
valor del parámetro, seleccione el valor indexado y pulse
[OK]. Para cambiar el valor, pulse [▲] / [▼]. Pulse [OK] para
aceptar el nuevo ajuste. Pulse [Cancel] (Cancelar) para
cancelar. Pulse [Back] para salir del parámetro.
Inicialización a los ajustes
6.6
predeterminados
Existen dos modos de inicializar el convertidor de
frecuencia a los ajustes predeterminados.
Inicialización recomendada
1. Seleccione parámetro 14-22 Modo funcionamiento.
2. Pulse [OK].
3. Seleccione [2] Inicialización y pulse [OK].
4. Desconecte el convertidor de frecuencia y espere
a que se apague la pantalla.
5. Vuelva a conectar la fuente de alimentación de
red. El convertidor de frecuencia ya está
reiniciado, salvo los siguientes parámetros:
Parámetro 1-06 En sentido horario
•
Parámetro 8-30 Protocolo
•
Parámetro 8-31 Dirección
•
Parámetro 8-32 Velocidad en baudios
•
Parámetro 8-33 Paridad / Bits de parada
•
Parámetro 8-35 Retardo respuesta mín.
•
Parámetro 8-36 Retardo respuesta máx.
•
Parámetro 8-37 Retardo máximo
•
intercarac.
Parámetro 8-70 Instancia BACnet
•
Parámetro 8-72 Máx. maest. MS/TP
•
Parámetro 8-73 Máx. tramas info MS/TP
•
Parámetro 8-74 "Startup I am"
•
Parámetro 8-75 Contraseña inicializac.
•
Parámetro 15-00 Horas de funcionamiento
•
a parámetro 15-05 Sobretensión
Parámetro 15-03 Arranques
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión
•
Parámetro 15-30 Reg. alarma: código de
•
fallo
Grupo de parámetros 15-4* Id. dispositivo
•
Parámetro 18-10 Registro modo incendio:
•
Evento
Inicialización con dos dedos:
La otra forma de inicializar el convertidor de frecuencia a
los ajustes predeterminados es mediante la inicialización
con dos dedos:
1. Desconecte la alimentación del convertidor de
frecuencia.
2. Pulse [OK] y [Menu].
3. Conecte la alimentación del convertidor de
frecuencia mientras sigue presionando las teclas
durante 10 s.
4. El convertidor de frecuencia ya está reiniciado,
salvo los siguientes parámetros:
Parámetro 1-06 En sentido horario
•
Parámetro 15-00 Horas de funcionamiento
•
Parámetro 15-03 Arranques
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión
•
Grupo de parámetros 15-4* Id. dispositivo
•
Parámetro 18-10 Registro modo incendio:
•
Evento
82 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Programación Guía de diseño
La inicialización de los parámetros se conrma con la
visualización en la pantalla de la alarma 80: Equ. inicializado
tras el ciclo de potencia.
6
6
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 83

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
7 Instalación y ajuste de RS485
7.1 RS485
7.1.1 Descripción general
RS485 es una interfaz de bus de dos cables compatible
con la topología de red multipunto, es decir, en la que los
nodos se pueden conectar como un bus o mediante cables
conectados a una línea troncal común. Se pueden conectar
un total de 32 nodos a un único segmento de red.
Los repetidores dividen los segmentos de la red.
AVISO!
Cada repetidor funciona como un nodo dentro del
segmento en el que está instalado. Cada nodo conectado
77
en una red determinada debe tener una dirección de
nodo única en todos los segmentos.
Cada segmento debe terminarse en ambos extremos,
utilizando bien el conmutador de terminación (S801) del
convertidor de frecuencia, o bien una red predispuesta de
resistencias de terminación. Utilice siempre cable de par
trenzado y apantallado (STP) para el cableado del bus y
siga unas buenas prácticas de instalación.
Es importante disponer de una conexión a tierra de baja
impedancia para el apantallamiento de cada nodo. Conecte
una gran supercie del apantallamiento a la toma de tierra,
por ejemplo, mediante una abrazadera de cables o un
prensacables conductor. Utilice cables ecualizadores de
potencial para mantener el mismo potencial de masa en
toda la red, especialmente en instalaciones con cables
largos.
Para evitar diferencias de impedancia, utilice siempre el
mismo tipo de cable en toda la red. Cuando conecte un
motor al convertidor de frecuencia, utilice siempre cable
de motor apantallado.
7.1.2 Conexión de red
Conecte el convertidor de frecuencia a la red RS485 de la
siguiente forma (consulte también la Ilustración 7.1):
1. Conecte los cables de señal al terminal 68 (P+) y
al terminal 69 (N–) en la placa de control
principal del convertidor de frecuencia.
2. Conecte el apantallamiento de cables a las
abrazaderas.
AVISO!
Para reducir el ruido entre los conductores, utilice cables
de par trenzado apantallados.
Ilustración 7.1 Conexión de red
7.1.3 Ajuste del hardware del convertidor
de frecuencia
Utilice el interruptor DIP terminador de la placa de control
principal del convertidor de frecuencia para terminar el bus
RS485.
Cable Par trenzado apantallado (STP)
Impedancia [Ω]
Longitud del
cable
[m (ft)]
Tabla 7.1 Especicaciones del cable
84 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
120
Máximo 1200 (3937) (incluidos los ramales
conectables).
Máximo 500 (1640) entre estaciones.
Ilustración 7.2 Ajustes de fábrica del interruptor terminador
El ajuste de fábrica del interruptor DIP está en OFF
(desactivado).

195NA493.11
1
2
90°
Instalación y ajuste de RS4... Guía de diseño
7.1.4 Ajustes de parámetros para la
comunicación Modbus
Parámetro Función
Parámetro 8-30 Pro
tocolo
Parámetro 8-31 Dir
ección
Parámetro 8-32 Vel
ocidad en baudios
Parámetro 8-33 Pari
dad / Bits de
parada
Seleccionar el protocolo de aplicación que
se ejecute para la interfaz RS485.
Ajustar la dirección del nodo.
AVISO!
El intervalo de direcciones depende
del protocolo seleccionado en el
parámetro 8-30 Protocolo.
Ajustar la velocidad en baudios.
AVISO!
La velocidad en baudios predeterminada depende del protocolo
seleccionado en el
parámetro 8-30 Protocolo.
Ajustar la paridad y el número de bits de
parada.
AVISO!
La selección predeterminada depende
del protocolo seleccionado en el
parámetro 8-30 Protocolo.
7.1.5 Precauciones de compatibilidad
electromagnética (EMC)
AVISO!
Cumpla las disposiciones nacionales y locales pertinentes
relativas a la conexión a tierra de protección. Si no se
efectúa de forma correcta la conexión a toma de tierra,
puede producirse una degradación de la comunicación,
así como daños en el equipo. Para evitar el acoplamiento
de ruido de alta frecuencia entre los cables, mantenga el
cable de comunicación RS485 alejado de los cables de la
resistencia de frenado y del motor. Normalmente, una
distancia de 200 mm (8 in) será suciente. Mantenga la
mayor distancia posible entre los cables, especialmente
cuando los cables se instalen en paralelo y cubran largas
distancias. Si el cruce es inevitable, el cable RS485 debe
cruzar los cables de motor o de resistencia de frenado en
un ángulo de 90 º.
7 7
Parámetro 8-35 Ret
ardo respuesta mín.
Parámetro 8-36 Ret
ardo respuesta
máx.
Parámetro 8-37 Ret
ardo máximo
intercarac.
Especicar un tiempo mínimo de retardo
entre la recepción de una petición y la
transmisión de la respuesta. Esta función se
utiliza para reducir el retardo de procesamiento del módem.
Especicar un tiempo de retardo máximo
entre la transmisión de una petición y la
recepción de una respuesta.
Si se interrumpe la transmisión, especique
un tiempo de retardo máximo entre dos
bytes recibidos para asegurar el tiempo
límite.
AVISO!
La selección predeterminada depende
Tabla 7.2 Ajustes de los parámetros de comunicación Modbus
del protocolo seleccionado en el
parámetro 8-30 Protocolo.
1 Cable de eldbus
2 Distancia mínima: 200 mm (8 pulgadas)
Ilustración 7.3 Distancia mínima entre los cables de comunicación y de alimentación
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 85

0 1 32 4 5 6 7
195NA036.10
Bit de
inicio
Paridad
par
Bit de
parada
Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
7.2 Protocolo FC
7.2.1 Descripción general
El protocolo FC, también conocido como bus FC o bus
estándar, es el
técnica de acceso conforme al principio maestro-esclavo
para las comunicaciones mediante un bus serie.
Pueden conectarse al bus un maestro y un máximo de 126
esclavos. El maestro selecciona individualmente los
esclavos mediante un carácter de dirección incluido en el
telegrama. Un esclavo no puede transmitir por sí mismo
sin recibir previamente una petición para hacerlo, y
tampoco es posible la transmisión directa de mensajes
entre esclavos. Las comunicaciones se producen en modo
semidúplex.
La función de maestro no se puede transmitir a otro nodo
(sistema de maestro único).
eldbus estándar de Danfoss. Dene una
77
La capa física es RS485, de manera que se utiliza el puerto
RS485 integrado en el convertidor de frecuencia. El
protocolo FC admite varios formatos de telegrama:
un formato breve de 8 bytes para datos de
•
proceso,
un formato largo de 16 bytes, que también
•
incluye un canal de parámetros,
un formato para textos.
•
7.2.2 FC con Modbus RTU
El protocolo FC proporciona acceso al código de control y
a la referencia del bus del convertidor de frecuencia.
El código de control permite al maestro del Modbus
controlar varias funciones importantes del convertidor de
frecuencia:
Arranque.
•
Detener el convertidor de frecuencia de diversas
•
formas:
- Paro por inercia.
- Parada rápida.
- Parada por freno de CC.
- Parada (de rampa) normal.
Reinicio tras desconexión por avería.
•
Funcionamiento a diferentes velocidades
•
predeterminadas.
Funcionamiento en sentido inverso.
•
Cambio del ajuste activo.
•
Control de los dos relés integrados en el
•
convertidor de frecuencia.
La referencia de bus se utiliza normalmente para el control
de la velocidad. También es posible acceder a los
parámetros, leer sus valores y, donde es posible, escribir
valores en ellos. El acceso a los parámetros ofrece una
amplia variedad de opciones de control, incluido el control
del valor de consigna del convertidor de frecuencia cuando
se utiliza el controlador PI interno.
7.3 Ajustes de parámetros para activar el
protocolo
Para activar el protocolo FC en el convertidor de
frecuencia, ajuste los siguientes parámetros.
Parámetro Ajuste
Parámetro 8-30 Protocolo FC
Parámetro 8-31 Dirección 1–126
Parámetro 8-32 Velocidad en baudios 2400–115200
Paridad par, 1 bit de
Parámetro 8-33 Paridad / Bits de parada
Tabla 7.3 Parámetros para activar el protocolo
parada (predeterminado)
7.4 Estructura de formato de mensaje del
protocolo FC
7.4.1 Contenido de un carácter (byte)
La transferencia de cada carácter comienza con un bit de
inicio. Entonces se transeren 8 bits de datos, que corresponden a un byte. Cada carácter está asegurado mediante
un bit de paridad. Este bit se ajusta a 1 cuando alcanza la
paridad. La paridad se da cuando hay un número
equivalente de unos en los 8 bits de datos y en el bit de
paridad en total. Un bit de parada completa un carácter,
por lo que consta de 11 bits en total.
Ilustración 7.4 Contenido de un carácter
7.4.2 Estructura de telegramas
Cada telegrama tiene la siguiente estructura:
Carácter de inicio (STX) = 02 hex
•
Un byte que indica la longitud del telegrama
•
(LGE).
Un byte que indica la dirección del convertidor
•
de frecuencia (ADR).
Después aparecen varios bytes de datos (en número
variable según el tipo de telegrama).
Un byte de control de datos (BCC) completa el telegrama.
86 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

STX LGE ADR D ATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Instalación y ajuste de RS4... Guía de diseño
Ilustración 7.5 Estructura de telegramas
Código de control y valor de referencia (de
•
maestro a esclavo).
Código de estado y frecuencia de salida actual
•
(de esclavo a maestro).
7.4.3 Longitud del telegrama (LGE)
La longitud de un telegrama es el número de bytes de
datos más el byte de dirección ADR, más el byte de control
de datos BCC.
4 bytes de datos LGE = 4+1+1 = 6 bytes
12 bytes de datos LGE = 12+1+1 = 14 bytes
Telegramas que contienen texto
Tabla 7.4 Longitud de los telegramas
1) El 10 representa los caracteres jos, mientras que «n» es variable
(dependiendo de la longitud del texto).
101)+n bytes
7.4.4 Dirección del convertidor de
frecuencia (ADR)
Formato de dirección 1-126
Bit 7 = 1 (formato de dirección 1-126 activado).
•
Bit 0-6 = dirección del convertidor de frecuencia
•
1-126.
Bit 0-6 = 0 transmisión.
•
El esclavo devuelve el byte de la dirección sin cambios al
maestro en el telegrama de respuesta.
7.4.5 Byte de control de datos (BCC)
Ilustración 7.6 Bloque de proceso
Bloque de parámetros
El bloque de parámetros se utiliza para transferir
parámetros entre un maestro y un esclavo. El bloque de
datos está formado por 12 bytes (6 códigos) y también
contiene el bloque de proceso.
Ilustración 7.7 Bloque de parámetros
Bloque de texto
El bloque de texto se utiliza para leer o escribir textos
mediante el bloque de datos.
Ilustración 7.8 Bloque de texto
7.4.7 El campo PKE
El campo PKE contiene dos subcampos:
Orden de parámetro y respuesta (AK)
•
Número de parámetro (PNU)
•
7 7
La suma de vericación (checksum) se calcula como una
función XOR. Antes de que se reciba el primer byte del
telegrama, la suma de vericación calculada es 0.
7.4.6 El campo de datos
La estructura de los bloques de datos depende del tipo de
telegrama. Hay tres tipos de telegrama, y cada uno de ellos
se aplica tanto a los telegramas de control
(maestro⇒esclavo) como a los de respuesta
(esclavo⇒maestro).
Los 3 tipos de telegrama son:
Bloque de proceso (PCD)
El PCD está formado por un bloque de datos de cuatro
bytes (2 códigos) y contiene:
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 87
Ilustración 7.9 Campo PKE
Los bits del n.º 12 al 15 transeren órdenes de parámetros
del maestro al esclavo y devuelven las respuestas
procesadas del esclavo al maestro.
Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
Órdenes de parámetros maestro⇒esclavo
Número de bit Orden de parámetro
15 14 13 12
0 0 0 0 Sin orden.
0 0 0 1 Leer valor de parámetro.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Leer texto.
Tabla 7.5 Órdenes de parámetro
77
Número de bit Respuesta
15 14 13 12
0 0 0 0 Sin respuesta.
0 0 0 1 Valor de parámetro transferido (código).
0 0 1 0
0 1 1 1 La orden no se puede ejecutar.
1 1 1 1 Texto transferido.
Tabla 7.6 Respuesta
Escribir valor de parámetro en RAM
(código).
Escribir valor de parámetro en RAM
(doble código).
Escribir valor de parámetro en RAM y
EEPROM (doble código).
Escribir valor de parámetro en RAM y
EEPROM (código).
Respuesta esclavo⇒maestro
Valor de parámetro transferido (doble
código).
Código de fallo Especicación del convertidor
254 Atributo desconocido.
255 Sin error.
Tabla 7.7 Informe del esclavo
7.4.8 Número de parámetro (PNU)
Los bits 0-11 transeren los números de los parámetros. La
función de los parámetros correspondientes se dene en la
descripción de los parámetros en el capétulo 6 Progra-
mación.
7.4.9 Índice (IND)
El índice se utiliza junto con el número de parámetro para
el acceso de lectura/escritura a los parámetros con un
índice, por ejemplo, parámetro 15-30 Reg. alarma: código de
fallo. El índice consta de 2 bytes: un byte bajo y un byte
alto.
Solo el byte bajo se utiliza como índice.
7.4.10 Valor de parámetro (PWE)
El bloque de valor de parámetro consta de 2 códigos (4
bytes) y el valor depende de la orden denida (AK). El
maestro solicita un valor de parámetro cuando el bloque
Si la orden no se puede ejecutar, el esclavo envía la
respuesta 0111 Orden no ejecutable y emite los siguientes
informes de fallo de la Tabla 7.7.
PWE no contiene ningún valor. Para cambiar el valor de un
parámetro (escritura), escriba el nuevo valor en el bloque
PWE y envíelo del maestro al esclavo.
Código de fallo Especicación del convertidor
0 Número de parámetro ilegal.
1 El parámetro no puede modicarse
2 Se ha superado el límite superior o inferior.
3 Subíndice deteriorado.
4 Sin matriz.
5 Tipo de dato erróneo.
6 Sin uso.
7 Sin uso.
9 Elemento de descripción no disponible.
11 Sin acceso de escritura de parámetros.
15 No hay texto disponible.
17 No aplicable durante el funcionamiento.
18 Otros errores.
100 –
>100 –
130 No hay acceso al bus para este parámetro.
131
132 No hay acceso al LCP.
252 Receptor desconocido.
253 Solicitud no admitida.
No es posible escribir en el ajuste de
fábrica.
Si el esclavo responde a una solicitud de parámetro (orden
de lectura), se transere el valor de parámetro actual del
bloque PWE y es devuelto al maestro. Si un parámetro
contiene varias opciones de datos, por ejemplo el
parámetro 0-01 Idioma, seleccione el valor de dato
escribiéndolo en el bloque PWE. La comunicación serie
solo es capaz de leer parámetros que tienen el tipo de
dato 9 (cadena de texto).
De Parámetro 15-40 Tipo FC a parámetro 15-53 N.º serie
tarjeta potencia contienen el tipo de dato 9.
Por ejemplo, se puede leer el tamaño del convertidor de
frecuencia y el intervalo de tensión de red en
parámetro 15-40 Tipo FC. Cuando se
transere una cadena
de texto (lectura), la longitud del telegrama varía, y los
textos pueden tener distinta longitud. La longitud del
telegrama se dene en su segundo byte (LGE). Cuando se
utiliza la transferencia de texto, el carácter de índice indica
si se trata de una orden de lectura o de escritura.
Para leer un texto a través del bloque PWE, ajuste la orden
del parámetro (AK) a F Hex. El carácter de índice de byte
alto debe ser 4.
88 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Instalación y ajuste de RS4... Guía de diseño
7.4.11 Tipos de datos admitidos por el
convertidor de frecuencia
«Sin signo» signica que el telegrama no tiene ningún
signo de funcionamiento.
Tipos de datos Descripción
3 Entero 16
4 Entero 32
5 Sin signo 8
6 Sin signo 16
7 Sin signo 32
9 Cadena de texto
Tabla 7.8 Tipos de datos
7.4.12 Conversión
La Guía de programación contiene las descripciones de los
atributos de cada parámetro. Los valores de parámetros
que se transeren son únicamente números enteros. Para
transferir decimales se utilizan factores de conversión.
El Parámetro 4-12 Límite bajo veloc. motor [Hz] tiene un
factor de conversión de 0,1. Para preajustar la frecuencia
mínima a 10 Hz,
conversión de 0,1 signica que el valor transferido se
multiplica por 0,1. El valor 100 se considerará, por tanto,
como 10,0.
transera el valor 100. Un factor de
PCD 1 PCD 2
Telegrama de control (código de control
maestro⇒esclavo)
Código de estado de telegrama de
control (esclavo⇒maestro)
Tabla 7.10 Códigos de proceso (PCD)
Valor de referencia
Frecuencia de salida
actual
7.5 Ejemplos
7.5.1 Escritura del valor de un parámetro.
Cambie parámetro 4-14 Límite alto veloc. motor [Hz] a
100 Hz.
Escriba los datos en EEPROM.
PKE=E19E hex - Escriba un único código en el
parámetro 4-14 Límite alto veloc. motor [Hz]:
IND = 0000 hex.
•
PWEALTO = 0000 hex.
•
PWEBAJO = 03E8 hex.
•
Valor de dato 1000, correspondiente a 100 Hz, consulte el
capétulo 7.4.12 Conversión.
El telegrama tendrá el aspecto de la Ilustración 7.10.
7 7
Índice de conversión Factor de conversión
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabla 7.9 Conversión
7.4.13 Códigos de proceso (PCD)
El bloque de códigos de proceso se divide en dos bloques
de 16 bits, que siempre se suceden en la secuencia
denida.
Ilustración 7.10 Telegrama
AVISO!
El Parámetro 4-14 Límite alto veloc. motor [Hz] es un
único código y la orden del parámetro para grabar en la
EEPROM es E. El Parámetro 4-14 Límite alto veloc. motor
[Hz] es 19E en hexadecimal.
La respuesta del esclavo al maestro se muestra en la
Ilustración 7.11.
Ilustración 7.11 Respuesta del maestro
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 89

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
7.5.2 Lectura del valor de un parámetro
Lea el valor en parámetro 3-41 Rampa 1 tiempo acel. rampa.
PKE=1155 hex - Lea el valor del parámetro en el
parámetro 3-41 Rampa 1 tiempo acel. rampa:
IND = 0000 hex.
•
PWE
•
PWE
•
Ilustración 7.12 Telegrama
Si el valor del
77
es 10 s, la respuesta del esclavo al maestro se indica en la
Ilustración 7.13.
Ilustración 7.13 Respuesta
3E8 Hex corresponde a 1000 en decimal. El índice de
conversión para el parámetro 3-41 Rampa 1 tiempo acel.
rampa es –2, es decir, 0,01.
Parámetro 3-41 Rampa 1 tiempo acel. rampa es del tipo Sin
signo 32.
= 0000 hex.
ALTO
= 0000 hex.
BAJO
parámetro 3-41 Rampa 1 tiempo acel. rampa
7.6.2 Descripción general
Independientemente de los tipos de redes de comunicación física, en este apartado se describe el proceso que
un controlador utiliza para solicitar acceso a otro
dispositivo. Esto incluye cómo el Modbus RTU responde a
las solicitudes de otro dispositivo y cómo se detectarán y
se informará de los errores que se produzcan. También se
establece un formato común para el diseño y los
contenidos de los campos de telegramas.
Durante las comunicaciones en una red Modbus RTU, el
protocolo:
Determina cómo aprende cada controlador su
•
dirección de dispositivo.
Reconoce un telegrama dirigido a él.
•
Determina qué acciones tomar.
•
Extrae cualquier dato o información incluidos en
•
el telegrama.
Si se requiere una respuesta, el controlador construirá el
telegrama de respuesta y lo enviará.
Los controladores se comunican utilizando una técnica
maestro/esclavo en la que solo el maestro puede iniciar
transacciones (llamadas peticiones). Los esclavos responden
proporcionando los datos pedidos al maestro o realizando
la acción solicitada en la petición.
El maestro puede dirigirse a un esclavo individualmente o
puede iniciar la transmisión de un telegrama a todos los
esclavos. Los esclavos devuelven una respuesta a las
peticiones que se les dirigen individualmente. No se
responde a las peticiones transmitidas por el maestro.
Visión general de Modbus RTU
7.6
7.6.1 Introducción
Danfoss da por sentado que el controlador instalado es
compatible con las interfaces mencionadas en este
documento y que se siguen estrictamente todos los
requisitos y limitaciones estipulados tanto en el
controlador como en el convertidor de frecuencia. El
Modbus RTU (Remote Terminal Unit) integrado está
diseñado para comunicarse con cualquier controlador
compatible con las interfaces denidas en este documento.
Se da por supuesto que el usuario tiene pleno conocimiento de las capacidades y limitaciones del controlador.
El protocolo Modbus RTU establece el formato de la
petición del maestro suministrando la siguiente
información:
La dirección (o transmisión) del dispositivo.
•
Un código de función en el que se dene la
•
acción solicitada.
Cualquier dato que se deba enviar.
•
Un campo de comprobación de errores.
•
El telegrama de respuesta del esclavo también se
construye utilizando el protocolo Modbus. Contiene
campos que conrman la acción realizada, los datos que se
hayan de devolver y un campo de comprobación de
errores. Si se produce un error en la recepción del
telegrama o si el esclavo no puede realizar la acción
solicitada, este genera y envía un mensaje de error. Si no,
se produce un error de tiempo límite.
90 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Instalación y ajuste de RS4... Guía de diseño
7.6.3 Convertidor de frecuencia con
Modbus RTU
El convertidor de frecuencia se comunica en formato
Modbus RTU a través de la interfaz RS485 integrada.
Modbus RTU proporciona acceso al código de control y a
la referencia de bus del convertidor de frecuencia.
El código de control permite al maestro del Modbus
controlar varias funciones importantes del convertidor de
frecuencia:
Arranque.
•
Varias paradas:
•
- Paro por inercia.
- Parada rápida.
- Parada por freno de CC.
- Parada (de rampa) normal.
Reinicio tras desconexión por avería.
•
Funcionamiento a diferentes velocidades
•
predeterminadas.
Funcionamiento en sentido inverso.
•
Cambio del ajuste activo.
•
Controlar el relé integrado del convertidor de
•
frecuencia.
La referencia de bus se utiliza normalmente para el control
de la velocidad. También es posible acceder a los
parámetros, leer sus valores y, en su caso, escribir valores
en ellos. El acceso a los parámetros ofrece una amplia
variedad de opciones de control, incluido el control del
valor de consigna del convertidor de frecuencia cuando se
utiliza el controlador PI interno.
Estructura de formato de mensaje de
7.8
Modbus RTU
7.8.1 Introducción
Los controladores están congurados para comunicarse en
la red Modbus utilizando el modo RTU (remote terminal
unit), donde cada byte de un telegrama contendrá dos
caracteres hexadecimales de 4 bits. El formato de cada
byte se muestra en Tabla 7.12.
Bit de
inicio
Tabla 7.12 Formato de cada byte
Sistema de codi-
cación
Bits por byte
Campo de
comprobación de
errores
Tabla 7.13 Detalles del byte
Byte de datos Parada
Binario de 8 bits, hexadecimal 0-9, A-F.
Dos caracteres hexadecimales contenidos en
cada campo de 8 bits del telegrama.
1 bit de inicio.
•
8 bits de datos, el menos signicativo
•
enviado primero.
1 bit de paridad par/impar; sin bit de no
•
paridad.
1 bit de parada si se utiliza paridad; 2
•
bits si no se usa paridad.
Comprobación de redundancia cíclica (CRC).
/
parida
d
Parad
a
7 7
Conguración de red
7.7
Para activar Modbus RTU en el convertidor de frecuencia,
ajuste los siguientes parámetros:
Parámetro Ajuste
Parámetro 8-30 Protocolo Modbus RTU
Parámetro 8-31 Dirección 1–247
Parámetro 8-32 Velocidad en
baudios
Parámetro 8-33 Paridad / Bits de
parada
Tabla 7.11 Conguración de red
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 91
2400–115200
Paridad par, 1 bit de parada
(predeterminado)
7.8.2 Estructura de telegrama Modbus RTU
El dispositivo emisor coloca un telegrama Modbus RTU en
un formato con un comienzo y un punto nal conocidos.
Esto permite a los dispositivos receptores comenzar al
principio del telegrama, leer la parte de la dirección,
determinar a qué dispositivo se dirige (o a todos, si el
telegrama es una transmisión) y reconocer cuándo se ha
completado el telegrama. Los telegramas parciales se
detectan y se determinan los errores resultantes. Los
caracteres que se van a transmitir deben estar en formato
hexadecimal 00-FF en cada campo. El convertidor de
frecuencia monitoriza continuamente el bus de red,
también durante los intervalos silenciosos. Cuando el
primer campo (el campo de dirección) es recibido, cada
convertidor de frecuencia o dispositivo lo descodica para
determinar a qué dispositivo se dirige. Los telegramas
Modbus RTU dirigidos a cero son telegramas de
transmisión. No se permiten respuestas a los telegramas de
Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
transmisión. En la Tabla 7.14 se muestra un formato típico
de telegrama.
bits
Compro-
bación
CRC
16 bits
Fin
T1-T2-T3-
-T4
Arranqu
T1-T2-T3-
Tabla 7.14 Estructura de telegrama típica de Modbus RTU
Dirección Función Datos
e
-T4
8 bits 8 bits
N × 8
7.8.3 Campo de arranque/parada
El telegrama comienza con un periodo de silencio de al
menos 3,5 intervalos de caracteres. Este periodo silencioso
se presenta como un múltiplo de intervalos de caracteres a
la velocidad en baudios seleccionada (mostrada como
Arranque T1-T2-T3-T4). El primer campo que se transmite
77
es la dirección del dispositivo. Tras el último carácter
transmitido, un periodo similar de al menos 3,5 intervalos
de carácter marca el n del telegrama. Después de este
periodo, puede comenzar otro telegrama.
Transmita el formato completo de telegrama como un
completo. Si se produce un periodo de más de 1,5
intervalos de carácter antes de que se complete el formato,
el dispositivo receptor descarta el telegrama incompleto y
asume que el siguiente byte es el campo de dirección de
un nuevo telegrama. De forma similar, si un nuevo
telegrama comienza antes de 3,5 intervalos de carácter tras
un telegrama previo, el dispositivo receptor lo considerará
una continuación del telegrama anterior. Esto produce un
error de tiempo límite (falta de respuesta por parte del
esclavo), porque el valor del campo CRC nal no es válido
para los telegramas combinados.
ujo
desde un maestro a un dispositivo esclavo, el campo de
código de función le indica al esclavo la clase de acción
que debe realizar. Cuando el esclavo responde al maestro,
utiliza el campo de código de función para indicar una
respuesta normal (sin error), o que se ha producido un
error de alguna clase (esta respuesta se denomina
«excepción»).
Para dar una respuesta normal, el esclavo simplemente
devuelve el código de función original. Para responder con
una excepción, el esclavo devuelve un código equivalente
al de la función original, pero con su bit más signicativo
cambiado a 1 lógico. Además, el esclavo pone un código
único en el campo de datos del telegrama de respuesta.
Este código le indica al maestro el tipo de error ocurrido o
la razón de la excepción. Consulte también el
capétulo 7.8.11 Códigos de función admitidos por Modbus
RTU y el capétulo 7.8.12 Códigos de excepción Modbus.
7.8.6 Campo de datos
El campo de datos se construye utilizando grupos de dos
dígitos hexadecimales, en el intervalo de 00 a FF en
hexadecimal. Estos dígitos están hechos con un carácter
RTU. El campo de datos de los telegramas enviados desde
un maestro a un dispositivo esclavo contiene información
más detallada que el esclavo debe utilizar para actuar en
consecuencia.
Dicha información puede incluir elementos como:
Direcciones de registro o de bobinas.
•
La cantidad de elementos que se deben manejar.
•
El recuento de bytes de datos reales del campo.
•
7.8.7 Campo de comprobación CRC
7.8.4 Campo de dirección
Los telegramas incluyen un campo de comprobación de
El campo de dirección del formato de un telegrama
contiene 8 bits. Las direcciones válidas de dispositivos
esclavos están en el rango de 0 a 247 decimal. Los
dispositivos esclavos individuales tienen direcciones
asignadas en un rango entre 1 y 247. El cero se reserva
para el modo de transmisión, que reconocen todos los
esclavos. Un maestro se dirige a un esclavo poniendo la
dirección de este en el campo de dirección del telegrama.
Cuando el esclavo envía su respuesta, pone su propia
dirección en dicho campo de dirección, para que el
maestro sepa qué esclavo le está contestando.
7.8.5 Campo de función
El campo de función del formato de un telegrama contiene
8 bits. Los códigos válidos están en el rango de 1 a FF. Los
campos de función se utilizan para enviar telegramas entre
el maestro y el esclavo. Cuando se envía un telegrama
errores, que opera según el método de comprobación de
redundancia cíclica (CRC). El campo CRC comprueba el
contenido de todo el telegrama. Se aplica independien-
temente del método de comprobación de paridad utilizado
para los caracteres individuales del telegrama. El
dispositivo transmisor calcula el valor de CRC y lo añade
como último campo en el telegrama. El dispositivo
receptor vuelve a calcular un CRC durante la recepción del
telegrama y compara el valor calculado con el valor
recibido en el campo CRC. Si los dos valores son distintos,
se produce un tiempo límite de bus. El campo de compro-
bación de errores contiene un valor binario de 16 bits
implementado como dos bytes de 8 bits. Tras la aplicación,
el byte de orden bajo del campo se añade primero,
seguido del byte de orden alto. El byte de orden alto del
CRC es el último byte que se envía en el telegrama.
92 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
Instalación y ajuste de RS4... Guía de diseño
7.8.8 Direccionamiento de bobinas
En Modbus, todos los datos están organizados en bobinas
y registros de retención. Las bobinas almacenan un solo
bit, mientras que los registros de retención alojan una
palabra de 2 bytes (es decir, 16 bits). Todas las direcciones
de datos de los telegramas Modbus están referenciadas a
cero. La primera aparición de un elemento de datos se
gestiona como elemento número cero. Por ejemplo: la
bobina conocida como «bobina 1» de un controlador
programable se direcciona como «bobina 0000» en el
campo de dirección de un telegrama Modbus. La bobina
127 decimal se trata como bobina 007E Hex (126 decimal).
El registro de retención 40001 se trata como registro 0000
en el campo de dirección del telegrama. El campo de
código de función ya especica una operación de registro
de retención. Por lo tanto, la referencia 4XXXX es implícita.
El registro de retención 40108 se procesa como un registro
006B Hex (107 decimal).
Número
de
bobina
Código de control del convertidor
1–16
17–32
33–48
49–64
66–65536 Reservado. –
de frecuencia (consulte la
Tabla 7.16).
Velocidad del convertidor de
frecuencia o intervalo de referencias
de valor de consigna 0x0-0xFFFF (–
200 %-~200 %).
Código de estado del convertidor
de frecuencia (consulte la
Tabla 7.17).
Modo de lazo abierto: frecuencia de
salida del convertidor de frecuencia.
Modo de lazo cerrado: señal de
realimentación del convertidor de
frecuencia.
Control de escritura de parámetro
(maestro a esclavo).
0 = los cambios en los parámetros
se escriben en la RAM del
65
convertidor de frecuencia.
1 = los cambios en los parámetros
se escriben en la RAM y la EEPROM
del convertidor de frecuencia.
Descripción
Dirección de la
señal
De maestro a
esclavo
De maestro a
esclavo
De esclavo a
maestro
De esclavo a
maestro
De maestro a
esclavo
Bobina 0 1
01 Referencia interna, bit menos signicativo (lsb)
02 Referencia interna, bit más signicativo (msb)
03 Freno de CC Sin freno de CC
04 Paro por inercia Sin paro por inercia
05 Parada rápida Sin parada rápida
06 Mantener la frecuencia No mantener la frecuencia
07 Parada de rampa Arranque
08 Sin reinicio Reset (Reiniciar)
09 Sin velocidad ja Velocidad ja
10 Rampa 1 Rampa 2
11 Datos no válidos Datos válidos
12 Relé 1 desactivado Relé 1 activado
13 Relé 2 desactivado Relé 2 activado
14 Ajuste del bit menos signicativo (lsb)
15 –
16 Sin cambio de sentido Cambio sentido
Tabla 7.16 Código de control del convertidor de frecuencia
(perl FC)
Bobina 0 1
33 Control no preparado Ctrl prep.
Convertidor de frecuencia
34
no preparado
35 Paro por inercia Cerrado seguro
36 Sin alarma Alarma
37 Sin uso Sin uso
38 Sin uso Sin uso
39 Sin uso Sin uso
40 Sin advertencia Advert
41 No en referencia En referencia
42 Modo manual Modo automático
Fuera de rango de
43
frecuencia
44 Detenido En funcionamiento
45 Sin uso Sin uso
46 Sin advertencia de tensión Exceso de tensión
47 No en límite de intensidad Límite intensidad
48 Nivel térmico OK Nivel térmico excesivo
Tabla 7.17 Código de estado del convertidor de frecuencia
(perl FC)
Convertidor de frecuencia
preparado
En rangos de frecuencia
7 7
Tabla 7.15 Registro de bobinas
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 93

Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
Dirección
del bus
0 1 40001 Reservado –
1 2 40002 Reservado –
2 3 40003 Reservado –
3 4 40004 Libre – –
4 5 40005 Libre – –
5 6 40006 Conguración de Modbus Lectura/escritura
6 7 40007 Último código de fallo
77
7 8 40008 Registro de último error
8 9 40009 Indicador de índice Lectura/escritura
9 10 40010 Parámetro 0-01 Idioma
19 20 40020 Libre – –
29 30 40030
Registro
de bus
1)
Registro
de PLC
Contenido Acceso Descripción
Reservado para convertidores de frecuencia antiguos
VLT® 5000 y VLT® 2800.
Reservado para convertidores de frecuencia antiguos
VLT® 5000 y VLT® 2800.
Reservado para convertidores de frecuencia antiguos
VLT® 5000 y VLT® 2800.
Solo TCP. Reservada para Modbus TCP
(parámetro 12-28 Grabar valores de datos y
parámetro 12-29 Almacenar siempre - almacenada, por
ejemplo, en la EEPROM).
Código de fallo recibido de la base de datos de
parámetros; consulte WHAT 38295 para obtener más
información.
Dirección de registro con que tuvo lugar el último error;
consulte WHAT 38296 para obtener información
detallada.
Subíndice de parámetros a los que acceder. Consulte
WHAT 38297 para obtener información detallada.
Parámetro 0-01 Idioma (Registro Modbus = 10 × número
de parámetro)
20 bytes de espacio reservado para un parámetro en el
mapa Modbus.
Parámetro 0-03 Ajustes regionales
20 bytes de espacio reservado para un parámetro en el
mapa Modbus.
Parámetro 0-03 Ajustes
regionales
Read only (Solo
lectura)
Read only (Solo
lectura)
Dependiente del
acceso del
parámetro
Dependiente del
acceso del
parámetro
Tabla 7.18 Dirección/registros
1) El valor escrito en el telegrama de Modbus RTU debe ser uno o menos que el número de registro. Por ejemplo, registro de lectura de Modbus 1,
escribiendo el valor 0 en el telegrama.
7.8.9 Acceso mediante PCD de escritura/
lectura
AVISO!
El código de control y la referencia se envían siempre en
la lista del controlador al convertidor de frecuencia.
La ventaja de usar la conguración de escritura/lectura de
PCD es que el controlador puede escribir o leer más datos
en un telegrama. Pueden leerse o escribirse hasta 63
La lista de escritura de PCD se congura en el
parámetro 8-42
Conguración de escritura PCD.
registros mediante los códigos de función «Lectura de
registro de retención» o «Escritura de múltiples registros»
en un telegrama. La estructura también es exible de
modo que solo dos registros puedan escribirse en el
controlador y diez registros puedan leerse desde este.
La lista de lectura de PCD está compuesta por datos
enviados del convertidor de frecuencia al controlador,
como el código de estado, el valor actual principal y otros
datos dependientes de la aplicación como las horas de
funcionamiento, la intensidad del motor y el código de
La lista de escritura de PCD está compuesta por datos
alarma.
enviados del controlador al convertidor de frecuencia.
Entre estos datos se incluye el código de control, la
referencia y otros datos dependientes de la aplicación
como la referencia mínima, los tiempos de rampa, etc.
AVISO!
El código de estado y el valor actual principal siempre se
envían en la lista del convertidor de frecuencia al
controlador.
94 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Instalación y ajuste de RS4... Guía de diseño
Ilustración 7.14 Acceso mediante PCD de escritura/lectura
AVISO!
Las cajas marcadas en gris no se pueden modicar: se
trata de los valores predeterminados.
AVISO!
Direccione los parámetros de 32 bits en los límites de 32
bits (PCD2 y PCD3 o PCD4 y PCD5, y así sucesivamente),
donde el número de parámetro se direcciona dos veces
al parámetro 8-42 Conguración de escritura PCD o al
parámetro 8-43 Cong. lectura PCD.
Función
Código de función
(hex)
Leer bobinas 1
Leer registros de retención 3
Escribir una sola bobina 5
Escribir un solo registro 6
Escribir múltiples bobinas F
Escribir múltiples registros 10
Coger contador de eventos de com. B
Informar de ID de esclavo 11
Lectura y escritura de múltiples
registros
17
Tabla 7.19 Códigos de función
Función
Código
de
función
Código
de
subfunción
Subfunción
1 Reiniciar comunicación.
Devolver registro de
2
diagnóstico.
10
11
Diagnóstico 8
12
Borrar contadores y
registro de diagnóstico.
Mostrar recuento de
mensajes de bus.
Mostrar recuento de
errores de comunicación
de bus.
13
14
Mostrar recuento de
errores de esclavo.
Mostrar recuento de
mensajes de esclavo.
Tabla 7.20 Códigos de función
7 7
7.8.10 Control del convertidor de
Este apartado describe los códigos que se pueden utilizar
en los campos de función y datos de un telegrama
Modbus RTU.
7.8.11 Códigos de función admitidos por
Modbus RTU admite el uso de los siguientes códigos en el
campo de función de un telegrama.
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 95
frecuencia
Modbus RTU
7.8.12 Códigos de excepción Modbus
Para obtener una explicación completa sobre la estructura
de una excepción, consulte capétulo 7.8.5 Campo de
función.
Códig
Nombre Signicado
o
El código de función recibido en la
petición no es una acción permitida para
el servidor (o esclavo). Esto puede ser
debido a que el código de la función solo
se aplica a dispositivos recientes y no se
1
Función
incorrecta
implementó en la unidad seleccionada.
También puede indicar que el servidor (o
esclavo) se encuentra en un estado
incorrecto para procesar una petición de
este tipo, por ejemplo, porque no esté
congurado y se le pide devolver valores
registrados.

Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
Códig
77
Nombre Signicado
o
La dirección de datos recibida en la
petición no es una dirección admisible
para el servidor (o esclavo). Más concretamente, la combinación del número de
referencia y la longitud de transferencia
no es válida. Para un controlador con 100
registros, se acepta una petición con
desviación 96 y longitud 4, mientras que
una petición con desviación 96 y longitud
5 genera una excepción 02.
Un valor contenido en el campo de datos
de solicitud no es un valor permitido para
el servidor (o esclavo). Esto indica un fallo
en la estructura de la parte restante de
una petición compleja como, por ejemplo,
la de que la longitud implicada es
incorrecta. NO signica que un conjunto
de datos enviado para su almacenamiento
en un registro tenga un valor situado
fuera de la expectativa del programa de la
aplicación, ya que el protocolo Modbus
no conoce el signicado de ningún valor
determinado de ningún registro en
particular.
Un error irrecuperable se produjo
mientras el servidor (o esclavo) intentaba
ejecutar la acción solicitada.
2
3
4
Dirección de
datos
incorrecta
Valor de
datos
incorrecto
Fallo del
dispositivo
esclavo
7.9.2 Almacenamiento de datos
El decimal de la bobina 65 determina si los datos escritos
en el convertidor de frecuencia se almacenan en la
EEPROM y la RAM (bobina 65 = 1) o solo en la RAM
(bobina 65 = 0).
7.9.3 IND (índice)
Algunos de los parámetros del convertidor de frecuencia
son parámetros de matrices, p. ej., el
parámetro 3-10 Referencia interna. Dado que el Modbus no
es compatible con matrices en los registros de retención, el
convertidor de frecuencia ha reservado el registro de
retención 9 como indicador para la matriz. Antes de leer o
escribir un parámetro de matrices, congure el registro de
retención 9. Si se congura el registro de retención al valor
2, las siguientes lecturas/escrituras a los parámetros de
matrices serán en el índice 2.
7.9.4 Bloques de texto
A los parámetros almacenados como cadenas de texto se
accede de la misma forma que a los restantes. El tamaño
máximo de un bloque de texto es 20 caracteres. Si se
realiza una petición de lectura de un parámetro por más
caracteres de los que el parámetro almacena, la respuesta
se trunca. Si la petición de lectura se realiza por menos
caracteres de los que el parámetro almacena, la respuesta
Tabla 7.21 Códigos de excepción Modbus
se rellena con espacios en blanco.
Cómo acceder a los parámetros
7.9
7.9.1 Gestión de parámetros
El PNU (número de parámetro) se traduce de la dirección
del registro contenida en el mensaje de lectura o escritura
Modbus. El número de parámetro se traslada a Modbus
como (10 × número de parámetro) decimal. Ejemplo:
lectura parámetro 3-12 Valor de enganche/arriba-abajo (16
bit): el registro de retención 3120 almacena el valor de los
parámetros. Un valor de 1352 (decimal) signica que el
parámetro está ajustado al 12,52 %.
Lectura del parámetro 3-14 Referencia interna relativa (32
bits): los registros de retención 3410 y 3411 almacenan los
valores de los parámetros. Un valor de 11 300 (decimal)
signica que el parámetro está ajustado en 1113,00.
Para obtener más información sobre los parámetros, el
tamaño y el índice de conversión, consulte el
capétulo 6 Programación.
7.9.5 Factor de conversión
El valor de un parámetro solo se transere como número
entero. Para transferir decimales, utilice un factor de
conversión.
7.9.6 Valores de parámetros
Tipos de datos estándar
Los tipos de datos estándar son int 16, int 32, uint 8, uint
16 y uint 32. Se guardan como registros 4x (40001-4FFFF).
Los parámetros se leen utilizando la función 03 Hex Read
holding registers (Lectura de registros de retención). Los
parámetros se escriben utilizando la función 6 Hex Preset
single register (Preajustar registro único) para 1 registro
(16 bits) y la función 10 Hex Preset multiple registers
(Preajustar múltiples registros) para 2 registros (32 bits). Los
tamaños legibles van desde 1 registro (16 bits) hasta 10
registros (20 caracteres).
Tipos de datos no estándar
Los tipos de datos no estándar son cadenas de texto y se
almacenan como registros 4x (40001-4FFFF). Los
parámetros se leen utilizando la función 03 hex Read
holding registers (Lectura de registros de retención) y se
escriben utilizando la función 10 hex Preset multiple
96 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805

Instalación y ajuste de RS4... Guía de diseño
registers (Preajustar múltiples registros). Los tamaños
legibles van desde 1 registro (2 caracteres) hasta 10
registros (20 caracteres).
7.10 Ejemplos
Los siguientes ejemplos ilustran varias órdenes de Modbus
RTU.
7.10.1 Lectura de estado de la bobina (01
hex)
Descripción
Esta función lee el estado ON/OFF de las distintas salidas
(bobinas) del convertidor de frecuencia. No se admite la
transmisión en las lecturas.
Petición
El telegrama de solicitud especica la bobina inicial y la
cantidad de bobinas que se deben leer. Las direcciones de
las bobinas comienzan en cero, es decir, la bobina 33 tiene
la dirección 32.
Ejemplo de una petición de lectura de las bobinas 33 a 48
(código de estado) del dispositivo esclavo 01.
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01 (dirección del convertidor de
frecuencia)
Función 01 (leer bobinas)
Dirección de inicio HI 00
Dirección de inicio LO 20 (32 decimal) bobina 33
Número de puntos HI 00
Número de puntos LO 10 (16 decimal)
Comprobación de errores
(CRC)
Tabla 7.22 Petición
Respuesta
El estado de la bobina en el telegrama de respuesta está
empaquetado como una bobina por bit del campo de
datos. El estado se indica como: 1 = ON; 0 = OFF. El lsb (bit
menos signicativo) del primer byte de datos contiene la
bobina a la que se dirige la consulta. Las otras bobinas
siguen hacia el nal de mayor nivel del byte, y desde el
nivel bajo al nivel alto en los bytes siguientes.
Si la cantidad de bobinas devueltas no es múltiplo de
ocho, los bits restantes del byte de datos nal se rellenan
con ceros (hacia la parte alta del byte). El campo contador
de bytes especica el número de bytes de datos
completos.
–
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01 (dirección del convertidor de
frecuencia)
Función 01 (leer bobinas)
Contador de bytes 02 (2 bytes de datos)
Datos (bobinas 40-33) 07
Datos (bobinas 48-41) 06 (STW = 0607hex)
Comprobación de errores
(CRC)
Tabla 7.23 Respuesta
–
AVISO!
Las bobinas y los registros se direccionan explícitamente
con una compensación de –1 en Modbus.
Por ejemplo, la bobina 33 tiene la dirección de bobina
32.
7.10.2 Forzar/escribir una sola bobina (05
hex)
Descripción
Esta función fuerza la bobina a activado o desactivado.
Cuando se transmite, la función fuerza las mismas
referencias de bobina en todos los esclavos conectados.
Petición
El telegrama de petición especica que se fuerce la bobina
65 (control de escritura de parámetro). Las direcciones de
las bobinas comienzan en cero, es decir, la bobina 65 tiene
la dirección 64. Forzar datos = 00 00 hex (OFF) o FF 00 hex
(ON).
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01 (dirección del convertidor de
frecuencia)
Función 05 (escribir una sola bobina)
Dirección de bobina HI 00
Dirección de bobina LO 40 (64 decimal) bobina 65
Forzar datos HI FF
Forzar datos LO 00 (FF 00 = ON)
Comprobación de errores
(CRC)
Tabla 7.24 Petición
Respuesta
La respuesta normal es un eco de la petición, devuelta tras
ser forzado el estado de la bobina.
–
7 7
MG18C805 Danfoss A/S © 04/2018 Reservados todos los derechos. 97

Instalación y ajuste de RS4...
VLT® HVAC Basic Drive FC 101
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01
Función 05
Forzar datos HI FF
Forzar datos LO 00
Cantidad de bobinas HI 00
Cantidad de bobinas LO 01
Comprobación de errores (CRC) –
Tabla 7.25 Respuesta
7.10.3 Forzar/escribir múltiples bobinas (0F
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01 (dirección del convertidor de
frecuencia)
Función 0F (escribir múltiples bobinas)
Dirección de bobina HI 00
Dirección de bobina LO 10 (dirección de bobina 17)
Cantidad de bobinas HI 00
Cantidad de bobinas LO 10 (16 bobinas)
Comprobación de errores
(CRC)
Tabla 7.27 Respuesta
–
hex)
7.10.4 Lectura de registros de retención (03
Descripción
Esta función fuerza cada bobina de una secuencia a
activado o desactivado. Cuando se transmite, la función
fuerza las mismas referencias de bobinas en todos los
77
esclavos conectados.
Petición
El telegrama de petición especica que se fuercen las
bobinas 17 a 32 (valor de consigna de velocidad).
AVISO!
Descripción
Esta función lee el contenido de los registros de retención
del esclavo.
Petición
El telegrama de petición especica el registro de inicio y la
cantidad de registros que se deben leer. Las direcciones de
registros comienzan en 0, es decir, los registros 1-4 se
tratan como 0-3.
Las direcciones de las bobinas comienzan en cero, es
decir, la bobina 17 tiene la dirección 16.
Ejemplo: lectura parámetro 3-03 Referencia máxima, registro
03030.
hex)
Nombre del campo Ejemplo (hex)
Dirección del esclavo
Función 0F (escribir múltiples bobinas)
Dirección de bobina HI 00
Dirección de bobina LO 10 (dirección de bobina 17)
Cantidad de bobinas HI 00
Cantidad de bobinas LO 10 (16 bobinas)
Contador de bytes 02
Forzar datos HI
(Bobinas 8-1)
Forzar datos LO
(Bobinas 16-9)
Comprobación de errores
(CRC)
Tabla 7.26 Petición
01 (dirección del convertidor de
frecuencia)
20
00 (referencia = 2000 hex)
–
Respuesta
La respuesta normal devuelve la dirección del esclavo, el
código de la función, la dirección de inicio y la cantidad de
bobinas forzadas.
Nombre del campo Ejemplo (hex)
Dirección del esclavo 01
Función 03 (Leer registros de retención)
Dirección de inicio HI 0B (dirección de registro 3029)
Dirección de inicio LO D5 (dirección de registro 3029)
Número de puntos HI 00
02 – (el parámetro 3-03 Referencia
Número de puntos LO
Comprobación de
errores (CRC)
Tabla 7.28 Petición
máxima tiene 32 bits de longitud, es
decir, 2 registros)
–
Respuesta
Los datos del registro en el telegrama de respuesta están
empaquetados a razón de 2 bytes por registro, con los
contenidos binarios justicados a la derecha en cada byte.
En cada registro, el primer byte contiene los bits de nivel
alto y el segundo, los de nivel bajo.
Ejemplo: hex 000088B8 = 35,000 = 35 Hz.
98 Danfoss A/S © 04/2018 Reservados todos los derechos. MG18C805
 Loading...
Loading...