

Page 1

ENGINEERING TOMORROW
Programmeerhandleiding
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com
Page 2

Page 3
Inhoud Programmeerhandleiding
Inhoud
1 Inleiding
1.1 Doel van de handleiding
1.2 Document- en softwareversie
1.3 Veiligheidssymbolen
1.4 Veiligheidsvoorschriften
1.5 Aanvullende hulpmiddelen
1.6 Denities
1.7 Elektrisch overzicht
2 Programmeren
2.1 Inleiding
2.2 Lokaal bedieningspaneel (LCP)
2.3 Menu's
2.3.1 Statusmenu 10
2.3.2 Quick Menu 10
2.3.3 Main Menu 25
2.4 Snel overzetten van parameterinstellingen naar andere frequentieomvormers
2.5 Geïndexeerde parameters uitlezen en programmeren
3
3
3
3
4
5
5
8
9
9
9
10
26
26
2.6 Initialiseren naar standaardinstellingen
3 Parameters
3.1 Hoofdmenu – Bediening/display – Groep 0
3.2 Hoofdmenu – Belasting & motor – Groep 1
3.3 Hoofdmenu – Remmen – Groep 2
3.4 Hoofdmenu – Ref./ramp – Groep 3
3.5 Hoofdmenu – Begr./waarsch. – Groep 4
3.6 Hoofdmenu – Digitaal In/Uit – Groep 5
3.7 Hoofdmenu – Analoog In/Uit – Groep 6
3.8 Hoofdmenu – Comm. en opties – Groep 8
3.9 Hoofdmenu – Smart Logic – Groep 13
3.10 Hoofdmenu – Speciale functies – Groep 14
3.11 Hoofdmenu – Geg. frequentieregelaar – Groep 15
3.12 Hoofdmenu – Data-uitlezingen – Groep 16
3.13 Hoofdmenu – Data-uitlezingen 2 – Groep 18
3.14 Hoofdmenu – FC met terugkoppeling – Groep 20
3.15 Hoofdmenu – Toepassingsfuncties – Groep 22
26
27
27
32
42
44
47
51
61
67
73
82
87
89
94
94
97
3.16 Hoofdmenu – Toepassingsfuncties 2 – Groep 24
3.17 Hoofdmenu – Speciale functies – Groep 30
4 Problemen verhelpen
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 1
104
107
108
Page 4
Inhoud
VLT® HVAC Basic Drive FC 101
4.1 Inleiding tot alarmen en waarschuwingen
4.2 Alarmwoorden
4.3 Waarschuwingswoorden
4.4 Uitgebreide statuswoorden
4.5 Lijst met waarschuwingen en alarmen
4.6 Lijst met LCP-fouten
5 Parameterlijsten
5.1 Parameteropties
5.1.1 Standaardinstellingen 117
5.1.2 0-** Operation/Display (Bediening/display) 118
5.1.3 1-** Load and Motor (Belasting & motor) 118
5.1.4 2-** Brakes (Remmen) 120
5.1.5 3-** Reference/Ramps (Ref./Ramp.) 120
5.1.6 4-** Limits/Warnings (Begr./waarsch.) 121
5.1.7 5-** Digital In/Out (Digitaal In/Uit) 121
5.1.8 6-** Analog In/Out (Analoog In/Uit) 122
5.1.9 8-** Comm. and Options (Comm. en opties) 123
108
110
110
111
112
116
117
117
5.1.10 13-** Smart Logic 124
5.1.11 14-** Special Functions (Speciale functies) 124
5.1.12 15-** Drive Information (Gegevens frequentieregelaar) 125
5.1.13 16-** Data Readouts (Data-uitlezingen) 126
5.1.14 18-** Info & Readouts (Info & uitlezingen) 127
5.1.15 20-** Drive Closed Loop (Frequentieregelaar met terugkoppeling) 128
5.1.16 22-** Appl. Functions (Toepassingsfuncties) 128
5.1.17 24-** Appl. Functions 2 (Toepassingsfuncties 2) 129
5.1.18 30-** Special Features (Speciale functies) 130
Trefwoordenregister
131
2 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 5
Inleiding Programmeerhandleiding
1 Inleiding
1.1 Doel van de handleiding
Deze programmeerhandleiding bevat informatie voor
geavanceerde programmering van de frequentieregelaar.
Hierin vindt u een volledig overzicht van alle parameters
en beschrijvingen voor alle parameters.
De programmeerhandleiding is bedoeld voor gebruik door
gekwaliceerd personeel.
Lees en volg de programmeerhandleiding om de frequentieregelaar op veilige en professionele wijze te kunnen
gebruiken. Let vooral ook op de veiligheidsvoorschriften en
algemene waarschuwingen.
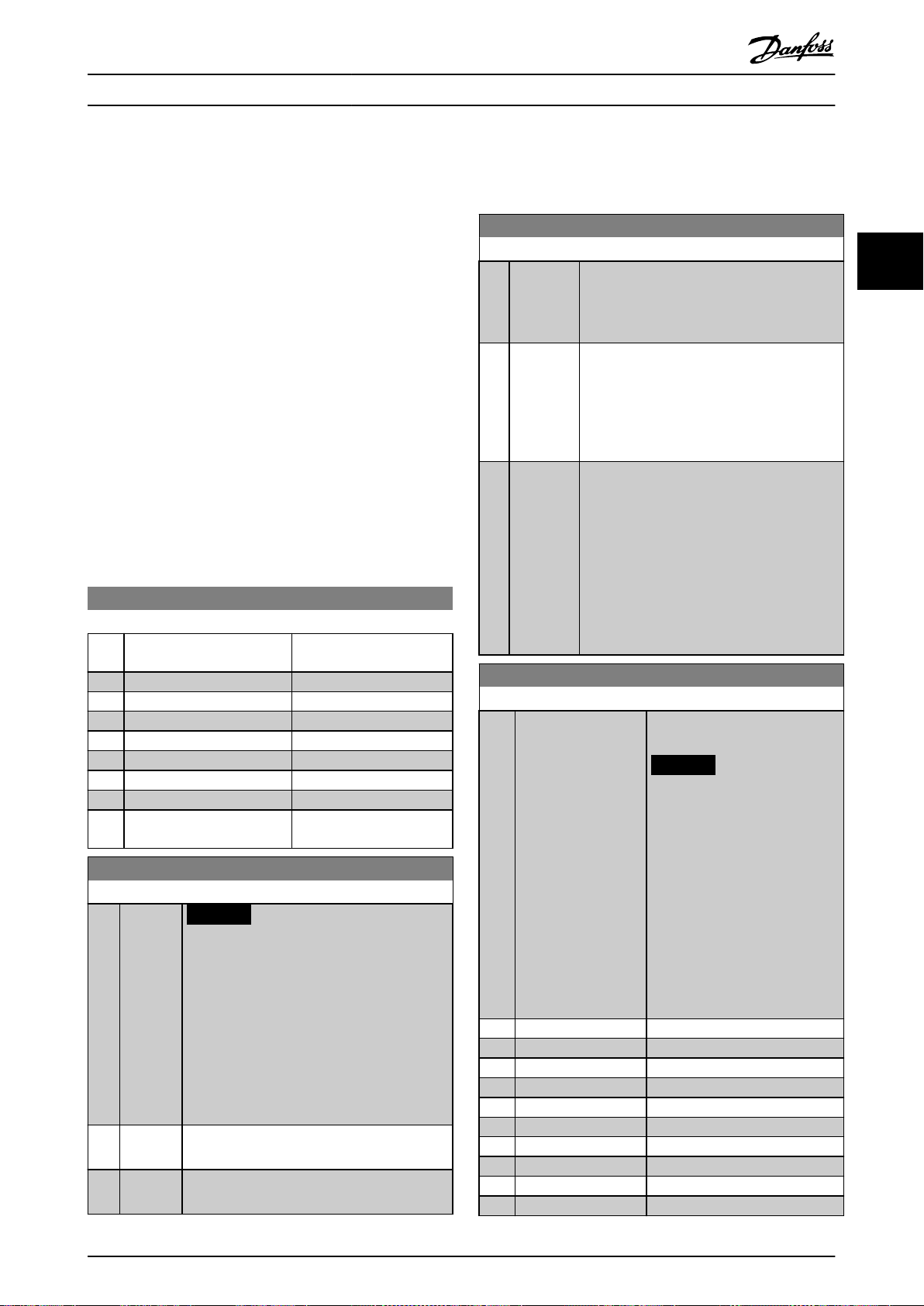
1.2 Document- en softwareversie
Deze handleiding wordt regelmatig herzien en bijgewerkt.
Alle suggesties voor verbetering zijn welkom.
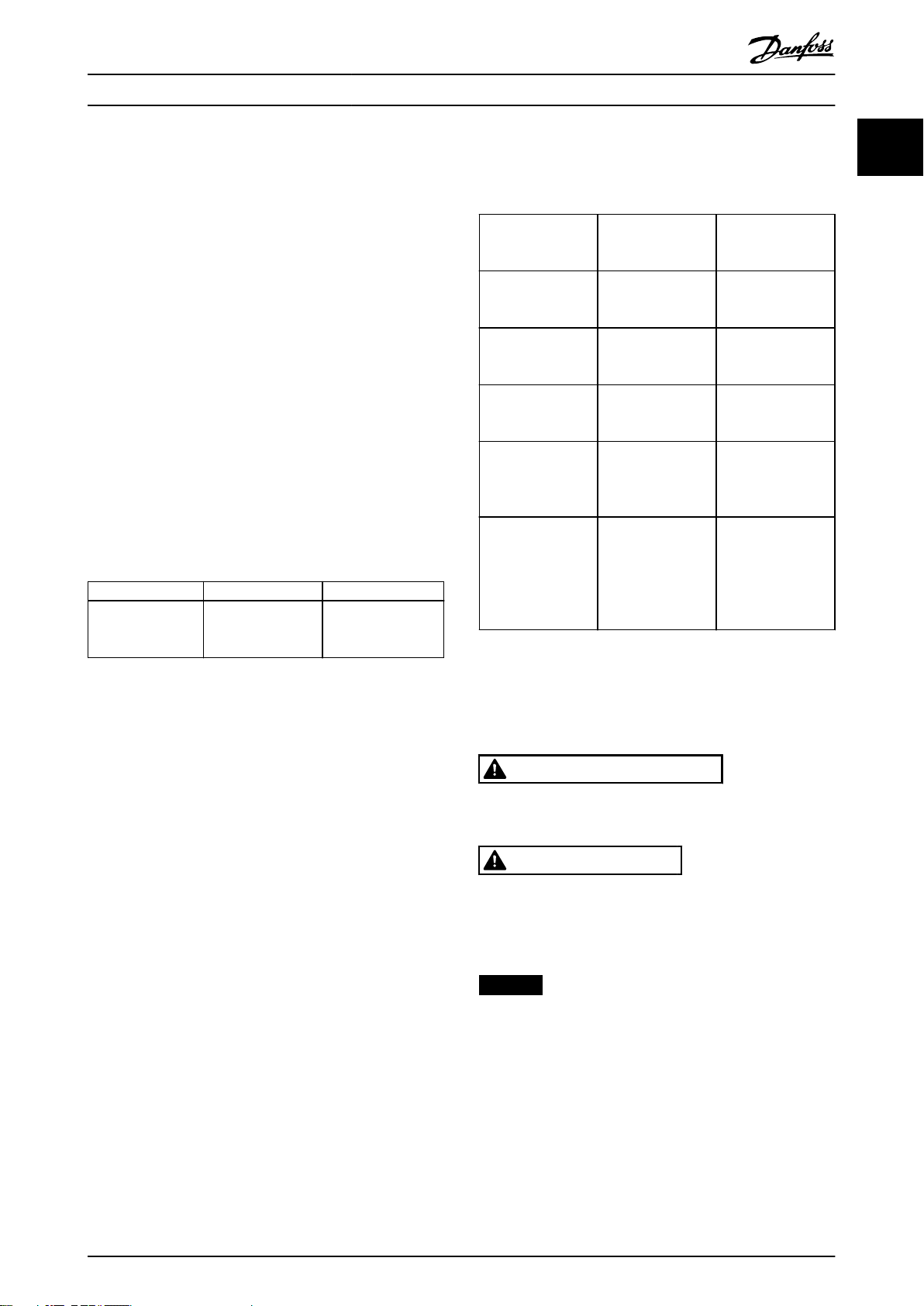
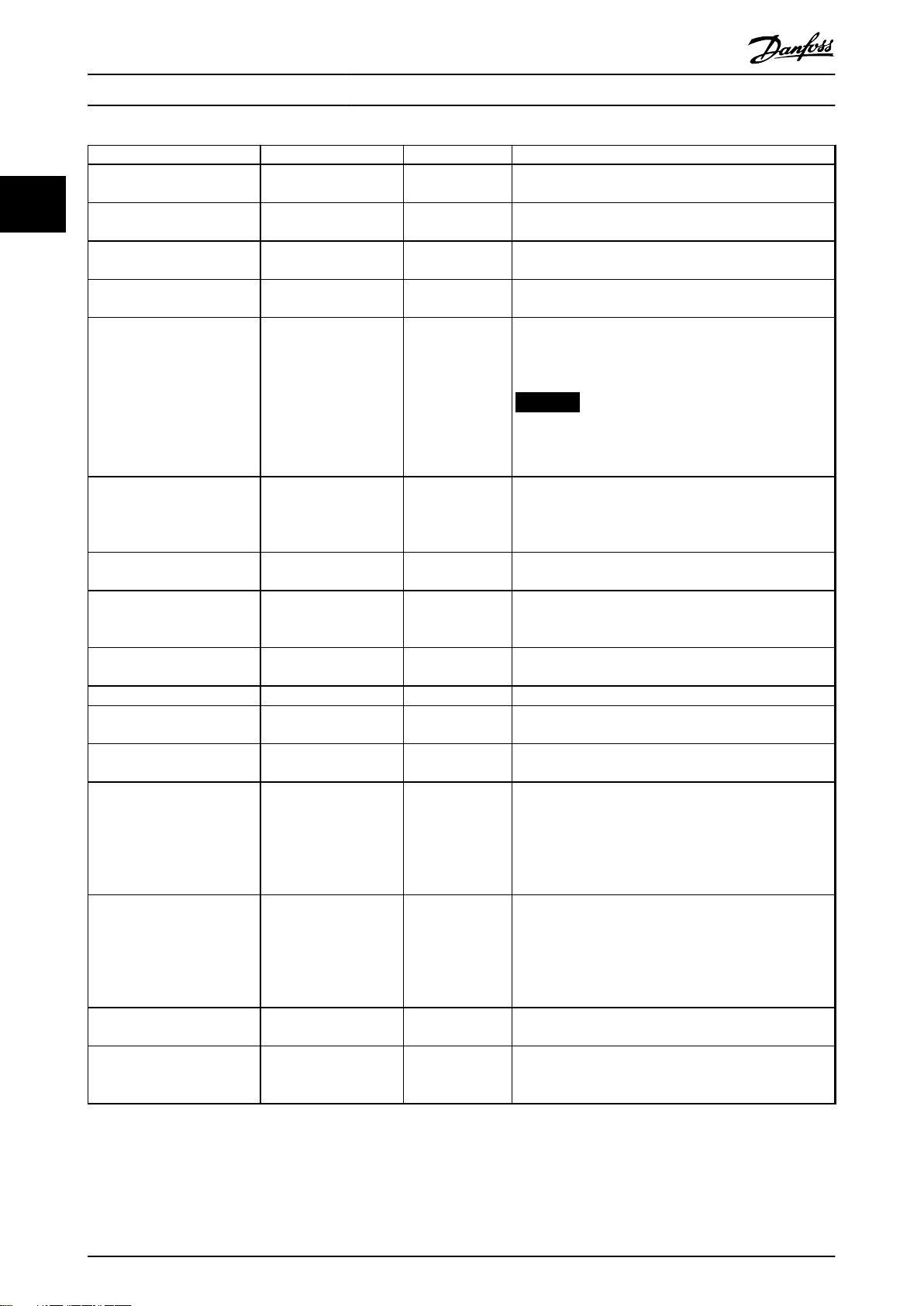
Versie Opmerkingen Softwareversie
MG18B5xx Bijgewerkt voor de
nieuwe software-
versie.
4.2x
Software-
compatibiliteit
Oude software
(OSS-bestand versie
3.xx en lager)
Nieuwe software
(OSS-bestand versie
4.xx of hoger)
Hardware-
compatibiliteit
Oude voedingskaart
(productieweek 33
2017 of eerder)
Nieuwe
voedingskaart
(productieweek 34
2017 of later)
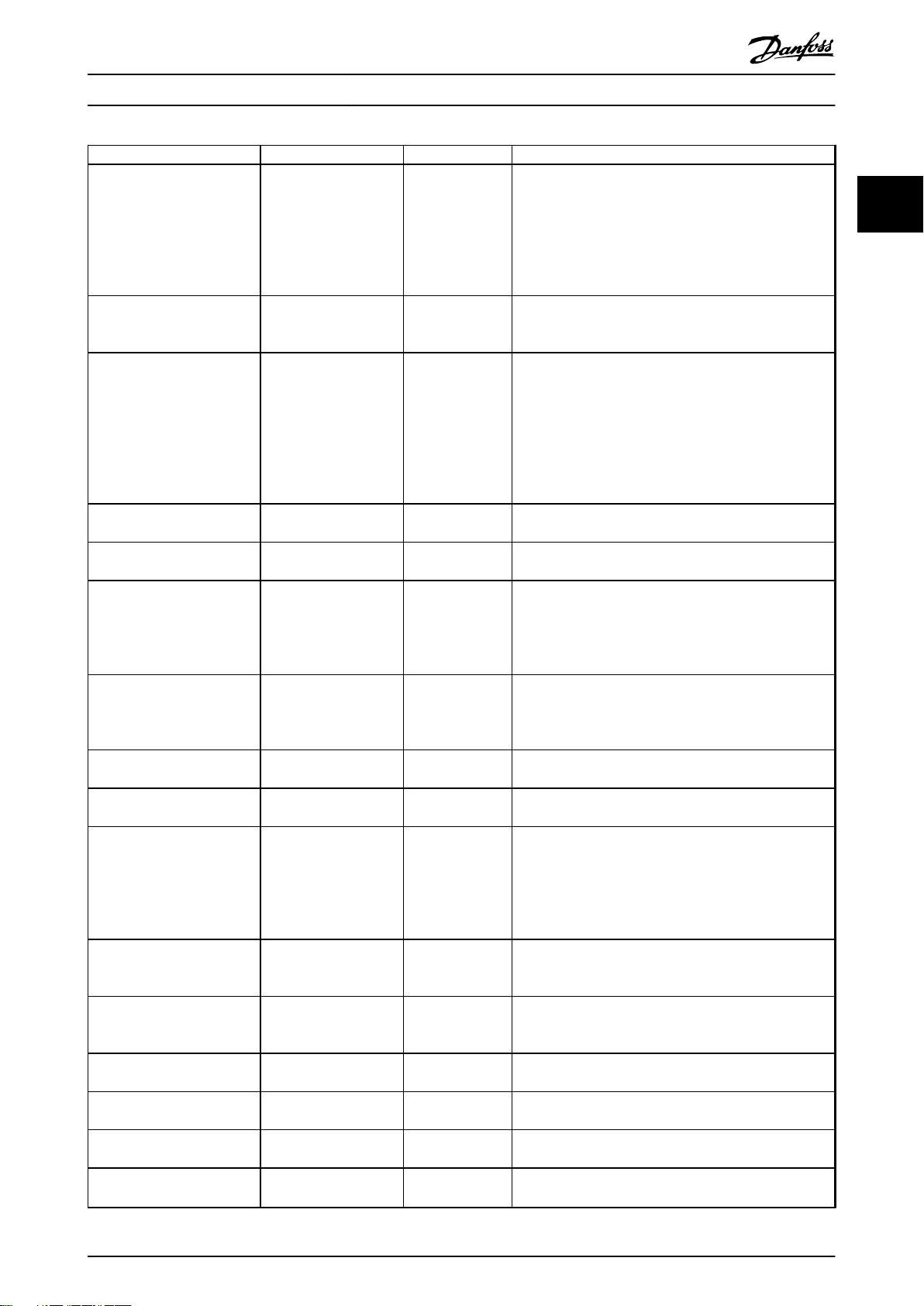
Tabel 1.2 Software- en hardwarecompatibiliteit
Oude stuurkaart
(productieweek 33
2017 of eerder)
Ja Nee
Nee Ja
Oude stuurkaart
(productieweek 33
2017 of eerder)
Ja (alleen softwareversie 3.xx of lager)
Ja (software MOET
worden bijgewerkt
naar versie 3.xx of
lager, ventilator
werkt continu op
volle toeren)
Nieuwe stuurkaart
(productieweek 34
Nieuwe stuurkaart
(productieweek 34
Ja (software MOET
worden bijgewerkt
naar versie 4.xx of
Ja (alleen software-
versie 4.xx of hoger)
1 1
2017 of later)
2017 of later)
hoger)
Tabel 1.1 Document- en softwareversie
Vanaf softwareversie 4.0x (productieweek 33 2017 en later)
is de variabeltoerentalfunctie voor de koelventilator van
het koellichaam geïmplementeerd in frequentieregelaars
met een vermogensklasse tot 22 kW (30 pk) 400 V IP 20 en
een vermogensklasse tot 18,5 kW (25 pk) 400 V IP 54. Voor
gebruik van deze functie moeten de software en hardware
worden bijgewerkt. De functie legt ook beperkingen op
ten aanzien van achterwaartse compatibiliteit voor
behuizingsgrootte H1-H5 en I2-I4. Zie Tabel 1.2 voor de
beperkingen.
Veiligheidssymbolen
1.3
In dit document worden de volgende symbolen gebruikt:
WAARSCHUWING
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot ernstig of dodelijk letsel.
VOORZICHTIG
Geeft een potentieel gevaarlijke situatie aan die kan
leiden tot licht of matig letsel. Kan tevens worden
gebruikt om te waarschuwen tegen onveilige werkpraktijken.
LET OP
Geeft belangrijke informatie aan, waaronder situaties die
kunnen leiden tot schade aan apparatuur of
eigendommen.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 3
Page 6
Inleiding
VLT® HVAC Basic Drive FC 101
11
1.4 Veiligheidsvoorschriften
WAARSCHUWING
ONTLADINGSTIJD
WAARSCHUWING
HOGE SPANNING
Frequentieregelaars bevatten hoge spanning wanneer ze
zijn aangesloten op een netingang, DC-voeding of
loadsharing. Als installatie, opstarten en onderhoud niet
worden uitgevoerd door gekwaliceerd personeel, kan
dat leiden tot ernstig of dodelijk letsel.
Installatie, opstarten en onderhoud mogen
•
uitsluitend worden uitgevoerd door gekwaliceerd personeel.
Controleer met een geschikt spanningsmeetap-
•
paraat of er geen spanning meer op de
frequentieregelaar staat voordat u service- of
reparatiewerkzaamheden gaat uitvoeren.
WAARSCHUWING
ONBEDOELDE START
Wanneer de frequentieregelaar is aangesloten op de
netvoeding, DC-voeding of loadsharing, kan de motor op
elk moment starten. Een onbedoelde start tijdens
programmeer-, onderhouds- of reparatiewerkzaamheden
kan leiden tot ernstig of dodelijk letsel of tot schade aan
apparatuur of eigendommen. De motor kan worden
gestart door een externe schakelaar, een veldbuscommando, een ingangsreferentiesignaal vanaf het LCP
of LOP, via externe bediening met MCT 10 setupsoftware
of door het opheen van een foutconditie.
Om een onbedoelde motorstart te voorkomen:
Druk op [O/Reset] op het LCP voordat u
•
parameters gaat programmeren.
Onderbreek de netvoeding naar de frequentie-
•
regelaar.
Zorg dat de frequentieregelaar, motor en
•
eventuele door de motor aangedreven
werktuigen volledig bedraad en gemonteerd
zijn voordat u de frequentieregelaar aansluit op
de netvoeding, DC-voeding of loadsharing.
De frequentieregelaar bevat DC-tussenkringcondensatoren waarop spanning kan blijven staan, ook wanneer
de frequentieregelaar niet van spanning wordt voorzien.
Er kan hoge spanning aanwezig zijn, ook wanneer de
waarschuwingsleds uit zijn. Als u de aangegeven
wachttijd na afschakeling niet in acht neemt voordat u
onderhouds- of reparatiewerkzaamheden uitvoert, kan
dat leiden tot ernstig of dodelijk letsel.
Stop de motor.
•
Schakel de netvoeding en externe DC-tussen-
•
kringvoedingen af, inclusief backupvoedingen,
UPS-eenheden en DC-tussenkringaansluitingen
naar andere frequentieregelaars.
Onderbreek de voeding naar de PM-motor of
•
vergrendel de motor.
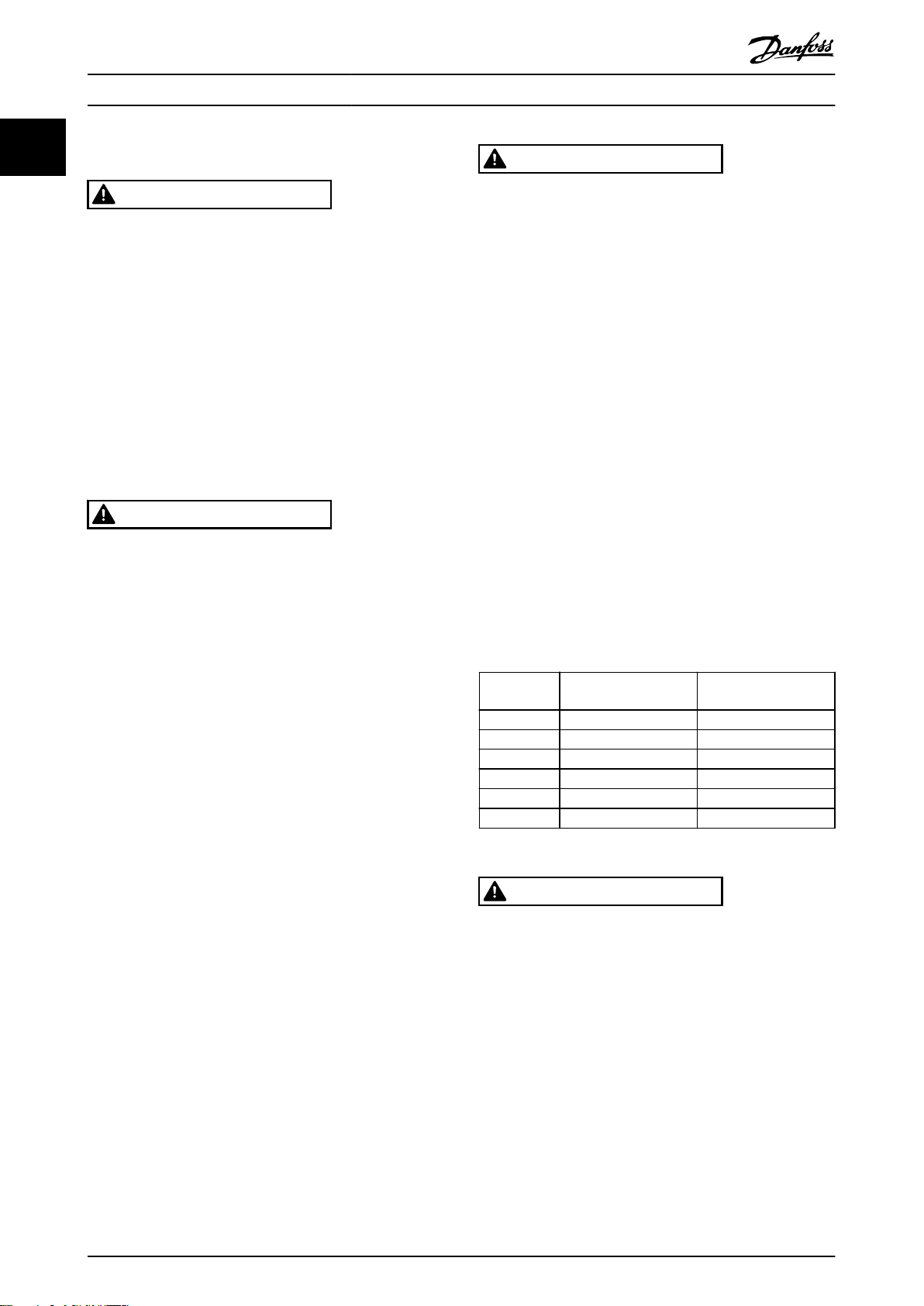
Wacht tot de condensatoren volledig ontladen
•
zijn. De vereiste minimale wachttijd staat
vermeld in Tabel 1.3.
Controleer met een geschikt spanningsmeetap-
•
paraat of de condensatoren volledig ontladen
zijn voordat u service- of reparatiewerkzaamheden gaat uitvoeren.
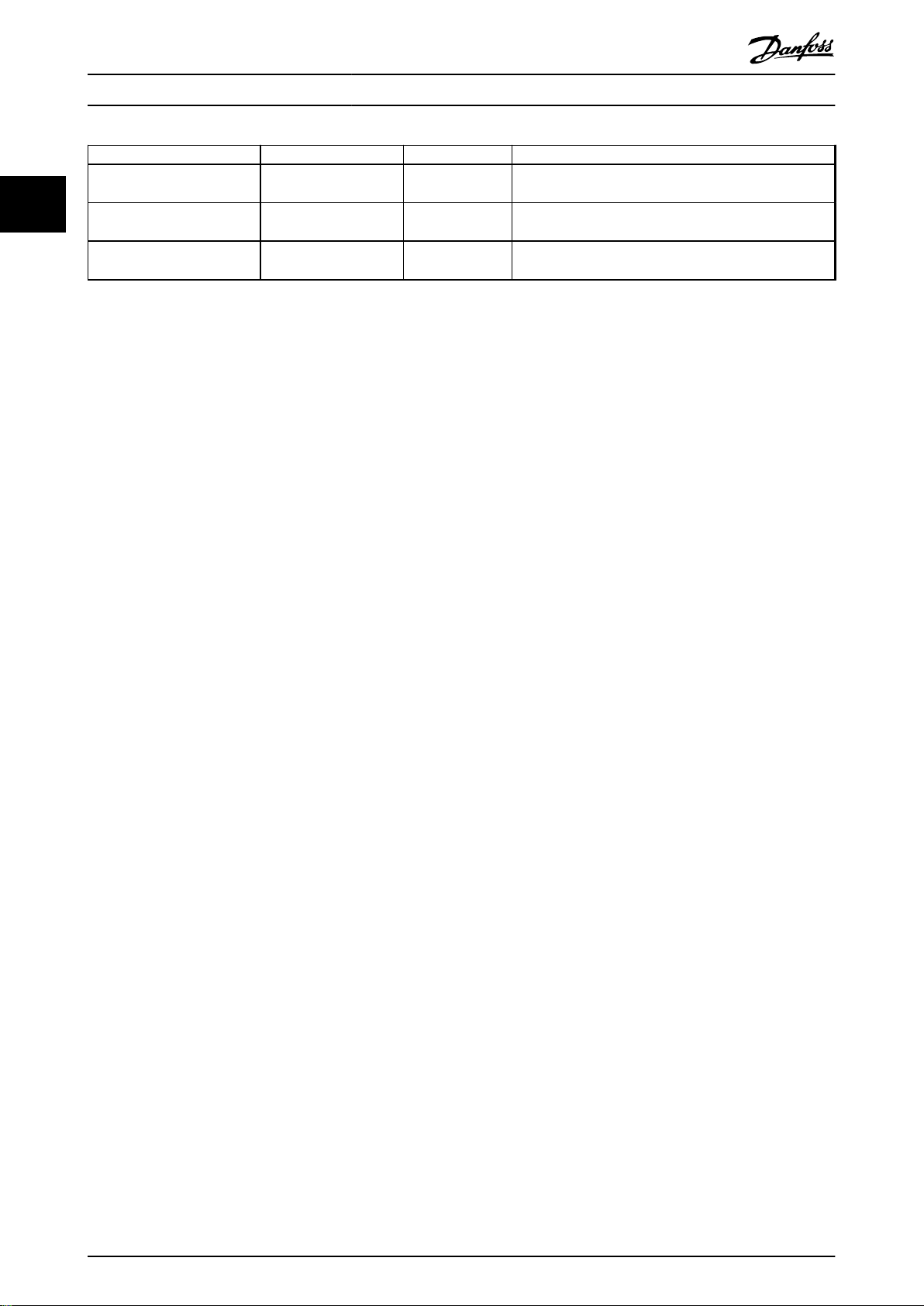
Spanning [V] Vermogensbereik [kW
(pk)]
3 x 200 0,25-3,7 (0,33-5) 4
3 x 200 5,5-11 (7-15) 15
3 x 400 0,37-7,5 (0,5-10) 4
3 x 400 11–90 (15–125) 15
3 x 600 2,2-7,5 (3-10) 4
3 x 600 11–90 (15–125) 15
Tabel 1.3 Ontladingstijd
Minimale wachttijd
(minuten)
WAARSCHUWING
GEVAAR VOOR LEKSTROOM
De aardlekstroom bedraagt meer dan 3,5 mA. Een
onjuiste aarding van de frequentieregelaar kan leiden tot
ernstig of dodelijk letsel.
Zorg dat de apparatuur correct is geaard door
•
een erkende elektrisch installateur.
4 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 7
Inleiding Programmeerhandleiding
WAARSCHUWING
GEVAARLIJKE APPARATUUR
Het aanraken van draaiende assen en elektrische
apparatuur kan leiden tot ernstig of dodelijk letsel.
Installatie, opstarten en onderhoud mogen
•
uitsluitend worden uitgevoerd door hiervoor
opgeleid en gekwaliceerd personeel.
Zorg dat alle elektrische werkzaamheden
•
worden uitgevoerd volgens de nationale en
lokale elektriciteitsvoorschriften.
Volg de procedures in deze handleiding.
•
VOORZICHTIG
GEVAAR BIJ INTERNE FOUT
Een interne fout in de frequentieregelaar kan leiden tot
ernstig letsel als de frequentieregelaar niet goed is
gesloten.
Controleer voordat u de spanning inschakelt of
•
alle veiligheidsafdekkingen op hun plaats zitten
en stevig zijn vastgezet.
1.5 Aanvullende hulpmiddelen
De Snelgids VLT® HVAC Basic Drive FC 101 bevat
•
basisinformatie over mechanische afmetingen,
installatie en programmering.
®
De VLT
•
bevat informatie over het ontwerpen van
motorregelsystemen.
HVAC Basic Drive FC 101 Design Guide
Voer tijdens het installatieproces van de software de
toegangscode 81463800 in om de FC 101-functionaliteit te
activeren. Om de FC 101-functionaliteit te gebruiken is
geen licentiecode vereist.
De nieuwste software bevat niet altijd de laatste updates
voor frequentieregelaars. Neem voor de laatste updates (in
de vorm van *.upd-bestanden) contact op met een
verkoopkantoor bij u in de buurt of download de frequentieregelaarupdates op www.danfoss.com/en/service-and-
support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
1.6 Denities
Frequentieregelaar
I
VLT, MAX
De maximale uitgangsstroom.
I
VLT,N
De nominale uitgangsstroom die door de frequentieregelaar wordt geleverd.
U
VLT, MAX
De maximale uitgangsspanning.
Ingang
De aangesloten motor kan worden gestart en gestopt via
het LCP en de digitale ingangen. Functies zijn in 2 groepen
verdeeld, zoals beschreven in Tabel 1.4. De functies in
groep 1 hebben een hogere prioriteit dan de functies in
groep 2.
Groep 1
Groep 2
Reset, vrijloop na stop, reset en vrijloop na stop,
snelle stop, DC-rem, stop en de [O]-toets.
Start, pulsstart, omkeren, start omkeren, jog en
uitgang vasthouden.
1 1
Danfoss VLT® Energy Box-software. Selecteer PC
•
Software Download op vlt-drives.danfoss.com/
products/engineering-software/software-download/
vlt-energy-box-software/.
Met de VLT® Energy Box-software kunt u het
energieverbruik van HVAC-ventilatoren en pompen die met behulp van Danfoss
frequentieregelaars worden geregeld, vergelijken
met het energieverbruik van andere debietregelingsmethoden. Gebruik dit hulpmiddel voor een
zo nauwkeurig mogelijke prognose van de
kosten, besparingen en terugverdientijd bij
gebruik van Danfoss frequentieregelaars voor
HVAC-ventilatoren, -pompen en -koeltorens.
De technische publicaties zijn online in elektronische vorm
beschikbaar via drives.danfoss.com/knowledge-center/
technical-documentation/.
Ondersteuning voor MCT 10 setupsoftware
Download de software op www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Tabel 1.4 Stuurcommando's
Motor
f
JOG
De motorfrequentie wanneer de jogfunctie is geactiveerd
(via digitale klemmen).
f
M
De motorfrequentie.
f
MAX
De maximale motorfrequentie.
f
MIN
De minimale motorfrequentie.
f
M,N
De nominale motorfrequentie (gegevens typeplaatje).
I
M
De motorstroom.
I
M,N
De nominale motorstroom (gegevens typeplaatje).
n
M,N
Het nominale motortoerental (gegevens typeplaatje).
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 5
Page 8
Inleiding
VLT® HVAC Basic Drive FC 101
11
P
M,N
Het nominale motorvermogen (gegevens typeplaatje).
U
M
De momentele motorspanning.
U
M,N
De nominale motorspanning (gegevens typeplaatje).
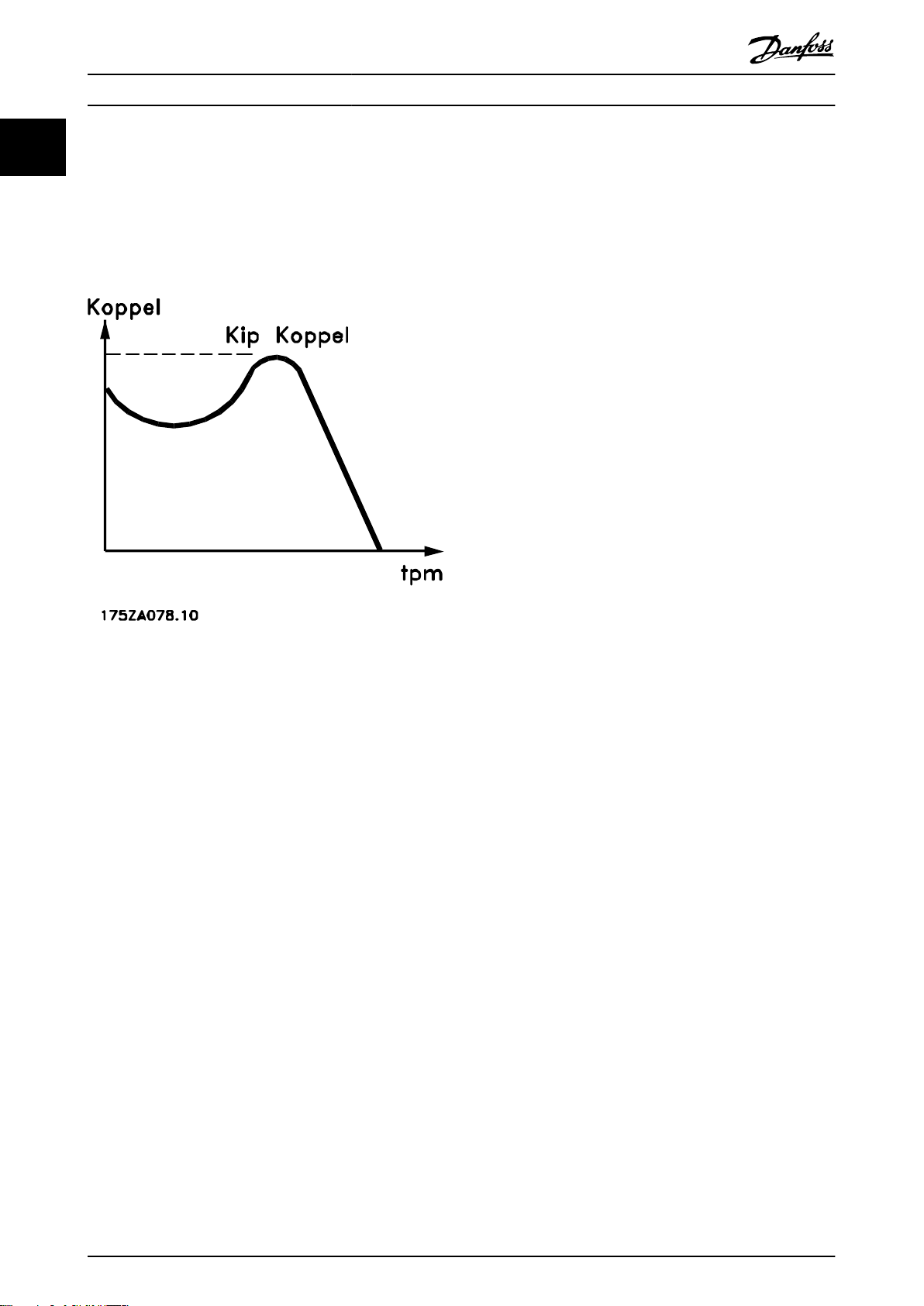
Losbreekkoppel
Afbeelding 1.1 Losbreekkoppel
η
VLT
Het rendement van de frequentieregelaar wordt gedenieerd als de verhouding tussen het uitgangsvermogen en
het ingangsvermogen.
Startdeactiveercommando
Een stopcommando behorend tot groep 1 van de
stuurcommando's; zie Tabel 1.4.
Stopcommando
Zie Tabel 1.4.
Analoge referentie
Een signaal dat naar analoge ingang 53 of 54 wordt
gestuurd, Dit kan spanning of stroom zijn.
Stroomingang: 0-20 mA en 4-20 mA
•
Spanningsingang: 0-10 V DC
•
Busreferentie
Een signaal dat naar de seriële-communicatiepoort (FCpoort) wordt gestuurd.
Digitale referentie
Een gedenieerde, vooraf ingestelde referentie die kan
worden ingesteld van -100% tot +100% van het referentiebereik. Selectie van 8 vooraf ingestelde referenties via de
digitale klemmen.
Ref
MAX
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 100% van de volledige schaal (gewoonlijk 10 V,
20 mA) en de totale referentie. De maximumreferentie die
is ingesteld in parameter 3-03 Max. referentie.
Ref
MIN
Bepaalt de relatie tussen de referentie-ingang met een
waarde van 0% (gewoonlijk 0 V, 0 mA, 4 mA) en de totale
referentie. De minimumreferentiewaarde wordt ingesteld in
parameter 3-02 Minimumreferentie.
Analoge ingangen
De analoge ingangen worden gebruikt om diverse functies
van de frequentieregelaar te besturen.
Er zijn 2 typen analoge ingangen:
Stroomingang: 0-20 mA en 4-20 mA
•
Spanningsingang: 0-10 V DC
•
Analoge uitgangen
De analoge uitgangen kunnen een signaal van 0-20 mA,
4-20 mA of een digitaal signaal leveren.
Automatische aanpassing motorgegevens, AMA
Het AMA-algoritme bepaalt de elektrische parameters van
de aangesloten motor bij stilstand en compenseert de
weerstand op basis van de lengte van de motorkabel.
Digitale ingangen
De digitale ingangen kunnen worden gebruikt voor het
besturen van diverse functies van de frequentieregelaar.
Digitale uitgangen
De frequentieregelaar bevat 2 halfgeleideruitgangen die
een signaal van 24 V DC (maximaal 40 mA) kunnen
leveren.
Relaisuitgangen
De frequentieregelaar heeft 2 programmeerbare relaisuitgangen.
ETR
Elektronisch thermisch relais is een berekening van de
thermische belasting op basis van de actuele belasting en
de tijd. Het doel hiervan is het schatten van de motortemperatuur en het voorkomen van oververhitting van de
motor.
Initialisatie
Bij initialisatie (parameter 14-22 Bedrijfsmodus) worden de
programmeerbare parameters van de frequentieregelaar
teruggezet naar de standaardinstellingen.
Communicatieparameters, de foutlog of de brandmoduslog
worden niet geïnitialiseerd via
Parameter 14-22 Bedrijfsmodus.
Intermitterende belastingscyclus
De nominale intermitterende belasting heeft betrekking op
een reeks belastingscycli. Elke cyclus bestaat uit een
belaste en een onbelaste periode. De werking kan een
periodieke cyclus of een niet-periodieke cyclus zijn.
6 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 9

Inleiding Programmeerhandleiding
LCP
Het lokale bedieningspaneel (LCP) biedt een complete
interface voor de bediening en programmering van de
frequentieregelaar. Het bedieningspaneel is afneembaar op
IP 20-eenheden en vast op IP 54-eenheden. Het kan op
maximaal 3 m (9,8 ft) van de frequentieregelaar worden
geïnstalleerd, d.w.z. op een frontpaneel, met behulp van de
optionele installatieset.
lsb
Minst signicante bit.
MCM
Staat voor Mille Circular Mil, een Amerikaanse meeteenheid
voor de doorsnede van kabels. 1 MCM = 0,5067 mm².
msb
Meest signicante bit.
Online-/oineparameters
Wijzigingen van onlineparameters worden meteen na het
wijzigen van de gegevenswaarde geactiveerd. Druk op [OK]
om oineparameters te activeren.
PI-regelaar
De PI-regelaar handhaaft de gewenste snelheid, druk,
temperatuur en dergelijke door de uitgangsfrequentie aan
te passen aan wijzigingen in de belasting.
RCD
Reststroomapparaat.
Setup
Parameterinstellingen kunnen worden opgeslagen in 2
setups. Het is mogelijk om tussen de 2 parametersetups te
schakelen en 1 setup te bewerken terwijl de andere setup
actief is.
Slipcompensatie
De frequentieregelaar compenseert voor het slippen van
de motor door verhoging van de frequentie op basis van
de gemeten motorbelasting, waardoor het motortoerental
vrijwel constant wordt gehouden.
Smart Logic Control (SLC)
De SLC is een reeks door de gebruiker gedenieerde acties
die wordt uitgevoerd wanneer de bijbehorende, door de
gebruiker gedenieerde gebeurtenissen door de SLC
worden geëvalueerd als TRUE
Thermistor
Een temperatuurafhankelijke weerstand die geplaatst
wordt op plaatsen waar de temperatuur moet worden
bewaakt (frequentieregelaar of motor).
Uitschakeling (trip)
Een toestand die zich voordoet in foutsituaties,
bijvoorbeeld als de frequentieregelaar te maken krijgt met
overtemperatuur of wanneer de frequentieregelaar de
motor, het proces of het mechanisme beschermt. Een
herstart is niet mogelijk totdat de oorzaak van de fout is
weggenomen en de uitschakelingsstatus is opgeheven
door het activeren van de reset of, in sommige gevallen,
doordat een automatische reset is geprogrammeerd.
Gebruik een uitschakeling (trip) niet voor persoonlijke
veiligheid.
Uitschakeling met blokkering
Een toestand die zich voordoet in foutsituaties waarbij de
frequentieregelaar zichzelf beschermt en fysiek ingrijpen
noodzakelijk is, bijvoorbeeld als de frequentieregelaar
wordt kortgesloten op de uitgang. Een uitschakeling met
blokkering kan alleen worden opgeheven door de
netvoeding te onderbreken, de oorzaak van de fout weg te
nemen en de frequentieregelaar opnieuw aan te sluiten op
het net. Een herstart is niet mogelijk totdat de uitschakelingsstatus is opgeheven door het activeren van de reset of,
in sommige gevallen, doordat een automatische reset is
geprogrammeerd. Gebruik een uitschakeling met
blokkering niet voor persoonlijke veiligheid.
VT-karakteristieken
Variabel-koppelkarakteristieken die worden gebruikt voor
pompen en ventilatoren.
+
VVC
In vergelijking met een standaardregeling van de
spanning-frequentieverhouding zorgt Voltage Vector
Control (VVC+) voor betere dynamische prestaties en
stabiliteit, zowel bij een wijziging van de toerentalreferentie als met betrekking tot het belastingskoppel.
1 1
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 7
Page 10
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Inleiding
VLT® HVAC Basic Drive FC 101
11
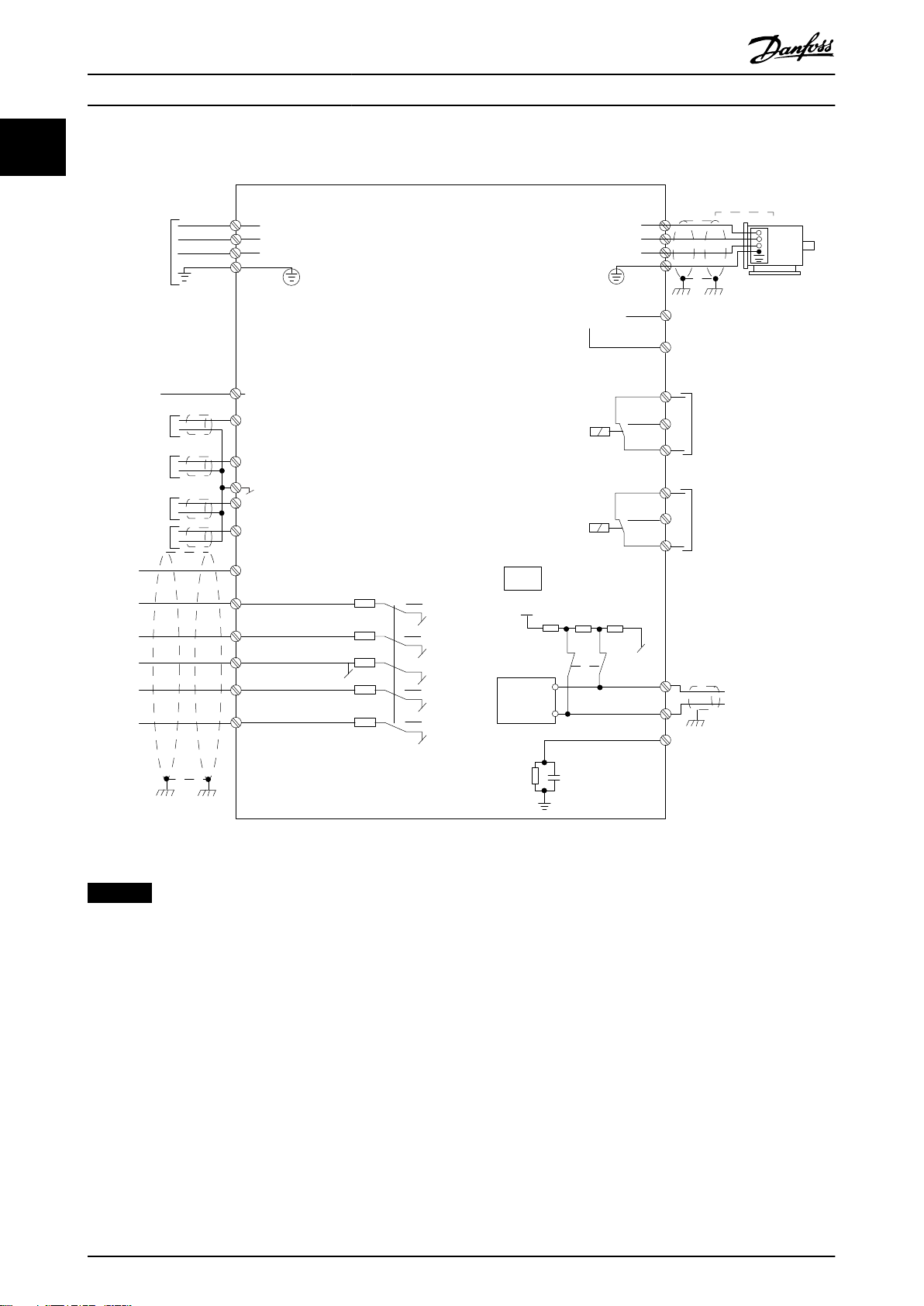
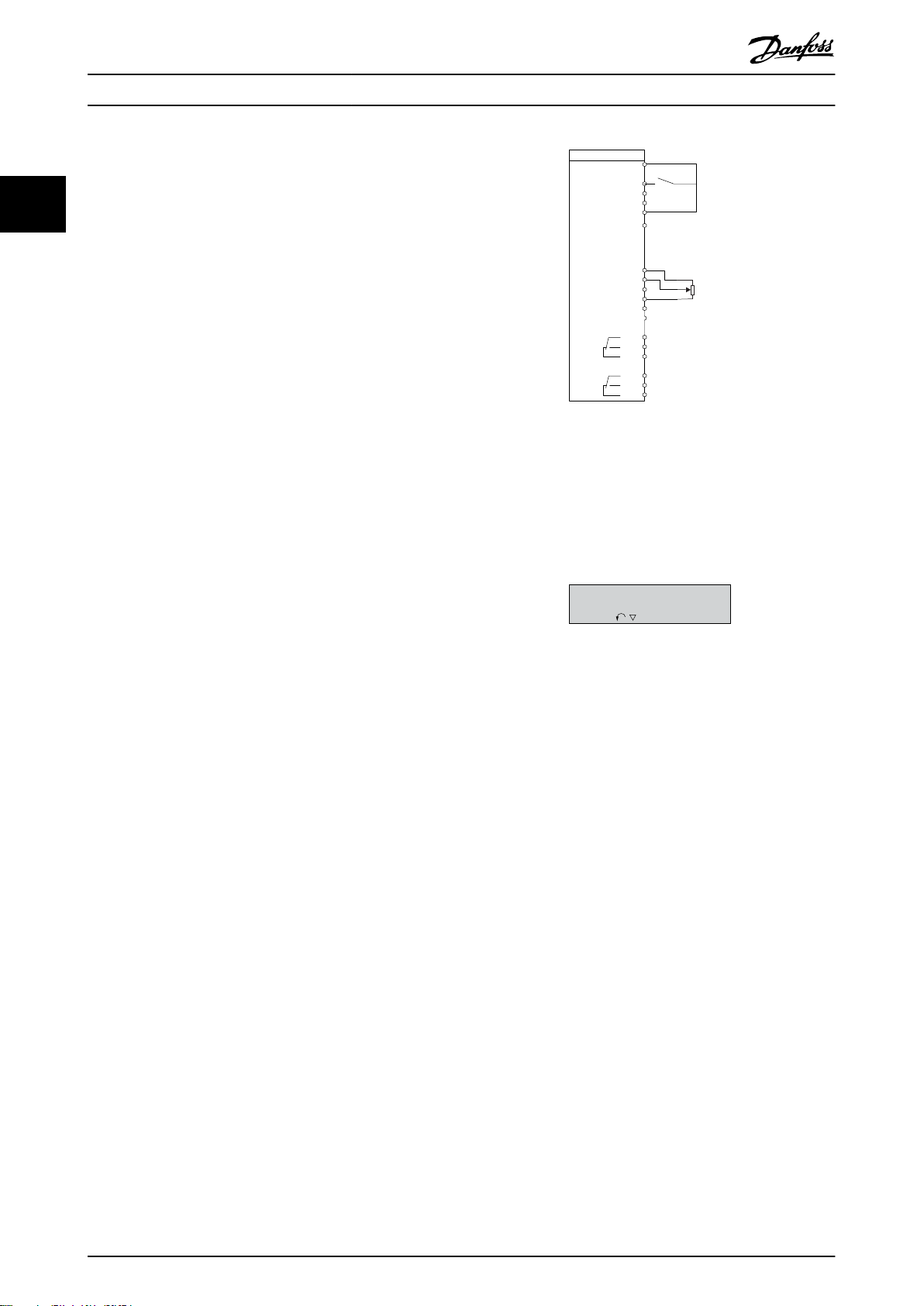
1.7 Elektrisch overzicht
Afbeelding 1.2 Eenvoudig bedradingsschema
LET OP
Houd er rekening mee dat UDC- en UDC+ niet toegankelijk zijn op de volgende eenheden:
•
•
•
•
IP 20, 380-480 V, 30-90 kW (40-125 pk)
IP 20, 200-240 V, 15-45 kW (20-60 pk)
IP 20, 525-600 V, 2,2-90 kW (3,0-125 pk)
IP 54, 380-480 V, 22-90 kW (30-125 pk)
8 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 11
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmeren Programmeerhandleiding
2 Programmeren
2.1 Inleiding
De frequentieregelaar kan worden geprogrammeerd via
het LCP of vanaf een pc via de RS485-COM-poort. Voor dit
laatste moet u MCT 10 setupsoftware installeren. Zie
hoofdstuk 1.5 Aanvullende hulpmiddelen voor meer
informatie over de software.
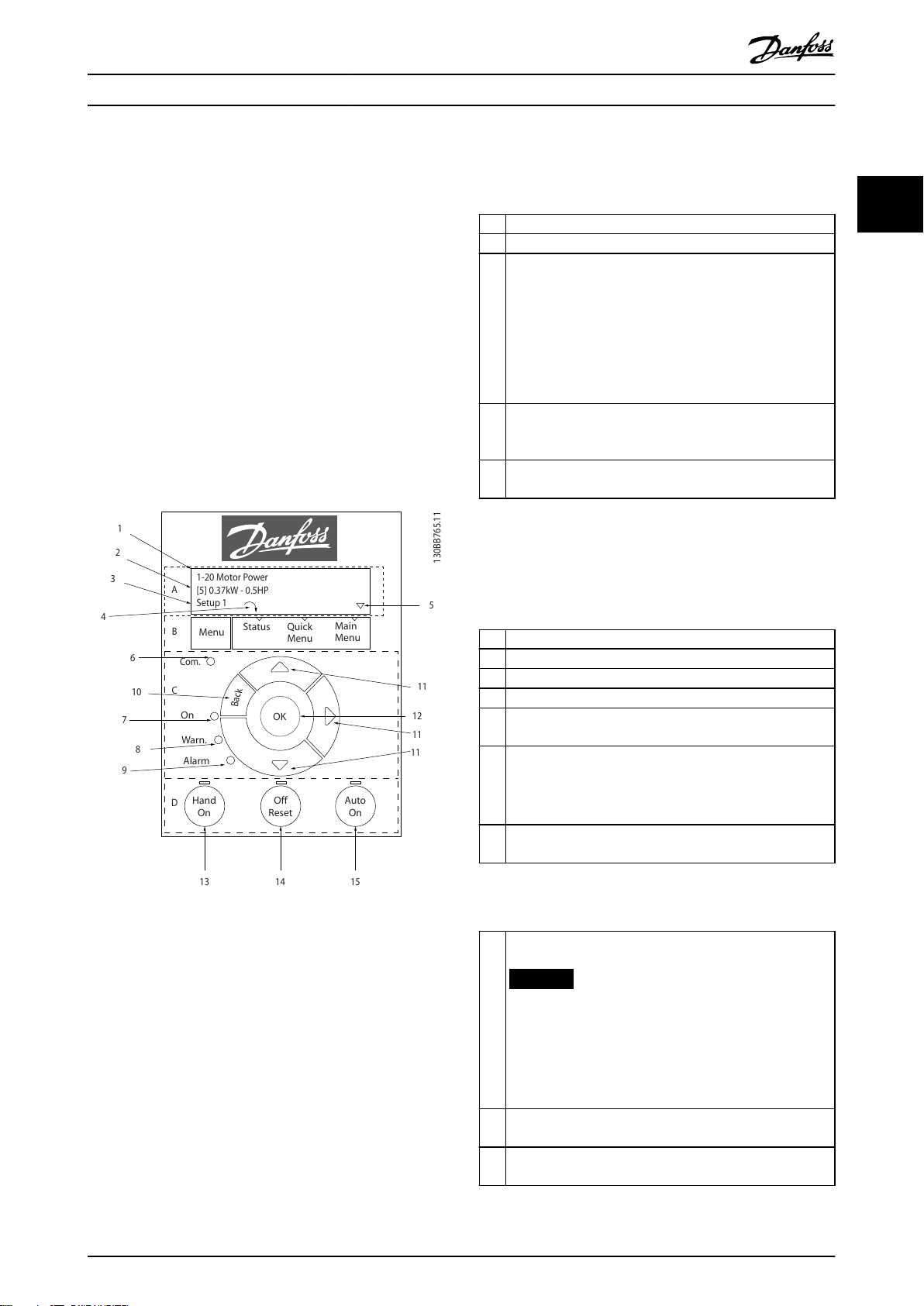
2.2 Lokaal bedieningspaneel (LCP)
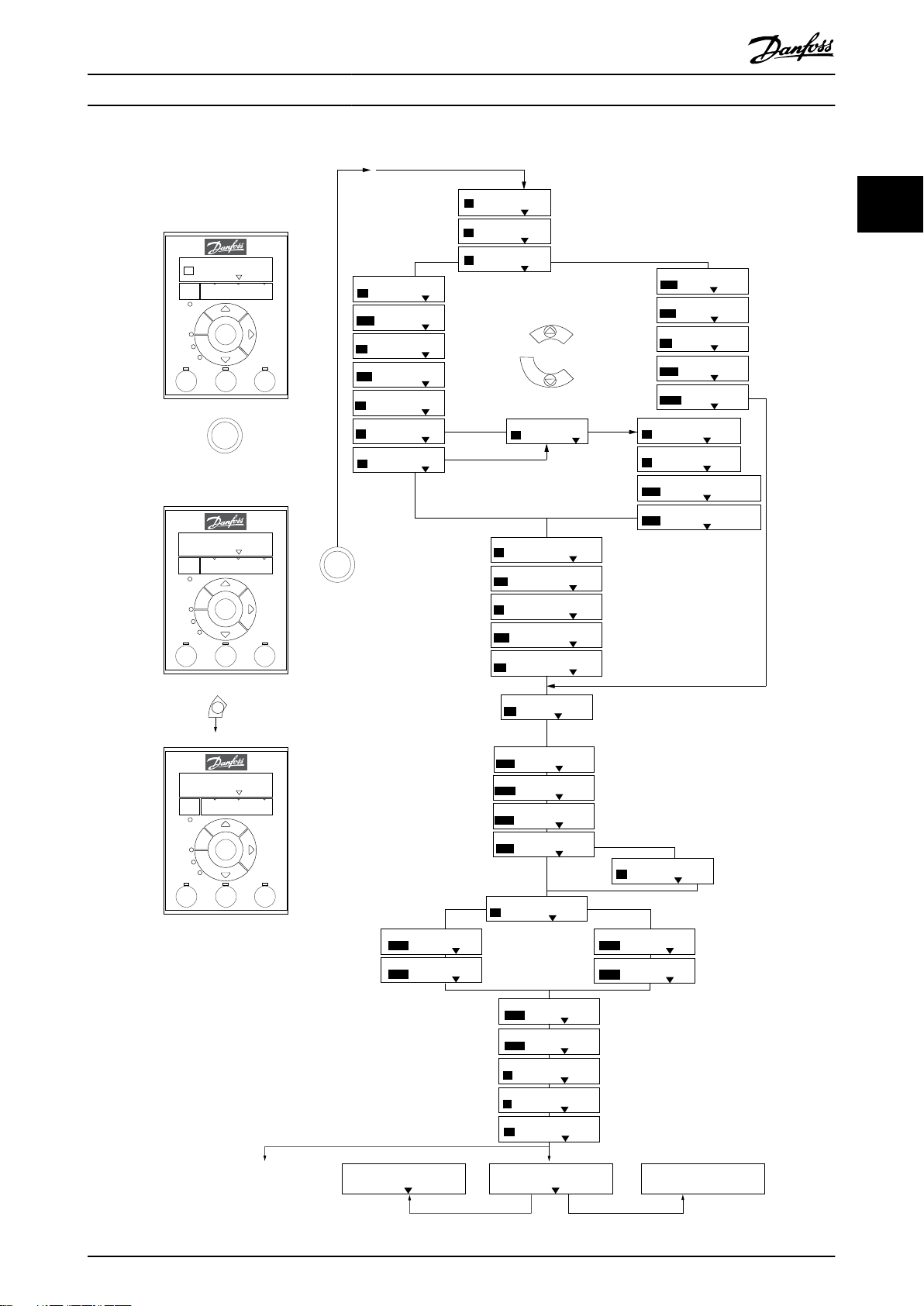
De functies van het LCP zijn onderverdeeld in 4 groepen.
A. Display
B. Menutoets
C. Navigatietoetsen en indicatielampjes
D. Bedieningstoetsen en indicatielampjes
1 Nummer en naam van de parameter.
2 Parameterwaarde.
Het setupnummer toont het nummer van de actieve setup
en het nummer van de setup die wordt gewijzigd. Als de
actieve setup ook de setup is die wordt bewerkt, wordt
alleen het nummer van deze setup getoond (fabrieksin-
3
stelling). Als de actieve en de te wijzigen setup niet
dezelfde zijn, worden beide nummers op het display
weergegeven (setup 12). Het nummer van de te bewerken
setup zal knipperen.
De draairichting van de motor wordt linksonder op het
4
display aangegeven door middel van een pijltje dat
rechtsom of linksom wijst.
Het driehoekje geeft aan of het LCP de status, het
5
snelmenu of het hoofdmenu weergeeft.
Tabel 2.1 Legenda bij Afbeelding 2.1, deel I
B. Menutoets
Druk op [Menu] om te schakelen tussen status, snelmenu
en hoofdmenu.
C. Navigatietoetsen en indicatielampjes
6 Com.-led: knippert tijdens buscommunicatie.
7 Groene led/On: de besturingssectie werkt correct.
8 Gele led/Warn.: geeft een waarschuwing aan.
9 Knipperende rode led/Alarm: geeft een alarm aan.
[Back]: dient om terug te keren naar de vorige stap of laag
10
in de navigatiestructuur.
[▲] [▼] [►]: dienen om te navigeren tussen parametergroepen en parameters en binnen parameters. Ze kunnen
11
ook worden gebruikt voor het instellen van de lokale
referentie.
[OK]: dient om een parameter te selecteren en wijzigingen
12
van de parameterinstelling te accepteren.
2 2
Tabel 2.2 Legenda bij Afbeelding 2.1, deel II
Afbeelding 2.1 Lokaal bedieningspaneel (LCP)
D. Bedieningstoetsen en indicatielampjes
[Hand On]: start de motor en maakt het mogelijk om de
A. Display
Het lcd-display is verlicht en heeft 2 alfanumerieke regels.
Alle gegevens worden op het LCP weergegeven.
Afbeelding 2.1 beschrijft de gegevens die kunnen worden
uitgelezen via het display.
frequentieregelaar via het LCP te besturen.
LET OP
[2] Coast inverse (Vrijloop geïnverteerd) is de
13
standaardoptie voor parameter 5-12 Klem 27 digitale
ingang. [Hand On] start de motor niet als er geen
24 V is aangesloten op klem 27. Verbind klem 12
met klem 27.
[O/Reset]: stopt de motor (O). Een eventueel aanwezig
14
alarm wordt gereset.
[Auto On]: de frequentieregelaar wordt bestuurd via
15
stuurklemmen of seriële communicatie.
Tabel 2.3 Legenda bij Afbeelding 2.1, deel III
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 9
Page 12
FC
+24 V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A UIT / D UIT
A UIT / D UIT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Referentie
Start
+10 V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Press OK to start Wizard
Push Back to skip it
Setup 1
Programmeren
VLT® HVAC Basic Drive FC 101
2.3 Menu's
2.3.1 Statusmenu
22
De selectiemogelijkheden in het menu Status zijn:
Motorfrequentie [Hz], parameter 16-13 Frequentie.
•
Motorstroom [A], parameter 16-14 Motorstroom.
•
Referentie motortoerental als percentage [%],
•
parameter 16-02 Referentie [%].
Terugkoppeling, parameter 16-52 Terugk. [Eenh].
•
Motorvermogen, parameter 16-10 Verm. [kW] voor
•
kW, parameter 16-11 Verm. [pk] voor pk. Als
parameter 0-03 Regionale instellingen is ingesteld
op [1] Noord-Amerika, wordt het motorvermogen
niet in kW maar in pk weergegeven.
Uitlezing gebruiker, parameter 16-09 Standaard
•
uitlez..
Motortoerental [tpm], parameter 16-17 Snelh.
•
[RPM].
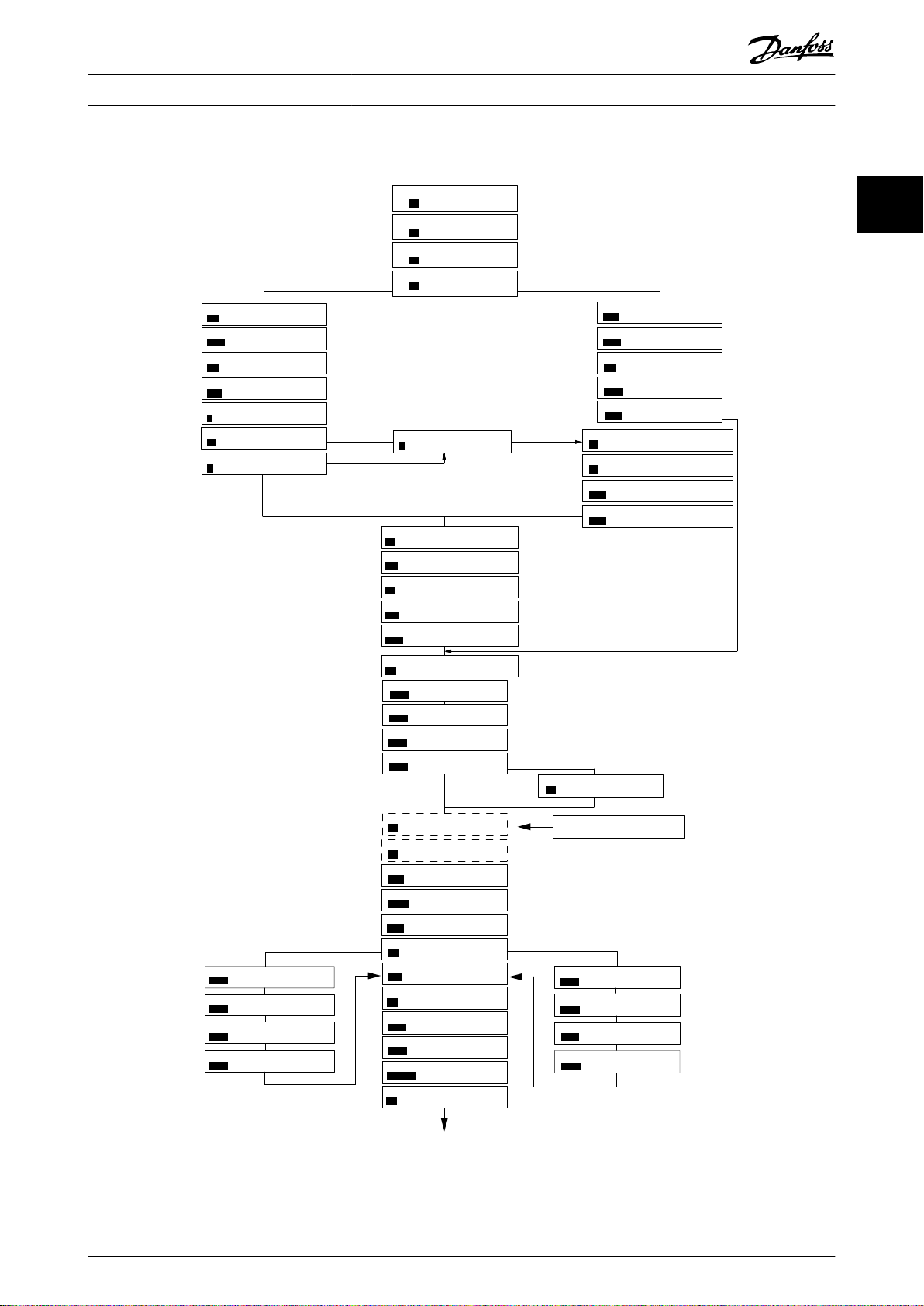
2.3.2 Quick Menu
Afbeelding 2.2 Bedrading frequentieregelaar
De wizard wordt na inschakeling weergegeven totdat er
een parameter is gewijzigd. De wizard kan altijd opnieuw
worden opgestart via het snelmenu. Druk op [OK] om de
wizard te starten. Druk op [Back] om terug te keren naar
de statusweergave.
Gebruik het snelmenu om de meestgebruikte functies te
programmeren. Via [Quick Menu] hebt u toegang tot de
volgende onderdelen:
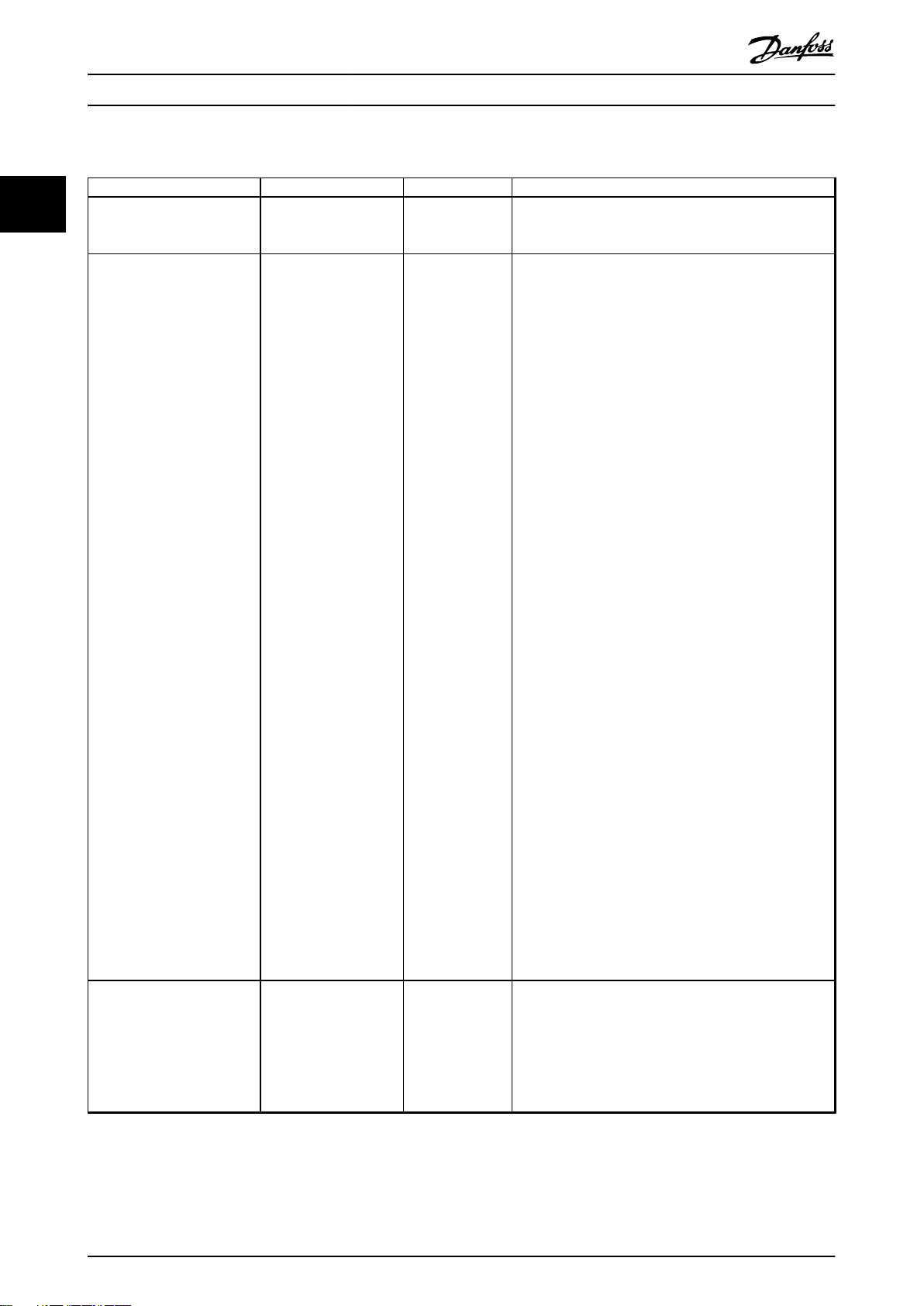
Opstartwizard voor toepassingen zonder
•
terugkoppeling. Zie Afbeelding 2.4 voor meer
informatie.
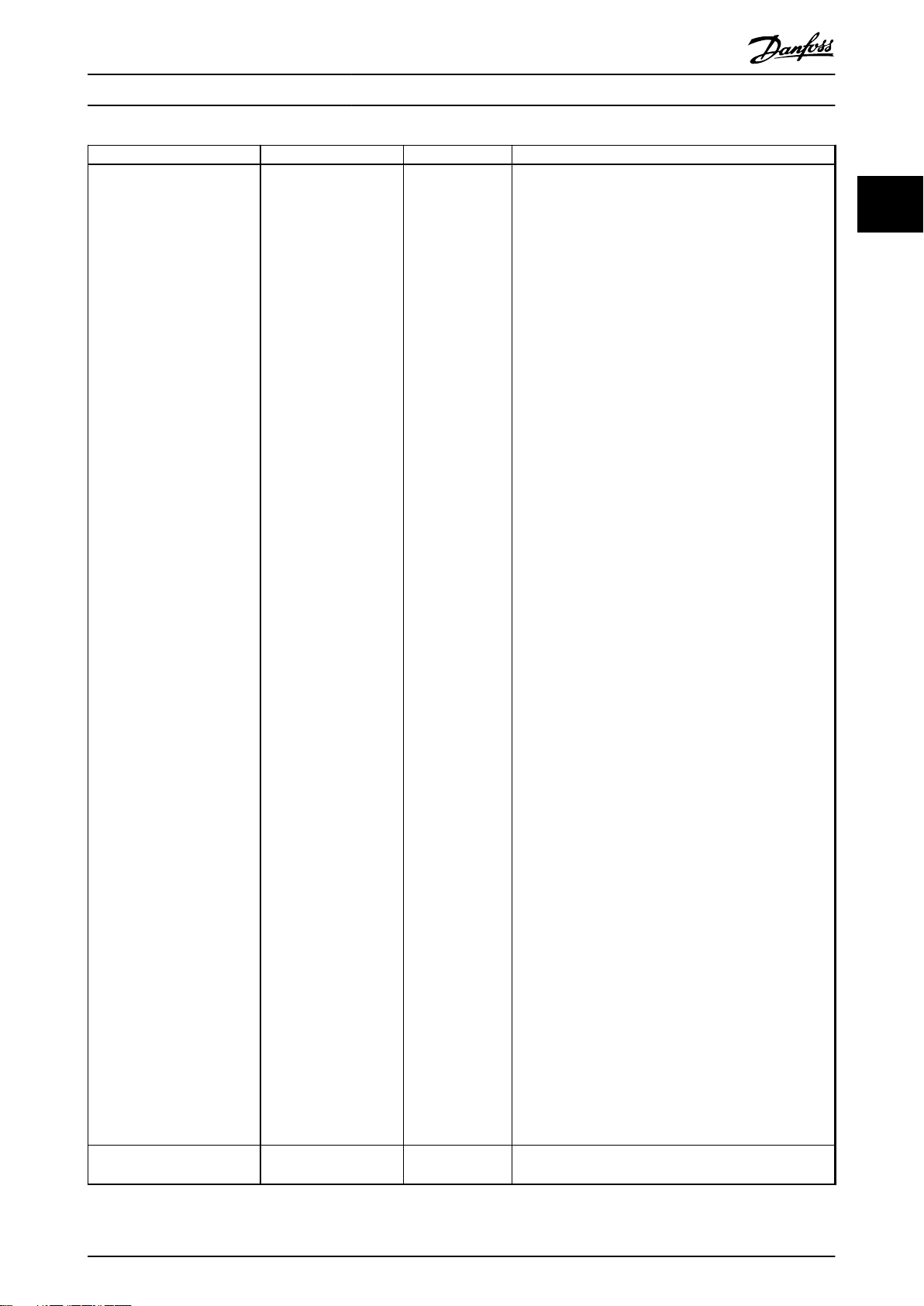
Wizard voor toepassingen met terugkoppeling.
•
Zie Afbeelding 2.5 voor meer informatie.
Motorsetup. Zie Tabel 2.6 voor meer informatie.
•
Gemaakte wijzigingen.
•
De ingebouwde wizard leidt de installateur op duidelijke
en gestructureerde wijze door de setup van de frequentieregelaar voor het congureren van toepassingen met of
zonder terugkoppeling en voor een snelle conguratie van
de motorinstellingen.
Afbeelding 2.3 Wizard voor opstarten/afsluiten
10 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 13
Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmeren Programmeerhandleiding
2 2
Afbeelding 2.4 Setupwizard voor toepassingen zonder terugkoppeling
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 11
Page 14
Programmeren
VLT® HVAC Basic Drive FC 101
Setupwizard voor toepassingen zonder terugkoppeling
Parameter Optie Standaard Gebruik
22
Parameter 0-03 Regionale instel-
lingen
Parameter 0-06 Type net [0] 200–240 V/50 Hz/IT-
Parameter 1-10 Motorcon-
structie
[0] International (Interna-
tionaal)
[1] US ( VS)
grid
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/IT-
grid
[11] 380–440 V/50 Hz/
Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/IT-
grid
[21] 440–480 V/50 Hz/
Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/IT-
grid
[31] 525–600 V/50 Hz/
Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/IT-
grid
[101] 200–240 V/60 Hz/
Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/IT-
grid
[111] 380–440 V/60 Hz/
Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/IT-
grid
[121] 440–480 V/60 Hz/
Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/IT-
grid
[131] 525–600 V/60 Hz/
Delta
[132] 525–600 V/60 Hz
*[0] Asynchron
(Asynchroon)
[1] PM, non-salient SPM
(PM, niet-uitspringende
SPM)
[3] PM, salient IPM (PM,
uitspringende IPM)
[0] Internationaal –
Afhankelijk van
grootte
[0] Asynchron
(Asynchroon)
Selecteer de bedieningsmodus die bij het starten actief
moet zijn wanneer de frequentieregelaar na een uitschakeling weer wordt aangesloten op de netvoeding.
Door het instellen van deze parameter kan de instelling
van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte
•
motorregeling).
12 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 15
Programmeren Programmeerhandleiding
Parameter Optie Standaard Gebruik
Parameter 1-20 Motorverm. 0,12-110 kW/0,16-150 pk Afhankelijk van
grootte
Parameter 1-14 Verst. demping.
•
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm..
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis
•
(Stroom bij min. inductantie voor d- as).
Parameter 1-49 Current at Min Inductance for q-axis
•
(Stroom bij min. inductantie voor q- as).
Parameter 1-66 Min. stroom bij lage snelh..
•
Parameter 1-70 Startmodus.
•
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq..
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
Stel het motorvermogen in volgens de gegevens van het
typeplaatje
2 2
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 13
Page 16
Programmeren
Parameter Optie Standaard Gebruik
Parameter 1-22 Motorspanning 50-1000 V Afhankelijk van
22
Parameter 1-23 Motorfrequentie 20-400 Hz Afhankelijk van
Parameter 1-24 Motorstroom 0,01-10000,00 A Afhankelijk van
Parameter 1-25 Nom.
motorsnelheid
Parameter 1-26 Cont. nom.
motorkoppel
50-9999 tpm Afhankelijk van
0,1-1000,0 Nm Afhankelijk van
VLT® HVAC Basic Drive FC 101
Stel de motorspanning in volgens de gegevens van het
grootte
grootte
grootte
grootte
grootte
typeplaatje.
Voer de motorfrequentie in volgens de gegevens van het
typeplaatje.
Stel de motorstroom in volgens de gegevens van het
typeplaatje.
Voer het nominale motortoerental in volgens de gegevens
van het typeplaatje.
Deze parameter is alleen beschikbaar als
parameter 1-10 Motorconstructie is ingesteld op een optie
die het gebruik van een permanentmagneetmotor
mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde
beïnvloedt de instelling van andere parameters.
Parameter 1-29 Autom.
aanpassing motorgeg. (AMA)
Parameter 1-30 Statorweerstand
(Rs)
Parameter 1-37 Inductantie d-as
(Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpolen 2–100 4 Stel het aantal motorpolen in.
Parameter 1-40 Tegen-EMK bij
1000 TPM
Parameter 1-42 Lengte
motorkabel:
Parameter 1-44 Inductantie d-as
verz. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Verst. positiede-
tectie
Parameter 1-48 Current at Min
Inductance for d-axis (Stroom
bij min. inductantie voor d-as)
Zie
parameter 1-29 Autom.
aanpassing motorgeg.
(AMA).
0,000-99,990 Ω
0,000-1000,000 mH Afhankelijk van
0,000-1000,000 mH Afhankelijk van
10-9000 V Afhankelijk van
0-100 m 50 m Voer de lengte van de motorkabel in.
0,000-1000,000 mH Afhankelijk van
0,000-1000,000 mH Afhankelijk van
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij
20–200% 100% Voer het verzadigingspunt van de inductantie in.
O (Uit) Het uitvoeren van een AMA optimaliseert de motorpres-
taties.
Afhankelijk van
grootte
grootte
grootte
grootte
grootte
grootte
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in.
Raadpleeg het datablad voor de permanentmagneetmotor
voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
Deze parameter komt overeen met de inductantieverzadiging van Ld. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-37 Inductantie d-as (Ld).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-38 q-axis Inductance (Lq).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
het starten aan.
14 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 17
Programmeren Programmeerhandleiding
Parameter Optie Standaard Gebruik
Parameter 1-49 Current at Min
Inductance for q-axis (Stroom
bij min. inductantie voor q-as)
Parameter 1-70 Startmodus [0] Rotor Detection
Parameter 1-73 Vlieg. start [0] Disabled (Uitgesch.)
Parameter 3-02 Minimumrefe-
rentie
Parameter 3-03 Max. referentie -4999,000-4999,000 50 De maximumreferentie is de hoogste waarde die wordt
Parameter 3-41 Ramp 1
aanlooptijd
Parameter 3-42 Ramp 1
uitlooptijd
Parameter 4-12 Motorsnelh.
lage begr. [Hz]
Parameter 4-14 Motorsnelh.
hoge begr. [Hz]
Parameter 4-19 Max.
uitgangsfreq.
Parameter 5-40 Functierelais Zie
Parameter 5-40 Functierelais Zie
Parameter 6-10 Klem 53 lage
spanning
Parameter 6-11 Klem 53 hoge
spanning
Parameter 6-12 Klem 53 lage
stroom
Parameter 6-13 Klem 53 hoge
stroom
20–200% 100% Deze parameter speciceert de verzadigingscurve van de
d- en q-inductantiewaarden. Bij een waarde van deze
parameter van 20-100% wordt een lineaire benadering van
de inductanties toegepast, vanwege de parameters
parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz. (LdSat)
en parameter 1-45 q-axis Inductance Sat. (LqSat).
[0] Rotor Detection
(Rotordetectie)
[1] Parking (Parkeren)
[1] Enabled (Ingesch.)
-4999,000-4999,000 0 De minimumreferentie is de laagste waarde die wordt
0,05-3600,00 s Afhankelijk van
0,05-3600,00 s Afhankelijk van
0,0-400,0 Hz 0 Hz Stel de minimumbegrenzing voor een laag toerental in.
0,0-400,0 Hz 100 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100 Hz Stel de waarde voor de maximale uitgangsfrequentie in.
parameter 5-40 Functierelais.
parameter 5-40 Functierelais.
0,00-10,00 V 0,07 V Voer de spanning in die overeenkomt met de lage referen-
0,00-10,00 V 10 V Voer de spanning in die overeenkomt met de hoge
0,00-20,00 mA 4 mA Voer de stroom in die overeenkomt met de lage referen-
0,00-20,00 mA 20 mA Voer de stroom in die overeenkomt met de hoge referen-
(Rotordetectie)
[0] Disabled
(Uitgesch.)
grootte
grootte
[9] Alarm Selecteer de functie voor het besturen van uitgangsrelais
[5] Drive running
(Frequentieregelaar
actief)
Selecteer de startmodus voor de PM-motor.
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in
staat moet zijn een draaiende motor op te vangen bij een
netstoring. Selecteer [0] Disabled (Uitgesch.) als deze
functie niet vereist is. Als deze parameter is ingesteld op
[1] Enabled (Ingesch.), zijn parameter 1-71 Startvertraging en
parameter 1-72 Startfunctie niet van toepassing.
Parameter 1-73 Vlieg. start is alleen actief in de modus VVC
+
.
bepaald door de som van alle referenties.
bepaald door de som van alle referenties.
Bij gebruik van een asynchrone motor bedraagt de
aanlooptijd 0 tot de nominale waarde in
parameter 1-23 Motorfrequentie. Bij gebruik van een PMmotor bedraagt de aanlooptijd 0 tot parameter 1-25 Nom.
motorsnelheid.
Voor asynchrone motoren geldt een uitlooptijd vanaf de
nominale waarde in parameter 1-23 Motorfrequentie tot 0.
Voor PM-motoren geldt een uitlooptijd vanaf
parameter 1-25 Nom. motorsnelheid tot 0.
Als parameter 4-19 Max. uitgangsfreq. wordt ingesteld op
een waarde lager dan parameter 4-14 Motorsnelh. hoge
begr. [Hz], wordt parameter 4-14 Motorsnelh. hoge begr. [Hz]
automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq..
1.
Selecteer de functie voor het besturen van uitgangsrelais
2.
tiewaarde.
referentiewaarde.
tiewaarde.
tiewaarde.
2 2
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 15
Page 18
Programmeren
Parameter Optie Standaard Gebruik
Parameter 6-19 Terminal 53
mode
22
Parameter 30-22 Beveiliging
geblokkeerde rotor
Parameter 30-23 Locked Rotor
Detection Time [s]
Tabel 2.4 Setupwizard voor toepassingen zonder terugkoppeling
[0] Current (Stroom)
[1] Voltage (Spanning)
[0] O (Uit)
[1] On (Aan)
0,05-1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[1] Spanning Selecteer of klem 53 wordt gebruikt als stroom- of als
spanningsingang.
[0] O (Uit)
–
–
16 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 19
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmeren Programmeerhandleiding
Setupwizard voor toepassingen met terugkoppeling
2 2
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 17
Afbeelding 2.5 Setupwizard voor toepassingen met terugkoppeling
Page 20
Programmeren
Parameter Bereik Standaard Gebruik
Parameter 0-03 Regionale instel-
lingen
22
Parameter 0-06 Type net [0]–[132] Zie Tabel 2.4. Geselecteerde
Parameter 1-00 Congura-
tiemodus
Parameter 1-10 Motorcon-
structie
[0] International (Interna-
tionaal)
[1] US ( VS)
[0] Open loop (Zonder
terugkoppeling)
[3] Closed loop (Met
terugkoppeling)
*[0] Asynchron
(Asynchroon)
[1] PM, non-salient SPM
(PM, niet-uitspringende
SPM)
[3] PM, salient IPM (PM,
uitspringende IPM)
VLT® HVAC Basic Drive FC 101
[0] Internationaal –
Selecteer de bedieningsmodus die bij het starten actief
grootte
[0] Open loop
(Zonder terugkop-
peling)
[0] Asynchron
(Asynchroon)
moet zijn wanneer de frequentieregelaar na een uitschakeling weer wordt aangesloten op de netvoeding.
Selecteer [3] Closed loop (Met terugkoppeling).
Door het instellen van deze parameter kan de instelling
van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte
•
motorregeling).
Parameter 1-14 Verst. demping.
•
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm..
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis
•
(Stroom bij min. inductantie voor d- as).
Parameter 1-49 Current at Min Inductance for q-axis
•
(Stroom bij min. inductantie voor q- as).
Parameter 1-66 Min. stroom bij lage snelh..
•
Parameter 1-70 Startmodus.
•
18 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 21
Programmeren Programmeerhandleiding
Parameter Bereik Standaard Gebruik
Parameter 1-20 Motorverm. 0,09-110 kW Afhankelijk van
grootte
Parameter 1-22 Motorspanning 50-1000 V Afhankelijk van
grootte
Parameter 1-23 Motorfrequentie 20-400 Hz Afhankelijk van
grootte
Parameter 1-24 Motorstroom 0-10000 A Afhankelijk van
grootte
Parameter 1-25 Nom.
motorsnelheid
Parameter 1-26 Cont. nom.
motorkoppel
50-9999 tpm Afhankelijk van
grootte
0,1-1000,0 Nm Afhankelijk van
grootte
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq..
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
Stel het motorvermogen in volgens de gegevens van het
typeplaatje
Stel de motorspanning in volgens de gegevens van het
typeplaatje.
Voer de motorfrequentie in volgens de gegevens van het
typeplaatje.
Stel de motorstroom in volgens de gegevens van het
typeplaatje.
Voer het nominale motortoerental in volgens de gegevens
van het typeplaatje.
Deze parameter is alleen beschikbaar als
parameter 1-10 Motorconstructie is ingesteld op een optie
die het gebruik van een permanentmagneetmotor
mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde
beïnvloedt de instelling van andere parameters.
2 2
Parameter 1-29 Autom.
aanpassing motorgeg. (AMA)
Parameter 1-30 Statorweerstand
(Rs)
Parameter 1-37 Inductantie d-as
(Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpolen 2–100 4 Stel het aantal motorpolen in.
Parameter 1-40 Tegen-EMK bij
1000 TPM
Parameter 1-42 Lengte
motorkabel:
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 19
O (Uit) Het uitvoeren van een AMA optimaliseert de motorpres-
taties.
0-99,990 Ω
0,000-1000,000 mH Afhankelijk van
0,000-1000,000 mH Afhankelijk van
10-9000 V Afhankelijk van
0-100 m 50 m Voer de lengte van de motorkabel in.
Afhankelijk van
grootte
grootte
grootte
grootte
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in.
Raadpleeg het datablad voor de permanentmagneetmotor
voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
Page 22
Programmeren
Parameter Bereik Standaard Gebruik
Parameter 1-44 Inductantie d-as
verz. (LdSat)
0,000-1000,000 mH Afhankelijk van
22
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Verst. positiede-
tectie
Parameter 1-48 Current at Min
Inductance for d-axis (Stroom
bij min. inductantie voor d-as)
Parameter 1-49 Current at Min
Inductance for q-axis (Stroom
bij min. inductantie voor q-as)
Parameter 1-70 Startmodus [0] Rotor Detection
Parameter 1-73 Vlieg. start [0] Disabled (Uitgesch.)
Parameter 3-02 Minimumrefe-
rentie
Parameter 3-03 Max. referentie -4999,000-4999,000 50 De maximumreferentie is de hoogste waarde die wordt
Parameter 3-10 Ingestelde ref. -100–100% 0 Voer het setpoint in.
Parameter 3-41 Ramp 1
aanlooptijd
Parameter 3-42 Ramp 1
uitlooptijd
Parameter 4-12 Motorsnelh.
lage begr. [Hz]
Parameter 4-14 Motorsnelh.
hoge begr. [Hz]
Parameter 4-19 Max.
uitgangsfreq.
0,000-1000,000 mH Afhankelijk van
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij
20–200% 100% Voer het verzadigingspunt van de inductantie in.
20–200% 100% Deze parameter speciceert de verzadigingscurve van de
(Rotordetectie)
[1] Parking (Parkeren)
[1] Enabled (Ingesch.)
-4999,000-4999,000 0 De minimumreferentie is de laagste waarde die wordt
0,05-3600,0 s Afhankelijk van
0,05-3600,0 s Afhankelijk van
0,0-400,0 Hz 0,0 Hz Stel de minimumbegrenzing voor een laag toerental in.
0,0-400,0 Hz 100 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100 Hz Stel de waarde voor de maximale uitgangsfrequentie in.
VLT® HVAC Basic Drive FC 101
Deze parameter komt overeen met de inductantieverza-
grootte
grootte
[0] Rotor Detection
(Rotordetectie)
[0] Disabled
(Uitgesch.)
grootte
grootte
diging van Ld. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-37 Inductantie d-as (Ld).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-38 q-axis Inductance (Lq).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
het starten aan.
d- en q-inductantiewaarden. Bij een waarde van deze
parameter van 20-100% wordt een lineaire benadering van
de inductanties toegepast, vanwege de parameters
parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz. (LdSat)
en parameter 1-45 q-axis Inductance Sat. (LqSat).
Selecteer de startmodus voor de PM-motor.
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in
staat moet zijn een draaiende motor op te vangen,
bijvoorbeeld in ventilatortoepassingen. Als PM is
geselecteerd, is deze parameter ingeschakeld.
bepaald door de som van alle referenties.
bepaald door de som van alle referenties.
Aanlooptijd vanaf 0 tot de nominale waarde in
parameter 1-23 Motorfrequentie voor asynchrone motoren.
Aanlooptijd vanaf 0 tot parameter 1-25 Nom. motorsnelheid
voor PM-motoren.
Uitlooptijd vanaf de nominale waarde in
parameter 1-23 Motorfrequentie tot 0 voor asynchrone
motoren. Uitlooptijd vanaf parameter 1-25 Nom.
motorsnelheid tot 0 voor PM-motoren.
Als parameter 4-19 Max. uitgangsfreq. wordt ingesteld op
een waarde lager dan parameter 4-14 Motorsnelh. hoge
begr. [Hz], wordt parameter 4-14 Motorsnelh. hoge begr. [Hz]
automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq..
20 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 23
Programmeren Programmeerhandleiding
Parameter Bereik Standaard Gebruik
Parameter 6-20 Klem 54 lage
spanning
Parameter 6-21 Klem 54 hoge
spanning
Parameter 6-22 Klem 54 lage
stroom
Parameter 6-23 Klem 54 hoge
stroom
Parameter 6-24 Klem 54 lage
ref./terugkopp. waarde
Parameter 6-25 Klem 54 hoge
ref./terugkopp. waarde
Parameter 6-26 Klem 54 lter
tijdconstante
Parameter 6-29 Klem 54 modus [0] Current (Stroom)
Parameter 20-81 PI normaal/inv
regeling
Parameter 20-83 PI startsnelheid
[Hz]
Parameter 20-93 PI prop.
versterking
Parameter 20-94 PI Integral
Time
Parameter 30-22 Beveiliging
geblokkeerde rotor
Parameter 30-23 Locked Rotor
Detection Time [s]
0,00-10,00 V 0,07 V Voer de spanning in die overeenkomt met de lage referen-
tiewaarde.
0,00-10,00 V 10,00 V Voer de spanning in die overeenkomt met de hoge
referentiewaarde.
0,00-20,00 mA 4,00 mA Voer de stroom in die overeenkomt met de lage referen-
tiewaarde.
0,00-20,00 mA 20,00 mA Voer de stroom in die overeenkomt met de hoge referen-
tiewaarde.
-4999–4999 0 Voer de terugkoppelingswaarde in die overeenkomt met
de in parameter 6-20 Klem 54 lage spanning/
parameter 6-22 Klem 54 lage stroom ingestelde spanning of
stroom.
-4999–4999 50 Voer de terugkoppelingswaarde in die overeenkomt met
de in parameter 6-21 Klem 54 hoge spanning/
parameter 6-23 Klem 54 hoge stroom ingestelde spanning
of stroom.
0,00-10,00 s 0,01 Stel de ltertijdconstante in.
[1] Spanning Selecteer of klem 54 wordt gebruikt als stroom- of als
[1] Voltage (Spanning)
[0] Normal (Normaal)
[1] Inverse (Geïnverteerd)
0-200 Hz 0 Hz Stel het motortoerental in dat moet worden bereikt als
0,00-10,00 0,01 Stel de proportionele versterking voor de procesregelaar
0,1-999,0 s 999,0 s Stel de integratietijd voor de procesregelaar in. Een korte
[0] O (Uit)
[1] On (Aan)
0,05-1,00 s 0,10 s
[0] Normal
(Normaal)
[0] O (Uit)
spanningsingang.
Selecteer [0] Normal (Normaal) om de procesregeling zo in
te stellen dat de uitgangssnelheid wordt verhoogd
wanneer de procesfout positief is. Selecteer [1] Inverse
(Geïnverteerd) om de uitgangssnelheid te verlagen.
startsignaal voor de PI-regeling.
in. Een hoge versterking zorgt voor een snelle regeling. Als
de versterking echter te hoog is, kan het proces instabiel
worden.
integratietijd zorgt voor een snelle regeling. Als de integratietijd echter te kort is, kan het proces instabiel worden.
Een extreem lange integratietijd schakelt de integratieactie
uit.
–
–
2 2
Tabel 2.5 Setupwizard voor toepassingen met terugkoppeling
Motorsetup
De motorsetupwizard leidt gebruikers stap voor stap door de benodigde motorparameters.
Parameter Bereik Standaard Gebruik
Parameter 0-03 Regionale instel-
lingen
Parameter 0-06 Type net [0]–[132] Zie Tabel 2.4. Afhankelijk van
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 21
[0] International (Interna-
tionaal)
[1] US ( VS)
0 –
grootte
Selecteer de bedieningsmodus die bij het starten actief
moet zijn wanneer de frequentieregelaar na een uitschakeling weer wordt aangesloten op de netvoeding.
Page 24
Programmeren
Parameter Bereik Standaard Gebruik
Parameter 1-10 Motorcon-
structie
22
*[0] Asynchron
(Asynchroon)
[1] PM, non-salient SPM
(PM, niet-uitspringende
SPM)
[3] PM, salient IPM (PM,
uitspringende IPM)
VLT® HVAC Basic Drive FC 101
[0] Asynchron
(Asynchroon)
Door het instellen van deze parameter kan de instelling
van de volgende parameters wijzigen:
Parameter 1-01 Motorbesturingsprincipe.
•
Parameter 1-03 Koppelkarakteristiek.
•
Parameter 1-08 Motor Control Bandwidth (Bandbreedte
•
motorregeling).
22 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 25
Programmeren Programmeerhandleiding
Parameter Bereik Standaard Gebruik
Parameter 1-20 Motorverm. 0,12-110 kW/0,16-150 pk Afhankelijk van
grootte
Parameter 1-22 Motorspanning 50-1000 V Afhankelijk van
grootte
Parameter 1-15 Filtertijdconstante lage snelh.
•
Parameter 1-16 Filtertijdconstante hoge snelh.
•
Parameter 1-17 Filtertijdconstante spanning
•
Parameter 1-20 Motorverm..
•
Parameter 1-22 Motorspanning.
•
Parameter 1-23 Motorfrequentie.
•
Parameter 1-24 Motorstroom.
•
Parameter 1-25 Nom. motorsnelheid.
•
Parameter 1-26 Cont. nom. motorkoppel.
•
Parameter 1-30 Statorweerstand (Rs).
•
Parameter 1-33 Statorlekreactantie (X1).
•
Parameter 1-35 Hoofdreactantie (Xh).
•
Parameter 1-37 Inductantie d-as (Ld).
•
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-39 Motorpolen.
•
Parameter 1-40 Tegen-EMK bij 1000 TPM.
•
Parameter 1-44 Inductantie d-as verz. (LdSat).
•
Parameter 1-45 q-axis Inductance Sat. (LqSat).
•
Parameter 1-46 Verst. positiedetectie.
•
Parameter 1-48 Current at Min Inductance for d-axis
•
(Stroom bij min. inductantie voor d- as).
Parameter 1-49 Current at Min Inductance for q-axis
•
(Stroom bij min. inductantie voor q- as).
Parameter 1-66 Min. stroom bij lage snelh..
•
Parameter 1-70 Startmodus.
•
Parameter 1-72 Startfunctie.
•
Parameter 1-73 Vlieg. start.
•
Parameter 1-80 Functie bij stop.
•
Parameter 1-82 Min. snelh. voor functie bij stop [Hz].
•
Parameter 1-90 Thermische motorbeveiliging.
•
Parameter 2-00 DC-houd/voorverw.stroom.
•
Parameter 2-01 DC-remstroom.
•
Parameter 2-02 DC-remtijd.
•
Parameter 2-04 Inschakelsnelh. DC-rem.
•
Parameter 2-10 Remfunctie.
•
Parameter 4-14 Motorsnelh. hoge begr. [Hz].
•
Parameter 4-19 Max. uitgangsfreq..
•
Parameter 4-58 Motorfasefunctie ontbreekt.
•
Parameter 14-65 Toerentalreductie dodetijdcompensatie.
•
Stel het motorvermogen in volgens de gegevens van het
typeplaatje
Stel de motorspanning in volgens de gegevens van het
typeplaatje.
2 2
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 23
Page 26
Programmeren
Parameter Bereik Standaard Gebruik
Parameter 1-23 Motorfrequentie 20-400 Hz Afhankelijk van
22
Parameter 1-24 Motorstroom 0,01-10000,00 A Afhankelijk van
Parameter 1-25 Nom.
motorsnelheid
Parameter 1-26 Cont. nom.
motorkoppel
50-9999 tpm Afhankelijk van
0,1-1000,0 Nm Afhankelijk van
VLT® HVAC Basic Drive FC 101
Voer de motorfrequentie in volgens de gegevens van het
grootte
grootte
grootte
grootte
typeplaatje.
Stel de motorstroom in volgens de gegevens van het
typeplaatje.
Voer het nominale motortoerental in volgens de gegevens
van het typeplaatje.
Deze parameter is alleen beschikbaar als
parameter 1-10 Motorconstructie is ingesteld op een optie
die het gebruik van een permanentmagneetmotor
mogelijk maakt.
LET OP
Het wijzigen van deze parameterwaarde
beïnvloedt de instelling van andere parameters.
Parameter 1-30 Statorweerstand
(Rs)
Parameter 1-37 Inductantie d-as
(Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpolen 2–100 4 Stel het aantal motorpolen in.
Parameter 1-40 Tegen-EMK bij
1000 TPM
Parameter 1-42 Lengte
motorkabel:
Parameter 1-44 Inductantie d-as
verz. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Verst. positiede-
tectie
Parameter 1-48 Current at Min
Inductance for d-axis (Stroom
bij min. inductantie voor d-as)
Parameter 1-49 Current at Min
Inductance for q-axis (Stroom
bij min. inductantie voor q-as)
Parameter 1-70 Startmodus [0] Rotor Detection
0-99,990 Ω
0,000-1000,000 mH Afhankelijk van
0,000-1000,000 mH Afhankelijk van
10-9000 V Afhankelijk van
0-100 m 50 m Voer de lengte van de motorkabel in.
0,000-1000,000 mH Afhankelijk van
0,000-1000,000 mH Afhankelijk van
20–200% 100% Past de hoogte van de testpuls tijdens positiedetectie bij
20–200% 100% Voer het verzadigingspunt van de inductantie in.
20–200% 100% Deze parameter speciceert de verzadigingscurve van de
(Rotordetectie)
[1] Parking (Parkeren)
Afhankelijk van
grootte
grootte
grootte
grootte
grootte
grootte
[0] Rotor Detection
(Rotordetectie)
Stel de statorweerstandswaarde in.
Stel de waarde voor de inductantie van de d-as in.
Raadpleeg het datablad voor de permanentmagneetmotor
voor de juiste waarde.
Stel de waarde voor de inductantie van de q-as in.
Lijnspanning (rms-waarde) tegen-EMK bij 1000 tpm.
Deze parameter komt overeen met de inductantieverzadiging van Ld. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-37 Inductantie d-as (Ld).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
Deze parameter komt overeen met de inductantieverzadiging van Lq. In het ideale geval heeft deze parameter
dezelfde waarde als parameter 1-38 q-axis Inductance (Lq).
Als de motorfabrikant echter een inductiecurve heeft
vermeld, voert u de inductiewaarde in; dit is 200% van de
nominale waarde.
het starten aan.
d- en q-inductantiewaarden. Bij een waarde van deze
parameter van 20-100% wordt een lineaire benadering van
de inductanties toegepast, vanwege de parameters
parameter 1-37 Inductantie d-as (Ld), parameter 1-38 q-axis
Inductance (Lq), parameter 1-44 Inductantie d-as verz.
(LdSat) en parameter 1-45 q-axis Inductance Sat. (LqSat).
Selecteer de startmodus voor de PM-motor.
24 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 27
Programmeren Programmeerhandleiding
Parameter Bereik Standaard Gebruik
Parameter 1-73 Vlieg. start [0] Disabled (Uitgesch.)
[1] Enabled (Ingesch.)
Parameter 3-41 Ramp 1
aanlooptijd
Parameter 3-42 Ramp 1
uitlooptijd
Parameter 4-12 Motorsnelh.
lage begr. [Hz]
Parameter 4-14 Motorsnelh.
hoge begr. [Hz]
Parameter 4-19 Max.
uitgangsfreq.
Parameter 30-22 Beveiliging
geblokkeerde rotor
Parameter 30-23 Locked Rotor
Detection Time [s]
0,05-3600,0 s Afhankelijk van
0,05-3600,0 s Afhankelijk van
0,0-400,0 Hz 0,0 Hz Stel de minimumbegrenzing voor een laag toerental in.
0,0-400,0 Hz 100,0 Hz Stel de maximumbegrenzing voor een hoog toerental in.
0,0-400,0 Hz 100,0 Hz Stel de waarde voor de maximale uitgangsfrequentie in.
[0] O (Uit)
[1] On (Aan)
0,05-1,00 s 0,10 s
[0] Disabled
(Uitgesch.)
grootte
grootte
[0] O (Uit)
Selecteer [1] Enabled (Ingesch.) als de frequentieregelaar in
staat moet zijn een draaiende motor op te vangen.
Aanlooptijd vanaf 0 tot de nominale waarde in
parameter 1-23 Motorfrequentie.
Uitlooptijd vanaf de nominale waarde in
parameter 1-23 Motorfrequentie tot 0.
Als parameter 4-19 Max. uitgangsfreq. wordt ingesteld op
een waarde lager dan parameter 4-14 Motorsnelh. hoge
begr. [Hz], wordt parameter 4-14 Motorsnelh. hoge begr. [Hz]
automatisch ingesteld op de waarde in
parameter 4-19 Max. uitgangsfreq..
–
–
2 2
Tabel 2.6 Instellingen Motorsetupwizard
Gemaakte wijzigingen
De functie Changes Made (Gemaakte wijzigingen) toont
alle parameters die zijn gewijzigd ten opzichte van de
standaardinstelling.
De lijst toont alleen parameters die zijn gewijzigd
•
in de huidige, te bewerken setup.
Parameters die weer op de standaardwaarde zijn
•
ingesteld, worden niet vermeld.
De melding Empty (Leeg) geeft aan dat geen van
•
de parameters is gewijzigd.
Parameterinstellingen wijzigen
1. Om het snelmenu te activeren, drukt u herhaaldelijk op de [Menu]-toets totdat het lampje
boven Quick Menu brandt.
2.
Gebruik [▲] [▼] voor het selecteren van de wizard,
de setup voor een regeling met terugkoppeling,
de motorsetup of de gemaakte wijzigingen.
3. Druk op [OK].
4.
Gebruik [▲] [▼] om door de parameters in het
snelmenu te navigeren.
5. Druk op [OK] om een parameter te selecteren.
6.
Gebruik [▲] [▼] om de waarde van de geselecteerde parameter te wijzigen.
7. Druk op [OK] om de wijziging op te slaan.
8. Druk twee keer op [Back] om naar Status te gaan
of druk één keer op [Menu] om naar Main Menu
te gaan.
Het hoofdmenu biedt toegang tot alle parameters
1. Druk herhaaldelijk op de [Menu]-toets totdat het
lampje boven Main Menu brandt.
2.
Gebruik [▲] [▼] om door de parametergroepen te
navigeren.
3. Druk op [OK] om een parametergroep te
selecteren.
4.
Gebruik [▲] [▼] om door de parameters binnen
een bepaalde groep te navigeren.
5. Druk op [OK] om de parameter te selecteren.
6.
Gebruik [▲] [▼] om de waarde van de geselecteerde parameter in te stellen of te wijzigen.
7. Druk op [OK] om de wijziging op te slaan.
2.3.3 Main Menu
Druk op [Menu] om toegang te krijgen tot het hoofdmenu
en alle parameters te programmeren. De parameters van
het hoofdmenu zijn direct toegankelijk, tenzij er een
wachtwoord is ingesteld via parameter 0-60 Wachtw.
hoofdmenu.
Voor de meeste toepassingen is het niet nodig om
parameters te selecteren via het hoofdmenu. Het snelmenu
biedt de snelste en eenvoudigste manier om toegang te
krijgen tot de typisch vereiste parameters.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 25
Page 28

Programmeren
2.4 Snel overzetten van
parameterinstellingen naar andere
22
frequentieomvormers
Wanneer de setup van een frequentieregelaar voltooid is,
kunt u de gegevens het beste in het LCP of met behulp
van de MCT 10 setupsoftware op een pc opslaan.
Gegevens overzetten van frequentieregelaar naar LCP
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op [OK].
3. Selecteer [1] Alles naar LCP.
4. Druk op [OK].
Sluit het LCP aan op een andere frequentieregelaar en
kopieer de parameterinstellingen ook naar die frequentieregelaar.
Gegevens overzetten van LCP naar frequentieregelaar
1. Ga naar parameter 0-50 LCP kopiëren.
2. Druk op [OK].
3. Selecteer [2] Alles vanaf LCP.
4. Druk op [OK].
Geïndexeerde parameters uitlezen en
2.5
programmeren
Selecteer de parameter, druk op [OK] en gebruik [▲]/[▼]
om door de geïndexeerde waarden te schuiven. Wijzig de
waarde van de parameter door de geïndexeerde waarde te
selecteren en op [OK] te drukken. Wijzig de waarde met
behulp van [▲]/[▼]. Druk op [OK] om de nieuwe instelling
op te slaan. Druk op [Cancel] om te annuleren. Druk op
[Back] om de parameter te verlaten.
Initialiseren naar standaardinstellingen
2.6
Er zijn 2 manieren om de standaardinstellingen van de
frequentieregelaar te herstellen.
Aanbevolen initialisatie
1. Selecteer parameter 14-22 Bedrijfsmodus.
2. Druk op [OK].
3. Selecteer [2] Initialisatie en druk op [OK].
4. Onderbreek de voeding naar de frequentieregelaar en wacht totdat het display uitgaat.
5. Sluit de netvoeding weer aan. De frequentieregelaar is nu gereset, met uitzondering van de
volgende parameters:
Parameter 1-06 Richting rechtsom
•
Parameter 8-30 Protocol
•
Parameter 8-31 Adres
•
VLT® HVAC Basic Drive FC 101
2-vingerige initialisatie
De andere manier om de frequentieregelaar terug te
zetten naar de standaardinstellingen is door middel van 2vingerige initialisatie:
1. Schakel de frequentieregelaar uit.
2. Druk op [OK] en [Menu].
3. Schakel de frequentieregelaar in terwijl u deze
4. De frequentieregelaar is nu gereset, met uitzon-
De initialisatie van de parameters wordt na inschakeling
bevestigd door de melding alarm 80, Drive initialised (Omv.
geïnitial.) op het display.
Parameter 8-32 Baudsnelheid
•
Parameter 8-33 Par./stopbits
•
Parameter 8-35 Min. responsvertr.
•
Parameter 8-36 Max. responsvertr.
•
Parameter 8-37 Max. tss.-tekenvertr.
•
Parameter 8-70 BACnet Device Voorbld
•
Parameter 8-72 MS/TP Max Masters (Max.
•
masters MS/TP)
Parameter 8-73 MS/TP Max Info Frames
•
(Max. informatieframes MS/TP)
Parameter 8-74 "Startup I am"
•
Parameter 8-75 Initialisatie wachtw.
•
Parameter 15-00 Bedrijfsuren tot
•
parameter 15-05 x Overspann.
Parameter 15-03 Inschakelingen
•
Parameter 15-04 x Overtemp.
•
Parameter 15-05 x Overspann.
•
Parameter 15-30 Alarmlog: foutcode
•
Parameter group 15-4* Drive identication
•
(ID frequentieregelaar)
Parameter 18-10 Brandmoduslog: event
•
toetsen 10 s ingedrukt houdt.
dering van de volgende parameters:
Parameter 1-06 Richting rechtsom
•
Parameter 15-00 Bedrijfsuren
•
Parameter 15-03 Inschakelingen
•
Parameter 15-04 x Overtemp.
•
Parameter 15-05 x Overspann.
•
Parameter group 15-4* Drive identication
•
(ID frequentieregelaar)
Parameter 18-10 Brandmoduslog: event
•
26 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 29
Parameters Programmeerhandleiding
3 Parameters
De * in parameternummers duidt een groep of subgroep
van parameters aan waarbij de eerste 1 of 2 cijfers identiek
zijn. Zo verwijst 0-** naar een groep van parameters die
allemaal beginnen met 0. 0-0* verwijst naar de subgroep
van parameters waarbij de eerste 2 cijfers identiek zijn,
namelijk 0-0.
Een asterisk (*) na een optienummer geeft de
standaardoptie aan. Zo is [0]* English (Engels) de
standaardoptie voor parameter 0-01 Taal.
3.1 Hoofdmenu – Bediening/display –
Groep 0
Parameters die betrekking hebben op de basisfuncties van
de frequentieregelaar, de functie van de LCP-toetsen en de
conguratie van het LCP-display.
3.1.1 0-0* Basic Settings (Basisinstellingen)
0-01 Taal
Option: Functie:
Bepaalt welke taal wordt
gebruikt op het display.
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
[255] Numeric prg. (Numerieke
prog.)
0-04 Bedieningsstatus bij insch.
Option: Functie:
Selecteer de bedieningsmodus voor het
moment waarop de netspanning weer wordt
ingeschakeld na een uitschakeling in de
handmatige (lokale) modus.
[0]*Hervatten Start de frequentieregelaar weer op met de
lokale referentie en start/stop-instellingen
(gegeven via [Hand On]/[O] op het LCP of
een lokale start via een digitale ingang) die
vlak voor uitschakeling van de frequentieregelaar van kracht waren.
[1] Gedw.
stop,
ref=oud
Gebruikt de opgeslagen referentie [1] om de
frequentieregelaar te stoppen, maar slaat
tevens de lokale toerentalreferentie die voor de
uitschakeling actief was, op in het geheugen.
Nadat de netspanning weer is aangesloten en
een startcommando is gegeven (via de [Hand
On]-toets of een lokaal startcommando via een
digitale ingang), wordt de frequentieregelaar
weer gestart en werkt hij weer op basis van de
opgeslagen toerentalreferentie.
0-06 Type net
Option: Functie:
Selecteer het type net van de
voedingsspanning/-frequentie.
LET OP
Niet alle opties zijn
beschikbaar voor alle
vermogens.
3 3
0-03 Regionale instellingen
Option: Functie:
LET OP
Deze parameter kan niet worden
gewijzigd terwijl de motor loopt.
Om tegemoet te komen aan de behoefte aan
andere standaardinstellingen in verschillende
landen is parameter 0-03 Regionale instellingen in
de frequentieregelaar geïmplementeerd. De
geselecteerde instelling beïnvloedt de
standaardinstelling van de nominale motorfrequentie.
[0] * Interna-
tionaal
[1] Noord-
Amerika
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 27
Stelt de standaardwaarde van
parameter 1-23 Motorfrequentie in op 50 Hz.
Stelt de standaardwaarde van
parameter 1-23 Motorfrequentie in op 60 Hz.
[0] 200-240 V/50 Hz/IT-net
[1] 200-240V/50Hz/Delta
[2] 200-240 V/50 Hz
[10] 380-440 V/50 Hz/IT-net
[11] 380-440 V/50 Hz/Delta
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/IT-net
[21] 440-480 V/50 Hz/Delta
[22] 440-480 V/50 Hz
[30] 525-600 V/50 Hz/IT-net
IT-grid (IT-net) is een voedingsnet
waarbij er geen aansluitingen zijn
naar aarde.
Delta is een voedingsnet waarbij
het tweede deel van de
transformator in driehoek is
aangesloten en 1 fase is
aangesloten op aarde.
Page 30
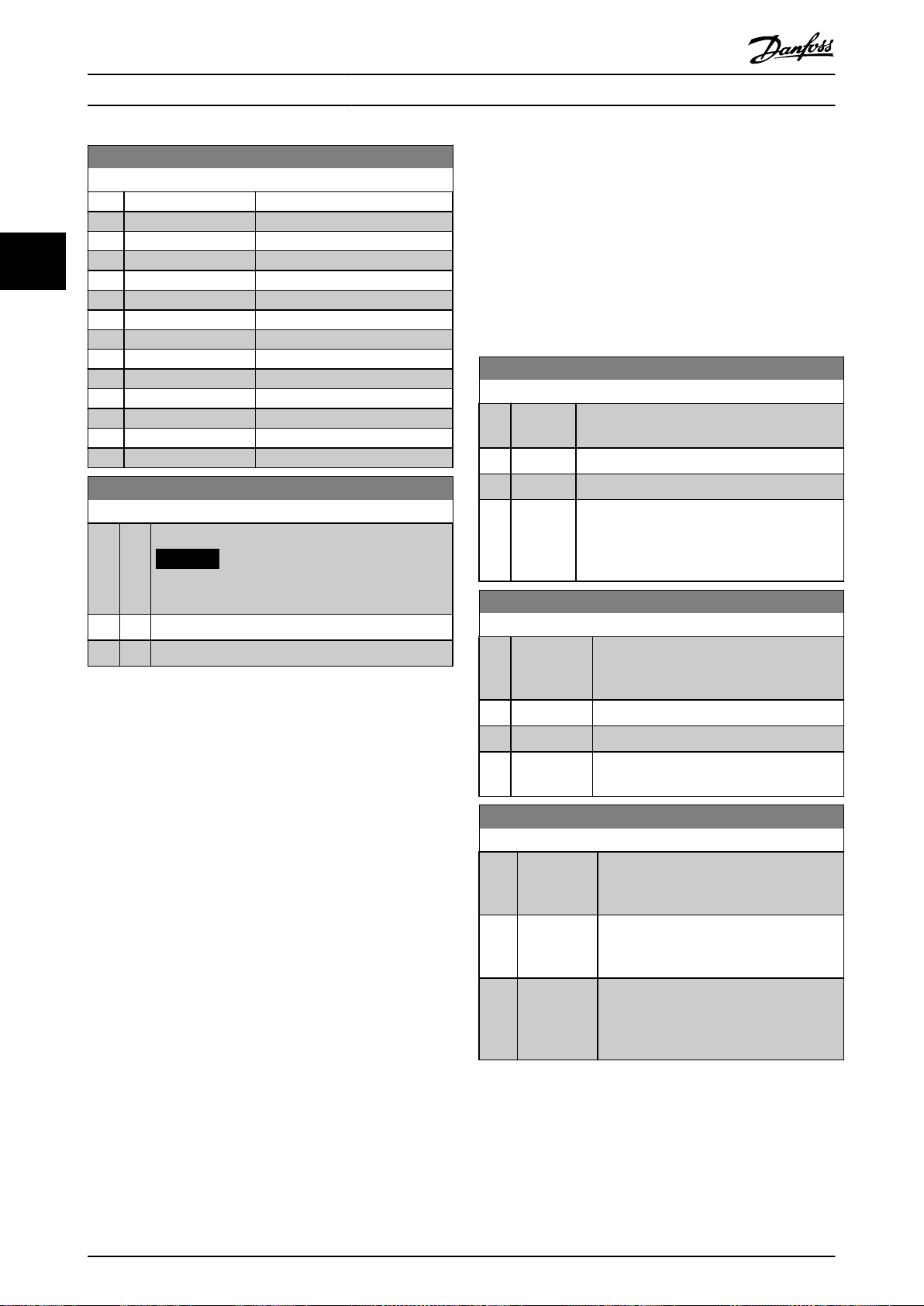
Parameters
VLT® HVAC Basic Drive FC 101
0-06 Type net
Option: Functie:
[31] 525-600 V/50 Hz/Delta
[32] 525-600 V/50 Hz
[100] 200-240 V/60 Hz/IT-net
33
[101] 200-240V/60Hz/Delta
[102] 200-240 V/60 Hz
[110] 380-440 V/60 Hz/IT-net
[111] 380-440 V/60 Hz/Delta
[112] 380-440V/60Hz
[120] 440-480 V/60 Hz/IT-net
[121] 440-480 V/60 Hz/Delta
[122] 440-480 V/60 Hz
[130] 525-600 V/60 Hz/IT-net
[131] 525-600 V/60 Hz/Delta
[132] 525-600 V/60 Hz
0-07 Auto DC-remmen
Option: Functie:
Beveiligingsfunctie tegen overspanning bij vrijloop.
LET OP
Gebruik parameter 0-51 Kopie setup om setup 1 te kopiëren
naar setup 2, of om setup 2 te kopiëren naar setup 1. Om
conicterende instellingen van een bepaalde parameter
binnen 2 verschillende setups te voorkomen, moet u de
setups koppelen via parameter 0-12 Setup gekoppeld aan.
Stop de frequentieregelaar voordat u schakelt tussen
setups waarbij parameters die zijn gemarkeerd als niet te
wijzigen tijdens bedrijf, verschillende waarden hebben.
Parameters die niet te wijzigen zijn tijdens bedrijf, zijn in de
parameterlijsten in hoofdstuk 5 Parameterlijsten gemarkeerd
als FALSE.
0-10 Actieve setup
Option: Functie:
Selecteer de setup op basis waarvan de
frequentieregelaar werkt.
[1] * Setup 1 Setup 1 is actief.
[2] Setup 2 Setup 2 is actief.
[9] Multi
setup
Dient voor externe setupselectie via digitale
ingangen en de seriële-communicatiepoort.
Deze setup maakt gebruik van de instellingen
van parameter 0-12 Setup gekoppeld aan.
Kan leiden tot PWM in geval van vrijlopen.
0-11 Setup wijzigen
[0] Uit Deze functie is niet actief.
[1] * Aan Deze functie is actief.
3.1.2 0-1* Dene and Set-up Operations
(Setupafhandeling)
Een complete set parameters waarmee de frequentieregelaar wordt bestuurd, heet een setup. De
Option: Functie:
Het nummer van de setup die wordt
gewijzigd, wordt knipperend weergegeven
op het LCP.
[1] Setup 1 Wijzig setup 1.
[2] Setup 2 Wijzig setup 2.
[9] * Actieve setup Wijzig parameters in de setup die is
geselecteerd via digitale I/O's.
frequentieregelaar bevat 2 setups: setup 1 en setup 2.
Daarnaast is het mogelijk om een vaste set fabrieksinstellingen naar 1 of beide setups te kopiëren.
Het hebben van meer dan 1 setup in de frequentieregelaar
biedt de volgende voordelen:
U kunt de motor laten draaien in de ene setup
•
(actieve setup) terwijl u de parameters in de
andere setup (bewerkingssetup) aanpast.
U kunt 2 motoren (1 tegelijk) aansluiten op de
•
frequentieregelaar. De motorgegevens voor de 2
motoren kunnen in de 2 setups worden
opgeslagen.
U kunt de instellingen van de frequentieregelaar
•
0-12 Setup gekoppeld aan
Option: Functie:
Wanneer de setups niet zijn gekoppeld, is
het niet mogelijk om van setup te wisselen
terwijl de motor loopt.
[0] Niet
gekoppeld
[20] * Gekoppeld Kopieert alle niet-te-wijzigen-tijdens-bedrijf-
Als u een andere setup selecteert om te
gebruiken, vindt de wijziging van setup pas
plaats bij vrijlopen van de motor.
parameters van de ene setup naar de
andere. Het is mogelijk om van setup te
wisselen terwijl de motor loopt.
en/of de motor snel wijzigen terwijl de motor
loopt. Bijvoorbeeld ramp-tijden of digitale
referenties via een bus of via digitale ingangen.
De actieve setup kan worden ingesteld op Multi setup,
waarbij de actieve setup kan worden geselecteerd via een
digitale ingangsklem en/of via het busstuurwoord.
28 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 31

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parameters Programmeerhandleiding
3.1.3 0-3* LCP Custom Readout and Display
Het is mogelijk om de displayelementen aan te passen
voor diverse doeleinden.
Uitlezing gebruiker
Welke berekende waarde wordt weergegeven, hangt af van
de instellingen in parameter 0-30 Eenheid voor uitlezing
gebr., parameter 0-31 Min. waarde uitlezing klant (alleen
lineair), parameter 0-32 Max. waarde uitlezing klant,
parameter 4-14 Motorsnelh. hoge begr. [Hz] en het actuele
toerental.
Afbeelding 3.1 Uitlezing gebruiker
De relatie is afhankelijk van het type eenheid dat is
geselecteerd in parameter 0-30 Eenheid voor uitlezing gebr.:
Type eenheid Relatie met toerental
Dimensieloos
Toerental
Flow, volume
Flow, massa
Snelheid
Lengte
Temperatuur
Druk Kwadratisch
Vermogen Kubiek
Tabel 3.1 Relatie met toerental
Text (Uitlezing gebr. LCP en
displaytekst)
Lineair
0-30 Eenheid voor uitlezing gebr.
Option: Functie:
Programmeer een waarde voor
weergave op het LCP. De waarde staat
in een lineaire, kwadratische of kubieke
verhouding tot het toerental. Deze
verhouding is afhankelijk van de
geselecteerde eenheid (zie Tabel 3.1).
De actuele berekende waarde kan
worden uitgelezen via
parameter 16-09 Standaard uitlez..
[0] Geen
[1] * %
[5] PPM
[10] l/min
[11] tpm
[12] PULS/s
[20] l/s
[21] l/min
[22] l/u.
[23] m3/s
[24] m3/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/u.
[33] t/min
[34] t/u.
[40] m/s
[41] m/min
[45] m
[60] Graden Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/u.
[124] CFM
[127] ft3/u.
[140] ft/s
[141] ft/min
[160] Graden Fahrenheit
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] pk
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 29
Page 32

Parameters
VLT® HVAC Basic Drive FC 101
0-31 Min. waarde uitlezing klant
Range: Functie:
0 StdUitlezingEenh*
33
[ 0-999999,99
StdUitlezingEenh]
Deze parameter bepaalt de
minimumwaarde van de door de
gebruiker gedenieerde uitlezing
(vindt plaats bij nultoerental). Het
selecteren van een andere waarde
dan 0 is alleen mogelijk als
parameter 0-30 Eenheid voor
uitlezing gebr. is ingesteld op een
lineaire eenheid. Voor kwadratische en kubieke eenheden is de
minimumwaarde 0.
0-40 [Hand on]-toets op LCP
Option: Functie:
[0] Uitgesch. Selecteer [0] Disabled (Uitgesch.) om onbedoeld
starten van de frequentieregelaar in de
handmodus te voorkomen.
[1] * Ingesch. [Hand On] is ingeschakeld.
0-42 [Auto on]-toets op LCP
Option: Functie:
[0] Uitgesch. Selecteer [0] Disabled [Uitgesch.] om onbedoeld
starten van de frequentieregelaar vanaf het LCP
te voorkomen.
[1] * Ingesch. [Auto On] is ingeschakeld.
0-32 Max. waarde uitlezing klant
Range: Functie:
100 StdUitlezingEenh*
[ 0,0-999999,99
StdUitlezingEenh]
Deze parameter bepaalt de
maximumwaarde die moet
worden weergegeven wanneer
het motortoerental de ingestelde
waarde in
parameter 4-14 Motorsnelh. hoge
begr. [Hz] heeft bereikt.
0-44 [O/Reset]-toets LCP
Option: Functie:
[0] Uitgesch. Schakel de [O/Reset]-toets uit.
[1] * Ingesch. Schakel zowel de O-functie als de Reset-
functie in.
[7] Alleen Reset
insch.
Schakel de Reset-functie in en schakel de
O-functie uit, om een onbedoelde stop
van de frequentieregelaar te voorkomen.
0-37 Displaytekst 1
Range: Functie:
[0 - 0 ] Gebruik deze parameter voor het schrijven van een
afzonderlijke tekstreeks die moet worden uitgelezen
via seriële communicatie. Apparaat-ID kan worden
opgenomen.
Wordt alleen gebruikt voor BACnet.
3.1.5 0-5* Copy/Save (Kopiëren/Opslaan)
Kopieer parameterinstellingen tussen setups en van/naar
het LCP.
0-50 LCP kopiëren
Option: Functie:
0-38 Displaytekst 2
Range: Functie:
[0 - 0 ] Gebruik deze parameter voor het schrijven van een
afzonderlijke tekstreeks die moet worden uitgelezen
via seriële communicatie.
Wordt alleen gebruikt voor BACnet.
0-39 Displaytekst 3
Range: Functie:
[0 - 0 ] Gebruik deze parameter voor het schrijven van een
afzonderlijke tekstreeks die moet worden uitgelezen
via seriële communicatie.
Wordt alleen gebruikt voor BACnet.
3.1.4 0-4* LCP
Schakel de afzonderlijke toetsen op het LCP in en uit en
beveilig ze met een wachtwoord.
[0] * Geen kopie
[1] Alles naar LCP Hierdoor worden alle parameters in alle
setups vanuit het geheugen van de
frequentieregelaar gekopieerd naar het
LCP-geheugen. Voor servicedoeleinden
moet u na de inbedrijfstelling alle
parameters kopiëren naar het LCP.
[2] Alles vanaf LCP Hierdoor worden alle parameters in alle
setups vanuit het LCP-geheugen
gekopieerd naar het geheugen van de
frequentieregelaar.
[3] Verm.onafh. v.
LCP
[10] Delete LCP copy
data (Data LCPkopie
verwijderen)
Kopieert alleen de parameters die niet
afhankelijk zijn van het motorvermogen.
De laatste optie kan worden gebruikt om
verschillende frequentieregelaars te
programmeren voor dezelfde functie
zonder de al ingestelde motorgegevens
te verstoren.
Verwijder de gekopieerde parameters in
het LCP. Deze functie is alleen
beschikbaar voor een LCP met versie
V11.00 en hoger.
30 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 33

Parameters Programmeerhandleiding
0-51 Kopie setup
Option: Functie:
[0] * Geen kopie Geen functie.
[1] Kopie van setup1Kopieer van setup 1 naar setup 2.
[2] Kopie van setup2Kopieer van setup 2 naar setup 1.
[9] Kopie van
fabrieksinstell.
Kopieer de fabrieksinstellingen naar de
setup voor programmering (geselecteerd
in parameter 0-11 Setup wijzigen).
3.1.6 0-6* Wachtw.
0-60 Wachtw. hoofdmenu
Range: Functie:
0* [0 -
999 ]
0-61 Toegang hoofdmenu zonder wachtw.
Option: Functie:
[0] * Voll. toeg. Schakelt het in parameter 0-60 Wachtw.
[1] LCP: Alleen
lezen
[2] LCP: geen toeg. Voorkomt het onbevoegd weergeven en
[3] Bus: Alleen
lezen
[5] Alle: Alleen
lezen
Stel het wachtwoord in voor toegang tot het
Hoofdmenu via de [Main Menu]-toets. Als de
waarde wordt ingesteld op 0, wordt de
wachtwoordfunctie uitgeschakeld. Deze parameter
wordt verborgen nadat er een wachtwoord is
ingesteld.
hoofdmenu ingestelde wachtwoord uit.
Voorkomt het onbevoegd bewerken van
de parameters in het Hoofdmenu.
bewerken van parameters in het
Hoofdmenu.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 31
Page 34

Parameters
VLT® HVAC Basic Drive FC 101
3.2 Hoofdmenu – Belasting & motor –
Groep 1
Parameters die betrekking hebben op de belastingcompensatie overeenkomstig het typeplaatje en het type
belasting van de toepassing.
33
3.2.1 1-0* General Settings (Algemene
1-01 Motorbesturingsprincipe
Option: Functie:
[1] * VVC+
LET OP
Als parameter 1-10 Motorconstructie is
ingesteld op een optie die het gebruik van
een PM-motor mogelijk maakt, is alleen de
VVC+-optie beschikbaar.
instellingen)
Normale bedrijfsmodus, inclusief slip- en belasting-
koppel
Energie
Optim.
compensatie.
Voor een snelheidsregeling voor centrifugaalpompen en ventilatoren. Moet ook worden
gebruikt voor het regelen van meerdere
motoren vanaf dezelfde frequentieregelaar
(bijvoorbeeld bij meerdere condensorventilatoren of koeltorenventilatoren). Levert een
spanning die is geoptimaliseerd voor motorbelastingen met een kwadratisch verlopende
koppelkarakteristiek.
Levert een spanning die is geoptimaliseerd voor
motorbelastingen met een kwadratisch
verlopende koppelkarakteristiek. Dit zorgt voor
een optimale, energiezuinige snelheidsregeling
voor centrifugaalpompen en ventilatoren.
Bovendien past de AEO-functie de spanning
nauwkeurig aan de huidige belastingscondities
aan, waardoor het energieverbruik en het
hoorbare geluid van de motor afnemen.
1-00 Conguratiemodus
Option: Functie:
LET OP
Deze parameter kan niet worden
gewijzigd terwijl de motor loopt.
[0]*Geen
terugk.
[3] Process
Closed
Loop
(Proces
met
terugk.)
Het motortoerental wordt bepaald door
toepassing van een toerentalreferentie of door
het gewenste motortoerental in te stellen in de
handmodus.
Open Loop (Geen terugk.) wordt ook gebruikt als
de frequentieregelaar deel uitmaakt van een
systeem met terugkoppeling op basis van een
externe PI-regelaar die een toerentalreferentiesignaal als uitgang geeft.
LET OP
Bij de instelling Closed Loop (Met terugk.)
zullen de commando's Reversing
(Omkeren) en Start Reversing (Start
omgekeerd) de draairichting van de motor
niet wijzigen.
1-03 Koppelkarakteristiek
Option: Functie:
[1]*Variabel
[3] Auto
Een referentie vanuit de ingebouwde PI-regelaar
bepaalt het motortoerental. De ingebouwde PIregelaar varieert het motortoerental zoals in een
regelproces met terugkoppeling (zoals voor een
constante druk of ow). Congureer de PIregelaar via parametergroep 20-** Drive Closed
Loop (Frequentieregelaar met terugkoppeling).
1-01 Motorbesturingsprincipe
Option: Functie:
[0] U/f
LET OP
Bij gebruik van een U/f-regeling wordt geen
slip- en belastingcompensatie toegepast.
Wordt gebruikt voor parallel geschakelde motoren
specieke motortoepassingen. Stel de U/f-
en/of
instellingen in parameter 1-55 U/f-karakteristiek - U en
parameter 1-56 U/f-karakteristiek - F in.
1-06 Clockwise Direction
Option: Functie:
LET OP
Deze parameter kan niet worden gewijzigd
terwijl de motor loopt.
Deze parameter denieert de term rechtsom die
overeenkomt met de richtingpijl op het LCP. Is te
gebruiken om de draairichting van de as
eenvoudig te wijzigen zonder motordraden te
verwisselen.
[0] * Normal De motoras draait rechtsom wanneer de frequen-
tieregelaar als volgt is aangesloten: U ⇒ U; V ⇒ V;
en W ⇒ W naar motor.
[1] Inverse De motoras draait linksom wanneer de frequentie-
regelaar als volgt is aangesloten: U ⇒ U; V ⇒ V; en
W ⇒ W naar motor.
32 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 35

Parameters Programmeerhandleiding
1-08 Motor Control Bandwidth (Bandbreedte motorregeling)
Option: Functie:
[0] hoog Geschikt voor een zeer dynamische
reactie.
[1] * Medium (Middel) Geschikt voor een soepele stabiele
werking.
[2] laag Geschikt voor een soepele stabiele
werking met minimale dynamische
reactie.
[3] Adaptive 1
(Adaptief 1)
[4] Adaptive 2
(Adaptief 2)
Geschikt voor een soepele stabiele
werking met extra actieve demping.
Dit is een alternatief voor [3] Adaptive 1
(Adaptief 1), speciaal bedoeld voor PMmotoren met lage inductantie.
3.2.2 1-10 tot 1-13 Motor Selection
(Motorselectie)
LET OP
Deze parametergroep kan niet worden gewijzigd terwijl
de motor loopt.
De volgende parameters zijn actief ('x'), afhankelijk van de
instelling in parameter 1-10 Motorconstructie.
[1] PM, non-
Parameter 1-10 Motorcon-
structie
Parameter 1-00 Congura-
tiemodus
Parameter 1-03 Koppelkarakte-
ristiek
Parameter 1-06 Richting
rechtsom
Parameter 1-08 Motor Control
Bandwidth (Bandbreedte
motorregeling)
Parameter 1-14 Verst. demping x x
Parameter 1-15 Filtertijdcon-
stante lage snelh.
Parameter 1-16 Filtertijdcon-
stante hoge snelh.
Parameter 1-17 Filtertijdcon-
stante spanning
Parameter 1-20 Motorverm.
[kW]
[0]
Asynchron
(Asynchroon)
x x x
x
x x x
x x x
x x
x x
x x
x
salient SPM
(PM, niet-
uitspringende
SPM)
salient
uitspr.
[3]
PM,
IPM,
Sat
(PM,
IPM,
verz)
PM,
[1] PM, non-
Parameter 1-10 Motorcon-
structie
Parameter 1-22 Motorspanning x
Parameter 1-23 Motorfre-
quentie
Parameter 1-24 Motorstroom x x x
Parameter 1-25 Nom.
motorsnelheid
Parameter 1-26 Cont. nom.
motorkoppel
Parameter 1-29 Autom.
aanpassing motorgeg. (AMA)
Parameter 1-30 Stator-
weerstand (Rs)
Parameter 1-33 Statorlek-
reactantie (X1)
Parameter 1-35 Hoofdreac-
tantie (Xh)
Parameter 1-37 Inductantie d-
as (Ld)
Parameter 1-38 q-axis
Inductance (Lq)
Parameter 1-39 Motorpolen x x x
Parameter 1-40 Tegen-EMK bij
1000 TPM
Parameter 1-42 Lengte
motorkabel:
Parameter 1-43 Lengte
motorkabel, feet
Parameter 1-44 Inductantie d-
as verz. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Verst. positie-
detectie
Parameter 1-48 Current at Min
Inductance for d-axis (Stroom
bij min. inductantie voor d-as)
Parameter 1-49 Current at Min
Inductance for q-axis (Stroom
bij min. inductantie voor q-as)
Parameter 1-50 Motormagneti-
sering bij nulsnelheid
Parameter 1-52 Min. snelh.
norm. magnetisering [Hz]
Parameter 1-55 U/f-karakte-
ristiek - U
[0]
Asynchron
(Asynchroon)
x
x x x
x x
x x x
x x x
x
x
x x
x
x x
x x x
x x x
x
x
x x
x
x
x
x
x
salient SPM
(PM, niet-
uitspringende
SPM)
salient
IPM,
(PM,
uitspr.
IPM,
verz)
[3]
Sat
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 33
Page 36

Parameters
VLT® HVAC Basic Drive FC 101
[3]
PM,
[1] PM, non-
Parameter 1-10 Motorcon-
structie
[0]
Asynchron
(Asynchroon)
33
Parameter 1-56 U/f-karakte-
ristiek - F
Parameter 1-62 Slipcom-
pensatie
Parameter 1-63 Slipcom-
pensatie tijdconstante
Parameter 1-64 Resonantie-
demping
Parameter 1-65 Resonantie-
demping tijdconstante
Parameter 1-66 Min. stroom bij
lage snelh.
Parameter 1-70 Startmodus x x
Parameter 1-71 Startvertraging x x x
parameter 1-72 Startfunctie x x x
Parameter 1-73 Vlieg. start x x x
Parameter 1-80 Functie bij
stop
Parameter 1-90 Thermische
motorbeveiliging
parameter 2-00 DC-
houdstroom
Parameter 2-01 DC-remstroom x x x
Parameter 2-02 DC-remtijd x x x
Parameter 2-04 Inschakelsnelh.
DC-rem [Hz]
Parameter 2-06 Parkeerstroom x x
Parameter 2-07 Parkeertijd x x
Parameter 2-10 Remfunctie x x x
Parameter 2-16 AC-rem max.
stroom
Parameter 2-17 Overspan-
ningsreg.
Parameter 4-10 Draairichting
motor
Parameter 4-14 Motorsnelh.
hoge begr. [Hz]
Parameter 4-18 Stroombegr. x x x
Parameter 4-19 Max.
uitgangsfreq.
Parameter 4-58 Motorfase-
functie ontbreekt
Parameter 14-01 Schakelfre-
quentie
Parameter 14-03 Overmo-
dulatie
x
x
x
x
x
x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
salient SPM
(PM, niet-
uitspringende
SPM)
salient
IPM,
Sat
(PM,
uitspr.
IPM,
verz)
[1] PM, non-
Parameter 1-10 Motorcon-
structie
Parameter 14-07 Dead Time
Compensation Level (Niveau
dodetijdcompensatie)
Parameter 14-08 Damping
Gain Factor (Versterkingsfactor
demping)
Parameter 14-09 Dead Time
Bias Current Level (Biasstroom-
niveau dode tijd)
Parameter 14-10 Netstoring x x x
Parameter 14-11 Netspanning
bij netfout
Parameter 14-12 Functie bij
onbalans net
Parameter 14-27 Actie bij
inverterfout
Parameter 14-40 VT-niveau x x x
Parameter 14-41 Min.
magnetisering AEO
Parameter 14-44 d-axis current
optimization for IPM (Stroom-
optimalisatie d-as voor IPM)
Parameter 14-50 RFI-lter x
Parameter 14-51 DC-linkcom-
pensatie
Parameter 14-55 Uitgangslter x x x
Parameter 14-64 Nulstroom-
niveau dodetijdcompensatie
Parameter 14-65 Toerentalre-
ductie dodetijdcompensatie
Parameter 30-22 Beveiliging
geblokkeerde rotor
Parameter 30-23 Locked Rotor
Detection Time [s]
Tabel 3.2 Actieve parameters
[0]
Asynchron
(Asynchroon)
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x
x x
salient SPM
(PM, niet-
uitspringende
SPM)
1-10 Motorconstructie
Option: Functie:
[0]*Asynchron
(Asynchroon)
[1] PM, non-salient
SPM (PM, nietuitspringende SPM)
Voor asynchrone motoren.
Voor permanentmagneetmotoren (PMmotoren) met op de buitenzijde van
de rotor gemonteerde (nietuitspringende) magneten. Zie
parameter 1-14 Damping Gain tot
parameter 1-17 Voltage lter time const.
[3]
PM,
salient
IPM,
Sat
(PM,
uitspr.
IPM,
verz)
34 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 37

Parameters Programmeerhandleiding
1-10 Motorconstructie
Option: Functie:
voor meer informatie over het optimaliseren van de motorwerking.
[3] PM, salient IPM, Sat
(PM, uitspr. IPM,
verz)
3.2.3
1-14 tot 1-17 VVC+ PM
Voor permanentmagneetmotoren (PMmotoren) met interne (uitspringende)
rotormagneten, met inductantieverzadigingsregeling.
De standaardparameters voor een VVC+ PM-regeling zijn
geoptimaliseerd voor toepassingen en traagheidsbelastingen in het bereik van 50 > Jl/Jm > 5. Jl is de
belastingstraagheid van de toepassing en Jm is de
massatraagheid van de machine.
Voor toepassingen met een lage massatraagheid (Jl/Jm <
5) wordt aangeraden om parameter 1-17 Filtertijdconstante
spanning te verhogen met een factor 5-10. In bepaalde
gevallen moet parameter 14-08 Damping Gain Factor
(Versterkingsfactor demping) worden verlaagd om de
prestaties en stabiliteit te verbeteren.
Bij toepassingen met een hoge massatraagheid (Jl/Jm >
50) moet u parameter 1-15 Filtertijdconstante lage snelh. en
parameter 1-16 Filtertijdconstante hoge snelh. verhogen om
de prestaties en stabiliteit te verbeteren.
Voor hoge belastingen bij lage toerentallen (< 30% van het
nominale toerental) wordt aangeraden om
parameter 1-17 Filtertijdconstante spanning te verhogen in
verband met de niet-lineariteit van de inverter bij lage
toerentallen.
1-15 Filtertijdconstante lage snelh.
Range: Functie:
lager dan 10% van het nominale
toerental.
1-16 Filtertijdconstante hoge snelh.
Range: Functie:
Afhankelijk
van grootte*
[0,01 20 s]
De dempingstijdconstante voor
hoogdoorlaatlters bepaalt de
responstijd bij belastingsstappen. Een
korte dempingstijdconstante zorgt
voor een snelle regeling. Wanneer
deze waarde echter te laag is, wordt
de regeling instabiel. Deze tijdconstante wordt gebruikt bij toerentallen
hoger dan 10% van het nominale
toerental.
1-17 Filtertijdconstante spanning
Range: Functie:
Afhankelijk
van grootte*
[0,001 1 s]
De ltertijdconstante voor de voedingsspanning van de machine wordt
gebruikt om de invloed van hoogfrequente rimpels en resonantie in het
systeem te beperken bij de berekening
van de voedingsspanning van de
machine. Zonder dit lter kunnen de
rimpels in de stroom de berekende
spanning verstoren en de stabiliteit van
het systeem aantasten.
3 3
1-14 Verst. demping
Range: Functie:
120%* [0 -
250 %]
De parameter stabiliseert de PM-motor om die
soepel en stabiel te laten werken. De waarde van
de dempingsversterking regelt de dynamische
prestaties van de PM-motor. Een lage waarde
voor de dempingsversterking zorgt voor hoge
dynamische prestaties, terwijl een hoge waarde
zorgt voor lage dynamische prestaties. De
dynamische prestaties zijn gerelateerd aan de
motorgegevens en het type belasting. Als de
dempingsversterking te hoog of te laag is, wordt
de regeling instabiel.
1-15 Filtertijdconstante lage snelh.
Range: Functie:
Afhankelijk
van grootte*
[0,01 20 s]
De dempingstijdconstante voor
hoogdoorlaatlters bepaalt de
responstijd bij belastingsstappen. Een
korte dempingstijdconstante zorgt
voor een snelle regeling. Wanneer
deze waarde echter te laag is, wordt
de regeling instabiel. Deze tijdconstante wordt gebruikt bij toerentallen
3.2.4 1-2* Motor Data I (Motordata I)
Deze parametergroep bevat invoergegevens voor de
gegevens van het typeplaatje van de aangesloten motor.
LET OP
Deze parameters kunnen niet worden gewijzigd terwijl
de motor loopt.
LET OP
Het wijzigen van de waarde van deze parameters
beïnvloedt de instelling van andere parameters.
1-20 Motorverm.
Stel het nominale motorvermogen in kW/pk in volgens de
gegevens van het typeplaatje. De standaardwaarde komt overeen
met het nominale vermogen van de eenheid.
Deze parameter kan niet worden gewijzigd terwijl de motor
loopt.
Option: Functie:
[2] 0,12 kW - 0,16 pk
[3] 0,18 kW - 0,25 hp
[4] 0,25 kW - 0,33 pk
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 35
Page 38

Parameters
VLT® HVAC Basic Drive FC 101
1-20 Motorverm.
Stel het nominale motorvermogen in kW/pk in volgens de
gegevens van het typeplaatje. De standaardwaarde komt overeen
met het nominale vermogen van de eenheid.
Deze parameter kan niet worden gewijzigd terwijl de motor
33
loopt.
Option: Functie:
[5] 0,37 kW - 0,5 pk
[6] 0,55 kW - 0,75 pk
[7] 0,75 kW - 1 pk
[8] 1,1 kW - 1,5 pk
[9] 1,5 kW - 2 pk
[10] 2,2 kW - 3 pk
[11] 3 kW - 4 pk
[12] 3,7 kW - 5 pk
[13] 4 kW - 5,4 pk
[14] 5,5 kW - 7,5 pk
[15] 7,5 kW - 10 pk
[16] 11 kW - 15 pk
[17] 15 kW - 20 pk
[18] 18,5 kW - 25 pk
[19] 22 kW - 30 pk
[20] 30 kW - 40 pk
[21] 37 kW - 50 pk
[22] 45 kW - 60 pk
[23] 55 kW - 75 pk
[24] 75 kW - 100 pk
[25] 90 kW - 120 pk
[26] 110 kW - 150 pk
1-24 Motorstroom
Range: Functie:
gegevens worden gebruikt voor
het berekenen van het
motorkoppel, de thermische
motorbeveiliging en dergelijke.
1-25 Nom. motorsnelheid
Range: Functie:
Afhankelijk van
grootte*
[50-60000
tpm]
Voer het nominale motortoerental in volgens de gegevens
van het motortypeplaatje. Deze
gegevens worden gebruikt voor
de berekening van motorcompensaties.
1-26 Cont. nom. motorkoppel
Range: Functie:
Size
related*
[0.1 10000
Nm]
LET OP
Het wijzigen van deze parameterwaarde beïnvloedt de instelling van
andere parameters.
Deze parameter is alleen beschikbaar als
parameter 1-10 Motorconstructie is
ingesteld op een optie die het gebruik
van een permanentmagneetmotor
mogelijk maakt.
1-29 Autom. aanpassing motorgeg. (AMA)
1-22 Motorspanning
Range: Functie:
Afhankelijk
van grootte*
[50-1000V]Stel de nominale motorspanning in
volgens de gegevens van het
motortypeplaatje. De standaardwaarde komt overeen met het
nominale vermogen van de eenheid.
1-23 Motorfrequentie
Range: Functie:
Afhankelijk
van
grootte*
[20-400
Hz]
Stel de motorfrequentie in volgens de
gegevens van het motortypeplaatje. Voor
87 Hz-bedrijf met 230/400 V-motoren
stelt u de gegevens van het typeplaatje
in voor 230 V/50 Hz. Stel
parameter 4-14 Motorsnelh. hoge begr. [Hz]
en parameter 3-03 Max. referentie in voor
de 87 Hz-toepassing.
1-24 Motorstroom
Range: Functie:
Afhankelijk
van grootte*
[ 0,01-1000,00A]Stel de nominale motorstroom in
volgens de gegevens van het
motortypeplaatje. Deze
Option: Functie:
LET OP
Deze parameter kan niet worden
gewijzigd terwijl de motor loopt.
De AMA-functie optimaliseert de dynamische
motorprestaties door een automatische optimalisatie van de geavanceerde motorparameters
terwijl de motor stationair loopt.
[0]*Uit Geen functie
[1] Volledige
AMA
insch.
Als parameter 1-10 Motorconstructie is ingesteld
op [0] Asynchron (Asynchroon), bepaalt de AMA
de instelling van parameter 1-30 Statorweerstand
(Rs), parameter 1-33 Statorlekreactantie (X1) en
parameter 1-35 Hoofdreactantie (Xh).
Als parameter 1-10 Motorconstructie is ingesteld
op een optie die het gebruik van permanentmagneetmotoren mogelijk maakt, bepaalt de
AMA de instelling van parameter 1-30 Stator-
weerstand (Rs) en parameter 1-37 Inductantie das (Ld).
36 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 39

Parameters Programmeerhandleiding
1-29 Autom. aanpassing motorgeg. (AMA)
Option: Functie:
LET OP
Klem 27 digitale ingang
(parameter 5-12 Klem 27 digitale ingang)
is standaard ingesteld op Coast inverse
(Vrijloop geïnv.). Dit betekent dat een
AMA niet kan worden uitgevoerd als er
geen 24 V is aangesloten op klem 27.
[2] Beperkte
AMA
insch.
Hiermee wordt een beperkte AMA uitgevoerd
waarbij alleen de statorweerstand Rs in het
systeem wordt bepaald. Selecteer deze optie als
een LC-lter wordt gebruikt tussen de frequentieregelaar en de motor.
LET OP
Als parameter 1-10 Motorconstructie is ingesteld op een
optie die het gebruik van een permanentmagneetmotor
mogelijk maakt, is alleen de optie [1] Enable Complete
AMA (Volledige AMA insch.) beschikbaar.
Activeer de AMA-functie door op [Hand On] te drukken
nadat u [1] Enable Complete AMA (Volledige AMA insch.) of
[2] Enable Reduced AMA (Beperkte AMA insch.) hebt
geselecteerd. Na een normale procedure toont het display:
Druk op [OK] om AMA te voltooien. Nadat u op [OK] hebt
gedrukt, is de frequentieregelaar gereed voor bedrijf.
LET OP
Voor een optimale aanpassing van de frequen-
•
tieregelaar wordt aanbevolen om een AMA uit
te voeren met een koude motor.
Een AMA kan niet worden uitgevoerd terwijl de
•
motor loopt.
AMA kan niet worden uitgevoerd op een motor
•
met een hoger nominaal vermogen dan dat van
de frequentieregelaar, bijvoorbeeld wanneer
een motor van 5,5 kW (7,4 pk) is aangesloten
op een frequentieregelaar van 4 kW (5,4 pk).
LET OP
Voorkom dat er tijdens de AMA een extern koppel wordt
gegenereerd.
LET OP
Voer een volledige AMA alleen uit zonder lters; voer
een beperkte AMA uit als er een lter is geïnstalleerd.
3.2.5 1-3* Motor Data II (Motordata II)
Deze parametergroep bevat invoergegevens voor de
gegevens van het typeplaatje van de aangesloten motor.
LET OP
Deze parameters kunnen niet worden gewijzigd terwijl
de motor loopt.
1-30 Statorweerstand (Rs)
Range: Functie:
Afhankelijk
van grootte*
1-33 Statorlekreactantie (X1)
Range: Functie:
Afhankelijk van
grootte*
1-35 Hoofdreactantie (Xh)
Range: Functie:
Afhankelijk
van
grootte*
[ 0,0-9999,000
ohm]
[ 0,0-9999,000
ohm]
[ 0,0-9999,00
ohm]
Stel de statorweerstandswaarde
in. Voer de waarde in volgens
het datablad voor de motor of
voer een AMA uit met een
koude motor.
Stelt de waarde voor de
statorlekreactantie van de
motor in.
Stel op 1 van de volgende manieren
de hoofdreactantie van de motor in:
Voer een AMA uit met een
•
koude motor. De frequentieregelaar meet de waarde
van de motor.
Voer de Xh-waarde
•
handmatig in. Vraag de
waarde op bij de
leverancier van de motor.
Gebruik de standaard Xh-
•
instelling. De
frequentieregelaar bepaalt
de instelling op basis van
de gegevens van het
motortypeplaatje.
3 3
LET OP
Als een van de instellingen in parametergroep 1-2* Motor
Data (Motordata) wordt gewijzigd, worden de geavan-
ceerde motorparameters parameter 1-30 Statorweerstand
(Rs) tot parameter 1-39 Motorpolen teruggezet op de
standaardinstelling.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 37
1-37 Inductantie d-as (Ld)
Range: Functie:
Afhankelijk van
grootte*
[ 0-65535 mH] Raadpleeg het datablad voor
de permanentmagneetmotor
voor de juiste waarde.
Page 40

Parameters
VLT® HVAC Basic Drive FC 101
1-38 q-axis Inductance (Lq)
Range: Functie:
Afhankelijk
van grootte*
33
[ 0,000-65535
mH]
Stel de waarde voor de
inductantie van de q-as in.
Raadpleeg het datablad voor de
permanentmagneetmotor voor
de juiste waarde. Deze waarde
kan niet worden gewijzigd
terwijl de motor loopt.
1-39 Motorpolen
1-45 q-axis Inductance Sat. (LqSat)
Range: Functie:
Afhankelijk
van grootte*
[ 0-65535
mH]
Deze parameter komt overeen met
de inductantieverzadiging van Lq. In
het ideale geval heeft deze
parameter dezelfde waarde als
parameter 1-38 q-axis Inductance (Lq).
Als de motorfabrikant echter een
inductiecurve heeft vermeld, voert u
de inductiewaarde in; dit is 200%
van de nominale waarde.
Range: Functie:
Afhankelijk
van grootte*
[2 100 ]
Stel het aantal motorpolen in. De
waarde voor de motorpolen is altijd
een even getal, omdat het verwijst
naar het totale aantal polen en niet
naar het aantal paren.
3.2.6 1-4* Motor Data III (Motordata III)
1-46 Verst. positiedetectie
Range: Functie:
100 %* [ 20 -
200 %]
Gebruik deze parameter om de hoogte van
de testpuls tijdens positiedetectie bij het
starten aan te passen. Deze parameter is
geldig vanaf softwareversie 2.80.
1-48 Current at Min Inductance for d-axis (Stroom bij
min. inductantie voor d-as)
Deze parametergroep bevat invoergegevens voor de
gegevens van het typeplaatje van de aangesloten motor.
LET OP
Range: Functie:
100 %* [ 20 - 200 %] Gebruik deze parameter om het verzadi-
gingspunt van de inductantie in te
stellen.
Deze parameters kunnen niet worden gewijzigd terwijl
de motor loopt.
1-49 Current at Min Inductance for q-axis (Stroom bij
min. inductantie voor q-as)
1-40 Tegen-EMK bij 1000 TPM
Range: Functie:
Afhankelijk van
grootte*
[1-9000 V] Lijnspanning (rms-waarde)
tegen-EMK bij 1000 tpm.
1-42 Lengte motorkabel:
Range: Functie:
50 m* [0-100 m] Stel de lengte van de motorkabel in tijdens
de inbedrijfstelling.
1-43 Lengte motorkabel, feet
Range: Functie:
164 ft* [0-328 ft] Stel de lengte van de motorkabel in tijdens
de inbedrijfstelling.
1-44 Inductantie d-as verz. (LdSat)
Range: Functie:
100 %* [ 20 -
200 %]
Deze parameter speciceert de verzadigingscurve van de q-inductantiewaarden. Bij
een waarde van deze parameter van 20-100%
wordt een lineaire benadering van de
inductanties toegepast, vanwege de parameters
parameter 1-37 Inductantie d-as (Ld),
parameter 1-38 q-axis Inductance (Lq),
parameter 1-44 Inductantie d-as verz. (LdSat) en
parameter 1-45 q-axis Inductance Sat. (LqSat).
Onder en boven deze curve worden ze gespeciceerd door de bijbehorende parameters.
Parameters hebben betrekking op de belastingcompensatie volgens het typeplaatje, het type
belasting van de toepassing en de elektronische remfunctie voor snel stoppen/houden
van de motor.
Range: Functie:
Afhankelijk
van grootte*
[ 0-65535
mH]
Deze parameter komt overeen met de
inductantieverzadiging van Ld. In het
ideale geval heeft deze parameter
dezelfde waarde als
parameter 1-37 Inductantie d-as (Ld).
Als de motorfabrikant echter een
inductiecurve heeft vermeld, voert u
de inductiewaarde in; dit is 200% van
de nominale waarde.
3.2.7 1-5* Load Indep. Setting
(Belastingonafhankelijke instelling)
Parameters voor motorinstellingen die niet afhankelijk zijn
van de belasting.
38 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 41

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Parameters Programmeerhandleiding
1-50 Motormagnetisering bij nulsnelheid
Range: Functie:
100%* [0 -
Gebruik deze parameter in combinatie met
300
parameter 1-52 Min. snelh. norm. magnetisering [Hz]
%]
om een andere thermische belasting op de motor
te verkrijgen bij lage toerentallen.
Voer een waarde in die een percentage van de
nominale magnetiseringsstroom aangeeft. Als de
instelling te laag is, wordt het koppel op de
motoras mogelijk beperkt.
Afbeelding 3.2 Motormagnetisering
1-56 U/f-karakteristiek - F
Array[6]
Range: Functie:
Afbeelding 3.3 U/f-karakteristiek
3.2.8 1-6* Load Depen. Setting
(Belastingafhankelijke instelling)
Parameters voor de motorinstellingen die afhankelijk zijn
1-52 Min. snelh. norm. magnetisering [Hz]
Range: Functie:
1 Hz* [0,1-10,0 Hz] Stel de gewenste frequentie voor normale
magnetiseringsstroom in.
Gebruik deze parameter in combinatie met
parameter 1-50 Motormagnetisering bij
nulsnelheid. Zie Afbeelding 3.2.
1-55 U/f-karakteristiek - U
Array [6]
Range: Functie:
Afhankelijk van
grootte*
[0-999 V] Stel de spanning bij elk frequen-
tiepunt in om een U/f-karakteristiek
te verkrijgen die overeenkomt met
de motor. De frequentiepunten
worden ingesteld in
parameter 1-56 U/f-karakteristiek - F.
1-56 U/f-karakteristiek - F
Array[6]
Range: Functie:
Afhankelijk
van grootte*
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 39
[ 0-400,0
Hz]
Stel frequentiepunten in om een U/fkarakteristiek te verkrijgen die
overeenkomt met de motor. De
spanning bij elk punt wordt ingesteld
in parameter 1-55 U/f-karakteristiek - U.
Creëer een U/f-karakteristiek op basis
van 6 te deniëren spanningen en
frequenties; zie Afbeelding 3.3.
Vereenvoudig U/f-karakteristieken door
2 of meer punten (spanningswaarden
en frequenties) samen te voegen. Stel
de punten in op gelijke waarden.
van de belasting.
1-62 Slipcompensatie
Range: Functie:
Afhankelijk
van grootte*
[-400 400 %]
Voer de %-waarde voor slipcompensatie in om de toleranties in de
waarde van n
slipcompensatie wordt automatisch
berekend op basis van het nominale
motortoerental n
te compenseren. De
M,N
.
M,N
1-63 Slipcompensatie tijdconstante
Range: Functie:
0,1 s* [0,05-5 s] Voer de reactiesnelheid van de slipcom-
pensatie in. Een hoge waarde resulteert in een
trage reactie en een lage waarde resulteert in
een snelle reactie. Stel een langere tijd in als
bij lage frequenties resonantieproblemen
optreden.
1-64 Resonantiedemping
Range: Functie:
100%* [0 -
500 %]
Stel de resonantiedempingswaarde in. Stel
parameter 1-64 Resonantiedemping en
parameter 1-65 Resonantiedemping tijdconstante
in om problemen met hoogfrequentresonantie
te helpen elimineren. Verhoog de waarde van
parameter 1-64 Resonantiedemping om resonantietrilling te verminderen.
1-65 Resonantiedemping tijdconstante
Range: Functie:
0,005s* [0,001-0,050s]Stel parameter 1-64 Resonantiedemping
en parameter 1-65 Resonantiedemping
tijdconstante in om problemen met
hoogfrequentresonantie te helpen
3 3
Page 42

Parameters
VLT® HVAC Basic Drive FC 101
1-65 Resonantiedemping tijdconstante
Range: Functie:
elimineren. Voer de tijdconstante in die
de beste demping oplevert.
33
1-66 Min. stroom bij lage snelh.
Range: Functie:
50 %* [0 - 120 %] Geldt alleen voor PM-motoren. Het
verhogen van de minimumstroom verbetert
het motorkoppel bij lage toerentallen, maar
verlaagt ook het rendement.
3.2.9 1-7* Start Adjustments
(Startaanpassingen)
Parameters voor het congureren van speciale startfuncties
van de motor.
1-70 Startmodus
Deze parameter geldt voor softwareversie 2.80 en latere versies.
Gebruik deze parameter om de startmodus van de PM-motor te
selecteren, om de VVC+-regelkern te initialiseren voor voorheen
vrijlopende PM-motoren. Deze parameter is alleen actief voor
PM-motor in VVC+-modus als de motor is gestopt (of met laag
toerental draait).
Option: Functie:
[0] Rotordetectie De rotordetectiefunctie schat de elektrische
hoek van de rotor en gebruikt de hoek als
startpunt. Dit is de standaardoptie voor
automatiseringstoepassingen met frequentieregelaars. Als de vliegendestartfunctie
detecteert dat de motor met lage toeren
draait of is gestopt, kan de frequentieregelaar de rotorpositie (de hoek) detecteren.
De frequentieregelaar start de motor
vervolgens onder die hoek.
[1] * Parkeren De parkeerfunctie past een DC-stroom toe
over de statorwikkeling en roteert de rotor
naar de elektrische nulpositie. Deze functie
wordt typisch geselecteerd voor HVACtoepassingen. Als de vliegendestartfunctie
detecteert dat de motor met lage toeren
draait of is gestopt, stuurt de frequentieregelaar een DC-stroom om de motor te
parkeren onder een bepaalde hoek. De
frequentieregelaar start de motor vervolgens
onder die hoek.
1-71 Startvertraging
Range: Functie:
0 s* [0-10s]Met deze parameter kan de start worden
vertraagd. De frequentieregelaar begint met de in
parameter 1-72 Startfunctie geselecteerde
startfunctie. Stel de startvertraging in waarna
moet worden begonnen met de versnelling.
1-72 Startfunctie
Option: Functie:
[0] DC-houd/vertr.
tijd
[2] * Vrijloop/vertr.-
tijd
De motor wordt gedurende de startvertraging voorzien van parameter 2-00 DC-
houd/voorverw.stroom.
De frequentieregelaar loopt tijdens de
startvertraging vrij (frequentieregelaar uit).
1-73 Vlieg. start
Deze functie maakt het mogelijk een motor op te vangen
wanneer die vrij draait als gevolg van een netstoring. Fliying start
(Vliegende start) zoekt alleen rechtsom. Als dit geen succes heeft,
wordt een DC-rem geactiveerd. Als een optie is geselecteerd die
het gebruik van een PM-motor mogelijk maakt, wordt het
parkeren uitgevoerd als het toerental lager is dan 2,5-5% van het
nominale toerental, in de tijd die is ingesteld in
parameter 2-07 Parkeertijd.
Wanneer het geschatte toerental lager is dan 2,5-5% van het
nominale toerental, wordt de parkeerfunctie ingeschakeld (zie
parameter 2-06 Parkeerstroom en parameter 2-07 Parkeertijd). In
andere gevallen vangt de frequentieregelaar de motor bij dat
toerental op en wordt het normale bedrijf hervat.
De vliegendestartfunctie die voor PM-motoren wordt gebruikt, is
gebaseerd op een schatting van het initiële toerental. Het
toerental wordt in eerste instantie altijd geschat nadat een actief
startsignaal is gegeven.
Stroomgrenzen bij gebruik van het vliegendestartprincipe voor
PM-motoren:
Het toerentalbereik loopt tot 100% van het nominale
•
toerental of het veldverzwakkingstoerental (de laagste
van deze twee).
Voor toepassingen met een hoge massatraagheid (d.w.z.
•
dat de massatraagheid van de belasting meer dan 30
maal zo groot is als de massatraagheid van de motor).
Option: Functie:
[0] Uitgesch.
[1] Ingesch.
3.2.10 1-8* Stop Adjustments
(Stopaanpassingen)
Parameters voor het congureren van speciale stopfuncties
van de motor.
1-80 Functie bij stop
Option: Functie:
Selecteer de functie die actief moet zijn
na een stopcommando of wanneer het
toerental is verlaagd naar de instelling
in parameter 1-82 Min. snelh. voor functie
bij stop [Hz].
[0] * Vrijloop Laat de motor vrijlopen.
40 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 43

Parameters Programmeerhandleiding
1-80 Functie bij stop
Option: Functie:
[1] DC-houd/
motorvoorverw
Voorziet de motor van een DChoudstroom (zie parameter 2-00 DC-
houd/voorverw.stroom).
1-82 Min. snelh. voor functie bij stop [Hz]
Range: Functie:
0 Hz* [0-20 Hz] Stel de uitgangsfrequentie in waarbij
parameter 1-80 Functie bij stop moet worden
geactiveerd.
1-88 AC Brake Gain (Versterking AC-rem)
Range: Functie:
1,4* [1,0-2,0 ] Deze parameter wordt gebruikt om het AC-
remvermogen in te stellen (stel de uitlooptijd in
wanneer de massatraagheid constant is). Als de
DC-tussenkringspanning niet hoger is dan de
waarschuwingswaarde voor de DC-tussenkringspanning, kunt u deze parameter gebruiken om
het generatorkoppel aan te passen.
3.2.11 1-9* Motor Temperature
(Motortemperatuur)
Parameters voor het congureren van temperatuurbeveiligingsfuncties voor de motor.
1-90 Thermische motorbeveiliging
Option: Functie:
Met behulp van een ETR (elektronisch
thermisch relais) wordt de motortemperatuur berekend op basis van frequentie,
stroom en tijd. Danfoss adviseert om deze
functie te gebruiken als er geen
thermistor aanwezig is. Voor asynchrone
motoren en PM-motoren geldt dezelfde
functionaliteit.
LET OP
De ETR-berekening is gebaseerd op
de motorgegevens in parame-
tergroep 1-2* Motor Data
(Motordata).
1-90 Thermische motorbeveiliging
Option: Functie:
[3] ETR-waarsch. 1 Als de berekende maximale motortempe-
ratuur wordt overschreden, wordt er een
waarschuwing gegenereerd.
[4] * ETR-uitsch. 1 Start de berekening van de motortempe-
ratuur op basis van de actuele belasting
en tijd plus de motorfrequentie alleen als
de motorstroom hoger is dan 110% van
de nominale motorstroom.
[22] ETR Trip -
Extended
Detection (ETRuitschakeling Uitgebreide
detectie)
Start de berekening van de motortemperatuur op basis van de actuele belasting
en tijd plus de motorfrequentie wanneer
de motorstroom hoger is dan 110% van
de nominale motorstroom. In het andere
geval start u de berekening van de
motortemperatuur wanneer de
motorstroom lager is dan 110% van de
nominale motorstroom en de stroomgrens
is bereikt.
1-93 Thermistorbron
Option: Functie:
LET OP
Deze parameter kan niet worden
gewijzigd terwijl de motor loopt.
LET OP
Stel de digitale ingang in op [0] PNP Active at 24 V (PNP - actief bij 24 V) via
parameter 5-03 Modus dig. ingang 29.
Selecteer de ingang waarop de thermistor (PTCsensor) moet worden aangesloten. Bij gebruik
van een analoge ingang kan de betreende
analoge ingang niet worden gebruikt als een
referentie in parameter 3-15 Referentiebron 1 tot
parameter 3-17 Referentiebron 3,
parameter 20-00 Bron terugkoppeling 1,
parameter 20-03 Bron terugk. 2,
parameter 24-06 Referentiebron brandmodus en
parameter 24-07 Bron terugk. brandmodus.
[0]*Geen Stel de thermistorbron niet in.
3 3
[0] Geen
bescherm.
[1] Thermistor-
waarsch.
[2] Thermisto-
ruitsch.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 41
Schakelt de temperatuurbewaking uit.
Een thermistor genereert een
waarschuwing als de maximale motortemperatuur is overschreden.
Als de maximale motortemperatuur wordt
overschreden, genereert een thermistor
een alarm en wordt de frequentieregelaar
uitgeschakeld.
[1] Anal.
ingang
AI53
[6] Dig.
ingang
29
Gebruik analoge ingang 53 als thermistorbron.
Gebruik digitale ingang 29 als thermistorbron.
Page 44

Parameters
VLT® HVAC Basic Drive FC 101
3.3 Hoofdmenu – Remmen – Groep 2
3.3.1 2-0* DC Brakes (DC-remmen)
Parameters voor het congureren van de DC-remfuncties
en DC-houdfuncties.
33
2-00 DC-houd/voorverw.stroom
Range: Functie:
50%* [0 -
LET OP
160
OVERVERHITTING MOTOR
%]
De maximumwaarde is afhankelijk van de
nominale motorstroom.
Om schade aan de motor door oververhitting
te voorkomen, moet u hem niet te lang op
100% laten lopen.
2-04 Inschakelsnelh. DC-rem
Range: Functie:
0 Hz* [ 0-500 Hz] Deze parameter dient voor het instellen van
de inschakelsnelheid van de DC-rem waarbij
parameter 2-01 DC-remstroom actief moet zijn
in geval van een stopcommando.
2-06 Parkeerstroom
Range: Functie:
100%* [0 -
150 %]
Stel de stroom in als een percentage van de
nominale motorstroom,
parameter 1-24 Motorstroom. Actief bij gebruik van
parameter 1-73 Vlieg. start. De parkeerstroom is
actief gedurende de tijd die is ingesteld in
parameter 2-07 Parkeertijd.
LET OP
Stel de houdstroom in als een percentage van de
nominale motorstroom I
parameter 1-24 Motorstroom. Parameter 2-00 DChoud/voorverw.stroom handhaaft de motorfunctie
(houdkoppel) of verwarmt de motor voor. Deze
parameter is actief als DC hold (DC-houd) is
geselecteerd in parameter 1-72 Startfunctie [0] DC
Hold/delay time (DC-houd/vertr.tijd) of
parameter 1-80 Functie bij stop[1] DC hold/Motor
Preheat (DC-houd/motorvoorverw.).
2-01 DC-remstroom
Range: Functie:
50%* [0 -
LET OP
150
OVERVERHITTING MOTOR
%]
De maximumwaarde is afhankelijk van de
nominale motorstroom.
Om schade aan de motor door oververhitting
te voorkomen, moet u hem niet te lang op
100% laten lopen.
M,N
in
2-07 Parkeertijd
Range: Functie:
3 s* [0.1 -
60 s]
3.3.2 2-1* Remenergie-functie
Parameter 2-06 Parkeerstroom is alleen
actief als 1 van de PM-motorconstructieopties is geselecteerd in
parameter 1-10 Motorconstructie.
Bepaal hoelang de in parameter 2-06 Parkeerstroom ingestelde parkeerstroom moet worden
toegepast. Actief bij gebruik van
parameter 1-73 Vlieg. start.
LET OP
Parameter 2-07 Parkeertijd is alleen actief
als parameter 1-10 Motorconstructie is
ingesteld op een optie die het gebruik van
PM-motoren mogelijk maakt.
Stel de stroom in als % van de nominale
motorstroom, parameter 1-24 Motorstroom. Na een
stopcommando wordt er een DC-remstroom
toegepast als het toerental lager is dan de
ingestelde begrenzing in parameter 2-04 Inscha-
kelsnelh. DC-rem of als de functie DC-rem
geïnverteerd actief is (via de instelling [5] DC-brake
inverse (DC-rem geïnv.) in parametergroep 5-1* Digital
Inputs (Digitale ingangen) of via de seriële-communi-
catiepoort). Zie parameter 2-02 DC-remtijd voor de
tijdsduur.
2-02 DC-remtijd
Range: Functie:
10 s* [0-60 s] Bepaal hoelang de ingestelde DC-remstroom in
parameter 2-01 DC-remstroom na activering moet
worden toegepast.
42 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Parametergroep voor het selecteren van de parameters
voor dynamisch remmen.
2-10 Remfunctie
Option: Functie:
[0] * Uit De remweerstand is niet actief.
[2] AC-rem De AC-rem is actief.
2-16 AC-rem max. stroom
Range: Functie:
100 %* [0 - 160 %] Voer de maximaal toegestane stroom bij
gebruik van de AC-rem in om oververhitting van de motorwikkelingen te
voorkomen.
Page 45

Parameters Programmeerhandleiding
2-17 Overspanningsreg.
Option: Functie:
Bepaal of de overspanningsregeling (OVC –
Over Voltage Control) moet worden
ingeschakeld tijdens het uitlopen. Deze
regeling beperkt de kans op een uitschakeling
(trip) van de frequentieregelaar als gevolg van
een overspanning op de DC-tussenkring die
wordt veroorzaakt door genererend vermogen
van de belasting.
[0] Uitgesch. Geen OVC vereist.
[1] Ingesch.
(geen stop)
[2] * Ingesch. Schakelt OVC in.
Activeert OVC wanneer de frequentieregelaar
niet in de stoptoestand is.
LET OP
De ramp-tijd wordt automatisch
aangepast om uitschakeling (trip) van
de frequentieregelaar te voorkomen.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 43
Page 46

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parameters
VLT® HVAC Basic Drive FC 101
3.4 Hoofdmenu – Ref./ramp – Groep 3
3.4.1 3-0* Reference Limits (Ref.begrenz.)
Parameters voor het instellen van de referentie-eenheid,
limieten en bereiken.
33
Zie ook parametergroep 20-0* Feedback ( Terugkoppeling)
voor informatie over de instellingen voor een regeling met
terugkoppeling.
3-02 Minimumreferentie
Range: Functie:
0* [-4999–4999] De minimumreferentie is de laagste waarde
die wordt bepaald door de som van alle
referenties.
3-03 Max. referentie
Range: Functie:
Afhankelijk
van
grootte*
3.4.2 3-1* References (Referenties)
[ -4999,0-4999
ReferentieTerugkEenheid]
De maximumreferentie is de
hoogste waarde die wordt
bepaald door de som van alle
referenties. De eenheid voor de
maximumreferentie komt
overeen met de conguratiese-
lectie in
parameter 1-00 Conguratiemodus.
3-10 Ingestelde ref.
Range: Functie:
0 %* [-100 -
100 %]
Voer maximaal 8 verschillende digitale
referenties (0-7) in deze parameter in, door
middel van arrayprogrammering. Om vooraf
ingestelde referenties te kunnen gebruiken,
moet Preset reference bit 0/1/2 (Ingesteld referen-
tiebit 0/1/2) [16], [17] of [18] worden
geselecteerd voor de betreende digitale
ingangen in parametergroep 5-1* Digital Inputs
(Digitale ingangen).
3-11 Jog-snelh. [Hz]
Range: Functie:
5 Hz* [ 0-500,0 Hz] De jogsnelheid is de vaste uitgangs-
snelheid waarbij de frequentieregelaar
functioneert wanneer de jogfunctie is
geactiveerd.
Zie ook parameter 3-80 Jog ramp-tijd.
3-14 Ingestelde relatieve ref.
Range: Functie:
0 %* [-100
100 %]
Voer een vaste waarde in % in die moet worden
opgeteld bij de ingestelde variabele waarde in
parameter 3-18 Rel. schaling van referentiebron.
De som van de vaste en variabele waarden (Y in
Afbeelding 3.5) wordt vermenigvuldigd met de
actuele referentie (X in Afbeelding 3.5). Dit product
wordt opgeteld bij de actuele referentie X + X ×
100
Y
Afbeelding 3.4 Referenties
Afbeelding 3.5 Ingestelde relatieve ref.
3-15 Referentiebron 1
Option: Functie:
Stel in welke ingang moet worden
gebruikt voor het eerste referentiesignaal.
Parameter 3-15 Referentiebron 1,
parameter 3-16 Referentiebron 2 en
parameter 3-17 Referentiebron 3 deniëren
maximaal 3 verschillende referentiesignalen. De som van deze
referentiesignalen bepaalt de actuele
referentie.
[0] Geen functie
[1] * Anal. ingang 53
[2] Anal. ingang 54
[7] Pulsingang 29
[11] Lokale busref.
44 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 47

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parameters Programmeerhandleiding
3-16 Referentiebron 2
Option: Functie:
Stel in welke ingang moet worden
gebruikt voor het tweede referentiesignaal.
Parameter 3-15 Referentiebron 1,
parameter 3-16 Referentiebron 2 en
parameter 3-17 Referentiebron 3 deniëren
maximaal 3 verschillende referentiesignalen. De som van deze
referentiesignalen bepaalt de actuele
referentie. Zie ook parameter 1-93 Thermis-
torbron.
Afbeelding 3.6 Ramps
[0] Geen functie
[1] Anal. ingang 53
[2] * Anal. ingang 54
[7] Pulsingang 29
[11] Lokale busref.
3-17 Referentiebron 3
Option: Functie:
3-41 Ramp 1 aanlooptijd
Range: Functie:
Afhankelijk
van
grootte*
Stel in welke referentie-ingang moet
worden gebruikt voor het derde referentiesignaal. Parameter 3-15 Referentiebron
1, parameter 3-16 Referentiebron 2 en
parameter 3-17 Referentiebron 3 deniëren
maximaal 3 verschillende referentiesignalen. De som van deze
referentiesignalen bepaalt de actuele
referentie.
[0] Geen functie
[1] Anal. ingang 53
[2] Anal. ingang 54
[7] Pulsingang 29
[11] * Lokale busref.
3-42 Ramp 1 uitlooptijd
Range: Functie:
Afhankelijk
van
3.4.3 3-4* Ramp 1
grootte*
Congureer de ramp-tijdparameters voor elk van 2 twee
ramps (parametergroep 3-4* Ramp 1 en 3-5* Ramp 2). De
ramp-tijd is voor alle vermogensklassen vooraf ingesteld
op de minimumwaarde van 10 ms.
[0,05-3600
s]
[0,05-3600
s]
3 3
Stel de tijd in die nodig is om te
versnellen van 0 Hz tot
parameter 1-23 Motorfrequentie
wanneer een asynchrone motor is
geselecteerd. Stel de tijd in die nodig
is om te versnellen van 0 tpm tot
parameter 1-25 Nom. motorsnelheid
wanneer een PM-motor is geselecteerd.
Stel de aanlooptijd zo in dat de
uitgangsstroom tijdens het aanlopen
de in parameter 4-18 Stroombegr.
ingestelde stroomgrens niet
overschrijdt. Zie uitlooptijd in
parameter 3-42 Ramp 1 uitlooptijd.
Stel de tijd in die nodig is om te
vertragen van parameter 1-23 Motorfre-
quentie tot 0 Hz wanneer een
asynchrone motor is geselecteerd.
Voer de tijd in die nodig is om te
vertragen van parameter 1-25 Nom.
motorsnelheid tot 0 tpm wanneer een
PM-motor is geselecteerd. Selecteer de
uitlooptijd zo dat uitschakeling (trip)
bij een overspanning in de DCtussenkring wordt voorkomen.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 45
Page 48

Parameters
VLT® HVAC Basic Drive FC 101
3.4.4 3-5* Ramp 2
3-81 Snelle stop ramp-tijd
Range: Functie:
Deze parametergroep bepaalt de conguratie van ramp 2parameters.
3-51 Ramp 2 aanlooptijd
33
Range: Functie:
Afhankelijk
van
grootte*
[0,05-3600
s]
Stel de tijd in die nodig is om te
versnellen van 0 Hz tot
parameter 1-23 Motorfrequentie
wanneer een asynchrone motor is
geselecteerd. Stel de tijd in die nodig
is om te versnellen van 0 tpm tot
parameter 1-25 Nom. motorsnelheid
wanneer een PM-motor is geselecteerd.
Stel de aanlooptijd zo in dat de
uitgangsstroom tijdens het aanlopen
de ingestelde stroomgrens in
parameter 4-18 Stroombegr. niet
overschrijdt.
Afhankelijk
van
grootte*
[0,05-3600
s]
Voer de uitlooptijd van
parameter 1-23 Motorfrequentie tot 0
Hz voor een snelle stop in. Tijdens het
uitlopen mag er geen overspanning
ontstaan in de inverter en mag de
gegenereerde stroom de ingestelde
begrenzing in
parameter 4-18 Stroombegr. niet
overschrijden. De snelle stop wordt
geactiveerd met een signaal op een
geselecteerde digitale ingang of via de
seriële-communicatiepoort.
3-52 Ramp 2 uitlooptijd
Range: Functie:
Afhankelijk
van grootte*
[0,05-3600s]Voer de tijd die nodig is om te
vertragen van parameter 1-25 Nom.
motorsnelheid tot 0 tpm. Stel de
uitlooptijd zo in dat de uitgangsstroom tijdens het uitlopen de
ingestelde stroomgrens in
parameter 4-18 Stroombegr. niet
overschrijdt.
3.4.5 3-8* Andere Ramps
3-80 Jog ramp-tijd
Range: Functie:
Afhankelijk
van
grootte*
[0,05-3600
s]
Stel de jog-aan/uitlooptijd in, d.w.z. de
tijd die nodig is om te versnellen/
vertragen tussen 0 Hz en de ingestelde
waarde in parameter 1-23 Motorfre-
quentie. Zorg ervoor dat de totale
uitgangsstroom die nodig is voor de
betreende jog-ramptijd, de in
parameter 4-18 Stroombegr. ingestelde
stroomgrens niet overschrijdt. De jogramptijd start wanneer er via het
bedieningspaneel, een geselecteerde
digitale ingang of de seriële-communicatiepoort een jog-signaal wordt
gegeven.
46 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 49

Parameters Programmeerhandleiding
3.5 Hoofdmenu – Begr./waarsch. – Groep 4
3.5.1 4-1* Motor Limits
(Motorbegrenzingen)
Denieer de koppel- en stroombegrenzingen voor de
motor en de reactie van de frequentieomvormer wanneer
de begrenzingen worden overschreden.
4-10 Draairichting motor
Option: Functie:
[0] Rechtsom
[2] * Bidirec-
tioneel
4-12 Motorsnelh. lage begr. [Hz]
Range: Functie:
0 Hz* [ 0-400,0
Hz]
4-14 Motorsnelh. hoge begr. [Hz]
Range: Functie:
Afhankelijk
van
grootte*
Afhankelijk
van
grootte*
LET OP
De instelling van
parameter 4-10 Draairichting motor is
van invloed op parameter 1-73 Vlieg.
start.
Alleen rechtsom draaien is toegestaan.
Zowel rechtsom als linksom draaien is
toegestaan.
Stel de lage begrenzing voor het motortoerental in. De lage begrenzing voor het
motortoerental kan worden ingesteld op een
waarde die overeenkomt met de minimale
uitgangsfrequentie van de motoras. De lage
begrenzing voor het motortoerental mag de
instelling in parameter 4-14 Motorsnelh. hoge
begr. [Hz] niet overschrijden.
[ 0,1-400,0
Hz]
[ 0,1-400,0
Hz]
LET OP
De maximale uitgangsfrequentie
mag niet hoger zijn dan 10% van
de schakelfrequentie van de
inverter
(parameter 14-01 Schakelfre-
quentie).
Voer de hoge begrenzing voor het
motortoerental in. Deze kan worden
ingesteld op een waarde die
overeenkomt met het aanbevolen
maximale toerental. De hoge
begrenzing voor het motortoerental
moet hoger zijn dan de instelling in
parameter 4-12 Motorsnelh. lage begr.
[Hz].
Het maximale motortoerental mag
niet hoger zijn dan de instelling in
parameter 4-19 Max. uitgangsfreq..
4-18 Stroombegr.
Range: Functie:
110%* [0 -
1000
%]
Voer de stroomgrens voor motor- en generatorwerking in (in % van de nominale motorstroom).
Als de waarde hoger is dan het maximale
nominale vermogen van de frequentieregelaar,
wordt de stroom nog steeds begrensd door de
maximale uitgangsstroom van de frequentieregelaar. Wanneer een instelling in
parameter 1-00 Conguratiemodus tot
parameter 1-25 Nom. motorsnelheid wordt
gewijzigd, wordt parameter 4-18 Stroombegr. niet
automatisch teruggezet naar de standaardinstelling.
4-19 Max. uitgangsfreq.
Range: Functie:
Afhankelijk
van grootte*
Afhankelijk
van grootte*
[ 0-400
Hz]
[ 0,0-400
Hz]
Stel de maximale uitgangsfrequentie in.
Deze bepaalt de absolute begrenzing
van de uitgangsfrequentie van de
frequentieregelaar voor een verbeterde
veiligheid in toepassingen waarbij
onbedoelde overtoeren moeten worden
vermeden. Deze absolute begrenzing
geldt voor alle conguraties, ongeacht
de instelling in parameter 1-00 Congu-
ratiemodus.
Als parameter 1-10 Motorconstructie is
ingesteld op een optie die het gebruik
van permanentmagneetmotoren
mogelijk maakt, wordt de maximale
waarde van parameter 4-19 Max.
uitgangsfreq. mogelijk begrensd door de
instelling van parameter 1-40 Tegen-EMK
bij 1000 TPM, om te voorkomen dat de
frequentieregelaar wordt beschadigd
door een te hoge tegen-EMK. Als
parameter 4-19 Max. uitgangsfreq. wordt
ingesteld op een waarde lager dan
parameter 4-14 Motorsnelh. hoge begr.
[Hz], wordt parameter 4-14 Motorsnelh.
hoge begr. [Hz] automatisch ingesteld
op de waarde in parameter 4-19 Max.
uitgangsfreq..
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 47
Page 50

Parameters
VLT® HVAC Basic Drive FC 101
3.5.2 4-4* Adjustable Warnings 2
(Aanpasbare waarsch. 2)
4-40 Warning Freq. laag
4-50 Waarschuwing stroom laag
Range: Functie:
signaal op de digitale uitgang of de relaisuitgang.
Range: Functie:
33
Afhankelijk
van
grootte*
[ 0-500
Hz]
Gebruik deze parameter om een lagere
begrenzing voor het frequentiebereik in te
stellen.
Wanneer het motortoerental lager wordt
dan deze begrenzing, verschijnt op het
display de melding SPEED LOW
(TOERENTAL LAAG). Waarschuwingsbit 10
wordt ingesteld in
parameter 16-94 Uitgebr. Statuswoord. Het
uitgangsrelais of de digitale uitgang kan
worden gecongureerd om deze
waarschuwing aan te geven. Het
waarschuwingslampje op het LCP gaat
niet branden wanneer de in deze
parameter ingestelde grenswaarde wordt
bereikt.
4-41 Warning Freq. hoog
Range: Functie:
Afhankelijk
van
grootte*
[ 0-500
Hz]
Gebruik deze parameter om een hogere
begrenzing voor het frequentiebereik in
te stellen.
Wanneer het motortoerental deze
grenswaarde overschrijdt, verschijnt op
het display de melding SPEED HIGH
(TOERENTAL HOOG). Waarschuwingsbit 9
wordt ingesteld in
parameter 16-94 Uitgebr. Statuswoord. Het
uitgangsrelais of de digitale uitgang kan
worden gecongureerd om deze
waarschuwing aan te geven. Het
waarschuwingslampje op het LCP gaat
niet branden wanneer de in deze
parameter ingestelde grenswaarde wordt
bereikt.
3.5.3 4-5* Adj. Warnings (Instelbare
waarschuwingen)
Denieer instelbare waarschuwingsbegrenzingen voor
stroom. Waarschuwingen worden weergegeven op het
4-51 Waarschuwing stroom hoog
Range: Functie:
Afhankelijk
van grootte*
[ 0,0-500,00A]Voer de waarde voor I
Wanneer de motorstroom hoger
wordt dan deze waarde, wordt een
bit in het statuswoord ingesteld.
Deze waarde kan ook worden
geprogrammeerd voor het geven
van een signaal op de digitale
uitgang of de relaisuitgang.
4-54 Waarsch: referentie laag
Range: Functie:
-4999* [-4999
- 4999 ]
Stel de lage referentiebegrenzing in. Wanneer
de actuele referentie lager wordt dan deze
begrenzing, verschijnt op het display de
melding Ref
wingsbit 20 wordt ingesteld in
parameter 16-94 Uitgebr. Statuswoord. Het
uitgangsrelais of de digitale uitgang kan
worden gecongureerd om deze waarschuwing
aan te geven. Het waarschuwingslampje op het
LCP gaat niet branden wanneer de in deze
parameter ingestelde grenswaarde wordt
bereikt.
(Referentie laag). Waarschu-
Low
4-55 Waarsch: referentie hoog
Range: Functie:
4999* [-4999
- 4999 ]
Gebruik deze parameter om een hogere
begrenzing voor het referentiebereik in te
stellen.
Als de huidige referentie hoger wordt dan deze
grenswaarde, verschijnt op het display de
melding Reference High (Referentie hoog).
Waarschuwingsbit 19 wordt ingesteld in
parameter 16-94 Uitgebr. Statuswoord. Het
uitgangsrelais of de digitale uitgang kan
worden gecongureerd om deze waarschuwing
aan te geven. Het waarschuwingslampje op het
LCP gaat niet branden wanneer de in deze
parameter ingestelde grenswaarde wordt
bereikt.
HIGH
in.
display, een geprogrammeerde uitgang of een veldbus.
4-50 Waarschuwing stroom laag
Range: Functie:
0 A [ 0-500A]Voer de waarde voor I
motorstroom lager wordt dan deze
grenswaarde, wordt een bit in het statuswoord
ingesteld. Deze waarde kan ook worden
geprogrammeerd voor het geven van een
in. Wanneer de
LOW
4-56 Waarsch: terugk. laag
Range: Functie:
-4999
ProcesRegEenh*
[-4999-4999
ProcesRegEenh]
Gebruik deze parameter om een lagere
begrenzing voor het terugkoppelingsbereik in te stellen.
Wanneer de terugkoppeling lager
wordt dan deze grenswaarde,
48 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 51

Parameters Programmeerhandleiding
4-56 Waarsch: terugk. laag
Range: Functie:
verschijnt op het display de melding
Feedback Low ( Terugk laag). Waarschuwingsbit 6 wordt ingesteld
inparameter 16-94 Uitgebr. Statuswoord.
Het uitgangsrelais kan worden gecon-
gureerd om deze waarschuwing aan te
geven. Het waarschuwingslampje op
het LCP gaat niet branden wanneer de
in deze parameter ingestelde
grenswaarde wordt bereikt.
4-57 Waarsch: terugk. hoog
Range: Functie:
4999
ProcesRegEenh*
[-4999-4999
ProcesRegEenh]
Gebruik deze parameter om een
hogere begrenzing voor het terugkoppelingsbereik in te stellen.
Wanneer de terugkoppeling hoger
wordt dan deze begrenzing, verschijnt
op het display de melding Feedback
High (Terugk. hoog). Waarschuwingsbit
5 wordt ingesteld in
parameter 16-94 Uitgebr. Statuswoord.
Het uitgangsrelais kan worden gecon-
gureerd om deze waarschuwing aan te
geven. Het waarschuwingslampje op
het LCP gaat niet branden wanneer de
in deze parameter ingestelde
grenswaarde wordt bereikt.
4-58 Motorfasefunctie ontbreekt
Option: Functie:
[0] Uit Er wordt geen alarm weergegeven in geval van een
ontbrekende motorfase.
[1] * Aan Er wordt een alarm weergegeven in geval van een
ontbrekende motorfase.
3.5.4 4-6* Snelh.-bypass
Denieer de toerentalbypassgebieden voor de aan-/
uitlopen. Er kunnen 3 frequentiebereiken worden
vermeden.
4-61 Bypass-snelh. vanaf [Hz]
Array[3]
Range: Functie:
0 Hz [ 0-500 Hz] Stel de lage begrenzing van de te vermijden
toerentallen in. Bij sommige systemen
moeten bepaalde uitgangstoerentallen
worden vermeden om problemen met
resonantie in het systeem te voorkomen.
4-63 Bypass-snelh. tot [Hz]
Array[3]
Range: Functie:
0 Hz* [ 0-500 Hz] Bij sommige systemen moeten bepaalde
uitgangstoerentallen worden vermeden om
problemen met resonantie in het systeem te
voorkomen. Voer de hoge begrenzingen van
de te vermijden toerentallen in.
3.5.5 Semi-auto bypass setup
Gebruik Semi-auto bypass setup om te programmeren
welke frequenties moeten worden overgeslagen in verband
met resonantie in het systeem.
Procedure:
1. Stop de motor.
LET OP
Pas de ramp-tijden in parameter 3-41 Ramp 1 aanlooptijd
en parameter 3-42 Ramp 1 uitlooptijd aan.
2. Selecteer [1] Enabled (Ingesch.) in
parameter 4-64 Semi-auto bypass setup.
3. Druk op [Hand On] om te starten met zoeken
naar frequentiebanden die resonantie
veroorzaken. De motor loopt aan op basis van de
ingestelde aanloop.
LET OP
Klem 27 digitale ingang (parameter 5-12 Klem 27 digitale
ingang) is standaard ingesteld op [2] Coast inverse
(Vrijloop geïnv.). Als er geen 24 V op klem 27 wordt
geschakeld, start [Hand On] de motor niet. Als dit het
geval is, moet u klem 12 verbinden met klem 27.
4. Bij het doorlopen van een resonantieband drukt
u op [OK] op het LCP bij het verlaten van de
band. De actuele frequentie wordt opgeslagen als
het eerste element in parameter 4-63 Bypass-snelh.
tot [Hz] (array). Herhaal deze procedure voor elke
resonantieband die is gevonden tijdens het
aanlopen (u kunt er maximaal 3 aanpassen).
5. Wanneer het maximale toerental is bereikt, begint
de motor automatisch uit te lopen. Herhaal deze
procedure wanneer het toerental tijdens het
vertragen buiten de resonantiebanden komt. De
actuele frequenties die worden geregistreerd
wanneer op [OK] wordt gedrukt, worden
opgeslagen in parameter 4-61 Bypass-snelh. vanaf
[Hz].
6. Druk op [OK] wanneer de motor is uitgelopen tot
stop. parameter 4-64 Semi-auto bypass setup wordt
automatisch teruggezet naar O (Uit). De frequen-
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 49
Page 52

Parameters
tieregelaar blijft in de handmodus staan totdat er
op [O] of [Auto On] wordt gedrukt.
Als de frequenties voor een bepaalde resonantieband niet
in de juiste volgorde zijn geregistreerd (de in
parameter 4-63 Bypass-snelh. tot [Hz] opgeslagen frequen-
33
tiewaarden moeten gelijk zijn aan of hoger zijn dan de
waarden in parameter 4-61 Bypass-snelh. vanaf [Hz]) of als
voor parameter 4-61 Bypass-snelh. vanaf [Hz] en
parameter 4-63 Bypass-snelh. tot [Hz] niet hetzelfde aantal
registraties is opgeslagen, worden alle registraties
geannuleerd en verschijnt de volgende melding: Collected
speed areas overlapping or not determined. (Bypasszones
overlappen of sets met start-eindpunten zijn niet bepaald.)
Druk op [Cancel] om te annuleren.
4-64 Semi-auto bypass setup
Option: Functie:
[0] * Uit
[1] Ingesch. Als deze optie is geselecteerd, worden toerental-
bereiken automatisch gescand om
resonantiebanden te identiceren.
VLT® HVAC Basic Drive FC 101
50 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 53

Parameters Programmeerhandleiding
3.6 Hoofdmenu – Digitaal In/Uit – Groep 5
3.6.1 5-0* Digital I/O Mode (Dig. I/Omodus)
Parameters voor het congureren van in- of uitgang, en
voor NPN of PNP.
LET OP
Deze parameters kunnen niet worden gewijzigd terwijl
de motor loopt.
5-00 Dig. I/O-modus
Option: Functie:
Stel de modus NPN of PNP in voor digitale ingang 18,
19 en 27. Modus digitale ingang.
[0] * PNP Actie na positieve directionele pulsen (0). PNP-
systemen worden naar aarde (GND) getrokken.
[1] NPN Actie na negatieve directionele pulsen (1). NPN-
systemen worden verhoogd tot +24 V, intern in de
frequentieregelaar.
5-03 Modus dig. ingang 29
Option: Functie:
[0] * PNP Stel de modus PNP in voor digitale ingang 29.
[1] NPN Stel de modus NPN in voor digitale ingang 29
3.6.2 5-1* Digital Inputs (Digitale ingangen)
Parameters voor het congureren van de ingangsfuncties
voor de ingangsklemmen.
De digitale ingangen worden gebruikt om diverse functies
van de frequentieregelaar in te stellen. Alle digitale
ingangen kunnen worden ingesteld op de volgende
functies:
Functie digitale
ingang
[0] No operation (Niet
in bedrijf)
[1] Reset Reset de frequentieregelaar na een trip/
[2] Coast inverse
(Vrijloop geïnv.)
[3] Coast and reset
inverse (Vrijloop &
reset inv)
Beschrijving
Geen reactie op signalen die naar de klem
worden gestuurd.
alarm. Alarmen met blokkering kunnen
worden gereset.
Laat de motor vrijlopen. Logische 0 ⇒
vrijloop.
Reset en vrijloop, geïnverteerde ingang
(NC). Laat de motor vrijlopen en voert
vervolgens een reset van de frequentieregelaar uit. Logische 0 ⇒ vrijloop en reset.
Functie digitale
ingang
[4] Quick stop inverse
(Snelle stop geïnv.)
[5] DC-brake inverse
(DC-rem geïnv.)
[6] Stop inverse (Stop
geïnverteerd)
[7] External interlock
(Ext. vergrendeling)
[8] Start Selecteer Start voor een start-/
[9] Latched start
(Pulsstart)
[10] Reversing
(Omkeren)
[11] Start reversing
(Start omgekeerd)
Beschrijving
Ingang geïnverteerd (NC). Genereert een
stop op basis van de uitlooptijd van de
snelle stop die is ingesteld in
parameter 3-81 Snelle stop ramp-tijd. Na
het uitlopen bevindt de as zich in de vrije
modus.
Ingang geïnverteerd voor DC-rem (NC).
Stopt de motor door gedurende een
bepaalde tijd een DC-stroom te schakelen;
zie parameter 2-01 DC-remstroom. Deze
functie is alleen actief als de waarde in
parameter 2-02 DC-remtijd niet 0 is. Deze
optie is niet beschikbaar als
parameter 1-10 Motorconstructie is
ingesteld op [1] PM non-salient SPM (PM,
niet uitspr. SPM).
Stop geïnverteerd genereert de
stopfunctie wanneer de geselecteerde
klem van logische 1 naar logische 0 gaat
(geen puls). De stop wordt uitgevoerd op
basis van de geselecteerde uitlooptijd.
Dezelfde functie als Vrijloop, geïnv., maar
Ext. vergrendeling genereert de
alarmmelding Externe storing op het
display wanneer de geprogrammeerde
klem voor Vrijloop, geïnv. logische 0 is. De
alarmmelding is ook actief via digitale
uitgangen en relaisuitgangen als deze
voor een externe vergrendeling zijn
geprogrammeerd. Als de oorzaak voor de
externe vergrendeling is weggenomen,
kan het alarm worden gereset via een
digitale ingang, veldbus of de [Reset]toets.
stopcommando. Logische 1 = start,
logische 0 = stop. (Standaard voor digitale
ingang 18.)
De motor start als gedurende minstens 2
ms een puls wordt gegeven. De motor
stopt als Stop geïnverteerd wordt
geactiveerd.
Wijzig de draairichting van de motoras.
Het omkeersignaal verandert alleen de
draairichting; de startfunctie wordt
hierdoor niet geactiveerd. Selecteer [2]
Both directions (Bidirectioneel) in
parameter 4-10 Draairichting motor. 0 =
normaal, 1 = omkeren.
Gebruik deze instelling om gelijktijdig te
starten/stoppen en om te keren. Signalen
op [8] Start op hetzelfde moment zijn niet
toegestaan. 0 = stop, 1 = start omgekeerd.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 51
Page 54

Parameters
VLT® HVAC Basic Drive FC 101
Functie digitale
ingang
[14] Jog Gebruikt om de jogsnelheid in te
33
[16] Preset ref bit 0
(Ingest. ref. bit 0)
[17] Preset ref bit 1
(Ingest. ref. bit 1)
[18] Preset ref bit 2
(Ingest. ref. bit 2)
[19] Freeze reference
(Ref. vasthouden)
[20] Freeze output
(Uitgang vasth.)
[21] Speed up (Snelh.
omh.)
[22] Speed down
(Snelh. omlaag)
[23] Set-up select bit
0 (Setupselectie bit 0)
[32] Pulse Input
(Pulsingang)
Beschrijving
schakelen. Zie parameter 3-11 Jog-snelh.
[Hz]. (Standaard voor digitale ingang 29.)
Maakt het mogelijk om 1 van de 8
digitale referenties te selecteren volgens
Tabel 3.4.
Maakt het mogelijk om 1 van de 8
digitale referenties te selecteren volgens
Tabel 3.4.
Maakt het mogelijk om 1 van de 8
digitale referenties te selecteren volgens
Tabel 3.4.
Houd de huidige referentie vast. De
vastgehouden referentie is nu het inschakelpunt/de voorwaarde voor het gebruik
van versnellen en vertragen. Als Snelh.
omh./Snelh. omlaag wordt gebruikt, volgt
de toerentalverandering altijd ramp 2
(parameter 3-51 Ramp 2 aanlooptijd en
parameter 3-52 Ramp 2 uitlooptijd) in het
bereik parameter 3-02 Minimumreferentie parameter 3-03 Max. referentie.
Houdt de huidige referentie vast. De
vastgehouden referentie is nu het inschakelpunt/de voorwaarde voor het gebruik
van versnellen en vertragen. Als Snelh.
omh./Snelh. omlaag wordt gebruikt, volgt
de toerentalverandering altijd ramp 2.
Voor digitale besturing voor het
verhogen/verlagen van het toerental
(motorpotentiometer). Selecteer referentie
vasthouden of uitgang vasthouden om
deze functie te activeren. Als snelheid
omhoog korter dan 400 ms wordt
geactiveerd, wordt de totale referentie
verhoogd met 0,1%. Als snelheid omhoog
langer dan 400 ms wordt geactiveerd,
wordt de totale referentie verhoogd op
basis van ramp 1 in parameter 3-41 Ramp
1 aanlooptijd.
Vergelijkbaar met [21] Speed up (Snelh.
omh.), maar nu wordt de referentie
verlaagd.
Selecteert 1 van de 2 setups. Stel
parameter 0-10 Actieve setup in op Multi
Set-up (Multi setup).
Selecteer pulsingang wanneer een
pulsreeks wordt gebruikt als referentie of
terugkoppeling. Schaling is mogelijk via
parametergroep 5-5* Pulse Input
(Pulsingang). Alleen beschikbaar voor klem
29.
Functie digitale
ingang
[34] Ramp bit 0 Selecteer welke ingang moet worden
[37] Fire mode
(Brandmodus)
[52] Run permissive
(Startvoorwaarde)
Beschrijving
gebruikt. Logische 0 selecteert ramp 1,
terwijl logische 1 ramp 2 selecteert.
Als dit signaal wordt toegepast, gaat de
frequentieregelaar naar de brandmodus
en worden alle andere commando's
genegeerd. Zie parametergroep 24-0* Fire
Mode (Brandmodus).
De ingangsklem waarvoor startvoorwaarde is geprogrammeerd, moet logische
'1' zijn om een startcommando te kunnen
accepteren. Startvoorwaarde heeft een
logische AND-functie die gerelateerd is
aan de klem die is geprogrammeerd voor
[8] Start, [14] Jog of [20] Freeze Output
(Uitgang vasth.). Er moet aan beide
voorwaarden zijn voldaan voordat de
motor kan worden gestart. Als startvoorwaarde is geprogrammeerd voor meerdere
klemmen, hoeft startvoorwaarde slechts
op 1 van de klemmen logische 1 te zijn
om de functie uit te voeren. Startvoorwaarde heeft geen invloed op digitale
uitgangssignaal voor startverzoek ([8]
Start, [14] Jog of [20] Freeze Output
(Uitgang vasth.)) dat is geprogrammeerd in
parametergroep 5-3* Digital Outputs
(Digitale uitgangen) of parametergroep 5-4*
Relays (Relais).
LET OP
Als er geen startvoorwaardesignaal
wordt toegepast, maar wel het
start-, jog- of vasthoudcommando
wordt gegeven, geeft de statusregel
op het display respectievelijk Start
Requested (Startverzoek), Jog
Requested (Jog-verzoek) of Freeze
Requested (Verzoek vasth.) weer.
52 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 55

Parameters Programmeerhandleiding
Functie digitale
ingang
[53] Hand start
(Handmatige start)
[54] Auto start
(Autostart)
[60] Counter A (up)
(Teller A (omhoog))
[61] Counter A (down)
(Teller A (omlaag))
[62] Reset Counter A
(Reset Teller A)
[63] Counter B (up)
(Teller B (omhoog))
[64] Counter B (down)
(Teller B (omlaag))
[65] Reset Counter B
(Reset Teller B)
[101] Sleep (Slaap) Als dit signaal wordt toegepast, wordt de
Tabel 3.3 Functies van digitale ingangen
Beschrijving
Als dit signaal wordt toegepast, wordt de
frequentieregelaar in de handmodus gezet
alsof er op [Hand On] werd gedrukt en
wordt een normaal stopcommando
genegeerd. Als het signaal wordt
weggenomen, stopt de motor. Om een
ander startcommando geldig te maken,
moet een andere digitale ingang worden
toegewezen aan Auto start (Autostart) en
moet hierop een signaal worden
toegepast. De toetsen [Hand On] en [Auto
On] hebben geen invloed. Met de [O]-
toets worden Hand start (Handmatige
start) en Auto start (Autostart) onderdrukt.
Druk op [Hand On] of [Auto On] om Hand
start (Handmatige start) en Auto start
(Autostart) weer te activeren. Als noch op
Hand start (Handmatige start) noch op
Auto start (Autostart) een signaal wordt
toegepast, stopt de motor, ongeacht
eventuele normale startcommando's die
worden gegeven. Als op zowel Hand start
(Handmatige start) als Auto start (Autostart)
een signaal wordt toegepast, is de functie
Auto start (Autostart).
Als dit signaal wordt toegepast, wordt de
frequentieregelaar in de automodus gezet
alsof er op [Auto On] werd gedrukt. Zie
ook [53] Hand start (Handmatige start).
Ingang om de SLC-teller stapsgewijs te
verhogen.
Ingang om de SLC-teller stapsgewijs te
verlagen.
Ingang om teller A te resetten.
Ingang om de SLC-teller stapsgewijs te
verhogen.
Ingang om de SLC-teller stapsgewijs te
verlagen.
Ingang om teller B te resetten.
frequentieregelaar in de slaapmodus
gezet.
Geselecteerde
digitale
referentie:
Digitale
referentie 0
Digitale
referentie 1
Digitale
referentie 2
Digitale
referentie 3
Digitale
referentie 4
Digitale
referentie 5
Digitale
referentie 6
Digitale
referentie 7
Tabel 3.4 Geselecteerde digitale referentie
Digitalerefe-
rentiebit 2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Digitalerefe-
rentiebit 1
Digitalerefe-
rentiebit 0
5-10 Klem 18 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 18. Zie Tabel 3.3 voor instelopties.
Option: Functie:
[0] Geen functie
[1] Reset
[2] Vrijloop geïnv.
[3] Vrijloop & reset inv
[4] Snelle stop geïnv.
[5] DC-rem geïnv.
[6] Stop geïnverteerd
[7] Ext. vergrendeling
[8] * Start
[9] Pulsstart
[10] Omkeren
[11] Start omgekeerd
[14] Jog
[16] Ingest. ref. bit 0
[17] Ingest. ref. bit 1
[18] Ingest. ref. bit 2
[19] Ref. vasthouden
[20] Uitgang vasthouden
[21] Snelh. omh.
[22] Snelh. omlaag
[23] Setupselectie bit 0
[34] Ramp bit 0
[37] Brandmodus
[52] Startvoorwaarde
[53] Hand start (Handmatige start)
[54] Autostart
[60] Teller A (omhoog)
[61] Teller A (omlaag)
[62] Reset Teller A
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 53
Page 56

Parameters
VLT® HVAC Basic Drive FC 101
5-10 Klem 18 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 18. Zie Tabel 3.3 voor instelopties.
Option: Functie:
[63] Teller B (omhoog)
33
[64] Teller B (omlaag)
[65] Reset Teller B
[101] Slaap
[120] Start hoofdpomp
[121] Wisseling hoofdpomp
[130] Vergr. pomp 1
[131] Vergr. pomp 2
[132] Vergr. pomp 3
[133] Vergr. pomp 4
[134] Vergr. pomp 5
5-11 Klem 19 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 19.
Option: Functie:
[0] * Geen functie
[1] Reset
[2] Vrijloop geïnv.
[3] Vrijloop & reset inv
[4] Snelle stop geïnv.
[5] DC-rem geïnv.
[6] Stop geïnverteerd
[7] Ext. vergrendeling
[8] Start
[9] Pulsstart
[10] Omkeren
[11] Start omgekeerd
[14] Jog
[16] Ingest. ref. bit 0
[17] Ingest. ref. bit 1
[18] Ingest. ref. bit 2
[19] Ref. vasthouden
[20] Uitgang vasthouden
[21] Snelh. omh.
[22] Snelh. omlaag
[23] Setupselectie bit 0
[34] Ramp bit 0
[37] Brandmodus
[52] Startvoorwaarde
[53] Hand start (Handmatige start)
[54] Autostart
[60] Teller A (omhoog)
[61] Teller A (omlaag)
[62] Reset Teller A
[63] Teller B (omhoog)
[64] Teller B (omlaag)
[65] Reset Teller B
[101] Slaap
[120] Start hoofdpomp
5-11 Klem 19 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 19.
Option: Functie:
[121] Wisseling hoofdpomp
[130] Vergr. pomp 1
[131] Vergr. pomp 2
[132] Vergr. pomp 3
[133] Vergr. pomp 4
[134] Vergr. pomp 5
5-12 Klem 27 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 27. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [2] Coast inverse (Vrijloop geïnv.). Als
parameter 0-03 Regionale instellingen is ingesteld op [1] North
America (Noord-Amerika), is de standaardwaarde [7] External
Interlock (Ext. vergrendeling).
Option: Functie:
[0] Geen functie
[1] Reset
[2] Vrijloop geïnv.
[3] Vrijloop & reset inv
[4] Snelle stop geïnv.
[5] DC-rem geïnv.
[6] Stop geïnverteerd
[7] Ext. vergrendeling
[8] Start
[9] Pulsstart
[10] Omkeren
[11] Start omgekeerd
[14] Jog
[16] Ingest. ref. bit 0
[17] Ingest. ref. bit 1
[18] Ingest. ref. bit 2
[19] Ref. vasthouden
[20] Uitgang vasthouden
[21] Snelh. omh.
[22] Snelh. omlaag
[23] Setupselectie bit 0
[34] Ramp bit 0
[37] Brandmodus
[52] Startvoorwaarde
[53] Hand start (Handmatige start)
[54] Autostart
[60] Teller A (omhoog)
[61] Teller A (omlaag)
[62] Reset Teller A
[63] Teller B (omhoog)
[64] Teller B (omlaag)
[65] Reset Teller B
[101] Slaap
[120] Start hoofdpomp
54 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 57

Parameters Programmeerhandleiding
5-12 Klem 27 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 27. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [2] Coast inverse (Vrijloop geïnv.). Als
parameter 0-03 Regionale instellingen is ingesteld op [1] North
America (Noord-Amerika), is de standaardwaarde [7] External
Interlock (Ext. vergrendeling).
Option: Functie:
[121] Wisseling hoofdpomp
[130] Vergr. pomp 1
[131] Vergr. pomp 2
[132] Vergr. pomp 3
[133] Vergr. pomp 4
[134] Vergr. pomp 5
5-13 Klem 29 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 29.
Option: Functie:
[0] Geen functie
[1] Reset
[2] Vrijloop geïnv.
[3] Vrijloop & reset inv
[4] Snelle stop geïnv.
[5] DC-rem geïnv.
[6] Stop geïnverteerd
[7] Ext. vergrendeling
[8] Start
[9] Pulsstart
[10] Omkeren
[11] Start omgekeerd
[14] * Jog
[16] Ingest. ref. bit 0
[17] Ingest. ref. bit 1
[18] Ingest. ref. bit 2
[19] Ref. vasthouden
[20] Uitgang vasthouden
[21] Snelh. omh.
[22] Snelh. omlaag
[23] Setupselectie bit 0
[32] Pulsingang
[34] Ramp bit 0
[37] Brandmodus
[52] Startvoorwaarde
[53] Hand start (Handmatige start)
[54] Autostart
[60] Teller A (omhoog)
[61] Teller A (omlaag)
[62] Reset Teller A
[63] Teller B (omhoog)
[64] Teller B (omlaag)
[65] Reset Teller B
[101] Slaap
[120] Start hoofdpomp
5-13 Klem 29 digitale ingang
Parameter voor het congureren van de ingangsfunctie op
ingangsklem 29.
Option: Functie:
[121] Wisseling hoofdpomp
[130] Vergr. pomp 1
[131] Vergr. pomp 2
[132] Vergr. pomp 3
[133] Vergr. pomp 4
[134] Vergr. pomp 5
3.6.3 5-3* Digital Outputs (Digitale
uitgangen)
Parameters voor het congureren van de uitgangsfuncties
voor de uitgangsklemmen.
5-34 Aan-vertr., dig. uitgang
Range: Functie:
0,01 s* [0-600 s] Voer de vertragingstijd tot aan de inscha-
keling van de digitale uitgang in. De toestand
van de digitale uitgang (klem 42/45) mag
gedurende de vertragingstijd niet worden
onderbroken.
5-35 Uit-vertr., dig. uitgang
Range: Functie:
0,01 s* [0-600 s] Voer de vertragingstijd tot aan de uitscha-
keling van de digitale uitgang in. De toestand
van de digitale uitgang (klem 42/45) mag
gedurende de vertragingstijd niet worden
onderbroken.
3.6.4 5-4* Relais
Parameters voor het congureren van de tijdslimieten en
de uitgangsfuncties voor de relais.
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
[0] Geen functie
[1] Besturing
gereed
[2] Frequentiere-
gelaar gereed
De stuurkaart krijgt voedingsspanning.
De frequentieregelaar is gereed voor
bedrijf en geeft een voedingssignaal aan
de stuurkaart.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 55
Page 58

Parameters
VLT® HVAC Basic Drive FC 101
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
33
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
[3] Omv. gereed/
extern
[4] Standby/gn
waarsch.
[5] Frequentiere-
gelaar actief
[6] Draaien/gn
wsch.
[7] Binnen ber/gn
wrsch
[8] Op ref/geen
waarsch.
[9] Alarm Een alarm activeert de uitgang.
[10] Alarm of
waarsch.
[12] Buiten stroom-
bereik
[13] Onder stroom,
laag
[14] Boven stroom,
hoog
[16] Onder snelh.,
laag
[17] Boven snelh.,
hoog
De frequentieregelaar is gereed voor
bedrijf en staat in de automodus.
De frequentieregelaar is gereed voor
bedrijf. Er is geen start- of
stopcommando gegeven. Er zijn geen
waarschuwingen actief.
De motor loopt.
De motor loopt en er zijn geen
waarschuwingen actief.
De motor werkt binnen het stroombereik dat is ingesteld via
parameter 4-50 Waarschuwing stroom
laag en parameter 4-51 Waarschuwing
stroom hoog. Er zijn geen waarschu-
wingen actief.
De motor werkt op het referentietoerental en er zijn geen waarschuwingen
actief.
Een alarm of waarschuwing activeert de
uitgang.
De uitgangsfrequentie ligt buiten het
bereik dat is ingesteld via
parameter 4-50 Waarschuwing stroom
laag en parameter 4-51 Waarschuwing
stroom hoog.
De motorstroom is lager dan de in
parameter 4-50 Waarschuwing stroom
laag ingestelde begrenzing.
De motorstroom is hoger dan de in
parameter 4-51 Waarschuwing stroom
hoog ingestelde begrenzing.
De uitgangssnelheid van de frequentieregelaar is lager dan de in
parameter 4-40 Warning Freq. laag
ingestelde begrenzing.
De uitgangssnelheid van de frequentieregelaar is hoger dan de in
parameter 4-41 Warning Freq. hoog
ingestelde begrenzing.
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
[19] Onder terugk.,
laag
[20] Boven terugk.,
hoog
[21] Thermische
waarschuwing
[22] Gereed, therm.okDe frequentieregelaar is gereed voor
[23] Ext, gereed,
thrm ok
[24] Gereed, spann.okDe frequentieregelaar is gereed voor
[25] Omkeren De motor werkt rechtsom (of is gereed
[26] Bus ok Actieve communicatie (geen time-out)
[35] Ext. vergren-
deling
[36] Stuurwoord bit11Bit 11 in het stuurwoord bestuurt het
[37] Stuurwoord bit12Bit 12 in het stuurwoord bestuurt het
[41] Onder ref, laag De referentie is lager dan de in
[42] Boven ref, hoog De referentie is hoger dan de in
[45] Busbest. De uitgang wordt gecongureerd in
De terugkoppeling is lager dan de in
parameter 4-56 Waarsch: terugk. laag
ingestelde begrenzing.
De terugkoppeling is hoger dan de in
parameter 4-57 Waarsch: terugk. hoog
ingestelde begrenzing.
De thermische waarschuwing wordt
gegeven als de temperatuurbegrenzing
in de motor, frequentieregelaar of
thermistor wordt overschreden.
bedrijf en er is geen waarschuwing
wegens overtemperatuur.
De frequentieregelaar is gereed voor
bedrijf in de automodus en er is geen
waarschuwing wegens overtemperatuur.
bedrijf en de netspanning ligt binnen
het gespeciceerde spanningsbereik.
om rechtsom te werken) bij logische 0
en linksom bij logische 1. De uitgang
wijzigt zodra het omkeersignaal wordt
toegepast.
via de seriële-communicatiepoort.
Zie digitale ingang.
relais.
relais.
parameter 4-54 Waarsch: referentie laag
ingestelde begrenzing.
parameter 4-55 Waarsch: referentie hoog
ingestelde begrenzing.
parameter 5-90 Digitale & relaisbesturing
bus.
56 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 59

Parameters Programmeerhandleiding
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
[60] Comparator 0 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 0 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[61] Comparator 1 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 1 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[62] Comparator 2 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 2 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[63] Comparator 3 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 3 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[64] Comparator 4 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 4 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[65] Comparator 5 Zie parametergroep 13-1* Comparators
(Comparatoren). De uitgang wordt hoog
als comparator 5 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[70] Log. regel 0 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 0 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[71] Log. regel 1 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 1 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[72] Log. regel 2 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 2 als true wordt
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
geëvalueerd. In andere gevallen is hij
laag.
[73] Log. regel 3 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 3 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[74] Log. regel 4 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 4 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[75] Log. regel 5 Zie parametergroep 13-4* Logic Rules
(Log. regels). De uitgang wordt hoog als
logische regel 5 als true wordt
geëvalueerd. In andere gevallen is hij
laag.
[80] SL dig. uitgangAZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer SL-controlleractie [38] Set digital out A high (Dig.
uitgang A hoog) wordt uitgevoerd. De
uitgang wordt laag wanneer SL-controlleractie [32] Set digital out A low (Dig.
uitgang A laag) wordt uitgevoerd.
[81] SL dig. uitgangBZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer SL-controlleractie [39] Set digital out B high (Dig.
uitgang B hoog) wordt uitgevoerd. De
uitgang wordt laag wanneer SL-controlleractie [33] Set digital out B low (Dig.
uitgang B laag) wordt uitgevoerd.
[82] SL dig. uitgangCZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer SL-controlleractie [40] Set digital out C high (Dig.
uitgang C hoog) wordt uitgevoerd. De
uitgang wordt laag wanneer SL-controlleractie [34] Set digital out C low (Dig.
uitgang C laag) wordt uitgevoerd.
[83] SL dig. uitgangDZie parameter 13-52 SL-controlleractie. De
uitgang wordt hoog wanneer SL-controlleractie [41] Set digital out D high (Dig.
uitgang D hoog) wordt uitgevoerd. De
uitgang wordt laag wanneer SL-control-
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 57
Page 60

Parameters
VLT® HVAC Basic Drive FC 101
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
33
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
leractie [35] Set digital out D low (Dig.
uitgang D laag) wordt uitgevoerd.
[160] Geen alarm De uitgang is hoog als er geen alarm
aanwezig is.
[161] Omgekeerd
draaien
[165] Lokale ref.
actief
[166] Externe ref.
actief
[167] Startcomm
actief
[168] Omv. in
handmodus
[169] Omv. in
automodus
[190] Geen ow Er is een situatie zonder ow
[193] Slaapstand De frequentieregelaar/het systeem is in
[194] Functie Defecte
band
[196] Brandmodus De frequentieregelaar werkt in de
De uitgang is hoog als de frequentieregelaar linksom werkt (het logische
product van de statusbits 'actief' en
'omkeren').
De uitgang is hoog als er een lokale
referentie is geactiveerd via de [Hand
On]-toets op het LCP of een
handmodus-aan-signaal via een digitale
ingang.
De uitgang is hoog als er een externe
referentie is geactiveerd via de [Auto
On]-toets op het LCP of een automodusaan-signaal via een digitale ingang.
De uitgang is hoog als er een actief
startcommando is (d.w.z. via een
digitale-busaansluiting, [Hand On] of
[Auto On]), en er geen stopcommando
actief is.
De uitgang is hoog als de frequentieregelaar in de handmodus staat (zoals
aangegeven door de led boven [Hand
On]).
De uitgang is hoog als de frequentieregelaar in de automodus staat (zoals
aangegeven door de led boven [Auto
On]).
gedetecteerd. Zie parametergroep 22-2*
No-Flow Detection (Detectie geen ow).
de slaapmodus gegaan. Zie parame-
tergroep 22-4* Sleep Mode (Slaapmodus).
Er is een situatie met een defecte band
gedetecteerd. Activeer deze functie in
parameter 22-60 Functie Defecte band.
brandmodus. Zie parametergroep 24-0*
Fire Mode (Brandmodus).
5-40 Functierelais
Array (Relais 1 [0], Relais 2 [1])
Selecteer de opties om de functie van de relais in te stellen.
De selectie van elk mechanische relais vindt plaats via een
arrayparameter. Als parameter 0-03 Regionale instellingen is
ingesteld op [0] International (Internationaal), is de standaardwaarde [9] Alarm. Als parameter 0-03 Regionale instellingen is
ingesteld op [1] North America (Noord-Amerika), is de standaardwaarde [160] No alarm (Geen alarm).
Option: Functie:
[198] Omv.bypass Te gebruiken als een signaal voor het
activeren van een externe elektromechanische bypass waarmee de motor
rechtstreeks op het net wordt
geschakeld.
Zie parametergroep 24-1* Drive Bypass
(Omv.bypass).
[211] Cascadepomp 1
[212] Cascadepomp 2
[213] Cascadepomp 3
[214] Cascadepomp 4
[215] Cascadepomp 5
5-41 Aan-vertr., relais
Array [2]
Range: Functie:
0.01 s* [0.01 600 s]
Afbeelding 3.7 Aan-vertr., relais
Stel de vertraging voor de inschakeltijd van
het relais in. Selecteer 1 van de 2 interne
mechanische relais in een arrayfunctie. Zie
parameter 5-40 Functierelais voor meer
informatie.
58 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 61

Parameters Programmeerhandleiding
5-42 Uit-vertr., relais
Array [2]
Range: Functie:
0.01 s* [0.01 600 s]
Stel de vertragingstijd voor uitschakeling van
het relais in. Selecteer 1 van de 2 interne
mechanische relais in een arrayfunctie. Zie
parameter 5-40 Functierelais voor meer
informatie. Als de conditie voor de geselecteerde gebeurtenis verandert voordat de timer
voor de in- of uitschakelvertraging is
verstreken, blijft de relaisuitgang ongewijzigd.
Afbeelding 3.9 Pulse Input (Pulsingang)
5-50 Klem 29 lage freq.
Range: Functie:
20 Hz* [20-31999
Afbeelding 3.8 Uit-vertr., relais
Hz]
3 3
Stel in parameter 5-52 Klem 29 lage ref./
terugk. waarde de lage begrenzing in voor
de frequentie die overeenkomt met het
lage toerental van de motoras (dat wil
zeggen de lage referentiewaarde). Zie
Afbeelding 3.9.
Als de conditie voor de geselecteerde gebeurtenis
verandert voordat de timer voor de in- of uitschakelvertraging is verstreken, blijft de relaisuitgang ongewijzigd.
3.6.5 5-5* Pulse Input (Pulsingang)
De pulsingangparameters worden gebruikt om een
geschikt raamwerk te deniëren voor de pulsreferenties
door de schaling en lterinstellingen voor de pulsingangen
in te stellen. Ingangsklem 29 of 33 werkt als frequentiereferentie-ingang. Stel klem 29 (parameter 5-13 Klem 29
digitale ingang) of klem 33 (parameter 5-15 Klem 33 digitale
ingang) in op [32] Pulse input (Pulsingang). Als klem 29
wordt gebruikt als ingang, moet u parameter 5-01 Klem 27
modus instellen op [0] Input (Ingang).
5-51 Klem 29 hoge freq.
Range: Functie:
32000
Hz*
[21-32000
Hz]
Stel in parameter 5-53 Klem 29 hoge ref./
terugk. waarde de hoge begrenzing in
voor de frequentie die overeenkomt
met het hoge toerental van de motoras
(dat wil zeggen de hoge referentiewaarde).
5-52 Klem 29 lage ref./terugk. waarde
Range: Functie:
0* [-4999 -
4999 ]
Voer de lage begrenzing voor de referentiewaarde in voor het toerental van de motoras
[tpm]. Dit is tevens de laagste terugkoppelingswaarde. Stel klem 29 in als digitale ingang
(parameter 5-13 Klem 29 digitale ingang =
relevante waarde).
5-53 Klem 29 hoge ref./terugk. waarde
Range: Functie:
Afhankelijk
van grootte*
[-4999 4999 ]
Voer de hoge referentiewaarde [tpm]
voor het toerental van de motoras
en de hoge terugkoppelingswaarde
in. Stel klem 29 in als digitale ingang
(parameter 5-13 Klem 29 digitale
ingang = relevante waarde).
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 59
Page 62

Parameters
VLT® HVAC Basic Drive FC 101
3.6.6 5-9* Bus Controlled (Via
busbesturing)
Deze parametergroep selecteert digitale en relaisuitgangen
via een veldbusinstelling.
33
5-90 Digitale & relaisbesturing bus
Range: Functie:
0* [0-0xFFFFFFFF ] Deze parameter houdt de busgestuurde
staat van de digitale uitgangen en relais
vast.
Een logische 1 geeft aan dat de uitgang
hoog of actief is.
Een logische 0 geeft aan dat de uitgang
laag of inactief is.
Bit 0-3 Gereserveerd
Bit 4 Relais 1 uitgangsklem
Bit 6-23 Gereserveerd
Bit 24 Klem 42 digitale uitgang
Bit 26-31 Gereserveerd
Tabel 3.5 Bitfuncties
60 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 63

Ref./Terugk.
[tpm]
Analoge ingang
Hoge ref./
terugk. waarde
Lage ref./
terugk. waarde
'Lage spanning' of
'Lage stroom'
'Hoge spanning' of
'Hoge stroom'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Parameters Programmeerhandleiding
3.7 Hoofdmenu – Analoog In/Uit – Groep 6
Parametergroep voor het instellen van de analoge I/O-
conguratie en de digitale uitgang.
De frequentieregelaar is voorzien van 2 analoge
ingangen:
klem 53
•
klem 54
•
De analoge ingangen kunnen naar keuze worden gebruikt
als spanningsingang (0-10 V) of als stroomingang (0/4-20
mA).
3.7.1 6-0* Analog I/O Mode (Analoge I/Omodus)
3 3
6-00 Live zero time-out-tijd
Range: Functie:
10 s* [1-99 s] Stel de time-outtijd in.
6-01 Live zero time-out-functie
Option: Functie:
Selecteer de time-outfunctie. De
ingestelde functie in parameter 6-01 Live
zero time-out-functie wordt geactiveerd als
het ingangssignaal op klem 53 of 54
minder dan 50% bedraagt van de
ingestelde waarde in parameter 6-10 Klem
53 lage spanning, parameter 6-12 Klem 53
lage stroom, parameter 6-20 Klem 54 lage
spanning of parameter 6-22 Klem 54 lage
stroom gedurende de tijd die is ingesteld
in parameter 6-00 Live zero time-out-tijd.
[0] * Uit
[1] Uitgang
vasthouden
[2] Stop
[3] Jogging
[4] Max. toerental
[5] Stop en uitsch.
Afbeelding 3.10 Live Zero Timeout Function (Live zero time-
outfunctie)
6-02 Live zero time-outfunctie brandmodus
Option: Functie:
Selecteer de time-outfunctie die actief
moet zijn in de brandmodus. De functie
die in deze parameter is ingesteld, wordt
ingeschakeld als het ingangssignaal op de
analoge ingangen lager is dan 50% van
de lage waarde gedurende de tijd die is
ingesteld in parameter 6-00 Live zero time-
out-tijd.
[0] * Uit
[1] Uitgang
vasthouden
[2] Stop
[3] Jogging
[4] Max. toerental
3.7.2 6-1* Analog Input 53 (Analoge ingang
53)
Parameters voor het congureren van de schaling en
begrenzingen voor analoge ingang 53 (klem 53).
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 61
6-10 Klem 53 lage spanning
Range: Functie:
0,07 V* [0-10 V] Stel de spanning (V) in die overeenkomt met
parameter 6-14 Klem 53 lage ref./terugkopp.
waarde. Stel de waarde in op > 1 V om
parameter 6-01 Live zero time-out-functie te
activeren.
Page 64

Parameters
VLT® HVAC Basic Drive FC 101
6-11 Klem 53 hoge spanning
Range: Functie:
10 V* [0-10 V] Voor de spanning (V) in die overeenkomt met
de waarde van de hoge referentie die is
ingesteld in parameter 6-15 Klem 53 hoge ref./
33
terugkopp. waarde.
6-19 Klem 53 modus
Option: Functie:
Selecteer of klem 53 wordt gebruikt als
stroom- of als spanningsingang.
[0] Stroommodus
[1] * Spanning
6-12 Klem 53 lage stroom
Range: Functie:
4 mA* [0-20
mA]
Stel de waarde voor lage stroom in. Dit
referentiesignaal komt overeen met de lage
referentie/terugkoppelingswaarde die is
ingesteld in parameter 6-14 Klem 53 lage ref./
terugkopp. waarde. Stel de waarde in op
> 2 mA om parameter 6-01 Live zero time-out-
functie te activeren.
6-13 Klem 53 hoge stroom
Range: Functie:
20 mA* [0-20
mA]
Voer de hoge stroomwaarde in die
overeenkomt met de hoge referentie-/
terugkoppelingswaarde die is ingesteld in
parameter 6-15 Klem 53 hoge ref./terugkopp.
waarde.
6-14 Klem 53 lage ref./terugkopp. waarde
Range: Functie:
0* [-4999 -
4999 ]
Voer de referentie- of terugkoppelingswaarde
in die overeenkomt met de in
parameter 6-10 Klem 53 lage spanning tot
parameter 6-12 Klem 53 lage stroom
ingestelde spanning of stroom.
6-15 Klem 53 hoge ref./terugkopp. waarde
Range: Functie:
Afhankelijk van
grootte*
[-4999 4999 ]
Voer de referentie- of terugkoppelingswaarde in die overeenkomt
met de in parameter 6-11 Klem 53
hoge spanning tot
parameter 6-13 Klem 53 hoge stroom
ingestelde spanning of stroom.
3.7.3 6-2* Analog Input 54 (Analoge ingang
54)
Parameters voor het congureren van de schaling en
begrenzingen voor analoge ingang 54 (klem 54).
6-20 Klem 54 lage spanning
Range: Functie:
0,07 V* [0-10V]Voer de spanning (V) in die overeenkomt met
de waarde van de lage referentie die is
ingesteld in parameter 6-24 Klem 54 lage ref./
terugkopp. waarde. Stel de waarde in op > 1 V
om parameter 6-01 Live zero time-out-functie te
activeren.
6-21 Klem 54 hoge spanning
Range: Functie:
10 V* [0-10 V] Voor de spanning (V) in die overeenkomt met
de waarde van de hoge referentie die is
ingesteld in parameter 6-25 Klem 54 hoge ref./
terugkopp. waarde.
6-22 Klem 54 lage stroom
Range: Functie:
4 mA* [0-20
mA]
6-23 Klem 54 hoge stroom
Stel de waarde voor lage stroom in. Dit referentiesignaal komt overeen met de lage
referentie-/terugkoppelingswaarde die is
ingesteld in parameter 6-24 Klem 54 lage ref./
terugkopp. waarde. Stel de waarde in op
> 2 mA om de Live zero time-out-functie in
parameter 6-01 Live zero time-out-functie te
activeren.
Range: Functie:
6-16 Klem 53 lter tijdconstante
Range: Functie:
0,01 s* [0,01-10 s] Stel de tijdconstante in. Dit is een tijdcon-
stante voor een digitaal laagdoorlaatlter
van de eerste orde voor het onderdrukken
van elektrische ruis op klem 53. Een hoge
waarde voor de tijdconstante zorgt voor
een betere demping maar verhoogt ook de
tijdsvertraging door het lter.
20 mA* [0-20
mA]
Voer de hoge stroomwaarde in die
overeenkomt met de hoge referentie-/
terugkoppelingswaarde die is ingesteld in
parameter 6-25 Klem 54 hoge ref./terugkopp.
waarde.
62 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 65

Parameters Programmeerhandleiding
6-24 Klem 54 lage ref./terugkopp. waarde
Range: Functie:
0* [-4999 -
4999 ]
Voer de referentie- of terugkoppelingswaarde
in die overeenkomt met de in
parameter 6-21 Klem 54 hoge spanning/
parameter 6-22 Klem 54 lage stroom
ingestelde spanning of stroom.
6-25 Klem 54 hoge ref./terugkopp. waarde
Range: Functie:
Afhankelijk van
grootte*
[-4999 4999 ]
Voer de referentie- of terugkoppelingswaarde in die overeenkomt
met de in parameter 6-21 Klem 54
hoge spanning/parameter 6-23 Klem
54 hoge stroom ingestelde
spanning of stroom.
6-26 Klem 54 lter tijdconstante
Range: Functie:
0,01 s* [0,01-10 s] Dit is een tijdconstante voor een digitaal
laagdoorlaatlter van de eerste orde voor
het onderdrukken van elektrische ruis op
klem 54. Een hoge waarde voor de tijdconstante zorgt voor een betere demping maar
verhoogt ook de tijdsvertraging door het
lter.
6-29 Klem 54 modus
Option: Functie:
Selecteer of klem 54 wordt gebruikt als
stroomingang of als spanningsingang.
[0] Stroommodus
[1] * Spanning
3.7.4 6-7* Analog/Digital Output 45
(Analoge/digitale uitgang 45)
Parameters voor het congureren van de schaling en
begrenzingen voor analoge/digitale uitgangsklem 45.
Analoge uitgangen zijn stroomuitgangen: 0/4-20 mA. De
resolutie op de analoge uitgang is 12 bit. Analoge
uitgangsklemmen kunnen ook worden ingesteld als
digitale uitgang.
6-70 Klem 45 modus
Option: Functie:
Stel in of klem 45 moet werken als
analoge of als digitale uitgang.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digitale uitgang
6-71 Klem 45 analoge uitgang
Option: Functie:
Selecteer de functie voor
klem 45 als een analoge
stroomuitgang. Zie ook
parameter 6-70 Klem 45
modus.
[254] DC-link voltage (DC-tussen-
kringspanning)
[0] * No operation (Niet in
bedrijf)
[100] Output frequency
(Uitgangsfrequentie)
[101] Reference (Referentie) Min
[102] Feedback (Terugkoppeling) MinFB - Max
[103] Motor Current
(Motorstroom)
[106] Power (Vermogen) 0 - P
[139] Bus Control (Busbest.) 0–100%
[254] DC Link Voltage (DC-
tussenkringspanning)
0-100 Hz
0 - I
0-65535 V
T2/S2, 200-400 V
•
T4, 400-800 V
•
T5, 400-1000 V
•
T6, 500-1000 V
•
Max
Ref -
max
nom
6-72 Klem 45 dig. uitgang
Option: Functie:
Selecteer de functie voor klem
45 als een digitale stroomuitgang. Zie ook
parameter 6-70 Klem 45 modus.
Zie parameter 5-40 Functierelais
voor een beschrijving van de
opties.
[0] * Geen functie
[1] Besturing gereed
[2] Frequentieregelaar gereed
[3] Omv. gereed/extern
[4] Standby/gn waarsch.
[5] Frequentieregelaar actief
[6] Draaien/gn wsch.
[7] Binnen ber/gn wrsch
[8] Op ref/geen waarsch.
[9] Alarm
[10] Alarm of waarsch.
[12] Buiten stroombereik
[13] Onder stroom, laag
[14] Boven stroom, hoog
[16] Onder snelh., laag
[17] Boven snelh., hoog
[19] Onder terugk., laag
[20] Boven terugk., hoog
[21] Thermische waarschuwing
[22] Gereed, therm. ok
[23] Ext, gereed, thrm ok
3 3
Ref
FB
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 63
Page 66

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Parameters
VLT® HVAC Basic Drive FC 101
6-72 Klem 45 dig. uitgang
Option: Functie:
[24] Gereed, spann. ok
[25] Omkeren
[26] Bus ok
33
[35] Ext. vergrendeling
[36] Stuurwoord bit 11
[37] Stuurwoord bit 12
[41] Onder ref, laag
[42] Boven ref, hoog
[45] Busbest.
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Log. regel 0
[71] Log. regel 1
[72] Log. regel 2
[73] Log. regel 3
[74] Log. regel 4
[75] Log. regel 5
[80] SL dig. uitgang A
[81] SL dig. uitgang B
[82] SL dig. uitgang C
[83] SL dig. uitgang D
[160] Geen alarm
[161] Omgekeerd draaien
[165] Lokale ref. actief
[166] Externe ref. actief
[167] Startcomm actief
[168] Omv. in handmodus
[169] Omv. in automodus
[190] Geen ow
[193] Slaapstand
[194] Functie Defecte band
[196] Brandmodus
[198] Omv.bypass
6-73 Klem 45 uitgang min. schaal
Range: Functie:
0 %* [0 -
200 %]
Schaling voor de minimale uitgangswaarde (0
of 4 mA) van het analoge signaal op klem 45.
Stel de waarde in als een percentage van het
volledige bereik van de variabele die is
ingesteld in parameter 6-71 Klem 45 analoge
uitgang.
6-74 Klem 45 uitgang max. schaal
Range: Functie:
100%* [0 -
Schaal de maximale uitgangswaarde (20 mA) van
200 %
het analoge signaal op klem 45. Stel de waarde in
]
als een percentage van het volledige bereik van
de variabele die is ingesteld in
parameter 6-71 Klem 45 analoge uitgang.
Afbeelding 3.11 Maximale schaal uitgang
6-76 Klem 45 uitgang busbesturing
Range: Functie:
0* [0 - 16384 ] Houdt het niveau van de analoge uitgang vast
als die wordt bestuurd door een bus.
3.7.5 6-9* Analog/Digital Output 42
(Analoge/digitale uitgang 42)
Parameters voor het congureren van de begrenzingen
voor analoge/digitale uitgangsklem 42. Analoge uitgangen
zijn stroomuitgangen: 0/4-20 mA. De resolutie op analoge
uitgangen is 12 bit. Analoge uitgangsklemmen kunnen ook
worden ingesteld als digitale uitgang.
6-90 Klem 42 modus
Option: Functie:
Stel in of klem 42 moet werken als
analoge of als digitale uitgang.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digitale uitgang
64 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 67

Parameters Programmeerhandleiding
6-91 Klem 42 analoge uitgang
Option: Functie:
Selecteer de functie voor
klem 42 als een analoge
stroomuitgang. Zie ook
parameter 6–90 Terminal 42
Mode.
[254] DC-link voltage (DC-tussen-
kringspanning)
[0] * No operation (Niet in bedrijf )
[100] Output frequency (Uitgangs-
frequentie)
[101] Reference (Referentie) Min
[102] Feedback (Terugkoppeling) MinFB - Max
[103] Motor Current (Motorstroom) 0 - I
[106] Power (Vermogen) 0 - P
[139] Bus Control (Busbest.) 0–100%
[184] Mirror AI53 mA (Spiegel AI53
mA)
[185] Mirror AI54 mA (Spiegel AI54
mA)
[254] DC Link Voltage (DC-tussen-
kringspanning)
0-100 Hz
0–20
0–20
0-65535 V
T2/S2, 200-400 V
•
T4, 400-800 V
•
T5, 400-1000 V
•
T6, 500-1000 V
•
- Max
Ref.
max
nom
6-92 Klem 42 dig. uitgang
Option: Functie:
Selecteer de functie voor klem
42 als een analoge stroomuitgang. Zie ook
parameter 6-90 Terminal 42
Mode. Zie
parameter 5-40 Functierelais
voor een beschrijving van de
opties.
[0] * Geen functie
[1] Besturing gereed
[2] Frequentieregelaar gereed
[3] Omv. gereed/extern
[4] Standby/gn waarsch.
[5] Frequentieregelaar actief
[6] Draaien/gn wsch.
[7] Binnen ber/gn wrsch
[8] Op ref/geen waarsch.
[9] Alarm
[10] Alarm of waarsch.
[12] Buiten stroombereik
[13] Onder stroom, laag
[14] Boven stroom, hoog
[16] Onder snelh., laag
[17] Boven snelh., hoog
[19] Onder terugk., laag
[20] Boven terugk., hoog
6-92 Klem 42 dig. uitgang
Option: Functie:
[21] Thermische waarschuwing
[22] Gereed, therm. ok
[23] Ext, gereed, thrm ok
[24] Gereed, spann. ok
[25] Omkeren
[26] Bus ok
[35] Ext. vergrendeling
[36] Stuurwoord bit 11
[37] Stuurwoord bit 12
[41] Onder ref, laag
[42] Boven ref, hoog
[45] Busbest.
[60] Comparator 0
Ref.
FB
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Log. regel 0
[71] Log. regel 1
[72] Log. regel 2
[73] Log. regel 3
[74] Log. regel 4
[75] Log. regel 5
[80] SL dig. uitgang A
[81] SL dig. uitgang B
[82] SL dig. uitgang C
[83] SL dig. uitgang D
[160] Geen alarm
[161] Omgekeerd draaien
[165] Lokale ref. actief
[166] Externe ref. actief
[167] Startcomm actief
[168] Omv. in handmodus
[169] Omv. in automodus
[190] Geen ow
[193] Slaapstand
[194] Functie Defecte band
[196] Brandmodus
[198] Omv.bypass
3 3
6-93 Klem 42 uitgang min. schaal
Range: Functie:
0 %* [0 -
200 %]
Schaling voor de minimale uitgangswaarde (0
of 4 mA) van het analoge signaal op klem 42.
Stel de waarde in als een percentage van het
volledige bereik van de variabele die is
ingesteld in parameter 6-91 Klem 42 analoge
uitgang.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 65
Page 68

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Parameters
VLT® HVAC Basic Drive FC 101
6-94 Klem 42 uitgang max. schaal
Range: Functie:
100%* [0 -
200 %
]
33
Schaal de maximale uitgangswaarde (20 mA) van
de schaling op klem 42. Stel de waarde in als een
percentage van het volledige bereik van de
variabele die is ingesteld in parameter 6-91 Klem
42 analoge uitgang.
Afbeelding 3.12 Maximale schaal uitgang
6-96 Klem 42 uitgang busbesturing
Range: Functie:
0* [0 - 16384 ] Houdt de analoge uitgang op klem 42 vast als
de uitgang wordt bestuurd door een bus.
66 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 69

Parameters Programmeerhandleiding
3.8 Hoofdmenu – Comm. en opties – Groep
8
3.8.1 8-0* General Settings (Algemene
instellingen)
8-01 Stuurplaats
Option: Functie:
Deze parameter heeft een hogere prioriteit
dan de instellingen in
parameter 8-50 Vrijloopselectie tot
parameter 8-56 Select. ingestelde ref..
[0]*Dig. en
stuurwoord
[1] Alleen dig. Voor een regeling die enkel gebruikmaakt
[2] Alleen
stuurwoord
Voor een regeling die gebruikmaakt van
zowel digitale ingangen als een stuurwoord.
van digitale ingangen.
Voor een regeling die enkel gebruikmaakt
van een stuurwoord.
8-02 Stuurwoordbron
Option: Functie:
LET OP
Deze parameter kan niet worden gewijzigd
terwijl de motor loopt.
Selecteer de bron voor het stuurwoord.
[0] Geen
[1] * FC Port
8-03 Time-out-tijd stuurwoord
Range: Functie:
Afhankelijk
van grootte*
8-04 Time-out-functie stuurwoord
Option: Functie:
[0] * Uit
[1] Uitgang
vasthouden
[2] Stop
[3] Jogging
[4] Max. toerental
[0,1-6500s]Stel de maximumtijd in die mag
verstrijken tussen de ontvangst van 2
opeenvolgende telegrammen.
Overschrijding van deze tijd betekent
dat de seriële communicatie is
gestopt. Vervolgens wordt de in
parameter 8-04 Time-out-functie
stuurwoord geselecteerde functie
uitgevoerd.
Selecteer de time-outfunctie. De timeoutfunctie wordt geactiveerd als het
stuurwoord niet is bijgewerkt binnen
tijd die is ingesteld in
parameter 8-03 Time-out-tijd stuurwoord.
8-04 Time-out-functie stuurwoord
Option: Functie:
[5] Stop en uitsch.
[20] N2-vrijgave
negeren
Deze optie geldt alleen als het protocol
N2 is.
3.8.2 8-3* FC Port Settings (FC-poortinst.)
8-30 Protocol
Option: Functie:
Selecteer het protocol voor de ingebouwde
RS485-poort.
[0] * FC Communicatie volgens het FC-protocol.
[2] Modbus
RTU
[3] Metasys N2 Communicatieprotocol. Het N2-software-
[4] FLN Communicatie volgens het FLN-protocol.
[5] BACnet Communicatie volgens het BACnet-protocol.
8-31 Adres
Range: Functie:
Afhankelijk van
grootte*
Afhankelijk van
grootte*
8-32 Baudsnelheid
Option: Functie:
[0] 2400 baud
[1] 4800 baud Standaardinstelling voor FLN.
[2] 9600 baud Standaardinstelling voor
[3] 19200 baud Standaardinstelling voor Modbus RTU.
[4] 38400 baud
[5] 57600 baud
[6] 76800 baud
Communicatie volgens het Modbus RTU-
protocol.
protocol is een algemeen protocol, waardoor
het geschikt is voor de unieke kenmerken van
elk toestel.
[ 0,0-247 ]
[ 0,0-247 ] Stel een adres voor de RS-485-
poort in. Geldig bereik: 1-126
voor FC-bus OF 1-247 voor
Modbus.
Selecteer de baudsnelheid voor de RS485poort.
De standaardinstelling heeft betrekking op het
FC-protocol. Een wijziging van het protocol in
parameter 8-30 Protocol kan leiden tot een
verandering van de baudsnelheid.
Een wijziging van het protocol in
parameter 8-30 Protocol kan leiden tot een
wijziging van de baudsnelheid.
BACnet
•
Metasys N2
•
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 67
Page 70

Parameters
VLT® HVAC Basic Drive FC 101
8-32 Baudsnelheid
Option: Functie:
[7] 115200
baud
8-33 Par./stopbits
33
Option: Functie:
Pariteit en stopbits voor het protocol dat
gebruikmaakt van de FC-poort. Voor
sommige protocollen zullen niet alle
opties beschikbaar zijn.
De standaardinstelling heeft betrekking op
het FC-protocol. Een wijziging van het
protocol in parameter 8-30 Protocol kan
leiden tot een wijziging van de
baudsnelheid.
[0] Even par, 1
stopbit
[1] Oneven par, 1
stopbit
[2] Geen par, 1
stopbit
[3] Geen par, 2
stopbits
8-35 Min. responsvertr.
Range: Functie:
Afhankelijk van
grootte*
Afhankelijk van
grootte*
[ 0,0010-0,5 s]
[ 0,0010-0,5 s] Speciceer de minimale vertra-
gingstijd tussen het ontvangen
van een verzoek en het
verzenden van een respons.
Deze wordt gebruikt om
omkeervertragingen van het
modem af te handelen.
8-36 Max. responsvertr.
Range: Functie:
Afhankelijk van
grootte*
Afhankelijk van
grootte*
[ 0,1-10,0 s]
[ 0,1-10,0 s] Speciceer de maximaal
toegestane vertragingstijd tussen
het ontvangen van een verzoek
en het versturen van de respons.
Als deze tijd wordt overschreden,
wordt er geen respons teruggestuurd.
8-37 Max. tss.-tekenvertr.
Range: Functie:
Afhankelijk van
grootte*
Afhankelijk van
grootte*
[ 0,005-0,025 s]
[ 0,005-0,025 s] Speciceer de maximaal
toegestane vertragingstijd
tussen 2 tekens in een
bericht. Als deze vertragingstijd wordt overschreden,
wordt het bericht
weggegooid.
3.8.3 8-4* FC MC Protocol Set (FC MCprotocolinstellingen)
Deze parametergroep heeft betrekking op PCD-schrijfcon-
guraties en -leesconguraties.
8-42 PCD-schrijfconguratie
Er kunnen verschillende parameters worden toegewezen aan PCD
3 tot 10 van de PPO's (het aantal PCD's is afhankelijk van het
PPO-type). De waarden in PCD 3-10 worden als gegevenswaarden naar de geselecteerde parameters geschreven.
Option: Functie:
[0] None (Geen)
[1] [302] Minimum Reference (Minimum-
referentie)
[2] [303] Maximum Reference (Max.
referentie)
[3] [341] Ramp 1 Ramp up time (Ramp 1
aanlooptijd)
[4] [342] Ramp 1 Ramp down time
(Ramp 1 uitlooptijd)
[5] [351] Ramp 2 Ramp up time (Ramp 2
aanlooptijd)
[6] [352] Ramp 2 Ramp down time
(Ramp 2 uitlooptijd)
[7] [380] Jog Ramp Time (Jog ramp-tijd)
[8] [381] Quick Stop Ramp Time (Snelle
stop ramp-tijd)
[9] [412] Motor Speed Low Limit [Hz]
(Motorsnelh. lage begr. [Hz])
[10] [414] Motor Speed High Limit [Hz]
(Motorsnelh. hoge begr. [Hz])
[11] [590] Digital & Relay Bus Control
(Digitale & relaisbesturing bus)
[12] [676] Terminal 45 Output Bus Control
(Klem 45 uitgang busbesturing)
[13] [696] Terminal 42 Output Bus Control
(Klem 42 uitgang busbesturing)
[14] [894] Bus Feedback 1 (Busterugk. 1)
[15] FC Port CTW (FC-poort CTW)
[16] FC Port REF (FC-poort REF)
[17] [2021] Setpoint 1
68 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 71

Parameters Programmeerhandleiding
8-43 PCD-leescong.
Er kunnen verschillende parameters worden toegewezen aan PCD
3 tot 10 van de PPO's (het aantal PCD's is afhankelijk van het
PPO-type). PCD 3-10 bevatten de actuele gegevenswaarden van
de geselecteerde parameters.
Option: Functie:
[0] Geen
[1] [1500] Bedrijfsuren
[2] [1501] Aantal draaiuren
[3] [1502] kWh-teller
[4] [1600] Stuurwoord
[5] [1601] Referentie [Eenh.]
[6] [1602] Referentie %
[7] [1603] Statuswoord
[8] [1605] Vrnste huid. waarde [%]
[9] [1609] Standaard uitlez.
[10] [1610] Verm. [kW]
[11] [1611] Verm. [pk]
[12] [1612] Motorspanning
[13] [1613] Frequentie
[14] [1614] Motorstroom
[15] [1615] Frequentie [%]
[16] [1618] Motor therm.
[17] [1630] DC-aansluitsp.
[18] [1634] Temp. koellich.
[19] [1635] Inverter therm.
[20] [1638] SL-controllerstatus
[21] [1650] Externe referentie
[22] [1652] Terugk. [Eenh]
[23] [1660] Dig. ingang 18,19,27,33
[24] [1661] Klem 53 schakelinstell.
[25] [1662] Anal. ingang 53
[26] [1663] Klem 54 schakelinstell.
[27] [1664] Analoge ingang 54
[28] [1665] Anal. uitgang 42 [mA]
[29] [1671] Relaisuitgang
[30] [1672] Teller A
[31] [1673] Teller B
[32] [1690] Alarmwoord
[33] [1692] Waarsch.-wrd
[34] [1694] Uitgebr. Statuswoord
3.8.4 8-5* Digital/Bus (Digitaal/Bus)
8-50 Vrijloopselectie
Option: Functie:
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
[0] Digital and control word (Dig. en
stuurwoord).
Stel in of de vrijloopfunctie via de klemmen
(digitale ingang) en/of via de bus moet worden
bestuurd.
[0] Digitale
ingang
[1] Bus Activeert de vrijloopfunctie via de seriële-
[2] Log. AND Activeert de vrijloopfunctie via de veldbus/
[3]*Log. OR Activeert de vrijloopfunctie via de seriële-
Activeert de vrijloopfunctie via een digitale
ingang.
communicatiepoort.
seriële-communicatiepoort en via 1 van de
digitale ingangen.
communicatiepoort of via 1 van de digitale
ingangen.
8-51 Select. snelle stop
Option: Functie:
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
[0] Digital and control word (Dig. en
stuurwoord).
Stel in of de snellestopfunctie via de klemmen
(digitale ingang) en/of via de bus moet worden
bestuurd.
[0] Digitale
ingang
[1] Bus Activeert de snelle stop via de seriële-communi-
[2] Log. AND Activeert de snelle stop via de seriële-communi-
[3]*Log. OR Activeert de snelle stop via de seriële-communi-
Activeert de snelle stop via een digitale ingang.
catiepoort.
catiepoort en via 1 van de digitale ingangen.
catiepoort of via 1 van de digitale ingangen.
3 3
Parameters voor het congureren van het stuurwoord in
combinatie met Digitaal/Bus.
8-52 DC-remselectie
Option: Functie:
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
[0] Digital and control word (Dig. en
stuurwoord).
Stel in of de DC-rem via de klemmen (digitale
ingang) moet worden bestuurd.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 69
Page 72

Parameters
VLT® HVAC Basic Drive FC 101
8-52 DC-remselectie
Option: Functie:
[0] Digitale
ingang
[1] Bus Activeert de DC-rem via de seriële-communica-
33
[2] Log. AND Activeert de DC-rem via de seriële-communica-
[3] Log. OR Activeert de DC-rem via de seriële-communica-
Activeert de DC-rem via een digitale ingang.
tiepoort.
tiepoort en via 1 van de digitale ingangen.
tiepoort of via 1 van de digitale ingangen.
8-54 Omkeerselectie
Option: Functie:
[2] Log. AND Activeert een omkeercommando via de seriële-
communicatiepoort en via 1 van de digitale
ingangen.
[3] Log. OR Activeert een omkeercommando via de seriële-
communicatiepoort of via 1 van de digitale
ingangen.
8-55 Setupselectie
Option: Functie:
8-53 Startselectie
Option: Functie:
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
[0] Digital and control word (Dig. en
stuurwoord).
[0] Digital and control word (Dig. en
stuurwoord).
Stel in of de startfunctie van de frequentieregelaar via de klemmen (digitale ingang) moet
worden bestuurd.
[0] Digitale
ingang
[1] Bus Activeert een startcommando via de seriële-
[2] Log. AND Activeert een startcommando via de seriële-
[3]*Log. OR Activeert een startcommando via de seriële-
Activeert het startcommando via een digitale
ingang.
communicatiepoort of via veldbusopties.
communicatiepoort en via 1 van de digitale
ingangen.
communicatiepoort of via 1 van de digitale
ingangen.
8-54 Omkeerselectie
Option: Functie:
LET OP
Deze parameter is alleen actief als
parameter 8-01 Stuurplaats is ingesteld op
[0] Digital and control word (Dig. en
stuurwoord).
Stel in of de omkeerfunctie van de frequentieregelaar via de klemmen (digitale ingang) en/of via
de seriële-communicatiepoort moet worden
bestuurd.
[0]*Digitale
ingang
[1] Bus Activeert een omkeercommando via de seriële-
Activeert een omkeercommando via een digitale
ingang.
communicatiepoort.
[0] Digitale
ingang
[1] Bus Activeert de setupselectie via de seriële-
[2] Log. AND Activeert de setupselectie via de seriële-
[3]*Log. OR Activeert de setupselectie via de seriële-
8-56 Select. ingestelde ref.
Option: Functie:
[0] Digitale
ingang
[1] Bus Activeert de selectie van de digitale referentie
[2] Log. AND Activeert de selectie van de digitale referentie
[3] * Log. OR Activeert de selectie van de digitale referentie
Stel in of de setupselectie van de frequentieregelaar via de klemmen (digitale ingang) en/of via
de seriële-communicatiepoort moet worden
bestuurd.
Activeert de setupselectie via een digitale
ingang.
communicatiepoort.
communicatiepoort en via 1 van de digitale
ingangen.
communicatiepoort of via 1 van de digitale
ingangen.
Stel in of de digitale referentie van de frequentieregelaar via de klemmen (digitale ingang)
en/of via de seriële-communicatiepoort moet
worden geselecteerd.
Activeert de selectie van de digitale referentie
via een digitale ingang.
via de seriële-communicatiepoort.
via de seriële-communicatiepoort en via 1 van
de digitale ingangen.
via de seriële-communicatiepoort of via 1 van
de digitale ingangen.
70 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 73

Parameters Programmeerhandleiding
3.8.5 8-7* BACnet
8-70 BACnet Device Voorbld
Range: Functie:
1* [0 - 4194303 ] Voer een uniek identicatienummer voor het
BACnet-apparaat in.
8-72 MS/TP Max Masters (Max. masters MS/TP)
Range: Functie:
127* [0 - 127 ] Stel het adres in van de master; deze heeft het
hoogste adres in dit netwerk. Het verlagen van
deze waarde zorgt voor optimale polling voor
de token.
8-73 MS/TP Max Info Frames (Max. informatieframes
MS/TP)
Range: Functie:
1* [1 - 65534 ] Stel in hoeveel info-/dataframes het apparaat
mag verzenden terwijl het de token in bezit
heeft.
8-74 "Startup I am"
Option: Functie:
[0] * Zenden bij
insch.
[1] Continu Selecteer of het apparaat een "I am"-service-
8-75 Initialisatie wachtw.
Range: Functie:
admin* [1 - 1 ] Voer het wachtwoord in dat nodig is voor het
Selecteer deze optie als het apparaat het "I
am"-servicebericht enkel bij het inschakelen
moet verzenden.
bericht continu moet zenden met intervallen
van circa 1 minuut.
uitvoeren van een nieuwe initialisatie van de
frequentieregelaar via BACnet.
8-80 Bus Berichtenteller
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal geldige
telegrammen dat op de bus is
gedetecteerd.
8-81 Bus Foutenteller
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal
telegrammen met fouten (bv. CRC-fout)
dat op de bus is gedetecteerd.
8-82 Slaveberichten ontv.
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal geldige,
aan de slave geadresseerde telegrammen
dat door de frequentieregelaar is
verzonden.
8-83 Slavefoutenteller
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal
ongeldige telegrammen dat de frequentieregelaar niet kon uitvoeren.
8-84 Slaveberichten verz.
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal
berichten dat door de slave werd
verzonden.
8-85 Slavetime-outfouten
Range: Functie:
0* [0 - 4294967295 ] Deze parameter toont het aantal
slavetime-outfouten.
3 3
8-79 Firmwareversie protocol
Array[5]
Range: Functie:
Afhankelijk van
grootte*
[0 655 ]
De rmwareversie van de frequentieregelaar staat in index 0, Modbus
staat in index 1, Metasys N2 staat in
index 2, FLN staat in index 3, BACnet
staat in index 4.
8-88 Reset FC-poortdiagn.
Option: Functie:
[0] * Niet resetten
[1] Teller reset
3.8.7 8-9* Busterugk.
8-94 Bus Terugk. 1
Range: Functie:
3.8.6 8-8* FC-poortdiagnostiek
0* [-32768 -
32767 ]
Deze parameters worden gebruikt voor het bewaken van
de buscommunicatie via de FC-poort.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 71
Schrijf een terugkoppeling weg naar deze
parameter via de seriële-communicatiepoort.
Stel deze parameter in parameter 20-00 Bron
terugkoppeling 1 of parameter 20-03 Bron terugk.
2 in als terugkoppelingsbron. De hexadecimale
waarde 4000 komt overeen met een terugkoppeling van 100% in het bereik van ±200%.
Page 74

Parameters
8-95 Bus Terugk. 2
Range: Functie:
0* [-32768 -
32767 ]
33
Schrijf een terugkoppeling weg naar deze
parameter via de seriële-communicatiepoort.
Deze parameter moet in parameter 20-00 Bron
terugkoppeling 1 of parameter 20-03 Bron terugk.
2 zijn ingesteld als terugkoppelingsbron. De
hexadecimale waarde 4000 komt overeen met
een terugkoppeling van 100% in het bereik van
±200%.
VLT® HVAC Basic Drive FC 101
72 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 75

130BA062.13
Toestand 1
Gebeurtenis 1/
Actie 1
Startgebeurtenis P13-01
Stopgebeurtenis P13-02
Stopgebeurtenis P13-02
Stopgebeurtenis P13-02
Toestand 2
Gebeurtenis 2/
Actie 2
Toestand 3
Gebeurtenis 3/
Actie 3
Toestand 4
Gebeurtenis 4/
Actie 4
Parameters Programmeerhandleiding
3.9 Hoofdmenu – Smart Logic – Groep 13
3.9.1 13-** Smart Logic
3.9.2 13-0* SLC-instellingen
Gebruik de SLC-instellingen voor het inschakelen,
uitschakelen of resetten van de Smart Logic Control-reeks.
Smart Logic Control (SLC) is een reeks door de gebruiker
gedenieerde acties (zie parameter 13-52 SL-controlleractie
[x]) die door de SLC wordt uitgevoerd wanneer de
bijbehorende, door de gebruiker gedenieerde gebeurtenis
(zie parameter 13-51 SL Controller Event [x]) door de SLC
wordt geëvalueerd als true. Gebeurtenissen en acties zijn
genummerd en in paren aan elkaar gekoppeld. Dat
betekent dat actie [0] wordt uitgevoerd wanneer
gebeurtenis [0] heeft plaatsgevonden (de waarde true
heeft gekregen). Nadat deze actie is uitgevoerd, worden de
omstandigheden van gebeurtenis [1] geëvalueerd. Als de
gebeurtenis wordt geëvalueerd als true, wordt actie [1]
uitgevoerd, enz. Er wordt steeds slechts 1 gebeurtenis
De logische functies en comparatoren draaien altijd mee
op de achtergrond, die opengaat voor een afzonderlijke
regeling van digitale in- en uitgangen.
13-00 SL-controllermodus
Option: Functie:
Selecteer [1] On (Aan) zodat Smart Logic Control kan
inschakelen als er een startcommando aanwezig is,
bijvoorbeeld via een digitale ingang. Selecteer [0] O
(Uit) om Smart Logic Control uit te schakelen.
[0] * Uit Schakelt de Smart Logic Controller uit.
[1] Aan Schakelt de Smart Logic Controller in.
geëvalueerd. Als een gebeurtenis wordt geëvalueerd als
false, gebeurt er niets (in de SLC) tijdens het huidige
scaninterval en worden er geen andere gebeurtenissen
geëvalueerd. Dat betekent dat bij het starten van de SLC
gebeurtenis [0] (en enkel gebeurtenis [0]) tijdens elk
scaninterval zal worden geëvalueerd. Alleen wanneer
gebeurtenis [0] als true wordt geëvalueerd, voert de SLC
actie [0] uit en begint hij met het evalueren van
gebeurtenis [1]. Er kunnen 1-20 gebeurtenissen en acties
worden geprogrammeerd. Als de laatste gebeurtenis/actie
is uitgevoerd, begint de cyclus opnieuw vanaf gebeurtenis
[0]/actie [0].
Afbeelding 3.13 Voorbeeld met 3 gebeurtenissen/acties
SLC starten en stoppen
Start en stop de SLC door [1] On (Aan) of [2] O (Uit) te
selecteren in parameter 13-00 SL-controllermodus. De SLC
start altijd in status 0 (waarbij gebeurtenis [0] wordt
geëvalueerd). De SLC start wanneer de startgebeurtenis
(gedenieerd in parameter 13-01 Gebeurt. starten) wordt
geëvalueerd als TRUE (op voorwaarde dat [1] On (Aan) is
geselecteerd in parameter 13-00 SL-controllermodus). De SLC
stopt wanneer de stopgebeurtenis
(parameter 13-02 Gebeurt. stoppen) true is.
Parameter 13-03 SLC resetten reset alle SLC-parameters en
start het programmeren geheel opnieuw.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 73
13-01 Gebeurt. starten
Option: Functie:
Selecteer de booleaanse input (true of
false) voor het activeren van de Smart
Logic Control.
[0] FALSE Voert de vaste waarde false in de
logische regel in.
[1] TRUE Voert de vaste waarde true in de
logische regel in.
[2] Actief De motor loopt.
[3] Binnen bereik De motor werkt binnen het ingestelde
stroombereik
(parameter 4-50 Waarschuwing stroom
laag en parameter 4-51 Waarschuwing
stroom hoog).
[4] Op referentie De motor loopt op de referentie-
snelheid.
[7] Buiten stroom-
bereik
[8] Onder I, laag De motorstroom is lager dan is
[9] Boven I, hoog De motorstroom is hoger dan is
[16] Thermische
waarschuwing
[17] Netsp. buiten
bereik
De motorstroom ligt buiten het in
parameter 4-18 Stroombegr. ingestelde
bereik.
ingesteld in
parameter 4-50 Waarschuwing stroom
laag.
ingesteld in
parameter 4-51 Waarschuwing stroom
hoog.
Een thermische waarschuwing wordt
gegeven als de temperatuurbegrenzing
in de motor, de frequentieregelaar of de
thermistor is overschreden.
Waarschuwing of alarm wegens
voedingsfaseverlies als
3 3
Page 76

Parameters
VLT® HVAC Basic Drive FC 101
13-01 Gebeurt. starten
Option: Functie:
parameter 14-12 Functie bij onbalans net
niet is ingesteld op [2] Disabled
(Uitgesch.).
33
[18] Omkeren De frequentieregelaar laat de motor in
omgekeerde richting draaien.
[19] Waarschuwing Er is een waarschuwing actief.
[20] Alarm (trip)
(Alarm (uitsch))
[21] Alrm (uitsch &
blok)
[22] Comparator 0 Gebruik het resultaat van comparator 0
[23] Comparator 1 Gebruik het resultaat van comparator 1
[24] Comparator 2 Gebruik het resultaat van comparator 2
[25] Comparator 3 Gebruik het resultaat van comparator 3
[26] Log. regel 0 Gebruik het resultaat van logische regel
[27] Log. regel 1 Gebruik het resultaat van logische regel
[28] Log. regel 2 Gebruik het resultaat van logische regel
[29] Log. regel 3 Gebruik het resultaat van logische regel
[33] Digitale ingang
DI18
[34] Digitale ingang
DI19
[35] Digitale ingang
DI27
[36] Digitale ingang
DI29
[39]*Startcommando Deze gebeurtenis is true als de frequen-
[40] Omv. gestopt Deze gebeurtenis is true als de frequen-
[42] Uitsch autoreset Deze gebeurtenis is true als de frequen-
Er is een alarm actief.
Er is een uitschakeling met blokkering
actief.
in de logische regel.
in de logische regel.
in de logische regel.
in de logische regel.
0 in de logische regel.
1 in de logische regel.
2 in de logische regel.
3 in de logische regel.
Gebruik de waarde van DI18 in de
logische regel (Hoog = true).
Gebruik de waarde van DI19 in de
logische regel (Hoog = true).
Gebruik de waarde van DI27 in de
logische regel (Hoog = true).
Gebruik de waarde van DI29 in de
logische regel (Hoog = true).
tieregelaar wordt gestart (via een
digitale ingang, een veldbus of op
andere wijze).
tieregelaar wordt stopgezet of op
vrijlopen wordt gezet (via een digitale
ingang, een veldbus of op andere wijze).
tieregelaar uitgeschakeld (trip) maar niet
geblokkeerd is en er een automatische
reset wordt gegenereerd.
13-01 Gebeurt. starten
Option: Functie:
[50] Comparator 4 Gebruik het resultaat van comparator 4
in de logische regel.
[51] Comparator 5 Gebruik het resultaat van comparator 5
in de logische regel.
[60] Log. regel 4 Gebruik het resultaat van logische regel
4 in de logische regel.
[61] Log. regel 5 Gebruik het resultaat van logische regel
5 in de logische regel.
[83] Band defect Er is een situatie met een defecte band
gedetecteerd. Activeer deze functie in
parameter 22-60 Functie Defecte band.
13-02 Gebeurt. stoppen
Option: Functie:
Selecteer de conditie (true of false)
waarbij de Smart Logic Controller
wordt uitgeschakeld.
[0] FALSE Voert de vaste waarde false in de
logische regel in.
[1] TRUE Voert de vaste waarde true in de
logische regel in.
[2] Actief Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
[3] Binnen bereik Zie parameter 13-01 Gebeurt. star ten
voor meer informatie.
[4] Op referentie Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
[7] Buiten stroom-
bereik
[8] Onder I, laag Zie parameter 13-01 Gebeurt. starten
[9] Boven I, hoog Zie parameter 13-01 Gebeurt. starten
[16] Thermische
waarschuwing
[17] Netsp. buiten
bereik
[18] Omkeren Zie parameter 13-01 Gebeurt. starten
[19] Waarschuwing Zie parameter 13-01 Gebeurt. starten
[20] Alarm (trip) (Alarm
(uitsch))
[21] Alrm (uitsch &
blok)
[22] Comparator 0 Gebruik het resultaat van comparator 0
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
voor meer informatie.
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
voor meer informatie.
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
in de logische regel.
74 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 77

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parameters Programmeerhandleiding
[23] Comparator 1 Gebruik het resultaat van comparator 1
[24] Comparator 2 Gebruik het resultaat van comparator 2
[25] Comparator 3 Gebruik het resultaat van comparator 3
[26] Log. regel 0 Gebruik het resultaat van logische
[27] Log. regel 1 Gebruik het resultaat van logische
[28] Log. regel 2 Gebruik het resultaat van logische
[29] Log. regel 3 Gebruik het resultaat van logische
[30] SL time-out 0 Gebruik het resultaat van timer 0 in de
[31] SL time-out 1 Gebruik het resultaat van timer 1 in de
[32] SL time-out 2 Gebruik het resultaat van timer 2 in de
[33] Digitale ingang
[34] Digitale ingang
[35] Digitale ingang
[36] Digitale ingang
[39] Startcommando Deze gebeurtenis is true als de
[40]*Omv. gestopt Deze gebeurtenis is true als de
[42] Uitsch autoreset Deze gebeurtenis is true als de
[50] Comparator 4 Gebruik het resultaat van comparator 4
[51] Comparator 5 Gebruik het resultaat van comparator 5
[60] Log. regel 4 Gebruik het resultaat van logische
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 75
13-02 Gebeurt. stoppen
Option: Functie:
in de logische regel.
in de logische regel.
in de logische regel.
regel 0 in de logische regel.
regel 1 in de logische regel.
regel 2 in de logische regel.
regel 3 in de logische regel.
logische regel.
logische regel.
logische regel.
Gebruik de waarde van DI18 in de
DI18
DI19
DI27
DI29
logische regel (Hoog = true).
Gebruik de waarde van DI19 in de
logische regel (Hoog = true).
Gebruik de waarde van DI27 in de
logische regel (Hoog = true).
Gebruik de waarde van DI29 in de
logische regel (Hoog = true).
frequentieregelaar wordt gestart (via
een digitale ingang, een veldbus of op
andere wijze).
frequentieregelaar wordt stopgezet of
op vrijlopen wordt gezet (via een
digitale ingang, een veldbus of op
andere wijze).
frequentieregelaar uitgeschakeld (trip)
maar niet geblokkeerd is en er een
automatische reset wordt gegenereerd.
in de logische regel.
in de logische regel.
regel 4 in de logische regel.
13-02 Gebeurt. stoppen
Option: Functie:
[61] Log. regel 5 Gebruik het resultaat van logische
regel 5 in de logische regel.
[70] SL time-out 3 Gebruik het resultaat van timer 3 in de
logische regel.
[71] SL time-out 4 Gebruik het resultaat van timer 4 in de
logische regel.
[72] SL time-out 5 Gebruik het resultaat van timer 5 in de
logische regel.
[73] SL time-out 6 Gebruik het resultaat van timer 6 in de
logische regel.
[74] SL time-out 7 Gebruik het resultaat van timer 7 in de
logische regel.
[83] Band defect Er is een situatie met een defecte band
gedetecteerd. Activeer deze functie in
parameter 22-60 Functie Defecte band.
13-03 SLC resetten
Option: Functie:
[0] * SLC niet
resetten
[1] SLC resetten Stelt alle parameters in parametergroep 13-
Handhaaft de geprogrammeerde instellingen in parametergroep 13-** Smart Logic.
** Smart Logic weer in op de
standaardwaarde.
3.9.3 13-1* Comparators (Comparatoren)
Comparatoren worden gebruikt om continue variabelen
(zoals uitgangsfrequentie, uitgangsstroom en analoge
ingang) te vergelijken met vast ingestelde waarden.
Afbeelding 3.14 Comparatoren
Daarnaast zijn er digitale waarden die worden vergeleken
met vast ingestelde waarden. Zie de toelichting bij
parameter 13-10 Comparator-operand. Comparatoren
worden eenmalig geëvalueerd in elk scaninterval. Maak
rechtstreeks gebruik van het resultaat (true of false). Alle
parameters in deze parametergroep zijn arrayparameters
met index 0-5. Selecteer index 0 om comparator 0 te
programmeren, index 1 om comparator 1 te
programmeren, enzovoort.
3 3
Page 78

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parameters
VLT® HVAC Basic Drive FC 101
13-10 Comparator-operand
Array [6]
Option: Functie:
Selecteer de variabele die moet worden
bewaakt door de comparator.
33
[0] * Uitgesch.
[1] Referentie
[2] Terugkoppeling
[3] Motortoerental
[4] Motorstroom
[6] Motorvermogen
[7] Motorspanning
[12] Anal. ingang AI53
[13] Anal. ingang AI54
[20] Alarmnummer
[30] Teller A
[31] Teller B
13-11 Comparator-operator
Array [6]
parameter 13-42 Logische regel Boolean 2 of
parameter 13-44 Logische regel Boolean 3). Een timer is
alleen false als hij is geactiveerd door een actie
(bijvoorbeeld [29] Start timer 1), totdat de in deze
parameter ingestelde tijd is verstreken. Daarna wordt hij
weer true.
Alle parameters in deze parametergroep zijn arrayparameters met index 0-2. Selecteer index 0 om timer 0 te
programmeren, index 1 om timer 1 te programmeren,
enzovoort.
13-20 Timer SL-controller
Array [8]
Range: Functie:
0 s* [0-3600s]Stel de waarde in voor de tijdsduur van de
false-uitgang van de geprogrammeerde timer.
Een timer is alleen false als hij is geactiveerd
door een actie (zie parameter 13-52 SL-control-
leractie [29-31] en parameter 13-52 SLcontrolleractie [70-74] Start timer X) en totdat de
betreende timerwaarde is verstreken. Arrayparameters bevatten de timers 0-7.
Option: Functie:
[0] Kleiner
dan (<)
[1]*Ongev.
gelijk aan
(~)
[2] Groter
dan (>)
Selecteer [0] < als het resultaat van de evaluatie
true moet zijn als de in
parameter 13-10 Comparator-operand geselec-
teerde variabele kleiner is dan de vaste waarde
in parameter 13-12 Comparatorwaarde. Het
resultaat is false als de in
parameter 13-10 Comparator-operand geselecteerde variabele groter is dan de vaste waarde in
parameter 13-12 Comparatorwaarde.
Selecteer [1] ~ als het resultaat van de evaluatie
true moet zijn als de in
parameter 13-10 Comparator-operand geselec-
teerde waarde ongeveer gelijk is aan de vaste
waarde in parameter 13-12 Comparatorwaarde.
Selecteer [2] > voor de omgekeerde logica van
optie [0] <.
3.9.5 13-4* Logic Rules (Logische regels)
Combineer maximaal 3 booleaanse inputs (true/falseinputs) van timers, comparatoren, digitale ingangen,
statusbits en gebeurtenissen die de logische operatoren
AND, OR en NOT gebruiken. Selecteer booleaanse inputs
voor de berekening in parameter 13-40 Logische regel
Boolean 1, parameter 13-42 Logische regel Boolean 2 en
parameter 13-44 Logische regel Boolean 3. Denieer de
operatoren die worden gebruikt om de in
parameter 13-41 Logische regel operator 1 en
parameter 13-43 Logische regel operator 2 geselecteerde
inputs logisch te combineren.
13-12 Comparatorwaarde
Array [6]
Range: Functie:
0* [-9999 -
9999 ]
Stel het triggerniveau in voor de variabele
die wordt bewaakt door deze comparator.
Deze parameter is een arrayparameter die
de comparatorwaarden 0-5 bevat.
Afbeelding 3.15 Logische regels
Prioriteit van berekening
3.9.4 13-2* Timers
De resultaten van parameter 13-40 Logische regel Boolean 1,
parameter 13-41 Logische regel operator 1 en
Gebruik het resultaat (true of false) van timers om
rechtstreeks een gebeurtenis te deniëren (zie
parameter 13-51 SL Controller Event), of gebruik het als
booleaanse input in een logische regel (zie
parameter 13-40 Logische regel Boolean 1,
76 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
parameter 13-42 Logische regel Boolean 2 worden als eerste
berekend. Het resultaat (true/false) van deze berekening
wordt gecombineerd met de instellingen van
parameter 13-43 Logische regel operator 2 en
parameter 13-44 Logische regel Boolean 3 en bepaalt zo het
eindresultaat (true/false) van de logische regel.
Page 79

Parameters Programmeerhandleiding
13-40 Logische regel Boolean 1
Array [6]
Option: Functie:
[0] * FALSE Voert de vaste waarde false in de
logische regel in.
[1] TRUE Voert de vaste waarde true in de
logische regel in.
[2] Actief Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
[3] Binnen bereik Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
[4] Op referentie Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
[7] Buiten stroom-
bereik
[8] Onder I, laag Zie parameter 13-01 Gebeurt. starten
[9] Boven I, hoog Zie parameter 13-01 Gebeurt. starten
[16] Thermische
waarschuwing
[17] Netsp. buiten
bereik
[18] Omkeren Zie parameter 13-01 Gebeurt. starten
[19] Waarschuwing Zie parameter 13-01 Gebeurt. starten
[20] Alarm (trip) (Alarm
(uitsch))
[21] Alrm (uitsch &
blok)
[22] Comparator 0 Gebruik het resultaat van comparator 0
[23] Comparator 1 Gebruik het resultaat van comparator 1
[24] Comparator 2 Gebruik het resultaat van comparator 2
[25] Comparator 3 Gebruik het resultaat van comparator 3
[26] Log. regel 0 Gebruik het resultaat van logische
[27] Log. regel 1 Gebruik het resultaat van logische
[28] Log. regel 2 Gebruik het resultaat van logische
[29] Log. regel 3 Gebruik het resultaat van logische
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
voor meer informatie.
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
voor meer informatie.
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
Zie parameter 13-01 Gebeurt. starten
voor meer informatie.
in de logische regel.
in de logische regel.
in de logische regel.
in de logische regel.
regel 0 in de logische regel.
regel 1 in de logische regel.
regel 2 in de logische regel.
regel 3 in de logische regel.
13-40 Logische regel Boolean 1
Array [6]
Option: Functie:
[30] SL time-out 0 Gebruik het resultaat van timer 0 in de
logische regel.
[31] SL time-out 1 Gebruik het resultaat van timer 1 in de
logische regel.
[32] SL time-out 2 Gebruik het resultaat van timer 2 in de
logische regel.
[33] Digitale ingang
DI18
[34] Digitale ingang
DI19
[35] Digitale ingang
DI27
[36] Digitale ingang
DI29
[39] Startcommando Deze logische regel is true als de
[40] Omv. gestopt Deze logische regel is true als de
[42] Uitsch autoreset Deze logische regel is true als de
[50] Comparator 4 Gebruik het resultaat van comparator 4
[51] Comparator 5 Gebruik het resultaat van comparator 5
[60] Log. regel 4 Gebruik het resultaat van logische
[61] Log. regel 5 Gebruik het resultaat van logische
[70] SL time-out 3 Gebruik het resultaat van timer 3 in de
[71] SL time-out 4 Gebruik het resultaat van timer 4 in de
[72] SL time-out 5 Gebruik het resultaat van timer 5 in de
[73] SL time-out 6 Gebruik het resultaat van timer 6 in de
[74] SL time-out 7 Gebruik het resultaat van timer 7 in de
Gebruik de waarde van DI18 in de
logische regel (Hoog = true).
Gebruik de waarde van DI19 in de
logische regel (Hoog = true).
Gebruik de waarde van DI27 in de
logische regel (Hoog = true).
Gebruik de waarde van DI29 in de
logische regel (Hoog = true).
frequentieregelaar wordt gestart (via
een digitale ingang of op enige andere
wijze).
frequentieregelaar wordt stopgezet of
op vrijlopen wordt gezet (via een
digitale ingang of op enige andere
wijze).
frequentieregelaar uitgeschakeld (trip)
maar niet geblokkeerd is en er een
automatische reset wordt gegenereerd.
in de logische regel.
in de logische regel.
regel 4 in de logische regel.
regel 5 in de logische regel.
logische regel.
logische regel.
logische regel.
logische regel.
logische regel.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 77
Page 80

Parameters
VLT® HVAC Basic Drive FC 101
13-40 Logische regel Boolean 1
Array [6]
Option: Functie:
[83] Band defect Er is een situatie met een defecte band
gedetecteerd. Activeer deze functie in
33
parameter 22-60 Functie Defecte band.
13-41 Logische regel operator 1
Option: Functie:
[0] * Uitgesch.
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
13-42 Logische regel Boolean 2
Array [6]
Option: Functie:
Selecteer de tweede
booleaanse input (true of false)
voor de geselecteerde logische
regel.
Zie parameter 13-40 Logische
regel Boolean 1 voor een
beschrijving van de mogelijke
opties en hun functie.
[0] * FALSE
[1] TRUE
[2] Actief
[3] Binnen bereik
[4] Op referentie
[7] Buiten stroombereik
[8] Onder I, laag
[9] Boven I, hoog
[16] Thermische waarschuwing
[17] Netsp. buiten bereik
[18] Omkeren
[19] Waarschuwing
[20] Alarm (trip) (Alarm (uitsch))
[21] Alrm (uitsch & blok)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Log. regel 0
[27] Log. regel 1
[28] Log. regel 2
[29] Log. regel 3
[30] SL time-out 0
[31] SL time-out 1
13-42 Logische regel Boolean 2
Array [6]
Option: Functie:
[32] SL time-out 2
[33] Digitale ingang DI18
[34] Digitale ingang DI19
[35] Digitale ingang DI27
[36] Digitale ingang DI29
[39] Startcommando
[40] Omv. gestopt
[42] Uitsch autoreset
[50] Comparator 4
[51] Comparator 5
[60] Log. regel 4
[61] Log. regel 5
[70] SL time-out 3
[71] SL time-out 4
[72] SL time-out 5
[73] SL time-out 6
[74] SL time-out 7
[83] Band defect Er is een situatie met een
defecte band gedetecteerd.
Activeer deze functie in
parameter 22-60 Functie Defecte
band.
13-43 Logische regel operator 2
Array [6]
Option: Functie:
Selecteer de tweede logische operator die
moet worden toegepast op de booleaanse
input die wordt berekend in
parameter 13-40 Logische regel Boolean 1,
parameter 13-41 Logische regel operator 1 en
parameter 13-42 Logische regel Boolean 2 en
de booleaanse input die afkomstig is van
parameter 13-42 Logische regel Boolean 2.
[13-44] verwijst naar de booleaanse input
van parameter 13-44 Logische regel Boolean
3.
[13-40/13-42] verwijst naar de booleaanse
input die wordt berekend in
parameter 13-40 Logische regel Boolean 1,
parameter 13-41 Logische regel operator 1 en
parameter 13-42 Logische regel Boolean 2. [0]
Disabled (Uitgesch.) (fabrieksinstelling).
Selecteer deze optie om
parameter 13-44 Logische regel Boolean 3 te
negeren.
[0] * Uitgesch.
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
78 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 81

Parameters Programmeerhandleiding
13-43 Logische regel operator 2
Array [6]
Option: Functie:
[5] NOT AND
[6] NOT OR
[7] NOT AND
NOT
[8] NOT OR NOT
13-44 Logische regel Boolean 3
Array [6]
Option: Functie:
Selecteer de derde booleaanse
input (true of false) voor de
geselecteerde logische regel.
Zie parameter 13-40 Logische
regel Boolean 1 voor een
beschrijving van de mogelijke
opties en hun functie.
[0] * FALSE
[1] TRUE
[2] Actief
[3] Binnen bereik
[4] Op referentie
[7] Buiten stroombereik
[8] Onder I, laag
[9] Boven I, hoog
[16] Thermische waarschuwing
[17] Netsp. buiten bereik
[18] Omkeren
[19] Waarschuwing
[20] Alarm (trip) (Alarm (uitsch))
[21] Alrm (uitsch & blok)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Log. regel 0
[27] Log. regel 1
[28] Log. regel 2
[29] Log. regel 3
[30] SL time-out 0
[31] SL time-out 1
[32] SL time-out 2
[33] Digitale ingang DI18
[34] Digitale ingang DI19
[35] Digitale ingang DI27
[36] Digitale ingang DI29
[39] Startcommando
[40] Omv. gestopt
[42] Uitsch autoreset
[50] Comparator 4
[51] Comparator 5
[60] Log. regel 4
13-44 Logische regel Boolean 3
Array [6]
Option: Functie:
[61] Log. regel 5
[70] SL time-out 3
[71] SL time-out 4
[72] SL time-out 5
[73] SL time-out 6
[74] SL time-out 7
[83] Band defect
3.9.6 13-5* States (Toestanden)
13-51 SL Controller Event
Array [20]
Option: Functie:
Selecteer de booleaanse input
(true of false) om de Smart
Logic-controllergebeurtenis te
deniëren.
Zie parameter 13-02 Gebeurt.
stoppen voor een beschrijving
van de mogelijke opties en
hun functie.
[0] * FALSE
[1] TRUE
[2] Actief
[3] Binnen bereik
[4] Op referentie
[7] Buiten stroombereik
[8] Onder I, laag
[9] Boven I, hoog
[16] Thermische waarschuwing
[17] Netsp. buiten bereik
[18] Omkeren
[19] Waarschuwing
[20] Alarm (trip) (Alarm (uitsch))
[21] Alrm (uitsch & blok)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Log. regel 0
[27] Log. regel 1
[28] Log. regel 2
[29] Log. regel 3
[30] SL time-out 0
[31] SL time-out 1
[32] SL time-out 2
[33] Digitale ingang DI18
[34] Digitale ingang DI19
[35] Digitale ingang DI27
[36] Digitale ingang DI29
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 79
Page 82

Parameters
VLT® HVAC Basic Drive FC 101
13-51 SL Controller Event
Array [20]
Option: Functie:
[39] Startcommando
[40] Omv. gestopt
33
[42] Uitsch autoreset
[50] Comparator 4
[51] Comparator 5
[60] Log. regel 4
[61] Log. regel 5
[70] SL time-out 3
[71] SL time-out 4
[72] SL time-out 5
[73] SL time-out 6
[74] SL time-out 7
[83] Band defect
13-52 SL-controlleractie
Array [20]
Option: Functie:
Selecteer de actie die overeenkomt
met de SLC-gebeurtenis. Acties
worden uitgevoerd wanneer de
bijbehorende gebeurtenis (gede-
nieerd in parameter 13-51 SL
Controller Event) als true wordt
geëvalueerd. De volgende acties
kunnen worden geselecteerd:
[100] ResetAlarm (Reset
alarm)
[0] * Disabled (Uitgesch.)
[1] No action (Geen
actie)
[2] Select set-up 1 (Kies
setup 1)
[3] Select set-up 2 (Kies
setup 2)
[10] Select preset ref 0
(Kies ingest. ref 0)
[11] Select preset ref 1
(Kies ingest. ref 1)
[12] Select preset ref 2
(Kies ingest. ref 2)
[13] Select preset ref 3
(Kies ingest. ref 3)
[14] Select preset ref 4
(Kies ingest. ref 4)
[15] Select preset ref 5
(Kies ingest. ref 5)
[16] Select preset ref 6
(Kies ingest. ref 6)
[17] Select preset ref 7
(Kies ingest. ref 7)
Verandert de actieve setup
(parameter 0-10 Actieve setup) in
setup 1.
Verandert de actieve setup
(parameter 0-10 Actieve setup) in
setup 2.
Selecteert digitale referentie 0.
Selecteert digitale referentie 1.
Selecteert digitale referentie 2.
Selecteert digitale referentie 3.
Selecteert digitale referentie 4.
Selecteert digitale referentie 5.
Selecteert digitale referentie 6.
Selecteert digitale referentie 7. Als
de actieve digitale referentie wordt
13-52 SL-controlleractie
Array [20]
Option: Functie:
gewijzigd, wordt die samengevoegd
met de andere digitale-referentiecommando's die via de digitale
ingangen of een veldbus worden
gegeven.
[18] Select ramp 1 (Kies
ramp 1)
[19] Select ramp 2 (Kies
ramp 2)
[22] Run (Draaien) Geeft een startcommando aan de
[23] Run reverse
(Omgekeerd draaien)
[24] Stop Geeft een stopcommando aan de
[25] Qstop Geeft een snelle-stopcommando
[26] DC Brake (DC-rem) Geeft een DC-stopcommando aan
[27] Coast (Vrijloop) De frequentieregelaar loopt
[28] Freeze output
(Uitgang vasth.)
[29] Start timer 0 Start timer 0; zie
[30] Start timer 1 Start timer 1; zie
[31] Start timer 2 Start timer 2; zie
[32] Set digital out A low
(Dig. uitgang A laag)
[33] Set digital out B low
(Dig. uitgang B laag)
[34] Set digital out C low
(Dig. uitgang C laag)
[35] Set digital out D low
(Dig. uitgang D laag)
[38] Set digital out A
high (Dig. uitgang A
hoog)
[39] Set digital out B
high (Dig. uitgang B
hoog)
Selecteert ramp 1.
Selecteert ramp 2.
frequentieregelaar.
Geeft een commando voor
omgekeerd starten aan de frequentieregelaar.
frequentieregelaar.
aan de frequentieregelaar.
de frequentieregelaar.
onmiddellijk vrij. Alle stopcommando's, waaronder het
vrijloopcommando, stoppen de SLC.
Houdt de uitgangsfrequentie van de
frequentieregelaar vast.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
Elke uitgang waarvoor digitale
uitgang 1 is geselecteerd, is laag
(uit).
Elke uitgang waarvoor digitale
uitgang 2 is geselecteerd, is laag
(uit).
Elke uitgang waarvoor digitale
uitgang 3 is geselecteerd, is laag
(uit).
Elke uitgang waarvoor digitale
uitgang 4 is geselecteerd, is laag
(uit).
Elke uitgang waarvoor digitale
uitgang 1 is geselecteerd, is hoog
(gesloten).
Elke uitgang waarvoor digitale
uitgang 2 is geselecteerd, is hoog
(gesloten).
80 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 83

Parameters Programmeerhandleiding
13-52 SL-controlleractie
Array [20]
Option: Functie:
[40] Set digital out C
high (Dig. uitgang C
hoog)
[41] Set digital out D
high (Dig. uitgang D
hoog)
[60] Reset Counter A
(Reset Teller A)
[61] Reset Counter B
(Reset Teller B)
[70] Start timer 3 Start timer 3; zie
[71] Start timer 4 Start timer 4; zie
[72] Start timer 5 Start timer 5; zie
[73] Start timer 6 Start timer 6; zie
[74] Start timer 7 Start timer 7; zie
[100] Reset Alarm Reset het alarm.
Elke uitgang waarvoor digitale
uitgang 3 is geselecteerd, is hoog
(gesloten).
Elke uitgang waarvoor digitale
uitgang 4 is geselecteerd, is hoog
(gesloten).
Zet teller A terug op 0.
Zet teller B terug op 0.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
parameter 13-20 Timer SL-controller
voor een beschrijving.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 81
Page 84

Parameters
VLT® HVAC Basic Drive FC 101
3.10 Hoofdmenu – Speciale functies –
Groep 14
3.10.1 14-0* Inverterschakeling
33
14-01 Schakelfrequentie
Option: Functie:
Stel de schakelfrequentie van de inverter in. Het
wijzigen van de schakelfrequentie kan de
akoestische ruis van de motor helpen
verminderen.
LET OP
De uitgangsfrequentiewaarde van de
frequentieregelaar mag nooit hoger zijn
dan 1/10 van de schakelfrequentie. Pas bij
draaiende motor de schakelfrequentie in
parameter 14-01 Schakelfrequentie aan
totdat de motor zo stil mogelijk werkt.
14-03 Overmodulatie
Option: Functie:
chrone bereik (van 0% bij nominaal toerental tot
ongeveer 12% bij dubbel nominaal toerental).
14-07 Dead Time Compensation Level (Niveau dodetijdcompensatie)
Range: Functie:
Afhankelijk van
grootte*
[0 100 ]
Niveau van de toegepaste dodetijdcompensatie, uitgedrukt als
percentage. Een hoog niveau (> 90%)
optimaliseert de dynamische reactie
van de motor. Een niveau van 50-90%
is geschikt voor zowel minimalisatie
van motorkoppelrimpels als een
goede motordynamiek. Een niveau
van 0 schakelt de dodetijdcompensatie uit.
14-08 Damping Gain Factor (Versterkingsfactor
LET OP
Hoge schakelfrequenties verhogen de
warmteontwikkeling in de frequentieregelaar en kunnen de levensduur van de
frequentieregelaar verkorten.
LET OP
demping)
Range: Functie:
Afhankelijk van
grootte*
[0 100 %]
Stel de dempingsfactor in voor
compensatie van de DC-tussenkringspanning. Zie
parameter 14-51 DC-linkcompensatie.
Niet alle opties zijn beschikbaar voor alle
vermogensklassen.
14-09 Dead Time Bias Current Level (Biasstroomniveau
dode tijd)
[0] Ran3 Werkelijk willekeurige PWM met 3 kHz (modulatie
witte ruis).
[1] Ran5 Werkelijk willekeurige PWM met 5 kHz (modulatie
witte ruis).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Overmodulatie
Option: Functie:
[0] * Uit Selecteert geen overmodulatie van de uitgangs-
spanning om koppelrimpels op de motoras te
voorkomen.
[1] Aan De overmodulatiefunctie genereert een extra
spanning van maximaal 8% van de uitgangsspanning
U
zonder overmodulatie, wat resulteert in een extra
max
koppel van 10-12% in het midden van het oversyn-
Range: Functie:
Afhankelijk van
grootte*
[0 100 %]
Stel een biassignaal (als
percentage) in dat moet worden
opgeteld bij het stroomdetectiesignaal voor
dodetijdcompensatie voor
bepaalde motoren.
3.10.2 14-1* Netsp. Aan/Uit
Parameters voor het congureren van de bewaking en
afhandeling van netfouten.
14-10 Netstoring
Congureer welke actie de frequentieregelaar moet uitvoeren
wanneer de netspanning lager is dan de netspanningslimiet die
is ingesteld in parameter 14-11 Netspanning bij netfout.
Option: Functie:
[0] * Geen functie
[1] Gecontr. uitloop
[3] Vrijloop
[4] Kinetische backup
[5] Kin backup, uitsch
[6] Alarm
82 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 85

Parameters Programmeerhandleiding
14-10 Netstoring
Congureer welke actie de frequentieregelaar moet uitvoeren
wanneer de netspanning lager is dan de netspanningslimiet die
is ingesteld in parameter 14-11 Netspanning bij netfout.
Option: Functie:
[7] Kin. back-up, trip w
recovery (Kin. backup,
uitsch met herstel)
14-11 Netspanning bij netfout
Range: Functie:
Afhankelijk
van grootte*
[100-800V]Gebruik deze parameter om te
deniëren bij welke netspanning de
in parameter 14-10 Netstoring
geselecteerde functie moet worden
ingeschakeld.
14-12 Functie bij onbalans net
Option: Functie:
LET OP
Selectie van deze optie kan de
levensduur van de frequentieregelaar verkorten.
Werking bij ernstige onbalans van het
net verkort de levensduur van de
motor. De condities worden als ernstig
beschouwd wanneer de motor continu
in bedrijf is met een bijna nominale
belasting.
Selecteer welke functie moet worden
geactiveerd als er een ernstige
onbalans van het net wordt
gedetecteerd.
[0] * Trip (Uitschakeling) Schakelt de frequentieregelaar uit.
[1] Warning
(Waarschuwing)
[2] Disabled
(Uitgesch.)
[3] Derate (Reductie) De frequentieregelaar zal reductie
3.10.3 14-2* Resetfuncties
14-20 Resetmodus
Stel in welke resetfunctie moet worden gebruikt na een uitschakeling (trip). Na de reset kan de frequentieregelaar opnieuw
worden gestart.
Option: Functie:
[0] * Handm. reset Selecteer [0] Manual reset (Handmatige
[1] Autom. reset x 1 Selecteer [1]-[12] Automatic reset x 1 ... x
Genereert een waarschuwing.
Geen actie.
toepassen.
reset) om een reset uit te voeren via
[Reset] of via de digitale ingangen.
20 (Automatische reset) x 1 ... x 20) om na
14-20 Resetmodus
Stel in welke resetfunctie moet worden gebruikt na een uitschakeling (trip). Na de reset kan de frequentieregelaar opnieuw
worden gestart.
Option: Functie:
een uitschakeling (trip) 1 tot 20 automatische resets uit te voeren.
[2] Autom. reset x 2
[3] Autom. reset x 3
[4] Autom. reset x 4
[5] Autom. reset x 5
[6] Autom. reset x 6
[7] Autom. reset x 7
[8] Autom. reset x 8
[9] Autom. reset x 9
[10] Autom. reset x 10
[11] Autom. reset x 15
[12] Autom. reset x 20
[13] Onbegr. aut. reset Selecteer [13] Innite Automatic Reset
(Onbeperkte autoreset om na een
uitschakeling (trip) een onbeperkt aantal
resets uit te voeren.
14-21 Tijd tot autom. herstart
Range: Functie:
10 s* [0-600 s] Stel het tijdsinterval tussen de uitschakeling
(trip) en de start van de automatischeresetfunctie in. Deze parameter is actief als
parameter 14-20 Resetmodus is ingesteld op [1]-
[13] Automatic reset (Automatische reset).
14-22 Bedrijfsmodus
Option: Functie:
Selecteer [2] Initialisation (Initialisatie) om alle
parameterwaarden terug te zetten naar de
standaardinstelling.
[0]*Normaal
bedrijf
[2] Initia-
lisatie
Selecteer [0] Normal operation (Normaal bedrijf )
voor normaal bedrijf van de frequentieregelaar
met de motor in de geselecteerde toepassing.
Selecteer [2] Initialisation (Initialisatie) om alle
parameterwaarden in te stellen op de standaardwaarde, met uitzondering van
buscommunicatieparameters, parametergroep
15-0* Operating Data (Bedrijfsgegevens) en parametergroep 15-3* Alarm Log (Alarmlog). De
frequentieregelaar wordt bij de eerstvolgende
inschakeling gereset.
Hierbij wordt ook Parameter 14-22 Bedrijfsmodus
teruggezet op de standaardinstelling [0] Normal
operation (Normaal bedrijf ).
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 83
Page 86

Parameters
VLT® HVAC Basic Drive FC 101
14-27 Actie bij inverterfout
Selecteer hoe de frequentieregelaar moet reageren in geval van
overspanning, overstroom, kortsluiting of aardfouten.
Option: Functie:
[0] Uitschakeling (trip)
33
[1] * Waarschuwing
14-29 Servicecode
Range: Functie:
0* [0-0x7FFFFFFF ] Alleen voor servicedoeleinden.
3.10.4 14-3* Current Limit Control
(Stroombegrenzingsregeling)
14-40 VT-niveau
Range: Functie:
90 %* [40 -
90 %]
LET OP
Deze parameter kan niet worden
gewijzigd terwijl de motor loopt.
Stel het niveau voor motormagnetisering bij
lage toerentallen in. Lage waarden
verminderen het energieverlies in de motor,
maar verminderen tevens het maximale
belastingsniveau.
14-41 Min. magnetisering AEO
Range: Functie:
Parameters voor het congureren van de stroombegrenzingsregeling, die wordt geactiveerd wanneer de
motorstroom hoger is dan de ingestelde koppelbegrenzingen (zie parameter 4-18 Stroombegr.). Deze parameters
worden gebruikt om het koppel zo snel mogelijk te
66 %* [40 -
75 %]
Stel de minimaal toegestane magnetisering
voor AEO in. Lage waarden verminderen het
energieverlies in de motor, maar verminderen
tevens de weerstand tegen plotselinge
veranderingen in de belasting.
verlagen zonder de controle over de motor te verliezen.
14-44 d-axis current optimization for IPM (Stroomopti-
14-30 Current Lim Ctrl, Proportional Gain
Range: Functie:
100 %* [0 -
500 %]
Stel de proportionele versterking voor de
stroombegrenzingsregelaar in. Bij een
hogere waarde reageert de regelaar sneller.
Een te hoge instelling leidt tot instabiliteit
van de regeling.
malisatie d-as voor IPM)
Range: Functie:
100 %* [0 - 200 %] Parametergroep voor het congureren van
speciale functies van de frequentieregelaar.
3.10.6 14-5* Omgeving
14-31 Current Lim Ctrl, Integration Time
Range: Functie:
0.020 s* [0.002 - 2s]Regelt de integratietijd van de stroombegrenzingsregeling. Bij een lagere waarde
reageert de regelaar sneller. Een te lage
instelling leidt tot instabiliteit van de
regeling.
14-32 Current Lim Ctrl, Filter Time
Range: Functie:
5 ms* [1 - 100 ms] Stelt een tijdconstante in voor het
laagdoorlaatlter voor de stroombegrenzingsregeling.
3.10.5 14-4* Energy Optimising
(Energieoptimalisatie)
Parameters voor het aanpassen van het energieoptimalisatieniveau in zowel de variabel-koppelmodus (VT) als de
automatische-energieoptimalisatiemodus (AEO).
Automatische energieoptimalisatie is alleen actief als
parameter 1-03 Koppelkarakteristiek is ingesteld op [3] Auto
Energy Optim. (Automatische energieoptimalisatie).
Deze parameters dienen om de frequentieregelaar te laten
functioneren onder speciale omgevingscondities.
14-50 RFI-lter
Deze parameter is alleen van toepassing op frequentieregelaars
met de volgende behuizingsgroottes:
IP 20, 3 x 200-240 V, behuizingsgrootte H6-H8
•
IP 20, 3 x 380-480 V, behuizingsgrootte H6-H8
•
IP 54, 3 x 380-480 V, behuizingsgrootte I6-I8
•
IP 20, 3 x 525-600 V, behuizingsgrootte H6-H10
•
Option: Functie:
[0] Uit Selecteer [0] O (Uit) alleen als de frequentieregelaar
wordt gevoed door een geïsoleerde netbron (IT-net).
In deze modus worden de interne RFI-condensatoren
tussen het chassis en het RFI-ltercircuit uitgeschakeld
om de aardlekstromen te beperken.
[1] * Aan Selecteer [1] On (Aan) om ervoor te zorgen dat de
frequentieregelaar voldoet aan de EMC-normen.
14-51 DC-linkcompensatie
Option: Functie:
[0] Uit De overmodulatie voor uitgangsspanning is uit om
koppelrimpels op de motoras te voorkomen.
84 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 87

Parameters Programmeerhandleiding
14-51 DC-linkcompensatie
Option: Functie:
[1] * Aan Schakelt overmodulatie voor de uitgangsspanning in
om een uitgangsspanning te verkrijgen die tot 15%
hoger is dan de netspanning.
14-52 Ventilatorbesturing
Deze parameter dient om de bedieningsmodus voor de ventilatorbesturing te selecteren. De akoestische ruis van de
frequentieregelaar is anders bij het aandrijven van een zware
belasting (hoge temperatuur koellichaam), bij het aandrijven van
een lichte belasting of in de stand-bymodus.
Option: Functie:
[0] Auto De ventilator werkt gedurende korte tijd
op volle toeren en past het toerental
automatisch aan op basis van de
belasting en de omgevingstemperatuur.
De ventilator werkt ook op het minimale
toerental als de referentie 0 Hz bedraagt
vanwege de warmte die de IGBT
genereert. De ventilator stopt als de
slaapmodus wordt geactiveerd. Dit is de
standaardinstelling voor alle frequentieregelaars behalve frequentieregelaars
met behuizingsgrootte H1.
[4] Auto Low Temp
Env. (Auto lage
omg.temp.)
[5] Constant-on mode
(constantaanmodus)
[6] Constant-o mode
(constantuitmodus)
[7] On-when-Inverter-
is-on-else-o Mode
(Modus aan-alsinverter-aan-isanders-uit)
Geldt alleen voor behuizingsgrootte H6H10 en I6-I8.
Voor ventilatortest op locatie of als de
ventilator continu op 100% van het
toerental werkt. Geldt alleen voor
behuizingsgrootte H1-H5 en I2-I4.
Als convectiekoeling voldoende is of als
de frequentieregelaar in een demonstratiepaneel is gemonteerd, bijvoorbeeld
tijdens een beurs, enzovoort. Bij een
overtemperatuur van het koellichaam
wordt de frequentieregelaar
uitgeschakeld (trip) als de belasting
hoger is dan de convectiekoeling
toestaat. Geldt alleen voor behuizingsgrootte H1-H5 en I2-I4.
De ventilator werkt met het maximale
toerental als de handmodus actief is of
als de referentie hoger is dan 0 Hz. De
ventilator wordt gestopt als de
slaapmodus actief is. Dit is de standaardinstelling voor frequentieregelaars met
behuizingsgrootte H1, maar kan ook
worden geselecteerd voor behuizingsgrootte H2-H5 en I2-I4.
14-53 Ventilatorbew.
Selecteer hoe de frequentieregelaar moet reageren als er een
fout wordt gedetecteerd in de ventilator. Deze parameter is
alleen van toepassing op frequentieregelaars met de volgende
behuizingsgroottes:
IP 20, 3 x 200-240 V, behuizingsgrootte H6-H8.
•
IP 20, 3 x 380-480 V, behuizingsgrootte H6-H8.
•
IP 54, 3 x 380-480 V, behuizingsgrootte I6-I8.
•
IP 20, 3 x 525-600 V, behuizingsgrootte H6-H10.
•
Option: Functie:
[0] Uitgesch.
[1] * Waarschuwing
[2] Uitschakeling (trip)
14-55 Uitgangslter
Selecteer of er een uitgangslter aanwezig is.
Option: Functie:
[0] * Geen lter
[1] Sinuslter
[3] Sinuslter met
terugkoppeling
[4] dv/dt Deze optie is alleen van toepassing op
frequentieregelaars met de volgende
behuizingsgroottes:
IP 20, 3 x 200-240 V, behuizings-
•
grootte H6-H8
IP 20, 3 x 380-480 V, behuizings-
•
grootte H6-H8
IP 54, 3 x 380-480 V, behuizings-
•
grootte I6-I8
IP 20, 3 x 525-600 V, behuizings-
•
grootte H6-H10
3.10.7 14-6* Auto Derate (Autoreductie)
Parametergroep voor het congureren van automatische
reductie op basis van de uitgangsfrequentie van de
frequentieomvormer.
14-63 Min. schakelfrequentie
Stel de minimale schakelfrequentie in die wordt toegestaan door
het uitgangslter.
Option: Functie:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 85
Page 88

Parameters
VLT® HVAC Basic Drive FC 101
14-64 Nulstroomniveau dodetijdcompensatie
Stel de parameter bij gebruik van een lange motorkabel in op [0]
Disabled (Uitgesch.) om motorkoppelrimpels te minimaliseren.
Option: Functie:
[0] * Uitgesch.
33
[1] Ingesch.
14-65 Toerentalreductie dodetijdcompensatie
Range: Functie:
Afhankelijk
van grootte*
[ 20-1000
Hz]
Het niveau van dodetijdcompensatie
wordt lineair verlaagd van het in
parameter 14-07 Dead Time Compen-
sation Level (Niveau
dodetijdcompensatie) ingestelde
maximumniveau van de uitgangsfrequentie tot het minimumniveau van
de uitgangsfrequentie dat in deze
parameter is ingesteld.
3.10.8 14-9* Fault Settings
(Foutinstellingen)
De parametergroep voor foutaanpassingsinstellingen.
14-90 Foutniveau
Gebruik deze parameter om foutniveaus naar wens in te stellen.
Alleen index 7, die overstroomfouten aangeeft, wordt
ondersteund.
Option: Functie:
[3] * Uitschakeling
met blokkering
[4] Uitsch. + vertr.
reset
[5] Flystart
(Vliegende start)
Het alarm wordt ingesteld op het niveau
voor uitschakeling met blokkering.
Het alarm wordt ingesteld als uitschakelalarm en kan na een vertragingstijd
worden gereset. Als voor deze optie
bijvoorbeeld een alarm wegens
overstroom is gecongureerd, kan dit
alarm 3 minuten na het genereren van
het alarm worden gereset.
De frequentieregelaar probeert bij het
opstarten een draaiende motor op te
vangen. Als deze optie is geselecteerd,
wordt parameter 1-73 Vlieg. startingesteld
op [1] Enabled (Ingesch.).
86 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 89

Parameters Programmeerhandleiding
3.11 Hoofdmenu – Geg. frequentieregelaar
– Groep 15
Parametergroep met informatie over de frequentieregelaar,
zoals bedrijfsgegevens, hardwareconguratie en softwareversies.
3.11.1 15-0* Bedrijfsgegevens
15-00 Bedrijfsuren
Range: Functie:
0 u* [0-0x7FFFFFFF u] Geef weer hoeveel uur de frequentiere-
gelaar in bedrijf is geweest. De waarde
wordt opgeslagen wanneer de frequentieregelaar wordt uitgeschakeld.
15-01 Aantal draaiuren
Range: Functie:
0 u* [0-0x7FFFFFFFu]Geef weer hoeveel uur de motor heeft
gedraaid. Reset de teller in
parameter 15-07 Draaiurenteller reset. De
waarde wordt opgeslagen wanneer de
frequentieregelaar wordt uitgeschakeld.
15-02 kWh-teller
Range: Functie:
0 kWh* [0-65535
kWh]
15-03 Inschakelingen
Range: Functie:
0* [0 - 2147483647 ] Geef weer hoeveel keer de frequentiere-
Geef het uitgangsvermogen van de
frequentieregelaar in kWh weer als
gemiddelde waarde over 1 uur. Reset de
teller in parameter 15-06 kWh-teller reset.
gelaar is ingeschakeld.
15-06 kWh-teller reset
Option: Functie:
[1] Teller reset Selecteer [1] Reset counter ( Teller resetten) en
druk op [OK] om de kWh-teller terug te
zetten op 0 (zie parameter 15-02 kWh-teller).
15-07 Draaiurenteller reset
Option: Functie:
[0] * Niet resetten
[1] Teller reset Selecteer [1] Reset counter ( Teller resetten) en
druk op [OK] om parameter 15-01 Aantal
draaiuren terug te zetten op 0 (zie ook
parameter 15-01 Aantal draaiuren).
3.11.2 15-3* Alarmlog
Parameters in deze groep zijn arrayparameters en maken
het mogelijk om max. 10 foutlogs weer te geven. [0] staat
voor de meest recent opgeslagen gegevens en [9] voor de
oudste. Foutcodes, waarden en tijdstempel kunnen worden
weergegeven voor alle gelogde gegevens.
15-30 Alarmlog: foutcode
Range: Functie:
0* [0 - 255 ] Geef de foutcode weer en zoek de betekenis
ervan op in hoofdstuk 4 Problemen verhelpen.
15-31 InternalFaultReason
Range: Functie:
0* [-32767 -
32767 ]
Geef een beschrijving van de fout weer.
Deze parameter wordt gebruikt in
combinatie met Alarm 38, Internal Fault
(Interne fout).
3.11.3 15-4* ID omvormer
3 3
15-04 x Overtemp.
Range: Functie:
0* [0 - 65535 ] Geef weer hoeveel temperatuurfouten er voor
de frequentieregelaar zijn opgetreden.
Parameters met alleen-lezeninformatie over de hardwareen softwareconguratie van de frequentieregelaar.
15-40 FC-type
Range: Functie:
15-05 x Overspann.
Range: Functie:
0* [0 - 65535 ] Geef weer hoe vaak er overspanning van de
frequentieregelaar is opgetreden.
0* [0 - 6 ] Geef de FC-typecode weer. De uitlezing is gelijk
aan het vermogensveld van de typecodedenitie
van de frequentieregelaarserie, teken 1-6.
15-41 Vermogenssectie
15-06 kWh-teller reset
Option: Functie:
LET OP
Druk op [OK] om te resetten.
[0] * Niet resetten
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 87
Range: Functie:
0* [0 - 20 ] Geef de FC-typecode weer. De uitlezing is gelijk
aan het vermogensveld van de typecodedenitie
van de frequentieregelaarserie, teken 7-10.
Page 90

Parameters
VLT® HVAC Basic Drive FC 101
15-42 Spanning
Range: Functie:
0* [0 - 20 ] Geef de FC-typecode weer. De uitlezing is gelijk
aan het vermogensveld van de typecodedenitie
van de frequentieregelaarserie, teken 11-12.
33
15-43 Softwareversie
Range: Functie:
0* [0 - 0 ] Geef de softwareversie van de frequentieregelaar
weer.
15-44 Bestelde Typecode
Range: Functie:
0* [0 - 40 ] Geef de typecodereeks weer voor het opnieuw
bestellen van de frequentieregelaar met de
oorspronkelijke conguratie.
15-45 Huidige typecodereeks
Range: Functie:
0 [0 - 40 ] Geef de huidige typecodereeks weer.
15-46 Bestelnr. freq.-omvormer
Range: Functie:
0* [0 - 8 ] Geef het 8-cijferige bestelnummer weer voor het
opnieuw bestellen van de frequentieregelaar met
de oorspronkelijke conguratie.
15-48 LCP ID-nr.
Range: Functie:
0* [0 - 0 ] Geef het ID-nummer van het LCP weer.
15-49 SW-id stuurkaart
Range: Functie:
0* [0 - 0 ] Geef het softwareversienummer van de stuurkaart
weer.
15-50 SW-id voedingskaart
Range: Functie:
0* [0 - 0 ] Geef het softwareversienummer van de
voedingskaart weer.
15-51 Serienr. freq.-omvormer
Range: Functie:
0* [0 - 10 ] Geef het serienummer van de frequentieregelaar
weer.
15-53 Serienr. voedingskaart
Range: Functie:
0* [0 - 0 ] Geef het serienummer van de voedingskaart weer.
15-59 CSIV-bestand
Range: Functie:
0 [0 - 16 ] Geef de naam van het huidige CSIV-bestand weer.
88 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 91

Parameters Programmeerhandleiding
3.12 Hoofdmenu – Data-uitlezingen –
Groep 16
3.12.1 16-0* General Status (Algemene
status)
16-00 Stuurwoord
Range: Functie:
0* [0 - 65535 ] Geef het stuurwoord weer dat via de seriële-
communicatiepoort als hex-code naar de
frequentieregelaar wordt verzonden.
Bit Bit = 0 Bit = 1
00 Digitale referentie, keuze lsb –
01 Digitale referentie, keuze 2e bit van de
digitale referenties
02 DC-rem Ramp
03 Vrijloop Inschakelen
04 Snelle stop Ramp
05 Uitgang vasthouden Ramp
06 Rampstop Start
07 Geen functie Reset
08 Geen functie Jog
09 Ramp 1 Ramp 2
10 Data niet geldig Geldig
11 Relais_A niet actief Relais_A actief
12 Relais_B niet actief Relais_B actief
13 Keuze van setup, lsb –
14 Geen functie Geen functie
15 Geen functie Omkeren
Tabel 3.6 Control Word (Stuurwoord)
–
16-03 Statuswoord
Range: Functie:
0* [0 - 65535 ] Geef het statuswoord weer dat via de seriële-
communicatiepoort als hex-code wordt
verzonden vanaf de frequentieregelaar.
Bit Bit = 0 Bit = 1
00 Besturing niet gereed Gereed
01
VLT® niet gereed
02 Vrijloop Inschakelen
03 Geen fout Uitschakeling (trip)
04 Geen waarschuwing Waarschuwing
05 Gereserveerd –
06 Geen uitschakeling met
blokkering
07 Geen waarschuwing Waarschuwing
08
Snelheid ≠ ref.
09 Lokale bediening Busbest.
10 Buiten snelh.-bereik Frequentie OK
11 Niet actief Actief
12 Geen functie Geen functie
13 Spanning OK Boven begrenzing
14 Stroom OK Boven begrenzing
15 Thermisch niveau OK Boven begrenzing
Tabel 3.7 Status Word (Statuswoord)
Gereed
Uitschakeling met
blokkering
Snelheid = ref.
16-05 Vrnste huid. waarde [%]
Range: Functie:
0 %* [-200 -
200 %]
Geef het woord van 2 bytes weer dat met
het statuswoord naar de busmaster wordt
verzonden bij het doorgeven van de
voornaamste huidige waarde.
3 3
16-01 Referentie [Eenh.]
Range: Functie:
0 ReferentieTerugkEenheid*
[-4999-4999
ReferentieTerugkEenheid]
Geef de actuele referentiewaarde weer die in de
eenheid wordt toegepast
op basis van pulsen of
analoge signalen als
gevolg van de
conguratie die is
geselecteerd in
parameter 1-00 Conguratiemodus (Hz).
16-02 Referentie [%]
Range: Functie:
0 %* [-200 -
200 %]
Geef de totale referentie weer. De totale
referentie is de som van digitale, analoge,
vooraf ingestelde, bus- en vasthoudreferenties.
16-09 Standaard uitlez.
Range: Functie:
0 StdUitlezingEenh*
[0-9999
StdUitlezingEenh]
Geef de door de gebruiker gede-
nieerde uitlezingen weer zoals
ingesteld in parameter 0-30 Eenheid
voor uitlezing gebr.,
parameter 0-31 Min. waarde
uitlezing klant en
parameter 0-32 Max. waarde
uitlezing klant.
3.12.2 16-1* Motorstatus
16-10 Verm. [kW]
Range: Functie:
0 kW* [0-1000
kW]
Geeft het actuele motorvermogen in kW
weer. De getoonde waarde wordt berekend
op basis van de actuele motorspanning en
motorstroom.
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 89
Page 92

Parameters
VLT® HVAC Basic Drive FC 101
16-11 Verm. [pk]
Range: Functie:
0 pk* [0-1000 pk] Geef het actuele motorvermogen in pk
weer. De getoonde waarde wordt berekend
op basis van de actuele motorspanning en
33
motorstroom.
16-12 Motorspanning
Range: Functie:
0 V* [0-65535 V] Geef de motorspanning weer, een berekende
waarde die wordt gebruikt voor het besturen
van de motor.
16-13 Frequentie
Range: Functie:
0 Hz* [0-6553,5 Hz] Geef de motorfrequentie weer, zonder
resonantiedemping.
16-18 Motor therm.
Range: Functie:
0 %* [0 -
100 %]
Geeft de berekende motortemperatuur weer als
een percentage van het toegestane maximum. Bij
100% vindt uitschakeling (trip) plaats als dat is
ingesteld in parameter 1-90 Thermische motorbevei-
liging. De berekening is gebaseerd op de ETRfunctie die is geselecteerd in
parameter 1-90 Thermische motorbeveiliging.
16-22 Koppel [%]
Range: Functie:
0 %* [-200 - 200 %] Geef het koppel weer (als percentage van
het nominale koppel) dat aan de motoras
wordt geleverd.
3.12.3 16-3* Drive Status (Status
omvormer)
16-14 Motorstroom
Range: Functie:
0 A* [0-655,35 A] Geef de motorstroom weer, gemeten als een
gemiddelde waarde, I
RMS
.
16-15 Frequentie [%]
Range: Functie:
0 %* [0-6553,5%]
0 %* [0-6553,5%] Geef een woord van 2 bytes weer dat de
huidige motorfrequentie (zonder resonantiedemping) aangeeft als een percentage
(schaal 0000-4000 hex) van
parameter 4-19 Max. uitgangsfreq..
16-16 Koppel [Nm]
Range: Functie:
0 Nm* [-30000-30000
Nm]
Geef de koppelwaarde weer die wordt
geleverd aan de motoras. Sommige
motoren leveren een koppel hoger
dan 160%. De minimumwaarde en de
maximumwaarde zijn dan ook
afhankelijk van de minimale/maximale
motorstroom en de gebruikte motor.
16-30 DC-aansluitsp.
Range: Functie:
0 V* [0-65535 V] Geef de actuele DC-tussenkringspanning
weer.
16-34 Temp. koellich.
Range: Functie:
0 °C* [-128-127 °C] Geef de temperatuur van het koellichaam
van de frequentieregelaar weer.
16-35 Inverter therm.
Range: Functie:
0 %* [0 - 255 %] Geef de thermische belasting op de frequen-
tieregelaar weer als een percentage. Bij 100%
vindt een uitschakeling (trip) plaats.
16-36 Inv. nom. Stroom
Range: Functie:
0 A* [0-655,35 A] Geef de maximale stroom van de inverter
weer. De gegevens worden gebruikt voor het
koppel, de motorbeveiliging enzovoort.
16-17 Snelh. [RPM]
Range: Functie:
0 tpm* [-30000-30000
tpm]
90 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Geef het huidige motortoerental
(tpm) weer. Bij een procesregeling
met of zonder terugkoppeling wordt
het motortoerental geschat. Bij een
snelheidsregeling met terugkoppeling wordt het motortoerental
gemeten.
16-37 Inv. max. stroom
Range: Functie:
0 A* [0-655,35 A] Geef de maximale stroom van de inverter
weer. De gegevens worden gebruikt voor het
berekenen van de beveiliging van de
frequentieregelaar enzovoort.
16-38 SL-controllerstatus
Range: Functie:
0* [0 - 20 ] Geef de actuele status van de Smart Logic
Controller (SLC) weer.
Page 93

Parameters Programmeerhandleiding
3.12.4 16-5* Ref. & Feedb. (Ref. & terugk.)
16-50 Externe referentie
Range: Functie:
0 %* [-200 - 200 %] Geef de totale referentie weer, d.w.z. de
som van digitale, analoge, vooraf
ingestelde, bus- en vasthoudreferenties.
16-52 Terugk. [Eenh]
Range: Functie:
0 ProcesRegEenh*
16-54 Terugk. 1 [Eenh]
Range: Functie:
0 ProcesRegEenh* [-999999,999-999999,999
16-55 Terugk. 2 [Eenh]
Range: Functie:
0 ProcesRegEenh* [-999999,999-999999,999
[-4999-4999
ProcesRegEenh]
ProcesRegEenh]
ProcesRegEenh]
Geef de terugkoppelingseenheid
weer op basis van de geselecteerde
schaling in
parameter 3-02 Minimumreferentie
en parameter 3-03 Max. referentie.
Geef de waarde van
terugkoppeling 1 weer op
basis van de geselecteerde
schaling in
parameter 3-02 Minimumreferentie en
parameter 3-03 Max.
referentie.
Geef de waarde van
terugkoppeling 2 weer op
basis van de geselecteerde
schaling in
parameter 3-02 Minimumreferentie en
parameter 3-03 Max.
referentie.
16-60 Digitale ingang
Range: Functie:
Bit 0 Niet gebruikt
Bit 1 Niet gebruikt
Bit 2 Digitale-ingangsklem 29
Bit 3 Digitale-ingangsklem 27
Bit 4 Digitale-ingangsklem 19
Bit 5 Digitale-ingangsklem 18
Bit 6-15 Niet gebruikt
Tabel 3.8 Bitdenitie
16-61 Klem 53 schakelinstell.
Option: Functie:
Geef de instelling van ingangsklem 53 weer.
Stroom = 0
•
Spanning = 1
•
[0] * Stroommodus
[1] Spanning
16-62 Anal. ingang 53
Range: Functie:
1* [0 - 20 ] Geef de actuele waarde van ingang 53 weer.
16-63 Klem 54 schakelinstell.
Geef de instelling van ingangsklem 54 weer.
Stroom = 0
•
Spanning = 1
•
Option: Functie:
[0] * Stroommodus
[1] Spanning
16-64 Analoge ingang 54
Range: Functie:
1* [0 - 20 ] Geef de actuele waarde van ingang 54 weer.
3 3
3.12.5 16-6* Inputs and Outputs (In- en
uitgangen)
16-60 Digitale ingang
Range: Functie:
0* [0 -
4095 ]
Geef de actuele status weer van de digitale
ingangen 18, 19, 27 en 29.
16-65 Anal. uitgang 42 [mA]
Range: Functie:
0 mA* [0-20
mA]
Geef de huidige waarde van uitgang 42 weer
in mA. Deze waarde is gebaseerd op de
instelling van parameter 6–90 Terminal 42
Mode en parameter 6-91 Klem 42 analoge
uitgang.
16-66 Digitale uitgang
Range: Functie:
0* [0 -
15 ]
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 91
Geef de binaire waarden van alle digitale uitgangen
weer.
Denitie:
X: niet gebruikt
0: laag
Page 94

Parameters
VLT® HVAC Basic Drive FC 101
16-66 Digitale uitgang
Range: Functie:
1: hoog
XX Geen enkele gebruikt
33
X0 Klem 42 niet gebruikt, klem 45 laag.
X1 Klem 42 niet gebruikt, klem 45
hoog.
0X Klem 42 laag, klem 45 niet gebruikt.
0 Klem 42 laag, klem 45 laag.
1 Klem 42 laag, klem 45 hoog.
1X Klem 42 hoog, klem 45 niet
gebruikt.
10 Klem 42 hoog, klem 45 laag.
11 Klem 42 hoog, klem 45 hoog.
Tabel 3.9 De binaire waarde van digitale
uitgangen
16-79 Anal. uitgang 45 [mA]
Range: Functie:
0 mA* [0-20
mA]
Geef de huidige waarde van uitgang 45 weer
in mA. Deze waarde is gebaseerd op de
instelling van parameter 6-70 Klem 45 modus
en parameter 6-71 Klem 45 analoge uitgang.
3.12.6 16-8* Veldbus & FC-poort
Parameters voor het weergeven van busreferenties en
stuurwoorden.
16-86 FC-poort REF 1
Range: Functie:
0* [-32768 - 32767 ] Geef de laatst ontvangen referentie van
de FC-poort weer.
3.12.7 16-9* Diagnosis Read-Outs
16-67 Pulsingang #29 [Hz]
Range: Functie:
0* [0 - 130000 ] Geef de actuele frequentiewaarde van klem
29 weer.
16-71 Relaisuitgang
Range: Functie:
0* [0 - 31 ] Geef de instelling van het relais weer.
Bit 0~2 Niet gebruikt
Bit 3 Relais 02
Bit 4 Relais 01
Bit 5-15 Niet gebruikt
0* [0-0xFFFFFFFFUL ] Geef het alarmwoord weer dat via de
0* [0-0xFFFFFFFFUL ] Geef alarmwoord 2 weer dat via de
(Diagnose-uitlezingen)
16-90 Alarmwoord
Range: Functie:
seriële-communicatiepoort als hex-code
werd verzonden.
16-91 Alarmwoord 2
Range: Functie:
seriële-communicatiepoort als hex-code
werd verzonden.
Tabel 3.10 Bitdenitie
16-72 Teller A
Range: Functie:
0* [-32768 -
32767 ]
Geef de huidige waarde van teller A weer. Tellers
zijn nuttig als comparator-operanden; zie
parameter 13-10 Comparator-operand.
De waarde kan worden gereset of gewijzigd via
digitale ingangen (parametergroep 5-1* Digital
Inputs (Digitale ingangen)) of met behulp van een
SLC-actie (parameter 13-52 SL-controlleractie).
16-73 Teller B
Range: Functie:
0* [-32768 -
32767 ]
Geef de huidige waarde van teller B weer. Tellers
zijn nuttig als comparator-operanden
(parameter 13-10 Comparator-operand).
De waarde kan worden gereset of gewijzigd via
digitale ingangen (parametergroep 5-1* Digital
Inputs (Digitale ingangen)) of met behulp van een
SLC-actie (parameter 13-52 SL-controlleractie).
16-92 Waarsch.-wrd
Range: Functie:
0* [0-0xFFFFFFFFUL ] Geef het waarschuwingswoord weer dat
via de seriële-communicatiepoort als
hex-code werd verzonden.
16-93 Waarsch.woord 2
Range: Functie:
0* [0-0xFFFFFFFFUL ] Geef waarschuwingswoord 2 weer dat
via de seriële-communicatiepoort als
hex-code werd verzonden.
16-94 Uitgebr. Statuswoord
Range: Functie:
0* [0-0xFFFFFFFFUL ] Geeft het uitgebreide statuswoord weer
dat via de seriële-communicatiepoort als
hex-code werd verzonden.
92 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 95

Parameters Programmeerhandleiding
16-95 Uitgebr. statusw. 2
Range: Functie:
0* [0-0xFFFFFFFFUL ] Geeft het uitgebreide statuswoord 2
weer dat via de seriële-communicatiepoort als hex-code werd verzonden.
16-97 Alarmwoord 3
Range: Functie:
0* [0 - 4294967295] Geef alarmwoord 3 weer dat via de
seriële-communicatiepoort als hex-code
werd verzonden.
16-98 Waarschuwingswoord 3
Range: Functie:
0* [0 - 4294967295] Geef waarschuwingswoord 3 weer dat via
de seriële-communicatiepoort als hexcode werd verzonden.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 93
Page 96

Parameters
VLT® HVAC Basic Drive FC 101
3.13 Hoofdmenu – Data-uitlezingen 2 –
Groep 18
Parameters in deze groep zijn arrayparameters en maken
het mogelijk om max. 10 foutlogs weer te geven. [0] staat
voor de meest recent opgeslagen gegevens en [9] voor de
33
oudste. Foutcodes, waarden en tijdstempel kunnen worden
weergegeven voor alle gelogde gegevens.
20-00 Bron terugkoppeling 1
Option: Functie:
[100] Bus Feedback 1 (Busterugk. 1)
[101] Bus Feedback 2 (Busterugk. 2)
[104] Sensorless Flow
[105] Sensorless Pressure (Sensorless
druk)
20-01 Conversie terugk. 1
3.13.1 18-1* Brandmoduslog
18-10 Brandmoduslog: event
Range: Functie:
0* [0 - 255 ] Geef de brandmodusgebeurtenis weer.
3.13.2 18-5* Ref. & terugk.
18-50 Uitlezing sensorless [eenh]
Range: Functie:
0 SensorlessEenh*
[-999999,999 999999,999
SensorlessEenh]
Geef de druk of ow weer op basis
van de sensorlessberekeningen.
Deze waarde is niet de waarde die
wordt gebruikt voor de regeling.
De waarde wordt alleen bijgewerkt
als de sensorlessgegevens zowel
ow als druk ondersteunen.
3.14 Hoofdmenu – FC met terugkoppeling
– Groep 20
Deze parametergroep wordt gebruikt voor het
congureren van de PI-regelaar voor een regeling met
terugkoppeling, die de uitgangsfrequentie van de frequentieregelaar regelt.
Option: Functie:
Deze parameter maakt het mogelijk om een
conversiefunctie toe te passen op terugkoppeling 1.
[0] * Lineair [0] Linear (Lineair) heeft geen invloed op de
terugkoppeling.
[1] Vierkants-
wortel
[1] Square root (Vierkantswortel) wordt
gewoonlijk gebruikt wanneer een druksensor
wordt gebruikt om owterugkoppeling te
verkrijgen.
(( flow ∝ druk)).
20-03 Bron terugk. 2
Option: Functie:
[0] * Geen functie
[1] Anal. ingang 53
[2] Anal. ingang 54
[3] Pulsingang 29
[100] Bus Terugk. 1
[101] Bus Terugk. 2
20-04 Conversie terugk. 2
Option: Functie:
[0] * Lineair
[1] Vierkantswortel
3.14.1 20-0* Terugkoppeling
20-12 Referentie/terugk.eenheid
Option: Functie:
Deze parametergroep wordt gebruikt voor het
congureren van het terugkoppelingssignaal voor de PIregelaar met terugkoppeling van de frequentieregelaar.
20-00 Bron terugkoppeling 1
Option: Functie:
Deze parameter bepaalt
welke ingang op de
frequentieregelaar wordt
gebruikt als de bron voor
het eerste terugkoppe-
lingssignaal.
[0] * No function (Geen functie)
[1] Analog Input 53 (Anal. ingang
53)
[2] Analog Input 54 (Anal. ingang
54)
[3] Pulse input 29 (Pulsingang 29)
94 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
[0] * None Expressionlimit (Geen
Uitdrukkingslimiet)
[20] l/s
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m WG
[75] mm Hg
[120] GPM
[121] gal/s
Stel in welke eenheid
moet worden gebruikt
voor referenties en
terugkoppelingen voor
een regeling met
terugkoppeling.
Page 97

Parameters Programmeerhandleiding
20-12 Referentie/terugk.eenheid
Option: Functie:
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[174] in Hg
3.14.2 20-2* Feedback/Setpoint
(Terugkoppeling/setpoint)
Parametergroep voor terugkoppelingsfunctie en setpoints.
Selecteer het setpoint en de terugkoppeling die moeten
worden gebruikt. Het setpoint en de terugkoppeling
kunnen een vast paar zijn of afzonderlijk worden
geselecteerd op basis van logische vergelijkingen.
20-20 Terugkoppelingsfunctie
Selecteer hoe de terugkoppeling moet worden berekend. De
terugkoppeling kan één terugkoppelingsbron zijn of een
combinatie van diverse terugkoppelingen.
Option: Functie:
[0] Sum (Som)
[1] Dierence (Verschil)
[2] Average (Gemiddelde)
[3] * Minimum
[4] Maximum
3.14.3 20-6* Sensorless
Parameters voor sensorless. Zie ook parameter 16-26 Verm.
gelterd [kW], parameter 16-27 Verm. gelterd [pk],
parameter 18-50 Uitlezing sensorless [eenh] en
parameter 20-00 Bron terugkoppeling 1.
20-60 Eenheid sensorless
Option: Functie:
Selecteer de eenheid die moet
worden gebruikt voor
parameter 18-50 Uitlezing sensorless
[eenh].
[0] None (Geen)
[20] * l/s Uitdrukkingslimiet
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m WG
[75] mm Hg
20-60 Eenheid sensorless
Option: Functie:
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[174] in Hg
20-69 Sensorless informatie
Array [8]
Range: Functie:
0* [0 - 25 ] Geef informatie weer over de sensorlessgegevens.
3.14.4 20-7* PI Auto-tuning (PI autotuning)
Parameters voor het inschakelen van een PI-regeling.
20-70 Type met terugk.
Option: Functie:
Bepaal de verwachte reactie van de
toepassing.
[0] * Auto
[1] Snelle druk
[2] Trage druk
[3] Snelle temp.
[4] Trage temp.
20-71 PI-prestaties
Option: Functie:
Selecteer de relatieve reactiesnelheid voor de
toepassing.
[0] * Normaal
[1] Snel
20-72 PI uitgangswijz.
Range: Functie:
0,10* [0,01-0,50 ] Bepaal de grootte van de stappen tijdens het
autotuningproces.
20-73 Min. terugk.niveau
Range: Functie:
-4999,000* [-4999,000 - Uitdruk-
kingslimiet (4999,000)]
Bepaal de minimaal
toegestane terugkoppelingswaarde tijdens het
autotuningproces.
3 3
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 95
Page 98

Parameters
VLT® HVAC Basic Drive FC 101
20-74 Max. terugk.niveau
Range: Functie:
4999,000* [Uitdrukkingslimiet
(-4999,000) 4999,000]
33
Bepaal de maximaal
toegestane terugkoppelingswaarde tijdens het
autotuningproces.
20-84 Bandbreedte op referentie
Range: Functie:
referentie' van het statuswoord van de frequentieregelaar hoog (1) is.
De waarde van On Reference Bandwidth
(Bandbreedte op referentie) wordt berekend als een
percentage van de setpointreferentie.
20-79 PI autotuning
Option: Functie:
[0] * Uitgesch. Schakelt PI-autotuning uit.
[1] Ingesch. Schakelt PI-autotuning in.
3.14.6 20-9* PI Controller (PI-regelaar)
20-91 PI integratiebegrenzing
Option: Functie:
3.14.5 20-8* PI Basic Settings (PIbasisinstellingen)
Parameters voor het congureren van de proces-PIregeling.
[0] Uit De regelaar gaat door met het regelen van een fout,
ook als de uitgangsfrequentie niet kan worden
verhoogd of verlaagd.
[1] * Aan Stopt het regelen van een fout wanneer de uitgangs-
frequentie niet meer kan worden aangepast.
20-81 PI normaal/inv regeling
Option: Functie:
[0] * Normaal Zorgt ervoor dat de uitgangsfrequentie van
de frequentieregelaar wordt verlaagd
wanneer de terugkoppeling hoger is dan de
setpointreferentie. Dit gedrag is gebruikelijk
voor toepassingen met drukgestuurde
toevoerventilatoren en pompen.
[1] Geïnverteerd Zorgt ervoor dat de uitgangsfrequentie van
de frequentieregelaar wordt verhoogd
wanneer de terugkoppeling hoger is dan de
setpointreferentie. Dit gedrag is gebruikelijk
voor temperatuurgestuurde koeltoepassingen,
zoals koeltorens.
20-83 PI startsnelheid [Hz]
Range: Functie:
0 Hz* [ 0-200,0
Hz]
Stel het motortoerental in dat moet worden
bereikt als startsignaal voor de PI-regeling.
Na inschakeling werkt de frequentieregelaar
op basis van een snelheidsregeling zonder
terugkoppeling. Wanneer het starttoerental
voor de proces-PI is bereikt, schakelt de
frequentieregelaar over naar de PI-regeling.
20-84 Bandbreedte op referentie
Range: Functie:
5 %* [0 -
200 %]
Wanneer het verschil tussen de terugkoppeling en
de setpointreferentie kleiner is dan de waarde van
deze parameter, wordt de tekst Run on Reference
(Op referentie) op het display van de frequentieregelaar weergegeven. Deze status kan extern
worden doorgegeven door een van de digitale
uitgangen in te stellen op [8] Run on Reference/No
Warning (Op ref/geen waarsch.). Voor seriële
communicatie geldt tevens dat het statusbit 'Op
20-93 PI prop. versterking
Range: Functie:
0,50* [0 - 10 ] Stel de proportionele versterking voor de
procesregelaar in. Een hoge versterking zorgt
voor een snelle regeling. Als de versterking
echter te hoog is, kan het proces instabiel
worden.
20-94 PI integratietijd
Range: Functie:
20 s* [0,10-9999 s] Stel de integratietijd voor de procesregelaar
in. Een korte integratietijd zorgt voor een
snelle regeling. Als de integratietijd echter
te kort is, kan het proces instabiel worden.
Een extreem lange integratietijd schakelt
de integratieactie uit.
20-97 PI voorw. kopp.factor
Range: Functie:
0 %* [0 -
400 %]
Stel de voorwaartse koppelingsfactor (FF-factor)
voor de PI in. De FF-factor verstuurt een
constant deel van het referentiesignaal voorbij
de PI-regelaar. Daarom is de PI alleen van
invloed op het overige deel van het
stuursignaal. De FF-factor kan de dynamische
prestaties verhogen.
96 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
Page 99

Detection
timer
Low Power
No-ow
detection
Warning
Alarm
External
sleep mode
command
Min run
timer
Min sleep
timer
Sleep
mode
Cascade
controller
(destaging
command)
speed detection
Sleep mode
O
No ow/low
130BE841.10
P 22-24
1
P 22-40
P 22-41
P 25-26
P 22-23
Parameters Programmeerhandleiding
3.15 Hoofdmenu – Toepassingsfuncties –
Groep 22
22-02 Sleepmode CL Control Mode (Slaapstand CLregelmodus)
Option: Functie:
3.15.1 22-0* Miscellaneous (Diversen)
Parametergroep voor extra instellingen.
[0] Normaal De terugkoppeling wordt gedetecteerd.
[1] Vereenvoudigd De terugkoppeling wordt niet gedetecteerd.
22-01 Verm.ltertijd
Range: Functie:
0,50 s* [0,02-10 s] Stel de tijdconstante voor de gelterde
vermogensuitlezing in. Een hogere waarde
geeft een stabielere uitlezing, maar ook een
tragere respons van het systeem op
veranderingen.
Deze parameter is van toepassing op de slaapmodus in
een procesregeling met terugkoppeling. Gebruik deze
parameter om in te stellen of de terugkoppeling voor de
slaapmodus moet worden gedetecteerd.
3.15.2 22-2* No-Flow Detection (Detectie geen ow)
Sommige parameters worden gecontroleerd.
3 3
Alleen het slaaptoerental en de slaaptijd
worden gecontroleerd.
Afbeelding 3.16 Detectie geen ow
De frequentieregelaar is uitgerust met functies om te detecteren of de belastingscondities in het systeem stopzetten van de
motor toelaten:
Een van deze 2 signalen moet gedurende een bepaalde tijd (parameter 22-24 Vertr. geen ow) actief zijn voordat de geselecteerde actie wordt uitgevoerd. Mogelijke acties om te selecteren (parameter 22-23 Functie geen ow):
Detectie geen ow
Deze functie dient om een situatie zonder ow te detecteren in pompsystemen waarvan alle kleppen kunnen worden
gesloten. Kan worden gebruikt bij besturing via de ingebouwde PI-regelaar in de frequentieregelaar of een externe PIregelaar. Programmeer de daadwerkelijke conguratie in parameter 1-00 Conguratiemodus.
Detectie laag vermogen
•
Geen actie
•
Waarschuwing
•
Alarm
•
Slaapmodus
•
MG18B510 Danfoss A/S © 05/2018 Alle rechten voorbehouden. 97
Page 100

FC
130BA253.10
P
130BA254.10
Flow
1
2
Opvoerhoogte
Parameters
Conguratiemodus voor
Ingebouwde PI-regelaar: met terugkoppeling
•
Externe PI-regelaar: zonder terugkoppeling
•
VLT® HVAC Basic Drive FC 101
LET OP
33
Voer een aanpassing voor situaties zonder ow uit voordat u de parameters voor de PI-regelaar instelt.
Tabel 3.11 Detectie geen ow
Detectie geen ow is gebaseerd op een meting van toerental en vermogen. De frequentieregelaar berekent het vermogen
bij geen ow voor een bepaald toerental.
Deze samenhang is gebaseerd op de aanpassing van 2 sets van toerental en een bijbehorend vermogen bij geen ow.
Bewaking van het vermogen maakt het mogelijk om situaties zonder ow te detecteren in systemen met een uctuerende
zuigdruk of wanneer de pomp een vlakke karakteristiek heeft bij lagere toerentallen.
De 2 datasets moeten worden gebaseerd op vermogensmetingen bij circa 50% en 85% van het maximale toerental met
gesloten kleppen. De gegevens worden geprogrammeerd in parametergroep 22-3* No-Flow Power Tuning (Verm.aanp. geen
ow).
Gebruik parameter 22-23 Functie geen ow en parametergroep 22-3* No-Flow Power Tuning (Verm.aanp. geen ow) om Detectie
geen ow in te schakelen en in bedrijf te stellen.
22-23 Functie geen ow
Option: Functie:
[0] * Uit
[1] Slaapstand
[2] Waarschuwing
[3] Alarm
22-24 Vertr. geen ow
Range: Functie:
10 s* [1-600 s] Bepaal na hoeveel tijd de in
parameter 22-23 Functie geen ow ingestelde
actie moet worden uitgevoerd nadat er een
situatie zonder ow is gedetecteerd.
3.15.3 22-3* No-ow Power Tuning
(Verm.aanp geen ow)
Tuningproces:
1. Sluit de hoofdklep om de ow te stoppen.
2. Draai met ingeschakelde motor totdat het
systeem de normale bedrijfstemperatuur heeft
bereikt.
3. Druk op de [Hand On]-toets op het LCP en stel
het toerental in op circa 85% van het nominale
toerental. Noteer het exacte toerental.
98 Danfoss A/S © 05/2018 Alle rechten voorbehouden. MG18B510
 Loading...
Loading...