

Danfoss FC 101 Programming guide [pt]

ENGINEERING TOMORROW
Guia de Programação
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com

Índice Guia de Programação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Versão do Software e do Documento
1.3 Símbolos de Segurança
1.4 Segurança e Precauções
1.5 Recursos adicionais
1.6 Denições
1.7 Visão geral elétrica
2 Programação
2.1 Introdução
2.2 Painel de Controle Local (LCP)
2.3 Menus
2.3.1 Menu Status 10
2.3.2 Menu Rápido 10
2.3.3 Menu Principal 25
2.4 Transferência Rápida da Programação do Parâmetro entre Múltiplos Conversores de
Frequência
3
3
3
3
4
5
5
8
9
9
9
10
26
2.5 Leitura e Programação de Parâmetros Indexados
2.6 Inicialização para as congurações padrão
3 Parâmetros
3.1 Menu Principal - Operação e Display - Grupo 0
3.2 Menu Principal - Carga e Motor - Grupo 1
3.3 Menu Principal - Freios - Grupo 2
3.4 Menu Principal-Referência/Rampas-Grupo 3
3.5 Menu Principal - Limites/Advertências - Grupo 4
3.6 Menu Principal - Entrada/Saída Digital - Grupo 5
3.7 Menu Principal - Entrada/Saída Analógica - Grupo 6
3.8 Menu Principal - Comunicação e Opcionais - Grupo 8
3.9 Menu Principal - Smart Logic - Grupo 13
3.10 Menu Principal - Funções Especiais - Grupo 14
3.11 Menu Principal - Informações do Conversor - Grupo 15
3.12 Menu Principal - Leituras de Dados - Grupo 16
3.13 Main Menu - Leitura de Dados 2 - Grupo 18
3.14 Menu Principal - Malha Fechada do FC - Grupo 20
26
26
27
27
32
42
44
47
50
59
64
69
78
83
85
90
90
3.15 Menu Principal - Funções de Aplicação - Grupo 22
3.16 Menu Principal - Funções de Aplicação 2 - Grupo 24
3.17 Menu Principal - Recursos Especiais - Grupo 30
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 1
93
100
103
Índice
VLT® HVAC Basic Drive FC 101
4 Resolução de Problemas
4.1 Introdução a Alarmes e Advertências
4.2 Alarm Words
4.3 Warning Words
4.4 Status Word Estendidas
4.5 Lista das advertências e alarmes
4.6 Lista de erros do LCP
5 Listas de Parâmetros
5.1 Opções de Parâmetro
5.1.1 Congurações Padrão 112
5.1.2 0-** Operação/Display 113
5.1.3 1-** Carga e motor 113
5.1.4 2-** Freios 115
5.1.5 3-** Referência / Rampas 116
5.1.6 4-** Limites/Advertêncs 117
5.1.7 5-** Entrada/Saída digital 117
5.1.8 6-** Entrad/Saíd Analóg 118
104
104
106
106
107
107
111
112
112
Índice
5.1.9 8-** Com. e Opcionais 119
5.1.10 13-** Smart Logic 120
5.1.11 14-** Funções especiais 121
5.1.12 15-** Informação do VLT
5.1.13 16-** Leitura de dados 123
5.1.14 18-** Informações e Leituras 124
5.1.15 20-** Malha Fechada do Drive 124
5.1.16 22-** Aplic. Funções 125
5.1.17 24-** Aplic. Funções 2 126
5.1.18 30-** Recursos especiais 126
®
122
127
2 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Introdução Guia de Programação
1 Introdução
1.1 Objetivo do Manual
Este guia de programação fornece informações para a
programação avançada do conversor de frequência. Ele
fornece uma visão geral completa de todos os parâmetros
e descrições de todos os parâmetros.
O guia de programação destina-se a uso por pessoal
qualicado.
Para operar o conversor de frequência de maneira segura e
prossional, leia e siga o guia de programação e preste
atenção especialmente nas instruções de segurança e nas
advertências gerais.
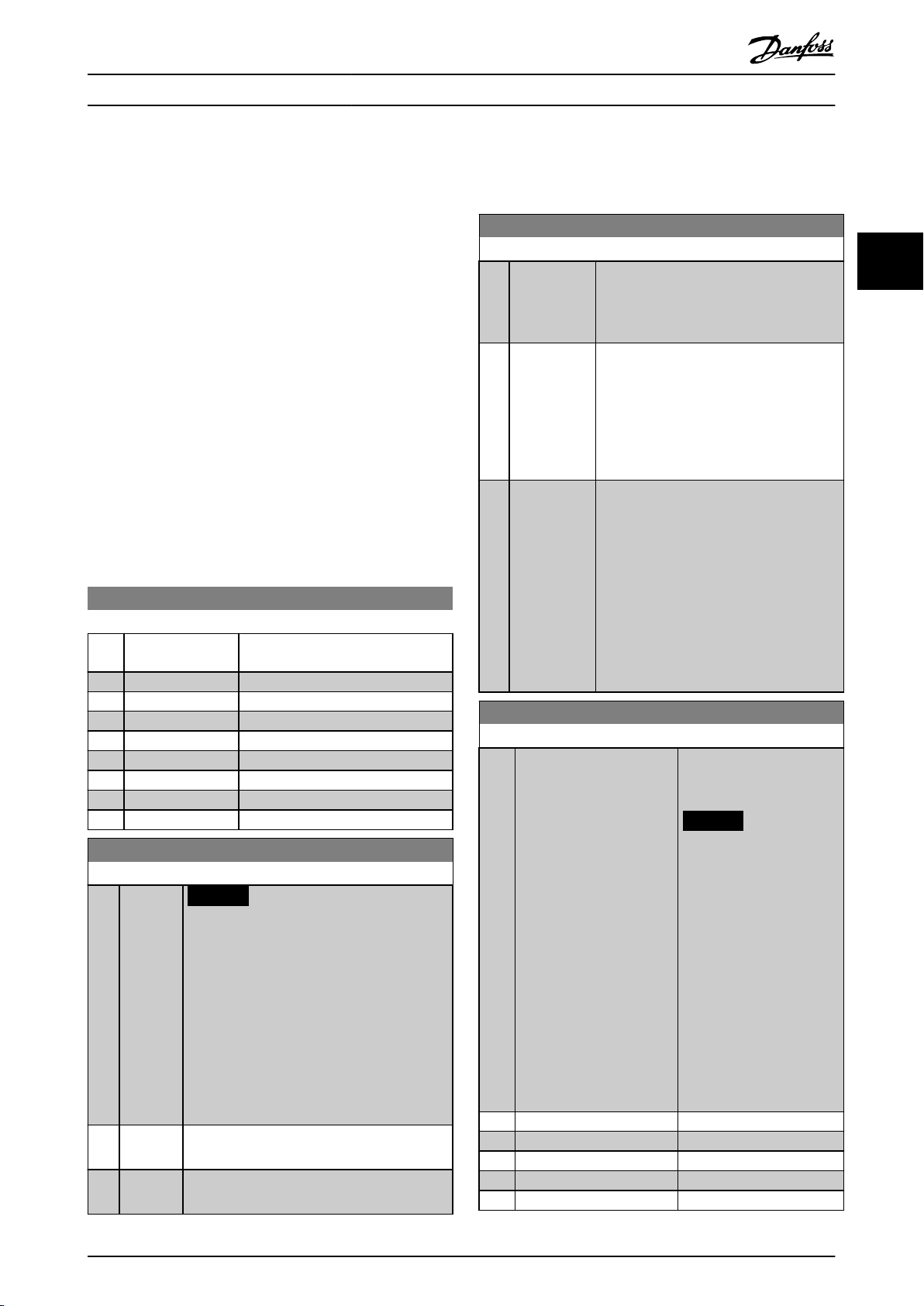
1.2 Versão do Software e do Documento
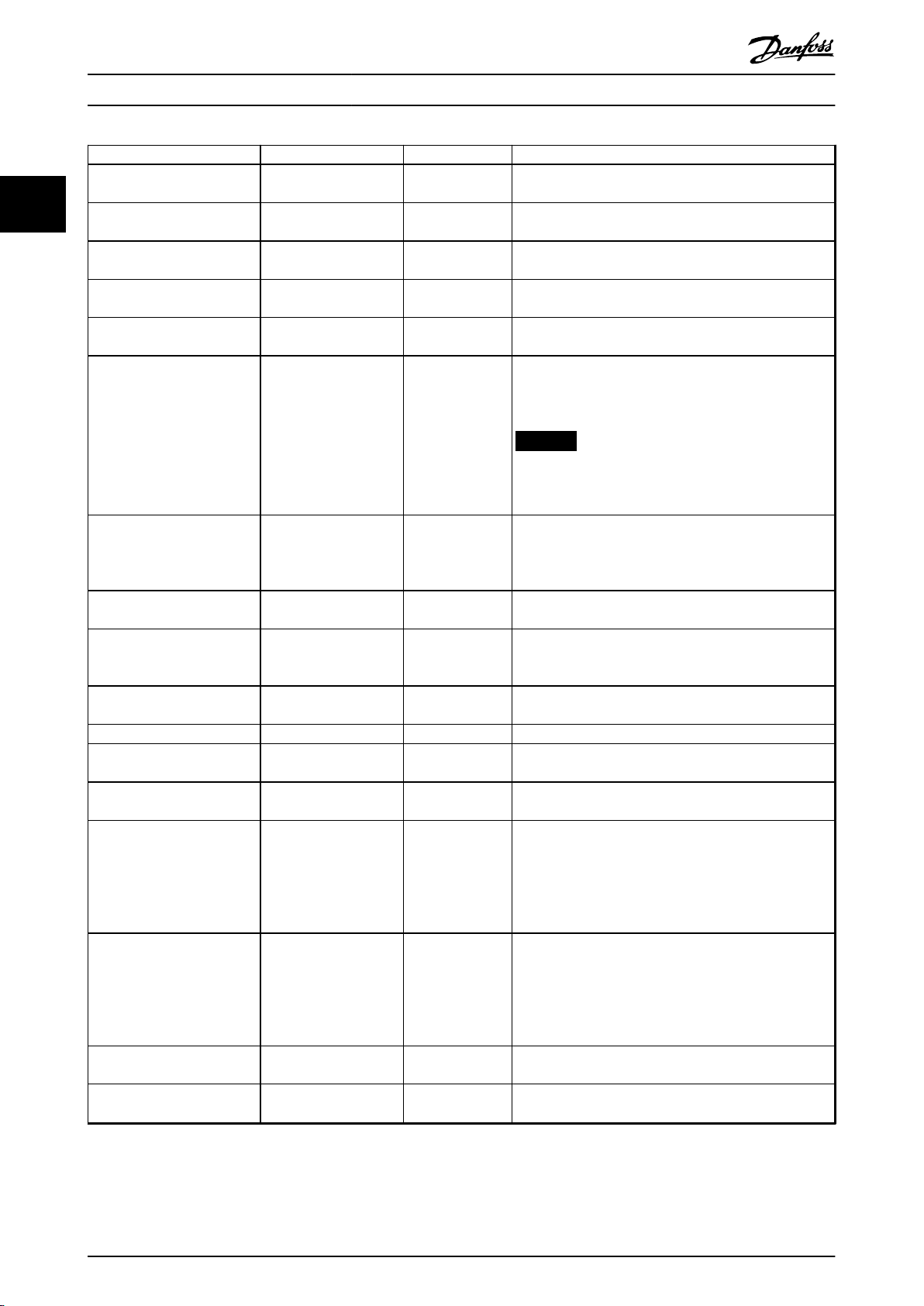
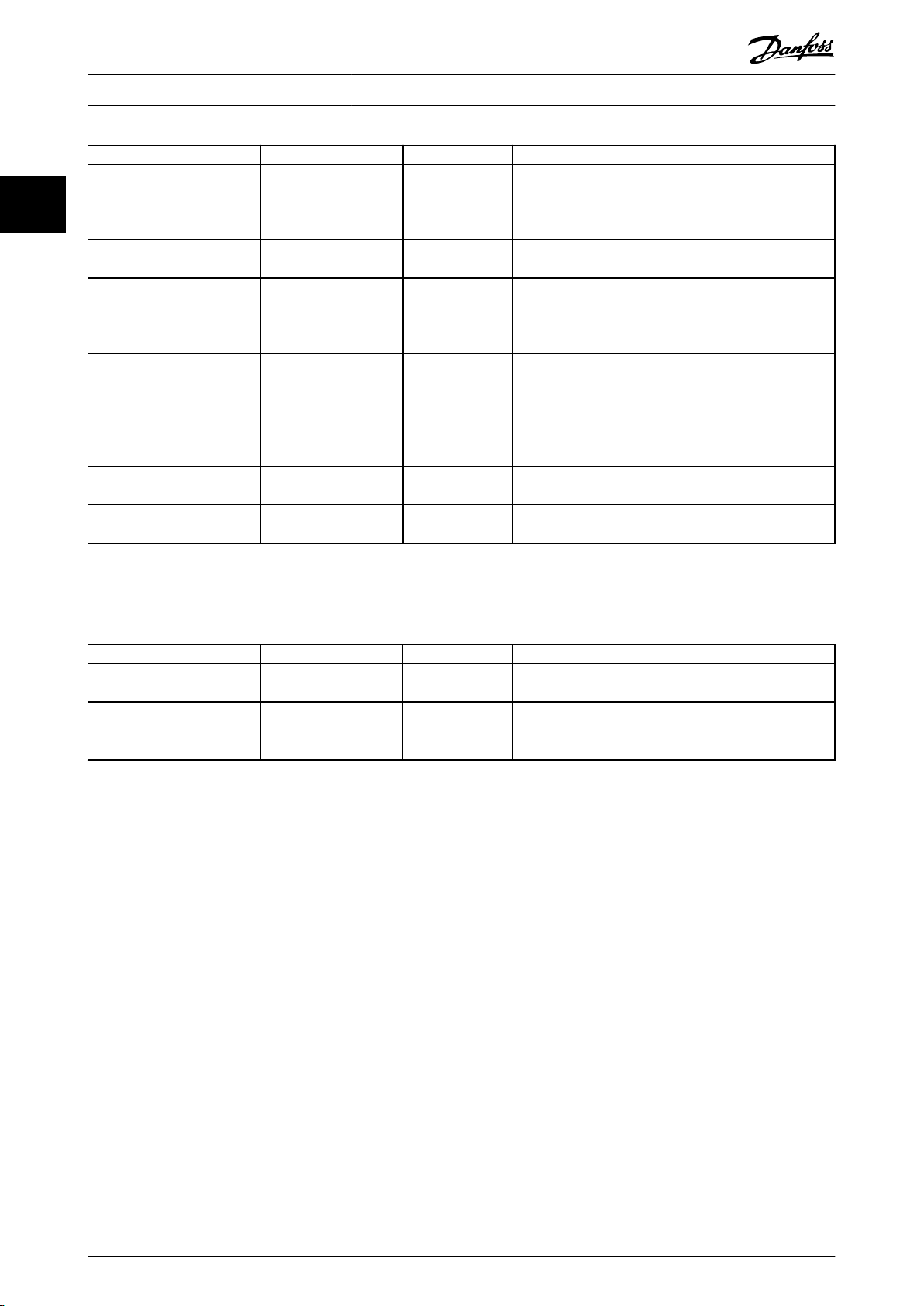
Este manual é revisado e atualizado regularmente. Todas as
sugestões de melhoria são bem-vindas.
Edição Observações Versão de software
MG18B5xx Atualização para a
nova versão do
software.
Tabela 1.1 Versão de software e documento
A partir da versão de software 4.0x (semana de produção
33 2017), a função do ventilador de resfriamento do
dissipador de calor de velocidade variável foi
implementada no conversor de frequência para as
potências abaixo de 22 kW (30 HP) 400 V IP20 e abaixo de
18,5 kW (25 hp) 400 V IP54. Esta função requer atualizações de software e hardware e introduz restrições em
relação à compatibilidade retroativa para gabinetes H1–H5
e I2–I4. Consulte Tabela 1.2 para obter informações sobre
as limitações.
4.2x
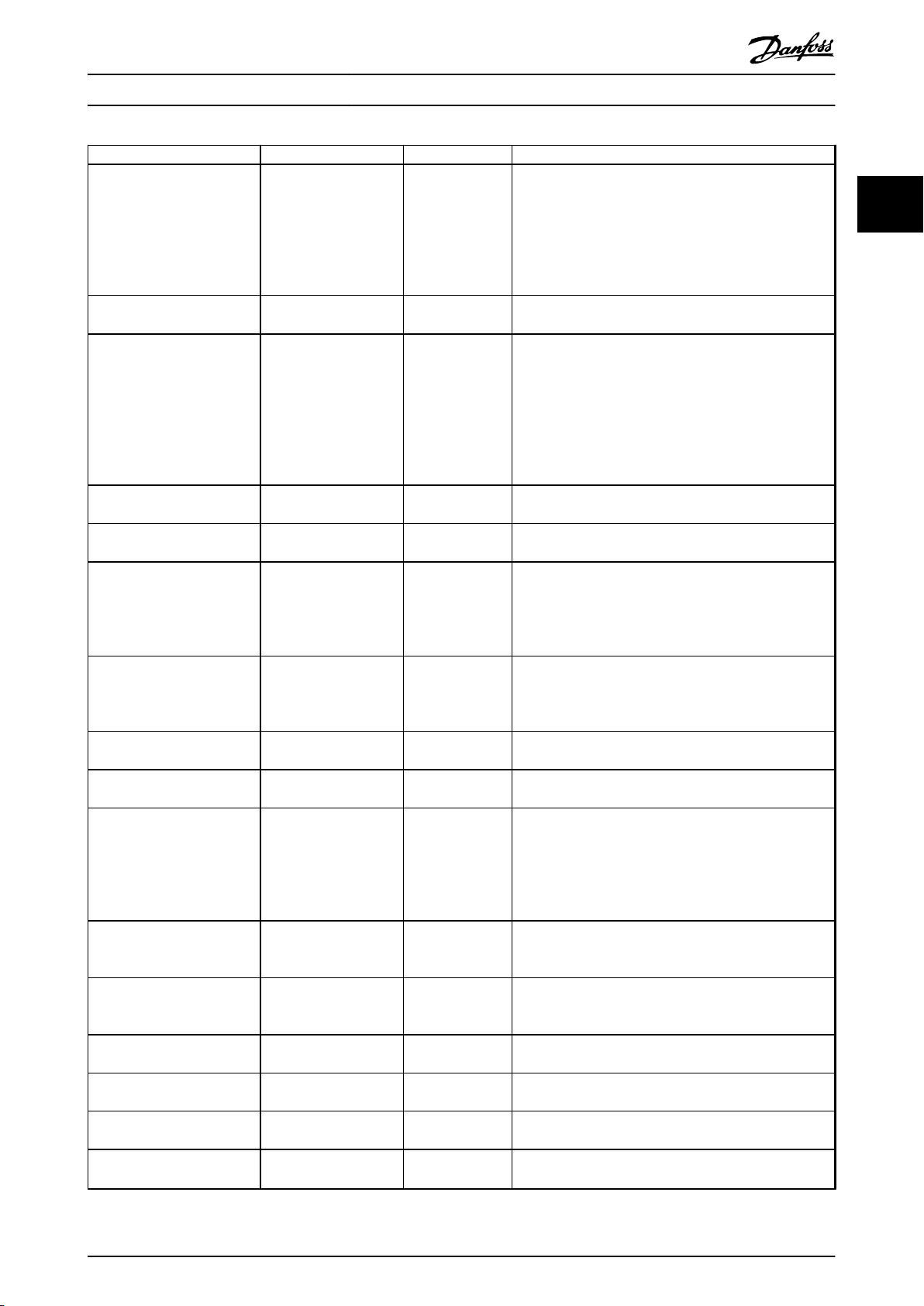
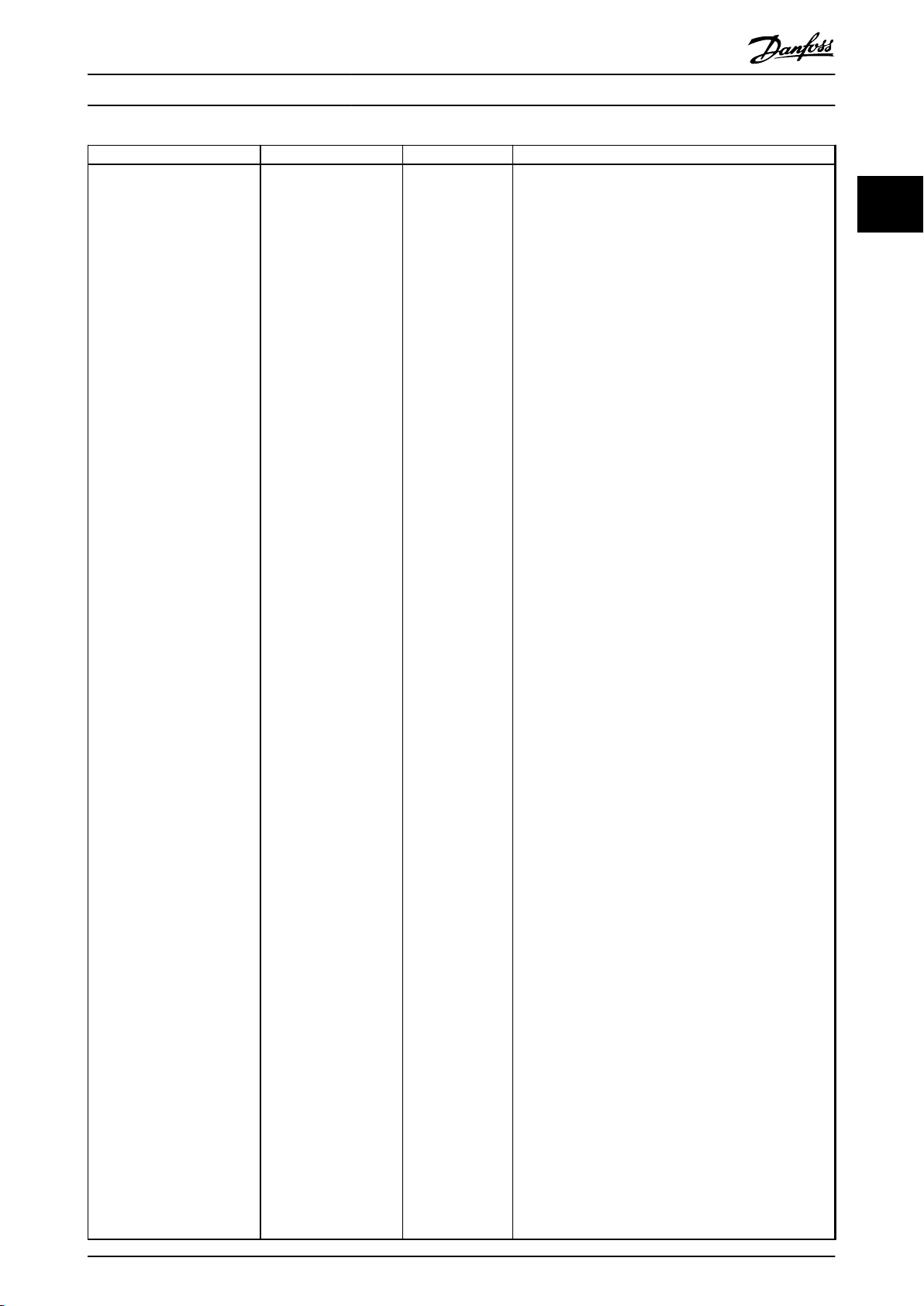
Cartão de controle
Compatibilidade de
software
Software antigo
(versão do arquivo
OSS 3.xx e
inferiores)
Software novo
(versão do arquivo
OSS 4.xx e
superiores)
Compatibilidade de
hardware
Cartão de potência
antigo
(semana de
produção 33 2017
ou anterior)
Cartão de potência
novo
(semana de
produção 34 2017
ou posterior)
Tabela 1.2 Compatibilidade de software e hardware
Símbolos de Segurança
1.3
antigo (semana de
produção 33 2017
ou anterior)
Sim Não
Não Sim
Cartão de controle
antigo (semana de
produção 33 2017
ou anterior)
Sim (somente versão
de software 3.xx e
inferiores)
Sim (DEVE atualizar
o software para a
versão 3.xx ou
inferior, o ventilador
funciona
continuamente na
velocidade máxima)
Cartão de controle
novo (semana de
produção 34 2017
ou posterior)
Cartão de controle
novo (semana de
produção 34 2017
ou posterior)
Sim (DEVE atualizar
o software para
versão 4.xx ou
superior)
Sim (somente versão
de software 4.xx e
superiores)
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que possa
resultar em morte ou ferimentos graves.
1 1
CUIDADO
Indica uma situação potencialmente perigosa que possa
resultar em ferimentos menores ou moderados. Também
pode ser usado para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, incluindo situações que
podem resultar em danos ao equipamento ou à
propriedade.
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 3
Introdução
VLT® HVAC Basic Drive FC 101
11
1.4 Segurança e Precauções
ADVERTÊNCIA
TEMPO DE DESCARGA
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Negligenciar em
realizar a instalação, partida e manutenção por pessoal
qualicado pode resultar em ferimentos graves ou fatais.
Somente pessoal qualicado deverá realizar a
•
instalação, partida e manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou outro serviço, use um
dispositivo de medição de tensão apropriado
para assegurar que não há tensão restante no
conversor de frequência.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor estiver conectado à rede elétrica CA,
alimentação CC ou Load Sharing, o motor pode ser
iniciado a qualquer momento. Partida acidental durante
a programação, serviço ou serviço de manutenção
podem resultar em morte, lesões graves ou danos à
propriedade. O motor pode dar partida com um
interruptor externo, um comando eldbus, um sinal de
referência de entrada do LCP ou LOP, por meio de
operação remota usando Software de Setup do MCT 10,
ou após uma condição de falha corrigida.
Para impedir a partida do motor acidental:
Pressione [O/Reset] no LCP antes de programar
•
os parâmetros.
Desconecte o conversor da rede elétrica.
•
Conecte completamente os os e monte o
•
conversor, o motor e todos os equipamentos
acionados antes de conectar o conversor à rede
elétrica CA, alimentação CC ou Load Sharing.
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes LED de advertência estiverem apagadas.
Se o tempo especicado após a energia ter sido
desligada não for aguardado para executar ou serviço de
manutenção, isto pode resultar em morte ou ferimentos
graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. A duração mínima do tempo de
espera é especicada em Tabela 1.3.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
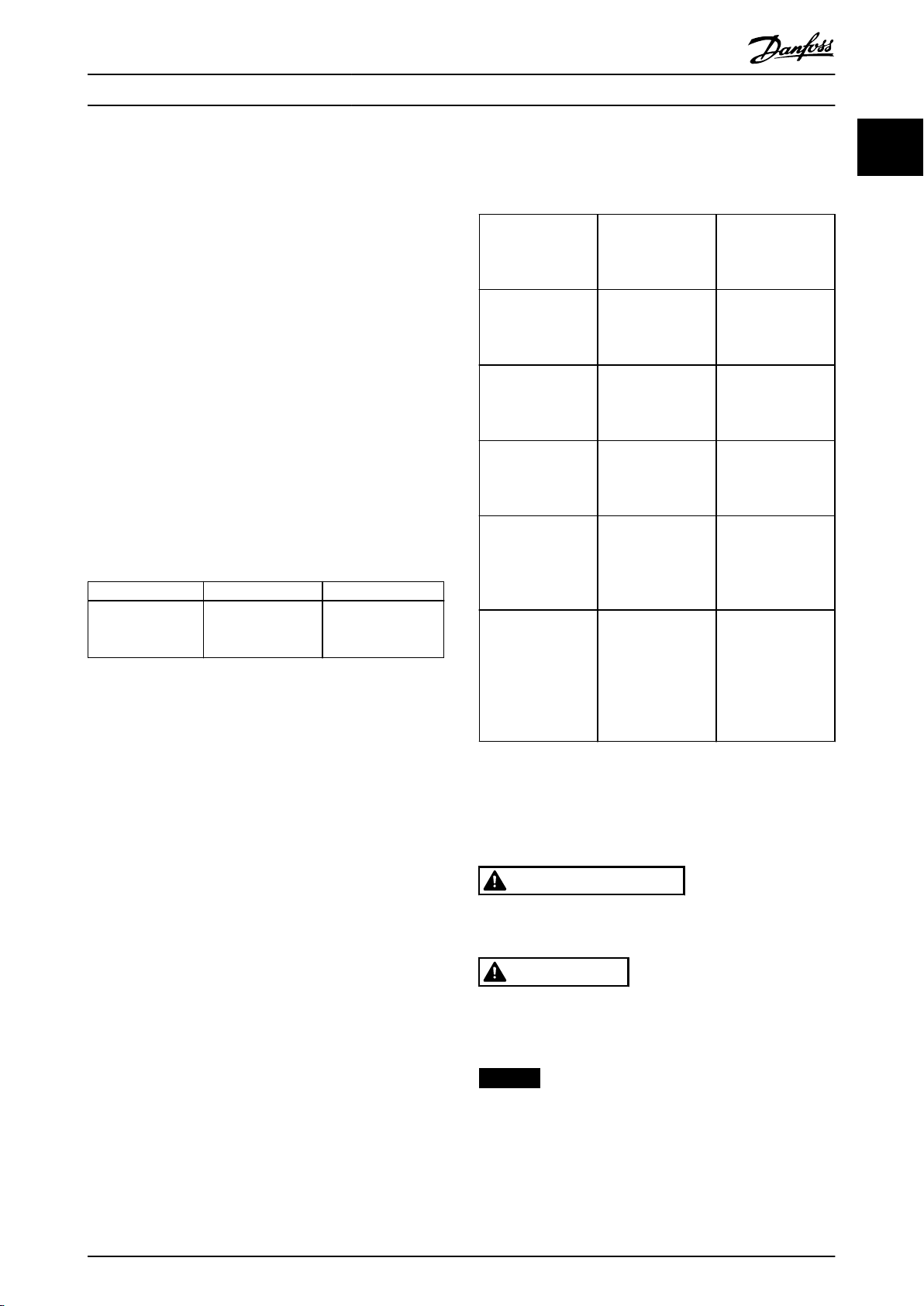
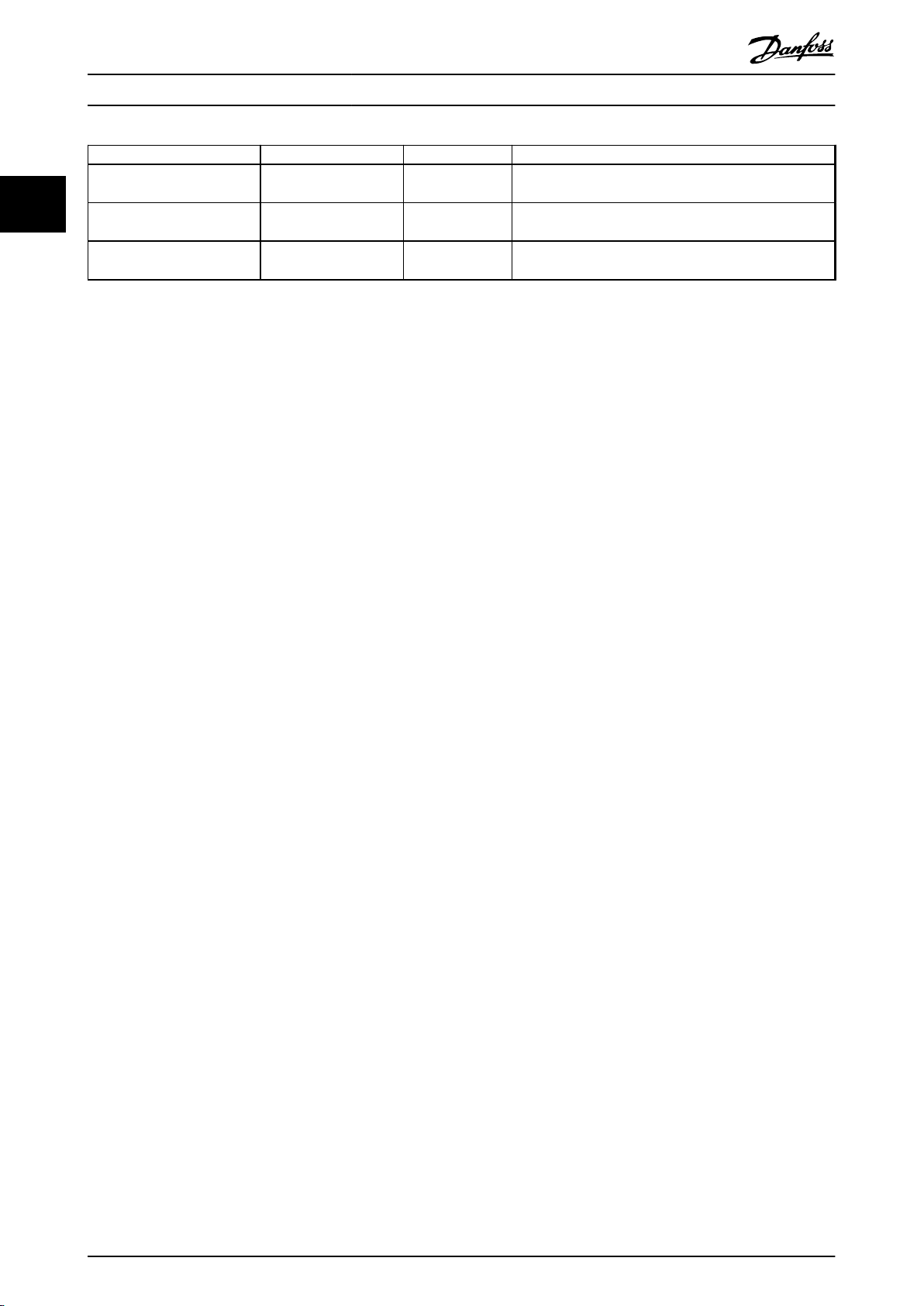
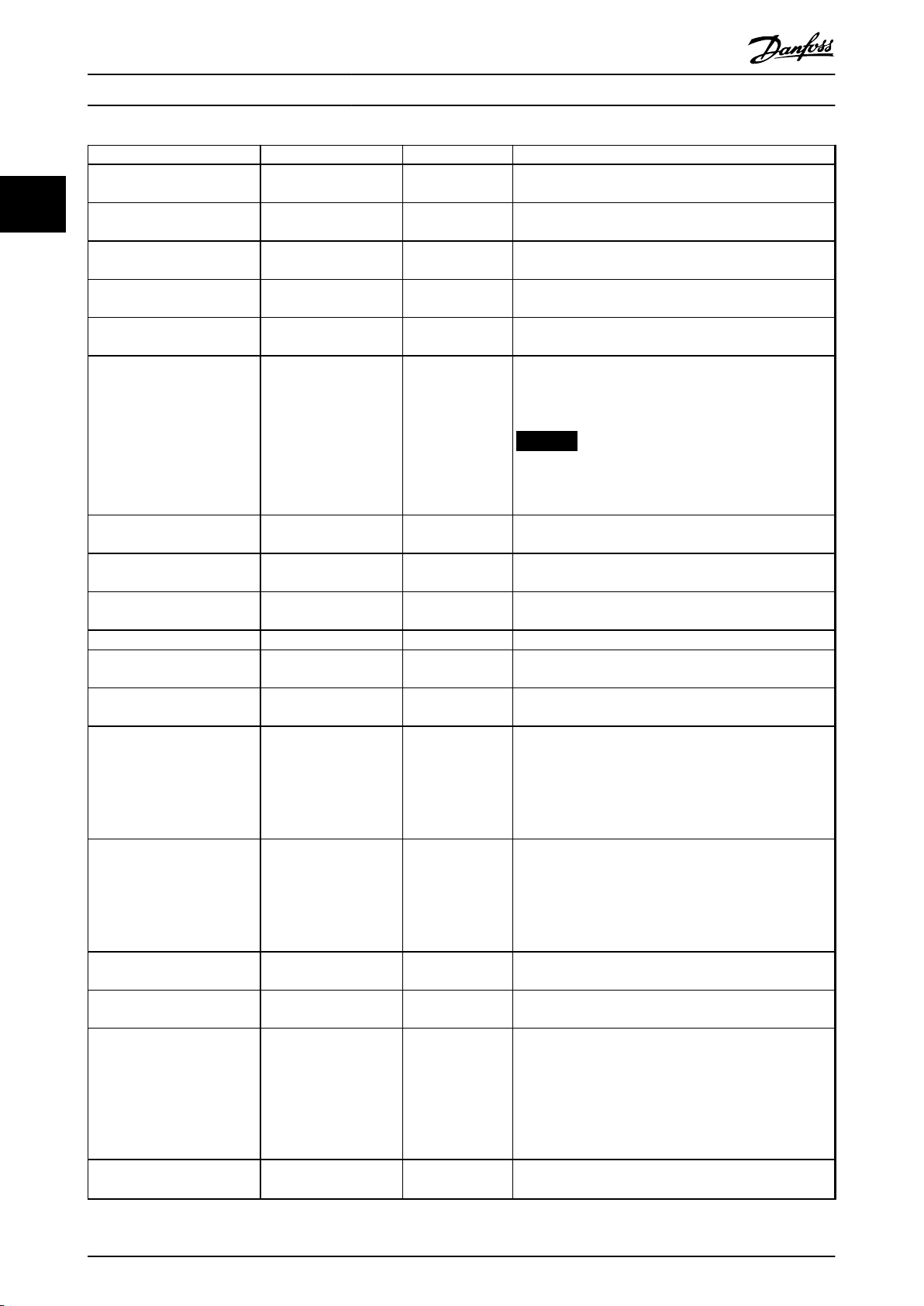
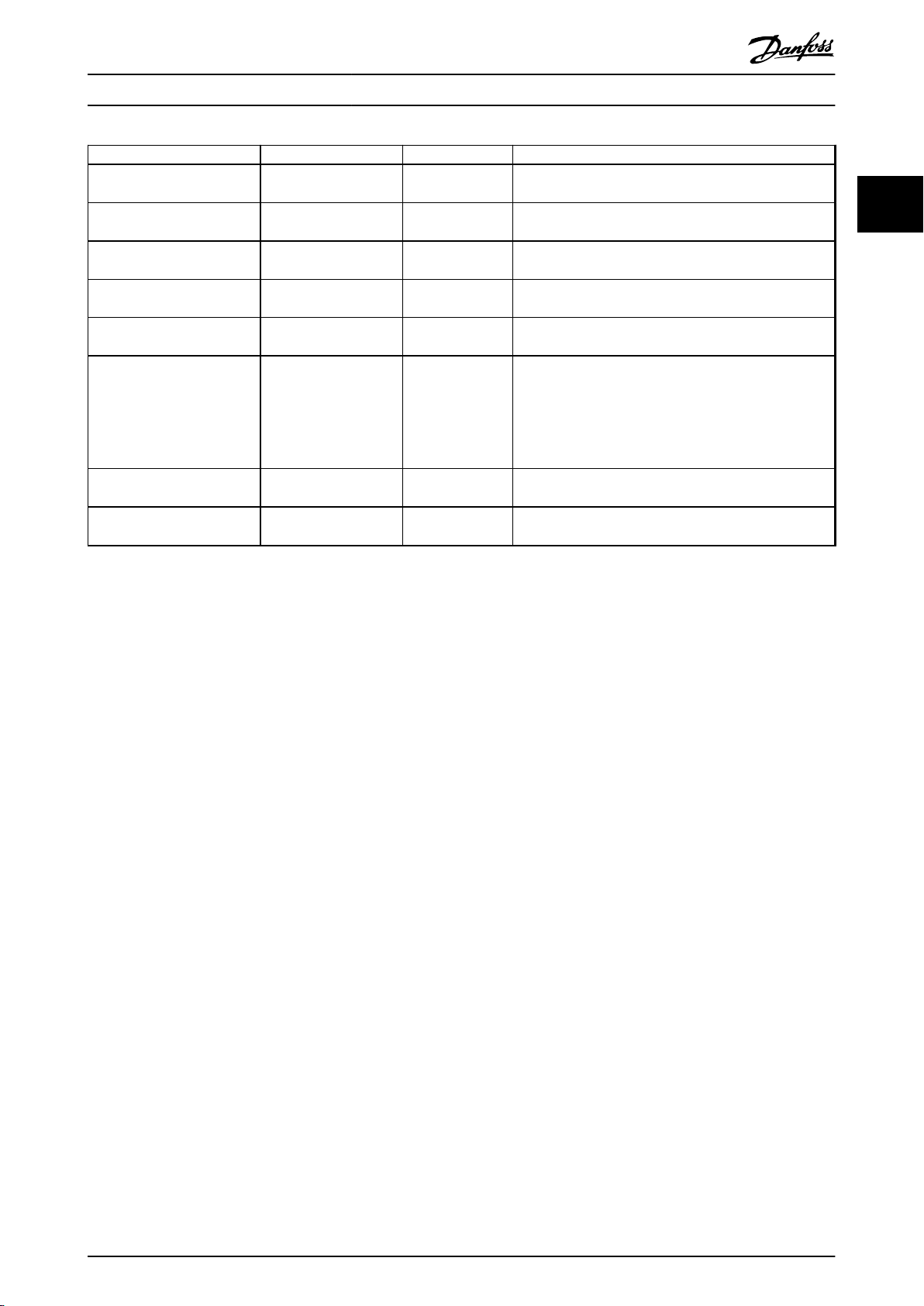
Tensão [V] Faixa de potência [kW
(hp)]
3x200 0,25–3,7 (0,33–5) 4
3x200 5,5–11 (7–15) 15
3x400 0,37–7,5 (0,5–10) 4
3x400 11–90 (15–125) 15
3x600 2,2–7,5 (3–10) 4
3x600 11–90 (15–125) 15
Tabela 1.3 Tempo de descarga
Tempo de espera
mínimo (minutos)
ADVERTÊNCIA
PERIGO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor de frequência corretamente pode resultar em
morte ou ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
4 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Introdução Guia de Programação
ADVERTÊNCIA
PERIGO PARA O EQUIPAMENTO
Contato com eixos rotativos e equipamentos elétricos
pode resultar em morte ou ferimentos graves.
Garanta que apenas pessoal treinado e
•
qualicado realize a instalação, inicialização e
manutenção.
Garanta que o trabalho elétrico esteja em
•
conformidade com os códigos elétricos
nacionais e locais.
Siga os procedimentos contidos neste manual.
•
CUIDADO
PERIGO DE FALHA INTERNA
Uma falha interna no conversor de frequência pode
resultar em ferimentos graves quando o conversor de
frequência não estiver devidamente fechado.
Garanta que todas as tampas de segurança
•
estejam no lugar e rmemente presas antes de
energizar.
1.5 Recursos adicionais
O Guia Rápido do VLT® HVAC Basic Drive FC 101
•
fornece informações básicas sobre dimensões
mecânicas, instalação e programação.
O Guia de Design do VLT
•
fornece informações sobre como projetar
sistemas de controle de motores.
Software Danfoss VLT® Energy Box. Selecione
•
Download Software de PC em vlt-
-drives.danfoss.com/products/engineering-software/
software-download/vlt-energy-box-software/.
O software VLT®Energy Box permite comparações
de consumo de energia de ventiladores de HVAC
e bombas acionadas por conversores de
frequência Danfoss e métodos alternativos de
controle de uxo. Use essa ferramenta para
projetar os custos, a economia e o retorno do uso
de conversores de frequência Danfoss em
ventiladores de HVAC, bombas e torres de
resfriamento.
A documentação técnica está disponível em forma
eletrônica on-line em drives.danfoss.com/knowledge-center/
technical-documentation/.
Software de Setup do MCT 10 suporte
Faça o download do software em www.danfoss.com/en/
service-and-support/downloads/dds/vlt-motion-control-tool-
-mct-10/.
®
HVAC Basic Drive FC 101
Durante o processo de instalação do software, insira o
código de acesso 81463800 para ativar a funcionalidade FC
101. Não é necessária uma chave de licença para usar a
funcionalidade FC 101.
O software mais recente nem sempre contém as últimas
atualizações para os conversores de frequência. Entre em
contato com o escritório de vendas local para obter as
últimas atualizações do conversor de frequência (na forma
de arquivos *.upd) ou faça o download das atualizações do
conversor de frequência www.danfoss.com/en/service-and-
-support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
1.6 Denições
Conversor de frequência
I
VLT, MAX
A corrente de saída máxima.
I
VLT,N
A corrente de saída nominal fornecida pelo conversor de
frequência.
U
VLT, MAX
A tensão máxima de saída.
Entrada
O motor conectado pode iniciar e parar por meio do LCP e
das entradas digitais. As funções são divididas em 2
grupos, conforme descrito em Tabela 1.4. As funções do
grupo 1 têm prioridade mais alta que as do grupo 2.
Reset, parada por inércia, reset e parada por
Grupo 1
Grupo 2
Tabela 1.4 Comandos de controle
Motor
f
JOG
A frequência do motor quando a função jog é ativada
(através dos terminais digitais).
f
M
A frequência do motor.
f
MAX
A frequência máxima do motor.
f
MIN
A frequência mínima do motor.
f
M,N
A frequência nominal do motor (dados da plaqueta de
identicação).
I
M
A corrente do motor.
I
M,N
A corrente nominal do motor (dados da plaqueta de
identicação).
inércia, parada rápida, freio CC, parada e [OFF]
(desligado).
Partida, partida por pulso, reversão, partida
inversa, jog e congelar frequência de saída.
1 1
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 5
175ZA078.10
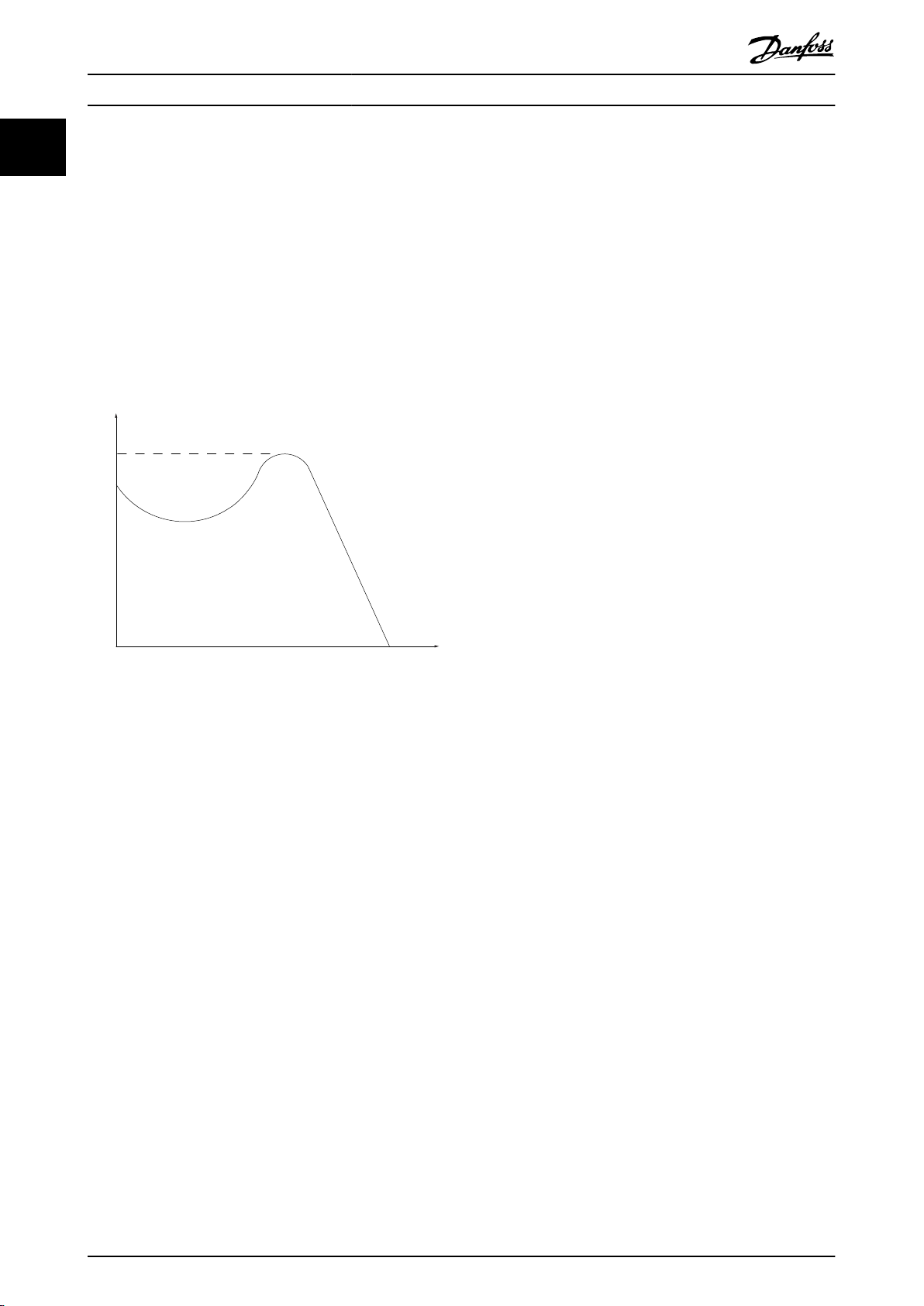
Arranque
RPM
Torque
Introdução
VLT® HVAC Basic Drive FC 101
11
n
M,N
A velocidade nominal do motor (dados da plaqueta de
identicação).
P
M,N
A potência nominal do motor (dados da plaqueta de
identicação).
U
M
A tensão instantânea do motor.
U
M,N
A tensão nominal do motor (dados da plaqueta de identi-
cação).
Torque de segurança
Ref
MAX
Determina a relação entre a entrada de referência com
valor de escala total de 100% (tipicamente 10 V, 20 mA) e
a referência resultante. O valor de referência máximo é
programado no parâmetro 3-03 Referência Máxima.
Ref
MIN
Determina a relação entre a entrada de referência com
valor de escala total de 0% (tipicamente 0 V, 0 mA, 4 mA)
e a referência resultante. O valor mínimo de referência está
programado em parâmetro 3-02 Referência Mínima.
Entradas analógicas
As entradas analógicas são utilizadas para controlar várias
funções do conversor de frequência.
Há 2 tipos de entradas analógicas:
Entrada de corrente: 0 a 20 mA e 4 a 20 mA
•
Entrada de tensão: 0 a 10 V CC
•
Saídas analógicas
As saídas analógicas podem fornecer um sinal de 0 a 20
mA, 4 a 20 mA ou um sinal digital.
Adaptação automática do motor, AMA
O algoritmo AMA determina os parâmetros elétricos para o
motor conectado na parada, e compensa a resistência com
base no comprimento do cabo do motor.
Entradas digitais
As entradas digitais podem ser utilizadas para controlar
Ilustração 1.1 Torque de segurança
várias funções do conversor de frequência.
Saídas digitais
O conversor de frequência fornece 2 saídas de estado
η
VLT
A eciência do conversor de frequência é denida como a
relação entre a potência de saída e a de entrada.
Comando inibidor da partida
Um comando de parada pertencente aos comandos de
controle do grupo 1; consulte Tabela 1.4.
Comando de parada
Consulte o Tabela 1.4.
Referência analógica
Um sinal transmitido para as entradas analógicas 53 ou 54.
Pode ser tensão ou corrente.
Entrada de corrente: 0 a 20 mA e 4 a 20 mA
•
Entrada de tensão: 0 a 10 V CC
•
Referência de barramento
Um sinal transmitido para a porta de comunicação serial
(Porta do FC).
Referência predenida
Uma referência predenida a ser programada de -100% a
+100% da faixa de referência. Seleção de 8 referências
predenidas via terminais digitais.
sólido que podem fornecer um sinal de 24 V CC (máxima
de 40 mA).
Saídas do relé
O conversor de frequência fornece 2 saídas de relé programáveis.
ETR
O relé térmico eletrônico é um cálculo da carga térmica
baseado na carga atual e no tempo. Sua nalidade é
estimar a temperatura do motor e evitar seu superaquecimento.
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação), os parâmetros programáveis do conversor de
frequência retornam às suas congurações padrão.
Parâmetro 14-22 Modo Operação não inicializa os
parâmetros de comunicação, o registro de falhas ou o
registro do modo de incêndio.
Ciclo útil intermitente
Uma característica útil intermitente refere-se a uma
sequência de ciclos úteis. Cada ciclo consiste de um
período com carga e outro sem carga. A operação pode
ser de funcionamento periódico ou de funcionamento
aperiódico.
6 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528

Introdução Guia de Programação
LCP
O painel de controle local (LCP) constitui uma interface
completa para controle e programação do conversor de
frequência. O painel de controle é desacoplável nas
unidades IP20, e xo nas unidades IP54. Ele pode ser
instalado a até 3 m (9,8 pés) do conversor de frequência,
ou seja, em um painel frontal com o kit de instalação
opcional.
Lsb
É o bit menos signicativo.
MCM
Curto para mille circular em milésimo, uma unidade de
medição americana para seção transversal do cabo. 1 MCM
= 0,5067 mm2.
Msb
É o bit mais signicativo.
Parâmetros on-line/o-line
As alterações nos parâmetros on-line são ativadas imediatamente após a mudança no valor dos dados. Pressione
[OK] para ativar os parâmetros o-line.
Controlador PI
O controlador PI mantém a velocidade, a pressão, a
temperatura desejadas e assim por diante, ajustando a
frequência de saída para corresponder à carga variável.
RCD
Dispositivo de corrente residual.
Setup
As congurações de parâmetros em 2 setups podem ser
salvas. Alterne entre os 2 setups de parâmetros e edite 1
setup enquanto o outro setup estiver ativo.
Compensação de escorregamento
O conversor de frequência compensa o deslizamento do
motor, acrescentando um suplemento à frequência que
acompanha a carga medida do motor, mantendo a
velocidade do motor praticamente constante.
Smart logic control (SLC)
O SLC é uma sequência de ações denidas pelo usuário
executadas quando os eventos denidos pelo usuário
associado são avaliados como verdadeiros pelo SLC.
Termistor
Um resistor que varia com a temperatura, instalado onde a
temperatura deve ser monitorada (conversor de frequência
ou motor).
Desarme
Um estado inserido em situações de falha, por exemplo, se
o conversor de frequência estiver sujeito a um superaquecimento ou quando o conversor de frequência estiver
protegendo o motor, processo ou mecanismo. A reinicialização é evitada até que a causa da falha não exista e o
estado de desarme seja cancelado ativando a reinicialização ou, às vezes, sendo programado para reinicializar
automaticamente. Não use o desarme para segurança
pessoal.
Bloqueio por desarme
Um estado inserido em situações de falha quando o
conversor de frequência está se protegendo e requer
intervenção física, por exemplo, se o conversor de
frequência estiver sujeito a um curto-circuito na saída. Um
desarme bloqueado só pode ser cancelado desconectando
a rede elétrica, removendo a causa da falha e
reconectando o conversor de frequência. A reinicialização é
impedida até que o estado de desarme seja cancelado,
ativando a reinicialização ou, às vezes, sendo programado
para reinicializar automaticamente. Não use o bloqueio por
desarme para segurança pessoal.
Características de VT
Características de torque variável, utilizado em bombas e
ventiladores.
+
VVC
Se comparado com o controle padrão da relação tensão/
frequência, o controle vetorial de tensão (VVC+) melhora a
dinâmica e a estabilidade, tanto quando a referência da
velocidade é mudada quanto em relação ao torque de
carga.
1 1
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 7
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Introdução
VLT® HVAC Basic Drive FC 101
11
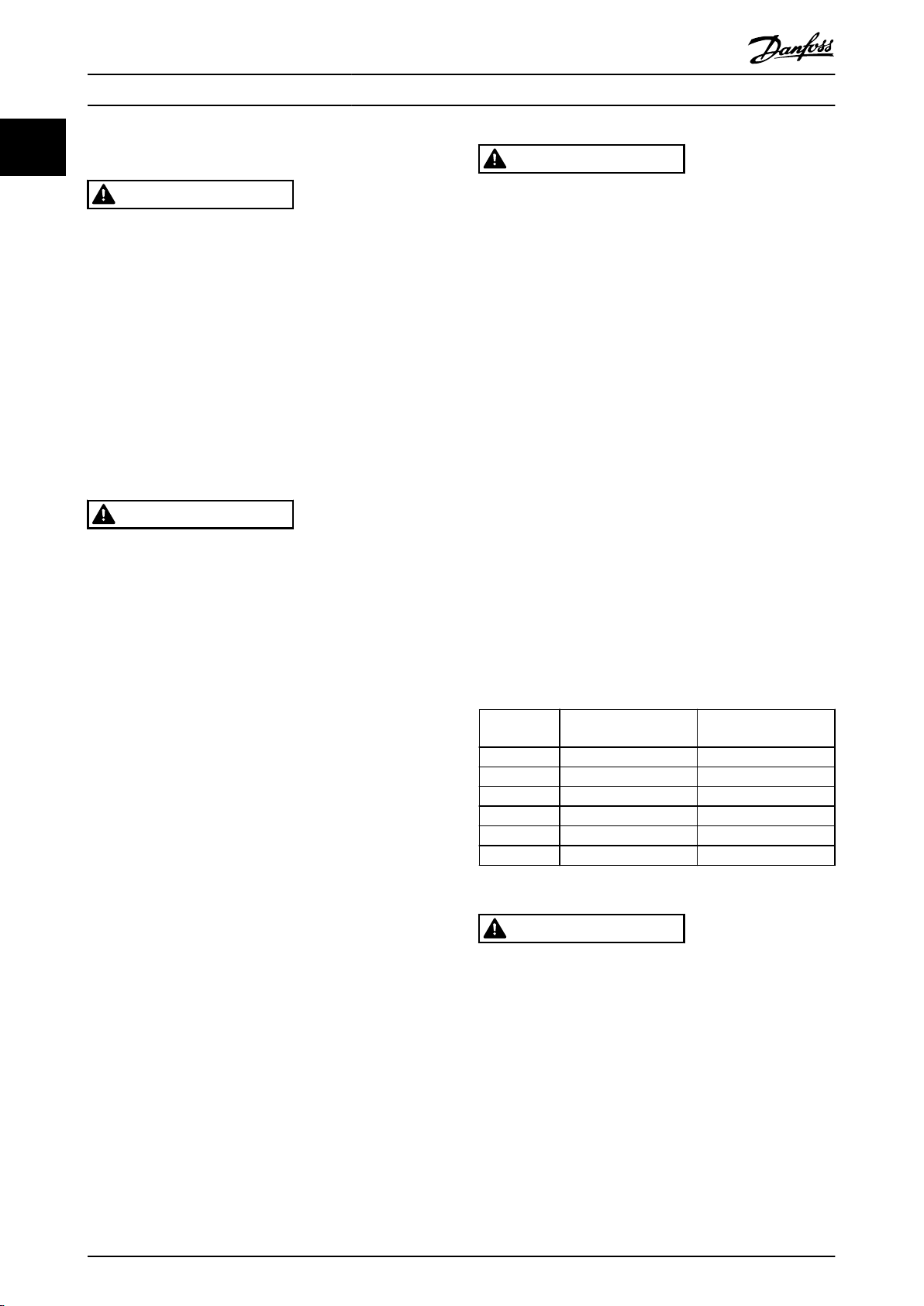
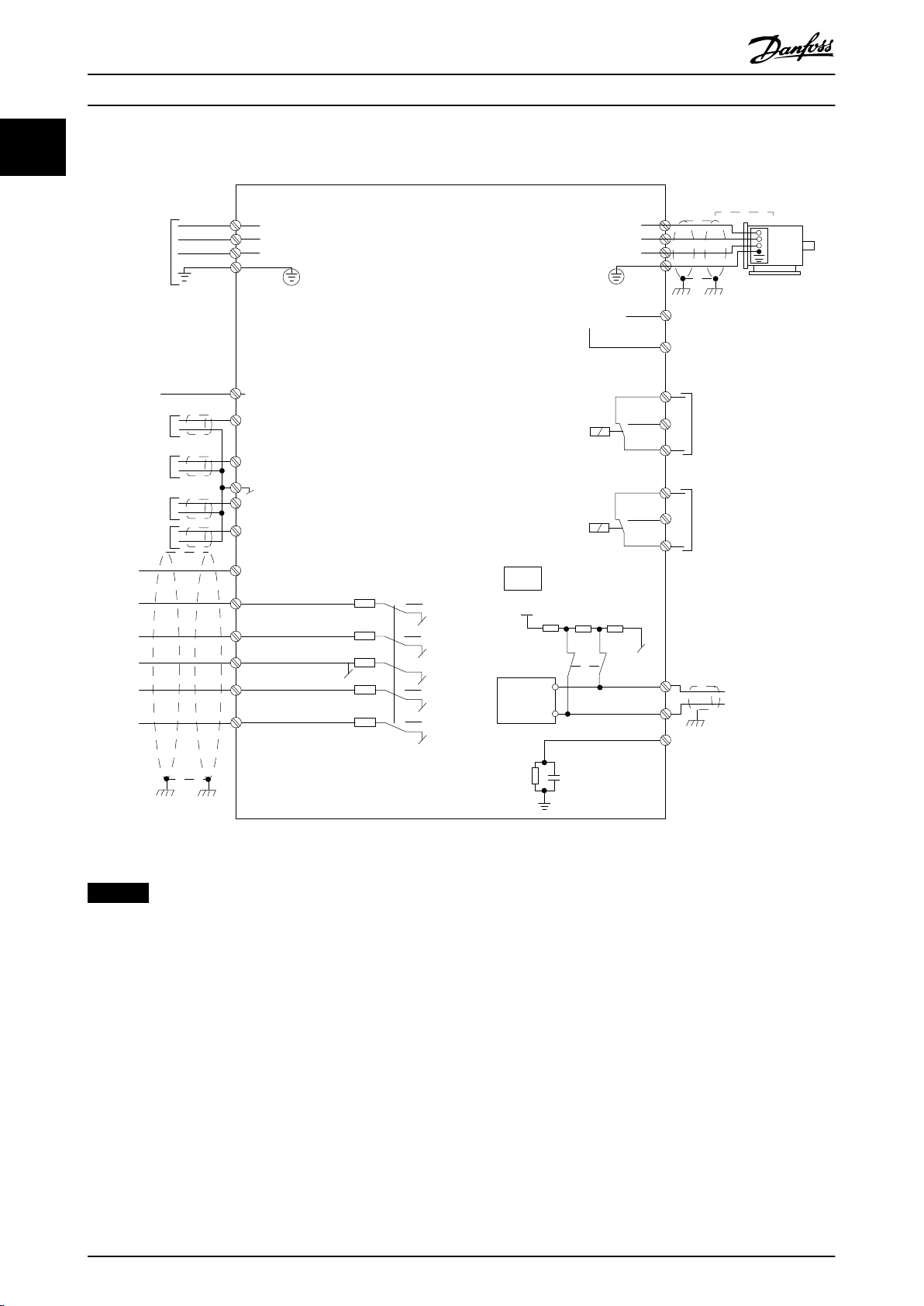
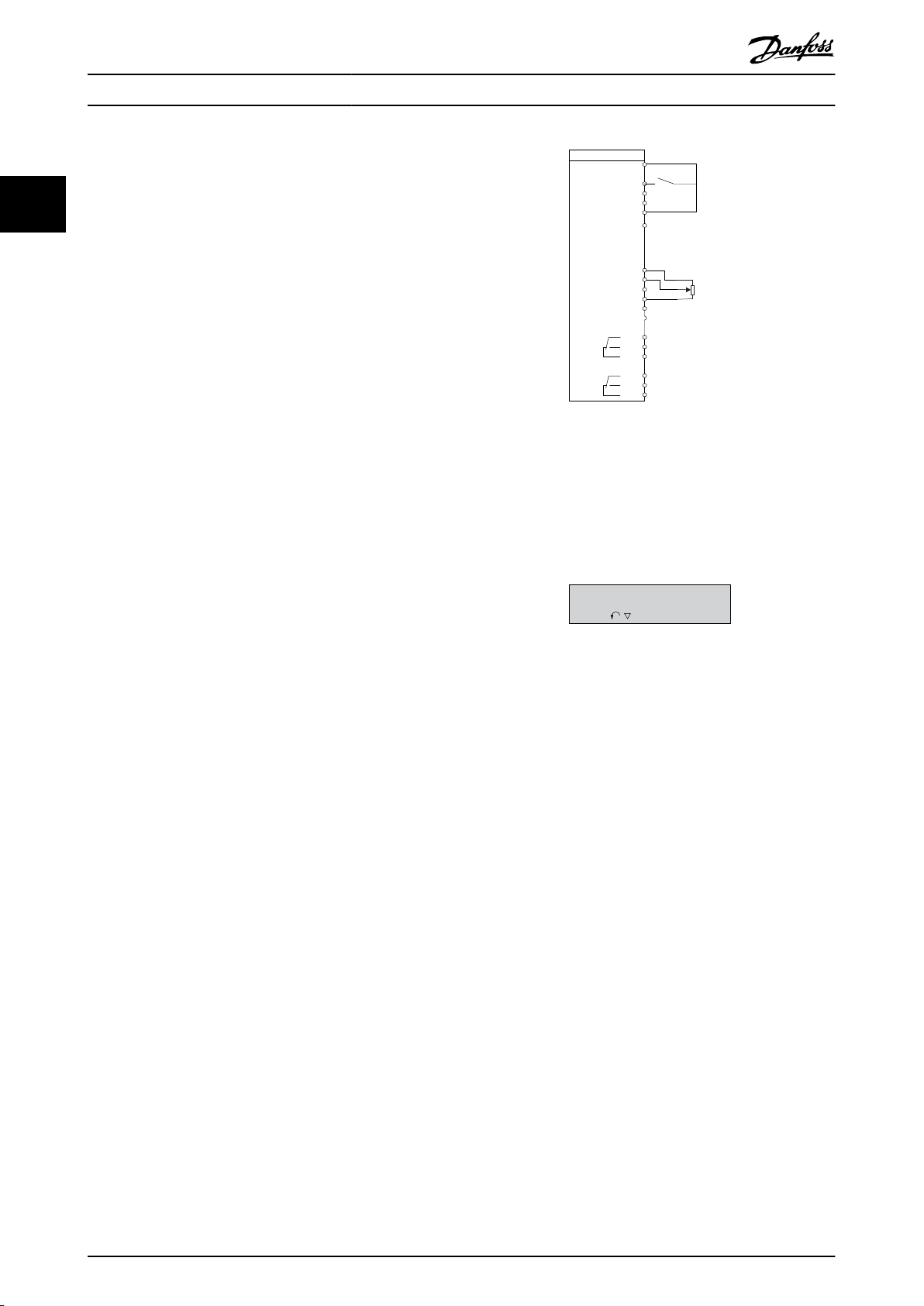
1.7 Visão geral elétrica
Ilustração 1.2 Diagrama esquemático de ação básica
AVISO!
Não existe acesso para UDC- e UDC+ nas seguintes unidades:
•
•
•
•
IP20, 380–480 V, 30–90 kW (40–125 hp)
IP20, 200–240 V, 15–45 kW (20–60 hp)
IP20, 525–600 V, 2,2–90 kW (3,0–125 hp)
IP54, 380–480 V, 22–90 kW (30–125 hp)
8 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programação Guia de Programação
2 Programação
2.1 Introdução
O conversor de frequência pode ser programado no LCP
ou em um PC através da porta COM RS485, instalando o
Software de Setup do MCT 10. Consulte
capétulo 1.5 Recursos adicionais para obter mais detalhes
sobre o software.
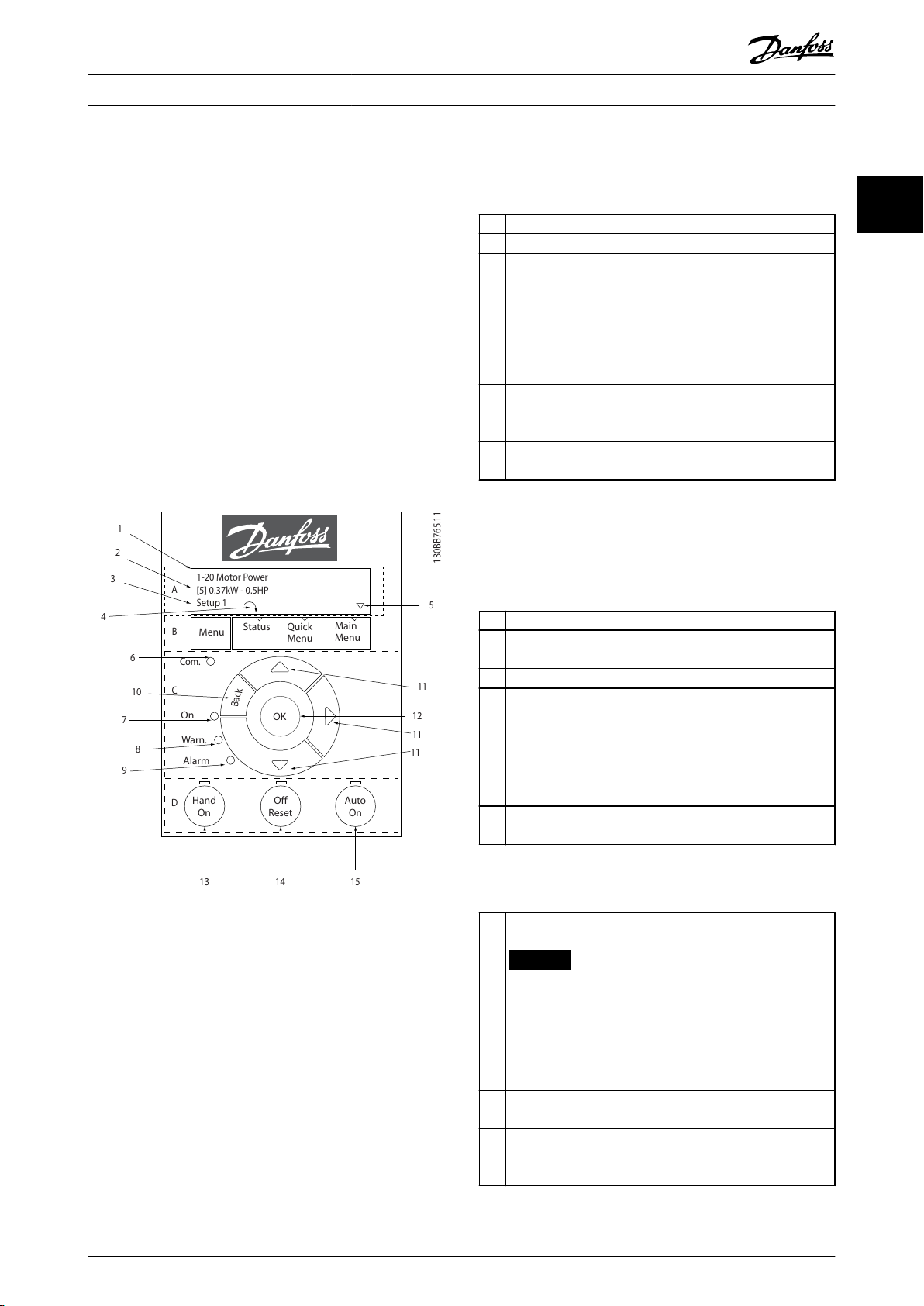
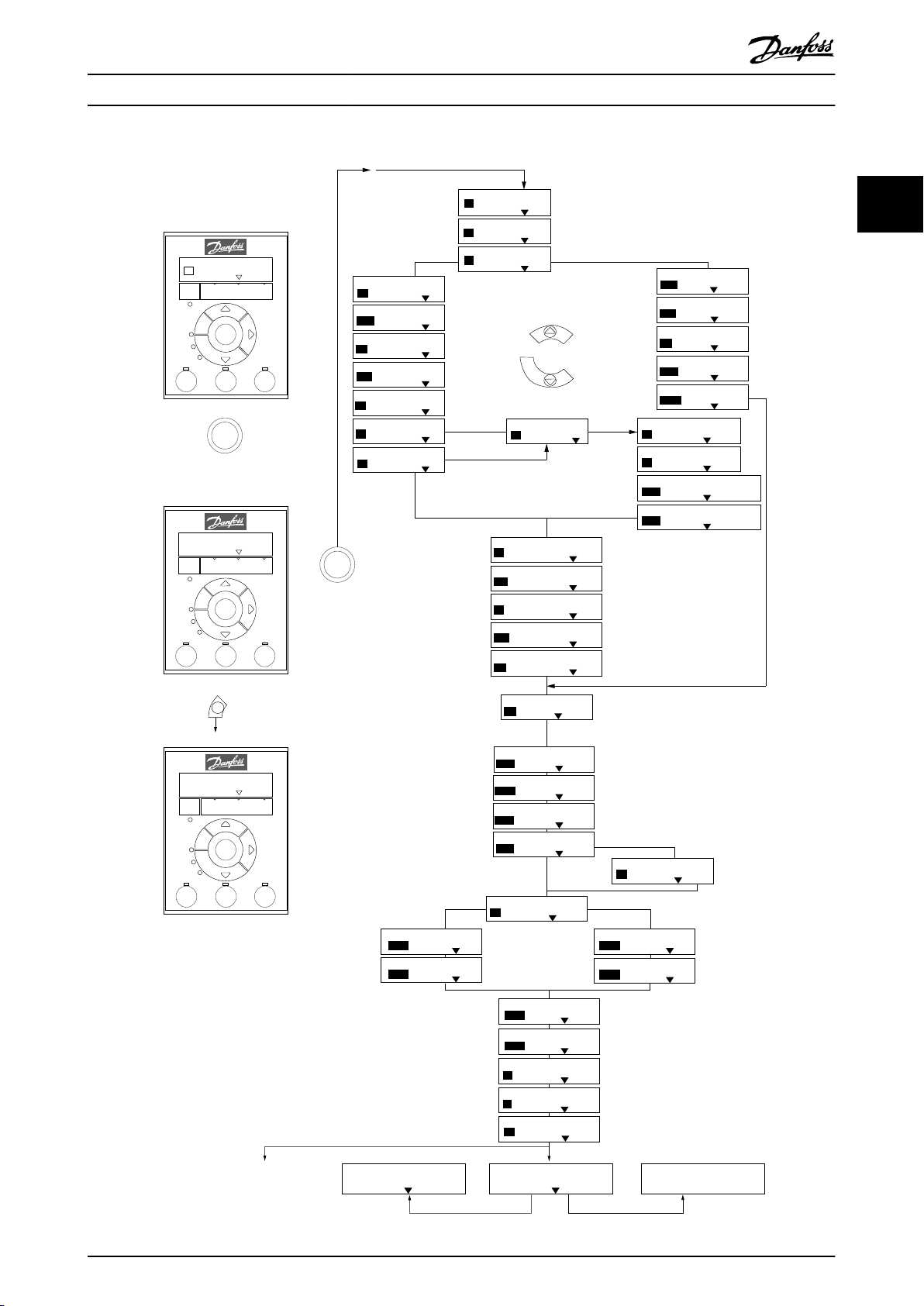
2.2 Painel de Controle Local (LCP)
O LCP é dividido em 4 seções funcionais.
A. Display
B. Tecla Menu
C. Teclas de navegação e luzes indicadoras
D. Teclas de operação e luzes indicadoras
1 Número e nome do parâmetro.
2 Valor do parâmetro.
Número do Setup exibe a conguração ativa e a
conguração de edição. Caso o mesmo setup atue tanto
como setup ativo e como setup de edição, somente esse
3
setup é mostrado (conguração de fábrica). Quando o
setup ativo e de edição forem diferentes, ambos os
números são mostrados no display (setup 12). O número
piscando indica o setup de edição.
O sentido do motor é mostrado na parte inferior esquerda
4
do display - indicado por uma pequena seta apontando
sentido horário ou anti-horário.
O triângulo indica se o LCP está em Status, Quick Menu ou
5
Menu Principal.
Tabela 2.1 Legenda para Ilustração 2.1, Parte I
B. Tecla Menu
Pressione [Menu] para selecionar entre Status, Quick Menu
ou Menu Principal.
C. Teclas de navegação e luzes indicadoras
6 LED Com.: Pisca durante a comunicação do barramento.
LED Verde/Aceso: A seção de controle está funcionando
7
corretamente.
8 LED Amarelo/Advert.: Indica que há uma advertência.
9 LED Vermelho piscando/Alarme: Indica que há um alarme.
[Back] (Voltar): Para retornar à etapa ou camada anterior, na
10
estrutura de navegação.
[▲] [▼] [►]: Para navegar entre grupos do parâmetro e
11
parâmetros, e dentro dos parâmetros. Podem também ser
usados para programar a referência local.
[OK]: Para selecionar um parâmetro e para conrmar as
12
modicações nas programações de parâmetros.
2 2
Tabela 2.2 Legenda para Ilustração 2.1, Parte II
Ilustração 2.1 Painel de Controle Local (LCP)
A. Display
O display LCD é iluminado com 2 linhas alfanuméricas.
Todos os dados são mostrados no LCP.
Ilustração 2.1 descreve as informações que podem ser lidas
no display.
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 9
D. Teclas de operação e luzes indicadoras
[Hand On] (Manual ligado): Dá partida no motor e permite
controlar o conversor de frequência por meio do LCP.
AVISO!
[2] Parada por inércia é a opção padrão para
13
parâmetro 5-12 Terminal 27, Entrada Digital. Se não
houver alimentação de 24 V para o terminal 27,
[Hand On] não liga o motor. Conecte o terminal 12
ao terminal 27.
[O/Reset] (Desligar/Reinicializar): Para o motor (Desligar).
14
Se estiver em modo de alarme, o alarme é redenido.
[Auto On] (Automático ligado): O conversor de frequência
15
será controlado por meio dos terminais de controle ou pela
comunicação serial.
Tabela 2.3 Legenda para Ilustração 2.1, Parte III
FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Referência
Partida
+10V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Pressione OK para iniciar o Assistente
Aperte Voltar para pular isso
Setup 1
Programação
VLT® HVAC Basic Drive FC 101
2.3 Menus
2.3.1 Menu Status
22
No menu Status, as opções de seleção são:
Frequência do motor [Hz],
•
parâmetro 16-13 Freqüência.
Corrente do motor [A], parâmetro 16-14 Corrente
•
do motor.
Referência da velocidade do motor em
•
porcentagem [%], parâmetro 16-02 Referência [%].
Feedback, parâmetro 16-52 Feedback [Unidade].
•
Potência do motor, parâmetro 16-10 Potência [kW]
•
para kW, parâmetro 16-11 Potência [hp] para hp.
Se parâmetro 0-03 Denições Regionais estiver
programado para [1] América do Norte, a potência
do motor é mostrada em hp em vez de kW.
Leitura personalizada,
•
parâmetro 16-09 Leit.Personalz..
Velocidade do motor [RPM],
•
parâmetro 16-17 Velocidade [RPM].
Ilustração 2.2 Fiação do conversor de frequência
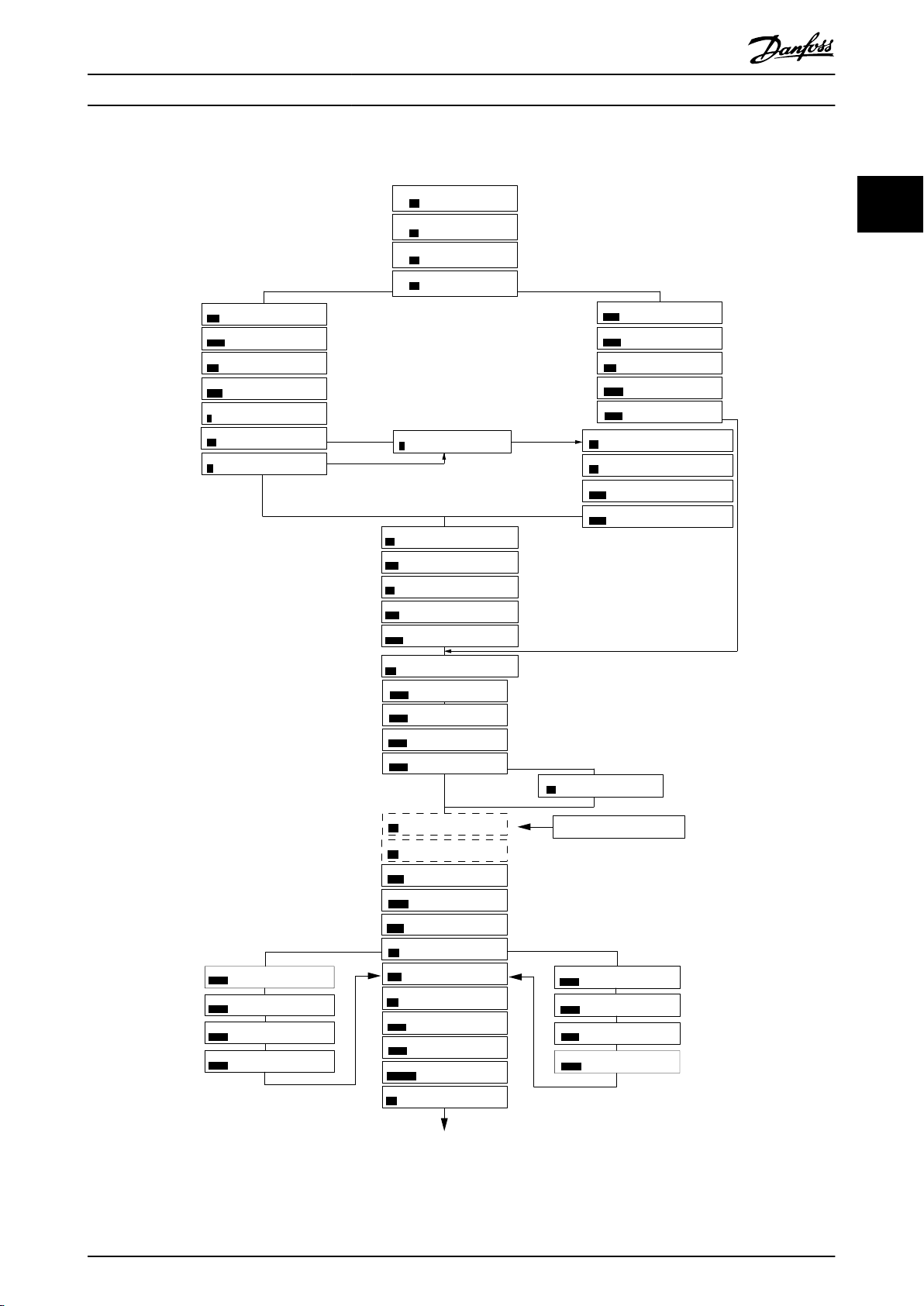
O assistente é mostrado após a energização até que algum
parâmetro seja alterado. O assistente pode sempre ser
acessado novamente através do quick menu. Pressione
[OK] para iniciar o assistente. Pressione [Back] para retornar
à visualização do status.
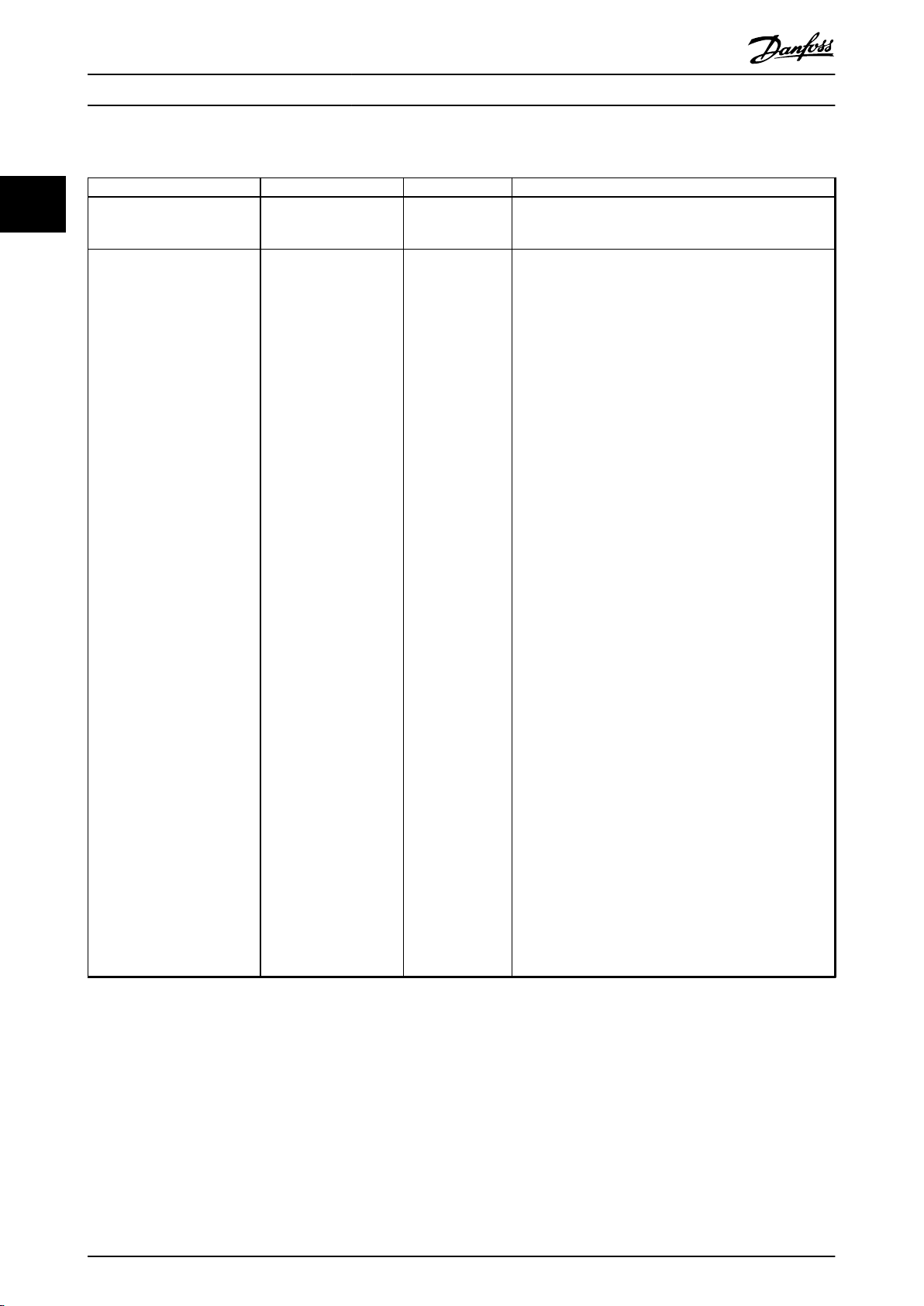
2.3.2 Menu Rápido
Use o Quick Menu para programar as funções mais
comuns. O Quick Menu consiste em:
Assistente para aplicações em malha aberta.
•
Consulte Ilustração 2.4 para obter detalhes.
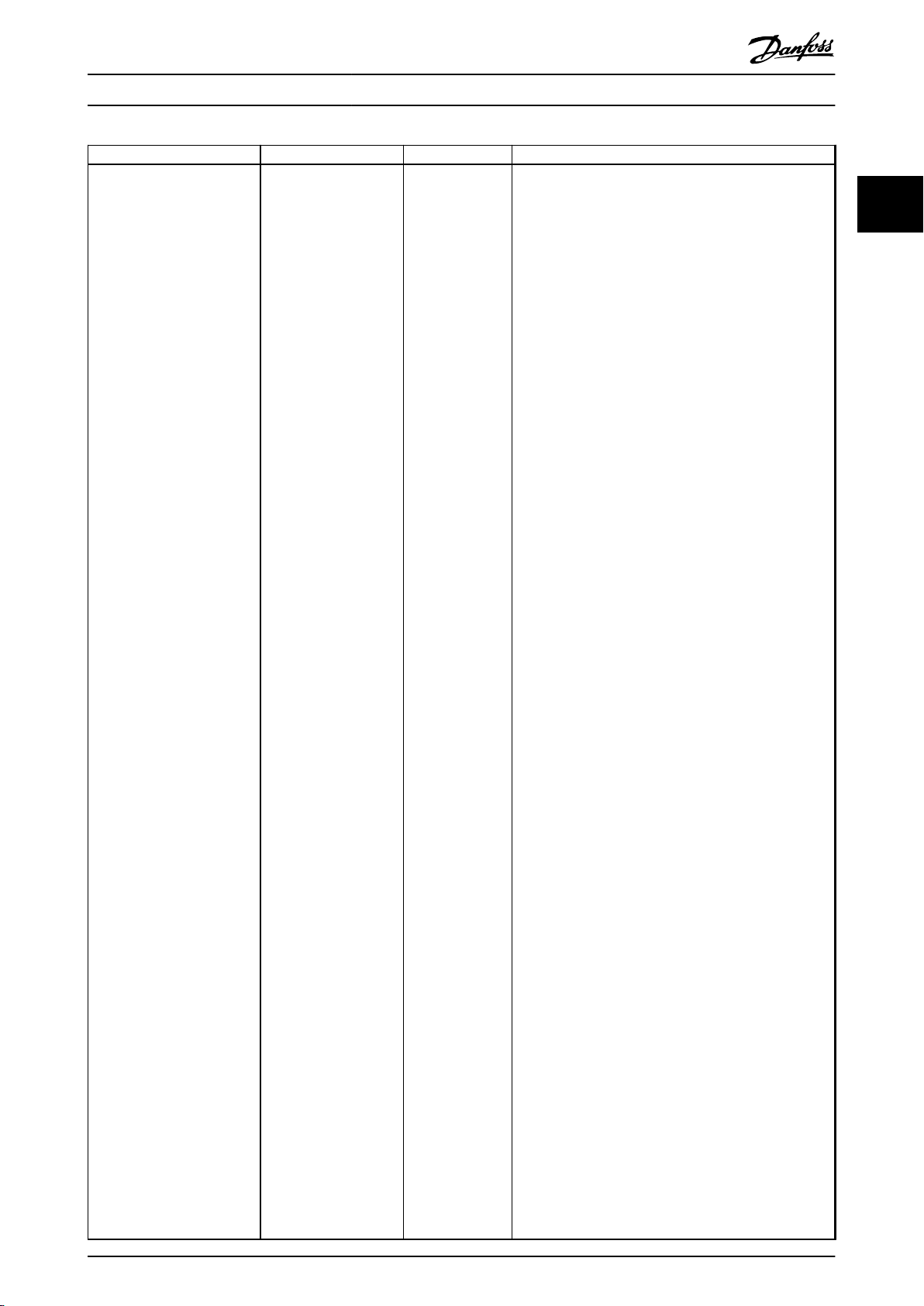
Assistente para aplicações em malha fechada.
•
Consulte Ilustração 2.5 para obter mais detalhes.
Setup do motor. Consulte Tabela 2.6 para obter
•
mais detalhes.
Alterações feitas.
•
O menu de assistente incorporado guia o instalador pelo
setup do conversor de frequência de maneira clara e
estruturada para aplicações de malha aberta, aplicações de
malha fechada e congurações rápidas do motor.
Ilustração 2.3 Assistente de partida/sair
10 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programação Guia de Programação
2 2
Ilustração 2.4 Assistente de setup para aplicações em malha aberta
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 11
Programação
VLT® HVAC Basic Drive FC 101
Assistente de setup para aplicações em malha aberta
Parâmetro Opcional Padrão Uso
22
Parâmetro 0-03 Denições
Regionais
[0] Internacional
[1] EUA
[0] Internacional –
Parâmetro 0-06 Tipo de Grade [0] 200–240 V/50 Hz/IT-
-grid
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/IT-
-grid
[11] 380–440 V/50 Hz/
Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/IT-
-grid
[21] 440–480 V/50 Hz/
Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/IT-
-grid
[31] 525–600 V/50 Hz/
Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/IT-
-grid
[101] 200–240 V/60 Hz/
Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/IT-
-grid
[111] 380–440 V/60 Hz/
Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/IT-
-grid
[121] 440–480 V/60 Hz/
Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/IT-
-grid
[131] 525–600 V/60 Hz/
Delta
[132] 525–600 V/60 Hz
Relacionado à
potência
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
12 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Opcional Padrão Uso
Parâmetro 1-10 Construção do
motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 13
Programação
Parâmetro Opcional Padrão Uso
Parâmetro 1-20 Potência do
Motor
22
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,12–110 kW/0,16–150hpRelacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0,01–10000,00 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-29 Adaptação
Automática do Motor (AMA)
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
Consulte o
parâmetro 1-29 Adaptaçã
o Automática do Motor
(AMA).
0,000–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
O (Desligado) Executar uma AMA otimiza o desempenho do motor.
Relacionado à
potência
potência
potência
potência
potência
potência
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d.
Obtenha o valor da folha de dados do motor de ímã
permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-37 Indutância do eixo-d (Ld). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-38 Indutância do eixo-q (Lq). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
14 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Opcional Padrão Uso
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
Parâmetro 1-73 Flying Start [0] Desativado
Parâmetro 3-02 Referência
Mínima
Parâmetro 3-03 Referência
Máxima
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 5-40 Função do Relé Consulte o
Parâmetro 5-40 Função do Relé Consulte o
Parâmetro 6-10 Terminal 53
Tensão Baixa
Parâmetro 6-11 Terminal 53
Tensão Alta
Parâmetro 6-12 Terminal 53
Corrente Baixa
Parâmetro 6-13 Terminal 53
Corrente Alta
20–200% 100% Este parâmetro especica a curva de saturação dos valores
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
[0] Detecção do rotor
[1] Estacionamento
[1] Ativado
-4999,000–4999,000 0 A referência mínima é o menor valor que pode ser obtido
-4999,000–4999,000 50 A referência máxima é o maior valor que pode ser obtido
0,05–3600,00 s Relacionado à
0,05–3600,00 s Relacionado à
0,0–400,0 Hz 0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100 Hz Inserir o valor da frequência máxima de saída. Se
parâmetro 5-40 Função
do Relé.
parâmetro 5-40 Função
do Relé.
0,00–10,00 V 0,07 V Insira a tensão que corresponde ao valor de referência
0,00–10,00 V 10 V Insira a tensão que corresponde ao valor de referência
0,00–20,00 mA 4 mA Insira a corrente que corresponde ao valor de referência
0,00–20,00 mA 20 mA Insira a corrente que corresponde ao valor de referência
[0] Detecção do
rotor
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
potência
potência
[9] Alarme Selecione a função para controlar o relé de saída 1.
[5] Conversor
funcionando
Selecione o modo de partida do motor PM.
para pegar um motor girando devido à queda da rede
elétrica. Selecione [0] Desativado se a função não for
necessária. Quando este parâmetro estiver programado
para [1] Ativado, parâmetro 1-71 Atraso da Partida e
parâmetro 1-72 Função de Partida não são funcionais.
Parâmetro 1-73 Flying Start é ativado somente no modo
VVC+.
através da soma de todas as referências.
através da soma de todas as referências.
Se o motor assíncrono for selecionado, o tempo de
aceleração será de 0 a parâmetro 1-23 Freqüência do Motor
nominal. Se o motor assíncrono for selecionado, o tempo
de aceleração será de 0 a parâmetro 1-25 Velocidade
nominal do motor.
Para motores assíncronos, o tempo de desaceleração será
de parâmetro 1-23 Freqüência do Motor a 0. Para motores
PM, o tempo de desaceleração será de
parâmetro 1-25 Velocidade nominal do motor a 0.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
Selecione a função para controlar o relé de saída 2.
baixa.
alta.
baixa.
alta.
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 15
Programação
Parâmetro Opcional Padrão Uso
Parâmetro 6-19 Terminal 53
mode
22
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
Tabela 2.4 Assistente de setup para aplicações em malha aberta
[0] Corrente
[1] Tensão
[0] O (Desligado)
[1] On (Ligado)
0,05 –1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[1] Tensão Selecione se o terminal 53 é usado para entrada de
corrente ou tensão.
[0] O (Desligado)
–
–
16 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programação Guia de Programação
Assistente de setup para aplicações em malha fechada
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 17
Ilustração 2.5 Assistente de setup para aplicações em malha fechada
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 0-03 Denições
Regionais
22
Parâmetro 0-06 Tipo de Grade [0]–[132] consulte
Parâmetro 1-00 Modo
Conguração
[0] Internacional
[1] EUA
Tabela 2.4.
[0] Malha aberta
[3] Malha fechada
VLT® HVAC Basic Drive FC 101
[0] Internacional –
Tamanho
selecionado
[0] Malha aberta Selecione [3] Malha fechada.
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
18 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-10 Construção do
motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 19
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-20 Potência do
Motor
22
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,09–110 kW Relacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0–10000 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-29 Adaptação
Automática do Motor (AMA)
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
O (Desligado) Executar uma AMA otimiza o desempenho do motor.
0–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
Relacionado à
potência
potência
potência
potência
potência
potência
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d.
Obtenha o valor da folha de dados do motor de ímã
permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-37 Indutância do eixo-d (Ld). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do que
parâmetro 1-38 Indutância do eixo-q (Lq). No entanto, se o
fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
20 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
Parâmetro 1-73 Flying Start [0] Desativado
Parâmetro 3-02 Referência
Mínima
Parâmetro 3-03 Referência
Máxima
Parâmetro 3-10 Referência
Predenida
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior
da Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 6-20 Terminal 54
Tensão Baixa
Parâmetro 6-21 Terminal 54
Tensão Alta
Parâmetro 6-22 Terminal 54
Corrente Baixa
Parâmetro 6-23 Terminal 54
Corrente Alta
Parâmetro 6-24 Terminal 54
Ref./Feedb. Valor Baixo
Parâmetro 6-25 Terminal 54
Ref./Feedb. Valor Alto
Parâmetro 6-26 Terminal 54
Const. de Tempo do Filtro
Parâmetro 6-29 Modo do
terminal 54
20–200% 100% Este parâmetro especica a curva de saturação dos valores
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
[0] Detecção do rotor
[1] Estacionamento
[1] Ativado
-4999,000–4999,000 0 A referência mínima é o menor valor que pode ser obtido
-4999,000–4999,000 50 A referência máxima é o maior valor que pode ser obtido
-100–100% 0 Insira o setpoint.
0,05–3600,0 s Relacionado à
0,05–3600,0 s Relacionado à
0,0–400,0 Hz 0,0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100 Hz Inserir o valor da frequência máxima de saída. Se
0,00–10,00 V 0,07 V Insira a tensão que corresponde ao valor de referência
0,00–10,00 V 10,00 V Insira a tensão que corresponde ao valor de referência
0,00–20,00 mA 4,00 mA Insira a corrente que corresponde ao valor de referência
0,00–20,00 mA 20,00 mA Insira a corrente que corresponde ao valor de referência
-4999–4999 0 Insira o valor de feedback que corresponde à tensão ou
-4999–4999 50 Insira o valor de feedback que corresponde à tensão ou
0,00–10,00 s 0,01 Insira a constante de tempo do ltro.
[0] Corrente
[1] Tensão
[0] Detecção do
rotor
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
potência
potência
[1] Tensão Selecione se o terminal 54 é usado para entrada de
Selecione o modo de partida do motor PM.
para capturar um motor girando, por exemplo, em
aplicações de ventilador. Ao selecionar PM, este parâmetro
será ativado.
através da soma de todas as referências.
através da soma de todas as referências.
Tempo de aceleração de 0 a parâmetro 1-23 Freqüência do
Motor nominal para motores assíncronos. Tempo de
aceleração de 0 a parâmetro 1-25 Velocidade nominal do
motor para motores PM.
Tempo de desaceleração de parâmetro 1-23 Freqüência do
Motor nominal a 0 para motores assíncronos. Tempo de
desaceleração de parâmetro 1-25 Velocidade nominal do
motor a 0 para motores PM.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
baixa.
alta.
baixa.
alta.
corrente programada em parâmetro 6-20 Terminal 54
Tensão Baixa/parâmetro 6-22 Terminal 54 Corrente Baixa.
corrente programada em parâmetro 6-21 Terminal 54
Tensão Alta/parâmetro 6-23 Terminal 54 Corrente Alta.
corrente ou tensão.
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 21
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 20-81 Controle
Normal/Inverso do PI
[0] Normal
[1] Inverso
22
Parâmetro 20-83 Velocidade de
Partida do PI [Hz]
Parâmetro 20-93 Ganho Proporcional do PI
Parâmetro 20-94 PI Integral
Time
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
0–200 Hz 0 Hz Insira a velocidade do motor a ser atingida como um sinal
0,00–10,00 0,01 Insira o ganho proporcional do controlador de processo. O
0,1–999,0 s 999,0 s Inserir o tempo de integração do controlador de processo.
[0] O (Desligado)
[1] On (Ligado)
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
[0] Normal Selecione [0] Normal para denir o controle de processo
para aumentar a velocidade de saída quando o erro de
processo for positivo. Selecione [1] Inverso para reduzir a
velocidade de saída.
de partida para o início do controle PI.
controle rápido é obtido em amplicação alta. No entanto,
se a amplicação for muito alta, o processo pode car
instável.
Obtém-se um controle rápido por meio de um tempo
integrado curto, muito embora, se este tempo for curto
demais, o processo pode tornar-se instável. Um tempo de
integração excessivamente longo desativa a ação da
integração.
[0] O (Desligado)
–
–
Tabela 2.5 Assistente de setup para aplicações em malha fechada
Setup do motor
O assistente de setup do motor orienta os usuários através dos parâmetros do motor necessários.
Parâmetro Intervalo Padrão Uso
Parâmetro 0-03 Denições
Regionais
Parâmetro 0-06 Tipo de Grade [0]–[132] consulte
[0] Internacional
[1] EUA
Tabela 2.4.
0 –
Relacionado à
potência
Selecione o modo de operação para reinicialização após a
reconexão do conversor de frequência à tensão de rede
após o desligamento.
22 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-10 Construção do
motor
*[0] Assíncrono
[1] PM, SPM não saliente
[3] PM, IPM saliente
[0] Assíncrono A conguração do valor do parâmetro poderá alterar esses
parâmetros:
Parâmetro 1-01 Principio de Controle do Motor.
•
Parâmetro 1-03 Características de Torque.
•
Parâmetro 1-08 Largura de banda do controle do motor.
•
Parâmetro 1-14 Fator de Ganho de Amortecimento.
•
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc
•
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc.
•
Parâmetro 1-17 Const. de tempo do ltro de tensão
•
Parâmetro 1-20 Potência do Motor.
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Parâmetro 1-24 Corrente do Motor.
•
Parâmetro 1-25 Velocidade nominal do motor.
•
Parâmetro 1-26 Torque nominal do Motor.
•
Parâmetro 1-30 Resistência do Estator (Rs).
•
Parâmetro 1-33 Reatância Parasita do Estator (X1).
•
Parâmetro 1-35 Reatância Principal (Xh).
•
Parâmetro 1-37 Indutância do eixo-d (Ld).
•
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-39 Pólos do Motor.
•
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM.
•
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat).
•
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
•
Parâmetro 1-46 Ganho de Detecção de Posição.
•
Parâmetro 1-48 Corrente na indutância mín. do eixo d.
•
Parâmetro 1-49 Corrente na indutância mín. do eixo q.
•
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade.
•
Parâmetro 1-70 Modo de Partida.
•
Parâmetro 1-72 Função de Partida.
•
Parâmetro 1-73 Flying Start.
•
Parâmetro 1-80 Função na Parada.
•
Parâmetro 1-82 Veloc. Mín p/ Funcionar na Parada [Hz].
•
Parâmetro 1-90 Proteção Térmica do Motor.
•
Parâmetro 2-00 Retenção CC / Corr. de Pré-aquec. do Mtr.
•
Parâmetro 2-01 Corrente de Freio CC.
•
Parâmetro 2-02 Tempo de Frenagem CC.
•
Parâmetro 2-04 Velocidade de ativação do freio CC.
•
Parâmetro 2-10 Função de Frenagem.
•
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
•
Parâmetro 4-19 Freqüência Máx. de Saída.
•
Parâmetro 4-58 Função de Fase do Motor Ausente.
•
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de
•
Veloc.
2 2
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 23
Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-20 Potência do
Motor
22
Parâmetro 1-22 Tensão do
Motor
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 1-24 Corrente do
Motor
Parâmetro 1-25 Velocidade
nominal do motor
Parâmetro 1-26 Torque nominal
do Motor
0,12–110 kW/0,16–150hpRelacionado à
50–1000 V Relacionado à
20–400 Hz Relacionado à
0,01–10000,00 A Relacionado à
50–9999 RPM Relacionado à
0,1–1000,0 Nm Relacionado à
VLT® HVAC Basic Drive FC 101
Insira a potência do motor indicada nos dados da
potência
potência
potência
potência
potência
potência
plaqueta de identicação.
Insira a tensão do motor indicada nos dados da plaqueta
de identicação.
Insira a frequência do motor indicada nos dados da
plaqueta de identicação.
Insira a corrente do motor indicada nos dados da plaqueta
de identicação.
Insira a velocidade nominal do motor indicada nos dados
da plaqueta de identicação.
Este parâmetro está disponível quando
parâmetro 1-10 Construção do motor estiver programado
para opcionais que ativam o modo de motor de ímã
permanente.
AVISO!
Alterar este parâmetro afeta as congurações de
outros parâmetros.
Parâmetro 1-30 Resistência do
Estator (Rs)
Parâmetro 1-37 Indutância do
eixo-d (Ld)
Parâmetro 1-38 Indutância do
eixo-q (Lq)
Parâmetro 1-39 Pólos do Motor 2–100 4 Insira o número de polos do motor.
Parâmetro 1-40 Força Contra
Eletromotriz em 1000RPM
Parâmetro 1-42 Comprimento
do Cabo do Motor
Parâmetro 1-44 Sat. da
Indutância do eixo-d (LdSat)
Parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat)
Parâmetro 1-46 Ganho de
Detecção de Posição
Parâmetro 1-48 Corrente na
indutância mín. do eixo d
Parâmetro 1-49 Corrente na
indutância mín. do eixo q
Parâmetro 1-70 Modo de
Partida
0–99,990 Ω
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
10–9000 V Relacionado à
0–100 m 50 m Insira o comprimento de cabo do motor.
0,000–1000,000 mH Relacionado à
0,000–1000,000 mH Relacionado à
20–200% 100% Ajusta a amplitude do pulso de teste durante a detecção
20–200% 100% Insira o ponto de saturação da indutância.
20–200% 100% Este parâmetro especica a curva de saturação dos valores
[0] Detecção do rotor
[1] Estacionamento
Relacionado à
potência
potência
potência
potência
potência
potência
[0] Detecção do
rotor
Programar o valor da resistência do estator.
Insira o valor da indutância do eixo-d. Obtenha o valor da
folha de dados do motor de ímã permanente.
Insira o valor da indutância do eixo-q.
Força Contra Eletromotriz RMS linha-linha a 1.000 RPM.
Este parâmetro corresponde à saturação de indutância de
Ld. Idealmente, este parâmetro tem o mesmo valor do
que parâmetro 1-37 Indutância do eixo-d (Ld). No entanto,
se o fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
Este parâmetro corresponde à saturação de indutância de
Lq. Idealmente, este parâmetro tem o mesmo valor do
que parâmetro 1-38 Indutância do eixo-q (Lq). No entanto,
se o fornecedor do motor fornecer uma curva de indução,
insira o valor de indução, que é 200% da corrente
nominal.
da posição na partida.
de indutância d e q. De 20 a 100% deste parâmetro, as
indutâncias são linearmente aproximadas devido a
parâmetro 1-37 Indutância do eixo-d (Ld),
parâmetro 1-38 Indutância do eixo-q (Lq),
parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) e
parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat).
Selecione o modo de partida do motor PM.
24 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Programação Guia de Programação
Parâmetro Intervalo Padrão Uso
Parâmetro 1-73 Flying Start [0] Desativado
[1] Ativado
Parâmetro 3-41 Tempo de
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Desaceleração da Rampa 1
Parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz]
Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz]
Parâmetro 4-19 Freqüência Máx.
de Saída
Parâmetro 30-22 Proteção de
Rotor Bloqueado
Parâmetro 30-23 Tempo de
Detecção do Rotor Bloq.[s]
0,05–3600,0 s Relacionado à
0,05–3600,0 s Relacionado à
0,0–400,0 Hz 0,0 Hz Insira o limite mínimo para velocidade baixa.
0,0–400,0 Hz 100,0 Hz Insira o limite máximo para velocidade alta.
0,0–400,0 Hz 100,0 Hz Inserir o valor da frequência máxima de saída. Se
[0] O (Desligado)
[1] On (Ligado)
0,05–1,00 s 0,10 s
[0] Desativado Selecione [1] Ativado para ativar o conversor de frequência
para pegar um motor girando.
Tempo de aceleração de 0 a parâmetro 1-23 Freqüência do
potência
potência
[0] O (Desligado)
Motor nominal.
Tempo de desaceleração de parâmetro 1-23 Freqüência do
Motor a 0.
parâmetro 4-19 Freqüência Máx. de Saída for programado
menor que parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz], parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
programado igual a parâmetro 4-19 Freqüência Máx. de
Saída automaticamente.
–
–
2 2
Tabela 2.6 Congurações do assistente de setup do motor
Alterações feitas
A função de alterações feitas lista todos os parâmetros
alterados a partir das congurações padrão.
A lista mostra somente os parâmetros que foram
•
alterados no setup de edição atual.
Parâmetros que foram reinicializados para os
•
valores padrão não são listados.
A mensagem Vazio indica que nenhum parâmetro
•
foi alterado.
Alteração das congurações de parâmetros
1. Para entrar no Quick Menu, pressione a tecla
[Menu] até o indicador no display car sobre
Quick Menu.
2.
Pressione [▲] [▼] para selecionar o assistente,
setup de malha fechada, setup do motor ou
alterações feitas.
3. Pressione [OK]
4.
Pressione [▲] [▼] para navegar pelos parâmetros
no Quick Menu.
5. Pressione [OK] para selecionar um parâmetro.
6.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
7. Pressione [OK] para aceitar a alteração.
8. Pressione [Back] duas vezes para acessar o Status,
ou pressione [Menu] uma vez para acessar o
Menu Principal.
O menu principal acessa todos os parâmetros
1. Pressione a tecla [Menu] até o indicador no
display car sobre o Menu Principal.
2.
Pressione [▲] [▼] para navegar pelos grupos do
parâmetro.
3. Pressione [OK] para selecionar um grupo de
parâmetros.
4.
Pressione [▲] [▼] para navegar pelos parâmetros
no grupo especíco.
5. Pressione [OK] para selecionar o parâmetro.
6.
Pressione [▲] [▼] para denir/alterar o valor do
parâmetro.
7. Pressione [OK] para aceitar a alteração.
2.3.3 Menu Principal
Pressione [Menu] para acessar o menu principal e
programe todos os parâmetros. Os parâmetros do menu
principal podem ser acessados rapidamente a menos que
uma senha tenha sido criada via parâmetro 0-60 Senha do
Menu Principal.
Para a maioria das aplicações, não é necessário acessar os
parâmetros do menu principal. O quick menu fornece o
acesso mais simples e rápido aos parâmetros normalmente
exigidos.
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 25

Programação
2.4 Transferência Rápida da Programação
do Parâmetro entre Múltiplos
22
Conversores de Frequência
Uma vez concluído o setup de um conversor de
frequência, armazene os dados no LCP ou em um PC via
Software de Setup do MCT 10.
Transferência de dados do conversor de frequência para
o LCP
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK]
3. Selecione [1] Tudo para o LCP.
4. Pressione [OK]
Conecte o LCP a outro conversor de frequência e copie as
programações de parâmetro para esse conversor de
frequência também.
Transferência de dados do LCP para o conversor de
frequência
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK]
3. Selecione [2] Todos a partir d LCP.
4. Pressione [OK]
Leitura e Programação de Parâmetros
2.5
Indexados
Selecione o parâmetro, pressione [OK] e pressione [▲]/[▼]
para percorrer os valores indexados. Para alterar o valor do
parâmetro, selecione o valor indexado e pressione a tecla
[OK]. Altere o valor pressionando [▲]/[▼]. Pressione [OK]
para aceitar a nova conguração. Pressione [Cancel] para
abortar. Pressione [Back] (Voltar) para sair do parâmetro.
Inicialização para as congurações
2.6
padrão
Há duas maneiras de inicializar o conversor de frequência
para as congurações padrão.
Inicialização recomendada
1. Selecione parâmetro 14-22 Modo Operação.
2. Pressione [OK]
3. Selecione [2] Inicialização e pressione [OK].
4. Desligue o conversor de frequência e aguarde o
display apagar.
5. Reconecte a alimentação de rede elétrica. O
conversor de frequência foi reinicializado, exceto
pelos seguintes parâmetros:
Parâmetro 1-06 Sentido Horário
•
Parâmetro 8-30 Protocolo
•
VLT® HVAC Basic Drive FC 101
Inicialização com 2 dedos
A outra maneira de inicializar o conversor de frequência
para as congurações padrão é através da inicialização
com 2 dedos:
1. Desligue o conversor de frequência.
2. Pressione [OK] e [Menu].
3. Energize o conversor de frequência enquanto
4. O conversor de frequência foi reinicializado,
A inicialização dos parâmetros é conrmada pelo alarme
80, Conversor inicializado no display após o ciclo de
energização.
Parâmetro 8-31 Endereço
•
Parâmetro 8-32 Baud Rate da Porta do FC
•
Parâmetro 8-33 Bits de Paridade / Parada
•
Parâmetro 8-35 Atraso Mínimo de
•
Resposta
Parâmetro 8-36 Atraso de Resposta
•
Mínimo
Parâmetro 8-37 Atraso Máximo Entre
•
Caracteres
Parâmetro 8-70 Instânc Dispos BACnet
•
Parâmetro 8-72 Masters Máx MS/TP
•
Parâmetro 8-73 Chassi Info Máx.MS/TP
•
Parâmetro 8-74 Serviço "I-Am"
•
Parâmetro 8-75 Senha de Inicialização
•
Parâmetro 15-00 Horas de funcionamento
•
a parâmetro 15-05 Sobretensões
Parâmetro 15-03 Energizações
•
Parâmetro 15-04 Superaquecimentos
•
Parâmetro 15-05 Sobretensões
•
Parâmetro 15-30 Log Alarme: Cód Falha
•
Grupo do parâmetro 15-4* Identic. do
•
•
pressiona as teclas por 10 s.
exceto pelos seguintes parâmetros:
•
•
•
•
•
•
•
®
VLT
Parâmetro 18-10 Log de Fire Mode: Evento
Parâmetro 1-06 Sentido Horário
Parâmetro 15-00 Horas de funcionamento
Parâmetro 15-03 Energizações
Parâmetro 15-04 Superaquecimentos
Parâmetro 15-05 Sobretensões
Grupo do parâmetro 15-4* Identic. do
®
VLT
Parâmetro 18-10 Log de Fire Mode: Evento
26 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
Parâmetros Guia de Programação
3 Parâmetros
O * em números de parâmetro indica um grupo ou um
subgrupo de parâmetros para os quais os primeiros 1 ou 2
números são os mesmos. Por exemplo, 0-** indica o grupo
de parâmetros que começam com 0. 0-0* indica o
subgrupo de parâmetros que compartilham os dois
primeiros números, que é 0-0.
Um asterisco (*) após um número opcional indica a opção
padrão. Por exemplo, [0]* Inglês é a opção padrão para
parâmetro 0-01 Idioma.
3.1 Menu Principal - Operação e Display Grupo 0
Parâmetros relacionados às funções fundamentais do
conversor de frequência, função das teclas do LCP e
conguração do display do LCP.
3.1.1 0-0* Congurações Básicas
0-01 Idioma
Option: Funcão:
Dene o idioma a ser utilizado na
tela.
[0] * Inglês
[1] Alemão
[2] Francês
[3] Dinamarquês
[4] Espanhol
[5] Italiano
[28] Português brasileiro
[255] Prog. numérica
0-03 Denições Regionais
Option: Funcão:
AVISO!
Não se pode ajustar este parâmetro
enquanto o motor estiver em funcionamento.
Para atender às necessidades de diferentes
congurações padrão em diferentes partes do
mundo, parâmetro 0-03 Denições Regionais é
implementado no conversor de frequência. A
conguração selecionada inuencia a
conguração padrão da frequência nominal do
motor.
[0]*Interna-
cional
[1] América
do Norte
Dene o valor padrão de
parâmetro 1-23 Freqüência do Motor para 50 Hz.
Dene o valor padrão de
parâmetro 1-23 Freqüência do Motor para 60 Hz.
0-04 Estado Operacional na Energização
Option: Funcão:
Selecione o modo de operação após a
reconexão do conversor de frequência à
tensão de rede após o desligamento ao
operar em modo Manual (local).
[0]*Retomar Retoma a operação do conversor de
frequência, mantendo a mesma referência
local e a mesma condição de partida/parada
(aplicada por [Hand On]/[O] no LCP ou
partida local via uma entrada digital) como
antes do conversor de frequência ter sido
desligado.
[1] Parad
forçd,ref=ant.
Usa a referência salva [1] para parar o
conversor de frequência, mas ao mesmo
tempo retém a referência de velocidade
local na memória antes de desligar. Depois
que a tensão da rede é reconectada, e
depois de receber um comando de partida
(pressionando a tecla [Hand On] ou usando
o comando de partida local através de uma
entrada digital), o conversor de frequência
reinicia e opera na referência de velocidade
retida.
0-06 Tipo de Grade
Option: Funcão:
Selecione o tipo de grade da
tensão/frequência de
alimentação.
AVISO!
Nem todos os opcionais
são suportados em todas
as capacidades de
potência.
A grade de TI é uma rede
elétrica de alimentação sem
conexões com o ponto de
aterramento.
Delta é uma rede elétrica de
alimentação em que a parte
secundária do transformador
é conectada em delta e 1
fase é conectada ao terra.
[0] 200-240 V/50 Hz/grade de TI
[1] 200-240 V/50 Hz/Delta
[2] 200-240 V/50 Hz
[10] 380-440 V/50 Hz/grade de TI
[11] 380-440 V/50 Hz/Delta
3 3
MG18B528 Danfoss A/S © 05/2018 Todos os direitos reservados. 27
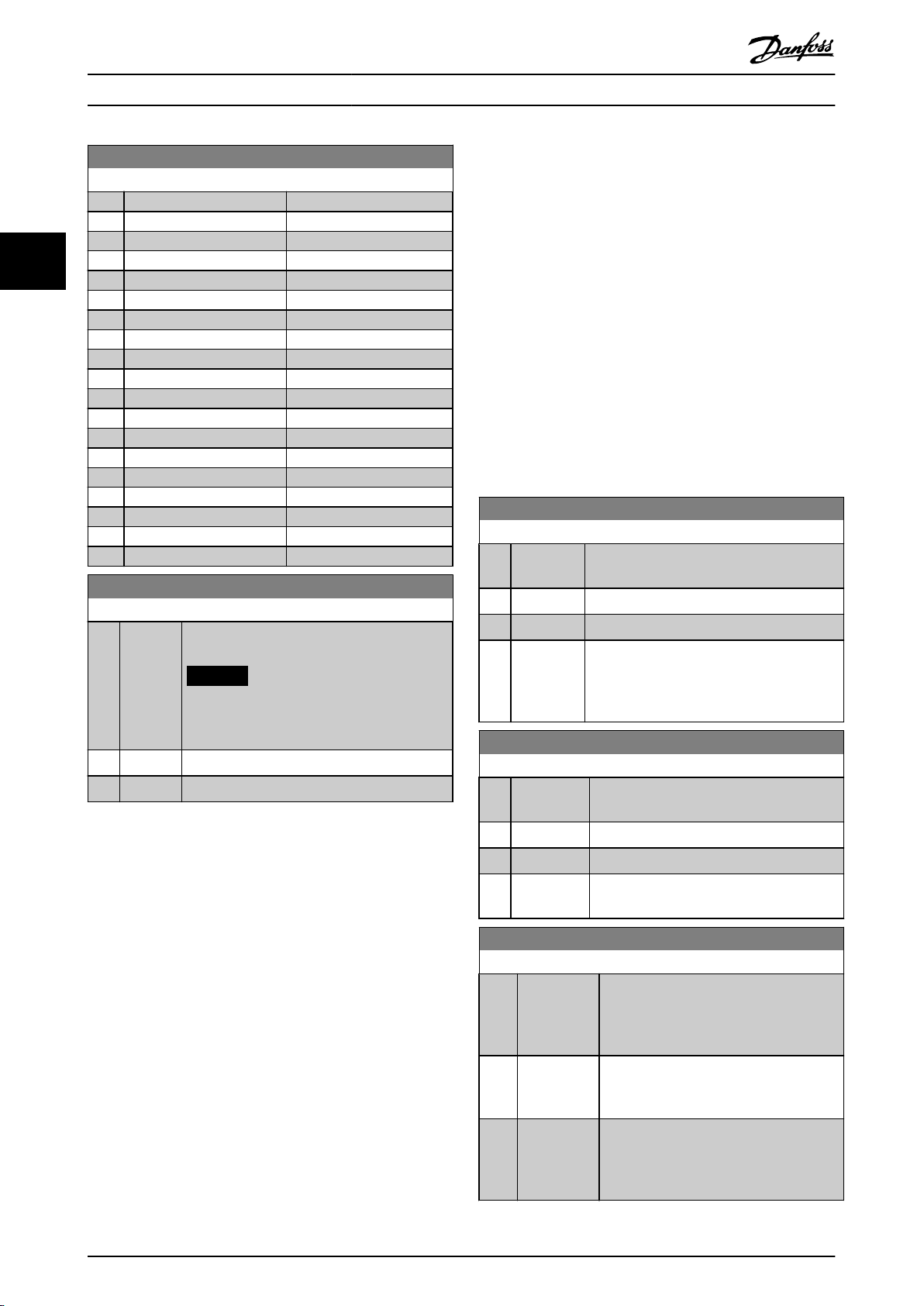
Parâmetros
VLT® HVAC Basic Drive FC 101
0-06 Tipo de Grade
Option: Funcão:
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/grade de TI
[21] 440-480 V/50 Hz/Delta
33
[22] 440-480 V/50 Hz
[30] 525-600 V/50 Hz/grade de TI
[31] 525-600 V/50 Hz/Delta
[32] 525-600 V/50 Hz
[100] 200-240 V/60 Hz/grade de TI
[101] 200-240 V/60 Hz/Delta
[102] 200-240 V/60 Hz
[110] 380-440 V/60 Hz/grade de TI
[111] 380-440 V/60 Hz/Delta
[112] 380-440 V/60 Hz
[120] 440-480 V/60 Hz/grade de TI
[121] 440-480 V/60 Hz/Delta
[122] 440-480 V/60 Hz
[130] 525-600 V/60 Hz/grade de TI
[131] 525-600 V/60 Hz/Delta
[132] 525-600 V/60 Hz
0-07 TI de Frenagem CC Automática
Option: Funcão:
Função de proteção contra sobretensão na
parada por inércia.
A conguração ativa pode ser programada como uma
conguração múltipla, onde a conguração ativa é
selecionada via entrada em um terminal de entrada digital
e/ou via control word de barramento.
Para copiar o setup 1 para o setup 2, ou copiar o setup 2
para o setup 1, use parâmetro 0-51 Cópia do Setup. Para
evitar congurações conitantes do mesmo parâmetro em
2 setups diferentes, vincule os setups usando
parâmetro 0-12 Setups de conexão. Para o conversor de
frequência antes de alternar entre setups onde os
parâmetros marcados como não variáveis durante a
operação têm valores diferentes.
Os parâmetros que não são alteráveis durante a operação
são marcados como falso em capétulo 5 Listas de
Parâmetros.
0-10 Setup Ativo
Option: Funcão:
[1] * Setup 1 Setup 1 está ativo.
[2] Setup 2 Setup 2 está ativo.
[9] Setup
AVISO!
Pode causar PWM quando parado por
rampa ou referências predenidas via barramento
ou entradas digitais.
Selecione o setup em que o conversor de
frequência opera.
Usado para seleções remotas de setup via
Múltiplo
entradas digitais e da porta de comunicação
serial. Este setup utiliza as programações do
parâmetro 0-12 Setups de conexão.
inércia.
0-11 Set-up da Programação
[0] Desligado Esta função não está ativa.
[1] * Ligado Esta função está ativa.
3.1.2 0-1* Denir e operações de setup
Um conjunto completo de todos os parâmetros que
controlam o conversor de frequência é chamado de setup.
O conversor de frequência contém 2 setups: Setup 1 e
setup 2. Além disso, um conjunto xo de congurações de
fábrica pode ser copiado para um ou ambos os setups.
Option: Funcão:
O número do setup que está sendo editado
é mostrado no LCP, piscando.
[1] Setup 1 Edite o setup 1.
[2] Setup 2 Edite o setup 2.
[9] * Ativar Set-up Edite os parâmetros no setup selecionado via
E/S digital.
0-12 Setups de conexão
Option: Funcão:
Algumas das vantagens de ter mais de 1 setup no
conversor de frequência são:
Opere o motor em 1 setup
•
(conguração ativa)
enquanto atualiza os parâmetros no outro setup
(conguração de edição).
Conecte os 2 motores (1 de cada vez) ao
•
conversor de frequência. Dados do motor para os
2 motores podem ser inseridos nos 2 setups.
Altere rapidamente as congurações do conversor
•
de frequência e/ou do motor enquanto o motor
estiver funcionando. Por exemplo, tempo de
[0] Não
conectado
[20] * Setups
Vinculados
Se os setups não estiverem vinculados,
uma alternação entre eles não será possível
enquanto o motor estiver em funcionamento.
Ao selecionar um setup diferente para
operação, a alteração do setup não ocorre
até que o motor esteja parado por inércia.
Copia os parâmetros não alteráveis durante
a operação do setup 1 para o outro. É
possível alternar os setups enquanto o
motor está em funcionamento.
28 Danfoss A/S © 05/2018 Todos os direitos reservados. MG18B528
 Loading...
Loading...