

Page 1

ENGINEERING TOMORROW
Projektierungshandbuch
VLT® Midi Drive Frequenzumrichter 280
www.danfoss.de/vlt
Page 2

Page 3

Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zweck des Projektierungshandbuchs
1.2 Zusätzliche Materialien
1.3 Definitionen
1.4 Dokument- und Softwareversion
1.5 Zulassungen und Zertifizierungen
1.6 Sicherheit
2 Produktübersicht
2.1 Baugrößenübersicht
2.2 Elektrische Installation
2.2.1 Motoranschluss 14
2.2.2 Netzanschluss 15
2.2.3 Steuerklemmentypen 16
2.2.4 Verdrahtung der Steuerklemmen 17
2.3 Regelungsstrukturen
2.3.1 Steuerungsmodi 17
2.3.2 Steuerverfahren 19
2.3.3 Regelungsstruktur in VVC
2.3.4 Interner Stromgrenzenregler in Betriebsart VVC
5
5
5
5
8
8
9
10
10
12
17
+
+
19
20
2.3.5 Hand-Steuerung (Hand On) und Fern-Betrieb (Auto On) 20
2.4 Sollwertverarbeitung
2.4.1 Sollwertgrenzen 23
2.4.2 Skalierung von Festsollwerten und Bussollwerten 24
2.4.3 Skalierung von Analog- und Pulssollwerten und Istwert 24
2.4.4 Totzone um Null 25
2.5 PID-Regelung
2.5.1 PID-Drehzahlregler 28
2.5.2 PID-Prozessregler 31
2.5.3 Relevante Parameter für die Prozessregelung 32
2.5.4 Beispiel für PID-Prozessregler 33
2.5.5 Optimierung des Prozessreglers 35
2.5.6 Ziegler-Nichols-Verfahren 36
2.6 EMV-Emission und Störfestigkeit
2.6.1 Allgemeine Aspekte von EMV-Emissionen 37
2.6.2 EMV-Emission 39
2.6.3 EMV-Immunität 40
22
28
37
2.7 Galvanische Trennung
2.8 Erdableitstrom
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 1
42
42
Page 4
Inhaltsverzeichnis
VLT® Midi Drive Frequenzumrichter 280
2.9 Bremsfunktionen
2.9.1 Mechanische Haltebremse 44
2.9.2 Dynamische Bremse 44
2.9.3 Auswahl des Bremswiderstands 44
2.10 Motorisolation
2.10.1 Sinusfilter 46
2.10.2 dU/dt-Filter 46
2.11 Smart Logic Controller
2.12 Extreme Betriebszustände
2.12.1 Thermischer Motorschutz 48
3 Anwendungsbeispiele
3.1 Einführung
3.1.1 Drehgeberverbindung 49
3.1.2 Drehgeberrichtung 49
3.1.3 Frequenzumrichtersystem mit Rückführung 49
3.2 Anwendungsbeispiele
3.2.1 AMA 50
44
46
46
47
49
49
50
3.2.2 Drehzahl 50
3.2.3 Start/Stopp 51
3.2.4 Externe Alarmquittierung 52
3.2.5 Motorthermistor 52
3.2.6 SLC 52
4 Safe Torque Off (STO)
5 RS485 Installation und Konfiguration
5.1 Einführung
5.1.1 Übersicht 55
5.1.2 Netzwerkverbindung 56
5.1.3 Hardware-Konfiguration 56
5.1.4 Parametereinstellungen für ModbusKommunikation 56
5.1.5 EMV-Schutzmaßnahmen 56
5.2 Frequenzumrichter-Protokoll
5.2.1 Übersicht 56
54
55
55
56
5.2.2 Frequenzumrichter mit Modbus RTU 57
5.3 Netzwerkkonfiguration
5.4 Aufbau der Telegrammblöcke für Frequenzumrichter-Protokoll
5.4.1 Inhalt eines Zeichens (Byte) 57
5.4.2 Telegrammaufbau 57
5.4.3 Telegrammlänge (LGE) 58
2 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
57
57
Page 5
Inhaltsverzeichnis Projektierungshandbuch
5.4.4 Frequenzumrichteradresse (ADR) 58
5.4.5 Datensteuerbyte (BCC) 58
5.4.6 Das Datenfeld 58
5.4.7 Das PKE-Feld 58
5.4.8 Parameternummer (PNU) 59
5.4.9 Index (IND) 59
5.4.10 Parameterwert (PWE) 59
5.4.11 Vom Frequenzumrichter unterstützte Datentypen 59
5.4.12 Umwandlung 60
5.4.13 Prozesswörter (PCD) 60
5.5 Beispiele
5.5.1 Schreiben eines Parameterwerts 60
5.5.2 Lesen eines Parameterwertes 60
5.6 Modbus RTU
5.6.1 Was der Anwender bereits wissen sollte 61
5.6.2 Übersicht 61
5.6.3 Frequenzumrichter mit Modbus RTU 61
5.7 Netzwerkkonfiguration
5.8 Aufbau der Modbus RTU-Telegrammblöcke
5.8.1 Einführung 62
5.8.2 Modbus RTU-Telegrammaufbau 62
5.8.3 Start-/Stoppfeld 62
5.8.4 Adressfeld 62
5.8.5 Funktionsfeld 63
5.8.6 Datenfeld 63
5.8.7 CRC-Prüffeld 63
5.8.8 Adressieren von Einzelregistern 63
60
61
62
62
5.8.9 Steuern des Frequenzumrichters 65
5.8.10 Von Modbus RTU unterstützte Funktionscodes 65
5.8.11 Modbus-Ausnahmecodes 65
5.9 Zugriff auf Parameter
5.9.1 Parameterverarbeitung 66
5.9.2 Datenspeicherung 66
5.9.3 IND (Index) 66
5.9.4 Textblöcke 66
5.9.5 Umrechnungsfaktor 66
5.9.6 Parameterwerte 66
5.10 Beispiele
5.10.1 Spulenzustand lesen (01 Hex) 67
5.10.2 Einzelne Spule erzwingen/schreiben (05 Hex) 67
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 3
66
67
Page 6
Inhaltsverzeichnis
VLT® Midi Drive Frequenzumrichter 280
5.10.3 Mehrere Spulen zwangsetzen/schreiben (0F Hex) 67
5.10.4 Halteregister lesen (03 Hex) 68
5.10.5 Voreingestelltes, einzelnes Register (06 Hex) 68
5.10.6 Voreingestellte multiple Register (10 Hex) 69
5.11 Danfoss Frequenzumrichter-Steuerprofil
5.11.1 Steuerwort gemäß Frequenzumrichter-Profil (8-10 Protokoll = FC-Profil) 69
5.11.2 Zustandswort gemäß FC-Profil (STW) 71
5.11.3 Bus-Drehzahlsollwert 72
6 Typencode und Auswahl
6.1 Typencode
6.2 Bestellnummern: Optionen, Zubehör und Ersatzteile
6.3 Bestellnummern: Bremswiderstände
6.3.1 Bestellnummern: Bremswiderstände 10 % 75
6.3.2 Bestellnummern: Bremswiderstände 40 % 77
6.4 Bestellnummern: Sinusfilter
6.5 Bestellnummern: dU/dt-Filter
6.6 Bestellnummern: Externe EMV-Filter
7 Technische Daten
7.1 Elektrische Daten
7.2 Netzversorgung
69
73
73
73
74
78
79
79
82
82
84
7.3 Motorausgang und Motordaten
7.4 Umgebungsbedingungen
7.5 Kabelspezifikationen
7.6 Steuereingang/-ausgang und Steuerdaten
7.7 Anzugsdrehmomente für Anschlüsse
7.8 Sicherungen und Trennschalter
7.9 Wirkungsgrad
7.10 Störgeräusche
7.11 dU/dt-Bedingungen
7.12 Besondere Betriebsbedingungen
7.12.1 Manuelle Leistungsreduzierung 92
7.12.2 Automatische Leistungsreduzierung 95
7.13 Baugrößen, Nennleistungen und Abmessungen
Index
85
85
86
86
89
89
90
91
91
92
95
98
4 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 7
Einführung Projektierungshandbuch
1 Einführung
1.1 Zweck des Projektierungshandbuchs
Dieses Projektierungshandbuch ist für Projektingenieure
und Anlagenbauer, Planungsberater sowie Anwendungsund Produktspezialisten bestimmt. Es enthält technische
Informationen zu den Möglichkeiten und Funktionen des
Frequenzumrichters zur Integration in Steuerungs- und
Überwachungssysteme für Motoren. Detaillierte Informationen bezüglich Betrieb, Anforderungen und
Empfehlungen für die Systemintegration sind ebenfalls
enthalten. Zudem enthält das Handbuch Informationen zur
Eingangsleistung, dem Ausgang für die Motorsteuerung
und Umgebungsbedingungen zum Betrieb des Frequenzumrichters.
Ebenfalls enthalten sind:
Sicherheitsmerkmale.
•
Überwachung der Fehlerbedingung.
•
Berichtsfunktionen zur Betriebsbereitschaft
•
Serielle Kommunikationsfunktionen.
•
Programmierbare Optionen und Merkmale.
•
Projektierungsdetails wie Standortanforderungen, Kabel,
Sicherungen, Steuerkabel, Größe und Gewicht von Geräten
und weitere kritische Informationen, die zur Planung der
Systemintegration erforderlich sind, können Sie dem
Handbuch ebenfalls entnehmen.
Die Verfügbarkeit aller detaillierten Produktinformationen
in der Projektierungsphase ist für die Entwicklung einer
ausgereiften Anlage mit optimaler Funktionalität und
Effizienz sehr hilfreich.
Definitionen
1.3
1.3.1 Frequenzumrichter
Motorfreilauf
Die Motorwelle dreht im Motorfreilauf. Kein Drehmoment
am Motor.
I
VLT,MAX
Maximaler Ausgangsstrom.
I
VLT,N
Vom Frequenzumrichter gelieferter Ausgangsnennstrom.
U
VLT,MAX
Maximale Ausgangsspannung.
1.3.2 Eingang
Steuerbefehle
Sie können den angeschlossenen Motor über das LCP und
die Digitaleingänge starten und stoppen.
Die Funktionen sind in zwei Gruppen unterteilt.
Funktionen in Gruppe 1 haben eine höhere Priorität als
Funktionen in Gruppe 2.
Gruppe 1 Präziser Stopp, Freilauf- und Resetstopp, präziser
Stopp und Freilaufstopp, Schnellstopp, DC-Bremse,
Stopp und [AUS].
Gruppe 2 Start, Puls-Start, Reversierung, Start +
Reversierung, Festdrehzahl JOG und Ausgangsfrequenz speichern.
Tabelle 1.1 Funktionsgruppen
1 1
VLT® ist eine eingetragene Marke.
Zusätzliche Materialien
1.2
Es stehen weitere Materialien bereit, die Ihnen helfen, die
Bedienung und Programmierung des Frequenzumrichters
zu verstehen:
VLT® Midi Drive FC 280 Bedienungsanleitung,
•
enthält Informationen zu Installation,
Inbetriebnahme, Anwendung und Wartung des
Frequenzumrichters.
Das VLT® Midi Drive FC 280 Programmierhandbuch
•
enthält Informationen über die Programmierung
und vollständige Parameterbeschreibungen.
Zusätzliche Veröffentlichungen und Handbücher sind bei
Danfoss erhältlich. Siehe drives.danfoss.de/knowledge-center/
technical-documentation/ für Auflistungen.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 5
1.3.3 Motor
Motor läuft
An der Antriebswelle erzeugtes Drehmoment und Drehzahl
von 0 UPM bis zur maximalen Drehzahl des Motors.
f
JOG
Motorfrequenz bei aktivierter Funktion Festdrehzahl JOG
(über Digitalklemmen oder Bus).
f
M
Motorfrequenz.
f
MAX
Maximale Motorfrequenz.
f
MIN
Minimale Motorfrequenz.
f
M,N
Motornennfrequenz (Typenschilddaten).
I
M
Motorstrom (Istwert).
Page 8
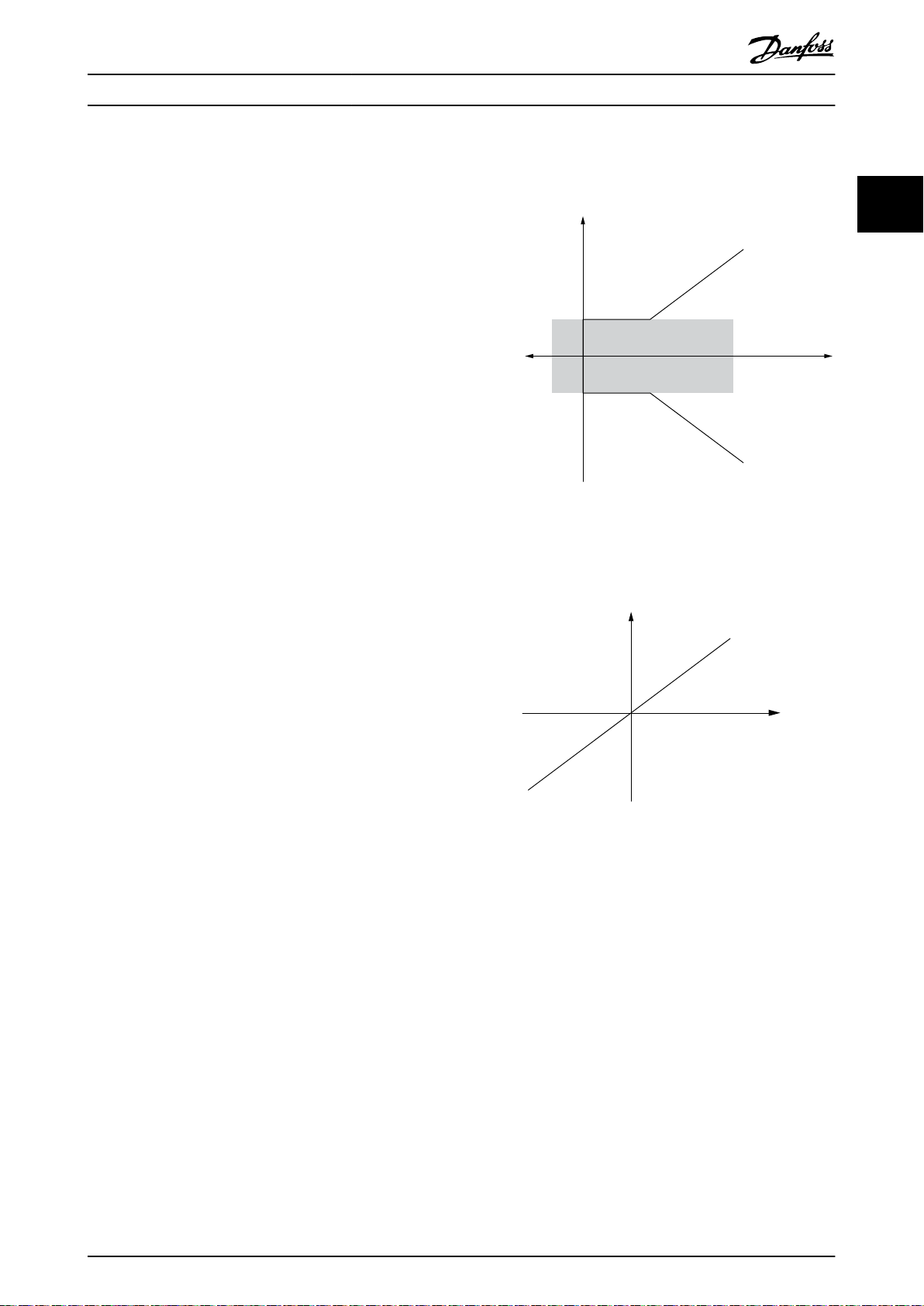
175ZA078.10
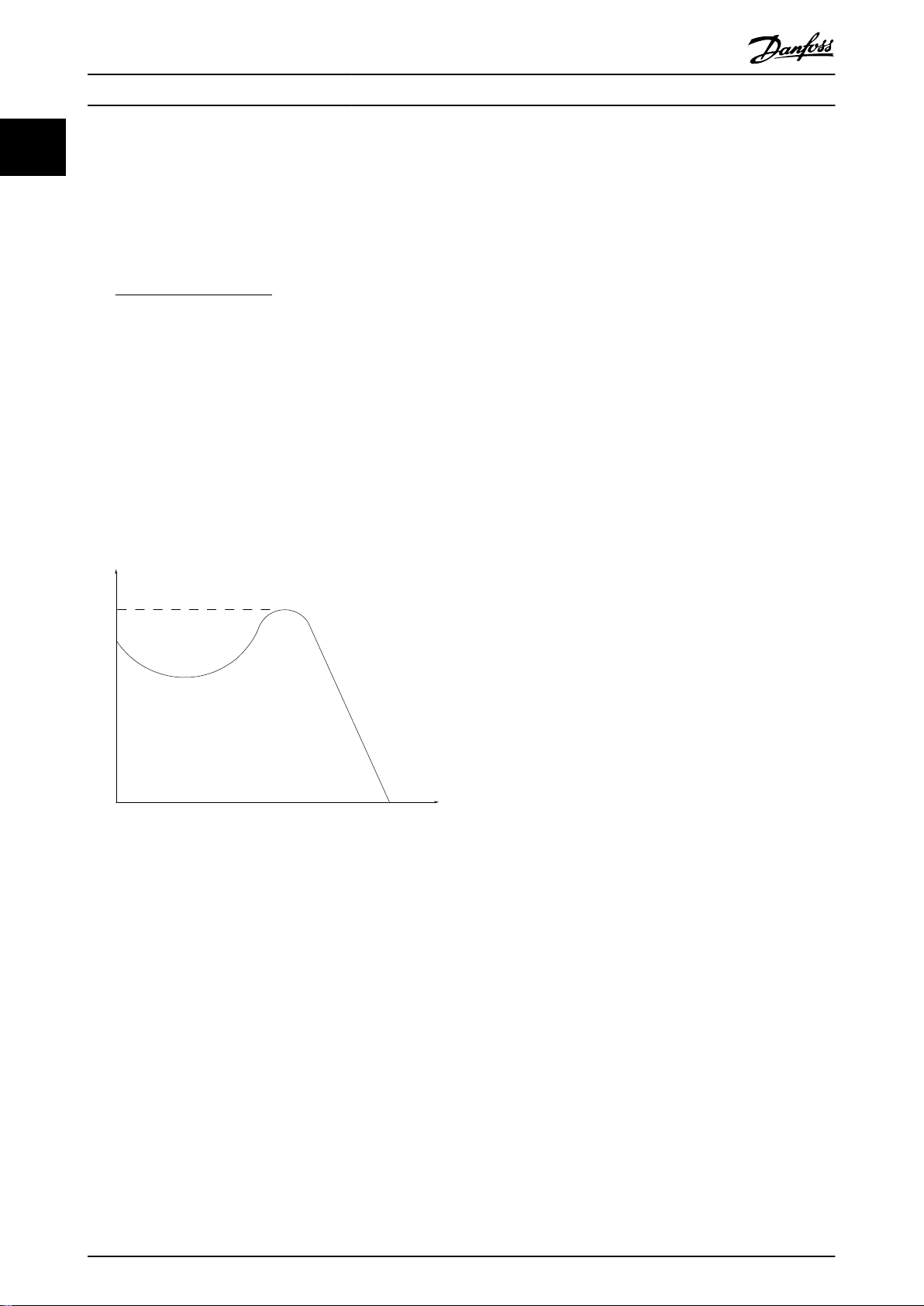
Kippgrenze
Drehzahi
Moment
Einführung
VLT® Midi Drive Frequenzumrichter 280
11
I
M,N
1.3.4 Sollwerteinstellung
Motornennstrom (Typenschilddaten).
n
M,N
Motornenndrehzahl (Typenschilddaten).
n
s
Synchrone Motordrehzahl.
2 × Parameter 1−23 × 60s
ns=
n
slip
Parameter 1−39
Motorschlupf.
P
M,N
Motornennleistung (Typenschilddaten in kW oder HP).
T
M,N
Nenndrehmoment (Motor).
U
M
Momentanspannung des Motors.
U
M,N
Motornennspannung (Typenschilddaten).
Losbrechmoment
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54
(Spannung oder Strom).
Binärsollwert
Ein über die serielle Kommunikationsschnittstelle
übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen. Sie
können bis zu 4 Festsollwerte über den Bus auswählen.
Pulssollwert
Ein an die Digitaleingänge übertragenes Pulsfrequenzsignal
(Klemme 29 oder 33).
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der in
Parameter 3-03 Maximaler Sollwert eingestellte maximale
Sollwert.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der in Parameter 3-02 Minimaler
Sollwert eingestellte minimale Sollwert.
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Startdeaktivierungsbefehl, der zu den Steuerbefehlen in
Gruppe 1 gehört. Nähere Angaben finden Sie unter
Tabelle 1.1.
Stoppbefehl
Ein Stoppbefehl, der zu den Steuerbefehlen in Gruppe 1
gehört. Nähere Angaben finden Sie unter Tabelle 1.1.
1.3.5 Verschiedenes
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt zwei Arten von Analogeingängen:
Eingangsstrom: 0–20 mA und 4–20 mA.
•
Spannungseingang: 0–10 V DC.
•
Analogausgang
Die Analogausgänge können ein Signal von 0-20 mA oder
4-20 mA ausgeben.
Automatische Motoranpassung, AMA
Die AMA ist ein Testalgorithmus, der die elektrischen
Parameter des angeschlossenen Motors im Stillstand misst.
Bremswiderstand
Der Bremswiderstand kann die bei generatorischer
Bremsung erzeugte Bremsleistung aufnehmen. Während
generatorischer Bremsung erhöht sich die Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
Konstantmoment (CT)-Kennlinie
Konstantmomentkennlinie; wird für Anwendungen wie
Förderbänder, Verdrängungspumpen und Kräne eingesetzt.
6 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 9
Einführung Projektierungshandbuch
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24 V-DC-Signal (max. 40 mA) liefern
können.
DSP
Digitaler Signalprozessor.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen.
Frequenzumrichter-Standardbus
Schließt RS485-Bus mit FC-Protokoll oder MC-Protokoll ein.
Siehe Parameter 8-30 Protocol.
Initialisierung
Eine Initialisierung (Parameter 14-22 Operation Mode) stellt
die Werkseinstellungen des Frequenzumrichters wieder her.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder aperiodisch sein.
LCP
Das LCP Bedienteil dient zum Steuern und Programmieren
des Frequenzumrichters. Das LCP ist abnehmbar. Mithilfe
des optionalen Einbausatzes können Sie die Bedieneinheit
bis zu 3 m (9,8 ft) vom Frequenzumrichter entfernt an
einer Schaltschranktür anbringen.
LCP 101
Das numerische Bedienteil dient zum Steuern und
Programmieren des Frequenzumrichters. Das Display ist
numerisch und die Bedieneinheit dient der Anzeige von
Prozesswerten. Das LCP 101 verfügt über Funktionen zum
Speichern und Kopieren.
LCP 102
Das grafische Bedienteil dient zum Steuern und Programmieren des Frequenzumrichters. Das Display ist grafisch
und die Bedieneinheit dient der Anzeige von Prozesswerten. Das LCP 102 verfügt über Funktionen zum
Speichern und Kopieren.
lsb
Steht für „Least Significant Bit“, bei binärer Codierung das
Bit mit der niedrigsten Wertigkeit.
msb
Steht für „Most Significant Bit“; bei binärer Codierung das
Bit mit der höchsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Leitungsquerschnitt. 1 MCM = 0,5067 mm2.
Online-/Offline-Parameter
Änderungen der Online-Parameter werden sofort nach
Änderung des Datenwertes aktiviert. Drücken Sie [OK], um
die Änderungen der Offline-Parameter zu aktivieren.
PID-Prozess
Der PID-Regler sorgt durch eine Anpassung der Ausgangsfrequenz an die wechselnde Last für eine
Aufrechterhaltung von Drehzahl, Druck und Temperatur.
PCD
Process Control Data (Prozessregelungsdaten).
PFC
Korrektur Leistungsfaktor.
Aus- und Einschaltzyklus
Schalten Sie die Netzversorgung aus, bis das Display (LCP)
dunkel ist. Schalten Sie die Spannungsversorgung
anschließend wieder ein.
Leistungsfaktor
Der Leistungsfaktor ist das Verhältnis zwischen I1 und I
Leistungs− faktor =
Für FC 280 Frequenzumrichter ist
Leistungs− faktor =
3xUxI1cosϕ1
3xUxI
EFF
cosϕ
I1xcosϕ1
=
I
EFF
1 = 1, deshalb:
I
1
I
EFF
.
eff
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
bei
eff
gleicher kW-Leistung.
I
EFF
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberschwingungsstrom sehr niedrig ist.
Die eingebauten DC-Spulen (T2/T4) und PFC (S2) erzeugen
einen hohen Leistungsfaktor und reduzieren dadurch die
Netzbelastung.
Pulseingang/Inkrementalgeber
Ein externer digitaler Impulsgeber für Istwertinformationen
über die Motordrehzahl. Der Drehgeber kommt in
Anwendungen zum Einsatz, bei denen eine große
Genauigkeit bei der Drehzahlregelung erforderlich ist.
Fehlerstromschutzschalter
Fehlerstromschutzschalter.
Parametersatz
Sie können die Parametereinstellungen in vier Parametersätzen speichern. Sie können zwischen den vier
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
SFAVM
Akronym für den Schaltmodus „Statorfluss-orientierte
asynchrone Vektormodulation“.
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorlast die
1 1
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 7
Page 10

Einführung
VLT® Midi Drive Frequenzumrichter 280
11
Ausgangsfrequenz anpasst (nahezu konstante
Motordrehzahl).
Smart Logic Control (SLC)
Die SLC ist eine Folge benutzerdefinierter Aktionen, die
ausgeführt werden, wenn der Smart Logic Controller die
zugeordneten benutzerdefinierter Ereignisse als „wahr“
ermittelt (Parametergruppe 13-** Smart Logic Control).
STW (ZSW)
Zustandswort
THD
Total Harmonic Distortion ist die gesamte Spannungsverzerrung, die sich aus der Addition der einzelnen
Oberschwingungen ergibt.
Thermistor
Ein temperaturabhängiger Widerstand, mit dem die
Temperatur des Frequenzumrichters oder des Motors
überwacht wird.
Abschaltung
Die Abschaltung ist ein Zustand, der in Fehlersituationen
eintritt. Beispiele für Fehlersituationen:
Der Frequenzumrichter ist einer Überspannung
•
ausgesetzt.
Der Frequenzumrichter schützt den Motor, den
•
Prozess oder die Installation.
Der Neustart wird verzögert, bis die Fehlerursache
behoben wurde und der Alarmzustand über die [Reset]Taste am LCP quittiert wird. In einigen Fällen erfolgt das
Quittieren automatisch (durch vorherige Programmierung).
Sie dürfen die Abschaltung nicht zu Zwecken der
Personensicherheit verwenden.
Abschaltblockierung
Die Abschaltblockierung ist ein Zustand, der in Fehlersituationen eintritt, in denen der Frequenzumrichter aus
Sicherheitsgründen abschaltet und ein manueller Eingriff
erforderlich ist. Beispiel: Ein Kurzschluss am Ausgang löst
Abschaltblockierung aus. Sie können eine Abschaltblockierung nur durch Unterbrechen der Netzversorgung,
Beheben der Fehlerursache und erneuten Anschluss des
Frequenzumrichters aufheben. Der Neustart wird verzögert,
bis der Fehlerzustand über die [Reset]-Taste am LCP
quittiert wird. In einigen Fällen erfolgt die Aufhebung
automatisch (durch vorherige Programmierung). Sie dürfen
die Abschaltblockierung nicht zu Zwecken der Personensicherheit verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
+
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet
Voltage Vector Control (VVC+) eine verbesserte Dynamik
und Stabilität der Motordrehzahl in Bezug auf Änderungen
des Last-Drehmoments.
60° AVM
Siehe den Schaltmodus 60° asynchrone Vektormodulation.
1.4 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.2
zeigt die Dokumentenversion und die entsprechende
Softwareversion an.
Ausgabe Anmerkungen
MG07B3
Tabelle 1.2 Dokument- und Softwareversion
Weitere Informationen zu POWERLINK
und Softwareaktualisierung.
Software-
version
1.3
1.5 Zulassungen und Zertifizierungen
Frequenzumrichter werden in Übereinstimmung mit den in
diesem Abschnitt beschriebenen Richtlinien konstruiert.
1.5.1 CE-Zeichen
Das CE-Zeichen (Communauté Européenne) zeigt an, dass
der Hersteller des Produkts alle relevanten EU-Richtlinien
einhält.
Die geltenden EU-Richtlinien zu Ausführung und
Konstruktion des Frequenzumrichters sind:
Die Niederspannungsrichtlinie.
•
Die EMV-Richtlinie.
•
Die Maschinenrichtlinie (für Geräte mit
•
integrierter Sicherheitsfunktion).
Die CE-Kennzeichnung soll für einen freien Handel
zwischen der EG und Mitgliedsstaaten der EFTA
(Europäische Freihandelsassoziation) innerhalb der EWE
technische Barrieren beseitigen. Über die Qualität eines
Produkts sagt die CE-Kennzeichnung nichts aus. Auch gibt
sie keinen Aufschluss zu technischen Spezifikationen.
1.5.2 Niederspannungsrichtlinie
Frequenzumrichter werden als elektronische Komponenten
klassifiziert und müssen in Übereinstimmung mit der
Niederspannungsrichtlinie die CE-Kennzeichnung tragen.
Die Richtlinie gilt für alle elektrischen Geräte in den
Spannungsbereichen 50–1000 V AC und 75–1500 V DC.
Die Richtlinie schreibt vor, dass aufgrund der Konstruktion
der Betriebsmittel bei einer ordnungsmäßigen Installation
und Wartung sowie einer bestimmungsgemäßen
Verwendung die Sicherheit von Menschen und Nutztieren
sowie die Erhaltung von Sachwerten gewährleistet sind.
Danfoss CE-Kennzeichnungen sind mit der Niederspan-
8 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 11

Einführung Projektierungshandbuch
nungsrichtlinie konform und Danfoss liefert auf Wunsch
eine Konformitätserklärung.
1.5.3 EMV-Richtlinie
Elektromagnetische Verträglichkeit (EMV) bedeutet, dass
elektromagnetische Störungen zwischen Geräten deren
Leistung nicht beeinträchtigt. Die grundlegende Schutzanforderung der EMV-Richtlinie 2014/30/EU gibt vor, dass
Betriebsmittel, die elektromagnetische Störungen
verursachen oder deren Betrieb durch diese Störungen
beeinträchtigt werden kann, bei einer ordnungsmäßigen
Installation und Wartung sowie einer bestimmungsgemäßen Verwendung so ausgelegt sein müssen, dass ihre
erreichten elektromagnetischen Störungen begrenzt sind
und die Betriebsmittel eine bestimmte Störfestigkeit
aufweisen.
Ein Frequenzumrichter kann als Stand-alone-Gerät oder als
Teil einer komplexeren Anlage eingesetzt werden. In jedem
dieser Fälle müssen die Gehäuse mit der CEKennzeichnung versehen sein. Anlagen müssen nicht über
eine CE-Kennzeichnung verfügen, jedoch den grundlegenden Schutzanforderungen der EMV-Richtlinie
entsprechen.
Im Falle einer Wiederausfuhr ist der Exporteur dafür verantwortlich, die Einhaltung aller geltenden
Exportkontrollvorschriften sicherzustellen.
1.6 Sicherheit
Frequenzumrichter enthalten Hochspannungskomponenten
und können bei unsachgemäßer Handhabung tödliche
Verletzungen verursachen. Nur qualifiziertes Fachpersonal
darf das Gerät installieren oder bedienen. Reparaturarbeiten dürfen erst erfolgen, wenn der Frequenzumrichter
vom Netz getrennt und der festgelegte Zeitraum für die
Entladung gespeicherter elektrischer Energie verstrichen ist.
Weitere Informationen entnehmen Sie dem Produkthandbuch, das dem Gerät bei Lieferung beiliegt und
online verfügbar ist unter:
Entladezeit.
•
Detaillierte Sicherheitshinweise und Warnungen.
•
Für einen sicheren Betrieb des Frequenzumrichters ist die
strikte Befolgung von Sicherheitsmaßnahmen und hinweisen unbedingt erforderlich.
1 1
1.5.4 UL-Konformität
UL-gelistet
Abbildung 1.2 UL
Angewendete Normen und Konformität für STO
Zur Verwendung der Funktion „Safe Torque Off“ an den
Klemmen 37 und 38 müssen Sie alle Sicherheitsbestimmungen in einschlägigen Gesetzen, Vorschriften und
Richtlinien erfüllen. Die integrierte STO-Funktion erfüllt
folgende Normen:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL von SIL2
•
EN ISO 13849-1:2015, Kategorie 3 PL d
•
Frequenzumrichter können regionalen und/oder nationalen
Exportkontrollvorschriften unterliegen.
Frequenzumrichter, die Exportkontrollvorschriften
unterliegen, sind mit einer ECCN-Nummer gekennzeichnet.
Die ECCN-Nummer finden Sie in den Dokumenten, die Sie
mit dem Frequenzumrichter erhalten.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 9
Page 12

130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2 Produktübersicht
22
2.1 Baugrößenübersicht
Die Baugröße hängt von der Leistung ab. Informationen zu den Abmessungen finden Sie in Kapitel 7.13 Baugrößen, Nennleis-
tungen und Abmessungen.
Baugröße K1 K2 K3 K4 K5
Gehäuseschutzart
Leistungsbereich
[kW (HP)]
3-phasig
380–480 V
Leistungsbereich
[kW (HP)]
3-phasig
200–240 V
Leistungsbereich
[kW (HP)]
, einphasig
200–240 V
1) IP21 ist für einige Varianten des VLT® Midi Drive FC 280 erhältlich. Durch die Montage der IP21-Bausatzoptionen können Sie alle Leistungsgrößen zu IP21 aufrüsten.
1)
Tabelle 2.1 Baugrößen
IP20 IP20 IP20 IP20 IP20
0,37–2,2 (0,5–3,0) 3,0–5,5 (5,0–7,5) 7,5 (10) 11–15 (15–20) 18,5–22 (25–30)
0,37–1,5 (0,5–2,0) 2,2 (3,0) 3,7 (5,0) – –
0,37–1,5 (0,5–2,0) 2,2 (3,0) – – –
Die Baugröße ist im gesamten Handbuch ein Indikator, da sich die Verfahren und Komponenten der Frequenzumrichter je
nach physischer Größe unterscheiden.
Suchen Sie die Baugröße mithilfe der folgenden Schritte:
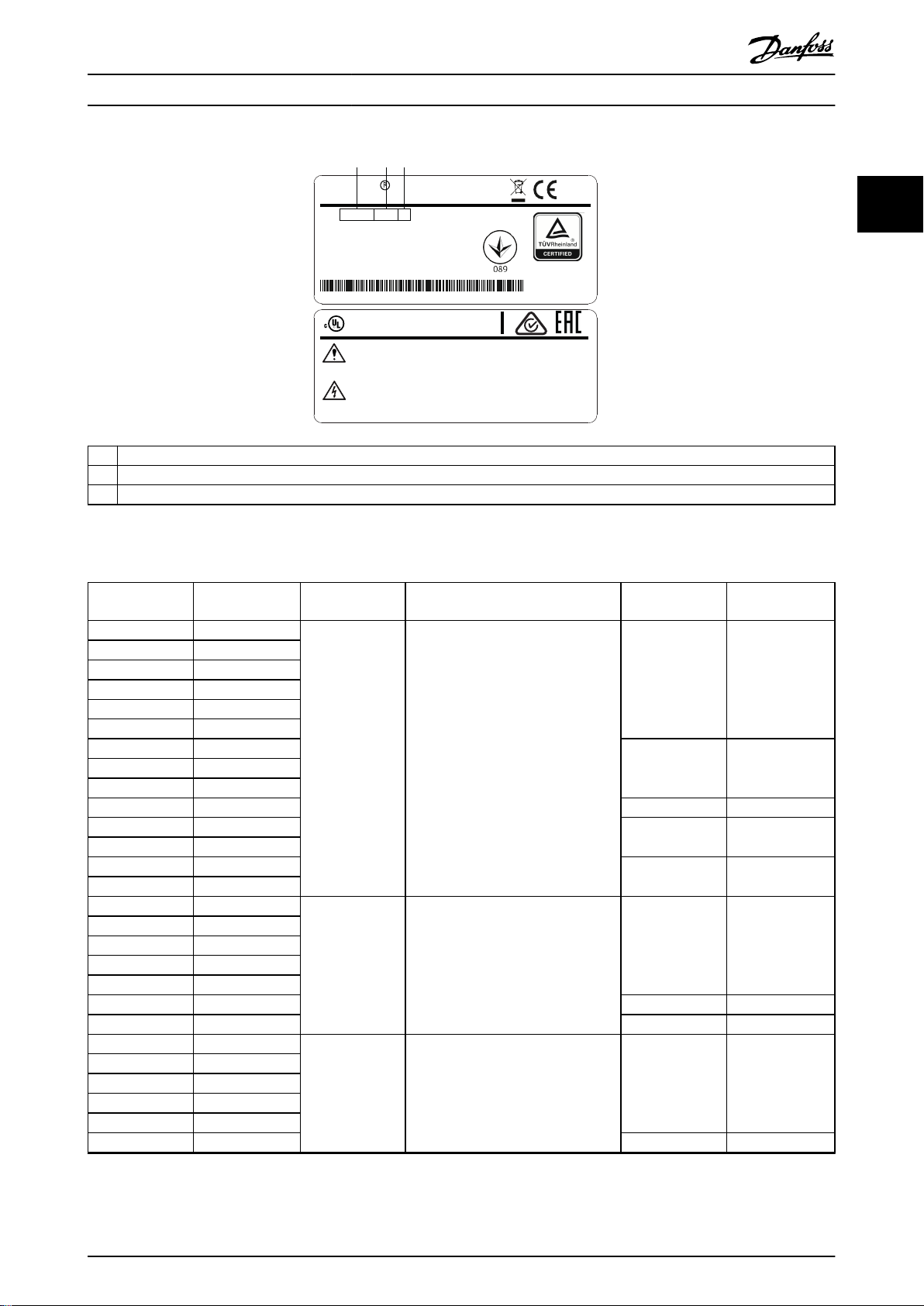
1. Entnehmen Sie dem Typencode auf dem Typenschild die folgenden Informationen. Siehe Abbildung 2.1.
1a Produktgruppe und Frequenzumrichterserie (Zeichen 1–6), zum Beispiel FC 280.
1b Nennleistung (Zeichen 7-10), zum Beispiel PK37.
1c Nennspannung (Phasen und Netzspannung) (Zeichen 11–12), zum Beispiel T4.
2. Entnehmen Sie Tabelle 2.2 die Nennleistung und Nennspannung, und schlagen Sie die Baugröße von FC 280 nach.
10 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 13
130BF709.10
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
1 2 3
Produktübersicht Projektierungshandbuch
1 Produktgruppe und Frequenzumrichterserie
2 Nennleistung
3 Nennspannung (Phasen und Netzspannung)
Abbildung 2.1 Verwendung des Typenschilds zum Suchen der Baugröße
2 2
Nennleistung in
Typenschild
Leistung
[kW (HP)]
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0)
P3K0 3 (4,0)
P4K0 4 (5,0)
P5K5 5,5 (7,5)
P7K5 7,5 (10) K3 K3T4
P11K 11 (15)
P15K 15 (20)
P18K 18,5 (25)
P22K 22 (30)
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2T2
P3K7 3,7 (5,0) K3 K3T2
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2S2
Tabelle 2.2 Baugröße von FC 280
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 11
Nennspannung in
Typenschild
Phasen und Netzspannung Baugröße
T4 Dreiphasig 380-480 V
T2 Dreiphasig 200-240 V
S2 Einphasig 200-240 V
Frequenzum-
richter
K1 K1T4
K2 K2T4
K4 K4T4
K5 K5T4
K1 K1T2
K1 K1S2
Page 14
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.18
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
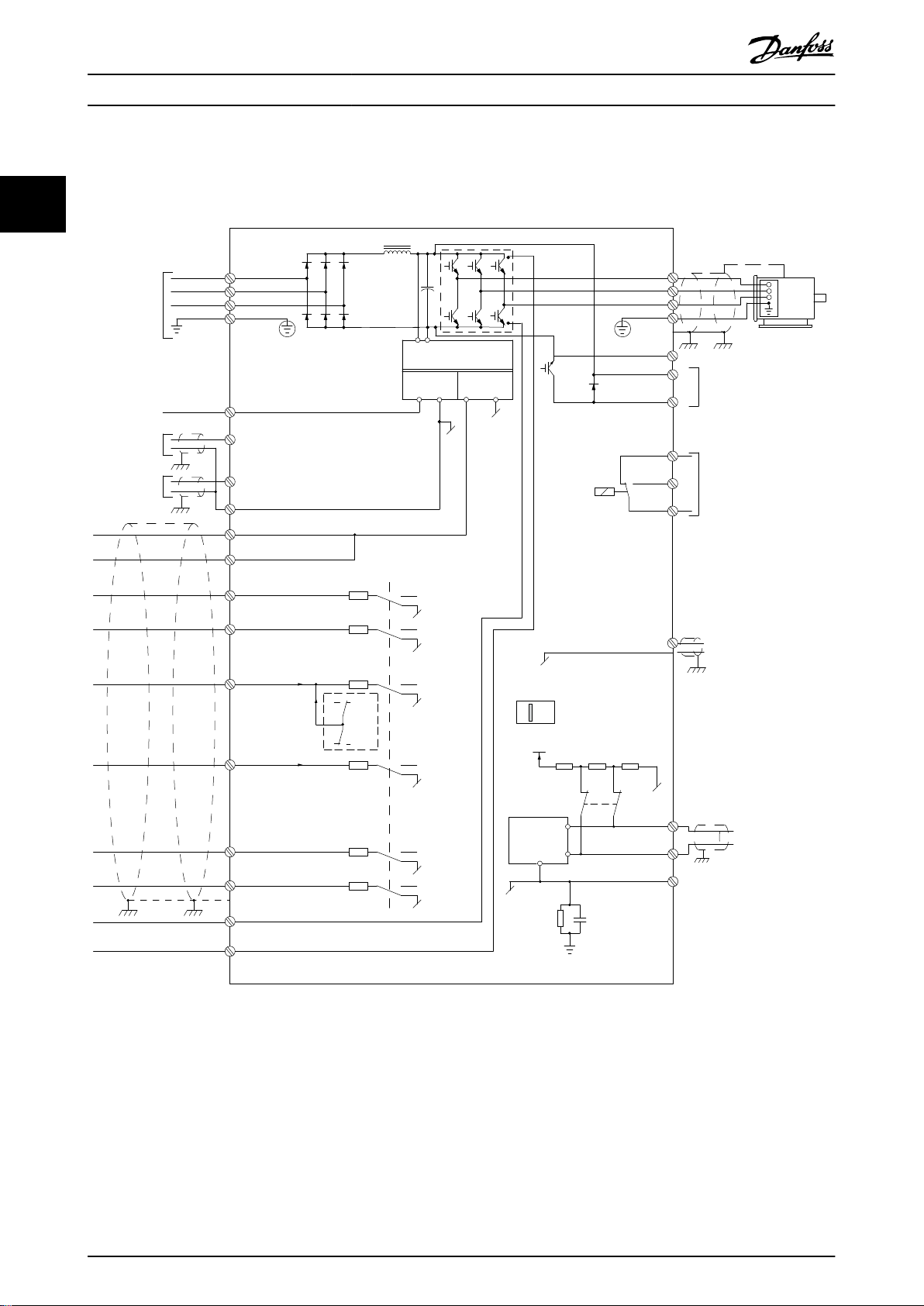
2.2 Elektrische Installation
Dieser Abschnitt enthält eine Beschreibung zum Anschluss des Frequenzumrichters.
22
Abbildung 2.2 Anschlussdiagramm des Grundgeräts
A = analog, D = digital
1) Der integrierte Bremschopper ist nur für 3-phasige Einheiten erhältlich.
2) Sie können Klemme 53 auch als Digitaleingang verwenden.
3) Sie können den Schalter S801 (DC-Bus-Zwischenkreisklemmen) verwenden, um für die serielle RS485-Schnittstelle (Klemmen 68
und 69) die integrierten Busabschlusswiderstände zu aktivieren.
4) Kapitel 4 Safe Torque Off (STO) zeigt die richtige STO-Verdrahtung.
5) Der S2-Frequenzumrichter (Single-Phase 200–240 V) unterstützt nicht Zwischenkreiskopplungsanwendungen.
12 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 15
130BF228.10
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
4
6
15
90
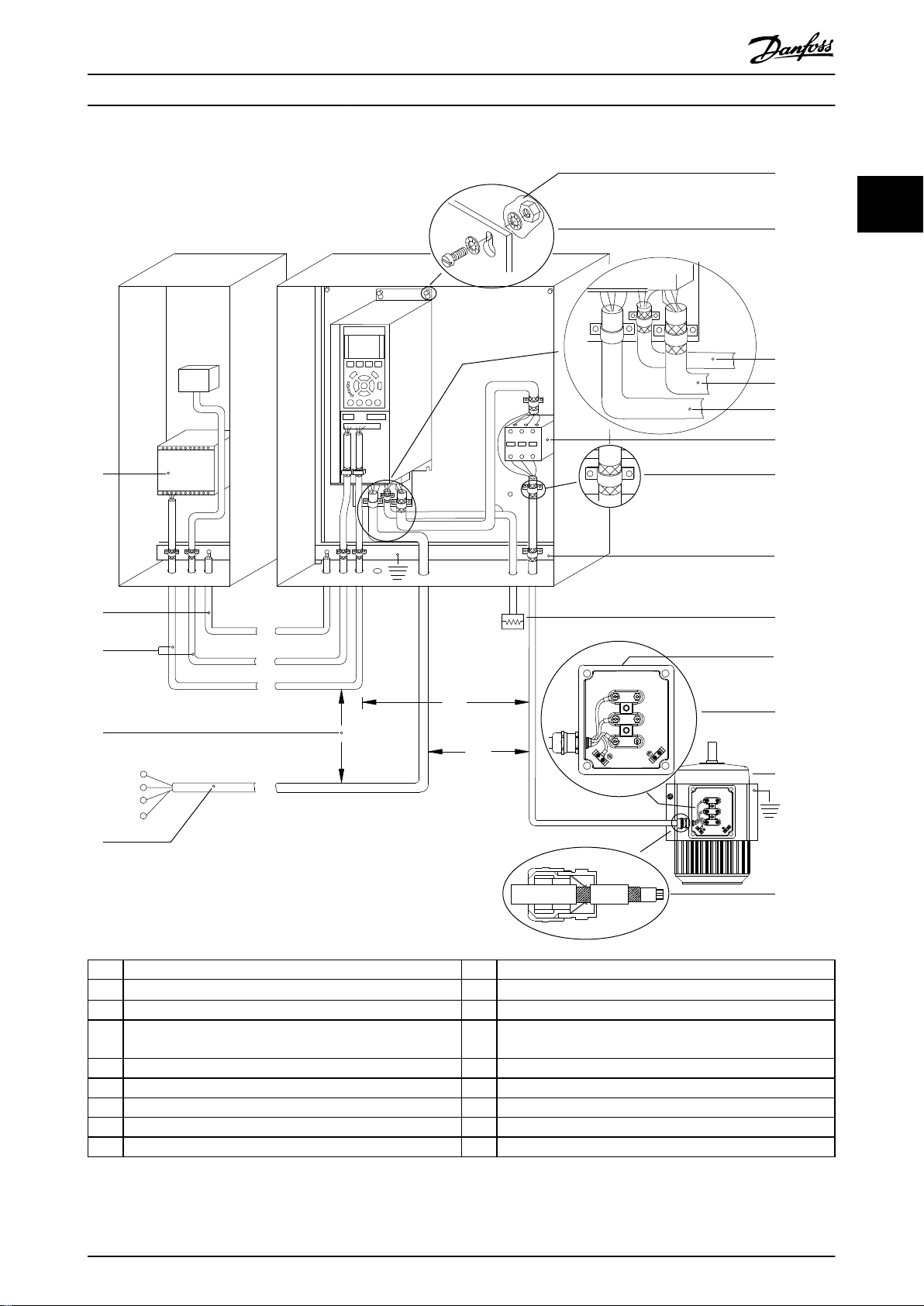
Produktübersicht Projektierungshandbuch
2 2
1 SPS 10 Netzkabel (ungeschirmt)
2
Minimum 16 mm2 (6 AWG) Ausgleichskabel
3 Steuerleitungen 12 Kabelisolierung, abisoliert
4 Mindestens 200 mm (656 ft) zwischen Steuerleitungen,
Motorkabeln und Netzkabeln.
5 Netzversorgung 14 Bremswiderstand
6 Freiliegende (nicht lackierte) Oberfläche 15 Metallkasten
7 Sternscheiben 16 Anschluss zum Motor
8 Anschlusskabel für Bremse (abgeschirmt) 17 Motor
9 Motorkabel (abgeschirmt) 18 EMV-Kabelverschraubung
Abbildung 2.3 Typische elektrische Verbindung
11 Ausgangsschütz usw.
13 Gemeinsame Erdsammelschiene. Beachten Sie nationale und
örtliche Vorschriften für die Schaltschrankerdung.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 13
Page 16
130BD531.10
U
V
W
96
97
98
Produktübersicht
2.2.1 Motoranschluss
VLT® Midi Drive Frequenzumrichter 280
22
WARNUNG
INDUZIERTE SPANNUNG!
Induzierte Spannung durch nebeneinander verlegte
Motorkabel kann Gerätekondensatoren auch dann
aufladen, wenn die Geräte abgeschaltet und verriegelt
sind. Die Nichtbeachtung der Empfehlung zum separaten
Verlegen von Motorkabeln oder zur Verwendung von
abgeschirmten Kabeln kann zum Tod oder zu schweren
Verletzungen führen!
Verlegen Sie Motorkabel getrennt.
•
Verwenden Sie abgeschirmte Kabel.
•
Befolgen Sie bezüglich der Kabelquerschnitte
•
örtliche und nationale Vorschriften. Maximale
Kabelquerschnitte siehe Kapitel 7.1 Elektrische
Daten.
Befolgen Sie die Anforderungen des Motorhers-
•
tellers an die Motorkabel.
Kabeleinführungen für Motorkabel oder
•
Bodenplatten mit Durchführungen sind am
Unterteil von Frequenzumrichtern mit Schutzart
IP21 (NEMA Typ 1) vorgesehen.
Schließen Sie kein Anlass- oder Polwechselgerät
•
(z. B. Dahlander-Motor oder Asynchron-Schleifringläufermotor) zwischen Frequenzumrichter und
Motor an.
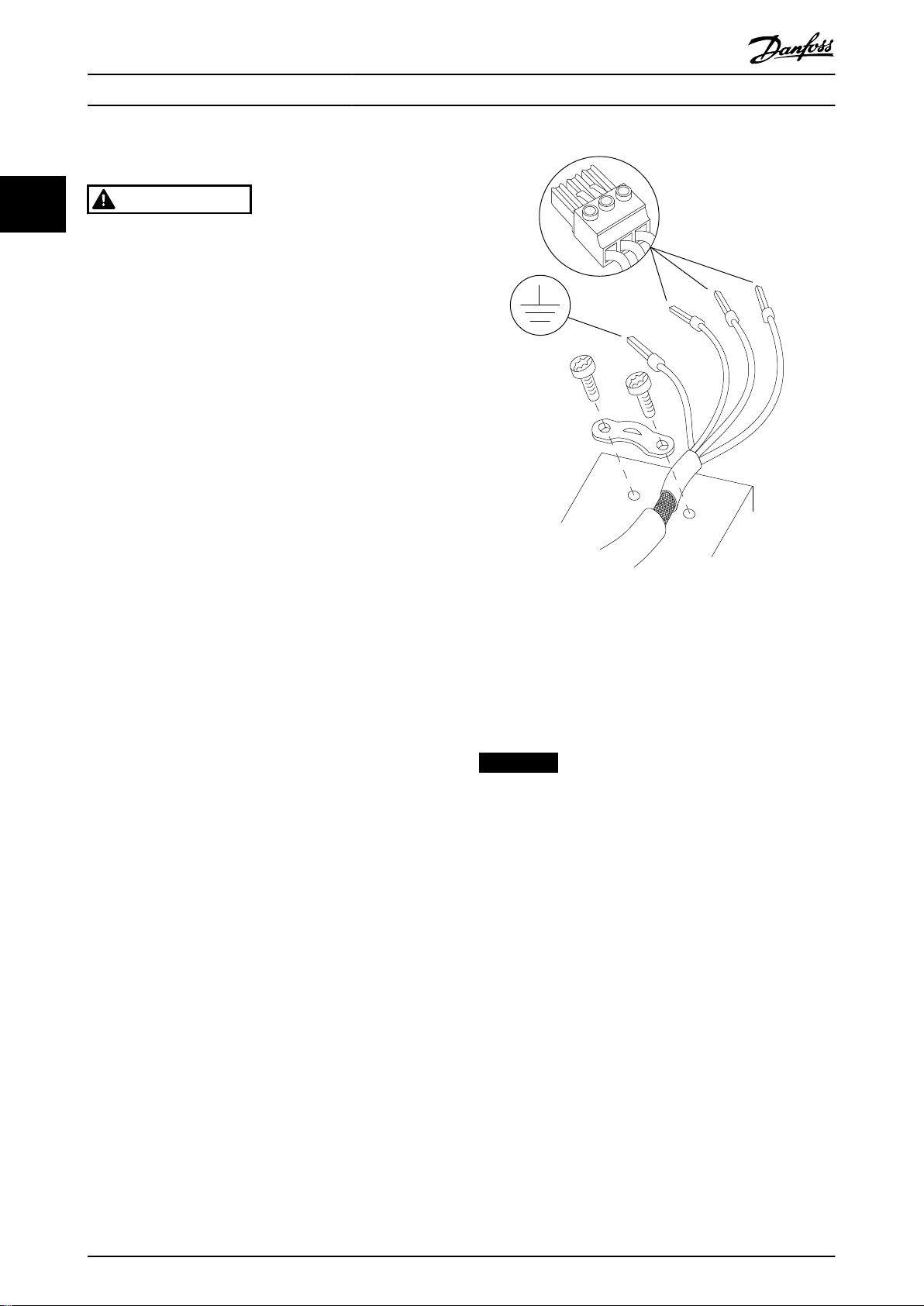
Vorgehensweise
1. Isolieren Sie einen Abschnitt der äußeren
Kabelisolierung ab. Empfohlene Länge beträgt
10–15 mm.
2. Positionieren Sie das abisolierte Kabel unter der
Kabelschelle, um eine mechanische Befestigung
und elektrischen Kontakt zwischen Kabelschirm
und Erde herzustellen.
3. Schließen Sie das Erdungskabel gemäß den
Erdungsanweisungen im Kapitel Erdung der VLT
Midi DriveFC 280 Bedienungsleitung an die
nächstgelegene Erdungsklemme an. Siehe
Abbildung 2.4.
4. Schließen Sie die 3 Phasen des Motorkabels an
die Klemmen 96 (U), 97 (V) und 98 (W) an (siehe
Abbildung 2.4).
5. Ziehen Sie die Klemmen gemäß den Anzugsdrehmomenten in Kapitel 7.7 Anzugsdrehmomente für
Anschlüsse an.
®
Abbildung 2.4 Motoranschluss
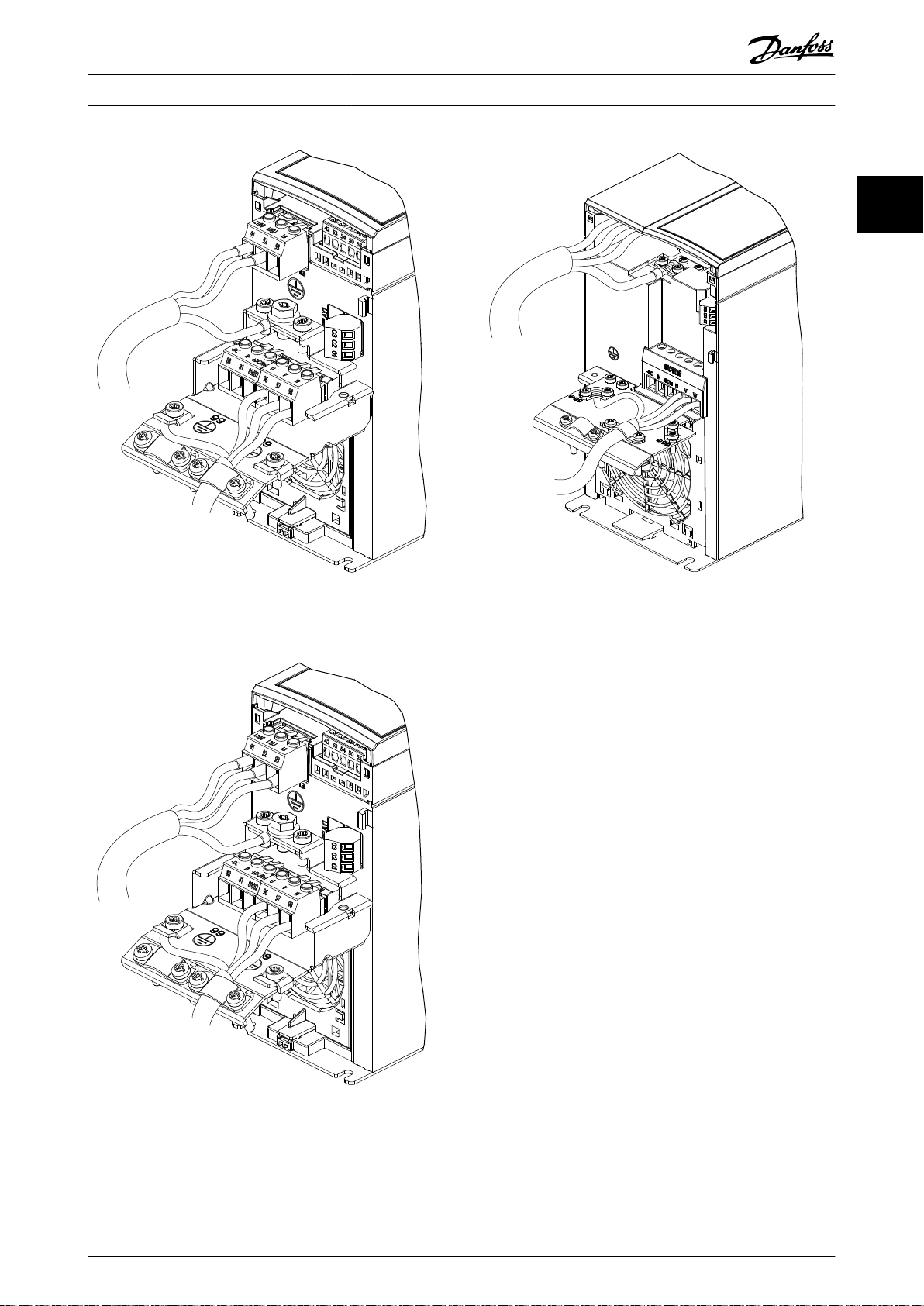
Die Netz-, Motor- und Erdanschlüsse für 1-phasige und 3phasige Frequenzumrichter sind jeweils in Abbildung 2.5,
Abbildung 2.6 und Abbildung 2.7 aufgeführt. Die jeweiligen
Konfigurationen ändern sich je nach Gerätetypen und
optionaler Ausrüstung.
HINWEIS
Bei Motoren ohne Phasentrennpapier oder eine
geeignete Isolation, welche für den Betrieb an einem
Zwischenkreisumrichter benötigt wird, müssen Sie einen
Sinusfilter am Ausgang des Frequenzumrichters
vorsehen.
14 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 17
130BE232.11
130BE231.11
130BE804.10
Produktübersicht Projektierungshandbuch
2 2
Abbildung 2.5 Netz-, Motor- und Erdanschluss für 1-phasige
Einheiten (K1, K2)
Abbildung 2.6 Netz-, Motor- und Erdanschluss für 3-phasige
Einheiten (K1, K2, K3)
Abbildung 2.7 Netz-, Motor- und Erdanschluss für 3-phasige
Einheiten (K4, K5)
2.2.2 Netzanschluss
Wählen Sie die Querschnitte der Kabel anhand
•
des Eingangsstroms des Frequenzumrichters.
Angaben zum maximalen Kabelquerschnitt finden
Sie in Kapitel 7.1 Elektrische Daten.
Befolgen Sie bezüglich der Kabelquerschnitte
•
örtliche und nationale Vorschriften.
Vorgehensweise
1. Schließen Sie die Netzkabel an die Klemmen N
und L für 1-phasige Einheiten (siehe
Abbildung 2.5) oder an die Klemmen L1, L2 und
L3 für 3-phasige Einheiten (siehe Abbildung 2.6
und Abbildung 2.7) an.
2. Schließen Sie je nach Konfiguration der Geräte
die Eingangsleistung an die Netzeingangsklemmen oder den Netztrennschalter an.
3. Erden Sie das Kabel gemäß den Erdungsanweisungen im Kapitel Erdung der VLT® Midi DriveFC
280 Bedienungsleitung.
4. Versorgt ein IT-Netz, eine potenzialfreie Dreieckschaltung oder ein TT/TN-S-Netz mit geerdetem
Zweig (geerdete Dreieckschaltung) den Frequenzumrichter, so stellen Sie sicher, dass die
Schraube des EMV-Filters entfernt wird. Durch das
Entfernen der Schraube des EMV-Filters
verhindern Sie Schäden am Zwischenkreis und
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 15
Page 18
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
verringern die Erdungskapazität gemäß IEC
61800-3 (siehe Abbildung 7.13, die Schraube des
EMV-Filters befindet sich an der Seite des
22
Frequenzumrichters).
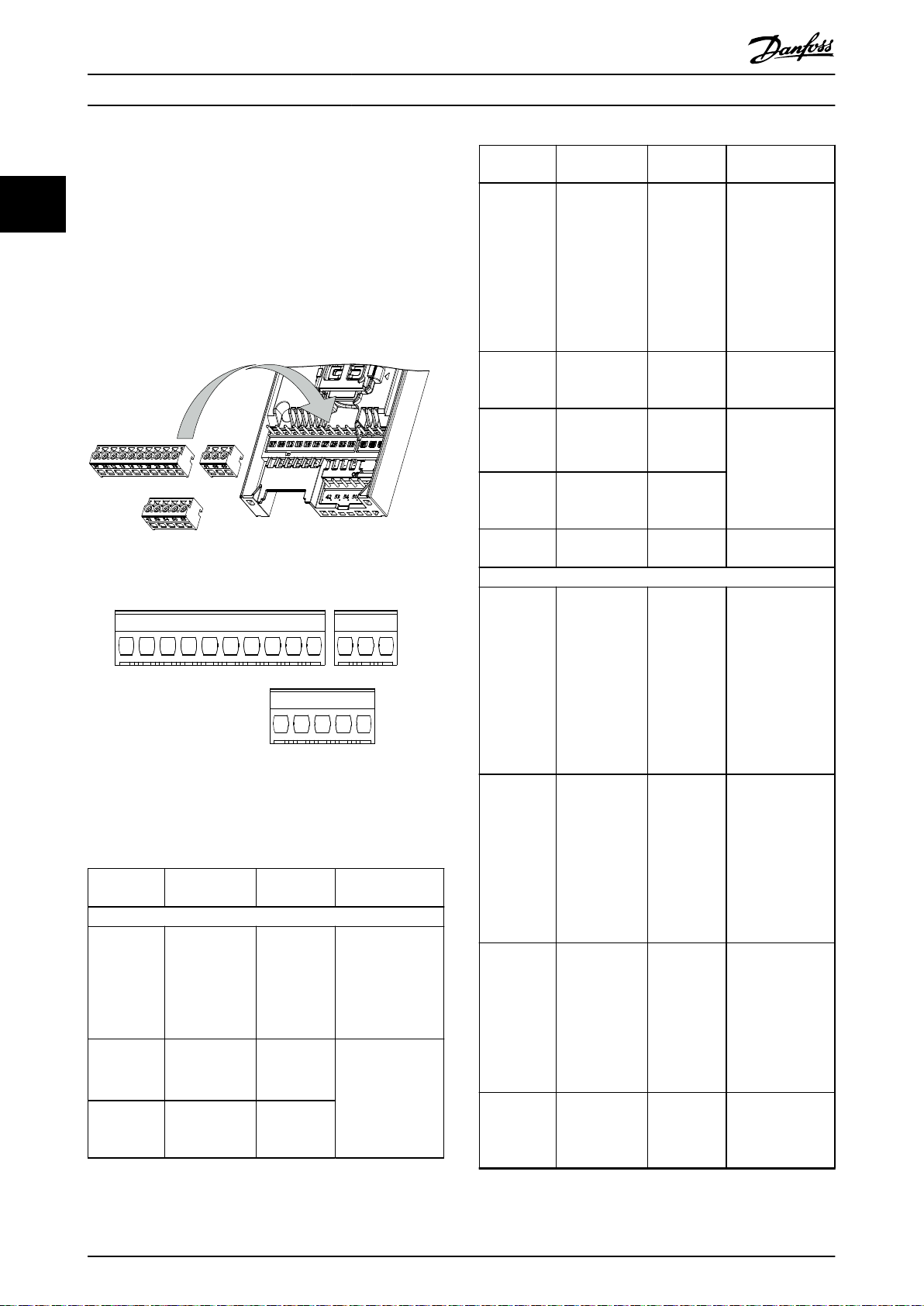
2.2.3 Steuerklemmentypen
Abbildung 2.8 zeigt die steckbaren Anschlüsse des Frequenzumrichters. Tabelle 2.3 und Tabelle 2.4 fasst
Klemmenfunktionen und Werkseinstellungen zusammen.
Abbildung 2.8 Anordnung der Steuerklemmen
Abbildung 2.9 Klemmennummern
Nähere Angaben zu Klemmenspezifikationen finden Sie in
Kapitel 7.6 Steuereingang/-ausgang und Steuerdaten .
Anschluss Parameter
Digital-E/A, Puls-E/A, Drehgeber
12, 13 – +24 V DC
Parameter 5-10
18
19
Klemme 18
Digitaleingang
Parameter 5-11
Klemme 19
Digitaleingang
Werksein-
stellung
[8] Start
[10]
Reversierung
Beschreibung
24-V-DC-Versorgungsspannung.
Maximaler
Ausgangsstrom
von 100 mA für
alle 24-V-Lasten.
Digitaleingänge.
Anschluss Parameter
Parameter 5-01
Klemme 27
Funktion
Parameter 5-12
27
29
32
33
37, 38 – STO
42
50 – +10 V DC
53
54
Klemme 27
Digitaleingang
Parameter 5-30
Klemme 27
Digitalausgang
Parameter 5-13
Klemme 29
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
Parameter 5-15
Klemme 33
Digitaleingang
Analogeingänge/-ausgänge
Parameter 6-91
Klemme 42
Analogausgang
Parameter-
gruppe 6-1*
Analogeingang
53
Parameter-
gruppe 6-2*
Analogeingang
54
Werksein-
stellung
Digitaleingang [2]
Motorfreilauf
(inv.)
Digitalausgang [0]
Ohne
Funktion
[14]
Festdrehzahl
JOG
[0] Ohne
Funktion
[0] Ohne
Funktion
[0] Ohne
Funktion
–
–
Beschreibung
Lässt sich als
Digitaleingang,
Digitalausgang
oder Pulsausgang
wählen. Die
Werkseinstellung
ist Digitaleingang.
Digitaleingang.
Digitaleingang, 24V-Drehgeber. Sie
können Klemme
33 als Pulseingang
verwenden.
Funktionale Sicherheitseingänge.
Programmierbarer
Analogausgang.
Das Analogsignal
liefert 0 .. 20 mA
oder 4 .. 20 mA
bei maximal 500
Ω. Sie können die
Klemmen auch als
Digitalausgänge
konfigurieren.
10-V-DC-Versorgungsspannung
am Analogausgang. Maximal
15 mA, in der
Regel für Potenziometer oder
Thermistor
verwendet.
Analogeingang.
Nur die Einstellung
Spannung wird
unterstützt. Sie
können diesen
auch als Digitaleingang
verwenden.
Analogeingang.
Programmierbar
für Spannung oder
Strom.
16 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 19
Produktübersicht Projektierungshandbuch
Anschluss Parameter
55 – –
Tabelle 2.3 Klemmenbeschreibung – Digitaleingänge/-ausgänge,
Analogeingänge/-ausgänge
Anschluss Parameter
Serielle Kommunikation
61 – –
Parameter-
68 (+)
69 (-)
01, 02, 03
Tabelle 2.4 Klemmenbeschreibungen – Serielle Schnittstelle
gruppe 8-3* Ser.
FC-Schnittst.
Parameter-
gruppe 8-3* Ser.
FC-Schnittst.
Parameter 5-40
Relaisfunktion
Werksein-
stellung
Werkseinstellung
Relais
[1] Steuer.
bereit
Beschreibung
Bezugspotential
für Digital- und
Analogeingänge.
Beschreibung
Integrierter RCFilter für
Kabelabschirmung.
Dient NUR zum
Anschluss der
Abschirmung bei
EMV-Problemen.
RS485-Schnitt-
–
–
stelle. Ein Schalter
auf der
Steuerkarte dient
zum Zuschalten
des Abschlusswiderstands.
WechselkontaktRelaisausgang.
Diese Relais
befinden sich je
nach Konfiguration
und Größe des
Frequenzumrichters an
verschiedenen
Positionen.
Verwendbar für
Wechsel- oder
Gleichspannung
sowie ohmsche
oder induktive
Lasten.
2.2.4 Verdrahtung der Steuerklemmen
Steuerklemmenanschlüsse am Frequenzumrichter sind
steckbar und ermöglichen so eine einfache Installation
(siehe Abbildung 2.8).
Details zur STO-Verdrahtung siehe Kapitel 4 Safe Torque Off
(STO).
HINWEIS
Halten Sie Steuerleitungen möglichst kurz und verlegen
Sie diese separat von den Leistungskabeln, um
Störungen möglichst gering zu halten.
1. Lösen Sie die Schrauben für die Klemmen.
2. Führen Sie die abisolierten Steuerleitungen in die
Steckplätze ein.
3. Ziehen Sie die Schrauben für die Klemmen fest.
4. Stellen Sie sicher, dass der Kontakt fest hergestellt
ist. Lose Steuerkabel können zu Fehlern oder
einem Betrieb führen, der nicht die optimale
Leistung erbringt.
Steuerleitungsquerschnitte finden Sie unter
Kapitel 7.5 Kabelspezifikationen und typische Beispiele für
den Anschluss der Steuerleitungen unter
Kapitel 3 Anwendungsbeispiele.
2.3 Regelungsstrukturen
Ein Frequenzumrichter richtet die Netzwechselspannung in
Gleichspannung gleich. Der Wechselrichter wandelt dann
die Gleichspannung in eine Wechselspannung mit variabler
Amplitude und Frequenz um.
Spannung/Strom und Frequenz am Motorausgang sind
somit variabel, was eine stufenlose Drehzahlregelung von
herkömmlichen Dreiphasen-Asynchronmotoren und
Permanentmagnet-Synchronmotoren ermöglicht.
2.3.1 Steuerungsmodi
Der Frequenzumrichter regelt die Drehzahl oder das
Drehmoment an der Motorwelle. Der Frequenzumrichter
regelt außerdem den Prozess für einige Anwendungen, die
die Prozessdaten als Soll- oder Istwert verwenden (z. B.
Temperatur und Druck). Einstellung von
Parameter 1-00 Configuration Mode bestimmt die Art der
Regelung.
Drehzahlregelung
Es gibt zwei Arten der Drehzahlregelung:
Drehzahlregelung ohne Istwertrückführung vom
•
Motor (ohne Geber).
Drehzahlregelung mit Istwertrückführung mit PID-
•
Regelcharakteristik. Eine optimierte
Drehzahlregelung mit Istwertrückführung arbeitet
mit einer wesentlich höheren Genauigkeit als eine
ohne Istwertrückführung.
Wählen Sie aus, welcher Eingang zur Rückführung des PIDDrehzahlistwerts in Parameter 7-00 Speed PID Feedback
Source verwendet werden soll.
2 2
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 17
Page 20

Produktübersicht
Drehmomentregelung
Die Drehmomentregelung kommt in Anwendungen zum
Einsatz, in denen das Drehmoment an der Motorwelle in
22
der Anwendung zur Zugkraftregelung dient. Wählen Sie [2]
Drehmoment mit Rückführung oder [4] Drehmoment ohne
Rückführung in Parameter 1-00 Configuration Mode. Die
Drehmomenteinstellung erfolgt durch Festlegung eines
analogen, digitalen oder busgesteuerten Sollwerts. Bei
Betrieb mit Drehmomentregelung empfehlen wir, eine
komplette AMA auszuführen, da die richtigen Motordaten
wichtig für optimale Leistung sind.
VVC+-Betrieb mit Rückführung. Diese Funktion
•
können Sie bei Anwendungen mit niedrigen bis
mittleren Dynamikanforderungen verwenden. Sie
bietet in allen vier Quadranten und bei allen
Motordrehzahlen eine ausgezeichnete Leistung.
Das Drehzahlistwertsignal ist obligatorisch. Stellen
Sie sicher, dass die Drehgeberauflösung
mindestens 1024 PPR beträgt und das
Abschirmkabel des Drehgebers ordnungsgemäß
geerdet ist, weil die Genauigkeit des Drehzahlistwertsignals wichtig ist. Stellen Sie
Parameter 7-06 Speed PID Lowpass Filter Time auf
das beste Drehzahlistwertsignal ein.
VLT® Midi Drive Frequenzumrichter 280
VVC+-Betrieb ohne Rückführung. Die Funktion
•
wird in mechanisch robusten Anwendungen
verwendet, die Genauigkeit ist jedoch begrenzt.
Die Drehmomentregelung ohne Rückführung
funktioniert in beide Richtungen. Das
Drehmoment wird anhand der internen
Strommessung des Frequenzumrichters
berechnet.
Drehzahl-/Drehmomentsollwert
Der Sollwert für dieses Regelverhalten kann entweder ein
einzelner Sollwert oder die Summe verschiedener Sollwerte
einschließlich relativ skalierter Sollwerte sein. Die Sollwertverarbeitung wird ausführlich in
Kapitel 2.4 Sollwertverarbeitung erläutert.
Prozessregelung
Es gibt zwei Arten der Prozessregelung:
Die Prozessregelung mit Rückführung ist ein
•
grundlegender PID-Prozessregler.
Die erweiterte PID-Drehzahlregelung ohne
•
Rückführung erweitert die Funktion des grundlegenden PID-Prozessreglers durch Hinzufügen
weiterer Funktionen. Beispielsweise Vorsteuerung,
Befestigung, Sollwert/Istwert-Filter und Verstärkungsskalierung.
18 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 21
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Produktübersicht Projektierungshandbuch
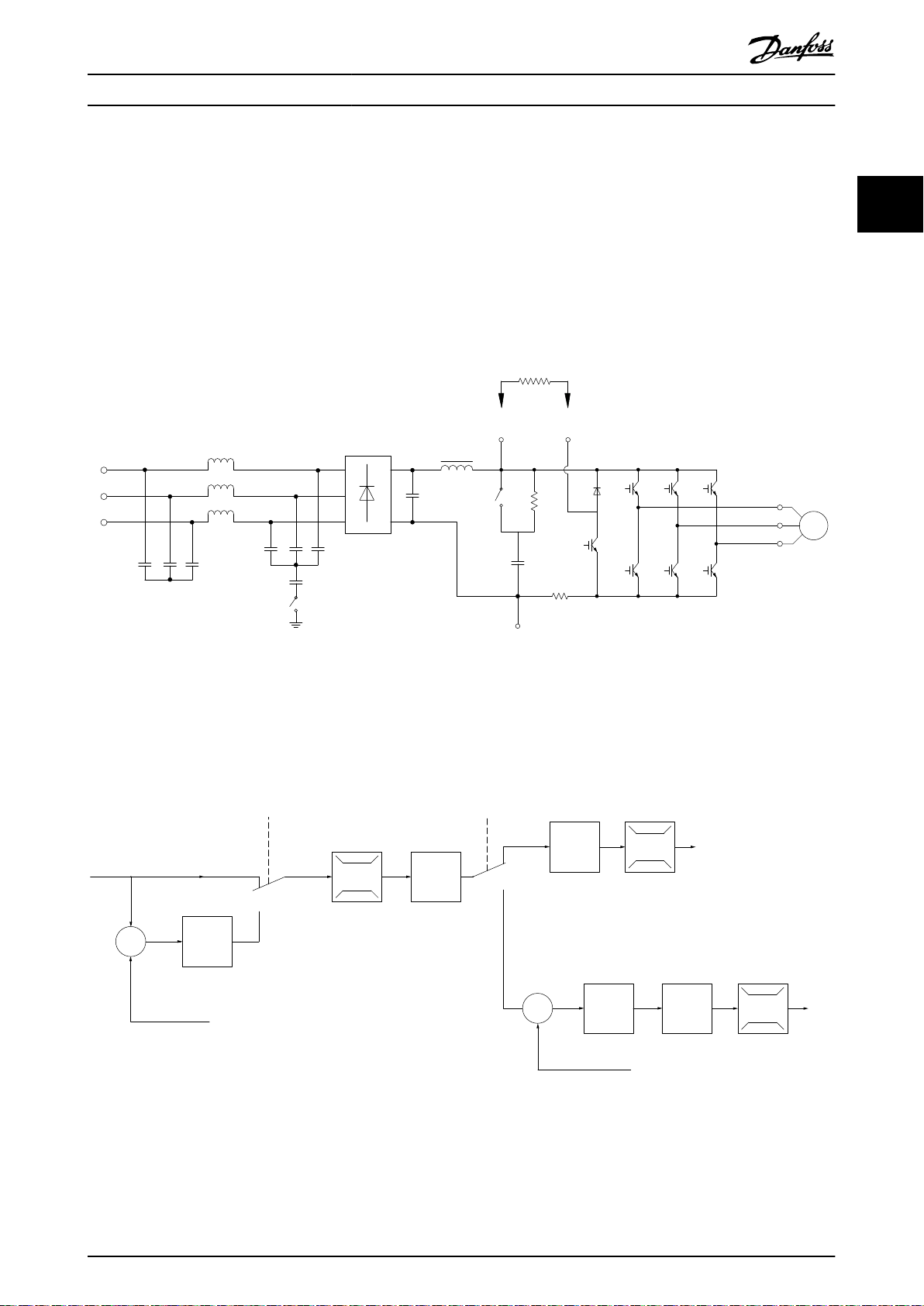
2.3.2 Steuerverfahren
Der VLT® Midi Drive FC 280 ist ein Frequenzumrichter für Anwendungen mit einfachen bis mittleren Anforderungen an
Dynamik und Genauigkeit. Das Steuerverfahren basiert auf VVC+.
FC 280 Frequenzumrichter können Asynchronmotoren und Permanentmagnet-Synchronmotoren bis 22 kW (30 hp) steuern.
Das Strommessprinzip in FC 280 Frequenzumrichtern basiert auf der Strommessung durch einen Widerstand im
Zwischenkreis. Erdschlussschutz und Kurzschlussverhalten werden durch denselben Widerstand realisiert.
2 2
Abbildung 2.10 Steuerschaltbild
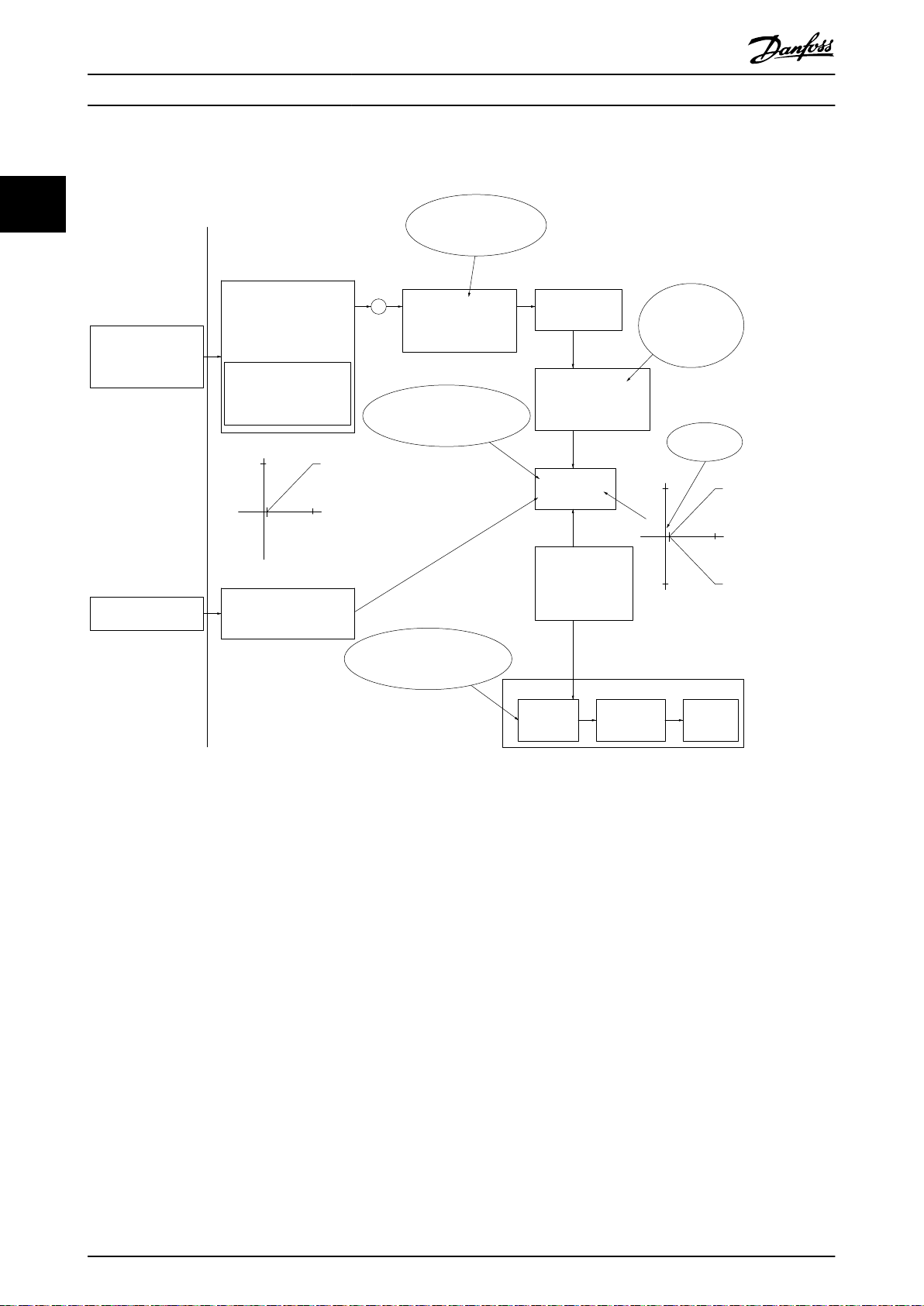
2.3.3
Regelungsstruktur in VVC
Abbildung 2.11 Regelungsstruktur in VVC+-Konfigurationen mit und ohne Rückführung
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 19
+
Page 22
130BP046.10
Hand
on
O
Auto
on
Reset
Hand
On
Off
Reset
Auto
On
130BB893.10
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
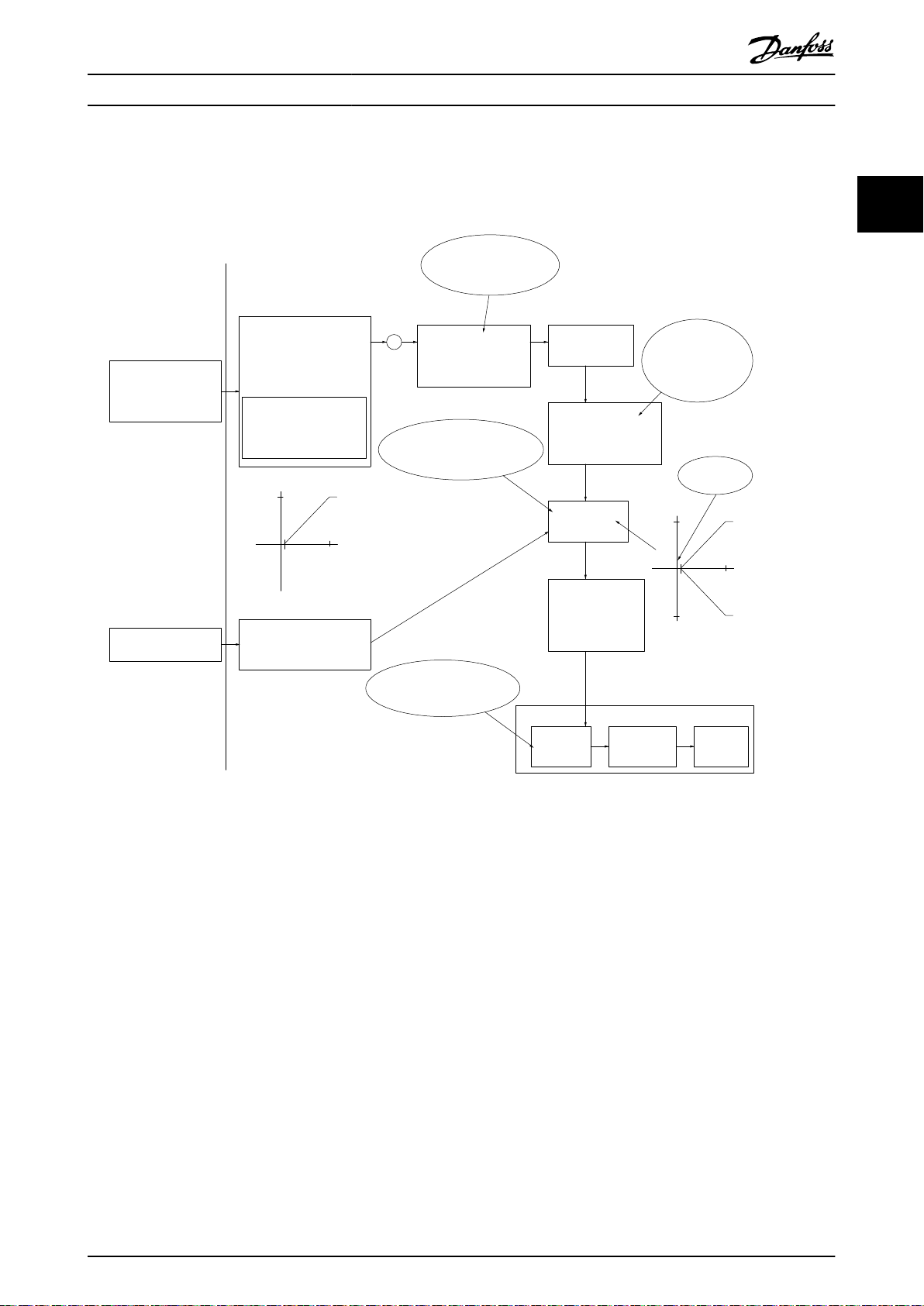
In der in Abbildung 2.11 gezeigten Konfiguration ist Parameter 1-01 Motor Control Principle auf [1] VVC+ eingestellt und
Parameter 1-00 Configuration Mode auf [0] Ohne Rückführung. Der resultierende Sollwert aus dem Sollwertsystem wird in der
Rampenbegrenzung und Drehzahlbegrenzung empfangen und durch sie geführt, bevor er an die Motorregelung übergeben
22
wird. Der Ausgang der Motorregelung ist dann zusätzlich durch die maximale Frequenzgrenze beschränkt.
Wenn Parameter 1-00 Configuration Mode auf [1] Mit Drehgeber eingestellt ist, wird der resultierende Sollwert von der
Rampenbegrenzung und Drehzahlgrenze an einen PID-Drehzahlregler übergeben. Die Parameter für den PID-Drehzahlregler
befinden sich in Parametergruppe 7-0* PID Drehzahlregler. Der resultierende Sollwert vom PID-Drehzahlregler wird beschränkt
durch die Frequenzgrenze an die Motorsteuerung geschickt.
Wählen Sie [3] PID-Prozess in Parameter 1-00 Configuration Mode, um den PID-Prozessregler zur Regelung mit Rückführung
bei einer Druck- oder Durchflussregelung zu verwenden. Die Parameter für Prozess-PID-Regelung befinden sich in den
Parametergruppen 7-2* PID-Prozess Istw. Istw. und 7-3* PID-Prozessregler.
2.3.4
Interner Stromgrenzenregler in Betriebsart VVC
+
Der Frequenzumrichter ist mit einem integrierten Stromgrenzenregler ausgestattet. Diese Funktion wird aktiviert, wenn der
Motorstrom und somit das Drehmoment die in Parameter 4-16 Torque Limit Motor Mode, Parameter 4-17 Torque Limit
Generator Mode und Parameter 4-18 Current Limit eingestellten Drehmomentgrenzen überschreitet.
Wenn der Frequenzumrichter während des Motorbetriebs oder im generatorischen Betrieb die Stromgrenze erreicht,
versucht der Frequenzumrichter schnellstmöglich, die eingestellten Drehmomentgrenzen wieder zu unterschreiten, ohne die
Kontrolle über den Motor zu verlieren.
2.3.5 Hand-Steuerung (Hand On) und Fern-Betrieb (Auto On)
Sie können den Frequenzumrichter manuell über das Bedienteil vor Ort (grafisches oder numerisches LCP) oder aus der
Ferne über Analog-/Digitaleingänge oder Feldbus betreiben.
Starten und stoppen Sie den Frequenzumrichter über das LCP mit den Tasten [Hand On] und [Reset]. Die Inbetriebnahme
erfolgt über folgende Parameter:
Parameter 0-40 [Hand On]-LCP Taste.
•
Parameter 0-44 [Off/Reset]-LCP Taste.
•
Parameter 0-42 [Auto On]-LCP Taste.
•
Quittieren Sie Alarme mithilfe der [Reset]-Taste oder über einen Digitaleingang, wenn die Klemme auf Reset programmiert
wird.
Abbildung 2.12 LCP 102-Steuertasten
Abbildung 2.13 LCP 101-Steuertasten
20 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 23

Produktübersicht Projektierungshandbuch
Der Ortsollwert versetzt das Regelverfahren in eine Regelung ohne Rückführung, die unabhängig von den Einstellungen in
Parameter 1-00 Regelverfahren ist.
Der Ortsollwert wird beim Ausschalten des Frequenzumrichters wiederhergestellt.
2 2
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 21
Page 24
No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.4 Sollwertverarbeitung
Ortsollwert
22
Der Ortsollwert ist aktiv, wenn der Frequenzumrichter mit aktiver [Hand on]-Taste betrieben wird. Stellen Sie den Sollwert
über [▲]/[▼] und [◄/[►] ein.
Fernsollwert
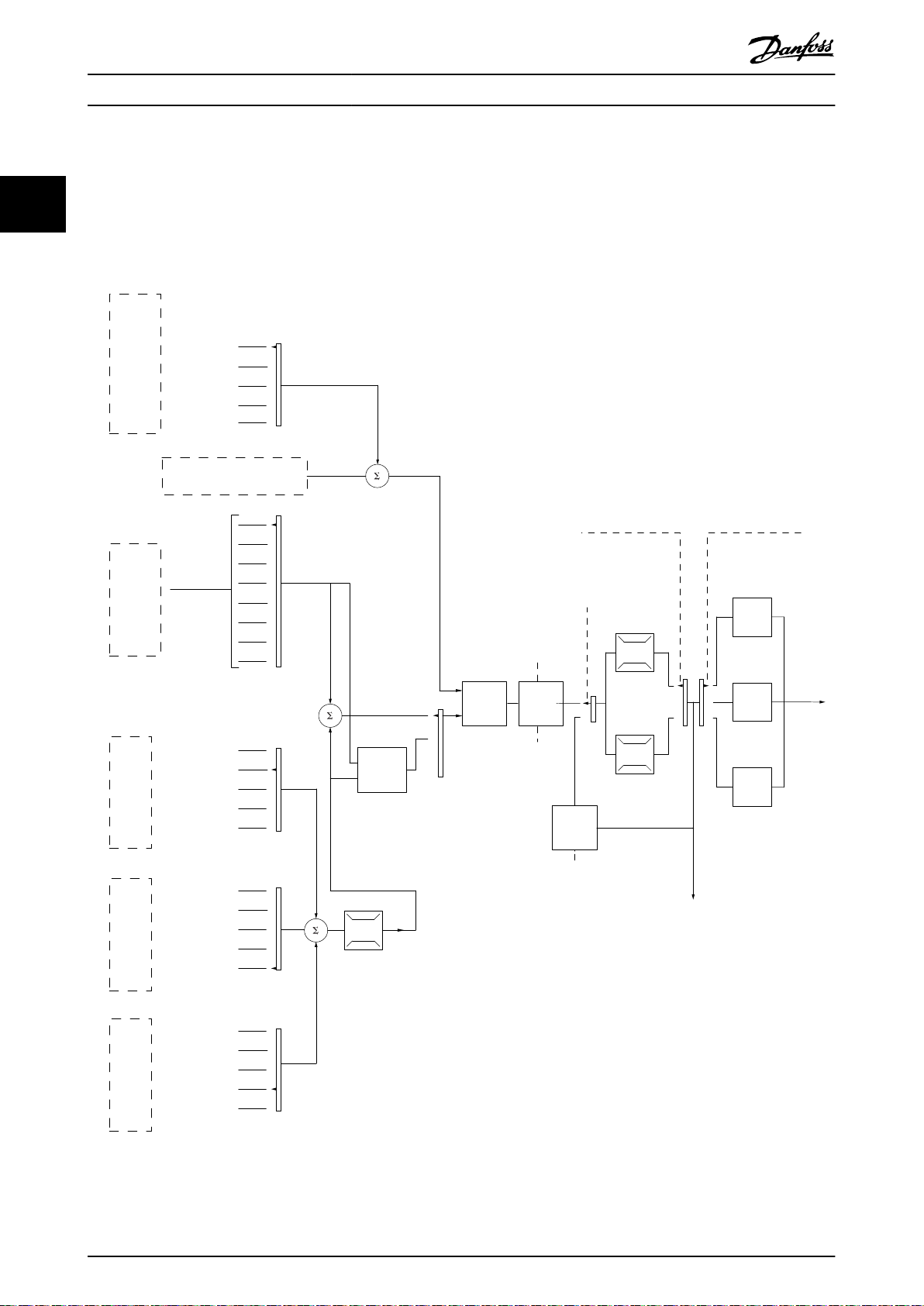
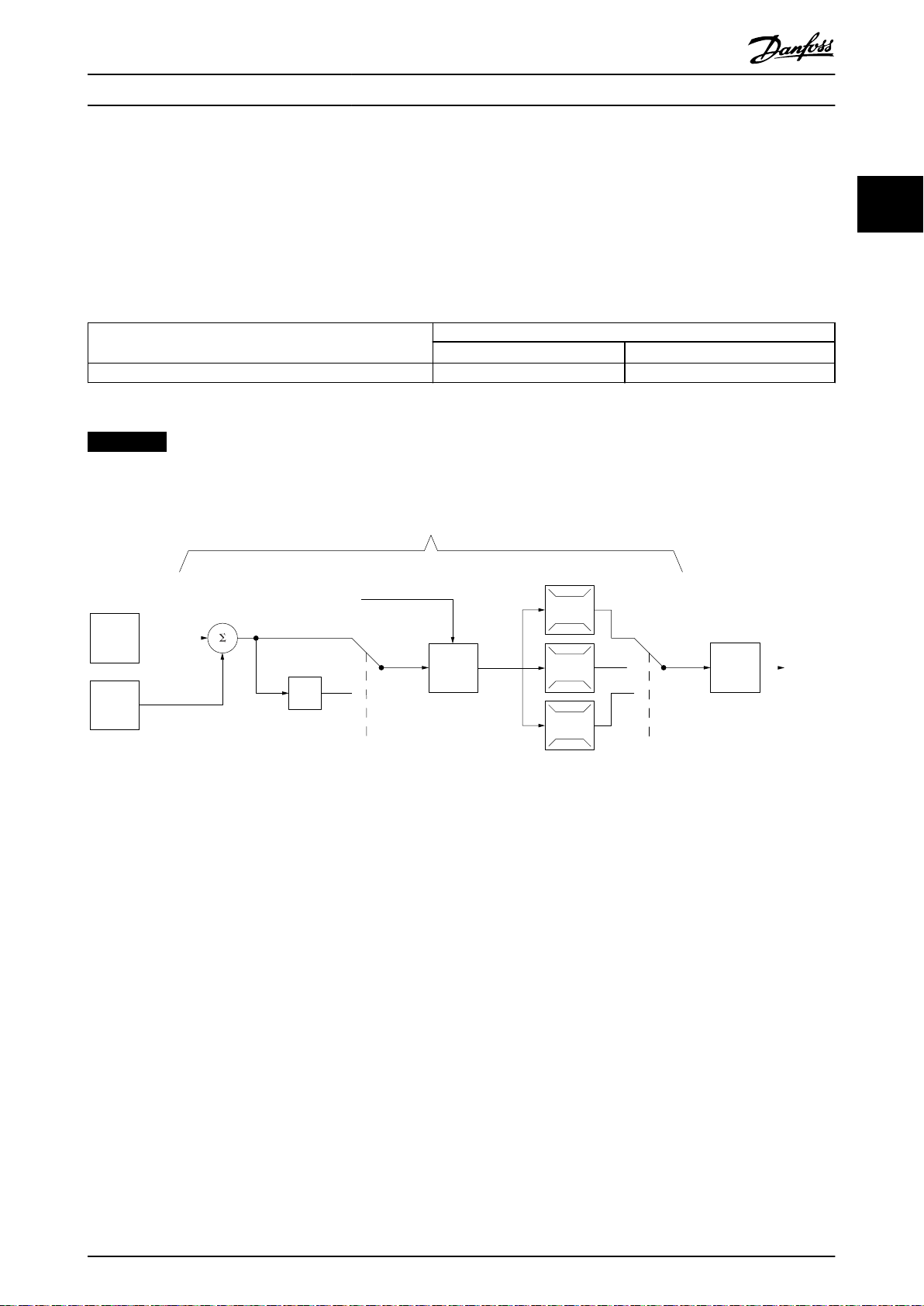
Abbildung 2.14 zeigt das Sollwertsystem zur Berechnung des Fernsollwerts.
Abbildung 2.14 Fernsollwert
22 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 25
Resultlerender Sollwert
Summe aller
Sollwerte
P 3-00 Sollwertbereich= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Sollwertbereich =[1]-Max-Max
Resultierender Sollwert
Summe aller
Sollwerte
-P 3-03
P 3-03
130BA185.10
Produktübersicht Projektierungshandbuch
Der Fernsollwert wird bei jedem Abtastintervall
berechnet und besteht anfänglich aus 2 Arten von
Sollwerteingängen:
1. X (der externe Sollwert): Eine Summe (siehe
Parameter 3-04 Reference Function) von bis zu vier
extern ausgewählten Sollwerten, bestehend aus
einer beliebigen Kombination (bestimmt durch
die Einstellung von Parameter 3-15 Reference 1
Source, Parameter 3-16 Reference 2 Source und
Parameter 3-17 Reference 3 Source) eines
Festsollwerts (Parameter 3-10 Preset Reference),
variabler Analogsollwerte, variabler digitaler
Pulssollwerte und verschiedener Feldbussollwerte
in einer beliebigen Einheit, in welcher der
Frequenzumrichter die Überwachungsfunktion
übernimmt ([Hz], [UPM], [Nm] usw.).
2. Y (der relative Sollwert): Eine Summe eines
Festsollwerts (Parameter 3-14 Preset Relative
Reference) und eines variablen Analogsollwerts
(Parameter 3-18 Relative Scaling Reference
Abbildung 2.15 Die Summe aller Sollwerte, wenn Sie den
Sollwertbereich auf 0 setzen
Resource) in [%].
Die 2 Arten von Sollwerteingängen werden in folgender
Formel kombiniert:
Fernsollwert = X+X*Y/100 %.
Wenn der relative Sollwert nicht verwendet wird, müssen
Sie Parameter 3-18 Relative Scaling Reference Resource auf
[0] Deaktiviert und Parameter 3-14 Preset Relative Reference
auf 0 % einstellen. Die Digitaleingänge des Frequenzumrichters können die Funktion „Frequenzkorrektur Auf/Ab“
und die Funktion „Sollwert speichern“ aktivieren. Die
Funktionen und Parameter werden im VLT® Midi DriveFC
280 Programmierhandbuch beschrieben.
Die Skalierung von Analogsollwerten wird in den Parame-
tergruppen 6-1* Analogeingang 53 und 6-2* Analogeingang
54 und die Skalierung digitaler Pulssollwerte in Parametergruppe 5-5* Pulseingänge beschrieben.
Sollwertgrenzen und -bereiche stellen Sie in Parameter-
Abbildung 2.16 Die Summe aller Sollwerte, wenn Sie den
Sollwertbereich auf 1 setzen
gruppe 3-0* Sollwertgrenzen ein.
2 2
2.4.1 Sollwertgrenzen
Parameter 3-00 Sollwertbereich, Parameter 3-02 Minimaler
Sollwert und Parameter 3-03 Maximaler Sollwert definieren
zusammen den zulässigen Bereich der Summe aller
Sollwerte. Die Summe aller Sollwerte wird bei Bedarf
begrenzt. Die Beziehung zwischen dem resultierenden
Sollwert (nach der Befestigung) und der Summe aller
Sollwerte wird in Abbildung 2.15 und Abbildung 2.16
gezeigt.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 23
Sie können den Wert von Parameter 3-02 Minimaler Sollwert
nicht unter 0 einstellen, sofern Parameter 1-00 Regelver-
fahren nicht auf [3] PID-Regler eingestellt ist. In diesem Fall
ergibt sich das Verhältnis zwischen dem resultierenden
Sollwert (nach der Befestigung) und der Summe aller
Sollwerte wie in Abbildung 2.17 gezeigt.
Page 26
130BA186.11
P 3-03
P 3-02
Summe aller
Sollwerte
P 3-00 Sollwertbereich= [0] Min to Max
Resultierender Sollwert
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.4.3 Skalierung von Analog- und
Pulssollwerten und Istwert
22
Soll- und Istwerte werden auf gleiche Weise von Analogund Pulseingängen skaliert. Der einzige Unterschied ist,
dass Sollwerte, die über oder unter den angegebenen
Endpunkten liegen (in Abbildung 2.18 P1 und P2),
eingegrenzt werden, während dies bei Istwerten nicht der
Fall ist.
Abbildung 2.17 Die Summe aller Sollwerte, wenn Sie den
minimalen Sollwert auf einen negativen Wert setzen
2.4.2 Skalierung von Festsollwerten und
Bussollwerten
Festsollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn Parameter 3-00 Reference Range [0] Min. bis
•
Max. ist, entspricht ein Sollwert von 0 % dem
Wert 0 [Einheit], wobei eine beliebige Einheit
(UPM, m/s, bar usw.) zulässig ist, und ein Sollwert
von 100 % entspricht dem Maximum (abs.
Parameter 3-03 Maximum Reference), abs
(Parameter 3-02 Minimaler Sollwert)).
Wenn Parameter 3-00 Reference Range [1] -Max–
•
+Max ist, entspricht ein Sollwert von 0 % dem
Wert 0 [Einheit] und ein Sollwert von 100 % dem
maximalen Sollwert.
Bussollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn Parameter 3-00 Reference Range [0] Min–Max
•
ist, entspricht ein Sollwert von 0 % dem
minimalen Sollwert und ein Sollwert von 100%
dem maximalen Sollwert.
Wenn Parameter 3-00 Reference Range [1] Min–
•
+Max ist, entspricht ein Sollwert von -100 % dem
negativen maximalen Sollwert und ein Sollwert
von 100% dem maximalen Sollwert.
Abbildung 2.18 Minimale und maximale Endpunkte
24 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 27
Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
Produktübersicht Projektierungshandbuch
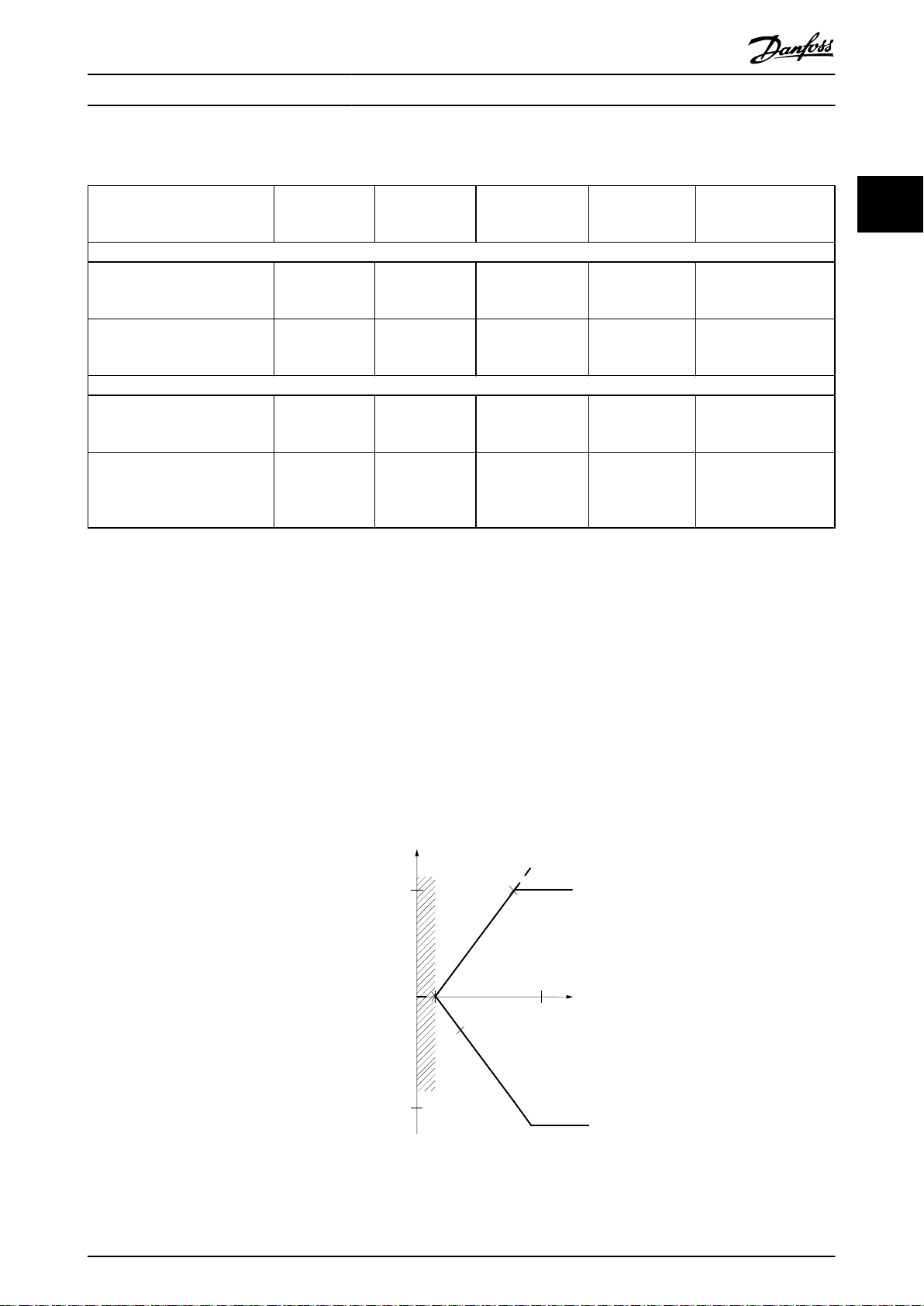
Die Endpunkte P1 und P2 werden in Abhängigkeit vom Eingang in Tabelle 2.5 definiert.
Eingang Analog 53
Spannungsmodu
s
P1 = (Minimaler Eingangswert, minimaler Sollwert)
Minimaler Sollwert Parameter 6-14 Kl
emme 53 Skal.
Min.-Soll/Istwert
Minimaler Eingangswert Parameter 6-10 Kl
emme 53 Skal.
Min.Spannung [V]
P2=(Minimaler Eingangswert, maximaler Sollwert)
Maximaler Sollwert Parameter 6-15 Kl
emme 53 Skal.
Max.-Soll/Istwert
Maximaler Eingangswert Parameter 6-11 Kl
emme 53 Skal.
Max.Spannung
[V]
Tabelle 2.5 Endpunkte P1 und P2
Analog 54
Spannungsmodu
s
Parameter 6-24 Kl
emme 54 Skal.
Min.-Soll/Istwert
Parameter 6-20 Kl
emme 54 Skal.
Min.Spannung [V]
Parameter 6-25 Kl
emme 54 Skal.
Max.-Soll/Istwert
Parameter 6-21 Kl
emme 54 Skal.
Max.Spannung
[V]
Analog 54
Strommodus
Parameter 6-24 Kle
mme 54 Skal. Min.Soll/Istwert
Parameter 6-22 Kle
mme 54 Skal.
Min.Strom [mA]
Parameter 6-25 Kle
mme 54 Skal. Max.Soll/Istwert
Parameter 6-23 Kle
mme 54 Skal.
Max.Strom [mA]
Pulseingang 29 Pulseingang 33
Parameter 5-52 Kle
mme 29 Min. Soll-/
Istwert
Parameter 5-50 Kle
mme 29 Min.
Frequenz [Hz]
Parameter 5-53 Kle
mme 29 Max. Soll-/
Istwert
Parameter 5-51 Kle
mme 29 Max.
Frequenz [Hz]
Parameter 5-57 Klemme
33 Min. Soll-/Istwert
Parameter 5-55 Klemme
33 Min. Frequenz [Hz]
Parameter 5-58 Klemme
33 Max. Soll-/Istwert
Parameter 5-56 Klemme
33 Max. Frequenz [Hz]
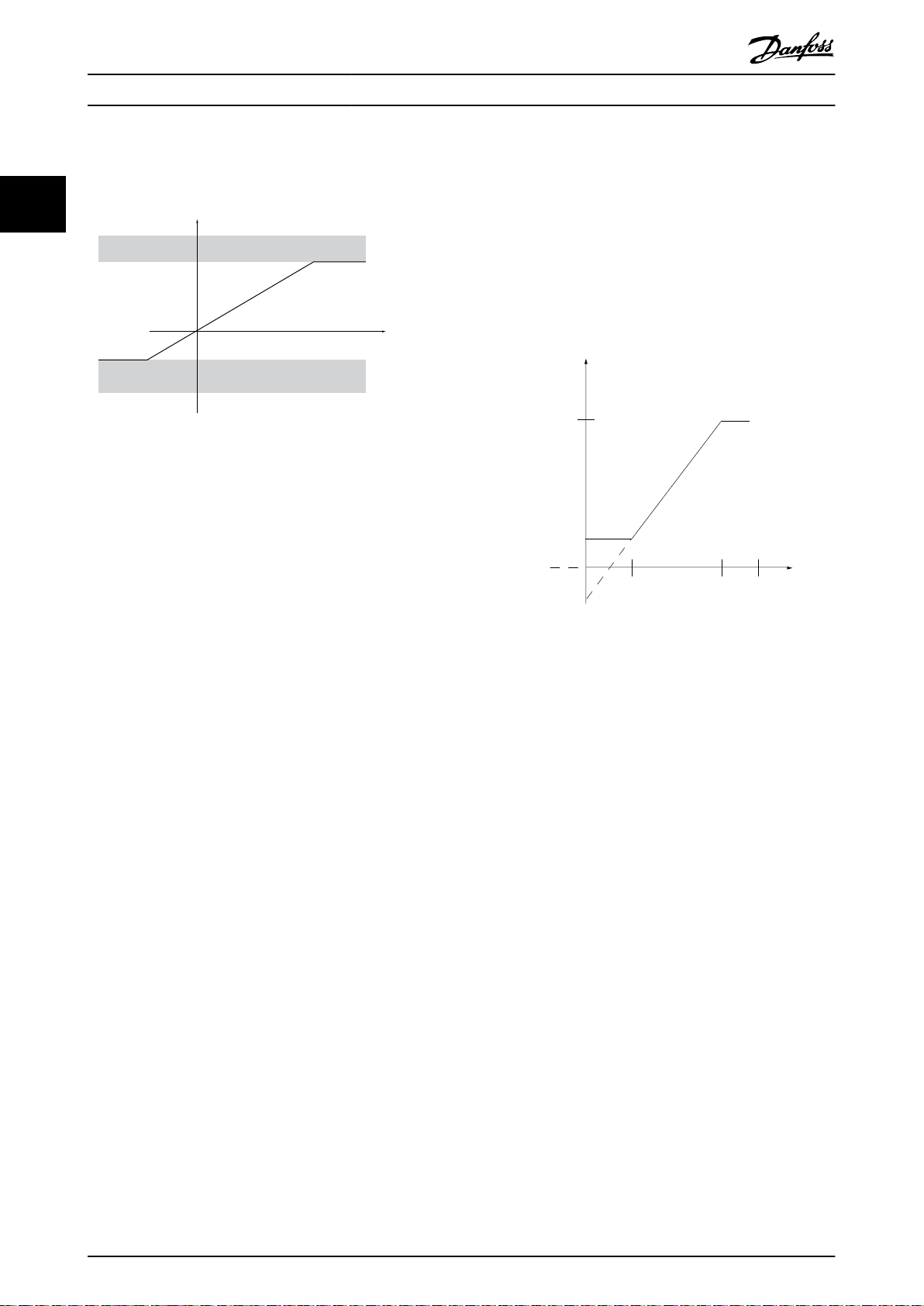
2.4.4 Totzone um Null
In einigen Fällen sollte der Sollwert (gelegentlich auch der Istwert) eine Totzone um Null haben, um sicherzustellen, dass die
Maschine gestoppt wird, wenn der Sollwert nahe Null liegt.
2 2
Nehmen Sie die folgenden Einstellungen vor, um die Totzone zu aktivieren und ihren Umfang zu definieren:
P1 oder P2 definiert die Größe der Totzone, wie dies in Abbildung 2.19 gezeigt wird.
Setzen Sie den minimalen Sollwert (siehe Tabelle 2.5 für relevante Parameter) oder den maximalen Sollwert auf 0.
•
Mit anderen Worten:P1 oder P2 muss auf der X-Achse in Abbildung 2.19 liegen.
Stellen Sie sicher, dass sich beide Punkte im selben Quadranten befinden.
•
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 25
Abbildung 2.19 Größe der Totzone
Page 28
20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
Fall 1: Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung, Teil I
Abbildung 2.20 zeigt die Wirkung der Min.-Max.-Begrenzungen an einem Sollwerteingang.
22
Abbildung 2.20 Beschränkung des Sollwerteingangs innerhalb von Minimum und Maximum
26 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 29
+
30 Hz
1
10
20 Hz
1
10
130BD433.11
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
–10 Hz
+10 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Produktübersicht Projektierungshandbuch
Fall 2: Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung, Teil II
Abbildung 2.21 zeigt, wie der Sollwerteingang mit Werten, die außerhalb der Grenzen für -Max und +Max liegen, die Unterund Obergrenzen der Eingänge begrenzt, bevor der externe Sollwert addiert wird. Außerdem sehen Sie, wie der externe
Sollwert durch den Sollwertalgorithmus an -Max bis +Max begrenzt wird.
2 2
Abbildung 2.21 Beschränkung des Sollwerteingangs außerhalb von Minimum - und Maximum +
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 27
Page 30
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.5 PID-Regelung
2.5.1 PID-Drehzahlregler
22
Parameter 1-00 Regelverfahren
[1] Mit Drehgeber
Tabelle 2.6 Steuerkonfigurationen, aktive Drehzahlregelung
1) Nicht verfügbar bedeutet, dass der Modus nicht verfügbar ist.
Parameter Funktionsbeschreibung
Parameter 7-00 Drehgeberrückführung Legt den Eingang fest, von der der PID-Drehzahlregler den Istwert erhält.
Parameter 7-02 Speed PID Proportional Gain Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu
Parameter 7-03 Drehzahlregler I-Zeit Eliminiert eine Abweichung von der stationären Drehzahl. Niedrigere Werte stehen für eine
Parameter 7-04 Drehzahlregler D-Zeit Liefert Zuwachs proportional zur Veränderungsrate des Istwerts. Die Einstellung 0
Parameter 7-05 Drehzahlregler D-Verstärk./
Grenze
Parameter 7-06 Drehzahlregler Tiefpassfilterzeit Ein Tiefpassfilter, der Schwingungen auf dem Istwertsignal dämpft und die stationäre
Parameter 1-01 Steuerprinzip
U/f
Nicht verfügbar
Schwingungen führen.
schnellere Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
deaktiviert den Differentiator.
Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so
kann der Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der
Regelabweichung. Je schneller sich die Regelabweichung ändert, desto höher fällt auch die
Differentiationsverstärkung aus. Sie können die Differentiationsverstärkung daher
begrenzen, so dass sowohl eine angemessene Differentiationszeit bei langsamen
Änderungen als auch eine angemessene Verstärkung bei schnellen Änderungen eingestellt
werden kann.
Leistung verbessert. Bei einer zu langen Filterzeit nimmt jedoch die dynamische Leistung
des PID-Drehzahlreglers ab.
Einstellungen von Parameter 7-06 Speed PID Lowpass Filter Time aus der Praxis anhand der
Anzahl von Impulsen pro Umdrehung am Drehgeber (PPR):
Drehgeber-PPR Parameter 7-06 Drehzahlregler Tiefpassfil-
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
1)
VVC
Aktiv
terzeit
+
Tabelle 2.7 Parameter für Drehzahlregelung
Beispiel zur Programmierung der Drehzahlregelung
In diesem Beispiel wird der PID-Drehzahlregler verwendet, um eine konstante Motordrehzahl trotz veränderlicher Motorlast
aufrecht zu erhalten. Die erforderliche Motordrehzahl wird über ein Potenziometer eingestellt, das mit Klemme 53
verbunden ist. Der Drehzahlbereich liegt zwischen 0 und 1500 U/min, was 0 bis 10 V über das Potenziometer entspricht. Ein
mit Klemme 18 verbundener Schalter regelt das Starten und das Stoppen. Der PID-Drehzahlregler überwacht die aktuelle
Drehzahl des Motors mit Hilfe eines 24 V/HTL-Inkrementalgebers als Istwertgeber. Der Istwertgeber (1024 Impulse pro
Umdrehung) ist mit den Klemmen 32 und 33 verbunden. Der Pulsfrequenzbereich an den Klemmen 32 und 33 beträgt 4
Hz–32 kHz.
28 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 31

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
32
33
24 Vdc
130BD372.11
Produktübersicht Projektierungshandbuch
2 2
Abbildung 2.22 Programmierung der Drehzahlregelung
Befolgen Sie die Schritte in Tabelle 2.8, um die Drehzahlregelung zu programmieren (siehe Erläuterung der Einstellungen
im Programmierhandbuch)
In Tabelle 2.8 wird davon ausgegangen, dass für alle anderen Parameter und Schalter die Werkseinstellung verwendet wird.
Funktion Parameternummer Einstellung
1) Stellen Sie sicher, dass der Motor einwandfrei läuft. Gehen Sie wie folgt vor:
Stellen Sie die Motorparameter mithilfe der Daten auf dem
Typenschild ein.
Eine AMA durchführen. Parameter 1-29 Automatic
2) Prüfen Sie, ob der Motor läuft und der Drehgeber ordnungsgemäß angeschlossen ist. Gehen Sie wie folgt vor:
Drücken Sie [Hand On]. Prüfen Sie, ob der Motor läuft und
in welche Drehrichtung er sich dreht (nachfolgend positive
Richtung genannt).
3) Stellen Sie sicher, dass die Grenzwerte des Frequenzumrichters auf sichere Werte eingestellt sind:
Stellen Sie zulässige Grenzwerte für die Sollwerte ein. Parameter 3-02 Minimum
Stellen Sie sicher, dass die Rampeneinstellungen innerhalb
des Leistungsbereichs des Frequenzumrichters liegen und
zulässigen Spezifikationen für den Anwendungsbetrieb
entsprechen.
Stellen Sie zulässige Grenzwerte für die Motordrehzahl und
-frequenz ein.
4) Konfigurieren Sie die Drehzahlregelung und wählen Sie das Motorsteuerprinzip:
Parametergruppe 1-2*
Siehe Motor-Typenschild.
Motordaten
[1] Komplette AMA
Motor Adaption (AMA)
Stellen Sie einen positiven Sollwert ein.
0
Reference
Parameter 3-03 Maximum
50
Reference
Parameter 3-41 Ramp 1
Werkseinstellung
Ramp Up Time
Parameter 3-42 Ramp 1
Werkseinstellung
Ramp Down Time
Parameter 4-12 Motor
0 Hz
Speed Low Limit [Hz]
Parameter 4-14 Motor
50 Hz
Speed High Limit [Hz]
Parameter 4-19 Max
60 Hz
Output Frequency
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 29
Page 32
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
Aktivierung der Drehzahlregelung Parameter 1-00 Configu-
ration Mode
Auswahl des Motorsteuerprinzips Parameter 1-01 Motor
22
5) Konfigurieren und skalieren Sie den Sollwert für die Drehzahlregelung:
Stellen Sie Analogeingang 53 als Sollwertquelle ein. Parameter 3-15 Reference 1
Skalieren Sie den Analogeingang 53 0 Hz (0 V) bis 50 Hz
(10 V)
6) Konfigurieren Sie das Signal des 24V/HTL-Drehgebers als Istwert für die Motorsteuerung und die Drehzahlregelung:
Stellen Sie Digitaleingang 32 und 33 als Drehgebereingänge ein.
Wählen Sie Klemme 32/33 als PID-Drehzahlrückführung. Parameter 7-00 Speed PID
7) Stellen Sie die Parameter für die PID-Drehzahlregelung ein:
Verwenden Sie ggf. die Einstellungsanweisungen oder
stellen Sie manuell ein.
8) Beenden:
Speichern Sie die Parametereinstellung im LCP. Parameter 0-50 LCP-Kopie [1] Speichern in LCP
Tabelle 2.8 Programmierreihenfolge für den PID-Drehzahlregler
Control Principle
Source
Parametergruppe 6-1*
Analogeingang 1
Parameter 5-14 Terminal
32 Digital Input
Parameter 5-15 Terminal
33 Digital Input
Feedback Source
Parametergruppe 7-0*PID
Drehzahlregler
[1] Mit Drehgeber
+
[1] VVC
Nicht notwendig (Werkseinstellung)
Nicht notwendig (Werkseinstellung)
[82] Drehgebereingang B
[83] Drehgebereingang A
[1] 24-V-Drehgeber
30 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 33
P 7-30
normal/invers
PID
P 7-38
*(-1)
Vorsteuerung
Sollwert−
verarbei−
tung
Istwert
verarbei−
tung
% [Einheit]]
% [Einheit]]
%
[Einheit]
%
[Drehzahl]
Drehzahl−
bereich
P 4-10
Motordrehrichtung
Zu
Motorsteuerung
Prozess H192PID
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
−
Produktübersicht Projektierungshandbuch
2.5.2 PID-Prozessregler
Mit dem PID-Prozessregler lassen sich Anwendungsparameter steuern, die mit einem Sensor messbar sind (Druck,
Temperatur, Fluss) und vom angeschlossenen Motor über eine Pumpe, einen Lüfter oder ein anderes angeschlossenes Gerät
beeinflusst werden können.
Tabelle 2.9 zeigt die Konfigurationen, bei denen die Prozessregelung möglich ist. Lesen Sie Kapitel 2.3 Regelungsstrukturen,
um zu sehen, wo die Drehzahlregelung aktiviert ist.
Parameter 1-00 Configuration Mode Parameter 1-01 Motor Control Principle
U/f
VVC
+
[3] PID-Prozess PID-Prozess PID-Prozess
Tabelle 2.9 Steuerungskonfiguration
HINWEIS
Die PID-Prozessregelung funktioniert mit der Standard-Parametereinstellung, Sie sollten diese jedoch zur Optimierung
der Anwendungssteuerung anpassen.
2 2
Abbildung 2.23 Diagramm für PID-Prozessregler
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 31
Page 34
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.5.3 Relevante Parameter für die Prozessregelung
22
Parameter Funktionsbeschreibung
Parameter 7-20 Process CL Feedback 1 Resource Legt den Eingang (Analog oder Puls) fest, von dem die PID-Prozessregelung den Istwert
erhält.
Parameter 7-22 Process CL Feedback 2 Resource Gegebenenfalls: Legt fest, ob (und von woher) die PID-Prozessregelung ein zusätzliches
Istwertsignal erhält. Wenn Sie einen weiteren Istwertanschluss ausgewählt haben, werden
die beiden Istwertsignale vor der Verwendung im PID-Prozessregler addiert.
Parameter 7-30 Process PID Normal/ Inverse
Control
Parameter 7-31 Process PID Anti Windup Die Anti-Windup-Funktion bewirkt, dass im Falle des Erreichens einer Frequenz- oder
Parameter 7-32 Process PID Star t Speed In einigen Anwendungen kann das Erreichen der gewünschten Drehzahl bzw. des
Parameter 7-33 Process PID Proportional Gain Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu
Parameter 7-34 Process PID Integral Time Eliminiert eine Abweichung von der stationären Drehzahl. Je niedriger der Wert, desto
Parameter 7-35 Process PID Differentiation Time Liefert Verstärkung proportional zur Veränderungsrate des Istwerts. Die Einstellung 0
Parameter 7-36 Process PID Diff. Gain Limit Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so
Parameter 7-38 Process PID Feed Forward
Factor
Parameter 5-54 Pulse Filter Time Constant
•
#29 (Puls Kl. 29)
Parameter 5-59 Pulse Filter Time Constant
•
#33 (Puls Kl. 33)
Parameter 6-16 Terminal 53 Filter Time
•
Constant (Analog Klemme 53)
Parameter 6-26 Terminal 54 Filter Time
•
Constant (Analog Kl. 54)
Im Betriebsmodus [0] Normal reagiert die Prozessregelung mit einer Erhöhung der
Motordrehzahl, wenn der Istwert den Sollwert unterschreitet. Im Betriebsmodus [1] Invers
reagiert die Prozessregelung mit einer abnehmenden Motordrehzahl.
Drehmomentgrenze der Integrator auf eine Verstärkung eingestellt wird, die der aktuellen
Frequenz entspricht. So vermeiden Sie, dass bei einer Abweichung, die mit einer Drehzahländerung nicht auszugleichen wäre, weiter integriert wird. Drücken Sie [0] Off, um diese
Funktion zu deaktivieren.
Sollwerts lange dauern. Bei solchen Anwendungen kann es von Vorteil sein, eine
Motorfrequenz festzulegen, auf die der Frequenzumrichter den Motor ungeregelt
hochfahren soll, bevor die Prozessregelung aktiviert wird. Stellen Sie durch Festlegen eines
Startwerts für den PID-Prozess in Parameter 7-32 Process PID Start Speed eine feste
Motordrehzahl ein.
Schwingungen führen.
schneller die Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
deaktiviert den Differentiator.
kann der Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der
Regelabweichung. Je schneller sich die Regelabweichung ändert, desto höher fällt auch die
Differentiationsverstärkung aus. Sie können die Differentiationsverstärkung daher
begrenzen, um eine angemessene Differentiationszeit für langsame Änderungen
einzustellen.
In Anwendungen mit einer ausgeglichenen und in etwa linearen Beziehung zwischen dem
Sollwert und der dafür erforderlichen Motordrehzahl können Sie die dynamische Leistung
des PID-Prozessreglers mit Hilfe des Vorsteuerungsfaktors steigern.
Sofern beim Istwertsignal Rippelströme bzw. -spannungen auftreten, können Sie diese mit
Hilfe eines Tiefpassfilters dämpfen. Die Pulsfilterzeitkonstante ist ein Ausdruck für eine
Drehzahlgrenze der Rippel, die beim Istwertsignal auftreten.
Beispiel: Ist das Tiefpassfilter auf 0,1 s eingestellt, so ist die Eckfrequenz 10 RAD/s,
(Kehrwert von 0,1), was (10/(2 x π)) = 1,6 Hz entspricht. Dies führt dazu, dass das Filter alle
Ströme/Spannungen herausfiltert, die um mehr als 1,6 Schwingungen pro Sekunde
schwanken. Es wird also nur ein Istwertsignal geregelt, das mit einer Frequenz (Drehzahl)
von unter 1,6 Hz schwankt.
Das Tiefpassfilter verbessert die stationäre Leistung, bei einer zu langen Filterzeit nimmt
jedoch die dynamische Leistung des PID-Prozessreglers ab.
Tabelle 2.10 Parameter der Prozessregelung
32 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 35
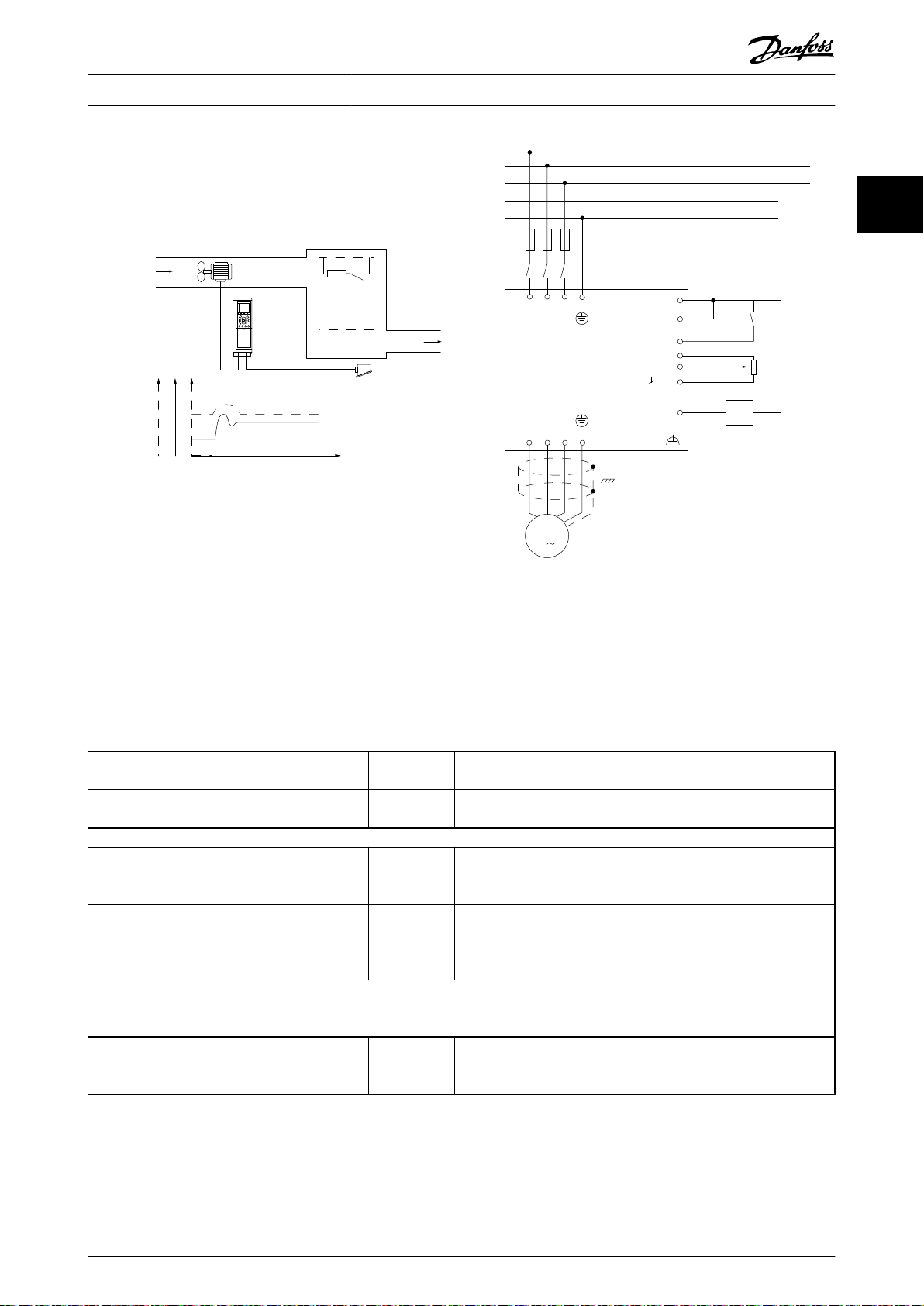
Temperatur
ebläsedrehzahl
Temperature
transmitter
Wärme
Wärme
erzeugung
Kaltluft
130BA218.10
100kW
n °CW
Transmitter
96 97 9998
91 92 93 95
50
13
L1 L2
L1
PEL3
W PEVU
F1
L2
L3
N
PE
130BF102.10
18
53
27
55
54
M
3
Produktübersicht Projektierungshandbuch
2.5.4 Beispiel für PID-Prozessregler
Abbildung 2.24 ist ein Beispiel für den PID-Prozessregler in
einer Lüftungsanlage:
Abbildung 2.24 PID-Prozessregler in einer Lüftungsanlage
In einer Lüftungsanlage können Sie mit Hilfe eines 0- bis
10-V-Potenziometers die Temperatur zwischen -5 und
+35 °C einstellen. Mit Hilfe der Prozessregelung halten Sie
die Temperatur konstant.
Dabei wird mit steigender Temperatur auch die Drehzahl
des Gebläses erhöht, um einen stärkeren Luftstrom zu
erzeugen. Sinkt die Temperatur, verringert sich die
Drehzahl. Der Transmitter wird als Temperatursensor mit
einem Funktionsbereich von -10 bis +40 °C, 4-20 mA,
verwendet.
Abbildung 2.25 Zweileiter-Transmitter
1. Start/Stopp über Schalter an Klemme 18.
2. Temperatursollwert über Potenziometer (-5 bis
35 °C, 0 bis 10 V DC) an Klemme 53.
3.
Temperaturistwert über Transmitter (-10 bis 40 °C,
4 bis 20 mA) an Klemme 54.
2 2
Funktion Parame-
Einstellung
ternummer
Initialisieren Sie den Frequenzumrichter Parameter 14-2
2 Betriebsart
[2] Initialisierung - Aus- und Einschaltzyklus des Frequenzumrichters
durchführen - Reset drücken
1) Einstellen der Motorparameter:
Stellen Sie die Motorparameter anhand der
Typenschilddaten ein.
Parametergruppe 1-2*
Siehe Motor-Typenschild.
Motordaten
Führen Sie eine komplette AMA aus. Parameter 1-29
[1] Aktivieren Sie eine komplette AMA.
Autom.
Motoranpassung
2) Prüfen Sie, ob der Motor in der richtigen Richtung läuft.
Bei Anschluss des Motors an einen Frequenzumrichter mit einfacher Phasenreihenfolge wie U-U, V-V oder W-W dreht sich die Motorwelle
bei Sicht auf das Wellenende im Rechtslauf.
Drücken Sie [Hand On]. Prüfen Sie die Wellendrehrichtung, indem Sie einen manuellen Sollwert
anlegen.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 33
Page 36
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
Funktion Parame-
ternummer
Falls sich der Motor in die falsche Richtung dreht:
22
1. Ändern Sie die Motordrehrichtung in
Parameter 4-10 Motor Speed Direction.
2. Schalten Sie das Netz aus und warten Sie auf
das Entladen der Zwischenkreisspannung.
3. Drehen Sie 2 Motorphasen.
Stellen Sie das Regelverfahren ein. Parameter 1-00
3) Konfigurieren Sie den Sollwert, d. h. den Bereich der Sollwertverarbeitung. Stellen Sie die Skalierung des Analogeingangs in Parameter-
gruppe 6-** Analoge Ein-/Ausg. ein.
Stellen Sie Soll-/Istwert-Einheiten ein.
Stellen Sie den min. Sollwert ein (10 °C):
Stellen Sie den maximalen Sollwert ein (80 °C):
Wird der Einstellwert durch einen Festwert
(Arrayparameter) bestimmt, setzen Sie andere
Sollwertquellen auf [0] Deaktiviert.
4) Stellen Sie Grenzen für den Frequenzumrichter ein:
Stellen Sie die Rampenzeiten auf einen ungefähren
Wert von 20 s ein.
Stellen Sie die min. Drehzahlgrenzen ein.
Stellen Sie die maximale Motordrehzahlgrenze ein.
Stellen Sie die maximale Ausgangsfrequenz ein.
Stellen Sie Parameter 6-19 Terminal 53 mode und Parameter 6-29 Terminal 54 mode auf Spannung oder Strom ein.
5) Skalieren Sie die für Sollwert und Istwert verwendeten Analogeingänge:
Parameter 4-10
Motor
Drehrichtung
Regelverfahren
Parameter 3-01
Reference/
Feedback Unit
Parameter 3-02
Minimum
Reference
Parameter 3-03
Maximum
Reference
Parameter 3-10
Preset
Reference
Parameter 3-41
Ramp 1 Ramp
Up Time
Parameter 3-42
Ramp 1 Ramp
Down Time
Parameter 4-12
Motor Speed
Low Limit [Hz]
Parameter 4-14
Motor Speed
High Limit [Hz]
Parameter 4-19
Max Output
Frequency
Einstellung
Wählen Sie die richtige Drehrichtung der Motorwelle.
[3] Prozess.
[60] °C Displayeinheit.
-5 °C °.
35 °C.
[0] 35 %.
Par. . 3 − 10
Sollw. =
Parameter 3-14 Relativer Festsollwert bis Parameter 3-18 Relativ. Skalierungssollw. Ressource [0] = Keine Funktion.
20 s
20 s
10 Hz
50 Hz
60 Hz
0
× Par. . 3 − 03 − par. . 3 − 02 = 24,5°C
100
34 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 37
Produktübersicht Projektierungshandbuch
Funktion Parame-
ternummer
Stellen Sie Klemme 53 Skal. Min. Spannung ein.
Stellen Sie Klemme 53 Skal. Max.-Spannung ein.
Stellen Sie Klemme 54 Skal. Min.-Istwert ein.
Stellen Sie Klemme 54 Skal. Max.-Istwert ein.
Legen Sie den Istwertanschluss fest.
6) Grundlegende PID-Einstellungen:
PID-Prozess normal/invers Parameter 7-30
PID-Prozess Anti-Windup. Parameter 7-31
PID-Prozess Reglerstartdrehzahl. Parameter 7-32
LCP-Kopie. Parameter 0-50
Parameter 6-10
Terminal 53
Low Voltage
Parameter 6-11
Terminal 53
High Voltage
Parameter 6-24
Terminal 54
Low Ref./Feedb.
Value
Parameter 6-25
Terminal 54
High Ref./
Feedb. Value
Parameter 7-20
Process CL
Feedback 1
Resource
Process PID
Normal/
Inverse Control
Process PID
Anti Windup
PID-Prozess
Reglerstart bei
LCP-Kopie
Einstellung
0 V
10 V
-5 °C
35 °C
[2] Analogeingang 54
[0] Normal
[1] Ein
300 UPM
[1] Speichern in LCP
2 2
Tabelle 2.11 Beispiel für Konfiguration des PID-Prozessreglers
2.5.5 Optimierung des Prozessreglers
Nach Konfiguration der Grundeinstellungen gemäß
Kapitel 2.5.5 Programmierreihenfolge optimieren Sie Proportionalverstärkung, Integrationszeit und Differentiationszeit
(Parameter 7-33 Process PID Proportional Gain,
Parameter 7-34 Process PID Integral Time und
Parameter 7-35 Process PID Differentiation Time). Bei den
meisten Prozessen gehen Sie wie folgt vor:
1. Starten Sie den Motor.
2. Stellen Sie Parameter 7-33 Process PID Proportional
Gain auf 0,3 und erhöhen Sie den Wert
anschließend, bis das Istwertsignal gleichmäßig
zu schwingen beginnt. Verringern Sie den Wert,
bis das Istwertsignal stabilisiert ist. Senken Sie die
Proportionalverstärkung um 40-60 %.
3. Stellen Sie Parameter 7-34 Process PID Integral
Time auf 20 s ein und setzen Sie den Wert
anschließend herab, bis das Istwertsignal
gleichmäßig zu schwingen beginnt. Erhöhen Sie
die Integrationszeit, bis sich das Istwertsignal
stabilisiert, gefolgt von einer Erhöhung um
15-50 %.
4. Verwenden Sie Parameter 7-35 Process PID
Differentiation Time nur bei schnellen Systemen
(Differentiationszeit). Der typische Wert ist das
Vierfache der eingestellten Integrationszeit.
Verwenden Sie den Differentiator nur dann, wenn
Proportionalverstärkung und Integrationszeit
optimal eingestellt sind. Stellen Sie sicher, dass
Schwingungen des Istwertsignals durch den
Tiefpassfilter ausreichend gedämpft werden.
HINWEIS
Bei Bedarf können Sie Start/Stopp mehrfach aktivieren,
um eine konstante Schwankung des Istwertsignals zu
erzielen.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 35
Page 38
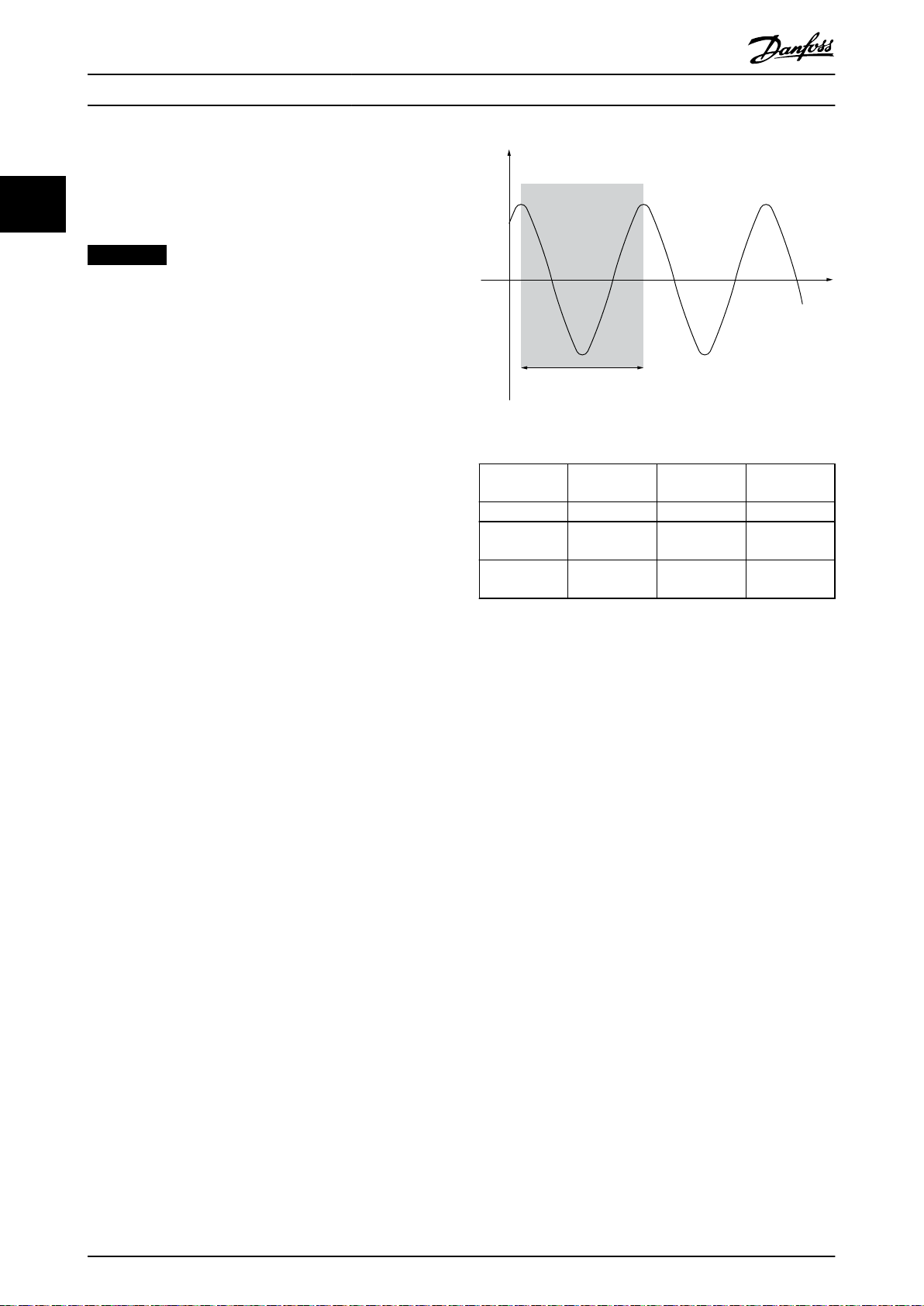
130BA183.10
y(t)
t
P
u
Produktübersicht
2.5.6 Ziegler-Nichols-Verfahren
VLT® Midi Drive Frequenzumrichter 280
22
empfiehlt Danfoss das Ziegler-Nichols-Verfahren.
HINWEIS
Verwenden Sie das Ziegler-Nichols-Verfahren nicht für
Anwendungen, die durch die Schwingungen von nicht
vollkommen stabilen Steuerungseinstellungen Schaden
nehmen können.
Die Kriterien zum Einstellen der Parameter basieren auf der
Auswertung des Systems an der Stabilitätsgrenze anstelle
Zum Einstellen der PID-Regler des Frequenzumrichters
der Ermittlung einer Schrittreaktion. Erhöhen Sie die
Proportionalverstärkung, bis Sie eine kontinuierliche
Schwingung (gemessen am Istwert) beobachten, d. h., bis
das System annähernd stabil ist. Die entsprechende
Verstärkung (Ku) wird als kritische Verstärkung bezeichnet,
bei der die Schwingung erreicht wird. Die Schwingperiode
(Pu) (als kritische Periodendauer bezeichnet) legen Sie
gemäß Abbildung 2.26 fest. Messen sollten Sie sie, wenn
die Amplitude der Schwingung klein ist.
1. Wählen Sie nur eine proportionale Steuerung, d.
h., die Integrationszeit wird auf den maximalen
Wert eingestellt, während die Differentiationszeit
auf Null gesetzt wird.
2. Erhöhen Sie den Wert der Proportionalverstärkung, bis der Punkt der Instabilität
(kontinuierliche Schwingungen) und somit der
kritische Verstärkungswert Ku erreicht ist.
3. Messen Sie den Schwingungszeitraum, um die
kritische Zeitkonstante Pu zu erhalten.
4. Berechnen Sie anhand Tabelle 2.12 die erforderlichen PID-Reglerparameter.
Der Prozessoperator kann die abschließende Einstellung
der Steuerung wiederholt durchführen, um eine zufriedenstellende Steuerung zu erzielen.
Abbildung 2.26 Annähernd stabiles System
Regelungstyp Proportional-
verstärkung
PI-Regelung 0,45 x K
Exakte PIDRegelung
Geringe PIDÜbersteuerung
Tabelle 2.12 Ziegler-Nichols-Verfahren für Regler
0,6 x K
0,33 x K
u
Integrationszeit
0,833 x P
u
0,5 x P
0,5 x P
u
u
u
u
Differentiationszeit
–
0,125 x P
0,33 x P
u
u
36 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 39

Produktübersicht Projektierungshandbuch
2.6 EMV-Emission und Störfestigkeit
2.6.1 Allgemeine Aspekte von EMV-Emissionen
Schalttransienten sind leitungsgeführt im Frequenzbereich von 150 kHz bis 30 MHz. Feldgebundene Störungen des Frequenzumrichtersystems im Frequenzbereich von 30 MHz bis 1 GHz werden durch den Frequenzumrichter, das Motorkabel und
den Motor erzeugt.
Durch kapazitive Ströme des Motorkabels, in Verbindung mit hohem dU/dt der Motorspannung, werden Ableitströme
erzeugt.
Die Verwendung eines abgeschirmten Motorkabels erhöht den Ableitstrom (siehe Abbildung 2.27), da abgeschirmte Kabel
eine höhere Kapazität zu Erde haben als nicht abgeschirmte Kabel. Wird der Ableitstrom nicht gefiltert, verursacht dies in
der Netzzuleitung größere Störungen im Funkfrequenzbereich unterhalb von etwa 5 MHz. Der Ableitstrom (I1) kann über die
Abschirmung (I3) direkt zurück zum Gerät fließen. Es verbleibt dann nur ein kleines elektromagnetisches Feld (I4) vom
abgeschirmten Motorkabel.
Die Abschirmung verringert zwar die abgestrahlte Störung, erhöht jedoch die Niederfrequenzstörungen am Netz. Schließen
Sie den Motorkabelschirm an die Gehäuse von Frequenzumrichter und Motor an. Dies geschieht am besten durch die
Verwendung von integrierten Schirmbügeln; verdrillte Abschirmungsenden (Pigtails) sind zu vermeiden. Die Schirmbügel
erhöhen die Abschirmungsimpedanz bei höheren Frequenzen, wodurch der Abschirmungseffekt reduziert und der
Ableitstrom erhöht wird (I4).
Verbinden Sie die Abschirmung an beiden Enden mit dem Gehäuse, wenn ein abgeschirmtes Kabel für Folgendes verwendet
wird:
2 2
Feldbus
•
Netzwerk
•
Relais
•
Steuerleitung
•
Signalschnittstelle
•
Bremse
•
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 37
Page 40
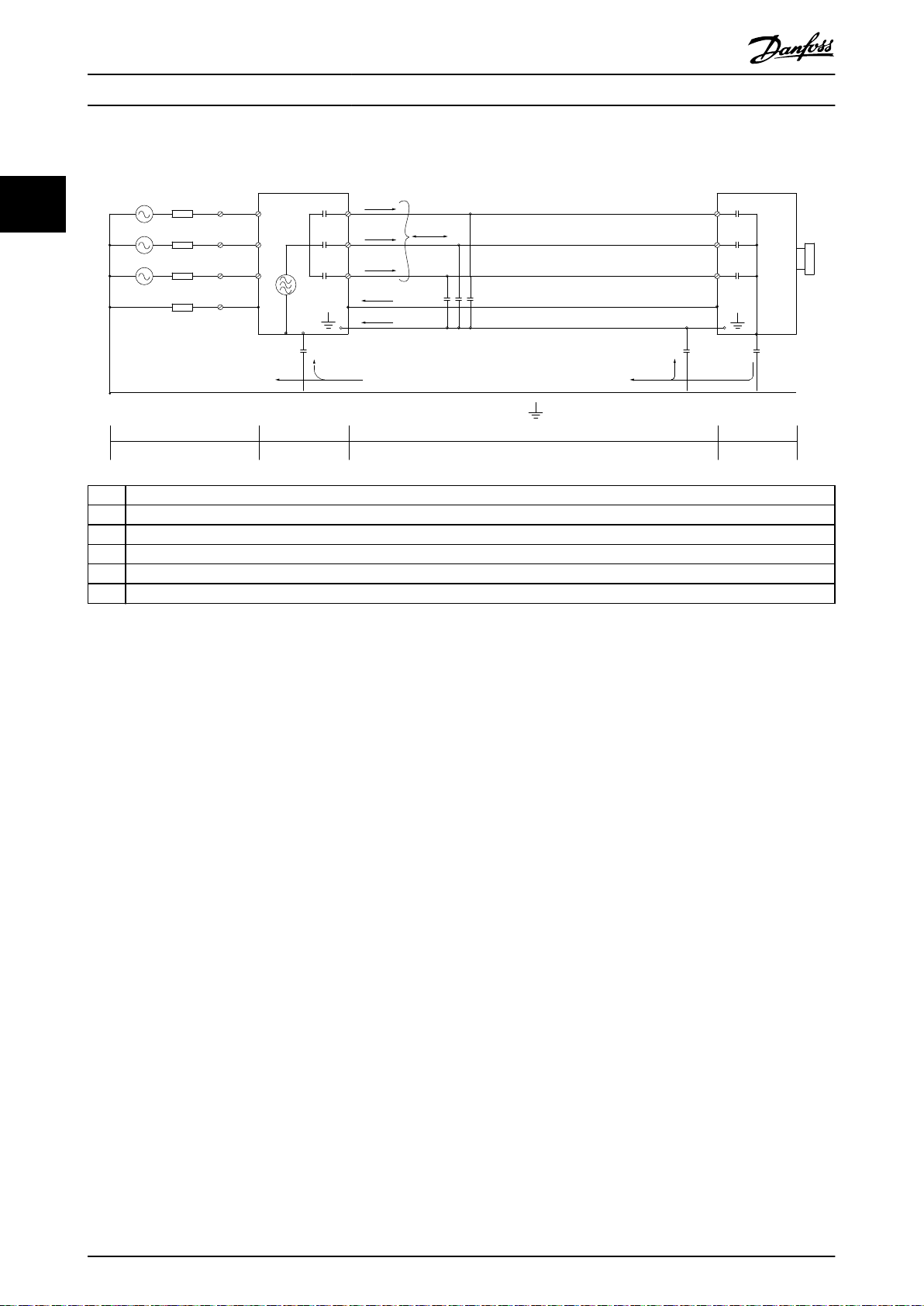
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
In einigen Situationen ist zum Vermeiden von Stromschleifen jedoch eine Unterbrechung der Abschirmung notwendig.
22
1 Erdkabel
2 Abschirmung
3 Netzversorgung
4 Frequenzumrichter
5 Abgeschirmtes Motorkabel
6 Motor
Abbildung 2.27 EMV-Emission
Wenn der Anschluss der Abschirmung über eine Montageplatte für den Frequenzumrichter vorgesehen ist, muss diese
Montageplatte aus Metall gefertigt sein, da die Ableitströme zum Gerät zurückgeführt werden müssen. Durch die Montageschrauben muss stets ein guter elektrischer Kontakt von der Montageplatte zur Gehäusemasse des Frequenzumrichters
gewährleistet sein.
Beim Einsatz ungeschirmter Leitungen werden einige Emissionsanforderungen nicht erfüllt. Die immunitätsbezogenen
Anforderungen werden jedoch erfüllt.
Um das Störungsniveau des gesamten Systems (Frequenzwandler und Installation) so weit wie möglich zu reduzieren, ist es
wichtig, dass Sie die Motor- und etwaige Anschlusskabel für Bremsen so kurz wie möglich halten. Sie dürfen Steuer- und
Buskabel nicht gemeinsam mit Anschlusskabeln für Netz, Motor und Bremse verlegen. Funkstörungen von mehr als 50 MHz
(in der Luft) werden insbesondere von der Regelelektronik erzeugt.
38 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 41
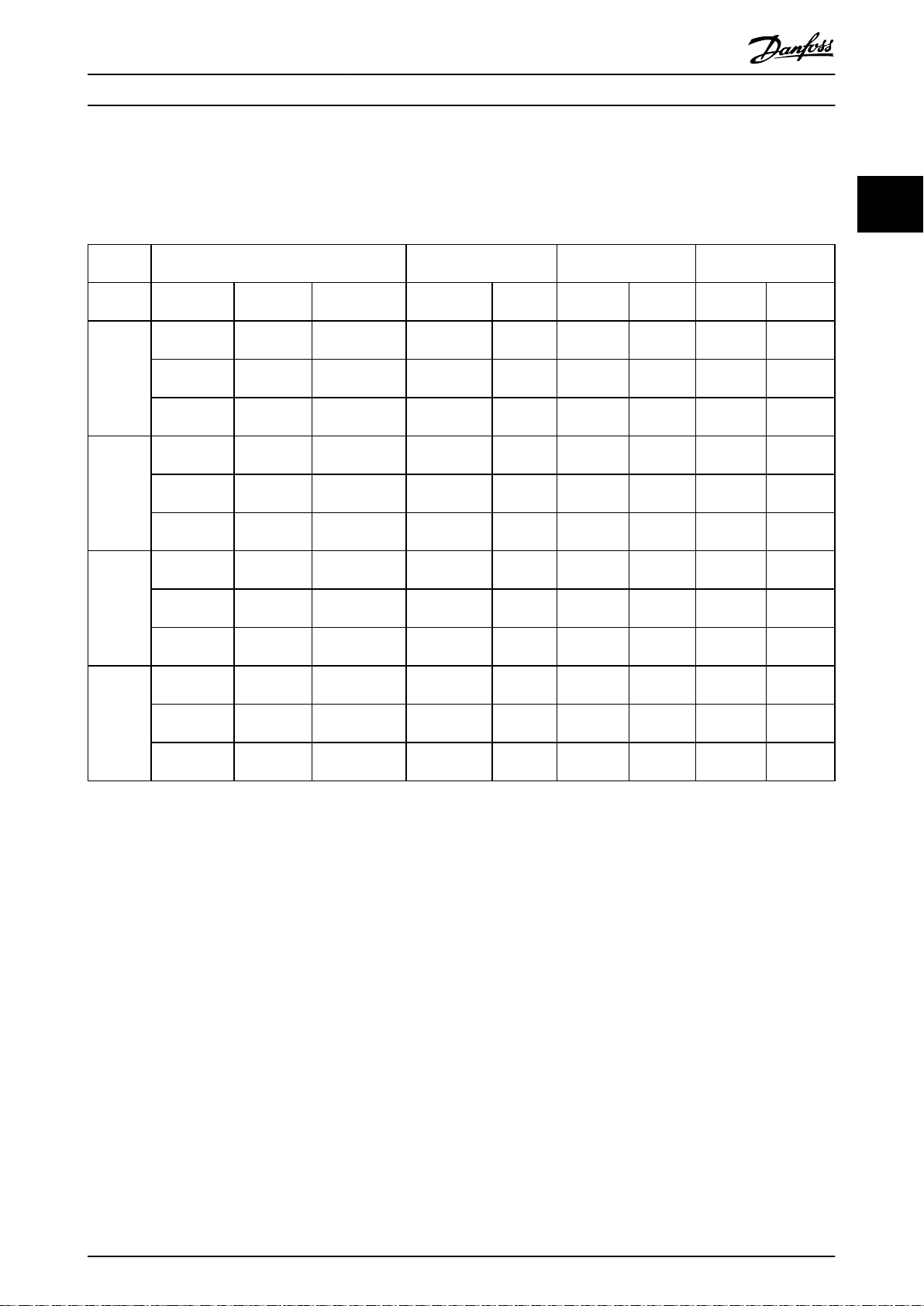
Produktübersicht Projektierungshandbuch
2.6.2 EMV-Emission
Die Testergebnisse in Tabelle 2.13 wurden unter Verwendung eines Systems mit Frequenzumrichter (mit Montageplatte),
Motor und abgeschirmten Motorkabeln erzielt.
Filtertyp
(intern)
A2-Filter
A1-Filter
A2-Filter
EMVSchraube
entfernt
A1-Filter
EMVSchraube
entfernt
Versorgungsspannung/Nennleistung Klasse A2/EN 55011 Klasse A1/EN 55011 Klasse B/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V
0,37–22 kW
(0,5–30 HP)
–
– –
0,37–7,5 kW
(0,5–10 HP)
11–22 kW
(15–30 HP)
– –
0,37–22 kW
(0,5–30 HP)
–
2)
– –
0,37–7,5 kW
(0,5–10 HP)
11–22 kW
(15–30 HP)
2)
– –
– – 25 m (82 ft)
0,37–4 kW
(0,5–5,4 HP)
0,37–2,2 kW
(0,5–3 HP)
– – 25 m (82 ft)
– – 50 m (164 ft)
0,37–2,2 kW
(0,5–3 HP)
– – – – – – – –
0,37–4 kW
(0,5–5,4 HP)
0,37–2,2 kW
(0,5–3 HP)
– – 5 m (16,4 ft)
– – 5 m (16,4 ft)
0,37–2,2 kW
(0,5–3 HP)
Leitungs-
geführt
– 25 m (82 ft)
– – – – – –
40 m (131 ft)
– – – – – – –
– – – – – –
5 m (16,4 ft)
AbgestrahltLeitungs-
geführt
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
– – – –
– – – –
25 m
(82 ft)
50 m
(164 ft)
40 m
(131 ft)
– – – –
– – – –
– – – –
AbgestrahltLeitungs-
geführt
Ja – –
Ja – –
Ja
15 m
(49,2 ft)
Abgestrahl
2 2
t
–
Tabelle 2.13 EMV-Emission (Filtertyp: intern)
1) Frequenzbereich von 150 kHz bis 30 MHz ist nicht zwischen IEC/EN 61800-3 und EN 55011 harmonisiert und nach den Vorschriften nicht
zwingend eingeschlossen.
2) Geringer Erdableitstrom Kompatibel mit Fehlerstromschutz/IT-Netzbetrieb
Die Testergebnisse in Tabelle 2.14 wurden unter Verwendung eines Systems mit Frequenzumrichter (mit Montageplatte),
Motor und abgeschirmten Motorkabeln erzielt. 3-phasige 380–480 V-Frequenzumrichter müssen über einen internen A1Filter verfügen.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 39
Page 42

Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
Filtertyp
(extern)
22
EMV-Filter
dU/dt-
Filter
Sinusfilter
EMV-Filter
+
Sinusfilter
Versorgungsspannung/Nennleistung Klasse A2/EN 55011 Klasse A1/EN 55011 Klasse B/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V
0,37–22 kW
(0,5–30 HP)
–
– –
0,37–7,5 kW
(0,5–10 HP)
11–22 kW
(15–30 HP)
–
– –
0,37–7,5 kW
(0,5–10 HP)
11–15 kW
(15–20 HP)
18,5–22 kW
(25–30 HP)
–
– –
0,37–15 kW
(0,5–20 HP)
18,5–22 kW
(25–30 HP)
–
– –
– – 100 m (328 ft)
0,37–4 kW
(0,5–5,4 HP)
– – – – – – – –
– – 150 m (492 ft)
0,37–4 kW
(0,5–5,4 HP)
– – 50 m (164 ft)
– – 150 m (492 ft)
– – 150 m (492 ft)
0,37–4 kW
(0,5–5,4 HP)
– – 150 m (492 ft)
– – – – – – – –
0,37–4 kW
(0,5–5,4 HP)
– – – – – – –
0,37–2,2 kW
(0,5–3 HP)
– – – – – – –
0,37–2,2 kW
(0,5–3 HP)
– – – – – – –
0,37–2,2 kW
(0,5–3 HP)
– – – – – – –
0,37–2,2 kW
(0,5–3 HP)
Leitungs-
geführt
100 m (328 ft)
– – – – – –
50 m (164 ft)
150 m (492 ft)
AbgestrahltLeitungs-
geführt
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
1)
Ja
100 m
(328 ft)
100 m
(328 ft)
40 m
(131 ft)
50 m
(164 ft)
50 m
(164 ft)
100 m
(328 ft)
50 m
(164 ft)
100 m
(328 ft)
100 m
(328 ft)
AbgestrahltLeitungs-
geführt
Ja
Ja
Ja – –
Ja – –
Ja – –
Ja – –
Ja – –
Ja – –
Ja – –
25 m
(82 ft)
40 m
(131 ft)
Abgestrahl
t
–
–
Tabelle 2.14 EMV-Emission (Filtertyp: extern)
1) Frequenzbereich von 150 kHz bis 30 MHz ist nicht zwischen IEC/EN 61800-3 und EN 55011 harmonisiert und nach den Vorschriften nicht
zwingend eingeschlossen.
2.6.3 EMV-Immunität
Der VLT® Midi Drive FC 280 erfüllt die Anforderungen für Industriebereiche, die höher als in Wohn- oder Bürobereichen sind.
Daher erfüllt der FC 280 auch die niedrigeren Anforderungen für Wohn- und Bürobereiche mit einem großen Sicherheitsspielraum.
Zur Dokumentation der Störfestigkeit gegenüber elektrischen Störungen/Schalttransienten wurden die nachfolgenden
Störfestigkeitstests auf einem System mit folgenden Bestandteilen durchgeführt:
Frequenzumrichter (ggf. mit Optionen).
•
Abgeschirmte Steuerleitung.
•
Steuerkasten mit Potenziometer, Motorkabel und Motor.
•
40 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 43

Produktübersicht Projektierungshandbuch
Die Prüfungen wurden nach den folgenden Fachgrundnormen durchgeführt:
EN 61000-4-2 (IEC 61000-4-2) Elektrostatische Entladung (ESD): Simulation elektrostatischer Entladung von
•
Personen.
EN 61000-4-3 (IEC 61000-4-3) Immunität gegen abgestrahlte Störungen: Amplitudenmodulierte Simulation der
•
Auswirkungen von Radar- und Funkgeräten sowie von mobilen Kommunikationsgeräten.
EN 61000-4-4 (IEC 61000-4-4) Schalttransienten: Simulation von Störungen, herbeigeführt durch Schalten mit
•
einem Schütz, Relais oder ähnlichen Geräten.
EN 61000-4-5 (IEC 61000-4-5) Überspannungen: Simulation von Transienten, z. B. durch Blitzschlag in nahe
•
gelegenen Anlagen.
EN 61000-4-6 (IEC 61000-4-6) Leitungsgeführte Störgrößen: Simulation der Auswirkung von Funksendegeräten,
•
die an Verbindungskabel angeschlossen sind.
FC 280 erfüllt den Standard IEC 61800-3. Nähere Angaben finden Sie in Tabelle 2.15.
Spannungsbereich: 380–480 V
Produktnorm 61800-3
ESD Immunität
Test
Abnahmekriterium B B B A A
Netzkabel – – 2 kV CN
Motorkabel
Anschlusskabel für Bremse – – 4 kV CCC (Capacitive
Zwischenkreiskopplungskabel
Relaiskabel
Steuerleitung – –
Standard/Feldbuskabel – –
LCP-Kabel – –
Gehäuse
Definitionen
CD: Kontaktentladung (Contact Discharge)
AD: Luftentladung (Air Discharge)
– –
– – 4 kV CCC (Capacitive
– –
4 kV CD
8 kV AD
gegen
abgestrahlte
Störungen
10 V/m – – –
DM: Differenzbetrieb
CM (Common Mode): Gleichtakt
Impulskette Stoßspannungstransienten Immunität gegen
leitungsgeführte
Störungen
2 kV/2 Ω Differenzbetrieb
10 V
10 V
10 V
4 kV CCC (Capacitive
Clamp Coupling)
Clamp Coupling)
Clamp Coupling)
4 kV CCC (Capacitive
Clamp Coupling)
Länge >2 m (6.6 ft)
1 kV CCC (Capacitive
Clamp Coupling)
Länge >2 m (6.6 ft)
1 kV CCC (Capacitive
Clamp Coupling)
Länge >2 m (6.6 ft)
1 kV CCC (Capacitive
Clamp Coupling)
2 kV/12 Ω CM (Common
Mode)
– 10 V
– 10 V
– 10 V
– 10 V
Ungeschirmt:
1 kV/42 Ω CM (Common
Mode)
Ungeschirmt:
1 kV/42 Ω CM (Common
Mode)
– 10 V
CN: Direkte Zuführung über Kopplungsnetz
CCC (Capacitive Clamp Coupling): Zuführung über
kapazitive Dämpfungskopplung
2 2
eff
eff
eff
eff
eff
eff
eff
eff
Tabelle 2.15 EMV-Immunität
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 41
Page 44

130BD447.11
12
4
3
ab
M
130BB955.12
a
b
Leakage current
Motor cable length
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.7 Galvanische Trennung
Eine funktionale galvanische Trennung (a und b auf
Abbildung 2.28) ist für die optionale externe 24 V-
PELV bietet Schutz durch Kleinspannung. Ein Schutz gegen
22
elektrischen Schlag gilt als gewährleistet, wenn die
Versorgung und für die RS485-Standardbusschnittstelle
vorgesehen.
Stromversorgung vom Typ PELV (Schutzkleinspannung –
Protective Extra Low Voltage) ist und die Installation
gemäß den örtlichen bzw. nationalen Vorschriften für PELVVersorgungen ausgeführt wurde.
WARNUNG
Achten Sie vor dem Berühren elektrischer Bauteile
darauf, dass andere Spannungseingänge, wie z. B.
Alle Steuerklemmen und die Relaisklemmen 01–03 sind mit
PELV (Schutzkleinspannung – Protective extra low voltage)
konform. Dies gilt nicht für den geerdeten Dreieck-Zweig
über 400 V.
Zwischenkreiskopplung (Zusammenschalten eines Gleichspannungszwischenkreises) sowie der Motoranschluss
beim kinetischen Speicher, ausgeschaltet sind. Halten Sie
die im Kapitel Sicherheit in der VLT® Midi Drive FC 280
Bedienungsanleitung angegebene Entladezeit ein. Das
Sie erreichen die galvanische (sichere) Trennung, indem Sie
die Anforderungen für höhere Isolierung erfüllen und die
Nichtbeachten der Empfehlungen kann zu schweren
Verletzungen oder zum Tod führen.
entsprechenden Kriech-Luftabstände beachten. Diese
Anforderungen sind in der Norm EN 61800-5-1
2.8 Erdableitstrom
beschrieben.
Befolgen Sie im Hinblick auf die Schutzerdung von Geräten
Die Bauteile, die die elektrische Trennung wie in
Abbildung 2.28 gezeigt bilden, erfüllen ebenfalls die
Anforderungen für höhere Isolierung und der
entsprechenden Tests gemäß Beschreibung in EN
61800-5-1.
Die galvanische PELV-Trennung ist an 3 Punkten vorhanden
(siehe Abbildung 2.28):
Um den PELV-Schutzgrad beizubehalten, müssen alle
steuerklemmenseitig angeschlossenen Geräte den PELVAnforderungen entsprechen, d. h. Thermistoren müssen
beispielsweise verstärkt/zweifach isoliert sein.
mit einem Ableitstrom gegen Erde von mehr als 3,5 mA
alle nationalen und lokalen Vorschriften.
Die Frequenzumrichtertechnik nutzt hohe Schaltfrequenzen
bei gleichzeitig hoher Leistung. Das Schalten erzeugt einen
Ableitstrom in der Erdverbindung. Ein Fehlerstrom im
Frequenzumrichter an den Ausgangsleistungsklemmen
kann eine Gleichstromkomponente enthalten, die die Filterkondensatoren laden und einen transienten Erdstrom
verursachen kann.
Der Ableitstrom gegen Erde setzt sich aus verschiedenen
Faktoren zusammen und hängt von verschiedenen Systemkonfigurationen ab, wie EMV-Filter, abgeschirmte
Motorleitungen und Leistung des Frequenzumrichters.
1 Stromversorgung (SMPS) für Steuerkassette
2 Kommunikation zwischen Leistungskarte und Steuerkassette
3 Isolierung zwischen STO-Eingängen und IGBT-Stromkreis
4 Bedarfsgerechtes Relais
Abbildung 2.28 Galvanische Trennung
42 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Abbildung 2.29 Einfluss von Kabellänge und Leistungsgröße
auf Ableitstrom, Pa>P
b
Page 45

130BB956.12
THDv=0%
THDv=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Produktübersicht Projektierungshandbuch
Der Ableitstrom hängt ebenfalls von der Netzverzerrung
ab.
Abbildung 2.30 Einfluss der Netzverzerrung auf den
Ableitstrom
Bemessen Sie Fehlerstromschutzschalter in Bezug
•
auf Systemkonfiguration und Umgebungsbedingungen.
Abbildung 2.31 Hauptbeiträge zum Ableitstrom
2 2
HINWEIS
Hoher Ableitstrom kann zu einer Abschaltung der Fehlerstromschutzschalter führen. Entfernen Sie zur
Vermeidung dieses Problems die EMV-Schraube, wenn
ein Filter geladen wird.
EN 61800-5-1 (Produktnorm für Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl) stellt besondere
Anforderungen, wenn der Erdableitstrom 3,5 mA
übersteigt. Die Erdverbindung muss auf eine der folgenden
Arten verstärkt werden:
Erdverbindung (Klemme 95) mit einem Leitungs-
•
querschnitt von mindestens 10 mm
Zwei getrennt verlegte Erdungskabel, die die
•
vorgeschriebenen Maße einhalten
Weitere Informationen finden Sie in EN/IEC61800-5-1.
Fehlerstromschutzschalter
Wenn Fehlerstromschutzschalter (RCD), auch als
Erdschlusstrennschalter bezeichnet, zum Einsatz kommen,
sind die folgenden Anforderungen einzuhalten:
Verwenden Sie RCD mit Einschaltverzögerung, um
•
Fehler durch transiente Erdströme zu vermeiden.
Verwenden Sie Fehlerstromschutzschalter mit
•
Einschaltverzögerung, um Fehler durch transiente
Erdströme zu vermeiden.
2
Abbildung 2.32 Einfluss der Trennfrequenz des Fehlerstromschutzschalters auf das, auf was reagiert wird/was gemessen
wird
Nähere Angaben finden Sie im Anwendungshinweis zum
Fehlerstromschutzschalter.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 43
Page 46

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Last
Zeit
Drehzahl
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
22
2.9 Bremsfunktionen
2.9.1 Mechanische Haltebremse
Eine direkt an der Motorwelle befestigte mechanische
Haltebremse führt in der Regel eine statische Bremsung
durch.
HINWEIS
Wenn die Haltebremse zur Sicherheitskette gehört, ist
eine sichere Steuerung einer mechanischen Bremse über
einen Frequenzumrichter nicht möglich. Nehmen Sie in
die Gesamtinstallation eine Redundanzschaltung für die
Bremsansteuerung auf.
2.9.2 Dynamische Bremse
Dynamisches Bremsen durch:
Bremswiderstand: Ein Brems-IGBT leitet die
•
Bremsenergie vom Motor an den
angeschlossenen Bremswiderstand
(Parameter 2-10 Brake Function = [1] Bremswi-
derstand) und verhindert so, dass die
Überspannung einen bestimmten Grenzwert
überschreitet.
Stellen Sie den Schwellenwert in
Parameter 2-14 Brake voltage reduce mit einem 70V-Bereich für 3x380–480 V ein.
AC-Bremse: Durch Ändern der Verlustbedin-
•
gungen im Motor wird die Bremsenergie im
Motor verteilt. Sie dürfen die AC-Bremsfunktion
nicht in Anwendungen mit einer hohen Ein-/
Ausschaltfrequenz verwenden, da dies zu einer
Überhitzung des Motors führen würde
(Parameter 2-10 Brake Function = [2] AC-Bremse).
DC-Bremse: Ein übermodulierter Gleichstrom
•
verstärkt den Wechselstrom und funktioniert als
Wirbelstrombremse (Parameter 2-02 DC Braking
Time≠ 0 s).
2.9.3 Auswahl des Bremswiderstands
Wenn erhöhte Anforderungen mit generatorischem
Bremsen bewältigt werden sollen, ist ein Bremswiderstand
erforderlich. Durch die Verwendung eines Bremswiderstands wird gewährleistet, dass die Wärme in diesen
Bremswiderstand und nicht in den Frequenzumrichter
abgeführt wird. Weitere Informationen finden Sie im Projek-
tierungshandbuch VLT® Bremswiderstand MCE 101.
Ist der Betrag der kinetischen Energie, die in jedem
Bremszeitraum zum Widerstand übertragen wird,
unbekannt, berechnen Sie die durchschnittliche Leistung
auf Basis von Zykluszeit und Bremszeit, was als Aussetzbetrieb bezeichnet wird. Der Arbeitszyklus für
Aussetzbetrieb des Widerstandes gibt den Arbeitszyklus an,
für den der Widerstand ausgelegt ist. Abbildung 2.33 zeigt
einen typischen Bremszyklus.
Sie können den Arbeitszyklus für Aussetzbetrieb des
Widerstands wie folgt berechnen:
Arbeitszyklus = tb/T
tb ist die Bremsdauer in Sekunden.
T = Zykluszeit in Sekunden.
Abbildung 2.33 Typischer Bremszyklus
Leistungsbereich:
0,37–22 kW 3x380–480 V
0,37–3,7 kW 3x200–240 V
Zykluszeit [s] 120
Bremsarbeitszyklus bei 100 %
Drehmoment
Bremsarbeitszyklus bei Übermoment
(150/160%)
Tabelle 2.16 Bremsung bei hohem Überlastmoment
Danfoss bietet Bremswiderstände mit Arbeitszyklen von
10 % und 40 % an. Bei Anwendung eines Arbeitszyklus
von 10 % können die Bremswiderstände die Bremsleistung
über 10 % der Zykluszeit aufnehmen. Die übrigen 90 % der
Zykluszeit werden zum Abführen überschüssiger Wärme
genutzt.
Dauerlast
40%
HINWEIS
Stellen Sie sicher, dass der Bremswiderstand für die
erforderliche Bremszeit ausgelegt ist.
Die maximal zulässige Last am Bremswiderstand wird als
Spitzenleistung bei einem gegebenen Arbeitszyklus für
Aussetzbetrieb ausgedrückt und wird berechnet als:
44 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 47

Produktübersicht Projektierungshandbuch
Berechnung des Bremswiderstands
2
U
x0 . 83
Rbr Ω =
dc,br
P
Höchstwert
wobei
P
Spitze
= P
x Mbr [%] x η
Motor
Motor
x η
VLT
[W]
Wie gezeigt, hängt der Bremswiderstand von der
Zwischenkreisspannung (Udc) ab.
Größe Bremse aktiv
U
dc,br
FC 280
3x380–480 V
FC 280
3x200–240 V
Tabelle 2.17 Schwellenwert des Bremswiderstands
770 V 800 V 800 V
390 V 410 V 410 V
Warnung vor
Abschaltung
Cutout
(Abschaltung)
Den Schwellenwert können Sie in Parameter 2-14 Brake
voltage reduce mit einem 70-V-Bereich einstellen.
HINWEIS
Je mehr der Wert reduziert wird, desto schneller erfolgt
die Reaktion auf eine generatorische Überlast. Sie sollten
dies nur verwenden, wenn Überspannungsprobleme in
der Zwischenkreisspannung auftreten.
HINWEIS
Achten Sie darauf, dass der Bremswiderstand für eine
Spitzenspannung von 410 V oder 800 V zugelassen ist.
Danfoss empfiehlt die Berechnung des Bremswiderstands
R
gemäß der folgenden Formel. Die empfohlenen
rec
Bremswiderstände gewährleisten, dass der Frequenzumrichter mit dem maximal verfügbaren Bremsmoment
(Mbr(%)) von 160 % bremst.
2
U
x100x0,83
P
motor
396349
=
397903
=
dc
xM
P
P
xη
VLT
br( % )
bei einem Bremsmoment von 160 %
rec
1)
Ω
motor
2)
Ω
motor
xη
motor
Ω =
R
rec
η
beträgt in der Regel 0,80 (≤7,5 kW (10 hp)); 0,85 (11–
Motor
22 kW)
η
beträgt in der Regel 0,97
VLT
Beim FC 280 wird R
wie folgt ausgedrückt:
480
V: R
rec
480
V: R
rec
1) Bei Frequenzumrichtern ≤ 7,5 kW Wellenleistung.
2) Bei Frequenzumrichtern mit 11-22 kW Wellenleistung.
HINWEIS
Der Widerstand des Bremswiderstands sollte den von
Danfoss empfohlenen Wert nicht überschreiten. Bei
Bremswiderständen mit höherem Ohmwert wird
möglicherweise nicht mehr das maximale Bremsmoment
von 160 % erzielt, weil der Frequenzumrichter während
der Bremsung möglicherweise mit DC-Überspannung
abschaltet.
Der Widerstand sollte größer als R
min
sein.
HINWEIS
Bei einem Kurzschluss im Bremstransistor können Sie
einen eventuellen Leistungsverlust im Bremswiderstand
durch Unterbrechung der Netzversorgung zum Frequenzumrichter (Netzschalter, Schütz) verhindern. Der
Frequenzumrichter kann den Schütz regeln.
HINWEIS
Berühren Sie den Bremswiderstand nicht, da er während
des Bremsens heiß werden kann. Zur Vermeidung
jeglicher Brandgefahr müssen Sie den Bremswiderstand
in einer sicheren Umgebung platzieren.
2.9.4 Steuerung mit Bremsfunktion
Die Bremse ist gegen einen Kurzschluss des Bremswiderstands geschützt. Der Bremstransistor wird auf eine
Kurzschlussbedingung hin überwacht. Den Schutz des
Bremswiderstands vor einer Überlastung aufgrund einer
Frequenzumrichterstörung kann ein Relais/ein Digitalausgang übernehmen.
Außerdem ermöglicht die Bremse eine Anzeige der
aktuellen Leistung und der mittleren Leistung der letzten
120 s. Die Bremse kann ebenfalls die Bremsleistung
überwachen und sicherstellen, dass sie die in
Parameter 2-12 Brake Power Limit (kW) gewählte Grenze
nicht überschreitet.
HINWEIS
Überwachen der Bremsleistung ist keine Sicherheitsfunktion. Um ein Überschreiten der zulässigen
Bremsleistung zu verhindern, ist ein Thermoschalter
erforderlich. Der Bremswiderstandskreis ist nicht gegen
Erdableitstrom geschützt.
Sie können Überspannungssteuerung (OVC) (ohne
Bremswiderstand) als alternative Bremsfunktion in
Parameter 2-17 Over-voltage Control wählen. Diese Funktion
ist für alle Geräte aktiv. Sie stellt sicher, dass bei Anstieg
der Zwischenkreisspannung eine Abschaltung verhindert
werden kann. Dies erfolgt durch Anheben der Ausgangsfrequenz zur Begrenzung der Zwischenkreisspannung. Es
ist eine nützliche Funktion, z. B. wenn die Rampe-ab-Zeit
zu kurz ist, um ein Abschalten des Frequenzumrichters zu
2 2
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 45
Page 48
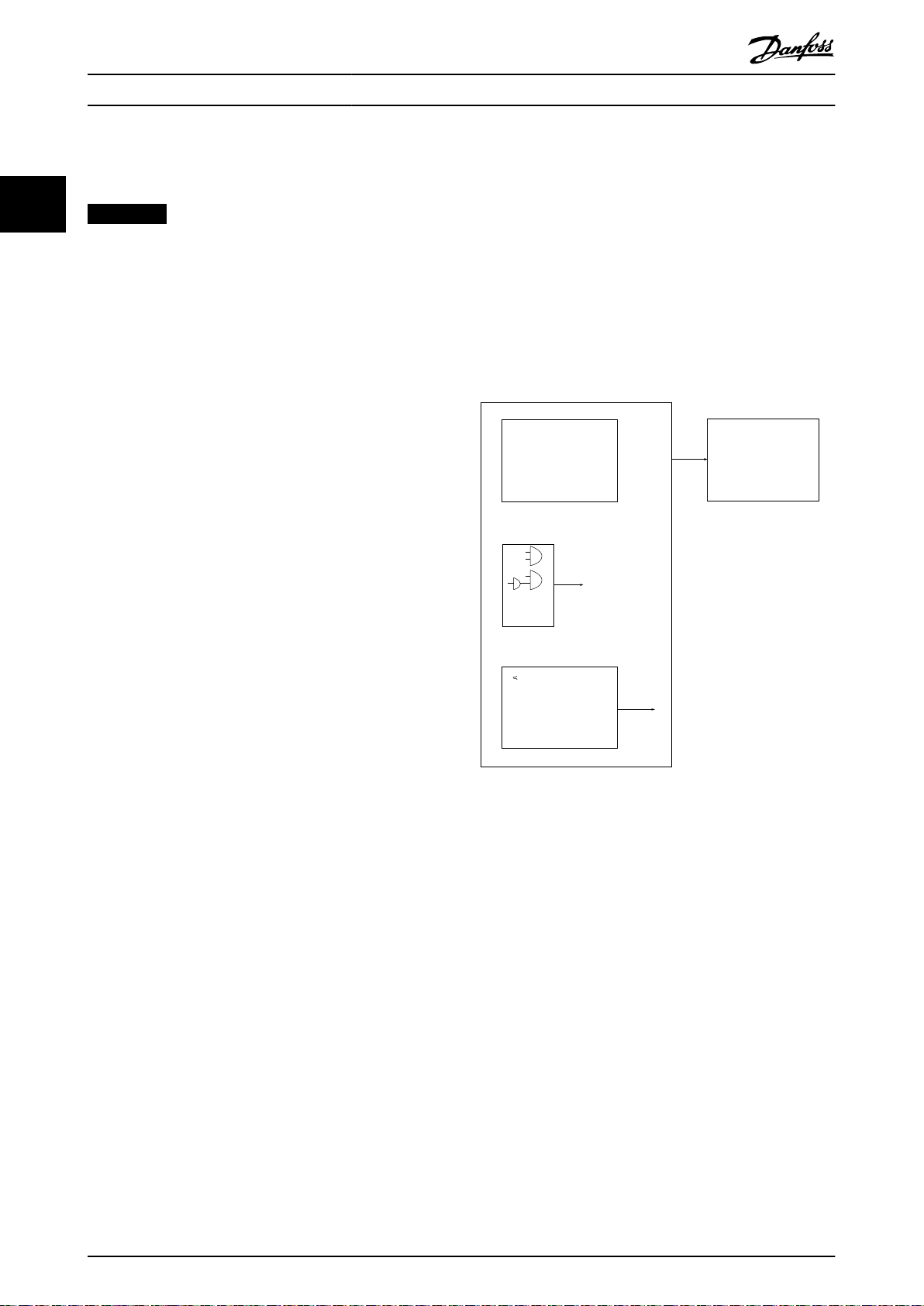
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
vermeiden. In dieser Situation wird jedoch die Rampe-Ab-
Smart Logic Controller
2.11
Zeit automatisch verlängert.
Die Smart Logic Control (SLC) ist eine Folge benutzerdefi-
22
HINWEIS
Sie können OVC aktivieren, wenn Sie einen PM-Motor
betreiben (wenn Parameter 1-10 Motor Construction auf
[1] PM, Vollpol SPM eingestellt ist).
nierter Aktionen (siehe Parameter 13-52 SL-Controller Aktion
[x]), die ausgeführt werden, wenn das zugehörige Ereignis
(siehe Parameter 13-51 SL-Controller Ereignis [x]) als wahr
ermittelt wird.
Die Bedingung für ein Ereignis kann ein bestimmter Status
sein oder wenn der Ausgang einer Logikregel oder eines
2.10 Motorisolation
Vergleicher-Funktion wahr wird. Dies führt zu einer
zugehörigen Aktion, wie in Abbildung 2.34 gezeigt.
Motoren mit moderner Konstruktion, die für die
Verwendung mit Frequenzumrichtern bestimmt sind,
haben einen höheren Isolationsgrad, durch den sich die
neue Generation der hocheffizienten IGBTs mit hohem
dU/dt auszeichnet. Zur Nachrüstung in alten Motoren
müssen Sie die Motorisolation überprüfen oder eine
Dämpfung mit einem dU/dt-Filter bzw. falls erforderlich mit
einem Sinusfilter durchführen.
2.10.1 Sinusfilter
Steuert ein Frequenzumrichter einen Motor, sind aus dem
Motor Resonanzgeräusche zu hören. Die Geräusche,
verursacht durch die Motorkonstruktion, treten immer bei
der Ummagnetisierung des Blechpakets auf. Die Frequenz
der Resonanzgeräusche entspricht somit der Taktfrequenz
des Frequenzumrichters.
Danfoss bietet einen Sinusfilter zur Dämpfung der
akustischen Motorgeräusche an.
Der Filter verringert die Rampe-Auf Zeit der Spannung, die
Spitzenlastspannung U
und den Rippel-Strom ΔI zum
PEAK
Motor. Das heißt, dass Strom und Spannung beinahe
sinusförmig werden. Folglich reduzieren sich die
akustischen Motorgeräusche auf ein Minimum.
Auch der Rippel-Strom in den Spulen des Sinusfilters
verursacht Geräusche. Dieses Problem können Sie durch
Einbau des Filters in einen Schaltschrank oder ein
ähnliches Gehäuse beseitigen.
2.10.2 dU/dt-Filter
Danfoss bietet dU/dt-Filter an. Hierbei handelt es sich um
Gegentakt-Tiefpassfilter, die Spannungsspitzen an den
Motorklemmen verringern und die Anstiegzeit bis auf ein
Niveau senken, auf dem die Belastung der Motorwicklungsisolierung reduziert wird. Dies ist besonders bei
kurzen Motorkabeln von Bedeutung.
Im Vergleich zu Sinusfiltern (siehe Kapitel 2.10.1 Sinusfilter)
haben die dU/dt-Filter eine Trennfrequenz über der
Taktfrequenz.
Abbildung 2.34 Zugehörige Aktion
Ereignisse und Aktionen sind jeweils nummeriert und
paarweise verknüpft (Zustände). Wenn also Ereignis [0]
erfüllt ist (d. h. WAHR ist), wird die Aktion [0] ausgeführt.
Danach werden die Bedingungen von Ereignis [1]
ausgewertet, und wenn wahr, wird Aktion [1] ausgeführt
usw. Es wird jeweils nur ein Ereignis ausgewertet. Ist das
Ereignis FALSCH, wird während des aktuellen Abtastintervalls keine Aktion (im SLC) ausgeführt und es werden
keine anderen Ereignisse ausgewertet. Wenn der SLC
startet, wird bei jedem Abtastintervall Ereignis [0] (und
zwar nur Ereignis [0]) ausgewertet. Nur wenn Ereignis [0]
als WAHR bewertet wird, führt der SLC Aktion [0] aus und
beginnt, Ereignis [1] auszuwerten. Es ist möglich, zwischen
1 und 20 Ereignisse und Aktionen zu programmieren.
Wenn das letzte Ereignis/die letzte Aktion durchgeführt
wurde, startet die Sequenz ausgehend von Ereignis [0]/
Aktion [0] erneut. Abbildung 2.35 zeigt ein Beispiel mit drei
Ereignissen/Aktionen:
46 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 49
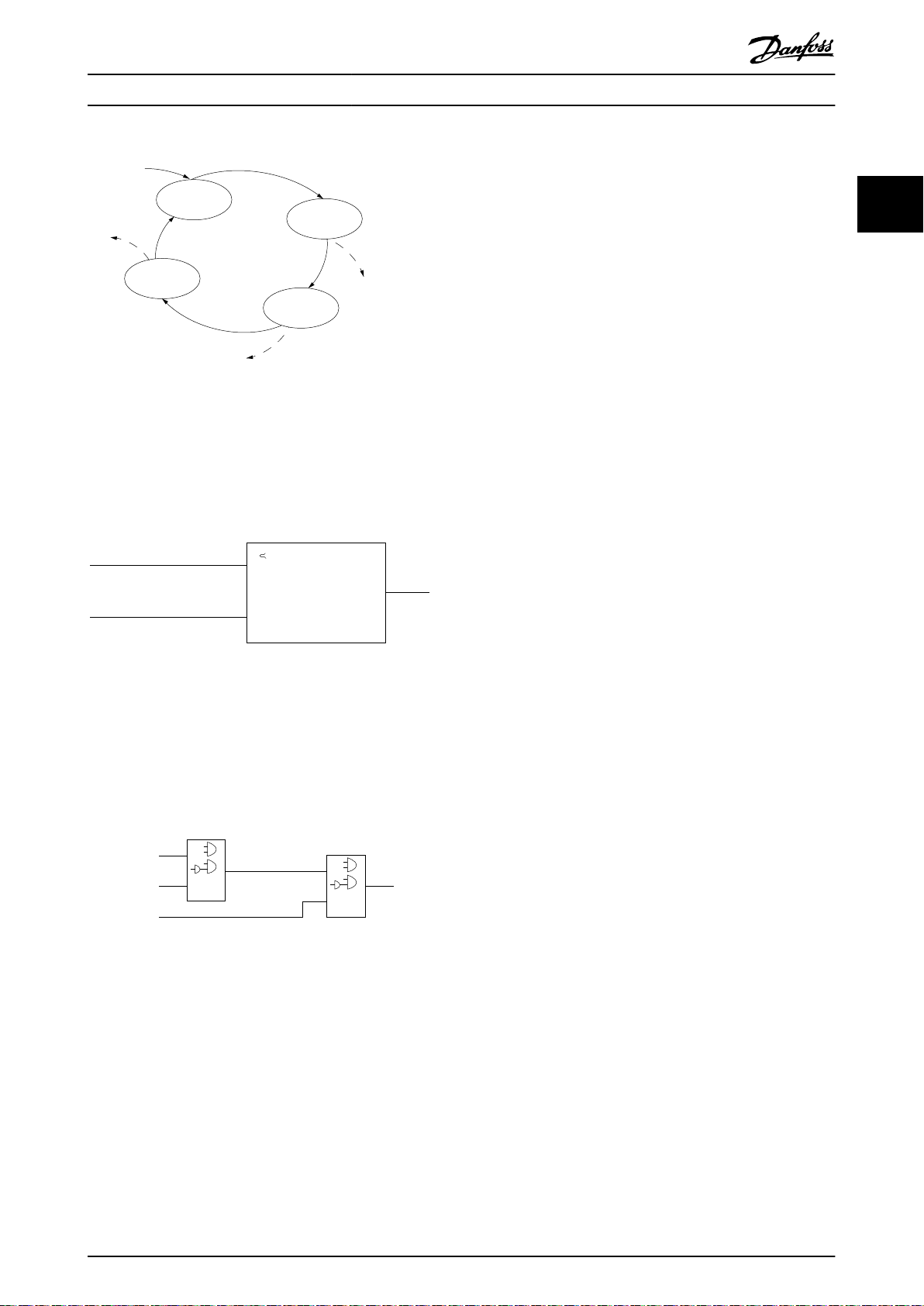
130BA062.13
Zustand 1
Ereignis 1/
Aktion 1
Zustand 2
Ereignis 2/
Aktion 2
Start
Ereignis P13-01
Zustand 3
Ereignis 3/
Aktion 3
Zustand 4
Ereignis 4/
Aktion 4
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktübersicht Projektierungshandbuch
Schalten am Ausgang
Das Schalten am Ausgang zwischen Motor und Frequenzumrichter ist uneingeschränkt zulässig und beschädigt
den Frequenzumrichter nicht, kann jedoch zur Anzeige von
Fehlermeldungen führen. Es können allerdings Fehlermeldungen auftreten.
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Dies geschieht in folgenden
Fällen:
Die Last treibt den Motor an (bei konstanter
•
Abbildung 2.35 Sequenz mit 3 Ereignissen/Aktionen
Ausgangsfrequenz des Frequenzumrichters),
Während der Verzögerung (Rampe Ab) ist die
•
Reibung bei hohem Trägheitsmoment niedrig und
Vergleicher
Vergleicher dienen zum Vergleichen von stetigen Variablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang)
mit voreingestellten Festwerten.
die Rampe-Ab-Zeit zu kurz, um die Energie als
Verlustleistung im Frequenzumrichter, Motor oder
in der Anlage abzugeben.
Eine falsche Einstellung beim Schlupfausgleich
•
kann eine höhere Zwischenkreisspannung
hervorrufen.
Die Bedieneinheit versucht ggf. die Rampe zu kompensieren (Parameter 2-17 Überspannungssteuerung).
Der Frequenzumrichter wird nach Erreichen eines
bestimmten Spannungsniveaus abgeschaltet, um die
Transistoren und die Zwischenkreiskondensatoren zu
Abbildung 2.36 Vergleicher
schützen.
Zur Auswahl der Methode zur Regelung des ZwischenkreisSpannungsniveaus siehe Parameter 2-10 Bremsfunktion und
Logikregeln
Es ist möglich, 3 bool'sche Eingänge (wahr/falsch) von
Timern, Vergleichern, Digitaleingängen, Statusbits und
Ereignissen über „und“, „oder“ und „nicht“ miteinander zu
verknüpfen.
Parameter 2-17 Überspannungssteuerung.
Netzausfall
Während eines Netzausfalls läuft der Frequenzumrichter
weiter, bis die Spannung des Zwischenkreises unter den
minimalen Stopppegel abfällt. Dieser beträgt
normalerweise:
314 V für 3x380–480 V.
•
202 V für 3x200–240 V.
•
225 V für 1x200–240 V.
•
Die Höhe der Netzspannung vor dem Ausfall und die
aktuelle Motorbelastung bestimmen, wie lange der
Wechselrichter im Freilauf ausläuft.
Abbildung 2.37 Logikregeln
Statische Überlast im Modus VVC
+
Wird der Frequenzumrichter überlastet, wird die Drehmo-
2.12 Extreme Betriebszustände
Kurzschluss (Motorphase – Phase)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der 3 Motorphasen oder im DC-Zwischenkreis gegen
Kurzschlüsse geschützt. Ein Kurzschluss zwischen zwei
Ausgangsphasen bewirkt einen Überstrom im Frequenzumrichter. Jedoch wird jeder Frequenzumrichter einzeln
abgeschaltet, sobald sein jeweiliger Kurzschlussstrom den
zulässigen Wert (Alarm 16 Abschaltblockierung)
überschreitet.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 47
mentgrenze in Parameter 4-16 Torque Limit Motor Mode/
Parameter 4-17 Torque Limit Generator Mode erreicht, und
die Bedieneinheit reduziert die Ausgangsfrequenz, um so
die Belastung zu reduzieren.
Bei extremer Überlastung kann jedoch ein Überstrom
auftreten, der den Frequenzumrichter nach etwa 5-10 s
zum Abschalten zwingt.
Sie können den Betrieb innerhalb der Momentgrenze in
Parameter 14-25 Trip Delay at Torque Limit zeitlich
begrenzen (0–60 s).
2 2
Page 50
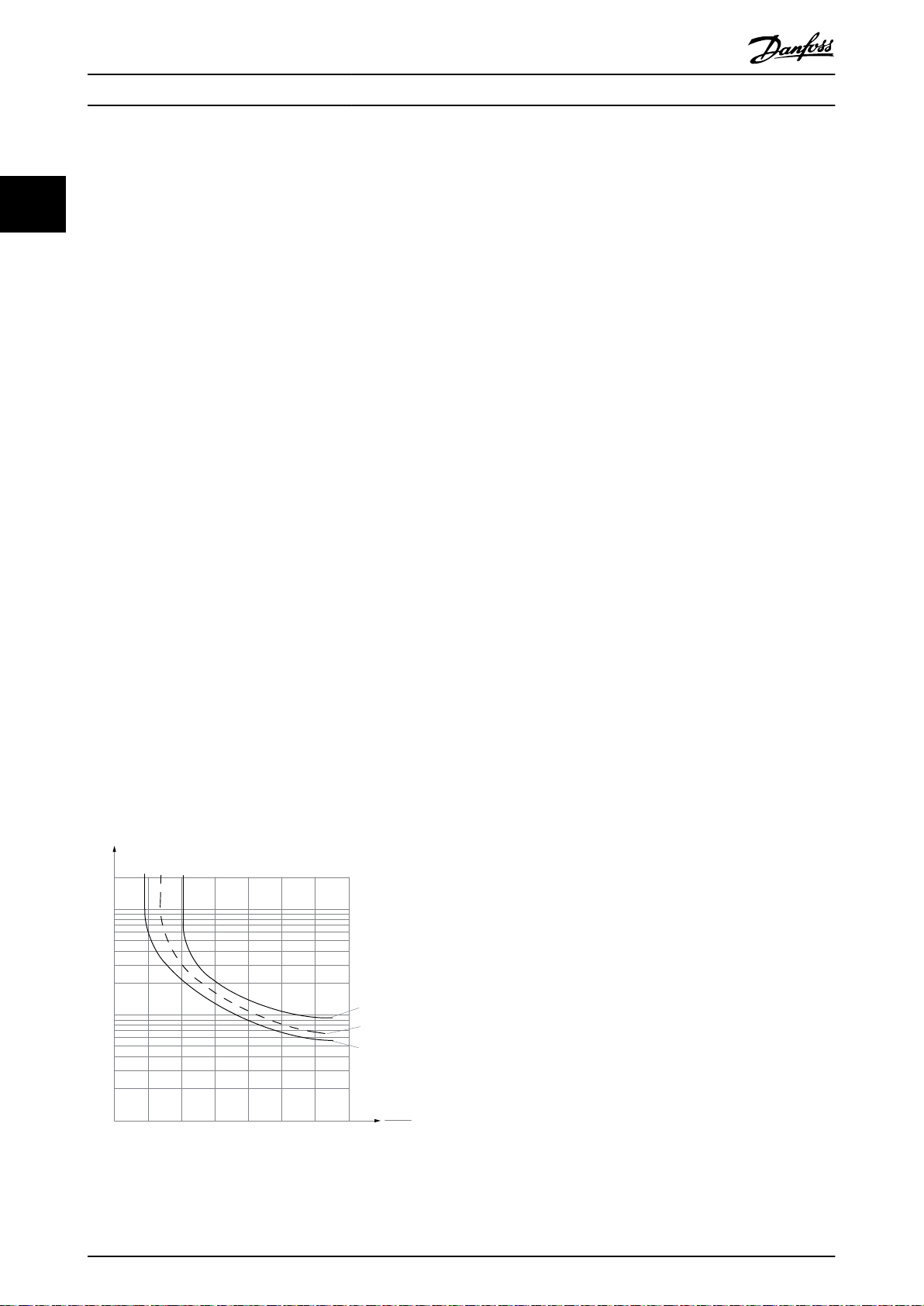
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Produktübersicht
VLT® Midi Drive Frequenzumrichter 280
2.12.1 Thermischer Motorschutz
22
Zum Schutz der Anwendung vor schwerer Beschädigung
bietet der VLT® Midi DriveFC 280 verschiedene spezielle
Funktionen.
Die X-Achse zeigt das Verhältnis zwischen Motorstrom
(I
) und Motornennstrom (I
motor
motor, nom
). Die Y-Achse zeigt
die Zeit in Sekunden, bevor ETR eingreift und den
Frequenzumrichter abschaltet. Die Kurven zeigen das
Verhalten der Nenndrehzahl bei Nenndrehzahl x 2 und
Nenndrehzahl x 0,2
Drehmomentgrenze
Die Drehmomentgrenze schützt den Motor unabhängig
von der Drehzahl vor Überlast. Die Drehmomentgrenze
wird in Parameter 4-16 Torque Limit Motor Mode und
Parameter 4-17 Torque Limit Generator Mode eingestellt.
Parameter 14-25 Trip Delay at Torque Limit regelt die Zeit
vor einer Abschaltung bei Drehmomentgrenzen-Warnung.
Bei geringerer Drehzahl schaltet das ETR aufgrund einer
geringeren Kühlung des Motors schon bei geringerer
Wärmeentwicklung ab. So wird der Motor auch in
niedrigen Drehzahlbereichen vor Überhitzung geschützt.
Die ETR-Funktion berechnet die Motortemperatur anhand
der Istwerte von Strom und Drehzahl. Sie können die
berechnete Temperatur als Anzeigeparameter in
Parameter 16-18 Motor Thermal ablesen.
Stromgrenze
Parameter 4-18 Current Limit regelt die Stromgrenze und
Parameter 14-24 Trip Delay at Current Limit regelt die Zeit
vor einer Abschaltung bei Stromgrenzen-Warnung.
Minimale Drehzahlgrenze
Parameter 4-12 Motor Speed Low Limit [Hz] legt die
minimale Ausgangsdrehzahl fest, die der Frequenzumrichter liefern kann.
Maximal Drehzahlgrenze
Parameter 4-14 Motor Speed High Limit [Hz] oder
Parameter 4-19 Max Output Frequency legt die maximal
Ausgangsdrehzahl fest, die der Frequenzumrichter liefern
kann.
ETR (Elektronisches Thermorelais)
Die ETR-Funktion des Frequenzumrichters misst den
aktuellen Strom, die aktuelle Drehzahl und Zeit zur
Berechnung der Motortemperatur. Außerdem schützt die
Funktion den Motor vor Überhitzung (Warnung oder
Abschaltung). Ein externer Thermistoreingang ist ebenfalls
verfügbar. Bei ETR handelt es sich um eine elektronische
Funktion, die anhand interner Messungen ein Bimetallrelais
simuliert. Die Kennlinie wird in Abbildung 2.38 gezeigt.
Abbildung 2.38 ETR
48 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 51
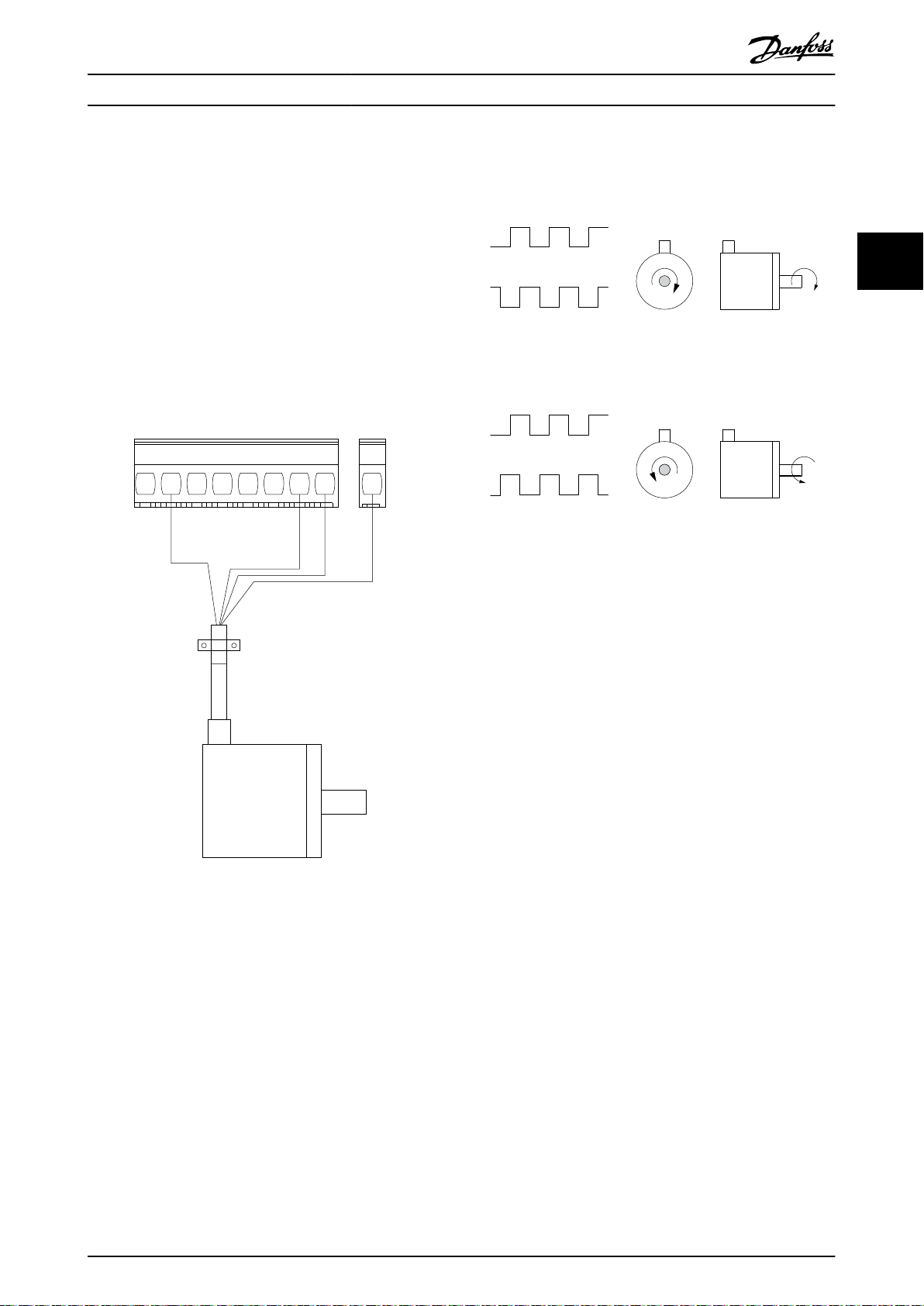
130BE805.11
+24 V DC
+24 V DC
A
B
GND
12 13 18 19 3227 29 33 55
B
A
B
A
130BA646.10
RECHTS
LINKS
Anwendungsbeispiele Projektierungshandbuch
3 Anwendungsbeispiele
3.1 Einführung
3.1.1 Drehgeberverbindung
Diese Anleitung soll die Konfiguration der Drehgeberverbindung mit dem Frequenzumrichter erleichtern. Vor der
Konfiguration des Drehgebers werden die Grundeinstellungen für eine Drehzahlregelung mit Rückführung gezeigt.
3 3
Abbildung 3.2 24-V-Inkrementalgeber, maximale Kabellänge 5
m
3.1.2 Drehgeberrichtung
Die Reihenfolge, in der die Pulse in den Frequenzumrichter
eingehen, bestimmt die Drehrichtung des Drehgebers.
Rechtslauf bedeutet, dass der A-Kanal sich 90 elektrische
Grad vor Kanal B befindet.
Linkslauf bedeutet, dass der B-Kanal sich 90 elektrische
Grad vor Kanal A befindet.
Die Drehrichtung bezieht sich auf den Blick von vorne auf
das Wellenende.
3.1.3 Frequenzumrichtersystem mit
Rückführung
Abbildung 3.1 24-V-Drehgeber
Ein Antriebssystem besteht üblicherweise aus mehr
Elementen wie z. B.:
Motor.
•
Bremse (Getriebe, mechanische Bremse).
•
Frequenzumrichter
•
Drehgeber als Rückführung.
•
Bremswiderstand für dynamische Bremse.
•
Kupplung.
•
Belastung
•
Anwendungen mit mechanischer Bremsansteuerung
erfordern häufig auch einen Bremswiderstand für generatorisches Bremsen.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 49
Page 52
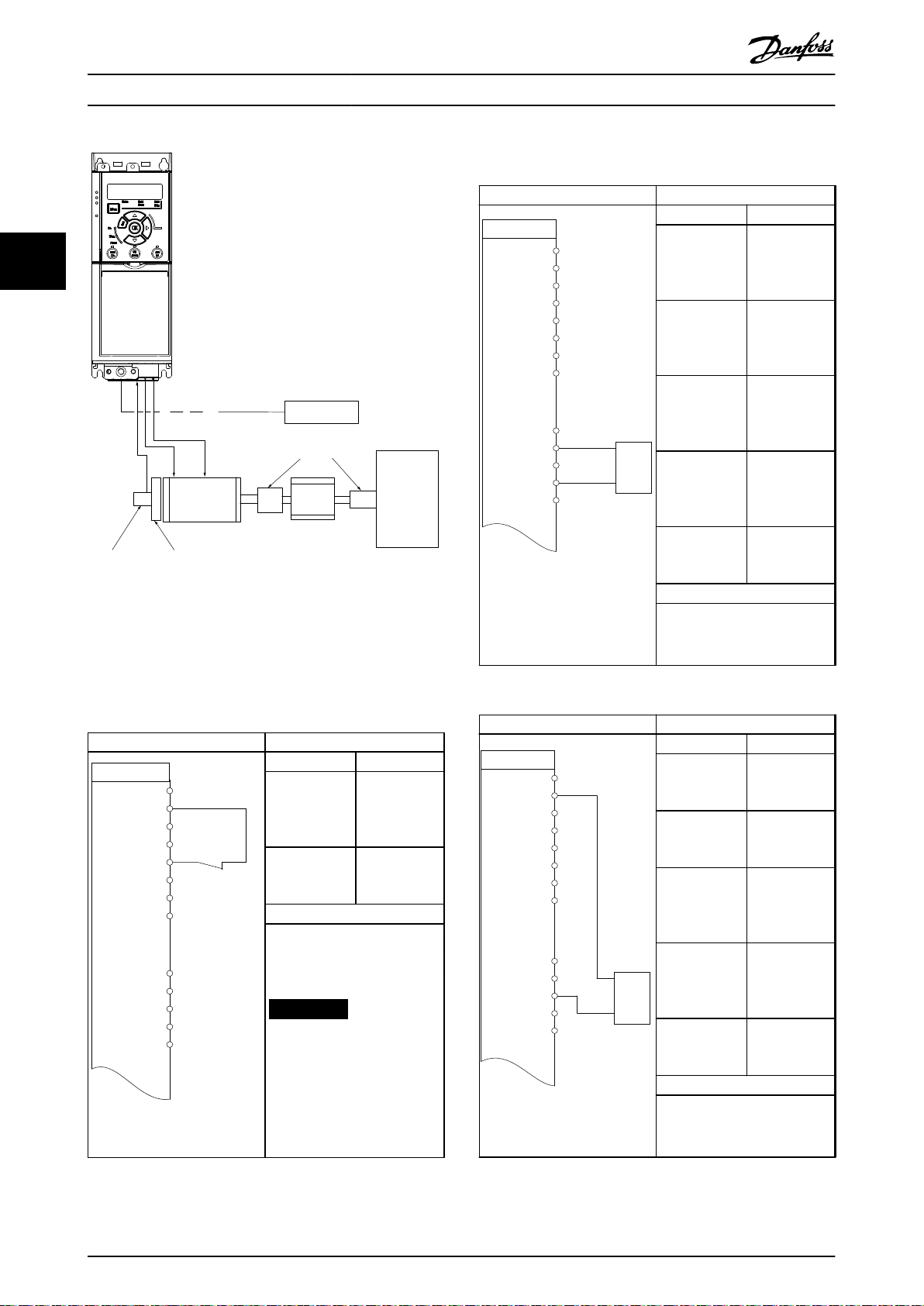
130BE728.10
Motor
Gearbox
Load
Transmission
Encoder Mech. brake
Brake resistor
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Anwendungsbeispiele
VLT® Midi Drive Frequenzumrichter 280
3.2.2 Drehzahl
Parameter
Funktion Einstellung
Parameter 6-10
33
Skal.
Min.Spannung
Parameter 6-11
Klemme 53
Skal.
Max.Spannung
Parameter 6-14
Klemme 53
Skal. Min.-Soll/
Istwert
Parameter 6-15
Klemme 53
Skal. Max.-Soll/
Istwert
Parameter 6-19
Terminal 53
mode
Klemme 53
Abbildung 3.3 Basiseinstellung für Drehzahlregelung mit
Istwertrückführung
* = Werkseinstellung
Hinweise/Anmerkungen:
0,07 V*
10 V*
0
50
[1] Spannung
Anwendungsbeispiele
3.2
Tabelle 3.2 Analoger Drehzahlsollwert (Spannung)
3.2.1 AMA
Parameter
Parameter
Funktion Einstellung
Parameter 1-29
Autom.
Motoran-
[1] Komplette
AMA
passung
Parameter 5-12
Klemme 27
Digitaleingang
*[2]
Motorfreilauf
invers
* = Werkseinstellung
Hinweise/Anmerkungen: Sie
müssen Parametergruppe 1-2*
Motordaten entsprechend den
Motorspezifikationen einstellen.
HINWEIS
Sind die Klemmen 13 und
27 nicht angeschlossen,
stellen Sie
Parameter 5-12 Terminal 27
Digital Input auf [0] Ohne
Funktion ein.
Funktion Einstellung
Parameter 6-22
Klemme 54
4 mA*
Skal. Min.Strom
Parameter 6-23
Klemme 54
20 mA*
Skal. Max.Strom
Parameter 6-24
Klemme 54
Skal. Min.-Soll/
0
Istwert
Parameter 6-25
Klemme 54
Skal. Max.-Soll/
50
Istwert
Parameter 6-29
Klemme 54
[0] Strom
Funktion
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 3.1 AMA mit angeschlossener Kl. 27
50 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Tabelle 3.3 Analoger Drehzahlsollwert (Strom)
Page 53

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Anwendungsbeispiele Projektierungshandbuch
Parameter
Funktion Einstellung
Parameter 6-10
Klemme 53 Skal.
Min.Spannung
Parameter 6-11
Klemme 53 Skal.
Max.Spannung
Parameter 6-14
Klemme 53 Skal.
Min.-Soll/Istwert
Parameter 6-15
Klemme 53 Skal.
Max.-Soll/
Istwert
Parameter 6-19
Terminal 53
mode
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 3.4 Drehzahlsollwert (Verwendung eines manuellen
Potenziometers)
Parameter
Funktion Einstellung
Parameter 5-10
Klemme 18
Digitaleingang
Parameter 5-12
Klemme 27
Digitaleingang
Parameter 5-13
Klemme 29
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
* = Werkseinstellung
Hinweise/Anmerkungen:
0,07 V*
10 V*
0
50
[1] Spannung
*[8] Start
[19] Sollw.
speich.
[21] Drehzahl
auf
[22] Drehzahl
ab
Abbildung 3.4 Drehzahl auf/Drehzahl ab
3.2.3 Start/Stopp
Parameter
Funktion Einstellung
Parameter 5-10
Klemme 18
[8] Start
Digitaleingang
Parameter 5-11
Klemme 19
Digitaleingang
Parameter 5-12
Klemme 27
*[10]
Reversierung
[0] Ohne
Funktion
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
Parameter 5-15
Klemme 33
Digitaleingang
Parameter 3-10
[16]
Festsollwert Bit
0
[17]
Festsollwert Bit
1
Festsollwert
Festsollwert 0
Festsollwert 1
Festsollwert 2
Festsollwert 3
25%
50%
75%
100%
* = Werkseinstellung
Hinweise/Anmerkungen:
3 3
Tabelle 3.6 Start/Stopp mit Reversierung und 4 Festdrehzahlen
Tabelle 3.5 Drehzahl auf/Drehzahl ab
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 51
Page 54
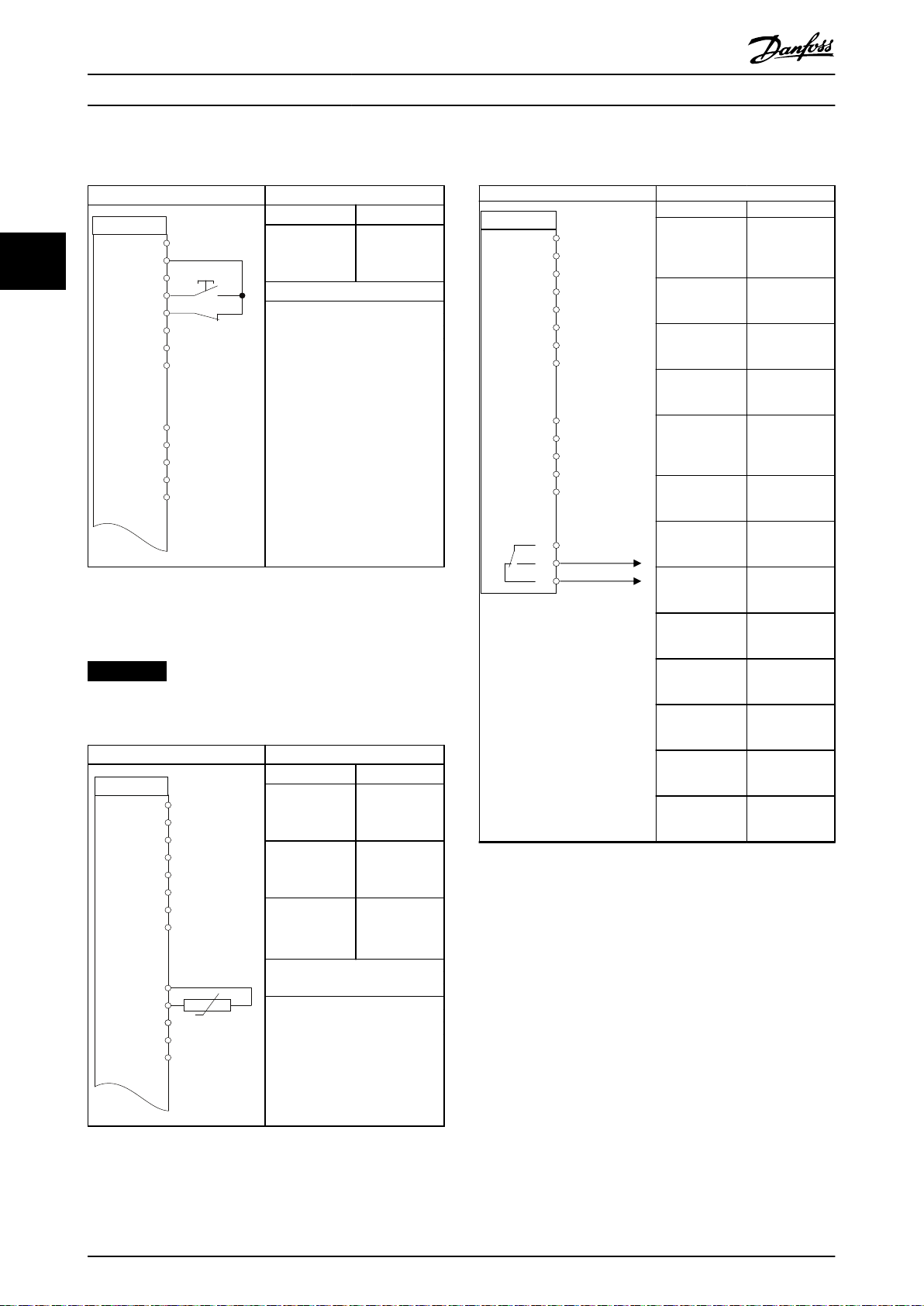
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Anwendungsbeispiele
VLT® Midi Drive Frequenzumrichter 280
3.2.4 Externe Alarmquittierung
Parameter
Funktion Einstellung
Parameter 5-11
33
Digitaleingang
* = Werkseinstellung
Hinweise/Anmerkungen:
Klemme 19
[1] Reset
3.2.6 SLC
Parameter
Funktion Einstellung
Parameter 4-30
Drehgeberüberwachung
[1] Warnung
Funktion
Parameter 4-31
Drehgeber max.
50
Fehlabweichung
Parameter 4-32
Drehgeber
5 s
Timeout-Zeit
Parameter 7-00
Drehgeberrückführung
[1] 24V-
Drehgeber
Parameter 5-70
Kl. 32/33
Drehgeber Aufl.
1024*
[Pulse/U]
Parameter 13-0
0 Smart Logic
[1] Ein
Controller
Parameter 13-0
1 SL-Controller
[19] Warnung
Start
Tabelle 3.7 Externe Alarmquittierung
3.2.5 Motorthermistor
HINWEIS
Um die PELV-Anforderungen zu erfüllen, müssen Sie
Thermistoren verstärken oder zweifach isolieren.
Parameter
Funktion Einstellung
Parameter 1-90
Thermischer
Motorschutz
Parameter 1-93
Thermistoran-
[2] ThermistorAbschalt.
[1] Analogeingang 53
Parameter 13-0
2 SL-Controller
Stopp
Parameter 13-1
0 VergleicherOperand
Parameter 13-1
1 VergleicherFunktion
Parameter 13-1
2 VergleicherWert
Parameter 13-5
1 SL-Controller
Ereignis
Parameter 13-5
2 SL-Controller
Aktion
[44] [Reset]-
Taste
[21] Nr. der
Warnung
*[1] ≈
61
[22] Vergleicher
0
[32] Digital-
ausgang A-AUS
schluss
Parameter 6-19
Tabelle 3.8 Motorthermistor
52 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Terminal 53
[1] Spannung
mode
* = Werkseinstellung
Hinweise/Anmerkungen:
Wenn nur eine Warnung
erforderlich ist, müssen Sie
Parameter 1-90 Thermischer
Motorschutz auf [1] Thermistor
Warnung programmieren.
Page 55
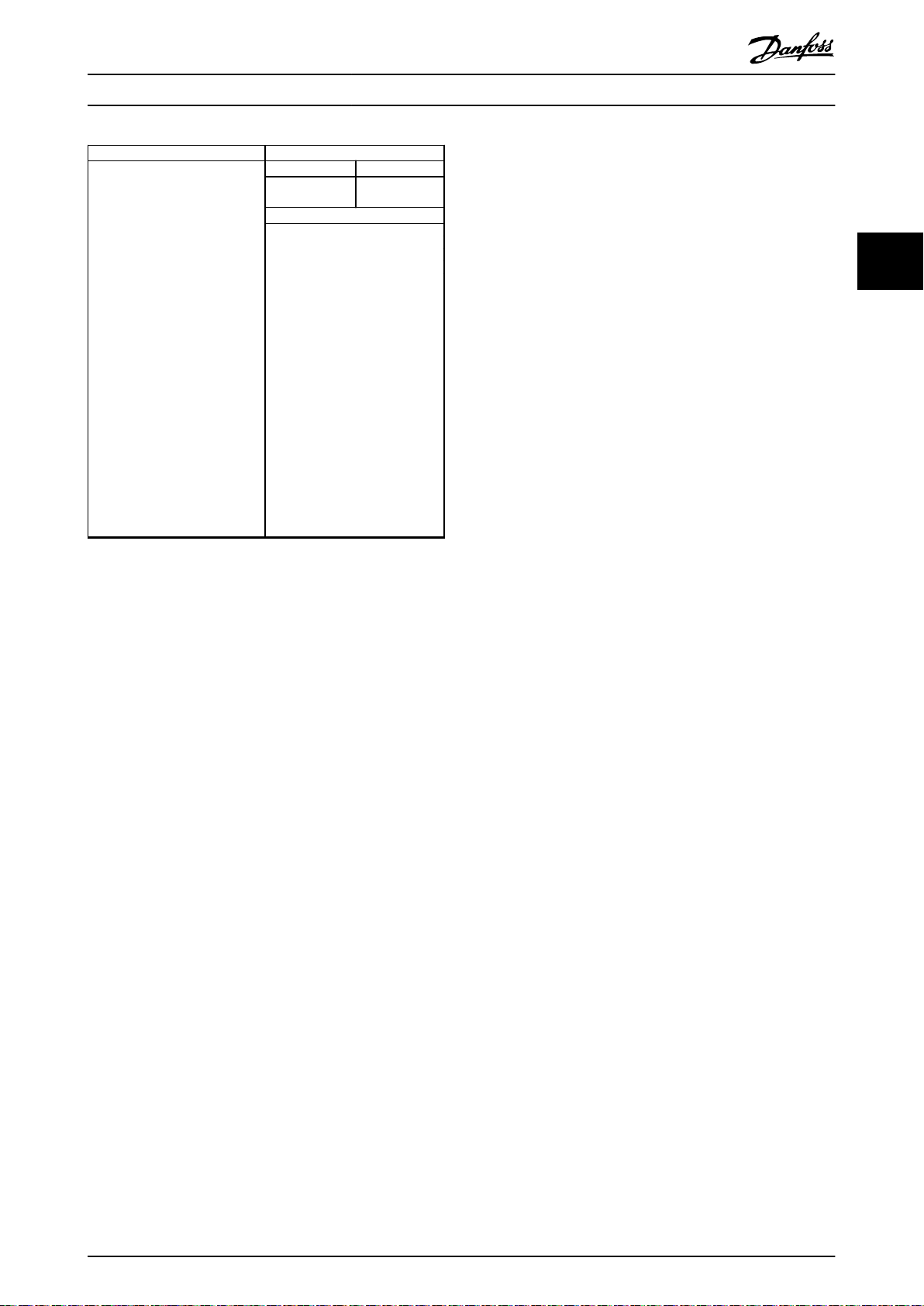
Anwendungsbeispiele Projektierungshandbuch
Parameter
Funktion Einstellung
Parameter 5-40
Relaisfunktion
* = Werkseinstellung
Hinweise/Anmerkungen:
Wenn der Grenzwert der
Drehgeberüberwachung
überschritten wird, gibt der
Frequenzumrichter Warnung 61,
Istwertüberwachung aus. Der
SLC überwacht Warnung 61,
Istwertüberwachung. Wird
Warnung 61, Istwertüberwachung wahr, wird Relais 1
ausgelöst.
Externe Geräte können
anzeigen, dass eine Wartung
erforderlich ist. Wenn der
Istwertfehler innerhalb von 5 s
wieder unter diese Grenze fällt,
läuft der Frequenzumrichter
weiter, und die Warnung wird
ausgeblendet. Relais 1 bleibt
ausgelöst, bis Sie [Off/Reset]
drücken.
[80] SL-Digitalausgang A
3 3
Tabelle 3.9 Verwendung von SLC zur Einstellung eines Relais
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 53
Page 56
Safe Torque Off (STO)
VLT® Midi Drive Frequenzumrichter 280
4 Safe Torque Off (STO)
Die Funktion „Safe Torque Off“ (STO) ist ein Bestandteil des sicherheitsbezogenen Steuerungssystems. Sie verhindert, dass
der Frequenzumrichter das Drehfeld, das der Motor zum Drehen benötigt, erzeugt.
Die STO-Funktion ist für folgende Anforderungen ausgelegt und als dafür geeignet zugelassen:
IEC/EN 61508: SIL2
•
44
Wählen Sie die Komponenten aus und legen Sie sie im sicherheitsbezogenen Steuerungssystem richtig an, um die
erforderliche Betriebssicherheitsstufe zu erreichen. Vor der Nutzung der Funktion „Safe Torque Off“ müssen Sie eine
umfassende Risikoanalyse der Anlage durchführen. Dies dient dazu, zu ermitteln, ob die Funktion „Safe Torque Off“ und die
Sicherheitsstufen des Frequenzumrichters für die Anlage und Anwendung angemessen und ausreichend sind.
IEC/EN 61800-5-2: SIL2
•
IEC/EN 62061: SILCL von SIL2
•
EN ISO 13849-1: Kategorie 3 PL d
•
Weitere Informationen zur Funktion Safe Torque Off (STO) finden Sie in Kapitel 6 Safe Torque Off (STO) in der VLT
FC 280 Bedienungsanleitung.
®
Midi Drive
54 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 57
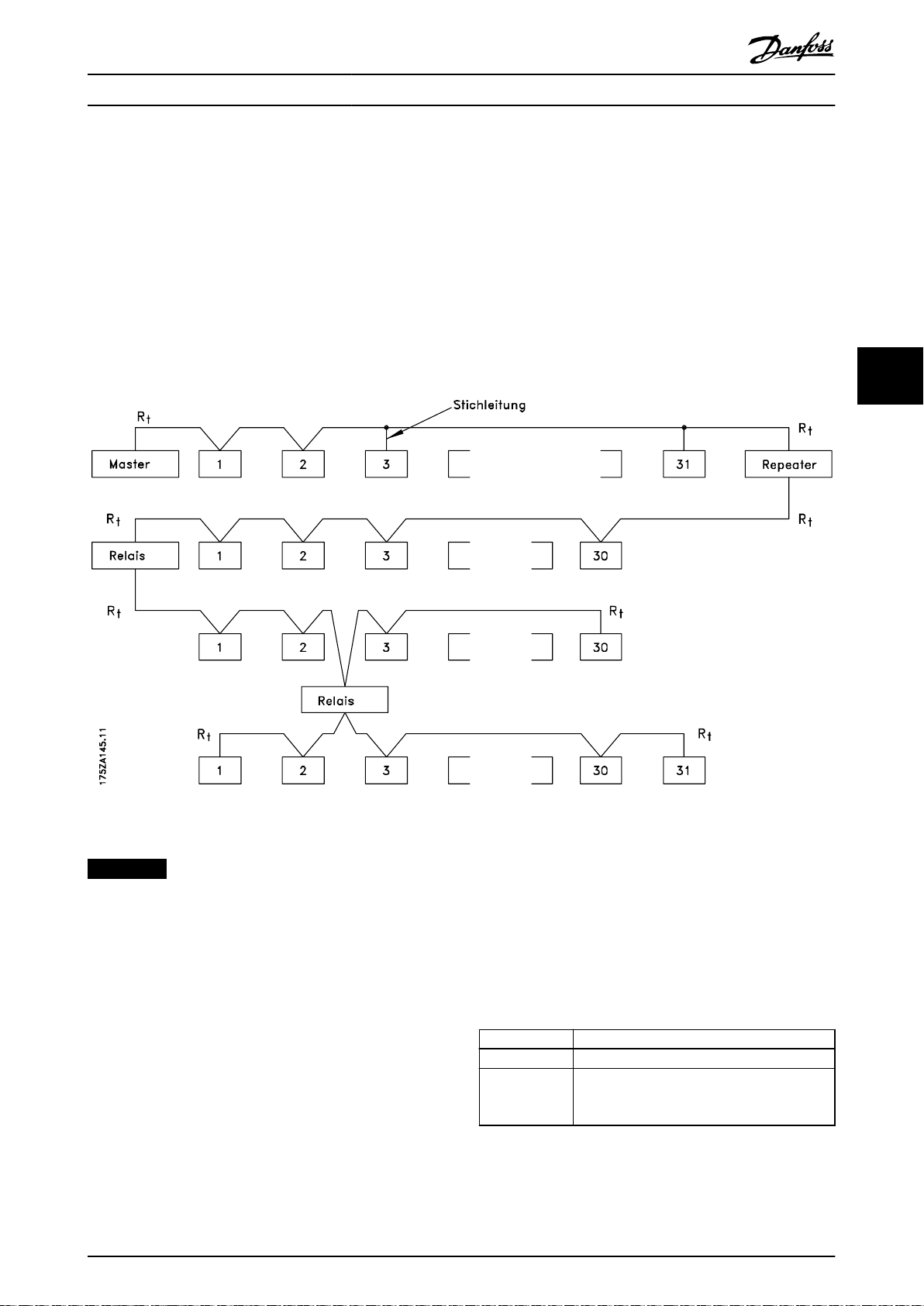
RS485 Installation und Konf... Projektierungshandbuch
5 RS485 Installation und Konfiguration
5.1 Einführung
5.1.1 Übersicht
RS485 ist eine Zweileiter-Busschnittstelle, die mit einer busförmigen Netztopologie kompatibel ist. Sie können die Knoten als
Bus oder über Übertragungskabel (Nahbuskabel) an eine gemeinsame Abnehmerleitung anschließen. Insgesamt können Sie
32 Teilnehmer (Knoten) an ein Netzwerksegment anschließen.
Netzwerksegmente sind durch Busverstärker (Repeater) unterteilt, siehe Abbildung 5.1.
5 5
Abbildung 5.1 RS485-Busschnittstelle
HINWEIS
Jeder Repeater fungiert in dem Segment, in dem er
installiert ist, als Teilnehmer. Jeder mit einem Netzwerk
verbundene Teilnehmer muss über alle Segmente hinweg
eine einheitliche Teilnehmeradresse aufweisen.
Schließen Sie die Segmente an beiden Endpunkten ab –
entweder mit Hilfe des Terminierungsschalters (S801) des
Frequenzumrichters oder mit einem polarisierten
Widerstandsnetzwerk. Verwenden Sie stets ein STP-Kabel
(Shielded Twisted Pair) für die Busverdrahtung, und
beachten Sie die bewährten Installationsverfahren.
Eine Erdverbindung der Abschirmung mit geringer
Impedanz an allen Knoten ist wichtig, auch bei hohen
Frequenzen. Schließen Sie daher die Abschirmung
großflächig an Masse an, z. B. mit einer Kabelschelle oder
einer leitfähigen Kabelverschraubung. Möglicherweise
müssen Sie Potenzialausgleichskabel verwenden, um im
Netz das gleiche Erdungspotenzial zu erhalten –
insbesondere bei Installationen mit langen Kabeln.
Um eine nicht übereinstimmende Impedanz zu verhindern,
müssen Sie im gesamten Netz den gleichen Kabeltyp
verwenden. Verwenden Sie beim Anschluss eines Motors
an den Frequenzumrichter immer ein abgeschirmtes
Motorkabel.
Kabel Abgeschirmtes verdrilltes Aderpaar (STP)
Impedanz [Ω]
Kabellänge [m]
Tabelle 5.1 Kabelspezifikationen
120
Maximal 1200 (3937) (einschließlich Abzweigleitungen)
Maximal 500 (1640) von Station zu Station
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 55
Page 58

61 68 69
N
P
COMM. GND
130BB795.10
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
5.1.2 Netzwerkverbindung
Verbinden Sie den Frequenzumrichter wie folgt mit dem
RS-485-Netzwerk (siehe auch Abbildung 5.2):
1. Verbinden Sie die Signalleitungen mit Klemme 68
(P+) und Klemme 69 (N-) auf der Hauptsteuerkarte des Frequenzumrichters.
2. Verbinden Sie das Kabel mit den Kabelschellen.
HINWEIS
Zur Reduzierung von Störungen zwischen Leitern
verwenden Sie abgeschirmte paarig verdrillte Kabel.
55
Abbildung 5.2 Netzwerkverbindung
Parameter Funktion
Parameter 8-33 Pari
tät/Stoppbits
Dieser Parameter definiert die Parität der
Schnittstelle und die Anzahl von Stoppbits.
HINWEIS
Die Standardauswahl hängt von der
Protokollauswahl in
Parameter 8-30 FC-Protokoll ab.
Parameter 8-35 FCAntwortzeit Min.Delay
Parameter 8-36 FCAntwortzeit Max.Delay
Tabelle 5.2 Parametereinstellungen für Modbus-Kommunikation
Definiert die minimale Zeit, welche der
Frequenzumrichter nach dem Empfang eines
Frequenzumrichter-Telegramms wartet,
bevor sein Antworttelegramm gesendet
wird. Diese Funktion dient dem Umgehen
von Modem-Umsteuerzeiten.
Definiert eine maximale Zeitverzögerung
zwischen dem Übertragen einer Abfrage
und dem Empfang der Antwort.
5.1.5 EMV-Schutzmaßnahmen
5.1.3 Hardware-Konfiguration
Danfoss empfiehlt die folgenden EMV-Schutzmaßnahmen,
Verwenden Sie zur Terminierung des RS485-Busses den
Schalter für den Abschlusswiderstand an der Hauptsteuerkarte des Frequenzumrichters.
um den störungsfreien Betrieb des RS-485-Netzwerks zu
erreichen.
Die Werkseinstellung des Schalters ist AUS.
5.1.4 Parametereinstellungen für Modbus-
Kommunikation
Parameter Funktion
Parameter 8-30 FCProtokoll
Parameter 8-31 Adr
esse
Dieser Parameter definiert das Anwendungsprotokoll für die RS485-Schnittstelle.
Dieser Parameter definiert die Teilnehmeradresse an der Schnittstelle.
HINWEIS
Der Adressbereich hängt von der
Protokollauswahl in
Parameter 8-30 FC-Protokoll ab.
Parameter 8-32 Bau
drate
Dieser Parameter definiert die Baudrate des
Frequenzumrichters an der Schnittstelle.
HINWEIS
Die Standardbaudrate hängt von der
Protokollauswahl in
Parameter 8-30 FC-Protokoll ab.
HINWEIS
Beachten Sie die einschlägigen nationalen und lokalen
Vorschriften und Gesetze, zum Beispiel im Hinblick auf
die Schutzerdung. Halten Sie das RS485-Kommunikati-
onskabel von Motor- und Bremswiderstandskabeln fern,
um das Einkoppeln von Hochfrequenzstörungen
zwischen den Kabeln zu vermeiden. In der Regel ist ein
Abstand von 200 mm ausreichend. Halten Sie den
größtmöglichen Abstand zwischen den Kabeln ein,
besonders wenn diese über weite Strecken parallel
laufen. Lässt sich das Kreuzen der Kabel nicht vermeiden,
muss das RS485-Kabel in einem Winkel von 90° über
Motor- und Bremswiderstandskabel geführt werden.
5.2 Frequenzumrichter-Protokoll
5.2.1 Übersicht
Das Frequenzumrichter-Protokoll, das auch als Frequen-
zumrichter-Bus oder Standardbus bezeichnet wird, ist der
Standardfeldbus von Danfoss. Es definiert ein Zugriffsver-
fahren nach dem Master/Follower-Prinzip für die
Kommunikation über einen Feldbus.
Es können maximal 126 Followers und ein Master an die
Schnittstelle angeschlossen werden. Die einzelnen Follower
werden vom Master über ein Adresszeichen im Telegramm
angewählt. Nur wenn ein Follower ein fehlerfreies, an ihn
adressiertes Telegramm empfangen hat, sendet er ein
Antworttelegramm. Die direkte Nachrichtenübertragung
56 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 59
0 1 32 4 5 6 7
195NA036.10
Start–
bit
Par. Stopp–
glchht. bit
STX LGE ADR DATA BCC
195NA099.10
RS485 Installation und Konf... Projektierungshandbuch
unter Followern ist nicht möglich. Die Datenübertragung
findet im Halbduplex-Betrieb statt.
Die Master-Funktion kann nicht auf einen anderen
Teilnehmer übertragen werden (Ein-Master-System).
Die physikalische Schicht ist RS-485 und nutzt damit die im
Frequenzumrichter integrierte RS-485-Schnittstelle. Das
Frequenzumrichter-Protokoll unterstützt unterschiedliche
Telegrammformate:
Ein kurzes Format mit 8 Bytes für Prozessdaten.
•
Ein langes Format von 16 Bytes, das außerdem
•
einen Parameterkanal enthält.
Ein Format für Text.
•
5.2.2 Frequenzumrichter mit Modbus RTU
Das Frequenzumrichter-Protokoll bietet Zugriff auf das
Steuerwort und den Bussollwert des Frequenzumrichters.
Mit dem Steuerwort kann der Modbus-Master mehrere
wichtige Funktionen des Frequenzumrichters steuern:
Anlaufen.
•
Stoppen des Frequenzumrichters auf
•
unterschiedliche Arten:
- Freilaufstopp.
- Schnellstopp.
- DC-Bremsstopp.
- Normaler Stopp (Rampenstopp).
Reset nach Fehlerabschaltung.
•
Betrieb mit verschiedenen Festdrehzahlen.
•
Start mit Reversierung.
•
Änderung des aktiven Parametersatzes.
•
Steuerung der beiden in den Frequenzumrichter
•
integrierten Relais.
Der Bussollwert wird in der Regel zur Drehzahlregelung
verwendet. Es ist ebenfalls möglich, auf die Parameter
zuzugreifen, ihre Werte zu lesen und, wo möglich, Werte
an sie zu schreiben. Der Zugriff auf die Parameter bietet
eine Reihe von Steuerungsoptionen wie die Regelung des
Sollwerts des Frequenzumrichters, wenn sein interner PIRegler verwendet wird.
Netzwerkkonfiguration
5.3
Um das FC-Protokoll für den Frequenzumrichter zu
aktivieren, stellen Sie die folgenden Parameter ein.
Parameter Einstellung
Parameter 8-30 FC-Protokoll FC
Parameter 8-31 Adresse 1–126
Parameter 8-32 Baudrate 2400–115200
Gerade Parität, 1
Parameter 8-33 Parität/Stoppbits
Tabelle 5.3 Parameter zum Aktivieren des Protokolls
Stoppbit (Werkseinstellung)
5.4 Aufbau der Telegrammblöcke für
Frequenzumrichter-Protokoll
5.4.1 Inhalt eines Zeichens (Byte)
Jedes übertragene Zeichen beginnt mit einem Startbit.
Danach werden 8 Datenbits übertragen, was einem Byte
entspricht. Jedes Zeichen wird über ein Paritätsbit
abgesichert, das auf 1 gesetzt wird, wenn Parität gegeben
ist (d. h. eine gleiche Anzahl binärer Einsen in den 8
Datenbits und dem Paritätsbit zusammen). Ein Zeichen
endet mit einem Stoppbit und besteht aus insgesamt 11
Bits.
Abbildung 5.3 Inhalt eines Zeichens
5.4.2 Telegrammaufbau
Jedes Telegramm ist folgendermaßen aufgebaut:
Startzeichen (STX) = 02 Hex.
•
Ein Byte zur Angabe der Telegrammlänge (LGE)
•
Ein Byte zur Angabe der Adresse des Frequen-
•
zumrichters (ADR)
Danach folgen verschiedene Nutzdaten (variabel, abhängig
vom Telegrammtyp).
Das Telegramm schließt mit einem Datensteuerbyte (BCC).
5 5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 57
Abbildung 5.4 Telegrammaufbau
Page 60

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
RS485 Installation und Konf...
5.4.3 Telegrammlänge (LGE)
VLT® Midi Drive Frequenzumrichter 280
Die Telegrammlänge ist die Anzahl der Datenbytes plus
Abbildung 5.6 Parameterblock
Adressbyte ADR und Datensteuerbyte BCC.
4 Datenbyte LGE = 4 + 1 + 1 = 6 Byte
12 Datenbyte LGE = 12 + 1 + 1 = 14 Byte
Text enthaltene Telegramme
Tabelle 5.4 Länge des Telegramms
1) Die 10 steht für die festen Zeichen, während das n variabel ist (je
55
nach Textlänge).
101)+n Byte
5.4.4 Frequenzumrichteradresse (ADR)
Adressformat 1–126
Bit 7 = 1 (Adressformat 1–126 aktiv).
•
Bit 0-6 = Frequenzumrichteradresse 1-126
•
Bit 0-6 = 0 Broadcast
•
Textblock
Der Textblock dient zum Lesen oder Schreiben von Texten
über den Datenblock.
Abbildung 5.7 Textblock
5.4.7 Das PKE-Feld
Das PKE-Feld enthält zwei untergeordnete Felder:
Parameterbefehle und Antworten (AK)
•
Parameternummer (PNU)
•
Der Follower sendet das Adress-Byte im Antworttelegramm
unverändert an den Master zurück.
5.4.5 Datensteuerbyte (BCC)
Die Prüfsumme wird als XOR-Funktion berechnet. Bevor das
erste Byte im Telegramm empfangen wird, lautet die
berechnete Prüfsumme 0.
5.4.6 Das Datenfeld
Die Struktur der Nutzdaten hängt vom Telegrammtyp ab.
Es gibt drei Telegrammtypen, die sowohl für Steuertelegramme (Master⇒Follower) als auch Antworttelegramme
(Follower⇒Master) gelten.
Die drei Telegrammarten sind:
Prozessblock (PCD)
Der PCD besteht aus einem Datenblock mit 4 Byte (2
Wörtern) und enthält:
•
•
Abbildung 5.5 Prozessblock
Parameterblock
Der Parameterblock dient zur Übertragung von Parametern
zwischen Master und Follower. Der Datenblock besteht aus
12 Byte (6 Wörtern) und enthält auch den Prozessblock.
Steuerwort und Sollwert (von Master zu Follower)
Zustandswort und aktuelle Ausgangsfrequenz
(von Follower zu Master)
Abbildung 5.8 PKE-Feld
Die Bits Nr. 12–15 übertragen Parameterbefehle vom
Master zum Follower und senden bearbeitete FollowerAntworten an den Master zurück.
Parameterbefehle Master⇒Follower
Bitanzahl Parameterbefehl
15 14 13 12
0 0 0 0 Kein Befehl
0 0 0 1 Parameterwert lesen
0 0 1 0 Parameterwert in RAM schreiben (Wort)
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Text lesen.
Tabelle 5.5 Parameterbefehle
Parameterwert in RAM schreiben
(Doppelwort)
Parameterwert in RAM und EEPROM
schreiben (Doppelwort)
Parameterwert in RAM und EEPROM
schreiben (Wort)
58 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 61

RS485 Installation und Konf... Projektierungshandbuch
Antwort Follower⇒Master
Bitanzahl Antwort
15 14 13 12
0 0 0 0 Keine Antwort
0 0 0 1 Übertragener Parameterwert (Wort)
0 0 1 0
0 1 1 1 Befehl kann nicht ausgeführt werden
1 1 1 1 Übertragener Text.
Tabelle 5.6 Antwort
Übertragener Parameterwert
(Doppelwort)
Wenn der Befehl nicht ausgeführt werden kann, sendet der
Follower die Antwort 0111 Befehl kann nicht ausgeführt
werden und gibt folgende Fehlermeldung in Tabelle 5.7 aus.
Fehlercode Frequenzumrichter-Spezifikation
0 Ungültige Parameternummer.
1 Parameter kann nicht geändert werden.
2 Obere oder untere Grenze überschritten.
3 Verstümmelter Subindex.
4 Kein Datenfeld.
5 Falscher Datentyp.
6 Unbenutzt.
7 Unbenutzt.
9 Beschreibungselement nicht verfügbar.
11 Kein Parameter-Schreibzugriff.
15 Kein Text verfügbar.
17 Nicht zutreffend im Betrieb.
18 Andere Fehler.
100 –
>100 –
130 Kein Buszugriff für diesen Parameter.
131
132 Kein LCP-Zugriff
252 Unbekannter Viewer.
253 Anforderung nicht unterstützt.
254 Unbekanntes Attribut.
255 Kein Fehler.
Tabelle 5.7 Follower-Bericht
Schreiben in Werkseinstellung nicht
möglich.
Der Index besteht aus zwei Bytes, einem Low Byte und
einem High Byte.
Nur das Low Byte wird als Index verwendet.
5.4.10 Parameterwert (PWE)
Der Parameterwertblock besteht aus zwei Wörtern (4
Bytes); der Wert hängt vom definierten Befehl (AK) ab.
Verlangt der Master einen Parameterwert, so enthält der
PWE-Block keinen Wert. Um einen Parameterwert zu
ändern (schreiben), wird der neue Wert in den PWE-Block
geschrieben und vom Master zum Follower gesendet.
Antwortet der Follower auf eine Parameteranfrage
(Lesebefehl), so wird der aktuelle Parameterwert im PWEBlock an den Master übertragen. Wenn ein Parameter
mehrere Datenoptionen enthält, z. B.
Parameter 0-01 Sprache, wird der Datenwert durch Eingabe
des Werts in den PWE-Block gewählt. Über die serielle
Kommunikationsschnittstelle können nur Parameter des
Datentyps 9 (Textblock) gelesen werden.
Parameter 15-40 FC-Typ bis Parameter 15-53 Leistungsteil
Seriennummer enthalten Datentyp 9.
Zum Beispiel können Sie in Parameter 15-40 FC-Typ die
Leistungsgröße und Netzspannung lesen. Wird eine
Textfolge übertragen (gelesen), so ist die Telegrammlänge
variabel, da die Texte unterschiedliche Längen haben. Die
Telegrammlänge ist im zweiten Byte (LGE) des Telegramms
definiert. Bei Textübertragung zeigt das Indexzeichen an,
ob es sich um einen Lese- oder Schreibbefehl handelt.
Um einen Text über den PWE-Block lesen zu können,
müssen Sie den Parameterbefehl (AK) auf F Hex einstellen.
Das Highbyte des Indexzeichens muss 4 sein.
5.4.11 Vom Frequenzumrichter unterstützte
Datentypen
„Ohne Vorzeichen“ bedeutet, dass das Telegramm kein
Vorzeichen enthält.
5 5
5.4.8 Parameternummer (PNU)
Die Bits 0–11 dienen zur Übertragung der Parameternummern. Die Funktion des betreffenden Parameters ist der
Parameterbeschreibung im VLT® Midi DriveFC 280 Program-
mierhandbuch zu entnehmen.
Datentypen Beschreibung
3 Ganzzahl 16 Bit
4 Ganzzahl 32 Bit
5 Ohne Vorzeichen 8 Bit
6 Ohne Vorzeichen 16 Bit
7 Ohne Vorzeichen 32 Bit
9 Textblock
5.4.9 Index (IND)
Tabelle 5.8 Datentypen
Der Index wird mit der Parameternummer zum Lesen/
Schreiben von Zugriffsparametern mit einem Index
verwendet, z. B. Parameter 15-30 Fehlerspeicher: Fehlercode.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 59
Page 62
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
5.4.12 Umwandlung
Datenwert 1000, entspricht 100 Hz, siehe
Kapitel 5.4.12 Umwandlung.
Das Programmierhandbuch enthält die Beschreibungen von
Attributen der einzelnen Parameter. Parameterwerte
Das Telegramm sieht wie Abbildung 5.9 aus.
werden nur als ganze Zahlen übertragen. Umrechnungsfaktoren werden zur Übertragung von Dezimalwerten
verwendet.
Parameter 4-12 Min. Frequenz [Hz] hat einen Umrechnungsfaktor von 0,1. Soll die Mindestfrequenz auf 10 Hz
Abbildung 5.9 Telegramm
eingestellt werden, übertragen Sie den Wert 100. Der
Umrechnungsfaktor 0,1 bedeutet, dass der übertragene
55
Wert mit 0,1 multipliziert wird. Der Wert 100 wird somit als
10,0 erkannt.
HINWEIS
Parameter 4-14 Max Frequenz [Hz] ist ein einzelnes Wort,
und der in EEPROM zu schreibende Parameter lautet E.
Umrechnungsindex Umrechnungsfaktor
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabelle 5.9 Umwandlung
Parameter 4-14 Max Frequenz [Hz] ist 19E in hexade-
zimaler Schreibweise.
Die Antwort des Follower an den Master ist in
Abbildung 5.10 zu sehen.
Abbildung 5.10 Antwort vom Master
5.4.13 Prozesswörter (PCD)
Der Block mit Prozesswörtern wird in 2 Blöcke zu je 16 Bit
unterteilt. Dies erfolgt stets in der definierten Reihenfolge.
PCD 1 PCD 2
Steuertelegramm (Steuerwort
Master⇒Follower)
Steuertelegramm (Zustandswort
Follower⇒Master)
Tabelle 5.10 Prozesswörter (PCD)
Beispiele
5.5
Sollwert
Aktuelle
Ausgangsfrequenz
5.5.1 Schreiben eines Parameterwerts
Ändern Sie Parameter 4-14 Max Frequenz [Hz] zu 100 Hz.
Schreiben Sie die Daten in EEPROM.
PKE = E19E Hex - Ein Wort schreiben in Parameter 4-14 Max
Frequenz [Hz]:
IND = 0000 Hex.
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 Hex.
•
5.5.2 Lesen eines Parameterwertes
Lesen Sie den Wert in Parameter 3-41 Rampenzeit Auf 1.
PKE = 1155 Hex - Parameterwert lesen in
Parameter 3-41 Rampenzeit Auf 1:
IND = 0000 Hex.
•
PWE
•
PWE
•
Abbildung 5.11 Telegramm
Lautet der Wert in Parameter 3-41 Rampenzeit Auf 1 10 s,
lautet die Antwort des Follower an den Master wie in
Abbildung 5.12 zu sehen.
Abbildung 5.12 Antwort
= 0000 hex.
HIGH
= 0000 Hex.
LOW
60 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 63

RS485 Installation und Konf... Projektierungshandbuch
3E8 Hex entspricht 1000 im Dezimalformat. Der Umwandlungsindex für Parameter 3-41 Rampenzeit Auf 1 beträgt -2,
d. h. 0,01.
Parameter 3-41 Rampenzeit Auf 1 ist vom Typ Unsigned 32
(Ohne Vorzeichen 32).
5.6 Modbus RTU
5.6.1 Was der Anwender bereits wissen
sollte
Danfoss geht davon aus, dass der installierte Regler die in
diesem Handbuch aufgeführten Schnittstellen unterstützt
und dass alle Anforderungen an den Regler und auch an
den Frequenzumrichter sowie sämtliche entsprechenden
Einschränkungen unbedingt erfüllt werden.
Das integrierte Modbus RTU-Protokoll (Remote Terminal
Unit) ist für die Kommunikation mit sämtlichen Reglern
ausgelegt, die die in diesem Handbuch definierten Schnittstellen unterstützen. Voraussetzung ist, dass der Anwender
vollständig über die Funktionen und Einschränkungen des
Reglers informiert ist.
5.6.2 Übersicht
Ungeachtet der Art des physischen Kommunikationsnetzwerks wird in diesem Abschnitt der Vorgang beschrieben,
den ein Regler beim Anfordern eines Zugriffs auf ein
anderes Gerät verwendet. Dieser Vorgang umfasst auch die
Art und Weise, wie die Modbus RTU auf Anforderungen
von einem anderen Gerät antwortet und wie Fehler
erkannt und gemeldet werden. Zudem etabliert er ein
allgemeines Format für das Layout und die Inhalte der
Telegrammfelder.
Während der Kommunikation über ein Modbus RTUNetzwerk nimmt das Protokoll Folgendes vor:
Bestimmt, wie jeder Regler seine Geräteadresse
•
lernt.
Erkennt ein an ihn adressiertes Telegramm.
•
Bestimmt die Art der auszuführenden Aktionen.
•
Auslesen von Daten oder anderen Informationen
•
aus dem Telegramm.
Wenn eine Antwort erforderlich ist, erstellt der Regler das
Antworttelegramm und sendet es.
Regler kommunizieren mithilfe einer Master/FollowerTechnik, bei der nur der Master Transaktionen (so genannte
Abfragen) einleiten kann. Die Follower antworten, indem
sie den Master mit den angeforderten Daten versorgen
oder die in der Abfrage angeforderte Maßnahme ergreifen.
Der Master kann einzelne Follower direkt ansprechen oder
ein Broadcast-Telegramm an alle Follower einleiten.
Follower senden auf Anfragen, die direkt an sie gerichtet
sind, eine Antwort. Bei Broadcast-Anfragen vom Master
werden keine Antworten zurückgesendet.
Das Modbus RTU-Protokoll erstellt das Format für die
Abfrage des Masters, indem es folgende Informationen
bereitstellt:
Die Geräte- (oder Broadcast-) Adresse.
•
Einen Funktionscode, der die angeforderte Aktion
•
definiert.
Alle zu sendenden Daten.
•
Ein Fehlerprüffeld.
•
Das Antworttelegramm des Followers wird ebenfalls über
das Modbus-Protokoll erstellt. Sie enthält Felder für die
Bestätigung der ergriffenen Maßnahme, jegliche zurückzu-
sendenden Daten und ein Feld zur Fehlerprüfung. Wenn
beim Empfang des Telegramms ein Fehler auftritt oder der
Follower die angeforderte Maßnahme nicht durchführen
kann, erstellt und sendet der Follower eine Fehlermeldung.
Oder es tritt ein Timeout auf.
5.6.3 Frequenzumrichter mit Modbus RTU
Der Frequenzumrichter kommuniziert im Modbus RTU-
Format über die integrierte RS485-Schnittstelle. Die
Modbus RTU bietet Zugriff auf das Steuerwort und den
Bussollwert des Frequenzumrichters.
Mit dem Steuerwort kann der Modbus-Master mehrere
wichtige Funktionen des Frequenzumrichters steuern:
Anlaufen.
•
Verschiedene Stopps:
•
- Freilaufstopp.
- Schnellstopp.
- DC-Bremsstopp.
- Normaler Stopp (Rampenstopp).
Reset nach Fehlerabschaltung.
•
Betrieb mit verschiedenen Festdrehzahlen.
•
Start mit Reversierung.
•
Änderung des aktiven Parametersatzes.
•
Steuerung des in den Frequenzumrichter
•
integrierten Relais.
Der Bussollwert wird in der Regel zur Drehzahlregelung
verwendet. Es ist ebenfalls möglich, auf die Parameter
zuzugreifen, ihre Werte zu lesen und, wo möglich, Werte
an sie zu schreiben. Der Zugriff auf die Parameter bietet
eine Reihe von Steuerungsoptionen wie die Regelung des
Sollwerts des Frequenzumrichters, wenn sein interner PI-
Regler verwendet wird.
5 5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 61
Page 64
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
5.7 Netzwerkkonfiguration
Um den Modbus RTU auf dem Frequenzumrichter zu
aktivieren, müssen Sie folgende Parameter einstellen:
Parameter Einstellung
Parameter 8-30 FC-Protokoll Modbus RTU
Parameter 8-31 Adresse 1–247
Parameter 8-32 Baudrate 2400–115200
Parameter 8-33 Parität/Stoppbits
55
Tabelle 5.11 Netzwerkkonfiguration
Gerade Parität, 1 Stoppbit
(Werkseinstellung)
5.8 Aufbau der Modbus RTU-
Telegrammblöcke
5.8.1 Einführung
Die Regler sind für die Kommunikation über RTU-Modus
(Remote Terminal Unit) am Modbus-Netz eingerichtet,
wobei jedes Byte einer Meldung zwei hexadezimale 4-BitZeichen enthält. Das Format für jedes Byte ist in
Tabelle 5.12 dargestellt.
Startb
it
Tabelle 5.12 Format jedes Byte
Codiersystem 8 Bit binär, hexadezimal 0-9, A–F.
Bit pro Byte
Fehlerprüffeld Zyklische Redundanz-Prüfung (CRC).
Tabelle 5.13 Byte-Details
Datenbyte Stopp/
2 hexadezimale Zeichen in jedem 8-Bit-Feld
des Telegramms.
1 Startbit.
•
8 Datenbits, Bit mit der niedrigsten
•
Wertigkeit wird zuerst gesendet.
1 Bit für gerade/ungerade Parität; kein
•
Bit ohne Parität.
1 Stoppbit, wenn Parität verwendet wird;
•
2 Bits ohne Parität.
Stopp
Parität
und als Konsequenz Fehler gesetzt. Die für alle Felder
zulässigen Zeichen sind im Hexadezimalformat 00-FF. Der
Frequenzumrichter überwacht kontinuierlich den
Netzwerkbus, auch während des Silent-Intervalls. Wenn das
erste Feld (das Adressfeld) empfangen wird, wird es von
jedem Frequenzumrichter oder jedem einzelnen Gerät
entschlüsselt, um zu ermitteln, welches Gerät adressiert ist.
Modbus RTU-Telegramme mit Adresse 0 sind Broadcast-
Telegramme. Auf Broadcast-Telegramme ist keine Antwort
erlaubt. Ein typischer Telegrammblock wird in Tabelle 5.14
gezeigt.
Start Adresse Funktion Daten
T1-T2-T3-
T4
Tabelle 5.14 Typischer Modbus RTU-Telegrammaufbau
8 Bit 8 Bit N x 8 Bit 16 Bit
CRC-
Prüfung
End
T1-T2-T3-
T4
5.8.3 Start-/Stoppfeld
Telegramme beginnen mit einer Sendepause von
mindestens 3,5 Zeichen pro Zeiteinheit. Die Sendepause
wird als Vielfaches der Zeichenintervalle mit der Baudrate
implementiert, mit der im Netzwerk die Datenübertragung
stattfindet (in der Abbildung als Start T1-T2-T3-T4
angegeben). Das erste übertragene Feld ist die Geräte-
adresse. Nach dem letzten übertragenen Intervall markiert
ein identisches Intervall von mindestens 3,5 Zeichen pro
Zeiteinheit das Ende des Telegramms. Nach diesem
Intervall kann ein neues Telegramm beginnen.
Übertragen Sie den gesamten Telegrammblock als kontinu-
ierlichen Datenstrom. Falls eine Sendepause von mehr als
1,5 Zeichen pro Zeiteinheit vor dem Abschluss des Blocks
auftritt, löscht das empfangende Gerät die Daten und
nimmt an, dass es sich beim nächsten Byte um das
Adressfeld eines neuen Telegramms handelt. Beginnt ein
neues Telegramm früher als 3,5 Zeichen pro Zeiteinheit
nach einem vorangegangenen Telegramm, interpretiert es
das empfangende Gerät als Fortsetzung des vorange-
gangenen Telegramms. Dies führt zu einem Timeout (keine
Antwort vom Follower), da der Wert im letzten CRC-Feld
für die kombinierten Telegramme nicht gültig ist.
5.8.4 Adressfeld
5.8.2 Modbus RTU-Telegrammaufbau
Das Adressfeld eines Telegrammblocks enthält acht Bits.
Ein Modbus RTU-Telegramm wird vom sendenden Gerät in
einen Block gepackt, der einen bekannten Anfangs- und
Endpunkt besitzt. Dadurch ist es dem empfangenden Gerät
möglich, am Anfang des Telegramms zu beginnen, den
Adressenabschnitt zu lesen, festzustellen, welches Gerät
adressiert ist (oder alle Geräte, im Fall eines BroadcastTelegramms) und festzustellen, wann das Telegramm
beendet ist. Unvollständige Telegramme werden ermittelt
Gültige Adressen von Follower-Geräten liegen im Bereich
von 0–247 dezimal. Die einzelnen Follower-Geräte
entsprechen zugewiesenen Adressen im Bereich von 1-247.
0 ist für den Broadcast-Modus reserviert, den alle Followers
erkennen. Ein Master adressiert ein Follower-Gerät, indem
er die Follower-Adresse in das Adressfeld des Telegramms
einträgt. Wenn das Follower-Gerät seine Antwort sendet,
trägt es seine eigene Adresse in das Adressfeld der
62 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 65
RS485 Installation und Konf... Projektierungshandbuch
Antwort ein, um den Master zu informieren, welches der
Follower-Geräte antwortet.
5.8.5 Funktionsfeld
Das Feld für den Funktionscode eines Telegrammblocks
enthält acht Bits. Gültige Codes liegen im Bereich von 1 bis
FF. Funktionsfelder dienen zum Senden von Telegrammen
zwischen Master und Follower. Wenn ein Telegramm vom
Master zu einem Follower-Gerät übertragen wird, teilt das
Funktionscodefeld dem Follower mit, welche Aktion
durchzuführen ist. Wenn der Follower dem Master
antwortet, nutzt er das Funktionscodefeld, um entweder
eine normale (fehlerfreie) Antwort anzuzeigen oder um
anzuzeigen, dass ein Fehler aufgetreten ist (Ausnahmeantwort).
Im Fall einer normalen Antwort wiederholt der Follower
den ursprünglichen Funktionscode. Im Fall einer Ausnahmeantwort sendet der Follower einen Code, der dem
ursprünglichen Funktionscode entspricht, dessen
wichtigstes Bit allerdings auf eine logische 1 gesetzt wurde.
Neben der Modifizierung des Funktionscodes zur
Erzeugung einer Ausnahmeantwort stellt der Follower
einen individuellen Code in das Datenfeld des Antworttelegramms. Dieser Code informiert den Master über die Art
des Fehlers oder den Grund der Ausnahme. Siehe auch
Kapitel 5.8.10 Von Modbus RTU unterstützte Funktionscodes
und Kapitel 5.8.11 Modbus-Ausnahmecodes.
5.8.6 Datenfeld
Das Datenfeld setzt sich aus Sätzen von je 2 hexadezimalen Zeichen im Bereich von 00 bis FF (hexadezimal)
zusammen. Diese Ziffern bestehen aus einem RTU-Zeichen.
Das von einem Master- an ein Followergerät gesendete
Telegrammdatenfeld enthält zusätzliche Informationen, die
der Follower für eine entsprechende Funktion verwenden
muss.
Die Informationen können folgende Punkte enthalten:
Spulen- oder Registeradressen.
•
Menge der zu behandelnden Informationen.
•
Anzahl der tatsächlichen Datenbytes im Feld.
•
5.8.7 CRC-Prüffeld
Telegramme enthalten ein Fehlerprüffeld, das auf der
zyklischen Redundanzprüfung (CRC) basiert. Das CRC-Feld
prüft den Inhalt des gesamten Telegramms. Die Prüfung
wird in jedem Fall durchgeführt, unabhängig vom Paritätsprüfverfahren für die einzelnen Zeichen des Telegramms.
Der CRC-Wert wird vom sendenden Gerät errechnet und
als letztes Feld an das Telegramm angehängt. Das
empfangende Gerät führt während des Erhalts des
Telegramms eine Neuberechnung der CRC durch und
vergleicht den errechneten Wert mit dem tatsächlichen
Wert im CRC-Feld. Zwei ungleiche Werte führen zu einem
Bus-Timeout. Das CRC-Feld enthält einen 16-Bit-Binärwert,
der in Form von zwei 8-Bit-Bytes implementiert wird. Nach
der Fehlerprüfung wird das niederwertige Byte im Feld
zuerst angehängt und anschließend das höherwertige Byte.
Das höherwertige CRC-Byte ist das letzte im Rahmen des
Telegramms übertragene Byte.
5.8.8 Adressieren von Einzelregistern
Im Modbus-Protokoll sind alle Daten in Einzelregistern
(Spulen) und Halteregistern organisiert. Spulen halten ein
einzelnes Bit, während Halteregister ein 2-Byte-Wort halten
(d. h. 16 Bits). Alle Datenadressen in Modbus-Telegrammen
werden als Null referenziert. Das erste Auftreten eines
Datenelements wird als Element Nr. 0 adressiert. Ein
Beispiel: Die als „Spule 1“ in einem programmierbaren
Regler eingetragene Spule wird im Datenadressfeld eines
Modbus-Telegramms als 0000 adressiert. Spule 127
(dezimal) wird als Spule 007E hexadezimal (126 dezimal)
adressiert.
Halteregister 40001 wird im Datenadressfeld des
Telegramms als 0000 adressiert. Im Funktionscodefeld ist
bereits eine „Halteregister“-Operation spezifiziert. Daher ist
die Referenz 4XXXX implizit. Halteregister 40108 wird als
Register 006B hexadezimal (107 dezimal) adressiert.
Spulennr. Beschreibung Signalrichtung
1–16 Frequenzumrichter-Steuerwort
(siehe Tabelle 5.16).
17–32 Drehzahl- oder Sollwertbereich des
Frequenzumrichters 0x0–0xFFFF
(-200 % ... ~200 %).
33–48 Zustandswort des Frequenzum-
richters (siehe Tabelle 5.17).
49–64 Regelung ohne Rückführung:
Frequenzumrichter-Ausgangsfrequenz.
Regelung mit Rückführung: Istwertsignal des Frequenzumrichters.
Parameterschreibsteuerung (Master
→ Follower).
0 = Parameteränderungen werden
65
66–65536 Reserviert. –
Tabelle 5.15 Einzelregister
zum RAM des Frequenzumrichters
geschrieben.
1 = Parameteränderungen werden
zum RAM und EEPROM des
Frequenzumrichters geschrieben.
Master →
Follower
Master →
Follower
Follower →
Master
Follower →
Master
Master →
Follower
5 5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 63
Page 66
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
Spule 0 1
01 Festsollwert lsb
02 Festsollwert msb
03 DC-Bremse Keine DC-Bremse
04 Freilaufstopp Kein Freilaufstopp
05 Schnellstopp Kein Schnellstopp
06 Speicherfrequenz Keine Speicherfrequenz
07 Rampenstopp Start
08 Kein Reset Reset
09 Keine Festdrehzahl JOG Festdrehzahl JOG
10 Rampe 1 Rampe 2
55
11 Daten nicht gültig Daten gültig
12 Relais 1 Aus Relais 1 Ein
13 Relais 2 Aus Relais 2 Ein
14 Einrichtung lsb
15 –
16 Keine Reversierung Reversierung
Tabelle 5.16 Frequenzumrichter-Steuerwort (FC-Profil)
Busadresse
0 1 40001 Reserviert
1 2 40002 Reserviert
2 3 40003 Reserviert
3 4 40004 Frei – –
4 5 40005 Frei – –
5 6 40006 Modbus-Konfiguration Lesen/Schreiben Nur TCP. Reserviert für Modbus-TCP
6 7 40007 Letzter Fehlercode Nur Lesen Fehlercode von der Parameterdatenbank erhalten,
7 8 40008 Letztes Fehlerregister Nur Lesen Adresse des Registers, bei dem der letzte Fehler
8 9 40009 Indexzeiger Lesen/Schreiben Sub-Index von dem Parameter, auf den zugegriffen
9 10 40010 Parameter 0-01 Sprache Parameterzugriffsab-
19 20 40020 Parameter 0-02 Hz/UPM
29 30 40030 Parameter 0-03 Länder-
Busregister
1)
PLCRegister
Inhalt Zugriff Beschreibung
hängig
Parameterzugriffsab-
Umschaltung
einstellungen
hängig
Parameterzugriffsabhängig
Spule 0 1
33 Steuerung nicht bereit Steuer. bereit
34 Frequenzumrichter nicht
bereit
35 Freilaufstopp Sicherheitsverriegelung
36 Kein Alarm Alarm
37 Unbenutzt Unbenutzt
38 Unbenutzt Unbenutzt
39 Unbenutzt Unbenutzt
40 Keine Warnung Warnung
41 Istwert≠Sollwert Ist=Sollwert
42 Hand-Betrieb Betriebsart Auto
43 Außerhalb Frequenz-
bereich
44 Gestoppt In Betrieb
45 Unbenutzt Unbenutzt
46 Keine Spannungswarnung Spannungswarnung
47 Nicht in Stromgrenze Stromgrenze
48 Keine Übertemperatur-
warnung
Tabelle 5.17 Frequenzumrichter-Zustandswort (FC-Profil)
–
–
–
Reserviert für ältere Frequenzumrichter vom Typ
VLT® 5000 und VLT® 2800.
Reserviert für ältere Frequenzumrichter vom Typ
VLT® 5000 und VLT® 2800.
Reserviert für ältere Frequenzumrichter vom Typ
VLT® 5000 und VLT® 2800.
(Parameter 12-28 Datenwerte speichern und
Parameter 12-29 EEPROM speichern - z. B.
gespeichert in EEPROM).
siehe WHAT 38295 für Details
aufgetreten ist, siehe WHAT 38296 für Details.
werden muss. Siehe WHAT 38297 für Details.
Parameter 0-01 Sprache (Modbusregister = 10
Parameternummer)
20 Bytes Platz reserviert für Parameter in Modbus
Map
Parameter 0-02 Hz/UPM Umschaltung
20 Bytes Platz reserviert für Parameter in Modbus
Map
Parameter 0-03 Ländereinstellungen
20 Bytes Platz reserviert für Parameter in Modbus
Map
Frequenzumrichter bereit
In Freq.-Bereich
Übertemperaturwarnung
Tabelle 5.18 Adresse/Register
1) Ein ins Modbus RTU-Telegramm geschriebener Wert muss 1 oder kleiner als die Registernummer sein. Lesen Sie z. B. Modbus Register 1, indem
Sie den Wert 0 in das Telegramm schreiben.
64 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 67
RS485 Installation und Konf... Projektierungshandbuch
5.8.9 Steuern des Frequenzumrichters
In diesem Abschnitt werden Codes zur Verwendung in der
Funktion und den Datenfeldern eines Modbus RTUTelegramms erläutert.
5.8.10 Von Modbus RTU unterstützte
Funktionscodes
Modbus RTU unterstützt die aufgeführten Funktionscodes
im Funktionsfeld eines Telegramms:
Funktion Funktionscode (Hex)
Spulen lesen (Read coils) 1
Halteregister lesen (Read holding
registers)
Einzelspule schreiben (Write single coil) 5
Einzelregister schreiben (Write single
register)
Mehrere Spulen schreiben ( Write
multiple coils)
Mehrere Register schreiben (Write
multiple registers)
Komm.-Ereigniszähler abrufen (Get
comm. event counter)
Follower-ID melden (Report Follower
ID)
Tabelle 5.19 Funktionscodes
3
6
F
10
B
11
Funktion Funkti-
onscode
Diagnose 8 1 Kommunikation neu
Tabelle 5.20 Funktionscodes
Subfunktion
scode
2 Diagnoseregister
10 Zähler und Diagnosere-
11 Zahl Busmeldungen
12 Buskommunikations-
13 Follower-Fehlernummer
14 Anzahl Follower-
Subfunktion
starten (Restart
communication).
angeben (Return
diagnostic register).
gister löschen (Clear
counters and diagnostic
register).
angeben (Return bus
message count).
Fehlernummer ausgeben
(Return bus communication error count).
ausgeben (Return
Follower error count).
Telegramme ausgeben
(Return Follower message
count).
5 5
5.8.11 Modbus-Ausnahmecodes
Für eine umfassende Erläuterung des Aufbaus einer
Ausnahmecode-Antwort siehe Kapitel 5.8.5 Funktionsfeld.
Code Name Bedeutung
Der in der Anfrage empfangene Funktionscode ist keine zulässige Aktion für den
Server (oder Follower). Es kann sein, dass
der Funktionscode nur für neuere Geräte
gilt und im ausgewählten Gerät nicht
1
Unzulässige
Funktion
implementiert wurde. Es könnte auch
anzeigen, dass der Server (oder Follower)
im falschen Zustand ist, um eine
Anforderung dieser Art zu verarbeiten, z.
B. weil er nicht konfiguriert ist und
aufgefordert wird, Registerwerte zu
senden.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 65
Page 68
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
Code Name Bedeutung
Die in der Anfrage empfangene
Datenadresse ist keine zulässige Adresse
für den Server (oder Follower). Genauer
gesagt ist die Kombination aus Referenz-
Unzulässige
2
Datenadresse
55
Unzulässiger
3
Datenwert
Follower-
4
Gerätefehler
nummer und Transferlänge ungültig. Bei
einem Regler mit 100 Registern wäre eine
Anfrage mit Offset 96 und Länge 4
erfolgreich, eine Anfrage mit Offset 96
und Länge 5 erzeugt jedoch Ausnahmefehler 02.
Ein im Anfragedatenfeld enthaltener Wert
ist kein zulässiger Wert für den Server
(oder Follower). Dies zeigt einen Fehler in
der Struktur des Rests einer komplexen
Anforderung an, z. B. dass die implizierte
Länge falsch ist. Es bedeutet jedoch
NICHT, dass ein zur Speicherung in einem
Register gesendetes Datenelement einen
Wert hat, der außerhalb der Erwartung
des Anwendungsprogramms liegt, da das
Modbus-Protokoll die Bedeutung eines
bestimmten Werts eines bestimmten
Registers nicht kennt.
Ein nicht behebbarer Fehler trat auf,
während der Server (oder Follower)
versuchte, die angeforderte Aktion
auszuführen.
5.9.2 Datenspeicherung
Die Spule 65 (dezimal) bestimmt, ob an den Frequenzumrichter geschriebene Daten im EEPROM und RAM (Spule 65
= 1) oder nur im RAM (Spule 65 = 0) gespeichert werden.
5.9.3 IND (Index)
Einige Parameter im Frequenzumrichter sind Arrayparameter, z. B. Parameter 3-10 Festsollwert. Da der Modbus
keine Arrays in Halteregistern unterstützt, hat der Frequenzumrichter das Halteregister 9 als Zeiger zum Array
reserviert. Stellen Sie das Halteregister 9 ein, bevor ein
Arrayparameter ausgelesen oder geschrieben wird. Wenn
Sie das Halteregister auf den Wert 2 einstellen, werden alle
Lese-/Schreibevorgänge zu Arrayparametern mit 2 indiziert.
5.9.4 Textblöcke
Der Zugriff auf als Textblöcke gespeicherte Parameter
erfolgt auf gleiche Weise wie für die anderen Parameter.
Die maximale Textblockgröße ist 20 Zeichen. Gilt die
Leseanfrage für einen Parameter für mehr Zeichen, als der
Parameter speichert, wird die Antwort verkürzt. Gilt die
Leseanfrage für einen Parameter für weniger Zeichen, als
der Parameter speichert, wird die Antwort mit Leerzeichen
gefüllt.
Tabelle 5.21 Modbus-Ausnahmecodes
Zugriff auf Parameter
5.9
5.9.1 Parameterverarbeitung
Die PNU (Parameternummer) wird aus der Registeradresse
übersetzt, die in dem Modbus-Lese- oder Schreibtelegramm enthalten ist. Die Parameternummer wird als (10
x Parameternummer) Dezimal für Modbus übersetzt.
Beispiele
Messwert Parameter 3-12 Frequenzkorrektur Auf/Ab (16 Bit):
Das Halteregister 3120 enthält den Wert der Parameter. Ein
Wert von 1352 (Dezimal) bedeutet, dass der Parameter auf
12,52 % eingestellt ist.
Messwert Parameter 3-14 Relativer Festsollwert (32 Bit): Die
Halteregister 3410 und 3411 enthalten die Parameterwerte.
Ein Wert von 11300 (Dezimal) bedeutet, dass der Parameter
auf 1113,00 eingestellt ist.
Weitere Informationen zu den Parametern, zur Größe und
zum Umrechnungsindex finden Sie im VLT® Midi DriveFC
280 Programmierhandbuch.
5.9.5 Umrechnungsfaktor
Ein Parameterwert kann nur als ganze Zahl übertragen
werden. Verwenden Sie zur Übertragung von Dezimalzahlen einen Umrechnungsfaktor.
5.9.6 Parameterwerte
Standarddatentypen
Standarddatentypen sind int 16, int 32, uint 8, uint 16 und
uint 32. Sie werden als 4x-Register gespeichert (40001–
4FFFF). Die Parameter werden über Funktion 03 Hex
„Halteregister lesen“ gelesen. Parameter werden über die
Funktion 6 Hex Einzelregister voreinstellen für 1 Register
(16 Bit) und die Funktion 10 Hex Mehrere Register voreinstellen für 2 Register (32 Bit) geschrieben. Lesbare Längen
reichen von 1 Register (16 Bit) bis zu 10 Registern (20
Zeichen).
Nicht-standardmäßige Datentypen
Nichtstandarddatentypen sind Textblöcke und werden als
4x-Register gespeichert (40001–4FFFF). Die Parameter
werden über Funktion 03 Hex Halteregister lesen gelesen
und über die Funktion 10 Hex Mehrere Register voreinstellen geschrieben. Lesbare Längen reichen von 1 Register
(2 Zeichen) bis zu 10 Registern (20 Zeichen).
66 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 69
RS485 Installation und Konf... Projektierungshandbuch
5.10 Beispiele
Die folgenden Beispiele veranschaulichen die
verschiedenen Modbus RTU-Befehle.
5.10.1 Spulenzustand lesen (01 Hex)
Beschreibung
Mit dieser Funktion wird der EIN/AUS-Zustand einzelner
Ausgänge (Spulen) im Frequenzumrichter ausgelesen.
Broadcast wird für Lesevorgänge nie unterstützt.
Abfrage
Das Abfragetelegramm legt die Startspule und die Anzahl
der zu lesenden Spulen an. Spulenadressen beginnen bei
0, d. h. Spule 33 wird als 32 adressiert.
Beispiel für eine Abfrage zum Lesen der Spulen 33 bis 48
(Zustandswort) vom Follower-Gerät 01.
Feldname Beispiel (Hex)
Follower-Adresse 01 (Frequenzumrichteradresse)
Funktion 01 (Spulen lesen)
Startadresse HI 00
Startadresse LO 20 (32 Dezimalstellen) Spule 33
Anzahl der Punkte HI 00
Anzahl der Punkte LO 10 (16 Dezimale)
Fehlerprüfung (CRC) –
Tabelle 5.22 Abfrage
HINWEIS
Spulen und Register werden explizit mit einem Offset
von -1 im Modbus adressiert.
Beispielsweise wird Spule 33 als Spule 32 adressiert.
5.10.2 Einzelne Spule erzwingen/schreiben
(05 Hex)
Beschreibung
Diese Funktion erzwingt den Spulenzustand EIN oder AUS.
Bei einem Broadcast erzwingt diese Funktion die gleichen
Ausgangsreferenzen in allen zugehörigen Followern.
Abfrage
Das Abfragetelegramm definiert das Erzwingen von Spule
65 (Parameter-Schreibsteuerung). Spulenadressen beginnen
bei 0, d. h. Spule 65 wird als 64 adressiert. Setzdaten = 00
00 Hex (AUS) oder FF 00 Hex (EIN).
Feldname Beispiel (Hex)
Follower-Adresse 01 (Frequenzumrichteradresse)
Funktion 05 (einzelne Spule schreiben)
Spulenadresse HI 00
Spulenadresse LO 40 (64 dezimal) Spule 65
Befehlskonstante HI FF
Befehlskonstante LO 00 (FF 00 = EIN)
Fehlerprüfung (CRC) –
Tabelle 5.24 Abfrage
5 5
Antwort
Der Spulenzustand im Antworttelegramm wird als eine
Spule pro Bit des Datenfelds gepackt. Der Zustand wird
angegeben als: 1 = ON; 0 = OFF. Das LSB des ersten
Datenbytes enthält die Spule, an die die Anfrage gerichtet
war. Die anderen Spulen folgen in Richtung des
hochwertigen Endes des Bytes, und vom niedrigen zum
hohen Wert in darauffolgenden Bytes.
Wenn die zurückgemeldete Spulenanzahl kein Vielfaches
von 8 ist, werden die verbleibenden Bits im letzten
Datenbyte mit Nullen aufgefüllt (in Richtung des
hochwertigen Byte-Endes). Im Feld für die Bytezahl wird
die Anzahl der vollständigen Datenbyte festgelegt.
Feldname Beispiel (Hex)
Follower-Adresse 01 (Frequenzumrichteradresse)
Funktion 01 (Spulen lesen)
Bytezahl 02 (2 Datenbytes)
Daten (Spulen 40–33) 07
Daten (Spulen 48–41) 06 (STW = 0607 Hex)
Fehlerprüfung (CRC) –
Tabelle 5.23 Antwort
Antwort
Die normale Reaktion ist ein Echo der Abfrage, das nach
dem Erzwingen des Spulenstatus zurückgegeben wird.
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 05
Befehlskonstante HI FF
Befehlskonstante LO 00
Anzahl Spulen HI 00
Anzahl Spulen LO 01
Fehlerprüfung (CRC) –
Tabelle 5.25 Antwort
5.10.3 Mehrere Spulen zwangsetzen/
schreiben (0F Hex)
Beschreibung
Mit dieser Funktion wird für alle Spulen in einer Folge von
Spulen der Zustand EIN oder AUS erzwungen. Bei einem
Broadcast erzwingt diese Funktion die gleichen Ausgangsreferenzen in allen zugehörigen Followern.
Abfrage
Das Abfrage-Telegramm gibt ein Zwangsetzen der Spulen
17 bis 32 (Drehzahlsollwert) an.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 67
Page 70
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
HINWEIS
Spulenadressen beginnen bei 0, d. h. Spule 17 wird als
16 adressiert.
Feldname Beispiel (Hex)
Follower-Adresse 01 (Frequenzumrichteradresse)
Funktion 0F (Mehrere Spulen schreiben)
Spulenadresse HI 00
Spulenadresse LO 10 (Spulenadresse 17)
Anzahl Spulen HI 00
Anzahl Spulen LO 10 (16 Spulen)
55
Bytezahl 02
Daten erzwingen HI
(Spulen 8–1)
Daten erzwingen LO
(Spulen 16–9)
Fehlerprüfung (CRC) –
Tabelle 5.26 Abfrage
20
00 (Sollwert = 2000 Hex)
Antwort
Die normale Antwort gibt die Follower-Adresse, den Funktionscode, die Startadresse und die Anzahl belegter
Ausgänge zurück.
Feldname Beispiel (Hex)
Follower-Adresse 01 (Frequenzumrichteradresse)
Funktion 0F (Mehrere Spulen schreiben)
Spulenadresse HI 00
Spulenadresse LO 10 (Spulenadresse 17)
Anzahl Spulen HI 00
Anzahl Spulen LO 10 (16 Spulen)
Fehlerprüfung (CRC) –
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 03 (Halteregister lesen)
Startadresse HI 0B (Registeradresse 3029)
Startadresse LO D5 (Registeradresse 3029)
Anzahl der Punkte HI 00
Anzahl der Punkte LO
Fehlerprüfung (CRC) –
Tabelle 5.28 Abfrage
02 – (Parameter 3-03 Maximaler Sollwert
ist 32 Bit lang, d. h. 2 Register)
Antwort
Die Registerdaten im Antworttelegramm werden als zwei
Byte pro Register gepackt, wobei die binären Inhalte in
jedem Byte korrekt ausgerichtet sind. In jedem Register
enthält das erste Byte die hohen Bits, und das zweite Byte
enthält die niedrigen Bits.
Beispiel: Hex 000088B8=35,000=35 Hz.
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 03
Bytezahl 04
Daten HI (Register 3030) 00
Daten LO (Register 3030) 16
Daten HI (Register 3031) E3
Daten LO (Register 3031) 60
Fehlerprüfung (CRC) –
Tabelle 5.29 Antwort
5.10.5 Voreingestelltes, einzelnes Register
(06 Hex)
Tabelle 5.27 Antwort
Beschreibung
5.10.4 Halteregister lesen (03 Hex)
Beschreibung
Mithilfe dieser Funktion werden die Inhalte der Halteregister im Follower gelesen.
Abfrage
Das Abfragetelegramm legt das Startregister und die
Anzahl der zu lesenden Register fest. Registeradressen
beginnen bei 0, d. h. die Register 1–4 werden als 0–3
adressiert.
Beispiel: Parameter 3-03 Maximaler Sollwert lesen, Register
03030.
Mithilfe dieser Funktion wird ein Wert in einem einzigen
Halteregister voreingestellt.
Abfrage
Das Abfragetelegramm definiert die Registerreferenz für
die Voreinstellung. Registeradressen beginnen bei null, d.
h., Register 1 wird als 0 adressiert.
Beispiel: Schreiben in Parameter 1-00 Regelverfahren,
Register 1000.
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 06
Registeradresse HI 03 (Registeradresse 999)
Registeradresse LO E7 (Registeradresse 999)
Voreinstellungsdaten HI 00
Voreinstellungsdaten LO 01
Fehlerprüfung (CRC) –
Tabelle 5.30 Abfrage
68 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 71
Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
RS485 Installation und Konf... Projektierungshandbuch
Antwort
Die normale Reaktion ist ein Echo der Abfrage, das nach
der Weitergabe des Registerinhalts zurückgegeben wird.
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 06
Registeradresse HI 03
Registeradresse LO E7
Voreinstellungsdaten HI 00
Voreinstellungsdaten LO 01
Fehlerprüfung (CRC) –
Tabelle 5.31 Antwort
5.10.6 Voreingestellte multiple Register (10
Hex)
Beschreibung
Mithilfe dieser Funktion werden Werte in einer Sequenz
von Halteregistern voreingestellt.
Abfrage
Das Abfragetelegramm definiert die Registerreferenz für
die Voreinstellung. Registeradressen beginnen bei null, d.
h., Register 1 wird als 0 adressiert. Beispiel einer Abfrage
zur Voreinstellung von zwei Registern (Parameter
Parameter 1-24 Motornennstrom auf 738 (7,38 A) einstellen):
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 10
Startadresse HI 04
Startadresse LO 07
Anzahl Register HI 00
Anzahl Register LO 02
Bytezahl 04
Schreiben von Daten HI (Register 4:
1049)
Schreiben von Daten LO (Register 4:
1049)
Schreiben von Daten HI (Register 4:
1050)
Schreiben von Daten LO (Register 4:
1050)
Fehlerprüfung (CRC) –
Tabelle 5.32 Abfrage
Antwort
Die normale Antwort gibt die Follower-Adresse, den Funktionscode, die Startadresse und die Anzahl der
voreingestellten Register zurück.
00
00
02
E2
Feldname Beispiel (Hex)
Follower-Adresse 01
Funktion 10
Startadresse HI 04
Startadresse LO 19
Anzahl Register HI 00
Anzahl Register LO 02
Fehlerprüfung (CRC) –
Tabelle 5.33 Antwort
5.11 Danfoss FrequenzumrichterSteuerprofil
5.11.1 Steuerwort gemäß
Frequenzumrichter-Profil (8-10
Protokoll = FC-Profil)
Abbildung 5.13 Steuerwort gemäß FC-Profil
Bit Bitwert = 0 Bitwert = 1
00 Sollwert Externe Anwahl lsb
01 Sollwert Externe Anwahl msb
02 DC-Bremse Rampe
03 Motorfreilauf Kein Motorfreilauf
04 Schnellstopp Rampe
Ausgangsfrequenz
05
halten
06 Rampenstopp Start
07 Ohne Funktion Reset
08 Ohne Funktion Festdrehzahl JOG
09 Rampe 1 Rampe 2
10 Daten ungültig Daten gültig
11 Relais 01 geöffnet Relais 01 aktiv
12 Relais 02 geöffnet Relais 02 aktiv
13 Parametersatz (lsb)
15 Ohne Funktion Rückwärts
Tabelle 5.34 Steuerwort gemäß FC-Profil
Erläuterung der Steuerbits
Bits 00/01
Bit 00 und 01 werden benutzt, um zwischen den vier
Sollwerten zu wählen, deren Vorprogrammierung Sie unter
Parameter 3-10 Festsollwert gemäß Tabelle 5.35 finden.
Rampe verwenden
5 5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 69
Page 72
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
Program-
mierter
Sollwert
1 Parameter 3-10 Festsollwert [0] 0 0
2 Parameter 3-10 Festsollwert [1] 0 1
3 Parameter 3-10 Festsollwert [2] 1 0
4 Parameter 3-10 Festsollwert [3] 1 1
Tabelle 5.35 Steuerbits
Parameter
Bit01Bit
00
HINWEIS
Definieren Sie in Parameter 8-56 Festsollwertanwahl, wie
55
Bit 00/01 mit der entsprechenden Funktion an den
Digitaleingängen verknüpft ist.
Bit 02, DC-Bremse
Bit 02 = 0: Führt zu DC-Bremsung und -Stopp. Stellen Sie
den Bremsstrom und die Bremsdauer in Parameter 2-01 DC-
Bremsstrom und Parameter 2-02 DC-Bremszeit ein.
Bit 02 = 1: Bewirkt Rampe.
Bit 03, Motorfreilauf
Bit 03 = 0: Der Frequenzumrichter lässt den Motor
austrudeln (Ausgangstransistoren werden „abgeschaltet“).
Bit 03 = 1: Der Frequenzumrichter startet den Motor, wenn
die anderen Startbedingungen erfüllt sind.
Definieren Sie in Parameter 8-50 Motorfreilauf, wie Bit 03
mit der entsprechenden Funktion an den Digitaleingängen
verknüpft ist.
Bit 04, Schnellstopp
Bit 04 = 0: Führt eine Rampe ab der Motordrehzahl bis
zum Stopp durch (eingestellt in Parameter 3-81 Rampenzeit
Schnellstopp).
Bit 05, Ausgangsfrequenz halten
Bit 05 = 0: Die aktuelle Ausgangsfrequenz (in Hz) wird
gespeichert. Sie können die gespeicherte Ausgangsfrequenz dann nur an den Digitaleingängen
(Parameter 5-10 Klemme 18 Digitaleingang bis
Parameter 5-13 Klemme 29 Digitaleingang), programmiert
für [21] Drehzahl auf und [22] Drehzahl ab, ändern.
HINWEIS
Ist Ausgangsfrequenz speichern aktiv, können Sie den
Frequenzumrichter nur durch Auswahl der folgenden Bits
stoppen:
Bit 03 Freilaufstopp
•
Bit 02 DC-Bremse.
•
Digitaleingang programmiert für [5] DC-Bremse
•
invers, [2] Motorfreilauf invers oder [3] Mot.freil./
Res.inv (Parameter 5-10 Klemme 18 Digitaleingang bis Parameter 5-13 Klemme 29
Digitaleingang).
Bit 06, Rampe Stopp/Start
Bit 06 = 0: Bewirkt einen Stopp, indem die Motordrehzahl
über den entsprechenden Parameter für Rampenzeit Ab bis
zum Stopp reduziert wird.
Bit 06 = 1: Erlaubt dem Frequenzumrichter, den Motor zu
starten, wenn die anderen Startbedingungen erfüllt sind.
In Parameter 8-53 Start definieren Sie, wie Bit 06
Rampenstart/-stopp mit der entsprechenden Funktion an
einem Digitaleingang verknüpft ist.
Bit 07, Reset
Bit 07 = 0: Kein Reset.
Bit 07 = 1: Reset einer Abschaltung. Reset wird auf der
Vorderflanke des Signals aktiviert, d. h. beim Wechsel von
Logik „0“ zu Logik „1“.
Bit 08, Jog
Bit 08 = 1: Parameter 3-11 Festdrehzahl Jog [Hz] bestimmt
die Ausgangsfrequenz.
Bit 09, Auswahl von Rampe 1/2
Bit 09 = 0: Rampe 1 ist aktiv (Parameter 3-41 Rampenzeit
Auf 1 bis Parameter 3-42 Rampenzeit Ab 1).
Bit 09 = 1: Rampe 2 (Parameter 3-51 Rampenzeit Auf 2 bis
Parameter 3-52 Rampenzeit Ab 2) ist aktiv.
Bit 10, Daten nicht gültig/Daten gültig
Teilt dem Frequenzumrichter mit, ob das Steuerwort
benutzt oder ignoriert wird.
Bit 10 = 0: Das Steuerwort wird ignoriert.
Bit 10 = 1: Das Steuerwort wird verwendet. Diese Funktion
ist relevant, weil das Telegramm unabhängig vom
Telegrammtyp stets das Steuerwort enthält. Deaktivieren
Sie das Steuerwort, wenn dieses beim Aktualisieren oder
Lesen von Parametern nicht benötigt wird.
Bit 11, Relais 01
Bit 11 = 0: Relais nicht aktiviert.
Bit 11 = 1: Relais 01 ist aktiviert, vorausgesetzt in
Parameter 5-40 Relaisfunktion wurde [36] Steuerwort Bit 11
gewählt.
Bit 12, Relais 02
Bit 12 = 0: Relais 02 ist nicht aktiviert.
Bit 12 = 1: Relais 02 ist aktiviert, vorausgesetzt in
Parameter 5-40 Relaisfunktion wurde [37] Steuerwort Bit 12
gewählt.
Bit 13, Konfigurationsauswahl
Verwenden Sie Bit 13 zur Auswahl der beiden Menüeinrichtungen gemäß Tabelle 5.36.
Parametersatz Bit 13
1 0
2 1
Tabelle 5.36 Menüeinrichtungen
Die Funktion ist nur möglich, wenn [9] Externe Anwahl in
Parameter 0-10 Aktiver Satz gewählt ist.
70 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 73
Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
RS485 Installation und Konf... Projektierungshandbuch
Verwenden Sie Parameter 8-55 Satzanwahl, um zu
definieren, wie Bit 13 mit der entsprechenden Funktion an
den Digitaleingängen verknüpft ist.
Bit 15 Reversierung
Bit 15 = 0: Keine Reversierung.
Bit 15 = 1: Reversierung. In der Werkseinstellung ist
Reversierung in Parameter 8-54 Reversierung auf Digital
eingestellt. Bit 15 bewirkt eine Reversierung nur dann,
wenn eine serielle Kommunikation, [2] ODER-Logik oder [3]
UND-Logik ausgewählt ist.
5.11.2 Zustandswort gemäß FC-Profil (STW)
Setzen Sie Parameter 8-30 FC-Protokoll auf [0] FC-Profil.
Abbildung 5.14 Zustandswort
Bit Bit=0 Bit = 1
00 Steuerung nicht bereit Steuer. bereit
01 Frequenzumrichter nicht
bereit
02 Motorfreilauf Aktivieren
03 Kein Fehler Abschaltung
04 Kein Fehler Fehler (keine Abschaltung)
05 Reserviert –
06 Kein Fehler Abschaltblockierung
07 Keine Warnung Warnung
08
09 Ortbetrieb Bussteuerung
10 Außerhalb Frequenzgrenze Frequenzgrenze OK
11 Ohne Funktion In Betrieb
12 Frequenzumrichter OK Gestoppt, Auto Start
13 Spannung OK Spannung überschritten
14 Moment OK Moment überschritten
15 Timer OK Timer überschritten
Drehzahl≠Sollwert
Tabelle 5.37 entsprechend dem Zustandswort gemäß FC-Profil
Erläuterung der Zustandsbits
Bit 00, Steuerung nicht bereit/bereit
Bit 00 = 0: Der Frequenzumrichter schaltet ab.
Bit 00 = 1: Die Frequenzumrichter-Regler sind bereit, aber
die Leistungskomponente empfängt nicht notwendigerweise eine Stromversorgung (im Falle einer externen
24-V-Versorgung der Regler).
Frequenzumrichter bereit
Drehzahl = Sollwert
Bit 01, Frequenzumrichter bereit
Bit 01=0: Der Frequenzumrichter ist nicht betriebsbereit.
Bit 01 = 1: Der Frequenzumrichter ist betriebsbereit.
Bit 02, Motorfreilaufstopp
Bit 02 = 0: Der Frequenzumrichter gibt den Motor frei.
Bit 02 = 1: Der Frequenzumrichter startet den Motor mit
einem Startbefehl.
Bit 03, Kein Fehler/keine Abschaltung
Bit 03 = 0: Es liegt kein Fehlerzustand des Frequenzumrichters vor.
Bit 03 = 1: Der Frequenzumrichter schaltet ab. Drücken Sie
zur Wiederaufnahme [Reset].
Bit 04, Kein Fehler/Fehler (keine Abschaltung)
Bit 04 = 0: Es liegt kein Fehlerzustand des Frequenzumrichters vor.
Bit 04 = 1: Der Frequenzumrichter meldet einen Fehler,
aber schaltet nicht ab.
Bit 05, Nicht verwendet
Bit 05 wird im Zustandswort nicht benutzt.
Bit 06, Kein Fehler/Abschaltsperre
Bit 06 = 0: Es liegt kein Fehlerzustand des Frequenzumrichters vor.
Bit 06 = 1: Der Frequenzumrichter ist abgeschaltet und
blockiert.
Bit 07, Keine Warnung/Warnung
Bit 07 = 0: Es liegen keine Warnungen vor.
Bit 07 = 1: Eine Warnung liegt vor.
Bit 08, Drehzahl Sollwert/Drehzahl = Sollwert
Bit 08 = 0: Der Motor läuft, die aktuelle Drehzahl entspricht
aber nicht dem voreingestellten Drehzahlsollwert. Dies
kann bei der Rampe auf/ab während des Starts/Stopps der
Fall sein.
Bit 08 = 1: Die Motordrehzahl entspricht dem voreingestellten Drehzahlsollwert.
Bit 09, Ort-Betrieb/Bussteuerung
Bit 09 = 0: [Off/Reset] ist in der Bedieneinheit aktiv, oder
[2] Ort-Steuerung in Parameter 3-13 Sollwertvorgabe wurde
ausgewählt. Es ist nicht möglich, den Frequenzumrichter
über die serielle Schnittstelle zu steuern.
Bit 09 = 1: Sie können den Frequenzumrichter über den
Feldbus/die serielle Schnittstelle steuern.
Bit 10, Frequenzgrenze überschritten
Bit 10 = 0: Die Ausgangsfrequenz hat den Wert in
Parameter 4-12 Min. Frequenz [Hz] oder Parameter 4-14 Max
Frequenz [Hz] erreicht.
Bit 10 = 1: Die Ausgangsfrequenz ist innerhalb der festgelegten Grenzen.
Bit 11, Kein Betrieb/Betrieb
Bit 11 = 0: Der Motor läuft nicht.
Bit 11 = 1: Der Frequenzumrichter hat ein Startsignal ohne
Freilauf.
5 5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 71
Page 74

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
RS485 Installation und Konf...
VLT® Midi Drive Frequenzumrichter 280
Bit 12, Frequenzumrichter OK/gestoppt, Auto Start
Bit 12 = 0: Der Frequenzumrichter hat keine temporäre
Übertemperatur.
Bit 12 = 1: Der Frequenzumrichter wird wegen Übertemperatur angehalten, aber die Einheit wird nicht
abgeschaltet und nimmt nach Beseitigung der Übertemperatur den Betrieb wieder auf.
Bit 13, Spannung OK/Grenze überschritten
Bit 13 = 0: Es liegen keine Spannungswarnungen vor.
Bit 13 = 1: Die Gleichspannung im Zwischenkreis des
Bit 14, Drehmoment OK/Grenze überschritten
Bit 14 = 0: Der Motorstrom liegt unter der in
Parameter 4-18 Current Limit gewählten Stromgrenze.
Bit 14 = 1: Die in Parameter 4-18 Current Limit eingestellte
Motorstromgrenze ist überschritten.
Bit 15, Timer OK/Grenze überschritten
Bit 15 = 0: Die Timer für thermischen Motorschutz und
thermischen Schutz des Frequenzumrichters überschreiten
nicht 100 %.
Bit 15 = 1: Einer der Timer überschreitet 100 %.
Frequenzumrichters ist zu niedrig oder zu hoch.
55
5.11.3 Bus-Drehzahlsollwert
Der Sollwert für die Drehzahl wird an den Frequenzumrichter als relativer Wert in % übermittelt. Der Wert wird in Form
eines 16-Bit-Wortes übermittelt. In Ganzzahlen entspricht der Wert 16384 (4000 Hex) 100 %. Negative Werte werden über
Zweier-Komplement formatiert. Die aktuelle Ausgangsfrequenz (HIW) wird auf gleiche Weise wie der Bussollwert skaliert.
Abbildung 5.15 Aktuelle Ausgangsfrequenz (HIW)
Der Sollwert und HIW werden wie folgt skaliert:
Abbildung 5.16 Sollwert und HIW
72 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 75

130BF710.10
FC-280PK37T4E20H1BXCXXXSXXXXAX
1 7 11 13 16 18 24 293 20
Typencode und Auswahl Projektierungshandbuch
6 Typencode und Auswahl
6.1 Typencode
Der Typencode ist eine Zeichenkette zur Beschreibung der
Frequenzumrichterkonfiguration,siehe Abbildung 6.1.
Abbildung 6.1 Typencode
Die in Tabelle 6.1 angezeigten Zahlen beziehen sich auch
die Buchstaben-/Zifferposition im Typencode-String,
gelesen von links nach rechts.
Produktgruppen 1–2
Frequenzumrichter-Serie 4–6
Nennleistung 7–10
Phasen 11
Netzspannung 12
Gehäuse 13–15
EMV-Filter 16–17
Bremse 18
Display (LCP) 19
Beschichtung der Platine 20
Netzoption 21
Anpassung A 22
Anpassung B 23
Softwareversion 24–27
Software-Sprache 28
A-Optionen 29–30
Bestellnummern: Optionen, Zubehör
6.2
und Ersatzteile
Optionen und Zubehör Bestellnummer
1)
132B0359
134B0792
132B0254
130B1107
132B0262
132B0363
132B0364
132B0365
132B0366
132B0368
132B0102
VLT® Memory Module MCM 102
VLT® Memory Module Programmer
MCM 101
VLT® Control Panel LCP 21 (Numerisch)
VLT® Control Panel LCP 102 (Grafisch)
Grafischer Bedieneinheitadapter 132B0281
VLT® Control Panel LCP (Blindabdeckung)
Umbausatz IP21/Typ 1, K1 132B0335
Umbausatz IP21/Typ 1, K2 132B0336
Umbausatz IP21/Typ 1, K3 132B0337
Umbausatz IP21/Typ 1, K4 132B0338
Umbausatz IP21/Typ 1, K5 132B0339
Adapterplatte, VLT® 2800 Größe A
Adapterplatte, VLT® 2800 Größe B
Adapterplatte, VLT® 2800 Größe C
Adapterplatte, VLT® 2800 Größe D
VLT® 24 V DC-Versorgung MCB 106
Fern-Einbausatz für LCP mit 3-m-Kabel
(10 ft)
LCP-Einbausatz ohne LCP 130B1117
1) Erhältlich ab Mitte 2017.
1)
Tabelle 6.2 Bestellnummern für Optionen und Zubehör
6
6
Tabelle 6.1 Typencode-Zeichenpositionen
Sie können mit dem webbasierten Antriebskonfigurator
den geeigneten Frequenzumrichter für Ihre Anwendung
zusammenstellen und erhalten dann den entsprechenden
Typencode. Der Antriebskonfigurator erzeugt automatisch
eine 8-stellige Bestellnummer, mit der Sie den Frequenzumrichter über eine Vertriebsniederlassung vor Ort
bestellen können.
Außerdem können Sie eine Projektliste mit mehreren
Produkten aufstellen und an ihren Danfoss-Verkaufsingenieur senden.
Der Antriebskonfigurator ist auf der globalen Internetseite
zu finden: vltconfig.danfoss.com.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 73
Page 76

Typencode und Auswahl
Ersatzteile Bestellnummer
VLT® Midi Drive Frequenzumrichter 280
Bestellnummern: Bremswiderstände
6.3
6
Beutel mit Zubehör, FC 280 Stecker 132B0350
Lüfter 50x20 IP21 PWM 132B0351
Lüfter 60x20 IP21 PWM 132B0352
Lüfter 70x20 IP21 PWM 132B0353
Lüfter 92x38 IP21 PWM 132B0371
Lüfter 120x38 IP21 PWM 132B0372
Klemmenabdeckung Baugröße K1 132B0354
Klemmenabdeckung Baugröße K2 132B0355
Klemmenabdeckung Baugröße K3 132B0356
Klemmenabdeckung Baugröße K4 132B0357
Klemmenabdeckung Baugröße K5 132B0358
Buskabel-Abschirmset, FC 280 132B0369
Abschirmset, Leistungs-I/O, K1 132B0373
Abschirmset, Leistungs-I/O, K2/K3 132B0374
Abschirmset, Leistungs-I/O, K4/K5 132B0375
VLT® Cassette control - Standard
VLT® Cassette control - CANopen
VLT® Cassette control - PROFIBUS
VLT® Cassette control - PROFINET
VLT® Cassette control - EtherNet/IP
VLT® Steuerkassette - POWERLINK
Tabelle 6.3 Bestellnummern für Ersatzteile
132B0345
132B0346
132B0347
132B0348
132B0349
132B0378
Danfoss bietet eine große Auswahl an unterschiedlichen
Bremswiderständen, die speziell auf unsere Frequenzumrichter abgestimmt sind. Informationen zur
Dimensionierung der Bremswiderstände finden Sie im
Abschnitt Kapitel 2.9.4 Steuerung mit Bremsfunktion. Dieser
Abschnitt listet die Bestellnummern für die Bremswiderstände auf. Der Widerstand des Bremswiderstands nach
Bestellnummer ist ggf. größer als R
. In diesem Fall kann
rec
das tatsächliche Bremsmoment kleiner als das maximal
verfügbare Bremsmoment des Frequenzumrichters sein.
74 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 77

Typencode und Auswahl Projektierungshandbuch
6.3.1 Bestellnummern: Bremswiderstände 10 %
NennleistungP
3-phasig
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
m (HO)
[kW (HP)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (HP)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,061
(0,080)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,262
(0,351)
0,354
(0,475)
0,492
(0,666)
0,677
(0,894)
0,945
(1,267)
1,297
(1,739)
1,610
(2,158)
1,923
(2,578)
Bestell-
nummer
3000 120 1,5 (16) 0,3 139
3001 120 1,5 (16) 0,4 131
3002 120 1,5 (16) 0,4 129
3004 120 1,5 (16) 0,5 132
3007 120 1,5 (16) 0,8 145
3008 120 1,5 (16) 0,9 131
3300 120 1,5 (16) 1,3 131
3335 120 1,5 (16) 1,9 128
3336 120 1,5 (16) 2,5 127
3337 120 1,5 (16) 3,3 132
3338 120 1,5 (16) 5,2 130
3339 120 1,5 (16) 6,7 129
3340 120 1,5 (16) 8,3 132
3357 120 1,5 (16) 10,1 128
Periode Leitungs-
querschni
1)
tt
2
[mm
(AWG)]
Thermische
s Relais
[A] [%]
Maximales
Bremsmome
nt mit
Widerstand
6
6
Tabelle 6.4 FC 280 - Netz: 3-phasig 380–480 V (T4), 10 % Arbeitszyklus
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 75
Page 78

Typencode und Auswahl
VLT® Midi Drive Frequenzumrichter 280
6
NennleistungP
3-phasig
[kW (HP)]
200–240 V
m (HO)
R
min
R
br. nom
[Ω] [Ω] [Ω]
R
rec
P
br avg
Bestell-
Periode Leitungs-
nummer
[kW (HP)] 175Uxxxx [s]
querschni
1)
tt
2
[mm
(AWG)]
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
0,030
(0,040)
0,045
(0,060)
0,062
(0,083)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,327
(0,439)
3006 120 1,5 (16) 0,6 140
3011 120 1,5 (16) 0,7 142
3016 120 1,5 (16) 0,8 143
3021 120 1,5 (16) 0,9 139
3026 120 1,5 (16) 1,6 143
3031 120 1,5 (16) 1,9 140
3326 120 1,5 (16) 3,5 145
Tabelle 6.5 FC 280 - Netz: 3-phasig 200–240 V (T2), 10 % Arbeitszyklus
1) Befolgen Sie stets die nationalen und lokalen Vorschriften zum Leitungsquerschnitt und zur Umgebungstemperatur.
Thermische
s Relais
[A] [%]
Maximales
Bremsmome
nt mit
Widerstand
76 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 79

Typencode und Auswahl Projektierungshandbuch
6.3.2 Bestellnummern: Bremswiderstände 40 %
NennleistungP
3-phasig
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
m (HO)
[kW (HP)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (HP)] 175Uxxxx [s]
0,127
(0,170)
0,191
(0,256)
0,260
(0,349)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,113
(1,491)
1,504
(2,016)
2,088
(2,799)
2,872
(3,850)
4,226
(5,665)
5,804
(7,780)
7,201
(9,653)
8,604
(11,534)
Bestell-
nummer
3101 120 1,5 (16) 0,4 139
3308 120 1,5 (16) 0,5 131
3309 120 1,5 (16) 0,7 129
3310 120 1,5 (16) 1 132
3311 120 1,5 (16) 1,4 145
3312 120 1,5 (16) 2,1 131
3313 120 1,5 (16) 2,7 131
3314 120 1,5 (16) 3,7 128
3315 120 1,5 (16) 5 127
3316 120 1,5 (16) 7,1 132
3236 120 2,5 (14) 11,5 130
3237 120 2,5 (14) 14,7 129
3238 120 4 (12) 19 132
3203 120 4 (12) 23 128
Periode Leitungs-
querschni
1)
tt
[mm2]
Thermisch
es Relais
[A] [%]
Maximales
Bremsmome
nt mit
Widerstand
6
6
Tabelle 6.6 FC 280 - Netz: 3-phasig 380–480 V (T4), 40 % Arbeitszyklus
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 77
Page 80
Typencode und Auswahl
VLT® Midi Drive Frequenzumrichter 280
6
NennleistungP
3-phasig
200–240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Tabelle 6.7 FC 280 - Netz: 3-phasig 200–240 V (T2), 40 % Arbeitszyklus
1) Befolgen Sie stets die nationalen und lokalen Vorschriften zum Leitungsquerschnitt und zur Umgebungstemperatur.
m (HO)
[kW (HP)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (HP)] 175Uxxxx [s]
0,129
(0,173)
0,192
(0,257)
0,261
(0,350)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,386
(1,859)
Bestell-
nummer
3096 120 1,5 (16) 0,8 140
3008 120 1,5 (16) 0,9 142
3300 120 1,5 (16) 1,3 143
3301 120 1,5 (16) 2 139
3302 120 1,5 (16) 2,7 143
3303 120 1,5 (16) 4,2 140
3305 120 1,5 (16) 6,8 145
Periode Leitungs-
querschni
1)
tt
2
[mm
(AWG)]
Thermische
s Relais
[A] [%]
Maximales
Bremsmome
nt mit
Widerstand
Bestellnummern: Sinusfilter
6.4
Leistungs- und Stromdaten des Frequenzumrichters Filternennstrom
[kW
(HP)]
– –
0,37
(0,5)
– – 1,1 (1,5) 3 1,1 (1,5) 2,8
0,55
(0,75)
0,75 (1) 4,2 2,2 (3) 5,3 2,2 (3) 4,8
1,1 (1,5) 6 3 (4) 7,2 3 (4) 6,3
1,5 (2) 6,8 – – – –
– – 4 (5,5) 9 4 (5,5) 8,2 10 9,5 7,5 6 130B2409 130B2444
2,2 (3) 9,6 5,5 (7,5) 12 5,5 (7,5) 11
3,7 (5) 15,2 7,5 (10) 15,5 7,5 (10) 14
– – 11 (15) 23 11 (15) 21 24 23 18 5 130B2412 130B2447
– – 15 (20) 31 15 (20) 27
– –
– – 22 (30) 42,5 22 (30) 40 48 45,5 36 5 130B2281 130B2307
[A]
200–240 V 200–240 V 200–240 V 50 Hz 60 Hz 100 Hz – IP00 IP20
2,2 0,75 (1) 2,2 0,75 (1) 2,1
3,2 1,5 (2) 3,7 1,5 (2) 3,4
[kW
(HP)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A]
1,2
1,7
37
[kW
(HP)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A] [A] [A] [A] [kHz] – –
1,1
1,6
34
2,5 2,5 2 6 130B2404 130B2439– –
4,5 4 3,5 6 130B2406 130B2441
8 7,5 5,5 6 130B2408 130B2443
17 16 13 6 130B2411 130B2446
38 36 28,5 5 130B2413 130B2448
Taktfreque
1)
nz
Bestellnummer
Tabelle 6.8 Sinusfilter für Frequenzumrichter mit 380-480 V
1) Die Taktfrequenz kann aufgrund der Ausgangsdrehzahl (geringer als 60 % der normalen Drehzahl), Überlast oder Übertemperatur auf 3 kHz
reduziert werden. Der Kunde kann die Änderung des Geräuschs vom Filter bemerken.
78 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 81
Typencode und Auswahl Projektierungshandbuch
Die empfohlenen Parametereinstellungen für den Betrieb mit Sinusfilter sind wie folgt:
Stellen Sie [1] Sinusfilter in Parameter 14-55 Ausgangsfilter ein.
•
Stellen Sie die Werte für die jeweiligen Filter in Parameter 14-01 Taktfrequenz ein. Wenn [1] Sinusfilter in
•
Parameter 14-55 Ausgangsfilter eingestellt ist, werden die Optionen, die in Parameter 14-01 Taktfrequenz geringer als
5 kHz sind, automatisch entfernt.
6.5 Bestellnummern: dU/dt-Filter
Leistungs- und Stromdaten des Frequenzumrichters Filternennstrom Bestellnummer
380@ 60 Hz
380-440 V 441-480 V
[kW (HP)] [A] [kW (HP)] [A] [A] [A] – – –
11 (15) 23 11 (15) 21
15 (20) 31 15 (20) 27
18,5 (25) 37 18,5 (25) 34
22 (30) 42,5 22 (30) 40
Tabelle 6.9 dU/dt-Filter für Frequenzumrichter mit 380-480 V
200–400/440
@ 50 Hz
44 40 130B2835 130B2836 130B2837
460/480 @
60 Hz
500/525 @
50 Hz
IP00 IP20 IP54
6
6
6.6 Bestellnummern: Externe EMV-Filter
Für K1S2 und K2S2 mit in Tabelle 6.10 aufgelisteten externen EMV-Filtern ist eine maximale Länge der abgeschirmten Kabel
von 100 m (328 ft) gemäß EN/IEC 61800-3 C2 (EN 55011 A1) oder 40 m (131,2 ft) gemäß EN/IEC 61800-3 C1 (EN 55011 B)
möglich.
Für K1T4, K2T4 und K3T4 mit in Tabelle 6.10 aufgelisteten externen EMV-Filtern ist eine maximale Länge der abgeschirmten
Kabel von 100 m (328 ft) gemäß EN/IEC 61800-3 C2 (EN 55011 A1) oder 25 m (82 ft) gemäß EN/IEC 61800-3 C1 (EN 55011 B)
möglich.
EMV-Filter – Bestellnummer
Frequenzumrichter – Baugröße K1S2 K2S2 K1T4 K2T4 K3T4
Abmessungen A [mm (in)] 250 (9,8) 312,5 (12,3) 250 (9,8) 312,5 (12,3)
Abmessungen a1 [mm (in)] 234 (9,2) 303 (11,9) 234 (9,2) 303 (11,9)
Abmessungen a2 [mm (in)] 19,5 (0,77) 21,3 (0,84) 19,5 (0,77) 21,3 (0,84)
Abmessungen am [mm (in)] 198 (7,8) 260 (10,2) 198 (7,8) 260 (10,2)
Abmessungen B [mm (in)] 75 (2,95) 90 (3,54) 75 (2,95) 90 (3,54) 115 (4,53)
Abmessungen b1 [mm (in)] 55 (2,17) 70 (2,76) 55 (2,17) 70 (2,76) 90 (3,54)
Abmessungen bm [mm (in)] 60 (2,36) 70 (2,76) 60 (2,36) 70 (2,76) 90 (3,54)
Abmessungen C [mm (in)] 50 (1,97)
Abmessungen c1 [mm (in)] 22,7 (0,89)
Abmessungen D1 [mm (in)] Ø5,3 (Ø0,21)
Abmessungen Dm [mm (in)] M4 M5 M4 M5
Abmessungen e1 [mm (in)] 6,5 (0,26) 5 (0,20) 6,5 (0,26) 5 (0,20)
Abmessungen f1 [mm (in)] 10 (0,39) 12,5 (0,49)
Abmessungen fm [mm (in)] 7,5 (0,30)
Befestigungsschrauben für EMV-Filter M5
Befestigungsschrauben für Frequenzum-
richter
Gewicht [kg (lb)] 1,10 (2,43)
134B5466 134B5467 134B5463 134B5464 134B5465
10 (0,39) 7,5 (0,30) 10 (0,39)
M4 M5 M4 M5
1,50 (3,31) 1,20 (2,65) 1,90 (4,19) 2,10 (4,63)
12,5 (0,49)
Tabelle 6.10 Details des EMV-Filters für K1–K3
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 79
Page 82
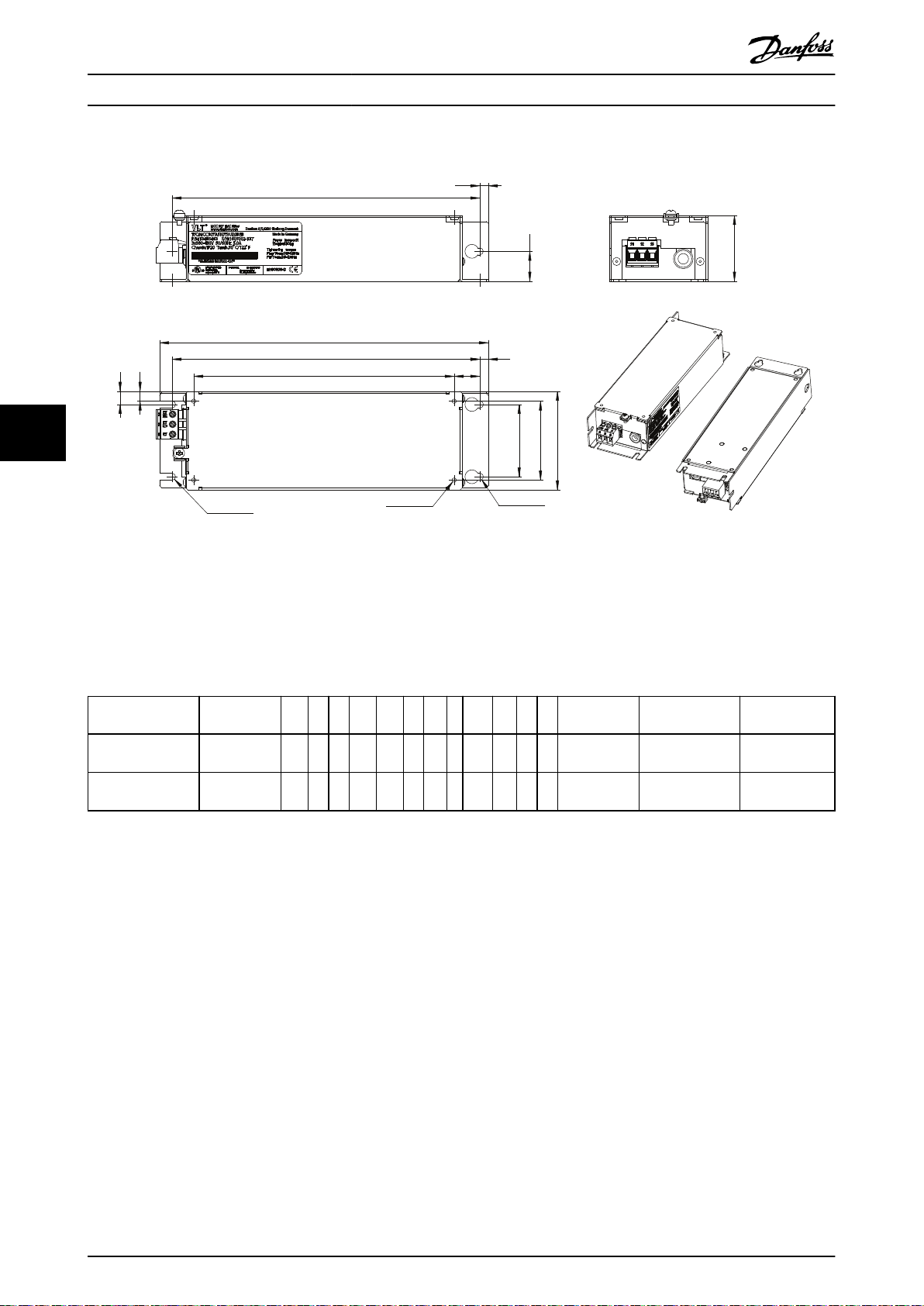
130BF872.10
a1
a1
A
am
a2
e1
e1
c1
f1
fm
6-D1
4-Dm
6-D1
b1
bm
B
C
6
Typencode und Auswahl
VLT® Midi Drive Frequenzumrichter 280
Abbildung 6.2 Abmessungen des EMV-Filters für K1–K3
Für K4T4 und K5T4 mit in Tabelle 6.11 aufgelisteten externen EMV-Filtern ist eine maximale Länge der abgeschirmten Kabel
von 100 m (328 ft) gemäß EN/IEC 61800-3 C2 (EN 55011 A1) oder 25 m (82 ft) gemäß EN/IEC 61800-3 C1 (EN 55011 B)
möglich.
Leistung [kW (HP)]
Größe 380-480 V
11–15
(15–20)
18,5–22
(25–30)
Typ A B C D E F G H I J K L1
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Tabelle 6.11 Details des EMV-Filters für K4–K5
Drehmoment
[Nm (in-lb)]
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Gewicht [kg (lb)] -Bestellnummer
1,2
(2,6)
1,4
(3,1)
132B0246
132B0247
80 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 83
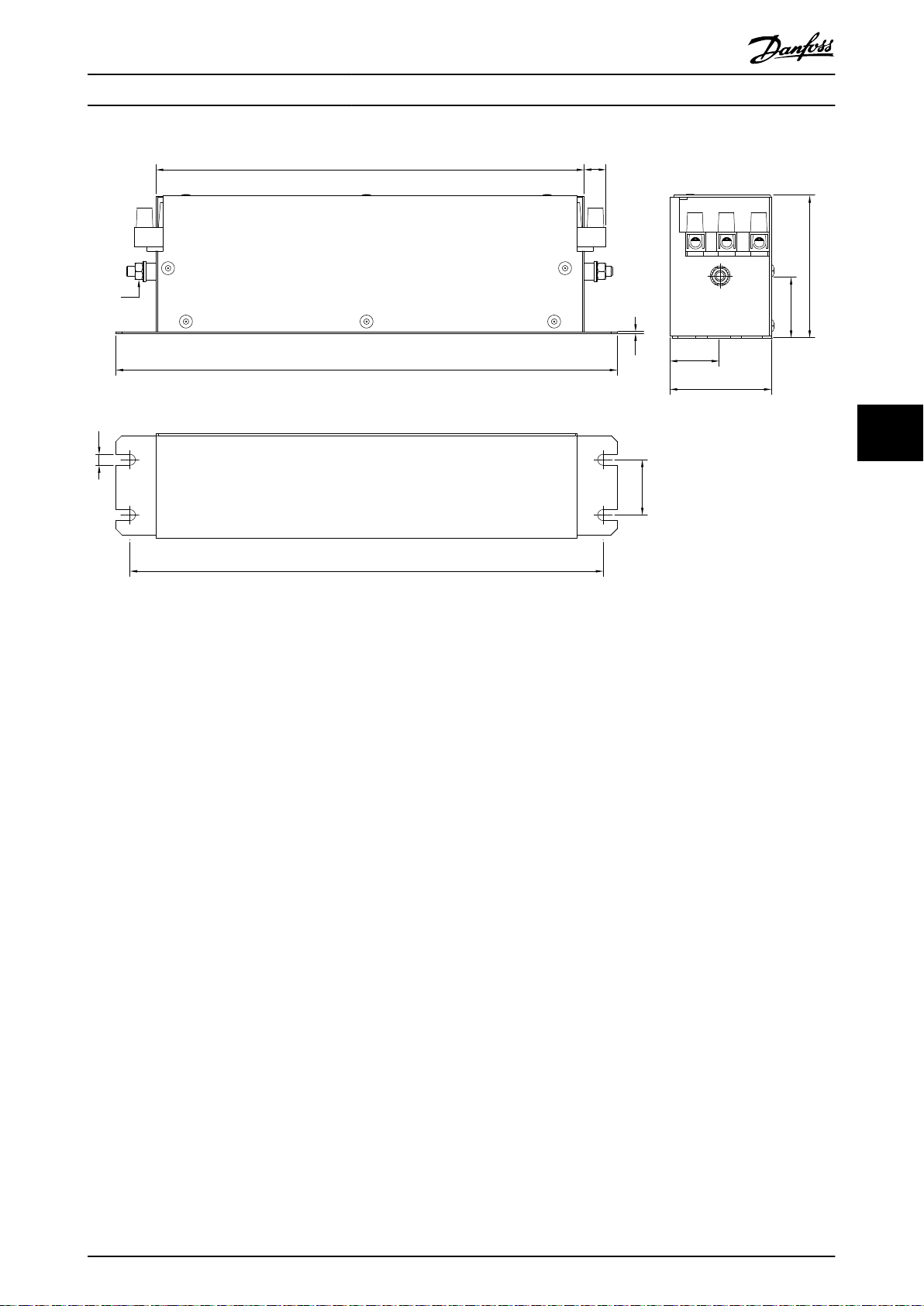
H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Typencode und Auswahl Projektierungshandbuch
6
6
Abbildung 6.3 Abmessungen des EMV-Filters für K4–K5
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 81
Page 84
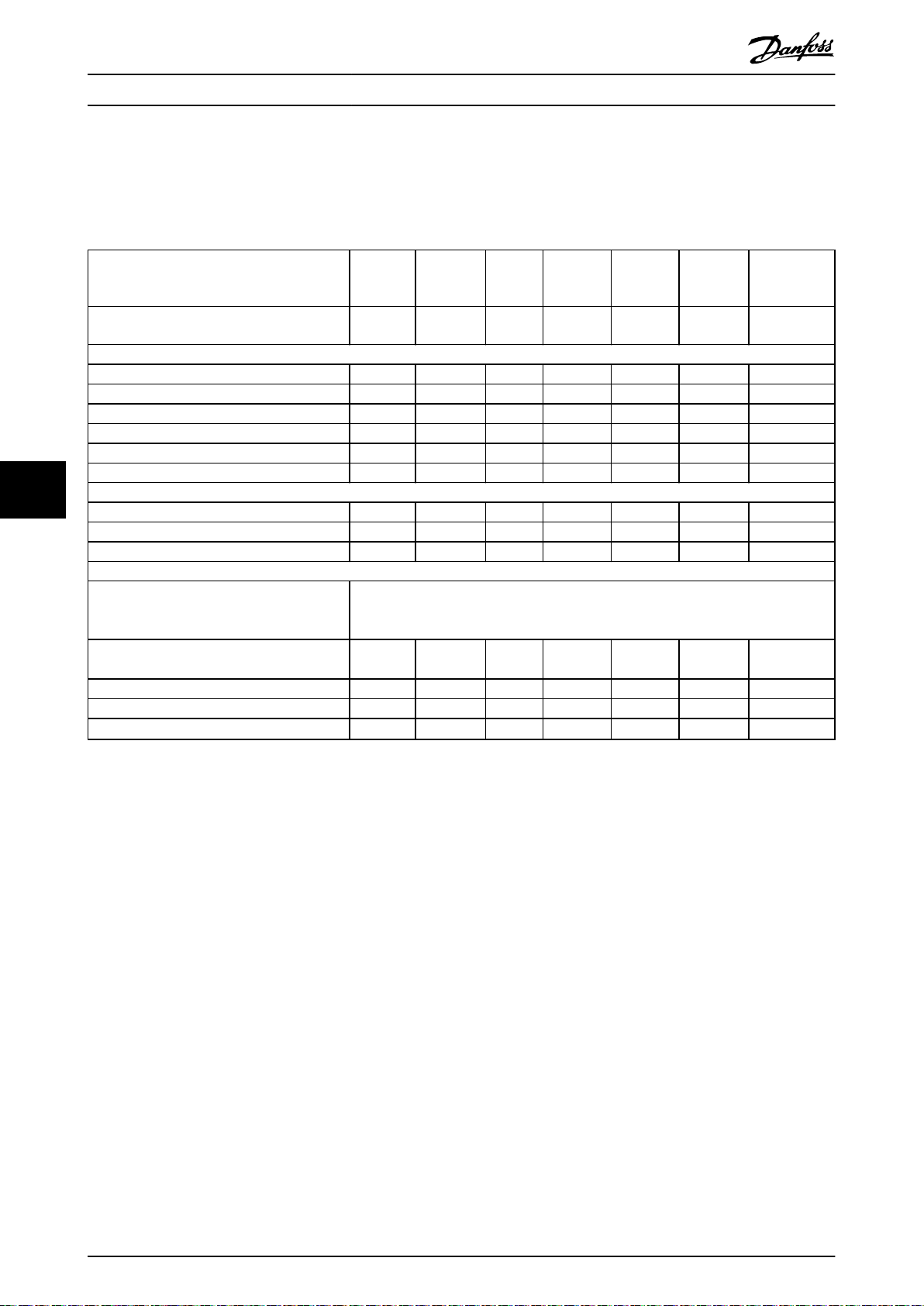
Technische Daten
7 Technische Daten
7.1 Elektrische Daten
VLT® Midi Drive Frequenzumrichter 280
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
Ausgangsstrom
Wellenleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Dauerbetrieb (3 x 441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Überlast (60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Dauerbetrieb kVA (400 V AC) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Dauerbetrieb kVA (480 V AC) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
77
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Dauerbetrieb (3 x 441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Überlast (60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
(AWG)]
Typische Verlustleistung bei maximaler
Nennlast [W]
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Wirkungsgrad [%]
1)
2)
2
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Tabelle 7.1 Netzversorgung 3 x 380–480 V AC
82 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 85
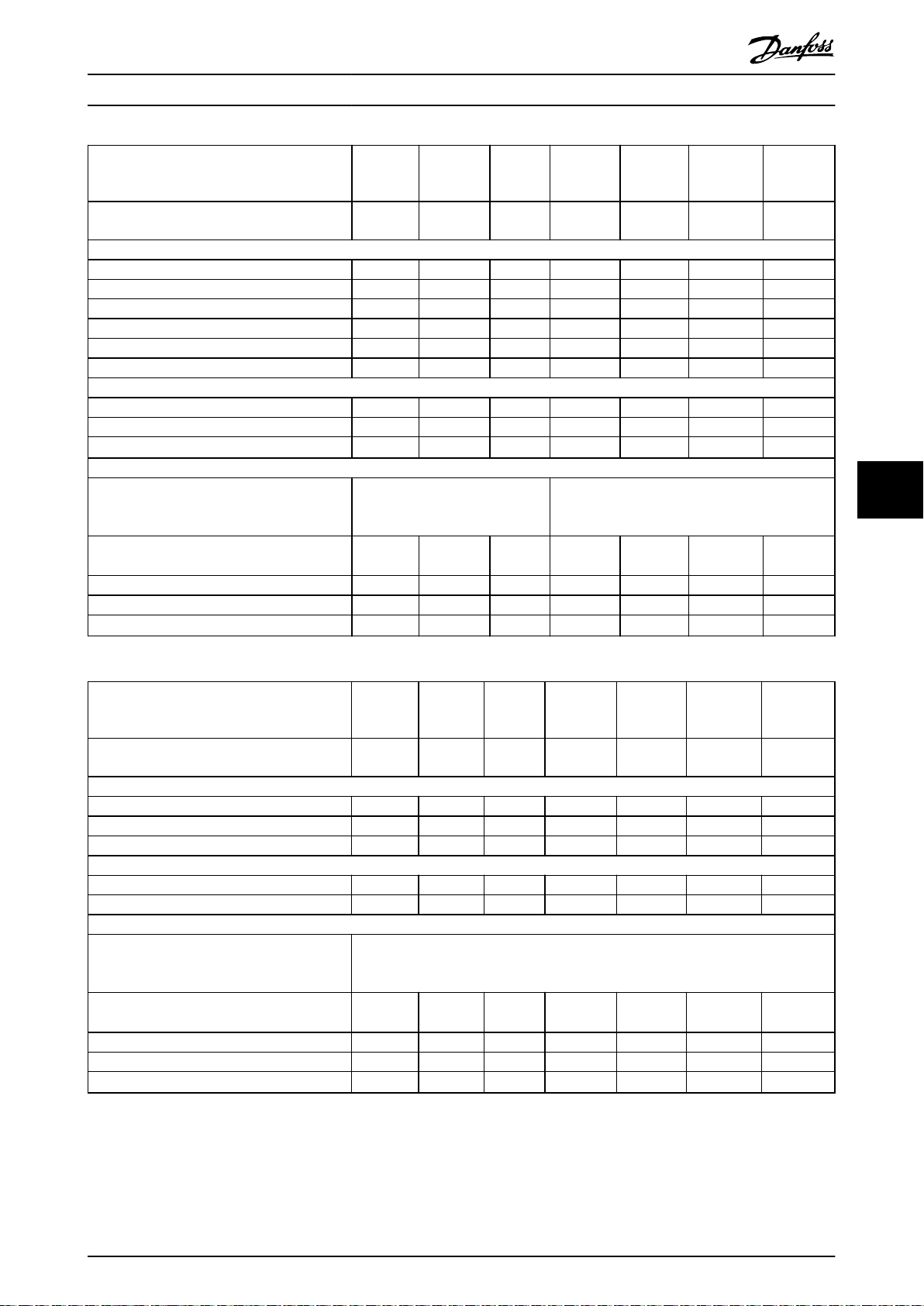
Technische Daten Projektierungshandbuch
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
P4K0
4
(5,4)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Ausgangsstrom
Wellenleistung 4 5,5 7,5 11 15 18,5 22
Dauerbetrieb (3 x 380–440 V) [A] 9 12 15,5 23 31 37 42,5
Dauerbetrieb (3 x 441–480 V) [A] 8,2 11 14 21 27 34 40
Überlast (60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Dauerbetrieb kVA (400 V AC) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Dauerbetrieb kVA (480 V AC) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Dauerbetrieb (3 x 441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Überlast (60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
2
4 (12) 16 (6)
(AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
115,5 157,5 192,8 289,5 393,4 402,8 467,5
Gewicht, Schutzart IP20 [kg (lb)] 3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Gewicht, Schutzart IP21 [kg (lb)] 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Wirkungsgrad [%]
2)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
7 7
Tabelle 7.2 Netzversorgung 3 x 380–480 V AC
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Überlast (60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Dauerbetrieb kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Max. Eingangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Überlast (60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
2
4 (12)
(AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
29,4 38,5 51,1 60,7 76,1 96,1 147,5
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Wirkungsgrad [%]
2)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabelle 7.3 Netzversorgung 3 x 200-240 V AC
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 83
Page 86
Technische Daten
VLT® Midi Drive Frequenzumrichter 280
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ 1) K1 K1 K1 K1 K1 K2
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Überlast (60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Dauerbetrieb kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Max. Eingangsstrom
Dauerbetrieb (1 x 200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Überlast (60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz und Motor)
[mm2 (AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
77
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Wirkungsgrad [%]
Tabelle 7.4 Netzversorgung 1x200-240 V AC
1) Die typische Verlustleistung gilt für Nennlastbedingungen und sollte innerhalb von ±15 % liegen (Toleranz bezieht sich auf variierende
Spannungs- und Kabelbedingungen).
Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE2/IE3). Motoren mit niedrigerem Wirkungsgrad tragen ebenfalls zur Verlustleistung im Frequenzumrichter bei, und Motoren mit hohem Wirkungsgrad reduzieren die Verlustleistung.
Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann die
Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Weitere Optionen und
Anschlusslasten können die Verluste um bis zu 30 W erhöhen (typisch sind allerdings nur 4 W zusätzlich, bei einer vollständig belasteten
Steuerkarte bzw. einem vollständig belasteten Feldbus).
Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter www.danfoss.com/vltenergyefficiency.
2) Gemessen mit 50 m (164 ft) abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Die Energieeffizienzklasse finden Sie unter
Kapitel 7.4 Umgebungsbedingungen. Informationen zu Teillastverlusten siehe www.danfoss.com/vltenergyefficiency.
2)
PK37
0,37
(0,5)
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,74)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Netzversorgung
7.2
Netzversorgung (L1/N, L2/L, L3)
Versorgungsklemmen (L1/N, L2/L, L3)
Versorgungsspannung 380–480 V: -15 % (-25 %)1) bis +10 %
Versorgungsspannung 200–240 V: -15 % (-25 %)1) bis +10 %
1) Der Frequenzumrichter kann bei einer Eingangsspannung von -25 % mit reduzierter Leistung laufen. Die maximale Ausgangsleistung des Frequenzumrichters beträgt 75 % bei einer Eingangsspannung von -25 % bzw. 85 % bei einer Eingangsspannung
von -15 %.
Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des Frequenzumrichters wird
kein volles Drehmoment erreicht.
Netzfrequenz 50/60 Hz ±5 %
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥0,9 bei Nennlast
Verschiebungs-Leistungsfaktor (cos ϕ) Nahe 1 (>0,98)
Schalten am Netzeingang (L1/N, L2/L, L3) (Anzahl der Netz-Einschaltungen) ≤7,5 kW (10 HP) max. 2 x/Min.
Schalten am Netzeingang (L1/N, L2/L, L3) (Anzahl der Netz-Einschaltungen) 11-22 kW (15–30 HP) max. 1 x/Min.
84 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 87
Technische Daten Projektierungshandbuch
7.3 Motorausgang und Motordaten
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
Ausgangsfrequenz 0–500 Hz
Ausgangsfrequenz bei VVC+-Betrieb 0–200 Hz
Schalten am Ausgang Unbegrenzt
Rampenzeit 0,01–3600 s
Drehmomentkennlinie
Startmoment (konstantes Drehmoment) maximal 160 %/60 s
Überlastmoment (konstantes Drehmoment) maximal 160 %/60 s
Anlaufstrom maximal 200 %/1 s
Drehmomentanstiegzeit in VVC+-Modus (unabhängig von fsw) Maximal 50 ms
1) Prozentwert bezieht sich auf das Nenndrehmoment. Bei Frequenzumrichtern mit einem Leistungsbereich von 11–22 kW (15–30
hp) beträgt dieser 150 %.
1)
1)
7.4 Umgebungsbedingungen
Umgebungsbedingungen
IP-Klasse IP20 (optional IP21/NEMA Typ 1)
Vibrationstest, alle Baugrößen 1,14 g
Luftfeuchtigkeit 5–95 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb
Umgebungstemperatur (bei Schaltmodus DPWM)
- mit Leistungsreduzierung Maximal 55 °C (131 °F)
- bei vollem konstanten Ausgangsstrom Maximal 45 °C (113 °F)
Min. Umgebungstemperatur bei Volllast 0 °C (32 °F)
Min. Umgebungstemperatur bei reduzierter Leistung -10 °C (14 °F)
Temperatur bei Lagerung/Transport -25 bis +65/70 °C (-13 bis +149/158 °F)
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m (3280 ft)
Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m (9243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EMV-Normen, Störaussendung
EMV-Normen, Störfestigkeit
Energieeffizienzklasse
1) Siehe Kapitel 7.12 Besondere Betriebsbedingungen für:
Leistungsreduzierung aufgrund von hoher Umgebungstemperatur
•
Leistungsreduzierung aufgrund von niedrigem Luftdruck
•
2) Um bei der PROFIBUS-, PROFINET-, EtherNet/IP- und POWERLINK-Variante von VLT
Überhitzung zu schützen, vermeiden Sie die volle digitale/analoge I/O-Last bei einer Umgebungstemperatur von mehr als 45 °C
°
F).
(113
3) Die Umgebungstemperatur für K1S2 mit Leistungsreduzierung beträgt maximal 50 °C (122 °F).
4) Die Umgebungstemperatur für K1S2 bei vollem konstantem Ausgangsstrom beträgt maximal 40 °C (104 °F).
5) Bestimmt gemäß EN 50598-2 bei:
Nennlast
•
90 % der Nennfrequenz
•
Taktfrequenz-Werkseinstellung.
•
Schaltmodus-Werkseinstellung
•
Offener Typ: Umgebungslufttemperatur 45 °C (113 °F).
•
Typ 1 (NEMA-Satz): Umgebungstemperatur 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
®
Midi Drive FC 280 die Steuerkarte vor
1)2)3)
IE2
7 7
4)
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 85
Page 88
Technische Daten
7.5 Kabelspezifikationen
VLT® Midi Drive Frequenzumrichter 280
Kabellängen
Maximale Motorkabellänge, mit Abschirmung 50 m (164 ft)
Maximale Motorkabellänge, ohne Abschirmung 75 m (246 ft)
Maximaler Querschnitt für Steuerklemmen, flexibler/starrer Draht 2,5 mm2/14 AWG
Mindestquerschnitt für Steuerklemmen 0,55 mm2/30 AWG
Maximale STO-Eingangskabellänge, ungeschirmt 20 m (66 ft)
1) Leistungskabelquerschnitte, siehe Tabelle 7.1, Tabelle 7.2, Tabelle 7.3 und Tabelle 7.4.
Bei Konformität mit EN 55011 1A und EN 55011 1B müssen Sie das Motorkabel in bestimmten Fällen kürzen. Nähere Angaben
finden Sie unter Kapitel 2.6.2 EMV-Emission.
1)
7.6 Steuereingang/-ausgang und Steuerdaten
Digitaleingänge
Klemme Nr.
Logik PNP oder NPN
77
Spannungsniveau 0–24 V DC
Spannungsniveau, logisch 0 PNP <5 V DC
Spannungsniveau, logisch 1 PNP >10 V DC
Spannungsniveau, logisch 0 NPN >19 V DC
Spannungsniveau, logisch 1 NPN <14 V DC
Maximale Spannung am Eingang 28 V DC
Pulsfrequenzbereich 4–32 kHz
(Arbeitszyklus) minimale Pulsbreite 4,5 ms
Eingangswiderstand, R
1) Sie können die Klemme 27 auch als Ausgang programmieren.
i
18, 19, 271), 29, 32, 33
Ca. 4 kΩ
STO-Eingänge
Klemme Nr. 37, 38
Spannungsniveau 0–30 V DC
Spannungsniveau, niedrig <1,8 V DC
Spannungsniveau, hoch > 20 V DC
Maximale Spannung am Eingang 30 V DC
Minimaler Eingangsstrom (pro Testpunkt) 6 mA
Analogeingänge
Anzahl der Analogeingänge 2
Klemme Nr. 531), 54
Betriebsarten Spannung oder Strom
Betriebsartwahl Software
Spannungsniveau 0–10 V
Eingangswiderstand, Ri Ca. 10 kΩ
Höchstspannung -15 V bis +20 V
Strombereich 0/4 bis 20 Ma (skalierbar)
Eingangswiderstand, Ri ca. 200 Ω
Maximaler Strom 30 mA
Auflösung der Analogeingänge 11 Bit
Genauigkeit der Analogeingänge Maximale Abweichung 0,5 % der Gesamtskala
Bandbreite 100 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage/Schutzkleinspannung)
und anderen Hochspannungsklemmen getrennt.
1) Klemme 53 unterstützt nur die Einstellung Spannung, und Sie können diese auch als Digitaleingang verwenden.
86 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 89
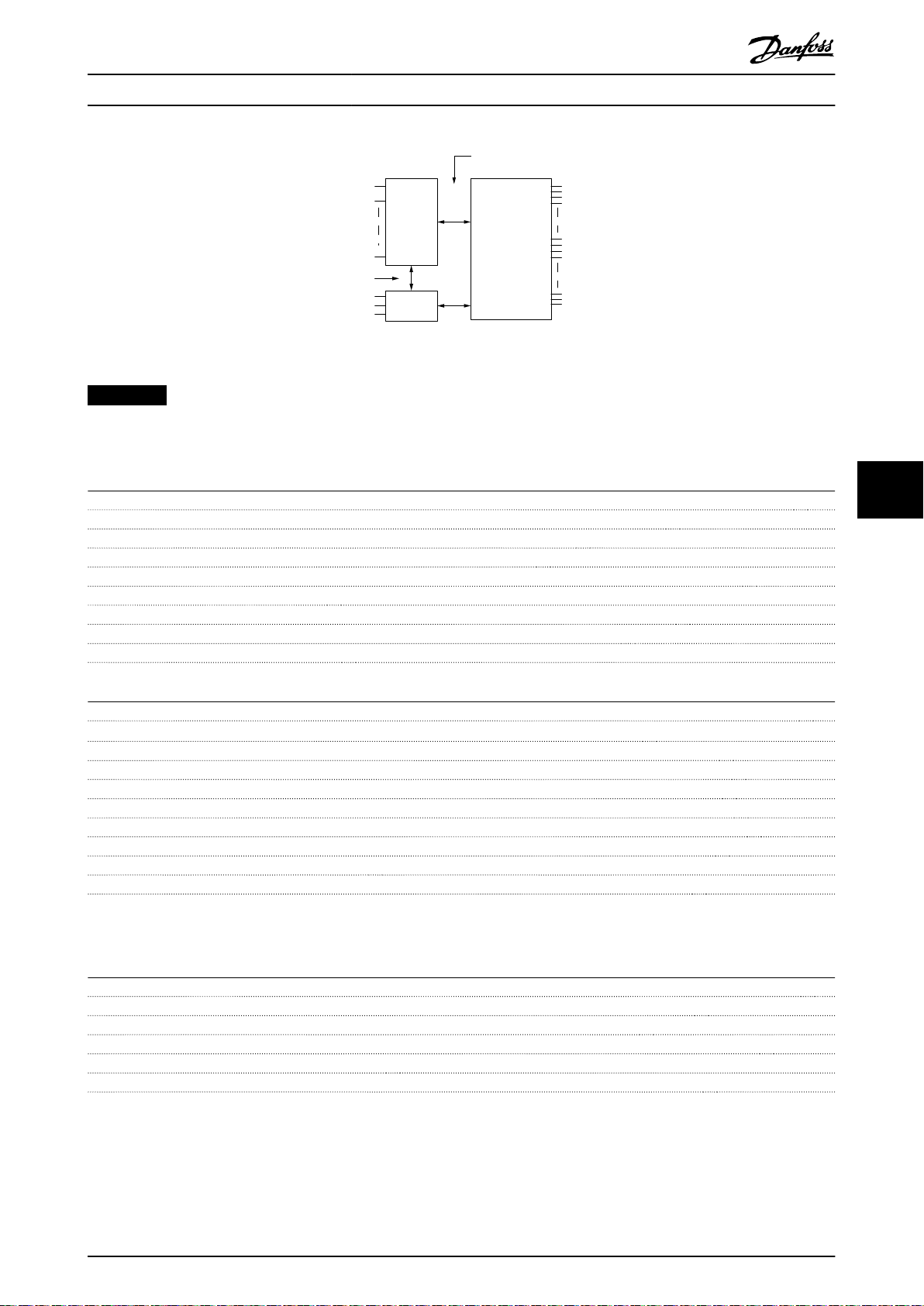
Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Technische Daten Projektierungshandbuch
Abbildung 7.1 Galvanische Trennung
HINWEIS
GROSSE HÖHENLAGE
Bei Höhenlagen über 2000 m über NN ziehen Sie bitte die Danfoss-Hotline bezüglich PELV zurate.
Pulseingänge
Programmierbare Pulseingänge 2
Klemmennummer Puls 29, 33
Maximale Frequenz an Klemme 29, 33 32 kHz (Gegentakt)
Maximale Frequenz an Klemme 29, 33 5 kHz (offener Kollektor)
Minimale Frequenz an Klemme 29, 33 4 Hz
Spannungsniveau Siehe Abschnitt zu Digitaleingängen
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
i
Ca. 4 kΩ
Pulseingangsgenauigkeit Maximale Abweichung: 0,1 % der Gesamtskala
Digitalausgänge
Programmierbare Digital-/Pulsausgänge 1
Klemme Nr. 27
Spannungsniveau am Digital-/Pulsausgang 0–24 V
Maximaler Ausgangsstrom (Körper oder Quelle) 40 mA
Maximale Last am Pulsausgang 1 kΩ
Maximale kapazitive Last am Pulsausgang 10 nF
Min. Ausgangsfrequenz am Pulsausgang 4 Hz
Max. Ausgangsfrequenz am Pulsausgang 32 kHz
Genauigkeit am Pulsausgang Maximale Abweichung: 0,1 % der Gesamtskala
Auflösung am Pulsausgang 10 Bit
1) Sie können die Klemme 27 auch als Eingang programmieren.
Der Digitalausgang ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
7 7
1)
Analogausgang
Anzahl programmierbarer Analogausgänge 1
Klemme Nr. 42
Strombereich am Analogausgang 0/4–20 mA
Maximale Widerstandslast zum Bezugspotential am Analogausgang 500 Ω
Genauigkeit am Analogausgang Maximale Abweichung: 0,8 % der Gesamtskala
Auflösung am Analogausgang 10 Bit
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV – Schutzkleinspannung, Protective extra low voltage) und
anderen Hochspannungsklemmen getrennt.
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 87
Page 90

Technische Daten
Steuerkarte, 24 V DC-Ausgang
Klemme Nr. 12, 13
Maximale Last 100 mA
Die 24-V-DC-Versorgung ist von der Versorgungsspannung (PELV) galvanisch getrennt. Jedoch hat die Versorgungsspannung das
gleiche Potenzial wie die analogen und digitalen Ein- und Ausgänge.
Steuerkarte, +10-V-DC-Ausgang
Klemme Nr. 50
Ausgangsspannung 10,5 V ±0,5 V
Maximale Last 15 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Die serielle RS485-Schnittstelle ist von der Versorgungsspannung (PELV, Schutzkleinspannung – Protective extra low voltage)
galvanisch getrennt.
77
Steuerkarte, serielle USB-Schnittstelle
USB-Standard 1,1 (Full Speed)
USB-Buchse USB-Stecker Typ B
Der Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.
Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspannungsklemmen getrennt.
Der USB-Erdanschluss ist nicht galvanisch vom Schutzleiter getrennt. Benutzen Sie nur einen isolierten Laptop als PC-Verbindung
zum USB-Anschluss am Frequenzumrichter.
VLT® Midi Drive Frequenzumrichter 280
Relaisausgang
Programmierbare Relaisausgänge 1
Relais 01 01–03 (NC/(Öffner), 01–02 (NO/Schließer)
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 250 V AC, 3 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-02 (NO/Schließer) (induktive Last bei bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 30 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 01-02 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 250 V AC, 3 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-03 (NC/Öffner) (induktive Last bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 30 V DC, 2 A
Minimaler Belastungsstrom der Klemme an 01-03 (NC/Öffner), 01-02 (NO/Schließer) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947 Teil 4 und 5
Die Relaiskontakte sind durch verstärkte Isolierung vom Rest der Schaltung galvanisch getrennt.
Steuerkartenleistung
Abtastintervall 1 ms
Steuerungseigenschaften
Auflösung der Ausgangsfrequenz bei 0-500 Hz ±0,003 Hz
System-Reaktionszeit (Klemmen 18, 19, 27, 29, 32 und 33) ≤2 ms
Drehzahlregelbereich (ohne Rückführung) 1:100 der Synchrondrehzahl
Drehzahlgenauigkeit (ohne Rückführung) ±0,5 % der Nenndrehzahl
Drehzahlgenauigkeit (mit Rückführung) ±0,1 % der Nenndrehzahl
Alle Angaben zu Steuerungseigenschaften basieren auf einem vierpoligen Asynchronmotor.
88 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 91
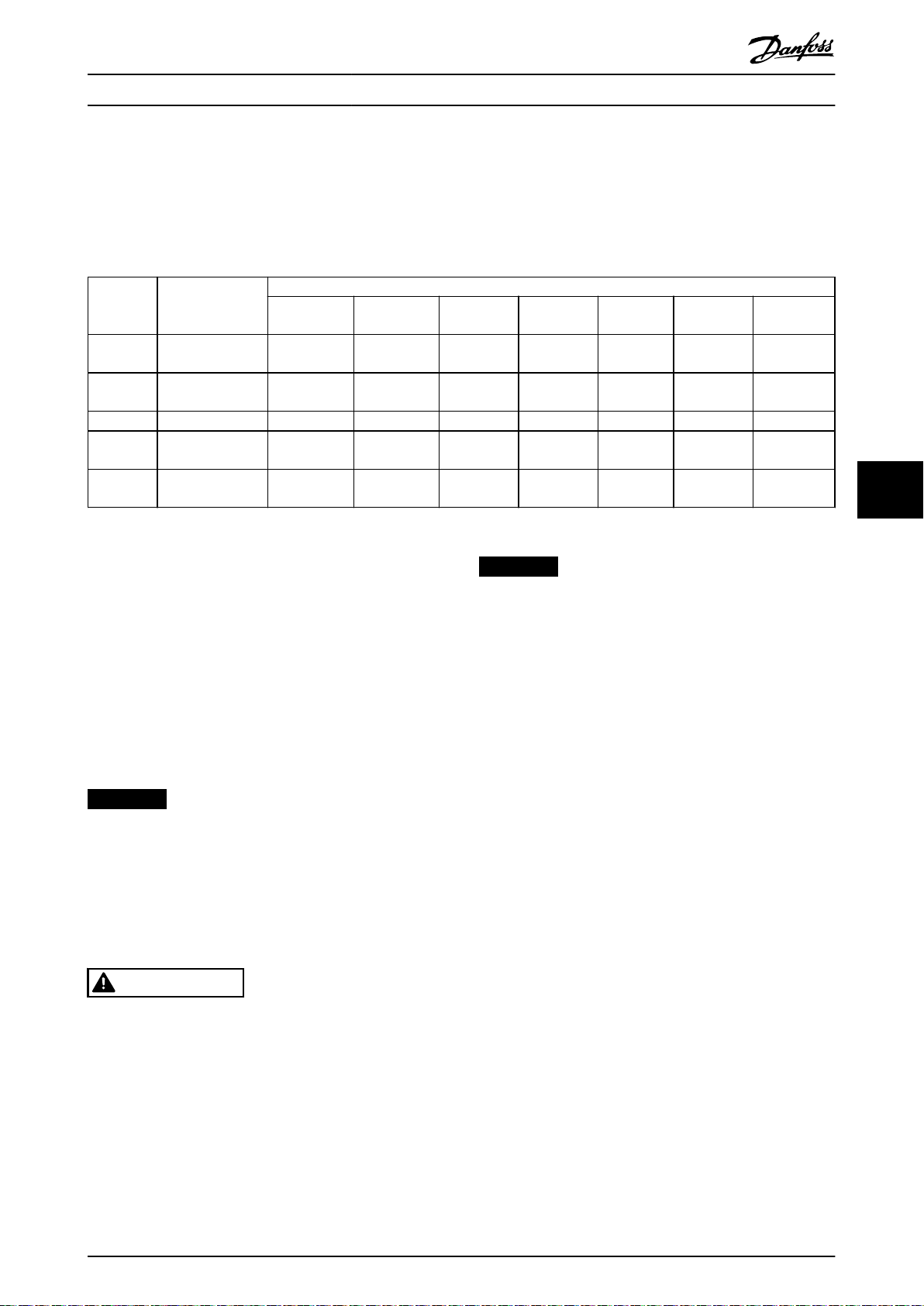
Technische Daten Projektierungshandbuch
7.7 Anzugsdrehmomente für Anschlüsse
Stellen Sie sicher, dass Sie beim Festziehen aller elektrischen Verbindungen die korrekten Anzugsdrehmomente verwenden.
Ein zu geringes oder zu hohes Anzugsdrehmoment führt zu Problemen an den elektrischen Anschlüssen. Verwenden Sie
einen Drehmomentschlüssel, um das richtige Drehmoment zu erzielen. Empfohlener Steckplatzschraubendrehertyp: SZS 0,6
x 3,5 mm.
Drehmoment [Nm (in-lb)]
Baugröße
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabelle 7.5 Anzugsdrehmomente
Leistung
[kW (HP)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Netz Motor
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Gleichstrom-
anschluss
Bremse Masse
Steuerung/
Regelung
Relais
7 7
7.8 Sicherungen und Trennschalter
Verwenden Sie versorgungsseitig Sicherungen und/oder
Trennschalter als Schutz vor Personen- und Sachschäden
für den Fall einer Bauteilstörung im Inneren des Frequenzumrichters (erster Fehler).
Schutz des Abzweigkreises
Sie müssen alle Abzweigkreise in Installationen
(einschließlich Schaltanlagen und Maschinen) in Übereinstimmung mit nationalen/internationalen Vorschriften mit
einem Kurzschluss- und Überstromschutz versehen.
HINWEIS
Integrierter elektronischer Kurzschlussschutz bietet
keinen Schutz des Abzweigkreises. Sorgt für Schutz des
Abzweigkreises gemäß den nationalen und lokalen
Richtlinien und Vorschriften.
Tabelle 7.6 enthält eine Auflistung der empfohlenen
getesteten Sicherungen.
VORSICHT
GEFAHR VON PERSONENSCHÄDEN UND
SACHSCHÄDEN
Im Falle einer Fehlfunktion kann das Nichtbeachten
dieser Empfehlungen zu Gefahren für den Bediener und
Schäden am Frequenzumrichter und anderen Geräten
führen.
Wählen Sie Sicherungen anhand der Empfeh-
•
lungen aus. Auf diese Weise können Sie
mögliche Schäden am Frequenzumrichter auf
Schäden innerhalb des Geräts beschränken.
HINWEIS
SACHSCHÄDEN
Die Verwendung von Sicherungen bzw. Trennschaltern
ist zur Übereinstimmung mit IEC 60364 für CE zwingend
erforderlich. Das Nichtbeachten der Schutzempfehlungen
kann zu Schäden am Frequenzumrichter führen.
Danfoss empfiehlt die Verwendung von Sicherungen und
Trennschaltern in Tabelle 7.6, um Konformität mit UL 508C
oder IEC 61800-5-1 sicherzustellen. Verwenden Sie für
Nicht-UL-Anwendungen Trennschalter für den Schutz einer
Schaltung, die eine maximale Stromstärke von 50.000 A
(symmetrisch) bei einer Spannung von 240 V/400 V
zulassen. Der Kurzschlussnennstrom für Frequenzumrichter
(SCCR) ist beim Schutz durch T-Klasse-Sicherungen für die
Verwendung in einer Schaltung mit mehr als 100.000 A
240 V/480 V geeignet.
eff
eff
,
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 89
Page 92

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Technische Daten
VLT® Midi Drive Frequenzumrichter 280
Baugröße Leistung [kW (HP)]
0,37 (0,5)
0,55–0,75
K1
Dreiphasig 380-480 V
77
Dreiphasig 200-240 V
Einphasig 200-240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20 JJN-25
(0,74–1,0)
1,1–1,5
(1,48–2,0)
2,2 (3,0) JJS-15
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
Nicht-UL-
Sicherung
gG-10
gG-20
gG-25
gG-50 – JJS-50
gG-80 – JJS-80
gG-20
gG-25
gG-20
Nicht-UL-
Trennschalter
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
UL-Sicherung
(Bussmann, Klasse T)
JJS-6
JJS-10
JJS-25
JJN-6
JJN-10
JJN-20
JJN-25
JJN-6
JJN-10
JJN-20
Tabelle 7.6 Sicherungen und Trennschalter
Wirkungsgrad
7.9
Wirkungsgrad des Frequenzumrichters (η
Die Last am Frequenzumrichter hat kaum Auswirkung auf
seinen Wirkungsgrad. In der Regel ist der Wirkungsgrad bei
der Motornennfrequenz f
derselbe. Diese Regel gilt auch
M,N
dann, wenn der Motor 100 % des Wellennenndrehmoments oder, im Fall von Teillasten, nur 75 % liefert.
Das heißt auch, dass sich der Wirkungsgrad des Frequenzumrichters selbst dann nicht ändert; wenn Sie eine andere
U/f-Kennlinie wählen.
Dennoch haben die U/f-Kennlinien Einfluss auf den
Wirkungsgrad des Motors.
Der Wirkungsgrad nimmt leicht ab, wenn die eingestellte
Taktfrequenz den Standardwert übersteigt. Der
Wirkungsgrad nimmt auch leicht ab, wenn die
Netzspannung 480 V beträgt oder das Motorkabel länger
als 30 m ist.
Berechnung des Frequenzumrichter-Wirkungsgrads
Berechnen Sie den Wirkungsgrad des Frequenzumrichters
bei unterschiedlichen Lasten auf Grundlage von
Abbildung 7.2. Multiplizieren Sie den Faktor in Abbildung 7.2
mit dem spezifischen Wirkungsgradfaktor, der in den
90 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
)
VLT
Spezifikationstabellen in Kapitel 7.1 Elektrische Daten zu
finden ist.
Abbildung 7.2 Typische Wirkungsgradkurven
Motorwirkungsgrad (η
MOTOR
)
Der Wirkungsgrad eines an den Frequenzumrichter
angeschlossenen Motors hängt von der Magnetisierungsstufe ab. In der Regel ist der Wirkungsgrad genauso
gut wie bei Netzbetrieb. Der Motorwirkungsgrad ist
außerdem vom Motortyp abhängig.
Im Nenndrehmomentbereich von 75–100 % ist der
Motorwirkungsgrad praktisch konstant, sowohl wenn dieser
Page 93

Technische Daten Projektierungshandbuch
vom Frequenzumrichter geregelt, als auch wenn er direkt
am Netz betrieben wird.
Bei kleinen Motoren haben die U/f-Kennlinien nur einen
minimalen Einfluss auf den Wirkungsgrad. Allerdings
ergeben sich beachtliche Vorteile bei Motoren mit
mindestens 11 kW (14,8 HP).
Im Allgemeinen hat die Taktfrequenz keinen Einfluss auf
den Wirkungsgrad von kleinen Motoren. Bei Motoren mit
mindestens 11 kW (14,8 hp) wird der Wirkungsgrad um 1–
2 % erhöht, da die Form der Sinuskurve des Motorstroms
bei hoher Taktfrequenz fast perfekt ist.
Wirkungsgrad des Systems (η
SYSTEM
)
Zur Berechnung des Systemwirkungsgrads wird der
Wirkungsgrad des Frequenzumrichters (η
Motorwirkungsgrad (η
η
= η
SYSTEM
VLT
x η
MOTOR
) multipliziert:
MOTOR
) mit dem
VLT
7.10 Störgeräusche
Störgeräusche von Frequenzumrichtern haben drei
Ursachen:
DC-Zwischenkreisdrosseln.
•
Eingebaute Kühllüfter
•
EMV-Filterdrossel.
•
Die typischen, im Abstand von 1 m zum Frequenzumrichter gemessenen Werte:
Baugröße [kW]
K1
0,37–2,2
(0,5–3,0)
K2
3,0–5,5 (4,0–7,5)
K3
7,5 (10)
K4
11–15 (15–20)
K5
18,5–22 (25–30)
Tabelle 7.7 Typische Messwerte
dU/dt-Bedingungen
7.11
80 % Lüfterdrehzahl [dBA]
41,4 42,7 33
50,3 54,3 32,9
51 54,2 33
59 61,1 32,9
64,6 65,6 32,9
Wenn ein Transistor in der Frequenzumrichterbrücke
schaltet, steigt die Spannung im Motor im Verhältnis
dU/dt, abhängig von folgenden Faktoren:
Der Motorkabeltyp.
•
Der Querschnitt des Motorkabels.
•
Die Länge des Motorkabels.
•
Egal, ob Motorkabel mit oder ohne Abschirmung.
•
Induktivität.
•
Volle Lüfterd-
rehzahl [dBA]
Hintergrund-
rauschen
Die Selbstinduktivität verursacht ein Übersteuern U
PEAK
in
der Motorspannung, bevor sie sich auf einem von der
Spannung im Zwischenkreis bestimmten Pegel stabilisiert.
Anstiegzeit und Spitzenspannung U
beeinflussen die
PEAK
Lebensdauer des Motors. Eine zu hohe Spitzenspannung
schädigt Motoren ohne Phasentrennungspapier in den
Wicklungen. Je länger das Motorkabel, desto höher sind
Anstiegzeit und Spitzenspannung.
Das Schalten der IGBT-Transistoren verursacht eine Spitzenspannung an den Motorklemmen. Der VLT® Midi Drive FC
280 ist konform mit IEC 60034-25 im Hinblick auf Motoren,
die für die Regelung durch Frequenzumrichter ausgelegt
sind. Der FC 280 erfüllt ebenfalls IEC 60034-17 im Hinblick
auf Normmotoren, die von Frequenzumrichtern geregelt
werden.
Die folgenden dU/dt-Daten werden auf der Motorklemmenseite gemessen:
Netzspa
Kabellänge
[m (ft)]
5 (16,4) 400 0,0904 0,718 6,41
50 (164) 400 0,292 1,05 2,84
5 (16,4) 480 0,108 0,835 6,20
50 (164) 480 0,32 1,25 3,09
Tabelle 7.8 dU/dt-Daten für FC 280, 2,2 kW (3,0 HP),
3x380–480 V
Kabellänge
[m (ft)]
5 (16,4) 400 0,096 0,632 5,31
50 (164) 400 0,306 0,99 2,58
5 (16,4) 480 0,118 0,694 4,67
50 (164) 480 0,308 1,18 3,05
Tabelle 7.9 dU/dt-Daten für FC 280, 5,5 kW (7,5 HP),
3x380–480 V
Kabellänge
[m (ft)]
5 (16,4) 400 0,128 0,732 4,54
50 (164) 400 0,354 1,01 2,27
5 (16,4) 480 0,134 0,835 5,03
50 (164) 480 0,36 1,21 2,69
Tabelle 7.10 dU/dt-Daten für FC 280, 7,5 kW (10 HP),
3x380–480 V
nnung
[V]
Netzspa
nnung
[V]
Netzspa
nnung
[V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
7 7
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 91
Page 94

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BE889.10
(1)
(2)
Technische Daten
VLT® Midi Drive Frequenzumrichter 280
Netzspa
Kabellänge
[m (ft)]
5 (16,4) 400 0,26 0,84 2,57
50 (164) 400 0,738 1,07 1,15
5 (16,4) 480 0,334 0,99 2,36
50 (164) 480 0,692 1,25 1,44
Tabelle 7.11 dU/dt-Daten für FC 280, 15 kW (20 HP),
3x380–480 V
Kabellänge
[m (ft)]
5 (16,4) 400 0,258 0,652 2,01
50 (164) 400 0,38 1,03 2,15
5 (16,4) 480 0,258 0,752 2,34
50 (164) 480 0,4 1,23 2,42
77
Tabelle 7.12 dU/dt-Daten für FC 280, 22 kW (30 HP),
3x380–480 V
Kabellänge
[m (ft)]
5 (16,4) 240 0,0712 0,484 5,44
50 (164) 240 0,224 0,594 2,11
Tabelle 7.13 dU/dt-Daten für FC 280, 1,5 kW (2,0 HP),
3x200–240 V
nnung
[V]
Netzspa
nnung
[V]
Netzspa
nnung
[V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Kabellänge
[m (ft)]
5 (16,4) 240 0,112 0,368 2,64
50 (164) 240 0,116 0,362 2,51
Tabelle 7.17 dU/dt-Daten für FC 280, 2,2 kW (3,0 HP),
1x200–240 V
7.12 Besondere Betriebsbedingungen
Unter einigen besonderen Bedingungen, bei denen der
Betrieb des Frequenzumrichters schwieriger ist, müssen Sie
die Leistungsreduzierung berücksichtigen. Bei bestimmten
Bedingungen muss die Leistungsreduzierung manuell
erfolgen.
Unter anderen Bedingungen führt der Frequenzumrichter
bei Bedarf automatisch eine Leistungsreduzierung durch.
Die Leistungsreduzierung soll das Funktionieren in
kritischen Situationen sicherstellen, in denen die
Alternative eine Abschaltung sein könnte.
7.12.1 Manuelle Leistungsreduzierung
Manuelle Leistungsreduzierung müssen Sie in folgenden
Fällen in Betracht ziehen:
•
•
Netzspa
nnung
[V]
Anstiegzeit
[μs]
U
PEAK
[kV]
dU/dt
[kV/μs]
Luftdruck – für Installationen in Höhenlagen über
1000 m (3281 ft).
Motordrehzahl – bei Dauerbetrieb mit niedriger
Drehzahl in Anwendungen mit konstantem
Netzspa
Kabellänge
[m (ft)]
5 (16,4) 240 0,072 0,468 5,25
50 (164) 240 0,208 0,592 2,28
nnung
[V]
Anstiegzeit
[μs]
U
PEAK
[kV]
dU/dt
[kV/μs]
Drehmoment.
Umgebungstemperatur – über 45 °C (113 °F),
•
Einzelheiten finden Sie unter Abbildung 7.3 bis
Abbildung 7.12.
Tabelle 7.14 dU/dt-Daten für FC 280, 2,2 kW (3,0 HP),
3x200–240 V
Netzspa
Kabellänge
[m (ft)]
5 (16,4) 240 0,092 0,526 4,56
50 (164) 240 0,28 0,6 1,72
Tabelle 7.15 dU/dt-Daten für FC 280, 3,7 kW (5,0 HP),
3x200–240 V
Kabellänge
[m (ft)]
5 (16,4) 240 0,088 0,414 3,79
50 (164) 240 0,196 0,593 2,41
Tabelle 7.16 dU/dt-Daten für FC 280, 1,5 kW (2,0 HP),
1x200–240 V
92 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
nnung
[V]
Netzspa
nnung
[V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.3 K1T4 Leistungsreduzierungskurve
Page 95

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE890.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE891.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE892.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE893.10
(1) Output Current
(2) Switching Frequency [kHz]
Technische Daten Projektierungshandbuch
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.4 K2T4 Leistungsreduzierungskurve
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.6 K4T4 Leistungsreduzierungskurve
7 7
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.7 K5T4 Leistungsreduzierungskurve
Abbildung 7.5 K3T4 Leistungsreduzierungskurve
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 93
Page 96
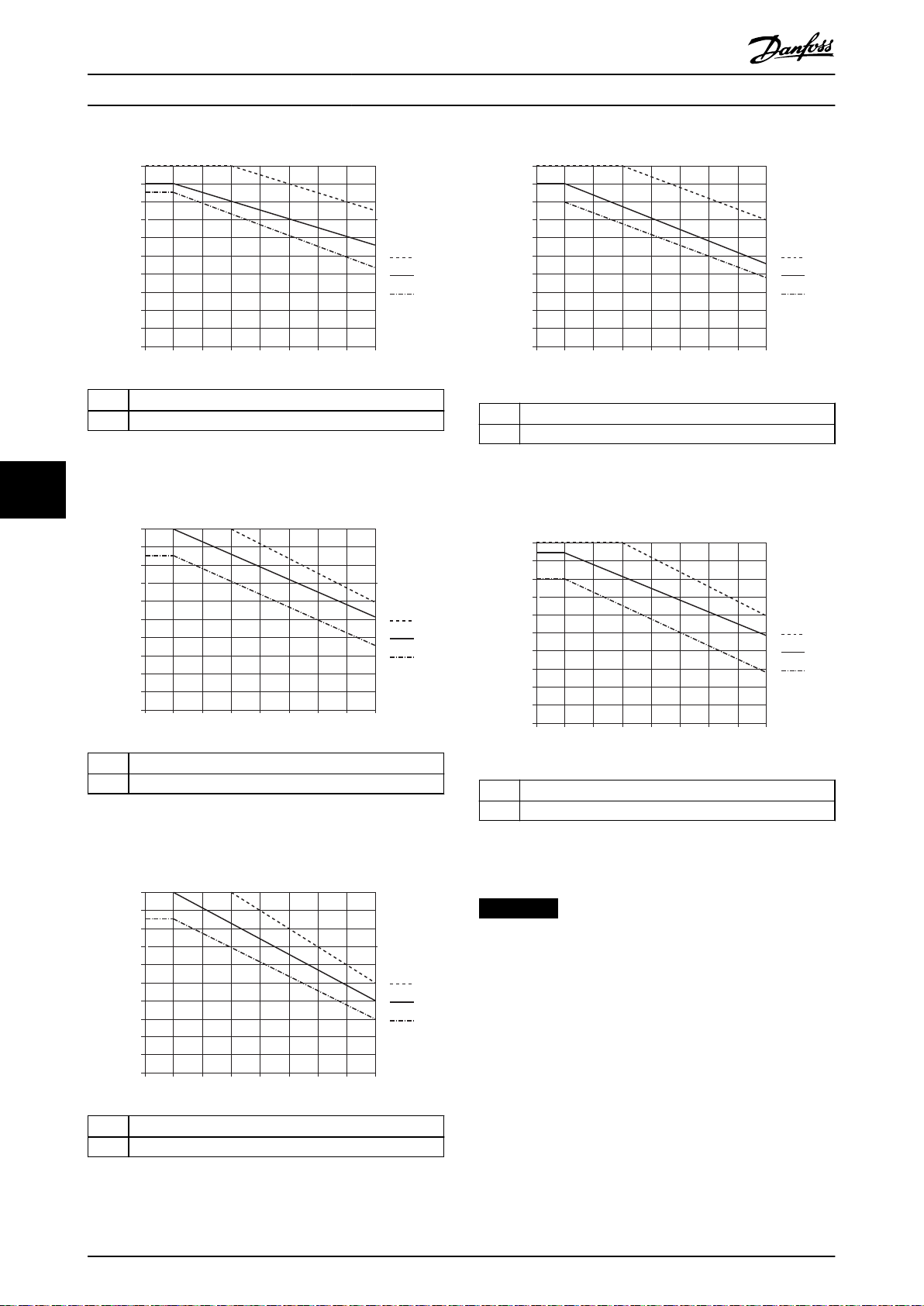
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF104.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF105.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF106.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Technische Daten
VLT® Midi Drive Frequenzumrichter 280
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.8 K1T2 Leistungsreduzierungskurve
Abbildung 7.11 K1S2 Leistungsreduzierungskurve
77
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.9 K2T2 Leistungsreduzierungskurve
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
(1) Ausgangsstrom
(2) Taktfrequenz [kHz]
Abbildung 7.10 K3T2 Leistungsreduzierungskurve
94 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Abbildung 7.12 K2S2 Leistungsreduzierungskurve
HINWEIS
Die Nenntaktfrequenz beträgt 6 kHz für K1–K3, 5 kHz für
K4–K5.
Page 97
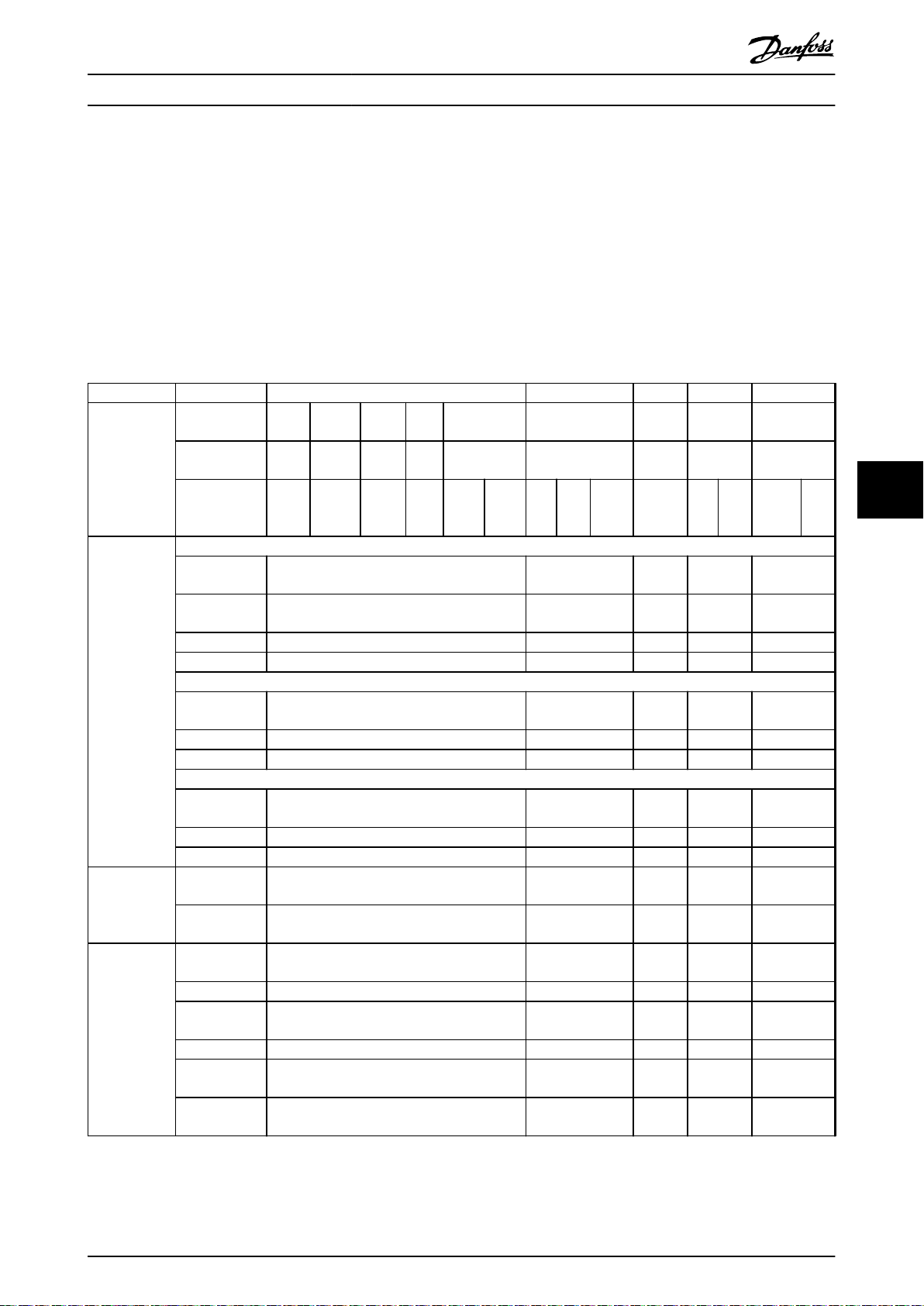
Technische Daten Projektierungshandbuch
7.12.2 Automatische Leistungsreduzierung
Der Frequenzumrichter prüft beständig, ob die folgenden Parameter ein kritisches Niveau aufweisen:
Kritisch erhöhte Temperatur am Kühlkörper.
•
Hohe Motorbelastung.
•
Niedrige Motordrehzahl.
•
Schutzsignale (Überspannung/Unterspannung, Überstrom, Erdschluss und Kurzschluss) werden ausgelöst.
•
Als Reaktion auf einen kritischen Wert passt der Frequenzumrichter die Taktfrequenz an.
7.13 Baugrößen, Nennleistungen und Abmessungen
Baugröße K1 K2 K3 K4 K5
Leistungsgröß
e [kW (HP)]
Abmessungen
[mm (in)]
Gewicht
[kg (lb)]
Bohrungen
[mm (in)]
1-phasig
200–240 V
3-phasig
200–240 V
3-phasig
380–480 V
Höhe A1 210 (8,3) 272,5 (10,7)
Höhe A2 278 (10,9) 340 (13,4)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Höhe A 338,5 (13,3) 395 (15,6)
Breite B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Tiefe C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Höhe A 294 (11,6) 356 (14)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 mit unterer Kabeleinführungsabdeckung (ohne obere Abdeckung)
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 mit IP21/UL/Typ 1-Satz
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
)
2,2
(3,0)
2,2
(3,0)
4
(5,5)
5,5
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
(14,1)
(10,1)
(14,3)
(10,2)
(0,26)
(0,22)
(0,36)
425 (16,7) 520 (20,5)
357
391 (15,4) 486 (19,1)
4,6
8,2 (18,1) 11,5 (25,4)
6,5
10,5 (23,1) 14,0 (30,9)
260
6,5
5,5
9,2
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
– –
317,5
(12,5)
379,5
(14,9)
297,5
(11,7)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
7 7
Tabelle 7.18 Baugrößen, Nennleistungen und Abmessungen
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 95
Page 98
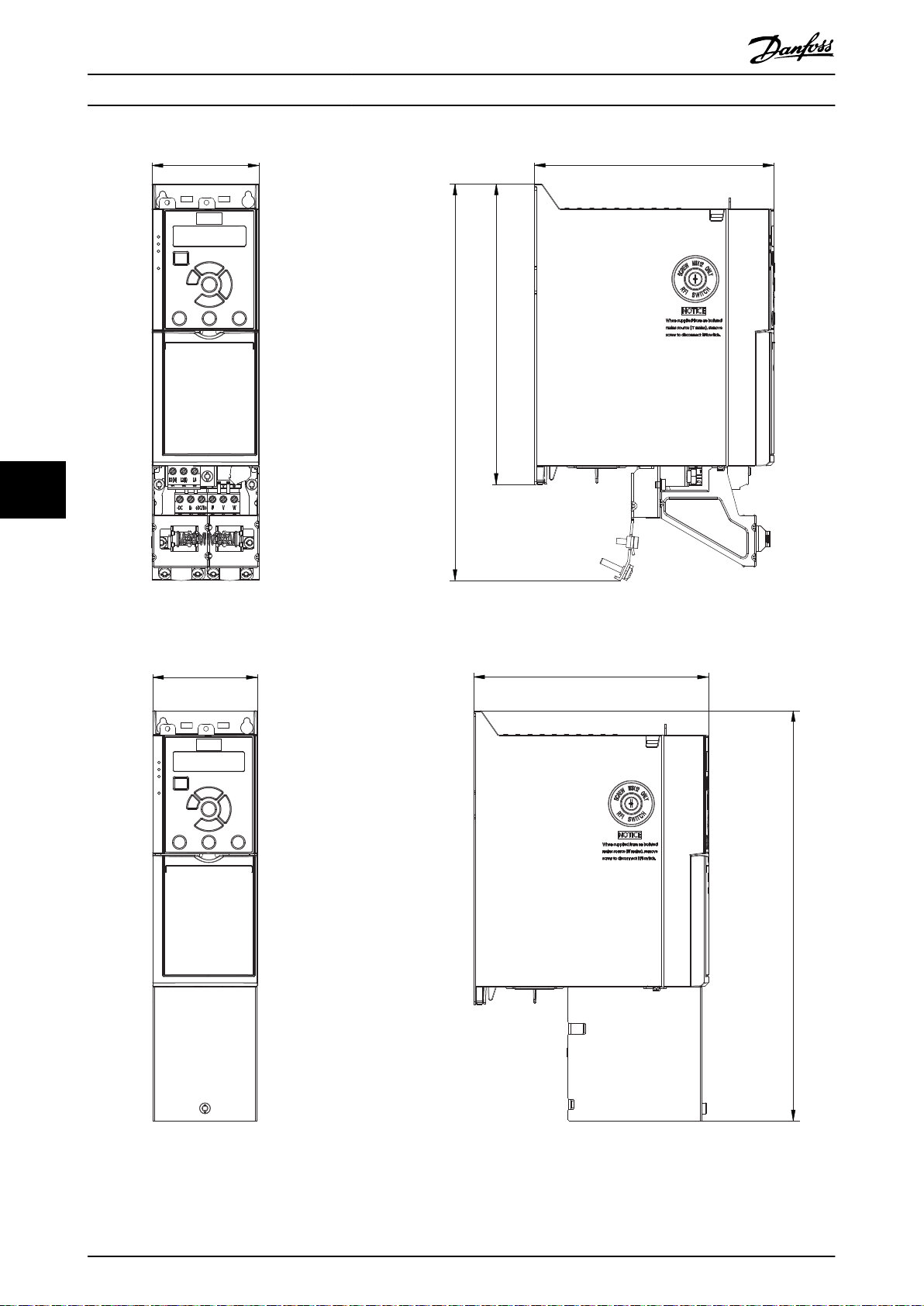
130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Technische Daten
VLT® Midi Drive Frequenzumrichter 280
77
Abbildung 7.13 Standard mit Abschirmblech
Abbildung 7.14 Standard mit unterer Kabeleinführungsabdeckung (ohne obere Abdeckung)
96 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
Page 99
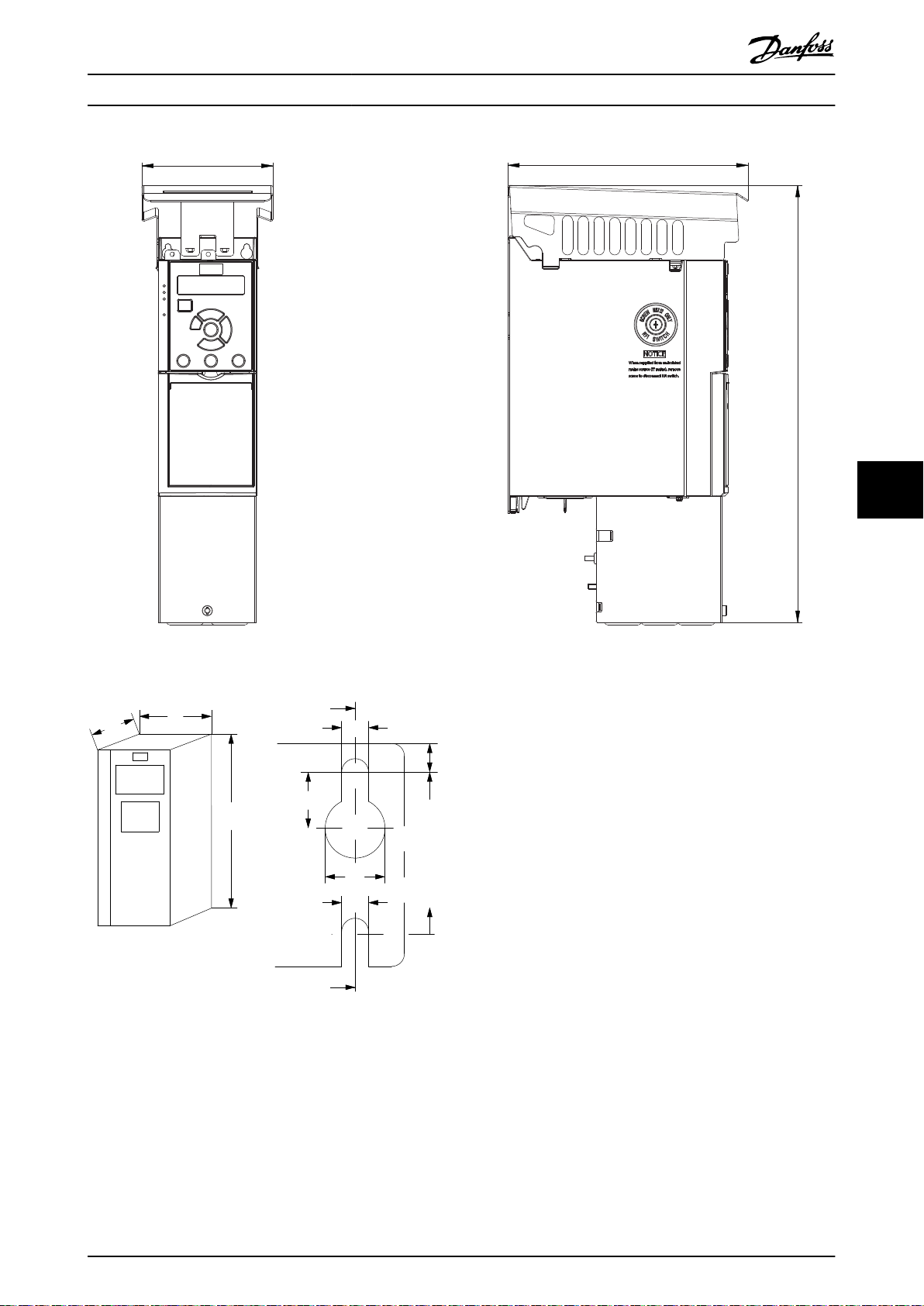
B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Technische Daten Projektierungshandbuch
7 7
Abbildung 7.15 Standard mit IP21/UL/Typ 1-Satz
Abbildung 7.16 Bohrungen oben und unten
MG07B303 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. 97
Page 100

Index
VLT® Midi Drive Frequenzumrichter 280
Index
A
Ableitstrom............................................................................................. 42
Abschaltung.............................................................................................. 8
Alarm quittieren.................................................................................... 20
AMA.............................................................................................................. 6
AMA mit angeschlossener Kl. 27..................................................... 50
Analoger Istwert................................................................................... 24
Analogsollwert...................................................................................... 24
Anstiegzeit.............................................................................................. 91
Arbeitszyklus für Aussetzbetrieb....................................................... 7
Aus- und Einschaltzyklus...................................................................... 7
Ausgänge
Analogausgang............................................................................ 6, 87
Digitalausgang.................................................................................. 87
Ausgangsfrequenz halten................................................................. 70
Ausgangsfrequenz speichern............................................................. 5
Ausgangsstrom..................................................................................... 87
Automatische Motoranpassung........................................................ 6
Eingänge
Analogeingang............................................................................. 6, 86
Digitaleingang........................................................................... 20, 86
Pulseingang....................................................................................... 87
Elektronisches Thermorelais............................................................... 7
Siehe auch ETR
EMV............................................................................................................ 85
EMV-Emission – Einführung.............................................................. 38
EMV-Filter................................................................................................ 16
EMV-Immunitätsanforderungen..................................................... 40
EMV-Prüfergebnis................................................................................. 39
EMV-Richtlinie.......................................................................................... 8
EMV-Schutzmaßnahmen................................................................... 56
Energieeffizienz....................................................................... 82, 83, 84
Energieeffizienzklasse......................................................................... 85
Entladezeit................................................................................................. 9
Erdung............................................................................................... 14, 15
ETR......................................................................................................... 7, 48
Siehe auch Elektronisches Thermorelais
Exportkontrollvorschriften.................................................................. 9
Extremer Betriebszustand................................................................. 47
B
Besondere Betriebsbedingungen.................................................. 92
Bestellung
DU/dt.................................................................................................... 79
Sinusfilter............................................................................................ 78
Bremsfunktion....................................................................................... 45
Bremsleistung.................................................................................... 6, 45
Bremswiderstand...................................................................... 6, 44, 74
Bussollwert.............................................................................................. 24
C
CE-Zeichen................................................................................................ 8
D
Datentyp, unterstützt.......................................................................... 59
DC-Bremse.............................................................................................. 70
Drehmomentregler
Drehmomentkennlinie.................................................................. 85
Drehmomentregelung................................................................... 18
Drehzahlsollwert................................................................................... 50
E
Eingang
Anschluss............................................................................................ 15
Leistung............................................................................................... 15
Strom.................................................................................................... 15
F
FC-Profil
FC-Profil............................................................................................... 69
Fehlerstromschutzschalter.................................................................. 7
Festdrehzahl JOG............................................................................. 5, 70
Festsollwert............................................................................................. 24
Filter
DU/dt-.................................................................................................. 46
Sinus-.................................................................................................... 46
Frequenzkorrektur Auf/Ab................................................................ 23
Frequenzumrichter-Profil
Frequenzumrichter mit Modbus RTU....................................... 57
Protokollübersicht........................................................................... 57
Funktionscode....................................................................................... 65
G
Geerdete Dreieckschaltung.............................................................. 16
H
Halteregister lesen (03 Hex).............................................................. 68
Hardware-Konfiguration.................................................................... 56
I
IEC 61800-3...................................................................................... 16, 85
IND............................................................................................................. 59
Index (IND).............................................................................................. 59
Interner Stromgrenzenregler in Betriebsart VVC+................... 20
98 Danfoss A/S © 05/2017 Alle Rechte vorbehalten. MG07B303
 Loading...
Loading...