


ENGINEERING TOMORROW
Guida alla Programmazione
VLT® HVAC Basic Drive FC 101
www.danfoss.it/vlt-drives
Sommario Guida alla Programmazione
Sommario
1 Introduzione
1.1 Scopo del manuale
1.2 Versione del documento e del software
1.3 Simboli di sicurezza
1.4 Precauzioni di sicurezza
1.5 Risorse aggiuntive
1.6 Denizioni
1.7 Descrizione collegamenti elettrici
2 Programmazione
2.1 Introduzione
2.2 Pannello di controllo locale (LCP)
2.3 Menu
2.3.1 Menu Status 10
2.3.2 Menu rapido 10
2.3.3 Menu principale 25
2.4 Trasferimento rapido delle impostazioni parametri tra diversi convertitori di frequenza
3
3
3
3
4
5
5
8
9
9
9
10
26
2.5 Visualizzazione e programmazione dei parametri indicizzati
2.6 Inizializzazione alle impostazioni di fabbrica
3 Parametri
3.1 Menu principale - Funzionamento e display - Gruppo 0
3.2 Menu principale - Carico e Motore - Gruppo 1
3.3 Menu principale - Freni - Gruppo 2
3.4 Menu principale - Rif./rampe - Gruppo 3
3.5 Menu principale - Limiti / avvisi - Gruppo 4
3.6 Menu principale - I/O Digitali - Gruppo 5
3.7 Menu principale - I/O analogici - Gruppo 6
3.8 Menu principale - Comunicazioni e opzioni - Gruppo 8
3.9 Menu principale - Smart logic - Gruppo 13
3.10 Menu principale - Funzioni speciali - Gruppo 14
3.11 Menu principale - Informazioni sul convertitore di frequenza - Gruppo 15
3.12 Menu principale - Visualizzazioni dei dati - Gruppo 16
3.13 Menu principale - Visualizzazioni dei dati 2 - Gruppo 18
3.14 Menu principale - FC anello chiuso - Gruppo 20
26
26
28
28
33
43
45
48
51
61
66
71
80
85
87
92
92
3.15 Menu principale - Funzioni applicazione - Gruppo 22
3.16 Menu principale - Funzioni dell'applicazione 2 - Gruppo 24
3.17 Menu principale - Funzioni speciali - Gruppo 30
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 1
95
102
105
Sommario
VLT® HVAC Basic Drive FC 101
4 Ricerca ed eliminazione dei guasti
4.1 Introduzione agli allarmi e avvisi
4.2 Parole di allarme
4.3 Parole di avviso
4.4 Parole di stato estese
4.5 Elenco degli avvisi e degli allarmi
4.6 Elenco di errori LCP
5 Elenchi dei parametri
5.1 Opzioni dei parametri
5.1.1 Impostazioni di fabbrica 114
5.1.2 0-** Funzionam./display 115
5.1.3 1-** Carico e Motore 115
5.1.4 2-** Freni 117
5.1.5 3-** Rif./rampe 117
5.1.6 4-** Limiti / avvisi 118
5.1.7 5-** I/O digitali 118
5.1.8 6-** I/O analogici 119
106
106
108
108
109
109
113
114
114
Indice
5.1.9 8-** Comun. e opzioni 120
5.1.10 13-** Smart logic 121
5.1.11 14-** Funzioni speciali 122
5.1.12 15-** Inform. conv. freq. 123
5.1.13 16-** Visualizzazione dati 123
5.1.14 18-** Inform. & visualizz. 125
5.1.15 20-** Conv. freq. anello chiuso 125
5.1.16 22-** Funzioni applicazione 126
5.1.17 24-** Funz. appl. 2 127
5.1.18 30-** Caratteristiche speciali 127
128
2 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Introduzione Guida alla Programmazione
1 Introduzione
1.1 Scopo del manuale
La presente guida alla programmazione fornisce
informazioni per la programmazione avanzata del convertitore di frequenza. Inoltre, fornisce una panoramica
completa di tutti i parametri e delle descrizioni per tutti i
parametri.
La guida alla programmazione è concepita per l'uso da
parte di personale
Per far funzionare il convertitore di frequenza in modo
sicuro e professionale, leggere e seguire la guida alla
programmazione e prestare particolare attenzione alle
istruzioni di sicurezza e agli avvisi generali.
1.2 Versione del documento e del software
Il presente manuale è revisionato e aggiornato
regolarmente. Tutti i suggerimenti per migliorare sono ben
accetti.
Edizione Osservazioni Versione software
MG18B5xx Aggiornamento alla
Tabella 1.1 Versione del documento e del software
qualicato.
4.2x
nuova versione del
software.
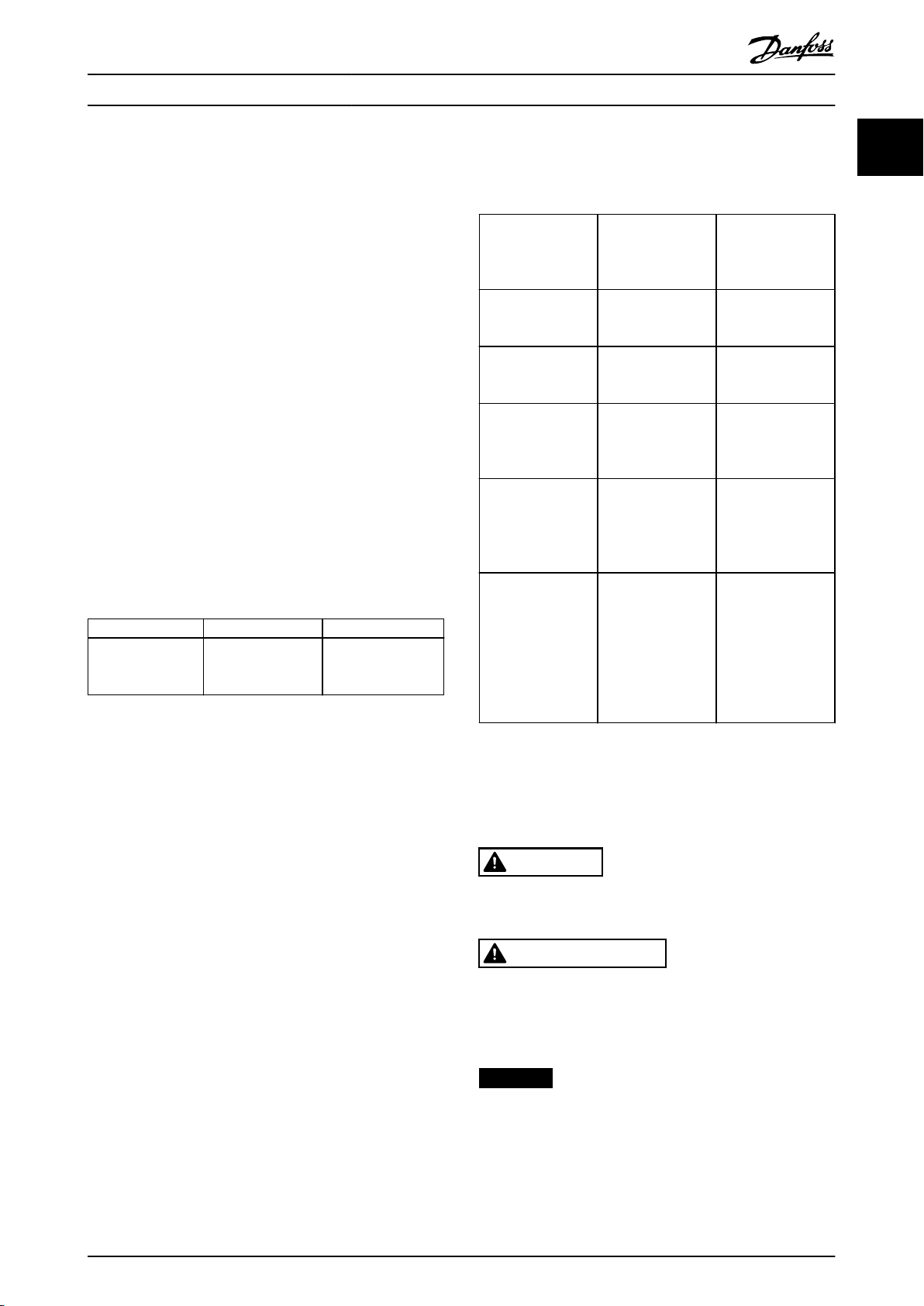
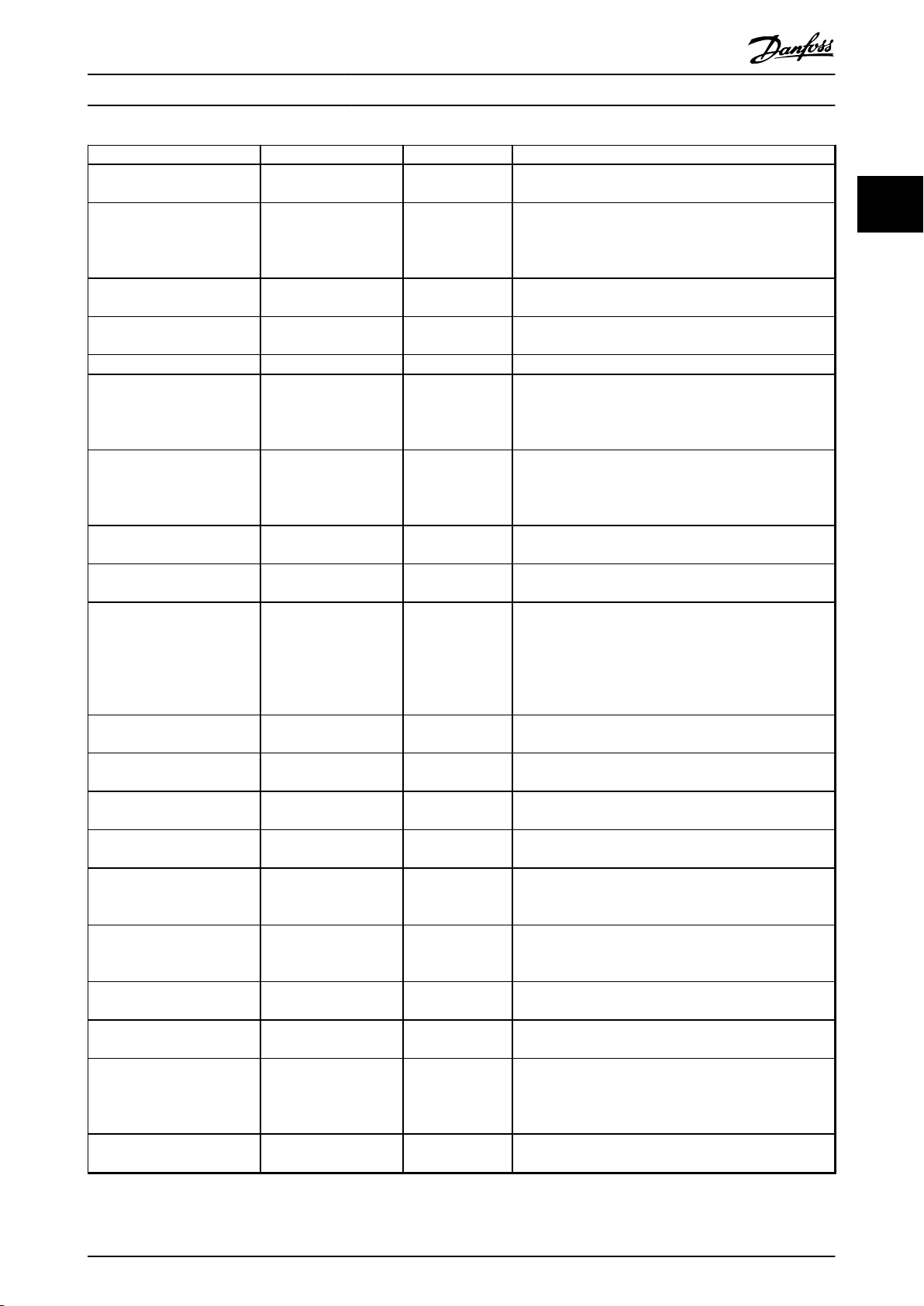
Compatibilità
software
Vecchio software
(le OSS versione
3.xx e inferiori)
Nuovo software
(le OSS versione
4.xx o superiori)
Compatibilità
hardware
Scheda di potenza
obsoleta
(settimana di
produzione 33 2017
o precedenti)
Scheda di potenza
nuova
(settimana di
produzione 34 2017
o successive)
Scheda di controllo
obsoleta (settimana
di produzione 33
2017 o precedenti)
Sì No
No Sì
Scheda di controllo
obsoleta (settimana
di produzione 33
2017 o precedenti)
Sì (soltanto software
versione 3.xx o
inferiori)
Sì (NECESSARIO
aggiornare il
software alla
versione 3.xx o
inferiori, la ventola è
continuamente in
funzione a piena
velocità)
1 1
Scheda di controllo
nuova (settimana di
produzione 34 2017
o successive)
Scheda di controllo
nuova (settimana di
produzione 34 2017
o successive)
Sì (NECESSARIO
aggiornare il
software alla
versione 4.xx o
superiori)
Sì (solo software
versione 4.xx o
superiori)
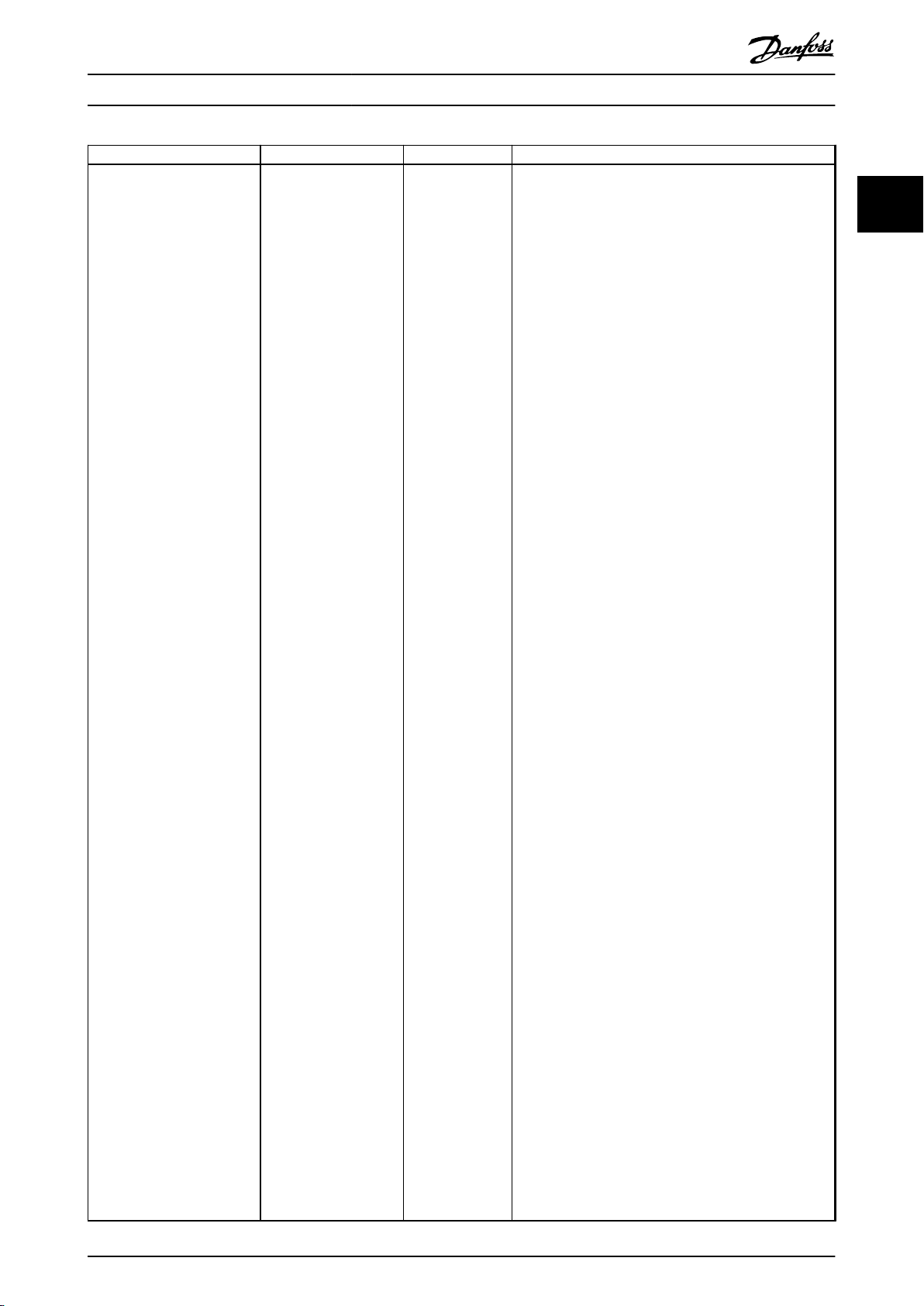
A partire dalla versione software 4.0x e successive
(settimana di produzione 33 2017 e successive), la funzione
della ventola di
rareddamento del dissipatore a velocità
variabile è stata implementata nel convertitore di
frequenza per taglie di potenza da 22 kW (30 cv) 400 V
IP20 e inferiori e 18,5 kW (25 cv) 400 V IP54 e inferiori.
Questa funzione necessita di aggiornamenti software e
hardware e introduce limitazioni inerenti alla retrocompatibilità per dimensioni del frame H1-H5 e I2-I4. Fare
riferimento alla Tabella 1.2 per le limitazioni.
Tabella 1.2 Compatibilità software e hardware
Simboli di sicurezza
1.3
Nella presente guida vengono usati i seguenti simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 3
Introduzione
VLT® HVAC Basic Drive FC 101
11
1.4 Precauzioni di sicurezza
AVVISO
TEMPO DI SCARICA
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eettuati esclusivamente da
personale qualicato.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che non sia presente
tensione residua nel convertitore di frequenza.
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore è collegato alla rete CA, all'alimentazione CC o alla condivisione del carico, il motore
può avviarsi in qualsiasi momento. L'avvio involontario
durante le operazioni di programmazione o i lavori di
manutenzione o riparazione può causare morte, lesioni
gravi o danni alle cose. Il motore può essere avviato
tramite un interruttore esterno, un comando bus di
campo, un segnale di riferimento in ingresso dall'LCP o
dall'LOP, da remoto utilizzando Software di installazione
MCT 10 oppure a seguito del ripristino di una condizione
di guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Scollegare il convertitore di frequenza dalla
•
rete.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
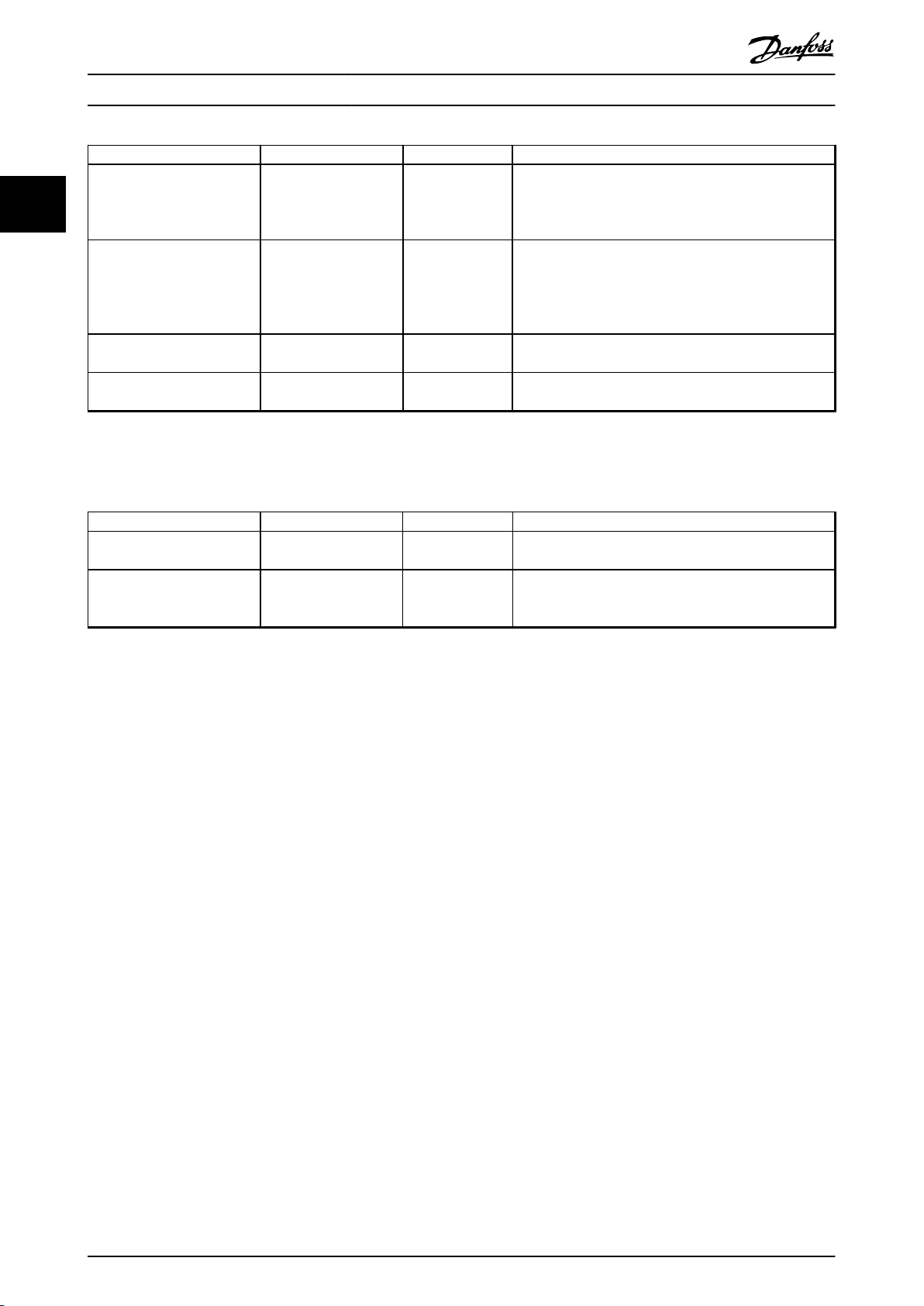
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore di frequenza non è alimentato.
Può ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o di
riparazione può causare lesioni gravi o mortali.
Arrestare il motore.
•
Scollegare la rete CA e gli alimentatori remoti
•
del collegamento CC, incluse le batterie di
backup, i gruppi di continuità e le connessioni
del collegamento CC ad altri convertitori di
frequenza.
Scollegare o bloccare il motore PM.
•
Attendere che i condensatori si scarichino
•
completamente. La durata minima del tempo di
attesa è specicata nella Tabella 1.3.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che i condensatori siano
completamente scarichi.
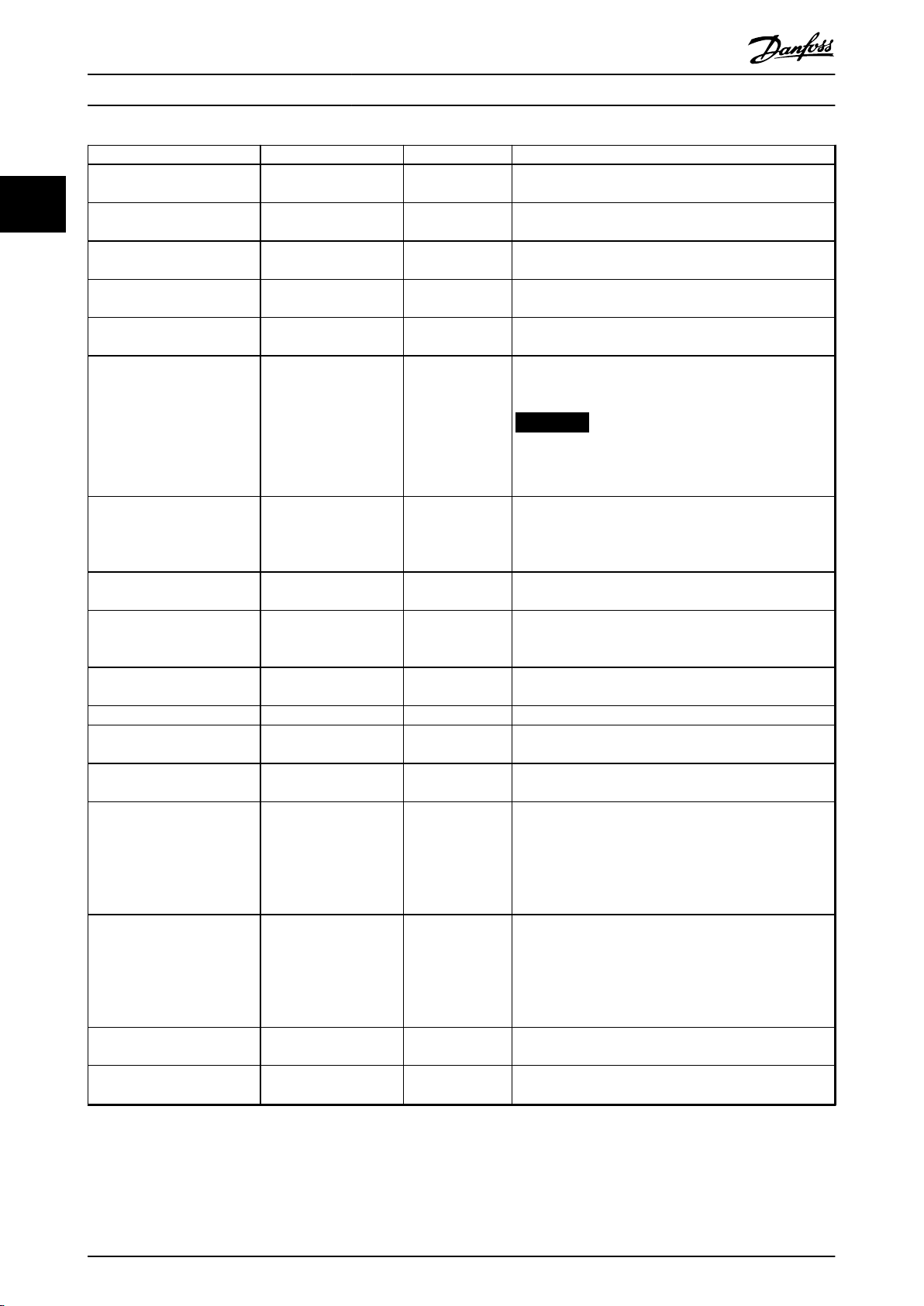
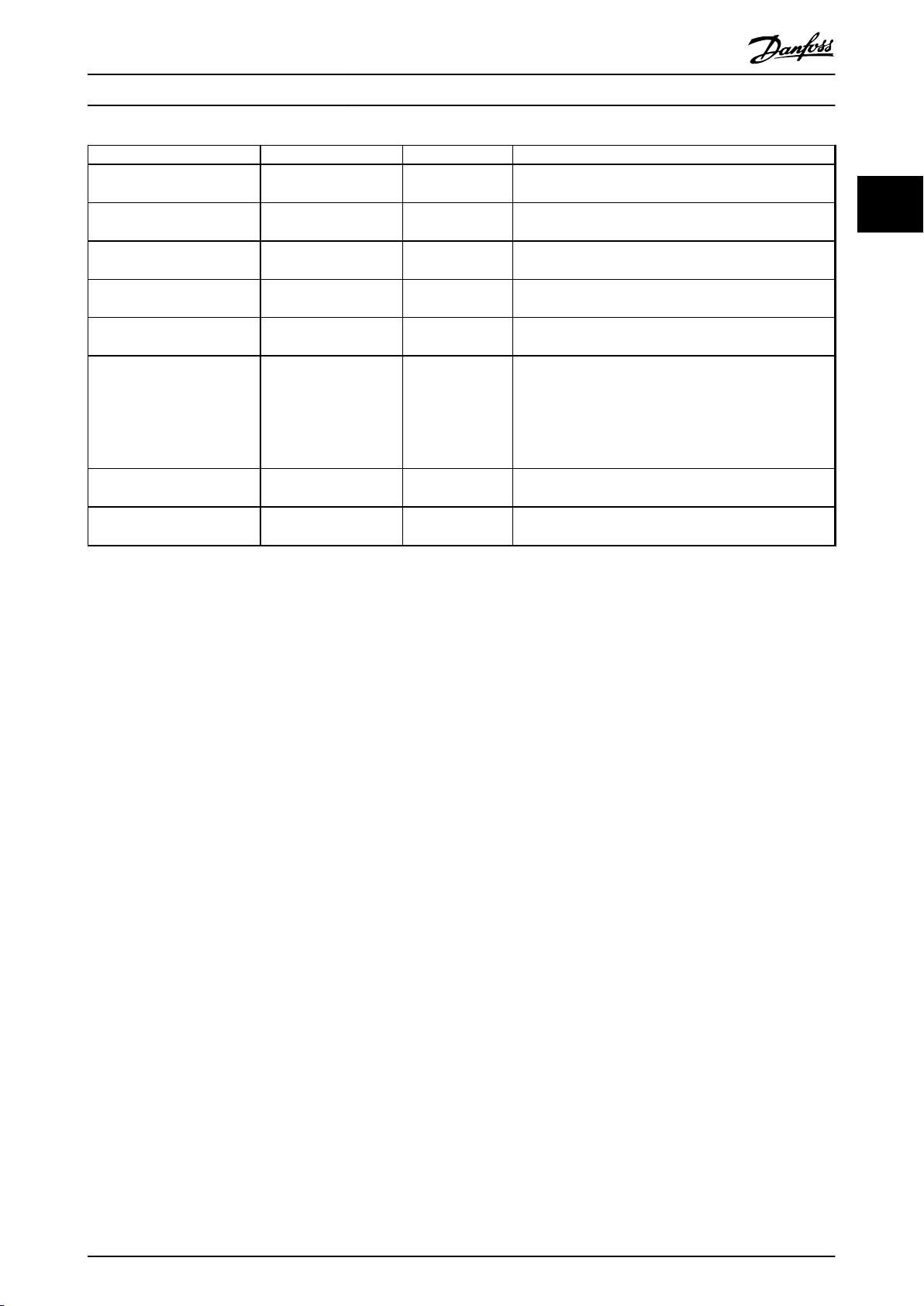
Tensione [V] Gamma di potenza [kW
(cv)]
3x200 0,25–3,7 (0,33–5) 4
3x200 5,5–11 (7–15) 15
3x400 0,37–7,5 (0,5–10) 4
3x400 11–90 (15–125) 15
3x600 2,2–7,5 (3–10) 4
3x600 11–90 (15–125) 15
Tabella 1.3 Tempo di scarica
Tempo di attesa
minimo (minuti)
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Una messa
a terra non appropriata del convertitore può causare
morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
4 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Introduzione Guida alla Programmazione
AVVISO
PERICOLO APPARECCHIATURE
Il contatto con gli alberi rotanti e le apparecchiature
elettriche può causare morte o lesioni gravi.
Assicurarsi che soltanto personale adegua-
•
tamente formato e qualicato eettui
l'installazione, l'avviamento e la manutenzione.
Assicurarsi che i lavori elettrici siano eseguiti in
•
conformità alle norme elettriche nazionali e
locali.
Seguire le procedure illustrate in questo
•
manuale.
ATTENZIONE
RISCHIO DI GUASTO INTERNO
Un guasto interno nel convertitore di frequenza può
provocare lesioni gravi quando questo non è chiuso
correttamente.
Prima di applicare la corrente elettrica,
•
assicurarsi che tutte le coperture di sicurezza
siano al loro posto e ssate in modo sicuro.
1.5 Risorse aggiuntive
La Guida rapida del VLT® HVAC Basic Drive FC 101
•
fornisce informazioni di base sulle dimensioni
meccaniche, l'installazione e la programmazione.
La Guida alla Progettazione VLT® HVAC Basic Drive
•
FC 101 fornisce informazioni su come progettare
sistemi di controllo motore.
Durante il processo di installazione del software, inserire il
codice di accesso 81463800 per attivare la funzionalità FC
101. Per usare la funzionalità FC 101 non è necessario
alcun codice licenza.
Il software più recente non contiene sempre gli aggiornamenti più recenti per convertitori di frequenza.
Contattare l'ucio vendite locale per gli aggiornamenti più
recenti del convertitore di frequenza (le *.upd) oppure
scaricarli all'indirizzo www.danfoss.com/en/service-and-
support/downloads/dds/vlt-motion-control-tool-mct-10/
#Overview.
1.6 Denizioni
Convertitore di frequenza
I
VLT, MAX
La massima corrente di uscita.
I
VLT,N
La corrente di uscita nominale fornita dal convertitore di
frequenza.
U
VLT, MAX
La massima tensione di uscita.
Ingresso
Il motore collegato può avviarsi e arrestarsi tramite l'LCP e
gli ingressi digitali. Le funzioni sono suddivise in due
gruppi come descritto nella Tabella 1.4. Le funzioni nel
gruppo 1 hanno una priorità maggiore rispetto a quelle nel
gruppo 2.
Ripristino, arresto a ruota libera, ripristino e
Gruppo 1
Gruppo 2
arresto a ruota libera, arresto rapido, frenatura
CC, arresto e [O].
Avvio, avviamento a impulsi, inversione, avvio
inverso, jog e uscita congelata.
1 1
Software Danfoss VLT® Energy Box. Selezionare PC
•
Software Download all'indirizzo vltdrives.danfoss.com/products/engineering-software/
software-download/vlt-energy-box-software/.
Il software VLT® Energy Box consente confronti
del consumo energetico di ventole HVAC e
pompe azionate da convertitori di frequenza
Danfoss e metodi alternativi di controllo del
usso. Usare questo tool per progettare i costi, i
risparmi e il recupero del capitale investito legato
all'uso di convertitori di frequenza Danfoss sulle
ventole, pompe e torri di rareddamento HVAC.
La documentazione tecnica è disponibile in formato
elettronico online su drives.danfoss.com/knowledge-center/
technical-documentation/.
Assistenza Software di installazione MCT 10
Scaricare il software all'indirizzo www.danfoss.com/en/
service-and-support/downloads/dds/vlt-motion-control-toolmct-10/.
Tabella 1.4 Comandi di controllo
Motore
f
JOG
La frequenza motore quando viene attivata la funzione jog
(mediante i morsetti digitali).
f
M
La frequenza motore.
f
MAX
La frequenza motore massima.
f
MIN
La frequenza motore minima.
f
M,N
La frequenza nominale del motore (dati di targa).
I
M
La corrente motore.
I
M,N
La corrente nominale del motore (dati di targa).
n
M,N
La velocità nominale del motore (dati di targa).
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 5
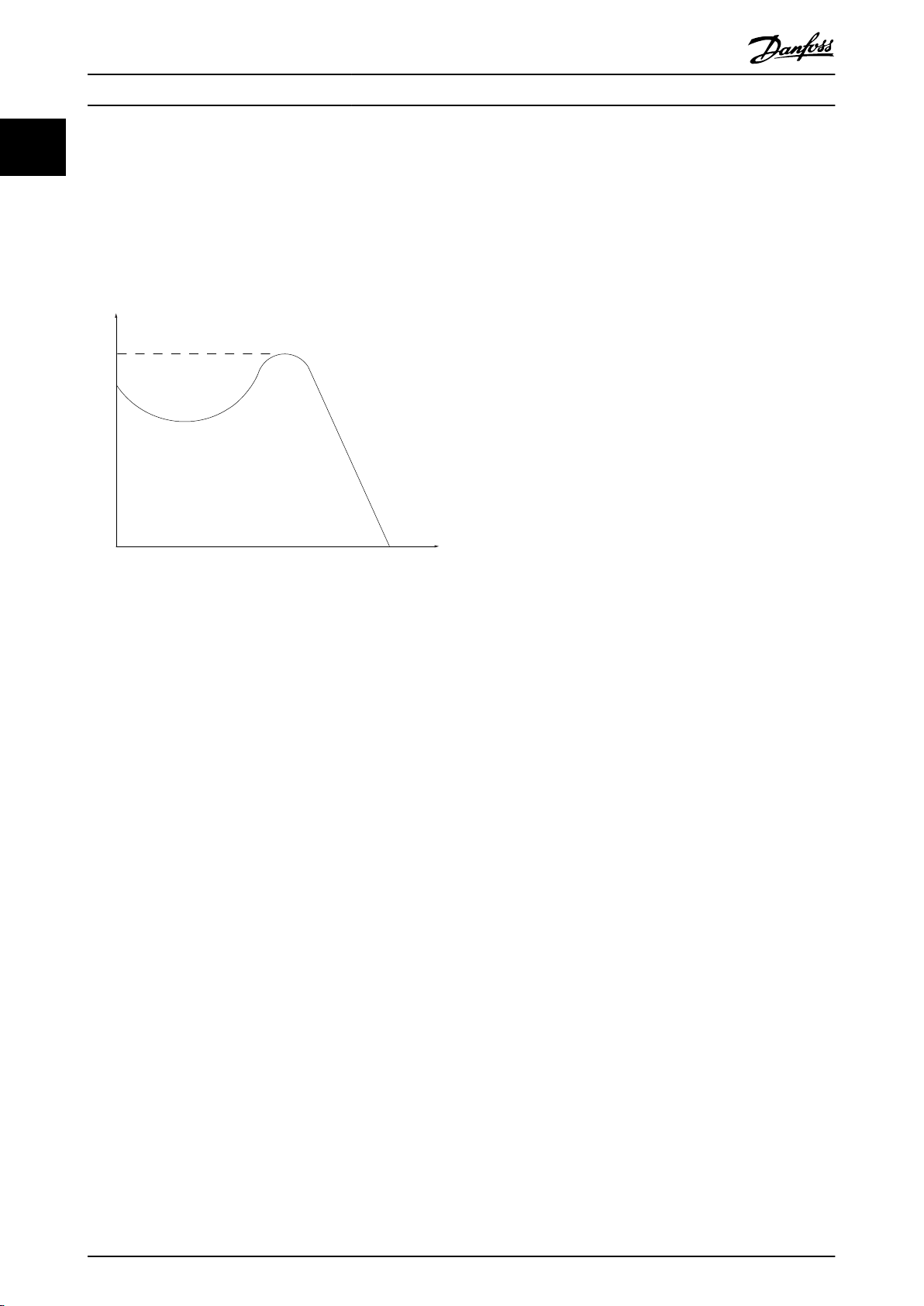
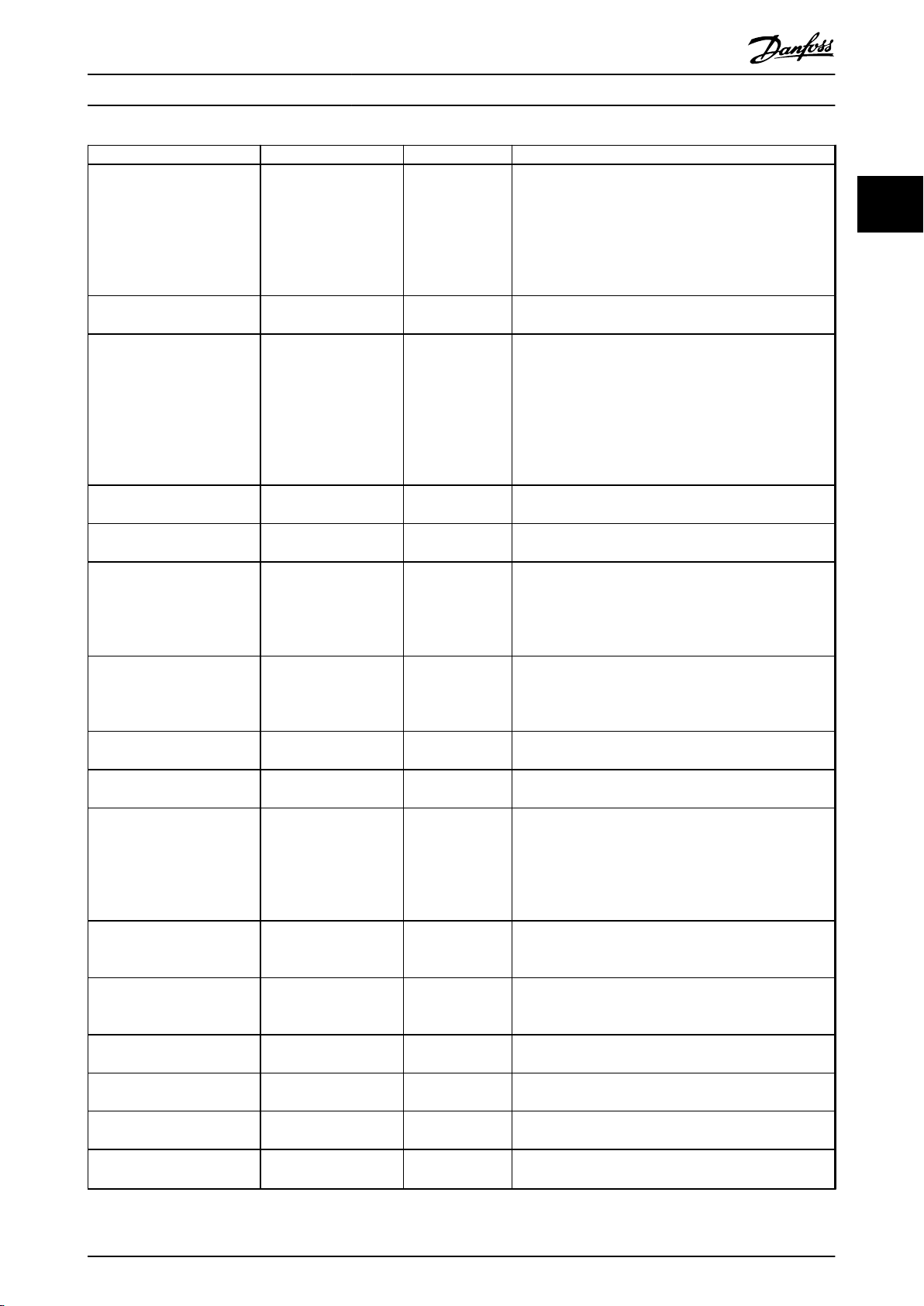
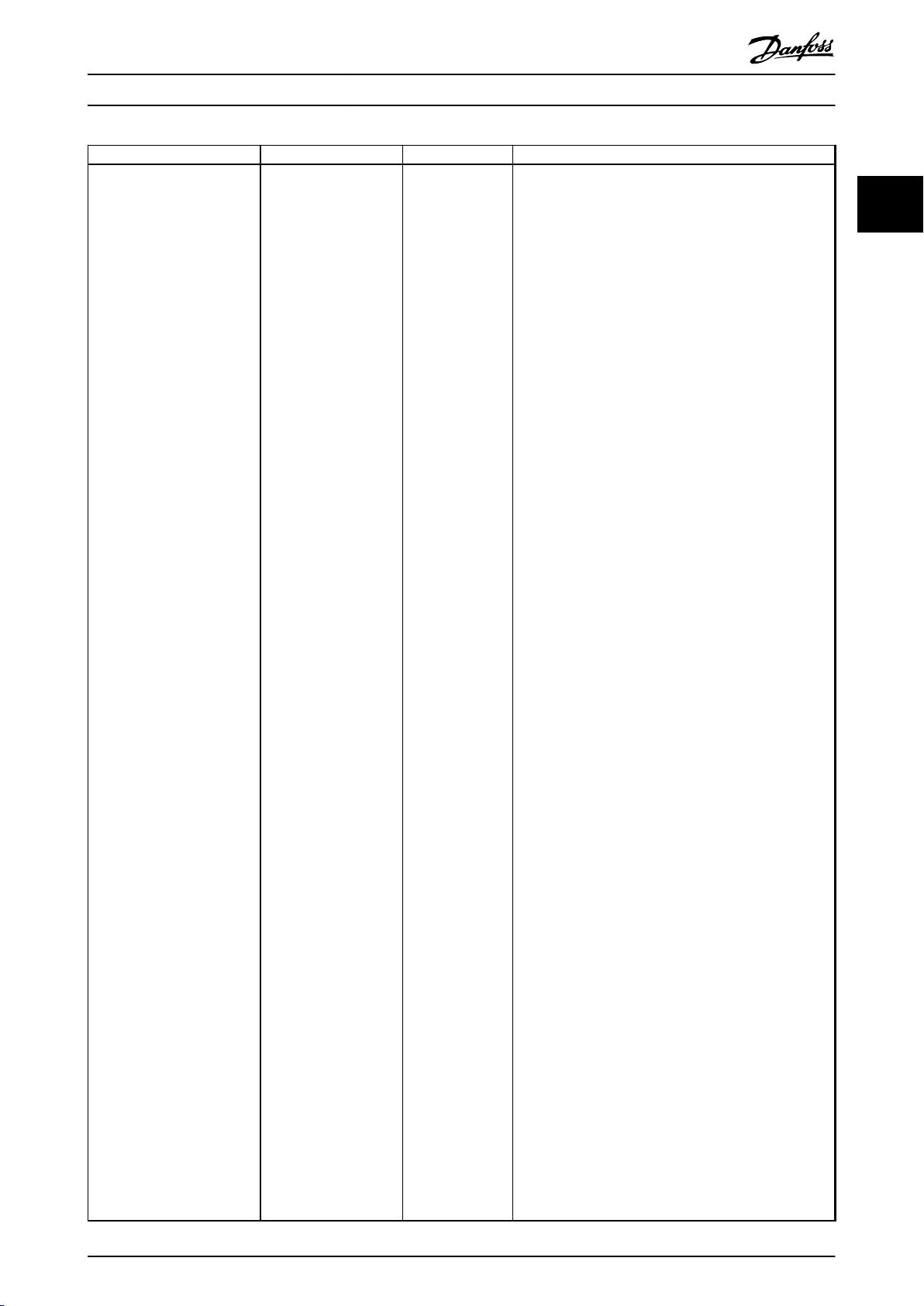
175ZA078.10
Coppia massima
Giri / min.
Coppia
Introduzione
VLT® HVAC Basic Drive FC 101
11
P
M,N
La potenza motore nominale (dati di targa).
U
M
La tensione motore istantanea.
U
M,N
La tensione nominale del motore (dati di targa).
Coppia di interruzione
Disegno 1.1 Coppia di interruzione
η
VLT
L'ecienza del convertitore di frequenza è denita come il
rapporto tra la potenza di uscita e quella di ingresso.
Comando per disabilitare l'avviamento
Un comando di arresto appartenente ai comandi di
controllo del gruppo 1, vedere la Tabella 1.4.
Comando di arresto
Vedere la Tabella 1.4.
Riferimento analogico
Un segnale trasmesso agli ingressi analogici 53 o 54. Può
essere in tensione o in corrente.
Ingresso in corrente: 0–20 mA e 4–20 mA
•
Ingresso in tensione: 0–10 V CC
•
Riferimento bus
Un segnale trasmesso alla porta di comunicazione seriale
(porta FC).
Riferimento preimpostato
Un riferimento preimpostato denito che può essere
impostato tra -100% e +100% dell'intervallo di riferimento.
Selezione di otto riferimenti preimpostati mediante i
morsetti digitali.
Ref
MAX
Determina la relazione tra l'ingresso di riferimento al 100%
del valore di fondo scala (tipicamente 10 V, 20 mA) e il
riferimento risultante. Il valore di riferimento massimo è
impostato nel parametro 3-03 Riferimento max..
Ref
MIN
Determina la relazione tra l'ingresso di riferimento allo 0%
del valore (tipicamente 0 V, 0 mA, 4 mA) e il riferimento
risultante. Il valore di riferimento minimo è impostato nel
parametro 3-02 Riferimento minimo.
Ingressi analogici
Gli ingressi analogici vengono utilizzati per controllare varie
funzioni del convertitore di frequenza.
Esistono due tipi di ingressi analogici:
ingresso in corrente: 0–20 mA e 4–20 mA;
•
ingresso in tensione: 0–10 V CC.
•
Uscite analogiche
Le uscite analogiche sono in grado di fornire un segnale di
0–20 mA, 4–20 mA o un segnale digitale.
Adattamento automatico motore, AMA
L'algoritmo AMA determina i parametri elettrici per il
motore collegato a fermo e compensa la resistenza in base
alla lunghezza del cavo motore.
Ingressi digitali
Gli ingressi digitali consentono di controllare varie funzioni
del convertitore di frequenza.
Uscite digitali
Il convertitore di frequenza fornisce due stadi di uscita a
stato solido che sono in grado di fornire un segnale a 24 V
CC (massimo 40 mA).
Uscite a relè
Il convertitore di frequenza mette a disposizione due uscite
a relè programmabili.
ETR
Il relè termico elettronico è un calcolo del carico termico
basato sul carico presente e sul tempo. Lo scopo consiste
nello stimare la temperatura del motore e impedire il
surriscaldamento.
Inizializzazione
Se viene eseguita un'inizializzazione (parametro 14-22 Modo
di funzionamento), i parametri programmabili del conver-
titore di frequenza ritornano alle rispettive impostazioni di
fabbrica. Il
Parametro 14-22 Modo di funzionamento non inizializza i
parametri di comunicazione, il log guasti né il log modalità
incendio.
Duty cycle intermittente
Un grado di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire con servizio intermittente periodico sia
aperiodico.
LCP
Il Pannello di Controllo Locale (LCP) rappresenta un'interfaccia completa per il controllo e la programmazione del
convertitore di frequenza. Il pannello di comando è
estraibile sulle unità IP20 e sso sulle unità IP54. Può
essere installato a una distanza massima di 3 m (9,8 piedi)
6 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Introduzione Guida alla Programmazione
dal convertitore di frequenza, vale a dire in un pannello
frontale mediante il kit di montaggio opzionale.
Lsb
Bit meno signicativo.
MCM
Abbreviazione di Mille Circular Mil, un'unità di misura
americana della sezione trasversale dei cavi. 1 MCM ≡
0,5067 mm2.
Msb
Bit più signicativo.
Parametri on-line/o-line
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei dati.
Premere [OK] per attivare i parametri o-line.
Controllore PI
Il controllore PI mantiene la velocità, pressione,
temperatura ecc. desiderata, regolando la frequenza di
uscita in base alle variazioni del carico.
RCD
Dispositivo a corrente residua.
Setup
Le impostazioni parametri possono essere salvate in due
setup. Cambiare tra le due programmazioni parametri e
modicarne una mentre è attivo un altro setup.
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico del
motore rilevato, mantenendo costante la velocità del
motore.
Smart logic control (SLC)
L'SLC è una sequenza di azioni denite dall'utente, che
vengono eseguite quando gli eventi associati deniti
dall'utente sono valutati come TRUE dall'SLC.
Termistore
Una resistenza dipendente dalla temperatura, installata nei
punti in cui deve essere controllata la temperatura (convertitore di frequenza o motore).
Scatto
Uno stato che si verica in situazioni di guasto, ad esempio
se il convertitore di frequenza è soggetto a surriscaldamento o quando lo stesso interviene per proteggere il
motore, un processo o un meccanismo. Il riavvio viene
impedito nché la causa del guasto non è scomparsa e lo
stato di scatto viene annullato attivando il ripristino
oppure, talvolta, tramite la programmazione di un ripristino
automatico. Non usare lo scatto per la sicurezza personale.
Scatto bloccato
Uno stato che si verica in situazioni di guasto quando il
convertitore di frequenza entra in autoprotezione e che
richiede un intervento manuale, ad esempio se nel convertitore di frequenza si verica un cortocircuito sull'uscita. È
possibile annullare uno scatto bloccato scollegando la rete,
eliminando la causa del guasto e ricollegando il convertitore di frequenza all'alimentazione. Il riavvio viene
impedito no a che lo stato di scatto non viene annullato
attivando il ripristino o, talvolta, tramite programmazione
di ripristino automatico. Non usare lo scatto bloccato per la
sicurezza personale.
Caratteristiche VT
Caratteristiche coppia variabile utilizzate per pompe e
ventole.
+
VVC
Rispetto a una regolazione a rapporto tensione/frequenza
tradizionale, il controllo vettoriale della tensione (VVC+)
migliora sia la dinamica che la stabilità, anche nel caso di
variazioni della velocità di riferimento e della coppia di
carico.
1 1
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 7
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Introduzione
VLT® HVAC Basic Drive FC 101
11
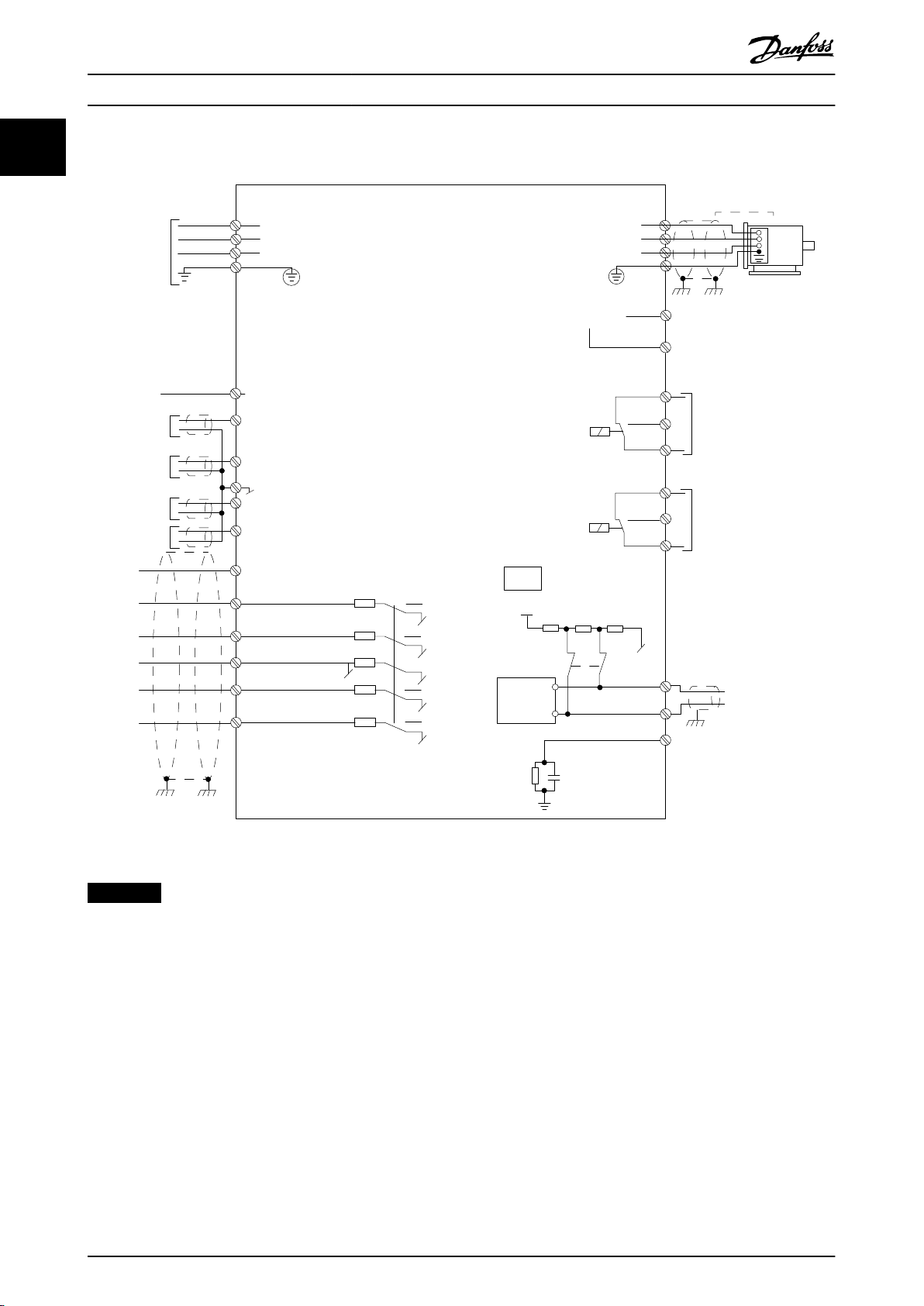
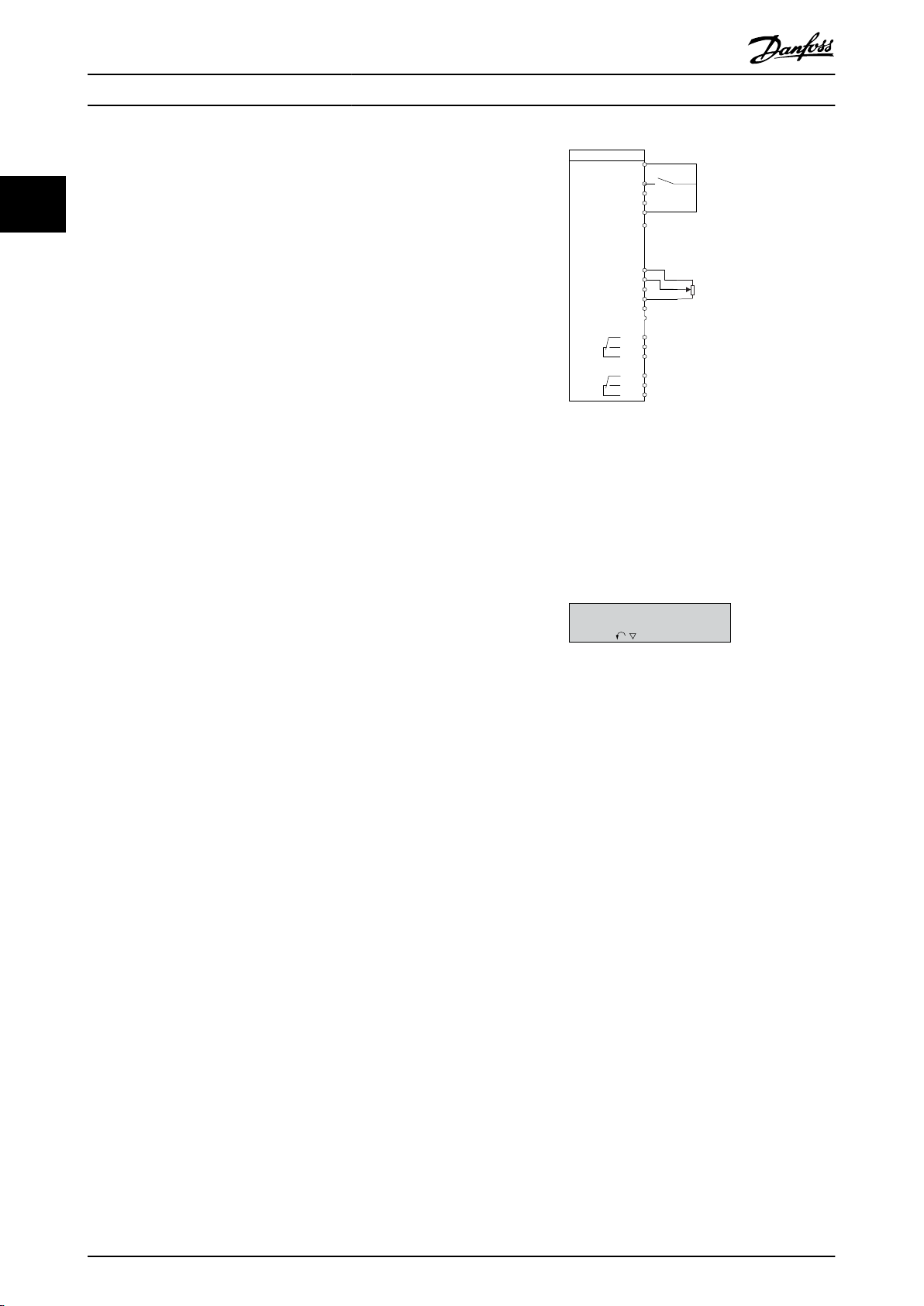
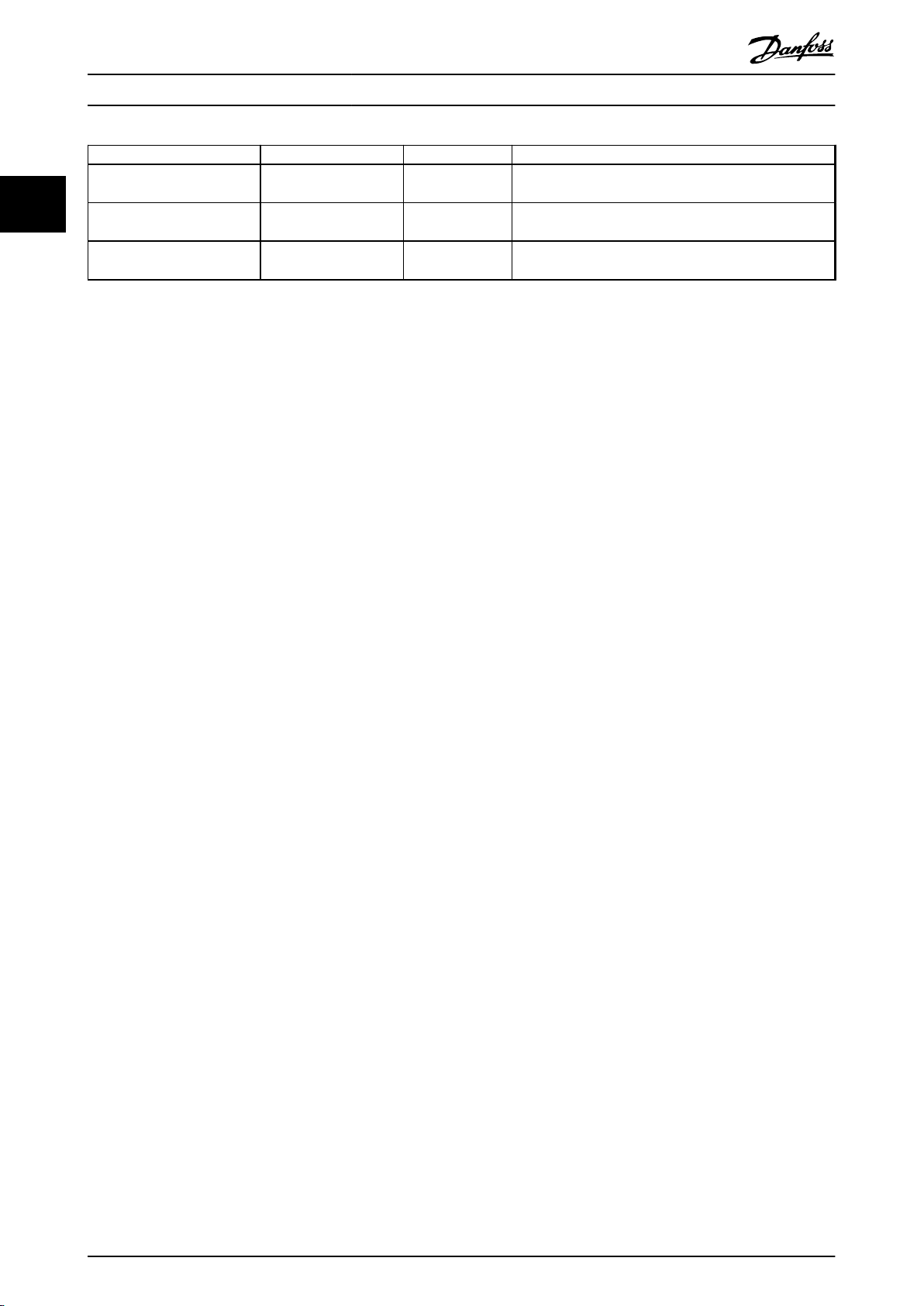
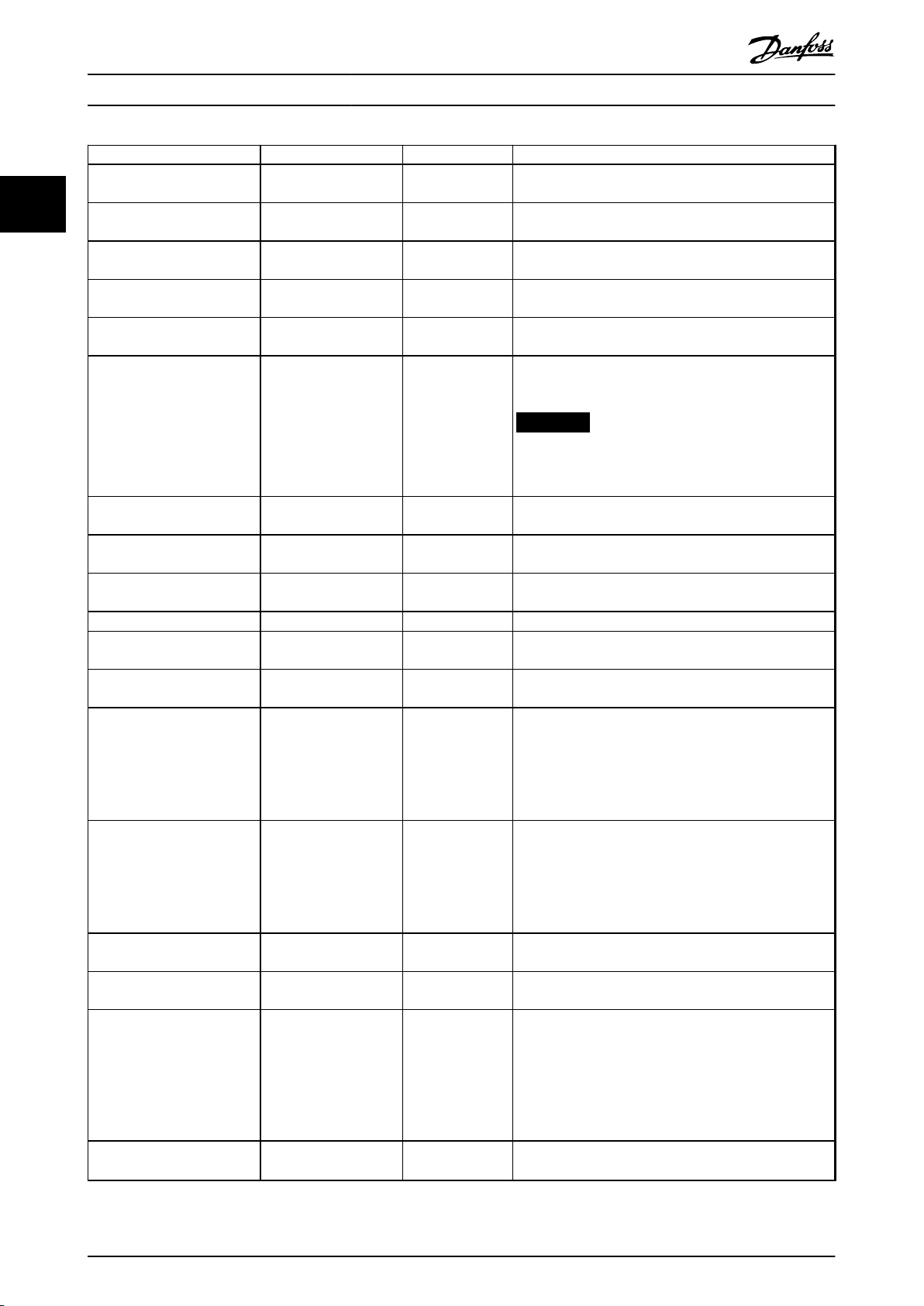
1.7 Descrizione collegamenti elettrici
Disegno 1.2 Schema di cablaggio base
AVVISO!
Non vi è modo di accedere a UCC- e UCC+ nelle unità seguenti:
•
•
•
•
IP20, 380–480 V, 30–90 kW (40–125 cv)
IP20, 200–240 V, 15–45 kW (20–60 cv)
IP20, 525–600 V, 2,2–90 kW (3,0–125 cv)
IP54, 380–480 V, 22–90 kW (30–125 cv)
8 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmazione Guida alla Programmazione
2 Programmazione
2.1 Introduzione
È possibile programmare il convertitore di frequenza
dall'LCP o da un PC tramite una porta COM RS485
installando il Software di installazione MCT 10. Per ulteriori
dettagli sul software consultare il capitolo 1.5 Risorse
aggiuntive.
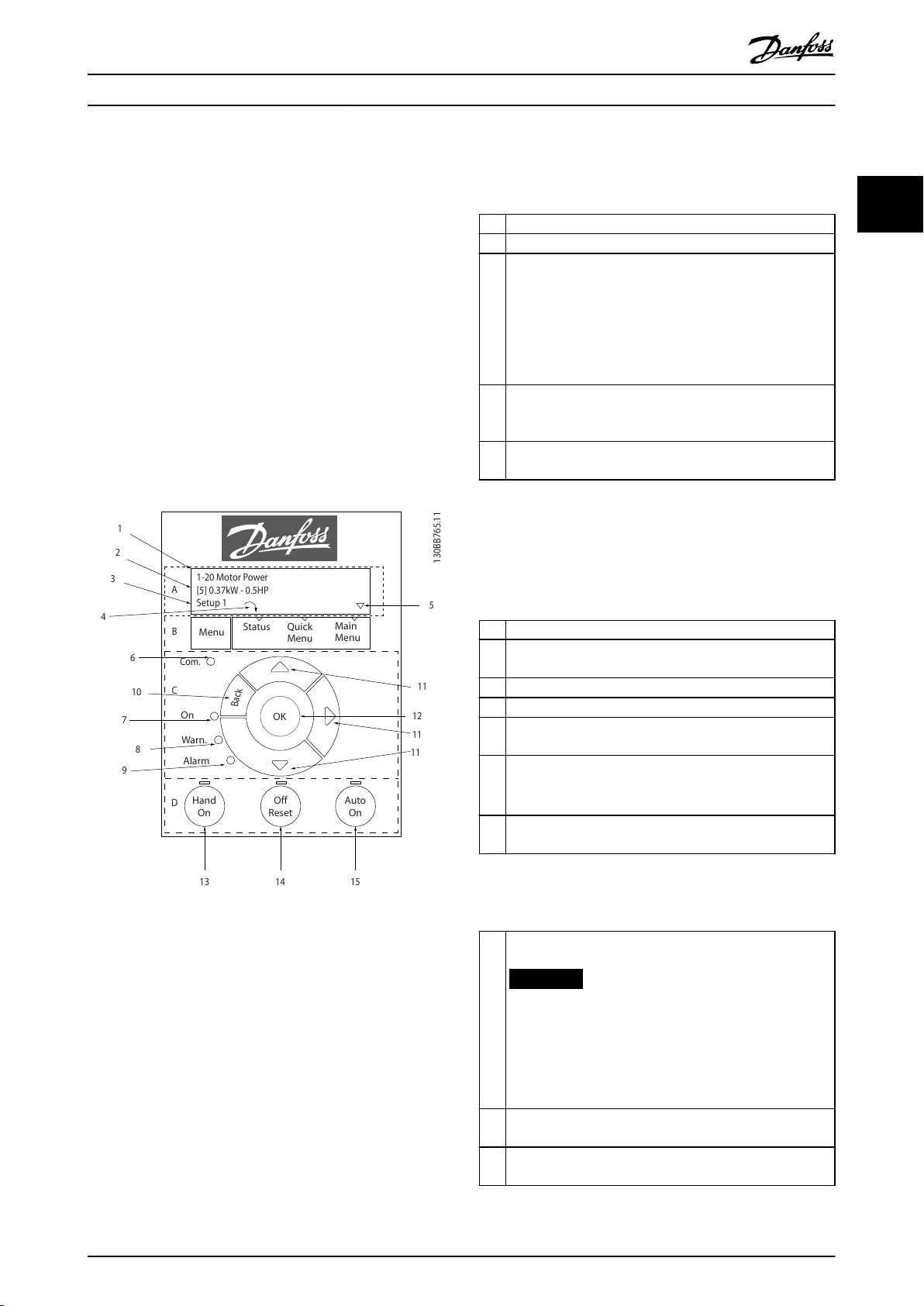
2.2 Pannello di controllo locale (LCP)
L'LCP è suddiviso in quattro gruppi funzionali.
A. Display
B. Tasto menu
C. Tasti di navigazione e spie luminose
D. Tasti di funzionamento e spie luminose
1 Numero e nome del parametro.
2 Valore del parametro.
Il numero del setup mostra il setup attivo e quello di
modica. Se lo stesso setup funge da setup attivo e da
setup di modica, viene visualizzato solo quel numero di
3
setup (impostazione di fabbrica). Se il setup attivo e il setup
di modica sono diversi, sul display vengono visualizzati
entrambi i numeri (setup 12). Il numero che lampeggia
indica il setup di modica.
La direzione del motore è mostrata nella parte bassa a
4
sinistra del display e segnalata da una piccola freccia rivolta
in senso orario o antiorario.
Il triangolo indica se l'LCP è nel menu di stato, nel menu
5
rapido o nel menu principale.
Tabella 2.1 Legenda per la Disegno 2.1, parte I
B. Tasto menu
Premere [Menu] per selezionare tra Status, Quick Menu e
Main Menu.
C. Tasti di navigazione e spie luminose
6 LED Com.: lampeggia durante la comunicazione bus.
LED verde/On: la sezione di comando funziona corret-
7
tamente.
8 LED giallo/Avviso: indica un avviso.
9 LED rosso lampeggiante/Allarme: indica un allarme.
[Back]: per spostarsi alla fase o al livello precedente nella
10
struttura di navigazione.
[▲] [▼] [►]: per spostarsi tra gruppi di parametri, tra
11
parametri e all'interno dei parametri. Possono anche essere
usati per impostare il riferimento locale.
[OK]: per selezionare un parametro e accettare le modiche
12
alle impostazioni parametri.
2 2
Tabella 2.2 Legenda per la Disegno 2.1, parte II
Disegno 2.1 Pannello di controllo locale (LCP)
A. Display
Il display LCD è illuminato con due linee alfanumeriche.
Tutti i dati sono visualizzati sull'LCP.
Disegno 2.1 descrive le informazioni che possono essere
lette dal display.
D. Tasti di funzionamento e spie luminose
[Hand On]: avvia il motore e abilita il controllo del conver-
titore di frequenza tramite LCP.
AVVISO!
[2] Evol. libera neg. è l'opzione predenita per il
13
parametro 5-12 Ingr. digitale morsetto 27. Se non è
presente un'alimentazione di 24 V al morsetto 27,
[Hand On] non avvia il motore. Collegare il
morsetto 12 al morsetto 27.
[O/Reset]: arresta il motore (O). Se è in modalità allarme,
14
l'allarme viene ripristinato.
[Auto On]: il convertitore di frequenza è controllato tramite
15
morsetti di controllo o comunicazione seriale.
Tabella 2.3 Legenda per la Disegno 2.1, parte III
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 9
FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Potenza
Avvio
+10V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Prem. OK per avviare la proc. guidata
Premere Indietro per saltarla
Setup 1
Programmazione
VLT® HVAC Basic Drive FC 101
2.3 Menu
2.3.1 Menu Status
22
Nel menu Status, le opzioni di selezione sono:
frequenza motore [Hz],
•
parametro 16-13 Frequenza;
corrente motore [A], parametro 16-14 Corrente
•
motore;
riferimento velocità del motore come percentuale
•
[%], parametro 16-02 Riferimento [%];
retroazione, parametro 16-52 Retroazione [unità];
•
potenza motore, parametro 16-10 Potenza [kW ]
•
per kW, parametro 16-11 Potenza [hp] per cv. Se il
parametro 0-03 Impostazioni locali è impostato su
[1] Nord America la potenza motore viene
visualizzata in cv invece che in kW.
visualizzazione personalizzata,
•
parametro 16-09 Visual. personaliz.;
velocità del motore [Giri/min.],
•
parametro 16-17 Velocità [giri/m].
Disegno 2.2 Cablaggio del convertitore di frequenza
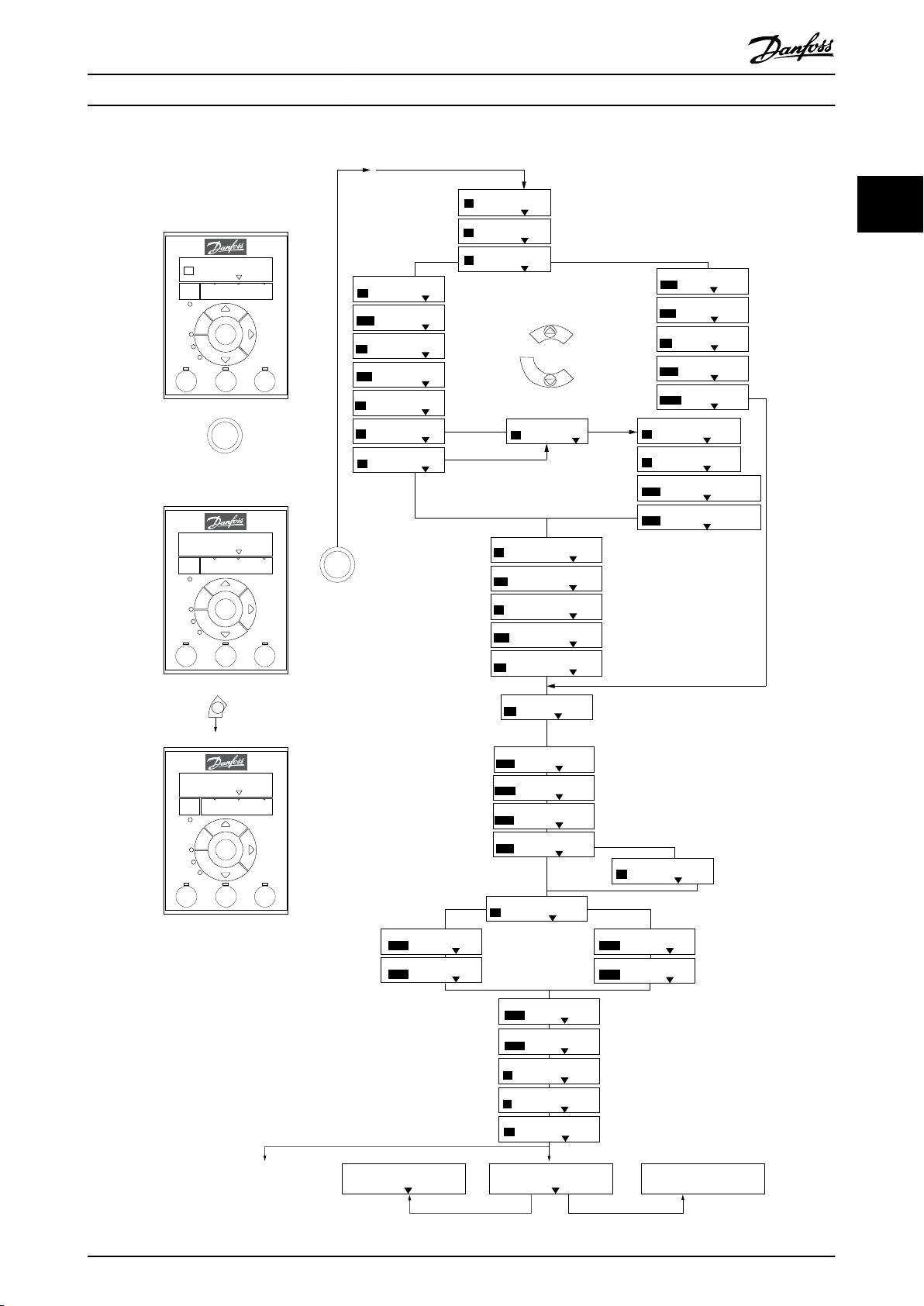
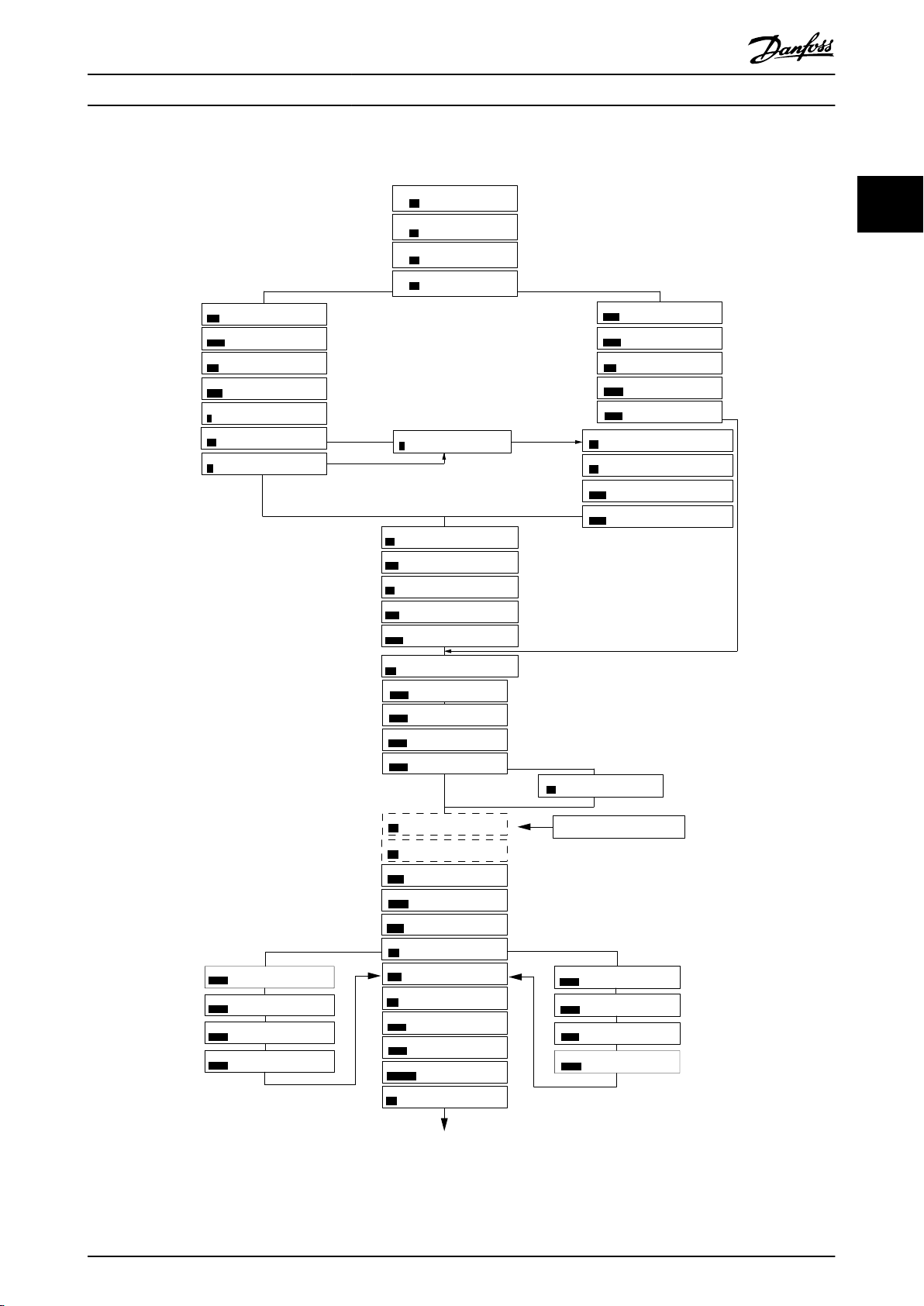
La procedura guidata viene visualizzata al momento
dell'accensione,
nché qualche parametro non viene
cambiato. Comunque si può sempre accedere alla
procedura guidata dal menu rapido. Premere [OK] per
avviare la procedura guidata. Premere [Back] per tornare
alla schermata di stato.
2.3.2 Menu rapido
Usare il Menu rapido per programmare le funzioni più
comuni. Il Menu rapido comprende:
procedura guidata per applicazioni ad anello
•
aperto Per i dettagli vedere la Disegno 2.4;
procedura guidata per applicazioni ad anello
•
chiuso. Per i dettagli vedere la Disegno 2.5;
setup del motore. Per i dettagli vedere la
•
Tabella 2.6;
modiche eettuate.
•
La procedura guidata integrata aiuta l'installatore nel setup
del convertitore di frequenza procedendo in modo
ordinato e coerente al ne di predisporre applicazioni ad
anello aperto, ad anello chiuso e impostazioni rapide per il
motore.
Disegno 2.3 Avvio/uscita dalla procedura guidata
10 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmazione Guida alla Programmazione
2 2
Disegno 2.4 Procedura guidata di setup per applicazioni ad anello aperto
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 11
Programmazione
VLT® HVAC Basic Drive FC 101
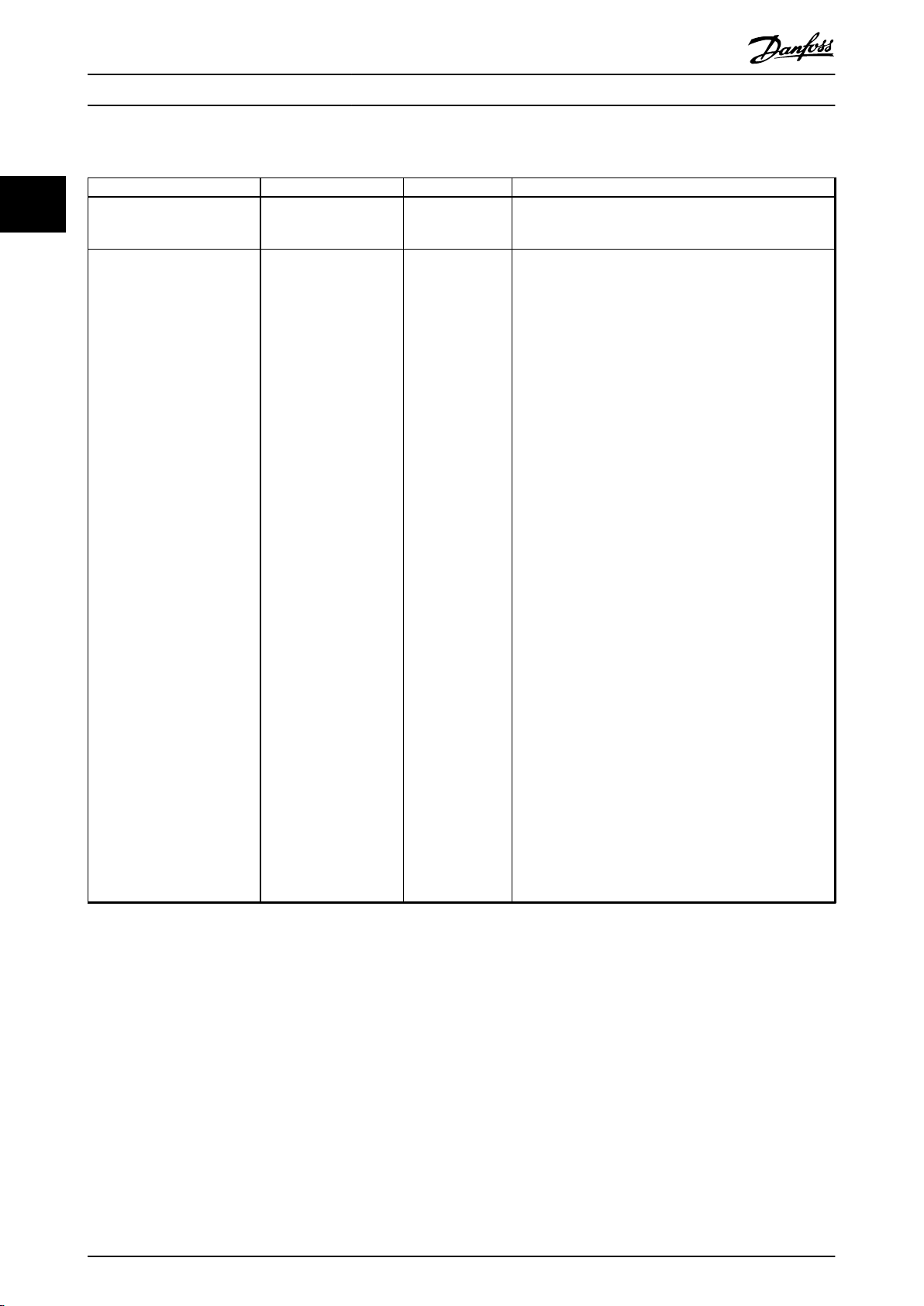
Procedura guidata di setup per applicazioni ad anello aperto
Parametro Opzione Predenito Uso
22
Parametro 0-03 Impostazioni
locali
[0] Internaz.
[1] Nord America
[0] Internaz. –
Parametro 0-06 Tipo di rete [0] 200–240V/50Hz/rete IT
[1] 200–240V/50Hz/Delta
[2] 200–240V/50Hz
[10] 380–440V/50Hz/rete
IT
[11] 380–440V/50Hz/Delta
[12] 380–440V/50Hz
[20] 440–480V/50Hz/rete
IT
[21] 440–480V/50Hz/Delta
[22] 440–480V/50Hz
[30] 525–600V/50Hz/rete
IT
[31] 525–600V/50Hz/Delta
[32] 525–600V/50Hz
[100] 200–240V/60Hz/rete
IT
[101] 200–240V/60Hz/
Delta
[102] 200–240V/60Hz
[110] 380–440V/60Hz/rete
IT
[111] 380–440V/60Hz/
Delta
[112] 380–440V/60Hz
[120] 440–480V/60Hz/rete
IT
[121] 440–480V/60Hz/
Delta
[122] 440–480V/60Hz
[130] 525–600V/60Hz/rete
IT
[131] 525–600V/60Hz/
Delta
[132] 525–600V/60Hz
In funzione della
dimensione
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
12 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Opzione Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz..
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont..
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv..
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max..
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 13
Programmazione
Parametro Opzione Predenito Uso
Parametro 1-20 Potenza motore 0,12-110 kW/0,16-150 cv In funzione della
22
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0,01–10.000,00 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-29 Adattamento
Automatico Motore (AMA)
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Vedere il
parametro 1-29 Adattame
nto Automatico Motore
(AMA).
0,000–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
Disattivato L'esecuzione di un AMA ottimizza le prestazioni del
motore.
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d.
Vedere la scheda tecnica del motore a magneti
permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
14 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Opzione Predenito Uso
Parametro 1-49 Corrente a
indutt. min. per asse q
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
Parametro 1-73 Riaggancio al
volo
Parametro 3-02 Riferimento
minimo
Parametro 3-03 Riferimento
max.
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 5-40 Funzione relè Vedere il
Parametro 5-40 Funzione relè Vedere il
Parametro 6-10 Tens. bassa
morsetto 53
Parametro 6-11 Tensione alta
morsetto 53
Parametro 6-12 Corr. bassa
morsetto 53
Parametro 6-13 Corrente alta
morsetto 53
20–200% 100% Questo parametro specica la curva di saturazione dei
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
[0] Rilevamento del
[1] Parcheggio
[0] Disattivato
[1] Abilitato
-4.999,000–4.999,000 0 Il riferimento minimo è il valore minimo ottenuto dalla
-4.999,000–4.999,000 50 Il riferimento massimo è il valore massimo ottenuto dalla
0,05–3.600,00 s In funzione della
0,05–3.600,00 s In funzione della
0,0–400,0 Hz 0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100 Hz Immettere il valore massimo di frequenza di uscita. Se il
parametro 5-40 Funzione
relè.
parametro 5-40 Funzione
relè.
0,00–10,00 V 0,07 V Immettere la tensione che corrisponde al valore di
0,00–10,00 V 10 V Immettere la tensione che corrisponde al valore di
0,00–20,00 mA 4 mA Immettere la corrente che corrisponde al valore di
0,00–20,00 mA 20 mA Immettere la corrente che corrisponde al valore di
rotore
[0] Disattivato Selezionare [1] Abilitato per consentire al convertitore di
dimensione
dimensione
[9] All. Selezionare la funzione per controllare il relè di uscita 1.
[5] In funzione Selezionare la funzione per controllare il relè di uscita 2.
Selezionare la modalità di avviamento del motore PM.
frequenza di agganciare un motore in rotazione in seguito
a una caduta di tensione di rete. Selezionare [0] Disattivato
se questa funzione non è necessaria. Quando questo
parametro è impostato su [1] Abilitato,
parametro 1-71 Ritardo avv. e parametro 1-72 Funz. di avv.
non hanno alcuna funzione. Parametro 1-73 Riaggancio al
volo è solo attivo nella modalità VVC+.
somma di tutti i riferimenti.
somma di tutti i riferimenti.
Se è selezionato il motore asincrono, il tempo rampa di
accelerazione è da 0 a parametro 1-23 Frequen. motore
nominale. Se è selezionato il motore PM, il tempo rampa
di accelerazione è da 0 a parametro 1-25 Vel. nominale
motore.
Per motori asincroni, il tempo rampa di decelerazione va
da parametro 1-23 Frequen. motore nominale a 0. Per
motori PM, il tempo rampa di decelerazione va da
parametro 1-25 Vel. nominale motore a 0.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max..
riferimento basso.
riferimento alto.
riferimento basso.
riferimento alto.
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 15
Programmazione
Parametro Opzione Predenito Uso
Parametro 6-19 Terminal 53
mode
22
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
Tabella 2.4 Procedura guidata di setup per applicazioni ad anello aperto
[0] Mod. corrente
[1] Mod. tensione
[0] O
[1] On
0,05–1 s 0,10 s
VLT® HVAC Basic Drive FC 101
[1] Mod. tensione Selezionare se il morsetto 53 viene utilizzato per ingresso
di corrente o di tensione.
[0] O
–
–
16 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmazione Guida alla Programmazione
Procedura guidata di setup per applicazioni ad anello chiuso
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 17
Disegno 2.5 Procedura guidata di setup per applicazioni ad anello chiuso
Programmazione
Parametro Gamma Predenito Uso
Parametro 0-03 Impostazioni
locali
22
Parametro 0-06 Tipo di rete [0]–[132] vedere la
Parametro 1-00 Modo congu-
razione
[0] Internaz.
[1] Nord America
Tabella 2.4.
[0] An. aper to
[3] Anello chiuso
VLT® HVAC Basic Drive FC 101
[0] Internaz. –
Dimensione
selezionata
[0] An. aper to Selezionare [3] Anello chiuso.
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
18 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Gamma Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz..
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont..
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv..
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max..
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 19
Programmazione
Parametro Gamma Predenito Uso
Parametro 1-20 Potenza motore 0,09–110 kW In funzione della
22
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0–10.000 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-29 Adattamento
Automatico Motore (AMA)
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Parametro 1-49 Corrente a
indutt. min. per asse q
Disattivato L'esecuzione di un AMA ottimizza le prestazioni del
motore.
0–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
20–200% 100% Questo parametro specica la curva di saturazione dei
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d.
Vedere la scheda tecnica del motore a magneti
permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
20 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Gamma Predenito Uso
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
[1] Parcheggio
Parametro 1-73 Riaggancio al
volo
Parametro 3-02 Riferimento
minimo
Parametro 3-03 Riferimento
max.
Parametro 3-10 Riferim preimp. -100–100% 0 Immettere il setpoint.
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 6-20 Tens. bassa
morsetto 54
Parametro 6-21 Tensione alta
morsetto 54
Parametro 6-22 Corr. bassa
morsetto 54
Parametro 6-23 Corrente alta
morsetto 54
Parametro 6-24 Rif.basso/
val.retroaz.morsetto 54
Parametro 6-25 Rif. alto/valore
retroaz. morsetto 54
Parametro 6-26 Tempo Cost.
ltro morsetto 54
Parametro 6-29 Modo morsetto54[0] Mod. corrente
Parametro 20-81 Controllo
Norm./Inverso PI
Parametro 20-83 Velocità
avviam. PI [Hz]
[0] Disattivato
[1] Abilitato
-4.999,000–4.999,000 0 Il riferimento minimo è il valore minimo ottenuto dalla
-4.999,000–4.999,000 50 Il riferimento massimo è il valore massimo ottenuto dalla
0,05–3.600,0 s In funzione della
0,05–3.600,0 s In funzione della
0,0–400,0 Hz 0,0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100 Hz Immettere il valore massimo di frequenza di uscita. Se il
0,00–10,00 V 0,07 V Immettere la tensione che corrisponde al valore di
0,00–10,00 V 10,00 V Immettere la tensione che corrisponde al valore di
0,00–20,00 mA 4,00 mA Immettere la corrente che corrisponde al valore di
0,00–20,00 mA 20,00 mA Immettere la corrente che corrisponde al valore di
-4999–4999 0 Immettere il valore di retroazione che corrisponde alla
-4999–4999 50 Immettere il valore di retroazione che corrisponde alla
0,00–10,00 s 0,01 Immettere la costante di tempo del ltro.
[1] Mod. tensione
[0] Norm.
[1] Inverso
0–200 Hz 0 Hz Impostare la velocità del motore da raggiungere come
[0] Rilevamento del
rotore
[0] Disattivato Selezionare [1] Abilitato per abilitare il convertitore di
dimensione
dimensione
[1] Mod. tensione Selezionare se il morsetto 54 viene utilizzato per ingresso
[0] Norm. Selezionare [0] Norm. per impostare un controllo di
Selezionare la modalità di avviamento del motore PM.
frequenza ad agganciare un motore in rotazione, ad es. in
applicazioni con ventole. Questo parametro viene abilitato
se viene selezionato il motore PM.
somma di tutti i riferimenti.
somma di tutti i riferimenti.
Tempo rampa di accelerazione da 0 a
parametro 1-23 Frequen. motore nominale per motori
asincroni. Tempo rampa di accelerazione da 0 a
parametro 1-25 Vel. nominale motore per motori PM.
Tempo rampa di decelerazione da parametro 1-23 Frequen.
motore nominale a 0 per motori asincroni. Tempo rampa
di decelerazione da parametro 1-25 Vel. nominale motore a
0 per motori PM.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max..
riferimento basso.
riferimento alto.
riferimento basso.
riferimento alto.
tensione o corrente impostata nel parametro 6-20 Tens.
bassa morsetto 54/parametro 6-22 Corr. bassa morsetto 54.
tensione o corrente impostata nel parametro 6-21 Tensione
alta morsetto 54/parametro 6-23 Corrente alta morsetto 54.
di corrente o di tensione.
processo che aumenta la velocità di uscita se l'errore del
processo è positivo. Selezionare [1] Inverso per impostare il
regolatore di processo che diminuisce la velocità di uscita.
segnale di avviamento per avviare la regolazione PI.
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 21
Programmazione
Parametro Gamma Predenito Uso
Parametro 20-93 Guadagno
proporz. PI
0,00–10,00 0,01 Impostare il guadagno proporzionale del regolatore di
22
Parametro 20-94 PI Integral
Time
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
Tabella 2.5 Procedura guidata di setup per applicazioni ad anello chiuso
0,1–999,0 s 999,0 s Immettere il tempo di integrazione del controllo di
[0] O
[1] On
0,05–1,00 s 0,10 s
VLT® HVAC Basic Drive FC 101
processo. Una regolazione rapida si ottiene con un'amplicazione elevata. Tuttavia se l'amplicazione è troppo
elevata, il processo può diventare instabile.
processo. Una regolazione rapida si ottiene con un tempo
di integrazione breve, se questo è troppo breve il processo
diventa instabile. Un tempo di integrazione troppo lungo
disabilita l'azione di integrazione.
[0] O
–
–
Setup motore
La procedura guidata setup motore guida gli utenti attraverso i parametri motore necessari.
Parametro Gamma Predenito Uso
Parametro 0-03 Impostazioni
locali
Parametro 0-06 Tipo di rete [0]–[132] vedere la
[0] Internaz.
[1] Nord America
Tabella 2.4.
0 –
In funzione della
dimensione
Selezionare il modo di funzionamento per il riavvio
quando il convertitore di frequenza viene ricollegato alla
tensione di rete dopo lo spegnimento.
22 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Gamma Predenito Uso
Parametro 1-10 Struttura
motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
[0] Asincrono L'impostazione del valore del parametro potrebbe
modicare questi parametri:
Parametro 1-01 Principio controllo motore.
•
Parametro 1-03 Caratteristiche di coppia.
•
Parametro 1-08 Motor Control Bandwidth.
•
Parametro 1-14 Fatt. di guad. attenuaz..
•
Parametro 1-15 Cost. tempo ltro a bassa velocità
•
Parametro 1-16 Cost. tempo ltro ad alta velocità
•
Parametro 1-17 Cost. di tempo ltro tensione
•
Parametro 1-20 Potenza motore.
•
Parametro 1-22 Tensione motore.
•
Parametro 1-23 Frequen. motore.
•
Parametro 1-24 Corrente motore.
•
Parametro 1-25 Vel. nominale motore.
•
Parametro 1-26 Coppia motore nominale cont..
•
Parametro 1-30 Resist. statore (RS).
•
Parametro 1-33 Reatt. dispers. statore (X1).
•
Parametro 1-35 Reattanza principale (Xh).
•
Parametro 1-37 Induttanza asse d (Ld).
•
Parametro 1-38 Induttanza asse q (Lq).
•
Parametro 1-39 Poli motore.
•
Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
•
Parametro 1-44 Sat. induttanza asse d (LdSat).
•
Parametro 1-45 Sat. indutt. asse q (LqSat).
•
Parametro 1-46 Guadagno rilevamento posizione.
•
Parametro 1-48 Corr. a indutt. min. per asse d.
•
Parametro 1-49 Corrente a indutt. min. per asse q.
•
Parametro 1-66 Corrente min. a velocità bassa.
•
Parametro 1-70 Modalità avvio.
•
Parametro 1-72 Funz. di avv..
•
Parametro 1-73 Riaggancio al volo.
•
Parametro 1-80 Funzione all'arresto.
•
Parametro 1-82 V. min. funz. all'arr. [Hz].
•
Parametro 1-90 Protezione termica motore.
•
Parametro 2-00 Corr. mant. CC/prerisc. motore.
•
Parametro 2-01 Corrente di frenatura CC.
•
Parametro 2-02 Tempo di frenata CC.
•
Parametro 2-04 Vel. freno inserito CC.
•
Parametro 2-10 Funzione freno.
•
Parametro 4-14 Limite alto velocità motore [Hz].
•
Parametro 4-19 Freq. di uscita max..
•
Parametro 4-58 Funzione fase motore mancante.
•
Parametro 14-65 Decl. vel. comp. tempi mor ti.
•
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 23
Programmazione
Parametro Gamma Predenito Uso
Parametro 1-20 Potenza motore 0,12-110 kW/0,16-150 cv In funzione della
22
Parametro 1-22 Tensione
motore
Parametro 1-23 Frequen. motore 20–400 Hz In funzione della
Parametro 1-24 Corrente motore 0,01–10.000,00 A In funzione della
Parametro 1-25 Vel. nominale
motore
Parametro 1-26 Coppia motore
nominale cont.
50–1.000 V In funzione della
50–9.999 Giri/min. In funzione della
0,1–1.000,0 Nm In funzione della
VLT® HVAC Basic Drive FC 101
Immettere la potenza motore indicata nei dati di targa.
dimensione
Immettere la tensione motore indicata nei dati di targa.
dimensione
Immettere la frequenza motore indicata nei dati di targa.
dimensione
Immettere la corrente motore indicata nei dati di targa.
dimensione
Immettere la velocità nominale del motore indicata nei
dimensione
dimensione
dati di targa.
Questo parametro è disponibile quando il
parametro 1-10 Struttura motore è impostato su opzioni
che abilitano il modo motore a magneti permanenti.
AVVISO!
La modica di questo parametro inuisce sulle
impostazioni di altri parametri.
Parametro 1-30 Resist. statore
(RS)
Parametro 1-37 Induttanza asse
d (Ld)
Parametro 1-38 Induttanza asse
q (Lq)
Parametro 1-39 Poli motore 2–100 4 Immettere il numero di poli del motore.
Parametro 1-40 Forza c.e.m. a
1000 giri/minuto
Parametro 1-42 Lungh. cavo
motore
Parametro 1-44 Sat. induttanza
asse d (LdSat)
Parametro 1-45 Sat. indutt. asse
q (LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt.
min. per asse d
Parametro 1-49 Corrente a
indutt. min. per asse q
Parametro 1-70 Modalità avvio [0] Rilevamento del rotore
0–99,990 Ω
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
10–9.000 V In funzione della
0–100 m 50 m Immettere la lunghezza del cavo motore.
0,000–1.000,000 mH In funzione della
0,000–1.000,000 mH In funzione della
20–200% 100% Regola l'altezza dell'impulso di prova durante il
20–200% 100% Immettere il punto di saturazione dell'induttanza.
20–200% 100% Questo parametro specica la curva di saturazione dei
[1] Parcheggio
In funzione della
dimensione
dimensione
dimensione
dimensione
dimensione
dimensione
[0] Rilevamento del
rotore
Impostare il valore della resistenza di statore.
Impostare il valore dell'induttanza asse d. Vedere la scheda
tecnica del motore a magneti permanenti.
Immettere il valore dell’induttanza asse q.
Impostare la forza c.e.m. nominale per il motore a 1.000
Giri/min.
Questo parametro corrisponde alla saturazione dell'induttanza di Ld. Idealmente questo parametro ha lo stesso
valore di parametro 1-37 Induttanza asse d (Ld). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
Questo parametro corrisponde alla saturazione dell'induttanza di Lq. Idealmente questo parametro ha lo stesso
valore di parametro 1-38 Induttanza asse q (Lq). Tuttavia, se
il fornitore del motore fornisce una curva di induzione,
immettere qui il valore di induzione che equivale al 200%
del valore nominale.
rilevamento della posizione all'avvio.
valori di induttanza asse d e q. Dal 20 al 100% di questo
parametro, le induttanze sono linearmente approssimate a
causa del parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat).
Selezionare la modalità di avviamento del motore PM.
24 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmazione Guida alla Programmazione
Parametro Gamma Predenito Uso
Parametro 1-73 Riaggancio al
volo
Parametro 3-41 Rampa 1 tempo
di accel.
Parametro 3-42 Rampa 1 tempo
di decel.
Parametro 4-12 Limite basso
velocità motore [Hz]
Parametro 4-14 Limite alto
velocità motore [Hz]
Parametro 4-19 Freq. di uscita
max.
Parametro 30-22 Protezione
rotore bloccato
Parametro 30-23 Tempo di rilev.
rot. bloccato [s]
[0] Disattivato
[1] Abilitato
0,05–3.600,0 s In funzione della
0,05–3.600,0 s In funzione della
0,0–400,0 Hz 0,0 Hz Immettere il limite minimo per bassa velocità.
0,0–400,0 Hz 100,0 Hz Immettere il limite massimo per alta velocità.
0,0–400,0 Hz 100,0 Hz Immettere il valore massimo di frequenza di uscita. Se il
[0] O
[1] On
0,05–1,00 s 0,10 s
[0] Disattivato Selezionare [1] Abilitato per abilitare il convertitore di
frequenza ad agganciare un motore in rotazione.
Tempo rampa di accelerazione da 0 a
dimensione
dimensione
[0] O
parametro 1-23 Frequen. motore nominale.
Tempo rampa di decelerazione da parametro 1-23 Frequen.
motore nominale a 0.
parametro 4-19 Freq. di uscita max. è impostato a un valore
inferiore al parametro 4-14 Limite alto velocità motore [Hz],
parametro 4-14 Limite alto velocità motore [Hz] verrà
impostato automaticamente su un valore uguale a
parametro 4-19 Freq. di uscita max..
–
–
2 2
Tabella 2.6 Impostazioni procedura guidata di setup del motore
Modiche eettuate
La funzione Modiche eettuate elenca tutti i parametri
modicati rispetto alle impostazioni di fabbrica.
L'elenco mostra solo parametri che sono stati
•
modicati nel setup di modica attuale.
I parametri che sono stati ripristinati ai valori
•
predeniti non sono elencati.
Il messaggio Vuoto indica che non è stato
•
modicato alcun parametro.
Modica delle impostazioni parametri
1. Per accedere al Menu rapido, premere il tasto
[Menu] no a quando l'indicatore nel display non
si trova posizionato sopra Menu rapido.
2.
Premere [▲] [▼] per selezionare la procedura
guidata, setup anello chiuso, setup motore
oppure modiche eettuate.
3. Premere [OK].
4.
Premere [▲] [▼] per scorrere tra i parametri nel
menu rapido.
5. Premere [OK] per selezionare un parametro.
6.
Premere [▲] o [▼] per modicare il valore di
impostazione parametri.
7. Premere [OK] per accettare la modica.
8. Premere due volte [Back] per accedere allo Stato
oppure premere [Menu] una volta per accedere al
menu principale.
Il menu principale consente di accedere a tutti i
parametri
1. Premere il tasto [Menu] nché l'indicatore nel
display non si trova sopra Menu principale.
2.
Premere [▲] e [▼] per spostarsi tra i gruppi di
parametri.
3. Premere [OK] per selezionare un gruppo di
parametri.
4.
Premere [▲] e [▼] per scorrere tra i parametri nel
gruppo prescelto.
5. Premere [OK] per selezionare il parametro.
6.
Premere [▲] e [▼] per impostare/modicare il
valore del parametro.
7. Premere [OK] per accettare la modica.
2.3.3 Menu principale
Premere [Menu] per accedere al menu principale e
programmare tutti i parametri. È possibile accedere ai
parametri del menu principale immediatamente, a meno
che sia stata creata una password tramite il
parametro 0-60 Passw. menu princ..
Per la maggior parte delle applicazioni non è necessario
accedere ai parametri del menu principale. Il menu rapido
fornisce un accesso più rapido e semplice ai parametri
solitamente necessari.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 25

Programmazione
2.4 Trasferimento rapido delle impostazioni
parametri tra diversi convertitori di
22
frequenza
Una volta completato il setup di un convertitore di
frequenza, memorizzare i dati nell'LCP o su un PC tramite
Software di installazione MCT 10.
Trasferimento di dati dal convertitore di frequenza
all'LCP
1. Andare al parametro 0-50 Copia LCP.
2. Premere [OK].
3. Selezionare [1] Tutti a LCP.
4. Premere [OK].
Collegare l'LCP a un altro convertitore di frequenza e
copiare le impostazioni parametri anche su questo convertitore.
Trasferimento di dati dall'LCP al convertitore di
frequenza.
1. Andare al parametro 0-50 Copia LCP.
2. Premere [OK].
3. Selezionare [2] Tutti da LCP.
4. Premere [OK].
Visualizzazione e programmazione dei
2.5
parametri indicizzati
Selezionare il parametro, premere [OK] e premere [▲]/[▼]
per scorrere i valori indicizzati. Per modicare il valore del
parametro, selezionare il valore indicizzato e premere [OK].
Cambiare il valore premendo [▲]/[▼]. Premere [OK] per
accettare la nuova impostazione. Premere [Cancel] per
annullare. Premere [Back] per uscire dal parametro.
Inizializzazione alle impostazioni di
2.6
fabbrica
Esistono due modi per inizializzare il convertitore di
frequenza alle impostazioni di fabbrica.
Inizializzazione consigliata
1. Selezionare il parametro 14-22 Modo di funzionamento.
2. Premere [OK].
3. Selezionare [2] Inizializzazione e premere [OK].
4. Spegnere il convertitore di frequenza e attendere
che il display si spenga.
5. Ricollegare l'alimentazione di rete. A questo
punto il convertitore di frequenza è ripristinato,
tranne i seguenti parametri:
VLT® HVAC Basic Drive FC 101
Inizializzazione con due dita
L'altro modo per inizializzare il convertitore di frequenza
alle impostazione di fabbrica è tramite l'inizializzazione con
due dita:
1. Spegnere il convertitore di frequenza.
2. Premere [OK] e [Menu].
3. Accendere il convertitore di frequenza premendo
4. A questo punto il convertitore di frequenza è
Parametro 1-06 Senso orario
•
Parametro 8-30 Protocollo
•
Parametro 8-31 Indirizzo
•
Parametro 8-32 Baud rate
•
Parametro 8-33 Parità / bit di stop
•
Parametro 8-35 Ritardo minimo risposta
•
Parametro 8-36 Ritardo max. risposta
•
Parametro 8-37 Ritardo max. intercar.
•
Parametro 8-70 Istanza della periferica
•
BACnet
Parametro 8-72 Master max. MS/TP
•
Parametro 8-73 Frame di inform. max.
•
MS/TP
Parametro 8-74 Servizio "I-Am"
•
Parametro 8-75 Password di inizializ-
•
zazione
dal Parametro 15-00 Ore di funzio-
•
namento al
parametro 15-05 Sovratensioni
Parametro 15-03 Accensioni
•
Parametro 15-04 Sovratemp.
•
Parametro 15-05 Sovratensioni
•
Parametro 15-30 Log allarme: Codice
•
guasto
Gruppo di parametri 15-4* Identif. conv.
•
freq.
Parametro 18-10 Log mod. incendio:
•
Evento
i tasti per 10 s.
ripristinato, tranne i seguenti parametri:
Parametro 1-06 Senso orario
•
Parametro 15-00 Ore di funzionamento
•
Parametro 15-03 Accensioni
•
Parametro 15-04 Sovratemp.
•
Parametro 15-05 Sovratensioni
•
Gruppo di parametri 15-4* Identif. conv.
•
freq.
26 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Programmazione Guida alla Programmazione
Parametro 18-10 Log mod. incendio:
•
Evento
L'inizializzazione di parametri viene confermata dall'allarme
80, Conv. iniz. nel display dopo lo spegnimento e la
riaccensione.
2 2
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 27
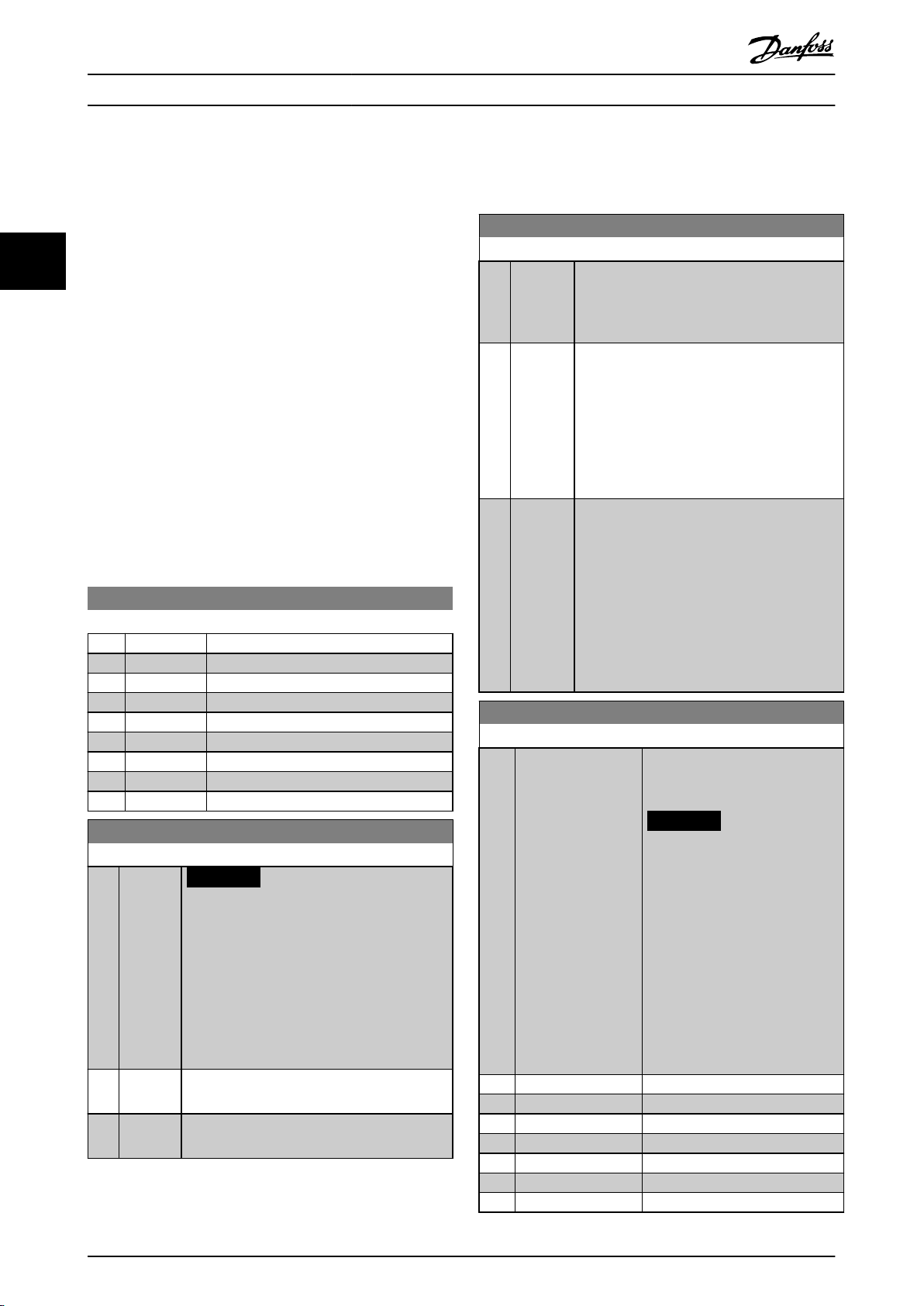
Parametri
3 Parametri
VLT® HVAC Basic Drive FC 101
L'* nei numeri di parametro indica un gruppo o un
sottogruppo di parametri per il quale il primo o i primi due
33
numeri sono gli stessi. Per esempio, 0-** indica il gruppo di
parametri che iniziano tutti con 0. 0-0* indica il
sottogruppo di parametri che condivide i primi 2 numeri,
che è 0-0.
Un asterisco (*) dopo un numero opzionale indica l'opzione
predenita. Per esempio, [0]* English è l'opzione predenita
per il parametro 0-01 Lingua.
3.1 Menu principale - Funzionamento e
display - Gruppo 0
Parametri associati alle funzioni fondamentali del convertitore di frequenza, alla funzione dei tasti LCP e alla
congurazione del display LCP.
3.1.1 0-0* Impost.di base
0-01 Lingua
Option: Funzione:
Denisce la lingua da utilizzare sul display.
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Español
[5] Italiano
[28] Portoghese
[255] Nessun testo
0-03 Impostazioni locali
Option: Funzione:
AVVISO!
0-04 Stato di funz. all'accens.
Option: Funzione:
Selezionare il modo di funzionamento quando
la tensione di rete viene reinserita dopo lo
spegnimento del convertitore di frequenza
quando è in modalità manuale (locale).
[0]*Prosegui Riprende il funzionamento del convertitore di
frequenza con lo stesso riferimento locale e le
stesse condizioni di avvio/arresto (applicate
tramite [Hand On]/[O] sull'LCP oppure
avviamento locale mediante un ingresso
digitale) come quelle che si presentavano prima
dello spegnimento del convertitore di
frequenza.
[1] Arr. forz.,
rif=vecc.
Utilizza il riferimento salvato [1] per arrestare il
convertitore di frequenza e contemporaneamente mantiene il riferimento di velocità
locale prima dello spegnimento. Dopo aver
ricollegato la tensione di rete e aver ricevuto un
comando di avviamento (premendo il tasto
[Hand On] o usando il comando di avviamento
locale mediante un ingresso digitale) il convertitore di frequenza viene riavviato e funziona al
riferimento di velocità memorizzato.
0-06 Tipo di rete
Option: Funzione:
Selezionare il sistema di distribuzione della tensione/frequenza di
alimentazione.
AVVISO!
Non tutte le opzioni vengono
supportate in tutte le taglie di
potenza.
Non è possibile regolare questo
parametro mentre il motore è in funzione.
Per soddisfare i requisiti di diverse impostazioni
di fabbrica in diverse località del mondo, nel
convertitore di frequenza è disponibile il
parametro 0-03 Impostazioni locali. L'impostazione selezionata
fabbrica della frequenza nominale del motore.
[0]*Internaz. Imposta il valore predenito del
parametro 1-23 Frequen. motore a 50Hz.
[1] Nord
America
Imposta il valore predenito del
parametro 1-23 Frequen. motore a 60Hz.
modica l'impostazione di
[0] 200-240V/50Hz/rete IT
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/rete IT
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/rete IT
Il sistema di distribuzione IT è una
rete di alimentazione senza
collegamenti a terra.
Delta è una rete di alimentazione
nella quale la parte secondaria del
trasformatore è collegata a
triangolo e una fase è collegata a
terra.
28 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
0-06 Tipo di rete
Option: Funzione:
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[30] 525-600V/50Hz/rete IT
[31] 525-600V/50Hz/Delta
[32] 525-600V/50Hz
[100] 200-240V/60Hz/rete IT
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/rete IT
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/rete IT
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
[130] 525-600V/60Hz/rete IT
[131] 525-600V/60Hz/Delta
[132] 525-600V/60Hz
0-07 Frenata CC autom. IT
Option: Funzione:
Funzione di protezione contro le sovratensioni durante
il funzionamento a ruota libera.
AVVISO!
Può causare PWM durante il funzionamento a
ruota libera.
[0] O Questa funzione non è attiva.
[1] * On Questa funzione è attiva.
3.1.2 0-1* Operazioni di setup
Una serie completa con tutti i parametri che controllano il
convertitore di frequenza viene denita setup. Il convertitore di frequenza contiene 2 setup: setup 1 e setup 2.
Inoltre un gruppo sso di impostazioni di fabbrica può
essere copiato in uno o più setup.
Alcuni dei vantaggi di disporre di più di un setup nel
convertitore di frequenza sono:
Far funzionare il motore con un setup (setup
•
attivo) mentre si aggiornano i parametri in un
altro setup (setup di modica).
Connettere i due motori (uno alla volta) al
•
convertitore di frequenza. I dati motore per i due
motori possono essere inseriti nei due setup
diversi.
Modicare rapidamente le impostazioni del
•
convertitore di frequenza e/o del motore mentre
il motore è in funzione. Ad esempio, tempo di
rampa o riferimenti preimpostati tramite bus o
ingresso digitale.
Il setup attivo può essere impostato come Multi setup
dove il Setup attivo è selezionato tramite ingresso su un
morsetto di ingresso digitale e/o tramite parola di controllo
bus.
Per copiare il setup 1 al setup 2 oppure per copiare il
setup 2 al setup 1, utilizzare il parametro 0-51 Copia setup.
Per evitare conitti di impostazione dello stesso parametro
in due setup diversi collegare i setup utilizzando il
parametro 0-12 Collega setup. Applicare un segnale di
arresto quando si commuta tra i setup, nei quali i
parametri segnati come non modicabili durante il funzio-
namento hanno valori diversi.
I parametri che sono non modicabili durante il funzio-
namento sono contrassegnati con falso nel
capitolo 5 Elenchi dei parametri.
0-10 Setup attivo
Option: Funzione:
Selezionare il setup con il quale il convertitore di
frequenza funziona.
[1] * Setup 1 È attivo il Setup 1.
[2] Setup 2 È attivo il Setup 2.
[9] Multi
setup
Usato per selezioni remote del setup usando gli
ingressi digitali e la porta di comunicazione
seriale. Questo setup usa le impostazioni del
parametro 0-12 Collega setup.
0-11 Setup di programmazione
Option: Funzione:
Il numero del setup che viene modicato è
visualizzato nell'LCP, lampeggiante.
[1] Setup 1 Modica setup 1.
[2] Setup 2 Modica setup 2.
[9] * Setup attivo Modica i parametri nel setup selezionato
tramite I/O digitali.
0-12 Collega setup
Option: Funzione:
Se i setup non sono collegati non è possibile
modicarli mentre il motore è in funzione.
[0] Non
collegato
[20] * Collegato Copia i parametri non modicabili durante il
Quando si seleziona un setup diverso per il
funzionamento, il cambio del setup non
avviene nché il motore non procede a ruota
libera.
funzionamento da un setup all'altro. È
possibile cambiare i setup mentre il motore è
in funzione.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 29

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parametri
VLT® HVAC Basic Drive FC 101
3.1.3 0-3* Visual. person. LCP
È possibile personalizzare gli elementi del display per vari
scopi.
33
Visualizzazione personalizzata
Il valore calcolato per la visualizzazione si basa sulle
impostazioni visualizzate nel parametro 0-30 Unità visual.
person., parametro 0-31 Valore min. visual. person. (soltanto
lineare), parametro 0-32 Valore max. visual. person.,
parametro 4-14 Limite alto velocità motore [Hz] e la velocità
eettiva.
Disegno 3.1 Visual. personaliz.
La relazione dipende dal tipo di unità selezionata nel
parametro 0-30 Unità visual. person.:
Tipo di unità Relazione velocità
Senza dimensioni
Velocità
Flusso, volume
Flusso, massa
Velocità
Lunghezza
Temperatura
Pressione Quadratica
Potenza Cubica
Tabella 3.1 Relazione velocità
0-30 Unità visual. person.
Option: Funzione:
30 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Programmare un valore da mostrare nel
display dell'LCP. Il valore ha una relazione
lineare, quadratica o cubica rispetto alla
velocità. Questa relazione dipende dall'unità
selezionata (vedere la Tabella 3.1). L'attuale
valore calcolato può essere letto nel
parametro 16-09 Visual. personaliz..
Lineare
0-30 Unità visual. person.
Option: Funzione:
[0] Ness
[1] * %
[5] PPM
[10] l/min.
[11] Giri/min.
[12] IMPULSI/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Gradi Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m Wg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft3/h
[140] ft/s
[141] ft/min
[160] Gradi Fahr.
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] cv
0-31 Valore min. visual. person.
Range: Funzione:
0 CustomReadoutUnit*
[ 0 -
999999.99
CustomReadoutUnit]
Questo parametro imposta il
valore minimo della visualizzazione denita dall'utente
(avviene a velocità zero). È
possibile impostare un valore
diverso da 0 soltanto quando si
seleziona un'unità lineare nel
parametro 0-30 Unità visual.

Parametri Guida alla Programmazione
0-31 Valore min. visual. person.
Range: Funzione:
person.. Per unità quadratiche e
cubiche il valore minimo è 0.
0-32 Valore max. visual. person.
Range: Funzione:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Questo parametro imposta il
valore max. da mostrare
quando la velocità del motore
ha raggiunto il valore
impostato per il
parametro 4-14 Limite alto
velocità motore [Hz].
0-37 Testo display 1
Range: Funzione:
[0 - 0 ] Usare questo parametro per scrivere una riga di
testo individuale per essere letta tramite la comunicazione seriale. L'ID dispositivo può essere incluso.
Usata soltanto se è in funzione BACnet.
0-38 Testo display 2
Range: Funzione:
[0 - 0 ] Usare questo parametro per scrivere una riga di
testo individuale per essere letta tramite la comunicazione seriale.
Usata soltanto se è in funzione BACnet.
0-39 Testo 3 del display
Range: Funzione:
[0 - 0 ] Usare questo parametro per scrivere una riga di
testo individuale per essere letta tramite la comunicazione seriale.
Usata soltanto se è in funzione BACnet.
3.1.4 0-4* Tastierino LCP
Attiva, disattiva e protegge tramite password singoli tasti
sull'LCP.
0-40 Tasto [Hand on] sull'LCP
Option: Funzione:
[0] Disabilita tutti Per impedire l'avvio involontario del conver-
titore di frequenza in modalità hand on,
selezionare [0] Disabilita tutti.
[1] * Abilita tutti [Hand On] è abilitato.
0-42 Tasto [Auto on] sull'LCP
Option: Funzione:
[0] Disabilita tutti Per impedire l'avvio involontario del conver-
titore di frequenza dall'LCP selezionare [0]
Disabilita tutti.
0-42 Tasto [Auto on] sull'LCP
Option: Funzione:
[1] * Abilita tutti [Auto On] è abilitato.
0-44 Tasto [O / Reset] Key sull'LCP
Option: Funzione:
[0] Disabilita tutti Disabilita il tasto o/reset.
[1] * Abilita tutti Abilita le funzioni O e Ripristino.
[7] Abil. solo riprist. Abilita la funzione di Ripristino, disabilita
la funzione O per evitare arresti
involontari del convertitore di frequenza.
3.1.5 0-5* Copia/Salva
Parametri per copiare le impostazioni dei parametri fra i
setup e a/da LCP.
0-50 Copia LCP
Option: Funzione:
[0] * Nessuna
copia
[1] Tutti a LCP Copia tutti i parametri in tutti i setup dalla
memoria del convertitore di frequenza alla
memoria dell'LCP. Per scopi di manutenzione,
copiare tutti i parametri sull'LCP dopo la
messa in funzione.
[2] Tutti da LCP Copia tutti i parametri in tutti i setup dalla
memoria dell'LCP alla memoria del convertitore di frequenza.
[3] Dim. indip.
da LCP
[10] Delete LCP
copy data
0-51 Copia setup
Option: Funzione:
[0] * Nessuna copia Nessuna funzione.
[1] Copia da setup 1 Copia dal setup 1 al setup 2.
[2] Copia da setup 2 Copia dal setup 2 al setup 1.
[9] Copia da setup dif.Copia le impostazioni di fabbrica al
Copia solo i parametri che sono indipendenti
dalla portata del motore. L'ultima selezione
può essere utilizzata per programmare vari
convertitori di frequenza con la stessa
funzione senza violare i dati motore che sono
già impostati.
Cancellare i parametri copiati nell'LCP. Questa
funzione richiede che la versione dell'LCP sia
maggiore o uguale a V11.00.
setup di programmazione (selezionato
nel parametro 0-11 Setup di program-
mazione).
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 31
Parametri
VLT® HVAC Basic Drive FC 101
3.1.6 0-6* Password
0-60 Passw. menu princ.
Range: Funzione:
0* [0 - 999 ] Denire la password per accedere al Menu
33
0-61 Accesso menu princ. senza passw.
Option: Funzione:
[0] * Accesso pieno Disabilitare la password denita nel
[1] LCP: sola lettura Impedisce la modica non autorizzata dei
[2] LCP: nessun
accesso
[3] Bus: sola lettura
[5] Tutti: sola lettura
principale tramite il tasto [Main Menu].
Impostando il valore su 0 si disabilita la funzione
di password. Questo parametro viene nascosto
dopo la denizione di una password.
parametro 0-60 Passw. menu princ..
parametri del Menu principale.
Impedisce le visualizzazioni e le
modiche non autorizzate dei parametri
del Menu principale.
32 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.2 Menu principale - Carico e Motore Gruppo 1
Parametri correlati alle compensazioni del carico e al tipo
di carico dell'applicazione indicati sulla targa del motore.
3.2.1 1-0* Impost.generali
1-00 Modo congurazione
Option: Funzione:
AVVISO!
Non è possibile regolare questo parametro
mentre il motore è in funzione.
[0]*An.
aperto
[3] Anello
chiuso
1-01 Principio controllo motore
Option: Funzione:
[0] U/f
[1] * VVC+
La velocità del motore è determinata applicando
una velocità di riferimento o impostando la
velocità desiderata mentre si è in modalità hand
on.
L'anello aperto viene usato anche se il convertitore
di frequenza fa parte di un sistema di controllo ad
anello chiuso, basato su un controllore PI esterno
che fornisce un segnale di riferimento di velocità
come uscita.
AVVISO!
Quando impostati per Anello chiuso, i
comandi Inversione e Avv. inversione non
invertono il senso di rotazione del motore.
Il riferimento dal controllore integrato PI determina
la velocità del motore. Il controllore PI integrato
varia la velocità del motore come parte di un
processo di controllo ad anello chiuso (ad
esempio, pressione o usso costante). Congurare
il controllore PI nel gruppo di parametri 20-** Conv.
freq. anello chiuso.
AVVISO!
Il controllo U/f non include le compensazioni
di scorrimento e del carico.
Usato per motori collegati in parallelo e/o
applicazioni con motori speciali. Impostare le
impostazioni U/f in parametro 1-55 Caratteristica u/f -
U e parametro 1-56 Caratteristica u/f - F.
AVVISO!
Quando parametro 1-10 Struttura motore è
impostato su opzioni abilitate PM, è
disponibile solo l'opzione VVC+.
Modalità di funzionamento normale, incluse le
compensazioni di scorrimento e del carico.
1-03 Caratteristiche di coppia
Option: Funzione:
[1] * Coppia
variabile
[3] Ottim. en.
autom. VT
Per il controllo di velocità di pompe e ventole
centrifughe. Da utilizzarsi anche quando più di
un motore viene controllato dallo stesso
convertitore di frequenza (ad esempio
ventilatori dei condensatori o torri di rared-
damento multipli). Fornisce una tensione che è
ottimizzata per una caratteristica di carico della
coppia quadratica del motore.
Per un controllo di velocità eciente dal punto
di vista energetico di pompe e ventilatori
centrifughi, fornisce una tensione ottimizzata
per una caratteristica di carico della coppia
quadratica del motore. Inoltre, la funzione AEO
adatta la tensione esattamente all'attuale
situazione di carico, riducendo così il consumo
energetico e i disturbi percettibili provenienti
dal motore.
1-06 Clockwise Direction
Option: Funzione:
AVVISO!
Non è possibile regolare questo parametro
mentre il motore è in funzione.
Questo parametro denisce il termine senso orario
corrispondente alla freccia di direzione dell'LCP.
Utilizzato per cambiare in modo semplice il senso
di rotazione dell'albero senza scambiare i
elettrici del motore.
[0] * Normal L'albero motore gira in senso orario quando il
convertitore di frequenza è collegato U⇒U; V⇒V; e
W⇒W al motore.
[1] Inverse L'albero motore gira in senso antiorario quando il
convertitore di frequenza è collegato U⇒U; V⇒V; e
W⇒W al motore.
1-08 Motor Control Bandwidth
Option: Funzione:
[0] High Adatto per una risposta estremamente dinamica.
[1] * Medium Adatto per condizioni operative in stato
stazionario uniformi.
[2] Low Adatto per condizioni operative di stato
stazionario uniformi con una risposta dinamica
minima.
[3] Adatt. 1 Adatto per condizioni operative di stato
stazionario uniformi con uno smorzamento
supplementare attivo.
[4] Adatt. 2 Questa è un'alternativa a [3] Adatt. 1 che si
concentra su motori PM a bassa induttanza.
li
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 33

Parametri
VLT® HVAC Basic Drive FC 101
3.2.2 Selezione motore da 1-10 a 1-13
[0]
Asincrono
AVVISO!
Parametro 1-10 Struttura motore
Questo gruppo di parametri non può essere regolato a
motore in funzione.
33
I seguenti parametri sono attivi ('x') in funzione dell'impostazione del parametro 1-10 Struttura motore.
[3]
Parametro 1-10 Struttura motore
Parametro 1-00 Modo congurazione x x x
Parametro 1-03 Caratteristiche di
coppia
Parametro 1-06 Senso orario x x x
Parametro 1-08 Motor Control
Bandwidth
Parametro 1-14 Fatt. di guad.
attenuaz.
Parametro 1-15 Cost. tempo ltro a
bassa velocità
Parametro 1-16 Cost. tempo ltro ad
alta velocità
Parametro 1-17 Cost. di tempo ltro
tensione
Parametro 1-20 Potenza motore [kW] x
Parametro 1-22 Tensione motore x
Parametro 1-23 Frequen. motore x
Parametro 1-24 Corrente motore x x x
Parametro 1-25 Vel. nominale motore x x x
Parametro 1-26 Coppia motore
nominale cont.
Parametro 1-29 Adattamento
Automatico Motore (AMA)
Parametro 1-30 Resist. statore (RS) x x x
Parametro 1-33 Reatt. dispers. statore
(X1)
Parametro 1-35 Reattanza principale
(Xh)
Parametro 1-37 Induttanza asse d
(Ld)
Parametro 1-38 Induttanza asse q
(Lq)
Parametro 1-39 Poli motore x x x
Parametro 1-40 Forza c.e.m. a 1000
giri/minuto
Parametro 1-42 Lungh. cavo motore x x x
Parametro 1-43 Lungh. cavi motore
piedi
Parametro 1-44 Sat. induttanza asse
d (LdSat)
[0]
Asincrono
[1] PM,
SPM n.
saliente
x
x x x
x x
x x
x x
x x
x x
x x x
x
x
x x
x
x x
x x x
x
PM,
IPM
sal.,
sat
Parametro 1-45 Sat. indutt. asse q
(LqSat)
Parametro 1-46 Guadagno
rilevamento posizione
Parametro 1-48 Corr. a indutt. min.
per asse d
Parametro 1-49 Corrente a indutt.
min. per asse q
Parametro 1-50 Magnetizz. motore a
vel. nulla.
Parametro 1-52 Min velocità
magnetizz. normale [Hz]
Parametro 1-55 Caratteristica u/f - U x
Parametro 1-56 Caratteristica u/f - F x
Parametro 1-62 Compens. scorrim. x
Parametro 1-63 Costante di tempo
compens. scorrim.
Parametro 1-64 Smorzamento
risonanza
Parametro 1-65 Smorzamento ris.
tempo costante
Parametro 1-66 Corrente min. a
velocità bassa
Parametro 1-70 Modalità avvio x x
Parametro 1-71 Ritardo avv. x x x
parametro 1-72 Funz. di avv. x x x
Parametro 1-73 Riaggancio al volo x x x
Parametro 1-80 Funzione all'arresto x x x
Parametro 1-90 Protezione termica
motore
parametro 2-00 Corrente CC di
mantenimento
Parametro 2-01 Corrente di frenatura
CC
Parametro 2-02 Tempo di frenata CC x x x
Parametro 2-04 Velocità inserimento
frenatura CC [Hz]
Parametro 2-06 Corrente di
parcheggio
Parametro 2-07 Tempo di parcheggio x x
Parametro 2-10 Funzione freno x x x
Parametro 2-16 Corrente max. per
freno CA
Parametro 2-17 Controllo
sovratensione
Parametro 4-10 Direz. velocità
motore
Parametro 4-14 Limite alto velocità
motore [Hz]
Parametro 4-18 Limite di corrente x x x
[1] PM,
SPM n.
saliente
x
x x
x
x
x
x
x
x
x
x x
x x x
x x x
x x x
x x x
x x
x
x x x
x x x
x x x
[3]
PM,
IPM
sal.,
sat
34 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
Parametro 1-10 Struttura motore
Parametro 4-19 Freq. di uscita max. x x x
Parametro 4-58 Funzione fase
motore mancante
Parametro 14-01 Freq. di commutaz. x x x
Parametro 14-03 Sovramodulazione x x x
Parametro 14-07 Livello di comp.
tempi morti
Parametro 14-08 Fatt. di guad.
attenuaz.
Parametro 14-09 Liv. corr. orient.
tempi morti
Parametro 14-10 Guasto di rete x x x
Parametro 14-11 Tens.di rete in caso
di guasto rete
Parametro 14-12 Funz. durante
sbilanciamento di rete
Parametro 14-27 Azione al guasto
inverter
Parametro 14-40 Livello VT x x x
Parametro 14-41 Magnetizzazione
minima AEO
Parametro 14-44 Ottim. corr. asse d
per IPM
Parametro 14-50 Filtro RFI x
Parametro 14-51 Compensazione
tens. coll. CC
Parametro 14-55 Filtro di uscita x x x
Parametro 14-64 Livello di corr. zero
comp. tempi morti
Parametro 14-65 Decl. vel. comp.
tempi morti
Parametro 30-22 Protezione rotore
bloccato
Parametro 30-23 Tempo di rilev. rot.
bloccato [s]
Tabella 3.2 Parametri attivi
[0]
Asincrono
[1] PM,
SPM n.
saliente
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x
x x
PM,
IPM
sal.,
1-10 Struttura motore
Option: Funzione:
[0] * Asincrono Per motori asincroni.
[1] PM, SPM n.
saliente
[3] PM, IPM sal.,
sat
Per motori a magnete permanente (PM) con
magneti montati sulla supercie (non
salienti). Fare riferimento dal
parametro 1-14 Damping Gain no al
parametro 1-17 Voltage lter time const. per
dettagli sull'ottimizzazione del funzionamento del motore.
Per motori a magnete permanente (PM) con
magneti interni (salienti), con controllo di
saturazione dell'induttanza.
[3]
sat
3.2.3
Da 1-14 a 1-17 PM VVC
+
I parametri di controllo di default per il nucleo di controllo
di motore PM VVC+ sono ottimizzati per applicazioni e un
carico inerziale nell'intervallo di 50>Jl/Jm>5, dove Jl è
l'inerzia di carico dall'applicazione e Jm è l'inerzia della
macchina.
Per applicazioni a inerzia ridotta (Jl/Jm<5), si raccomanda
di aumentare il parametro 1-17 Cost. di tempo ltro tensione
con un fattore di 5–10. In alcuni casi sarebbe necessario
ridurre il parametro 14-08 Fatt. di guad. attenuaz. per
migliorare le prestazioni e la stabilità.
Per applicazioni a inerzia elevata, Jl/Jm>50 aumentare il
parametro 1-15 Cost. tempo ltro a bassa velocità e il
parametro 1-16 Cost. tempo ltro ad alta velocità per
migliorare le prestazioni e la stabilità.
Per un carico elevato a bassa velocità (<30% della velocità
nominale) si consiglia di aumentare il parametro 1-17 Cost.
di tempo ltro tensione a causa della non linearità nell'inverter a basse velocità.
1-14 Fatt. di guad. attenuaz.
Range: Funzione:
120%* [0 -
250 %]
Il parametro stabilizza il motore PM al ne di
farlo funzionare in modo regolare e stabile. Il
valore del guadagno di smorzamento controlla le
prestazioni dinamiche del motore PM. Un basso
guadagno di smorzamento produce un'elevata
prestazione dinamica, mentre un valore elevato
produce una prestazione dinamica ridotta. La
prestazione dinamica è collegata ai dati del
motore e al tipo di carico. Se il guadagno di
smorzamento è troppo alto o troppo basso, il
controllo diventa instabile.
1-15 Cost. tempo ltro a bassa velocità
Range: Funzione:
Size
related*
[0.01 20 s]
La costante di tempo per lo smorzamento
del ltro passa alto determina il tempo di
risposta alle fasi di caricamento. Ottenere
un controllo rapido attraverso una
costante di tempo di smorzamento breve.
Tuttavia, se questo valore è troppo
piccolo, il controllo diventa instabile.
Questa costante di tempo viene usata al
di sotto del 10% della velocità nominale.
1-16 Cost. tempo ltro ad alta velocità
Range: Funzione:
Size
related*
[0.01 20 s]
La costante di tempo per lo smorzamento
del ltro passa alto determina il tempo di
risposta alle fasi di caricamento. Ottenere
un controllo rapido attraverso una
costante di tempo di smorzamento breve.
Tuttavia, se questo valore è troppo
piccolo, il controllo diventa instabile.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 35

Parametri
VLT® HVAC Basic Drive FC 101
1-16 Cost. tempo ltro ad alta velocità
Range: Funzione:
Questa costante di tempo viene usata al
di sopra del 10% della velocità nominale.
33
1-17 Cost. di tempo ltro tensione
Range: Funzione:
Size
related*
[0.001 - 1s]La costante di tempo del ltro della
tensione di alimentazione della
macchina viene usata per ridurre
l'inusso di elevate ondulazioni di
frequenza e risonanze del sistema nel
calcolo della tensione di alimentazione
della macchina. Senza questo ltro, le
ondulazioni nelle correnti possono
distorcere la tensione calcolata e
compromettere la stabilità del sistema.
3.2.4 1-2* Dati motore I
1-20 Potenza motore
Immettere la potenza motore nominale in kW/cv (vedere i dati di
targa del motore). Il valore di default corrisponde all'uscita
nominale dell'unità.
Non è possibile regolare questo parametro mentre il motore è in
funzione.
Option: Funzione:
[17] 15,00kW - 20 hp
[18] 18,5kW - 25 hp
[19] 22kW - 30 hp
[20] 30kW - 40 hp
[21] 37kW - 50 hp
[22] 45kW - 60 hp
[23] 55kW - 75 hp
[24] 75kW - 100 hp
[25] 90kW - 120 hp
[26] 110kW - 150 hp
1-22 Tensione motore
Range: Funzione:
Il gruppo di parametri contiene i dati di ingresso dalla
targa sul motore collegato.
AVVISO!
Size
related*
[50 - 1000V]Immettere la tensione motore
nominale in base ai dati di targa del
motore. Il valore di default
corrisponde all'uscita nominale
dell'unità.
Questi parametri non possono essere regolati mentre il
motore è in funzione.
1-23 Frequen. motore
Range: Funzione:
AVVISO!
Il cambiamento del valore di questi parametri ha eetto
sull'impostazione di altri parametri.
1-20 Potenza motore
Immettere la potenza motore nominale in kW/cv (vedere i dati di
targa del motore). Il valore di default corrisponde all'uscita
nominale dell'unità.
Non è possibile regolare questo parametro mentre il motore è in
funzione.
Option: Funzione:
[2] 0,12 kW - 0,16 cv
[3] 0,18 kW - 0,25 cv
[4] 0,25 kW - 0,33Hp
[5] 0,37 kW - 0,50 hp
[6] 0,55 kW - 0,75 cv
[7] 0,75 kW - 1,00 hp
[8] 1,10 kW - 1,50 hp
[9] 1,50 kW - 2,00 hp
[10] 2,20 kW - 3,00 hp
[11] 3,00 kW - 4,00 hp
[12] 3,70 kW - 5,00 hp
[13] 4,00 kW - 5,40 hp
[14] 5,50 kW - 7,50 hp
[15] 7,50 kW - 10,0 hp
[16] 11,00 kW - 15,00 hp
Size
related*
[20 -
Selezionare la frequenza motore dai dati di
400
targa del motore. Per il funzionamento a 87 Hz
Hz]
con motori da 230/400 V, impostare i dati di
targa relativi a 230 V/50 Hz. Adattare il
parametro 4-14 Limite alto velocità motore [Hz]
e il parametro 3-03 Riferimento max. all'applicazione da 87 Hz.
1-24 Corrente motore
Range: Funzione:
Size
related*
[ 0.01 -
1000.00 A]
Immettere il valore di corrente
nominale del motore dai dati di targa
del motore. Questi dati vengono
utilizzati per calcolare la coppia del
motore, la protezione termica del
motore e così via.
1-25 Vel. nominale motore
Range: Funzione:
Size
related*
[50 - 60000
RPM]
Immettere il valore di velocità
nominale del motore dai dati di
targa del motore. Questi dati
vengono utilizzati per calcolare le
compensazioni del motore.
36 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
1-26 Coppia motore nominale cont.
Range: Funzione:
Size
related*
1-29 Adattamento Automatico Motore (AMA)
Option: Funzione:
[0.1 10000 Nm]
AVVISO!
La modica di questo parametro
inuisce sull'impostazione di altri
parametri
Questo parametro è disponibile quando
il parametro 1-10 Struttura motore è
impostato su opzioni che abilitano il
modo motore permanente.
AVVISO!
Non è possibile regolare questo
parametro mentre il motore è in
funzione.
La funzione AMA migliora le prestazioni
dinamiche del motore mediante l'ottimizzazione automatica, a motore fermo, dei
parametri motore avanzati.
[0]*O Nessuna funzione
AVVISO!
Quando il parametro 1-10 Struttura motore è impostato
su opzioni che consentono la modalità motore
permanente, l'unica opzione disponibile è [1] Abilit.AMA
compl.
Attivare la funzione AMA premendo [Hand On] dopo aver
selezionato [1] Abilit.AMA compl. o [2] Abilitare AMA ridotto.
Dopo una sequenza normale, il display visualizza il
messaggio: Premere [OK] per terminare l'AMA. Dopo aver
premuto [OK], il convertitore di frequenza è pronto per
funzionare.
AVVISO!
Per un adattamento ottimale del convertitore di
•
frequenza, eseguire l'AMA su un motore freddo.
L'AMA non può essere eettuato quando il
•
motore è in funzione.
L'AMA non può essere eettuato su un motore
•
con una potenza nominale superiore a quella
del convertitore di frequenza, ad es. quando un
motore da 5,5 kW (7,4 cv) viene collegato a un
convertitore di frequenza da 4 kW (5,4 cv).
3 3
[1] Abilit.AMA
compl.
[2] Abilitare
AMA
ridotto
Quando il parametro 1-10 Struttura motore è
impostato su [0] Asincrono, viene eseguito
l'AMA del parametro 1-30 Resist. statore (RS), del
parametro 1-33 Reatt. dispers. statore (X1) e del
parametro 1-35 Reattanza principale (Xh).
Quando il parametro 1-10 Struttura motore è
impostato su opzioni che consentono motori
permanenti, viene eseguito l'AMA del
parametro 1-30 Resist. statore (RS) e del
parametro 1-37 Induttanza asse d (Ld).
AVVISO!
Il morsetto 27 Ingresso digitale
(parametro 5-12 Ingr. digitale morsetto
27) è impostato di fabbrica su
evoluzione libera negata. Ciò signica
che l'AMA non può essere eettuato se
il morsetto 27 non è alimentato con 24
V.
Eettua un AMA ridotto in cui viene
determinata solo la resistenza di statore Rs del
sistema. Selezionare questa opzione se si
utilizza un ltro LC tra il convertitore di
frequenza e il motore.
AVVISO!
Evitare una coppia rigenerativa esterna durante l'AMA.
AVVISO!
Se una delle impostazioni nel gruppo di parametri 1-2*
Dati motore viene modicata, i parametri motore
avanzati, dal parametro 1-30 Resist. statore (RS) al
parametro 1-39 Poli motore, tornano alle impostazioni di
fabbrica.
AVVISO!
Eseguire un AMA completo solo senza ltro, mentre
l'AMA ridotto dovrebbe essere eseguito con un ltro.
3.2.5 1-3* Dati motore avanz.
Il gruppo di parametri contiene i dati di ingresso dalla
targa sul motore collegato.
AVVISO!
Questi parametri non possono essere regolati mentre il
motore è in funzione.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 37

Parametri
VLT® HVAC Basic Drive FC 101
1-30 Resist. statore (RS)
3.2.6 1-4* Contr. mot. avanz. II
Range: Funzione:
Size
related*
33
[ 0.0 -
9999.000 Ohm]
Impostare il valore della resistenza
di statore. Fare riferimento al
valore nella scheda tecnica del
motore o eettuare un AMA a
motore freddo.
Il gruppo di parametri contiene i dati di ingresso dalla
targa sul motore collegato.
AVVISO!
Questi parametri non possono essere regolati mentre il
motore è in funzione.
1-33 Reatt. dispers. statore (X1)
Range: Funzione:
Size related* [ 0.0 - 9999.000
Ohm]
Impostare la reattanza di
dispersione dello statore del
motore.
1-35 Reattanza principale (Xh)
Range: Funzione:
Size
related*
[ 0.0 -
9999.00
Ohm]
Impostare la reattanza principale del
motore utilizzando uno dei metodi
seguenti:
Eseguire l'AMA su un motore
•
freddo. Il convertitore di
frequenza misura il valore dal
motore.
Immettere il valore X
•
manualmente. I valori sono
indicati dal fornitore del motore.
Usare l'impostazione di fabbrica
•
Xh. Il convertitore di frequenza
stabilisce l'impostazione sulla
base dei dati di targa del motore.
h
1-37 Induttanza asse d (Ld)
Range: Funzione:
Size related* [ 0 - 65535 mH] Vedere la scheda tecnica del
motore a magneti permanenti.
1-40 Forza c.e.m. a 1000 giri/minuto
Range: Funzione:
Size related* [1 - 9000 V] Impostare la forza c.e.m. nominale
per il motore a 1.000 Giri/min.
1-42 Lungh. cavo motore
Range: Funzione:
50 m* [0 - 100 m] Impostare la lunghezza del cavo motore
durante la messa in funzione.
1-43 Lungh. cavi motore piedi
Range: Funzione:
164 ft* [0 - 328 ft] Impostare la lunghezza del cavo motore
durante la messa in funzione.
1-44 Sat. induttanza asse d (LdSat)
Range: Funzione:
Size
related*
[ 0 65535
mH]
Questo parametro corrisponde alla
saturazione dell'induttanza di Ld.
Idealmente questo parametro ha lo stesso
valore del parametro 1-37 Induttanza asse d
(Ld). Tuttavia, se il fornitore del motore
fornisce una curva di induzione, qui
dovrebbe essere immesso il valore di
induzione che è pari al 200% della corrente
nominale.
1-38 Induttanza asse q (Lq)
Range: Funzione:
Size
related*
[ 0.000 65535 mH]
Impostare il valore dell’induttanza
asse q. Vedere la scheda tecnica del
motore a magneti permanenti. Il
valore non può essere modicato
quando il motore è in funzione.
1-39 Poli motore
Range: Funzione:
Size
related*
38 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
[2 100 ]
Immettere il numero di poli del motore. Il
valore dei poli del motore deve sempre
essere un numero pari perché si riferisce
al numero totale di poli, non alla coppia
di poli.
1-45 Sat. indutt. asse q (LqSat)
Range: Funzione:
Size
related*
[ 0 65535
mH]
This parameter corresponds to the
inductance saturation of Lq. Ideally, this
parameter has the same value as
parametro 1-38 Induttanza asse q (Lq).
However, if the motor supplier provides an
induction curve, enter the induction value
here, which is 200% of the nominal
current.
1-46 Guadagno rilevamento posizione
Range: Funzione:
100 %* [ 20 -
200 %]
Use this parameter to adjust the height of
the test pulse during position detection at
start. Questo parametro è valido dalla
versione software 2.80.

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Parametri Guida alla Programmazione
1-48 Corr. a indutt. min. per asse d
Range: Funzione:
100 %* [ 20 - 200 %] Usare questo parametro per impostare il
punto di saturazione dell'induttanza.
1-49 Corrente a indutt. min. per asse q
Range: Funzione:
100%* [ 20 -
Questo parametro specica il valore di
200 %
saturazione della curva dell'induttanza q. Dal 20
]
al 100% di questo parametro, le induttanze sono
linearmente approssimate a causa del
parametro 1-37 Induttanza asse d (Ld), del
parametro 1-38 Induttanza asse q (Lq), del
parametro 1-44 Sat. induttanza asse d (LdSat) e del
parametro 1-45 Sat. indutt. asse q (LqSat). Sotto e
sopra sono specicati dai parametri
corrispondenti. I parametri sono legati alla
compensazione del carico di targa del motore, al
tipo di carico e alla funzione del freno elettronico
all'arresto rapido/ritenuta del motore.
3.2.7 1-5* Impos.indip. carico
1-55 Caratteristica u/f - U
Array [6]
Range: Funzione:
Size
related*
[0 - 999V]Immettere la tensione in ogni punto di
frequenza per formare una caratteristica
U/f che si adatta al motore. I punti di
frequenza sono deniti nel
parametro 1-56 Caratteristica u/f - F
1-56 Caratteristica u/f - F
Array[6]
Range: Funzione:
Size
related*
[ 0 -
400.0
Hz]
Immettere i punti di frequenza per formare
una caratteristica U/f che si adatta al
motore. La tensione in ogni punto è denita
nel parametro 1-55 Caratteristica u/f - U.
Per realizzare una caratteristica U/f basata
su sei tensioni e frequenze denibili fare
riferimento alla Disegno 3.3.
Semplicare le caratteristiche U/f unendo 2
o più punti (tensioni e frequenze).
Impostare i punti a valori uguali.
3 3
Parametri per le impostazioni indipendenti dal carico del
motore.
1-50 Magnetizz. motore a vel. nulla.
Range: Funzione:
100%* [0 -
Usare questo parametro insieme a
300 %
parametro 1-52 Min velocità magnetizz. normale
]
[Hz] per ottenere un carico termico dierente sul
motore nel funzionamento a bassa velocità.
Impostare un valore percentuale della corrente
magnetizzante nominale. Un valore troppo basso
può ridurre la coppia sull'albero motore.
Disegno 3.2 Magnetizzazione del motore
1-52 Min velocità magnetizz. normale [Hz]
Range: Funzione:
1 Hz* [0.1 -
10.0 Hz]
Impostare la frequenza richiesta per la
corrente di magnetizzazione normale.
Utilizzare questo parametro insieme al
parametro 1-50 Magnetizz. motore a vel. nulla..
Vedere la Disegno 3.2.
Disegno 3.4 Caratteristica U/f
3.2.8 1-6* Imp. dipend. dal carico
Par. per regolare le impostaz del motore dip. dal carico.
1-62 Compens. scorrim.
Range: Funzione:
Size
related*
[-400 400 %]
Immettere il valore percentuale per la
compensazione dello scorrimento per
compensare le tolleranze nel valore di
n
. La compensazione dello
M,N
scorrimento viene calcolata automaticamente, sulla base della velocità
nominale del motore n
M,N
.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 39
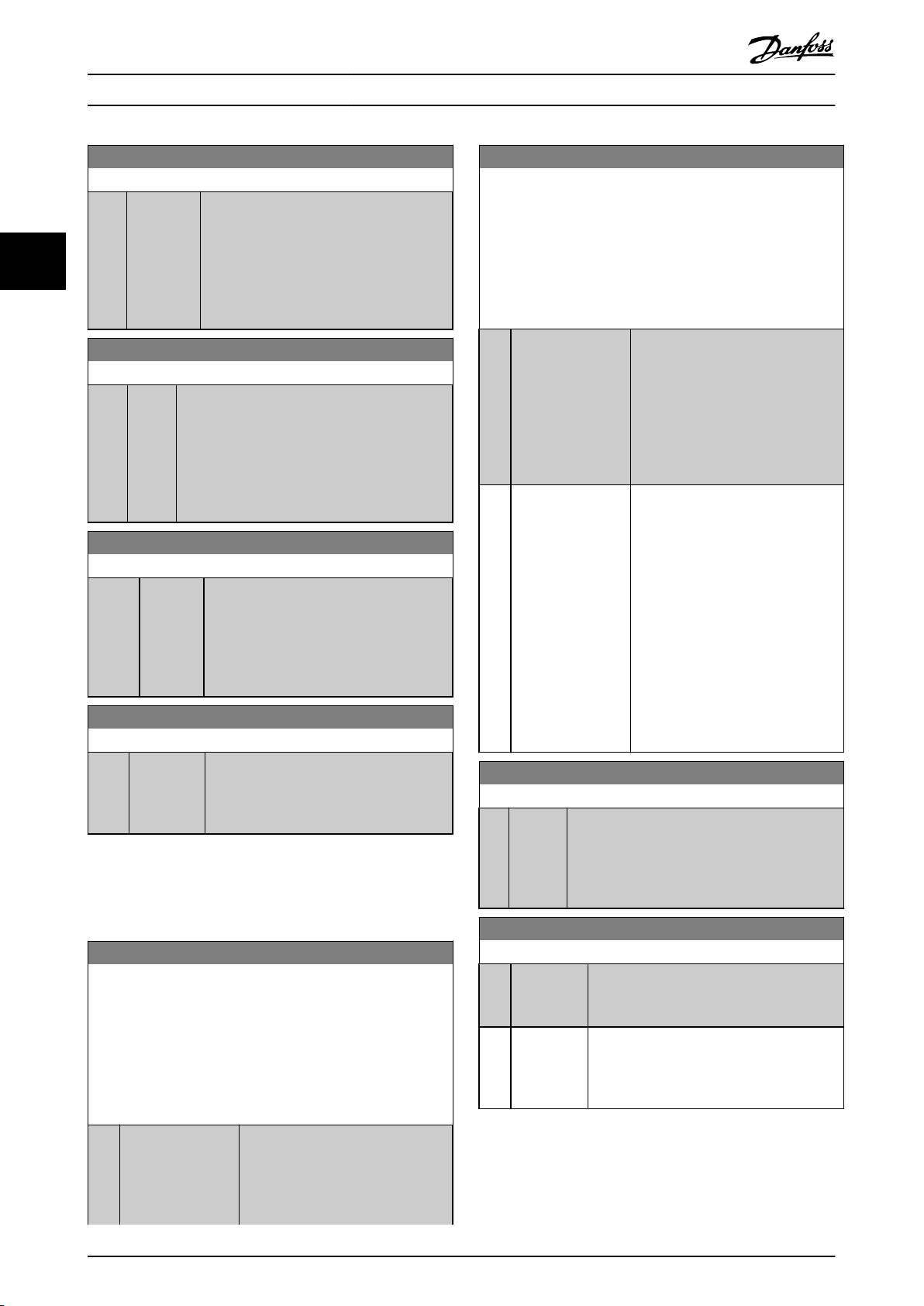
Parametri
VLT® HVAC Basic Drive FC 101
1-63 Costante di tempo compens. scorrim.
Range: Funzione:
0.1 s* [0.05 - 5 s] Immettere la velocità di reazione della
compensazione dello scorrimento. Un valore
alto comporta una reazione lenta mentre un
33
valore basso comporta una reazione veloce.
In caso di problemi di risonanza a bassa
frequenza, prolungare l'impostazione del
tempo.
1-64 Smorzamento risonanza
Range: Funzione:
100%* [0 -
500 %]
Immettere il valore di smorzamento risonanza.
Impostare il parametro 1-64 Smorzamento
risonanza e il parametro 1-65 Smorzamento ris.
tempo costante per eliminare problemi di
risonanza ad alta frequenza. Per ridurre l'oscillazione di risonanza aumentare il valore del
parametro 1-64 Smorzamento risonanza.
1-65 Smorzamento ris. tempo costante
Range: Funzione:
0.005 s* [0.001 -
0.050 s]
Impostare il parametro 1-64 Smorzamento
risonanza e il parametro 1-65 Smorzamento
ris. tempo costante per eliminare problemi di
risonanza ad alta frequenza. Immettere la
costante di tempo che fornisce lo
smorzamento ideale.
1-66 Corrente min. a velocità bassa
Range: Funzione:
50 %* [0 - 120 %] Vale solo per motori PM. L'aumento della
corrente minima migliora la coppia del
motore a bassa velocità, ma riduce anche
l'ecienza.
3.2.9 1-7* Regolaz.per avvio
1-70 Modalità avvio
Questo parametro è valido a partire dalla versione software 2.80
e successive. Usare questo parametro per selezionare la modalità
di avviamento del motore PM che deve inizializzare il nucleo di
controllo VVC+ per i motori PM che precedentemente funzionavano a ruota libera. Questo parametro è attivo per motori PM
in modalità VVC+ solo se il motore viene arrestato (o funziona a
bassa velocità).
Option: Funzione:
titori di frequenza per l'automazione.
Se la funzione di avviamento
riaggancio al volo rileva che il motore
funziona a bassa velocità o si ferma, il
convertitore di frequenza può rilevare
la posizione del rotore (l'angolo). Il
convertitore di frequenza avvia quindi
il motore da quell'angolo.
[1] * Parcheggio La funzione di parcheggio applica
corrente CC attraverso l'avvolgimento
dello statore e ruota il rotore alla
posizione dello zero elettrico. Questa
funzione viene tipicamente
selezionata per applicazioni HVAC. Se
la funzione di avviamento riaggancio
al volo rileva che il motore funziona a
bassa velocità o si ferma, il convertitore di frequenza trasmette una
corrente CC per parcheggiare il
motore a un angolo. Il convertitore di
frequenza avvia quindi il motore da
quell'angolo.
1-71 Ritardo avv.
Range: Funzione:
0 s* [0 - 10s]Questo parametro consente un ritardo del tempo
di avviamento. Il convertitore di frequenza inizia
con la funzione di avviamento selezionata in
parametro 1-72 Funz. di avv.. Impostare il ritardo
all'avviamento no all'inizio dell'accelerazione.
Parametri per congurare caratteristiche di avviamento
speciali del motore.
1-70 Modalità avvio
Questo parametro è valido a partire dalla versione software 2.80
e successive. Usare questo parametro per selezionare la modalità
di avviamento del motore PM che deve inizializzare il nucleo di
controllo VVC+ per i motori PM che precedentemente funzionavano a ruota libera. Questo parametro è attivo per motori PM
in modalità VVC+ solo se il motore viene arrestato (o funziona a
bassa velocità).
1-72 Funz. di avv.
Option: Funzione:
[0] Corr. CC/t.
ritardo
[2] * Ev. libera/t.
ritardo
Il motore viene alimentato con il
parametro 2-00 Corr. mant. CC/prerisc. motore
durante il tempo di ritardo dell'avviamento.
Il convertitore di frequenza viene fatto
funzionare a ruota libera durante il tempo di
ritardo dell'avviamento (convertitore di
frequenza o).
Option: Funzione:
[0] Rilevamento del
rotore
La funzione rilevamento del rotore
stima l'angolo elettrico del rotore e
usa questo angolo come punto di
avviamento. Questa è la selezione
standard per applicazioni con conver-
40 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
1-73 Riaggancio al volo
Questa funzione rende possibile sincronizzarsi con un motore che
gira liberamente a causa di una caduta di tensione di rete. Il
riaggancio al volo cerca solo in senso orario. Se non funziona,
viene attivato un freno CC. Se sono selezionate opzioni abilitate
PM, il parcheggio viene eettuato se la velocità è inferiore a
2,5-5% nel tempo impostato nel parametro 2-07 Tempo di
parcheggio.
Se la stima di velocità risulta essere inferiore al 2,5-5% della
velocità nominale, viene attivata la funzione di parcheggio
(vedere il parametro 2-06 Corrente di parcheggio e il
parametro 2-07 Tempo di parcheggio). Altrimenti il convertitore di
frequenza aggancia il motore a quella velocità e riprende il
funzionamento normale.
La funzione di avviamento Riaggancio al volo per motori PM è
basata su una stima di velocità iniziale. La velocità è sempre
stimata come prima cosa dopo che viene dato un segnale di
avviamento attivo.
Limitazioni correnti del principio di riaggancio al volo usato per
motori PM:
L'intervallo di velocità arriva no al 100% della velocità
•
nominale o alla velocità di indebolimento di campo (a
seconda del valore che è più basso).
Per applicazioni a elevata inerzia (cioè dove l'inerzia del
•
carico è oltre 30 volte superiore all'inerzia del motore).
Option: Funzione:
[0] Disabilitato
[1] Abilitato
3.2.10 1-8* Adattam. arresto
Parametri per congurare particolari caratteristiche di
arresto del motore.
1-80 Funzione all'arresto
Option: Funzione:
Selezionare questa funzione dopo un comando
di arresto o dopo che la velocità è stata ridotta
alle impostazioni nel parametro 1-82 V. min.
funz. all'arr. [Hz].
[0] * Evol. libera Lascia il motore in evoluzione libera.
[1] Mant. CC/
prerisc.
mot.
1-82 V. min. funz. all'arr. [Hz]
Range: Funzione:
0 Hz* [0 - 20 Hz] Impostare la frequenza di uscita alla quale
1-88 Guad. freno CA
Range: Funzione:
1.4* [1.0 -
2.0 ]
Alimenta il motore con una corrente di
mantenimento CC (vedere il
parametro 2-00 Corr. mant. CC/prerisc. motore).
attivare parametro 1-80 Funzione all'arresto.
Questo parametro viene usato per impostare la
capacità della potenza freno CA (impostare il
1-88 Guad. freno CA
Range: Funzione:
tempo rampa di decelerazione quando l'inerzia è
costante). Se la tensione del collegamento CC non
è superiore al valore di avviso della tensione del
collegamento CC, la coppia del generatore può
essere regolata con questo parametro.
3.2.11 1-9* Temp. motore
I parametri per congurare le caratteristiche di protezione
in temperatura del motore.
1-90 Protezione termica motore
Option: Funzione:
Utilizzando l'ETR (relè termico elettronico),
la temperatura del motore viene calcolata in
funzione di frequenza, corrente e tempo.
Danfoss consiglia di utilizzare la funzione
ETR in mancanza di un termistore. La
funzionalità è la stessa per motori asincroni
e motori PM.
AVVISO!
Il calcolo ETR si basa sui dati del
motore dal gruppo di parametri 1-2*
Dati motore.
[0] Nessuna
protezione
[1] Termistore,
avviso
[2] Termistore,
scatto
[3] ETR avviso 1 Se il limite superiore calcolato per la
[4] * ETR sc. 1 Avviare il calcolo termico del motore in
[22] ETR scatto -
rilevamento
esteso
Disabilita il monitoraggio della temperatura.
Un termistore genera un avviso in caso di
superamento del limite superiore della
gamma di temperatura del motore.
Se viene superato il limite superiore dell'intervallo di temperatura del motore, un
termistore emette un allarme e fa scattare il
convertitore di frequenza.
gamma di temperatura del motore è
superato, viene generato un avviso.
base al carico eettivo e al tempo, nonché
alla frequenza motore, quando la corrente
motore è superiore al 110% della corrente
nominale del motore.
Avviare il calcolo termico del motore in
base al carico eettivo e al tempo, nonché
alla frequenza motore, quando la corrente
motore è superiore al 110% della corrente
nominale del motore. In alternativa, avviare
il calcolo termico del motore quando la
corrente motore è inferiore al 110% della
corrente nominale del motore e si attiva il
limite di corrente.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 41

Parametri
1-93 Fonte termistore
Option: Funzione:
VLT® HVAC Basic Drive FC 101
AVVISO!
Non è possibile regolare questo
parametro mentre il motore è in
33
funzione.
AVVISO!
Impostare l'ingresso digitale su [0] PNP
nel parametro 5-03 Mod. ingresso dig. 29.
Selezionare l'ingresso al quale dovrebbe essere
collegato il termistore (sensore PTC). Utilizzando
un ingresso analogico, lo stesso ingresso
analogico non può essere usato come
riferimento dal parametro 3-15 Risorsa di rif. 1 al
parametro 3-17 Risorsa di riferimento 3,
parametro 20-00 Fonte retroazione 1,
parametro 20-03 Risorsa retroazione 1 CL
processo, parametro 24-06 Origine riferim. mod.
incendio e parametro 24-07 Fire Mode Feedback
Source.
[0]*Nessuno Non impostare la fonte termistore.
[1] Ingr.
analog. 53
[6] Ingresso
digitale 29
Usare l'ingresso analogico 53 come fonte
termistore.
Usare l'ingresso digitale 29 come fonte
termistore.
42 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.3 Menu principale - Freni - Gruppo 2
3.3.1 2-0* Freno CC
Parametri per congurare il freno CC e le funzioni di
mantenimento CC.
2-00 Corr. mant. CC/prerisc. motore
Range: Funzione:
50 %* [0 -
160 %]
2-01 Corrente di frenatura CC
Range: Funzione:
50 %* [0 -
150 %]
AVVISO!
SURRISCALDAMENTO DEL MOTORE
Il valore massimo dipende dalla corrente
nominale del motore.
Per evitare danni al motore causati dal
surriscaldamento, non farlo funzionare al
100% per troppo tempo.
L'impostazione della corrente di mantenimento
come percentuale della corrente nominale del
motore I
Parametro 2-00 Corr. mant. CC/prerisc. motore
mantiene la funzione motore (coppia di
mantenimento) o preriscalda il motore. Questo
parametro è attivo se viene selezionato il
mantenimento CC nel parametro 1-72 Funz. di avv.
[0] Corr. CC/t. ritardo o parametro 1-80 Funzione
all'arresto [1] Mant. CC/prerisc. mot.
nel parametro 1-24 Corrente motore.
M,N
AVVISO!
SURRISCALDAMENTO DEL MOTORE
Il valore massimo dipende dalla corrente
nominale del motore.
Per evitare danni al motore causati dal
surriscaldamento, non farlo funzionare al
100% per troppo tempo.
2-04 Vel. freno inserito CC
Range: Funzione:
0 Hz* [ 0 - 500
Hz]
Questo parametro viene utilizzato per
impostare la velocità di inserimento del freno
CC a cui il parametro 2-01 Corrente di frenatura
CC deve essere attivo con un comando di
arresto.
2-06 Corrente di parcheggio
Range: Funzione:
100%* [0 -
150 %]
Impostare la corrente come percentuale della
corrente nominale del motore,
parametro 1-24 Corrente motore. Attiva con il
parametro 1-73 Riaggancio al volo. La corrente di
parcheggio è attiva durante il periodo di tempo
impostato nel parametro 2-07 Tempo di
parcheggio.
AVVISO!
Il Parametro 2-06 Corrente di parcheggio è
attivo soltanto se la costruzione motore
PM è selezionata nel
parametro 1-10 Struttura motore.
2-07 Tempo di parcheggio
Range: Funzione:
3 s* [0.1 - 60s]Impostare la durata della corrente di parcheggio
impostata nel parametro 2-06 Corrente di
parcheggio. Attiva con il
parametro 1-73 Riaggancio al volo.
AVVISO!
Il Parametro 2-07 Tempo di parcheggio è
attivo soltanto se il
parametro 1-10 Struttura motore è
impostato sulle opzioni che abilitano
motori PM.
3 3
Impostare la corrente come % della corrente
nominale del motore, parametro 1-24 Corrente
motore. Quando la velocità è inferiore al limite
impostato nel parametro 2-04 Vel. freno inserito CC
o quando è attiva la funzione Frenatura CC a
recupero (nel gruppo di parametri 5-1* Ingressi
digitali impostato su [5] Freno CC neg.; o tramite la
porta seriale), in caso di comando di arresto viene
applicata una corrente di frenatura CC. Vedere il
parametro 2-02 Tempo di frenata CC per la durata.
2-02 Tempo di frenata CC
Range: Funzione:
10 s* [0 - 60 s] Immettere la durata della corrente di frenatura
CC impostata in parametro 2-01 Corrente di
frenatura CC dopo l'attivazione.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 43
3.3.2 2-1* Funz. energia freno
Gruppo di parametri per selezionare i parametri del freno
dinamico.
2-10 Funzione freno
Option: Funzione:
[0] * O La resistenza di frenatura non è attiva.
[2] Freno CA Il freno CA è attivo.
2-16 Freno CA, corr. max
Range: Funzione:
100 %* [0 - 160 %] Immettere la corrente massima consentita
quando si usa il freno CA per evitare il
surriscaldamento degli avvolgimenti
motore.
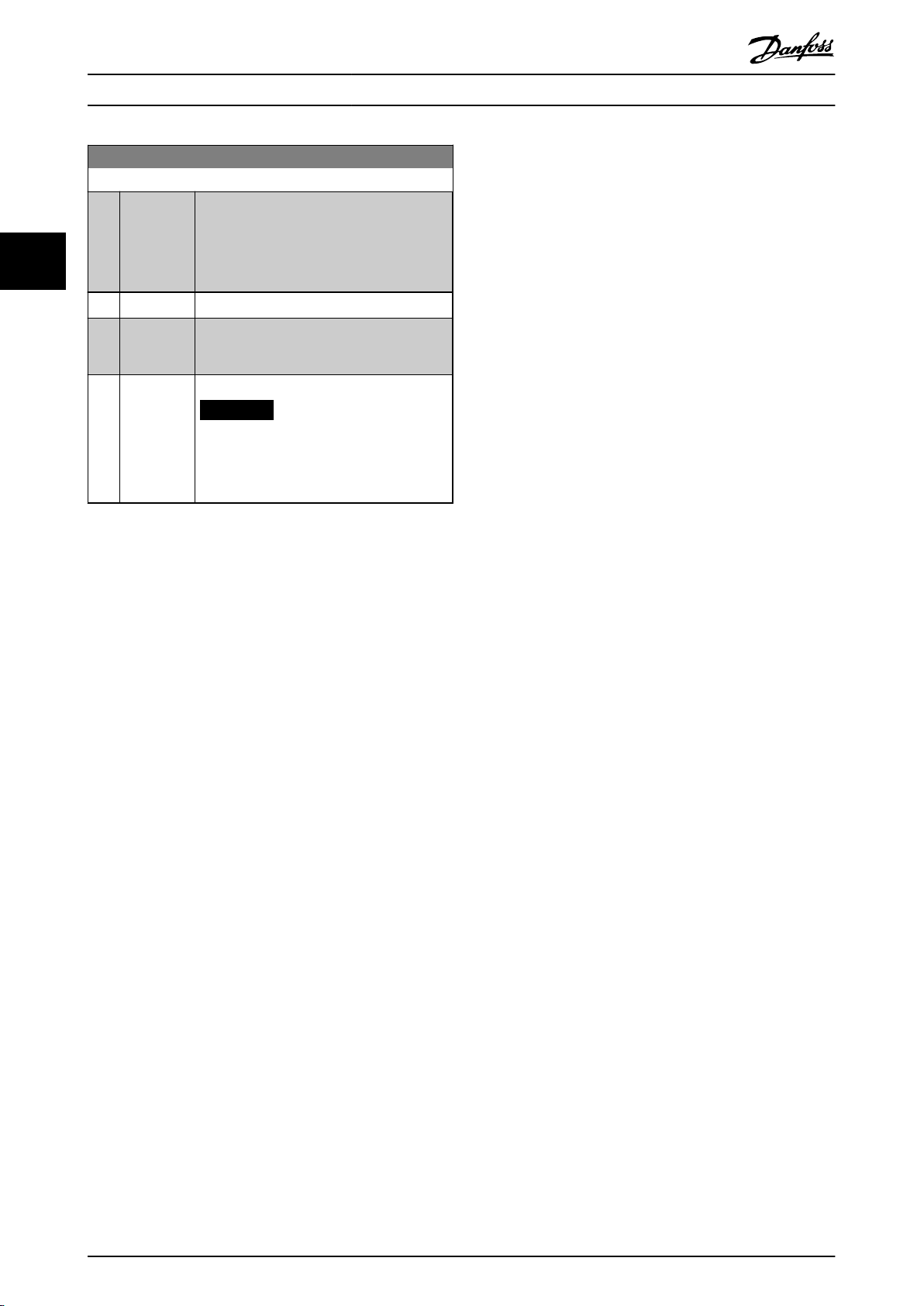
Parametri
2-17 Controllo sovratensione
Option: Funzione:
Selezionare se abilitare l'OVC durante la
decelerazione, per ridurre il rischio di scatto
del convertitore di frequenza a causa di una
33
[0] Disabilitato Nessun OVC richiesto.
[1] Abilitato
(non in
stop)
[2] * Abilitato Attiva l'OVC.
sovratensione nel collegamento CC dovuta
alla potenza rigenerativa dal carico.
Attiva l'OVC quando il convertitore di
frequenza non è nello stato di arresto.
VLT® HVAC Basic Drive FC 101
AVVISO!
Il tempo di rampa viene regolato
automaticamente per evitare lo scatto
del convertitore di frequenza.
44 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
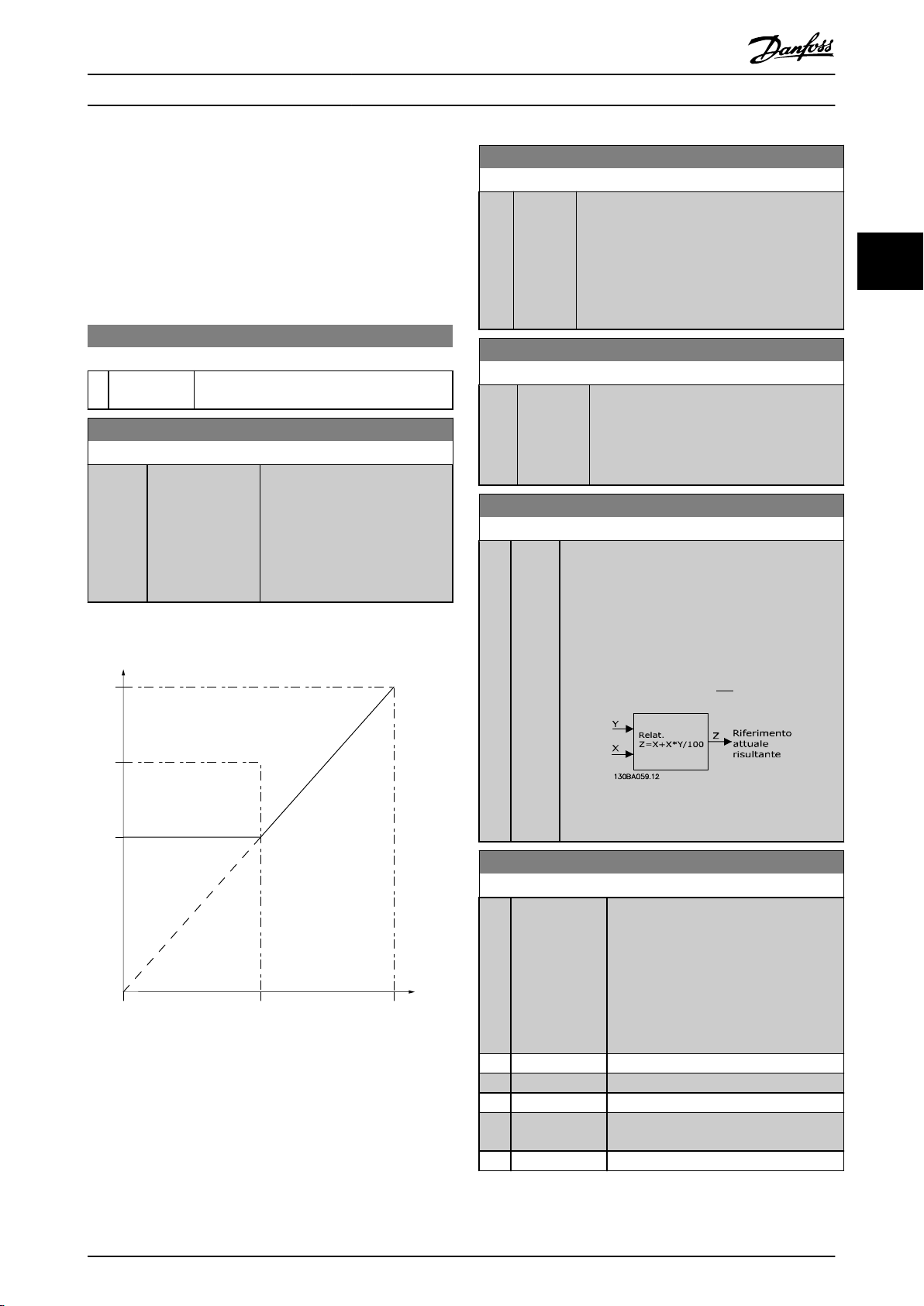
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parametri Guida alla Programmazione
3.4 Menu principale - Rif./rampe - Gruppo 3
3.4.1 3-0* Limiti riferimento
Parametri per impostare unità di riferimento, limiti e
intervalli.
Vedere anche il gruppo di parametri 20-0* Retroazione per
informazioni sulle impostazioni in anello chiuso.
3-02 Riferimento minimo
Range: Funzione:
0* [-4999–4999] Il riferimento minimo è il valore minimo
ottenuto dalla somma di tutti i riferimenti
3-03 Riferimento max.
Range: Funzione:
Size
related*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
Il riferimento massimo è il valore
massimo ottenuto dalla somma di
tutti i riferimenti. L'unità di
riferimento massimo corrisponde
alla scelta della congurazione
nel parametro 1-00 Modo congu-
razione.
3.4.2 3-1* Riferimenti
3-10 Riferim preimp.
Range: Funzione:
0 %* [-100 -
100 %]
Immettere no a otto riferimenti preimpostati
diversi (0–7) in questo parametro usando una
programmazione ad array. Per la selezione dei
riferimenti dedicati, selezionare Rif. preimp. bit
0/1/2 [16], [17] o [18] per gli ingressi digitali
corrispondenti nel gruppo di parametri 5-1*
Ingressi digitali.
3-11 Velocità di jog [Hz]
Range: Funzione:
5 Hz* [ 0 - 500.0
Hz]
La velocità jog è la velocità di uscita ssata a
cui il convertitore di frequenza funziona
quando la funzione jog è attivata.
Vedere anche il parametro 3-80 Tempo rampa
Jog.
3-14 Rif. relativo preimpostato
Range: Funzione:
0 %* [-100
100 %]
Denire un valore sso in % da aggiungere al
valore variabile denito nel parametro 3-18 Risorsa
rif. in scala relativa.
La somma dei valori ssi e variabili (denominata Y
nella Disegno 3.6) viene moltiplicata per il
riferimento eettivo (denominato X nella
Disegno 3.6). Il risultato viene sommato al
riferimento eettivo. X + X ×
100
3 3
Y
Disegno 3.5 Riferimenti
Disegno 3.6 Rif. relativo preimpostato
3-15 Risorsa di rif. 1
Option: Funzione:
Selezionare quale ingresso utilizzare per il
primo segnale di riferimento. Il
Parametro 3-15 Risorsa di rif. 1, il
parametro 3-16 Risorsa di riferimento 2 e il
parametro 3-17 Risorsa di riferimento 3
deniscono no a tre diversi segnali di
riferimento. La somma di questi segnali di
riferimento denisce il riferimento attuale.
[0] Nessuna funz.
[1] * Ingr. analog. 53
[2] Ingr. analog. 54
[7] Ingr. frequenza
29
[11] Rif. bus locale
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 45

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parametri
VLT® HVAC Basic Drive FC 101
3-16 Risorsa di riferimento 2
Option: Funzione:
Selezionare quale ingresso utilizzare per il
secondo segnale di riferimento.
Parametro 3-15 Risorsa di rif. 1,
33
[0] Nessuna funz.
[1] Ingr. analog. 53
[2] * Ingr. analog. 54
[7] Ingr. frequenza
29
[11] Rif. bus locale
3-17 Risorsa di riferimento 3
Option: Funzione:
[0] Nessuna funz.
[1] Ingr. analog. 53
[2] Ingr. analog. 54
[7] Ingr. frequenza
29
[11] * Rif. bus locale
3.4.3 3-4* Rampa 1
Congura i parametri tempo di rampa per ognuna delle
parametro 3-16 Risorsa di riferimento 2 e
parametro 3-17 Risorsa di riferimento 3
deniscono no a 3 diversi segnali di
riferimento. La somma di questi segnali di
riferimento denisce il riferimento attuale.
Vedere anche il parametro 1-93 Fonte
termistore.
Selezionare quale ingresso utilizzare per
il terzo segnale di riferimento. Il
Parametro 3-15 Risorsa di rif. 1, il
parametro 3-16 Risorsa di riferimento 2 e il
parametro 3-17 Risorsa di riferimento 3
deniscono no a tre diversi segnali di
riferimento. La somma di questi segnali
di riferimento denisce il riferimento
attuale.
Disegno 3.7 Rampe
3-41 Rampa 1 tempo di accel.
Range: Funzione:
Size
related*
[0.05 3600 s]
Immettere il tempo di accelerazione da 0 Hz
al parametro 1-23 Frequen. motore se è
selezionato motore asincrono. Immettere il
tempo di accelerazione da 0 Giri/min. al
parametro 1-25 Vel. nominale motore se viene
selezionato motore PM. Selezionare un
tempo rampa di accelerazione tale che la
corrente di uscita non superi il limite di
corrente impostato nel parametro 4-18 Limite
di corrente durante la rampa. Vedere il tempo
rampa di decelerazione nel
parametro 3-42 Rampa 1 tempo di decel..
3-42 Rampa 1 tempo di decel.
Range: Funzione:
Size
related*
[0.05 3600 s]
Se viene selezionato motore asincrono,
immettere il tempo di decelerazione dal
parametro 1-23 Frequen. motore a 0 Hz. Se
viene selezionato motore PM, immettere il
tempo di decelerazione dal
parametro 1-25 Vel. nominale motore a 0
Giri/min. Selezionare un tempo rampa di
decelerazione per evitare lo scatto in
presenza di sovratensione nel bus CC.
due rampe (gruppo di parametri 3-4* Rampa 1 e gruppo di
parametri 3-5* Rampa 2). Il tempo di rampa viene
preimpostato al valore minimo di 10 ms per tutte le taglie
di potenza.
3.4.4 3-5* Rampa 2
Questo gruppo di parametri congura i parametri rampa 2.
3-51 Rampa 2 tempo di accel.
Range: Funzione:
46 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
Size
related*
[0.05 3600 s]
Se viene selezionato motore asincrono,
immettere il tempo di accelerazione da 0 Hz
al parametro 1-23 Frequen. motore. Se viene
selezionato motore PM, immettere il tempo
di accelerazione da 0 Giri/min. al
parametro 1-25 Vel. nominale motore.
Selezionare un tempo rampa di accelerazione tale che la corrente di uscita non

Parametri Guida alla Programmazione
3-51 Rampa 2 tempo di accel.
Range: Funzione:
superi il limite di corrente impostato nel
parametro 4-18 Limite di corrente durante la
rampa.
3-52 Rampa 2 tempo di decel.
Range: Funzione:
Size
related*
[0.05 3600 s]
Immettere il tempo di decelerazione dal
parametro 1-25 Vel. nominale motore a 0
Giri/min. Selezionare un tempo rampa di
decelerazione tale da assicurare che la
corrente di uscita non superi il limite di
corrente impostato nel
parametro 4-18 Limite di corrente durante
la rampa.
3.4.5 3-8* Altre rampe
3-80 Tempo rampa Jog
Range: Funzione:
Size
related*
[0.05
Immettere il tempo di rampa jog che è il
- 3600
tempo di accelerazione/decelerazione tra 0 Hz
s]
e il parametro 1-23 Frequen. motore. Assicurarsi
che la corrente di uscita risultante richiesta
per il tempo di rampa jog in questione non
superi il limite di corrente impostato nel
parametro 4-18 Limite di corrente. Il tempo di
rampa jog inizia dopo l'attivazione di un
segnale di jog tramite il quadro di comando,
un ingresso digitale selezionato o la porta di
comunicazione seriale.
3 3
3-81 Tempo rampa arr. rapido
Range: Funzione:
Size
related*
[0.05 3600 s]
Immettere il tempo di rampa arresto rapido
dal parametro 1-23 Frequen. motore a 0 Hz.
Durante la decelerazione, non può vericarsi
una sovratensione nell'inverter e la corrente
generata non deve superare il limite nel
parametro 4-18 Limite di corrente. L'arresto
rapido viene attivato per mezzo di un
segnale su un ingresso digitale selezionato
oppure mediante la porta di comunicazione
seriale.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 47

Parametri
VLT® HVAC Basic Drive FC 101
3.5 Menu principale - Limiti / avvisi Gruppo 4
3.5.1 4-1* Limiti motore
33
Denisce i limiti di corrente e di velocità per il motore e la
risposta del convertitore di frequenza al superamento dei
limiti.
4-10 Direz. velocità motore
Option: Funzione:
[0] Senso orario
AVVISO!
L'impostazione nel
parametro 4-10 Direz. velocità motore
inuisce sul parametro 1-73 Riaggancio
al volo.
È consentito solo il funzionamento in senso
orario.
[2] * Entrambe le
direzioni
È consentito il funzionamento sia in senso
orario sia in senso antiorario.
4-12 Limite basso velocità motore [Hz]
Range: Funzione:
0 Hz* [ 0 -
400.0 Hz]
Immettere il limite minimo per la velocità del
motore. Il limite basso velocità motore può
essere impostato per corrispondere alla
frequenza di uscita minima dell'albero motore.
Il limite basso velocità non deve superare
l'impostazione nel parametro 4-14 Limite alto
velocità motore [Hz].
4-14 Limite alto velocità motore [Hz]
4-18 Limite di corrente
Range: Funzione:
parametro 1-25 Vel. nominale motore, il
parametro 4-18 Limite di corrente non viene
ripristinato automaticamente alle impostazioni di
fabbrica.
4-19 Freq. di uscita max.
Range: Funzione:
Size
related*
[ 0 -
Immettere il valore massimo della frequenza di
400
uscita, che specica il limite assoluto della
Hz]
frequenza di uscita del convertitore di
frequenza per una maggiore protezione
nell'applicazione, nei casi in cui deve essere
evitato un fuorigiri involontario. Questo limite
assoluto è valido per tutte le congurazioni ed
è indipendentemente dall'impostazione nel
parametro 1-00 Modo congurazione.
Quando il parametro 1-10 Struttura motore è
impostato su una delle opzioni di abilitazione
della costruzione motore PM, il limite massimo
del parametro 4-19 Freq. di uscita max. può
essere limitato impostando il
parametro 1-40 Forza c.e.m. a 1000 giri/minuto
per evitare una forza c.e.m. troppo alta che
potrebbe danneggiare il convertitore di
frequenza. Se il parametro 4-19 Freq. di uscita
max. è impostato a un valore inferiore del
parametro 4-14 Limite alto velocità motore [Hz],
il valore del parametro 4-14 Limite alto velocità
motore [Hz] verrà regolato automaticamente su
un valore uguale a quello del
parametro 4-19 Freq. di uscita max..
Range: Funzione:
Size
related*
[ 0.1 -
400.0
Hz]
Immettere il limite massimo per la velocità
del motore. Può essere impostato per
corrispondere alla velocità del motore
massima consigliata. Il limite alto velocità
motore deve essere superiore al valore
impostato nel parametro 4-12 Limite basso
velocità motore [Hz].
Il limite alto velocità motore non può
essere impostato su un valore superiore al
parametro 4-19 Freq. di uscita max..
4-18 Limite di corrente
Range: Funzione:
110%* [0 -
1000 %
]
Immettere il limite di corrente per motore e
generatore (in % della corrente nominale del
motore). Se il valore è superiore all'uscita
massima nominale dal convertitore di frequenza,
la corrente continua a essere limitata dalla
massima corrente di uscita del convertitore di
frequenza. Se viene modicata un'impostazione
nel parametro 1-00 Modo congurazione no al
3.5.2 4-4* Regolazione Avvisi 2
4-40 Avviso freq. bassa
Range: Funzione:
Size
related*
[ 0 -
Utilizzare questo parametro per impostare il
500
limite inferiore per il campo di frequenza.
Hz]
Quando la velocità del motore scende al di
sotto di questo limite, il display indica
VELOCITÀ BASSA. Il bit di avviso 10 viene
impostato nel parametro 16-94 Parola di stato
est.. Il relè di uscita o l'uscita digitale possono
essere congurati per indicare questo avviso.
La spia di avviso dell'LCP non si accende
quando viene raggiunto il limite impostato di
questo parametro.
48 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
4-41 Avviso freq. alta
Range: Funzione:
Size
related*
[ 0 -
Utilizzare questo parametro per impostare un
500
limite superiore per il campo di frequenza.
Hz]
Quando la velocità del motore supera questo
limite, il display indica VELOCITÀ ALTA. Il bit di
avviso 9 viene impostato nel
parametro 16-94 Parola di stato est.. Il relè di
uscita o l'uscita digitale possono essere
congurati per indicare questo avviso. La spia
di avviso dell'LCP non si accende quando viene
raggiunto il limite impostato di questo
parametro.
3.5.3 4-5* Adattam. avvisi
Def. i limiti di avviso impostabili per corrente. Gli avvisi
vengono visualizzati sul display, sull'uscita programmata o
sul bus seriale.
4-50 Avviso corrente bassa
Range: Funzione:
0 A [ 0 - 500A]Immettere il valore I
motore scende al di sotto di questo limite, viene
impostato un bit nella parola di stato. Questo
valore può anche essere programmato per
produrre un segnale sull'uscita digitale o
sull'uscita a relè.
4-51 Avviso corrente alta
Range: Funzione:
Size
related*
[ 0.0 -
500.00 A]
Immettere il valore I
corrente motore supera questo limite,
viene impostato un bit nella parola di
stato. Questo valore può anche essere
programmato per produrre un segnale
sull'uscita digitale o sull'uscita a relè.
4-54 Avviso rif. basso
Range: Funzione:
-4999* [-4999
- 4999 ]
Immettere il limite inferiore del riferimento.
Quando il riferimento attuale scende al di sotto
di questo limite, il display indica Ref
avviso 20 viene impostato nel
parametro 16-94 Parola di stato est.. Il relè di
uscita o l'uscita digitale possono essere
congurati per indicare questo avviso. La spia
di avviso dell'LCP non si accende quando viene
raggiunto il limite impostato di questo
parametro.
Quando la corrente
LOW.
Quando la
HIGH.
. Il bit di
Low
4-55 Avviso riferimento alto
Range: Funzione:
4999* [-4999
- 4999 ]
Utilizzare questo parametro per impostare il
limite superiore per l'intervallo di riferimento.
Quando il riferimento eettivo supera questo
limite, il display mostra Riferimento Alto. Il bit di
avviso 19 viene impostato nel
parametro 16-94 Parola di stato est.. Il relè di
uscita o l'uscita digitale possono essere
congurati per indicare questo avviso. La spia
di avviso dell'LCP non si accende quando viene
raggiunto il limite impostato di questo
parametro.
4-56 Avviso retroazione bassa
Range: Funzione:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilizzare questo parametro
per impostare il limite
inferiore del campo di
retroazione.
Se la retroazione scende al di
sotto di questo limite, il
display mostra Retroazione
Bassa. Il bit di avviso 6 viene
impostato in
parametro 16-94 Parola di
stato est.. Il relè di uscita o
l'uscita digitale possono
essere congurati per indicare
questo avviso. La spia di
avviso dell'LCP non si accende
quando viene raggiunto il
limite impostato di questo
parametro.
4-57 Avviso retroazione alta
Range: Funzione:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilizzare questo parametro
per impostare il limite
superiore per il campo di
retroazione.
Se la retroazione supera
questo limite, il display
mostra Retroazione Alta. Il bit
di avviso 5 viene impostato
nel parametro 16-94 Parola di
stato est.. Il relè di uscita o
l'uscita digitale possono
essere congurati per indicare
questo avviso. La spia di
avviso dell'LCP non si accende
quando viene raggiunto il
limite impostato di questo
parametro.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 49
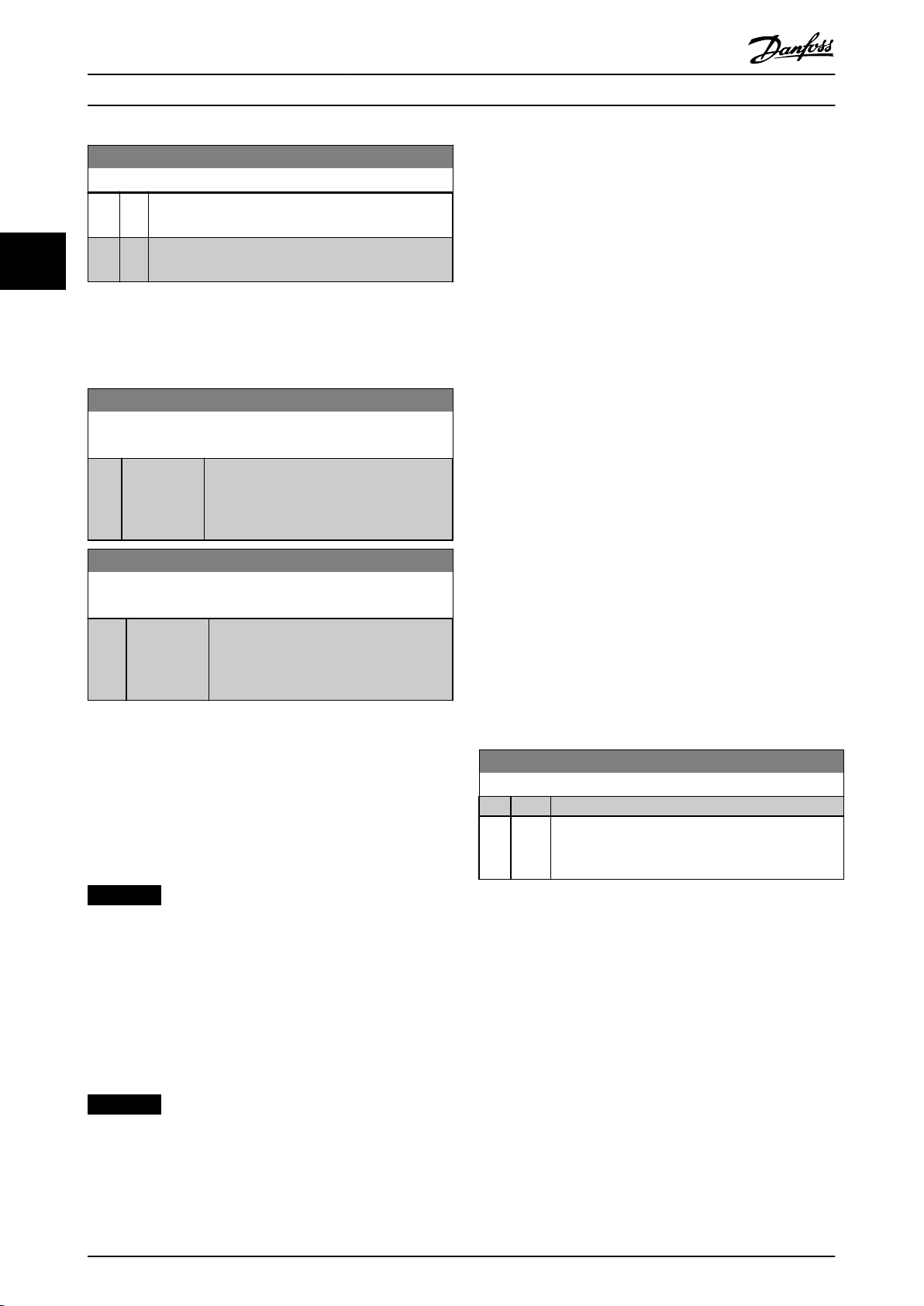
Parametri
VLT® HVAC Basic Drive FC 101
4-58 Funzione fase motore mancante
Option: Funzione:
[0] O Non viene visualizzato alcun allarme in caso di
mancanza di una fase del motore.
[1] * On Viene visualizzato un allarme in caso di mancanza di
33
una fase del motore.
3.5.4 4-6* Bypass di velocità
Denire le aree di bypass della velocità per le rampe.
Possono essere evitati tre intervalli di frequenza.
4-61 Bypass velocità da [Hz]
Array[3]
Range: Funzione:
0 Hz [ 0 - 500 Hz] Immettere i limiti inferiori delle velocità da
evitare. Alcuni sistemi richiedono di evitare
determinate velocità di uscita per problemi
di risonanza nel sistema.
4-63 Bypass velocità a [Hz]
Array[3]
Range: Funzione:
0 Hz* [ 0 - 500 Hz] Alcuni sistemi richiedono di evitare
determinate velocità di uscita per problemi
di risonanza nel sistema. Immettere i limiti
superiori delle velocità da evitare.
3.5.5 Setup velocità bypass semiautomatica
4. Quando si percorre una banda di risonanza,
premere [OK] sull'LCP quando ci si sposta dalla
banda. La frequenza del momento viene salvata
come primo elemento nel parametro 4-63 Bypass
velocità a [Hz] (array). Ripetere questa procedura
per ogni banda di risonanza identicata alla
rampa di salita (no a un massimo di tre
regolazioni).
5. Quando viene raggiunta la velocità massima il
motore inizia automaticamente a decelerare.
Ripetere questa procedura quando la velocità si
discosta dalle bande di risonanza durante la
decelerazione. Le frequenze attuali registrate
quando si preme [OK] vengono salvate nel
parametro 4-61 Bypass velocità da [Hz].
6. Quando il motore ha decelerato no all'arresto,
premere [OK]. Il parametro 4-64 Setup bypass
semiautom. viene automaticamente riportato su
o. Il convertitore di frequenza rimane in
modalità Hand On nché non viene premuto [O]
o [Auto On].
Se le frequenze per una determinata banda di risonanza
non sono registrate nell'ordine corretto (i valori di
frequenza salvati nel parametro 4-63 Bypass velocità a [Hz]
sono ≥ di quelli nel parametro 4-61 Bypass velocità da [Hz]),
o se non hanno gli stessi numeri di registrazione per il
parametro 4-61 Bypass velocità da [Hz] e il
parametro 4-63 Bypass velocità a [Hz], tutte le registrazioni
vengono eliminate ed è visualizzato il seguente messaggio:
Le aree di velocità rilevate si sovrappongono o non sono
determinate. Premere [Cancel] per annullare.
Usare il setup velocità bypass semiautomatico per facilitare
la programmazione delle frequenze da saltare a causa di
risonanze nel sistema.
Procedura:
1. Arrestare il motore.
AVVISO!
Regolare i tempi di rampa nel parametro 3-41 Rampa 1
tempo di accel. e nel parametro 3-42 Rampa 1 tempo di
decel..
2. Selezionare [1] Abilit. nel parametro 4-64 Setup
bypass semiautom..
3. Premere [Hand On] per iniziare la ricerca di bande
di frequenza che causano risonanze. Il motore
accelera secondo la rampa impostata.
AVVISO!
Il parametro 5-12 Ingr. digitale morsetto 27 ingr. digitale
morsetto 27 è impostato di fabbrica su [2] Evol. libera
neg. Se non sono presenti 24 V per il morsetto 27, [Hand
On] non avvia il motore. In tal caso collegare il morsetto
12 al morsetto 27.
4-64 Setup bypass semiautom.
Option: Funzione:
[0] * O
[1] Abilit. Se viene selezionata questa opzione, gli intervalli di
velocità vengono scansionati automaticamente per
identicare le bande di risonanza.
50 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.6 Menu principale - I/O Digitali - Gruppo 5
3.6.1 5-0* Modalità I/O digitali
Parametri per congurare l'ingresso e l'uscita usando NPN
e PNP.
AVVISO!
Questi parametri non possono essere regolati mentre il
motore è in funzione.
5-00 Modo ingr. dig.
Option: Funzione:
Impost. la mod. NPN o PNP per gli ingressi digitali
18,19 e 27. Modo I/O digitale.
[0] * PNP Azione sul fronte di salita dell'impulso (0). I sistemi
PNP sono collegati con uno stadio di pull-down a
(GND).
[1] NPN Azione sugli impulsi con fronte negativo (1). I sistemi
NPN vengono collegati in pull-up a +24 V all'interno
del convertitore di frequenza.
5-03 Mod. ingresso dig. 29
Option: Funzione:
[0] * PNP Imp. la modalità PNP per l'ingr. dig. 29.
[1] NPN Imp. la modalità NPN per l'ingr. dig. 29.
3.6.2 5-1* Ingressi digitali
Parametri per congurare le funzioni di ingresso per i
morsetti di ingresso.
Gli ingressi digitali vengono utilizzati per selezionare varie
funzioni nel convertitore di frequenza. Tutti gli ingressi
digitali possono essere impostati sulle seguenti funzioni:
Funzione dell'in-
gresso digitale
[0] Nessuna funzione Nessuna reazione ai segnali trasmessi al
[1] Ripristino Ripristina il convertitore di frequenza
[2] Evol. libera neg. Lascia il motore in evoluzione libera. 0
[3] Ruota lib. e ripr.
inv.
Descrizione
morsetto.
dopo uno scatto/allarme. Gli allarmi scatto
bloccato possono essere ripristinati.
logico⇒arresto a ruota libera.
Ripristinare e arrestare a ruota libera
l'ingresso negato (NC). Lascia il motore in
evoluzione libera e ripristina il convertitore
di frequenza. 0 logico⇒arresto a ruota
libera e ripristino.
Funzione dell'in-
gresso digitale
[4] Arr. rapido
(negato)
[5] Freno CC neg. Ingresso negato per frenatura in CC (NC).
[6] Stop negato La funzione stop negato genera una
[7] Interblocco esterno Stessa funzione di arresto a ruota libera,
[8] Avvio Selezionare avvio per un comando di
[9] Avv. a impulsi Se viene fornito un impulso per almeno 2
[10] Inversione Cambia il senso di rotazione dell'albero
[11] Avv. inversione Utilizzato per l’avvio/arresto e per
[14] Jog Utilizzato per attivare la velocità jog.
Descrizione
Ingresso negato (NC). Produce un arresto
in base al tempo di rampa di arresto
rapido impostato nel
parametro 3-81 Tempo rampa arr. rapido.
Dopo la decelerazione, l'albero è in
evoluzione libera.
Arresta il motore alimentandolo con una
corrente CC per un determinato tempo,
vedere il parametro 2-01 Corrente di
frenatura CC. La funzione è attiva soltanto
quando il valore nel parametro 2-02 Tempo
di frenata CC è diverso da 0. Questa
selezione non è possibile quando il
parametro 1-10 Struttura motore è
impostato su [1] PM, SPM n. saliente.
funzione di arresto quando il morsetto
selezionato passa dal livello logico 1 a 0
(non da impulso). L'arresto viene eseguito
in base al tempo di rampa selezionato.
negato, ma l'interblocco esterno genera il
messaggio di allarme guasto esterno nel
display quando il morsetto selezionato per
evol. libera neg. è 0 logico. Se
programmato per interblocco esterno, il
messaggio di allarme è attivo anche
tramite le uscite digitali e le uscite a relè.
Se viene rimossa la causa dell'interblocco
esterno, l'allarme può essere ripristinato
utilizzando un ingresso digitale, un bus di
campo o il tasto [Reset].
avvio/arresto. 1 logico = avvio, 0 logico =
arresto. (Ingresso digitale di default 18).
ms, si avvia il motore. Il motore si arresta
se viene attivato stop negato.
motore. Il segnale di inversione cambia
soltanto il senso di rotazione, ma non
attiva la funzione di avviamento.
Selezionare [2] Entrambe le direzioni nel
parametro 4-10 Direz. velocità motore. 0 =
normale, 1 = inversione.
l'inversione contemporanei. Non sono
ammessi segnali su [8] Avvio contem-
poranei. 0 = Arresto, 1 = Avv. inversione.
Vedere il parametro 3-11 Velocità di jog
[Hz]. (Ingresso digitale di default 29).
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 51

Parametri
VLT® HVAC Basic Drive FC 101
Funzione dell'in-
gresso digitale
[16] Rif. preimp. bit 0 Consente una selezione di uno degli otto
33
[17] Rif. preimp. bit 1 Consente una selezione di uno degli otto
[18] Rif. preimp. bit 2 Consente una selezione di uno degli otto
[19] Blocco
riferimento
[20] Blocco uscita Blocca il riferimento attuale. Il riferimento
[21] Accelerazione Per il controllo digitale della velocità di
[22] Decelerazione Vale lo stesso come per [21] Accelerazione,
[23] Selez. setup bit 0 Seleziona uno dei 2 setup. Impostare il
[32] Puse Input (Ingr.
impulsi)
[34] Rampa bit 0 Selezionare quale ingresso usare. Lo 0
Descrizione
riferimenti preimpostati secondo la
Tabella 3.4.
riferimenti preimpostati secondo la
Tabella 3.4.
riferimenti preimpostati secondo la
Tabella 3.4.
Blocca il riferimento eettivo. Il
riferimento bloccato è ora il punto che
abilita/condiziona l'utilizzo di accelerazione e decelerazione. Se vengono
utilizzati accelerazione/decelerazione, la
variazione di velocità segue sempre la
rampa 2 (parametro 3-51 Rampa 2 tempo
di accel. e parametro 3-52 Rampa 2 tempo
di decel.) nell’intervallo
parametro 3-02 Riferimento minimo parametro 3-03 Riferimento max..
bloccato è ora il punto che abilita/
condiziona l'utilizzo di accelerazione e
decelerazione. Se vengono utilizzati
accelerazione/decelerazione, la variazione
di velocità segue sempre la rampa 2.
accelerazione/decelerazione
(potenziometro motore). Attivare questa
funzione selezionando Blocco riferimento
o Blocco uscita. Se Accelerazione viene
attivato per un tempo inferiore a 400 ms,
il riferimento risultante viene aumentato
dello 0,1%. Se Accelerazione viene attivato
per oltre 400 ms, il riferimento risultante
viene aumentato in base alla rampa 1 nel
parametro 3-41 Rampa 1 tempo di accel..
ma il riferimento si riduce.
parametro 0-10 Setup attivo su Multi setup.
Selezionare ingresso a impulsi se si utilizza
una sequenza di impulsi come riferimento
o retroazione. La messa in scala viene
eettuata nel gruppo di parametri 5-5*
Ingr. impulsi. Disponibile solo per il
morsetto 29.
logico seleziona la rampa 1 mentre l'1
logico seleziona la rampa 2.
Funzione dell'in-
gresso digitale
[37] Modalità
incendio
[52] Abilitaz. avviam. Il morsetto di ingresso per il quale è
Descrizione
Un segnale applicato commuta il convertitore di frequenza alla modalità incendio
e tutti gli altri comandi vengono ignorati.
Vedere il gruppo di parametri 24-0* Mod.
incendio.
programmato Abilitaz. avviam. deve essere
in una condizione di 1 logico perché
venga accettato un comando di
avviamento. Abilitaz. avviam. comprende
una funzione logica AND legata al
morsetto programmato per [8] Avvio, [14]
Jog o [20] Blocco uscita. Per iniziare a far
funzionare il motore, devono essere
soddisfatte entrambe le condizioni. Se
Abilitaz. avviam. è stato programmato su
più morsetti, è suciente che il suo valore
sia 1 logico su un solo morsetto perché la
funzione venga eseguita. Abilitaz.avviam.
non inuisce sull'uscita digitale del
segnale per la richiesta di funzionamento
([8] Avvio, [14] Jog o [20] Blocco uscita)
programmati nel gruppo di parametri 5-3*
Uscite digitali o nel gruppo di parametri
5-4* Relè.
AVVISO!
Se non viene applicato nessun
segnale di Abilitaz. avviam., ma
viene attivato uno dei comandi di
funzionamento, jog o blocco, la riga
di stato nel display mostra Richiesta
funzionam., Richiesta jog o Richiesta
blocco.
52 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
Funzione dell'in-
gresso digitale
[53] Avviam. manuale Un segnale applicato mette il convertitore
[54] Avviam. autom. Un segnale applicato mette il convertitore
[60] Cont. A (increm.) Ingresso per il conteggio incrementale nel
[61] Cont. A (decrem.) Ingresso per il conteggio in decremento
[62] Ripristino cont. A Ingresso per il ripristino del contatore A.
[63] Cont. B (increm.) Ingresso per il conteggio incrementale nel
[64] Cont. B (decrem.) Ingresso per il conteggio in decremento
[65] Ripristino cont. B Ingresso per il ripristino del contatore B.
[101] Pausa Un segnale applicato mette il convertitore
Tabella 3.3 Funzioni degli ingressi digitali
Descrizione
di frequenza in modalità manuale come se
fosse stato premuto [Hand On] e venga
bypassato un normale comando di arresto.
Se si disconnette il segnale, il motore si
ferma. Per validare qualsiasi altro
comando di avvio, è necessario assegnare
un altro ingresso digitale ad Avviam.
autom. e applicare un segnale. I tasti
[Hand On] e [Auto On] non hanno eetto.
Il tasto [O] sovrascrive Avviam. manuale e
Avviam. autom. Premere [Hand On] o
[Auto On] per riattivare Avviam. manuale e
Avviam. autom. Se non è presente né il
segnale di Avviam. manuale né quello di
Avviam. autom., il motore si ferma
indipendentemente da qualunque
comando di avviamento applicato. Se il
segnale viene applicato sia a Avviam.
manuale che a Avviam. autom., la funzione
è Avviam. autom.
di frequenza in modalità Automatico come
se fosse stato premuto [Auto On]. Vedere
anche [53] Avviam. manuale.
contatore SLC.
nel contatore SLC.
contatore SLC.
nel contatore SLC.
di frequenza in modo pausa.
Riferimento
preimpostato
selezionato:
Riferimento
preimpostato 0
Riferimento
preimpostato 1
Riferimento
preimpostato 2
Riferimento
preimpostato 3
Riferimento
preimp. 4
Riferimento
preimp. 5
Riferimento
preimp. 6
Riferimento
preimp. 7
Tabella 3.4 Riferimento preimpostato selezionato
Bit di
riferimento
preimp. 2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Bit di
riferimento
preimp. 1
Bit di
riferimento
preimp. 0
5-10 Ingr. digitale morsetto 18
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 18. Fare riferimento a Tabella 3.3 per le opzioni di
impostazioni.
Option: Funzione:
[0] Nessuna funzione
[1] Ripristino
[2] Evol. libera neg.
[3] Ruota lib. e ripr. inv.
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop negato
[7] Interblocco esterno
[8] * Avvio
[9] Avv. a impulsi
[10] Inversione
[11] Avv. inversione
[14] Jog
[16] Rif. preimp. bit 0
[17] Rif. preimp. bit 1
[18] Rif. preimp. bit 2
[19] Blocco riferimento
[20] Blocco uscita
[21] Accelerazione
[22] Decelerazione
[23] Selez. setup bit 0
[34] Rampa bit 0
[37] Modalità incendio
[52] Abilitaz. avviam.
[53] Avviam. manuale
[54] Avviam. autom.
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 53

Parametri
VLT® HVAC Basic Drive FC 101
5-10 Ingr. digitale morsetto 18
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 18. Fare riferimento a Tabella 3.3 per le opzioni di
impostazioni.
Option: Funzione:
33
[62] Ripristino cont. A
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Ripristino cont. B
[101] Pausa
[120] Avviam. pompa di comando
[121] Altern. pompa primaria
[130] Interbl. pompa 1
[131] Interbl. pompa 2
[132] Interbl. pompa 3
[133] Interbl. pompa 4
[134] Interbl. pompa 5
5-11 Ingr. digitale morsetto 19
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 19.
Option: Funzione:
[0] * Nessuna funzione
[1] Ripristino
[2] Evol. libera neg.
[3] Ruota lib. e ripr. inv.
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop negato
[7] Interblocco esterno
[8] Avvio
[9] Avv. a impulsi
[10] Inversione
[11] Avv. inversione
[14] Jog
[16] Rif. preimp. bit 0
[17] Rif. preimp. bit 1
[18] Rif. preimp. bit 2
[19] Blocco riferimento
[20] Blocco uscita
[21] Accelerazione
[22] Decelerazione
[23] Selez. setup bit 0
[34] Rampa bit 0
[37] Modalità incendio
[52] Abilitaz. avviam.
[53] Avviam. manuale
[54] Avviam. autom.
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
[62] Ripristino cont. A
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Ripristino cont. B
5-11 Ingr. digitale morsetto 19
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 19.
Option: Funzione:
[101] Pausa
[120] Avviam. pompa di comando
[121] Altern. pompa primaria
[130] Interbl. pompa 1
[131] Interbl. pompa 2
[132] Interbl. pompa 3
[133] Interbl. pompa 4
[134] Interbl. pompa 5
5-12 Ingr. digitale morsetto 27
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 27. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [2] Evol. libera neg.
Quando il parametro 0-03 Impostazioni locali è impostato su [1]
Nord America, il valore di default è [7] Interblocco esterno.
Option: Funzione:
[0] Nessuna funzione
[1] Ripristino
[2] Evol. libera neg.
[3] Ruota lib. e ripr. inv.
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop negato
[7] Interblocco esterno
[8] Avvio
[9] Avv. a impulsi
[10] Inversione
[11] Avv. inversione
[14] Jog
[16] Rif. preimp. bit 0
[17] Rif. preimp. bit 1
[18] Rif. preimp. bit 2
[19] Blocco riferimento
[20] Blocco uscita
[21] Accelerazione
[22] Decelerazione
[23] Selez. setup bit 0
[34] Rampa bit 0
[37] Modalità incendio
[52] Abilitaz. avviam.
[53] Avviam. manuale
[54] Avviam. autom.
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
[62] Ripristino cont. A
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Ripristino cont. B
[101] Pausa
[120] Avviam. pompa di comando
54 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
5-12 Ingr. digitale morsetto 27
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 27. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [2] Evol. libera neg.
Quando il parametro 0-03 Impostazioni locali è impostato su [1]
Nord America, il valore di default è [7] Interblocco esterno.
Option: Funzione:
[121] Altern. pompa primaria
[130] Interbl. pompa 1
[131] Interbl. pompa 2
[132] Interbl. pompa 3
[133] Interbl. pompa 4
[134] Interbl. pompa 5
5-13 Ingr. digitale morsetto 29
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 29.
Option: Funzione:
[0] Nessuna funzione
[1] Ripristino
[2] Evol. libera neg.
[3] Ruota lib. e ripr. inv.
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop negato
[7] Interblocco esterno
[8] Avvio
[9] Avv. a impulsi
[10] Inversione
[11] Avv. inversione
[14] * Jog
[16] Rif. preimp. bit 0
[17] Rif. preimp. bit 1
[18] Rif. preimp. bit 2
[19] Blocco riferimento
[20] Blocco uscita
[21] Accelerazione
[22] Decelerazione
[23] Selez. setup bit 0
[32] Ingr. impulsi
[34] Rampa bit 0
[37] Modalità incendio
[52] Abilitaz. avviam.
[53] Avviam. manuale
[54] Avviam. autom.
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
[62] Ripristino cont. A
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Ripristino cont. B
[101] Pausa
[120] Avviam. pompa di comando
[121] Altern. pompa primaria
[130] Interbl. pompa 1
5-13 Ingr. digitale morsetto 29
Parametro per congurare la funzione di ingresso sul morsetto di
ingresso 29.
Option: Funzione:
[131] Interbl. pompa 2
[132] Interbl. pompa 3
[133] Interbl. pompa 4
[134] Interbl. pompa 5
3.6.3 5-3* Uscite digitali
Parametri per congurare le funzioni di uscita per i
morsetti di uscita.
5-34 Ritardo att., usc. dig.
Range: Funzione:
0.01 s* [0 - 600 s] Immettere il tempo di ritardo prima che
l'uscita digitale viene attivata. La condizione
di uscita digitale (morsetto 42/45) non deve
essere interrotta durante il tempo di ritardo.
5-35 Ritardo disatt., usc. dig.
Range: Funzione:
0.01 s* [0 - 600 s] Immettere il tempo di ritardo prima della
disattivazione dell'uscita digitale. La
condizione di uscita digitale (morsetto
42/45) non deve essere interrotta durante il
tempo di ritardo.
3.6.4 5-4* Relè
Per congurare la temporizzazione e le funzioni di uscita
per i relè.
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
[0] Nessuna funzione
[1] Comando pronto Il quadro di comando riceve
tensione di alimentazione.
[2] Conv. freq. pronto Il convertitore di frequenza è
pronto per il funzionamento e
alimenta il quadro di comando.
[3] Conv. freq. pr. / rem. Il convertitore di frequenza è
pronto per il funzionamento in
modalità Auto On.
[4] Stand-by/n.avviso il convertitore di frequenza è
pronto per il funzionamento. Non
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 55
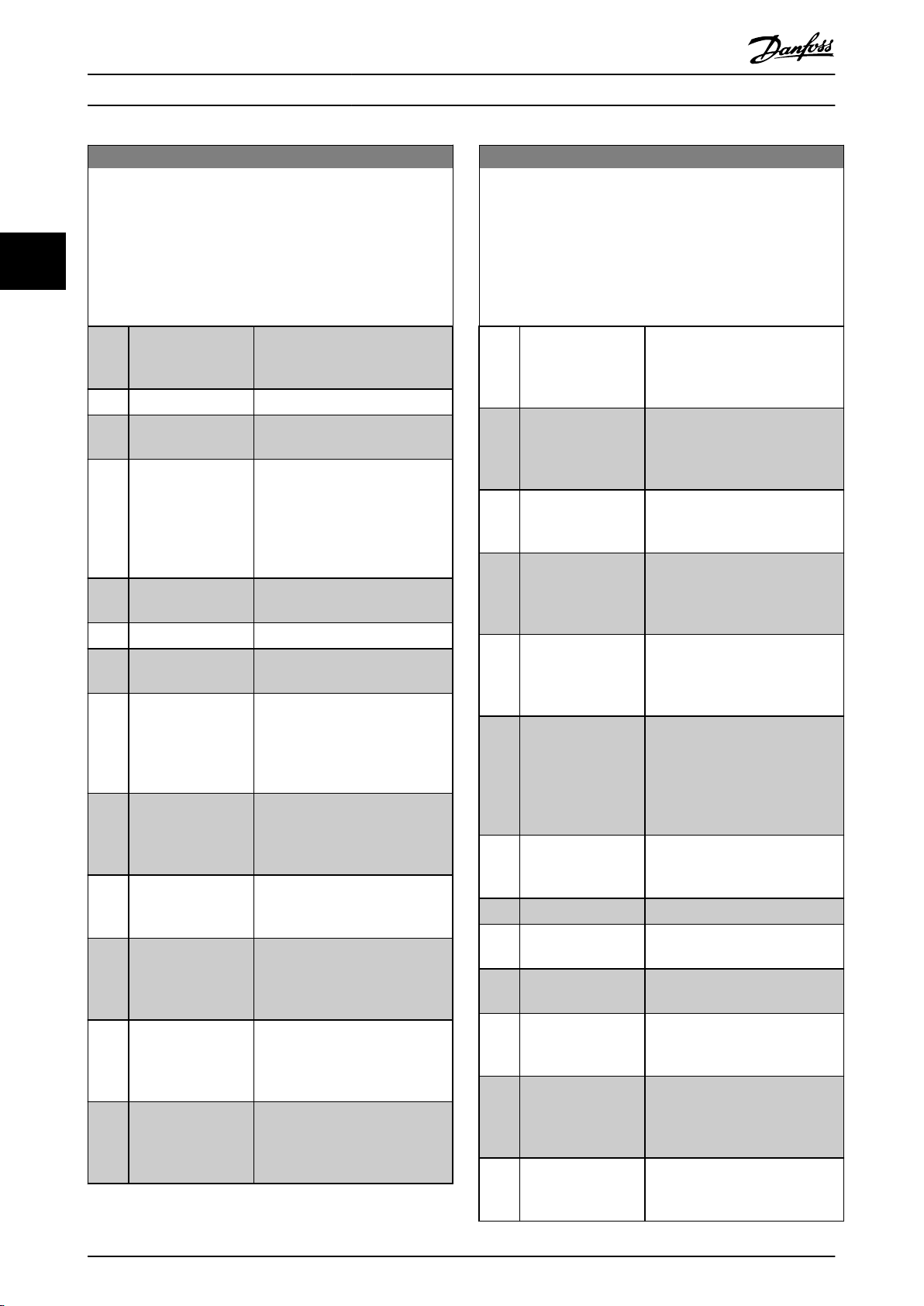
Parametri
VLT® HVAC Basic Drive FC 101
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
33
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
è stato trasmesso alcun comando
di avvio o di arresto. Non sono
presenti avvisi.
[5] In funzione Il motore è in funzione.
[6] In marcia/no avviso Il motore è in funzione e non sono
presenti avvisi.
[7] Mar. in range/n. avv. Il motore funziona negli intervalli
di corrente programmati, vedere il
parametro 4-50 Avviso corrente
bassa e il parametro 4-51 Avviso
corrente alta. Non sono presenti
avvisi.
[8] Mar./rif. rag./n. avv. Il motore gira alla velocità di
riferimento e senza avvisi.
[9] All. L'uscita è attivata da un allarme.
[10] Allarme o avviso L'uscita è attivata da un allarme o
da un avviso.
[12] Fuori interv.di corr. La corrente motore non rientra
nell'intervallo impostato nel
parametro 4-50 Avviso corrente
bassa e nel parametro 4-51 Avviso
corrente alta.
[13] Sotto corrente, bassa La corrente motore è inferiore al
limite impostato nel
parametro 4-50 Avviso corrente
bassa.
[14] Sopra corrente, alta La corrente motore è superiore al
limite impostato nel
parametro 4-51 Avviso corrente alta.
[16] Sotto vel., bassa La velocità di uscita del conver-
titore di frequenza è inferiore al
limite impostato nel
parametro 4-40 Avviso freq. bassa.
[17] Sopra vel., alta La velocità di uscita del conver-
titore di frequenza è superiore al
limite impostato nel
parametro 4-41 Avviso freq. alta.
[19] Sotto retroaz. bassa La retroazione è inferiore al limite
impostato nel
parametro 4-56 Avviso retroazione
bassa.
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
[20] Sopra retroaz. alta La retroazione è superiore al limite
impostato nel
parametro 4-57 Avviso retroazione
alta.
[21] Termica Avviso L'avviso termico si attiva se è stato
superato il limite di temperatura
nel motore, nel convertitore di
frequenza o nel termistore.
[22] Pronto, n. avv. term. Il convertitore di frequenza è
pronto per il funzionamento e non
sono presenti avvisi termici.
[23] Rem.,pronto, n. ter. Il convertitore di frequenza è
pronto per il funzionamento in
modalità Automatico e non sono
presenti avvisi termici.
[24] Pronto, tens. OK Il convertitore di frequenza è
pronto per il funzionamento e la
tensione di rete rientra nell'intervallo di tensione specicato.
[25] Inversione Il motore funziona/è pronto per
funzionare in senso orario in
presenza di logica=0 e in senso
antiorario in presenza di logica=1.
L'uscita cambia non appena viene
applicato il segnale di inversione.
[26] Bus OK Comunicazione attiva (nessuna
temporizzazione) mediante la
porta di comunicazione seriale.
[35] Interblocco esterno Vedere l'ingresso digitale.
[36] Bit 11 par. di contr. Il bit 11 nella parola di controllo
controlla il relè.
[37] Bit 12 par. di contr. Il bit 12 nella parola di controllo
controlla il relè.
[41] Sotto rif., basso Il riferimento è inferiore al limite
impostato nel
parametro 4-54 Avviso rif. basso.
[42] Sopra rif., alto Il riferimento è superiore al limite
impostato nel
parametro 4-55 Avviso riferimento
alto.
[45] Com. bus L'uscita è congurata nel
parametro 5-90 Controllo bus
digitale e a relè.
56 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
[60] Comparatore 0 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 0
viene valutato come VERO, l'uscita
diventa alta. Altrimenti è bassa.
[61] Comparatore 1 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 1
viene valutato come VERO l'uscita
diventa alta. Altrimenti è bassa.
[62] Comparatore 2 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 2
viene valutato come VERO, l'uscita
diventa alta. Altrimenti è bassa.
[63] Comparatore 3 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 3
viene valutato come VERO, l'uscita
diventa alta. Altrimenti è bassa.
[64] Comparatore 4 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 4
viene valutato come VERO, l'uscita
diventa alta. Altrimenti è bassa.
[65] Comparatore 5 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 5
viene valutato come VERO, l'uscita
diventa alta. Altrimenti è bassa.
[70] Regola logica 0 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 0 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
[71] Regola logica 1 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 1 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
[72] Regola logica 2 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 2 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
[73] Regola logica 3 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 3 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
[74] Reg. log. 4 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 4 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
[75] Reg. log. 5 Vedere il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 5 viene valutata come VERA,
l'uscita diventa alta. Altrimenti è
bassa.
[80] Uscita digitale SL A Vedere il parametro 13-52 Azione
regol. SL. L'ingresso aumenta
ogniqualvolta viene eseguita
l'azione Smart Logic [38] Imp. usc.
dig. A alta. L'ingresso diminuisce
ogniqualvolta viene eseguita
l'azione smart logic [32] Imp. usc.
dig. A bassa.
[81] Uscita digitale SL B Vedere il parametro 13-52 Azione
regol. SL. L'ingresso diventa alto
ogniqualvolta viene eseguita
l'azione smart logic [39] Imp. usc.
dig. B alta. L'ingresso diminuisce
ogniqualvolta viene eseguita
l'azione smart logic [33] Imp. usc.
dig. B bassa.
[82] Uscita digitale SL C Vedere il parametro 13-52 Azione
regol. SL. L'ingresso diventa alto
ogniqualvolta viene eseguita
l'azione smart logic [40] Imp. usc.
dig. C alta. L'ingresso diminuisce
ogniqualvolta viene eseguita
l'azione smart logic [34] Imp. usc.
dig. C bassa.
[83] Uscita digitale SL D Vedere il parametro 13-52 Azione
regol. SL. L'ingresso aumenta
ogniqualvolta viene eseguita
l'azione smart Logic [41] Imp. usc.
dig. D alta. L'ingresso diminuisce
ogniqualvolta viene eseguita
l'azione smart logic [35] Imp. usc.
dig. D bassa.
[160] Nessun allarme L'uscita è alta se non è presente
alcun allarme.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 57
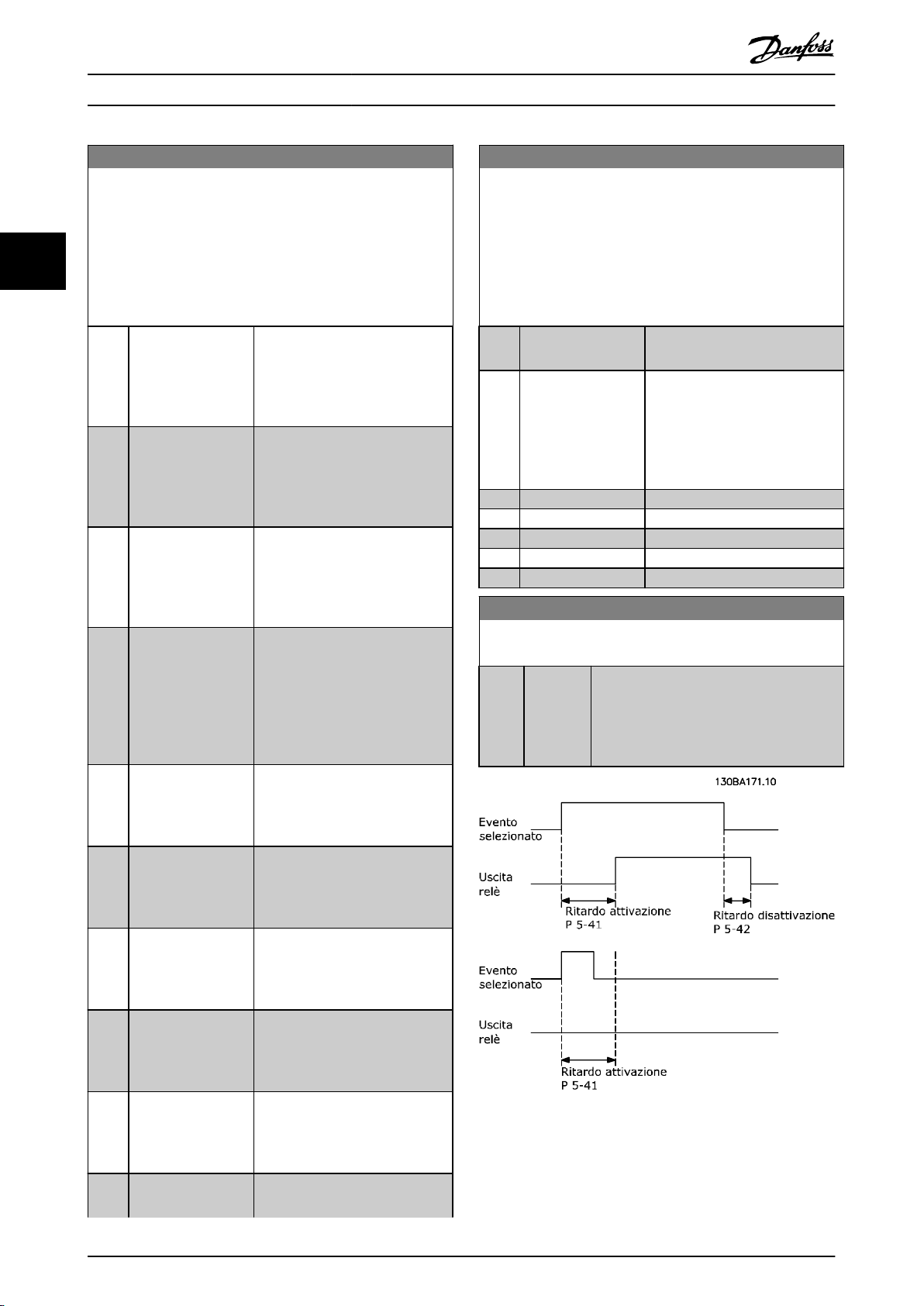
Parametri
VLT® HVAC Basic Drive FC 101
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
33
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
[161] Inversione attiva L'uscita è alta ogniqualvolta il
convertitore di frequenza ruota in
senso antiorario (il prodotto logico
dei bit di stato in funzione e
inversione).
[165] Rif. locale attivo L'uscita è alta ogniqualvolta il
riferimento locale viene attivato
dal tasto [Hand On] sull'LCP o dal
comando Hand On dell'ingresso
digitale.
[166] Rif. remoto attivo L'uscita è alta ogniqualvolta il
riferimento remoto viene attivato
dal tasto [Auto on] su LCP o dal
comando Auto On dell'ingresso
digitale.
[167] Comando di
avviamento attivo
[168] Conv.freq.mod.man. L'uscita è alta ogniqualvolta il
[169] Conv. in mod.auto L'uscita è alta ogniqualvolta il
[190] Portata nulla È stata rilevata una condizione di
[193] Modo pausa Il convertitore di frequenza/sistema
[194] Funz. cinghia rotta È stata rilevata una condizione di
[196] Mod. incendio Il convertitore di frequenza
L'uscita è alta ogniqualvolta è
presente un comando di
avviamento attivo (cioè mediante
una connessione bus all'ingresso
digitale o [Hand On] o [Auto On], e
non è attivo nessun comando di
Arresto.
convertitore di frequenza è in
modalità Hand On (come indicato
dal LED in alto [Hand On]).
convertitore di frequenza è in
modalità Auto On (come indicato
da LED in alto [Auto On]).
portata nulla. Vedere il gruppo di
parametri 22-2* Rilevam. portata
nulla.
è entrato nel modo pausa. Vedere
il gruppo di parametri 22-4* Modo
Pausa.
cinghia rotta. Abilitare la funzione
nel parametro 22-60 Funzione
cinghia rotta.
funziona in modalità incendio.
5-40 Funzione relè
Array (relè 1 [0], relè 2 [1])
Selezionare le opzioni per denire la funzione dei relè.
La selezione di ciascun relè meccanico è realizzata in un
parametro array. Quando il parametro 0-03 Impostazioni locali è
impostato su [0] Internaz., il valore di default è [9] All. Quando il
parametro 0-03 Impostazioni locali è impostato su [1] Nord
America, il valore di default è [160] Nessun allarme.
Option: Funzione:
Vedere il gruppo di parametri 24-0*
Mod. incendio.
[198] Modo bypass attivo Da utilizzare come segnale per
attivare un bypass elettromeccanico esterno che commuta il
motore direttamente in linea.
Vedere il gruppo di parametri 24-1*
Bypass inverter.
[211] Pompa in cascata 1
[212] Pompa in cascata 2
[213] Pompa in cascata 3
[214] Pompa in cascata 4
[215] Pompa in cascata 5
5-41 Ritardo attiv., relè
Array [2]
Range: Funzione:
0.01 s* [0.01 -
600 s]
Disegno 3.8 Ritardo attiv., relè
Immettere il ritardo per il tempo di
attivazione dei relè. Selezionare uno tra i due
relè meccanici interni in una funzione array.
Vedere il parametro 5-40 Funzione relè per
dettagli.
58 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
5-42 Ritardo disatt., relè
Array[2]
Range: Funzione:
0.01s* [0.01 600 s]
Immettere il ritardo del tempo di disattivazione
dei relè. Selezionare uno tra i due relè
meccanici interni in una funzione array. Vedere
il parametro 5-40 Funzione relè per dettagli. Se
la condizione dell'evento selezionato cambia
prima dello scadere del timer di ritardo, l'uscita
a relè non viene modicata.
Disegno 3.10 Puse Input (Ingr. impulsi)
5-50 Frequenza bassa morsetto 29
Range: Funzione:
20 Hz* [20 -
Disegno 3.9 Ritardo disatt., relè
31999 Hz]
3 3
Immettere il limite di bassa frequenza
corrispondente alla velocità bassa
dell'albero motore (vale a dire al valore di
riferimento basso) nel parametro 5-52 Rif.
basso/val. retroaz. morsetto 29. Vedere la
Disegno 3.10.
Se la condizione dell'evento selezionato cambia prima che
il timer di ritardo di attivazione o disattivazione scada,
l'uscita a relè non viene modicata.
3.6.5 5-5* Ingr. impulsi
I parametri degli ingressi a impulsi vengono usati per
denire una nestra adatta per l'area del riferimento a
impulsi congurando la scala e le impostazioni del ltro
per gli ingressi digitali. I morsetti di ingresso 29 o 33
fungono da ingressi di riferimento di frequenza. Impostare
il morsetto 29 (parametro 5-13 Ingr. digitale morsetto 29) o il
morsetto 33 (parametro 5-15 Ingr. digitale morsetto 33) su
[32] Ingr. impulsi. Se il morsetto 29 viene utilizzato come
ingresso, impostare il parametro 5-01 Modo Morsetto 27 su
[0] Ingresso.
5-51 Frequenza alta mors. 29
Range: Funzione:
32000
Hz*
[21 32000 Hz]
Immettere il limite superiore della
frequenza corrispondente al valore
superiore della velocità dell'albero
motore (vale a dire al valore di
riferimento alto) nel parametro 5-53 Rif.
alto/val. retroaz. morsetto 29.
5-52 Rif. basso/val. retroaz. morsetto 29
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il limite del valore di riferimento
basso per la velocità dell'albero motore [Giri/
min.]. Questo è anche il valore di retroazione
più basso. Impostare il morsetto 29 su ingresso
digitale (parametro 5-13 Ingr. digitale morsetto
29 = valore applicabile).
5-53 Rif. alto/val. retroaz. morsetto 29
Range: Funzione:
Size
related*
[-4999 4999 ]
Immettere il valore di riferimento alto
[giri/min.] per la velocità dell'albero
motore e il valore di retroazione
massimo. Selezionare il morsetto 29
come ingresso digitale
(parametro 5-13 Ingr. digitale morsetto
29 = valore applicabile).
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 59

Parametri
VLT® HVAC Basic Drive FC 101
3.6.6 5-9* Controllato da bus
Questo gruppo di parametri consente di selezionare le
uscite digitali e a relè tramite l'impostazione del bus di
campo.
33
5-90 Controllo bus digitale e a relè
Range: Funzione:
0* [0 - 0xFFFFFFFF ] Questo parametro mantiene lo stato delle
uscite digitali e dei relè controllati tramite
bus.
Un 1 logico signica che l'uscita è alta o
attiva.
Uno 0 logico signica che l'uscita è bassa
o inattiva.
Bit 0–3 Riservato
Bit 4 Morsetto di uscita relè 1
Bit 6–23 Riservato
Bit 24 Terminale 42 uscita digitale
Bit 26–31 Riservato
Tabella 3.5 Funzioni di bit
60 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Rif./Retroazione
[RPM]
Ingresso analogico
Valore rif./
retroazione alto'
Valore rif./
retroazione basso'
'Bassa tensione' o
'Corrente bassa'
'Alta tensione' o
'Corrente alta'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Parametri Guida alla Programmazione
3.7 Menu principale - I/O analogici - Gruppo
6
Gruppo di parametri per impostare la congurazione I/O
analogici e l'uscita digitale.
Il convertitore di frequenza fornisce 2 ingressi analogici:
Morsetto 53.
•
Morsetto 54.
•
Gli ingressi analogici possono essere assegnati all'ingresso
di tensione (0–10 V) o all'ingresso di corrente (0/4–20 mA).
3.7.1 6-0* Mod. I/O analogici
6-00 Tempo timeout tensione zero
Range: Funzione:
10 s* [1 - 99 s] Immettere il tempo di temporizzazione.
6-01 Funz. temporizz. tensione zero
Option: Funzione:
Selezionare la funzione di temporizzazione. La
funzione impostata nel parametro 6-01 Funz.
temporizz. tensione zero viene attivata se il
segnale di ingresso sul morsetto 53 o 54 è
inferiore al 50% del valore nel
parametro 6-10 Tens. bassa morsetto 53, nel
parametro 6-12 Corr. bassa morsetto 53, nel
parametro 6-20 Tens. bassa morsetto 54 o nel
parametro 6-22 Corr. bassa morsetto 54 per un
periodo di tempo denito nel
parametro 6-00 Tempo timeout tensione zero.
[0] * O
[1] Blocco
uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
[5] Stop e
scatto
3 3
Disegno 3.11 Funz. temporizz. tensione zero
6-02 Funzione Fire mode timeout
Option: Funzione:
Selezionare la funzione di temporizzazione
quando la modalità incendio è attiva. La
funzione impostata in questo parametro viene
attivata se il segnale di ingresso sugli ingressi
analogici è inferiore al 50% del valore basso
per un periodo di tempo denito nel
parametro 6-00 Tempo timeout tensione zero.
[0] * O
[1] Blocco
uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
3.7.2 6-1* Ingr. analog. 53
Parametri per congurare la conversione in scala e i limiti
per l'ingresso analogico 53 (morsetto 53).
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 61
6-10 Tens. bassa morsetto 53
Range: Funzione:
0.07 V* [0 - 10V]Immettere la tensione (V) che corrisponde al
parametro 6-14 Rif.basso/val.retroaz.morsetto
53. Per attivare il parametro 6-01 Funz.
temporizz. tensione zero, impostare il valore su
>1 V.
6-11 Tensione alta morsetto 53
Range: Funzione:
10 V* [0 - 10 V] Immettere la tensione (V) che corrisponde al
valore di riferimento alto (impostato nel
parametro 6-15 Rif. alto/valore retroaz. morsetto
53).

Parametri
VLT® HVAC Basic Drive FC 101
6-12 Corr. bassa morsetto 53
3.7.3 6-2* Ingr. analog. 54
Range: Funzione:
4 mA* [0 - 20
mA]
33
Immettere il valore di corrente bassa. Questo
segnale di riferimento deve corrispondere al
valore di riferimento/retroazione basso
impostato nel parametro 6-14 Rif.basso/
val.retroaz.morsetto 53. Per attivare il
parametro 6-01 Funz. temporizz. tensione zero,
impostare il valore su >2 mA.
6-13 Corrente alta morsetto 53
Parametri per congurare la conversione in scala e i limiti
per l'ingresso analogico 54 (morsetto 54).
6-20 Tens. bassa morsetto 54
Range: Funzione:
0.07 V* [0 - 10V]Immettere la tensione (V) che corrisponde al
valore di riferimento basso (impostato nel
parametro 6-24 Rif.basso/val.retroaz.morsetto 54).
Per attivare il parametro 6-01 Funz. temporizz.
tensione zero, impostare il valore su >1 V.
Range: Funzione:
20 mA* [0 - 20 mA] Immettere il valore di corrente alta che
corrisponde al riferimento/retroazione alti
impostati nel parametro 6-15 Rif. alto/
valore retroaz. morsetto 53.
6-14 Rif.basso/val.retroaz.morsetto 53
6-21 Tensione alta morsetto 54
Range: Funzione:
10 V* [0 - 10 V] Immettere la tensione (V) che corrisponde al
valore di riferimento alto (impostato in
parametro 6-25 Rif. alto/valore retroaz. morsetto
54).
Range: Funzione:
0* [-4999 -
4999 ]
6-15 Rif. alto/valore retroaz. morsetto 53
Range: Funzione:
Size
related*
6-16 Tempo cost. ltro morsetto 53
Range: Funzione:
0.01 s* [0.01 - 10s]Immettere la costante di tempo. Questa è
6-19 Mod. morsetto 53
Option: Funzione:
[0] Mod. corrente
[1] * Mod. tensione
Immettere il valore di riferimento o retroazione
che corrisponde alla tensione o corrente
impostata nel parametro 6-10 Tens. bassa
morsetto 53 no al parametro 6-12 Corr. bassa
morsetto 53.
[-4999 4999 ]
Immettere il valore di riferimento o
retroazione che corrisponde alla
tensione o corrente impostata nel
parametro 6-11 Tensione alta morsetto
53 no al parametro 6-13 Corrente alta
morsetto 53.
una costante di tempo del ltro passa-basso
di primo ordine per sopprimere il disturbo
elettrico nel morsetto 53. Un valore elevato
della costante di tempo migliora lo
smorzamento ma aumenta anche il ritardo
di tempo.
Selezionare se il morsetto 53 viene utilizzato
per ingresso di corrente o di tensione.
6-22 Corr. bassa morsetto 54
Range: Funzione:
4 mA* [0 - 20
mA]
Immettere il valore di corrente bassa. Questo
segnale di riferimento corrisponde al valore di
riferimento/retroazione basso impostato in
parametro 6-24 Rif.basso/val.retroaz.morsetto 54.
Per attivare la funzione temporizzazione zero
vivo in parametro 6-01 Funz. temporizz. tensione
zero, impostare il valore come >2 mA.
6-23 Corrente alta morsetto 54
Range: Funzione:
20 mA* [0 - 20
mA]
Immettere il valore di corrente alta che
corrisponde al valore di riferimento o di
retroazione alti impostati in
parametro 6-25 Rif. alto/valore retroaz.
morsetto 54.
6-24 Rif.basso/val.retroaz.morsetto 54
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il valore di riferimento o retroazione
che corrisponde alla tensione o corrente
impostata in parametro 6-21 Tensione alta
morsetto 54/parametro 6-22 Corr. bassa morsetto
54.
6-25 Rif. alto/valore retroaz. morsetto 54
Range: Funzione:
Size
related*
[-4999 4999 ]
Immettere il valore di riferimento o
retroazione che corrisponde alla
tensione o corrente impostata in
parametro 6-21 Tensione alta morsetto
54/parametro 6-23 Corrente alta
morsetto 54.
62 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
6-26 Tempo Cost. ltro morsetto 54
Range: Funzione:
0.01 s* [0.01 - 10s]Immettere la costante di tempo del ltro
passa-basso di primo ordine per sopprimere
il disturbo elettrico nel morsetto 54. Un
valore elevato della costante di tempo
migliora lo smorzamento ma aumenta
anche il ritardo di tempo.
6-29 Modo morsetto 54
Option: Funzione:
Selezionare se il morsetto 54 è usato per
ingresso in corrente o in tensione.
[0] Mod. corrente
[1] * Mod. tensione
3.7.4 6-7* Uscita anal./digit. 45
Parametri per congurare la messa in scala e i limiti per
l'uscita analogica/digitale morsetto 45. Le uscite analogiche
sono uscite in corrente: 0/4–20 mA. La risoluzione
sull'uscita analogica è 12 bit. I morsetti di uscita analogica
possono anche essere programmati come uscita digitale.
6-70 Mod. morsetto 45
Option: Funzione:
Impostare il morsetto 45 come uscita
analogica o digitale.
[0] * 0-20 mA
[1] 4-20 mA
[2] Uscita digitale
6-71 Uscita anal. morsetto 45
Option: Funzione:
Selezionare la funzione del morsetto
45 come uscita analogica in
corrente. Vedere anche il
parametro 6-70 Mod. morsetto 45.
[254] DC-link voltage
(Tensione bus CC)
[0] * Nessuna funzione
[100] Freq. di uscita 0–100 Hz
[101] Riferimento Min-Max Min
[102] Retroaz. MinFB–Max
[103] Corr. mot. 0-Imax 0–I
[106] Potenza 0–P
[139] Contr. bus 0–100%
[254] DC-Link Voltage
(Tensione bus CC)
0–65.535 V
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1000 V
•
T6, 500–1000 V
•
–Max
Ref.
FB
max
nom
Ref.
6-72 Uscita dig. morsetto 45
Option: Funzione:
Selezionare la funzione del
morsetto 45 come uscita
digitale in corrente. Vedere
anche il
parametro 6-70 Mod.
morsetto 45. Vedere il
parametro 5-40 Funzione
relè per la descrizione
delle opzioni.
[0] * Nessuna funzione
[1] Comando pronto
[2] Conv. freq. pronto
[3] Conv. freq. pr. / rem.
[4] Stand-by/n.avviso
[5] In funzione
[6] In marcia/no avviso
[7] Mar. in range/n. avv.
[8] Mar./rif. rag./n. avv.
[9] All.
[10] Allarme o avviso
[12] Fuori interv.di corr.
[13] Sotto corrente, bassa
[14] Sopra corrente, alta
[16] Sotto vel., bassa
[17] Sopra vel., alta
[19] Sotto retroaz. bassa
[20] Sopra retroaz. alta
[21] Termica Avviso
[22] Pronto, n. avv. term.
[23] Rem.,pronto, n. ter.
[24] Pronto, tens. OK
[25] Inversione
[26] Bus OK
[35] Interblocco esterno
[36] Bit 11 par. di contr.
[37] Bit 12 par. di contr.
[41] Sotto rif., basso
[42] Sopra rif., alto
[45] Com. bus
[60] Comparatore 0
[61] Comparatore 1
[62] Comparatore 2
[63] Comparatore 3
[64] Comparatore 4
[65] Comparatore 5
[70] Regola logica 0
[71] Regola logica 1
[72] Regola logica 2
[73] Regola logica 3
[74] Reg. log. 4
[75] Reg. log. 5
[80] Uscita digitale SL A
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 63

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Parametri
VLT® HVAC Basic Drive FC 101
6-72 Uscita dig. morsetto 45
3.7.5 6-9* Uscita anal./digit. 42
Option: Funzione:
[81] Uscita digitale SL B
[82] Uscita digitale SL C
[83] Uscita digitale SL D
33
[160] Nessun allarme
[161] Inversione attiva
[165] Rif. locale attivo
[166] Rif. remoto attivo
[167] Comando di avviamento attivo
[168] Conv.freq.mod.man.
[169] Conv. in mod.auto
[190] Portata nulla
[193] Modo pausa
[194] Funz. cinghia rotta
[196] Mod. incendio
[198] Modo bypass attivo
6-73 Mors. 45, usc. scala min.
Range: Funzione:
0 %* [0 -
200 %]
Scala per l'uscita minima (0 mA o 4 mA) del
segnale analogico sul morsetto 45. Impostare il
valore alla percentuale dell'intero campo della
variabile selezionata nel parametro 6-71 Uscita
anal. morsetto 45.
6-74 Mors. 45, usc. scala max.
Range: Funzione:
100%* [0 -
200 %]
Scala per l'uscita massima (20 mA) del segnale
analogico sul morsetto 45. Impostare il valore
alla percentuale dell'intero campo della variabile
selezionata nel parametro 6-71 Uscita anal.
morsetto 45.
Parametri per congurare i limiti per il morsetto di uscita
analogica/digitale 42. Le uscite analogiche sono uscite in
corrente: 0/4–20 mA. La risoluzione sulle uscite analogiche
è 12 bit. I morsetti di uscita analogica possono anche
essere programmati come uscita digitale.
6-90 Terminal 42 Mode
Option: Funzione:
Impostare il morsetto 42 come uscita
analogica o digitale.
[0] * 0-20 mA
[1] 4-20 mA
[2] Uscita digitale
6-91 Uscita analogica morsetto 42
Option: Funzione:
Selezionare la funzione del
morsetto 42 come uscita
analogica in corrente. Vedere
anche il parametro 6–90 Terminal
42 Mode.
[254] DC-link voltage
(Tensione bus CC)
[0] * Nessuna funzione
[100] Freq. di uscita 0–100 Hz
[101] Riferimento Min-Max Min
[102] Retroaz. MinFB - Max
[103] Corr. mot. 0-Imax 0–I
[106] Potenza 0–P
[139] Contr. bus 0–100%
[184] Mirror AI53 mA 0–20
[185] Mirror AI54 mA 0–20
[254] DC-Link Voltage
(Tensione bus CC)
0–65.535 V
T2/S2, 200–400 V
•
T4, 400–800 V
•
T5, 400–1000 V
•
T6, 500–1000 V
•
– Max
Ref.
max
nom
Ref.
FB
6-92 Terminal 42 Digital Output
Option: Funzione:
Selezionare la funzione del
morsetto 42 come uscita
Disegno 3.12 Uscita a scala massima
6-76 Morsetto 45, uscita controllata via bus
Range: Funzione:
0* [0 - 16384 ] Mantiene il livello dell'uscita analogica se
controllato tramite bus.
64 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
[0] * Nessuna funzione
[1] Comando pronto
[2] Conv. freq. pronto
[3] Conv. freq. pr. / rem.
analogica in corrente.
Vedere anche il
parametro 6-90 Terminal 42
Mode. Vedere il
parametro 5-40 Funzione
relè per una descrizione
delle scelte.

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Parametri Guida alla Programmazione
6-92 Terminal 42 Digital Output
Option: Funzione:
[4] Stand-by/n.avviso
[5] In funzione
[6] In marcia/no avviso
[7] Mar. in range/n. avv.
[8] Mar./rif. rag./n. avv.
[9] All.
[10] Allarme o avviso
[12] Fuori interv.di corr.
[13] Sotto corrente, bassa
[14] Sopra corrente, alta
[16] Sotto vel., bassa
[17] Sopra vel., alta
[19] Sotto retroaz. bassa
[20] Sopra retroaz. alta
[21] Termica Avviso
[22] Pronto, n. avv. term.
[23] Rem.,pronto, n. ter.
[24] Pronto, tens. OK
6-92 Terminal 42 Digital Output
Option: Funzione:
[196] Mod. incendio
[198] Modo bypass attivo
6-93 Mors. 42, usc. scala min.
Range: Funzione:
0 %* [0 -
200 %]
Scala per l'uscita minima (0 mA o 4 mA) del
segnale analogico sul morsetto 42. Impostare il
valore alla percentuale dell'intero campo della
variabile selezionata nel parametro 6-91 Uscita
analogica morsetto 42.
6-94 Mors. 42, usc. scala max.
Range: Funzione:
100%* [0 -
200 %]
Scala per l'uscita max (20 mA) della messa in
scala sul morsetto 42. Impostare il valore alla
percentuale dell'intero campo della variabile
selezionata nel parametro 6-91 Uscita analogica
morsetto 42.
[25] Inversione
[26] Bus OK
[35] Interblocco esterno
[36] Bit 11 par. di contr.
[37] Bit 12 par. di contr.
[41] Sotto rif., basso
[42] Sopra rif., alto
[45] Com. bus
[60] Comparatore 0
[61] Comparatore 1
[62] Comparatore 2
Disegno 3.13 Uscita a scala massima
[63] Comparatore 3
[64] Comparatore 4
[65] Comparatore 5
[70] Regola logica 0
[71] Regola logica 1
[72] Regola logica 2
[73] Regola logica 3
6-96 Morsetto 42, uscita controllata via bus
Range: Funzione:
0* [0 - 16384 ] Mantenere l'uscita analogica in corrispondenza
del morsetto 42 se controllato dal bus.
[74] Reg. log. 4
[75] Reg. log. 5
[80] Uscita digitale SL A
[81] Uscita digitale SL B
[82] Uscita digitale SL C
[83] Uscita digitale SL D
[160] Nessun allarme
[161] Inversione attiva
[165] Rif. locale attivo
[166] Rif. remoto attivo
[167] Comando di avviamento attivo
[168] Conv.freq.mod.man.
[169] Conv. in mod.auto
[190] Portata nulla
[193] Modo pausa
[194] Funz. cinghia rotta
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 65
3 3

Parametri
VLT® HVAC Basic Drive FC 101
3.8 Menu principale - Comunicazioni e
3.8.2 8-3* Impostaz. porta FC
opzioni - Gruppo 8
8-30 Protocollo
3.8.1 8-0* Impost.gener.
33
8-01 Sito di comando
Option: Funzione:
Questo parametro esclude le impostazioni
nel parametro 8-50 Selezione ruota libera no
al parametro 8-56 Selezione rif. preimpostato.
[0] * Par. dig. e di
com.
[1] Solo digitale Controllo utilizzando solo gli ingressi digitali.
[2] Solo parola di
com.
Controllo utilizzando sia l'ingresso digitale
sia la parola di controllo.
Controllo utilizzando solamente la parola di
controllo.
8-02 Fonte di contr.
Option: Funzione:
AVVISO!
Non è possibile regolare questo parametro
mentre il motore è in funzione.
Selezionare la fonte della parola di controllo.
[0] Nessuno
[1] * Porta FC
8-03 Tempo temporizz. di contr.
Range: Funzione:
Size
related*
8-04 Funzione temp. controllo
Option: Funzione:
[0] * O
[1] Blocco uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
[5] Stop e scatto
[20] Rilascio punti
[0.1 6500 s]
esclusi N2
Immettere il tempo massimo previsto che
deve trascorrere fra la ricezione di due
telegrammi consecutivi. Se questo tempo
viene superato, ciò indica che la comunicazione seriale si è arrestata. In tal caso
viene eseguita la funzione selezionata nel
parametro 8-04 Funzione temp. controllo.
Selezionare la funzione di temporizzazione.
La funzione di temporizzazione viene
attivata se la parola di controllo non viene
aggiornata entro il tempo specicato nel
parametro 8-03 Tempo temporizz. di contr..
Questa opzione è valida solamente quando
il protocollo è N2.
Option: Funzione:
Selezionare il protocollo per la porta RS485
integrata.
[0] * FC Comunicazione in base al protocollo FC.
[2] Modbus
RTU
[3] Metasys N2 Protocollo di comunicazione. Il protocollo del
[4] FLN Comunicazione in base al protocollo FLN.
[5] BACNet Comunicazione in base al protocollo BACNet.
Comunicazione secondo il protocollo Modbus
RTU.
software N2 è progettato con una natura
generale per supportare le proprietà esclusive
che ogni dispositivo potrebbe avere.
8-31 Indirizzo
Range: Funzione:
Size
related*
[ 0.0 247 ]
Immettere l'indirizzo per la porta
RS485. Intervallo valido: 1–126 per il
bus FC OPPURE 1–247 per Modbus.
8-32 Baud rate
Option: Funzione:
Selezionare il baud rate per la porta RS485.
Le impostazioni predenite fanno riferimento
al protocollo FC. La modica del protocollo nel
parametro 8-30 Protocollo può modicare il
baud rate.
La modica del protocollo nel
parametro 8-30 Protocollo può modicare il
baud rate.
[0] 2400 Baud
[1] 4800 Baud Impostazione di fabbrica per FLN.
[2] 9600 Baud Impostazione di fabbrica per:
BACnet.
•
Metasys N2.
•
[3] 19200 Baud Impostazione di fabbrica per Modbus RTU.
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200
Baud
8-33 Parità / bit di stop
Option: Funzione:
Parità e bit di stop per il protocollo
utilizzando la porta FC. Per alcuni dei
protocolli non sono disponibili tutte le
opzioni.
Le impostazioni predenite fanno
riferimento al protocollo FC. La
66 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
8-33 Parità / bit di stop
Option: Funzione:
modica del protocollo nel
parametro 8-30 Protocol può modicare
il baud rate.
[0] Parità pari, 1 bit di
stop
[1] Parità dispari, 1 bit
di stop
[2] Ness. parità, 1 bit di
stop
[3] Ness. parità, 2 bit di
stop
8-35 Ritardo minimo risposta
Range: Funzione:
Size
related*
[ 0.0010 -
0.5 s]
Specica un tempo di ritardo minimo
tra la ricezione di una richiesta e la
trasmissione di una risposta. Viene
utilizzato per superare i tempi di
attesa del modem.
8-36 Ritardo max. risposta
Range: Funzione:
Size
related*
[ 0.1 -
10.0 s]
Specicare il ritardo massimo
ammissibile tra la ricezione di una
richiesta e la trasmissione di una
risposta. Se questo tempo viene
superato, non viene data alcuna
risposta.
8-37 Ritardo max. intercar.
Range: Funzione:
Size
related*
[ 0.005 -
0.025 s]
Specicare il tempo di ritardo
massimo tra due caratteri in un
messaggio. Il superamento di questo
tempo di ritardo fa sì che il
messaggio viene scartato.
3.8.3 8-4* Imp. prot. FC MC
Questo gruppo di parametri e per congurazioni di
scrittura e lettura PDC.
8-42 Cong. scrittura PCD
Possono essere assegnati diversi parametri ai PCD (dal 3 al 10)
del PPO scelto (la quantità di PCD dipende dal tipo di PPO). I
valori nel PCD da 3 a 10 verranno scritti nei par. selezionati come
valori dei dati.
Option: Funzione:
[0] Ness
[1] [302] Riferimento min.
[2] [303] Riferimento max.
[3] [341] Rampa 1 tempo accel.
[4] [342] Rampa 1 tempo decel.
8-42 Cong. scrittura PCD
Possono essere assegnati diversi parametri ai PCD (dal 3 al 10)
del PPO scelto (la quantità di PCD dipende dal tipo di PPO). I
valori nel PCD da 3 a 10 verranno scritti nei par. selezionati come
valori dei dati.
Option: Funzione:
[5] [351] Rampa 2 tempo accel.
[6] [352] Rampa 2 tempo decel.
[7] [380] T. rampa jog
[8] [381] T. arr. rapido
[9] [412] Lim. basso vel. mot. [Hz]
[10] [414] Lim. alto vel. mot. [Hz]
[11] [590] Controllo bus dig. e a relè
[12] [676] Mors. 45, bus controllo
uscita
[13] [696] Mors. 42, bus controllo
uscita
[14] [894] Bus retroaz. 1
[15] Por. FC CTW
[16] Por. FC RIF
[17] [2021] Riferimento 1 - signal
number 527
8-43 Cong. lettura PCD
Possono essere assegnati diversi parametri ai PCD (dal 3 al 10)
del PPO scelto (la quantità di PCD dipende dal tipo di PPO). I
PCD da 3 a 10 mantengono il valore dei dati eettivo dei
parametri selezionati.
Option: Funzione:
[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1652] Feedback [Unit]
[23] [1660] Digital Input 18,19,27,33
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 67

Parametri
VLT® HVAC Basic Drive FC 101
8-43 Cong. lettura PCD
Possono essere assegnati diversi parametri ai PCD (dal 3 al 10)
del PPO scelto (la quantità di PCD dipende dal tipo di PPO). I
PCD da 3 a 10 mantengono il valore dei dati eettivo dei
parametri selezionati.
33
Option: Funzione:
[24] [1661] Terminal 53 Switch
Setting
[25] [1662] Analog input 53
[26] [1663] Terminal 54 Switch
Setting
[27] [1664] Analog input 54
[28] [1665] Analog output 42 [mA]
[29] [1671] Relay output
[30] [1672] Counter A
[31] [1673] Counter B
[32] [1690] Alarm Word
[33] [1692] Warning Word
[34] [1694] Ext. Status Word
8-51 Selez. arresto rapido
Option: Funzione:
Scegliere se controllare la funzione di arresto
rapido tramite i morsetti (ingressi digitale) e/o
tramite il bus.
[0] Ingr.
digitale
[1] Bus Attiva l'arresto rapido mediante la porta di
[2] Logica E Attiva l'arresto rapido tramite la porta di
[3] * Logica O Attiva l'arresto rapido tramite la porta di
Attiva l'arresto rapido tramite un ingresso
digitale.
comunicazione seriale.
comunicazione seriale e tramite uno degli
ingressi digitali.
comunicazione seriale o tramite uno degli
ingressi digitali.
8-52 Selez. freno CC
Option: Funzione:
AVVISO!
3.8.4 8-5* Digitale/Bus
Par. per congurare la combinaz. di parola di controllo
digitale/bus.
8-50 Selezione ruota libera
Option: Funzione:
AVVISO!
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
Selezionare un controllo della funzione di
rotazione libera tramite i morsetti (ingressi
digitale) e/o tramite il bus.
[0] Ingr.
digitale
[1] Bus Attiva la ruota libera tramite la porta di comuni-
[2] Logica E Attiva la ruota libera tramite il bus di campo/
[3] * Logica O Attiva la ruota libera tramite la porta di comuni-
Attiva la ruota libera mediante un ingresso
digitale.
cazione seriale.
porta di comunicazione seriale e anche tramite
uno degli ingressi digitali.
cazione seriale o tramite uno degli ingressi
digitali.
8-51 Selez. arresto rapido
Option: Funzione:
AVVISO!
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
[0] Ingr.
digitale
[1] Bus Attiva il freno CC mediante la porta di comuni-
[2] Logica E Attiva il freno CC tramite la porta di comuni-
[3] Logica O Attiva il freno CC tramite la porta di comuni-
8-53 Selez. avvio
Option: Funzione:
[0] Ingr.
digitale
[1] Bus Attiva un comando di avviamento mediante la
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
Selezionare il controllo della frenatura CC tramite
i morsetti (ingresso digitale).
Attiva il freno CC mediante un ingresso digitale.
cazione seriale.
cazione seriale e tramite uno degli ingressi
digitali.
cazione seriale o tramite uno degli ingressi
digitali.
AVVISO!
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
Selezionare il controllo della funzione di
avviamento del convertitore di frequenza tramite
i morsetti (ingresso digitale).
Attiva un comando di avviamento mediante un
ingresso digitale.
porta di comunicazione seriale o le opzioni
eldbus.
68 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
8-53 Selez. avvio
Option: Funzione:
[2] Logica E Attiva un comando di avvio tramite la porta di
comunicazione seriale e tramite uno degli
ingressi digitali.
[3] * Logica O Attiva un comando di avvio tramite la porta di
comunicazione seriale o tramite uno degli
ingressi digitali.
8-54 Selez. inversione
Option: Funzione:
AVVISO!
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
Selezionare il controllo della funzione di
inversione del convertitore di frequenza tramite i
morsetti (ingresso digitale) e/o tramite la porta
di comunicazione seriale.
[0]*Ingr.
digitale
[1] Bus Attiva un comando di Inversione mediante la
[2] Logica E Attiva un comando di inversione tramite la porta
[3] Logica O Attiva un comando di inversione tramite la porta
Attiva un comando di Inversione tramite un
ingresso digitale.
porta di comunicazione seriale.
di comunicazione seriale e tramite uno degli
ingressi digitali.
di comunicazione seriale o tramite uno degli
ingressi digitali.
8-55 Selez. setup
Option: Funzione:
AVVISO!
Questo parametro è attivo soltanto
quando il parametro 8-01 Sito di comando
è impostato su [0] Par. dig. e di com.
Scegliere la selezione del setup del convertitore
di frequenza mediante i morsetti (ingresso
digitale) e/o mediante la porta di comunicazione
seriale.
[0] Ingr.
digitale
[1] Bus Attiva la selezione del setup mediante la porta
[2] Logica E Attiva la selezione del setup mediante la porta
Attiva la selezione del setup mediante ingresso
digitale.
di comunicazione seriale.
di comunicazione seriale e tramite uno degli
ingressi digitali.
8-55 Selez. setup
Option: Funzione:
[3] * Logica O Attiva la selezione del setup mediante la porta
di comunicazione seriale o tramite uno degli
ingressi digitali.
8-56 Selezione rif. preimpostato
Option: Funzione:
Scegliere se controllare il riferimento
preimpostato del convertitore di frequenza
mediante i morsetti (ingresso digitale) e/o
mediante la porta di comunicazione seriale.
[0] Ingr.
digitale
[1] Bus Attiva la selezione del riferimento preimpostato
[2] Logica E Attiva la selezione del riferimento preimpostato
[3] * Logica O Attiva la selezione del riferimento preimpostato
Attiva la selezione del riferimento preimpostato
tramite un ingresso digitale.
mediante la porta di comunicazione seriale.
tramite la porta di comunicazione seriale e
tramite uno degli ingressi digitali.
tramite la porta di comunicazione seriale o
tramite uno degli ingressi digitali.
3.8.5 8-7* BACnet
8-70 Istanza della periferica BACnet
Range: Funzione:
1* [0 - 4194303 ] Immettere un numero ID univoco per il
dispositivo BACnet.
8-72 Master max. MS/TP
Range: Funzione:
127* [0 - 127 ] Denire l'indirizzo del master che possiede
l'indirizzo maggiore in questa rete. La riduzione
di questo valore ottimizza il polling per il
token.
8-73 Frame di inform. max. MS/TP
Range: Funzione:
1* [1 - 65534 ] Denisce quante informazioni/frame di dati
può inviare il dispositivo mentre possiede il
token.
8-74 Servizio "I-Am"
Option: Funzione:
[0] * Invio all'ac-
censione
[1] Continuamente Selezionare se il dispositivo dovrebbe
Selezionare quando il dispositivo
dovrebbe inviare il messaggio di
servizio I-Am soltanto all'accensione.
inviare il messaggio di servizio "I-Am"
continuamente con un intervallo di
circa 1 minuto.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 69

Parametri
VLT® HVAC Basic Drive FC 101
8-75 Password di inizializzazione
Range: Funzione:
admin* [1 - 1 ] Immettere la password necessaria per
l'esecuzione della reinizializzazione del convertitore di frequenza dal BACnet.
33
8-79 Vers. Firmware prot.
Array[5]
Range: Funzione:
Size
related*
[0 - 655 ] La revisione del rmware del conver-
titore di frequenza è nell'indice 0,
Modbus è nell'indice 1, Metasys N2 è
nell'indice 2, FLN è nell'indice 3 e
BACnet è nell'indice 4.
3.8.6 8-8* Diagnostica porta FC
Questi parametri vengono usati per monitorare la comunicazione del bus tramite la porta FC.
8-80 Conteggio messaggi bus
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi validi rilevati sul bus.
8-81 Conteggio errori bus
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi con errori (ad esempio
guasto CRC), rilevati sul bus.
8-88 Ripr. diagnost. porta FC
Option: Funzione:
[0] * Non riprist.
[1] Riprist. cont.
3.8.7 8-9* Bus jog
8-94 Bus retroazione 1
Range: Funzione:
0* [-32768 -
32767 ]
8-95 Bus retroazione 2
Range: Funzione:
0* [-32768 -
32767 ]
Scrivere una retroazione a questo par. mediante
la porta di comunicazione seriale. Questo
parametro deve essere selezionato nel
parametro 20-00 Fonte retroazione 1 o nel
parametro 20-03 Risorsa retroazione 1 CL processo
come una Fonte retroazione. Il valore Hex 4.000
h corrisponde al 100% retroazione/campo è del
±200%.
Scrivere una retroazione a questo parametro
mediante la porta di comunicazione seriale.
Questo parametro deve essere selezionato nel
parametro 20-00 Fonte retroazione 1 o nel
parametro 20-03 Risorsa retroazione 1 CL processo
come Fonte retroazione. Il valore esadecimale
4.000 h corrisponde a ±200% al 100% della
retroazione/range.
8-82 Messaggi slave ricevuti
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi validi indirizzati allo slave
inviati dal convertitore di frequenza.
8-83 Conteggio errori slave
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi di errore che il convertitore
di frequenza non ha potuto eseguire.
8-84 Messaggi slave inviati
Range: Funzione:
0* [0 - 4294967295 ] Mostra il numero di messaggi inviati
dallo slave.
8-85 Errore timeout slave
Range: Funzione:
0* [0 - 4294967295 ] Mostra il numero di errori di temporiz-
zazione dello slave.
70 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

130BA062.13
Stato 1
Evento 1/
Azione 1
Stato 2
Evento 2/
Azione 2
Evento avviamento
P13-01
Stato 3
Evento 3/
Azione 3
Stato 4
Evento 4/
Azione 4
Evento arresto
P13-02
Evento arresto
P13-02
Evento arresto
P13-02
Parametri Guida alla Programmazione
3.9 Menu principale - Smart logic - Gruppo
3.9.2 13-0* Impostazioni SLC
13
Per attivare, disattivare e ripristinare la sequenza dello
3.9.1 13-** Smart logic
Lo Smart Logic Control (SLC) è una sequenza di azioni
denite dall'utente (vedere il parametro 13-52 Azione regol.
SL [x]), le quali vengono eseguite dall'SLC quando l'evento
associato denito dall'utente (vedere il
parametro 13-51 Evento regol. SL [x]) è valutato come VERO
dall'SLC. Tutti gli eventi e le azioni sono numerati e
collegati fra loro formando delle coppie. Questo signica
che quando l'evento [0] è soddisfatto (raggiunge il valore
VERO), viene eseguita l'azione [0]. Dopo aver eseguito
questa azione, le condizioni dell'evento [1] vengono
valutate. Se questo evento viene valutato come VERO,
allora verrà eseguita l'azione [1] e così via. Verrà valutato
un solo evento alla volta. Se un evento viene valutato
falso, durante l'intervallo di scansione corrente non
succede nulla (nell'SLC) e non vengono valutati altri eventi.
Questo signica che quando l'SLC inizia, valuta ogni
intervallo di scansione come evento [0] (e solo evento [0]).
Soltanto se l'evento [0] viene valutato come VERO l'SLC
esegue l'azione [0] e inizia a valutare l'evento [1]. È
possibile programmare da 1 a 20 eventi e azioni. Una volta
eseguito l'ultimo evento/azione, la sequenza inizia da capo
con evento [0]/azione [0].
Disegno 3.14 Esempio con tre eventi/azioni
Avvio e arresto dell'SLC
Per avviare o arrestare l'SLC, selezionare[1] On o [2] O nel
parametro 13-00 Modo regol. SL. L'SLC si avvia sempre nello
stato 0 (dove valuta l'evento [0]). L'SLC si avvia quando
l'evento di avviamento (denito nel parametro 13-01 Evento
avviamento) viene valutato come VERO (a condizione che
nel parametro 13-00 Modo regol. SL sia selezionato [1] On).
L'SLC si arresta quando l'evento arresto
(parametro 13-02 Evento arresto) è VERO. Il
Parametro 13-03 Ripristinare SLC ripristina tutti i parametri
SLC e inizia la programmazione da zero.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 71
smart logic control, utilizzare le impostazioni SLC. Le
funzioni logiche e i comparatori sono sempre eseguiti in
background, permettendo il controllo separato di ingressi e
uscite digitali.
13-00 Modo regol. SL
Option: Funzione:
Selezionare [1] On per consentire allo Smart Logic
Control di avviarsi quando è presente un comando di
avvio da ingresso digitale. Selezionare [0] O per
disabilitare lo Smart Logic Control.
[0] * O Disabilita il controllore smart logic.
[1] On Abilita il controllore smart logic.
13-01 Evento avviamento
Option: Funzione:
Per attivare smart logic control,
selezionare l'ingresso booleano (vero o
falso).
[0] Falso Immette il valore sso di FALSO nella
regola logica.
[1] Vero Immette il valore sso di VERO nella
regola logica.
[2] In funzione Il motore è in funzione.
[3] Nel campo Il motore funziona negli intervalli di
corrente programmati
(parametro 4-50 Avviso corrente bassa e
parametro 4-51 Avviso corrente alta)
[4] Riferimento on Il motore gira alla velocità di riferimento.
[7] Fuori dall'interv.
di corrente
[8] Sotto I, bassa La corrente motore è inferiore a quella
[9] Sopra I, alta La corrente motore è superiore a quella
[16] Termica Avviso L'avviso termico si attiva se è stato
[17] Tens.rete f.
campo
[18] Inversione Il convertitore di frequenza esegue
La corrente motore è al di fuori dell'intervallo impostato nel
parametro 4-18 Limite di corrente.
impostata nel parametro 4-50 Avviso
corrente bassa.
impostata nel parametro 4-51 Avviso
corrente alta.
superato il limite di temperatura nel
motore, nel convertitore di frequenza o
nel termistore.
Avviso o allarme di perdita di fase di rete,
se il parametro 14-12 Funz. durante sbilan-
ciamento di rete non è impostato su [2]
Disabilitato.
un'inversione.
3 3

Parametri
VLT® HVAC Basic Drive FC 101
13-01 Evento avviamento
Option: Funzione:
[19] Avviso È presente un avviso.
[20] Allarme (sc.) È presente un allarme.
33
[21] All.(scatto
blocc.)
[22] Comparatore 0 Utilizzare il risultato del comparatore 0
[23] Comparatore 1 Utilizzare il risultato del comparatore 1
[24] Comparatore 2 Utilizzare il risultato del comparatore 2
[25] Comparatore 3 Utilizzare il risultato del comparatore 3
[26] Reg. log. 0 Utilizzare il risultato della regola logica 0
[27] Reg. log. 1 Utilizzare il risultato della regola logica 1
[28] Reg. log. 2 Utilizzare il risultato della regola logica 2
[29] Reg. log. 3 Utilizzare il risultato della regola logica 3
[33] Ingr. digitale
DI18
[34] Ingr. digitale
DI19
[35] Ingr. digitale
DI27
[36] Ingr. digitale
DI29
[39]*Comando
avviamento
[40] Conv. di freq.
arr.
[42] Ripr. autom.
scatto
[50] Comparatore 4 Utilizzare il risultato del comparatore 4
[51] Comparatore 5 Utilizzare il risultato del comparatore 5
[60] Reg. log. 4 Utilizzare il risultato della regola logica 4
[61] Reg. log. 5 Utilizzare il risultato della regola logica 5
È presente un allarme scatto bloccato.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
Utilizzare il valore di DI18 nella regola
logica (alto = vero).
Utilizzare il valore di DI19 nella regola
logica (alto = vero).
Utilizzare il valore di DI27 nella regola
logica (alto = vero).
Utilizzare il valore di DI29 nella regola
logica (alto = vero).
Questo evento è VERO se il convertitore
di frequenza viene avviato (tramite un
ingresso digitale, bus di campo o altro).
Questo evento è VERO se il convertitore
di frequenza viene arrestato o lasciato a
ruota libera (tramite un ingresso digitale,
un bus di campo o altri).
Questo evento è VERO se il convertitore
di frequenza è scattato (ma non bloccato)
e viene generato un ripristino automatico.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
13-01 Evento avviamento
Option: Funzione:
[83] Cinghia rotta È rilevata una condizione di cinghia rotta.
Abilitare questa funzione nel
parametro 22-60 Funzione cinghia rotta.
13-02 Evento arresto
Option: Funzione:
Selezionare la condizione (vero o falso)
che disattiva il controllore smart logic.
[0] Falso Immette il valore sso di FALSO nella
regola logica.
[1] Vero Immette il valore sso di VERO nella
regola logica.
[2] In funzione Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[3] Nel campo Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[4] Riferimento on Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[7] Fuori dall'interv.
di corrente
[8] Sotto I, bassa Per una descrizione più dettagliata,
[9] Sopra I, alta Per una descrizione più dettagliata,
[16] Termica Avviso Per una descrizione più dettagliata,
[17] Tens.rete f.
campo
[18] Inversione Per una descrizione più dettagliata,
[19] Avviso Per una descrizione più dettagliata,
[20] Allarme (sc.) Per una descrizione più dettagliata,
[21] All.(scatto
blocc.)
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
72 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parametri Guida alla Programmazione
[22] Comparatore 0 Utilizzare il risultato del comparatore 0
[23] Comparatore 1 Utilizzare il risultato del comparatore 1
[24] Comparatore 2 Utilizzare il risultato del comparatore 2
[25] Comparatore 3 Utilizzare il risultato del comparatore 3
[26] Reg. log. 0 Utilizzare il risultato della regola logica 0
[27] Reg. log. 1 Utilizzare il risultato della regola logica 1
[28] Reg. log. 2 Utilizzare il risultato della regola logica 2
[29] Reg. log. 3 Utilizzare il risultato della regola logica 3
[30] Timeout SL 0 Utilizzare il risultato del timer 0 nella
[31] Timeout SL 1 Utilizzare il risultato del timer 1 nella
[32] Timeout SL 2 Utilizzare il risultato del timer 2 nella
[33] Ingr. digitale
[34] Ingr. digitale
[35] Ingr. digitale
[36] Ingr. digitale
[39] Comando
[40]*Conv. di freq.
[42] Ripr. autom.
[50] Comparatore 4 Utilizzare il risultato del comparatore 4
[51] Comparatore 5 Utilizzare il risultato del comparatore 5
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 73
13-02 Evento arresto
Option: Funzione:
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
regola logica.
regola logica.
regola logica.
Utilizzare il valore di DI18 nella regola
DI18
DI19
DI27
DI29
avviamento
arr.
scatto
logica (alto = vero).
Utilizzare il valore di DI19 nella regola
logica (alto = vero).
Utilizzare il valore di DI27 nella regola
logica (alto = vero).
Utilizzare il valore di DI29 nella regola
logica (alto = vero).
Questo evento è VERO se il convertitore
di frequenza viene avviato in qualsiasi
modo (tramite un ingresso digitale, bus di
campo o altri).
Questo evento è VERO se il convertitore
di frequenza viene arrestato o lasciato a
ruota libera in qualsiasi modo (tramite un
ingresso digitale, un bus di campo o
altri).
Questo evento è VERO se il convertitore
di frequenza è scattato (ma non bloccato)
e viene generato un ripristino automatico.
nella regola logica.
nella regola logica.
13-02 Evento arresto
Option: Funzione:
[60] Reg. log. 4 Utilizzare il risultato della regola logica 4
nella regola logica.
[61] Reg. log. 5 Utilizzare il risultato della regola logica 5
nella regola logica.
[70] Timeout SL 3 Utilizzare il risultato del timer 3 nella
regola logica.
[71] Timeout SL 4 Utilizzare il risultato del timer 4 nella
regola logica.
[72] Timeout SL 5 Utilizzare il risultato del timer 5 nella
regola logica.
[73] Timeout SL 6 Utilizzare il risultato del timer 6 nella
regola logica.
[74] Timeout SL 7 Utilizzare il risultato del timer 7 nella
regola logica.
[83] Cinghia rotta È stata rilevata una condizione di cinghia
rotta. Abilitare questa funzione nel
parametro 22-60 Funzione cinghia rotta.
13-03 Ripristinare SLC
Option: Funzione:
[0] * Non ripristinare
SLC
[1] Ripristinare SLC Ripristina tutti i parametri nel gruppo di
Mantiene le impostazioni programmate in
tutti i gruppi di parametri 13-** Smart
logic.
parametri 13-** Smart logic alle
impostazioni di fabbrica.
3.9.3 13-1* Comparatori
I comparatori vengono utilizzati per confrontare variabili
continue (frequenza di uscita, corrente di uscita e ingresso
analogico) con valori ssi preimpostati.
Disegno 3.15 Comparatori
Inoltre vi sono dei valori digitali che vengono confrontati
con valori tempo ssi. Vedere la spiegazione nel
parametro 13-10 Comparatore di operandi. I comparatori
vengono valutati a ogni intervallo di scansione. Utilizzare
direttamente il risultato (vero o falso). Tutti i parametri in
questo gruppo di parametri sono parametri array con
l'indice 0–5. Selezionare l'indice 0 per programmare il
3 3

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parametri
VLT® HVAC Basic Drive FC 101
comparatore 0, selezionare l'indice 1 per programmare il
comparatore 1 e così via.
13-10 Comparatore di operandi
Array [6]
Option: Funzione:
33
[0] * Disabil.
[1] Riferimento
[2] Retroaz.
[3] Vel. motore
[4] Corrente motore
[6] Potenza motore
[7] Tensione motore
[12] Ingr. anal. AI53
[13] Ingr. anal. AI54
[20] Numero allarme.
[30] Contatore A
[31] Contatore B
Selezionare la variabile da monitorare con
il comparatore.
13-11 Comparatore di operandi
Array [6]
Option: Funzione:
[0] Inferiore a
(<)
[1]*Quasi
uguale (~)
[2] Superiore a
(>)
Selezionare [0] < perché il risultato della
valutazione sia VERO se la variabile selezionata
nel parametro 13-10 Comparatore di operandi è
inferiore al valore sso nel
parametro 13-12 Valore comparatore. Il risultato
è falso se la variabile selezionata nel
parametro 13-10 Comparatore di operandi è
superiore al valore sso nel
parametro 13-12 Valore comparatore.
Selezionare [1] ≈ perché il risultato della
valutazione sia VERO quando la variabile
selezionata nel parametro 13-10 Comparatore
di operandi è pressoché uguale al valore sso
nel parametro 13-12 Valore comparatore.
Selezionare [2] > per la logica inversa
dell'opzione [0] <.
booleano in una regola logica (vedere
parametro 13-40 Regola logica Booleana 1,
parametro 13-42 Regola logica Booleana 2 o
parametro 13-44 Regola logica Booleana 3). Un timer è
FALSO soltanto se avviato da un'azione (ad es. [29] Avvio
timer 1) nché non è scaduto il valore del timer immesso
in questo parametro. In seguito diventa nuovamente VERO.
Tutti i parametri in questo gruppo di parametri sono
parametri array con l'indice da 0 a 2 Selezionare indice 0
per programmare il timer 0, selezionare l'indice 1 per
programmare il timer 1 e così via.
13-20 Timer regolatore SL
Array [8]
Range: Funzione:
0 s* [0 -
3600 s]
Immettere il valore per denire la durata
dell'uscita falso dal timer programmato. Un timer
è falso soltanto se viene avviato da un'azione
(vedere il parametro 13-52 Azione regol. SL [29-31]
e il parametro 13-52 Azione regol. SL [70-74] Avvio
timer X) e no allo scadere del valore impostato
per il timer. I parametri array contengono i timer
0–7.
3.9.5 13-4* Regole logiche
Si possono combinare no a tre ingressi booleani (ingressi
vero/falso) di timer, comparatori, ingressi digitali, bit di
stato ed eventi utilizzando gli operatori logici AND, OR e
NOT. Selezionare gli ingressi booleani per il calcolo nel
parametro 13-40 Regola logica Booleana 1, nel
parametro 13-42 Regola logica Booleana 2 e nel
parametro 13-44 Regola logica Booleana 3. Denire gli
operatori per combinare logicamente gli ingressi
selezionati nel parametro 13-41 Operatore regola logica 1 e
nel parametro 13-43 Operatore regola logica 2.
13-12 Valore comparatore
Array [6]
Range: Funzione:
0* [-9999 -
9999 ]
Immettere il livello di attivazione per la
variabile che viene monitorata da questo
comparatore. Questo è un parametro array
contenente i valori comparatore 0–5.
Disegno 3.16 Regole logiche
Priorità di calcolo
I risultati del parametro 13-40 Regola logica Booleana 1, del
parametro 13-41 Operatore regola logica 1 e del
3.9.4 13-2* Timer
parametro 13-42 Regola logica Booleana 2 vengono calcolati
per primi. Il risultato (vero/falso) di questo calcolo viene
È possibile utilizzare il risultato (vero o falso) dai timer
direttamente per denire un evento (vedere il
parametro 13-51 Evento regol. SL) oppure come ingresso
74 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
combinato con le impostazioni del
parametro 13-43 Operatore regola logica 2 e del
parametro 13-44 Regola logica Booleana 3, portando al
risultato nale (vero/falso) della regola logica.

Parametri Guida alla Programmazione
13-40 Regola logica Booleana 1
Array [6]
Option: Funzione:
[0] * Falso Immette il valore sso di FALSO nella
regola logica.
[1] Vero Immette il valore sso VERO nella regola
logica.
[2] In funzione Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[3] Nel campo Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[4] Riferimento on Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
[7] Fuori dall'interv.
di corrente
[8] Sotto I, bassa Per una descrizione più dettagliata,
[9] Sopra I, alta Per una descrizione più dettagliata,
[16] Termica Avviso Per una descrizione più dettagliata,
[17] Tens.rete f.
campo
[18] Inversione Per una descrizione più dettagliata,
[19] Avviso Per una descrizione più dettagliata,
[20] Allarme (sc.) Per una descrizione più dettagliata,
[21] All.(scatto
blocc.)
[22] Comparatore 0 Utilizzare il risultato del comparatore 0
[23] Comparatore 1 Utilizzare il risultato del comparatore 1
[24] Comparatore 2 Utilizzare il risultato del comparatore 2
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
vedere il parametro 13-01 Evento
avviamento.
Per una descrizione più dettagliata,
vedere il parametro 13-01 Evento
avviamento.
nella regola logica.
nella regola logica.
nella regola logica.
13-40 Regola logica Booleana 1
Array [6]
Option: Funzione:
[25] Comparatore 3 Utilizzare il risultato del comparatore 3
nella regola logica.
[26] Reg. log. 0 Utilizzare il risultato della regola logica 0
nella regola logica.
[27] Reg. log. 1 Utilizzare il risultato della regola logica 1
nella regola logica.
[28] Reg. log. 2 Utilizzare il risultato della regola logica 2
nella regola logica.
[29] Reg. log. 3 Utilizzare il risultato della regola logica 3
nella regola logica.
[30] Timeout SL 0 Utilizzare il risultato del timer 0 nella
regola logica.
[31] Timeout SL 1 Utilizzare il risultato del timer 1 nella
regola logica.
[32] Timeout SL 2 Utilizzare il risultato del timer 2 nella
regola logica.
[33] Ingr. digitale
DI18
[34] Ingr. digitale
DI19
[35] Ingr. digitale
DI27
[36] Ingr. digitale
DI29
[39] Comando
avviamento
[40] Conv. di freq.
arr.
[42] Ripr. autom.
scatto
[50] Comparatore 4 Utilizzare il risultato del comparatore 4
[51] Comparatore 5 Utilizzare il risultato del comparatore 5
[60] Reg. log. 4 Utilizzare il risultato della regola logica 4
[61] Reg. log. 5 Utilizzare il risultato della regola logica 5
[70] Timeout SL 3 Utilizzare il risultato del timer 3 nella
Utilizzare il valore di DI18 nella regola
logica (alto = vero).
Utilizzare il valore di DI19 nella regola
logica (alto = vero).
Utilizzare il valore di DI27 nella regola
logica (alto = vero).
Utilizzare il valore di DI29 nella regola
logica (alto = vero).
Questa regola logica è VERA se il convertitore di frequenza viene avviato in
qualsiasi modo (tramite un ingresso
digitale o altro).
Questa regola logica è VERA se il convertitore di frequenza viene arrestato o
lasciato a ruota libera in qualsiasi modo
(tramite un ingresso digitale o altro).
Questa regola logica è VERA se il convertitore di frequenza è scattato (ma non
bloccato) e viene eseguito un ripristino
automatico.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
regola logica.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 75

Parametri
VLT® HVAC Basic Drive FC 101
13-40 Regola logica Booleana 1
Array [6]
Option: Funzione:
[71] Timeout SL 4 Utilizzare il risultato del timer 4 nella
regola logica.
33
[72] Timeout SL 5 Utilizzare il risultato del timer 5 nella
regola logica.
[73] Timeout SL 6 Utilizzare il risultato del timer 6 nella
regola logica.
[74] Timeout SL 7 Utilizzare il risultato del timer 7 nella
regola logica.
[83] Cinghia rotta È stata rilevata una condizione di cinghia
rotta. Abilitare questa funzione nel
parametro 22-60 Funzione cinghia rotta.
13-41 Operatore regola logica 1
Option: Funzione:
[0] * Disabil.
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
13-42 Regola logica Booleana 2
Array [6]
Option: Funzione:
Selezionare il secondo ingresso
booleano (vero o falso) per la
regola logica selezionata.
Vedere il
parametro 13-40 Regola logica
Booleana 1 per ulteriori
descrizioni delle opzioni e delle
relative funzioni.
[0] * Falso
[1] Vero
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori dall'interv. di
corrente
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo
[18] Inversione
[19] Avviso
[20] Allarme (sc.)
[21] All.(scatto blocc.)
13-42 Regola logica Booleana 2
Array [6]
Option: Funzione:
[22] Comparatore 0
[23] Comparatore 1
[24] Comparatore 2
[25] Comparatore 3
[26] Reg. log. 0
[27] Reg. log. 1
[28] Reg. log. 2
[29] Reg. log. 3
[30] Timeout SL 0
[31] Timeout SL 1
[32] Timeout SL 2
[33] Ingr. digitale DI18
[34] Ingr. digitale DI19
[35] Ingr. digitale DI27
[36] Ingr. digitale DI29
[39] Comando avviamento
[40] Conv. di freq. arr.
[42] Ripr. autom. scatto
[50] Comparatore 4
[51] Comparatore 5
[60] Reg. log. 4
[61] Reg. log. 5
[70] Timeout SL 3
[71] Timeout SL 4
[72] Timeout SL 5
[73] Timeout SL 6
[74] Timeout SL 7
[83] Cinghia rotta È stata rilevata una condizione
di cinghia rotta. Abilitare questa
funzione nel
parametro 22-60 Funzione
cinghia rotta.
13-43 Operatore regola logica 2
Array [6]
Option: Funzione:
Selezionare il secondo operatore logico da
utilizzare negli ingressi booleani calcolati nel
parametro 13-40 Regola logica Booleana 1, nel
parametro 13-41 Operatore regola logica 1 e
nel parametro 13-42 Regola logica Booleana 2
e l'ingresso booleano proveniente dal
parametro 13-42 Regola logica Booleana 2.
[13-44] indica l'ingresso booleano del
parametro 13-44 Regola logica Booleana 3.
[13-40/13-42] indica l'ingresso booleano
calcolato nel parametro 13-40 Regola logica
Booleana 1, nel parametro 13-41 Operatore
regola logica 1 e nel parametro 13-42 Regola
logica Booleana 2. [0] Disabil. (impostazione di
fabbrica): Selezionare questa opzione per
76 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
13-43 Operatore regola logica 2
Array [6]
Option: Funzione:
ignorare il parametro 13-44 Regola logica
Booleana 3.
[0] * Disabil.
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND
NOT
[8] NOT OR
NOT
13-44 Regola logica Booleana 3
Array [6]
Option: Funzione:
Selezionare il terzo ingresso
booleano (vero o falso) per la
regola logica selezionata.
Vedere il
parametro 13-40 Regola logica
Booleana 1 per ulteriori
descrizioni delle opzioni e
delle relative funzioni.
[0] * Falso
[1] Vero
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori dall'interv. di corrente
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo
[18] Inversione
[19] Avviso
[20] Allarme (sc.)
[21] All.(scatto blocc.)
[22] Comparatore 0
[23] Comparatore 1
[24] Comparatore 2
[25] Comparatore 3
[26] Reg. log. 0
[27] Reg. log. 1
[28] Reg. log. 2
[29] Reg. log. 3
[30] Timeout SL 0
[31] Timeout SL 1
[32] Timeout SL 2
[33] Ingr. digitale DI18
13-44 Regola logica Booleana 3
Array [6]
Option: Funzione:
[34] Ingr. digitale DI19
[35] Ingr. digitale DI27
[36] Ingr. digitale DI29
[39] Comando avviamento
[40] Conv. di freq. arr.
[42] Ripr. autom. scatto
[50] Comparatore 4
[51] Comparatore 5
[60] Reg. log. 4
[61] Reg. log. 5
[70] Timeout SL 3
[71] Timeout SL 4
[72] Timeout SL 5
[73] Timeout SL 6
[74] Timeout SL 7
[83] Cinghia rotta
3.9.6 13-5* Stati
13-51 Evento regol. SL
Array [20]
Option: Funzione:
Selezionare l'ingresso booleano
(vero o falso) per denire
l'evento controllore smart
logic.
Vedere il
parametro 13-02 Evento arresto
per ulteriori descrizioni delle
opzioni e delle relative
funzioni.
[0] * Falso
[1] Vero
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori dall'interv. di corrente
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo
[18] Inversione
[19] Avviso
[20] Allarme (sc.)
[21] All.(scatto blocc.)
[22] Comparatore 0
[23] Comparatore 1
[24] Comparatore 2
[25] Comparatore 3
[26] Reg. log. 0
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 77

Parametri
VLT® HVAC Basic Drive FC 101
13-51 Evento regol. SL
Array [20]
Option: Funzione:
[27] Reg. log. 1
[28] Reg. log. 2
33
[29] Reg. log. 3
[30] Timeout SL 0
[31] Timeout SL 1
[32] Timeout SL 2
[33] Ingr. digitale DI18
[34] Ingr. digitale DI19
[35] Ingr. digitale DI27
[36] Ingr. digitale DI29
[39] Comando avviamento
[40] Conv. di freq. arr.
[42] Ripr. autom. scatto
[50] Comparatore 4
[51] Comparatore 5
[60] Reg. log. 4
[61] Reg. log. 5
[70] Timeout SL 3
[71] Timeout SL 4
[72] Timeout SL 5
[73] Timeout SL 6
[74] Timeout SL 7
[83] Cinghia rotta
13-52 Azione regol. SL
Array [20]
Option: Funzione:
Selezionare l'azione corrispondente
all'evento SLC. Le azioni vengono
eseguite se l'evento corrispondente
(denito nel parametro 13-51 Evento
regol. SL) è valutato come vero.
Possono essere selezionate le seguenti
azioni:
[100] ResetAlarm
[0] * DISATTIVATO
[1] Nessun'azione
[2] Selez. setup 1 Cambia il setup attivo
(parametro 0-10 Setup attivo) a 1.
[3] Selez. setup 2 Cambia il setup attivo
(parametro 0-10 Setup attivo) a 2.
[10] Selez. rif. preimp.0 Seleziona il riferimento preimpostato 0.
[11] Selez. rif. preimp.1 Seleziona il riferimento preimpostato 1.
[12] Selez. rif. preimp.2 Seleziona il riferimento preimpostato 2.
[13] Selez. rif. preimp.3 Seleziona il riferimento preimpostato 3.
[14] Selez. rif. preimp.4 Seleziona il riferimento preimpostato 4.
[15] Selez. rif. preimp.5 Seleziona il riferimento preimpostato 5.
[16] Selez. rif. preimp.6 Seleziona il riferimento preimpostato 6.
[17] Selez. rif. preimp.7 Seleziona il riferimento preimpostato 7.
Se il riferimento preimpostato attivo
viene modicato, si unisce agli altri
13-52 Azione regol. SL
Array [20]
Option: Funzione:
comandi di riferimento preimpostato
provenienti dagli ingressi digitali o
tramite un bus di campo.
[18] Selez. rampa 1 Seleziona la rampa 1.
[19] Selez. rampa 2 Seleziona la rampa 2.
[22] Funzionamento Invia un comando di avvio al conver-
titore di frequenza.
[23] Mar.in se.antior. Invia un comando di avvio inverso al
convertitore di frequenza.
[24] Arresto Invia un comando di arresto al conver-
titore di frequenza.
[25] Arresto rapido Invia un comando di arresto rapido al
convertitore di frequenza.
[26] Freno CC Invia un comando di arresto CC al
convertitore di frequenza.
[27] Evoluzione libera Il convertitore di frequenza va
immediatamente a ruota libera. Tutti i
comandi di arresto, incluso il comando
di ruota libera, arrestano l'SLC.
[28] Blocco uscita Blocca la frequenza di uscita del
convertitore di frequenza.
[29] Avvio timer 0 Avvia il timer 0, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[30] Avvio timer 1 Avvia il timer 1, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[31] Avvio timer 2 Avvia il timer 2, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[32] Imp. usc. dig. A
bassa
[33] Imp. usc. dig. B
bassa
[34] Imp. usc. dig. C
bassa
[35] Imp. usc. dig. D
bassa
[38] Imp. usc. dig. A
alta
[39] Imp. usc. dig. B
alta
[40] Imp. usc. dig. C
alta
[41] Imp. usc. dig. D
alta
[60] Ripristino cont. A Azzera il contatore A.
[61] Ripristino cont. B Azzera il contatore B.
[70] Avvio timer 3 Avvia il timer 3, vedere il
Qualsiasi uscita con uscita digitale 1
selezionata è bassa (o).
Qualsiasi uscita con uscita digitale 2
selezionata è bassa (o).
Qualsiasi uscita con uscita digitale 3
selezionata è bassa (o).
Qualsiasi uscita con uscita digitale 4
selezionata è bassa (o).
Qualsiasi uscita con uscita digitale 1
selezionata è alta (chiusa).
Qualsiasi uscita con uscita digitale 2
selezionata è alta (chiusa).
Qualsiasi uscita con uscita digitale 3
selezionata è alta (chiusa).
Qualsiasi uscita con uscita digitale 4
selezionata è alta (chiusa).
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
78 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
13-52 Azione regol. SL
Array [20]
Option: Funzione:
[71] Avvio timer 4 Avvia il timer 4, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[72] Avvio timer 5 Avvia il timer 5, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[73] Avvio timer 6 Avvia il timer 6, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[74] Avvio timer 7 Avvia il timer 7, vedere il
parametro 13-20 Timer regolatore SL per
una descrizione più dettagliata.
[100] Reimp. allarmi Ripristina l'allarme.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 79

Parametri
VLT® HVAC Basic Drive FC 101
3.10 Menu principale - Funzioni speciali Gruppo 14
3.10.1 14-0* Commut.inverter
33
14-01 Freq. di commutaz.
14-03 Sovramodulazione
Option: Funzione:
aggiuntiva del 10-12% al centro della gamma
ipersincrona (dallo 0% alla velocità nominale
aumentando a circa il 12% al doppio della velocità
nominale).
Option: Funzione:
Selezionare la frequenza di commutazione dell'inverter. La modica della frequenza di
commutazione può contribuire a ridurre i disturbi
acustici del motore.
AVVISO!
Il valore della frequenza di uscita del
convertitore di frequenza non può mai
essere un valore superiore a 1/10 della
frequenza di commutazione. Quando il
motore è in funzione, regolare la
frequenza di commutazione nel
parametro 14-01 Freq. di commutaz. nché
il motore è il più silenzioso possibile.
AVVISO!
Elevate frequenze di commutazione
aumentano la generazione di calore nel
14-07 Livello di comp. tempi morti
Range: Funzione:
Size
related*
[0 100 ]
Livello di compensazione tempi morti
applicata in percentuale. Un alto livello
(>90%) ottimizza la risposta dinamica del
motore. Un livello da 50 a 90% è adatto
sia per la minimizzazione dell'ondulazione
della coppia del motore sia per la
dinamica del motore. Un livello 0 disattiva
la compensazione tempi morti.
14-08 Fatt. di guad. attenuaz.
Range: Funzione:
Size
related*
[0 100 %]
Impostare il fattore di attenuazione per
la compensazione della tensione
collegamento CC. Vedere il
parametro 14-51 Compensazione tens. coll.
CC.
convertitore di frequenza e possono
ridurne la durata.
14-09 Liv. corr. orient. tempi morti
Range: Funzione:
AVVISO!
Non tutte le opzioni sono disponibili in
tutte le taglie di potenza.
[0] Ran3 3 kHz PWM random VERO (modulazione rumore
bianco).
[1] Ran5 5kHz PWM random VERO (modulazione rumore
bianco).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz.
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Sovramodulazione
Option: Funzione:
[0] * O Seleziona nessuna sovramodulazione della tensione di
uscita per evitare un'ondulazione della coppia
sull’albero motore.
[1] On La funzione di sovramodulazione genera una tensione
aggiuntiva no all'8% della tensione di uscita U
senza sovramodulazione, il che genera una coppia
max
Size related* [0 - 100 %] Impostare un segnale bias (in
percentuale) da aggiungere al
segnale di corrente per la compensazione dei tempi morti per alcuni
motori.
3.10.2 14-1* Rete On/O
Per congurare il monitoraggio e la gestione del guasto di
rete.
14-10 Guasto di rete
Congurare l'azione del convertitore di frequenza quando la
tensione di rete è al di sotto del limite della tensione di rete
congurata nel parametro 14-11 Tens.di rete in caso di guasto rete.
Option: Funzione:
[0] * Nessuna funzione
[1] Rampa decel. contr.
[3] Ruota libera
[4] Back up cinetico
[5] Funz. rigen., scatto
[6] All.
[7] Kin. back-up, trip w
recovery
80 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
14-11 Tens.di rete in caso di guasto rete
Range: Funzione:
Size related* [100 -
800 V]
Utilizzare questo parametro per
denire la tensione CA alla quale deve
essere attivata la funzione selezionata
nel parametro 14-10 Guasto di rete.
14-12 Funz. durante sbilanciamento di rete
Option: Funzione:
AVVISO!
La selezione di questa opzione può
ridurre la durata del convertitore di
frequenza.
Il funzionamento in condizioni di grave
squilibrio di rete riduce la durata del motore.
Se il motore viene usato continuamente a
valori vicini al carico nominale, le condizioni
sono gravi.
Quando viene rilevato un grave squilibrio di
rete, selezionare una delle funzioni disponibili.
[0] * Scatto Fa scattare il convertitore di frequenza.
[1] Avviso Emette un avviso.
[2] Disabilitato Nessuna azione.
[3] Declas-
samento
3.10.3 14-2* Funzione Reset
14-20 Modo ripristino
Selezionare la funzione di ripristino dopo lo scatto. Dopo il
ripristino, è possibile riavviare il convertitore di frequenza.
Option: Funzione:
[0] * Ripristino manuale Selezionare [0] Ripristino manuale per
[1] Riprist. autom. x 1 Selezionare [1]-[12] Riprist. autom. x 1…
[2] Riprist. autom. x 2
[3] Riprist. autom. x 3
[4] Riprist. autom. x 4
[5] Riprist. autom. x 5
[6] Riprist. autom. x 6
[7] Riprist. autom. x 7
[8] Riprist. autom. x 8
[9] Riprist. autom. x 9
[10] Riprist. autom. x 10
[11] Riprist. autom. x 15
[12] Riprist. autom. x 20
[13] Ripr. autom. inn. Selezionare [13] Ripr. autom. inn. per
Il convertitore di frequenza si declasserebbe.
eettuare il ripristino mediante [Reset]
o mediante gli ingressi digitali.
x20 per eseguire da 1 a 20 ripristini
automatici dopo lo scatto.
ripristinare in modo continuo dopo lo
scatto.
14-21 Tempo di riavv. autom.
Range: Funzione:
10 s* [0 - 600s]Per avviare la funzione di ripristino automatico,
immettere l'intervallo tempo dallo scatto.
Questo parametro è attivo quando il
parametro 14-20 Modo ripristino è impostato su
[1] - [13] Riprist. autom.
14-22 Modo di funzionamento
Option: Funzione:
Per ripristinare tutti i valori dei parametri
all'impostazione di fabbrica selezionare [2]
Inizializzazione.
[0]*Funzion.norm. Selezionare [0] Funzion.norm. per il funzio-
namento normale con il motore
nell'applicazione selezionata.
[2] Inizializzazione Selezionare [2] Inizializzazione per riportare
tutti i valori dei parametri all'impostazione
di fabbrica, a eccezione dei parametri di
comunicazione bus, dei gruppi di parametri
15-0* Dati di funzion. e 15-3* Log allarme. Il
convertitore di frequenza eettua un
ripristino durante la successiva accensione.
Il Parametro 14-22 Modo di funzionamento
torna anche all'impostazione di fabbrica [0]
Funzion.norm.
14-27 Azione al guasto inverter
Selezionare come il convertitore di frequenza agisce in caso di
sovratensione, sovracorrente, cortocircuito o errori di messa a
terra.
Option: Funzione:
[0] Scatto
[1] * Avviso
14-29 Cod. di serv.
Range: Funzione:
0* [0 - 0x7FFFFFFF ] Solo per manutenzione.
3.10.4 14-3* Reg. lim. di corr.
Parametri per la congurazione del regolatore limitazione
di corrente che viene attivato quando la corrente motore
supera i limiti di corrente preimpostati (vedere il
parametro 4-18 Limite di corrente). Questi parametri
vengono utilizzati per ridurre la coppia il più rapidamente
possibile senza perdere il controllo del motore.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 81

Parametri
VLT® HVAC Basic Drive FC 101
14-30 Current Lim Ctrl, Proportional Gain
Range: Funzione:
100 %* [0 - 500 %] Immettere il guadagno proporzionale del
regolatore limitazione di corrente. Un
valore più alto velocizza la risposta del
33
controllore. Un valore eccessivo rende il
controllore instabile.
14-44 Ottim. corr. asse d per IPM
Range: Funzione:
100 %* [0 - 200 %] Gruppo di parametri per la congurazione
delle funzioni speciali del convertitore di
frequenza
3.10.6 14-5* Ambiente
14-31 Current Lim Ctrl, Integration Time
Range: Funzione:
0.020 s* [0.002 - 2 s] Controllare il tempo di integrazione del
controllo del limite di corrente. Se si
imposta un valore più basso, il controllo
reagirà più rapidamente. Un'impostazione
troppo bassa renderà il regolatore
instabile.
14-32 Current Lim Ctrl, Filter Time
Range: Funzione:
5 ms* [1 - 100 ms] Impostare una costante di tempo per il
ltro passa basso del reg. limitaz. corrente.
3.10.5 14-4* Ottimizz. energia
Questo gruppo contiene i parametri per la regolazione del
livello di ottimizzazione di energia in modalità a Coppia
variabile (VT) e a Ottimizzazione automatica di energia
(AEO).
Questi parametri favoriscono il funzionamento del convertitore di frequenza in particolari condizioni ambientali.
14-50 Filtro RFI
Questo parametro è valido soltanto per i convertitori di
frequenza delle seguenti dimensioni frame:
IP20, 3x200–240 V, dimensioni frame H6–H8
•
IP20, 3x380–480 V, dimensioni frame H6–H8
•
IP54, 3x380–480 V, dimensioni frame I6–I8
•
IP20, 3x525–600 V, dimensioni frame H6–H10
•
Option: Funzione:
[0] O Selezionare [0] O se il convertitore di frequenza è
alimentato da una rete isolata (rete IT).
In questa modalità i condensatori del ltro RFI interni
tra lo chassis e il circuito del ltro RFI di rete vengono
scollegati per ridurre le correnti capacitive verso terra.
[1] * On Selezionare [1] On per assicurare che il convertitore di
frequenza soddis le norme EMC.
L'ottimizzazione automatica di energia è attiva soltanto se
il parametro 1-03 Caratteristiche di coppia è impostato su [3]
Ottim. en. autom. VT.
14-40 Livello VT
Range: Funzione:
90 %* [40 -
90 %]
AVVISO!
Non è possibile regolare questo
parametro mentre il motore è in
funzione.
Immettere il livello di magnetizzazione del
motore a bassa velocità. Valori bassi riducono
le perdite di energia nel motore ma anche la
capacità di carico.
14-41 Magnetizzazione minima AEO
Range: Funzione:
66 %* [40 - 75 %] Immettere la magnetizzazione minima
consentita per AEO. Valori bassi riducono le
perdite di energia nel motore ma anche la
resistenza alle variazioni improvvise del
carico.
14-51 Compensazione tens. coll. CC
Option: Funzione:
[0] O La sovramodulazione per la tensione di uscita è
disinserita per evitare un'ondulazione della coppia
sull'albero motore.
[1] * On Consente la sovramodulazione per la tensione di uscita
per ottenere una tensione di uscita no a 15%
superiore alla tensione di rete.
14-52 Comando ventola
Questo parametro è utilizzato per selezionare il modo di funzionamento del comando ventola. Il disturbo acustico del
convertitore di frequenza è diverso durante il funzionamento con
carico pesante (temperatura del dissipatore alta) da quello
durante il funzionamento a carico leggero o dalla modalità standby.
Option: Funzione:
[0] Auto La ventola funziona a piena velocità per un
breve tempo, poi regola automaticamente la
velocità in base al carico e alla temperatura
ambiente. La ventola funziona a velocità
minima anche se il riferimento è 0 Hz a
causa del calore generato dall'IGBT. La
ventola si arresta se viene attivata la
funzione modo pausa. Questa è l'impo-
82 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
14-52 Comando ventola
Questo parametro è utilizzato per selezionare il modo di funzionamento del comando ventola. Il disturbo acustico del
convertitore di frequenza è diverso durante il funzionamento con
carico pesante (temperatura del dissipatore alta) da quello
durante il funzionamento a carico leggero o dalla modalità standby.
Option: Funzione:
stazione di fabbrica per tutti i convertitori di
frequenza tranne quelli con dimensioni
frame H1.
[4] Imp. autom.
bassa temp.
[5] Modo on cost. Per test ventola in loco o se la ventola deve
[6] Modo o cost. Se il rareddamento convenzionale è
[7] On se inverter
in modo o
(Valido soltanto per dimensioni frame H6H10 e I6-I8.
funzionare costantemente al 100% di
velocità. (Valido soltanto per dimensioni
frame H1-H5 e I2-I4.
suciente o se il convertitore di frequenza è
montato su un pannello dimostrativo, in
ere e così via. Il convertitore di frequenza
scatta a causa della sovratemperatura del
dissipatore se viene caricato più di quanto
consentito dal rareddamento convenzionale. (Valido soltanto per dimensioni
frame H1-H5 e I2-I4.
La ventola funziona a velocità massima in
modalità Hand On oppure il valore di
riferimento è superiore a 0 Hz. La ventola si
arresta se il modo pausa è attivo. Questa è
l'impostazione di fabbrica per la sola
dimensione frame H1, ma può anche essere
selezionata per le dimensioni frame H2-H5 e
I2-I4.
14-53 Monitor. ventola
Selezionare la reazione che il convertitore di frequenza dovrebbe
avere in caso di rilevamento di un guasto ventola. Questo
parametro è valido soltanto per i convertitori di frequenza delle
seguenti dimensioni frame:
IP20, 3x200–240 V, dimensioni frame H6–H8.
•
IP20, 3x380–480 V, dimensioni frame H6–H8.
•
IP54, 3x380–480 V, dimensioni frame I6–I8.
•
IP20, 3x525–600 V, dimensioni frame H6–H10.
•
Option: Funzione:
[0] Disattivato
[1] * Avviso
[2] Scatto
14-55 Filtro di uscita
Selezionare se c'è un ltro di uscita.
Option: Funzione:
[0] * Senza ltro
[1] Filtro sinusoidale
[3] Filtro sinus. con
feedback
[4] dv/dt Questa opzione è valida soltanto per il
convertitore di frequenza con le
seguenti dimensioni frame:
IP20, 3x200-240 V, dimensioni
•
frame H6-H8
IP20, 3x380-480 V, dimensioni
•
frame H6-H8
IP54, 3x380-480 V, dimensioni
•
frame I6-I8
IP20, 3x525-600 V, dimensioni
•
frame H6-H10
3.10.7 14-6* Declassamento automatico
Il gruppo di parametri per congurare il declassamento
automatico sulla base della frequenza di uscita del convertitore di frequenza.
14-63 Freq. di commutaz. min.
Impostare la frequenza di commutazione minima consentita dal
ltro di uscita.
Option: Funzione:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz.
[9] 12,0 kHz
[10] 16,0 kHz
14-64 Livello di corr. zero comp. tempi morti
In presenza di un cavo motore lungo, impostare questo
parametro su [0] Disabilitato per ridurre al minimo l'ondulazione
della coppia.
Option: Funzione:
[0] * Disabilitato
[1] Abilitato
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 83

Parametri
VLT® HVAC Basic Drive FC 101
14-65 Decl. vel. comp. tempi morti
Range: Funzione:
Size
related*
33
[ 20 1000 Hz]
Il livello di compensazione di tempi morti
viene ridotto linearmente dal livello
massimo della frequenza di uscita
impostato al parametro 14-07 Livello di
comp. tempi morti a un livello minimo
della frequenza di uscita impostata in
questo parametro.
3.10.8 14-9* Impostaz. guasti
Gruppo di parametri per le impostazioni di personalizzazione dei guasti.
14-90 Livello di guasto
Utilizzare questo parametro per personalizzare i livelli di guasto.
Viene supportato solo l'indice 7 che indica i guasti di
sovracorrente.
Option: Funzione:
[3] * Sc. bloc. L'allarme è impostato al livello di scatto
bloccato.
[4] Scatto con
reset ritardato
[5] Riagg. v. Il convertitore di frequenza tenta di
L'allarme è congurato su allarme scatto
che può essere ripristinato dopo un tempo
di ritardo. Per esempio, se l'allarme di
sovracorrente è congurato su questa
opzione, può essere ripristinato 3 minuti
dopo che l'allarme è stato segnalato.
agganciare un motore all'avvio. Se viene
selezionata questa opzione,
parametro 1-73 Riaggancio al volo è
impostato su [1] Abilitato.
84 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.11 Menu principale - Informazioni sul
convertitore di frequenza - Gruppo 15
Gruppo di parametri che contiene informazioni sul convertitore di frequenza come dati di funzionamento,
congurazione hardware e versioni software.
3.11.1 15-0* Dati di funzion.
15-00 Ore di funzionamento
Range: Funzione:
0 h* [0 - 0x7f. h] Visualizza il numero di ore di esercizio
del convertitore di frequenza. Il valore
viene salvato quando il convertitore di
frequenza viene spento.
15-01 Ore esercizio
Range: Funzione:
0 h* [0 -
0x7f. h]
15-02 Contatore kWh
Range: Funzione:
0 kWh* [0 -
65535
kWh]
15-03 Accensioni
Range: Funzione:
0* [0 - 2147483647 ] Visualizza il numero di volte che il
Visualizza il numero di ore di funzionamento
del motore. Ripristinare il contatore nel
parametro 15-07 Ripristino contatore ore di
esercizio. Il valore viene salvato quando il
convertitore di frequenza viene spento.
Visualizza la potenza di uscita del convertitore di frequenza espressa in kWh come
valore medio in 1 ora. Ripristinare il
contatore nel parametro 15-06 Riprist. contat.
kWh.
convertitore di frequenza è stato acceso.
15-06 Riprist. contat. kWh
Option: Funzione:
[0] * Nessun
reset
[1] Contat.
riprist.
Per azzerare il contatore kWh, selezionare [1]
Contat. riprist., quindi premere [OK] (vedere il
parametro 15-02 Contatore kWh).
15-07 Ripristino contatore ore di esercizio
Option: Funzione:
[0] * Nessun reset
[1] Contat. riprist. Per ripristinare il contatore ore di esercizio,
selezionare [1] Contat. riprist., quindi
premere [OK] (parametro 15-01 Ore esercizio)
a 0 (vedere anche il parametro 15-01 Ore
esercizio).
3.11.2 15-3* Registro allarmi:
I parametri in questo gruppo sono parametri array che
consento di visualizzare no a 10 log guasti. [0] è il dato
registrato più recente e [9] il meno recente. I codici di
guasto, i valori e il marcatempo sono disponibili per tutti i
dati registrati.
15-30 Log allarme: Codice guasto
Range: Funzione:
0* [0 - 255 ] Visualizzare il codice di guasto e ricercare il suo
signicato nel capitolo 4 Ricerca ed eliminazione
dei guasti.
15-31 InternalFaultReason
Range: Funzione:
0* [-32767 - 32767 ] Visualizza una descrizione dell'errore.
Questo parametro è usato con allarme 38,
Guasto interno.
3 3
15-04 Sovratemp.
3.11.3 15-4* Identif. conv. freq.
Range: Funzione:
0* [0 - 65535 ] Visualizza il numero di guasti da sovratempe-
ratura del convertitore di frequenza che si sono
vericati.
15-05 Sovratensioni
Range: Funzione:
0* [0 - 65535 ] Visualizza il numero di sovratensioni del
convertitore di frequenza che si sono vericate.
15-06 Riprist. contat. kWh
Parametri che contengono informazioni di sola lettura sulla
congurazione hardware e software del convertitore di
frequenza.
15-40 Tipo FC
Range: Funzione:
0* [0 - 6 ] Visualizza il codice identicativo FC. La visualiz-
zazione corrisponde al campo di potenza della
serie del convertitore di frequenza denito nel
codice identicativo, caratteri 1-6.
Option: Funzione:
AVVISO!
Per ripristinare, premere [OK].
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 85

Parametri
VLT® HVAC Basic Drive FC 101
15-41 Sezione potenza
Range: Funzione:
0* [0 - 20 ] Visualizza il codice identicativo FC. La visualiz-
zazione corrisponde al campo di potenza della
serie del convertitore di frequenza denito nel
33
codice identicativo, caratteri 7-10.
15-42 Tensione
15-53 N. di serie scheda di potenza
Range: Funzione:
0* [0 - 0 ] Visualizza il numero seriale della scheda di potenza.
15-59 Nome le
Range: Funzione:
0 [0 - 16 ] Visualizza il nome del le CSIV attuale.
Range: Funzione:
0* [0 - 20 ] Visualizza il codice identicativo FC. La visualiz-
zazione corrisponde al campo di potenza della
serie del convertitore di frequenza denito nel
codice identicativo, caratteri 11–12.
15-43 Versione software
Range: Funzione:
0* [0 - 0 ] Visualizza la versione software del convertitore di
frequenza.
15-44 Stringa cod. tipo ordin.
Range: Funzione:
0* [0 - 40 ] Visualizza il codice identicativo usato per
riordinare il convertitore di frequenza nella sua
congurazione originale.
15-45 Stringa codice tipo e.
Range: Funzione:
0 [0 - 40 ] Visualizza il codice identicativo eettivo.
15-46 N. d'ordine convertitore di frequenza
Range: Funzione:
0* [0 - 8 ] Visualizza il numero d'ordine a otto cifre per
riordinare il convertitore di frequenza nella sua
congurazione originale.
15-48 N. ld LCP
Range: Funzione:
0* [0 - 0 ] Visualizza il numero ID dell'LCP.
15-49 Scheda di contr. SW id
Range: Funzione:
0* [0 - 0 ] Visualizza il numero di versione software della
scheda di controllo.
15-50 Scheda di pot. SW id
Range: Funzione:
0* [0 - 0 ] Visualizza il numero di versione software della
scheda di potenza.
15-51 Numero seriale conv. di freq.
Range: Funzione:
0* [0 - 10 ] Visualizza il numero seriale del convertitore di
frequenza.
86 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.12 Menu principale - Visualizzazioni dei
dati - Gruppo 16
3.12.1 16-0* Stato generale
16-00 Par. di contr.
Range: Funzione:
0* [0 - 65535 ] Visualizza la parola di controllo inviata dal
convertitore di frequenza tramite la porta di
comunicazione seriale in codice hex.
Bit Bit = 0 Bit = 1
00 Opzione lsb riferim preimp. –
01 Riferimento preimpostato opzione
secondo bit di
riferimenti preimpostati
02 Freno CC Rampa
03 Ruota libera Abilit.
04 Arresto rapido Rampa
05 Blocco uscita Rampa
06 Arresto rampa Avvio
07 Nessuna funzione Ripristino
08 Nessuna funzione Jog
09 Rampa 1 Rampa 2
10 Dati non validi Validi
11 Relè_A non attivo Relè_A attivato
12 Relè_B non attivo Relè_B attivato
13 Selezione programmazione lsb –
14 Nessuna funzione Nessuna
15 Nessuna funzione Inversione
–
funzione
16-03 Parola di stato
Range: Funzione:
0* [0 - 65535 ] Visualizza la parola di stato inviata dal conver-
titore di frequenza tramite la porta di
comunicazione seriale in codice hex.
Bit Bit = 0 Bit = 1
00 Comando non pronto Pronto
01
VLT® non pronto
02 Ruota libera Abilit.
03 Nessun guasto Scatto
04 Nessun avviso Avviso
05 Riservato –
06 Nessuno scatto bloccato Sc. bloc.
07 Nessun avviso Avviso
08
Velocità ≠ rif.
09 Comando locale Com. bus
10 Fuori dall'intervallo di velocità Frequenza OK
11 Non in funzione In funzione
12 Nessuna funzione Nessuna funzione
13 Tensione OK Oltre i limiti
14 Corrente OK Oltre i limiti
15 Livello termico OK Oltre i limiti
Tabella 3.7 Status Word
Pronto
Velocità = rif.
16-05 Val. reale princ. [%]
Range: Funzione:
0 %* [-200 - 200 %] Visualizza la parola di 2 byte inviata con la
parola di stato al bus master che riporta il
Valore eettivo principale.
3 3
Tabella 3.6 Par. di contr.
16-01 Riferimento [unità]
Range: Funzione:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
Visualizza il valore di
riferimento attuale
applicato su base a impulsi
o analogica nell'unità che
risulta dalla congurazione
selezionata nel
parametro 1-00 Modo
congurazione (Hz).
16-02 Riferimento [%]
Range: Funzione:
0 %* [-200 -
200 %]
Visualizza il riferimento totale. Il
riferimento totale è la somma dei
riferimenti digitale/analogico/
preimpostato/bus e riferimenti congelati.
16-09 Visual. personaliz.
Range: Funzione:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
Visualizzazioni denite
dall'utente come denito nel
parametro 0-30 Unità visual.
person., nel
parametro 0-31 Valore min.
visual. person. e nel
parametro 0-32 Valore max.
visual. person..
3.12.2 16-1* Stato motore
16-10 Potenza [kW]
Range: Funzione:
0 kW* [0 - 1000
kW]
Visualizza la potenza motore in kW. Il
valore mostrato viene calcolato sulla base
della tensione e della corrente motore
attuali.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 87

Parametri
VLT® HVAC Basic Drive FC 101
16-11 Potenza [hp]
Range: Funzione:
0 hp* [0 - 1000
hp]
33
Visualizza l'attuale potenza motore in cv. Il
valore visualizzato viene calcolato sulla
base della tensione motore e della
corrente motore attuali.
16-12 Tensione motore
16-18 Term. motore
Range: Funzione:
0 %* [0 -
100 %]
Visualizza la temperatura calcolata del motore
come percentuale del massimo consentito. Al
100% si verica un scatto, se selezionato nel
parametro 1-90 Protezione termica motore. La base
per il calcolo è la funzione ETR selezionata nel
parametro 1-90 Protezione termica motore.
Range: Funzione:
0 V* [0 - 65535 V] Visualizza la tensione motore, un valore
calcolato per controllare il motore.
16-13 Frequenza
Range: Funzione:
0 Hz* [0 - 6553.5 Hz] Visualizzare la frequenza del motore
senza smorzamento della risonanza.
16-14 Corrente motore
Range: Funzione:
0 A* [0 - 655.35 A] Visualizza la corrente motore misurata
come valore medio, I
RMS
.
16-15 Frequenza [%]
Range: Funzione:
0 %* [0 -
6553.5 %]
Visualizza una parola di due byte che
rappresenta la frequenza motore eettiva
(senza smorzamento risonanza) in
percentuale (scala 0000-4.000 hex) del
parametro 4-19 Freq. di uscita max..
16-22 Coppia [%]
Range: Funzione:
0 %* [-200 - 200 %] Visualizza la coppia in percentuale
(rispetto alla coppia nominale) applicata
all'albero motore.
3.12.3 16-3* Stato conv. freq.
16-30 Tensione bus CC
Range: Funzione:
0 V* [0 - 65535 V] Mostra la tensione eettiva del
collegamento CC.
16-34 Temp. dissip.
Range: Funzione:
0 °C* [-128 - 127 °C] Visualizza la temperatura del dissipatore
di calore del convertitore di frequenza.
16-35 Termico inverter
Range: Funzione:
16-16 Coppia [Nm]
Range: Funzione:
0 Nm* [-30000 -
30000 Nm]
Visualizza il valore di coppia applicato
all'albero motore. Alcuni motori forniscono
più del 160% di coppia. Di conseguenza, il
valore minimo e il valore massimo
dipendono dalla corrente motore minima/
massima, nonché dal motore utilizzato.
0 %* [0 - 255 %] Visualizza la percentuale del carico termico
sul convertitore di frequenza. Al 100% si
verica uno scatto.
16-36 Corrente nom inv.
Range: Funzione:
0 A* [0 - 655.35 A] Visualizza la corr. nom. inverter. I dati sono
utilizzati per la protezione da sovraccarico
motore, e così via.
16-17 Velocità [giri/m]
Range: Funzione:
0 RPM* [-30000 -
30000 RPM]
Visualizza la velocità eettiva dell'albero
motore in Giri/min. I Giri/min. del motore
sono stimati nelle modalità di controllo di
processo ad anello aperto o ad anello
chiuso e i Giri/min. del motore sono
misurati nella modalità anello chiuso della
velocità.
16-37 Corrente max inv.
Range: Funzione:
0 A* [0 - 655.35 A] Visualizza la corrente massima dell'inverter.
I dati vengono usati per il calcolo della
protezione del convertitore di frequenza, e
così via.
16-38 Condiz. regol. SL
Range: Funzione:
0* [0 - 20 ] Visualizza lo stato attuale del controllore smart
logic (SLC).
88 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.12.4 16-5* Rif. & retroaz.
16-50 Riferimento esterno
Range: Funzione:
0 %* [-200 - 200 %] Visualizza il riferimento totale, la somma
di riferimenti digitali, analogici,
preimpostati, bus e congelati.
16-52 Retroazione [unità]
Range: Funzione:
0
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Visualizza la retroazione
risultante dalla selezione
della scala selezionata nel
parametro 3-02 Riferimento
minimo e nel
parametro 3-03 Riferimento
max..
16-54 Retroazione 1 [unità]
Range: Funzione:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Visualizza il valore della
retroazione 1 risultante dalla
selezione della scala nel
parametro 3-02 Riferimento
minimo e nel
parametro 3-03 Riferimento
max..
16-55 Retroazione 2 [unità]
Range: Funzione:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Visualizza il valore della
retroazione 2 risultante dalla
selezione della scala nel
parametro 3-02 Riferimento
minimo e nel
parametro 3-03 Riferimento
max..
3.12.5 16-6* Ingressi & uscite
16-60 Ingresso digitale
Range: Funzione:
0* [0 -
4095 ]
Visualizza lo stato attuale degli ingressi digitali 18,
19, 27 e 29.
16-61 Impost. mors. 53
Option: Funzione:
Visualizza l'impostazione del morsetto di
ingresso 53.
Corrente = 0
•
Tensione = 1
•
[0] * Mod. corrente
[1] Mod. tensione
16-62 Ingr. anal. 53
Range: Funzione:
1* [0 - 20 ] Visualizza il valore eettivo sull'ingresso 53.
16-63 Imp. interr. mors. 54
Visualizza l'impostazione del morsetto di ingresso 54.
Corrente = 0
•
Tensione = 1
•
Option: Funzione:
[0] * Mod. corrente
[1] Mod. tensione
16-64 Ingr. anal. 54
Range: Funzione:
1* [0 - 20 ] Visualizza il valore eettivo sull'ingresso 54.
16-65 Uscita anal. 42 [mA]
Range: Funzione:
0 mA* [0 - 20
mA]
Visualizza il valore eettivo in mA sull'uscita
42. Il valore visualizzato riette l'impostazione nel parametro 6–90 Terminal 42
Mode e nel parametro 6-91 Uscita analogica
morsetto 42.
16-66 Uscita digitale
Range: Funzione:
0* [0 -
15 ]
Visualizza il valore binario di tutte le uscite digitali.
Denizione:
X: Non utilizzato
0: Basso
1: Alto
3 3
Bit 0 Inutilizzato
Bit 1 Inutilizzato
Bit 2 Ingresso digitale morsetto 29
Bit 3 Ingresso digitale morsetto 27
Bit 4 Ingresso digitale morsetto 19
Bit 5 Ingresso digitale morsetto 18
Bit 6–15 Inutilizzato
Tabella 3.8 Denizione dei bit
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 89
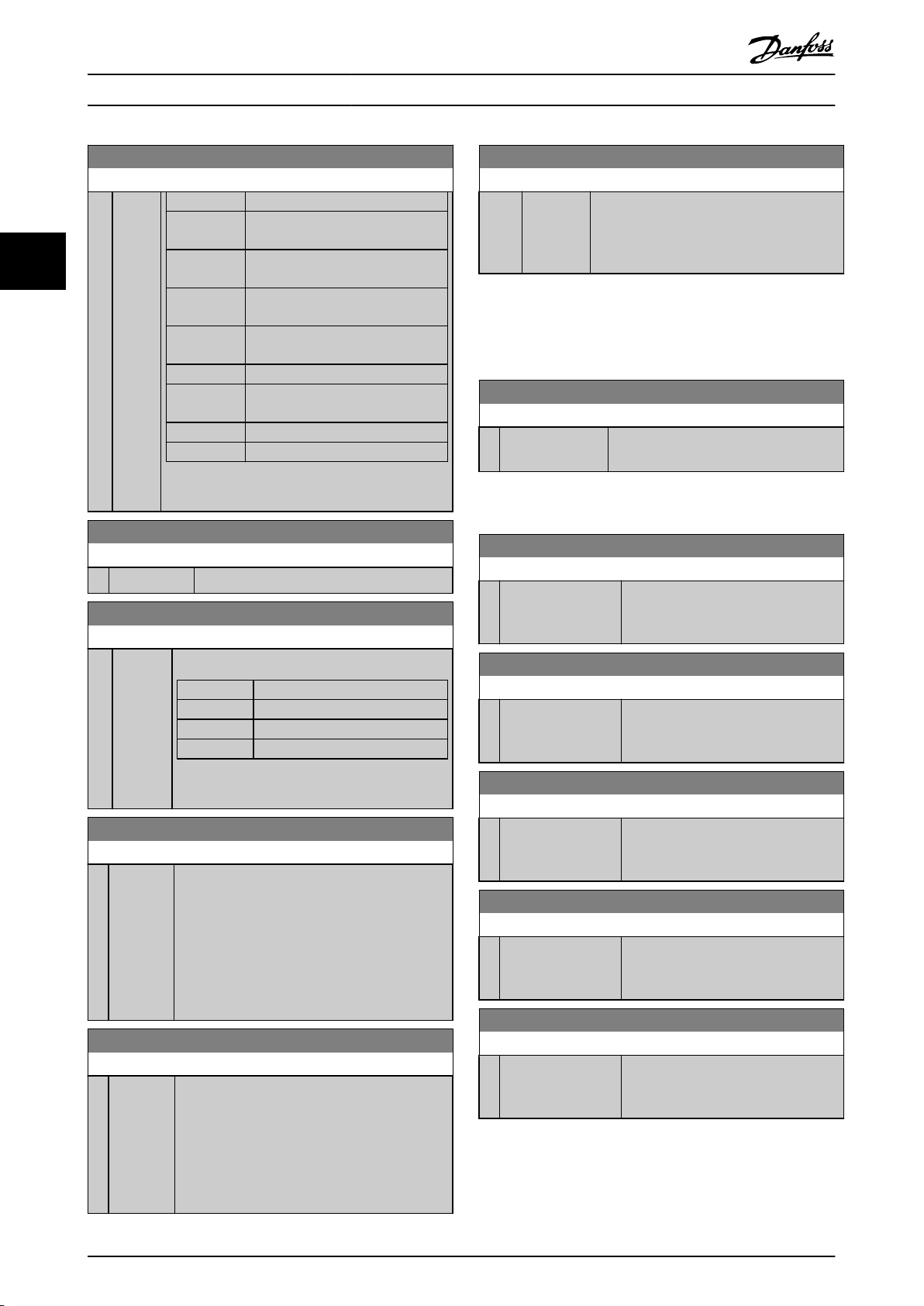
Parametri
VLT® HVAC Basic Drive FC 101
16-66 Uscita digitale
Range: Funzione:
XX Nessuna utilizzata
X0 Il morsetto 42 non è utilizzato,
morsetto 45 basso.
33
X1 Il morsetto 42 non è utilizzato,
morsetto 45 alto.
0X Morsetto 42 basso, morsetto 45 non
usato.
0 Morsetto 42 basso, morsetto 45
basso.
1 Morsetto 42 basso, morsetto 45 alto.
1X Morsetto 42 alto, il morsetto 45 non
viene utilizzato.
10 Morsetto 42 alto, morsetto 45 basso.
11 Morsetto 42 alto, morsetto 45 alto.
Tabella 3.9 Valore binario di uscite digitali
16-79 Uscita analogica AO45
Range: Funzione:
0 mA* [0 - 20
mA]
Visualizza il valore attuale sull'uscita 45 in
mA. Il valore visualizzato riette l'impostazione nel parametro 6-70 Mod. morsetto 45
e nel parametro 6-71 Uscita anal. morsetto 45.
3.12.6 16-8* Fieldbus & porta FC
Parametri per segnalare i riferimenti bus e le parole di
controllo.
16-86 RIF 1 porta FC
Range: Funzione:
0* [-32768 - 32767 ] Visualizza l'ultimo riferimento ricevuto
dalla porta FC.
3.12.7 16-9* Visualizz. diagn.
16-67 Ingr. impulsi #29 [Hz]
Range: Funzione:
0* [0 - 130000 ] View the actual frequency rate on terminal 29.
16-71 Uscita a relè
Range: Funzione:
0* [0 - 31 ] Visualizza l'impostazione del relè.
Bit 0~2 Inutilizzato
Bit 3 Relè 02
Bit 4 Relè 01
Bit 5~15 Inutilizzato
16-90 Parola di all.
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di allarme inviata
tramite la porta di comunicazione
seriale in codice hex.
16-91 Parola di allarme 2
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di allarme 2 inviata
dalla porta di comunicazione seriale in
codice hex.
Tabella 3.10 Denizione dei bit
16-72 Contatore A
Range: Funzione:
0* [-32768 -
32767 ]
Visualizza il valore corrente del contatore A. I
contatori sono utili come comparatori di
operandi; vedere il parametro 13-10 Comparatore
di operandi.
Il valore può essere ripristinato o modicato
tramite gli ingressi digitali (gruppo di parametri
5-1* Ingressi digitali) oppure usando un’azione SLC
(parametro 13-52 Azione regol. SL).
16-73 Contatore B
Range: Funzione:
0* [-32768 -
32767 ]
Visualizza il valore corrente del contatore B. I
contatori sono utili come comparatori di operandi
parametro 13-10 Comparatore di operandi.
Il valore può essere ripristinato o modicato
tramite gli ingressi digitali (gruppo di parametri
5-1* Ingressi digitali) oppure usando un’azione SLC
(parametro 13-52 Azione regol. SL).
16-92 Parola di avv.
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di avviso inviata
tramite porta di comunicazione seriale
in codice hex.
16-93 Parola di avv. 2
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di avviso 2 inviata
dalla porta di comunicazione seriale in
codice hex.
16-94 Parola di stato est.
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di stato estesa
inviata mediante la porta di comunicazione seriale in codice hex.
90 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
16-95 Parola di stato est. 2
Range: Funzione:
0* [0 - 0xFFFFFFFFUL ] Visualizza la parola di stato estesa 2
inviata mediante la porta di comunicazione seriale in codice hex.
16-97 Par. all. 3
Range: Funzione:
0* [0 - 4294967295] Visualizza la parola di allarme 3 inviata
dalla porta di comunicazione seriale in
codice hex.
16-98 Warning Word 3
Range: Funzione:
0* [0 - 4294967295] Visualizza la parola di avviso 3 inviata
dalla porta di comunicazione seriale in
codice hex.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 91

Parametri
VLT® HVAC Basic Drive FC 101
3.13 Menu principale - Visualizzazioni dei
dati 2 - Gruppo 18
I parametri in questo gruppo sono parametri array che
consento di visualizzare no a 10 log guasti. [0] è il dato
registrato più recente e [9] il meno recente. I codici di
33
guasto, i valori e il marcatempo sono disponibili per tutti i
dati registrati.
3.13.1 18-1* Log mod. incendio
20-01 Conversione retroazione 1
Option: Funzione:
Questo parametro permette di applicare una
funzione di conversione alla retroazione 1.
[0] * Lineare [0] Lineare non ha eetti sulla retroazione.
[1] Radice
quadrata
[1] Radice quadrata è solitamente usato
quando un sensore di pressione viene
utilizzato per fornire una retroazione del
usso.
(( flusso ∝ pressione)).
18-10 Log mod. incendio: Evento
Range: Funzione:
0* [0 - 255 ] Visualizza evento modo incendio
3.13.2 18-5* Rif e retroaz.
18-50 Lettura senza sensore [unità]
Range: Funzione:
0 SensorlessUnit*
[-999999.999 -
999999.999
SensorlessUnit]
Visualizza la pressione o la
portata risultanti dai calcoli
dell'applicazione sensorless.
Questo valore non viene
utilizzato per la regolazione. Il
valore viene aggiornato soltanto
se i dati sensorless supportano
sia la pressione sia la portata.
3.14 Menu principale - FC anello chiuso Gruppo 20
Questo gruppo di parametri viene utilizzato per
congurare il controllore PI ad anello chiuso che regola la
frequenza di uscita del convertitore di frequenza.
3.14.1 20-0* Retroazione
Questo gruppo di parametri viene usato per congurare il
segnale di retroazione per il controllore PI ad anello chiuso
del convertitore di frequenza.
20-00 Fonte retroazione 1
Option: Funzione:
Questo parametro denisce quale
ingresso viene utilizzato come fonte
del segnale di retroazione.
[0] * Nessuna funzione
[1] Ingresso analogico 53
[2] Ingresso analogico 54
[3] Ingr. frequenza 29
[100] Bus retroazione 1
[101] Bus retroazione 2
[104] Port. s. sensore
[105] Press. senza sens.
20-03 Risorsa retroazione 1 CL processo
Option: Funzione:
[0] * Nessuna funzione
[1] Ingresso analogico 53
[2] Ingresso analogico 54
[3] Ingr. frequenza 29
[100] Bus retroazione 1
[101] Bus retroazione 2
20-04 Conversione retroazione 2
Option: Funzione:
[0] * Lineare
[1] Radice quadrata
20-12 Unità riferimento/Retroazione
Option: Funzione:
Selez. l'unità da utilizzare con riferimenti e
retroazioni per l'anello chiuso.
[0] * Ness
[20] l/s
[23]
m3/s
[24]
m3/min
[25]
m3/h
[71] bar
[73] kPa
[74] m
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
lb/in
2
[171]
[172] in wg
[173] ft WG
[174] in Hg
92 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
3.14.2 20-2* Feedback/Setpoint
Parameter group for feedback function and setpoints.
Select which setpoint and feedback to use. The setpoint
and feedback can be a xed pair or selected separately
based on logic comparisons.
20-20 Funzione feedback
Selezionare come calcolare la retroazione. La retroazione può
essere una Fonte retroazione singola oppure una combinazione
di varie retroazioni.
Option: Funzione:
[0] Somma
[1] Dierenza
[2] Media
[3] * Minimo
[4] Massimo
3.14.3 20-6* Senza sensore
Parametri per applicazioni sensorless. Vedere anche il
parametro 16-26 Potenza ltrata [kW], il
parametro 16-27 Potenza ltrata [hp], il
parametro 18-50 Lettura senza sensore [unità] e il
parametro 20-00 Fonte retroazione 1.
20-60 Unità senza sensore
Option: Funzione:
Selez. l'unità da utilizzare con il
parametro 18-50 Lettura senza sensore [unità].
[0] Ness
[20] * l/s
[23]
m3/s
[24]
m3/min
[25]
m3/h
[71] bar
[73] kPa
[74] m
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
lb/in
2
[171]
[172] in wg
[173] ft WG
[174] in Hg
20-69 Informazioni senza sensore
Array [8]
Range: Funzione:
0* [0 - 25 ] Visualizza informazioni sui dati sensorless.
3.14.4 20-7* Adattam. autom. PID
Parametri per abilitare l'autotaratura PI.
20-70 Tipo ad anello chiuso
Option: Funzione:
Selezionare la risposta attesa dell'applicazione.
[0] * Auto
[1] Pressione veloce
[2] Pressione lenta
[3] Temperatura veloce
[4] Temperatura lenta
20-71 Modalità regolazione
Option: Funzione:
Selezionare la vel. di risposta relativa per
l'applicaz.
[0] * Normale
[1] Veloce
20-72 Modica uscita PID
Range: Funzione:
0.10* [0.01 - 0.50 ] Imposta l’ampiezza del cambio durante la
sequenza di tarat. autom.
20-73 Livello di retroazione min.
Range: Funzione:
-4.999,000* [-4.999,000 - Limite
di espressione
(4.999,000)]
20-74 Livello di retroazione max.
Range: Funzione:
4.999,000* [Limite di espressione
(-4.999,000) -
4.999,000]
20-79 Adattam. autom. PID
Option: Funzione:
[0] * Disabilitato Selezionare per disabilitare l'autotaratura PI.
[1] Abilitato Selezionare per abilitare l'autotaratura PI.
Imposta il val. di retroaz.
min. consentito durante la
sequenza di tarat. autom.
Imposta il val. di retroaz.
max. consentito durante la
sequenza di tarat. autom.
3 3
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 93

Parametri
VLT® HVAC Basic Drive FC 101
3.14.5 20-8* Impost. di base PI
20-93 Guadagno proporz. PI
Range: Funzione:
Parametri per congurare il regolatore di processo PI.
20-81 Controllo Norm./Inverso PI
Option: Funzione:
33
[0] * Norm. Causa la diminuzione della frequenza di uscita del
convertitore di frequenza quando la retroazione è
superiore al riferimento del setpoint. Questo
comportamento è comune per le ventole di
alimentazione controllate in pressione e le
applicazioni a pompa.
[1] Inverso Provoca l'aumento della frequenza di uscita del
convertitore di frequenza quando la retroazione è
maggiore del riferimento del setpoint. Questo
comportamento è comune per le applicazioni di
rareddamento a temperatura controllata, come le
torri di rareddamento.
20-83 Velocità avviam. PI [Hz]
Range: Funzione:
0 Hz* [ 0 -
200.0 Hz]
Immettere la velocità del motore da
raggiungere come segnale di avviamento per
avviare la regolazione PI. Dopo l'accensione, il
convertitore di frequenza funziona usando la
regolazione della velocità ad anello aperto. Al
raggiungimento del valore di avviamento del
regolatore PI, il convertitore di frequenza
passa alla regolazione PI.
0.50* [0 - 10 ] Immettere il guadagno proporzionale del
regolatore di processo. Una regolazione rapida
si ottiene con un'amplicazione elevata. Tuttavia
se l'amplicazione è troppo elevata, il processo
può diventare instabile.
20-94 Tempo di integrazione PID
Range: Funzione:
20 s* [0.10 -
9999 s]
Immettere il tempo di integrazione del
controllo di processo. Una regolazione rapida
si ottiene con un tempo di integrazione
breve, se questo è troppo breve il processo
diventa instabile. Un tempo di integrazione
troppo lungo disabilita l'azione di
integrazione.
20-97 Fattore feed forward PI
Range: Funzione:
0 %* [0 -
400 %]
Immettere il fattore di feed forward PI. Il fattore
FF invia una frazione costante del segnale di
riferimento per bypassare il regolatore PI.
Pertanto, il PI può inuire solo sulla frazione
rimanente del segnale di controllo. Il fattore FF
può aumentare le prestazioni dinamiche.
20-84 Ampiezza di banda riferimento a
Range: Funzione:
5 %* [0 -
200 %]
Quando la dierenza fra la retroazione e il
riferimento setpoint è inferiore al valore di
riferimento di questo parametro, il display del
convertitore di frequenza mostra Rif.ragg. Questo
stato può essere comunicato esternamente
programmando la funzione di un'uscita digitale
per [8] Mar/rif.rag./n. avv. Inoltre, per le comuni-
cazioni seriali, il bit di stato Riferimento della
parola di stato del convertitore di frequenza è
alto (1).
L'ampiezza della banda di riferimento è calcolata
come percentuale del riferimento del setpoint.
3.14.6 20-9* Controllore PI
20-91 Anti saturaz. PI
Option: Funzione:
[0] O Continuare la regolazione di un errore anche se non è
più possibile aumentare o diminuire la frequenza di
uscita.
[1] * On Interrompere la regolazione dell'errore quando non è
più possibile variare la frequenza di uscita.
94 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Detection
timer
Low Power
No-ow
detection
Warning
Alarm
External
sleep mode
command
Min run
timer
Min sleep
timer
Sleep
mode
Cascade
controller
(destaging
command)
speed detection
Sleep mode
O
No ow/low
130BE841.10
P 22-24
1
P 22-40
P 22-41
P 25-26
P 22-23
Parametri Guida alla Programmazione
3.15 Menu principale - Funzioni
applicazione - Gruppo 22
3.15.1 22-0* Varie
Gruppo di parametri per le impostazioni supplementari.
22-01 Tempo ltro potenza
Range: Funzione:
0.50 s* [0.02 - 10s]Immettere la costante di tempo per la
visualizzazione della potenza ltrata. Un
valore più alto fornisce una visualizzazione
3.15.2 22-2* Rilevam. portata nulla
22-01 Tempo ltro potenza
Range: Funzione:
più stabile ma una risposta più lenta del
sistema al variare delle condizioni.
22-02 Modo contr. CL modo pausa
Option: Funzione:
[0] Norm. La retroazione è stata rilevata. Vengono vericati
alcuni parametri.
[1] Semplif. La retroazione non è stata rilevata. Vengono
unicamente vericati il tempo e la velocità a riposo.
Questo parametro è relativo al modo pausa, attivo nel
processo ad anello chiuso. Utilizzare questo parametro se si
vuole congurare il rilevamento della retroazione per il
modo pausa.
3 3
Disegno 3.17 Rilevam. portata nulla
Il convertitore di frequenza prevede funzioni per determinare se le condizioni di carico nel sistema consentono l'arresto del
motore:
Uno di questi due segnali deve essere attivo per il tempo impostato (parametro 22-24 Ritardo assenza di usso) prima dello
svolgimento dell'azione selezionata. Possibili azioni da selezionare (parametro 22-23 Funzione assenza di portata):
Rilevam. portata nulla
Questa funzione viene utilizzata per rilevare una situazione di portata nulla in sistemi di pompaggio in cui è possibile
chiudere tutte le valvole. È possibile utilizzarla quando è controllata dal controllore PI nel convertitore di frequenza o da un
controllore PI esterno. Programmare la congurazione attuale nel parametro 1-00 Modo congurazione.
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 95
Rilevamento bassa potenza.
•
Nessuna azione
•
Avviso
•
Allarme
•
Modo pausa
•

FC
130BA253.10
P
1
2
Portata
130BA254.10
Altezza
piezometrica
Parametri
VLT® HVAC Basic Drive FC 101
Modo congurazione per
Controllore PI integrato: Anello chiuso
•
Controllore PI esterno: Anello aperto
•
AVVISO!
33
Eettuare una taratura a portata nulla prima di impostare i parametri del controllore PI.
Tabella 3.11 Rilevam. portata nulla
Il rilevamento portata nulla è basato sulle misurazioni di velocità e potenza. Per una data velocità, il convertitore di
frequenza calcola la potenza in assenza di usso.
Questa coerenza è basata sulla regolazione di 2 set di velocità e potenza associate a portata nulla. Il monitoraggio della
potenza consente di rilevare condizioni di portata nulla in sistemi con pressione di mandata oscillante o se la pompa
presenta una caratteristica piatta verso la bassa velocità.
I 2 set di dati devono essere basati su misurazioni di potenza a circa il 50% e l'85% di velocità massima con le valvole
chiuse. I dati sono programmati nel gruppo di parametri 22-3* Tarat. pot. a portata nulla.
Abilitare e mettere in funzione il rilevamento portata nulla nel parametro 22-23 Funzione assenza di portata e nel gruppo di
parametri 22-3* Tarat. pot. a portata nulla.
22-23 Funzione assenza di portata
3.15.3 22-3* Tarat. pot. a portata nulla
Option: Funzione:
Sequenza di taratura:
1. Per arrestare il usso chiudere la valvola
principale.
2. Azionare il motore nché il sistema non
[0] * O
[1] Modo pausa
[2] Avviso
[3] Allarme
raggiunge la normale temperatura di funzio-
22-24 Ritardo assenza di usso
Range: Funzione:
10 s* [1 - 600s]Impostare il ritardo prima dell'azione
impostata nel parametro 22-23 Funzione
assenza di portata in caso di rilevazione di una
condizione di portata nulla.
namento.
3. Premere il tasto [Hand On] sull'LCP e regolare la
velocità a circa l'85% della velocità nominale.
Prendere nota della velocità esatta.
4. Leggere il consumo di potenza guardando la
potenza corrente nella riga dati nell'LCP o
96 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506

Parametri Guida alla Programmazione
richiamando il parametro 16-10 Potenza [kW] nel
menu principale. Prendere nota della potenza
visualizzata.
5. Modicare la velocità a circa il 50% della velocità
nominale. Prendere nota della velocità esatta.
6. Leggere il consumo di potenza guardando la
potenza corrente nella riga dati nell'LCP o
richiamando il parametro 16-10 Potenza [kW] nel
menu principale. Prendere nota della potenza
visualizzata.
7. Programmare le velocità utilizzate nel
parametro 22-33 Bassa velocità [Hz] e nel
parametro 22-37 Alta velocità [Hz].
8. Programmare i valori di potenza associati nel
parametro 22-34 Potenza bassa velocità [kW] e nel
parametro 22-38 Potenza alta velocità [kW].
9. Tornare indietro premendo [Auto On] oppure
[O].
AVVISO!
Impostare parametro 1-03 Caratteristiche di coppia prima
di eseguire la taratura.
22-30 Potenza a portata nulla
Range: Funzione:
0 kW* [0 - 1000 kW] Visualizzazione della potenza a portata
nulla calcolata alla velocità eettiva.
22-38 Potenza alta velocità [kW]
Range: Funzione:
0 kW* [ 0 - 5.50 kW] Imp. la pot. a portata nulla ad alta vel.
3.15.4 22-4* Modo pausa
3 3
Il modo pausa consente al convertitore di frequenza di
arrestarsi autonomamente in situazioni in cui il sistema è
equilibrato. Questa funzione fa risparmiare energia ed evita
pressione eccessiva, acqua rareddata eccessivamente nelle
torri di rareddamento e problemi di pressurizzazione
dell'edicio. Questo è importante anche perché alcune
applicazioni impediscono al convertitore di frequenza di
regolare il motore a una bassa velocità. Ciò potrebbe
danneggiare le pompe, provocare una lubricazione insu-
ciente nelle trasmissioni e rendere instabili le ventole.
Il controllore di pausa possiede due funzioni importanti:
1. La capacità di andare in pausa al momento
giusto.
2. La capacità di abbandonare il modo pausa al
momento giusto.
Lo scopo è mantenere il convertitore di frequenza nel
modo pausa il più a lungo possibile per evitare cicli
frequenti di accensione e spegnimento del motore e
mantenere la variabile del sistema controllato entro un
intervallo accettabile.
22-31 Fattore correzione potenza
Range: Funzione:
100 %* [1 - 400 %] Impostare una correzione se il rilevamento
portata nulla interviene con un valore di
potenza troppo basso o troppo alto.
22-33 Bassa velocità [Hz]
Range: Funzione:
0 Hz* [ 0 - 400 Hz] Impostare la vel. di uscita usata per la
registr. della pot. a portata nulla a bassa
vel.
22-34 Potenza bassa velocità [kW]
Range: Funzione:
0 kW* [ 0 - 5.50 kW] Impostare la pot. a portata nulla a bassa
vel.
22-37 Alta velocità [Hz]
Range: Funzione:
0 Hz* [ 0 - 400 Hz] Impost. la vel. di uscita usata per la
registraz. della pot. a portata nulla ad alta
vel.
La sequenza durante il funzionamento del modo pausa
ad anello aperto:
1. La velocità del motore è inferiore alla velocità
impostata nel parametro 22-47 Vel. a riposo [Hz]. Il
motore ha funzionato più a lungo della durata
impostata nel parametro 22-40 Tempo ciclo
minimo. La condizione di pausa dura più a lungo
del tempo impostato nel parametro 22-48 Ritardo
pausa.
2. Il convertitore di frequenza decelera la velocità
del motore al parametro 1-82 V. min. funz. all'arr.
[Hz].
3. Il convertitore di frequenza attiva il
parametro 1-80 Funzione all'arresto. Il convertitore
di frequenza è ora nel modo pausa.
4. Il convertitore di frequenza confronta il setpoint
di velocità con il parametro 22-43 Vel.
[Hz] per rilevare la situazione di ne pausa.
5. Il setpoint di velocità è superiore al
parametro 22-43 Vel. ne pausa [Hz]. La condizione
di pausa è durata più a lungo del tempo
impostato nel parametro 22-41 Tempo di pausa
minimo. La condizione di riattivazione dura più a
lungo del tempo impostato nel
ne pausa
MG18B506 Danfoss A/S © 05/2018 Tutti i diritti riservati. 97

Parametri
VLT® HVAC Basic Drive FC 101
parametro 22-49 Ritardo ne pausa. Il convertitore
di frequenza è ora uscito dal modo pausa.
6. Tornare indietro al controllo della velocità ad
anello aperto (aumentare la velocità del motore al
setpoint di velocità).
33
La sequenza quando il modo pausa viene fatto
funzionare ad anello chiuso:
1. Il convertitore di frequenza va nello stato di boost
se sono soddisfatte le seguenti condizioni.
1a Se il parametro 22-02 Modo contr. CL
modo pausa viene impostato su [0]
Norm.:
a. La velocità del motore è
inferiore al valore nel
parametro 22-47 Vel. a riposo
[Hz].
4. Il convertitore di frequenza è uscito dal modo
pausa quando:
4a l'errore tra il riferimento e la retroazione
è superiore al valore nel
parametro 22-44 Di. rif./retr. f. pausa, e
4b il tempo di pausa dura più a lungo del
tempo nel parametro 22-41 Tempo di
pausa minimo, e
4c la condizione di riattivazione dura più a
lungo del tempo impostato nel
parametro 22-48 Ritardo pausa.
5. Il convertitore di frequenza ritorna al controllo ad
anello chiuso.
AVVISO!
Il modo pausa non è attivo quando è attivo il riferimento
locale (impostare la velocità manualmente con i tasti di
b. La retroazione è superiore al
riferimento.
c. Il motore funziona più a lungo
del tempo nel
navigazione sull'LCP).
Il modo pausa non funziona in modo locale. Eettuare
un setup automatico ad anello aperto prima di
impostare l'ingresso/l'uscita ad anello chiuso.
parametro 22-40 Tempo ciclo
minimo.
d. La condizione di riposo dura
più a lungo del tempo
impostato nel
parametro 22-48 Ritardo pausa.
1b Se il parametro 22-02 Modo contr. CL
22-40 Tempo ciclo minimo
Range: Funzione:
10 s* [0 - 600 s] Impostare il tempo minimo di funzionamento
che deve trascorrere dal comando Start
(ingresso digitale o bus) prima dell'attivazione
del Modo pausa.
modo pausa viene impostato su [1]
Semplif.:
a. La velocità del motore è
inferiore al valore nel
parametro 22-47 Vel. a riposo
[Hz].
b. Il motore funziona più a lungo
del tempo nel
parametro 22-40 Tempo ciclo
minimo.
c. La condizione di riposo dura
più a lungo del tempo
impostato nel
parametro 22-48 Ritardo pausa.
Se il parametro 22-45 Riferimento pre
pausa non è impostato, il convertitore di
frequenza va in modo pausa.
2. Una volta che il tempo nel
parametro 22-46 Tempo massimo pre pausa è
trascorso, il convertitore di frequenza riduce la
velocità del motore alla velocità nel
parametro 1-82 V. min. funz. all'arr. [Hz].
3. Il convertitore di frequenza attiva il
22-41 Tempo di pausa minimo
Range: Funzione:
10 s* [0 - 600 s] Impostare il tempo minimo per la durata della
funzione nel modo pausa. Questo escluderà
qualunque condizione di Fine pausa.
22-43 Vel. ne pausa [Hz]
Range: Funzione:
10* [ 0 -
400.0 ]
Da utilizzare soltanto se il parametro 1-00 Modo
congurazione è impostato su [0] An. aperto e se
un controllore esterno applica il riferimento di
velocità. Imposta la velocità di riferimento alla
quale il modo pausa deve essere disattivato.
La velocità di ne pausa non deve superare
l'impostazione nel parametro 4-14 Motor Speed
High Limit [Hz].
22-44 Di. rif./retr. f. pausa
Range: Funzione:
10 %* [0 -
100 %]
Da utilizzare soltanto se il parametro 1-00 Modo
congurazione è impostato per Anello chiuso e
il controllore PI integrato è utilizzato per
controllare la pressione.
parametro 1-80 Funzione all'arresto. Il convertitore
di frequenza è ora nel modo pausa.
98 Danfoss A/S © 05/2018 Tutti i diritti riservati. MG18B506
 Loading...
Loading...