


ENGINEERING TOMORROW
Guía de programación
VLT® HVAC Basic Drive FC 101
vlt-drives.danfoss.com

Índice Guía de programación
Índice
1 Introducción
1.1 Finalidad del manual
1.2 Versión del documento y del software
1.3 Símbolos de seguridad
1.4 Medidas de seguridad
1.5 Recursos adicionales
1.6 Deniciones
1.7 Descripción general del sistema eléctrico
2 Programación
2.1 Introducción
2.2 Panel de control local (LCP)
2.3 Menús
2.3.1 Menú de estado 10
2.3.2 Menú rápido 10
2.3.3 Menú principal 25
2.4 Transferencia rápida de ajustes de parámetros entre varios convertidores de frecuencia
3
3
3
3
4
5
5
8
9
9
9
10
26
2.5 Lectura de datos y programación de parámetros indexados
2.6 Inicialización a los ajustes predeterminados
3 Parámetros
3.1 Menú principal - Funcionamiento y pantalla - Grupo 0
3.2 Menú principal - Carga y motor - Grupo 1
3.3 Menú principal - Frenos - Grupo 2
3.4 Menú principal - Ref./Rampas - Grupo 3
3.5 Menú principal - Lím./Advert. - Grupo 4
3.6 Menú principal - E/S digital - Grupo 5
3.7 Menú principal - E/S analógica - Grupo 6
3.8 Menú principal - Comunic. y opciones - Grupo 8
3.9 Menú principal - Lógica inteligente - Grupo 13
3.10 Menú principal - Func. especiales - Grupo 14
3.11 Menú principal - Información drive - Grupo 15
3.12 Menú principal - Lecturas de datos - Grupo 16
3.13 Menú principal - Info y lect. de datos 2 - Grupo 18
3.14 Menú principal - Convertidor de lazo cerrado - Grupo 20
26
26
28
28
33
43
45
48
52
61
66
71
80
85
87
91
91
3.15 Menú principal - Funciones de aplicación - Grupo 22
3.16 Menú principal - Funciones de aplicaciones 2 - Grupo 24
3.17 Menú principal - Características especiales - Grupo 30
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 1
94
101
104
Índice
VLT® HVAC Basic Drive FC 101
4 Resolución de problemas
4.1 Introducción a Alarmas y advertencias
4.2 Códigos de alarma
4.3 Códigos de advertencia
4.4 Códigos de estado ampliados
4.5 Lista de Advertencias y Alarmas
4.6 Lista de errores del LCP
5 Listas de parámetros
5.1 Opciones de parámetros
5.1.1 Ajustes predeterminados 113
5.1.2 0-** Func./Display 114
5.1.3 1-** Carga y motor 114
5.1.4 2-** Frenos 116
5.1.5 3-** Ref./Rampas 116
5.1.6 4-** Lím./Advert. 117
5.1.7 5-** E/S digital 117
5.1.8 6-** E/S analógica 118
105
105
107
107
108
108
112
113
113
Índice
5.1.9 8-** Comunic. y opciones 119
5.1.10 13-** Lógica inteligente 120
5.1.11 14-** Func. especiales 120
5.1.12 15-** Información drive 121
5.1.13 16-** Lecturas de datos 122
5.1.14 18-** Info y lect. de datos 124
5.1.15 20-** Convertidor de lazo cerrado 124
5.1.16 22-** Funciones de aplicación 125
5.1.17 24-** Funciones de aplicaciones 2 126
5.1.18 30-** Características especiales 126
127
2 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Introducción Guía de programación
1 Introducción
1.1 Finalidad del manual
Esta guía de programación le proporciona información
para la programación avanzada del convertidor de
frecuencia. Ofrece un resumen completo de todos los
parámetros junto con sus descripciones.
La guía de programación está diseñada para su utilización
por parte de personal
Para manejar el convertidor de frecuencia de un modo
seguro y profesional, lea y siga la guía de programación, y
preste especial atención a las instrucciones de seguridad y
a las advertencias generales.
1.2 Versión del documento y del software
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras.
Edición Comentarios Versión de software
MG18B5xx Actualización a la
Tabla 1.1 Versión del documento y del software
A partir de la versión 4.0x del software (semana de
producción 33/2017 y posteriores), la función de ventilador
de refrigeración del disipador de velocidad variable se
aplicará al convertidor de frecuencia para potencias de 22
kW (30 CV) 400 V IP20, de 18,5 kW (25 CV) 400 V IP54 e
inferiores. Esta función requiere actualizaciones de software
y hardware e introduce restricciones de retrocompatibilidad para los alojamientos de tipo H1-H5 e I2-I4.
Consulte la Tabla 1.2 para conocer las limitaciones.
cualicado.
4.2x
nueva versión del
software.
Tarjeta de control
Compatibilidad
del software
Software antiguo
(versión 3.xx y
anteriores del
archivo OSS)
Software nuevo
(versión 4.xx o
posterior del archivo
OSS)
Compatibilidad
del hardware
Tarjeta de potencia
antigua
(semana de
producción 33/2017
o anterior)
Tarjeta de potencia
nueva
(semana de
producción 34/2017
o posterior)
Tabla 1.2 Compatibilidad del software y el hardware
Símbolos de seguridad
1.3
antigua (semana de
producción 33/2017
o anterior)
Sí No
No Sí
Tarjeta de control
antigua (semana de
producción 33/2017
o anterior)
Sí (solo con la
versión de software
3.xx o anteriores)
Sí (DEBE actualizarse
el software a la
versión 3.xx o
anteriores; el
ventilador funciona
continuamente a la
velocidad máxima)
Tarjeta de control
nueva (semana de
producción 34/2017
o posterior)
Tarjeta de control
nueva (semana de
producción 34/2017
o posterior)
Sí (DEBE actualizarse
el software a la
versión 4.xx o
superior)
Sí (solo con la
versión de software
4.xx o posterior)
En esta guía se han utilizado los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
1 1
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 3
Introducción
VLT® HVAC Basic Drive FC 101
11
1.4 Medidas de seguridad
ADVERTENCIA
TIEMPO DE DESCARGA
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que el convertidor de
frecuencia se haya descargado por completo.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o el LOP, por
funcionamiento remoto mediante el Software de
conguración MCT 10 o por la eliminación de una
condición de fallo.
Para evitar un arranque accidental del motor:
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Desconecte el convertidor de frecuencia de la
•
alimentación.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor a la red de CA, al suministro de CC
o a una carga compartida.
El convertidor de frecuencia contiene condensadores en
el bus de corriente continua que pueden seguir cargados
incluso cuando el convertidor de frecuencia está
apagado. Puede haber tensión alta presente aunque las
luces del indicador LED de advertencia estén apagadas.
Si, después de desconectar la alimentación, no espera el
tiempo especicado antes de realizar cualquier trabajo
de reparación o tarea de mantenimiento, pueden
producirse lesiones graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, entre las
que se incluyen baterías de emergencia, SAI y
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo de espera mínimo se
especica en la Tabla 1.3.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
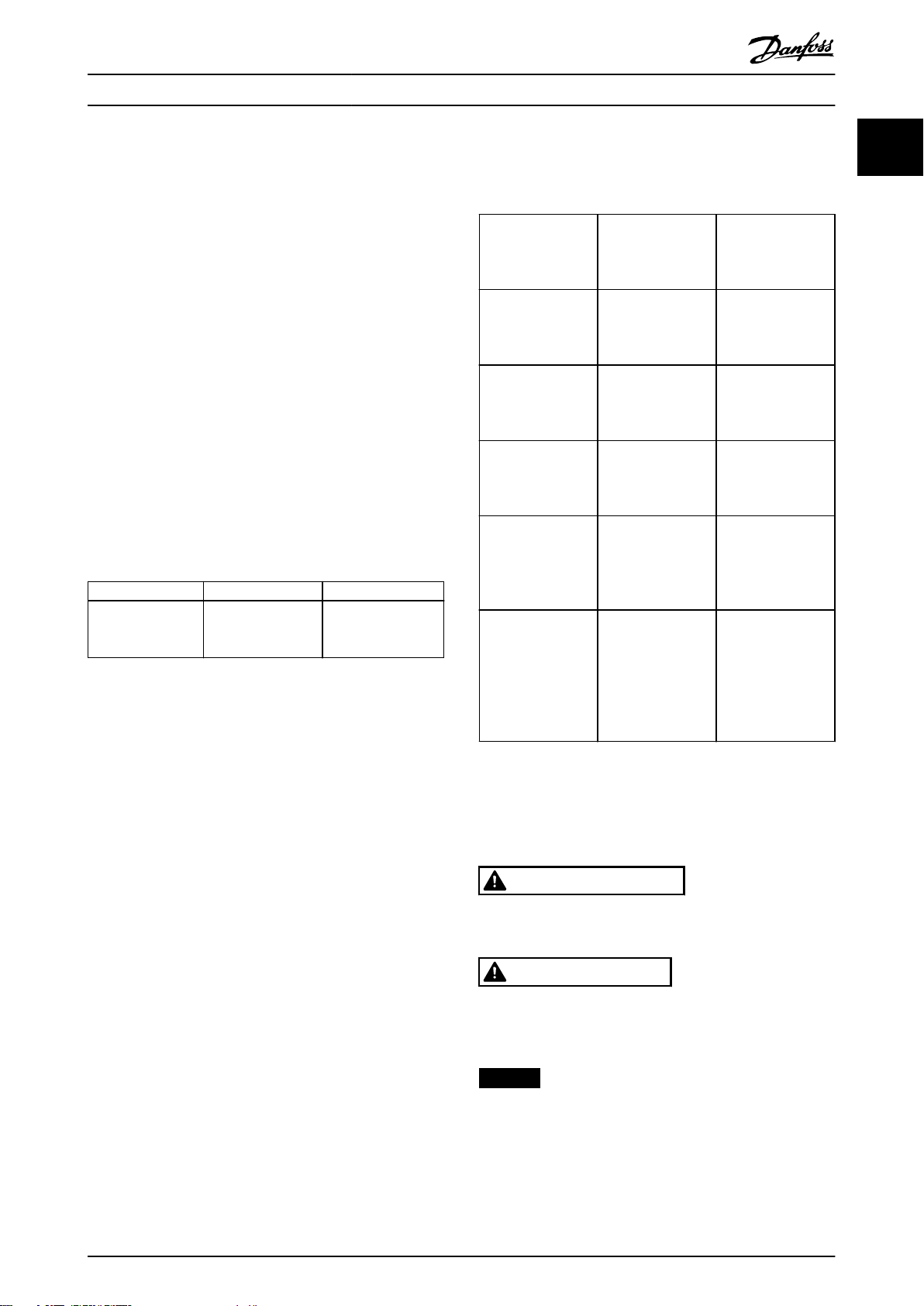
Tensión [V] Gama de potencias
[kW (CV)]
3 × 200 0,25-3,7 (0,33-5) 4
3 × 200 5,5-11 (7-15) 15
3 × 400 0,37-7,5 (0,5-10) 4
3 × 400 11–90 (15–125) 15
3 × 600 2,2-7,5 (3-10) 4
3 × 600 11–90 (15–125) 15
Tabla 1.3 Tiempo de descarga
Tiempo de espera
mínimo (minutos)
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
4 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Introducción Guía de programación
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes en movimiento y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos de este manual.
•
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
1.5 Recursos adicionales
La Guía rápida del VLT® HVAC Basic Drive FC 101
•
proporciona información básica sobre las
dimensiones mecánicas, la instalación y la programación.
La Guía de diseño del VLT® HVAC Basic Drive FC
•
101 proporciona información sobre cómo diseñar
sistemas de control de motores.
Software Danfoss VLT® Energy Box. Seleccione
•
Descarga de software para PC en vlt-
-drives.danfoss.com/products/engineering-software/
software-download/vlt-energy-box-software/.
El software VLT®Energy Box permite realizar
comparaciones de consumo energético de
ventiladores y bombas HVAC accionados por
convertidores de frecuencia de Danfoss y
métodos alternativos de control de caudal. Utilice
esta herramienta para proyectar los costes, los
ahorros y la amortización del uso de convertidores de frecuencia de Danfoss en ventiladores,
bombas y torres de refrigeración HVAC.
La documentación técnica está disponible en línea, en
formato electrónico, en la dirección drives.danfoss.com/
knowledge-center/technical-documentation/.
Soporte Software de
Descargue el software desde www.danfoss.com/en/service-
-and-support/downloads/dds/vlt-motion-control-tool-mct-10/.
conguración MCT 10
Durante el proceso de instalación del software, introduzca
el código de acceso 81463800 para activar la función FC
101. No se necesita ninguna clave de licencia para utilizar
la función FC 101.
El software más actualizado no siempre contiene las
últimas actualizaciones de los convertidores de frecuencia.
Diríjase a su ocina local de ventas para conseguir las
últimas actualizaciones del convertidor de frecuencia (en
forma de archivos *.upd), o descárguelas desde
www.danfoss.com/en/service-and-support/downloads/dds/vlt-
-motion-control-tool-mct-10/#Overview.
1.6 Deniciones
Convertidor de frecuencia
I
VLT, MÁX.
Intensidad de salida máxima
I
VLT, N
Corriente nominal de salida suministrada por el convertidor
de frecuencia.
U
VLT, MÁX.
La tensión de salida máxima
Entrada
El motor conectado puede arrancarse y detenerse
mediante un LCP y entradas digitales. Las funciones se
dividen en dos grupos, tal y como se describe en la
Tabla 1.4. Las funciones del grupo 1 tienen mayor prioridad
que las funciones del grupo 2.
Reinicio, paro por inercia, reinicio y paro por
Grupo 1
Grupo 2
Tabla 1.4 Orden de control
Motor
f
VELOCIDAD FIJA
La frecuencia del motor cuando se activa la función de
velocidad ja (mediante terminales digitales).
f
M
La frecuencia del motor.
f
MÁX.
La frecuencia máxima del motor.
f
MÍN.
La frecuencia mínima del motor.
f
M,N
La frecuencia nominal del motor (datos de la placa de
características).
I
M
La intensidad del motor.
I
M,N
La corriente nominal del motor (datos de la placa de
características).
inercia, parada rápida, freno de CC, parada, y
[O].
Arranque, Arranque de pulsos, Cambio de
sentido, Arranque e inversión, Velocidad ja y
Mantener salida.
1 1
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 5
175ZA078.10
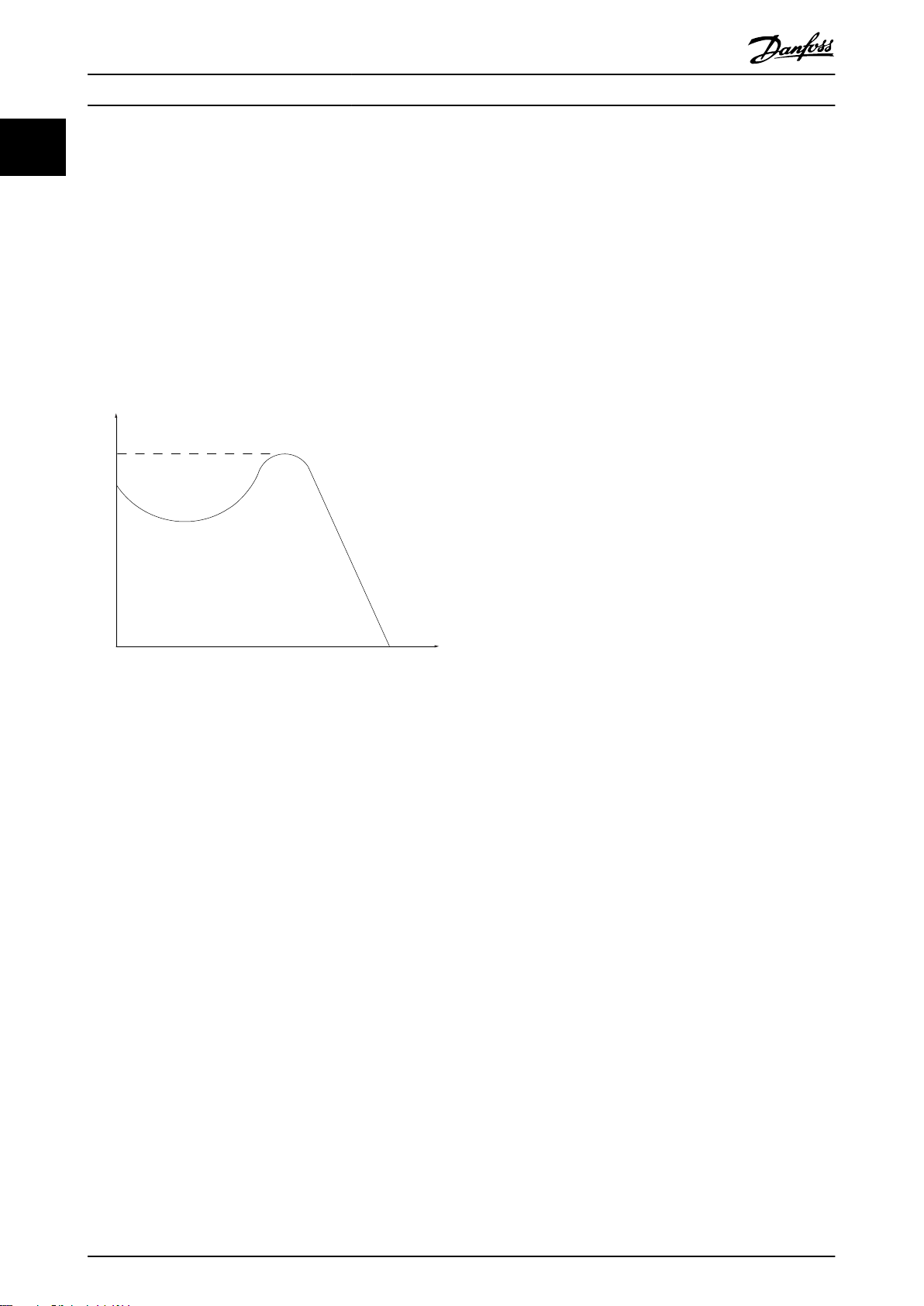
Par max.
0 / min.
Par
Introducción
VLT® HVAC Basic Drive FC 101
11
n
M,N
La velocidad nominal del motor (datos de la placa de
características).
P
M,N
La potencia nominal del motor (datos de la placa de
características).
U
M
La tensión instantánea del motor.
U
M,N
La tensión nominal del motor (datos de la placa de
características).
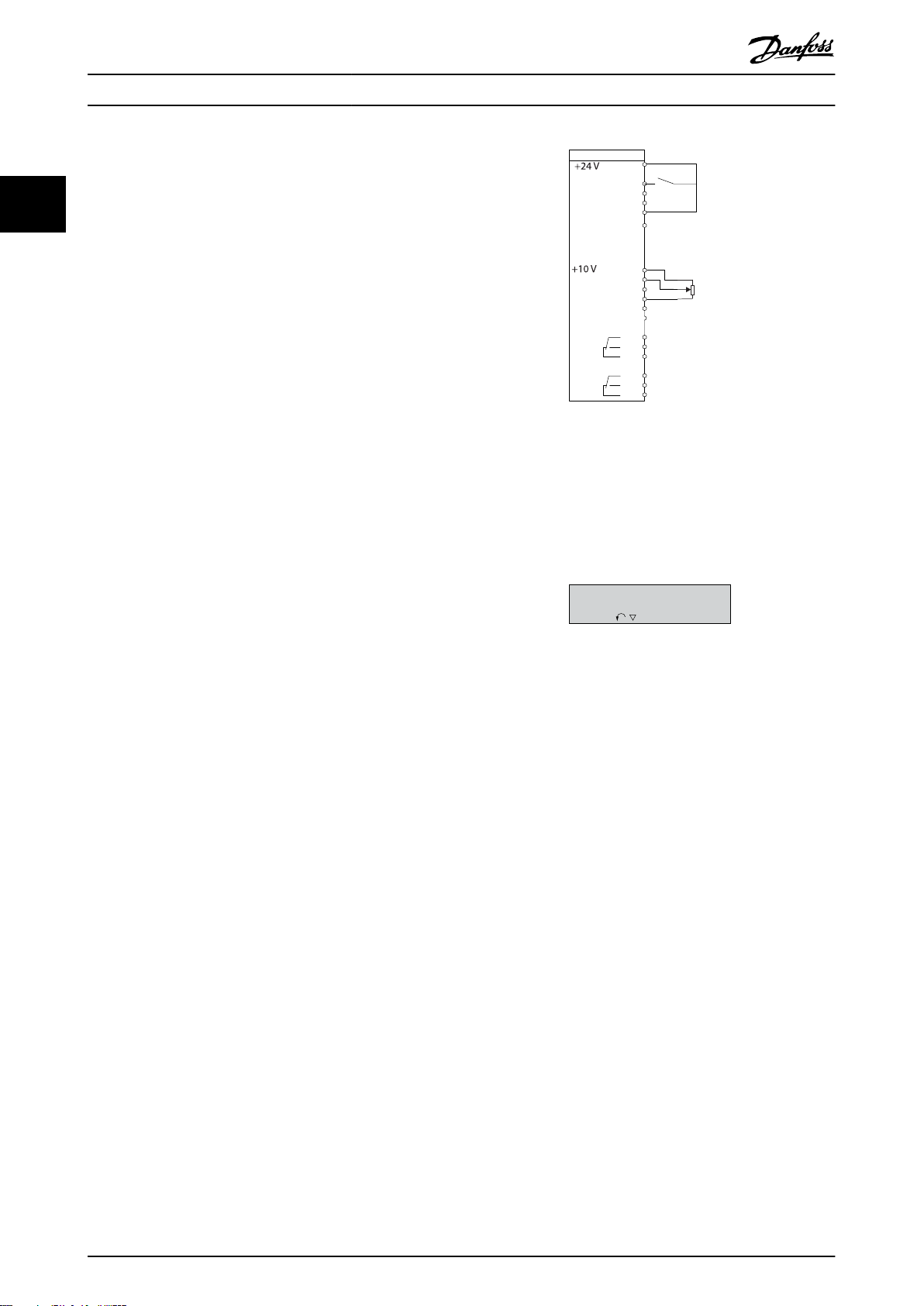
Par de arranque
Ref
MÁX.
Determina la relación entre la entrada de referencia a un
100 % de escala completa (normalmente, 10 V y 20 mA) y
la referencia resultante. El valor de referencia máximo se
ajusta en parámetro 3-03 Referencia máxima.
Ref
MÍN.
Determina la relación entre la entrada de referencia a un
valor del 0 % (normalmente, 0 V, 0 mA y 4 mA) y la
referencia resultante. El valor de referencia mínimo se
ajusta en el parámetro 3-02 Referencia mínima.
Entradas analógicas
Las entradas analógicas se utilizan para controlar varias
funciones del convertidor de frecuencia.
Hay dos tipos de entradas analógicas:
Entrada de corriente: 0-20 mA y 4-20 mA
•
Entrada de tensión: 0-10 V CC
•
Salidas analógicas
Las salidas analógicas pueden proporcionar una señal de
0-20 mA, 4-20 mA o una señal digital.
Adaptación automática del motor (AMA)
El algoritmo AMA determina los parámetros eléctricos del
motor conectado cuando se encuentra parado, y
compensa la resistencia en función de la longitud del cable
de motor.
Entradas digitales
Ilustración 1.1 Par de arranque
Las entradas digitales pueden utilizarse para controlar
distintas funciones del convertidor de frecuencia.
Salidas digitales
η
VLT
El rendimiento del convertidor de frecuencia se dene
como la relación entre la potencia de salida y la potencia
de entrada.
Orden de desactivación de arranque
Una orden de parada que pertenece al grupo 1 de las
órdenes de control. Consulte la Tabla 1.4.
Orden de parada
Consulte el Tabla 1.4.
Referencia analógica
Señal transmitida a las entradas analógicas 53 o 54. Puede
ser tensión o intensidad.
Entrada de corriente: 0-20 mA y 4-20 mA
•
Entrada de tensión: 0-10 V CC
•
Referencia de bus
Señal transmitida al puerto de comunicación en serie
(puerto FC).
Referencia interna
Una referencia interna denida que puede ajustarse a un
valor comprendido entre el –100 % y el +100 % del
intervalo de referencias. Pueden seleccionarse ocho
referencias internas mediante los terminales digitales.
El convertidor de frecuencia dispone de dos salidas de
estado sólido que pueden proporcionar una señal de 24 V
CC (máximo 40 mA).
Salidas de relé
El convertidor de frecuencia presenta dos salidas de relé
programables.
ETR
El relé termoelectrónico es un cálculo de carga térmica
basado en la carga presente y el tiempo transcurrido. Su
nalidad es calcular la temperatura del motor y evitar su
sobrecalentamiento.
Inicialización
Si se lleva a cabo una inicialización (parámetro 14-22 Modo
funcionamiento), los parámetros programables del
convertidor de frecuencia se restablecen a los ajustes
predeterminados.
El Parámetro 14-22 Modo funcionamiento no inicializa los
parámetros de comunicación, el registro de fallos ni el
registro del modo incendio.
Ciclo de trabajo intermitente
Una clasicación de trabajo intermitente es una secuencia
de ciclos de trabajo. Cada ciclo está formado por un
periodo en carga y un periodo sin carga. El funcionamiento
puede ser de trabajo periódico o de trabajo no periódico.
6 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Introducción Guía de programación
LCP
El panel de control local (LCP) constituye una completa
interfaz para el control y la programación del convertidor
de frecuencia. El panel de control es extraíble en las
unidades IP20 y jo en las unidades IP54. Puede instalarse
a una distancia máxima de 3 m (9,8 ft) del convertidor de
frecuencia, p. ej., en un panel frontal con el kit de
instalación opcional.
Bit menos signicativo (lsb)
Bit menos signicativo.
MCM
Sigla en inglés de Mille Circular Mil, una unidad norteamericana de sección transversal de cable. 1 MCM =
0,5067 mm2.
Bit más signicativo (msb)
Bit más signicativo.
Parámetros en línea / fuera de línea
Los cambios realizados en los parámetros en línea se
activan inmediatamente después de cambiar el valor de
dato. Pulse [OK] para activar los parámetros fuera de línea.
Controlador PI
El controlador PI mantiene la velocidad, la presión, la
temperatura y demás parámetros que desee ajustando la
frecuencia de salida para adaptarla a la carga variable.
RCD
Dispositivo de corriente diferencial.
Ajuste
Los ajustes de parámetros se pueden guardar en dos
conguraciones. Alterne entre estos dos ajustes de
parámetros y edite uno de los ajustes mientras el otro está
activo.
Compensación de deslizamiento
El convertidor de frecuencia compensa el deslizamiento del
motor añadiendo un suplemento a la frecuencia que sigue
a la carga medida del motor, manteniendo la velocidad del
mismo casi constante.
Smart logic control (SLC)
SLC es una secuencia de acciones denidas por el usuario
que se ejecuta cuando el SLC evalúa como verdaderos los
eventos asociados denidos por el usuario.
Termistor
Resistencia que depende de la temperatura y que se
coloca en el punto donde ha de controlarse la temperatura
(convertidor de frecuencia o motor).
Desconexión
Estado al que se pasa en situaciones de fallo; por ejemplo,
si el convertidor de frecuencia se sobrecalienta, o cuando
está protegiendo el motor, el proceso o el mecanismo del
motor. Se impide el rearranque hasta que desaparece la
causa del fallo y se anula el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación de un reinicio automático. La
desconexión no debe utilizarse para la seguridad personal.
Bloqueo por alarma
Estado al que se pasa en situaciones de fallo cuando el
convertidor de frecuencia está protegiéndose a sí mismo y
requiere una intervención física; por ejemplo, si el
convertidor de frecuencia se cortocircuita en la salida. Un
bloqueo por alarma solo puede cancelarse cortando la
alimentación, eliminando la causa del fallo y volviendo a
conectar el convertidor de frecuencia. Se impide el
rearranque hasta que se cancela el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación del reinicio automático. El
bloqueo por alarma no debe utilizarse para la seguridad
personal.
Características VT
Características de par variable utilizadas en bombas y
ventiladores.
+
VVC
Comparado con el control estándar de la proporción de
tensión/frecuencia, el control vectorial de la tensión (VVC+)
mejora la dinámica y la estabilidad, tanto cuando se
cambia la velocidad de referencia como en relación con el
par de carga.
1 1
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 7
L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Introducción
VLT® HVAC Basic Drive FC 101
11
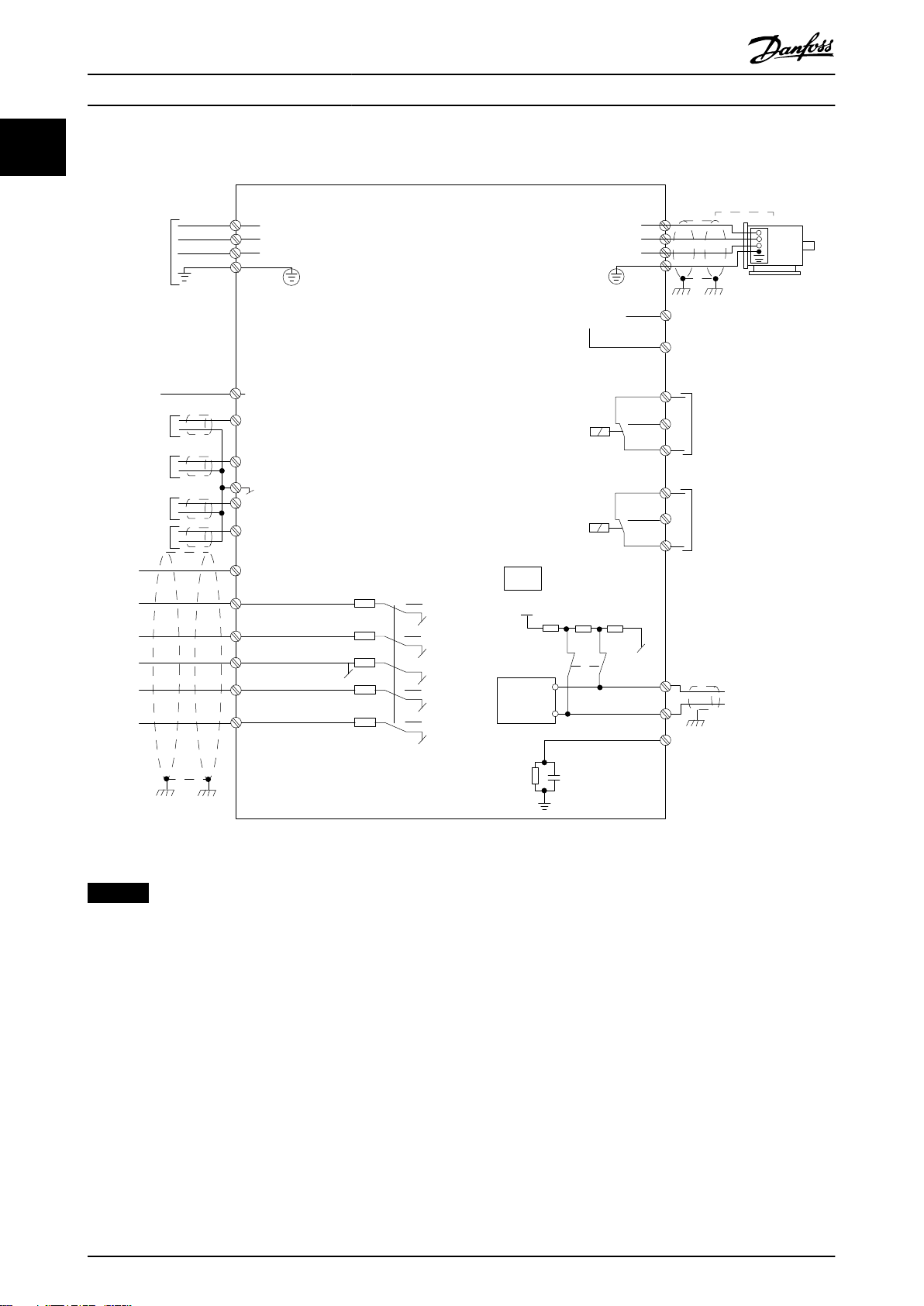
1.7 Descripción general del sistema eléctrico
Ilustración 1.2 Dibujo esquemático del cableado básico
AVISO!
No hay acceso a UDC– y UDC+ en las siguientes unidades:
•
•
•
•
IP20, 380-480 V, 30-90 kW (40-125 CV)
IP20, 200-240 V, 15-45 kW (20-60 CV)
IP20, 525-600 V, 2,2-90 kW (3,0-125 CV)
IP54, 380-480 V, 22-90 kW (30-125 CV)
8 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programación Guía de programación
2 Programación
2.1 Introducción
El convertidor de frecuencia puede programarse desde el
LCP o desde un ordenador a través del puerto de comunicaciones RS485, instalando el Software de conguración
MCT 10. Consulte el capétulo 1.5 Recursos adicionales para
obtener más detalles acerca del software.
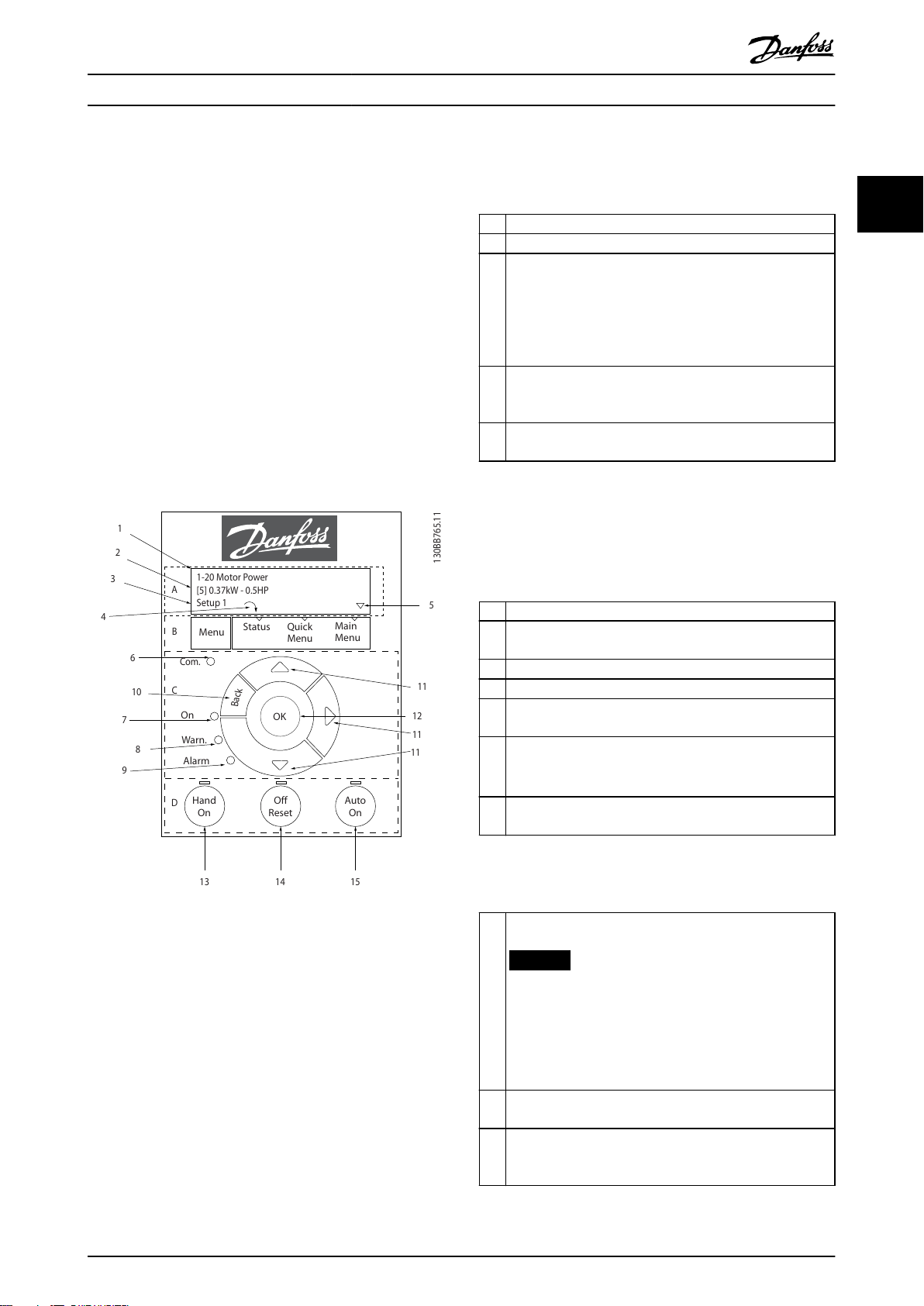
2.2 Panel de control local (LCP)
El LCP se divide en cuatro grupos funcionales.
A. Pantalla
B. Tecla de menú
C. Teclas de navegación y luces indicadoras
D. Teclas de funcionamiento y luces indicadoras
1 Número y nombre del parámetro.
2 Valor del parámetro.
El número de ajuste muestra el ajuste activo y el ajuste
editado. Si el mismo ajuste actúa como ajuste activo y
editado, solo se mostrará ese número de ajuste (ajustes de
3
fábrica). Cuando dieren el ajuste activo y el editado,
ambos números se muestran en la pantalla (ajuste 12). El
número intermitente indica el ajuste editado.
El sentido de giro del motor aparece en la parte inferior
4
izquierda de la pantalla, con una pequeña echa al lado
que señala en sentido horario o en el sentido contrario.
El triángulo indica si el LCP está en Status (Estado), Quick
5
Menu (Menú rápido) o Main Menu (Menú principal).
Tabla 2.1 Leyenda de la Ilustración 2.1, Parte I
B. Tecla de menú
Pulse [Menu] para seleccionar Status (Estado), Quick Menu
(Menú rápido) o Main Menu (Menú principal).
C. Teclas de navegación y luces indicadoras
6 LED Com.: parpadea durante la comunicación de bus.
LED verde / encendido: la sección de control funciona
7
correctamente.
8 LED amarillo / advertencia: indica una advertencia.
9 LED rojo intermitente / alarma: indica una alarma.
[Back]: para ir al paso o nivel anterior en la estructura de
10
navegación.
[▲] [▼] [►]: para navegar entre grupos de parámetros, entre
11
parámetros y dentro de estos. También pueden usarse para
ajustar la referencia local.
[OK]: para seleccionar un parámetro y aceptar los cambios
12
en ajustes de parámetros.
2 2
Tabla 2.2 Leyenda de la Ilustración 2.1, Parte II
D. Teclas de funcionamiento y luces indicadoras
Ilustración 2.1 Panel de control local (LCP)
A. Pantalla
La pantalla LCD dispone de iluminación y cuenta con dos
líneas alfanuméricas. Todos los datos se muestran en el
LCP.
En la Ilustración 2.1 se describe la información que puede
leerse en la pantalla.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 9
[Hand On]: arranca el motor y activa el control del
convertidor de frecuencia a través del LCP.
AVISO!
[2] Inercia inversa es la opción predeterminada para
13
el parámetro 5-12 Terminal 27 Entrada digital. Si no
hay una fuente de alimentación de 24 V en el
terminal 27, [Hand On] no arrancará el motor.
Conecte el terminal 12 al terminal 27.
[O / Reset]: detiene el motor (O). Si está en modo de
14
alarma, la alarma se reinicia.
[Auto On]: el convertidor de frecuencia puede controlarse
15
mediante terminales de control o mediante comunicación
serie.
Tabla 2.3 Leyenda de la Ilustración 2.1, Parte III
FC
ENT DIG
ENT DIG
ENT DIG
ENT DIG
COM ENT DIG
SAL AN / SAL DIG
SAL AN / SAL DIG
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Referencia
Arranque
ENT AN
ENT AN
COM
130BB674.10
45
+
-
130BB629.10
Pulse [OK] para iniciar el asistente
Pulse [Back] para ignorarlo
Ajuste 1
Programación
VLT® HVAC Basic Drive FC 101
2.3 Menús
2.3.1 Menú de estado
22
En el menú de estado, las opciones de selección son:
Frecuencia del motor [Hz]:
•
parámetro 16-13 Frecuencia.
Intensidad del motor [A]:
•
parámetro 16-14 Intensidad motor.
Velocidad de referencia del motor en porcentaje
•
[%]: parámetro 16-02 Referencia %.
Realimentación: parámetro 16-52 Realimentación
•
[Unit].
Potencia del motor: parámetro 16-10 Potencia [kW]
•
para kW, parámetro 16-11 Potencia [hp] para CV. Si
el parámetro 0-03 Ajustes regionales se ajusta
como [1] Norteamérica, la potencia del motor se
mostrará en CV en lugar de kW.
Lectura personalizada: parámetro 16-09 Lectura
•
personalizada.
Velocidad del motor [RPM]:
•
parámetro 16-17 Velocidad [RPM].
Ilustración 2.2 Cableado del convertidor de frecuencia
El asistente aparecerá después del encendido hasta que se
modique algún parámetro. Siempre se puede volver a
acceder al asistente a través del menú rápido. Pulse [OK]
para iniciar el asistente. Pulse [Back] para volver a la vista
de estado.
2.3.2 Menú rápido
Utilice el menú rápido para programar las funciones más
comunes. El menú rápido está formado por:
El asistente para aplicaciones de lazo abierto.
•
Consulte el Ilustración 2.4 para obtener más
detalles.
El asistente para aplicaciones de lazo cerrado.
•
Consulte Ilustración 2.5 para obtener mas
información.
Conguración del motor. Consulte Tabla 2.6 para
•
obtener mas información.
Cambios realizados.
•
De un modo claro y estructurado, el menú «asistente»
integrado guía al instalador a través de la conguración
del convertidor de frecuencia, para ajustar aplicaciones de
lazo abierto y lazo cerrado y para el ajuste rápido del
motor.
Ilustración 2.3 Asistente de arranque / salida
10 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
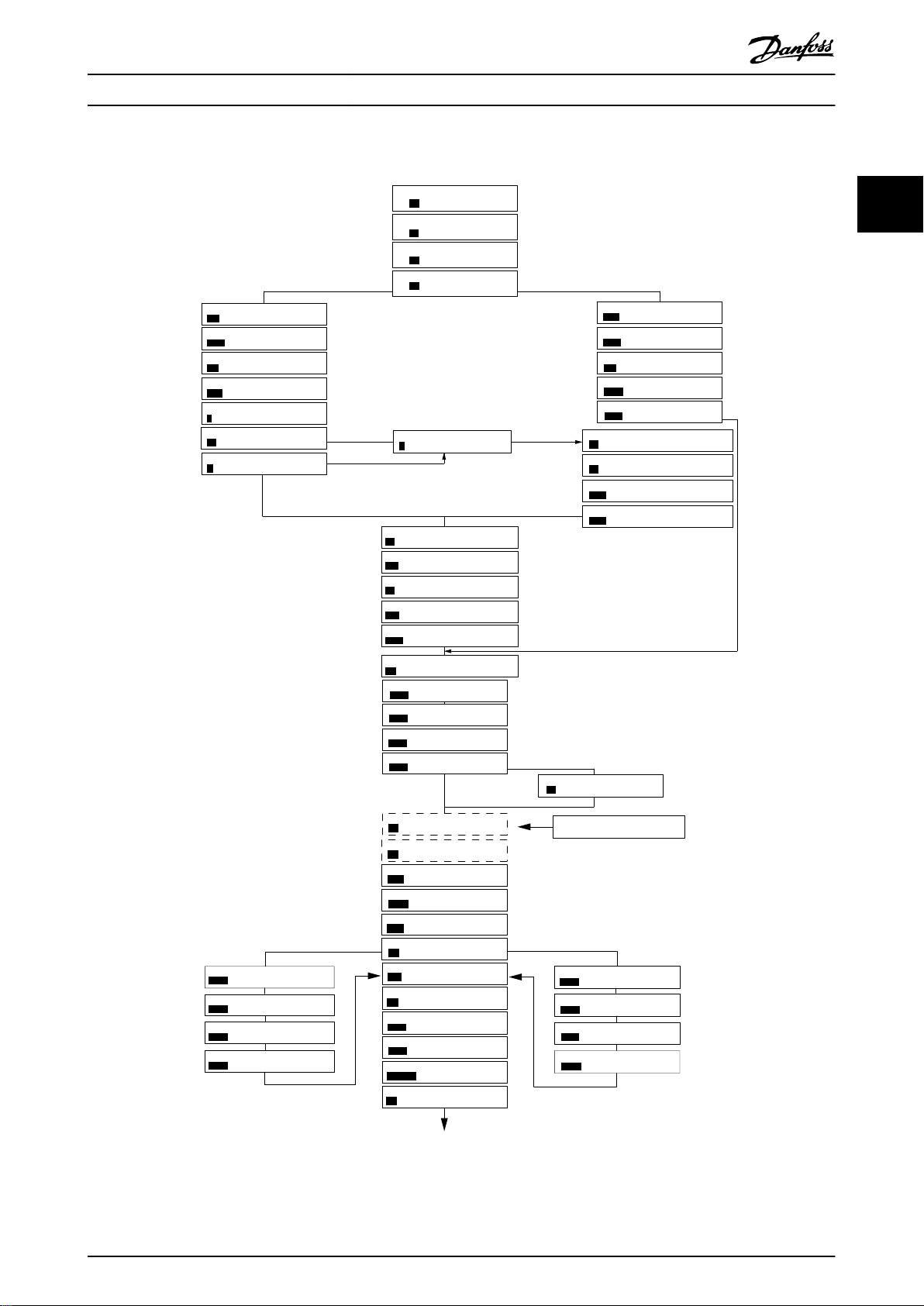
... the Wizard starts
Programación Guía de programación
2 2
Ilustración 2.4 Asistente de conguración para aplicaciones de lazo abierto
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 11
Programación
VLT® HVAC Basic Drive FC 101
Asistente de conguración para aplicaciones de lazo abierto
Parámetro Opción Valor predeter-
22
Parámetro 0-03 Ajustes
regionales
Parámetro 0-06 Tipo red [0] 200-240 V / 50 Hz /
[0] Internacional
[1] Norteamérica
red IT
[1] 200-240 V / 50 Hz /
triáng.
[2] 200-240 V / 50 Hz
[10] 380-440 V/ 50 Hz /
red IT
[11] 380-440 V / 50 Hz /
triángulo
[12] 380-440 V / 50 Hz
[20] 440-480 V / 50 Hz /
red IT
[21] 440-480 V /50 Hz /
triángulo
[22] 440-480 V / 50 Hz
[30] 525-600 V / 50 Hz /
red IT
[31] 525-600 V / 50 Hz /
triángulo
[32] 525-600 V / 50 Hz
[100] 200-240 V / 60 Hz /
red IT
[101] 200-240 V /60 Hz /
triángulo
[102] 200-240 V / 60 Hz
[110] 380-440 V / 60 Hz /
red IT
[111] 380-440 V / 60 Hz /
triángulo
[112] 380-440 V / 60 Hz
[120] 440-480 V / 60 Hz /
red IT
[121] 440-480 V / 60 Hz /
triángulo
[122] 440-480 V / 60 Hz
[130] 525-600 V / 60 Hz /
red IT
[131] 525-600 V / 60 Hz /
triángulo
[132] 525-600 V / 60 Hz
minado
[0] Internacional –
Depende del
tamaño.
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
12 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Opción Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM, Sat
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 13
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Opción Valor predeter-
minado
Parámetro 1-20 Potencia motor
22
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,12-110 kW / 0,16-150CVDepende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0,01-10000,00 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-29 Adaptación
automática del motor (AMA)
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
Consulte el
parámetro 1-29 Adaptació
n automática del motor
(AMA).
0,000-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
O La realización de un procedimiento AMA optimiza el
rendimiento del motor.
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d.
Obtenga el valor de la hoja de datos del motor de
magnetización permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
14 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Opción Valor predeter-
minado
Parámetro 1-49 Corriente en
inductancia mín.
Parámetro 1-70 Modo de inicio [0] Detección de rotor
Parámetro 1-73 Motor en giro [0] Desactivado
Parámetro 3-02 Referencia
mínima
Parámetro 3-03 Referencia
máxima
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 5-40 Relé de función Consulte el
Parámetro 5-40 Relé de función Consulte el
Parámetro 6-10 Terminal 53
escala baja V
Parámetro 6-11 Terminal 53
escala alta V
Parámetro 6-12 Terminal 53
escala baja mA
Parámetro 6-13 Terminal 53
escala alta mA
20–200% 100% Este parámetro especica la curva de saturación de los
[0] Detección de
[1] Parking
[1] Activado
–4999,000-4999,000 0 La referencia mínima es el valor mínimo que puede
–4999,000-4999,000 50 La referencia máxima es el valor más alto que puede
0,05-3600,00 s Depende del
0,05-3600,00 s Depende del
0,0-400,0 Hz 0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100 Hz Introducir el valor máximo de frecuencia de salida. Si el
parámetro 5-40 Relé de
función.
parámetro 5-40 Relé de
función.
0,00-10,00 V 0,07 V Introduzca la tensión que corresponda al valor de
0,00-10,00 V 10 V Introduzca la tensión que corresponda al valor de
0,00-20,00 mA 4 mA Introduzca la intensidad que corresponda al valor de
0,00-20,00 mA 20 mA Introduzca la intensidad que corresponda al valor de
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
[9] Alarma Seleccione la función para controlar el relé de salida 1.
[5] Funcionamiento Seleccione la función para controlar el relé de salida 2.
Uso
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d (Ld),
el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
Seleccione el modo de arranque del motor PM.
frecuencia atrape al motor en giro por corte de red.
Seleccione [0] Desactivado si no se requiere esta función.
Cuando este parámetro se ajusta a [1] Activado, el
parámetro 1-71 Retardo arr. y el parámetro 1-72 Función de
arranque carecen de función. Parámetro 1-73 Motor en giro
solo se activa en modo VVC+.
obtenerse sumando todas las referencias.
obtenerse sumando todas las referencias.
Si se selecciona motor asíncrono, el tiempo de aceleración
será desde 0 hasta el parámetro 1-23 Frecuencia motor
nominal. Si se selecciona motor PM, el tiempo de
aceleración será desde 0 hasta el parámetro 1-25 Veloc.
nominal motor.
En motores asíncronos, el tiempo de deceleración va
desde el parámetro 1-23 Frecuencia motor nominal hasta 0.
En motores PM, el tiempo de deceleración va desde el
parámetro 1-25 Veloc. nominal motor hasta 0.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
referencia bajo.
referencia alto.
referencia bajo.
referencia alto.
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 15
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Opción Valor predeter-
minado
Parámetro 6-19 Terminal 53
22
mode
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
Tabla 2.4 Asistente de conguración para aplicaciones de lazo abierto
[0] Modo de intensidad
[1] Modo tensión
[0] Desactivado
[1] Activado
0,05-1 s 0,10 s
[1] Modo tensión Seleccione si el terminal 53 se utiliza para entrada de
[0] Desactivado
Uso
intensidad o de tensión.
–
–
16 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
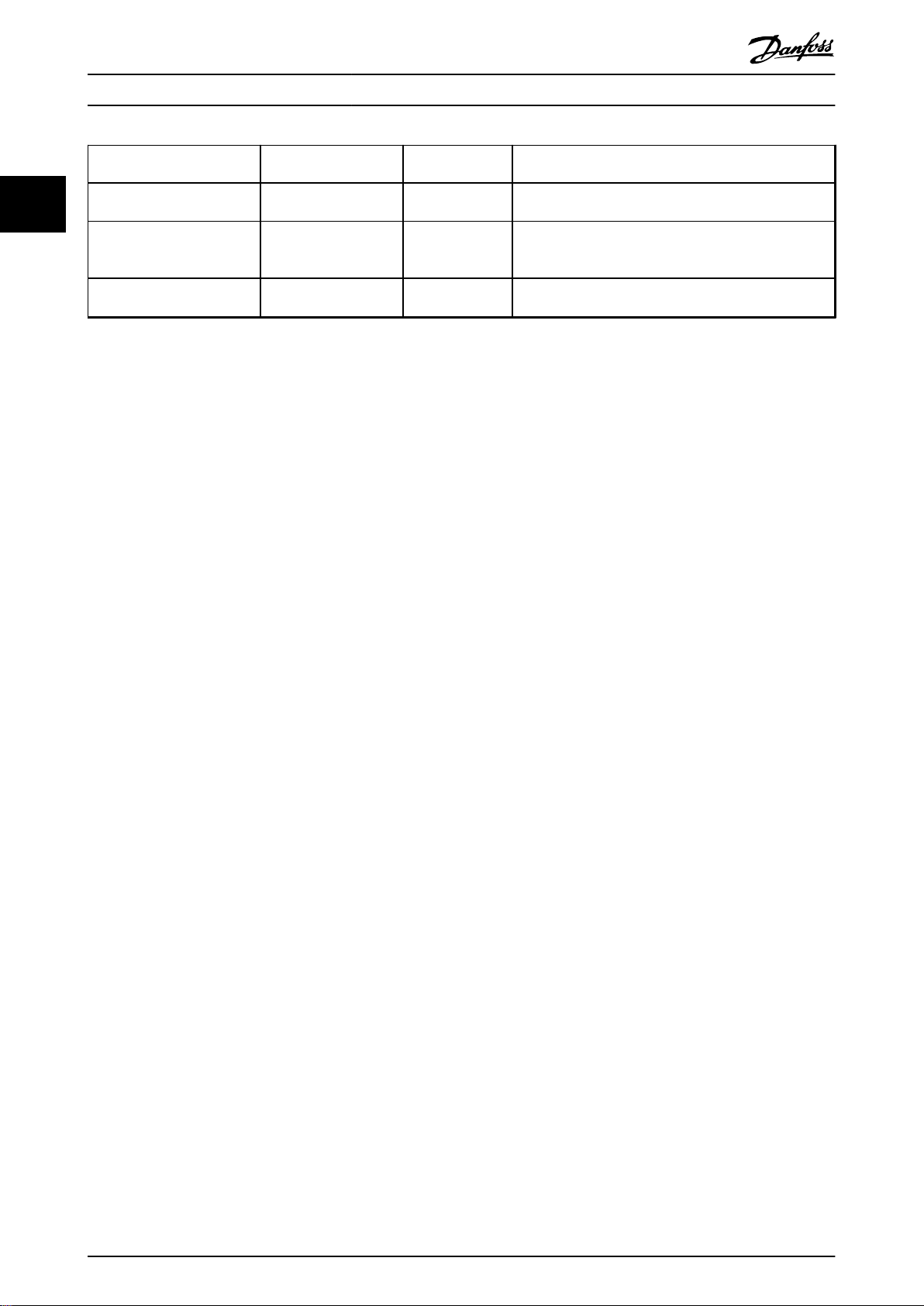
... the Wizard starts
... the Wizard starts
Programación Guía de programación
Asistente de conguración para aplicaciones de lazo cerrado
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 17
Ilustración 2.5 Asistente de conguración para aplicaciones de lazo cerrado
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Rango Valor predeter-
minado
Parámetro 0-03 Ajustes
22
regionales
Parámetro 0-06 Tipo red [0]–[132] consulte la
Parámetro 1-00 Modo Congu-
ración
[0] Internacional
[1] Norteamérica
Tabla 2.4.
[0] Veloc. lazo abierto
[3] Lazo cerrado
[0] Internacional –
Tamaño
seleccionado
[0] Veloc. lazo
abierto
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
Seleccione [3] Lazo cerrado.
18 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Rango Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM, Sat
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 19
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Rango Valor predeter-
minado
Parámetro 1-20 Potencia motor
22
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,09-110 kW Depende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0-10 000 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-29 Adaptación
automática del motor (AMA)
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
O La realización de un procedimiento AMA optimiza el
rendimiento del motor.
0-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d.
Obtenga el valor de la hoja de datos del motor de
magnetización permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
20 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Rango Valor predeter-
minado
Parámetro 1-49 Corriente en
inductancia mín.
Parámetro 1-70 Modo de inicio [0] Detección de rotor
Parámetro 1-73 Motor en giro [0] Desactivado
Parámetro 3-02 Referencia
mínima
Parámetro 3-03 Referencia
máxima
Parámetro 3-10 Referencia
interna
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 6-20 Terminal 54
escala baja V
Parámetro 6-21 Terminal 54
escala alta V
Parámetro 6-22 Terminal 54
escala baja mA
Parámetro 6-23 Terminal 54
escala alta mA
Parámetro 6-24 Term. 54 valor
bajo ref./realim
Parámetro 6-25 Term. 54 valor
alto ref./realim
20–200% 100% Este parámetro especica la curva de saturación de los
[0] Detección de
[1] Parking
[1] Activado
–4999,000-4999,000 0 La referencia mínima es el valor mínimo que puede
–4999,000-4999,000 50 La referencia máxima es el valor más alto que puede
-100–100% 0 Especique el valor de consigna.
0,05–3600,0 s Depende del
0,05–3600,0 s Depende del
0,0-400,0 Hz 0,0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100 Hz Introducir el valor máximo de frecuencia de salida. Si el
0,00-10,00 V 0,07 V Introduzca la tensión que corresponda al valor de
0,00-10,00 V 10,00 V Introduzca la tensión que corresponda al valor de
0,00-20,00 mA 4,00 mA Introduzca la intensidad que corresponda al valor de
0,00-20,00 mA 20,00 mA Introduzca la intensidad que corresponda al valor de
-4999–4999 0 Introduzca el valor de realimentación que corresponda a la
-4999–4999 50 Introduzca el valor de realimentación que corresponda a la
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
Uso
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d
(Ld), el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
Seleccione el modo de arranque del motor PM.
frecuencia pueda atrapar un motor en giro, por ejemplo
en aplicaciones de ventilador. Si PM está seleccionado,
este parámetro estará activado.
obtenerse sumando todas las referencias.
obtenerse sumando todas las referencias.
Tiempo de aceleración desde 0 hasta el
parámetro 1-23 Frecuencia motor nominal en motores
asíncronos. Tiempo de aceleración desde 0 hasta el
parámetro 1-25 Veloc. nominal motor en motores PM.
Tiempo de deceleración de rampa desde el
parámetro 1-23 Frecuencia motor nominal hasta 0 en
motores asíncronos. Tiempo de deceleración de rampa
desde el parámetro 1-25 Veloc. nominal motor hasta 0 en
motores PM.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
referencia bajo.
referencia alto.
referencia bajo.
referencia alto.
tensión o la intensidad ajustada en
parámetro 6-20 Terminal 54 escala baja V/
parámetro 6-22 Terminal 54 escala baja mA.
tensión o la intensidad ajustada en
parámetro 6-21 Terminal 54 escala alta V/
parámetro 6-23 Terminal 54 escala alta mA.
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 21
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Rango Valor predeter-
minado
Parámetro 6-26 Terminal 54
22
tiempo ltro constante
Parámetro 6-29 Modo terminal54[0] Modo de intensidad
Parámetro 20-81 Ctrl. normal/
inverso de PID
Parámetro 20-83 Veloc.
arranque PID [Hz]
Parámetro 20-93 Ganancia
proporc. PID
Parámetro 20-94 PI Integral
Time
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
0,00-10,00 s 0,01 Introduzca la constante del tiempo de ltro.
[1] Modo tensión Seleccione si el terminal 54 se utiliza para entrada de
[1] Modo tensión
[0] Normal
[1] Inversa
0-200 Hz 0 Hz Introduzca la velocidad del motor que se debe alcanzar
0,00-10,00 0,01 Introduzca la ganancia proporcional del controlador de
0,1-999,0 s 999,0 s Introduzca el tiempo integral del controlador de procesos.
[0] Desactivado
[1] Activado
0,05-1,00 s 0,10 s
[0] Normal Seleccione [0] Normal para ajustar el control de proceso
[0] Desactivado
Uso
intensidad o de tensión.
para aumentar la velocidad de salida cuando el error de
proceso sea positivo. Seleccione [1] Inversa para reducir la
velocidad de salida.
como señal de arranque para iniciar el control de PI.
procesos. Se obtiene un control rápido con una ampli-
cación alta. Sin embargo, si la amplicación es demasiado
alta, puede que el proceso se vuelva inestable.
Obtenga control rápido mediante un tiempo integral
corto, aunque si es demasiado corto, el proceso es
inestable. Un tiempo integral demasiado largo desactiva la
acción de la integral.
–
–
Tabla 2.5 Asistente de conguración para aplicaciones de lazo cerrado
Conguración del motor
El asistente de conguración del motor le guía a través de los parámetros del motor necesarios.
Parámetro Rango Valor predeter-
minado
Parámetro 0-03 Ajustes
regionales
Parámetro 0-06 Tipo red [0]–[132] consulte la
[0] Internacional
[1] Norteamérica
Tabla 2.4.
0 –
Depende del
tamaño.
Uso
Seleccione el modo de funcionamiento para cuando se
vuelve a conectar el convertidor de frecuencia a la tensión
de red después de apagarlo.
22 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Rango Valor predeter-
minado
Parámetro 1-10 Construcción
del motor
*[0] Asynchron
[1] PM, no saliente SPM
[3] PM, salient IPM
[0] Asynchron Si ajusta el valor de los parámetros podría alterar estos
Uso
parámetros:
Parámetro 1-01 Principio control motor.
•
Parámetro 1-03 Características de par.
•
Parámetro 1-08 Motor Control Bandwidth.
•
Parámetro 1-14 Factor de ganancia de amortiguación.
•
Parámetro 1-15 Const. tiempo ltro a baja velocidad
•
Parámetro 1-16 Const. tiempo ltro a alta velocidad
•
Parámetro 1-17 Const. de tiempo del ltro de tensión
•
Parámetro 1-20 Potencia motor [kW ].
•
Parámetro 1-22 Tensión motor.
•
Parámetro 1-23 Frecuencia motor.
•
Parámetro 1-24 Intensidad motor.
•
Parámetro 1-25 Veloc. nominal motor.
•
Parámetro 1-26 Par nominal continuo.
•
Parámetro 1-30 Resistencia estator (Rs).
•
Parámetro 1-33 Reactancia fuga estátor (X1).
•
Parámetro 1-35 Reactancia princ. (Xh).
•
Parámetro 1-37 Inductancia eje d (Ld).
•
Parámetro 1-38 Inductancia eje q (Lq).
•
Parámetro 1-39 Polos motor.
•
Parámetro 1-40 fcem a 1000 RPM.
•
Parámetro 1-44 Saturac. inductanc. eje d (LdSat).
•
Parámetro 1-45 Sat. inductanc. eje q (LqSat).
•
Parámetro 1-46 Ganancia de detecc. de posición.
•
Parámetro 1-48 Intensidad Min Inductance para d-axis.
•
Parámetro 1-49 Corriente en inductancia mín..
•
Parámetro 1-66 Intens. mín. a baja veloc..
•
Parámetro 1-70 Modo de inicio.
•
Parámetro 1-72 Función de arranque.
•
Parámetro 1-73 Motor en giro.
•
Parámetro 1-80 Función de parada.
•
Parámetro 1-82 Vel. mín. para func. parada [Hz].
•
Parámetro 1-90 Protección térmica motor.
•
Parámetro 2-00 Intensidad CC mantenida/precalent..
•
Parámetro 2-01 Intens. freno CC.
•
Parámetro 2-02 Tiempo de frenado CC.
•
Parámetro 2-04 Velocidad de conexión del freno CC [Hz].
•
Parámetro 2-10 Función de freno.
•
Parámetro 4-14 Límite alto veloc. motor [Hz].
•
Parámetro 4-19 Frecuencia salida máx..
•
Parámetro 4-58 Función Fallo Fase Motor.
•
Parámetro 14-65 Comp. tiempo muerto reduc. potencia.
•
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 23
Programación
VLT® HVAC Basic Drive FC 101
Parámetro Rango Valor predeter-
minado
Parámetro 1-20 Potencia motor
22
[kW]
Parámetro 1-22 Tensión motor 50-1000 V Depende del
Parámetro 1-23 Frecuencia
motor
Parámetro 1-24 Intensidad
motor
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
0,12-110 kW / 0,16-150CVDepende del
tamaño.
tamaño.
20-400 Hz Depende del
tamaño.
0,01-10000,00 A Depende del
tamaño.
50-9999 r/min Depende del
tamaño.
0,1-1000,0 Nm Depende del
tamaño.
Uso
Introduzca la potencia del motor que gura en los datos
de la placa de características.
Introduzca la tensión del motor que gura en los datos de
la placa de características.
Introduzca la frecuencia del motor que gura en los datos
de la placa de características.
Introduzca la intensidad del motor que gura en los datos
de la placa de características.
Introduzca la velocidad nominal de motor que gura en
los datos de la placa de características.
Este parámetro está disponible cuando el
parámetro 1-10 Construcción del motor se ajusta con
opciones que activan el modo de motor de magnetización
permanente.
AVISO!
El cambio de este parámetro afecta al ajuste de
otros parámetros.
Parámetro 1-30 Resistencia
estator (Rs)
Parámetro 1-37 Inductancia eje
d (Ld)
Parámetro 1-38 Inductancia eje
q (Lq)
Parámetro 1-39 Polos motor 2–100 4 Introduzca el n.º de polos del motor.
Parámetro 1-40 fcem a 1000
RPM
Parámetro 1-42 Longitud del
cable del motor
Parámetro 1-44 Saturac.
inductanc. eje d (LdSat)
Parámetro 1-45 Sat. inductanc.
eje q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
Parámetro 1-49 Corriente en
inductancia mín.
0-99,990 Ω
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
10-9000 V Depende del
0-100 m 50 m Introduzca la longitud del cable de motor.
0,000-1000,000 mH Depende del
0,000-1000,000 mH Depende del
20–200% 100% Ajusta la altura del pulso de prueba durante la detección
20–200% 100% Introduzca el punto de saturación de la inductancia.
20–200% 100% Este parámetro especica la curva de saturación de los
Depende del
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
tamaño.
Fije el valor de resistencia del estátor.
Introduzca el valor de la inductancia del eje d. Obtenga el
valor de la hoja de datos del motor de magnetización
permanente.
Introduzca el valor de la inductancia del eje q.
Tensión de fuerza contraelectromotriz RMS línea-línea a
1000 r/min.
Este parámetro corresponde a la saturación de la
inductancia de Ld. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación de la
inductancia de Lq. En condiciones ideales, este parámetro
tiene el mismo valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor proporciona
una curva de inducción, introduzca el valor de inducción,
que corresponde al 200 % del valor nominal.
de la posición en el arranque.
valores de inductancia de d y q. Entre el 20 % y el 100 %
de este parámetro, las inductancias se aproximan
linealmente debido al parámetro 1-37 Inductancia eje d
(Ld), el parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat).
24 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programación Guía de programación
Parámetro Rango Valor predeter-
minado
Parámetro 1-70 Modo de inicio [0] Detección de rotor
[1] Parking
Parámetro 1-73 Motor en giro [0] Desactivado
[1] Activado
Parámetro 3-41 Rampa 1
tiempo acel. rampa
Parámetro 3-42 Rampa 1
tiempo desacel. rampa
Parámetro 4-12 Límite bajo
veloc. motor [Hz]
Parámetro 4-14 Límite alto
veloc. motor [Hz]
Parámetro 4-19 Frecuencia
salida máx.
Parámetro 30-22 Protecc. rotor
bloqueado
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
0,05–3600,0 s Depende del
0,05–3600,0 s Depende del
0,0-400,0 Hz 0,0 Hz Introduzca el límite mínimo para la velocidad baja.
0,0-400,0 Hz 100,0 Hz Introduzca el límite máximo para la velocidad alta.
0,0-400,0 Hz 100,0 Hz Introducir el valor máximo de frecuencia de salida. Si el
[0] Desactivado
[1] Activado
0,05-1,00 s 0,10 s
[0] Detección de
rotor
[0] Desactivado Seleccione [1] Activado para que el convertidor de
tamaño.
tamaño.
[0] O
Uso
Seleccione el modo de arranque del motor PM.
2 2
frecuencia pueda atrapar un motor en giro.
Tiempo de aceleración desde 0 hasta el
parámetro 1-23 Frecuencia motor nominal.
Tiempo de deceleración desde el
parámetro 1-23 Frecuencia motor nominal a 0.
parámetro 4-19 Frecuencia salida máx. se ajusta más bajo
que el parámetro 4-14 Límite alto veloc. motor [Hz], el
parámetro 4-14 Límite alto veloc. motor [Hz] se ajustará
automáticamente igual que el parámetro 4-19 Frecuencia
salida máx..
–
–
Tabla 2.6 Ajustes del asistente de conguración del motor
Cambios realizados
En la función de cambios realizados se enumeran todos los
parámetros modicados desde los ajustes predeterminados.
La lista muestra únicamente los parámetros que
•
se han cambiado en el ajuste de edición actual.
No se indican los parámetros que se han
•
restablecido a los valores predeterminados.
El mensaje Vacío indica que no se ha cambiado
•
ningún parámetro.
Cambio de los ajustes de parámetros
1. Para entrar en Quick Menu (Menú rápido), pulse
la tecla [Menu] hasta que el indicador de la
pantalla se coloque encima de Quick Menu.
2.
Pulse [▲] [▼] para seleccionar el asistente, el
ajuste de lazo cerrado, los ajustes de motor o los
cambios realizados.
3. Pulse [OK].
4.
Pulse [▲] [▼] para desplazarse por los parámetros
del Menú rápido.
5. Pulse [OK] para seleccionar un parámetro.
6.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
7. Pulse [OK] para aceptar el cambio.
8. Pulse [Back] dos veces para entrar en Estado, o
bien pulse [Menu] una vez para entrar en el
Menú principal.
El menú principal proporciona acceso a todos los
parámetros
1. Pulse la tecla [Menu] hasta que el indicador de la
pantalla se coloque sobre Menú principal.
2.
Pulse [▲] [▼] para desplazarse por los grupos de
parámetros.
3. Pulse [OK] para seleccionar un grupo de
parámetros.
4.
Pulse [▲] [▼] para desplazarse por los parámetros
de ese grupo en concreto.
5. Pulse [OK] para seleccionar el parámetro.
6.
Pulse [▲] [▼] para ajustar/cambiar el valor del
parámetro.
7. Pulse [OK] para aceptar el cambio.
2.3.3 Menú principal
Pulse [Menu] para acceder al menú principal y programar
todos los parámetros. Se puede acceder cómodamente a
los parámetros del menú principal, salvo que se haya
creado una contraseña mediante el
parámetro 0-60 Contraseña menú principal.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 25

Programación
VLT® HVAC Basic Drive FC 101
Para la mayoría de aplicaciones, no es necesario acceder a
los parámetros del menú principal. El menú rápido
proporciona el acceso más rápido y sencillo a los
22
parámetros más habituales.
2.4 Transferencia rápida de ajustes de
parámetros entre varios convertidores
de frecuencia
Una vez
convertidor de frecuencia, almacene los datos en el LCP o
en un PC mediante el Software de conguración MCT 10.
Transferencia de datos del convertidor de frecuencia al
LCP
Conecte el LCP a otro convertidor de frecuencia y copie los
ajustes de parámetros en dicho convertidor.
Transferencia de datos del LCP al convertidor de
frecuencia
2.5
Seleccione el parámetro, pulse [OK] y pulse [▲] / [▼] para
desplazarse por los valores indexados. Para cambiar el
valor del parámetro, seleccione el valor indexado y pulse
[OK]. Para cambiar el valor, pulse [▲] / [▼]. Pulse [OK] para
aceptar el nuevo ajuste. Pulse [Cancel] (Cancelar) para
cancelar. Pulse [Back] para salir del parámetro.
2.6
Existen dos modos de inicializar el convertidor de
frecuencia a los ajustes predeterminados.
Inicialización recomendada
nalizado el proceso de conguración de un
1. Vaya al parámetro 0-50 Copia con LCP.
2. Pulse [OK].
3. Seleccione [1] Trans. LCP tod. par.
4. Pulse [OK].
1. Vaya al parámetro 0-50 Copia con LCP.
2. Pulse [OK].
3. Seleccione [2] Tr d LCP tod. par.
4. Pulse [OK].
Lectura de datos y programación de
parámetros indexados
Inicialización a los ajustes
predeterminados
1. Seleccione parámetro 14-22 Modo funcionamiento.
2. Pulse [OK].
3. Seleccione [2] Inicialización y pulse [OK].
4. Desconecte el convertidor de frecuencia y espere
a que se apague la pantalla.
5. Vuelva a conectar la fuente de alimentación de
red. El convertidor de frecuencia ya está
reiniciado, salvo los siguientes parámetros:
Inicialización con dos dedos:
La otra forma de inicializar el convertidor de frecuencia a
los ajustes predeterminados es mediante la inicialización
con dos dedos:
1. Desconecte la alimentación del convertidor de
frecuencia.
2. Pulse [OK] y [Menu].
3. Conecte la alimentación del convertidor de
frecuencia mientras sigue presionando las teclas
durante 10 s.
4. El convertidor de frecuencia ya está reiniciado,
salvo los siguientes parámetros:
Parámetro 1-06 En sentido horario
•
Parámetro 8-30 Protocolo
•
Parámetro 8-31 Dirección
•
Parámetro 8-32 Velocidad en baudios
•
Parámetro 8-33 Paridad / Bits de parada
•
Parámetro 8-35 Retardo respuesta mín.
•
Parámetro 8-36 Retardo respuesta máx.
•
Parámetro 8-37 Retardo máximo
•
intercarac.
Parámetro 8-70 Instancia BACnet
•
Parámetro 8-72 Máx. maest. MS/TP
•
Parámetro 8-73 Máx. tramas info MS/TP
•
Parámetro 8-74 "Startup I am"
•
Parámetro 8-75 Contraseña inicializac.
•
Parámetro 15-00 Horas de funcionamiento
•
a parámetro 15-05 Sobretensión
Parámetro 15-03 Arranques
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión
•
Parámetro 15-30 Reg. alarma: código de
•
fallo
Grupo de parámetros 15-4* Id. dispositivo
•
Parámetro 18-10 Registro modo incendio:
•
Evento
Parámetro 1-06 En sentido horario
•
Parámetro 15-00 Horas de funcionamiento
•
Parámetro 15-03 Arranques
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión
•
Grupo de parámetros 15-4* Id. dispositivo
•
Parámetro 18-10 Registro modo incendio:
•
Evento
26 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Programación Guía de programación
La inicialización de los parámetros se conrma con la
visualización en la pantalla de la alarma 80: Equ. inicializado
tras el ciclo de potencia.
2 2
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 27
Parámetros
3 Parámetros
VLT® HVAC Basic Drive FC 101
El * en los números de parámetros indica un grupo o
subgrupo de parámetros en el cual los primeros uno o dos
33
números son iguales. Por ejemplo, 0-** indica el grupo de
parámetros donde todos comienzan por 0. 0-0* indica el
subgrupo de parámetros que comparte los primeros dos
números, es decir, 0-0.
Un asterisco (*) tras un número de opción indica que se
trata de la opción predeterminada. Por ejemplo, [0]* Inglés
es la opción predeterminada para parámetro 0-01 Idioma.
3.1 Menú principal - Funcionamiento y
pantalla - Grupo 0
Parámetros relacionados con las funciones fundamentales
del convertidor de frecuencia, el funcionamiento de las
teclas del LCP y la conguración de su pantalla.
3.1.1 0-0* Ajustes básicos
0-01 Idioma
Option: Función:
Dene el idioma que se usará en la pantalla.
[0] * Inglés
[1] Alemán
[2] Francés
[3] Danés
[4] Español
[5] Italiano
[28] Portugués
[255] Sin text
0-03 Ajustes regionales
Option: Función:
0-04 Estado operación en arranque
Option: Función:
Seleccionar el modo de funcionamiento al
volver a conectar el convertidor de frecuencia a
la tensión de red cuando funciona en modo
manual (local).
[0]*Auto-
-arranque
[1] Par. forz.,
ref. guard
Vuelve a arrancar el convertidor de frecuencia
manteniendo la misma referencia local y las
mismas condiciones de arranque/parada que
tenía el convertidor al apagarlo (aplicadas por
[Hand On] / [O] en el LCP o en el arranque
local a través de una entrada digital).
Utiliza la referencia guardada [1] para detener
el convertidor de frecuencia, pero mantiene al
mismo tiempo en memoria la referencia local
de velocidad previa a la parada. Después de
volver a conectar la tensión de red y de recibir
una orden de arranque (pulsando la tecla
[Hand On] o mediante una orden de arranque
local desde una entrada digital), el convertidor
de frecuencia vuelve a arrancar y funciona a la
velocidad de referencia guardada.
0-06 Tipo red
Option: Función:
Seleccione el tipo de red de
la frecuencia / tensión de
alimentación.
AVISO!
No todas las opciones
son compatibles con
todas las magnitudes de
potencia.
AVISO!
Este parámetro no se puede ajustar
con el motor en marcha.
A n de satisfacer la necesidad de contar con
diferentes ajustes predeterminados en
diferentes partes del mundo, se ha incluido
en el convertidor de frecuencia el
parámetro 0-03 Ajustes regionales. La
ración seleccionada inuye en el ajuste
predeterminado de la frecuencia nominal del
motor.
[0]*Internacional Ajusta el valor predeterminado del
parámetro 1-23 Frecuencia motor a 50 Hz.
[1] Norteamérica Ajusta el valor predeterminado de
parámetro 1-23 Frecuencia motor a 60 Hz.
congu-
[0] 200-240 V / 50 Hz / red IT
[1] 200-240 V / 50 Hz / triáng.
[2] 200-240 V / 50 Hz
[10] 380-440 V / 50 Hz / red IT
[11] 380-440 V / 50 Hz / triángulo
[12] 380-440 V / 50 Hz
La red IT es una red de
alimentación en la que no
hay conexiones a tierra.
Delta es una red de alimentación en la que la parte
secundaria del
transformador está
conectada en triángulo y
una fase está conectada a
tierra.
28 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
0-06 Tipo red
Option: Función:
[20] 440-480 V / 50 Hz / red IT
[21] 440-480 V / 50 Hz / triángulo
[22] 440-480 V / 50 Hz
[30] 525-600 V / 50 Hz / red IT
[31] 525-600 V / 50 Hz / triángulo
[32] 525-600 V / 50 Hz
[100] 200-240 V / 60 Hz / red IT
[101] 200-240 V / 60 Hz / triángulo
[102] 200-240 V / 60 Hz
[110] 380-440 V / 60 Hz / red IT
[111] 380-440 V / 60 Hz / triángulo
[112] 380-440 V / 60 Hz
[120] 440-480 V / 60 Hz / red IT
[121] 440-480 V / 60 Hz / triángulo
[122] 440-480 V / 60 Hz
[130] 525-600 V / 60 Hz / red IT
[131] 525-600 V / 60 Hz / triángulo
[132] 525-600 V / 60 Hz
0-07 Frenado de CC aut. IT
Option: Función:
Función protectora contra la sobretensión en inercia.
AVISO!
Puede provocar PWM cuando está en inercia.
[0] O Esta función no está activa.
[1] * act La función está activa.
3.1.2 0-1* Operac. de ajuste
El conjunto completo de parámetros que controlan el
convertidor de frecuencia se conoce como un ajuste. El
convertidor de frecuencia contiene 2 ajustes: ajuste 1 y
ajuste 2. Además, puede copiarse un conjunto jo de
ajustes de fábrica a uno o ambos ajustes.
Algunas de las ventajas de tener más de un ajuste activo
en el convertidor de frecuencia son:
Utilizar el motor en un ajuste (ajuste activo),
•
mientras actualiza los parámetros en otro ajuste
(editar ajuste).
Conectar los dos motores (uno cada vez) al
•
convertidor de frecuencia. Los datos de motor de
ambos motores pueden colocarse en los dos
ajustes.
Cambiar rápidamente la conguración del
•
convertidor de frecuencia y/o del motor mientras
éste último está en marcha. Por ejemplo, tiempo
de rampa o referencias internas mediante bus o
entradas digitales.
El ajuste activo puede ajustarse como ajuste múltiple,
donde el ajuste activo se selecciona mediante una entrada
digital a través de un terminal o a través del código de
control del bus.
Para copiar el ajuste 1 sobre el ajuste 2 o viceversa, utilice
el parámetro 0-51 Copia de ajuste. Para evitar congura-
ciones contradictorias del mismo parámetro en dos ajustes
diferentes, enlace los ajustes entre sí utilizando el
parámetro 0-12 Ajuste enlaces. Detenga el convertidor de
frecuencia antes de cambiar entre ajustes en los que los
parámetros marcados como no modicables durante el
funcionamiento tengan valores diferentes.
Los parámetros no modicables durante el funcionamiento
están marcados como falsos en el capétulo 5 Listas de
parámetros.
0-10 Ajuste activo
Option: Función:
Seleccione el ajuste en el que funciona el
convertidor de frecuencia.
[1] * Ajuste
activo 1
[2] Ajuste
activo 2
[9] Ajuste
activo
El ajuste 1 está activo.
El ajuste 2 está activo.
Se utiliza para la selección remota de ajustes
utilizando las entradas digitales y el puerto de
comunicación serie. Este ajuste utiliza los
ajustes del parámetro 0-12 Ajuste enlaces.
0-11 Ajuste de programación
Option: Función:
El número del ajuste que se está editando
se muestra, parpadeando, en el LCP.
[1] Ajuste activo1Editar el ajuste 1.
[2] Ajuste activo2Editar el ajuste 2.
[9] * Ajuste activo Edita los parámetros del ajuste seleccionado
a través de las E/S digitales.
0-12 Ajuste enlaces
Option: Función:
Si los ajustes no están relacionados, no será
posible cambiar de uno a otro con el motor
en marcha.
[0] Sin
relacionar
[20] * Enlazado Copia de un ajuste a otro parámetros no
Al seleccionar un ajuste de funcionamiento
diferente, el cambio de ajuste no se produce
hasta que el motor se queda en inercia.
modicables durante el funcionamiento. Es
posible cambiar de ajustes con el motor en
marcha.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 29

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parámetros
VLT® HVAC Basic Drive FC 101
3.1.3 0-3* Lectura LCP
Es posible personalizar los elementos de la pantalla con
diversos nes.
33
Lectura personalizada
El valor calculado que se mostrará se basa en los ajustes
del parámetro 0-30 Unidad de lectura personalizada, el
parámetro 0-31 Valor mínimo de lectura personalizada (solo
lineal), el parámetro 0-32 Valor máximo de lectura persona-
lizada, el parámetro 4-14 Límite alto veloc. motor [Hz] y en la
velocidad real.
Ilustración 3.1 Lectura personalizada
La relación depende del tipo de unidad seleccionada en
parámetro 0-30 Unidad de lectura personalizada:
Tipo de unidad Relación de velocidad
Sin dimensión
Velocidad
Caudal, volumen
Caudal, masa
Velocidad
Longitud
Temperatura
Presión Cuadrática
Potencia Cúbica
Tabla 3.1 Relación de velocidad
0-30 Unidad de lectura personalizada
Option: Función:
30 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Programar un valor para ser mostrado en
la pantalla del LCP. El valor tiene una
relación lineal, cuadrática o cúbica con la
velocidad. Esta relación depende de la
unidad seleccionada (consulte la Tabla 3.1).
El valor real calculado puede leerse en el
parámetro 16-09 Lectura personalizada.
Lineal
0-30 Unidad de lectura personalizada
Option: Función:
[0] Ning.
[1] * %
[5] PPM
[10] l/min
[11] r/min
[12] PULSO/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Grados Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m Wg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft3/h
[140] pies/s
[141] ft/m
[160] Grados Fahr
[170] psi
[171] libras/pulg.²
[172] in wg
[173] pies WG
[180] CV
0-31 Valor mínimo de lectura personalizada
Range: Función:
0 CustomReadoutUnit*
[ 0 -
999999.99
CustomReadoutUnit]
Este parámetro establece el valor
mínimo de la lectura de datos
denida por el usuario (se
produce a velocidad cero). Solo
es posible ajustar un valor
diferente de 0 cuando se
selecciona una unidad lineal en
el parámetro 0-30 Unidad de

Parámetros Guía de programación
0-31 Valor mínimo de lectura personalizada
Range: Función:
lectura personalizada. Para
unidades cuadráticas o cúbicas,
el valor mínimo es 0.
0-32 Valor máximo de lectura personalizada
Range: Función:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Este parámetro establece el
valor máximo que se mostrará
cuando la velocidad del motor
haya alcanzado el valor
ajustado para el
parámetro 4-14 Límite alto
veloc. motor [Hz].
0-37 Texto display 1
Range: Función:
[0 - 0 ] Utilice este parámetro para escribir una cadena de
texto individual para ser leída a través de la
comunicación serie. Puede incluirse la ID del
dispositivo.
Solo se utiliza cuando funciona BACnet.
0-38 Texto display 2
Range: Función:
[0 - 0 ] Utilice este parámetro para escribir una cadena de
texto individual para ser leída a través de la
comunicación serie.
Solo se utiliza cuando funciona BACnet.
0-39 Texto display 3
Range: Función:
[0 - 0 ] Utilice este parámetro para escribir una cadena de
texto individual para ser leída a través de la
comunicación serie.
Solo se utiliza cuando funciona BACnet.
3.1.4 0-4* LCP (LCP)
Activar, desactivar y proteger con contraseña teclas individuales del LCP.
0-40 Botón (Hand on) en LCP
Option: Función:
[0] Desact todo Para evitar el arranque accidental del
convertidor de frecuencia en modo manual,
seleccione [0] Desact todo.
[1] * Act. todo [Hand On] está activado.
0-42 [Auto activ.] llave en LCP
Option: Función:
[0] Desact todo Para evitar el arranque accidental del
convertidor de frecuencia desde el LCP,
seleccione [0] Desact todo.
[1] * Act. todo [Auto On] está activado.
0-44 Tecla [O/Reset] en LCP
Option: Función:
[0] Desact todo Desactivar la tecla o/reset.
[1] * Act. todo Activar las funciones de o y reset.
[7] Act reinicio
solo
Activar la función de reset y desactivar la
función de desconexión para evitar una
parada accidental del convertidor de
frecuencia.
3.1.5 0-5* Copiar/Guardar
Copie ajustes de parámetros entre conguraciones y
desde / hasta el LCP.
0-50 Copia con LCP
Option: Función:
[0] * No copiar
[1] Trans. LCP
tod. par.
[2] Tr d LCP
tod. par.
[3] Tr d LCP par
ind tam
[10] Delete LCP
copy data
0-51 Copia de ajuste
Option: Función:
[0] * No copiar Sin función.
[1] Copiar al
ajuste 1
[2] Copiar al
ajuste 2
Copia todos los parámetros de todos los
ajustes desde la memoria del convertidor de
frecuencia a la memoria del LCP. Para facilitar
el mantenimiento, es recomendable copiar
todos los parámetros en el LCP después de la
puesta en servicio.
Copia todos los parámetros de todos los
ajustes desde la memoria del LCP hasta la
memoria del convertidor de frecuencia.
Copia solo los parámetros que sean independientes del tamaño del motor. La última
selección puede utilizarse para programar
varios convertidores de frecuencia con la
misma función sin perturbar los datos del
motor que ya se han ajustado.
Borrar los parámetros copiados en el LCP. Esta
función requiere la versión V11.00. del LCP o
una versión superior.
Copia del ajuste 1 en el ajuste 2.
Copia del ajuste 2 en el ajuste 1.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 31

Parámetros
VLT® HVAC Basic Drive FC 101
0-51 Copia de ajuste
Option: Función:
[9] Copiar a todos Copiar los ajustes de fábrica en el ajuste de
programación (seleccionado en el
parámetro 0-11 Ajuste de programación).
33
3.1.6 0-6* Contraseña
0-60 Contraseña menú principal
Range: Función:
0* [0 - 999 ] Denir la contraseña para acceder al Menú
principal con la tecla [Main Menu]. Si se ajusta el
valor a 0, se desactiva la función de contraseña.
Este parámetro se ocultará al denir una
contraseña.
0-61 Acceso a menú princ. sin contraseña
Option: Función:
[0] * Acceso total Desactiva la contraseña denida en el
parámetro 0-60 Contraseña menú principal.
[1] LCP: Sólo
lectura
[2] LCP: Sin
acceso
[3] Bus: sólo
lectura
[5] Todo: sólo
lectura
Evite la modicación no autorizada de los
parámetros del Menú principal.
Evite la visualización y modicación no
autorizadas de los parámetros del Menú
principal.
32 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.2 Menú principal - Carga y motor - Grupo
1
Parámetros relacionados con las compensaciones de carga
de la placa de características del motor y tipo de carga de
aplicación.
3.2.1 1-0* Ajustes generales
1-00 Modo Conguración
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
[0]*Veloc.
lazo
abierto
[3] Lazo
cerrado
1-01 Principio control motor
Option: Función:
[0] U/f
[1] * VVC+
La velocidad del motor se determina aplicando
una velocidad de referencia o ajustando la
velocidad deseada en el modo manual.
El modo de lazo abierto también se utiliza si el
convertidor de frecuencia forma parte de un
sistema de control de lazo cerrado basado en un
controlador PI externo que proporciona una señal
de velocidad de referencia como salida.
AVISO!
Cuando se conguran para Lazo cerrado,
las órdenes Cambio de sentido y Arranque
e inversión no invierten el sentido de giro
del motor.
Un referencia desde el controlador PI integrado
determina la velocidad del motor. El controlador
PI integrado varía la velocidad del motor, como
parte de un proceso de control de lazo cerrado
(p. ej., presión o caudal constantes). El
controlador PI debe congurarse en el grupo de
parámetros 20-** Convertidor de lazo cerrado.
AVISO!
Al llevar a cabo el control U/f no se incluyen
las compensaciones de carga y deslizamiento.
Se utiliza con motores conectados en paralelo y/o
aplicaciones de motor especiales. Ajuste la
ración U/f en el parámetro 1-55 Característica u/f - U
y el parámetro 1-56 Característica u/f - F.
congu-
AVISO!
Cuando se ajuste el
parámetro 1-10 Construcción del motor a
opciones de PM activado, solo estará
disponible la opción VVC+.
1-01 Principio control motor
Option: Función:
Modo de funcionamiento normal, con las compensaciones de deslizamiento y carga.
1-03 Características de par
Option: Función:
[1] * Par
variable
[3] Optim.
auto.
energía
VT
Para el control de velocidad de bombas
centrífugas y ventiladores. También se utiliza
para controlar más de un motor desde el
mismo convertidor de frecuencia (por ejemplo,
varios ventiladores de condensador o varios
ventiladores de torre de refrigeración).
Proporciona una tensión optimizada para una
característica de carga de par cuadrático del
motor.
Para garantizar un control de velocidad de alto
rendimiento energético en bombas centrífugas
y ventiladores, proporciona una tensión
optimizada para una característica de carga de
par cuadrático del motor. Además, la función
AEO adapta la tensión exactamente a la
situación de carga actual, para reducir así el
consumo energético y el ruido audible del
motor.
1-06 Clockwise Direction
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
Este parámetro dene el término en sentido horario
correspondiente a la
utiliza para cambiar de forma sencilla el sentido de
la rotación del eje sin intercambiar los cables del
motor.
[0] * Normal El eje del motor gira en sentido horario cuando el
convertidor de frecuencia está conectado U⇒U;
V⇒V; y W⇒W al motor.
[1] Inverse El eje del motor gira en sentido antihorario cuando
el convertidor de frecuencia está conectado U⇒U;
V⇒V; y W⇒W al motor.
1-08 Motor Control Bandwidth
Option: Función:
[0] Alto Adecuado para una respuesta muy dinámica.
[1] * Medio Adecuado para un correcto funcionamiento en
estado estable.
[2] Bajo Adecuado para un correcto funcionamiento en
estado estable con una respuesta dinámica
mínima.
echa de sentido del LCP. Se
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 33

Parámetros
VLT® HVAC Basic Drive FC 101
1-08 Motor Control Bandwidth
Option: Función:
[3] Adaptat. 1 Adecuado para un correcto funcionamiento en
estado estable con amortiguación activa
adicional.
33
[4] Adaptat. 2 Consiste en una alternativa a [3] Adaptat. 1
orientada a motores PM de baja inductancia.
3.2.2 De 1-10 a 1-13 Selección de motor
AVISO!
Este grupo de parámetros no se puede ajustar con el
motor en marcha.
Los siguientes parámetros están activos («x») en función
del ajuste de parámetro 1-10 Construcción del motor.
[1] PM,
Parámetro 1-10 Construcción del
motor
Parámetro 1-00 Modo Congu-
ración
Parámetro 1-03 Características de
par
Parámetro 1-06 En sentido horario x x x
Parámetro 1-08 Motor Control
Bandwidth
Parámetro 1-14 Factor de
ganancia de amortiguación
Parámetro 1-15 Const. tiempo
ltro a baja velocidad
Parámetro 1-16 Const. tiempo
ltro a alta velocidad
Parámetro 1-17 Const. de tiempo
del ltro de tensión
Parámetro 1-20 Potencia motor
[kW]
Parámetro 1-22 Tensión motor x
Parámetro 1-23 Frecuencia motor x
Parámetro 1-24 Intensidad motor x x x
Parámetro 1-25 Veloc. nominal
motor
Parámetro 1-26 Par nominal
continuo
Parámetro 1-29 Adaptación
automática del motor (AMA)
Parámetro 1-30 Resistencia estator
(Rs)
Parámetro 1-33 Reactancia fuga
estátor (X1)
Parámetro 1-35 Reactancia princ.
(Xh)
[0]
Asynchron
saliente
x x x
x
x x x
x x
x x
x x
x x
x
x x x
x x
x x x
x x x
x
x
no
SPM
[3] PM,
salient
IPM,
Sat.
Parámetro 1-10 Construcción del
motor
Parámetro 1-37 Inductancia eje d
(Ld)
Parámetro 1-38 Inductancia eje q
(Lq)
Parámetro 1-39 Polos motor x x x
Parámetro 1-40 fcem a 1000 RPM x x
Parámetro 1-42 Longitud del cable
del motor
Parámetro 1-43 Long. cable motor
(ft)
Parámetro 1-44 Saturac. inductanc.
eje d (LdSat)
Parámetro 1-45 Sat. inductanc. eje
q (LqSat)
Parámetro 1-46 Ganancia de
detecc. de posición
Parámetro 1-48 Intensidad Min
Inductance para d-axis
Parámetro 1-49 Corriente en
inductancia mín.
Parámetro 1-50 Magnet. motor a
veloc. cero
Parámetro 1-52 Magnetización
normal veloc. mín. [Hz]
Parámetro 1-55 Característica u/f U
Parámetro 1-56 Característica u/f F
Parámetro 1-62 Compensación
deslizam.
Parámetro 1-63 Tiempo compens.
deslizam. constante
Parámetro 1-64 Amortiguación de
resonancia
Parámetro 1-65 Const. tiempo
amortigua. de resonancia
Parámetro 1-66 Intens. mín. a baja
veloc.
Parámetro 1-70 Modo de inicio x x
Parámetro 1-71 Retardo arr. x x x
parámetro 1-72 Función de
arranque
Parámetro 1-73 Motor en giro x x x
Parámetro 1-80 Función de parada x x x
Parámetro 1-90 Protección térmica
motor
parámetro 2-00 CC mantenida x x x
Parámetro 2-01 Intens. freno CC x x x
Parámetro 2-02 Tiempo de frenado
CC
[0]
Asynchron
[1] PM,
saliente
x x
x
x x x
x x x
x
x
x x
x
x
x
x
x
x
x
x
x
x
x x
x x x
x x x
x x x
no
SPM
[3] PM,
salient
IPM,
Sat.
34 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
[1] PM,
Parámetro 1-10 Construcción del
motor
Parámetro 2-04 Velocidad de
conexión del freno CC [Hz]
Parámetro 2-06 Intensidad estacionamiento
Parámetro 2-07 Tiempo estacionamiento
Parámetro 2-10 Función de freno x x x
Parámetro 2-16 Intensidad máx. de
frenado de CA
Parámetro 2-17 Control de
sobretensión
Parámetro 4-10 Dirección veloc.
motor
Parámetro 4-14 Límite alto veloc.
motor [Hz]
Parámetro 4-18 Límite intensidad x x x
Parámetro 4-19 Frecuencia salida
máx.
Parámetro 4-58 Función Fallo Fase
Motor
Parámetro 14-01 Frecuencia
conmutación
Parámetro 14-03 Sobremodulación x x x
Parámetro 14-07 Nivel comp.
tiempo muerto
Parámetro 14-08 Factor de
ganancia de amortiguación
Parámetro 14-09 Dead Time Bias
Current Level
Parámetro 14-10 Fallo aliment. x x x
Parámetro 14-11 Tensión de red en
fallo de red
Parámetro 14-12 Función desequil.
alimentación
Parámetro 14-27 Acción en fallo
del inversor
Parámetro 14-40 Nivel VT x x x
Parámetro 14-41 Mínima magnetización AEO
Parámetro 14-44 Intens. optimización d-axis para IPM
Parámetro 14-50 Filtro RFI x
Parámetro 14-51 Comp. del enlace
de CC
Parámetro 14-55 Filtro de salida x x x
Parámetro 14-64 Dead Time
Compensation Zero Current Lev
Parámetro 14-65 Comp. tiempo
muerto reduc. potencia
Parámetro 30-22 Protecc. rotor
bloqueado
[0]
Asynchron
saliente
x x x
x x
x x
x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x
no
SPM
[3] PM,
salient
IPM,
Sat.
Parámetro 1-10 Construcción del
motor
Parámetro 30-23 Tiempo detecc.
rotor bloqueado [s]
Tabla 3.2 Parámetros activos
[1] PM,
[0]
Asynchron
saliente
x x
no
SPM
[3] PM,
salient
IPM,
Sat.
1-10 Construcción del motor
Option: Función:
[0] * Asynchron Para motores asíncronos.
[1] PM, no
saliente SPM
[3] PM, salient
IPM, Sat.
3.2.3
De 1-14 a 1-17 VVC+ PM
Para los motores de magnetización
permanente (PM) con los polos montados
en supercie (no salientes). Consulte los
parámetros del parámetro 1-14 Damping
Gain al parámetro 1-17 Voltage lter time
const. para conocer los detalles sobre la
optimización del funcionamiento del motor.
Para los motores de magnetización
permanente (PM) con polos interiores
(salientes), con control de saturación de la
inductancia.
Los parámetros de control predeterminados para el control
de motor PM VVC+ están optimizados para aplicaciones y
para cargas de inercia en el intervalo 50>Jl/Jm>5. JI es la
carga de inercia de la aplicación y Jm es la inercia de la
máquina.
Para aplicaciones con un nivel de inercia bajo (Jl/Jm<5), se
recomienda que el parámetro 1-17 Const. de tiempo del
ltro de tensión se aumente con un factor de 5-10. En
algunos casos, el parámetro 14-08 Factor de ganancia de
amortiguación debe reducirse también a n de mejorar el
rendimiento y la estabilidad.
Para aplicaciones con un nivel de inercia alto (Jl/Jm >50),
aumenta el parámetro 1-15 Const. tiempo ltro a baja
velocidad y el parámetro 1-16 Const. tiempo ltro a alta
velocidad a n de mejorar el rendimiento y la estabilidad.
Con una carga alta a baja velocidad (<30 % de la velocidad
nominal), se recomienda aumentar el parámetro 1-17 Const.
de tiempo del ltro de tensión dada la no linealidad del
inversor a baja velocidad.
1-14 Factor de ganancia de amortiguación
Range: Función:
120 %* [0 -
250 %]
Este parámetro estabiliza el motor PM para
garantizar un funcionamiento suave y estable. El
valor de la ganancia de amortiguación controla
el rendimiento dinámico del motor PM. Una
ganancia de amortiguación baja provoca un
rendimiento dinámico elevado y un valor alto
causa un rendimiento dinámico bajo. El
rendimiento dinámico depende de los datos del
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 35

Parámetros
VLT® HVAC Basic Drive FC 101
1-14 Factor de ganancia de amortiguación
Range: Función:
motor y del tipo de carga. Si la ganancia de
amortiguación es demasiado alta o demasiado
baja, el control será inestable.
33
1-15 Const. tiempo ltro a baja velocidad
Range: Función:
Size
related*
[0.01 20 s]
La constante de tiempo de ganancia de
amortiguación del ltro determina el
tiempo de respuesta en la carga.
Obtendrá un control rápido mediante
una constante de tiempo de amortiguación breve. Sin embargo, si este valor
es demasiado escaso, el control se
volverá inestable. Esta constante de
tiempo se aplica por debajo del 10 % de
la velocidad nominal.
1-16 Const. tiempo ltro a alta velocidad
Range: Función:
Size
related*
[0.01 20 s]
La constante de tiempo de ganancia de
amortiguación del ltro determina el
tiempo de respuesta en la carga.
Obtendrá un control rápido mediante
una constante de tiempo de amortiguación breve. Sin embargo, si este valor
es demasiado escaso, el control se
volverá inestable. Esta constante de
tiempo se aplica por encima del 10 % de
la velocidad nominal.
1-17 Const. de tiempo del ltro de tensión
Range: Función:
Size
related*
[0.001 - 1s]La constante del tiempo de ltro de
tensión de alimentación se utiliza para
reducir la inuencia de las ondulaciones
de frecuencia y resonancias del sistema
a la hora de calcular la tensión de
alimentación de la máquina. Sin este
ltro, las ondulaciones en la corriente
podrían distorsionar la tensión
calculada y afectar la estabilidad del
sistema.
AVISO!
Cambiar el valor de estos parámetros afecta a los ajustes
de otros parámetros.
1-20 Potencia motor [kW]
Introduzca la potencia nominal del motor en kW/CV conforme a
los datos de la placa de características del mismo. El valor
predeterminado se corresponde con la salida nominal de la
unidad.
Este parámetro no se puede ajustar con el motor en marcha.
Option: Función:
[2] 0,12 kW - 0,16 CV
[3] 0,18 kW - 0,25 CV
[4] 0,25 kW - 0,33 CV
[5] 0,37 kW - 0,50 CV
[6] 0,55 kW - 0,75 CV
[7] 0,75 kW - 1,00 CV
[8] 1,10 kW - 1,50 CV
[9] 1,50 kW - 2,00 CV
[10] 2,20 kW - 3,00 CV
[11] 3,00 kW - 4,00 CV
[12] 3,70 kW - 5,00 CV
[13] 4,00 kW - 5,40 CV
[14] 5,50 kW - 7,50 CV
[15] 7,50 kW - 10,0 CV
[16] 11,00 kW - 15,00 CV
[17] 15,00 kW - 20 CV
[18] 18,5 kW - 25 CV
[19] 22 kW - 30 CV
[20] 30 kW - 40 CV
[21] 37 kW - 50 CV
[22] 45 kW - 60 CV
[23] 55 kW - 75 CV
[24] 75 kW - 100 CV
[25] 90 kW - 120 CV
[26] 110 kW - 150 CV
1-22 Tensión motor
Range: Función:
Size
related*
[50 1000 V]
Introduzca la tensión del motor nominal
conforme a los datos de la placa de
características del mismo. El valor
predeterminado se corresponde con la
salida nominal de la unidad.
3.2.4 1-2* Motor Data I
El grupo de parámetros comprende los datos de entrada
de la placa de características del motor conectado.
AVISO!
Estos parámetros no se pueden ajustar con el motor en
marcha.
36 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
1-23 Frecuencia motor
Range: Función:
Size
related*
[20 -
Seleccione el valor de frecuencia del motor
400
según los datos de la placa de características
Hz]
del mismo. Para el funcionamiento a 87 Hz con
motores de 230/400 V, ajuste los datos de la
placa de características para 230 V/50 Hz.
Adapte el parámetro 4-14 Límite alto veloc.

Parámetros Guía de programación
1-23 Frecuencia motor
Range: Función:
motor [Hz] y el parámetro 3-03 Referencia
máxima a la aplicación de 87 Hz.
1-24 Intensidad motor
Range: Función:
Size
related*
1-25 Veloc. nominal motor
Range: Función:
Size
related*
1-26 Par nominal continuo
Range: Función:
Size
related*
1-29 Adaptación automática del motor (AMA)
Option: Función:
[ 0.01 -
1000.00 A]
[50 60000 RPM]
[0.1 10000
Nm]
Introduzca el valor de la corriente
nominal del motor según los datos de
la placa de características del mismo.
Los datos se utilizan para calcular el
par motor, la protección térmica del
motor, etc.
Introduzca el valor de la velocidad
nominal del motor según los datos de
la placa de características del mismo.
Estos datos se utilizan para calcular las
compensaciones automáticas del
motor.
AVISO!
El cambio de este parámetro afecta
al valor de otros parámetros.
Este parámetro está disponible cuando
parámetro 1-10 Construcción del motor se
ajusta a opciones que activan el modo de
motor permanente.
AVISO!
Este parámetro no se puede ajustar con
el motor en marcha.
La función de AMA optimiza el rendimiento
dinámico del motor optimizando automáticamente sus parámetros avanzados con el
motor parado.
[0]*O Sin función
[1] Act. AMA
completo
Cuando el parámetro 1-10 Construcción del
motor se ajusta en [0] Asynchron, se efectúa un
AMA del parámetro 1-30 Resistencia estator (Rs),
el parámetro 1-33 Reactancia fuga estátor (X1) y
el parámetro 1-35 Reactancia princ. (Xh).
Cuando el parámetro 1-10 Construcción del
motor se ajusta en opciones que activan los
1-29 Adaptación automática del motor (AMA)
Option: Función:
motores permanentes, se efectúa un AMA del
parámetro 1-30 Resistencia estator (Rs) y el
parámetro 1-37 Inductancia eje d (Ld).
AVISO!
Terminal 27 Entrada digital
(parámetro 5-12 Terminal 27 Entrada
digital) tiene inercia inversa como ajuste
predeterminado. Esto signica que el
AMA no puede efectuarse si no hay 24 V
en el terminal 27.
[2] Act. AMA
reducido
Realiza un AMA reducido de la resistencia del
estátor Rs únicamente en el sistema. Seleccione
esta opción si se utiliza un ltro LC entre el
convertidor de frecuencia y el motor.
AVISO!
Cuando el parámetro 1-10 Construcción del motor se
ajusta a opciones que activan el modo de motor
permanente, la única opción disponible será [1] Act. AMA
completo.
Active la función de AMA pulsando la tecla [Hand on]
después de seleccionar [1] Act. AMA completo o [2] Act.
AMA reducido. Después de una secuencia normal, aparece
en pantalla lo siguiente: pulse [OK] para nalizar el AMA.
Después de pulsar [OK], el convertidor de frecuencia está
listo para su uso.
AVISO!
Para obtener la mejor adaptación posible del
•
convertidor de frecuencia, ejecute el AMA con el
motor en frío.
El AMA no puede realizarse mientras el motor
•
esté en funcionamiento.
El AMA no puede efectuarse en un motor con
•
una mayor potencia de salida que la del
convertidor de frecuencia, p. ej., cuando un
motor de 5,5 kW (7,4 CV) está conectado a un
convertidor de frecuencia de 4 kW (5,4 CV).
AVISO!
Evite la generación externa de par durante el AMA.
AVISO!
Si se cambia alguno de los ajustes del grupo de
parámetros 1-2* Datos de motor, los parámetros
avanzados del motor, del parámetro 1-30 Resistencia
estator (Rs) al parámetro 1-39 Polos motor, volverán a los
ajustes predeterminados.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 37

Parámetros
VLT® HVAC Basic Drive FC 101
AVISO!
El AMA completo debe ejecutarse sin ltro, mientras que
el AMA reducido debe ejecutarse con ltro.
1-38 Inductancia eje q (Lq)
Range: Función:
cambiarse mientras el motor está en
marcha.
3.2.5 1-3* Motor Data II
33
El grupo de parámetros comprende los datos de entrada
de la placa de características del motor conectado.
AVISO!
Estos parámetros no se pueden ajustar con el motor en
marcha.
1-30 Resistencia estator (Rs)
Range: Función:
Size
related*
1-33 Reactancia fuga estátor (X1)
Range: Función:
Size related* [ 0.0 - 9999.000
1-35 Reactancia princ. (Xh)
Range: Función:
Size
related*
1-37 Inductancia eje d (Ld)
Range: Función:
Size related* [ 0 - 65535
1-38 Inductancia eje q (Lq)
Range: Función:
Size
related*
[ 0.0 -
9999.000 Ohm]
Ohm]
[ 0.0 -
9999.00
Ohm]
mH]
[ 0.000 65535 mH]
Fije el valor de resistencia del
estátor. Introduzca el valor de la
hoja de datos del motor o ejecute
un AMA en un motor frío.
Dena la reactancia de fuga
del estátor del motor.
Ajuste la reactancia principal del motor
utilizando uno de los siguientes métodos:
Ejecute un AMA en un motor frío.
•
El convertidor de frecuencia mide
el valor del motor.
Introduzca manualmente el valor
•
de Xh. Consulte este valor al
proveedor del motor.
Utilice el ajuste predeterminado
•
de Xh. El convertidor de
frecuencia selecciona el ajuste
basándose en los datos de la
placa de características del motor.
Obtenga el valor de la hoja de
datos del motor de magnetización permanente.
Ajuste el valor de la inductancia del
eje q. Obtenga el valor de la hoja de
datos del motor de magnetización
permanente. Este valor no puede
1-39 Polos motor
Range: Función:
Size
related*
[2 100 ]
Introduzca el n.º de polos del motor. El
número de polos del motor debe ser
siempre un número par porque la cifra se
reere al número total de polos, no a
pares de polos.
3.2.6 1-4* Motor Data III
El grupo de parámetros comprende los datos de entrada
de la placa de características del motor conectado.
AVISO!
Estos parámetros no se pueden ajustar con el motor en
marcha.
1-40 fcem a 1000 RPM
Range: Función:
Size related* [1 - 9000 V] Tensión de fuerza contraelectro-
motriz RMS línea-línea a 1000 r/min.
1-42 Longitud del cable del motor
Range: Función:
50 m* [0 - 100 m] Ajustar la longitud del cable de motor
durante la puesta en servicio.
1-43 Long. cable motor (ft)
Range: Función:
164 ft* [0 - 328 ft] Ajustar la longitud del cable de motor
durante la puesta en servicio.
1-44 Saturac. inductanc. eje d (LdSat)
Range: Función:
Size
related*
1-45 Sat. inductanc. eje q (LqSat)
Range: Función:
Size
related*
[ 0 65535
mH]
[ 0 65535
mH]
Este parámetro corresponde a la saturación
de la inductancia de Ld. En condiciones
ideales, este parámetro tiene el mismo
valor que parámetro 1-37 Inductancia eje d
(Ld). Sin embargo, si el proveedor del motor
proporciona una curva de inducción,
introduzca aquí el valor de inducción, que
corresponde al 200 % del valor nominal.
Este parámetro corresponde a la saturación
de la inductancia de Lq. En condiciones
ideales, este parámetro tiene el mismo
38 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Parámetros Guía de programación
1-45 Sat. inductanc. eje q (LqSat)
Range: Función:
valor que parámetro 1-38 Inductancia eje q
(Lq). Sin embargo, si el proveedor del motor
proporciona una curva de inducción,
introduzca aquí el valor de inducción, que
corresponde al 200 % del valor nominal.
1-46 Ganancia de detecc. de posición
Range: Función:
100 %* [ 20 -
200 %]
Utilice este parámetro para ajustar la altura
del pulso de prueba durante la detección
de la posición en el arranque. Este
parámetro es válido desde la versión 2.80
del software.
1-48 Intensidad Min Inductance para d-axis
Range: Función:
100 %* [ 20 - 200 %] Utilice este parámetro para ajustar el
punto de saturación de la inductancia.
1-49 Corriente en inductancia mín.
Range: Función:
100%* [ 20
Este parámetro especica la curva de saturación de
-
los valores de inductancia de q. Entre el 20 % y el
200
100 % de este parámetro, las inductancias se
%]
aproximan linealmente debido al
parámetro 1-37 Inductancia eje d (Ld), el
parámetro 1-38 Inductancia eje q (Lq), el
parámetro 1-44 Saturac. inductanc. eje d (LdSat) y el
parámetro 1-45 Sat. inductanc. eje q (LqSat). Debajo
y encima se especican mediante los parámetros
correspondientes. Los parámetros están
relacionados con las compensaciones de carga de
la placa de características del motor, el tipo de
carga de la aplicación y la función de freno
electrónico para parada rápida de motor y sujeción
de la carga.
3.2.7 1-5* Aj. indep. carga
Parámetros para realizar ajustes independientes de la carga
del motor.
1-50 Magnet. motor a veloc. cero
Range: Función:
Ilustración 3.2 Magnetización del motor
1-52 Magnetización normal veloc. mín. [Hz]
Range: Función:
1 Hz* [0.1 - 10.0
Hz]
Ajuste la frecuencia deseada para una
corriente de magnetización normal.
Utilice este parámetro junto con el
parámetro 1-50 Magnet. motor a veloc. cero.
Consulte el Ilustración 3.2.
1-55 Característica u/f - U
Matriz [6]
Range: Función:
Size
related*
[0 999 V]
Introduzca la tensión para cada punto de
frecuencia para crear una característica
U/f que se ajuste al motor. Los puntos de
frecuencia se denen en el
parámetro 1-56 Característica u/f - F.
1-56 Característica u/f - F
Matriz [6]
Range: Función:
Size
related*
[ 0 -
400.0
Hz]
Introduzca los puntos de frecuencia para
crear una característica U/f que se ajuste al
motor. La tensión en cada punto se dene
en el parámetro 1-55 Característica u/f - U.
Cree una característica U/f basándose en
seis tensiones y frecuencias denibles.
Consulte la Ilustración 3.3.
Simplique características U/f combinando
dos o más puntos (tensiones y frecuencias).
Ajuste los puntos en valores iguales.
3 3
1-50 Magnet. motor a veloc. cero
Range: Función:
100%* [0 -
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 39
Utilice este parámetro junto con el
300 %
parámetro 1-52 Magnetización normal veloc. mín.
]
[Hz] para obtener una carga térmica distinta en el
motor cuando funciona a velocidad lenta.
Introduzca un valor como porcentaje de la
corriente de magnetización nominal. Si el ajuste es
muy pequeño, puede reducirse el par en el eje del
motor.
Ilustración 3.3 Característica u/f

Parámetros
VLT® HVAC Basic Drive FC 101
3.2.8 1-6* Aj. depend. carga
Parámetros para realizar ajustes dependientes de la carga
del motor.
1-62 Compensación deslizam.
33
Range: Función:
Size
related*
[-400 400 %]
Introducir el % para la compensación de
deslizamiento para compensar las
tolerancias en el valor de n
compensación de deslizamiento se
calcula automáticamente sobre la base
de la velocidad nominal del motor, n
M, N
. La
M, N
3.2.9 1-7* Ajustes arranque
Parámetros para ajustar funciones especiales de arranque
del motor.
1-70 Modo de inicio
Este parámetro es válido para la versión 2.80 del software y las
versiones posteriores. Utilice este parámetro para seleccionar el
modo de arranque del motor PM, es decir, para iniciar el núcleo
de control VVC+ en motores PM que previamente funcionaban
libremente. Este parámetro está activo para motores PM en
modo VVC+ solo si el motor se detiene (o en funcionamiento a
velocidad lenta).
.
Option: Función:
1-63 Tiempo compens. deslizam. constante
Range: Función:
0.1 s* [0.05 - 5 s] Introduzca la velocidad de reacción de
compensación de deslizamiento. Un valor
alto produce una reacción lenta y uno bajo
produce una reacción rápida. Si se producen
problemas de resonancia a baja frecuencia,
ajuste un tiempo más largo.
1-64 Amortiguación de resonancia
Range: Función:
100 %* [0 -
500 %]
Introduzca el valor de amortiguación de
resonancia. Ajuste el parámetro 1-64 Amorti-
guación de resonancia y el parámetro 1-65 Const.
tiempo amortigua. de resonancia para ayudar a
eliminar problemas de resonancia de alta
frecuencia. Para reducir la oscilación de
resonancia, incremente el valor del
parámetro 1-64 Amortiguación de resonancia.
1-65 Const. tiempo amortigua. de resonancia
Range: Función:
0.005 s* [0.001 -
0.050 s]
Ajuste el parámetro 1-64 Amortiguación de
resonancia y el parámetro 1-65 Const.
tiempo amortigua. de resonancia para
ayudar a eliminar problemas de resonancia
de alta frecuencia. Introduzca la constante
de tiempo que proporcione la mejor
amortiguación.
[0] Detección de
rotor
[1] * Parking La función de estacionamiento aplica
La función de detección del rotor
estima el ángulo eléctrico del rotor y lo
utiliza como punto de arranque. Esta
opción es la selección estándar en
aplicaciones de automatización de
convertidores de frecuencia. Si la
función de Motor en giro detecta que
el motor está en funcionamiento a
velocidad lenta o se detiene, el
convertidor de frecuencia puede
detectar la posición del rotor (el
ángulo). El convertidor de frecuencia
arranca entonces el motor desde ese
ángulo.
corriente CC al bobinado del estátor y
gira el rotor a la posición eléctrica cero.
Esta función suele seleccionarse para
aplicaciones HVAC. Si la función de
Motor en giro detecta que el motor
está en funcionamiento a velocidad
lenta o se detiene, el convertidor de
frecuencia envía una corriente CC para
estacionar el motor a un ángulo
determinado. El convertidor de
frecuencia arranca entonces el motor
desde ese ángulo.
1-71 Retardo arr.
Range: Función:
1-66 Intens. mín. a baja veloc.
Range: Función:
50 %* [0 - 120 %] Aplicable solo a motores PM. El aumento de
la intensidad mínima mejora el par del
motor a velocidad baja, pero también
reduce la ecacia.
0 s* [0 -
10 s]
Este parámetro activa un retardo del tiempo de
arranque. El convertidor de frecuencia comienza
con la función de arranque seleccionada en el
parámetro 1-72 Función de arranque. Ajusta el
tiempo de retardo de arranque antes de que
comience la aceleración.
40 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
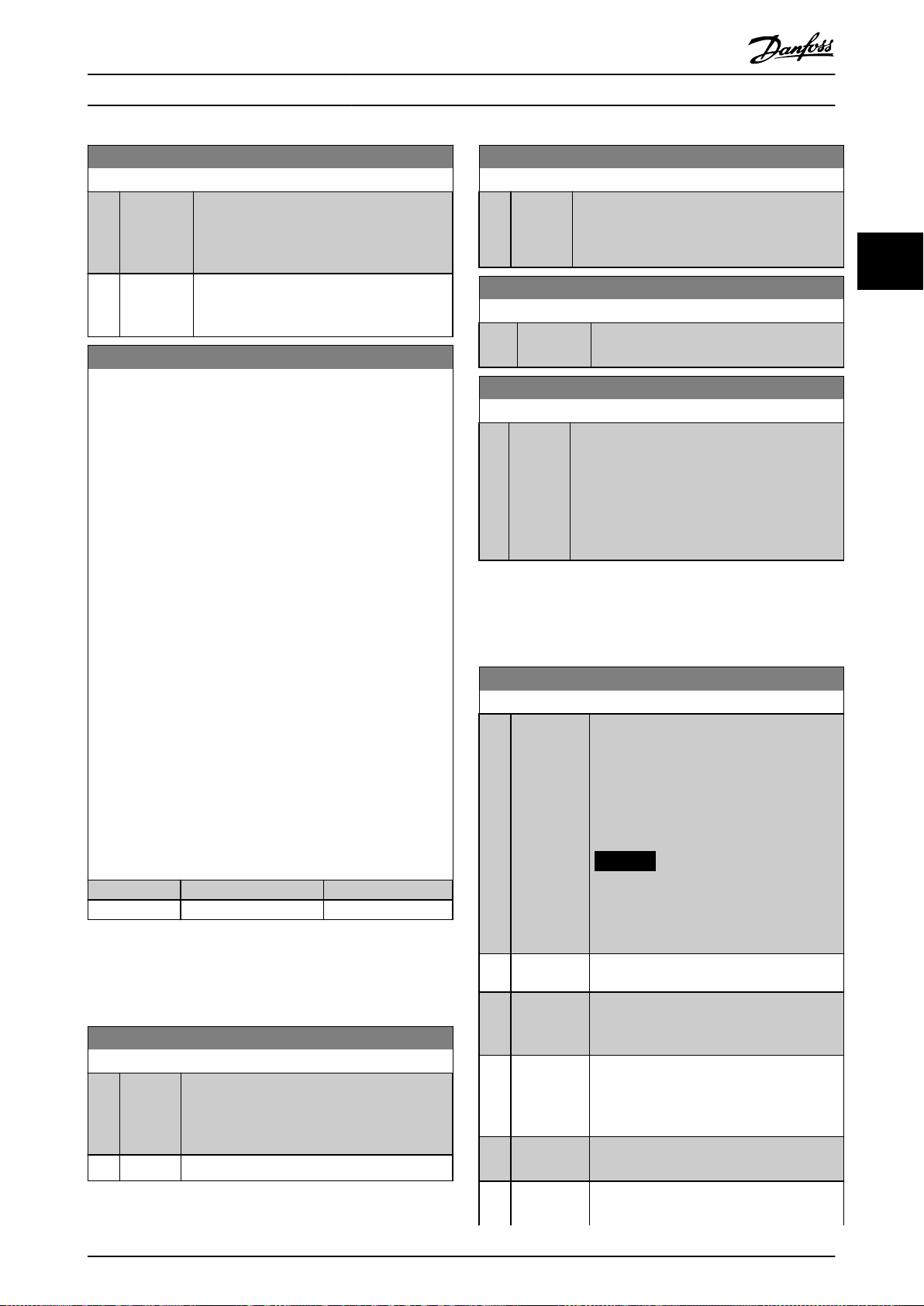
Parámetros Guía de programación
1-72 Función de arranque
Option: Función:
[0] CC mant./
tiempo ret.
[2] * Tiempo
inerc/
retardo
El motor recibe energía con el
parámetro 2-00 Intensidad CC mantenida/
precalent. durante el tiempo de retardo de
arranque.
El convertidor de frecuencia está en inercia
durante el tiempo de retardo de arranque
(convertidor de frecuencia apagado).
1-73 Motor en giro
Esta función hace posible atrapar un motor que, debido a un
corte de red, gira sin control. La función de motor en giro busca
solo en sentido horario. Si no tiene éxito, se activa un freno de
CC. Si se seleccionan las opciones de activación PM, el estacionamiento se lleva a cabo si la velocidad es inferior al 2,5-5 % de la
velocidad nominal, en el tiempo jado en el
parámetro 2-07 Tiempo estacionamiento.
Si la estimación de velocidad resulta ser inferior al 2,5-5 % de la
velocidad nominal, la función de estacionamiento se activa
(consulte parámetro 2-06 Intensidad estacionamiento y el
parámetro 2-07 Tiempo estacionamiento). De lo contrario, el
convertidor de frecuencia atrapa al motor a esa velocidad y
reanuda el funcionamiento normal.
La función de Motor en giro utilizada en motores PM se basa en
una estimación inicial de la velocidad. La velocidad siempre se
estima en primer lugar una vez se ha emitido la señal de
arranque activo.
Límites de intensidad del principio de la función de Motor en
giro utilizado en motores PM:
El intervalo de velocidad alcanza el 100 % de la
•
velocidad nominal o de la velocidad de debilitamiento
del campo inductor (la que sea inferior).
Para aplicaciones con alta inercia (es decir, allí donde la
•
inercia de carga es superior a 30 veces la inercia del
motor).
Option: Función:
[0] Desactivado
[1] Activado
1-80 Función de parada
Option: Función:
[1] CC
mant./
precal.
motor
El motor recibe una corriente de CC mantenida
(consulte el parámetro 2-00 Intensidad CC
mantenida/precalent.).
1-82 Vel. mín. para func. parada [Hz]
Range: Función:
0 Hz* [0 - 20 Hz] Ajuste la frecuencia de salida a la que se
activa el parámetro 1-80 Función de parada.
1-88 Ganancia del freno de CA
Range: Función:
1.4* [1.0 -
2.0 ]
Este parámetro se utiliza para ajustar la
capacidad de potencia de frenado de CA (ajuste
el tiempo de deceleración cuando la inercia sea
constante). Siempre que la tensión del enlace de
CC no sea superior al valor de advertencia de
tensión del enlace de CC, el par del generador
podrá ajustarse con este parámetro.
3.2.11 1-9* Temperatura motor
Parámetros para congurar las funciones de protección de
temperatura del motor.
1-90 Protección térmica motor
Option: Función:
Al utilizar el ETR (relé termoelectrónico) la
temperatura del motor se calcula en función
de la frecuencia, la intensidad y el tiempo.
Danfoss recomienda el uso de la función ETR
si no se cuenta con un termistor. La función
es idéntica para motores asíncronos y
motores PM.
AVISO!
El cálculo del ETR se basa en los datos
del motor del grupo de parámetros 1-2*
Datos de motor.
3 3
3.2.10 1-8* Ajustes de parada
Parámetros para congurar funciones especiales de parada
del motor.
1-80 Función de parada
Option: Función:
Seleccionar esta función después de una orden
de parada o de que la velocidad disminuya al
valor ajustado en el parámetro 1-82 Vel. mín.
para func. parada [Hz].
[0] * Inercia Deja el motor en el modo libre.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 41
[0] Sin
protección
[1] Advert.
termistor
[2] Descon.
termistor
[3] Advert. ETR1Si se supera el límite máximo de temperatura
[4] * Descon. ETR1Arranque el cálculo térmico del motor a
Desactiva el control de la temperatura.
Un termistor genera una advertencia si se
supera el límite máximo de temperatura del
motor.
Si se supera el límite máximo de temperatura
del motor, un termistor genera una alarma y
provoca la desconexión del convertidor de
frecuencia.
del motor, se genera una advertencia.
partir de la carga real y el tiempo, así como
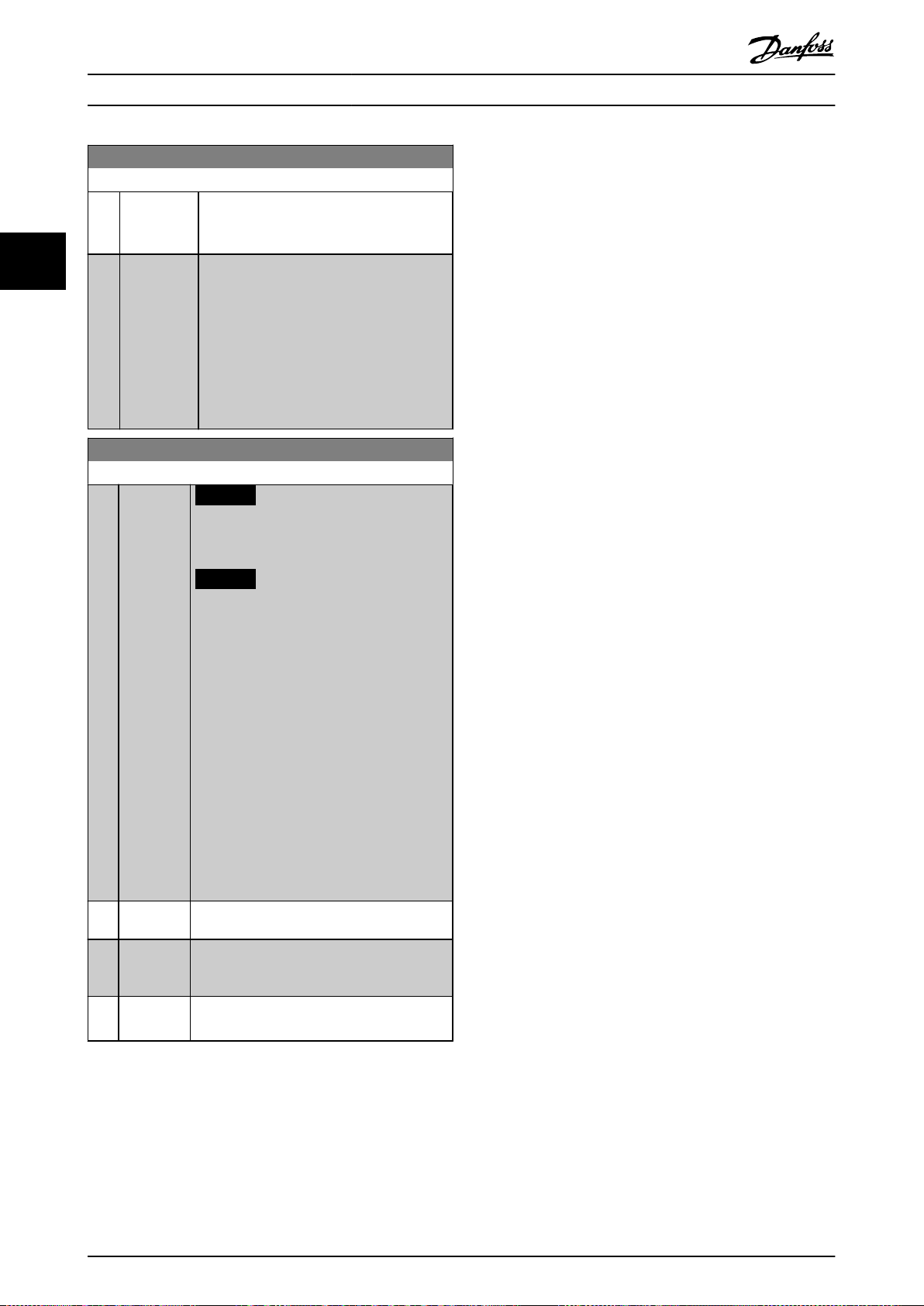
Parámetros
VLT® HVAC Basic Drive FC 101
1-90 Protección térmica motor
Option: Función:
de la frecuencia del motor, cuando la
intensidad del motor supere el 110 % de la
corriente nominal del motor.
33
[22] Desconex.
ETR: detecc.
ampl.
Arranque el cálculo térmico del motor a
partir de la carga real y el tiempo, así como
de la frecuencia del motor, cuando la
intensidad del motor supere el 110 % de la
corriente nominal del motor. Otra posibilidad
es arrancar el cálculo térmico del motor
cuando la intensidad del motor sea inferior al
110 % de la corriente nominal del motor y se
active el límite de intensidad.
1-93 Fuente de termistor
Option: Función:
AVISO!
Este parámetro no se puede ajustar con
el motor en marcha.
AVISO!
Ajuste la entrada digital a [0] PNP Active at 24 V en el
parámetro 5-03 Modo entrada digital 29.
Seleccione la entrada a la que se debe
conectar el termistor (sensor PTC). Cuando se
utiliza una entrada analógica, la misma entrada
no puede utilizarse como referencia en los
parámetros comprendidos entre
parámetro 3-15 Recurso de referencia 1 y
parámetro 3-17 Recurso de referencia 3 ni en el
parámetro 20-00 Fuente realim. 1, el
parámetro 20-03 Fuente 2 realim. lazo cerrado
proceso, el parámetro 24-06 Fuente referencia
modo incendio y el parámetro 24-07 Fuente
realim. modo incendio.
[0]*Ninguno No ajuste la fuente del termistor.
[1] Entrada
analógica
53
[6] Entrada
digital 29
Utilice la entrada analógica 53 como fuente
del termistor.
Utilice la entrada digital 29 como fuente del
termistor.
42 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.3 Menú principal - Frenos - Grupo 2
3.3.1 2-0* Freno CC
Parámetros para congurar las funciones de freno de CC y
CC mantenida.
2-00 Intensidad CC mantenida/precalent.
Range: Función:
50%* [0 -
160 %
]
2-01 Intens. freno CC
Range: Función:
50%* [0 -
150 %
]
AVISO!
SOBRECALENTAMIENTO DEL MOTOR
El valor máximo depende de la corriente
nominal del motor.
Para evitar daños por sobrecalentamiento
en el motor, no lo haga funcionar al 100 %
durante demasiado tiempo.
Ajuste la intensidad mantenida como % de la
corriente nominal del motor I
parámetro 1-24 Intensidad motor. El
Parámetro 2-00 Intensidad CC mantenida/precalent.
mantiene la función del motor (par mantenido) o
precalienta el motor. Este parámetro está activo si
se selecciona CC mantenida en el
parámetro 1-72 Función de arranque [0] CC mant./
tiempo ret. o el parámetro 1-80 Función de parada
[1] CC mant./precal. motor.
M, N
en el
AVISO!
SOBRECALENTAMIENTO DEL MOTOR
El valor máximo depende de la corriente
nominal del motor.
Para evitar daños por sobrecalentamiento
en el motor, no lo haga funcionar al 100 %
durante demasiado tiempo.
Ajuste la intensidad como porcentaje de la
corriente nominal del motor,
parámetro 1-24 Intensidad motor. Si la velocidad es
inferior al límite establecido en el
parámetro 2-04 Velocidad de conexión del freno CC
[Hz] o si está activada la función de parada por
freno de CC (en el grupo de parámetros 5-1*
Entradas digitales, mediante [5] Freno CC, o a través
del puerto serie), se aplicará intensidad de frenado
CC ante una orden de parada. Ver el
parámetro 2-02 Tiempo de frenado CC para
averiguar la duración.
2-02 Tiempo de frenado CC
Range: Función:
10 s* [0 - 60 s] Una vez activada, ajuste la duración de la
intensidad de frenado CC en el
parámetro 2-01 Intens. freno CC.
2-04 Velocidad de conexión del freno CC [Hz]
Range: Función:
0 Hz* [ 0 - 500
Hz]
Este parámetro establece la velocidad de
conexión del freno de CC a la que se
activará el parámetro 2-01 Intens. freno CC
con una orden de parada.
2-06 Intensidad estacionamiento
Range: Función:
100%* [0 -
Ajuste la intensidad como un porcentaje de la
150 %
corriente nominal del motor,
]
parámetro 1-24 Intensidad motor. Activo con el
parámetro 1-73 Motor en giro. La intensidad de
estacionamiento se activa durante el tiempo
denido en parámetro 2-07 Tiempo estaciona-
miento.
AVISO!
El Parámetro 2-06 Intensidad estacionamiento solo está activo si se ha
seleccionado una de las opciones de
construcción de motor PM en el
parámetro 1-10 Construcción del motor.
2-07 Tiempo estacionamiento
Range: Función:
3 s* [0.1 -
60 s]
Ajuste la duración de la intensidad de frenado de
estacionamiento en parámetro 2-06 Intensidad
estacionamiento. Activo con el
parámetro 1-73 Motor en giro.
AVISO!
El Parámetro 2-07 Tiempo estacionamiento
solo está activo cuando las opciones del
parámetro 1-10 Construcción del motor se
ajustan para activar motores PM.
3.3.2 2-1* Func. energ. freno
Grupo de parámetros para la selección de parámetros de
freno dinámico.
2-10 Función de freno
Option: Función:
[0] * O La resistencia de frenado no está activa.
[2] Frenado de CA El freno de CA está activo.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 43

Parámetros
VLT® HVAC Basic Drive FC 101
2-16 Intensidad máx. de frenado de CA
Range: Función:
100 %* [0 - 160 %] Introducir la máxima corriente admisible al
usar el freno de CA para evitar el sobrecalentamiento de los bobinados del motor.
33
2-17 Control de sobretensión
Option: Función:
Seleccione si desea activar el control de
sobretensión (OVC) durante la rampa de
deceleración, que reduce el riesgo de
desconexión del convertidor de frecuencia
por sobretensión en el enlace de CC
causada por energía generativa procedente
de la carga.
[0] Desactivado No se requiere control de sobretensión
(OVC).
[1] Activado (no
parada)
[2] * Activado Activa el control de sobretensión (OVC).
Activa el OVC cuando el convertidor de
frecuencia no está en estado de parada.
AVISO!
El tiempo de rampa se ajusta
automáticamente para evitar la
desconexión del convertidor de
frecuencia.
44 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parámetros Guía de programación
3.4 Menú principal - Ref./Rampas - Grupo 3
3.4.1 3-0* Límites referencia
Parámetros para ajustar la unidad de referencia, los límites
y los intervalos.
Consulte también el grupo de parámetros 20-0* Realimen-
tación para obtener más información sobre los ajustes en
lazo cerrado.
3-02 Referencia mínima
Range: Función:
0* [-4999–4999] La referencia mínima es el valor mínimo que
puede obtenerse sumando todas las
referencias.
3-03 Referencia máxima
Range: Función:
Size
related*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
La referencia máxima es el valor
más alto que puede obtenerse
sumando todas las referencias. La
unidad de referencia máxima
coincide con la selección de
conguración del
parámetro 1-00 Modo Conguración.
3.4.2 3-1* Referencias
3-10 Referencia interna
Range: Función:
0 %* [-100 -
100 %]
Es posible programar hasta ocho referencias
internas distintas (0-7) en este parámetro,
utilizando una programación indexada. Para
seleccionar las referencias especicas, seleccione
[16] Ref. interna bit 0, [17] Ref. interna bit 1 o
[18] Ref. interna bit 2 para las entradas digitales
correspondientes del grupo de parámetros 5-1*
Entradas digitales.
3-11 Velocidad ja [Hz]
Range: Función:
5 Hz* [ 0 -
500.0 Hz]
La velocidad ja es una velocidad de salida
ja a la que funciona el convertidor de
frecuencia cuando se activa la función de
velocidad ja.
Consulte también el parámetro 3-80 Tiempo
rampa veloc. ja.
3-14 Referencia interna relativa
Range: Función:
0 %* [-100
100 %]
Dena el valor jo en porcentaje que se agregará
al valor variable denido en el
parámetro 3-18 Recurso refer. escalado relativo.
La suma de los valores jo y variable (denominada
Y en la Ilustración 3.5) se multiplica por la
referencia real (denominada X en la Ilustración 3.5).
Este producto se añade a la referencia real
Y
X + X ×
100
3 3
Ilustración 3.4 Referencias
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 45
Ilustración 3.5 Referencia interna relativa
3-15 Fuente 1 de referencia
Option: Función:
Seleccione la entrada que se utilizará para
la primera señal de referencia. El
Parámetro 3-15 Fuente 1 de referencia, el
parámetro 3-16 Fuente 2 de referencia y el
parámetro 3-17 Fuente 3 de referencia
denen hasta tres señales de referencia
distintas. La suma de estas señales de
referencia dene la referencia actual.
[0] Sin función
[1] * Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr. frec. 29
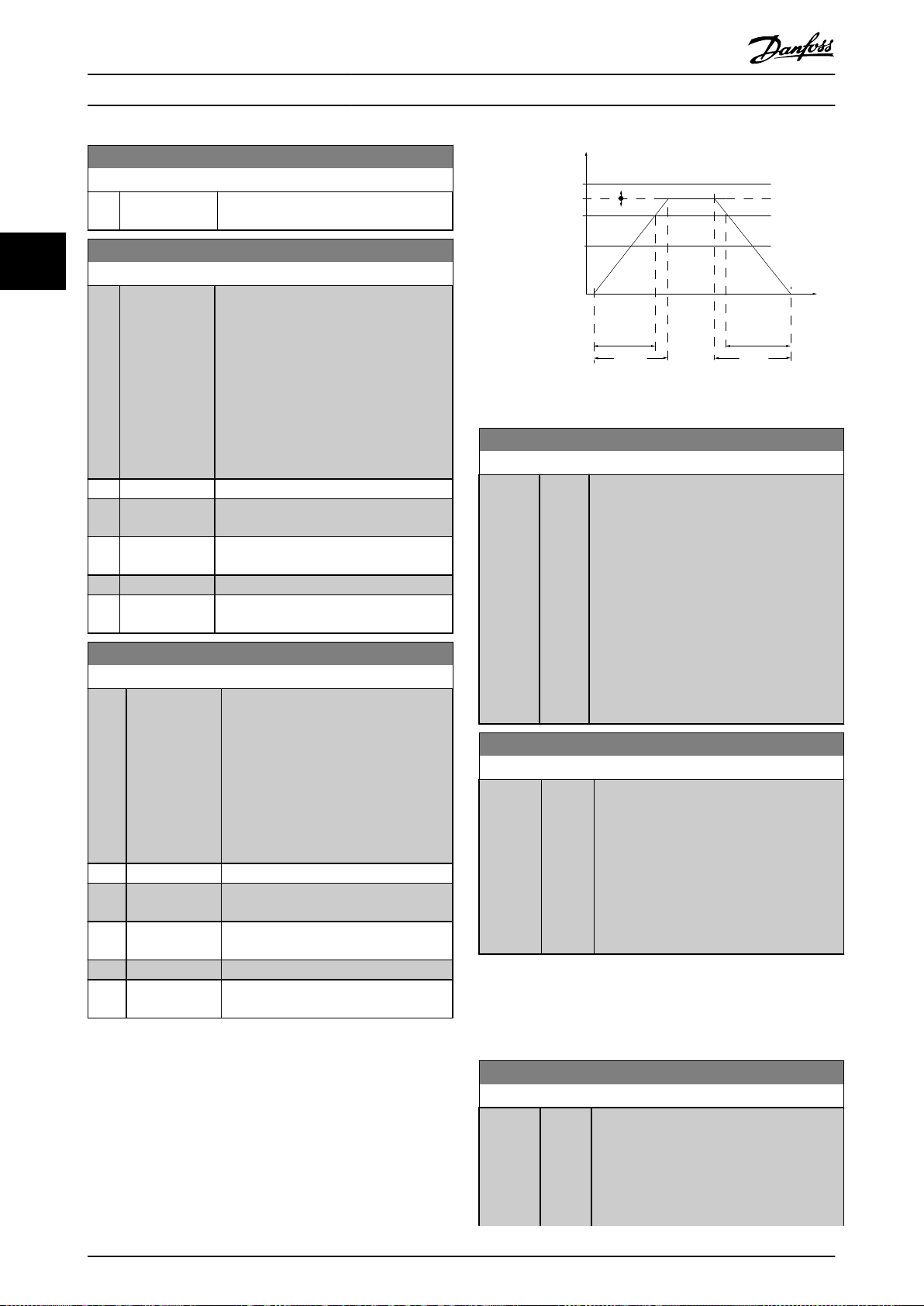
t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parámetros
3-15 Fuente 1 de referencia
Option: Función:
[11] Referencia bus
local
VLT® HVAC Basic Drive FC 101
33
3-16 Fuente 2 de referencia
Option: Función:
Seleccione la entrada que se utilizará para
la segunda señal de referencia. El
Parámetro 3-15 Fuente 1 de referencia, el
parámetro 3-16 Fuente 2 de referencia y el
parámetro 3-17 Fuente 3 de referencia
denen hasta tres señales de referencia
distintas. La suma de estas señales de
referencia dene la referencia actual.
Consulte también el parámetro 1-93 Fuente
de termistor.
[0] Sin función
[1] Entrada
analógica 53
[2] * Entrada
analógica 54
[7] Entr. frec. 29
[11] Referencia bus
local
3-17 Fuente 3 de referencia
Option: Función:
Seleccione la entrada de referencia que
se utilizará para la tercera señal de
referencia. El Parámetro 3-15 Fuente 1 de
referencia, el parámetro 3-16 Fuente 2 de
referencia y el parámetro 3-17 Fuente 3 de
referencia denen hasta tres señales de
referencia diferentes. La suma de estas
señales de referencia dene la referencia
actual.
[0] Sin función
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr. frec. 29
[11] * Referencia bus
local
3.4.3 3-4* Rampa 1
Congure los parámetros de tiempo de rampa para cada
una de las dos rampas (grupo de parámetros 3-4* Rampa 1
y grupo de parámetros 3-5* Rampa 2). El tiempo de rampa
se preajusta en el valor mínimo de 10 ms para todas las
potencias.
Ilustración 3.6 Rampas
3-41 Rampa 1 tiempo acel. rampa
Range: Función:
Size
related*
[0.05
- 3600
s]
Introduzca el tiempo de aceleración desde 0
Hz hasta el parámetro 1-23 Frecuencia motor
si se ha seleccionado motor asíncrono.
Introduzca el tiempo de aceleración desde 0
r/min hasta parámetro 1-25 Veloc. nominal
motor si se ha seleccionado motor PM.
Seleccione un tiempo de aceleración tal que
la intensidad de salida no supere el límite de
intensidad del parámetro 4-18 Límite
intensidad durante la rampa. Consulte el
tiempo de deceleración en el
parámetro 3-42 Rampa 1 tiempo desacel.
rampa.
3-42 Rampa 1 tiempo desacel. rampa
Range: Función:
Size
related*
[0.05 3600 s]
Si se ha seleccionado motor asíncrono,
introduzca el tiempo de desaceleración
desde el parámetro 1-23 Frecuencia motor
hasta 0 Hz. Si se ha seleccionado motor PM,
introduzca el tiempo de desaceleración
desde el parámetro 1-25 Veloc. nominal
motor hasta 0 RPM. Seleccione un tiempo de
deceleración para evitar la desconexión por
sobretensión del enlace de CC.
3.4.4 3-5* Rampa 2
Este grupo de parámetros congura los parámetros de la
rampa 2.
3-51 Rampa 2 tiempo acel. rampa
Range: Función:
Size
related*
[0.05 3600 s]
Si se ha seleccionado motor asíncrono,
introduzca el tiempo de aceleración desde 0
Hz hasta el parámetro 1-23 Frecuencia motor.
Si se ha seleccionado motor PM, introduzca
el tiempo de aceleración desde 0 RPM hasta
el parámetro 1-25 Veloc. nominal motor.
46 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3-51 Rampa 2 tiempo acel. rampa
Range: Función:
Seleccione un tiempo de aceleración tal que
la intensidad de salida no supere el límite de
intensidad del parámetro 4-18 Límite
intensidad durante la rampa.
3-52 Rampa 2 tiempo desacel. rampa
Range: Función:
Size
related*
[0.05 3600 s]
Introduzca el tiempo de desaceleración
desde el parámetro 1-25 Veloc. nominal
motor hasta 0 r/min. Seleccione un
tiempo de deceleración tal que la
intensidad de salida no exceda el límite
de intensidad del parámetro 4-18 Límite
intensidad durante la rampa de deceleración.
3.4.5 3-8* Otras rampas
3 3
3-80 Tiempo rampa veloc. ja
Range: Función:
Size
related*
[0.05
Introduzca el tiempo de rampa de velocidad
- 3600
ja, que corresponde al tiempo de
s]
aceleración/desaceleración desde 0 Hz hasta el
parámetro 1-23 Frecuencia motor. Asegúrese de
que la intensidad de salida resultante
requerida para el tiempo de rampa de
velocidad ja determinado no supere el límite
de intensidad del parámetro 4-18 Límite
intensidad. El tiempo de rampa de velocidad
ja se inicia tras la activación de una señal de
velocidad ja mediante el panel de control,
una entrada digital seleccionada o el puerto
de comunicación serie.
3-81 Tiempo rampa parada rápida
Range: Función:
Size
related*
[0.05
- 3600
s]
Introduzca el tiempo de rampa de parada
rápida desde el parámetro 1-23 Frecuencia
motor hasta 0 Hz. Durante la rampa, no debe
producirse sobretensión en el inversor, ni la
corriente generada puede exceder el límite
del parámetro 4-18 Límite intensidad. La
parada rápida se activa mediante una señal
de una entrada digital seleccionada o
mediante el puerto de comunicación serie.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 47

Parámetros
VLT® HVAC Basic Drive FC 101
3.5 Menú principal - Lím./Advert. - Grupo 4
3.5.1 4-1* Límites motor
Denir límites de intensidad y velocidad para el motor, y la
reacción del convertidor de frecuencia cuando se
33
sobrepasen los límites.
4-10 Dirección veloc. motor
Option: Función:
[0] Izqda. a
dcha.
AVISO!
El ajuste en el parámetro 4-10 Dirección
veloc. motor tiene su efecto en el
4-18 Límite intensidad
Range: Función:
110%* [0 -
1000 %
]
Introduzca el límite de intensidad para el funcionamiento del motor y del generador (en
porcentaje de la corriente nominal del motor). Si
el valor es superior a la salida nominal máxima
desde el convertidor de frecuencia, la intensidad
se ve limitada por la intensidad de salida máxima
del convertidor de frecuencia. Si se modica un
ajuste en el parámetro 1-00 Modo Conguración al
parámetro 1-25 Veloc. nominal motor, el
parámetro 4-18 Límite intensidad no se reinicia
automáticamente a los ajustes predeterminados.
parámetro 1-73 Motor en giro.
4-19 Frecuencia salida máx.
Solo se permite el funcionamiento en sentido
horario.
[2] * Ambos
sentidos
Se permite el funcionamiento tanto en
sentido horario como en sentido antihorario.
4-12 Límite bajo veloc. motor [Hz]
Range: Función:
0 Hz* [ 0 -
400.0 Hz]
Introduzca el límite mínimo para la velocidad
del motor. El límite bajo de la velocidad del
motor puede ajustarse para que se
corresponda con la frecuencia de salida
mínima del eje del motor. El límite bajo de
velocidad no debe exceder el ajuste de
parámetro 4-14 Límite alto veloc. motor [Hz].
4-14 Límite alto veloc. motor [Hz]
Range: Función:
Size
related*
[ 0.1 -
400.0 Hz]
AVISO!
La frecuencia de salida máxima no
puede superar el 10 % de la
frecuencia de conmutación del
inversor
(parámetro 14-01 Frecuencia
conmutación).
Depende
del
tamaño.*
[ 0,1-400,0
Hz]
Introduzca el límite máximo para la
velocidad del motor. Puede ajustarse
para coincidir con la máxima velocidad
del motor recomendada. El límite alto
de la velocidad del motor debe superar
el ajuste del parámetro 4-12 Límite bajo
veloc. motor [Hz].
El límite alto de la velocidad del motor
no debe ser superior al del
parámetro 4-19 Frecuencia salida máx..
Range: Función:
Size
related*
Depende
del
tamaño.*
[ 0 - 400
Hz]
[ 0,0-400
Hz]
Introduzca la frecuencia de salida
máxima, que dene el límite absoluto de
la frecuencia de salida del convertidor de
frecuencia para mejorar la seguridad en
aplicaciones donde debe evitarse un
exceso de velocidad involuntario. Este
límite absoluto se aplica en todas las
conguraciones y es independiente del
ajuste del parámetro 1-00 Modo Congu-
ración.
Cuando el parámetro 1-10 Construcción del
motor se ajusta en una de las opciones
que permiten construcción del motor PM,
el límite máximo del
parámetro 4-19 Frecuencia salida máx.
podría marcarse según el ajuste del
parámetro 1-40 fcem a 1000 RPM para
evitar una fuerza contraelectromotriz
demasiado elevada, que podría dañar el
convertidor de frecuencia. Si el
parámetro 4-19 Frecuencia salida máx. se
ajusta más bajo que el
parámetro 4-14 Límite alto veloc. motor
[Hz], el valor del parámetro 4-14 Límite
alto veloc. motor [Hz] se ajustará automáti-
camente al mismo valor que el
parámetro 4-19 Frecuencia salida máx..
3.5.2 4-4* Adj. Warnings 2
4-40 Advert. frec. baja
Range: Función:
Size
related*
[ 0 -
Utilice este parámetro para establecer un límite
500
inferior para el rango de frecuencia.
Hz]
Cuando la velocidad del motor es inferior a
este límite, en la pantalla se indica VELOCIDAD
BAJA. La advertencia del bit 10 se ajusta en el
48 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
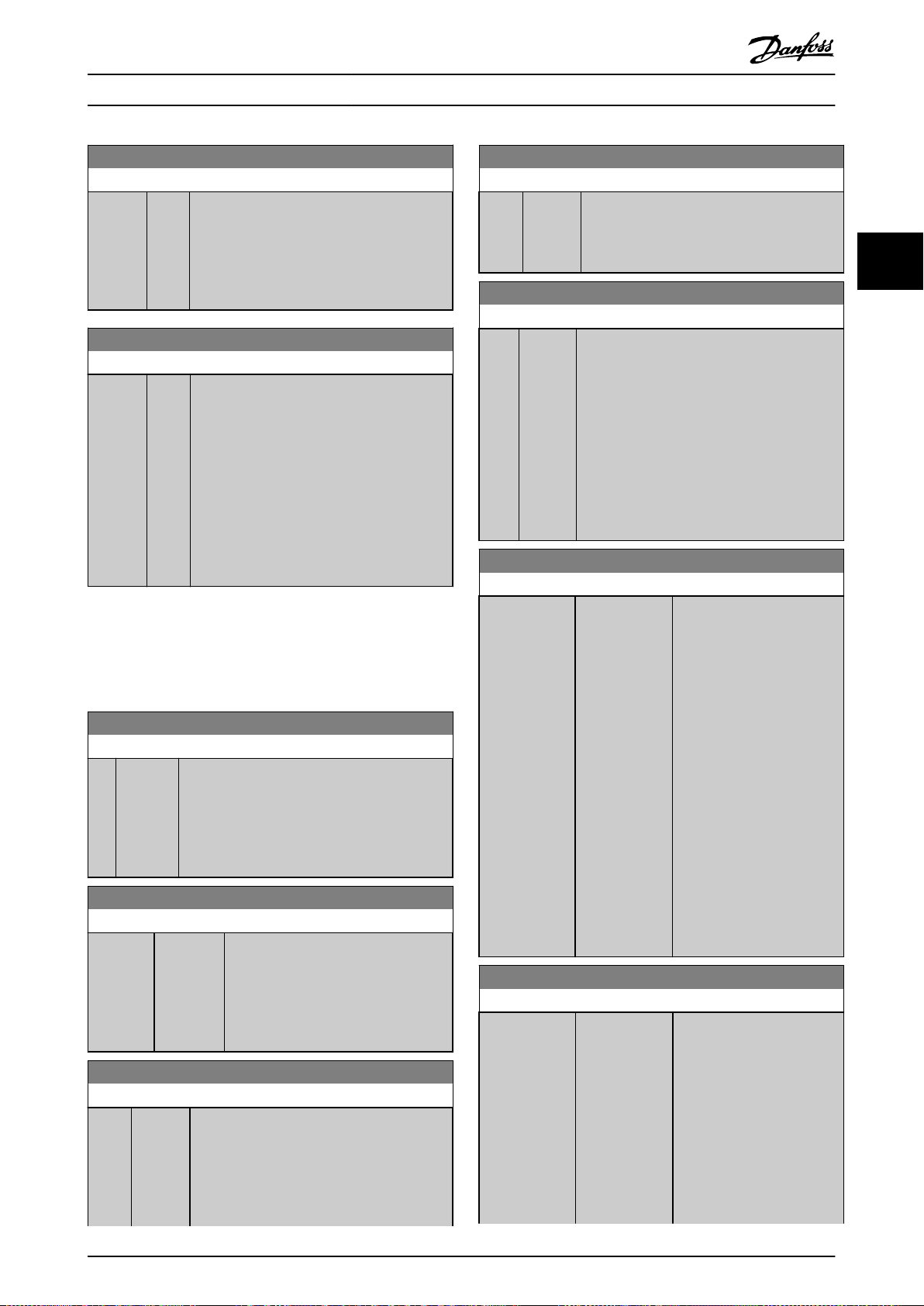
Parámetros Guía de programación
4-40 Advert. frec. baja
Range: Función:
parámetro 16-94 Cód. estado amp. El relé de
salida o la salida digital pueden congurarse
para indicar esta advertencia. La luz de
advertencia del LCP no estará activada cuando
se haya alcanzado el límite establecido para
este parámetro.
4-41 Advert. frec. alta
Range: Función:
Size
related*
[ 0 -
Utilice este parámetro para establecer un
500
límite superior para el rango de frecuencia.
Hz]
Cuando la velocidad del motor supera este
límite, en la pantalla se indica VELOCIDAD ALTA.
La advertencia del bit 9 se ajusta en el
parámetro 16-94 Cód. estado amp. El relé de
salida o la salida digital pueden congurarse
para indicar esta advertencia. La luz de
advertencia del LCP no estará activada cuando
se haya alcanzado el límite establecido para
este parámetro.
3.5.3 4-5* Ajuste Advert.
Denir los límites de advertencia ajustables para
intensidad. Se muestran advertencias en la pantalla, en la
salida programada o en el bus de campo.
4-50 Advert. Intens. baja
Range: Función:
0 A [ 0 - 500A]Introduzca el valor de I
del motor cae por debajo de este límite, se
congura un bit en el código de estado. Este
valor también puede programarse para producir
una señal en la salida digital o en la salida de
relé.
4-51 Advert. Intens. alta
Range: Función:
Size
related*
[ 0.0 -
500.00 A]
Introduzca el valor de I
intensidad del motor supera este límite,
se ajusta un bit en el código de estado.
Este valor también puede programarse
para producir una señal en la salida
digital o en la salida de relé.
4-54 Advertencia referencia baja
Range: Función:
-4999* [-4999 -
4999 ]
Introduzca el límite de referencia inferior.
Cuando la referencia real desciende por debajo
de este límite, la pantalla indica Ref
advertencia del bit 20 se congura en el
parámetro 16-94 Cód. estado amp. El relé de
salida o la salida digital pueden congurarse
. Cuando la intensidad
BAJO
. Si la
ALTO
Baja
. La
4-54 Advertencia referencia baja
Range: Función:
para indicar esta advertencia. La luz de
advertencia del LCP no estará activada cuando
se haya alcanzado el límite establecido para
este parámetro.
4-55 Advertencia referencia alta
Range: Función:
4999* [-4999
- 4999 ]
Utilice este parámetro para establecer un límite
superior para el intervalo de referencias.
Cuando la referencia real supera este límite, en
la pantalla se indica Referencia alta. La
advertencia del bit 19 se ajusta en el
parámetro 16-94 Cód. estado amp. El relé de
salida o la salida digital pueden congurarse
para indicar esta advertencia. La luz de
advertencia del LCP no estará activada cuando
se haya alcanzado el límite establecido para
este parámetro.
4-56 Advertencia realimentación baja
Range: Función:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilice este parámetro para
establecer un límite inferior
para el rango de realimentación.
Cuando la realimentación cae
por debajo de este límite, la
pantalla indica Realimentación
baja. La advertencia del bit 6
se ajusta en el
parámetro 16-94 Cód. estado
amp. El relé de salida o la
salida digital pueden
congurarse para indicar esta
advertencia. La luz de
advertencia del LCP no estará
activada cuando se haya
alcanzado el límite
establecido para este
parámetro.
4-57 Advertencia realimentación alta
Range: Función:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilice este parámetro para
establecer un límite superior
para el rango de realimentación.
Cuando la realimentación
supera este límite, en la
pantalla se indica Realimen-
tación alta. La advertencia del
bit 5 se ajusta en el
parámetro 16-94 Cód. estado
amp. El relé de salida o la
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 49

Parámetros
VLT® HVAC Basic Drive FC 101
4-57 Advertencia realimentación alta
Range: Función:
salida digital pueden
congurarse para indicar esta
advertencia. La luz de
33
4-58 Función Fallo Fase Motor
Option: Función:
[0] O En caso de que falte una fase del motor, no se
muestra ninguna alarma.
[1] * Act Se muestra una alarma si falta una fase del motor.
advertencia del LCP no estará
activada cuando se haya
alcanzado el límite
establecido para este
parámetro.
3.5.4 4-6* Bypass veloc.
Denir las áreas de bypass de velocidad para las rampas.
Pueden evitarse tres rangos de frecuencia.
4-61 Velocidad bypass desde [Hz]
Matriz [3]
Range: Función:
0 Hz [ 0 - 500
Hz]
4-63 Veloc. bypass hasta [Hz]
Matriz [3]
Range: Función:
0 Hz* [ 0 - 500
Hz]
Introduzca los límites inferiores de las
velocidades que se deben evitar. En algunos
sistemas es necesario evitar algunas
velocidades de salida por problemas de
resonancia en el sistema.
En algunos sistemas es necesario evitar
algunas velocidades de salida por
problemas de resonancia en el sistema.
Introduzca los límites superiores de las
velocidades que se deben evitar.
3.5.5 Ajuste del bypass de velocidad
semiautomático
Utilice el ajuste semiautomático de velocidad del bypass
para facilitar la programación de las frecuencias que se han
de evitar debido a resonancias en el sistema.
Procedimiento:
1. Pare el motor.
AVISO!
Por favor, ajuste los tiempos de rampa en
parámetro 3-41 Rampa 1 tiempo acel. rampa y
parámetro 3-42 Rampa 1 tiempo desacel. rampa.
2. Seleccione [1] Activar en parámetro 4-64 Ajuste
bypass semiauto.
3. Pulse [Hand On] para iniciar la búsqueda de
bandas de frecuencia que producen resonancias.
El motor acelera conforme a la rampa ajustada.
AVISO!
El terminal 27 Entrada digital (parámetro 5-12 Terminal 27
Entrada digital) tiene [2] Inercia inversa como ajuste
predeterminado. Si no hay 24 V en el terminal 27, [Hand
On] no arrancará el motor. Si es así, conecte el terminal
12 al terminal 27.
4. Cuando se recorra una banda de resonancia,
pulse [OK] en el LCP al salir de la banda. La
frecuencia real se guarda como primer elemento
en parámetro 4-63 Veloc. bypass hasta [Hz]
(matriz). Repita este procedimiento para cada
banda de resonancia identicada durante la
aceleración (pueden ajustarse un máximo de
tres).
5. Cuando se haya alcanzado la máxima velocidad,
el motor comenzará a decelerar automáticamente. Repita este procedimiento cuando la
velocidad salga de las bandas de resonancia
durante la desaceleración. Las frecuencias reales
registradas al pulsar [OK] se almacenan en
parámetro 4-61 Velocidad bypass desde [Hz].
6. Cuando el motor haya efectuado una rampa de
desaceleración hasta detenerse, pulse [OK]. El
parámetro 4-64 Ajuste bypass semiauto se reinicia
automáticamente en o. El convertidor de
frecuencia permanecerá en modo manual hasta
que se pulse [O] o [Auto On].
Si las frecuencias de una cierta banda de resonancia no se
registran en el orden correcto (los valores de frecuencia
guardados en el parámetro 4-63 Veloc. bypass hasta [Hz]
son ≥ que los valores del parámetro 4-61 Velocidad bypass
desde [Hz]), o si no tienen los mismos números de registros
para el parámetro 4-61 Velocidad bypass desde [Hz] y el
parámetro 4-63 Veloc. bypass hasta [Hz], todos los registros
se cancelan y se muestra el siguiente mensaje: Áreas de
velocidad obtenidas superpuestas o sin determinar. Pulse
[Cancel] (Cancelar) para cancelar.
50 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
4-64 Ajuste bypass semiauto
Option: Función:
[0] * O
[1] Activar Si se selecciona esta opción, se barren automáti-
camente los rangos de velocidad para identicar
bandas de resonancia.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 51

Parámetros
VLT® HVAC Basic Drive FC 101
3.6 Menú principal - E/S digital - Grupo 5
Función de entrada
digital
Descripción
3.6.1 5-0* Modo E/S digital
[4] Parada rápida inv. Entrada invertida (NC). Genera una parada
Parámetros para congurar la entrada y salida utilizando
NPN y PNP.
33
AVISO!
Estos parámetros no se pueden ajustar con el motor en
marcha.
5-00 Modo E/S digital
Option: Función:
Ajustar los modos NPN o PNP para las entradas
digitales 18, 19 y 27. Modo de entrada digital.
[0] * PNP Acción en pulsos direccionales positivos (0). Los
sistemas PNP tienen una resistencia a GND (conexión
toma a tierra).
[1] NPN Acción en pulsos direccionales negativos (1). Los
sistemas NPN tienen un arranque de hasta +24 V
internamente en el convertidor de frecuencia.
5-03 Modo entrada digital 29
Option: Función:
[0] * PNP Ajustar el modo PNP para la entrada digital 29.
[1] NPN Ajustar el modo NPN para la entrada digital 29.
3.6.2 5-1* Entradas digitales
Parámetros para congurar las funciones de entrada para
los terminales de entrada.
Las entradas digitales se usan para seleccionar varias
funciones del convertidor de frecuencia. Todas las entradas
digitales pueden ajustarse a las siguientes funciones:
Función de entrada
digital
[0] Sin funcionam. No hay reacción a las señales que llegan
[1] Reinicio Reinicia el convertidor de frecuencia
[2] Inercia inversa Deja el motor en el modo libre. «0»
[3] Inercia y reinicio Entrada invertida de reinicio y paro por
Descripción
al terminal.
después de una desconexión/alarma. Las
alarmas del bloqueo por alarma pueden
reiniciarse.
lógico⇒paro por inercia.
inercia (NC). Deja el motor en modo libre
y reinicia el convertidor de frecuencia. «0»
lógico⇒paro por inercia y reinicio.
[5] Freno CC inverso Entrada invertida para frenado de CC (NC).
[6] Parada inversa La función de parada inversa genera una
[7] Bloqueo externo Misma función que el paro por inercia
[8] Arranque Seleccione el arranque para una orden de
[9] Arran. pulsos Si se aplica un pulso durante 2 ms como
[10] Cambio sentido Cambiar el sentido de rotación del eje del
[11] Arranque e
inversión
de acuerdo con el tiempo de rampa de
parada rápida ajustado en el
parámetro 3-81 Tiempo rampa parada
rápida. Tras la desaceleración, el eje se
encuentra en modo libre.
Detiene el motor al alimentarlo con CC
durante un período de tiempo
determinado, véase el
parámetro 2-01 Intens. freno CC. Esta
función solo está activada cuando el valor
del parámetro 2-02 Tiempo de frenado CC
es distinto de 0. Esta selección no estará
disponible cuando el
parámetro 1-10 Construcción del motor esté
ajustado en [1] PM, no saliente SPM.
función de parada cuando el terminal
seleccionado pasa del nivel lógico 1 a 0
(sin pulsos). La parada se lleva a cabo de
acuerdo con el tiempo de rampa
seleccionado.
inverso, pero la parada externa genera el
mensaje de alarma fallo externo en la
pantalla cuando el terminal programado
para inercia inversa es 0 lógico. Si se
programa para parada externa, el mensaje
de alarma también estará activo a través
de las salidas digitales y de relé. Si se
elimina la causa de la parada externa, la
alarma puede reiniciarse mediante una
entrada digital, un eldbus o la tecla
[Reset].
arranque/parada. 1 lógico = arranque, 0
lógico = parada. (Entrada digital 18
predeterminada).
mínimo, el motor arranca. El motor se
para si se activa la orden de parada
inversa.
motor. La señal de inversión solo cambia
el sentido de giro, pero no activa la
función de arranque. Seleccione [2] Ambos
sentidos en parámetro 4-10 Dirección veloc.
motor. 0 = normal, 1 = cambio de sentido.
Se utiliza para realizar un/a arranque /
parada y un cambio de sentido al mismo
tiempo. Las señales en el [8] Arranque no
se permiten al mismo tiempo. 0 = parada,
1 = arranque e inversión.
52 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
Función de entrada
digital
[14] Velocidad ja Utilizado para activar la velocidad ja.
[16] Ref. interna bit 0 Permite elegir una de las ocho referencias
[17] Ref. interna bit 1 Permite elegir una de las ocho referencias
[18] Ref. interna bit 2 Permite elegir una de las ocho referencias
[19] Mantener
referencia
[20] Mantener salida Mantiene la referencia actual. La referencia
[21] Aceleración Para un control digital de la aceleración /
[22] Deceleración Igual que [21] Aceleración pero la
[23] Selec. ajuste bit 0 Selecciona uno de los dos ajustes. Ajuste
[32] Entrada de
pulsos
Descripción
Consulte el parámetro 3-11 Velocidad ja
[Hz]. (Entrada digital 29 predeterminada).
internas de acuerdo con la Tabla 3.4.
internas de acuerdo con la Tabla 3.4.
internas de acuerdo con la Tabla 3.4.
Mantiene la referencia real. La referencia
mantenida es ahora el punto de
activación o condición de aceleración y
deceleración que se va a emplear. Si se
utiliza aceleración/desaceleración, un
cambio de velocidad siempre se lleva a
cabo después de la rampa 2
(parámetro 3-51 Rampa 2 tiempo acel.
rampa y parámetro 3-52 Rampa 2 tiempo
desacel. rampa) en el intervalo
parámetro 3-02 Referencia mínima parámetro 3-03 Referencia máxima.
mantenida es ahora el punto de
activación o condición de aceleración y
deceleración que se va a emplear. Si se
utiliza aceleración/deceleración, el cambio
de velocidad siempre se lleva a cabo
después de la rampa 2.
desaceleración (potenciómetro de motor).
Active esta función seleccionando
Mantener referencia o Mantener salida.
Cuando la aceleración se activa durante
menos de 400 ms, la referencia resultante
se incrementa en un 0,1 %. Si la
aceleración se activa durante más de 400
ms, la referencia resultante genera una
rampa según la rampa 1 del
parámetro 3-41 Rampa 1 tiempo acel.
rampa.
referencia disminuye.
parámetro 0-10 Ajuste activo a Ajuste
múltiple.
Seleccione la entrada de pulsos cuando se
utilice una secuencia de impulsos como
referencia o realimentación. El escalado se
realiza en el grupo de parámetros 5-5*
Entrada de pulsos. Disponible solo para el
terminal 29.
Función de entrada
digital
[34] Bit rampa 0 Seleccione la rampa que se va a utilizar. El
[37] Modo Incendio Al aplicar una señal se pone el
[52] Permiso arranque El terminal de entrada, para el que se ha
Descripción
0 lógico selecciona la rampa 1, mientras
que el 1 lógico selecciona la rampa 2.
convertidor de frecuencia en modo
incendio y se descartan todas las demás
órdenes. Consulte el grupo de parámetros
24-0* Modo incendio.
programado el permiso de arranque, debe
ser 1 lógico para que se pueda aceptar
una orden de arranque. El permiso de
arranque tiene una función AND lógica
relacionada con el terminal, que está
programado para [8] Arranque, [14]
Velocidad ja o [20] Mantener salida. Para
activar el funcionamiento del motor,
deben cumplirse ambas condiciones. Si se
programa el permiso de arranque en
varios terminales, este solo necesita un 1
lógico en uno de los terminales para que
se realice la función. El permiso de
arranque no afecta a la señal de salida
digital para la solicitud de ejecución ([8]
Arranque, [14] Velocidad ja o [20]
Mantener salida) programada en el grupo
de parámetros 5-3* Salidas digitales o el
grupo de parámetros 5-4* Relés.
AVISO!
Si no se aplica una señal de permiso
de arranque, pero se activa una
orden de Arranque, Velocidad ja o
Mantener, la línea de estado de la
pantalla mostrará Solicitud de
arranque, Solicitud de velocidad ja o
Solicitud de mantener
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 53

Parámetros
VLT® HVAC Basic Drive FC 101
Función de entrada
digital
[53] Arr manual Una señal aplicada pone el convertidor de
33
[54] Arr autom Una señal aplicada pone el convertidor de
[60] Contador A (asc.) Entrada para cuenta creciente en el
[61] Contador A
(desc.)
[62] Reset contador A Entrada para reiniciar el contador A.
[63] Contador B (asc.) Entrada para cuenta creciente en el
[64] Contador B
(desc.)
[65] Reset contador B Entrada para reiniciar el contador B.
[101] Reposo La aplicación de una señal pone el
Tabla 3.3 Funciones de entrada digital
Descripción
frecuencia en modo manual, como si se
pulsase [Hand On] y se anulase una orden
de parada normal. Si se desconecta la
señal, el motor se para. Para que cualquier
otra orden de arranque sea válida, asigne
otra entrada digital a Arranque automático
y aplíquele una señal. Las teclas [Hand
On] y [Auto On] no afectan a la operación.
La tecla [O] anula el Arranque manual y
el Arranque automático. Pulse [Hand On] o
[Auto On] para volver a activar el Arranque
manual y el Arranque automático. Si no
hay señal ni en Arranque manual ni en
Arranque automático, el motor se parará
independientemente de que se aplique
cualquier orden de arranque normal. Si se
aplica una señal tanto a Arranque manual
como a Arranque automático, la función es
Arranque automático.
frecuencia en modo automático como si
se hubiera pulsado [Auto On]. Consulte
también [53] Arr manual.
contador SLC.
Entrada para cuenta decreciente en el
contador SLC.
contador SLC.
Entrada para cuenta decreciente en el
contador SLC.
convertidor de frecuencia en modo de
reposo.
Referencia
interna
seleccionada:
Referencia
interna 0
Referencia
interna 1
Referencia
interna 2
Referencia
interna 3
Referencia
interna 4
Referencia
interna 5
Referencia
interna 6
Referencia
interna 7
Tabla 3.4 Referencia interna seleccionada
Referencia
interna bit 2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Referencia
interna bit 1
Referencia
interna bit 0
5-10 Terminal 18 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 18. Consulte la Tabla 3.3 para conocer las opciones de
ajustes.
Option: Función:
[0] Sin funcionam.
[1] Reinicio
[2] Inercia inversa
[3] Inercia y reinicio
[4] Parada rápida inv.
[5] Freno CC inverso
[6] Parada inversa
[7] Bloqueo externo
[8] * Arranque
[9] Arran. pulsos
[10] Cambio sentido
[11] Arranque e inversión
[14] Velocidad ja
[16] Ref. interna bit 0
[17] Ref. interna bit 1
[18] Ref. interna bit 2
[19] Mantener referencia
[20] Mantener salida
[21] Aceleración
[22] Deceleración
[23] Selec. ajuste bit 0
[34] Bit rampa 0
[37] Modo Incendio
[52] Permiso arranque
[53] Arr manual
[54] Arr autom
[60] Contador A (asc.)
[61] Contador A (desc.)
54 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
5-10 Terminal 18 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 18. Consulte la Tabla 3.3 para conocer las opciones de
ajustes.
Option: Función:
[62] Reset contador A
[63] Contador B (asc.)
[64] Contador B (desc.)
[65] Reset contador B
[101] Reposo
[120] Arranque bomba principal
[121] Alternancia bomba principal
[130] Parada bomba 1
[131] Parada bomba 2
[132] Parada bomba 3
[133] Bloqueo bomba 4
[134] Bloqueo bomba 5
5-11 Terminal 19 entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 19.
Option: Función:
[0] * Sin funcionam.
[1] Reinicio
[2] Inercia inversa
[3] Inercia y reinicio
[4] Parada rápida inv.
[5] Freno CC inverso
[6] Parada inversa
[7] Bloqueo externo
[8] Arranque
[9] Arran. pulsos
[10] Cambio sentido
[11] Arranque e inversión
[14] Velocidad ja
[16] Ref. interna bit 0
[17] Ref. interna bit 1
[18] Ref. interna bit 2
[19] Mantener referencia
[20] Mantener salida
[21] Aceleración
[22] Deceleración
[23] Selec. ajuste bit 0
[34] Bit rampa 0
[37] Modo Incendio
[52] Permiso arranque
[53] Arr manual
[54] Arr autom
[60] Contador A (asc.)
[61] Contador A (desc.)
[62] Reset contador A
[63] Contador B (asc.)
[64] Contador B (desc.)
[65] Reset contador B
5-11 Terminal 19 entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 19.
Option: Función:
[101] Reposo
[120] Arranque bomba principal
[121] Alternancia bomba principal
[130] Parada bomba 1
[131] Parada bomba 2
[132] Parada bomba 3
[133] Bloqueo bomba 4
[134] Bloqueo bomba 5
5-12 Terminal 27 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 27. Cuando el parámetro 0-03 Ajustes regionales se
ajusta en [0] Internacional, el valor predeterminado es [2] Inercia
inversa. Cuando el parámetro 0-03 Ajustes regionales se ajusta en
[1] Norteamérica, el valor predeterminado es [7] Bloqueo externo.
Option: Función:
[0] Sin funcionam.
[1] Reinicio
[2] Inercia inversa
[3] Inercia y reinicio
[4] Parada rápida inv.
[5] Freno CC inverso
[6] Parada inversa
[7] Bloqueo externo
[8] Arranque
[9] Arran. pulsos
[10] Cambio sentido
[11] Arranque e inversión
[14] Velocidad ja
[16] Ref. interna bit 0
[17] Ref. interna bit 1
[18] Ref. interna bit 2
[19] Mantener referencia
[20] Mantener salida
[21] Aceleración
[22] Deceleración
[23] Selec. ajuste bit 0
[34] Bit rampa 0
[37] Modo Incendio
[52] Permiso arranque
[53] Arr manual
[54] Arr autom
[60] Contador A (asc.)
[61] Contador A (desc.)
[62] Reset contador A
[63] Contador B (asc.)
[64] Contador B (desc.)
[65] Reset contador B
[101] Reposo
[120] Arranque bomba principal
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 55

Parámetros
VLT® HVAC Basic Drive FC 101
5-12 Terminal 27 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 27. Cuando el parámetro 0-03 Ajustes regionales se
ajusta en [0] Internacional, el valor predeterminado es [2] Inercia
inversa. Cuando el parámetro 0-03 Ajustes regionales se ajusta en
33
[1] Norteamérica, el valor predeterminado es [7] Bloqueo externo.
Option: Función:
[121] Alternancia bomba principal
[130] Parada bomba 1
[131] Parada bomba 2
[132] Parada bomba 3
[133] Bloqueo bomba 4
[134] Bloqueo bomba 5
5-13 Terminal 29 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 29.
Option: Función:
[0] Sin funcionam.
[1] Reinicio
[2] Inercia inversa
[3] Inercia y reinicio
[4] Parada rápida inv.
[5] Freno CC inverso
[6] Parada inversa
[7] Bloqueo externo
[8] Arranque
[9] Arran. pulsos
[10] Cambio sentido
[11] Arranque e inversión
[14] * Velocidad ja
[16] Ref. interna bit 0
[17] Ref. interna bit 1
[18] Ref. interna bit 2
[19] Mantener referencia
[20] Mantener salida
[21] Aceleración
[22] Deceleración
[23] Selec. ajuste bit 0
[32] Entrada de pulsos
[34] Bit rampa 0
[37] Modo Incendio
[52] Permiso arranque
[53] Arr manual
[54] Arr autom
[60] Contador A (asc.)
[61] Contador A (desc.)
[62] Reset contador A
[63] Contador B (asc.)
[64] Contador B (desc.)
[65] Reset contador B
[101] Reposo
[120] Arranque bomba principal
[121] Alternancia bomba principal
[130] Parada bomba 1
5-13 Terminal 29 Entrada digital
Parámetro para congurar la función de entrada en el terminal
de entrada 29.
Option: Función:
[131] Parada bomba 2
[132] Parada bomba 3
[133] Bloqueo bomba 4
[134] Bloqueo bomba 5
3.6.3 5-3* Salidas digitales
Parámetros para congurar las funciones de salida para los
terminales de salida.
5-34 Retardo de conexión, salida digital
Range: Función:
0.01 s* [0 - 600 s] Introducir el tiempo de retardo antes de
conectar la salida digital. La condición de la
salida digital (terminal 42/45) no debe
interrumpirse durante el tiempo de retardo.
5-35 Retardo de desconexión, salida digital
Range: Función:
0.01 s* [0 - 600 s] Introducir el tiempo de retardo antes de
desconectar la salida digital. La condición de
la salida digital (terminal 42/45) no debe
interrumpirse durante el tiempo de retardo.
3.6.4 5-4* Relés
Parámetros para congurar la sincronización y las
funciones de salida para los relés.
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
[0] Sin función
[1] Ctrl prep. La placa de control recibe tensión de
alimentación.
[2] Unidad lista El convertidor de frecuencia está
preparado para el funcionamiento y la
placa de control tiene alimentación.
[3] Unid. lista/
remoto
[4] En espera / sin
advert.
El convertidor de frecuencia está
preparado para el funcionamiento en
modo automático.
El convertidor de frecuencia está listo
para funcionar. No se ha dado orden de
56 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
arranque ni de parada. Ninguna
advertencia presente.
[5] Funciona-
miento
[6] Func./sin
advert.
[7] Func. en
ran./sin adv.
[8] Func. en
ref./sin adv.
[9] Alarma Una alarma activa la salida.
[10] Alarma o
advertencia
[12] Fuera ran.
intensidad
[13] Corriente
posterior, baja
[14] Corriente
anterior, alta
[16] Velocidad
posterior, baja
[17] Velocidad
anterior, alta
[19] < que realim.
alta
[20] > que realim.
baja
El motor está en funcionamiento.
El motor está en marcha y no hay
ninguna advertencia presente.
El motor funciona con los rangos de
intensidad programados; consulte el
parámetro 4-50 Advert. Intens. baja y el
parámetro 4-51 Advert. Intens. alta.
Ninguna advertencia presente.
El motor funciona a la velocidad de
referencia y sin advertencias.
Una alarma o una advertencia activa la
salida.
La intensidad del motor está fuera de los
intervalos ajustados en el
parámetro 4-50 Advert. Intens. baja y el
parámetro 4-51 Advert. Intens. alta.
La intensidad del motor es más baja que
el límite establecido en el
parámetro 4-50 Advert. Intens. baja.
La intensidad del motor es superior al
límite establecido en el
parámetro 4-51 Advert. Intens. alta.
La velocidad de salida del convertidor de
frecuencia es inferior al límite establecido
en el parámetro 4-40 Advert. frec. baja.
La velocidad de salida del convertidor de
frecuencia es superior al límite
establecido en el parámetro 4-41 Advert.
frec. alta.
La realimentación es inferior al límite
establecido en el
parámetro 4-56 Advertencia realimentación
baja.
La realimentación es superior al límite
establecido en el
parámetro 4-57 Advertencia realimentación
alta.
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
[21] Advertencia
térmica
[22] Listo, sin adv.
térm.
[23] Rem list sin
adv tér
[24] Listo, tensiónOKEl convertidor de frecuencia está
[25] Cambio
sentido
[26] Bus OK Comunicación activa (sin tiempo límite) a
[35] Parada externa Consulte entrada digital.
[36] Bit código
control 11
[37] Bit código
control 12
[41] Bajo ref., alta La referencia es inferior al límite
[42] Sobre ref., alta La referencia es superior al límite
[45] Contr. bus La salida está congurada en el
[60] Comparador 0 Consulte el grupo de parámetros 13-1*
La advertencia térmica se activa cuando
la temperatura sobrepasa el límite en el
motor, en el convertidor de frecuencia o
en el termistor.
El convertidor de frecuencia está
preparado para funcionar y no existe
ninguna advertencia térmica.
El convertidor de frecuencia está
preparado para funcionar en modo
automático y no existe ninguna
advertencia térmica.
preparado para su uso y la tensión de
red se encuentra dentro del rango de
tensión especicado.
El motor está en marcha o listo para
funcionar en sentido horario cuando el
valor lógico = 0 y en sentido antihorario
cuando el valor lógico = 1. La salida
cambia tan pronto como se aplica la
señal de cambio de sentido.
través del puerto de comunicación serie.
El bit 11 del código de control controla
el relé.
El bit 12 del código de control controla
el relé.
establecido en el
parámetro 4-54 Advertencia referencia
baja.
establecido en el
parámetro 4-55 Advertencia referencia alta.
parámetro 5-90 Control de bus digital y de
relé.
Comparadores. Si el comparador 0 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 57

Parámetros
VLT® HVAC Basic Drive FC 101
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
33
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
[61] Comparador 1 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 1 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[62] Comparador 2 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 2 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[63] Comparador 3 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 3 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[64] Comparador 4 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 4 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[65] Comparador 5 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 5 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[70] Regla lógica 0 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 0 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
[71] Regla lógica 1 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 1 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
[72] Regla lógica 2 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 2 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
[73] Regla lógica 3 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 3 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
[74] Regla lógica 4 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 4 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
[75] Regla lógica 5 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 5 se
evalúa como verdadera, la salida será alta.
De lo contrario, será baja.
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
[80] Salida digital
SL A
[81] Salida digital
SL B
[82] Salida digital
SL C
[83] Salida digital
SL D
[160] Sin alarma El valor de la salida es alto si no hay
[161] Func. inverso La salida es alta cuando el convertidor de
[165] Ref. local
activa
[166] Ref. remota
activa
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta
cuando se ejecute la acción de lógica
inteligente [38] Aj. sal. dig. A alta . La
entrada será baja cuando se ejecute la
acción de lógica inteligente [32] Aj.
sal.dig. A baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta
cuando se ejecute la acción de lógica
inteligente [39] Aj. sal. dig. B alta. La
entrada será baja cuando se ejecute la
acción de lógica inteligente [33] Aj.
sal.dig. B baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta
cuando se ejecute la acción de lógica
inteligente [40] Aj. sal. dig. C alta. La
entrada será baja cuando se ejecute la
acción de lógica inteligente [34] Aj.
sal.dig. C baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta
cuando se ejecute la acción de lógica
inteligente [41] Aj. sal.dig. D alta se
ejecute. La entrada será baja cuando se
ejecute la acción de lógica inteligente
[35] Aj. sal.dig. D baja.
presente ninguna alarma.
frecuencia funciona en sentido
antihorario (el producto lógico de los bits
de estado «en funcionamiento» e
«inverso»).
La salida es alta cuando la referencia
local se activa mediante la tecla [Hand
On] (manual) del LCP o mediante la
orden manual de la entrada digital.
La salida es alta cuando la referencia
remota se activa mediante la tecla [Auto
On] (activación automática) del LCP o
mediante la orden automática de la
entrada digital.
58 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Evento
seleccionado
Salida de relé
Retardo a la
Conexión E-26
Retardo a la
Desconexión E-27
130BA172.10
Parámetros Guía de programación
5-40 Relé de función
Matriz (relé 1 [0], relé 2 [1])
Seleccione opciones para denir la función de los relés.
La selección de cada relé mecánico se realiza en un parámetro
de matrices. Cuando se ajusta el parámetro 0-03 Ajustes regionales
en [0] Internacional, el valor predeterminado es [9] Alarma.
Cuando se ajusta el parámetro 0-03 Ajustes regionales en [1]
Norteamérica, el valor predeterminado es [160] Sin alarma.
Option: Función:
[167] Coman.
arranque
activo
[168] Conv. modo
manual
[169] Dispos. en
modo auto.
[190] Falta de
caudal
[193] Modo reposo El convertidor de frecuencia / sistema ha
[194] Func. correa
rota
[196] Modo
Incendio
[198] Bypass conv. Para utilizar como señal para la
[211] Bomba de
cascada 1
[212] Bomba de
cascada 2
[213] Bomba de
cascada 3
[214] Bomba de
cascada 4
[215] Bomba de
cascada 5
La salida es alta cuando hay activa una
orden de arranque (por ejemplo,
mediante la entrada digital de conexión
de bus o [Hand on] o [Auto on]) y no
hay activa ninguna orden de parada.
La salida es alta cuando el convertidor de
frecuencia está en modo manual (según
indica el LED situado sobre [Hand On]).
La salida es alta cuando el convertidor de
frecuencia está en modo automático
(según indica el LED situado sobre [Auto
On]).
Se ha detectado una condición de falta
de caudal. Consulte el grupo de
parámetros 22-2* Detección falta de
caudal.
pasado al modo reposo. Consulte el
grupo de parámetros 22-4* Modo reposo.
Se ha detectado una rotura en la correa.
Puede activar esta función en el
parámetro 22-60 Func. correa rota.
El convertidor de frecuencia está
funcionando en Modo incendio. Consulte
el grupo de parámetros 24-0* Modo
incendio.
activación de un bypass electromagnético externo que conmute el motor
directamente en línea.
Consulte el grupo de parámetros 24-1*
Bypass conv.
5-41 Retardo conex, relé
Matriz [2]
Range: Función:
0.01 s* [0.01 -
600 s]
Ilustración 3.7 Retardo conex, relé
Introduzca el retardo del tiempo de
conexión del relé. Seleccione uno de los dos
relés mecánicos internos en una función
matricial. Consulte parámetro 5-40 Relé de
función para obtener mas información.
5-42 Retardo desconex, relé
Matriz [2]
Range: Función:
0.01 s* [0.01 -
600 s]
Ilustración 3.8 Retardo desconex, relé
Introduzca el retardo del tiempo de
desconexión del relé. Seleccione uno de los
dos relés mecánicos internos en una función
matricial. Consulte parámetro 5-40 Relé de
función para obtener mas información. Si la
condición del evento seleccionado cambia
antes de que expire el tiempo de retardo, la
salida de relé no se verá afectada.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 59

Parámetros
VLT® HVAC Basic Drive FC 101
Si la condición del evento seleccionado cambia antes de
que expire el temporizador de retardo de conexión o
desconexión, la salida de relé no se verá afectada.
3.6.5 5-5* Entrada de pulsos
33
Los parámetros de entrada de pulsos se usan para denir
una ventana adecuada para el área de referencia del pulso
5-52 Term. 29 valor bajo ref./realim
Range: Función:
0* [-4999 -
4999 ]
Ajuste el límite del valor de referencia bajo para
la velocidad del eje del motor [r/min]. Este es
también el valor de realimentación más bajo.
Ajuste el terminal 29 como entrada digital
(parámetro 5-13 Terminal 29 Entrada digital =
valor aplicable).
congurando los ajustes de escalado y ltro para las
entradas de pulsos. Los terminales de entrada 29 o 33
funcionan como entradas de referencia de frecuencia.
Ajuste el terminal 29 (parámetro 5-13 Terminal 29 Entrada
digital) o el terminal 33 (parámetro 5-15 Terminal 33 entrada
digital) en [32] Entrada de pulsos. Si se utiliza el terminal 29
como entrada, ajuste el parámetro 5-01 Terminal 27 modo
E/S a [0] Entrada.
5-53 Term. 29 valor alto ref./realim
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia alto [r/
min] para la velocidad del eje del motor
y el valor alto de realimentación.
Seleccione el terminal 29 como entrada
digital (parámetro 5-13 Terminal 29
Entrada digital = valor aplicable).
3.6.6 5-9* Controlado por bus
Este grupo de parámetros selecciona salidas digitales y de
relé mediante un ajuste del eldbus.
5-90 Control de bus digital y de relé
Range: Función:
0* [0 - 0xFFFFFFFF ] Este parámetro guarda el estado de los
relés y salidas digitales controlados por
bus.
Un 1 lógico indica que la salida es alta o
Ilustración 3.9 Entrada de pulsos
está activa.
Un 0 lógico indica que la salida es baja o
está inactiva.
5-50 Term. 29 baja frecuencia
Range: Función:
20 Hz* [20 -
31999 Hz]
Ajuste el límite de frecuencia baja correspondiente a la velocidad baja del eje del
motor (es decir, al valor de referencia bajo)
en el parámetro 5-52 Term. 29 valor bajo ref./
realim. Consulte el Ilustración 3.9.
5-51 Term. 29 alta frecuencia
Range: Función:
32000
Hz*
[21 32000 Hz]
Introduzca el límite alto de frecuencia
correspondiente a la velocidad alta del
eje del motor (es decir, al valor de
referencia alto) en el
parámetro 5-53 Term. 29 valor alto ref./
realim.
Bit 0-3 Reservado
Bit 4 Relé 1 terminal de salida
Bit 6-23 Reservado
Bit 24 Terminal 42 salida digital
Bit 26-31 Reservado
Tabla 3.5 Funciones de bit
60 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Ref. / Realimentación
[rpm]
Entrada analógica
Valor alto de
ref. / realim.
Valor bajo de
ref. / realim.
«Tensión baja» o
«Intensidad baja»
«Tensión alta» o
«Intensidad alta»
130BA038.13
5 V 10 V
300
600
900
1200
1500
[V]
150
Par. 6-xx
Par. 6-xx
Par. 6-xx
Par. 6-xx
Parámetros Guía de programación
3.7 Menú principal - E/S analógica - Grupo 6
Grupos de parámetros para ajustar la conguración de E/S
analógica y la salida digital.
El convertidor de frecuencia proporciona 2 entradas
analógicas:
Terminal 53.
•
Terminal 54.
•
Las entradas analógicas pueden asignarse libremente a la
tensión (0-10 V) o a la entrada de intensidad (0/4-20 mA).
3.7.1 6-0* Modo E/S analógico
6-00 Tiempo Límite Cero Activo
Range: Función:
10 s* [1 - 99 s] Introduzca el valor de tiempo límite.
6-01 Función Cero Activo
Option: Función:
Seleccionar la función de tiempo límite. La
función ajustada en el
parámetro 6-01 Función Cero Activo se
activa si la señal de entrada de los
terminales 53 o 54 es inferior al 50 % del
valor del parámetro 6-10 Terminal 53 escala
baja V, el parámetro 6-12 Terminal 53 escala
baja mA, el parámetro 6-20 Terminal 54
escala baja V o el parámetro 6-22 Terminal
54 escala baja mA durante el periodo de
tiempo denido en el
parámetro 6-00 Tiempo Límite Cero Activo.
[0] * O
[1] Mantener
salida
[2] Parada
[3] Velocidad ja
[4] Velocidad max.
[5] Parada y
desconexión
3 3
Ilustración 3.10 Función Cero Activo
6-02 Función Cero Activo en modo incendio
Option: Función:
Seleccione la función de tiempo límite
cuando el modo incendio esté activo. La
función ajustada en este parámetro se
activa si la señal de entrada de las entradas
analógicas es inferior al 50 % del valor bajo
durante un período de tiempo denido en
el parámetro 6-00 Tiempo Límite Cero Activo.
[0] * O
[1] Mantener
salida
[2] Parada
[3] Velocidad ja
[4] Velocidad
max.
3.7.2 6-1* Entrada analógica 53
Parámetros para congurar el escalado y los límites para la
entrada analógica 53 (terminal 53).
6-10 Terminal 53 escala baja V
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 61
Range: Función:
0.07 V* [0 - 10V]Introduzca la tensión (V) que corresponda al
parámetro 6-14 Term. 53 valor bajo ref./realim.
Para activar el parámetro 6-01 Función Cero
Activo, ajuste el valor en >1 V.
6-11 Terminal 53 escala alta V
Range: Función:
10 V* [0 - 10 V] Introduzca la tensión (V) que corresponda al
valor de referencia alto (denido en el
parámetro 6-15 Term. 53 valor alto ref./realim).

Parámetros
VLT® HVAC Basic Drive FC 101
6-12 Terminal 53 escala baja mA
3.7.3 6-2* Entrada analógica 54
Range: Función:
4 mA* [0 - 20
mA]
33
Introduzca el valor de intensidad baja. Esta
señal de referencia corresponde al valor bajo
de referencia/realimentación ajustado en el
parámetro 6-14 Term. 53 valor bajo ref./realim.
Para activar el parámetro 6-01 Función Cero
Activo, ajuste el valor a >2 mA.
6-13 Terminal 53 escala alta mA
Range: Función:
20 mA* [0 - 20
mA]
Introduzca el valor de intensidad alta que
corresponda al valor alto de referencia /
realimentación denido en
parámetro 6-15 Term. 53 valor alto ref./
realim.
6-14 Term. 53 valor bajo ref./realim
Range: Función:
0* [-4999 -
4999 ]
Introduzca el valor de referencia o realimentación que se corresponde con la tensión o
intensidad ajustadas en los parámetros de
parámetro 6-10 Terminal 53 escala baja V a
parámetro 6-12 Terminal 53 escala baja mA.
6-15 Term. 53 valor alto ref./realim
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia o
realimentación que se corresponde con
la tensión o intensidad ajustadas en los
parámetros de parámetro 6-11 Terminal
53 escala alta V a
parámetro 6-13 Terminal 53 escala alta
mA.
6-16 Terminal 53 tiempo ltro constante
Range: Función:
0.01 s* [0.01 - 10s]Introducir la constante de tiempo. Se trata
de una constante del tiempo de ltro de
paso bajo digital de primer nivel para
supresión de ruido eléctrico en el terminal
53. Un valor alto de la constante de tiempo
mejora la amortiguación, aunque aumenta el
retardo de tiempo por el ltro.
Parámetros para congurar el escalado y los límites para la
entrada analógica 54 (terminal 54).
6-20 Terminal 54 escala baja V
Range: Función:
0.07 V* [0 - 10V]Introduzca la tensión (V) que corresponda al
valor bajo de referencia (denido en el
parámetro 6-24 Term. 54 valor bajo ref./realim).
Para activar el parámetro 6-01 Función Cero
Activo, ajuste el valor en >1 V.
6-21 Terminal 54 escala alta V
Range: Función:
10 V* [0 - 10 V] Introduzca la tensión (V) que corresponda al
valor de referencia alto (denido en el
parámetro 6-25 Term. 54 valor alto ref./realim).
6-22 Terminal 54 escala baja mA
Range: Función:
4 mA* [0 - 20
mA]
Introduzca el valor de intensidad baja. Esta
señal de referencia corresponde al valor bajo
de referencia/realimentación ajustado en el
parámetro 6-24 Term. 54 valor bajo ref./realim.
Para activar la función tiempo límite de cero
activo del parámetro 6-01 Función Cero Activo,
ajuste el valor a >2 mA.
6-23 Terminal 54 escala alta mA
Range: Función:
20 mA* [0 - 20
mA]
Introduzca el valor de corriente alta que
corresponda al valor alto de referencia/
realimentación denido en el
parámetro 6-25 Term. 54 valor alto ref./
realim.
6-24 Term. 54 valor bajo ref./realim
Range: Función:
0* [-4999 -
4999 ]
Introduzca el valor de referencia o realimentación que se corresponde con la tensión o
corriente ajustadas en el
parámetro 6-21 Terminal 54 escala alta V / el
parámetro 6-22 Terminal 54 escala baja mA.
6-19 Modo terminal 53
Option: Función:
Seleccionar si el terminal 53 se utiliza
para entrada de intensidad o de
tensión.
[0] Modo de intensidad
[1] * Modo tensión
62 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
6-25 Term. 54 valor alto ref./realim
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia o
realimentación que se corresponde con
la tensión o corriente ajustadas en el
parámetro 6-21 Terminal 54 escala alta
V / el parámetro 6-23 Terminal 54 escala
alta mA.

Parámetros Guía de programación
6-26 Terminal 54 tiempo ltro constante
Range: Función:
0.01 s* [0.01 - 10s]Introduzca la constante de tiempo, que es
una constante del tiempo de ltro de paso
bajo digital de primer nivel para supresión
de ruido eléctrico en el terminal 54. Un valor
alto de la constante de tiempo mejora la
amortiguación, aunque aumenta el retardo
de tiempo por el ltro.
6-29 Modo terminal 54
Option: Función:
Seleccione si el terminal 54 se utiliza
para entrada de corriente o de
tensión.
[0] Modo de intensidad
[1] * Modo tensión
3.7.4 6-7* Salida anal. / digit. 45
Parámetros para congurar el escalado y los límites de
salida analógica/digital (terminal 45). Las salidas analógicas
son salidas de intensidad: 0/4-20 mA. La resolución en
salida analógica es de 12 bits. Los terminales de salida
analógica pueden ajustarse como salida digital.
6-70 Modo terminal 45
Option: Función:
Ajuste el terminal 45 como salida analógica o
salida digital.
[0] * 0-20 mA
[1] 4-20 mA
[2] Salida digital
6-71 Salida analógica terminal 45
Option: Función:
Seleccione la función del terminal 45
como una salida de intensidad
analógica. Consulte también el
parámetro 6-70 Modo terminal 45.
[254] Tensión Bus CC
[0] * Sin función
[100] Frecuencia de salida 0-100 Hz
[101] Referencia mín-máx. Mín
[102] Realimentación MínFB-Máx
[103] Int. motor 0-Imax 0–I
[106] Potencia 0–P
[139] Contr. bus 0–100%
[254] Tensión Bus CC 0-65 535 V
T2/S2, 200-400 V
•
T4, 400-800 V
•
T5, 400-1000 V
•
T6, 500-1000 V
•
-Máx
Ref.
Ref.
FB
máx
nom
6-72 Salida digital terminal 45
Option: Función:
Seleccione la función del
terminal 45 como salida de
intensidad digital. Consulte
también el parámetro 6-70 Modo
terminal 45. Consulte las descripciones de las opciones en el
parámetro 5-40 Relé de función.
[0] * Sin función
[1] Ctrl prep.
[2] Unidad lista
[3] Unid. lista/remoto
[4] En espera / sin advert.
[5] Funcionamiento
[6] Func./sin advert.
[7] Func. en ran./sin adv.
[8] Func. en ref./sin adv.
[9] Alarma
[10] Alarma o advertencia
[12] Fuera ran. intensidad
[13] Corriente posterior, baja
[14] Corriente anterior, alta
[16] Velocidad posterior, baja
[17] Velocidad anterior, alta
[19] < que realim. alta
[20] > que realim. baja
[21] Advertencia térmica
[22] Listo, sin adv. térm.
[23] Rem list sin adv tér
[24] Listo, tensión OK
[25] Cambio sentido
[26] Bus OK
[35] Parada externa
[36] Bit código control 11
[37] Bit código control 12
[41] Bajo ref., alta
[42] Sobre ref., alta
[45] Contr. bus
[60] Comparador 0
[61] Comparador 1
[62] Comparador 2
[63] Comparador 3
[64] Comparador 4
[65] Comparador 5
[70] Regla lógica 0
[71] Regla lógica 1
[72] Regla lógica 2
[73] Regla lógica 3
[74] Regla lógica 4
[75] Regla lógica 5
[80] Salida digital SL A
[81] Salida digital SL B
[82] Salida digital SL C
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 63

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Parámetros
VLT® HVAC Basic Drive FC 101
6-72 Salida digital terminal 45
3.7.5 6-9* Salida anal. / digit. 42
Option: Función:
[83] Salida digital SL D
[160] Sin alarma
[161] Func. inverso
33
[165] Ref. local activa
[166] Ref. remota activa
[167] Coman. arranque activo
[168] Conv. modo manual
[169] Dispos. en modo auto.
[190] Falta de caudal
[193] Modo reposo
[194] Func. correa rota
[196] Modo Incendio
[198] Bypass conv.
6-73 Escala mín. salida terminal 45
Range: Función:
0 %* [0 -
200 %]
Escalado para la salida mínima (0 mA o 4 mA)
de la señal analógica en el terminal 45. Ajuste
el valor en porcentaje del intervalo completo de
la variable seleccionada en el
parámetro 6-71 Salida analógica terminal 45.
6-74 Escala máx. salida terminal 45
Range: Función:
100%* [0 -
200 %
]
Escale la salida máxima (20 mA) de la señal
analógica seleccionada en el terminal 45. Ajuste
el valor en porcentaje del intervalo completo de
la variable seleccionada en el
parámetro 6-71 Salida analógica terminal 45.
Parámetros para congurar los límites del terminal 42 de
salida analógica/digital. Las salidas analógicas son salidas
de intensidad: 0/4-20 mA. La resolución en salidas
analógicas es 12 bits. Los terminales de salida analógica
pueden ajustarse como salida digital.
6-90 Terminal 42 Mode
Option: Función:
Ajuste el terminal 42 como salida analógica o
salida digital.
[0] * 0-20 mA
[1] 4-20 mA
[2] Salida digital
6-91 Terminal 42 salida analógica
Option: Función:
Seleccione la función del terminal 42
como salida de corriente analógica.
Consulte también el parámetro 6–
90 Terminal 42 Mode.
[254] Tensión Bus CC
[0] * Sin función
[100] Frecuencia de salida 0-100 Hz
[101] Referencia mín-máx. Mín.
[102] Realimentación MínFB-Máx
[103] Int. motor 0-Imax 0–I
[106] Potencia 0–P
[139] Contr. bus 0–100%
[184] Mirror AI53 mA 0–20
[185] Mirror AI54 mA 0–20
[254] Tensión Bus CC 0-65 535 V
T2/S2, 200-400 V
•
T4, 400-800 V
•
T5, 400-1000 V
•
T6, 500-1000 V
•
-Máx.
Ref.
FB
máx
nom
Ref.
6-92 Terminal 42 Digital Output
Option: Función:
Seleccione la función del
terminal 42 como salida de
Ilustración 3.11 Escala máxima de salida
6-76 Control bus salida terminal 45
Range: Función:
0* [0 - 16384 ] Mantiene el nivel de salida analógica si se
controla mediante bus.
64 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
[0] * Sin función
[1] Ctrl prep.
[2] Unidad lista
[3] Unid. lista/remoto
[4] En espera / sin advert.
[5] Funcionamiento
[6] Func./sin advert.
corriente analógica. Consulte
también el
parámetro 6-90 Terminal 42 Mode.
Consultar la descripción de las
opciones en el
parámetro 5-40 Relé de función.

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Parámetros Guía de programación
6-92 Terminal 42 Digital Output
Option: Función:
[7] Func. en ran./sin adv.
[8] Func. en ref./sin adv.
[9] Alarma
[10] Alarma o advertencia
[12] Fuera ran. intensidad
[13] Corriente posterior, baja
[14] Corriente anterior, alta
[16] Velocidad posterior, baja
[17] Velocidad anterior, alta
[19] < que realim. alta
[20] > que realim. baja
[21] Advertencia térmica
[22] Listo, sin adv. térm.
[23] Rem list sin adv tér
[24] Listo, tensión OK
[25] Cambio sentido
[26] Bus OK
[35] Parada externa
[36] Bit código control 11
[37] Bit código control 12
[41] Bajo ref., alta
[42] Sobre ref., alta
[45] Contr. bus
[60] Comparador 0
[61] Comparador 1
[62] Comparador 2
[63] Comparador 3
[64] Comparador 4
[65] Comparador 5
[70] Regla lógica 0
[71] Regla lógica 1
[72] Regla lógica 2
[73] Regla lógica 3
[74] Regla lógica 4
[75] Regla lógica 5
[80] Salida digital SL A
[81] Salida digital SL B
[82] Salida digital SL C
[83] Salida digital SL D
[160] Sin alarma
[161] Func. inverso
[165] Ref. local activa
[166] Ref. remota activa
[167] Coman. arranque activo
[168] Conv. modo manual
[169] Dispos. en modo auto.
[190] Falta de caudal
[193] Modo reposo
[194] Func. correa rota
[196] Modo Incendio
[198] Bypass conv.
6-93 Esc. mín. salida terminal 42
Range: Función:
0 %* [0 -
200 %]
Escalado para la salida mínima (0 o 4 mA) de la
señal analógica en el terminal 42. Ajuste el valor
en porcentaje del intervalo completo de la
variable seleccionada en el
parámetro 6-91 Terminal 42 salida analógica.
6-94 Esc. máx. salida terminal 42
Range: Función:
100%* [0 -
Escale la salida máxima (20 mA) del escalado del
200 %]
terminal 42. Ajuste el valor en porcentaje del
intervalo completo de la variable seleccionada en
el parámetro 6-91 Terminal 42 salida analógica.
Ilustración 3.12 Escala máxima de salida
6-96 Control bus salida terminal 42
Range: Función:
0* [0 - 16384 ] Mantener la salida analógica del terminal 42 si
está controlada mediante bus.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 65

Parámetros
VLT® HVAC Basic Drive FC 101
3.8 Menú principal - Comunic. y opciones Grupo 8
3.8.1 8-0* Ajustes generales
33
8-01 Puesto de control
Option: Función:
Este parámetro anula los ajustes de los
parámetros del parámetro 8-50 Selección
inercia al parámetro 8-56 Selec. referencia
interna.
[0] * Digital y
cód. ctrl
[1] Sólo digital Control solo mediante el uso de entradas
[2] Sólo cód.
de control
Control mediante el uso de la entrada digital
y el código de control.
digitales.
Control solo mediante el uso de código de
control.
8-02 Fuente de control
Option: Función:
8-04 Función tiempo límite cód. ctrl.
Option: Función:
[20] Liberación del
desbordamiento
N2
Esta opción solo será válida cuando el
protocolo sea N2.
3.8.2 8-3* Ajuste puerto FC
8-30 Protocolo
Option: Función:
Seleccione el protocolo para el puerto RS485
integrado.
[0] * FC Comunicación conforme al protocolo FC.
[2] Modbus
RTU
[3] Metasys N2 Protocolo de comunicación. El protocolo de
[4] FLN Comunicación conforme al protocolo FLN.
[5] Opción FC Comunicación conforme al protocolo BACNet.
Comunicación conforme al protocolo Modbus
RTU.
software N2 está diseñado para ser general
por naturaleza para acomodar las propiedades
exclusivas que pueda tener cada dispositivo.
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
Seleccione la fuente de código de control.
[0] Ninguno
[1] * FC RS485
8-03 Valor de tiempo límite ctrl.
Range: Función:
Size
related*
[0.1 6500 s]
Introduzca el tiempo máximo entre la
recepción de dos telegramas consecutivos.
Si se supera este tiempo, esto indica que
la comunicación serie se ha detenido. Se
ejecutará la función seleccionada en el
parámetro 8-04 Función tiempo límite cód.
ctrl..
8-04 Función tiempo límite cód. ctrl.
Option: Función:
Seleccionar la función de tiempo límite.
La función de tiempo límite se activa
cuando el código de control no se
actualiza dentro del periodo de tiempo
especicado en el parámetro 8-03 Valor
de tiempo límite ctrl..
[0] * O
[1] Mantener salida
[2] Parada
[3] Velocidad ja
[4] Velocidad max.
[5] Parada y
desconexión
8-31 Dirección
Range: Función:
Size related* [ 0.0 - 247 ]
Depende del
tamaño*
[ 0,0-247 ] Introduzca la dirección del puerto
RS485. Intervalo válido: 1-126
para bus FC o 1-247 para
Modbus.
8-32 Velocidad en baudios
Option: Función:
Seleccione la velocidad en baudios del puerto
RS485
El valor predeterminado se reere al
protocolo FC. La modicación del protocolo
del parámetro 8-30 Protocolo podría cambiar la
velocidad en baudios.
La modicación del protocolo en
parámetro 8-30 Protocolo podría cambiar la
velocidad en baudios.
[0] 2.400
baudios
[1] 4.800
baudios
[2] 9.600
baudios
[3] 19.200
baudios
[4] 38.400
baudios
[5] 57.600
baudios
Ajustes predeterminados para FLN.
Ajustes predeterminados para:
BACnet.
•
Metasys N2.
•
Ajustes predeterminados para Modbus RTU.
66 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
8-32 Velocidad en baudios
Option: Función:
[6] 76.800
baudios
[7] 115.200
baudios
8-33 Paridad / Bits de parada
Option: Función:
Paridad y bits de parada para el
protocolo que utilice el puerto FC.
Para algunos protocolos, no todas las
opciones están disponibles.
El valor predeterminado se reere al
protocolo FC. La modicación del
protocolo en el parámetro 8-30
Protocol podría cambiar la velocidad
en baudios.
[0] Paridad par, 1 bit de
parada
[1] Paridad impar, 1 bit
de parada
[2] Sin paridad, 1 bit de
parada
[3] Sin paridad, 2 bits de
parada
8-35 Retardo respuesta mín.
Range: Función:
Size related* [ 0.0010 - 0.5 s]
Depende del
tamaño.*
[ 0,0010-0,5 s] Especicar el tiempo de retardo
mínimo entre la recepción de
una petición y la transmisión de
una respuesta. Se utiliza para
reducir el retardo de procesamiento del módem.
8-36 Retardo respuesta máx.
Range: Función:
Size related* [ 0.1 - 10.0 s]
Depende del
tamaño.*
[ 0,1-10,0 s] Especique el tiempo de retardo
máximo aceptable entre la
recepción de una petición y la
transmisión de una respuesta. Si
se supera este tiempo, no se
devuelve ninguna respuesta.
8-37 Retardo máximo intercarac.
Range: Función:
Size related* [ 0.005 - 0.025 s]
Depende del
tamaño.*
[ 0,005-0,025 s] Especicar el tiempo de
retardo máximo entre dos
caracteres en un mensaje.
Superar este tiempo de
8-37 Retardo máximo intercarac.
Range: Función:
retardo hace que se rechace
el mensaje.
3.8.3 8-4* Conf. protoc. FC MC
Este grupo de parámetros es para las conguraciones de
escritura y lectura de PCD.
8-42 Cong. escritura PCD
Se pueden asignar diferentes parámetros a los PCD 3-10 de los
PPO (el número de PCD depende del tipo de PPO). Los valores
de los PCD de 3 a 10 se escribirán en los parámetros
seleccionados como valores de datos.
Option: Función:
[0] Ning.
[1] [302] Referencia mínima
[2] [303] Referencia máxima
[3] [341] Tiempo acel rampa 1
[4] [342] Tiempo decel. rampa 1
[5] [351] Tiempo acel rampa 2
[6] [352] Tiempo decel. rampa 2
[7] [380] Tiempo rampa veloc. ja
[8] [381] Tiempo par. ráp
[9] [412] Límite bajo veloc. motor
[Hz]
[10] [414] Límite alto veloc. motor
[Hz]
[11] [590] Control de bus digital y
de relé
[12] [676] Term. 45 control bus
salida
[13] [696] Control bus salida
terminal 42
[14] [894] Realim. de bus 1
[15] FC Port CTW
[16] FC Port REF
[17] [2021] Valor de consigna 1
8-43 Cong. lectura PCD
Se pueden asignar diferentes parámetros a los PCD 3-10 de los
PPO (el número de PCD depende del tipo de PPO). Los PCD del
3 al 10 mantienen los valores de datos reales de los parámetros
seleccionados.
Option: Función:
[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 67

Parámetros
VLT® HVAC Basic Drive FC 101
8-43 Cong. lectura PCD
Se pueden asignar diferentes parámetros a los PCD 3-10 de los
PPO (el número de PCD depende del tipo de PPO). Los PCD del
3 al 10 mantienen los valores de datos reales de los parámetros
seleccionados.
33
Option: Función:
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1652] Feedback [Unit]
[23] [1660] Digital Input 18,19,27,33
[24] [1661] Terminal 53 Switch Setting
[25] [1662] Analog input 53
[26] [1663] Terminal 54 Switch Setting
[27] [1664] Analog input 54
[28] [1665] Analog output 42 [mA]
[29] [1671] Relay output
[30] [1672] Counter A
[31] [1673] Counter B
[32] [1690] Alarm Word
[33] [1692] Warning Word
[34] [1694] Ext. Status Word
3.8.4 8-5* Digital/Bus
Parámetros para congurar la unión del código de control
Digital/Bus.
8-50 Selección inercia
Option: Función:
[2] Lógico Y Activa la parada libre a través de eldbus /
puerto de comunicación serie y a través de una
de las entradas digitales.
[3]*Lógico O Activa la parada libre a través del puerto de
comunicación serie o a través de una de las
entradas digitales.
8-51 Selección parada rápida
Option: Función:
AVISO!
Este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
como [0] Digital y cód. ctrl.
Seleccionar el control de la función de parada
rápida mediante los terminales (entrada digital)
y/o a través del bus.
[0] Entrada
digital
[1] Bus Activa la parada rápida a través del puerto de
[2] Lógico Y Activa la parada rápida a través del puerto de
[3] * Lógico O Activa la parada rápida a través del puerto de
Activa la parada rápida a través de una entrada
digital.
comunicación serie.
comunicación serie y de una de las entradas
digitales.
comunicación serie o a través de una de las
entradas digitales.
8-52 Selección freno CC
Option: Función:
AVISO!
este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
como [0] Digital y cód. ctrl.
8-50 Selección inercia
Option: Función:
AVISO!
este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
[0] Entrada
digital
[1] Bus Activa el freno de CC a través del puerto de
como [0] Digital y cód. ctrl.
Seleccione el control de la función de inercia a
través de los terminales (entrada digital) y/o a
través del bus.
[0] Entrada
digital
[1] Bus Activa la inercia a través del puerto de comuni-
68 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Activa la inercia a través de una entrada digital.
cación serie.
[2] Lógico Y Activa el freno de CC a través del puerto de
[3] Lógico O Activa el freno de CC a través del puerto de
Seleccione el control del freno de CC a través de
los terminales (entrada digital).
Activa el freno de CC a través de una entrada
digital.
comunicación serie.
comunicación serie y de una de las entradas
digitales.
comunicación serie o a través de una de las
entradas digitales.

Parámetros Guía de programación
8-53 Selec. arranque
Option: Función:
AVISO!
este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
como [0] Digital y cód. ctrl.
Seleccione el control de la función de arranque
del convertidor de frecuencia a través de los
terminales (entrada digital).
[0] Entrada
digital
[1] Bus Activa una orden de arranque a través del puerto
[2] Lógico Y Activa una orden de arranque a través del puerto
[3]*Lógico O Activa una orden de arranque a través del puerto
Activa la orden de arranque a través de una
entrada digital.
de comunicación serie o de la opción de bus de
campo.
de comunicación serie y de una de las entradas
digitales.
de comunicación serie o a través de una de las
entradas digitales.
8-54 Selec. sentido inverso
Option: Función:
AVISO!
este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
como [0] Digital y cód. ctrl.
Seleccione el control de la función de cambio de
sentido del convertidor de frecuencia a través de
los terminales (entrada digital) y / o el puerto de
comunicación serie.
[0]*Entrada
digital
[1] Bus Activa una orden de cambio de sentido
[2] Lógico Y Activa una orden de cambio de sentido
[3] Lógico O Activa la orden de cambio de sentido mediante
Activa una orden de cambio de sentido a través
de una entrada digital.
mediante el puerto de comunicación serie.
mediante el puerto de comunicación serie y a
través de una de las entradas digitales.
el puerto de comunicación serie o a través de
una de las entradas digitales.
8-55 Selec. ajuste
Option: Función:
AVISO!
este parámetro solo está activo si el
parámetro 8-01 Puesto de control se ajusta
como [0] Digital y cód. ctrl.
8-55 Selec. ajuste
Option: Función:
Seleccione el control del ajuste del convertidor
de frecuencia a través de los terminales (entrada
digital) y/o mediante el puerto de comunicación
serie.
[0] Entrada
digital
[1] Bus Activa la selección de ajustes a través del puerto
[2] Lógico Y Activa la selección de ajustes a través del puerto
[3]*Lógico O Activa la selección de ajustes a través del puerto
Activa la selección de ajustes mediante una
entrada digital.
de comunicación serie.
de comunicación serie y de una de las entradas
digitales.
de comunicación serie o a través una de las
entradas digitales.
8-56 Selec. referencia interna
Option: Función:
Seleccione el control de la selección de
referencia interna del convertidor de frecuencia
mediante los terminales (entrada digital) y/o
mediante el puerto de comunicación serie.
[0] Entrada
digital
[1] Bus Activa la selección de la referencia interna a
[2] Lógico Y Activa la selección de la referencia interna
[3] * Lógico O Activa la selección de la referencia interna
Activa la selección de referencia interna
mediante una entrada digital.
través del puerto de comunicación serie.
mediante el puerto de comunicación serie y a
través de una de las entradas digitales.
mediante el puerto de comunicación serie o a
través de una de las entradas digitales.
3.8.5 8-7* BACnet
8-70 Instancia BACnet
Range: Función:
1* [0 - 4194303 ] Introduzca un número de identicación
único para el dispositivo BACnet.
8-72 Máx. maest. MS/TP
Range: Función:
127* [0 - 127 ] Dena la dirección del maestro que tenga la
dirección superior de esta red. Al reducir este
valor, se optimiza la selección.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 69

Parámetros
VLT® HVAC Basic Drive FC 101
8-73 Máx. tramas info MS/TP
Range: Función:
1* [1 - 65534 ] Dena cuántas tramas de información/datos se
permite enviar al dispositivo mientras conserva
el elemento.
33
8-74 "Startup I am"
Option: Función:
[0] * Enviar al conectar Seleccione si el dispositivo debe enviar
el mensaje de servicio «I-Am» solo al
conectarse.
[1] Continuamente Seleccione si el dispositivo debe enviar
el mensaje de servicio «I-Am» de forma
continuada con un intervalo de un
minuto aproximadamente.
8-75 Contraseña inicializac.
Range: Función:
admin* [1 - 1 ] Introducir la contraseña necesaria para la
ejecución de la reinicialización del convertidor
desde BACnet.
8-79 Protocol Firmware version
Matriz [5]
Range: Función:
Size
related*
[0 655 ]
La revisión del rmware del convertidor
de frecuencia está en el índice 0,
Modbus está en el índice 1, Metasys N2
está en el índice 2, FLN está en el índice
3 y BACnet está en el índice 4.
3.8.6 8-8* Diagnóstico puerto FC
Estos parámetros se utilizan para controlar la comunicación
de bus a través del puerto FC.
8-80 Contador mensajes de bus
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas válidos detectados en el bus.
8-81 Contador errores de bus
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas con fallos (por ejemplo, fallo
de CRC) detectados en el bus.
8-83 Contador errores de esclavo
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas de error que el convertidor
de frecuencia no ha podido ejecutar.
8-84 Mensajes de esclavo enviados
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el n.º de
mensajes enviados desde el esclavo.
8-85 Errores de tiempo lím. esclavo
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra los errores de
tiempo límite del esclavo.
8-88 Reset Diagn. puerto FC
Option: Función:
[0] * No reiniciar
[1] Reiniciar contador
3.8.7 8-9* Realim. de bus
8-94 Realim. de bus 1
Range: Función:
0* [-32768 -
32767 ]
8-95 Realim. de bus 2
Range: Función:
0* [-32768 -
32767 ]
Escriba realimentación en este parámetro
mediante el puerto de comunicación serie.
Seleccione este parámetro en el
parámetro 20-00 Fuente realim. 1 o el
parámetro 20-03 Fuente 2 realim. lazo cerrado
proceso como fuente de realimentación. El valor
hex. de 4000 h se corresponde con el 100 % de
realimentación / el intervalo es ±200 %.
Escribir una realimentación en este parámetro
mediante el puerto de comunicación serie o la
opción de bus de campo. Este parámetro debe
seleccionarse en el parámetro 20-00 Fuente
realim. 1 o el parámetro 20-03 Fuente 2 realim.
lazo cerrado proceso como fuente de realimen-
tación. El valor hexadecimal de 4000 h
corresponde a ±200 % en el 100 % de realimentación/intervalo.
8-82 Mensajes de esclavo recibidos
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas válidos enviados al esclavo
por el convertidor de frecuencia.
70 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

130BA062.13
Estado 1
Evento 1/
Acción 1
Estado 2
Evento 2/
Acción 2
Start
event P13-01
Estado 3
Evento 3/
Acción 3
Estado 4
Evento 4/
Acción 4
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Parámetros Guía de programación
3.9 Menú principal - Lógica inteligente -
3.9.2 13-0* Ajustes SLC
Grupo 13
Para activar, desactivar y reiniciar la secuencia del Smart
3.9.1 13-** Prog. Features
El Smart Logic Control (SLC) es una secuencia de acciones
denidas por el usuario (consulte el parámetro 13-52 Acción
Controlador SL [x]) y ejecutadas por el SLC cuando el
evento asociado denido por el usuario (consulte el
parámetro 13-51 Evento Controlador SL [x]) es evaluado
como verdadero por el SLC. Los eventos y las acciones
están numerados y vinculados en parejas. Esto signica
que cuando se complete el evento [0] (cuando alcance el
valor verdadero), se ejecutará la acción [0]. Después de
ejecutar esta acción, se evalúan las condiciones del evento
[1]. Si se evalúa como verdadero, se ejecutará la acción [1],
y así sucesivamente. En cada momento solo se evalúa un
evento. Si un evento se evalúa como falso, no sucede nada
(en el SLC) durante el intervalo de exploración actual y no
se evalúan otros eventos. Esto signica que cuando el SLC
se inicia, evalúa el evento [0] (y solo el evento [0]) en cada
intervalo de exploración. El SLC ejecuta la acción [0] e
inicia la evaluación del evento [1] solo si el evento [0] se
considera verdadero. Se pueden programar de 1 a 20
eventos y acciones. Cuando se haya ejecutado el último
evento o acción, la secuencia volverá a comenzar desde
evento [0] / acción [0].
Ilustración 3.13 Ejemplo con tres eventos/acciones
Arranque y parada del SLC
Para arrancar o detener el SLC, seleccione [1] Sí o [2] No en
el parámetro 13-00 Modo Controlador SL. El SLC siempre
comienza en estado 0 (donde evalúa el evento [0]). El SLC
se inicia cuando el evento de arranque (denido en el
parámetro 13-01 Evento arranque) se evalúa como
verdadero (siempre que esté seleccionado [1] Sí en el
parámetro 13-00 Modo Controlador SL). El SLC se detiene
cuando el evento parada (parámetro 13-02 Evento parada)
es verdadero. El Parámetro 13-03 Reiniciar SLC reinicia todos
los parámetros SLC e inicia la programación desde el
comienzo.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 71
Logic Control, utilice los ajustes de SLC. Las funciones
lógicas y los comparadores siempre funcionan en segundo
plano, abriendo el control individual de las entradas y
salidas digitales.
13-00 Modo Controlador SL
Option: Función:
Para activar el Smart Logic Control de forma que se
inicie cuando haya una orden de arranque, por
ejemplo, mediante una entrada digital, seleccione [1]
Sí. Para desactivar el Smart Logic Control, seleccione
[0] No.
[0] * O Desactiva el controlador Smart Logic.
[1] act Activa el controlador Smart Logic.
13-01 Evento arranque
Option: Función:
Para activar el Smart Logic Control,
seleccione la entrada booleana (verdadero
o falso).
[0] Falso Introduce el valor jo de falso en la regla
lógica.
[1] Verdadero Introduce el valor jo de «verdadero» en
la regla lógica.
[2] En funciona-
miento
[3] En rango El motor funciona dentro de los rangos de
[4] En referencia El motor funciona a la velocidad de
[7] Fuera rango
intensidad
[8] I posterior bajo La intensidad del motor es inferior a la
[9] I anterior alto La intensidad del motor es superior a la
[16] Advertencia
térmica
[17] Tens. alim.
fuera ran.
El motor está en funcionamiento.
intensidad programados
(parámetro 4-50 Advert. Intens. baja y
parámetro 4-51 Advert. Intens. alta)
referencia.
La intensidad del motor está fuera del
intervalo denido en el
parámetro 4-18 Límite intensidad.
ajustada en el parámetro 4-50 Advert.
Intens. baja.
ajustada en el parámetro 4-51 Advert.
Intens. alta.
La advertencia térmica se activa cuando la
temperatura sobrepasa el límite en el
motor, en el convertidor de frecuencia o
en el termistor.
Advertencia o alarma de pérdida de fase
de red, si el parámetro 14-12 Función
desequil. alimentación no está ajustado
como [2] Desactivado.
3 3

Parámetros
VLT® HVAC Basic Drive FC 101
13-01 Evento arranque
Option: Función:
[18] Cambio de
sentido
[19] Advertencia Se presenta una advertencia.
33
[20] Alarma
(descon.)
[21] Alar. (bloq.
descon.)
[22] Comparador 0 Utilice el resultado del comparador 0 en la
[23] Comparador 1 Utilice el resultado del comparador 1 en la
[24] Comparador 2 Utilice el resultado del comparador 2 en la
[25] Comparador 3 Utilice el resultado del comparador 3 en la
[26] Regla lógica 0 Utilice el resultado de la regla lógica 0 en
[27] Regla lógica 1 Utilice el resultado de la regla lógica 1 en
[28] Regla lógica 2 Utilice el resultado de la regla lógica 2 en
[29] Regla lógica 3 Utilice el resultado de la regla lógica 3 en
[33] Entrada digital
DI18
[34] Entrada digital
DI19
[35] Entrada digital
DI27
[36] Entrada digital
DI29
[39]*Comando de
arranque
[40] Convert. frec.
parado
[42] Desc. reinic.
autom.
[50] Comparador 4 Utiliza el resultado del comparador 4 en la
[51] Comparador 5 Utiliza el resultado del comparador 5 en la
El convertidor de frecuencia cambia de
sentido.
Se presenta una alarma.
Se presenta una alarma de bloqueo por
alarma.
regla lógica.
regla lógica.
regla lógica.
regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
Utiliza el valor de DI18 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI19 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI27 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI29 en la regla lógica
(alto = verdadero).
Este evento es verdadero si el convertidor
de frecuencia arranca (ya sea mediante
entrada digital, eldbus u otro).
Este evento es verdadero si el convertidor
de frecuencia se detiene o entra en inercia
(ya sea por entrada digital, eldbus u
otro).
Este evento es verdadero si el convertidor
de frecuencia está detenido (pero no
bloqueado por alarma) y se emite un
Reset automático.
regla lógica.
regla lógica.
13-01 Evento arranque
Option: Función:
[60] Regla lógica 4 Utiliza el resultado de la regla lógica 4 en
la regla lógica.
[61] Regla lógica 5 Utiliza el resultado de la regla lógica 5 en
la regla lógica.
[83] Correa rota Se ha detectado una situación de correa
rota. Puede activar esta función en
parámetro 22-60 Func. correa rota.
13-02 Evento parada
Option: Función:
Seleccione la condición (verdadero o
falso) que desactiva el controlador Smart
Logic.
[0] Falso Introduce el valor jo de falso en la regla
lógica.
[1] Verdadero Introduce el valor jo de «verdadero» en
la regla lógica.
[2] En funciona-
miento
[3] En rango Para más detalles, consulte el
[4] En referencia Para más detalles, consulte el
[7] Fuera rango
intensidad
[8] I posterior bajo Para más detalles, consulte el
[9] I anterior alto Para más detalles, consulte el
[16] Advertencia
térmica
[17] Tens. alim. fuera
ran.
[18] Cambio de
sentido
[19] Advertencia Para más detalles, consulte el
[20] Alarma
(descon.)
[21] Alar. (bloq.
descon.)
[22] Comparador 0 Utilice el resultado del comparador 0 en
[23] Comparador 1 Utilice el resultado del comparador 1 en
[24] Comparador 2 Utilice el resultado del comparador 2 en
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
la regla lógica.
la regla lógica.
la regla lógica.
72 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parámetros Guía de programación
[25] Comparador 3 Utilice el resultado del comparador 3 en
[26] Regla lógica 0 Utilice el resultado de la regla lógica 0 en
[27] Regla lógica 1 Utilice el resultado de la regla lógica 1 en
[28] Regla lógica 2 Utilice el resultado de la regla lógica 2 en
[29] Regla lógica 3 Utilice el resultado de la regla lógica 3 en
[30] Tiempo límite
[31] Tiempo límite
[32] Tiempo límite
[33] Entrada digital
[34] Entrada digital
[35] Entrada digital
[36] Entrada digital
[39] Comando de
[40]*Convert. frec.
[42] Desc. reinic.
[50] Comparador 4 Utiliza el resultado del comparador 4 en
[51] Comparador 5 Utiliza el resultado del comparador 5 en
[60] Regla lógica 4 Utiliza el resultado de la regla lógica 4 en
[61] Regla lógica 5 Utiliza el resultado de la regla lógica 5 en
[70] Tiempo límite
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 73
13-02 Evento parada
Option: Función:
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
Utilizar el resultado del temporizador 0
SL 0
SL 1
SL 2
DI18
DI19
DI27
DI29
arranque
parado
autom.
SL 3
en la regla lógica.
Utilizar el resultado del temporizador 1
en la regla lógica.
Utilizar el resultado del temporizador 2
en la regla lógica.
Utiliza el valor de DI18 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI19 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI27 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI29 en la regla lógica
(alto = verdadero).
Este evento es verdadero si el
convertidor de frecuencia arranca por
cualquier método (entrada digital,
eldbus u otro).
Este evento es verdadero si el
convertidor de frecuencia se detiene o
entra en inercia por cualquier método
(entrada digital, eldbus u otro).
Este evento es verdadero si el
convertidor de frecuencia está detenido
(pero no bloqueado por alarma) y se
emite un Reset automático.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
Utiliza el resultado del temporizador 3 en
la regla lógica.
13-02 Evento parada
Option: Función:
[71] Tiempo límite
SL 4
[72] Tiempo límite
SL 5
[73] Tiempo límite
SL 6
[74] Tiempo límite
SL 7
[83] Correa rota Se ha detectado una rotura en la correa.
Utiliza el resultado del temporizador 4 en
la regla lógica.
Utiliza el resultado del temporizador 5 en
la regla lógica.
Utiliza el resultado del temporizador 6 en
la regla lógica.
Utiliza el resultado del temporizador 7 en
la regla lógica.
Puede activar esta función en
parámetro 22-60 Func. correa rota.
13-03 Reiniciar SLC
Option: Función:
[0] * No reiniciar
SLC
[1] Reiniciar SLC Reinicia todos los parámetros del grupo de
Mantiene los ajustes programados en el
grupo de parámetros 13-** Lógica inteligente.
parámetros 13-** Lógica inteligente a los
ajustes predeterminados.
3.9.3 13-1* Comparadores
Los comparadores se usan para comparar variables
continuas (como frecuencia o intensidad de salida y
entrada analógica) con valores jos predeterminados.
Ilustración 3.14 Comparadores
Además, hay valores digitales que se comparan según
intervalos de tiempo jados. Consulte la explicación del
parámetro 13-10 Operando comparador. Los comparadores
se evalúan una vez en cada intervalo de exploración.
Utilice directamente el resultado (verdadero o falso). Todos
los parámetros de este grupo son parámetros de matrices
con índice de 0 a 5. Seleccione el índice 0 para programar
el comparador 0, seleccione el índice 1 para programar el
comparador 1, y así sucesivamente.
13-10 Operando comparador
Matriz [6]
Option: Función:
Seleccione la variable que debe
controlar el comparador.
3 3

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parámetros
VLT® HVAC Basic Drive FC 101
13-10 Operando comparador
Matriz [6]
Option: Función:
[0] * Desactivado
[1] Referencia
33
[2] Realimentación
[3] Veloc. motor
[4] Intensidad motor
[6] Potencia motor
[7] Tensión motor
[12] Entr. analóg. AI53
[13] Entr. analóg. AI54
[20] Número de alarma
[30] Contador A
[31] Contador B
13-11 Operador comparador
Matriz [6]
Option: Función:
[0] Menor
que (<)
[1]*≈ (igual) Seleccione [1] ≈ para que el resultado de la
[2] Mayor
que (>)
Seleccione [0] < para que el resultado de la
evaluación sea verdadero cuando la variable
seleccionada en el parámetro 13-10 Operando
comparador sea inferior al valor jado en el
parámetro 13-12 Valor comparador. El resultado
será falso si la variable seleccionada en el
parámetro 13-10 Operando comparador es
superior al valor jado en el
parámetro 13-12 Valor comparador.
evaluación sea verdadero cuando la variable
seleccionada en el parámetro 13-10 Operando
comparador sea aproximadamente igual al valor
jado en el parámetro 13-12 Valor comparador.
Seleccione [2] > para la lógica inversa de la
opción [0] <.
Tempor. inicio 0) hasta que pase el valor del temporizador
introducido en este parámetro. A continuación, vuelve a
ser verdadero.
Todos los parámetros de este grupo son parámetros de
matrices con índice de 0 a 2. Seleccione el índice 0 para
programar el temporizador 0; seleccione el índice 1 para
programar el temporizador 1, y así sucesivamente.
13-20 Temporizador Smart Logic Controller
Matriz [8]
Range: Función:
0 s* [0 -
3600 s]
Introduzca el valor para denir la duración de la
salida falso del temporizador programado. Un
temporizador solo es falso si lo activa una acción
(véase el parámetro 13-52 Acción Controlador SL
[29-31] y parámetro 13-52 Acción Controlador SL
[70-74] Tempor. inicio X) y hasta que transcurra el
tiempo introducido en el temporizador. Los
parámetros de matrices contienen temporizadores de 0 a 7.
3.9.5 13-4* Reglas lógicas
Se pueden combinar hasta tres entradas booleanas
(entradas verdaderas/falsas) de temporizadores,
comparadores, entradas digitales, bits de estado y eventos
utilizando los operadores lógicos Y, O y NO. Seleccione
entradas booleanas para el cálculo en el
parámetro 13-40 Regla lógica booleana 1, el
parámetro 13-42 Regla lógica booleana 2 y el
parámetro 13-44 Regla lógica booleana 3. Dena los
operadores utilizados para combinar de forma lógica las
entradas seleccionadas en el parámetro 13-41 Operador
regla lógica 1 y el parámetro 13-43 Operador regla lógica 2.
13-12 Valor comparador
Matriz [6]
Range: Función:
0* [-9999 -
9999 ]
3.9.4 13-2* Temporizadores
Utilice el resultado (verdadero o falso) directamente de los
temporizadores para denir un evento (consulte el
parámetro 13-51 Evento Controlador SL) o como entrada
booleana en una regla lógica (consulte el
parámetro 13-40 Regla lógica booleana 1, el
parámetro 13-42 Regla lógica booleana 2 o el
parámetro 13-44 Regla lógica booleana 3). Un temporizador
es falso solo cuando lo inicia una acción (por ejemplo, [29]
74 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Introduzca el nivel de disparo para la variable
controlada por este comparador. Este es un
parámetro de matrices que contiene los
valores de comparador de 0 a 5.
Ilustración 3.15 Reglas lógicas
Prioridad de cálculo
Primero, se calculan los resultados del
parámetro 13-40 Regla lógica booleana 1, del
parámetro 13-41 Operador regla lógica 1 y del
parámetro 13-42 Regla lógica booleana 2. El resultado
(verdadero/falso) de este cálculo se combina con los
ajustes del parámetro 13-43 Operador regla lógica 2 y del
parámetro 13-44 Regla lógica booleana 3, y produce el
resultado nal (verdadero/falso) de la regla lógica.

Parámetros Guía de programación
13-40 Regla lógica booleana 1
Matriz [6]
Option: Función:
[0] * Falso Introduce el valor jo de falso en la regla
lógica.
[1] Verdadero Introduce el valor jo de verdadero en la
regla lógica.
[2] En funciona-
miento
[3] En rango Para más detalles, consulte el
[4] En referencia Para más detalles, consulte el
[7] Fuera rango
intensidad
[8] I posterior bajo Para más detalles, consulte el
[9] I anterior alto Para más detalles, consulte el
[16] Advertencia
térmica
[17] Tens. alim. fuera
ran.
[18] Cambio de
sentido
[19] Advertencia Para más detalles, consulte el
[20] Alarma (descon.) Para más detalles, consulte el
[21] Alar. (bloq.
descon.)
[22] Comparador 0 Utilice el resultado del comparador 0 en
[23] Comparador 1 Utilice el resultado del comparador 1 en
[24] Comparador 2 Utilice el resultado del comparador 2 en
[25] Comparador 3 Utilice el resultado del comparador 3 en
[26] Regla lógica 0 Utilice el resultado de la regla lógica 0 en
[27] Regla lógica 1 Utilice el resultado de la regla lógica 1 en
[28] Regla lógica 2 Utilice el resultado de la regla lógica 2 en
[29] Regla lógica 3 Utilice el resultado de la regla lógica 3 en
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
parámetro 13-01 Evento arranque.
Para más detalles, consulte el
parámetro 13-01 Evento arranque.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
13-40 Regla lógica booleana 1
Matriz [6]
Option: Función:
[30] Tiempo límite
SL 0
[31] Tiempo límite
SL 1
[32] Tiempo límite
SL 2
[33] Entrada digital
DI18
[34] Entrada digital
DI19
[35] Entrada digital
DI27
[36] Entrada digital
DI29
[39] Comando de
arranque
[40] Convert. frec.
parado
[42] Desc. reinic.
autom.
[50] Comparador 4 Utiliza el resultado del comparador 4 en
[51] Comparador 5 Utiliza el resultado del comparador 5 en
[60] Regla lógica 4 Utiliza el resultado de la regla lógica 4 en
[61] Regla lógica 5 Utiliza el resultado de la regla lógica 5 en
[70] Tiempo límite
SL 3
[71] Tiempo límite
SL 4
[72] Tiempo límite
SL 5
[73] Tiempo límite
SL 6
[74] Tiempo límite
SL 7
Utilizar el resultado del temporizador 0
en la regla lógica.
Utilizar el resultado del temporizador 1
en la regla lógica.
Utilizar el resultado del temporizador 2
en la regla lógica.
Utiliza el valor de DI18 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI19 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI27 en la regla lógica
(alto = verdadero).
Utiliza el valor de DI29 en la regla lógica
(alto = verdadero).
Esta regla lógica es verdadera si el
convertidor de frecuencia arranca por
cualquiera de los métodos (ya sea por
entrada digital o de otro modo).
Esta regla lógica es verdadera si el
convertidor de frecuencia se detiene o
entra en inercia por cualquiera de los
métodos (ya sea por entrada digital o de
otro modo).
Esta regla lógica es verdadera si el
convertidor de frecuencia está detenido
(pero no bloqueado por alarma) y se
emite un reset automático.
la regla lógica.
la regla lógica.
la regla lógica.
la regla lógica.
Utiliza el resultado del temporizador 3 en
la regla lógica.
Utiliza el resultado del temporizador 4 en
la regla lógica.
Utiliza el resultado del temporizador 5 en
la regla lógica.
Utiliza el resultado del temporizador 6 en
la regla lógica.
Utiliza el resultado del temporizador 7 en
la regla lógica.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 75

Parámetros
VLT® HVAC Basic Drive FC 101
13-40 Regla lógica booleana 1
Matriz [6]
Option: Función:
[83] Correa rota Se ha detectado una rotura en la correa.
Puede activar esta función en
33
parámetro 22-60 Func. correa rota.
13-41 Operador regla lógica 1
Option: Función:
[0] * Desactivado
[1] Y
[2] O
[3] Y NO
[4] O NO
[5] NO Y
[6] NO O
[7] NO Y NO
[8] NO O NO
13-42 Regla lógica booleana 2
Matriz [6]
Option: Función:
Seleccione la segunda entrada
booleana (verdadero o falso) para
la regla lógica seleccionada.
Consulte el parámetro 13-40 Regla
lógica booleana 1 para obtener más
descripciones de opciones y sus
funciones.
[0] * Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[7] Fuera rango intensidad
[8] I posterior bajo
[9] I anterior alto
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[18] Cambio de sentido
[19] Advertencia
[20] Alarma (descon.)
[21] Alar. (bloq. descon.)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regla lógica 0
[27] Regla lógica 1
[28] Regla lógica 2
[29] Regla lógica 3
[30] Tiempo límite SL 0
[31] Tiempo límite SL 1
[32] Tiempo límite SL 2
13-42 Regla lógica booleana 2
Matriz [6]
Option: Función:
[33] Entrada digital DI18
[34] Entrada digital DI19
[35] Entrada digital DI27
[36] Entrada digital DI29
[39] Comando de arranque
[40] Convert. frec. parado
[42] Desc. reinic. autom.
[50] Comparador 4
[51] Comparador 5
[60] Regla lógica 4
[61] Regla lógica 5
[70] Tiempo límite SL 3
[71] Tiempo límite SL 4
[72] Tiempo límite SL 5
[73] Tiempo límite SL 6
[74] Tiempo límite SL 7
[83] Correa rota Se ha detectado una rotura en la
correa. Puede activar esta función
en parámetro 22-60 Func. correa
rota.
13-43 Operador regla lógica 2
Matriz [6]
Option: Función:
Seleccione el segundo operador lógico que se
utilizará en la entrada booleana calculada en
el parámetro 13-40 Regla lógica booleana 1, en
el parámetro 13-41 Operador regla lógica 1 y
en el parámetro 13-42 Regla lógica booleana 2,
y la entrada booleana del
parámetro 13-42 Regla lógica booleana 2.
[13-44] indica la entrada booleana del
parámetro 13-44 Regla lógica booleana 3.
[13-40/13-42] indica la entrada booleana
calculada en el parámetro 13-40 Regla lógica
booleana 1, en el parámetro 13-41 Operador
regla lógica 1 y en el parámetro 13-42 Regla
lógica booleana 2. [0] Desactivado (ajuste de
fábrica): Seleccione esta opción para ignorar
parámetro 13-44 Regla lógica booleana 3.
[0] * Desactivado
[1] Y
[2] O
[3] Y NO
[4] O NO
[5] NO Y
[6] NO O
[7] NO Y NO
[8] NO O NO
76 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
13-44 Regla lógica booleana 3
Matriz [6]
Option: Función:
Seleccione la tercera entrada
booleana (verdadero o falso) para
la regla lógica seleccionada.
Consulte el parámetro 13-40 Regla
lógica booleana 1 para obtener más
descripciones de opciones y sus
funciones.
[0] * Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[7] Fuera rango intensidad
[8] I posterior bajo
[9] I anterior alto
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[18] Cambio de sentido
[19] Advertencia
[20] Alarma (descon.)
[21] Alar. (bloq. descon.)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regla lógica 0
[27] Regla lógica 1
[28] Regla lógica 2
[29] Regla lógica 3
[30] Tiempo límite SL 0
[31] Tiempo límite SL 1
[32] Tiempo límite SL 2
[33] Entrada digital DI18
[34] Entrada digital DI19
[35] Entrada digital DI27
[36] Entrada digital DI29
[39] Comando de arranque
[40] Convert. frec. parado
[42] Desc. reinic. autom.
[50] Comparador 4
[51] Comparador 5
[60] Regla lógica 4
[61] Regla lógica 5
[70] Tiempo límite SL 3
[71] Tiempo límite SL 4
[72] Tiempo límite SL 5
[73] Tiempo límite SL 6
[74] Tiempo límite SL 7
[83] Correa rota
3.9.6 13-5* Estados
13-51 Evento Controlador SL
Matriz [20]
Option: Función:
Seleccione la entrada booleana
(verdadero o falso) para denir el
evento de controlador Smart Logic.
Consulte el parámetro 13-02 Evento
parada para obtener más descripciones de opciones y sus funciones.
[0] * Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[7] Fuera rango intensidad
[8] I posterior bajo
[9] I anterior alto
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[18] Cambio de sentido
[19] Advertencia
[20] Alarma (descon.)
[21] Alar. (bloq. descon.)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regla lógica 0
[27] Regla lógica 1
[28] Regla lógica 2
[29] Regla lógica 3
[30] Tiempo límite SL 0
[31] Tiempo límite SL 1
[32] Tiempo límite SL 2
[33] Entrada digital DI18
[34] Entrada digital DI19
[35] Entrada digital DI27
[36] Entrada digital DI29
[39] Comando de arranque
[40] Convert. frec. parado
[42] Desc. reinic. autom.
[50] Comparador 4
[51] Comparador 5
[60] Regla lógica 4
[61] Regla lógica 5
[70] Tiempo límite SL 3
[71] Tiempo límite SL 4
[72] Tiempo límite SL 5
[73] Tiempo límite SL 6
[74] Tiempo límite SL 7
[83] Correa rota
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 77

Parámetros
VLT® HVAC Basic Drive FC 101
13-52 Acción Controlador SL
Matriz [20]
Option: Función:
Seleccione la acción correspondiente al
evento SLC. Las acciones se ejecutan
33
[100] Rest. alarma
[0] * Desactivado
[1] Sin acción
[2] Selección de
ajuste 1
[3] Selección de
ajuste 2
[10] Selec. ref.
presel. 0
[11] Selec. ref.
presel. 1
[12] Selec. ref.
presel. 2
[13] Selec. ref.
presel. 3
[14] Selec. ref.
presel. 4
[15] Selec. ref.
presel. 5
[16] Selec. ref.
presel. 6
[17] Selec. ref.
presel. 7
[18] Seleccionar
rampa 1
[19] Seleccionar
rampa 2
[22] En funciona-
miento
[23] Func. sentido
inverso
[24] Parada Envía una orden de parada al convertidor
[25] Parada rápida Envía una orden de parada rápida al
[26] Freno de CC Emite una orden de parada CC al
[27] Inercia El convertidor de frecuencia entra en
[28] Mant. salida Mantiene la frecuencia de salida del
cuando el evento correspondiente
(denido en el parámetro 13-51 Evento
Controlador SL) se evalúa como
verdadero. Las siguientes acciones están
disponibles para ser seleccionadas:
Cambia el ajuste activo
(parámetro 0-10 Ajuste activo) al ajuste 1.
Cambia el ajuste activo
(parámetro 0-10 Ajuste activo) al ajuste 2.
Selecciona la referencia interna 0.
Selecciona la referencia interna 1.
Selecciona la referencia interna 2.
Selecciona la referencia interna 3.
Selecciona la referencia interna 4.
Selecciona la referencia interna 5.
Selecciona la referencia interna 6.
Selecciona la referencia interna 7. Si se
cambia la referencia interna activa, esta
se une con otras órdenes de referencia
interna que llegan de las entradas
digitales o a través de un eldbus.
Selecciona la rampa 1.
Selecciona la rampa 2.
Envía una orden de arranque al
convertidor de frecuencia.
Emite una orden de arranque con cambio
de sentido al convertidor de frecuencia.
de frecuencia.
convertidor de frecuencia.
convertidor de frecuencia.
parada por inercia inmediatamente. Todas
las órdenes de parada, incluyendo la de
inercia, detienen el SLC.
convertidor de frecuencia.
13-52 Acción Controlador SL
Matriz [20]
Option: Función:
[29] Tempor. inicio0Inicia el temporizador 0; consulte
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa
[30] Tempor. inicio1Inicia el temporizador 1; consulte
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
[31] Tempor. inicio2Inicia el temporizador 2; consulte
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
[32] Aj. sal. dig. A
baja
[33] Aj. sal. dig. B
baja
[34] Aj. sal. dig. C
baja
[35] Aj. sal. dig. D
baja
[38] Aj. sal. dig. A
alta
[39] Aj. sal. dig. B
alta
[40] Aj. sal. dig. C
alta
[41] Aj. sal. dig. D
alta
[60] Reset del
contador A
[61] Reset del
contador B
[70] Tempor. inicio3Inicia el temporizador 3; consulte
[71] Tempor. inicio4Inicia el temporizador 4; consulte
[72] Tempor. inicio5Inicia el temporizador 5; consulte
[73] Tempor. inicio6Inicia el temporizador 6; consulte
[74] Tempor. inicio7Arranca el temporizador 7; consulte
Cualquier salida que tenga seleccionada
la salida digital 1 será baja
(desconectada).
Cualquier salida con salida digital 2
seleccionada es baja (descon.).
Cualquier salida con salida digital 3
seleccionada es baja (descon.).
Cualquier salida con salida digital 4
seleccionada es baja (descon.).
Cualquier salida con salida digital 1
seleccionada es alta (cerrada).
Cualquier salida con salida digital 2
seleccionada es alta (cerrada).
Cualquier salida con salida digital 3
seleccionada es alta (cerrada).
Cualquier salida con salida digital 4
seleccionada es alta (cerrada).
Reinicia el contador A a 0.
Reinicia el contador B a 0.
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
parámetro 13-20 Temporizador Smart Logic
Controller para una descripción más
completa.
78 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
13-52 Acción Controlador SL
Matriz [20]
Option: Función:
[100] alarma man. Reiniciar la alarma.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 79

Parámetros
VLT® HVAC Basic Drive FC 101
3.10 Menú principal - Func. especiales Grupo 14
3.10.1 14-0* Conmut. inversor
33
14-01 Frecuencia conmutación
14-03 Sobremodulación
Option: Función:
par adicional en mitad del intervalo de sobresincronía
(desde un 0 % a velocidad nominal hasta una
elevación cercana al 12 % al doble de la velocidad
nominal).
Option: Función:
Seleccione la frecuencia de conmutación del
inversor. El cambio de la frecuencia de cambio
puede ayudar a reducir el ruido acústico del
motor.
AVISO!
El valor de la frecuencia de salida del
convertidor de frecuencia nunca debe ser
superior a 1/10 de la frecuencia de
conmutación. Con el motor en funcionamiento, ajuste la frecuencia de
conmutación del
parámetro 14-01 Frecuencia conmutación
hasta disminuir todo lo posible el ruido del
motor.
AVISO!
Unas frecuencias de conmutación altas
14-07 Nivel comp. tiempo muerto
Range: Función:
Size
related*
[0 100 ]
Nivel de compensación de tiempo muerto
aplicada en porcentaje. Un nivel elevado
(>90 %) optimiza la respuesta dinámica del
motor. Un nivel situado entre el 50 % y el
90 % es adecuado tanto para la minimización del rizado del par del motor como
para la dinámica del motor. Un nivel cero
desactiva la compensación de tiempo
muerto.
14-08 Factor de ganancia de amortiguación
Range: Función:
Size related* [0 -
100 %]
Ajuste el factor de amortiguación para
compensación de tensión de enlace de
CC. Consulte el parámetro 14-51 Comp.
del enlace de CC.
calientan el convertidor de frecuencia y
podrían reducir su vida útil.
14-09 Dead Time Bias Current Level
Range: Función:
AVISO!
No todas las opciones están disponibles en
todas las potencias.
[0] Ran3 PWM real aleatorio de 3 kHz (modulación de
ruido blanco).
[1] Ran5 PWM real aleatorio de 5 kHz (modulación de
ruido blanco).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Sobremodulación
Option: Función:
[0] * O No selecciona sobremodulación alguna de la tensión
de salida, para evitar el rizado del par en el eje del
motor.
[1] act La función de sobremodulación genera una corriente
adicional de hasta un 8 % de la tensión de salida U
sin sobremodulación. Esto da lugar a un 10-12 % de
máx.
Size related* [0 -
100 %]
Ajuste una señal de sesgo (en
porcentaje) que se añadirá a la señal
de detección de la intensidad para
compensación de tiempo muerto de
algunos motores.
3.10.2 14-1* Alim. on/o
Parámetros para congurar la gestión y el control de fallos
de red.
14-10 Fallo aliment.
Congure la acción del convertidor de frecuencia cuando la
tensión de red sea inferior al límite de tensión de red
congurado en el parámetro 14-11 Tensión de red en fallo de red.
Option: Función:
[0] * Sin función
[1] Deceler. controlada
[3] Inercia
[4] Energía regenerativa
[5] Energía regen., desc.
[6] Alarma
[7] Kin. back-up, trip w
recovery
80 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
14-11 Tensión de red en fallo de red
Range: Función:
Size related* [100 - 800V]Utilice este parámetro para denir a
qué tensión de CA debe activarse la
función seleccionada en el
parámetro 14-10 Fallo aliment..
14-12 Función desequil. alimentación
Option: Función:
AVISO!
Seleccionar esta opción puede reducir
la vida útil del convertidor de
frecuencia.
El funcionamiento en situación de grave
desequilibrio de red reduce la vida útil del
motor. Si el motor se utiliza continuamente
cerca del valor nominal de carga, las
condiciones se consideran duras.
Si se detecta un desequilibrio de red grave,
seleccione una de las funciones disponibles.
[0] * Desconexión Desconecta el convertidor de frecuencia.
[1] Advertencia Emite una advertencia.
[2] Desactivado Sin acción.
[3] Reducción El convertidor de frecuencia reducirá la
potencia.
3.10.3 14-2* Reinicio desconex.
14-20 Modo Reset
Seleccione la función de reset después de una desconexión. Tras
el reinicio, el convertidor de frecuencia puede volver a arrancarse.
Option: Función:
[0] * Reset manual Seleccione [0] Reset manual para
realizar un reinicio mediante [Reset] o
a través de las entradas digitales.
[1] Reset autom. x 1 Seleccione [1]-[12] Reset autom. x 1-x
20 para realizar entre uno y 20
reinicios automáticos tras una
desconexión.
[2] Reset autom. x 2
[3] Reset autom. x 3
[4] Reset autom. x 4
[5] Reset autom. x 5
[6] Reset autom. x 6
[7] Reset autom. x 7
[8] Reset autom. x 8
[9] Reset autom. x 9
[10] Reset autom. x 10
[11] Reset autom. x 15
[12] Reset autom. x 20
[13] Reinic. auto. innito Seleccione [13] Reinic. auto. innito
para un reinicio continuo tras una
desconexión.
14-21 Tiempo de reinicio automático
Range: Función:
10 s* [0 - 600s]Para iniciar la función de reinicio automático,
introduzca el intervalo de tiempo desde la
desconexión. Este parámetro está activo
cuando parámetro 14-20 Modo Reset se ajusta
como [1]-[13] Reset autom.
14-22 Modo funcionamiento
Option: Función:
Para reiniciar todos los valores de los parámetros
a los ajustes predeterminados, seleccione [2]
inicialización.
[0]*Funcion.
normal
[2] Iniciali-
zación
Seleccione [0] Funcion. normal para el funciona-
miento normal del convertidor de frecuencia con
el motor en la aplicación seleccionada.
Seleccione [2] Inicialización para reiniciar los
valores de todos los parámetros a los ajustes
predeterminados, excepto los parámetros de
comunicación de bus y los grupos de parámetros
15-0* Datos func. y 15-3* Reg. alarma. El
convertidor de frecuencia se reinicia durante la
siguiente puesta en marcha.
Parámetro 14-22 Modo funcionamiento también
vuelve al ajuste predeterminado [0] Funcion.
normal.
14-27 Acción en fallo del inversor
Seleccione cómo reaccionará el convertidor de frecuencia en caso
de sobretensión, sobreintensidad, cortocircuito o fallos de
conexión a tierra.
Option: Función:
[0] Desconexión
[1] * Advertencia
14-29 Código de servicio
Range: Función:
0* [0 - 0x7FFFFFFF ] Solo uso de servicio.
3.10.4 14-3* Ctrl. lím. intens.
Parámetros de conguración del controlador del límite de
intensidad, que se activa cuando la intensidad del motor
supera los límites de intensidad predenidos (véase el
parámetro 4-18 Límite intensidad). Estos parámetros se
utilizan para reducir el par lo más rápidamente posible sin
perder el control del motor.
14-30 Current Lim Ctrl, Proportional Gain
Range: Función:
100 %* [0 -
500 %]
Introducir la ganancia proporcional para el
controlador de límite de corriente. Un valor
más alto hará que el controlador reaccione
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 81

Parámetros
VLT® HVAC Basic Drive FC 101
14-30 Current Lim Ctrl, Proportional Gain
Range: Función:
más rápidamente. El ajuste de un valor
excesivo hará que el controlador sea
inestable.
33
14-31 Current Lim Ctrl, Integration Time
Range: Función:
0.020 s* [0.002 - 2 s] Controlar el tiempo de integración para
el control del límite de corriente.
Ajustarlo a un valor inferior hace que
reaccione con mayor rapidez. Un ajuste
demasiado bajo puede provocar inestabilidad en el control.
14-32 Current Lim Ctrl, Filter Time
Range: Función:
5 ms* [1 - 100 ms] Ajustar una constante de tiempo para el
ltro de paso bajo del controlador de
límite de intensidad.
3.10.5 14-4* Optimización energ
Parámetros para el ajuste del nivel de optimización de
energía en ambos modos: par variable (VT) y optimización
automática de energía (AEO).
La optimización automática de energía sólo estará activa si
el parámetro 1-03 Características de par se ajusta como [3]
14-44 Intens. optimización d-axis para IPM
Range: Función:
100 %* [0 - 200 %] Grupo de parámetros para congurar
funciones especiales del convertidor de
frecuencia.
3.10.6 14-5* Ambiente
Estos parámetros ayudan al convertidor de frecuencia a
trabajar bajo condiciones ambientales especiales.
14-50 Filtro RFI
Este parámetro solo es válido para convertidores de frecuencia
con los siguientes tamaños de protección:
IP20, 3 × 200-240 V, tamaños de protección H6-H8
•
IP20, 3 × 380-480 V, tamaños de protección H6-H8
•
IP54, 3 × 380-480 V, tamaños de protección I6-I8
•
IP20, 3 × 525-600 V, tamaños de protección H6-H10
•
Option: Función:
[0] O Seleccione [0] O si la alimentación del convertidor de
frecuencia se suministra desde una fuente de red
aislada (red IT).
En este modo, se desconectan los condensadores
internos del ltro RFI entre el chasis y el circuito del
ltro RFI de la alimentación para reducir las corrientes
capacitivas de puesta a tierra.
[1] * act Seleccione [1] act para asegurar que el convertidor de
frecuencia cumple las normas CEM.
Optim. auto. energía VT.
14-40 Nivel VT
Range: Función:
90 %* [40 -
90 %]
AVISO!
Este parámetro no se puede ajustar con
el motor en marcha.
Introduzca el nivel de magnetización del motor
a baja velocidad. Los valores bajos reducen la
pérdida de energía en el motor, pero también
reducen la capacidad de carga.
14-41 Mínima magnetización AEO
Range: Función:
66 %* [40 -
75 %]
Introduzca el valor mínimo de magnetización
admisible para la AEO. Los valores bajos
reducen la pérdida de energía en el motor,
pero también reducen la resistencia a
cambios de carga repentinos.
14-51 Comp. del enlace de CC
Option: Función:
[0] O La sobremodulación de la tensión de salida está
desconectada para evitar el rizado del par en el eje
del motor.
[1] * act Permite la función de sobremodulación de la tensión
de salida, para obtener una tensión de salida hasta un
15 % mayor que la tensión de red.
14-52 Control del ventilador
Este parámetro se utiliza para seleccionar el modo de funcionamiento del control de ventilador. El ruido acústico del convertidor
de frecuencia será distinto si funciona con una carga pesada (alta
temperatura del disipador) y si funciona con carga ligera o está
en modo de espera.
Option: Función:
[0] Autom. El ventilador funciona a máxima velocidad
durante un corto periodo de tiempo y luego
ajusta automáticamente su velocidad en
función de la carga y de la temperatura
ambiente. Además, el ventilador funcionará a
velocidad mínima incluso aunque la
referencia sea 0 Hz, debido al calor generado
por el IGBT. El ventilador se detiene si está
82 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
14-52 Control del ventilador
Este parámetro se utiliza para seleccionar el modo de funcionamiento del control de ventilador. El ruido acústico del convertidor
de frecuencia será distinto si funciona con una carga pesada (alta
temperatura del disipador) y si funciona con carga ligera o está
en modo de espera.
Option: Función:
activada la función de reposo. Este es el
ajuste predeterminado para todos los convertidores de frecuencia excepto en el caso de
los alojamientos de tamaño H1.
[4] Temp amb
baja auto
[5] Modo const.ONPara pruebas de ventilación in situ o en caso
[6] Modo const.
OFF
[7] Modo ON si-
-inv ON; de lo
contr, OFF
Válido únicamente para los alojamientos de
tamaño H6-H10 e I6-I8.
de que el ventilador deba funcionar constantemente al 100 % de su velocidad. Válido
únicamente para alojamientos de tamaño
H1-H5 e I2-I4.
Si es suciente la refrigeración por
convección o el convertidor de frecuencia
está montado en un panel de demostración
o muestra, etc. El convertidor de frecuencia
se desconectará por exceso de temperatura
del disipador si la carga supera lo permitido
por la refrigeración de convección. Válido
únicamente para alojamientos de tamaño
H1-H5 e I2-I4.
El ventilador funcionará a la velocidad
máxima si está en modo manual o si la
referencia es superior a 0 Hz. El ventilador se
detendrá si está activada la función de
reposo. Este es el ajuste predeterminado para
el tamaño de protección H1, pero también se
puede seleccionar para los tamaños H2-H5 e
I2-I4.
14-53 Monitor del ventilador
Selecciona qué reacción deberá tener el convertidor de
frecuencia en caso de que se detecte un fallo en el ventilador.
Este parámetro solo es válido para convertidores de frecuencia
con los siguientes tamaños de protección:
IP20, 3 × 200-240 V, tamaños de protección H6-H8.
•
IP20, 3 × 380-480 V, tamaños de protección H6-H8.
•
IP54, 3 × 380-480 V, tamaños de protección I6-I8.
•
IP20, 3 × 525-600 V, tamaños de protección H6-H10.
•
Option: Función:
[0] Desactivado
[1] * Advertencia
[2] Desconexión
14-55 Filtro de salida
Seleccione si hay un ltro de salida.
Option: Función:
[0] * Sin ltro
[1] Filtro senoidal
14-55 Filtro de salida
Seleccione si hay un ltro de salida.
Option: Función:
[3] Filtro senoidal
con realiment.
[4] dv/dt Esta opción solo es válida para conver-
tidores de frecuencia con los siguientes
tamaños de protección:
IP20, 3 × 200-240 V, tamaños de
•
protección H6-H8
IP20, 3 × 380-480 V, tamaños de
•
protección H6-H8
IP54, 3 × 380-480 V, tamaños de
•
protección I6-I8
IP20, 3 × 525-600 V, tamaños de
•
protección H6-H10
3.10.7 14-6* Auto Reducción
Grupo de parámetros para congurar la reducción de
potencia automática en función de la frecuencia de salida
del convertidor de frecuencia.
14-63 Frec. conmutación mín.
Ajuste la frecuencia de conmutación mínima permitida por el
ltro de salida.
Option: Función:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-64 Dead Time Compensation Zero Current Lev
Si se utiliza un cable de motor largo, ajuste el parámetro como
[0] Desactivado para minimizar el rizado del par del motor.
Option: Función:
[0] * Desactivado
[1] Activado
14-65 Comp. tiempo muerto reduc. potencia
Range: Función:
Size
related*
[ 20 1000 Hz]
El nivel de compensación de tiempo
muerto se reduce linealmente desde el
nivel máximo de frecuencia de salida
congurado en el parámetro 14-07 Nivel
comp. tiempo muerto hasta el nivel
mínimo de frecuencia de salida ajustado
en este parámetro.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 83

Parámetros
VLT® HVAC Basic Drive FC 101
3.10.8 14-9* Ajustes de fallo
Grupo de parámetros de ajustes de personalización de
fallos.
14-90 Nivel de fallos
33
Use este parámetro para personalizar los niveles de fallo. Solo es
compatible el índice 7, que indica fallos de sobreintensidad.
Option: Función:
[3] * Bloqueo por
alarma
[4] Desconex. reinic.
retard.
[5] Mot en giro El convertidor de frecuencia intenta
La alarma se ajusta al nivel de bloqueo
por alarma.
La alarma está congurada como alarma
de desconexión, que puede reiniciarse
tras un tiempo de retardo. Por ejemplo, si
la alarma de sobreintensidad se congura
para esta opción, puede reiniciarse tres
minutos después de emitirse la alarma.
atrapar un motor en giro durante el
arranque. Si se selecciona esta opción,
parámetro 1-73 Motor en giro se ajusta a
[1] Activado.
84 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.11 Menú principal - Información drive Grupo 15
Grupo de parámetros con información sobre el convertidor
de frecuencia, tal como datos de funcionamiento, congu-
ración de hardware y versiones de software.
3.11.1 15-0* Datos func.
15-00 Horas de funcionamiento
Range: Función:
0 h* [0 - 0x7f. h] Ver cuántas horas ha funcionado el
convertidor de frecuencia. Este valor se
guarda cuando se desconecta el
convertidor de frecuencia.
15-01 Horas funcionam.
Range: Función:
0 h* [0 -
0x7f. h]
Ver cuántas horas ha funcionado el motor.
Reiniciar el contador en el
parámetro 15-07 Reinicio contador de horas
funcionam.. Este valor se guarda cuando se
desconecta el convertidor de frecuencia.
15-06 Reiniciar contador KWh
Option: Función:
[1] Reiniciar
contador
Para reiniciar a cero el contador de KWh,
seleccione [1] Reiniciar contador y pulse [OK]
(consulte el parámetro 15-02 Contador KWh).
15-07 Reinicio contador de horas funcionam.
Option: Función:
[0] * No reiniciar
[1] Reiniciar
contador
Para reiniciar a cero el contador de horas
de funcionamiento, seleccione [1] Reiniciar
contador y pulse [OK]
(parámetro 15-01 Horas funcionam.) para 0
(consulte también el parámetro 15-01 Horas
funcionam.).
3.11.2 15-3* Reg. alarma
Los parámetros de este grupo son parámetros de matrices
y en ellos se ven hasta 10 registros de fallos. [0] es el dato
registrado más reciente y [9] el más antiguo. Pueden verse
los códigos de fallo, los valores y la marca temporal de
todos los datos registrados
3 3
15-02 Contador KWh
Range: Función:
0 kWh* [0 -
65535
kWh]
Ver la potencia de salida en kWh del
convertidor de frecuencia como valor medio
durante una hora. Reiniciar el contador en el
parámetro 15-06 Reiniciar contador KWh.
15-03 Arranques
Range: Función:
0* [0 - 2147483647 ] Ver el número de veces que se ha
encendido el convertidor de frecuencia.
15-04 Sobretemperat.
Range: Función:
0* [0 - 65535 ] Ver el número de fallos de temperatura que
han ocurrido en el convertidor de frecuencia.
15-05 Sobretensión
Range: Función:
0* [0 - 65535 ] Ver el número de situaciones de sobretensión
que se han producido en el convertidor de
frecuencia.
15-06 Reiniciar contador KWh
Option: Función:
AVISO!
Para reiniciar, pulse [OK].
[0] * No reiniciar
15-30 Reg. alarma: código de fallo
Range: Función:
0* [0 - 255 ] Anote el código de fallo y busque su signicado
en el capétulo 4 Resolución de problemas.
15-31 RazónFalloInterno
Range: Función:
0* [-32767 -
32767 ]
Visualice una descripción del error. Este
parámetro se utiliza en combinación con la
alarma 38, Fa. corr. carga.
3.11.3 15-4* Id. dispositivo
Parámetros que contienen información de solo lectura
sobre la conguración de hardware y software del
convertidor de frecuencia.
15-40 Tipo FC
Range: Función:
0* [0 - 6 ] Visualice el código de tipo de convertidor de
frecuencia. La lectura de datos es igual al campo
de potencia de la denición del código descriptivo
de la serie del convertidor de frecuencia, caracteres
1-6.
15-41 Sección de potencia
Range: Función:
0* [0 - 20 ] Visualice el código de tipo de convertidor de
frecuencia. La lectura de datos es igual al campo
de potencia de la denición del código
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 85

Parámetros
VLT® HVAC Basic Drive FC 101
15-41 Sección de potencia
Range: Función:
descriptivo de la serie del convertidor de
frecuencia, caracteres 7-10.
15-53 N.º serie tarjeta potencia
Range: Función:
0* [0 - 0 ] Ver el número de serie de la tarjeta de potencia.
15-59 Nombre de archivo
33
15-42 Tensión
Range: Función:
0* [0 -
20 ]
Visualice el código de tipo de convertidor de
frecuencia. La lectura de datos es igual al campo
de potencia de la denición del código
descriptivo de la serie del convertidor de
frecuencia, caracteres 11-12.
Range: Función:
0 [0 - 16 ] Ver el nombre de archivo CSIV actual.
15-43 Versión de software
Range: Función:
0* [0 - 0 ] Ver la versión de software del convertidor de
frecuencia.
15-44 Tipo cód. cadena solicitado
Range: Función:
0* [0 - 40 ] Vea el código descriptivo utilizado para pedir de
nuevo el convertidor de frecuencia con su
conguración original.
15-45 Cadena de código
Range: Función:
0 [0 - 40 ] Ver la cadena de código descriptivo real.
15-46 Nº pedido conv. frec.
Range: Función:
0* [0 - 8 ] Muestra el número de pedido de ocho dígitos
utilizado para volver a pedir el convertidor de
frecuencia en su conguración original.
15-48 No id LCP
Range: Función:
0* [0 - 0 ] Ver el número ID del LCP.
15-49 Tarjeta control id SW
Range: Función:
0* [0 - 0 ] Visualice el número de versión de software de la
tarjeta de control.
15-50 Tarjeta potencia id SW
Range: Función:
0* [0 - 0 ] Visualice el número de versión de software de la
tarjeta de potencia.
15-51 Nº serie convert. frecuencia
Range: Función:
0* [0 - 10 ] Visualice el número de serie del convertidor de
frecuencia.
86 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.12 Menú principal - Lecturas de datos Grupo 16
3.12.1 16-0* Estado general
16-00 Código de control
Range: Función:
0* [0 - 65535 ] Vea el código de control enviado desde el
convertidor de frecuencia a través del puerto
de comunicación serie en código hexadecimal.
Bit Bit = 0 Bit = 1
00 Opción de referencia interna, bit menos
signicativo (lsb)
01 Opción de referencia interna, segundo bit
de
referencias internas
02 Freno de CC Rampa
03 Inercia Activar
04 Parada rápida Rampa
05 Mantener salida Rampa
06 Parada de rampa Arranque
07 Sin función Reinicio
08 Sin función Velocidad ja
09 Rampa 1 Rampa 2
10 Datos no válidos Válido
11 Relé_A no activo Relé_A activado
12 Relé_B no activo Relé_B activado
13 Selección de ajuste, bit menos signicativo
(lsb)
14 Sin función Sin función
15 Sin función Cambio sentido
Tabla 3.6 Código de control
16-01 Referencia [Unidad]
Range: Función:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
Visualice el valor actual de
referencia aplicado, en
forma de impulsos o
analógica, en la unidad
resultante de la congu-
ración seleccionada en
parámetro 1-00 Modo
Conguración (Hz).
16-02 Referencia %
Range: Función:
0 %* [-200 -
200 %]
Visualice la referencia total. La referencia
total es la suma de referencias digitales,
analógicas, internas, de bus y mantenidas.
–
–
–
16-03 Código estado
Range: Función:
0* [0 - 65535 ] Vea el código de estado enviado desde el
convertidor de frecuencia a través del puerto
de comunicación serie en código hexadecimal.
Bit Bit = 0 Bit = 1
00 Control no preparado Listo
01
VLT® no preparado
02 Inercia Activar
03 Sin fallo Desconexión
04 Sin advertencia Advertencia
05 Reservado –
06 Sin bloqueo por alarma Bloqueo por alarma
07 Sin advertencia Advertencia
08
Velocidad≠ref.
09 Control local Control de bus
10 Out of range Frecuencia OK
11 No en funcionamiento En funcionamiento
12 Sin función Sin función
13 Tensión OK Límite sobrepasado
14 Intensidad OK Límite sobrepasado
15 Nivel térmico OK Límite sobrepasado
Tabla 3.7 Código de control
Listo
Velocidad = ref.
16-05 Valor real princ. [%]
Range: Función:
0 %* [-200 - 200 %] Consulte el código de dos bytes enviado
con el código de estado al bus maestro
que indica el valor real principal.
16-09 Lectura personalizada
Range: Función:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
Consulte las lecturas denidas
por el usuario como se han
congurado en el
parámetro 0-30 Unidad de lectura
personalizada, el
parámetro 0-31 Valor mínimo de
lectura personalizada y el
parámetro 0-32 Valor máximo de
lectura personalizada.
3.12.2 16-1* Estado motor
16-10 Potencia [kW]
Range: Función:
0 kW* [0 - 1000
kW]
Muestra la potencia real del motor en kW.
El valor mostrado se calcula sobre la base
de la tensión e intensidad reales del motor.
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 87

Parámetros
VLT® HVAC Basic Drive FC 101
16-11 Potencia [hp]
Range: Función:
0 hp* [0 - 1000 hp] Ver la potencia real del motor en CV. El
valor se calcula con la tensión e intensidad
reales del motor.
33
16-12 Tensión motor
Range: Función:
0 V* [0 - 65535 V] Ver la tensión del motor, un valor calculado
utilizado para controlar el mismo.
16-13 Frecuencia
Range: Función:
0 Hz* [0 - 6553.5 Hz] Ver la frecuencia del motor, sin amorti-
guación de resonancia.
16-18 Térmico motor
Range: Función:
seleccionada en el parámetro 1-90 Protección
térmica motor.
16-22 Par [%]
Range: Función:
0 %* [-200 - 200 %] Ver el par en porcentaje (en relación con
el par nominal) que se aplica al eje del
motor.
3.12.3 16-3* Estado Drive
16-30 Tensión Bus CC
Range: Función:
16-14 Intensidad motor
Range: Función:
0 A* [0 - 655.35 A] Consulte la intensidad del motor calculada
como un valor medio, I
RMS
.
16-15 Frecuencia [%]
Range: Función:
0 %* [0 - 6553.5 %]
0 %* [0-6553,5 %] Visualice un código de dos bytes que
informa de la frecuencia real del motor
(sin amortiguación de resonancia), como
porcentaje (escala 0000-4000 hexadecimal)
del parámetro 4-19 Frecuencia salida máx..
0 V* [0 - 65535 V] Muestra la tensión real del enlace de CC.
16-34 Temp. disipador
Range: Función:
0 °C* [-128 - 127 °C] Visualice la temperatura del disipador
térmico del convertidor de frecuencia.
16-35 Témico inversor
Range: Función:
0 %* [0 - 255 %] Visualice el % de la carga térmica estimada
en el convertidor de frecuencia. Al 100 %, se
produce una desconexión.
16-36 Int. Nom. Inv.
16-16 Par [Nm]
Range: Función:
0 Nm* [-30000 -
30000 Nm]
Muestra el valor de par que se aplica al eje
del motor. Algunos motores proporcionan
más del 160 % del par. Por lo tanto, el valor
mínimo y el valor máximo dependerán de la
intensidad mínima/máxima del motor así
como del motor que se utilice.
16-17 Velocidad [RPM]
Range: Función:
0 A* [0 - 655.35 A] Ver la corriente nominal del inversor. Estos
datos se utilizan para calcular la protección
de sobrecarga del motor, etc.
16-37 Máx. Int. Inv.
Range: Función:
0 A* [0 - 655.35 A] Ver la intensidad máxima del inversor. Estos
datos se usan para calcular la protección
del convertidor de frecuencia, etc.
Range: Función:
0 RPM* [-30000 -
30000 RPM]
Ver las r/min reales del motor. Las RPM
del motor se estiman en los modos de
control de proceso de lazo abierto o de
lazo cerrado, y se miden en el modo de
velocidad de lazo cerrado.
16-38 Estado ctrlador SL
Range: Función:
0* [0 - 20 ] Visualice el estado real del controlador Smart
Logic (SLC).
16-18 Térmico motor
3.12.4 16-5* Ref. & realim.
Range: Función:
0 %* [0 -
100 %]
88 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Visualice la temperatura calculada del motor en
porcentaje de máximo permitido. Al 100 %, se
producirá una desconexión si se ha seleccionado
en el parámetro 1-90 Protección térmica motor. La
base para el cálculo es la función ETR
16-50 Referencia externa
Range: Función:
0 %* [-200 - 200 %] Consulte la referencia total, la suma de las
referencias digitales, analógicas, internas,
de bus y mantenidas.

Parámetros Guía de programación
16-52 Realimentación [Unit]
Range: Función:
0
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Visualice la realimentación
resultante de la selección de
escalado en
parámetro 3-02 Referencia
mínima y
parámetro 3-03 Referencia
máxima.
16-54 Realim. 1 [Unidad]
Range: Función:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Ver el valor de realimentación 1 resultante de la
selección de escalado en
parámetro 3-02 Referencia
mínima y el
parámetro 3-03 Referencia
máxima.
16-55 Realim. 2 [Unidad]
Range: Función:
0
ProcessCtrlUnit*
[-999999.999 -
999999.999
ProcessCtrlUnit]
Ver el valor de realimentación 2 resultante de la
selección de escalado en
parámetro 3-02 Referencia
mínima y el
parámetro 3-03 Referencia
máxima.
16-61 Terminal 53 ajuste conex.
Option: Función:
[0] * Modo de
intensidad
[1] Modo tensión
16-62 Entrada analógica 53
Range: Función:
1* [0 - 20 ] Visualice el valor real en la entrada 53.
16-63 Terminal 54 ajuste conex.
Ver el ajuste del terminal de entrada 54:
Corriente = 0
•
Tensión = 1
•
Option: Función:
[0] * Modo de intensidad
[1] Modo tensión
16-64 Entrada analógica 54
Range: Función:
1* [0 - 20 ] Ver el valor real en la entrada 54.
16-65 Salida analógica 42 [mA]
Range: Función:
0 mA* [0 - 20
mA]
Visualice el valor real en mA en la salida 42.
El valor mostrado reeja la selección realizada
en parámetro 6–90 Terminal 42 Mode y
parámetro 6-91 Terminal 42 salida analógica.
3 3
3.12.5 16-6* Entradas y salidas
16-60 Entrada digital
Range: Función:
0* [0 -
4095 ]
16-61 Terminal 53 ajuste conex.
Option: Función:
Visualice el estado real de las entradas digitales 18,
19, 27 y 29.
Bit 0 No utilizado
Bit 1 No utilizado
Bit 2 Terminal de entrada digital 29
Bit 3 Terminal de entrada digital 27
Bit 4 Terminal de entrada digital 19
Bit 5 Terminal de entrada digital 18
Bit 6-15 No utilizado
Tabla 3.8 Denición de bits
Ver el ajuste del terminal de entrada
53.
Corriente = 0
•
Tensión = 1
•
16-66 Salida digital [bin]
Range: Función:
0* [0 -
15 ]
Ver el valor binario de todas las salidas digitales.
Denición:
X: Sin uso
0: Bajo
1: Alto
XX No se utiliza ninguno
X0 Terminal 42 sin uso, terminal 45
X1 Terminal 42 sin uso, terminal 45
0X Terminal 42 bajo, terminal 45 sin
0 Terminal 42 bajo, terminal 45 bajo.
1 Terminal 42 bajo, terminal 45 alto.
1X Terminal 42 alto, terminal 45 sin
10 Terminal 42 alto, terminal 45 bajo.
11 Terminal 42 alto, terminal 45 alto.
Tabla 3.9 Valor binario de las salidas digitales
bajo.
alto.
uso.
uso.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 89

Parámetros
VLT® HVAC Basic Drive FC 101
16-67 Ent. pulsos #29 [Hz]
3.12.7 16-9* Lect. diagnóstico
Range: Función:
0* [0 - 130000 ] Ver el valor actual de la frecuencia en el
terminal 29.
33
16-71 Salida de relé
Range: Función:
0* [0 - 31 ] Visualice la conguración del relé.
16-90 Código de alarma
Range: Función:
0* [0 - 0xFFFFFFFFUL ] Ver el código de alarma enviado
mediante el puerto de comunicación
serie en código hexadecimal.
16-91 Código de alarma 2
Bit 0~2 No utilizado
Bit 3 Relé 02
Bit 4 Relé 01
Bit 5~15 No utilizado
Tabla 3.10 Denición de bits
Range: Función:
0* [0 - 0xFFFFFFFFUL ] Ver el código de alarma 2 enviado a
través del puerto de comunicación
serie en código hexadecimal.
16-92 Código de advertencia
Range: Función:
16-72 Contador A
Range: Función:
0* [-32768 -
32767 ]
Ver el valor actual del contador A. Los contadores
son útiles como operandos de comparación,
consulte el parámetro 13-10 Operando
comparador.
El valor puede reiniciarse o modicarse mediante
las entradas digitales (grupo de parámetros 5-1*
Entradas digitales) o usando una acción SLC
(parámetro 13-52 Acción Controlador SL).
16-73 Contador B
Range: Función:
0* [-32768 -
32767 ]
Ver el valor real del contador B. Los contadores
son útiles como operandos de comparación
(parámetro 13-10 Operando comparador).
El valor puede reiniciarse o modicarse mediante
las entradas digitales (grupo de parámetros 5-1*
Entradas digitales) o usando una acción SLC
(parámetro 13-52 Acción Controlador SL).
16-79 Sal. analógica AO45
Range: Función:
0 mA* [0 - 20
mA]
Visualice el valor real en mA en la salida 45.
El valor mostrado reeja la selección realizada
en parámetro 6-70 Modo terminal 45 y
parámetro 6-71 Salida analógica terminal 45.
0* [0 - 0xFFFFFFFFUL ] Ver el código de advertencia enviado a
través del puerto de comunicación
serie en código hexadecimal.
16-93 Código de advertencia 2
Range: Función:
0* [0 - 0xFFFFFFFFUL ] Ver el código de advertencia 2 enviado
a través del puerto de comunicación
serie en código hexadecimal.
16-94 Cód. estado amp
Range: Función:
0* [0 - 0xFFFFFFFFUL ] Muestra el código de estado ampliado
enviado a través del puerto de comunicación serie en código hexadecimal.
16-95 Código de estado ampl. 2
Range: Función:
0* [0 - 0xFFFFFFFFUL ] Muestra el código de estado ampliado
2 enviado a través del puerto de
comunicación serie en código
hexadecimal.
16-97 Alarm Word 3
Range: Función:
0* [0 - 4294967295] Visualizar el código de alarma 3 enviado a
través del puerto de comunicación serie
en código hexadecimal.
3.12.6 16-8* Fieldb. y puerto FC
16-98 Warning Word 3
Parámetros para informar de las referencias de bus y de los
códigos de control.
16-86 Puerto FC REF 1
Range: Función:
0* [-32768 - 32767 ] Visualice la última referencia recibida del
puerto FC.
Range: Función:
0* [0 - 4294967295] Ver el código de advertencia 3 enviado a
través del puerto de comunicación serie
en código hexadecimal.
90 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.13 Menú principal - Info y lect. de datos 2
- Grupo 18
Los parámetros de este grupo son parámetros de matrices
y en ellos se pueden ver hasta diez registros de fallos. [0]
es el dato registrado más reciente y [9] el más antiguo.
Pueden verse los códigos de fallo, los valores y la marca
temporal de todos los datos registrados
3.13.1 18-1* Registro modo Incendio
18-10 Registro modo incendio: Evento
Range: Función:
0* [0 - 255 ] Ver evento de modo incendio.
3.13.2 18-5* Ref. y realim.
18-50 Lectura Sensorless [unidad]
Range: Función:
0 SensorlessUnit*
[-999999.999 -
999999.999
SensorlessUnit]
Ver la presión o el caudal
resultante de los cálculos
sensorless. Este valor no es el
valor utilizado para el control.
Este valor solo se actualiza si los
datos sensorless admiten tanto
caudal como presión.
3.14 Menú principal - Convertidor de lazo
cerrado - Grupo 20
Este grupo de parámetros se utiliza para congurar el
controlador PI de lazo cerrado, que controla la frecuencia
de salida del convertidor.
3.14.1 20-0* Realimentación
Este grupo de parámetros se utiliza para congurar la señal
de realimentación del controlador PI de lazo cerrado del
convertidor de frecuencia.
20-00 Fuente realim. 1
Option: Función:
Este parámetro dene qué entrada
se utiliza como fuente de la señal de
realimentación.
[0] * Sin función
[1] Entrada analógica 53
[2] Entrada analógica 54
[3] Entrada pulsos 29
[100] Realim. de bus 1
[101] Realim. de bus 2
[104] Caudal Sensorless
[105] Presión Sensorless
20-01 Conversión realim. 1
Option: Función:
Este parámetro permite aplicar una función
de conversión a la realimentación 1.
[0] * Lineal [0] Lineal no tiene efectos sobre la realimen-
tación.
[1] Raíz
cuadrada
[1] La raíz cuadrada se utiliza normalmente
cuando se usa un sensor de presión para
proporcionar realimentación de caudal
((caudal ∝ presión)).
20-03 Fuente 2 realim. lazo cerrado proceso
Option: Función:
[0] * Sin función
[1] Entrada analógica 53
[2] Entrada analógica 54
[3] Entrada pulsos 29
[100] Realim. de bus 1
[101] Realim. de bus 2
20-04 Conversión realim. 2
Option: Función:
[0] * Lineal
[1] Raíz cuadrada
20-12 Referencia/Unidad Realimentación
Option: Función:
Selección de la unidad
que se utilizará con
referencias y realimentaciones para lazo
cerrado.
[0] * None Expressionlimit (Sin límite
de expresión)
[20] l/s
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m Wg
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] libras/pulg.²
[172] in wg
[173] pies WG
[174] pulg Hg
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 91

Parámetros
VLT® HVAC Basic Drive FC 101
3.14.2 20-2* Realim. y consigna
Grupo de parámetros para la función de realimentación y
los valores de consigna. Seleccione qué valor de consigna
y qué realimentación deben utilizarse. El valor de consigna
20-69 Información Sensorless
Matriz [8]
Range: Función:
0* [0 - 25 ] Ver información acerca de los datos sensorless.
y la realimentación pueden ser un par jo o seleccionarse
33
de manera independiente a partir de comparaciones
3.14.4 20-7* Ajuste autom. PID
lógicas.
20-20 Cálculo de realimentación doble
Selección de la forma en que se calculará la realimentación. La
realimentación puede ser una fuente de realimentación simple o
una combinación de varias realimentaciones.
Option: Función:
[0] Suma
[1] Resta
[2] Media
[3] * Mínima
[4] Máxima
Parámetros para activar el ajuste automático de PID.
20-70 Tipo de lazo cerrado
Option: Función:
Selec. respuesta esperada de la aplicac.
[0] * Autom.
[1] Presión rápida
[2] Presión lenta
[3] Temperatura rápida
[4] Temperatura lenta
20-71 Modo Conguración
3.14.3 20-6* Sensorless
Parámetros para sensorless. Consulte también el
parámetro 16-26 Potencia ltrada [kW], el
parámetro 16-27 Potencia ltrada [CV], el
parámetro 18-50 Lectura Sensorless [unidad] y el
parámetro 20-00 Fuente realim. 1.
20-60 Unidad Sensorless
Option: Función:
Seleccione la unidad que debe
utilizarse con parámetro 18-50 Lectura
Sensorless [unidad].
[0] Ning.
[20] * l/s Expressionlimit
[23] m3/s
[24] m3/min
[25] m3/h
[71] bar
[73] kPa
[74] m Wg
[75] mm Hg
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125]
ft3/s
[126]
ft3/min
[170] psi
[171] libras/pulg.²
[172] in wg
[173] pies WG
[174] pulg Hg
Option: Función:
Seleccione la respuesta relativa de vel. para la
aplic.
[0] * Normal
[1] Rápido
20-72 Cambio de salida PID
Range: Función:
0.10* [0.01 - 0.50 ] Ajustar la magnitud del cambio de paso
durante la secuencia de Auto tune.
20-73 Nivel mínimo de realim.
Range: Función:
–4999,000* [–4999,000 - Expres-
sionlimit (4999,000)]
Ajustar el valor mín.
permitido de realimentación
en la secuencia de Auto
tune.
20-74 Nivel máximo de realim.
Range: Función:
4999,000* [Expressionlimit (–
4999,000)-4999,000]
Ajustar el valor máx.
permitido de realimentación en la secuencia de
Auto tune.
20-79 Ajuste autom. PID
Option: Función:
[0] * Desactivado Seleccionar para desactivar el ajuste
automático de PID.
[1] Activado Seleccionar para activar el ajuste automático
de PID.
92 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
3.14.5 20-8* Ajustes básicos PI
Parámetros para congurar el control de PI de proceso.
20-81 Ctrl. normal/inverso de PID
Option: Función:
[0] * Normal Hace que la frecuencia de salida del convertidor de
frecuencia disminuya cuando la realimentación es
mayor que la referencia del valor de consigna. Esto
es lo normal en aplicaciones de bombeo y de
ventilación con alimentación regulada por presión.
[1] Inversa Hace que la frecuencia de salida del convertidor de
frecuencia aumente cuando la realimentación es
mayor que la referencia del valor de consigna. Esto
es lo normal en aplicaciones de refrigeración
controladas por temperatura, como torres de
refrigeración.
20-83 Veloc. arranque PID [Hz]
Range: Función:
0 Hz* [ 0 -
200.0 Hz]
Introduzca la velocidad del motor que se debe
alcanzar como señal de arranque para iniciar
el control de PI. Tras el encendido, el
convertidor de frecuencia funciona con control
de velocidad de lazo abierto. Cuando se
alcanza la velocidad de arranque para el PI de
proceso, el convertidor de frecuencia cambia a
control de PI.
20-93 Ganancia proporc. PID
Range: Función:
0.50* [0 - 10 ] Introduzca la ganancia proporcional del
controlador de procesos. Se obtiene un control
rápido con una amplicación alta. Sin embargo,
si la amplicación es demasiado alta, puede que
el proceso se vuelva inestable.
20-94 Tiempo integral PID
Range: Función:
20 s* [0.10 -
9999 s]
Introduzca el tiempo integral del controlador
de procesos. Obtenga control rápido
mediante un tiempo integral corto, aunque si
es demasiado corto, el proceso es inestable.
Un tiempo integral demasiado largo desactiva
la acción de la integral.
20-97 Factor directo aliment. PID de proc.
Range: Función:
0 %* [0 -
400 %]
Introducir el factor de acercamiento PI. El
factor FF envía una parte constante de la señal
de referencia para evitar el control PI. Por lo
tanto, el PI solo puede afectar a la fracción
restante de la señal de control. El factor FF
puede aumentar el rendimiento dinámico.
3 3
20-84 Ancho banda En Referencia
Range: Función:
5 %* [0 -
200 %]
Cuando la diferencia entre la realimentación y la
referencia de valor de consigna es menor que el
valor de este parámetro, la pantalla del
convertidor de frecuencia muestra Funcionando
en referencia. Este estado puede comunicarse de
forma externa programando la función de una
salida digital para [8] Func. en ref./sin adv.
Además, para la comunicación serie, está activado
(1) el bit de estado en referencia del código de
estado del convertidor de frecuencia.
El ancho de banda en referencia se calcula como
porcentaje del valor de consigna.
3.14.6 20-9* Controlad. PI
20-91 Saturación de PID
Option: Función:
[0] O Continuar regulando un error aunque no se pueda
aumentar o disminuir la frecuencia de salida.
[1] * act Terminar la regulación de un error cuando ya no se
puede seguir ajustando la frecuencia de salida.
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 93

Detection
timer
Low Power
No-ow
detection
Warning
Alarm
External
sleep mode
command
Min run
timer
Min sleep
timer
Sleep
mode
Cascade
controller
(destaging
command)
speed detection
Sleep mode
O
No ow/low
130BE841.10
P 22-24
1
P 22-40
P 22-41
P 25-26
P 22-23
Parámetros
VLT® HVAC Basic Drive FC 101
3.15 Menú principal - Funciones de
aplicación - Grupo 22
3.15.1 22-0* Varios
Grupo de parámetros para ajustes adicionales.
33
22-01 Tiempo de ltro de potencia
Range: Función:
0.50 s* [0.02 - 10s]Ajustar la constante de tiempo para la
lectura de la potencia ltrada. Un valor
más alto proporciona una lectura de datos
22-01 Tiempo de ltro de potencia
Range: Función:
más estable pero una respuesta más lenta
del sistema a los cambios.
22-02 Modo control reposo CL
Option: Función:
[0] Normal Se detecta la realimentación. Se comprueban
algunos parámetros.
[1] Simplic. No se detecta la realimentación. Solo se
comprueban la velocidad de reposo y el tiempo.
Este parámetro es para el modo reposo, cuando funciona
en modo de proceso de lazo cerrado. Utilice este
parámetro para congurar si se detecta la realimentación
en el modo reposo.
3.15.2 22-2* Detección falta de caudal
Ilustración 3.16 Detección de falta de caudal
El convertidor de frecuencia incluye funciones para detectar si las condiciones de carga del sistema permiten que el motor
se detenga:
Una de estas dos señales debe estar activa durante un tiempo ajustado (parámetro 22-24 Retardo falta de caudal) antes de
que se produzca la acción seleccionada. Posibles acciones que seleccionar (parámetro 22-23 Función falta de caudal):
Detección falta de caudal
Esta función se utiliza para detectar una situación de falta de caudal en sistemas de bombeo en los que todas las válvulas
pueden cerrarse. Puede usarse tanto cuando están controladas por el controlador PI integrado del convertidor de frecuencia
como por un controlador PI externo. Programe la conguración real en el parámetro 1-00 Modo Conguración.
94 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
Detección de baja potencia.
•
Sin acción
•
Advertencia
•
Alarma
•
Modo reposo
•
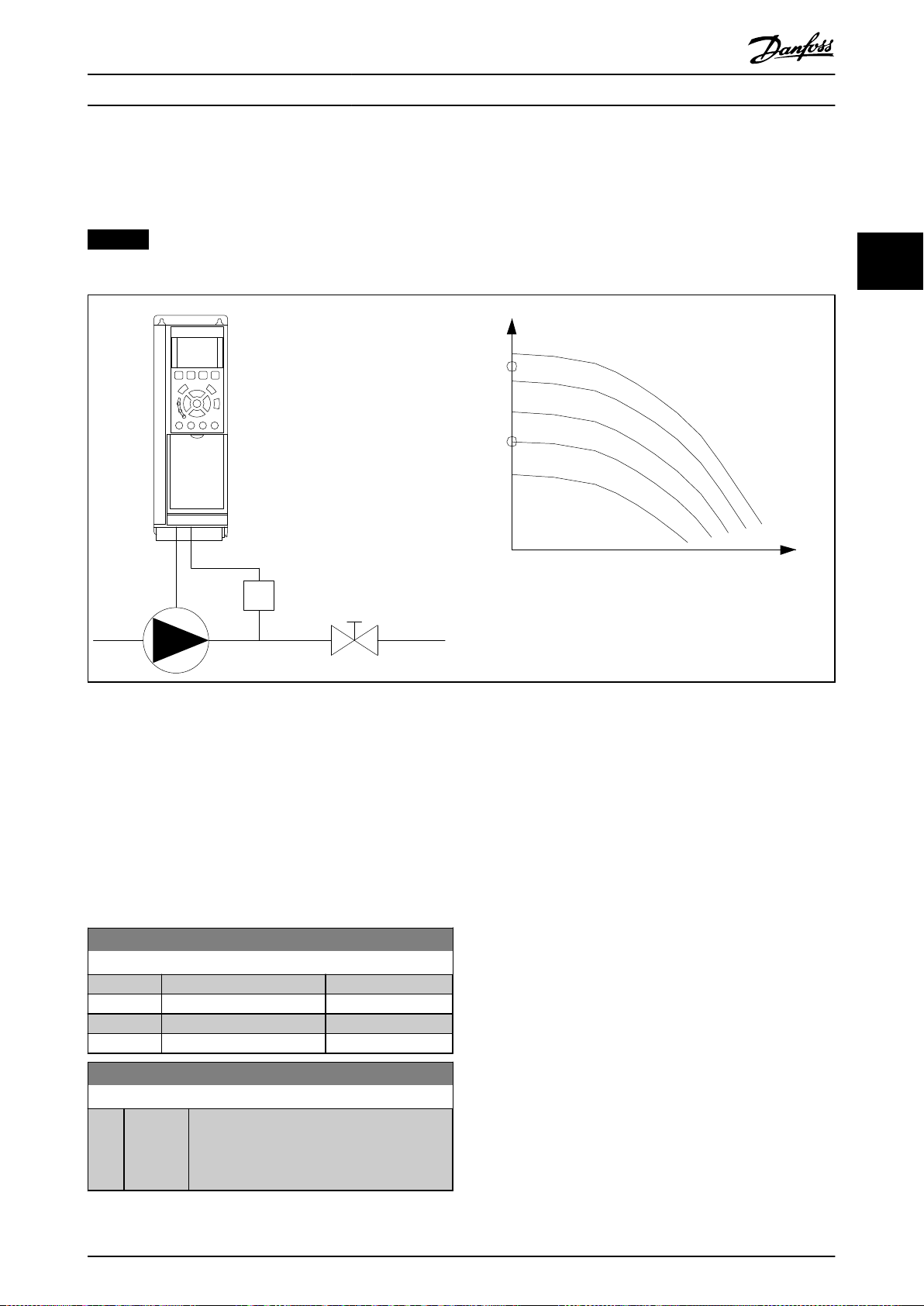
FC
130BA253.10
P
Flujo
130BA254.10
Cabezal
1
2
Parámetros Guía de programación
Modo de conguración para
Controlador PI integrado: lazo cerrado.
•
Controlador PI externo: lazo abierto.
•
AVISO!
Realice el ajuste sin caudal antes de ajustar los parámetros del controlador PI.
3 3
Tabla 3.11 Detección de falta de caudal
La detección de falta de caudal se basa en la medición de la velocidad y la potencia. Para una determinada velocidad, el
convertidor de frecuencia calcula la potencia sin caudal.
Esta coherencia está basada en el ajuste de dos conjuntos de velocidad con su potencia asociada sin caudal. El control de la
potencia permite detectar las condiciones de falta de caudal en sistemas con presión de succión uctuante, o si la bomba
tiene una característica plana en la zona de baja velocidad.
Los dos conjuntos de datos deben basarse en mediciones de potencia realizadas aprox. al 50 y al 85 % de la velocidad
máxima, con las válvulas cerradas. Los datos se programan en el grupo de parámetros 22-3* Ajuste pot. falta de caudal.
Active y ponga en marcha la detección de falta de caudal en el parámetro 22-23 Función falta de caudal y en el grupo de
parámetros 22-3* Ajuste pot. falta de caudal.
22-23 Función falta de caudal
3.15.3 22-3* Ajuste pot. falta de caudal
Option: Función:
[0] * Desactivado
[1] Modo reposo
[2] Advertencia
[3] Alarma
Secuencia de ajuste:
1. Para detener el caudal, cierre la válvula principal.
2. Haga funcionar el motor hasta que el sistema
haya alcanzado la temperatura normal de funcionamiento.
22-24 Retardo falta de caudal
Range: Función:
10 s* [1 - 600s]Ajustar el retardo antes de que se ejecute la
acción denida en el parámetro 22-23 Función
falta de caudal si se detecta una condición de
falta de caudal.
3. Pulse la tecla [Hand on] del LCP y ajuste la
velocidad a aproximadamente el 85 % de la
velocidad nominal. Tome nota de la velocidad
exacta.
4. Lea el consumo de energía comprobando la
potencia real en la línea de datos del LCP o
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 95

Parámetros
VLT® HVAC Basic Drive FC 101
ejecutando el parámetro 16-10 Potencia [kW] en el
menú principal. Anote la lectura de datos de
potencia.
5. Cambie la velocidad a aproximadamente el 50 %
de la velocidad nominal. Tome nota de la
33
velocidad exacta.
6. Lea el consumo de energía comprobando la
potencia real en la línea de datos del LCP o
ejecutando el parámetro 16-10 Potencia [kW] en el
menú principal. Anote la lectura de datos de
potencia.
7. Programe las velocidades utilizadas en el
parámetro 22-33 Veloc. baja [Hz] y en el
parámetro 22-37 Veloc. alta [Hz].
8. Programe los valores de potencia asociados en el
parámetro 22-34 Potencia veloc. baja [kW] y el
parámetro 22-38 Potencia veloc. alta [kW].
9. Vuelva a cambiar mediante [Auto On] u [O].
AVISO!
Ajuste el parámetro 1-03 Características de par antes de
realizar el ajuste.
22-30 Potencia falta de caudal
Range: Función:
0 kW* [0 - 1000 kW] Lectura de datos de potencia de falta de
caudal calculada a velocidad real.
22-31 Factor corrección potencia
Range: Función:
100 %* [1 - 400 %] Denir una corrección si la detección de
falta de caudal reacciona ante un valor de
potencia demasiado elevado o demasiado
bajo.
22-33 Veloc. baja [Hz]
Range: Función:
0 Hz* [ 0 - 400 Hz] Ajuste la velocidad de salida utilizada para
el registro de potencia de falta de caudal a
baja velocidad.
22-34 Potencia veloc. baja [kW]
Range: Función:
0 kW* [ 0 - 5.50 kW] Ajuste la potencia de falta de caudal a
baja velocidad.
22-37 Veloc. alta [Hz]
Range: Función:
0 Hz* [ 0 - 400 Hz] Ajuste la velocidad de salida utilizada para
el registro de potencia de falta de caudal a
alta velocidad.
22-38 Potencia veloc. alta [kW]
Range: Función:
0 kW* [ 0 - 5.50 kW] Ajuste la potencia de falta de caudal a
alta velocidad.
3.15.4 22-4* Modo reposo
El modo reposo permite al convertidor de frecuencia
detenerse automáticamente en situaciones en las que el
sistema está en equilibrio. Esta función ahorra energía y
evita un exceso de presión, agua demasiado fría en las
torres de refrigeración y problemas de presurización en el
sistema. Esto también es importante, ya que algunas
aplicaciones evitan que el convertidor de frecuencia ajuste
el motor a una velocidad baja. Esto podría dañar las
bombas, causar insuciente lubricación en las cajas de
engranajes y desestabilizar los ventiladores.
El controlador de reposo tiene dos funciones importantes:
1. La capacidad de entrar en modo reposo en el
momento preciso.
2. La capacidad de abandonar el modo reposo en el
momento preciso.
El objetivo es mantener el convertidor de frecuencia en
modo reposo el máximo tiempo posible para evitar que el
motor arranque y se pare frecuentemente y, al mismo
tiempo, mantener la variable controlada del sistema dentro
de un rango aceptable.
Secuencia de funcionamiento de modo reposo en lazo
abierto:
1. La velocidad del motor es menor que la
velocidad ajustada en el
parámetro 22-47 Velocidad de reposo [Hz]. El motor
funciona durante más tiempo del estipulado en el
parámetro 22-40 Tiempo ejecución mín.. el estado
de reposo se prolonga durante más tiempo del
ajustado en el parámetro 22-48 Tiempo ret. rep..
2. El convertidor de frecuencia desacelera la
velocidad del motor a parámetro 1-82 Vel. mín.
para func. parada [Hz].
3. El convertidor de frecuencia activa
parámetro 1-80 Función de parada. El convertidor
de frecuencia está ahora en modo reposo.
4. El convertidor de frecuencia compara el valor de
consigna de la velocidad con el
parámetro 22-43 Veloc. reinicio [Hz] para detectar
una situación de reactivación.
5. El valor de consigna de velocidad es mayor que
el parámetro 22-43 Veloc. reinicio [Hz]. El estado de
reposo se ha prolongado durante más tiempo del
estipulado en el parámetro 22-41 Tiempo reposo
96 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505

Parámetros Guía de programación
mín.. el estado de reactivación dura más tiempo
del estipulado en el parámetro 22-49 Tiempo ret.
reinic. El convertidor de frecuencia ha salido del
modo reposo.
6. Volver al control de lazo abierto de velocidad
(rampa de aceleración de la velocidad del motor
hasta el valor de consigna de velocidad).
Secuencia de funcionamiento en modo reposo en lazo
cerrado:
1. El convertidor de frecuencia pasa a estado de
refuerzo si se cumplen las siguientes condiciones:
1a Si el parámetro 22-02 Modo control
reposo CL se ajusta a [0] Normal:
a. La velocidad del motor es
menor que el valor del
parámetro 22-47 Velocidad de
reposo [Hz].
b. La realimentación es superior a
la referencia.
c. El motor funciona durante más
tiempo del estipulado en el
parámetro 22-40 Tiempo
ejecución mín..
d. El estado de reposo dura más
tiempo del indicado en el
parámetro 22-48 Tiempo ret.
rep..
1b Si el parámetro 22-02 Modo control
reposo CL se ajusta a [1] Simplic.:
a. La velocidad del motor es
menor que el valor del
parámetro 22-47 Velocidad de
reposo [Hz].
b. El motor funciona durante más
tiempo del estipulado en el
parámetro 22-40 Tiempo
ejecución mín..
c. El estado de reposo dura más
tiempo del indicado en el
parámetro 22-48 Tiempo ret.
rep..
Si el parámetro 22-45 Refuerzo de
consigna no está ajustado, el convertidor
entrará en modo reposo.
2. Transcurrido el tiempo indicado en el
parámetro 22-46 Tiempo refuerzo máx., el
convertidor de frecuencia reduce la velocidad del
motor hasta la velocidad indicada en el
parámetro 1-82 Vel. mín. para func. parada [Hz].
3. El convertidor de frecuencia activa
parámetro 1-80 Función de parada. El convertidor
de frecuencia está ahora en modo reposo.
4. El convertidor de frecuencia sale del modo
reposo cuando:
4a el error entre la referencia y la realimen-
tación es mayor que el
parámetro 22-44 Refer. despertar/Dif.
realim., y
4b el estado de reposo dura más tiempo
del indicado en el
parámetro 22-41 Tiempo reposo mín., y
4c el estado de reactivación dura más
tiempo del estipulado en el
parámetro 22-48 Tiempo ret. rep..
5. El convertidor de frecuencia vuelve al control de
lazo cerrado.
AVISO!
El modo reposo no está activo cuando la referencia local
lo está (ajuste manualmente la velocidad por medio de
las teclas de navegación del LCP).
El modo reposo no funciona en modo local. Realice un
ajuste automático en lazo abierto antes de ajustar la
entrada/salida en lazo cerrado.
22-40 Tiempo ejecución mín.
Range: Función:
10 s* [0 - 600 s] Ajustar el tiempo mínimo deseado de funcio-
namiento del motor tras una orden de
arranque (entrada digital o bus), antes de
entrar en modo reposo.
22-41 Tiempo reposo mín.
Range: Función:
10 s* [0 - 600 s] Ajuste el tiempo mínimo de permanencia en
modo reposo. Esto anula cualquier otra
condición de reinicio.
22-43 Veloc. reinicio [Hz]
Range: Función:
10* [ 0 -
400.0 ]
Solo se debe utilizar si el parámetro 1-00 Modo
Conguración está ajustado en [0] Veloc. lazo
abierto y la velocidad de referencia se aplica
mediante un controlador externo. Ajuste la
velocidad de referencia a la que debe
desactivarse el modo reposo.
La velocidad de reinicio no debe exceder el ajuste
del parámetro 4-14 Motor Speed High Limit [Hz].
3 3
MG18B505 Danfoss A/S © 05/2018 Reservados todos los derechos. 97

Parámetros
VLT® HVAC Basic Drive FC 101
22-44 Refer. despertar/Dif. realim.
Range: Función:
10 %* [0 -
100 %]
33
Solo para ser usado si el parámetro 1-00 Modo
Conguración está ajustado a lazo cerrado y el
controlador PI integrado se utiliza para controlar
la presión.
Ajuste la caída de presión permitida en forma de
valor porcentual del valor de consigna de
presión (P
) antes de cancelar el modo reposo.
set
22-45 Refuerzo de consigna
Range: Función:
0 %* [-100
100 %]
Solo para ser usado si el parámetro 1-00 Modo
Conguración está ajustado en lazo cerrado y se
utiliza el controlador PI integrado. En sistemas
con, por ejemplo, control de presión constante,
resulta ventajoso incrementar la presión del
sistema antes de detener el motor. Esto aumenta
el tiempo que el motor está parado y ayuda a
evitar frecuentes arranques y paradas.
Ajuste la sobrepresión/sobretemperatura requerida
en forma de valor porcentual del valor de
consigna de presión (P
pasar al modo reposo.
Si se ajusta al 5 %, la presión de refuerzo será P
× 1,05. Los valores negativos pueden utilizarse
para el control de torres de refrigeración, donde
se necesita un cambio negativo.
)/temperatura antes de
set
set
22-46 Tiempo refuerzo máx.
Range: Función:
60s* [0 -
600 s]
Solo se debe utilizar si el parámetro 1-00 Modo
Conguración está ajustado en [3] Lazo cerrado y el
controlador PI integrado se utiliza para controlar la
presión.
Ajuste el tiempo máximo durante el que se
permite el modo de refuerzo. Si se excede el
tiempo ajustado, el convertidor de frecuencia entra
en modo reposo sin esperar a que se alcance la
presión de refuerzo ajustada.
22-49 Tiempo ret. reinic
Range: Función:
0 s [0 - 3600 s] Ajuste el tiempo de retardo durante el cual el
motor esperará antes de salir del modo reposo
cuando se cumplan las condiciones para la
reactivación.
3.15.5 22-6* Detección correa rota
Utilice la detección de correa rota tanto en sistemas de
lazo abierto como en sistemas de lazo cerrado, para
bombas y ventiladores. Si el par motor estimado (actual) se
encuentra por debajo del valor de par de correa rota
(actual) (parámetro 22-61 Par correa rota) y la frecuencia de
salida del convertidor de frecuencia es mayor o igual a 15
Hz, se ejecuta el parámetro 22-60 Func. correa rota.
22-60 Func. correa rota
Selecciona la acción que se ha de realizar si se detecta la
condición de correa rota.
Option: Función:
[0] * O
[1] Advertencia El convertidor de frecuencia sigue
funcionando, pero activa una advertencia de
correa rota (advertencia 95: Correa rota).
Mediante una salida digital del convertidor
de frecuencia o mediante el bus de comunicación serie, se puede comunicar una
advertencia a otro equipo.
[2] Desconexión El convertidor de frecuencia se detiene y
activa una alarma de correa rota (alarma 95:
Correa rota). Mediante una salida digital del
convertidor de frecuencia o mediante el bus
de comunicación serie, se puede comunicar
una alarma a otro equipo.
AVISO!
No ajuste el parámetro 14-20 Modo Reset en [13] Reinic.
auto. innito cuando el parámetro 22-60 Func. correa rota
esté ajustado en [2] Desconexión. Eso hace que el
22-47 Velocidad de reposo [Hz]
Range: Función:
0* [ 0 - 400.0 ] Ajuste la velocidad por debajo de la cual el
convertidor de frecuencia entra en modo
reposo.
convertidor de frecuencia conmute continuamente entre
marcha y parada cuando se detecta una correa rota.
AVISO!
Si está activada la función de bypass automático, el
bypass comenzará cuando el convertidor de frecuencia
22-48 Tiempo ret. rep.
Range: Función:
0 s [0 - 3600 s] Ajuste el tiempo de retardo durante el cual el
motor esperará antes de entrar en modo de
reposo cuando se cumpla la condición para
entrar en dicho modo.
sufra una situación de alarma persistente. En este caso,
desactive la función de bypass automático si se ha
seleccionado [2] Desconexión como función de correa
rota.
98 Danfoss A/S © 05/2018 Reservados todos los derechos. MG18B505
 Loading...
Loading...