

Data sheet
CI-TI™ Contactors and motor starters
Types CI 61 - CI 98
Contactors CI 61, CI 73, CI 86 and CI 98 switch
powers of up to 30 kW, 37 kW, 45 kW and 55 kW
respectively under 3 × 380 V AC-3 loads.
Accessories include a wide selection of auxiliary
contacts, mechanical interlocks and RC elements.
Auxiliary contacts for mounting on the side or
top are available. The auxiliary contacts have
force-actuated contacts and can form part of
safety switching.
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 1
Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Ordering
CBD 11
BD S-
CBD 22
Mechanical
interlock
Contactors CI 61, CI 73, CI 86, CI 98
Main circuit
Type
U
e
220 – 240 V
AC-3 load
U
e
380 – 690 V
2
I
)
th
I
e
(AC-1)
Open
I
the
(AC-1)
Encl.
3
)
[kW] [kW] [A] [A] [A] Number Number
CI 61 18.5 30 60 100 100 3 1-8 037H3061
CI 73 22 37 72 100 100 3 1-8 037H3062
CI 86 25 45 85 100 100 3 1-8 037H3063
CI 98 30 55 97 130 110 3 1-8 037H3040
1
) Coil voltage / frequency or Suffix no. (see table below) must be added to the Danfoss code no.
2
) The thermal current Ith gives the maximum load at 40 °C, which corresponds to installing the contactor in air (open).
3
) The thermal current I
gives the maximum load at 60 °C, which corresponds to installing the contactor in an enclosure.
the
Main
contacts
(make)
Add-on
options
Code no.1)
Coil voltages and coils for CI 61, CI 73, CI 86, C 98
Coil voltage 1) - (sufix no.)
Contactor Code no.
CI 61 037H3061
CI 73 037H3062
CI 86 037H3063
CI 98 037H3040 - -
Available
Special order
Unavailable
-
24 V 50/60 Hz
(13)
110 V, 50/60 Hz
(23)
220 – 230 V, 50/60 Hz
(32)
380 – 400 V, 50/60 Hz
(39)
Auxiliary contact block CBD for CI 61, CI 73, CI 86 and CI 98 contactors
Load
Type Contact function 1)
I
e
(AC-15)
2
I
)
th
(AC-1) Open
3
I
)
the
(AC-1) Encl.
U
e
Code no.
[A] [A] [A] [V]
CBD-11 1 make (NO) + 1 break (NC) 5.5 10 6 690 037H3064
CBD-22 2 make (NO) + 2 break (NC) 5.5 10 6 690 037H3065
CBD S-NC 1 break (NC) 3 10 6 690 037H3066
CBD S-NO 1 make (NO) 3 10 6 690 037H3067
CBD S-11 1 make (NO) + 1 break (NC) 3 10 6 690 037H3069
CBD S-20 2 make (NO) 3 10 6 690 037H3070
1
) Force-actuated contacts suitable for safety switching.
2
) The thermal current Ith gives the maximum load at
40 °C, which corresponds to installing the contactor
3
) The thermal current Ithe gives the maximum load at
60 °C, which corresponds to installing the contactor
in an enclosure.
in air (open).
In CBD auxiliary contact the silver tips are
cross-stamped.
Both contact types are PLC-compatible.
Min. load 24 V, 10 mA.
In CBD S auxiliary contact the silver tips are
H-shaped.
RCD-
Clip-on marker
© Danfoss | DCS (az) | 2018.02
Accessories for contactors CI 61, CI 73, CI 86, CI 98
Description Comments Code no.
Mech. interlock Mech. interlock can be established between pairs 037H3074
Type RCD 280 (110 – 280 V, 50/60 Hz) 037H3072
Clip-on markers Rating plate with cover 037H3142
IC.PD.C00.F6.02 | 2
Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Description
Ordering
Thermal overload relays TI 80 - TI 86 are used with
contactors type CI 61, CI 73 and CI 86 to give
overload protection of squirrel-cage motors of
30 – 55 kW.
The relays trip under asymmetric load, i.e.
accelerated release if phase drop-out occurs.
Other features of TI 80 and TI 86:
• stop / reset button
• manual / automatic reset
• test button
• double scale for direct start or Y / D start
• signal contact with changeover
Thermal overload relays TI 80 and TI 86
Range Max. fuse 1)
Type
TI 80 42 – 63 75 – 109 100 100 047H1016
TI 80 60 – 80 105 – 138 125 125 047H1017
TI 86 74 – 85 130 – 147 125 125 047H1018
1
) To IEC 947-4 coordination types 1 and 2:
Coordination type 1: Any type of damage to the motor starter is permissible. If the motor starter is in an enclosure, no external
damage to the enclosure is permissible. After a short-circuit the thermal overload relay shall be partially or
wholly replaced.
Coordination type 2: No damage to the motor starter is permissible, but slight contact burning and welding is permissible.
Motor
starter
[A] [A] [A] [A]
Y / D
starter
gI, gL, gG
Type 2
BS 88, type T
Type 2
Code no.
Base
Push button extension
Current rail set
Selection of thermal overload relay
The selection of a thermal overload relay must
be based on the motor full load current and the
method of starting:
• With direct start the motor starter range applies
• With star-delta start Y / D starter range applies
Example:
Full load current: 85 A
• With direct start, the suitable motor starter
range is 74 – 85 A, i.e. thermal overload relay
047H1018
• With star-delta start, the suitable Y/D starter
range is 75 – 109 A, i.e. thermal overload relay
047H1016
Accessories for thermal overload relays TI 80 - TI 86
Description Comments Code no.
Clip-on markers For mounting on TI 80 - TI 86 (250-off )
Base For separate mounting of TI 80 - TI 86 047L045666
Pushbutton extension For TI 9C TI- TI 86 (3 mm) 047L040666
Current rail set For direct mounting of TI 80 / TI 86 on contactors CI 61-73-86 (set of 3 )
037H010566
037H010866
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 3
Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Construction standards
• Contactors, thermal overload relays and
accessories are designed and tested in
accordance with IEC 947/EN 60947.
Pulse voltage
Type U
CI 61-CI 73-CI 86-CI 98 8 KV
imp
• Environment
• Temperate climate
• Tested and passed in accordance with
DIN 50 016 and 40 046 part 38 and IEC 68
• Max. installation height: 2000 NN, in accordance
with IEC 947
Ambient temperature
Type
CI 61-CI 73-CI 86-CI 98 -25 °C – 60 °C -55 °C – 80 °C
Operation Storage / Transport
Environment
Type
TI 86 -5 – 40 °C -50 – 60 °C 2 g at 200 Hz 9 g for 7.5 ms 30
Temperature
compensated
Ambient
temperature
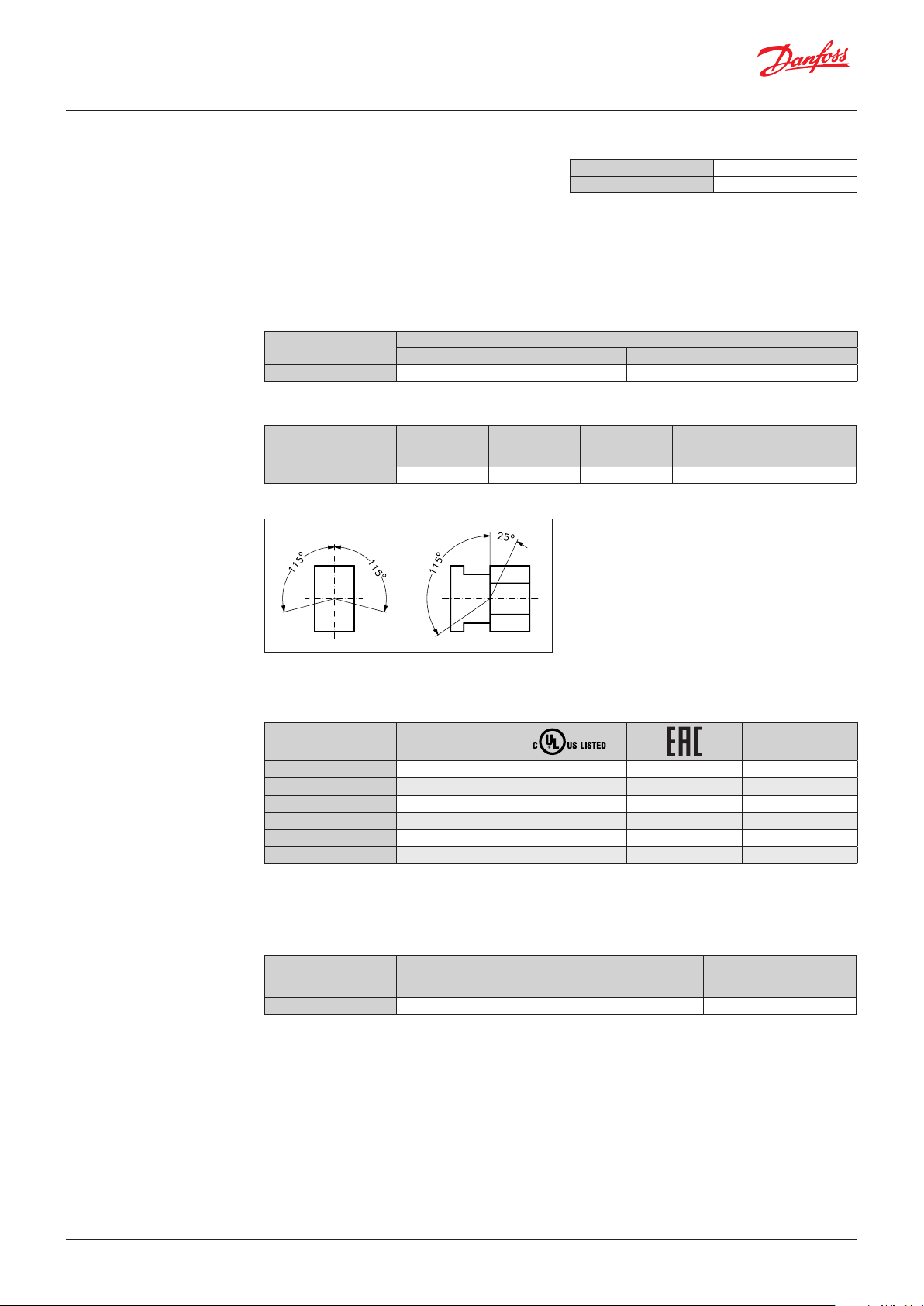
Mounting direction
Ambient temperature
Vibration
Shock
perpendicular to
contact system
operations
per hour
Max.
Approvals
Rated life
Type EN 60947 LLC CDC TYSK
CI 61
CI 73
CI 86
CI 98
TI 80
TI 86
Approved
Type
CI 61-CI 73-CI 86-CI 98 10 x 10
Mechanical
life
Operations
6
Electrical life
AC-3
Operations
6
1 x 10
Duty cycles per hour
AC-3 load
Operations
300
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 4

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Electrical life curves
Contactors CI 61-73-86-98 load categories, AC-1
Contactors CI 61-73-86-98, load categories AC-3 & AC4
10% AC-4 Mixed operation of squirrel-cage motors;
Ue = 230…400…460 V
Contactors CI 61-73-86-98, load categories AC-4
Switching of squirrel-cage motors; Ue = 230…690 V
Contactors CI 61-73-86-98, load categories AC-3
Switching of squirrel-cage motors while starting;
Ue = 230…400…460 V
A: Electrical life in millions of make / break operations.
B: Rated Operating current (A).
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 5

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Tripping graphs
TI 80 / 86
Explanation of graphs
Mean value curves
Upper curve: 3-phase tripping and asymmetric load tripping at min. setting
Lower curve: Asymmetric load tripping at max. setting
When tripping from the operationally warm condition, the tripping times are approx. 30% of the
values shown. These values apply at an ambient temperature = 20 °C.
3-phase tripping: x =
rated motor current
Asymmetric load tripping: x =
max. scale value on overload relay
Tripping time 2 < Tp ≤ 10 s at 7.2 × Ie class 10 A
Note! In general, the thermal overload relay is always set on motor full load current.
3-phase overload
. Measure overload current
. Find the overload factor (x) by dividing the measured value by the set value of the thermal overload
relay (motor full load current).
. Find (x) on the horizontal axis and follow a line vertically up until it intersects the upper curve.
. From the intersection point, follow a horizontal line to the left and read off on the vertical axis the
time that will elapse before the thermal overload relay cuts out the motor.
Asymmetric load tripping
. Measure the current the motor draws from one of the intact phases.
. Find the overload factor (x) by dividing the measured value by the maximum scale value of the
thermal overload relay.
. Find (x) on the horizontal axis and follow a line vertically up until it intersects the lower curve.
. From the intersection point, follow a horizontal line to the left and read off on the vertical axis the
time that will elapse before the thermal overload relay switch off the motor.
measured current
measured current
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 6

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Contact symbols and
terminal marking
Auxiliary contacts
Auxiliary contacts
CBD - 11
Auxiliary contacts
CBD S - NO
Auxiliary contacts
CBD S - NC
Auxiliary contacts
CBD S - 11
Auxiliary contacts
CBD - 22
Auxiliary contacts
CBD S - 20
Contactors and thermal overload relay
Contactors
CI 61/73/86/98
Thermal overload relay
TI 80/86
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 7

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Connections
Loads
Connections, main contacts and contactor coils
EN 60947
Multicore
Type Connection method
CI 61, CI 73, CI 86, CI 98 Screw and box terminal 2.5 – 50 2.5 – 35 – 2 – 6
TI 80, TI 86 Screw and box terminal 1.5 – 35 1.5 – 25 – 0.8 – 3 – 5
Coil Screw and clamp washer 0.52 – 2.5 0.5 – 2.5 0.5 – 2.5 1 – 1.5
Single
[mm2] [mm2] [mm2] [Nm]
Without
terminal
sleeve
With terminal
sleeve
Tightening
torque
Direct start, load categories AC-2, AC-3, AC-4
Switching of 3-phase Motors; (50 Hz); Ambient temperature 60 °C, AC-2, AC-3, AC-4
Type
CI 61
CI 73
CI 86
CI 98
220 – 230 V 240 V 380 – 400 V 415 V 500 V 690 V
A 62 62 60 60 55 34
kW 18.5 18.5 32 32 37 32
A 72 72 72 72 67 42
kW 22 22 40 40 45 40
A 85 85 85 85 80 49
kW 25 25 45 45 55 45
A 96 95 97 97 78 57
kW 30 30 55 55 55 55
Rated loads at 50 Hz
Star-delta start, load category AC-3
Star-delta start, load category AC-3
Type
CI 61
CI 73
CI 86
CI 98
220 – 230 V 240 V 380 – 400 V 415 V 500 V 690 V
A 107 107 104 104 95 59
kW 32 32 55 55 63 55
A 125 125 125 125 116 73
kW 37 40 63 63 80 63
A 147 147 147 147 139 85
kW 45 50 80 80 90 80
A 166 165 168 168 135 99
kW 50 50 90 90 90 90
Rated Loads at 50 Hz
Three-phase ohmic load, load category AC-1
AC-1 Active Power Load (50 Hz)
Type
CI 61, CI73, CI86
CI 98
Operating temperatur max. 40 °C (open condition) Heat-resistant cable only (min 75 °C)
220 – 230 V 240 V 380 – 400 V 415 V 500 V 690 V
A 100 100 100 100 100 100
kW 40 42 69 2 87 120
A 130 130 130 130 130 130
kW 52 54 90 93 113 155
Three-phase ohmic load, load category AC-1
AC-1 Active Power Load (50 Hz)
Type
CI 61, CI73, CI86
CI 98
Operating temperatur max. 60 °C (encl. condition) Heat-resistant cable only (min 75 °C)
220 – 230 V 240 V 380 – 400 V 415 V 500 V 690 V
A 100 100 100 100 100 100
kW 40 42 69 72 87 120
A 110 110 110 110 110 110
kW 44 46 76 79 95 131
Switching three-phase power transformers (AC-6a)
Switching of Power Transformers; AC-6a (50 Hz)
Type
CI 61
CI 73
CI 86
CI 98
Transformer load, (factor n = 30, inrush current = n x rated transformer current)
220 – 230 V 240 V 380 – 400 V 415 V 500 V 690 V
A 40.8 40.8 40.8 40.8 40.8 40.8
kW 16 17 28 29 35 49
A 40.8 40.8 40.8 40.8 40.8 40.8
kW 16 17 28 29 35 49
A 40.8 40.8 40.8 40.8 40.8 40.8
kW 16 17 28 29 35 49
A 48.5 48.5 48.5 48.5 48.5 48.5
kW 19.3 20.2 33.6 34.9 42 58
© Danfoss | DCS (az) | 2018.02
IC.PD.C00.F6.02 | 8

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Technical data
Switching lighting
Incandescent lamps
Type
CI 61 60 81 77 4000 2000 800
CI 73 70 85 81 4000 2000 800
CI 86 76 90 90 4700 2350 940
CI 98 90 115 100 4700 2350 940
(AC-5b)
Max. operating
current
[A]
Max. operating current [A] at
operating tempereature 1)
40 °C 60 °C 10 kA 20 kA 50 kA
Fluorescent lamps. individually compensated
(AC-5b)
Max. Capacity
[uF] at Icc=
Switching capacitor loads, individual capacitors (AC-6b)
Inductance in leads between capacitors connected in parallel min. 6µH
Type
CI 61 28 28 48 42 50 42 50 42
CI 73 28 28 48 48 55 50 55 50
CI 86 28 28 48 48 60 55 60 55
CI 98 28 28 48 48 60 55 60 55
220 – 240 V 380 – 415 V 500 V 690 V
40 °C 60 °C 40 °C 60 °C 40 °C 60 °C 40 °C 60 °C
Max. Reactive power [kVAr] 1)
Switching capacitor loads, regulating capacitors (AC-6b)
Inductance in leads between parallel-connected capacitors must be min.6µH
Type
CI 61 28 28 40 40 50 40 40 40
CI 73 28 28 48 48 50 50 50 50
CI 86 28 28 48 48 50 50 50 50
CI 98 28 28 48 48 50 50 50 50
220 – 240 V 380 – 415 V 500 V 690 V
40 °C 60 °C 40 °C 60 °C 40 °C 60 °C 40 °C 60 °C
Max. Reactive power [kVAr] 1)
Switching direct current load at 60 °C ambient temperature
Load categories DC-3 and DC-5, contacts connected in series
Type
CI 61 90 70 70 25 0.6 90 70 70 25 0.6
CI 73 90 70 70 25 0.6 90 70 70 25 0.6
CI 86 100 80 80 30 0.6 100 80 80 30 0.6
CI 98 100 80 80 30 0.6 100 80 80 30 0.6
Switching direct current load at 60 °C ambient temperature
Load category C-1, contacts connected in series
Type
CI 61 70 70 90 40 70 90 11 70 90 2 15 70 0.5 1.5 5
CI 73 80 80 90 40 80 90 11 80 90 2 15 80 0.5 1.5 5
CI 86 80 80 100 40 80 100 11 80 100 2 15 80 0.5 1.5 5
CI 98 80 80 100 40 80 100 11 80 100 2 15 80 0.5 1.5 5
24 V 48 V 110 V 220 V 440 V 24 V 48 V 110 V 220 V 440 V
1
pole2 poles3 poles1 pole2 poles3 poles1 pole2 poles3 poles1pole2 poles3 poles1 pole2 poles3 poles
DC-3. 3 poles in series DC-5. 3 poles in series
24 V 48 V 110 220 V 440 V
Max. operating current [A]
Max. operating current [A]
Contact resistance and power loss
Type
CI 61 0.9 9.7 4.5 14.2
CI 73 0.9 14 4.5 18.5
CI 86 0.9 19.5 4.5 24
CI 98 0.6 17 9 26
Typical impedance
per pole
[mΩ]
Power loss at
3 poles
AC-3 [W] AC-1 [W]
Coil consumption AC
[W]
Total power loss
© Danfoss | DCS (az) | 2018.02
Short-time withstand current I
Type
CI 61 700 20
CI 73 700 20
CI 86 700 20
CI 98 840 20
1
) 40 °C is defined as non-enclosed installation.
60 °C is defined as enclosed installation.
Short time withstand current in Amps (Icw)
cw
Current transfer time 10 sec.
Min cooling Time
[min.]
IC.PD.C00.F6.02 | 9

Data sheet | CI-TI™ Contactors and motor starters, Types CI 61 - CI 98
Technical data (continued)
Connections, auxiliary contacts
Single and
Type Connection method
CBD-, CBD S- For
CI 61- CI 73 - CI 86- CI 98
TI 80, TI 86 Screw and clamp washer 0.75 – 2.5 0.75 – 1.5 0.5 – 1.5 0.3 – 1
Screw and clamp washer 0.75 – 2.5 1 – 2.5 1 – 2.5 1 – 1.5
multi core
[mm2] [mm2] [mm2] [Nm]
High capacity
without term.
sleeve
with
term. sleeve
Tightening
torque
Auxiliary contacts, load categories AC-15 and AC-1
Max. operating current [A]
Type Comments
220 – 230 V
CBD-
CBD S- 3 3 2 2 1.6 0.75 10 6
1
) 40 °C is defined as non-enclosed installation.
60 °C is defined as enclosed installation.
For contactors CI 61- CI 73 CI 86 - CI 98
5.5 5 3 2.5 1.6 1 10 6
AC-15 AC-1
240 V 380
–
400 V 415 V 500 V 690 V 40 °C 1) 60°C 1)
Auxiliary contacts, load categories DC-12, DC-13, and DC-14
Type Comments
CBD- For contactors
CI 61- CI 73 - CI
CBD S- 6 3 0.45 0.18 0.1 3 1.5 0.6 0.3 0.2 2 1.6 0.3 0.12 0.15
86 - CI 98
24 V 48 V
12 9 3.5 0.55 0.2 5 2 0.7 0.25 0.12 9 5 2 0.4 0.16
DC-12 DC-13 DC-14
110 V 220 V 440 V
Max. operating current [A]
24 V 48 V
110 V 220 V 440 V
24 V 48 V
110 V 220 V
440 V
Coils, consumption and operating times
Type
CI 61- CI 73 -
CI 86 - CI 98
Inrush powerACHolding-power ACPull-in voltage ACDrop-out voltage ACMake time
[VA ] [W] [ VA] [W] [V] [V] [ms] [ms]
200 16 16 4.5 (0.85 – 1.1) x U
S
(0.3 – 0) x U
S
AC
18.5 – 30 10 – 60
Break time
AC
UL / CSA Specifications
RC Element (charge suppressor)
Overvoltage factor
Type Comments
RCD Suitable for contactors CI 61, CI 73, CI 86 1 – 3
n =
U
max
U
n
Max. load control circuit (contact system)
Type
TI 80 500 V, 2A, 200 VA 250 V, 2 A, 20 W 4 A 6 A
TI 86 500 V, 2A, 200 VA 250 V, 2 A, 20 W 4 A 6 A
AC-15 DC-13 gl, gL, gG BS 88 type T
Load Max. fuse
UL/CSA approved loads
Motor load (AC-3) [hp] Other loads (AC-1) [A]
Type
CI 61 5 10 15 20 40 50 90 90 90 90
CI 73 5 15 20 25 50 60 90 90 90 90
CI 86 7.5 15 25 30 60 60 100 100 100 100
CI 98 10 20 30 30 75 75 120 120 120 120
1
) 40 °C is defined as non-enclosed installation.
60 °C is defined as enclosed installation.
1-phase 3-phase UL CSA
115 V 230 V 200 V 240 V 460 V 575 V 40°C 1) 60°C 1) 40°C 1) 60°C 1)
Auxiliary contacts, UL/CSA approved loads
Load capacity
Type Comments
Category [VA] Category [W]
CBD For contactors CI 61- CI 73 - CI 86-CI 98 A600 720 Q600 69
CBD S For contactors CI 61- CI 73 - CI 86-CI 98 A600 720 Q600 69
[AC] [DC]
© Danfoss | DCS (az) | 2018.02
Connections, main contacts
Type Connection method
CI 61, CI 73, CI 86, CI 98 Screw and clamp washer 14 – 2 18 – 52
TI 80, TI 86 Screw and clamp washer 16 – 3 7 – 30
Single and multi core
[AWG ]
Tightening torque
[lb-in]
IC.PD.C00.F6.02 | 10

Dimensions
Contactor CI 61, 73, 86, 98 Contactor CI 61, 73, 86, 98 built together with thermal
overload relay TI 80-86
Drilling dimensions
CI 61, 73, 86, 98 with mechanical interlock
Thermal overload relays TI 80 and TI 86 for contactors CI 61, 73, 86 Thermal overload relays TI 80 and TI 86
Thermal overload relay TI 80 / TI 86 on base plate
© Danfoss | DCS (az) | 2018.02 IC.PD.C00.F6.02 | 11
 Loading...
Loading...