

Page 1

Reference Manual
Epsilon EP-P
Servo Drive
"MOTION MADE EASY"
Part Number: 400518-04
Revision: A4
Date: December 29, 2017
®
Page 2

Page 3

Epsilon EP-P Drive Reference Manual
Information furnished by Control Techniques Americas is believed to be accurate and reliable. However, no responsibility is
assumed by Control Techniques Americas. Control Techniques Americas reserves the right to change the design or operation of the
equipment described herein and any associated motion products without notice. Control Techniques Americas also assumes no
responsibility for any errors that may appear in this document. Information in this document is subject to change without notice.
P/N 400518-04
Revision: A4
Date: December 29, 2017
Page 4

© 2017 Control Techniques Americas a business unit of Nidec Motor Corporation.
Part Number: 400518-04
Revision: A4
Date: December 2017
Information in this document is subject to change without notice. No part of this document may be reproduced or transmitted in any
form or by any means, electronic or mechanical, for any purpose, without the express written permission of Control Techniques
Americas.
Control Techniques Americas is part of the Control Techniques global organization, a Nidec Corporation business.
The following are trademarks of Control Techniques Americas and may not be reproduced in any fashion without written approval
of Control Techniques Americas: AXIMA, “Motion Made Easy”®, and Position Tracker
Control Techniques Americas is not affiliated with Microsoft Corporation, owner of the Microsoft, Windows, and Windows NT
trademarks.
This document has been prepared to conform to the current released version of the product. Because of our extensive development
efforts and our desire to further improve and enhance the product, inconsistencies may exist between the product and documentation
in some instances. Call your customer support representative if you encounter an inconsistency.
ii Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 5
Customer Support
Control Techniques Americas
7078 Shady Oak Rd.
Eden Prairie, Minnesota 55344
U.S.A.
Telephone: (952) 995-8000 or (800) 893-2321
It is Control Techniques’ goal to ensure your greatest possible satisfaction with the operation of our products. We are dedicated to
providing fast, friendly, and accurate assistance. That is why we offer you so many ways to get the support you need. Whether it’s by
phone, fax or email found on our website, you can access Control Techniques support information 24 hours a day, seven days a week.
FAX (952) 995-8129
You can FAX questions and comments to Control Techniques. Just send a FAX to the number listed above.
Website and Email www.controltechniques.com
Website: www.control techniques.com
If you have Internet capabilities, you also have access to technical support using our website. The website includes technical notes,
frequently asked questions, release notes and other technical documentation. This direct technical support connection lets you request
assistance and exchange software files electronically.
Epsilon EP-P Drive Reference Manual iii
Revision A4 www.controltechniques.com
Page 6
Document Conventions
Manual conventions have been established to help you learn to use this manual quickly and easily. As much as possible, these conventions correspond to
those found in other Microsoft® Windows® compatible software documentation.
Menu names and options are printed in bold type: the File menu.
Dialog box names begin with uppercase letters: the Axis Limits dialog box.
Dialog box field names are in quotes: “Field Name.”
Button names are in italic: OK button.
Source code is printed in Courier font: Case ERMS.
In addition, you will find the following typographic conventions throughout this manual.
This Represents
bold
italic
ALL CAPITALS Directory names, file names, key names, and acronyms.
SMALL CAPS Non-printable ASCII control characters.
KEY1+KEY2
example: (Alt+F)
KEY1,KEY2
example: (Alt,F)
Characters that you must type exactly as they appear. For example, if you are directed to type
a:setup, you should type all the bold characters exactly as they are printed.
Placeholders for information you must provide. For example, if you are directed to type
filename, you should type the actual name for a file instead of the word shown in italic type.
A plus sign (+) between key names means to press and hold down the first key while you press
the second key.
A comma (,) between key names means to press and release the keys one after the other.
Reference Materials
The following related reference and installation manuals may be useful with your particular system.
• Epsilon EP Installation Manual (P/N 400518-01)
• Epsilon EP Connectivity Manual (P/N 400518-05)
iv Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 7
Safety Information
NOTE
WARNING
CAUTION
Safety Precautions
This product is intended for professional incorporation into a complete system by qualified persons. If you install the product
incorrectly, it may present a safety hazard. The product and system may use high voltages and currents, carry a high level of
stored electrical energy, or are used to control mechanical equipment that can cause injury.
You must give close attention to the electrical installation and system design to avoid hazards either in normal operation or in
the event of equipment malfunction. System design, installation, commissioning and maintenance must be carried out by
personnel who have the necessary training and experience. Read and follow this safety information and this instruction manual
carefully.
Qualified Person
For the purpose of this manual and product, a “qualified person” is one who is familiar with the installation, construction and
operation of the equipment and the hazards involved. In addition, this individual has the following qualifications:
Is trained and authorized to energize, de-energize, clear and ground and tag circuits and equipment in accordance with
established safety practices.
Is trained in the proper care and use of protective equipment in accordance with established safety practices.
Is trained in rendering first aid.
Enclosure
This product is intended to be mounted in an enclosure that prevents access except by qualified persons and that prevents the
ingress of contamination. This product is designed for use in an environment classified as pollution degree 2 in accordance with
IEC664-1. This means that only dry, non-conducting contamination is acceptable.
Setup, Commissioning and Maintenance
It is essential that you give careful consideration to changes to drive settings. Depending on the application, a change could
have an impact on safety. You must take appropriate precautions against inadvertent changes or tampering. Restoring default
parameters in certain applications may cause unpredictable or hazardous operation.
Safety of Machinery
Within the European Union all machinery in which this product is used must comply with Directive 89/392/EEC, Safety of
Machinery.
The product has been designed and tested to a high standard, and failures are very unlikely. However the level of integrity
offered by the product’s control function – for example stop/start, forward/reverse and maximum speed – is not sufficient for
use in safety-critical applications without additional independent channels of protection. All applications where malfunction
could cause injury or loss of life must be subject to a risk assessment, and further protection provided where needed.
Identification of Safety Information
Safety related information through out this manual is identified with the following markings.
“Warning” indicates a potentially hazardous situation that, if not avoided, could result in death or serious injury.
“Caution” indicates a potentially hazardous situation that, if not avoided, may result in minor or moderate injury.
For the purpose of this manual and product, “Note” indicates essential information about the product or the respective part
of the manual
Throughout this manual, the word "drive" refers to an Epsilon EP-P drive.
www.controltechniques.com Reference Manual v
Revision A4 www.controltechniques.com
Page 8
General warning
Failure to follow safe installation guidelines can cause death or serious injury. The voltages used in this unit can cause
severe electric shock and/or burns, and could be lethal. Extreme care is necessary at all times when working with or
adjacent to this equipment. The installation must comply with all relevant safety legislation in the country of use.
Supply isolation device
The AC supply or high voltage DC supply must be removed from the drive using an approved isolation device or disconnect
before any servicing work is performed, other than adjustments to the settings or parameters specified in the manual. The
drive contains capacitors which remain charged to a potentially lethal voltage after the supply has been removed. Allow at
least 6 minutes for Epsilon EP206/209/216 and 3 minutes for Epsilon EP202/204 after removing the supply before carrying
out any work which may involve contact with electrical connections to the drive.
Products connected by plug and socket
A special hazard may exist where the drive is incorporated into a product which is connected to the AC supply by a plug
and socket. When unplugged, the pins of the plug may be connected to the drive input, which is only separated from the
charge stored in the bus capacitor by semiconductor devices. To avoid any possibility of electric shock from the pins, if they
are accessible, a means must be provided for automatically disconnecting the plug from the drive (e.g., a latching
contactor).
Grounding (Earthing, equipotential bonding) - High Leakage Current
The drive must be grounded by a conductor sufficient to carry all possible fault current in the event of a fault. This
equipment has high earth leakage current. You must comply with local safety regulations with respect to minimum size and
special installation requirements on the protective earth conductor for high leakage current equipment. The ground
connections shown in the manual must be followed.
Fuses
Fuses or over-current protection must be provided at the input in accordance with the instructions in the manual.
The drive alone does not provide branch circuit protection. Branch circuit protection must be provided in accordance with
the National Electrical Code and any additional local codes.
Isolation of control circuits
The installer must ensure that the external control circuits are isolated from human contact by at least one layer of
insulation rated for use at the applied AC supply voltage. External control circuits identified as PELV circuits do not need
this isolation when they are completely within a zone of equipotential bonding, generally within a single enclosure or group
of enclosures bonded together.
vi Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 9

Table of Contents
Customer Support iii
Safety Information v
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Qualified Person . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Enclosure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Setup, Commissioning and Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Safety of Machinery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Identification of Safety Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Introduction 1
Epsilon EP Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Operational Overview 3
Software Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
PowerTools Pro Setup Software. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
How Motion Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
How Jogging Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
How Home Works. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Home Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Establishing a Home Reference Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Accuracy and Repeatability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Home Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
End of Home Position. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Home Limit Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Home Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
How Indexes Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Absolute vs. Incremental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
How Communications Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Configuring Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Upload Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Downloading. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Change Path Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
NVM Options for Uploading and Downloading. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Updating to RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Options/Preferences/Ptools Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Secure Downloading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Brake Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
How Data Capture Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Navigating the Graph Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Setting Up Parameters 23
Status View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Status Online Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Motor Position Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Motor Velocity Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Control Loop Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Master Feedback Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Torque Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Information Tab (Online Only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Drive Information Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Graph View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Epsilon EP-P Drive Reference Manual vii
Revision A4 www.controltechniques.com
Page 10

Data Capture Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Timing Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Data Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Setup View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Identification Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Configuration Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Drive Encoder Output Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Positive Direction Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Update Rate Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Switching Frequency Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Motor View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Motor Type List Box. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Use Motor Data From .ddf File Check box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Motor Parameters Column . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Run Auto-Tune Button. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Values from Drive Column. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Apply to Config. Button . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Save .ddf Values Button . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
User Units View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Distance Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Velocity Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Acceleration Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Torque Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Dual Loop View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Display Dual Loop Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Position Encoder Setup Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Sync Output Connector Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Dual Loop Encoder Ration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Master Units View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Encoder Setup Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Sync Output Connector Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Master Position Setup Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Master Distance Units Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Master Velocity Units Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Master Acceleration Units Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Master Position Filter Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Virtual Master View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Enable Virtual Master Check Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Virtual Master Setup Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Virtual Master Conversion Ratio Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Feedrate Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Position View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Settings Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Limits Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Rotary Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Online Tab (not shown) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Velocity View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Settings Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Online Tab (not shown) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Ramps View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Settings Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Ramps Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Torque View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Settings Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Limits Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Peak Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Online Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
. . . . . . . . . . . . 39
viii Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 11

Distance Recovery View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Gear and Camming Distance Recovery Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Tuning View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Load Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Low Pass Filter Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Tuning Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Position Error Integral Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Shunt View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
External Shunt Resistor Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Shunt Control Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Faults View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Active Faults Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Power Up Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Fault Log Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Fault Counts Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Drive Fault Log Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Setup NVM View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Devices / Vars Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
PLS View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Capture View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Queues View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Queue Sources and Destinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Timers View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Timer Signals/Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Using Timers within Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Variables View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Adding and Deleting Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Using Variables in a Program. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Bits View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Adding and Deleting User Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
User 32-bit Bit Register and User Bit Masking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Configuring the User Bit Mask Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Packed Bits . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Packed Bits Control Words View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Pack Bits Status Words View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
I/O Setup Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Assignments View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Creating An Assignment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Deleting An Assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Assignment Polarity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
User Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Only Show Assigned Check Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Assignments that Automatically Use Position Capture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Selector View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Input Lines View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Output Lines View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Analog Inputs View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Enable Channel Check Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Set Maximums Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Set Minimums Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A/D Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
ValueIn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Read Max/Min Voltage Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Analog Outputs View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Enable Channel Check Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Epsilon EP-P Drive Reference Manual ix
Revision A4 www.controltechniques.com
Page 12
Maximum Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Maximum Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Minimum Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Minimum Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Feedback. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Motion Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Jog View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Jog Sources and Destinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Home View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Home Sources and Destinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Index View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Timed Indexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Index Sources and Destinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Adding and Deleting Indexes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Gearing View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Use Scale Check Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Gear Ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Acc/Dec Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Camming View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Cam Table Plot Error. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Torque Mode View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Torque Mode Settings Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Velocity Limiting Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Multiple Profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Stopping Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
MotionStop from a Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
MotionStop from an Assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Profile.#.MotionStop from a Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Profile.#.MotionStop from an Assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Network Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Modbus RTU/TCP View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Modbus Master View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DeviceNet View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Profibus View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Ethernet View. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
. . . . . . . . . . . . . . . . 107
Programming 111
Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Program Toolbar Buttons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Program Multi-Tasking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Program Instruction Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Program Flow Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Program Math Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Program Array Access. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Motion Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Motion Modifiers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Modbus Slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Adding and Deleting Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
PowerTools Toolbar Button Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Power Tools Menu Bar Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Right Click Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Run Anytime Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Program Blocking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Example Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
x Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 13

Parameter Descriptions 145
Tuning Procedures 187
PID vs. State-Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Motor Tuning and Motor Auto-Tuning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Tuning Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Initial Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Tuning Steps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
No Tuning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Basic Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Intermediate Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
Fully Optimized Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
Tuning Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Determining Tuning Parameter Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
Diagnostics and Troubleshooting 193
Diagnostic Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Status Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Fault Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Drive Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Error Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Non-Programming Error Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Programming Error Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Online Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
Watch Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
Global Where Am I Button . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
Motion Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
Diagnostic Analog Output Test Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
Specifications 205
Dimensions and Clearances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Cable Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
EIO26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
XV Motor Cables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
XTMDS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
XCMDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
XCMDBS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
XTBMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
XEFTS/XUFTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
XEFCS/XUFSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
NT and MG Motors Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
CMDS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
CMMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
CBMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
EFCS / UFCS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
SYNC Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
ENCO Cable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
SNCDD-915 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
SNCFLOA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
SNCMD-815 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
SNCFLI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
SNCMD-89 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
SNCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
Communications Cables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
ESA-SP-485 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
ETH-PATCH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Epsilon EP-P Drive Reference Manual xi
Revision A4 www.controltechniques.com
Page 14

Glossary 225
Index 231
xii Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 15
1 Introduction
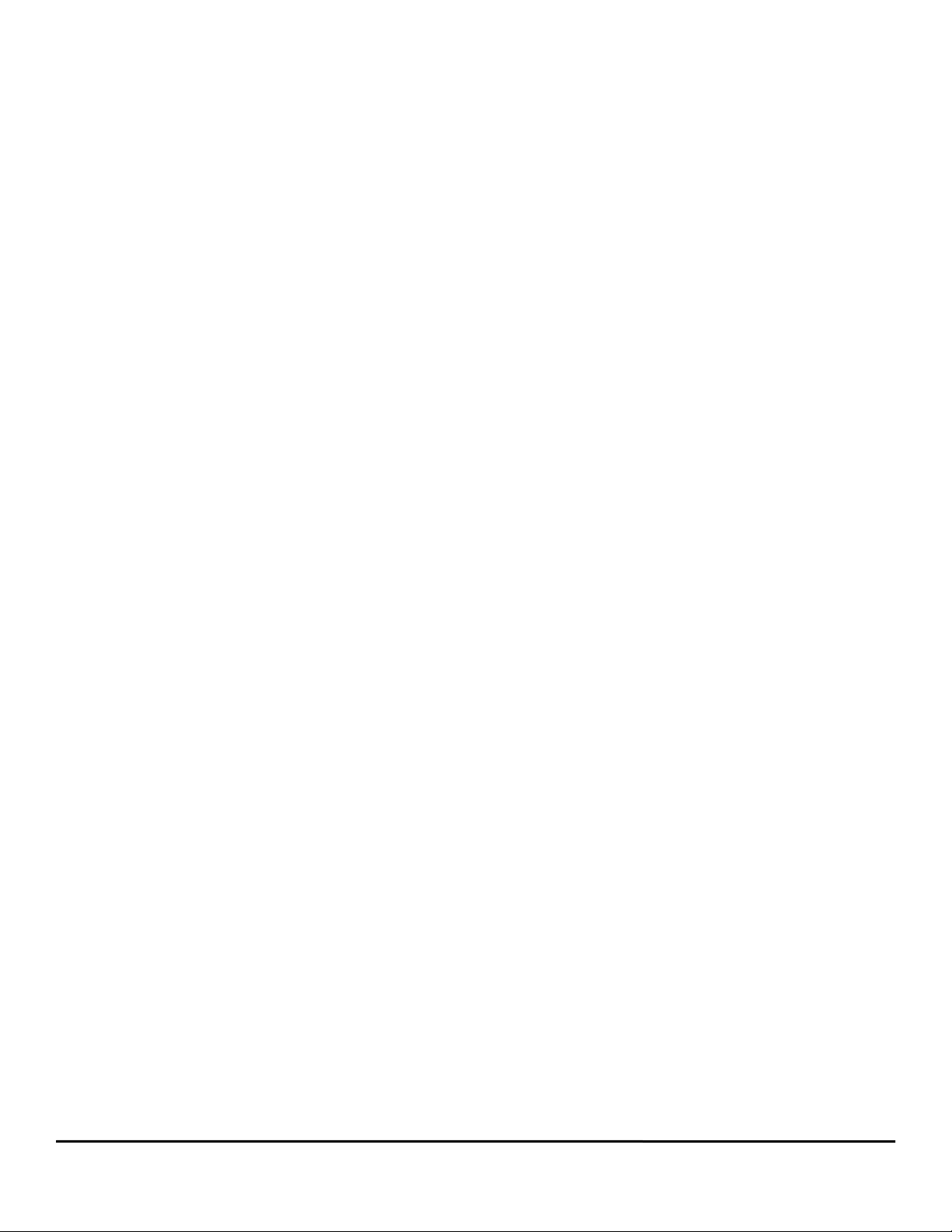
AC Power Connections
Motor Connections
24 Vdc Logic Power Supply Connections
Digital I/O Connctor (J3)
DeviceNet Connector (J9)
(EP-IDN or EP-PDN only)
Serial
Connectors (J2)
Ethernet
Connector (J4)
(EP-Pxx only)
Diagnostic Display
Shunt Connector (J8)
Reset Button
Encoder Feedback Connector (J6)
Sync Input Connector (J10)
Analog/Sync Output
Connector (J5)
1.1 Epsilon EP Drive
The Epsilon EP drive is a stand-alone, fully digital brushless servo drive designed and built to reliably provide high
performance and flexibility without sacrificing ease of use.
The use of State-Space algorithms make tuning very simple and forgiving. The drives are designed to operate with up to a
10:1 inertia mismatch right out of the box. Higher (50:1 and more) inertial mismatches are possible with two simple parameter
settings.
The Epsilon EP drive can be quickly configured to many applications in less than 5 minutes with PowerTools Pro software on
a PC running Windows® 98, 2000, XP (32-bit) or Vista (32-bit).
Complete diagnostics are provided for quick troubleshooting. A diagnostic display on the front of the drive informs the user of
the operational or fault status. The last 10 faults are stored in non-volatile memory along with a time stamp for easy recall.
Epsilon EP-P Drive Reference Manual 1
Revision A4 A4
Figure 1: Epsilon EP-PDN (EP202-206) Drive Feature Location
Page 16
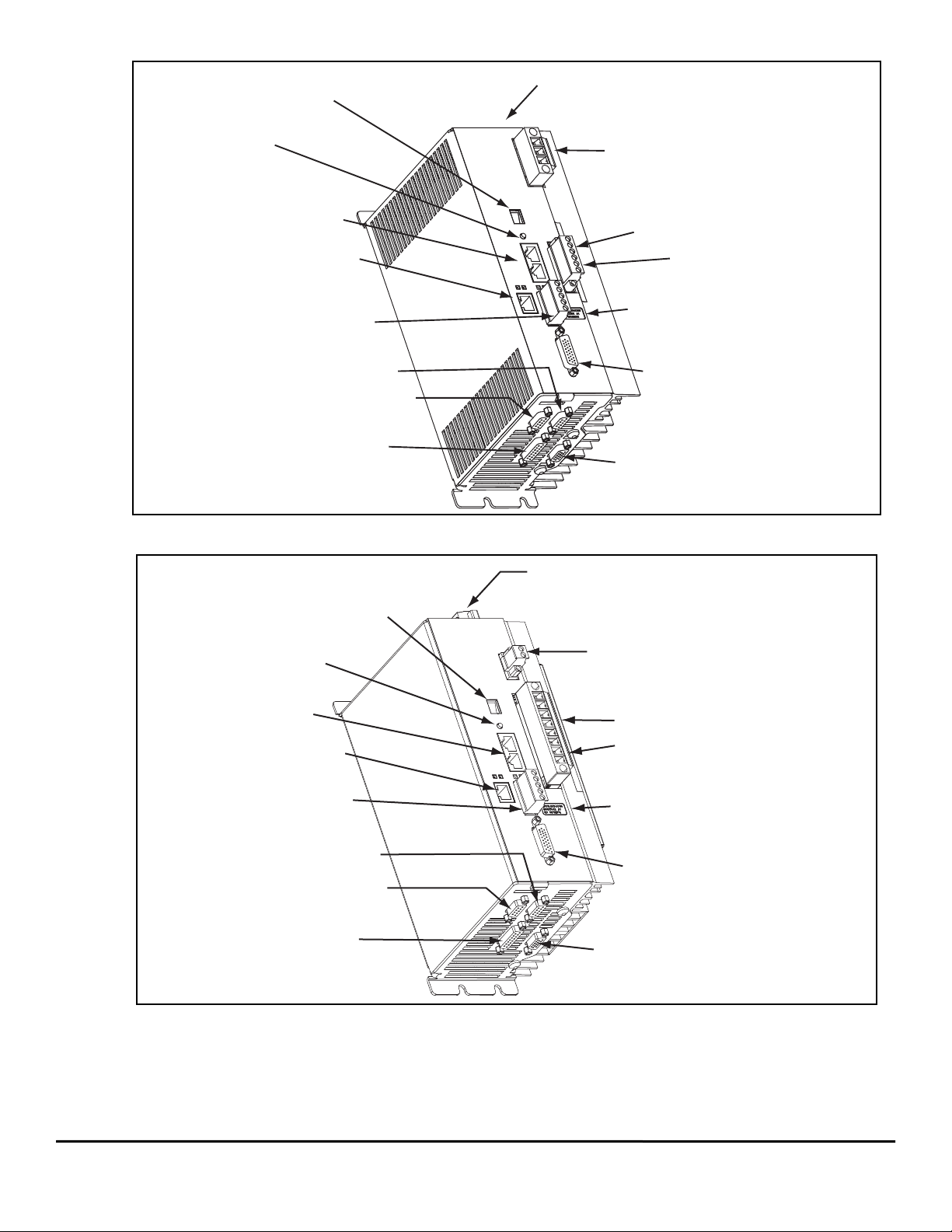
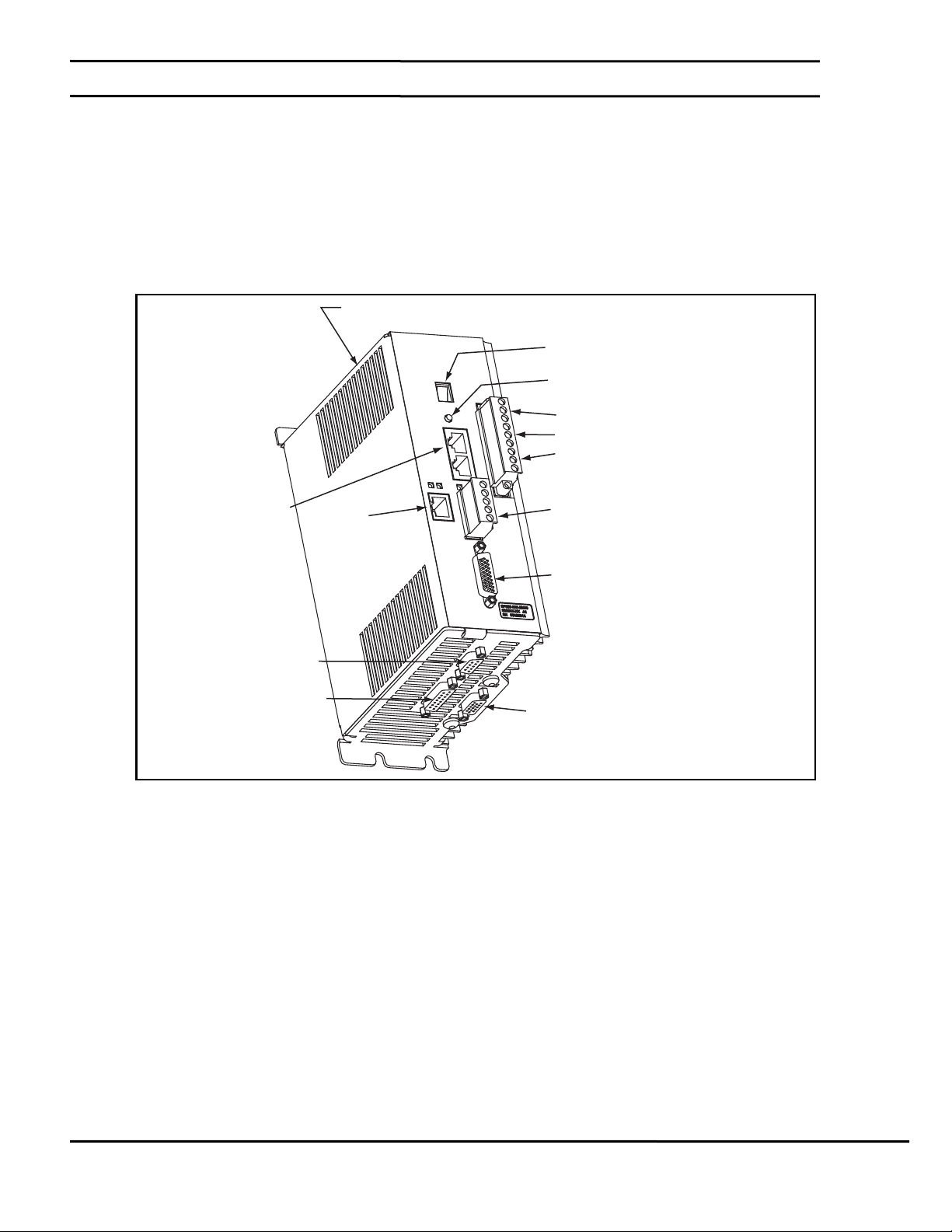
Figure 2: Epsilon EP-209 Drive Feature Location
Shunt Connector (J8)
Model Number, Part Number,
Revision and Serial Number Label
24 Vdc Logic Power
Supply Connections
Status/Diagnostic Display
Motor Power Connections
Reset Button
AC Power Connector
Serial
Connectors (J2)
Ethernet Connector (J4)
(EP-Pxx only)
DeviceNet Connector (J9)
(EP-PDN only)
Digital I/O Connector (J3)
Encoder Feedback Connector (J6)
Sync Input Connector (J10)
Analog/Sync Output
Connector (J5)
Profibus Connector (J13)
(EP-PPB only)
Shunt Connector (J8)
24 Vdc Logic Power
Supply Connector
Status/Diagnostic Display
AC Power Connections
Motor Power Connections
Reset Button
Serial
Connectors (J2)
Ethernet Connector (J4)
(EP-Pxx only)
Ethernet Connector (J9)
(EP-PDN only)
Digital I/O Connector (J3)
Model Number, Part Number,
Revision and Serial Number Label
Encoder Feedback Connector (J6)
Sync Input Connector (J10)
Analog/Sync Output
Connector (J5)
Profibus Connector (J13)
(EP-PPB only)
Figure 3: Epsilon EP-216 Drive Feature Location
2 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 17
2 Operational Overview
This section provides a complete functional description of the Epsilon EP-P drive. It is intended to provide you, the user, with a
thorough understanding of all operations. The description includes references to many Epsilon EP-P drive parameters which
can be displayed and/or edited using PowerTools Pro software, or through any Modbus interface.
The Epsilon EP-P drive allows the user to set up 100 different Indexes, Jog functions and a Home. The Epsilon EP-P drive
provides fifteen digital inputs and eight digital outputs.
2.1 Software Interface
The Epsilon EP-P drive is set up using PowerTools Pro software. PowerTools Pro is an easy-to-use Windows® based setup
and diagnostics tool. It provides the user with the ability to create, edit and maintain the drive’s setup. You can download or
upload the setup data to or from a drive. The setup data can also be saved to a file on the PC or printed for review or
permanent storage.
2.2 PowerTools Pro Setup Software
PowerTools Pro is designed to be the easiest-to-use software available for single axis motion controllers.
Features
• “Hierarchy Tree” for quick navigation to any setup view
• Simple I/O function assignments
• Powerful online diagnostic capabilities
• Programming
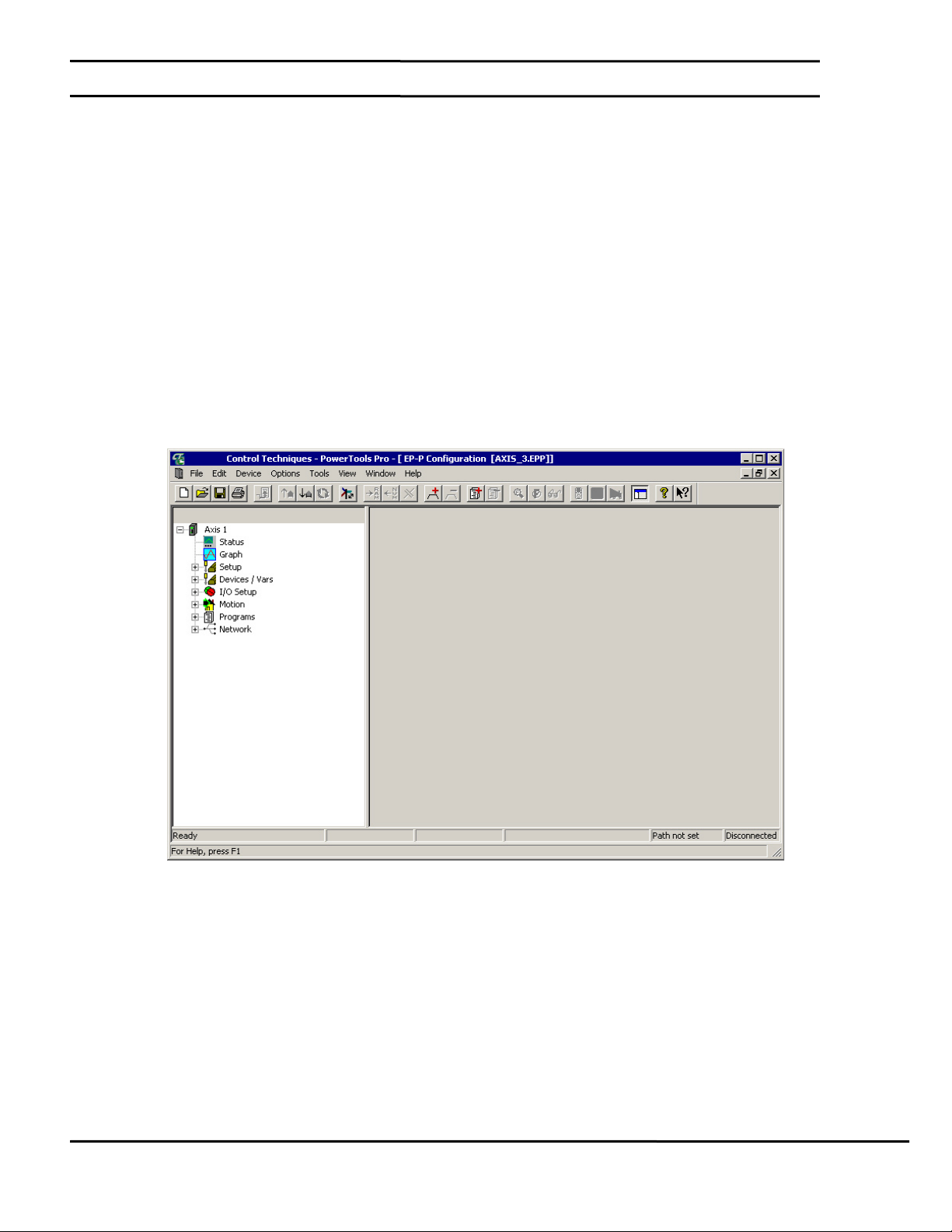
Figure 4: Hierarchy Tree
The “Hierarchy Tree” (shown above in the left side) contains expandable groups of parameters. The groups can be expanded
and contracted just like folders in Windows® Explorer. Left click on a view name in the Hierarchy Tree will display that view on
the right side of the computer screen.
To setup a drive the user simply steps through the Hierarchy Tree from top to bottom starting with the Setup view. Simple
applications can be setup in a matter of minutes.
2.3 How Motion Works
The Epsilon EP-P drive provides six types of motion: jogging, homing, indexing, gearing, camming, and torque mode. The
drive will be either in velocity mode or torque mode. What this means is that while the drive is in torque mode, the other types
of motion cannot run. If the other types of motion are active on either profile, the torque mode may not run. It is possible to run
two different velocity mode types of motion at the same time. For instance, gearing could be running on profile zero while an
index is running on profile one. Note that the same instance of a motion type may not run on both profiles at the same time.
This means that while index 0 is running on profile zero, it may not run on profile one. But while index 0 is running on profile
Epsilon EP-P Drive Reference Manual 3
Revision A4 www.controltechniques.com
Page 18
zero, index 1 may run on profile one.
NT Motor
with Encoder
Gear Reducer
Carriage
External
Home Sensor
Home Offset
Distance
Sensor Point
+
-
Direction
Please note that Indexes and Jogs can be run simultaneously by using the two Profiles, however, Gearing or Camming can only run on one
profile at a time. This means that two indexes or two jogs can run at the same time, but gearing or camming can not be run on multiple profiles
simultaneously.
The Positive direction parameter affects all motion types by specifying which direction of motor revolution (CW or CCW) is considered motion
in the “+” direction.
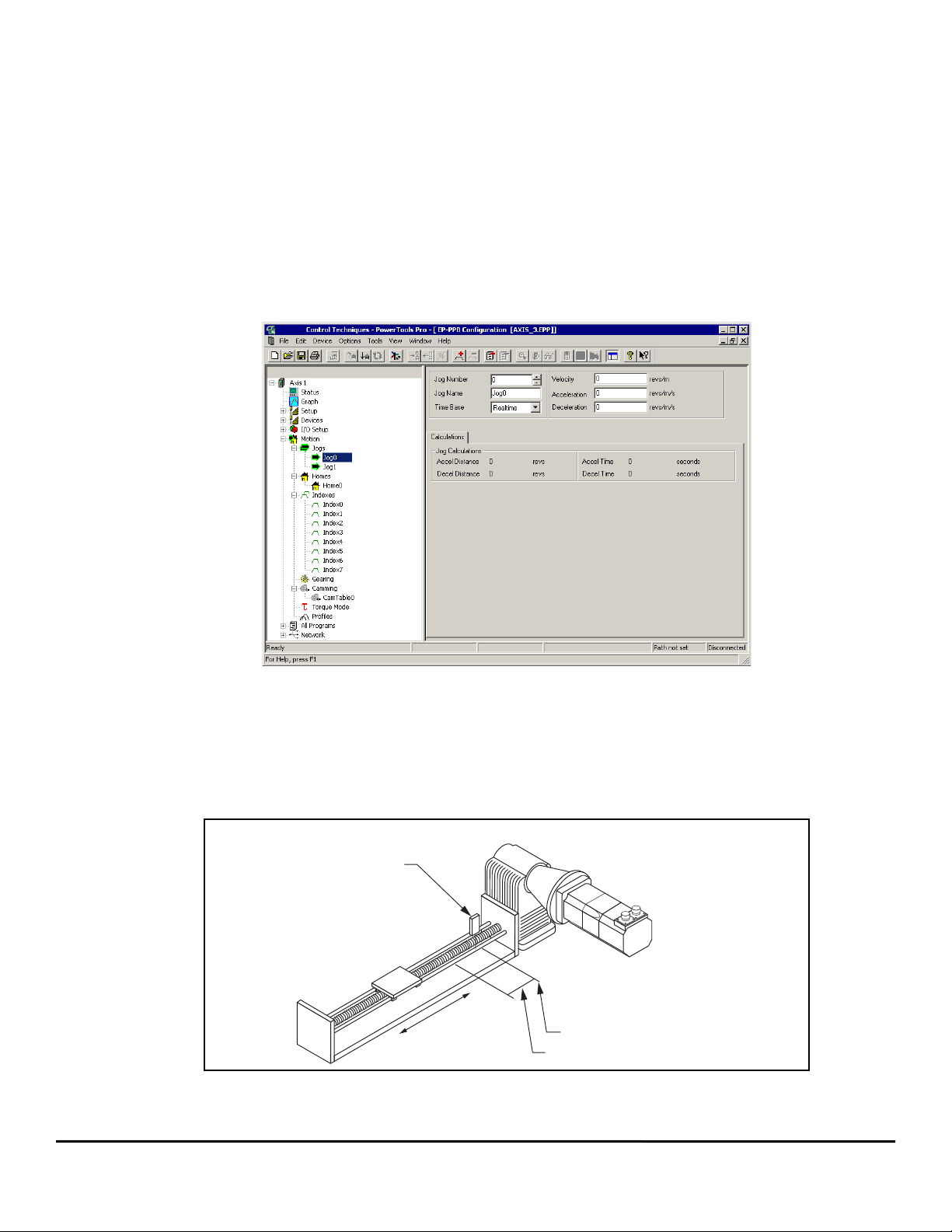
2.4 How Jogging Works
Jogging produces rotation of the motor at controlled velocities in a positive or negative direction.
Assignments to jogs are level sensitive such that when the jog input is turned on, jogging begins and continues jogging until the jog input is
removed.
Each jog has its own acceleration and deceleration ramp along with a specified velocity. Jogging has no distance parameter associated with it.
If trying to move a specific distance or to a known position, then an index is used.
Jog velocity can be changed on the fly with a negative value reversing the direction. The velocity transition will use the deceleration or
acceleration parameters.
Figure 5: Jog View
2.5 How Home Works
The Home is used in applications in which the axis must be precisely aligned with some part of the machine. The Home is initiated in one of
three ways: with the Initiate Destination function found in the Assignments view, through a program, or with the Online tab. A Home or Define
Home is required to set the Absolute Position Valid so that any index to absolute position can work.
The Epsilon EP-P drive can home the motor to an external sensor, the motor’s encoder marker pulse, or to a sensor and then to the encoder
marker pulse.
The figure above show a basic home function using a ball screw. This example uses most of the setup features in the PowerTools Pro Home
Figure 6: Basic Home Function, Example
4 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 19

view.
NOTE
2.5.1 Home Sequence
1. Back off the sensor, if on the sensor. (This step is optional).
2. Move to the external home sensor to establish a home reference point.
3. Next it will move to the Offset position.
4. Then the command and feedback positions are set to the value entered into the End of Home Position.
Homing to the motor’s encoder marker will establish the most accurate and repeatable home position. This method will
position the motor relative to the location of the rising edge of the encoder marker pulse. Most applications will use a sensor
and marker to find an accurate home position in the vicinity of the home sensor.
Several parameters affect how the Home function operates. Each of these parameters are explained in detail on the following
pages.
The Home function will NOT be initiated when any other motion command is in progress.
2.5.2 Establishing a Home Reference Position
The first step in setting up a home is to select the desired home reference type. The Home Reference type selected
determines how the Home Reference Position is established. PowerTools Pro allows selection of one of three different Home
Reference types: Sensor, Marker, or Sensor then Marker.
Sensor
Selecting Sensor means the rising edge of the Home Sensor input function is used to establish the home reference position.
Figure 7: Sensor Home Reference Position
Marker
Selecting Marker means the rising edge of the motor’s encoder marker channel is used to establish the reference position.
Figure 8: Marker Home Reference Position
Sensor then Marker
Selecting Sensor then Marker means the reference position is established using the first marker rising edge after the drive
sees the rising edge of the Home Sensor input function.
Epsilon EP-P Drive Reference Manual 5
Revision A4 www.controltechniques.com
Page 20
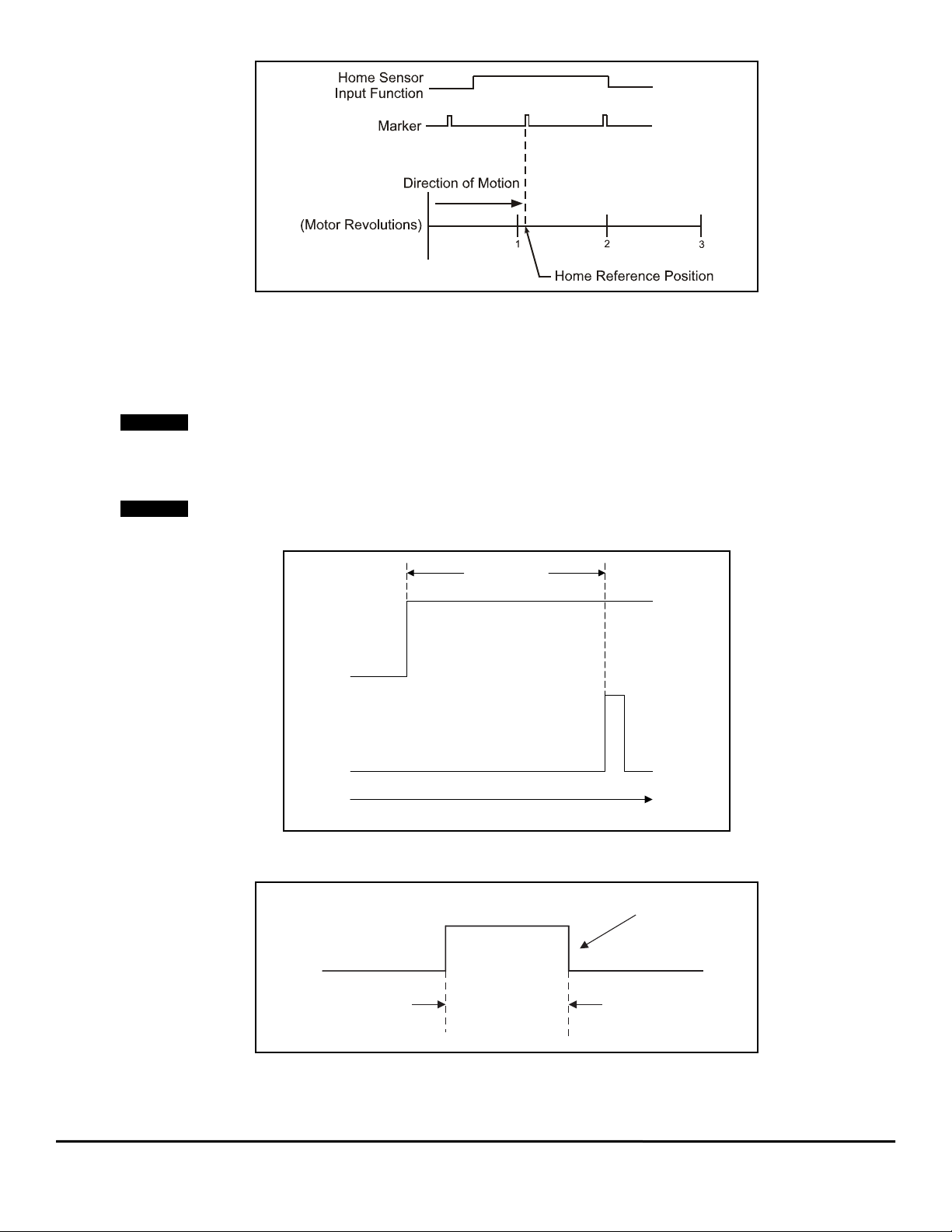
Figure 9: Sensor then Marker Home Reference Position Example 1
NOTE
NOTE
Marker
Sensor
>800 µsec
Direction of Travel
2.5.3 Accuracy and Repeatability
The accuracy is one trajectory update rate. For example - if the trajectory update rate is set to 800 s then the accuracy will be 800 s, if the
trajectory update rate is set to 1.6 ms then the accuracy will be 1.6 ms.
The amount of accuracy the application requires will determine the Home Reference type selected. Homing to an external sensor will only
establish a repeatable home position within 0.04 revolutions at 3000 RPMs (800 sec sensor capture interval).
The data above assumes the use of a perfectly repeatable home sensor.
In Sensor then Marker applications, the marker must be at least 800 sec after the rising edge of the sensor input to be considered a valid
marker pulse, see
At 1000 RPM, the motor will travel 0.0133 revolutions (or 4.8°) in 800 sec.
Figure 10.
Figure 10: Sensor then Marker Home Reference Position Example 2
The Home Sensor must be “On” for at least 800 sec to guarantee that it will be recognized.
Sensor Min.
On Time
Sensor
800 μsec
Figure 11: Sensor then Marker Home Reference Position Example 3
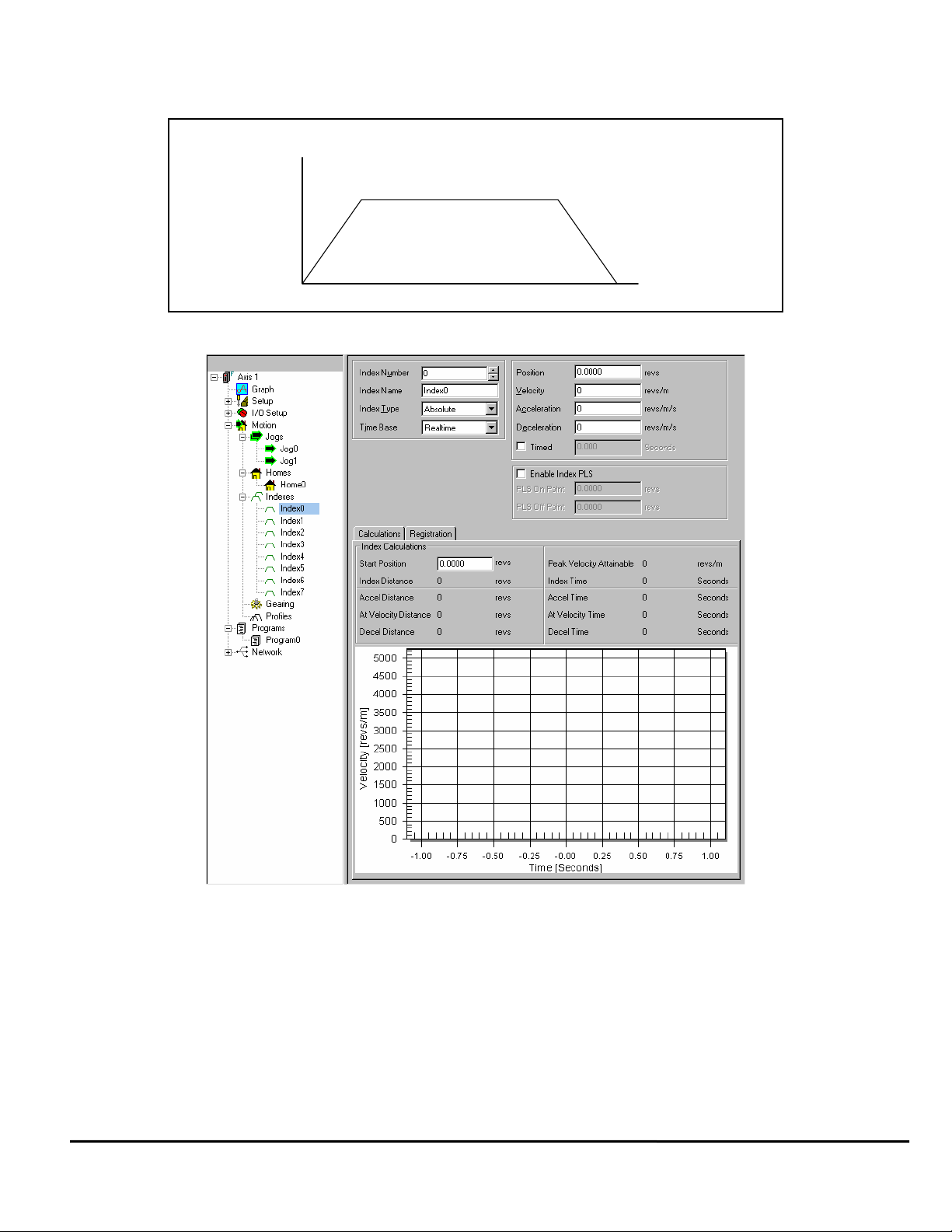
2.5.4 Home Offset
The Home Offset is the distance from the home reference position to the final stopping point at the end of the homing sequence. Regardless of
6 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 21
the value you enter for the Offset or which Home Reference type you choose, there is always an offset inherent in the homing
process.
The user may either specify a desired offset or allow the drive to calculate an offset automatically. The drive calculates an
offset that guarantees that the motor will not have to backup to get to the offset position. This is very convenient for
unidirectional applications.
The Calculated offset is the distance travelled during deceleration ramp from the home velocity to a stop plus the distance
travelled at the home velocity for 800 usec. This extra distance is used to guarantee that the motor will not need to backup
after the deceleration ramp.
The Specified offset allows the user to choose an exact offset from the home reference. Once the home reference is detected,
the drive will do whatever is necessary to reach the offset position. This may be as simple as a deceleration to a stop, a
continuation at speed followed by a deceleration to a stop, or a deceleration followed by a move in the opposite direction.
To enter a Specified offset, select the Specified offset radio button. PowerTools Pro always displays the calculated offset value
as a reference.
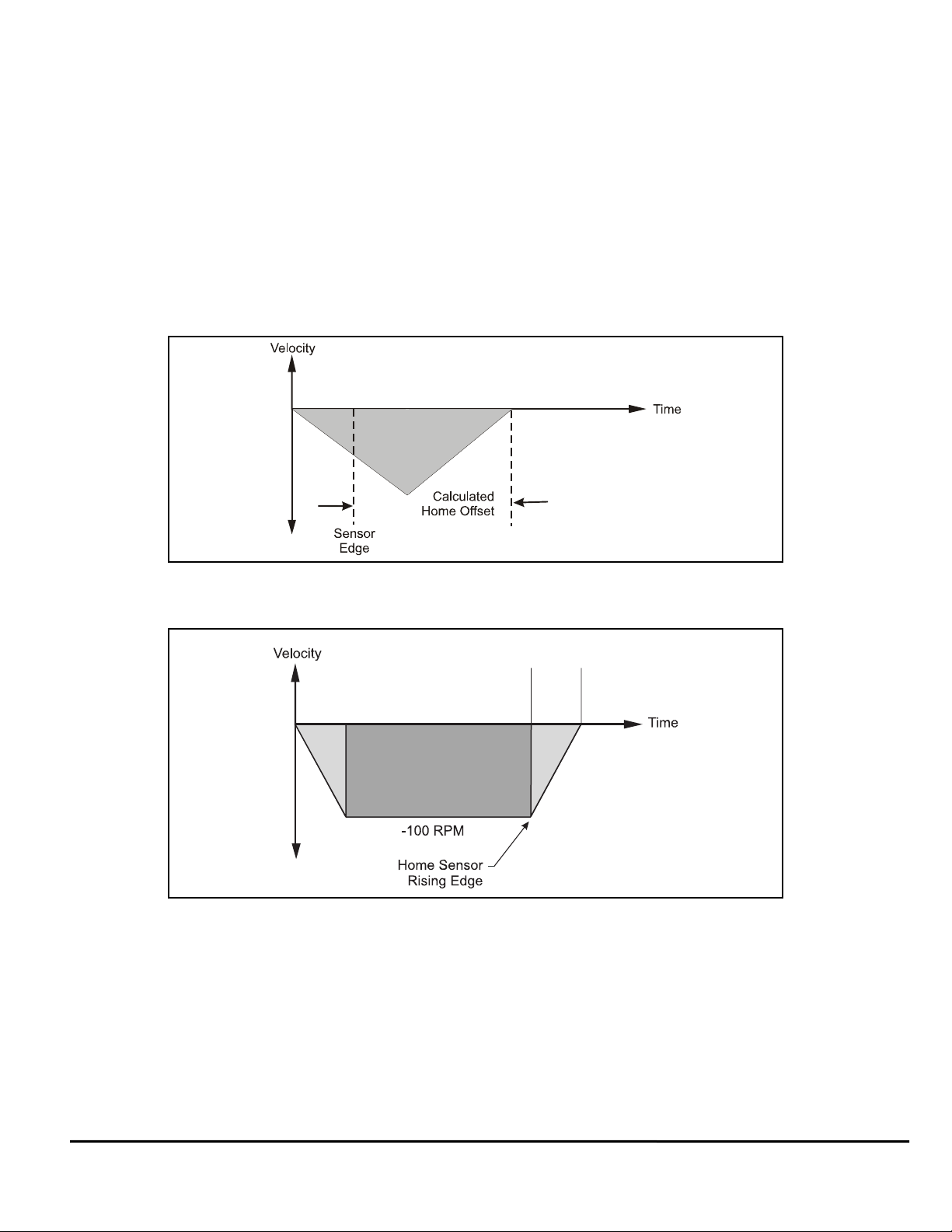
Offset Examples
With a Calculated offset if the home reference is detected before the axis has reached its peak velocity, the axis will still
continue to the precise offset position, see
Figure 12.
Figure 12: Calculated Home Offset, Peak Velocity Not Reached
If the home reference is detected after the axis has reached its peak velocity, the axis will decelerate to the precise offset
position.
Calculated
Home Offset
Figure 13: Calculated Home Offset, Peak Velocity Reached
Two examples below show operation when the specified offset is greater or lesser than the calculated offset. This causes the
axis to continue on at speed before decelerating and stopping at the offset position, or backing up after the home sensor.
Epsilon EP-P Drive Reference Manual 7
Revision A4 www.controltechniques.com
Page 22

Figure 14: Specified Home Offset, Greater than Calculated Offset
Specified
Offset
Specified
Offset
Figure 15: Specified Home Offset, Backup Required
2.5.5 End of Home Position
The End of Home Position (End Posn) defines the home position in relation to the machine’s coordinate system. At the completion of the
home, the value of the End of Home Position is put into the command position.
2.5.6 Home Limit Distance
This parameter places an upper limit on the incremental distance the motor will travel during the home.
If no reference is found, the system will decelerate and stop at the limit distance. The Home Limit Distance Hit function will be activated if the
home stops at the limit distance without finding the reference. Additionally, the Home.CommandComplete function will not turn “On” if the limit
distance is hit.
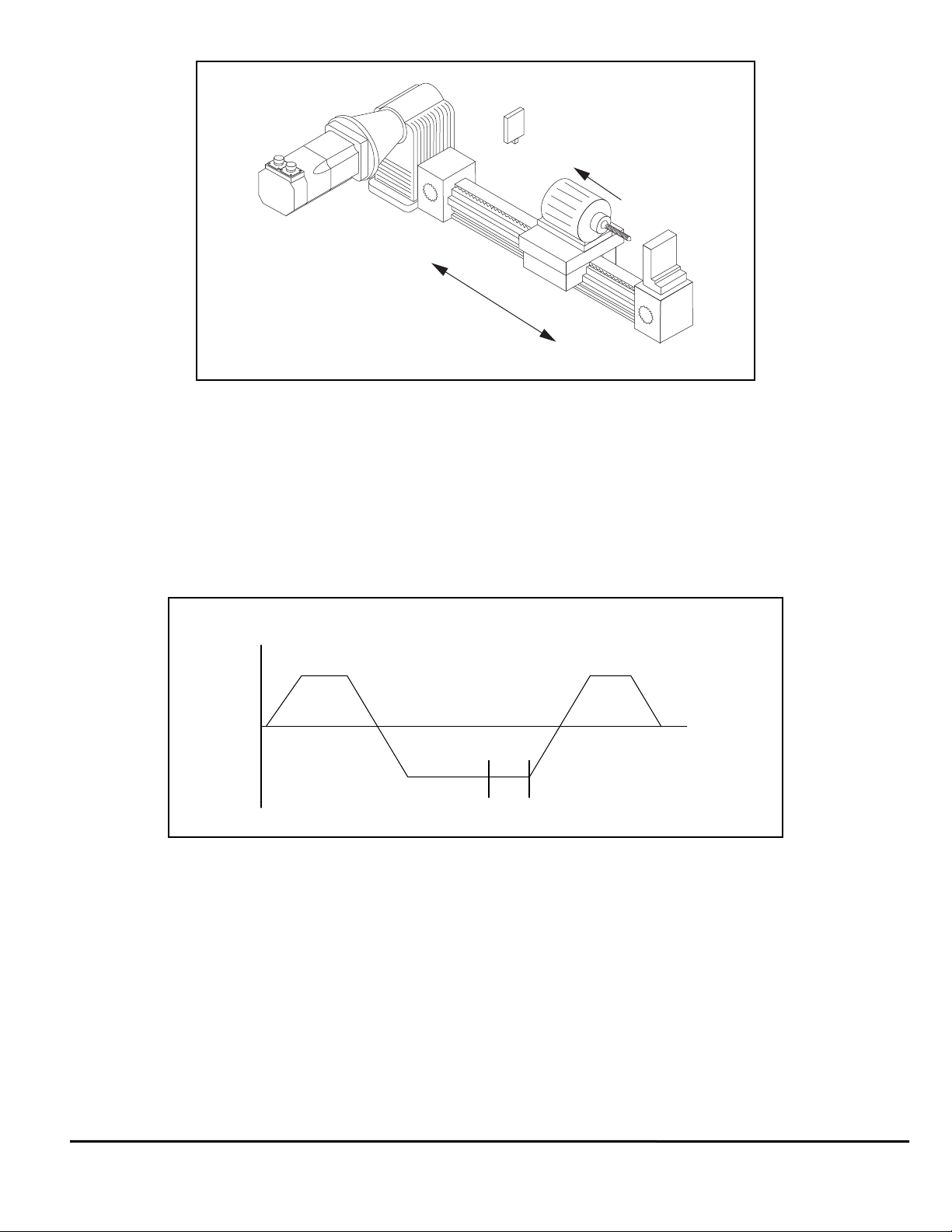
2.5.7 Home Examples
Linear Application
In this example, the system uses an external sensor and the motor’s encoder marker channel to establish a Home Reference Position. This is
the most accurate and most common way to home.
8 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 23
Gear Reducer
Velocity
Time
Sensor
Back off
Sensor
Marker
+ 100
- 100
+ 100
External
NT
Motor
Home Sensor
-
Direct
ion
+
Figure 16: Home to Sensor and Marker, Example
When the drive sees the Home Initiate, it accelerates the motor to the Home Velocity.
The motor continues at that velocity until it first senses the Home Sensor input. It continues at the same velocity until the
motor’s encoder marker channel is sensed. The rising edge of the motor’s encoder marker channel is used to establish the
reference position. Once the home reference is detected, the motor decelerates to a stop and moves to the offset position.
Home Sequence
1. If on sensor then back off (if enabled)
2. Search for sensor
3. Search for marker
4. Go to offset (2.0 Revs)
5. Set feedback position equal to End of Home Position
Figure 17: Home Velocity Profile
Epsilon EP-P Drive Reference Manual 9
Revision A4 www.controltechniques.com
Page 24
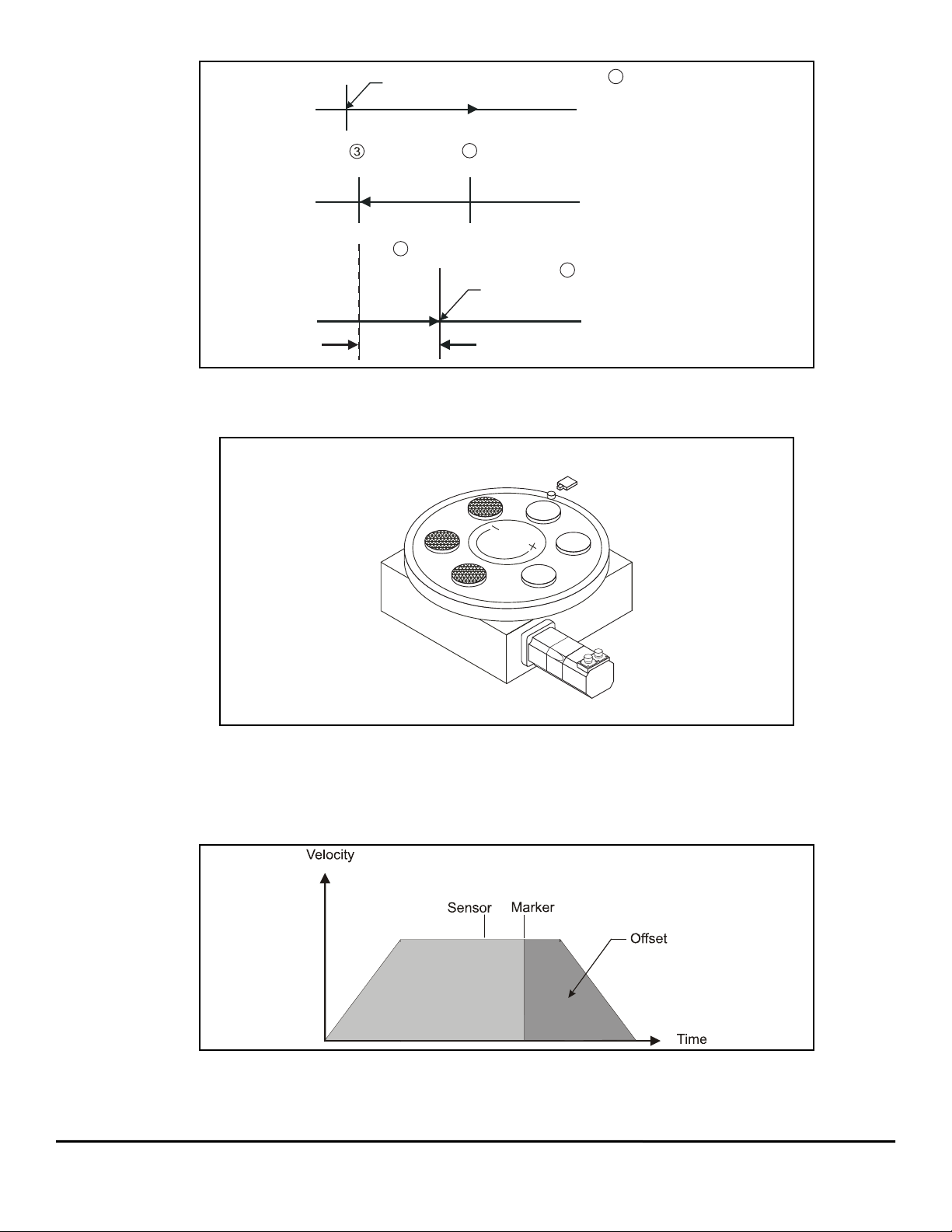
Figure 18: Home Move Sequence
Sensor
Marker
Home Move
Back Off Sensor
Start of Home
1
2
Offset
Offset Move
2.0 Revs
Final Position = End of Home Position
4
5
NT Motor
External
Home Sensor
Gear
Reducer
Rotary Application
This example uses an external sensor and the motor’s encoder marker pulse to establish a home reference position.
Figure 19: Home Sensor and Marker then Offset, Example
When the drive sees the rising edge of the Home Initiate function, it accelerates the motor to the Home Velocity. The motor continues at that
velocity until it first senses the Home Sensor input. The motor continues on at the home velocity until the marker is activated.
The rising edge of the motor’s encoder marker channel is used to establish the reference position.
After sensing the rising edge of the motor’s marker channel, the drive will continue moving and will decelerate to a stop at the specified offset
position.
Figure 20: Home Velocity Profile
10 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 25
2.6 How Indexes Work
Velocity
Time
Acceleration
Deceleration
Run at Velocity
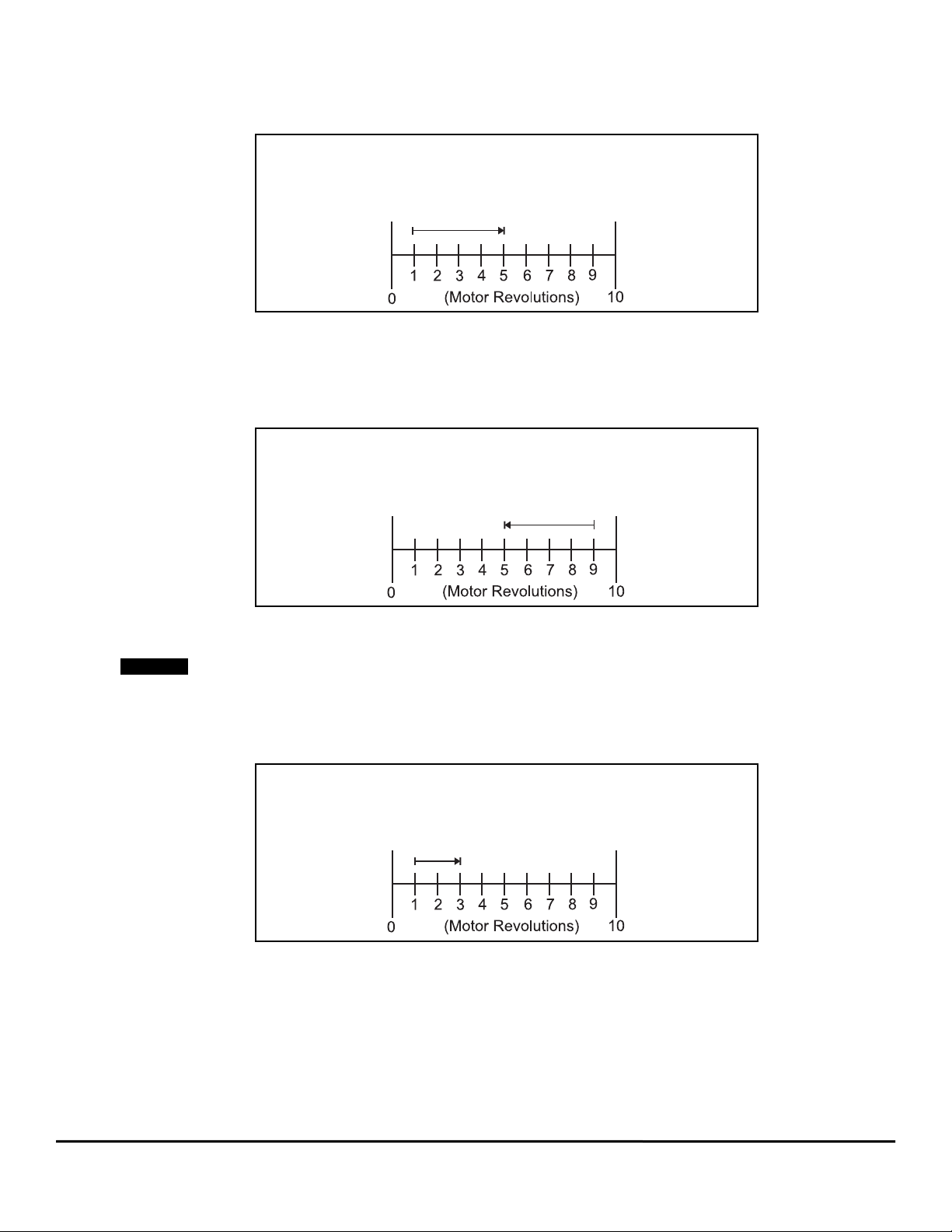
An index is a complete motion sequence that moves the motor a specific incremental distance or to an absolute position. This
motion sequence includes an acceleration ramp to a programmed velocity, a run at velocity, and a deceleration ramp to a stop.
Figure 21: Index Motion Sequence
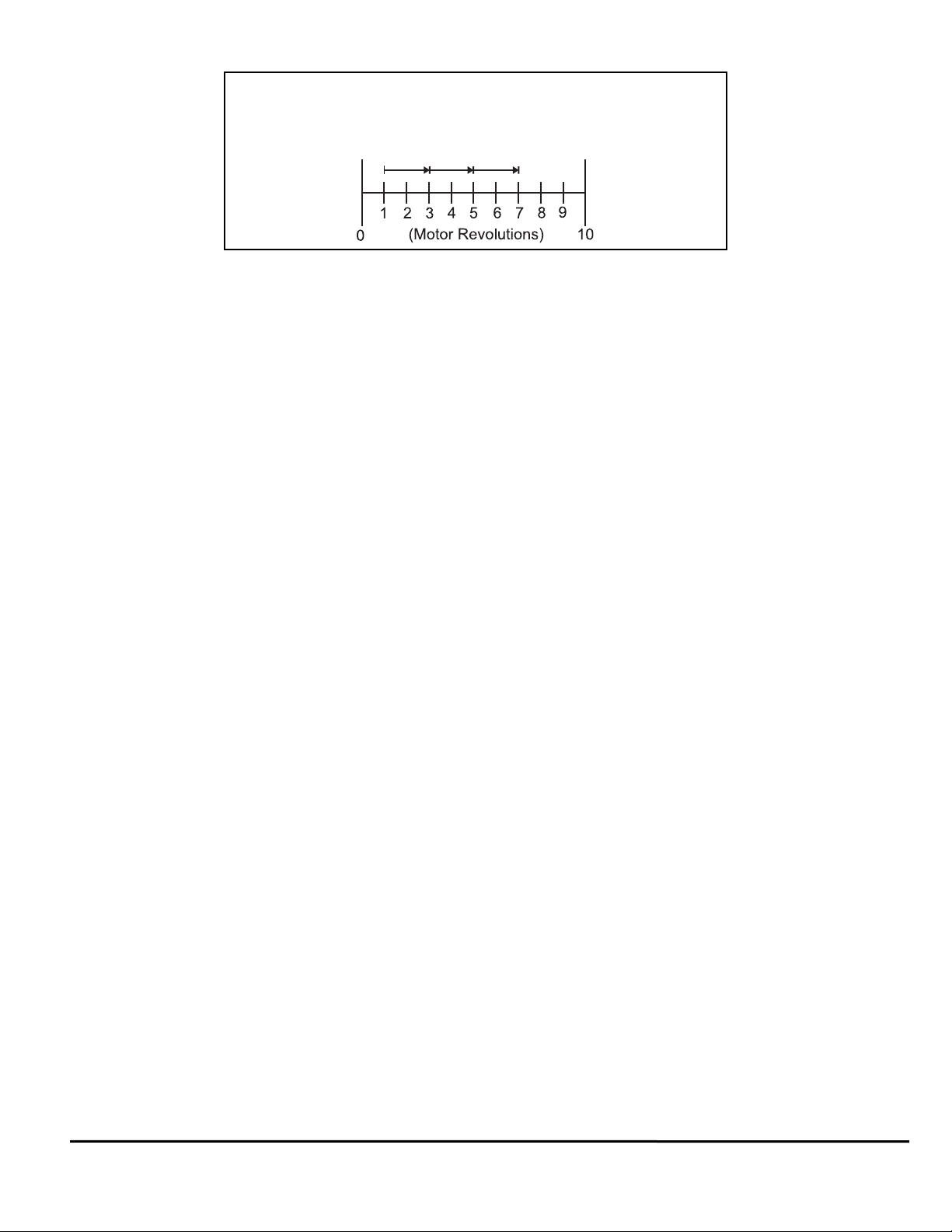
Figure 22: Indexes View
Indexes use acceleration and deceleration ramps which may or may not reach the specified velocity depending on the total
distance and the ramp values. For example, a short move with long acceleration and deceleration ramps may not reach the
target velocity entered.
Indexes cannot be initiated when any other motion (jogging, homing, or program) is in progress. Indexes can be aborted with
the Stop destination found in the Ramps group on the Assignments View.
The Epsilon EP-P supports eight types of indexes: absolute, correction, incremental, posn track cont., posn track once,
registration, rotary plus and rotary minus.
2.6.1 Absolute vs. Incremental
The difference between absolute and incremental indexes is that absolute indexes move to a specific absolute position and
incremental indexes move the motor a specific distance. The following figures and explanations demonstrate this concept.
Epsilon EP-P Drive Reference Manual 11
Revision A4 www.controltechniques.com
Page 26
Absolute Indexes
NOTE
Absolute indexes are used in applications where the motor must travel to a specific position, regardless of where the motor is when the index
is initiated.
The drive calculates the distance required to move to the specified position from the current position.
Absolute Index
Start Position = 1 Rev
Index Position = 5 Revs
Figure 23: Absolute Index Example 1
In the example above, the current position is 1 rev. If this index is initiated, the motor will travel to a position of 5 revs no matter where it is
sitting before the move. From 3 revs, it will travel 2 revs to finish at 5 revs. If the absolute index to 5 revs is initiated a second time immediately
after the index, no motion will occur because the motor will already be at a position of 5 revs.
The direction of an Absolute Index is determined by the starting position and the absolute index position. If the starting position for the above
index is 9 revs, then the motor will rotate in the negative direction to end up at 5 revs. The figure below shows this.
Absolute Index
Start Position = 9 Revs
Index Position = 5 Revs
Figure 24: Absolute Index Example 2
Absolute indexes with Rotary Rollover enabled will take the shortest path to the position entered in the index position parameter.
Absolute indexes move to positions relative to where the machine was homed using the Home, or the DefineHome destination.
Incremental Indexes
An incremental index will move the motor a specified distance in the + or - direction regardless of the starting position. The direction of the
incremental index motion is determined by the sign (+ or -) of the Index Distance parameter.
Incremental Index
Start Position = 1 Rev
Index Distance = 2 Revs
Figure 25: Incremental Index Example
In the example above, the motor starts at 1 rev, travels a distance of 2 revs and stops at 3 revs. If the same index is initiated a second time, the
drive would move the motor another 2 revs to a position of 5 revs. If initiated a third time, the motor would travel another 2 revs to a final
position of 7 revs.
Figure 26 shows this operation.
12 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 27
Incremental Index
Start Position = 1 Rev
Index Distance = 2 Revs
Figure 26: Incremental Index Example 2
Correction Indexes
A Correction index is intended to continuously run on the second profile correcting any position drift. It will adjust the motor
position based on changes to it's index.#.dist parameter. The Correction indexes use incremental distance values. Updates to
the index distance while the correction index is executing will take effect immediately by recalculating the index on the fly.
Another words, if this index is in progress and the distance value is changed, the move profile instantaneously recalculates
based on the index's current position, speed and acceleration. Once the Correction index is initiated it will remain active until
stopped by the user with the Profile.#.MotionStop function.
Example: Correction index distance sources are user program calculations, fieldbus inputs or analog input values. The index
distance value can be updated via Fieldbus, by simply writing to the index distance parameter. If the analog input's Destination
Variable is set to the Index.#.Dist parameter, the index's distance value will be updated by the Analog Input. This can be set to
a automatic refresh using the Analog Input view
Posn Tracker Cont and Posn Tracker Once Indexes
Posn Tracker Cont and Posn Tracker Once are indexes which expect their position values to be dynamically changed while
executing. Position Tracker indexes use absolute position values. Posn Tracker Cont index once initiated, will remain active
until stopped by the user with the Profile.#.MotionStop function. The Posn Tracker Once index will accept position changes
until the target position is reached, at which point the index is complete.
The index 's position value can be updated via fieldbus, by simply writing to the index position parameter. Posn Tracker
Indexes are used to follow dynamic changes to the end point of the index prior to and during the index motion. If the analog
input's Destination is set to an Index.#.distance, the index's position value will be updated by the Analog to Position scaling
found in the Analog Input view.
Posn Tracker also accepts on the fly changes to index velocity, acceleration and deceleration. The index is recalculated on the
next trajectory update.
Registration Indexes
A Registration Index is used in applications where the motor must move until an object is detected and then move a specific
distance from the point of detection, such as finding a registration mark and moving a distance beyond.
The Registration Index consists of two parts. The first part accelerates the motor to the target velocity and continues at this
velocity until it receives a registration trigger (sensor or analog). Upon receipt of a registration trigger, the registration offset will
be executed at the target velocity. The Sensor Limit Distance Hit source can be used to turn on an output, if a sensor input or
analog limit is not received within the Limit Distance. A registration window can also be used to determine the validity of a
registration trigger. If a registration trigger is received outside of the registration window, it will be ignored.
Rotary Plus and Rotary Minus Indexes
Rotary Plus and Rotary Minus Indexes provide forced directional control of moves to absolute positions. The position entered
for a Rotary Plus or Minus type index must be within the rotary range (i.e. 0
parameters function the same as they do with absolute indexes. An Absolute Index is a direct move to a specific position,
regardless of the starting point. A Rotary Plus Index moves to the specified position, but is forced in a positive direction.
Similarly, a Rotary Minus index moves to the specific position, but is forced in a negative direction.
Rotary Plus and Minus Indexes are usually used in rotary applications, therefore the rotary rollover feature on the Setup Position view in the PowerTools Pro software must be enabled to use them.
1. In the following examples the term “D” = (absolute position specified) - (current position). If “D” is negative,
motion in the negative direction is implied.
2. In the following examples the Rotary Rollover parameter on the Setup - Position view is set to 360.00°. This
means that with each revolution of the motor (or rotary table), feedback will count up to 359.99°, then roll over
to Ø°.
Indexes with Rotary Rollover Enabled
Incremental move distances can be outside of the rotary rollover range. See the "Setting Up Parameters" chapter for an
explanation of Rotary Rollover.
Example 1: If the starting position is at Ø° and 720° is the specified distance, an Incremental index would move 2 revolutions
in the positive direction. At the completion of this index the motor position would be Ø°.
Absolute indexes will take the shortest path to the specified position. Absolute index positions must be within the rotary
Position < Rotary Rollover Point). All other
Epsilon EP-P Drive Reference Manual 13
Revision A4 www.controltechniques.com
Page 28

rollover range.
Example 2: If the starting position is at 90° and 80° is the specified position, an Absolute index would travel 10° in the negative direction. At
the completion of this index the motor position would be 80°.
Example 3: If the starting position is 45° and 315° is the specified position, an Absolute index would travel 90° in the negative direction
because that is the shortest path between 45° and 315°.
Rotary Plus indexes will move to the specified position and are forced in a positive (or plus) direction. Rotary Plus index distances must be
within the rotary rollover range.
Example 4: As in example 2 above, the starting position is at 90° and 80° is the specified position. A Rotary Plus index would travel 350° in
the positive direction. At the completion of this index the motor position would be 80°.
Example 5: If the starting position is 10° and the specified position is 350°, a Rotary Plus index will travel 340° in the positive direction.
Rotary Minus indexes move to the specified position, but are forced to travel in the negative (or minus) direction. Rotary Minus index positions
must be within the rotary rollover range.
Example 6: As in examples 2 and 4 above, the starting position is at 90° and 80° is the specified position. A Rotary Minus index would travel
10° in the negative direction. At the completion of this index the motor position would be 80°.
Example 7: If the starting position is 15° and the specified position is 270°, a Rotary Minus index would travel 105° in the negative direction.
2.7 How Communications Work
2.7.1 Configuring Communication
Before attempting to upload or download a configuration file using PowerTool Pro, the software must be configured to the correct
communication settings for the intended communication connection. The Epsilon EP-P drive supports both RS-485 serial communication
connections (J2) and Ethernet communication (J4) connection, on the front of the drive.
When downloading or uploading a selected configuration file that is open in PowerTools the communication scanner will only scan the
configuration file’s Modbus ID and Ethernet address (unless Ethernet change address is clear). Once a connection is established, that
connection (Comm port used, port number, modbus ID and Ethernet address) is saved, a second download, upload or reconnect will bypass
the scanner and use this previously defined communication path. To change the communication path use the Change Path toolbar button.
The communication connection may be selected in the Upload Drive Configuration, Download to Device IDx or the Change Path dialog boxes.
From the
see below.
2.7.2 Upload Drive
Uploading is the process of reading information back from the drive to the PowerTools Pro configuration file views.
To upload information from a drive, click on the Upload All button, on the PowerTools Pro toolbar or from the Device menu,
choose Upload All or Upload Drive. The Upload Drive Configuration dialog box will open, all communication connections are
scanned and the results appear. In
Drive Configuration dialog box contains the following information for every drive found:
Device menu, choose Upload Drive, Download or Path Change to open the dialog box or the toolbar buttons can also be used,
Figure 27, it shows that one drive on COM 1 was found, an Epsilon EP204-P drive. The Upload
• Ip Address/COM
• Modbus Address ID
•Drive Type
• Module Type
• Communication Options
• Base/Drive FW Revision
• Module FW Revision
• Module Serial Number
• Drive Serial Number
14 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 29
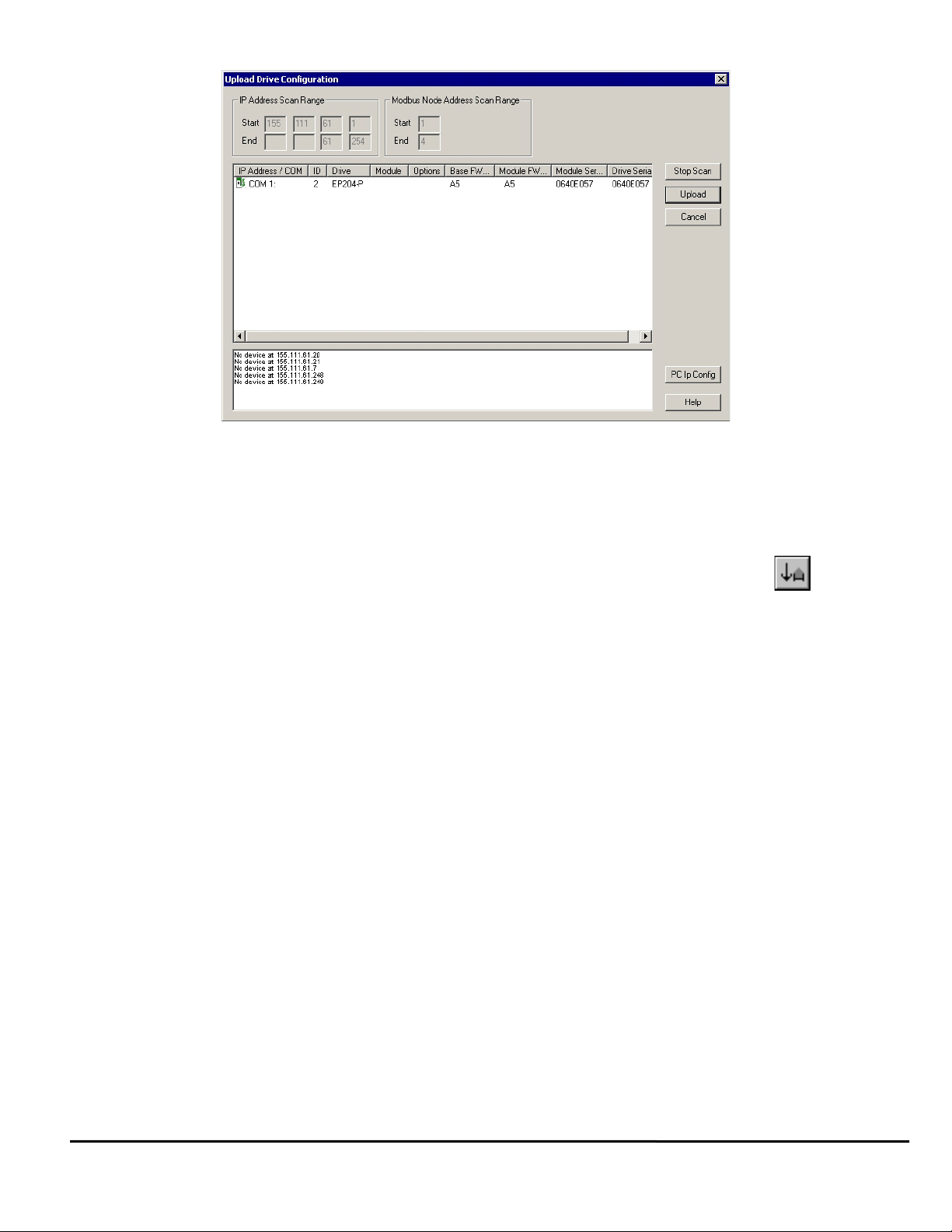
.
Figure 27: Upload Drive Configuration Dialog Box
Select the drive to upload and click Upload.
2.7.3 Downloading
Downloading is the process of sending the configuration created with PowerTools Pro from the PC to the drive. Changes
made in PowerTools Pro will not take effect until the information has been downloaded or the Update to RAM button has been
clicked.
To download information to a drive, click the Download button on the PowerTools Pro toolbar or from the Device
menu, choose Download. The Download to Device IDx (x equals the modbus address) dialog box will open, all
communication connections are scanned and the results appear. In
found, it’s a Epsilon EP204-P drive. The Download Drive Configuration dialog box contains the following
information for every drive found:
Figure 28, one drive on COM port 1 was
• Ip Address/COM
• Modbus Address ID
•Drive Type
• Module Type
• Communication Options
• Base/Drive FW Revision
• Module FW Revision
• Module Serial Number
• Drive Serial Number
Epsilon EP-P Drive Reference Manual 15
Revision A4 www.controltechniques.com
Page 30
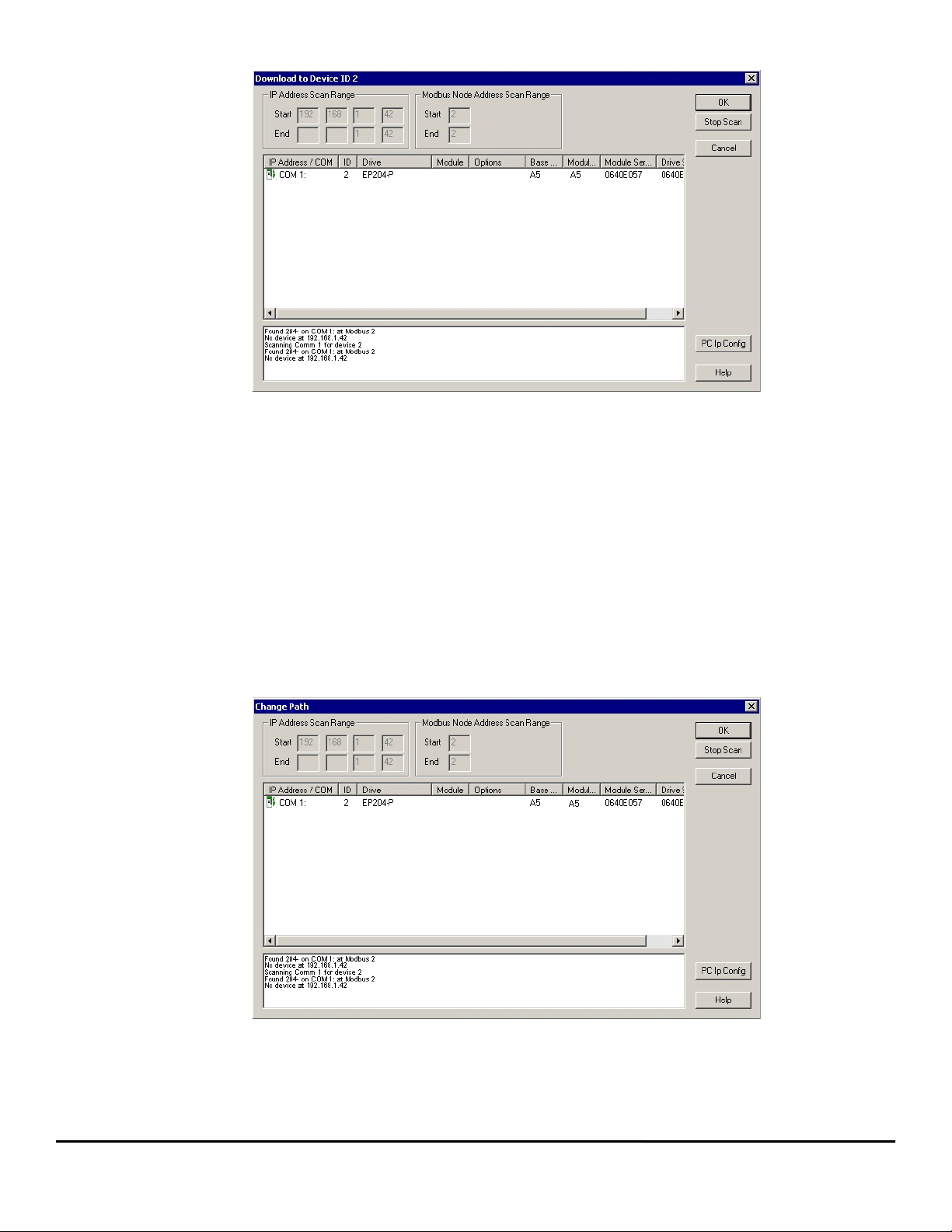
Figure 28: Download to Device ID 1 Dialog box
Select the drive to download to and click OK.
2.7.4 Change Path Connection
This function allows the user to change the drive and Ip address/Com port used for download and upload. It is used when the user has already
selected one Ip Address/Com port and wishes to change to another.
The dialog box provides the user with communication information available on the Modbus and Ethernet network. This information contains:
• Ip Address/COM
• Modbus Address ID
•Drive Type
• Module Type
• Communication Options
• Base/Drive FW Revision
• Module FW Revision
• Module Serial Number
• Drive Serial Number
Figure 29: Change Path Dialog Box
Select the drive in the list and then click OK. The communication connection path will then be displayed in the status bar at the bottom of
PowerTools Pro window.
16 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 31

2.7.5 NVM Options for Uploading and Downloading
CAUTION
Uploading
When uploading from a drive, the values that were last downloaded are uploaded and put into a PowerTools Pro configuration
file. At the completion of the upload, the user will be asked if they wish to upload the NVM values. This dialog box is shown
below.
By selecting Yes, the values of all parameters stored in NVM will be uploaded and entered into the PowerTools Pro file values.
If No is selected, the values entered into the PowerTools Pro file will remain the same as those that were last downloaded to
the drive.
Downloading
When downloading to the drive the user will be required to select how to handle the NVM parameters upon downloading. The
dialog box asking the user to select one of three options for the download is shown below.
A description of each of the options is as follows:
Overwrite – This option will overwrite all the parameters stored in NVM with the current values in the user configuration
(PowerTools Pro file). The values that are in NVM prior to the download will be lost.
Update – This option will upload the current NVM parameter values from the drive and enter them into the user configuration
(PowerTools Pro file). Once the NVM values have been stored in the file, the file is fully downloaded.
Keep – This option will download the entire user configuration, but then NVM parameters will be restored to the value prior to
download. This is similar to the Update option, but the Keep option does not upload the NVM values into the user
configuration (PowerTools Pro file).
The following table shows an example of how these options work:
PT Pro file value for Index.0.Vel 150 150 500 150
NVM value for Index.0.Vel 500 150 500 500
2.7.6 Updating to RAM
The Update to RAM button can be used to send changes to the drive without performing a complete download.
The Update to RAM button
that have been made since the last Update to RAM or a Device>Download to the drive was done. The changes
will take effect immediately upon clicking on the button.
The parameters will be sent to the drive without stopping motion or disabling the drives. Because of this, it is
important to use caution when changing motion parameters while the motor is in motion.
Before Download After Download
Overwrite
Option
is found in the PowerTools Pro toolbar. This operation will send only those changes
Update
Option
Keep
Option
The Update to RAM button saves the parameters only to RAM and not to Non-Volatile Memory (NVM). Therefore, if the
system power is removed, any changes made using the Update to RAM button will be lost. In order to save changes to NVM,
a full-download must be performed.
The flowchart below describes a typical process using the Update to RAM to make changes, and then downloading when
complete to save changes to NVM.
Epsilon EP-P Drive Reference Manual 17
Revision A4 www.controltechniques.com
Page 32

Figure 30: Update to RAM Flow Chart
The Update to RAM button operates according to the following rules:
• If no parameters have been modified by the user, the Update to RAM button will be disabled
• If the user modifies a parameter that does not require a full download, the Update to RAM button will be enabled
• If while the button is enabled, the user modifies a parameter that requires a full download, the Update to RAM button will become
disabled
• When the user clicks on the Update to RAM button, all the modified parameters are transmitted to the drive. Once transmitted,
the button will become disabled again until another parameter is changed
• If the user performs a full download while the button is enabled, when the download is complete, the Update to RAM button will
be disabled
• If the user modifies parameters, and disconnects, the Update to RAM button will be disabled, and the changes will not be sent.
2.7.7 Options/Preferences/Ptools Operation Communications Tab
This tab allows the user to set-up the serial communication baud rate. The drive baud rate and PowerTools Pro baud rate must match, default
drive baud rate = 19200. The Enable Scan group allows the user to select which communications connections are scanned when doing any
communication operations. Windows allows up to 256 COM ports. PowerTools Pro scans the Windows registry to find all the defined COM
ports. The scanner sends commands down each of the COM ports to find the drives. Default = All ports are scanned. The user also has the
control of which Modbus node address are scanned when doing any communication operations The range is 1 to 247 but since it’s not
practical from a time stand point to scan all nodes in the range the default is 1 to 4 node addresses. This scan range can be changed by the
user.
Figure 31: Preferences-Communications Tab
PopUps Tab
The options in this dialog box controls the dialog boxes that the user encounters when uploading and downloading the configuration file.
18 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 33

Figure 32: Preferences-PopUps Tab
NOTE
Download Section:
Ignore saving file on Ptools/Drive revision conversion.
On a download PowerTools Pro checks the firmware revision of the drive that it is about to be downloaded to and is required to
make changes to files that are to be downloaded to older firmware revisions. This check box allows the user to avoid saving
the newer file before converting it to a previous revision.
Overwrite – Reset the NVM configuration.
When this option is selected the “Overwrite” function will default on every download to the drive. This function will overwrite the
entire configuration including user defined NVM parameters as set in the NVM setup area of PowerTools Pro.
It is required to Overwrite the Non-Volatile Memory on the first download to the drive since no Non-Volatile Memory
parameters have been loaded into the drive on initial startup.
Update – Upload the values into the current Update PowerTools configuration.
When this option is selected the “Update” function will Update the NVM on every download to the drive. Upon download the
Update function uploads the configured NVM from the drive and places the data into the PowerTools Pro configuration file.
The software then downloads this newly updated file to the drive.
Keep – Remember the values, and restore them after the download.
This option was created to allow users to save the values that have been changed via HMI, PLC or internally in a program so
long as they have been added to the NVM list. When this option is selected PowerTools Pro will poll the drive on download for
all of the values that have been added to the NVM list. PowerTools Pro then stores these values into a temporary memory
location and after the program download is complete PowerTools Pro reinstates these values to the parameters before the
drive can be enabled.
Ask on each download.
This option was created for users who want control of whether they will overwrite or keep the NVM on download. When this
option is selected, PowerTools Pro will display a pop-up window that gives the user the option to Overwrite, Update, or Keep
as described above.
Upload Non-Volatile Memory (NVM) Section:
Always upload NVM
When this option is selected, PowerTools Pro will default on an upload to uploading all of the parameters that have been
mapped to the NVM and updating the display of these parameters in PowerTools Pro.
Always bypass NVM upload
When this option is selected, PowerTools Pro will not upload the NVM and the values that were originally downloaded to the
drive will be displayed in the PowerTools Pro configuration.
Ask on each upload
When this option is selected, PowerTools Pro will default to asking the user via a dialog box whether to upload the NVM or to
bypass the NVM upload.
Motor DDF Tab
The Motor DDF tab controls which .ddf files PowerTools Pro will use when working in the configuration file. The standard ddf
files contain a list of motors that can be purchased from Control Techniques and their parameters. This tab gives the advanced
user the capability to create their own standard motor ddf file. Never save a newly created user standard ddf file as
StdMotor.ddf because it will be overwritten with the next release of PowerTools Pro. The user’s ddf file name would be enter
Epsilon EP-P Drive Reference Manual 19
Revision A4 www.controltechniques.com
Page 34

into the Standard Motor DDF Name text box for the correct drive type, see below.
Figure 33: Preferences-Motor DDF Tab
En, MDS, Epsilon Motor DDF Section:
Use the standard Motor DDF file
Select this check box to use the standard motor ddf file.
Standard Motor DDF Name
The name of the standard motor ddf file is entered in the text box, the information in this file will be used to setup the configuration file, the
default is stdmotor.ddf.
User Motor DDF Name
When a custom motor is created this is the name of the motor ddf file where the information is stored, default is motor.ddf.
Ep Motor DDF Section
Standard Motor DDF Name
The name of the standard motor ddf file for Epsilon EP drives.
Unidrive SP Motor DDF Section
Use the SP Standard Motor DDF file
Select this check box to use the standard motor ddf file with the Unidrive SP.
SP Standard Motor DDF Name
The name of the standard motor ddf file is entered in the text box, default is spstdmotor.ddf.
SP User Motor DDF Name
When a custom motor is created this is the name of the motor ddf file where the information is stored, default is spmotor.ddf.
2.7.8 Secure Downloading
The Secure Download feature allows the user to download a configuration that prevents anyone from uploading the file, or going online with
the system. This is used to protect a file from being accessed by unauthorized personnel. If a secure file is downloaded to the system, all
diagnostics capabilities in the software are lost. The only way to go online with the system again is to download the original (non-secure) file
over the secure version, or to download a completely new file.
Before performing a secure download, the file must first be saved in the secure file format. To do this, open the file you wish to save in the
secure format using PowerTools Pro. Then on the File menu, click SaveAs. The following SaveAs dialog box should appear when saving an
EP-P configuration file.
20 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 35

In this dialog box, select the “Save also as secure download format” check box located at the bottom of the dialog box, then
click Save. Doing this will save the file in BOTH the standard file format (.EPP), as well as in the secure file format (EPPs). The
“s” at the end of the file extension stands for “secure”. The secure file will be saved to the same directory as the standard file.
To perform the Secure Download, close all open files in PowerTools Pro. Then on the Device menu, click Secure Download,
as shown below.
A dialog box will then open asking the user to select the secure file that they wish to download. Select the secure file that was
just saved, then click Open. This will download the secure file to the target drive.
A secure file (EPPs) cannot be opened or modified. The file extension cannot be changed to allow the user to open it. The
secure file is only valid for use by the secure download function. If a user attempts to upload a secure file, a message will
appear indicating that the file residing in the drive has been protected by the user. An example of this is shown below.
2.8 Brake Operation
The brake is operational when the Brake.Disengaged parameter is wired to an output. It is expected that this output is then
physically wired to the Motor's brake. The standard operation for brake is to engage the brake when the drive is disabled. The
LED shows the little "b" when the brake is engaged. The Brake can further be controlled by the Brake controls Brake.Activate
and Brake.Release. The Brake.Release overrides all conditions (drive disable and Brake.Activate) to insure the brake is
disengaged. The Brake Activate parameter allows the user to engage the brake while the drive is enabled. However, you need
to be careful because Brake.Activate does not stop motion commands
The table below shows the relationship between the Brake sources and destinations.
Epsilon EP-P Drive Reference Manual 21
Revision A4 www.controltechniques.com
Page 36

NOTE
No motion should be commanded while the brake is engaged.
Brake.Activate Brake.Release Drive Enable Brake.Disengaged Brake Status Drive Diagnostic Display
Off Off Off Off Enabled b
Off Off On On Disabled
On Off Off Off Enabled b
On Off On Off Enabled
x On x On Disabled
Brake Release
The Brake.Release destination function will release the brake under all conditions. When this function is active, the Brake output will be on
(that is, release brake). This function overrides all other brake control, thus allowing the brake to be released while a fault is active or the power
stage is disabled.
Brake Activate
The Brake.Activate destination function, when active, will engage the brake unless overridden by the Brake Release function. This function lets
you externally engage the brake while allowing the drive to also control the brake during fault and disabled conditions.
Brake Disengaged
The Brake.Disengaged source function is used to control the motor holding brake. If the Brake function is off, the brake is mechanically
engaged. When the brake is engaged, the diagnostic display on the front of the drive will display a “b”.
The drive outputs are limited to 150 mA capacity, therefore, a suppressed relay is required to control motor coil. Control Techniques offers a
relay, model # BRM-1.
2.9 How Data Capture Works
Data Capture is a mechanism to capture data and display that data graphically. The capture mechanism is part of the drive and captures drive
data as fast as 100 usec. Data is captured in a circular 8 K byte buffer. The format is fixed at 4 channels of 32 bit words for a total of 512 time
samples. The circular buffer is continuously loaded until the trigger condition (or command abort) stops loading data. The capture mechanism
follows three buffer states - Filling Buffer, Waiting for trigger, and Triggered.
At the start of the Run command, the buffer starts to fill (filling the whole buffer). The buffer must be completely filled before the trigger is
armed. Once the buffer is filled, the buffer state will display - Waiting for Trigger. When the trigger is detected, the data capture is stopped
(triggered). The sampling rate is based on the trajectory update rate. The sample rate can be adjusted in multiples of the trajectory update rate.
PowerTools displays this in the form of seconds. At the update sampling, a new set of data is overwritten into the circular buffer and the trigger
is checked.
The Data Capture update rate for the Epsilon EP-P drive is 100 usec. The drive captures data at the user selectable trajectory update rate of
800, 1200 or 1600 usec for Drive Inputs, Drive Outputs and Custom Variables. This means if the Data Capture rate is faster then the Epsilon
EP-P drive trajectory update rate the user will be sampling data faster than it is changing. All other parameters in the Select list box are
captured at 100 usec except Bus Voltage and Following Error which are 400 usec.
The trigger detection checks the data level. It does not specially look for an edge. Once the buffer is filled the trigger is armed and the check for
trigger level is started. Since the drive is looking back in the buffer at data captured during the fill, the trigger condition may already exist. If that
is so, the drive immediately transitions to the trigger state. If not, the drive continues the data capture cycle of sample and trigger check until
the trigger is detected at the edge of the data transition. When the Trigger Falling Edge check box is selected the trigger is detected when the
data transitions below the trigger level.
When sampling digital inputs and outputs, the data captured is binary bit mapped. The state of all the digital signals in the group selected are
encoded into one 32 bit word. When this is graphed it is displayed as an analog signal. To trigger on this bit map data, the trigger mechanism
is changed to a mask. The user can select one of the bits to trigger on.
The captured data is uploaded when the UploadPlot button is pressed. Once uploaded, PowerTools plots the data in graph window. Data is
also saved in a data file named, PtProGraphData.csv. This data file can be exported to a spread sheet for data manipulation and graphing.
2.9.1 Navigating the Graph Window
The Graph window display can be altered, double-click anywhere in the Graph Window except on the graph area itself. The Customization
dialog box opens and contains tabbed graph options. Many of the graphs attributes, such as colors, line format, etc. can be changed in this
box. The graph can also be exported to a file.
Holding the shift key down while moving the mouse allows the user to zoom in on the graph area. Double-click on the graph area and the
Graph Coordinate window opens and gives the x/y coordinate of where the mouse point was when double-clicked.
The Graph window overlaps the data into a Y axis if the next channel has the same units. If the units change for the next channel, a new graph
on the Y axis is added to the plot. If None is selected for a channel the drive data capture samples zero for that channel an PowerTools ignores
plotting that channel. The Reserved channel selection is for internal use only and also captures zero. The title of the graph matches the
application’s name defined on the Setup view.
Graph settings are downloaded to the drive when the Run button is pressed. Only changed values are sent. The graph settings are the same
as any application variable. When a variable is changed in a PowerTools view the Update to RAM button is available, indicating the
application and drive are out of sync, (Update to RAM remains unavailable if the user changes a variable that requires a reboot. The user then
requires a full download). When the Run button is pressed, it does a limited Update to RAM by downloading the changed graph settings to
RAM.
22 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 37

3 Setting Up Parameters
3.1 Status View
3.1.1 Status Online Tab
The Status Online tab (see Figure 34) is visible when online and consists of the Motor Position group, Motor Velocity group,
Control Loop group, Master Feedback group, and the Torque group.
Figure 34: Status View - Status Online Tab
3.1.2 Motor Position Group Position Command
Position command (PosnCommand) is the commanded position generated by the drive based on the application. This
parameter does not take following error into account. See also Position Feedback and Following Error. Units are in user units.
Position Feedback
Feedback position (PosnFeedback) is the actual motor position in user units. PosnCommand minus the PosnFeedback is the
FollowingError.
Following Error
Following Error (FollowingError) is the difference between the PosnCommand and the PosnFeedback. It is positive when the
PosnCommand is greater than the PosnFeedback.
Encoder Position
Motor encoder position in encoder counts (PosnFeedbackInCounts). This position reflects the feedback position of the motor
and is not scaled into user units. This is a signed 32 bit value.
3.1.3 Motor Velocity Group Velocity Command
The Velocity Command (VelCommand) is the velocity that the drive is commanding the motor to run at. This command is
generated by the drive velocity control loop and position loop. It is displayed in user units.
Velocity Feedback
The Velocity Feedback (VelFeedback) is the feedback (or actual) velocity. It is calculated using the change in position of the
motor encoder. It will always return the actual motor velocity - even in synchronized applications in which the master axis is
halted during a move.
3.1.4 Control Loop Group
Changing the Trajectory Update Rate can have a major effect on the performance of the servo system. A longer trajectory
update rate means that more time is available to process user programs. A shorter update rate means that the control loop is
updated more often and provides the most accurate performance. Without proper diagnostics, it can be impossible to tell how
much time is being consumed by the control loop update, and how much time is available to run user programs.
The Control Loop group of parameters on the Status Online tab shows the user how much time is available to run programs.
There are two parameters available to help with this. They are as follows:
Epsilon EP-P Drive Reference Manual 23
Revision A4 www.controltechniques.com
Page 38

Control Loop Limit
This parameter shows the lowest measured time difference (in microseconds) between the Trajectory Update Rate and the time taken to
process the control loop since the last reset. Certain features in the Epsilon EP-P require more time to process (i.e. Real Time program
execution, PLS, Capture, Compound Indexes), and therefore will cause lower limits. The software records the lowest measured value and
displays it as the limit. To reset the limit to the average and continue tracking the lowest value, the user can click on the Limit button. If the Limit
reaches 0, a fault will be generated. If a Limit of less then 75 - 100 usec is seen, it is recommended to switch the trajectory update rate to the
next higher value.
The cyclic program is run as a high priority user program and is not part of the Control loop time.
Average Margin
This parameter shows a running average of the difference (in microseconds) between the Trajectory Update Rate and the time taken to
process the control loop since the Status Online tab was brought up. The higher the value, the more time available to run user programs. For
Averages less than 150 usec, it is recommended to switch the trajectory update rate to the next higher value.
3.1.5 Master Feedback Group Master Position
Used for synchronized motion, this displays the position of the master encoder in the user units name, defined on the Master Units View.
Encoder Position
This displays the position of the master encoder in counts.
Master Velocity
This displays the velocity of the master encoder in master user units/second.
3.1.6 Torque Group Torque Command
This displays the torque command value before it is limited. The torque command may be limited by the motors rating, the drives rating, the
Torque Limit (if the Torque Limit Enable destination is active) or Current Foldback. Units for this parameter are defined in the Torque Group on
the User Units View.
Limited Torque
This is the actual torque commanded to the motor. This value is the result after the TorqueCommand is limited by the current foldback or the
TorqueLimit value (if enabled).
Foldback RMS
This parameter accurately models the thermal heating and cooling of the drive and motor. When it reaches 100 percent, current foldback will
be activated. See the Diagnostics section for an explanation of foldback.
Shunt Power RMS
This parameter models the thermal heating and cooling of the drive internal shunt. This parameter indicates the percent of shunt capacity
utilization. When this value reaches 100 percent, the drive will generate an RMS Shunt Power Fault.
3.1.7 Information Tab (Online Only)
PowerTools Pro is designed to work with all releases of drive firmware. PowerTools Pro internally uses interface revisions to negotiate and
define the application to match the connected drive. The first line shows the file name and user application for reference.
3.1.8 Drive Information Group Firmware Revision
Displays the revision of the drive firmware.
Serial Number
Displays the serial number of the drive.
The following interface revisions are PowerTools and the drive firmware internal revision numbers to identify parameter sets, data structures,
data ranges and access attributes to match the drives’s data structures to PowerTools. When parameters are added to support new features or
parameters are altered, a new interface revision is assigned.
Base Interface Revision
This parameter displays the interface revision of the data parameter structure in the Epp's base drive. This revision has a correlation with the
features supported by the Epp drive.
Registry Interface Revision
This parameter displays the interface revision of the "Registry" data parameter structure in the Epp drive. This revision has a correlation with
the features supported by the Epp. On download, both the Registry and Base Interface revisions are used to convert the Power Tools data set
to match the drive's data structure. In this way Power Tools can support different releases of the EPP Flashes. For the most part the user does
not need to be concerned over interface revisions.
FPGA Revision
The Field Programmable Date Array (FPGA) is an electronic component in the drives. The FPGA revision is only displayed because when the
Epsilon EP drive was first released the FPGA was not field upgradable. When the revision is <100 the drive is not field upgradable. When the
revision is >100 the FPGA can be upgraded by flash upgrading and then Virtual Master Sync Output will work.
24 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 39

3.2 Graph View
Figure 35: Graph View
3.2.1 Data Capture Group Graph State
There are three graph state conditions in the following order: Filling Buffer, Filled. Waiting for Trigger, and Filled and Triggered.
Run
The Run button commands the drive to begin a high speed data capture of the parameters as selected in each of the four data
channels. After the Run button is activated the buffer will fill up to the trigger offset while the words “Filling Buffer” appear
indicating this Graph State. Once the trigger offset level is reached the words “Waiting Trigger” will appear next to the Graph
State indicating that graphical monitor is now ready to be triggered based on the trigger level selected.
Upload and Plot
The Upload and Plot button will upload captured data from the drive and display this data in the Graph window. The user
should wait for the Graph State to read “Filled and Triggered” before the data is uploaded.
Stop
The Stop button stops the data capture with the data captured at that point. You can upload and plot that data. If the buffer is
only partially filled you will get a combination of good and bad data. Stop works well as a manual trigger, in place of the
configured trigger.
Automatically Re-trigger and Plot Check Box
Select the check box and the Automatically Re-trigger and Plot tells PowerTools Pro to monitor the graph state for the
triggered condition. When this condition occurs, it automatically initiates the UploadPlot command, waits for a brief time then
initiates the Run button to repeat the cycle. Initially the user must press the Run button to start the auto cycle.
This mechanism is only active when the graph view is displayed, If the user enters a different PowerTools view the auto update
will stop and it will restart when returning to the Graph view.
The Print button is used to print the graph in the Graph window.
3.2.2 Timing Group
The sliders can be moved in several different ways.
1. With the mouse pointer over the slider, left click and hold while dragging the slider back or forth to the desire setting.
2. With the mouse pointer over the slider, left click on the slider and then the arrow keys on the PC keyboard can be used to
move the slider in fine increments. The Page Up and Page Down keys move the slider in course increments. The Home key
will move the slider all the way to the left and the End key will all the way to the right.
Sample Rate
The Sample Rate slider gives the user control of time spacing for the captured date. To give the user a better idea of what this
number means, the total number of samples and total capture time is displayed on the bottom of the “Timing” group box.
Trigger Offset
The Trigger Offset slider corresponds to the number of samples that will be included on the graph display and data capture
prior to the actual trigger. If the Trigger offset slider is completely to the left (min samples), the data capture and graphing will
Epsilon EP-P Drive Reference Manual 25
Revision A4 www.controltechniques.com
Page 40

start at the trigger location. If the slider is completely to the right (max samples) the graph will capture data until the trigger point.
Buffer Upload Size
The buffer upload size slider truncates the drive captured data. If the slider is completely to the right (max) the complete buffer will be
uploaded. If the slider is completely to the left, only 1% of the buffer will be uploaded. This parameter does not effect the data capture size, it
only defines how much of the buffer will be uploaded.
3.2.3 Data Group Data Channel 1 - 4 Select List Boxes
The Channel 1 through Channel 4 list boxes give the user options for parameter display. If parameters with the same units are mapped on
adjacent channels then the graphical display will show these two parameters overlapped on the same x/y axis. If it is desirable to have two
adjacent Channels with the same units mapped to separate axis on the graph then the selection (none) should be used on the channel in
between these two parameters.
Trigger Radio Buttons
Selecting the radio button will cause the graphical capture to trigger the capture off the selected Channel. The “Trigger Level” text box on the
bottom of the display will change units to the selected channel's parameter units. This trigger level may be changed at any time but the change
must be sent to the drive via the Update to RAM or Download button. If a manual trigger is desired, set the channel to None and select the
corresponding trigger radio button. If no trigger is selected the capture will begin when the Run button is clicked and end at the end of the
Sample Rate.
Custom Variable
A Custom Variable text box is only available once the user has selected Custom Variable from the Select list box. This field is used to define
what parameter will be plotted on that channel. The custom variable parameter can be entered two ways: by just typing any custom variable
using the program format for the variable, or click the Popup Variables button and the variable window will open. Then select the variable and
drag it over to the channel custom variable text box.
Trigger Mask List Box
This list box is only available when Drive Inputs or Drive Outputs are selected in the channel select list box and the Trigger radio button is
selected for that channel. The Trigger Mask list box will only list the inputs or outputs for the selected channel parameter.
Trigger Falling Edge Check Box
When the Trigger Falling Edge check box is selected, the trigger is detected when the data transitions below the trigger level. When the Trigger
Falling Edge check box is clear, the trigger is detected when the data transitions above the trigger level.
Trigger Level
This is the level at which the graph is triggered. The “Trigger Level” text box will change units to the selected channel's parameter unit. This
trigger level may be changed at any time but the change must be sent to the drive via the Update to RAM or Download button.
26 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 41

3.3 Setup View
The Setup View contains all of the primary system setup parameters. These parameters must be setup prior to using your
system.
By selecting Setup in the Hierarchy Tree, the Setup view will appear on the right side of the view (see Figure 36). The Setup
view is divided into six groups, with an explanation of each function. The groups are Identification, Configuration, Drive
Encoder Output, Positive Direction, Update Rate and Switching Frequency.
Figure 36: Setup View-Epsilon EP-P drive
3.3.1 Identification Group
The identification group consists of the Name, Target Drive Address, Change IP Address Check box, IP Address, Subnet and
Gateway.
Name
This is a 12-character alpha/numeric user-configured name for this axis. Enter this name for the drive currently being set up.
Assigning a unique name for each drive in the system allows the user to quickly identify a drive when downloading, editing,
and troubleshooting. All keyboard characters are valid. This will default to Axis 1.
Target Drive Address
This parameter (Modbus.ModbusId) is the Modbus address of the target drive to which the user will download the
configuration. The default target drive address is 1.
Change IP Address Check box
Change IP Address check box is used to determine if the user wants to use the scanner to determine the application's
Ethernet address. If Change IP Address check box is selected then the scanner selected address becomes the new
application address (saved with application). This applies for Download, Upload into an existing application and Change Path.
When Change IP Address check box is clear the Ethernet Address scanner range is the last scan range entered using the
scanner's "Stop Scan". If Change IP Address is selected, then the scanner's "Ip Address Scan Range" range will be loaded to
select only the applications IP address.
The Change IP Address check box must be selected to change the IP Address, Subnet and Gateway.
IP Address
This parameter (Ethernet.EthernetConfiguration.IPAddress) is a 32-bit identification number for each node on an Internet
Protocol network. These addresses are represented as four 8-bit numbers (0 to 255), with periods between them. Each node
on the Ethernet network must have a unique IP address.
Subnet
This 32-bit parameter (Ethernet.EthernetConfiguration.Subnet) indicates the subnet mask used for this node. The subnet
mask is used to group drives that are connected on the same physical connection. For a detailed description of Subnet mask
refer to the Industrial Ethernet Overview section in the
Gateway
This 32-bit parameter (Ethernet.EthernetConfiguration.Gateway) indicates the default Gateway address for the drive. When
attempting to communicate with a drive on a different Subnet, the message must go through this gateway to reach it’s
destination. For a detailed description of the Gateway address refer to the Industrial Ethernet Overview section in the
Epsilon EP Connectivity Reference Manual (P/N 400518-04).
Epsilon
Epsilon EP-P Drive Reference Manual 27
Revision A4 www.controltechniques.com
Page 42

EP Connectivity Reference Manual (P/N 400518-04).
NOTE
3.3.2 Configuration Group
The configuration group consists of list boxes for Drive Type and Motor Type.
Drive Type List Box
Select the drive model for the system you are currently setting up.
Motor Type List Box
Select the motor model for the application from the list of motors.
Motor types are arranged as follows:
• FM motors
Motor voltage is determined by the first letter (E=230, U=460), brake motors have a 1 as the last digit (095E2A401).
•NT motors
Standard 230 V motors, brake motors have BR after the model #.
• XV motors
Standard 230 V motors, brake motors have BR after the model #.
•MG motors
Standard 230 V motors, brake motors have BR after the model #.
• Unimotor Classic motors
Model numbers end with a UL in the part number, for example: 115EZB200-UL.
Motor voltage is determined by the first letter (E=230, U=460).
For brake motors, use the standard motor model.
Selecting the wrong motor type can cause poor performance and may even damage the motor and/or drive.
3.3.3 Drive Encoder Output Group
The drive encoder output group consists of the encoder scaling check box and encoder scaling.
Encoder Scaling Check Box
Select this check box to enable the Encoder Scaling parameter of the Drive Encoder Output.
Encoder Scaling
This parameter defines the encoder resolution (lines per revolution) of the drive's encoder output. This feature allows you to change the drive
encoder output resolution in increments of 1 line per revolution up to the density of the encoder in the motor. If the Encoder Output Scaling
parameter is set to a value higher than the motor encoder density, the drive encoder output density will equal that of the motor encoder.
3.3.4 Positive Direction Group
The Positive Direction group consists of a CW (clockwise) Motor Rotation radio button or a CCW (counter-clockwise) Motor Rotation radio
button.
The motion will move in either CW direction or CCW direction. Perspective of rotation is defined as you face the motor shaft from the front of
the motor.
CW Motor Rotation Radio Button
Select this radio button for applications in which CW motor rotation is considered to be motion in the positive direction (increasing absolute
position).
CCW Motor Rotation Radio Button
Select this radio button for applications in which CCW motor rotation is considered to be motion in the positive direction (increasing absolute
position).
3.3.5 Update Rate Group Trajectory
This parameter configures the interrupt interval for the drive processor. This defines how often the motion program is interrupted and the
Control Loop is processed. In the Control Loop, the feedback information is processed and a new position command is generated. Also, in the
Control Loop, the I/O is scanned. After Control Loop is complete, all messages are handled. Messages are Modbus data, DeviceNet data,
28 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 43

Display information, and are only processed if a message is waiting. If no device is querying data from the Epsilon EP-P drive
CAUTION
or sending data to the Epsilon EP-P drive, then messages do not take up any time. Once messages have been processed, the
remainder of the interrupt is dedicated to running the motion programs of user programs.
Available selections for Trajectory Update are 800, 1200, and 1600 microseconds. The longer the update, the more time is
dedicated to the user programs, and the less time dedicated to servo performance. The shorter the update, the more precise
the servo performance, but less time is available to process user programs. Diagnostics are available on the Status Online tab
when online with the drive to help select the ideal setting. (See description of Control Loop Group of online parameters on
page 23 for further information)
3.3.6 Switching Frequency Group
This parameter defines the switching frequency of the drive. For the Epsilon EP drives, the switching frequency is 10 kHz and
cannot be changed.
3.4 Motor View
The Motor view under Setup view is used for many different functions:
1. To see/verify the motor data for a standard motor that had been selected
2. To create a new motor entry in the .ddf file
3. To Run the Auto-Tune feature
4. To store Auto-Tune results into an existing configuration
The primary function of this view is to define the parameters for the given motor that is to be connected to the drive.
Following is a description of all the different functions on the Motor view.
Figure 37: Motor View
3.4.1 Motor Type List Box
Use this list box to select the motor type. PowerTools Pro software will display all the standard motor models and any user
defined motors.
Selecting the wrong motor type can cause instability and may cause property damage to the motor
and/or drive.
3.4.2 Use Motor Data From .ddf File Check box
When selecting a motor for use with the Epsilon EP-P drive the user has two basic options:
1. Use a motor that already exists in the standard motor definition file (StdMotor.ddf) or custom motor definition file
(Motor.ddf).
Epsilon EP-P Drive Reference Manual 29
Revision A4 www.controltechniques.com
Page 44

2. Create a custom motor that has not been used before.
When selecting option 1 from above (use an existing motor), the user simply selects one of the motors from the Motor Type list at the top of the
Motor view. Once the user selects a motor from the Motor Type list, the data for that motor is read from the pertinent .ddf file and then is
displayed in the Motor Parameters column on the Motor view (see
because the motor information comes directly from the .ddf file.
If the user wishes to edit one or more of the parameters read from the .ddf file, it is necessary to clear the “User Motor Data From .ddf File”
check box. Clearing the check box will break the “link” between the motor data displayed on this view, and the motor data in the .ddf file. This
is necessary because as soon as the user changes any of the values, it no longer matches the .ddf file, and is now in effect a “custom motor”.
When the “User Motor Data From .ddf File” check box is cleared, all of the values in the Motor Parameters column will become available, and
the Motor Name will be changed to “New Motor” so that there is no association with the existing motor that was previously selected. The user
can now change any of the values as desired and give the motor a new name. Once the values have been changed, the motor data only exists
within the active configuration. To save the new values into the .ddf file, the user must click on the Save .ddf Values button on the right side of
the view.
3.4.3 Motor Parameters Column
Motor Parameters column is a column of data displayed on the Motor view under the Setup view (See Figure 37). This column of data contains
the values for each of the motor data parameters. The values in this column are unavailable for edit if the “Use Motor Data From .ddf File”
check box is selected. This means that since the data is associated with the .ddf file, it cannot be changed. The values in this column become
available when the “Use Motor Data From .ddf File” check box is cleared. The user can then change one or more of the parameter values
because there no longer is a link to the data in the .ddf file.
If the user does edit motor parameter values on this view, those values are only stored within that particular configuration file. In order to save
the values to the .ddf file, the user must click the “Save .ddf Values” button on the right side of the view. Below are the motor parameter with a
brief description.
Motor Name
The motor name is limited to 12 characters and must begin with an alpha character (non-numeric character). This is the motor name that will
appear in the “Motor Type” list box above.
Peak Current
Specifies the peak current allowed by the motor. The motor manufacturer typically provides the peak current data.
If a system is “drive limited” (meaning that the motor can handle more current than the drive can deliver), the peak current actually used by the
system may be lower than the value specified here.
Continuous Current Rating
Specifies the continuous current allowed by the motor. It is used to determine the drive continuous current and peak current limits. The drive
can also limit the continuous current to the motor based on the drive capacity. The motor manufacturer typically provides the continuous
current data.
If a system is “drive limited” (meaning that the motor can handle more current than the drive can deliver), the continuous current actually used
by the system may be lower than the value specified here.
Motor Poles
Specifies the number of magnetic pole pairs (N-S) on the motor. The supported values are 2, 4, 6, 8, 10, 12, 14 and 16 poles. The motor
manufacturer typically provides the motor pole information.
Rotor Inertia
This parameter specifies the inertia of the motor rotor. The drive uses this parameter to interpret the “Inertia Ratio” parameter. “Inertia Ratio” is
specified as a ratio of reflected load inertia to motor inertia.
Motor KE
Specifies the Ke of the motor. The units are Vrms/ kRPM. The line-to-line voltage will have this RMS value when the motor is rotated at 1000
RPM. The range is 5.0 to 500.0 Vrms/ kRPM. The motor manufacturer will typically provide the Ke data.
Phase Resistance
Specifies the phase-to-phase resistance of the motor. This value is determined by measuring the resistance between any two motor stator
terminals with an ohm meter. The range is.1 to 50 ohms.
Phase Inductance
Specifies the phase-to-phase inductance of the motor.
Max Operating Speed
This parameter specifies the maximum speed of the motor when used with a variable speed drive to achieve velocities over the rated base
speed of the motor.
Encoder Lines/Rev
Specifies a coefficient for determining the number of encoder lines per mechanical revolution. The supported values are 1 to 16383. The
equation for determining the total number of encoder lines per revolutions is:
nLines = n*10x
where:
nLines = Total number of Encoder Lines
n = Motor Encoder Lines per Rev Coefficient
x = Motor Encoder Exponent
The total number of encoder lines is used both for commutation and for position/velocity control. To properly commutate the motor, the drive
Figure 37). The parameters in this column will be dimmed and unavailable
30 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 45

must know the electrical angle (the angle between the motor magnetic field and stator coils).
Encoder Lines/Rev Exponent
Specifies a coefficient for determining the number of encoder lines per mechanical revolution. The supported values are 1 to
16383. The equation for determining the total number of encoder lines per revolutions is:
nLines = n*10x
where:
nLines = Total number of Encoder Lines
n = Motor Encoder Lines per Rev Coefficient
x = Motor Encoder Exponent
The total number of encoder lines is used both for commutation and for position/velocity control. To properly commutate the
motor, the drive must know the electrical angle (the angle between the motor magnetic field and stator coils).
Encoder Marker Angle
Specifies the electrical angle at which the marker (Z) pulse occurs with reference to VTS when the motor is spun in the encoder
reference direction. At power-up the drive obtains an initial estimate of the electrical angle from the status of the U, V and W
commutation tracks. This estimate can be off by as much as 30 °.
When the drive receives the marker pulse, the drive will, within one second, gradually shift the commutation to the more
accurate electrical angle specified by this parameter. The system will then operate more efficiently.
Encoder U-track Angle
Specifies the electrical angle at which the rising edge of the U commutation track will occur with reference to VTS when the
motor is spun in the encoder reference direction.
At power-up the drive looks at the status of the U, V and W commutation tracks and, using this parameter, obtains a crude (±
30 °) estimate of the electrical angle.
Encoder Reference Motion
Specifies the direction of motion assumed in phase plots of the encoder’s quadrature and summation signals. The supported
values are CW(1) and CCW(0). Your encoder may have the same phase plot but is generated from a different direction of
rotation. This parameter affects the way the drive interprets the quadrature and commutation signals.
Encoder Type
The supported values for this parameter are 1 and 0. If set to a 1 the drive uses the Encoder Marker angle as well as the
Encoder U Angle for commutation. If this parameter is set to a 0, the drive uses only the Encoder U Angle.
3.4.4 Run Auto-Tune Button
The drive has the ability to run an Auto-Tune operation thereby measuring several different motor parameters. Doing so allows
the drive to obtain certain parameters that are not typically provided by the motor manufacturer, and also optimizes other drive
parameters to work properly with the connected motor/load.
PowerTools Pro allows the user to initiate the Auto-Tune feature from the Motor view.
The following table shows which parameters must be entered in order to run the Auto-Tune feature, and which parameters are
measured by the Auto-Tune.
Motor Parameters Needed to Run Auto-Tune Measured by Auto-Tune Mode #
Motor Name
Peak Current Yes
Continuous Current Rating Yes
Motor Poles Yes
Rotor Inertia 3
Motor Ke 3
Phase Resistance 2,3
Phase Inductance 2,3
Max Operation Speed Yes
Encoder Lines/Rev Yes 1,2,3
Encoder Lines/Rev Exponent Yes 1,2,3
Encoder Marker Angle 1,2,3
Encoder U-Marker 1,2,3
Encoder Reference Motion 1,2,3
Encoder Type
All Auto-Tune modes cause motion. It is important to read and understand the warnings and instructions on the Auto-Tune
windows. It is strongly recommended to unload the motor before performing an Auto-Tune.
Epsilon EP-P Drive Reference Manual 31
Revision A4 www.controltechniques.com
Page 46

When online with the drive, to initiate an Auto-Tune, click RunAuto-Tune button. The Auto-Tune dialog box opens and contains warnings and
instructions related to the Auto-Tune procedure, as well as selection of the Auto-Tune mode. An example of one of the Auto-Tune windows is
shown in
Figure 38.
Figure 38: Auto-Tune Dialog Box - Auto-Tune Mode 3
After the Auto-Tune Mode has been selected, click Proceed, to start the Auto-Tune. As the Auto-Tune is executing the gray check boxes will
show the progress of the Auto-Tune. When the Auto-Tune is completed the Auto-Tune dialog box closes and the auto-tune results will be in the
Values from Drive column on the Motor view.
Auto-Tune Mode 1
Auto-Tune Mode 1 provides the encoder information of the motor. Auto-Tune Mode 1 is the most beneficial tuning by providing parameter
values that are difficult to measure or vary the most from common motor specifications. Auto-Tune Mode 1 will rotate the motor for 1 or more
revolutions at a slow speed.
With Auto-Mode 1 the test sequence is Moves 1 through 3 consisting of:
Move #1, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #2, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #3, Vel = 0.15 Electrical Cycles/sec (approx 1 rev/min), Distance < 1.0 Revolutions of motor, Direction = CW
The parameters measured in Auto-Tune Mode 1 are Encoder Marker Angle, U-track Angle, Encoder Reference Motion and Encoder
Resolution.
As Auto-Tune Mode 1 is executed the test is checked off, Phase 1 Encoder Marker Angle, U Angle, Motion.Resolution
Auto-Tune Mode 2
Auto Tune Mode 2 provides and method to determine the motor resistance and inductance. These are used in the current control loop. It is
more accurate to make these measurements with external meters. If you do not have measured motor resistance and inductance, you can use
auto tune 2.
Auto Mode 2 is a subset of auto mode 3 running Moves 1 through 3:
Move #1, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #2, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #3, Vel = 0.15 Electrical Cycles/sec (approx 1 rev/min), Distance < 1.0 Revolutions of motor, Direction = CW
The parameters measured by Auto-Tune Mode 2 are those tested in Auto-Tune Mode 1 plus Phase Resistance and Phase Inductance.
As Auto-Tune Mode 2 is executed, the completed portion of the test is checked off,
Phase 1 Encoder Marker Angle, U Angle, Motion.Resolution
32 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 47

Phase 2 Voltage for Phase 3
WARNING
Phase 3 Resistance and Inductance
Auto-Tune Mode 3
Auto Tune Mode 3 provides a method to determine the motor Ke and Rotor Inertia. These are used in the velocity control loop.
It is more accurate to use the Motor Ke and Rotor Inertia from the manufacturer. If you do not have manufacturer provided
motor Ke and Rotor Inertia specifications, you can run an Auto-Tune Mode 3.
Auto-Tune Mode 3 runs the motor at 75% max motor velocity. If the load is connected this may cause harm to the
system or personnel.
Auto-Tune Mode 3 is the full auto-tune running Moves 1 through 5:
Move #1, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #2, Vel = Max Motor Vel, Distance < (1 / # of motor poles) motor revs, Either Direction
Move #3, Vel = 0.15 Electrical Cycles/sec (approx 1 rev/min), Distance < 1.0 Revolutions of motor, Direction = CW
Move #4, vel < 0.75 max motor velocity, Time = 4 sec, Direction = CW
Move #5 - #12, vel < 0.75 max motor velocity, Distance = 3 Revolutions of the motor, Direction = CW
As Auto-Tune Mode 3 is executing the completed portion of the test is checked off,
Phase 1 Encoder Marker Angle, U Angle, Motion.Resolution
Phase 2 Voltage for Phase 3
Phase 3 Resistance and Inductance
Phase 4 Motor Ke
Phase 5 Rotor Inertia
3.4.5 Values from Drive Column
The Values from Drive column shows the new motor parameters as a result of an Auto-Tune. These parameters are
continually being read from the drive. The theory of operation is that the user will perform an Auto-Tune function that reads/
measures/calculates the motor parameters within the drive. The results are read from the drive and displayed in the Values
from Drive column. Once they are displayed in PowerTools Pro (in the Values From Drive column) the user can apply those
values to the Motor Parameters column by clicking on the Apply to Config. button, in the middle of the Motor view (this button
looks like a series of arrows pointing from the Values from Drive column towards the Motor Parameters column).
The values in the Values from Drive column are not saved as part of the configuration file. To save these values, the user must
use the “Apply to Config” button to save them.
This column is only functional when online with the drive. When offline, the values in the Values from Drive column will all read
zero.
3.4.6 Apply to Config. Button
After any Auto-Tune has been performed, the results are displayed in the Values from Drive column on the Motor view and the
measured parameter values are saved in the drives NVM. When the user clicks Apply to Config., the values in the Values
From Drive column are transferred into the Motor Parameters column. The configuration file then can be saved to disk.
Therefore, in order to store the motor parameter values in the drives flash memory the configuration file must be downloaded
to the drive using Device > Download.
3.4.7 Save .ddf Values Button
Once the user has entered the data for the motor they are using, they may or may not wish to save the motor data to the
Motor.ddf file so it can be easily recalled at a later time. If the user does not save the motor data to the Motor.ddf file, then the
motor data will only reside in the specific application configuration file that it has been entered into.
In order to save the motor data to the Motor.ddf file, click the Save .ddf Values button. This takes all the parameter values and
writes them to the Motor.ddf file.
When saving to the .ddf file, if PowerTools Pro finds that a motor already exists with the same name, the User Defined Motor
Name Conflict dialog box will appear. The user must then decide how to proceed with saving the motor data .ddf file.
User Defined Motor Name Conflict Dialog Box
The purpose of this dialog box is to resolve conflicts between the application’s motor settings and those defined in the .ddf file.
The User Defined Motor Name Conflict dialog box opens during the following conditions:
1. From the Motor view, click the Save .ddf values button and the motor already exists with the same name but
has different motor parameters
2. Opening an application (or uploading a application), where the Use Motor data from the .ddf file check box is
select but the data in the application no longer matches the .ddf file.
This occasionally occurs when a newer version of PowerTools Pro is installed and the parameters for the
standard motors has been updated in the .ddf file.
If the motor name does not exist in the .ddf file, it will be written into the file.
It is strongly recommended to unload the motor before performing any Auto-Tune Mode.
Epsilon EP-P Drive Reference Manual 33
Revision A4 www.controltechniques.com
Page 48

Figure 39: The User Defined Motor Name Conflict Dialog Box
The User Defined Motor Name Conflict dialog box presents the user with four options on how to proceed with saving the motor data. Those
four options are:
Create new motor entry In .ddf File
The user can select to keep the existing data and create a new entry into the motor.ddf file with a different name. After selecting this option, the
user simply enters a new name in the Please enter a new motor name text box. Then click OK, the data will be written to the .ddf file using the
new motor name.
Overwrite existing .ddf file motor entry
The user can select to overwrite the existing data in the .ddf file with the current data in the Motor Parameters column. If this option is selected,
the data in the .ddf file will be overwritten and the overwritten data will be lost forever. The overwritten data cannot be recovered.
If the user attempts to overwrite data for a Standard Motor (in the stdmotor.ddf file), the operation will be canceled and the user will be notified
that they cannot proceed. The figure below shows the error message that will be produced when the user attempts to overwrite a standard
motor. In this case, the user would need to change the motor name before saving to the .ddf file.
Load and use motor parameters from matching motor in .ddf file
If this option is selected, the motor data in the Motor.ddf or stdmotor.ddf file for the matching Motor Name will overwrite the data in the Motor
Parameters column. After this option is selected, the “Use Motor Data From .ddf File” check box will be selected, and all the parameter values
will be unavailable.
Retain existing Motor Parameters without saving to .ddf
If the user selects this option, the values in the Motor Parameters column will not be written to the motor.ddf file, and the values will only reside
within the configuration file. The specific motor data values will not be available for selection in the Motor Type list box because they are not
saved to the .ddf file. The “Save .ddf Values” operation is in effect canceled.
Existing Motor Names List Box
This list box is part of the User Defined Motor Name Conflict dialog box and contains all the names of the motors that exist in the motor.ddf and
stdmotor.ddf files. When selecting a new name, it is important to select a name that is not already displayed in this list box.
Parameters Not Matching List
This list is part of the User Defined Motor Name Conflict dialog box and displays the parameter value(s) from the Motor Parameters column
that do not match the equivalent parameter value in either the motor.ddf or stdmotor.ddf files, for the motor with the matching name.
This helps the user to determine whether they wish to overwrite, cancel, or create a new motor with this Save .ddf Values operation.
34 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 49

3.5 User Units View
NOTE
Scaling
Characteristic Distance
Characteristic Length
-------------------------------------------------------------- ----
=
Scaling
Characteristic Distance = 4.712
Characteristic Length = 1
------------------------------------------------------------- ---------------------------
=
The User Units View is used to scale the desired application units into known values. All information for distance, velocity, and
accel/decel units are set up here and used throughout the system setup.
By selecting User Units in the Hierarchy Tree, the User Units view will appear on the right (see Figure 40).
3.5.1 Distance Group Units Name
This is a 10-character name for the distance user units the user wants to use in the application.
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all distance
and position parameters throughout the configuration. Using a high number of decimal places will improve position resolution,
but will also limit the range of absolute position. You can select from zero to six decimal places of accuracy.
Figure 40: User Units View
When the number of decimal places are changed in an existing configuration file the Index accel and decel parameters need
to be checked.
Scaling
A Characteristic Distance and Length must be established to allow the drive to scale user units back to actual motor
revolutions. This scaling factor is as follows:
Characteristic Distance
This is the distance the load travels (in user units) when the motor travels the characteristic length (in motor revolutions).
Characteristic Length
This is the distance the motor travels (in whole number of revolutions) to achieve one characteristic distance of load travel.
Distance Scaling Examples:
A 1.5" diameter pulley is used to drive a conveyor belt, and the user wishes to use units of inches instead of revolutions.
Units Name — Set to Inches
Decimal Places — Set to desired accuracy 0.000
In one revolution of the motor (or pulley), the belt will travel a distance of one pulley circumference.
= 1.5" x
= 1.5 x 3.14...
= 4.712 inches / revolution
Epsilon EP-P Drive Reference Manual 35
Revision A4 www.controltechniques.com
Page 50

If the user decides to put a 5:1 reducer on the system, the user simply needs to change the Characteristic Length.
NOTE
Scaling
Characteristic Distance = 4.712
Characteristic Length = 5
------------------------------------------------------------ -------------------------------
=
Now the belt travels 4.71" in 5 motor revolutions.
Keep in mind that the characteristic length is always a whole number and the valid range is from 1 to 2000.
User Units may affect end motor speed and could cause trajectory faults.
Because of internal math in the Epsilon EP-P drive, some user unit combinations may cause a drive trajectory faults. The maximum motor
velocity allowed by the drive is detailed under the distance section of the User Units View and is labeled “User Unit Limited Speed”. When the
user unit setup is altered in such a way that the maximum motor speed allowed by the drive is less than the maximum speed allowed by the
chosen motor, the readout of maximum motor speed allowed by the drive changes to have a red background. If a configuration is downloaded
to the drive with a red background on the “User Unit Limited Speed”, the drive will obtain a trajectory fault at speeds near this velocity. To
alleviate this issue, simply remove decimal places from your user units, and/or change the characteristic distance (numerator) of your scaling
parameters to be a smaller number that it was. The red background indicating trajectory faults will go away when the user unit setup is scaled
for a realistic accuracy based on the encoder counts per revolution.
3.5.2 Velocity Group Enable Separate Distance Units Check Box
If selected (enabled), separate distance and velocity units, name and scaling will be enabled. If not enabled, the velocity units, name and
scaling will be defined by the Distance Group.
Scaled Distance Name
If the user wants the velocity units to have a different distance scaling than the distance units a name can be entered here up to 10 characters.
For example, the user distance units name could be inches while the velocity units name is feet per minute.
Velocity Distance Units Scale Factor
This parameter scales the Velocity Distance Units back to actual distance units. To do this, enter the number of distance user units that are
equal to one velocity scaled distance unit.
Separate Distance Units Example:
A user has an application using a leadscrew with a 0.5"/turn lead. The user wants to have Distance Units of Inches, but wants Velocity Units of
Feet so motion can be programmed in feet/minute.
Distance Units Name — Inches
Enable Separate Distance Units — Select check box (enabled)
Scaled Distance Name — Feet
Velocity Distance Units Scale Factor — # of Distance Units / 1 Scaled Distance Unit
1 Foot = 12 Inches
Velocity Distance Units Scale Factor = 12
Time Scale List Box
The time can be one of two values: seconds or minutes. This selection sets the real-time velocity time scale.
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all real-time velocity
parameters throughout the software. Using a high number of decimal places will improve velocity resolution, but will also limit the maximum
velocity. You can select from zero to six decimal places of programming resolution.
3.5.3 Acceleration Group Time Scale List Box
From this list box, select the acceleration time scale to be used for all real-time profiles. The time scale selected will be used for both
acceleration and deceleration parameters. You can select from milliseconds or seconds.
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all real-time accel/decel
parameters throughout the software. Using a high number of decimal places will improve accel/decel resolution, but will also limit the
maximum accel/decel rate. You can select from zero to six decimal places of programming resolution.
3.5.4 Torque Group Units Name
10-character name for the torque user units.
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all torque parameters
throughout the software. Using a high number of decimal places will improve torque resolution, but will also limit the maximum torque. You can
select from zero to six decimal places of programming resolution.
Scaling
The amount of torque in user torque units will be set equal to the Percent Continuous Current. This parameter is used to scale the actual
36 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 51

torque back into the user defined units. The units of this parameter are % ContinuousCurrent. This scaling factor is used
along with the user torque to establish a relationship between torque user units and actual torque.
3.6 Dual Loop View
Dual Loop View provides the setup parameters to have an axis position controlled by a remote or secondary encoder, while
maintaining a velocity encoder feedback to help with loop stability and to prevent the axis “runaway” if the remote encoder
becomes disconnected.
An example application would be where a web is pulled through rollers, but there is not a precise grip on the material so it can
slip a little and so loose position. This is solved by an external encoder touching the web and providing the accurate feedback
of the web position.
Figure 41: Dual Loop View
3.6.1 Display Dual Loop Setup
Select this check box to enable the Dual Loop Mode feature which accepts a secondary feedback device to close the position
loop while still using the motor encoder to close the velocity loop.
3.6.2 Position Encoder Setup Group Position Feedback Polarity
Position Feedback Polarity defines the direction of the position encoder that corresponds to a positive position change. This
value is somewhat arbitrary, since the position encoder can be mounted to spin CW or CCW as the material moves "forward".
If this value is not set correctly in Dual Loop mode the motor will rotate in the opposite direction as desired.
Master Interpolation
This parameter determines how the incoming pulses are seen to generate the synchronized motion command. This setting
allows the user to choose the appropriate signal type to match the device generating the master input pulses.
Pulse Quadrature
The most common type for use with incremental encoders using AB Quadrature signals
Pulse Direction
Used with Step and Direction control signals
Pulse Pulse
Used with Pulse Forward and Pulse Reverse control signals
Available when Sync Encoder Input is selected as the Master Source on the MasterUnits View or on the Dual Loop View when
the Dual Loop setup checkbox is selected enabling the feature.
Drive Input Signal
This is selected accordingly based on whether the incoming pulses are Differential (default) or Single Ended. Available when
Sync Encoder Input is selected as the Master Source on the Master Units view or when the Dual Loop feature is enabled.
Epsilon EP-P Drive Reference Manual 37
Revision A4 www.controltechniques.com
Page 52

3.6.3 Sync Output Connector Group
Dual Loop Encoder Ratio
Motor Encoder
Position Encoder
-------------------------------------------------
=
Output Source
This determines which signal is sent out the Sync Output connector on the drive. If Motor Encoder (default) is selected, the encoder signals
from the motor that the drive is controlling will be sent out the 15-pin Analog/Sync Output connector (J5). If Drive Encoder Input is selected,
then the signals coming in the drives 9-pin Sync Input connector on the drive will be sent out the Analog/Sync. Output connector. When Virtual
Master is selected the virtual master signal generated by the drive will be sent out the Analog/Sync. Output connector.
3.6.4 Dual Loop Encoder Ration
Motor Encoder
This parameter is the numerator in the ratio used to define the mechanical ratio between the Motor Encoder and the Position Feedback
Encoder. This parameter is only used when Dual Loop Control Mode is enabled, and must be set correctly to achieve the correct target
velocity.
Position Encoder
This parameter is the denominator in the ratio used to define the mechanical ratio between the Motor Encoder and the Position Feedback
Encoder. This parameter is only used when Dual Loop Control Mode is enabled, and must be set correctly to achieve the correct target
velocity.
3.7 Master Units View
Master Units View provides the setup parameters for use with synchronized motion. This setup window determines how the encoder signals
are interpreted and establishes the scaling for all master units (master distance, master velocity, etc.).
Figure 42: Master Units View
3.7.1 Encoder Setup Group Master Source
Master Source (MasterAxis.Source) indicates the source of the master encoder input.
Select Custom Variable, the Custom Variable text box will became available to enter a parameter. The custom variable can be entered two
ways: by just typing any parameter into the text box using the program format for the variable, or click the Popup Variables button and the
Select Variables from Tree window will open. Select the variable and drag it over to the Custom Variable text box.
Select Sync Encoder Input to use the Sync Input connector (J10) on the Epsilon EP drive.
Select Virtual Master.Counts to use the Virtual Master as the Master Source.
Custom Variable
The Custom Variable (MasterAxis.CustomSourceVariable) text box is only available once the user has selected Custom Variable from the
Master Source list box. This field is used to define what parameter will be used as the Master Source. The Custom Variable can be entered two
ways: by just typing any parameter using the program format for the variable, or click the Popup Variables button and the Select Variables from
Tree window will open. Select the variable and drag it over to the Custom Variable text box.
38 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 53

Master Polarity
Master Polarity (MasterAxis.Polarity) defines the direction of the master encoder that corresponds to a positive master position
change.
Master Interpretation
Master Interpretation (MasterAxis.Interpetation) determines how the incoming pulses are seen to generate the synchronized
motion command. This setting allows the user to choose the appropriate signal type to match the device generating the
master input pulses.
Drive Input Signal
Drive Input Signal is selected based on whether the incoming pulses are Differential (default) or Single Ended. Available only
when Sync Encoder Input is selected as the Master Source.
3.7.2 Sync Output Connector Group Output Source
Output Source determines which signal will be sent to the 15-pin Analog/Sync Output connector on the drive. If Motor Encoder
(default) is selected, then the encoder signals from the motor that the drive is controlling will be sent out the Analog/Sync
Output connector. If Drive Encoder Input is selected, then the synchronization signals sent to the drives 9-pin Sync Input
connector will be sent to the drives Analog/Sync Output connector. When Virtual Master is selected the Virtual Master that was
setup on the Virtual Master view is sent to the Analog/Sync Output connector.
3.7.3 Master Position Setup Group Define Home Position
Define Home Position (MasterAxis.DefineHomePosn) is the value that the Master Position Feedback will be set to when the
MasterAxis.DefineHome destination is activated. After the MasterAxis.DefineHome has been activated, the
MasterAxis.AbsolutePosnValid source will activate.
Rotary Rollover Check Box
When selected, (MasterAxis.RotaryRolloverEnable=on)the rotary rollover feature for the Master Axis will be enabled.
Rotary Rollover
If enabled, the Master Position will rollover to zero at the value specified here. As the master encoder counts up, the master
position feedback will increase until it reaches the Rotary Rollover value (MasterAxis.RotaryRolloverPosn) and then reset to
zero and continue to count up. If rotating in the negative direction, the master position feedback will decrease until it reaches
zero, and then start over at the Rotary Rollover value.
3.7.4 Master Distance Units Group
The parameters in this group are used to establish the scaling of the master axis into user units.
Units Name
This is a text string up to 12 characters that will be used to define the units of distance traveled by the master axis for incoming
synchronization signals.
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all distance
and position parameters used in synchronized motion throughout the software. Using a high number of decimal places will
improve position resolution, but will also limit the maximum position. You can select from zero to six decimal places of
programming resolution.
Scaling
When Sync Encoder Input is selected as the Master Source then the scaling factor is defined as
MasterAxis.CharacteristicDistance/MasterAxis.Counts. The numerator (top value of the scaling fraction) is the Characteristic
Distance. The denominator (bottom value of the scaling fraction) is the # of Counts. The Characteristic Distance is the number
of Master Distance Units that will be traveled per number of counts in the bottom of the fraction. The Counts parameter is the
number of incoming pulses it takes to travel the characteristic distance.
3.7.5 Master Velocity Units Group Decimal Places
Decimal Places determines the number of decimal places to be used in the velocity parameter for all synchronized motion.
3.7.6 Master Acceleration Units Group Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all realtime accel/decel parameters used for synchronized motion throughout the software. Using a high number of decimal places
will improve accel/decel resolution, but will also limit the maximum accel/decel rate. You can select from zero to six decimal
places of programming resolution.
3.7.7 Master Position Filter Group
The master position filter is designed for applications where the master encoder input requires smoothing due to low resolution
or high gain. These applications include low speed masters, low resolution master encoders, and large follower to master gear
ratios.
Filters inherently introduce phase shift (or delay) in the followers response to the master position, velocity and acceleration.
Epsilon EP-P Drive Reference Manual 39
Revision A4 www.controltechniques.com
Page 54

The drive provides Feedforward compensation to correct for these delays introduced by the filter.
The user may set the number of filter samples to be used to “smooth” the master encoder velocity. The more samples used by the filter, the
smoother the master velocity signal, however, the more positional delay introduced by the filter. This means that more filtering will cause more
position error between master and follower. Feedforward is used in conjunction with the filter to provide accurate positioning performance while
still maintaining smooth motion.
The following table can be used to best determine the proper filter settings for your application.
Feedforward OFF Feedforward ON
One update of phase shift
Disabled
# of
Sample
s
Filter parameters cannot be changed using the “Update to RAM” feature. Changes must be fully downloaded before taking effect.
The gray box in the table above denotes the default setting for the master filter parameters.
4
8
16
(not velocity dependent)
No Filtering
Small Lag (function of
speed),
Low Filtering
Medium Lag (function of
speed),
Medium Filtering
Large Lag (function of
speed),
High Filtering
No delay,
No Filtering
Poor at low speed,
Low Filtering
Good at low speed,
Medium Filtering
Best at low speeds,
High Filtering
Reduced Lag
Smoother
Increasing
Lag with FF
Off
Enable Check Box
The Enable check box is used to turn on or turn off the Master Position Filter. If selected, the filter is turned on (active) and the user must select
the number of samples used by the filter. If clear, the filter is not used.
Samples
Defines the number of samples used by the filter to smooth the master signal. Increasing the number of samples increases smoothness, but
also increases lag. See Filter table above to select proper setting.
Enable Feedforward Check Box
The Enable Feedforward check box is used to turn on or turn off feedforward. If selected, feedforward is active. If the check box is clear,
feedforward is not used.
3.8 Virtual Master View
The Virtual Master View is used to create a simulated encoder output. It generates an encoder stream of counts without the actual operation of
a motor. This count can be used by the drive itself as an input to the Master Source (MasterAxis.Source). It can also be transmitted to other
drives through the Sync Encoder Output connector and into their Master Sync Input connector.
Figure 43: Virtual Master View Enabled
3.8.1 Enable Virtual Master Check Box
Enable Virtual Master check box (VirtualMaster.VirtualMasterEnable) by default is clear. Select the check box to enable the virtual master
40 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 55

feature.
3.8.2 Virtual Master Setup Group Distance
Distance (VirtualMaster.Dist) is the incremental distance virtual master will move, in user units, if the virtual master is initiated
as an index.
Velocity
Velocity (VirtualMaster.Vel) is the maximum virtual velocity that will be attained by the virtual master. This parameter is in user
units.
Acceleration
Acceleration (VirtualMaster.Accel) is the acceleration rate, in user units, that the virtual master will use to accelerate. This
parameter is used when in either jog or indexing mode.
Deceleration
Deceleration (VirtualMaster.Decel) is the deceleration rate, in user units, that the virtual master will use to decelerate in either
jog or index mode.
Marker Count
The encoder marker pulses are simulated and this parameter (VirtualMaster.MarkerCount) specifies the number of
VirtualMaster.Counts per encoder marker pulse generated.
3.8.3 Virtual Master Conversion Ratio Group Scaling
Converts the user units distance into virtual counts.
VirtCnts
The numerator (top value of the scaling fraction) is the VirtualMaster.CharacteristicLength. The characteristic length is the
number of virtual counts that will be generated per the distance, in user units, defined by the denominator (bottom number of
the scaling fraction).
Distance (UserUnits)
The denominator (bottom value of the scaling fraction) is VirtualMaster.CharateristicDistance, in user units, and is used with
VirtualMaster.CharacteristicLength to create the virtual master conversion ratio.
Example:
If the user sets the numerator to 10,000 and the denominator to 1 revs, then 10,000 virtual counts will be sent out when the
virtual master produces 1 rev of virtual motion.
3.8.4 Feedrate Group FeedRate Override
This parameter (VirtualMaster.FeedRateOverride) is used to scale the Virtual Master counts. It can be described as “scaling in
real time”. The default setting of 100% will allow all counts to occur in real time. A seeing of 50% will scale time so that all
counts are half as fast as they are at 100%. A setting of 200% will scale time so that all count run twice as fast as they would
at 100%. Feed Rate Override is always active, and this parameter may be modified via Modbus, Ethernet, or in a program.
FeedRate Decel/Accel
FeedRate Decel/Accel (VirtualMaster.FeedRateDecelerationTime) specifies the ramp used when velocity changes due to a
change in the FeedRate Override value. The units of FeedRate Decel/Accel are seconds/100%. Therefore, the user must
specify the amount of time (in seconds) to accelerate or decelerate 100% of programmed feedrate.
3.9 Position View
The Position View allows you to set up and view the parameters related to drive positioning. In Figure 44, Position has been
selected in the Hierarchy Tree. The right side of the view is divided into groups. An explanation of the groups and their
functions is provided below.
Epsilon EP-P Drive Reference Manual 41
Revision A4 www.controltechniques.com
Page 56

Figure 44: Position View
3.9.1 Settings Group Define Home Position
Define Home Position (DefineHomePosn) is the value to which the Position Command will be set when the DefineHome destination is
activated. This is used in applications which do not use a home routine but, require a known reference point. The units are defined on the User
Units View.
In Position
The In Position (InPosn) source will activate at the end of a move if the absolute value of following error is less than or equal to the In Position
Window (InPosnWindow) for the In Position Time (InPosnTime).
In Position Window (InPosnWindow)
The absolute value of the Following Error must be less than or equal to this value at the end of an index in order for the InPosn source to
activate. This window is set in units specified in the User Units View.
Example:
The In Position window is set to 0.0025 revs. At the end of an index, the following error is calculated to be 0.0012 revolutions. Therefore,
the InPosn source will activate.
Or the In Position window is set to 0.001 inches. If at the end of an index, the following error is calculated to be.0015 inches, then the InPosn
source will not activate.
In Position Time (InPosnTime)
This is the amount of time in seconds that commanded motion must be complete and the absolute value of the following error must be less
than the In Position Window for the InPosn source to activate. If set to zero (default), then InPosn will activate as soon as motion stops and the
following error is less than the In Position Window parameter value.
3.9.2 Limits Group Enable Following Error Check Box
Select this check box (FollowingErrorEnable) to enable (or disable if the check box is clear) the Following Error Limit. If enabled, a fault will be
generated if the absolute value of the following error ever exceeds the value in the following error parameter. If disabled, a fault will never be
generated.
Following Error
Following Error (FollowingError) is the difference between the Position Command and the Position Feedback. It is positive when the Position
Command is greater than the Position Feedback. If the absolute value of the following error exceeds the value you enter here, the drive will
generate a Following Error Fault (F). All accumulated Following Error will be cleared when the drive is disabled.
The Following Error Limit is defined in user units.
Enable Software Travel Limits Check Box
Select this check box (SoftwareTravelLimitEnable) to enable (or disable if clear) the software travel limits. If disabled, the software travel limits
are not monitored.
Software Travel Limits
Software Travel limits can be used to limit machine travel. They are often setup inside the hardware travel limits to add another level of security
or protection from exceeding the machines travel limits. The Epsilon EP-P drive constantly monitor the feedback position, and if this position
exceeds the values entered for Software Travel Limit + or -, then the drive will decel to a stop. Software Travel Limits are not functional unless
the Absolute PosnValid source is active. AbsolutePosnValid is active upon successful completion of a home or the DefineHome destination is
activated.
To recover from a software travel limit, a jog may be commanded in the opposite direction of travel. For example, if a software travel limit - is
42 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 57

hit, then the axis can be jogged in the + direction.
Software Travel Limit + (SoftwareTravelLimitPlusPosn)
If the absolute position is greater than or equal to this value the SoftwareTravelLimitPlusActive source shall activate.
A rising edge occurs when the absolute position is greater than or equal to the parameter SoftwareTravelLimitPlusPosn. A
falling edge will be generated as soon as the above is not true.
Software Travel Limit - (SoftwareTravelLimitMinusPosn)
If the absolute position is less than or equal to this value the SoftwareTravelLimitMinusActivate shall activate.
A rising edge occurs when the absolute position is less than or equal to the parameter SoftwareTravelLimitMinusPosn. A
falling edge will be generated as soon as the above is not true.
3.9.3 Rotary Group Rotary Rollover Check Box
Select this check box (RotaryRolloverEnable) to enable (or disable if clear) the rotary rollover feature.
Rotary Rollover
This parameter (RotaryRolloverPosn) is used in rotary applications and determines the position at which the internal position
counter will be reset to zero.
Example:
The user has a rotary table application with distance user units of degrees, 360.00 degrees/1 rev. The Rotary Rollover
would be set to a value of 360°.
The motor is travelling in the positive direction. As the feedback position reaches 359.999 and continues on, the feedback
position will reset (or roll-over) to zero. If the motor changes direction and travels in the negative direction, the position will
rollover at 0 to 359.999 degrees and count down. The resolution of the rotary rollover point is determined by the Distance
Units Decimal Places parameter on the User Units view in the PowerTools Pro software.
If an absolute index is used with a non-zero rotary rollover point, the Epsilon EP-P drive will calculate the shortest path to its
destination and move in the required direction.
To force the motor to run a certain direction, use the Rotary Plus or Rotary Minus type of indexes.
3.9.4 Online Tab (not shown)
While online, the following real-time data will be displayed.
Motor Position Group
Position Command
This is the commanded position in user units.
Position Feedback
This is the feedback position of the motor in user units.
Following Error
The Following Error is the difference (in user units) between the Position Command and the Position Feedback. It is positive
when the Position Command is greater than the Position Feedback.
Encoder Position
The motor position in encoder counts since power up when the value was set to zero. This is a signed 32-bit value.
3.10 Velocity View
The Velocity View allows the setup of feedrate override details.
By selecting Velocity in the Hierarchy Tree, the Velocity View will appear on the right (see Figure 45).
Epsilon EP-P Drive Reference Manual 43
Revision A4 www.controltechniques.com
Page 58

Figure 45: Velocity View
3.10.1 Settings Group FeedRate Override
This parameter is used to scale all motion. It can be described as scaling in real time. The default setting of 100% will allow all motion to occur
in real time. A setting of 50% will scale time so that all moves run half as fast as they do at 100%. A setting of 200% will scale time so that all
moves run twice as fast as they would at 100%. FeedRate Override is always active and affects all motion, including accels, decels, dwells,
and synchronized motion. This parameter may be modified via Modbus or in a program.
FeedRate Decel/Accel
The FeedRate Decel/Accel parameter specifies the ramp used when velocity changes due to a change in the FeedRate Override value. The
units of FeedRate Decel/Accel are Seconds/100% of FeedRate. Therefore, the user must specify the amount of time (in seconds) to accelerate
or decelerate 100% of FeedRate.
Example:
Feedrate Override is set to 100% (default). The user wishes to slow down motion to 50% of programmed velocity. If FeedRate Decel/Accel
is set to 1 Sec/100%, when the FeedRate Override parameter is changed to 50%, it will take 0.5 seconds to decelerate to 50% velocity.
Decel/Accel Time = FeedRate Decel/Accel * % Change in FeedRate
= (1 Sec/100%) * (100% - 50%)
= 0.5 Seconds
44 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 59

Example:
A user wishes to accelerate from 100% programmed velocity to 175% in 0.5 Seconds. Therefore, the value they need to
enter for Feedrate Decel/Accel is calculated as follows:
3.10.2 Online Tab (not shown)
If online, the following real-time data will be displayed.
Motor Velocity Group
Velocity Command
The Velocity Command is the actual command generated by the drive to the motor in user units.
Velocity Feedback
This parameter is the actual feedback motor velocity in user units.
3.11 Ramps View
The Ramps View allows the user to define various accel/decel ramps used under typical application conditions. By selecting
Ramps in the Hierarchy Tree, the Ramps View will appear on the right (see
FeedRate Decel/Accel = Decel Time/ % Change in FeedRate
= (0.5 Sec) / (175% - 100%)
= 0.5 Sec / 75%
= (0.5 Sec) / (100% * 75%)
= 0.66 Sec / 100%
Figure 46).
Figure 46: Ramps View
3.11.1 Settings Group Acceleration Type
The Acceleration Type list box display the various acceleration types: 5/8 S-Curve, 1/4 S-Curve, Linear, and S-Curve.
This is used to select the acceleration/deceleration type for all motion (homes, jogs and indexes). The “S-Curve” ramps offer
the smoothest motion, but lead to higher peak acceleration/deceleration rates. “Linear” ramps have the lowest peak
acceleration/deceleration rates but they are the least smooth ramp type. “5/8 S-Curve” ramps and “1/4 S-Curve” ramps use
smoothing at the beginning and end of the ramp but have constant (linear) acceleration rates in the middle of their profiles.
The “5/8 S-Curve” is less smooth than the “S-Curve” but smoother than the “1/4 S-Curve”.
S-Curve accelerations are very useful on machines where product slip is a problem. They are also useful when smooth
machine operation is critical. Linear ramps are useful in applications where low peak torque is critical. Below is a comparison
of the 4 ramp types:
S-Curve: Peak Acceleration = 2 x Average Acceleration
5/8 S-Curve: Peak Acceleration = 1.4545 x Average
1/4 S-Curve: Peak Acceleration = 1.142857 x Average Acceleration
Linear: Peak Acceleration = Average Acceleration
Honor Distance Enable Group
User Ramps/Auto Calculate Ramps
The user has the ability to select one of two ramp control types for the entire motion control system. By default, User Ramps is
selected, The user can change the ramp controls in PowerTools Pro and perform a download to make the change, or the
parameter AutoCalcRampsEnable can be turned On or Off within a program. To enable User Ramps, AutoCalcRampsEnable
should be turned Off, and to enable Auto Ramps, AutoCalcRampsEnable should be turned On. Once a motion profile is in
Epsilon EP-P Drive Reference Manual 45
Revision A4 www.controltechniques.com
Page 60

progress, changes to this parameter will be ignored until the next motion is initiated. See the description of each of the ramp types below.
Blended Index
User Ramps
Compound Index
Auto Ramps
Blended Index
Auto Ramps
Compound Index
User Ramps
V
t
= Index 0
= Index 1
1
2
3
4
1250
500
User Ramps Radio Button
Prior to the introduction of this feature, User Ramps was the only ramp control type available. When User Ramps are enabled, the Acceleration
or Deceleration ramp entered by the user will ALWAYS be used during a motion profile, even if that means the motor must overshoot the
entered stopping position. Under this circumstance, the acceleration or deceleration ramp would be honored, and therefore the motor may
need to reverse directions after coming to a stop in-order to reach the user entered target position. This scenario most often occurs when using
Compound or Blended Index instructions within a program. During Compound or Blended indexes, the user occasionally does not enter an
aggressive enough acceleration or deceleration ramp to reach the target velocity within the specified distance. See
Figure 47 and Figure 48
below for examples of how User Ramps work. For more information on Index.#.CompoundInitiate and/or Index.#.BlendInitiats, see the
programming section of this manual.
Auto Calculate Ramps Radio Button
When Auto Calculate Ramps is selected the drive will automatically calculate the necessary ramp to reach the target velocity within the user
specified distance without any overshoot. In this scenario, the user entered acceleration of deceleration rate is ignored, See the figures below
for examples of how Auto Calculate Ramps work.
Distance
(Revs)
Index 0 20 1250 2000 3000
Index 1 3 500 500 500
Vel oci ty
(RPM)
Accel
(RPM/sec)
Decel
(RPM/sec)
1. Index.1.Accel specified by user is used to decelerate from Index.0.Vel, to Index.1.Vel, but overshoots since ramp is not
aggressive enough to reach Index.1.Vel within Index.1.Dist of 3 Revs.
2. Index.1 begins at Index.1.Vel but since Index.1.Decel specified by user is not aggressive enough to decelerate to zero velocity
within Index.1.Dist of 3 Revs slight overshoot occurs.
3. Index.1 begins at Index.0.Vel and ramp is automatically calculated to reach zero speed within Index.1.Dist of 3 Revs without any
overshoot. If Index.1.Accel and or Decel were aggressive enough to reach zero speed within 3 Revs, they would have been used
instead of automatically calculating the ramp.
4. Index.1 begins at Index.1.Vel and ramps is automatically calculated to reach zero speed within Index.1.Dist of 3 Revs without
any overshoot. If Index.1.Decel was aggressive enough to reach zero speed within 3 Revs, it would have been used instead of
automatically calculating the ramp.
Figure 47: Ramps Examples of a Fast Index to a Slower Index
46 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 61

Distance
= Index 0
= Index 1
1250
500
1
2
3
4
t
V
Compound Index
User Ramps
Blended Index
Auto Ramps
Blended Index
User Ramps
Compound Index
Auto Ramps
(Revs)
Veloci ty
(RPM)
Accel
(RPM/sec)
Decel
(RPM/sec)
Index 0 5 500 1000 1000
Index 1 20 1250 2000 2000
1. Index.0.Accel specified by user is used to accelerate up to Index.0.Vel. Index.0.Accel is aggressive enough to
reach Index.0.Vel within Index.0.Dist of 5 Revs. Since indexes are compounded together, Index 1 begins at
Index.0.Vel.
2. When indexes are Blended, Index 0 should end at velocity of Index 1, but Index.0.Accel is not aggressive
enough to reach Index.1.Vel within Index.0.Dist of 5 Revs. Therefore, entire distance of Index 0 is used to
accelerate towards Index.1.Vel.
3. Acts the same as the Compound with User Ramps because Index.0.Accel entered by user is aggressive enough
to reach Index.0.Vel of 500 RPM. If Index.0.Accel entered by the user was not aggressive enough to reach 500
RPM within 5 Revs, necessary ramp would be calculated.
4. Acceleration ramp is automatically calculated to reach Index.1.Vel within Index.1.Dist of 5 Revs. If user had
entered a ramp aggressive enough to reach Index.1.Vel within 5 Revs, no automatic ramp calculation would be
required, and the user entered acceleration rate would be followed.
Figure 48: Ramps Examples of a Slow Index to a Faster Index
3.11.2 Ramps Group Stop Deceleration
The value you enter here defines the deceleration rate which is used when the Stop destination is activated. The default is 100
RPM/second.
The Stop destination is found in the Ramps Group in the Assignments view.
Feedhold Decel/Accel
When the Feedhold destination is activated, the motor will decelerate to a stop in the time specified by the
FeedholdDecelTime parameter. When feedhold is cleared, the motor will accelerate back to speed in the same specified
period of time.
Feedhold is a means to halt the motor within a velocity profile and then return to the profile later at the exact same place in the
profile. Feedhold does not ramp and does not decelerate in terms of velocity. Instead, it stops by decelerating time. For
example, if the motor is running at 50 revs/second and feedhold is activated with 2 seconds specified in the
FeedholdDecelTime parameter, then the motor will actually slow and stop in 2 seconds as measured time (on a time/velocity
profile) goes from 100% to 0%.
Travel Limit Decel
The value entered here is the deceleration ramp that is used when a software or hardware travel limit is hit.
Epsilon EP-P Drive Reference Manual 47
Revision A4 www.controltechniques.com
Page 62

3.12 Torque View
The Torque View allows you to edit torque level and limit parameters as well as view real-time torque values when online.
By selecting Torque in the Hierarchy Tree, the Torque View will appear on the right (see Figure 49). The right part of the window is divided into
groups. An explanation of the groups and their functions is provided below.
Figure 49: Torque View
3.12.1 Settings Group Torque Level
This parameter sets the activation point for the Torque Level Active source. If set to 100%, the Torque Level Active source will activate any time
the Torque Command reaches or exceeds 100% continuous. This parameter is specified in Torque User Units.
3.12.2 Limits Group Torque Limit
This parameter sets the value to which the Torque Command will be limited when the Torque Limit Enable destination is active. To make the
Torque Limit always active, assign the Torque Limit Enable destination to the Initially Active source on the Assignments view.
3.12.3 Peak Torque
Displays the Peak Torque for the motor drive combination setup in the Setup View.
3.12.4 Online Tab
If online, this view will show the Torque Command, Limited Torque, Foldback RMS, and Shunt Power RMS.
3.13 Distance Recovery View
When initiating gear or cam using the Master Axis to provide synchronization, distance is lost as we must follow the acceleration limitations.
This distance can be recovered when at velocity by adding a distance recovery index on top of the gear operation or cam. This view defines
the limits of that recovery index.
Gearing uses distance recovery after accelerating from zero to a locked state. Camming uses distance recovery after using the Resume
48 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 63

process.
Figure 50: Distance Recovery View
3.13.1 Gear and Camming Distance Recovery Group Enable Distance Recovery Check Box
The Enable Distance Recovery Check box (DistanceRecovery.DistanceRecoveryEnable) is clear (disabled) by default. Select
the check box to enable the additive distance recovery index feature.
Velocity
This parameter (DistanceRecovery. Vel) is the velocity limit of the distance recovery index in user units.
Acceleration
Acceleration (DistanceRecovery. Accel) is acceleration rate for the distance recovery index in user units.
Deceleration
This (DistanceRecovery. Decel) is the deceleration rate for the distance recovery index in user units.
3.14 Tuning View
The Tuning View allows you to modify tuning parameters based on specific application information.
By selecting Tuning in the Hierarchy Tree, the Tuning View will appear on the right (see Figure 51). The right part of the
window is divided into groups. An explanation of the groups and their functions is provided below.
For help on calculating tuning parameters and more in-depth tuning information, turn to Tuning Procedures on page 187.
Figure 51: Tuning View
3.14.1 Load Group Inertia Ratio
Inertia Ratio specifies the load to motor inertia ratio and has a range of 0.0 to 50.0. If the exact inertia is unknown, a
Epsilon EP-P Drive Reference Manual 49
Revision A4 www.controltechniques.com
Page 64

conservative approximate value should be used. If you enter an inertia value higher than the actual inertia, the resultant motor response will
tend to be more oscillatory.
Friction
This parameter is characterized in terms of the rate of friction increase per 100 motor RPM. If estimated, always use a conservative (less than
or equal to actual) estimate. If the friction is completely unknown, a value of zero should be used. A typical value used here is less than one
percent.
3.14.2 Low Pass Filter Group
The Low Pass Filter will reduce machine resonance due to mechanical coupling and other flexible drive/load components by filtering the
command generated by the velocity loop.
Low Pass Filter Enable Check Box
When this check box is selected it enables a Low Pass Filter to be applied to the output of the velocity command before the torque
compensator.
Low Pass Filter Frequency
This parameter defines the Low Pass Filter cut-off frequency. Signals exceeding this frequency will be filtered at a rate of 40 dB per decade.
The default value is 600 Hz.
3.14.3 Tuning Group Response
The Response adjusts the velocity loop bandwidth with a range of 1 to 500 Hz. In general, it affects how quickly the drive will respond to
commands, load disturbances and velocity corrections. A good value to start with (the default) is 50 Hz. The maximum value recommended is
80 Hz.
Enable Feedforwards Check Box
When feedforwards are enabled, the accuracy of the Inertia and Friction parameters is very important. If the Inertia parameter is larger than the
actual inertia, the result could be a significant overshoot during ramping. If the Inertia parameter is smaller than the actual inertia, following
error during ramping will be reduced but not eliminated. If the Friction parameter is greater than the actual friction, it may result in velocity error
or instability. If the Friction parameter is less than the actual friction, velocity error will be reduced but not eliminated.
3.14.4 Position Error Integral Group Time Constant Check Box
When this check box is selected it enables the Time Constant parameter.
Time Constant
Position Error Integral is a control term, which can be used to compensate for the continuous torque required to hold a vertical load against
gravity. It is also useful in low speed applications, which have high friction.
The user configures this control term using the “Position Error Integral Time Constant” parameter. This parameter determines how quickly the
drive will correct for in-position following error. The time constant is in milliseconds and defines how long it will take to decrease the following
error to 37 percent of the original value. In certain circumstances the value actually used by the drive will be greater than the value specified
here.
Min Time Constant = 1000/Response
For example, with “Response” set to 50, the minimum time constant value is 1000/50 = 20 msec.
3.15 Shunt View
The Shunt view is used to configure the external shunt for the EP204, EP206, EP209 and EP216 drives.
Figure 52: Shunt View
50 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 65

3.15.1 External Shunt Resistor Group Max Energy
The total energy that can be absorbed by the resistor when its initial temperature is ambient temperature.
Average Power
The average power rating of the shunt resistor.
Resistance
The resistance value of the shunt resistor.
3.15.2 Shunt Control Group
The parameters in this group are read-only and only available when online with the drive.
Shunt Power RMS
This parameter models the thermal heating and cooling of the drive internal shunt. This parameter indicates the percent of
shunt capacity utilization and is based on the Heat Sink RMS value. When this value reaches 100 percent the drive will
generate a RMS Shunt Power Fault.
Bus Voltage
Displays the actual measured voltage of the DC power bus.
Epsilon EP-P Drive Reference Manual 51
Revision A4 www.controltechniques.com
Page 66

3.16 Faults View
The Faults View displays any active faults when online. Figure 53 below shows the Faults view offline.
Figure 53: Faults View - Offline
When online and a fault is detected, the Faults window opens, showing the fault condition and allows the fault to be reset or ignored. Pressing
Reset attempts to reset the fault if the cause of the fault has been removed. Pressing Ignore just closes the faults window.
Figure 54: Faults Window
When online, the Active Faults window, Reset button and Power Up group window become active. There will also be three tabs that appear,
Fault Log, Fault Counts, and Drive Fault Log.
52 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 67

Figure 55: Faults View Online - Faults Log Tab
3.16.1 Active Faults Group
The Active Faults group contains the Active Faults window.
Active Faults Window
This window displays any active faults in the system. Those faults which do not require a reboot can be cleared by clicking on
the Reset button. For more detailed fault information, refer to
3.16.2 Power Up Group
These parameters will be active when online with the drive.
Drive Power Up Count
This parameter shows the number of times the drive has been powered up since the last reset by the factory.
Drive Power Up Time
This parameter shows the time, in hours, since the drive was last powered up.
Drive Total Power Up
This parameter shows the total time that the drive has been powered up since reset by the factory.
3.16.3 Fault Log Tab
The Fault Log tab is visible when online and consists of a list of the ten most recent faults detected by the drive. These are
saved in non-volatile memory to be preserved during power down.
Faults are listed in reverse order of occurrence-the most recent fault is listed first, and older faults are pushed off the list.
Fault Code
The fault code has the same description of the fault that is or was reported in the Active Faults window.
Fault Sub Code
The fault subcode applies to only a few faults and provides some additional information about the fault when available. When
there is no additional information for the fault, OK is displayed.
Power Up (counts)
This is the drive’s power up counter at the time of the fault.
Time (hours.minutes)
This is the drive’s total power up time in tenths of an hour at the time of the fault.
Diagnostics and Troubleshooting on page 193.
Epsilon EP-P Drive Reference Manual 53
Revision A4 www.controltechniques.com
Page 68

3.16.4 Fault Counts Tab
Figure 56: Fault View - Fault Counts Tab
The Fault Counts tab is visible when online and consists of a list of all supported faults and the number of times each fault has been detected.
Most of the counts start at zero following a power up or a configuration download.
A few faults are saved in non-volatile memory so that the total number of times they have occurred can be easily viewed. These faults tend to
have hardware significance.
Fault Code
This is the faults parameter name.
Fault Counts
This is the number of times that the fault has occurred.
Clear Non-Critical Fault Counts Button
Pressing this control button will zero the Fault Counts of all non-critical faults(i.e.software travel limit). Critical faults are faults that are used by
the factory to verify warranty claim and aid in troubleshooting the drive.
54 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 69

3.16.5 Drive Fault Log Tab
Figure 57: Faults View - Drive Fault Log Tab
The Drive Fault Log tab is visible when online and consists of a list of the ten most recent faults detected by the drive. These
are saved in the drive’s non-volatile memory to be preserved during power cycles. Faults are listed in reverse order of
occurrence so that the most recent is listed first.
Fault Code
The fault code has the same description of the fault that is or was reported in the Active Faults window.
Power Up (Counts)
This is the Drive Power Up Counts when the fault was detected.
Time (Hours.Minutes)
This is the Drive Power Up Time when the fault was detected.
3.17 Setup NVM View
At power-down, parameters can be saved to Non-Volatile Memory (NVM). See the “How Communications Work” section of the
“Operational Overview” chapter for more details. In PowerTools Pro, you can customize which parameters will be saved in
non-volatile memory.
Figure 58: Setup NVM View
Epsilon EP-P Drive Reference Manual 55
Revision A4 www.controltechniques.com
Page 70

3.18 Devices / Vars Group
3.19 PLS View
The PLS View allows users to define Programmable Limit Switches (PLS) for advanced machine operation. By selecting PLS in the Hierarchy
Tree, the PLS View will appear on the right (see
Figure 59).
Figure 59: PLS View
A PLS can be used to turn on or off a bit based on feedback position, commanded position, or master feedback position. Eight global PLS’s are
available for a single application. To operate a PLS, first it must be enabled (see the PLS enable destinations in the assignments view) and
then the Absolute Position Valid source must be active. Each PLS has its own OnPoint and Off Point, as well as a Rollover Point.
The terms OnPoint and Off Point assume movement in the positive direction. Those labels should be reversed if traveling in the negative
direction.
Number of PLS Points
This parameter determines the number of PLS Points that will be used. Count always begins with 0, so 5 points will be 0 to 4. Up to eight PLS
points may be used simultaneously.
Source
The source list box is used to select the source for the individual PLS and reference its OnPosn and OffPosn to determine the PLS.#.Status
parameter. The source of a PLS (PLS.#.Source) can be assigned to the motor axis (MotorPosnFeedback, MotorPosnCommand), a master
synchronization signal (MasterPosnFeedback) or the real time clock from the drive’s built-in microprocessor (FreeRunTime). The term motor
axis refers to the motor being controlled by the drive.
ON Point
PLS.#.Status will be active when the selected source position is between the PLS.#.OnPosn and the PLS.#.OffPosn.
Examples:
Example 1: Assume that the PLS.#.Source is MotorPosnFeedback and PLS.#.Direction is set to "Both". When traveling in the positive direction
and the feedback position executes the OnPosn, the PLS.#.Status will activate. As the motor continues in the same direction, the PLS.#.Status
will deactivate when feedback position reaches or exceeds the OffPosn. If motor travel changes to the negative direction, the PLS.#.Status will
activate when the feedback position reaches the OffPosn, and will deactivate when it continues past the OnPosn. All on/off positions are
defined in user units.
Example 2: Assume that the PLS.#.Source is MotorPosnFeedback and PLS.#.Direction is set to "Plus". When traveling in the positive direction
and the feedback position executes the OnPosn, the PLS.#.Status will activate. As the motor continues in the positive direction, the
PLS.#.Status will deactivate when feedback position reaches or exceeds the OffPosn. If motor travel changes to the negative direction after
passing the OffPosn, the PLS.#.Status will remain deactivate. If the motor travel changes to the negative direction before passing the OffPosn
the PLS.#.Status will deactivate. All on/off positions are defined by the selected PLS.#.Source, either user units or seconds.
PLS.#.Status will be active if:PLS.#.OnPosn < Feedback Position PLS.#.OffPosn
OFF Point
PLS.#.Status will be active when the selected source position is between the PLS.#.OnPosn and the PLS.#.OffPosn. Assume that the
PLS.#.Direction is set to "Both". When traveling in the positive direction and the feedback position reaches the OnPosn, the PLS.#.Status will
56 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 71

activate. As the motor continues in the same direction, the PLS.#.Status will deactivate when feedback position reaches or
exceeds the OffPosn. If motor travel changes to the negative direction, the PLS.#.Status will activate when feedback position
reaches the OffPosn, and will deactivate when it continues past the OnPosn.
PLS.#.Status will be active if:PLS.#.OnPosn < Feedback Position PLS.#.OffPosn
If using negative values for your OnPosn and OffPosn, the most negative value should go in the OnPosn parameter, and the
least negative value should go in the OffPosn.
If the PLS has a rollover point, and the OnPosn is greater than the OffPosn, the PLS will be active whenever the position
feedback is not between the On and Off positions, and in-active whenever the position feedback is between the two positions.
However, the PLS.#.Status will not turn on until it reaches the OnPosn the first time.All on/off positions are defined in user
units.
Direction
This parameter (PLS.#.Direction) specifies the direction of motion that a particular PLS output will function. If set to Both, the
PLS will activate regardless of whether the motor (or master motor) is moving in the positive or negative direction. If set to
Plus, the PLS will activate only when the motor is moving in the positive direction. If set to Minus, the PLS will activate only
when the motor is moving in the negative direction.
Example:
A flying cutoff or flying shear application may use this feature to activate the PLS to fire the knife only when the axis is
moving in the positive direction.
If accessing this parameter from a network, the following table displays the value for this 16-bit integer.
0 N/A
1 Both
2 Plus
3 Minus
Rotary Enable
This parameter (PLS.#.RotaryRolloverEnable) is used to enable the RotaryRolloverPosn for this PLS.
Rollover Point
This parameter (PLS.#.RotaryRolloverPosn) is the absolute position of the first repeat position for this PLS. When enabled it
causes the PLS to repeat every time this distance is passed. The repeating range begins at an absolute position of zero and
ends at the RotaryRolloverPosn.
For example, in a rotary application a PLS could be setup with an OnPosn of 90 degrees and an OffPosn of 100 degrees. If
the RotaryRolloverPosn is set to 360 degrees the PLS would come on at 90, go off at 100, go on at 450 (360+90), go off at 460
(360+100), go on at 810 (2*360+90), go off at 820 (2*360+100), and continue repeating every 360 degrees forever.
Example: if the source of the PLS is FreeRunTime, this parameter is the time of the first repeat for this PLS. When enabled it
causes the PLS to repeat every time this time is passed. The repeating range begins at the beginning of the trajectory update
rate and ends at the RotaryRolloverPosn.
3.20 Capture View
Many applications require the ability to accurately capture a position at an exact moment in time so that the motion profile can
be repeatably time accurate. The Epsilon EP-P drive allows for this by using the Capture component. The Capture component
is fully controlled by the user through the Assignments View or through the Programs View. When the capture is activated, the
following parameters are captured and stored: Time, Command Position, Feedback Position, and Master Feedback Position.
Epsilon EP-P Drive Reference Manual 57
Revision A4 www.controltechniques.com
Page 72

Figure 60: Capture View
The user must determine which signals are used to enable, activate, and then reset the Capture component. A CaptureTriggered destination
is then available to indicate to the user that data has been captured and is available for use.
CaptureEnable
CaptureActivate
CaptureReset
Time
Command Position
Feedback Position
Master Position
CaptureTriggered
Captured Data
Figure 61: Capture Component
A detailed description of all the Capture parameters is below.
CaptureEnable
The CaptureEnable is used to enable or “arm” the capture component. If the CaptureEnable is not active, then the CaptureActivate has no
effect, and the CaptureTriggered remains inactive. Once the CaptureEnable is activated, the Capture component is ready and waiting for a
CaptureActivate signal to capture data. CaptureEnable is a read-only destination on the Assignments view, and is accessible through a user
program.
CaptureActivate
If the Capture component is enabled and has been reset (CaptureTriggered is inactive), then the rising edge of CaptureActivate will capture
the four data parameters and cause CaptureTriggered to be activated. If the Capture component is not enabled, or has not been reset, the
CaptureActivate will be ignored.
CaptureReset
The CaptureReset is used to reset or re-arm the capture component after it has been activated. If the capture has been activated, the
CaptureTriggered destination will be active. The capture component cannot capture data again until it has been reset. The capture
component will automatically reset itself if the CaptureEnable signal is removed.
CaptureTriggered
The CaptureTriggered signal is read-only and indicates that the Capture component was activated and that data has been captured.
CaptureTriggered will activate on the leading edge of CaptureActivate if the Capture component is enabled and reset. Capture Triggered will
remain active until CaptureReset is activated.
Name
You can assign a descriptive name to each capture, making the setup easier to follow. The length of the text string is limited by the column
58 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 73

width with a maximum of 12 characters. Simply double click on the Name field of any capture’s line to assign a name to it.
Capture Number
This parameter defines the number of Capture objects available. Maximum is eight.
Captured Data
The data that is acquired by the position capture is available to be used as variables in a program. The four parameters can
be accessed as follows:
Capture.#.CapturedTime
The time, in microseconds, from a free-running 32-bit binary counter at which CaptureTriggered activated.
Capture.#.CapturedPositionCommand
The command position, in user units, at the time when CaptureTriggered activated.
Capture.#.CapturedPositionFeedback
The feedback position, in user units, at the time when CaptureTriggered activated.
Capture.#.CapturedMasterPostion
The master axis feedback position, in master axis distance units, at the time when CaptureTriggered activated.
The captured data remains in these parameters until the capture component is reset and CaptureActivate is activated. When
the capture component is reset and CaptureActivate is activated, the data related to the previous capture will be over-written
by the most recent capture data.
Figure 62: Capture Timing Diagram
Figure 62 is a timing diagram that shows how the different capture related sources and destinations function. The three
numbers located on the diagram are associated to the following three notes respectively:
1. The CaptureActivate has no effect when the CaptureTriggered is active. CaptureActivate is ignored until the
capture component has been reset.
2. When CaptureEnable is deactivated, CaptureTriggered is deactivated, and the capture component is
automatically reset. The captured data is retained until the capture component is re-enabled and
CaptureActivate is activated.
3. CaptureActivate has no effect while the capture component is not enabled.
Assignments that Automatically Use Position Capture
Certain assignments (Sources or Destinations) automatically generate position capture data internally without using the
capture component. This data is used by the drive, but is not directly available to the user like the capture component data.
Following is a list of assignments that automatically generate or use captured data.
Sources that generate capture data:
Drive Inputs 1-8 – The Epsilon EP-P drive Inputs 1-8 are constantly monitored by the processor, and when activated will
automatically capture related data. The processor controls all resetting requirements. The capture only occurs on the rising
edge of an input. When the input is activated, the captured data will automatically be passed to the destination that it is
assigned to. The destination may then use the captured data to accurately initiate motion (if it is a motion-related destination).
Motor Encoder Marker – The rising edge of the motor encoder marker pulse will automatically capture data. This will allow
the user to accurately initiate motion on the rising edge of the motor encoder marker pulse. The falling edge of the marker
pulse does not capture data.
Master Encoder Marker – The rising edge of the master encoder marker pulse will automatically capture data. This allows
the user to accurately initiate motion on the rising edge of the master encoder marker pulse. The falling edge of the marker
pulse does not capture data.
Index/Jog Command Complete – Activation of the command complete signal at the end of indexes and jogs will
automatically capture data. A subsequent index, jog, or dwell can then use the captured data to start itself extremely accurate
at the end of the previous motion.
Index/Jog At Velocity – Activation of the command complete signal at the end of indexes and jogs will automatically capture
Epsilon EP-P Drive Reference Manual 59
Revision A4 www.controltechniques.com
Page 74

data. A subsequent index, jog, or dwell can then use the captured data to start itself extremely accurately at the end of the previous motion.
Data[ ]
Size
Offset
Full Level
Comparitor Select
Name
Queue Object
Clear
Compare
Enable
Exit
Empty
Full
Overflow
Data In
Queue Data = X
Data Out
Y = Queue Data
PLS Status – A rising or a falling edge of a Global PLS will automatically capture data for use in initiating motion. In order to accurately initiate
motion from a Global PLS, an assignment can be made from PLS.#.Status to the initiate destination.
Destinations that use captured data:
Index/Jog Initiates – When one of the sources listed above is assigned to an Index or Jog Initiate, the captured information is automatically
applied to the index starting point. This offers extremely high accuracy for initiation of motion, which is beneficial especially in synchronized
applications.
Index.#.SensorTrigger – The sensor trigger destination used in registration indexes can use captured data to accurately calculate the ending
position of the index based on the Registration Offset parameter. The Offset distance is added to the captured position to get the accurate
stopping position for the registration index.
3.21 Queues View
Many applications require the ability to store data in a temporary memory location as the data comes in. The user then has access to the data
for use in a program or other operation. The Epsilon EP-P drive use an object called a queue to store data in this way. The queue is a first-infirst-out (FIFO) type memory device. In other words, the first piece of data put into the queue is the first piece of data to come out of the queue.
The user has complete control over what data is stored in the queue, and when to put data into the queue, as well as when to remove it from
the queue.
Figure 63: Queues View
Figure 64: Queue Object and Components Diagram
A detailed explanation of each of the queue components is as follows:
The queue data is loaded into the queue by statements in the user program. Two types of data are most often used with the queue: Position
Feedback, and Master Position Feedback.
Queue Data
60 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 75

Queue Size
This is the maximum number of elements that can be stored in the queue. If more pieces of data than this number are in the
queue at a time, then a Queue Overflow source will activate.
Queue Offset
The Queue Offset is the value that is added to the Queue Data and then compared to the selected source to determine when
the Queue Exit event activates. For instance, if the source in selected source is set to Feedback Position, and the Queue
Offset is set to 10, and the user puts the value 5 into the queue, the Queue Exit source will activate when the Feedback
Position is greater than or equal to 5 + 10 or 15.
Full Level
The amount of data in the queue is constantly monitored and the Queue Full source will activate when the number of pieces of
data in the queue exceeds the Full Level parameter. This is only a flag and does not indicate a fault of any kind.
Source
The Source determines which parameter the sum of the Queue Data and Queue Offset are compared to in order to activate
the Queue Exit function. If set to FeedBackPosn (Position Feedback), the sum of the data and offset are compared to the
Position Feedback parameter. If set to MasterPosn (Master Position), then the sum is compared to the Master Feedback
Position parameter, and if set to CommandPosn (Command Position), then the sum is compared to the Motor Commanded
Position.
Name
You can assign a descriptive name to each queue, making the setup easier to follow. The length of the text string is limited by
the column width with a maximum of 12 characters. Simply double click on the Name field of any queue’s line to assign a
name to it.
Number of Queue Units
This selects the number of Queues available. Maximum of eight.
3.21.1 Queue Sources and Destinations Sources
Queue Exit
This source activates when the Comparitor Select parameter is greater to or equal to the sum of the data entered into the
queue, and the queue offset.
Queue Empty
This source is active if no data is stored in the queue. It will become inactive when the first piece of data is loaded into the
queue and remain inactive until all data has been removed from the queue.
Queue Full
The Queue Full source will activate if the number of pieces of data in the queue equals or exceeds the Full Level parameter.
The source will deactivate when the number of pieces of data in the queue is less than the Full Level.
Queue Overflow
This source activates when there is no more room in the queue to store data. The maximum number of pieces of data is
determined by the Queue Size parameter.
Destinations
Queue Clear
This destination automatically clears all of the data out of the queue. The cleared data is not saved and there is no way to
recover the cleared data. This is typically activated on power-up of the system to make sure no old data remains in the queue.
Queue Compare Enable
The Compare Enable causes the comparitor internal to the queue to function. If the Compare Enable is inactive, then the
Queue Exit source will never activate. If activated, then the Queue Exit source will activate when the Queue Data plus the
Queue Offset is greater than or equal to the Comparitor Select parameter.
To fully understand the operation of the queue, the following diagram has a more detailed view of the Queue object.
Epsilon EP-P Drive Reference Manual 61
Revision A4 www.controltechniques.com
Page 76

Figure 65: Detailed Queue Diagram
Data In
Queue
Size
CompareEnable
Full
Level
Queue Offset
Sum
IF (# of Queue
Objects = 0)
IF (# of Queue
Objects = or > Full Level)
Comparitor
QueueEmpty
QueueFull
QueueExit
QueueOverflow
IF (# of Queue
Objects = Queue Size)
Source Select:
MasterPosn
FeedbackPosn
CommandPosn
QueueClear
Set # of Queue Objects = 0
and clear data in queue
Exit Position
Comparitor
Data Out
3.22 Timers View
The Timer View is used to configure necessary parameters to use Timer objects within an application. Timers are used in many different types
of applications to accurately control the timing of a given machine event with respect to one or more previous events. For example: When a
digital input turns on, we want to start a program exactly 500 msec later. Or, when an index is complete, we want to hold an output on for
exactly 2.000 seconds.
There are several different types of Timers available to the user based on the task they are trying to achieve.
62 Epsilon EP-P Drive Reference Manual
Figure 66: Timers View
Number of Timers
This parameter determines the number of Timer objects that are available in the configuration. Use the spin control to change the number of
Timers from 1 to 8. The Timers are numbered with a base number of 0. This means that if there are 5 Timers available, they will be numbered
0 through 4.
www.controltechniques.com Revision: A4
Page 77

The number of Timers in the configuration can only be modified while offline.
Timer Name
The user can assign a descriptive name to each Timer, making the configuration easier to follow. The length of the text string
is limited by the column width, with a maximum of 12 characters. Spaces are not allowed in the name, but underscores are.
Simply click on the name field to modify the individual Timer Name.
Timer Type
There are several types of Timers available that help you to achieve different tasks. Use the combobox in the Type column to
change the individual Timer Type. The Enable is not shown in the diagrams below. Assume in all cases the TimerEnable is
ON. Select from these Types:
Edge ON Timer
With this type of timer, when the input of the timer activates, the internal clock begins to count. When the Preset time is
reached, the Output of the timer turns ON.
In the case of the Edge type timer, once the rising-edge occurs on the Input, it doesn't matter what happens to the state of the
Input after that. The Output will always turn ON when the Preset Time is reached (unless the Reset activates before the Preset
Time is reached). The Timer Output will remain ON until the Reset is activated or the TimerEnable is deactivated.
Figure 67: Edge On Timer - Timing Diagram
Level ON Timer
With this type of timer, when the Input of the timer activates, the internal clock begins to count. When the Preset time is
reached, the output of the timer turns ON. If the Input of the timer turns OFF before the output turns ON, then the internal clock
stops counting and the output will not turn ON. The whole sequence begins again the next time the Input turns ON. This
means that the Input must remain ON for the duration of the Preset Time in order for the Output to turn ON.
The Level On Timer does not use the Reset, but rather, the Output will remain ON as long as the Input remains ON. When the
Input turns OFF, the Output will automatically turn OFF.
Figure 68: Level On Timer - Timing Diagram
Edge OFF Timer
With this type of timer, when the Input of the timer activates, the Output turns ON automatically. When the Input turns OFF, the
internal clock begins to count. Once the Preset time is reached, the Output of the timer turns OFF. As soon as the Input turns
OFF, it does not matter what happens to the state of the Input, the Output will turn OFF when the Preset time is reached. The
Epsilon EP-P Drive Reference Manual 63
Revision A4 www.controltechniques.com
Page 78

Output will remain OFF until the Reset is activated.
Note that if the Input is already ON when the Reset activates, the Output will not automatically activate at that point. The timer controller must
see a rising edge on the Input to activate the Output.
Figure 69: Edge Off Timer - Timing Diagram
Level OFF Timer
With this type of timer, when the Input of the timer activates, the Output turns ON automatically. When the Input turns OFF, the internal clock
begins to count. Once the Preset time is reached, the Output of the timer turns OFF. If the Input turns ON again before the Preset time is
reached, the clock resets to zero and waits again for the Input to turn OFF before starting the count.
The Level Off Timer does not use the Reset, but rather, the Output will remain OFF as long as the Input remains OFF.
Figure 70: Level Off Timer - Timing Diagram
Cumulative ON Timer
This type of timer works exactly like the Level ON Timer, except that if the Input turns OFF before the Preset time is reached, the elapsed time
is not reset. The total time that the Input is ON is added together such that when the total time of the Input being ON reaches the Preset time,
64 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 79

the Output turns ON. Figure 6 below shows an example timing diagram of the Cumulative On Timer.
Figure 71: Cumulative ON Timer, No Reset - Timing Diagram
Additionally, a Reset signal can be used to clear the cumulative timer and restart it at zero. The figure below shows an
example of this.
Figure 72: Cumulative ON Timer with Reset - Timing Diagram
Cumulative OFF Timer
This type of timer works exactly like the Level OFF Timer, except that with this type of timer, when the Input of the timer
activates, the output turns ON. When the Input turns off, the internal clock begins to count. Once the Preset time is reached,
the Output of the timer turns OFF. If the Input turns ON again before the Preset time is reached, the clock resets to zero and
Epsilon EP-P Drive Reference Manual 65
Revision A4 www.controltechniques.com
Page 80

waits again for the Input to turn OFF before resuming the count again.
Figure 73: Cumulative OFF Timer - Timing Diagram
Additionally, a Reset signal can be used to clear the cumulative timer and restart it at zero. The figure below shows an example of this.
Figure 74: Cumulative OFF Timer with Reset - Timing Diagram
Watchdog Timer
With this type of timer, when the Enable of the timer activates, the internal clock begins to count. If a rising edge is seen on the Input before the
Preset Time is reached, the Elapsed Time is set to zero and the internal clock again starts counting immediately. The duration that the Input
remains on does not have any effect on the Output. If at any point, the Elapsed Timer reaches Preset time, the Output turns ON. The Output
will remain ON until the Timer Reset is activated. If a rising edge is seen on the Input while the Output is ON, it will be ignored and the Elapsed
Time will NOT be reset.
66 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 81

Figure 75: Watchdog Timer - Timing Diagram
One Shot
With this type of timer, when the Input activates, the internal clock begins to count. Once the Preset time is reached, the
Output of the timer turns ON. If the Input of the timer turns OFF before the Output turns ON, then the internal clock keeps
counting and the Output will turn on when Preset time is reached. If the Output is active and a rising edge of the Input timer is
received the Output will be reset. The Output will activate once the Preset time has past.
In the case of the One Shot type timer, once the rising-edge occurs on the Input, it does not matter what happens to the state
of the Input after that during the Preset time. When past the Preset time and the Output is still active and a rising-edge occurs
on the Input the timer will reset. The Output deactivates and will not become active until the Preset time has past.
Input
Preset
Preset Preset
Output
Active
Figure 76: One Shot Timer - Timing Diagram
Timer Timebase
This parameter is used to select the desired Timebase for each timer object. If you want to control the Timer using actual time
(seconds, or milliseconds, or microseconds) then the Timebase should be set to Realtime. Realtime is the default setting for
the Timebase of each Timer object. When using Realtime, the Preset value of the Timer is entered in units of seconds. For
example, after a program has run, you wish to hold an output active for ten seconds. This is an example that uses Realtime.
However, if you wanted to hold that same output active for ten revolutions of the Master Encoder instead of ten seconds, you
set the Timebase to Synchronized. This means that you are using the master encoder position to control the duration of the
Timer rather than actual Time. When the Timebase of the Timer is set to Synchronized, the Preset is entered in units of Master
Epsilon EP-P Drive Reference Manual 67
Revision A4 www.controltechniques.com
Page 82

Distance rather than units of Time.
Use the combo box in the Timebase column to change the individual Timer Timebase settings.
Timer Preset
This parameter is used to control the actual duration of the timer delay.
If the Timebase is set to Realtime, the user specifies the Preset value in units of seconds with resolution of 1 microsecond (0.000001 seconds).
If the Timebase is set to Synchronized, the Preset value is set in units of Master Distance and the resolution is dependant upon the Master
Distance Units Decimal Places configured on the master Units view.
Once a timer has begun timing, if the Preset is modified, it is ignored until the next time the timer starts.
The Preset value must always be positive and can range from 0 to 2147483647 with the decimal place removed (example: 0.000000 to
2147.483647 with six decimal places).
Timer "Elapsed Time"
This is a read only parameter available on the Online tab that acts as feedback to the user to indicate how much of the Preset time has expired.
This value starts at zero and counts up to the Preset value.
This parameter has the same resolution as the Preset parameter.
If a Timer is Reset or Enable deactivates, this value is zeroed out automatically. Once the Preset time is reached, the Elapsed Time will remain
at its full preset value until the Timer is Reset, the Enable deactivates, or the Output deactivates.
3.22.1 Timer Signals/Events
The Timer objects has several inputs and outputs that are available on the Assignments view, or within a user program. A block diagram of the
Timer object is seen in
Figure 77 below.
Input Events
TimerEnable
TimerInput
TimerReset
Figure 77: Timer Object Block Diagram
Timer.#
Preset
Type
Timebase Elapsed Time
Output Events
TimerActive
TimerOutput
Input Events / Destinations
The following signals are available in user programs and as Destinations on the Assignments view.
Timer.#.TimerEnable
The Timer Enable event is level sensitive (not edge only) and is used to enable the Timer object. If a timer is not Enabled, the Output will never
activate regardless of the state of the Input.
When the TimerEnable is deactivated, all output events associated with that Timer object will also deactivate and Elapsed Time will be set to
zero.
All timer types use the Enable even though it is not shown in the individual timing diagrams. See examples of how TimerEnable affects timer
functionality in
Figure 78 and Figure 79.
68 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 83

Figure 78: Timer Enable with Edge ON Timer
Figure 79: Time Enable with Level ON Timer
Timer.#.TimerInput
The Timer Input event is level sensitive (not edge only) and is used to define when the Timer starts counting against the Preset
(along with the Timer Type). See the various timing diagrams in
the Timer Output.
Figure 67 through Figure 76 to see how the Timer Input affects
Timer.#.TimerReset
The Timer Reset event is used to reset the ElapsedTime to zero and deactivate the TimerOutput and TimerActive. Level On
and Level Off timer types do not utilize the reset, as they reset automatically based on the state of the Input.
The Reset is a self-clearing function meaning that the reset occurs on the rising edge of the Reset input, and internally the
reset is set off. Therefore a timer can immediately begin counting again even if the user holds the Reset input ON. Additionally,
when resetting a timer in user program, the user must only set the Reset ON, and the controller will automatically set it off.
There is no reason for the user to force the Reset OFF within the program.
Output Events / Destinations
The following signals are available in user programs and as Sources on the Assignments view.
Timer.#.TimerOutput
The Timer Output state is controlled by the Timer Input, the Timer Type, and the other configuration settings of the Timer
object. See the various timing diagrams in Figures 2 through 10 to see how Timer Output functions.
The Timer Output can be assigned to multiple Destinations on the Assignments view just as any other Output Event.
Timer.#.TimerActive
The TimerActive event is used as an indicator that the Timer is actively counting (i.e. In the case of an OFF Timer, the Active
event would not activate until the Input turns OFF.).
In the case of Cumulative timers, the Active does not remain on even though the Elapsed Time may be non-zero, if the timer is
Epsilon EP-P Drive Reference Manual 69
Revision A4 www.controltechniques.com
Page 84

not currently counting.
When a timer reaches the user defined Preset time, the Output activates, and the Active event turns OFF.
See the timing diagrams for each of the Timer Types for examples of how TimerActive behaves.
3.22.2 Using Timers within Programs
Timers can be used within user programs without the need for assignments. Following are some examples of using Timer functions within a
program.
To start a Timer in a program, you must do the following:
Timer.#.Input = ON
The user must also turn the Input off as necessary to control the timer:
Timer.#.Input = OFF
To use the output of a Timer within a program:
Wait For Timer.#.Output = ON (or = OFF)
To change the value of a Timer Preset in a program:
Timer.#.Preset = 12.345 'Seconds
To check if a timer is running:
If (Timer.#.Active = ON) Then
Some code
.
.
Endif
To wait for a Timer to start running:
Wait For Timer.#.Active = ON
Other examples:
If((Timer.#.Active=ON) AND (Timer.#.ElapsedTimer<0.500)) Then
Some code
.
.
Endif
If ((Timer.#.Output = ON) AND (Index.#.CommandComplete)) Then
Timer.#.Reset = ON 'Self-resetting - No need to turn OFF
Endif
3.23 Variables View
Variables allow the user to store data related to their system into a parameter, which the user can name. The user must define each user
variable by giving it a name, resolution (number of decimal places), and initial value. All variables are signed 32-bit parameters. Setup for the
Variables is done on the Variables view located under the Drive /Var group in the Hierarchy Tree. The Variables view is shown in
Figure 80.
Figure 80: Variables View
70 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 85

The following parameters are part of the User Variable definition:
Name
This is a twelve-character string that allows the user to assign a descriptive name to the parameter. Spaces are not allowed in
the name of a user variable.
Decimal
This parameter (Var.Var#.Decimal) defines the number of digits (up to 6) to be used after the decimal point for the specific
variable. This is the maximum resolution that the parameter will have.
Initial Value
This is the initial value of the user variable that will be used on power up. If the user variable has been configured as a Save
to NVM parameter, then the value in NVM will overwrite the initial value on power up.
3.23.1 Adding and Deleting Variables
The default number of variables is ten. To add more user variables, click on the up arrow next to the “Number of User
Variables” box on the User Variables view. The maximum number of user variables is 500.
Only the last variable in the list can be deleted. To delete the last variable, simple click on the down arrow next to the “Number
of User Variables” box.
User variables are all of a Global type, meaning that they can be accessed from any program.
Online Tab (not shown)
While online with the Epsilon EP-P drive, an online tab will be shown next to the Setup tab. This online tab will show the
current online value of each of the user variables.
3.23.2 Using Variables in a Program
Once setup, user variables can be used inside a program in calculations, motion profile setup, or any other user-desired
function. To access user variables, click on the Drag in Variables button in the user program toolbar. User Variables is a
branch in the Select Variables From Tree dialog box.
3.24 Bits View
Bits act just like Variables except that they allow the user to store bit level parameters rather than 32-bit parameters. The user
may customize each Bit by giving it a Name and an Initial Value.
The Name for each bit may be up to 12 characters in length, and must start in an alpha character (non-numeric character).
Spaces are not available in the Name for a Bit, however the underscore character ("_") may be used.
The Initial Value for each user bit is configured using the check box for the specific bit. To make the Initial Value “On” or
“Active”, simply select the check box for that bit. The default value for each User Bit will be “Off” or “Inactive”.
User Bits are configured on the Bits view as shown in Figure 81.
Bits may be accessed on the User Program. Several examples of this are shown below.
Bit.Raise_Table = ON
Wait For Bit.Vacuum_ON = OFF
Wait For Bit.RunPart_A OR Bit.RunPart_B OR Bit.RunPart_C
If (Bit.RunPart_A = ON AND Bit.Vacuum_ON = OFF) Then
Call Program.1
Endif
Bits are turned on by setting them equal to ON, TRUE, YES, SET, or ENABLE (not case sensitive), and can be deactivated by
setting them equal to OFF, FALSE, NO, CLEAR, or DISABLE. Setting an individual bit equal to 1 or 0 in a user program will
cause a red dot error. The Boolean values listed above must be used.
Epsilon EP-P Drive Reference Manual 71
Revision A4 www.controltechniques.com
Page 86

Figure 81: User Bits View
3.24.1 Adding and Deleting User Bits
Bits can be added or deleted in groups of 32-bits. Individual bits cannot be added or deleted. The default number of User Bits available is 32.
To add an additional 32 bits, simply click on the up arrow next to the “Number of Bit Registers” box at the top of the User Bits view (see
81).
To decrease the number of User Bits by 32, click on the down arrow next to the “Number of Bit Registers” box. When decreasing the number of
User Bits, it is always the last 32 bits in the list that will be eliminated.
3.24.2 User 32-bit Bit Register and User Bit Masking
When using different communications protocols (i.e. DeviceNet, Profibus, Modbus), it is often desirable to access groups of User Bits in a
single parameter, rather than having to access them individually. In the Epsilon EP-P drive it is possible to access 32 User Bits in a single
parameter. This parameter is named BitRegister.#.Value. Because some of the 32 User Bits may be used by the program, and should not be
modified from the network communications, it is possible to “Mask Off” certain bits. Masking bits prevents them from being modified in the
program when the 32-bit parameter is written to.
When a User Bit Register (group of 32 User Bits) is written to, the value is then logic-AND’ed with the mask to determine the resulting state of
each of the 32 individual bits. If the individual bit value of the 32-bit mask is “1”, then the corresponding bit from the written 32-bit parameter is
passed through, and the resulting value stored in the specific bit will be the written bit value. If the bit value of the 32-bit mask is “0”, then that
particular bit is blocked (or masked), and the resulting bit value does not change, (Original Value AND NOT 32-Bit Mask) or (Value Written over
Network AND 32-Bit Mask). An example of this is shown in
Figure
Figure 82.
72 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 87

Figure 82: Writing to the User Bit Register
01010101010101010101010101010101
10000001010000001000001000000000
015
Bit #31
01101000011110000111111101010110
11000000010100001101011101010100
Original
Value
Value written
over network
32-bit Mask
Result stored
in each bit
Network
Master
Write
Read
Epsilon EP Drive
Written data is AND’ed with the Mask
and then written into 32-bit Value.
Read data is read directly from the
32-bit Value and bypasses the Mask.
Mask
Value
AND
The Mask is only used when WRITING to the 32-bit parameter, BitRegister.#.Value. When reading the 32-bit value, all bits are
read regardless of the mask.
Figure 83: User Bits Read/Write Process
3.24.3 Configuring the User Bit Mask Register
Epsilon EP-P Drive Reference Manual 73
Revision A4 www.controltechniques.com
The User Bit Mask is a 32-bit parameter that can be configured through Power Tools Pro, in the User Program, or over the
communications network. The default value for the Mask register is 0xFFFFFFFF (HEX), or all bits ON. To change the Mask
value using PowerTools Pro, navigate to the Mask tab on the User Bits view, see
In the User Bits Mask view, each bit of the Mask can be set to 0 or 1 individually. ON (or 1) is indicated by a shaded square,
and OFF (or 0) is indicated by an empty square. Bit 31 is the most significant bit in the word, and bit 0 is the least significant
bit. If the bit is shaded, it means that particular bit will be passed through when written.
Each additional group of 32 User Bits that are added, a new Mask parameter will appear for that group. Mask 0 will control the
mask for User Bits 0 through 31. Mask 1 will control the mask for Bits 32 through 63. This sequence repeats for each
additional 32 bits that is added.
Figure 84.
Page 88

Figure 84: User Bits Mask View
Modbus, EtherNet I/P,
Profibus, DeviceNet
PLC
HMI
Jog.0.PlusActivate
Jog.0.MinusActivate
Home.0.Initiate
Index.0.Initiate
Index.1.Initiate
Program.0.Initiate
Program.0.Stop
Stop
Feedhold
Bit0
Bit1
Bit2
Bit3
Bit4
Bit5
Bit6
Bit7
Bit8
Bit9
Bit10
Bit11
Bit12
Bit13
Bit14
Bit15
ControlWord.0
Value
To configure the mask in a user program, the parameter named BitRegisiter.#.ValueMask is written to. The mask can be written to using
Hexadecimal based values or decimal based values. To write a hexadecimal value to the parameter, the hex value must be preceded with the
characters "0x". To write a decimal value to the parameter, normal notation is used. For examples of writing the Mask to a value in a program,
see below.
Example: BitRegister.1.ValueMask = 0xFFFF0000
This example writes a 1 into all bits of the upper sixteen bits, and 0 into each of the lower sixteen bits using hexadecimal value. To write the
same value using decimal notation, the following instruction would be used.
Example: BitRegister.1.ValueMask = 4294901760
This instruction would also write a 1 into each of the upper sixteen bits, and a 0 into each of the lower sixteen bits.
3.24.4 Packed Bits
Packed Bits are 16-bit words configured by the user to read and write groupings of bit-level parameters (booleans and input/output events).
Packed Bits are broken into Control Word(s) and Status Word(s). These words, once configured, can then be accessed via communication
networks and/or within user programs to handle the bits as desired.
Control Words
A master device such as a PLC or HMI writes to the Control Word(s) as a 16-bit word. The data within that word is then broken into individual
bits and written to the bit-level parameters that the user has mapped (see
control word is modified from some other means (i.e. a user program or an Assignment), that the value of that parameter is not written into the
Control Word value. For example, if a user initiates a Jog Plus within a user program, Bit0 of the Control Word in the
automatically change to 1. Bit0 will only be 1 if the master device sets that bit when writing to the Control Word.
Figure 85). Note that if one of the bit-level parameters within the
Figure 85 below would not
Figure 85: Control Words Communications Example
Status Words
Status Words are read by the master device as a 16-bit word. The drive assembles the bit-level parameters mapped by the user into 16-bit
74 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 89

words for efficient transfer of status information to the master (see Figure 86 below).
Modbus, EtherNet I/P,
Profibus, DeviceNet
PLC
HMI
Jog.0.CommandInProgress
Jog.0.CommandComplete
Home.0.CommandComplete
Index.0.CommandComplete
Index.0.Accelerating
Program.0.ProgramRunning
Program.0.ProgramComplete
Bit0
Bit1
Bit2
Bit3
Bit4
Bit5
Bit6
Bit7
Bit8
Bit9
Bit10
Bit11
Bit12
Bit13
Bit14
Bit15
StatusWord.0
Value
Index.0.AtVel
Index.0.Decelerating
DriveOK
PowerStageEnabled
Figure 86: Status Word Communication Example
3.24.5 Packed Bits Control Words View
Control Words handle data being written to the user defined drive bit-level parameters. The user configures the Control
Word(s) by dragging-and-dropping the desired bit-level parameters they wish to write into the Control Word mapping.
87 below shows the Packed Bits Control Words view onto which the user has dragged several motion initiate parameters.
Figure
Figure 87: Packed Bits Control Words View
Enable Packed Bits Control and Status Words
In order to use the Pack Bits Control Word and Status Word mapping, the function must be enabled by activating the Enable
Packed Bits Control and Status Words checkbox. If the checkbox is clear, the view remains blank (default). If the checkbox is
selected, then the mapping tree appears which allows the user to configure the Control Word(s) as desired. This checkbox
enables both Control Words and Status Words, and the two cannot be enabled/disabled independently.
Number of Control Words
The user can specify the number of desired 16-bit Control Words for the application. This parameter is adjustable from 1 to 4
words (1 default) using the arrows next to the box. The Number of Control Words cannot be adjusted while online with the
device. If online, the user must disconnect communications and then adjust the number of control words.
Epsilon EP-P Drive Reference Manual 75
Revision A4 www.controltechniques.com
Page 90

Control Word Setup Tab
NOTE
The Control Word Setup Tab is used to map the desired bit-level parameters onto the existing control word(s). The parameters can be mapped
using one of two methods:
• Drag and Drop: Using the Drag and Drop method, the user navigates the parameter tree, which as been pre-filtered to only show bit-level
parameters, to find the desired parameter they wish to control (write to). Once the desired parameter is found, the user left-clicks and hold
on the desired parameter. While still holding the left-button down, the user drags the parameter onto the desired bit of the desired Control
Word. Then the left-button is released. Doing so will map the selected bit parameter to the selected Control Word bit.
• Add Button: Using the Add Button method, the user navigates the parameter tree to find the desired parameter they wish to control. Once
the desired parameter is found, the user left clicks on the parameter to highlight it. Then the user clicks on the desired bit of the Control
Word to highlight it. Once both are highlighted, the Add button on the right side of the view (see
Simply click the Add button and the highlighted parameter will be assigned to the highlighted bit on the Control Word.
To delete parameters from the Control Word, simply drag and drop the parameter off the control word (see explanation above), or highlight the
desired parameter to delete, and click the Delete button on the right side of the view.
Parameters can be mapped while online, but cannot be sent to the drive using the Update to RAM function. Therefore, any changes to Control
Word mapping requires a full download.
Figure 87 above) should become enabled.
Online Status Tab (Available Online Only)
While online with the drive, the user can monitor the Control Words value (see Figure 88 below). The data is displayed in binary form for each
individual bit of the Control Word(s), as well as hexidecimal and decimal format for each Control Word.
Figure 88: Control Word Online Status View
Using Pack Bits Control Words
Once the Control Word(s) have been configured by the user, they can be utilized by fieldbus communications (i.e. Modbus, EtherNet I/P,
Profibus, DeviceNet, etc.) or within a user program.
Ethernet I/P.
Figure 89 shows an example in which the user will write to the Control Word 0 and 1 via
76 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 91

Figure 89: Using Ethernet to Communicate to the Control Words 0 and 1
3.24.6 Pack Bits Status Words View
Status Words work to pass bit-level status information from the drive back to the master device as a 16-bit word(s). The user
configures the Status Word(s) by dragging-and-dropping the desired bit-level parameters they wish to read onto the Status
Word mapping.
parameters.
Figure 90 below shows the Packed Bits Status Words view onto which the user has dragged several status
Figure 90: Pack Bits Status Words View
Epsilon EP-P Drive Reference Manual 77
Revision A4 www.controltechniques.com
Page 92

Enable Packed Bits Control and Status Words
NOTE
In order to use the Pack Bits Control Word and Status Word mapping, the function must be enabled by activating the Enable Packed Bits
Control and Status Words checkbox. If the checkbox is unchecked, the view remains blank (default). If the checkbox is checked, then the
mapping tree appears which allows the user to configure the Status Word(s) as desired. This checkbox enables both Control Words AND
Status Words, and the two cannot be enabled/disabled independently.
Number of Status Words
The user can specify the number of desired 16-bit Status Words for the application. This parameter is adjustable using the spinner control from
1 to 4 words (1 default). The Number of Status Words cannot be adjusted while online with the device. If online, the user must disconnect
communications and then adjust the number of status words.
Status Word Setup Tab
The Status Word Setup Tab is used to map the desired bit-level parameters onto the existing status word(s). The method for mapping
parameters to the Status Word(s) is the same as for the Control Words. See the Drag and Drop and Add Button methods described in the
Control Words section above.
To delete parameters from the Status Word, simply drag and drop the parameter off the status word (see explanation above), or highlight the
desired parameter to delete, and click the Delete button on the right side of the view.
Parameters can be mapped while online, but cannot be sent to the drive using the Update to RAM function. Therefore, any changes to Status
Word mapping requires a full download.
Online Status Tab (Available Online Only)
While online with the device, the user can monitor the Status Word value (see Figure 91). The data is displayed in binary form for each
individual bit of the Status Word(s), as well as hexidecimal and decimal format for each Status Word.
Figure 91: Pack Bits Online Status Tab
Using Pack Bits Status Words
Once the Status Word(s) have been configured by the user, they can be utilized by fieldbus communications (i.e. Modbus, EtherNet I/P,
Profibus, DeviceNet, etc.) or within a user program.
drive via Ethernet I/P.
Figure 92 below shows an example in which the user will read Status Word 0 from the
78 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 93

Figure 92: Configuring Ethernet to Communicate Status Word 0 from the Drive
3.25 I/O Setup Group
The I/O Setup group contains views that control input and output functions as well as other drive functions. These views are as
follows: Selector, Assignments, Input Lines, Output Lines, Analog Inputs, and Analog Outputs. These can be viewed by
expanding I/O Setup then simply clicking on any one of the setup views underneath the I/O Setup.
3.26 Assignments
External control capability is provided through the use of assignments to the Sources (Drive Inputs) or the Destinations (Drive
Outputs). Assignments provide a mechanism for the user to define the internal and external dynamic control structure to
separate complex motion profiles. These functions directly correspond to any input or output line on the drive. External
controllers, such as a PLC or other motion controllers, may be connected to affect or monitor the drive’s operation.
All inputs and outputs are configured as sourcing and are designed to operate from a +10 Vdc to +30 Vdc power source. The
user is responsible for limiting the output current to less than 200 mA for each digital output.
The drive is equipped with sixteen optically isolated input lines (one dedicated to a Drive Enable function) and can be
accessed through the 26-pin dsub connector (J3) located on the front of the drive.
3.27 Assignments View
The Assignments View not only displays information but also makes assignments regarding the source and the destination.
Epsilon EP-P Drive Reference Manual 79
Revision A4 www.controltechniques.com
Page 94

Figure 93: Assignments View
The Assignments View is used to tie a source to a destination. Destinations are functions that need to be triggered, such as Index Initiates,
Program Initiates, Jog Initiates and so on.
Sources are located on the left side of the Assignment View and reflect events that occur in the drive. These events are based on drive activity.
By expanding individual groups, you will see more detailed parameters. For example, in an Epsilon EP-P drive configuration if you expand the
Inputs source group, you will see DriveInput.1 through DriveInput.15, as shown in
actions (or destinations) on the right side of the view.
To make an assignment, a source must be tied to a destination. Any source can be tied to any destination to create the desired system
operation.
3.27.1 Creating An Assignment
Various methods can be used to tie a source (such as DriveInput.1) to a destination, (such as Index.0.Initiate).
Drag and Drop Method
First, position the mouse pointer over the source on the left to assign to the destination on the right. Press the left mouse button while over the
source, and hold the button down. While holding the left button down, drag the source until the pointer is positioned over the desired
destination and release the left mouse button.
Destinations can also be dragged over to sources, see Figure 94.
Assign Button Method
Click on both the source and destination you wish to assign to each other. Once both are selected, the Assign button in the lower left corner of
the view will become enabled. Click the Assign button to complete the assignment.
and the Assign button available to click on.
Once an assignment has been made, you will see the “Assigned to..” and the “Set From” columns filled in for the specific sources and
destinations. This indicates what destination(s) an individual source has been assigned to, and what source(s) an individual destination is
assigned to.
Any source can be assigned to up to ten different destinations maximum. Any destination can have as many sources as desired assigned to it.
3.27.2 Deleting An Assignment
Delete Button Method
Click on the source or destination you wish to delete. Once selected, the Delete button will become available. Click the Delete button to
remove the assignment.
Right Click Method
Position the pointer over the specific assignment to delete then right click. A selection box will appear. From this selection box, choose Delete.
After either of these procedures, the assignment will disappear.
Figure 93. You can use these events to trigger certain
Figure 93 shows the source and destination highlighted,
80 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 95

Figure 94: Tying a Source to a Destination
NOTE
Drag and
Drop Method
3.27.3 Assignment Polarity
The active state of an assignment can be programmed to be Active Off, Active On, or Custom using PowerTools Pro. Making
an assignment “Active On” means that the destination will be active when the source it is assigned to becomes active, and is
inactive when the source is inactive. Making an assignment “Active Off” means that the destination will be active when the
source it is assigned to is inactive, and will be inactive when the source is active.
The polarity of the assignment can also be changed to Custom when required. Custom polarity allows you to make a
destination activate and deactivate based on two different sources.
Destination functions which initiate motion (Jog.PlusInitiate, Jog.MinusInitiate, Index.#.Initiate, and Home.#.Initiate) cannot
be set “Active Off”.
Default polarity for a new assignment is Active On. Two methods will change the polarity of an assignment.
Polarity Button Method
Click on either the Source or the Destination you wish to change the polarity of. Once highlighted, the Polarity button will
become available in the lower right corner of the view. Click on the Polarity button and change the settings as desired in the
Polarity dialog box. Click OK to apply the changes.
Right Click Method
Position the pointer over the specific assignment you with to change polarity of and click the right mouse button. A selection
box will appear. From this selection box, choose Polarity. the Polarity dialog box will appear. Change the Polarity settings as
desired and click OK to apply the changes.
3.27.4 User Level
The User Level filters the available assignments. The User Level is changed on the Options menu at the top of the PowerTools
Pro toolbar. Choose Options/Preferences/User Levels. Easy mode filters out all but the most commonly used sources and
destinations. Detailed mode filters out less, expanding the list of sources and destinations for more complex configurations.
Too Much mode does not filter at all and provides all sources and destinations.
3.27.5 Only Show Assigned Check Box
When this check box is selected it removes the unassigned sources and destinations from the view. It allows the user to
quickly see how many sources and destinations have been assigned.
3.27.6 Assignments that Automatically Use Position Capture
Certain assignments (Sources or Destinations) automatically generate position capture data internally for greater performance
and accuracy. This captured data is used by the Epsilon EP-P drive, but is not directly available to the user. Following is a list
of assignments that automatically generate or use captured data.
Epsilon EP-P Drive Reference Manual 81
Revision A4 www.controltechniques.com
Page 96

Sources that generate capture data
Drive Inputs 1-15
The Epsilon EP-P Inputs are constantly monitored by the processor, and when activated will automatically capture related data. The processor
controls all resetting requirements. The capture only occurs on the rising edge of an input. When the input is activated, the captured data will
automatically be passed to the destination that it is assigned to. The destination may then use the captured data to accurately initiate motion (if
it is a motion-related destination).
Motor Encoder Marker
The rising edge of the motor encoder marker pulse will automatically capture data. This will allow the user to accurately initiate motion on the
rising edge of the motor encoder marker pulse. The falling edge of the marker pulse does not capture data.
Master Encoder Marker
The rising edge of the master encoder marker pulse will automatically capture data. This allows the user to accurately initiate motion on the
rising edge of the master encoder marker pulse. The falling edge of the marker pulse does not capture data.
Index/Jog Command Complete
Activation of the command complete signal at the end of indexes and jogs will automatically capture data. A subsequent index, jog, or dwell
can then use the captured data to start itself extremely accurately at the end of the previous motion.
Index/Jog At Velocity
Activation of the command complete signal at the end of indexes and jogs will automatically capture data. A subsequent index, jog, or dwell
can then use the captured data to start itself extremely accurately at the end of the previous motion.
PLS Status
A rising or a falling edge of a Global PLS will automatically capture data for use in initiating motion. In order to accurately initiate motion from a
Global PLS, an assignment can be made from PLS.#.Status to the initiate destination.
Destinations that use captured data:
Index/Jog Initiates
When one of the sources listed above is assigned to an Index or Jog Initiate, the captured information is automatically applied to the index
starting point. This offers extremely high accuracy for initiation of motion, which is beneficial especially in synchronized applications.
Index.#.SensorTrigger
The sensor trigger destination used in registration indexes can use captured data to accurately calculate the ending position of the index based
on the Registration Offset parameter. The Offset distance is added to the captured position to get the accurate stopping position for the
registration index.
3.28 Selector View
The Selector view is located under I/O Setup in the Hierarchy Tree on the left of the view.
Figure 95: Selector View
The selector allows conservation of the number of input lines by using a binary input conversion to decimal. The binary select lines are set up
by assigning sources to the Selector.Select destinations on the Assignments view. In most cases, hardware inputs are assigned to the
Selector.Select functions (see
Based on the status of the binary select lines, a Selector.Selection source will be active when the Selector.SelectorInitiate destination is
activated.
At the top of the Selector view, the Selector Input Destinations scroll box defines how many binary select lines will be used. The number of
Selector.Selections is a direct result of the number of select lines. The formula is as follows:
# of selections = 2n where n is the number of select lines.
Figure 96).
82 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 97

The maximum number of select lines is eight.
Once you have determined how many select lines you want, the assignments to these Selector.Select lines must then be
made in the Assignments view.
Figure 96: Assignment View
For example, if we entered 3 for the number of Selector Input Destinations, we would have 8 selection lines
(Selector.Selection0 through Selector.Selection7). The Selector.Selection number that is activated is determined by the status
of the Selector.Select lines when the Selector.Selector Initiate bit is activated. Each select line has a specific binary value.
The binary value is determined as follows:
Sn x 2nwhere Sn = Status of Selector.Select line n
Sn = 0 if Selector.Select line n is inactive, and
Sn = 1 if Selector.Select line n is active
The sum of all the binary values determines which Selector.Selection line will be active.
The following examples demonstrate how to determine which Selector.Selection will activate based on the Selector.Select
lines.
Example: 1
If Selector.Select2 is active, Selector.Select1 is inactive, and Selector.Select0 is active, then the total binary value is as
follows:
S2 = 1, S1 = 0, and S0 = 1. Therefore,
Total Binary Value = (1 x 22) + (0 x 21) + (1 x 20)
Total Binary Value = 4 + 0 + 1
Total Binary Value = 5
Therefore, when Selector.SelectorInitiate activates, then Selector.Selection5 will activate.
Example: 2
If Selector.Select2 is inactive, Selector.Select1 is active, and Selector.Select0 is active, then the total binary value would be as
follows:
S2 = 0, S1 = 1, and S0 = 1. Therefore,
Total Binary Value = (0 x 22) + (1 x 21) + (1 x 20)
Total Binary Value = 0 + 2 + 1
Total Binary Value = 3
Epsilon EP-P Drive Reference Manual 83
Revision A4 www.controltechniques.com
Page 98

Therefore, Selector.Selection3 would activate.
NOTE
The Selector.Select lines can change without any action until the Selector.SelectorInitiate destination is activated.
Selector.Selection sources can be tied to any destination in the Assignments view. Figure 96 shows the four selection lines being tied to Index
0 through Index 3 initiates. By doing this, we could initiate up to four indexes with only two select lines and a selector initiate. This can help
minimize the number of inputs required to initiate a large number of indexes or programs.
3.29 Input Lines View
The Input Lines View displays any functions that have been assigned to the drive hardware inputs. See Figure 97.
No assignments can be made using the Input Lines View, assignments are only displayed in the Input Lines View.
Figure 97: Input Lines View
The following two functions can be performed on the Input Lines view.
Name
You can assign a descriptive name to each input and make the setup easier to follow. The length of the text string is limited to a maximum of
12 characters. Simply double click on the Name field of any input line to assign a name to it.
Debounce
You can program a “Debounce Time” to any input line, which means the motion profile will need to be steady for at least the debounce time
before it is recognized. This feature helps prevent false triggering in applications in noisy electrical environments. At the end of the debounce
time, the next action can occur.
Figure 98: Input Line Diagram
If the Input Line attached to the home sensor is debounced, the actual rising edge of the Home Sensor is used to determine the Home
Reference Position (the debounce time ensures a minimum pulse width).
3.30 Output Lines View
The Output Lines View displays any functions that have been assigned to the drive hardware outputs. See Figure 99.
84 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
Page 99

Figure 99: Output Lines View
Names
Descriptive text names can be assigned to individual output lines to make the setup easier to follow.
3.31 Analog Inputs View
The analog input is scaled from +10 V to -10 V range to either the units of the selected variable or to the defined units. A linear
scale with offset is defined by entering two points on the scale, a min and max to correlate the user unit to analog voltage. The
actual minimum and maximum range of either user unit or analog voltage does not need to be entered as the algorithm will
extrapolate the range.
The drive has one Analog input channel that accepts a +10 V to -10 V signal. The drive has a 12-bit over sampled to 14-bit
analog to digital converter (A/D), which is used to transform the analog voltage to a usable parameter in the drive. The analog
input is scanned by the drive every 100 microseconds.
Figure 100: Analog Inputs View - Enabled
3.31.1 Enable Channel Check Box
By default, the analog input channel is not enabled meaning that the drive is not reading the A/D value read by the analog
circuit. If the check box is clear, the channel is not enabled and the configuration parameters for the analog input are
unavailable and therefore have no effect.
To enable the analog input, simply select the Enable Channel check box, and the configuration parameters will become
available to edit. With the channel enabled, the trajectory loop update will transfer data from the drive into
DriveAnalogInput.RawValue as volts and into DriveAnalogInput.ValueIn scaled.
Destination Variable
The Destination Variable (DriveAnalogInput.CustomDestinationVariable) can be entered one of two ways: by just typing any
parameter using the program format (dot notation) for the variable, or click the Popup Variables button and the Select
Variables from Tree window will open. Select the variable and drag it over to the Destination Variable text box.
Epsilon EP-P Drive Reference Manual 85
Revision A4 www.controltechniques.com
Page 100

Bandwidth
This parameter (DriveAnalogInput.LowPassFilterFrequency) sets the low-pass filter cutoff frequency applied to the analog input. Signals
exceeding this frequency will be filtered at a rate of 20 db per decade.
3.31.2 Set Maximums Group Maximum Value
This parameter (DriveAnalogInput.MaxUserValue) is used for user unit scaling. Enter the maximum value in analog user units to which the
maximum analog voltage should correspond.
Maximum Voltage
Enter the maximum voltage that will be seen on the analog input terminals. The user can enter the value in this text box
(DriveAnalogInput.MaxVoltageValue) by hand, or set the analog source to it’s maximum value with just a click of the “Set Max Voltage to
Measured” button next to the text box.
Set Max Voltage To Measured Button
Click this button to read the current value on the analog channel and enter it into the Maximum Voltage text box.
3.31.3 Set Minimums Group Minimum Value
Enter the minimum value in analog user units that the minimum analog voltage should correspond to.
Minimum Voltage
Enter the minimum voltage that will be seen on the analog input terminals. The user can enter the value in this text box
(DriveAnalogInput.MinVoltageValue) by hand, or set the analog source to it’s minimum value with just a click of the “Set MinVoltage to
Measured” button next to the text box.
Set Min Voltage To Measured Button
Click this button to read the current value on the analog channel and enter it into the Minimum Voltage text box.
3.31.4 A/D Voltage
This parameter (DriveAnalogInput.RawValue) is visible while online. It is the raw analog input in Volts.
3.31.5 ValueIn
This parameter (DriveAnalogInput.ValueIn) is visible while online. This is the results of the analog value scaled to the user unit value.
3.31.6 Read Max/Min Voltage Settings
This button when pressed will read the Min and Max voltages from the drive and the voltages are entered into the Min and Max Voltage text
boxes in the configuration file.
3.32 Analog Outputs View
The drive has two 10-bit Analog Outputs that may be used for diagnostics, monitoring or control purposes. These outputs are referred to as
Channel 1 and Channel 2. They can be accessed from the analog/sync output connector (J5) on the Epsilon EP-P drive.
The analog output is scaled from the units of the selected variable to the +10/-10 volt range of the Analog Output. It is a linear scale with offset
defined by entering two points on the scale, a minimum and maximum to correlate the user units to analog voltage. The actual minimum and
maximum range of either user unit or analog voltage does not need to be entered as the algorithm will extrapolate the ranges.
Figure 101: Analog Outputs View
86 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
 Loading...
Loading...