

Page 1
©Copyright 2005 by Bird Electronic Corporation
Instruction Book Part Number 920-4027FS Rev. E
Page 2
Specifications
RFL Accuracy FWD Accuracy
FWD Power
10
Directivity 10/
---------------------------------+=
VSWR 1
P
R
P
F
------+
1
P
R
P
F
------–
⁄=
CAUTION
Changing the sensor’s connectors will invalidate calibration data, and may
reduce the maximum power rating of the unit.
Frequency Range
4027F2M
4027F10M
4027F60M
RF Power Range
4027F2M
4027F10M
4027F60M
Accuracy, Fwd, Best Case
Accuracy, Reflected Calculated from FWD accuracy and power
Accuracy, VSWR Calculated from FWD and RFL power
*
1.8 – 2.2 MHz
12 – 15 MHz
57 – 63 MHz
0.1 – 10 kW
0.1 – 10 kW
0.1 – 6 kW
± 1.0% (2σ)
Repeatability, Multiple
Measurements, Single Sensor
*. Best case assumes calibration frequency, calibration power, and 25
± 5 °C. For other conditions see Uncertainty Budget.
Harmonic Rejection, Min
4027F2M
4027F10M
4027F60M
Low Freq. Rejection, Min
4027F10M
4027F60M
Max Error Induced by 10% AM
4027F2M, 4027F10M
4027F60M
VSWR, Max 1.05:1
Insertion Loss, Max 0.05 dB (with female “N” connectors)
2
± 0.3% (2σ) (with female “N” connectors)
Determined by connector repeatability
26 dB @ 3.6 – 3.8 MHz
30 dB @ > 3.8 MHz
30 dB @ > 25 MHz
30 dB @ > 114 MHz
30 dB @ < 1 MHz
30 dB @ < 15 MHz
0.2% @ < 5 kW
1.0% @ 5 – 10 kW
0.2% @ < 1.5 kW
1.0% @ 1.5 – 3 kW
Page 3

Directivity, Min 28 dB
Impedance, Nominal 50 ohms
Max. Allowable Terminating
2.00:1
VSWR
Calibration Technique Frequency-specific calibration factors stored in
nonvolatile memory in each sensor. Sensor
output corrected for frequency and temperature
within specified ranges.
Cal. Frequencies, Typical
4027F2M
4027F10M
4027F60M
*
1.8, 2.0, 2.17 MHz
12.0, 12.5, 13.56, 14.0, 15.0 MHz
57.0, 58.5, 60.0, 61.5, 63.0 MHz
Cal. Power, Typical 1.7 kW
Cal. Cycle, Nominal 6 months
*. Other calibration frequencies available upon request
Connectors Customer specified from “QC” list, appropriate
for frequency and power.
Operating Power Supplied by power meter via sensor cable
Sampling Rate, Nominal 2 readings / second
Temperature
Operating
Storage
*
0 to 50 °C (32 to 122 ºF)
–20 to +70 °C (–4 to +158 °F)
Humidity, Max 95% (non-condensing)
Altitude, Max 10,000 ft. (3,000 m)
CE CE Compliant. Refer to Declaration of
Conformity for specific standards
Dimensions, Nominal
†
5.2”L x 2.5”W x 3.25”H
(137 x 64 x 83 mm)
Weight, Nominal
†
1 lb. 13 oz. (0.8 kg)
*. Derated accuracy outside 25 ± 5 °C, see Uncertainty Budget
†. Values for units with female “N” connectors
3
Page 4

Uncertainty Budget
*
4027F2M
Frequency
Error...
Power
Linearity...
Temperature
Uncert...
Calibration Uncertainty ± 0.6% ± 0.6% ± 0.6%
Resolution
Uncert...
Other sources of error ± 0.4% ± 0.5% ± 0.6%
Best Case RSS Uncertainty ± 1.0% ± 1.0% ± 1.0%
*. All values 2σ
†. Resolution uncertainty is error due to limited display digits. Actual
uncertainty can be calculated as:
For a 3.5-digit display, worst case is at 300W. Least significant digit
is one watt, uncertainty is ± 1W out of 300 or 0.34%. For a 4.5-digit
display, least significant digit is 0.1W, so the uncertainty is 0.034%
at cal freq ± 0.1% ± 0.1% ± 0.1%
not at cal freq ± 0.5% ± 1.5% ± 0.5%
at cal power ± 0.1% ± 0.1% ± 0.1%
not at cal power ± 1.0% ± 0.5% ± 1.0%
within 20 to 30°C ± 0.65% ± 0.6% ± 0.5%
outside 20 to 30°C ± 3.2% –3.0, +0.75% ± 2.9%
at cal power ± 0.06% ± 0.06% ± 0.06%
†
not at cal power
± (1 in least significant digit) / Reading
± 0.34% ± 0.34% ± 0.34%
4027F10M
*
4027F60M
*
4
Page 5

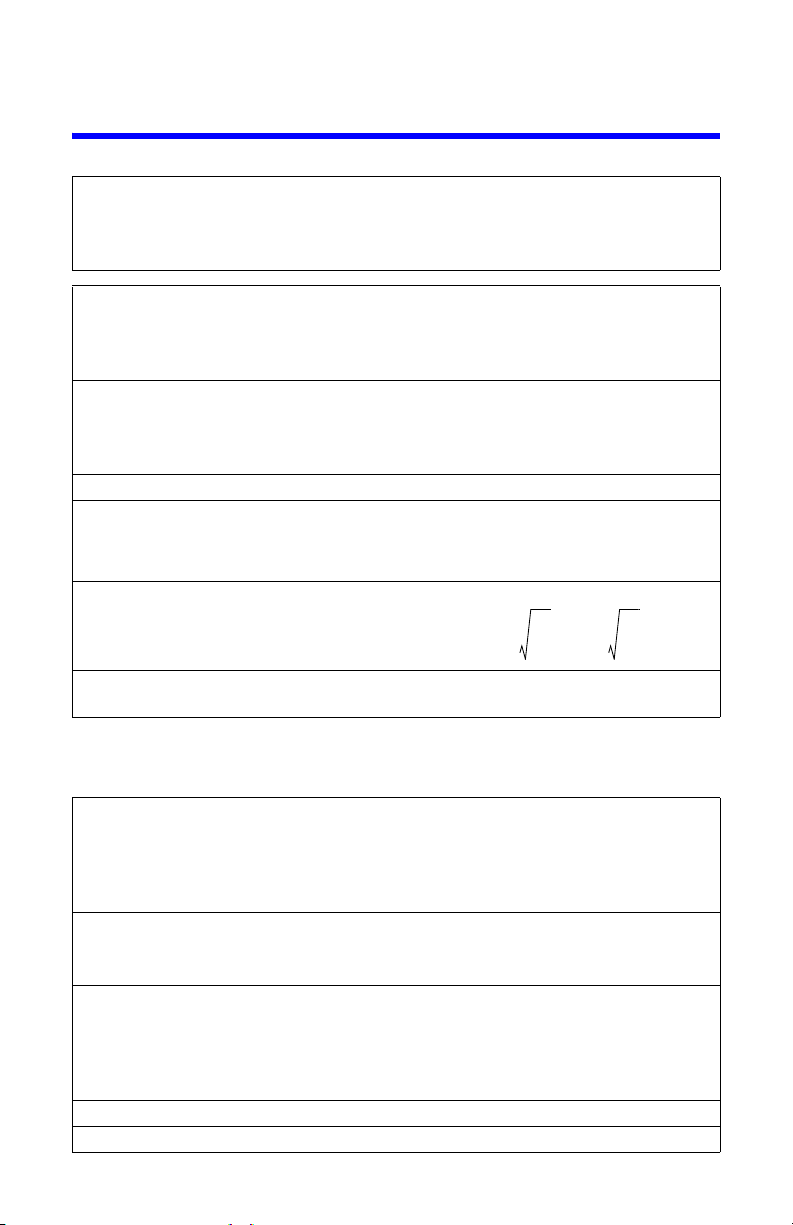
2-1/2”
(64 mm)
3-1/4”
(83 mm)
DIRECTIONAL POWER SENSOR
MODEL 4027F10M
100W – 10kW
12 – 15 MHz
3-3/4”
(95 mm)
3/4”
(19 mm)
1-3/8”
(35 mm)
RF CONNECTORS
(FEMALE N SHOWN)
– CAUTION –
12000 WATTS MAX.
SOURCE
L
OAD
SENSOR PLUG
SOCKET
RUBBER
SHOCK FEET
5
Page 6

Special Lifetime Warranty –
Series 4027F Power Sensor Head
In addition to its standard warranty, the Bird Electronic Corporation warrants its Series
4027F Thruline® Power Sensor Heads for lifetime to original purchaser. This extended
warranty is against burnout. For the warranty to apply, the Sensor Head must be used
with the correct Bird Electronic Corporation Display Unit, the maximum power rating of
the Sensor must not be exceeded, the Sensor RF circuit must be properly terminated and
the Sensor not subjected to physical abuse.
Bird Electronic Corporation, at its option, will repair or replace the defective Sensor at its
world Headquarters at 30303 Aurora Road, Solon, Ohio 44139.
The customer is responsible to pay transportation charges to return the defective sensor
to Bird.
6
 Loading...
Loading...