

BEIJING P100 Operating Manual
Distributor
CTB technology
BEIJING CTB TECHNOLOGY CO., LTD.
Address: Wanggezhuang Industry Base, Shilipu Town, Miyun County,
Beijing
Tel.: 010 -82755611
Fax: 010 -82755610
24-hour national free service Tel.:400 -888-9055
Data No.: ZL-12-808-IBCN
The data may subject to change without notice as improvement of the
product.

CTB technology
GS DRIVER
P100 operating manual
AC servo spindle driver
Model: BKSC-□ □ □ □ GS □
Class 400V, 1.5 ~ 315KW (2.5 ~ 460KVA)
Please send the manual to final user, and keep it properly.
BEIJING CTB TECHNOLOGY CO.,LTD.
Data No.: Z L-12-808-I B C N

GS DRIVER CTB
Preface
Thank you for purchasing GS series servo driver produced by Beijing CTB Technology Co.,
Ltd. The GS series AC servo spindle driver is a high-quality, multi-functional and low-noise
AC servo driver that was researched, developed and manufactured by Beijing CTB
Technology Co., Ltd. The spindle driver is servo driver for AC induction motor (IM) and AC
permanent magnet synchronous motor (PM). It can control the position, speed,
acceleration and output torque of various AC servo spindle motor appropriately. The wide
application of GS series AC servo spindle driver brings infinite vitality to field of machine
tool spindle drive control.
In command to achieve control functions of various machine tools, GS series AC servo
spindle driver is equipped with dual 32-bit CPU and abundant control function module. It
may be conveniently connected with various domestic and foreign CNC systems through
standard control interfaces to allow full play to spindle function of CNC system. The
characteristics of torque, acceleration and deceleration, precision and efficiency of machine
tool spindle which is equipped with GS series AC servo spindle driver are remarkable, and
accurate stop, C-axis, rigid tapping, electronic shift, multi-axis synchronization and other
spindle functions can be realized easily. GS series AC servo spindle driver is the first
choice of electric spindle drive products.
As the first choice of driving product of various machine tool power shaft (spindle), GS
series AC servo spindle driver can be widely used for spindle drive of product such as CNC
milling machine, vertical machining center, horizontal machining center, CNC boring
machine, CNC lathe, vertical lathe, heavy horizontal lathe and gantry machine tool.
For proper application, please read the manual carefully before using the GS series AC
servo spindle driver. Abnormal operation, fault or reduction of service life, and even
personal injury accident may be caused by inappropriate use. Therefore, the manual shall
be read repeatedly before use, and operate in strict accordance with the instructions. The
manual is attachment with the equipment. Please keep it properly after using for future
repair and maintenance of the driver.
01

GS DRIVER CTB
Safety -related symbol description
The following symbols are used for safety-related content in the manual. Sentences
marked by the safety symbols describes important content, and must be abided. If the
requirements in the safety-related content are not abided, application of the product may
led to abnormal product operation, damage to the product, even danger and personal
injury.
Danger
Caution
Forbid Prohibited matters (matters that cannot do).
Important
Use the symbol where danger, even personal injury or death when
wrong about the described content.
Use the symbol where danger, even mild or moderate personal
injury and equipment damage when wrong about the described
content.
Certain matters do not belong to "danger", and "caution", but they
are required to be abided by user. They are marked in the relevant
sections.
02
GS DRIVER CTB
Safety precautions
◆ Unpacking inspection
Caution
● For risk of injury, please do not install damaged or part missing driver.
◆ Installation
Caution
● For risk of fire, please install the equipment on nonflammable metal plate without
combustible materials around.
● Please be sure to tighten the mounting screws of the driver. Falling and damage of the
driver or personal injury may be caused by mounting screws loosing.
●Please do not install the equipment in environment with flammable gas where an
explosion is caused easily.
◆ Wiring
Danger
● For risk of electric shock and fire, please make sure that the input power supply is in
the OFF state before wiring.
●For risk of electric shock, the operation on main circuit terminal of the controller shall be
conducted after the power is cut off for five minutes, and the power charge indicator
CHARGE in the controller completely extinguished.
●For risk of electric shock and fire, the wiring shall be carried by professional electrical
engineering personnel.
●For risk of electric shock and fire, the ground terminal must be grounded reliably. (earth
resistance shall be lower than 4Ω)
● It's prohibited to directly connect terminals of P / PB and N, or connect the zero line or
the earth wire to the N terminal. Otherwise, the rectifier bridge will be shorted and the
main loop will be burned.
●It's prohibited to connect the high-voltage line to control terminal of the driver.
Otherwise, the control board will be burned.
●For risk of injury, please set emergency stop and locking circuit at the outside of the
controller (user is responsible for the wiring) .
● There is a risk of electric shock and short circuit.
03
GS DRIVER CTB
◆ Wiring
Caution
●For risk of injury and fire, please ensure that the voltage of the main circuit AC input
power and the rated voltage of the driver are consistent.
● Please do not conduct withstand voltage and insulation test to the controller
arbitrarily. Otherwise, the semiconductor and other components in the controller may
be damaged.
●For risk of fire, please connect braking resistor and braking unit according to the
wiring diagram.
● Please do not connect the AC input power cord to the output U, V, W terminals.
Otherwise, damage to inside of the controller may be caused.
●For risk of fire and malfunction of the controller, please tighten the terminals of main
loop and control circuit with appropriate torque.
●Please do not connect the phase shifting electrolytic capacitor and LC / RC noise
filter to the output circuit. Otherwise, damage to inside of the controller may be
caused.
●Please do not connect the electromagnetic switch and electromagnetic contactor to
the output circuit to connect or disconnect the load. During loaded operation of the
controller, the surge current will arose protection circuit action of the controller.
◆ Trial run
●For risk of electric shock and short circuit, please do not touch the terminals of the
main circuit directly after power-on.
●Please confirm the input and output signals to guarantee safe operation.
Malfunction of the system will cause casualties and damage to the work piece and
nearby equipment..
●For risk of injury, alarm reset only can be done after ensuring that the operating
Danger
04
signal is cut off. Alarm reset with operating signal will lead to suddenly re-start.
●For risk of driver burning, the inside of long term stored driver shall be checked for
water and condensation.
●For risk of electric shock and burning the equipment, it's prohibited to touch the
terminals of the driver with hand during operating.
GS DRIVER CTB
Caution
●For risk of scalding, the running servo driver and motor may have a high
temperature rise, please do not touch.
●For risk of scalding and electric shock as the braking resistor has a high
temperature rise for discharging, please do not touch.
●For risk of damage to the equipment and accident, please do not change the
settings of the drive arbitrarily.
05
GS DRIVER CTB
◆ Maintenance and inspection
Danger
●For risk of electric shock, please do not directly touch terminals of the controller.
Some of them have high voltage and very dangerous.
●For risk of electric shock, please do install the housing before power-on; and must
disconnect the power firstly before removing the housing.
●For risk of electric shock and fire, please confirm that the power source is in the OFF
state or not before wiring.
● Inspection and maintenance only can be carried out after cut off the main circuit input
power and confirm that the power charge indicator CHARGE completely extinguished.
There is a risk of electric shock as residual power in electrolytic capacitor.
●Please make designated professional electrical engineering personnel to conduct
inspection and maintenance. Before work, please take off metal object (watch, rings
etc.), and use tools with insulation protection during operation. Otherwise, it may cause
electric shock.
●For risk of explosion and fire, used battery, circuit printing plate must not be throw into
fire. Otherwise, it may cause explosion.
Caution
●CMOS IC integrated circuit is installed on main control panel. Full attention shall be
paid during operating. The electrostatic induction due to direct touching of finger on the
main control panel may cause damage to the main control panel.
●For risk of electric shock, please do not conduct wiring and removing terminal when
the equipment is energized.
●For risk of damage to the equipment, the appropriate parameter settings must be
carried out before running after control panel replacing.
06

GS DRIVER CTB
Table of contents
Preface……………………………………………………………………………………………1
Safety -related symbol description…………………………………………………………..2
Safety precautions………………………………………………………………..……………..3
Chapter 1 - Installation…………………………………………..……………………………1-1
Introduction to GS DRIVER…………………………………..……………………………1-2
Unpacking inspection…………………………………………..……………………………1-2
Standard specifications and performance parameters…………………………………1-3
Driver nameplate description………………………………………………………………1-4
External dimensions and installation dimensions…………………………………………1-4
Confirmation and requirements of the installation space………………………………1-7
Notes on motor and load……………………………………………………………………1-7
Notes on the driver…………………………………………………………………………1-8
Notes on scrapping…………………………………………………………………………1-9
Chapter 2 – wiring…………………………………………………………………………….2-1
Selection and connection of peripheral devices…………………………………………2-2
Wiring of the main circuit terminals………………………………………………………2-3
Wiring of control circuit ……………………………………………………………………2-10
Connection of the encoder interface……………………………………………………2-15
Connection of the serial communication port ……………………………………………2-16
Chapter 3 - Manipulator application……………………………………………………….3-1
0.4 ~ 18.5kw driver:
Configuration and key functions of the manipulator………………………………………3-2
Operative mode of the driver………………………………………………………………3-3
Operative mode of the manipulator………………………………………………………3-4
Use method of the manipulator……………………………………………………………3-5
Modify the parameters with the manipulator……………………………………………3-6
Monitor operating state with the manipulator……………………………………………3-7
22 ~ 315kw driver:
Configuration and key functions of the manipulator……………………………………3-8
07

GS DRIVER CTB
Operative mode of the driver…………………………………….………………………3-10
Operative mode of the manipulator…………………………….………………………3-10
Use method of the manipulator………………………………….………………………3-12
Modify the parameters with the manipulator………………….………………………3-12
Monitor operating state with the manipulator……………….………………………3-13
Chapter 4 - Test run…………………………………………………………………..………..4-1
Basic procedure of test run…………………………………………………………………4-2
Confirmation of connection of the main circuit……………………………………………4-2
Control circuit wiring confirmation…………………………………………………………4-3
Initial power-on of the driver………………………………………………………………4-3
Motor and driver parameters confirmation………………………………………………4-4
No-load test run………………………………………………………………………………4-4
Loaded test run………………………………………………………………………………4-4
Chapter 5 - Parameter list……………………………………………………………………5-1
Parameter list description.............................................................................................5-2
Monitor parameter U1................................................................................................5-2
Monitor parameter U2..............................................................................................5-3
Monitor parameter U3..............................................................................................5-3
Initialize parameter An..............................................................................................5-3
Basic control parameter Bn..........................................................................................5-5
User parameter Cn.......................................................................................................5-6
Motor drive parameter Dn..........................................................................................5-8
Function parameter Fn.......... ........................................................................5-9
Function parameter In.................................................................................................5-9
Protection parameter Pn.............................................................................................5-10
System communication parameter Sn......................................................................5-11
Chapter 6 - Operation by function…………………………...………………………………6-1
Spindle control timing sequence state diagram…………………………………………6-2
Motor basic parameters setting……………………………………………………………6-2
Motor operating parameters……………………………………………………………..6-3
Operation panel operation……………………………………………………………..……6-3
Analog quantity speed control……………………………………………………………..6-3
08
GS DRIVER CTB
Acceleration and deceleration control parameters………………………………………6-5
Accurate stop parameters………………………………………………………………6-6
Rigid tapping…………………………………………………………………………….. 6-7
PULSE control…………………………………………………………….. ………………6-8
Swing control…………………………………………………………….. …………………6-9
Multi-function terminal control……………………………………….. …………………6-10
Chapter 7 – Troubleshooting………………………………………………………………..7-1
List of fault alarm and remedies …………………………………………………………..7-2
Common fault analysis……………………………….……………………………………..7-3
Alarm reset method………………………………………………………………...………..7-7
Chapter 8 - Routine maintenance...................................................................................8-1
Prompt..........................................................................................................................8-2
Routine maintenance .................................................................................................8-2
Regular maintenance..................................................................................................8-3
Wearing parts of the driver ..........................................................................................8-3
Driver storage..............................................................................................................8-4
Driver warranty.............................................................................................................8-4
09
GS DRIVER CTB
Installation
The chapter describes matters to be confirmed and installation requirements for the user
after getting the GS driver.
Introduction to GS DRIVER……………………………………….1-2
Unpacking inspection………………………………………………1-2
Standard specifications and performance parameters…………1-3
Driver nameplate description……………………….……………..1-4
External dimensions and installation dimensions.………..……..1-4
Confirmation and requirements of the installation space.……....1-7
Notes on motor and load…………………………….……………..1-7
Notes on the driver…………………………….……………….…..1-8
Notes on scrapping………………………….………………….…..1-9
GS DRIVER CTB
Introduction to GS DRIVER
GS DRIVER is a type of spindle driver that specifically designed for CNC machine tool.
Precise control of position, speed, acceleration and output torque of AC induction servo
motor and ordinary inverter motor is allowed through the driver. It can be used for control of
spindle motor of machining center, CNC milling machine, CNC drilling machine, CNC lathe,
CNC grinder, and feed motor of large gantry equipment and vertical lathe. To achieve the
best operation effect, please complete wiring with CNC system by the " CTB servo
application manual ", and carry out installation and commissioning in accordance to the
manual.
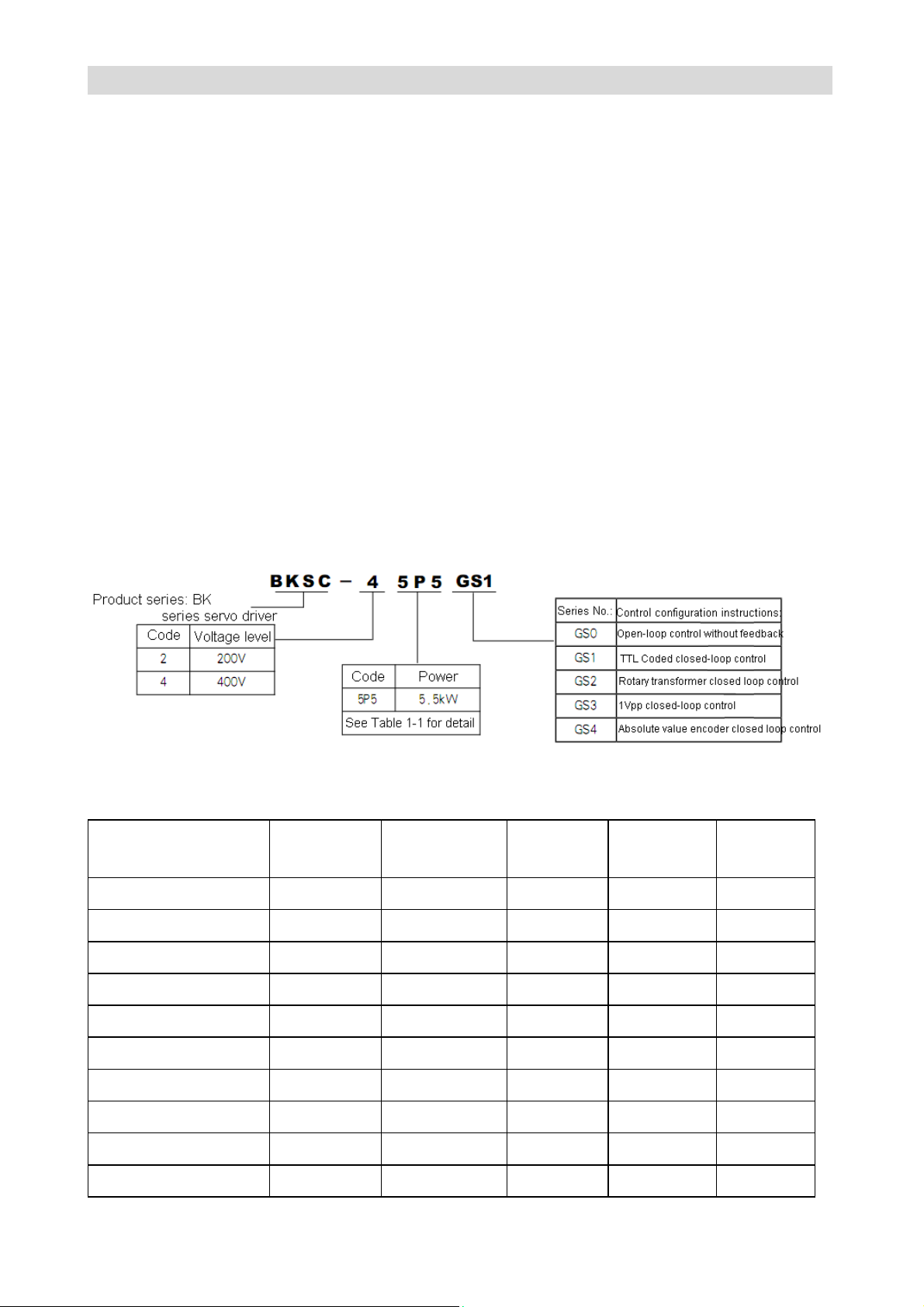
Model description
● GS driver series servo driver is suitable for motor with capacity from 1.5 to 315kw. Please
see the 21 models shown in Table 1-1.
Table 1-1 GS driver model (rated voltage: 400v)
Driver model
BKSC-41P5GS□ 2.5 4 3 1.5 Yes
BKSC-42P2GS□ 3 6 5 2.2 Yes
BKSC-43P7GS□ 5.5 9 8 3.7 Yes
BKSC-45P5GS□ 8.5 14.2 13 5.5 Yes
Rated
capacity(KVA)
Rated input
current (A)
Rated output
current (A)
Adapt motor
power (kW)
Built-in
brake unit
BKSC-47P5GS□ 11 18 17 7.5 Yes
BKSC-4011GS□ 17 26 25 11 Yes
BKSC-4015GS□ 21 35 32 15 Yes
BKSC-4018GS□ 24 38.5 37 18.5 Yes
BKSC-4022GS□ 30 46.5 45 22 Yes
BKSC-4030GS□ 40 62 60 30 Yes
GS DRIVER CTB
BKSC-4037GS□ 50 76 75 37 Yes
BKSC-4045GS□ 60 92 90 45 Yes
BKSC-4055GS□ 72 113 110 55 Yes
BKSC-4075GS□ 100 157 152 75 Yes
BKSC-4090GS□ 116 190 185 90 No
BKSC-4110GS□ 138 236 230 110 No
BKSC-4132GS□ 167 288 280 132 No
BKSC-4160GS□ 200 345 336 160 No
Unpacking inspection
Please confirm the following items when you get the product. Please contact directly with
the dealer or manufacturer that purchased from for any adverse situation. Please see Table
1-2 for detail.
Table 1-2 Confirm items
Confirm item Confirm method
Confirm that the materials listed on
the packing list are complete.
Are they in line with the ordered
Check the materials in the packing against the
packing list stuck to the external packing.
Please confirm the label at the side of the driver.
merchandise?
Is there any damage? Check the overall appearance for damage during
transportation.
GS DRIVER CTB
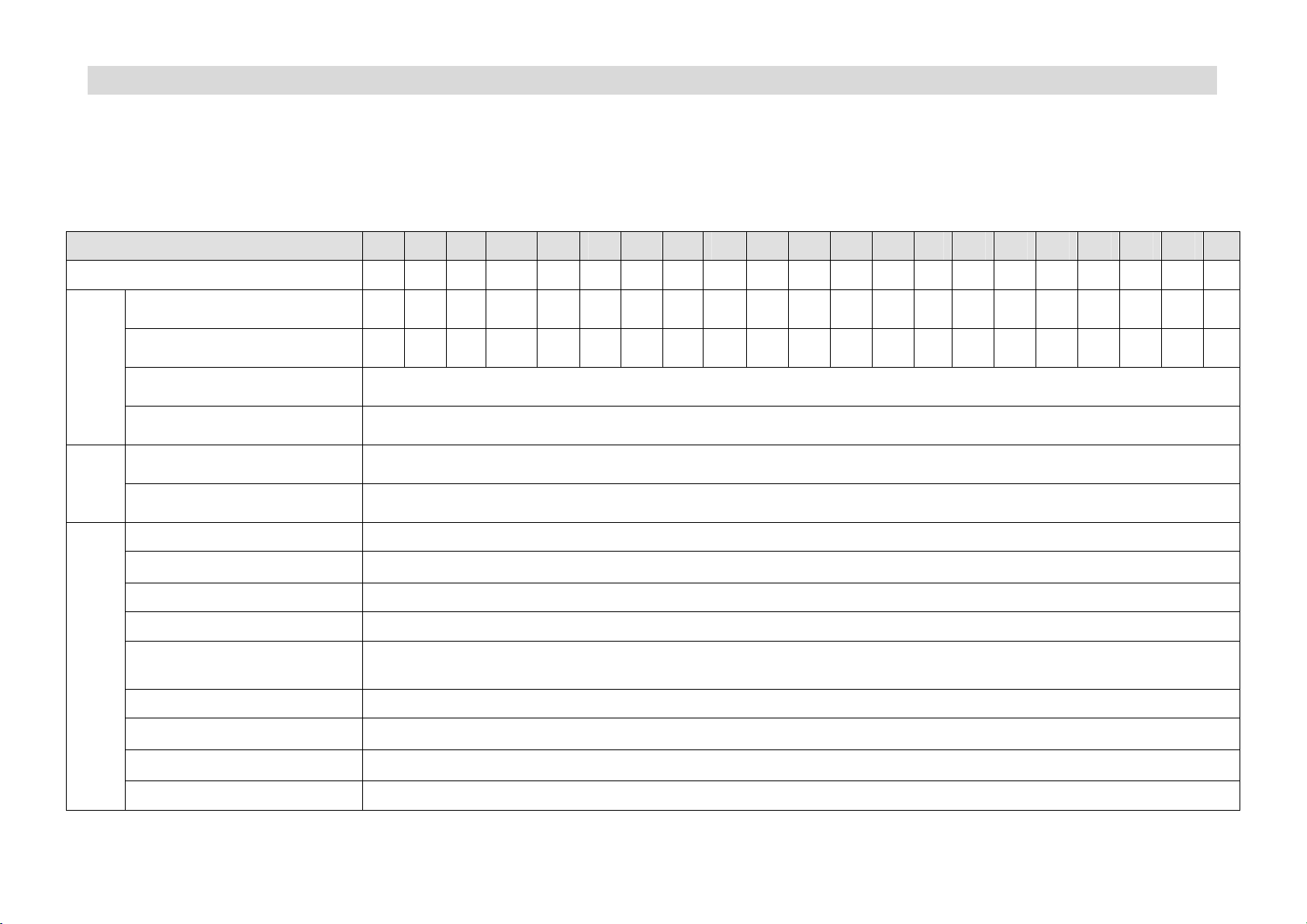
Standard specifications and performance parameters
Please see Table 1-3 for standard specifications and performance parameters of 3-phase Class 400V driver
Table 1-3 Standard specifications and performance parameters of GS □ driver
Model BKSC-××××GS□ 41P5 42P2 43P4 45P5 47P5 4011 4015 4018 4022 4030 4037 4045 4055 4075 4090 4110 4132 4160 4185 4220 4315
Adapt motor power kW 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75 90 110 132 160 185 220 315
Capacity KVA
Output
Current A
Maximum output voltage V
Maximum output speed rpm
Power
Rated voltage and frequency
Allowed voltage pulsation
Control mode Sine wave PWM modulation, entirely closed-loop vector control
Torque feather
Control characteristics
Range of speed regulation 1: 5000
Speed control accuracy ±0.1%
Frequency set resolution
Position control accuracy ±1PULSE
Acceleration
2.5 3 5.5 8.5 11 17 21 24 30 40 50 60 72 100 116 138 167 200 280 340 460
3 5 8 13 17 25 32 37 45 60 75 90 110 152 185 230 280 336 370 450 630
3-phase 380/400/415/440V corresponding input voltage
4-pole motor 15000rpm: 500Hz
3-phase 380/400/415/440V: 50/60Hz±5%
+10%, -15%
200% rated torque output below the fundamental frequency. Accuracy: ±5%
Digital quantity: : 0.01Hz; analog quantity: Unipolar, maximum output frequency is /4092; bipolar, maximum output
frequency is / 2046
0.05~3000Hz/s
Brake mode
Overload capacity 200% rated current 30s
dynamic braking. 125% rated torque: built-in braking unit (external braking resistor)
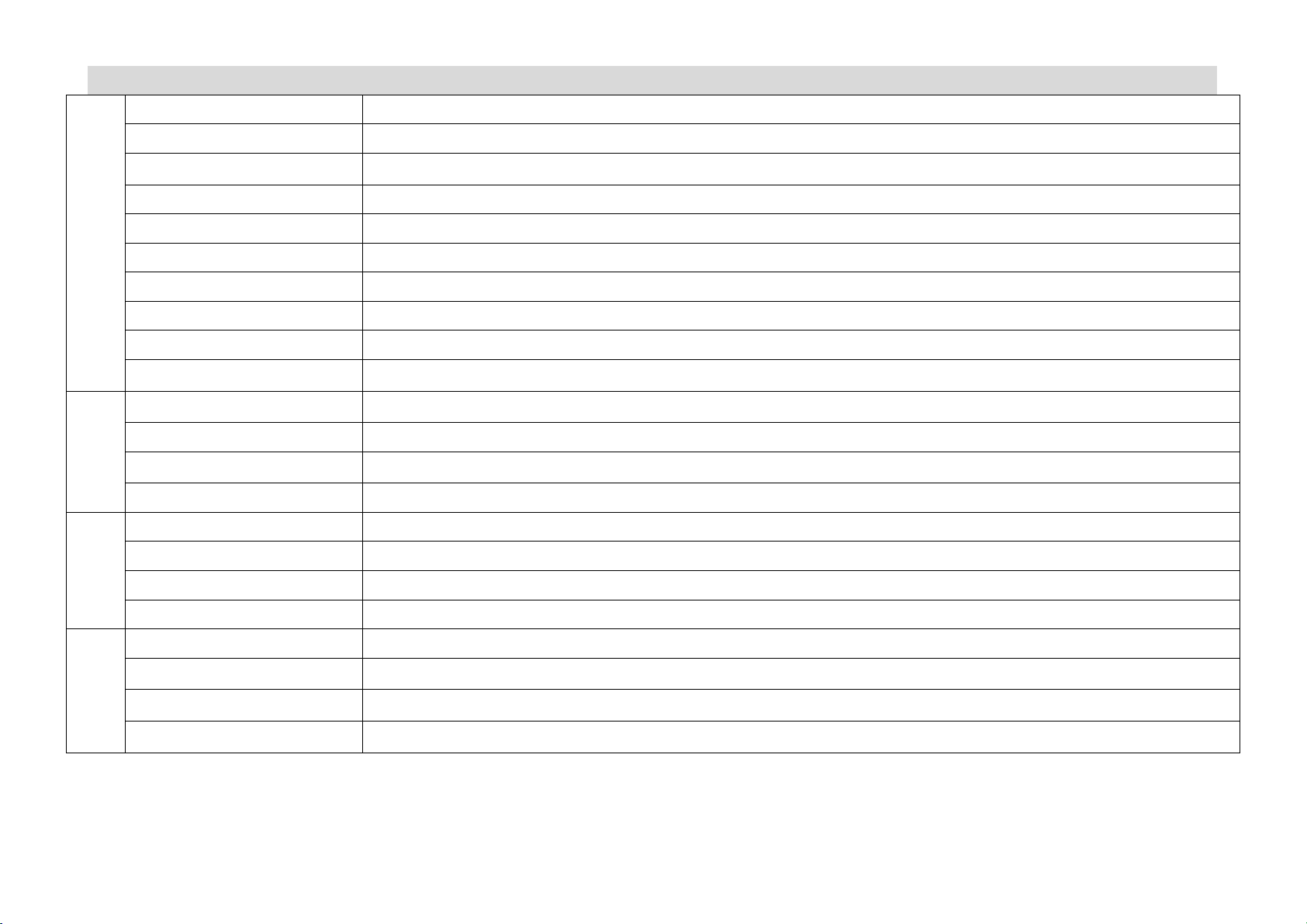
GS DRIVER CTB
Digital quantity input 7-channel isolation photo-coupler input; input mode: PNP, NPN optional
Digital quantity output 2-channel isolation photo-coupler output; 24V, 10mA
Input output interface
Analog quantity input
Analog quantity output None
Relay output 1 channel N.O. type; AC250V/DC30V, 1A
Fault output relay 1 channel: a group of N.O/N.C contact; AC250V/DC30V, 1A
Encoder input interface One: maximum receive frequency is 300KHz; cable driven receive mode: RS422 standard
PULSE input interface One: direction PULSE or orthotropic PULSE
Encoder output interface One: maximum output frequency is 300KHz; cable driven output mode: RS422 standard
3-channel; -10V~+10V 1 channel, 0~10V 2-channel
function
Spindle
Protection
function
environment
Service
Bus interface
Speed control
Accurate stop Accuracy: ±1PULSE; position adjustment: set by user's parameter
Rigid tapping
Other function C-axis control, thread cutting, electronic gear, reaming, swing control
Spindle motor over-current Greater than 200% rated current output
Motor overload Specified time of exceeding overload alarm value. Alarm output: set by parameters
Overvoltage The voltage of main circuit bus is higher than 800V. Alarm output
Low voltage The voltage of main circuit bus is lower than 400V. Alarm output
Service site Free of dust, corrosive gas and inflammable gas
Temperature
Humidity
Vibration
RS232,can,Ethernet network
Range: 0~15000rpm; turning: positive and negative; speed order: analog quantity, imPULSE frequency and bus
May be connected to several domestic and foreign system. Tapping error: ±2%
-10~45℃
Lower than 95%RH (no condensation)
2
vibration frequency≤20Hz: 9.8m/s
;20Hz≤vibration frequency≤50Hz: 2m/s2;
GS DRIVER CTB
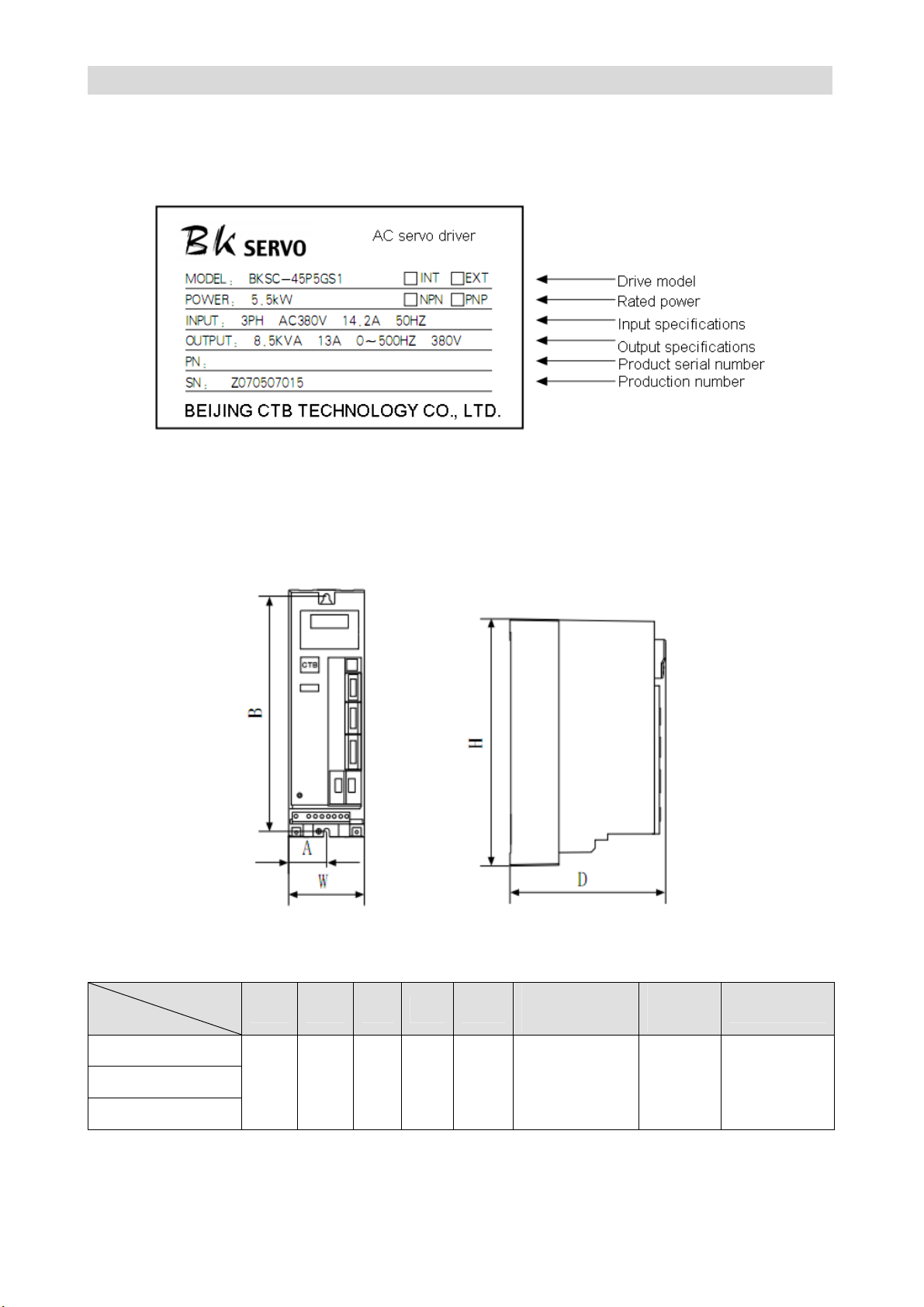
Driver nameplate description
Nameplate which indicates model and rated values of the driver is affixed to the lower right
of housing of the driver. The content of the nameplate is shown in Figure 1-1.
Figure 1-1 Servo driver nameplate
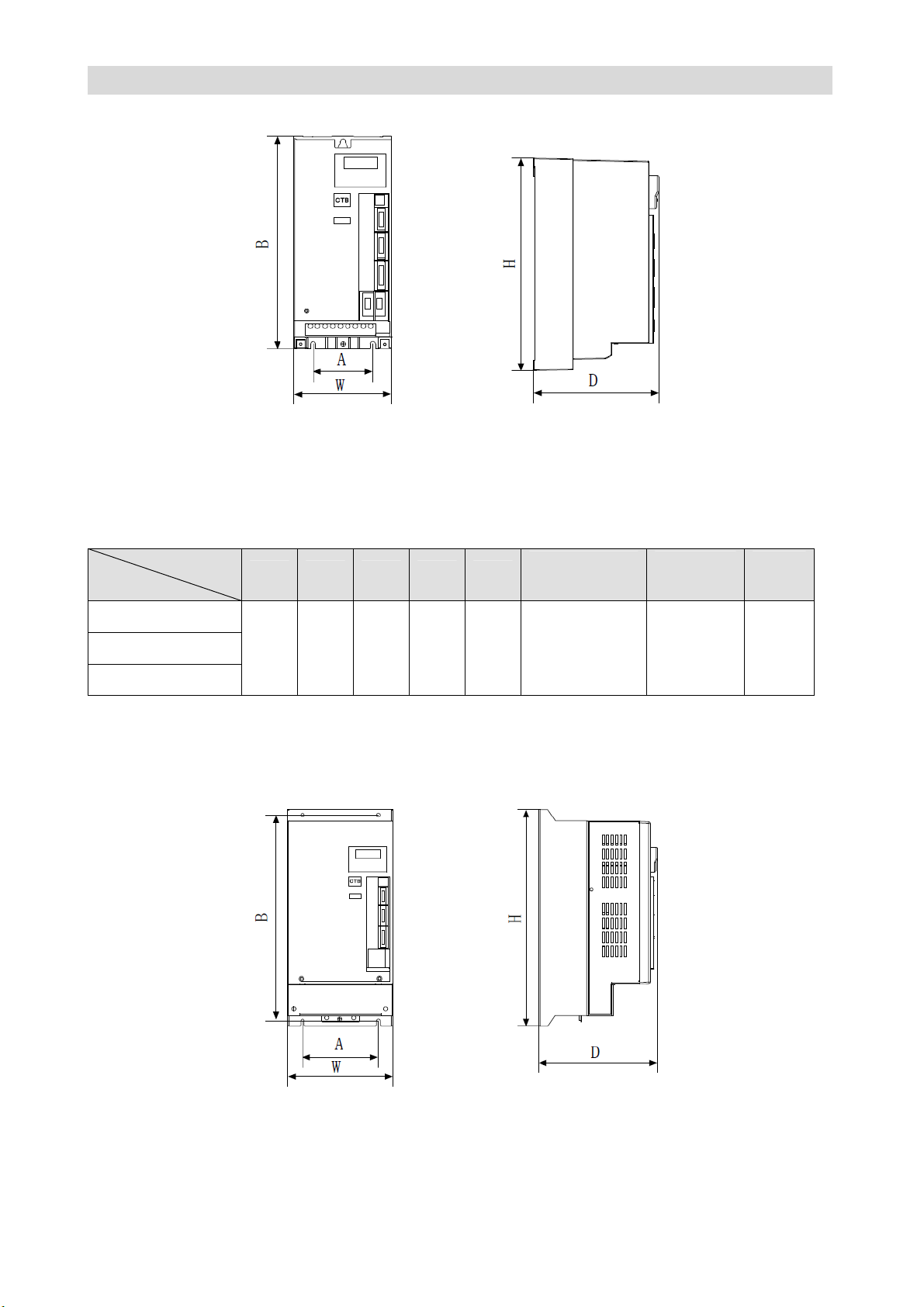
External dimensions and installation dimensions
1. 1.5-3.7kw driver
Please see diagram 1-2 for external dimensions and installation dimensions
Figure 1-2
Table 1-4 Dimensions (mm) and weight (kg) of GS DRIVER (1.5-3.7kw) driver
Model
Dimension
A B W H D
Connecting
terminal screw
Installati
on screw
Weight (kg)
BKSC-41P5GS□
BKSC--42P2GS□
BKSC--43P7GS□
2. 5.5~11kw driver
45.5 276 91 290 200
Wire nail width
3mm
M6 3
GS DRIVER CTB
Please see diagram 1-3 for external dimensions and installation dimensions
Figure 1-3
Table 1-5 Dimensions (mm) and weight (kg) of GS DRIVER (5.5-11kw) driver
Dimension
Model
BKSC--45P5GS□
BKSC--47P5GS□
BKSC--4011GS□
A B W H D
80 276 132 290 200
Connecting
terminal screw
Wire nail width
3mm
Installation
screw
M6 5
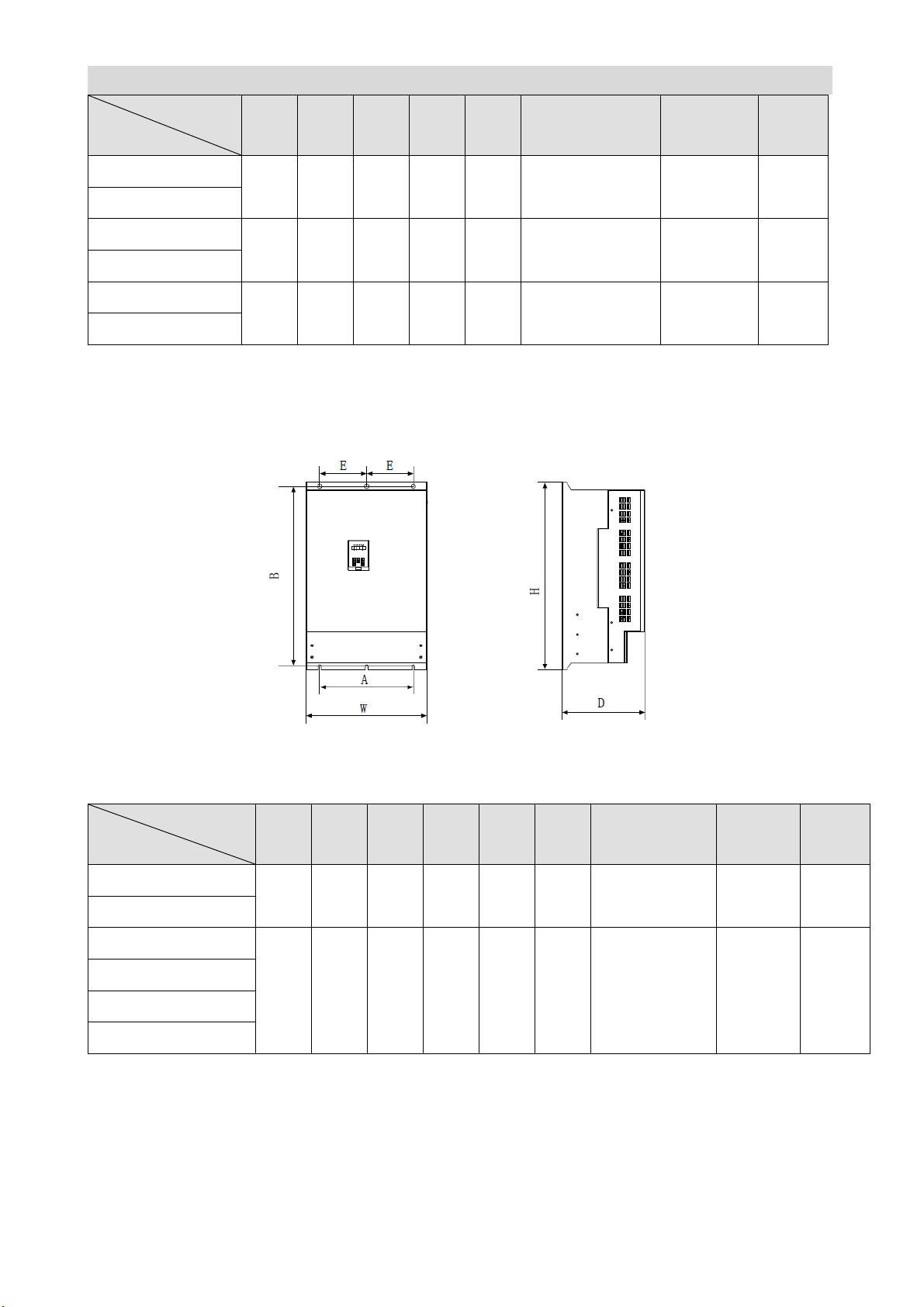
3. 15~45kw driver
Please see diagram 1-4 for external dimensions and installation dimensions.
Weight
(kg)
Figure 1-4
Table 1-6 Dimensions (mm) and weight (kg) of GS DRIVER (15-45kw) driver
GS DRIVER CTB
Dimension
Model
BKSC--4015GS□
BKSC--4018GS□
BKSC--4022GS□
BKSC--4030GS□
BKSC--4037GS□
BKSC--4045GS□
A B W H D
140 376 194 390 228 M6 M6 14
236 376 282 390 228 M6 M8 20
300 376 380 390 269 M8 M8 26
Connecting
terminal screw
Installation
screw
Weight
(kg)
4. 55~160kw driver
Please see diagram 1-5 for external dimensions and installation dimensions
Figure 1-5
Table 1-7 Dimensions (mm) and weight (kg) of GS DRIVER (55-160kw) driver
Dimension
Model
BKSC--4055GS□
BKSC--4075GS□
BKSC--4090GS□
BKSC--4110GS□
BKSC--4132GS□
BKSC--4160GS□
A B W H D E
392 376 472 390 269 196 M10 M8 33
360 690 464 720 320 180 M10 M16
Connecting
terminal screw
5.185 ~ 315kw driver
Please see diagram 1-6 for external dimensions and installation dimensions
Installati
on screw
Weight
(kg)
90
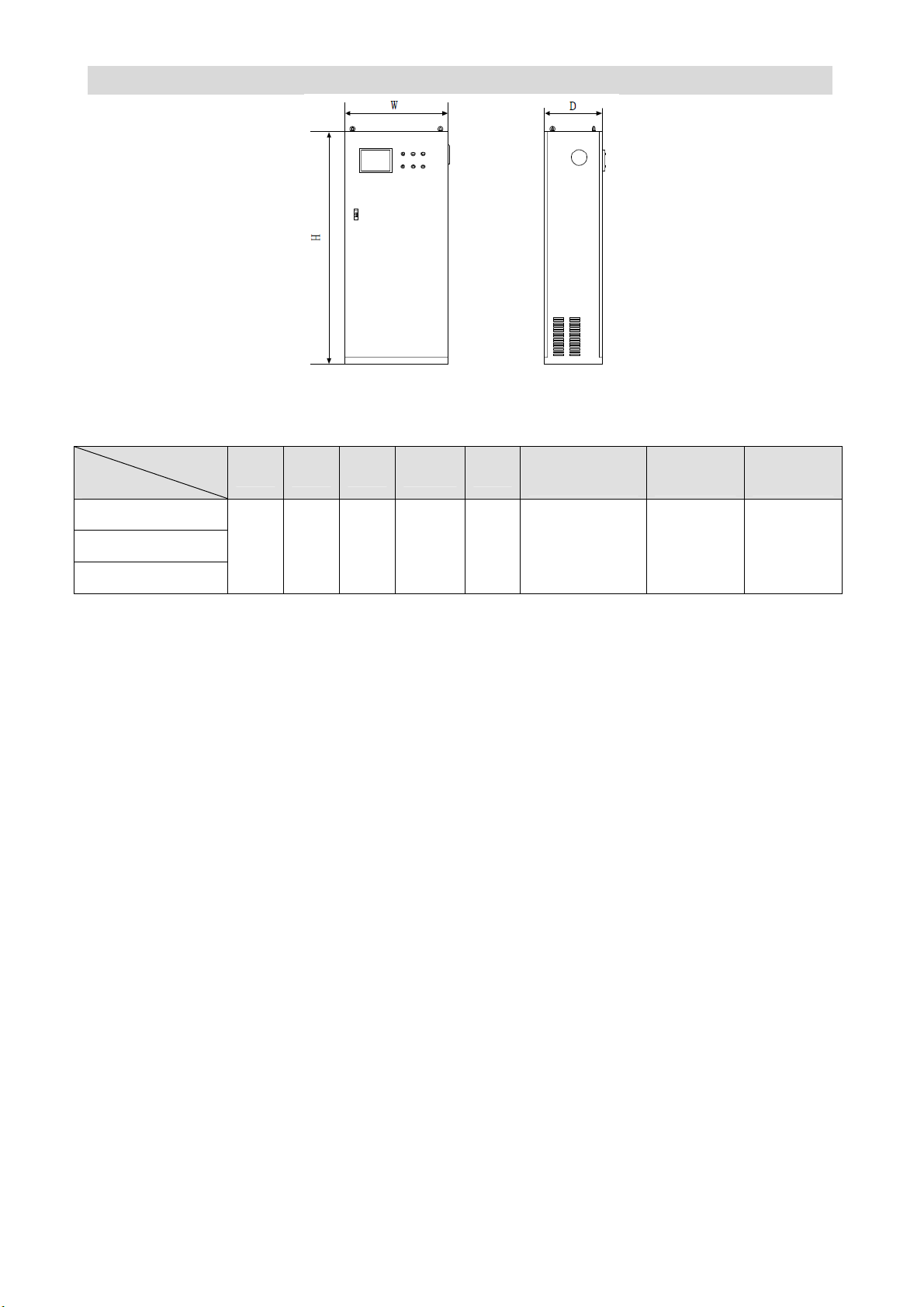
GS DRIVER CTB
Figure 1-6
Table 1-8 Dimensions (mm) and weight (kg) of GS DRIVER (185-315kw) driver
Dimension
Model
BKSC -4185GS□
BKSC -4220GS□
BKSC -4315GS□
A B W H D
- - 800 1800 450 - - 230
Connecting
terminal screw
Installation
screw
Weight
(kg)
Confirmation and requirements of the installation space
Installation environment
The following items shall be noted when selecting the installation environment:
1. Ambient temperature: operate in -10℃ ~ 45℃; if the ambient temperature is higher than
45℃, the equipment shall be used with 30% derating for each 5℃ temperature rise.
★ Note: If the ambient temperature is higher than 45 ℃ , the ventilation shall be
strengthened, and use by the specified derating.
2. The humidity of the installation site shall lower than 95%, and free of condensing;
3. Do not install the equipment in place with dust or metal powder;
4. The equipment shall be installed at place without corrosive, explosive gas;
5. The equipment shall be installed at place that meet the requirements of vibration. The
vibration frequency ≤ 20Hz: 9.8m/s2; 20Hz ≤ vibration frequency ≤ 50Hz: 2m/s2;
6. The equipment shall be installed at place away from direct sunlight.
Installation direction and space
●Installation spacing and distance requirements of single driver are shown in Figure 1-7.
● Generally, abreast installation mode is adopted when multiple drivers are installed in the
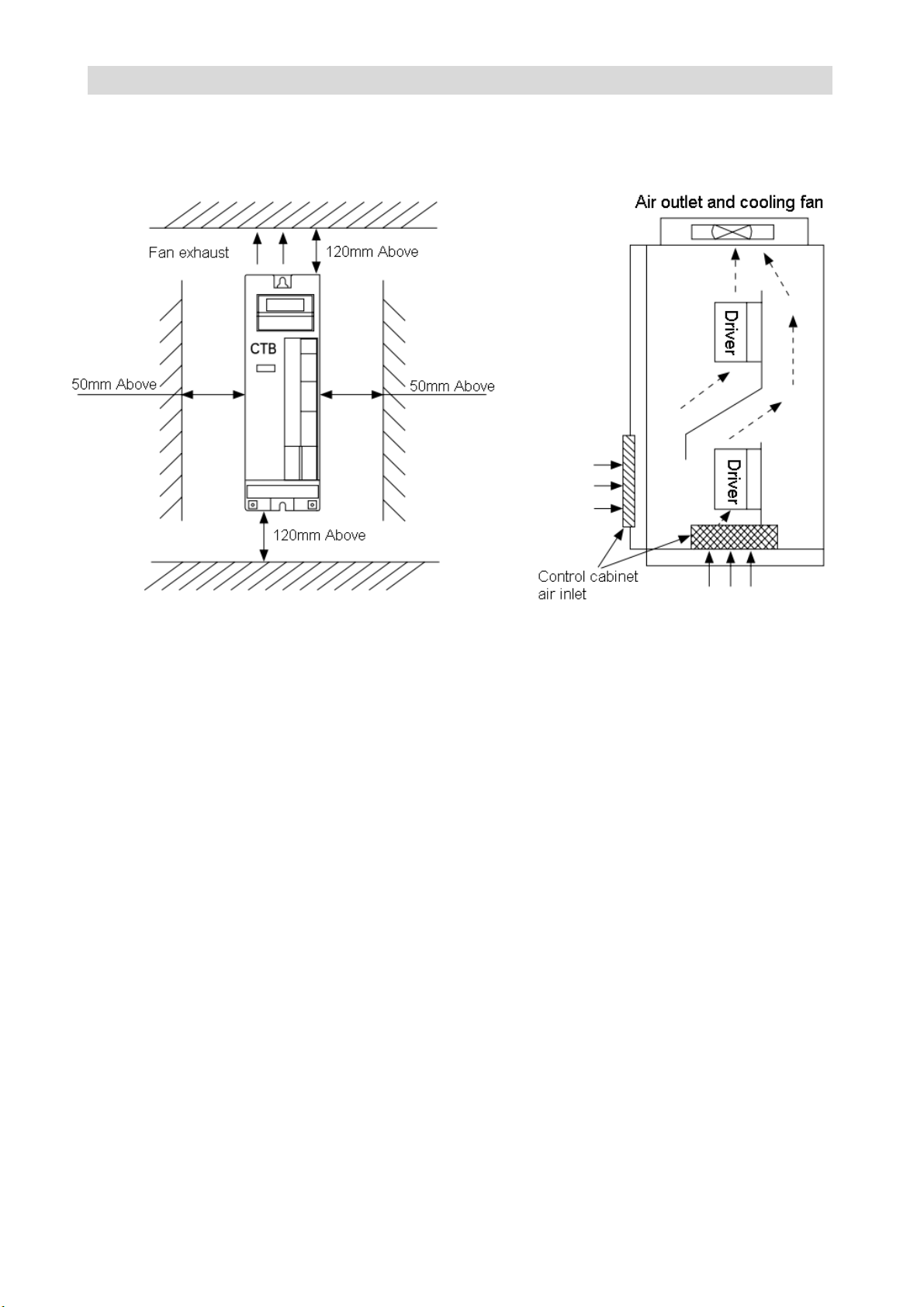
GS DRIVER CTB
control cabinet, and air inlet, outlet and dedicated cooling fan shall be equipped; if up and
down installation mode is adopted, stream guidance clapboard shall be added between
drivers to guarantee good cooling effect as shown in Figure 1-8.
Figure 1-7 Single controller installation Figure 1-8 Multiple controllers installation
Notes on motor and load
Compared with frequency conversion operation
GS DRIVER is full closed-loop vector servo driver. It adjusts output voltage and current
automatically according to the load change. It's more energy-efficient than inverter with
higher speed control accuracy and wider speed regulation range. As the controlled motor
and driver are closed loop, the control of position, speed and torque can be achieved
conveniently.
Constant torque operation
When motor works in constant torque area, the output torque of the motor is required by the
mechanical operation instead of the rated torque of the motor. However, the maximum
continuous output torque of the motor must not exceed the rated torque.
High-speed operation in constant power area
For high-speed operation in constant power area, the increased vibration and noise shall
be considered, and the service speed range of motor bearing and mechanical devices must
be confirmed, and consulted in advance. It's strictly prohibited to make the machine operate
above the rated speed.

GS DRIVER CTB
Lubrication of the mechanical device
For reduction box and gear head motor and other mechanical device that requires
lubrication, damage may be caused due to deterioration of lubricating effect in long-term
low-speed operation. It must be consulted in advance.
Negative torque load
Negative torque load occurs frequently for load such as lifting. The driver will generate
over-current and overvoltage alarm and trip. Equipping of brake components or mechanical
safety devices shall be considered.
Reciprocating load
Please pay attention to unstable phenomenon in output current when the driver is driving
piston reciprocating load. The phenomenon is more prominent in long-term low-frequency
operation. The capacity of driver shall be increased.
Mechanical resonance point of the load device
The driver may encounter the mechanical resonance point of the load device in certain
output frequency range. It can be avoided by setting jump frequency.
Notes on the driver
Applications not in rated voltage
The servo driver shall not be used in voltage that not in the working voltage range. Please
conduct voltage transformation with appropriate step-up or step-down unit as required.
Note on the drive phase input into 2-phase input
The device shall not be changed into 2-phase input, otherwise, default phase protection will
occur.
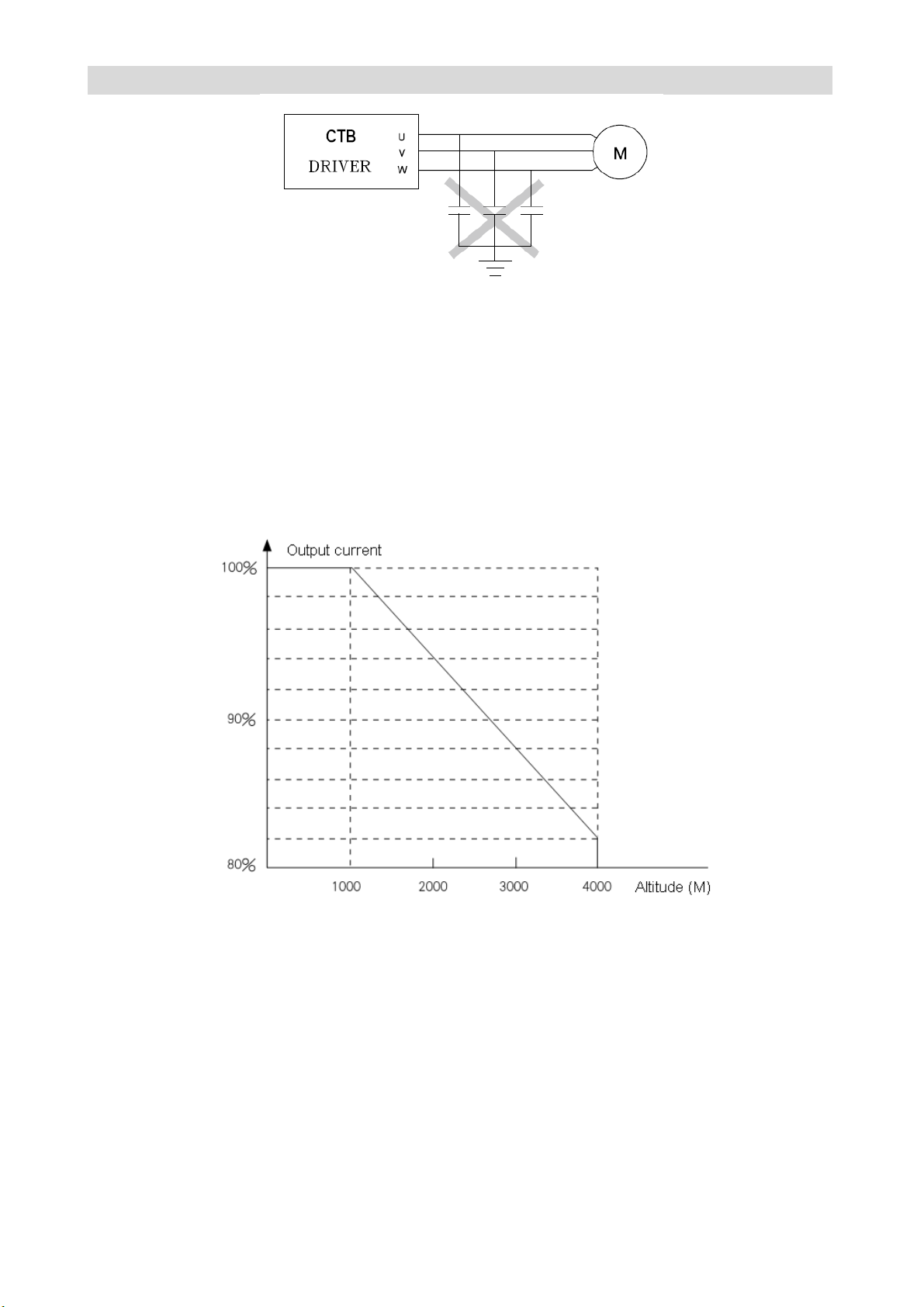
Capacitor or pressure-sensitive device to improve power factor
As shown in Figure 1-9, the output of the driver is PULSE wave, drive failure tripping or
damage to the device will be caused due to capacitor or pressure-sensitive device for
lightning to improve power factor installed at the output side. They must be removed.
GS DRIVER CTB
Figure 1-9 Capacitor is prohibited at the output end of controller
Lightning attack protection
lightning over-current device is equipped in the driver for self-protection to induction stroke
Altitude and derating operation
For areas with altitude over 1000 m, derating operation is necessary due to deterioration of
cooling effect of the drive caused by thin air. The relationship curve of rated current of driver
and altitude is shown in Figure 1-10.
Figure 1-10 Derating curve of rated current of driver and altitude
Notes on scrapping:
Explosion of electrolytic capacitor: the electrolytic capacitors on main circuit and printed
panel may explode when incinerated.
Plastic incineration waste gas: toxic gases will be generated in incineration of front panel
and other plastic parts.
Processing method: please process the waste as industrial waste.
★ Description: The contents of the manual are subject to change due to product upgrade
or optimize. The new version shall prevail.
GS DRIVER CTB
Wiring
The chapter describes the wiring specifications of power supply terminals and control circuit
terminals, and install wiring specifications of control board jumpers and expansion interface
board.
Selection and connection of peripheral devices………………………..2-2
Wiring of the main circuit terminals………………………………………2-3
Wiring of control circuit ………………………………………………….2-10
Connection of the encoder interface…………………………………..2-15
Connection of the serial communication port ………………………..2-16
GS DRIVER CTB
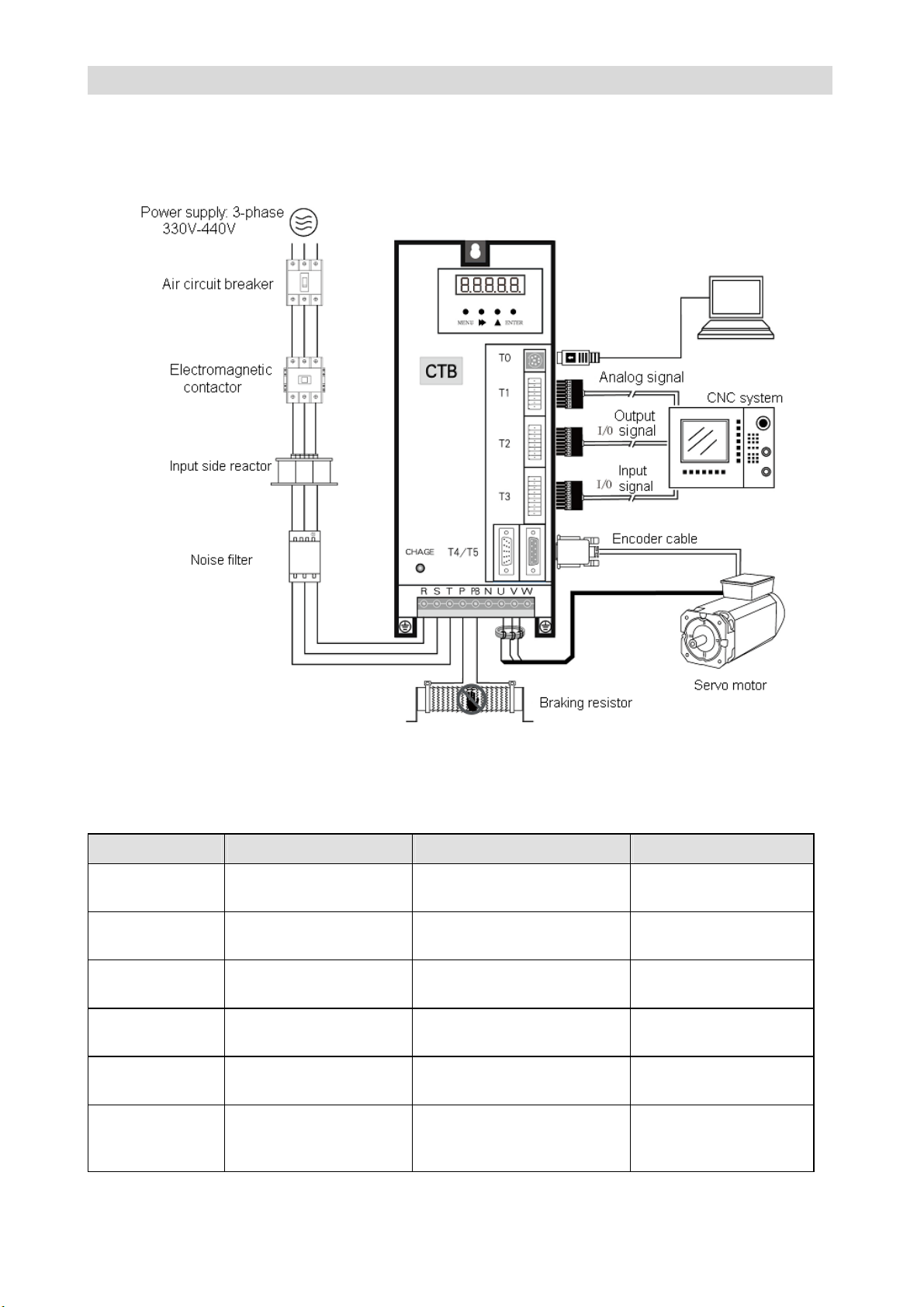
Selection and connection of peripheral devices
Spindle driver and peripheral devices connection diagram, take 15kw drives as an example
in Figure 2-1.
Figure 2-1 Spindle driver and peripheral devices connection diagram
Parts selection description
Item Usage Selection note Remarks
Air circuit breaker
Electromagnetic
contactor
Input side reactor
Input noise filter
Braking resistor
Filtering magnet
ring
Turn on or off driver
power
For automatic power on
of driver
Improve power factor of
power grid
Suppress interference of
driver to power supply
Consume regenerated
energy of the driver
Suppress wireless
interference of the driver
to outside
Select by 150% of rated
current of the driver
Select by 150% of rated
current of the driver
Select by 100% of rated
current of the driver
Select by 150% of rated
current of the driver
Select by standard provided
by the factory
Select by standard provided
by the factory
Refer to Table 2 - 3
Refer to Table 2 - 3
Refer to Table 2 - 2
Refer to GS model
selection sample
GS DRIVER CTB
Wiring of the main circuit terminals
The structure of the main circuit
See Figure 2-2A, 2-2B and 2-2C for internal structure diagram of the main circuit.
Figure 2-2A 1.5~15kw main
circuit composition
Figure 2-2B 18.5~75kw main
circuit composition
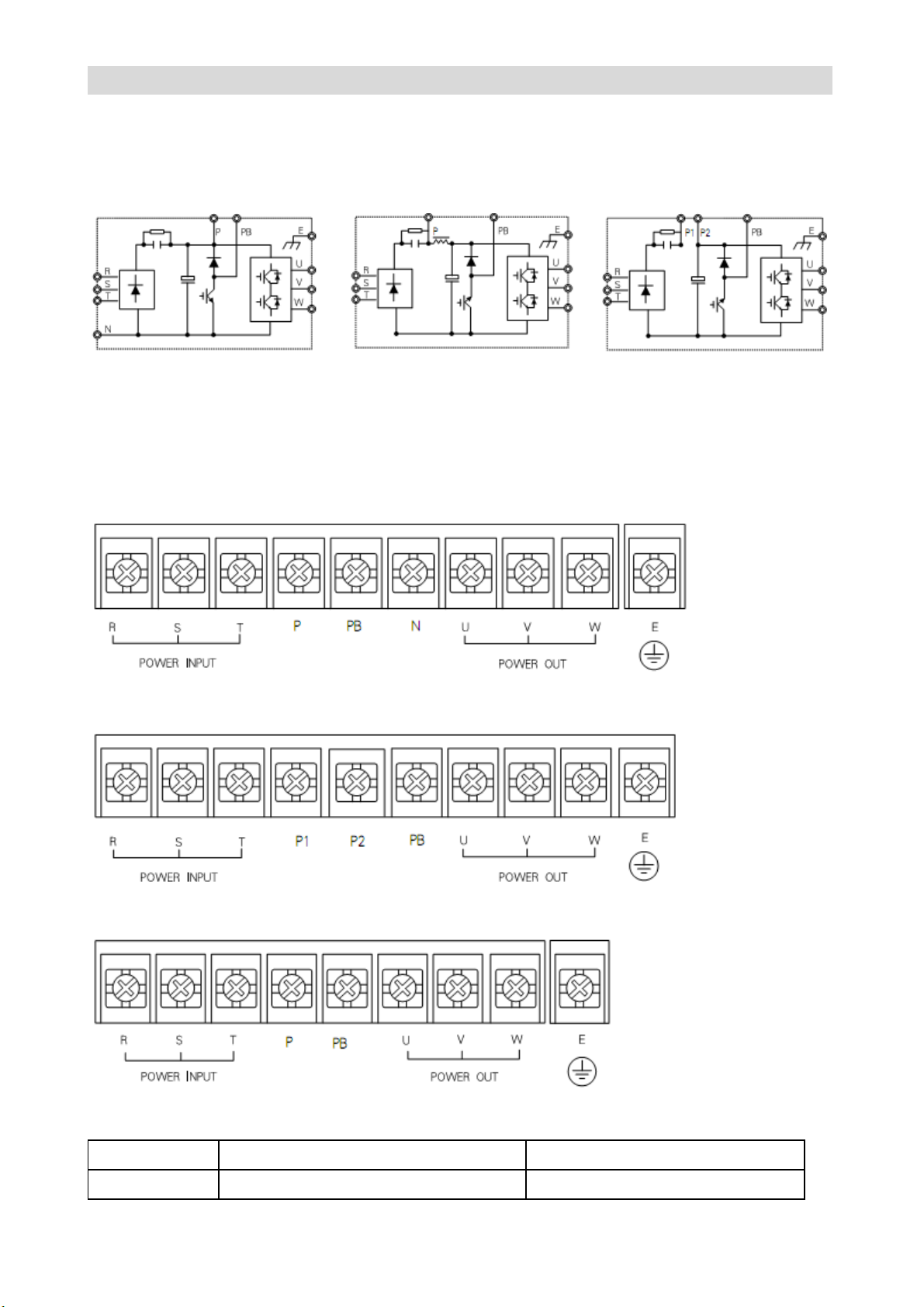
Main circuit terminals composition
1.5~22kw main circuit terminals composition
37~75kw main circuit terminals composition
Figure 2-2C 90~160kw main
circuit composition
90~160kw main circuit terminals composition
Main circuit terminals and functional description
Item Function Notes
R S T
3-phase AC supply input terminal.
Need to install breaker for protection
GS DRIVER CTB
380~440V, 50/60Hz
P P1 DC bus positive pole
P2 DC reactor wiring terminal P1 and P2 are for external DC reactor
Pb Braking resistor wiring terminal
n DC bus negative pole
U V w Driver output terminal
E Earth terminal
P and N are for input of external
braking unit or DC power input
P, P2 and PB are for external braking
resistor
N and P are for external braking unit
or DC power input
Consistent with the phase sequence
of the motor during wiring
C type grounding, the grounding
resistance≤ 4Ω
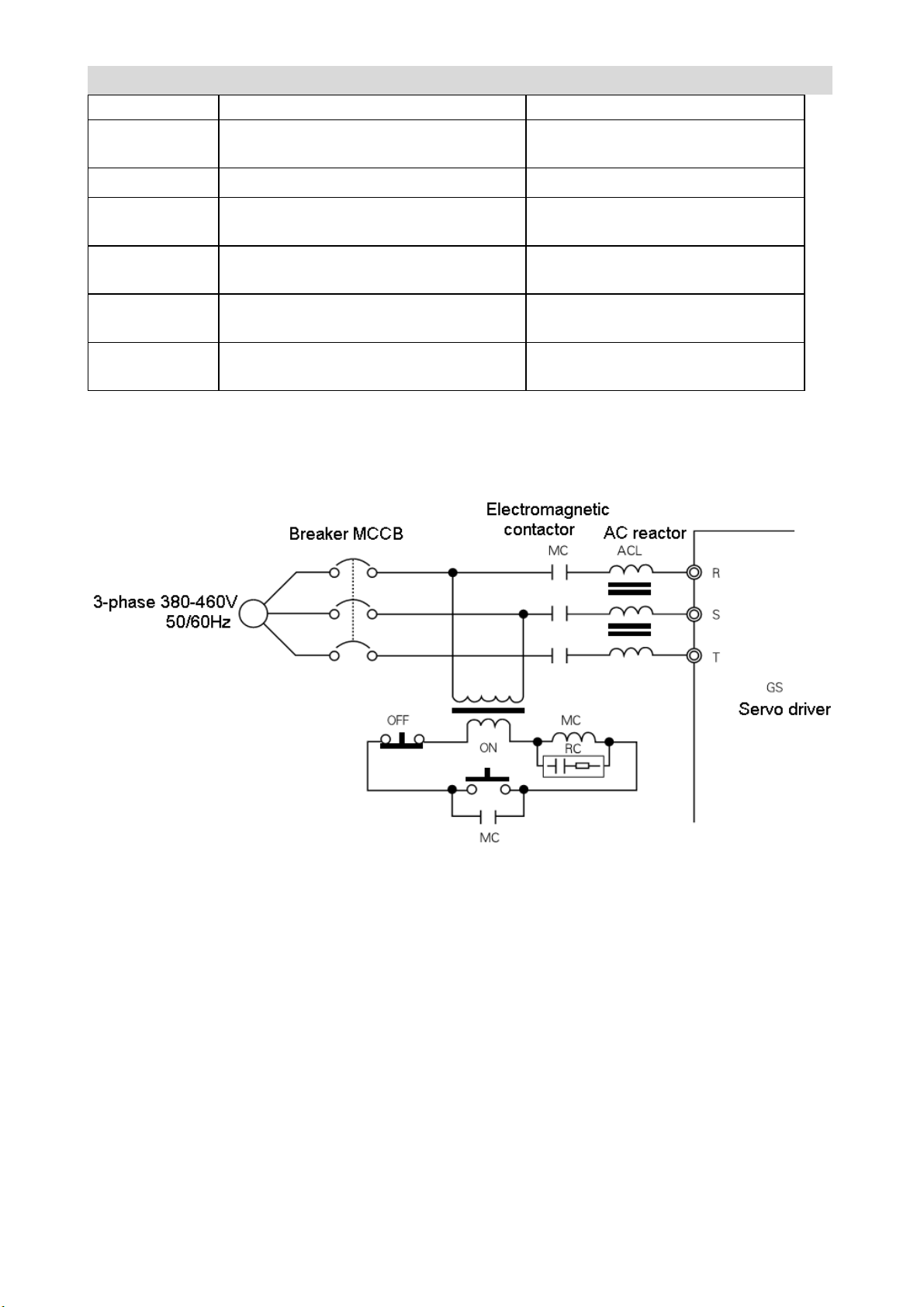
Wiring of input side of the main circuit
Please pay attention to the following items for wiring of input side of the main circuit. See
Figure 2-3 for standard wiring.
Incoming line circuit breaker (MCCB)
The main circuit power input terminals (R, S, T) must be connected to 3-phase AC power
through line protection circuit breaker (MCCB).
● The selection of MCCB must be in accordance with requirements in Table 2-3.
●The time characteristics of MCCB must take overload characteristics (rated output current
200%/min) and time characteristics of the servo driver into account.
●Each servo driver shall be equipped with independent breaker; when multiple drivers
share a circuit breaker, to cut off the power supply and prevent the failure expansion during
driver failure, it's recommended to control the incoming line electromagnetic contactor with
the fault output relay of the driver to ensure safety.

GS DRIVER CTB
Installation of the residual current circuit breaker
The output of the servo driver is a high frequency PULSE wave so that there is
high-frequency leakage current generated. Residual current circuit breaker can be used at
the incoming line side of the driver to remove high-frequency leakage current, and only
inspect channel current that dangerous to human body. Please select special residual
current circuit breaker for servo (inverter) for wiring.
● When select special residual current circuit breaker, please select model for control of
one driver with an induction current over 30ma.
●When select normal residual current circuit breaker, please select model for control of one
driver with an induction current over 200ma, and a time over 0.1s.
●Installing isolation transformer between normal residual current circuit breaker and servo
driver can effectively avoid malfunction of the breaker.
Incoming line electromagnetic contactor
Incoming line electromagnetic contactor may be used to cut off the power in sequential
control. It cannot be used as start of servo driver. When cut off power of servo driver
compulsorily with incoming line electromagnetic contactor, servo driver is in power-off
alarm state, motor only can slide freely and stop.
● Frequent turning on/off incoming line magnetic contactor may cause heating, even
burning of charging resistor of the driver (driver interior).
● The time interval of turning on/off incoming line magnetic contactor shall be longer than
10 minutes.
AC reactor
Installing AC reactor at the incoming line side of the servo driver can effectively suppress
the surge of power, avoid burning of rectification part of the driver, and also can improve the
power factor of the power supply side. Please see Figure 2-3 for connection of AC reactor,
see Table 2-1 for selection of AC reactor.
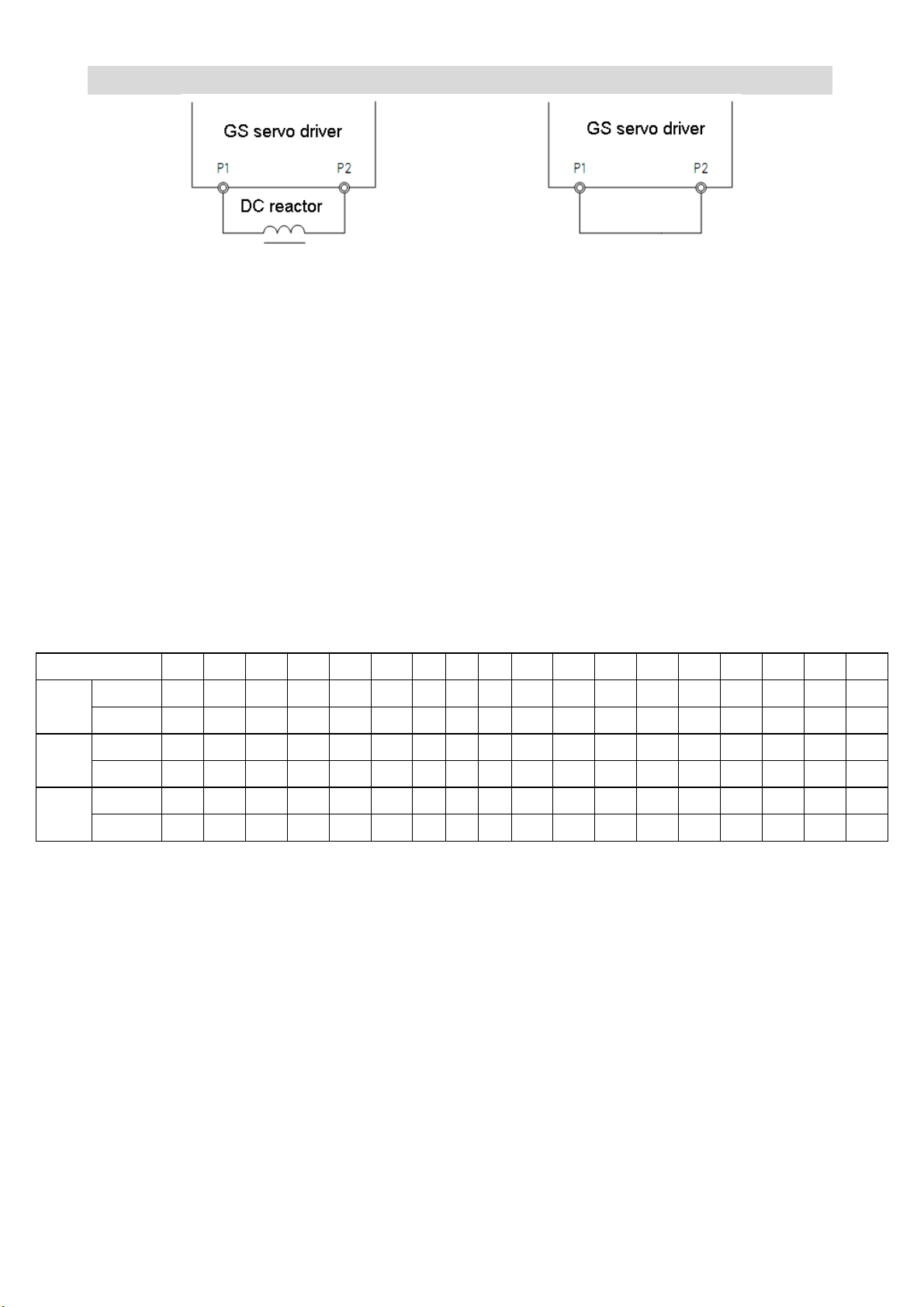
DC reactor
External DC reactor can be connected to GS servo driver above 22KW. It can effectively
suppress the surge of power, avoid burning of rectification part of the driver, and also can
improve the power factor of the power supply side. Please see Figure 2-4 for connection of
DC reactor.
External DC reactor shall not be connected to GS servo driver lower than 15 KW. For GS
servo driver above 22KW without external DC reactor shall have P1, P2 or D C + terminals
shorted as shown in Figure 2-5.
GS DRIVER CTB
L
Figure 2-4 DC reactor connection diagram Figure 2-5 Connection diagram without DC reactor
Precautions for wiring of DC reactor
1. Please do not connect DC reactor to any main circuit terminal except P1, P2, otherwise,
it may cause internal short circuit of the driver, and burn the driver.
2. Please see Table 2-3 for specifications of DC driver connecting cable, the standard of
the main circuit cable.
3. Please see Table 2-1 for selection standard of DC reactor.
4. With external DC reactor, the P2 terminal shall be multiplex terminal, and one end of
braking resistor also shall be connected to the terminal.
Table 2-1 Selection of AC reactor, DC reactor and input filter
Driver model 41P5 42P2 43P7 45P5 47P5 4011 4015 4018 4022 4030 4037 4045 4055 4075 4090 4110 4132 4160
Current (A) 5 7 10 15 20 30 40 50 60 80 90 120 150 200 230 250 290 330
AC
reactor
reactor
Model ACL 0005 0007 0010 0015 0020 0030 00400050 0060 0080 0090 0120 0150 0200 0230 0250 0290 0490
Current (A) 15 20 25 30 35 40 50 60 70 80 90 110 150 180 200 250 270 360
DC
Model DC
Current (A) 6 6 6 10 16 25 30 50 50 65 80 100 120 150 200 250 250 320
Input
filter
Model EMI 06 06 06 010 016 025 030 050 050 065 080 0100 0120 0150 0200 0250 0250 0320
015 020 025 030 035 040 050 060 070 080 090 0110 0150 0180 0200 0250 0270 0360
Power side noise filter
In command to reduce high-frequency interference noise from power line coupling to the
driver, and suppress the noise feedback to power from the driver, noise filter with
appropriate model and specifications at the power input side of the driver.
Set and connect the incoming line filter correctly as shown in Figure 2-6.
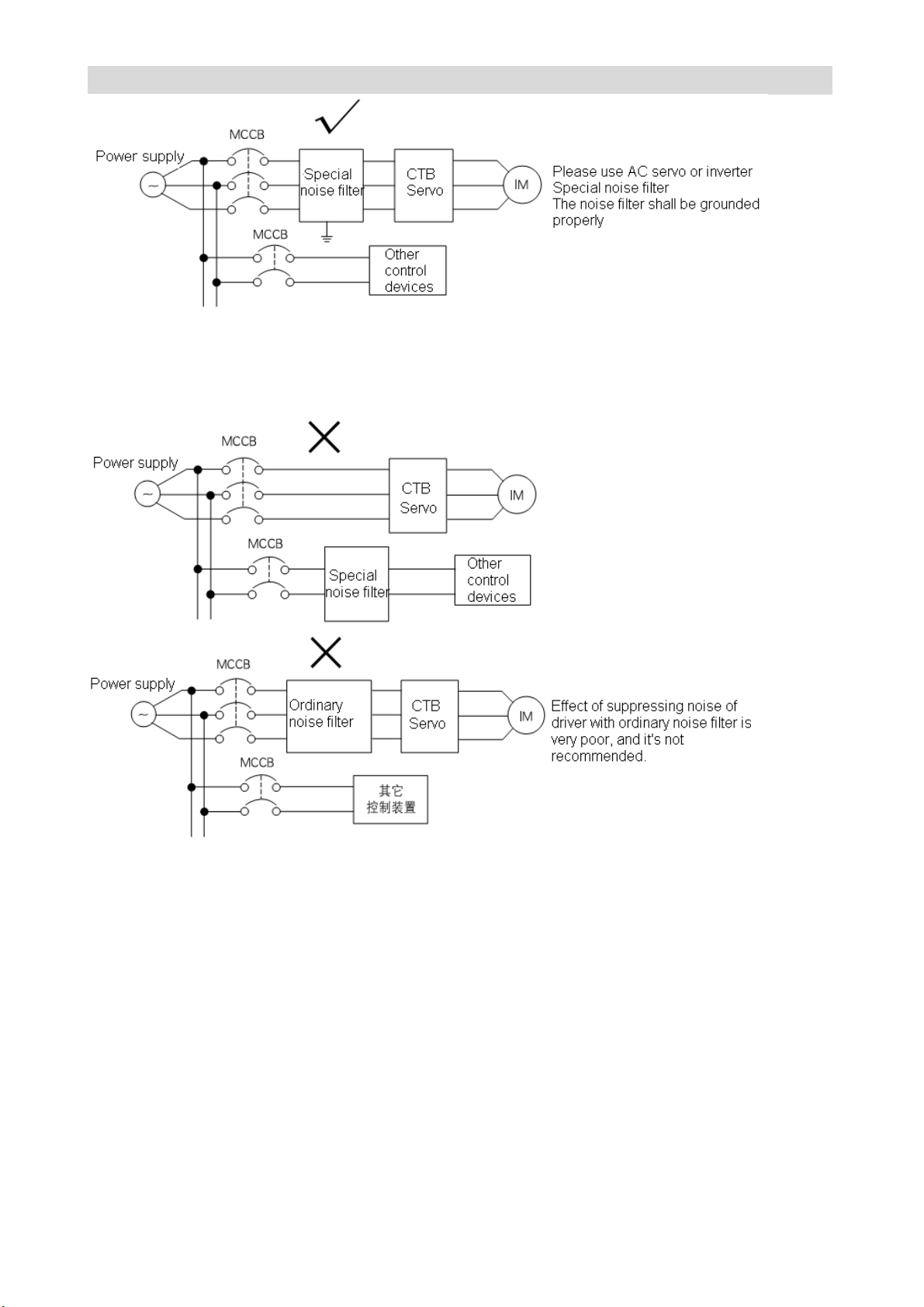
GS DRIVER CTB
Figure 2-6 Correct installation of noise filter at the input side of the power supply
Please see Figure 2-6 for examples of incorrect settings and connection
Figure 2-7 Incorrect settings and connection of noise filter at the input side of the power
supply
The wiring of output side of main circuit
The output terminals of U, V, and W of the driver shall be connected to the connecting
terminals of U, V, and W of three-phase AC motor by correct phase sequence; if the phase
sequence is connected wrongly, the driver will raise the wrong phase sequence alarm with
an alarm number of E.PV. To solve the problem, exchange phase sequence of any two
phases. Please see Figure 2-8 for standard wiring of the output side.
 Loading...
Loading...