

Page 1

G
CANopen network adapter
GN-9261
User manual
-series GN-9261 CANopen Rev. 1.01.docx
Page 1 of (52)
Page 2

GN-9261 User Manual
G
REV.
PAGES
REMARKS
DATE
Editor
1.00
New Document
2018/7/30
1.01
First release
2019/01/29
NJL
DOCUMENT CHANGE SUMMARY
-series GN-9261 CANopen Rev. 1.01.docx
Page 2 of (52)
Page 3

GN-9261 User Manual
G
Contents
1. Important Notes ............................................................................................................................................................. 5
1.1.1 Symbols.............................................................................................................................................................. 6
1.1.2 Safety Notes .................................................................................................................................................... 6
1.1.3 Certification ..................................................................................................................................................... 6
3.1 GN-9261 Specification ........................................................................................................................................ 8
3.2 GN-9261 Wiring Diagram ..................................................................................................................................... 9
3.3 GN-9261 LED Indicator ....................................................................................................................................... 10
3.3.1 LED Indicator................................................................................................................................................. 10
3.3.2 MOD(Module Status LED) ...................................................................................................................... 10
3.3.3 RUN(Module Status LED) ....................................................................................................................... 10
3.3.4 ERROR(CANopen Error LED)................................................................................................................. 10
3.3.6 Field Power, System Power LED(Field Power, System Power Status LED) ................... 11
3.3.7 Indicator states and flash rates .......................................................................................................... 11
3.4. GN-9261 Electrical Interface ............................................................................................................................ 12
3.4.1 5pin Open Connector ............................................................................................................................... 12
3.4.2 Dip Switch ...................................................................................................................................................... 12
3.4.4 RS232 Port for MODBUS/RTU, Touch Panel or I/O Guide .................................................. 13
4. Dimension ........................................................................................................................................................................ 14
4.1 GN-9261 .................................................................................................................................................................... 14
5. Communication .............................................................................................................................................................. 15
5.1 Device Model
......................................................................................................................................................... 15
5.1.1 Structure of the device model ............................................................................................................ 15
5.2 PDO (Process Data) ........................................................................................................................................... 15
5.2.1 Introduction ................................................................................................................................................... 15
5.2.2 PDO Mapping ............................................................................................................................................... 16
5.2.3 PDO Identifier .............................................................................................................................................. 16
5.2.4 PDO Communication Type .................................................................................................................... 17
-series GN-9261 CANopen Rev. 1.01.docx
Page 3 of (52)
Page 4

GN-9261 User Manual
G
5.3 SDO (Service Data) ............................................................................................................................................. 19
5.3.1 Introduction ................................................................................................................................................... 19
5.4 Emergency (Error Message) .......................................................................................................................... 20
5.5 NMT (Network Management) ......................................................................................................................... 20
5.5.1 Network Start-up ........................................................................................................................................ 20
5.5.2 Boot-up Message ....................................................................................................................................... 21
5.5.3 Node Guarding ............................................................................................................................................ 21
5.5.4 Life Guarding ................................................................................................................................................ 23
6. Object Directory ............................................................................................................................................................. 26
6.1 Communication Profile Area ......................................................................................................................... 26
6.2. Manufacturer Specific Profile Area ........................................................................................................... 33
6.3 Standard Device Profile Area – DS401 ..................................................................................................... 35
7. MODBUS Interface ....................................................................................................................................................... 39
7.1 MODBUS Interface Register/Bit Map......................................................................................................... 39
7.2 Supported MODBUS Function Codes ...................................................................................................... 39
7.2.1 8(0x08)Diagnostics .................................................................................................................................... 40
7.2.2 Error Response ............................................................................................................................................. 41
7.3 MODBUS Special Register Map ..................................................................................................... 42
7.3.1 Adapter Identification Special Register (0x1000, 4096) ....................................................... 42
7.3.3 Expansion Slot Information Special Register (0x2000, 8192)....................................... 43
APPENDIX A .................................................................................................................................................................. 48
A.1 Pr oduct List ........................................................................................................................................................... 48
A.2 Glossary .................................................................................................................................................................. 50
APPENDIX B .................................................................................................................................................................. 51
-series GN-9261 CANopen Rev. 1.01.docx
Page 4 of (52)
Page 5

GN-9261 User Manual
G
Warning!
Caution!
1. Important Notes
Solid state equipment has operational characteristics differing from those of electromechanical equipment.
Safety Guidelines for the Application, Installation and Maintenance of Solid State Controls describes some
important differences between solid state equipment and hard-wired electromechanical devices.
Because of this difference, and also becaus e of the wide variety of uses for solid state equipment, all
persons responsible for applying this equipment must satisfy themselves that each intended application of
this equipment is acceptable.
In no event will CREVIS be responsible or liable for indirect or consequential damages resulting from the use
or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many
variables and requirements associated with any particular installation, CREVIS cannot assume responsibility
or liability for actual use based on the examples and diagrams.
If you don’t follow the directions, it could cause a personal injury, damage to the equipment or
explosion
Do not assemble the products and wire with power applied to the system. Else it may cause an electric
arc, which can result into unexpected and potentially dangerous action by field devices. Arching is
explosion risk in hazardous locations. Be sure that the area is non-hazardous or remove system power
appropriately before assembling or wiring the modules.
Do not touch any terminal blocks or IO modules when system is running. Else it may cause the unit to
an electric shock or malfunction.
Keep away from the strange metallic materials not related to the unit and wiring works should be
controlled by the electric expert engineer. Else it may cause the unit to a fire, electric shock or
malfunction.
If you disobey the instructions, there may be possibility of personal injury, damage to equipment
or explosion. Please follow below Instructions.
Check the rated voltage and terminal array before wiring. Avoid the circumstances over 55℃ of
temperature. Avoid placing it directly in the sunlight.
Avoid the place under circumstances over 85% of humidity.
Do not place Modules near by the inflammable material. Else it may cause a fire.
Do not permit any vibration approaching it directly.
Go through module specification carefully, ensure inputs, output connections are made with the
specifications. Use standard cables for wiring.
Use Product under pollution degree 2 environment.
-series GN-9261 CANopen Rev. 1.01.docx
Page 5 of (52)
Page 6

GN-9261 User Manual
G
1.1. Safety Instruction
1.1.1 Symbols
Identifies information about practices or circumstances that can cause an explosion
in a hazardous environment, which may lead to personal injury
or death property damage, or economic loss
Identifies information that is critical for successful application and understanding of
the product
Identifies information about practices or circumstances that can lead to personal
injury, property damage, or economic loss.
Attentions help you to identity a hazard, avoid a hazard, and recognize
the consequences
1.1.2 Safety Notes
The modules are equipped with electronic components that may be destroyed by
electrostatic discharge. When handling the modules, ensure that the environment
(persons, workplace and packing) is well grounded. Avoid touching conductive
components, G-BUS Pin.
1.1.3 Certification
c-UL-us UL Listed Industrial Control Equipment, certified for U.S. and Canada
See UL File E235505
FCC, Reach, RoHS- II, China RoHS
CE Certificate
EN 61000-6-2; Industrial Immunity
EN 61000-6-4; Industrial Emissions
-series GN-9261 CANopen Rev. 1.01.docx
Page 6 of (52)
Page 7

GN-9261 User Manual
G
Environment Specification
Operating T emperature
-40℃~70℃
UL Temperature
-20℃~60℃
Storage T e mperature
-40℃~85℃
Relative Humidity
5% ~ 90% non-condensing
Operating Altitude
2000m
Mounting
DIN rail
General Specification
Shock Operating
IEC 60068-2-6
Vibration resistance
Based on IEC 60068-2-6
Test time : 1hrs for each test
EMC resistance burst/ESD
EN 61000-6-2 : 2005
EN 61000-6-4/ALL : 2011
Installation Pos. / Protect. Class
Vertical and horizontal installation is available.
Product Certifications
CE, UL
2. Environment Specification
Sine Vibration
5 ~ 25Hz : 1.6mm
25 ~ 300Hz : 4g
Sweep Rate : 1 Oct/min, 20 cycles
Random Vibration
10 ~ 40Hz : 0.0125g²/Hz
40 ~ 100Hz : 0.0125 → 0.002g²/Hz
100 ~ 500Hz : 0.002g²/Hz
500 ~ 2000Hz : 0.002 → 1.3 x 10-⁴g²/Hz
-series GN-9261 CANopen Rev. 1.01.docx
Page 7 of (52)
Page 8

GN-9261 User Manual
G
Interface Specifications, GN-9261
Adapter Type
Slave node (CANopen, CiA 301)
Max. PDO Number
32 TPDO / 32 RPDO
Max. SDO Number
1 Standard SDOs
PDO Mapping Method
Auto Mapping : CiA 301 (default), Sequential
Max. Expansion Module
63 slots
Max. Input size
252 bytes
Max. Output size
252 bytes
Nodes
1~99
Baudrate
10, 20, 50, 100, 125, 250, 500, 800, 1000 Kbps(default 1000Kbps)
Interface Connector
5pin Open Connector
Other Serial Port
RS232 for MODBUS/RTU(Touch Panel, I/O Guide ...)
Serial Configuration (RS232)
Node : 1 (Fixed)
Stop bit : 1 (Fixed)
Indicator
6 LEDs
1 Green, Field Power Status
Module Location
Starter module left side of G-Series system
Field Power Detection
About 14Vdc
General Specification
System Power
Supply voltage : 24Vdc nominal
Reverse polarity protection
Power dissipation
70mA typical @ 24Vdc
Current for I/O module
1.5A @ 5Vdc
Isolation
System power to internal logic : Non-isolation
System power I/O driver : Isolation
Field Power
Supply voltage : 24Vdc typical(Max. 32Vdc)
Refer to IO Module`s Specification.
Max. Current Field Power Contact
DC 10A Max
Weight
162g
Module Size
54mm x 99mm x 70mm
Environment Condition
Refer to ‘2. Environment Specification’
3. General Description
3.1 GN-9261 Specification
Manual Mapping (Reference to Index : 0x20F0, Sub Index : 6)
Baud Rate : 115200 (Fixed)
Data bit : 8 (Fixed)
Parity bit : No parity (Fixed)
1 Green/Red, Module Status (MOD)
1 Green, Network Status(RUN)
1 Red, Error Status (ERROR)
1 Green/Red, Expansion I/O Module Status (IOS)
1 Green, System Power Status
Supply voltage range : 15~32Vdc
Protection : Output current limit (Min. 1.5A)
* Field Power Range is different depending on IO Module series.
-series GN-9261 CANopen Rev. 1.01.docx
Page 8 of (52)
Page 9

GN-9261 User Manual
G
3.2 GN-9261 Wiring Diagram
Pin No. Signal Description Signal Description Pin No.
0 System Power, 24V System Power, Ground 1
2 System Power, 24V System Power, Ground 3
4 F.G F.G 5
6 Field Power, Ground Field Power, Ground 7
8 Field Power, 24V Field Power, 24V 9
-series GN-9261 CANopen Rev. 1.01.docx
Page 9 of (52)
Page 10

GN-9261 User Manual
G
Status
LED
To indicate
At least one of the error counters of the CAN controller has
reached or exceeded the warning limit.
A guard event (NMT-Slave or NMT-Master) or a Heartbeat event
has occurred.
The SYNC message has not been received within then
0x1006)
3.3 GN-9261 LED Indicator
3.3.1 LED Indicator
LED No. LED Function / Description LED Color
MOD Module Status Green/Red
RUN CANopen Status Green/Red
ERROR CANopen Error Status Red
I.O Extension Module Status Green/Red
Field Power Field Power Enable Green
3.3.2 MOD(Module Status LED)
Not Powered OFF Not power is supplied to the unit.
Normal Operational Green The unit is operating in normal condition.
Unrecoverable Fault Red
The device has an unrecoverable fault.
- Memory error or CPU watchdog error.
3.3.3 RUN(Module Status LED)
Status LED To indicate
Not Powered OFF
Stopped Single flash Green Module is stopped
Pre-Operational Blinking Green Module is in PRE-OPERATIONAL
Operational Green Module is in OPENRATIONAL
Module is either not getting power, or it is NOT_ACTIVE status.
Module is initializing.
3.3.4 ERROR(CANopen Error LED)
Status LED To indicate
Not Powered OFF Module is not getting powered or No error.
Warning limit reached Single flash
Error control Event Double flash
Sync. Error Triple flash
Bus Off ON The CAN controller is bus off.
-series GN-9261 CANopen Rev. 1.01.docx
configured communication cycle period time out (see index
Page 10 of (52)
Page 11

GN-9261 User Manual
G
Red
Status
LED
To indicate
Equal ON and OFF times with a frequency of approximately 10 Hz: ON for
approximately 50ms and OFF for approximately 50ms.
3.3.5 IOS LED(Extension Module Status LED)
Status LED To indicate
Not Powered OFF Device may not be powered.
No Expansion Module Flashing Red Adapter has no expansion module
Internal Bus Connection,
Run Exchanging I/O
Expansion Configuration
Failed - Detected invalid expansion module ID.
- Overflowed Input/Output Size
- Too many expansion module
- Initialization failure
- Communication failure.
- Changed expansion module configuration.
- Mismatch vendor code between adapter and expansion module.
Green Exchanging I/O data.
One or more expansion module occurred in fault state.
3.3.6 Field Power, System Power LED(Field Power, System Power Status LED)
Not Powered OFF Not power is supplied to the unit.
Normal Operational Green The unit is operating in normal condition.
Unrecoverable Fault Red
The device has an unrecoverable fault.
- Memory error or CPU watchdog error.
3.3.7 Indicator states and flash rates
LED ON Constantly ON
LED OFF Constantly OFF.
LED Blinking
LED Single flash
LED Double flash
LED Triple flash
-series GN-9261 CANopen Rev. 1.01.docx
One short flash (approximately 200ms) followed by a long OFF phase
(approximately 1000ms)
A sequence of two short flashes (approximately 200ms), separated by an OFF phase
(approximately 200ms).
The sequence is finished by a long OFF phase (approximately 1000ms)
A sequence of three short flashes (approximately 200ms), separated by an OFF phase
(approximately 200ms).
The sequence is finished by a long OFF phase (approximately 1000ms)
Page 11 of (52)
Page 12

GN-9261 User Manual
G
1
Terminal Resister
On : Terminal Resister On
Default : 0 (1000kbps)
8
Baudrate #1
3.4. GN-9261 Electrical Interface
3.4.1 5pin Open Connector
No. Signal Name Description
3.4.2 Dip Switch
1 -
2 CAN H CAN High
3 Shield F.G
4 CAN L CAN Low
5 CAN G CAN GND
DIP Pole# Description
2
3
4
5 Baudrate #4
6 Baudrate #3
7 Baudrate #2
Reserved
5 6 7 8 (ex.)
0 0 0 1 : 10Kbps
0 0 1 0 : 20Kbps
0 0 1 1 : 50Kbps
0 1 0 0 : 100Kbps
0 1 0 1 : 125Kbps
0 1 1 0 : 250Kbps
0 1 1 1 : 500Kbps
1 0 0 0 : 800Kbps
1 0 0 1 : 1000Kbps
-series GN-9261 CANopen Rev. 1.01.docx
Page 12 of (52)
Page 13

GN-9261 User Manual
G
3.4.3 Address setup
Each Adapter could have an unique address (from 1 to 99)
so that it can be addressed independently from other nodes.
The address 0 is reserved.
3.4.4 RS232 Port for MODBUS/RTU, Touch Panel or I/O Guide
RS232 (37204-64A3-004PL/3M
Pin# Signal Name Description
1 Reserved ---2 TXD RS232 TXD
3 RXD RS232 RXD
4 GND RS232 GND
-series GN-9261 CANopen Rev. 1.01.docx
Page 13 of (52)
Page 14

GN-9261 User Manual
G
4. Dimension
4.1 GN-9261
(mm)
-series GN-9261 CANopen Rev. 1.01.docx
Page 14 of (52)
Page 15

GN-9261 User Manual
G
5. Communication
5.1 Device Model
5.1.1 Structure of the device model
Communication. This functional unit makes the communication data objects and the associated functionality
for data exchange over the CANopen network available. The network status machine is part of this.
Object directory. This contains all the data objects (application data + parameters) that are accessible from
outside and that affect the behavior of communication, application and status machines. The object directory
is organized as a two-dimensional table in which the data are addressed by their index and sub-index.
The data exchange with CANopen devices takes place by means of data objects. In the CANopen
communication profile, two types of standard object (PDO and SDO) and special objects (for network
management etc.) are defined. The GN-9261 supports the following objects:
• 32 transmit PDOs
• 32 receive PDOs
• 1 standard SDO (server)
• Node guarding
• NMT objects
Every CANopen device possesses a CANopen object directory in which
The parameters for all the CANopen objects are entered.
5.2 PDO (Process Data)
5.2.1 Introduction
In many fieldbus systems the entire process image is continuously transferred - usually in a more or less
cyclic manner. CANopen is not limited to this communication principle, since the multi-master bus access
protocol allows CAN to offer other methods.
The process data in CANopen is divided into segments with a maximum of 8 bytes. These segments are
known as process data objects (PDOs). The PDOs each corresponds to a CAN telegram, whose specific
CAN identifier is used to allocate them and to determine their priority.
The PDOs are named from the point of view of the Network Adapter: receive PDOs (RxPDOs) are received
by the coupler and contain output data, while transmit PDOs (TxPDOs) are sent by the coupler and contain
input data.
-series GN-9261 CANopen Rev. 1.01.docx
Page 15 of (52)
Page 16

GN-9261 User Manual
G
5.2.2 PDO Mapping
CANopen specifies the data assignment for the first two PDOs in the device profile for input/output groups
(DS401) (“default mapping”). The first PDO is provided for digital inputs (TxPDO1) or outputs (RxPDO1). The
first 4 analog inputs or outputs are located in the second PDO. These PDOs are accordingly occupied by the
Network Adapters - if, for instance, no digital output terminals are plugged in, RxPDO1 remains empty.
Once the first PDOs have been occupied, the next PDOs are filled with process data in the following
sequence:
1. Digital I/O (1-byte)
2. Digital I/O (2-byte)
3. Analog I/O
5.2.3 PDO Identifier
For the first two PDOs (PDO1 + PDO2) CANopen provides default identifiers depending on the node
address, but all other PDOs must have identifiers assigned to them. The principle of the default identifiers is
explained in the section on “Network Management”, and there is a list of all the CANopen default identifiers
in the appendix.
Pre-Define Connection Set
In the system of default identifiers, all the nodes (here: slaves) communicate with one central station (the
master), since slave nodes do not listen by default to the send identifier of other slave nodes:
PDO Linking
If the consumer-producer model of CANopen PDOs is to be used for direct data exchange between nodes
(without a master), the distribution of identifiers must be appropriately adapted, so that the TxPDO identifier
of the producer agrees with the RxPDO identifier of the consumer:
-series GN-9261 CANopen Rev. 1.01.docx
Page 16 of (52)
Page 17

GN-9261 User Manual
G
This procedure is known as PDO linking. It permits, for example, easy construction of electronic drives in
which several slave axes simultaneously listen to the actual value in the master axis TxPDO.
5.2.4 PDO Communication Type
Event driven
The “event” is the alteration of an input value, the data being transmitted immediately after this change. The
event-driven flow can make optimal use of the bus bandwidth, since instead of the whole process image it is
only the changes in it that are transmitted. A short reaction time is achieved at the same time, since when an
input value changes it is not necessary to wait for the next interrogation from a master.
Polling
The PDOs can also be polled by data request telegrams (remote frames). In this way it is possible to get the
input process image of event-driven inputs onto the bus, even when the inputs have not changed, for
instance by a monitoring or diagnostic device brought into the network while it is running.
The Crevis CANopen bus Adapter supports the interrogation of PDOs by means of remote frames.
Synchronized
It is not only for drive applications that it is worthwhile to synchronize the determination of the input
information and the setting the outputs. For this purpose CANopen provides the SYNC object, a CAN
telegram of high priority but containing no user data, whose reception is used by the synchronized nodes as
a trigger for reading the inputs or for setting the outputs:
PDO transmission type
The “PDO transmission type” parameter specifies how the transmission of the PDO is triggered, or how
received PDOs are handled:
-series GN-9261 CANopen Rev. 1.01.docx
Page 17 of (52)
Page 18

GN-9261 User Manual
G
X
X
X
Transmission type PDO transmission
cyclic acyclic synchronous asynchronous RTR only
0
1-240 X
241-251 reserved
252
253
254
255
Synchronous
Transmission type 0 is only useful for RxPDOs: the PDO is only used when the next SYNC telegram is
received. In transmission types 1-240 the PDO is cyclically transmitted or expected: after every “nth” SYNC
(n = 1...240).
Since transmission types can be combined on a coupler as well as in the network, it is possible, for example,
for a fast cycle to be agreed for digital inputs (n = 1), whereas the data for analog inputs is transmitted in a
slower cycle (e.g. n = 10). The cycle time (SYNC rate) can be monitored (object 0x1006), so that if the SYNC
fails the Adapter switches its outputs into the fault state.
Asynchronous
X X
X
X X
X
The transmission types 254 + 255 are asynchronous, but may also be event-driven. In transmission type
254, the event is specific to the manufactur er, where as for type 255 it is defined in the device pr of ile. Sinc e
the Beckhoff CANopen Network Adapters support device profile DS401 no distinction is made here between
the two transmission types.
Inhibit Time
The “inhibit time” parameter can be used to implement a “transmit filter” that does not increase the reaction
time for relatively new input alterations, but is active for changes that follow immediately afterwards. The
inhibit time (transmit delay time) specifies the minimum length of time that must be allowed to elapse
between the transmission of two of the same telegrams. If the inhibit time is used, the maximum bus loading
can be determined, so that the worst case latency can then be found.
-series GN-9261 CANopen Rev. 1.01.docx
Page 18 of (52)
Page 19

GN-9261 User Manual
G
5.3 SDO (Service Data)
5.3.1 Introduction
The parameters listed in the object directory are read and written by means of service data objects. These
SDOs are multiplexed domains, i.e. structures of any size that have a multiplexer (address). The multiplexer
consists of a 16-bit index and an 8-bit sub-index that address the corresponding entries in the object
directory.
The CANopen Network Adapters are servers for the SDO, which means that at the request of a client they
make data available (upload), or they receive data from the client (download).
This involves a handshake between the client and the server. When the size of the parameter to be
transferred is not more than 4 bytes, a single handshake is sufficient (one telegram pair).
For a download, the client sends the data together with its index and sub-index, and the server confirms
reception. For an upload, the client requests the data by transmitting the index and sub-index of the desired
parameter and the server sends the parameter (including index and sub-index) in its answer telegram. The
same pair of identifiers is used for both upload and download. The telegrams, which are always 8 bytes long,
encode the various services in the first data byte.
All parameters with the exception of objects 1008h, 1009h and 100Ah (device name, hardware and software
versions) are only at most 4 bytes long, so this description is restricted to transmission in expedited transfer.
-series GN-9261 CANopen Rev. 1.01.docx
Page 19 of (52)
Page 20

GN-9261 User Manual
G
5.4 Emergency (Error Message)
Emergency messages are always sent in the event of a critical error situation having occurred/overcome in
the device, or if important information has to be communicated to other devices.
Structure and meaning of the entries in the emergency object are explained in the table .EMCY-CODE., they
are coded in the bus message in a ‘Low byte’ / ‘High byte’ order.
An emergency object is also sent, after an error is remedied (Error Code = 0x0000, the Error Register and
the Additional Code behave as described in the table .EMCY-CODE.).
Following Power On an emergency object is sent if the loaded settings are the default settings. This occurs
for two reasons:
• No settings have yet been saved (Index 0x1010).
• The saved setting was discarded by the Network Adapter, because modules were connected or
disconnected.
5.5 NMT (Network Management)
5.5.1 Network Start-up
CANopen defines a state machine that controls the functionality of a device. Transition between the
individual states is initiated by internal events or services from the NMT master. These devices states can be
connected to application processes.
In Initialization state, the CANopen data structures of a node are initialized by the application. The CiA DS301 standard defines various mandatory OD entries for this task as well as specific communication objects
required for that. In the minimum device configuration, the identifier for these communication objects must
correspond to the so-called Pre-Defined Connection-Set. The device profiles define further settings for the
applicable device class. The pre-defined settings for identifier for emergency, PDOs and SDOs are
calculated based on the node address (Node ID) that can be in the range from 1 to 99, added to a base
identifier that determines the function of the individual object.
-series GN-9261 CANopen Rev. 1.01.docx
Page 20 of (52)
Page 21

GN-9261 User Manual
G
After Initialization is completed the node automatically switches into PRE-OPERATIONAL (12) state. The
NMT master will be informed about this state change with the BOOT-UP message sent by the corresponding
node. In this state it is not possible to communicate with the node using PDOs. However, the node can be
configured over the CAN bus using SDOs in PRE-OPERATIONAL state. NMT services and Life Guarding
are also available in this state.
The application as well as the available resources of the CANopen device determine to what extend
configuration over the CAN bus with the help of SDOs must take place. For example, if the CANopen device
does not provide a non-volatile memory to store mapping and communication parameters for PDOs and
these parameters differ from the default values, then these parameters must be transmitted to the node over
the network after initialization is completed.
After the configuration of these parameters by the application or the NMT master is completed, the NMT
service Start_Remote_Node (6) can be used to render the node from PRE-OPERATIONAL state into
OPERATIONAL state. This state change also causes the initial transmission of all TPDOs independently of
whether an event for it is present. Each subsequent transmission of PDOs then always takes place as a
function of an event.
All CANopen devices also support the Stop_Remote_Node (7), Enter_PRE-OPERATIONAL_State (8),
Reset_Node (10), Reset_Communication (11) services. Reset_Node is used to reset the application-specific
data and the communication parameter of the node. The CANopen data structures are loaded with their
initial values. Data stored in a non-volatile memory are rejected. This state change is comparable with an
initial operation of the node.
If the NMT service Reset_Communication is used to change the state of a node, then loading initial values
exclusive for the communication parameters in the CANopen stack takes place.
No communication via PDO and SDO is possible if the device is in STOPPED state. Only NMT services,
Node Guarding, Life Guarding as well as Heartbeat are possible in this state.
5.5.2 Boot-up Message
After the initialization phase and the self-test, the Network Adapter sends the boot-up message, a CAN
message with no data bytes and with the identifier of the emergency message: CAN-ID = 0x80 + node ID.
5.5.3 Node Guarding
Node Guarding represents a means of node supervision that is initiated by the NMT master. This service is
used to request the node’s operational state and to determine whether the node is functioning correctly. The
NMT master transmits a single Node Guard message to the slave in the form of a remote frame with the
CAN identifier 0x700 plus the node address of the NMT slave. As a response to this remote frame, the NMT
slave sends a CAN message back containing its current NMT state and a one bit that toggles between two
subsequent messages.
Response from the NMT Slave to a Node Guard Remote Frame:
Identifier DLC
0x700 + Node Address 1 Status Byte
-series GN-9261 CANopen Rev. 1.01.docx
Data
0
Page 21 of (52)
Page 22

GN-9261 User Manual
G
Node state of a CANopen Device
Status Byte Node State
0x00 BOOT-UP
0x04 STOPED
0x05 OPERATIONAL
0x7F PRE-OPERATIONAL
Bit 7 of the status byte always starts with a 0 and changes its value after each transmission. The application
is responsible for actively toggling this bit. This ensures that the Node Guard response message from a
slave is not just stored in one of the Full-CAN channels. Thus the NMT master will get the confirmation from
the NMT slave node that the application is still running.
-series GN-9261 CANopen Rev. 1.01.docx
Page 22 of (52)
Page 23

GN-9261 User Manual
G
5.5.4 Life Guarding
As an alternative to Node Guarding node supervision can also be performed by Life Guarding services. In
contrast to the Node Guarding the NMT master cyclically sends a Life Guard message to the slave in the
form of a remote frame with the CAN identifier 0x700 plus the node address of the NMT slave. As a
response to this remote frame, the NMT slave sends a CAN message back containing its current NMT state
and a one bit that toggles between two subsequent messages. With being missing the answer or unexpected
status of the slave the NMT masters application is informed. Further the slave can detect the loss of the
masters. The Life Guarding is started with the transmission of the first Life Guard message of the masters.
Response from the NMT Slave to a Life Guard Remote Frame
Identifier DLC
0x700 + Node Address 1 Status Byte
Meaning of the status byte corresponds to that of the Node Guarding message The Life Guarding
supervision on the NMT slave node is deactivated, if the Life Guard time (object entry 0x100C in the object
dictionary) or the Life time factor (object entry 0x100D in the object dictionary) are equal to zero.I/O Process
Image Map
Data
0
An expansion module may have 3 types of data as I/O data, configuration parameter and memory register.
The data exchange between network adapter and expansion modules is done via an I/O process image data
by FnBus protocol. The following figure shows the data flow of process image between network adapter and
expansion modules.
-series GN-9261 CANopen Rev. 1.01.docx
Page 23 of (52)
Page 24

GN-9261 User Manual
G
5.6 Example of Input and Output Proce s s Im a ge Ma p
Input image data depends on slot position and expansion slot data type. Input process image data is only
ordered by expansion slot position when input image mode is uncompressed (mode 0). But, when input image
mode is compr essed (m ode 1), input proces s im age data is or dered b y expans ion slo t pos ition and slot d ata
type.
Input process image mode can be set by Object Index 0x4500
For example slot configuration
Slot Address Module Description
#0 CANopen Adapter
#1 8-discrete output
#2 8-dis cr ete inp ut
#3 4-analog output
#4 2ch, high speed counter
#5 4-relay output
#6 16-dis c rete in put
#7 4-analog input
#8 16-dis c rete out put
Non-compress mode data format
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Index Sub-Index
0 Analog Output Ch0 low byte (Slot#3) 0x6411 0x01
1 Analog Output Ch0 high byte (Slot#3) 0x6411 0x01
2 Analog Output Ch1 low byte (Slot#3) 0x6411 0x02
3 Analog Output Ch1 high byte (Slot#3) 0x6411 0x02
4 Analog Output Ch2 low byte (Slot#3) 0x6411 0x03
5 Analog Output Ch2 high byte (Slot#3) 0x6411 0x03
6 Analog Output Ch3 low byte (Slot#3) 0x6411 0x04
7 Analog Output Ch3 high byte (Slot#3) 0x6411 0x04
8 Discrete Output 8 pts. (Slot#1) 0x6200 0x01
9 Reserved Discrete Output 4 pts. (Slot#5) 0x6200 0x02
10 Discrete Output low 8 pts. (Slot#8) 0x6200 0x03
11 Discrete Output high 8 pts. (Slot#8) 0x6200 0x04
12 Discrete Input 8 pts. (Slot#2) 0x6000 0x01
13 Discrete Input low 8 pts. (Slot#6) 0x6000 0x02
14 Discrete Input high 8 pts. (Slot#6) 0x6000 0x03
-series GN-9261 CANopen Rev. 1.01.docx
Page 24 of (52)
Page 25

GN-9261 User Manual
G
15 Discrete Input low 8 pts. (Slot#9) 0x6000 0x08
16 Discrete Input high 8 pts. (Slot#9) 0x6000 0x09
17 Analog Output Ch0 low byte (Slot#7) 0x6400 0x01
18 Analog Output Ch0 high byte (Slot#7) 0x6400 0x01
19 Analog Output Ch1 low byte (Slot#7) 0x6400 0x02
20 Analog Output Ch1 high byte (Slot#7) 0x6400 0x02
21 Analog Output Ch2 low byte (Slot#7) 0x6400 0x03
22 Analog Output Ch2 high byte (Slot#7) 0x6400 0x03
23 Analog Output Ch3 low byte (Slot#7) 0x6400 0x04
24 Analog Output Ch3 high byte (Slot#7) 0x6400 0x04
25 Special Input LL byte Ch#0 (Slot#4) 0x3000 0x01
26 Special Input LH byte Ch#0 (Slot#4) 0x3000 0x02
27 Special Input HL byte Ch#0 (Slot#4) 0x3000 0x03
28 Special Input HH byte Ch#0 (Slot#4) 0x3000 0x04
29 Special Input LL byte Ch#1 (Slot#4) 0x3000 0x05
30 Special Input LH byte Ch#1 (Slot#4) 0x3000 0x06
31 Special Input HL byte Ch#1 (Slot#4) 0x3000 0x07
32 Special Input HH byte Ch#1 (Slot#4) 0x3000 0x08
33 Special Output byte Ch#0 (Slot#4) 0x3200 0x01
34 Special Output byte Ch#1 (Slot#4) 0x3200 0x02
-series GN-9261 CANopen Rev. 1.01.docx
Page 25 of (52)
Page 26
GN-9261 User Manual
G
Sub-
Index
0x1000
0x00
Device type
unsigned32
ro
Statement of device type
0x1001
0x00
Error register
unsgined8
ro
Error register
0x00
Predefine error field
unsgined8
rw
0
Number of error states stored
0x01
Standard error filed
unsigned32
ro
0
Error state are stored
0x1005
0x00
COB-ID sync message
unsigned32
rw
0x80000080
Identifier of the Sync message
0x1007
0x00
Synchronous Window Length
unsigned32
rw
0
Synchronous Window Length
visible
string
visible
string
visible
string
Interval between two guard
Is set by the NMTmaster.(ms)
0x00
Largest sub-index supported
unsigned32
ro
1
Number of store options
0x00
Restore default parameters
unsgined8
ro
1
Number of restore options
0x1012
0x00
COB-ID Time Stamp
unsigned32
rw
100
COB-ID Time Stamp
0x1014
0x00
COB-ID emergency message
unsigned32
ro
0x80+node ID
COB-ID of the emergency object
0x1015
0x00
Inhibit time EMCY
unsigned16
rw
0
COB-ID SYNC
0x00
Number of entries
unsgined8
ro
5
Heartbeat time value
0x01
Consumer Heartbeat time1
unsigned32
rw
0
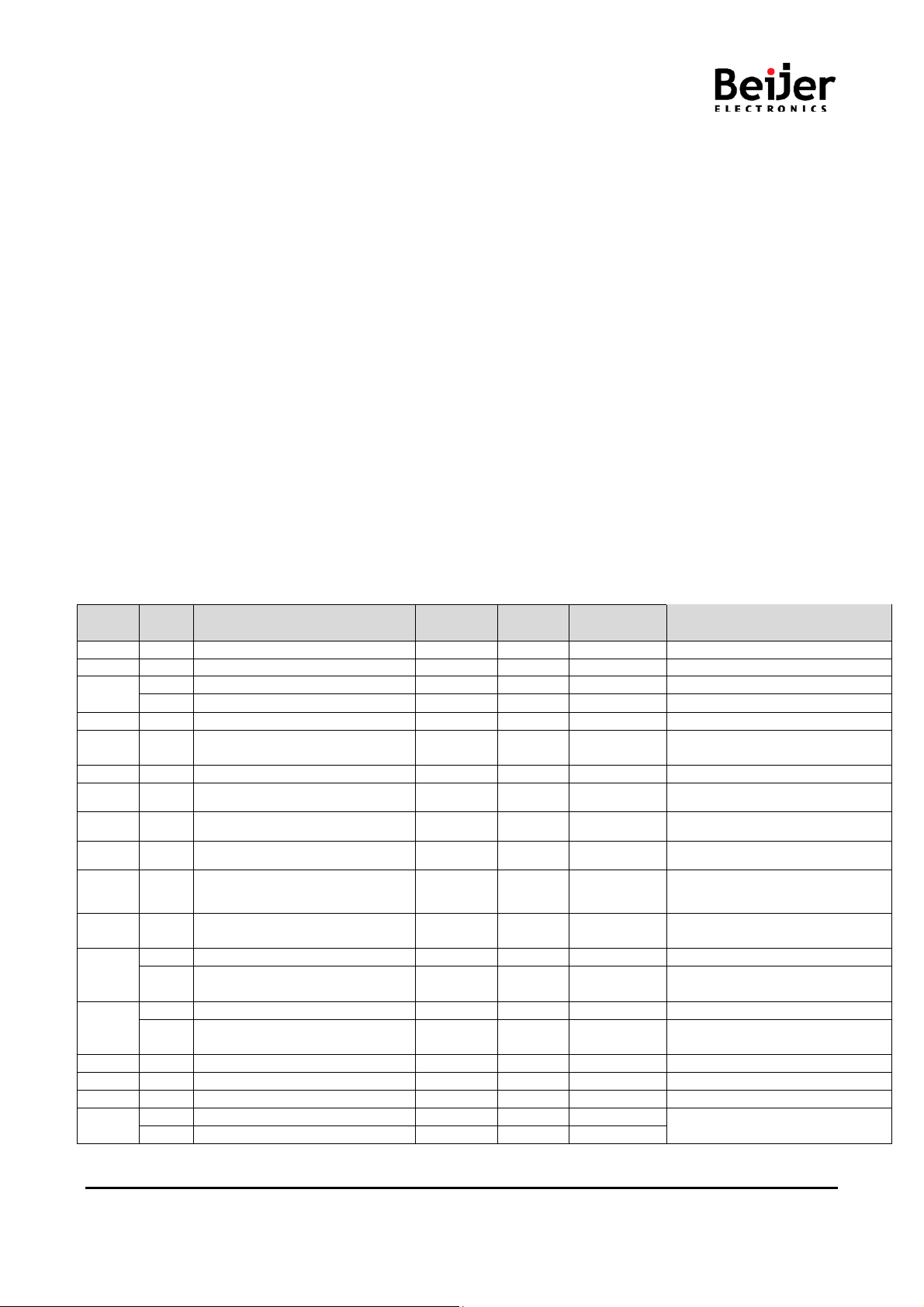
6. Object Directory
All the CANopen objects relevant for the Network Adapter are entered into the CANopen object directory.
The object directory is divided into three different regions:
1) communication-specific profile region (index 0x1000 – 0x1FFF)
2) manufacturer-specific profile region (index 0x2000 – 0x5FFF)
3) standardized device profile region (0x6000 – 0x9FFF)
Region 1 thus contains the description of all the parameters particular to communication, the manufacturerspecific entries are described in region 2, and region 3 stores the objects for the device profile according to
DS-401. Every entry in the object directory is identified by a 16 bit index.
6.1 Communication Profile Area
The following table contains all objects of the communication profile supported by the Network adapter
Index
0x1003
0x1006 0x00 Communication cycle period unsigned32 rw 0
0x1008 0x00 Manufacturer device name
0x1009 0x00 Manufacturer hardware version
0x100A 0x00 Manufacturer software version
0x100C 0x00 Guard time unsigned16 rw 0x00C8
0x100D 0x00 Life time factor unsgined8 rw 2
0x1010
0x1011
0x01 Save all parameters unsigned32 rw 1
0x01 Restore all default unsigned32 rw 1
Name Type Attribute Default Meaning
ro GN-9261 Device name of the Adapter
ro 100 H/W version description
ro 100 Software version number
Communication cycle period in.
’0’ if not used
telegrams.
Life time factor * guard time =
life time(watchdog for life guarding)
Store all parameters
0x65766173(ASCII : save)
Restore all default parameters
0x64616F6C(ASCII : load)
0x1016
-series GN-9261 CANopen Rev. 1.01.docx
Page 26 of (52)
Page 27

GN-9261 User Manual
G
...
...
...
...
...
0x05
Consumer Heartbeat time5
unsigned32
rw
0
0x1017
0x00
Producer Heartbeat time
unsigned16
rw
Producer Heartbeat time (0~127)
0x00
Identity object
unsgined8
ro
4
Identity Object
0x01
Manufacturer ID
unsigned32
ro
0x0000029D
0x03
Revision number
unsigned32
ro
0x00000100
0x04
Serial number
unsigned32
ro
0x1019
0x00
Synchronous counter overflow value
unsigned16
rw
0
Synchronous counter overflow value
Error Behavior
0x01
Communication Error
unsgined8
rw
0
0x01
COB-ID used by PDO
unsigned32
rw
0x200+nodeID
Parameter 1-32
0x02
Transfer type
unsgined8
rw
… …
…
0x00
Number of entries
unsgined8
ro
5
0x01
COB-ID used by PDO
unsigned32
rw
0x00
Number of entries
unsgined8
rw
8
Receive PDO Mapping
0x01
1. Mapping Entry 1
unsigned32
rw
Parameter 1-32
…
…
0x08
8. Mapping Entry 8
unsigned32
rw
… …
…
0x01
1. Mapping Entry 1
unsigned32
rw
… …
0x08
8. Mapping Entry 8
unsigned32
rw
0x01
COB-ID used by PDO
unsigned32
rw
0x180+nodeID
Parameter 1-32
…
…
…
0x00
Number of entries
unsgined8
ro
5
0x01
COB-ID used by PDO
unsigned32
rw
0x02
Transfer type
unsgined8
rw
0x00
Number of entries
unsgined8
rw
8
Transmit PDO Mapping
…
…
0x08
8. Mapping Entry 8
unsigned32
rw
… …
…
0x00
Number of entries
unsgined8
rw
8
0x01
1. Mapping Entry 1
unsigned32
rw
0x08
8. Mapping Entry 8
unsigned32
rw
0x02 Consumer Heartbeat time2 unsigned32 rw 0
0x1018
0x1029
0x1400
0x141F
0x1600
0x161F
0x1800
0x02 Product code unsigned32 ro 0x00009060
0x00 Number of error unsgined8 ro 1
0x00 Number of entries unsgined8 ro 5 Receive PDO Communication
0x02 Transfer type unsgined8 rw
0x00 Number of entries unsgined8 rw 8
0x00 Number of entries unsgined8 ro 5 Transmit PDO Communication
0x02 Transfer type unsgined8 rw
0x181F
0x1A00
0x1A1F
0x01 1. Mapping Entry 1 unsigned32 rw
… …
Parameter 1-32
• Object 0x1000, Device Type
The object indicates the implemented device profile. The CANopen Network Adapter has implemented the
Device Profile for Generic I/O Modules" (device profile No. 401). Moreover, in the index 0x1000 the value
informs about the type of modules connected.
-series GN-9261 CANopen Rev. 1.01.docx
Page 27 of (52)
Page 28

GN-9261 User Manual
G
Bit
Meaning
Format:
MSB
4 byte 3 byte 2 byte 1 byte 0 byte
0x00 0x00 0000.4321 (bit) 0x01 0x91
Device connect Number Device Profile Number
This register contains internal errors. This register is also part of the emergency message
1 1 = 1, if at least one digital input is connected.
2 2 = 1, if at least one digital output is connected.
3 3 = 1, if at least one analog input is connected.
4 4 = 1, if at least one analog output is connected.
• Object 0x1001, Error Register
Format:
Bit Meaning
0 General Error
1 Reserved
2 Reserved
3 Reserved
4 Communication
5 Device profile specific
6 Reserved
7 Manufacturer specific
In the event of an error, bit 0 is always set. Additional bits used specify the error in more detail.
• Object 0x1003, Pre-defined Error Field
The sub-index 0 contains the errors currently stored in the field. If a new error occurs, it will be entered in
sub-index 1, and all errors already existing moved down by one sub-index. A max. Of 20 error entries are
supported. Should more than 20 errors occur, each time the error contained in sub-index 20 is written over?
Format:
The additional information corresponds to the first 2 bytes of the additional code of the Emergency telegram.
The error code coincides with the error code in the Emergency telegram.
The complete error memory is deleted by writing a .0" in sub-index 0.
-series GN-9261 CANopen Rev. 1.01.docx
Page 28 of (52)
Page 29

GN-9261 User Manual
G
• Object 0x1005, COB-ID SYNC message
The object defines the COB ID for the synchronization message.
• Object 0x1006, Communication Cycle Period
The object defines the max. Time in µs for two subsequent SYNC messages.
The internal resolution is 2ms. If the value is 0, no SYNC monitoring is performed.
• Object 0x1008, Manufacturer Device Name
The object indicates the device name of the Network Adapter.
• Object 0x1008, Manufacturer Device Name
The object contains the length of the time window for synchronous PDOs in us. It is 0 if not used.
• Object 0x1009, Manufacturer Hardware Version
The object indicates the current hardware version of the Network Adapter
• Object 0x100A, Manufacturer Software Version
The object indicates the current software version of the Network Adapter
• Object 0x100C, Guard Time
The object indicates the Guarding Time in milliseconds. An NMT master cyclically interrogates the NMT
slave for its status. The time between two interrogations is termed Guard Time.
• Object 0x100D, Life Time Factor
The life Time Factor is part of the Node Guarding Protocol. The NMT slave checks if it was interrogated
within the Node Life Time (Guard time multiplied with the life time factor). If not, the slave works on the basis
that the NMT master is no longer in its normal operation. It then triggers a Life Guarding Event.
If the node life time is zero, no monitoring will take place.
• Object 0x1010, Store Parameters
This object allows to permanently storing the settings made by the user. For this purpose, the
signature .save" (lower case letters ASCII - MSB. 0x65 76 61 73 - LSB) must be written into the index
0x1010 sub index 1. The storing process runs in the background and takes approx. 2-3 seconds. When the
storing process is finished, the SDO reply telegram is sent. Communication remains possible during storage
by means of SDOs. An error message as a result of a new storage attempt only occurs, when the previous
one was not yet finished.
It is also not possible to trigger the storage function for as long as .Restore" is active.
As soon as a setting is stored, the Emergency .Changed HW configuration. Is not sent any longer if the
Network Adapter is started up again without changing the module configuration.
-series GN-9261 CANopen Rev. 1.01.docx
Page 29 of (52)
Page 30

GN-9261 User Manual
G
Object 0x1011, Restore default Parameters
This object allows resetting the user stored parameters to the original default values.
Sub-indexes 2 and 3 are not supported.
The load command is processed in the background and takes approx. 2-3 seconds. When the performance
is finished, the SDO reply message is sent. Communication can be continued during performance using
SDOs. An error message is only tripped with another attempt to send a load command, if the previous one is
not yet completed. It is also not possible to trigger a load command for as long as .Save" is active.
Sub-index 1 - Permanent entry of default parameters:
Writing the signature .load" (lower case letters ASCII - MSB 0x64 0x61 0x6F 0x6C LSB) into the index
0x1011 sub-index 1 entails loading of the standard factory settings after the following Power ON and each
further Power On (until the next SAVE command is given).
• Object 0x1014, COB-ID Emergency Object
The object defines the COB ID for the EMCY message.
If a new COB ID is to be entered, set bit 31 to 1 first, because standard DS301 does not allow to change a
valid COB ID (Bit31=0).
• Object 0x1015, Inhibit Time Emergency Object
This object indicates the time in minutes which must be allowed to elapse prior to another Emer genc y
to be sent.
An entry of zero deactivates the delayed transmission.
Due to the fact that with delayed transmission the entries are entered in a queue, the max. number of
Emergencies in quick succession is limited to the queue size (20 entries). If this number is exceeded, an
Emergency is sent immediately indicating the overf lo w.
One time unit is 100µs.
• Object 0x1016, Consumer Heartbeat Time
This entry allows the monitoring of a maximum of 1modules. The system checks whether each module
defined in this object has created a Heartbeat within the set time. If the set time was exceeded, a HeartbeatEvent is triggered. The Heartbeat-Time is entered in milliseconds. The monitoring is deactivated, if the time
value is 0.
• Object 0x1017, Producer Heartbeat Time
The object defines the time between two Heartbeat messages sent in milliseconds. If the time is 0, no
Heartbeat is sent. The Heartbeat transmission starts as soon as a value other than 0 is entered.
-series GN-9261 CANopen Rev. 1.01.docx
Page 30 of (52)
Page 31

GN-9261 User Manual
G
• Object 0x1018, Identity Object
The object specifies the device used.
• Object 0x1029, Error behavior
The object specifies to which state an I/O module shall be set, when a communication error, output error or
input error is detected.
• Object 0x1400 ~ 0x141F Receive PDO Communication Parameter
This object is used to set the communication parameters of the RxPDOs. 8 RxPDOs are supported. The
default COB IDs of the first four PDOs is resigned according to the DS301 standard. All further PDOs are
deactivated. If not all default PDOs are used (i.e. a smaller number of modules is connected), also the
default PDOs not used are deactivated.
If a new COB ID is to be entered, bit 31 must be set to 1 first,
because the DS301 standard does not permit to change a valid COB ID (Bit31=0).
• Object 0x1600 ~ 0x161F, Receive PDO Mapping Parameter
This object is used to define the data, which is to be transmitted by means of the PDO.
Sub-index 0 contains the number of objects valid for the PDO.
Index: Index of the object to be transmitted
Sub-Index: Sub-index of the object to be transmitted
Size: Object size in bits Due to the fact that max. 32 bytes can be transmitted in a PDO, the sum of the valid
object lengths must not exceed 252 (32Byte*8Bit = 256 but, Fn-bus specification is Max.252bytes)
• Object 0x1800 ~ 0x181F, Transmit PDO Communication Parameter
This object is used to set the communication parameters of the TxPDOs. 8 TxPDOs are supported. The
default COB IDs of the first four PDOs is reassigned according to the DS301 standard. All other PDOs are
de-activated. If not all default PDOs are used (i.e. a smaller number of modules is connected), also the
default PDOs not used are de-activated.
-series GN-9261 CANopen Rev. 1.01.docx
Page 31 of (52)
Page 32

GN-9261 User Manual
G
• Object 0x1A00 ~ 0x1A1F, Transmit PDO Mapping Parameter
This object is used to define the data, which is transmitted using the PDO. Sub-index 0 contains the number
of objects valid for the PDO.
Index: Index of the object to be transmitted
Sub-Index: Sub-index of the object to be transmitted
Size: Object size in bits Due to the fact that max. 8 bytes can be transmitted in a PDO, the sum of the valid
object lengths must not exceed 252
-series GN-9261 CANopen Rev. 1.01.docx
Page 32 of (52)
Page 33

GN-9261 User Manual
G
Sub-
Index
unsigned16
ro
0
unsigned16*n
ro
All module name
unsigned16
ro
Baudrate Setting value
0x03E8 : 1000(default)
unsigned8
rw
0
unsigned32
ro
0x00000003
unsigned16
ro
unsigned16
ro
unsigned16
ro
unsigned16
ro
unsigned16
ro
unsigned16
ro
unsigned32
ro
unsigned32
ro
unsigned16
ro
unsigned16
ro
unsigned8*n
rw
unsigned8*n
ro
unsigned16
ro
unsigned8*n
rw
unsigned32
ro
unsigned32
ro
unsigned32
ro
unsigned16
ro
unsigned8*n
ro
6.2. Manufacturer Specific Profile Area
The following table shows all objects of the manufacturer profile supported by the Network Adapter.
*0x2100(Slot#0=NA), 0x2101(Slot#1), 0x2102(Slot#2)...
Index
0x20F0
0x21xx
0x00 Number of entries unsigned8 ro 0x4F
0x01 Node id current switch value unsigned8 ro
0x02 Number of module unsigned16 ro
Run command
0 : IO_Available
1 : IO_Ready
2 : IO_Idle
0x03
0x04 All module id
0x05 Baudrate
0x06
0x0C Status, error inf orm ation
0x0E All size of output bit
0x0F All size of input bit
0x10 All size of output byte
0x11 All size of input byte
0x04 Module ID
0x08 Address of output byte
0x09 Address of input byte
0x0C Fnbus Status, error inf ormati on
0x0E Size of output bit
0x0F Size of input bit
0x12 IO Data output#0
0x13 IO Data input#0
0x16 Parameter length
0x17 Parameter data
0x18 Hardware Rev
0x19 Firmware Rev
0x1A Firmware release date
0x1B Inspection date
0x20 String, Module description
3 : IO_Run
4 : IO_Timeout
5 : IO_Minorfault
6 : IO_Unrecoveryfault
7 : Reset
PDO Mapping Method
0 : DS301(Auto) (default)
2 : Manual
Name Type Attribute Default Meaning
Node ID value
Number of Module
-series GN-9261 CANopen Rev. 1.01.docx
Page 33 of (52)
Page 34

GN-9261 User Manual
G
unsigned8
ro
0xFE
Read Special Input 8 bit
unsigned8
ro
...
...
...
unsigned8
ro
unsigned8
rw
1
unsigned8
ro
0xFE
Special input Interrupt Mask any
unsigned8
rw
0xFF
...
...
...
unsigned8
rw
0xFF
unsigned8
ro
0xFE
number of entries
unsigned8
rw
0
1st special output block
...
...
...
unsigned8
rw
0
64st special output block
unsigned8
ro
0xFE
Error Mode 8 Special output
unsigned8
rw
0xFF
...
...
...
unsigned8
rw
0xFF
unsigned8
ro
0xFE
Fault State 8 output lines
unsigned8
rw
0
...
...
...
unsigned8
rw
0
0x2100
0x213F
0x00 Read special input data
0x3000
0x3005 0x00 Enable speci al input int errupts
0x3006
0x3200
0x3206
0x3207
0x1 8-bit special input 1
… …
0xFE 8-bit special input 254
0x00 Number of entries
0x01
0xFE
0x00 Number of entries
0x01 8-bit special output 1
0xFE 8-bit special output 254
0x00 Number of entries
0x01 Faultmode for special output 1
0xFE Faultmode for special output 254
0x00 Number of entries
0x01 Fault state for spec i al output 1
0xFE Fault state for special output 254
Special input interrupt mask any
change for special input 1
... ...
Special input interrupt mask any
change for special input 254
… …
... ...
... ...
change for Special Inputs
• Object 0x2100(Slot#0=NA), Manufacture Information.
Index Sub Name Type Attribute Default Meaning
0x00 number of entries unsigned8 ro 0x4F number of entries(slot number)
0x04 module id unsigned16 ro 0
• Object 0x2101(Slot#1=IO), ... , 0x213F(Slot#63=IO), IO Module Inform ation.
Index Sub Name Type Attribute Default Meaning
0x00 number of entries unsigned8 ro 0x4F number of entries(slot number)
0x04 module id unsigned16 ro 0
• Object 0x20F0, Network Adapter Status.
This object contains the Network Adapter status.
- Sub-index 2 contains rotary switch value set Node ID from NA.
- Sub-index 5 contains Dip switch value set baudrate from NA. If you write 5(125), you can read 7D
h.
- Sub-index 6 set Master's PDO mapping method. By default, DS301 Auto mapping. PDO1 is digital IO and
PDO2~3 analog IO fixed. From PDO4 additional IO slot is used in sequence. Manual mapping set all digital
IO, second analog IO and Special IO lastly. So you need separate master.
-series GN-9261 CANopen Rev. 1.01.docx
Page 34 of (52)
Page 35

GN-9261 User Manual
G
• Object 0x3000, Special Modules, Inputs.
This object contains the process data of the special input modules. Sub-index 1 contains the first 8 special
input channels from the left to the right, counted from starting with the Network Adapter. Sub-index 2 the next
etc.
• Object 0x3005, Special Inputs Interrupt.
This object shall enable and disable special module the interrupt behavior without changing the interrupt
mask. By default, special input activates an interrupt.
• Object 0x3005, Special Inputs Interrupt.
This object determines, which input port lines shall activate an interrupt by positive or/and negative edge
detection.
• Object 0x3200, Special Modules, Outputs.
This object contains the process data of the special output modules. Sub-index 1 contains the first 8 special
output channels from the left to the right, counted from starting with the Network Adapter. Sub-index 2 the
next etc.
• Object 0x3206, Special Output Error Mode
This object is used to define whether the outputs change to a pre-defined error status (see object 0x3207) in
the event of an
error (i.e. Adapter changes to the Stopped status, Node guarding has failed,). Once the error is remedied,
the outputs retain
their momentary status, i, e. the set error status of the output channels remains unchanged.
All analog outputs that are not covered by the object 0x3207 are always set to 0 in the event of an error.
0 = The output remains unchanged
1 = The output changes to a pre-defined error status
• Object 0x3207, Special Output Error Value integer
This object is used to define values that they are to assume in the event of an error. Prerequisite being that
the corresponding bit is set in object 0x3206
6.3 Standard Device Profile Area – DS401
• Object 0x6000, Digital Inputs
This object contains the process data of the digital input modules. Sub-index 1 contains th e fi r st 8 di gi t al in pu t
channels from the left to the right, counted from starting with the Network Adapter. Sub-index 2 the next etc.
• Object 0x6005, Global Interrupt Enable Digital 8-bit
This object shall enable an d disable globally the interr upt behavior without chan ging the interrupt mask s. In
event-driven mode th e device tr ansmits the i nput values depending o n the interrupt masks in objects 6006
h, and 6008h. If the object is not supported, the device shall behave accordingly to the default value.
6007
h,
• Object 0x6006, Interrupt Mask Any Change 8-bit
-series GN-9261 CANopen Rev. 1.01.docx
Page 35 of (52)
Page 36

GN-9261 User Manual
G
This object determines, which input port lines shall activate an interrupt by positive or/and negative edge
detection.
If the object is not supported the device shall behave accordingly to the default value.
• Object 0x6007, Interrupt Mask Low-to-High 8-bit
This object determ ines, which input port l ines shall acti vate an interru pt by positive edg e detection (lo gical 0
to 1). Done for groups of 8 lines. The values shall be in an ”OR” connect ion to the values of 6006
(Interrupt mask any change 8-bit). If inputs are inverted by 6002
h object (polarity input 8-bit), the positive logical
h object
edge shall correspond to negative physical edge.
0 = Interrupt Disabled
1 = Interrupt Enabled
• Object 0x6008, Interrupt Mask High-to-Low 8-bit
This object determ ines, whi ch input por t lines shal l activat e an interr upt b y negativ e edge det ectio n (logic al 1
to 0). Done for groups of 8 lines. The values shall be in an ”OR” connect ion to the values of 6006
h object
(Interrupt mask an y change 8-bit). If inputs are inverted by 6002h o bject (polarity input 8-bit), the negat ive
logical edge shall correspond to positive physical edge.
0 = Interrupt Disabled
1 = Interrupt Enabled
• Object 0x6200, Digital Outputs
This object contai ns the process data of t he digital output m odules. Sub-index 1 contai ns the first 8 digital
output channels from left to right, counting starting from the Network Adapter. Sub-index 2 the next etc.
• Object 0x6206, Error Mode Output 8-Bit
This object defines whether the out puts change to a pre-defined error status i n the event of an error (i.e.
Adapter changes to the Stopped status, Node guarding has failed,) (see object 0x6207). If the error is remedied,
the outputs remain in their momentary status, i.e. the set error status of the output channels remains
unchanged.
0 = Outputs remain unchanged (per channel)
1 = Outputs change to a pre-defined error status (per channel)
• Object 0x6207, Error Value Output 8-Bit
This object is used to define the values, which the outputs should assume in the event of an error. Prerequisite
being that the corresponding bit in object 0x6206 is set.
0 = Output to 0 (per channel)
1 = Output to 1 (per channel)
Example: Index 0x6206 sub-index 0 = 1, sub-index 1 = 65 = 0x41
Index 0x6207 sub-index 0 = 1 sub-index 1 = 33 = 0x21
Channel 1 is set to 1, channel 7 is set to 0, and all other output channels remain unchanged in the event of an
error
• Object 0x6401, Analog Inputs 16 Bit
This object contains the process data of the analog input modules. Sub-index 1 contains the first analog input
channel from left to right, counting starting with the Network Adapter. Sub-index 2 the second, etc.
• Object 0x6411, Analog Outputs 16 Bit
This object contains t he process data of the an alog output modules. Sub-in dex 1 contains the first an alog
output channel from left to right, counting starting with the Network Adapter. Sub-index 2 the second, etc.
-series GN-9261 CANopen Rev. 1.01.docx
Page 36 of (52)
Page 37

GN-9261 User Manual
G
• Object 0x6421, Analog Input Interrupt Trigger Selection
This object determ ines, which events shall cause an interrupt f or a specific channel. All bits set to 1b shall
trigger the correspond ing analog input. If the objec t is not suppor ted, the dev ice shall beha ve accordingl y to
the default value.
Format:
Bit Value Meaning
0
0b Upper limit not exceeded
1b Upper limit exceeded
1
2
3
4
reversed 0b Reserved for future use
• Object 0x6423, Analog Input Global Interrupt Enable
This object shall e nable and disab le globally the interrupt behavior without changing the interrupt mask . By
default, no analog input activates an interrupt.
0 = global interrupt disabled
1 = global interrupt enabled
• Object 0x6424, Analog Input Interrupt Up per Limit Integer
If enabled (see 6423h object), an interrupt is triggered when the analog input is equal or rises above the given
value. The value shall be always left adjusted. As long as the trig ger condition is m et, every change of the
analog input data generate s a new interrupt, if there i s no additional trigger condition, e.g. an inpu t interrupt
delta (6426h).
• Object 0x6425, Analog Input Interrupt Lower Limit Integer
0b Input not below lower limit
1b Input below lower limit
0b Input not changed by more than delta
1b Input changed by more than delta
0b Input not reduced by more than negative delta
1b Input reduced by more than negative delta
0b Input not increased by more than positive delta
1b Input increased by more than positive delta
If enabled (see 6423h obje c t), an inter rup t is tr igg ered when t h e analog input falls below the given value. T he
value shall be always left adjusted. As long as the trigger conditi on is met, ever y change of the analog inp ut
data generates a new interrupt, if there is no addit ional tr igger co nd iti on, e.g. an in put interr u pt delt a (64 26h).
• Object 0x6426, Analog Input Interrupt Delta Limit Integer
This object shall set the delta value (rising or falling above or below the last communicated value) for interruptenabled analog inputs (see 6423h object).
• Object 0x6427, Analog Input Interrupt Negative Delta Unsigned
This object shall set the negative delta value (falling below the last communicated value) for interrupt-enabled
analog inputs (see 6423h object).
-series GN-9261 CANopen Rev. 1.01.docx
Page 37 of (52)
Page 38

GN-9261 User Manual
G
• Object 0x6428, Analog Input Interrupt Positive Delta Unsigned
This object shall set the ne gat ive d elt a v alu e (r ising be lo w the las t c om municated value) for interrupt-enabled
analog inputs (see 6423h object).
• Object 0x6443, Analog Output Error Mode
This object is used to d ef ine whether t he outp uts chan ge to a pre-defined error status (s ee objec t 0x64 44) in
the event of an error (i.e. Adapter changes to the Stopped status , Node guarding has failed,). Once the err or
is remedied, the outputs retain their momentary status, i, e. the set error status of the output channels remains
unchanged.
All analog outputs that are not covered by the object 0x6444 are always set to 0 in the event of an error.
0 = The output remains unchanged
1 = The output changes to a pre-defined error status
• Object 0x6444, Analog Output Error Value Integer
This object is used to defin e values that they are to assum e in the event of an error. Prerequisite being that
the corresponding bit is set in object 0x6443
-series GN-9261 CANopen Rev. 1.01.docx
Page 38 of (52)
Page 39

GN-9261 User Manual
G
0x0000~
Read
Process input image bits
2
All input registers area are addressable by bit address.
Size of input image bit is size of input image register * 16.
0x1000~
Read/Write
Process output image bits
1,5,15
All output registers area are addressable by bit address.
Size of output image bit is size of output image register * 16.
Code
1(0x01)
Read Coils
This function code is used to read from 1 to 2000 contiguous
7. MODBUS Interface
7.1 MODBUS Interface Register/Bit Map
• Register Map
Start Address Read/Write Description Func. Code
0x0000 ~ 0x007E Read Process input image registers (Real Input Register) 3,4,23
0x0800 ~ 0x087E Read/Write Process output image registers (Real Output Register) 3,16,23
0x1000 * Read Adapter Identification special registers. 3,4,23
0x1020 * Read/Write Adapter Watchdog, other time special register. 3,4,6,16,23
0x1100 * Read/Write Adapter Information special registers. 3,4,6,16,23
0x2000 * Read/Write Expansion Slot Information special registers. 3,4,6,16,23
* The special register map must be accessed by read/write of every each address (one address).
• Register Bit Map
Start Address Read/Write Description Func. Code
7.2 Supported MODBUS Function Codes
Function
-series GN-9261 CANopen Rev. 1.01.docx
Function Description
(Read output bit)
status of coils in a remote device. The Request PDU specifies the
starting address, i.e. the address of the first coil specified, and the
number of coils. In the PDU Coils are addressed starting at zero.
Therefore coils numbered 1-16 are addressed as 0-15. The coils in the
response message are packed as one coil per bit of the data field. Status
is indicated as 1= ON and 0= OFF.
Page 39 of (52)
Page 40

GN-9261 User Manual
G
2(0x02)
Read Discrete Inputs
This function code is used to read from 1 to 2000 contiguous status of
3(0x03)
Read Holding Registers
This function code is used to read the contents of a contiguous block of
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x0000(0)
Any
Echo Request Data
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x0001(1)
0x0000, 0xFF00
Echo Request Data
Reset Only
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x000B(11)
0x0000
Total Message Count
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x000C(12)
0x0000
CRC Error Count
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x000D(13)
0x0000
Exception Error Count
(Read input bit)
(Read output word)
discrete inputs in a remote device. The Request PDU specifies the
starting address, i.e. the address of the first input specified, and the
number of inputs. In the PDU Discrete Inputs are addressed starting at
zero. Therefore Discrete inputs numbered 1-16 are addressed as 0-15.
The discrete inputs in the response message are packed as one input
per bit of the data field.
Status is indicated as 1= ON; 0= OFF.
holding registers in a remote device. The Request PDU specifies the
starting register address and the number of registers. The register data
in the response message are packed as two bytes per register, with the
binary contents right justified within each byte. For each register, the first
byte contains the high order bits and the second contains the low order
bits.
7.2.1 8(0x08)Diagnostics
Sub-function 0x0000(0) Return Query Data
The data passed in the request data field is to be returned (looped back) in the response.
The entire response message should be identical to the request.
Sub-function 0x0001(1) Restart Communications Option
The remote device could be initialized and restarted, and all of its communications event counters are
cleared.
Especially, data field 0x55AA make the remote device to restart with factory default setup of EEPROM.
Sub-function 0x000B(1 1) Return Bus Message Count
The response data field returns the quantity of messages that the remote device has detected on the
communications system since its last restart, clear counters operation, or power-up.
Sub-function 0x000C(12) Return Bus Communication Error Count
The response data field returns the quantity of CRC errors encountered by the remote device since its last
restart, clear counters operation, or power-up.
Sub-function 0x000D(13) Return Bus Exception Error Count
The response data field returns the quantity of MODBUS exception responses returned by the remote device
since its last restart, clear counters operation, or power-up.
Exception responses are described and listed in section 3.2.11.
Sub-function 0x000E(14) Return Slave Message Count
The response data field returns the quantity of messages addressed to the remote device, or broadcast, that
the remote device has processed since its last restart, clear counters operation, or power–up.
-series GN-9261 CANopen Rev. 1.01.docx
Page 40 of (52)
Page 41

GN-9261 User Manual
G
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x000E(14)
0x0000
Slave Message Count
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x000F(15)
0x0000
Slave No Response Count
Sub-function
Data Field (Request)
Data Field (Response)
Description
0x0064(100)
0x0000
MODBUS, Internal Status
Same as status 1word
Sub-function 0x000F(15) Return Slave No Response Count
The response data field returns the quantity of messages addressed to the remote device for which it has
returned no response (neither a normal response nor an exception response), since its last restart, clear
counters operation, or power–up.
Sub-function 0x0064(100) Return Slave MODBUS, Internal Status
The response data field returns the status of MODBUS and Internal addressed to the remote device.
This status values are identical with status 1word of input process image.
7.2.2 Error Response
In an exception response, the server sets the MSB of the function code to 1. This makes the function code
value in an exception response exactly 80 hexadecimal higher than the value would be for a normal
response.
• Exception Codes
Exception
Code
Name Description
01 Illegal Function
02 Illegal Data Address
03 Illegal Data Value
04 Slave Device Failure
05 Acknowledge
06 Slave Device Busy
08 Memory Parity Error
0A
Gateway Path
Unavailable
The function code received in the query is not an allowable action
for the server (or slave).
The data address received in the query is not an allowable address
for the server (or slave).
A value contained in the query data field is not an allowable value
for server (or slave).
An unrecoverable error occurred while the server (or slave) was
attempting to perform the requested action.
The server (or slave) has accepted the request and is processing it,
but a long duration of time will be required to do so.
Specialized use in conjunction with programming commands.
The server (or slave) is engaged in processing a long–duration
program command. The client (or master) should retransmit the
message later when the server (or slave) is free.
The server (or slave) attempted to read record file, but detected a
parity error in the memory. The client (or master) can retry the
request, but service may be required on the server (or slave)
device.
Specialized use in conjunction with gateways, indicates that the
gateway was unable to allocate an internal communication path
from the input port to the output port for processing the request.
-series GN-9261 CANopen Rev. 1.01.docx
Page 41 of (52)
Page 42

GN-9261 User Manual
G
7.3 MODBUS Special Register Map
The special register map can be accessed by function code 3, 4, 6 and 16. Also the special register map
must be accessed by read/write of every each address (one address).
7.3.1 Adapter Identification Special Register (0x1000, 4096)
Address Access Type, Size Description
0x1000(4096) Read 1word Vendor ID = 0x029D(669), Crevis. Co., Ltd.
0x1001(4097) Read 1word Device type = 0x000C, Network Adapter
0x1002(4098) Read 1word Product code = 0x9060(GN-9261)
0x1003(4099) Read 1word Firmware revision, if 0x0101, revision 1.01
0x1004(4100) Read 2word Product unique serial number
0x1005(4101) Read
0x1010(4112) Read 2word Firmware release date
0x1013(4115) Read 1word Firmware Code = 0x9261
0x101E(4126) Read
- String Type consist of valid string length (firs t 1word) and arr a y of charact ers
String Product nam e string (ASCII)
Up to 34byte "GN-926 1,C ANopen Adapter, G-Bus"
7word Composite Id of following address
- 1word 0x1100(4352), Modbus RS232 Node. (Fixed 0x0001)
- 1word 0x1000(4096), Vendor ID
- 1word 0x1001(4097), Device type
- 1word 0x1002(4098), Product code
- 1word 0x1003(4099), Firmware revision
- 2word 0x1004(4100), Product serial number
-series GN-9261 CANopen Rev. 1.01.docx
Page 42 of (52)
Page 43

GN-9261 User Manual
G
Address
Access
Type, Size
Description
7.3.2 Adapter Identification Special Register (0x1100, 4352)
0x1102(4354) Read 1word Start address of input image word register. =0x0000
0x1103(4355) Read 1word Start address of output image word register. =0x0800
0x1104(4356) Read 1word Size of input image word register.
0x1105(4357) Read 1word Size of output image word register.
0x1106(4358) Read 1word Start address of input image bit. = 0x0000
0x1107(4359) Read 1word Start address of output image bit. =0x1000
0x1108(4360) Read 1word Size of input image bit.
0x1109(4361) Read 1word Size of output image bit.
0x110A(4362) Read 1word Update time for cyclic data change (same as 0x1028)
0x110C(4364) Read 1word Field power status
Current Rotary Switch State and Dip Switch Status (MSB)
0x110D(4365) Read 1word
ex) Rotary SW(0x02) , Dip SW(0x01) = 0x8201
(0x8000 field power on)
0x110E(4366) Read up to 33word
0x1110(4368) Read 1word Number of expansion slot
0x1113(4371) Read up to 33word
0x1119(4377) Read 1word
0x111D(4381) Read 1word Adapter G-Series Revision. If 0x013C, G-Series Revision is 1.60
*After the system is reset, the new “Set Value” action is applied.
** If the slot location is changed, set default value automatically (all expansion slot are live).
Expansion slot’s GT-number including GN
First 1word is adapter’s number, if GN-9289, then 0x9289
Expansion slot Module Id. Refer to Appendix A.1 Product List.
First 1word is adapter’s module id.
Hi byte is Modbus status, low byte is internal status.
Zero value means ‘no error’.
7.3.3 Expansion Slot Information Special Register (0x2000, 8192)
Each expansion slot has 0x20(32) address offset and same information structure.
Slot#1 0x2000(8192)~0x 20 1F( 8223) Slot#2 0x 20 20( 82 24)~ 0x 20 3F (8255)
Slot#3 0x2040(8256)~0x 20 5F( 8287) Slot#4 0x 20 60( 82 88)~ 0x 20 7F (8319)
Slot#5 0x2080(8320)~0x 20 9F( 8351) Slot#6 0x 20 A0( 8 352) ~0x 20 BF( 838 3)
Slot#7 0x20C0(8384)~0x 20 DF (8415) Slot#8 0x20E0(8416) ~0x20FF(8447)
Slot#9 0x2100(8448)~0x 211F(8479) Slot#10 0x2120(8480)~0x213F(8511)
Slot#11 0x2140(8512)~0x215F(8543) Slot#12 0x2160(8544)~0x217F(8575)
Slot#13 0x2180(8576)~0x219F(8607) Slot#14 0x21A0(8608)~0x21BF(8639)
Slot#15 0x21C0(8640)~0x21DF(8671) Slot#16 0x21E0(8672)~0x21FF(8703)
Slot#17 0x2200(8704)~0x221F(8735) Slot#18 0x2220(8736)~0x223F(8767)
Slot#19 0x2240(8768)~0x225F(8799) Slot#20 0x2260(8800)~0x227F(8831)
Slot#21 0x2280(8832)~0x229F(8863) Slot#22 0x22A0(8864)~0x22BF(8895)
Slot#23 0x22C0(8896)~0x22DF(8927) Slot#24 0x22E0(8928)~0x22FF(8959)
…..Slot#63 0x27C0(10176)~0x27DF(10207)
-series GN-9261 CANopen Rev. 1.01.docx
Page 43 of (52)
Page 44

GN-9261 User Manual
G
Address Expansion Expansion Expansion Expansion
Offset Slot#1 Slot#2 Slot#3 Slot#4 Slot#63
……..
Expansion
+ 0x00(+0)
+ 0x01(+1)
+ 0x02(+2)
+ 0x03(+3)
+ 0x04(+4)
+ 0x05(+5)
+ 0x06(+6)
+ 0x07(+7)
+ 0x08(+8)
+ 0x09(+9)
+ 0x0A(+10)
+ 0x0B(+11)
+ 0x0C(+12)
+ 0x0D(+13)
+ 0x0E(+14)
+ 0x0F(+15)
0x2000(8192) 0x2020(8224) 0x2040(8256) 0x2060(8288)
0x2001(8193) 0x2021(8225) 0x2041(8257) 0x2061(8289)
0x2002(8194) 0x2022(8226) 0x2042(8258) 0x2062(8290)
0x2003(8195) 0x2023(8227) 0x2043(8259) 0x2063(8291)
0x2004(8196) 0x2024(8228) 0x2044(8260) 0x2064(8292)
0x2005(8197) 0x2025(8229) 0x2045(8261) 0x2065(8293)
0x2006(8198) 0x2026(8230) 0x2046(8262) 0x2066(8294)
0x2007(8199) 0x2027(8231) 0x2047(8263) 0x2067(8295)
0x2008(8200) 0x2028(8232) 0x2048(8264) 0x2068(8296)
0x2009(8201) 0x2029(8233) 0x2049(8265) 0x2069(8297)
0x200A(8202) 0x202A(8234) 0x204A(8266) 0x206A(8298)
0x200B(8203) 0x202B(8235) 0x204B(8267) 0x206B(8299)
0x200C(8204) 0x202C(8236) 0x204C(8268) 0x206C(8300)
0x200D(8205) 0x202D(8237) 0x204D(8269) 0x206D(8301)
0x200E(8206) 0x202E(8238) 0x204E(8270) 0x206E(8302)
0x200F(8207) 0x202F(8239) 0x204F(8271) 0x206F(8303)
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
0x27C0(10176)
0x27C1(10177)
0x27C2(10178)
0x27C3(10179)
0x27C4(10180)
0x27C5(10181)
0x27C6(10182)
0x27C7(10183)
0x27C8(10184)
0x27C9(10185)
0x27CA(10186)
0x27CB(10187)
0x27CC(10188)
0x27CD(10189)
0x27CE(10190)
0x27CF(10191)
+ 0x10(+16)
+ 0x11(+17)
+ 0x12(+18)
+ 0x13(+19)
+ 0x14(+20)
+ 0x15(+21)
+ 0x16(+22)
+ 0x17(+23)
+ 0x18(+24)
+ 0x19(+25)
+ 0x1A(+26)
+ 0x1B(+27)
+ 0x1C(+28)
+ 0x1D(+29)
+ 0x1E(+30)
+ 0x1F(+31)
0x2010(8208) 0x2030(8240) 0x2050(8272) 0x2070(8304)
0x2011(8209) 0x2031(8241) 0x2051(8273) 0x2071(8305)
0x2012(8210) 0x2032(8242) 0x2052(8274) 0x2072(8306)
0x2013(8211) 0x2033(8243) 0x2053(8275) 0x2073(8307)
0x2014(8212) 0x2034(8244) 0x2054(8276) 0x2074(8308)
0x2015(8213) 0x2035(8245) 0x2055(8277) 0x2075(8309)
0x2016(8214) 0x2036(8246) 0x2056(8278) 0x2076(8310)
0x2017(8215) 0x2037(8247) 0x2057(8279) 0x2077(8311)
0x2018(8216) 0x2038(8248) 0x2058(8280) 0x2078(8312)
0x2018(8217) 0x2038(8249) 0x2058(8281) 0x2078(8313)
0x201A(8218) 0x203A(8250) 0x205A(8282) 0x207A(8314)
0x201B(8219) 0x203B(8251) 0x205B(8283) 0x207B(8315)
0x201C(8220) 0x203C(8252) 0x205C(8284) 0x207C(8316)
0x201D(8221) 0x203D(8253) 0x205D(8285) 0x207D(8317)
0x201E(8222) 0x203E(8254) 0x205E(8286) 0x207E(8318)
0x201F(8223) 0x203F(8255) 0x205F(8287) 0x207F(8319)
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
…….
0x27D0(10192)
0x27D1(10193)
0x27D2(10194)
0x27D3(10195)
0x27D4(10196)
0x27D5(10197)
0x27D6(10198)
0x27D7(10199)
0x27D8(10200)
0x27D9(10201)
0x27DA(10202)
0x27DB(10203)
0x27DC(10204)
0x27DD(10205)
0x27DE(10206)
0x27DF(10207)
-series GN-9261 CANopen Rev. 1.01.docx
Page 44 of (52)
Page 45
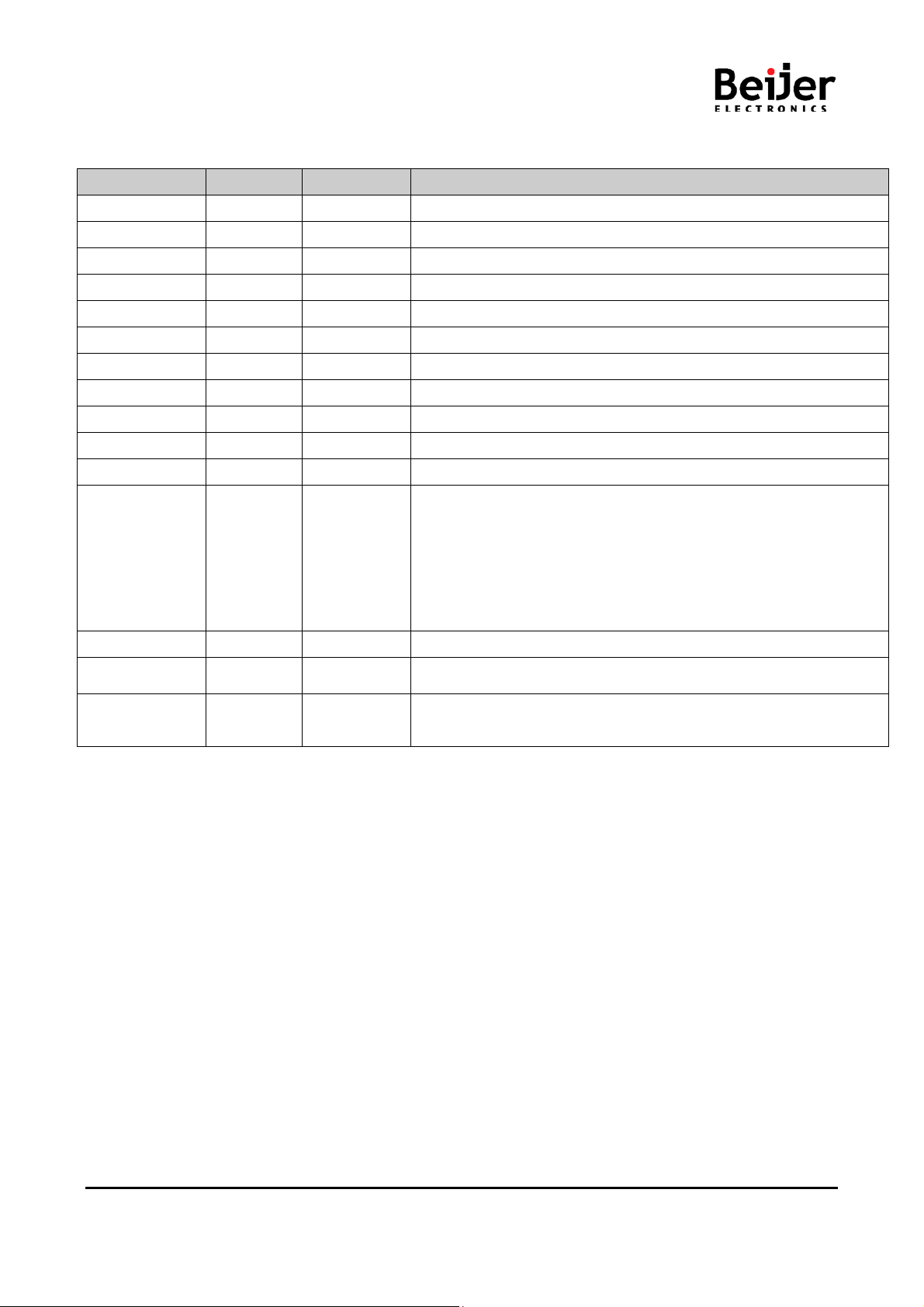
GN-9261 User Manual
G
“00 1E 52 54 2D 31 32 33 38 2C 20 38 44 49 2C 20 32 34 56 64
63 2C 20 55 6E 69 76 65 72 73 61 6C 00 00”
Read/write Configuration parameter data, up to 8byte. Refer to A.2
***
Address Offset Access Type, Size Description
+ 0x02(+2) ** Read 1word Input start register address of input image word this slot.
+ 0x03(+3) ** Read 1word Input word’s bit offset of input image word this slot.
+ 0x04(+4) ** Read 1word Output start register address of output image word this slot.
+ 0x05(+5) ** Read 1word Output word’s bit offset of output image word this slot.
+ 0x06(+6) ** Read 1word Input bit start address of input image bit this slot.
+ 0x07(+7) ** Read 1word Output bit start address of output image bit this slot.
+ 0x08(+8) ** Read 1word Size of input bit this slot
+ 0x09(+9) ** Read 1word Size of output bit this slot
+ 0x0A(+10)** Read n word Read input data this slot
+ 0x0B(+11)** Read/Write n word Read/write output data this slot
+ 0x0E(+14) Read 1word GT-number, if GT-1238, returns 0x1238
String First 1word is length of valid character string.
upto 72byte If GT-1238, returns
+ 0x0F(+15) Read
+ 0x10(+16) Read 1word Size of configuration parameter byte
+ 0x11(+17)** Read/Write n word
+ 0x17(+23) Read 1word
* After the system is reset, the new “Set Value” action is applied.
** Nothing of output, input, memory or configuration parameter corresponding slot returns Exception 02.
Valid character size = 0x001E =30 characters,
“GT-1238, 8DI, 24Vdc, Universal”
Firmware Revision
ex) 0x0001 (Major revision 0 /Minor revision 1)
-series GN-9261 CANopen Rev. 1.01.docx
Page 45 of (52)
Page 46

GN-9261 User Manual
G
All LED turns off
- No power
- Check main power Cable
- Occurrence critical error in
firmware
- Contact Sales team and send
module for repair.
- At least one of the error counters
or exceeded the warning limit.
- A guard event (NMT-Slave or
has occurred.
- Adjust guard time or life time factor.
module power reset.
- The SYNC message has not been
out (see index 0x1006)
ERR LED ON
- The CAN controller is bus off.
- The CAN controller is bus off.
IOS LED turns off
- Device may not be powered.
- Check main power Cable
- Add one or more expansion
One or more expansion module
- Check main power Cable
- Check main power Cable
8. TROUBLE SHOOTING
How to diagnose by LED indicator
LED Status Cause Action
MOD LED is red
ERR LED Single flash
ERR LED Double flash
ERR LED Triple flash
IOS LED flashes red - Adapter has no expansion module
IOS LED is red
of the CAN controller has reached
NMT-Master) or a Heartbeat event
received within then configur ed
communication cycle period time
occurred in fault state.
- Detected invalid expansion module
ID.
- Overflowed Input/Output Size
- Too many expansion module
- Initialization failure
- Communication failure.
- Changed expansion module
configuration.
- Mismatch vendor code between
adapter and expansion module.
- Check the communication cable or
communication setting.
If Heartbeat event has occurred,
- Adjust transfer type setting.
modules.
- Use expansion slot up to 63.
- Compose that IO total size is not
excess.
- Check status of expansion IO
connection.
- Check the vendor code of module.
Field Power LED turns off - Field power is not supplied.
System Power LED turns
off
-series GN-9261 CANopen Rev. 1.01.docx
- System power is not supplied.
- Contact Sales team and send
module for repair.
- Contact Sales team and send
module for repair.
Page 46 of (52)
Page 47

GN-9261 User Manual
G
How to diagnose when device couldn’t communicate network
Inspection of wrong or omission cable connection
- Check status of cable connection for each node.
- Check that all color matches between connector and cable.
- Check wire omission.
Terminator resistor
- If terminator resistor is not installed, install terminator resistor
- Check location of terminator resistor
Configuration of Node address
- Check duplication node address.
Configuration of Master
- Check configuration of master
- Check whether to do download or don’t
- Check composition is right as below Configuration of communication baud rate I/O size
Configuration of each node
Ground and environment
- Check ground is contacted
- Check environment factor (temperature, humidity, etc.) is in less than regular limit
-series GN-9261 CANopen Rev. 1.01.docx
Page 47 of (52)
Page 48

GN-9261 User Manual
G
No.
GT-Number
Description
ID(hex)
Digital Input Module
1
GT-1238
8 Points, Universal, 24Vdc, 10RTB
1238
2
GT-123F
16 Points, Universal, 24Vdc, 20P connector
123F
3
GT-12DF
16 Points, Universal, 24Vdc, 18RTB
12DF
4
GT-12FA
32 Points, Universal, 24Vdc, 40P connector
12FA
5
GT-1804
4 Points, 120Vac, 10RTB
1804
6
GT-1904
4 Points, 240Vac, 10RTB
1904
Digital Output Module
7
GT-2318
8 Points, Sink, 24Vdc/0.5A, 10RTB
2318
8
GT-2328
8 Points, Source, 24Vdc/0.5A, 10RTB
2328
9
GT-221F
16 Points, Sink, 24Vdc/0.3A, 20P connector
221F
10
GT-222F
16 Points, Source, 24Vdc/0.3A, 20P connector
222F
11
GT-225F
16 Points, Sink, 24Vdc/0.3A, 18RTB
225F
12
GT-226F
16 Points, Source, 24Vdc/0.3A, 18RTB
226F
13
GT-22BA
32 Points, Sink, 24Vdc/0.3A, 40P connector
22BA
14
GT-22CA
32 Points, Source, 24Vdc/0.3A, 40P connector
22CA
15
GT-2618
8 Points, Sink, 24Vdc/2A, 10RTB
2618
16
GT-2628
8 Points, Source, 24Vdc/2A, 10RTB
2628
17
GT-2734
4 Points, MOS Relay, 240Vdc/ac, 0.5A, 10RTB
2734
18
GT-2744
4 Points, Relay, 24Vdc/2A, 240Vac/2A, 10RTB
2744
19
GT-2764
4 Points, MOS Relay, 24Vdc/ac, 2A, 10RTB
2764
20
GT-2784
4 Points, MOS Relay, 110Vdc/ac, 1A, 10RTB
2784
Analog Input Module
21
GT-3001
LoadCell (TBD)
3001
22
GT-3114
4 Channels, 0~20, 4~20mA, 12bits, 10RTB
3114
23
GT-3154
4 Channels, 0~20, 4~20mA, 16bits, 10RTB
3154
24
GT-3118
8 Channels, 0~20, 4~20mA, 12bits, 10RTB
3118
25
GT-3158
8 Channels, 0~20, 4~20mA, 16bits, 10RTB
3158
26
GT-311F
16 Channels, 0~20, 4~20mA, 12bits, 20P connector
311F
27
GT-315F
16 Channels, 0~20, 4~20mA, 16bits, 20P connector
315F
28
GT-317F
16 Channels, 0~20, 4~20mA, 12bits, 18RTB
317F
29
GT-319F
16 Channels, 0~20, 4~20mA, 16bits, 18RTB
319F
30
GT-3424
4 Channels, 0~10, 0~5, 1~5Vdc, 12bits, 10RTB
3424
31
GT-3464
4 Channels, 0~10, 0~5, 1~5Vdc, 16bits, 10RTB
3464
32
GT-3428
8 Channels, 0~10, 0~5, 1~5Vdc, 12bits, 10RTB
3428
33
GT-3468
8 Channels, 0~10, 0~5, 1~5Vdc, 16bits, 10RTB
3468
34
GT-342F
16 Channels, 0~10, 0~5, 1~5Vdc, 12bits, 20P connector
342F
35
GT-346F
16 Channels, 0~10, 0~5, 1~5Vdc, 16bits, 20P connector
346F
36
GT-347F
16 Channels, 0~10, 0~5, 1~5Vdc, 12bits, 18RTB
347F
37
GT-349F
16 Channels, 0~10, 0~5, 1~5Vdc, 16bits, 18RTB
349F
38
GT-3704
4 Channels, RTD, 10RTB
3704
39
GT-3708
8 Channels, RTD, 20P connector
3708
40
GT-3804
4 Channels, Thermocouple, 10RTB
3804
APPENDIX A
A.1 Product List
-series GN-9261 CANopen Rev. 1.01.docx
Page 48 of (52)
Page 49

GN-9261 User Manual
G
41
GT-3808
8 Channels, Thermocouple, 20P connector
3808
42
GT-3901
AC Measurement
3901
43
GT-3914
4 Channels, Differential, 0~20, 4~20, +/-20mA, 12Bits, 10RTB
3914
44
GT-3934
4 Channels, Differential, 0~20, 4~20, +/-20mA, 16Bits, 10RTB
3934
45
GT-3918
8 Channels, Differential, 0~20, 4~20, +/-20mA, 12Bi ts , 18RT B
3918
46
GT-3938
8 Channels, Differential, 0~20, 4~20, +/-20mA, 16Bi ts , 18RT B
3938
47
GT-3924
4 Channels, Differential, 0~5, 0~10, +/-5, +/-10Vdc, 12Bits, 10RTB
3924
48
GT-3944
4 Channels, Differential, 0~5, 0~10, +/-5, +/-10Vdc, 16Bits, 10RTB
3944
49
GT-3928
8 Channels, Differential, 0~5, 0~10, +/-5, +/-10Vdc, 12Bits, 18RTB
3928
50
GT-3948
8 Channels, Differential, 0~5, 0~10, +/-5, +/-10Vdc, 16Bits, 18RTB
3948
Analog Output Module
51
GT-4114
4CH, 0~20mA, 12Bits, 10RTB
4114
52
GT-4154
4CH, 0~20mA, 16Bits, 10RTB
4154
53
GT-4118
8CH, 0~20mA, 12Bits, 10RTB
4118
54
GT-4158
8CH, 0~20mA, 16Bits, 10RTB
4158
55
GT-4424
4CH, 0~10Vdc, 12Bits, 10RTB
4424
56
GT-4464
4CH, 0~10Vdc, 16Bits, 10RTB
4464
57
GT-4428
8CH, 0~10Vdc, 12Bits, 10RTB
4428
58
GT-4468
8CH, 0~10Vdc, 16Bits, 10RTB
4468
59
GT-417F
16CH, 0~20mA, 12Bits, 18RTB
417F
60
GT-419F
16CH, 0~20mA, 16Bits, 18RTB
419F
61
GT-442F
16CH, 0~10Vdc, 12Bits, 20P Connector
442F
62
GT-446F
6CH, 0~10Vdc, 16Bits, 20P Connector
446F
63
GT-447F
16CH, 0~10Vdc, 12Bits, 18RTB
447F
64
GT-449F
16CH, 0~10Vdc, 16Bits, 18RTB
449F
Special Module
65
GT-5102
2CH, Encoder, Input, 5Vdc, 10RTB
5102
66
GT-5211
1CH, RS 232, RTS/CTS, Full Duplex Type, 10RTB
5211
67
GT-5212
2CH, RS 232, Full Duplex Type, 10RTB
5212
68
GT-5221
1CH, RS 485, Full Duplex Type, 10RTB
5221
69
GT-5231
1CH, RS 485, Half Full Duplex Type, 10RTB
5231
70
GT-5232
2CH, RS 485, Half Full Duplex Ty pe, 10RTB
5232
71
GT-5352
2CH, Synchronous Serial Interface Input, 10RTB
5352
72
GT-5521
1CH, Stepper Module (TBD)
5521
Power Module
73
GT-7408
Shield Module
7408
74
GT-7508
Common for 0Vdc
7508
75
GT-7511
Power Expansion, In 24Vdc, Out 1A/5Vdc
7511
76
GT-7518
Common for 24Vdc
7518
77
GT-7588
Common for 0Vdc, 24Vdc
7588
78
GT-7641
Field Power, 5/24/48 Vdc, 110/220 Vac
7641
-series GN-9261 CANopen Rev. 1.01.docx
Page 49 of (52)
Page 50

GN-9261 User Manual
G
A.2 Glossary
- System Power : The power for starting up CPU.
- Field Power : The power for input and output line.
- Terminator Resistor : Resistor for prevention reflected wave.
- EDS : Electronic Data Sheet.
- Sink : The method of in/output power supply if a device has no power source.
- Source : The method of in/output power supply if a device has the power source.
-series GN-9261 CANopen Rev. 1.01.docx
Page 50 of (52)
Page 51

GN-9261 User Manual
G
Bus cable (1)
Length-related
Resistance [m/m]
Cross-section
[mm2]
0 ... 40
70
0.25 … 0.34
124
1000 at 40m
40 … 300
< 60
0.34 … 0.6
150 … 300
> 500 at 100m
300 ... 600
< 40
0.5 ... 0.6
150 ... 300
> 100 at 500 m
600 ... 1000
< 26
0.75 ... 0.8
150 ... 300
> 50 at 1 km
Wire cross-
Maximum length [m] (1)
Maximum length [m] (2)
n = 32
n = 64
n = 100
n = 32
n = 64
n = 100
0.25
200
170
150
230
200
170
0.5
360
310
270
420
360
320
0.75
550
470
410
640
550
480
APPENDIX B
Bus cable and termination resistors
The cables, connectors, a nd termination resistors used in CANo pen networks shall meet the requirements
defined in ISO 11898. In addition, here are given some guidelines for selecting cables and connectors.
The table below sh ows some standard values for DC parameter s for CANopen network s with less than 64
nodes:
Bus length [m]
(1) Recommended cable AC parameters: 120- impedance and 5-ns/m specific line delay
For drop cables a wire cross-section of 0.25 to 0.34 mm2 would be an appropriate choice in many cases.
Besides the cable resistance, there should also be considered the real resistance of the connectors, if
calculating the voltage drop. The transmission resistance of one connector should be in the range of 2.5 to 10
m.
With the assumed values for
Minimum dominant value Vdiff.out.min = 1.5 V
Minimum differential input resistance Rdiff.min = 20 k
Requested differential input voltage Vth.max = 1.0 V
Minimum termination resistance RT.min = 118
The maximum wiring leng th is give n for diff erent bus cables and diff erent num ber of connect ed bus nodes in
the following table.
Termination
resistance [Ω]
Baud rate [Kbit/s]
Section
[mm2]
(1) Safety margin of 0.2 (2) safety margin of 0.1
Note: If driving more than 64 nodes and/or more than 250 m bus length the accuracy of the VCC supply voltage
for the ISO 11898 transceiver is recommended to be 5% or better. You also have to consider the m inimum
supply voltage of at least 4.75V when dr iving 50 load, i.e. 64 bus nodes, an d at least 4.9V when dr iv ing 4 5
loads, i.e. 100 bus nodes.
-series GN-9261 CANopen Rev. 1.01.docx
Page 51 of (52)
Page 52

GN-9261 User Manual
G
Head office
Beijer Electronics AB
Box 426
20124 Malmö, Sweden
Phone +46 40 358600
www.beijerelectronics.com
-series GN-9261 CANopen Rev. 1.01.docx
Page 52 of (52)
 Loading...
Loading...