

Page 1
Manual | EN
TF6610
TwinCAT 3 | S5/S7 Communication
11/10/2020 | Version: 1.1
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation..............................................................................................................5
1.2 Safety instructions .............................................................................................................................6
2 Overview.....................................................................................................................................................7
3 Installation..................................................................................................................................................8
3.1 Installation .........................................................................................................................................8
3.2 Installation WindowsCE..................................................................................................................11
3.3 Licensing .........................................................................................................................................13
4 Configuration of an IBH Link S5/S7 ++ adapter....................................................................................16
5 Description of the PLC data area parameter values ............................................................................18
6 API.............................................................................................................................................................20
6.1 PLC Reference ................................................................................................................................20
6.1.1 Function blocks................................................................................................................ 20
6.1.2 Functions [obsolete]......................................................................................................... 25
6.1.3 Data Types ...................................................................................................................... 26
6.1.4 Global Constants ............................................................................................................. 29
7 Samples....................................................................................................................................................31
8 Appendix ..................................................................................................................................................32
8.1 Error codes overview.......................................................................................................................32
8.2 Internal S5/S7 communication error codes .....................................................................................33
8.3 ADS Return Codes ..........................................................................................................................35
8.4 Win32 Error Codes ..........................................................................................................................40
8.5 Troubleshooting/diagnostics............................................................................................................95
TF6610 3Version: 1.1
Page 4

Table of contents
TF66104 Version: 1.1
Page 5
Foreword
1 Foreword
1.1 Notes on the documentation
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning the components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT G®, EtherCAT G10®, EtherCAT P®, Safety over EtherCAT®,
TwinSAFE®, XFC®, XTS® and XPlanar® are registered trademarks of and licensed by Beckhoff Automation
GmbH.
Other designations used in this publication may be trademarks whose use by third parties for their own
purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents:
EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702
with corresponding applications or registrations in various other countries.
EtherCAT® is a registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
TF6610 5Version: 1.1
Page 6
Foreword
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of symbols
In this documentation the following symbols are used with an accompanying safety instruction or note. The
safety instructions must be read carefully and followed without fail!
DANGER
Serious risk of injury!
Failure to follow the safety instructions associated with this symbol directly endangers the life and health of
persons.
WARNING
Risk of injury!
Failure to follow the safety instructions associated with this symbol endangers the life and health of persons.
CAUTION
Personal injuries!
Failure to follow the safety instructions associated with this symbol can lead to injuries to persons.
NOTE
Damage to the environment or devices
Failure to follow the instructions associated with this symbol can lead to damage to the environment or
equipment.
Tip or pointer
This symbol indicates information that contributes to better understanding.
TF66106 Version: 1.1
Page 7

Overview
2 Overview
The function blocks of the PLC library Tc2_S5S7Com can be used to realise data exchange between the
local TwinCAT PLC and a S5/S7 controller via an Ethernet LAN adapter from IBHsoftec.
The adapter is not part of the Beckhoff product and must be bought from IBHsoftec.
Product components
The function TF6610 | S5/S7 consists of the following components which are automatically installed during
setup:
• Functions: TF6310
• PLC library Tc2_S5S7Com (Tc2_TcpIp installed with TF6310)
• Background program:TwinCAT TCP/IP connection server (for communication, installed with
TF6310);.
System requirements
Supported adapters:
• IBH Link S5++ adapter from IBHsoftec (from firmware version 1.39; the firmware version can be
read via the configuration software provided).
Older adapters (without ++) are currently not supported.
• IBH Link S7++ adapter from IBHsoftec (from firmware version NL50MPI V02.004 05.06.09; the
firmware version can be read via the configuration software provided).
The following article describes the minimum requirements for the engineering or runtime system.
Development environment
A development environment describes a computer developing PLC program, but not running. On a
development computer, the following have to be installed:
• TwinCAT v3.1.4016.0 XAE (engineering) or higher;
• TwinCAT 3 Function TF6610 S5 / S7 Communication;
Run-time environment
A runtime environment describes a computer running PLC programs. On a runtime computer, the following
have to be installed:
• TwinCAT v3.1.4016.0 XAR (runtime) or higher;
• TwinCAT 3 Function TF6610 S5 / S7 Communication;
• Licenses for TC1200 PLC and TF6610;
Developer and run-time version on a computer
To run a runtime and development environment on a computer (for example, to test a PLC program before
loading it to the target computer), the following requirements must be fullfilled:
• TwinCAT v3.1.4016.0 XAE (Engineering) or higher;
• TwinCAT 3 function TF6610 S5 / S7 communication;
• Licenses for TC1200 PLC, TF6610;;
Please note: For test purposes a 7-day trial license can be generated, see licensing.
TF6610 7Version: 1.1
Page 8
Installation
3 Installation
The function TF6610 can be installed with the Operating System XP and CE.
3.1 Installation
The following section describes how to install the TwinCAT3Function for Windows-based operating
systems.
ü The TwinCAT3Function setup file was downloaded from the Beckhoff website.
1. Run the setup file as administrator. To do this, select the command Run as administrator in the context
menu of the file.
ð The installation dialog opens.
2. Accept the end user licensing agreement and click Next.
TF66108 Version: 1.1
Page 9
3. Enter your user data.
Installation
4. If you want to install the full version of the TwinCAT3Function, select Complete as installation type. If
you want to install the TwinCAT3Function components separately, select Custom.
TF6610 9Version: 1.1
Page 10
Installation
5. Select Next, then Install to start the installation.
ð A dialog box informs you that the TwinCAT system must be stopped to proceed with the installation.
6. Confirm the dialog with Yes.
TF661010 Version: 1.1
Page 11
7. Select Finish to exit the setup.
Installation
ð The TwinCAT3Function has been successfully installed and can be licensed (see Licensing [}13]).
3.2 Installation WindowsCE
The following section describes how to install a TwinCAT3function (TFxxx) on a Beckhoff Embedded PC
with WindowsCE.
1. Download and install the setup file [}11]
2. Transfer the CAB file to the WindowsCE device [}12]
3. Run the CAB file on the WindowsCE device [}12]
If an older TFxxx version is already installed on the WindowsCE device, it can be updated:
• Software upgrade [}12]
Download and install the setup file
The CAB installation file for WindowsCE is part of the TFxxx setup. This is made available on the Beckhoff
website www.beckhoff.com and automatically contains all versions for Windows XP, Windows 7 and
Windows CE (x86 and ARM).
Download the TFxxx setup file and install the TwinCAT3function as described in the Installation [}8]
section.
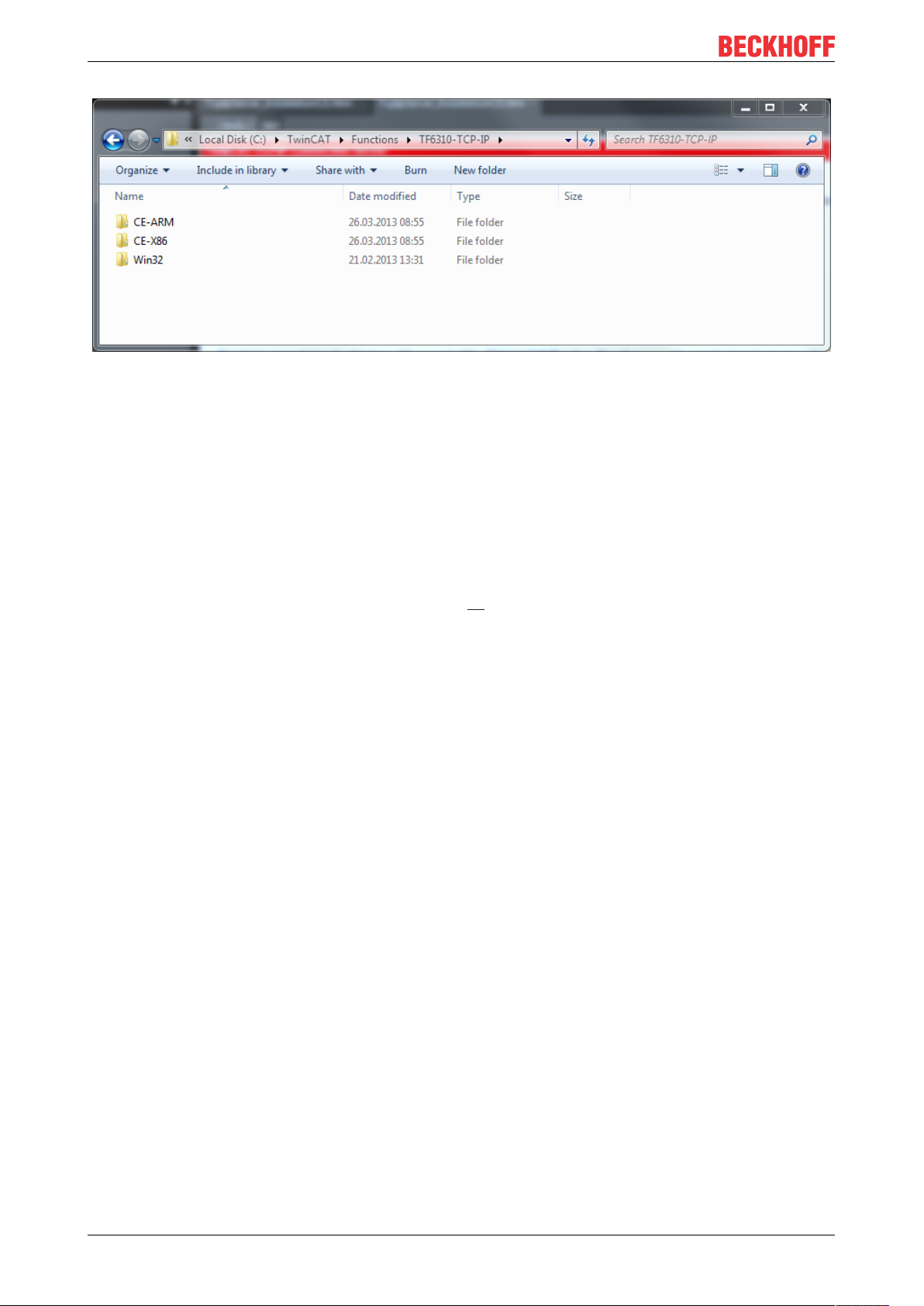
After the installation, the installation folder contains three directories (one directory per hardware platform):
• CE-ARM: ARM-based Embedded PCs running WindowsCE, e.g. CX8090, CX9020
• CE-X86: X86-based Embedded PCs running WindowsCE, e.g. CX50xx, CX20x0
• Win32: Embedded PCs running WindowsXP, Windows7 or WindowsEmbeddedStandard
The CE-ARM and CE-X86 directories contain the CAB files of the TwinCAT3function for WindowsCE in
relation to the respective hardware platform of the WindowsCE device.
Example: "TF6310" installation folder
TF6610 11Version: 1.1
Page 12
Installation
Transfer the CAB file to the WindowsCE device
Transfer the corresponding CAB file to the WindowsCE device.
There are various options for transferring the executable file:
• via network shares
• via the integrated FTP server
• via ActiveSync
• via CF/SD cards
Further information can be found in the Beckhoff Information System in the "Operating Systems"
documentation (EmbeddedPC>Operating Systems>CE).
Run the CAB file on the WindowsCE device
After transferring the CAB file to the WindowsCE device, double-click the file there. Confirm the installation
dialog with OK. Then restart the WindowsCE device.
After restarting the device, the files of the TwinCAT3function (TFxxxx) are automatically loaded in the
background and are then available.
The software is installed in the following directory on the WindowsCE device:
\Hard Disk\TwinCAT\Functions\TFxxxx
Software upgrade
If an older version of the TwinCAT3function is already installed on the WindowsCE device, carry out the
following steps on the WindowsCE device to upgrade to a new version:
1. Open the CE Explorer by clicking Start>Run and entering "Explorer".
2. Navigate to \Hard Disk\TwinCAT\Functions\TFxxx\xxxx.
3. Rename the file Tc*.exe to Tc*.old.
4. Restart the WindowsCE device.
5. Transfer the new CAB file to the WindowsCE device.
6. Run the CAB file on the WindowsCE device and install the new version.
7. Delete the file Tc*.old.
8. Restart the WindowsCE device.
ð The new version is active after the restart.
TF661012 Version: 1.1
Page 13
Installation
3.3 Licensing
The TwinCAT3function can be activated as a full version or as a 7-day test version. Both license types can
be activated via the TwinCAT 3 development environment (XAE).
Licensing the full version of a TwinCAT3Function
A description of the procedure to license a full version can be found in the Beckhoff Information System in
the documentation "TwinCAT3Licensing".
Licensing the 7-day test version of a TwinCAT3Function
A 7-day test version cannot be enabled for a TwinCAT 3 license dongle.
1. Start the TwinCAT 3 development environment (XAE).
2. Open an existing TwinCAT 3 project or create a new project.
3. If you want to activate the license for a remote device, set the desired target system. To do this, select
the target system from the Choose Target System drop-down list in the toolbar.
ð The licensing settings always refer to the selected target system. When the project is activated on
the target system, the corresponding TwinCAT 3 licenses are automatically copied to this system.
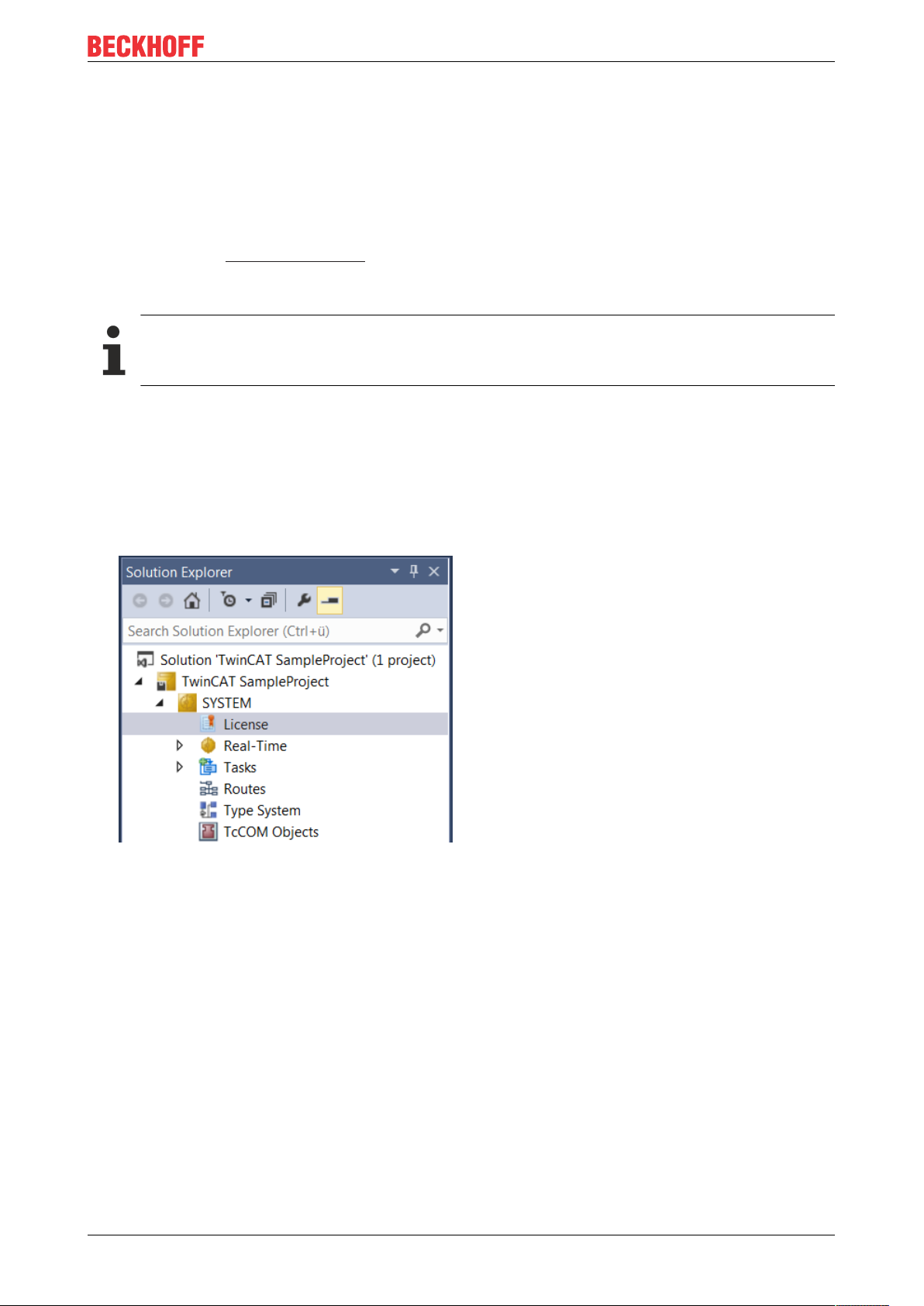
4. In the Solution Explorer, double-click License in the SYSTEM subtree.
ð The TwinCAT 3 license manager opens.
TF6610 13Version: 1.1
Page 14
Installation
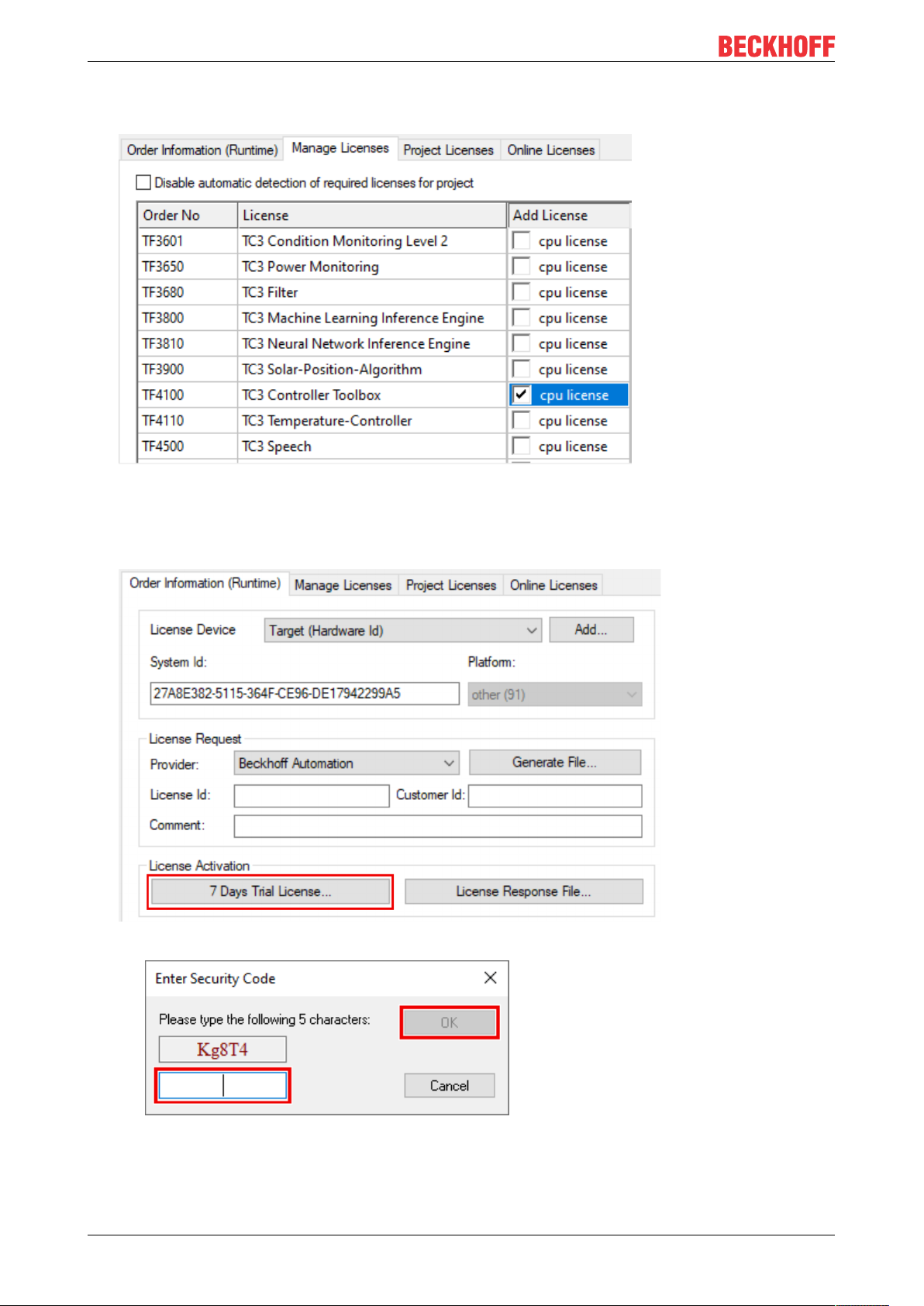
5. Open the Manage Licenses tab. In the AddLicense column, check the check box for the license you
want to add to your project (e.g."TF6420:TC3DatabaseServer").
6. Open the Order Information (Runtime) tab.
ð In the tabular overview of licenses, the previously selected license is displayed with the status
“missing”.
7. Click7-DayTrialLicense... to activate the 7-day trial license.
ð A dialog box opens, prompting you to enter the security code displayed in the dialog.
8. Enter the code exactly as it is displayed and confirm the entry.
9. Confirm the subsequent dialog, which indicates the successful activation.
ð In the tabular overview of licenses, the license status now indicates the expiry date of the license.
10. Restart the TwinCAT system.
TF661014 Version: 1.1
Page 15

ð The 7-day trial version is enabled.
Installation
TF6610 15Version: 1.1
Page 16
Configuration of an IBH Link S5/S7 ++ adapter
4 Configuration of an IBH Link S5/S7 ++ adapter
The adapter configuration software is provided by the manufacturer of the adapter. It is not part of the
TwinCAT function. A detailed description of the module configuration can be found in the manufacturer
documentation.
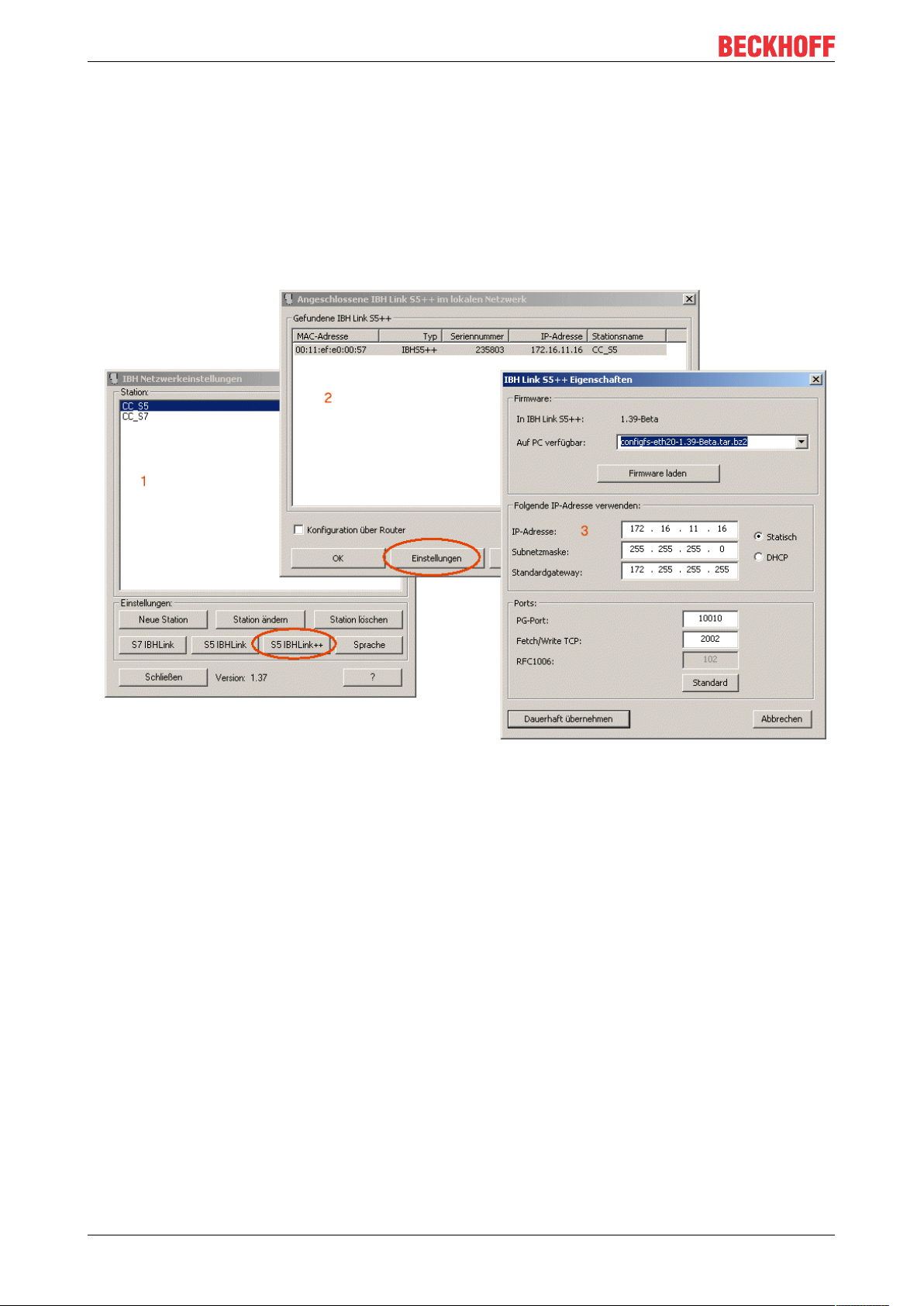
Configuration of an IBH Link S5++ adapter
In the following example a fixed IP address 172.16.11.16 was set:
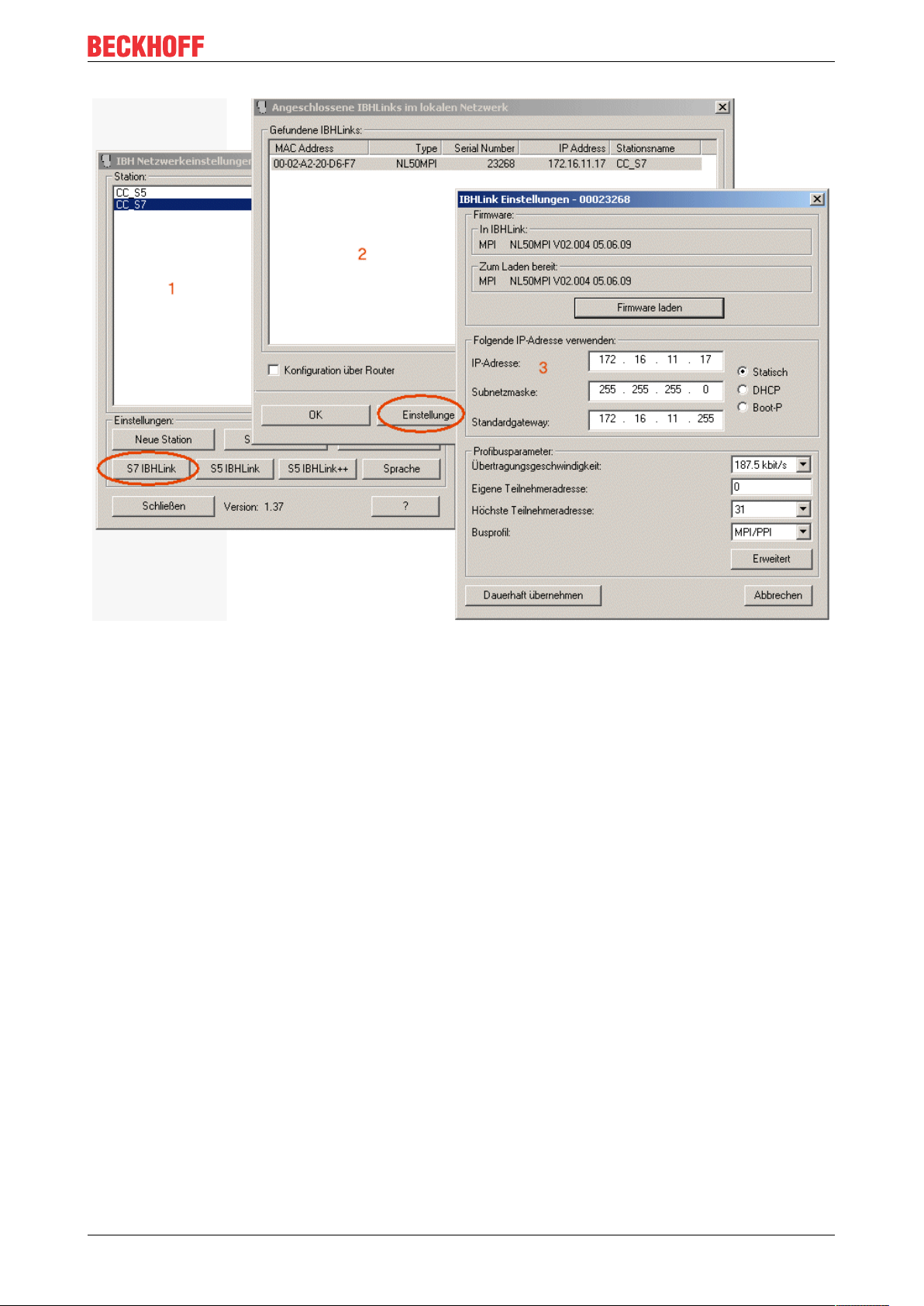
Configuration of an IBH Link S7++ adapter
In the following example a fixed IP address 172.16.11.17 was set:
TF661016 Version: 1.1
Page 17
Configuration of an IBH Link S5/S7 ++ adapter
TF6610 17Version: 1.1
Page 18
Description of the PLC data area parameter values
5 Description of the PLC data area parameter
values
The parameter values to be used for the write/read command differ depending on the type of external control
used, the adapter or the communication protocol. Some data areas may not be available, or the data have to
be read/written word by word instead of byte by byte. Further information can be found in the documentation
for the external control.
Data type
Read access to word variables in the S5/S7 controller returns data in Motorola format (Hi and Lo
bytes interchanged). For the evaluation the read data first have to be converted to the common Intel
format used in the TwinCAT system. Data to be written from the TwinCAT system to the S5/S7 controller must be converted to the Motorola format before the write access.
The BCD number system is used in the S5/S7 controller for representing the counter/timer variables. The
data may have to be converted, if necessary.
The TwinCAT PLC library: TcUtilities.Lib offers functions for conversion between Motorola and Intel format
(e.g. BE16_TO_host, host_TO_BE16...).
The following table provides an overview of the available communication routes:
Control LAN adapter Transport
protocol
S5 IBH Link S5++ TCP/IP IBH S5 LAN link protocol =
S7 IBH Link S7++ TCP/IP NetLink MPI protocol (NL-MPI)
IBH S5 LAN link protocol = FETCH/WRITE telegrams
• Currently this protocol can only be used with S5 controllers.
• The TCP/IP port number has the default value 2002;
• The parameter devAddr is not evaluated.
• The data block number (nDB) is only evaluated when the areas data blocks (DB) and extended data
blocks (DX) are accessed. Permitted range: 1..255;
• The areas P (periphery) and OS (operating state) are not supported.
Data area (eArea) Start address (nOffset) Permitted data length (cbBuffer)
DB Data word offset: 0..2047 read/write 1..2048 words
M Flag byte offset: 0..255 read/write 1..256 bytes
I Input byte offset: 0..127 read 1..128 bytes
Q Output byte offset: 0..127 write 1..128 bytes
P I/O periphery byte offset: 0..127 (digital
I/Os), 128..255 (analog I/Os)
C Counter start offset: 0..255 read/write 1 word
T Timer start offset: 0..255 read/write 1 word
DX Data word offset: read/write 1..2048 words
LAN adapter communication
protocol
FETCH/WRITE telegrams
from Hilscher
read/write 1..256 bytes
Notes
No connection parameterisation
required in the external controller.
No connection parameterisation
required in the external controller.
NetLink MPI protocol (NL-MPI) from Hilscher
• This protocol can only be used with S7 controllers.
• The TCP/IP port number has the default value 1099
• The MPI address (devAddr) has the default value 2. Permissible values: 1..126;
• The data block number (nDB) is only evaluated when the data blocks (DB) data area is accessed.
Permissible values: 0..65534;
TF661018 Version: 1.1
Page 19
Description of the PLC data area parameter values
• The areas P (periphery) and DX (extended data block) are not supported.
• The byte length has to be specified for the data length parameter (cbBuffer).
• The OS area (operating state) is only available for read access.
Data area (eArea) Start address (nOffset) Permitted data length (cbBuffer)
DB Data byte offset: 0..65534 Read: max. 222 bytes, write: max. 216
M Flag byte offset: 0..65534
I Input byte offset: 0..65534
Q Output byte offset: 0..65534
C Counter start offset: 0..65534 Read: max. 111 word counters, write:
T Timer start offset: 0..65534 Read: max. 111 word timers, write: max.
OS Operating state: Irrelevant 1 word (0=STOP, 1=START, 2=RUN,
bytes
max. 108 counters
108 timers
3=UNKNOWN)
TF6610 19Version: 1.1
Page 20
API
6 API
6.1 PLC Reference
6.1.1 Function blocks
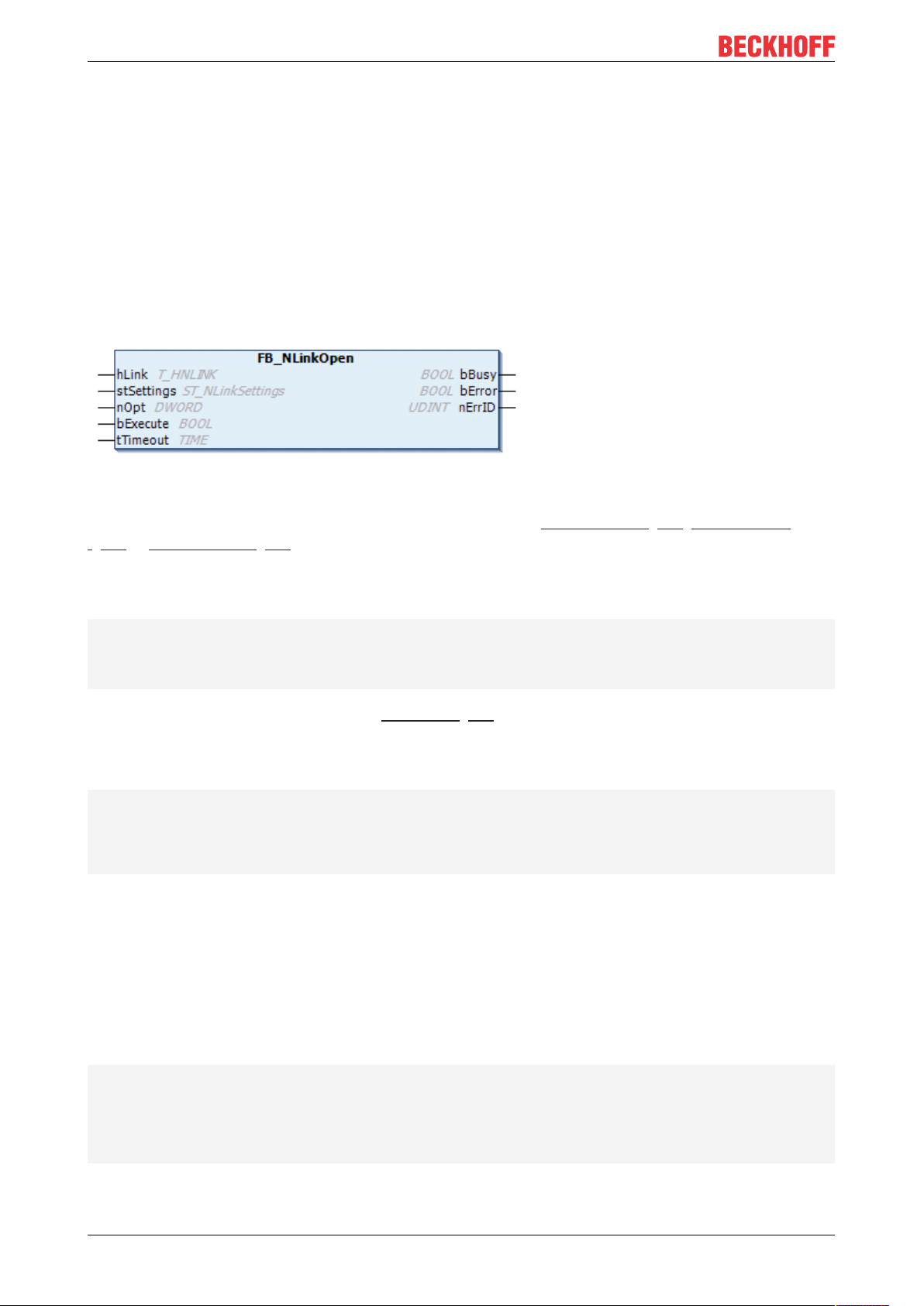
6.1.1.1 FB_NLinkOpen
This function block (actively) establishes a network connection to the third-party system. If successful, the
internal parameters of the hLink variable are initialised. The same instance of the hLink variable must then
be transferred to the other instances of the communication blocks FB_NLinkFetch [}22], FB_NLinkWrite
[}24] or FB_NLinkClose [}21]. In a PLC application one instance of this variables is required for each
network connection (TwinCAT system<->Ethernet LAN adapter<->external controller).
VAR_IN_OUT
VAR_IN_OUT
hLink : T_HNLINK;
END_VAR
hLink : Network connection handle ( Type:T_HNLINK [}29]). The instance of this variable is required by the
other communication blocks and is transferred to them via VAR_IN_OUT.
VAR_INPUT
VAR_INPUT
stSettings:ST_NLinkSettings:=(sHost:='127.0.0.1',nPort:=2002);
nOpt:DWORD:=0;
bExecute:BOOL;
tTimeout:TIME:=T#45s;
END_VAR
stSettings: Structure with configuration settings for the communication connection. The member variables of
this structure should contain parameters such as port number, host name, etc.
nOpt: Reserved for future applications.
bExecute: The block is activated by a rising edge at this input.
tTimeout: Specifies the timeout that must not be exceeded on receipt of the command.
VAR_OUTPUT
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrID : UDINT;
END_VAR
TF661020 Version: 1.1
Page 21

API
bBusy: When the function block is activated this output is set. It remains set until a feedback is received.
While Busy = TRUE, no new command will be accepted at the inputs. Please note that it is not the command
execution but the receipt of the command that is monitored.
bError: In the event of an error during the command transfer, this output is set once the bBusy output has
been reset.
nErrID: Supplies the error number [}32] when the bError output is set.
Example:
See examples [}31].
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.1.2 FB_NLinkClose
This function block closes the network connection to the third-party system.
VAR_IN_OUT
VAR_IN_OUT
hLink : T_HNLINK;
END_VAR
hLink : Network connection handle ( Type:T_HNLINK [}29]). This is where the instance of the variable used
for establishing the connection by the FB_NLinkOpen [}20] function block is transferred.
VAR_INPUT
VAR_INPUT
nOpt:DWORD:=0;
bExecute:BOOL;
tTimeout:TIME:=DEFAULT_ADS_TIMEOUT;
END_VAR
nOpt: Reserved for future applications.
bExecute: The block is activated by a rising edge at this input.
tTimeout: Specifies the timeout that must not be exceeded on receipt of the command.
VAR_OUTPUT
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
TF6610 21Version: 1.1
Page 22
API
nErrID : UDINT;
END_VAR
bBusy: When the function block is activated this output is set. It remains set until a feedback is received.
While Busy = TRUE, no new command will be accepted at the inputs. Please note that it is not the command
execution but the receipt of the command that is monitored.
bError: In the event of an error during the command transfer, this output is set once the bBusy output has
been reset.
nErrID: Supplies the error number [}32] when the bError output is set.
Example:
See examples [}31].
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
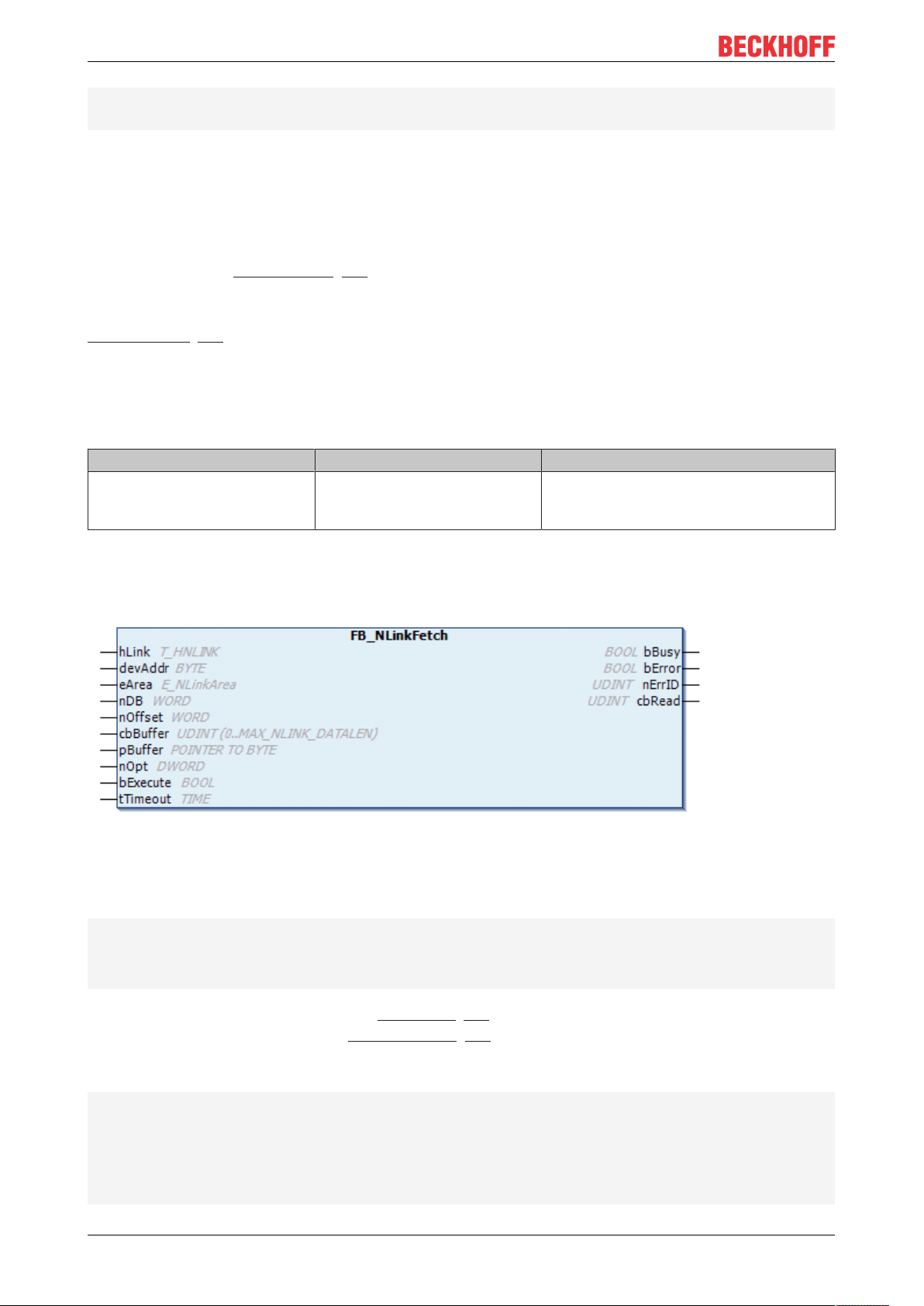
6.1.1.3 FB_NLinkFetch
This function block reads data from the third-party system and writes them to the local TwinCAT system
(FETCH service).
VAR_IN_OUT
VAR_IN_OUT
hLink : T_HNLINK;
END_VAR
hLink : Network connection handle (Type:T_HNLINK [}29]). This is where the instance of the variable used
for establishing the connection by the FB_NLinkOpen [}20] function block is transferred.
VAR_INPUT
VAR_INPUT
devAddr:BYTE:=2;
eArea:E_NLinkArea:=eNLinkArea_DB;
nDB:WORD:=0;
nOffset:WORD:=0;
cbBuffer:UDINT(0..MAX_NLink_DATALENGTH):=0;
pBuffer:POINTERTOBYTE:=0;
nOpt:DWORD:=0;
TF661022 Version: 1.1
Page 23
API
bExecute:BOOL;
tTimeout:TIME:=DEFAULT_ADS_TIMEOUT;
END_VAR
devAddr: Device address, MPI address of the component on the third-party system.
eArea: PLC data area in the third-party system (inputs, outputs, data block etc.) from which data are to be
read (type:E_NLinkArea [}26]).
nDB: Data block number in the third-party system. Data are to be read from this data block (only relevant for
access to data blocks and extended data blocks).
nOffset: The start byte address or word address from which data are to be read in the third-party system.
Whether a byte or word address is to be specified depends on the type of external controller/protocol used
and the data area to be accessed. Further information can be found here: Description of the PLC data area
parameter values [}18].
cbBuffer: Maximum number of data bytes to be read. The byte length is specified even for access to word
addresses.
pBuffer: Pointer/address of the target data buffer in the TwinCAT system. The read data are written into this
buffer. The address can be determined with the ADR operator. The target data buffer must not be smaller
than the specified length of the data to be read.
nOpt: Reserved for future applications.
bExecute: The block is activated by a rising edge at this input.
tTimeout: Specifies the timeout that must not be exceeded on receipt of the command.
VAR_OUTPUT
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrID : UDINT;
cbRead : UDINT := 0; (* Number of recend realy returned data bytes *)
END_VAR
bBusy: When the function block is activated this output is set. It remains set until a feedback is received.
While Busy = TRUE, no new command will be accepted at the inputs. Please note that it is not the command
execution but the receipt of the command that is monitored.
bError: In the event of an error during the command transfer, this output is set once the bBusy output has
been reset.
nErrID: Supplies the error number [}32] when the bError output is set.
cbRead: Number of successfully read data bytes.
Example:
See examples [}31].
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
TF6610 23Version: 1.1
Page 24
API
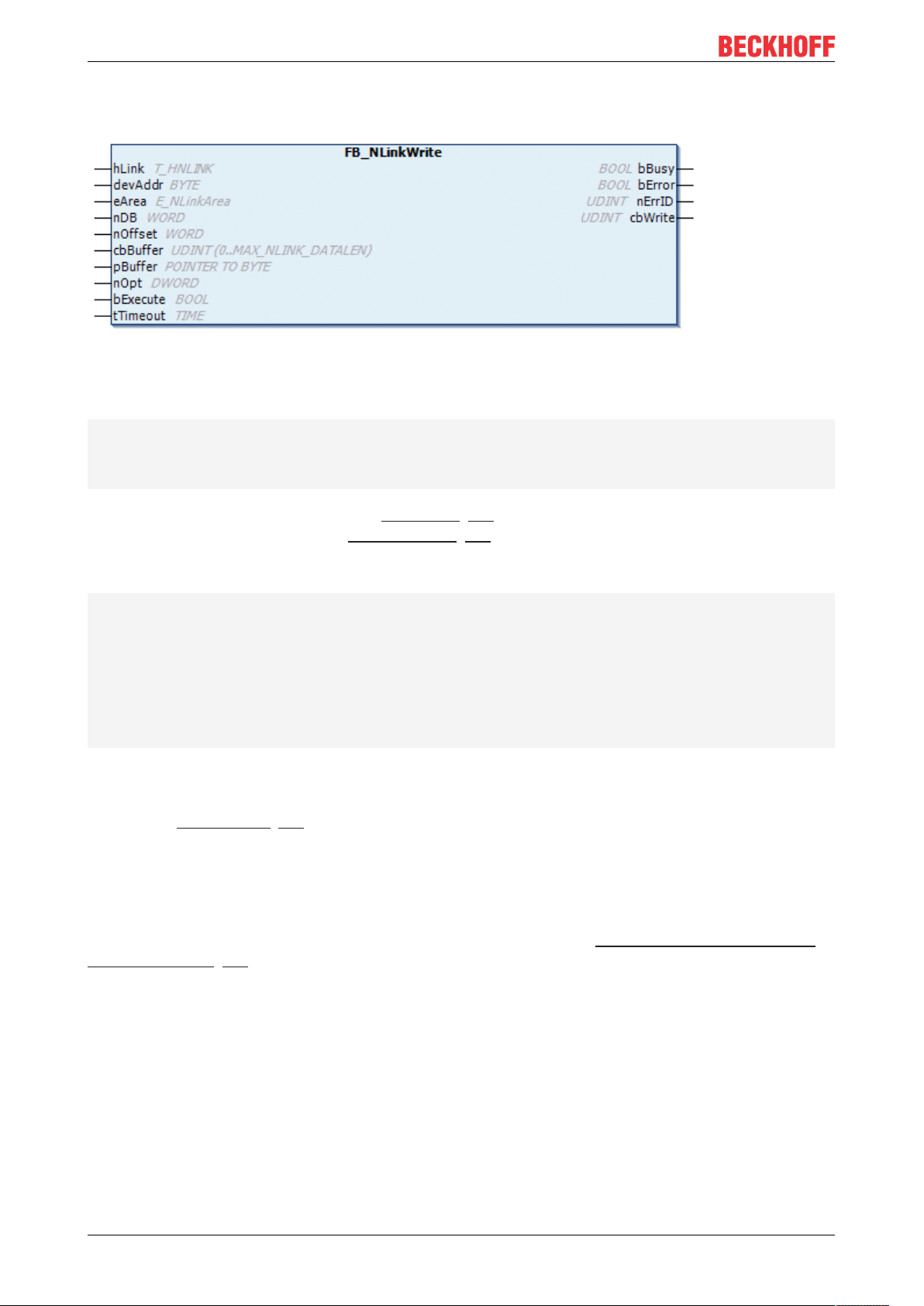
6.1.1.4 FB_NLinkWrite
This function block sends data from the local TwinCAT system to the third-party system (WRITE service).
VAR_IN_OUT
VAR_IN_OUT
hLink : T_HNLINK;
END_VAR
hLink : Network connection handle ( Type:T_HNLINK [}29]). This is where the instance of the variable used
for establishing the connection by the FB_NLinkOpen [}20] function block is transferred.
VAR_INPUT
VAR_INPUT
devAddr:BYTE:=2;
eArea:E_NLinkArea:=eNLinkArea_DB;
nDB:WORD:=0;
nOffset:WORD:=0;
cbBuffer:UDINT(0..MAX_NLink_DATALENGTH):=0;
pBuffer:POINTERTOBYTE:=0;
nOpt:DWORD:=0;
bExecute:BOOL;
tTimeout:TIME:=DEFAULT_ADS_TIMEOUT;
END_VAR
devAddr: Device address, MPI address of the component on the third-party system.
eArea: PLC data area in the third-party system (inputs, outputs, data block, etc.) to which data are to be
written (type:E_NLinkArea [}26])
nDB: Data block number in the third-party system. Block in which data are to be written (only relevant for
access to data blocks and extended data blocks).
nOffset: The start byte address or word address from which data are to be written to the third-party system.
Whether a byte or word address is to be specified depends on the type of external controller/protocol used
and the data area to be accessed. Further information can be found here: Description of the PLC data area
parameter values [}18].
cbBuffer: Maximum byte length of the data to be transferred from the source data buffer in the local
TwinCAT system to the third-party system. The byte length is specified even for access to word addresses.
pBuffer: Pointer/address for the source data buffer. Data from this buffer are transferred to the third-party
system. The address can be determined with the ADR operator. The source data buffer must not be smaller
than the specified length of the data to be sent.
nOpt: Reserved for future applications.
bExecute: The block is activated by a rising edge at this input.
tTimeout: Specifies the timeout that must not be exceeded on receipt of the command.
TF661024 Version: 1.1
Page 25
API
VAR_OUTPUT
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrID : UDINT;
cbWrite : UDINT := 0;(* Number of successfull written data bytes *)
END_VAR
bBusy: When the function block is activated this output is set. It remains set until a feedback is received.
While Busy = TRUE, no new command will be accepted at the inputs. Please note that it is not the command
execution but the receipt of the command that is monitored.
bError: In the event of an error during the command transfer, this output is set once the bBusy output has
been reset.
nErrID: Supplies the error number [}32] when the bError output is set.
cbWrite: In case of success: Number of successfully written data bytes.
Example:
See examples [}31].
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.2 Functions [obsolete]
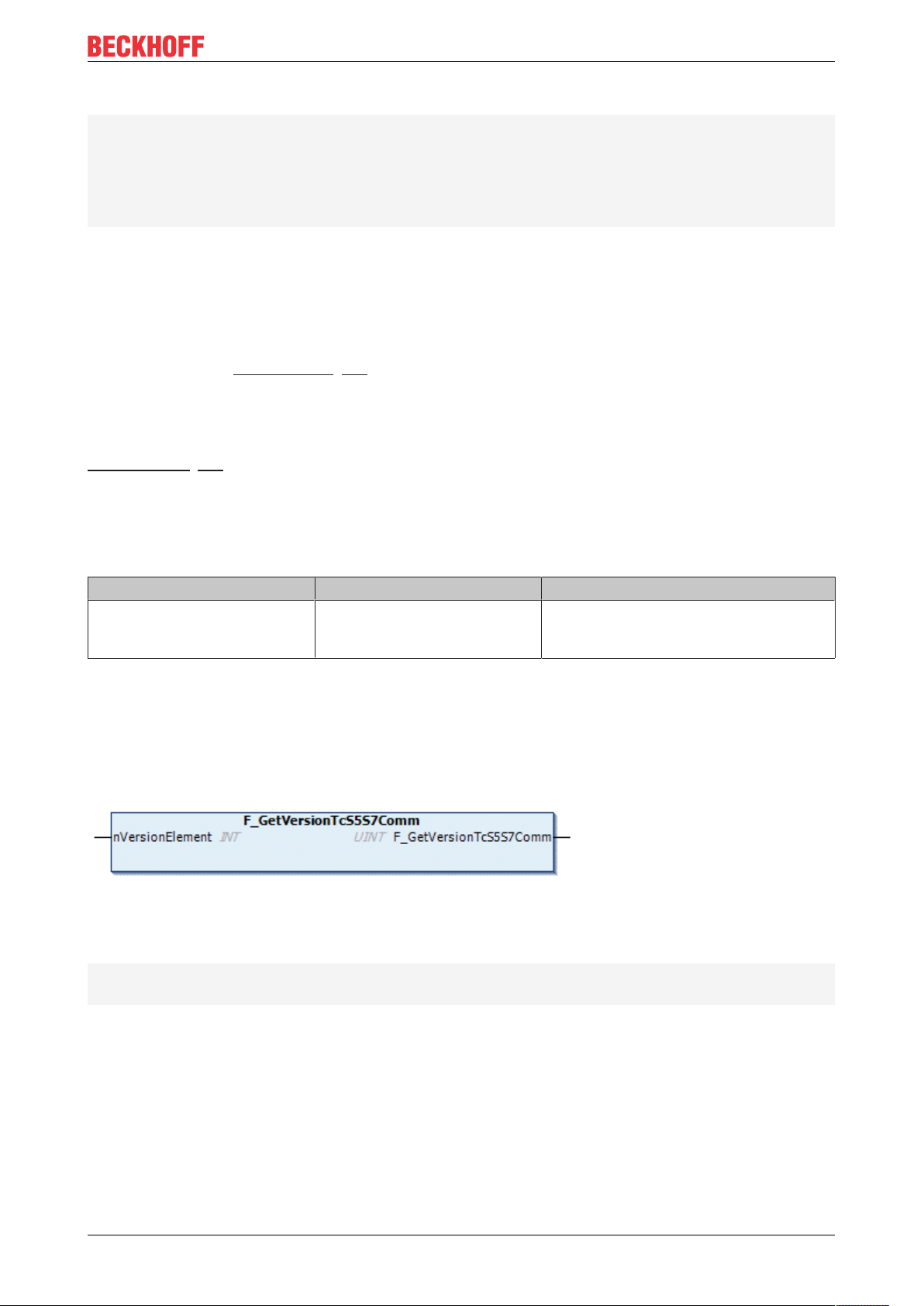
6.1.2.1 F_GetVersionTcS5S7Comm
This function can be used to read PLC library version information.
FUNCTION F_GetVersionTcS5S7Comm : UINT
VAR_INPUT
nVersionElement:INT;
END_VAR
nVersionElement : Version element to be read. Possible parameter:
• 1 : major number;
• 2 : minor number;
• 3 : revision number;
TF6610 25Version: 1.1
Page 26
API
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3 Data Types
6.1.3.1 E_NLinkArea
TYPEE_NLinkArea:
(
eNLinkArea_DB:=16#01,(* Source/dest. data from/to data block in main memory. *)
eNLinkArea_M:=16#02,(* Source/dest. data from/to flag area. *)
eNLinkArea_I:=16#03,(* Source/dest. data from/to process image of the inputs. *)
eNLinkArea_Q:=16#04,(* Source/dest. data from/to process image of the outputs. *)
eNLinkArea_P:=16#05,(* Source/dest. data from/to in I/O modules (S7 only PI, PQ). *)
eNLinkArea_C:=16#06,(* Source/dest. data from/to counter cells. *)
eNLinkArea_T:=16#07,(* Source/dest. data from/to timer cells. *)
eNLinkArea_DX:=16#0A,(* Source/dest. data from/to extended data block. *)
eNLinkArea_OS:=16#100(* Read PLC operational status information *)
);
END_TYPE
PLC data area (inputs, outputs, flag, data block etc.) to be accessed. The parameter values differ depending
on the type of external control used, the adapter or the communication protocol. Some data areas may not
be available, or the data have to be read/written word by word instead of byte by byte .
More detailed information on this topic can be found under: S5/S7 data area parameter values [}18].
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3.2 E_NLinkProtocol
TYPE E_NLinkProtocol:
(
eNLinkProtocol_IBH_SX_PP := 0, (* IBH Link protocol (used by IBH Link S5++ adater) *)
eNLinkProtocol_MPI (* Hilscher NL-MPI protocol (used only by IBH Link S7++ adapter) *)
);
END_TYPE
Communication protocol (depends on the hardware used).
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
TF661026 Version: 1.1
Page 27
6.1.3.3 E_NLinkTransport
TYPE E_NLinkTransport:
(
eNLinkTransport_TCPIP:=0
);
END_TYPE
Transport protocol (determines how the data are to be transported). Only the stream-oriented TCP/IP
protocol is supported at present.
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3.4 E_NLinkOpState
TYPE E_NLinkOpState:
(
eNLinkOpState_STOP:=0,
eNLinkOpState_START:=1,
eNLinkOpState_RUN:=2,
eNLinkOpState_UNKNOWN:=3
);
END_TYPE
API
Operational state (only S7);
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3.5 ST_NLinkDebug
Via these parameters the debug outputs can be activated/deactivated during troubleshooting (standard
setting: inactive)
The debug outputs are shown in the log view of the TwinCAT System Manager.
TYPEST_NLinkDebug:
STRUCT
eTx:E_DbgDirection:=eDbgDirection_OFF;
eRx:E_DbgDirection:=eDbgDirection_OFF;
bState:BOOL:=TRUE;
END_STRUCT
END_TYPE
eTx: Activates/deactivates the debug output for the send buffer (Type: E_DbgDirection).
eRx: Activates/deactivates the debug output for the receive buffer (Type: E_DbgDirection).
bState: Activates/deactivates status messages when establishing or closing the socket connection.
TF6610 27Version: 1.1
Page 28
API
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3.6 ST_NLinkSettings
TYPE ST_NLinkSettings:
STRUCT
sSrvNetID:T_AmsNetID:='';
eProtocol:E_NLinkProtocol:=eNLinkProtocol_IBH_SX_PP;
eTransport:E_NLinkTransport:=eNLinkTransport_TCPIP;
sHost:T_IPv4Addr:='127.0.0.1';
nPort:UDINT:=2002;
local_T_selector:STRING:='00 01';
remote_T_selector:STRING:='00 01';
bServer:BOOL:=FALSE;
bThrottle:BOOL:=FALSE;
debug:ST_NLinkDebug;
END_STRUCT
END_TYPE
sSrvNetID: TwinCAT network address of the TwinCAT TCP/IP connection server (default = empty string,
type: T_AmsNetId).
eProtocol: The communication protocol to be used is set via this parameter (type: E_NLinkProtocol [}26]).
eTransport: The transport protocol to be used is set via this parameter (type: E_NLinkTransport [}27]).
sHost: String containing the network address (Ipv4) of the communication partner (default = ‘127.0.0.1’,
type: T_IPv4Addr).
nPort: Internet Protocol (IP) port (default = 2002).
local_T_selector : Local TSAP address (reserved).
remote_T_selector : Remote TSAP address (reserved).
bServer: FALSE = client (active) connection. TRUE = server (passive) connection. Currently only client
connections are permitted.
bThrottle: If this parameter is set, the number of polling socket calls is reduced if no or few data are
received, i.e. the poll cycle is slowed down, thereby reducing the system load (default = FALSE).
debug: Optional debug output settings(type:ST_NLinkDebug [}27]).
Hint!
Background information about the configuration of eProtocol- and eTransport parameter:
The IBHsoftec S7++ adapter is supporting more than one communication protocol (channel) to S7 controller.
• Using the Hilscher MPI-Protokoll + TCP/IP as transport protocol.
• Using the IBHsoftec S5++/S7++ protocol + RFC1006 as transport protocol.
The TwinCAT S5/S7 communication library is supporting only the first communication channel (using TCP/IP
transport protocol).
If you want to communicate with S7 controller then use this settings:
eProtocol := eNLinkProtocol_MPI;
eTransport := eNLinkTransport_TCPIP;
If you want to communicate with S5 controller then use this settings:
TF661028 Version: 1.1
Page 29
API
eProtocol := eNLinkProtocol_IBH_SX_PP;
eTransport := eNLinkTransport_TCPIP;
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.3.7 T_HNLINK
A variable of this type represents a network connection handle. The structural elements should not be written
to or modified directly. Variables of this type are used for internal data exchange.
One instance is required for each network connection (TwinCAT system<->Ethernet LAN adapter<->external
controller). The same instance is then transferred to other communication blocks as VAR_IN_OUT
parameter.
TYPE T_HNLINK :
STRUCT
END_STRUCT
END_TYPE
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.4 Global Constants
6.1.4.1 Overview
Name Value Description
MAX_NLINK_BUFFER_SIZE 16#FFFF Max. internal buffer size for RX/TX (64k)
MAX_NLINK_DATALEN 2048 Max. data length supported by the PLC blocks for
transfers. The actual max. length may be smaller due to
specific device characteristics.
MAX_NLINK_HEADERLEN 16 Max. length of the frame header for the NL-MPI and
IBHNet protocols.
MAX_NLINK_MPI_CONNECTIONS16 Max. number of open MPI connections. If this number is
exceeded, the oldest connections are closed
automatically.
TF6610 29Version: 1.1
Page 30
API
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
6.1.4.2 Library version
All libraries have a specific version. This version is shown in the PLC library repository too.
A global constant contains the library version information:
Global_Version
VAR_GLOBAL CONSTANT
stLibVersion_Tc2_S5S7Com : ST_LibVersion;
END_VAR
stLibVersion_Tc2_S5S7Com: version information of Tc2_S5S7Com library (type: ST_LibVersion).To
compare the existing version to a required version the function F_CmpLibVersion (defined in Tc2_System
library) is offered.
Hint: All other possibilities known from TwinCAT2 libraries to query a library version are obsolete!
Requirements
Development environment Target platform PLC libraries to include
TwinCAT V3.1.4016 or higher PC oder CX (x86, x64, ARM) Tc2_S5S7Com (Communication->TcpIp)
Tc2_TcpIp (Communication->TcpIp)
Tc2_Utilities (System)
TF661030 Version: 1.1
Page 31

7 Samples
The communication parameters in the project examples must be set to match your configuration.
Samples
PLC project Third-party
system
https://
infosys.beckh
off.com/
content/1033/
tf6610_tc3_s5
s7communicat
ion/
Resources/
zip/70701953
1.zip
https://
infosys.beckh
off.com/
content/1033/
tf6610_tc3_s5
s7communicat
ion/
Resources/
zip/70702260
3.zip
S5 Ethernet adapter:
S7 Ethernet adapter:
Adapter Communication
parameters
• Protocol: IBH S5
IBH Link S5++
IBH Link S7++
LAN Link
protocol
• Transport: TCP/
IP
• IP address:
'172.17.60.243'
• Port number:
2002
• Protocol:
NetLink MPI
protocol (NLMPI)
• Transport: TCP/
IP
• IP address:
'172.17.60.243'
• Port number:
1099
• MPI address: 2
Data area parameter values
• Data area: DB
• Data block
number: 16
• Write 1 word (2
bytes) from the
start address
(word offset): 9
• Read 10 words
(20 bytes) from
the start address
(word offset): 0
• Data area: DB
• Data block
number: 1
• Write 10 bytes
from the start
address (byte
offset): 0
• Read 10 bytes
from the start
address (byte
offset): 0
Description
The data in the
data block are
accessed word
by word.
The data in the
data block are
accessed byte
by byte. In
addition to the
selected data
area the
operating status
of the controller
is read (STOP,
RUN, START...).
TF6610 31Version: 1.1
Page 32

Appendix
8 Appendix
8.1 Error codes overview
Codes (hex) Codes (dec) Error source Description
0x00000000-0x00007800 0-30720
0x00008000-0x000080FF 32768-33023 Internal TwinCAT TCP/IP
0x00008300-0x000085FF 33536-34303
0x80070000-0x8007FFFF 2147942400-2148007935 Error source = Code -
TwinCAT system error
codes [}35]
Connection Server error
codes
Internal TwinCAT S5/S7
communication error
codes [}33]
0x80070000 = Win32
system error codes.
The low word of the error
code includes the Win32
Error Codes [}40]
TwinCAT system error
(including ADS error
codes)
Internal error of the
TwinCAT TCP/IP
Connection Server
Internal error in the S5/S7
Ethernet/LAN module or
the TwinCAT PLC library
Win32 system error
(including Windows
sockets error codes).
Please seach in the
Win32 Error Codes list for
the low word of the error
code.
TF661032 Version: 1.1
Page 33

8.2 Internal S5/S7 communication error codes
Appendix
TF6610 33Version: 1.1
Page 34

Appendix
Code
(hex)
0x00000000 0 NLINK_COMMERR_NOERROR No error.
0x00008300 33536 NLINK_COMMERR_TIMEOUT Timeout during communication
0x00008301 33537 NLINK_COMMERR_TXOVERFLOW Send buffer overflow
0x00008302 33538 NLINK_COMMERR_RXOVERFLOW Receive buffer overflow
0x00008303 33539 NLINK_COMMERR_FATAL Fatal internal error
0x00008304 33540 NLINK_COMMERR_SYSTEMID Invalid system ID
0x00008305 33541 NLINK_COMMERR_HEADERLEN Invalid header length parameter
0x00008306 33542 NLINK_COMMERR_OPCODE Invalid OP code, OP code length or OP
0x00008307 33543 NLINK_COMMERR_INVALIDSIZE Invalid data length
0x00008308 33544 NLINK_COMMERR_INVALIDSTATE Device or connection is in a faulty/invalid
0x00008309 33545 NLINK_COMMERR_INVALIDVALUE An invalid parameter value was specified
0x0000830A 33546 NLINK_COMMERR_INVALIDAREA Invalid/unsupported data area
0x0000830B 33547 NLINK_COMMERR_UNEXPTECTED Unexpected error
0x00008402 33794 NLINK_COMMERR_IBH_AREA_NOT_
0x00008403 33795 NLINK_COMMERR_IBH_AREA_TO_S
0x00008406 33798 NLINK_COMMERR_IBH_INVALID_HE
0x00008407 33799 NLINK_COMMERR_IBH_DATA_OVER
0x00008409 33801 NLINK_COMMERR_IBH_TIMEOUT Timeout during communication with the
0x0000840A 33802 NLINK_COMMERR_IBH_DATA_UNDE
0x00008501 34049 NLINK_COMMERR_MPI_UE Timeout from remote station remote
0x00008502 34050 NLINK_COMMERR_MPI_RR Resource unavailable remote station
0x00008503 34051 NLINK_COMMERR_MPI_RS Requested function of master is not
0x00008511 34065 NLINK_COMMERR_MPI_NA No response of the remote station remote
0x00008512 34066 NLINK_COMMERR_MPI_DS Master not into the logical token ring
Code
(dec)
Symbolic constant Description
General error codes Offset 0x8300 + error code
(transaction)
code word
state
IBH Link S5++ specific error codes Offset 0x8400 + error code
Data area not available in the controller,
AVAILABLE
MALL
ADER
FLOW
RFLOW
Hilscher NL-MPI interface error
codes
data block not available
Requested area is too small
Invalid frame/header format
Permitted data size exceeded, data buffer
too small
controller
Too few data were received
Offset 0x8500 + MPI response
message error code
station remote station has not responded
within 1 sec.timeout
remote station has no left buffer space for
the requested service
activated within the remote station. The
connection seems to be closed in the
remote station. Try to send command
again
station check network wiring, check
remote address, check baud rate
network in general check master DPAddress or highest-station-Addres s of
other masters. Examine bus wiring to bus
short circuits
TF661034 Version: 1.1
Page 35

Appendix
Code
(hex)
0x00008514 34068 NLINK_COMMERR_MPI_LR Resource of the local FDL controller not
0x00008515 34069 NLINK_COMMERR_MPI_IV The specified msg.data_cnt parameter
0x00008530 34096 NLINK_COMMERR_MPI_TO Timeout, the request message was
0x00008539 34105 NLINK_COMMERR_MPI_SE Sequence fault, internal state machine
0x00008585 34181 NLINK_COMMERR_MPI_REJ_IV Specified offset address out of limits or
0x00008586 34182 NLINK_COMMERR_MPI_REJ_PDU Wrong PDU coding in the MPI response
0x00008587 34183 NLINK_COMMERR_MPI_REJ_OP Specified length to write or to read results
0x00008588 34184 NLINK_COMMERR_MPI_REJ_OP Specified address not defined in the
0x00008589 34185 NLINK_COMMERR_MPI_REJ_OP MPI remote station not in the right
Code
(dec)
Symbolic constant Description
General error codes Offset 0x8300 + error code
available or not sifficient. HOST too many
messages. no more segments in DEVICE
free
invalid HOST check the limit of 222 bytes
(read) respectively 216 bytes (write) in
msg.data_cnt
accepted but no indication is sent back by
the remote station remote station MPI
protocol error, or station not presentor
error. Remote station does not react like
awaited or a reconnection was retried
while connection is already open or
device has no SAPs left to open
connection channel
not known in the remote station HOST
please check msg.data_adr if present or
offset parameter in request message
of the remote station DEVICE contact
hotline
in an access outside the limits HOST
please check msg.data_cnt length in
request message
remote station, please check
msg.data_adr in the request message
operational mode, bring S7 into RUN-P
Mode
8.3 ADS Return Codes
Grouping of error codes: 0x000 [}35]..., 0x500 [}36]..., 0x700 [}37]..., 0x1000 [}39]...
Global error codes
TF6610 35Version: 1.1
Page 36

Appendix
Hex Dec HRESULT Name Description
0x0 0 0x9811 0000 ERR_NOERROR No error.
0x1 1 0x9811 0001 ERR_INTERNAL Internal error.
0x2 2 0x9811 0002 ERR_NORTIME No real-time.
0x3 3 0x9811 0003 ERR_ALLOCLOCKEDMEM Allocation locked – memory error.
0x4 4 0x9811 0004 ERR_INSERTMAILBOX Mailbox full – the ADS message could not be sent.
0x5 5 0x9811 0005 ERR_WRONGRECEIVEHMSG Wrong HMSG.
0x6 6 0x9811 0006 ERR_TARGETPORTNOTFOUND Target port not found – ADS server is not started or
0x7 7 0x9811 0007 ERR_TARGETMACHINENOTFOUND Target computer not found – AMS route was not
0x8 8 0x9811 0008 ERR_UNKNOWNCMDID Unknown command ID.
0x9 9 0x9811 0009 ERR_BADTASKID Invalid task ID.
0xA 10 0x9811 000A ERR_NOIO No IO.
0xB 11 0x9811 000B ERR_UNKNOWNAMSCMD Unknown AMS command.
0xC 12 0x9811 000C ERR_WIN32ERROR Win32 error.
0xD 13 0x9811 000D ERR_PORTNOTCONNECTED Port not connected.
0xE 14 0x9811 000E ERR_INVALIDAMSLENGTH Invalid AMS length.
0xF 15 0x9811 000F ERR_INVALIDAMSNETID Invalid AMS Net ID.
0x10 16 0x9811 0010 ERR_LOWINSTLEVEL Installation level is too low –TwinCAT 2 license er-
0x11 17 0x9811 0011 ERR_NODEBUGINTAVAILABLE No debugging available.
0x12 18 0x9811 0012 ERR_PORTDISABLED Port disabled – TwinCAT system service not
0x13 19 0x9811 0013 ERR_PORTALREADYCONNECTED Port already connected.
0x14 20 0x9811 0014 ERR_AMSSYNC_W32ERROR AMS Sync Win32 error.
0x15 21 0x9811 0015 ERR_AMSSYNC_TIMEOUT AMS Sync Timeout.
0x16 22 0x9811 0016 ERR_AMSSYNC_AMSERROR AMS Sync error.
0x17 23 0x9811 0017 ERR_AMSSYNC_NOINDEXINMAP No index map for AMS Sync available.
0x18 24 0x9811 0018 ERR_INVALIDAMSPORT Invalid AMS port.
0x19 25 0x9811 0019 ERR_NOMEMORY No memory.
0x1A 26 0x9811 001A ERR_TCPSEND TCP send error.
0x1B 27 0x9811 001B ERR_HOSTUNREACHABLE Host unreachable.
0x1C 28 0x9811 001C ERR_INVALIDAMSFRAGMENT Invalid AMS fragment.
0x1D 29 0x9811 001D ERR_TLSSEND TLS send error – secure ADS connection failed.
0x1E 30 0x9811 001E ERR_ACCESSDENIED Access denied – secure ADS access denied.
Reducing the number of ADS messages per cycle
will help.
is not reachable.
found.
ror.
started.
Router error codes
Hex Dec HRESULT Name Description
0x500 1280 0x9811 0500 ROUTERERR_NOLOCKEDMEMORY Locked memory cannot be allocated.
0x501 1281 0x9811 0501 ROUTERERR_RESIZEMEMORY The router memory size could not be changed.
0x502 1282 0x9811 0502 ROUTERERR_MAILBOXFULL The mailbox has reached the maximum number of
0x503 1283 0x9811 0503 ROUTERERR_DEBUGBOXFULL The Debug mailbox has reached the maximum
0x504 1284 0x9811 0504 ROUTERERR_UNKNOWNPORTTYPE The port type is unknown.
0x505 1285 0x9811 0505 ROUTERERR_NOTINITIALIZED The router is not initialized.
0x506 1286 0x9811 0506 ROUTERERR_PORTALREADYINUSE The port number is already assigned.
0x507 1287 0x9811 0507 ROUTERERR_NOTREGISTERED The port is not registered.
0x508 1288 0x9811 0508 ROUTERERR_NOMOREQUEUES The maximum number of ports has been reached.
0x509 1289 0x9811 0509 ROUTERERR_INVALIDPORT The port is invalid.
0x50A 1290 0x9811 050A ROUTERERR_NOTACTIVATED The router is not active.
0x50B 1291 0x9811 050B ROUTERERR_FRAGMENTBOXFULL The mailbox has reached the maximum number for
0x50C 1292 0x9811 050C ROUTERERR_FRAGMENTTIMEOUT A fragment timeout has occurred.
0x50D 1293 0x9811 050D ROUTERERR_TOBEREMOVED The port is removed.
possible messages.
number of possible messages.
fragmented messages.
TF661036 Version: 1.1
Page 37

General ADS error codes
Appendix
TF6610 37Version: 1.1
Page 38

Appendix
Hex Dec HRESULT Name Description
0x700 1792 0x9811 0700 ADSERR_DEVICE_ERROR General device error.
0x701 1793 0x9811 0701 ADSERR_DEVICE_SRVNOTSUPP Service is not supported by the server.
0x702 1794 0x9811 0702 ADSERR_DEVICE_INVALIDGRP Invalid index group.
0x703 1795 0x9811 0703 ADSERR_DEVICE_INVALIDOFFSET Invalid index offset.
0x704 1796 0x9811 0704 ADSERR_DEVICE_INVALIDACCESS Reading or writing not permitted.
0x705 1797 0x9811 0705 ADSERR_DEVICE_INVALIDSIZE Parameter size not correct.
0x706 1798 0x9811 0706 ADSERR_DEVICE_INVALIDDATA Invalid data values.
0x707 1799 0x9811 0707 ADSERR_DEVICE_NOTREADY Device is not ready to operate.
0x708 1800 0x9811 0708 ADSERR_DEVICE_BUSY Device is busy.
0x709 1801 0x9811 0709 ADSERR_DEVICE_INVALIDCONTEXT Invalid operating system context. This can result
0x70A 1802 0x9811 070A ADSERR_DEVICE_NOMEMORY Insufficient memory.
0x70B 1803 0x9811 070B ADSERR_DEVICE_INVALIDPARM Invalid parameter values.
0x70C 1804 0x9811 070C ADSERR_DEVICE_NOTFOUND Not found (files, ...).
0x70D 1805 0x9811 070D ADSERR_DEVICE_SYNTAX Syntax error in file or command.
0x70E 1806 0x9811 070E ADSERR_DEVICE_INCOMPATIBLE Objects do not match.
0x70F 1807 0x9811 070F ADSERR_DEVICE_EXISTS Object already exists.
0x710 1808 0x9811 0710 ADSERR_DEVICE_SYMBOLNOTFOUND Symbol not found.
0x711 1809 0x9811 0711 ADSERR_DEVICE_SYMBOLVERSIONIN-
VALID
0x712 1810 0x9811 0712 ADSERR_DEVICE_INVALIDSTATE Device (server) is in invalid state.
0x713 1811 0x9811 0713 ADSERR_DEVICE_TRANSMODENOTSUPP AdsTransMode not supported.
0x714 1812 0x9811 0714 ADSERR_DEVICE_NOTIFYHNDINVALID Notification handle is invalid.
0x715 1813 0x9811 0715 ADSERR_DEVICE_CLIENTUNKNOWN Notification client not registered.
0x716 1814 0x9811 0716 ADSERR_DEVICE_NOMOREHDLS No further notification handle available.
0x717 1815 0x9811 0717 ADSERR_DEVICE_INVALIDWATCHSIZE Notification size too large.
0x718 1816 0x9811 0718 ADSERR_DEVICE_NOTINIT Device not initialized.
0x719 1817 0x9811 0719 ADSERR_DEVICE_TIMEOUT Device has a timeout.
0x71A 1818 0x9811 071A ADSERR_DEVICE_NOINTERFACE Interface query failed.
0x71B 1819 0x9811 071B ADSERR_DEVICE_INVALIDINTERFACE Wrong interface requested.
0x71C 1820 0x9811 071C ADSERR_DEVICE_INVALIDCLSID Class ID is invalid.
0x71D 1821 0x9811 071D ADSERR_DEVICE_INVALIDOBJID Object ID is invalid.
0x71E 1822 0x9811 071E ADSERR_DEVICE_PENDING Request pending.
0x71F 1823 0x9811 071F ADSERR_DEVICE_ABORTED Request is aborted.
0x720 1824 0x9811 0720 ADSERR_DEVICE_WARNING Signal warning.
0x721 1825 0x9811 0721 ADSERR_DEVICE_INVALIDARRAYIDX Invalid array index.
0x722 1826 0x9811 0722 ADSERR_DEVICE_SYMBOLNOTACTIVE Symbol not active.
0x723 1827 0x9811 0723 ADSERR_DEVICE_ACCESSDENIED Access denied.
0x724 1828 0x9811 0724 ADSERR_DEVICE_LICENSENOTFOUND Missing license.
0x725 1829 0x9811 0725 ADSERR_DEVICE_LICENSEEXPIRED License expired.
0x726 1830 0x9811 0726 ADSERR_DEVICE_LICENSEEXCEEDED License exceeded.
0x727 1831 0x9811 0727 ADSERR_DEVICE_LICENSEINVALID Invalid license.
0x728 1832 0x9811 0728 ADSERR_DEVICE_LICENSESYSTEMID License problem: System ID is invalid.
0x729 1833 0x9811 0729 ADSERR_DEVICE_LICENSENOTIMELIMIT License not limited in time.
0x72A 1834 0x9811 072A ADSERR_DEVICE_LICENSEFUTUREISSUE License problem: Time in the future.
0x72B 1835 0x9811 072B ADSERR_DEVICE_LICENSETIMETOLONG License period too long.
0x72C 1836 0x9811 072C ADSERR_DEVICE_EXCEPTION Exception at system startup.
0x72D 1837 0x9811 072D ADSERR_DEVICE_LICENSEDUPLICATED License file read twice.
0x72E 1838 0x9811 072E ADSERR_DEVICE_SIGNATUREINVALID Invalid signature.
0x72F 1839 0x9811 072F ADSERR_DEVICE_CERTIFICATEINVALID Invalid certificate.
0x730 1840 0x9811 0730 ADSERR_DEVICE_LICENSEOEMNOT-
FOUND
0x731 1841 0x9811 0731 ADSERR_DEVICE_LICENSERESTRICTED License not valid for this system ID.
0x732 1842 0x9811 0732 ADSERR_DEVICE_LICENSEDEMODENIED Demo license prohibited.
0x733 1843 0x9811 0733 ADSERR_DEVICE_INVALIDFNCID Invalid function ID.
0x734 1844 0x9811 0734 ADSERR_DEVICE_OUTOFRANGE Outside the valid range.
0x735 1845 0x9811 0735 ADSERR_DEVICE_INVALIDALIGNMENT Invalid alignment.
from use of ADS function blocks in different tasks. It
may be possible to resolve this through multitasking
synchronization in the PLC.
Invalid symbol version. This can occur due to an online change. Create a new handle.
Public key not known from OEM.
TF661038 Version: 1.1
Page 39

Appendix
Hex Dec HRESULT Name Description
0x736 1846 0x9811 0736 ADSERR_DEVICE_LICENSEPLATFORM Invalid platform level.
0x737 1847 0x9811 0737 ADSERR_DEVICE_FORWARD_PL Context – forward to passive level.
0x738 1848 0x9811 0738 ADSERR_DEVICE_FORWARD_DL Context – forward to dispatch level.
0x739 1849 0x9811 0739 ADSERR_DEVICE_FORWARD_RT Context – forward to real-time.
0x740 1856 0x9811 0740 ADSERR_CLIENT_ERROR Client error.
0x741 1857 0x9811 0741 ADSERR_CLIENT_INVALIDPARM Service contains an invalid parameter.
0x742 1858 0x9811 0742 ADSERR_CLIENT_LISTEMPTY Polling list is empty.
0x743 1859 0x9811 0743 ADSERR_CLIENT_VARUSED Var connection already in use.
0x744 1860 0x9811 0744 ADSERR_CLIENT_DUPLINVOKEID The called ID is already in use.
0x745 1861 0x9811 0745 ADSERR_CLIENT_SYNCTIMEOUT Timeout has occurred – the remote terminal is not
0x746 1862 0x9811 0746 ADSERR_CLIENT_W32ERROR Error in Win32 subsystem.
0x747 1863 0x9811 0747 ADSERR_CLIENT_TIMEOUTINVALID Invalid client timeout value.
0x748 1864 0x9811 0748 ADSERR_CLIENT_PORTNOTOPEN Port not open.
0x749 1865 0x9811 0749 ADSERR_CLIENT_NOAMSADDR No AMS address.
0x750 1872 0x9811 0750 ADSERR_CLIENT_SYNCINTERNAL Internal error in Ads sync.
0x751 1873 0x9811 0751 ADSERR_CLIENT_ADDHASH Hash table overflow.
0x752 1874 0x9811 0752 ADSERR_CLIENT_REMOVEHASH Key not found in the table.
0x753 1875 0x9811 0753 ADSERR_CLIENT_NOMORESYM No symbols in the cache.
0x754 1876 0x9811 0754 ADSERR_CLIENT_SYNCRESINVALID Invalid response received.
0x755 1877 0x9811 0755 ADSERR_CLIENT_SYNCPORTLOCKED Sync Port is locked.
responding in the specified ADS timeout. The route
setting of the remote terminal may be configured incorrectly.
RTime error codes
Hex Dec HRESULT Name Description
0x1000 4096 0x9811 1000 RTERR_INTERNAL Internal error in the real-time system.
0x1001 4097 0x9811 1001 RTERR_BADTIMERPERIODS Timer value is not valid.
0x1002 4098 0x9811 1002 RTERR_INVALIDTASKPTR Task pointer has the invalid value 0 (zero).
0x1003 4099 0x9811 1003 RTERR_INVALIDSTACKPTR Stack pointer has the invalid value 0 (zero).
0x1004 4100 0x9811 1004 RTERR_PRIOEXISTS The request task priority is already assigned.
0x1005 4101 0x9811 1005 RTERR_NOMORETCB No free TCB (Task Control Block) available. The
0x1006 4102 0x9811 1006 RTERR_NOMORESEMAS No free semaphores available. The maximum num-
0x1007 4103 0x9811 1007 RTERR_NOMOREQUEUES No free space available in the queue. The maximum
0x100D 4109 0x9811 100D RTERR_EXTIRQALREADYDEF An external synchronization interrupt is already ap-
0x100E 4110 0x9811 100E RTERR_EXTIRQNOTDEF No external sync interrupt applied.
0x100F 4111 0x9811 100F RTERR_EXTIRQINSTALLFAILED Application of the external synchronization interrupt
0x1010 4112 0x9811 1010 RTERR_IRQLNOTLESSOREQUAL Call of a service function in the wrong context
0x1017 4119 0x9811 1017 RTERR_VMXNOTSUPPORTED Intel VT-x extension is not supported.
0x1018 4120 0x9811 1018 RTERR_VMXDISABLED Intel VT-x extension is not enabled in the BIOS.
0x1019 4121 0x9811 1019 RTERR_VMXCONTROLSMISSING Missing function in Intel VT-x extension.
0x101A 4122 0x9811 101A RTERR_VMXENABLEFAILS Activation of Intel VT-x fails.
maximum number of TCBs is 64.
ber of semaphores is 64.
number of positions in the queue is 64.
plied.
has failed.
TCP Winsock error codes
Hex Dec Name Description
0x274C 10060 WSAETIMEDOUT A connection timeout has occurred - error while establishing the connection, because
0x274D 10061 WSAECONNREFUSED Connection refused - no connection could be established because the target computer
0x2751 10065 WSAEHOSTUNREACH No route to host - a socket operation referred to an unavailable host.
the remote terminal did not respond properly after a certain period of time, or the established connection could not be maintained because the connected host did not respond.
has explicitly rejected it. This error usually results from an attempt to connect to a service that is inactive on the external host, that is, a service for which no server application is running.
More Winsock error codes: Win32 error codes [}40]
TF6610 39Version: 1.1
Page 40

Appendix
8.4 Win32 Error Codes
The following table provides a list of Win32 error codes.
0 [}41], 100 [}43], 200 [}45], 1001 [}47], 1100 [}49], 1200 [}51], 1400 [}56], 1600 [}58], 1800
[}62], 2000 [}64], 3000 [}65], 5000 [}68], 6000 [}71], 8000 [}73], 8500 [}82], 9001 [}86],
10004 [}88], 12000 [}91],
TF661040 Version: 1.1
Page 41

Appendix
Error Description
decimal Hexadecimal Name
0 0x00000000 ERROR_SUCCESS The operation completed successfully.
1 0x00000001 ERROR_INVALID_FUNCTION Incorrect function.
2 0x00000002 ERROR_FILE_NOT_FOUND The system cannot find the file specified.
3 0x00000003 ERROR_PATH_NOT_FOUND The system cannot find the path specified.
4 0x00000004 ERROR_TOO_MANY_OPEN_FILES The system cannot open the file.
5 0x00000005 ERROR_ACCESS_DENIED Access is denied.
6 0x00000006 ERROR_INVALID_HANDLE The handle is invalid.
7 0x00000007 ERROR_ARENA_TRASHED The storage control blocks were destroyed.
8 0x00000008 ERROR_NOT_ENOUGH_MEMORY Not enough storage is available to process this
9 0x00000009 ERROR_INVALID_BLOCK The storage control block address is invalid.
10 0x0000000A ERROR_BAD_ENVIRONMENT The environment is incorrect.
11 0x0000000B ERROR_BAD_FORMAT An attempt was made to load a program with an
12 0x0000000C ERROR_INVALID_ACCESS The access code is invalid.
13 0x0000000D ERROR_INVALID_DATA The data is invalid.
14 0x0000000E ERROR_OUTOFMEMORY Not enough storage is available to complete this
15 0x0000000F ERROR_INVALID_DRIVE The system cannot find the drive specified.
16 0x00000010 ERROR_CURRENT_DIRECTORY The directory cannot be removed.
17 0x00000011 ERROR_NOT_SAME_DEVICE The system cannot move the file to a different
18 0x00000012 ERROR_NO_MORE_FILES There are no more files.
19 0x00000013 ERROR_WRITE_PROTECT The media is write protected.
20 0x00000014 ERROR_BAD_UNIT The system cannot find the device specified.
21 0x00000015 ERROR_NOT_READY The device is not ready.
22 0x00000016 ERROR_BAD_COMMAND The device does not recognize the command.
23 0x00000017 ERROR_CRC Data error (cyclic redundancy check).
24 0x00000018 ERROR_BAD_LENGTH The program issued a command but the com-
25 0x00000019 ERROR_SEEK The drive cannot locate a specific area or track on
26 0x0000001A ERROR_NOT_DOS_DISK The specified disk or diskette cannot be ac-
27 0x0000001B ERROR_SECTOR_NOT_FOUND The drive cannot find the sector requested.
28 0x0000001C ERROR_OUT_OF_PAPER The printer is out of paper.
29 0x0000001D ERROR_WRITE_FAULT The system cannot write to the specified device.
30 0x0000001E ERROR_READ_FAULT The system cannot read from the specified de-
31 0x0000001F ERROR_GEN_FAILURE A device attached to the system is not function-
32 0x00000020 ERROR_SHARING_VIOLATION The process cannot access the file because it is
33 0x00000021 ERROR_LOCK_VIOLATION The process cannot access the file because an-
34 0x00000022 ERROR_WRONG_DISK The wrong diskette is in the drive. Insert %2 (Vol-
36 0x00000024 ERROR_SHARING_BUFFER_EXCEEDED Too many files opened for sharing.
38 0x00000026 ERROR_HANDLE_EOF Reached the end of the file.
39 0x00000027 ERROR_HANDLE_DISK_FULL The disk is full.
50 0x00000032 ERROR_NOT_SUPPORTED The request is not supported.
51 0x00000033 ERROR_REM_NOT_LIST The remote computer is not available.
52 0x00000034 ERROR_DUP_NAME A duplicate name exists on the network.
53 0x00000035 ERROR_BAD_NETPATH The network path was not found.
54 0x00000036 ERROR_NETWORK_BUSY The network is busy.
55 0x00000037 ERROR_DEV_NOT_EXIST The specified network resource or device is no
56 0x00000038 ERROR_TOO_MANY_CMDS The network BIOS command limit has been
57 0x00000039 ERROR_ADAP_HDW_ERR A network adapter hardware error occurred.
command.
incorrect format.
operation.
disk drive.
mand length is incorrect.
the disk.
cessed.
vice.
ing.
being used by another process.
other process has locked a portion of the file.
ume Serial Number: %3) into drive %1.
longer available.
reached.
TF6610 41Version: 1.1
Page 42

Appendix
Error Description
decimal Hexadecimal Name
58 0x0000003A ERROR_BAD_NET_RESP The specified server cannot perform the re-
59 0x0000003B ERROR_UNEXP_NET_ERR An unexpected network error occurred.
60 0x0000003C ERROR_BAD_REM_ADAP The remote adapter is not compatible.
61 0x0000003D ERROR_PRINTQ_FULL The printer queue is full.
62 0x0000003E ERROR_NO_SPOOL_SPACE Space to store the file waiting to be printed is not
63 0x0000003F ERROR_PRINT_CANCELLED Your file waiting to be printed was deleted.
64 0x00000040 ERROR_NETNAME_DELETED The specified network name is no longer avail-
65 0x00000041 ERROR_NETWORK_ACCESS_DENIED Network access is denied.
66 0x00000042 ERROR_BAD_DEV_TYPE The network resource type is not correct.
67 0x00000043 ERROR_BAD_NET_NAME The network name cannot be found.
68 0x00000044 ERROR_TOO_MANY_NAMES The name limit for the local computer network
69 0x00000045 ERROR_TOO_MANY_SESS The network BIOS session limit was exceeded.
70 0x00000046 ERROR_SHARING_PAUSED The remote server has been paused or is in the
71 0x00000047 ERROR_REQ_NOT_ACCEP No more connections can be made to this remote
72 0x00000048 ERROR_REDIR_PAUSED The specified printer or disk device has been
80 0x00000050 ERROR_FILE_EXISTS The file exists.
82 0x00000052 ERROR_CANNOT_MAKE The directory or file cannot be created.
83 0x00000053 ERROR_FAIL_I24 Fail on INT 24.
84 0x00000054 ERROR_OUT_OF_STRUCTURES Storage to process this request is not available.
85 0x00000055 ERROR_ALREADY_ASSIGNED The local device name is already in use.
86 0x00000056 ERROR_INVALID_PASSWORD The specified network password is not correct.
87 0x00000057 ERROR_INVALID_PARAMETER The parameter is incorrect.
88 0x00000058 ERROR_NET_WRITE_FAULT A write fault occurred on the network.
89 0x00000059 ERROR_NO_PROC_SLOTS The system cannot start another process at this
quested operation.
available on the server.
able.
adapter card was exceeded.
process of being started.
computer at this time because there are already
as many connections as the computer can accept.
paused.
time.
TF661042 Version: 1.1
Page 43

Appendix
Error Description
decimal Hexadecimal Name
100 0x00000064 ERROR_TOO_MANY_SEMAPHORES Cannot create another system semaphore.
101 0x00000065 ERROR_EXCL_SEM_ALREADY_OWNED The exclusive semaphore is owned by another
102 0x00000066 ERROR_SEM_IS_SET The semaphore is set and cannot be closed.
103 0x00000067 ERROR_TOO_MANY_SEM_REQUESTS The semaphore cannot be set again.
104 0x00000068 ERROR_INVALID_AT_INTERRUPT_TIME Cannot request exclusive semaphores at interrupt
105 0x00000069 ERROR_SEM_OWNER_DIED The previous ownership of this semaphore has
106 0x0000006A ERROR_SEM_USER_LIMIT Insert the diskette for drive %1.
107 0x0000006B ERROR_DISK_CHANGE The program stopped because an alternate
108 0x0000006C ERROR_DRIVE_LOCKED The disk is in use or locked by another process.
109 0x0000006D ERROR_BROKEN_PIPE The pipe has been ended.
110 0x0000006E ERROR_OPEN_FAILED The system cannot open the device or file speci-
111 0x0000006F ERROR_BUFFER_OVERFLOW The file name is too long.
112 0x00000070 ERROR_DISK_FULL There is not enough space on the disk.
113 0x00000071 ERROR_NO_MORE_SEARCH_HANDLES No more internal file identifiers available.
114 0x00000072 ERROR_INVALID_TARGET_HANDLE The target internal file identifier is incorrect.
117 0x00000075 ERROR_INVALID_CATEGORY The IOCTL call made by the application program
118 0x00000076 ERROR_INVALID_VERIFY_SWITCH The verify-on-write switch parameter value is not
119 0x00000077 ERROR_BAD_DRIVER_LEVEL The system does not support the command re-
120 0x00000078 ERROR_CALL_NOT_IMPLEMENTED This function is not supported on this system.
121 0x00000079 ERROR_SEM_TIMEOUT The semaphore timeout period has expired.
122 0x0000007A ERROR_INSUFFICIENT_BUFFER The data area passed to a system call is too
123 0x0000007B ERROR_INVALID_NAME The filename, directory name, or volume label
124 0x0000007C ERROR_INVALID_LEVEL The system call level is not correct.
125 0x0000007D ERROR_NO_VOLUME_LABEL The disk has no volume label.
126 0x0000007E ERROR_MOD_NOT_FOUND The specified module could not be found.
127 0x0000007F ERROR_PROC_NOT_FOUND The specified procedure could not be found.
128 0x00000080 ERROR_WAIT_NO_CHILDREN There are no child processes to wait for.
129 0x00000081 ERROR_CHILD_NOT_COMPLETE The %1 application cannot be run in Win32 mode.
130 0x00000082 ERROR_DIRECT_ACCESS_HANDLE Attempt to use a file handle to an open disk parti-
131 0x00000083 ERROR_NEGATIVE_SEEK An attempt was made to move the file pointer be-
132 0x00000084 ERROR_SEEK_ON_DEVICE The file pointer cannot be set on the specified de-
133 0x00000085 ERROR_IS_JOIN_TARGET A JOIN or SUBST command cannot be used for a
134 0x00000086 ERROR_IS_JOINED An attempt was made to use a JOIN or SUBST
135 0x00000087 ERROR_IS_SUBSTED An attempt was made to use a JOIN or SUBST
136 0x00000088 ERROR_NOT_JOINED The system tried to delete the JOIN of a drive that
137 0x00000089 ERROR_NOT_SUBSTED The system tried to delete the substitution of a
138 0x0000008A ERROR_JOIN_TO_JOIN The system tried to join a drive to a directory on a
139 0x0000008B ERROR_SUBST_TO_SUBST The system tried to substitute a drive to a direc-
140 0x0000008C ERROR_JOIN_TO_SUBST The system tried to join a drive to a directory on a
141 0x0000008D ERROR_SUBST_TO_JOIN The system tried to SUBST a drive to a directory
process.
time.
ended.
diskette was not inserted.
fied.
is not correct.
correct.
quested.
small.
syntax is incorrect.
tion for an operation other than raw disk I/O.
fore the beginning of the file.
vice or file.
drive that contains previously joined drives.
command on a drive that has already been joined.
command on a drive that has already been substituted.
is not joined.
drive that is not substituted.
joined drive.
tory on a substituted drive.
substituted drive.
on a joined drive.
TF6610 43Version: 1.1
Page 44

Appendix
Error Description
decimal Hexadecimal Name
142 0x0000008E ERROR_BUSY_DRIVE The system cannot perform a JOIN or SUBST at
143 0x0000008F ERROR_SAME_DRIVE The system cannot join or substitute a drive to or
144 0x00000090 ERROR_DIR_NOT_ROOT The directory is not a subdirectory of the root di-
145 0x00000091 ERROR_DIR_NOT_EMPTY The directory is not empty.
146 0x00000092 ERROR_IS_SUBST_PATH The path specified is being used in a substitute.
147 0x00000093 ERROR_IS_JOIN_PATH Not enough resources are available to process
148 0x00000094 ERROR_PATH_BUSY The path specified cannot be used at this time.
149 0x00000095 ERROR_IS_SUBST_TARGET An attempt was made to join or substitute a drive
150 0x00000096 ERROR_SYSTEM_TRACE System trace information was not specified in
151 0x00000097 ERROR_INVALID_EVENT_COUNT The number of specified semaphore events for
152 0x00000098 ERROR_TOO_MANY_MUXWAITERS DosMuxSemWait did not execute; too many sem-
153 0x00000099 ERROR_INVALID_LIST_FORMAT The DosMuxSemWait list is not correct.
154 0x0000009A ERROR_LABEL_TOO_LONG The volume label you entered exceeds the label
155 0x0000009B ERROR_TOO_MANY_TCBS Cannot create another thread.
156 0x0000009C ERROR_SIGNAL_REFUSED The recipient process has refused the signal.
157 0x0000009D ERROR_DISCARDED The segment is already discarded and cannot be
158 0x0000009E ERROR_NOT_LOCKED The segment is already unlocked.
159 0x0000009F ERROR_BAD_THREADID_ADDR The address for the thread ID is not correct.
160 0x000000A0 ERROR_BAD_ARGUMENTS The argument string passed to DosExecPgm is
161 0x000000A1 ERROR_BAD_PATHNAME The specified path is invalid.
162 0x000000A2 ERROR_SIGNAL_PENDING A signal is already pending.
164 0x000000A4 ERROR_MAX_THRDS_REACHED No more threads can be created in the system.
167 0x000000A7 ERROR_LOCK_FAILED Unable to lock a region of a file.
170 0x000000AA ERROR_BUSY The requested resource is in use.
173 0x000000AD ERROR_CANCEL_VIOLATION A lock request was not outstanding for the sup-
174 0x000000AE ERROR_ATOMIC_LOCKS_NOT_SUPPORTED The file system does not support atomic changes
180 0x000000B4 ERROR_INVALID_SEGMENT_NUMBER The system detected a segment number that was
182 0x000000B6 ERROR_INVALID_ORDINAL The operating system cannot run %1.
183 0x000000B7 ERROR_ALREADY_EXISTS Cannot create a file when that file already exists.
186 0x000000BA ERROR_INVALID_FLAG_NUMBER The flag passed is not correct.
187 0x000000BB ERROR_SEM_NOT_FOUND The specified system semaphore name was not
188 0x000000BC ERROR_INVALID_STARTING_CODESEG The operating system cannot run %1.
189 0x000000BD ERROR_INVALID_STACKSEG The operating system cannot run %1.
190 0x000000BE ERROR_INVALID_MODULETYPE The operating system cannot run %1.
191 0x000000BF ERROR_INVALID_EXE_SIGNATURE Cannot run %1 in Win32 mode.
192 0x000000C0 ERROR_EXE_MARKED_INVALID The operating system cannot run %1.
193 0x000000C1 ERROR_BAD_EXE_FORMAT %1 is not a valid Win32 application.
194 0x000000C2 ERROR_ITERATED_DATA_EXCEEDS_64k The operating system cannot run %1.
195 0x000000C3 ERROR_INVALID_MINALLOCSIZE The operating system cannot run %1.
196 0x000000C4 ERROR_DYNLINK_FROM_INVALID_RING The operating system cannot run this application
197 0x000000C5 ERROR_IOPL_NOT_ENABLED The operating system is not presently configured
198 0x000000C6 ERROR_INVALID_SEGDPL The operating system cannot run %1.
199 0x000000C7 ERROR_AUTODATASEG_EXCEEDS_64k The operating system cannot run this application
this time.
for a directory on the same drive.
rectory.
this command.
for which a directory on the drive is the target of a
previous substitute.
your CONFIG.SYS file, or tracing is disallowed.
DosMuxSemWait is not correct.
aphores are already set.
character limit of the target file system.
locked.
not correct.
plied cancel region.
to the lock type.
not correct.
found.
program.
to run this application.
program.
TF661044 Version: 1.1
Page 45

Appendix
Error Description
decimal Hexadecimal Name
200 0x000000C8 ERROR_RING2SEG_MUST_BE_MOVABLE The code segment cannot be greater than or
201 0x000000C9 ERROR_RELOC_CHAIN_XEEDS_SEGLIM The operating system cannot run %1.
202 0x000000CA ERROR_INFLOOP_IN_RELOC_CHAIN The operating system cannot run %1.
203 0x000000CB ERROR_ENVVAR_NOT_FOUND The system could not find the environment option
205 0x000000CD ERROR_NO_SIGNAL_SENT No process in the command subtree has a signal
206 0x000000CE ERROR_FILENAME_EXCED_RANGE The filename or extension is too long.
207 0x000000CF ERROR_RING2_STACK_IN_USE The ring 2 stack is in use.
208 0x000000D0 ERROR_META_EXPANSION_TOO_LONG The global filename characters, * or ?, are en-
209 0x000000D1 ERROR_INVALID_SIGNAL_NUMBER The signal being posted is not correct.
210 0x000000D2 ERROR_THREAD_1_INACTIVE The signal handler cannot be set.
212 0x000000D4 ERROR_LOCKED The segment is locked and cannot be reallocated.
214 0x000000D6 ERROR_TOO_MANY_MODULES Too many dynamic-link modules are attached to
215 0x000000D7 ERROR_NESTING_NOT_ALLOWED Cannot nest calls to LoadModule.
216 0x000000D8 ERROR_EXE_MACHINE_TYPE_MISMATCH The image file %1 is valid, but is for a machine
230 0x000000E6 ERROR_BAD_PIPE The pipe state is invalid.
231 0x000000E7 ERROR_PIPE_BUSY All pipe instances are busy.
232 0x000000E8 ERROR_NO_DATA The pipe is being closed.
233 0x000000E9 ERROR_PIPE_NOT_CONNECTED No process is on the other end of the pipe.
234 0x000000EA ERROR_MORE_DATA More data is available.
240 0x000000F0 ERROR_VC_DISCONNECTED The session was canceled.
254 0x000000FE ERROR_INVALID_EA_NAME The specified extended attribute name was in-
255 0x000000FF ERROR_EA_LIST_INCONSISTENT The extended attributes are inconsistent.
258 0x00000102 WAIT_TIMEOUT The wait operation timed out.
259 0x00000103 ERROR_NO_MORE_ITEMS No more data is available.
266 0x0000010A ERROR_CANNOT_COPY The copy functions cannot be used.
267 0x0000010B ERROR_DIRECTORY The directory name is invalid.
275 0x00000113 ERROR_EAS_DIDNT_FIT The extended attributes did not fit in the buffer.
276 0x00000114 ERROR_EA_FILE_CORRUPT The extended attribute file on the mounted file
277 0x00000115 ERROR_EA_TABLE_FULL The extended attribute table file is full.
278 0x00000116 ERROR_INVALID_EA_HANDLE The specified extended attribute handle is invalid.
282 0x0000011A ERROR_EAS_NOT_SUPPORTED The mounted file system does not support ex-
288 0x00000120 ERROR_NOT_OWNER Attempt to release mutex not owned by caller.
298 0x0000012A ERROR_TOO_MANY_POSTS Too many posts were made to a semaphore.
299 0x0000012B ERROR_PARTIAL_COPY Only part of a ReadProcessMemory or WritePro-
300 0x0000012C ERROR_OPLOCK_NOT_GRANTED The oplock request is denied.
301 0x0000012D ERROR_INVALID_OPLOCK_PROTOCOL An invalid oplock acknowledgment was received
302 0x0000012E ERROR_DISK_TOO_FRAGMENTED The volume is too fragmented to complete this
303 0x0000012F ERROR_DELETE_PENDING The file cannot be opened because it is in the
317 0x0000013D ERROR_MR_MID_NOT_FOUND The system cannot find message text for mes-
487 0x000001E7 ERROR_INVALID_ADDRESS Attempt to access invalid address.
534 0x00000216 ERROR_ARITHMETIC_OVERFLOW Arithmetic result exceeded 32 bits.
535 0x00000217 ERROR_PIPE_CONNECTED There is a process on other end of the pipe.
536 0x00000218 ERROR_PIPE_LISTENING Waiting for a process to open the other end of the
994 0x000003E2 ERROR_EA_ACCESS_DENIED Access to the extended attribute was denied.
equal to 64K.
that was entered.
handler.
tered incorrectly or too many global filename
characters are specified.
this program or dynamic-link module.
type other than the current machine.
valid.
system is corrupt.
tended attributes.
cessMemory request was completed.
by the system.
operation.
process of being deleted.
sage number 0x%1 in the message file for %2.
pipe.
TF6610 45Version: 1.1
Page 46

Appendix
Error Description
decimal Hexadecimal Name
995 0x000003E3 ERROR_OPERATION_ABORTED The I/O operation has been aborted because of
996 0x000003E4 ERROR_IO_INCOMPLETE Overlapped I/O event is not in a signaled state.
997 0x000003E5 ERROR_IO_PENDING Overlapped I/O operation is in progress.
998 0x000003E6 ERROR_NOACCESS Invalid access to memory location.
999 0x000003E7 ERROR_SWAPERROR Error performing inpage operation.
either a thread exit or an application request.
TF661046 Version: 1.1
Page 47

Appendix
Error Description
decimal Hexadecimal Name
1001 0x000003E9 ERROR_STACK_OVERFLOW Recursion too deep; the stack overflowed.
1002 0x000003EA ERROR_INVALID_MESSAGE The window cannot act on the sent message.
1003 0x000003EB ERROR_CAN_NOT_COMPLETE Cannot complete this function.
1004 0x000003EC ERROR_INVALID_FLAGS Invalid flags.
1005 0x000003ED ERROR_UNRECOGNIZED_VOLUME The volume does not contain a recognized file
1006 0x000003EE ERROR_FILE_INVALID The volume for a file has been externally altered
1007 0x000003EF ERROR_FULLSCREEN_MODE The requested operation cannot be performed in
1008 0x000003F0 ERROR_NO_TOKEN An attempt was made to reference a token that
1009 0x000003F1 ERROR_BADDB The configuration registry database is corrupt.
1010 0x000003F2 ERROR_BADKEY The configuration registry key is invalid.
1011 0x000003F3 ERROR_CANTOPEN The configuration registry key could not be
1012 0x000003F4 ERROR_CANTREAD The configuration registry key could not be read.
1013 0x000003F5 ERROR_CANTWRITE The configuration registry key could not be writ-
1014 0x000003F6 ERROR_REGISTRY_RECOVERED One of the files in the registry database had to be
1015 0x000003F7 ERROR_REGISTRY_CORRUPT The registry is corrupted. The structure of one of
1016 0x000003F8 ERROR_REGISTRY_IO_FAILED An I/O operation initiated by the registry failed un-
1017 0x000003F9 ERROR_NOT_REGISTRY_FILE The system has attempted to load or restore a file
1018 0x000003FA ERROR_KEY_DELETED Illegal operation attempted on a registry key that
1019 0x000003FB ERROR_NO_LOG_SPACE System could not allocate the required space in a
1020 0x000003FC ERROR_KEY_HAS_CHILDREN Cannot create a symbolic link in a registry key
1021 0x000003FD ERROR_CHILD_MUST_BE_VOLATILE Cannot create a stable subkey under a volatile
1022 0x000003FE ERROR_NOTIFY_ENUM_DIR A notify change request is being completed and
1051 0x0000041B ERROR_DEPENDENT_SERVICES_RUNNING A stop control has been sent to a service that
1052 0x0000041C ERROR_INVALID_SERVICE_CONTROL The requested control is not valid for this service.
1053 0x0000041D ERROR_SERVICE_REQUEST_TIMEOUT The service did not respond to the start or control
1054 0x0000041E ERROR_SERVICE_NO_THREAD A thread could not be created for the service.
1055 0x0000041F ERROR_SERVICE_DATABASE_LOCKED The service database is locked.
1056 0x00000420 ERROR_SERVICE_ALREADY_RUNNING An instance of the service is already running.
1057 0x00000421 ERROR_INVALID_SERVICE_ACCOUNT The account name is invalid or does not exist, or
1058 0x00000422 ERROR_SERVICE_DISABLED The service cannot be started, either because it is
1059 0x00000423 ERROR_CIRCULAR_DEPENDENCY Circular service dependency was specified.
1060 0x00000424 ERROR_SERVICE_DOES_NOT_EXIST The specified service does not exist as an in-
system. Please make sure that all required file
system drivers are loaded and that the volume is
not corrupted.
so that the opened file is no longer valid.
full-screen mode.
does not exist.
opened.
ten.
recovered by use of a log or alternate copy. The
recovery was successful.
the files containing registry data is corrupted, or
the system's memory image of the file is corrupted, or the file could not be recovered because
the alternate copy or log was absent or corrupted.
recoverably. The registry could not read in, or
write out, or flush, one of the files that contain the
system's image of the registry.
into the registry, but the specified file is not in a
registry file format.
has been marked for deletion.
registry log.
that already has subkeys or values.
parent key.
the information is not being returned in the caller's
buffer. The caller now needs to enumerate the
files to find the changes.
other running services are dependent on.
request in a timely fashion.
the password is invalid for the account name
specified.
disabled or because it has no enabled devices associated with it.
stalled service.
TF6610 47Version: 1.1
Page 48

Appendix
Error Description
decimal Hexadecimal Name
1061 0x00000425 ERROR_SERVICE_CANNOT_ACCEPT_CTRL The service cannot accept control messages at
1062 0x00000426 ERROR_SERVICE_NOT_ACTIVE The service has not been started.
1063 0x00000427 ERROR_FAILED_SERVICE_CONTROLLER_CON-
NECT
1064 0x00000428 ERROR_EXCEPTION_IN_SERVICE An exception occurred in the service when han-
1065 0x00000429 ERROR_DATABASE_DOES_NOT_EXIST The database specified does not exist.
1066 0x0000042A ERROR_SERVICE_SPECIFIC_ERROR The service has returned a service-specific error
1067 0x0000042B ERROR_PROCESS_ABORTED The process terminated unexpectedly.
1068 0x0000042C ERROR_SERVICE_DEPENDENCY_FAIL The dependency service or group failed to start.
1069 0x0000042D ERROR_SERVICE_LOGON_FAILED The service did not start due to a logon failure.
1070 0x0000042E ERROR_SERVICE_START_HANG After starting, the service hung in a start-pending
1071 0x0000042F ERROR_INVALID_SERVICE_LOCK The specified service database lock is invalid.
1072 0x00000430 ERROR_SERVICE_MARKED_FOR_DELETE The specified service has been marked for dele-
1073 0x00000431 ERROR_SERVICE_EXISTS The specified service already exists.
1074 0x00000432 ERROR_ALREADY_RUNNING_LKG The system is currently running with the last-
1075 0x00000433 ERROR_SERVICE_DEPENDENCY_DELETED The dependency service does not exist or has
1076 0x00000434 ERROR_BOOT_ALREADY_ACCEPTED The current boot has already been accepted for
1077 0x00000435 ERROR_SERVICE_NEVER_STARTED No attempts to start the service have been made
1078 0x00000436 ERROR_DUPLICATE_SERVICE_NAME The name is already in use as either a service
1079 0x00000437 ERROR_DIFFERENT_SERVICE_ACCOUNT The account specified for this service is different
1080 0x00000438 ERROR_CANNOT_DETECT_DRIVER_FAILURE Failure actions can only be set for Win32 ser-
1081 0x00000439 ERROR_CANNOT_DETECT_PROCESS_ABORT This service runs in the same process as the ser-
1082 0x0000043A ERROR_NO_RECOVERY_PROGRAM No recovery program has been configured for this
1083 0x0000043B ERROR_SERVICE_NOT_IN_EXE The executable program that this service is con-
1084 0x0000043C ERROR_NOT_SAFEBOOT_SERVICE This service cannot be started in Safe Mode.
this time.
The service process could not connect to the service controller.
dling the control request.
code.
state.
tion.
known-good configuration.
been marked for deletion.
use as the last-known-good control set.
since the last boot.
name or a service display name.
from the account specified for other services running in the same process.
vices, not for drivers.
vice control manager. Therefore, the service control manager cannot take action if this service's
process terminates unexpectedly.
service.
figured to run in does not implement the service.
TF661048 Version: 1.1
Page 49

Appendix
Error Description
decimal Hexadecimal Name
1100 0x0000044C ERROR_END_OF_MEDIA The physical end of the tape has been reached.
1101 0x0000044D ERROR_FILEMARK_DETECTED A tape access reached a filemark.
1102 0x0000044E ERROR_BEGINNING_OF_MEDIA The beginning of the tape or a partition was en-
1103 0x0000044F ERROR_SETMARK_DETECTED A tape access reached the end of a set of files.
1104 0x00000450 ERROR_NO_DATA_DETECTED No more data is on the tape.
1105 0x00000451 ERROR_PARTITION_FAILURE Tape could not be partitioned.
1106 0x00000452 ERROR_INVALID_BLOCK_LENGTH When accessing a new tape of a multivolume par-
1107 0x00000453 ERROR_DEVICE_NOT_PARTITIONED Tape partition information could not be found
1108 0x00000454 ERROR_UNABLE_TO_LOCK_MEDIA Unable to lock the media eject mechanism.
1109 0x00000455 ERROR_UNABLE_TO_UNLOAD_MEDIA Unable to unload the media.
1110 0x00000456 ERROR_MEDIA_CHANGED The media in the drive may have changed.
1111 0x00000457 ERROR_BUS_RESET The I/O bus was reset.
1112 0x00000458 ERROR_NO_MEDIA_IN_DRIVE No media in drive.
1113 0x00000459 ERROR_NO_UNICODE_TRANSLATION No mapping for the Unicode character exists in
1114 0x0000045A ERROR_DLL_INIT_FAILED A dynamic link library (DLL) initialization routine
1115 0x0000045B ERROR_SHUTDOWN_IN_PROGRESS A system shutdown is in progress.
1116 0x0000045C ERROR_NO_SHUTDOWN_IN_PROGRESS Unable to abort the system shutdown because no
1117 0x0000045D ERROR_IO_DEVICE The request could not be performed because of
1118 0x0000045E ERROR_SERIAL_NO_DEVICE No serial device was successfully initialized. The
1119 0x0000045F ERROR_IRQ_BUSY Unable to open a device that was sharing an in-
1120 0x00000460 ERROR_MORE_WRITES A serial I/O operation was completed by another
1121 0x00000461 ERROR_COUNTER_TIMEOUT A serial I/O operation completed because the
1122 0x00000462 ERROR_FLOPPY_ID_MARK_NOT_FOUND No ID address mark was found on the floppy disk.
1123 0x00000463 ERROR_FLOPPY_WRONG_CYLINDER Mismatch between the floppy disk sector ID field
1124 0x00000464 ERROR_FLOPPY_UNKNOWN_ERROR The floppy disk controller reported an error that is
1125 0x00000465 ERROR_FLOPPY_BAD_REGISTERS The floppy disk controller returned inconsistent re-
1126 0x00000466 ERROR_DISK_RECALIBRATE_FAILED While accessing the hard disk, a recalibrate oper-
1127 0x00000467 ERROR_DISK_OPERATION_FAILED While accessing the hard disk, a disk operation
1128 0x00000468 ERROR_DISK_RESET_FAILED While accessing the hard disk, a disk controller
1129 0x00000469 ERROR_EOM_OVERFLOW Physical end of tape encountered.
1130 0x0000046A ERROR_NOT_ENOUGH_SERVER_MEMORY Not enough server storage is available to process
1131 0x0000046B ERROR_POSSIBLE_DEADLOCK A potential deadlock condition has been detected.
1132 0x0000046C ERROR_MAPPED_ALIGNMENT The base address or the file offset specified does
1140 0x00000474 ERROR_SET_POWER_STATE_VETOED An attempt to change the system power state was
1141 0x00000475 ERROR_SET_POWER_STATE_FAILED The system BIOS failed an attempt to change the
1142 0x00000476 ERROR_TOO_MANY_LINKS An attempt was made to create more links on a
1150 0x0000047E ERROR_OLD_WIN_VERSION The specified program requires a newer version
countered.
tition, the current block size is incorrect.
when loading a tape.
the target multi-byte code page.
failed.
shutdown was in progress.
an I/O device error.
serial driver will unload.
terrupt request (IRQ) with other devices. At least
one other device that uses that IRQ was already
opened.
write to the serial port. (The IOCTL_SERIAL_XOFF_COUNTER reached zero.)
timeout period expired. (The IOCTL_SERIAL_XOFF_COUNTER did not reach zero.)
and the floppy disk controller track address.
not recognized by the floppy disk driver.
sults in its registers.
ation failed, even after retries.
failed even after retries.
reset was needed, but even that failed.
this command.
not have the proper alignment.
vetoed by another application or driver.
system power state.
file than the file system supports.
of Windows.
TF6610 49Version: 1.1
Page 50

Appendix
Error Description
decimal Hexadecimal Name
1151 0x0000047F ERROR_APP_WRONG_OS The specified program is not a Windows or MS-
1152 0x00000480 ERROR_SINGLE_INSTANCE_APP Cannot start more than one instance of the speci-
1153 0x00000481 ERROR_RMODE_APP The specified program was written for an earlier
1154 0x00000482 ERROR_INVALID_DLL One of the library files needed to run this applica-
1155 0x00000483 ERROR_NO_ASSOCIATION No application is associated with the specified file
1156 0x00000484 ERROR_DDE_FAIL An error occurred in sending the command to the
1157 0x00000485 ERROR_DLL_NOT_FOUND One of the library files needed to run this applica-
1158 0x00000486 ERROR_NO_MORE_USER_HANDLES The current process has used all of its system al-
1159 0x00000487 ERROR_MESSAGE_SYNC_ONLY The message can be used only with synchronous
1160 0x00000488 ERROR_SOURCE_ELEMENT_EMPTY The indicated source element has no media.
1161 0x00000489 ERROR_DESTINATION_ELEMENT_FULL The indicated destination element already con-
1162 0x0000048A ERROR_ILLEGAL_ELEMENT_ADDRESS The indicated element does not exist.
1163 0x0000048B ERROR_MAGAZINE_NOT_PRESENT The indicated element is part of a magazine that
1164 0x0000048C ERROR_DEVICE_REINITIALIZATION_NEEDED The indicated device requires reinitialization due
1165 0x0000048D ERROR_DEVICE_REQUIRES_CLEANING The device has indicated that cleaning is required
1166 0x0000048E ERROR_DEVICE_DOOR_OPEN The device has indicated that its door is open.
1167 0x0000048F ERROR_DEVICE_NOT_CONNECTED The device is not connected.
1168 0x00000490 ERROR_NOT_FOUND Element not found.
1169 0x00000491 ERROR_NO_MATCH There was no match for the specified key in the
1170 0x00000492 ERROR_SET_NOT_FOUND The property set specified does not exist on the
1171 0x00000493 ERROR_POINT_NOT_FOUND The point passed to GetMouseMovePointsEx is
1172 0x00000494 ERROR_NO_TRACKING_SERVICE The tracking (workstation) service is not running.
1173 0x00000495 ERROR_NO_VOLUME_ID The Volume ID could not be found.
1175 0x00000497 ERROR_UNABLE_TO_REMOVE_REPLACED Unable to remove the file to be replaced.
1176 0x00000498 ERROR_UNABLE_TO_MOVE_REPLACEMENT Unable to move the replacement file to the file to
1177 0x00000499 ERROR_UNABLE_TO_MOVE_REPLACEMENT_2 Unable to move the replacement file to the file to
1178 0x0000049A ERROR_JOURNAL_DELETE_IN_PROGRESS The volume change journal is being deleted.
1179 0x0000049B ERROR_JOURNAL_NOT_ACTIVE The volume change journal is not active.
1180 0x0000049C ERROR_POTENTIAL_FILE_FOUND A file was found, but it may not be the correct file.
1181 0x0000049D ERROR_JOURNAL_ENTRY_DELETED The journal entry has been deleted from the jour-
DOS program.
fied program.
version of Windows.
tion is damaged.
for this operation.
application.
tion cannot be found.
lowance of handles for Window Manager objects.
operations.
tains media.
is not present.
to hardware errors.
before further operations are attempted.
index.
object.
not in the buffer.
be replaced. The file to be replaced has retained
its original name.
be replaced. The file to be replaced has been renamed using the backup name.
nal.
TF661050 Version: 1.1
Page 51

Appendix
Error Description
decimal Hexadecimal Name
1200 0x000004B0 ERROR_BAD_DEVICE The specified device name is invalid.
1201 0x000004B1 ERROR_CONNECTION_UNAVAIL The device is not currently connected but it is a
1202 0x000004B2 ERROR_DEVICE_ALREADY_REMEMBERED The local device name has a remembered con-
1203 0x000004B3 ERROR_NO_NET_OR_BAD_PATH No network provider accepted the given network
1204 0x000004B4 ERROR_BAD_PROVIDER The specified network provider name is invalid.
1205 0x000004B5 ERROR_CANNOT_OPEN_PROFILE Unable to open the network connection profile.
1206 0x000004B6 ERROR_BAD_PROFILE The network connection profile is corrupted.
1207 0x000004B7 ERROR_NOT_CONTAINER Cannot enumerate a noncontainer.
1208 0x000004B8 ERROR_EXTENDED_ERROR An extended error has occurred.
1209 0x000004B9 ERROR_INVALID_GROUPNAME The format of the specified group name is invalid.
1210 0x000004BA ERROR_INVALID_COMPUTERNAME The format of the specified computer name is in-
1211 0x000004BB ERROR_INVALID_EVENTNAME The format of the specified event name is invalid.
1212 0x000004BC ERROR_INVALID_DOMAINNAME The format of the specified domain name is in-
1213 0x000004BD ERROR_INVALID_SERVICENAME The format of the specified service name is in-
1214 0x000004BE ERROR_INVALID_NETNAME The format of the specified network name is in-
1215 0x000004BF ERROR_INVALID_SHARENAME The format of the specified share name is invalid.
1216 0x000004C0 ERROR_INVALID_PASSWORDNAME The format of the specified password is invalid.
1217 0x000004C1 ERROR_INVALID_MESSAGENAME The format of the specified message name is in-
1218 0x000004C2 ERROR_INVALID_MESSAGEDEST The format of the specified message destination
1219 0x000004C3 ERROR_SESSION_CREDENTIAL_CONFLICT The credentials supplied conflict with an existing
1220 0x000004C4 ERROR_REMOTE_SESSION_LIMIT_EXCEEDED An attempt was made to establish a session to a
1221 0x000004C5 ERROR_DUP_DOMAINNAME The workgroup or domain name is already in use
1222 0x000004C6 ERROR_NO_NETWORK The network is not present or not started.
1223 0x000004C7 ERROR_CANCELLED The operation was canceled by the user.
1224 0x000004C8 ERROR_USER_MAPPED_FILE The requested operation cannot be performed on
1225 0x000004C9 ERROR_CONNECTION_REFUSED The remote system refused the network connec-
1226 0x000004CA ERROR_GRACEFUL_DISCONNECT The network connection was gracefully closed.
1227 0x000004CB ERROR_ADDRESS_ALREADY_ASSOCIATED The network transport endpoint already has an
1228 0x000004CC ERROR_ADDRESS_NOT_ASSOCIATED An address has not yet been associated with the
1229 0x000004CD ERROR_CONNECTION_INVALID An operation was attempted on a nonexistent net-
1230 0x000004CE ERROR_CONNECTION_ACTIVE An invalid operation was attempted on an active
1231 0x000004CF ERROR_NETWORK_UNREACHABLE The network location cannot be reached. For in-
1232 0x000004D0 ERROR_HOST_UNREACHABLE The network location cannot be reached. For in-
1233 0x000004D1 ERROR_PROTOCOL_UNREACHABLE The network location cannot be reached. For in-
1234 0x000004D2 ERROR_PORT_UNREACHABLE No service is operating at the destination network
1235 0x000004D3 ERROR_REQUEST_ABORTED The request was aborted.
1236 0x000004D4 ERROR_CONNECTION_ABORTED The network connection was aborted by the local
remembered connection.
nection to another network resource.
path.
valid.
valid.
valid.
valid.
valid.
is invalid.
set of credentials.
network server, but there are already too many
sessions established to that server.
by another computer on the network.
a file with a user-mapped section open.
tion.
address associated with it.
network endpoint.
work connection.
network connection.
formation about network troubleshooting, see
Windows Help.
formation about network troubleshooting, see
Windows Help.
formation about network troubleshooting, see
Windows Help.
endpoint on the remote system.
system.
TF6610 51Version: 1.1
Page 52

Appendix
Error Description
decimal Hexadecimal Name
1237 0x000004D5 ERROR_RETRY The operation could not be completed. A retry
1238 0x000004D6 ERROR_CONNECTION_COUNT_LIMIT A connection to the server could not be made be-
1239 0x000004D7 ERROR_LOGIN_TIME_RESTRICTION Attempting to log in during an unauthorized time
1240 0x000004D8 ERROR_LOGIN_WKSTA_RESTRICTION The account is not authorized to log in from this
1241 0x000004D9 ERROR_INCORRECT_ADDRESS The network address could not be used for the
1242 0x000004DA ERROR_ALREADY_REGISTERED The service is already registered.
1243 0x000004DB ERROR_SERVICE_NOT_FOUND The specified service does not exist.
1244 0x000004DC ERROR_NOT_AUTHENTICATED The operation being requested was not performed
1245 0x000004DD ERROR_NOT_LOGGED_ON The operation being requested was not performed
1246 0x000004DE ERROR_CONTINUE Continue with work in progress.
1247 0x000004DF ERROR_ALREADY_INITIALIZED An attempt was made to perform an initialization
1248 0x000004E0 ERROR_NO_MORE_DEVICES No more local devices.
1249 0x000004E1 ERROR_NO_SUCH_SITE The specified site does not exist.
1250 0x000004E2 ERROR_DOMAIN_CONTROLLER_EXISTS A domain controller with the specified name al-
1251 0x000004E3 ERROR_ONLY_IF_CONNECTED This operation is supported only when you are
1252 0x000004E4 ERROR_OVERRIDE_NOCHANGES The group policy framework should call the exten-
1253 0x000004E5 ERROR_BAD_USER_PROFILE The specified user does not have a valid profile.
1254 0x000004E6 ERROR_NOT_SUPPORTED_ON_SBS This operation is not supported on a Microsoft
1255 0x000004E7 ERROR_SERVER_SHUTDOWN_IN_PROGRESS The server machine is shutting down.
1256 0x000004E8 ERROR_HOST_DOWN The remote system is not available. For informa-
1257 0x000004E9 ERROR_NON_ACCOUNT_SID The security identifier provided is not from an ac-
1258 0x000004EA ERROR_NON_DOMAIN_SID The security identifier provided does not have a
1259 0x000004EB ERROR_APPHELP_BLOCK AppHelp dialog canceled thus preventing the ap-
1260 0x000004EC ERROR_ACCESS_DISABLED_BY_POLICY Access to the requested resource has been dis-
1261 0x000004ED ERROR_REG_NAT_CONSUMPTION A program attempt to use an invalid register
1262 0x000004EE ERROR_CSCSHARE_OFFLINE The share is currently offline or does not exist.
1300 0x00000514 ERROR_NOT_ALL_ASSIGNED Not all privileges referenced are assigned to the
1301 0x00000515 ERROR_SOME_NOT_MAPPED Some mapping between account names and se-
1302 0x00000516 ERROR_NO_QUOTAS_FOR_ACCOUNT No system quota limits are specifically set for this
1303 0x00000517 ERROR_LOCAL_USER_SESSION_KEY No encryption key is available. A well-known en-
1304 0x00000518 ERROR_NULL_LM_PASSWORD The password is too complex to be converted to a
1305 0x00000519 ERROR_UNKNOWN_REVISION The revision level is unknown.
1306 0x0000051A ERROR_REVISION_MISMATCH Indicates two revision levels are incompatible.
1307 0x0000051B ERROR_INVALID_OWNER This security ID may not be assigned as the
should be performed.
cause the limit on the number of concurrent connections for this account has been reached.
of day for this account.
station.
operation requested.
because the user has not been authenticated.
because the user has not logged on to the network. The specified service does not exist.
operation when initialization has already been
completed.
ready exists.
connected to the server.
sion even if there are no changes.
Small Business Server.
tion about network troubleshooting, see Windows
Help.
count domain.
domain component.
plication from starting.
abled by your administrator.
value. Normally caused by an uninitialized register. This error is Itanium specific.
caller.
curity IDs was not done.
account.
cryption key was returned.
LAN Manager password. The LAN Manager password returned is a NULL string.
owner of this object.
TF661052 Version: 1.1
Page 53

Appendix
Error Description
decimal Hexadecimal Name
1308 0x0000051C ERROR_INVALID_PRIMARY_GROUP This security ID may not be assigned as the pri-
1309 0x0000051D ERROR_NO_IMPERSONATION_TOKEN An attempt has been made to operate on an im-
1310 0x0000051E ERROR_CANT_DISABLE_MANDATORY The group may not be disabled.
1311 0x0000051F ERROR_NO_LOGON_SERVERS There are currently no logon servers available to
1312 0x00000520 ERROR_NO_SUCH_LOGON_SESSION A specified logon session does not exist. It may
1313 0x00000521 ERROR_NO_SUCH_PRIVILEGE A specified privilege does not exist.
1314 0x00000522 ERROR_PRIVILEGE_NOT_HELD A required privilege is not held by the client.
1315 0x00000523 ERROR_INVALID_ACCOUNT_NAME The name provided is not a properly formed ac-
1316 0x00000524 ERROR_USER_EXISTS The specified user already exists.
1317 0x00000525 ERROR_NO_SUCH_USER The specified user does not exist.
1318 0x00000526 ERROR_GROUP_EXISTS The specified group already exists.
1319 0x00000527 ERROR_NO_SUCH_GROUP The specified group does not exist.
1320 0x00000528 ERROR_MEMBER_IN_GROUP Either the specified user account is already a
1321 0x00000529 ERROR_MEMBER_NOT_IN_GROUP The specified user account is not a member of the
1322 0x0000052A ERROR_LAST_ADMIN The last remaining administration account cannot
1323 0x0000052B ERROR_WRONG_PASSWORD Unable to update the password. The value pro-
1324 0x0000052C ERROR_ILL_FORMED_PASSWORD Unable to update the password. The value pro-
1325 0x0000052D ERROR_PASSWORD_RESTRICTION Unable to update the password. The value pro-
1326 0x0000052E ERROR_LOGON_FAILURE Logon failure: unknown user name or bad pass-
1327 0x0000052F ERROR_ACCOUNT_RESTRICTION Logon failure: user account restriction.
1328 0x00000530 ERROR_INVALID_LOGON_HOURS Logon failure: account logon time restriction viola-
1329 0x00000531 ERROR_INVALID_WORKSTATION Logon failure: user not allowed to log on to this
1330 0x00000532 ERROR_PASSWORD_EXPIRED Logon failure: the specified account password has
1331 0x00000533 ERROR_ACCOUNT_DISABLED Logon failure: account currently disabled.
1332 0x00000534 ERROR_NONE_MAPPED No mapping between account names and security
1333 0x00000535 ERROR_TOO_MANY_LUIDS_REQUESTED Too many local user identifiers (LUIDs) were re-
1334 0x00000536 ERROR_LUIDS_EXHAUSTED No more local user identifiers (LUIDs) are avail-
1335 0x00000537 ERROR_INVALID_SUB_AUTHORITY The subauthority part of a security ID is invalid for
1336 0x00000538 ERROR_INVALID_ACL The access control list (ACL) structure is invalid.
1337 0x00000539 ERROR_INVALID_SID The security ID structure is invalid.
1338 0x0000053A ERROR_INVALID_SECURITY_DESCR The security descriptor structure is invalid.
1340 0x0000053C ERROR_BAD_INHERITANCE_ACL The inherited access control list (ACL) or access
1341 0x0000053D ERROR_SERVER_DISABLED The server is currently disabled.
1342 0x0000053E ERROR_SERVER_NOT_DISABLED The server is currently enabled.
1343 0x0000053F ERROR_INVALID_ID_AUTHORITY The value provided was an invalid value for an
1344 0x00000540 ERROR_ALLOTTED_SPACE_EXCEEDED No more memory is available for security informa-
mary group of an object.
personation token by a thread that is not currently
impersonating a client.
service the logon request.
already have been terminated.
count name.
member of the specified group, or the specified
group cannot be deleted because it contains a
member.
specified group account.
be disabled or deleted.
vided as the current password is incorrect.
vided for the new password contains values that
are not allowed in passwords.
vided for the new password does not meet the
length, complexity, or history requirement of the
domain.
word.
tion.
computer.
expired.
IDs was done.
quested at one time.
able.
this particular use.
control entry (ACE) could not be built.
identifier authority.
tion updates.
TF6610 53Version: 1.1
Page 54

Appendix
Error Description
decimal Hexadecimal Name
1345 0x00000541 ERROR_INVALID_GROUP_ATTRIBUTES The specified attributes are invalid, or incompati-
1346 0x00000542 ERROR_BAD_IMPERSONATION_LEVEL Either a required impersonation level was not pro-
1347 0x00000543 ERROR_CANT_OPEN_ANONYMOUS Cannot open an anonymous level security token.
1348 0x00000544 ERROR_BAD_VALIDATION_CLASS The validation information class requested was in-
1349 0x00000545 ERROR_BAD_TOKEN_TYPE The type of the token is inappropriate for its at-
1350 0x00000546 ERROR_NO_SECURITY_ON_OBJECT Unable to perform a security operation on an ob-
1351 0x00000547 ERROR_CANT_ACCESS_DOMAIN_INFO Configuration information could not be read from
1352 0x00000548 ERROR_INVALID_SERVER_STATE The security account manager (SAM) or local se-
1353 0x00000549 ERROR_INVALID_DOMAIN_STATE The domain was in the wrong state to perform the
1354 0x0000054A ERROR_INVALID_DOMAIN_ROLE This operation is only allowed for the Primary Do-
1355 0x0000054B ERROR_NO_SUCH_DOMAIN The specified domain either does not exist or
1356 0x0000054C ERROR_DOMAIN_EXISTS The specified domain already exists.
1357 0x0000054D ERROR_DOMAIN_LIMIT_EXCEEDED An attempt was made to exceed the limit on the
1358 0x0000054E ERROR_INTERNAL_DB_CORRUPTION Unable to complete the requested operation be-
1359 0x0000054F ERROR_INTERNAL_ERROR An internal error occurred.
1360 0x00000550 ERROR_GENERIC_NOT_MAPPED Generic access types were contained in an ac-
1361 0x00000551 ERROR_BAD_DESCRIPTOR_FORMAT A security descriptor is not in the right format (ab-
1362 0x00000552 ERROR_NOT_LOGON_PROCESS The requested action is restricted for use by logon
1363 0x00000553 ERROR_LOGON_SESSION_EXISTS Cannot start a new logon session with an ID that
1364 0x00000554 ERROR_NO_SUCH_PACKAGE A specified authentication package is unknown.
1365 0x00000555 ERROR_BAD_LOGON_SESSION_STATE The logon session is not in a state that is consis-
1366 0x00000556 ERROR_LOGON_SESSION_COLLISION The logon session ID is already in use.
1367 0x00000557 ERROR_INVALID_LOGON_TYPE A logon request contained an invalid logon type
1368 0x00000558 ERROR_CANNOT_IMPERSONATE Unable to impersonate using a named pipe until
1369 0x00000559 ERROR_RXACT_INVALID_STATE The transaction state of a registry subtree is in-
1370 0x0000055A ERROR_RXACT_COMMIT_FAILURE An internal security database corruption has been
1371 0x0000055B ERROR_SPECIAL_ACCOUNT Cannot perform this operation on built-in ac-
1372 0x0000055C ERROR_SPECIAL_GROUP Cannot perform this operation on this built-in spe-
1373 0x0000055D ERROR_SPECIAL_USER Cannot perform this operation on this built-in spe-
1374 0x0000055E ERROR_MEMBERS_PRIMARY_GROUP The user cannot be removed from a group be-
1375 0x0000055F ERROR_TOKEN_ALREADY_IN_USE The token is already in use as a primary token.
1376 0x00000560 ERROR_NO_SUCH_ALIAS The specified local group does not exist.
ble with the attributes for the group as a whole.
vided, or the provided impersonation level is invalid.
valid.
tempted use.
ject that has no associated security.
the domain controller, either because the machine
is unavailable, or access has been denied.
curity authority (LSA) server was in the wrong
state to perform the security operation.
security operation.
main Controller of the domain.
could not be contacted.
number of domains per server.
cause of either a catastrophic media failure or a
data structure corruption on the disk.
cess mask which should already be mapped to
nongeneric types.
solute or self-relative).
processes only. The calling process has not registered as a logon process.
is already in use.
tent with the requested operation.
value.
data has been read from that pipe.
compatible with the requested operation.
encountered.
counts.
cial group.
cial user.
cause the group is currently the user's primary
group.
TF661054 Version: 1.1
Page 55

Appendix
Error Description
decimal Hexadecimal Name
1377 0x00000561 ERROR_MEMBER_NOT_IN_ALIAS The specified account name is not a member of
1378 0x00000562 ERROR_MEMBER_IN_ALIAS The specified account name is already a member
1379 0x00000563 ERROR_ALIAS_EXISTS The specified local group already exists.
1380 0x00000564 ERROR_LOGON_NOT_GRANTED Logon failure: the user has not been granted the
1381 0x00000565 ERROR_TOO_MANY_SECRETS The maximum number of secrets that may be
1382 0x00000566 ERROR_SECRET_TOO_LONG The length of a secret exceeds the maximum
1383 0x00000567 ERROR_INTERNAL_DB_ERROR The local security authority database contains an
1384 0x00000568 ERROR_TOO_MANY_CONTEXT_IDS During a logon attempt, the user's security con-
1385 0x00000569 ERROR_LOGON_TYPE_NOT_GRANTED Logon failure: the user has not been granted the
1386 0x0000056A ERROR_NT_CROSS_ENCRYPTION_REQUIRED A cross-encrypted password is necessary to
1387 0x0000056B ERROR_NO_SUCH_MEMBER A new member could not be added to or removed
1388 0x0000056C ERROR_INVALID_MEMBER A new member could not be added to a local
1389 0x0000056D ERROR_TOO_MANY_SIDS Too many security IDs have been specified.
1390 0x0000056E ERROR_LM_CROSS_ENCRYPTION_REQUIRED A cross-encrypted password is necessary to
1391 0x0000056F ERROR_NO_INHERITANCE Indicates an ACL contains no inheritable compo-
1392 0x00000570 ERROR_FILE_CORRUPT The file or directory is corrupted and unreadable.
1393 0x00000571 ERROR_DISK_CORRUPT The disk structure is corrupted and unreadable.
1394 0x00000572 ERROR_NO_USER_SESSION_KEY There is no user session key for the specified lo-
1395 0x00000573 ERROR_LICENSE_QUOTA_EXCEEDED The service being accessed is licensed for a par-
1396 0x00000574 ERROR_WRONG_TARGET_NAME Logon Failure: The target account name is incor-
1397 0x00000575 ERROR_MUTUAL_AUTH_FAILED Mutual Authentication failed. The server's pass-
1398 0x00000576 ERROR_TIME_SKEW There is a time difference between the client and
1399 0x00000577 ERROR_CURRENT_DOMAIN_NOT_ALLOWED This operation can not be performed on the cur-
the local group.
of the local group.
requested logon type at this computer.
stored in a single system has been exceeded.
length allowed.
internal inconsistency.
text accumulated too many security IDs.
requested logon type at this computer.
change a user password.
from the local group because the member does
not exist.
group because the member has the wrong account type.
change this user password.
nents.
gon session.
ticular number of connections. No more connections can be made to the service at this time because there are already as many connections as
the service can accept.
rect.
word is out of date at the domain controller.
server.
rent domain.
TF6610 55Version: 1.1
Page 56

Appendix
Error Description
decimal Hexadecimal Name
1400 0x00000578 ERROR_INVALID_WINDOW_HANDLE Invalid window handle.
1401 0x00000579 ERROR_INVALID_MENU_HANDLE Invalid menu handle.
1402 0x0000057A ERROR_INVALID_CURSOR_HANDLE Invalid cursor handle.
1403 0x0000057B ERROR_INVALID_ACCEL_HANDLE Invalid accelerator table handle.
1404 0x0000057C ERROR_INVALID_HOOK_HANDLE Invalid hook handle.
1405 0x0000057D ERROR_INVALID_DWP_HANDLE Invalid handle to a multiple-window position struc-
1406 0x0000057E ERROR_TLW_WITH_WSCHILD Cannot create a top-level child window.
1407 0x0000057F ERROR_CANNOT_FIND_WND_CLASS Cannot find window class.
1408 0x00000580 ERROR_WINDOW_OF_OTHER_THREAD Invalid window; it belongs to other thread.
1409 0x00000581 ERROR_HOTKEY_ALREADY_REGISTERED Hot key is already registered.
1410 0x00000582 ERROR_CLASS_ALREADY_EXISTS Class already exists.
1411 0x00000583 ERROR_CLASS_DOES_NOT_EXIST Class does not exist.
1412 0x00000584 ERROR_CLASS_HAS_WINDOWS Class still has open windows.
1413 0x00000585 ERROR_INVALID_INDEX Invalid index.
1414 0x00000586 ERROR_INVALID_ICON_HANDLE Invalid icon handle.
1415 0x00000587 ERROR_PRIVATE_DIALOG_INDEX Using private DIALOG window words.
1416 0x00000588 ERROR_LISTBOX_ID_NOT_FOUND The list box identifier was not found.
1417 0x00000589 ERROR_NO_WILDCARD_CHARACTERS No wildcards were found.
1418 0x0000058A ERROR_CLIPBOARD_NOT_OPEN Thread does not have a clipboard open.
1419 0x0000058B ERROR_HOTKEY_NOT_REGISTERED Hot key is not registered.
1420 0x0000058C ERROR_WINDOW_NOT_DIALOG The window is not a valid dialog window.
1421 0x0000058D ERROR_CONTROL_ID_NOT_FOUND Control ID not found.
1422 0x0000058E ERROR_INVALID_COMBOBOX_MESSAGE Invalid message for a combo box because it does
1423 0x0000058F ERROR_WINDOW_NOT_COMBOBOX The window is not a combo box.
1424 0x00000590 ERROR_INVALID_EDIT_HEIGHT Height must be less than 256.
1425 0x00000591 ERROR_DC_NOT_FOUND Invalid device context (DC) handle.
1426 0x00000592 ERROR_INVALID_HOOK_FILTER Invalid hook procedure type.
1427 0x00000593 ERROR_INVALID_FILTER_PROC Invalid hook procedure.
1428 0x00000594 ERROR_HOOK_NEEDS_HMOD Cannot set nonlocal hook without a module han-
1429 0x00000595 ERROR_GLOBAL_ONLY_HOOK This hook procedure can only be set globally.
1430 0x00000596 ERROR_JOURNAL_HOOK_SET The journal hook procedure is already installed.
1431 0x00000597 ERROR_HOOK_NOT_INSTALLED The hook procedure is not installed.
1432 0x00000598 ERROR_INVALID_LB_MESSAGE Invalid message for single-selection list box.
1433 0x00000599 ERROR_SETCOUNT_ON_BAD_LB LB_SETCOUNT sent to non-lazy list box.
1434 0x0000059A ERROR_LB_WITHOUT_TABSTOPS This list box does not support tab stops.
1435 0x0000059B ERROR_DESTROY_OB-
JECT_OF_OTHER_THREAD
1436 0x0000059C ERROR_CHILD_WINDOW_MENU Child windows cannot have menus.
1437 0x0000059D ERROR_NO_SYSTEM_MENU The window does not have a system menu.
1438 0x0000059E ERROR_INVALID_MSGBOX_STYLE Invalid message box style.
1439 0x0000059F ERROR_INVALID_SPI_VALUE Invalid system-wide (SPI_*) parameter.
1440 0x000005A0 ERROR_SCREEN_ALREADY_LOCKED Screen already locked.
1441 0x000005A1 ERROR_HWNDS_HAVE_DIFF_PARENT All handles to windows in a multiple-window posi-
1442 0x000005A2 ERROR_NOT_CHILD_WINDOW The window is not a child window.
1443 0x000005A3 ERROR_INVALID_GW_COMMAND Invalid GW_* command.
1444 0x000005A4 ERROR_INVALID_THREAD_ID Invalid thread identifier.
1445 0x000005A5 ERROR_NON_MDICHILD_WINDOW Cannot process a message from a window that is
1446 0x000005A6 ERROR_POPUP_ALREADY_ACTIVE Popup menu already active.
1447 0x000005A7 ERROR_NO_SCROLLBARS The window does not have scroll bars.
1448 0x000005A8 ERROR_INVALID_SCROLLBAR_RANGE Scroll bar range cannot be greater than MAX-
1449 0x000005A9 ERROR_INVALID_SHOWWIN_COMMAND Cannot show or remove the window in the way
ture.
not have an edit control.
dle.
Cannot destroy object created by another thread.
tion structure must have the same parent.
not a multiple document interface (MDI) window.
LONG.
specified.
TF661056 Version: 1.1
Page 57

Appendix
Error Description
decimal Hexadecimal Name
1450 0x000005AA ERROR_NO_SYSTEM_RESOURCES Insufficient system resources exist to complete
1451 0x000005AB ERROR_NONPAGED_SYSTEM_RESOURCES Insufficient system resources exist to complete
1452 0x000005AC ERROR_PAGED_SYSTEM_RESOURCES Insufficient system resources exist to complete
1453 0x000005AD ERROR_WORKING_SET_QUOTA Insufficient quota to complete the requested ser-
1454 0x000005AE ERROR_PAGEFILE_QUOTA Insufficient quota to complete the requested ser-
1455 0x000005AF ERROR_COMMITMENT_LIMIT The paging file is too small for this operation to
1456 0x000005B0 ERROR_MENU_ITEM_NOT_FOUND A menu item was not found.
1457 0x000005B1 ERROR_INVALID_KEYBOARD_HANDLE Invalid keyboard layout handle.
1458 0x000005B2 ERROR_HOOK_TYPE_NOT_ALLOWED Hook type not allowed.
1459 0x000005B3 ERROR_REQUIRES_INTERACTIVE_WINDOW-
STATION
1460 0x000005B4 ERROR_TIMEOUT This operation returned because the timeout pe-
1461 0x000005B5 ERROR_INVALID_MONITOR_HANDLE Invalid monitor handle.
1500 0x000005DC ERROR_EVENTLOG_FILE_CORRUPT The event log file is corrupted.
1501 0x000005DD ERROR_EVENTLOG_CANT_START No event log file could be opened, so the event
1502 0x000005DE ERROR_LOG_FILE_FULL The event log file is full.
1503 0x000005DF ERROR_EVENTLOG_FILE_CHANGED The event log file has changed between read op-
the requested service.
the requested service.
the requested service.
vice.
vice.
complete.
This operation requires an interactive window station.
riod expired.
logging service did not start.
erations.
TF6610 57Version: 1.1
Page 58

Appendix
Error Description
decimal Hexadecimal Name
1601 0x00000641 ERROR_INSTALL_SERVICE_FAILURE The Windows Installer service could not be ac-
1602 0x00000642 ERROR_INSTALL_USEREXIT User cancelled installation.
1603 0x00000643 ERROR_INSTALL_FAILURE Fatal error during installation.
1604 0x00000644 ERROR_INSTALL_SUSPEND Installation suspended, incomplete.
1605 0x00000645 ERROR_UNKNOWN_PRODUCT This action is only valid for products that are cur-
1606 0x00000646 ERROR_UNKNOWN_FEATURE Feature ID not registered.
1607 0x00000647 ERROR_UNKNOWN_COMPONENT Component ID not registered.
1608 0x00000648 ERROR_UNKNOWN_PROPERTY Unknown property.
1609 0x00000649 ERROR_INVALID_HANDLE_STATE Handle is in an invalid state.
1610 0x0000064A ERROR_BAD_CONFIGURATION The configuration data for this product is corrupt.
1611 0x0000064B ERROR_INDEX_ABSENT Component qualifier not present.
1612 0x0000064C ERROR_INSTALL_SOURCE_ABSENT The installation source for this product is not
1613 0x0000064D ERROR_INSTALL_PACKAGE_VERSION This installation package cannot be installed by
1614 0x0000064E ERROR_PRODUCT_UNINSTALLED Product is uninstalled.
1615 0x0000064F ERROR_BAD_QUERY_SYNTAX SQL query syntax invalid or unsupported.
1616 0x00000650 ERROR_INVALID_FIELD Record field does not exist.
1617 0x00000651 ERROR_DEVICE_REMOVED The device has been removed.
1618 0x00000652 ERROR_INSTALL_ALREADY_RUNNING Another installation is already in progress. Com-
1619 0x00000653 ERROR_INSTALL_PACKAGE_OPEN_FAILED This installation package could not be opened.
1620 0x00000654 ERROR_INSTALL_PACKAGE_INVALID This installation package could not be opened.
1621 0x00000655 ERROR_INSTALL_UI_FAILURE There was an error starting the Windows Installer
1622 0x00000656 ERROR_INSTALL_LOG_FAILURE Error opening installation log file. Verify that the
1623 0x00000657 ERROR_INSTALL_LANGUAGE_UNSUPPORTED The language of this installation package is not
1624 0x00000658 ERROR_INSTALL_TRANSFORM_FAILURE Error applying transforms. Verify that the specified
1625 0x00000659 ERROR_INSTALL_PACKAGE_REJECTED This installation is forbidden by system policy.
1626 0x0000065A ERROR_FUNCTION_NOT_CALLED Function could not be executed.
1627 0x0000065B ERROR_FUNCTION_FAILED Function failed during execution.
1628 0x0000065C ERROR_INVALID_TABLE Invalid or unknown table specified.
1629 0x0000065D ERROR_DATATYPE_MISMATCH Data supplied is of wrong type.
1630 0x0000065E ERROR_UNSUPPORTED_TYPE Data of this type is not supported.
1631 0x0000065F ERROR_CREATE_FAILED The Windows Installer service failed to start. Con-
1632 0x00000660 ERROR_INSTALL_TEMP_UNWRITABLE The temp folder is either full or inaccessible. Ver-
1633 0x00000661 ERROR_INSTALL_PLATFORM_UNSUPPORTED This installation package is not supported by this
1634 0x00000662 ERROR_INSTALL_NOTUSED Component not used on this computer.
cessed. Contact your support personnel to verify
that the Windows Installer service is properly registered.
rently installed.
Contact your support personnel.
available. Verify that the source exists and that
you can access it.
the Windows Installer service. You must install a
Windows service pack that contains a newer version of the Windows Installer service.
plete that installation before proceeding with this
install.
Verify that the package exists and that you can
access it, or contact the application vendor to verify that this is a valid Windows Installer package.
Contact the application vendor to verify that this is
a valid Windows Installer package.
service user interface. Contact your support personnel.
specified log file location exists and that you can
write to it.
supported by your system.
transform paths are valid.
Contact your system administrator.
tact your support personnel.
ify that the temp folder exists and that you can
write to it.
processor type. Contact your product vendor.
TF661058 Version: 1.1
Page 59

Appendix
Error Description
decimal Hexadecimal Name
1635 0x00000663 ERROR_PATCH_PACKAGE_OPEN_FAILED This patch package could not be opened. Verify
1636 0x00000664 ERROR_PATCH_PACKAGE_INVALID This patch package could not be opened. Contact
1637 0x00000665 ERROR_PATCH_PACKAGE_UNSUPPORTED. This patch package cannot be processed by the
1638 0x00000666 ERROR_PRODUCT_VERSION Another version of this product is already in-
1639 0x00000667 ERROR_INVALID_COMMAND_LINE Invalid command line argument. Consult the Win-
1640 0x00000668 ERROR_INSTALL_REMOTE_DISALLOWED Only administrators have permission to add, re-
1641 0x00000669 ERROR_SUCCESS_REBOOT_INITIATED The requested operation completed successfully.
1642 0x0000066A ERROR_PATCH_TARGET_NOT_FOUND The upgrade patch cannot be installed by the
1643 0x0000066B ERROR_PATCH_PACKAGE_REJECTED The patch package is not permitted by system
1644 0x0000066C ERROR_INSTALL_TRANSFORM_REJECTED One or more customizations are not permitted by
1700 0x000006A4 RPC_S_INVALID_STRING_BINDING The string binding is invalid.
1701 0x000006A5 RPC_S_WRONG_KIND_OF_BINDING The binding handle is not the correct type.
1702 0x000006A6 RPC_S_INVALID_BINDING The binding handle is invalid.
1703 0x000006A7 RPC_S_PROTSEQ_NOT_SUPPORTED The RPC protocol sequence is not supported.
1704 0x000006A8 RPC_S_INVALID_RPC_PROTSEQ The RPC protocol sequence is invalid.
1705 0x000006A9 RPC_S_INVALID_STRING_UUID The string universal unique identifier (UUID) is in-
1706 0x000006AA RPC_S_INVALID_ENDPOINT_FORMAT The endpoint format is invalid.
1707 0x000006AB RPC_S_INVALID_NET_ADDR The network address is invalid.
1708 0x000006AC RPC_S_NO_ENDPOINT_FOUND No endpoint was found.
1709 0x000006AD RPC_S_INVALID_TIMEOUT The timeout value is invalid.
1710 0x000006AE RPC_S_OBJECT_NOT_FOUND The object universal unique identifier (UUID) was
1711 0x000006AF RPC_S_ALREADY_REGISTERED The object universal unique identifier (UUID) has
1712 0x000006B0 RPC_S_TYPE_ALREADY_REGISTERED The type universal unique identifier (UUID) has al-
1713 0x000006B1 RPC_S_ALREADY_LISTENING The RPC server is already listening.
1714 0x000006B2 RPC_S_NO_PROTSEQS_REGISTERED No protocol sequences have been registered.
1715 0x000006B3 RPC_S_NOT_LISTENING The RPC server is not listening.
1716 0x000006B4 RPC_S_UNKNOWN_MGR_TYPE The manager type is unknown.
1717 0x000006B5 RPC_S_UNKNOWN_IF The interface is unknown.
1718 0x000006B6 RPC_S_NO_BINDINGS There are no bindings.
1719 0x000006B7 RPC_S_NO_PROTSEQS There are no protocol sequences.
1720 0x000006B8 RPC_S_CANT_CREATE_ENDPOINT The endpoint cannot be created.
that the patch package exists and that you can
access it, or contact the application vendor to verify that this is a valid Windows Installer patch
package.
the application vendor to verify that this is a valid
Windows Installer patch package.
Windows Installer service. You must install a Windows service pack that contains a newer version
of the Windows Installer service.
stalled. Installation of this version cannot continue. To configure or remove the existing version
of this product, use Add/Remove Programs on the
Control Panel.
dows Installer SDK for detailed command line
help.
move, or configure server software during a Terminal Services remote session. If you want to install or configure software on the server, contact
your network administrator.
The system will be restarted so the changes can
take effect.
Windows Installer service because the program to
be upgraded may be missing, or the upgrade
patch may update a different version of the program. Verify that the program to be upgraded exists on your computer and that you have the correct upgrade patch.
policy. It is not signed with an appropriate certificate.
system policy. They are not signed with an appropriate certificate.
valid.
not found.
already been registered.
ready been registered.
TF6610 59Version: 1.1
Page 60

Appendix
Error Description
decimal Hexadecimal Name
1721 0x000006B9 RPC_S_OUT_OF_RESOURCES Not enough resources are available to complete
1722 0x000006BA RPC_S_SERVER_UNAVAILABLE The RPC server is unavailable.
1723 0x000006BB RPC_S_SERVER_TOO_BUSY The RPC server is too busy to complete this oper-
1724 0x000006BC RPC_S_INVALID_NETWORK_OPTIONS The network options are invalid.
1725 0x000006BD RPC_S_NO_CALL_ACTIVE There are no remote procedure calls active on
1726 0x000006BE RPC_S_CALL_FAILED The remote procedure call failed.
1727 0x000006BF RPC_S_CALL_FAILED_DNE The remote procedure call failed and did not exe-
1728 0x000006C0 RPC_S_PROTOCOL_ERROR A remote procedure call (RPC) protocol error oc-
1730 0x000006C2 RPC_S_UNSUPPORTED_TRANS_SYN The transfer syntax is not supported by the RPC
1732 0x000006C4 RPC_S_UNSUPPORTED_TYPE The universal unique identifier (UUID) type is not
1733 0x000006C5 RPC_S_INVALID_TAG The tag is invalid.
1734 0x000006C6 RPC_S_INVALID_BOUND The array bounds are invalid.
1735 0x000006C7 RPC_S_NO_ENTRY_NAME The binding does not contain an entry name.
1736 0x000006C8 RPC_S_INVALID_NAME_SYNTAX The name syntax is invalid.
1737 0x000006C9 RPC_S_UNSUPPORTED_NAME_SYNTAX The name syntax is not supported.
1739 0x000006CB RPC_S_UUID_NO_ADDRESS No network address is available to use to con-
1740 0x000006CC RPC_S_DUPLICATE_ENDPOINT The endpoint is a duplicate.
1741 0x000006CD RPC_S_UNKNOWN_AUTHN_TYPE The authentication type is unknown.
1742 0x000006CE RPC_S_MAX_CALLS_TOO_SMALL The maximum number of calls is too small.
1743 0x000006CF RPC_S_STRING_TOO_LONG The string is too long.
1744 0x000006D0 RPC_S_PROTSEQ_NOT_FOUND The RPC protocol sequence was not found.
1745 0x000006D1 RPC_S_PROCNUM_OUT_OF_RANGE The procedure number is out of range.
1746 0x000006D2 RPC_S_BINDING_HAS_NO_AUTH The binding does not contain any authentication
1747 0x000006D3 RPC_S_UNKNOWN_AUTHN_SERVICE The authentication service is unknown.
1748 0x000006D4 RPC_S_UNKNOWN_AUTHN_LEVEL The authentication level is unknown.
1749 0x000006D5 RPC_S_INVALID_AUTH_IDENTITY The security context is invalid.
1750 0x000006D6 RPC_S_UNKNOWN_AUTHZ_SERVICE The authorization service is unknown.
1751 0x000006D7 EPT_S_INVALID_ENTRY The entry is invalid.
1752 0x000006D8 EPT_S_CANT_PERFORM_OP The server endpoint cannot perform the opera-
1753 0x000006D9 EPT_S_NOT_REGISTERED There are no more endpoints available from the
1754 0x000006DA RPC_S_NOTHING_TO_EXPORT No interfaces have been exported.
1755 0x000006DB RPC_S_INCOMPLETE_NAME The entry name is incomplete.
1756 0x000006DC RPC_S_INVALID_VERS_OPTION The version option is invalid.
1757 0x000006DD RPC_S_NO_MORE_MEMBERS There are no more members.
1758 0x000006DE RPC_S_NOT_ALL_OBJS_UNEXPORTED There is nothing to unexport.
1759 0x000006DF RPC_S_INTERFACE_NOT_FOUND The interface was not found.
1760 0x000006E0 RPC_S_ENTRY_ALREADY_EXISTS The entry already exists.
1761 0x000006E1 RPC_S_ENTRY_NOT_FOUND The entry is not found.
1762 0x000006E2 RPC_S_NAME_SERVICE_UNAVAILABLE The name service is unavailable.
1763 0x000006E3 RPC_S_INVALID_NAF_ID The network address family is invalid.
1764 0x000006E4 RPC_S_CANNOT_SUPPORT The requested operation is not supported.
1765 0x000006E5 RPC_S_NO_CONTEXT_AVAILABLE No security context is available to allow imperson-
1766 0x000006E6 RPC_S_INTERNAL_ERROR An internal error occurred in a remote procedure
1767 0x000006E7 RPC_S_ZERO_DIVIDE The RPC server attempted an integer division by
1768 0x000006E8 RPC_S_ADDRESS_ERROR An addressing error occurred in the RPC server.
1769 0x000006E9 RPC_S_FP_DIV_ZERO A floating-point operation at the RPC server
this operation.
ation.
this thread.
cute.
curred.
server.
supported.
struct a universal unique identifier (UUID).
information.
tion.
endpoint mapper.
ation.
call (RPC).
zero.
caused a division by zero.
TF661060 Version: 1.1
Page 61

Appendix
Error Description
decimal Hexadecimal Name
1770 0x000006EA RPC_S_FP_UNDERFLOW A floating-point underflow occurred at the RPC
1771 0x000006EB RPC_S_FP_OVERFLOW A floating-point overflow occurred at the RPC
1772 0x000006EC RPC_X_NO_MORE_ENTRIES The list of RPC servers available for the binding
1773 0x000006ED RPC_X_SS_CHAR_TRANS_OPEN_FAIL Unable to open the character translation table file.
1774 0x000006EE RPC_X_SS_CHAR_TRANS_SHORT_FILE The file containing the character translation table
1775 0x000006EF RPC_X_SS_IN_NULL_CONTEXT A null context handle was passed from the client
1777 0x000006F1 RPC_X_SS_CONTEXT_DAMAGED The context handle changed during a remote pro-
1778 0x000006F2 RPC_X_SS_HANDLES_MISMATCH The binding handles passed to a remote proce-
1779 0x000006F3 RPC_X_SS_CANNOT_GET_CALL_HANDLE The stub is unable to get the remote procedure
1780 0x000006F4 RPC_X_NULL_REF_POINTER A null reference pointer was passed to the stub.
1781 0x000006F5 RPC_X_ENUM_VALUE_OUT_OF_RANGE The enumeration value is out of range.
1782 0x000006F6 RPC_X_BYTE_COUNT_TOO_SMALL The byte count is too small.
1783 0x000006F7 RPC_X_BAD_STUB_DATA The stub received bad data.
1784 0x000006F8 ERROR_INVALID_USER_BUFFER The supplied user buffer is not valid for the re-
1785 0x000006F9 ERROR_UNRECOGNIZED_MEDIA The disk media is not recognized. It may not be
1786 0x000006FA ERROR_NO_TRUST_LSA_SECRET The workstation does not have a trust secret.
1787 0x000006FB ERROR_NO_TRUST_SAM_ACCOUNT The security database on the server does not
1788 0x000006FC ERROR_TRUSTED_DOMAIN_FAILURE The trust relationship between the primary do-
1789 0x000006FD ERROR_TRUSTED_RELATIONSHIP_FAILURE The trust relationship between this workstation
1790 0x000006FE ERROR_TRUST_FAILURE The network logon failed.
1791 0x000006FF RPC_S_CALL_IN_PROGRESS A remote procedure call is already in progress for
1792 0x00000700 ERROR_NETLOGON_NOT_STARTED An attempt was made to logon, but the network
1793 0x00000701 ERROR_ACCOUNT_EXPIRED The user's account has expired.
1794 0x00000702 ERROR_REDIRECTOR_HAS_OPEN_HANDLES The redirector is in use and cannot be unloaded.
1795 0x00000703 ERROR_PRINTER_DRIVER_ALREADY_IN-
STALLED
1796 0x00000704 ERROR_UNKNOWN_PORT The specified port is unknown.
1797 0x00000705 ERROR_UNKNOWN_PRINTER_DRIVER The printer driver is unknown.
1798 0x00000706 ERROR_UNKNOWN_PRINTPROCESSOR The print processor is unknown.
1799 0x00000707 ERROR_INVALID_SEPARATOR_FILE The specified separator file is invalid.
server.
server.
of auto handles has been exhausted.
has fewer than 512 bytes.
to the host during a remote procedure call.
cedure call.
dure call do not match.
call handle.
quested operation.
formatted.
have a computer account for this workstation trust
relationship.
main and the trusted domain failed.
and the primary domain failed.
this thread.
logon service was not started.
The specified printer driver is already installed.
TF6610 61Version: 1.1
Page 62

Appendix
Error Description
decimal Hexadecimal Name
1800 0x00000708 ERROR_INVALID_PRIORITY The specified priority is invalid.
1801 0x00000709 ERROR_INVALID_PRINTER_NAME The printer name is invalid.
1802 0x0000070A ERROR_PRINTER_ALREADY_EXISTS The printer already exists.
1803 0x0000070B ERROR_INVALID_PRINTER_COMMAND The printer command is invalid.
1804 0x0000070C ERROR_INVALID_DATATYPE The specified datatype is invalid.
1805 0x0000070D ERROR_INVALID_ENVIRONMENT The environment specified is invalid.
1806 0x0000070E RPC_S_NO_MORE_BINDINGS There are no more bindings.
1807 0x0000070F ERROR_NOLOGON_INTERDOMAIN_TRUST_AC-
COUNT
1808 0x00000710 ERROR_NOLOGON_WORKSTA-
TION_TRUST_ACCOUNT
1809 0x00000711 ERROR_NOLOGON_SERVER_TRUST_AC-
COUNT
1810 0x00000712 ERROR_DOMAIN_TRUST_INCONSISTENT The name or security ID (SID) of the domain
1811 0x00000713 ERROR_SERVER_HAS_OPEN_HANDLES The server is in use and cannot be unloaded.
1812 0x00000714 ERROR_RESOURCE_DATA_NOT_FOUND The specified image file did not contain a re-
1813 0x00000715 ERROR_RESOURCE_TYPE_NOT_FOUND The specified resource type cannot be found in
1814 0x00000716 ERROR_RESOURCE_NAME_NOT_FOUND The specified resource name cannot be found in
1815 0x00000717 ERROR_RESOURCE_LANG_NOT_FOUND The specified resource language ID cannot be
1816 0x00000718 ERROR_NOT_ENOUGH_QUOTA Not enough quota is available to process this
1817 0x00000719 RPC_S_NO_INTERFACES No interfaces have been registered.
1818 0x0000071A RPC_S_CALL_CANCELLED The remote procedure call was cancelled.
1819 0x0000071B RPC_S_BINDING_INCOMPLETE The binding handle does not contain all required
1820 0x0000071C RPC_S_COMM_FAILURE A communications failure occurred during a re-
1821 0x0000071D RPC_S_UNSUPPORTED_AUTHN_LEVEL The requested authentication level is not sup-
1822 0x0000071E RPC_S_NO_PRINC_NAME No principal name registered.
1823 0x0000071F RPC_S_NOT_RPC_ERROR The error specified is not a valid Windows RPC
1824 0x00000720 RPC_S_UUID_LOCAL_ONLY A UUID that is valid only on this computer has
1825 0x00000721 RPC_S_SEC_PKG_ERROR A security package specific error occurred.
1826 0x00000722 RPC_S_NOT_CANCELLED Thread is not canceled.
1827 0x00000723 RPC_X_INVALID_ES_ACTION Invalid operation on the encoding/decoding han-
1828 0x00000724 RPC_X_WRONG_ES_VERSION Incompatible version of the serializing package.
1829 0x00000725 RPC_X_WRONG_STUB_VERSION Incompatible version of the RPC stub.
1830 0x00000726 RPC_X_INVALID_PIPE_OBJECT The RPC pipe object is invalid or corrupted.
1831 0x00000727 RPC_X_WRONG_PIPE_ORDER An invalid operation was attempted on an RPC
1832 0x00000728 RPC_X_WRONG_PIPE_VERSION Unsupported RPC pipe version.
1898 0x0000076A RPC_S_GROUP_MEMBER_NOT_FOUND The group member was not found.
1899 0x0000076B EPT_S_CANT_CREATE The endpoint mapper database entry could not be
1900 0x0000076C RPC_S_INVALID_OBJECT The object universal unique identifier (UUID) is
1901 0x0000076D ERROR_INVALID_TIME The specified time is invalid.
1902 0x0000076E ERROR_INVALID_FORM_NAME The specified form name is invalid.
1903 0x0000076F ERROR_INVALID_FORM_SIZE The specified form size is invalid.
1904 0x00000770 ERROR_ALREADY_WAITING The specified printer handle is already being
The account used is an interdomain trust account.
Use your global user account or local user account to access this server.
The account used is a computer account. Use
your global user account or local user account to
access this server.
The account used is a server trust account. Use
your global user account or local user account to
access this server.
specified is inconsistent with the trust information
for that domain.
source section.
the image file.
the image file.
found in the image file.
command.
information.
mote procedure call.
ported.
error code.
been allocated.
dle.
pipe object.
created.
the nil UUID.
waited on
TF661062 Version: 1.1
Page 63

Appendix
Error Description
decimal Hexadecimal Name
1905 0x00000771 ERROR_PRINTER_DELETED The specified printer has been deleted.
1906 0x00000772 ERROR_INVALID_PRINTER_STATE The state of the printer is invalid.
1907 0x00000773 ERROR_PASSWORD_MUST_CHANGE The user's password must be changed before
1908 0x00000774 ERROR_DOMAIN_CONTROLLER_NOT_FOUND Could not find the domain controller for this do-
1909 0x00000775 ERROR_ACCOUNT_LOCKED_OUT The referenced account is currently locked out
1910 0x00000776 OR_INVALID_OXID The object exporter specified was not found.
1911 0x00000777 OR_INVALID_OID The object specified was not found.
1912 0x00000778 OR_INVALID_SET The object resolver set specified was not found.
1913 0x00000779 RPC_S_SEND_INCOMPLETE Some data remains to be sent in the request buf-
1914 0x0000077A RPC_S_INVALID_ASYNC_HANDLE Invalid asynchronous remote procedure call han-
1915 0x0000077B RPC_S_INVALID_ASYNC_CALL Invalid asynchronous RPC call handle for this op-
1916 0x0000077C RPC_X_PIPE_CLOSED The RPC pipe object has already been closed.
1917 0x0000077D RPC_X_PIPE_DISCIPLINE_ERROR The RPC call completed before all pipes were
1918 0x0000077E RPC_X_PIPE_EMPTY No more data is available from the RPC pipe.
1919 0x0000077F ERROR_NO_SITENAME No site name is available for this machine.
1920 0x00000780 ERROR_CANT_ACCESS_FILE The file can not be accessed by the system.
1921 0x00000781 ERROR_CANT_RESOLVE_FILENAME The name of the file cannot be resolved by the
1922 0x00000782 RPC_S_ENTRY_TYPE_MISMATCH The entry is not of the expected type.
1923 0x00000783 RPC_S_NOT_ALL_OBJS_EXPORTED Not all object UUIDs could be exported to the
1924 0x00000784 RPC_S_INTERFACE_NOT_EXPORTED Interface could not be exported to the specified
1925 0x00000785 RPC_S_PROFILE_NOT_ADDED The specified profile entry could not be added.
1926 0x00000786 RPC_S_PRF_ELT_NOT_ADDED The specified profile element could not be added.
1927 0x00000787 RPC_S_PRF_ELT_NOT_REMOVED The specified profile element could not be re-
1928 0x00000788 RPC_S_GRP_ELT_NOT_ADDED The group element could not be added.
1929 0x00000789 RPC_S_GRP_ELT_NOT_REMOVED The group element could not be removed.
1930 0x0000078A ERROR_KM_DRIVER_BLOCKED The printer driver is not compatible with a policy
logging on the first time.
main.
and may not be logged on to.
fer.
dle.
eration.
processed.
system.
specified entry.
entry.
moved.
enabled on your computer that blocks NT 4.0 drivers.
TF6610 63Version: 1.1
Page 64

Appendix
Error Description
decimal Hexadecimal Name
2000 0x000007D0 ERROR_INVALID_PIXEL_FORMAT The pixel format is invalid.
2001 0x000007D1 ERROR_BAD_DRIVER The specified driver is invalid.
2002 0x000007D2 ERROR_INVALID_WINDOW_STYLE The window style or class attribute is invalid for
2003 0x000007D3 ERROR_METAFILE_NOT_SUPPORTED The requested metafile operation is not sup-
2004 0x000007D4 ERROR_TRANSFORM_NOT_SUPPORTED The requested transformation operation is not
2005 0x000007D5 ERROR_CLIPPING_NOT_SUPPORTED The requested clipping operation is not sup-
2010 0x000007DA ERROR_INVALID_CMM The specified color management module is in-
2011 0x000007DB ERROR_INVALID_PROFILE The specified color profile is invalid.
2012 0x000007DC ERROR_TAG_NOT_FOUND The specified tag was not found.
2013 0x000007DD ERROR_TAG_NOT_PRESENT A required tag is not present.
2014 0x000007DE ERROR_DUPLICATE_TAG The specified tag is already present.
2015 0x000007DF ERROR_PROFILE_NOT_ASSOCI-
ATED_WITH_DEVICE
2016 0x000007E0 ERROR_PROFILE_NOT_FOUND The specified color profile was not found.
2017 0x000007E1 ERROR_INVALID_COLORSPACE The specified color space is invalid.
2018 0x000007E2 ERROR_ICM_NOT_ENABLED Image Color Management is not enabled.
2019 0x000007E3 ERROR_DELETING_ICM_XFORM There was an error while deleting the color trans-
2020 0x000007E4 ERROR_INVALID_TRANSFORM The specified color transform is invalid.
2021 0x000007E5 ERROR_COLORSPACE_MISMATCH The specified transform does not match the bit-
2022 0x000007E6 ERROR_INVALID_COLORINDEX The specified named color index is not present in
2108 0x0000083C ERROR_CONNECTED_OTHER_PASSWORD The network connection was made successfully,
2202 0x0000089A ERROR_BAD_USERNAME The specified username is invalid.
2250 0x000008CA ERROR_NOT_CONNECTED This network connection does not exist.
2401 0x00000961 ERROR_OPEN_FILES This network connection has files open or re-
2402 0x00000962 ERROR_ACTIVE_CONNECTIONS Active connections still exist.
2404 0x00000964 ERROR_DEVICE_IN_USE The device is in use by an active process and
2500 0x000009C4 ERROR_PKINIT_FAILURE The kerberos protocol encountered an error while
2501 0x000009C5 ERROR_SMARTCARD_SUBSYSTEM_FAILURE The kerberos protocol encountered an error while
this operation.
ported.
supported.
ported.
valid.
The specified color profile is not associated with
any device.
form.
map's color space.
the profile.
but the user had to be prompted for a password
other than the one originally specified.
quests pending.
cannot be disconnected.
validating the KDC certificate during smartcard logon.
attempting to utilize the smartcard subsystem.
TF661064 Version: 1.1
Page 65

Appendix
Error Description
decimal Hexadecimal Name
3000 0x00000BB8 ERROR_UNKNOWN_PRINT_MONITOR The specified print monitor is unknown.
3001 0x00000BB9 ERROR_PRINTER_DRIVER_IN_USE The specified printer driver is currently in use.
3002 0x00000BBA ERROR_SPOOL_FILE_NOT_FOUND The spool file was not found.
3003 0x00000BBB ERROR_SPL_NO_STARTDOC A StartDocPrinter call was not issued.
3004 0x00000BBC ERROR_SPL_NO_ADDJOB An AddJob call was not issued.
3005 0x00000BBD ERROR_PRINT_PROCESSOR_ALREADY_IN-
STALLED
3006 0x00000BBE ERROR_PRINT_MONITOR_ALREADY_IN-
STALLED
3007 0x00000BBF ERROR_INVALID_PRINT_MONITOR The specified print monitor does not have the re-
3008 0x00000BC0 ERROR_PRINT_MONITOR_IN_USE The specified print monitor is currently in use.
3009 0x00000BC1 ERROR_PRINTER_HAS_JOBS_QUEUED The requested operation is not allowed when
3010 0x00000BC2 ERROR_SUCCESS_REBOOT_REQUIRED The requested operation is successful. Changes
3011 0x00000BC3 ERROR_SUCCESS_RESTART_REQUIRED The requested operation is successful. Changes
3012 0x00000BC4 ERROR_PRINTER_NOT_FOUND No printers were found.
4000 0x00000FA0 ERROR_WINS_INTERNAL WINS encountered an error while processing the
4001 0x00000FA1 ERROR_CAN_NOT_DEL_LOCAL_WINS The local WINS can not be deleted.
4002 0x00000FA2 ERROR_STATIC_INIT The importation from the file failed.
4003 0x00000FA3 ERROR_INC_BACKUP The backup failed. Was a full backup done be-
4004 0x00000FA4 ERROR_FULL_BACKUP The backup failed. Check the directory to which
4005 0x00000FA5 ERROR_REC_NON_EXISTENT The name does not exist in the WINS database.
4006 0x00000FA6 ERROR_RPL_NOT_ALLOWED Replication with a nonconfigured partner is not al-
4100 0x00001004 ERROR_DHCP_ADDRESS_CONFLICT The DHCP client has obtained an IP address that
4200 0x00001068 ERROR_WMI_GUID_NOT_FOUND The GUID passed was not recognized as valid by
4201 0x00001069 ERROR_WMI_INSTANCE_NOT_FOUND The instance name passed was not recognized
4202 0x0000106A ERROR_WMI_ITEMID_NOT_FOUND The data item ID passed was not recognized as
4203 0x0000106B ERROR_WMI_TRY_AGAIN The WMI request could not be completed and
4204 0x0000106C ERROR_WMI_DP_NOT_FOUND The WMI data provider could not be located.
4205 0x0000106D ERROR_WMI_UNRESOLVED_INSTANCE_REF The WMI data provider references an instance set
4206 0x0000106E ERROR_WMI_ALREADY_ENABLED The WMI data block or event notification has al-
4207 0x0000106F ERROR_WMI_GUID_DISCONNECTED The WMI data block is no longer available.
4208 0x00001070 ERROR_WMI_SERVER_UNAVAILABLE The WMI data service is not available.
4209 0x00001071 ERROR_WMI_DP_FAILED The WMI data provider failed to carry out the re-
4210 0x00001072 ERROR_WMI_INVALID_MOF The WMI MOF information is not valid.
4211 0x00001073 ERROR_WMI_INVALID_REGINFO The WMI registration information is not valid.
4212 0x00001074 ERROR_WMI_ALREADY_DISABLED The WMI data block or event notification has al-
4213 0x00001075 ERROR_WMI_READ_ONLY The WMI data item or data block is read only.
4214 0x00001076 ERROR_WMI_SET_FAILURE The WMI data item or data block could not be
4300 0x000010CC ERROR_INVALID_MEDIA The media identifier does not represent a valid
4301 0x000010CD ERROR_INVALID_LIBRARY The library identifier does not represent a valid li-
The specified print processor has already been installed.
The specified print monitor has already been installed.
quired functions.
there are jobs queued to the printer.
will not be effective until the system is rebooted.
will not be effective until the service is restarted.
command.
fore?
you are backing the database.
lowed.
is already in use on the network. The local interface will be disabled until the DHCP client can obtain a new address.
a WMI data provider.
as valid by a WMI data provider.
valid by a WMI data provider.
should be retried.
that has not been registered.
ready been enabled.
quest.
ready been disabled.
changed.
medium.
brary.
TF6610 65Version: 1.1
Page 66

Appendix
Error Description
decimal Hexadecimal Name
4302 0x000010CE ERROR_INVALID_MEDIA_POOL The media pool identifier does not represent a
4303 0x000010CF ERROR_DRIVE_MEDIA_MISMATCH The drive and medium are not compatible or exist
4304 0x000010D0 ERROR_MEDIA_OFFLINE The medium currently exists in an offline library
4305 0x000010D1 ERROR_LIBRARY_OFFLINE The operation cannot be performed on an offline
4306 0x000010D2 ERROR_EMPTY The library, drive, or media pool is empty.
4307 0x000010D3 ERROR_NOT_EMPTY The library, drive, or media pool must be empty to
4308 0x000010D4 ERROR_MEDIA_UNAVAILABLE No media is currently available in this media pool
4309 0x000010D5 ERROR_RESOURCE_DISABLED A resource required for this operation is disabled.
4310 0x000010D6 ERROR_INVALID_CLEANER The media identifier does not represent a valid
4311 0x000010D7 ERROR_UNABLE_TO_CLEAN The drive cannot be cleaned or does not support
4312 0x000010D8 ERROR_OBJECT_NOT_FOUND The object identifier does not represent a valid
4313 0x000010D9 ERROR_DATABASE_FAILURE Unable to read from or write to the database.
4314 0x000010DA ERROR_DATABASE_FULL The database is full.
4315 0x000010DB ERROR_MEDIA_INCOMPATIBLE The medium is not compatible with the device or
4316 0x000010DC ERROR_RESOURCE_NOT_PRESENT The resource required for this operation does not
4317 0x000010DD ERROR_INVALID_OPERATION The operation identifier is not valid.
4318 0x000010DE ERROR_MEDIA_NOT_AVAILABLE The media is not mounted or ready for use.
4319 0x000010DF ERROR_DEVICE_NOT_AVAILABLE The device is not ready for use.
4320 0x000010E0 ERROR_REQUEST_REFUSED The operator or administrator has refused the re-
4321 0x000010E1 ERROR_INVALID_DRIVE_OBJECT The drive identifier does not represent a valid
4322 0x000010E2 ERROR_LIBRARY_FULL Library is full. No slot is available for use.
4323 0x000010E3 ERROR_MEDIUM_NOT_ACCESSIBLE The transport cannot access the medium.
4324 0x000010E4 ERROR_UNABLE_TO_LOAD_MEDIUM Unable to load the medium into the drive.
4325 0x000010E5 ERROR_UNABLE_TO_INVENTORY_DRIVE Unable to retrieve status about the drive.
4326 0x000010E6 ERROR_UNABLE_TO_INVENTORY_SLOT Unable to retrieve status about the slot.
4327 0x000010E7 ERROR_UNABLE_TO_INVENTORY_TRANSPORT Unable to retrieve status about the transport.
4328 0x000010E8 ERROR_TRANSPORT_FULL Cannot use the transport because it is already in
4329 0x000010E9 ERROR_CONTROLLING_IEPORT Unable to open or close the inject/eject port.
4330 0x000010EA ERROR_UNABLE_TO_EJECT_MOUNTED_MEDIA Unable to eject the media because it is in a drive.
4331 0x000010EB ERROR_CLEANER_SLOT_SET A cleaner slot is already reserved.
4332 0x000010EC ERROR_CLEANER_SLOT_NOT_SET A cleaner slot is not reserved.
4333 0x000010ED ERROR_CLEANER_CARTRIDGE_SPENT The cleaner cartridge has performed the maxi-
4334 0x000010EE ERROR_UNEXPECTED_OMID Unexpected on-medium identifier.
4335 0x000010EF ERROR_CANT_DELETE_LAST_ITEM The last remaining item in this group or resource
4336 0x000010F0 ERROR_MESSAGE_EXCEEDS_MAX_SIZE The message provided exceeds the maximum
4337 0x000010F1 ERROR_VOLUME_CONTAINS_SYS_FILES The volume contains system or paging files.
4338 0x000010F2 ERROR_INDIGENOUS_TYPE The media type cannot be removed from this li-
4339 0x000010F3 ERROR_NO_SUPPORTING_DRIVES This offline media cannot be mounted on this sys-
4340 0x000010F4 ERROR_CLEANER_CARTRIDGE_INSTALLED A cleaner cartridge is present in the tape library.
4350 0x000010FE ERROR_FILE_OFFLINE The remote storage service was not able to recall
valid media pool.
in different libraries.
and must be online to perform this operation.
library.
perform this operation.
or library.
cleaner.
cleaning.
object.
media pool.
exist.
quest.
drive.
use.
mum number of drive cleanings.
cannot be deleted.
size allowed for this parameter.
brary since at least one drive in the library reports
it can support this media type.
tem since no enabled drives are present which
can be used.
the file.
TF661066 Version: 1.1
Page 67

Appendix
Error Description
decimal Hexadecimal Name
4351 0x000010FF ERROR_REMOTE_STORAGE_NOT_ACTIVE The remote storage service is not operational at
4352 0x00001100 ERROR_REMOTE_STORAGE_MEDIA_ERROR The remote storage service encountered a media
4390 0x00001126 ERROR_NOT_A_REPARSE_POINT The file or directory is not a reparse point.
4391 0x00001127 ERROR_REPARSE_ATTRIBUTE_CONFLICT The reparse point attribute cannot be set because
4392 0x00001128 ERROR_INVALID_REPARSE_DATA The data present in the reparse point buffer is in-
4393 0x00001129 ERROR_REPARSE_TAG_INVALID The tag present in the reparse point buffer is in-
4394 0x0000112A ERROR_REPARSE_TAG_MISMATCH There is a mismatch between the tag specified in
4500 0x00001194 ERROR_VOLUME_NOT_SIS_ENABLED Single Instance Storage is not available on this
this time.
error.
it conflicts with an existing attribute.
valid.
valid.
the request and the tag present in the reparse
point.
volume.
TF6610 67Version: 1.1
Page 68

Appendix
Error Description
decimal Hexadecimal Name
5001 0x00001389 ERROR_DEPENDENT_RESOURCE_EXISTS The cluster resource cannot be moved to another
5002 0x0000138A ERROR_DEPENDENCY_NOT_FOUND The cluster resource dependency cannot be
5003 0x0000138B ERROR_DEPENDENCY_ALREADY_EXISTS The cluster resource cannot be made dependent
5004 0x0000138C ERROR_RESOURCE_NOT_ONLINE The cluster resource is not online.
5005 0x0000138D ERROR_HOST_NODE_NOT_AVAILABLE A cluster node is not available for this operation.
5006 0x0000138E ERROR_RESOURCE_NOT_AVAILABLE The cluster resource is not available.
5007 0x0000138F ERROR_RESOURCE_NOT_FOUND The cluster resource could not be found.
5008 0x00001390 ERROR_SHUTDOWN_CLUSTER The cluster is being shut down.
5009 0x00001391 ERROR_CANT_EVICT_ACTIVE_NODE A cluster node cannot be evicted from the cluster
5010 0x00001392 ERROR_OBJECT_ALREADY_EXISTS The object already exists.
5011 0x00001393 ERROR_OBJECT_IN_LIST The object is already in the list.
5012 0x00001394 ERROR_GROUP_NOT_AVAILABLE The cluster group is not available for any new re-
5013 0x00001395 ERROR_GROUP_NOT_FOUND The cluster group could not be found.
5014 0x00001396 ERROR_GROUP_NOT_ONLINE The operation could not be completed because
5015 0x00001397 ERROR_HOST_NODE_NOT_RE-
SOURCE_OWNER
5016 0x00001398 ERROR_HOST_NODE_NOT_GROUP_OWNER The cluster node is not the owner of the group.
5017 0x00001399 ERROR_RESMON_CREATE_FAILED The cluster resource could not be created in the
5018 0x0000139A ERROR_RESMON_ONLINE_FAILED The cluster resource could not be brought online
5019 0x0000139B ERROR_RESOURCE_ONLINE The operation could not be completed because
5020 0x0000139C ERROR_QUORUM_RESOURCE The cluster resource could not be deleted or
5021 0x0000139D ERROR_NOT_QUORUM_CAPABLE The cluster could not make the specified resource
5022 0x0000139E ERROR_CLUSTER_SHUTTING_DOWN The cluster software is shutting down.
5023 0x0000139F ERROR_INVALID_STATE The group or resource is not in the correct state to
5024 0x000013A0 ERROR_RESOURCE_PROPERTIES_STORED The properties were stored but not all changes
5025 0x000013A1 ERROR_NOT_QUORUM_CLASS The cluster could not make the specified resource
5026 0x000013A2 ERROR_CORE_RESOURCE The cluster resource could not be deleted since it
5027 0x000013A3 ERROR_QUORUM_RESOURCE_ONLINE_FAILED The quorum resource failed to come online.
5028 0x000013A4 ERROR_QUORUMLOG_OPEN_FAILED The quorum log could not be created or mounted
5029 0x000013A5 ERROR_CLUSTERLOG_CORRUPT The cluster log is corrupt.
5030 0x000013A6 ERROR_CLUSTERLOG_RECORD_EX-
CEEDS_MAXSIZE
5031 0x000013A7 ERROR_CLUSTERLOG_EXCEEDS_MAXSIZE The cluster log exceeds its maximum size.
5032 0x000013A8 ERROR_CLUSTERLOG_CHK-
POINT_NOT_FOUND
5033 0x000013A9 ERROR_CLUSTERLOG_NOT_ENOUGH_SPACE The minimum required disk space needed for log-
5034 0x000013AA ERROR_QUORUM_OWNER_ALIVE The cluster node failed to take control of the quo-
5035 0x000013AB ERROR_NETWORK_NOT_AVAILABLE A cluster network is not available for this opera-
5036 0x000013AC ERROR_NODE_NOT_AVAILABLE A cluster node is not available for this operation.
group because other resources are dependent on
it.
found.
on the specified resource because it is already
dependent.
unless the node is down.
quests.
the cluster group is not online.
The cluster node is not the owner of the resource.
specified resource monitor.
by the resource monitor.
the cluster resource is online.
brought offline because it is the quorum resource.
a quorum resource because it is not capable of
being a quorum resource.
perform the requested operation.
will take effect until the next time the resource is
brought online.
a quorum resource because it does not belong to
a shared storage class.
is a core resource.
successfully.
The record could not be written to the cluster log
since it exceeds the maximum size.
No checkpoint record was found in the cluster log.
ging is not available.
rum resource because the resource is owned by
another active node.
tion.
TF661068 Version: 1.1
Page 69

Appendix
Error Description
decimal Hexadecimal Name
5037 0x000013AD ERROR_ALL_NODES_NOT_AVAILABLE All cluster nodes must be running to perform this
5038 0x000013AE ERROR_RESOURCE_FAILED A cluster resource failed.
5039 0x000013AF ERROR_CLUSTER_INVALID_NODE The cluster node is not valid.
5040 0x000013B0 ERROR_CLUSTER_NODE_EXISTS The cluster node already exists.
5041 0x000013B1 ERROR_CLUSTER_JOIN_IN_PROGRESS A node is in the process of joining the cluster.
5042 0x000013B2 ERROR_CLUSTER_NODE_NOT_FOUND The cluster node was not found.
5043 0x000013B3 ERROR_CLUSTER_LOCAL_NODE_NOT_FOUND The cluster local node information was not found.
5044 0x000013B4 ERROR_CLUSTER_NETWORK_EXISTS The cluster network already exists.
5045 0x000013B5 ERROR_CLUSTER_NETWORK_NOT_FOUND The cluster network was not found.
5046 0x000013B6 ERROR_CLUSTER_NETINTERFACE_EXISTS The cluster network interface already exists.
5047 0x000013B7 ERROR_CLUSTER_NETINTER-
FACE_NOT_FOUND
5048 0x000013B8 ERROR_CLUSTER_INVALID_REQUEST The cluster request is not valid for this object.
5049 0x000013B9 ERROR_CLUSTER_INVALID_NET-
WORK_PROVIDER
5050 0x000013BA ERROR_CLUSTER_NODE_DOWN The cluster node is down.
5051 0x000013BB ERROR_CLUSTER_NODE_UNREACHABLE The cluster node is not reachable.
5052 0x000013BC ERROR_CLUSTER_NODE_NOT_MEMBER The cluster node is not a member of the cluster.
5053 0x000013BD ERROR_CLUSTER_JOIN_NOT_IN_PROGRESS A cluster join operation is not in progress.
5054 0x000013BE ERROR_CLUSTER_INVALID_NETWORK The cluster network is not valid.
5056 0x000013C0 ERROR_CLUSTER_NODE_UP The cluster node is up.
5057 0x000013C1 ERROR_CLUSTER_IPADDR_IN_USE The cluster IP address is already in use.
5058 0x000013C2 ERROR_CLUSTER_NODE_NOT_PAUSED The cluster node is not paused.
5059 0x000013C3 ERROR_CLUSTER_NO_SECURITY_CONTEXT No cluster security context is available.
5060 0x000013C4 ERROR_CLUSTER_NETWORK_NOT_INTERNAL The cluster network is not configured for internal
5061 0x000013C5 ERROR_CLUSTER_NODE_ALREADY_UP The cluster node is already up.
5062 0x000013C6 ERROR_CLUSTER_NODE_ALREADY_DOWN The cluster node is already down.
5063 0x000013C7 ERROR_CLUSTER_NETWORK_ALREADY_ON-
LINE
5064 0x000013C8 ERROR_CLUSTER_NETWORK_ALREADY_OFF-
LINE
5065 0x000013C9 ERROR_CLUSTER_NODE_ALREADY_MEMBER The cluster node is already a member of the clus-
5066 0x000013CA ERROR_CLUSTER_LAST_INTERNAL_NETWORK The cluster network is the only one configured for
5067 0x000013CB ERROR_CLUSTER_NETWORK_HAS_DEPEN-
DENTS
5068 0x000013CC ERROR_INVALID_OPERATION_ON_QUORUM This operation cannot be performed on the cluster
5069 0x000013CD ERROR_DEPENDENCY_NOT_ALLOWED The cluster quorum resource is not allowed to
5070 0x000013CE ERROR_CLUSTER_NODE_PAUSED The cluster node is paused.
5071 0x000013CF ERROR_NODE_CANT_HOST_RESOURCE The cluster resource cannot be brought online.
5072 0x000013D0 ERROR_CLUSTER_NODE_NOT_READY The cluster node is not ready to perform the re-
5073 0x000013D1 ERROR_CLUSTER_NODE_SHUTTING_DOWN The cluster node is shutting down.
5074 0x000013D2 ERROR_CLUSTER_JOIN_ABORTED The cluster join operation was aborted.
5075 0x000013D3 ERROR_CLUSTER_INCOMPATIBLE_VERSIONS The cluster join operation failed due to incompati-
5076 0x000013D4 ERROR_CLUSTER_MAXNUM_OF_RE-
SOURCES_EXCEEDED
operation.
The cluster network interface was not found.
The cluster network provider is not valid.
cluster communication.
The cluster network is already online.
The cluster network is already offline.
ter.
internal cluster communication between two or
more active cluster nodes. The internal communication capability cannot be removed from the network.
One or more cluster resources depend on the network to provide service to clients. The client access capability cannot be removed from the network.
resource as it the quorum resource. You may not
bring the quorum resource offline or modify its
possible owners list.
have any dependencies.
The owner node cannot run this resource.
quested operation.
ble software versions between the joining node
and its sponsor.
This resource cannot be created because the
cluster has reached the limit on the number of resources it can monitor.
TF6610 69Version: 1.1
Page 70

Appendix
Error Description
decimal Hexadecimal Name
5077 0x000013D5 ERROR_CLUSTER_SYSTEM_CON-
FIG_CHANGED
5078 0x000013D6 ERROR_CLUSTER_RE-
SOURCE_TYPE_NOT_FOUND
5079 0x000013D7 ERROR_CLUSTER_RESTYPE_NOT_SUP-
PORTED
5080 0x000013D8 ERROR_CLUSTER_RESNAME_NOT_FOUND The specified resource name is supported by this
5081 0x000013D9 ERROR_CLUSTER_NO_RPC_PACKAGES_REG-
ISTERED
5082 0x000013DA ERROR_CLUSTER_OWNER_NOT_IN_PREFLIST You cannot bring the group online because the
5083 0x000013DB ERROR_CLUSTER_DATABASE_SEQMISMATCH The join operation failed because the cluster data-
5084 0x000013DC ERROR_RESMON_INVALID_STATE The resource monitor will not allow the fail opera-
5085 0x000013DD ERROR_CLUSTER_GUM_NOT_LOCKER A non locker code got a request to reserve the
5086 0x000013DE ERROR_QUORUM_DISK_NOT_FOUND The quorum disk could not be located by the clus-
5087 0x000013DF ERROR_DATABASE_BACKUP_CORRUPT The backup up cluster database is possibly cor-
5088 0x000013E0 ERROR_CLUSTER_NODE_AL-
READY_HAS_DFS_ROOT
5089 0x000013E1 ERROR_RESOURCE_PROPERTY_UNCHANGE-
ABLE
5890 0x00001702 ERROR_CLUSTER_MEMBERSHIP_IN-
VALID_STATE
5891 0x00001703 ERROR_CLUSTER_QUORUMLOG_NOT_FOUND The quorum resource does not contain the quo-
5892 0x00001704 ERROR_CLUSTER_MEMBERSHIP_HALT The membership engine requested shutdown of
5893 0x00001705 ERROR_CLUSTER_INSTANCE_ID_MISMATCH The join operation failed because the cluster in-
5894 0x00001706 ERROR_CLUSTER_NET-
WORK_NOT_FOUND_FOR_IP
5895 0x00001707 ERROR_CLUSTER_PROP-
ERTY_DATA_TYPE_MISMATCH
5896 0x00001708 ERROR_CLUSTER_EVICT_WITHOUT_CLEANUP The cluster node was evicted from the cluster
The system configuration changed during the
cluster join or form operation. The join or form operation was aborted.
The specified resource type was not found.
The specified node does not support a resource
of this type. This may be due to version inconsistencies or due to the absence of the resource DLL
on this node.
resource DLL. This may be due to a bad (or
changed) name supplied to the resource DLL.
No authentication package could be registered
with the RPC server.
owner of the group is not in the preferred list for
the group. To change the owner node for the
group, move the group.
base sequence number has changed or is incompatible with the locker node. This may happen
during a join operation if the cluster database was
changing during the join.
tion to be performed while the resource is in its
current state. This may happen if the resource is
in a pending state.
lock for making global updates.
ter service.
rupt.
A DFS root already exists in this cluster node.
An attempt to modify a resource property failed
because it conflicts with another existing property.
An operation was attempted that is incompatible
with the current membership state of the node.
rum log.
the cluster service on this node.
stance ID of the joining node does not match the
cluster instance ID of the sponsor node.
A matching network for the specified IP address
could not be found. Please also specify a subnet
mask and a cluster network.
The actual data type of the property did not match
the expected data type of the property.
successfully. The node was not cleaned up because it does not support the evict cleanup functionality.
TF661070 Version: 1.1
Page 71

Appendix
Error Description
decimal Hexadecimal Name
6000 0x00001770 ERROR_ENCRYPTION_FAILED The specified file could not be encrypted.
6001 0x00001771 ERROR_DECRYPTION_FAILED The specified file could not be decrypted.
6002 0x00001772 ERROR_FILE_ENCRYPTED The specified file is encrypted and the user does
6003 0x00001773 ERROR_NO_RECOVERY_POLICY There is no valid encryption recovery policy con-
6004 0x00001774 ERROR_NO_EFS The required encryption driver is not loaded for
6005 0x00001775 ERROR_WRONG_EFS The file was encrypted with a different encryption
6006 0x00001776 ERROR_NO_USER_KEYS There are no EFS keys defined for the user.
6007 0x00001777 ERROR_FILE_NOT_ENCRYPTED The specified file is not encrypted.
6008 0x00001778 ERROR_NOT_EXPORT_FORMAT The specified file is not in the defined EFS export
6009 0x00001779 ERROR_FILE_READ_ONLY The specified file is read only.
6010 0x0000177A ERROR_DIR_EFS_DISALLOWED The directory has been disabled for encryption.
6011 0x0000177B ERROR_EFS_SERVER_NOT_TRUSTED The server is not trusted for remote encryption
6012 0x0000177C ERROR_BAD_RECOVERY_POLICY Recovery policy configured for this system con-
6013 0x0000177D ERROR_EFS_ALG_BLOB_TOO_BIG The encryption algorithm used on the source file
6014 0x0000177E ERROR_VOLUME_NOT_SUPPORT_EFS The disk partition does not support file encryption.
6118 0x000017E6 ERROR_NO_BROWSER_SERVERS_FOUND The list of servers for this workgroup is not cur-
6200 0x00001838 SCHED_E_SERVICE_NOT_LOCALSYSTEM The Task Scheduler service must be configured
7001 0x00001B59 ERROR_CTX_WINSTATION_NAME_INVALID The specified session name is invalid.
7002 0x00001B5A ERROR_CTX_INVALID_PD The specified protocol driver is invalid.
7003 0x00001B5B ERROR_CTX_PD_NOT_FOUND The specified protocol driver was not found in the
7004 0x00001B5C ERROR_CTX_WD_NOT_FOUND The specified terminal connection driver was not
7005 0x00001B5D ERROR_CTX_CANNOT_MAKE_EVENTLOG_EN-
TRY
7006 0x00001B5E ERROR_CTX_SERVICE_NAME_COLLISION A service with the same name already exists on
7007 0x00001B5F ERROR_CTX_CLOSE_PENDING A close operation is pending on the session.
7008 0x00001B60 ERROR_CTX_NO_OUTBUF There are no free output buffers available.
7009 0x00001B61 ERROR_CTX_MODEM_INF_NOT_FOUND The MODEM.INF file was not found.
7010 0x00001B62 ERROR_CTX_INVALID_MODEMNAME The modem name was not found in MODEM.INF.
7011 0x00001B63 ERROR_CTX_MODEM_RESPONSE_ERROR The modem did not accept the command sent to
7012 0x00001B64 ERROR_CTX_MODEM_RESPONSE_TIMEOUT The modem did not respond to the command sent
7013 0x00001B65 ERROR_CTX_MODEM_RESPONSE_NO_CAR-
RIER
7014 0x00001B66 ERROR_CTX_MODEM_RESPONSE_NO_DIAL-
TONE
7015 0x00001B67 ERROR_CTX_MODEM_RESPONSE_BUSY Busy signal detected at remote site on callback.
7016 0x00001B68 ERROR_CTX_MODEM_RESPONSE_VOICE Voice detected at remote site on callback.
7017 0x00001B69 ERROR_CTX_TD_ERROR Transport driver error
7022 0x00001B6E ERROR_CTX_WINSTATION_NOT_FOUND The specified session cannot be found.
7023 0x00001B6F ERROR_CTX_WINSTATION_ALREADY_EXISTS The specified session name is already in use.
7024 0x00001B70 ERROR_CTX_WINSTATION_BUSY The requested operation cannot be completed be-
not have the ability to decrypt it.
figured for this system.
this system.
driver than is currently loaded.
format.
operation.
tains invalid recovery certificate.
needs a bigger key buffer than the one on the
destination file.
rently available.
to run in the System account to function properly.
Individual tasks may be configured to run in other
accounts.
system path.
found in the system path.
A registry key for event logging could not be created for this session.
the system.
it. Verify that the configured modem name
matches the attached modem.
to it. Verify that the modem is properly cabled and
powered on.
Carrier detect has failed or carrier has been
dropped due to disconnect.
Dial tone not detected within the required time.
Verify that the phone cable is properly attached
and functional.
cause the terminal connection is currently busy
processing a connect, disconnect, reset, or delete
operation.
TF6610 71Version: 1.1
Page 72

Appendix
Error Description
decimal Hexadecimal Name
7025 0x00001B71 ERROR_CTX_BAD_VIDEO_MODE An attempt has been made to connect to a ses-
7035 0x00001B7B ERROR_CTX_GRAPHICS_INVALID The application attempted to enable DOS graph-
7037 0x00001B7D ERROR_CTX_LOGON_DISABLED Your interactive logon privilege has been dis-
7038 0x00001B7E ERROR_CTX_NOT_CONSOLE The requested operation can be performed only
7040 0x00001B80 ERROR_CTX_CLIENT_QUERY_TIMEOUT The client failed to respond to the server connect
7041 0x00001B81 ERROR_CTX_CONSOLE_DISCONNECT Disconnecting the console session is not sup-
7042 0x00001B82 ERROR_CTX_CONSOLE_CONNECT Reconnecting a disconnected session to the con-
7044 0x00001B84 ERROR_CTX_SHADOW_DENIED The request to control another session remotely
7045 0x00001B85 ERROR_CTX_WINSTATION_ACCESS_DENIED The requested session access is denied.
7049 0x00001B89 ERROR_CTX_INVALID_WD The specified terminal connection driver is invalid.
7050 0x00001B8A ERROR_CTX_SHADOW_INVALID The requested session cannot be controlled re-
7051 0x00001B8B ERROR_CTX_SHADOW_DISABLED The requested session is not configured to allow
7052 0x00001B8C ERROR_CTX_CLIENT_LICENSE_IN_USE Your request to connect to this Terminal Server
7053 0x00001B8D ERROR_CTX_CLIENT_LICENSE_NOT_SET Your request to connect to this Terminal Server
7054 0x00001B8E ERROR_CTX_LICENSE_NOT_AVAILABLE The system has reached its licensed logon limit.
7055 0x00001B8F ERROR_CTX_LICENSE_CLIENT_INVALID The client you are using is not licensed to use this
7056 0x00001B90 ERROR_CTX_LICENSE_EXPIRED The system license has expired. Your logon re-
7057 0x00001B91 ERROR_CTX_SHADOW_NOT_RUNNING Remote control could not be terminated because
sion whose video mode is not supported by the
current client.
ics mode. DOS graphics mode is not supported.
abled. Please contact your administrator.
on the system console. This is most often the result of a driver or system DLL requiring direct console access.
message.
ported.
sole is not supported.
was denied.
motely. This may be because the session is disconnected or does not currently have a user
logged on.
remote control.
has been rejected. Your Terminal Server client license number is currently being used by another
user. Please call your system administrator to obtain a unique license number.
has been rejected. Your Terminal Server client license number has not been entered for this copy
of the Terminal Server client. Please contact your
system administrator.
Please try again later.
system. Your logon request is denied.
quest is denied.
the specified session is not currently being remotely controlled.
TF661072 Version: 1.1
Page 73

Appendix
Error Description
decimal Hexadecimal Name
8001 0x00001F41 FRS_ERR_INVALID_API_SEQUENCE The file replication service API was called incor-
8002 0x00001F42 FRS_ERR_STARTING_SERVICE The file replication service cannot be started.
8003 0x00001F43 FRS_ERR_STOPPING_SERVICE The file replication service cannot be stopped.
8004 0x00001F44 FRS_ERR_INTERNAL_API The file replication service API terminated the re-
8005 0x00001F45 FRS_ERR_INTERNAL The file replication service terminated the request.
8006 0x00001F46 FRS_ERR_SERVICE_COMM The file replication service cannot be contacted.
8007 0x00001F47 FRS_ERR_INSUFFICIENT_PRIV The file replication service cannot satisfy the re-
8008 0x00001F48 FRS_ERR_AUTHENTICATION The file replication service cannot satisfy the re-
8009 0x00001F49 FRS_ERR_PARENT_INSUFFICIENT_PRIV The file replication service cannot satisfy the re-
8010 0x00001F4A FRS_ERR_PARENT_AUTHENTICATION The file replication service cannot satisfy the re-
8011 0x00001F4B FRS_ERR_CHILD_TO_PARENT_COMM The file replication service cannot communicate
8012 0x00001F4C FRS_ERR_PARENT_TO_CHILD_COMM The file replication service on the domain con-
8013 0x00001F4D FRS_ERR_SYSVOL_POPULATE The file replication service cannot populate the
8014 0x00001F4E FRS_ERR_SYSVOL_POPULATE_TIMEOUT The file replication service cannot populate the
8015 0x00001F4F FRS_ERR_SYSVOL_IS_BUSY The file replication service cannot process the re-
8016 0x00001F50 FRS_ERR_SYSVOL_DEMOTE The file replication service cannot stop replicating
8017 0x00001F51 FRS_ERR_INVALID_SERVICE_PARAMETER The file replication service detected an invalid pa-
8200 0x00002008 ERROR_DS_NOT_INSTALLED An error occurred while installing the directory
8201 0x00002009 ERROR_DS_MEMBERSHIP_EVALUATED_LO-
CALLY
8202 0x0000200A ERROR_DS_NO_ATTRIBUTE_OR_VALUE The specified directory service attribute or value
8203 0x0000200B ERROR_DS_INVALID_ATTRIBUTE_SYNTAX The attribute syntax specified to the directory ser-
8204 0x0000200C ERROR_DS_ATTRIBUTE_TYPE_UNDEFINED The attribute type specified to the directory ser-
8205 0x0000200D ERROR_DS_ATTRIBUTE_OR_VALUE_EXISTS The specified directory service attribute or value
8206 0x0000200E ERROR_DS_BUSY The directory service is busy.
8207 0x0000200F ERROR_DS_UNAVAILABLE The directory service is unavailable.
8208 0x00002010 ERROR_DS_NO_RIDS_ALLOCATED The directory service was unable to allocate a rel-
8209 0x00002011 ERROR_DS_NO_MORE_RIDS The directory service has exhausted the pool of
8210 0x00002012 ERROR_DS_INCORRECT_ROLE_OWNER The requested operation could not be performed
rectly.
quest. The event log may have more information.
The event log may have more information.
The event log may have more information.
quest because the user has insufficient privileges.
The event log may have more information.
quest because authenticated RPC is not available. The event log may have more information.
quest because the user has insufficient privileges
on the domain controller. The event log may have
more information.
quest because authenticated RPC is not available
on the domain controller. The event log may have
more information.
with the file replication service on the domain controller. The event log may have more information.
troller cannot communicate with the file replication
service on this computer. The event log may have
more information.
system volume because of an internal error. The
event log may have more information.
system volume because of an internal timeout.
The event log may have more information.
quest. The system volume is busy with a previous
request.
the system volume because of an internal error.
The event log may have more information.
rameter.
service. For more information, see the event log.
The directory service evaluated group memberships locally.
does not exist.
vice is invalid.
vice is not defined.
already exists.
ative identifier.
relative identifiers.
because the directory service is not the master for
that type of operation.
TF6610 73Version: 1.1
Page 74

Appendix
Error Description
decimal Hexadecimal Name
8211 0x00002013 ERROR_DS_RIDMGR_INIT_ERROR The directory service was unable to initialize the
8212 0x00002014 ERROR_DS_OBJ_CLASS_VIOLATION The requested operation did not satisfy one or
8213 0x00002015 ERROR_DS_CANT_ON_NON_LEAF The directory service can perform the requested
8214 0x00002016 ERROR_DS_CANT_ON_RDN The directory service cannot perform the re-
8215 0x00002017 ERROR_DS_CANT_MOD_OBJ_CLASS The directory service detected an attempt to mod-
8216 0x00002018 ERROR_DS_CROSS_DOM_MOVE_ERROR The requested cross-domain move operation
8217 0x00002019 ERROR_DS_GC_NOT_AVAILABLE Unable to contact the global catalog server.
8218 0x0000201A ERROR_SHARED_POLICY The policy object is shared and can only be modi-
8219 0x0000201B ERROR_POLICY_OBJECT_NOT_FOUND The policy object does not exist.
8220 0x0000201C ERROR_POLICY_ONLY_IN_DS The requested policy information is only in the di-
8221 0x0000201D ERROR_PROMOTION_ACTIVE A domain controller promotion is currently active.
8222 0x0000201E ERROR_NO_PROMOTION_ACTIVE A domain controller promotion is not currently ac-
8224 0x00002020 ERROR_DS_OPERATIONS_ERROR An operations error occurred.
8225 0x00002021 ERROR_DS_PROTOCOL_ERROR A protocol error occurred.
8226 0x00002022 ERROR_DS_TIMELIMIT_EXCEEDED The time limit for this request was exceeded.
8227 0x00002023 ERROR_DS_SIZELIMIT_EXCEEDED The size limit for this request was exceeded.
8228 0x00002024 ERROR_DS_ADMIN_LIMIT_EXCEEDED The administrative limit for this request was ex-
8229 0x00002025 ERROR_DS_COMPARE_FALSE The compare response was false.
8230 0x00002026 ERROR_DS_COMPARE_TRUE The compare response was true.
8231 0x00002027 ERROR_DS_AUTH_METHOD_NOT_SUPPORTED The requested authentication method is not sup-
8232 0x00002028 ERROR_DS_STRONG_AUTH_REQUIRED A more secure authentication method is required
8233 0x00002029 ERROR_DS_INAPPROPRIATE_AUTH Inappropriate authentication.
8234 0x0000202A ERROR_DS_AUTH_UNKNOWN The authentication mechanism is unknown.
8235 0x0000202B ERROR_DS_REFERRAL A referral was returned from the server.
8236 0x0000202C ERROR_DS_UNAVAILABLE_CRIT_EXTENSION The server does not support the requested critical
8237 0x0000202D ERROR_DS_CONFIDENTIALITY_REQUIRED This request requires a secure connection.
8238 0x0000202E ERROR_DS_INAPPROPRIATE_MATCHING Inappropriate matching.
8239 0x0000202F ERROR_DS_CONSTRAINT_VIOLATION A constraint violation occurred.
8240 0x00002030 ERROR_DS_NO_SUCH_OBJECT There is no such object on the server.
8241 0x00002031 ERROR_DS_ALIAS_PROBLEM There is an alias problem.
8242 0x00002032 ERROR_DS_INVALID_DN_SYNTAX An invalid dn syntax has been specified.
8243 0x00002033 ERROR_DS_IS_LEAF The object is a leaf object.
8244 0x00002034 ERROR_DS_ALIAS_DEREF_PROBLEM There is an alias dereferencing problem.
8245 0x00002035 ERROR_DS_UNWILLING_TO_PERFORM The server is unwilling to process the request.
8246 0x00002036 ERROR_DS_LOOP_DETECT A loop has been detected.
8247 0x00002037 ERROR_DS_NAMING_VIOLATION There is a naming violation.
8248 0x00002038 ERROR_DS_OBJECT_RESULTS_TOO_LARGE The result set is too large.
8249 0x00002039 ERROR_DS_AFFECTS_MULTIPLE_DSAS The operation affects multiple DSAs
8250 0x0000203A ERROR_DS_SERVER_DOWN The server is not operational.
8251 0x0000203B ERROR_DS_LOCAL_ERROR A local error has occurred.
8252 0x0000203C ERROR_DS_ENCODING_ERROR An encoding error has occurred.
8253 0x0000203D ERROR_DS_DECODING_ERROR A decoding error has occurred.
8254 0x0000203E ERROR_DS_FILTER_UNKNOWN The search filter cannot be recognized.
8255 0x0000203F ERROR_DS_PARAM_ERROR One or more parameters are illegal.
8256 0x00002040 ERROR_DS_NOT_SUPPORTED The specified method is not supported.
8257 0x00002041 ERROR_DS_NO_RESULTS_RETURNED No results were returned.
subsystem that allocates relative identifiers.
more constraints associated with the class of the
object.
operation only on a leaf object.
quested operation on the RDN attribute of an object.
ify the object class of an object.
could not be performed.
fied at the root.
rectory service.
tive
ceeded.
ported by the server.
for this server.
extension.
TF661074 Version: 1.1
Page 75

Appendix
Error Description
decimal Hexadecimal Name
8258 0x00002042 ERROR_DS_CONTROL_NOT_FOUND The specified control is not supported by the
8259 0x00002043 ERROR_DS_CLIENT_LOOP A referral loop was detected by the client.
8260 0x00002044 ERROR_DS_REFERRAL_LIMIT_EXCEEDED The preset referral limit was exceeded.
8261 0x00002045 ERROR_DS_SORT_CONTROL_MISSING The search requires a SORT control.
8262 0x00002046 ERROR_DS_OFFSET_RANGE_ERROR The search results exceed the offset range speci-
8301 0x0000206D ERROR_DS_ROOT_MUST_BE_NC The root object must be the head of a naming
8302 0x0000206E ERROR_DS_ADD_REPLICA_INHIBITED The add replica operation cannot be performed.
8303 0x0000206F ERROR_DS_ATT_NOT_DEF_IN_SCHEMA A reference to an attribute that is not defined in
8304 0x00002070 ERROR_DS_MAX_OBJ_SIZE_EXCEEDED The maximum size of an object has been ex-
8305 0x00002071 ERROR_DS_OBJ_STRING_NAME_EXISTS An attempt was made to add an object to the di-
8306 0x00002072 ERROR_DS_NO_RDN_DEFINED_IN_SCHEMA An attempt was made to add an object of a class
8307 0x00002073 ERROR_DS_RDN_DOESNT_MATCH_SCHEMA An attempt was made to add an object using an
8308 0x00002074 ERROR_DS_NO_REQUESTED_ATTS_FOUND None of the requested attributes were found on
8309 0x00002075 ERROR_DS_USER_BUFFER_TO_SMALL The user buffer is too small.
8310 0x00002076 ERROR_DS_ATT_IS_NOT_ON_OBJ The attribute specified in the operation is not
8311 0x00002077 ERROR_DS_ILLEGAL_MOD_OPERATION Illegal modify operation. Some aspect of the mod-
8312 0x00002078 ERROR_DS_OBJ_TOO_LARGE The specified object is too large.
8313 0x00002079 ERROR_DS_BAD_INSTANCE_TYPE The specified instance type is not valid.
8314 0x0000207A ERROR_DS_MASTERDSA_REQUIRED The operation must be performed at a master
8315 0x0000207B ERROR_DS_OBJECT_CLASS_REQUIRED The object class attribute must be specified.
8316 0x0000207C ERROR_DS_MISSING_REQUIRED_ATT A required attribute is missing.
8317 0x0000207D ERROR_DS_ATT_NOT_DEF_FOR_CLASS An attempt was made to modify an object to in-
8318 0x0000207E ERROR_DS_ATT_ALREADY_EXISTS The specified attribute is already present on the
8320 0x00002080 ERROR_DS_CANT_ADD_ATT_VALUES The specified attribute is not present, or has no
8321 0x00002081 ERROR_DS_SINGLE_VALUE_CONSTRAINT Multiple values were specified for an attribute that
8322 0x00002082 ERROR_DS_RANGE_CONSTRAINT A value for the attribute was not in the acceptable
8323 0x00002083 ERROR_DS_ATT_VAL_ALREADY_EXISTS The specified value already exists.
8324 0x00002084 ERROR_DS_CANT_REM_MISSING_ATT The attribute cannot be removed because it is not
8325 0x00002085 ERROR_DS_CANT_REM_MISSING_ATT_VAL The attribute value cannot be removed because it
8326 0x00002086 ERROR_DS_ROOT_CANT_BE_SUBREF The specified root object cannot be a subref.
8327 0x00002087 ERROR_DS_NO_CHAINING Chaining is not permitted.
8328 0x00002088 ERROR_DS_NO_CHAINED_EVAL Chained evaluation is not permitted.
8329 0x00002089 ERROR_DS_NO_PARENT_OBJECT The operation could not be performed because
8330 0x0000208A ERROR_DS_PARENT_IS_AN_ALIAS Having a parent that is an alias is not permitted.
8331 0x0000208B ERROR_DS_CANT_MIX_MASTER_AND_REPS The object and parent must be of the same type,
server.
fied.
context. The root object cannot have an instantiated parent.
The naming context must be writable in order to
create the replica.
the schema occurred.
ceeded.
rectory with a name that is already in use.
that does not have an RDN defined in the
schema.
RDN that is not the RDN defined in the schema.
the objects.
present on the object.
ification is not permitted.
DSA.
clude an attribute that is not legal for its class
object.
values.
can have only one value.
range of values.
present on the object.
is not present on the object.
the object's parent is either uninstantiated or
deleted.
Aliases are leaf objects.
either both masters or both replicas.
TF6610 75Version: 1.1
Page 76

Appendix
Error Description
decimal Hexadecimal Name
8332 0x0000208C ERROR_DS_CHILDREN_EXIST The operation cannot be performed because child
8333 0x0000208D ERROR_DS_OBJ_NOT_FOUND Directory object not found.
8334 0x0000208E ERROR_DS_ALIASED_OBJ_MISSING The aliased object is missing.
8335 0x0000208F ERROR_DS_BAD_NAME_SYNTAX The object name has bad syntax.
8336 0x00002090 ERROR_DS_ALIAS_POINTS_TO_ALIAS It is not permitted for an alias to refer to another
8337 0x00002091 ERROR_DS_CANT_DEREF_ALIAS The alias cannot be dereferenced.
8338 0x00002092 ERROR_DS_OUT_OF_SCOPE The operation is out of scope.
8339 0x00002093 ERROR_DS_OBJECT_BEING_REMOVED The operation cannot continue because the object
8340 0x00002094 ERROR_DS_CANT_DELETE_DSA_OBJ The DSA object cannot be deleted.
8341 0x00002095 ERROR_DS_GENERIC_ERROR A directory service error has occurred.
8342 0x00002096 ERROR_DS_DSA_MUST_BE_INT_MASTER The operation can only be performed on an inter-
8343 0x00002097 ERROR_DS_CLASS_NOT_DSA The object must be of class DSA.
8344 0x00002098 ERROR_DS_INSUFF_ACCESS_RIGHTS Insufficient access rights to perform the operation.
8345 0x00002099 ERROR_DS_ILLEGAL_SUPERIOR The object cannot be added because the parent
8346 0x0000209A ERROR_DS_ATTRIBUTE_OWNED_BY_SAM Access to the attribute is not permitted because
8347 0x0000209B ERROR_DS_NAME_TOO_MANY_PARTS The name has too many parts.
8348 0x0000209C ERROR_DS_NAME_TOO_LONG The name is too long.
8349 0x0000209D ERROR_DS_NAME_VALUE_TOO_LONG The name value is too long.
8350 0x0000209E ERROR_DS_NAME_UNPARSEABLE The directory service encountered an error pars-
8351 0x0000209F ERROR_DS_NAME_TYPE_UNKNOWN The directory service cannot get the attribute type
8352 0x000020A0 ERROR_DS_NOT_AN_OBJECT The name does not identify an object; the name
8353 0x000020A1 ERROR_DS_SEC_DESC_TOO_SHORT The security descriptor is too short.
8354 0x000020A2 ERROR_DS_SEC_DESC_INVALID The security descriptor is invalid.
8355 0x000020A3 ERROR_DS_NO_DELETED_NAME Failed to create name for deleted object.
8356 0x000020A4 ERROR_DS_SUBREF_MUST_HAVE_PARENT The parent of a new subref must exist.
8357 0x000020A5 ERROR_DS_NCNAME_MUST_BE_NC The object must be a naming context.
8358 0x000020A6 ERROR_DS_CANT_ADD_SYSTEM_ONLY It is not permitted to add an attribute which is
8359 0x000020A7 ERROR_DS_CLASS_MUST_BE_CONCRETE The class of the object must be structural; you
8360 0x000020A8 ERROR_DS_INVALID_DMD The schema object could not be found.
8361 0x000020A9 ERROR_DS_OBJ_GUID_EXISTS A local object with this GUID (dead or alive) al-
8362 0x000020AA ERROR_DS_NOT_ON_BACKLINK The operation cannot be performed on a back
8363 0x000020AB ERROR_DS_NO_CROSSREF_FOR_NC The cross reference for the specified naming con-
8364 0x000020AC ERROR_DS_SHUTTING_DOWN The operation could not be performed because
8365 0x000020AD ERROR_DS_UNKNOWN_OPERATION The directory service request is invalid.
8366 0x000020AE ERROR_DS_INVALID_ROLE_OWNER The role owner attribute could not be read.
8367 0x000020AF ERROR_DS_COULDNT_CONTACT_FSMO The requested FSMO operation failed. The cur-
8368 0x000020B0 ERROR_DS_CROSS_NC_DN_RENAME Modification of a DN across a naming context is
8369 0x000020B1 ERROR_DS_CANT_MOD_SYSTEM_ONLY The attribute cannot be modified because it is
8370 0x000020B2 ERROR_DS_REPLICATOR_ONLY Only the replicator can perform this function.
8371 0x000020B3 ERROR_DS_OBJ_CLASS_NOT_DEFINED The specified class is not defined.
8372 0x000020B4 ERROR_DS_OBJ_CLASS_NOT_SUBCLASS The specified class is not a subclass.
8373 0x000020B5 ERROR_DS_NAME_REFERENCE_INVALID The name reference is invalid.
objects exist. This operation can only be performed on a leaf object.
alias.
is in the process of being removed.
nal master DSA object.
is not on the list of possible superiors.
the attribute is owned by the Security Accounts
Manager (SAM).
ing a name.
for a name.
identifies a phantom.
owned by the system.
cannot instantiate an abstract class.
ready exists.
link.
text could not be found.
the directory service is shutting down.
rent FSMO holder could not be reached.
not permitted.
owned by the system.
TF661076 Version: 1.1
Page 77

Appendix
Error Description
decimal Hexadecimal Name
8374 0x000020B6 ERROR_DS_CROSS_REF_EXISTS A cross reference already exists.
8375 0x000020B7 ERROR_DS_CANT_DEL_MASTER_CROSSREF It is not permitted to delete a master cross refer-
8376 0x000020B8 ERROR_DS_SUBTREE_NOTIFY_NOT_NC_HEAD Subtree notifications are only supported on NC
8377 0x000020B9 ERROR_DS_NOTIFY_FILTER_TOO_COMPLEX Notification filter is too complex.
8378 0x000020BA ERROR_DS_DUP_RDN Schema update failed: duplicate RDN.
8379 0x000020BB ERROR_DS_DUP_OID Schema update failed: duplicate OID
8380 0x000020BC ERROR_DS_DUP_MAPI_ID Schema update failed: duplicate MAPI identifier.
8381 0x000020BD ERROR_DS_DUP_SCHEMA_ID_GUID Schema update failed: duplicate schema-id GUID.
8382 0x000020BE ERROR_DS_DUP_LDAP_DISPLAY_NAME Schema update failed: duplicate LDAP display
8383 0x000020BF ERROR_DS_SEMANTIC_ATT_TEST Schema update failed: range-lower less than
8384 0x000020C0 ERROR_DS_SYNTAX_MISMATCH Schema update failed: syntax mismatch
8385 0x000020C1 ERROR_DS_EXISTS_IN_MUST_HAVE Schema deletion failed: attribute is used in must-
8386 0x000020C2 ERROR_DS_EXISTS_IN_MAY_HAVE Schema deletion failed: attribute is used in may-
8387 0x000020C3 ERROR_DS_NONEXISTENT_MAY_HAVE Schema update failed: attribute in may-contain
8388 0x000020C4 ERROR_DS_NONEXISTENT_MUST_HAVE Schema update failed: attribute in must-contain
8389 0x000020C5 ERROR_DS_AUX_CLS_TEST_FAIL Schema update failed: class in aux-class list does
8390 0x000020C6 ERROR_DS_NONEXISTENT_POSS_SUP Schema update failed: class in poss-superiors
8391 0x000020C7 ERROR_DS_SUB_CLS_TEST_FAIL Schema update failed: class in subclassof list
8392 0x000020C8 ERROR_DS_BAD_RDN_ATT_ID_SYNTAX Schema update failed: Rdn-Att-Id has wrong syn-
8393 0x000020C9 ERROR_DS_EXISTS_IN_AUX_CLS Schema deletion failed: class is used as auxiliary
8394 0x000020CA ERROR_DS_EXISTS_IN_SUB_CLS Schema deletion failed: class is used as sub class
8395 0x000020CB ERROR_DS_EXISTS_IN_POSS_SUP Schema deletion failed: class is used as poss su-
8396 0x000020CC ERROR_DS_RECALCSCHEMA_FAILED Schema update failed in recalculating validation
8397 0x000020CD ERROR_DS_TREE_DELETE_NOT_FINISHED The tree deletion is not finished.
8398 0x000020CE ERROR_DS_CANT_DELETE The requested delete operation could not be per-
8399 0x000020CF ERROR_DS_ATT_SCHEMA_REQ_ID Cannot read the governs class identifier for the
8400 0x000020D0 ERROR_DS_BAD_ATT_SCHEMA_SYNTAX The attribute schema has bad syntax.
8401 0x000020D1 ERROR_DS_CANT_CACHE_ATT The attribute could not be cached.
8402 0x000020D2 ERROR_DS_CANT_CACHE_CLASS The class could not be cached.
8403 0x000020D3 ERROR_DS_CANT_REMOVE_ATT_CACHE The attribute could not be removed from the
8404 0x000020D4 ERROR_DS_CANT_REMOVE_CLASS_CACHE The class could not be removed from the cache.
8405 0x000020D5 ERROR_DS_CANT_RETRIEVE_DN The distinguished name attribute could not be
8406 0x000020D6 ERROR_DS_MISSING_SUPREF A required subref is missing.
8407 0x000020D7 ERROR_DS_CANT_RETRIEVE_INSTANCE The instance type attribute could not be retrieved.
8408 0x000020D8 ERROR_DS_CODE_INCONSISTENCY An internal error has occurred.
8409 0x000020D9 ERROR_DS_DATABASE_ERROR A database error has occurred.
8410 0x000020DA ERROR_DS_GOVERNSID_MISSING The attribute GOVERNSID is missing.
8411 0x000020DB ERROR_DS_MISSING_EXPECTED_ATT An expected attribute is missing.
8412 0x000020DC ERROR_DS_NCNAME_MISSING_CR_REF The specified naming context is missing a cross
8413 0x000020DD ERROR_DS_SECURITY_CHECKING_ERROR A security checking error has occurred.
8414 0x000020DE ERROR_DS_SCHEMA_NOT_LOADED The schema is not loaded.
ence.
heads.
name.
range upper
contain
contain
does not exist
does not exist
not exist or is not an auxiliary class
does not exist
does not exist or does not satisfy hierarchy rules
tax
class
perior
cache.
formed.
schema record.
cache.
read.
reference.
TF6610 77Version: 1.1
Page 78

Appendix
Error Description
decimal Hexadecimal Name
8415 0x000020DF ERROR_DS_SCHEMA_ALLOC_FAILED Schema allocation failed. Please check if the ma-
8416 0x000020E0 ERROR_DS_ATT_SCHEMA_REQ_SYNTAX Failed to obtain the required syntax for the at-
8417 0x000020E1 ERROR_DS_GCVERIFY_ERROR The global catalog verification failed. The global
8418 0x000020E2 ERROR_DS_DRA_SCHEMA_MISMATCH The replication operation failed because of a
8419 0x000020E3 ERROR_DS_CANT_FIND_DSA_OBJ The DSA object could not be found.
8420 0x000020E4 ERROR_DS_CANT_FIND_EXPECTED_NC The naming context could not be found.
8421 0x000020E5 ERROR_DS_CANT_FIND_NC_IN_CACHE The naming context could not be found in the
8422 0x000020E6 ERROR_DS_CANT_RETRIEVE_CHILD The child object could not be retrieved.
8423 0x000020E7 ERROR_DS_SECURITY_ILLEGAL_MODIFY The modification was not permitted for security
8424 0x000020E8 ERROR_DS_CANT_REPLACE_HIDDEN_REC The operation cannot replace the hidden record.
8425 0x000020E9 ERROR_DS_BAD_HIERARCHY_FILE The hierarchy file is invalid.
8426 0x000020EA ERROR_DS_BUILD_HIERARCHY_TABLE_FAILED The attempt to build the hierarchy table failed.
8427 0x000020EB ERROR_DS_CONFIG_PARAM_MISSING The directory configuration parameter is missing
8428 0x000020EC ERROR_DS_COUNTING_AB_INDICES_FAILED The attempt to count the address book indices
8429 0x000020ED ERROR_DS_HIERARCHY_TABLE_MAL-
LOC_FAILED
8430 0x000020EE ERROR_DS_INTERNAL_FAILURE The directory service encountered an internal fail-
8431 0x000020EF ERROR_DS_UNKNOWN_ERROR The directory service encountered an unknown
8432 0x000020F0 ERROR_DS_ROOT_REQUIRES_CLASS_TOP A root object requires a class of 'top'.
8433 0x000020F1 ERROR_DS_REFUSING_FSMO_ROLES This directory server is shutting down, and cannot
8434 0x000020F2 ERROR_DS_MISSING_FSMO_SETTINGS The directory service is missing mandatory con-
8435 0x000020F3 ERROR_DS_UNABLE_TO_SURRENDER_ROLES The directory service was unable to transfer own-
8436 0x000020F4 ERROR_DS_DRA_GENERIC The replication operation failed.
8437 0x000020F5 ERROR_DS_DRA_INVALID_PARAMETER An invalid parameter was specified for this repli-
8438 0x000020F6 ERROR_DS_DRA_BUSY The directory service is too busy to complete the
8439 0x000020F7 ERROR_DS_DRA_BAD_DN The distinguished name specified for this replica-
8440 0x000020F8 ERROR_DS_DRA_BAD_NC The naming context specified for this replication
8441 0x000020F9 ERROR_DS_DRA_DN_EXISTS The distinguished name specified for this replica-
8442 0x000020FA ERROR_DS_DRA_INTERNAL_ERROR The replication system encountered an internal
8443 0x000020FB ERROR_DS_DRA_INCONSISTENT_DIT The replication operation encountered a database
8444 0x000020FC ERROR_DS_DRA_CONNECTION_FAILED The server specified for this replication operation
8445 0x000020FD ERROR_DS_DRA_BAD_INSTANCE_TYPE The replication operation encountered an object
8446 0x000020FE ERROR_DS_DRA_OUT_OF_MEM The replication operation failed to allocate mem-
8447 0x000020FF ERROR_DS_DRA_MAIL_PROBLEM The replication operation encountered an error
chine is running low on memory.
tribute schema.
catalog is not available or does not support the
operation. Some part of the directory is currently
not available.
schema mismatch between the servers involved.
cache.
reasons.
from the registry.
failed.
The allocation of the hierarchy table failed.
ure.
failure.
take ownership of new floating single-master operation roles.
figuration information, and is unable to determine
the ownership of floating single-master operation
roles.
ership of one or more floating single-master operation roles to other servers.
cation operation.
replication operation at this time.
tion operation is invalid.
operation is invalid.
tion operation already exists.
error.
inconsistency.
could not be contacted.
with an invalid instance type.
ory.
with the mail system.
TF661078 Version: 1.1
Page 79

Appendix
Error Description
decimal Hexadecimal Name
8448 0x00002100 ERROR_DS_DRA_REF_ALREADY_EXISTS The replication reference information for the tar-
8449 0x00002101 ERROR_DS_DRA_REF_NOT_FOUND The replication reference information for the tar-
8450 0x00002102 ERROR_DS_DRA_OBJ_IS_REP_SOURCE The naming context cannot be removed because
8451 0x00002103 ERROR_DS_DRA_DB_ERROR The replication operation encountered a database
8452 0x00002104 ERROR_DS_DRA_NO_REPLICA The naming context is in the process of being re-
8453 0x00002105 ERROR_DS_DRA_ACCESS_DENIED Replication access was denied.
8454 0x00002106 ERROR_DS_DRA_NOT_SUPPORTED The requested operation is not supported by this
8455 0x00002107 ERROR_DS_DRA_RPC_CANCELLED The replication remote procedure call was can-
8456 0x00002108 ERROR_DS_DRA_SOURCE_DISABLED The source server is currently rejecting replication
8457 0x00002109 ERROR_DS_DRA_SINK_DISABLED The destination server is currently rejecting repli-
8458 0x0000210A ERROR_DS_DRA_NAME_COLLISION The replication operation failed due to a collision
8459 0x0000210B ERROR_DS_DRA_SOURCE_REINSTALLED The replication source has been reinstalled.
8460 0x0000210C ERROR_DS_DRA_MISSING_PARENT The replication operation failed because a re-
8461 0x0000210D ERROR_DS_DRA_PREEMPTED The replication operation was preempted.
8462 0x0000210E ERROR_DS_DRA_ABANDON_SYNC The replication synchronization attempt was
8463 0x0000210F ERROR_DS_DRA_SHUTDOWN The replication operation was terminated because
8464 0x00002110 ERROR_DS_DRA_INCOMPATIBLE_PAR-
TIAL_SET
8465 0x00002111 ERROR_DS_DRA_SOURCE_IS_PAR-
TIAL_REPLICA
8466 0x00002112 ERROR_DS_DRA_EXTN_CONNECTION_FAILED The server specified for this replication operation
8467 0x00002113 ERROR_DS_INSTALL_SCHEMA_MISMATCH The version of the Active Directory schema of the
8468 0x00002114 ERROR_DS_DUP_LINK_ID Schema update failed: An attribute with the same
8469 0x00002115 ERROR_DS_NAME_ERROR_RESOLVING Name translation: Generic processing error.
8470 0x00002116 ERROR_DS_NAME_ERROR_NOT_FOUND Name translation: Could not find the name or in-
8471 0x00002117 ERROR_DS_NAME_ERROR_NOT_UNIQUE Name translation: Input name mapped to more
8472 0x00002118 ERROR_DS_NAME_ERROR_NO_MAPPING Name translation: Input name found, but not the
8473 0x00002119 ERROR_DS_NAME_ERROR_DOMAIN_ONLY Name translation: Unable to resolve completely,
8474 0x0000211A ERROR_DS_NAME_ERROR_NO_SYNTACTI-
CAL_MAPPING
8475 0x0000211B ERROR_DS_CONSTRUCTED_ATT_MOD Modification of a constructed att is not allowed.
8476 0x0000211C ERROR_DS_WRONG_OM_OBJ_CLASS The OM-Object-Class specified is incorrect for an
8477 0x0000211D ERROR_DS_DRA_REPL_PENDING The replication request has been posted; waiting
get server already exists.
get server does not exist.
it is replicated to another server.
error.
moved or is not replicated from the specified
server.
version of the directory service.
celled.
requests.
cation requests.
of object names.
quired parent object is missing.
abandoned because of a lack of updates.
the system is shutting down.
The replication synchronization attempt failed as
the destination partial attribute set is not a subset
of source partial attribute set.
The replication synchronization attempt failed because a master replica attempted to sync from a
partial replica.
was contacted, but that server was unable to contact an additional server needed to complete the
operation.
source forest is not compatible with the version of
Active Directory on this computer. You must upgrade the operating system on a domain controller in the source forest before this computer
can be added as a domain controller to that forest.
link identifier already exists.
sufficient right to see name.
than one output name.
associated output format.
only the domain was found.
Name translation: Unable to perform purely syntactical mapping at the client without going out to
the wire.
attribute with the specified syntax.
for reply.
TF6610 79Version: 1.1
Page 80

Appendix
Error Description
decimal Hexadecimal Name
8478 0x0000211E ERROR_DS_DS_REQUIRED The requested operation requires a directory ser-
8479 0x0000211F ERROR_DS_INVALID_LDAP_DISPLAY_NAME The LDAP display name of the class or attribute
8480 0x00002120 ERROR_DS_NON_BASE_SEARCH The requested search operation is only supported
8481 0x00002121 ERROR_DS_CANT_RETRIEVE_ATTS The search failed to retrieve attributes from the
8482 0x00002122 ERROR_DS_BACKLINK_WITHOUT_LINK The schema update operation tried to add a back-
8483 0x00002123 ERROR_DS_EPOCH_MISMATCH Source and destination of a cross domain move
8484 0x00002124 ERROR_DS_SRC_NAME_MISMATCH Source and destination of a cross domain move
8485 0x00002125 ERROR_DS_SRC_AND_DST_NC_IDENTICAL Source and destination of a cross domain move
8486 0x00002126 ERROR_DS_DST_NC_MISMATCH Source and destination for a cross domain move
8487 0x00002127 ERROR_DS_NOT_AUTHORITIVE_FOR_DST_NC Destination of a cross domain move is not author-
8488 0x00002128 ERROR_DS_SRC_GUID_MISMATCH Source and destination of a cross domain move
8489 0x00002129 ERROR_DS_CANT_MOVE_DELETED_OBJECT Object being moved across domains is already
8490 0x0000212A ERROR_DS_PDC_OPERATION_IN_PROGRESS Another operation which requires exclusive ac-
8491 0x0000212B ERROR_DS_CROSS_DOMAIN_CLEANUP_REQD A cross domain move operation failed such that
8492 0x0000212C ERROR_DS_ILLEGAL_XDOM_MOVE_OPERA-
TION
8493 0x0000212D ERROR_DS_CANT_WITH_ACCT_GROUP_MEM-
BERSHPS
8494 0x0000212E ERROR_DS_NC_MUST_HAVE_NC_PARENT A naming context head must be the immediate
8495 0x0000212F ERROR_DS_CR_IMPOSSIBLE_TO_VALIDATE The directory cannot validate the proposed nam-
8496 0x00002130 ERROR_DS_DST_DOMAIN_NOT_NATIVE Destination domain must be in native mode.
vice, and none was available.
contains non-ASCII characters.
for base searches.
database.
ward link attribute that has no corresponding forward link.
do not agree on the object's epoch number. Either
source or destination does not have the latest version of the object.
do not agree on the object's current name. Either
source or destination does not have the latest version of the object.
operation are identical. Caller should use local
move operation instead of cross domain move operation.
are not in agreement on the naming contexts in
the forest. Either source or destination does not
have the latest version of the Partitions container.
itative for the destination naming context.
do not agree on the identity of the source object.
Either source or destination does not have the latest version of the source object.
known to be deleted by the destination server.
The source server does not have the latest version of the source object.
cess to the PDC PSMO is already in progress.
the two versions of the moved object exist - one
each in the source and destination domains. The
destination object needs to be removed to restore
the system to a consistent state.
This object may not be moved across domain
boundaries either because cross domain moves
for this class are disallowed, or the object has
some special characteristics, eg: trust account or
restricted RID, which prevent its move.
Can't move objects with memberships across domain boundaries as once moved, this would violate the membership conditions of the account
group. Remove the object from any account
group memberships and retry.
child of another naming context head, not of an
interior node.
ing context name because it does not hold a
replica of the naming context above the proposed
naming context. Please ensure that the domain
naming master role is held by a server that is configured as a global catalog server, and that the
server is up to date with its replication partners.
(Applies only to Windows 2000 Domain Naming
masters)
TF661080 Version: 1.1
Page 81

Appendix
Error Description
decimal Hexadecimal Name
8497 0x00002131 ERROR_DS_MISSING_INFRASTRUCTURE_CON-
TAINER
8498 0x00002132 ERROR_DS_CANT_MOVE_ACCOUNT_GROUP Cross-domain move of non-empty account groups
8499 0x00002133 ERROR_DS_CANT_MOVE_RESOURCE_GROUP Cross-domain move of non-empty resource
The operation can not be performed because the
server does not have an infrastructure container
in the domain of interest.
is not allowed.
groups is not allowed.
TF6610 81Version: 1.1
Page 82

Appendix
Error Description
decimal Hexadecimal Name
8500 0x00002134 ERROR_DS_INVALID_SEARCH_FLAG The search flags for the attribute are invalid. The
8501 0x00002135 ERROR_DS_NO_TREE_DELETE_ABOVE_NC Tree deletions starting at an object which has an
8502 0x00002136 ER-
ROR_DS_COULDNT_LOCK_TREE_FOR_DELETE
8503 0x00002137 ERROR_DS_COULDNT_IDENTIFY_OB-
JECTS_FOR_TREE_DELETE
8504 0x00002138 ERROR_DS_SAM_INIT_FAILURE Security Accounts Manager initialization failed be-
8505 0x00002139 ERROR_DS_SENSITIVE_GROUP_VIOLATION Only an administrator can modify the membership
8506 0x0000213A ERROR_DS_CANT_MOD_PRIMARYGROUPID Cannot change the primary group ID of a domain
8507 0x0000213B ERROR_DS_ILLEGAL_BASE_SCHEMA_MOD An attempt is made to modify the base schema.
8508 0x0000213C ERROR_DS_NONSAFE_SCHEMA_CHANGE Adding a new mandatory attribute to an existing
8509 0x0000213D ERROR_DS_SCHEMA_UPDATE_DISALLOWED Schema update is not allowed on this DC be-
8510 0x0000213E ERROR_DS_CANT_CREATE_UNDER_SCHEMA An object of this class cannot be created under
8511 0x0000213F ERROR_DS_INSTALL_NO_SRC_SCH_VERSION The replica/child install failed to get the objectVer-
8512 0x00002140 ERROR_DS_INSTALL_NO_SCH_VER-
SION_IN_INIFILE
8513 0x00002141 ERROR_DS_INVALID_GROUP_TYPE The specified group type is invalid.
8514 0x00002142 ERROR_DS_NO_NEST_GLOBAL-
GROUP_IN_MIXEDDOMAIN
8515 0x00002143 ERROR_DS_NO_NEST_LOCAL-
GROUP_IN_MIXEDDOMAIN
8516 0x00002144 ERROR_DS_GLOBAL_CANT_HAVE_LO-
CAL_MEMBER
8517 0x00002145 ERROR_DS_GLOBAL_CANT_HAVE_UNIVER-
SAL_MEMBER
8518 0x00002146 ERROR_DS_UNIVERSAL_CANT_HAVE_LO-
CAL_MEMBER
8519 0x00002147 ERROR_DS_GLOBAL_CANT_HAVE_CROSSDO-
MAIN_MEMBER
8520 0x00002148 ERROR_DS_LOCAL_CANT_HAVE_CROSSDO-
MAIN_LOCAL_MEMBER
8521 0x00002149 ERROR_DS_HAVE_PRIMARY_MEMBERS A group with primary members cannot change to
8522 0x0000214A ERROR_DS_STRING_SD_CONVERSION_FAILED The schema cache load failed to convert the
8523 0x0000214B ERROR_DS_NAMING_MASTER_GC Only DSAs configured to be Global Catalog
8524 0x0000214C ERROR_DS_LOOKUP_FAILURE The DSA operation is unable to proceed because
ANR bit is valid only on attributes of Unicode or
Teletex strings.
NC head as a descendant are not allowed.
The directory service failed to lock a tree in preparation for a tree deletion because the tree was in
use.
The directory service failed to identify the list of
objects to delete while attempting a tree deletion.
cause of the following error: %1. Error Status: 0x
%2. Click OK to shut down the system and reboot
into Directory Services Restore Mode. Check the
event log for detailed information.
list of an administrative group.
controller account.
class, deleting a mandatory attribute from an existing class, or adding an optional attribute to the
special class Top that is not a backlink attribute
(directly or through inheritance, for example, by
adding or deleting an auxiliary class) is not allowed.
cause the DC is not the schema FSMO Role
Owner.
the schema container. You can only create attribute-schema and class-schema objects under
the schema container.
sion attribute on the schema container on the
source DC. Either the attribute is missing on the
schema container or the credentials supplied do
not have permission to read it.
The replica/child install failed to read the objectVersion attribute in the SCHEMA section of
the file schema.ini in the system32 directory.
Cannot nest global groups in a mixed domain if
the group is security-enabled.
Cannot nest local groups in a mixed domain if the
group is security-enabled.
A global group cannot have a local group as a
member.
A global group cannot have a universal group as
a member.
A universal group cannot have a local group as a
member.
A global group cannot have a cross-domain member.
A local group cannot have another cross-domain
local group as a member.
a security-disabled group.
string default SD on a class-schema object.
servers should be allowed to hold the Domain
Naming Master FSMO role. (Applies only to Windows 2000 servers)
of a DNS lookup failure.
TF661082 Version: 1.1
Page 83

Appendix
Error Description
decimal Hexadecimal Name
8525 0x0000214D ERROR_DS_COULDNT_UPDATE_SPNS While processing a change to the DNS Host
8526 0x0000214E ERROR_DS_CANT_RETRIEVE_SD The Security Descriptor attribute could not be
8527 0x0000214F ERROR_DS_KEY_NOT_UNIQUE. The object requested was not found, but an object
8528 0x00002150 ERROR_DS_WRONG_LINKED_ATT_SYNTAX The syntax of the linked attributed being added is
8529 0x00002151 ERROR_DS_SAM_NEED_BOOTKEY_PASS-
WORD
8530 0x00002152 ERROR_DS_SAM_NEED_BOOTKEY_FLOPPY Security Account Manager needs to get the boot
8531 0x00002153 ERROR_DS_CANT_START Directory Service cannot start.
8532 0x00002154 ERROR_DS_INIT_FAILURE Directory Services could not start.
8533 0x00002155 ERROR_DS_NO_PKT_PRIVACY_ON_CONNEC-
TION
8534 0x00002156 ERROR_DS_SOURCE_DOMAIN_IN_FOREST The source domain may not be in the same forest
8535 0x00002157 ERROR_DS_DESTINATION_DO-
MAIN_NOT_IN_FOREST
8536 0x00002158 ERROR_DS_DESTINATION_AUDITING_NOT_EN-
ABLED
8537 0x00002159 ERROR_DS_CANT_FIND_DC_FOR_SRC_DO-
MAIN
8538 0x0000215A ERROR_DS_SRC_OBJ_NOT_GROUP_OR_USER The source object must be a group or user.
8539 0x0000215B ERROR_DS_SRC_SID_EXISTS_IN_FOREST The source object's SID already exists in destina-
8540 0x0000215C ERROR_DS_SRC_AND_DST_OB-
JECT_CLASS_MISMATCH
8541 0x0000215D ERROR_SAM_INIT_FAILURE Security Accounts Manager initialization failed be-
8542 0x0000215E ERROR_DS_DRA_SCHEMA_INFO_SHIP Schema information could not be included in the
8543 0x0000215F ERROR_DS_DRA_SCHEMA_CONFLICT The replication operation could not be completed
8544 0x00002160 ERROR_DS_DRA_EARLIER_SCHEMA_CONLICT The replication operation could not be completed
8545 0x00002161 ERROR_DS_DRA_OBJ_NC_MISMATCH The replication update could not be applied be-
8546 0x00002162 ERROR_DS_NC_STILL_HAS_DSAS The requested domain could not be deleted be-
8547 0x00002163 ERROR_DS_GC_REQUIRED The requested operation can be performed only
8548 0x00002164 ERROR_DS_LOCAL_MEMBER_OF_LO-
CAL_ONLY
8549 0x00002165 ERROR_DS_NO_FPO_IN_UNIVERSAL_GROUPS Foreign security principals cannot be members of
8550 0x00002166 ERROR_DS_CANT_ADD_TO_GC The attribute is not allowed to be replicated to the
8551 0x00002167 ERROR_DS_NO_CHECKPOINT_WITH_PDC The checkpoint with the PDC could not be taken
8552 0x00002168 ERROR_DS_SOURCE_AUDITING_NOT_EN-
ABLED
8553 0x00002169 ERROR_DS_CANT_CREATE_IN_NONDO-
MAIN_NC
Name for an object, the Service Principal Name
values could not be kept in sync.
read.
with that key was found.
incorrect. Forward links can only have syntax
2.5.5.1, 2.5.5.7, and 2.5.5.14, and backlinks can
only have syntax 2.5.5.1.
Security Account Manager needs to get the boot
password.
key from floppy disk.
The connection between client and server requires packet privacy or better.
as destination.
The destination domain must be in the forest.
The operation requires that destination domain
auditing be enabled.
The operation couldn't locate a DC for the source
domain.
tion forest.
The source and destination object must be of the
same type.
cause of the following error: %1. Error Status: 0x
%2. Click OK to shut down the system and reboot
into Safe Mode. Check the event log for detailed
information.
replication request.
due to a schema incompatibility.
due to a previous schema incompatibility.
cause either the source or the destination has not
yet received information regarding a recent crossdomain move operation.
cause there exist domain controllers that still host
this domain.
on a global catalog server.
A local group can only be a member of other local
groups in the same domain.
universal groups.
GC because of security reasons.
because there are too many modifications being
processed currently.
The operation requires that source domain auditing be enabled.
Security principal objects can only be created inside domain naming contexts.
TF6610 83Version: 1.1
Page 84

Appendix
Error Description
decimal Hexadecimal Name
8554 0x0000216A ERROR_DS_INVALID_NAME_FOR_SPN A Service Principal Name (SPN) could not be
8555 0x0000216B ERROR_DS_FILTER_USES_CONTRUCTED_AT-
TRS
8556 0x0000216C ERROR_DS_UNICODEPWD_NOT_IN_QUOTES The unicodePwd attribute value must be enclosed
8557 0x0000216D ERROR_DS_MACHINE_ACCOUNT_QUOTA_EX-
CEEDED
8558 0x0000216E ERROR_DS_MUST_BE_RUN_ON_DST_DC For security reasons, the operation must be run
8559 0x0000216F ER-
ROR_DS_SRC_DC_MUST_BE_SP4_OR_GREATE
R
8560 0x00002170 ERROR_DS_CANT_TREE_DELETE_CRITI-
CAL_OBJ
8561 0x00002171 ERROR_DS_INIT_FAILURE_CONSOLE Directory Services could not start because of the
8562 0x00002172 ERROR_DS_SAM_INIT_FAILURE_CONSOLE Security Accounts Manager initialization failed be-
8563 0x00002173 ERROR_DS_FOREST_VERSION_TOO_HIGH This version of Windows is too old to support the
8564 0x00002174 ERROR_DS_DOMAIN_VERSION_TOO_HIGH This version of Windows is too old to support the
8565 0x00002175 ERROR_DS_FOREST_VERSION_TOO_LOW This version of Windows no longer supports the
8566 0x00002176 ERROR_DS_DOMAIN_VERSION_TOO_LOW This version of Windows no longer supports the
8567 0x00002177 ERROR_DS_INCOMPATIBLE_VERSION The version of Windows is incompatible with the
8568 0x00002178 ERROR_DS_LOW_DSA_VERSION The behavior version cannot be increased to the
8569 0x00002179 ERROR_DS_NO_BEHAVIOR_VER-
SION_IN_MIXEDDOMAIN
8570 0x0000217A ERROR_DS_NOT_SUPPORTED_SORT_ORDER The sort order requested is not supported.
8571 0x0000217B ERROR_DS_NAME_NOT_UNIQUE Found an object with a non unique name.
8572 0x0000217C ERROR_DS_MACHINE_ACCOUNT_CRE-
ATED_PRENT4
8573 0x0000217D ERROR_DS_OUT_OF_VERSION_STORE The database is out of version store.
8574 0x0000217E ERROR_DS_INCOMPATIBLE_CONTROLS_USED Unable to continue operation because multiple
8575 0x0000217F ERROR_DS_NO_REF_DOMAIN Unable to find a valid security descriptor refer-
constructed because the provided hostname is
not in the necessary format.
A Filter was passed that uses constructed attributes.
in double quotes.
Your computer could not be joined to the domain.
You have exceeded the maximum number of
computer accounts you are allowed to create in
this domain. Contact your system administrator to
have this limit reset or increased.
on the destination DC.
For security reasons, the source DC must be
NT4SP4 or greater.
Critical Directory Service System objects cannot
be deleted during tree delete operations. The tree
delete may have been partially performed.
following error: %1. Error Status: 0x%2. Please
click OK to shutdown the system. You can use
the recovery console to diagnose the system further.
cause of the following error: %1. Error Status: 0x
%2. Please click OK to shutdown the system. You
can use the recovery console to diagnose the
system further.
current directory forest behavior. You must upgrade the operating system on this server before
it can become a domain controller in this forest.
current domain behavior. You must upgrade the
operating system on this server before it can become a domain controller in this domain.
behavior version in use in this directory forest.
You must advance the forest behavior version before this server can become a domain controller in
the forest.
behavior version in use in this domain. You must
advance the domain behavior version before this
server can become a domain controller in the domain.
behavior version of the domain or forest.
requested value because Domain Controllers still
exist with versions lower than the requested
value.
The behavior version value cannot be increased
while the domain is still in mixed domain mode.
You must first change the domain to native mode
before increasing the behavior version.
The machine account was created pre-NT4. The
account needs to be recreated.
conflicting controls were used.
ence domain for this partition.
TF661084 Version: 1.1
Page 85

Appendix
Error Description
decimal Hexadecimal Name
8576 0x00002180 ERROR_DS_RESERVED_LINK_ID Schema update failed: The link identifier is re-
8577 0x00002181 ERROR_DS_LINK_ID_NOT_AVAILABLE Schema update failed: There are no link identi-
8578 0x00002182 ERROR_DS_AG_CANT_HAVE_UNIVER-
SAL_MEMBER
8579 0x00002183 ERROR_DS_MODIFYDN_DISALLOWED_BY_IN-
STANCE_TYPE
8580 0x00002184 ERROR_DS_NO_OB-
JECT_MOVE_IN_SCHEMA_NC
8581 0x00002185 ERROR_DS_MODIFYDN_DISAL-
LOWED_BY_FLAG
8582 0x00002186 ERROR_DS_MODIFYDN_WRONG_GRANDPAR-
ENT
8583 0x00002187 ERROR_DS_NAME_ERROR_TRUST_REFERRAL Unable to resolve completely, a referral to another
8584 0x00002188 ERROR_NOT_SUPPORTED_ON_STAN-
DARD_SERVER
8585 0x00002189 ERROR_DS_CANT_ACCESS_RE-
MOTE_PART_OF_AD
8586 0x0000218A ERROR_DS_CR_IMPOSSIBLE_TO_VALIDATE_V2 The directory cannot validate the proposed nam-
8587 0x0000218B ERROR_DS_THREAD_LIMIT_EXCEEDED The thread limit for this request was exceeded.
8588 0x0000218C ERROR_DS_NOT_CLOSEST The Global catalog server is not in the closet site.
served.
fiers available.
An account group can not have a universal group
as a member.
Rename or move operations on naming context
heads or read-only objects are not allowed.
Move operations on objects in the schema naming context are not allowed.
A system flag has been set on the object and
does not allow the object to be moved or renamed.
This object is not allowed to change its grandparent container. Moves are not forbidden on this object, but are restricted to sibling containers.
forest is generated.
The requested action is not supported on standard server.
Could not access a partition of the Active Directory located on a remote server. Make sure at
least one server is running for the partition in
question.
ing context (or partition) name because it does
not hold a replica nor can it contact a replica of
the naming context above the proposed naming
context. Please ensure that the parent naming
context is properly registered in DNS, and at least
one replica of this naming context is reachable by
the Domain Naming master.
TF6610 85Version: 1.1
Page 86

Appendix
Error Description
decimal Hexadecimal Name
9001 0x00002329 DNS_ERROR_RCODE_FORMAT_ERROR DNS server unable to interpret format.
9002 0x0000232A DNS_ERROR_RCODE_SERVER_FAILURE DNS server failure.
9003 0x0000232B DNS_ERROR_RCODE_NAME_ERROR DNS name does not exist.
9004 0x0000232C DNS_ERROR_RCODE_NOT_IMPLEMENTED DNS request not supported by name server.
9005 0x0000232D DNS_ERROR_RCODE_REFUSED DNS operation refused.
9006 0x0000232E DNS_ERROR_RCODE_YXDOMAIN DNS name that ought not exist, does exist.
9007 0x0000232F DNS_ERROR_RCODE_YXRRSET DNS RR set that ought not exist, does exist.
9008 0x00002330 DNS_ERROR_RCODE_NXRRSET DNS RR set that ought to exist, does not exist.
9009 0x00002331 DNS_ERROR_RCODE_NOTAUTH DNS server not authoritative for zone.
9010 0x00002332 DNS_ERROR_RCODE_NOTZONE DNS name in update or prereq is not in zone.
9016 0x00002338 DNS_ERROR_RCODE_BADSIG DNS signature failed to verify.
9017 0x00002339 DNS_ERROR_RCODE_BADKEY DNS bad key.
9018 0x0000233A DNS_ERROR_RCODE_BADTIME DNS signature validity expired.
9501 0x0000251D DNS_INFO_NO_RECORDS No records found for given DNS query.
9502 0x0000251E DNS_ERROR_BAD_PACKET Bad DNS packet.
9503 0x0000251F DNS_ERROR_NO_PACKET No DNS packet.
9504 0x00002520 DNS_ERROR_RCODE DNS error, check rcode.
9505 0x00002521 DNS_ERROR_UNSECURE_PACKET Unsecured DNS packet.
9551 0x0000254F DNS_ERROR_INVALID_TYPE Invalid DNS type.
9552 0x00002550 DNS_ERROR_INVALID_IP_ADDRESS Invalid IP address.
9553 0x00002551 DNS_ERROR_INVALID_PROPERTY Invalid property.
9554 0x00002552 DNS_ERROR_TRY_AGAIN_LATER Try DNS operation again later.
9555 0x00002553 DNS_ERROR_NOT_UNIQUE Record for given name and type is not unique.
9556 0x00002554 DNS_ERROR_NON_RFC_NAME DNS name does not comply with RFC specifica-
9557 0x00002555 DNS_STATUS_FQDN DNS name is a fully-qualified DNS name.
9558 0x00002556 DNS_STATUS_DOTTED_NAME DNS name is dotted (multi-label).
9559 0x00002557 DNS_STATUS_SINGLE_PART_NAME DNS name is a single-part name.
9560 0x00002558 DNS_ERROR_INVALID_NAME_CHAR DSN name contains an invalid character.
9561 0x00002559 DNS_ERROR_NUMERIC_NAME DNS name is entirely numeric.
9601 0x00002581 DNS_ERROR_ZONE_DOES_NOT_EXIST DNS zone does not exist.
9602 0x00002582 DNS_ERROR_NO_ZONE_INFO DNS zone information not available.
9603 0x00002583 DNS_ERROR_INVALID_ZONE_OPERATION Invalid operation for DNS zone.
9604 0x00002584 DNS_ERROR_ZONE_CONFIGURATION_ERROR Invalid DNS zone configuration.
9605 0x00002585 DNS_ERROR_ZONE_HAS_NO_SOA_RECORD DNS zone has no start of authority (SOA) record.
9606 0x00002586 DNS_ERROR_ZONE_HAS_NO_NS_RECORDS DNS zone has no name server (NS) record.
9607 0x00002587 DNS_ERROR_ZONE_LOCKED DNS zone is locked.
9608 0x00002588 DNS_ERROR_ZONE_CREATION_FAILED DNS zone creation failed.
9609 0x00002589 DNS_ERROR_ZONE_ALREADY_EXISTS DNS zone already exists.
9610 0x0000258A DNS_ERROR_AUTOZONE_ALREADY_EXISTS DNS automatic zone already exists.
9611 0x0000258B DNS_ERROR_INVALID_ZONE_TYPE Invalid DNS zone type.
9612 0x0000258C DNS_ERROR_SECONDARY_REQUIRES_MAS-
TER_IP
9613 0x0000258D DNS_ERROR_ZONE_NOT_SECONDARY DNS zone not secondary.
9614 0x0000258E DNS_ERROR_NEED_SECONDARY_ADDRESSES Need secondary IP address.
9615 0x0000258F DNS_ERROR_WINS_INIT_FAILED WINS initialization failed.
9616 0x00002590 DNS_ERROR_NEED_WINS_SERVERS Need WINS servers.
9617 0x00002591 DNS_ERROR_NBSTAT_INIT_FAILED NBTSTAT initialization call failed.
9618 0x00002592 DNS_ERROR_SOA_DELETE_INVALID Invalid delete of start of authority (SOA)
9619 0x00002593 DNS_ERROR_FORWARDER_ALREADY_EXISTS A conditional forwarding zone already exists for
9651 0x000025B3 DNS_ERROR_PRIMARY_REQUIRES_DATAFILE Primary DNS zone requires datafile.
9652 0x000025B4 DNS_ERROR_INVALID_DATAFILE_NAME Invalid datafile name for DNS zone.
9653 0x000025B5 DNS_ERROR_DATAFILE_OPEN_FAILURE Failed to open datafile for DNS zone.
9654 0x000025B6 DNS_ERROR_FILE_WRITEBACK_FAILED Failed to write datafile for DNS zone.
9655 0x000025B7 DNS_ERROR_DATAFILE_PARSING Failure while reading datafile for DNS zone.
9701 0x000025E5 DNS_ERROR_RECORD_DOES_NOT_EXIST DNS record does not exist.
9702 0x000025E6 DNS_ERROR_RECORD_FORMAT DNS record format error.
tions.
Secondary DNS zone requires master IP address.
that name.
TF661086 Version: 1.1
Page 87

Appendix
Error Description
decimal Hexadecimal Name
9703 0x000025E7 DNS_ERROR_NODE_CREATION_FAILED Node creation failure in DNS.
9704 0x000025E8 DNS_ERROR_UNKNOWN_RECORD_TYPE Unknown DNS record type.
9705 0x000025E9 DNS_ERROR_RECORD_TIMED_OUT DNS record timed out.
9706 0x000025EA DNS_ERROR_NAME_NOT_IN_ZONE Name not in DNS zone.
9707 0x000025EB DNS_ERROR_CNAME_LOOP CNAME loop detected.
9708 0x000025EC DNS_ERROR_NODE_IS_CNAME Node is a CNAME DNS record.
9709 0x000025ED DNS_ERROR_CNAME_COLLISION A CNAME record already exists for given name.
9710 0x000025EE DNS_ERROR_RECORD_ONLY_AT_ZONE_ROOT Record only at DNS zone root.
9711 0x000025EF DNS_ERROR_RECORD_ALREADY_EXISTS DNS record already exists.
9712 0x000025F0 DNS_ERROR_SECONDARY_DATA Secondary DNS zone data error.
9713 0x000025F1 DNS_ERROR_NO_CREATE_CACHE_DATA Could not create DNS cache data.
9714 0x000025F2 DNS_ERROR_NAME_DOES_NOT_EXIST DNS name does not exist.
9715 0x000025F3 DNS_WARNING_PTR_CREATE_FAILED Could not create pointer (PTR) record.
9716 0x000025F4 DNS_WARNING_DOMAIN_UNDELETED DNS domain was undeleted.
9717 0x000025F5 DNS_ERROR_DS_UNAVAILABLE The directory service is unavailable.
9718 0x000025F6 DNS_ERROR_DS_ZONE_ALREADY_EXISTS DNS zone already exists in the directory service.
9719 0x000025F7 DNS_ERROR_NO_BOOTFILE_IF_DS_ZONE DNS server not creating or reading the boot file
9751 0x00002617 DNS_INFO_AXFR_COMPLETE DNS AXFR (zone transfer) complete.
9752 0x00002618 DNS_ERROR_AXFR DNS zone transfer failed.
9753 0x00002619 DNS_INFO_ADDED_LOCAL_WINS Added local WINS server.
9801 0x00002649 DNS_STATUS_CONTINUE_NEEDED Secure update call needs to continue update re-
9851 0x0000267B DNS_ERROR_NO_TCPIP TCP/IP network protocol not installed.
9852 0x0000267C DNS_ERROR_NO_DNS_SERVERS No DNS servers configured for local system.
9901 0x000026AD DNS_ERROR_DP_DOES_NOT_EXIST The specified directory partition does not exist.
9902 0x000026AE DNS_ERROR_DP_ALREADY_EXISTS The specified directory partition already exists.
9903 0x000026AF DNS_ERROR_DP_NOT_ENLISTED The DS is not enlisted in the specified directory
9904 0x000026B0 DNS_ERROR_DP_ALREADY_ENLISTED The DS is already enlisted in the specified direc-
for the directory service integrated DNS zone.
quest.
partition.
tory partition.
TF6610 87Version: 1.1
Page 88

Appendix
Error Description
decimal Hexadecimal Name
10004 0x00002714 WSAEINTR A blocking operation was interrupted by a call to
10009 0x00002719 WSAEBADF The file handle supplied is not valid.
10013 0x0000271D WSAEACCES An attempt was made to access a socket in a way
10014 0x0000271E WSAEFAULT The system detected an invalid pointer address in
10022 0x00002726 WSAEINVAL An invalid argument was supplied.
10024 0x00002728 WSAEMFILE Too many open sockets.
10035 0x00002733 WSAEWOULDBLOCK A non-blocking socket operation could not be
10036 0x00002734 WSAEINPROGRESS A blocking operation is currently executing.
10037 0x00002735 WSAEALREADY An operation was attempted on a non-blocking
10038 0x00002736 WSAENOTSOCK An operation was attempted on something that is
10039 0x00002737 WSAEDESTADDRREQ A required address was omitted from an operation
10040 0x00002738 WSAEMSGSIZE A message sent on a datagram socket was larger
10041 0x00002739 WSAEPROTOTYPE A protocol was specified in the socket function
10042 0x0000273A WSAENOPROTOOPT An unknown, invalid, or unsupported option or
10043 0x0000273B WSAEPROTONOSUPPORT The requested protocol has not been configured
10044 0x0000273C WSAESOCKTNOSUPPORT The support for the specified socket type does not
10045 0x0000273D WSAEOPNOTSUPP The attempted operation is not supported for the
10046 0x0000273E WSAEPFNOSUPPORT The protocol family has not been configured into
10047 0x0000273F WSAEAFNOSUPPORT An address incompatible with the requested pro-
10048 0x00002740 WSAEADDRINUSE Only one usage of each socket address (protocol/
10049 0x00002741 WSAEADDRNOTAVAIL The requested address is not valid in its context.
10050 0x00002742 WSAENETDOWN A socket operation encountered a dead network.
10051 0x00002743 WSAENETUNREACH A socket operation was attempted to an unreach-
10052 0x00002744 WSAENETRESET The connection has been broken due to keep-
10053 0x00002745 WSAECONNABORTED An established connection was aborted by the
10054 0x00002746 WSAECONNRESET An existing connection was forcibly closed by the
10055 0x00002747 WSAENOBUFS An operation on a socket could not be performed
10056 0x00002748 WSAEISCONN A connect request was made on an already con-
10057 0x00002749 WSAENOTCONN A request to send or receive data was disallowed
10058 0x0000274A WSAESHUTDOWN A request to send or receive data was disallowed
10059 0x0000274B WSAETOOMANYREFS Too many references to some kernel object.
WSACancelBlockingCall.
forbidden by its access permissions.
attempting to use a pointer argument in a call.
completed immediately.
socket that already had an operation in progress.
not a socket.
on a socket.
than the internal message buffer or some other
network limit, or the buffer used to receive a datagram into was smaller than the datagram itself.
call that does not support the semantics of the
socket type requested.
level was specified in a getsockopt or setsockopt
call.
into the system, or no implementation for it exists.
exist in this address family.
type of object referenced.
the system or no implementation for it exists.
tocol was used.
network address/port) is normally permitted.
able network.
alive activity detecting a failure while the operation was in progress.
software in your host machine.
remote host.
because the system lacked sufficient buffer space
or because a queue was full.
nected socket.
because the socket is not connected and (when
sending on a datagram socket using a sendto
call) no address was supplied.
because the socket had already been shut down
in that direction with a previous shutdown call.
TF661088 Version: 1.1
Page 89

Appendix
Error Description
decimal Hexadecimal Name
10060 0x0000274C WSAETIMEDOUT A connection attempt failed because the con-
10061 0x0000274D WSAECONNREFUSED No connection could be made because the target
10062 0x0000274E WSAELOOP Cannot translate name.
10063 0x0000274F WSAENAMETOOLONG Name component or name was too long.
10064 0x00002750 WSAEHOSTDOWN A socket operation failed because the destination
10065 0x00002751 WSAEHOSTUNREACH A socket operation was attempted to an unreach-
10066 0x00002752 WSAENOTEMPTY Cannot remove a directory that is not empty.
10067 0x00002753 WSAEPROCLIM A Windows Sockets implementation may have a
10068 0x00002754 WSAEUSERS Ran out of quota.
10069 0x00002755 WSAEDQUOT Ran out of disk quota.
10070 0x00002756 WSAESTALE File handle reference is no longer available.
10071 0x00002757 WSAEREMOTE Item is not available locally.
10091 0x0000276B WSASYSNOTREADY WSAStartup cannot function at this time because
10092 0x0000276C WSAVERNOTSUPPORTED The Windows Sockets version requested is not
10093 0x0000276D WSANOTINITIALISED Either the application has not called WSAStartup,
10101 0x00002775 WSAEDISCON Returned by WSARecv or WSARecvFrom to indi-
10102 0x00002776 WSAENOMORE No more results can be returned by WSA-
10103 0x00002777 WSAECANCELLED A call to WSALookupServiceEnd was made while
10104 0x00002778 WSAEINVALIDPROCTABLE The procedure call table is invalid.
10105 0x00002779 WSAEINVALIDPROVIDER The requested service provider is invalid.
10106 0x0000277A WSAEPROVIDERFAILEDINIT The requested service provider could not be
10107 0x0000277B WSASYSCALLFAILURE A system call that should never fail has failed.
10108 0x0000277C WSASERVICE_NOT_FOUND No such service is known. The service cannot be
10109 0x0000277D WSATYPE_NOT_FOUND The specified class was not found.
10110 0x0000277E WSA_E_NO_MORE No more results can be returned by WSA-
10111 0x0000277F WSA_E_CANCELLED A call to WSALookupServiceEnd was made while
10112 0x00002780 WSAEREFUSED A database query failed because it was actively
11001 0x00002AF9 WSAHOST_NOT_FOUND No such host is known.
11002 0x00002AFA WSATRY_AGAIN This is usually a temporary error during hostname
11003 0x00002AFB WSANO_RECOVERY A non-recoverable error occurred during a data-
11004 0x00002AFC WSANO_DATA The requested name is valid and was found in the
11005 0x00002AFD WSA_QOS_RECEIVERS At least one reserve has arrived.
11006 0x00002AFE WSA_QOS_SENDERS At least one path has arrived.
11007 0x00002AFF WSA_QOS_NO_SENDERS There are no senders.
11008 0x00002B00 WSA_QOS_NO_RECEIVERS There are no receivers.
11009 0x00002B01 WSA_QOS_REQUEST_CONFIRMED Reserve has been confirmed.
nected party did not properly respond after a period of time, or established connection failed because connected host has failed to respond.
machine actively refused it.
host was down.
able host.
limit on the number of applications that may use it
simultaneously.
the underlying system it uses to provide network
services is currently unavailable.
supported.
or WSAStartup failed.
cate the remote party has initiated a graceful
shutdown sequence.
LookupServiceNext.
this call was still processing. The call has been
canceled.
loaded or initialized.
found in the specified name space.
LookupServiceNext.
this call was still processing. The call has been
canceled.
refused.
resolution and means that the local server did not
receive a response from an authoritative server.
base lookup.
database, but it does not have the correct associated data being resolved for.
TF6610 89Version: 1.1
Page 90

Appendix
Error Description
decimal Hexadecimal Name
11010 0x00002B02 WSA_QOS_ADMISSION_FAILURE Error due to lack of resources.
11011 0x00002B03 WSA_QOS_POLICY_FAILURE Rejected for administrative reasons - bad creden-
11012 0x00002B04 WSA_QOS_BAD_STYLE Unknown or conflicting style.
11013 0x00002B05 WSA_QOS_BAD_OBJECT Problem with some part of the filterspec or
11014 0x00002B06 WSA_QOS_TRAFFIC_CTRL_ERROR Problem with some part of the flowspec.
11015 0x00002B07 WSA_QOS_GENERIC_ERROR General QOS error.
11016 0x00002B08 WSA_QOS_ESERVICETYPE An invalid or unrecognized service type was
11017 0x00002B09 WSA_QOS_EFLOWSPEC An invalid or inconsistent flowspec was found in
11018 0x00002B0A WSA_QOS_EPROVSPECBUF Invalid QOS provider-specific buffer.
11019 0x00002B0B WSA_QOS_EFILTERSTYLE An invalid QOS filter style was used.
11020 0x00002B0C WSA_QOS_EFILTERTYPE An invalid QOS filter type was used.
11021 0x00002B0D WSA_QOS_EFILTERCOUNT An incorrect number of QOS FILTERSPECs were
11022 0x00002B0E WSA_QOS_EOBJLENGTH An object with an invalid ObjectLength field was
11023 0x00002B0F WSA_QOS_EFLOWCOUNT An incorrect number of flow descriptors was spec-
11024 0x00002B10 WSA_QOS_EUNKNOWNPSOBJ An unrecognized object was found in the QOS
11025 0x00002B11 WSA_QOS_EPOLICYOBJ An invalid policy object was found in the QOS
11026 0x00002B12 WSA_QOS_EFLOWDESC An invalid QOS flow descriptor was found in the
11027 0x00002B13 WSA_QOS_EPSFLOWSPEC An invalid or inconsistent flowspec was found in
11028 0x00002B14 WSA_QOS_EPSFILTERSPEC An invalid FILTERSPEC was found in the QOS
11029 0x00002B15 WSA_QOS_ESDMODEOBJ An invalid shape discard mode object was found
11030 0x00002B16 WSA_QOS_ESHAPERATEOBJ An invalid shaping rate object was found in the
11031 0x00002B17 WSA_QOS_RESERVED_PETYPE A reserved policy element was found in the QOS
tials.
providerspecific buffer in general.
found in the flowspec.
the QOS structure.
specified in the FLOWDESCRIPTOR.
specified in the QOS provider-specific buffer.
ified in the QOS structure.
provider-specific buffer.
provider-specific buffer.
flow descriptor list.
the QOS provider-specific buffer.
provider-specific buffer.
in the QOS provider-specific buffer.
QOS provider-specific buffer.
provider-specific buffer.
TF661090 Version: 1.1
Page 91

Appendix
Error Description
decimal Hexadecimal Name
12000 0x00002EE0 ERROR_SXS_SECTION_NOT_FOUND The requested section was not present in the acti-
12001 0x00002EE1 ERROR_SXS_CANT_GEN_ACTCTX This application has failed to start because the
12002 0x00002EE2 ERROR_SXS_INVALID_ACTCTXDATA_FORMAT The application binding data format is invalid.
12003 0x00002EE3 ERROR_SXS_ASSEMBLY_NOT_FOUND The referenced assembly is not installed on your
12004 0x00002EE4 ERROR_SXS_MANIFEST_FORMAT_ERROR The manifest file does not begin with the required
12005 0x00002EE5 ERROR_SXS_MANIFEST_PARSE_ERROR The manifest file contains one or more syntax er-
12006 0x00002EE6 ERROR_SXS_ACTIVATION_CONTEXT_DIS-
ABLED
12007 0x00002EE7 ERROR_SXS_KEY_NOT_FOUND The requested lookup key was not found in any
12008 0x00002EE8 ERROR_SXS_VERSION_CONFLICT A component version required by the application
12009 0x00002EE9 ERROR_SXS_WRONG_SECTION_TYPE The type requested activation context section
12010 0x00002EEA ERROR_SXS_THREAD_QUERIES_DISABLED Lack of system resources has required isolated
12011 0x00002EEB ERROR_SXS_PROCESS_DEFAULT_AL-
READY_SET
12012 0x00002EEC ERROR_SXS_UNKNOWN_ENCODING_GROUP The encoding group identifier specified is not rec-
12013 0x00002EED ERROR_SXS_UNKNOWN_ENCODING The encoding requested is not recognized.
12014 0x00002EEE ERROR_SXS_INVALID_XML_NAMESPACE_URI The manifest contains a reference to an invalid
12015 0x00002EEF ERROR_SXS_ROOT_MANIFEST_DEPEN-
DENCY_NOT_INSTALLED
12016 0x00002EF0 ERROR_SXS_LEAF_MANIFEST_DEPEN-
DENCY_NOT_INSTALLED
12017 0x00002EF1 ERROR_SXS_INVALID_ASSEMBLY_IDEN-
TITY_ATTRIBUTE
12018 0x00002EF2 ERROR_SXS_MANIFEST_MISSING_REQUIRED_
DEFAULT_NAMESPACE
12019 0x00002EF3 ERROR_SXS_MANIFEST_INVALID_REQUIRED_
DEFAULT_NAMESPACE
12020 0x00002EF4 ERROR_SXS_PRIVATE_MANI-
FEST_CROSS_PATH_
WITH_REPARSE_POINT
12021 0x00002EF5 ERROR_SXS_DUPLICATE_DLL_NAME Two or more components referenced directly or
12022 0x00002EF6 ERROR_SXS_DUPLICATE_WINDOW-
CLASS_NAME
12023 0x00002EF7 ERROR_SXS_DUPLICATE_CLSID Two or more components referenced directly or
12024 0x00002EF8 ERROR_SXS_DUPLICATE_IID Two or more components referenced directly or
12025 0x00002EF9 ERROR_SXS_DUPLICATE_TLBID Two or more components referenced directly or
12026 0x00002EFA ERROR_SXS_DUPLICATE_PROGID Two or more components referenced directly or
vation context.
application configuration is incorrect. Reinstalling
the application may fix this problem.
system.
tag and format information.
rors.
The application attempted to activate a disabled
activation context.
active activation context.
conflicts with another component version already
active.
does not match the query API used.
activation to be disabled for the current thread of
execution.
An attempt to set the process default activation
context failed because the process default activation context was already set.
ognized.
URI.
The application manifest contains a reference to a
dependent assembly which is not installed.
The manifest for an assembly used by the application has a reference to a dependent assembly
which is not installed.
The manifest contains an attribute for the assembly identity which is not valid.
The manifest is missing the required default
namespace specification on the assembly element.
The manifest has a default namespace specified
on the assembly element but its value is not
"urn:schemas-microsoft-com:asm.v1".
The private manifest probe has crossed the
reparse-point-associated path.
indirectly by the application manifest have files by
the same name.
Two or more components referenced directly or
indirectly by the application manifest have window
classes with the same name.
indirectly by the application manifest have the
same COM server CLSIDs.
indirectly by the application manifest have proxies
for the same COM interface IIDs.
indirectly by the application manifest have the
same COM type library TLBIDs.
indirectly by the application manifest have the
same COM ProgIDs.
TF6610 91Version: 1.1
Page 92

Appendix
Error Description
decimal Hexadecimal Name
12027 0x00002EFB ERROR_SXS_DUPLICATE_ASSEMBLY_NAME Two or more components referenced directly or
12028 0x00002EFC ERROR_SXS_FILE_HASH_MISMATCH A component's file does not match the verification
12029 0x00002EFD ERROR_SXS_POLICY_PARSE_ERROR The policy manifest contains one or more syntax
12030 0x00002EFE ERROR_SXS_XML_E_MISSINGQUOTE Manifest Parse Error : A string literal was ex-
12031 0x00002EFF ERROR_SXS_XML_E_COMMENTSYNTAX Manifest Parse Error : Incorrect syntax was used
12032 0x00002F00 ERROR_SXS_XML_E_BADSTARTNAMECHAR Manifest Parse Error : A name was started with
12033 0x00002F01 ERROR_SXS_XML_E_BADNAMECHAR Manifest Parse Error : A name contained an in-
12034 0x00002F02 ERROR_SXS_XML_E_BADCHARINSTRING Manifest Parse Error : A string literal contained an
12035 0x00002F03 ERROR_SXS_XML_E_XMLDECLSYNTAX Manifest Parse Error : Invalid syntax for an XML
12036 0x00002F04 ERROR_SXS_XML_E_BADCHARDATA Manifest Parse Error : An invalid character was
12037 0x00002F05 ERROR_SXS_XML_E_MISSINGWHITESPACE Manifest Parse Error : Required white space was
12038 0x00002F06 ERROR_SXS_XML_E_EXPECTINGTAGEND Manifest Parse Error : The character '>' was ex-
12039 0x00002F07 ERROR_SXS_XML_E_MISSINGSEMICOLON Manifest Parse Error : A semi colon character
12040 0x00002F08 ERROR_SXS_XML_E_UNBALANCEDPAREN Manifest Parse Error : Unbalanced parentheses.
12041 0x00002F09 ERROR_SXS_XML_E_INTERNALERROR Manifest Parse Error : Internal error.
12042 0x00002F0A ERROR_SXS_XML_E_UNEXPECTED_WHITE-
SPACE
12043 0x00002F0B ERROR_SXS_XML_E_INCOMPLETE_ENCODING Manifest Parse Error : End of file reached in in-
12044 0x00002F0C ERROR_SXS_XML_E_MISSING_PAREN Manifest Parse Error : Missing parenthesis.
12045 0x00002F0D ERROR_SXS_XML_E_EXPECTINGCLOSEQUOTE Manifest Parse Error : A single or double closing
12046 0x00002F0E ERROR_SXS_XML_E_MULTIPLE_COLONS Manifest Parse Error : Multiple colons are not al-
12047 0x00002F0F ERROR_SXS_XML_E_INVALID_DECIMAL Manifest Parse Error : Invalid character for deci-
12048 0x00002F10 ERROR_SXS_XML_E_INVALID_HEXIDECIMAL Manifest Parse Error : Invalid character for hexa-
12049 0x00002F11 ERROR_SXS_XML_E_INVALID_UNICODE Manifest Parse Error : Invalid Unicode character
12050 0x00002F12 ERROR_SXS_XML_E_WHITESPACEORQUES-
TIONMARK
12051 0x00002F13 ERROR_SXS_XML_E_UNEXPECTEDENDTAG Manifest Parse Error : End tag was not expected
12052 0x00002F14 ERROR_SXS_XML_E_UNCLOSEDTAG Manifest Parse Error : The following tags were not
12053 0x00002F15 ERROR_SXS_XML_E_DUPLICATEATTRIBUTE Manifest Parse Error : Duplicate attribute.
12054 0x00002F16 ERROR_SXS_XML_E_MULTIPLEROOTS Manifest Parse Error : Only one top level element
12055 0x00002F17 ERROR_SXS_XML_E_INVALIDATROOTLEVEL Manifest Parse Error : Invalid at the top level of
12056 0x00002F18 ERROR_SXS_XML_E_BADXMLDECL Manifest Parse Error : Invalid XML declaration.
12057 0x00002F19 ERROR_SXS_XML_E_MISSINGROOT Manifest Parse Error : XML document must have
12058 0x00002F1A ERROR_SXS_XML_E_UNEXPECTEDEOF Manifest Parse Error : Unexpected end of file.
12059 0x00002F1B ERROR_SXS_XML_E_BADPEREFINSUBSET Manifest Parse Error : Parameter entities cannot
12060 0x00002F1C ERROR_SXS_XML_E_UNCLOSEDSTARTTAG Manifest Parse Error : Element was not closed.
indirectly by the application manifest are different
versions of the same component which is not permitted.
information present in the component manifest.
errors.
pected, but no opening quote character was
found.
in a comment.
an invalid character.
valid character.
invalid character.
declaration.
found in text content.
missing.
pected.
was expected.
Manifest Parse Error : White space is not allowed
at this location.
valid state for current encoding.
quote character (\' or \") is missing.
lowed in a name.
mal digit.
decimal digit.
value for this platform.
Manifest Parse Error : Expecting white space or
'?'.
at this location.
closed: %1.
is allowed in an XML document.
the document.
a top level element.
be used inside markup declarations in an internal
subset.
TF661092 Version: 1.1
Page 93

Appendix
Error Description
decimal Hexadecimal Name
12061 0x00002F1D ERROR_SXS_XML_E_UNCLOSEDENDTAG Manifest Parse Error : End element was missing
12062 0x00002F1E ERROR_SXS_XML_E_UNCLOSEDSTRING Manifest Parse Error : A string literal was not
12063 0x00002F1F ERROR_SXS_XML_E_UNCLOSEDCOMMENT Manifest Parse Error : A comment was not
12064 0x00002F20 ERROR_SXS_XML_E_UNCLOSEDDECL Manifest Parse Error : A declaration was not
12065 0x00002F21 ERROR_SXS_XML_E_UNCLOSEDCDATA Manifest Parse Error : A CDATA section was not
12066 0x00002F22 ERROR_SXS_XML_E_RESERVEDNAMESPACE Manifest Parse Error : The namespace prefix is
12067 0x00002F23 ERROR_SXS_XML_E_INVALIDENCODING Manifest Parse Error : System does not support
12068 0x00002F24 ERROR_SXS_XML_E_INVALIDSWITCH Manifest Parse Error : Switch from current encod-
12069 0x00002F25 ERROR_SXS_XML_E_BADXMLCASE Manifest Parse Error : The name 'xml' is reserved
12070 0x00002F26 ERROR_SXS_XML_E_INVALID_STANDALONE Manifest Parse Error : The standalone attribute
12071 0x00002F27 ERROR_SXS_XML_E_UNEXPECTED_STAND-
ALONE
12072 0x00002F28 ERROR_SXS_XML_E_INVALID_VERSION Manifest Parse Error : Invalid version number.
12073 0x00002F29 ERROR_SXS_XML_E_MISSINGEQUALS Manifest Parse Error : Missing equals sign be-
13000 0x000032C8 ERROR_IPSEC_QM_POLICY_EXISTS The specified quick mode policy already exists.
13001 0x000032C9 ERROR_IPSEC_QM_POLICY_NOT_FOUND The specified quick mode policy was not found.
13002 0x000032CA ERROR_IPSEC_QM_POLICY_IN_USE The specified quick mode policy is being used.
13003 0x000032CB ERROR_IPSEC_MM_POLICY_EXISTS The specified main mode policy already exists.
13004 0x000032CC ERROR_IPSEC_MM_POLICY_NOT_FOUND The specified main mode policy was not found.
13005 0x000032CD ERROR_IPSEC_MM_POLICY_IN_USE The specified main mode policy is being used.
13006 0x000032CE ERROR_IPSEC_MM_FILTER_EXISTS The specified main mode filter already exists.
13007 0x000032CF ERROR_IPSEC_MM_FILTER_NOT_FOUND The specified main mode filter was not found.
13008 0x000032D0 ERROR_IPSEC_TRANSPORT_FILTER_EXISTS The specified transport mode filter already exists.
13009 0x000032D1 ERROR_IPSEC_TRANSPORT_FIL-
TER_NOT_FOUND
13010 0x000032D2 ERROR_IPSEC_MM_AUTH_EXISTS The specified main mode authentication list ex-
13011 0x000032D3 ERROR_IPSEC_MM_AUTH_NOT_FOUND The specified main mode authentication list was
13012 0x000032D4 ERROR_IPSEC_MM_AUTH_IN_USE The specified quick mode policy is being used.
13013 0x000032D5 ERROR_IPSEC_DEFAULT_MM_POL-
ICY_NOT_FOUND
13014 0x000032D6 ERROR_IPSEC_DE-
FAULT_MM_AUTH_NOT_FOUND
13015 0x000032D7 ERROR_IPSEC_DEFAULT_QM_POL-
ICY_NOT_FOUND
13016 0x000032D8 ERROR_IPSEC_TUNNEL_FILTER_EXISTS The application attempted to activate a disabled
13017 0x000032D9 ERROR_IPSEC_TUNNEL_FILTER_NOT_FOUND The requested lookup key was not found in any
13018 0x000032DA ERROR_IPSEC_MM_FILTER_PENDING_DELE-
TION
13019 0x000032DB ERROR_IPSEC_TRANSPORT_FILTER_PEND-
ING_DELETION
13020 0x000032DC ERROR_IPSEC_TUNNEL_FILTER_PEND-
ING_DELETION
13021 0x000032DD ERROR_IPSEC_MM_POLICY_PENDING_DELE-
TION
13022 0x000032DE ERROR_IPSEC_MM_AUTH_PENDING_DELE-
TION
13023 0x000032DF ERROR_IPSEC_QM_POLICY_PENDING_DELE-
TION
the character '>'.
closed.
closed.
closed.
closed.
not allowed to start with the reserved string "xml".
the specified encoding.
ing to specified encoding not supported.
and must be lower case.
must have the value 'yes' or 'no'.
Manifest Parse Error : The standalone attribute
cannot be used in external entities.
tween attribute and attribute value.
The specified transport mode filter does not exist.
ists.
not found.
The specified main mode policy was not found.
The specified quick mode policy was not found.
The manifest file contains one or more syntax errors.
activation context.
active activation context.
The Main Mode filter is pending deletion.
The transport filter is pending deletion.
The tunnel filter is pending deletion.
The Main Mode policy is pending deletion.
The Main Mode authentication bundle is pending
deletion.
The Quick Mode policy is pending deletion.
TF6610 93Version: 1.1
Page 94

Appendix
Error Description
decimal Hexadecimal Name
13801 0x000035E9 ERROR_IPSEC_IKE_AUTH_FAIL IKE authentication credentials are unacceptable.
13802 0x000035EA ERROR_IPSEC_IKE_ATTRIB_FAIL IKE security attributes are unacceptable.
13803 0x000035EB ERROR_IPSEC_IKE_NEGOTIATION_PENDING IKE Negotiation in progress.
13804 0x000035EC ERROR_IPSEC_IKE_GENERAL_PROCESS-
ING_ERROR
13805 0x000035ED ERROR_IPSEC_IKE_TIMED_OUT Negotiation timed out.
13806 0x000035EE ERROR_IPSEC_IKE_NO_CERT IKE failed to find valid machine certificate.
13807 0x000035EF ERROR_IPSEC_IKE_SA_DELETED IKE SA deleted by peer before establishment
13808 0x000035F0 ERROR_IPSEC_IKE_SA_REAPED IKE SA deleted before establishment completed.
13809 0x000035F1 ERROR_IPSEC_IKE_MM_ACQUIRE_DROP Negotiation request sat in Queue too long.
13810 0x000035F2 ERROR_IPSEC_IKE_QM_ACQUIRE_DROP Negotiation request sat in Queue too long.
13811 0x000035F3 ERROR_IPSEC_IKE_QUEUE_DROP_MM Negotiation request sat in Queue too long.
13812 0x000035F4 ERROR_IPSEC_IKE_QUEUE_DROP_NO_MM Negotiation request sat in Queue too long.
13813 0x000035F5 ERROR_IPSEC_IKE_DROP_NO_RESPONSE No response from peer.
13814 0x000035F6 ERROR_IPSEC_IKE_MM_DELAY_DROP Negotiation took too long.
13815 0x000035F7 ERROR_IPSEC_IKE_QM_DELAY_DROP Negotiation took too long.
13816 0x000035F8 ERROR_IPSEC_IKE_ERROR Unknown error occurred.
13817 0x000035F9 ERROR_IPSEC_IKE_CRL_FAILED Certificate Revocation Check failed.
13818 0x000035FA ERROR_IPSEC_IKE_INVALID_KEY_USAGE Invalid certificate key usage.
13819 0x000035FB ERROR_IPSEC_IKE_INVALID_CERT_TYPE Invalid certificate type.
13820 0x000035FC ERROR_IPSEC_IKE_NO_PRIVATE_KEY No private key associated with machine certifi-
13822 0x000035FE ERROR_IPSEC_IKE_DH_FAIL Failure in Diffie-Helman computation.
13824 0x00003600 ERROR_IPSEC_IKE_INVALID_HEADER Invalid header.
13825 0x00003601 ERROR_IPSEC_IKE_NO_POLICY No policy configured.
13826 0x00003602 ERROR_IPSEC_IKE_INVALID_SIGNATURE Failed to verify signature.
13827 0x00003603 ERROR_IPSEC_IKE_KERBEROS_ERROR Failed to authenticate using Kerberos.
13828 0x00003604 ERROR_IPSEC_IKE_NO_PUBLIC_KEY Peer's certificate did not have a public key.
13829 0x00003605 ERROR_IPSEC_IKE_PROCESS_ERR Error processing error payload.
13830 0x00003606 ERROR_IPSEC_IKE_PROCESS_ERR_SA Error processing SA payload.
13831 0x00003607 ERROR_IPSEC_IKE_PROCESS_ERR_PROP Error processing Proposal payload.
13832 0x00003608 ERROR_IPSEC_IKE_PROCESS_ERR_TRANS Error processing Transform payload.
13833 0x00003609 ERROR_IPSEC_IKE_PROCESS_ERR_KE Error processing KE payload.
13834 0x0000360A ERROR_IPSEC_IKE_PROCESS_ERR_ID Error processing ID payload.
13835 0x0000360B ERROR_IPSEC_IKE_PROCESS_ERR_CERT Error processing Cert payload.
13836 0x0000360C ER-
ROR_IPSEC_IKE_PROCESS_ERR_CERT_REQ
13837 0x0000360D ERROR_IPSEC_IKE_PROCESS_ERR_HASH Error processing Hash payload.
13838 0x0000360E ERROR_IPSEC_IKE_PROCESS_ERR_SIG Error processing Signature payload.
13839 0x0000360F ERROR_IPSEC_IKE_PROCESS_ERR_NONCE Error processing Nonce payload.
13840 0x00003610 ERROR_IPSEC_IKE_PROCESS_ERR_NOTIFY Error processing Notify payload.
13841 0x00003611 ERROR_IPSEC_IKE_PROCESS_ERR_DELETE Error processing Delete Payload.
13842 0x00003612 ERROR_IPSEC_IKE_PROCESS_ERR_VENDOR Error processing VendorId payload.
13843 0x00003613 ERROR_IPSEC_IKE_INVALID_PAYLOAD Invalid payload received.
13844 0x00003614 ERROR_IPSEC_IKE_LOAD_SOFT_SA Soft SA loaded.
13845 0x00003615 ERROR_IPSEC_IKE_SOFT_SA_TORN_DOWN Soft SA torn down.
13846 0x00003616 ERROR_IPSEC_IKE_INVALID_COOKIE Invalid cookie received..
13847 0x00003617 ERROR_IPSEC_IKE_NO_PEER_CERT Peer failed to send valid machine certificate.
13848 0x00003618 ERROR_IPSEC_IKE_PEER_CRL_FAILED Certification Revocation check of peer's certificate
13849 0x00003619 ERROR_IPSEC_IKE_POLICY_CHANGE New policy invalidated SAs formed with old policy.
13850 0x0000361A ERROR_IPSEC_IKE_NO_MM_POLICY There is no available Main Mode IKE policy.
13851 0x0000361B ERROR_IPSEC_IKE_NOTCBPRIV Failed to enabled TCB privilege.
13852 0x0000361C ERROR_IPSEC_IKE_SECLOADFAIL Failed to load SECURITY.DLL.
13853 0x0000361D ERROR_IPSEC_IKE_FAILSSPINIT Failed to obtain security function table dispatch
13854 0x0000361E ERROR_IPSEC_IKE_FAILQUERYSSP Failed to query Kerberos package to obtain max
General processing error.
completed.
cate.
Error processing Certificate Request payload.
failed.
address from SSPI.
token size.
TF661094 Version: 1.1
Page 95

Appendix
Error Description
decimal Hexadecimal Name
13855 0x0000361F ERROR_IPSEC_IKE_SRVACQFAIL Failed to obtain Kerberos server credentials for
13856 0x00003620 ERROR_IPSEC_IKE_SRVQUERYCRED Failed to determine SSPI principal name for
13857 0x00003621 ERROR_IPSEC_IKE_GETSPIFAIL Failed to obtain new SPI for the inbound SA from
13858 0x00003622 ERROR_IPSEC_IKE_INVALID_FILTER Given filter is invalid.
13859 0x00003623 ERROR_IPSEC_IKE_OUT_OF_MEMORY Memory allocation failed.
13860 0x00003624 ERROR_IPSEC_IKE_ADD_UPDATE_KEY_FAILED Failed to add Security Association to IPSec
13861 0x00003625 ERROR_IPSEC_IKE_INVALID_POLICY Invalid policy.
13862 0x00003626 ERROR_IPSEC_IKE_UNKNOWN_DOI Invalid DOI.
13863 0x00003627 ERROR_IPSEC_IKE_INVALID_SITUATION Invalid situation.
13864 0x00003628 ERROR_IPSEC_IKE_DH_FAILURE Diffie-Hellman failure.
13865 0x00003629 ERROR_IPSEC_IKE_INVALID_GROUP Invalid Diffie-Hellman group.
13866 0x0000362A ERROR_IPSEC_IKE_ENCRYPT Error encrypting payload.
13867 0x0000362B ERROR_IPSEC_IKE_DECRYPT Error decrypting payload.
13868 0x0000362C ERROR_IPSEC_IKE_POLICY_MATCH Policy match error.
13869 0x0000362D ERROR_IPSEC_IKE_UNSUPPORTED_ID Unsupported ID.
13870 0x0000362E ERROR_IPSEC_IKE_INVALID_HASH Hash verification failed.
13871 0x0000362F ERROR_IPSEC_IKE_INVALID_HASH_ALG Invalid hash algorithm.
13872 0x00003630 ERROR_IPSEC_IKE_INVALID_HASH_SIZE Invalid hash size.
13873 0x00003631 ERROR_IPSEC_IKE_INVALID_ENCRYPT_ALG Invalid encryption algorithm.
13874 0x00003632 ERROR_IPSEC_IKE_INVALID_AUTH_ALG Invalid authentication algorithm.
13875 0x00003633 ERROR_IPSEC_IKE_INVALID_SIG Invalid certificate signature.
13876 0x00003634 ERROR_IPSEC_IKE_LOAD_FAILED Load failed.
13877 0x00003635 ERROR_IPSEC_IKE_RPC_DELETE Deleted via RPC call.
13878 0x00003636 ERROR_IPSEC_IKE_BENIGN_REINIT Temporary state created to perform reinitializa-
13879 0x00003637 ERROR_IPSEC_IKE_INVALID_RESPON-
DER_LIFETIME_NOTIFY
13880 0x00003638 ERROR_IPSEC_IKE_QM_LIMIT_REAP SA reaped because QM limit was reached.
13881 0x00003639 ERROR_IPSEC_IKE_INVALID_CERT_KEYLEN Key length in certificate is too small for configured
13882 0x0000363A ERROR_IPSEC_IKE_MM_LIMIT Max number of established MM SAs to peer ex-
13883 0x0000363B ERROR_IPSEC_IKE_NEGOTIATION_DISABLED IKE received a policy that disables negotiation.
13884 0x0000363C ERROR_IPSEC_IKE_QM_LIMIT Reached maximum quick mode limit for the main
ISAKMP/ERROR_IPSEC_IKE service. Kerberos
authentication will not function. The most likely
reason for this is lack of domain membership.
This is normal if your computer is a member of a
workgroup.
ISAKMP/ERROR_IPSEC_IKE service (QueryCredentialsAttributes).
Ipsec driver. The most common cause for this is
that the driver does not have the correct filter.
Check your policy to verify the filters.
Driver. The most common cause for this is if the
IKE negotiation took too long to complete. If the
problem persists, reduce the load on the faulting
machine.
tion. This is not a real failure.
The lifetime value received in the Responder Lifetime Notify is below the Windows 2000 configured
minimum value. Please fix the policy on the peer
machine.
security requirements.
ceeded.
mode. New main mode will be started.
8.5 Troubleshooting/diagnostics
1. In the event of connection problems the PING command can be used to ascertain whether the external
controller can be reached via the network connection. If this is not the case, check the configuration/power
supply and the network connection of the adapter module. Instructions for configuring the adapter module
can be found in the manufacturer documentation for the adapter.
2. Sniffer tools such as Wireshark enable logging of the entire network communication. The log can then be
analyzed by Beckhoff support staff.
TF6610 95Version: 1.1
Page 96

Appendix
3. Check the hardware and software requirements described in this documentation (adapter manufacturer,
model, firmware version).
4. If you access the external controller via the IBH Link S5++ or IBH Link S7++ adapter in conjunction with
TCP/IP as transport protocol, no connections have to be configured/parameterized in the external controller.
In the event of data access problems, check whether the corresponding data areas (flags, data blocks etc. )
in the external controller are configured correctly and available.
5. Check the input parameters that are transferred to the function blocks (network address, MPI address,
data block number etc.) for correctness. Check whether the function block issues an error code. The
documentation for the error codes can be found here: Overview of error codes [}32].
6. A simple debug output is integrated in the TwinCAT PLC library. This must be activated before
establishing the connection at the FB_NlinkOpen [}20]function block. Open TwinCAT XAE and enable the
error list window. The following image shows some debug output strings.
Sample:
Communication via the IBH Link S7++ (NL-MPI protocol via TCP/IP). Only complete frames are logged (16
byte header + PLC data from the corresponding data area), i.e. byte 16 is followed by the read and written
PLC data.
Some explanations regarding the messages:
TF661096 Version: 1.1
Page 97

NoMessage Meaning
Appendix
1 Tc2_TcpIp.library::FB_SocketConnect(CLIENT),
Handle:0x6010001 Local:172.17.60.233:25309
Remote:172.17.60.243:1099, error:0x00000000
2 NLink.TX[0x6010001]=>03 FF 12 00 00 00 31 00 02 00 01
00 00 0A 05 02 01 02 03 04 05 06 07 08 09 0A
3 NLink.RX[0x6010001]<=FF 03 08 00 31 00 00 00 02 00 01
00 00 0A 05 02
4 NLink.MG[0x6010001]<=MPI-CONNECT: 2 The internal MPI connection to the device
5 NLink.TX[0x6010001]=>03 FF 08 01 00 00 31 00 02 00 01
00 00 0A 05 01
6 NLink.RX[0x6010001]<=FF 03 12 01 31 00 00 00 02 00 01
00 00 0A 05 01 01 02 03 04 05 06 07 08 09 0A
7 NLink.TX[0x6010001]=>03 FF 12 02 00 00 31 00 02 00 01
00 00 0A 05 02 01 02 03 04 05 06 07 08 09 0A
8 NLink.RX[0x6010001]<=FF 03 08 00 31 00 00 00 02 00 01
00 00 0A 05 02
9 NLink.TX[0x6010001]=>03 FF 08 03 00 00 31 00 02 00 01
00 00 0A 05 01
10NLink.RX[0x6010001]<=FF 03 12 01 31 00 00 00 02 00 01
00 00 0A 05 01 01 02 03 04 05 06 07 08 09 0A
11NLink.MG[0x6010001]=>MPI-DISCONNECT: 2 The internal MPI connection to the device
12Tc2_TcpIp.library::FB_SocketClose(CLIENT),
Handle:0x6010001 Local:172.17.60.233:25309
Remote:172.17.60.243:1099, error:0x00000000
TCP/IP connection (internal handle: 0x100D)
is established error-free.
WRITE request was sent... (10 bytes: 01 02
03 04 05 06 07 08 09 0A are written to the
external controller).
WRITE response was received... (only
acknowledgement).
with MPI address 2 is opened.
READ request was sent.
READ response was received... (10 bytes:
01 02 03 04 05 06 07 08 09 0A received
successfully).
WRITE request was sent...
WRITE response was received...
READ request was sent…
READ response was received.
with MPI address 2 is closed.
TCP/IP connection (internal handle: 0x100D)
is closed error-free.
TF6610 97Version: 1.1
Page 98

Page 99

Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Germany
Phone: +49 5246 9630
info@beckhoff.com
www.beckhoff.com
 Loading...
Loading...