

Page 1

Documentation
KM3701, KM3702 and KM3712
Pressure Measuring Module
Version:
Date:
2.0.0
2017-11-20
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation........................................................................................................... 5
1.2 Safety instructions .......................................................................................................................... 6
1.3 Documentation issue status............................................................................................................ 7
2 Product overview.......................................................................................................................................8
2.1 KM3701 - Introduction .................................................................................................................... 8
2.2 KM3702 - Introduction .................................................................................................................... 9
2.3 KM3712 - Introduction .................................................................................................................. 10
2.4 Technical data .............................................................................................................................. 11
2.5 Basic function principles ............................................................................................................... 12
2.6 LED displays................................................................................................................................. 15
3 Mounting and wiring ...............................................................................................................................16
3.1 Recommended mounting rails ...................................................................................................... 16
3.2 Mounting and demounting - terminals with front unlocking........................................................... 16
3.3 Connection.................................................................................................................................... 18
4 Application examples..............................................................................................................................19
4.1 KM3701 - Application examples ................................................................................................... 19
4.2 KM3702 - Application example ..................................................................................................... 20
4.3 KM3712 - Application example ..................................................................................................... 21
5 KS2000 Configuration software .............................................................................................................22
5.1 KS2000 - Introduction ................................................................................................................... 22
5.2 Parameterization with KS2000 ..................................................................................................... 23
5.3 Register ........................................................................................................................................ 25
5.4 Process Data ................................................................................................................................ 26
6 Access from the user programm ...........................................................................................................27
6.1 KM3701 - Process image ............................................................................................................. 27
6.2 KM3702, KM3712 - Process image .............................................................................................. 27
6.3 Control and Status Byte................................................................................................................ 28
6.4 Register overview ......................................................................................................................... 30
6.5 Register description ...................................................................................................................... 32
6.6 Examples of Register Communication.......................................................................................... 35
6.6.1 Example 1: reading the firmware version from Register 9 ...............................................35
6.6.2 Example 2: Writing to an user register.............................................................................35
7 Appendix ..................................................................................................................................................38
7.1 Support and Service ..................................................................................................................... 38
KM3701, KM3702 and KM3712 3Version: 2.0.0
Page 4

Table of contents
KM3701, KM3702 and KM37124 Version: 2.0.0
Page 5

Foreword
1 Foreword
1.1 Notes on the documentation
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning these components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE®, XFC® and XTS® are registered
trademarks of and licensed by Beckhoff Automation GmbH.
Other designations used in this publication may be trademarks whose use by third parties for their own
purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, DE102004044764, DE102007017835 with corresponding applications or
registrations in various other countries.
The TwinCAT Technology is covered, including but not limited to the following patent applications and
patents: EP0851348, US6167425 with corresponding applications or registrations in various other countries.
EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
KM3701, KM3702 and KM3712 5Version: 2.0.0
Page 6

Foreword
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of symbols
In this documentation the following symbols are used with an accompanying safety instruction or note. The
safety instructions must be read carefully and followed without fail!
DANGER
WARNING
CAUTION
Attention
Note
Serious risk of injury!
Failure to follow the safety instructions associated with this symbol directly endangers the
life and health of persons.
Risk of injury!
Failure to follow the safety instructions associated with this symbol endangers the life and
health of persons.
Personal injuries!
Failure to follow the safety instructions associated with this symbol can lead to injuries to
persons.
Damage to the environment or devices
Failure to follow the instructions associated with this symbol can lead to damage to the environment or equipment.
Tip or pointer
This symbol indicates information that contributes to better understanding.
KM3701, KM3702 and KM37126 Version: 2.0.0
Page 7

1.3 Documentation issue status
Version Comment
2.0.0 • Corrections
• First public issue as PDF
1.2.0 • Technical data updated
• Installation and wiring extended
• Process data corrected
• KM3701-0340 added
1.1.1 Application examples update
1.1.0 Technical data updated
1.0.0 First release
Firmware and hardware versions
Foreword
Documentation
Version
2.0.0 1G 09 1D 07 1E 09
1.2.0 1C 01 1B 01 1B 01
1.1.1 1C 00 1B 00 1B 00
1.1.0 1B 00 1A 00 1A 00
1.0.0 1B 00 1A 00 1A 00
The firmware and hardware versions (delivery state) can be taken from the serial number printed on the side
of the terminal module.
Syntax of the serial number
Structure of the serial number: WWYYFFHH
WW - week of production (calendar week)
YY - year of production
FF - firmware version
HH - hardware version
Example with ser. no.: 35 05 00 01:
35 - week of production 35
05 - year of production 2005
00 - firmware version 00
01 - hardware version 01
KM3701-0000, KM3701-0340 KM3702-0000 KM3712-0000
Firmware Hardware Firmware Hardware Firmware Hardware
KM3701, KM3702 and KM3712 7Version: 2.0.0
Page 8

Product overview
2 Product overview
2.1 KM3701 - Introduction
Fig.1: KM3701
Single-channel differential pressure measuring module
The KM3701 differential pressure measuring module enables direct measurement of pressure differences
between two hose connections. The pressure difference is available in the fieldbus with 16-bit resolution.
The measuring range is between -100hPa and +100hPa (-100mbar to +100mbar). The status LEDs
indicate proper function or errors such as range exceedance.
Two variants are available:
• KM3701-0000: Measuring range -100 to +100hPa (-100 to +100mbar)
• KM3701-0340: Measuring range -340 to +340hPa (-340 to +340mbar)
Quick links
• Mounting and wiring [}16]
• Access from the user program [}27]
• Application examples [}19]
KM3701, KM3702 and KM37128 Version: 2.0.0
Page 9

2.2 KM3702 - Introduction
Product overview
Fig.2: KM3702
Two-channel relative pressure measuring module for 0 to 7500hPa (0 to 7.5bar)
The relative pressure measuring module KM3702 enables direct measurement of two pressure values at the
hose connections. The pressure is determined as the difference to the environment of the KM3702 and is
available in the fieldbus with 16bit resolution. The status LEDs indicate proper function or errors such as
range exceedance.
KM3701, KM3702 and KM3712 9Version: 2.0.0
Page 10

Product overview
2.3 KM3712 - Introduction
Fig.3: KM3712
Dual channel relative pressure measuring module for -1,000hPa to +1,000hPa (-1bar to +1bar)
The relative pressure measuring module KM3712 allows the direct measurement of two negative pressure
values on the hose connections. The pressure is determined as the difference to the environment of the
KM3712 and is available in the fieldbus with 16bit resolution. The status LEDs indicate proper function or
errors such as range exceedance.
KM3701, KM3702 and KM371210 Version: 2.0.0
Page 11

Product overview
2.4 Technical data
Technical Data KM3701-0000 KM3701-0340 KM3702-0000 KM3712-0000
Number of inputs 1 (differential pressure) 2 2
Measuring range -100 to +100hPa
(-100 to +100mbar)
Permissible overpressure max. ±500hPa differential
max. +5000hPa relative to ambient
permissible media non-aggressive gases
Resolution 0.1hPa (0.1mbar) per digit 1hPa (1mbar)
Measuring accuracy 3% (of the full scale value)
Measuring speed typically 5ms
Pressure connectors
Power supply for the
electronics
Current consumption from
the K-bus
Width of a bus terminal
block
Electrical isolation 500V (K-bus/signal voltage)
Bit width in the input
process image
Bit width in the output
process image
Dimensions without tubes
(wxhxd)
Weight approx. 100g
Permissible ambient
temperature range during
operation
Permissible ambient
temperature range during
storage
Permissible relative air
humidity
Mounting [}16] on a 35mm mounting rail [}16] (e.g.DIN rail TH 35-7.5 conforming to EN
Vibration / shock
resistance
EMC immunity/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP20
Installation position variable
Approval CE, cULus
screwing plug [}18], M12 x 1
via the K-bus
typically 15mA
Maximum 64 standard Bus Terminals or 80cm
(a KM37xx is equivalent to 2 standard Bus Terminals)
3byte 3byte 6byte 6byte
3byte 3byte 6byte 6byte
approx. 26.5mmx100mmx69mm (width aligned: 24mm)
0°C ... + 55°C
-25°C ... + 85°C
95%, no condensation
60715)
conforms to EN 60068-2-6 / EN 60068-2-27
-340 to +340hPa
(-340 to
+340mbar)
0 to 7500hPa
(0 to 7.5bar)
+10000hPa +5000hPa
per digit
-1000 to +1000hPa
(-1 to +1bar)
1hPa (1mbar) per
digit
KM3701, KM3702 and KM3712 11Version: 2.0.0
Page 12
Product overview
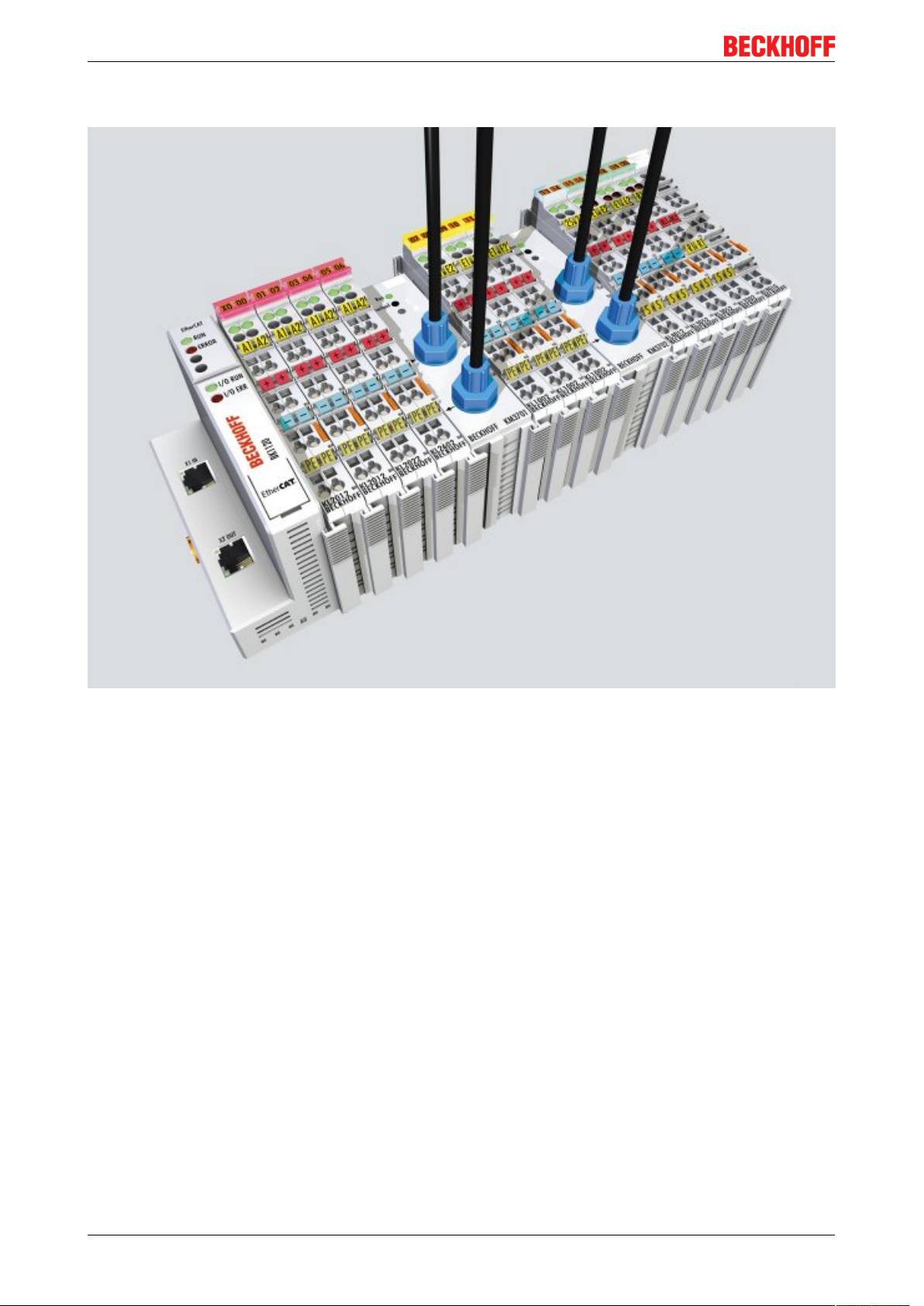
2.5 Basic function principles
Fig.4: Bus Terminal block with pressure measuring modules
The pressure measuring modules KM3701 and KM3712 directly record differential and relative pressures in
non-aggressive gases. As in electronic signal acquisition the pressure measurement takes place via a
terminal module. The pressure measuring modules convert the measured pressure into an electrical signal
and make it available to the higher-level controller with a resolution of 16bits. The measuring principle is
based on the most up-to-date on-chip sensor technology. In addition to just measuring, the semiconductor
also executes other functions, such as temperature compensation and avoidance of long-term drift. The
status LEDs indicate proper function or errors such as range exceedance.
KM3701, KM3702 and KM371212 Version: 2.0.0
Page 13

Product overview
KM3701 single-channel differential pressure measuring module
Fig.5: KM3701 - Single-channel differential pressure measurement
The KM3701 terminal module can measure pressure differences between 0 and 100hPa (0 and 100mbar)
between two hose connections. The differential pressure can be measured up to an ambient pressure of
7500hPa (7bar) between any points.
KM3702 - Two-channel relative pressure measuring module (0hPa to 7500hPa)
Fig.6: KM3702 - Two-channel relative pressure measurement
The KM3702 terminal module can measure pressure values between 0 and 7000hPa (0 and 7bar) at each
hose connection. Pressure measurement takes place relative to the actual current ambient pressure.
KM3701, KM3702 and KM3712 13Version: 2.0.0
Page 14

Product overview
KM3712 - Two-channel relative pressure measuring module (-1000hPa to +1000hPa)
Fig.7: KM3712 - Two-channel relative pressure measurement
The KM3712 terminal module can measure pressure values between -1000hPa and +1000hPa (-1bar and
+1bar) at each hose connection. Pressure measurement takes place relative to the actual current ambient
pressure.
Installation and connection technique
The pressure measuring terminal samples the pressure values directly. Additional measuring devices are
unnecessary. This avoids connection systems and saves available space compared with the use of
conventional measuring devices. The installation of the pressure measuring terminals is simple and fast and
can be carried out without any additional mounting tools. The measuring hoses are connected directly to the
quick couplings of the pressure measuring terminal. Standard commercial plastic hoses can be used as
measuring hoses. In terms of connections and installation space the pressure measuring terminals are
designed like a "normal" 24 mm Bus Terminal and can be installed with minimum space requirement directly
in the Bus Terminal system.
KM3701, KM3702 and KM371214 Version: 2.0.0
Page 15

2.6 LED displays
KM3701
Fig.8: KM3701 - LEDs
LED Display
Run (green) off Data transmission on the K-bus is not active
on Data transmission on the K-bus is active
Over-range (red) on
Under-range (red) on
The differential pressure is above the permitted measuring range [}11]
The differential pressure is below the permitted measuring range [}11]
Product overview
KM3702, KM3712
Fig.9: KM3702, KM3712 - LEDs
LED Display
Run (green) off Data transmission on the K-bus is not active
on Data transmission on the K-bus is active
Error X1 (red) on The pressure at connection X1 is below (under-range) or above (over-range) the
permitted measuring range [}11]
Error X2 (red) on The pressure at connection X2 is below (under-range) or above (over-range) the
permitted measuring range [}11]
KM3701, KM3702 and KM3712 15Version: 2.0.0
Page 16

Mounting and wiring
3 Mounting and wiring
3.1 Recommended mounting rails
Terminal Modules and EtherCAT Modules of KMxxxx and EMxxxx series, same as the terminals of the
EL66xx and EL67xx series can be snapped onto the following recommended mounting rails:
• DIN Rail TH 35-7.5 with 1 mm material thickness (according to EN 60715)
• DIN Rail TH 35-15 with 1,5 mm material thickness
Pay attention to the material thickness of the DIN Rail
Terminal Modules und EtherCAT Modules of KMxxxx and EMxxxx series, same as the ter-
Note
3.2 Mounting and demounting - terminals with front
minals of the EL66xx and EL67xx series does not fit to the DIN Rail TH 35-15 with 2,2 to
2,5 mm material thickness (according to EN 60715)!
unlocking
The terminal modules are fastened to the assembly surface with the aid of a 35 mm mounting rail (e.g.
mounting rail TH 35-15).
Fixing of mounting rails
The locking mechanism of the terminals and couplers extends to the profile of the mounting
Note
rail. At the installation, the locking mechanism of the components must not come into conflict with the fixing bolts of the mounting rail. To mount the recommended mounting rails under the terminals and couplers, you should use flat mounting connections (e.g. countersunk
screws or blind rivets).
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation,
WARNING
Mounting
• Fit the mounting rail to the planned assembly location.
disassembly or wiring of the Bus Terminals!
KM3701, KM3702 and KM371216 Version: 2.0.0
Page 17

and press (1) the terminal module against the mounting rail until it latches in place on the mounting
rail (2).
• Attach the cables.
Mounting and wiring
Demounting
• Remove all the cables.
• Lever the unlatching hook back with thumb and forefinger (3). An internal mechanism pulls the two
latching lugs (3a) from the top hat rail back into the terminal module.
• Pull (4) the terminal module away from the mounting surface.
Avoid canting of the module; you should stabilize the module with the other hand, if required.
KM3701, KM3702 and KM3712 17Version: 2.0.0
Page 18

Mounting and wiring
3.3 Connection
The air hoses are connected to push-in fittings.
Technical Data Threaded push-in fitting
Type QSS-4-F
Outer hose diameter 4mm
Nominal diameter 2.6mm
Thread M12 x 1
Width across flats 14mm
KM3701, KM3702 and KM371218 Version: 2.0.0
Page 19

Application examples
4 Application examples
The pressure measuring modules can be used in any applications requiring logging and monitoring of
differential and dynamic pressures in non-aggressive gases, e.g. pressure vessels, pressure cabins or
pneumatic, filter, suction, packaging and positioning systems.
They measure operating pressures, monitor filters and sieves, check the seal tightness of tanks and assist in
position testing of construction elements or monitoring the level of liquids. If flow rates are calculated from
the measured pressures, then the pressure measuring terminals can also be used for flow measurement.
They can therefore be applied in areas such as process engineering, systems engineering, building services
and heating, ventilating and air conditioning.
• Application examples for KM3701 [}19]
• Application example for KM3702 [}20]
• Application example for KM3712 [}21]
4.1 KM3701 - Application examples
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminals system into a safe, de-energized state before starting mounting,
WARNING
disassembly or wiring of the Bus Terminals!
Tank systems
Fig.10: KM3701 - Application example for the fill level of tanks
• Monitors tank filling levels and activates topping up when the level falls below a defined filling value
• The pressure difference is an indicator for the filling level
• No additional pressure gauges, switches and associated connection equipment are required
KM3701, KM3702 and KM3712 19Version: 2.0.0
Page 20

Application examples
Filter systems, pipe constrictions
Fig.11: KM3701 - Application example for filter systems, pipe restrictions
• Monitors the operating state of filters and screens
• The pressure difference indicates the level of contamination
4.2 KM3702 - Application example
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminals system into a safe, de-energized state before starting mounting,
WARNING
Pneumatic systems
disassembly or wiring of the Bus Terminals!
Fig.12: KM3702 - Application example for pneumatic systems
• Checking the filling level of stores
• Monitoring the operating pressure of equipment
KM3701, KM3702 and KM371220 Version: 2.0.0
Page 21

• enables monitoring and avoidance of overpressure
4.3 KM3712 - Application example
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminals system into a safe, de-energized state before starting mounting,
disassembly or wiring of the Bus Terminals!
WARNING
Packaging plant for eggs
Application examples
Fig.13: EM3712 - Application example Packging plant for eggs
• controls suction
• Pressure deviations indicate leakages or positioning inaccuracies
KM3701, KM3702 and KM3712 21Version: 2.0.0
Page 22

KS2000 Configuration software
5 KS2000 Configuration software
5.1 KS2000 - Introduction
The KS2000 configuration software permits configuration, commissioning and parameterization of bus
couplers, of the affiliated bus terminals and of Fieldbus Box Modules. The connection between bus coupler/
Fieldbus Box Module and the PC is established by means of the serial configuration cable or the fieldbus.
Fig.14: KS2000 configuration software
Configuration
You can configure the Fieldbus stations with the Configuration Software KS2000 offline. That means, setting
up a terminal station with all settings on the couplers and terminals resp. the Fieldbus Box Modules can be
prepared before the commissioning phase. Later on, this configuration can be transferred to the terminal
station in the commissioning phase by means of a download. For documentation purposes, you are provided
with the breakdown of the terminal station, a parts list of modules used and a list of the parameters you have
modified. After an upload, existing fieldbus stations are at your disposal for further editing.
Parameterization
KS2000 offers simple access to the parameters of a fieldbus station: specific high-level dialogs are available
for all bus couplers, all intelligent bus terminals and Fieldbus Box modules with the aid of which settings can
be modified easily. Alternatively, you have full access to all internal registers of the bus couplers and
intelligent terminals. Refer to the register description for the meanings of the registers.
KM3701, KM3702 and KM371222 Version: 2.0.0
Page 23

KS2000 Configuration software
Commissioning
The KS2000 software facilitates commissioning of machine components or their fieldbus stations: Configured
settings can be transferred to the fieldbus modules by means of a download. After a login to the terminal
station, it is possible to define settings in couplers, terminals and Fieldbus Box modules directly online. The
same high-level dialogs and register access are available for this purpose as in the configuration phase.
The KS2000 offers access to the process images of the bus couplers and Fieldbus Box modules.
• Thus, the coupler's input and output images can be observed by monitoring.
• Process values can be specified in the output image for commissioning of the output modules.
All possibilities in the online mode can be used in parallel with the actual fieldbus mode of the terminal
station. The fieldbus protocol always has the higher priority in this case.
5.2 Parameterization with KS2000
Connect the configuration interface of your Fieldbus Coupler with the serial interface of your PC via the
configuration cable and start the KS2000 Configuration Software.
Click on the Login button. The configuration software will now load the information
for the connected fieldbus station.
In the example shown, this is
• a BK9000 Bus Coupler for Ethernet
• a KL1xx2 Digital Input Terminal
• a KM3701 differential pressure measuring module
• a KL9010 Bus End Terminal
KM3701, KM3702 and KM3712 23Version: 2.0.0
Page 24

KS2000 Configuration software
Fig.15: Display of the fieldbus station in KS2000
The left-hand KS2000 window displays the terminals of the fieldbus station in a tree structure.
The right-hand KS2000 window contains a graphic display of the fieldbus station terminals.
In the tree structure of the left-hand window, click on the plus-sign next to the module whose parameters you
wish to change (pos. 2 in the example).
Fig.16: KS2000 branch for channel 1 of the KM3701
For the KM3701, the branches Register, Settings and ProcData are displayed:
• Register [}25] enables direct access to the KM3701 registers.
• ProcData [}26] shows the process data of the KM3701.
KM3701, KM3702 and KM371224 Version: 2.0.0
Page 25

KS2000 Configuration software
5.3 Register
Under Register you can directly access the registers of the terminal module (KM3701 in this example). The
meaning of the register is explained in the Register Overview [}30].
Fig.17: Register view in KS2000
KM3701, KM3702 and KM3712 25Version: 2.0.0
Page 26

KS2000 Configuration software
5.4 Process Data
The Status byte (Status), the Control byte (Ctrl) and the process data (Data) are displayed in a tree structure
under ProcData.
The spectacles mark the data that are currently graphically displayed in the History field.
Fig.19: History field
The current input value is displayed numerically in the Value field.
Fig.20: Value field
Output values can be modified through direct input or by means of the fader control.
Fig.21: Value field
Danger for persons, the environment or devices!
Note that changing output values (forcing them) can have a direct effect on your automa-
CAUTION
After pressing the Settings button you can set the format of the numerical display to hexadecimal, decimal or
binary.
tion application. Only modify these output values if you are certain that the state of your
equipment permits it, and that there will be no risk to people or to the machine!
Fig.22: Setting the display
KM3701, KM3702 and KM371226 Version: 2.0.0
Page 27

Access from the user programm
6 Access from the user programm
6.1 KM3701 - Process image
The KM3701 terminal module is represented in the process image with a maximum of 3bytes of input data
and 3bytes of output data. These are organized as follows:
Format Input data Output data
Byte
Word DataIN DataOUT
Key
SB: Status byte
CB: Control byte
DataIN: Input data word
DataOUT: Output data word
• The meaning of the control and status bytes is explained in Control and status bytes.
• In process data mode, the analog value is transferred in the input data word DataIN. The output data
word DataOUT is not used.
SB [}28] CB [}28]
Representation of the analog values
The terminal module displays the analog input values as follows:
KM3701-0000
Differential pressure Decimal Hexadecimal
-100 hPa -1000 0xFC18
0 hPa 0 0x0000
+100 hPa +1000 0x03E8
KM3701-0340
Differential pressure Decimal Hexadecimal
-340 hPa -3400 0xF2B8
0 hPa 0 0x0000
+340 hPa +3400 0x0D48
6.2 KM3702, KM3712 - Process image
The KM3702 and KM3712 terminal modules are represented in the process image with a maximum of
6bytes of input data and 6bytes of output data. These are organized as follows:
Format Input data Output data
Byte
Word DataIN1 DataOUT1
Byte
Word DataIN2 DataOUT2
KM3701, KM3702 and KM3712 27Version: 2.0.0
SB1 [}28] CB1 [}28]
SB2 [}29] CB2 [}29]
Page 28

Access from the user programm
Key
SB n: Status byte for channel n
CB n: Control byte for channel n
DataIN n: Input data word channel n
DataOUT n: Output data word channel n
• The meaning of the control and status bytes is explained in Control and status bytes.
• In process data mode the analog values are transferred in output data words DataIN1 and DataIN2.
Input data words DataOUT1 and DataOUT2 are not used.
Representation of the analog values
The analog input values are represented by the terminal modules as follows:
KM3702-0000
Pressure Decimal Hexadecimal
0 hPa 0 0x0000
7500 hPa 7500 0x1D4C
KM3712-0000
Pressure Decimal Hexadecimal
-1000 hPa -1000 0xFC18
0 hPa 0 0x0000
+1000 hPa +1000 0x03E8
6.3 Control and Status Byte
Channel1
Process data mode
Control byte1 (for process data mode)
Control byte 1 (CB1) is located in the output image, and is transmitted from the controller to the terminal
module.
Bit CB1.7 CB1.6 CB1.5 CB1.4 CB1.3 CB1.2 CB1.1 CB1.0
Name RegAccess - - - - - - -
Bit Name Description
CB1.7 RegAccess 0
CB1.6 to CB1.1 - 0
... ... ... ...
CB1.0 - 0
Register communication off (process data mode)
bin
reserved
bin
reserved
bin
Status byte1 (for process data mode)
Status byte 1 (SB1) is located in the input image and is transmitted from terminal module to the controller.
Bit SB1.7 SB1.6 SB1.5 SB1.4 SB1.3 SB1.2 SB1.1 SB1.0
Name RegAccess Error StateThreshold2 StateThreshold1 Overload Underload
KM3701, KM3702 and KM371228 Version: 2.0.0
Page 29

Bit Name Description
SB1.7 RegAccess 0
SB1.6 Error 1
Acknowledgment for process data mode
bin
an internal error has occurred (current process data is no longer
bin
valid)
SB1.5 / SB1.4 StateThreshold2 0
Threshold 2 [}34] is not enabled via bit R32.10 [}33] of the
bin
feature register
01
Process data is greater than threshold 2
bin
10
Process data is less than threshold 2
bin
11
Process data equals threshold 2
bin
SB1.3 / SB1.2 StateThreshold1 0
Threshold 1 [}34] is not enabled via bit R32.9 [}33] of the
bin
feature register
01
Process data is greater than threshold 1
bin
10
Process data is less than threshold 1
bin
11
Process data equals threshold 1
bin
SB1.1 Overload 1
Process data is greater than specified in register R21 [}33]. The
bin
red error LED of this channel is lit.
SB1.0 Underload 1
Process data are less than specified in register R22 [}33]. The
bin
red error LED of this channel is lit. (The calibration is active if
SB1.0 and SB1.1 are set simultaneously).
Access from the user programm
Register communication
Controlbyte1 (in register communication)
Control byte 1 (CB1) is located in the output image, and is transmitted from the controller to the terminal
module.
Bit CB1.7 CB1.6 CB1.5 CB1.4 CB1.3 CB1.2 CB1.1 CB1.0
Name RegAccess R/W Reg. no.
Bit Name Description
CB1.7 RegAccess 1
CB1.6 R/W 0
Register communication switched on
bin
Read access
bin
1
Write access
bin
CB1.5 to CB1.0 Reg. no. Register number:
Enter the number of the register [}30] that you
- want to read with input data word DataIn or
- want to write with output data word DataOut.
Statusbyte1 (in register communication)
Status byte 1 (SB1) is located in the input image and is transmitted from terminal module to the controller.
Bit SB1.7 SB1.6 SB1.5 SB1.4 SB1.3 SB1.2 SB1.1 SB1.0
Name RegAccess R/W Reg. no.
Bit Name Description
SB1.7 RegAccess 1
SB1.6 R 0
Acknowledgment for register access
bin
Read access
bin
SB1.5 to SB1.0 Reg. no. Number of the register that was read or written.
Channel2 (only KM3702 and KM3712)
The control and status bytes of channel 2 (CB2 and SB2) have the same structure as the control and status
bytes of channel 1 [}28].
KM3701, KM3702 and KM3712 29Version: 2.0.0
Page 30

Access from the user programm
6.4 Register overview
The registers are used for the parameterization of the Bus Terminals and are available for each channel.
They can be read or written by means of register communication.
KM3701, KM3702 and KM371230 Version: 2.0.0
Page 31

Access from the user programm
Register no. Comment Default value R/W Memory
R0 [}32]
R1 reserved 0x0000 0
Raw ADC value variable variable R RAM
dec
- -
... ... ... ... ... ...
R5 reserved 0x0000 0
R6 [}32]
R7 [}32]
R8 [}32]
Diagnostic register 0x0000 0
Command register 0x0000 0
Terminal type KM3701: 0x0E75 3701
KM3702: 0x0E76 3702
KM3712: 0x0E80 3712
R9 [}32]
Firmware version e.g.0x3141 e.g.1A
R10 Multiplex shift register 0x0118 280
R11 Signal channels 0x0218 280
R12 [}32]
minimum data length of a channel 0x0098 152
R13 Data structure 0x0000 0
R14 reserved 0x0000 0
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
R15 Alignment register typically 0x7F80 typically
32640
R16 [}33]
R17 [}33]
R18 [}33]
R19 [}33]
R20 [}33]
R21 [}33]
R22 [}33]
R23 internal use 0x0000 0
R24 internal use 0x1004 4100
R25 reserved 0x0000 0
Hardware version number e.g.0x0000 e.g.0
Vendor calibration:
Offset
Vendor calibration: Gain 0x0000 0
Manufacturer scaling: Offset 0x0000 0
Manufacturer scaling:
Gain
KM3701, KM3712: typically 0xF800 typically
63488
KM3702: typically
0xFE66
KM3701, KM3712: 0x00A2 162
KM3702: 0x021B 539
typically
65126
dec
dec
dec
dec
Overrange limit KM3701, KM3712: 0x03E8 1000
KM3702: 0x1D4C 7500
Under range limit KM3701, KM3712: 0xFC18 -1000
KM3702: 0xFF9C -100
dec
dec
dec
dec
dec
dec
dec
dec
ASCII
dec
dec
dec
- -
R RAM
R/W RAM
R ROM
R ROM
R ROM
R ROM
R ROM
R ROM
- -
R/W RAM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
- -
... reserved - - - -
R30 reserved 0x0000 0
R31 [}33]
R32 [}33]
R33 [}34]
R34 [}34]
R35 [}34]
R36 [}34]
Code word register 0x0000 0
Feature register 0x0202 514
User offset 0x0000 0
User gain 0x0100 256
Threshold 1 0x0000 0
Threshold 2 0x0000 0
dec
dec
dec
dec
dec
dec
dec
- -
R/W RAM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R/W EEPROM
R37 reserved - - - -
... reserved - - - -
R63 reserved - - - -
KM3701, KM3702 and KM3712 31Version: 2.0.0
Page 32

Access from the user programm
6.5 Register description
The registers are used for the parameterization of the Bus Terminals and are available for each channel.
They can be read or written by means of register communication.
R0: Raw ADC value
Register R0 contains the raw value of the analog/digital converter. This is the unchanged analog value prior
to any scaling.
R6: Diagnostic register
Status byte SB1 [}28] is placed into register R6.
R7: Command register
User code word
For the following commands to be executed, it is first necessary for the user code word,
Note
Command 0x7000: Restore Factory Settings
0x1235, to be entered into register R31 [}33]!
Entering 0x7000 in register R7 restores the factory settings for the following registers of both channels:
KM3701, KM3712:
R21: 0x03E8 (1000
R22: 0xFC18 (-1000
R32: 0x0202 (514
R33: 0x0000 (0
R34: 0x0100 (256
R35: 0x0000 (0
R36: 0x0000 (0
dec
dec
dec
dec
)
dec
)
)
dec
)
)
dec
)
)
KM3702:
R21: 0x1D4C (7500
R22: 0xFF9C (-100
R32: 0x0202 (514
R33: 0x0000 (0
R34: 0x0100 (256
R35: 0x0000 (0
R36: 0x0000 (0
dec
dec
dec
dec
)
dec
)
)
dec
dec
)
)
)
)
Delivery state for all channels
The command Restore Factory Settings simultaneously resets all module channels to the
Note
R8: Module ID
Register R8 contains the ID for the terminal module.
KM3701: 0x0C64 (3701
KM3702: 0x0C6E (3702
KM3712: 0xC3C (3712
R9: Firmware version
delivery state, irrespective of which register set it is called from!
)
dec
)
dec
)
dec
Register R9 contains the ASCII coding of the terminal's firmware version, e.g.0x3141 = '1A'. The '0x31'
corresponds here to the ASCII character '1', while the '0x41' represents the ASCII character 'A'.
This value cannot be changed.
R12: Minimum data length of a channel
Bits 0 to 6 of the high-order byte specify the minimum number of output data in bits: 000.0000
bin
= 0
, hence
dec
0bytes.
Bits 0 to 6 of the low-order byte specify the minimum number of input data in bits: 001.1000
bin
= 24
, hence
dec
3 bytes.
The fact that bit 7 is set indicates that the control and status byte are not mandatory for the terminal function
and are not transferred in compact mode.
KM3701, KM3702 and KM371232 Version: 2.0.0
Page 33

Access from the user programm
R16: Hardware version number
Register R16 contains the hardware version of the terminal.
R17: Vendor calibration - offset
This register contains the vendor calibration offset (16bit signed integer).
R18: Vendor calibration - gain
This register contains the vendor calibration gain (16bit unsigned integer x 2
-16
+ 1). Samples:
0x0000 means factor 1
0xFFFF means factor 2
R19: Manufacturer scaling - offset
This register contains the offset of the manufacturer scaling. Can be activated via R32.1 [}33] in the feature
register (16bit signed integer).
R20: Manufacturer scaling - gain
This register contains the gain of the manufacturer scaling. Can be activated via R32.1 [}33] in the feature
register (16bit unsigned integer x 2-8 + 1). Samples:
0x0100 means factor 1.
0x0080 means factor 0.5
R21: Upper measuring range limit
This register contains the upper measuring range limit. It can be activated by R32.8 [}33] in the feature
register.
R22: Lower measuring range limit
This register contains the lower measuring range limit. It can be activated by R32.8 [}33] in the feature
register.
R31: Code word register
• If you write values into the user registers without first entering the user code word (0x1235) into the
code word register, the terminal will not accept the supplied data.
• If you write values into the user registers and have previously entered the user code word (0x1235) in
the code word register, these values are stored in the RAM registers and in the SEEPROM registers
and are therefore retained if the terminal is restarted.
The code word is reset if the terminal is restarted.
R32: Feature register
The feature register defines the module configuration.
Bit R32.15 R32.14 R32.13 R32.12 R32.11 R32.10 R32.9 R32.8
Name - - - - enTh2 enTh1 enOverProt -
Bit R32.7 R32.6 R32.5 R32.4 R32.3 R32.2 R32.1 R32.0
Name - - - enSiemens
Format
enAverage
Format
disWdTimer enManScal enUsrScal
KM3701, KM3702 and KM3712 33Version: 2.0.0
Page 34

Access from the user programm
Bit Name Description default
R32.15 - reserved 0
bin
... ... ... ...
R32.12 - reserved 0
R32.11 enTh2 0
R32.10 enTh1 0
R32.9 enOverProt 0
Threshold 2 not active 0
bin
1
Threshold 2 active
bin
Threshold 1 not active 0
bin
1
Threshold 1 active
bin
Measuring range limitation not active 1
bin
1
Overrange protection active
bin
R32.8 - reserved 0
bin
bin
bin
bin
bin
... ... ... ...
R32.5 - reserved 0
R32.4 enSiemensFormat 0
R32.3 enAverageFormat 0
R32.2 disWdTimer 0
Siemens output format not active 0
bin
1
Siemens output format active
bin
Signed amount representation not active 0
bin
1
Signed amount representation active
bin
Watchdog timer is active (the watchdog is triggered if no
bin
bin
bin
bin
0
bin
process data are received for 100ms)
1
Watchdog timer is not active
bin
R32.1 enManScal 0
R32.0 enUsrScal 0
Manufacturer scaling is not active 1
bin
1
Manufacturer scaling is active
bin
User scaling is not active 0
bin
1
User scaling is active
bin
bin
bin
R33: User scaling - offset
This register contains the offset of the user scaling. The user scaling can be activated in the feature register
through bit R32.0 [}33] (16bit signed integer).
R34: User scaling - gain
This register contains the gain of the user scaling. The user scaling can be activated in the feature register
through bit R32.0 [}33] (16bit unsigned integer x 2-8 + 1, 1
corresponds to 0x0100).
dec
R35: Threshold 1
Threshold 1 is entered in register R35. The threshold can be activated in the feature register through bit
R32.10 [}33].
R36: Threshold 2
Threshold 2 is entered in register R36. The threshold can be activated in the feature register through bit R32
[}33].11.
KM3701, KM3702 and KM371234 Version: 2.0.0
Page 35

Access from the user programm
6.6 Examples of Register Communication
The numbering of the bytes in the examples corresponds to the display without word alignment.
6.6.1 Example 1: reading the firmware version from Register 9
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0x89 (1000 1001
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 specify the register number 9 with 00 1001
• The output data word (byte 1 and byte 2) has no meaning during read access. To change a register,
write the required value into the output word.
Input Data (answer of the bus terminal)
) 0xXX 0xXX
bin
.
bin
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x89 0x33 0x41
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the firmware version 0x3341 in the input data word (byte 1 and byte 2). This is to
be interpreted as an ASCII code:
◦ ASCII code 0x33 represents the digit 3
◦ ASCII code 0x41 represents the letter A
The firmware version is thus 3A.
6.6.2 Example 2: Writing to an user register
Code word
In normal mode all user registers are read-only with the exception of Register 31. In order
Note
I. Write the code word (0x1235) into Register 31.
to deactivate this write protection you must write the code word (0x1235) into Register 31. If
a value other than 0x1235 is written into Register 31, write protection is reactivated. Please
note that changes to a register only become effective after restarting the terminal (poweroff/power-on).
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xDF (1101 1111
) 0x12 0x35
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) contains the code word (0x1235) for deactivating write
protection.
KM3701, KM3702 and KM3712 35Version: 2.0.0
Page 36

Access from the user programm
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
II. Read Register 31 (check the set code word)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) has no meaning during read access.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0x12 0x35
bin
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the current value of the code word register in the input data word (byte 1 and byte
2).
III. Write to Register 32 (change contents of the feature register)
Output data
Byte 0: Control byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xE0 (1110 0000
) 0x00 0x02
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 indicate register number 32 with 10 0000
.
bin
• The output data word (byte 1 and byte 2) contains the new value for the feature register.
CAUTION
Observe the register description!
The value of 0x0002 given here is just an example!
The bits of the feature register change the properties of the terminal and have a different
meaning, depending on the type of terminal. Refer to the description of the feature register
of your terminal (chapter Register description) regarding the meaning of the individual bits
before changing the values.
KM3701, KM3702 and KM371236 Version: 2.0.0
Page 37

Access from the user programm
Input data (response from the Bus Terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xA0 (1010 0000
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
IV. Read Register 32 (check changed feature register)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xA0 (1010 0000
) 0xXX 0xXX
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 indicate register number 32 with 10 0000
.
bin
• The output data word (byte 1 and byte 2) has no meaning during read access.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xA0 (1010 0000
) 0x00 0x02
bin
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the current value of the feature register in the input data word (byte 1 and byte 2).
V. Write Register 31 (reset code word)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xDF (1101 1111
) 0x00 0x00
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) contains 0x0000 for reactivating write protection.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
KM3701, KM3702 and KM3712 37Version: 2.0.0
Page 38

Appendix
7 Appendix
7.1 Support and Service
Beckhoff and their partners around the world offer comprehensive support and service, making available fast
and competent assistance with all questions related to Beckhoff products and system solutions.
Beckhoff's branch offices and representatives
Please contact your Beckhoff branch office or representative for local support and service on Beckhoff
products!
The addresses of Beckhoff's branch offices and representatives round the world can be found on her internet
pages:
http://www.beckhoff.com
You will also find further documentation for Beckhoff components there.
Beckhoff Headquarters
Beckhoff Automation GmbH & Co. KG
Huelshorstweg 20
33415 Verl
Germany
Phone: +49(0)5246/963-0
Fax: +49(0)5246/963-198
e-mail: info@beckhoff.com
Beckhoff Support
Support offers you comprehensive technical assistance, helping you not only with the application of
individual Beckhoff products, but also with other, wide-ranging services:
• support
• design, programming and commissioning of complex automation systems
• and extensive training program for Beckhoff system components
Hotline: +49(0)5246/963-157
Fax: +49(0)5246/963-9157
e-mail: support@beckhoff.com
Beckhoff Service
The Beckhoff Service Center supports you in all matters of after-sales service:
• on-site service
• repair service
• spare parts service
• hotline service
Hotline: +49(0)5246/963-460
Fax: +49(0)5246/963-479
e-mail: service@beckhoff.com
KM3701, KM3702 and KM371238 Version: 2.0.0
Page 39

List of illustrations
List of illustrations
Fig. 1 KM3701 ....................................................................................................................................... 8
Fig. 2 KM3702 ....................................................................................................................................... 9
Fig. 3 KM3712 ....................................................................................................................................... 10
Fig. 4 Bus Terminal block with pressure measuring modules ............................................................... 12
Fig. 5 KM3701 - Single-channel differential pressure measurement..................................................... 13
Fig. 6 KM3702 - Two-channel relative pressure measurement ............................................................. 13
Fig. 7 KM3712 - Two-channel relative pressure measurement ............................................................. 14
Fig. 8 KM3701 - LEDs ........................................................................................................................... 15
Fig. 9 KM3702, KM3712 - LEDs ............................................................................................................ 15
Fig. 10 KM3701 - Application example for the fill level of tanks .............................................................. 19
Fig. 11 KM3701 - Application example for filter systems, pipe restrictions.............................................. 20
Fig. 12 KM3702 - Application example for pneumatic systems............................................................... 20
Fig. 13 EM3712 - Application example Packging plant for eggs ............................................................. 21
Fig. 14 KS2000 configuration software.................................................................................................... 22
Fig. 15 Display of the fieldbus station in KS2000 .................................................................................... 24
Fig. 16 KS2000 branch for channel 1 of the KM3701.............................................................................. 24
Fig. 17 Register view in KS2000.............................................................................................................. 25
Fig. 18 Process Data field ....................................................................................................................... 000
Fig. 19 History field.................................................................................................................................. 26
Fig. 20 Value field.................................................................................................................................... 26
Fig. 21 Value field.................................................................................................................................... 26
Fig. 22 Setting the display ....................................................................................................................... 26
KM3701, KM3702 and KM3712 39Version: 2.0.0
 Loading...
Loading...