

Page 1
Documentation
EP1xxx
EtherCAT Box Modules with digital inputs
Version:
Date:
2.5.0
2017-05-19
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation........................................................................................................... 5
1.2 Safety instructions .......................................................................................................................... 6
1.3 Documentation issue status............................................................................................................ 7
2 Product overview.......................................................................................................................................9
2.1 EtherCAT Box - Introduction........................................................................................................... 9
2.2 EP1xxx Module overview.............................................................................................................. 11
2.3 EP1008, EP1018 .......................................................................................................................... 12
2.3.1 EP1008, EP1018 - Introduction .......................................................................................12
2.3.2 EP1008, EP1018 - Technical Data ..................................................................................14
2.3.3 EP1008-0001 - Process image ........................................................................................15
2.4 EP1098-0001................................................................................................................................ 16
2.4.1 EP1098 - Introduction ......................................................................................................16
2.4.2 EP1098 - Technical Data .................................................................................................17
2.4.3 EP1098-0001 - Process image ........................................................................................18
2.5 EP1111-0000................................................................................................................................ 19
2.5.1 EP1111-0000 - Introduction .............................................................................................19
2.5.2 EP1111-0000 - Technical Data........................................................................................20
2.5.3 EP1111-0000 - Process image ........................................................................................20
2.6 EP1258-000x ................................................................................................................................ 21
2.6.1 EP1258 - Introduction ......................................................................................................21
2.6.2 EP1258 - Technical Data .................................................................................................22
2.6.3 EP1258-0001 - Process image ........................................................................................23
2.7 EP1809, EP1819 .......................................................................................................................... 24
2.7.1 EP1809-0021, EP1819-0021 - Introduction .....................................................................24
2.7.2 EP1809-0022, EP1819-0022 - Introduction .....................................................................25
2.7.3 EP1809, EP1819 - Technical data...................................................................................26
2.7.4 EP1809-0021 - Process image ........................................................................................27
2.8 EP1816-0008................................................................................................................................ 28
2.8.1 EP1816-0008 - Introduction .............................................................................................28
2.8.2 EP1816-0008 - Technical Data........................................................................................29
2.8.3 EP1816-0008 - Status-LEDs............................................................................................29
2.8.4 EP1816-0008 - Process image ........................................................................................30
2.9 EP1816-3008................................................................................................................................ 31
2.9.1 EP1816-3008 - Introduction .............................................................................................31
2.9.2 EP1816-3008 - Technical data ........................................................................................32
2.9.3 EP1816-3008 - Process image ........................................................................................33
2.9.4 Accelerometers ................................................................................................................35
2.9.5 Acceleration measurement .............................................................................................36
2.9.6 Update frequency.............................................................................................................37
2.9.7 Angle measurement.........................................................................................................38
3 Mounting and cabling .............................................................................................................................42
3.1 Mounting ....................................................................................................................................... 42
3.1.1 Dimensions ......................................................................................................................42
3.1.2 Fixing................................................................................................................................43
3.1.3 Nut torque for connectors ................................................................................................44
3.1.4 Additional checks .............................................................................................................45
3.2 EtherCAT ...................................................................................................................................... 46
3.2.1 EtherCAT connection.......................................................................................................46
3.2.2 EtherCAT - Fieldbus LEDs...............................................................................................48
EP1xxx 3Version: 2.5.0
Page 4

Table of contents
3.3 Power supply ................................................................................................................................ 49
3.3.1 Power Connection............................................................................................................49
3.3.2 Status LEDs for power supply..........................................................................................52
3.3.3 Power cable conductor losses M8 ...................................................................................53
3.4 UL Requirements.......................................................................................................................... 54
3.5 ATEX notes................................................................................................................................... 55
3.5.1 ATEX - Special conditions ...............................................................................................55
3.5.2 BG2000-0000 - EtherCAT Box protection enclosure .......................................................56
3.5.3 ATEX Documentation ......................................................................................................57
3.6 Signal connection ......................................................................................................................... 58
3.6.1 Digital inputs M8 and M12 ...............................................................................................58
3.6.2 Digital inputs Sub-D25 .....................................................................................................59
3.6.3 EP1816-3008 - Signal connection ...................................................................................60
3.7 Cabling.......................................................................................................................................... 61
4 Commissioning/Configuration ...............................................................................................................63
4.1 Inserting into the EtherCAT network............................................................................................. 63
4.2 Configuration via TwinCAT ........................................................................................................... 66
4.3 EP1816-0008 - Object Overview .................................................................................................. 74
4.4 EP1816-0008 - Object description and parameterization ............................................................. 76
4.5 EP1816-3008 - Object overview ................................................................................................... 81
4.6 EP1816-3008 - Object description and parameterization ............................................................. 86
4.6.1 Objects to be parameterized during commissioning ........................................................86
4.6.2 Standard objects (0x1000-0x1FFF) .................................................................................89
4.6.3 Profile-specific objects (0x6000-0xFFFF) ........................................................................95
4.7 Restoring the delivery state .......................................................................................................... 97
4.8 Firmware Update EL/ES/EM/EPxxxx............................................................................................ 98
5 Appendix ................................................................................................................................................108
5.1 General operating conditions...................................................................................................... 108
5.2 EtherCAT Box- / EtherCATPBox - Accessories........................................................................ 109
5.3 Support and Service ................................................................................................................... 110
EP1xxx4 Version: 2.5.0
Page 5

Foreword
1 Foreword
1.1 Notes on the documentation
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning these components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE®, XFC® and XTS® are registered
trademarks of and licensed by Beckhoff Automation GmbH.
Other designations used in this publication may be trademarks whose use by third parties for their own
purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, DE102004044764, DE102007017835 with corresponding applications or
registrations in various other countries.
The TwinCAT Technology is covered, including but not limited to the following patent applications and
patents: EP0851348, US6167425 with corresponding applications or registrations in various other countries.
EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
EP1xxx 5Version: 2.5.0
Page 6
Foreword
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of symbols
In this documentation the following symbols are used with an accompanying safety instruction or note. The
safety instructions must be read carefully and followed without fail!
DANGER
WARNING
CAUTION
Attention
Note
Serious risk of injury!
Failure to follow the safety instructions associated with this symbol directly endangers the
life and health of persons.
Risk of injury!
Failure to follow the safety instructions associated with this symbol endangers the life and
health of persons.
Personal injuries!
Failure to follow the safety instructions associated with this symbol can lead to injuries to
persons.
Damage to the environment or devices
Failure to follow the instructions associated with this symbol can lead to damage to the environment or equipment.
Tip or pointer
This symbol indicates information that contributes to better understanding.
EP1xxx6 Version: 2.5.0
Page 7
1.3 Documentation issue status
Version Modifications
2.5.0 • EP1816-3008 added
2.4.1 • EP1111-0000 – technical data updated
2.4.0 • Nut torques for connectors updated
2.3.0 • Torque wrench diagram updated
• Power connection updated
2.2.0 • EP1008-0022 added
• EP1819-0021 added
• Cabling adjusted
2.1.0 • Nut torques for connectors extended
2.0.0 • Migration
• Technical data updated
1.4.0 • Accessories chapter added
• Chapter on Nut torques for connectors updated
• Chapter on EtherCAT connection updated
• Chapter on BG2000-0000 - protective housing for EtherCAT Box updated
1.3.0 • EP1111-0000 added
• EP1098-0001 and EP1098-0002 added
• EP1809-0021, EP1809-0022 and EP1819-0022 updated
1.2.0 • ATEX notes added
• Extended temperature range for activated modules documented
• EP1809-0021, EP1809-0022 and EP1819-0022 added
• Description of the power connection updated
• Overview of EtherCAT cables extended
1.1.0 • Technical data: Current consumption values amended
• Nut torques for connectors added
1.0.0 • Process data description extended
0.7 • Description of status LEDs added
• Signal connection extended
• Explanation of the serial number adapted to the new standard
0.6 • Signal connection extended
0.5 • First preliminary version
Foreword
Firmware and hardware versions
This documentation refers to the firmware and hardware version that was applicable at the time the
documentation was written.
The module features are continuously improved and developed further. Modules having earlier production
statuses cannot have the same properties as modules with the latest status. However, existing properties
are retained and are not changed, so that older modules can always be replaced with new ones.
The firmware and hardware version (delivery state) can be found in the batch number (D-number) printed on
the side of the EtherCATBox.
Syntax of the batch number (D-number):
D: WW YY FF HH
EP1xxx 7Version: 2.5.0
Page 8
Foreword
WW - week of production (calendar week)
YY - year of production
FF - firmware version
HH - hardware version
Example with D no. 29 10 02 01:
29 - week of production 29
10 - year of production 2010
02 - firmware version 02
01 - hardware version 01
EP1xxx8 Version: 2.5.0
Page 9

Product overview
2 Product overview
2.1 EtherCAT Box - Introduction
The EtherCAT system has been extended with EtherCAT Box modules with protection class IP67. Through
the integrated EtherCAT interface the modules can be connected directly to an EtherCAT network without an
additional Coupler Box. The high-performance of EtherCAT is thus maintained into each module.
The extremely low dimensions of only 126x30x26.5 mm (hxw xd) are identical to those of the Fieldbus
Box extension modules. They are thus particularly suitable for use where space is at a premium. The small
mass of the EtherCAT modules facilitates applications with mobile I/O interface (e.g. on a robot arm). The
EtherCAT connection is established via screened M8connectors.
Fig.1: EtherCAT Box Modules within an EtherCAT network
The robust design of the EtherCAT Box modules enables them to be used directly at the machine. Control
cabinets and terminal boxes are now no longer required. The modules are fully sealed and therefore ideally
prepared for wet, dirty or dusty conditions.
Pre-assembled cables significantly simplify EtherCAT and signal wiring. Very few wiring errors are made, so
that commissioning is optimized. In addition to pre-assembled EtherCAT, power and sensor cables, fieldconfigurable connectors and cables are available for maximum flexibility. Depending on the application, the
sensors and actuators are connected through M8 or M12connectors.
The EtherCAT modules cover the typical range of requirements for I/O signals with protection class IP67:
• digital inputs with different filters (3.0ms or 10μs)
• digital outputs with 0.5 or 2A output current
• analog inputs and outputs with 16bit resolution
• Thermocouple and RTD inputs
• Stepper motor modules
XFC (eXtreme Fast Control Technology) modules, including inputs with time stamp, are also available.
EP1xxx 9Version: 2.5.0
Page 10
Product overview
Fig.2: EtherCAT Box with M8 connections for sensors/actuators
Fig.3: EtherCAT Box with M12 connections for sensors/actuators
Basic EtherCAT documentation
You will find a detailed description of the EtherCAT system in the Basic System Documen-
Note
tation for EtherCAT, which is available for download from our website (www.beckhoff.com)
under Downloads.
XML files
You will find XML files (XML Device Description Files) for Beckhoff EtherCAT modules on
Note
our website (www.beckhoff.com) under Downloads, in the Configuration Files area.
EP1xxx10 Version: 2.5.0
Page 11
2.2 EP1xxx Module overview
Digital input modules
Module Signal connection Number of inputs Filter Comment
EP1008-0001 [}12]
EP1008-0002 [}12]
EP1008-0022 [}12]
EP1018-0001 [}12]
EP1018-0002 [}12]
EP1098-0001 [}16]
EP1111-0000 [}19]
EP1258-0001 [}21]
EP1258-0002 [}21]
EP1809-0021 [}24]
EP1809-0022 [}25]
EP1816-0008 [}28]
EP1816-3008 [}31]
EP1819-0022 [}25]
8 x M8 8 3.0ms
4 x M12 8 3.0ms
8 x M12 8 3.0ms
8 x M8 8 10µs
4 x M12 8 10µs
8 x M8 8 10µs negative switching
- 3 ID switches - for identification of EtherCAT groups
8 x M8 8 10µs 2 channels with time stamp
4 x M12 8 10µs 2 channels with time stamp
8 x M8 8 3.0ms wide body
8 x M12 8 3.0ms wide body
1 x D-Sub 25 16 10µs
2 x M8 16 10µs D-Sub
8 x M12 8 10µs wide body
Product overview
EP1xxx 11Version: 2.5.0
Page 12
Product overview
2.3 EP1008, EP1018
2.3.1 EP1008, EP1018 - Introduction
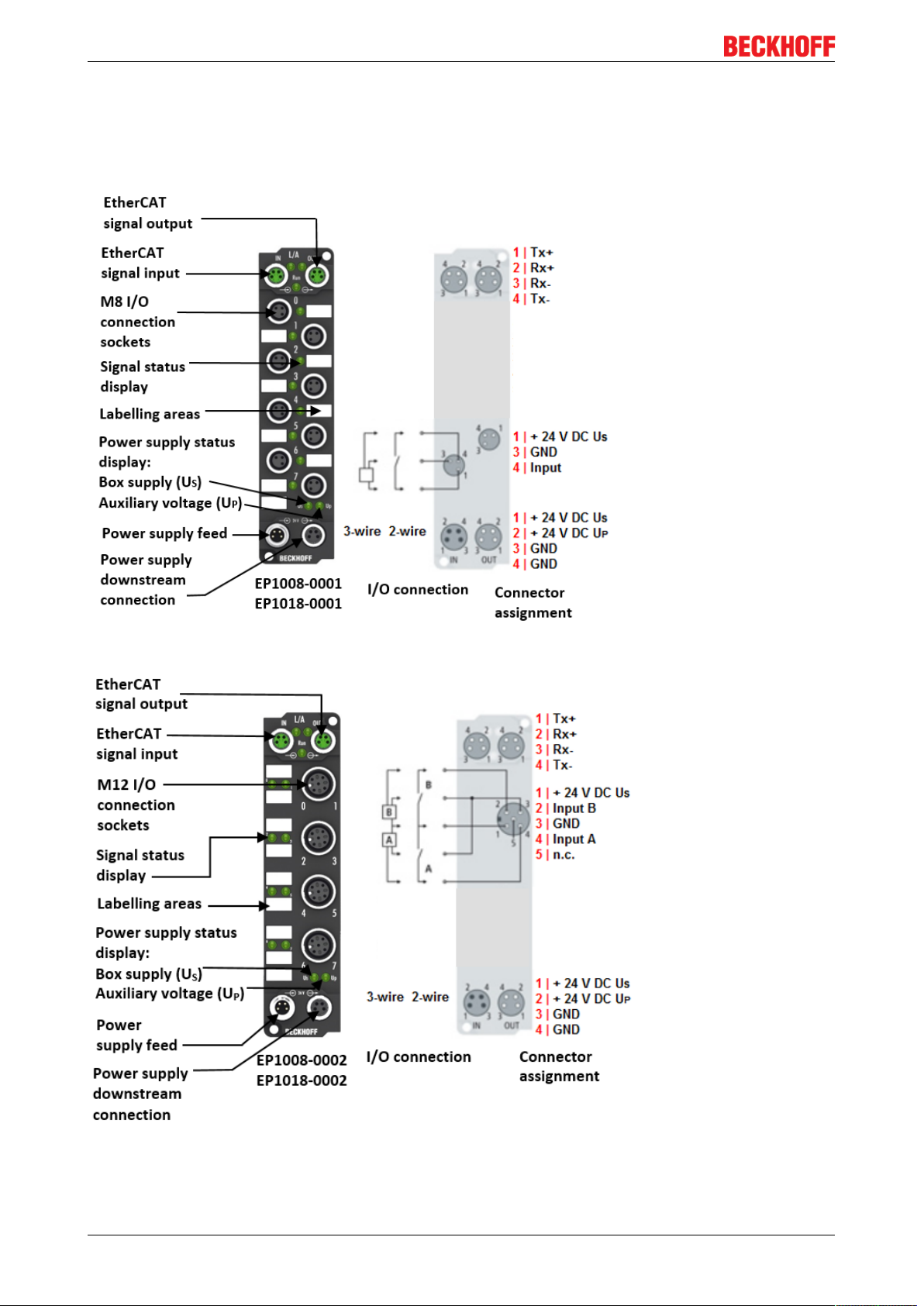
Fig.4: EP1008-0001, EP1018-0001
Fig.5: EP1008-0002, EP1018-0002
EP1xxx12 Version: 2.5.0
Page 13
Product overview
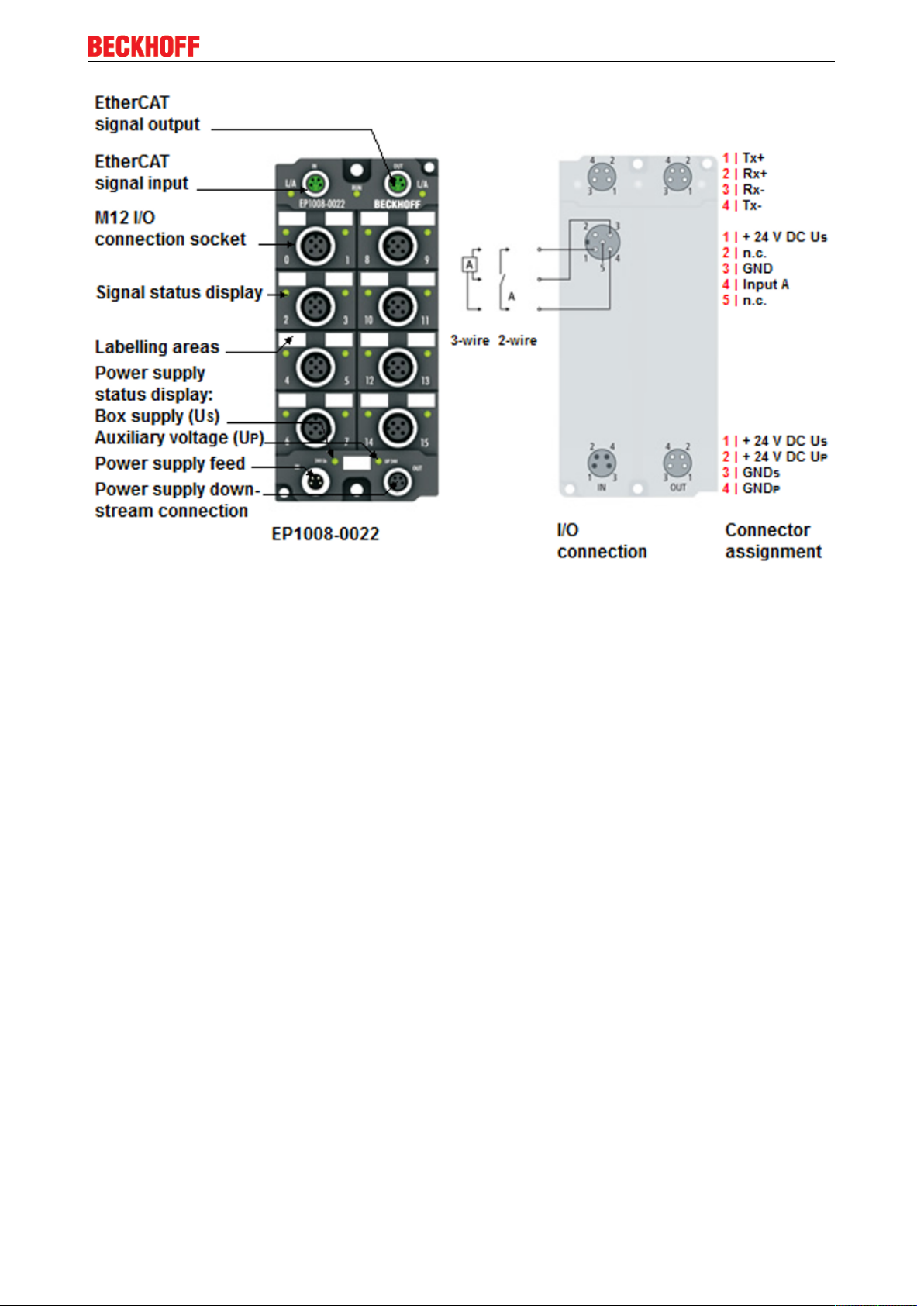
Fig.6: EP1008-0022
8 digital inputs, 24V
DC
The EP1008 and EP1018 EtherCAT Box modules with digital inputs acquire binary control signals from the
process level, and transfer them, electrically isolated, to the controller.
The status of the signal is displayed by light emitting diodes; the signal connection is made optionally
through M8 connectors (EP1008-0001, EP1018-0001) or M12 connectors (EP1008-0002, EP1018-0002,
EP1008-0022). These versions have input filters of different speeds.
The sensors are supplied from the control voltage US. The load voltage UP is not used in the input module,
but may be connected in order to be relayed downstream.
Quick links
Installation
UL Requirements for UL approved modules
ATEX - Special conditions for ATEX approved modules
EP1xxx 13Version: 2.5.0
Page 14

Product overview
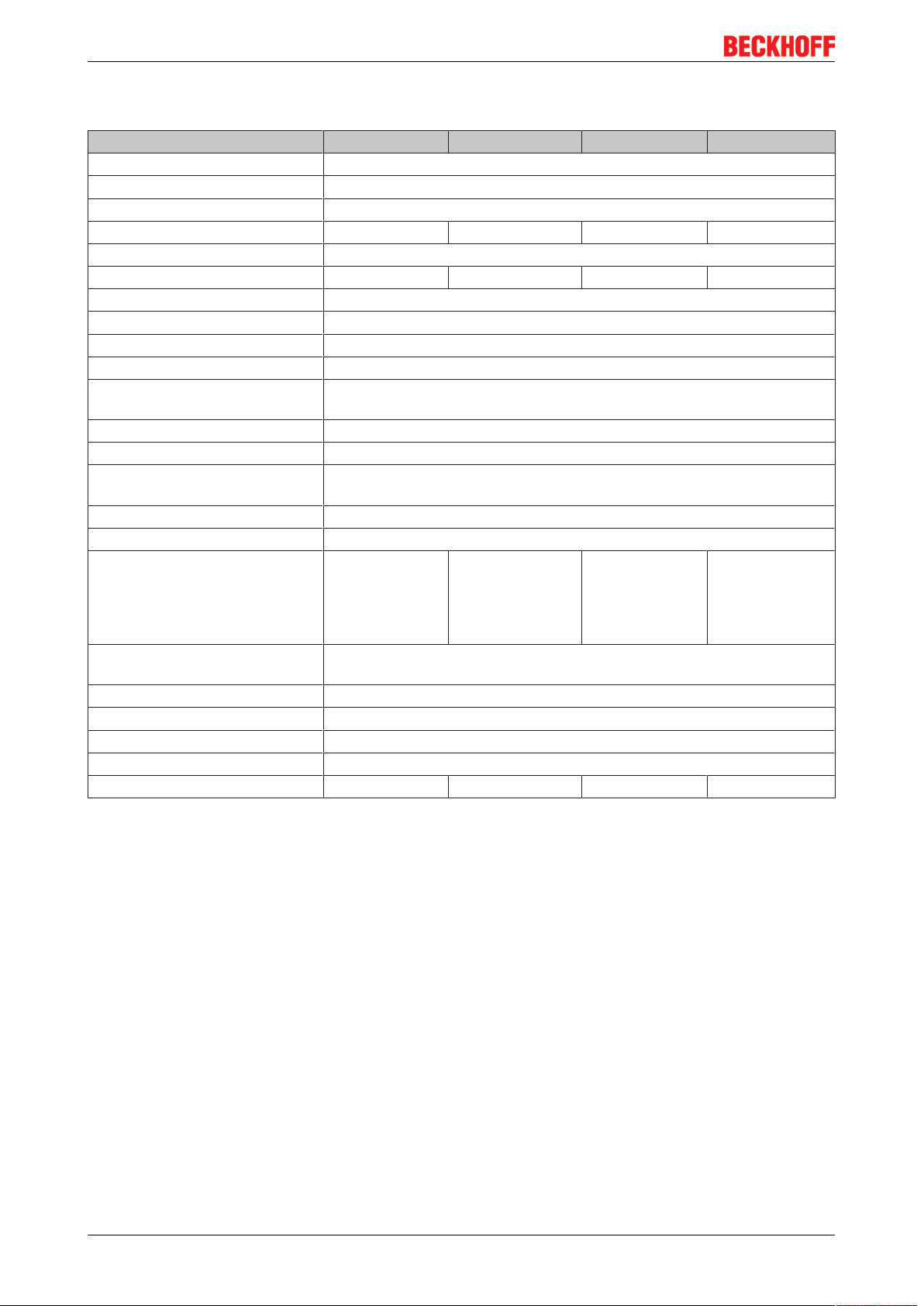
2.3.2 EP1008, EP1018 - Technical Data
Technical data EP1008-0001 EP1008-0002 EP1008-0022 EP1018-0001 EP1018-0002
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 8
Input connections M8 M12 M12 M8 M12
Nominal input voltage 24VDC (-15%/+20%)
Input filter 3,0ms 3,0ms 3,0ms 10µs 10µs
"0" signal voltage -3...+5V (EN 61131-2, Type 3)
"1" signal voltage +11...+30V (EN 61131-2, Type 3)
Input current typically 3 mA (EN 61131-2, Type 3)
Module electronic supply derived from control voltage Us
Module electronic current
consumption
Sensor supply derived from control voltage, Us
Sensor current consumption max. 0.5A total, short-circuit proof
Power supply connection Feed: 1 x M8 plug, 4-pin
Process image 8 input bits
Electrical isolation Control voltage/fieldbus: yes
Permissible ambient
temperature during operation
Permissible ambient
temperature during storage
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE, cULus, ATEX
typically 120mA
Onward connection: 1 x M8 socket, 4-pin
-25°C ... +60°C
0°C ... +55°C (according to cULus, see UL Requirements)
0°C ... +55°C (according to ATEX, see special conditions)
-40°C ... +85°C
EP1xxx14 Version: 2.5.0
Page 15
Product overview
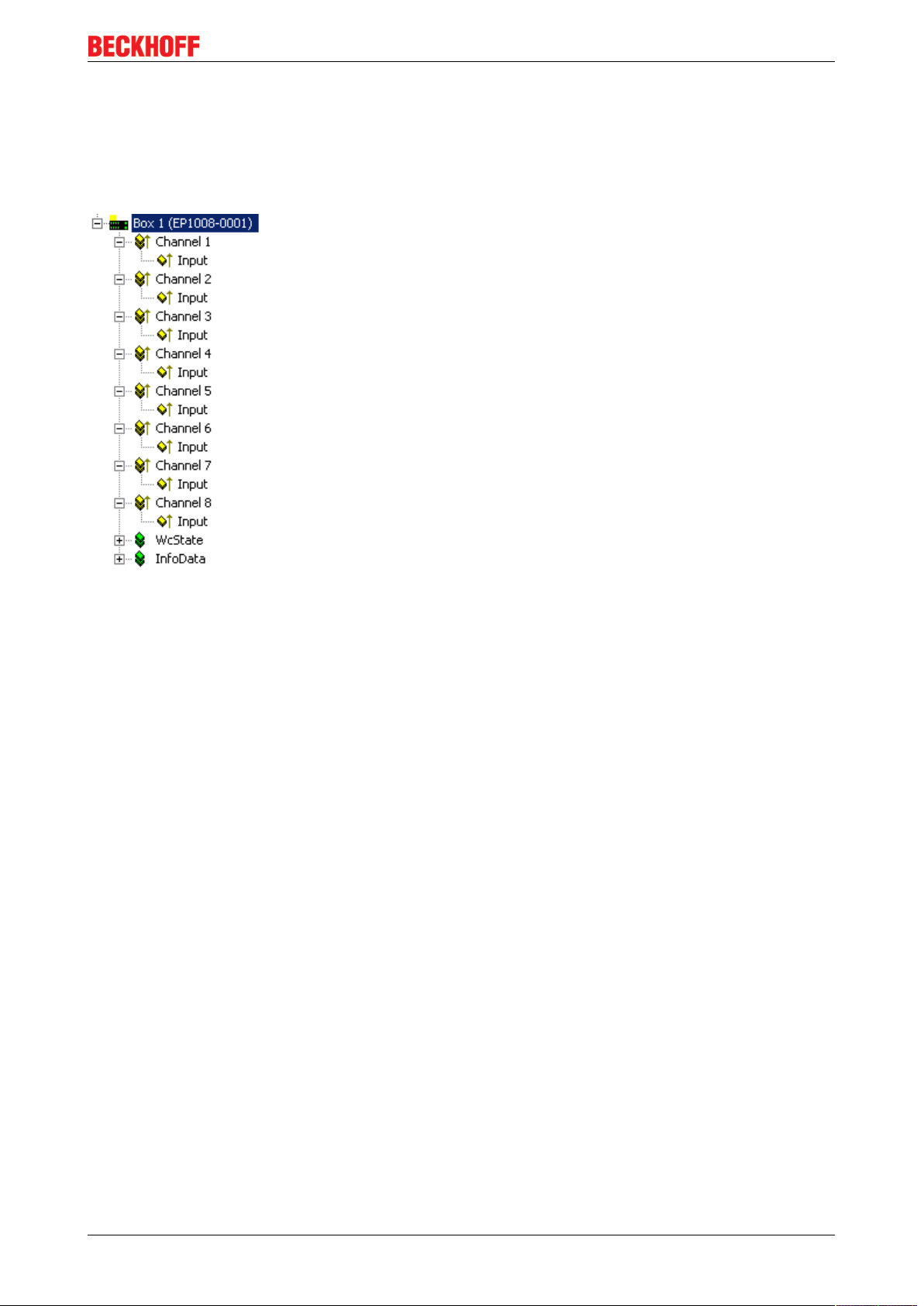
2.3.3 EP1008-0001 - Process image
Channel 1 to Channel 8
You will find the 8 digital inputs to the module (here using the EP1008-0001 as an example) under Channel
1 to Channel 8.
Fig.7: EP1008-0001, Process image
EP1xxx 15Version: 2.5.0
Page 16
Product overview
2.4 EP1098-0001
2.4.1 EP1098 - Introduction
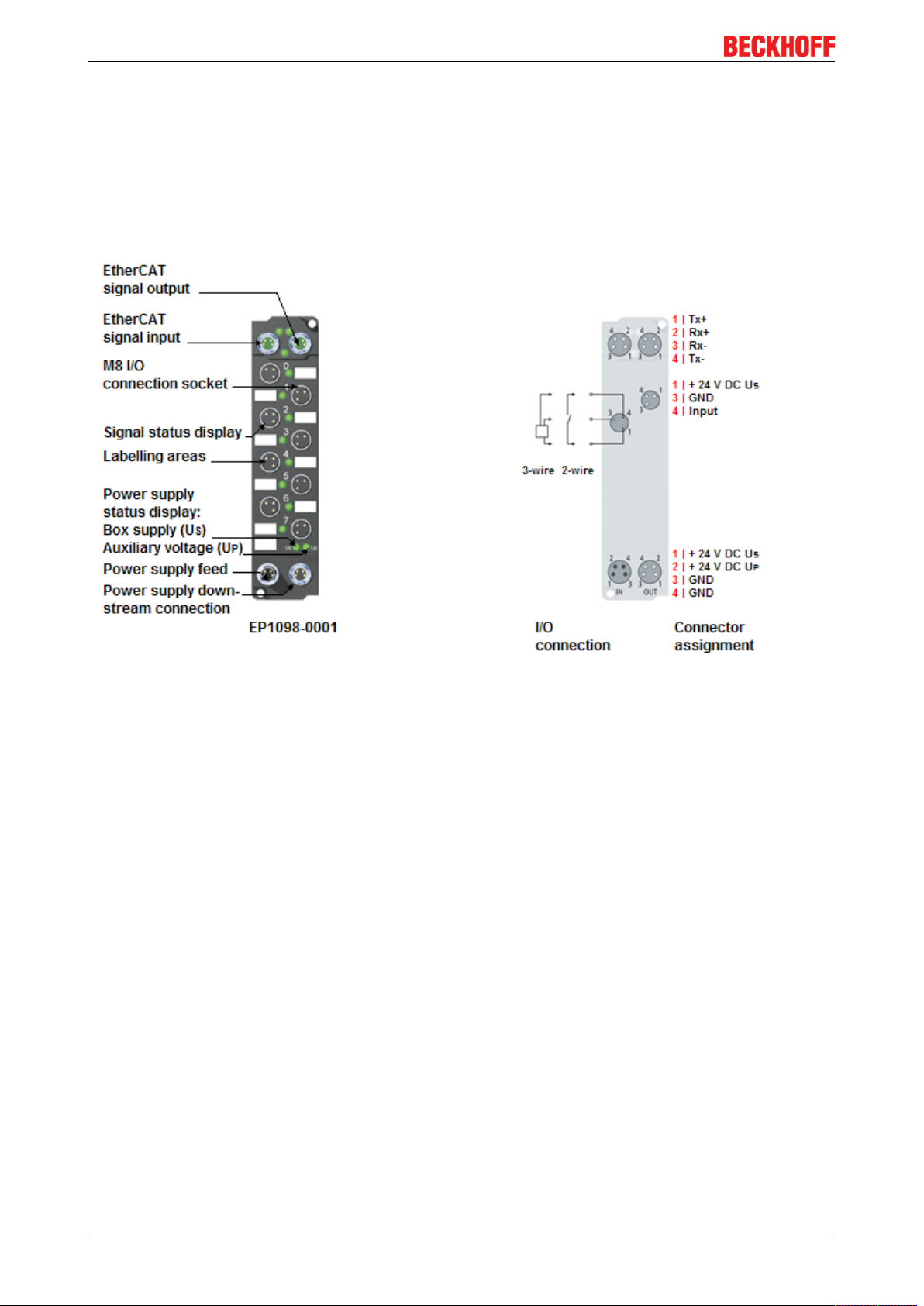
Fig.8: EP1098-0001
8 digital inputs, 24VDC, negative switching
The EP1098 EtherCAT Box modules with digital inputs acquire binary control signals from the process level,
and transfer them, electrically isolated, to the controller.
The status of the signal is displayed by light emitting diodes. The signal connection is made through M8
connectors (EP1098 -0001) or M12 connectors (EP1098 -0002).
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
Quick links
Installation
UL Requirements for UL approved modules
EP1xxx16 Version: 2.5.0
Page 17

2.4.2 EP1098 - Technical Data
Technical data EP1098-0001
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 8 (negative switching)
Input connections M8
Nominal input voltage 24VDC (-15%/+20%)
Input filter 10µs
"0" signal voltage 11…30V
"1" signal voltage 0…7V
Input current typically 2.5 mA (EN 61131-2, Type3)
Module electronic supply derived from control voltage Us
Module electronic current
consumption
Sensor supply derived from control voltage, Us
Sensor current consumption max. 0.5A total, short-circuit proof
Power supply connection Feed: 1 x M8 plug, 4-pin
Process image 8 input bits
Electrical isolation Control voltage/fieldbus: yes
Permissible ambient temperature
during operation
Permissible ambient temperature
during storage
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE, cULus
typically 120mA
Onward connection: 1 x M8 socket, 4-pin
-25°C ... +60°C
0°C ... +55°C (according to cULus, see UL Requirements)
-40°C ... +85°C
Product overview
EP1xxx 17Version: 2.5.0
Page 18
Product overview
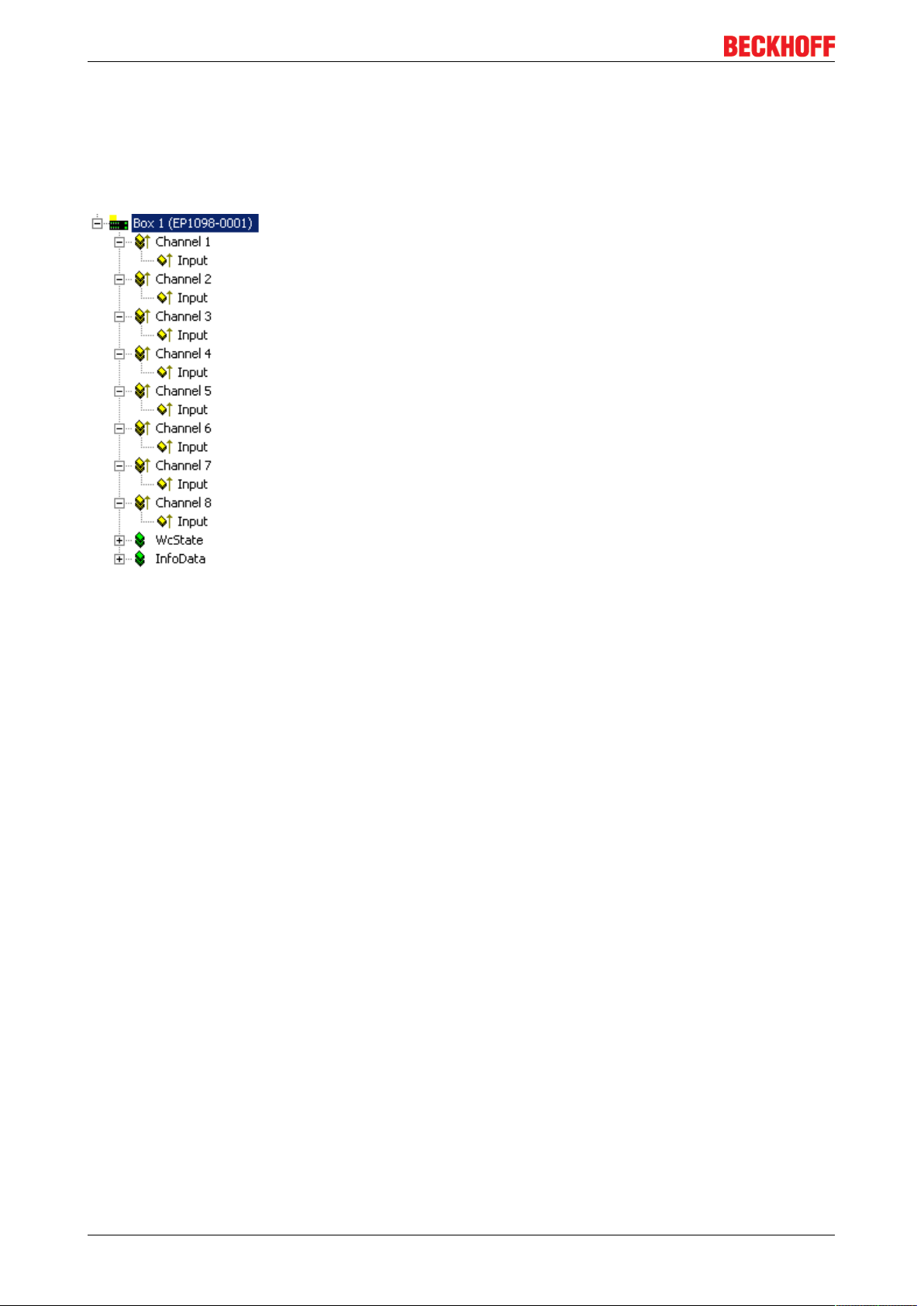
2.4.3 EP1098-0001 - Process image
Channel 1 to Channel 8
You will find the 8 digital inputs to the module (here using the EP1098-0001 as an example) under Channel
1 to Channel 8.
Fig.9: EP1098-0001, Process image
EP1xxx18 Version: 2.5.0
Page 19

2.5 EP1111-0000
2.5.1 EP1111-0000 - Introduction
Product overview
Fig.10: EP1111-0000
EtherCAT Box with ID switch
The EP1111-0000 EtherCAT Box has three decimal ID switches, with which a group of EtherCAT
components can be assigned an ID. This group can be present in any position in the EtherCAT network, as a
result of which variable topologies can be realized in a simple manner.
The EtherCAT connection is established via shielded M8 connectors with direct display of link and activity
status. The Run LED indicates the status of the EP1111.
Quick links
Installation
Also see about this
2 UL Requirements [}54]
EP1xxx 19Version: 2.5.0
Page 20
Product overview
2.5.2 EP1111-0000 - Technical Data
Technical data EP1111-0000
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Task within EtherCAT system identification of any EtherCAT group in the EtherCAT
network
Number of ID switches 3
Positions per ID switch 10
Number of different IDs 999
Module electronic supply derived from control voltage Us
Module electronic current consumption typically 120 mA
Power supply connection Feed: 1 x M8 plug, 4-pin
Onward connection: 1 x M8 socket, 4-pin
Process image 2 byte input data
Weight app. 165 g
Permissible ambient temperature during operation -25°C ... +60°C
0°C…+55°C (according to cULus, see UL
Requirements [}54])
Permissible ambient temperature during storage -40°C ... +85°C
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE, cULus
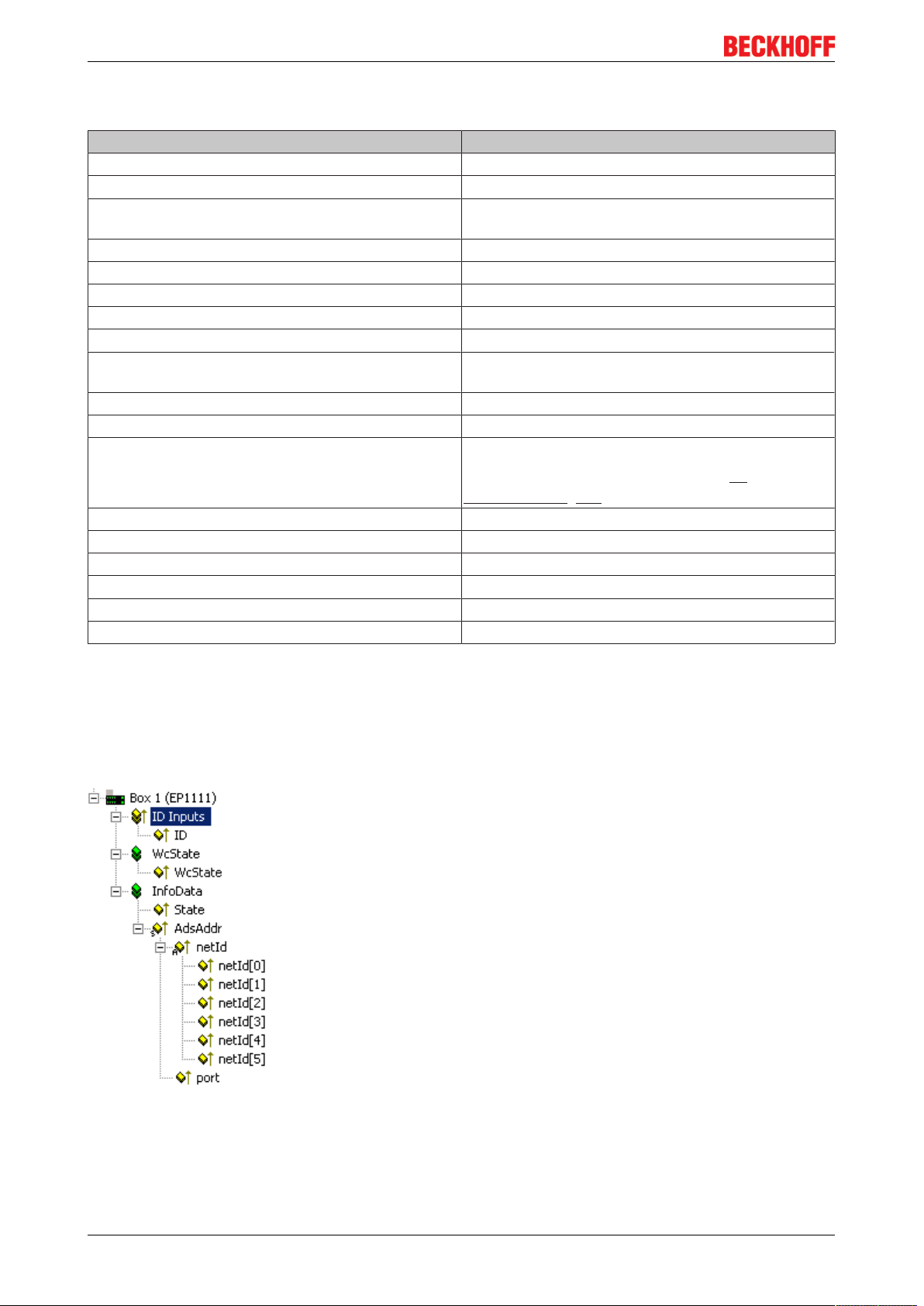
2.5.3 EP1111-0000 - Process image
ID inputs
You will find input data of the ID switches under under ID Inputs.
Fig.11: EP1111-0000, ID inputs
EP1xxx20 Version: 2.5.0
Page 21
2.6 EP1258-000x
2.6.1 EP1258 - Introduction
Product overview
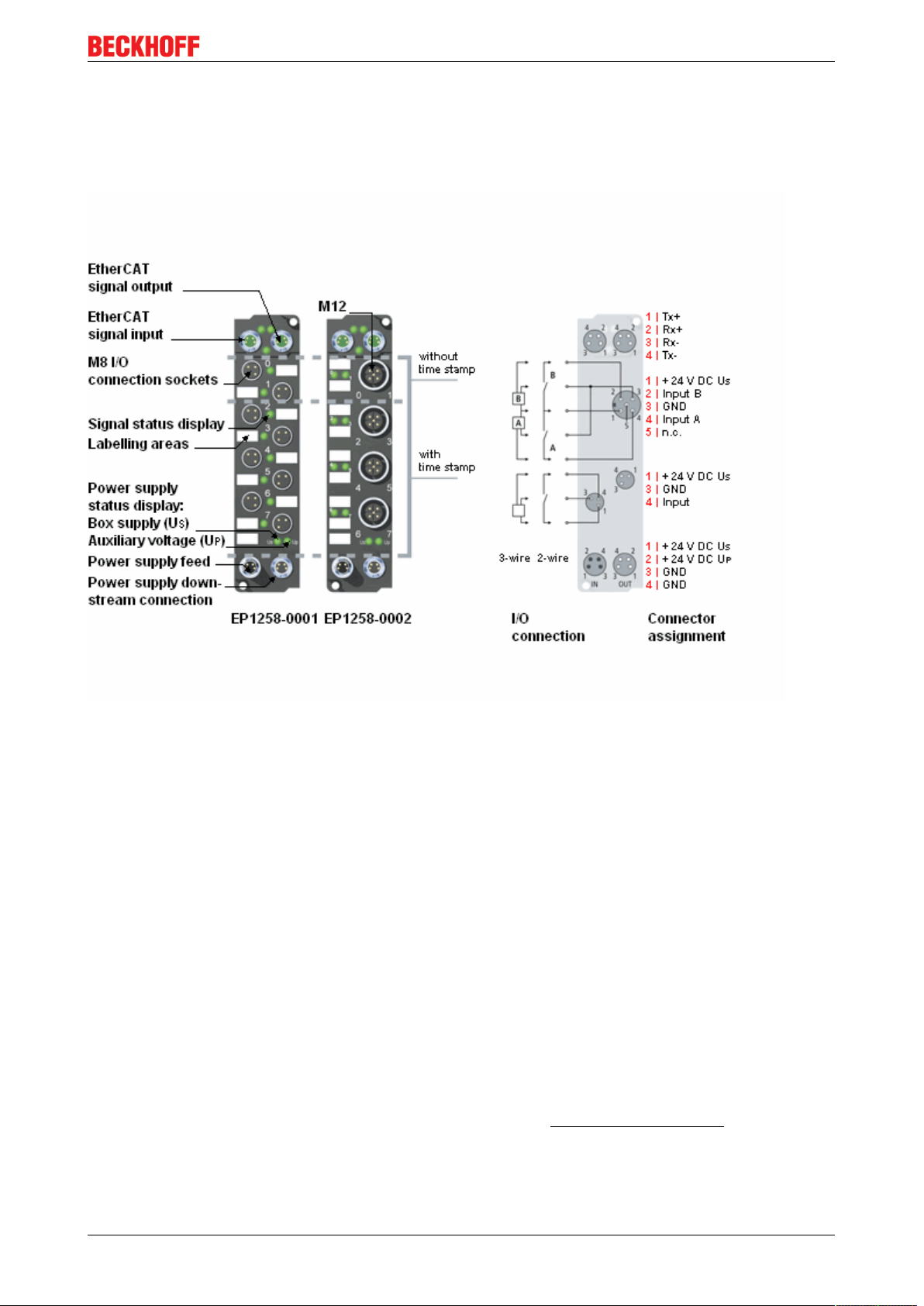
Fig.12: EP1258-0001, EP1258-0002
8 digital inputs 24VDC (two channels with time stamp)
The EP1258 EtherCAT Box with digital inputs acquires fast binary control signals from the process level and
transmits them, electrically isolated, to the controller.
The status of the signal is displayed by light emitting diodes; the signal connection is made optionally
through M8 connectors (EP1258-0001) or M12 connectors (EP1258-0002). Both modules have 10µs input
filters.
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
Distributed Clocks
Channels 0 and 1 are assigned a time stamp that shows the time of the last edge change with a resolution of
1ns. This technology enables signals to be traced exactly over time and synchronized with the clocks
distributed across the system. With this technology, machine-wide parallel hardware wiring of digital inputs or
encoder signals for synchronization purposes is often no longer required. As a result, equally timed
reactions, independent of the bus cycle time, are to a large extent possible.
You will find more information about the distributed clocks system in the Distributed Clocks System
Description, which is available under Download at our Internet site (http://www.beckhoff.com).
Quick links
Installation
EP1xxx 21Version: 2.5.0
Page 22
Product overview
UL Requirements for UL approved modules
ATEX - Special conditions for ATEX approved modules
2.6.2 EP1258 - Technical Data
Technical data EP1258-0001 EP1258-0002
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 8
Input connections M8 M12
Nominal input voltage 24 VDC (-15%/+20%)
Input filter 10 µs
"0" signal voltage -3...+5 V (similar to EN 61131-2, Type 3)
"1" signal voltage +11...+30 V (similar to EN 61131-2, Type 3)
Input current typically 3 mA (similar to EN 61131-2, Type 3)
Module electronic supply derived from control voltage Us
Module electronic current
consumption
Sensor supply derived from control voltage Us
Sensor current consumption max. 0.5 A total, short-circuit proof
Power supply connection Feed: 1 x M8 plug, 4-pin
Resolution time stamp 1 ns (Channel 0/1)
Precision of the time stamp 10 ns (+ input delay) (Channel 0/1)
Precision of the distributed clocks < 100 ns (Channel 0/1)
Process image 8 input bits , 36 byte time stamp
Electrical isolation Control voltage/fieldbus: yes
Permissible ambient temperature
during operation
Permissible ambient temperature
during storage
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE, cULus, ATEX
typically 120 mA
Onward connection: 1 x M8 socket, 4-pin
-25°C ... +60°C
0°C ... +55°C (according to cULus, see UL Requirements)
0°C ... +55°C (according to ATEX, see special conditions)
-40°C ... +85°C
EP1xxx22 Version: 2.5.0
Page 23
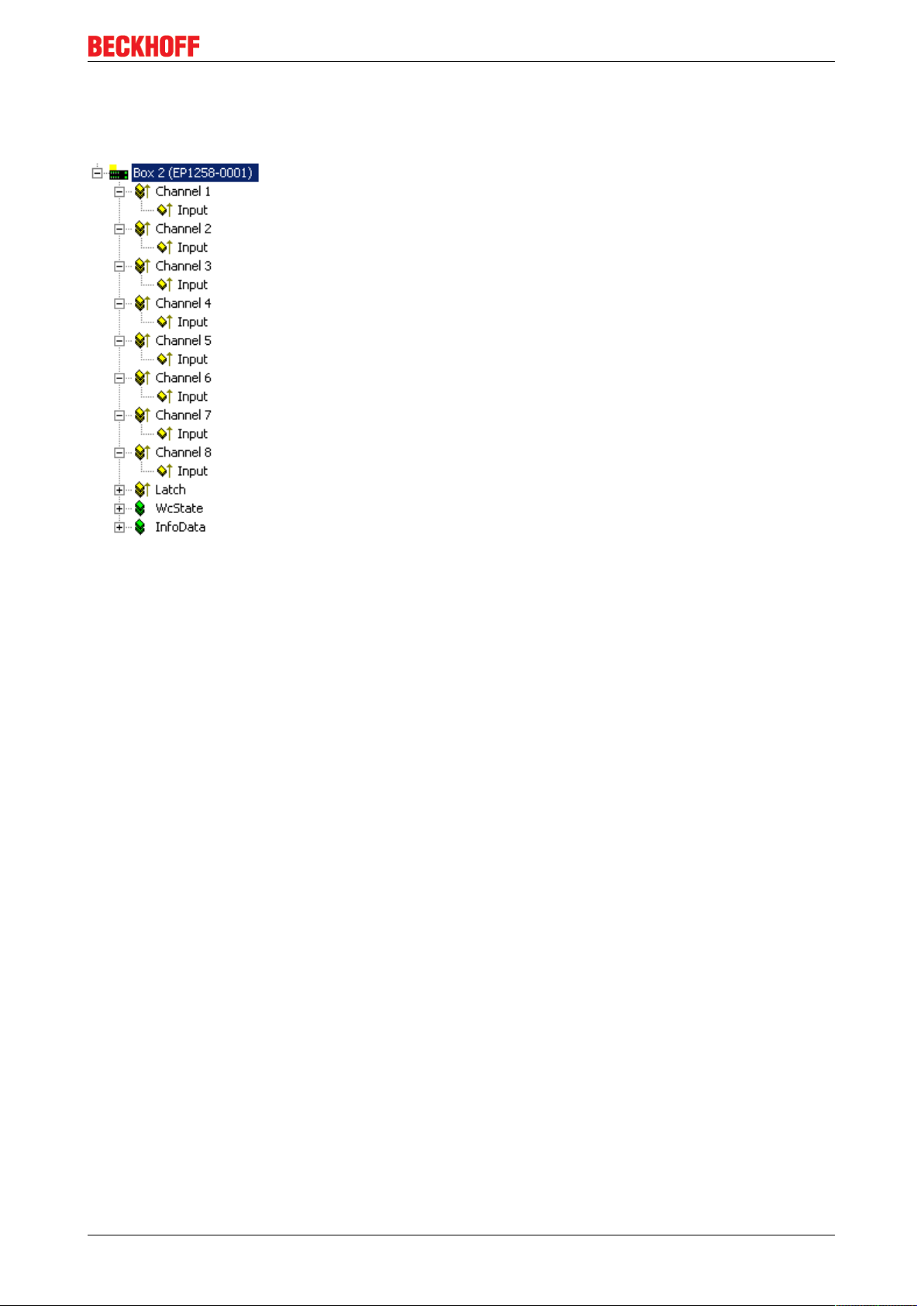
2.6.3 EP1258-0001 - Process image
Channel 1 to Channel 8
Product overview
Fig.13: EP1258-0001, Process image
You will find the 8 digital inputs to the module (here using the EP1258-0001 as an example) under Channel
1 to Channel 8.
EP1xxx 23Version: 2.5.0
Page 24
Product overview
2.7 EP1809, EP1819
2.7.1 EP1809-0021, EP1819-0021 - Introduction
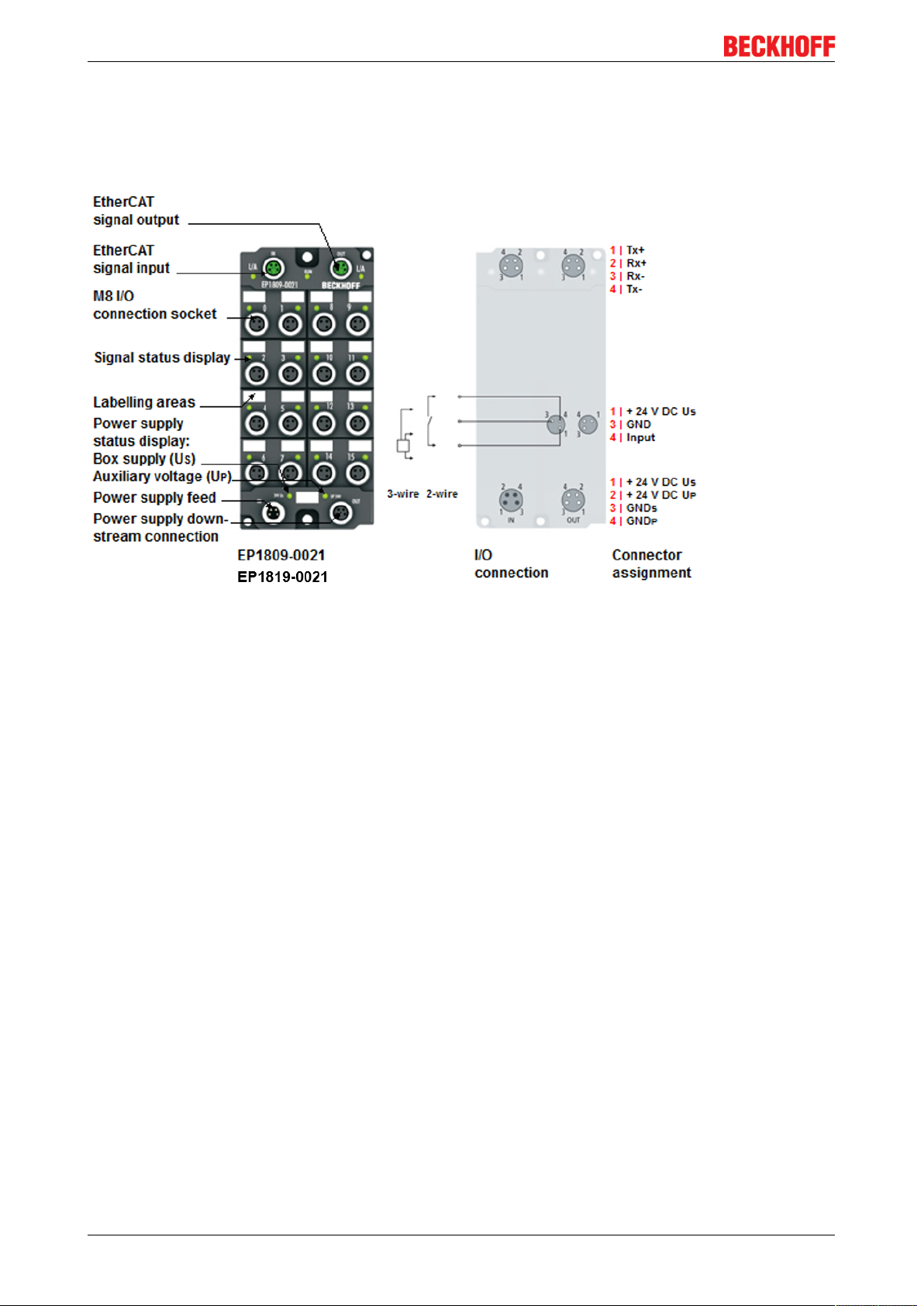
Fig.14: EP1809-0021, EP1819-0021
16 digital inputs, 24V
The EtherCAT modules EP1809-0021 and EP1819-0021 with digital inputs acquires the binary control
signals from the process level and transmits them, in an electrically isolated form, to the controller. The state
of the signals is indicated by light emitting diodes. The signals are connected via M8 connectors.
The sensors are supplied from the box supply voltage US. The auxiliary voltage UP is not used in the input
module, but may be connected in order to be relayed downstream.
Quick links
Installation
DC
EP1xxx24 Version: 2.5.0
Page 25
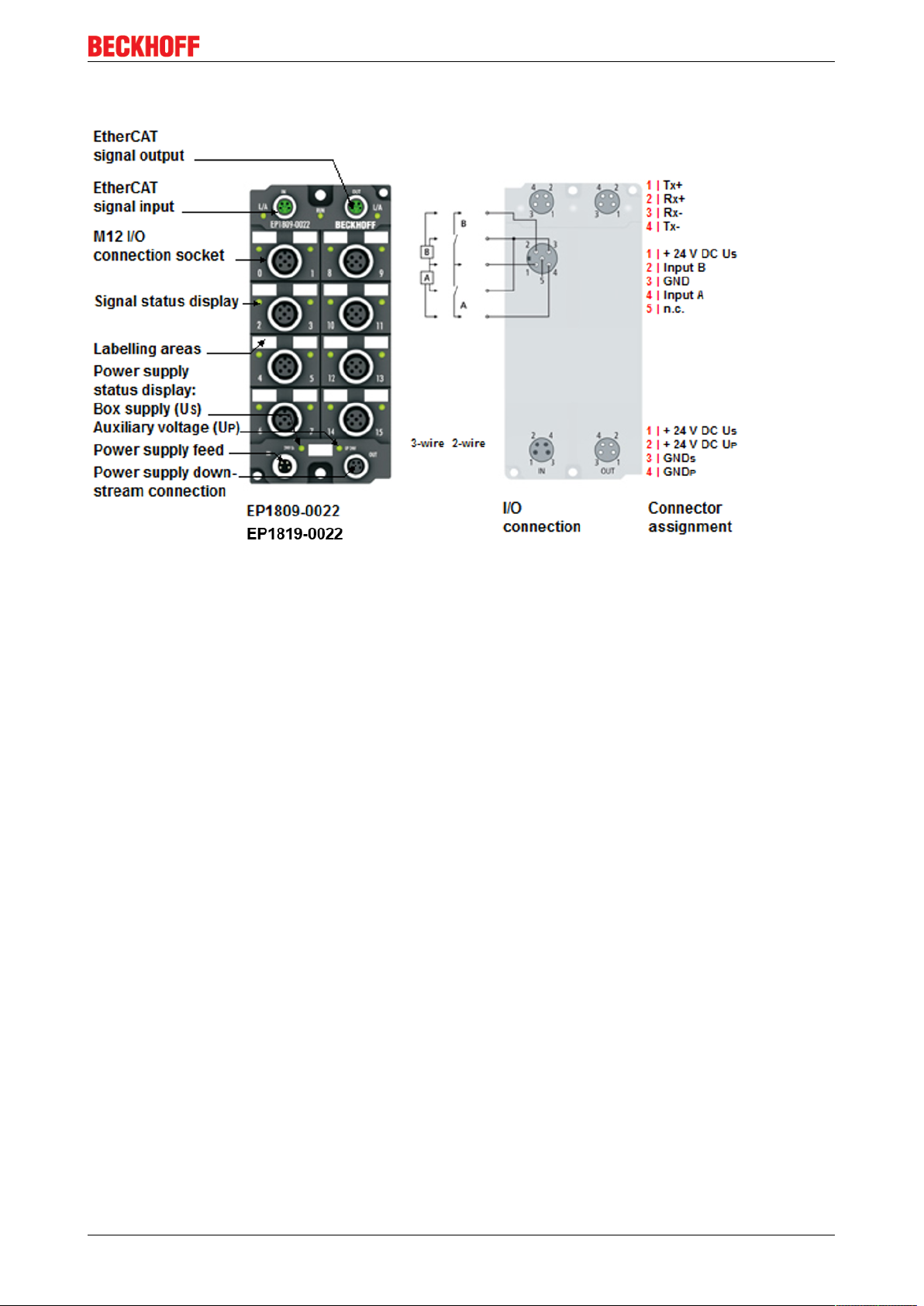
2.7.2 EP1809-0022, EP1819-0022 - Introduction
Product overview
Fig.15: EP1809-0022, EP1819-0022
16 digital inputs 24V
DC
The EP1809-0022 and EP1819-0022 modules with digital inputs acquire the binary control signals from the
process level and transmit them, in an electrically isolated form, to the controller. The state of the signals is
indicated by light emitting diodes. The signals are connected via M12 connectors. These versions are
distinguished by input filters of different speeds.
The sensors are supplied from the box supply voltage US. The auxiliary voltage UP is not used in the input
module, but may be connected in order to be relayed downstream.
Quick-Links
Installation
EP1xxx 25Version: 2.5.0
Page 26
Product overview
2.7.3 EP1809, EP1819 - Technical data
Technical data EP1809-0021 EP1809-0022 EP1819-0021 EP1819-0022
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 16
Input connections M8 M12 M8 M12
Nominal input voltage 24 VDC (-15%/+20%)
Input filter 3 ms 3 ms 10 µs 10 µs
"0" signal voltage -3...+5 V (similar to EN 61131-2, Type 3)
"1" signal voltage +11...+30 V (similar to EN 61131-2, Type 3)
Input current typically 3 mA (similar to EN 61131-2, Type 3)
Module electronic supply derived from control voltage Us
Module electronic current
consumption
Sensor supply derived from control voltage Us
Sensor current consumption max. 0.5 A total, short-circuit proof
Power supply connection Feed: 1 x M8 plug, 4-pin
Process image 16 input bits
Electrical isolation Control voltage / fieldbus: yes
Permissible ambient temperature
during operation
Permissible ambient temperature
during storage
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance / emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE CE, cULus CE CE
typically 130 mA (without sensor current)
Onward connection: 1 x M8 socket, 4-pin
-25°C ... +60°C -25°C ... +60°C
0°C ... +55°C
(according to
cULus, see UL
Requirements)
-40°C ... +85°C
-25°C ... +60°C -25°C ... +60°C
EP1xxx26 Version: 2.5.0
Page 27

Product overview
2.7.4 EP1809-0021 - Process image
Channel 1 to Channel 16
You will find the 16 digital inputs to the module (here using the EP1809-0021 as an example) under Channel
1 to Channel 16.
Fig.16: EP1809-0021, Process image
EP1xxx 27Version: 2.5.0
Page 28
Product overview
2.8 EP1816-0008
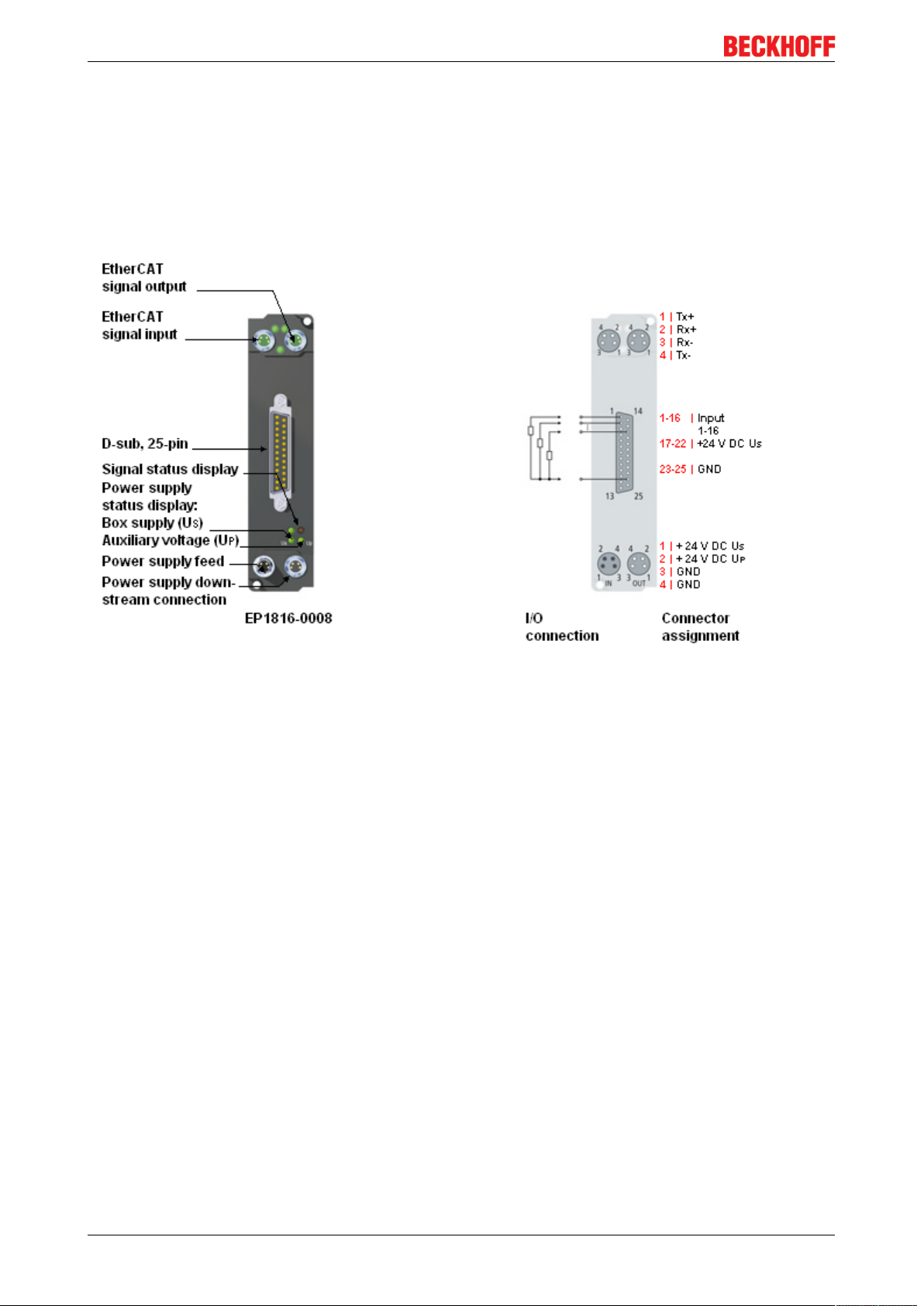
2.8.1 EP1816-0008 - Introduction
Fig.17: EP1816-0008
16 digital inputs, 24V
The EP1816-0008 EtherCAT Box with digital inputs acquires binary control signals from the process level
and transfers them, with electrical isolation, to the controller. The signal status is indicated by light emitting
diodes; the signal connection is made through a 25-pin Sub-D socket.
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
Quick links
Installation
UL Requirements for UL approved modules
DC
EP1xxx28 Version: 2.5.0
Page 29

Product overview
2.8.2 EP1816-0008 - Technical Data
Technical data EP1816-0008
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 16
Input connections [}59]
Nominal input voltage 24 VDC (-15%/+20%)
Input filter 10 µs
"0" signal voltage -3...+5 V (EN 61131-2, Type 3)
"1" signal voltage +11...+30 V (EN 61131-2, Type 3)
Input current typically 3 mA (EN 61131-2, Type 3)
Module electronic supply derived from control voltage Us
Module electronic current consumption typically 120 mA
Sensor supply derived from control voltage Us
Sensor current consumption max. 0.5 A total, short-circuit proof
Power supply connection Feed: 1 x M8 plug, 4-pin
Process image 16 input bits
Electrical isolation Control voltage/fieldbus: yes
Permissible ambient temperature during operation -25°C ... +60°C
Permissible ambient temperature during storage -40°C ... +85°C
Vibration / shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC resistance/emission conforms to EN 61000-6-2 / EN 61000-6-4
Protection class IP65, IP66, IP67 (conforms to EN 60529)
Installation position variable
Approvals CE, cULus
25 pin SUB-D socket
Onward connection: 1 x M8 socket, 4-pin
0°C ... +55°C (according to cULus, see UL
Requirements)
2.8.3 EP1816-0008 - Status-LEDs
Fig.18: EP1816-0008 - Status-LEDs
EP1xxx 29Version: 2.5.0
Page 30
Product overview
LED display
LED Display Meaning
STATUS 1-8 Green illuminated A signal (24V) is present at a least one of the inputs for
channels 1 to 8
STATUS 9-16 Green illuminated A signal (24V) is present at a least one of the inputs for
channels 9 to 16
Us off The power supply voltage, Us, is not present
Green illuminated The power supply voltage, Us, is present
Up off The power supply voltage, Up, is not present
Green illuminated The power supply voltage, Up, is present
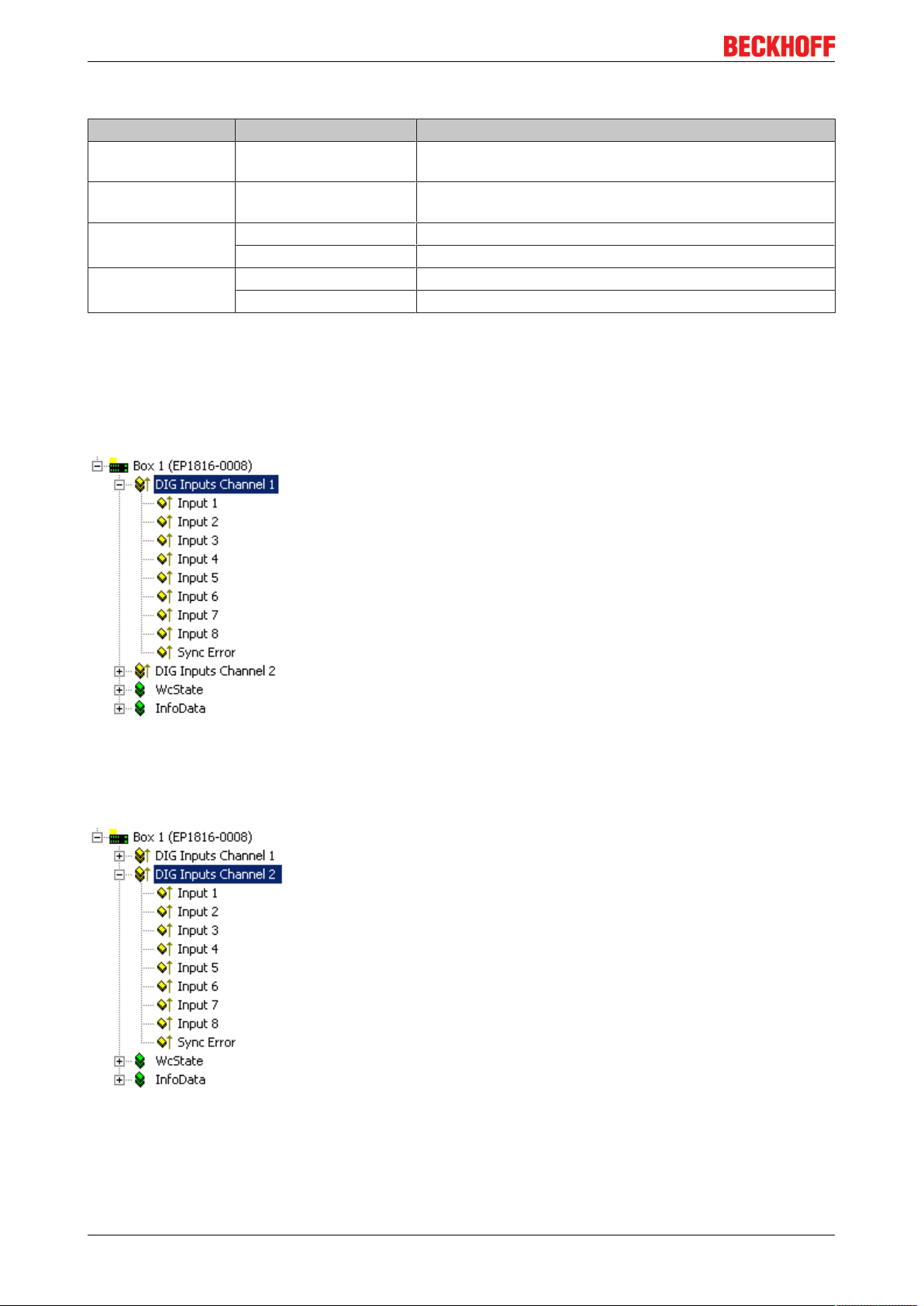
2.8.4 EP1816-0008 - Process image
DIG Inputs Channel 1
You will find the first 8 digital inputs of the module under DIG Inputs Channel 1.
Fig.19: EP1816-0008, Process image, DIG Inputs Channel 1
DIG Inputs Channel 2
You will find the second 8 digital inputs of the module under DIG Inputs Channel 2.
Fig.20: EP1816-0008, Process image, DIG Inputs Channel 2
EP1xxx30 Version: 2.5.0
Page 31

2.9 EP1816-3008
2.9.1 EP1816-3008 - Introduction
Product overview
Fig.21: EP1816-3008
16 digital inputs 24VDC, 2 x 3G accelerometers
The EP1816-3008 EtherCAT Box with digital inputs acquires binary control signals from the process level
and transfers them, with electrical isolation, to the controller. The signal status is indicated by light emitting
diodes; the signal connection is made through a 25-pin Sub-D socket.
In addition the EP1816-3008 has two 3-axis accelerometers.
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
Quick links
Installation
UL requirements for UL-approved modules
EP1xxx 31Version: 2.5.0
Page 32

Product overview
2.9.2 EP1816-3008 - Technical data
Technical data EP1816-3008
Fieldbus EtherCAT
Fieldbus connection 2 x M8 socket (green)
Number of inputs 16
Input connections [}60]
Rated input voltage 24VDC (-15%/+20%)
Input filter 10µs
Signal voltage "0" -3...+5V (EN61131-2, type3)
Signal voltage "1" +11...+30V (EN61131-2, type3)
Input current typically 3mA (EN61131-2, type3)
Minimum cycle time > 500µs
Diagnostics Undervoltage detection <18VDC for Us and Up
Supply of the module circuitry From the control voltage Us
Current consumption of the module circuitry typically 120mA
Sensor supply From the control voltage Us
Current consumption of the sensors max. 0.5A, short-circuit-proof overall
Power supply connection Power supply: 1 x M8 plug, 4-pin
Electrical isolation Control voltage/fieldbus: yes
Permissible ambient temperature during operation -25°C ... +60°C
Permissible ambient temperature during storage -40°C ... +85°C
Vibration/ shock resistance conforms to EN60068-2-6/ EN60068-2-27
EMC immunity/ emission conforms to EN61000-6-2/ EN61000-6-4
Protection class IP65, IP66, IP67 (according to EN60529)
Installation position variable
Technical approvals CE, cULus
25 pin SUB-D socket
Onward connection: 1 x M8 socket, 4-pin
0 °C ... +55 °C (according to cULus, see UL
requirements)
Technical data Accelerometers
Sensor type Two 3-axis sensors / offset by 90°
Resolution 16bit raw data; 1mg / LSB
Measuring range ±2g/±4g/±8g/±16g configurable
Special features Self-test
Sampling rate 1Hz to 5kHz
Maximum transfer rate
The EP1816-3008 reads sensors with sampling rates between 1Hz and 5kHz. Since the
Note
smallest cycle time is limited to 500µs due to the internal processing, the resulting maximum transfer rate is 2.5kHz.
EP1xxx32 Version: 2.5.0
Page 33

2.9.3 EP1816-3008 - Process image
DIG Inputs Channel1 and 2
Product overview
Fig.22: EP1816-3008, process image, DIG inputs channels 1 and 2
The 16 digital inputs of the module can be found under DIG Inputs Channeln.
AIInputs Channel 1 to 6
Fig.23: EP1816-3008 - AI inputs channels 1 to 6
The data for the two accelerometers can be found under AI inputs Channel
• Status Error: error relating to the communication with the accelerometer
• Value: 16 bit acceleration value
AI Inputs Channel 1 value: sensor 1, axis +X
AI Inputs Channel 2 value: sensor 1, axis +Y
AI Inputs Channel 3 value: sensor 1, axis -Z
EP1xxx 33Version: 2.5.0
Page 34

Product overview
AI Inputs Channel 1 value: sensor 2, axis +Y
AI Inputs Channel 2 value: sensor 2, axis -X
AI Inputs Channel 3 value: sensor 2, axis -Z
DIG Inputs Device
Fig.24: EP1816-3008 DIG Inputs Device
16bit status bit of the module
EP1xxx34 Version: 2.5.0
Page 35

2.9.4 Accelerometers
2 x 3G accelerometers
The EP1816-3008 EtherCAT Box features 2 3-axis accelerometers.
They are fitted on the underside the PCB at 90° angles.
Product overview
Fig.25: Location of the accelerometers
The image shows a top view and a side view of the EtherCAT Box. It shows the location of the
accelerometers within the Box. The green line indicates the location of the PCB. The accelerometers are
numbered 1 and 2. They are mounted on the underside of the PCB.
In this position, gravity (which is a form of acceleration), is displayed as a negative value when the Box is in
its normal operating position on a flat, level surface, e.g. on a test bench.
Process values Allocated acceleration value
AI Inputs Channel1 value Sensor 1, +X axis
AI Inputs Channel2 value Sensor 1, +Y axis
AI Inputs Channel3 value Sensor 1, -Z axis
AI Inputs Channel4 value Sensor 2, +Y axis
AI Inputs Channel5 value Sensor 2, -X axis
AI Inputs Channel6 value Sensor 2, -Z axis
EP1xxx 35Version: 2.5.0
Page 36

Product overview
2.9.5 Acceleration measurement
Resolution and display
By default the data from the accelerometers, in each case X, Y and Z axis values, are displayed as RAW
data, i.e. directly in the form in which they are transferred from the sensors.
Fig.26: CoE object 0x8080:1D
Alternatively, the data can be converted to 1mG / LSB. CoE object 0x8080:1D must be set accordingly.
Fig.27: Setting for output in mG
EP1xxx36 Version: 2.5.0
Page 37

Example for acceleration value display in TwinCAT ScopeView 2
Product overview
Fig.28: EP1816-3008, movement of the box in the axes, resulting acceleration values
Color Meaning
Blue sensor 1, Z axis
Red sensor 1, X axis
Green Sensor 1, Y axis
2.9.6 Update frequency
Fig.29: Update frequency
The update frequency of the sensor data is set via CoE object 0x8080:0D. On delivery this is set to 5kHz.
EP1xxx 37Version: 2.5.0
Page 38

Product overview
2.9.7 Angle measurement
The angle relative to gravity can be calculated directly in the EP1816-3008 (CoE 0x8080:1D).
However, the complex trigonometric calculations would have undue impact on the cycle time of the Box, so
that in this mode the angle resolution is limited to 1°.
In cases where higher resolution and accuracy is required, the calculations should be executed on a PC. The
sensors used are capable of an accuracy of less than 0.1°.
Since the angle values are derived from the acceleration values, which are subject to certain noise, they
have to be filtered via suitable algorithms.
In simple cases this could be moving average, for example.
Fig.30: Angle measurement, process data as acceleration values, calculation on a PC
EP1xxx38 Version: 2.5.0
Page 39

Product overview
Fig.31: Signal noise in detail
Color Meaning
Red Angle measured with 1024-step encoder / 4-way analysis for reference
Green Angle trigonometrically calculated on a PC, without noise suppression
blue Fast algorithm
yellow Arithmetic mean (1000 sliding values)
Direct measurement in the EP1816-3008
For direct measurements CoE object 0x8080:1D Presentation must be set to Horizontal Off-Axis Angle.
Fig.32: Activating direct measurements in the EP1816-3008
EP1xxx 39Version: 2.5.0
Page 40

Product overview
The angle is displayed with a resolution of 1 degree. Since the value is still noisy, filtering on the PC is
recommended.
Fig.33: red = angle values from EP1816-3008, green = after arithmetic mean calculation on the PC
Reference directions
• "Power supply high / EtherCAT connection low" -> negative angle X
• "Power supply low / EtherCAT connection high" -> positive angle X
• "Box tilted to the left (top to the left)" -> positive angle Y
• "Box tilted to the right (top to the right)" -> negative angle Y
Color Meaning
AI Inputs Channel 1: Input 1 -180° to +180° relative to X
AI Inputs Channel 2: Input 2 -180° to +180° relative to Y
AI Inputs Channel 3: Input 3 0
AI Inputs Channel 4: Input 4 -180° to +180° relative to Y
AI Inputs Channel 5: Input 5 -180° to +180° relative to X
AI Inputs Channel 6: Input 6 0
Calculation based on the acceleration values
If the calculation takes place on the PC, the "Presentation" in CoE object 0x8080:1D must be set to Milli-G.
EP1xxx40 Version: 2.5.0
Page 41

Variable Meaning
AI Inputs Channel 1 +X1
AI Inputs Channel 2 +Y1
AI Inputs Channel 3 -Z1
AI Inputs Channel 4 +Y2
AI Inputs Channel 5 -X2
AI Inputs Channel 6 -Z2
WinkelX=atan2[sqrt(Z1*Z1+Y1*Y1),|X1)].
IFZ1<0
THEN
WinkelX=90°-WinkelX,
ELSE
WinkelX=WinkelX+90°.
IFZ1>0
THEN
Winkel=-Winkel
Sample Program
Product overview
Using the sample program
This document contains sample applications of our products for certain areas of applica-
Attention
To download the sample program from this documentation please click on the following link: (http://
infosys.beckhoff.com/content/1033/ep1xxx/Resources/zip/3626380299.zip)
tion. The application notices provided here are based on typical features of our products
and only serve as samples. The notices contained in this document explicitly do not refer to
specific applications. The customer is therefore responsible for assessing and deciding
whether the product is suitable for a particular application. We accept no responsibility for
the completeness and correctness of the source code contained in this document. We reserve the right to modify the content of this document at any time and accept no responsibility for errors and missing information.
EP1xxx 41Version: 2.5.0
Page 42

Mounting and cabling
3 Mounting and cabling
3.1 Mounting
3.1.1 Dimensions
Fig.34: Dimensions of the EtherCAT Box Modules
All dimensions are given in millimeters.
Housing properties
EtherCAT Box lean body wide body
Housing material PA6 (polyamide)
Casting compound Polyurethane
Mounting two fastening holes Ø3mm for M3 two fastening holes Ø3mm for M3
two fastening holes Ø4,5mm for M4
Metal parts Brass, nickel-plated
Contacts CuZn, gold-plated
Power feed through max. 4A
Installation position variable
Protection class IP65, IP66, IP67 (conforms to EN 60529) when screwed together
Dimensions (HxWxD) ca. 126 x 30 x 26,5mm ca. 126 x 60 x 26,5mm
Weight approx. 125g, depending on module type approx. 250g, depending on module
type
EP1xxx42 Version: 2.5.0
Page 43

Mounting and cabling
3.1.2 Fixing
Note or pointer
While mounting the modules, protect all connectors, especially the IP-Link, against contam-
Note
Modules with narrow housing are mounted with two M3 bolts.
Modules with wide housing are mounted with two M3 bolts to the fixing holes located at the corners or
mounted with two M4 bolts to the fixing holes located centrally.
The bolts must be longer than 15 mm. The fixing holes of the modules are not threaded.
When assembling, remember that the fieldbus connectors increases the overall height. See chapter
accessories.
Mounting Rail ZS5300-0001
The mounting rail ZS5300-0001 (500 mm x 129 mm) allows the time saving assembly of modules.
The rail is made of stainless steel, 1.5 mm thick, with already pre-made M3 threads for the modules. The rail
has got 5.3 mm slots to mount it via M5 screws to the machine.
ination! Only with connected cables or plugs the protection class IP67 is guaranteed! Unused connectors have to be protected with the right plugs! See for plug sets in the catalogue.
Fig.35: Mounting Rail ZS5300-000
The mounting rail is 500 mm long, that way 15 narrow modules can be mounted with a distance of 2 mm
between two modules. The rail can be cut to length for the application.
Mounting Rail ZS5300-0011
The mounting rail ZS5300-0011 (500 mm x 129 mm) has in addition to the M3 treads also pre-made M4
treads to fix 60 mm wide modules via their middle holes.
Up to 14 narrow or 7 wide modules may be mixed mounted.
EP1xxx 43Version: 2.5.0
Page 44

Mounting and cabling
3.1.3 Nut torque for connectors
M8 connectors
It is recommended to pull the M8 connectors tight with a nut torque of 0.4 Nm. When using the torque control
screwdriver ZB8800 is also a max. torque of 0.5Nm permissible.
Fig.36: EtherCAT Box with M8 connectors
M12 connectors
It is recommended to pull the M12 connectors tight with a nut torque of 0.6 Nm.
Fig.37: EtherCAT Box with M8 and M12 connectors
EP1xxx44 Version: 2.5.0
Page 45

7/8" plug connectors
We recommend fastening the 7/8" plug connectors with a torque of 1.5Nm.
Fig.38: 7/8" plug connectors
Torque socket wrenches
Mounting and cabling
Fig.39: ZB8801 torque socket wrench
Ensure the right torque
Use the torque socket wrenches available by Beckhoff to pull the connectors tight (ZB8800,
Note
ZB8801-0000)!
3.1.4 Additional checks
The boxes have undergone the following additional tests:
Verification Explanation
Vibration 10 frequency runs in 3 axes
5Hz < f < 60Hz displacement 0.35mm, constant amplitude
60.1Hz < f < 500Hz acceleration 5g, constant amplitude
Shocks 1000 shocks in each direction, in 3 axes
35g, 11ms
EP1xxx 45Version: 2.5.0
Page 46

Mounting and cabling
3.2 EtherCAT
3.2.1 EtherCAT connection
For the incoming and ongoing EtherCAT connection,
• the EtherCAT Box (EPxxxx) has two M8 sockets, marked in green
• the Coupler Box (FBB-x110) has two M12 sockets
Fig.40: EtherCAT Box: M8 (30mm housing)
Fig.41: EtherCAT Box: M8 60mm housing (EP9214 for example )
EP1xxx46 Version: 2.5.0
Page 47

Mounting and cabling
Fig.42: Coupler Box: M12
Assignment
There are various different standards for the assignment and colors of connectors and cables for Ethernet/
EtherCAT.
Ethernet/EtherCAT Plug connector Cable Standard
Signal Description M8 M12 RJ45
Tx + Transmit Data+ Pin 1 Pin 1 Pin 1 yellow
Tx - Transmit Data- Pin 4 Pin 3 Pin 2 orange
Rx + Receive Data+ Pin 2 Pin 2 Pin 3 white
Rx - Receive Data- Pin 3 Pin 4 Pin 6 blue
1
ZB9010, ZB9020,
ZB9030, ZB9032,
ZK1090-6292,
ZK1090-3xxx-xxxx
2
2
2
2
ZB9031 and old
versions
of ZB9030, ZB9032,
ZK1090-3xxx-xxxx
orange/white
orange
blue/white
3
blue
3
3
3
TIA-568B
white/orange
orange
white/green
green
Shield Shield Housing Shroud Screen Screen Screen
1
) colored markings according to EN 61918 in the four-pin RJ45 connector ZS1090-0003
2
) wire colors according to EN 61918
3
) wire colors
Assimilation of color coding for cable ZB9030, ZB9032 and ZK1090-3xxxxxxxx (with M8 connectors)
Note
For unification the prevalent cables ZB9030, ZB9032 and ZK1090-3xxx-xxxx this means
the pre assembled cables with M8 connectors were changed to the colors of EN61918 (yellow, orange, white, blue).So different color coding exists. But the electrical properties are
absolutely identical.
EtherCAT connectors
The following connectors can be supplied for use in Beckhoff EtherCAT systems.
EP1xxx 47Version: 2.5.0
Page 48

Mounting and cabling
Designation Plug connector Comment
ZS1090-0003 RJ45 four-pin, IP20, for field assembly
ZS1090-0004 M12 four-pin, IP67, for field assembly
ZS1090-0005 RJ45 eight-pin, IP20, for field assembly, suitable for GigaBit Ethernet
ZS1090-0006 M8 male four-pin, IP67, for field assembly, for ZB903x cable
ZS1090-0007 M8 female four-pin, IP67, for field assembly, for ZB903x cable
ZS1090-1006 M8 male four-pin, IP67, for field assembly up to OD = 6.5mm
ZS1090-1007 M8 female four-pin, IP67, for field assembly up to OD = 6.5mm
3.2.2 EtherCAT - Fieldbus LEDs
Fig.43: EtherCAT-LEDs
LED display
LED Display Meaning
IN L/A off no connection to the preceding EtherCAT module
Lit LINK: connection to the preceding EtherCAT module
flashing ACT: Communication with the preceding EtherCAT module
OUT L/A off no connection to the following EtherCAT module
Lit LINK: connection to the following EtherCAT module
flashing ACT: Communication with the following EtherCAT module
Run off Status of the EtherCAT module is Init
flashes quickly Status of the EtherCAT module is pre-operational
flashes slowly Status of the EtherCAT module is safe-operational
Lit Status of the EtherCAT module is operational
EtherCAT statuses
The various statuses in which an EtherCAT module may be found are described in the Ba-
Note
sic System Documentation for EtherCAT, which is available for download from our website
(www.beckhoff.com) under Downloads.
EP1xxx48 Version: 2.5.0
Page 49

Mounting and cabling
3.3 Power supply
3.3.1 Power Connection
The feeding and forwarding of supply voltages is done via two M8 connectors at the bottom end of the
modules:
• IN: left M8 connector for feeding the supply voltages
• OUT: right M8 connector for forwarding the supply voltages
Fig.44: EtherCAT Box, Connectors for power supply
Fig.45: Pin assignment M8, Power In and Power Out
Table1: PIN assignment
Pin Voltage
1 Control voltage Us, +24V
2 Auxiliary voltage Up, +24V
DC
DC
3 GNDs* *) may be connected internally to each other depending on the module: see specific
4 GNDp*
module descriptions
The pins M8 connectors carry a maximum current of 4A.
Two LEDs display the status of the supply voltages.
Don't confuse the power connectors with the EtherCAT connectors!
Never connect the power cables (M8, 24VDC) with the green marked EtherCAT sockets of
Attention
the EtherCAT Box Modules! This can damage the modules!
Control voltage Us: 24V
DC
Power is supplied to the fieldbus, the processor logic, the inputs and the sensors from the 24VDC control
voltage Us. The control voltage is electrically isolated from the fieldbus circuitry.
EP1xxx 49Version: 2.5.0
Page 50

Mounting and cabling
Auxiliary voltage Up 24V
DC
The Auxiliary voltage Up supplies the digital outputs; it can be brought in separately. If the load voltage is
switched off, the fieldbus functions and the power supply and functionality of the inputs are retained.
Redirection of the supply voltages
The IN and OUT power connections are bridged in the module (not IP204x-Bxxx and IE204x). The supply
voltages Us and Up can thus easily be transferred from EtherCATBox to EtherCATBox.
Pay attention to the maximum permissible current!
Pay attention also for the redirection of the supply voltages Us and Up, the maximum per-
Attention
missible current for M8 connectors of 4A must not be exceeded!
EP1xxx50 Version: 2.5.0
Page 51

Mounting and cabling
Supply via EP92x4-0023 PowerBox modules
If the machine requires higher current or if the EtherCAT Box Modules are installed far away from the control
cabinet with included power supply, the usage of four cannel power distribution modules EP9214 or EP9224
(with integrated data logging, see www.beckhoff.com/EP9224) is recommended.
With these modules intelligent power distribution concepts with up to 2x16A and a maximum of 2.5mm²
cable cross-section can be realized.
Fig.46: EP92x4-0023, Connectors for Power In and Power Out
Fig.47: Pin assignment 7/8”, Power In and Power Out
EP1xxx 51Version: 2.5.0
Page 52

Mounting and cabling
Electrical isolation
Digital modules
In the digital input/output modules, the grounds of the control voltage (GNDs) and the auxiliary voltage
(GNDp) are connected to each other!
Check this at the documentation of each used EtherCAT Box.
Analog modules
In the analog input/output modules the grounds of the control voltage (GNDs) and the auxiliary voltage
(GNDp) are separated from each other in order to ensure electrical isolation of the analog signals from the
control voltage.
In some of the analog modules the sensors or actuators are supplied by Up - this means, for instance, that in
the case of 0...10 V inputs, any reference voltage (0...30 V) may be connected to Up; this is then available to
the sensors (e.g. smoothed 10 V for measuring potentiometers).
Details of the power supply may be taken from the specific module descriptions.
Electrical isolation may be cancelled!
If digital and analog fieldbus boxes are connected directly via four-core power leads, the
Attention
analog signals in the fieldbus boxes may be no longer electrically isolated from the control
voltage!
3.3.2 Status LEDs for power supply
Fig.48: Status LEDs for power supply
LED display
LED Display Meaning
Us (Control voltage) off The power supply voltage Us is not present
green illuminated The power supply voltage Us is present
red illuminated Because of overload (current>0.5A) the sensor supply
generated from power supply voltage Us was switched off for
all sensors fed from this.
Up (Auxiliary voltage) off The power supply voltage Up is not present
green illuminated The power supply voltage Up is present
EP1xxx52 Version: 2.5.0
Page 53

Mounting and cabling
3.3.3 Power cable conductor losses M8
The ZK2020-xxxx-yyyy power cables should not exceed the total length of 15m at 4A (with continuation).
When planning the cabling, note that at 24V nominal voltage, the functionality of the module can no longer
be assured if the voltage drop reaches 6V. Variations in the output voltage from the power supply unit must
also be taken into account.
Fig.49: Power cable conductor losses
Example
8m power cable with 0.34mm² cross-section has a voltage drop of 3.2V at 4A.
EP92x4 Power Distribution Modules
With EP9214 and EP9224 Power Distribution Modules intelligent concepts for voltage sup-
Note
ply are available. Further information may be found under www.beckhoff.com/EP9224.
EP1xxx 53Version: 2.5.0
Page 54

Mounting and cabling
3.4 UL Requirements
The installation of the EtherCAT Box Modules certified by UL has to meet the following requirements.
Supply voltage
CAUTION!
This UL requirements are valid for all supply voltages of all marked EtherCAT Box Mod-
CAUTION
CAUTION
ules!
For the compliance of the UL requirements the EtherCAT Box Modules should only be supplied
• by a 24 VDC supply voltage, supplied by an isolating source and protected by means of
a fuse (in accordance with UL248), rated maximum 4 Amp, or
• by a 24 VDC power source, that has to satisfy NEC class 2.
A NEC class 2 power supply shall not be connected in series or parallel with another
(class 2) power source!
CAUTION!
To meet the UL requirements, the EtherCAT Box Modules must not be connected to unlimited power sources!
Networks
CAUTION!
To meet the UL requirements, EtherCAT Box Modules must not be connected to telecom-
CAUTION
Ambient temperature range
munication networks!
CAUTION!
To meet the UL requirements, EtherCAT Box Modules has to be operated only at an ambi-
CAUTION
Marking for UL
All EtherCAT Box Modules certified by UL (Underwriters Laboratories) are marked with the following label.
Fig.50: UL label
ent temperature range of 0 to 55°C!
EP1xxx54 Version: 2.5.0
Page 55

3.5 ATEX notes
3.5.1 ATEX - Special conditions
Observe the special conditions for the intended use of EtherCAT Box modules in potentially explosive areas – directive 94/9/EU.
Mounting and cabling
WARNING
Standards
The fundamental health and safety requirements are fulfilled by compliance with the following standards:
• EN 60079-0: 2006
• EN 60079-15: 2005
Marking
The EtherCAT Box modules certified for potentially explosive areas bear the following marking:
• The certified components are to be installed in the BG2000-0000 protection enclosure
[}56] that guarantees a protection against mechanical hazards!
• If the temperatures during rated operation are higher than 70°C at the feed-in points of
cables, lines or pipes, or higher than 80°C at the wire branching points, then cables
must be selected whose temperature data correspond to the actual measured temperature values!
• Observethe permissible ambient temperature range of 0 - 55°C for the use of EtherCAT
Box modules in potentially explosive areas!
• Measures must be taken to protect against the rated operating voltage being exceeded
by more than 40% due to short-term interference voltages!
• The connections of the certified components may only be connected or disconnected if
the supply voltage has been switched off or if a non-explosive atmosphere is ensured!
II 3 GEx nA II T4DEKRA 11ATEX0080 XTa: 0 - 55°C
or
II 3 GEx nA nC IIC T4DEKRA 11ATEX0080 XTa: 0 - 55°C
Batch number (D number)
The EtherCAT Box modules bear a batch number (D number) that is structured as follows:
D: WW YY FF HH
WW - week of production (calendar week)
YY - year of production
FF - firmware version
HH - hardware version
Beispiel mit Ser. Nr.: 29 10 02 01:
29 - week of production 29
10 - year of production 2010
02 - firmware version 02
01 - hardware version 01
EP1xxx 55Version: 2.5.0
Page 56

Mounting and cabling
3.5.2 BG2000-0000 - EtherCAT Box protection enclosure
Risk of electric shock and damage of device!
Bring the EtherCAT system into a safe, powered down state before starting installation, dis-
WARNING
ATEX
The BG2000-0000 protection enclosure has to be mounted over a single EtherCAT Box to fulfill the special
conditions according to ATEX [}55].
Installation
Put the cables for EtherCAT, power supply and sensors/actuators through the hole of the BG2000-0000
protection enclosure.
assembly or wiring of the modules!
Fig.51: BG2000-0000, putting the cables
Fix the wires for EtherCAT, power supply and sensors/actuators to the EtherCAT Box.
EP1xxx56 Version: 2.5.0
Page 57

Mounting and cabling
Fig.52: BG2000-0000, fixing the cables
Mount the BG2000-0000 protection enclosure over the EtherCAT Box.
Fig.53: BG2000-0000, mounting the protection enclosure
3.5.3 ATEX Documentation
Notes about operation of EtherCAT Box Modules (EPxxxx-xxxx) in potentially
explosive areas (ATEX)
Note
EP1xxx 57Version: 2.5.0
Pay also attention to the continuative documentationNotes about operation of EtherCAT
Box Modules (EPxxxx-xxxx) in potentially explosive areas (ATEX) that is available in the
download area of the Beckhoff homepage http:\\www.beckhoff.com!
Page 58

Mounting and cabling
3.6 Signal connection
3.6.1 Digital inputs M8 and M12
The digital input modules acquire the binary control signals from the process level and transmit them to the
higher-level automation unit.
The signals are optionally connected via screw-in M8 connectors (EP1xxx-0001) or screw-in M12 connectors
(EP1xxx-0002).
Fig.54: Digital inputs M8 and M12
The sensors are supplied from the control voltage Us with a maximum current of 0.5 A.
The state of the signals is indicated by light emitting diodes.
EP1xxx58 Version: 2.5.0
Page 59

Mounting and cabling
3.6.2 Digital inputs Sub-D25
Digital inputs Sub-D25
The EP1xxx digital input modules acquire the binary control signals from the process level and transmit them
to the higher-level automation unit.
The signal connection is made through a 25-pin sub-D socket.
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
Fig.55: Digital inputs Sub-D25, 16 channels
EP1xxx 59Version: 2.5.0
Page 60

Mounting and cabling
3.6.3 EP1816-3008 - Signal connection
Digital inputs/outputs, 24VDC: 25 pin SUB-D socket
The digital input modules EP100x acquire the binary control signals from the process level and transmit them
to the higher-level automation device.
The signal connection is made through a 25-pin sub-D socket.
The sensors are supplied from the control voltage Us. The load voltage Up is not used in the input module,
but may be connected in order to be relayed downstream.
EP1816-3008
Fig.56: Digital inputs Sub-D 25
Please note the special pin assignment of the EP1816-3008.
The pin assignment of the EP1816-3008 differs from the EP1816-0008!
Attention
The supply voltage and GND connections differ, which means that incorrect connection
could damage the end devices, if these are not short-circuit-proof.
EP1xxx60 Version: 2.5.0
Page 61

Mounting and cabling
3.7 Cabling
A list of EtherCAT cables, power cables, sensor cables, Ethernet/EtherCAT connectors and fieldconfigurable connectors can be found under the following link: http://download.beckhoff.com/download/
document/catalog/main_catalog/german/Beckhoff_EtherCAT-Box-Zubehoer.pdf
The corresponding data sheets can be found under the following link:
https://beckhoff.de/default.asp?ethercat-box/ethercat_box_cables.htm?id=690338951657421
EtherCAT cables
Fig.57: ZK1090-3131-0xxx
For connecting EtherCAT devices, only use shielded Ethernet cables with a minimum specification of
category5 (CAT5) according to EN50173 or ISO/IEC11801.
Wiring recommendations
Detailed recommendations for EtherCAT cabling can be found in the documentation "De-
Note
EtherCAT uses four cable wires for signal transmission.
Due to automatic cable detection (auto-crossing) symmetric (1:1) or cross-over cables can be used between
EtherCAT devices from Beckhoff.
sign recommendations for EtherCAT/Ethernet infrastructure", which is available for download from www.beckhoff.de.
EP1xxx 61Version: 2.5.0
Page 62

Mounting and cabling
Power cable
Fig.58: ZK2020-3132-0xxx
Sensor cables
Fig.59: Selection of Beckhoff sensor cables
EP1xxx62 Version: 2.5.0
Page 63

Commissioning/Configuration
4 Commissioning/Configuration
4.1 Inserting into the EtherCAT network
Installation of the latest XML device description
Please ensure that you have installed the latest XML device description in TwinCAT. This
Note
At the Beckhoff TwinCAT System Manager the configuration tree can be build in two different ways:
• by scanning [}63] for existing hardware (called "online") and
• by manual inserting/appending [}63] of fieldbus devices, couplers and slaves.
Automatic scanning in of the box
• The EtherCAT system must be in a safe, de-energized state before the EtherCAT modules are
connected to the EtherCAT network!
• Switch on the operating voltage, open the TwinCAT System Manager [}66] (Config mode), and scan
in the devices (see Fig. 1). Acknowledge all dialogs with "OK", so that the configuration is in "FreeRun"
mode.
can be downloaded from the Beckhoff website (http://www.beckhoff.de/english/download/
elconfg.htm?id=1983920606140) and installed according to the installation instructions.
Fig.60: Scanning in the configuration (I/O Devices -> right-click -> Scan Devices...)
Appending a module manually
• The EtherCAT system must be in a safe, de-energized state before the EtherCAT modules are
connected to the EtherCAT network!
• Switch on the operating voltage, open the TwinCAT System Manager [}66] (Config mode)
• Append a new I/O device. In the dialog that appears select the device EtherCAT (Direct Mode), and
confirm with OK.
EP1xxx 63Version: 2.5.0
Page 64

Commissioning/Configuration
Fig.61: Appending a new I/O device (I/O Devices -> right-click -> Append Device...)
Fig.62: Selecting the device EtherCAT
• Append a new box.
Fig.63: Appending a new box (Device -> right-click -> Append Box...)
• In the dialog that appears select the desired box (e.g. EP2816-0008), and confirm with OK.
EP1xxx64 Version: 2.5.0
Page 65

Commissioning/Configuration
Fig.64: Selecting a Box (e.g. EP2816-0008)
Fig.65: Appended Box in the TwinCAT tree
EP1xxx 65Version: 2.5.0
Page 66

Commissioning/Configuration
4.2 Configuration via TwinCAT
In the left-hand window of the TwinCAT System Manager, click on the branch of the EtherCAT Box you wish
to configure (EP2816-0008 in this example).
Fig.66: Branch of the EtherCAT box to be configured
In the right-hand window of the TwinCAT System manager, various tabs are now available for configuring
the EtherCAT Box.
General tab
Fig.67: General tab
Name Name of the EtherCAT device
Id Number of the EtherCAT device
Type EtherCAT device type
Comment Here you can add a comment (e.g. regarding the system).
Disabled Here you can deactivate the EtherCAT device.
Create symbols Access to this EtherCAT slave via ADS is only available if this control box is
activated.
EP1xxx66 Version: 2.5.0
Page 67

Commissioning/Configuration
EtherCAT tab
Fig.68: EtherCAT tab
Type EtherCAT device type
Product/Revision Product and revision number of the EtherCAT device
Auto Inc Addr. Auto increment address of the EtherCAT device. The auto increment address can be
used for addressing each EtherCAT device in the communication ring through its
physical position. Auto increment addressing is used during the start-up phase when
the EtherCAT master allocates addresses to the EtherCAT devices. With auto
increment addressing the first EtherCAT slave in the ring has the address 0000
For each further slave the address is decremented by 1 (FFFF
, FFFE
hex
hex
etc.).
hex
.
EtherCAT Addr. Fixed address of an EtherCAT slave. This address is allocated by the EtherCAT
master during the start-up phase. Tick the control box to the left of the input field in
order to modify the default value.
Previous Port Name and port of the EtherCAT device to which this device is connected. If it is
possible to connect this device with another one without changing the order of the
EtherCAT devices in the communication ring, then this combination field is activated
and the EtherCAT device to which this device is to be connected can be selected.
Advanced Settings This button opens the dialogs for advanced settings.
The link at the bottom of the tab points to the product page for this EtherCAT device on the web.
Process Data tab
Indicates the configuration of the process data. The input and output data of the EtherCAT slave are
represented as CANopen process data objects (PDO). The user can select a PDO via PDO assignment and
modify the content of the individual PDO via this dialog, if the EtherCAT slave supports this function.
EP1xxx 67Version: 2.5.0
Page 68

Commissioning/Configuration
Fig.69: Process Data tab
Sync Manager
Lists the configuration of the Sync Manager (SM).
If the EtherCAT device has a mailbox, SM0 is used for the mailbox output (MbxOut) and SM1 for the mailbox
input (MbxIn).
SM2 is used for the output process data (outputs) and SM3 (inputs) for the input process data.
If an input is selected, the corresponding PDO assignment is displayed in the PDO Assignment list below.
PDO Assignment
PDO assignment of the selected Sync Manager. All PDOs defined for this Sync Manager type are listed
here:
• If the output Sync Manager (outputs) is selected in the Sync Manager list, all RxPDOs are displayed.
• If the input Sync Manager (inputs) is selected in the Sync Manager list, all TxPDOs are displayed.
The selected entries are the PDOs involved in the process data transfer. In the tree diagram of the System
Manager these PDOs are displayed as variables of the EtherCAT device. The name of the variable is
identical to the Name parameter of the PDO, as displayed in the PDO list. If an entry in the PDO assignment
list is deactivated (not selected and greyed out), this indicates that the input is excluded from the PDO
assignment. In order to be able do select a greyed out PDO, the currently selected PDO has to be
deselected first.
EP1xxx68 Version: 2.5.0
Page 69

Commissioning/Configuration
Activation of PDO assignment
• the EtherCAT slave has to run through the PS status transition cycle (from pre-opera-
Note
PDO list
List of all PDOs supported by this EtherCAT device. The content of the selected PDOs is displayed in the
PDO Content list. The PDO configuration can be modified by double-clicking on an entry.
Column Description
Index PDO index.
Size Size of the PDO in bytes.
Name Name of the PDO.
Flags F Fixed content: The content of this PDO is fixed and cannot be changed by the
SM Sync Manager to which this PDO is assigned. If this entry is empty, this PDO does
SU Sync unit to which this PDO is assigned.
tional to safe-operational) once (see Online tab [}72]),
• and the System Manager has to reload the EtherCAT slaves ( button)
If this PDO is assigned to a Sync Manager, it appears as a variable of the slave with
this parameter as the name.
System Manager.
M Mandatory PDO. This PDO is mandatory and must therefore be assigned to a
Sync Manager! Consequently, this PDO cannot be deleted from the PDO
Assignment list
not take part in the process data traffic.
PDO Content
Indicates the content of the PDO. If flag F (fixed content) of the PDO is not set the content can be modified.
Download
If the device is intelligent and has a mailbox, the configuration of the PDO and the PDO assignments can be
downloaded to the device. This is an optional feature that is not supported by all EtherCAT slaves.
PDO Assignment
If this check box is selected, the PDO assignment that is configured in the PDO Assignment list is
downloaded to the device on startup. The required commands to be sent to the device can be viewed in the
Startup [}69] tab.
PDO Configuration
If this check box is selected, the configuration of the respective PDOs (as shown in the PDO list and the
PDO Content display) is downloaded to the EtherCAT slave.
Startup tab
The Startup tab is displayed if the EtherCAT slave has a mailbox and supports the CANopen over EtherCAT
(CoE) or Servo drive over EtherCAT protocol. This tab indicates which download requests are sent to the
mailbox during startup. It is also possible to add new mailbox requests to the list display. The download
requests are sent to the slave in the same order as they are shown in the list.
EP1xxx 69Version: 2.5.0
Page 70

Commissioning/Configuration
Fig.70: Startup tab
Column Description
Transition Transition to which the request is sent. This can either be
• the transition from pre-operational to safe-operational (PS), or
• the transition from safe-operational to operational (SO).
If the transition is enclosed in "<>" (e.g. <PS>), the mailbox request is fixed and cannot be
modified or deleted by the user.
Protocol Type of mailbox protocol
Index Index of the object
Data Date on which this object is to be downloaded.
Comment Description of the request to be sent to the mailbox
Move Up This button moves the selected request up by one position in the list.
Move Down This button moves the selected request down by one position in the list.
New This button adds a new mailbox download request to be sent during startup.
Delete This button deletes the selected entry.
Edit This button edits an existing request.
CoE - Online tab
The additional CoE - Online tab is displayed if the EtherCAT slave supports the CANopen over EtherCAT
(CoE) protocol. This dialog lists the content of the object list of the slave (SDO upload) and enables the user
to modify the content of an object from this list. Details for the objects of the individual EtherCAT devices can
be found in the device-specific object descriptions.
EP1xxx70 Version: 2.5.0
Page 71

Commissioning/Configuration
Fig.71: CoE - Online tab
Table2: Object list display
Column Description
Index Index and sub-index of the object
Name Name of the object
Flags RW The object can be read, and data can be written to the object (read/write)
RO The object can be read, but no data can be written to the object (read only)
P An additional P identifies the object as a process data object.
Value Value of the object
Update List The Update list button updates all objects in the displayed list
Auto Update If this check box is selected, the content of the objects is updated automatically.
Advanced The Advanced button opens the Advanced Settings dialog. Here you can specify which
objects are displayed in the list.
EP1xxx 71Version: 2.5.0
Page 72

Commissioning/Configuration
Fig.72: Advanced Settings
Online
- via SDO Information
Offline
- via EDS File
Online tab
If this option button is selected, the list of the objects included in the object list of
the slave is uploaded from the slave via SDO information. The list below can be
used to specify which object types are to be uploaded.
If this option button is selected, the list of the objects included in the object list is
read from an EDS file provided by the user.
Fig.73: Online tab
EP1xxx72 Version: 2.5.0
Page 73

Commissioning/Configuration
State Machine
Init This button attempts to set the EtherCAT device to the Init state.
Pre-Op This button attempts to set the EtherCAT device to the pre-operational
state.
Op This button attempts to set the EtherCAT device to the operational state.
Bootstrap This button attempts to set the EtherCAT device to the Bootstrap state.
Safe-Op This button attempts to set the EtherCAT device to the safe-operational
state.
Clear Error This button attempts to delete the fault display. If an EtherCAT slave
fails during change of state it sets an error flag.
Example: An EtherCAT slave is in PREOP state (pre-operational). The
master now requests the SAFEOP state (safe-operational). If the slave
fails during change of state it sets the error flag. The current state is now
displayed as ERR PREOP. When the Clear Error button is pressed the
error flag is cleared, and the current state is displayed as PREOP again.
Current State Indicates the current state of the EtherCAT device.
Requested
State
DLL Status
Indicates the state requested for the EtherCAT device.
Indicates the DLL status (data link layer status) of the individual ports of the EtherCAT slave. The DLL status
can have four different states:
Status Description
No Carrier / Open No carrier signal is available at the port, but the port is open.
No Carrier / Closed No carrier signal is available at the port, and the port is closed.
Carrier / Open A carrier signal is available at the port, and the port is open.
Carrier / Closed A carrier signal is available at the port, but the port is closed.
Table3: File Access over EtherCAT
Download With this button a file can be written to the EtherCAT device.
Upload With this button a file can be read from the EtherCAT device.
EP1xxx 73Version: 2.5.0
Page 74

Commissioning/Configuration
4.3 EP1816-0008 - Object Overview
EtherCAT XML Device Description
The description corresponds to the display of the CoE objects from the EtherCAT XML De-
Note
Index Name Flags Default value
1000 [}76]
1008 [}76]
1009 [}77]
100A [}77]
1011
[}76]:0
1018
[}77]:0
10F0
[}77]:0
1A00
[}77]:0
1A01
[}78]:0
1C00
[}78]:0
1C12
[}78]:0
1C13
[}78]:0
SubIndex Restore default parameters RO 0x01 (1
1011:01 SubIndex 001 RW 0x00000000 (0
SubIndex Identity RO 0x04 (4
1018:01 Vendor ID RO 0x00000002 (2
1018:02 Product code RO 0x07184052 (119029842
1018:03 Revision RO 0x00100008 (1048584
1018:04 Serial number RO 0x00000000 (0
SubIndex Backup parameter handling RO 0x01 (1
10F0:01 Checksum RO 0x00000000 (0
SubIndex DO TxPDO-Map Inputs Ch.1 RO 0x0B (11
1A00:01 SubIndex 001 RO 0x6000:01, 1
1A00:02 SubIndex 002 RO 0x6000:02, 1
1A00:03 SubIndex 003 RO 0x6000:03, 1
1A00:04 SubIndex 004 RO 0x6000:04, 1
1A00:05 SubIndex 005 RO 0x6000:05, 1
1A00:06 SubIndex 006 RO 0x6000:06, 1
1A00:07 SubIndex 007 RO 0x6000:07, 1
1A00:08 SubIndex 008 RO 0x6000:08, 1
1A00:09 SubIndex 009 RO 0x0000:00, 5
1A00:0A SubIndex 010 RO 0x1C32:20, 1
1A00:0B SubIndex 011 RO 0x0000:00, 2
SubIndex DO TxPDO-Map Inputs Ch.2 RO 0x0B (11
1A01:01 SubIndex 001 RO 0x6010:01, 1
1A01:02 SubIndex 002 RO 0x6010:02, 1
1A01:03 SubIndex 003 RO 0x6010:03, 1
1A01:04 SubIndex 004 RO 0x6010:04, 1
1A01:05 SubIndex 005 RO 0x6010:05, 1
1A01:06 SubIndex 006 RO 0x6010:06, 1
1A01:07 SubIndex 007 RO 0x6010:07, 1
1A01:08 SubIndex 008 RO 0x6010:08, 1
1A01:09 SubIndex 009 RO 0x0000:00, 5
1A01:0A SubIndex 010 RO 0x1C32:20, 1
1A01:0B SubIndex 011 RO 0x0000:00, 2
SubIndex Sync manager type RO 0x04 (4
1C00:01 SubIndex 001 RO 0x01 (1
1C00:02 SubIndex 002 RO 0x02 (2
1C00:03 SubIndex 003 RO 0x03 (3
1C00:04 SubIndex 004 RO 0x04 (4
SubIndex RxPDO assign RO 0x00 (0
SubIndex TxPDO assign RO 0x02 (2
1C13:01 SubIndex 001 RO 0x1A00 (6656
1C13:02 SubIndex 002 RO 0x1A01 (6657
vice Description. It is strongly recommended to download the latest revision of the corresponding XML file from the Beckhoff website (http://www.beckhoff.com/english/default.htm?
download/elconfg.htm) and follow the installation instructions.
Device type RO 0x01181389 (18355081
Device name RO EP1816-0008
Hardware version RO 00
Software version RO 01
)
dec
)
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
)
)
dec
)
dec
EP1xxx74 Version: 2.5.0
Page 75

Commissioning/Configuration
Index Name Flags Default value
1C33
[}79]:0
6000
[}80]:0
6010
[}80]:0
F000
[}80]:0
F008 [}80]
F010
[}80]:0
SubIndex SM input parameter RO 0x20 (32
1C33:01 Sync mode RW 0x0022 (34
1C33:02 Cycle time RW 0x000186A0 (100000
1C33:03 Shift time RO 0x00000000 (0
1C33:04 Sync modes supported RO 0xC007 (49159
1C33:05 Minimum cycle time RO 0x000124F8 (75000
1C33:06 Calc and copy time RO 0x00000000 (0
1C33:08 Command RW 0x0000 (0
1C33:09 Delay time RO 0x00000000 (0
1C33:0B SM event missed counter RO 0x0000 (0
1C33:0C Cycle exceeded counter RO 0x0000 (0
1C33:0D Shift too short counter RO 0x0000 (0
1C33:20 Sync error RO 0x00 (0
SubIndex DO Inputs Ch.1 RO 0x0E (14
6000:01 Input 1 RO 0x00 (0
6000:02 Input 2 RO 0x00 (0
6000:03 Input 3 RO 0x00 (0
6000:04 Input 4 RO 0x00 (0
6000:05 Input 5 RO 0x00 (0
6000:06 Input 6 RO 0x00 (0
6000:07 Input 7 RO 0x00 (0
6000:08 Input 8 RO 0x00 (0
6000:0E Sync Error RO 0x00 (0
SubIndex DO Inputs Ch.2 RO 0x0E (14
6010:01 Input 1 RO 0x00 (0
6010:02 Input 2 RO 0x00 (0
6010:03 Input 3 RO 0x00 (0
6010:04 Input 4 RO 0x00 (0
6010:05 Input 5 RO 0x00 (0
6010:06 Input 6 RO 0x00 (0
6010:07 Input 7 RO 0x00 (0
6010:08 Input 8 RO 0x00 (0
6010:0E Sync Error RO 0x00 (0
SubIndex Modular device profile RO 0x02 (2
F000:01 Module index distance RO 0x0010 (16
F000:02 Maximum number of modules RO 0x0002 (2
Code word RW 0x00000000 (0
SubIndex Module list RW 0x02 (2
F010:01 SubIndex 001 RW 0x00000118 (280
F010:02 SubIndex 002 RW 0x00000118 (280
)
dec
dec
dec
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
dec
dec
)
dec
)
)
dec
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
)
)
)
)
)
dec
)
dec
)
dec
Key
Flags:
RO = Read Only
RW = Read/Write
EP1xxx 75Version: 2.5.0
Page 76

Commissioning/Configuration
4.4 EP1816-0008 - Object description and parameterization
Parameterization
The terminal is parameterized via the CoE - Online tab (double-click on the respective ob-
Note
Note
Introduction
The CoE overview contains objects for different intended applications:
• Objects required for parameterization [}76] during commissioning
• Objects intended for regular operation [}76], e.g. through ADS access
• Objects for indicating internal settings [}76] (may be fixed)
ject) or via the Process Data tab (allocation of PDOs).
EtherCAT XML Device Description
The display matches that of the CoE objects from the EtherCAT XML Device Description.
We recommend downloading the latest XML file from the download area of the Beckhoff
website (http://beckhoff.de/german/download/elconfg.htm?id=1983920606140) and installing it according to the installation instructions.
The following section first describes the objects required for normal operation, followed by a complete
overview of missing objects.
Objects to be parameterized during commissioning
Objects to be parameterized during commissioning
Index 1011 Restore default parameters
Index Name Meaning Data type Flags Default
1011:0 Restore default
parameters
1011:01 SubIndex 001 If this object is set to 0x64616F6C in the set value dia-
Restore default parameters UINT8 RO 0x01 (1
UINT32 RW 0x00000000 (0
log, all backup objects are reset to their delivery state.
dec
Objects for regular operation
The EP1816 has no such objects.
Additional objects
Standard objects (0x1000-0x1FFF)
The standard objects have the same meaning for all EtherCAT slaves.
Index 1000 Device type
Index Name Meaning Data type Flags Default
1000:0 Device type Device type of the EtherCAT slave: The Lo-Word con-
tains the CoE profile used (5001). The Hi-Word contains
the module profile according to the modular device profile.
UINT32 RO 0x01181389
(18355081
)
)
dec
)
dec
Index 1008 Device name
Index Name Meaning Data type Flags Default
1008:0 Device name Device name of the EtherCAT slave string RO EP1816-0008
EP1xxx76 Version: 2.5.0
Page 77

Commissioning/Configuration
Index 1009 Hardware version
Index Name Meaning Data type Flags Default
1009:0 Hardware ver-
Hardware version of the EtherCAT slave string RO 00
sion
Index 100A Software version
Index Name Meaning Data type Flags Default
100A:0 Software version Firmware version of the EtherCAT slave string RO 01
Index 1018 Identity
Index Name Meaning Data type Flags Default
1018:0 Identity Information for identifying the slave UINT8 RO 0x04 (4
1018:01 Vendor ID Vendor ID of the EtherCAT slave UINT32 RO 0x00000002 (2
1018:02 Product code Product code of the EtherCAT slave UINT32 RO 0x07184052
(119029842
1018:03 Revision Revision numberof the EtherCAT slave; the low word
(bit 0-15) indicates the special terminal number, the
UINT32 RO 0x00100008
(1048584
high word (bit 16-31) refers to the device description
1018:04 Serial number Serial number of the EtherCAT slave; the low byte (bit
UINT32 RO 0x00000000 (0
0-7) of the low word contains the year of production, the
high byte (bit 8-15) of the low word contains the week of
production, the high word (bit 16-31) is 0
)
dec
)
dec
)
dec
)
dec
)
dec
Index 10F0 Backup parameter handling
Index Name Meaning Data type Flags Default
10F0:0 Backup parame-
ter handling
10F0:01 Checksum Checksum across all backup entries of the EtherCAT
Information for standardized loading and saving of
backup entries
UINT8 RO 0x01 (1
)
dec
UINT32 RO 0x00000000 (0
slave
Index 1A00 DO TxPDO-Map Inputs Ch.1
Index Name Meaning Data type Flags Default
1A00:0 DO TxPDO-Map
Inputs Ch.1
1A00:01 SubIndex 001 1. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:02 SubIndex 002 2. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:03 SubIndex 003 3. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:04 SubIndex 004 4. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:05 SubIndex 005 5. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:06 SubIndex 006 6. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:07 SubIndex 007 7. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:08 SubIndex 008 8. PDO Mapping entry (object 0x6000 (DO Inputs Ch.1),
1A00:09 SubIndex 009 9. PDO Mapping entry (5 bits align) UINT32 RO 0x0000:00, 5
1A00:0A SubIndex 010 10. PDO Mapping entry (object 0x1C32, entry 0x20) UINT32 RO 0x1C32:20, 1
1A00:0B SubIndex 011 11. PDO Mapping entry (2 bits align) UINT32 RO 0x0000:00, 2
PDO Mapping TxPDO 1 UINT8 RO 0x0B (11
UINT32 RO 0x6000:01, 1
entry 0x01 (Input 1))
UINT32 RO 0x6000:02, 1
entry 0x02 (Input 2))
UINT32 RO 0x6000:03, 1
entry 0x03 (Input 3))
UINT32 RO 0x6000:04, 1
entry 0x04 (Input 4))
UINT32 RO 0x6000:05, 1
entry 0x05 (Input 5))
UINT32 RO 0x6000:06, 1
entry 0x06 (Input 6))
UINT32 RO 0x6000:07, 1
entry 0x07 (Input 7))
UINT32 RO 0x6000:08, 1
entry 0x08 (Input 8))
dec
)
dec
)
EP1xxx 77Version: 2.5.0
Page 78

Commissioning/Configuration
Index 1A01 DO TxPDO-Map Inputs Ch.2
Index Name Meaning Data type Flags Default
1A01:0 DO TxPDO-Map
Inputs Ch.2
1A01:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:02 SubIndex 002 2. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:03 SubIndex 003 3. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:04 SubIndex 004 4. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:05 SubIndex 005 5. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:06 SubIndex 006 6. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:07 SubIndex 007 7. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:08 SubIndex 008 8. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2),
1A01:09 SubIndex 009 9. PDO Mapping entry (5 bits align) UINT32 RO 0x0000:00, 5
1A01:0A SubIndex 010 10. PDO Mapping entry (object 0x1C32, entry 0x20) UINT32 RO 0x1C32:20, 1
1A01:0B SubIndex 011 11. PDO Mapping entry (2 bits align) UINT32 RO 0x0000:00, 2
PDO Mapping TxPDO 2 UINT8 RO 0x0B (11
UINT32 RO 0x6010:01, 1
entry 0x01 (Input 1))
UINT32 RO 0x6010:02, 1
entry 0x02 (Input 2))
UINT32 RO 0x6010:03, 1
entry 0x03 (Input 3))
UINT32 RO 0x6010:04, 1
entry 0x04 (Input 4))
UINT32 RO 0x6010:05, 1
entry 0x05 (Input 5))
UINT32 RO 0x6010:06, 1
entry 0x06 (Input 6))
UINT32 RO 0x6010:07, 1
entry 0x07 (Input 7))
UINT32 RO 0x6010:08, 1
entry 0x08 (Input 8))
dec
)
Index 1C00 Sync manager type
Index Name Meaning Data type Flags Default
1C00:0 Sync manager
Using the sync managers UINT8 RO 0x04 (4
type
1C00:01 SubIndex 001 Sync-Manager Type Channel 1: Mailbox Write UINT8 RO 0x01 (1
1C00:02 SubIndex 002 Sync-Manager Type Channel 2: Mailbox Read UINT8 RO 0x02 (2
1C00:03 SubIndex 003 Sync-Manager Type Channel 3: Process Data Write
UINT8 RO 0x03 (3
(Outputs)
1C00:04 SubIndex 004 Sync-Manager Type Channel 4: Process Data Read (In-
UINT8 RO 0x04 (4
puts)
Index 1C12 RxPDO assign
Index Name Meaning Data type Flags Default
1C12:0 RxPDO assign PDO Assign Outputs UINT8 RO 0x00 (0
Index 1C13 TxPDO assign
Index Name Meaning Data type Flags Default
1C13:0 TxPDO assign PDO Assign Inputs UINT8 RO 0x02 (2
1C13:01 Subindex 001 1. allocated TxPDO (contains the index of the associ-
ated TxPDO mapping object)
1C13:02 Subindex 002 2. allocated TxPDO (contains the index of the associ-
ated TxPDO mapping object)
UINT16 RO 0x1A00 (6656
UINT16 RO 0x1A01 (6657
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx78 Version: 2.5.0
Page 79

Commissioning/Configuration
Index 1C33 SM input parameter
Index Name Meaning Data type Flags Default
1C33:0 SM input param-
eter
1C33:01 Sync mode Current synchronization mode:
1C33:02 Cycle time Cycle time (in ns):
1C33:03 Shift time Time between SYNC0 event and reading of the inputs
1C33:04 Sync modes
supported
1C33:05 Minimum cycle
time
1C33:06 Calc and copy
time
1C33:08 Command • 0: Measurement of the local cycle time is
1C33:09 Delay time Time between SYNC1 event and reading of the inputs
1C33:0B SM event
missed counter
1C33:0C Cycle exceeded
counter
1C33:0D Shift too short
counter
1C33:20 Sync error The synchronization was not correct in the last cycle
Synchronization parameters for the inputs UINT8 RO 0x20 (32
UINT16 RW 0x0022 (34
• 0: Free Run
• 1: Synchronous with SM 3 Event (no outputs
available)
• 2: DC - Synchron with SYNC0 Event
• 3: DC - Synchron with SYNC1 Event
• 34: Synchronous with SM 2 Event (outputs
available)
UINT32 RW 0x000186A0
• Synchron with SM 2 Event: Master cycle time
(100000
• DC mode: SYNC0/SYNC1 Cycle Time
UINT32 RO 0x00000000 (0
(in ns, only DC mode)
Supported synchronization modes:
UINT16 RO 0xC007 (49159
• Bit 0: free run is supported
• Bit 1: Synchronous with SM 2 Event is supported
(outputs available)
• Bit 1: Synchronous with SM 3 Event is supported
(no outputs available)
• Bit 2-3 = 01: DC mode is supported
• Bit 4-5 = 01: Input shift through local event
(outputs available)
• Bit 4-5 = 10: Input shift with SYNC1 event (no
outputs available)
• Bit 14 = 1: dynamic times (measurement through
writing of 1C32:08 [}79] )
Minimum cycle time (in ns) UINT32 RO 0x000124F8
(75000
Time between reading of the inputs and availability of
UINT32 RO 0x00000000 (0
the inputs for the master (in ns, only DC mode)
UINT16 RW 0x0000 (0
stopped
• 1: Measurement of the local cycle time is started
The entries 1C33:03 [}79], 1C33:06 [}79], 1C33:07,
1C33:09 [}79] are updated with the maximum mea-
sured values.
For a subsequent measurement the measured values
are reset
UINT32 RO 0x00000000 (0
(in ns, only DC mode)
Number of missed SM events in OPERATIONAL (DC
UINT16 RO 0x0000 (0
mode only)
Number of occasions the cycle time was exceeded in
UINT16 RO 0x0000 (0
OPERATIONAL (cycle was not completed in time or the
next cycle began too early)
Number of occasions that the interval between SYNC0
UINT16 RO 0x0000 (0
and SYNC1 event was too short (DC mode only)
boolean RO 0x00 (0
(outputs were output too late; DC mode only)
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Profile-specific objects (0x6000-0xFFFF)
The profile-specific objects have the same meaning for all EtherCAT slaves that support the profile 5001.
EP1xxx 79Version: 2.5.0
Page 80

Commissioning/Configuration
Index 6000 DO Inputs Ch.1
Index Name Meaning Data type Flags Default
6000:0 DO Inputs Ch.1 UINT8 RO 0x0E (14
6000:01 Input 1 boolean RO 0x00 (0
6000:02 Input 2 boolean RO 0x00 (0
6000:03 Input 3 boolean RO 0x00 (0
6000:04 Input 4 boolean RO 0x00 (0
6000:05 Input 5 boolean RO 0x00 (0
6000:06 Input 6 boolean RO 0x00 (0
6000:07 Input 7 boolean RO 0x00 (0
6000:08 Input 8 boolean RO 0x00 (0
6000:0E Sync Error boolean RO 0x00 (0
Index 6010 DO Inputs Ch.2
Index Name Meaning Data type Flags Default
6010:0 DO Inputs Ch.2 UINT8 RO 0x0E (14
6010:01 Input 1 boolean RO 0x00 (0
6010:02 Input 2 boolean RO 0x00 (0
6010:03 Input 3 boolean RO 0x00 (0
6010:04 Input 4 boolean RO 0x00 (0
6010:05 Input 5 boolean RO 0x00 (0
6010:06 Input 6 boolean RO 0x00 (0
6010:07 Input 7 boolean RO 0x00 (0
6010:08 Input 8 boolean RO 0x00 (0
6010:0E Sync Error boolean RO 0x00 (0
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Index F000 Modular device profile
Index Name Meaning Data type Flags Default
F000:0 Modular device
profile
F000:01 Module index
distance
F000:02 Maximum num-
ber of modules
General information for the modular device profile UINT8 RO 0x02 (2
dec
Index distance of the objects of the individual channels UINT16 RO 0x0010 (16
Number of channels UINT16 RO 0x0002 (2
)
)
dec
)
dec
Index F008 Code word
Index Name Meaning Data type Flags Default
F008:0 Code word UINT32 RW 0x00000000 (0
Index F010 Module list
Index Name Meaning Data type Flags Default
F010:0 Module list UINT8 RW 0x02 (2
F010:01 SubIndex 001 UINT32 RW 0x00000118 (280
F010:02 SubIndex 002 UINT32 RW 0x00000118 (280
)
dec
)
dec
)
dec
)
dec
EP1xxx80 Version: 2.5.0
Page 81

Commissioning/Configuration
4.5 EP1816-3008 - Object overview
EtherCAT XML Device Description
The display matches that of the CoE objects from the EtherCAT XML Device Description.
Note
Index (hex) Name Flags Default value
1000 [}89]
1008 [}89]
1009 [}89]
100A [}89]
1011:0
[}89]
1018:0
[}90]
10F0:0
[}90]
1A00:0
[}90]
1A01:0
[}91]
1A02:0
[}91]
1A03:0
[}91]
Subindex Restore default parameters RO 0x01 (1
0x1011:01 SubIndex 001 RW 0x00000000 (0
Subindex Identity RO 0x04 (4
0x1018:01 Vendor ID RO 0x00000002 (2
0x1018:02 Product code RO 0x05E44052 (98844754
01018:03 Revision RO 0x00000000 (0
0x1018:04 Serial number RO 0x00000000 (0
Subindex Backup parameter handling RO 0x01 (1
0x10F0:01 Checksum RO 0x00000000 (0
Subindex DIG TxPDO-Map Inputs Ch.1 RO 0x09 (9
0x1A00:01 SubIndex 001 RO 0x6000:01, 1
0x1A00:02 SubIndex 002 RO 0x6000:02, 1
0x1A00:03 SubIndex 003 RO 0x6000:03, 1
0x1A00:04 SubIndex 004 RO 0x6000:04, 1
0x1A00:05 SubIndex 005 RO 0x6000:05, 1
0x1A00:06 SubIndex 006 RO 0x6000:06, 1
0x1A00:07 SubIndex 007 RO 0x6000:07, 1
0x1A00:08 SubIndex 008 RO 0x6000:08, 1
0x1A00:09 SubIndex 009 RO 0x0000:00, 8
Subindex DIG TxPDO-Map Inputs Ch.2 RO 0x09 (9
0x1A01:01 SubIndex 001 RO 0x6010:01, 1
0x1A01:02 SubIndex 002 RO 0x6010:02, 1
0x1A01:03 SubIndex 003 RO 0x6010:03, 1
0x1A01:04 SubIndex 004 RO 0x6010:04, 1
0x1A01:05 SubIndex 005 RO 0x6010:05, 1
0x1A01:06 SubIndex 006 RO 0x6010:06, 1
0x1A01:07 SubIndex 007 RO 0x6010:07, 1
0x1A01:08 SubIndex 008 RO 0x6010:08, 1
0x1A01:09 SubIndex 009 RO 0x0000:00, 8
Subindex AI TxPDO-Map Inputs Ch.1 RO 0x05 (5
0x1A02:01 SubIndex 001 RO 0x0000:00, 6
0x1A02:02 SubIndex 002 RO 0x6020:07, 1
0x1A02:03 SubIndex 003 RO 0x0000:00, 8
0x1A02:04 SubIndex 004 RO 0x6020:10, 1
0x1A02:05 SubIndex 005 RO 0x6020:11, 16
Subindex AI TxPDO-Map Inputs Ch.2 RO 0x05 (5
0x1A03:01 SubIndex 001 RO 0x0000:00, 6
0x1A03:02 SubIndex 002 RO 0x6030:07, 1
0x1A03:03 SubIndex 003 RO 0x0000:00, 8
0x1A03:04 SubIndex 004 RO 0x6030:10, 1
0x1A03:05 SubIndex 005 RO 0x6030:11, 16
We recommend downloading the latest XML file from the download area on the Beckhoff
website (http://www.beckhoff.de/german/default.htm?download/elconfg.htm) and installing
it according to the installation instructions.
Device type RO 0x00001389 (5001
Device name RO EP1816-3008
Hardware version RO
Software version RO 03
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx 81Version: 2.5.0
Page 82

Commissioning/Configuration
Index (hex) Name Flags Default value
1A04:0
[}91]
1A05:0
[}92]
1A06:0
[}92]
1A07:0
[}92]
1A08:0
[}92]
1C00:0
[}92]
1C12:0
[}93]
1C13:0
[}93]
Subindex AI TxPDO-Map Inputs Ch.3 RO 0x05 (5
0x1A04:01 SubIndex 001 RO 0x0000:00, 6
0x1A04:02 SubIndex 002 RO 0x6040:07, 1
0x1A04:03 SubIndex 003 RO 0x0000:00, 8
0x1A04:04 SubIndex 004 RO 0x6040:10, 1
0x1A04:05 SubIndex 005 RO 0x6040:11, 16
Subindex AI TxPDO-Map Inputs Ch.4 RO 0x05 (5
0x1A05:01 SubIndex 001 RO 0x0000:00, 6
0x1A05:02 SubIndex 002 RO 0x6050:07, 1
0x1A05:03 SubIndex 003 RO 0x0000:00, 8
0x1A05:04 SubIndex 004 RO 0x6050:10, 1
0x1A05:05 SubIndex 005 RO 0x6050:11, 16
Subindex AI TxPDO-Map Inputs Ch.5 RO 0x05 (5
0x1A06:01 SubIndex 001 RO 0x0000:00, 6
0x1A06:02 SubIndex 002 RO 0x6060:07, 1
0x1A06:03 SubIndex 003 RO 0x0000:00, 8
0x1A06:04 SubIndex 004 RO 0x6060:10, 1
0x1A06:05 SubIndex 005 RO 0x6060:11, 16
Subindex AI TxPDO-Map Inputs Ch.6 RO 0x05 (5
0x1A07:01 SubIndex 001 RO 0x0000:00, 6
0x1A07:02 SubIndex 002 RO 0x6070:07, 1
0x1A07:03 SubIndex 003 RO 0x0000:00, 8
0x1A07:04 SubIndex 004 RO 0x6070:10, 1
0x1A07:05 SubIndex 005 RO 0x6070:11, 16
Subindex DIG TxPDO-Map Inputs Device RO 0x04 (4
0x1A08:01 SubIndex 001 RO 0xF600:01, 1
0x1A08:02 SubIndex 002 RO 0xF600:02, 1
0x1A08:03 SubIndex 003 RO 0x0000:00, 13
0x1A08:04 SubIndex 004 RO 0xF600:10, 1
Subindex Sync manager type RO 0x04 (4
0x1C00:01 SubIndex 001 RO 0x01 (1
0x1C00:02 SubIndex 002 RO 0x02 (2
0x1C00:03 SubIndex 003 RO 0x03 (3
0x1C00:04 SubIndex 004 RO 0x04 (4
Subindex RxPDO assign RO 0x00 (0
Subindex TxPDO assign RO 0x09 (9
0x1C13:01 SubIndex 001 RO 0x1A00 (6656
0x1C13:02 SubIndex 002 RO 0x1A01 (6657
0x1C13:03 SubIndex 003 RO 0x1A02 (6658
0x1C13:04 SubIndex 004 RO 0x1A03 (6659
0x1C13:05 SubIndex 005 RO 0x1A04 (6660
0x1C13:06 SubIndex 006 RO 0x1A05 (6661
0x1C13:07 SubIndex 007 RO 0x1A06 (6662
0x1C13:08 SubIndex 008 RO 0x1A07 (6663
0x1C13:09 SubIndex 009 RO 0x1A08 (6664
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx82 Version: 2.5.0
Page 83

Commissioning/Configuration
Index (hex) Name Flags Default value
1C33:0
[}94]
6000:0
[}95]
6010:0
[}95]
6020:0
[}95]
6030:0
[}95]
6040:0
[}95]
6050:0
[}95]
6060:0
[}96]
6070:0
[}96]
Subindex SM input parameter RO 0x20 (32
0x1C33:01 Sync mode RW 0x0022 (34
0x1C33:02 Cycle time RW 0x003D0900 (4000000
0x1C33:03 Shift time RO 0x00000000 (0
0x1C33:04 Sync modes supported RO 0xC007 (49159
0x1C33:05 Minimum cycle time RO 0x00030D40 (200000
0x1C33:06 Calc and copy time RO 0x00000000 (0
0x1C33:07 Minimum delay time RO 0x00000000 (0
0x1C33:08 Command RW 0x0000 (0
0x1C33:09 Maximum delay time RO 0x00000000 (0
0x1C33:0B SM event missed counter RO 0x0000 (0
0x1C33:0C Cycle exceeded counter RO 0x0000 (0
0x1C33:0D Shift too short counter RO 0x0000 (0
0x1C33:20 Sync error RO 0x00 (0
Subindex DIG Inputs Ch.1 RO 0x08 (8
0x6000:01 Input 1 RO 0x00 (0
0x6000:02 Input 2 RO 0x00 (0
0x6000:03 Input 3 RO 0x00 (0
0x6000:04 Input 4 RO 0x00 (0
0x6000:05 Input 5 RO 0x00 (0
0x6000:06 Input 6 RO 0x00 (0
0x6000:07 Input 7 RO 0x00 (0
0x6000:08 Input 8 RO 0x00 (0
Subindex DIG Inputs Ch.2 RO 0x08 (8
0x6010:01 Input 1 RO 0x00 (0
0x6010:02 Input 2 RO 0x00 (0
0x6010:03 Input 3 RO 0x00 (0
0x6010:04 Input 4 RO 0x00 (0
0x6010:05 Input 5 RO 0x00 (0
0x6010:06 Input 6 RO 0x00 (0
0x6010:07 Input 7 RO 0x00 (0
0x6010:08 Input 8 RO 0x00 (0
Subindex AI Inputs Ch.1 RO 0x11 (17
0x6020:07 Error RO 0x00 (0
0x6020:10 TxPDO Toggle RO 0x00 (0
0x6020:11 Value RO 0x0000 (0
Subindex AI Inputs Ch.2 RO 0x11 (17
0x6030:07 Error RO 0x00 (0
0x6030:10 TxPDO Toggle RO 0x00 (0
0x6030:11 Value RO 0x0000 (0
Subindex AI Inputs Ch.3 RO 0x11 (17
0x6040:07 Error RO 0x00 (0
0x6040:10 TxPDO Toggle RO 0x00 (0
0x6040:11 Value RO 0x0000 (0
Subindex AI Inputs Ch.4 RO 0x11 (17
0x6050:07 Error RO 0x00 (0
0x6050:10 TxPDO Toggle RO 0x00 (0
0x6050:11 Value RO 0x0000 (0
Subindex AI Inputs Ch.5 RO 0x11 (17
0x6060:07 Error RO 0x00 (0
0x6060:10 TxPDO Toggle RO 0x00 (0
0x6060:11 Value RO 0x0000 (0
Subindex AI Inputs Ch.6 RO 0x11 (17
0x6070:07 Error RO 0x00 (0
0x6070:10 TxPDO Toggle RO 0x00 (0
0x6070:11 Value RO 0x0000 (0
)
dec
dec
dec
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
dec
)
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
)
)
)
)
)
)
)
)
EP1xxx 83Version: 2.5.0
Page 84

Commissioning/Configuration
Index (hex) Name Flags Default value
8020:0
[}86]
802F:0
[}86]
8030:0
[}87]
803F:0
[}87]
8040:0
[}87]
804F:0
[}87]
8050:0
[}87]
805F:0
[}88]
8060:0
[}88]
806F:0
[}88]
Subindex AI Settings Ch.1 RW 0x18 (24
0x8020:01 Enable user scale RW 0x00 (0
0x8020:0A Enable user calibration RW 0x00 (0
0x8020:0B Enable vendor calibration RW 0x00 (0
0x8020:11 User scale offset RW 0x0000 (0
0x8020:12 User scale gain RW 0x02A00000 (44040192
0x8020:17 User calibration offset RW 0x0000 (0
0x8020:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.1 RW 0x02 (2
0x802F:01 Calibration Offset RW 0x0000 (0
0x802F:02 Calibration Gain RW 0x0000 (0
Subindex AI Settings Ch.2 RW 0x18 (24
0x8030:01 Enable user scale RW 0x00 (0
0x8030:0A Enable user calibration RW 0x00 (0
0x8030:0B Enable vendor calibration RW 0x00 (0
0x8030:11 User scale offset RW 0x0000 (0
0x8030:12 User scale gain RW 0x02A00000 (44040192
0x8030:17 User calibration offset RW 0x0000 (0
0x8030:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.2 RW 0x02 (2
0x803F:01 Calibration Offset RW 0x0000 (0
0x803F:02 Calibration Gain RW 0x0000 (0
Subindex AI Settings Ch.3 RW 0x18 (24
0x8040:01 Enable user scale RW 0x00 (0
0x8040:0A Enable user calibration RW 0x00 (0
0x8040:0B Enable vendor calibration RW 0x00 (0
0x8040:11 User scale offset RW 0x0000 (0
0x8040:12 User scale gain RW 0x02A00000 (44040192
0x8040:17 User calibration offset RW 0x0000 (0
0x8040:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.3 RW 0x02 (2
0x804F:01 Calibration Offset RW 0x0000 (0
0x804F:02 Calibration Gain RW 0x0000 (0
Subindex AI Settings Ch.4 RW 0x18 (24
0x8050:01 Enable user scale RW 0x00 (0
0x8050:0A Enable user calibration RW 0x00 (0
0x8050:0B Enable vendor calibration RW 0x00 (0
0x8050:11 User scale offset RW 0x0000 (0
0x8050:12 User scale gain RW 0x02A00000 (44040192
0x8050:17 User calibration offset RW 0x0000 (0
0x8050:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.4 RW 0x02 (2
0x805F:01 Calibration Offset RW 0x0000 (0
0x805F:02 Calibration Gain RW 0x0000 (0
Subindex AI Settings Ch.5 RW 0x18 (24
0x8060:01 Enable user scale RW 0x00 (0
0x8060:0A Enable user calibration RW 0x00 (0
0x8060:0B Enable vendor calibration RW 0x00 (0
0x8060:11 User scale offset RW 0x0000 (0
0x8060:12 User scale gain RW 0x02A00000 (44040192
0x8060:17 User calibration offset RW 0x0000 (0
0x8060:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.5 RW 0x02 (2
0x806F:01 Calibration Offset RW 0x0000 (0
0x806F:02 Calibration Gain RW 0x0000 (0
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
)
dec
)
)
)
)
)
)
dec
)
)
)
)
)
)
dec
)
)
)
)
)
)
dec
)
)
)
)
)
)
dec
)
)
)
)
EP1xxx84 Version: 2.5.0
Page 85

Commissioning/Configuration
Index (hex) Name Flags Default value
8070:0
[}88]
807F:0
[}88]
8080:0
[}89]
F000:0
[}96]
F008 [}96]
F010:0
[}96]
F600:0
[}96]
Subindex AI Settings Ch.6 RW 0x18 (24
0x8070:01 Enable user scale RW 0x00 (0
0x8070:0A Enable user calibration RW 0x00 (0
0x8070:0B Enable vendor calibration RW 0x00 (0
0x8070:11 User scale offset RW 0x0000 (0
0x8070:12 User scale gain RW 0x02A00000 (44040192
0x8070:17 User calibration offset RW 0x0000 (0
0x8070:18 User calibration gain RW 0x0000 (0
Subindex AI Vendor data Ch.6 RW 0x02 (2
0x807F:01 Calibration Offset RW 0x0000 (0
0x807F:02 Calibration Gain RW 0x0000 (0
Subindex SAI Settings RW 0x11 (17
0x8080:0D Mode RW 0x0000 (0
0x8080:11 Range RW 0x0000 (0
Subindex Modular device profile RO 0x02 (2
0xF000:01 Module index distance RO 0x0010 (16
0xF000:02 Maximum number of modules RO 0x0009 (9
Code word RW 0x00000000 (0
Subindex Module list RW 0x09 (9
0xF010:01 SubIndex 001 RW 0x00000118 (280
0xF010:02 SubIndex 002 RW 0x00000118 (280
0xF010:03 SubIndex 003 RW 0x0000012C (300
0xF010:04 SubIndex 004 RW 0x0000012C (300
0xF010:05 SubIndex 005 RW 0x0000012C (300
0xF010:06 SubIndex 006 RW 0x0000012C (300
0xF010:07 SubIndex 007 RW 0x0000012C (300
0xF010:08 SubIndex 008 RW 0x0000012C (300
0xF010:09 SubIndex 009 RW 0x00000168 (360
Subindex DIG Inputs RO 0x10 (16
0xF600:01 Us Undervoltage RO 0x00 (0
0xF600:02 Up Undervoltage RO 0x00 (0
0xF600:10 TxPDO Toggle RO 0x00 (0
)
dec
)
dec
)
dec
)
dec
dec
dec
dec
)
dec
dec
dec
)
dec
dec
dec
)
dec
dec
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
)
)
)
)
)
)
)
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Key
Flags:
RO (Read Only): this object can be read only
RW (Read/Write): this object can be read and written to
EP1xxx 85Version: 2.5.0
Page 86

Commissioning/Configuration
4.6 EP1816-3008 - Object description and parameterization
Parameterization
The terminal is parameterized via the CoE - Online tab (double-click on the respective ob-
Note
Note
Introduction
The CoE overview contains objects for different intended applications:
• Objects required for parameterization during [}86] commissioning
• Objects for indicating internal settings [}89] (may be fixed)
• Further profile-specific objects [}95]indicating inputs, outputs and status information
The following section first describes the objects required for normal operation, followed by a complete
overview of missing objects.
ject) or via the Process Data tab (allocation of PDOs).
EtherCAT XML Device Description
The display matches that of the CoE objects from the EtherCAT XML Device Description.
We recommend downloading the latest XML file from the download area of the Beckhoff
website and installing it according to installation instructions.
4.6.1 Objects to be parameterized during commissioning
Index 8020 AI Settings Ch.1
Index (hex) Name Meaning Data type Flags Default
8020:0 AI Settings Ch.1 UINT8 RO 0x18 (24
8020:01 Enable user scale BOOLEAN RW 0x00 (0
8020:0A Enable user calibra-
tion
8020:0B Enable vendor cali-
bration
8020:11 User scale offset INT16 RW 0x0000 (0
8020:12 User scale gain INT32 RW 0x02A00000
8020:17 User calibration offset INT16 RW 0x0000 (0
8020:18 User calibration gain INT16 RW 0x0000 (0
BOOLEAN RW 0x00 (0
BOOLEAN RW 0x00 (0
(44040192
Index 802F AI Vendor data Ch.1
Index (hex) Name Meaning Data type Flags Default
802F:0 AI Vendor data Ch.1 UINT8 RO 0x02 (2
802F:01 Calibration Offset INT16 RW 0x0000 (0
802F:02 Calibration Gain INT16 RW 0x0000 (0
dec
dec
dec
dec
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
dec
EP1xxx86 Version: 2.5.0
Page 87

Commissioning/Configuration
Index 8030 AI Settings Ch.2
Index (hex) Name Meaning Data type Flags Default
8030:0 AI Settings Ch.2 UINT8 RO 0x18 (24
8030:01 Enable user scale BOOLEAN RW 0x00 (0
8030:0A Enable user calibra-
BOOLEAN RW 0x00 (0
tion
8030:0B Enable vendor cali-
BOOLEAN RW 0x00 (0
bration
dec
dec
dec
dec
8030:11 User scale offset INT16 RW 0x0000 (0
8030:12 User scale gain INT32 RW 0x02A00000
(44040192
8030:17 User calibration offset INT16 RW 0x0000 (0
8030:18 User calibration gain INT16 RW 0x0000 (0
Index 803F AI Vendor data Ch.2
Index (hex) Name Meaning Data type Flags Default
803F:0 AI Vendor data Ch.2 UINT8 RO 0x02 (2
dec
803F:01 Calibration Offset INT16 RW 0x0000 (0
803F:02 Calibration Gain INT16 RW 0x0000 (0
Index 8040 AI Settings Ch.3
Index (hex) Name Meaning Data type Flags Default
8040:0 AI Settings Ch.3 UINT8 RO 0x18 (24
8040:01 Enable user scale BOOLEAN RW 0x00 (0
8040:0A Enable user calibra-
BOOLEAN RW 0x00 (0
tion
8040:0B Enable vendor cali-
BOOLEAN RW 0x00 (0
bration
8040:11 User scale offset INT16 RW 0x0000 (0
8040:12 User scale gain INT32 RW 0x02A00000
(44040192
8040:17 User calibration offset INT16 RW 0x0000 (0
8040:18 User calibration gain INT16 RW 0x0000 (0
dec
dec
dec
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
Index 804F AI Vendor data Ch.3
Index (hex) Name Meaning Data type Flags Default
804F:0 AI Vendor data Ch.3 UINT8 RO 0x02 (2
dec
804F:01 Calibration Offset INT16 RW 0x0000 (0
804F:02 Calibration Gain INT16 RW 0x0000 (0
Index 8050 AI Settings Ch.4
Index (hex) Name Meaning Data type Flags Default
8050:0 AI Settings Ch.4 UINT8 RO 0x18 (24
8050:01 Enable user scale BOOLEAN RW 0x00 (0
8050:0A Enable user calibra-
BOOLEAN RW 0x00 (0
tion
8050:0B Enable vendor cali-
BOOLEAN RW 0x00 (0
bration
8050:11 User scale offset INT16 RW 0x0000 (0
8050:12 User scale gain INT32 RW 0x02A00000
(44040192
8050:17 User calibration offset INT16 RW 0x0000 (0
8050:18 User calibration gain INT16 RW 0x0000 (0
dec
dec
dec
dec
)
)
dec
)
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
EP1xxx 87Version: 2.5.0
Page 88

Commissioning/Configuration
Index 805F AI Vendor data Ch.4
Index (hex) Name Meaning Data type Flags Default
805F:0 AI Vendor data Ch.4 UINT8 RO 0x02 (2
dec
805F:01 Calibration Offset INT16 RW 0x0000 (0
805F:02 Calibration Gain INT16 RW 0x0000 (0
Index 8060 AI Settings Ch.5
Index (hex) Name Meaning Data type Flags Default
8060:0 AI Settings Ch.5 UINT8 RO 0x18 (24
8060:01 Enable user scale BOOLEAN RW 0x00 (0
8060:0A Enable user calibra-
BOOLEAN RW 0x00 (0
tion
8060:0B Enable vendor cali-
BOOLEAN RW 0x00 (0
bration
dec
dec
dec
dec
8060:11 User scale offset INT16 RW 0x0000 (0
8060:12 User scale gain INT32 RW 0x02A00000
(44040192
8060:17 User calibration offset INT16 RW 0x0000 (0
8060:18 User calibration gain INT16 RW 0x0000 (0
Index 806F AI Vendor data Ch.5
Index (hex) Name Meaning Data type Flags Default
806F:0 AI Vendor data Ch.5 UINT8 RO 0x02 (2
806F:01 Calibration Offset INT16 RW 0x0000 (0
806F:02 Calibration Gain INT16 RW 0x0000 (0
dec
)
)
dec
)
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
dec
Index 8070 AI Settings Ch.6
Index (hex) Name Meaning Data type Flags Default
8070:0 AI Settings Ch.6 UINT8 RO 0x18 (24
8070:01 Enable user scale BOOLEAN RW 0x00 (0
8070:0A Enable user calibra-
BOOLEAN RW 0x00 (0
tion
8070:0B Enable vendor cali-
BOOLEAN RW 0x00 (0
bration
dec
dec
dec
dec
8070:11 User scale offset INT16 RW 0x0000 (0
8070:12 User scale gain INT32 RW 0x02A00000
(44040192
8070:17 User calibration offset INT16 RW 0x0000 (0
8070:18 User calibration gain INT16 RW 0x0000 (0
Index 807F AI Vendor data Ch.6
Index (hex) Name Meaning Data type Flags Default
807F:0 AI Vendor data Ch.6 UINT8 RO 0x02 (2
807F:01 Calibration Offset INT16 RW 0x0000 (0
807F:02 Calibration Gain INT16 RW 0x0000 (0
dec
)
)
)
)
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
dec
EP1xxx88 Version: 2.5.0
Page 89

Commissioning/Configuration
Index 8080 SAI Settings
Index (hex) Name Meaning Data type Flags Default
8080:0 SAI Settings UINT8 RO 0x11 (17
8080:0D Mode permitted values: UINT16 RW 0x0000 (0
4 1Hz
5 10Hz
6 25Hz
7 50Hz
8 100Hz
9 200Hz
10 400Hz
11 1600Hz
12 5000Hz
8080:11 Range permitted values: UINT16 RW 0x0000 (0
3 +/-2G
4 +/-4G
5 +/-8G
6 +/-16G
)
dec
)
dec
)
dec
4.6.2 Standard objects (0x1000-0x1FFF)
The standard objects have the same meaning for all EtherCAT slaves.
Index 1000Device type
Index (hex) Name Meaning Data type Flags Default
1000:0 Device type Device type of the EtherCAT slave: The Lo-Word con-
tains the CoE profile used (5001). The Hi-Word contains
the module profile according to the modular device profile.
Index 1008Device name
Index (hex) Name Meaning Data type Flags Default
1008:0 Device name Device name of the EtherCAT slave STRING RO EP1816-3008
Index 1009Hardware version
Index (hex) Name Meaning Data type Flags Default
1009:0 Hardware version Hardware version of the EtherCAT slave STRING RO
Index 100ASoftware version
Index (hex) Name Meaning Data type Flags Default
100A:0 Software version Firmware version of the EtherCAT slave STRING RO 03
UINT32 RO 0x00001389
(5001
)
dec
Index 1011 Restore default parameters
Index (hex) Name Meaning Data type Flags Default
1011:0 Restore default pa-
rameters
1011:01 SubIndex 001 UINT32 RW 0x00000000
UINT8 RO 0x01 (1
(0
)
dec
dec
EP1xxx 89Version: 2.5.0
)
Page 90

Commissioning/Configuration
Index 1018Identity
Index (hex) Name Meaning Data type Flags Default
1018:0 Identity Information for identifying the slave UINT8 RO 0x04 (4
)
dec
1018:01 Vendor ID Vendor ID of the EtherCAT slave UINT32 RO 0x00000002
(2
)
dec
1018:02 Product code Product code of the EtherCAT slave UINT32 RO 0x05E44052
(98844754
1018:03 Revision Revision numberof the EtherCAT slave; the low word (bit
0-15) indicates the special terminal number, the high
word (bit 16-31) refers to the device description
1018:04 Serial number Serial number of the EtherCAT slave; the low byte (bit
0-7) of the low word contains the year of production, the
high byte (bit 8-15) of the low word contains the week of
UINT32 RO 0x00000000
(0
)
dec
UINT32 RO 0x00000000
(0
)
dec
production, the high word (bit 16-31) is 0
Index 10F0 Backup parameter handling
Index (hex) Name Meaning Data type Flags Default
10F0:0 Backup parameter
handling
UINT8 RO 0x01 (1
)
dec
10F0:01 Checksum UINT32 RO 0x00000000
(0
)
dec
Index 1A00 DIG TxPDO-Map Inputs Ch.1
Index (hex) Name Meaning Data type Flags Default
1A00:0 DIG TxPDO-Map In-
puts Ch.1
1A00:01 SubIndex 001 1. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:02 SubIndex 002 2. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:03 SubIndex 003 3. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:04 SubIndex 004 4. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:05 SubIndex 005 5. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:06 SubIndex 006 6. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:07 SubIndex 007 7. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:08 SubIndex 008 8. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1),
1A00:09 SubIndex 009 9. PDO Mapping entry (5bits align) UINT32 RO 0x0000:00, 8
PDO Mapping TxPDO 1 UINT8 RO 0x09 (9
UINT32 RO 0x6000:01, 1
entry 0x01 (Input 1))
UINT32 RO 0x6000:02, 1
entry 0x02 (Input 2))
UINT32 RO 0x6000:03, 1
entry 0x03 (Input 3))
UINT32 RO 0x6000:04, 1
entry 0x04 (Input 4))
UINT32 RO 0x6000:05, 1
entry 0x05 (Input 5))
UINT32 RO 0x6000:06, 1
entry 0x06 (Input 6))
UINT32 RO 0x6000:07, 1
entry 0x07 (Input 7))
UINT32 RO 0x6000:08, 1
entry 0x08 (Input 8))
)
dec
)
dec
EP1xxx90 Version: 2.5.0
Page 91

Commissioning/Configuration
Index 1A01 DIG TxPDO-Map Inputs Ch.2
Index (hex) Name Meaning Data type Flags Default
1A01:0 DIG TxPDO-Map In-
puts Ch.2
1A01:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
PDO Mapping TxPDO 2 UINT8 RO 0x09 (9
UINT32 RO 0x6010:01, 1
)
dec
entry 0x01 (Input 1))
1A01:02 SubIndex 002 2. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:02, 1
entry 0x02 (Input 2))
1A01:03 SubIndex 003 3. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:03, 1
entry 0x03 (Input 3))
1A01:04 SubIndex 004 4. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:04, 1
entry 0x04 (Input 4))
1A01:05 SubIndex 005 5. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:05, 1
entry 0x05 (Input 5))
1A01:06 SubIndex 006 6. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:06, 1
entry 0x06 (Input 6))
1A01:07 SubIndex 007 7. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:07, 1
entry 0x07 (Input 7))
1A01:08 SubIndex 008 8. PDO Mapping entry (object 0x6010 (DIG Inputs Ch.2),
UINT32 RO 0x6010:08, 1
entry 0x08 (Input 8))
1A01:09 SubIndex 009 9. PDO Mapping entry (5 bits align) UINT32 RO 0x0000:00, 8
Index 1A02 AI TxPDO-Map Inputs Ch.1
Index (hex) Name Meaning Data type Flags Default
1A02:0 AI TxPDO-Map Inputs
Ch.1
1A02:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A02:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
1A02:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A02:04 SubIndex 004 4. PDO Mapping entry (object 0x6020 (AI Inputs Ch.1),
1A02:05 SubIndex 005 5. PDO Mapping entry (object 0x6020 (AI Inputs Ch.1),
PDO Mapping TxPDO 3 UINT8 RO 0x05 (5
UINT32 RO 0x6020:07, 1
eter), entry 0x20 (Sync error))
UINT32 RO 0x6020:10, 1
entry 0x10 (TxPDO Toggle))
UINT32 RO 0x6020:11, 16
entry 0x11 (Value))
)
dec
Index 1A03 AI TxPDO-Map Inputs Ch.2
Index (hex) Name Meaning Data type Flags Default
1A03:0 AI TxPDO-Map Inputs
Ch.2
PDO Mapping TxPDO 4 UINT8 RO 0x05 (5
)
dec
1A03:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A03:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
UINT32 RO 0x6030:07, 1
eter), entry 0x20 (Sync error))
1A03:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A03:04 SubIndex 004 4. PDO Mapping entry (object 0x6030 (AI Inputs Ch.2),
UINT32 RO 0x6030:10, 1
entry 0x10 (TxPDO Toggle))
1A03:05 SubIndex 005 5. PDO Mapping entry (object 0x6030 (AI Inputs Ch.2),
UINT32 RO 0x6030:11, 16
entry 0x11 (Value))
Index 1A04 AI TxPDO-Map Inputs Ch.3
Index (hex) Name Meaning Data type Flags Default
1A04:0 AI TxPDO-Map Inputs
Ch.3
1A04:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A04:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
1A04:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A04:04 SubIndex 004 4. PDO Mapping entry (object 0x6040 (AI Inputs Ch.3),
1A04:05 SubIndex 005 5. PDO Mapping entry (object 0x6040 (AI Inputs Ch.3),
PDO Mapping TxPDO 5 UINT8 RO 0x05 (5
UINT32 RO 0x6040:07, 1
eter), entry 0x20 (Sync error))
UINT32 RO 0x6040:10, 1
entry 0x10 (TxPDO Toggle))
UINT32 RO 0x6040:11, 16
entry 0x11 (Value))
)
dec
EP1xxx 91Version: 2.5.0
Page 92

Commissioning/Configuration
Index 1A05 AI TxPDO-Map Inputs Ch.4
Index (hex) Name Meaning Data type Flags Default
1A05:0 AI TxPDO-Map Inputs
Ch.4
PDO Mapping TxPDO 6 UINT8 RO 0x05 (5
)
dec
1A05:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A05:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
UINT32 RO 0x6050:07, 1
eter), entry 0x20 (Sync error))
1A05:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A05:04 SubIndex 004 4. PDO Mapping entry (object 0x6050 (AI Inputs Ch.4),
UINT32 RO 0x6050:10, 1
entry 0x10 (TxPDO Toggle))
1A05:05 SubIndex 005 5. PDO Mapping entry (object 0x6050 (AI Inputs Ch.4),
UINT32 RO 0x6050:11, 16
entry 0x11 (Value))
Index 1A06 AI TxPDO-Map Inputs Ch.5
Index (hex) Name Meaning Data type Flags Default
1A06:0 AI TxPDO-Map Inputs
Ch.5
1A06:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A06:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
1A06:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A06:04 SubIndex 004 4. PDO Mapping entry (object 0x6060 (AI Inputs Ch.5),
1A06:05 SubIndex 005 5. PDO Mapping entry (object 0x6060 (AI Inputs Ch.5),
PDO Mapping TxPDO 7 UINT8 RO 0x05 (5
UINT32 RO 0x6060:07, 1
eter), entry 0x20 (Sync error))
UINT32 RO 0x6060:10, 1
entry 0x10 (TxPDO Toggle))
UINT32 RO 0x6060:11, 16
entry 0x11 (Value))
)
dec
Index 1A07 AI TxPDO-Map Inputs Ch.6
Index (hex) Name Meaning Data type Flags Default
1A07:0 AI TxPDO-Map Inputs
Ch.6
PDO Mapping TxPDO 8 UINT8 RO 0x05 (5
)
dec
1A07:01 SubIndex 001 1. PDO Mapping entry (13bits align) UINT32 RO 0x0000:00, 6
1A07:02 SubIndex 002 2. PDO Mapping entry (object 0x1C33 (SM input param-
UINT32 RO 0x6070:07, 1
eter), entry 0x20 (Sync error))
1A07:03 SubIndex 003 3. PDO Mapping entry (1bits align) UINT32 RO 0x0000:00, 8
1A07:04 SubIndex 004 4. PDO Mapping entry (object 0x6070 (AI Inputs Ch.6),
UINT32 RO 0x6070:10, 1
entry 0x10 (TxPDO Toggle))
1A07:05 SubIndex 005 5. PDO Mapping entry (object 0x6070 (AI Inputs Ch.6),
UINT32 RO 0x6070:11, 16
entry 0x11 (Value))
Index 1A08 DIG TxPDO-Map Inputs Device
Index (hex) Name Meaning Data type Flags Default
1A08:0 DIG TxPDO-Map In-
puts Device
1A08:01 SubIndex 001 1. PDO Mapping entry (object 0xF600 (DIG Inputs), entry
1A08:02 SubIndex 002 2. PDO Mapping entry (object 0xF600 (DIG Inputs), entry
1A08:03 SubIndex 003 3. PDO Mapping entry (11bits align) UINT32 RO 0x0000:00, 13
1A08:04 SubIndex 004 4. PDO Mapping entry (object 0xF600 (DIG Inputs), entry
PDO Mapping TxPDO 9 UINT8 RO 0x04 (4
UINT32 RO 0xF600:01, 1
0x01 (Us Undervoltage))
UINT32 RO 0xF600:02, 1
0x02 (Up Undervoltage))
UINT32 RO 0xF600:10, 1
0x0E (Sync error))
)
dec
Index 1C00Sync manager type
Index (hex) Name Meaning Data type Flags Default
1C00:0 Sync manager type Using the sync managers UINT8 RO 0x04 (4
1C00:01 SubIndex 001 Sync-Manager Type Channel 1: Mailbox Write UINT8 RO 0x01 (1
1C00:02 SubIndex 002 Sync-Manager Type Channel 2: Mailbox Read UINT8 RO 0x02 (2
1C00:03 SubIndex 003 Sync-Manager Type Channel 3: Process Data Write
(Outputs)
1C00:04 SubIndex 004 Sync-Manager Type Channel 4: Process Data Read (In-
puts)
UINT8 RO 0x03 (3
UINT8 RO 0x04 (4
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx92 Version: 2.5.0
Page 93

Commissioning/Configuration
Index 1C12 RxPDO assign
Index (hex) Name Meaning Data type Flags Default
1C12:0 RxPDO assign PDO Assign Outputs UINT8 RO 0x00 (0
Index 1C13 TxPDO assign
Index (hex) Name Meaning Data type Flags Default
1C13:0 TxPDO assign PDO Assign Inputs UINT8 RO 0x09 (9
1C13:01 Subindex 001 1. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:02 Subindex 002 2. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:03 Subindex 003 3. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:04 Subindex 004 4. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:05 Subindex 005 5. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:06 Subindex 006 6. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:07 Subindex 007 7. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:08 Subindex 008 8. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
1C13:09 Subindex 009 9. allocated TxPDO (contains the index of the associated
TxPDO mapping object)
UINT16 RO 0x1A00
(6656
UINT16 RO 0x1A01
(6657
UINT16 RO 0x1A02
(6658
UINT16 RO 0x1A03
(6659
UINT16 RO 0x1A04
(6660
UINT16 RO 0x1A05
(6661
UINT16 RO 0x1A06
(6662
UINT16 RO 0x1A07
(6663
UINT16 RO 0x1A08
(6664
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx 93Version: 2.5.0
Page 94

Commissioning/Configuration
Index 1C33SM input parameter
Index (hex) Name Meaning Data type Flags Default
1C33:0 SM input parameter Synchronization parameters for the inputs UINT8 RO 0x20 (32
1C33:01 Sync mode Current synchronization mode:
UINT16 RW 0x0022 (34
• 0: Free Run
• 1: Synchronous with SM 3 Event (no outputs
available)
• 2: DC - Synchron with SYNC0 Event
• 3: DC - Synchron with SYNC1 Event
• 34: Synchronous with SM 2 Event (outputs
available)
1C33:02 Cycle time as 0x1C32:02 UINT32 RW 0x003D0900
(4000000
1C33:03 Shift time Time between SYNC0 event and reading of the inputs (in
ns, only DC mode)
1C33:04 Sync modes sup-
ported
Supported synchronization modes:
• Bit 0: free run is supported
UINT32 RO 0x00000000
(0
UINT16 RO 0xC007
(49159
• Bit 1: Synchronous with SM 2 Event is supported
(outputs available)
• Bit 1: Synchronous with SM 3 Event is supported
(no outputs available)
• Bit 2-3 = 01: DC mode is supported
• Bit 4-5 = 01: Input shift through local event
(outputs available)
• Bit 4-5 = 10: Input shift with SYNC1 event (no
outputs available)
• Bit 14 = 1: dynamic times (measurement through
writing of 0x1C32:08 or 0x1C33:08)
1C33:05 Minimum cycle time as 0x1C32:05 UINT32 RO 0x00030D40
(200000
1C33:06 Calc and copy time Time between reading of the inputs and availability of the
inputs for the master (in ns, only DC mode)
UINT32 RO 0x00000000
(0
1C33:07 Minimum delay time UINT32 RO 0x00000000
(0
1C33:08 Command as 0x1C32:08 UINT16 RW 0x0000 (0
1C33:09 Maximum delay time Time between SYNC1 event and reading of the inputs (in
ns, only DC mode)
1C33:0B SM event missed
as 0x1C32:11 UINT16 RO 0x0000 (0
UINT32 RO 0x00000000
(0
counter
1C33:0C Cycle exceeded
as 0x1C32:12 UINT16 RO 0x0000 (0
counter
1C33:0D Shift too short counter as 0x1C32:13 UINT16 RO 0x0000 (0
1C33:20 Sync error as 0x1C32:32 BOOLEAN RO 0x00 (0
dec
dec
)
dec
)
dec
dec
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
)
)
dec
)
dec
)
dec
)
dec
EP1xxx94 Version: 2.5.0
Page 95

Commissioning/Configuration
4.6.3 Profile-specific objects (0x6000-0xFFFF)
The profile-specific objects have the same meaning for all EtherCAT slaves that support the profile 5001.
Index 6000 DIG Inputs Ch.1
Index (hex) Name Meaning Data type Flags Default
6000:0 DIG Inputs Ch.1 UINT8 RO 0x08 (8
6000:01 Input 1 BOOLEAN RO 0x00 (0
6000:02 Input 2 BOOLEAN RO 0x00 (0
6000:03 Input 3 BOOLEAN RO 0x00 (0
6000:04 Input 4 BOOLEAN RO 0x00 (0
6000:05 Input 5 BOOLEAN RO 0x00 (0
6000:06 Input 6 BOOLEAN RO 0x00 (0
6000:07 Input 7 BOOLEAN RO 0x00 (0
6000:08 Input 8 BOOLEAN RO 0x00 (0
Index 6010 DIG Inputs Ch.2
Index (hex) Name Meaning Data type Flags Default
6010:0 DIG Inputs Ch.2 UINT8 RO 0x08 (8
6010:01 Input 1 BOOLEAN RO 0x00 (0
6010:02 Input 2 BOOLEAN RO 0x00 (0
6010:03 Input 3 BOOLEAN RO 0x00 (0
6010:04 Input 4 BOOLEAN RO 0x00 (0
6010:05 Input 5 BOOLEAN RO 0x00 (0
6010:06 Input 6 BOOLEAN RO 0x00 (0
6010:07 Input 7 BOOLEAN RO 0x00 (0
6010:08 Input 8 BOOLEAN RO 0x00 (0
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Index 6020 AI Inputs Ch.1
Index (hex) Name Meaning Data type Flags Default
6020:0 AI Inputs Ch.1 UINT8 RO 0x11 (17
6020:07 Error BOOLEAN RO 0x00 (0
6020:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6020:11 Value INT16 RO 0x0000 (0
Index 6030 AI Inputs Ch.2
Index (hex) Name Meaning Data type Flags Default
6030:0 AI Inputs Ch.2 UINT8 RO 0x11 (17
6030:07 Error BOOLEAN RO 0x00 (0
6030:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6030:11 Value INT16 RO 0x0000 (0
Index 6040 AI Inputs Ch.3
Index (hex) Name Meaning Data type Flags Default
6040:0 AI Inputs Ch.3 UINT8 RO 0x11 (17
6040:07 Error BOOLEAN RO 0x00 (0
6040:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6040:11 Value INT16 RO 0x0000 (0
Index 6050 AI Inputs Ch.4
Index (hex) Name Meaning Data type Flags Default
6050:0 AI Inputs Ch.4 UINT8 RO 0x11 (17
6050:07 Error BOOLEAN RO 0x00 (0
6050:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6050:11 Value INT16 RO 0x0000 (0
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EP1xxx 95Version: 2.5.0
Page 96

Commissioning/Configuration
Index 6060 AI Inputs Ch.5
Index (hex) Name Meaning Data type Flags Default
6060:0 AI Inputs Ch.5 UINT8 RO 0x11 (17
6060:07 Error BOOLEAN RO 0x00 (0
6060:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6060:11 Value INT16 RO 0x0000 (0
Index 6070 AI Inputs Ch.6
Index (hex) Name Meaning Data type Flags Default
6070:0 AI Inputs Ch.6 UINT8 RO 0x11 (17
6070:07 Error BOOLEAN RO 0x00 (0
6070:10 TxPDO Toggle BOOLEAN RO 0x00 (0
6070:11 Value INT16 RO 0x0000 (0
Index F000 Modular device profile
Index (hex) Maximum number of
modules>Name
F000:0 Modular device profile General information for the modular device profile UINT8 RO 0x02 (2
F000:01 Module index dis-
tance
F000:02 Maximum number of
modules
Meaning UINT16>Data
type
UINT16 RO 0x0010 (16
UINT16 RO 0x0009 (9
RO>Flags0x0009
(9
)>Default
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Index F008 Code word
Index (hex) Name Meaning Data type Flags Default
F008:0 Code word UINT32 RW 0x00000000
(0
)
dec
Index F010 Module list
Index (hex) Name Meaning Data type Flags Default
F010:0 Module list UINT8 RW 0x09 (9
F010:01 SubIndex 001 UINT32 RW 0x00000118
(280
F010:02 SubIndex 002 UINT32 RW 0x00000118
(280
F010:03 SubIndex 003 UINT32 RW 0x0000012C
(300
F010:04 SubIndex 004 UINT32 RW 0x0000012C
(300
F010:05 SubIndex 005 UINT32 RW 0x0000012C
(300
F010:06 SubIndex 006 UINT32 RW 0x0000012C
(300
F010:07 SubIndex 007 UINT32 RW 0x0000012C
(300
F010:08 SubIndex 008 UINT32 RW 0x0000012C
(300
F010:09 SubIndex 009 UINT32 RW 0x00000168
(360
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Index F600 DIG Inputs
Index (hex) Name Meaning Data type Flags Default
F600:0 DIG Inputs UINT8 RO 0x10 (16
F600:01 Us Undervoltage BOOLEAN RO 0x00 (0
F600:02 Up Undervoltage BOOLEAN RO 0x00 (0
F600:10 TxPDO Toggle BOOLEAN RO 0x00 (0
EP1xxx96 Version: 2.5.0
)
dec
)
dec
)
dec
)
dec
Page 97

Commissioning/Configuration
4.7 Restoring the delivery state
To restore the delivery state for backup objects in ELxxxx terminals / EPxxxx boxes, the CoE object Restore
default parameters, SubIndex 001 can be selected in the TwinCAT System Manager (Config mode).
Fig.74: Selecting the Restore default parameters PDO
Double-click on SubIndex 001 to enter the Set Value dialog. Enter the value 1684107116 in field Dec or the
value 0x64616F6C in field Hex and confirm with OK.
All backup objects are reset to the delivery state.
Fig.75: Entering a restore value in the Set Value dialog
Alternative restore value
In some older terminals / boxes the backup objects can be switched with an alternative re-
Note
store value:
Decimal value: 1819238756
Hexadecimal value: 0x6C6F6164
An incorrect entry for the restore value has no effect.
EP1xxx 97Version: 2.5.0
Page 98

Commissioning/Configuration
4.8 Firmware Update EL/ES/EM/EPxxxx
This section describes the device update for Beckhoff EtherCAT slaves from the EL/ES, EM, EK and EP
series. A firmware update should only be carried out after consultation with Beckhoff support.
Storage locations
An EtherCAT slave stores operating data in up to 3 locations:
• Depending on functionality and performance EtherCAT slaves have one or several local controllers for
processing I/O data. The corresponding program is the so-called firmware in *.efw format.
• In some EtherCAT slaves the EtherCAT communication may also be integrated in these controllers. In
this case the controller is usually a so-called FPGA chip with *.rbf firmware.
• In addition, each EtherCAT slave has a memory chip, a so-called ESI-EEPROM, for storing its own
device description (ESI: EtherCAT Slave Information). On power-up this description is loaded and the
EtherCAT communication is set up accordingly. The device description is available from the download
area of the Beckhoff website at (http://www.beckhoff.de). All ESI files are accessible there as zip files.
Customers can access the data via the EtherCAT fieldbus and its communication mechanisms. Acyclic
mailbox communication or register access to the ESC is used for updating or reading of these data.
The TwinCAT System Manager offers mechanisms for programming all 3 parts with new data, if the slave is
set up for this purpose. Generally the slave does not check whether the new data are suitable, i.e. it may no
longer be able to operate if the data are unsuitable.
Risk of damage to the device!
Note the following when downloading new device files
Attention
Device description ESI file/XML
• Firmware downloads to an EtherCAT device must not be interrupted
• Flawless EtherCAT communication must be ensured. CRC errors or LostFrames must be
avoided.
• The power supply must adequately dimensioned. The signal level must meet the specification.
In the event of malfunctions during the update process the EtherCAT device may become
unusable and require re-commissioning by the manufacturer.
Notice regarding update of the ESI description/EEPROM
Some slaves have stored calibration and configuration data from the production in the EEP-
Attention
The ESI device description is stored locally on the slave and loaded on start-up. Each device description has
a unique identifier consisting of slave name (9 characters/digits) and a revision number (4 digits). Each slave
configured in the System Manager shows its identifier in the EtherCAT tab:
ROM. These are irretrievably overwritten during an update.
EP1xxx98 Version: 2.5.0
Page 99

Commissioning/Configuration
Fig.76: Device identifier consisting of name EL3204-0000 and revision -0016
The configured identifier must be compatible with the actual device description used as hardware, i.e. the
description which the slave has loaded on start-up (in this case EL3204). Normally the configured revision
must be the same or lower than that actually present in the terminal network.
For further information on this, please refer to the EtherCAT system documentation.
Update of XML/ESI description
The device revision is closely linked to the firmware and hardware used. Incompatible com-
Note
Display of ESI slave identifier
The simplest way to ascertain compliance of configured and actual device description is to scan the
EtherCAT boxes in TwinCAT mode Config/FreeRun:
binations lead to malfunctions or even final shutdown of the device. Corresponding updates
should only be carried out in consultation with Beckhoff support.
Fig.77: Scan the subordinate field by right-clicking on the EtherCAT device in Config/FreeRun mode
If the found field matches the configured field, the display shows
EP1xxx 99Version: 2.5.0
Page 100

Commissioning/Configuration
Fig.78: Configuration is identical
otherwise a change dialog appears for entering the actual data in the configuration.
Fig.79: Change dialog
In this example in Fig. "Change dialog", an EL3201-0000-0017 was found, while an EL3201-0000-0016 was
configured. In this case the configuration can be adapted with the Copy Before button. The Extended
Information checkbox must be set in order to display the revision.
Changing the ESI slave identifier
The ESI/EEPROM identifier can be updated as follows under TwinCAT:
• Trouble-free EtherCAT communication must be established with the slave.
• The state of the slave is irrelevant.
• Right-clicking on the slave in the online display opens the EEPROM Update dialog, Fig. "EEPROM
Update"
EP1xxx100 Version: 2.5.0
 Loading...
Loading...