

Page 1
Dokumentation | DE
EL32xx-0xx0
Analoge Eingangsklemmen Pt100 (RTD)
19.01.2021 | Version: 6.1
Page 2

Page 3

Inhaltsverzeichnis
Inhaltsverzeichnis
1 Produktübersicht Analoge Eingangsklemmen Pt100 (RTD)..................................................................5
2 Vorwort .......................................................................................................................................................6
2.1 Hinweise zur Dokumentation.............................................................................................................6
2.2 Sicherheitshinweise...........................................................................................................................7
2.3 Ausgabestände der Dokumentation ..................................................................................................8
2.4 Versionsidentifikation von EtherCAT-Geräten.................................................................................10
2.4.1 Beckhoff Identification Code (BIC)................................................................................... 13
3 Produktübersicht.....................................................................................................................................15
3.1 EL3201, EL3202, EL3204, EL3214, EL3208, EL3218 - Einführung................................................15
3.2 EL3214-0090 - Einführung ..............................................................................................................22
3.3 Technologie RTD-Messung.............................................................................................................23
3.4 Grundlagen der RTD-Technologie ..................................................................................................27
3.4.1 Übersicht implementierte RTD Transformationen ........................................................... 32
3.5 Technische Daten............................................................................................................................38
3.6 Hinweis zu Beckhoff Kalibrierzertifikaten.........................................................................................45
3.7 Start .................................................................................................................................................45
4 Grundlagen der Kommunikation............................................................................................................46
4.1 EtherCAT-Grundlagen.....................................................................................................................46
4.2 EtherCAT-Verkabelung - Drahtgebunden .......................................................................................46
4.3 Allgemeine Hinweise zur Watchdog-Einstellung .............................................................................47
4.4 EtherCAT State Machine.................................................................................................................49
4.5 CoE-Interface ..................................................................................................................................51
4.6 Distributed Clock .............................................................................................................................56
5 Installation................................................................................................................................................57
5.1 Sicherheitshinweise.........................................................................................................................57
5.2 Umgebungsbedingungen ................................................................................................................57
5.3 Transportvorgaben / Lagerung ........................................................................................................57
5.4 Schaltschrank / Klemmenkasten .....................................................................................................57
5.5 Hinweise zum ESD-Schutz..............................................................................................................58
5.6 Tragschienenmontage.....................................................................................................................59
5.7 Montagevorschriften für erhöhte mechanische Belastbarkeit..........................................................62
5.8 Positionierung von passiven Klemmen............................................................................................63
5.9 Einbaulagen.....................................................................................................................................64
5.10 Anschluss ........................................................................................................................................66
5.10.1 Anschlusstechnik............................................................................................................. 66
5.10.2 Verdrahtung..................................................................................................................... 68
5.10.3 Schirmung........................................................................................................................ 69
5.11 ATEX - Besondere Bedingungen (Standardtemperaturbereich) .....................................................70
5.12 ATEX - Besondere Bedingungen (erweiterter Temperaturbereich).................................................71
5.13 Weiterführende Dokumentation zu ATEX und IECEx .....................................................................72
5.14 UL-Hinweise ....................................................................................................................................72
5.15 LEDs und Anschlussbelegung.........................................................................................................73
5.16 Anschluss analoger RTD-Signalleitungen .......................................................................................84
EL32xx-0xx0 3Version: 6.1
Page 4

Inhaltsverzeichnis
6 Inbetriebnahme........................................................................................................................................87
6.1 TwinCAT Quickstart.........................................................................................................................87
6.1.1 TwinCAT 2 ....................................................................................................................... 90
6.1.2 TwinCAT 3 ..................................................................................................................... 100
6.2 TwinCAT Entwicklungsumgebung.................................................................................................113
6.2.1 Installation TwinCAT Realtime Treiber .......................................................................... 114
6.2.2 Hinweise ESI-Gerätebeschreibung................................................................................ 119
6.2.3 TwinCAT ESI Updater ................................................................................................... 123
6.2.4 Unterscheidung Online/Offline....................................................................................... 123
6.2.5 OFFLINE Konfigurationserstellung ................................................................................ 124
6.2.6 ONLINE Konfigurationserstellung.................................................................................. 129
6.2.7 EtherCAT Teilnehmerkonfiguration ............................................................................... 137
6.2.8 Import/Export von EtherCAT-Teilnehmern mittels SCI und XTI .................................... 147
6.3 Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves .........................................................153
6.4 Einstellungen und Anwendungshinweise zur EL32xx-0010/0020 .................................................162
6.5 Einstellungen und Anwendungshinweise zur EL3204-0200..........................................................165
6.6 Prozessdaten und Betriebsmodi....................................................................................................174
6.7 TwinSAFE SC................................................................................................................................181
6.7.1 TwinSAFE SC - Funktionsprinzip .................................................................................. 181
6.7.2 TwinSAFE SC - Konfiguration ....................................................................................... 182
6.8 TwinSAFE SC Prozessdaten EL3214-0090 ..................................................................................186
6.9 CoE Objektverzeichnis EL32xx-00xx ............................................................................................186
6.10 CoE Objektverzeichnis EL3204-0200............................................................................................199
6.11 Status-Wort....................................................................................................................................207
6.12 Grundlagen zu Signaltrennern, Barrieren......................................................................................212
6.13 Hinweise zu analogen Spezifikationen..........................................................................................214
6.13.1 Messbereichsendwert (MBE)......................................................................................... 214
6.13.2 Messfehler/ Messabweichung ....................................................................................... 214
6.13.3 Temperaturkoeffizient tK [ppm/K] .................................................................................. 215
6.13.4 Langzeiteinsatz.............................................................................................................. 216
6.13.5 Typisierung SingleEnded / Differentiell.......................................................................... 216
6.13.6 Gleichtaktspannung und Bezugsmasse (bezogen auf Differenzeingänge)................... 221
6.13.7 Spannungsfestigkeit ...................................................................................................... 221
6.13.8 Zeitliche Aspekte der analog/digital Wandlung.............................................................. 222
7 Anhang ...................................................................................................................................................225
7.1 EtherCAT AL Status Codes...........................................................................................................225
7.2 Kalibrierungs-Zertifikat...................................................................................................................225
7.3 Firmware Kompatibilität .................................................................................................................226
7.4 Firmware Update EL/ES/ELM/EM/EPxxxx ....................................................................................228
7.4.1 Gerätebeschreibung ESI-File/XML ................................................................................ 229
7.4.2 Erläuterungen zur Firmware .......................................................................................... 232
7.4.3 Update Controller-Firmware *.efw ................................................................................. 234
7.4.4 FPGA-Firmware *.rbf ..................................................................................................... 235
7.4.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ....................................................... 239
7.5 Wiederherstellen des Auslieferungszustandes..............................................................................240
7.6 Support und Service ......................................................................................................................241
EL32xx-0xx04 Version: 6.1
Page 5
Produktübersicht Analoge Eingangsklemmen Pt100 (RTD)
1 Produktübersicht Analoge Eingangsklemmen
Pt100 (RTD)
EL3201, EL3202, EL3204 [}15]
EL3201-0010, EL3202-0010 [}15]
EL3201-0020, EL3202-0020 [}15]
EL3204-0162
EL3204-0200 [}15]
EL3214 [}19]
EL3214-0090 [}22]
EL3208 [}20]
EL3208-0010 [}20]
EL3218 [}21]
1-, 2-, 4 kanalige Eingangsklemmen Pt100 (RTD)
1-, 2 kanalige Eingangsklemmen Pt100 (RTD), hochpräzise
1-, 2 kanalige Eingangsklemmen Pt100 (RTD), hochpräzise mit
Kalibrierungszertifikat
4 kanalige Eingangsklemme für 2x Pt100 (RTD) und 2x -10 …+10 V,
12 Bit, single ended
4 kanalige Eingangsklemme für RTD bis 240 kΩ, NTC 20 k, 16 Bit
4 kanalige HD-Eingangsklemme Pt100 für 3-Leiteranschluss
4 kanalige HD-Eingangsklemme für Pt100 (RTD), 3-Leiteranschluss,
TwinSAFE Single Channel
8 kanalige HD-Eingangsklemme Pt100 (RTD)
8 kanalige HD-Eingangsklemme PT1000, Ni1000 (RTD); NTCSensoren, Potentiometer
8 kanalige analoge HD-Eingangsklemme PT100 (RTD) für 2/3Leiteranschluss
EL32xx-0xx0 5Version: 6.1
Page 6

Vorwort
2 Vorwort
2.1 Hinweise zur Dokumentation
Zielgruppe
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- und
Automatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.
Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der Dokumentation und der
nachfolgenden Hinweise und Erklärungen unbedingt notwendig.
Das Fachpersonal ist verpflichtet, für jede Installation und Inbetriebnahme die zu dem betreffenden Zeitpunkt
veröffentlichte Dokumentation zu verwenden.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produkte
alle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungen
und Normen erfüllt.
Disclaimer
Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiter
entwickelt.
Wir behalten uns das Recht vor, die Dokumentation jederzeit und ohne Ankündigung zu überarbeiten und zu
ändern.
Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche auf
Änderung bereits gelieferter Produkte geltend gemacht werden.
Marken
Beckhoff®, TwinCAT®, EtherCAT®, EtherCATG®, EtherCATG10®, EtherCATP®, SafetyoverEtherCAT®,
TwinSAFE®, XFC®, XTS® und XPlanar® sind eingetragene und lizenzierte Marken der Beckhoff Automation
GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch
Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
Patente
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden
Anmeldungen und Eintragungen in verschiedenen anderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff
Automation GmbH, Deutschland.
Copyright
© Beckhoff Automation GmbH & Co. KG, Deutschland.
Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind
verboten, soweit nicht ausdrücklich gestattet.
Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmusteroder Geschmacksmustereintragung vorbehalten.
EL32xx-0xx06 Version: 6.1
Page 7
Vorwort
2.2 Sicherheitshinweise
Sicherheitsbestimmungen
Beachten Sie die folgenden Sicherheitshinweise und Erklärungen!
Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,
Verdrahtung, Inbetriebnahme usw.
Haftungsausschluss
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und SoftwareKonfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die
dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der
Beckhoff Automation GmbH & Co. KG.
Qualifikation des Personals
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,
Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der Hinweise
In der vorliegenden Dokumentation werden die folgenden Hinweise verwendet.
Diese Hinweise sind aufmerksam zu lesen und unbedingt zu befolgen!
GEFAHR
Akute Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht unmittelbare Gefahr für Leben und Gesundheit
von Personen!
WARNUNG
Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht Gefahr für Leben und Gesundheit von Personen!
VORSICHT
Schädigung von Personen!
Wenn dieser Sicherheitshinweis nicht beachtet wird, können Personen geschädigt werden!
HINWEIS
Schädigung von Umwelt/Geräten oder Datenverlust
Wenn dieser Hinweis nicht beachtet wird, können Umweltschäden, Gerätebeschädigungen oder Datenverlust entstehen.
Tipp oder Fingerzeig
Dieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
EL32xx-0xx0 7Version: 6.1
Page 8
Vorwort
2.3 Ausgabestände der Dokumentation
Version Kommentar
6.1 • Update Kapitel „Einführung“
• Update Kapitel "LEDs und Anschlussbelegung"
• Update Kapitel „Ratiometrische Spannungsmessung"
• Update Struktur
• Update Revisionsstand
6.0 • Update Kapitel „Einführung“
• Kapitel „Inbetriebnahme“: Selbsterwärmung von RTD-Sensoren“ ergänzt
5.9 • Kapitel „Inbetriebnahme“: Unterkapitel „Grundlagen zu Signaltrennern, Barrieren“ eingefügt
• Revisionsstand aktualisiert
• Kapitel „Objektbeschreibung“ aktualisiert
• Update Struktur
5.8 • EL3208-0010 ergänzt
• EL3218-0000 ergänzt
• Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
5.7 • Update Kapitel "Technische Daten"
• Update Struktur
5.6 • Update Kapitel "Technische Daten"
• Update Struktur
5.5 • Update Kapitel "Technische Daten"
• Update UL - Hinweise
5.4 • Update Kapitel "Technische Daten"
• Update Kapitel "CoE Objektbeschreibung EL32xx-00xx"
• Update Struktur
• Update Revisionsstand
5.3 • Update Kapitel "Technische Daten"
• Update Kapitel " EL3214-0090 - Einleitung" und Kapitel "CoE Objektbeschreibung EL32xx-00xx"
• Update Kapitel "TwinSAFE SC"
• Update Struktur
• Update Revisionsstand
5.2 • Update Kapitel "Objektverzeichnis", „Funktion“
• Update Struktur
• Update Revisionsstand
5.1 • Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
5.0 • EL3214-0090 ergänzt
• Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
4.9 • Update Kapitel "Technische Daten"Hinweis zum ESD-Schutz eingefügt
• Kapitel "Analogtechnische Hinweise - Spezifikationen" ersetzt durch Kapitel "Hinweise zu analogen Spezifikationen"
4.8 • Update Kapitel "Technologie RTD-Messung“
• Korrektur Revisionsstand
EL32xx-0xx08 Version: 6.1
Page 9
Version Kommentar
4.7 • Update Kapitel "Hinweise zur Dokumentation"
• Korrektur Technische Daten
• Update Kapitel "TwinCAT 2.1x" -> Kapitel "TwinCAT Entwicklungsumgebung" und Kapitel "TwinCAT Quick Start"
• Korrektur Revisionsstand
4.6 • Update Kapitel „Technische Daten“
• Revisionstand aktualisiert
4.5 • Update Kapitel „Einstellungen und Anwendungshinweise zur EL32xx-0010/0020“
• „Hinweis zum Werkskalibrierzertifikat“ in das Kapitel „Produktübersicht“ eingefügt
4.4 • Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
4.3 • Update Kapitel "Technologie RTD-Messung"
• Update Struktur
• Update Revisionsstand
4.2 • Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
4.1 • Update Kapitel "LED’s und Anschluss"
4.0 • Überführung SCHEMA
• EL3208 hinzugefügt
• EL3214 hinzugefügt
• Update Kapitel "Technische Daten"
• Update Struktur
• Update Revisionsstand
3.1 • Update Kapitel "Technische Daten"
• Kapitel "Montagehinweise bei erhöhter mechanischer Belastbarkeit" ergänzt
• Update Struktur
• Update Revisionsstand
3.0 • Update Struktur
2.9 • EL3204-0200 ergänzt
• Update Struktur
2.8 • Kapitel "Technologie" aktualisiert
2.7 • Kapitel "Technologie RTD-Messung" aktualisiert, EL3204-0200 ergänzt
2.6 • Kapitel "Technologie" aktualisiert
2.5 • Kapitel "RTD-Technologie" hinzugefügt
2.4 • Update Kapitel "Technologie"
2.3 • Hinweis zum Anschluss analoger Signalleitungen ergänzt
2.2 • Hinweis Kalibrierungs-Zertifikat ergänzt
• Update Struktur
2.1 • EL3202-0020 ergänzt
2.0 • Datenflussschema ergänzt, Technische Hinweise ergänzt
1.9 • Technische Hinweise ergänzt
1.8 • Technische Hinweise ergänzt
1.7 • Technische Daten ergänzt und korrigiert
1.6 • Technische Korrekturen, Ergänzung EL3202-0010
1.5 • KT/KTY Kennlinien hinzugefügt, Ergänzung Limit
1.4 • Technische Änderungen hinzugefügt
1.3 • Technische Änderungen hinzugefügt
1.2 • EL3201-0010, EL3201-0020 hinzugefügt
1.1 • Technische Daten korrigiert
1.0 • Technische Daten ergänzt, erste Veröffentlichung
Vorwort
EL32xx-0xx0 9Version: 6.1
Page 10
Vorwort
2.4 Versionsidentifikation von EtherCAT-Geräten
Bezeichnung
Ein Beckhoff EtherCAT-Gerät hat eine 14stellige technische Bezeichnung, die sich zusammensetzt aus
• Familienschlüssel
• Typ
• Version
• Revision
Beispiel Familie Typ Version Revision
EL3314-0000-0016 EL-Klemme
(12 mm, nicht steckbare
Anschlussebene)
ES3602-0010-0017 ES-Klemme
(12 mm, steckbare
Anschlussebene)
CU2008-0000-0000 CU-Gerät 2008
3314
(4 kanalige
Thermoelementklemme)
3602
(2 kanalige Spannungsmessung)
(8 Port FastEthernet Switch)
0000
(Grundtyp)
0010
(Hochpräzise
Version)
0000
(Grundtyp)
0016
0017
0000
Hinweise
• die oben genannten Elemente ergeben die technische Bezeichnung, im Folgenden wird das Beispiel
EL3314-0000-0016 verwendet.
• Davon ist EL3314-0000 die Bestellbezeichnung, umgangssprachlich bei „-0000“ dann oft nur EL3314
genannt. „-0016“ ist die EtherCAT-Revision.
• Die Bestellbezeichnung setzt sich zusammen aus
- Familienschlüssel (EL, EP, CU, ES, KL, CX, ...)
- Typ (3314)
- Version (-0000)
• Die Revision -0016 gibt den technischen Fortschritt wie z.B. Feature-Erweiterung in Bezug auf die
EtherCAT Kommunikation wieder und wird von Beckhoff verwaltet.
Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn nicht
anders z.B. in der Dokumentation angegeben.
Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT
Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht.
Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL-
Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“.
• Typ, Version und Revision werden als dezimale Zahlen gelesen, auch wenn sie technisch hexadezimal
gespeichert werden.
Identifizierungsnummer
Beckhoff EtherCAT Geräte der verschiedenen Linien verfügen über verschiedene Arten von
Identifizierungsnummern:
Produktionslos/Chargennummer/Batch-Nummer/Seriennummer/Date Code/D-Nummer
Als Seriennummer bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf dem
Gerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand im
Auslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nicht
die Module einer Charge.
Aufbau der Seriennummer: KK YY FF HH
KK - Produktionswoche (Kalenderwoche)
YY - Produktionsjahr
FF - Firmware-Stand
HH - Hardware-Stand
EL32xx-0xx010 Version: 6.1
Page 11

Vorwort
Beispiel mit
Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 Hardware-Stand 02
Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehe
jeweilige Gerätedokumentation):
Syntax: D ww yy x y z u
D - Vorsatzbezeichnung
ww - Kalenderwoche
yy - Jahr
x - Firmware-Stand der Busplatine
y - Hardware-Stand der Busplatine
z - Firmware-Stand der E/A-Platine
u - Hardware-Stand der E/A-Platine
Beispiel: D.22081501 Kalenderwoche 22 des Jahres 2008 Firmware-Stand Busplatine: 1 Hardware Stand
Busplatine: 5 Firmware-Stand E/A-Platine: 0 (keine Firmware für diese Platine notwendig) Hardware-Stand
E/A-Platine: 1
Eindeutige Seriennummer/ID, ID-Nummer
Darüber hinaus verfügt in einigen Serien jedes einzelne Modul über eine eindeutige Seriennummer.
Siehe dazu auch weiterführende Dokumentation im Bereich
• IP67: EtherCAT Box
• Safety: TwinSafe
• Klemmen mit Werkskalibrierzertifikat und andere Messtechnische Klemmen
Beispiele für Kennzeichnungen
Abb.1: EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer und
Revisionskennzeichnung (seit 2014/01)
EL32xx-0xx0 11Version: 6.1
Page 12
Vorwort
Abb.2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer
Abb.3: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418
EL32xx-0xx012 Version: 6.1
Page 13

Vorwort
2.4.1 Beckhoff Identification Code (BIC)
Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen
Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema
ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016.
Abb.4: BIC als Data Matrix Code (DMC, Code-Schema ECC200)
Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg.
Er ist je nach Produkt an folgenden Stellen zu finden:
• auf der Verpackungseinheit
• direkt auf dem Produkt (bei ausreichendem Platz)
• auf Verpackungseinheit und Produkt
Der BIC ist maschinenlesbar und enthält Informationen, die auch kundenseitig für Handling und
Produktverwaltung genutzt werden können.
Jede Information ist anhand des so genannten Datenidentifikators (ANSIMH10.8.2-2016) eindeutig
identifizierbar. Dem Datenidentifikator folgt eine Zeichenkette. Beide zusammen haben eine maximale Länge
gemäß nachstehender Tabelle. Sind die Informationen kürzer, werden sie um Leerzeichen ergänzt. Die
Daten unter den Positionen 1 bis 4 sind immer vorhanden.
Folgende Informationen sind enthalten:
EL32xx-0xx0 13Version: 6.1
Page 14
Vorwort
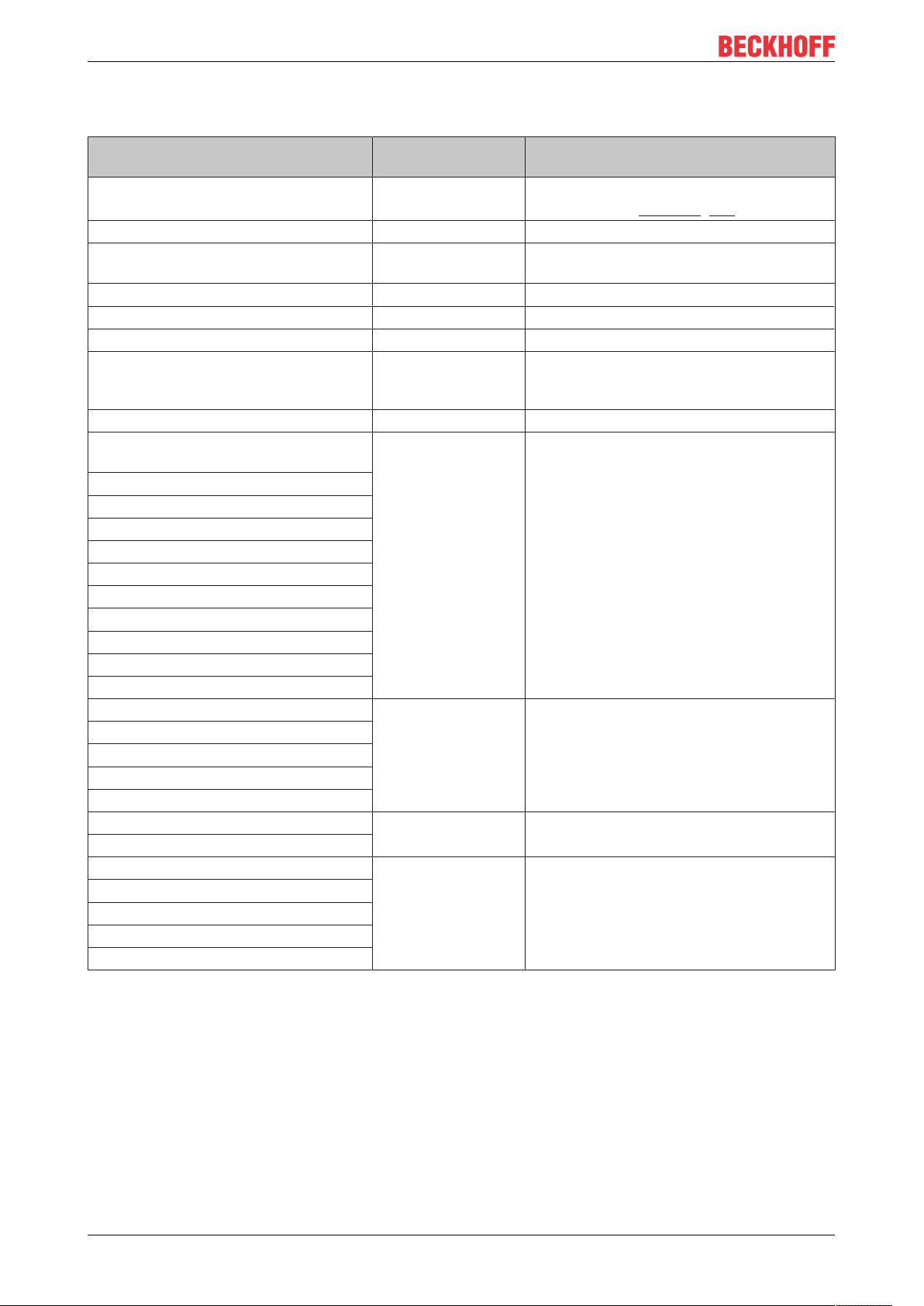
Pos-
Art der Information Erklärung Dateniden-
Nr.
1 Beckhoff-
Artikelnummer
2 Beckhoff Traceability
Number (BTN)
3 Artikelbezeichnung Beckhoff
4 Menge Menge in
5 Chargennummer Optional: Produktionsjahr
6 ID-/Seriennummer Optional: vorheriges
7 Variante Optional:
...
Beckhoff Artikelnummer
Eindeutige
Seriennummer, Hinweis
s. u.
Artikelbezeichnung, z.B.
EL1008
Verpackungseinheit,
z.B. 1, 10…
und -woche
Seriennummer-System,
z.B. bei Safety-Produkten
oder kalibrierten Klemmen
Produktvarianten-Nummer
auf Basis von
Standardprodukten
Anzahl Stellen inkl.
tifikator
1P 8 1P072222
S 12 SBTNk4p562d7
1K 32 1KEL1809
Q 6 Q1
2P 14 2P401503180016
51S 12 51S678294104
30P 32 30PF971, 2*K183
Datenidentifikator
Beispiel
Weitere Informationsarten und Datenidentifikatoren werden von Beckhoff verwendet und dienen internen
Prozessen.
Aufbau des BIC
Beispiel einer zusammengesetzten Information aus den Positionen 1 bis 4 und 6.
Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert:
BTN
Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr.2). Die BTN ist eine
eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen SeriennummernSysteme bei Beckhoff ersetzen wird (z. B. Chargenbezeichungen auf IO-Komponenten, bisheriger
Seriennummernkreis für Safety-Produkte, etc.). Die BTN wird ebenfalls schrittweise eingeführt, somit kann
es vorkommen, dass die BTN noch nicht im BIC codiert ist.
HINWEIS
Diese Information wurde sorgfältig erstellt. Das beschriebene Verfahren wird jedoch ständig weiterentwickelt. Wir behalten uns das Recht vor, Verfahren und Dokumentation jederzeit und ohne Ankündigung zu
überarbeiten und zu ändern. Aus den Angaben, Abbildungen und Beschreibungen in dieser Information
können keine Ansprüche auf Änderung geltend gemacht werden.
EL32xx-0xx014 Version: 6.1
Page 15
Produktübersicht
3 Produktübersicht
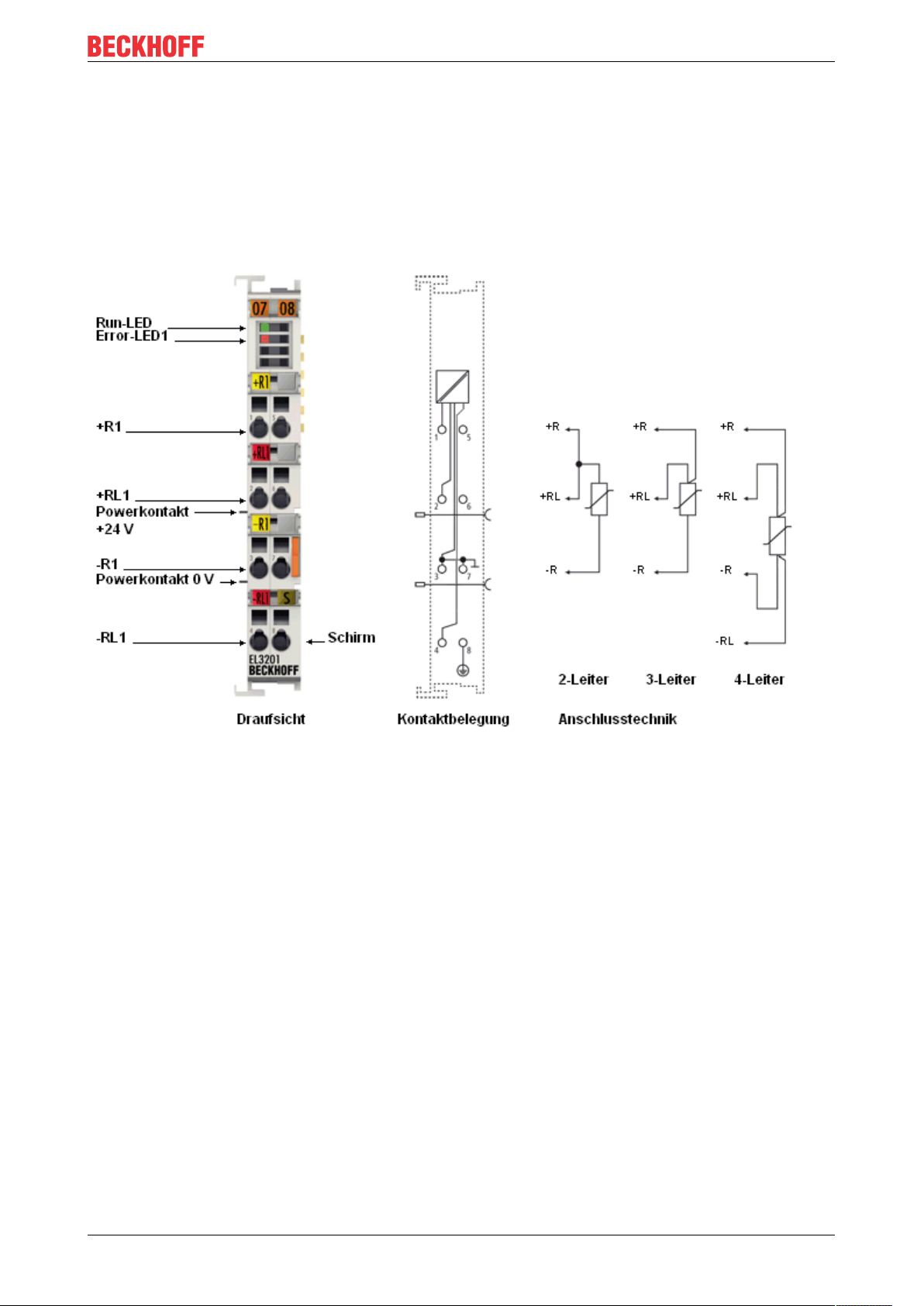
3.1 EL3201, EL3202, EL3204, EL3214, EL3208, EL3218 Einführung
Ein-, zwei- und vierkanalige analoge Eingangsklemmen Pt100 (RTD)
Abb.5: EL3201
EL32xx-0xx0 15Version: 6.1
Page 16
Produktübersicht
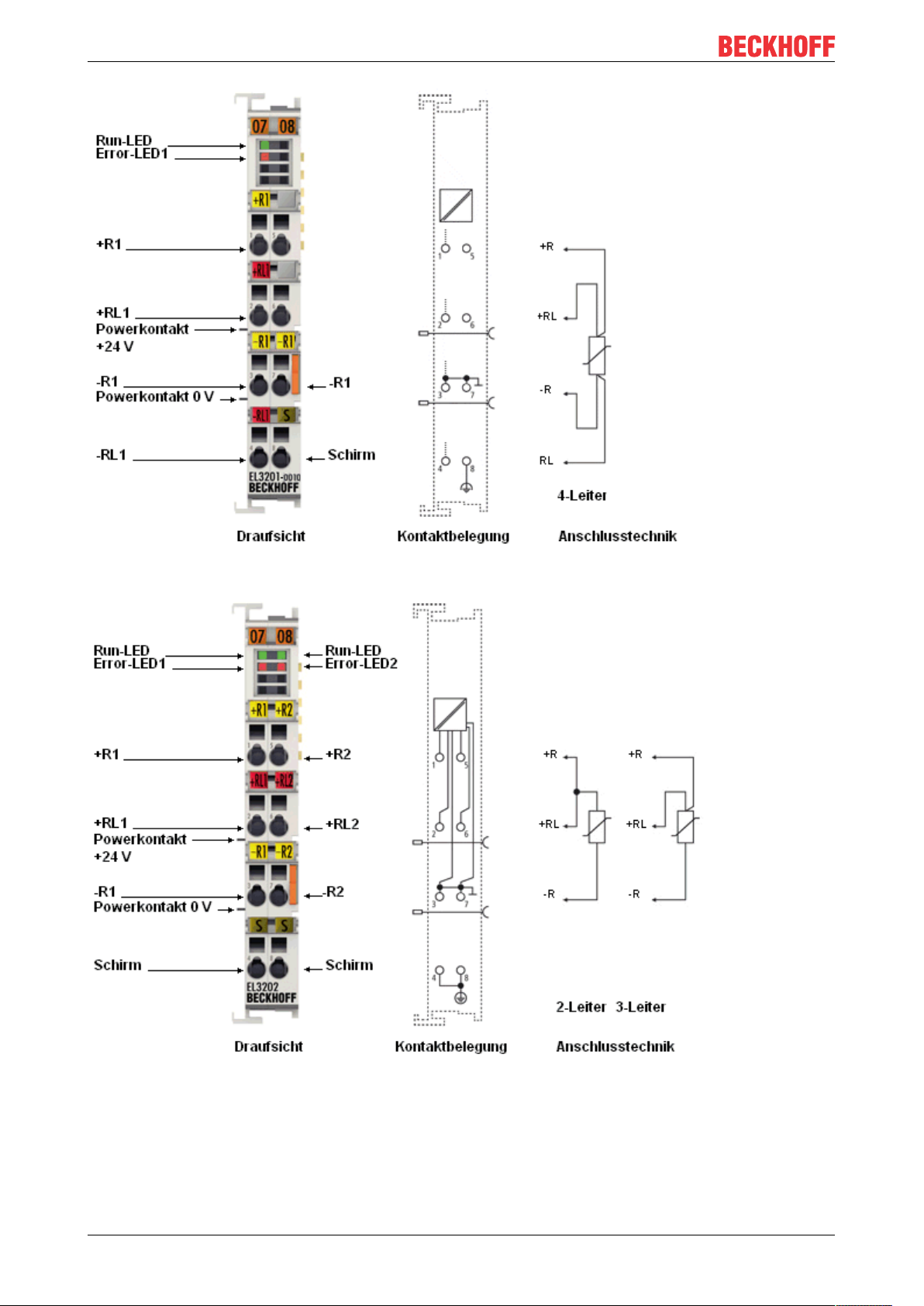
Abb.6: EL3201-0010/0020
Abb.7: EL3202
EL32xx-0xx016 Version: 6.1
Page 17
Produktübersicht
Abb.8: EL3202-0010/0020
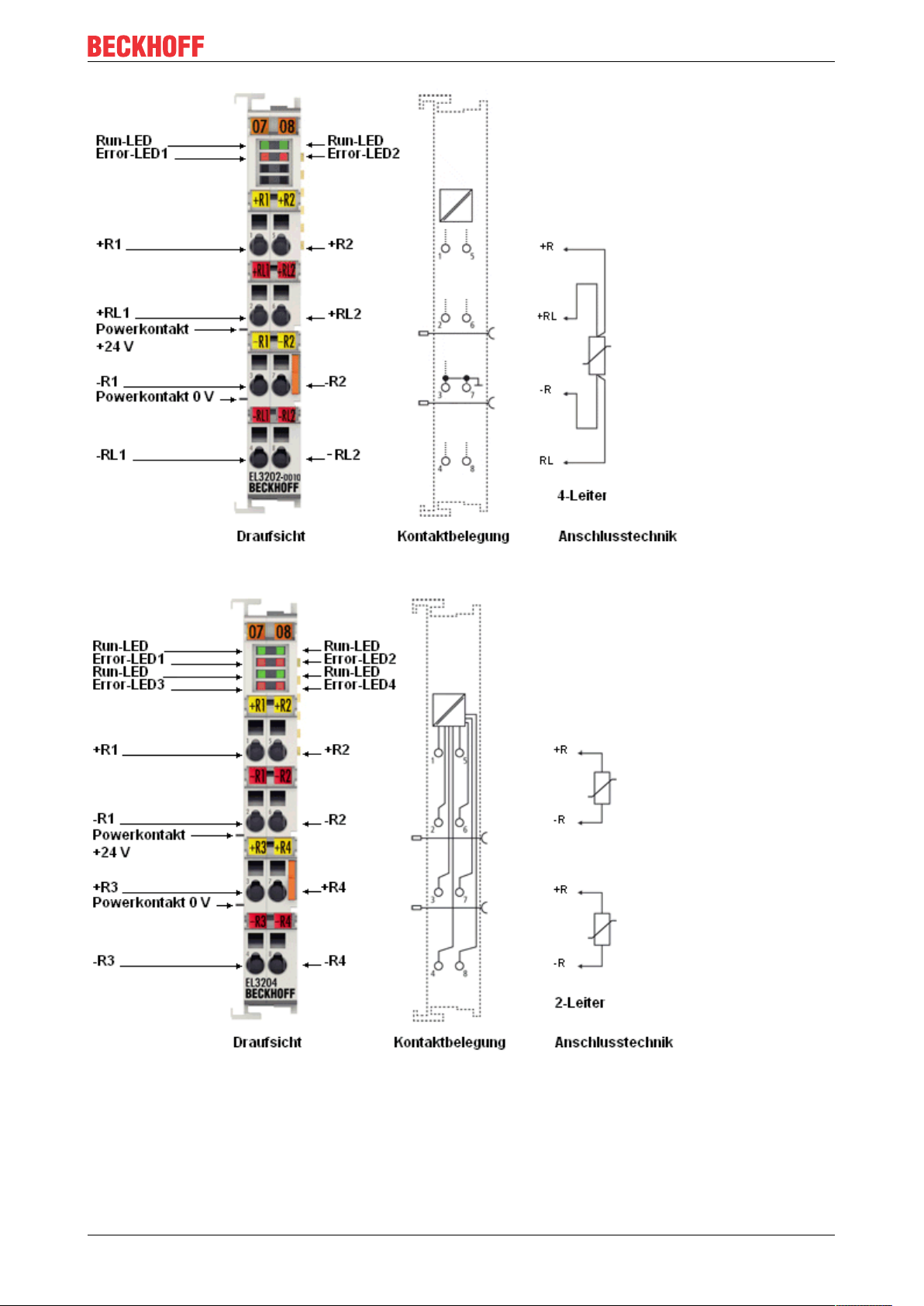
Abb.9: EL3204
Die analogen Eingangsklemmen EL320x-0xxx erlauben den direkten Anschluss von Widerstandssensoren
(RTD). Es kann der Widerstandswert direkt gemessen und ausgegeben werden, oder es wird die integrierte
Umrechnung nach diversen Sensorkennlinien (Pt100, Pt1000, NI120, NI1000, KTY-Typen u.a.) genutzt und
so die Temperatur am Messort gemessen.
EL32xx-0xx0 17Version: 6.1
Page 18
Produktübersicht
Aus der gegebenen Anzahl von Anschlusspunkten im Gehäuse folgt die mögliche Anschlusstechnik: die
EL3201 unterstützt 2-, 3- und 4-Leitertechnik, die EL3202 2- und 3-Leitertechnik und die EL3204 die 2Leitertechnik.
Die EL320x-0010 (EL3201-0010, EL3202-0010) ist die hochpräzise Ausführung der jeweiligen Basisklemme.
Diese Klemmen sind in 4-Leitertechnik zu betreiben, um die spezifizierte Genauigkeit zu erreichen. Diese
Klemmen sind auch als Variante mit Werkskalibrierzertifikat [}225] als EL3201-0020, EL3202-0020 und mit
externem ISO17025 oder DAkkS Zertifikat als EL3201-0030, EL3202-0030 verfügbar.
Mit der EL3204-0200 sind beliebige RTD im Bereich 100 Ohm bis 240 kOhm einsetzbar. Die Umrechnung
der Widerstandswerte (Linearisierung) erfolgt in der Klemme wahlweise nach voreingestellten Kennlinien,
Umrechnungsformeln mit spezifischen Materialkennwerten (bspw. nach IEC 60751, Steinhart-HartGleichung, B-Parameter-Gleichung), oder nach einer frei programmierbaren Umrechnungstabelle.
Die EtherCAT-Klemmen zeigen ihren Signalzustand durch Leuchtdioden an. Sensorstörungen (z. B.
Drahtbruch) signalisieren Error-LEDs.
EL32xx-0xx018 Version: 6.1
Page 19
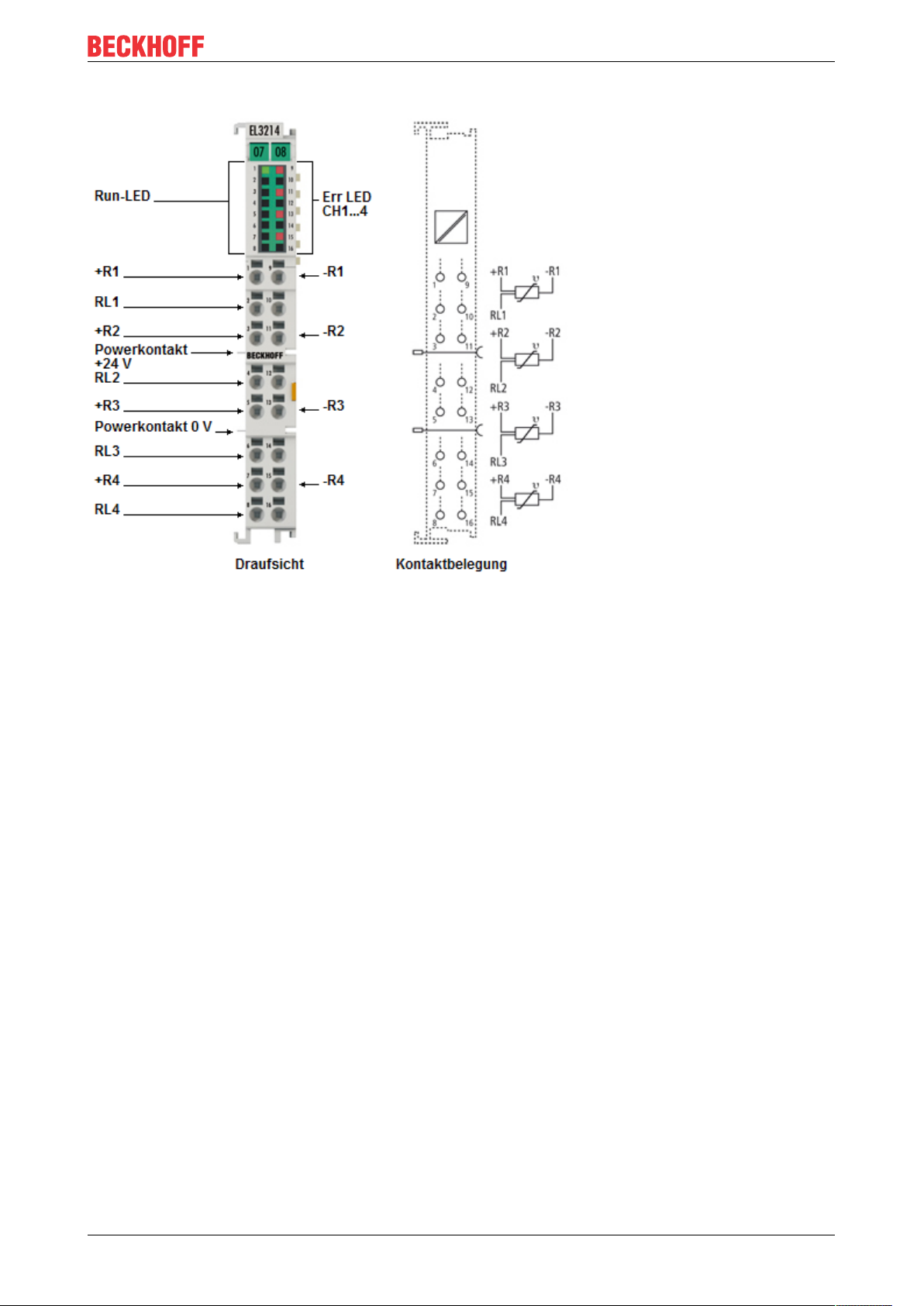
Vierkanalige analoge HD-Eingangsklemme Pt100 (RTD) für 3-Leiteranschluss
Produktübersicht
Abb.10: EL3214
Die analoge Eingangsklemme EL3214 erlaubt den direkten Anschluss von vier Widerstandssensoren auf
12mm Breite.
Die Schaltung der EtherCAT-Klemme kann Sensoren in 3-Leitertechnik betreiben. Ein Mikroprozessor
realisiert die Linearisierung über den gesamten Temperaturbereich, der frei wählbar ist.
Die Standardeinstellung der EtherCAT-Klemme ist: Auflösung 0,1 °C. Sensorstörungen (z. B. Drahtbruch)
signalisieren Error-LEDs.
EL32xx-0xx0 19Version: 6.1
Page 20
Produktübersicht
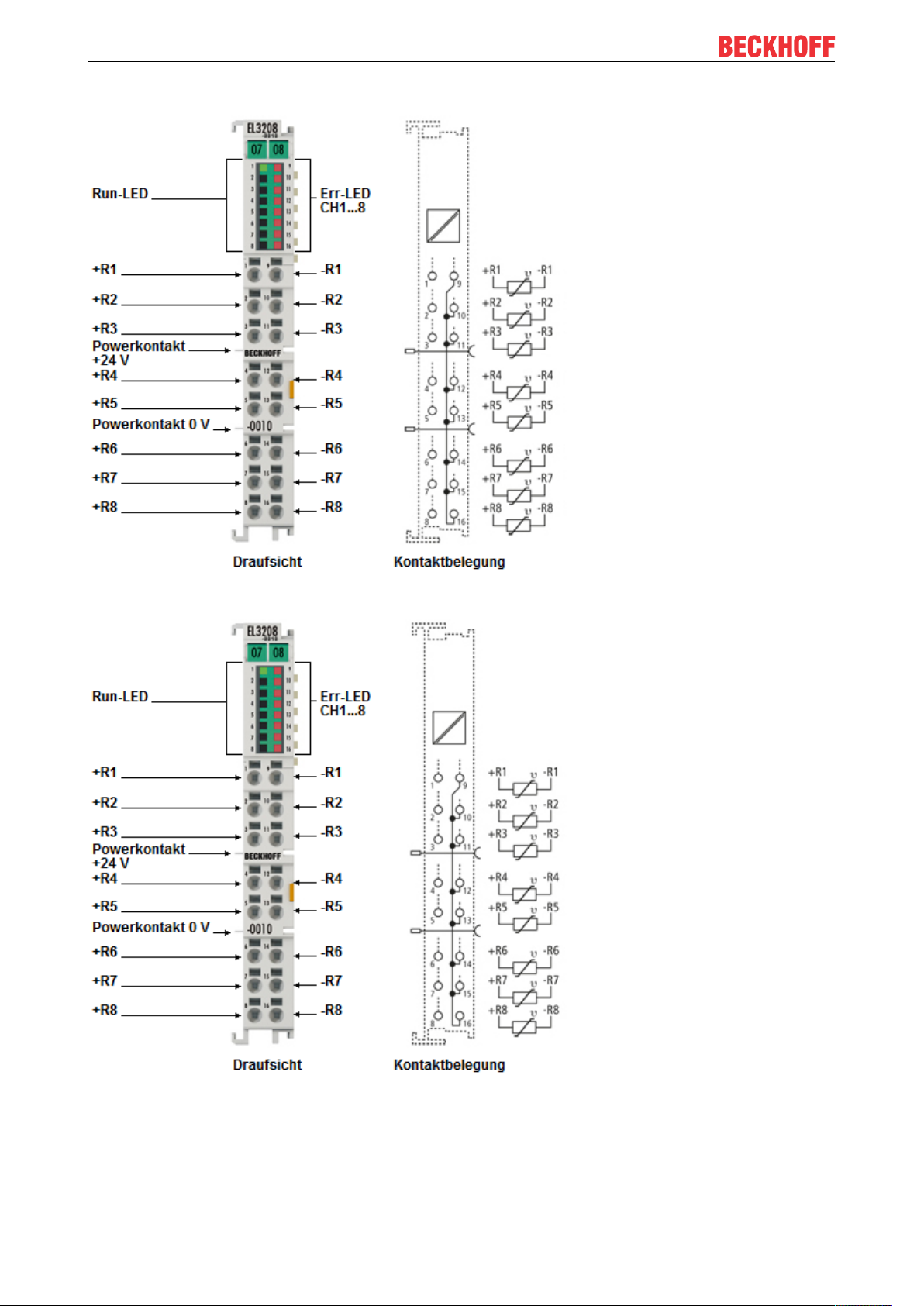
Achtkanalige analoge HD-Eingangsklemme (RTD)
Abb.11: EL3208-0000
Abb.12: EL3208-0010
Die analoge Eingangsklemme EL3208 erlaubt den direkten Anschluss von acht Widerstandssensoren auf
12mm Breite (High Density Gehäuse).
Die Schaltung der EtherCAT-Klemme kann Sensoren in 2-Leitertechnik betreiben. Ein Mikroprozessor
realisiert die Linearisierung über den gesamten Temperaturbereich, der frei wählbar ist.
EL32xx-0xx020 Version: 6.1
Page 21
Produktübersicht
Die Standardeinstellung der EtherCAT-Klemme ist: Auflösung 0,1 °C. Sensorstörungen (z. B. Drahtbruch)
signalisieren Error-LEDs.
Die EL3208-0010 Variante hat eine Auflösung von 0,01°C/Digit und ist standardmäßig auf PT1000 Sensoren
eingestellt.
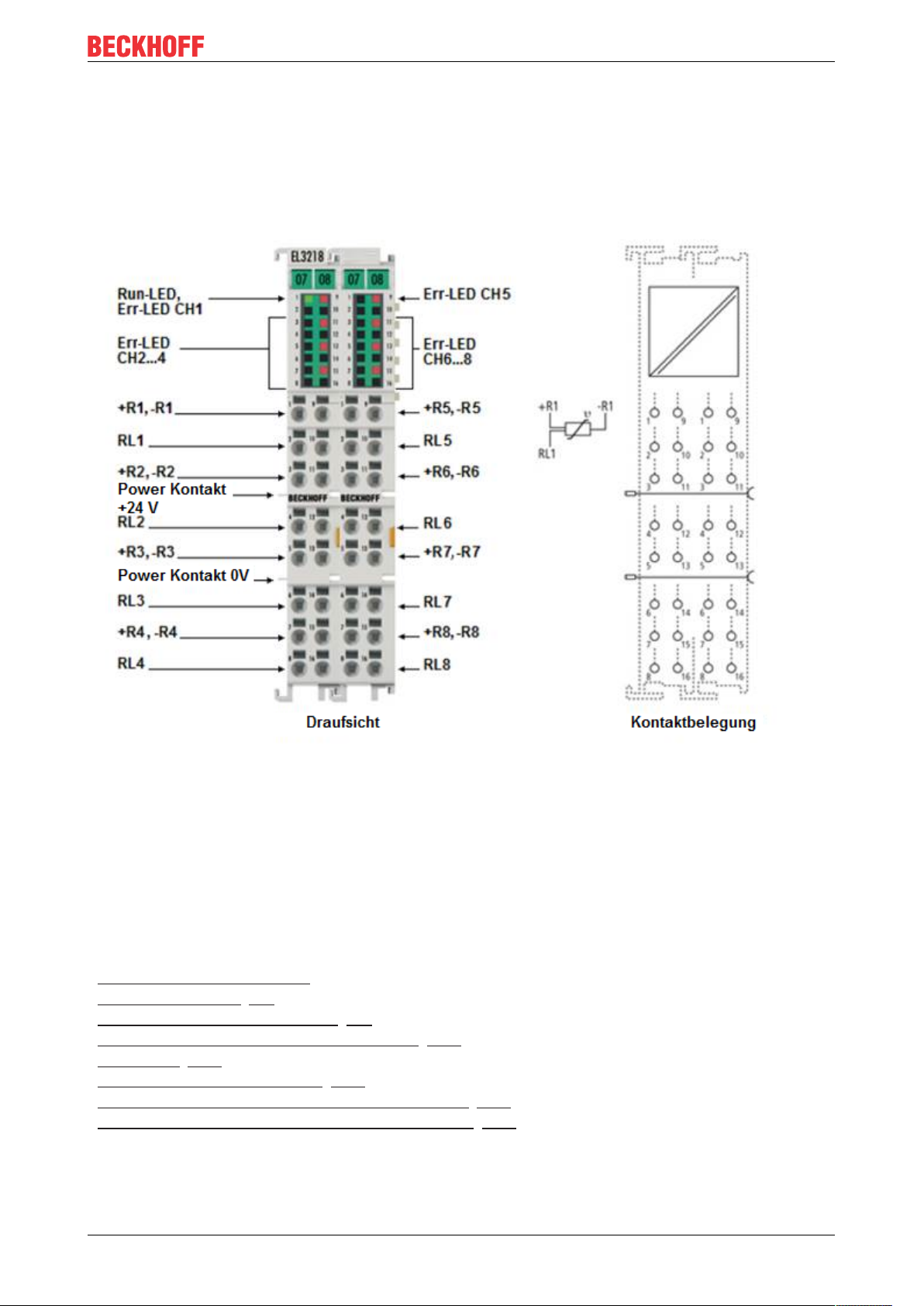
Achtkanalige analoge HD-Eingangsklemme PT100 (RTD) für 2/3-Leiteranschluss
Abb.13: EL3218-0000
Die analoge Eingangsklemme EL3218 erlaubt den direkten Anschluss von acht Widerstandssensoren auf
24mm Breite (High Density Gehäuse).
Die Schaltung der EtherCAT-Klemme kann Sensoren in 3- und auch 2-Leitertechnik betreiben. Ein
Mikroprozessor realisiert die Linearisierung über den gesamten Temperaturbereich, der frei wählbar ist.
Sensorstörungen (z. B. Drahtbruch) signalisieren Error-LEDs
Quick-Links
• EtherCAT Funktionsgrundlagen
• Technologie EL32xx [}23]
• Konfigurationserstellung TwinCAT [}87]
• CoE-Objektbeschreibung und Parametrierung [}186]
• Statuswort [}207]
• Prozessdaten und Betriebsmodi [}174]
• Einstellungen und Anwendungshinweise EL32xx-00xx [}162]
• Einstellungen und Anwendungshinweise EL3204-0200 [}165]
EL32xx-0xx0 21Version: 6.1
Page 22
Produktübersicht
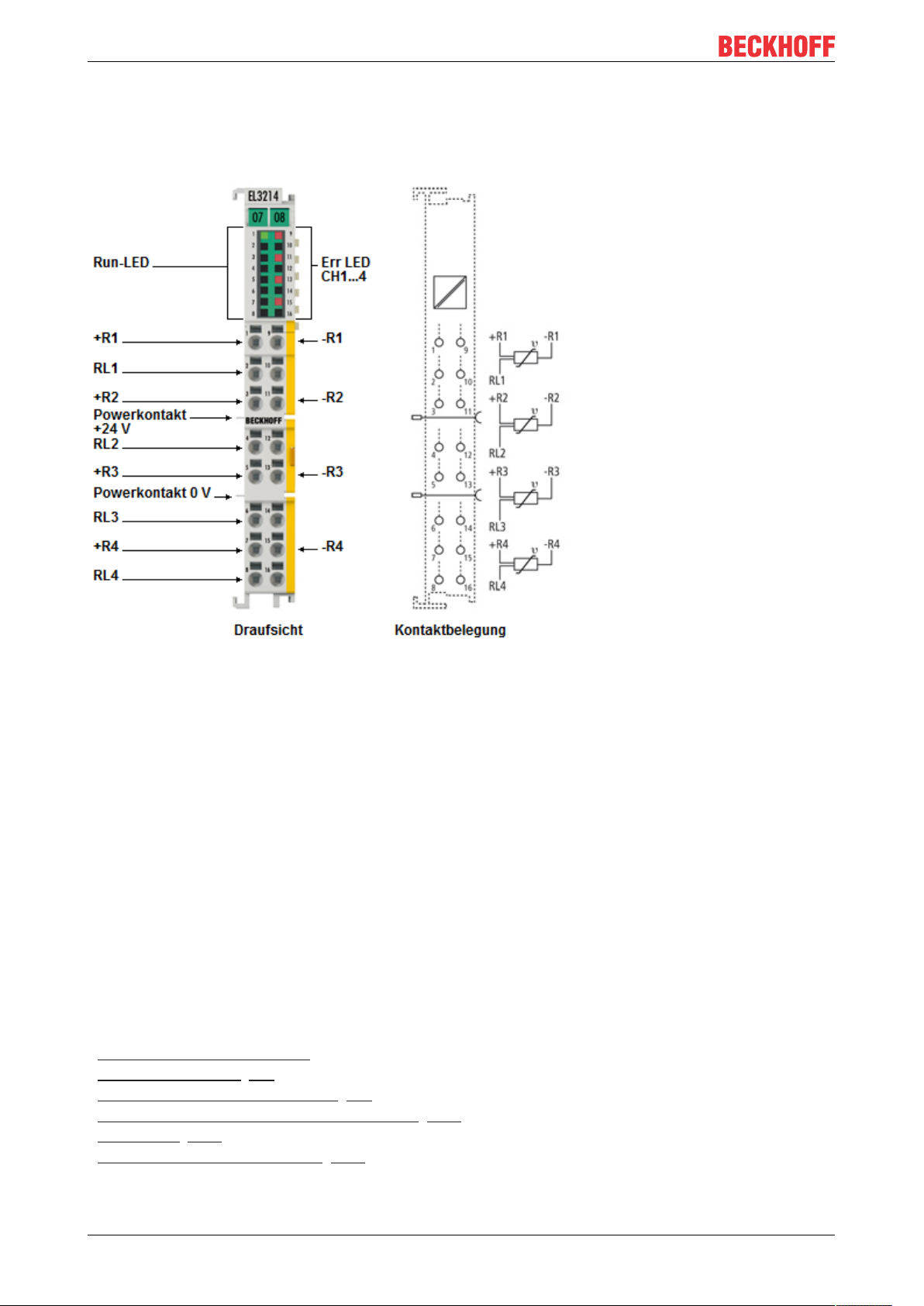
3.2 EL3214-0090 - Einführung
Vierkanalige analoge Eingangsklemmen Pt100 (RTD), 2/3-Leiteranschluss, TwinSAFE Single Channel
Abb.14: EL3214-0090
Die analoge Eingangsklemme EL3214-0090 erlaubt den direkten Anschluss von vier Widerstandssensoren.
Die Schaltung der EtherCAT-Klemme kann Sensoren in 3-Leitertechnik (ab Firmware 02 auch in 2Leitertechnik) betreiben. Ein Mikroprozessor realisiert die Linearisierung über den gesamten
Temperaturbereich, der frei wählbar ist.
Mit Hilfe der TwinSAFE-SC-Technologie (TwinSAFE Single Channel) ist es möglich, in beliebigen
Netzwerken bzw. Feldbussen Standardsignale für sicherheitstechnische Aufgaben nutzbar zu machen. Die
Standard-Funktionalitäten und Features der I/Os bleiben dabei erhalten. Die Daten der TwinSAFE-SC-I/Os
werden zu der TwinSAFE-Logic geleitet und dort sicherheitstechnisch mehrkanalig verarbeitet. In der SafetyLogic werden die aus verschiedenen Quellen stammenden Daten analysiert, plausibilisiert und einem
„Voting“ unterzogen. Dieses erfolgt durch zertifizierte Funktionsbausteine wie z. B. Scale, Compare/Voting
(1oo2, 2oo3, 3oo5), Limit usw. Dabei muss aus Sicherheitsgründen mindestens eine der Datenquellen eine
TwinSAFE-SC-Komponente sein. Die weiteren Daten können aus anderen Standard-Busklemmen,
Antriebsreglern oder Messumformern stammen.
Mit Hilfe der TwinSAFE-SC-Technologie ist ein Sicherheitsniveau entsprechend PL d/Kat. 3 gem. EN ISO
13849-1 bzw. SIL 2 gem. EN 62061 typischerweise erreichbar.
Quick-Links
• EtherCAT Funktionsgrundlagen
• Technologie EL32xx [}23]
• Konfigurationserstellung TwinCAT [}87]
• CoE-Objektbeschreibung und Parametrierung [}186]
• Statuswort [}207]
• Prozessdaten und Betriebsmodi [}174]
EL32xx-0xx022 Version: 6.1
Page 23
Produktübersicht
3.3 Technologie RTD-Messung
Inhaltsverzeichnis
• Funktion [}23]
- Hinweis zur Serie EL320x-0010/-0020 (hochpräzise) [}24]
• Ratiometrische Spannungsmessung [}24]
• Anschlusstechniken [}24]
- Beispiel für Leitungskompensation im 2-Leiter-Modus [}25]
• Übersicht geeigneter Widerstandssensoren [}25]
Funktion
Die analoge Eingangsklemmen EL32xx-xxxx erlauben den direkten Anschluss von Widerstandssensoren im
Bereich 0 - 4096 Ohm (EL3204-0200: bis 240 kOhm, siehe besondere Hinweise)
Funktionen:
• Widerstandsmessung
◦ Messbereich 0 bis 1024 Ω: Auflösung 1/64 Ohm
◦ Messbereich 0 bis 4096 Ω: Auflösung 1/16 Ohm
◦ Der Einsatz der Klemme im Bereich 0 bis 10 Ohm wird aufgrund der relativ geringen
Messgenauigkeit nicht empfohlen. Für solche Messungen sind Widerstandsmessklemmen wie die
EL3692 in 4-Leiter-Messung zu verwenden.
◦ Bei der EL3201 und EL3202 ist die externe Brücke zwischen +R und +RL beim 3-Leiter-Modus
einzusetzen
• Temperaturmessung
der ermittelte Sensorwiderstand wird vom internen µC über die gewünschte Linearisierungskennlinie
direkt in eine Temperatur umgerechnet
◦ Standardauflösung 1/10 °C (1 Digit = 0,1 °C) entsprechend einem theoretisch darstellbaren
Temperaturbereich [-3276,7 ... 3276,8 °C]
Es ist der für den jeweiligen Sensor physikalisch vorgegebene Temperaturbereich zu beachten!
◦ Es sind in der EL32xx-Serie diverse PTC-Sensor-Kennlinien über ihren kompletten Messbereich
zur Auswahl implementiert: Pt/Ni xxxx, KTY xx
◦ Skalierung und Präsentation können geändert werden
◦ Falls ein Sensor verwendet werden soll, der nicht bereits in der EL320x implementiert ist, kann die
EL3204-0200 verwendet werden
Durch die freie Programmierbarkeit kann die EL3204-0200 auf jede Sensorkennlinie im zulässigen
Widerstandbereich eingestellt werden.
Weitere Hinweise:
• Die Widerstandermittlung erfolgt durch ratiometrische Spannungsmessung, siehe unten [}24].
• Der Fehlerzustand "Drahtbruch" wird als Overrange detektiert, als Error an die Steuerung gemeldet
und durch die ERROR-LED angezeigt.
• Der Fehlerzustand "Kurzschluss" wird als Underrange detektiert, wenn der Widerstand kleiner ist als
der kleinste Widerstand des Messbereichs, so wie als Error an die Steuerung gemeldet und durch die
ERROR-LED angezeigt.
• Ab Firmware 06 (EL3201, EL3202-xxxx, EL3204) sind Kennlinien für KT/KTY-Sensoren implementiert
und über das CoE-Verzeichnis anwählbar.
• Die Ausgabe des Messwertes erfolgt im Auslieferungszustand in 1/10° C Schritten in
Zweierkomplement-Darstellung (integer).
• Über CoE 0x80n0:02 [}187] sind andere Darstellungsarten anwählbar z.B. hohe Auflösung mit 1/100
°C
Bei Verwendung der hohen Auflösung ist durch das 2-Byte-PDO ein Temperaturbereich von -320 ...
320°C (-32566 .... 32567) messbar.
EL32xx-0xx0 23Version: 6.1
Page 24
Produktübersicht
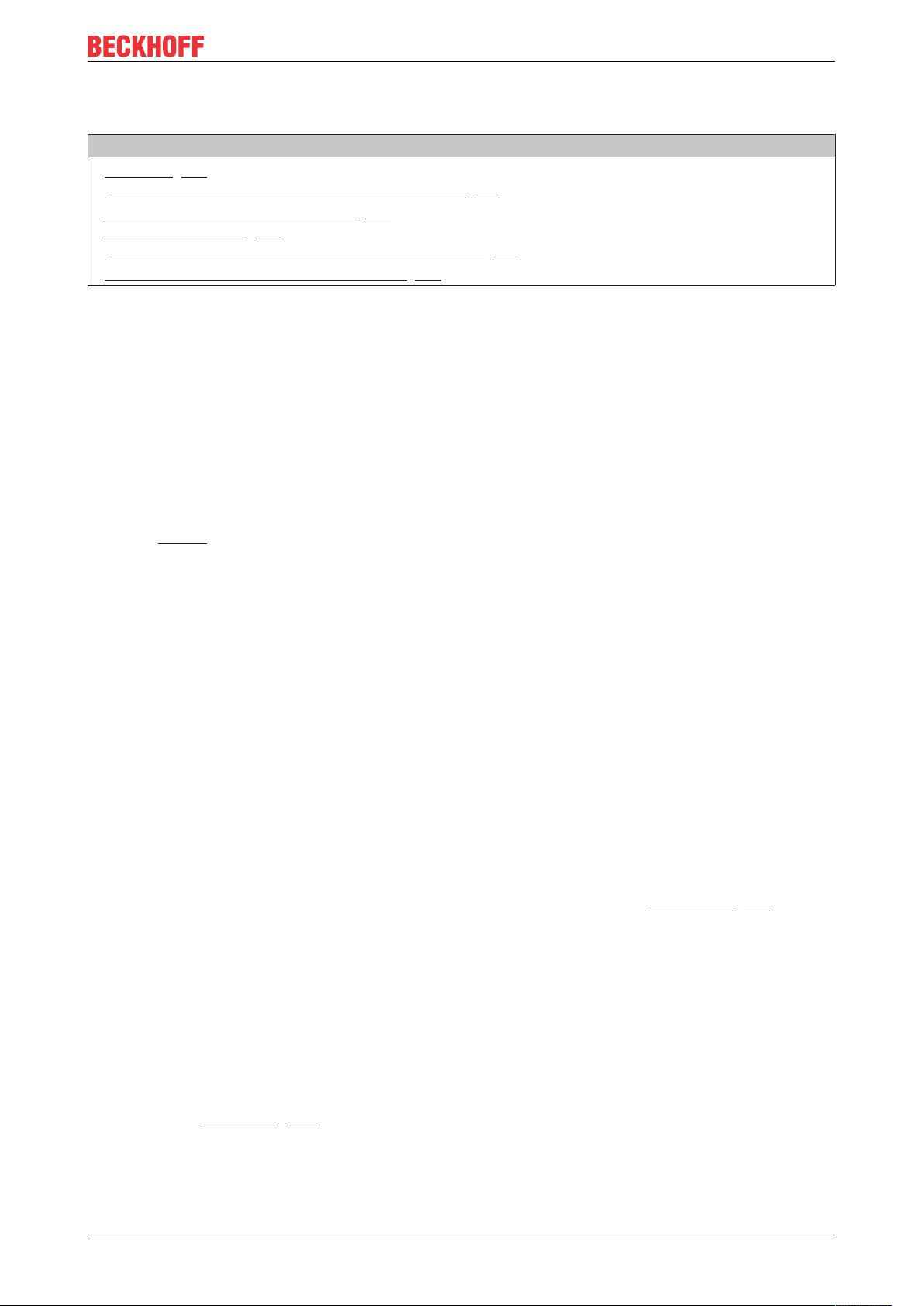
Abb.15: Darstellung der Messung und Berechnung Widerstand/Temperatur
Hinweis zur Serie EL320x-0010/-0020 (hochpräzise)
Durch besondere Eigenschaften in Hardware und Firmware ist die EL320x-0010/0020 in der Lage, den
Widerstandswert und damit ggf. die Temperatur hochgenau zu messen. Dabei ist zu beachten:
Erhöhte Genauigkeit EL320x-00x0
Bei den hochpräzisen Klemmen soll die Einstellungen im Objekt 0x80n0 [}186] / RTD-Settings
nicht verändert werden! Die hochgenaue Widerstandermittlung/Temperaturmessung kann nur im
Bereich 10 ... 220 Ohm erfolgen, dies entspricht einem Pt100-Messbereich von -200 ... 320°C.
Um die hohe Genauigkeit darstellen zu können, ist die 0,01°C/Digit Darstellung voreingestellt. Die
erhöhte Genauigkeit der EL320x-00x0 gilt deshalb nur für folgende Einstellungen:
• Widerstandsmessung oder Pt100-Kennlinie (0,00385 Ω/Ω/°C, IEC60751 Kennlinie Pt385) - andere
Kennlinie ohne Gewähr!
• Umgebungstemperatur von 40°C
• 4-Leiter-Anschlusstechnik
• Messbereich -200 bis 320°C
• 50 Hz Filter
Temperaturen bzw. Widerstände außerhalb des o.g. Bereichs können nicht hochgenau gemessen
werden. Werden diese Eckwerte verlassen, verhält sich die hochgenaue Klemme wie eine Klemme
mit Standard-Genauigkeit.
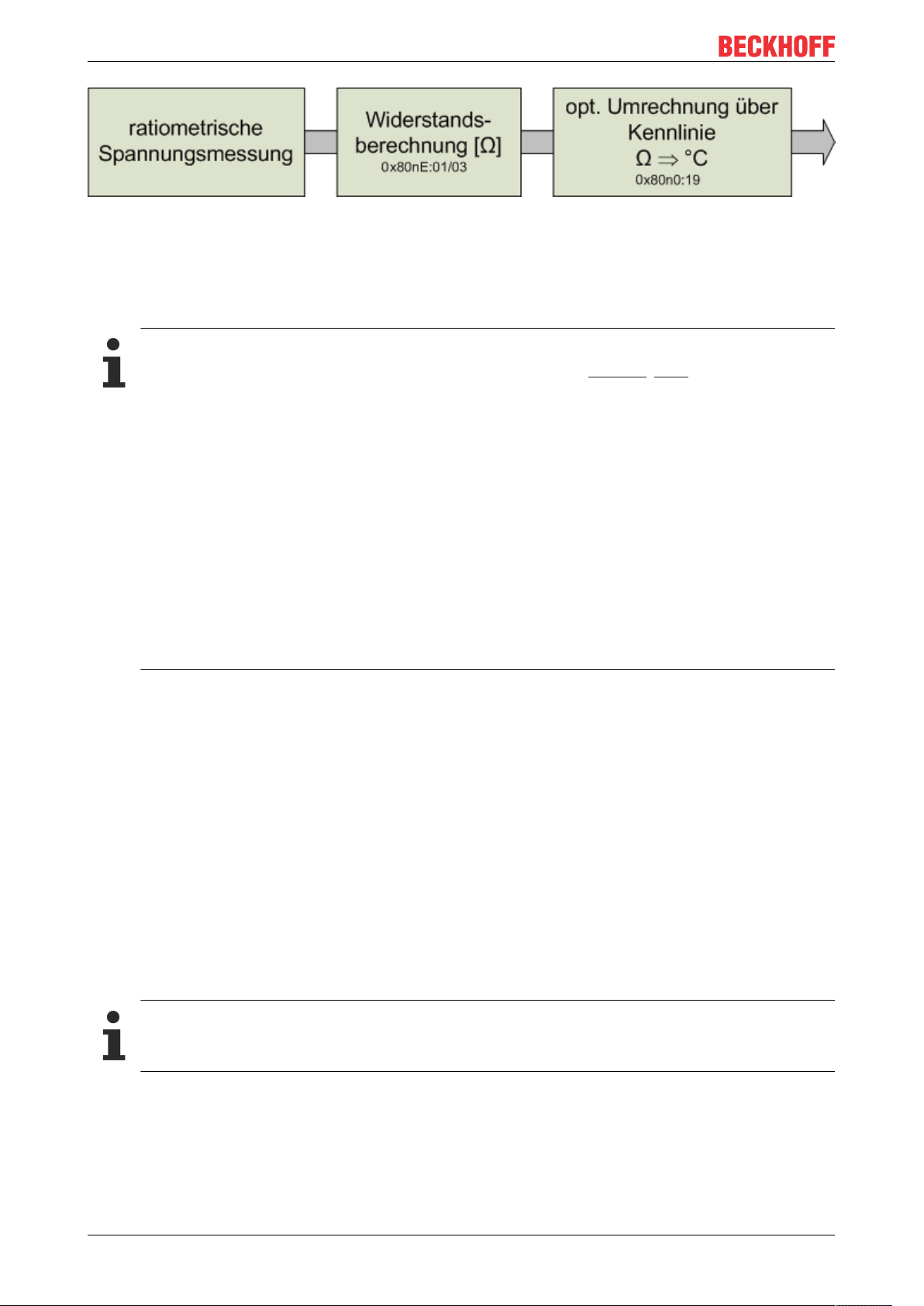
Ratiometrische Spannungsmessung
Die Widerstandsermittlung der EL32xx-xxxx erfolgt ratiometrisch durch Spannungsvergleich, siehe Abb.
„Anschlusstechnik 4-Leiter und 3-Leiter“:
• Eine Konstantspannung von 2,5 V wird durch einen stabilen bekannten Referenzwiderstand R
den Sensor Rt geführt. R
ist
ref
ref
und
◦ EL3204-0200: 120 kOhm
◦ alle anderen EL32xx: 5 kOhm
• Durch Vergleich der beiden Spannungen, U1 an R
und U2 an Rt kann auf den Sensorwiderstand R
ref
geschlossen werden
• Der Messstrom durch den Sensor ist damit abhängig vom Sensorwiderstand Rt, dies ist bei Fragen zur
Sensoreigenerwärmung zu berücksichtigen:
Beispiel: ein Pt1000 bewirkt bei 0°C und damit Rt = 1000 Ohm Eigenwiderstand an einer EL3204 mit
2,5V Speisung und R
= 5 kΩ einen Messstrom von 0,42 mA. Am Widerstand entsteht dadurch die
ref
Wärmeleistung von 1kΩ * (0,42 mA)² = 0,17 mW
Beschaltung der Eingangskanäle
Auf Grund dieses Messprinzips (widerstandsbehafteter Temperatursensor) darf keine Parallelschaltung von einem Sensor an 2 oder mehr Eingangskanäle erfolgen!
t
Anschlusstechniken
Die elektrische Verbindung eines Widerstandssensors zur EL32xx kann im Zweileiter-, Dreileiter- oder
Vierleiterverfahren (nur EL3201) erfolgen. Da das Messverfahren eine Widerstandsmessung ist, können die
Sensorzuleitungen mit ihrem Eigenwiderstand die Messung verfälschen. Zu diesem Zweck sind verfügbar:
EL32xx-0xx024 Version: 6.1
Page 25
Produktübersicht
Abb.16: Anschlusstechnik 4-Leiter und 3-Leiter
• 4-Leiter-Sensoren: Stromführung und Spannungsmessung laufen über separate Adern. Da die
Spannung von der EL32xx hochohmig gemessen wird, unterliegen die Adern zur Spannungsmessung
somit annähernd keinem Spannungsabfall.
• 3-Leiter-Sensoren: diese vereinfachte Anschaltung reduziert Verkabelungskosten und kompensiert
Leitungswiderstände in hohem Maße.
• 2-Leiter-Sensoren: sehr einfache Anschaltung, nur für kurze Zuleitung empfohlen
Die Zuleitungswiderstände können im 2-Leiter-Modus herausgerechnet werden, wenn der EL32xx im
CoE-Objekt 0x80n0:1B [}187] der Zuleitungswiderstand bekannt gegeben wird (Einheit [1/32 Ω]). Die
Ermittlung des Zuleitungswiderstands kann applikationsseitig durch Messung oder durch Abgleich
geschehen.
Zweileiter Anschluss
Wird die EL3201/EL3202 im 2-Leiter-Anschluss betrieben, müssen der Eingang +R und +RL vom
Anwender gebrückt werden.
Beispiel für Leitungskompensation im 2-Leiter-Modus
Beispiel für Leitungskompensation im 2-Leiter-Modus Der Leitungsquerschnitt der 50 m langen
Anschlussleitung aus Kupferlitze sei 0,5 mm2. Der spezifische Widerstand von Kupfer entspricht
0,0175Ωmm2m
-1.
Ermittlung des Gesamtwiderstandes der Zuleitung:
R
= 0,0175 Ω mm2m-1* (2 * 50 m / 0,5 mm2) = 3,5 Ω
Lges
Bei einer Widerstandsänderung des Pt100 von ≈0,39 Ω/K ergibt sich daraus eine Temperaturabweichung
von
3,5 Ω / (0,39 Ω/°C) = 8,97 °C
wenn der Leitungswiderstand nicht berücksichtigt wird. Wenn nun die 3,5 Ohm als
3,5 Ω / (1/32) Ω = 112
dez
in 0x8000:1B [}187] eingetragen werden, wird dies vom Messwert abgezogen, und die Temperatur
entsprechend korrigiert.
Steckervariante ES32xx mit Pt100 / Ni100 Sensoren
Bei der Verwendung von Pt100 / Ni100 Sensoren empfehlen wir zur Vermeidung von Genauigkeitsverlusten auf Grund von Übergangswiderständen bei der Steckervariante ES32xx den Einsatz der
EL32xx .
Übersicht geeigneter Widerstandssensoren
Übersicht geeigneter Widerstandssensoren Folgende Widerstandssensoren sind für die
Temperaturmessung mit der EL32xx-0000 geeignet (Tab. 1) und können über das Objekt 0x80n0:19 [}187]
gewählt werden:
EL32xx-0xx0 25Version: 6.1
Page 26
Produktübersicht
Besondere oder abweichende Kennlinien (z. B. Pt375) können mit der frei parametrierbaren EL3204-0200
erfasst werden.
Typ Widerstandsbe-
reich
Pt100 (0,00385 Ω/Ω/°C, IEC60751
Kennlinie Pt385)
Ni100 -60°C bis 250°C
Pt1000 (0,00385 Ω/Ω/°C, IEC60751
Kennlinie Pt385)
Pt500 -200°C bis 850°C
Pt200 -200°C bis 1370°C
Ni1000 -60°C bis 250°C
Ni1000
TK5000
100°C: 1500 Ohm
Ni120 -60°C bis 320°C
KT100/110/130/210/230
KTY10/11/13/16/19
KTY81/82-110,120,150
KTY81-121
KTY81-122
KTY81-151
KTY81-152
KTY81/82-210,220,250
KTY81-221
KTY81-222
KTY81-251
KTY81-252
KTY83-110,120,150 ~500 ... ~2500 Ohm -50...175°C
KTY83-121
KTY83-122
KTY83-151
KTY83-152
KTY84-130,150 ~350 ... ~2500 Ohm -40...300°C
KTY84-151
KTY21/23-6 ~500 ... ~4000 Ohm -50...150°C
KTY1x-5
KTY1x-7
KTY21/23-5
KTY21/23-7
~ 18 ... ~390 Ohm -200°C bis 850°C (für hochpräzise
~180 ... ~ 3900 Ohm -200°C bis 850°C
~500 ... ~2200 Ohm -55...150°C
Implementierter Temperaturbereich
Klemmen siehe Hinweis [}24]!
-30 bis 160°C
EL32xx-0xx026 Version: 6.1
Page 27

Produktübersicht
3.4 Grundlagen der RTD-Technologie
Bestimmte Werkstoffe ändern ihren elektrischen Widerstand, wenn sich die Temperatur des Werkstoffs
ändert. Durch diese Eigenschaft können sie als Sensor zur Temperaturmessung verwendet werden. Solch
ein RTD-Element (Resistance Temperature Detector) oder Thermistor weist dann eine materialabhängige
bekannte Charakteristik auf, nämlich, wie sich der Widerstand in Abhängigkeit von der Temperatur
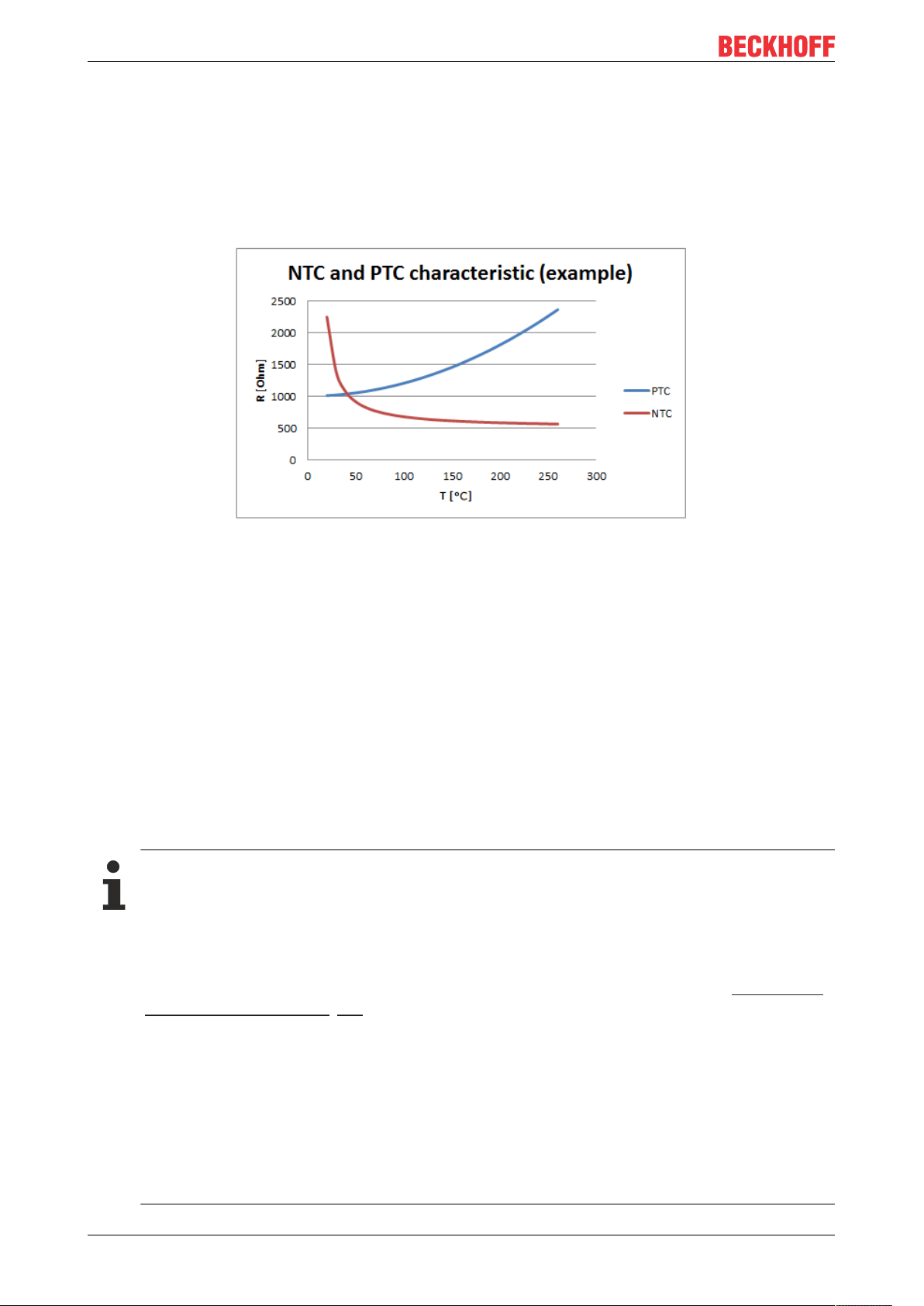
reproduzierbar ändert. In erster Näherung kann diese Kennlinie als lineare Gleichung aufgefasst werden:
Der Faktor k kann positiv oder negativ sein und muss vom Sensorhersteller angegeben werden:
• Positiver Koeffizient (PTC): elektrischer Widerstand steigt mit steigender Temperatur, wird also
schlechter leitend, Sensor wird dann als Kaltleiter bezeichnet,
• negativer Koeffizient (NTC): elektrischer Widerstand steigt mit fallender Temperatur, wird also besser
leitend, Sensor wird dann als Heißleiter bezeichnet.
Je größer der Koeffizient, desto empfindlicher ist der Sensor.
Temperaturmessung
Diese Art der Temperaturmessung ist abzugrenzen von jener mit Thermoelement‑Sensoren: Letztere erzeugen von sich aus eine (kleine) Spannung über den Leiter, die an den Kontaktstellen gemessen wird.
In einem sehr kleinen Messbereich können fast alle Materialien durch solch eine lineare Kennlinie
beschrieben werden. Oft soll jedoch über einen großen Messbereich, z.B. mehrere 10K oder 100K,
gemessen werden. In solchen Bereichen muss die Kennlinie bei vielen Materialien durch nichtlineare
Gleichungen höherer Ordnung oder mit exponentiellen Funktionen beschrieben werden. Beispiele für solche
Gleichungen sind
• Platin/Pt-Sensoren (PTC/Kaltleiter) nach IEC 60751:
◦ für den Bereich -200.. 0°C:
◦ für den Bereich 0°C..850°C:
Die Koeffizienten A, B, C sind vom Sensorhersteller anzugeben bzw. der Norm zu entnehmen. Der
Parameter R0 gibt den Widerstand in Ω des Platinsensors bei T=0°C an. Die Sensoren werden nach diesen
Bezeichnungen qualifiziert, so spricht man vom PT100, wenn R0=100Ω bei T=0°C beträgt.
• Steinhart-Hart (für NTC/Heißleiter):
Die Koeffizienten a, b, c sind vom Sensorhersteller anzugeben, diese können auch durch Messung des
Widerstandes bei drei bekannten Temperaturen bestimmt werden.
• B-Parameter-Gleichung (für NTC/Heißleiter):
Die Koeffizienten RT0, B, T0 und A sind vom Sensorhersteller anzugeben, diese können auch durch Messung
des Widerstandes bei zwei bekannten Temperaturen bestimmt werden.
EL32xx-0xx0 27Version: 6.1
Page 28
Produktübersicht
Die B-Parameter-Gleichung stellt eine Vereinfachung der Steinhart-Hart-Gleichung dar. Der B-Parameter
selber ist nur in einem kleinen Bereich konstant, z.B. zwischen 25°C.. 50°C oder 25°C.. 85°C; dieser wird
wie folgt Bezeichnet: B
25/50
bzw. B
. Die Genauigkeit der Gleichung hängt stark von dem B-Parameter ab,
25/85
je größer der Messbereich, desto geringer die Genauigkeit. Wird ein größerer Messbereich benötigt, so ist
die Steinhart-Hart-Gleichung vorzuziehen.
• Weitere..
Eine jeweils typische Kennlinie für die NTC- und PTC-Familien ist in folgender Abbildung gezeigt:
Abb.17: Beispiele für Temperaturabhängige Widerstandswerte
Es gibt also nicht den allgemeinen NTC- oder PTC-Sensor, sondern dies sind Bezeichnungen für SensorFamilien mit einem bestimmten Verhalten.
Für weit verbreitete Sensoren/Kennlinien wie PT100, werden diese Kennlinien bereits fest in die Messgeräte
implementiert. Es ist anwenderseitig zu prüfen, ob ein vorgesehener Sensor vom Messgerät unterstützt wird,
dabei gelten Kriterien wie
• Temperaturbereich: Unterstützt der Sensor den vorgesehenen Temperaturbereich?
• Messbereich: Kann der Sensor-Widerstand im beabsichtigten Temperaturbereich gemessen werden?
• Kennlinie: Kann der gemessene Widerstand entsprechend in Temperatur umgerechnet werden?
(Basispunkt, Steigung/Koeffizienten)
• Geschwindigkeit: Wie oft wird der Widerstand gemessen?
In ganz grundsätzlicher Art kann ein Sensorhersteller die Kennlinie seines Sensors natürlich auch als WerteTabelle veröffentlichen.
Widerstandsmessung
Zur Ermittlung des Widerstands ist es üblich, einen geringen Messstrom I im mA-Bereich (I<5mA)
durch den Sensor fließen zu lassen und die resultierende Spannung zu messen. Dabei sind drei Effekte zu berücksichtigen:
●Der Messstrom kann zu einer Eigenerwärmung des Sensors führen. Dies hat üblicherweise
aber nur geringen Einfluss auf die Messgenauigkeit. Bei Hochpräzisionsmessungen kann dies aber
eine wesentliche Rolle spielen; siehe dazu die Ausführungen im folgenden Abschnitt: „Selbsterwär-
mung von RTD Sensoren“ [}29].
Für Tiefsttemperaturanwendungen sind spezielle Sensoren gebräuchlich.
●Die Zuleitungen zum Sensor sind ebenfalls widerstandsbehaftet und bringen einen (meist) kon-
stanten zusätzlichen Widerstand in die Messung ein. Kompensation kann erfolgen durch
●3- oder 4-Leiter-Anschluss des Sensors,
●manuelle Berücksichtigung des bekannten Leitungswiderstands in der Berechnung oder
●Verwendung eines Sensors mit höherem Nennwiderstand - dann fallen die Zuleitungseffekte
weniger ins Gewicht.
●Isolationsfehler oder Thermospannungen können die Messung beeinflussen.
EL32xx-0xx028 Version: 6.1
Page 29
Produktübersicht
Zur Einordnung im Folgenden eine Übersicht der NTC/PTC-Eigenschaften verschiedener Sensoren:
NTC und PTC Eigenschaften
NTC PTC
viele Halbleiter viele Metalle
verschiedene Keramiken versch. Keramiken
NTC20, NTC100 etc. Pt100, Pt1000, ..
KTY ..
Ni100, Ni1000, ..
FeT
Sensortausch
Es ist zu beachten, dass eine 1:1 Austauschbarkeit gerade von herstellerspezifizierten Sensoren
nicht immer gewährleistet ist. Ggf. muss der neue Sensor in der Anlage neu eingemessen werden.
Selbsterwärmung von RTD‑Sensoren
Durch den Messstrom kommt es am widerstandsbehafteten Sensor zwangsläufig und gewollt zu einem
Spannungsabfall. Es entsteht eine Verlustleistung an dem Sensor, die ihn selbst erwärmt und somit die
Messung verfälscht. Das Abfließen der Wärme an die Umgebung über die Luft, dem Gehäuse, so wie dem
zu messenden Objekt über Oberflächenkontaktierung (z.B. mittels Klebeschicht), kann ein komplexer
Prozess sein. Es ist ratsam, überschlägig zu prüfen, ob die Selbsterwärmung in einen für die angestrebte
Messgenauigkeit relevanten Bereich kommt. Je nach Sensor kann dies bei Zielgenauigkeiten von unter
100mK der Fall sein.
Im Folgenden werden einige beispielhafte Werte zur Veranschaulichung des Effekts verwendet, die Methode
ist ggf. auf die konkrete Anwendung zu übertragen.
Zum Sensor:
• Ein Sensor kann einen self‑heating Koeffizient von z.B. 0,5mK/µW ausgewiesen haben, je nach
Umgebung.
• Über den Messstrom und die abfallende Spannung am Widerstandselement kann die Verlustleistung
und die Selbsterwärmung berechnet werden. Achtung: Dies ist ein nichtlinearer Vorgang!
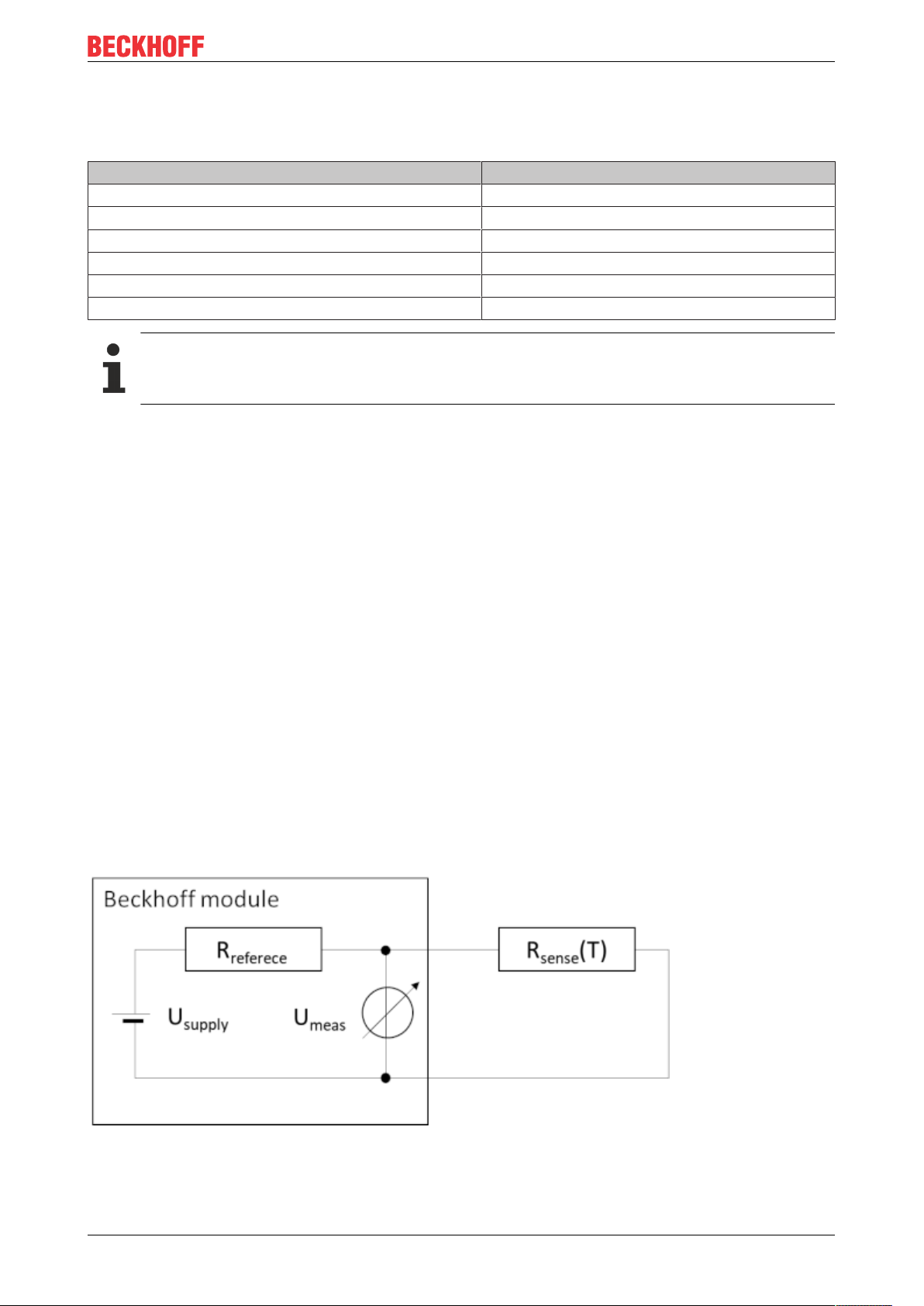
Zur Beckhoff Klemme/Modul:
• Das Beckhoff Messgerät schickt einen Messstrom durch den RTD‑Sensor.
• Eine mögliche, z.B. in EL32xx/ELM370x realisierte Messmethode kann die Vergleichsmessung mit
einem bekannten Referenzwiderstand sein, hier für die folgenden Überlegungen vereinfacht im
2‑Leiter‑Anschluss dargestellt:
Abb.18: Vergleichsmessung mit einem bekannten Referenzwiderstand
• U
supply
, R
reference
und U
seien bekannt, dann kann R
meas
und damit die Temperatur T vom Modul in der
sense
Firmware berechnet werden.
EL32xx-0xx0 29Version: 6.1
Page 30
Produktübersicht
• Anhand der in der Gerätedokumentation gegebenen Werte kann die Auswirkung auf den R/RTD
Sensor berechnet werden.
Im Folgenden ein Beispiel in Zahlen:
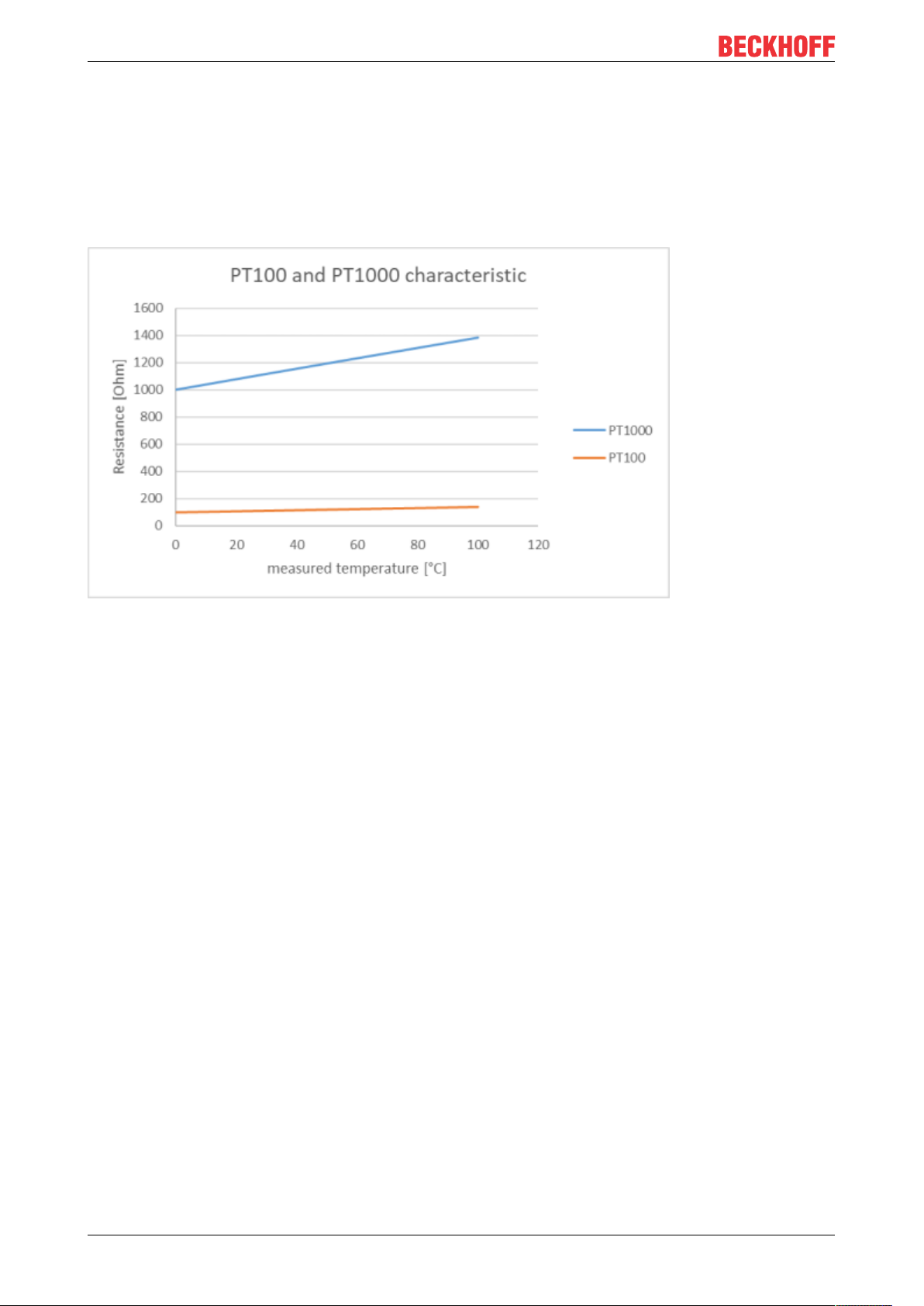
• Es soll untersucht werden, mit welchem Sensor in welchem Messbereich der ELM3704 bei einer
Zieltemperatur T die geringste Wärme am Sensor entsteht.
• Es wird ein Sensor PT100 oder PT1000 verwendet und von 0‑100°C gemessen, der
Widerstandbereich wäre somit im Bereich 100..138Ω bzw. 1000…1385Ω.
Abb.19: Darstellung Widerstandwerte bei gemessener Temperatur; PT100, PT1000 Sensor
• Die ELM3704 hat die Eigenschaften (hier nur Richtwerte, gültig sind die in der ELM370x
Dokumentation gegebenen Werte)
◦ Messbereich 5Ω, R
◦ Messbereich 2Ω, R
◦ Messbereich 500Ω, R
◦ Messbereich 200Ω, R
◦ Messbereich 50Ω, R
• R
reference
und R
sense
liegen in Reihe, dann lässt sich der Messstrom und damit die Leistung am Sensor in
Reference
Reference
Reference
Reference
Reference
= 5kΩ, U
= 5kΩ, U
= 5kΩ, U
= 5kΩ, U
= 5kΩ, U
Supply
Supply
Supply
= 2,5V
= 2,5V
= 4,5V
Supply
= 4,5V
Supply
= 4,5V
Abhängigkeit von R bzw. T in den möglichen fünf Messbereichen der ELM3704 einfach berechnen:
EL32xx-0xx030 Version: 6.1
Page 31

Abb.20: Darstellung Messstrom bzw. Verlustleistung bei den verschiedenen Messbereichen
Produktübersicht
• Somit wird bei T=0°C und damit R
=100Ω bzw. R
PT100
=1000Ω der PT100 mit 0,08mW nur
PT1000
halb so viel Wärme erzeugen wie der PT1000 mit 0,17mW.
• Dennoch würde sich der o.a. Sensor also um 0,17mW * 0,5mK/µW = 85mK selbst erwärmen
Falls die Selbsterwärmung relevant für den betrachteten Prozess wird, ist zu bedenken:
• ob der Sensor gewechselt werden kann,
• ob die thermische Anbindung des Sensors verbessert werden kann,
• ob eine dauerhafte Messung nötig ist oder aus der Steuerung heraus der Messstrom des Beckhoff
Moduls temporär abgeschaltet werden kann, z.B. 1Sekunde messen, 10Sekunden abkühlen und
• ob der Effekt numerisch greifbar ist und somit auch nachträglich in der Steuerung aus dem
Temperaturwert herausgerechnet werden kann.
Diese Betrachtung konzentriert sich allerdings allein auf die Problematik der Eigenerwärmung.
Ob der Sensor und der Messbereich insgesamt der Geeignete ist, muss auch gegen andere Aspekte wie
Rauschen, angegebene Messunsicherheit im Messbereich und Empfindlichkeit des Sensor ∆T/∆T
ambient
geprüft werden.
EL32xx-0xx0 31Version: 6.1
Page 32

Produktübersicht
3.4.1 Übersicht implementierte RTD Transformationen
Einige Beckhoff IO Geräte (IP20 Klemmen, Steckmodule) unterstützen die Auswertung von
Widerstandssensoren zur Temperaturmessung (RTD) wie PT100, PT1000, NTC1K etc.
Im Folgenden sind die dort teilweise je nach Gerät implementierten Kennlinien aufgeführt. Die angegebenen
Tabellenwerte sind die Grundlage für die Auswertung im Gerät.
• Pt, Ni, KTY: die Tabellenwerte sind entsprechend im Gerät hinterlegt, Zwischenwerte werden
interpoliert. Bei KL-Klemmen wird die Temperatur davon abweichend über ein Näherungspolynom
berechnet.
• NTC: die Tabellenwerte wurden zur Ermittlung der Steinhart-Hart-Koeffizienten genutzt und über diese
Koeffizienten ermittelt die Firmware die Temperatur.
Stand 12/2020
EL32xx-0xx032 Version: 6.1
Page 33

Pt-RTD
Produktübersicht
EL32xx-0xx0 33Version: 6.1
Page 34

Produktübersicht
Werte in Ω Pt100 Pt1000 Pt500 Pt200
[°C] (ITS-90) -200…+850°C -200…+850°C -200…+850°C -200…+850°C
-200 18,520 185,200 92,600 37,040
-190 22,825 228,250 114,125 45,650
-180 27,096 270,960 135,480 54,192
-170 31,335 313,350 156,675 62,670
-160 35,543 355,430 177,715 71,086
-150 39,723 397,230 198,615 79,446
-140 43,876 438,760 219,380 87,752
-130 48,005 480,050 240,025 96,010
-120 52,110 521,100 260,550 104,220
-110 56,193 561,930 280,965 112,386
-100 60,256 602,560 301,280 120,512
-90 64,300 643,000 321,500 128,600
-80 68,325 683,250 341,625 136,650
-70 72,335 723,350 361,675 144,670
-60 76,328 763,280 381,640 152,656
-50 80,306 803,060 401,530 160,612
-40 84,271 842,710 421,355 168,542
-30 88,222 882,220 441,110 176,444
-20 92,160 921,600 460,800 184,320
-10 96,086 960,860 480,430 192,172
0 100,000 1.000,000 500,000 200,000
10 103,903 1.039,030 519,515 207,806
20 107,794 1.077,940 538,970 215,588
30 111,673 1.116,730 558,365 223,346
40 115,541 1.155,410 577,705 231,082
50 119,397 1.193,970 596,985 238,794
60 123,242 1.232,420 616,210 246,484
70 127,075 1.270,750 635,375 254,150
80 130,897 1.308,970 654,485 261,794
90 134,707 1.347,070 673,535 269,414
100 138,506 1.385,060 692,530 277,012
110 142,293 1.422,930 711,465 284,586
120 146,068 1.460,680 730,340 292,136
130 149,832 1.498,320 749,160 299,664
140 153,584 1.535,840 767,920 307,168
150 157,325 1.573,250 786,625 314,650
160 161,054 1.610,540 805,270 322,108
170 164,772 1.647,720 823,860 329,544
180 168,478 1.684,780 842,390 336,956
190 172,173 1.721,730 860,865 344,346
200 175,856 1.758,560 879,280 351,712
210 179,528 1.795,280 897,640 359,056
220 183,188 1.831,880 915,940 366,376
230 186,836 1.868,360 934,180 373,672
240 190,473 1.904,730 952,365 380,946
250 194,098 1.940,980 970,490 388,196
260 197,712 1.977,120 988,560 395,424
270 201,314 2.013,140 1.006,570 402,628
280 204,905 2.049,050 1.024,525 409,810
290 208,484 2.084,840 1.042,420 416,968
300 212,052 2.120,520 1.060,260 424,104
310 215,608 2.156,080 1.078,040 431,216
320 219,152 2.191,520 1.095,760 438,304
330 222,685 2.226,850 1.113,425 445,370
340 226,206 2.262,060 1.131,030 452,412
350 229,716 2.297,160 1.148,580 459,432
360 233,214 2.332,140 1.166,070 466,428
EL32xx-0xx034 Version: 6.1
Page 35

Produktübersicht
Werte in Ω Pt100 Pt1000 Pt500 Pt200
[°C] (ITS-90) -200…+850°C -200…+850°C -200…+850°C -200…+850°C
370 236,701 2.367,010 1.183,505 473,402
380 240,176 2.401,760 1.200,880 480,352
390 243,640 2.436,400 1.218,200 487,280
400 247,092 2.470,920 1.235,460 494,184
410 250,533 2.505,330 1.252,665 501,066
420 253,962 2.539,620 1.269,810 507,924
430 257,379 2.573,790 1.286,895 514,758
440 260,785 2.607,850 1.303,925 521,570
450 264,179 2.641,790 1.320,895 528,358
460 267,562 2.675,620 1.337,810 535,124
470 270,933 2.709,330 1.354,665 541,866
480 274,293 2.742,930 1.371,465 548,586
490 277,641 2.776,410 1.388,205 555,282
500 280,978 2.809,780 1.404,890 561,956
510 284,303 2.843,030 1.421,515 568,606
520 287,616 2.876,160 1.438,080 575,232
530 290,918 2.909,180 1.454,590 581,836
540 294,208 2.942,080 1.471,040 588,416
550 297,487 2.974,870 1.487,435 594,974
560 300,754 3.007,540 1.503,770 601,508
570 304,010 3.040,100 1.520,050 608,020
580 307,254 3.072,540 1.536,270 614,508
590 310,487 3.104,870 1.552,435 620,974
600 313,708 3.137,080 1.568,540 627,416
610 316,918 3.169,180 1.584,590 633,836
620 320,116 3.201,160 1.600,580 640,232
630 323,302 3.233,020 1.616,510 646,604
640 326,477 3.264,770 1.632,385 652,954
650 329,640 3.296,400 1.648,200 659,280
660 332,792 3.327,920 1.663,960 665,584
670 335,932 3.359,320 1.679,660 671,864
680 339,061 3.390,610 1.695,305 678,122
690 342,178 3.421,780 1.710,890 684,356
700 345,284 3.452,840 1.726,420 690,568
710 348,378 3.483,780 1.741,890 696,756
720 351,460 3.514,600 1.757,300 702,920
730 354,531 3.545,310 1.772,655 709,062
740 357,590 3.575,900 1.787,950 715,180
750 360,638 3.606,380 1.803,190 721,276
760 363,674 3.636,740 1.818,370 727,348
770 366,699 3.666,990 1.833,495 733,398
780 369,712 3.697,120 1.848,560 739,424
790 372,714 3.727,140 1.863,570 745,428
EL32xx-0xx0 35Version: 6.1
Page 36

Produktübersicht
Ni-RTD
Werte in Ω Ni100 Ni120 Ni1000 Ni1000 TK5000
[°C] (ITS-90) -60..50°C -60..320°C -60..250°C -30..160°C
-60 69,52 80,943 695,200
-50 74,255 87,011 742,550
-40 79,131 93,251 791,310
-30 84,146 99,667 841,460 871,690
-20 89,296 106,261 892,960 913,480
-10 94,582 113,038 945,820 956,240
0 100 120,000 1.000,000 1.000,000
10 105,552 127,151 1.055,520 1.044,790
20 111,236 134,494 1.112,360 1.090,650
30 117,056 142,033 1.170,560 1.137,620
40 123,011 149,772 1.230,110 1.185,710
50 129,105 157,712 1.291,050 1.234,950
60 135,34 165,859 1.353,400 1.285,450
70 141,721 174,214 1.417,210 1.337,150
80 148,25 182,783 1.482,500 1.390,120
90 154,934 191,567 1.549,340 1.444,390
100 161,779 200,572 1.617,790 1.500,000
110 168,789 209,798 1.687,890 1.556,980
120 175,972 219,251 1.759,720 1.615,370
130 183,335 228,934 1.833,350 1.675,190
140 190,887 238,850 1.908,870 1.736,470
150 198,635 249,002 1.986,350 1.799,270
160 206,589 259,394 2.065,890 1.863,600
170 214,758 270,029 2.147,580
180 223,153 280,911 2.231,530
190 231,783 292,042 2.317,830
200 240,66 303,427 2.406,600
210 249,795 315,069 2.497,950
220 259,2 326,971 2.592,000
230 268,887 339,136 2.688,870
240 278,868 351,569 2.788,680
250 289,156 364,271 2.891,560
260 377,247
270 390,501
280 404,035
290 417,853
300 431,958
310 446,354
320 461,044
EL32xx-0xx036 Version: 6.1
Page 37

Produktübersicht
KT/KTY-RTD
Werte in Ω KT100.. KTY81/82-110… KTY81-121 KTY81-122 KTY81-151 KTY81-152
[°C] (ITS-90) -50..150°C -50..150°C -50..150°C -50..150°C -50..150°C -50..150°C
-50 518 515 510 520 502 528
-40 570 567 562 573 553 582
-30 625 624 617 630 608 639
-20 685 684 677 690 667 701
-10 748 747 740 755 729 766
0 815 815 807 823 794 835
10 886 886 877 895 864 908
20 961 961 951 971 937 985
30 1.040 1.040 1.029 1.050 1.014 1.066
40 1.123 1.122 1.111 1.134 1.094 1.150
50 1.209 1.209 1.196 1.221 1.178 1.239
60 1.300 1.299 1.286 1.312 1.266 1.331
70 1.394 1.392 1.378 1.406 1.357 1.427
80 1.492 1.490 1.475 1.505 1.453 1.527
90 1.594 1.591 1.575 1.607 1.551 1.631
100 1.700 1.696 1.679 1.713 1.654 1.738
110 1.810 1.805 1.786 1.823 1.759 1.850
120 1.923 1.915 1.896 1.934 1.867 1.963
130 2.041 2.023 2.003 2.044 1.973 2.074
140 2.128 2.124 2.103 2.146 2.071 2.178
150 2.235 2.211 2.189 2.233 2.156 2.266
NTC-RTD
Werte in Ω NTC1K8 NTC1K8_TK NTC2K2 NTC3K NTC5K NTC10K
R0=4940 R0=5200 R0=7373 R0=9822 R0=16325 R0=32650
[°C] (ITS-90) -40..130°C -30..150°C -50..130°C -30..80°C -30..150°C -30..150°C
-50 154.464 205.800 333.914 6.678.300
-40 35.480 77.081 102.690 167.836 335.670
-30 20.659 24.500 40.330 53.730 88.342 176.680
-20 12.443 14.000 22.032 29.346 48.487 96.970
-10 7.730 8.400 12.519 16.674 27.649 55.300
0 4.940 5.200 7.373 9.822 16.325 32.650
10 3.241 3.330 4.487 5.976 9.952 19.900
20 2.177 2.200 2.814 3.750 6.247 12.490
25 1.800 1.800 2.252 3.000 5.000 10.000
30 1.496 1.480 1.814 2.417 4.028 8.060
40 1.049 1.040 1.199 1.598 2.662 5.320
50 750 740 812 1.081 1.801 3.600
60 545 540 561 747 1.244 2.490
70 403 402 396 527 876 1.750
80 303 306 284 378 628 1.260
90 230 240 207 458 920
100 178 187 154 339 680
110 139 149 116 255 510
120 110 118 88 194 390
130 87 95 68 150 300
140 71 77 117 230
150 64 92 180
EL32xx-0xx0 37Version: 6.1
Page 38

Produktübersicht
3.5 Technische Daten
EL3201 - Technische Daten
Technische Daten EL3201 EL3201-0010 EL3201-0020
Anzahl Eingänge 1
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120, Ni1000
KT/KTY ab Firmware 06 [}226]
Widerstandsmessung 10Ω...1kΩ bzw. 10Ω...4kΩ (z.B. für Poti-Anschluss )
Anschlusstechnik 2-, 3-, 4-Leiter 4-Leiter
Temperaturbereich Bereichsabhängig:
Auflösung (default) 0,1°C pro Digit 0,01°C pro Digit
Wandlungszeit ca. 4 .. 500ms (konfigurierbar), je nach Konfiguration und Filtereinstellung
Messstrom (abh. vom Sensorelement und Temperatur)
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler bei Pt-Sensoren:
Breite im Prozessabbild max. 4Byte Input
Spannungsversorgung für
Elektronik
Stromaufnahme aus dem E-
Bus
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstempe-
raturbereich im Betrieb
zulässiger Umgebungstempe-
raturbereich bei Lagerung
zulässige relative Luftfeuch-
tigkeit
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
ca. 24ms voreingestellt
typ. < 0,5mA
< ±0,5 °C bei Umgebungstempe-
ratur 0°C ... +55°C
< ±1,5 °C im erweiterten Tempe-
raturbereich
über den E-Bus
typ. 190mA
-25°C ... +60°C (erweiterter Temperaturbereich) 0°C ... +55°C
-40°C ... +85°C -25°C ... +85°C
95%, keine Betauung
auf 35mm Tragschiene nach EN 60715
60068-2-27,
siehe auch Montagevorschriften
für Klemmen mit erhöhter me-
chanischer Belastbarkeit [}62]
ATEX [}71]
UL [}72]
Bereichsabhängig:
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
Hochpräzise Messung
nur für Pt100 Sensoren,
Messbereich
-200…+320°C,
siehe Hinweis [}24]!
bei Pt100-Sensoren, 4-Leiter-Anschlusstechnik, Messbereich -200
bis 320°C, 50Hz Filter:
< ±0,1 °C bei Umgebungstemperatur von 40°C
< ±0,3 °C im Betriebs-Temperaturbereich
Hinweis: andere Sensorfälle lt. CoE bei verminderter Genauigkeit
nutzbar (z.B. PT1000, 3-Leiter-Anschluss usw.)
gemäß EN 60068-2-6 / EN 60068-2-27
CE, EAC
ATEX [}70]
UL [}72]
EL32xx-0xx038 Version: 6.1
Page 39

EL3202 - Technische Daten
Technische Daten EL3202 EL3202-0010, EL3202-0020
Anzahl Eingänge 2 2
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120, Ni1000
KT/KTY ab Firmware 06 [}226]
Widerstandsmessung 10 Ω...1kΩ bzw. 10Ω...4kΩ (z.B. für Poti-Anschluss )
Anschlusstechnik 2-, 3-Leiter
Temperaturbereich Bereichsabhängig:
Auflösung (default) 0,1°C pro Digit 0,01°C pro Digit
Wandlungszeit ca. 800ms .. 2ms (konfigurierbar), je nach Konfiguration und Filtereinstellung
Messstrom (abh. vom Sensorelement und Temperatur)
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler bei Pt-Sensoren:
Breite im Prozessabbild max. 8Byte Input
Spannungsversorgung für Elek-
tronik
Stromaufnahme aus dem E-Bus typ. 190mA
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstempera-
turbereich im Betrieb
zulässiger Umgebungstempera-
turbereich bei Lagerung
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27,
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
(Voreinstellung: 3-Leiter)
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
ca. 85ms voreingestellt
typ. < 0,5mA
< ±0,5 °C bei Umgebungstemperatur 0°C ...
+55°C
< ±1,5 °C im erweiterten Temperaturbereich
über den E-Bus
-25°C ... +60°C (erweiterter Temperaturbereich)
-40°C ... +85°C
auf 35mm Tragschiene nach EN 60715
siehe auch Montagevorschriften für Klemmen mit
erhöhter mechanischer Belastbarkeit [}62]
ATEX [}71]
UL [}72]
4-Leiter
Bereichsabhängig:
-200…+850°C
(Pt-Sensoren)
-60…+250°C
(Ni-Sensoren)
Hochpräzise Messung
nur für Pt100 Sensoren,
Messbereich
-200…+320°C,
siehe Hinweis [}24]!
bei Pt100-Sensoren, 4-Leiter-Anschlusstechnik,
Messbereich -200 bis 320°C, 50Hz Filter:
< ±0,1 °C bei Umgebungstemperatur von 40°C
< ±0,3 °C im Betriebs-Temperaturbereich
Hinweis: andere Sensorfälle lt. CoE bei verminderter Genauigkeit nutzbar (z.B. PT1000, 3-Leiter-Anschluss usw.)
gemäß EN 60068-2-6 / EN 60068-2-27
Produktübersicht
EL32xx-0xx0 39Version: 6.1
Page 40

Produktübersicht
EL3204 - Technische Daten
Technische Daten EL3204 EL3204-0200
Anzahl Eingänge 4 4
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120,
Anschlusstechnik 2-Leiter
Temperaturbereich Bereichsabhängig:
Auflösung (default) 0,1°C pro Digit default: 0,1°C pro Digit bei Temperaturmessung
Wandlungszeit ca. 800ms .. 2ms (konfigurierbar), je nach Konfi-
Messstrom (abh. vom Sensorelement und Temperatur)
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler < ±0,5 °C bei Pt-Sensoren
Breite im Prozessabbild max. 16Byte Input max. 16Byte Input
Spannungsversorgung für Elek-
tronik
Stromaufnahme aus dem E-Bus typ. 190mA typ. 150mA
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstempera-
turbereich im Betrieb
zulässiger Umgebungstempera-
turbereich bei Lagerung
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27,
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
Ni1000
KT/KTY ab Firmware 06 [}226]
Widerstandsmessung 10 Ω...1 kΩ bzw.
10Ω...4kΩ (z.B. für Poti-Anschluss )
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
guration und Filtereinstellung
ca.85 ms voreingestellt
typ. < 0,5mA typ. < 0,03mA
< ±1,5 °C (erweiterter Temperaturbereich)
über den E-Bus
-25°C ... +60°C (erweiterter Temperaturbereich) 0°C ... +55°C
-40°C ... +85°C -25°C ... +85°C
auf 35mm Tragschiene nach EN 60715
siehe auch Montagevorschriften für Klemmen mit erhöhter mechanischer Belastbarkeit [}62]
IECEx
FM
ATEX [}71]
UL [}72]
beliebige RTD im Bereich
100Ω…240kΩ
Bereichsabhängig
ca. 4ms .. 500ms (konfigurierbar), je nach Konfiguration und Filtereinstellung
ca. 24ms voreingestellt
< ±0,3% vom Messbereichsendwert jeweiligen
bei Widerstandsmessung
CE, EAC
ATEX [}70]
UL [}72]
EL32xx-0xx040 Version: 6.1
Page 41

EL3208-00x0 - Technische Daten
Technische Daten EL3208-0000 EL3208-0010
Anzahl Eingänge 8
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120,
Anschlusstechnik 2-Leiter
Grenzbereich Eingangsfilter 1kHz typ.
Messbereich -200…+850°C (Pt-Sensoren);
Auflösung (default) 0,1°C pro Digit 0,01°C pro Digit
Wandlungszeit ca. 3ms .. 1600ms (konfigurierbar),
Messstrom (abh. vom Sensorelement und Temperatur)
Sensor Versorgung Dauerstrom (nicht geschaltet) multiplex (geschaltet)
Messfehler < ±0,5 °C bei Pt-Sensoren
Breite im Prozessabbild max. 32Byte Input
Spannungsversorgung für Elektro-
nik
Stromaufnahme aus dem E-Bus typ. 140mA
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstemperatur-
bereich im Betrieb
zulässiger Umgebungstemperaturbereich bei Lagerung
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27,
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
Ni1000
KT/KTY, Widerstandsmessung 10Ω...1kΩ bzw.
10Ω...4 kΩ (z.B. für Poti-Anschluss )
-60…+250°C (Ni-Sensoren)
je nach Konfiguration und Filtereinstellung
typ. < 0,5mA
< ±1,5 °C (erweiterter Temperaturbereich)
über den E-Bus
-25 °C ... +60 °C
(erweiterter Temperaturbereich)
-40 °C ... +85 °C -25 °C ... +85 °C
auf 35mm Tragschiene nach EN 60715
siehe auch Montagevorschriften für Klemmen mit erhöhter mechanischer Belastbarkeit [}62]
ATEX [}71]
UL [}72]
Pt1000 (Default), Ni1000, Poti 1/5/10 kΩ, NTC
1,8 k/2,2 k/3 k/5 k/10 k/20 k/100 k
-50…+150 °C (sensorabhängig)
ca. 1 s
-20…+60 °C: ±0,25 °C bei 25 °C Umgebungstemperatur;
-50…+150 °C: ±1,5 °C (bei PT-/Ni-Sensoren)
0 °C ... +55 °C
Produktübersicht
EL32xx-0xx0 41Version: 6.1
Page 42

Produktübersicht
EL3214 - Technische Daten
Technische Daten EL3214
Anzahl Eingänge 4
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120, Ni1000
Anschlusstechnik 3-Leiter
Temperaturbereich Bereichsabhängig:
Auflösung (default) 0,1°C pro Digit
Wandlungszeit ca. 5ms .. 1600ms (konfigurierbar), je nach Konfiguration und Filterein-
Messstrom (abh. vom Sensorelement und Temperatur) typ. < 0,5mA
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler < ±0,5 °C bei Pt-Sensoren, 4 x 3-Leiteranschluss
Breite im Prozessabbild max. 16Byte Input
Spannungsversorgung für Elektronik über den E-Bus
Stromaufnahme aus dem E-Bus typ. 140mA
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstemperaturbereich im Betrieb -25°C ... +60°C (erweiterter Temperaturbereich)
zulässiger Umgebungstemperaturbereich bei Lagerung -40°C ... +85°C
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27,
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
KT/KTY, Widerstandsmessung 10Ω...1kΩ bzw. 10Ω...4kΩ (z.B. für
Poti-Anschluss )
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
stellung
< ±1,5 °C (erweiterter Temperaturbereich)
auf 35mm Tragschiene nach EN 60715
siehe auch Montagevorschriften für Klemmen mit erhöhter mechani-
scher Belastbarkeit [}62]
UL [}72]
EL32xx-0xx042 Version: 6.1
Page 43

Produktübersicht
EL3214-0090 - Technische Daten
Technische Daten EL3214-0090
Anzahl Eingänge 4
Sensorarten Pt100, Pt200, Pt500, Pt1000, Ni100, Ni120, Ni1000
Anschlusstechnik 2-Leiter (ab Firmware 02), 3-Leiter
Grenzfrequenz Eingangsfilter 1kHz typ.
Temperaturbereich Bereichsabhängig:
Auflösung (default) 0,1°C pro Digit
Wandlungszeit ca. 170ms (voreingestellt)
Messstrom (abh. vom Sensorelement und Temperatur) typ. < 0,5mA
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler < ±0,5 °C bei Pt-Sensoren, 4 x 3-Leiteranschluss
MTBF (55°C) >890.000h
Spannungsversorgung für Elektronik über den E-Bus
Stromaufnahme aus dem E-Bus typ. 140mA
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 60g
zulässiger Umgebungstemperaturbereich im Betrieb -25°C ... +60°C (erweiterter Temperaturbereich)
zulässiger Umgebungstemperaturbereich bei Lagerung -40°C ... +85°C
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15mm x 100mm x 70mm (Breite angereiht: 12mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
KT/KTY, Widerstandsmessung 10Ω...1kΩ bzw. 10Ω...4kΩ (z.B. für
Poti-Anschluss )
-200…+850°C
(Pt-Sensoren);
-60…+250°C
(Ni-Sensoren)
< ±1,5 °C (erweiterter Temperaturbereich)
auf 35mm Tragschiene nach EN 60715
UL [}72]
EL32xx-0xx0 43Version: 6.1
Page 44

Produktübersicht
EL3218 - Technische Daten
Technische Daten EL3218
Anzahl Eingänge 8
Anschlusstechnik 2-/3-Leiter (einstellbar)
Distributed-Clocks Grenzfrequenz Eingangsfilter 1 kHz typ.
Sensorarten PT100, PT200, PT500, PT1000, Ni100, Ni120, Ni1000, Widerstands-
Messbereich/ Temperaturbereich -200…+850 °C (PT-Sensoren); -60…+250 °C (Ni-Sensoren)
Auflösung 0,1 °C oder 0,01°C pro Digit
Wandlungszeit ca. 170 ms voreingestellt
Messstrom < 0,5 mA (lastabhängig)
Sensor Versorgung Dauerstrom (nicht geschaltet)
Messfehler < ±0,5 °C bei PT-Sensoren, 8 x 3-Leiteranschluss
Breite im Prozessabbild max. 32 Byte Input
Spannungsversorgung für Elektronik über den E-Bus
Stromaufn. Powerkontakte Stromaufnahme aus dem E-Bus typ. 120mA
Besondere Eigenschaften digitaler Filter integriert, Grenzwertüberwachung, Anschlusstechnik ein-
Potenzialtrennung 500V (E-Bus/Feldspannung)
Konfiguration über TwinCAT System Manager
Gewicht ca. 95g
zulässiger Umgebungstemperaturbereich im Betrieb -25°C ... +55°C
zulässiger Umgebungstemperaturbereich bei Lagerung -25°C ... +85°C
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 30mm x 100mm x 70mm (Breite angereiht: 24mm)
Montage [}59]
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27,
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP20
Einbaulage beliebig
Zulassung CE, EAC
messung (z.B. Poti-Anschluss, 10 Ω…1/4 kΩ), KTY‑Sensoren (Typen
siehe Dokumentation)
stellbar
auf 35mm Tragschiene nach EN 60715
siehe auch Montagevorschriften für Klemmen mit erhöhter mechani-
scher Belastbarkeit [}62]
EL32xx-0xx044 Version: 6.1
Page 45

Produktübersicht
3.6 Hinweis zu Beckhoff Kalibrierzertifikaten
Grundsätzlich wird jedes Beckhoff Analog-Gerät (Eingang oder Ausgang) justiert, d.h. in der Produktion
einem Abgleich unterzogen. Allerdings wird dieser Vorgang nicht einzeln dokumentiert. Diese
Dokumentation als Kalibrierzertifikat erfolgt nur bei Geräten die ausdrücklich mit Zertifikat ausgeliefert
werden.
Das Kalibrierzertifikat (auch: Kalibrierschein) benennt die nach der Justage/Abgleich verbleibende
Restabweichung zum verwendeten Normal (Referenzgerät). Das Kalibrierzertifikat (in pdf-Form) ist über die
ID-Nummer dem Gerät eindeutig zuzuordnen. Es ist also keine Aussage über eine Geräteklasse wie z.B.
eine Zulassung, sondern immer nur für ein einzelnes, benanntes Gerät zutreffend. Es steht über die
Beckhoff Website zum Download bereit
Seiner Natur nach dokumentiert es die Messgenauigkeit zum Zeitpunkt der Zertifikatserstellung, das
Kalibrierzertifikat enthält keine Aussage über das Verhalten bzw. die Veränderung der Messgenauigkeit in
der Zukunft. Ein Kalibrierzertifikat dient der Rückbetrachtung auf den vorangegangenen
Verwendungszeitraum. Wird der Zertifizierungsvorgang über Jahre mehrmals wiederholt (ohne das Gerät
neu zu justieren) erlaubt er Rückschlüsse auf das Alterungsverhalten, die sog. Kalibrierhistorie.
Es sind verschiedene „Qualitäten“ eines Kalibrierzertifikats üblich:
• Beckhoff Werkskalibrierzertifikate
Solche IP20 Klemmen sind an der Produktendung -0020 erkennbar. Das Zertifikat wird in der Beckhoff
Produktion als pdf ausgestellt.
Die Klemmen können über Beckhoff bezogen und über den Beckhoff Service rekalibriert werden.
• ISO17025 Kalibrierzertifikate
Solche IP20 Klemmen sind an der Produktendung -0030 erkennbar. Das Zertifikat wird von einem
Dienstleister im Auftrag für Beckhoff als Teil der Beckhoff Produktion ausgestellt.
Die Klemmen können über Beckhoff bezogen und über den Beckhoff Service rekalibriert werden.
• DAkkS Kalibrierzertifikate (Deutsche Akkreditierungsstelle GmbH)
Solche IP20 Klemmen sind an der Produktendung -0030 erkennbar. Das Zertifikat wird von einem
akkreditierten Dienstleister im Auftrag für Beckhoff als Teil der Beckhoff Produktion ausgestellt.
Die Klemmen können über Beckhoff bezogen und über den Beckhoff Service rekalibriert werden.
Beckhoff produziert eine große Auswahl an analogen Ein/Ausgangsgeräten als IP20 Klemme oder IP67 Box.
Eine Auswahl davon ist auch mit Werk/ISO/DAkkS-Kalibrierzertifikaten lieferbar. Konkrete Angaben dazu
siehe techn. Daten der Geräte oder über den Beckhoff Vertrieb.
Hinweis zum Sprachgebrauch
Im US-amerikanischen Sprachumfeld wird mit „Calibration“ oder „Alignment“ der Abgleich/die Justage bezeichnet, also das verändernde Einwirken auf das Gerät. „Verification“ ist dagegen das beobachtende Ermitteln und Dokumentieren des verbliebenden Restfehlers, das im deutschen Sprachgebrauch als Kalibrierung bezeichnet wird.
3.7 Start
Zur Inbetriebsetzung:
• montieren Sie den EL32xx wie im Kapitel Installation [}57] beschrieben
• konfigurieren Sie den EL32xx in TwinCAT wie im Kapitel Inbetriebnahme [}87] beschrieben.
EL32xx-0xx0 45Version: 6.1
Page 46

Grundlagen der Kommunikation
4 Grundlagen der Kommunikation
4.1 EtherCAT-Grundlagen
Grundlagen zum Feldbus EtherCAT entnehmen Sie bitte der EtherCAT System-Dokumentation.
4.2 EtherCAT-Verkabelung - Drahtgebunden
Die zulässige Leitungslänge zwischen zwei EtherCAT-Geräten darf maximal 100 Meter betragen. Dies
resultiert aus der FastEthernet-Technologie, die vor allem aus Gründen der Signaldämpfung über die
Leitungslänge eine maximale Linklänge von 5 + 90 + 5 m erlaubt, wenn Leitungen mit entsprechenden
Eigenschaften verwendet werden. Siehe dazu auch die Auslegungsempfehlungen zur Infrastruktur für
EtherCAT/Ethernet.
Kabel und Steckverbinder
Verwenden Sie zur Verbindung von EtherCAT-Geräten nur Ethernet-Verbindungen (Kabel + Stecker), die
mindestens der Kategorie 5 (CAT5) nach EN 50173 bzw. ISO/IEC 11801 entsprechen. EtherCAT nutzt 4
Adern des Kabels für die Signalübertragung.
EtherCAT verwendet beispielsweise RJ45-Steckverbinder. Die Kontaktbelegung ist zum Ethernet-Standard
(ISO/IEC 8802-3) kompatibel.
Pin Aderfarbe Signal Beschreibung
1 gelb TD+ Transmission Data +
2 orange TD- Transmission Data 3 weiß RD+ Receiver Data +
6 blau RD- Receiver Data -
Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von
Beckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden.
Empfohlene Kabel
Es wird empfohlen die entsprechenden Beckhoff Komponenten zu verwenden, z.B.
- Kabelsätze ZK1090-9191-xxxx bzw.
- feldkonfektionierbare RJ45 Stecker ZS1090-0005
- feldkonfektionierbare Ethernet Leitung ZB9010, ZB9020
Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website!
E-Bus-Versorgung
Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5V
versorgen, in der Regel ist ein Koppler dabei bis zu 2A belastbar (siehe Dokumentation des jeweiligen
Gerätes).
Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E-Bus-Versorgung benötigt, online und im
Katalog verfügbar. Benötigen die angefügten Klemmen mehr Strom als der Koppler liefern kann, sind an
entsprechender Position im Klemmenstrang Einspeiseklemmen (z.B. EL9410) zu setzen.
Im TwinCAT System Manager wird der vorberechnete theoretische maximale E-Bus-Strom angezeigt. Eine
Unterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, vor einer solchen Stelle
ist eine Einspeiseklemme zu setzen.
EL32xx-0xx046 Version: 6.1
Page 47

Grundlagen der Kommunikation
Abb.21: System Manager Stromberechnung
HINWEIS
Fehlfunktion möglich!
Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepotential erfolgen!
4.3 Allgemeine Hinweise zur Watchdog-Einstellung
Die ELxxxx Klemmen sind mit einer Sicherungseinrichtung (Watchdog) ausgestattet, die z.B. bei
unterbrochenem Prozessdatenverkehr nach einer voreinstellbaren Zeit die Ausgänge in einen sicheren
Zustand schaltet, in Abhängigkeit vom Gerät und Einstellung z.B. auf AUS.
Der EtherCAT Slave Controller (ESC) verfügt dazu über zwei Watchdogs:
• SM-Watchdog (default: 100 ms)
• PDI-Watchdog (default: 100 ms)
SM-Watchdog (SyncManagerWatchdog)
Der SyncManager-Watchdog wird bei jeder erfolgreichen EtherCAT-Prozessdaten-Kommunikation mit der
Klemme zurückgesetzt. Findet z.B. durch eine Leitungsunterbrechung länger als die eingestellte und
aktivierte SM-Watchdog-Zeit keine EtherCAT-Prozessdaten-Kommunikation mit der Klemme statt, löst der
Watchdog aus und setzt die Ausgänge auf FALSE. Der OP-Status der Klemme bleibt davon unberührt. Der
Watchdog wird erst wieder durch einen erfolgreichen EtherCAT-Prozessdatenzugriff zurückgesetzt. Die
Überwachungszeit ist nach unten genanntem Verfahren einzustellen.
Der SyncManager-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige
Prozessdatenkommunikation mit dem ESC von der EtherCAT-Seite aus betrachtet.
PDI-Watchdog (Process Data Watchdog)
Findet länger als die eingestellte und aktivierte PDI-Watchdog-Zeit keine PDI-Kommunikation mit dem
EtherCAT Slave Controller (ESC) statt, löst dieser Watchdog aus.
PDI (Process Data Interface) ist die interne Schnittstelle des ESC, z.B. zu lokalen Prozessoren im EtherCAT
Slave. Mit dem PDI-Watchdog kann diese Kommunikation auf Ausfall überwacht werden.
Der PDI-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige Prozessdatenkommunikation mit
dem ESC, aber von der Applikations-Seite aus betrachtet.
Die Einstellungen für SM- und PDI-Watchdog sind im TwinCAT System Manager für jeden Slave gesondert
vorzunehmen:
EL32xx-0xx0 47Version: 6.1
Page 48

Grundlagen der Kommunikation
Abb.22: Karteireiter EtherCAT -> Erweiterte Einstellungen -> Verhalten --> Watchdog
Anmerkungen:
• der Multiplier ist für beide Watchdogs gültig.
• jeder Watchdog hat dann noch eine eigene Timer-Einstellung, die zusammen mit dem Multiplier eine
resultierende Zeit ergibt.
• Wichtig: die Multiplier/Timer-Einstellung wird nur beim Start in den Slave geladen, wenn die Checkbox
davor aktiviert ist.
Ist diese nicht aktiviert, wird nichts herunter geladen und die im ESC befindliche Einstellung bleibt
unverändert.
Multiplier
Beide Watchdogs erhalten ihre Impulse aus dem lokalen Klemmentakt, geteilt durch den WatchdogMultiplier:
1/25 MHz * (Watchdog-Multiplier + 2) = 100 µs (bei Standard-Einstellung 2498 für den Multiplier)
Die Standard Einstellung 1000 für den SM-Watchdog entspricht einer Auslösezeit von 100ms.
Der Wert in Multiplier + 2 entspricht der Anzahl 40ns-Basisticks, die einen Watchdog-Tick darstellen.
Der Multiplier kann verändert werden, um die Watchdog-Zeit in einem größeren Bereich zu verstellen.
Beispiel „Set SM-Watchdog“
Die Checkbox erlaubt eine manuelle Einstellung der Watchdog-Zeiten. Sind die Ausgänge gesetzt und tritt
eine EtherCAT-Kommunikationsunterbrechung auf, löst der SM-Watchdog nach der eingestellten Zeit ein
Löschen der Ausgänge aus. Diese Einstellung kann dazu verwendet werden, um eine Klemme an langsame
EL32xx-0xx048 Version: 6.1
Page 49

Grundlagen der Kommunikation
EtherCAT-Master oder sehr lange Zykluszeiten anzupassen. Der Standardwert des SM-Watchdog ist auf
100ms eingestellt. Der Einstellbereich umfasst 0...65535. Zusammen mit einem Multiplier in einem Bereich
von 1...65535 deckt dies einen Watchdog-Zeitraum von 0...~170 Sekunden ab.
Berechnung
Multiplier = 2498 → Watchdog-Basiszeit = 1 / 25MHz * (2498 + 2) = 0,0001Sekunden = 100µs
SM Watchdog = 10000 → 10000 * 100µs = 1 Sekunde Watchdog-Überwachungszeit
VORSICHT
Ungewolltes Verhalten des Systems möglich!
Die Abschaltung des SM-Watchdog durch SM Watchdog = 0 funktioniert erst in Klemmen ab Version
-0016. In vorherigen Versionen wird vom Einsatz dieser Betriebsart abgeraten.
VORSICHT
Beschädigung von Geräten und ungewolltes Verhalten des Systems möglich!
Bei aktiviertem SM-Watchdog und eingetragenem Wert 0 schaltet der Watchdog vollständig ab! Dies ist die
Deaktivierung des Watchdogs! Gesetzte Ausgänge werden dann bei einer Kommunikationsunterbrechung
NICHT in den sicheren Zustand gesetzt!
4.4 EtherCAT State Machine
Über die EtherCAT State Machine (ESM) wird der Zustand des EtherCAT-Slaves gesteuert. Je nach
Zustand sind unterschiedliche Funktionen im EtherCAT-Slave zugänglich bzw. ausführbar. Insbesondere
während des Hochlaufs des Slaves müssen in jedem State spezifische Kommandos vom EtherCAT Master
zum Gerät gesendet werden.
Es werden folgende Zustände unterschieden:
• Init
• Pre-Operational
• Safe-Operational und
• Operational
• Boot
Regulärer Zustand eines jeden EtherCAT Slaves nach dem Hochlauf ist der Status OP.
EL32xx-0xx0 49Version: 6.1
Page 50

Grundlagen der Kommunikation
Abb.23: Zustände der EtherCAT State Machine
Init
Nach dem Einschalten befindet sich der EtherCAT-Slave im Zustand Init. Dort ist weder Mailbox- noch
Prozessdatenkommunikation möglich. Der EtherCAT-Master initialisiert die Sync-Manager-Kanäle 0 und 1
für die Mailbox-Kommunikation.
Pre-Operational (Pre-Op)
Beim Übergang von Init nach Pre-Op prüft der EtherCAT-Slave, ob die Mailbox korrekt initialisiert wurde.
Im Zustand Pre-Op ist Mailbox-Kommunikation aber keine Prozessdaten-Kommunikation möglich. Der
EtherCAT-Master initialisiert die Sync-Manager-Kanäle für Prozessdaten (ab Sync-Manager-Kanal 2), die
FMMU-Kanäle und falls der Slave ein konfigurierbares Mapping unterstützt das PDO-Mapping oder das
Sync-Manager-PDO-Assignement. Weiterhin werden in diesem Zustand die Einstellungen für die
Prozessdatenübertragung sowie ggf. noch klemmenspezifische Parameter übertragen, die von den
Defaulteinstellungen abweichen.
Safe-Operational (Safe-Op)
Beim Übergang von Pre-Op nach Safe-Op prüft der EtherCAT-Slave, ob die Sync-Manager-Kanäle für die
Prozessdatenkommunikation sowie ggf. ob die Einstellungen für die Distributed-Clocks korrekt sind. Bevor er
den Zustandswechsel quittiert, kopiert der EtherCAT-Slave aktuelle Inputdaten in die entsprechenden DPRAM-Bereiche des EtherCAT-Slave-Controllers (ECSC).
Im Zustand Safe-Op ist Mailbox- und Prozessdaten-Kommunikation möglich, allerdings hält der Slave seine
Ausgänge im sicheren Zustand und gibt sie noch nicht aus. Die Inputdaten werden aber bereits zyklisch
aktualisiert.
Ausgänge im SAFEOP
Die standardmäßig aktivierte Watchdogüberwachung [}47] bringt die Ausgänge im Modul in Abhängigkeit von den Einstellungen im SAFEOP und OP in einen sicheren Zustand - je nach Gerät
und Einstellung z.B. auf AUS. Wird dies durch Deaktivieren der Watchdogüberwachung im Modul
unterbunden, können auch im Geräte-Zustand SAFEOP Ausgänge geschaltet werden bzw. gesetzt
bleiben.
EL32xx-0xx050 Version: 6.1
Page 51

Grundlagen der Kommunikation
Operational (Op)
Bevor der EtherCAT-Master den EtherCAT-Slave von Safe-Op nach Op schaltet, muss er bereits gültige
Outputdaten übertragen.
Im Zustand Op kopiert der Slave die Ausgangsdaten des Masters auf seine Ausgänge. Es ist Prozessdatenund Mailbox-Kommunikation möglich.
Boot
Im Zustand Boot kann ein Update der Slave-Firmware vorgenommen werden. Der Zustand Boot ist nur über
den Zustand Init zu erreichen.
Im Zustand Boot ist Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich,
aber keine andere Mailbox-Kommunikation und keine Prozessdaten-Kommunikation.
4.5 CoE-Interface
Allgemeine Beschreibung
Das CoE-Interface (CAN application protocol over EtherCAT) ist die Parameterverwaltung für EtherCATGeräte. EtherCAT-Slaves oder auch der EtherCAT-Master verwalten darin feste (ReadOnly) oder
veränderliche Parameter, die sie zum Betrieb, Diagnose oder Inbetriebnahme benötigen.
CoE-Parameter sind in einer Tabellen-Hierarchie angeordnet und prinzipiell dem Anwender über den
Feldbus lesbar zugänglich. Der EtherCAT-Master (TwinCAT System Manager) kann über EtherCAT auf die
lokalen CoE-Verzeichnisse der Slaves zugreifen und je nach Eigenschaften lesend oder schreibend
einwirken.
Es sind verschiedene Typen für CoE-Parameter möglich wie String (Text), Integer-Zahlen, Bool'sche Werte
oder größere Byte-Felder. Damit lassen sich ganz verschiedene Eigenschaften beschreiben. Beispiele für
solche Parameter sind Herstellerkennung, Seriennummer, Prozessdateneinstellungen, Gerätename,
Abgleichwerte für analoge Messung oder Passwörter.
Die Ordnung erfolgt in zwei Ebenen über hexadezimale Nummerierung: zuerst wird der (Haupt)Index
genannt, dann der Subindex. Die Wertebereiche sind
• Index: 0x0000…0xFFFF (0...65535
• SubIndex: 0x00…0xFF (0...255
dez
)
dez
)
Üblicherweise wird ein so lokalisierter Parameter geschrieben als 0x8010:07 mit voranstehendem „0x“ als
Kennzeichen des hexadezimalen Zahlenraumes und Doppelpunkt zwischen Index und Subindex.
Die für den EtherCAT-Feldbusanwender wichtigen Bereiche sind
• 0x1000: hier sind feste Identitäts-Informationen zum Gerät hinterlegt wie Name, Hersteller,
Seriennummer etc. Außerdem liegen hier Angaben über die aktuellen und verfügbaren
Prozessdatenkonstellationen.
• 0x8000: hier sind die für den Betrieb erforderlichen funktionsrelevanten Parameter für alle Kanäle
zugänglich wie Filtereinstellung oder Ausgabefrequenz.
Weitere wichtige Bereiche sind:
• 0x4000: hier befinden sich bei manchen EtherCAT-Geräten die Kanalparameter. Historisch war dies
der erste Parameterbereich, bevor der 0x8000 Bereich eingeführt wurde. EtherCAT Geräte, die früher
mit Parametern in 0x4000 ausgerüstet wurden und auf 0x8000 umgestellt wurden, unterstützen aus
Kompatibilitätsgründen beide Bereiche und spiegeln intern.
• 0x6000: hier liegen die Eingangs-PDO („Eingang“ aus Sicht des EtherCAT-Masters)
• 0x7000: hier liegen die Ausgangs-PDO („Ausgang“ aus Sicht des EtherCAT-Masters)
EL32xx-0xx0 51Version: 6.1
Page 52

Grundlagen der Kommunikation
Verfügbarkeit
Nicht jedes EtherCAT Gerät muss über ein CoE-Verzeichnis verfügen. Einfache I/O-Module ohne
eigenen Prozessor verfügen in der Regel. über keine veränderlichen Parameter und haben deshalb
auch kein CoE-Verzeichnis.
Wenn ein Gerät über ein CoE-Verzeichnis verfügt, stellt sich dies im TwinCAT System Manager als ein
eigener Karteireiter mit der Auflistung der Elemente dar:
Abb.24: Karteireiter „CoE-Online“
In der oberen Abbildung sind die im Gerät „EL2502“ verfügbaren CoE-Objekte von 0x1000 bis 0x1600
zusehen, die Subindizes von 0x1018 sind aufgeklappt.
Datenerhaltung und Funktion „NoCoeStorage“
Einige, insbesondere die vorgesehenen Einstellungsparameter des Slaves sind veränderlich und
beschreibbar. Dies kann schreibend/lesend geschehen
• über den System Manager (Abb. Karteireiter „CoE-Online“) durch Anklicken
Dies bietet sich bei der Inbetriebnahme der Anlage/Slaves an. Klicken Sie auf die entsprechende Zeile
des zu parametrierenden Indizes und geben sie einen entsprechenden Wert im „SetValue“-Dialog ein.
• aus der Steuerung/PLC über ADS z.B. durch die Bausteine aus der TcEtherCAT.lib Bibliothek
Dies wird für Änderungen während der Anlangenlaufzeit empfohlen oder wenn kein System Manager
bzw. Bedienpersonal zur Verfügung steht.
EL32xx-0xx052 Version: 6.1
Page 53

Grundlagen der Kommunikation
Datenerhaltung
Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherweise ausfallsicher im Gerät (EEPROM) gespeichert. D.h. nach einem Neustart (Repower) sind die
veränderten CoE-Parameter immer noch erhalten.
Andere Hersteller können dies anders handhaben.
Ein EEPROM unterliegt in Bezug auf Schreibvorgänge einer begrenzten Lebensdauer. Ab typischerweise 100.000 Schreibvorgängen kann eventuell nicht mehr sichergestellt werden, dass neue
(veränderte) Daten sicher gespeichert werden oder noch auslesbar sind. Dies ist für die normale Inbetriebnahme ohne Belang. Werden allerdings zur Maschinenlaufzeit fortlaufend CoE-Parameter
über ADS verändert, kann die Lebensdauergrenze des EEPROM durchaus erreicht werden.
Es ist von der FW-Version abhängig, ob die Funktion NoCoeStorage unterstützt wird, die das Abspeichern veränderter CoE-Werte unterdrückt.
Ob das auf das jeweilige Gerät zutrifft, ist den technischen Daten dieser Dokumentation zu entnehmen.
• wird unterstützt: die Funktion ist per einmaligem Eintrag des Codeworts 0x12345678 in CoE
0xF008 zu aktivieren und solange aktiv, wie das Codewort nicht verändert wird. Nach dem Einschalten des Gerätes ist sie nicht aktiv.
Veränderte CoE-Werte werden dann nicht im EEPROM abgespeichert, sie können somit beliebig
oft verändert werden.
• wird nicht unterstützt: eine fortlaufende Änderung von CoE-Werten ist angesichts der o.a. Lebensdauergrenze nicht zulässig.
Startup List
Veränderungen im lokalen CoE-Verzeichnis der Klemme gehen im Austauschfall mit der alten
Klemme verloren. Wird im Austauschfall eine neue Klemme mit Werkseinstellungen ab Lager
Beckhoff eingesetzt, bringt diese die Standardeinstellungen mit. Es ist deshalb empfehlenswert, alle
Veränderungen im CoE-Verzeichnis eines EtherCAT Slave in der Startup List des Slaves zu verankern, die bei jedem Start des EtherCAT Feldbus abgearbeitet wird. So wird auch ein im Austauschfall ein neuer EtherCAT Slave automatisch mit den Vorgaben des Anwenders parametriert.
Wenn EtherCAT Slaves verwendet werden, die lokal CoE-Wert nicht dauerhaft speichern können,
ist zwingend die StartUp-Liste zu verwenden.
Empfohlenes Vorgehen bei manueller Veränderung von CoE-Parametern
• gewünschte Änderung im System Manager vornehmen
Werte werden lokal im EtherCAT Slave gespeichert
• wenn der Wert dauerhaft Anwendung finden soll, einen entsprechenden Eintrag in der StartUp-Liste
vornehmen.
Die Reihenfolge der StartUp-Einträge ist dabei i.d.R. nicht relevant.
Abb.25: StartUp-Liste im TwinCAT System Manager
In der StartUp-Liste können bereits Werte enthalten sein, die vom System Manager nach den Angaben der
ESI dort angelegt werden. Zusätzliche anwendungsspezifische Einträge können angelegt werden.
EL32xx-0xx0 53Version: 6.1
Page 54

Grundlagen der Kommunikation
Online/Offline Verzeichnis
Während der Arbeit mit dem TwinCAT System Manager ist zu unterscheiden ob das EtherCAT-Gerät gerade
„verfügbar“, also angeschaltet und über EtherCAT verbunden und damit online ist oder ob ohne
angeschlossene Slaves eine Konfiguration offline erstellt wird.
In beiden Fällen ist ein CoE-Verzeichnis nach Abb. „Karteireiter ‚CoE-Online‘“ zu sehen, die Konnektivität
wird allerdings als offline/online angezeigt.
• wenn der Slave offline ist:
◦ wird das Offline-Verzeichnis aus der ESI-Datei angezeigt. Änderungen sind hier nicht sinnvoll bzw.
möglich.
◦ wird in der Identität der konfigurierte Stand angezeigt
◦ wird kein Firmware- oder Hardware-Stand angezeigt, da dies Eigenschaften des realen Gerätes
sind.
◦ ist ein rotes Offline zu sehen
Abb.26: Offline-Verzeichnis
• wenn der Slave online ist
◦ wird das reale aktuelle Verzeichnis des Slaves ausgelesen. Dies kann je nach Größe und
Zykluszeit einige Sekunden dauern.
◦ wird die tatsächliche Identität angezeigt
◦ wird der Firmware- und Hardware-Stand des Gerätes laut elektronischer Auskunft angezeigt
◦ ist ein grünes Online zu sehen
EL32xx-0xx054 Version: 6.1
Page 55

Abb.27: Online-Verzeichnis
Grundlagen der Kommunikation
Kanalweise Ordnung
Das CoE-Verzeichnis ist in EtherCAT Geräten angesiedelt, die meist mehrere funktional gleichwertige
Kanäle umfassen. z.B. hat eine 4 kanalige Analogeingangsklemme 0...10V auch vier logische Kanäle und
damit vier gleiche Sätze an Parameterdaten für die Kanäle. Um in den Dokumentationen nicht jeden Kanal
auflisten zu müssen, wird gerne der Platzhalter „n“ für die einzelnen Kanalnummern verwendet.
Im CoE-System sind für die Menge aller Parameter eines Kanals eigentlich immer 16 Indizes mit jeweils 255
Subindizes ausreichend. Deshalb ist die kanalweise Ordnung in 16
dez
/10
-Schritten eingerichtet. Am
hex
Beispiel des Parameterbereichs 0x8000 sieht man dies deutlich:
• Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255
• Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255
• Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255
• ...
Allgemein wird dies geschrieben als 0x80n0.
Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der
Beckhoff Website.
EL32xx-0xx0 55Version: 6.1
Page 56

Grundlagen der Kommunikation
4.6 Distributed Clock
Die Distributed Clock stellt eine lokale Uhr im EtherCAT Slave Controller (ESC) dar mit den Eigenschaften:
• Einheit 1 ns
• Nullpunkt 1.1.2000 00:00
• Umfang 64 Bit (ausreichend für die nächsten 584 Jahre); manche EtherCAT-Slaves unterstützen
jedoch nur einen Umfang von 32 Bit, d.h. nach ca. 4,2 Sekunden läuft die Variable über
• Diese lokale Uhr wird vom EtherCAT Master automatisch mit der Master Clock im EtherCAT Bus mit
einer Genauigkeit < 100 ns synchronisiert.
Detaillierte Informationen entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung.
EL32xx-0xx056 Version: 6.1
Page 57

Installation
5 Installation
5.1 Sicherheitshinweise
Lesen Sie vor Installation und Inbetriebnahme der TwinSAFE-Komponenten auch die Sicherheitshinweise im
Vorwort dieser Dokumentation.
5.2 Umgebungsbedingungen
Stellen Sie sicher, dass die TwinSAFE-Komponenten nur bei den spezifizierten Umgebungsbedingungen
(siehe technische Daten) transportiert, gelagert und betrieben werden!
WARNUNG
Verletzungsgefahr!
Die TwinSAFE-Komponenten dürfen unter folgenden Betriebsbedingungen nicht eingesetzt werden.
• unter dem Einfluss ionisierender Strahlung (die das Maß der natürlichen Umgebungsstrahlung überschreitet)
• in korrosivem Umfeld
• in einem Umfeld, das zu unzulässiger Verschmutzung der TwinSAFE-Komponente führt
HINWEIS
Elektromagnetische Verträglichkeit
Die TwinSAFE-Komponenten entsprechen den Anforderungen der geltenden Normen zur elektromagnetischen Verträglichkeit in Bezug auf Störausstrahlung und insbesondere auf Störfestigkeit.
Sollten jedoch in der Nähe der TwinSAFE-Komponenten Geräte (z.B. Funktelefone, Funkgeräte, Sendeanlagen oder Hochfrequenz-Systeme) betrieben werden, welche die in den Normen festgelegten Grenzen zur
Störaussendung überschreiten, können diese ggf. die Funktion der TwinSAFE-Komponenten stören.
5.3 Transportvorgaben / Lagerung
Verwenden Sie zum Transport und bei der Lagerung der TwinSAFE-Komponenten die Originalverpackung in
der die Komponenten geliefert wurden.
VORSICHT
Spezifizierten Umgebungsbedingungen beachten
Stellen Sie sicher, dass die digitalen TwinSAFE- Komponenten nur bei den spezifizierten Umgebungsbedingungen (siehe technische Daten) transportiert und gelagert werden.
5.4 Schaltschrank / Klemmenkasten
Die TwinSAFE-Klemmen müssen zum Betrieb in einen Schaltschrank oder Klemmenkasten montiert
werden, der mindestens der Schutzart IP54 nach IEC60529 entspricht.
EL32xx-0xx0 57Version: 6.1
Page 58

Installation
5.5 Hinweise zum ESD-Schutz
HINWEIS
Zerstörung der Geräte durch elektrostatische Aufladung möglich!
Die Geräte enthalten elektrostatisch gefährdete Bauelemente, die durch unsachgemäße Behandlung beschädigt werden können.
• Sie müssen beim Umgang mit den Komponenten elektrostatisch entladen sein; vermeiden Sie außerdem die Federkontakte (s. Abb.) direkt zu berühren.
• Vermeiden Sie den Kontakt mit hoch isolierenden Stoffen (Kunstfaser, Kunststofffolien etc.)
• Beim Umgang mit den Komponenten ist auf gute Erdung der Umgebung zu achten (Arbeitsplatz, Verpackung und Personen)
• Jede Busstation muss auf der rechten Seite mit der Endkappe EL9011 oder EL9012 abgeschlossen werden, um Schutzart und ESD-Schutz sicher zu stellen.
Abb.28: Federkontakte der Beckhoff I/O-Komponenten
EL32xx-0xx058 Version: 6.1
Page 59

Installation
5.6 Tragschienenmontage
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
Montage
Abb.29: Montage auf Tragschiene
Die Buskoppler und Busklemmen werden durch leichten Druck auf handelsübliche 35 mm Tragschienen
(Hutschienen nach EN60715) aufgerastet:
1. Stecken Sie zuerst den Feldbuskoppler auf die Tragschiene.
2. Auf der rechten Seite des Feldbuskopplers werden nun die Busklemmen angereiht. Stecken Sie dazu
die Komponenten mit Nut und Feder zusammen und schieben Sie die Klemmen gegen die Tragschiene, bis die Verriegelung hörbar auf der Tragschiene einrastet.
Wenn Sie die Klemmen erst auf die Tragschiene schnappen und dann nebeneinander schieben ohne
das Nut und Feder ineinander greifen, wird keine funktionsfähige Verbindung hergestellt! Bei richtiger
Montage darf kein nennenswerter Spalt zwischen den Gehäusen zu sehen sein.
Tragschienenbefestigung
Der Verriegelungsmechanismus der Klemmen und Koppler reicht in das Profil der Tragschiene hinein. Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismus
nicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befestigung von Tragschienen mit einer Höhe von 7,5mm unter den Klemmen und Kopplern flache Montageverbindungen wie Senkkopfschrauben oder Blindnieten.
EL32xx-0xx0 59Version: 6.1
Page 60

Installation
Demontage
Abb.30: Demontage von Tragschiene
Jede Klemme wird durch eine Verriegelung auf der Tragschiene gesichert, die zur Demontage gelöst werden
muss:
1. Ziehen Sie die Klemme an ihren orangefarbigen Laschen ca. 1 cm von der Tragschiene herunter. Dabei wird die Tragschienenverriegelung dieser Klemme automatisch gelöst und Sie können die Klemme
nun ohne großen Kraftaufwand aus dem Busklemmenblock herausziehen.
2. Greifen Sie dazu mit Daumen und Zeigefinger die entriegelte Klemme gleichzeitig oben und unten an
den Gehäuseflächen und ziehen sie aus dem Busklemmenblock heraus.
Verbindungen innerhalb eines Busklemmenblocks
Die elektrischen Verbindungen zwischen Buskoppler und Busklemmen werden durch das
Zusammenstecken der Komponenten automatisch realisiert:
• Die sechs Federkontakte des K-Bus/E-Bus übernehmen die Übertragung der Daten und die
Versorgung der Busklemmenelektronik.
• Die Powerkontakte übertragen die Versorgung für die Feldelektronik und stellen so innerhalb des
Busklemmenblocks eine Versorgungsschiene dar. Die Versorgung der Powerkontakte erfolgt über
Klemmen auf dem Buskoppler (bis 24V) oder für höhere Spannungen über Einspeiseklemmen.
Powerkontakte
Beachten Sie bei der Projektierung eines Busklemmenblocks die Kontaktbelegungen der einzelnen
Busklemmen, da einige Typen (z.B. analoge Busklemmen oder digitale 4-Kanal-Busklemmen) die
Powerkontakte nicht oder nicht vollständig durchschleifen. Einspeiseklemmen (KL91xx, KL92xx
bzw. EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Versorgungsschiene dar.
PE-Powerkontakt
Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus
Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125A ableiten.
EL32xx-0xx060 Version: 6.1
Page 61

Abb.31: Linksseitiger Powerkontakt
Installation
HINWEIS
Beschädigung des Gerätes möglich
Beachten Sie, dass aus EMV-Gründen die PE-Kontakte kapazitiv mit der Tragschiene verbunden sind. Das
kann bei der Isolationsprüfung zu falschen Ergebnissen und auch zur Beschädigung der Klemme führen
(z.B. Durchschlag zur PE-Leitung bei der Isolationsprüfung eines Verbrauchers mit 230V Nennspannung).
Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. der Einspeiseklemme ab! Um
weitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln und
mindestens 10mm aus dem Verbund der übrigen Klemmen herausziehen.
WARNUNG
Verletzungsgefahr durch Stromschlag!
Der PE-Powerkontakt darf nicht für andere Potentiale verwendet werden!
EL32xx-0xx0 61Version: 6.1
Page 62

Installation
5.7 Montagevorschriften für erhöhte mechanische Belastbarkeit
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
Zusätzliche Prüfungen
Die Klemmen sind folgenden zusätzlichen Prüfungen unterzogen worden:
Prüfung Erläuterung
Vibration 10 Frequenzdurchläufe, in 3-Achsen
6Hz<f<60Hz Auslenkung 0,35 mm, konstante Amplitude
60,1Hz<f<500Hz Beschleunigung 5g, konstante Amplitude
Schocken 1000 Schocks je Richtung, in 3-Achsen
25 g, 6 ms
Zusätzliche Montagevorschriften
Für die Klemmen mit erhöhter mechanischer Belastbarkeit gelten folgende zusätzliche Montagevorschriften:
• Die erhöhte mechanische Belastbarkeit gilt für alle zulässigen Einbaulagen
• Es ist eine Tragschiene nach EN 60715 TH35-15 zu verwenden
• Der Klemmenstrang ist auf beiden Seiten der Tragschiene durch eine mechanische Befestigung, z.B.
mittels einer Erdungsklemme oder verstärkten Endklammer zu fixieren
• Die maximale Gesamtausdehnung des Klemmenstrangs (ohne Koppler) beträgt:
64 Klemmen mit 12 mm oder 32 Klemmen mit 24 mm Einbaubreite
• Bei der Abkantung und Befestigung der Tragschiene ist darauf zu achten, dass keine Verformung und
Verdrehung der Tragschiene auftritt, weiterhin ist kein Quetschen und Verbiegen der Tragschiene
zulässig
• Die Befestigungspunkte der Tragschiene sind in einem Abstand vom 5 cm zu setzen
• Zur Befestigung der Tragschiene sind Senkkopfschrauben zu verwenden
• Die freie Leiterlänge zwischen Zugentlastung und Leiteranschluss ist möglichst kurz zu halten; der
Abstand zum Kabelkanal ist mit ca.10cm zu einhalten
EL32xx-0xx062 Version: 6.1
Page 63

5.8 Positionierung von passiven Klemmen
Hinweis zur Positionierung von passiven Klemmen im Busklemmenblock
EtherCAT-Klemmen (ELxxxx / ESxxxx), die nicht aktiv am Datenaustausch innerhalb des Busklemmenblocks teilnehmen, werden als passive Klemmen bezeichnet. Zu erkennen sind diese Klemmen
an der nicht vorhandenen Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zu
gewährleisten, dürfen nicht mehr als zwei passive Klemmen direkt aneinander gereiht werden!
Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt)
Installation
Abb.32: Korrekte Positionierung
Abb.33: Inkorrekte Positionierung
EL32xx-0xx0 63Version: 6.1
Page 64

Installation
5.9 Einbaulagen
HINWEIS
Einschränkung von Einbaulage und Betriebstemperaturbereich
Entnehmen Sie den technischen Daten zu einer Klemme, ob sie Einschränkungen bei Einbaulage und/oder
Betriebstemperaturbereich unterliegt. Sorgen Sie bei der Montage von Klemmen mit erhöhter thermischer
Verlustleistung dafür, dass im Betrieb oberhalb und unterhalb der Klemmen ausreichend Abstand zu anderen Komponenten eingehalten wird, so dass die Klemmen ausreichend belüftet werden!
Optimale Einbaulage (Standard)
Für die optimale Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KLKlemmen weisen nach vorne (siehe Abb. Empfohlene Abstände bei Standard-Einbaulage). Die Klemmen
werden dabei von unten nach oben durchlüftet, was eine optimale Kühlung der Elektronik durch
Konvektionslüftung ermöglicht. Bezugsrichtung „unten“ ist hier die Erdbeschleunigung.
Abb.34: Empfohlene Abstände bei Standard-Einbaulage
Die Einhaltung der Abstände nach Abb. Empfohlene Abstände bei Standard-Einbaulage wird empfohlen.
Weitere Einbaulagen
Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage der Tragschiene aus,
siehe Abb. Weitere Einbaulagen.
Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur
Umgebung.
EL32xx-0xx064 Version: 6.1
Page 65

Installation
Abb.35: Weitere Einbaulagen
EL32xx-0xx0 65Version: 6.1
Page 66

Installation
5.10 Anschluss
5.10.1 Anschlusstechnik
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
Übersicht
Mit verschiedenen Anschlussoptionen bietet das Busklemmensystem eine optimale Anpassung an die
Anwendung:
• Die Klemmen der Serien ELxxxx und KLxxxx mit Standardverdrahtung enthalten Elektronik und
Anschlussebene in einem Gehäuse.
• Die Klemmen der Serien ESxxxx und KSxxxx haben eine steckbare Anschlussebene und ermöglichen
somit beim Austausch die stehende Verdrahtung.
• Die High-Density-Klemmen (HD-Klemmen) enthalten Elektronik und Anschlussebene in einem
Gehäuse und haben eine erhöhte Packungsdichte.
Standardverdrahtung (ELxxxx / KLxxxx)
Abb.36: Standardverdrahtung
Die Klemmen der Serien ELxxxx und KLxxxx sind seit Jahren bewährt und integrieren die schraublose
Federkrafttechnik zur schnellen und einfachen Montage.
Steckbare Verdrahtung (ESxxxx / KSxxxx)
Abb.37: Steckbare Verdrahtung
Die Klemmen der Serien ESxxxx und KSxxxx enthalten eine steckbare Anschlussebene.
Montage und Verdrahtung werden wie bei den Serien ELxxxx und KLxxxx durchgeführt.
Im Servicefall erlaubt die steckbare Anschlussebene, die gesamte Verdrahtung als einen Stecker von der
Gehäuseoberseite abzuziehen.
Das Unterteil kann, über das Betätigen der Entriegelungslasche, aus dem Klemmenblock herausgezogen
werden.
Die auszutauschende Komponente wird hineingeschoben und der Stecker mit der stehenden Verdrahtung
wieder aufgesteckt. Dadurch verringert sich die Montagezeit und ein Verwechseln der Anschlussdrähte ist
ausgeschlossen.
EL32xx-0xx066 Version: 6.1
Page 67

Installation
Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägt
ungefähr 3mm auf; dabei bleibt die maximale Höhe der Klemme unverändert.
Eine Lasche für die Zugentlastung des Kabels stellt in vielen Anwendungen eine deutliche Vereinfachung
der Montage dar und verhindert ein Verheddern der einzelnen Anschlussdrähte bei gezogenem Stecker.
Leiterquerschnitte von 0,08mm2 bis 2,5mm2 können weiter in der bewährten Federkrafttechnik verwendet
werden.
Übersicht und Systematik in den Produktbezeichnungen der Serien ESxxxx und KSxxxx werden wie von den
Serien ELxxxx und KLxxxx bekannt weitergeführt.
High-Density-Klemmen (HD-Klemmen)
Abb.38: High-Density-Klemmen
Die Klemmen dieser Baureihe mit 16 Klemmstellen zeichnen sich durch eine besonders kompakte Bauform
aus, da die Packungsdichte auf 12mm doppelt so hoch ist wie die der Standard-Busklemmen. Massive und
mit einer Aderendhülse versehene Leiter können ohne Werkzeug direkt in die Federklemmstelle gesteckt
werden.
Verdrahtung HD-Klemmen
Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine steckbare Verdrahtung.
Ultraschall-litzenverdichtete Leiter
Ultraschall-litzenverdichtete Leiter
An die Standard- und High-Density-Klemmen können auch ultraschall-litzenverdichtete (ultraschallverschweißte) Leiter angeschlossen werden. Beachten Sie die Tabellen zum Leitungsquerschnitt!
EL32xx-0xx0 67Version: 6.1
Page 68

Installation
5.10.2 Verdrahtung
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
Klemmen für Standardverdrahtung ELxxxx/KLxxxx und für steckbare Verdrahtung ESxxxx/KSxxxx
Abb.39: Anschluss einer Leitung an eine Klemmstelle
Bis zu acht Klemmstellen ermöglichen den Anschluss von massiven oder feindrähtigen Leitungen an die
Busklemme. Die Klemmstellen sind in Federkrafttechnik ausgeführt. Schließen Sie die Leitungen
folgendermaßen an:
1. Öffnen Sie eine Klemmstelle, indem Sie einen Schraubendreher gerade bis zum Anschlag in die
viereckige Öffnung über der Klemmstelle drücken. Den Schraubendreher dabei nicht drehen oder hin
und her bewegen (nicht hebeln).
2. Der Draht kann nun ohne Widerstand in die runde Klemmenöffnung eingeführt werden.
3. Durch Rücknahme des Druckes schließt sich die Klemmstelle automatisch und hält den Draht sicher
und dauerhaft fest.
Den zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle.
Klemmengehäuse ELxxxx, KLxxxx ESxxxx, KSxxxx
Leitungsquerschnitt (massiv) 0,08 ... 2,5mm
Leitungsquerschnitt (feindrähtig) 0,08 ... 2,5mm
Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 1,5mm
2
2
2
0,08 ... 2,5mm
0,08 ... 2,5mm
0,14 ... 1,5mm
2
2
2
Abisolierlänge 8 ... 9mm 9 ... 10mm
High-Density-Klemmen (HD-Klemmen [}67]) mit 16 Klemmstellen
Bei den HD-Klemmen erfolgt der Leiteranschluss bei massiven Leitern werkzeuglos, in Direktstecktechnik,
das heißt der Leiter wird nach dem Abisolieren einfach in die Klemmstelle gesteckt. Das Lösen der
Leitungen erfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines
Schraubendrehers. Den zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle.
EL32xx-0xx068 Version: 6.1
Page 69

Klemmengehäuse HD-Gehäuse
Leitungsquerschnitt (massiv) 0,08 ... 1,5 mm
Leitungsquerschnitt (feindrähtig) 0,25 ... 1,5mm
Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75mm
Leitungsquerschnitt (ultraschall-litzenverdichtet) nur 1,5mm
2
Abisolierlänge 8 ... 9mm
5.10.3 Schirmung
Schirmung
Encoder, analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen angeschlossen werden.
Installation
2
2
2
EL32xx-0xx0 69Version: 6.1
Page 70

Installation
5.11 ATEX - Besondere Bedingungen (Standardtemperaturbereich)
WARNUNG
Beachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung von
Beckhoff-Feldbuskomponenten mit Standardtemperaturbereich in explosionsgefährdeten
Bereichen (Richtlinie2014/34/EU)!
• Die zertifizierten Komponenten sind in ein geeignetes Gehäuse zu errichten, das eine Schutzart von
mindestens IP54 gemäß EN60079-15 gewährleistet! Dabei sind die Umgebungsbedingungen bei der
Verwendung zu berücksichtigen!
• Für Staub (nur die Feldbuskomponenten der Zertifikatsnummer KEMA10ATEX0075XIssue9): Das
Gerät ist in ein geeignetes Gehäuse einzubauen, das einen Schutzgrad von IP54 gemäß EN60079-31
für Gruppe IIIA oder IIIB und IP6X für Gruppe IIIC bietet, wobei die Umgebungsbedingungen, unter denen das Gerät verwendet wird, zu berücksichtigen sind!
• Wenn die Temperaturen bei Nennbetrieb an den Einführungsstellen der Kabel, Leitungen oder Rohrleitungen höher als 70°C oder an den Aderverzweigungsstellen höher als 80°C ist, so müssen Kabel ausgewählt werden, deren Temperaturdaten den tatsächlich gemessenen Temperaturwerten entsprechen!
• Beachten für Beckhoff-Feldbuskomponenten mit Standardtemperaturbereich beim Einsatz in explosionsgefährdeten Bereichen den zulässigen Umgebungstemperaturbereich von 0 bis 55°C!
• Es müssen Maßnahmen zum Schutz gegen Überschreitung der Nennbetriebsspannung durch kurzzeitige Störspannungen um mehr als 40% getroffen werden!
• Die einzelnen Klemmen dürfen nur aus dem Busklemmensystem gezogen oder entfernt werden, wenn
die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Die Anschlüsse der zertifizierten Komponenten dürfen nur verbunden oder unterbrochen werden, wenn
die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Die Sicherung der Einspeiseklemmen KL92xx/EL92xx dürfen nur gewechselt werden, wenn die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Adresswahlschalter und ID-Switche dürfen nur eingestellt werden, wenn die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
Normen
Die grundlegenden Sicherheits- und Gesundheitsanforderungen werden durch Übereinstimmung mit den
folgenden Normen erfüllt:
• EN 60079-0:2012+A11:2013
• EN 60079-15:2010
• EN 60079-31:2013 (nur für Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
EL32xx-0xx070 Version: 6.1
Page 71

Kennzeichnung
Die gemäß ATEX-Richtlinie für den explosionsgefährdeten Bereich zertifizierten BeckhoffFeldbuskomponenten mit Standardtemperaturbereich tragen eine der folgenden Kennzeichnungen:
II 3G KEMA 10ATEX0075 X Ex nA IIC T4 Gc Ta: 0 … +55°C
II 3D KEMA 10ATEX0075 X Ex tc IIIC T135°C Dc Ta: 0 ... +55°C
(nur für Feldbuskomponenten mit Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
oder
II 3G KEMA 10ATEX0075 X Ex nA nC IIC T4 Gc Ta: 0 … +55°C
II 3D KEMA 10ATEX0075 X Ex tc IIIC T135°C Dc Ta: 0 ... +55°C
(nur für Feldbuskomponenten mit Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
5.12 ATEX - Besondere Bedingungen (erweiterter Temperaturbereich)
WARNUNG
Installation
Beachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung von
Beckhoff-Feldbuskomponenten mit erweitertem Temperaturbereich (ET) in explosionsgefährdeten Bereichen (Richtlinie2014/34/EU)!
• Die zertifizierten Komponenten sind in ein geeignetes Gehäuse zu errichten, das eine Schutzart von
mindestens IP54 gemäß EN60079-15 gewährleistet! Dabei sind die Umgebungsbedingungen bei der
Verwendung zu berücksichtigen!
• Für Staub (nur die Feldbuskomponenten der Zertifikatsnummer KEMA10ATEX0075XIssue9): Das
Gerät ist in ein geeignetes Gehäuse einzubauen, das eine Schutzart von IP54 gemäß EN60079-31 für
Gruppe IIIA oder IIIB und IP6X für Gruppe IIIC bietet, wobei die Umgebungsbedingungen, unter denen
das Gerät verwendet wird, zu berücksichtigen sind!
• Wenn die Temperaturen bei Nennbetrieb an den Einführungsstellen der Kabel, Leitungen oder Rohrleitungen höher als 70°C oder an den Aderverzweigungsstellen höher als 80°C ist, so müssen Kabel ausgewählt werden, deren Temperaturdaten den tatsächlich gemessenen Temperaturwerten entsprechen!
• Beachten Sie für Beckhoff-Feldbuskomponenten mit erweitertem Temperaturbereich (ET) beim Einsatz
in explosionsgefährdeten Bereichen den zulässigen Umgebungstemperaturbereich von -25 bis 60°C!
• Es müssen Maßnahmen zum Schutz gegen Überschreitung der Nennbetriebsspannung durch kurzzeitige Störspannungen um mehr als 40% getroffen werden!
• Die einzelnen Klemmen dürfen nur aus dem Busklemmensystem gezogen oder entfernt werden, wenn
die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Die Anschlüsse der zertifizierten Komponenten dürfen nur verbunden oder unterbrochen werden, wenn
die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Die Sicherung der Einspeiseklemmen KL92xx/EL92xx dürfen nur gewechselt werden, wenn die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Adresswahlschalter und ID-Switche dürfen nur eingestellt werden, wenn die Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
Normen
Die grundlegenden Sicherheits- und Gesundheitsanforderungen werden durch Übereinstimmung mit den
folgenden Normen erfüllt:
• EN 60079-0:2012+A11:2013
• EN 60079-15:2010
• EN 60079-31:2013 (nur für Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
EL32xx-0xx0 71Version: 6.1
Page 72

Installation
Kennzeichnung
Die gemäß ATEX-Richtlinie für den explosionsgefährdeten Bereich zertifizierten BeckhoffFeldbuskomponenten mit erweitertem Temperaturbereich (ET) tragen die folgende Kennzeichnung:
II 3G KEMA 10ATEX0075 X Ex nA IIC T4 Gc Ta: -25 … +60°C
II 3D KEMA 10ATEX0075 X Ex tc IIIC T135°C Dc Ta: -25 ... +60°C
(nur für Feldbuskomponenten mit Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
oder
II 3G KEMA 10ATEX0075 X Ex nA nC IIC T4 Gc Ta: -25 … +60°C
II 3D KEMA 10ATEX0075 X Ex tc IIIC T135°C Dc Ta: -25 ... +60°C
(nur für Feldbuskomponenten mit Zertifikatsnummer KEMA 10ATEX0075 X Issue 9)
5.13 Weiterführende Dokumentation zu ATEX und IECEx
Weiterführende Dokumentation zum Explosionsschutz gemäß ATEX und IECEx
Beachten Sie auch die weiterführende Dokumentation
Hinweise zum Einsatz der Beckhoff Klemmensysteme in explosionsgefährdeten Bereichen gemäß
ATEX und IECEx
die Ihnen auf der Beckhoff-Homepage https://www.beckhoff.de im Bereich Download zur Verfügung
steht!
5.14 UL-Hinweise
Application
The modules are intended for use with Beckhoff’s UL Listed EtherCAT System only.
Examination
For cULus examination, the Beckhoff I/O System has only been investigated for risk of fire
and electrical shock (in accordance with UL508 and CSAC22.2 No.142).
For devices with Ethernet connectors
Not for connection to telecommunication circuits.
Grundlagen
UL-Zertifikation nach UL508. Solcherart zertifizierte Geräte sind gekennzeichnet durch das Zeichen:
EL32xx-0xx072 Version: 6.1
Page 73

5.15 LEDs und Anschlussbelegung
EL3201, EL3202
Installation
Abb.40: Anschlussbelegung EL3201
Abb.41: Anschlussbelegung EL3202
EL32xx-0xx0 73Version: 6.1
Page 74

Installation
Zweileiter-Anschluss EL3201/EL3202
Wird die EL3201/EL3202 im 2-Leiter-Anschluss betrieben, müssen die Eingänge +R und +RL vom
Anwender gebrückt werden.
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung
der Klemme oder BOOTSTRAP = Funktion für FirmwareUpdates der Klemme
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für
Mailbox-Kommunikation und abweichende StandardEinstellungen gesetzt
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP =
Überprüfung der Kanäle des Sync-Managers und der
Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
an Zustand der EtherCAT State Machine: OP = normaler
Betriebszustand; Mailbox- und Prozessdatenkommunikation
ist möglich
ERROR1,
ERROR2**
rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet
sich im ungültigen Bereich der Kennlinie
** nur EL3202
Anschlussbelegung EL3201
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
+RL1 2 Eingang +RL1, stromlose Sense-Leitung
-R1 3 Eingang -R1, stromführend
-RL1 4 Eingang -RL1, stromlose Sense-Leitung
... 5 nicht belegt
... 6 nicht belegt
... 7 nicht belegt
Shield 8 Schirm
Anschlussbelegung EL3202
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
+RL1 2 Eingang +RL1, stromlose Sense-Leitung
-R1 3 Eingang -R1, stromführend
Shield 4 Schirm (intern verbunden mit Klemmstelle 8)
+R2 5 Eingang +R2, stromführend
+RL2 6 Eingang +RL2, stromlose Sense-Leitung
-R2 7 Eingang -R2, stromführend
Shield 8 Schirm (intern verbunden mit Klemmstelle 4)
EL32xx-0xx074 Version: 6.1
Page 75

EL3201-00x0, EL3202-00x0
Installation
Abb.42: Anschlussbelegung EL3201-00x0
Abb.43: Anschlussbelegung EL3202-00x0
Vierleiter-Anschluss
Die hochpräzisen Klemmen EL320x-00x0 dürfen bestimmungsgemäß nur in 4-Leiter Anschlusstechnik betrieben werden!
EL32xx-0xx0 75Version: 6.1
Page 76

Installation
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung
der Klemme oder BOOTSTRAP = Funktion für FirmwareUpdates der Klemme
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für
Mailbox-Kommunikation und abweichende StandardEinstellungen gesetzt
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP =
Überprüfung der Kanäle des Sync-Managers und der
Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
an Zustand der EtherCAT State Machine: OP = normaler
Betriebszustand; Mailbox- und Prozessdatenkommunikation
ist möglich
ERROR1,
ERROR2**
** nur EL3202-00x0
rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet
sich im ungültigen Bereich der Kennlinie
Anschlussbelegung EL3201-00x0
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
+RL1 2 Eingang +RL1, stromlose Sense-Leitung
-R1 3 Eingang -R1, stromführend
-RL1 4 Eingang -RL1, stromlose Sense-Leitung
... 5 nicht belegt
... 6 nicht belegt
... 7 nicht belegt
Shield 8 Schirm
Anschlussbelegung EL3202-00x0
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
+RL1 2 Eingang +RL1, stromlose Sense-Leitung
-R1 3 Eingang -R1, stromführend
-RL1 4 Eingang -RL1, stromlose Sense-Leitung
+R2 5 Eingang +R2, stromführend
+RL2 6 Eingang +RL2, stromlose Sense-Leitung
-R2 7 Eingang -R2, stromführend
-RL2 8 Eingang -RL2, stromlose Sense-Leitung
EL32xx-0xx076 Version: 6.1
Page 77

EL3204-0x00
Installation
Abb.44: Anschlussbelegung EL3204-0x00
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung der Klemme oder
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kom-
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP = Überprüfung der Kanäle
an Zustand der EtherCAT State Machine: OP = normaler Betriebszustand; Mail-
ERROR1 - 4 rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet sich im ungültigen
Bereich der Kennlinie.
BOOTSTRAP = Funktion für Firmware-Updates der Klemme
munikation und abweichende Standard-Einstellungen gesetzt
des Sync-Managers und der Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
box- und Prozessdatenkommunikation ist möglich
Anschlussbelegung EL3204-0x00
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
-R1 2 Eingang -R1, stromführend
+R3 3 Eingang +R3, stromführend
-R3 4 Eingang -R3, stromführend
+R2 5 Eingang +R2, stromführend
-R2 6 Eingang -R2, stromführend
+R4 7 Eingang +R4, stromführend
-R4 8 Eingang -R4, stromführend
EL32xx-0xx0 77Version: 6.1
Page 78

Installation
EL3214-00x0
Abb.45: EL3214 Anschlussbelegung
Abb.46: EL3214-0090 Anschlussbelegung
EL32xx-0xx078 Version: 6.1
Page 79

Installation
Zweileiter-Anschluss EL3214-00x0
Wird die EL3214 im 2-Leiter-Anschluss betrieben, müssen die Eingänge +R und +RL vom Anwender gebrückt werden.
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung
der Klemme oder BOOTSTRAP = Funktion für FirmwareUpdates der Klemme
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für
Mailbox-Kommunikation und abweichende StandardEinstellungen gesetzt
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP =
Überprüfung der Kanäle des Sync-Managers und der
Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
an Zustand der EtherCAT State Machine: OP = normaler
Betriebszustand; Mailbox- und Prozessdatenkommunikation
ist möglich
ERROR1 - 4 rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet
sich im ungültigen Bereich der Kennlinie.
Anschlussbelegung EL3214-00x0
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
RL1 2 Eingang RL1, stromlose Sense-Leitung
+R2 3 Eingang +R2, stromführend
RL2 4 Eingang RL2, stromlose Sense-Leitung
+R3 5 Eingang +R3, stromführend
RL3 6 Eingang RL3, stromlose Sense-Leitung
+R4 7 Eingang +R4, stromführend
RL4 8 Eingang RL4, stromlose Sense-Leitung
-R1 9 Eingang -R1, stromführend
… 10 nicht belegt
-R2 11 Eingang -R2, stromführend
… 12 nicht belegt
-R3 13 Eingang -R3, stromführend
… 14 nicht belegt
-R4 15 Eingang -R4, stromführend
… 16 nicht belegt
EL32xx-0xx0 79Version: 6.1
Page 80

Installation
EL3208
Abb.47: Anschlussbelegung EL3208
Abb.48: Anschlussbelegung EL3208-0010
EL32xx-0xx080 Version: 6.1
Page 81

Installation
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung der Klemme oder BOOTSTRAP =
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kommunikation und ab-
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP = Überprüfung der Kanäle des Sync-Managers
an Zustand der EtherCAT State Machine: OP = normaler Betriebszustand; Mailbox- und Prozess-
ERROR1 - 8 rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet sich im ungültigen Bereich der
Kennlinie.
Funktion für Firmware-Updates der Klemme
weichende Standard-Einstellungen gesetzt
und der Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
datenkommunikation ist möglich
Anschlussbelegung EL3208
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
+R2 2 Eingang +R2, stromführend
+R3 3 Eingang +R3, stromführend
+R4 4 Eingang +R4, stromführend
+R5 5 Eingang +R5, stromführend
+R6 6 Eingang +R6, stromführend
+R7 7 Eingang +R7, stromführend
+R8 8 Eingang +R8, stromführend
-R1 9 Eingang -R1, stromführend
-R2 10 Eingang -R2, stromführend
-R3 11 Eingang -R3, stromführend
-R4 12 Eingang -R4, stromführend
-R5 13 Eingang -R5, stromführend
-R6 14 Eingang -R6, stromführend
-R7 15 Eingang -R7, stromführend
-R8 16 Eingang -R8, stromführend
EL32xx-0xx0 81Version: 6.1
Page 82

Installation
EL3218-0000
Abb.49: Anschlussbelegung EL3218-0000
Zweileiter-Anschluss EL3218
Wird die EL3218-0000 im 2-Leiter-Anschluss betrieben, muss der RTD zwischen +R und -R angeschlossen werden; es sind keine externe Brücken anzuwenden.
LEDs
LED Farbe Bedeutung
RUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung der Klemme oder
blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kom-
Einzelblitz Zustand der EtherCAT State Machine: SAFEOP = Überprüfung der Kanäle
an Zustand der EtherCAT State Machine: OP = normaler Betriebszustand; Mail-
ERROR1 - 8 rot Es liegt ein Kurzschluss oder Drahtbruch vor. Der Widerstandswert befindet sich im ungültigen
Bereich der Kennlinie.
BOOTSTRAP = Funktion für Firmware-Updates der Klemme
munikation und abweichende Standard-Einstellungen gesetzt
des Sync-Managers und der Distributed Clocks.
Ausgänge bleiben im sicheren Zustand
box- und Prozessdatenkommunikation ist möglich
EL32xx-0xx082 Version: 6.1
Page 83

Anschlussbelegung EL3218-0000
Klemmstelle Nr. Kommentar
+R1 1 Eingang +R1, stromführend
RL1 2 Eingang RL1, stromlose Sense-Leitung
+R2 3 Eingang +R2, stromführend
RL2 4 Eingang RL2, stromlose Sense-Leitung
+R3 5 Eingang +R3, stromführend
RL3 6 Eingang RL3, stromlose Sense-Leitung
+R4 7 Eingang +R4, stromführend
RL4 8 Eingang RL4, stromlose Sense-Leitung
-R1 9 Eingang -R1, stromführend
… 10 nicht belegt
-R2 11 Eingang -R2, stromführend
… 12 nicht belegt
-R3 13 Eingang -R3, stromführend
… 14 nicht belegt
-R4 15 Eingang -R4, stromführend
… 16 nicht belegt
+R5 1‘ Eingang +R5, stromführend
RL5 2‘ Eingang RL5, stromlose Sense-Leitung
+R6 3‘ Eingang +R6, stromführend
RL6 4‘ Eingang RL6, stromlose Sense-Leitung
+R7 5‘ Eingang +R7, stromführend
RL7 6‘ Eingang RL7, stromlose Sense-Leitung
+R8 7‘ Eingang +R8, stromführend
RL8 8‘ Eingang RL8, stromlose Sense-Leitung
-R5 9‘ Eingang –R5, stromführend
… 10‘ nicht belegt
-R6 11‘ Eingang –R6, stromführend
… 12‘ nicht belegt
-R7 13‘ Eingang –R7, stromführend
… 14‘ nicht belegt
-R8 15‘ Eingang –R8, stromführend
… 16‘ nicht belegt
Installation
EL32xx-0xx0 83Version: 6.1
Page 84

Installation
5.16 Anschluss analoger RTD-Signalleitungen
Die RTD-Eingangsklemmen der Serie EL32xx messen den analogen Widerstand des Sensors. Der
Spannungsabfall am Sensor (je nach Anschlusstechnik inkl. der Zuleitungswiderstände) ist äquivalent zum
Sensorwiderstand und damit bei bekannter Sensorkennlinie ein Maß für die Temperatur des Sensors. Damit
die analogen Signale möglichst störungsfrei gemessen werden, wird im Folgenden eine Vorgehensweise
zum Anschluss der analogen Signalleitungen vorgestellt.
Maßnahmen
• zu verwendendes Sensorkabel
◦ eng verdrillt
◦ geschirmtes Kupfergeflecht
◦ niederohmige Leitung verwenden, insbesondere im 2-Leiter-Anschluss
• Sensor und Sensorleitungen potenzialfrei von Fremdspannungen halten.
Die GND-Anschlüsse (3/7 bei EL3201, EL3202) sind keinesfalls mit anderen Potenzialen zu verbinden.
• Die Auswahl der Widerstandsgrößenordnung des RTD-Sensors (z.B. 100 oder 1000 Ω
Nennwiderstand) sollte im Hinblick auf das Verhältnis von Sensor- zu Leitungswiderstand unter
Beachtung der Anschlusstechnik (2/3/4-Leiter) erfolgen.
Maßnahmen Schirmung
Schirmung Maßnahmen
Aufgrund der Komplexität im Bereich "EMV" gibt es keine allgemeingültige Handlungsrichtlinie, sondern nur technische Maßnahmen nach dem Stand der Technik, die sich mitunter auch widersprechen können. Diese sind auf Umsetzbarkeit und Wirksamkeit unter Berücksichtigung der Anlagenspezifika und nach Beurteilung durch den Anlagenerrichter anzuwenden.
Die folgenden Hinweise zur Schirmung sind als technische Vorschläge zu verstehen, die sich im
praktischen Einsatz mitunter bewährt haben. Es ist in jedem Fall je nach Installation und Anlage zu
prüfen, welche Maßnahmen angewendet werden können. Die Wirksamkeit ist für jede Maßnahme
einzeln zu prüfen. Eine formale Übertragbarkeit von Maßnahmen auf Anlagen anderen Typs ist im
Allgemeinen nicht gegeben.
Landestypische oder allgemein normative Vorgaben sind vorrangig zu beachten.
Im Folgenden ist ein Schirmungsansatz beschrieben, der in vielen Fällen eine Verbesserung der
Messqualität bringt. Die Maßnahmenvorschläge sind in der tatsächlichen Anlage auf Umsetzbarkeit und
Wirksamkeit zu prüfen.
• Schirm niederohmig und 360°-leitungsumfassend auflegen
• den Schirm beim Eintritt in den Schaltschrank leitend erden
• Schirm an der Klemme erneut erden
◦ am Klemmen-Anschlusspunkt, wenn vorhanden
◦ wenn kein Klemmen-Anschlusspunkt vorhanden, möglichst nahe bei der Klemme der Schirm
erden.
◦ zur Vermeidung von Erdschleifen kann der Schirm nach dem Schaltschrankeintritt aufgetrennt
werden.
Eine kapazitive Anbindung an den Klemmen-Schirmkontakt ist möglich.
◦ ungeschirmte Leitungsstrecke von > 50 cm vermeiden!
EL32xx-0xx084 Version: 6.1
Page 85

Installation
Abb.50: Beispielhafte Schirmanbindung bei EL3202-0000 mit Schirmkontakt, bei potenziellen Störquellen
innerhalb des Schaltschranks
EL32xx-0xx0 85Version: 6.1
Page 86

Installation
Abb.51: Beispielhafte Schirmanbindung bei EL3202-0000 mit Schirmkontakt, bei potenziellen Störquellen
innerhalb und außerhalb des Schaltschranks
EL32xx-0xx086 Version: 6.1
Page 87

Inbetriebnahme
6 Inbetriebnahme
6.1 TwinCAT Quickstart
TwinCAT stellt eine Entwicklungsumgebung für Echtzeitsteuerung mit Multi-SPS-System, NC Achsregelung,
Programmierung und Bedienung dar. Das gesamte System wird hierbei durch diese Umgebung abgebildet
und ermöglicht Zugriff auf eine Programmierumgebung (inkl. Kompilierung) für die Steuerung. Einzelne
digitale oder analoge Eingänge bzw. Ausgänge können auch direkt ausgelesen bzw. beschrieben werden,
um diese z.B. hinsichtlich ihrer Funktionsweise zu überprüfen.
Weitere Informationen hierzu erhalten Sie unter http://infosys.beckhoff.de:
• EtherCAT Systemhandbuch:
Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Einrichtung im
TwinCAT System Manager
• TwinCAT2 → TwinCAT System Manager → E/A- Konfiguration
• Insbesondere zur TwinCAT – Treiberinstallation:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet →
Installation
Geräte, d.h. „devices“ beinhalten jeweils die Klemmen der tatsächlich aufgebauten Konfiguration. Dabei gibt
es grundlegend die Möglichkeit sämtliche Informationen des Aufbaus über die „Scan“ - Funktion
einzubringen („online“) oder über Editorfunktionen direkt einzufügen („offline“):
• „offline“: der vorgesehene Aufbau wird durch Hinzufügen und entsprechendes Platzieren einzelner
Komponenten erstellt. Diese können aus einem Verzeichnis ausgewählt und Konfiguriert werden.
◦ Die Vorgehensweise für den „offline“ – Betrieb ist unter http://infosys.beckhoff.de einsehbar:
TwinCAT2 → TwinCAT System Manager → EA - Konfiguration → Anfügen eines E/A-Gerätes
• „online“: die bereits physikalisch aufgebaute Konfiguration wird eingelesen
◦ Sehen Sie hierzu auch unter http://infosys.beckhoff.de:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet →
Installation → Geräte suchen
Vom Anwender –PC bis zu den einzelnen Steuerungselementen ist folgender Zusammenhang vorgesehen:
EL32xx-0xx0 87Version: 6.1
Page 88

Inbetriebnahme
Abb.52: Bezug von der Anwender Seite (Inbetriebnahme) zur Installation
Das anwenderseitige Einfügen bestimmter Komponenten (E/A – Gerät, Klemme, Box,..) erfolgt bei
TwinCAT2 und TwinCAT3 auf die gleiche Weise. In den nachfolgenden Beschreibungen wird
ausschließlich der „online“ Vorgang angewandt.
Beispielkonfiguration (realer Aufbau)
Ausgehend von der folgenden Beispielkonfiguration wird in den anschließenden Unterkapiteln das Vorgehen
für TwinCAT2 und TwinCAT3 behandelt:
• Steuerungssystem (PLC) CX2040 inkl. Netzteil CX2100-0004
• Rechtsseitig angebunden am CX2040 (E-Bus):
EL1004 (4-Kanal-Digital-Eingangsklemme 24VDC)
• Über den X001 Anschluss (RJ-45) angeschlossen: EK1100 EtherCAT-Koppler
• Rechtsseitig angebunden am EK1100 EtherCAT-Koppler (E-Bus):
EL2008 (8-Kanal-Digital-Ausgangsklemme 24VDC;0,5A)
• (Optional über X000: ein Link zu einen externen PC für die Benutzeroberfläche)
EL32xx-0xx088 Version: 6.1
Page 89

Inbetriebnahme
Abb.53: Aufbau der Steuerung mit Embedded-PC, Eingabe (EL1004) und Ausgabe (EL2008)
Anzumerken ist, dass sämtliche Kombinationen einer Konfiguration möglich sind; beispielsweise könnte die
Klemme EL1004 ebenso auch nach dem Koppler angesteckt werden oder die Klemme EL2008 könnte
zusätzlich rechts an dem CX2040 angesteckt sein – dann wäre der Koppler EK1100 überflüssig.
EL32xx-0xx0 89Version: 6.1
Page 90

Inbetriebnahme
6.1.1 TwinCAT 2
Startup
TwinCAT2 verwendet grundlegend zwei Benutzeroberflächen: den „TwinCAT System Manager“ zur
Kommunikation mit den elektromechanischen Komponenten und „TwinCAT PLC Control“ für die Erstellung
und Kompilierung einer Steuerung. Begonnen wird zunächst mit der Anwendung des „TwinCAT System
Manager“.
Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender PC der zur Entwicklung verwendet
werden soll, zeigt der TwinCAT2 (System Manager) folgende Benutzeroberfläche nach dem Start:
Abb.54: Initiale Benutzeroberfläche TwinCAT2
Es besteht generell die Möglichkeit das TwinCAT „lokal“ oder per „remote“ zu verwenden. Ist das TwinCAT
System inkl. Benutzeroberfläche (Standard) auf dem betreffenden PLC installiert, kann TwinCAT „lokal“
eingesetzt werden und mit Schritt „Geräte einfügen [}92]“ fortgesetzt werden.
Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System
als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Im
Menü unter „Aktionen“ → „Auswahl des Zielsystems...“, über das Symbol „ “ oder durch Taste „F8“ wird
folgendes Fenster hierzu geöffnet:
EL32xx-0xx090 Version: 6.1
Page 91

Inbetriebnahme
Abb.55: Wähle Zielsystem
Mittels „Suchen (Ethernet)...“ wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um
hier entweder:
• den bekannten Rechnernamen hinter „Enter Host Name / IP:“ einzutragen (wie rot gekennzeichnet)
• einen „Broadcast Search“ durchzuführen (falls der Rechnername nicht genau bekannt)
• die bekannte Rechner - IP oder AmsNetId einzutragen
Abb.56: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems
Ist das Zielsystem eingetragen steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort
eingetragen werden):
Nach der Auswahl mit „OK“ ist das Zielsystem über den System Manager ansprechbar.
EL32xx-0xx0 91Version: 6.1
Page 92

Inbetriebnahme
Geräte einfügen
In dem linksseitigen Konfigurationsbaum der TwinCAT2 – Benutzeroberfläche des System Managers wird
„E/A Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü geöffnet und „Geräte
Suchen…“ ausgewählt oder in der Menüleiste mit die Aktion gestartet. Ggf. ist zuvor der TwinCAT
System Manager in den „Konfig Modus“ mittels oder über das Menü
„Aktionen“ → „Startet/ Restarten von TwinCAT in Konfig-Modus“(Shift + F4) zu versetzen.
Abb.57: Auswahl „Gerät Suchen..“
Die darauf folgende Hinweismeldung ist zu bestätigen und in dem Dialog die Geräte „EtherCAT“ zu wählen:
Abb.58: Automatische Erkennung von E/A Geräten: Auswahl der einzubindenden Geräte
Ebenfalls ist anschließend die Meldung „nach neuen Boxen suchen“ zu bestätigen, um die an den Geräten
angebundenen Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten
innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden.
Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration [}88] sieht das
Ergebnis wie folgt aus:
EL32xx-0xx092 Version: 6.1
Page 93

Inbetriebnahme
Abb.59: Abbildung der Konfiguration im TwinCAT2 System Manager
Der gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können
(erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Boxen, Klemmen
o.ä.). So kann auch durch Markierung von „Gerät ..“ aus dem Kontextmenü eine „Suche“ Funktion (Scan)
ausgeführt werden, die hierbei dann lediglich die darunter liegenden (im Aufbau vorliegenden) Elemente
einliest:
Abb.60: Einlesen von einzelnen an einem Gerät befindlichen Klemmen
Diese Funktionalität ist nützlich, falls die Konfiguration (d.h. der „reale Aufbau“) kurzfristig geändert wird.
PLC programmieren und integrieren
TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen
Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen
Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen.
• Textuelle Sprachen
◦ Anweisungsliste (AWL, IL)
EL32xx-0xx0 93Version: 6.1
Page 94

Inbetriebnahme
◦ Strukturierter Text (ST)
• Grafische Sprachen
◦ Funktionsplan (FUP, FBD)
◦ Kontaktplan (KOP, LD)
◦ Freigrafischer Funktionsplaneditor (CFC)
◦ Ablaufsprache (AS, SFC)
Für die folgenden Betrachtungen wird lediglich vom strukturierten Text (ST) Gebrauch gemacht.
Nach dem Start von TwinCAT PLC Control wird folgende Benutzeroberfläche für ein initiales Projekt
dargestellt:
Abb.61: TwinCAT PLC Control nach dem Start
Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt und unter dem
Namen „PLC_example.pro“ gespeichert worden:
EL32xx-0xx094 Version: 6.1
Page 95

Inbetriebnahme
Abb.62: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung)
Die Warnung 1990 (fehlende „VAR_CONFIG“) nach einem Kompiliervorgang zeigt auf, dass die als extern
definierten Variablen (mit der Kennzeichnung „AT%I*“ bzw. „AT%Q*“) nicht zugeordnet sind. Das TwinCAT
PLC Control erzeugt nach erfolgreichen Kompiliervorgang eine „*.tpy“ Datei in dem Verzeichnis in dem das
Projekt gespeichert wurde. Diese Datei („*.tpy“) enthält u.a. Variablenzuordnungen und ist dem System
Manager nicht bekannt, was zu dieser Warnung führt. Nach dessen Bekanntgabe kommt es nicht mehr zu
dieser Warnung.
Im System Manager ist das Projekt des TwinCAT PLC Control zunächst einzubinden. Dies geschieht über
das Kontext Menü der „SPS- Konfiguration“ (rechts-Klick) und der Auswahl „SPS Projekt Anfügen…“:
Abb.63: Hinzufügen des Projektes des TwinCAT PLC Control
EL32xx-0xx0 95Version: 6.1
Page 96

Inbetriebnahme
Über ein dadurch geöffnetes Browserfenster wird die PLC- Konfiguration „PLC_example.tpy“ ausgewählt.
Dann ist in dem Konfigurationsbaum des System Manager das Projekt inklusive der beiden „AT“ –
gekennzeichneten Variablen eingebunden:
Abb.64: Eingebundenes PLC Projekt in der SPS- Konfiguration des System Managers
Die beiden Variablen „bEL1004_Ch4“ sowie „nEL2008_value“ können nun bestimmten Prozessobjekten der
E/A - Konfiguration zugeordnet werden.
Variablen Zuordnen
Über das Kontextmenü einer Variable des eingebundenen Projekts „PLC_example“ unter „Standard“ wird
mittels „Verknüpfung Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs)
geöffnet:
Abb.65: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten
In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die
Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden:
EL32xx-0xx096 Version: 6.1
Page 97

Inbetriebnahme
Abb.66: Auswahl des PDO vom Typ BOOL
Entsprechend der Standarteinstellungen stehen nur bestimmte PDO Objekte zur Auswahl zur Verfügung. In
diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im
Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle
Typen“ aktiviert werden, um in diesem Fall eine Byte-Variable einen Satz von acht separaten Ausgangsbits
zuzuordnen. Die folgende Abbildung zeigt den gesamten Vorgang:
Abb.67: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“
Zu sehen ist, dass überdies die Checkbox „Kontinuierlich“ aktiviert wurde. Dies ist dafür vorgesehen, dass
die in dem Byte der Variablen „nEL2008_value“ enthaltenen Bits allen acht ausgewählten Ausgangsbits der
Klemme EL2008 der Reihenfolge nach zugeordnet werden sollen. Damit ist es möglich, alle acht Ausgänge
der Klemme mit einem Byte entsprechend Bit 0 für Kanal 1 bis Bit 7 für Kanal 8 von der PLC im Programm
später anzusprechen. Ein spezielles Symbol ( ) an dem gelben bzw. roten Objekt der Variablen zeigt an,
dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z.B. auch überprüft werden, indem
„Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das
gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert:
EL32xx-0xx0 97Version: 6.1
Page 98

Inbetriebnahme
Abb.68: Anwendung von „Goto Link Variable“ am Beispiel von „MAIN.bEL1004_Ch4“
Anschließend wird mittels Menüauswahl „Aktionen“ → „Zuordnung erzeugen…“ oder über der
Vorgang des Zuordnens von Variablen zu PDO abgeschlossen.
Dies lässt sich entsprechend in der Konfiguration einsehen:
Der Vorgang zur Erstellung von Verknüpfungen kann auch in umgekehrter Richtung, d.h. von einzelnen
PDO ausgehend zu einer Variablen erfolgen. In diesem Beispiel wäre dann allerdings eine komplette
Auswahl aller Ausgangsbits der EL2008 nicht möglich, da die Klemme nur einzelne digitale Ausgänge zur
Verfügung stellt. Hat eine Klemme einen Byte, Word, Integer oder ein ähnliches PDO, so ist es möglich dies
wiederum einen Satz von bit-typisierten Variablen (Typ „BOOL“) zuzuordnen. Auch hier kann ebenso in die
andere Richtung ein „Goto Link Variable“ ausgeführt werden, um dann die betreffende Instanz der PLC zu
selektieren.
Aktivieren der Konfiguration
Die Zuordnung von PDO zu PLC Variablen hat nun die Verbindung von der Steuerung zu den Ein- und
Ausgängen der Klemmen hergestellt. Nun kann die Konfiguration aktiviert werden. Zuvor kann mittels
(oder über „Aktionen“ → „Konfiguration überprüfen…“) die Konfiguration überprüft werden. Falls kein Fehler
vorliegt, kann mit (oder über „Aktionen“ → „Aktiviert Konfiguration…“) die Konfiguration aktiviert
werden, um dadurch Einstellungen im System Manger auf das Laufzeitsystem zu übertragen. Die darauf
folgenden Meldungen „Alte Konfigurationen werden überschrieben!“ sowie „Neustart TwinCAT System in
Run Modus“ werden jeweils mit „OK“ bestätigt.
Einige Sekunden später wird der Realtime Status unten rechts im System Manager angezeigt.
Das PLC System kann daraufhin wie im Folgenden beschrieben gestartet werden.
Starten der Steuerung
Ausgehend von einem remote System muss nun als erstes auch die PLC Steuerung über „Online“ →
„Choose Run-Time System…“ mit dem embedded PC über Ethernet verbunden werden:
EL32xx-0xx098 Version: 6.1
Page 99

Inbetriebnahme
Abb.69: Auswahl des Zielsystems (remote)
In diesem Beispiel wird das „Laufzeitsystem 1 (Port 801)“ ausgewählt und bestätigt. Mittels Menüauswahl
„Online“ → „Login“, Taste F11 oder per Klick auf wird auch die PLC mit dem Echtzeitsystem
verbunden und nachfolgend das Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird
entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen
werden?“ bekannt gemacht und ist mit „Ja“ zu beantworten. Die Laufzeitumgebung ist bereit zum
Programstart:
Abb.70: PLC Control Logged-in, bereit zum Programmstart
EL32xx-0xx0 99Version: 6.1
Page 100

Inbetriebnahme
Über „Online“ → „Run“, Taste F5 oder kann nun die PLC gestartet werden.
6.1.2 TwinCAT 3
Startup
TwinCAT3 stellt die Bereiche der Entwicklungsumgebung durch das Microsoft Visual-Studio gemeinsam zur
Verfügung: in den allgemeinen Fensterbereich erscheint nach dem Start linksseitig der ProjektmappenExplorer (vgl. „TwinCAT System Manager“ von TwinCAT2) zur Kommunikation mit den
elektromechanischen Komponenten.
Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender PC der zur Entwicklung verwendet
werden soll, zeigt der TwinCAT3 (Shell) folgende Benutzeroberfläche nach dem Start:
Abb.71: Initale Benutzeroberfläche TwinCAT3
Zunächst ist die Erstellung eines neues Projekt mittels (oder unter
„Datei“→“Neu“→“Projekt…“) vorzunehmen. In dem darauf folgenden Dialog werden die entsprechenden
Einträge vorgenommen (wie in der Abbildung gezeigt):
EL32xx-0xx0100 Version: 6.1
 Loading...
Loading...