

Page 1

Documentation | EN
EJ2502
2-Channel pulse width output module 24 V DC
2020-12-18 | Version: 1.5
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation..............................................................................................................5
1.2 Safety instructions .............................................................................................................................6
1.3 Intended use......................................................................................................................................7
1.4 Signal distribution board ....................................................................................................................7
1.5 Documentation issue status ..............................................................................................................7
1.6 Guide through documentation ...........................................................................................................8
1.7 Marking of EtherCAT plug-in modules...............................................................................................8
1.7.1 Beckhoff Identification Code (BIC)................................................................................... 11
1.7.2 Certificates....................................................................................................................... 13
2 System overview .....................................................................................................................................14
3 Product overview.....................................................................................................................................15
3.1 EJ2502 - Introduction ......................................................................................................................15
3.2 EJ2502 - Technical data..................................................................................................................16
3.3 EJ2502 - Pinout ...............................................................................................................................17
3.4 EJ2502 - LEDs ................................................................................................................................18
4 Installation of EJ modules ......................................................................................................................19
4.1 Power supply for the EtherCAT plug-in modules.............................................................................19
4.2 EJxxxx - dimensions........................................................................................................................21
4.3 Installation positions and minimum distances .................................................................................22
4.3.1 Minimum distances for ensuring installability................................................................... 22
4.3.2 Installation positions ........................................................................................................ 23
4.4 Codings ...........................................................................................................................................25
4.4.1 Color coding..................................................................................................................... 25
4.4.2 Mechanical position coding.............................................................................................. 26
4.5 Installation on the signal distribution board .....................................................................................27
4.6 Extension options ............................................................................................................................29
4.6.1 Using placeholder modules for unused slots ................................................................... 29
4.6.2 Linking with EtherCAT Terminals and EtherCAT Box modules via an Ethernet/EtherCAT
connection ....................................................................................................................... 30
4.7 IPC integration.................................................................................................................................31
4.8 Disassembly of the signal distribution board ...................................................................................33
5 EtherCAT basics......................................................................................................................................34
6 Commissioning........................................................................................................................................35
6.1 EJ2502 - Basic function principles...................................................................................................35
6.2 EJ2502- process data.....................................................................................................................35
6.3 EJ2502 - data stream ......................................................................................................................36
6.4 EJ2502 - operation modes ..............................................................................................................36
6.5 EJ2502 - setting of the process data objects (PDO) .......................................................................37
6.6 EJ2502 - settings via the CoE directory ..........................................................................................39
6.6.1 User Scaling .................................................................................................................... 40
6.6.2 Presentation..................................................................................................................... 40
6.6.3 Watchdog......................................................................................................................... 40
EJ2502 3Version: 1.5
Page 4

Table of contents
6.6.4 Channel synchronization (from firmware 10) ................................................................... 41
6.7 EJ2502 - object description and parameterization ..........................................................................43
6.7.1 Restore object.................................................................................................................. 43
6.7.2 Configuration data ........................................................................................................... 44
6.7.3 Profile-specific objects (0x6000-0xFFFF) ........................................................................ 45
6.7.4 Standard objects (0x1000-0x1FFF) ................................................................................. 46
6.8 General notes for setting the watchdog...........................................................................................50
7 Appendix ..................................................................................................................................................53
7.1 EtherCAT AL Status Codes.............................................................................................................53
7.2 EJ2502 - Firmware compatibility .....................................................................................................53
7.3 Firmware Update EL/ES/EM/ELM/EPxxxx ......................................................................................53
7.3.1 Device description ESI file/XML....................................................................................... 54
7.3.2 Firmware explanation ...................................................................................................... 57
7.3.3 Updating controller firmware *.efw................................................................................... 58
7.3.4 FPGA firmware *.rbf......................................................................................................... 60
7.3.5 Simultaneous updating of several EtherCAT devices...................................................... 64
7.4 Restoring the delivery state .............................................................................................................65
7.5 Support and Service ........................................................................................................................66
EJ25024 Version: 1.5
Page 5
Foreword
1 Foreword
1.1 Notes on the documentation
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning these components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, EtherCATG®, EtherCATG10®, EtherCATP®, SafetyoverEtherCAT®,
TwinSAFE®, XFC®, XTS® and XPlanar® are registered trademarks of and licensed by Beckhoff Automation
GmbH. Other designations used in this publication may be trademarks whose use by third parties for their
own purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 with corresponding
applications or registrations in various other countries.
EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany.
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
EJ2502 5Version: 1.5
Page 6
Foreword
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of instructions
In this documentation the following instructions are used.
These instructions must be read carefully and followed without fail!
DANGER
Serious risk of injury!
Failure to follow this safety instruction directly endangers the life and health of persons.
WARNING
Risk of injury!
Failure to follow this safety instruction endangers the life and health of persons.
CAUTION
Personal injuries!
Failure to follow this safety instruction can lead to injuries to persons.
NOTE
Damage to environment/equipment or data loss
Failure to follow this instruction can lead to environmental damage, equipment damage or data loss.
Tip or pointer
This symbol indicates information that contributes to better understanding.
EJ25026 Version: 1.5
Page 7
Foreword
1.3 Intended use
WARNING
Caution - Risk of injury!
EJ components may only be used for the purposes described below!
1.4 Signal distribution board
NOTE
Signal distribution board
Make sure that the EtherCAT plug-in modules are used only on a signal distribution board that has been
developed and manufactured in accordance with the Design Guide.
1.5 Documentation issue status
Version Comment
1.5 • New Title page
• Update chapter Pinout
• Chapters Basics communication, TwinCAT Quick Start , TwinCAT development
environment and General Notes - EtherCAT Slave Application replaced by
references in the chapter Guide through documentation
• Update structure
• Update revision status
1.4 • Note Signal distribution board added
• Chapter Version identification of EtherCAT devices replaced by chapter Marking
of EtherCAT plug-in modules
• Update chapter Technical data
• Update chapter Pinout
1.3 • Chapter Intended use added
• Update Technical data
• Update chapter Pinout
• Update chapter Installation of EJ modules
• Update structure
1.2 • Update Technical data
• Update chapter Power supply for the EtherCAT plug-in modules
• Update structure
1.1 • Update Technical data
• Pinout added
• Update revision status
1.0 • 1. First publication EJ2502
EJ2502 7Version: 1.5
Page 8
Foreword
1.6 Guide through documentation
NOTE
Further components of documentation
The documentations named in the following table are further components of the complete
documentation. These documentations are required for the use of EtherCAT plug-in modules.
No. Title Description
[1]
[2]
[3]
EtherCAT System Documentation
Infrastructure for EtherCAT/Ethernet
Design GuideSignal-Distribution-Board for
standard EtherCAT plug-in modules
• System overview
• EtherCAT basics
• Cable redundancy
• Hot Connect
• Distributed Clocks
• Configuration of EtherCAT-Components
• Technical recommendations and notes for
design, implementation an testing
Requirements for the design of a SignalDistribution-Board for standard EtherCAT plug-in
modules
• Backplane mounting guidelines
• Module placement
• Routing guidelines
1.7 Marking of EtherCAT plug-in modules
Designation
A Beckhoff EtherCAT device has a 14-digit technical designation, made up as follows (e.g.
EJ1008-0000-0017)
• Order identifier
◦ family key: EJ
◦ product designation: The first digit of product designation is used for assignment to a product
group (e.g. EJ2xxx = digital output module).
◦ Version number: The four digit version number identifies different product variants.
• Revision number:
It is incremented when changes are made to the product.
The Order identifier and the revision number are printed on the side of EtherCAT plug-in modules (s.
following illustration (A and B).
EJ25028 Version: 1.5
Page 9

Foreword
Fig.1: Order identifier (A), Revision number (B) and serial number (C) using the example of EJ1008
Product group Example
Product designation Version Revision
EtherCAT Coupler
EJ11xx
Digital input modules
EJ1xxx
Digital output modules
EJ2xxx
Analog input modules
EJ3xxx
Analog output modules
EJ4xxx
Special function modules
EJ5xxx, EJ6xxx
Motion modules
EJ7xxx
EJ1101 -0022
EJ1008
8-channel
EJ2521
1-channel
EJ3318
8-channel thermocouple
EJ4134
4-channel
EJ6224
IO-Link master
EJ7211
servomotor
(Coupler with external connectors, power supply module and
optional ID switches
-0000
(basic type)
-0224
(2 x 24V outputs)
-0000
(basic type)
-0000
(basic type)
-0090
(with TwinSAFE SC)
-9414
(with ECT, STO and TwinSAFE SC)
Notes
• The elements mentioned above result in the technical designation. EJ1008-0000-0017 is used in the
example below.
• EJ1008-0000 is the order identifier, in the case of “-0000” usually abbreviated to EJ1008.
• The revision -0017 shows the technical progress, such as the extension of features with regard to the
EtherCAT communication, and is managed by Beckhoff.
In principle, a device with a higher revision can replace a device with a lower revision, unless specified
otherwise, e.g. in the documentation.
Associated and synonymous with each revision there is usually a description (ESI, EtherCAT Slave
Information) in the form of an XML file, which is available for download from the Beckhoff web site.
• The product designation, version and revision are read as decimal numbers, even if they are
technically saved in hexadecimal.
-0016
-0017
-0016
-0017
-0019
-0016
-0029
Serial number
The serial number for EtherCAT plug-in modules is usually the 8-digit number printed on the side of the
module (see following illustration C). The serial number indicates the configuration in delivery state and
therefore refers to a whole production batch, without distinguishing the individual modules of a batch.
EJ2502 9Version: 1.5
Page 10

Foreword
Fig.2: Order identifier (A), revision number (B) and serial number (C) using the example of EJ1008
Serial number Example serial number: 08 15 08 16
KK - week of production (CW, calendar week) 08 - week of production: 08
YY - year of production 15 - year of production: 2015
FF - firmware version 08 -f irmware version: 08
HH - hardware version 16 - hardware version: 16
EJ250210 Version: 1.5
Page 11

Foreword
1.7.1 Beckhoff Identification Code (BIC)
The Beckhoff Identification Code (BIC) is increasingly being applied to Beckhoff products to uniquely identify
the product. The BIC is represented as a Data Matrix Code (DMC, code scheme ECC200), the content is
based on the ANSI standard MH10.8.2-2016.
Fig.3: BIC as data matrix code (DMC, code scheme ECC200)
The BIC will be introduced step by step across all product groups.
Depending on the product, it can be found in the following places:
• on the packaging unit
• directly on the product (if space suffices)
• on the packaging unit and the product
The BIC is machine-readable and contains information that can also be used by the customer for handling
and product management.
Each piece of information can be uniquely identified using the so-called data identifier (ANSI
MH10.8.2-2016). The data identifier is followed by a character string. Both together have a maximum length
according to the table below. If the information is shorter, it shall be replaced by spaces. The data under
positions 1-4 are always available.
The following information is contained:
EJ2502 11Version: 1.5
Page 12
Foreword
Item
no.
1 Beckhoff order
2 Beckhoff Traceability
3 Article description Beckhoff article
4 Quantity Quantity in packaging
5 Batch number Optional: Year and week
6 ID/serial number Optional: Present-day
7 Variant number Optional: Product variant
...
Further types of information and data identifiers are used by Beckhoff and serve internal processes.
Structure of the BIC
Type of information
number
Number (BTN)
Explanation Data iden-
tifier
Beckhoff order number 1P 8 1P072222
Unique serial number,
see note below
description, e.g. EL1008
unit, e.g. 1, 10, etc.
of production
serial number system,
e.g. with safety products
number on the basis of
standard products
S 12 SBTNk4p562d7
1K 32 1KEL1809
Q 6 Q1
2P 14 2P4015031800
51S 12 51S678294104
30P 32 30PF971 ,
Number of digits
incl. data identifier
Example
16
2*K183
Example of composite information from items 1 - 4 and 6. The data identifiers are marked in red for better
display:
BTN
An important component of the BIC is the Beckhoff Traceability Number (BTN, item no. 2). The BTN is a
unique serial number consisting of eight characters that will replace all other serial number systems at
Beckhoff in the long term (e.g. batch designations on IO components, previous serial number range for
safety products, etc.). The BTN will also be introduced step by step, so it may happen that the BTN is not yet
coded in the BIC
Notice
This information has been carefully prepared. However, the procedure described is constantly being further
developed. We reserve the right to revise and change procedures and documentation at any time and
without prior notice. No claims for changes can be made from the information, illustrations and descriptions
in this information.
EJ250212 Version: 1.5
Page 13
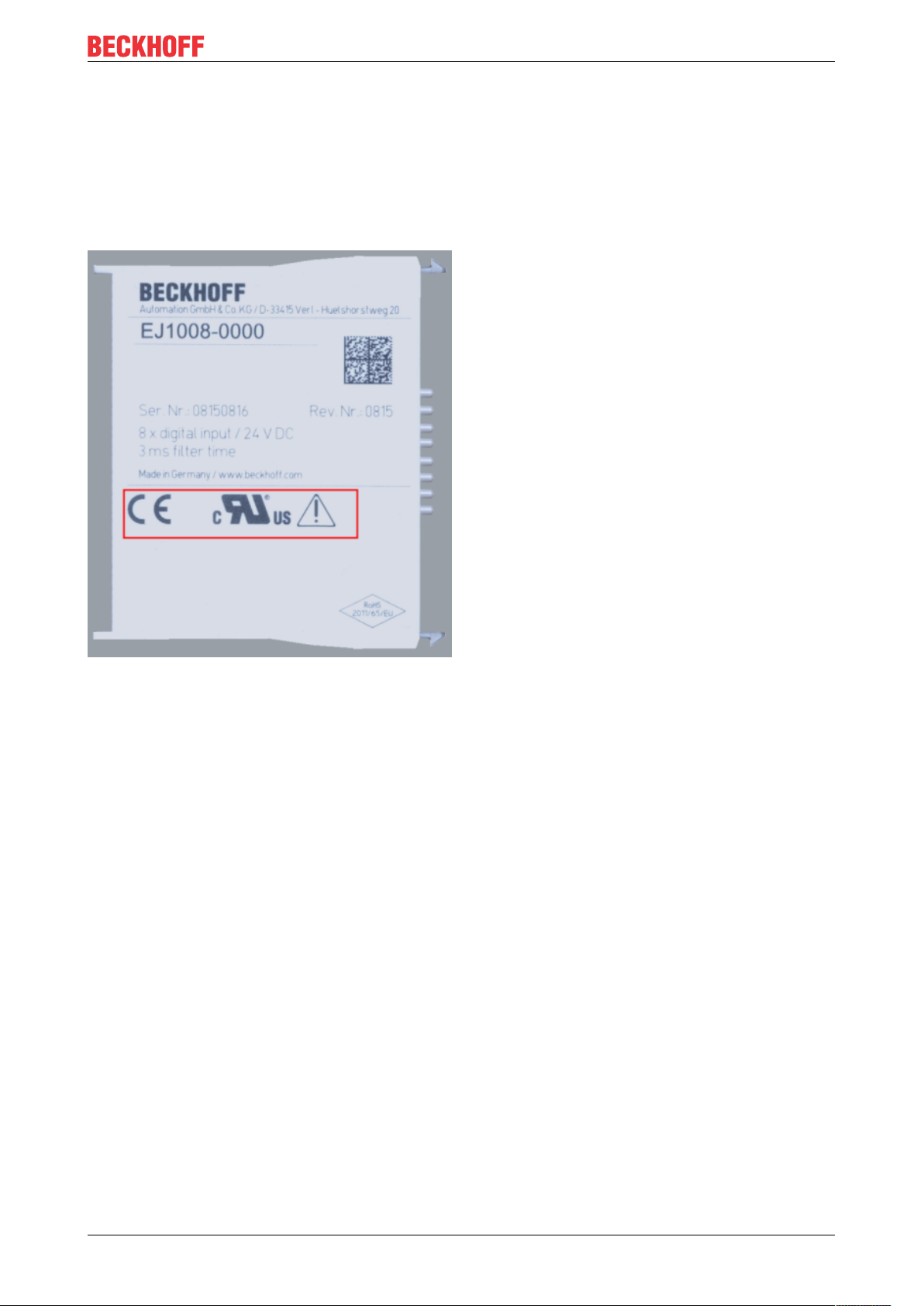
1.7.2 Certificates
• The EhterCAT plug-in modules meet the requirements of the EMC and Low Voltage Directive. The CE
mark is printed on the side of the modules.
• The cRUus imprint identifies devices that meet product safety requirements according to U.S. and
Canadian regulations.
• The warning symbol is a request to read the corresponding documentation. The documentations for
EtherCAT plug-in modules can be downloaded from the Beckhoff homepage.
Foreword
Fig.4: Marking for CE and UL using EJ1008 as an example
EJ2502 13Version: 1.5
Page 14

System overview
2 System overview
Electronically, the EJxxxx EtherCAT plug-in modules are based on the EtherCAT I/O system. The EJ system
consists of the signal distribution board and EtherCAT plug-in modules. It is also possible to connect an IPC
to the EJ system.
The EJ system is suitable for mass production applications, applications with small footprint and applications
requiring a low total weight.
The machine complexity can be extended by means of the following:
• reserve slots,
• the use of placeholder modules,
• linking of EtherCAT Terminals and EtherCAT Boxes via an EtherCAT connection.
The following diagram illustrates an EJ system. The components shown are schematic, to illustrate the
functionality.
Fig.5: EJ system sample
Signal distribution board
The signal distribution board distributes the signals and the power supply to individual application-specific
plug connectors, in order to connect the controller to further machine modules. Using pre-assembled cable
harnesses avoids the need for time-consuming connection of individual wires. Coded components reduce
the unit costs and the risk of miswiring.
Beckhoff offers development of signal distribution boards as an engineering service. Customers have the
option to develop their own signal distribution board, based on the design guide.
EtherCAT plug-in modules
Similar to the EtherCAT terminal system, a module strand consists of a Bus Coupler and I/O modules.
Almost all of the EtherCAT Terminals can also be manufactured in the EJ design as EtherCAT plug-in
modules. The EJ modules are directly attached to the signal distribution board. The communication, signal
distribution and supply take place via the contact pins at the rear of the modules and the PCB tracks of the
signal distribution board. The coding pins at the rear serve as mechanical protection against incorrect
connection. Color coding on the housing facilitates distinguishing of the modules.
EJ250214 Version: 1.5
Page 15

3 Product overview
3.1 EJ2502 - Introduction
Product overview
Fig.6: EJ2502
2-channel pulse width output module 24 V
The EJ2502 output terminal modulates the pulse width of a binary signal and outputs it electrically isolated
from the E-bus. The mark/space ratio is preset by a 16-bit value from the automation device. The output
stage is protected against overload and short-circuit. The EtherCAT plug-in module has two channels that
indicate their signal state via light emitting diodes. The LEDs are driven in time with the outputs, and show
the duty factor by their brightness.
DC
EJ2502 15Version: 1.5
Page 16
Product overview
3.2 EJ2502 - Technical data
Technical data EJ2502
Number of outputs 2
Rated load voltage 24VDC (-15%/+20%)
Load type ohmic, inductive, lamp load
Distributed Clocks -
Output current (per channel) max. 0.5A (short-circuit proof, 1 A driver component)
Base frequency 1 .. 20kHz, 250Hz default
Duty factor 0 .. 100%
Resolution 9 .. 15Bits
Switching times TON > 750ns, T
Power supply for electronics via the E-bus
Current consumption via E-bus typ. 110mA
Electrical isolation 500V (E-bus/field voltage)
Load voltage current consumption typ. 10mA + load
Permissible ambient temperature range
during operation
Permissible ambient temperature range
during storage
Permissible relative humidity 95%, no condensation
Operating altitude max. 2,000m
Dimensions (W x H x D) approx. 12mm x 66mm x 55mm
Gewicht approx. 30g
Mounting on signal distribution board
Pollution degree 2
Installation position
Position of the coding pins [}26]
Color coding red
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27 (with corresponding
EMC immunity / emission conforms to EN 61000-6-2/EN 61000-6-4 (with corresponding
Protection class EJ module: IP20,
Approval CE, UL
-25°C .. + 60°C (extended temperature range)
-40°C .. + 85°C
Standard [}23]
1 and 4
signal distribution board)
signal distribution board)
EJ system: dependent on signal distribution board and housing
>500ns
OFF
CE approval
The CE Marking refers to the EtherCAT plug-in module mentioned above.
If the EtherCAT plug-in module is used in the production of a ready-to-use end product (PCB in conjunction with a housing), the manufacturer of the end product must check compliance of the overall
system with relevant directives and CE certification.
To operate the EtherCAT plug-in modules, they must be installed in a housing.
EJ250216 Version: 1.5
Page 17
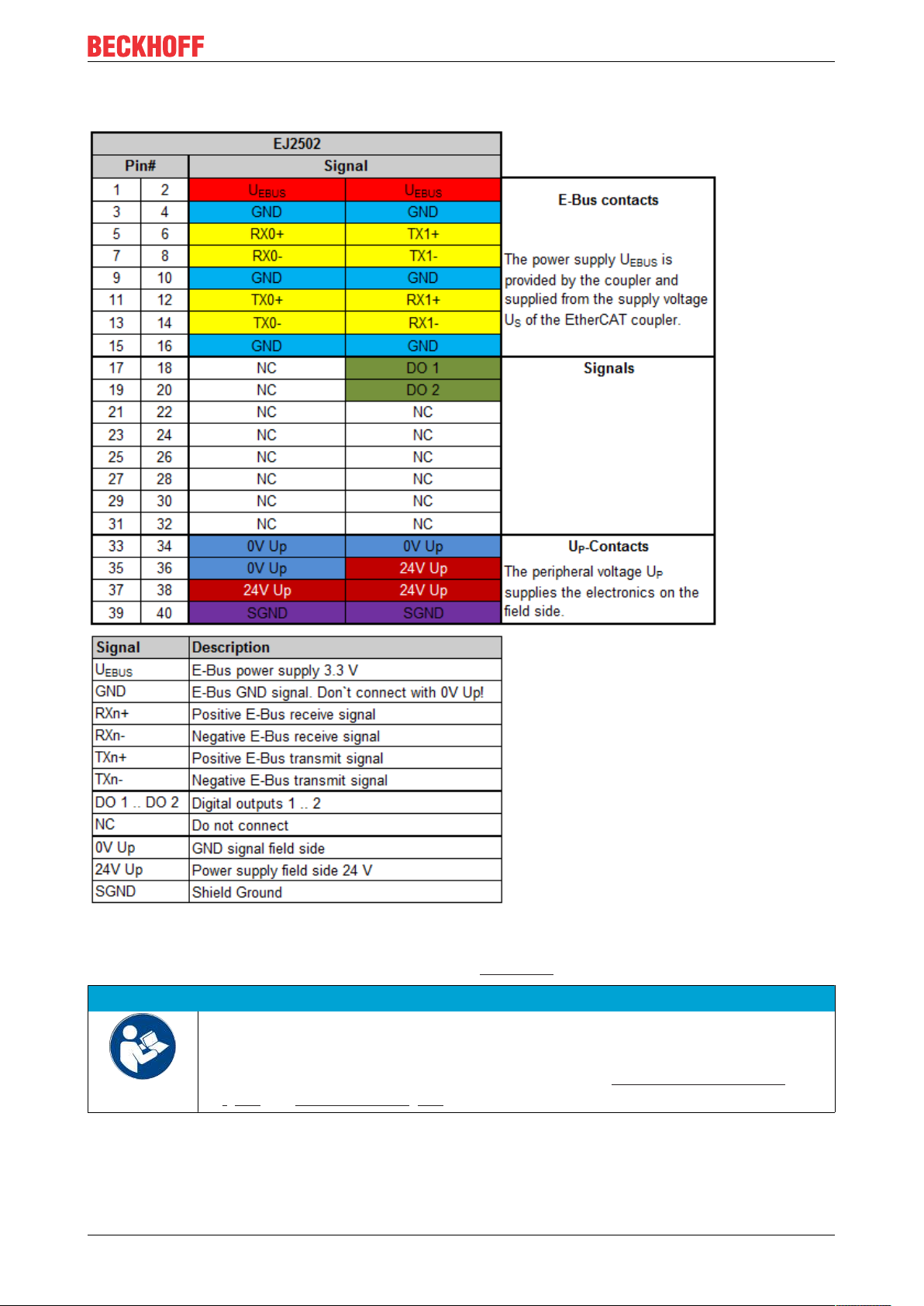
3.3 EJ2502 - Pinout
Product overview
Fig.7: EJ2502 - Pinout
The PCB footprint can be downloaded from the Beckhoff homepage.
NOTE
Damage to devices possible!
• The pins named with “NC” must not be connected.
• Before installation and commissioning read the chapters Installation of EJ modules
[}19] and Commissioning [}35]!
EJ2502 17Version: 1.5
Page 18
Product overview
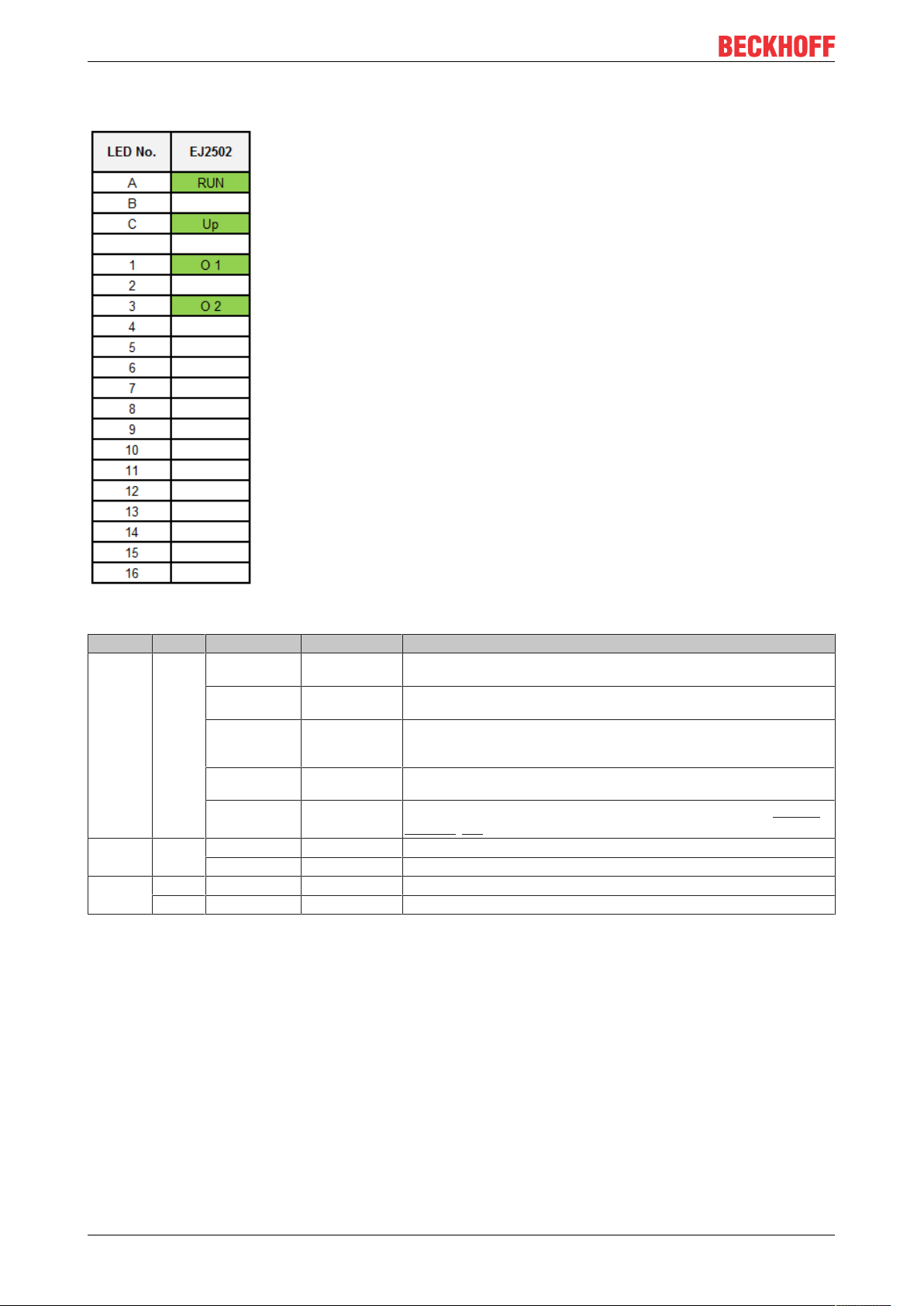
3.4 EJ2502 - LEDs
Fig.8: EJ2502 - LEDs
LED Color Display State Description
RUN green off Init State of the EtherCAT State Machine: INIT = initialization of the plug-in mod-
flashing Pre-
Operational
Single flash Safe-
Operational
on Operational State of the EtherCAT State Machine: OP = normal operating state; mailbox
flickering Bootstrap
Up green off - No 24V
on - 24V
O1 .. O2 green off - no output voltage
on - +24VDC output voltage
ule
State of the EtherCAT State Machine: PREOP = function for mailbox communication and different standard-settings set
State of the EtherCAT State Machine: SAFEOP = verification of the Sync
Manager channels and the distributed clocks.
Outputs remain in safe state
and process data communication is possible
State of the EtherCAT State Machine: BOOTSTRAP = function for firmware
updates [}53] of the plug-in module
power supply connected
DC
power supply connected
DC
EJ250218 Version: 1.5
Page 19
Installation of EJ modules
4 Installation of EJ modules
4.1 Power supply for the EtherCAT plug-in modules
WARNING
Power supply
A SELV/PELV power supply must be used to supply power for the EJ coupler and modules. Couplers and
modules have to be connected to SELV/PELV circuits exclusively.
The signal distribution board should have a power supply designed for the maximum possible current load of
the module string. Information on the current required from the E-bus supply can be found for each module
in the respective documentation in section “Technical data”, online and in the catalog. The power
requirement of the module string is displayed in the TwinCAT System Manager.
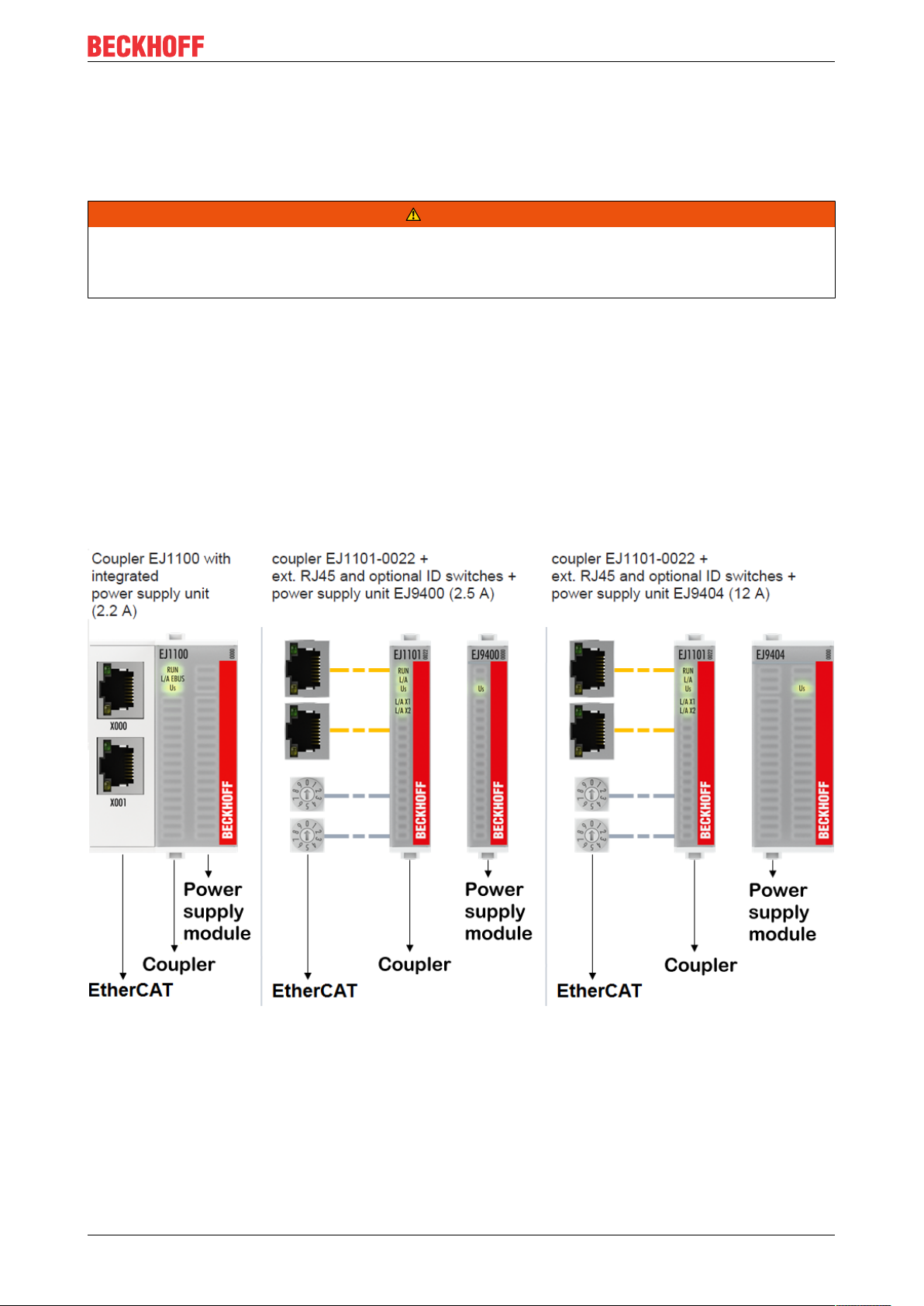
E-bus power supply with EJ1100 or EJ1101-0022 and EJ940x
The EJ1100 Bus Coupler supplies the connected EJ modules with the E-bus system voltage of 3.3V. The
Coupler can accommodate a load up to 2.2A. If a higher current is required, a combination of the coupler
EJ1101-0022 and the power supply units EJ9400 (2.5A) or EJ9404 (12A) should be used. The EJ940x
power supply units can be used as additional supply modules in the module string.
Depending on the application, the following combinations for the E-bus supply are available:
Fig.9: E-bus power supply with EJ1100 or EJ1101-0022 + EJ940x
In the EJ1101-0022 coupler, the RJ45 connectors and optional ID switches are external and can be
positioned anywhere on the signal distribution board, as required. This facilitates feeding through a housing.
The EJ940x power supply plug-in modules provide an optional reset function (see chapter Connection of the
documentation for EJ9400 and EJ9404)
EJ2502 19Version: 1.5
Page 20

Installation of EJ modules
E-bus power supply with CXxxxx and EK1110-004x
The Embedded PC supplies the attached EtherCAT terminals and the EtherCAT EJ coupler
• with a supply voltage of 24VDC (-15 %/+20%). This voltage supplies the E-bus and the bus terminal
electronics.
The CXxxxx units supply the E-bus with up to 2,000mA E-bus current. If a higher current is required
due to the attached terminals, power feed terminals or power supply plug-in modules must be used for
the E-bus supply.
• with a peripheral voltage Up of 24VDC to supply the field electronics.
The EK1110-004x EtherCAT EJ couplers relay the following parameters to the signal distribution board via
the rear connector:
• the E-bus signals,
• the E-bus voltage U
(3.3V) and
EBUS
• the peripheral voltage UP (24VDC).
Fig.10: PCB with Embedded PC, EK1110-0043 and EJxxxx, rear view EK1110-0043
EJ250220 Version: 1.5
Page 21
Installation of EJ modules
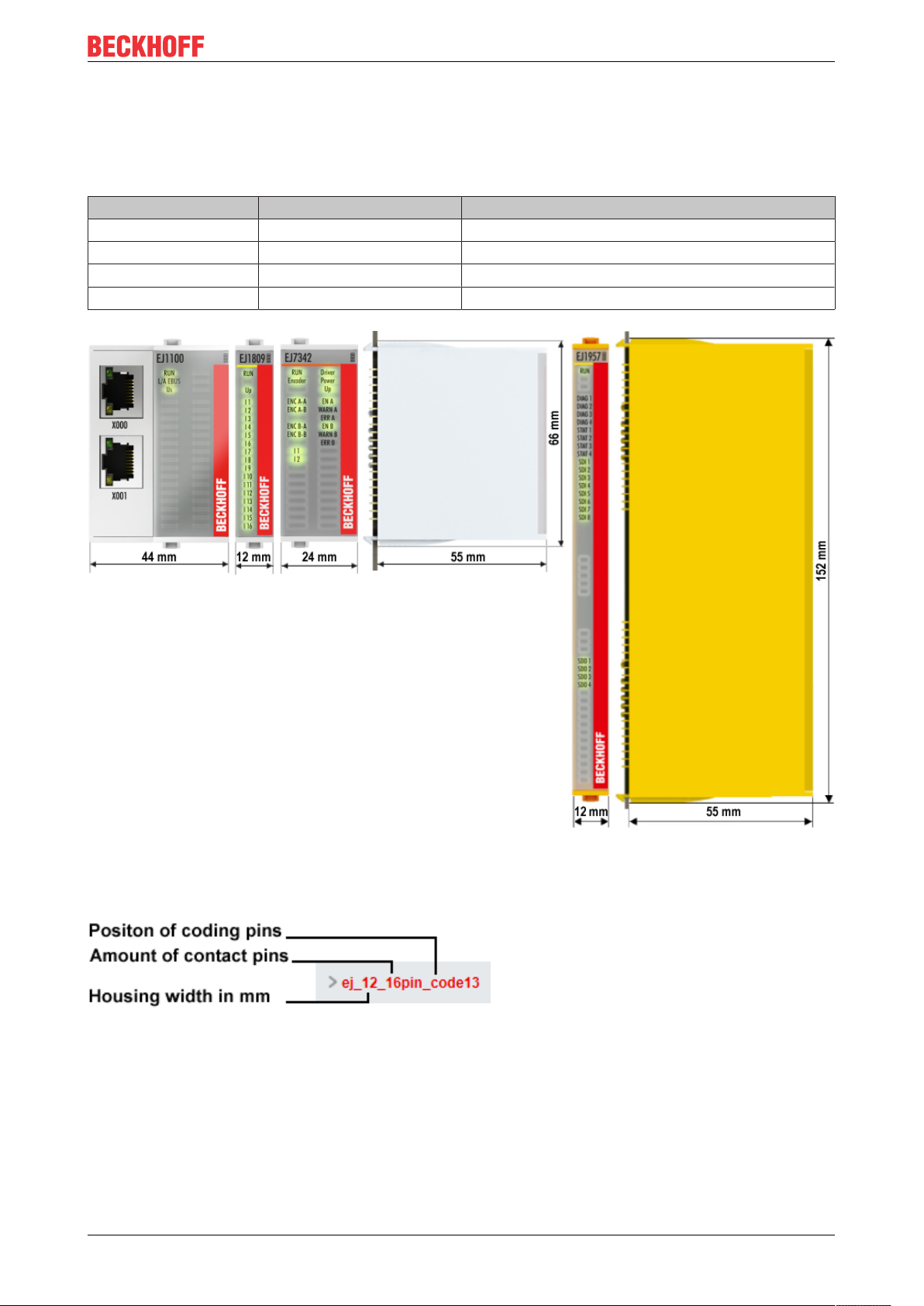
4.2 EJxxxx - dimensions
The EJ modules are compact and lightweight thanks to their design. Their volume is approx. 50% smaller
than the volume of the EL terminals. A distinction is made between four different module types, depending
on the width and the height:
Module type Dimensions (W x H x D) Sample in figure below
Coupler 44mm x 66mm x 55mm EJ1100 (ej_44_2xrj45_coupler)
Single module 12mm x 66mm x 55mm EJ1809 (ej_12_16pin_code13)
Double module 24mm x 66mm x 55mm EJ7342 (ej_24_2x16pin_code18)
Single module (long) 12mm x 152mm x 55mm EJ1957 (ej_12_2x16pin_extended_code4747)
Fig.11: EJxxxx - Dimensions
The technical drawings can be downloaded from the Beckhoff homepage. The drawings are named as
described in the drawing below.
Fig.12: Naming of the technical drawings
EJ2502 21Version: 1.5
Page 22

Installation of EJ modules
4.3 Installation positions and minimum distances
4.3.1 Minimum distances for ensuring installability
Note the dimensions shown in the following diagram for the design of the signal distribution board to ensure
safe latching and simple assembly / disassembly of the modules.
Fig.13: Mounting distances EJ module - PCB
Observing the reaching area
A minimum reaching area of 92mm is required for assembly / disassembly, in order to be able to
reach the mounting tabs with the fingers.
Adherence to the recommended minimum distances for ventilation (see section Installation position
[}23]) ensures an adequate reaching area.
The signal distribution board must have a thickness of 1.6mm and a minimum distance of 4mm from the
mounting surface, in order to ensure latching of the modules on the board.
EJ250222 Version: 1.5
Page 23

Installation of EJ modules
4.3.2 Installation positions
NOTE
Constraints regarding installation position and operating temperature range
Please refer to the technical data [}16] for the installed components to ascertain whether any restrictions
regarding the mounting position and/or the operating temperature range have been specified. During installation of modules with increased thermal dissipation, ensure adequate distance above and below the modules to other components in order to ensure adequate ventilation of the modules during operation!
The standard installation position is recommended. If a different installation position is used, check whether
additional ventilation measures are required.
Ensure that the specified conditions (see Technical data) are adhered to!
Optimum installation position (standard)
For the optimum installation position the signal distribution board is installed horizontally, and the fronts of
the EJ modules face forward (see Fig. Recommended distances for standard installation position). The
modules are ventilated from below, which enables optimum cooling of the electronics through convection.
“From below” is relative to the acceleration of gravity.
Fig.14: Recommended distances for standard installation position
Compliance with the distances shown in Fig. Recommended distances for standard installation position is
recommend. The recommended minimum distances should not be regarded as restricted areas for other
components. The customer is responsible for verifying compliance with the environmental conditions
described in the technical data. Additional cooling measures must be provided, if required.
EJ2502 23Version: 1.5
Page 24

Installation of EJ modules
Other installation positions
All other installation positions are characterized by a different spatial position of the signal distribution board,
see Fig. Other installation positions.
The minimum distances to ambient specified above also apply to these installation positions.
Fig.15: Other installation positions
EJ250224 Version: 1.5
Page 25

4.4 Codings
4.4.1 Color coding
Installation of EJ modules
Fig.16: EJ modules color code; sample: EJ1809
The EJ modules are color-coded for a better overview in the control cabinet (see diagram above). The color
code indicates the signal type. The following table provides an overview of the signal types with
corresponding color coding.
Signal type Modules Color
Coupler EJ11xx No color coding
Digital input EJ1xxx Yellow
Digital output EJ2xxx Red
Analog input EJ3xxx Green
Analog output EJ4xxx Blue
Motion EJ7xxx orange
System EJ9xxx grey
EJ2502 25Version: 1.5
Page 26

Installation of EJ modules
4.4.2 Mechanical position coding
The modules have two signal-specific coding pins on the underside (see Figs. B1 and B2 below). In
conjunction with the coding holes in the signal distribution board (see Figs. A1 and A2 below), the coding
pins provide an option for mechanical protection against incorrect connection. This significantly reduces the
risk of error during installation and service.
Couplers and placeholder modules have no coding pins.
Fig.17: Mechanical position coding with coding pins (B1 and B2) and coding holes (A1 and A2)
The following diagram shows the position of the position coding with position numbers on the left-hand side.
Modules with the same signal type have the same coding. For sample, all digital input modules have the
coding pins at positions one and three. There is no plug protection between modules with the same signal
type. During installation the module type should therefore be verified based on the device name.
Fig.18: Pin coding; sample: digital input modules
EJ250226 Version: 1.5
Page 27

Installation of EJ modules
4.5 Installation on the signal distribution board
EJ modules are installed on the signal distribution board. The electrical connections between coupler and EJ
modules are realized via the pin contacts and the signal distribution board.
The EJ components must be installed in a control cabinet or enclosure which must provide protection against
fire hazards, environmental conditions and mechanical impact.
WARNING
Risk of injury through electric shock and damage to the device!
Bring the module system into a safe, de-energized state before starting installation, disassembly or wiring
of the modules.
NOTE
Risk of damage to components through electrostatic discharge!
Observe the regulations for ESD protection.
Fig.19: Installation of EJ modules
A1 / A2 Latching lugs top / bottom C1 / C2 Mounting holes
B1 / B2 Coding pins D1 / D2 Coding holes
To install the modules on the signal distribution board proceed as follows:
1. Before the installation, ensure that the signal distribution board is securely connected to the mounting
surface. Installation on an unsecured signal distribution board may result in damage to the board.
2. If necessary, check whether the positions of the coding pins (B) match the corresponding holes in the
signal distribution board (D).
3. Compare the device name on the module with the information in the installation drawing.
4. Press the upper and the lower mounting tabs simultaneously and push the module onto the board
while gently moving it up and down, until the module is latched securely.
The required contact pressure can only be established and the maximum current carrying capacity ensured if the module is latched securely.
5. Use placeholder modules (EJ9001) to fill gaps in the module strand.
EJ2502 27Version: 1.5
Page 28

Installation of EJ modules
NOTE
• During installation ensure safe latching of the modules on the signal distribution board! The consequences of inadequate contact pressure include:
ð loss of quality of the transferred signals,
ð increased power dissipation of the contacts,
ð impairment of the service life.
EJ250228 Version: 1.5
Page 29

Installation of EJ modules
4.6 Extension options
Three options are available for modifications and extensions of the EJ system.
• Replacing the placeholder modules with the function modules provided for the respective slot
• Assigning function modules specified for the respective slots for the reserve slots at the end of the
module string
• Linking with EtherCAT Terminals and EtherCAT Box modules via an Ethernet/EtherCAT connection
4.6.1 Using placeholder modules for unused slots
The EJ9001 placeholder modules are used to close temporary gaps in the module strands (see Fig. A1
below). Gaps in the module strand cause interruption in EtherCAT communication and must be equipped
with placeholder modules.
In contrast to the passive terminals of the EL series, the placeholder modules actively participate in the data
exchange. Several placeholder modules can therefore be connected in series, without impairing the data
exchange.
Unused slots at the end of the module strand can be left as reserve slots (see Fig. B1 below).
The machine complexity is extended (extended version) by allocating unused slots (see Figs. A2 below Exchanging placeholder modules and B2 - Assigning reserve slots) according to the specifications for the
signal distribution board.
Fig.20: Sample: Exchanging placeholder modules and assigning reserve slots
E-bus supply
Exchange the placeholder modules with other modules changes the current input from the E-Bus.
Ensure that adequate power supply is provided.
EJ2502 29Version: 1.5
Page 30

Installation of EJ modules
4.6.2 Linking with EtherCAT Terminals and EtherCAT Box modules via an Ethernet/EtherCAT connection
Fig.21: Example of extension via an Ethernet/EtherCAT connection
EJ250230 Version: 1.5
Page 31

Installation of EJ modules
4.7 IPC integration
Connection of CX and EL terminals via the EK1110-004x EtherCAT EJ Coupler
The EK1110-0043 and EK1110-0044 EtherCAT EJ couplers connect the compact DIN-rail PCs of the CX
series and attached EtherCAT terminals (ELxxxx) with the EJ modules on the signal distribution board.
The EK1110-004x are supplied from the power supply unit of the Embedded PC.
The E-bus signals and the supply voltage of the field side UP are routed directly to the PCB via a plug
connector at the rear of the EtherCAT EJ couplers.
Due to the direct coupling of the Embedded PC and the EL terminals with the EJ modules on the PCB, no
EtherCAT extension (EK1110) or EtherCAT coupler (EJ1100) is required.
The Embedded PC can be expanded with EtherCAT terminals that are not yet available in the EJ system,
forexample.
Fig.22: Example PCB with Embedded PC, EK1110-0043 and EJxxxx, rear view EK1110-0043
EJ2502 31Version: 1.5
Page 32

Installation of EJ modules
Connection of C6015 / C6017 via the EJ110x-00xx EtherCAT Coupler
Thanks to their ultra-compact design and versatile mounting options, the C6015 and C6017 IPCs are ideally
suited for connection to an EJ system.
In combination with the ZS5000-0003 mounting set, it is possible to place the C6015 and C6017 IPCs
compactly on the signal distribution board.
The EJ system is optimally connected to the IPC via the corresponding EtherCAT cable (see following Fig.
[A]).
The IPC can be supplied directly via the signal distribution board using the enclosed power plug (see Fig. [B]
below).
NOTE
Positioning on the signal distribution board
The dimensions and distances for placement and other details can be found in the Design
Guide and the documentation for the individual components.
The figure below shows the connection of a C6015 IPC to an EJ system as an example. The components
shown are schematic, to illustrate the functionality.
Fig.23: Example for the connection of a C6015 IPC to an EJ system
EJ250232 Version: 1.5
Page 33

Installation of EJ modules
4.8 Disassembly of the signal distribution board
WARNING
Risk of injury through electric shock and damage to the device!
Bring the module system into a safe, de-energized state before starting installation, disassembly or wiring
of the modules.
NOTE
Risk of damage to components through electrostatic discharge!
Observe the regulations for ESD protection.
Each module is secured through latching on the distribution board, which has to be released for
disassembly.
Fig.24: Disassembly of EJ modules
To disassemble the module from the signal distribution board proceed as follows:
1. Before disassembly, ensure that the signal distribution board is securely connected to the mounting
surface. Disassembly of an unsecured signal distribution board may result in damage to the board.
2. Press the upper and lower mounting tabs simultaneously and pull the module from board while gently
moving it up and down.
EJ2502 33Version: 1.5
Page 34

EtherCAT basics
5 EtherCAT basics
Please refer to the EtherCAT System Documentation for the EtherCAT fieldbus basics.
EJ250234 Version: 1.5
Page 35

Commissioning
6 Commissioning
NOTE
Damage to devices or loss of data
Please refer to the EtherCAT System Documentation for commissioning basics of EtherCAT
devices.
6.1 EJ2502 - Basic function principles
The EJ2502 outputs a pulse width modulated 24V square wave signal with a maximum load capacity of
0.5A on two channels. This signal can be modified in terms of PWM ratio [0..100%] (duty factor) and
frequency [1Hz .. 20kHz], see Technical Data [}16]. The output frequency is configurable for each channel.
The peripheral side of the electronics is electrically isolated from the internal E-bus, and therefore also from
the fieldbus.
The process data resolution of 16bit is converted to the hardware resolution of 10bit inside the module.
6.2 EJ2502- process data
Depending on the mode of operation, the EJ2502 module offers one or two different items of process data
per analog channel for transmission: the analog values PWM output (16-bit) and PWM period (16-bit) / PWM
period (1 Hz) (32-bit).
There is a choice of three types of process data in the EJ2502 module:
• Pulse width (standard): PWM output (16-bit) is transmitted per channel.
• Pulse width and frequency (16 bit): PWM output (16-bit) and PWM period (16-bit) are transmitted per
channel.
• Pulse width and frequency (1 Hz) (32-bit): PWM output (16-bit) and PWM period (1 Hz) (32-bit) are
transmitted per channel.
The transmission of individual items of process data can be deactivated on the ProcessData tab (see
chapter "EJ2502 - Setting the process data objects (PDO) [}37]".
EJ2502 - Process data (Default)
The default process data of the EJ2502 are illustrated below. The data apply to TwinCAT 2.11 from build
1544 onward.
Fig.25: EJ2502 - default process data
EJ2502 35Version: 1.5
Page 36

Commissioning
6.3 EJ2502 - data stream
The parameters are considered in the following order:
Fig.26: EJ2502 data flow diagram
6.4 EJ2502 - operation modes
The EJ2502 output module has three basic operation modes with additional settings for each channel
(channel 1: n=0, channel 2:n=1):
• Pulse width (standard)
• Pulse width and frequency (16 bit)
• Pulse width and frequency1Hz(32-bit)
The basic setting is done via the process data selection [}37].
The differences and setting options are illustrated in the following table.
Operation modes Pulse width (standard)
OP mode can be set via
CoE Index 0x80n0:07 (ch.1: n=0, ch.2: n=1)
CoE index
0x80n0:07
Mark/space ratio
preset
Frequency preset Via CoE (acyclic) [20Hz to20kHz] via
Used if only the mark/space ratio is to be changed quickly in the
Operating
range
Period value from CoE
Period unit [1000ns=1µs] [100ns] [1000ns=1µs]
Permissible value
range
Frequency range 20Hz..20kHz 153Hz..125kHz 1Hz..20kHz 20Hz..20kHz 1Hz..20kHz
0 2 3 Not relevant
Via process data (cyclic)
real-time context.
PWM 20Hz..20kHz PWM 100ns
0x80n0:15* [}44]
80..32657 (signed)
50..65535 (unsigned)
frequ. resolution
CoE
0x80n0:15* [}44]
80..65535 50..1000000 0..65535 (only unsigned) 0..1000000
PWM
1Hz..20kHz
CoE
0x80n0:16*
[}44]
Pulse width and
frequency (16bit)
process data 16-bit unsigned (cyclic),
1digit=1µsperiod
mark/space ratio and frequency are to be changed
quickly in the real-time
context.
PWM 20Hz PWM 1Hz..20kHz
Process data
Pulse width and frequency 1Hz (32-bit)
[1Hz to20kHz]
via process data 32-bit unsigned (cyclic),
1digit=1µsperiod
mark/space ratio and frequency are to be changed
quickly in the real-time context.
The frequency can be set to
min. 1Hz.
*The corresponding output frequency can be calculated from the period.
Impermissible values in the pulse width operation mode (standard), OP mode
"100ns"
• If a value < 80 [*100ns] is preset in the pulse width operation mode (standard), OP mode
"100ns", this cannot be processed.
ð If such an invalid value is entered, the EtherCAT device has to be started in the PREOP state
and the CoE entry corrected in this state.
EJ250236 Version: 1.5
Page 37

Commissioning
6.5 EJ2502 - setting of the process data objects (PDO)
The process data to be transmitted (PDO, ProcessDataObjects) can be selected by the user
• for all channels simultaneously via the "Predefined PDO Assignment" selection dialog; see fig. (E)
below.
The EJ2502 offers a choice of three different "Predefined PDO Assignments":
◦ "Pulse width (standard)": 0x1600 and 0x1601 (marked in blue in the illustration below)
◦ "Pulse width and frequency (16 bit)": 0x1602 and 0x1603 (marked in red in the illustration below)
◦ "Pulse width and frequency 1 Hz (32-bit)": 0x1604 and 0x1605 (marked in green in the illustration
below)
• These can be selected for individual channels and PDOs by selecting the Sync Manager (see
illustration A below) and then selecting the PDOs (see illustration B below).
Exclusion criteria prevent irregular combinations. Excluded PDOs have a grey background. Therefore,
for example, the PDO 0x1600 cannot be selected as long as 0x1604 is activated.
These changes become effective after activation and an EtherCAT restart or a reload.
The assignment of the PDOs to the respective Sync Manager is displayed in the "SM" column in the "PDO
List" (see fig. C below). The contents of the PDO selected in the "PDO List" are displayed in the "PDO
Content" field (see fig. D below). An overview of the assignment and contents of the PDOs can be found in
the chapter "EJ2502 - Assignment and contents of the PDOs [}38]".
The selected PDOs are displayed in the TwinCAT tree (F) and can be linked.
A detailed description of the selection of the PDO can be found in the EtherCAT System-Documentation in
chapter "EtherCAT subscriber configuration".
Fig.27: Operation modes of the EJ2502
EJ2502 37Version: 1.5
Page 38

Commissioning
EJ2502 - Assignment and contents of the PDOs
Predefined PDO Assignment PDO
Pulswith (standard) 0x1600
Pulswith and frequency (16bit) 0x1602
Pulswith and frequency (1Hz)
(32bit)
Index
Name (size in byte.bit)
PWM Outputs Channel1 (2.0)
0x1601
PWM Outputs Channel2 (2.0)
PWM Outputs Channel1 (4.0)
0x1603
PWM Outputs Channel2 (4.0)
0x1604
PWM Outputs Channel1 (6.0)
0x1605
PWM Outputs Channel2 (6.0)
Index of excluded
PDOs
0x1602,
0x1604
0x1603,
0x1605
0x1600,
0x1604
0x1601,
0x1605
0x1600,
0x1602
0x1601,
0x1603
SM PDO content
Index - name (size in byte.bit)
2 0x7000:11 - PWM output (2.0)
0x7010:11 - PWM output (2.0)
0x7000:11 - PWM output (2.0)
0x7000:12 - PWM period (2.0)
0x7010:11 - PWM output (2.0)
0x7010:12 - PWM period (2.0)
0x7000:11 - PWM output (2.0)
0x7000:13 - PWM period 1 Hz (4.0)
0x7010:11 - PWM output (2.0)
0x7010:13 - PWM period 1 Hz (4.0)
EJ250238 Version: 1.5
Page 39

Commissioning
6.6 EJ2502 - settings via the CoE directory
Parameterization via the CoE list (CAN over EtherCAT)
The EtherCAT device is parameterized via the CoE - Online tab (with a double click on the respective object) or via the Process Data tab (assignment of PDOs). A detailed description can be found
in the EtherCAT System-Documentation in chapter “EtherCAT subscriber configuration”
Please note the general CoE notes in the EtherCAT System Documentation in chapter “CoE-inter-
face” when using/manipulating the CoE parameters:
- Keep a startup list if components have to be replaced
- Differentiation between online/offline dictionary, existence of current XML description
- use "CoE reload" for resetting changes
The following CoE settings from the objects 0x80n0:0 (channel1:n=0; channel2: n=1) are reflected here in
the default settings:
Fig.28: "CoE-Online" tab, taking the EJ2502 as an example
• Changes in the CoE directory are in general immediately effective.
• They are generally stored non-volatile only in the slave and should therefore be entered in the CoE
StartUp list. This list is processed at each EtherCAT start and the settings are loaded into the slave.
EJ2502 39Version: 1.5
Page 40

Commissioning
6.6.1 User Scaling
It is possible to activate user scaling with offset and gain. This affects the PWM process data value. See fig.
Data flow chart for EJ2502.
• The user scaling is enabled via index 0x80n0:01 [}44]
• The parameterization takes place via the indices:
◦ 0x80n0:11 [}44] - user scaling offset
◦ 0x80n0:12 [}44] - user scaling gain
Fig.29: Data flow chart for EJ2502
6.6.2 Presentation
In the CoE a channel parameter Presentation (0x80n0:02) can be set. This affects the consideration of the
PWM-PDO (16 bit):
• signed (default): value range 0...7FFF
• unsigned: value range 0...FFFF
hex
hex
/65535
/32767
for 0..100% duty factor
dec
• Absolute value with MSB as sign
• Absolute value
6.6.3 Watchdog
Fig.30: Setting the watchdog via the CoE directory
for 0..100% duty factor
dec
The watchdog can be set via the indices 0x80n0:05, 0x80n0:13 and 0x80n0:14 (Ch1: n=0; Ch2: n=1) in the
CoE Online directory. The following parameters can be set:
• Default watchdog value (Index 0x8000:05)
◦ In the case of an interruption in communication, a watchdog [}50] switches the outputs off after
100ms (default). The watchdog time can be changed outside the CoE directory via the Advanced
Settings [}50] on the "EtherCAT" tab [}50] (System Manager).
◦ In addition, an output value can be defined in Index 0x8000:13 (Ch1) or 0x8010:13 [}44] (Ch2)
respectively, which is switched to the outputs.
• Watchdog ramp (Index 0x8000:05)
EJ250240 Version: 1.5
Page 41

Commissioning
◦ A ramp (index 0x8000:14 or 0x8010:14 [}44]) is parameterizable in the watchdog: if the
watchdog is triggered, the outputs are not immediately moved to the target value from 0x80n0:13
[}44]; instead, the values are changed linearly from the current output value [digit/ms] up to the
target value from Index 0x80n0:13 [}44]. This is then retained.
• Last output value (Index 0x8000:05)
◦ The last valid output value after the occurrence of an error is output.
NOTE
Watchdog parameterization can trigger unintended actions!
Please refer to section "Notes for setting the watchdog [}50]".
6.6.4 Channel synchronization (from firmware 10)
From EJ2502 FW10 a setting is available in the CoE that makes the output of channel 2 directly dependent
on the settings of channel 1.
Fig.31: CoE setting for synchronisation
Function:
• No: no dependence of channel 2 on channel 1
• Ch2 = Ch1: Frequency and duty factor of channel 1 are also applied to channel 2.
The phase angle is 0, i.e. the rising/falling edges of channels 1 and 2 arrive at the same time and
channel 2 outputs the same as channel 1.
• Ch2 = Ch1 inverted: Frequency and duty factor of channel 1 are also applied to channel 2, but the duty
factor is inverted.
The phase angle is 0, i.e. a rising edge of channel 1 arrives at the same time as a falling edge of
channel 2, etc.
Notes
• The ChannelSynchronisation setting is also present in channel 2, but has no effect there or rather is
not to be used.
• On activating or deactivating the function in the CoE, an invalid phase angle briefly occurs (naturally)
on channel 2.
EJ2502 41Version: 1.5
Page 42

Commissioning
Fig.32: Oscilloscope recording at the moment of synchronisation
Sample: As soon as “Ch2 = Ch1” is activated (visualized here for triggering the oscilloscope by the additional
channel Trig) there is a brief pause on channel 2 until the synchronisation takes effect.
EJ250242 Version: 1.5
Page 43

Commissioning
6.7 EJ2502 - object description and parameterization
EtherCAT XML Device Description
The display matches that of the CoE objects from the EtherCAT XML Device Description. We recommend downloading the latest XML file from the download area of the Beckhoff website and installing it according to installation instructions.
Parameterization via the CoE list (CAN over EtherCAT)
The EtherCAT device is parameterized via the CoE - Online tab (with a double click on the respective object) or via the Process Data tab (assignment of PDOs). A detailed description can be found
in the EtherCAT System-Documentation in chapter “EtherCAT subscriber configuration”
Please note the general CoE notes in the EtherCAT System Documentation in chapter “CoE-inter-
face” when using/manipulating the CoE parameters:
- Keep a startup list if components have to be replaced
- Differentiation between online/offline dictionary, existence of current XML description
- use "CoE reload" for resetting changes
Introduction
The CoE overview contains objects for different intended applications:
• Objects required for parameterization during commissioning:
◦ Restore object index 0x1011
◦ Configuration data index 0x80n0
• Objects intended for regular operation, e.g. through ADS access.
• Profile-specific objects:
◦ Configuration data (vendor-specific) index 0x80nF
◦ Output data index 0x70n0
◦ Information and diagnostic data index 0x80nE, 0xF000, 0xF008, 0xF010
• Standard objects
The following section first describes the objects required for normal operation, followed by a complete
overview of missing objects.
6.7.1 Restore object
Index 1011 Restore default parameters
Index
(hex)
1011:0
1011:01 SubIndex 001 If this object is set to “0x64616F6C” in the set value dia-
Name Meaning Data type Flags Default
Restore default parameters [}65]
Restore default parameters UINT8 RO 0x01 (1
UINT32 RW 0x00000000 (0
log, all backup objects are reset to their delivery state.
)
dec
)
dec
EJ2502 43Version: 1.5
Page 44

Commissioning
6.7.2 Configuration data
Index 80n0 PWM Settings (n=0 for Ch.1, n=1 for Ch.2)
Index (hex) Name Meaning Data type Flags Default
80n0:0 PWM Settings Ch.2 Max. Subindex UINT8 RO 0x16 (22
80n0:01 Enable user scale Activation of scaling (index 0x80n0:11 and 0x80n0:12) BIT1 RW 0x00 (0
80n0:02 Presentation • 0: Signed presentation
The value range of the output (index 0x70n0:11
[}45]) is represented as 16 bit signed integer.
100% duty cycle corresponds to 0x7FFF, 50%
duty cycle corresponds to 0x3FFF.
0% is used for the negative range.
• 1: Unsigned presentation
The value range of the output (index 0x70n0:11
[}45]) is represented as 16 bit unsigned
integer.
100% duty cycle corresponds to 0xFFFF, 50%
duty cycle corresponds to 0x7FFF.
• 2: Absolute value with MSB as sign
Signed amount representation becomes active.
Since the negative range is set to zero this
format is identical with the signed integer
representation.
• 3: Absolute value
The absolute value of the signed integer
representation is formed.
The output also includes the negative range
between zero and 100%
80n0:05 Watchdog • 0: Default watchdog value
The default value (index 0x80n0:13) is active.
• 1: Watchdog ramp active
The ramp (index 0x80n0:14) for changing to the
default value (index 0x80n0:13) is active.
• 2: Last output value active
In the event of a fault (watchdog drop) the last
process data is issued.
80n0:07 Operation mode 0: PWM 20Hz..20kHz
Period setting 1 unit = 1000ns = 1µs
2: PWM 100ns frq. res.
Period setting 1 unit = 100ns
3: PWM 1Hz..20kHz
Period setting 1 unit = 1000ns = 1µs
80n0:09 Channel synchronisa-
tion
• 0: No
no dependence of channel 2 on channel 1
• 1: Ch2=Ch1
Frequency and mark/space ratio of channel 1
are also applied to channel 2.
• 2: Ch2=Ch1 inverted
Frequency and inverted mark/space ratio of
channel 1 are also applied to channel 2.
80n0:11 Offset User scaling offset INT16 RW 0x0000 (0
80n0:12 Gain User scaling gain
The gain is represented in fixed-point format, with the
-16
factor 2
.
80n0:13 Default output Output value, if activated via index 0x80n0:05 UINT16 RW 0x0000 (0
80n0:14 Default output ramp This value defines the ramps for the ramp-down to the
default value. The value is specified in digits/ms.
If the entry is 100 and the default value 0, for example,
it takes 327ms (32767/100) for the output value to
change from the maximum value (32767) to the default
value in the event of a fault.
BIT3 RW 0x00 (0
BIT2 RW 0x00 (0
BIT2 RW 0x00 (0
BIT2 RW 0x00 (0
INT32 RW 0x00010000
(65536
UINT16 RW 0xFFFF (65535
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
EJ250244 Version: 1.5
Page 45

Commissioning
Index (hex) Name Meaning Data type Flags Default
80n0:15 Period PWM
20Hz..20kHz [µs]
The cycle duration is specified with a resolution of 1 µs
(default).
UINT16 RW 0x0FA0 (4000
The default setting is 4000µs (corresponding to
250Hz).
This entry is to be used in the operation mode "Pulse
width (standard)", for the working areas "PWM 20Hz
to 20kHz" and "PWM 100ns frequ. resolution"
80n0:16 Period PWM
1Hz..20kHz [µs]
The cycle duration is specified with a resolution of 1 µs
(default).
The default setting is 100000µs (corresponding to
UINT32 RW 0x000186A0
(1000000
dec
)
10Hz).
This entry is to be used in the operation mode "Pulse
width (standard)", for the working areas "PWM 1Hz to
20kHz".
6.7.3 Profile-specific objects (0x6000-0xFFFF)
The profile-specific objects have the same meaning for all EtherCAT slaves that support the profile 5001.
6.7.3.1 Output data
)
dec
Index 7000 PWM Outputs Ch.1
Index (hex) Name Meaning Data type Flags Default
7000:0 PWM Outputs Ch.1 Max. Subindex UINT8 RO 0x13 (19
7000:11 PWM output Output data channel 1 UINT16 RO 0x0000 (0
7000:12 PWM period Output period channel 1 UINT16 RO 0x0000 (0
)
dec
dec
dec
7000:13 PWM period 1 Hz Output period channel 1: 1Hz UINT32 RO 0x00000000 (0
Index 7010 PWM Outputs Ch.2
Index (hex) Name Meaning Data type Flags Default
7010:0 PWM Outputs Ch.2 Max. Subindex UINT8 RO 0x13 (19
7010:11 PWM output Output data channel 2 UINT16 RO 0x0000 (0
7010:12 PWM period Output period channel 2 UINT16 RO 0x0000 (0
)
dec
dec
dec
7010:13 PWM period Output period channel 2: 1Hz UINT32 RO 0x00000000 (0
6.7.3.2 Information and diagnostic data
Index 800E PWM Internal data Ch.1
Index (hex) Name Meaning Data type Flags Default
800E:0 PWM Internal data
Ch.1
800E:01 Timer resolution Reload value of the PWM timer. The reload value
800E:02 Duty cycle Current duty cycle of the PWM unit. 100% corresponds
Max. Subindex UINT8 RO 0x02 (2
UINT16 RO 0x0000 (0
matches the maximum resolution of the PWM unit
UINT16 RO 0x0000 (0
to the timer resolution (index 0x800E:01)
)
dec
dec
dec
)
)
)
dec
)
)
)
dec
)
)
Index 801E PWM Internal data Ch.2
Index (hex) Name Meaning Data type Flags Default
801E:0 PWM Internal data
Max. Subindex UINT8 RO 0x02 (2
Ch.2
801E:01 Timer resolution Reload value of the PWM timer. The reload value
UINT16 RO 0x0000 (0
matches the maximum resolution of the PWM unit
801E:02 Duty cycle Current duty cycle of the PWM unit. 100% corresponds
UINT16 RO 0x0000 (0
to the timer resolution (index 0x801E:01)
EJ2502 45Version: 1.5
)
dec
)
dec
)
dec
Page 46

Commissioning
Index F000 Modular device profile
Index (hex) Name Meaning Data type Flags Default
F000:0 Modular device profile General information for the modular device profile UINT8 RO 0x02 (2
F000:01 Module index distance Index spacing of the objects of the individual channels UINT16 RO 0x0010 (16
F000:02 Maximum number of
Number of channels UINT16 RO 0x0002 (2
modules
)
dec
dec
dec
Index F008 Code word
Index (hex) Name Meaning Data type Flags Default
F008:0 Code word reserved UINT32 RW 0x00000000 (0
Index F010 Module list
Index (hex) Name Meaning Data type Flags Default
F010:0 Module list Max. Subindex UINT8 RW 0x02 (2
F010:01 Subindex 001 MDP PWM 250 UINT32 RO 0x000000FA
(250
F010:02 Subindex 002 MDP PWM 250 UINT32 RO 0x000000FA
(250
)
dec
)
dec
)
dec
)
)
)
dec
6.7.4 Standard objects (0x1000-0x1FFF)
The standard objects have the same meaning for all EtherCAT slaves.
Index 1000 Device type
Index (hex) Name Meaning Data type Flags Default
1000:0 Device type Device type of the EtherCAT slave: the Lo-Word con-
tains the CoE profile used (5001). The Hi-Word contains the module profile according to the modular device profile.
Index 1008 Device name
Index (hex) Name Meaning Data type Flags Default
1008:0 Device name Device name of the EtherCAT slave STRING RO EJ2502-0000
Index 1009 Hardware version
Index (hex) Name Meaning Data type Flags Default
1009:0 Hardware version Hardware version of the EtherCAT slave STRING RO 01
Index 100A Software version
Index (hex) Name Meaning Data type Flags Default
100A:0 Software version Firmware version of the EtherCAT slave STRING RO 01
UINT32 RO 0x00FA1389
(16389001
)
dec
Index 1018 Identity
Index (hex) Name Meaning Data type Flags Default
1018:0 Identity Information for identifying the slave UINT8 RO 0x04 (4
)
dec
1018:01 Vendor ID Vendor ID of the EtherCAT slave UINT32 RO 0x00000002 (2
1018:02 Product code Product code of the EtherCAT slave UINT32 RO 0x09C62852
(163981394
1018:03 Revision Revision numberof the EtherCAT slave; the low word
(bit 0-15) indicates the special terminal number, the
high word (bit 16-31) refers to the device description
1018:04 Serial number Serial number of the EtherCAT slave; the low byte (bit
UINT32 RO 0x00100000
(1048576
)
dec
UINT32 RO 0x00000000 (0
0-7) of the low word contains the year of production,
the high byte (bit 8-15) of the low word contains the
week of production, the high word (bit 16-31) is 0
EJ250246 Version: 1.5
)
dec
)
dec
)
dec
Page 47

Commissioning
Index 10F0 Backup parameter
Index (hex) Name Meaning Data type Flags Default
10F0:0 Backup parameter Information for standardized loading and saving of
UINT8 RO 0x01 (1
backup entries
10F0:01 Checksum Checksum across all backup entries of the EtherCAT
UINT32 RO 0x00000000 (0
slave
Index 1400 PWM RxPDO-Par Ch.1
Index (hex) Name Meaning Data type Flags Default
1400:0 RxPDO-Par Ch.1 PDO Parameter RxPDO 1 UINT8 RO 0x06 (6
1400:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 1
OCTET-
STRING[2]
RO 02 16
04 16
Index 1401 PWM RxPDO-Par Ch.2
Index (hex) Name Meaning Data type Flags Default
1401:0 RxPDO-Par Ch.2 PDO Parameter RxPDO 2 UINT8 RO 0x06 (6
1401:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 2
OCTET-
STRING[2]
RO 03 16
05 16
)
dec
)
dec
)
dec
)
dec
Index 1402 PWM RxPDO-Par Ch.1
Index (hex) Name Meaning Data type Flags Default
1402:0 RxPDO-Par Ch.1 PDO Parameter RxPDO 1 UINT8 RO 0x06 (6
1402:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 1
OCTET-
STRING[2]
RO 00 16
04 16
Index 1403 PWM RxPDO-Par Ch.2
Index (hex) Name Meaning Data type Flags Default
1403:0 RxPDO-Par Ch.2 PDO Parameter RxPDO 2 UINT8 RO 0x06 (6
1403:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 2
OCTET-
STRING[2]
RO 01 16
05 16
Index 1404 PWM RxPDO-Par Ch.1
Index (hex) Name Meaning Data type Flags Default
1404:0 RxPDO-Par Ch.1 PDO Parameter RxPDO 1 UINT8 RO 0x06 (6
1404:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 1
OCTET-
STRING[2]
RO 00 16
02 16
Index 1405 PWM RxPDO-Par Ch.2
Index (hex) Name Meaning Data type Flags Default
1405:0 RxPDO-Par Ch.2 PDO Parameter RxPDO 2 UINT8 RO 0x06 (6
1405:06 Exclude RxPDOs Specifies the RxPDOs (index of RxPDO mapping ob-
jects) that must not be transferred together with RxPDO 2
OCTET-
STRING[2]
RO 01 16
03 16
)
dec
)
dec
)
dec
)
dec
Index 1600 RxPDO-Map Ch.1
Index (hex) Name Meaning Data type Flags Default
1600:0 RxPDO-Map Ch.1 PDO Mapping RxPDO 1 UINT8 RO 0x01 (1
1600:01 SubIndex 001 1. PDO Mapping entry (object 0x7000 (PWM Outputs
UINT32 RO 0x7000:11, 16
Ch.1), entry 0x11 (PWM output))
EJ2502 47Version: 1.5
)
dec
Page 48

Commissioning
Index 1601 RxPDO-Map Ch.2
Index (hex) Name Meaning Data type Flags Default
1601:0 RxPDO-Map Ch.2 PDO Mapping RxPDO 2 UINT8 RO 0x01 (1
1601:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (PWM Outputs
UINT32 RO 0x7010:11, 16
Ch.2), entry 0x11 (PWM output))
Index 1602 RxPDO-Map Ch.1
Index (hex) Name Meaning Data type Flags Default
1602:0 RxPDO-Map Ch.1 PDO Mapping RxPDO 1 UINT8 RO 0x02 (2
1602:01 SubIndex 001 1. PDO Mapping entry (object 0x7000 (PWM Outputs
UINT32 RO 0x7000:11, 16
h.1 Ch.1), entry 0x11 (PWM output))
1602:02 SubIndex 002 2. PDO Mapping entry (object 0x7000 (PWM Outputs
UINT32 RO 0x7000:12, 16
h.1 Ch.1), entry 0x12 (PWM period)
Index 1603 RxPDO-Map Ch.2
Index (hex) Name Meaning Data type Flags Default
1603:0 RxPDO-Map Ch.2 PDO Mapping RxPDO 2 UINT8 RO 0x02 (2
1603:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (PWM Outputs
Ch.2), entry 0x11 (PWM output))
1603:02 SubIndex 002 2. PDO Mapping entry (object 0x7010 (PWM Outputs
Ch.2), entry 0x12 (PWM period))
UINT32 RO 0x7010:11, 16
UINT32 RO 0x7010:12, 16
)
dec
)
dec
)
dec
Index 1604 RxPDO-Map Ch.1
Index (hex) Name Meaning Data type Flags Default
1604:0 RxPDO-Map Ch.1 PDO Mapping RxPDO 1 UINT8 RO 0x02 (2
1604:01 SubIndex 001 1. PDO Mapping entry (object 0x7000 (PWM Outputs
UINT32 RO 0x7000:11, 16
Ch.1), entry 0x11 (PWM output))
1604:02 SubIndex 002 2. PDO Mapping entry (object 0x7000 (PWM Outputs
UINT32 RO 0x7000:13, 32
Ch.1), entry 0x13 (PWM period1Hz))
Index 1605 RxPDO-Map Ch.2
Index (hex) Name Meaning Data type Flags Default
1605:0 RxPDO-Map Ch.2 PDO Mapping RxPDO 2 UINT8 RO 0x02 (2
1605:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (PWM Outputs
UINT32 RO 0x7010:11, 16
Ch.2), entry 0x11 (PWM output))
1605:02 SubIndex 002 2. PDO Mapping entry (object 0x7010 (PWM Outputs
UINT32 RO 0x7010:13, 32
Ch.2), entry 0x13 (PWM period1Hz))
Index 1C00 Sync manager type
Index (hex) Name Meaning Data type Flags Default
1C00:0 Sync manager type Using the sync managers UINT8 RO 0x04 (4
1C00:01 SubIndex 001 Sync-Manager Type Channel 1: Mailbox Write UINT8 RO 0x01 (1
1C00:02 SubIndex 002 Sync-Manager Type Channel 2: Mailbox Read UINT8 RO 0x02 (2
1C00:03 SubIndex 003 Sync-Manager Type Channel 3: Process Data Write
(Outputs)
1C00:04 SubIndex 004 Sync-Manager Type Channel 4: Process Data Read
(Inputs)
UINT8 RO 0x03 (3
UINT8 RO 0x04 (4
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
)
dec
Index 1C12 RxPDO assign
Index (hex) Name Meaning Data type Flags Default
1C12:0 RxPDO assign PDO Assign Outputs UINT8 RO 0x02 (2
1C12:01 Subindex 001 1st allocated RxPDO (contains the index of the associ-
ated RxPDO mapping object)
1C12:02 Subindex 002 2nd allocated RxPDO (contains the index of the associ-
ated RxPDO mapping object)
UINT16 RO 0x1600 (5632
UINT16 RO 0x1601 (5633
)
dec
)
dez
)
dez
EJ250248 Version: 1.5
Page 49

Commissioning
Index 0x1C32 SyncManager (SM) Output Parameter
This module does not support distributed clock functionality! The following descriptions are adapted
to the reduced functionality of the EJ2502.
Index 1C32 SM output parameter
Index (hex) Name Meaning Data type Flags Default
1C32:0 SM output parameter Synchronisation parameters for the outputs UINT8 RO 0x20 (32
1C32:01 Sync mode Current synchronisation mode:
UINT16 RW 0x0001 (1
• 0: Free Run
• 1: Synchronous with SM 2 event
1C32:02 Cycle time Cycle time (in ns):
UINT32 RW 0x00000000 (0
• Free Run: Cycle time of the local timer
• Synchronous with SM 2 event: Master cycle
time
1C32:03 Shift time Time between SYNC0 event and output of the outputs
UINT32 RO 0x00000000 (0
(in ns, DC mode only)
1C32:04 Sync modes supported Supported synchronisation modes:
UINT16 RO 0xC003 (49155
• Bit 0 = 1: free run is supported
• Bit 1 = 1: Synchronous with SM 2 event is
supported
• Bit 2-3 = 01: DC mode is supported
• Bit 4-5 = 10: Output shift with SYNC1 event
(only DC mode)
• Bit 14 = 1: dynamic times (measurement
through writing of 0x1C32:08)
1C32:05 Minimum cycle time Minimum cycle time (in ns) UINT32 RO 0x00000000 (0
1C32:06 Calc and copy time Minimum time between SYNC0 and SYNC1 event (in
UINT32 RO 0x00000000 (0
ns, DC mode only)
1C32:08 Command • 0: Measurement of the local cycle time is
UINT16 RW 0x0000 (0
stopped
• 1: Measurement of the local cycle time is
started
The entries 0x1C32:03, 0x1C32:05, 0x1C32:06,
0x1C32:09 are updated with the maximum measured
values.
For a subsequent measurement the measured values
are reset.
1C32:09 Delay time Time between SYNC1 event and output of the outputs
UINT32 RO 0x00000000 (0
(in ns, DC mode only)
1C32:0B SM event missed
counter
1C32:0C Cycle exceeded
counter
Number of missed SM events in OPERATIONAL (DC
mode only)
Number of occasions the cycle time was exceeded in
OPERATIONAL (cycle was not completed in time or
UINT16 RO 0x0000 (0
UINT16 RO 0x0000 (0
the next cycle began too early)
1C32:0D Shift too short counter Number of occasions that the interval between SYNC0
UINT16 RO 0x0000 (0
and SYNC1 event was too short (DC mode only)
1C32:20 Sync error The synchronisation was not correct in the last cycle
BOOLEAN RO 0x00 (0
(outputs were output too late; DC mode only)
)
dec
dec
dec
dec
dec
dec
)
dec
)
)
dec
)
dec
)
dec
)
dec
)
dec
)
)
dec
)
)
)
EJ2502 49Version: 1.5
Page 50

Commissioning
6.8 General notes for setting the watchdog
ELxxxx terminals are equipped with a safety feature (watchdog) that switches off the outputs after a
specifiable time e.g. in the event of an interruption of the process data traffic, depending on the device and
settings, e.g. in OFF state.
The EtherCAT slave controller (ESC) in the EL2xxx terminals features two watchdogs:
• SM watchdog (default: 100 ms)
• PDI watchdog (default: 100 ms)
SM watchdog (SyncManager Watchdog)
The SyncManager watchdog is reset after each successful EtherCAT process data communication with the
terminal. If no EtherCAT process data communication takes place with the terminal for longer than the set
and activated SM watchdog time, e.g. in the event of a line interruption, the watchdog is triggered and the
outputs are set to FALSE. The OP state of the terminal is unaffected. The watchdog is only reset after a
successful EtherCAT process data access. Set the monitoring time as described below.
The SyncManager watchdog monitors correct and timely process data communication with the ESC from the
EtherCAT side.
PDI watchdog (Process Data Watchdog)
If no PDI communication with the EtherCAT slave controller (ESC) takes place for longer than the set and
activated PDI watchdog time, this watchdog is triggered.
PDI (Process Data Interface) is the internal interface between the ESC and local processors in the EtherCAT
slave, for example. The PDI watchdog can be used to monitor this communication for failure.
The PDI watchdog monitors correct and timely process data communication with the ESC from the
application side.
The settings of the SM- and PDI-watchdog must be done for each slave separately in the TwinCAT System
Manager.
EJ250250 Version: 1.5
Page 51

Commissioning
Fig.33: EtherCAT tab -> Advanced Settings -> Behavior -> Watchdog
Notes:
• the multiplier is valid for both watchdogs.
• each watchdog has its own timer setting, the outcome of this in summary with the multiplier is a
resulting time.
• Important: the multiplier/timer setting is only loaded into the slave at the start up, if the checkbox is
activated.
If the checkbox is not activated, nothing is downloaded and the ESC settings remain unchanged.
Multiplier
Multiplier
Both watchdogs receive their pulses from the local terminal cycle, divided by the watchdog multiplier:
1/25 MHz * (watchdog multiplier + 2) = 100µs (for default setting of 2498 for the multiplier)
The standard setting of 1000 for the SM watchdog corresponds to a release time of 100ms.
The value in multiplier + 2 corresponds to the number of basic 40 ns ticks representing a watchdog tick.
The multiplier can be modified in order to adjust the watchdog time over a larger range.
EJ2502 51Version: 1.5
Page 52

Commissioning
Example “Set SM watchdog”
This checkbox enables manual setting of the watchdog times. If the outputs are set and the EtherCAT
communication is interrupted, the SM watchdog is triggered after the set time and the outputs are erased.
This setting can be used for adapting a terminal to a slower EtherCAT master or long cycle times. The
default SM watchdog setting is 100ms. The setting range is 0...65535. Together with a multiplier with a
range of 1...65535 this covers a watchdog period between 0...~170 seconds.
Calculation
Multiplier = 2498 → watchdog base time = 1 / 25MHz * (2498 + 2) = 0.0001seconds = 100µs
SM watchdog = 10000 → 10000 * 100µs = 1second watchdog monitoring time
CAUTION
Undefined state possible!
The function for switching off of the SM watchdog via SM watchdog = 0 is only implemented in terminals
from version -0016. In previous versions this operating mode should not be used.
CAUTION
Damage of devices and undefined state possible!
If the SM watchdog is activated and a value of 0 is entered the watchdog switches off completely. This is
the deactivation of the watchdog! Set outputs are NOT set in a safe state, if the communication is interrupted.
EJ250252 Version: 1.5
Page 53

Appendix
7 Appendix
7.1 EtherCAT AL Status Codes
For detailed information please refer to the EtherCAT system description.
7.2 EJ2502 - Firmware compatibility
Beckhoff EtherCAT devices are delivered with the latest available firmware version. Compatibility of firmware
and hardware is mandatory; not every combination ensures compatibility. The overview below shows the
hardware versions on which a firmware can be operated.
Note
• It is recommended to use the newest possible firmware for the respective hardware
• Beckhoff is not under any obligation to provide customers with free firmware updates for delivered
products.
NOTE
Risk of damage to the device!
Pay attention to the instructions for firmware updates on the separate page [}53].
If a device is placed in BOOTSTRAP mode for a firmware update, it does not check when downloading
whether the new firmware is suitable.
This can result in damage to the device! Therefore, always make sure that the firmware is suitable for the
hardware version!
EJ2502
Hardware (HW) Firmware (FW) Revision no. Release date
00 - 02 09 EJ2502-0000-0023 2013/07
10 2013/08
01 - 04* 11 EJ2502-0000-0024 2014/06
12 2014/09
13 2017/04
14* 2020/09
*) This is the current compatible firmware/hardware version at the time of the preparing this documentation.
Check on the Beckhoff website whether more up-to-date documentation is available.
7.3 Firmware Update EL/ES/EM/ELM/EPxxxx
This section describes the device update for Beckhoff EtherCAT slaves from the EL/ES, ELM, EM, EK and
EP series. A firmware update should only be carried out after consultation with Beckhoff support.
Storage locations
An EtherCAT slave stores operating data in up to three locations:
• Depending on functionality and performance EtherCAT slaves have one or several local controllers for
processing I/O data. The corresponding program is the so-called firmware in *.efw format.
• In some EtherCAT slaves the EtherCAT communication may also be integrated in these controllers. In
this case the controller is usually a so-called FPGA chip with *.rbf firmware.
EJ2502 53Version: 1.5
Page 54

Appendix
• In addition, each EtherCAT slave has a memory chip, a so-called ESI-EEPROM, for storing its own
device description (ESI: EtherCAT Slave Information). On power-up this description is loaded and the
EtherCAT communication is set up accordingly. The device description is available from the download
area of the Beckhoff website at (https://www.beckhoff.de). All ESI files are accessible there as zip files.
Customers can access the data via the EtherCAT fieldbus and its communication mechanisms. Acyclic
mailbox communication or register access to the ESC is used for updating or reading of these data.
The TwinCAT System Manager offers mechanisms for programming all three parts with new data, if the
slave is set up for this purpose. Generally the slave does not check whether the new data are suitable, i.e. it
may no longer be able to operate if the data are unsuitable.
Simplified update by bundle firmware
The update using so-called bundle firmware is more convenient: in this case the controller firmware and the
ESI description are combined in a *.efw file; during the update both the firmware and the ESI are changed in
the terminal. For this to happen it is necessary
• for the firmware to be in a packed format: recognizable by the file name, which also contains the
revision number, e.g. ELxxxx-xxxx_REV0016_SW01.efw
• for password=1 to be entered in the download dialog. If password=0 (default setting) only the firmware
update is carried out, without an ESI update.
• for the device to support this function. The function usually cannot be retrofitted; it is a component of
many new developments from year of manufacture 2016.
Following the update, its success should be verified
• ESI/Revision: e.g. by means of an online scan in TwinCAT ConfigMode/FreeRun – this is a convenient
way to determine the revision
• Firmware: e.g. by looking in the online CoE of the device
NOTE
Risk of damage to the device!
ü Note the following when downloading new device files
a) Firmware downloads to an EtherCAT device must not be interrupted
b) Flawless EtherCAT communication must be ensured. CRC errors or LostFrames must be avoided.
c) The power supply must adequately dimensioned. The signal level must meet the specification.
ð In the event of malfunctions during the update process the EtherCAT device may become unusable and
require re-commissioning by the manufacturer.
7.3.1 Device description ESI file/XML
NOTE
Attention regarding update of the ESI description/EEPROM
Some slaves have stored calibration and configuration data from the production in the EEPROM. These are
irretrievably overwritten during an update.
The ESI device description is stored locally on the slave and loaded on start-up. Each device description has
a unique identifier consisting of slave name (9 characters/digits) and a revision number (4 digits). Each slave
configured in the System Manager shows its identifier in the EtherCAT tab:
EJ250254 Version: 1.5
Page 55

Appendix
Fig.34: Device identifier consisting of name EL3204-0000 and revision -0016
The configured identifier must be compatible with the actual device description used as hardware, i.e. the
description which the slave has loaded on start-up (in this case EL3204). Normally the configured revision
must be the same or lower than that actually present in the terminal network.
For further information on this, please refer to the EtherCAT system documentation.
Update of XML/ESI description
The device revision is closely linked to the firmware and hardware used. Incompatible combinations
lead to malfunctions or even final shutdown of the device. Corresponding updates should only be
carried out in consultation with Beckhoff support.
Display of ESI slave identifier
The simplest way to ascertain compliance of configured and actual device description is to scan the
EtherCAT boxes in TwinCAT mode Config/FreeRun:
Fig.35: Scan the subordinate field by right-clicking on the EtherCAT device
If the found field matches the configured field, the display shows
EJ2502 55Version: 1.5
Page 56

Appendix
Fig.36: Configuration is identical
otherwise a change dialog appears for entering the actual data in the configuration.
Fig.37: Change dialog
In this example in Fig. Change dialog, an EL3201-0000-0017 was found, while an EL3201-0000-0016 was
configured. In this case the configuration can be adapted with the Copy Before button. The Extended
Information checkbox must be set in order to display the revision.
Changing the ESI slave identifier
The ESI/EEPROM identifier can be updated as follows under TwinCAT:
• Trouble-free EtherCAT communication must be established with the slave.
• The state of the slave is irrelevant.
• Right-clicking on the slave in the online display opens the EEPROM Update dialog, Fig. EEPROM
Update
EJ250256 Version: 1.5
Page 57

Appendix
Fig.38: EEPROM Update
The new ESI description is selected in the following dialog, see Fig. Selecting the new ESI. The checkbox
Show Hidden Devices also displays older, normally hidden versions of a slave.
Fig.39: Selecting the new ESI
A progress bar in the System Manager shows the progress. Data are first written, then verified.
The change only takes effect after a restart.
Most EtherCAT devices read a modified ESI description immediately or after startup from the INIT.
Some communication settings such as distributed clocks are only read during power-on. The EtherCAT slave therefore has to be switched off briefly in order for the change to take effect.
7.3.2 Firmware explanation
Determining the firmware version
Determining the version on laser inscription
Beckhoff EtherCAT slaves feature serial numbers applied by laser. The serial number has the following
structure: KK YY FF HH
KK - week of production (CW, calendar week)
YY - year of production
FF - firmware version
HH - hardware version
EJ2502 57Version: 1.5
Page 58

Appendix
Example with ser. no.: 12 10 03 02:
12 - week of production 12
10 - year of production 2010
03 - firmware version 03
02 - hardware version 02
Determining the version via the System Manager
The TwinCAT System Manager shows the version of the controller firmware if the master can access the
slave online. Click on the E-Bus Terminal whose controller firmware you want to check (in the example
terminal 2 (EL3204)) and select the tab CoE Online (CAN over EtherCAT).
CoE Online and Offline CoE
Two CoE directories are available:
• online: This is offered in the EtherCAT slave by the controller, if the EtherCAT slave supports this.
This CoE directory can only be displayed if a slave is connected and operational.
• offline: The EtherCAT Slave Information ESI/XML may contain the default content of the CoE.
This CoE directory can only be displayed if it is included in the ESI (e.g. “Beckhoff EL5xxx.xml”).
The Advanced button must be used for switching between the two views.
In Fig. Display of EL3204 firmware version the firmware version of the selected EL3204 is shown as 03 in
CoE entry 0x100A.
Fig.40: Display of EL3204 firmware version
In (A) TwinCAT 2.11 shows that the Online CoE directory is currently displayed. If this is not the case, the
Online directory can be loaded via the Online option in Advanced Settings (B) and double-clicking on
AllObjects.
7.3.3 Updating controller firmware *.efw
CoE directory
The Online CoE directory is managed by the controller and stored in a dedicated EEPROM, which
is generally not changed during a firmware update.
Switch to the Online tab to update the controller firmware of a slave, see Fig. Firmware Update.
EJ250258 Version: 1.5
Page 59

Appendix
Fig.41: Firmware Update
Proceed as follows, unless instructed otherwise by Beckhoff support. Valid for TwinCAT2 and 3 as
EtherCAT master.
• Switch TwinCAT system to ConfigMode/FreeRun with cycle time >= 1 ms (default in ConfigMode is
4ms). A FW-Update during real time operation is not recommended.
• Switch EtherCAT Master to PreOP
• Switch slave to INIT (A)
• Switch slave to BOOTSTRAP
EJ2502 59Version: 1.5
Page 60

Appendix
• Check the current status (B, C)
• Download the new *efw file (wait until it ends). A pass word will not be neccessary usually.
• After the download switch to INIT, then PreOP
• Switch off the slave briefly (don't pull under voltage!)
• Check within CoE 0x100A, if the FW status was correctly overtaken.
7.3.4 FPGA firmware *.rbf
If an FPGA chip deals with the EtherCAT communication an update may be accomplished via an *.rbf file.
• Controller firmware for processing I/O signals
• FPGA firmware for EtherCAT communication (only for terminals with FPGA)
The firmware version number included in the terminal serial number contains both firmware components. If
one of these firmware components is modified this version number is updated.
Determining the version via the System Manager
The TwinCAT System Manager indicates the FPGA firmware version. Click on the Ethernet card of your
EtherCAT strand (Device 2 in the example) and select the Online tab.
The Reg:0002 column indicates the firmware version of the individual EtherCAT devices in hexadecimal and
decimal representation.
EJ250260 Version: 1.5
Page 61

Appendix
Fig.42: FPGA firmware version definition
If the column Reg:0002 is not displayed, right-click the table header and select Properties in the context
menu.
Fig.43: Context menu Properties
The Advanced Settings dialog appears where the columns to be displayed can be selected. Under
Diagnosis/Online View select the '0002 ETxxxx Build' check box in order to activate the FPGA firmware
version display.
EJ2502 61Version: 1.5
Page 62

Appendix
Fig.44: Dialog Advanced Settings
Update
For updating the FPGA firmware
• of an EtherCAT coupler the coupler must have FPGA firmware version 11 or higher;
• of an E-Bus Terminal the terminal must have FPGA firmware version 10 or higher.
Older firmware versions can only be updated by the manufacturer!
Updating an EtherCAT device
The following sequence order have to be met if no other specifications are given (e.g. by the Beckhoff
support):
• Switch TwinCAT system to ConfigMode/FreeRun with cycle time >= 1ms (default in ConfigMode is
4ms). A FW-Update during real time operation is not recommended.
EJ250262 Version: 1.5
Page 63

Appendix
• In the TwinCAT System Manager select the terminal for which the FPGA firmware is to be updated (in
the example: Terminal 5: EL5001) and
click the Advanced Settings button in the EtherCAT tab:
• The Advanced Settings dialog appears. Under ESC Access/E²PROM/FPGA click on Write FPGA
button:
EJ2502 63Version: 1.5
Page 64

Appendix
• Select the file (*.rbf) with the new FPGA firmware, and transfer it to the EtherCAT device:
• Wait until download ends
• Switch slave current less for a short time (don't pull under voltage!). In order to activate the new FPGA
firmware a restart (switching the power supply off and on again) of the EtherCAT device is required.
• Check the new FPGA status
NOTE
Risk of damage to the device!
A download of firmware to an EtherCAT device must not be interrupted in any case! If you interrupt this
process by switching off power supply or disconnecting the Ethernet link, the EtherCAT device can only be
recommissioned by the manufacturer!
7.3.5 Simultaneous updating of several EtherCAT devices
The firmware and ESI descriptions of several devices can be updated simultaneously, provided the devices
have the same firmware file/ESI.
Fig.45: Multiple selection and firmware update
Select the required slaves and carry out the firmware update in BOOTSTRAP mode as described above.
EJ250264 Version: 1.5
Page 65

Appendix
7.4 Restoring the delivery state
To restore the delivery state for backup objects in ELxxxx terminals, the CoE object Restore default
parameters, SubIndex 001 can be selected in the TwinCAT System Manager (Config mode) (see Fig.
Selecting the Restore default parameters PDO)
Fig.46: Selecting the Restore default parameters PDO
Double-click on SubIndex 001 to enter the Set Value dialog. Enter the value 1684107116 in field Dec or the
value 0x64616F6C in field Hex and confirm with OK (Fig. Entering a restore value in the Set Value dialog).
All backup objects are reset to the delivery state.
Fig.47: Entering a restore value in the Set Value dialog
Alternative restore value
In some older terminals the backup objects can be switched with an alternative restore value: Decimal value: 1819238756, Hexadecimal value: 0x6C6F6164An incorrect entry for the restore value
has no effect.
EJ2502 65Version: 1.5
Page 66

Appendix
7.5 Support and Service
Beckhoff and their partners around the world offer comprehensive support and service, making available fast
and competent assistance with all questions related to Beckhoff products and system solutions.
Beckhoff's branch offices and representatives
Please contact your Beckhoff branch office or representative for local support and service on Beckhoff
products!
The addresses of Beckhoff's branch offices and representatives round the world can be found on her internet
pages: https://www.beckhoff.com/english/beckhoff/world.htm
You will also find further documentation for Beckhoff components there.
Beckhoff Support
Support offers you comprehensive technical assistance, helping you not only with the application of
individual Beckhoff products, but also with other, wide-ranging services:
• support
• design, programming and commissioning of complex automation systems
• and extensive training program for Beckhoff system components
Hotline: +49 5246 963 157
Fax: +49 5246 963 9157
e-mail: support@beckhoff.com
Beckhoff Service
The Beckhoff Service Center supports you in all matters of after-sales service:
• on-site service
• repair service
• spare parts service
• hotline service
Hotline: +49 5246 963 460
Fax: +49 5246 963 479
e-mail: service@beckhoff.com
Beckhoff Headquarters
Beckhoff Automation GmbH & Co. KG
Huelshorstweg 20
33415 Verl
Germany
Phone: +49 5246 963 0
Fax: +49 5246 963 198
e-mail: info@beckhoff.com
web:
https://www.beckhoff.com
EJ250266 Version: 1.5
Page 67

Page 68

More Information:
www.beckhoff.com/EJ2502/
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Germany
Phone: +49 5246 9630
info@beckhoff.com
www.beckhoff.com
 Loading...
Loading...