

Page 1

XFC
Application Note DK9222-0909-0005
XFC technology oversampling
Oversampling
Keywords
XFC
oversampling
Distributed Clocks
EtherCAT
EL1262
EL2262
EL3632
EL3702
EL3742
EL4712
EL4732
Oversampling is a special type of signal sampling that is used for refining the time resolution of a signal.
Detection of the signal curve is refined according to the set oversample factor, so that high resolutions of
up to 1 µs (digital EL12xx input terminals) and 10 µs (analog EL37xx input terminals) are possible.
Technical background
Oversampling means that a signal is scanned with a higher frequency within the terminal than would be required for the signal
transfer. The time window of the signal variation is narrower than the duration of a communication cycle, since sampling takes
place several times within a communication cycle. In order to maintain the chronology of the events, a whole set of process
data is transferred to the controller during the next communication cycle.
Achieving shorter cycle times via high-performance fieldbus technology and high-performance processors is one technique for
improving the time resolution of the signal curve in the field. Alternatively, the higher precision can be achieved through high-
precision input and output terminals, rather than during data transfer. This technical approach for finer time resolution of the
data requires a reliable time relationship between all system devices to be generated.
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
1
Page 2
Application Note DK9222-0909-0005
XFC technology oversampling
XFC
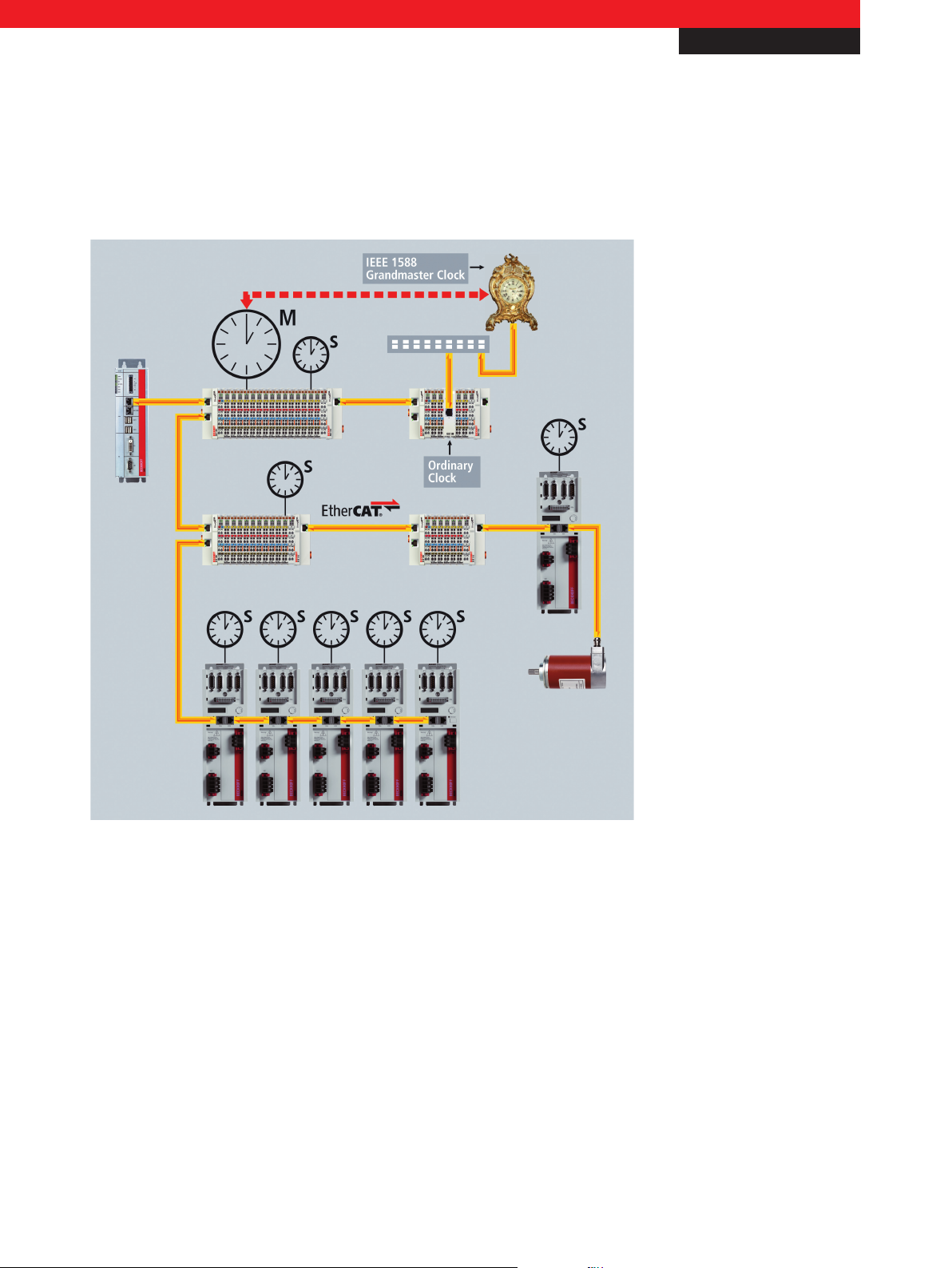
Fig. 1 Local clock generators in the field
This is possible through the distributed clock function under EtherCAT (see Fig. 1): The local clock generators in the EtherCAT
slaves provide a uniform system time. The differences in internal protocol run-times of the bus between slaves are calculated,
and these micro-delays are compensated after synchronisation of the clocks in the EtherCAT slaves. The now unified system
time in the bus system allows reliable chronological relationships between different events within the system. For distributed
clock function see distributed clocks system description, available from the download area under http://www.beckhoff.com/
english/download/ethercat.htm .
The precision of the signal acquisition at I/Os is achieved through oversampling of the signal. This means that the signal is not
queried once per communication cycle as usual, but several times with a defined frequency within the cycle. The sampled data
are sent to the controller as a process data packet with the next communication cycle and analysed. For the user this has the
advantage that a finer subdivision can be achieved through oversampling with a typical motion application communication
cycle of 1 ms, without having to modify the cycle time. With an oversample frequency of 10 kHz and a cycle time of 1 ms the
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
2
Page 3

XFC
1 2 3 4 5 6 7 8 9
100 μs sample time
10
samples
1 ms cycle time
Application Note DK9222-0909-0005
XFC technology oversampling
communication cycle is divided into 10 intervals. The change of state at the input or output is determined with a precision of
100 µs.
Fig. 2: Cycle time vs. sample time
Different oversample frequencies can be set depending on the terminal. As a rule, the configurable frequency does not depend
on the bus speed, but on the signal processing within the terminal. Digital input and output terminals currently enable
resolutions of up to 1 µs, with analog signals the smallest possible interval is 10 µs. Even for moderate communication cycles
with only 1 ms, digital signal acquisition is possible with a 1000th of the time, analog with a 100th.
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
3
Page 4

Application Note DK9222-0909-0005
EL3632
XFC technology oversampling
Practical applications: vibration analysis
Sampling of an analog input signal with the EL3632 IEPE terminal
XFC
Fig. 3 Gear unit with sensor at the ball bearing
For the quality evaluation of a gear unit the built-in radial ball bearings are checked for faulty balls. Since faulty balls show
up in a vibration analysis, the bearing is run in a test rig with a vibration sensor. The sensor signal indicates the vibration
curve according to the IEPE standard and shows any vibrations. (The acronym IEPE stands for Integrated Electronics Piezo-
Electric and describes an industrial standard for piezoelectric sensors with built-in impedance transformer electronics. Other
manufacturer names for the same principle are ICP®, CCLD, Isotron®, Deltatron®, Piezotron®, etc.) For communication with a
higher-level analysis unit, e.g. a control PC, the values are transferred cyclically via a bus system. A more detailed temporal
resolution of the vibration can be achieved through reduction of the bus cycle time or through oversampling with a constant
cycle time. With a moderate bus cycle of 1 ms and high-resolution oversampling, even finely graded vibration amplitudes can
be represented, resulting in a computing time surplus that can be used for mathematical analyses.
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
4
Page 5

XFC
Application Note DK9222-0909-0005
XFC technology oversampling
Practical applications: torque analysis
A corresponding application scenario would be an EL3702 (±10 V input terminal, max. oversample factor 10 µs) at a fast
torque sensor with matching analog signal output. This can be used for measuring the synchronously smooth operation of
a gear specimen, for example. The incoming signals have to be suitably filtered in the higher-level control system in order to
eliminate noise as necessary. Through oversampling with a frequency of 100 kHz the vibration curve is scaled more finely with
a timebase of 10 µs, so that small torque fluctuation are reproduced sufficiently. The vibration curve can therefore also be
mapped in relation to the exact axis position, e.g. through application of a high-resolution incremental encoder.
Control architecture for highest performance www.beckhoff.com/XFC
EtherCAT www.beckhoff.com/EtherCAT
Digital input terminal with oversampling www.beckhoff.com/EL1262
Digital output terminal with oversampling www.beckhoff.com/EL2262
± 5 V analog input terminal with oversampling (IEPE) www.beckhoff.com/EL3632
± 10 V analog input terminal with oversampling www.beckhoff.com/EL3702
0…20 mA analog input terminal with oversampling www.beckhoff.com/EL3742
0…20 mA analog output terminal with oversampling www.beckhoff.com/EL4712
± 10 V analog output terminal with oversampling www.beckhoff.com/EL4732
This publication contains statements about the suitability of our products for certain areas of application. These statements are based on typical features of our products. The examples shown in this publication are for demonstration purposes only. The information provided herein should not be regarded as specific operation characteristics. It is incumbent on the
customer to check and decide whether a product is suit-able for use in a particular application. We do not give any warranty that the source code which is made available with this
publication is complete or accurate. This publication may be changed at any time with-out prior notice. No liability is assumed for errors and/or omissions. Our products are described
in detail in our data sheets and documentations. Product-specific warnings and cautions must be observed. For the latest version of our data sheets and documentations please visit
our website (www.beckhoff.com).
© Beckhoff Automation GmbH, September 2009
The reproduction, distribution and utilisation of this document as well as the communication of its contents to others without express authorisation is prohibited. Offenders will be
held liable for the payment of damages. All rights reserved in the event of the grant of a patent, utility model or design.
Beckhoff
New Automation Technology
5
 Loading...
Loading...