

Page 1

I/O
Application Note DK9222-0610-0027
Motion
Keywords
Buffer capacitor
Brake chopper
Fieldbus
Drive
Stepper
DC motor
Output stage
DC link
Overload
Recovery
EtherCAT
K-Bus
Bus Terminal
PLC
Overvoltage protection and voltage stabilization for
Motion Control terminals
This application example describes how Motion Control applications with the output stages for servo, DC
and stepper motors by Beckhoff are optimized by the utilization of buffer capacitors. The buffer capacitor
terminals EL9570 for EtherCAT and KL9570 for K-Bus stabilize the voltage supply by absorbing the fed back
energy and dumping the energy that the buffer capacitor cannot protect against into an external braking
resistor. The buffer capacitor terminal protects the DC power supply and other motor terminals that may
be sharing the same DC power source. The buffer capacitor terminal extends the area of application for
Beckhoff Motion Control terminals to also include applications with short start/stop ramp times and large
inertia. Additional installation space in control cabinets is saved due to the solution’s compact design as a
double-sized standard terminal block.
Electrical drives
Variable-speed electrical drives are used in practically all industrial sectors. They are preferred for the following reasons:
– Good system efficiency
– Good or very good static and dynamic control characteristics
– Communication with higher-level controllers is possible
– Market prices are in line with user expectations.
Electrical drives are also influenced by the control electronics. New servo drives make complete solutions that are compact
and energy-saving possible. These exhibit dynamic control behavior, good torque stability, and control capability down to zero
speed.
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
1
Page 2
I/O
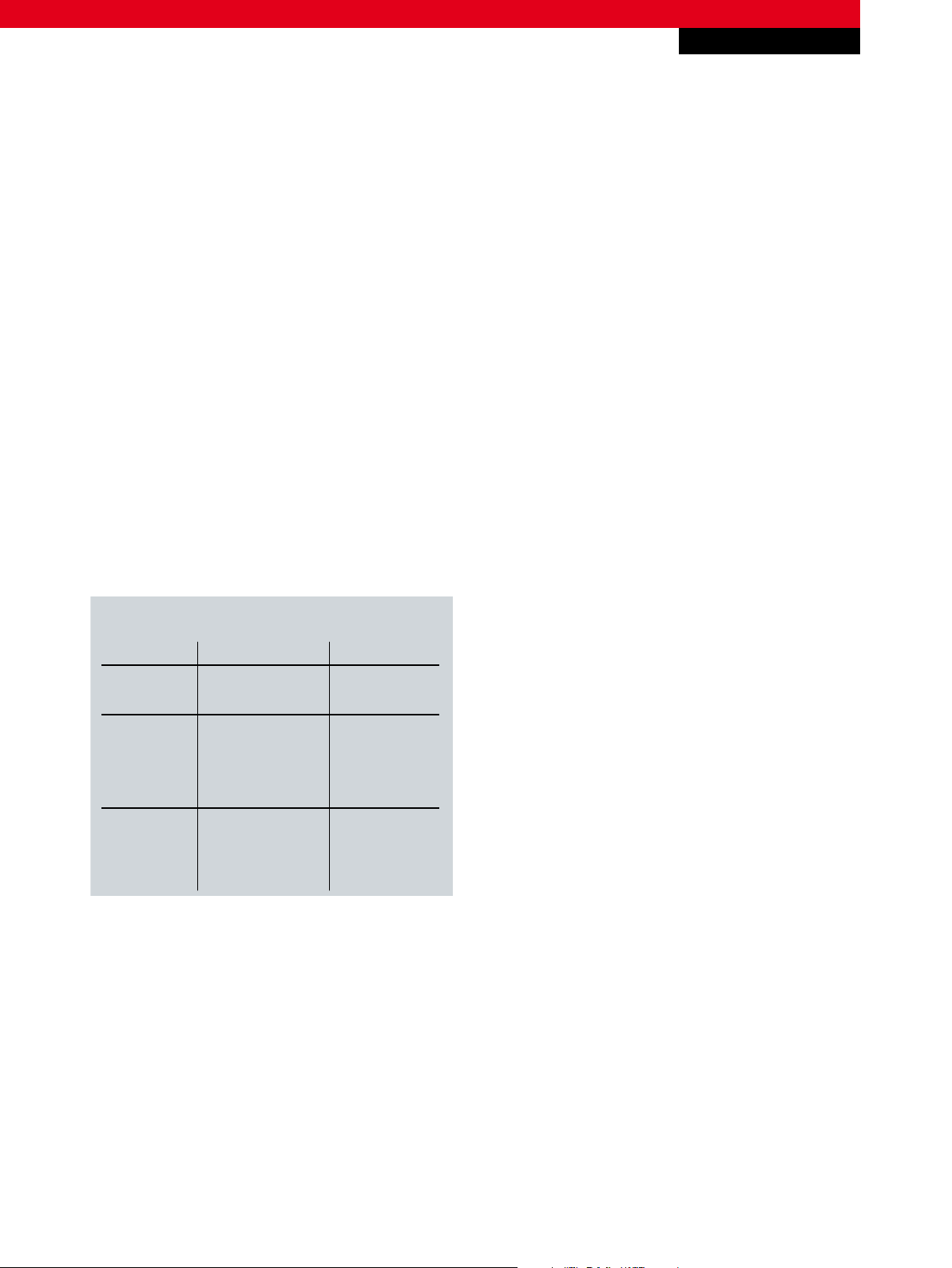
Overview of Motion Control terminals
EtherCAT Terminals Bus Terminals
Servomotors
EL7201
50 V DC, 4 A
–
DC motors
Stepper motors
EL7332
24 V DC, 1 A
EL7342
50 V DC, 3.5 A
EL7031
24 V DC, 1.5 A
EL7041
50 V DC, 5 A
KL2532
24 V DC, 1 A
KL2552
50 V DC, 5 A
KL2531
24 V DC, 1.5 A
KL2541
50 V DC, 5 A
Application Note DK9222-0610-0027
Motion
Servo motors are suitable drives for position control applications. They combine motor, speed and angular position measuring
systems. For cost-sensitive applications with low dynamics, stepper motors may be used as an alternative. In the lower capacity
range, DC motors offer good control ability with low costs. The suitability of a drive is judged on the basis of the torque
produced and the dynamics.
Motion Control in a very compact form factor
The modular I/O system from Beckhoff also encompasses Motion Control in an exceptionally compact form factor. Motors are
driven directly from the PLC with output stages for servo, stepper and DC motors. To have an output stage means that the
motor amplifier is built right into the motor terminal. Whether using an EtherCAT or a Bus Terminal, these I/O devices with
a built in drive can be integrated into any control environment using Beckhoff Bus Couplers. The TwinCAT System Manager
reduces familiarization efforts to a minimum, since TwinCAT enables equal treatment of all motors on the software side. The
interfaces are almost identical, and parameterization is quite straightforward.
Fig. 1 Overview of the Motion Control terminals
DC, servo and stepper motors (principle of operation)
The principles of operation for DC motors and stepper motors are fundamentally different. DC motors generate a torque and a
rotary motion when a voltage is applied. Stepper motors only generate a torque. A prerequisite for the rotary motor motion is
For application notes see disclaimer on the last page
commutation of the current, i.e. inversion of the direction of current flow in the electromagnetic coil during a motor rotation.
DC motors with brushes are self-commutating. Stepper motors cannot commutate independently. Servo motors do not differ
from the aforementioned types of motors in their physical operating principle, but rather in the way they are controlled: they
are operated in conjunction with position feedback in a closed control loop.
Beckhoff
New Automation Technology
2
Page 3

I/O
V DC
max.
t
U
I
t
Application Note DK9222-0610-0027
Motion
Power supply of electrical drives – problems from real applications
A Voltage peaks at the power supply unit
In highly dynamic applications, fast decelerations cause the feedback of energy, which will lead to voltage spikes at the power
supply unit. The overvoltage spikes can destroy the power supply unit. ’Intelligent’ power supplies with overvoltage protection
switch themselves off briefly, but this results in the drive losing control. These are all factors that will significantly impair
system reliability.
Fig. 2 Voltage spikes at the power supply unit
B Ripple currents
Fig. 3 Occurrence of ripple currents
Ripple currents occur during fast acceleration. The power supply unit can no longer compensate, resulting in voltage drops.
Ripple currents additionally occur with the commutation of DC machines, which have a negative influence on synchronization,
particularly in the case of short start/stop ramp times of the motors, and appear as torque ripple (rough mechanical operation).
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
3
Page 4

I/O
55 V DC
t
U
Application Note DK9222-0610-0027
Motion
C Braking energy/energy recovery
The faster the deceleration time of the motors, the more negative energy is generated, which appears as a voltage peak at the
power supply unit.
See A Voltage peaks
Optimization potential with the Beckhoff buffer capacitor terminals
The EL9570 and KL9570 buffer capacitor terminals are intended for use with the output stages of stepper motors and DC
motors. With a capacitance of 500 µF they stabilize the power supply, feed energy back and protect highly dynamic drives
against overvoltage. The 12 mm wide EL9570 and KL9570 buffer capacitor terminals supplement the extensive I/O system kit
for Motion Control in miniature format and can be integrated in any control environment via Bus Couplers.
Overvoltage protection
Fig. 5 Prevention of overvoltage
The KL9570 and EL9570 buffer capacitor terminals can absorb the energy generated by highly dynamic drives due to their
500 µF capacitors, which are particularly resistant to ripple current. If the fed-back energy exceeds the capacity of the
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
4
Page 5

I/O
KL9570 in combination with:
KL2531 | Stepper motor terminal
24 V DC, 1.5 A
KL2541 | Stepper motor terminal
50 V DC, 5 A, with incremental encoder
KL2532 | 2-channel DC motor output stage
24 V DC, 1 A
KL2552 | 2-channel DC motor output stage
50 V DC, 5 A
EL9570 in combination with:
EL7031 | Stepper motor terminal
24 V DC, 1.5 A
EL7041 | Stepper motor terminal
50 V DC, 5 A, with incremental encoder
EL7201 | Servomotor terminal
50 V DC, 4 A, with resolver, motor brake
EL7332 | 2-channel DC motor output stage
24 V DC, 1 A
EL7342 | 2-channel DC motor output stage
50 V DC, 3.5 A
Application Note DK9222-0610-0027
Motion
ccapacitors, an external braking resistor prevents overvoltage. The low internal resistance and the high pulse current capability
of up to 10 A enables good buffering parallel to the power supply.
Fig. 6 Possible combinations of Beckhoff Motion Control and buffer capacitor terminals
– Buffer capacitor terminal www.beckhoff.com/KL9570
– Buffer capacitor terminal EtherCAT www.beckhoff.com/EL9570
Bus Terminals
– Stepper motor terminal 24 V DC, 1.5 A www.beckhoff.com/KL2531
– Stepper motor terminal 50 V DC, 5 A, with incremental encoder www.beckhoff.com/KL2541
– 2-channel DC motor output stage 24 V DC, 1 A www.beckhoff.com/KL2532
– 2-channel DC motor output stage 50 V DC, 5 A www.beckhoff.com/KL2552
EtherCAT Terminals
– Servomotor terminal 50 V DC, 4 A EtherCAT www.beckhoff.com/EL7201
– Stepper motor terminal 24 V DC, 1.5 A EtherCAT www.beckhoff.com/EL7031
– Stepper motor terminal 50 V DC, 5 A, with incremental encoder EtherCAT www.beckhoff.com/EL7041
– 2-channel DC motor output stage 24 V DC, 1 A EtherCAT www.beckhoff.com/EL7332
– 2-channel DC motor output stage 50 V DC, 3.5 A EtherCAT www.beckhoff.com/EL7342
For application notes see disclaimer on the last page
Beckhoff
New Automation Technology
5
Page 6

Application Note DK9222-0610-0027
Motion
I/O
This publication contains statements about the suitability of our products for certain areas of application. These statements are based on typical features of our products. The examples shown in this publication are for demonstration purposes only. The information provided herein should not be regarded as specific operation characteristics. It is incumbent on the
customer to check and decide whether a product is suit-able for use in a particular application. We do not give any warranty that the source code which is made available with this
publication is complete or accurate. This publication may be changed at any time with-out prior notice. No liability is assumed for errors and/or omissions. Our products are described
in detail in our data sheets and documentations. Product-specific warnings and cautions must be observed. For the latest version of our data sheets and documentations please visit
our website (www.beckhoff.com).
© Beckhoff Automation GmbH, June 2010
The reproduction, distribution and utilisation of this document as well as the communication of its contents to others without express authorisation is prohibited. Offenders will be
held liable for the payment of damages. All rights reserved in the event of the grant of a patent, utility model or design.
Beckhoff
New Automation Technology
6
 Loading...
Loading...