

Page 1

Version: 2.4
Documentation
Synchronous Servomotor AM8000 and AM8500
Date : 2015-01-05
Page 2
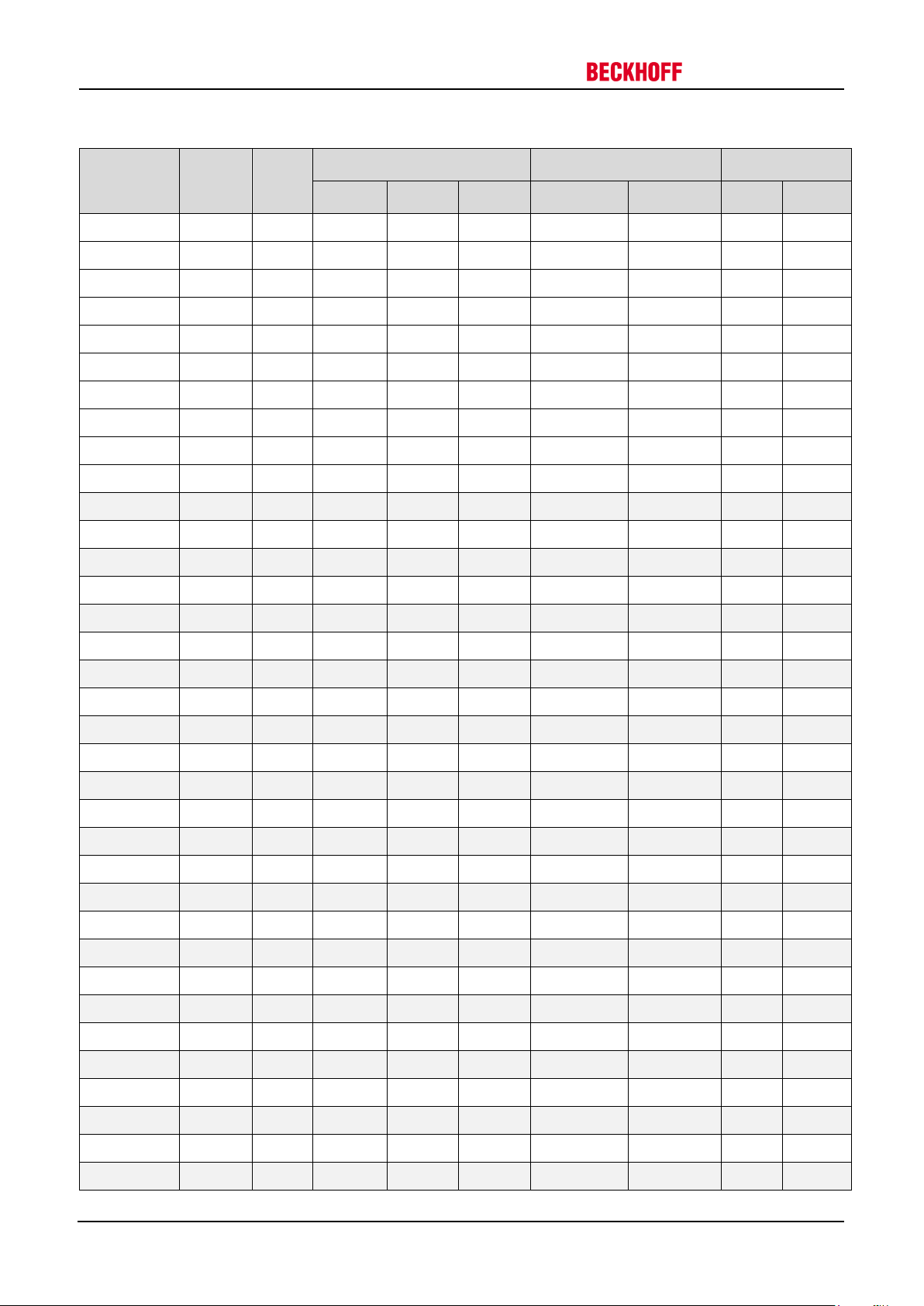
Documented motors – AM8000 and AM8500
Rated speed at rated supply
voltage
without
brake
with
brake
without
brake
with
brake
Documented motors – AM8000 and AM8500
Drive Technology
Rotor moment of inertia Weight
AM8tuv-wxyz
Standstill
torque
Stand
still
current
230 V AC 400 V AC 480 V AC
AM8011-wByz 0.20 Nm 0.76 A 8000 min-1 --- --- 0.0294 kg cm² 0.0521 kg cm² 0.62 kg 0.81 kg
AM8012-wCyz 0.38 Nm 1.30 A 8000 min-1 --- --- 0.0482 kg cm² 0.0709 kg cm² 0.74 kg 0.93 kg
AM8013-wDyz 0.52 Nm 1.65 A 8000 min-1 --- --- 0.0670 kg cm² 0.0897 kg cm² 0.86 kg 1.05 kg
AM8021-wByz 0.50 Nm 0.85 A 4000 min-1 8000 min
AM8021-wDyz 0.50 Nm 1.60 A 8000 min-1 9000 min
AM8022-wDyz 0.80 Nm 1.50 A 4500 min-1 8000 min
AM8022-wEyz 0.80 Nm 2.44 A 8000 min-1 9000 min
AM8023-wEyz 1.20 Nm 2.20 A 4500 min-1 8000 min
AM8023-wFyz 1.20 Nm 3.40 A 8000 min-1 9000 min
AM8031-wCyz 1.37 Nm 1.00 A 1400 min-1 3000 min
AM8531-wCyz 1.37 Nm 1.00 A 1400 min-1 3000 min
AM8031-wDyz 1.38 Nm 1.95 A 3300 min-1 6000 min
AM8531-wDyz 1.38 Nm 1.95 A 3300 min-1 6000 min
AM8031-wFyz 1.40 Nm 3.20 A 6000 min-1 9000 min
AM8531-wFyz 1.40 Nm 3.20 A 6000 min-1 9000 min
AM8032-wDyz 2.38 Nm 1.70 A 1500 min-1 3000 min
AM8532-wDyz 2.38 Nm 1.70 A 1500 min-1 3000 min
AM8032-wEyz 2.37 Nm 2.95 A 3200 min-1 6000 min
AM8532-wEyz 2.37 Nm 2.95 A 3200 min-1 6000 min
AM8032-wHyz 2.37 Nm 5.10 A 6000 min-1 9000 min
AM8532-wHyz 2.37 Nm 5.10 A 6000 min-1 9000 min
AM8033-wEyz 3.20 Nm 2.10 A 1500 min-1 3000 min
AM8533-wEyz 3.20 Nm 2.10 A 1500 min-1 3000 min
AM8033-wFyz 3.22 Nm 4.10 A 3200 min-1 6000 min
AM8533-wFyz 3.22 Nm 4.10 A 3200 min-1 6000 min
AM8033-wJyz 3.22 Nm 6.80 A 5900 min-1 9000 min
AM8533-wJyz 3.22 Nm 6.80 A 5900 min-1 9000 min
AM8041-wDyz 2.37 Nm 1.65 A 1500 min-1 3000 min
AM8541-wDyz 2.37 Nm 1.65 A 1500 min-1 3000 min
AM8041-wEyz 2.45 Nm 3.00 A 3000 min-1 6000 min
AM8541-wEyz 2.45 Nm 3.00 A 3000 min-1 6000 min
AM8041-wHyz 2.40 Nm 5.25 A 6000 min-1 8000 min
AM8541-wHyz 2.40 Nm 5.25 A 6000 min-1 8000 min
AM8042-wEyz 4.10 Nm 2.15 A 1200 min-1 2500 min
AM8542-wEyz 4.10 Nm 2.15 A 1200 min-1 2500 min
-1
9000 min
-1
9000 min
-1
9000 min
-1
9000 min
-1
9000 min
-1
9000 min
-1
3400 min
-1
3400 min
-1
6800 min
-1
6800 min
-1
9000 min
-1
9000 min
-1
3400 min
-1
3400 min
-1
6800 min
-1
6800 min
-1
9000 min
-1
9000 min
-1
3400 min
-1
3400 min
-1
6800 min
-1
6800 min
-1
9000 min
-1
9000 min
-1
3400 min
-1
3400 min
-1
6800 min
-1
6800 min
-1
8000 min
-1
8000 min
-1
2800 min
-1
2800 min
-1
0.134 kg cm² 0.156 kg cm² 1.00 kg 1.10 kg
-1
0.134 kg cm² 0.156 kg cm² 1.00 kg 1.10 kg
-1
0.253 kg cm² 0.276 kg cm² 1.30 kg 1.60 kg
-1
0.253 kg cm² 0.276 kg cm² 1.30 kg 1.60 kg
-1
0.373 kg cm² 0.396 kg cm² 1.70 kg 1.90 kg
-1
0.373 kg cm² 0.396 kg cm² 1.70 kg 1.90 kg
-1
0.462 kg cm² 0.541 kg cm² 1.80 kg 2.20 kg
-1
1.670 kg cm² 1.760 kg cm² 2.40 kg 2.60 kg
-1
0.462 kg cm² 0.541 kg cm² 1.80 kg 2.20 kg
-1
1.670 kg cm² 1.760 kg cm² 2.40 kg 2.60 kg
-1
0.462 kg cm² 0.541 kg cm² 1.80 kg 2.20 kg
-1
1.670 kg cm² 1.760 kg cm² 2.40 kg 2.60 kg
-1
0.842 kg cm² 0.921 kg cm² 2.40 kg 2.80 kg
-1
2.050 kg cm² 2.150 kg cm² 3.00 kg 3.30 kg
-1
0.842 kg cm² 0.921 kg cm² 2.40 kg 2.80 kg
-1
2.050 kg cm² 2.150 kg cm² 3.00 kg 3.30 kg
-1
0.842 kg cm² 0.921 kg cm² 2.40 kg 2.80 kg
-1
2.050 kg cm² 2.150 kg cm² 3.00 kg 3.30 kg
-1
1.220 kg cm² 1.460 kg cm² 3.00 kg 3.60 kg
-1
2.440 kg cm² ----. 3.60 kg ---
-1
1.220 kg cm² 1.460 kg cm² 3.00 kg 3.60 kg
-1
2.440 kg cm² --- 3.60 kg ---
-1
1.220 kg cm² 1.460 kg cm² 3.00 kg 3.60 kg
-1
2.440 kg cm² --- 3.60 kg ---
-1
1.080 kg cm² 1.730 kg cm² 2.80 kg 3.60 kg
-1
4.630 kg cm² 5.270 kg cm² 3.80 kg 4.50 kg
-1
1.080 kg cm² 1.730 kg cm² 2.80 kg 3.60 kg
-1
4.630 kg cm² 5.270 kg cm² 3.80 kg 4.50 kg
-1
1.080 kg cm² 1.730 kg cm² 2.80 kg 3.60 kg
-1
4.630 kg cm² 5.270 kg cm² 3.80 kg 4.50 kg
-1
1.970 kg cm² 2.620 kg cm² 3.80 kg 4.70 kg
-1
5.530 kg cm² 6.160 kg cm² 4.90 kg 5.70 kg
2 Version: 2.4 AM8000 and AM8500
Page 3
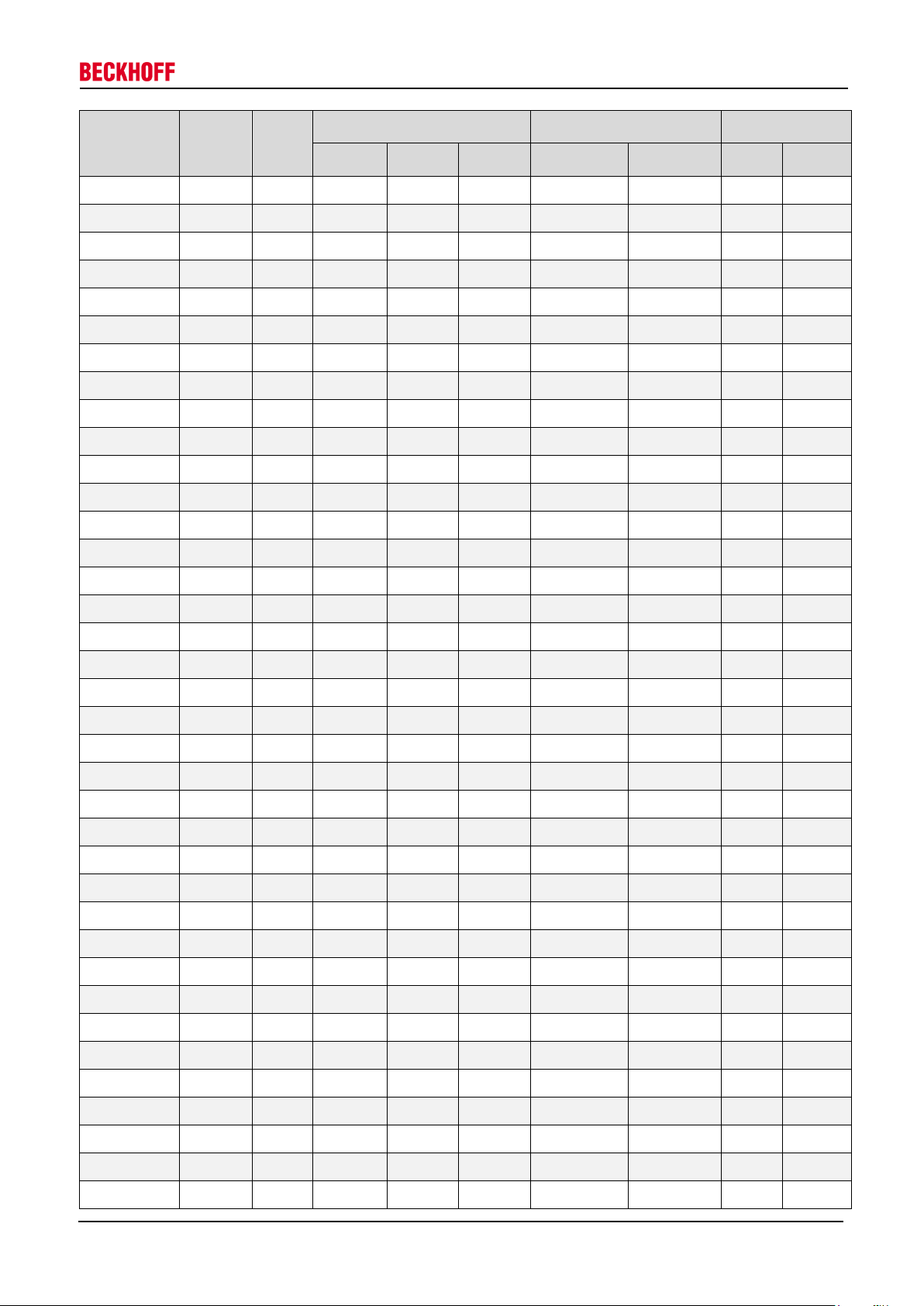
Rated speed at rated supply
voltage
without
brake
with
brake
without
brake
with
brake
Drive Technology Documented motors – AM8000 and AM8500
Stand
still
current
230 V AC 400 V AC 480 V AC
AM8tuv-wxyz
Standstill
torque
AM8042-wFyz 4.10 Nm 4.10 A 2800 min-1 5000 min
AM8542-wFyz 4.10 Nm 4.10 A 2800 min-1 5000 min
AM8042-wJyz 4.10 Nm 6.90 A 5000 min-1 8000 min
AM8542-wJyz 4.10 Nm 6.90 A 5000 min-1 8000 min
AM8043-wEyz 5.65 Nm 2.90 A 1200 min-1 2500 min
AM8543-wEyz 5.65 Nm 2.90 A 1200 min-1 2500 min
AM8043-wHyz 5.65 Nm 5.40 A 2700 min-1 5000 min
AM8543-wHyz 5.65 Nm 5.40 A 2700 min-1 5000 min
AM8043-wKyz 5.60 Nm 9.30 A 5000 min-1 8000 min
AM8543-wKyz 5.60 Nm 9.30 A 5000 min-1 8000 min
AM8051-wEyz 4.80 Nm 2.70 A 1400 min-1 2500 min
AM8551-wEyz 4.80 Nm 2.70 A 1400 min-1 2500 min
AM8051-wGyz 4.90 Nm 4.75 A 2700 min-1 5000 min
AM8551-wGyz 4.90 Nm 4.75 A 2700 min-1 5000 min
AM8051-wKyz 4.90 Nm 8.50 A 5000 min-1 8000 min
AM8551-wKyz 4.90 Nm 8.50 A 5000 min-1 8000 min
AM8052-wFyz 8.20 Nm 3.30 A 1100 min-1 2000 min
AM8552-wFyz 8.20 Nm 3.30 A 1100 min-1 2000 min
AM8052-wJyz 8.20 Nm 6.30 A 2200 min-1 4000 min
AM8552-wJyz 8.20 Nm 6.30 A 2200 min-1 4000 min
AM8052-wLyz 8.20 Nm 11.30 A 4000 min-1 7300 min
AM8552-wLyz 8.20 Nm 11.30 A 4000 min-1 7300 min
AM8053-wGyz 11.40 Nm 4.70 A 1100 min-1 2000 min
AM8553-wGyz 11.40 Nm 4.70 A 1100 min-1 2000 min
AM8053-wKyz 11.40 Nm 8.80 A 2200 min-1 4000 min
AM8553-wKyz 11.40 Nm 8.80 A 2200 min-1 4000 min
AM8053-wNyz 11.40 Nm 15.60 A 4000 min-1 7000 min
AM8553-wNyz 11.40 Nm 15.60 A 4000 min-1 7000 min
AM8061-wGyz 12.80 Nm 4.00 A 800 min-1 1500 min
AM8561-wGyz 12.80 Nm 4.00 A 800 min-1 1500 min
AM8061-wJyz 12.80 Nm 7.80 A 1600 min-1 3000 min
AM8561-wJyz 12.80 Nm 7.80 A 1600 min-1 3000 min
AM8061-wMyz 12.80 Nm 13.10 A 2800 min-1 5000 min
AM8561-wMyz 12.80 Nm 13.10 A 2800 min-1 5000 min
AM8062-wJyz 21.10 Nm 6.20 A 800 min-1 1500 min
AM8562-wJyz 21.10 Nm 6.20 A 800 min-1 1500 min
AM8062-wLyz 21.10 Nm 12.40 A 1700 min-1 3000 min
-1
5700 min
-1
5700 min
-1
8000 min
-1
8000 min
-1
2800 min
-1
2800 min
-1
5700 min
-1
5700 min
-1
8000 min
-1
8000 min
-1
3000 min
-1
3000 min
-1
5700 min
-1
5700 min
-1
8000 min
-1
8000 min
-1
2400 min
-1
2400 min
-1
4500 min
-1
4500 min
-1
7500 min
-1
7500 min
-1
2400 min
-1
2400 min
-1
4500 min
-1
4500 min
-1
7000 min
-1
7000 min
-1
1700 min
-1
1700 min
-1
3400 min
-1
3400 min
-1
5000 min
-1
5000 min
-1
1700 min
-1
1700 min
-1
3400 min
Rotor moment of inertia Weight
-1
1.970 kg cm² 2.620 kg cm² 3.80 kg 4.70 kg
-1
5.530 kg cm² 6.160 kg cm² 4.90 kg 5.70 kg
-1
1.970 kg cm² 2.620 kg cm² 3.80 kg 4.70 kg
-1
5.530 kg cm² 6.160 kg cm² 4.90 kg 5.70 kg
-1
2.870 kg cm² 3.520 kg cm² 4.90 kg 5.80 kg
-1
6.430 kg cm² --- 6.00 kg ---
-1
2.870 kg cm² 3.520 kg cm² 4.90 kg 5.80 kg
-1
6.430 kg cm² --- 6.00 kg ---
-1
2.870 kg cm² 3.520 kg cm² 4.90 kg 5.80 kg
-1
6.430 kg cm² --- 6.00 kg ---
-1
2.240 kg cm² 2.900 kg cm² 4.10 kg 4.90 kg
-1
8.740 kg cm² 9.400 kg cm² 5.50 kg 6.30 kg
-1
2.240 kg cm² 2.900 kg cm² 4.10 kg 4.90 kg
-1
8.740 kg cm² 9.400 kg cm² 5.50 kg 6.30 kg
-1
2.240 kg cm² 2.900 kg cm² 4.10 kg 4.90 kg
-1
8.740 kg cm² 9.400 kg cm² 5.50 kg 6.30 kg
-1
4.080 kg cm² 4.740 kg cm² 5.70 kg 6.60 kg
-1
10.600 kg cm² 11.200 kg cm² 7.00 kg 7.90 kg
-1
4.080 kg cm² 4.740 kg cm² 5.70 kg 6.60 kg
-1
10.600 kg cm² 11.200 kg cm² 7.00 kg 7.90 kg
-1
4.080 kg cm² 4.740 kg cm² 5.70 kg 6.60 kg
-1
10.600 kg cm² 11.200 kg cm² 7.00 kg 7.90 kg
-1
5.920 kg cm² 7.040 kg cm² 7.40 kg 8.40 kg
-1
12.500 kg cm² --- 8.80 kg ---
-1
5.920 kg cm² 7.040 kg cm² 7.40 kg 8.40 kg
-1
12.500 kg cm² --- 8.80 kg ---
-1
5.920 kg cm² 7.040 kg cm² 7.40 kg 8.40 kg
-1
12.500 kg cm² --- 8.80 kg ---
-1
11.100 kg cm² 13.400 kg cm² 9.80 kg 11.60 kg
-1
48.200 kg cm² 50.600 kg cm² 13.20 kg 14.80 kg
-1
11.100 kg cm² 13.400 kg cm² 9.80 kg 11.60 kg
-1
48.200 kg cm² 50.600 kg cm² 13.20 kg 14.80 kg
-1
11.100 kg cm² 13.400 kg cm² 9.80 kg 11.60 kg
-1
48.200 kg cm² 50.600 kg cm² 13.20 kg 14.80 kg
-1
20.000 kg cm² 22.300 kg cm² 13.60 kg 15.40 kg
-1
57.100 kg cm² 59.600 kg cm² 17.00 kg 18.70 kg
-1
20.000 kg cm² 22.300 kg cm² 13.60 kg 15.40 kg
AM8000 and AM8500 Version: 2.4 3
Page 4
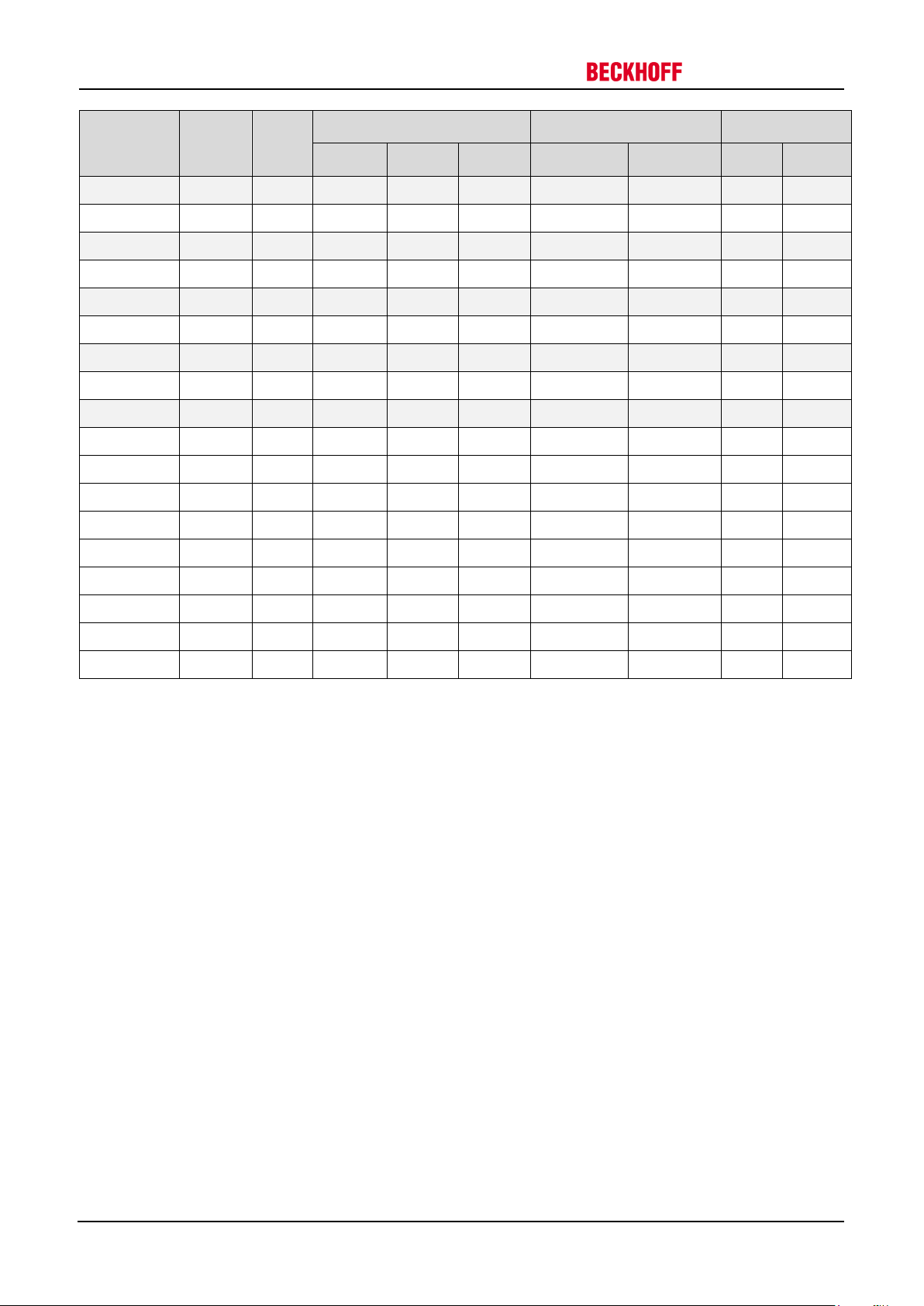
Documented motors – AM8000 and AM8500
Rated speed at rated supply
voltage
without
brake
with
brake
without
brake
with
brake
Drive Technology
Stand
still
current
230 V AC 400 V AC 480 V AC
AM8tuv-wxyz
Standstill
torque
AM8562-wLyz 21.10 Nm 12.40 A 1700 min-1 3000 min
AM8062-wPyz 21.10 Nm 20.30 A 2800 min-1 5000 min
AM8562-wPyz 21.10 Nm 20.30 A 2800 min-1 5000 min
AM8063-wKyz 29.00 Nm 8.70 A 800 min-1 1500 min
AM8563-wKyz 29.00 Nm 8.70 A 800 min-1 1500 min
AM8063-wNyz 29.00 Nm 17.20 A 1700 min-1 3000 min
AM8563-wNyz 29.00 Nm 17.20 A 1700 min-1 3000 min
AM8063-wRyz 29.00 Nm 29.50 A 3000 min-1 4000 min
AM8563-wRyz 29.00 Nm 29.50 A 3000 min-1 4000 min
AM8071-wKyz 31.80 Nm 9.60 A 800 min-1 1500 min
AM8071-wNyz 31.80 Nm 17.80 A 1500 min-1 3000 min
AM8071-wRyz 29.00 Nm 28.2 A 3000 min-1 4000 min
AM8072-wLyz 54.60 Nm 11.10 A 500 min-1 1000 min
AM8072-wPyz 54.60 Nm 20.60 A 1000 min-1 2000 min
AM8072-wTyz 50.00 Nm 37.50 A 2000 min-1 3000 min
AM8073-wNyz 72.60 Nm 14.70°A 500 min-1 1000 min
AM8073-wQyz 72.60 Nm 27.90 A 1000 min-1 2000 min
AM8073-wTyz 70.00 Nm 45.60 A 2000 min-1 3000 min
-1
3400 min
-1
5000 min
-1
5000 min
-1
1700 min
-1
1700 min
-1
3400 min
-1
3400 min
-1
4000 min
-1
4000 min
-1
1700 min
-1
3300 min
-1
4500 min
-1
1100 min
-1
2200 min
-1
3300 min
-1
1100 min
-1
2200 min
-1
3300 min
Rotor moment of inertia Weight
-1
57.100 kg cm² 59.600 kg cm² 17.00 kg 18.70 kg
-1
20.000 kg cm² 22.300 kg cm² 13.60 kg 15.40 kg
-1
57.100 kg cm² 59.600 kg cm² 17.00 kg 18.70 kg
-1
29.000 kg cm² 34.900 kg cm² 17.40 kg 20.10 kg
-1
66.100 kg cm² --- 20.90 kg ---
-1
29.000 kg cm² 34.900 kg cm² 17.40 kg 20.10 kg
-1
66.100 kg cm² --- 20.90 kg ---
-1
29.000 kg cm² 34.900 kg cm² 17.40 kg 20.10 kg
-1
66.100 kg cm² --- 20.90 kg ---
-1
49.600 kg cm² 68.300 kg cm² 23.80 kg 29.30 kg
-1
49.600 kg cm² 68.300 kg cm² 23.80 kg 29.30 kg
-1
49.600 kg cm² 68.300 kg cm² 23.80 kg 29.30 kg
-1
92.300 kg cm² 110.90 kg cm² 33.20 kg 38.70 kg
-1
92.300 kg cm² 110.90 kg cm² 33.20 kg 38.70 kg
-1
92.300 kg cm² 110.90 kg cm² 33.20 kg 38.70 kg
-1
134.90 kg cm² 153.60 kg cm² 44.80 kg 50.30 kg
-1
134.90 kg cm² 153.60 kg cm² 44.80 kg 50.30 kg
-1
134.90 kg cm² 153.60 kg cm² 44.80 kg 50.30 kg
4 Version: 2.4 AM8000 and AM8500
Page 5

Drive Technology Table of contents – AM8000 and AM8500
Chapter Page
Table of contents – AM8000 and AM8500
Documented motors – AM8000 and AM8500 ..................................................................................................... 2
Table of contents – AM8000 and AM8500 .......................................................................................................... 5
1 Foreword ................................................................................................................................................ 7
1.1 Notes on the documentation .......................................................................................................... 7
1.2 Disclaimer ...................................................................................................................................... 7
1.3 Brands ............................................................................................................................................ 7
1.4 Patents ........................................................................................................................................... 7
1.5 Copyright ........................................................................................................................................ 7
1.6 Documentation issue status ........................................................................................................... 7
1.7 Appropriate use .............................................................................................................................. 8
2 Guidelines and Standards ................................................................................................................... 9
2.1 EC declaration of conformity .......................................................................................................... 9
3 Safety .................................................................................................................................................... 10
3.1 General safety instructions .......................................................................................................... 10
3.1.1 Personnel qualification ................................................................................................................. 10
3.1.2 Description of safety symbols ...................................................................................................... 10
3.2 Special safety instructions for AM8000 and AM8500 .................................................................. 11
4 Handling ............................................................................................................................................... 12
4.1 Transport ...................................................................................................................................... 12
4.2 Packaging .................................................................................................................................... 12
4.3 Storage ......................................................................................................................................... 12
4.4 Maintenance / Cleaning ............................................................................................................... 12
4.5 Disposal ....................................................................................................................................... 13
5 Product identification ........................................................................................................................ 14
5.1 AM8000 and AM8500, scope of supply ....................................................................................... 14
5.2 AM8000 and AM8500 nameplate ................................................................................................ 14
5.3 Type key AM8000 and AM8500 ................................................................................................... 14
6 Technical description ........................................................................................................................ 14
6.1 Design of the motors .................................................................................................................... 15
6.2 General technical data ................................................................................................................. 15
6.3 Standard features ......................................................................................................................... 16
6.3.1 Style ............................................................................................................................................. 16
6.3.2 Shaft end, A-side .......................................................................................................................... 16
6.3.3 Flange .......................................................................................................................................... 16
6.3.4 Protection class ............................................................................................................................ 16
6.3.5 Overtemperature protection ......................................................................................................... 16
6.3.6 Insulation material class ............................................................................................................... 16
6.3.7 Vibration class .............................................................................................................................. 17
6.3.8 Vibrations and shocks .................................................................................................................. 17
6.3.9 Connection technology ................................................................................................................ 17
6.3.10 Feedback system ......................................................................................................................... 17
6.3.11 Holding brake ............................................................................................................................... 17
6.3.12 Pole number ................................................................................................................................. 18
6.4 Options ......................................................................................................................................... 18
6.5 Selection criteria ........................................................................................................................... 18
6.6 Transport, assembly and disassembly ......................................................................................... 19
7 Mechanical installation ....................................................................................................................... 20
7.1 Important notes ............................................................................................................................ 20
7.2 Flange mounts ............................................................................................................................. 21
8 Electrical installation ........................................................................................................................... 22
8.1 Important notes ............................................................................................................................ 22
8.2 Connection of motors with pre-assembled cables ....................................................................... 23
8.3 AX5000 connection diagram for motors with OCT and iTec-plug .................................................. 24
8.4 AX5000 connection diagram for motors with OCT-Feedback ..................................................... 25
8.5 AX5000 connection diagram for motors with OCT-Feedback ..................................................... 26
AM8000 and AM8500 Version: 2.4 5
Page 6

Table of contents – AM8000 and AM8500
8.6 AX5000 connection diagram for motors with OCT-Feedback ..................................................... 27
8.7 AX5000 connection diagram for motors with resolver and yTec-plug ............................................ 28
8.8 AX5000 connection diagram for motors with resolver ................................................................. 29
8.9 AX5000 connection diagram for motors with resolver ................................................................. 30
8.10 AX5000 connection diagram for motors with resolver ................................................................. 31
8.11 AX5000 connection diagram for motors with resolver ................................................................. 32
8.12 AX5000 connection diagram for motors with Hiperface ............................................................... 33
9 Commissioning .................................................................................................................................... 34
9.1 Important notes ............................................................................................................................ 34
9.2 Guide for commissioning.............................................................................................................. 34
9.3 Troubleshooting ........................................................................................................................... 34
10 Technical data ...................................................................................................................................... 36
10.1 AM801x ........................................................................................................................................ 37
10.1.1 Dimensional drawing AM801x ..................................................................................................... 38
10.1.2 Radial / axial forces at the shaft end ............................................................................................ 38
10.1.3 Characteristic torque / speed curves ........................................................................................... 38
10.2 AM802x ........................................................................................................................................ 39
10.2.1 Dimensional drawing AM802x ..................................................................................................... 40
10.2.2 Radial / axial forces at the shaft end ............................................................................................ 40
10.2.3 Characteristic torque / speed curves ........................................................................................... 40
10.3 AM803x and AM853x ................................................................................................................... 41
10.3.1 Dimensional drawing AM803x and AM853x ................................................................................ 42
10.3.2 Radial / axial forces at the shaft end ............................................................................................ 42
10.3.3 Characteristic torque / speed curves ........................................................................................... 42
10.4 AM804x and AM854x ................................................................................................................... 43
10.4.1 Dimensional drawing AM804x and AM854x ................................................................................ 44
10.4.2 Radial / axial forces at the shaft end ............................................................................................ 44
10.4.3 Characteristic torque / speed curves ........................................................................................... 44
10.5 AM805x and AM855x ................................................................................................................... 45
10.5.1 Dimensional drawing AM805x and AM855x ................................................................................ 46
10.5.2 Dimensional drawing AM805x-9000 and AM855x-9000 (Flange compatible to AM3x5x) ......... 46
10.5.3 Radial / axial forces at the shaft end ............................................................................................ 47
10.5.4 Characteristic torque / speed curves ........................................................................................... 47
10.6 AM806x and AM856x ................................................................................................................... 48
10.6.1 Dimensional drawing AM806x and AM856x ................................................................................ 49
10.6.2 Dimensional drawing AM8063 and AM8563 with R-Winding ...................................................... 49
10.6.3 Radial / axial forces at the shaft end ............................................................................................ 50
10.6.4 Characteristic torque / speed curves ........................................................................................... 50
10.7 AM807x ........................................................................................................................................ 51
10.7.1 Dimensional drawing AM807x ..................................................................................................... 52
10.7.2 Radial / axial forces at the shaft end ............................................................................................ 53
10.7.3 Characteristic torque / speed curves ........................................................................................... 53
11 Appendix ............................................................................................................................................. 54
11.1 Support and Service ..................................................................................................................... 54
11.2 Beckhoff's branch offices and representatives ............................................................................ 54
11.3 Beckhoff headquarters ................................................................................................................. 54
11.3.1 Beckhoff Support .......................................................................................................................... 54
11.3.2 Beckhoff Service .......................................................................................................................... 54
Drive Technology
6 Version: 2.4 AM8000 and AM8500
Page 7
Ausgabe
Bemerkung
2.4
Graphic resolution adjusted
2.3
Chapter update
10.1; 10.1.1; 10.1.2
2.2
Chapter update
6.6
2.1
General update (Series AM8500 added)
Drive Technology 1 Foreword
1 Foreword
1.1 Notes on the documentation
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards. It is essential that the following notes and explanations are
followed when installing and commissioning these components. The "General safety instructions" and "Special
safety instructions for AM8000 and AM8500" sections are also essential.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Danger for persons, the environment or equipment
The motors are operated in the drive system in conjunction with Beckhoff servo drives. Please
CAUTION
1.2 Disclaimer
This documentation has been prepared with care. The products described are, however, constantly under
development.
For this reason, the documentation may not always have been fully checked for consistency with the
performance data, standards or other characteristics described.
If it should contain technical or editorial errors, we reserve the right to make changes at any time and without
notice.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
observe the entire documentation which consists of:
− AM8000 and AM8500 documentation (this manual)
− Complete documentation (online and paper) for Beckhoff servo drives available at
www.beckhoff.com.
− Complete machine documentation (provided by the machine manufacturer)
1.3 Brands
Beckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE® and XFC® are registered and licensed
brand names of Beckhoff Automation GmbH & Co. KG.
The use by third parties of other brand names or trademarks contained in this documentation may lead to an
infringement of the rights of the respective trademark owner.
1.4 Patents
The TwinCAT technology is patent protected, in particular by the following applications and patents:
EP0851348, US6167425 with the corresponding applications and registrations in various other countries.
1.5 Copyright
© Beckhoff Automation GmbH.
The copying, distribution and utilisation of this document as well as the communication of its contents to others
without express authorisation is prohibited.
Offenders shall be held liable for damages. All rights conferred by patent grant or registration of a utility model
or registered design are reserved.
1.6 Documentation issue status
2.1; 3.2; 4.2; 4.4; 5.2; 5.3; 6.3.2; 6.3.3; 6.3.4; 6.3.5; 6.3.12; 10.2; 10.3; 10.4; 10.5; 10.6; 10.7
New chapter
6.3.5; 6.3.11; 10.5.1; 10.6; 10.7
New chapter
AM8000 and AM8500 Version: 2.4 7
Page 8
1 Foreword
2.0
Not published
1.2
Chapter update
6.3.8
1.1
Chapter update
8.2.1.1; 8.3; 8.4; 8.5; 8.6
1.0
First issue
drive system.
10.7.1
New chapter
Drive Technology
1.7 Appropriate use
Synchronous servomotors of the AM8000 and AM8500 series are designed as drives for handling equipment,
textile machines, machine tools, packaging machines and similar machines with demanding requirements in
terms of dynamics. The motors of the AM8000 and AM8500 series are exclusively intended for speed- and/or
torque-controlled operation via digital servo drives from Beckhoff.
The thermal protection contact incorporated in the motor windings must be analysed and monitored.
Caution – Risk of injury!
Electronic equipment is not fail-safe. The machine manufacturer is responsible for ensuring that
WARNING
The servomotors from the AM8000 and AM8500 series are exclusively designed for installation as components
in electrical systems or machines and may only be operated as integrated components of the system or
machine.
The motors may only be operated under the ambient conditions defined in this documentation.
the connected motors and the machine are brought into a safe state in the event of a fault in the
8 Version: 2.4 AM8000 and AM8500
Page 9
conformity of the complete machine or system.
Drive Technology 2 Guidelines and Standards
2 Guidelines and Standards
Danger for persons
Servomotors of the AM8000 and AM8500 series are not classified as products within the
CAUTION
2.1 EC declaration of conformity
We,
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Germany
hereby declare, under our sole responsibility, that the product range
motor series AM8000
(types AM801x, AM802x, AM803x, AM804x, AM805x, AM806x, AM807x)
motor series AM8500
(types AM853x, AM854x, AM855x, AM856x)
complies with following relevant regulations:
− EC Directive 2004/108/EC
Electromagnetic compatibility
Applied harmonised standard EN 61800-3
− EC Directive 2006/95/EC
Electrical equipment designed for use within certain voltage limits
Applied harmonised standard EN 61800-5-1
Attachment of the CE marking: 2012
Issued by: Management
H. Beckhoff
Verl, 25.05.2012
meaning of the EC Machinery Directive. Operation of the servomotors in machines or systems is
only permitted once the machine or system manufacturers has provided evidence of EC
AM8000 and AM8500 Version: 2.4 9
Page 10
3 Safety
DANGER
and health of persons.
WARNING
health of persons.
CAUTION
persons.
Attention
environment or equipment.
Note
This symbol indicates important information regarding UL certification.
Drive Technology
3 Safety
3.1 General safety instructions
3.1.1 Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
3.1.2 Description of safety symbols
The following safety symbols and associated safety instructions are used in this document. These safety
instructions must be read and followed.
Serious risk of injury!
Failure to follow the safety instructions associated with this symbol directly endangers the life
Caution – Risk of injury!
Failure to follow the safety instructions associated with this symbol endangers the life and
Personal injuries!
Failure to follow the safety instructions associated with this symbol can lead to injuries to
Damage to the environment or devices!
Failure to follow the safety instructions associated with this symbol can lead to damage to the
Tip or pointer
This symbol indicates information that contributes to better understanding.
UL note
10 Version: 2.4 AM8000 and AM8500
Page 11
Drive Technology 3 Safety
3.2 Special safety instructions for AM8000 and AM8500
The safety instructions are designed to avert danger and must be followed during installation, commissioning,
production, troubleshooting, maintenance and trial or test assemblies.
The servomotors of the AM8000 and AM8500 series are not designed for stand-alone operation and are always
installed in a machine or system. After installation the additional documentation and safety instructions provided
by the machine manufacturer must be read and followed.
Serious risk of injury through high electrical voltage!
• Never open the servomotor when it is live. The measured voltage between terminals U, V
WARNING
and W must have dropped below 50 V. Opening the device would invalidate any warranty
and liability claims against Beckhoff Automation GmbH.
• Negligent, improper handling of the servomotor and bypassing of the safety devices can lead
to personal injury or death through electric shock.
• Ensure that the protective conductor is connected properly.
• The machine manufacturer must prepare a hazard analysis for the machine, and must take
appropriate measures to ensure that unexpected movements cannot lead to injury to
persons or to material damage.
• Power leads may be live, even if the motor is not running. Never undo the electrical
connections to the motor when it is live. Under unfavourable conditions arcing may occur,
resulting in injury and damage to contacts.
WARNING
Attention
• Disconnect the servomotor from the servo drive and secure it against reconnection before
working on electrical parts with a voltage > 50 V.
• The DC link voltage of the servo drive may exceed 890 V
. Wait until the DC link capacitors
DC
are discharged before touching live terminals. The measured voltage between terminals DC+
and DC- (X02) must have dropped below 50 V
DC
.
Serious risk of injury through hot surfaces!
• The surface temperature may exceed 100 °C, resulting in a risk of burns.
• Avoid touching the housing during or shortly after operation.
• Leave the servomotor to cool down for at least 15 minutes after it is switched off.
• Use a thermometer to check whether the surface has cooled down sufficiently.
Danger for persons
• Carefully read this manual before using the servomotor thoroughly, paying particular
attention to the safety instructions. In the event of any uncertainties please notify your sales
office immediately and refrain from working on the servomotor.
• Only well trained, qualified electricians with sound knowledge of drive equipment may work
on the device.
• During installation it is essential to ensure that the specified ventilation clearances and
climatic conditions are adhered to. Further information can be found in the "Technical data"
and "Mechanical installation" sections.
• If a servomotor is installed in a machine it must not be commissioned until proof of
compliance of the machine with the latest version of the EC Machinery Directive has been
provided. This includes all relevant harmonised standards and regulations required for
implementation of this Directive in national legislation.
AM8000 and AM8500 Version: 2.4 11
Page 12
4 Handling
AM801x
10
AM802x
10
AM803x and AM853x
6
AM804x and AM854x
6
AM805x and AM855x
5
AM806x and AM856x
2
AM807x
1
Attention
Drive Technology
4 Handling
4.1 Transport
• Climate category: 2K3 according to EN 60721
• Transport temperature: -25 °C - +70 °C, max. fluctuation 20 K/hour
• Transport humidity: relative humidity 5% - 95%, non-condensing
• The servomotor may only be transported by qualified personnel and in the manufacturer's original recyclable
packaging.
• Avoid hard impacts, particularly at the shaft end.
• If the packaging is damaged, check the motor for visible damage. Inform the transport company and, if
necessary, the manufacturer.
4.2 Packaging
• Cardboard packaging
Motor type Max. stacking height
4.3 Storage
• Climate category 2K3 according to EN 60721
• Storage temperature: -25 °C - +70 °C, max. fluctuation 20 K/hour
• Air humidity: relative humidity 5% - 95%, non-condensing
• Max. stacking height: see table Packaging
• Storage time: without limitation
• Store only in the manufacturer’s original recyclable packaging
4.4 Maintenance / Cleaning
• Maintenance and cleaning only by qualified personnel.
• The ball bearings have a grease filling with a service life of 30,000 hours under normal operating conditions.
The bearings should be replaced after 30,000 hours of operation under rated conditions.
• Check the motor for bearing noise every 2,500 operating hours or once per year. If any noises are heard,
stop the operation of the motor. The bearings must be replaced.
• In motors with optional shaft seal ring the ring must be lubricated every 5,000 hours. We recommend
“Mobilgrease
• Opening the motor invalidates the warranty.
TM
FM 222 lubricant” from Fa. Mobil.
• Clean the housing with isopropanol or similar.
12 Version: 2.4 AM8000 and AM8500
Destruction of the servomotor
Never immerse or spray the servomotor.
Page 13

Drive Technology 4 Handling
4.5 Disposal
• In accordance with the WEEE 2002/96/EC Directives we take old devices and accessories back for
professional disposal, provided the transport costs are taken over by the sender. Please send the devices
to:
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Germany
AM8000 and AM8500 Version: 2.4 13
Page 14
5 Product identification
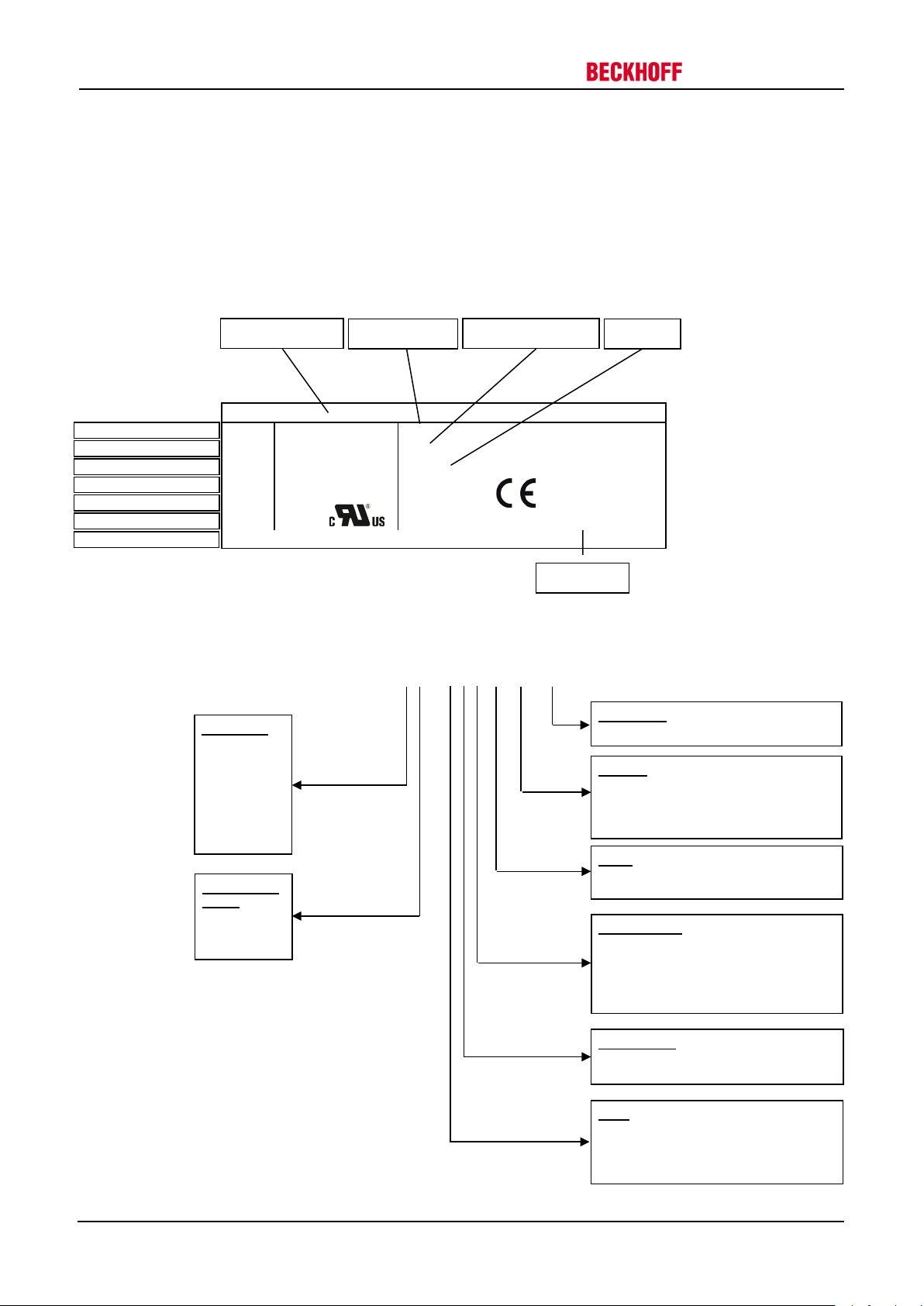
BECKHOFF
AM8062-0P01-0000
M0
ThCl
Nm
F
IP54 Made in Germany
SN .
File E355768 TOTALLY ENCLOSED
Flange size
7 = 194 mm
Construction
Winding type
S = special winding
Shaft
3 sealing ring – feather key groove *)
AM80 6 2 – 0 P 0 1 – 0000
Servomotor type
Thermo contact type
Standstill torque
Protection class
Serial number
Brake
1 24 V holding brake
Connection
Feedback unit
4 Hyperface Multiturn (only AM807x)
Variants
(only for AM805x and AM855x)
Standstill current
Rated voltage
Nominal speed
Rated output
Insulation class
Brake type
Certification USA / CAN
*) not for AM801x
5 Product identification
5.1 AM8000 and AM8500, scope of supply
Please check that the delivery includes the following items:
• Motor from the AM8000 or AM8500 series
• Leaflet (short info)
5.2 AM8000 and AM8500 nameplate
Drive Technology
I0
UN
nN
PN
Arms
Vrms
rpm
kW
Thermo
Brake
5.3 Type key AM8000 and AM8500
1 = 40 mm
2 = 58 mm
3 = 72 mm
4 = 87 mm
5 = 104 mm
6 = 142 mm
length
1
2
3
0 rotatable angular connectors
0 standard
1 special
9 flange compatible to AM3x5x
0 none brake
0 resolver, 2-pole *)
1 OCT Singleturn
2 OCT Multiturn
3 Hyperface Singleturn (only AM807x)
A…Z
0 smooth shaft
1 feather key groove
2 sealing ring – smooth shaft *)
14 Version: 2.4 AM8000 and AM8500
Page 15

3K3 according to EN 60721
+5 - +40 °C for site altitudes up to 1000 m amsl
above 40 °C and encapsulated installation of the motors.
95% relative humidity, non-condensing
For site altitudes above 1000 m amsl and 40 °C
reduction of 10K / 1000m
≥30.000 operating hours
→ see Section 10
→ see Section 4
Drive Technology 6 Technical description
6 Technical description
6.1 Design of the motors
The synchronous servomotors of the AM8000 and AM8500 series are brushless three-phase motors for
demanding servo-applications. In conjunction with our digital servo drives they are particularly suitable for
positioning tasks in industrial robots, machine tools, transfer lines etc. with demanding requirements in terms of
dynamics and stability.
The servomotors are equipped with permanent magnets in the rotor. This advanced neodymium magnetic
material makes a significant contribution to the motors' exceptional dynamic properties. A three-phase winding
is housed in the stator, and this is powered by the servo drive. The motor has no brushes, the commutation
being implemented electronically in the servo drive.
The winding temperature is measured with a KTY 84.130 PTC silicon sensor and monitored in the servo drive.
The motors are available with or without built-in holding brake. The brake cannot be retrofitted.
The motors have a matt black powder coating (RAL 7016). The finish is not resistant against solvents (e.g.
trichlorethylene, thinners or similar).
6.2 General technical data
Climate category
Ambient temperature
(at rated values)
Permissible humidity
(at rated values)
Power derating
(currents and torques)
Ball bearing service life
Technical data
Storage and transport data
It is vital to consult our applications department for ambient temperatures
6% at 2000 m amsl
17% at 3000m amsl
30% at 4000m amsl
55% at 5000m amsl
No derating for site altitudes above 1000 m amsl with temperature
AM8000 and AM8500 Version: 2.4 15
Page 16
6 Technical description
Attention
removed from shaft when motor is mounted according to IM V3.
Drive Technology
6.3 Standard features
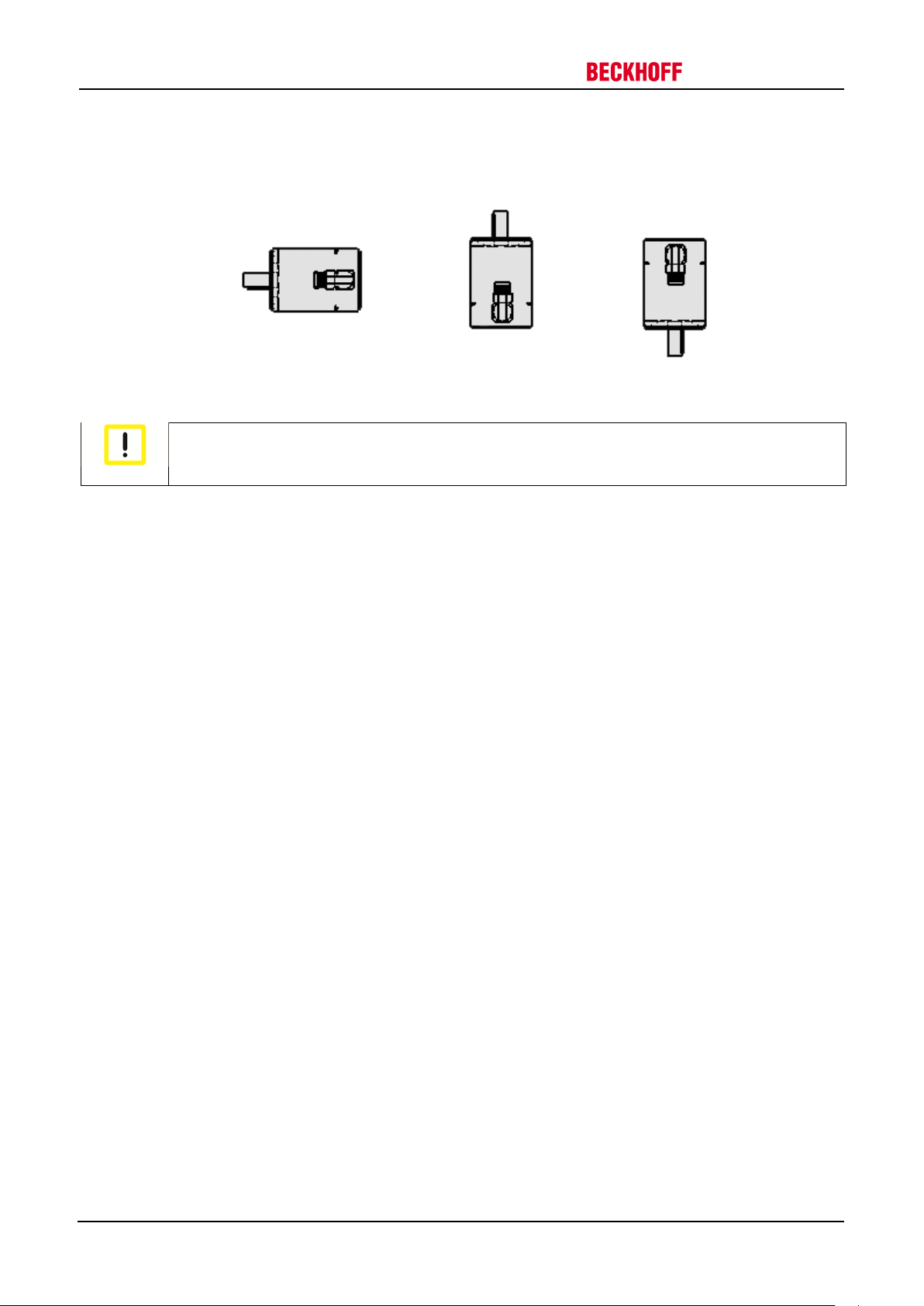
6.3.1 Style
The basic style for the AM8000 and AM8500 synchronous servomotors is IM B5 according to DIN EN 60034-7.
IM B 5 (B5) IM V 3 (V3) IM V 1 (V1)
The permitted mounting positions are specified in the technical data.
Motor damage
To avoid liquid entry damaging the motor, fluids (i.e. used for cleaning purposes) must be
6.3.2 Shaft end, A-side
Load transmission occurs force locked (zero-play) with a clutch on the cylindric end of the shaft A or optionally
by keyed connection with feather key groove according to DIN 6885. The lifecycle of the bearings is 30.000
operating hours.
Radial force
If the motors drive via pinions or toothed belts, then high radial forces will occur. The permissible values at the
shaft end, depending on the speed, may be read from the diagrams in the Section 10. Please use the force
calculation program “Beckhoff AM8000-Motors Radial forces, life cycle” available from our website for exact
calculation of the radial forces.
Axial force
Axial forces arise when assembling pinions or pulleys on the shaft and using angular gearheads, for example.
Please use the force calculation program “Beckhoff AM8000-Motors Radial forces, life cycle” available from our
website for exact calculation of the radial forces.
Coupling
Double-coned collets, possibly in association with metal bellows couplings, have proven themselves as
excellent, zero backlash coupling elements.
6.3.3 Flange
Flange dimensions according to IEC standard, fit j6 (h7 at AM801x), accuracy according to DIN 42955
Tolerance class: N
6.3.4 Protection class
Standard version - housing IP65 (IP54 at AM801x)
Standard version - shaft feedthrough IP54
Shaft feedthrough with shaft sealing ring IP65
6.3.5 Overtemperature protection
The standard version of each motor (not AM801x) is fitted with a KTY 84.130.
Provided our preassembled motor cable is used, the KTY is integrated into the monitoring system of the digital
servo amplifiers. Please configure the servo drive such that a motor temperature warning is issued at 100 °C
and the motor is switched off at 140 °C.
6.3.6 Insulation material class
The motors conform to insulation material class F according to IEC 60085 (UL 1446 class F).
16 Version: 2.4 AM8000 and AM8500
Page 17
<= 1800
90
23
> 1800
65
16
Feedbacksystem
Impulse per
rotation
System accuracy
Comment
OCT, Singleturn
OCT, Multiturn
33554432
± 120 Angle sec.
ca. 0,03°
Standard:
AM801x – AM8x6x
Hyperface
Standard:
AM807x
Resolver
16384
± 120 Angle sec.
ca. 0,17°
Option
Note
different system is not possible.
WARNING
without a remanent torque!
Note
fit one at a later date.
Drive Technology 6 Technical description
6.3.7 Vibration class
The motors are made to vibration class A according to DIN EN 60034-14. For a speed range of 600-3600 rpm
and a shaft centre height between 54 - 97 mm, this means that the actual value of the permitted vibration
severity is 1.6 mm/s.
Speed [rpm] Max. rel. vibration
Max. run-out [µm]
displacement [µm]
6.3.8 Vibrations and shocks
OCT, singleturn and multiturn
Vibration according to EN 60068-2-6 50 g / 10…2000 Hz
Shocks according to EN 60068-2-27 100 g / 6 ms
6.3.9 Connection technology
The motors are fitted with rotatable, angular connectors for the power supply and the feedback signals (only
resolver).
The mating connectors are not included in the scope of supply. We can supply preassembled feedback (only
resolver) and power cables.
6.3.10 Feedback system
Feedback exchange
The feedback system installed can only be replaced with an identical system. Retrofitting a
6.3.11 Holding brake
Serious risk of injury!
The holding brake is not personal safety. If the brake is released then the rotor can be moved
The motors are optionally available with an in-built holding brake. The permanent magnet brake blocks the rotor
in de-energised state. The holding brakes are designed as standstill brakes and are not suited for repeated
operational braking.
The holding brakes can be controlled directly by the servo drive (no personal safety!). The brake voltage is then
switched off in the servo drive — no additional wiring is required.
If the holding brake is not controlled directly by the servo drive, additional circuitry (e.g. varistor) is required.
Consult our applications department beforehand.
The maximum number of brake cycles is 10 million.
Motor length
The motor length depends on the built-in holding brake, among other factors. It is not possible to
AM8000 and AM8500 Version: 2.4 17
Page 18

6 Technical description
AM801x
6
AM805x, AM855x
8
AM802x
6
AM806x, AM856x
10
AM803x, AM853x
8
AM807x
10
AM804x, AM854x
8
Note
The option sealing ring can lead to a reduction of the rated data.
Drive Technology
6.3.12 Pole number
Motor Poles Motor Poles
6.4 Options
Holding brake
The holding brake is integrated in the motor. It increases the motor length and the rotor moment of inertia.
Radial shaft-sealing ring
Radial shaft-sealing ring (FKM) for sealing against splash water. This increases the protection class of the shaft
bushing to IP65.
Feather key
The motors are available with feather key groove and fitted feather key according to DIN6885. The rotor is
balanced with half a feather key.
Resolver
This model features a different feedback system in place of the OCT or the hyperface.
Installation options and reduction of rated values
With the exception of the sealing ring, the options cannot be retrofitted.
6.5 Selection criteria
The three-phase servomotors are designed for operation with servo drives.
Both units together form a speed or torque control loop.
The main selection criteria are:
— Standstill torque M0 [Nm]
— Maximal torque Mmax [Nm]
— Rated speed at rated supply voltage nn [min-1]
— Moment of inertia of motor and load J [kgcm²]
— Effective torque (calculated) Mrms [Nm]
The static load and the dynamic load (acceleration/braking) must be taken into account in the calculation of the
required motors and servo drives. Formulas and calculation example are available from our applications
department on request.
18 Version: 2.4 AM8000 and AM8500
Page 19

CAUTION
assembly and disassembly. Do not step under suspended motors.
The motors of the AM8x6x series can be moved with loop belts.
Drive Technology 6 Technical description
6.6 Transport, assembly and disassembly
Personal injuries!
Protective clothing, protective gloves and safety boots must be worn at all times during transport,
The motors of the AM8x1x to AM8x5x series can be moved without auxiliary equipment.
The motors of the AM807x series are equipped with eyebolts as standard. These eyebolts are suitable for
crane hooks.
AM8000 and AM8500 Version: 2.4 19
Page 20

7 Mechanical installation
2
0
min
x
F
M
dR≥
7 Mechanical installation
7.1 Important notes
Destruction of the motors
• Protect the motors from unacceptable stresses. Take care, especially during transport and
Attention
handling that components are not bent and that insulation clearances are not altered.
• The site must be free of conductive and aggressive material. For V3-mounting (shaft end
upwards), make sure that no liquids can enter the bearings. If an encapsulated assembly is
required, please consult our applications department beforehand.
• Ensure unhindered ventilation of the motors and observe the permissible ambient and flange
temperatures. For ambient temperatures above 40 °C please consult our applications
department beforehand.
• Servomotors are precision devices. The flange and shaft are especially vulnerable during
storage and assembly. It is important to use the locking thread which is provided to tighten
up couplings, gear wheels or pulleys and warm up the drive components, where possible.
Blows or the use of force will lead to damage to the ball bearings, shaft, holding brake and
feedback system.
Drive Technology
• Wherever possible, use only backlash-free, frictionally-locking collets or couplings. Ensure
correct alignment of the couplings. A displacement will cause unacceptable vibration and the
destruction of the ball bearings and the coupling.
• For toothed belts, it is vital to observe the permissible radial forces. An excessive radial load
on the shaft will significantly shorten the life of the motor.
• Avoid axial loads on the motor shaft, as far as possible. Axial loading significantly shortens
the life of the motor.
• In any case, avoid creating a mechanically constrained motor shaft mounting by using a rigid
coupling with additional external bearings (e.g. in a gearbox).
• Take note of the no. of motor poles and the no. of resolver poles and ensure that the correct
setting is made in the used servo drives. An incorrect setting can lead to the destruction of
the motor, especially with small motors.
• Check compliance the permitted radial and axial loads F
drive, the minimum permitted diameter of the pinion follows from the equation:
and FA. When using a toothed belt
R
20 Version: 2.4 AM8000 and AM8500
Page 21

Motor
Bore diameter
[mm]
Cheese head screw
DIN EN ISO 4762 (8.8)
Tightening torque
[Nm]
Plain washer
DIN EN ISO 7089
AM801x
4,3
M4x16
3
4,3
AM802x
5,5
M5x16
5,5
5,3
AM8x3x
6,0
M5x16
5,5
5,3
AM8x4x
7,0
M6x20
10,0
6,4
AM8x5x
9,0
M8x25
25,0
8,3
AM8x6x
11,0
M10x30
50,0
10,5
AM807x
13,5
M12x40
85,0
13,0
Drive Technology 7 Mechanical installation
7.2 Flange mounts
AM8000 and AM8500 Version: 2.4 21
Page 22

8 Electrical installation
Connect the motor holding brake
8 Electrical installation
8.1 Important notes
Serious risk of injury through electric shock!
• Only staffs qualified and trained in electrical engineering are allowed to wire up the motor.
DANGER
Attention
• Check the assignment of the servo drive and the motor. Compare the rated voltage and the
rated current of the devices.
• Always make sure that the motors are de-energised during assembly and wiring, i.e. no
voltage may be switched on for any piece of equipment which is to be connected. Ensure
that the control cabinet remains turned off (barrier, warning signs etc.). The individual
voltages will only be turned on again during commissioning.
• Never undo the electrical connections to the motor when it is live. A dangerous voltage,
resulting from residual charge, can be still present on the capacitors after switch-off of the
mains supply.
Measure the DC link voltage and wait until it has fallen below 50 V
Control and power leads may be live, even if the motor is not running.
Failure-free operation
• Ensure that the servo drive and the motor are earthed properly. See below for further
information regarding EMC shielding and earthing. Earth the mounting plate and motor
housing. Further details of connection types can be found in Section 8.2
Drive Technology
.
DC
Attention
• Only use cables approved by Beckhoff for operating the AM8000 and AM8500 with the “one-
cable technology” (OCT).
• Route the power and control cables as separately as possible from one another (separation
> 20 cm). This will improve the immunity of the system to electromagnetic interference. If a
motor power cable is used which includes integral brake control leads, then these brake
control leads must be shielded. The shielding must be connected at both ends (see Section
8.3 – 8.6)
• Install all cables carrying a heavy current with an adequate cross-section, as per EN 60204.
The recommended cross-section can be found in the technical data of the cables.
• Wiring:
Connect the feedback cable
Connect the motor cables
Connect shields to shield terminals or EMC connectors at both ends
Connect the temperature contact
HF interference
• The ground symbol , which you will find in the wiring diagrams, indicates that you must
provide an electrical connection, with as large a surface area as possible, between the unit
indicated and the mounting plate in the control cabinet. This connection is to suppress HF
interference and must not be confused with the PE (protective earth) symbol (protective
measure according to EN 60204).
Follow the instructions in the circuit diagrams in Sections 8.3 to 8.6
Motor cable length at servo drives up to 25 A
Motors with max. 400 V rated voltage:
Note
22 Version: 2.4 AM8000 and AM8500
If the length of the motor cable is ≥ 25 m, then a motor choke is required for each motor.
Motors with max. 480 V rated voltage:
If the length of the motor cable is > 20 m, then a motor choke is required for each motor.
The control cabinet should then have adequate space for motor chokes. In exceptional cases
(sensitive sensors etc.) it can be necessary to use a motor choke even for motor cable lengths
< 25 / 20 m.
The motor choke is supplied with a connection cable. Do not alter the configuration (cable
length, cross-section etc.).
Page 23

Drive Technology 8 Electrical installation
8.2 Connection of motors with pre-assembled cables
Beckhoff offers preassembled motor and feedback cables for safe, faster and flawless installation of the
motors. Beckhoff cables have been tested with regard to the materials, shielding and connectors used. They
ensure proper functioning and compliance with statutory regulations such as EMC, UL etc. The use of other
cables may lead to unexpected interference and invalidate the warranty.
• Carry out the wiring in accordance with the valid standards and regulations.
• Only use our preassembled shielded cables for the power and feedback connections.
• Connect up the shielding according to the wiring diagrams in sections 8.3 to 8.12. Incorrectly installed
shielding inevitably leads to EMC interference.
Detailed specifications of the cables are listed on our homepage
Download Documentation Drive Technology Cable.
AM8000 and AM8500 Version: 2.4 23
Page 24

Drive Technology
8.3 AX5000 connection diagram for motors with OCT and iTec-plug
Servo drives: AX5101 – AX5112 and AX52xx
Motors : AM801x – AM803x and AM853x
OCT / Thermal protection and brake
Power plug Motor cable
9 pol. - iTec ZK4500-8022-xxxx
View “X”
Power
24 Version: 2.4 AM8000 and AM8500
Page 25

Power
Drive Technology
8.4 AX5000 connection diagram for motors with OCT-Feedback
Servo drives: AX5101 – AX5125 and AX52xx
Motors : AM804x – AM806x and AM854x – AM856x
OCT / Thermal protection and brake
Power connector Motor cable
9-poles, round Speedtec ZK4500-8023-xxxx
View “X”
AM8000 and AM8500 Version: 2.4 25
Page 26

Power
Drive Technology
8.5 AX5000 connection diagram for motors with OCT-Feedback
Servo drives: AX5125
Motors : AM806x, AM856x (from Q-Winding) and AM807x
OCT / Thermal protection and brake
Power connector Motor cable
11-poles, round Speedtec ZK4500-8023-xxxx
View “X”
26 Version: 2.4 AM8000 and AM8500
Page 27

Drive Technology
8.6 AX5000 connection diagram for motors with OCT-Feedback
Servo drive: AX5140
Motors
Power
: AM806x, AM856x (from Q-Winding) and AM807x
Power connetor Motor cable
11 pol. – round Speedtec ZK4500-8027-xxxx
View „X“
OCT / Thermal protection and brake
AM8000 and AM8500 Version: 2.4 27
Page 28

Drive Technology
8.7 AX5000 connection diagram for motors with resolver and yTec-plug
Servo drives: AX5101 – AX5112 and AX52xx
Motors : AM802x – AM803x and AM853x
Thermal protection and brake
Power plug Motor cable
9 pol. - yTec ZK4500-8022-xxxx
View “X”
Power
View “Y”
Resolver plug Resolver cable
12 pol. - yTec ZK4530-8110-xxxx
D-Sub 15 poles
28 Version: 2.4 AM8000 and AM8500
Page 29

Power
Drive Technology
8.8 AX5000 connection diagram for motors with resolver
Servo drives: AX5101 – AX5125 and AX52xx
Motors : AM804x – AM806x and AM854x – AM856x (up to P-Winding)
Thermal protection and brake
Power connector Motor cable
9-poles, round Speedtec ZK4500-8023-xxxx
View “X”
View “Y”
Resolver connector Resolver cable
12-poles, round Speedtec ZK4530-8010-xxxx
D-Sub 15 poles
AM8000 and AM8500 Version: 2.4 29
Page 30

Power
Drive Technology
8.9 AX5000 connection diagram for motors with resolver
Servov drive: AX5125
Motors
View „X“
View „Y“
D-Sub 15 poles
: AM806x, AM856x (from Q-Winding) and AM807x
Thermal protection and brake
Power connector Power cable
11 pol. – round Speedtec ZK4500-8025-xxxx
Resolver connector Resolver cable
12 pol. – rund Speedtec ZK4530-8010-xxxx
30 Version: 2.4 AM8000 and AM8500
Page 31

Thermal protection and brake
Drive Technology
8.10 AX5000 connection diagram for motors with resolver
Servov drive: AX5140
Motors : AM806x, AM856x (from Q-Winding) and AM807x
Power
Power connector Motor cable
11 pol. – round Speedtec ZK4500-8027-xxxx
View „X“
View „Y“
Resolver connector Resolver cable
12 pol. – round Speedtec ZK4530-8010-xxxx
D-Sub 15 poles
AM8000 and AM8500 Version: 2.4 31
Page 32

Drive Technology
8.11 AX5000 connection diagram for motors with resolver
Servo drives: AX5160 and AX5172
Motors
: AM806x, AM856x (from Q-Winding) and AM807x
Power connector Motor cable
11-poles, round Speedtec ZK4504-8027-xxxx Thermal protection and brake
View „X“
View „Y“
D-Sub 15 poles
Power
Resolver connector Resolver cable
12-poles, round Speedtec ZK4530-8010-xxxx
32 Version: 2.4 AM8000 and AM8500
Page 33

Power
Drive Technology
8.12 AX5000 connection diagram for motors with Hiperface
Servo drives:AX5160 and AX5172
Motors : AM806x, AM856x (from Q-Winding) and AM807x
Power connector Motor cable
11-poles, round Speedtec ZK4504-8027-xxxx Thermal protection and brake
View “X”
View “Y”
Encoder connector Endoder cable
17-poles, round Speedtec ZK4510-8020-xxxx
D-Sub 15 poles
AM8000 and AM8500 Version: 2.4 33
Page 34

9 Commissioning
9 Commissioning
9.1 Important notes
Serious risk of injury!
• Only specialist personnel with extensive knowledge in the areas of electrical engineering /
DANGER
9.2 Guide for commissioning
drive technology are allowed to install and commission the equipment.
• Check that all live connection points are protected against accidental contact. Dangerous
voltages can occur, up to 890 V
• Never undo the electrical connections to the motor when it is live. The residual charge in the
capacitors of the servo drives can produce dangerous voltages up to 5 minutes after the
mains supply has been switched off.
• The surface temperature of the motor can exceed 100 °C in operation. Check (measure) the
temperature of the motor. Wait until the motor has cooled down below 40 °C before touching
it.
• Make sure that, even if the drive starts to move unintentionally, no danger can result for
personnel or machinery.
DC
Drive Technology
.
The procedure for commissioning is described as an example.
A different method may be appropriate or necessary, depending on the application of the equipment.
• Check the assembly and orientation of the motor.
• Check the drive components (coupling, gear unit, pulley) for the correct seating and setting (observe the
permissible radial and axial forces).
• Check the wiring and connections to the motor and the servo drive. Check that the earthing is correct.
• Test the function of the holding brake, if used. (apply 24 V
• Check whether the rotor of the motor revolves freely (release the brake, if necessary). Listen out for grinding
noises.
• Check that all the required measures against accidental contact with live and moving parts have been
carried out.
• Carry out any further tests which are specifically required for your system.
• Now commission the drive according to the commissioning instructions for the servo drive.
• In multi-axis systems, individually commission each drive unit (servo drive/motor(s)).
, the brake must be released).
DC
9.3 Troubleshooting
The following table is to be seen as a “First Aid” box. There can be a large number of different reasons for a
fault, depending on the particular conditions in your system. The fault causes described below are mostly those
which directly influence the motor. Peculiarities which show up in the control behaviour can usually be traced
back to an error in the parameterisation of the servo drive. The documentation for the servo drive and the
commissioning software provides information on these matters.
For multi-axis systems there may be further hidden reasons for faults.
Our applications department can give you further help with your problems.
34 Version: 2.4 AM8000 and AM8500
Page 35

Servo drive not enabled
Supply ENABLE signal
• Motor phases in wrong
• Correct the phase sequence
Break in the shielding of the
Replace feedback cable
Short-circuit in the supply
Remove the short circuit
• Motor cable has short circuit or
• Replace motor cable
Connector is not properly
Check connector
• Motor thermostat has switched
• Wait until the motor has
Required holding torque too
Check the dimensioning
Drive Technology 9 Commissioning
Fault Possible cause Measures to remove the cause
of the fault
Motor doesn’t rotate
•
• Break in setpoint lead
•
• Check setpoint lead
Motor runs away
Motor oscillates
Error message: brake
Error message: output stage
fault
Error message: feedback
• Motor phases in wrong
sequence
• Brake not released
• Drive is mechanically blocked
sequence
•
feedback cable
• Amplification to high
•
voltage lead to the motor
holding brake
• Faulty motor holding brake
earth leakage
• Motor has short circuit or earth
leakage
•
plugged in
• Break in cable, cable crushed
or similar
• Correct the phase sequence
• Check brake control
• Check mechanism
•
• Use motor default values
•
• Replace motor
• Replace motor
•
• Check cables
Error message: motor
temperature
Brake does not grip
• Loose connector or break in
cable
•
high
• Brake faulty
cooled down. Then investigate
why the motor becomes so
hot.
• Check connector, replace
cable if necessary
•
• Replace motor
AM8000 and AM8500 Version: 2.4 35
Page 36

10 Technical data
Jx
cm
m
x
sxM
x
S
t
b
24
2
10
60
23000
]
[
0
π
=
Drive Technology
10 Technical data
All data, excluding the voltage constant, valid for 40 °C ambient temperature and 100 K overtemperature of the
winding.
The data can have a tolerance of +/- 10%.
If a gear unit is attached the power may be reduced by up to 20%. This loss in performance has thermal
reasons, since a gear unit that is subject to warming is installed at the motor flange intended for heat
dissipation.
Term definitions
[Nm]
n
0rms
Trms
[Nm]
0
[A]
[Nm/A]
x KT
0=I0
[mVmin]
Erms
0max
[A]
the acceleration time
0
Standstill torque M
The standstill torque can be maintained indefinitely at a speed n<100 rpm and rated ambient conditions.
Rated torque M
The rated torque is produced when the motor is drawing the rated current at the rated speed.
The rated torque can be produced indefinitely at the rated speed in continuous operation (S1).
Standstill current I
The standstill current is the effective sinusoidal current which the motor draws at n<100 rpm to produce the
standstill torque.
Peak current (pulse current) I
The peak current (effective sinusoidal value) is approximately equivalent to 5-times the rated standstill current
(3-times at AM806x, AM807x and AM856x). The configured peak current of the servo drive used must be
smaller.
Torque constant K
The torque constant defines how much torque in Nm is produced by the motor with standstill current.
The relationship is M
Voltage constant K
The voltage constant defines the induced motor EMF, as an effective sinusoidal value between two terminals,
at 20 °C per 1000 rpm.
Rotor moment of inertia J [kgcm²]
The constant J is a measure of the acceleration capability of the motor. For instance, at I
from 0 to 3000 rpm is given as:
t
b
with M0 in Nm and J in kgcm2
Thermal time constant t
The constant t
defines the time for the cold motor, under a load of I0 to heat up to an overtemperature of 0.63
TH
[min]
TH
x 100 Kelvin.
This temperature rise happens in a much shorter time when the motor is loaded with the peak current.
Release delay time t
[ms] / Application delay time t
BRH
[ms] of the brake
BRL
These constants define the response times of the holding brake when operated with the rated voltage from the
servo drive.
36 Version: 2.4 AM8000 and AM8500
Page 37

Electrical Data
Standstill current
I
orms
[A]
0,76
1,30
1,65
Max. mechanical speed
N
max
[min-1]
10.000
Max. rated mains voltage
UN [VAC]
250
U
N
= 115V
U
N
= 230V
Peak current
I
0max
[A]
2,30
4,55
5,90 Peak torque
M
0max
[Nm]
0,68
1,37
2,04
Voltage constant
K
Erms
[mVmin]
19
19
22
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8011
AM8012
AM8013
Rotor moment of inertia (without brake)
J [kgcm2]
0,0294
0,0482
0,0670
(with brake)
Pole number 6 6 6
Static friction torque
MR [Nm]
0,0009
0,0018
0,0027
Thermal time constant
tTH [min] 9 9
10
Weight (without brake)
G [kg]
0,62
0,74
0,86
(with brake)
Permitted radial force at shaft end
FR [N]
Permitted axial force
FA [N]
Supply voltage
UBR [VDC]
24 +6 -10%
Electrical power
PBR [W]
10
Current
Ion [A]
0,3
Release delay time
t
BRH
[ms]
14
Drive Technology 10 Technical data
10.1 AM801x
Technical data
Standstill torque* M
Rated speed Nn [min-1] 3500 4000 3500
Rated torque* Mn [Nm] 0,19 0,35 0,49
Rated output Pn [kW] 0,07 0,15 0,18
Rated speed Nn [min-1] 8000 8000 8000
Rated torque* Mn [Nm] 0,18 0,33 0,45
Rated output Pn [kW] 0,15 0,28 0,38
Torque constant K
Symbol
[Unit]
[Nm] 0,20 0,38 0,52
0
[Nm/A] 0,263 0,292 0,315
Trms
R20 [Ω]
L [mH] 21,00 10,50 9,00
11B 12C 13D
34,50
15,00 11,50
AM80xx
* reference flange aluminium 130 mm x 230 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Weight
G [kg] 0,81 0,93 1,05
J [kgcm2] 0,0521 0,0709 0,0897
Data for optional brake
Data
Holding torque at 120 °C MBR [Nm] 0,6
Application delay time t
Symbol
[Unit]
[ms] 8
BRL
AM801x
siehe 10.1.2
AM8000 and AM8500 Version: 2.4 37
Page 38

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
10.1.1 Dimensional drawing AM801x
Drive Technology
AM8011 97 129
AM8012 117 149
AM8013 137 169
10.1.2 Radial / axial forces at the shaft end
10.1.3 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
38 Version: 2.4 AM8000 and AM8500
Page 39

Electrical data
Standstill current
I
orms
[A]
0,85
1,60
1,50
2,44
2,20
3,40
Max. mechanical speed
N
max
[min-1]
12000
Max. rated mains voltage
UN [VAC]
480
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak current
I
0max
[A]
4,90
8,60
7,70
12,60
11,40
17,70
Peak torque
M
0max
[Nm]
2,68
2,67
4,18
4,18
6,36
6,37
Torque constant
K
Trms
[Nm/A]
0,588
0,313
0,533
0,328
0,545
0,353
Voltage constant
K
Erms
[mVmin]
42
23
41
25
43
25
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8021
AM8022
AM8023
Rotor moment of inertia (with brake)
J [kgcm2]
0,156
0,276
0,396
Static friction torque
MR [Nm]
0,002
0,004
0,006
Thermal time constant
tTH [min]
10
13
16
Weight (without brake)
G [kg]
1,00
1,30
1,70
Weight (with brake)
G [kg]
1,10
1,60
1,90
Permitted axial force
FA [N]
Holding torque at 120 °C
MBR [Nm]
0,8
Electrical power
PBR [W]
10
Release delay time
t
BRH
[ms]
8
Application delay time
t
BRL
[ms]
12
U
N
= 115V
Drive Technology 10 Technical data
10.2 AM802x
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 0,50 0,50 0,80 0,80 1,20 1,20
0
21B 21D 22D 22E 23E 23F
AM80xx
Rated speed Nn [min-1] 1500 3500 2000 4000 2000 3500
Rated torque * Mn [Nm] 0,50 0,50 0,78 0,76 1,15 1,11
Rated output Pn [kW] 0,08 0,18 0,16 0,32 0,24 0,43
Rated speed Nn [min-1] 4000 8000 4500 8000 4500 8000
Rated torque * Mn [Nm] 0,50 0,50 0,75 0,70 1,10 1,00
Rated output Pn [kW] 0,21 0,42 0,35 0,59 0,52 0,84
Rated speed Nn [min-1] 8000 9000 8000 9000 8000 9000
Rated torque * Mn [Nm] 0,50 0,50 0,70 0,65 1,00 0,90
Rated output Pn [kW] 0,42 0,47 0,59 0,61 0,84 0,85
Rated speed Nn [min-1] 9000 9000 9000 9000 9000 9000
Rated torque * Mn [Nm] 0,50 0,50 0,65 0,65 0,90 0,90
Rated output Pn [kW] 0,47 0,47 0,61 0,61 0,85 0,85
39,40
R20 [Ω]
12,80 13,20 5,10 8,50 3,60
L [mH] 82,40 26,50 36,80 14,40 25,20 11,40
* reference flange aluminium 230 mm x 130 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia (without brake) J [kgcm2] 0,134 0,253 0,373
Pole number 6 6 6
Permitted radial force at shaft end FR [N]
see 10.2.2
Data for optional brake
Data
Supply voltage UBR [VDC] 24 +6 -10%
Symbol
[Unit]
AM802x
Current Ion [A] 0,3
AM8000 and AM8500 Version: 2.4 39
Page 40

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
10.2.1 Dimensional drawing AM802x
Drive Technology
AM8021 111,5 146
AM8022 133,5 168
AM8023 155,5 190
10.2.2 Radial / axial forces at the shaft end
10.2.3 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
40 Version: 2.4 AM8000 and AM8500
Page 41

Electrical data
Standstill current
I
orms
[A]
1,00
1,95
3,20
1,70
2,95
5,10
2,10
4,10
6,80 Max. mechanical speed
N
max
[min-1]
10000
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak torque
M
0max
[Nm]
6,10
6,07
6,07
11,66
11,66
11,65
17,19
17,71
17,22 Torque constant
K
Trms
[Nm/A]
1,37
0,71
0,44
1,40
0,80
0,46
1,52
0,78
0,47
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8031
AM8531
AM8032
AM8532
AM8033
AM8533
Rotor moment of inertia (without brake)
J [kgcm2]
0,462
1,670
0,842
2,050
1,220
2,440
(with brake)
Pole number
8 8 8 8 8 8
Thermal time constant
tTH [min]
24
24
26
26
28
28
Weight (without brake)
G [kg]
1,80
2,40
2,40
3,00
3,00
3,60
(with brake)
Permitted radial force at shaft end
FR [N]
Holding torque at 120 °C
MBR [Nm]
2,0
3,5
Supply voltage
UBR [VDC]
24 +6 -10%
24 +6 -10%
Current
Ion [A]
0,33
0,36
Release delay time
t
BRH
[ms]
8
15
Application delay time
t
BRL
[ms]
25
35
U
N
= 115V
Drive Technology 10 Technical data
10.3 AM803x and AM853x
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 1,37 1,38 1,40 2,38 2,37 2,37 3,20 3,22 3,22
0
31C 31D 31F 32D 32E 32H 33E 33F 33J
AM80xx / AM85xx
Max. rated mains voltage UN [VAC] 480
Rated speed Nn [min-1] 400 1400 2700 600 1400 2700 600 1400 2700
Rated torque * Mn [Nm] 1,36 1,38 1,37 2,37 2,34 2,29 3,15 3,10 3,05
Rated output Pn [kW] 0,06 0,20 0,39 0,15 0,34 0,65 0,20 0,45 0,86
Rated speed Nn [min-1] 1400 3300 6000 1500 3200 6000 1500 3200 5900
Rated torque * Mn [Nm] 1,35 1,36 1,34 2,34 2,28 2,10 3,10 3,00 2,70
Rated output Pn [kW] 0,20 0,47 0,84 0,37 0,76 1,32 0,49 1,00 1,67
Rated speed Nn [min-1] 3000 6000 9000 3000 6000 9000 3000 6000 9000
Rated torque * Mn [Nm] 1,34 1,33 1,30 2,30 2,20 1,85 2,98 2,70 2,30
Rated output Pn [kW] 0,42 0,84 1,23 0,72 1,38 1,74 0,94 1,70 2,17
Rated speed Nn [min-1] 3400 6800 9000 3400 6800 9000 3400 6800 9000
Rated torque * Mn [Nm] 1,33 1,32 1,30 2,26 2,10 1,85 2,95 2,60 2,30
Rated output Pn [kW] 0,47 0,94 1,23 0,80 1,50 1,74 1,05 1,85 2,17
Peak current I
[A] 5,50 10,70 17,60 9,60 17,20 29,50 12,90 24,60 39,80
0max
Voltage constant K
[mVmin] 99 50 30 100 56 32 106 57 34
Erms
51,00
R20 [Ω]
12,60 4,50 21,00 6,50 2,20 13,20 3,90 1,35
L [mH] 185,0 41,80 16,80 101,0 28,50 10,20 60,60 18,80 6,80
* reference flange aluminium 230 mm x 130 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Static friction torque MR [Nm] 0,009 0,009 0,015 0,015 0,020 0,020
Weight
G [kg] 2,20 2,60 2,80 3,30 3,60 ---
Permitted axial force FA [N]
J [kgcm2] 0,541 1,76 0,921 2,150 1,460 ---
see 10.3.2
Data for optional brake
Data
Symbol
[Unit]
Electrical power PBR [W] 11 12
AM8031 / AM8032
AM8531 / AM8532
AM8033
AM8000 and AM8500 Version: 2.4 41
Page 42

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
10.3.1 Dimensional drawing AM803x and AM853x
AM8031 129 168
AM8032 154 194
AM8033 180 229
AM8531 168 194
AM8532 194 229
AM8533 229 ---
10.3.2 Radial / axial forces at the shaft end
Drive Technology
10.3.3 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
42 Version: 2.4 AM8000 and AM8500
Page 43

Electrical data
Standstill current
I
orms
[A]
1,65
3,00
5,25
2,15
4,10
6,90
2,90
5,40
9,30 Max. mechanical speed
N
max
[min-1]
9000
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak torque
M
0max
[Nm]
9,67
9,14
9,14
18,94
18,90
18,89
29,33
29,25
29,25 Torque constant
K
Trms
[Nm/A]
1,43
0,81
0,45
1,90
1,00
0,59
1,94
1,04
0,60
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8041
AM8541
AM8042
AM8542
AM8043
AM8543
Rotor moment of inertia (without brake)
J [kgcm2]
1,080
4,630
1,970
5,530
2,870
6,430
(with brake)
Pole number
8 8 8 8 8 8
Thermal time constant
tTH [min]
30
30
33
33
36
36
Weight (without brake)
G [kg]
2,80
3,80
3,80
4,90
4,90
6,00
(with brake)
Permitted radial force at shaft end
FR [N]
Holding torque at 120 °C
MBR [Nm]
9
Supply voltage
UBR [VDC]
24 +6 -10%
Current
Ion [A]
0,54
Release delay time
t
BRH
[ms]
20
Application delay time
t
BRL
[ms]
40
U
N
= 115V
Drive Technology 10 Technical data
10.4 AM804x and AM854x
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 2,37 2,45 2,40 4,10 4,10 4,10 5,65 5,65 5,60
0
41D 41E 41H 42E 42F 42J 43E 43H 43K
AM80xx / AM85xx
Max. rated mains voltage UN [VAC] 480
Rated speed Nn [min-1] 600 1300 2600 500 1200 2200 600 1200 2200
Rated torque * Mn [Nm] 2,35 2,43 2,34 4,05 3,97 3,90 5,58 5,50 5,27
Rated output Pn [kW] 0,15 0,33 0,64 0,21 0,50 0,90 0,29 0,69 1,21
Rated speed Nn [min-1] 1500 3000 6000 1200 2800 5000 1200 2700 5000
Rated torque * Mn [Nm] 2,33 2,39 2,27 3,97 3,90 3,70 5,50 5,30 4,90
Rated output Pn [kW] 0,37 0,75 1,43 0,50 1,14 1,94 0,70 1,50 2,57
Rated speed Nn [min-1] 3000 6000 8000 2500 5000 8000 2500 5000 8000
Rated torque * Mn [Nm] 2,30 2,31 2,10 3,90 3,70 3,10 5,30 4,90 4,10
Rated output Pn [kW] 0,72 1,45 1,76 1,02 1,94 2,60 1,39 2,57 3,43
Rated speed Nn [min-1] 3400 6800 8000 2800 5700 8000 2800 5700 8000
Rated torque * Mn [Nm] 2,29 2,27 2,10 3,87 3,64 3,10 5,30 4,88 4,10
Rated output Pn [kW] 0,82 1,62 1,76 1,13 2,17 2,60 1,55 2,91 3,43
Peak current I
[A] 8,30 13,6 23,30 11,80 22,70 37,60 16,60 31,00 53,90
0max
Voltage constant K
[mVmin] 101,0 56,00 33,00 128,0 68,00 41,00 131,0 73,00 42,00
Erms
22,50
R20 [Ω]
6,10 2,21 14,20 3,70 1,40 8,90 2,40 0,83
L [mH] 98,20 29,50 5,20 81,00 22,20 7,80 59,10 15,80 5,00
* reference flange aluminium 230 mm x 130 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Static friction torque MR [Nm] 0,020 0,020 0,027 0,027 0,035 0,035
Weight
G [kg] 3,60 4,50 4,70 5,70 5,80 ---
Permitted axial force FA [N]
J [kgcm2] 1,730 5,270 2,620 6,160 3,520 ---
see 10.4.2
Data for optional brake
Data
Electrical power PBR [W] 18
Symbol
[Unit]
AM804x / AM854x
AM8000 and AM8500 Version: 2.4 43
Page 44

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
10.4.1 Dimensional drawing AM804x and AM854x
AM8041 132 179,5
AM8042 162 209,5
AM8043 192 239,5
AM8541 179,5 209,5
AM8542 209,5 239,5
AM8543 239,5 ---
10.4.2 Radial / axial forces at the shaft end
Drive Technology
10.4.3 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
44 Version: 2.4 AM8000 and AM8500
Page 45

Electrical data
Standstill current
I
orms
[A]
2,70
4,75
8,50
3,30
6,30
11,30
4,70
8,80
15,60 Max. mechanical speed
N
max
[min-1]
9000
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak torque
M
0max
[Nm]
17,74
17,76
17,78
35,32
35,34
35,34
53,13
53,13
53,14 Torque constant
K
Trms
[Nm/A]
1,77
1,03
0,57
2,48
1,30
0,72
2,42
1,29
0,73
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8051
AM8551
AM8052
AM8552
AM8053
AM8553
Rotor moment of inertia (without brake)
J [kgcm2]
2,24
8,75
4,08
10,60
5,92
12,50
(with brake)
Pole number
8 8 8 8 8 8
Thermal time constant
tTH [min]
31
31
38
38
40
40
Weight (without brake)
G [kg]
4,10
5,50
5,70
7,00
7,40
8,80
(with brake)
Permitted radial force at shaft end
FR [N]
Holding torque at 120 °C
MBR [Nm]
9
13
Supply voltage
UBR [VDC]
24 +6 -10%
24 +6 -10%
Current
Ion [A]
0,54
0,51
Release delay time
t
BRH
[ms]
20
20
Application delay time
t
BRL
[ms]
40
45
U
N
= 115V
Drive Technology 10 Technical data
10.5 AM805x and AM855x
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 4,80 4,90 4,90 8,20 8,20 8,20 11,40 11,40 11,40
0
51E 51G 51K 52F 52J 52L 53G 53K 53N
AM80xx / AM85xx
Max. rated mains voltage UN [VAC] 480
Rated speed Nn [min-1] 500 1200 2300 400 1000 1900 400 1000 1900
Rated torque * Mn [Nm] 4,80 4,80 4,65 8,00 7,90 7,55 11,10 10,80 10,00
Rated output Pn [kW] 0,25 0,60 1,12 0,34 0,83 1,50 0,46 1,13 2,00
Rated speed Nn [min-1] 1400 2700 5000 1100 2200 4000 1100 2200 4000
Rated torque * Mn [Nm] 4,70 4,65 4,40 7,80 7,50 6,90 10,70 9,90 8,35
Rated output Pn [kW] 0,69 1,31 2,30 0,90 1,73 2,89 1,23 2,28 3,50
Rated speed Nn [min-1] 2500 5000 8000 2000 4000 7300 2000 4000 7000
Rated torque * Mn [Nm] 4,60 4,40 3,90 7,50 6,90 5,40 10,00 8,35 4,50
Rated output Pn [kW] 1,20 2,30 3,27 1,57 2,89 4,13 2,09 3,50 3,30
Rated speed Nn [min-1] 3000 5700 8000 2300 4500 7500 2400 4500 7000
Rated torque * Mn [Nm] 4,50 4,30 3,90 7,40 6,70 5,40 9,70 7,85 4,50
Rated output Pn [kW] 1,41 2,57 3,27 1,78 3,16 4,24 2,44 3,70 3,30
Peak current I
[A] 12,10 20,90 37,70 17,90 33,60 60,70 26,90 50,90 89,70
0max
Voltage constant K
[mVmin] 125,0 73,00 40,00 167,0 89,00 49,00 168,0 89,00 51,00
Erms
11,40
R20 [Ω]
3,60 1,14 8,50 2,30 0,70 5,10 1,40 0,45
L [mH] 53,70 18,80 6,70 48,6 14,10 4,60 33,20 8,80 3,10
* reference flange aluminium 305 mm x 305 mm x 12,7 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Static friction torque MR [Nm] 0,021 0,021 0,036 0,036 0,050 0,050
Weight
G [kg] 4,90 6,30 6,60 7,90 8,40 ---
Permitted axial force FA [N]
J [kgcm2] 2,90 9,41 4,74 11,20 7,04 ---
see 10.5.2
Data for optional brake
Data
Symbol
[Unit]
Electrical power PBR [W] 18 17
AM8051 / AM8052
AM8551 / AM8552
AM8053
AM8000 and AM8500 Version: 2.4 45
Page 46

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
Optional: Feather key
Motor type
Y
Z (brake)
10.5.1 Dimensional drawing AM805x and AM855x
AM8051 136,5 183,5
AM8052 169,5 216,5
AM8053 202,5 251,5
AM8551 183,5 216,5
AM8552 216,5 251,5
AM8553 251,5 284,5
10.5.2 Dimensional drawing AM805x-9000 and AM855x-9000
(Flange compatible to AM3x5x)
Drive Technology
AM8051-9000 136,5 183,5
AM8052-9000 169,5 216,5
AM8053-9000 202,5 251,5
AM8551-9000 183,5 216,5
AM8552-9000 216,5 251,5
AM8553-9000 251,5 284,5
46 Version: 2.4 AM8000 and AM8500
Page 47

Drive Technology 10 Technical data
10.5.3 Radial / axial forces at the shaft end
10.5.4 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
AM8000 and AM8500 Version: 2.4 47
Page 48

10 Technical data
Electrical data
Standstill current
I
orms
[A]
4,00
7,80
13,10
6,20
12,40
20,30
8,70
17,20
29,50 Max. mechanical speed
N
max
[min-1]
6000
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak torque
M
0max
[Nm]
37,10
37,08
37,07
74,16
74,16
74,17
110,95
110,84
111,11 Torque constant
K
Trms
[Nm/A]
3,20
1,64
0,97
3,40
1,70
1,03
3,33
1,68
0,98
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8061
AM8561
AM8062
AM8562
AM8063
AM8563
Rotor moment of inertia (without brake)
J [kgcm2]
11,100
48,200
20,000
57,10
29,000
66,100
(with brake)
Pole number
10
10
10
10
10
10
Thermal time constant
tTH [min]
35
35
38
38
41
41
Weight (without brake)
G [kg]
9,80
13,20
13,60
17,00
17,40
20,90
(with brake)
Permitted radial force at shaft end
FR [N]
Holding torque at 120 °C
MBR [Nm]
20
30
Supply voltage
UBR [VDC]
24 +6 -10%
24 +6 -10%
Current
Ion [A]
0,72
0,79
Release delay time
t
BRH
[ms]
40
45
Application delay time
t
BRL
[ms]
60
100
U
N
= 115V
10.6 AM806x and AM856x
Drive Technology
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 12,80 12,80 12,80 21,10 21,10 21,10 29,00 29,00 29,00
0
61G 61J 61M 62J 62L 62P 63K 63N 63R
AM80xx / AM85xx
Max. rated mains voltage UN [VAC] 480
Rated speed Nn [min-1] 300 750 1300 300 800 1400 300 800 1400
Rated torque * Mn [Nm] 12,60 12,40 12,20 20,70 20,10 18,60 28,20 25,90 22,80
Rated output Pn [kW] 0,40 0,97 1,66 0,65 1,68 2,73 0,89 2,17 3,34
Rated speed Nn [min-1] 800 1600 2800 800 1700 2800 800 1700 3000
Rated torque * Mn [Nm] 12,40 12,00 11,10 20,10 18,20 15,30 25,90 21,10 13,20
Rated output Pn [kW] 1,04 2,01 3,25 1,68 3,24 4,49 2,17 3,76 4,15
Rated speed Nn [min-1] 1500 3000 5000 1500 3000 5000 1500 3000 4000
Rated torque * Mn [Nm] 12,10 11,00 9,00 18,50 15,20 6,50 22,30 13,20 6,10
Rated output Pn [kW] 1,90 3,46 4,71 2,91 4,78 3,40 3,50 4,15 2,56
Rated speed Nn [min-1] 1700 3400 5000 1700 3400 5000 1700 3400 4000
Rated torque * Mn [Nm] 12,00 10,40 9,00 18,20 13,90 6,50 21,10 11,00 6,10
Rated output Pn [kW] 2,14 3,70 4,71 3,24 4,95 3,40 3,76 3,92 2,56
Peak current I
[A] 13,90 27,00 45,20 27,00 54,00 88,40 38,90 80,90 130,0
0max
Voltage constant K
[mVmin] 223,0 115,0 69,00 234,0 117,0 71,00 240,0 116,0 72,00
Erms
R20 [Ω]
7,00 1,85 0,66 2,95 0,75 0,28 1,95 0,45 0,18
L [mH] 65,90 13,90 4,70 35,40 6,60 2,40 25,20 4,20 1,70
* reference flange aluminium 380 mm x 170 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Static friction torque MR [Nm] 0,045 0,045 0,102 0,102 0,150 0,150
Weight
G [kg] 11,60 14,80 15,40 18,70 20,10 ---
Permitted axial force FA [N]
J [kgcm2] 13,400 50,600 22,300 59,600 34,900 ---
see 10.6.2
Data for optional brake
Data
Symbol
[Unit]
Electrical power PBR [W] 24 26
AM8061 / AM8062
AM8561 / AM8562
AM8063
48 Version: 2.4 AM8000 and AM8500
Page 49

Optional: Feather key
Motor type
Y
Z (brake)
Motor type
Y
Z (brake)
Optional: Feather key
Drive Technology 10 Technical data
10.6.1 Dimensional drawing AM806x and AM856x
AM8061 176 228
AM8062 216 268
AM8063 256 315
AM8561 228 268
AM8562 268 315
AM8563 315 ---
10.6.2 Dimensional drawing AM8063 and AM8563 with R-Winding
AM8063 256 315
AM8563 315 ---
AM8000 and AM8500 Version: 2.4 49
Page 50

10 Technical data
10.6.3 Radial / axial forces at the shaft end
Drive Technology
10.6.4 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
50 Version: 2.4 AM8000 and AM8500
Page 51
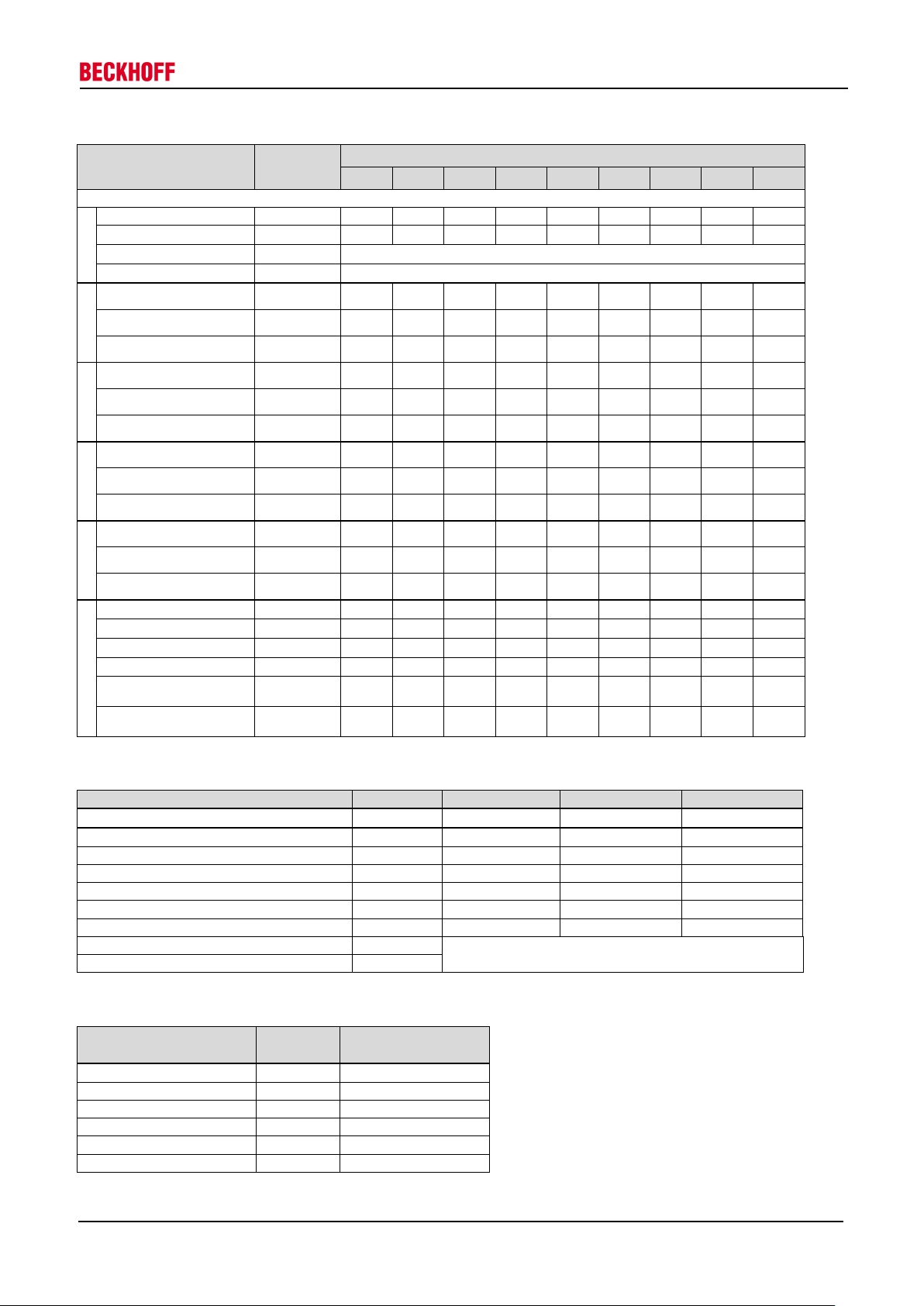
Electrical data
Standstill current
I
orms
[A]
9,6
17,8
28,2
11,1
20,6
37,5
14,7
27,9
45,6
Max. mechanical speed
N
max
[min-1]
5000
U
N
= 230V
U
N
= 400V
U
N
= 480V
Peak torque
M
0max
[Nm]
80,00
79,91
92,15
172,52
172,49
164,21
262,72
275,32
219,74
Torque constant
K
Trms
[Nm/A]
3,31
1,78
1,02
4,91
2,65
1,33
4,93
2,60
1,53
Winding resistance
Ph-Ph
Winding inductance
Ph-Ph
Mechanical data
AM8071
AM8072
AM8073
Rotor moment of inertia (without brake)
J [kgcm2]
49,600
92,300
134,900
(with brake)
Pole number 10
10
10
Thermal time constant
tTH [min]
70
80
90
Weight (without brake)
G [kg]
23,80
33,20
44,80
(with brake)
Permitted radial force at shaft end
FR [N]
Holding torque at 120 °C
MBR [Nm]
70
Supply voltage
UBR [VDC]
24 +6 -10%
Current
Ion [A]
1,21
Release delay time
t
BRH
[ms]
50
Application delay time
t
BRL
[ms]
200
U
N
= 115V
Drive Technology 10 Technical data
10.7 AM807x
Technical data
Standstill torque * M
Symbol
[Unit]
[Nm] 31,8 31,8 29,0 54,6 54,6 50,0 72,6 72,6 70,0
0
71K 71N 71R 72L 72P 72T 73N 73Q 73T
AM80xx
Max. rated mains voltage UN [VAC] 480
Rated speed Nn [min-1] 350 700 1400 200 400 1000 200 500 1000
Rated torque * Mn [Nm] 30,6 29,2 22,5 54,5 53,5 41,0 70,5 66,5 48,0
Rated output Pn [kW] 1,12 2,14 3,30 1,14 2,24 4,29 1,48 3,48 5,03
Rated speed Nn [min-1] 800 1500 3000 500 1000 2000 500 1000 2000
Rated torque * Mn [Nm] 29,0 26,4 14,0 53,1 48,9 28,0 66,7 58,5 27,4
Rated output Pn [kW] 2,43 4,15 4,40 2,78 5,12 5,86 3,49 6,13 5,74
Rated speed Nn [min-1] 1500 3000 4000 1000 2000 3000 1000 2000 3000
Rated torque * Mn [Nm] 26,5 19,5 8,0 48,9 38,2 13,0 58,5 38,8 10,8
Rated output Pn [kW] 4,16 6,13 3,35 5,12 8,00 4,08 6,13 8,13 3,39
Rated speed Nn [min-1] 1700 3300 4500 1100 2200 3300 1100 2200 3300
Rated torque * Mn [Nm] 25,7 18,2 5,0 47,6 35,9 8,0 57,0 35,4 6,2
Rated output Pn [kW] 4,58 6,29 2,36 5,48 8,27 2,76 6,57 8,16 2,14
Peak current I
[A] 25,9 49,0 105,0 36,3 66,1 116,0 49,0 97,4 147,0
0max
Voltage constant K
[mVmin] 231 122 70 328 180 92 347 183 104
Erms
R20 [Ω]
1,60 0,45 0,14 1,22 0,39 0,12 0,85 0,25 0,07
L [mH] 28,0 7,8 2,6 25,5 7,7 2,2 17,6 4,9 1,1
* reference flange steel 375 mm x 601 mm x 10 mm
The installation of a shaft seal ring leads to a reduction of the rated values.
Rotor moment of inertia
Static friction torque MR [Nm] 0,14 0,22 0,30
Weight
G [kg] 29,30 38,70 50,30
Permitted axial force FA [N]
J [kgcm2] 68,300 110,900 153,600
see 10.7.2
Data for optional brake
Data
Electrical power PBR [W] 40
Symbol
[Unit]
AM807x
AM8000 and AM8500 Version: 2.4 51
Page 52

10 Technical data
Optional: Feather key
Motor type
Y
Z (brake)
Optional: Feather key
10.7.1 Dimensional drawing AM807x
Drive Technology
AM8071 212 284,5
AM8072 269 341,5
AM8073 326 398,5
52 Version: 2.4 AM8000 and AM8500
Page 53

Drive Technology 10 Technical data
10.7.2 Radial / axial forces at the shaft end
10.7.3 Characteristic torque / speed curves
Characteristic torque / speed curves can be found on the Beckhoff-website under Motion.
AM8000 and AM8500 Version: 2.4 53
Page 54

11 Appendix
Drive Technology
11 Appendix
11.1 Support and Service
Beckhoff and their partners around the world offer comprehensive support and service, making available fast
and competent assistance with all questions related to Beckhoff products and system solutions.
11.2 Beckhoff's branch offices and representatives
Please contact your Beckhoff branch office or representative for local support and service on Beckhoff
products! The addresses of Beckhoff's branch offices and representatives round the world can be found on her
internet pages: www.beckhoff.com.
You will also find further documentation for Beckhoff components there.
11.3 Beckhoff headquarters
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Germany
Phone : +49(0)5246/963-0
Fax : +49(0)5246/963-198
e-mail : info@beckhoff.com
11.3.1 Beckhoff Support
Support offers you comprehensive technical assistance, helping you not only with the application of individual
Beckhoff products, but also with other, wide-ranging services:
• Support
• design, programming and commissioning of complex automation systems
• and extensive training program for Beckhoff system components
Hotline : +49(0)5246/963-157
Fax : +49(0)5246/963-9157
E-Mail : support@beckhoff.com
11.3.2 Beckhoff Service
The Beckhoff Service Center supports you in all matters of after-sales service:
• local service
• repair service
• spare parts service
• hotline service
Hotline : +49(0)5246/963-460
Fax : +49(0)5246/963-479
e-mail: : service@beckhoff.com
54 Version: 2.4 AM8000 and AM8500
 Loading...
Loading...