

Page 1

PresencePLUS
User's Manual
®
P4 AREA/AREA 1.3
Banner Engineering Corp.
P/N 125439 rev. D — 2009R2
Page 2
Page 3

Table of Contents
1. Product Support and Maintenance...................................................................7
1.1 Product Support......................................................................................................................7
1.2 Maintenance...........................................................................................................................8
2. System Description ...........................................................................................9
2.1 P4 Vision Sensors..................................................................................................................9
2.1.1 Typical P4 Vision Application........................................................................................9
2.1.2 PresencePLUS®P4 Components..............................................................................10
2.1.3 P4 Cable Connections................................................................................................11
2.2 Software Overview................................................................................................................12
2.2.1 Main Menu Toolbar ....................................................................................................13
2.2.2 Image Window............................................................................................................14
2.2.3 Navigation/Results Window........................................................................................15
2.2.4 Configuration Window................................................................................................17
2.2.5 Status Window............................................................................................................17
3. Getting Started.................................................................................................19
3.1 Installing the PresencePLUS Software.................................................................................19
3.1.1 Installing the Software................................................................................................19
3.1.2 Starting Up the Software............................................................................................19
3.2 Typical Setup and Startup Sequence...................................................................................24
3.3 Startup and Troubleshooting................................................................................................24
3.3.1 General Troubleshooting............................................................................................25
3.4 Setting Up Hardware Parameters.........................................................................................26
3.5 Building an Inspection...........................................................................................................26
4. Setup.................................................................................................................29
4.1 Setup Screen........................................................................................................................29
4.2 Capturing a Reference Image..............................................................................................29
4.3 Focus Tab.............................................................................................................................29
4.3.1 Reference Image Source...........................................................................................30
4.3.2 Focus Value................................................................................................................31
4.3.3 Auto Exposure............................................................................................................31
4.4 Trigger Tab............................................................................................................................32
4.4.1 Trigger Settings..........................................................................................................33
4.4.2 Resolution...................................................................................................................34
4.5 Advanced Tab.......................................................................................................................34
5. Tools Screen ....................................................................................................37
5.1 Overview...............................................................................................................................37
5.2 Typical Build/Modify Procedure............................................................................................38
5.2.1 Choosing a Tool..........................................................................................................38
5.2.2 Adding a Tool..............................................................................................................38
5.2.3 Adding a Test Tool......................................................................................................38
5.2.4 Renaming Tools..........................................................................................................38
5.2.5 Removing a Tool.........................................................................................................39
5.3 Quick Teach..........................................................................................................................39
5.4 Load Tab...............................................................................................................................39
iiiP/N 000000
Page 4
7/2009PresencePLUS®P4 AREA/AREA 1.3
5.4.1 Flexible Inspection Loading........................................................................................40
5.4.2 Inspection Storage Capacity......................................................................................41
5.4.3 Opening an Inspection from the Sensor or a Library..................................................42
6. System Setup Window Overview....................................................................45
6.1 Sensor Select Tab.................................................................................................................46
6.1.1 Change Sensor IP Address........................................................................................48
6.1.2 PC (GUI) to Sensor Connection Setup.......................................................................49
6.1.3 IP Address History......................................................................................................50
6.2 Communication Tab..............................................................................................................51
6.2.1 Communication Setup................................................................................................52
6.2.2 Remote Command Channel Configuration ...............................................................56
6.2.3 PresencePLUS/Kawasaki Vision Guidance and Inspection.......................................65
6.2.4 Using Custom_ASCII to Communicate with an External Device Over Ethernet........81
6.3 P4 Input/Output Tab..............................................................................................................82
6.4 Strobe Tab............................................................................................................................84
6.4.1 Strobe Width...............................................................................................................84
6.4.2 Level...........................................................................................................................85
6.5 Units Tab...............................................................................................................................85
6.6 Reset Tab..............................................................................................................................86
6.7 Start-Up Inspection Tab........................................................................................................87
6.8 NTSC Tab.............................................................................................................................89
6.9 Language Tab.......................................................................................................................90
6.10 Tools Configuration.............................................................................................................91
6.10.1 Standard Mode.........................................................................................................92
6.10.2 Enhanced Mode.......................................................................................................92
6.10.3 Custom Mode...........................................................................................................92
6.10.4 Tool Licensing...........................................................................................................92
7. PresencePLUS Software Tools.......................................................................95
7.1 ROI Types.............................................................................................................................95
7.1.1 Linear ROI..................................................................................................................95
7.1.2 Area ROI.....................................................................................................................95
7.1.3 Search ROI.................................................................................................................96
7.2 Location Tools.......................................................................................................................96
7.2.1 Locate Tool.................................................................................................................96
7.3 Vision Gray Scale Tools......................................................................................................103
7.3.1 Average Gray Scale Tool..........................................................................................104
7.3.2 Blob Detect Tool.......................................................................................................107
7.4 Analysis Tools.....................................................................................................................119
7.4.1 Communication Tool.................................................................................................120
7.4.2 Math Tool..................................................................................................................136
7.4.3 Measure Tool............................................................................................................141
7.4.4 Test Tool...................................................................................................................162
8. Communication Tool Setup...........................................................................183
8.1 Ethernet Connection...........................................................................................................183
8.2 Serial Connection...............................................................................................................185
8.3 Overview of Testing the Communication Tool.....................................................................186
8.4 Detailed Steps for Testing the Communication Tool...........................................................187
8.4.1 Testing Ethernet Communications............................................................................187
8.4.2 Testing Serial Communications................................................................................187
8.5 Troubleshooting Ethernet Connections..............................................................................188
8.6 Troubleshooting Serial Connections...................................................................................188
P/N 000000iv
Page 5

PresencePLUS®P4 AREA/AREA 1.37/2009
8.7 Remote Command Channel Configuration ........................................................................189
8.7.1 Remote Command Set ............................................................................................189
8.7.2 RCC Return Values..................................................................................................192
8.7.3 Frame Tag Numbers ................................................................................................193
8.7.4 Command Processing .............................................................................................194
8.7.5 RCC Log ..................................................................................................................194
8.7.6 Frame and Field Delimiters......................................................................................195
9. Teach...............................................................................................................197
9.1 Quick Teach........................................................................................................................197
9.2 Teach..................................................................................................................................197
9.3 Teach Screen......................................................................................................................198
9.3.1 Teaching an Inspection.............................................................................................198
9.4 Remote Teach.....................................................................................................................200
9.4.1 Understanding Remote Teach..................................................................................200
9.4.2 Remotely Teaching a Tool........................................................................................201
9.4.3 Timing Sequence......................................................................................................201
9.4.4 Remote Teach Results.............................................................................................202
10. Run Screen...................................................................................................203
10.1 Selected Inspection..........................................................................................................204
10.2 Display..............................................................................................................................204
10.3 Capture Control................................................................................................................205
10.4 Results..............................................................................................................................205
10.5 Inputs................................................................................................................................206
10.6 Outputs.............................................................................................................................206
10.7 Product Select..................................................................................................................207
10.8 System..............................................................................................................................207
10.9 Start/Stop..........................................................................................................................207
10.10 Select Tab.......................................................................................................................207
10.11 Log Tab...........................................................................................................................209
10.12 Run Results....................................................................................................................211
10.13 Run Player/Recorder......................................................................................................213
10.13.1 Record..................................................................................................................215
10.13.2 Playback...............................................................................................................217
11. Product Change............................................................................................221
11.1 Product Change Specifications.........................................................................................221
11.2 Product Select Input Specifications..................................................................................222
12. P4 Product Change and Product Select Timing........................................223
12.1 One Pulse Set Overview...................................................................................................223
12.1.1 Product Select in One-Pulse Configuration............................................................224
12.2 Three Pulse Set Overview................................................................................................225
12.2.1 Product Select in Three-Pulse Configuration.........................................................225
13. Saving Inspections.......................................................................................227
13.1 Saving Inspections to a Vision Sensor.............................................................................228
13.2 Saving Inspections to a PC or Network Drive...................................................................230
14. Backing Up and Restoring Vision Sensor Data.........................................231
14.1 Backing up Vision Sensor Data........................................................................................231
14.2 Restoring Vision Sensor Data...........................................................................................235
vP/N 000000
Page 6

7/2009PresencePLUS®P4 AREA/AREA 1.3
15. Dimensions and Specifications..................................................................239
15.1 Sensor Dimensions...........................................................................................................239
15.1.1 Right-Angle Sensor Dimensions............................................................................239
15.1.2 Right-Angle Sensor Mounting Bracket Dimensions...............................................239
15.1.3 In-Line Sensor Dimensions....................................................................................240
15.1.4 In-Line Sensor Mounting Bracket Dimensions.......................................................240
15.2 Sensor Specifications.......................................................................................................241
15.3 Monitor Specifications - 9" CRT........................................................................................243
15.4 Monitor Specifications - Flat Panel 8" LCD Color.............................................................243
15.5 Ethernet Communication Specifications...........................................................................244
15.6 Serial Port Communication Specifications........................................................................245
..............................................................................................................................247
P/N 000000vi
Page 7
Product Support and Maintenance
This section provides general Banner resources and specific documentation for installers and operators of this
PresencePLUS Vision Sensor.
Attention: Not to be Used for Personal Protection.
Never use these products as sensing devices for personel protection. Doing so could lead to serious injury
or death.
These sensors do NOT include the self-checking redundant circuitry necessary to allow their use in personnel
safety applications. A sensor failure or malfunction can cause either an energized or de-energized sensor output
condition. Consult your current Banner Safety Products catalog for safety products which meet OSHA, ANSI, and
IEC standards for personnel protection.
1.1 Product Support
1
Banner provides the following resources for quickly setting up and operating the sensor.
Documentation
Online Help
The PresencePLUS online help is available from the from the Help menu item within the PresencePLUS
software. You can also get targeted help while on any system tab or dialog by pressing the <F1> key.
PDF Documentation
The PresencePLUS Sensor documentation is available in a convenient printable format (PDF) on the installation
CD or on the Banner Web site
Banner Website
The most current PresencePLUS information, documentation, and software updates are available at the
following Banner website page:
www.bannerengineering.com
Warranty Service
The PresencePLUS Vision Sensor is designed for reliability. Do not open the housing; it contains no
field-replaceable components. If repair is necessary, do not attempt to repair the sensor yourself; return the
unit to the factory. Should it become necessary to return a sensor to the factory, please do the following:
1. Contact the Banner Factory Application Engineering group at the address or numbers listed below.
They will attempt to trouble shoot the system from your description of the problem. If they conclude
that a component is defective, they will issue an RMA (Return Merchandise Authorization) number
for your paperwork and give you the proper shipping address.
P/N 000000
Tel: 763.544.3164
7Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 8
7/2009Product Support and Maintenance
2. Pack the sensor carefully. Damage which occurs during return shipping is not covered by warranty.
Factory Support
Call, e-mail, fax, or write your local Banner representative or a Banner Applications Engineer for support.
Applications Engineers are available from 8:00 A.M. to 5:00 P.M. Central Time, Monday through Friday,
excluding holidays.
Phone
Local: 763.544.3164
Toll Free: 1.888.3.SENSOR (1.888.373.6767)
763.544.3213Fax
sensors@bannerengineering.comE-mail
Address
To help Banner better assist you, be ready to provide the following information:
Banner Engineering Corp.
9714 10th Avenue North, Minneapolis, MN 55441 USA
• PresencePLUS software version (to find version number, click Help in the Main Menu toolbar and
choose About)
• Operating system of your PC
• Sensor Model Number and Date Code. Model Number is on top of Sensor, Date Code is either on
the bottom or the side
• Exact wording of any messages that appeared on your screen
• A description of what you were doing and what happened
• A description of how you tried to solve the problem
1.2 Maintenance
Maintenance tasks include keeping the hardware free of dust and dirt and possibly updating the PresencePLUS
software as new versions become available.
Cleaning the Sensor
Regularly remove any dust or dirt from the Sensor using a soft cloth. If needed, slightly dampen the cloth with
a weak solution of neutral detergent. Avoid getting dirt on the imager (the area behind the lens). If the imager
is dirty, use anti-static compressed air to blow off the dust.
Cleaning the Lens
Regularly remove dust, dirt, or fingerprints from the lens. Use anti-static compressed air to blow off dust. If
necessary, use a lens cloth and lens cleaner or window cleaner to wipe off remaining debris.
Do not use any other chemicals for cleaning.
Updating the PresencePLUS Software
The current version of PresencePLUS software is available for download from the Banner website. See Banner
Website for the software downloads link.
8
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 9
2
System Description
The PresencePLUS ProII and P4 sensor families are easy-to-use camera systems with advanced visual inspection
capability. With minimal knowledge of vision systems, a user can quickly set up a PresencePLUS ProII or P4 and
run an inspection that tests products accurately, rejecting bad products on a production line.
Inspections are set up using a personal computer (PC). A digital camera inside the Vision sensor captures images,
and the sensor software analyzes the images using one or more Vision tools to pass or fail the product. The PC is
not required for running inspections after the inspection files have been stored in the sensor’s memory.
Inspection setup involves focusing the camera and selecting the appropriate Location, Vision, and Analysis tools.
The full range of inspection tolerances can be established either automatically or manually. The automatic Teach
function eliminates the iterative process of determining correct tolerances.
The PresencePLUS ProII and P4 Sensor families accommodate both translational and rotational variation. Parts
moving down a production line or web need not be oriented in exactly the same way.
The Sensor is easy to operate, with both basic and advanced options. New users can follow the guided Setup
sequence. Advanced users can override automatic settings and create highly customized inspections.
2.1 P4 Vision Sensors
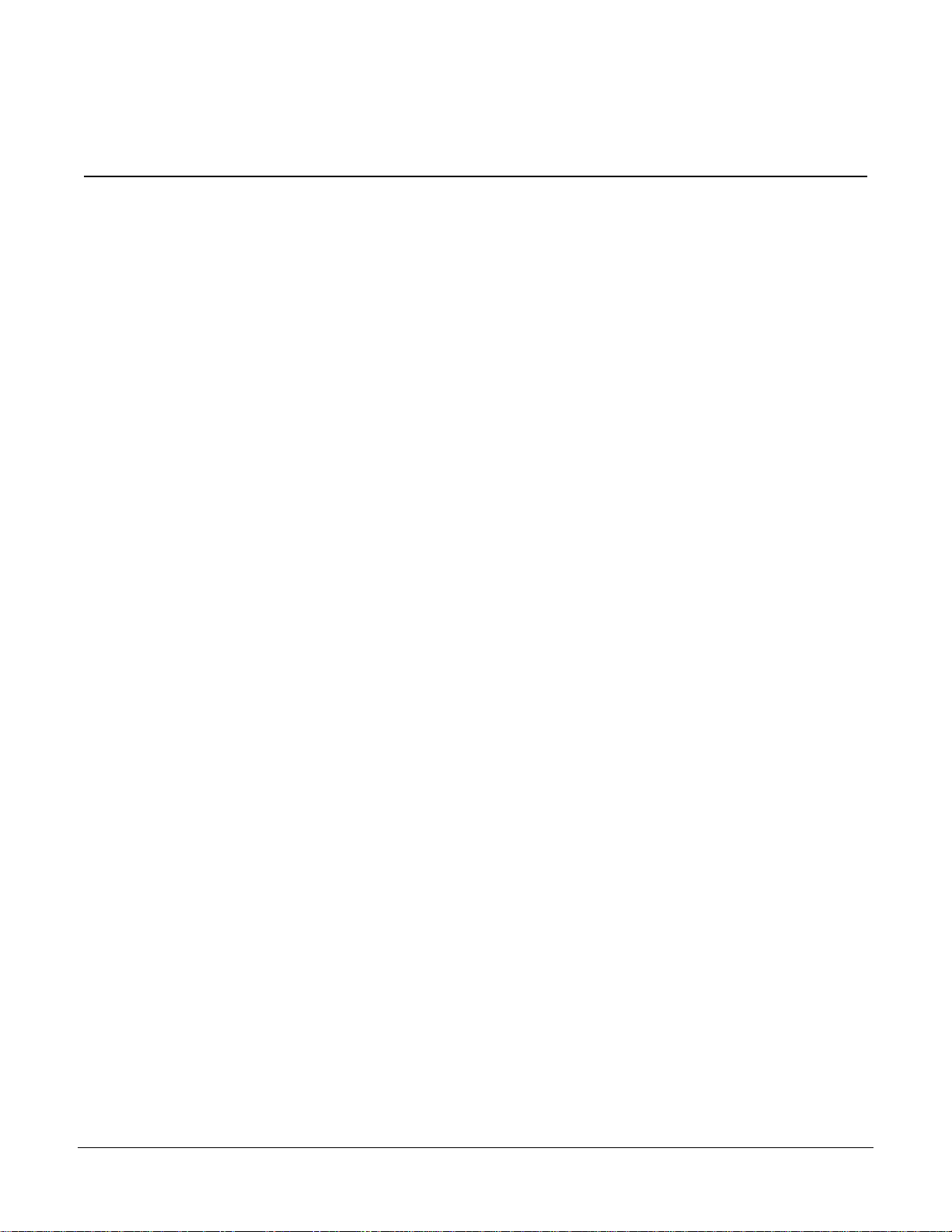
2.1.1 Typical P4 Vision Application
A typical PresencePLUS P4 application is shown below.
P/N 000000
Tel: 763.544.3164
9Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 10
7/2009System Description
In the application shown above, as each plastic formed part comes past the Vision sensor, an inspection is
performed. If the part is not shaped correctly as shown here, the inspection fails.
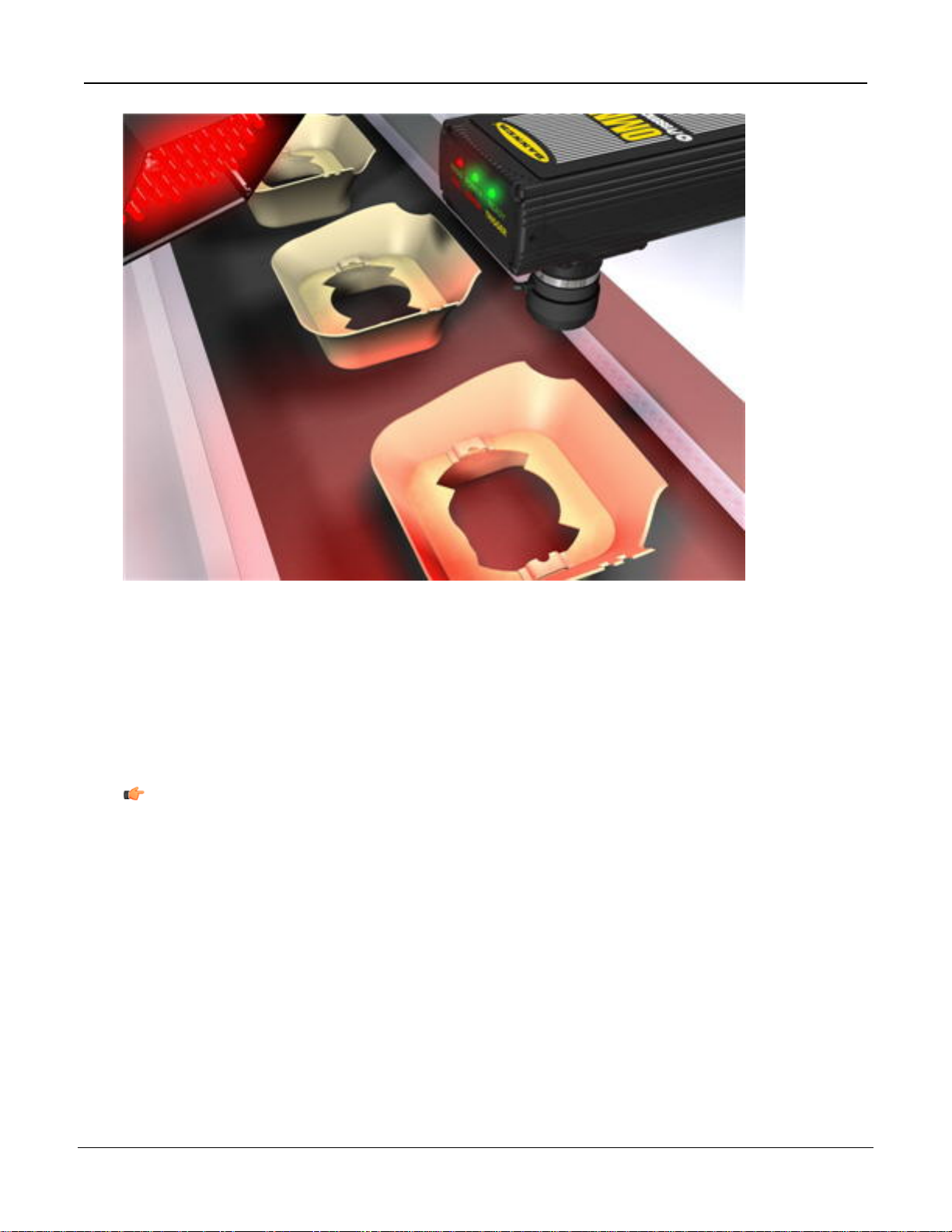
2.1.2 PresencePLUS®P4 Components
The PresencePLUS P4 system consists of the Sensor and a PC with PresencePLUS software and the
appropriate connections. The Sensor requires lighting and a trigger device, and an optional video monitor can
be connected.
Note: The trigger device can be any 10-30V dc photoelectric sensor (PNP or NPN) or a device with a
similar output.
10
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 11
2.1.3 P4 Cable Connections
System Description7/2009
or Switch
STP07 — 2.1 m (7')
P/N 000000
Note: The sensor power must be 24V dc ± 10% if a light source is powered by the sensor.
Monitor Cable (to Video Monitor, optional)Crossover Ethernet Cable (to PC Ethernet Port)*
BNC06 —2 m (6')STPX07 — 2.1 m (7')
BNC15 — 5 m (15')STPX25 — 7.6 m (25')
BNC30 — 9 m (30')or
Serial Cable (to PC serial Port)*Standard Ethernet Cable (to PC via Network Hub
DB9P06 — 2 m (6')
DB9P15 — 5 m (15')
11Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 12
7/2009System Description
STP25 — 7.6 m (25') DB9P30 — 9 m (30')
*The Sensor can be connected to the PC via a serial cable or an Ethernet network; Ethernet provides faster
communication.
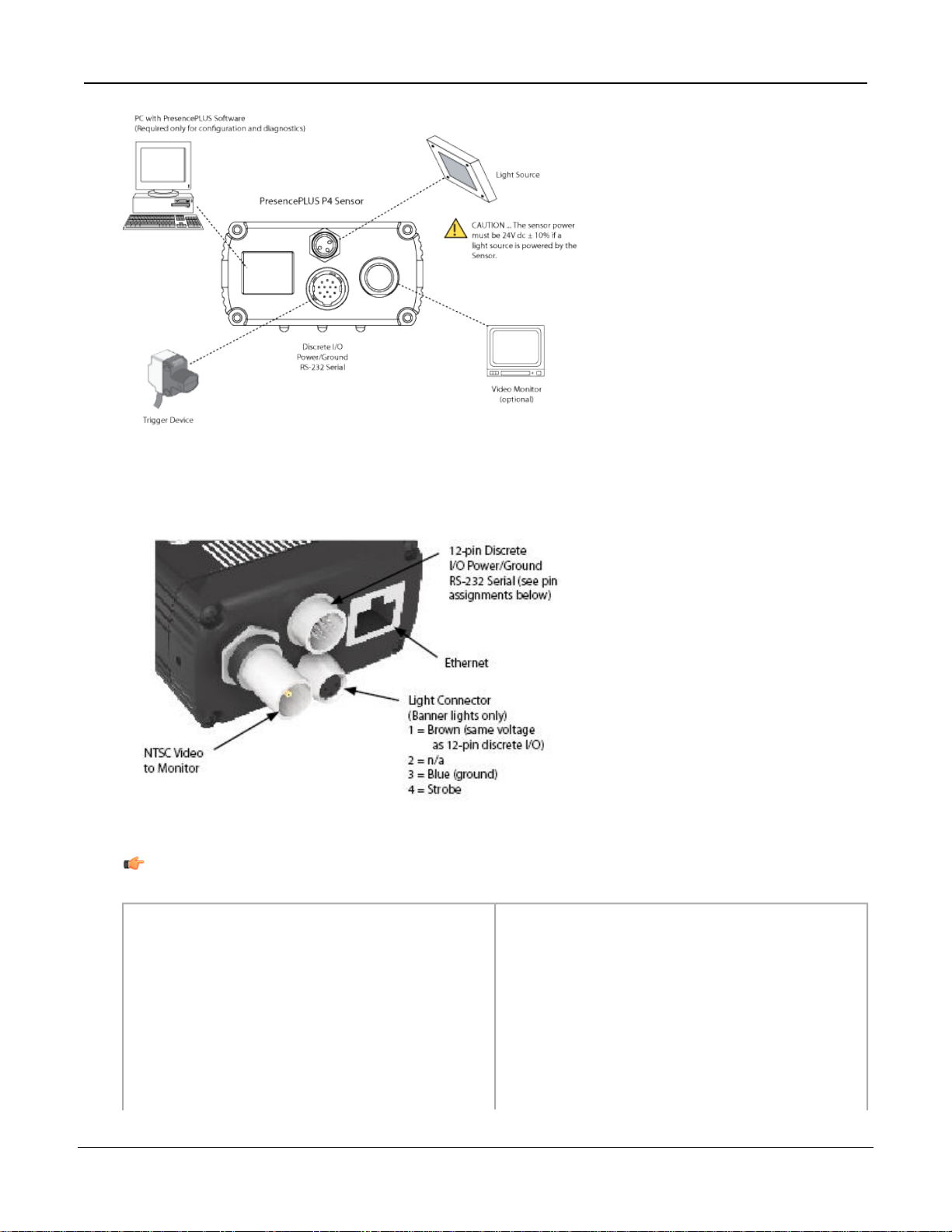
DirectionDescriptionWire ColorPin #
OutputRS-232 TX**Yellow1
InputRemote TeachGray2
InputProduct ChangeOrange3
InputExternal TriggerPink4
In/OutDiscrete I/O #1Black5
In/OutDiscrete I/O #2Red6
In/OutDiscrete I/O #3White7
In/OutDiscrete I/O #4Light Blue8
InputRS-232 RX**Violet9
OutputRS-232 Signal Ground**Green10
** These three wires make up the RS-232 serial connection.
Note: All unused inputs and outputs should be connected to ground if configured as PNP, and
connected to +24V dc if configured as NPN. Serial input pins should be connected to ground.
2.2 Software Overview
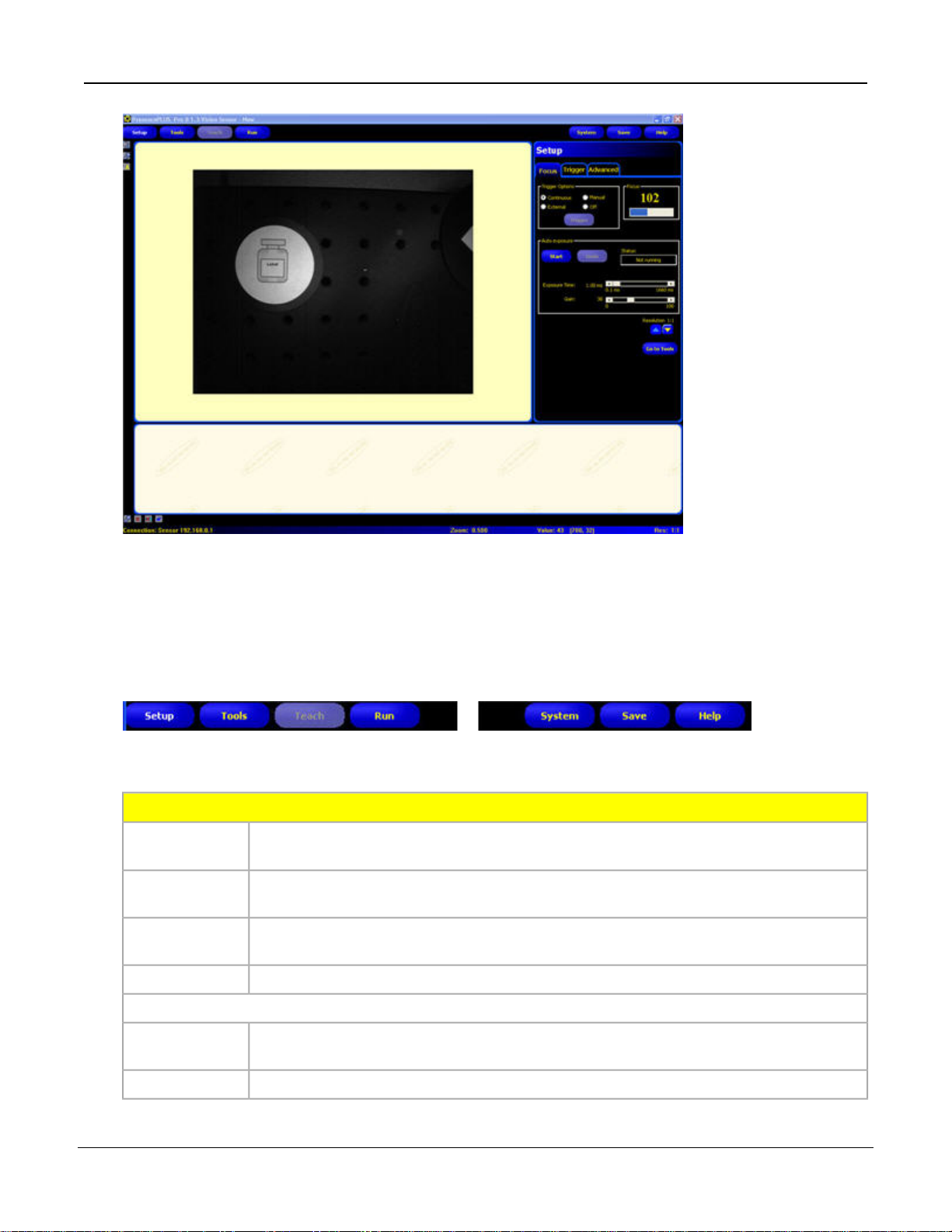
The PresencePLUS application window is shown below.
InputCommon (Signal Ground)Blue11
Input10-30V dcBrown12
12
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 13
System Description7/2009
2.2.1 Main Menu Toolbar
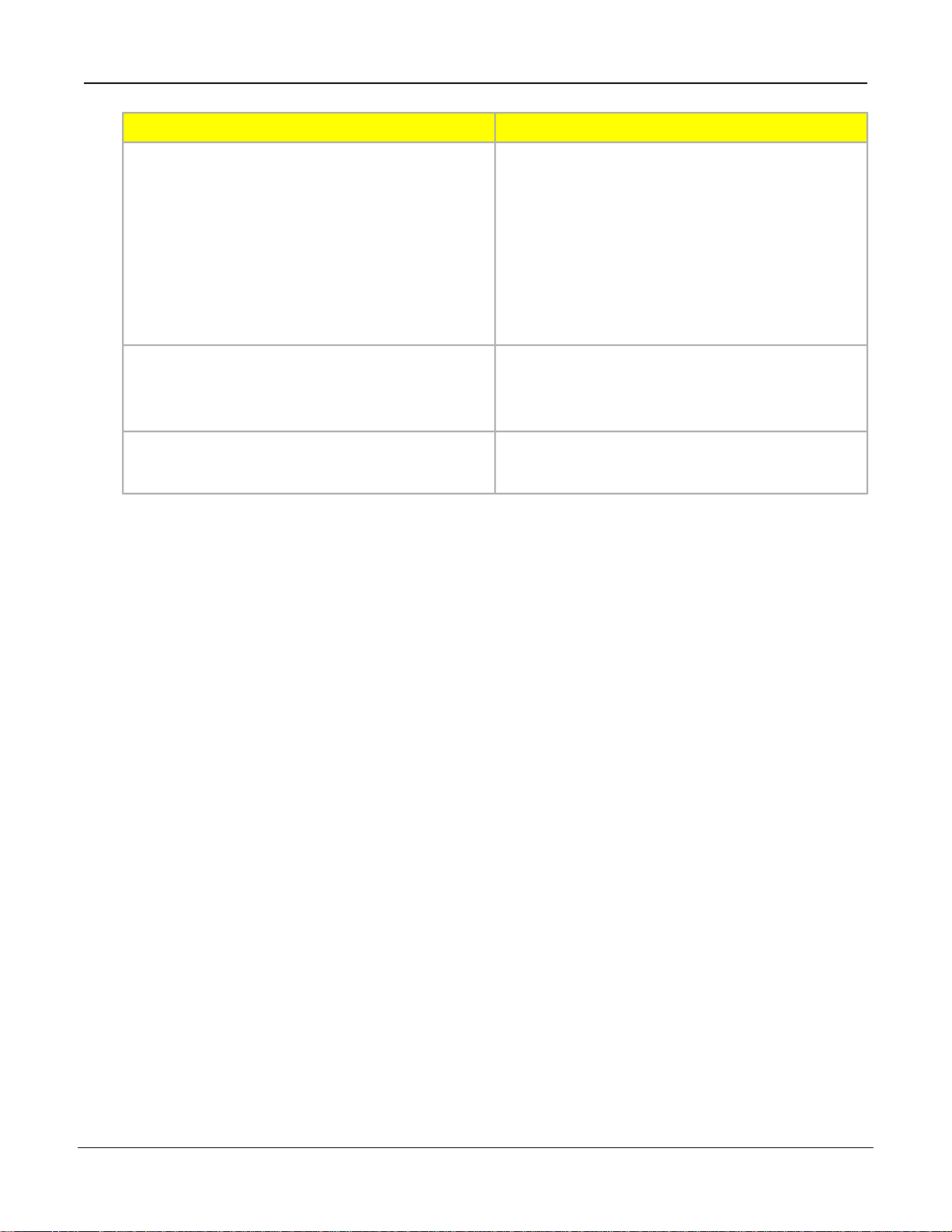
Use the Main Menu toolbar to navigate between the Sensor options. Proceeding from left to right, the buttons
in the Main Menu toolbar step through the process of creating and controlling an inspection. Each button is
explained in the illustration below and in the table that follows.
The following table describes the screen associated with each button in the Main Menu.
Inspection-Specific Screens
Setup
Tools
Teach
System
Set up the camera, lens, trigger, and lighting to acquire images. Create a reference image
to be used later.
Add tools to an inspection. Build the inspection from scratch, or load tools from a previous
inspection file saved on the controller or a PC.
Teach the Sensor good products. This screen automatically configures the parameters
chosen in the Tools screen.
Choose which inspection file the Sensor will run, and view the results of the inspectionRun
System-Wide Screens
Set up the discrete inputs and outputs and communication configuration. This screen also
has the Sensor diagnostic tools.
P/N 000000
Name the current inspection files and save them to the controller or a PC for future use.Save
13Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 14
Inspection-Specific Screens
Call the Help window or the About window.Help
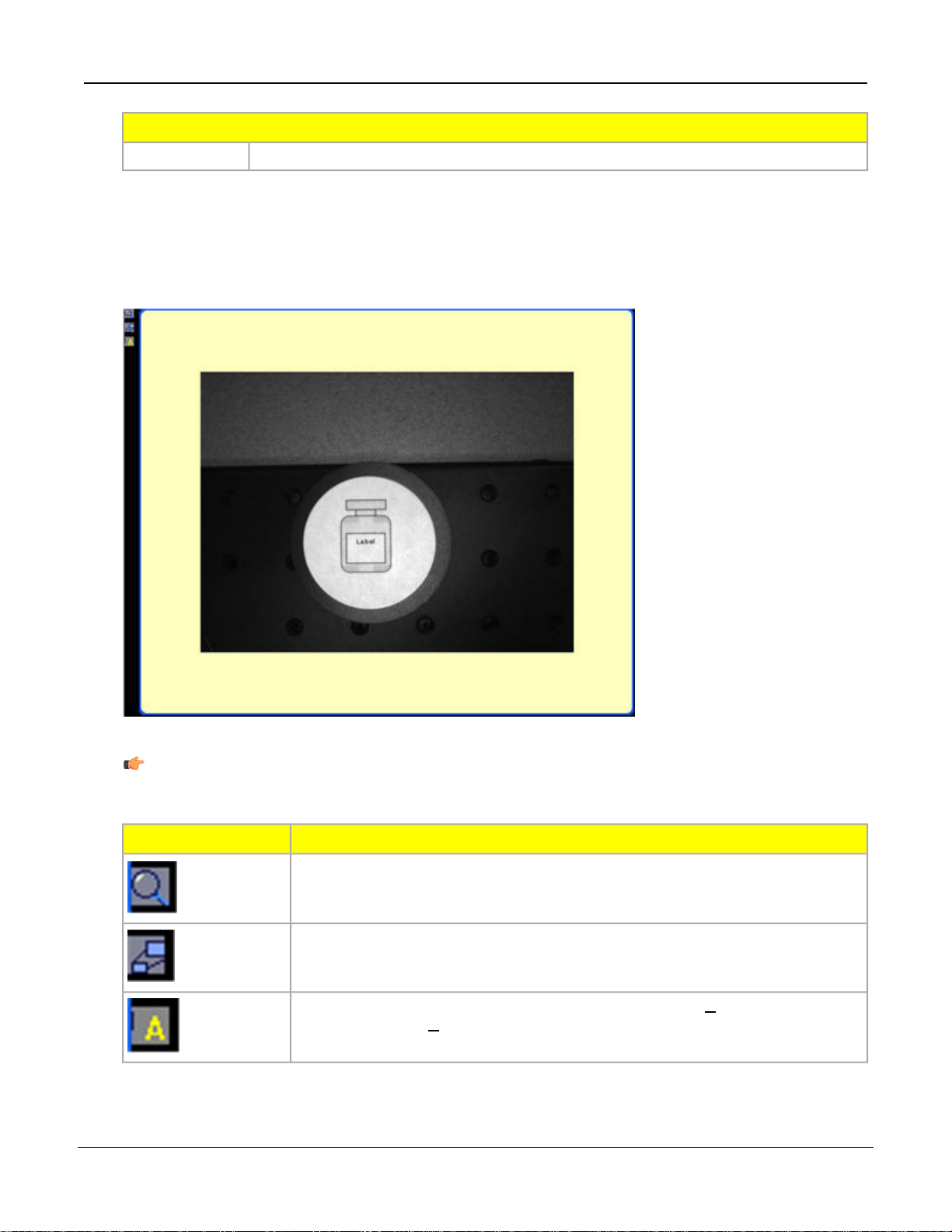
2.2.2 Image Window
The Image window, on the left side of the screen, displays images acquired from the camera or the reference
image that is set for the current inspection. The toolbar buttons in the Image window are explained below.
7/2009System Description
14
Note: The reference image is used as a template for developing an inspection; it establishes
the initial values for the Vision tools. The reference image also is used by Quick Teach.
DescriptionIcon
Zoom -- toggles zoom control. When enabled, click on the image window to zoom
in and right-click to zoom out. This button is active when an image is displayed in
the Image window.
Expand Image -- toggles the size of the Image window between maximum and
minimum.
Selected ROI / ALL ROIs -- toggles between the currently S elected Region of
Interest (ROI) and A ll ROIs.
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 15
System Description7/2009
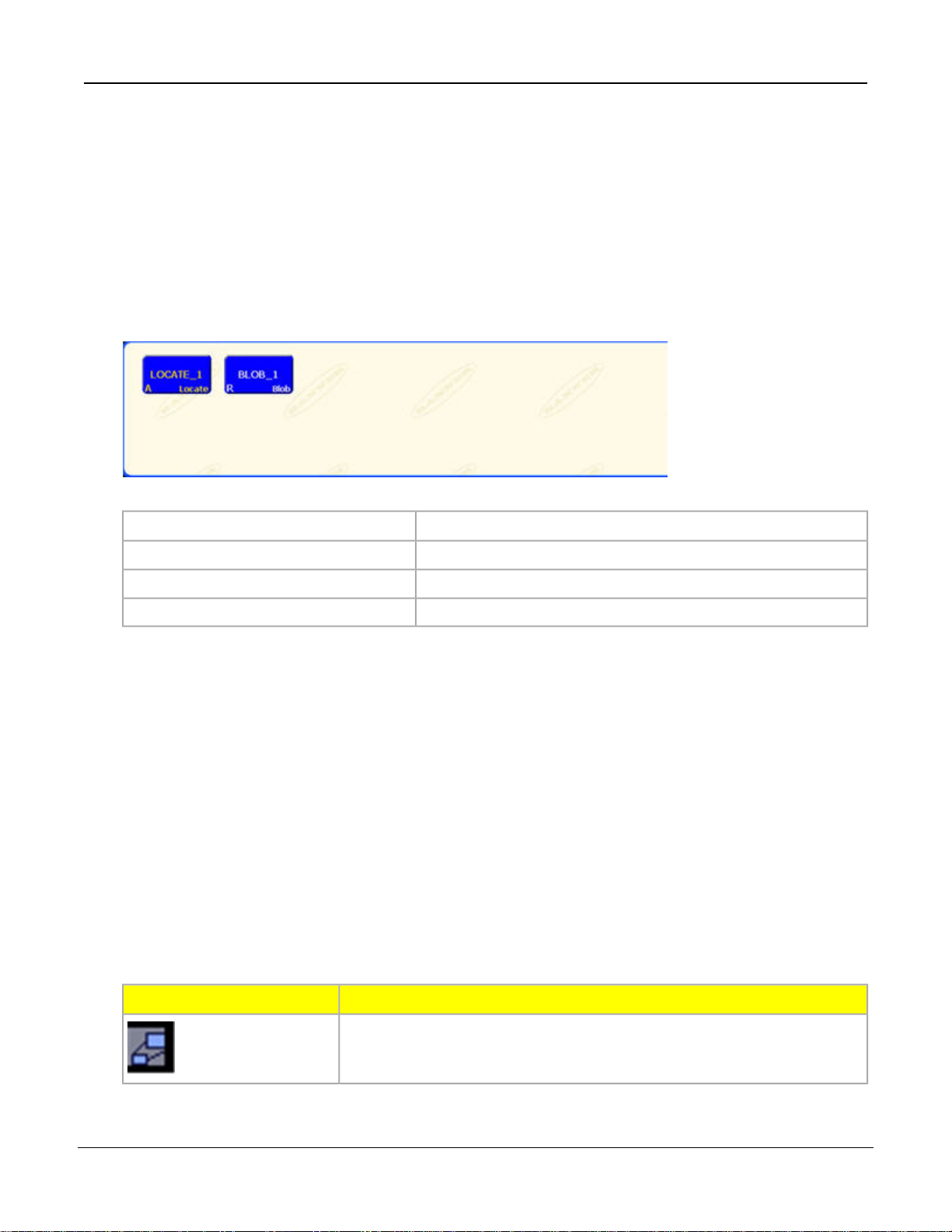
2.2.3 Navigation/Results Window
The Navigation/Results window, at the bottom of the screen, displays tool navigation buttons or inspection
results files.
Navigation Buttons
Clicking on the Tools button in the Main Menu toolbar brings up the tool navigation buttons in the
Navigation/Results window. When setting up or using tools, click on any tool navigation button to get the
corresponding tab in the Configuration window.
Tool nameLOCATE_1 (or BLOB_1)
AbsoluteA
RelativeR
Tool typeLocate (or Blob)
Absolute and Relative Tools
An absolute tool’s Region of Interest (ROI) does not move in the image window. A relative tool shifts the ROI
from the previous tool, relative to the position of the part.
The Location tools (for example, Locate) track parts in the Image window, and the Vision tools that follow (for
example, Average Gray Scale and Blob Detect) are relative. A Vision tool that precedes all Location tools will
be absolute. Rules governing whether a tool is absolute or relative are as follows:
• The first Location tool is always absolute.
• All tools following a Location tool are relative to that tool unless they are made absolute themselves, in which
case the chain is broken, and a new chain is started.
• For a Vision tool to be absolute, it must be placed before any Location tools.
Navigation/Results Toolbar Buttons
Using the Navigation/Results toolbar buttons, the Navigation/Results window size can be set, and tools can
be deleted.
P/N 000000
DescriptionIcon
Expand Results -- toggles the size of the Navigation/Results window between
maximum and minimum.
15Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 16
7/2009System Description
DescriptionIcon
Delete Selected Tool -- deletes the selected tool from the current inspection.
Delete Selected Tools -- deletes the selected tool and all the tools to the
right of the selected tool.
Copy Selected Tool -- clones the selected tool.
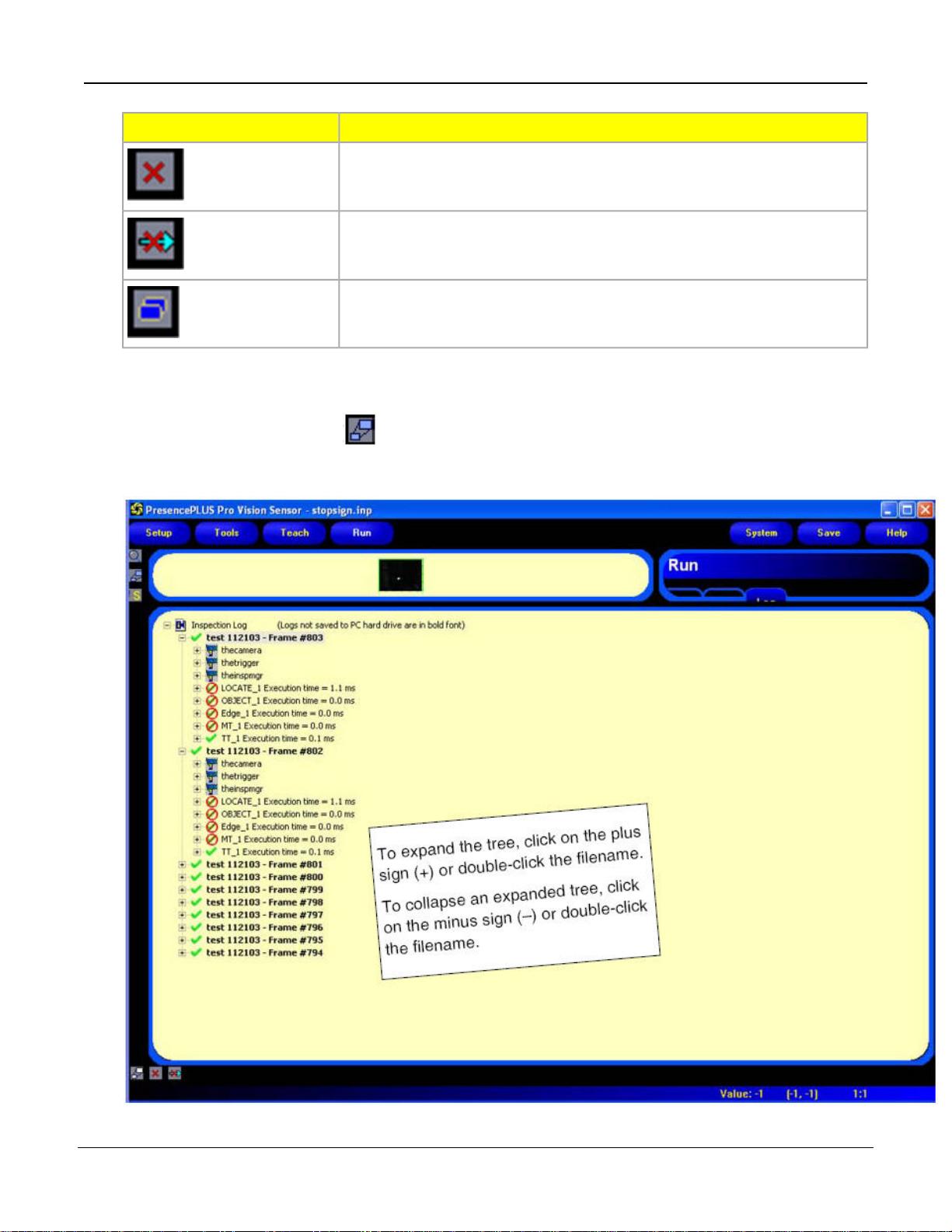
Expand Button
Clicking on the Expand button ( ) toggles the size of the Navigation/Results window to accommodate an
expanded list of inspection results files, as shown below.
16
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 17
System Description7/2009
2.2.4 Configuration Window
The Configuration window, on the right side of the screen, displays the currently selected options with multiple
tabs. Clicking the Setup, Tools, Teach, Run, System, Save, or Help buttons on the Main Menu toolbar changes
the contents of the Configuration window accordingly.
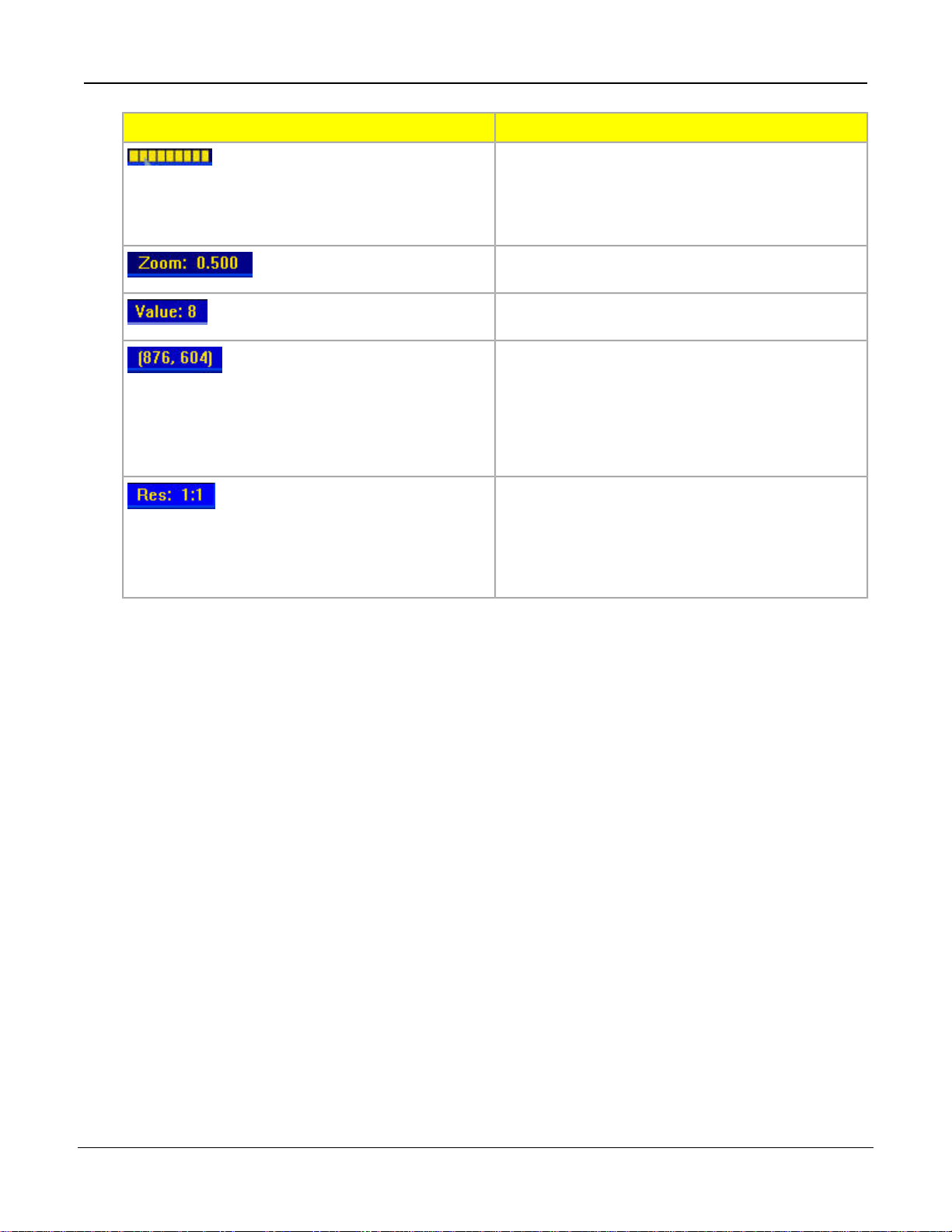
2.2.5 Status Window
The Status window, shown below, provides the following Sensor feedback.
The following table provides descriptions of each region in the Status window:
DescriptionRegion
Connection info -- current sensor to which the PC is
connected.
P/N 000000
Tel: 763.544.3164
17Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 18
7/2009System Description
DescriptionRegion
Image update completion -- progress bar shows
relative image update completion when an image is
being transferred from the camera to the PC (this
flickers, and is next to Connection: Sensor
192.168.0.1).
Current zoom value - works with the Zoom icon
(magnifying glass).
Current grayscale value -- the 0-255 gray scale value
of the pixel under the cursor.
Cursor position -- displays the x, y coordinates of the
pixel under the cursor relative to the upper-left corner
(origin, which is 0,0) of the field of view. Note that you
must have the mouse pointer hovering over the image
to get this information, otherwise, it displays
(-1,-1).
Current image display resolution -- displays the
user-specified value, which can be from 1:1 to 64:1.
Note that this does not affect how the sensor operates;
it only affects sensor-to-GUI image communication
speed, and is more useful when using Serial
communication.
18
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 19
3
Getting Started
This section begins with some Vision basics, then provides a brief overview of how to install the software, and the
general steps to creating an inspection.
3.1 Installing the PresencePLUS Software
The PresencePLUS software CD includes the sensor software and this documentation.
3.1.1 Installing the Software
To install the PresencePLUS software:
1. Close all active programs.
2.
Make sure that no previous installations of PresencePLUS are installed.
3.
Insert the PresencePLUS CD into the CD ROM drive of the personal computer. If you have
auto-start enabled, the CD should automatically start. If it doesn't start --
a. Double-click on the My Computer icon on the desktop.
b. Double-click on the CD Drive in the list that appears.
c. Double-click on the PresencePLUS autorun file.
4. When the Install screen appears, click PresencePLUS PC Software.
5. Follow the instructions on the screen.
6. When the installation completes, reboot the PC.
3.1.2 Starting Up the Software
1. Power up the PC.
2.
Install the software if it has not been installed. The installation screen of the PresencePLUS Pro
software CD is shown below.
P/N 000000
Tel: 763.544.3164
19Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 20

7/2009Getting Started
Note: The following instructions assume you are installing the software on Windows XP.
3. If using an Ethernet communication cable, configure the IP address as follows:
a. Open Network Properties on the PC (right-click on the Network Neighborhood icon).
20
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 21
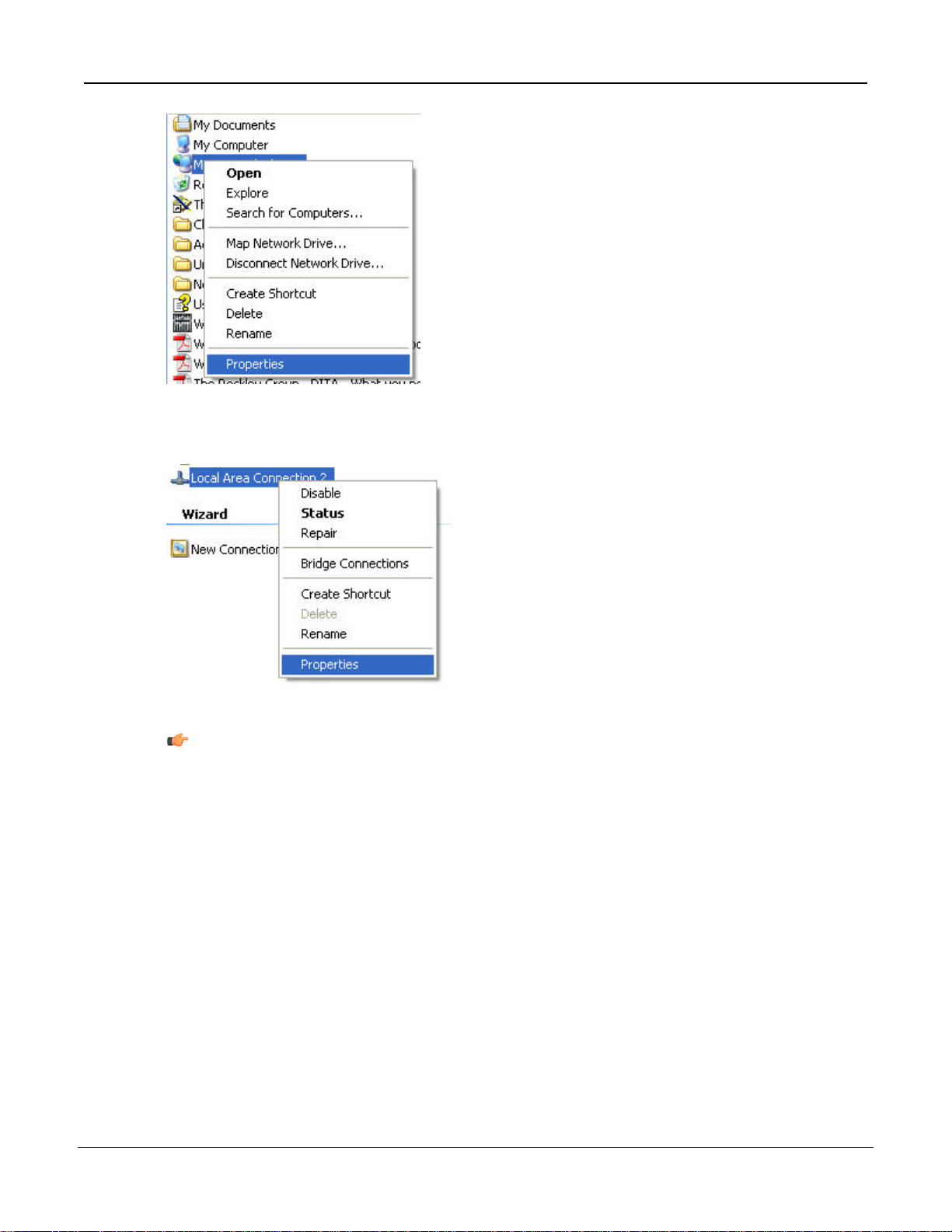
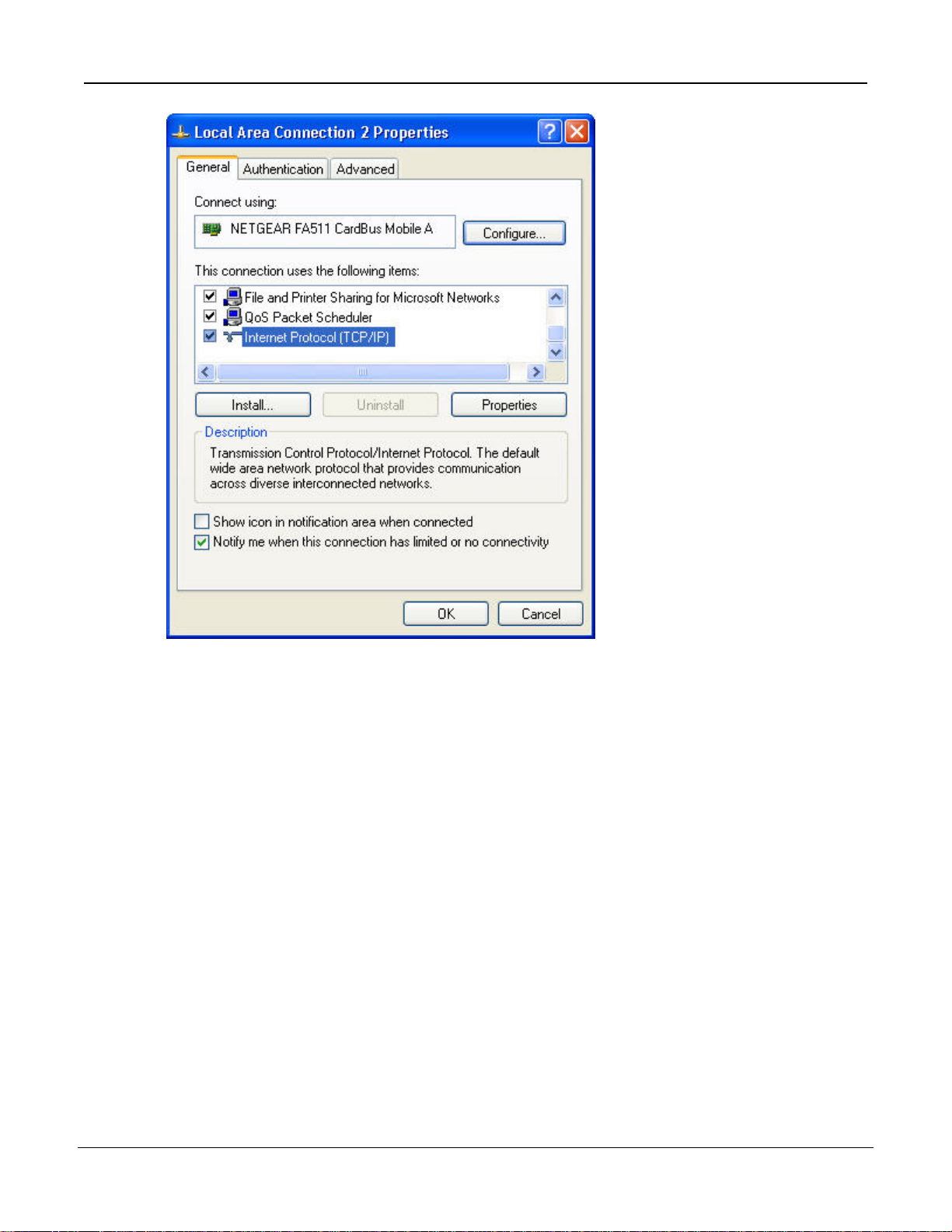
b. On the Local Area Connection, right-click on Properties.
Getting Started7/2009
P/N 000000
Note: The PC in the example above has a second network card which is used to connect
to the camera so it is using Local Area Connection 2.
c. In the dialog, click on Internet Protocol (TCP/IP) and click the Properties button.
21Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 22
7/2009Getting Started
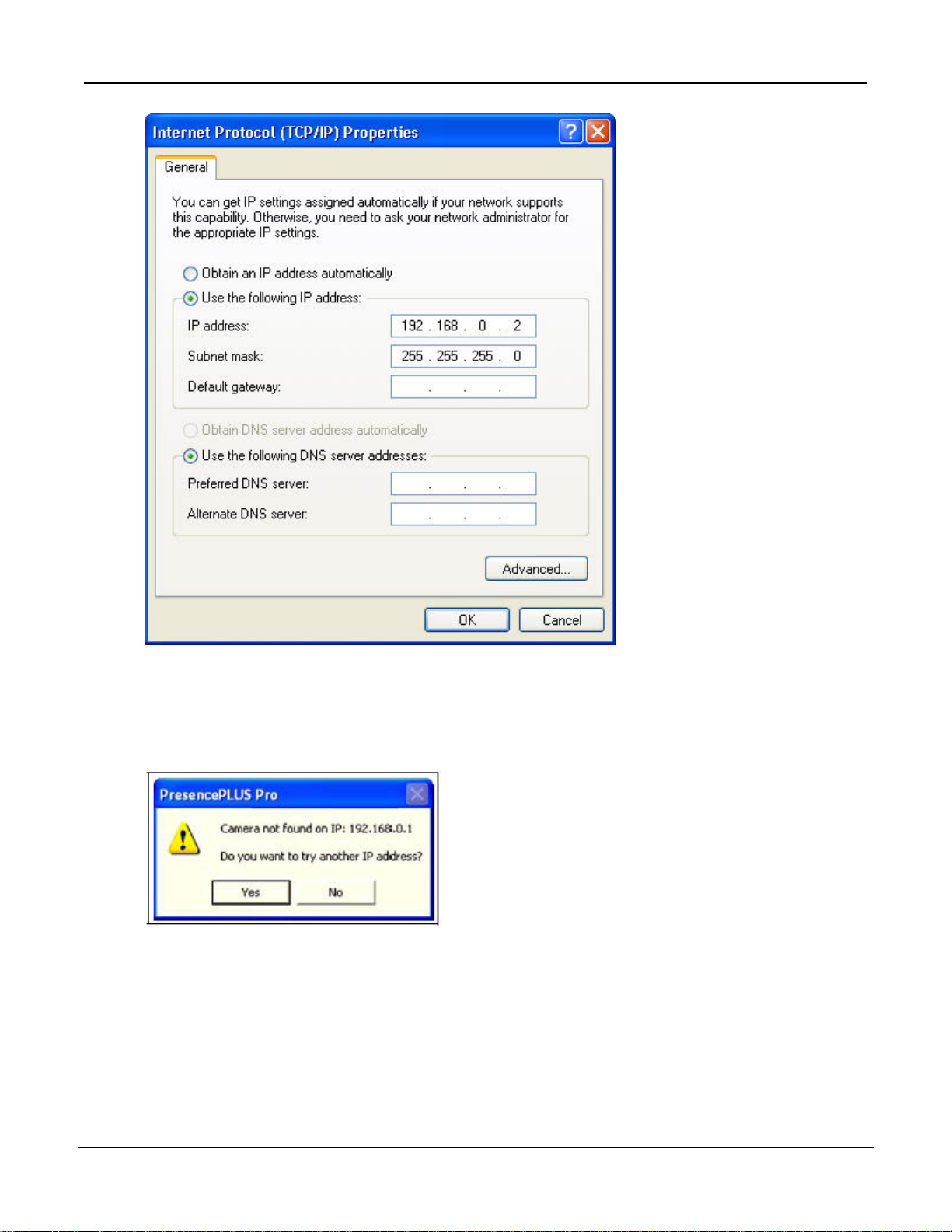
4. In the Internet Protocol (TCP/IP) Properties dialog, select Use the following IP address and
make sure that the the IP address is 192.168.0.2, and the subnet mask is 255.255.255.0.
22
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 23
Getting Started7/2009
5. Start the sofware.
6. Upon initial startup, the software communication is not configured, and the following error message
is displayed.
7. Click Yes to open the Communication screen.
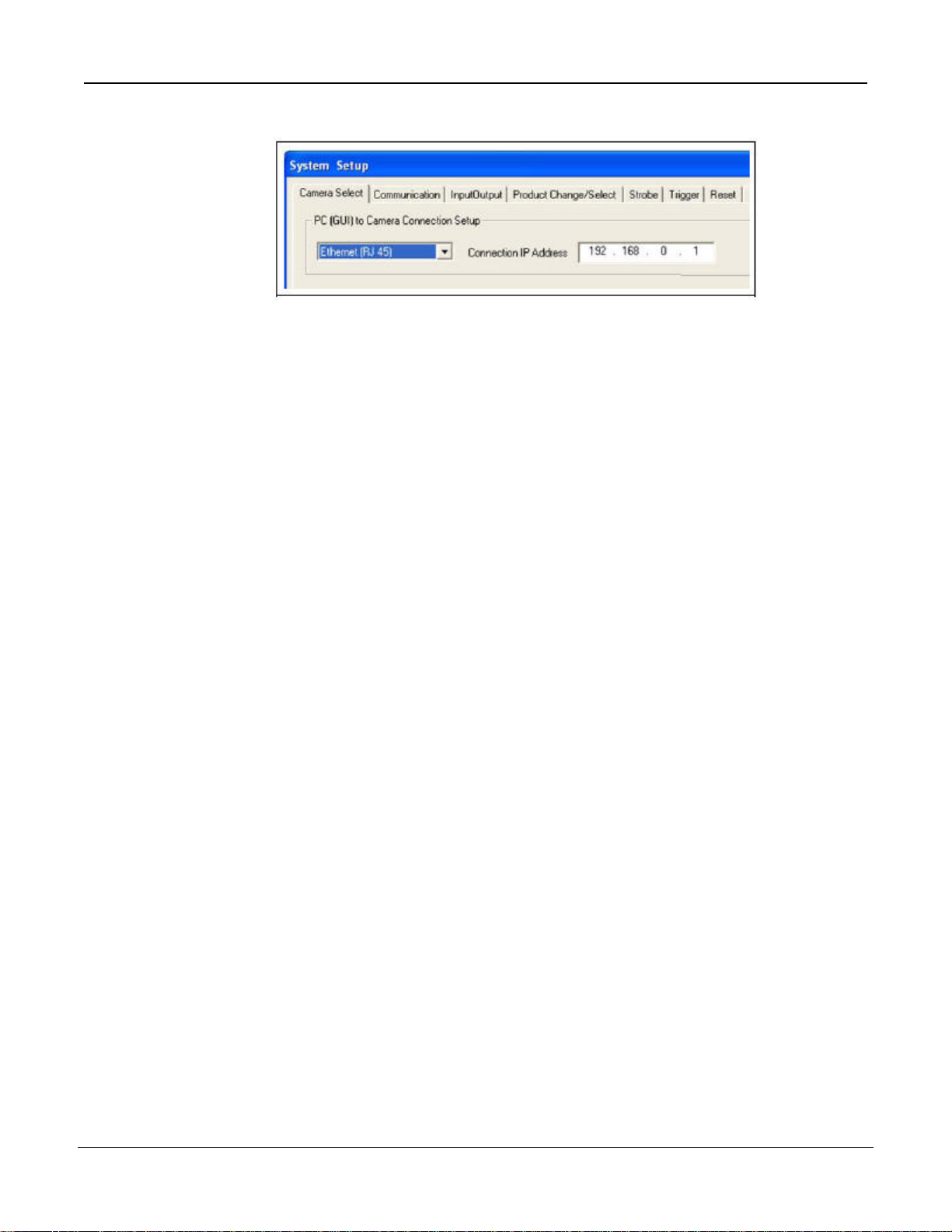
8. Establish communications as follows:
Ethernet
Connection
1. When the software is started for the first time, the IP address is "Localhost."
Choose Ethernet (RJ 45).
2. Change the IP address to 192.168.0.1 (default IP address of the sensor).
3. Click OK.
P/N 000000
Tel: 763.544.3164
23Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 24
3.2 Typical Setup and Startup Sequence
The following subsections proceed through a typical Sensor setup and startup sequence
1. Connect and power up the hardware.
2. Start up the software.
3. Set up hardware parameters.
4. Build and run an inspection.
7/2009Getting Started
3.3 Startup and Troubleshooting
The following explains how to verify connections and start the PresencePLUS software.
1. Verify cable connections.
• The sensor is connected to a PC with an Ethernet crossover cable ofr a serial cable.
• The monitor, if used, is connected to the sensor's video port.
2. Thread the lens onto the sensor.
3. Verify electrical connections.
• +V is connected to Pin 12, brown were, 10-30V dc (24V dc ± 10% if a light is powered by the
sensor).
• -V is connected to Pin 11, blue wire (dc common).
• The trigger device is connected to Pin 4 (pink wire, Trigger In).
• Any additional connections are made as required.
4. Verify power. Ensure that the sensor is powered by 10-30V dc (24V dc ± 10% if a light is powered
by the sensor).
5. Verify PC configuration.
• Ethernet connection: IP address of PC is 192.168.0.2.
• Serial connection: A dial-up network has been established, and the network is a point-to-point
protocol (PPP).
6. Power up the hardware and verify that the Error LED turns off.
24
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 25
Getting Started7/2009
During powerup, all the sensor LEDs illuminate for 15 to 20 seconds.•
• After the Red Error LED turns OFF, verify that the Green power LED is flashing.
7. Launch the Software.
• Click Start > PresencePLUS to start the program.
• If the sensor has a different IP address than the default address (192.168.0.1), or if it is connected
through a serial connection, the following error message will display:
Sensor not found on specified IP address 192.168.0.1.
Do you want to try another IP address?
• Click Yes to access the System Setup window.
• Click on the Sensor select tab, and change the conection setup as follows:
Ethernet Connection --
1. Select Ethernet (RJ45) in the drop-down menu.
2. Change the IP address to the address of the sensor to which the PC is connected.
3. Click OK.
Serial Connection --
1. Select PC Serial in the drop-down menu.
2. Click OK.
3.3.1 General Troubleshooting
The following table describes solutions to the most common problems in using the PresencePLUS software.
For further assistance, contact Banner Engineering.
Cause/SolutionProblem
• Green Power LED on sensor is not ON.
• Interface cannot connect to the sensor.
• No image on the monitor.
• No image on PC or monitor.
• Green Ready LED on sensor is OFF.
• The software seems to be working correctly, but the
image is missing.
• Error message "Failed to capture a full-resolution
image. Please try again."
• Image is frozen on the PC and monitor.
• Green Ready LED on sensor is OFF
Sensor not getting enough power.
• Check the connection to the power supply.
Run display set to "None"
• Ensure that the sensor is receiving trigger signals.
Sensor not receiving triggers
• If the connections are secure, call a Banner
Applications Engineer.
Software restart needed or there are loose
connections.
• Restart the PresencePLUS software.
• Check all connections.
• If a software restart does not correct the problem and
the connections are secure, call a Banner
Applications Engineer.
P/N 000000
Tel: 763.544.3164
25Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 26
7/2009Getting Started
Cause/SolutionProblem
• Error message "Failed to capture a full-resolution
image. Please try again." • Reconnect the cable.
• •Image is frozen on PC, but image on monitor updates
properly.Image is frozen on PC, but image on monitor
updates properly.
• Indicator lights on RJ-45 port are OFF.
• Focus number does not update.
• QuickStart fails.
• Errors when saving inspections to the sensor.
Error code is displayed on PC.
Ethernet connection lost.
Check the cable for breaks, then power down and
back up.
• Replace the cable.
• Attempt to close and reopen PresencePLUS
software.
• If none of these actions fix the problem, call a Banner
Applications Engineer.
FTP communications is blocked.
• Disable TCP/IP Firewall software on the PC.
•• A list of error codes and potential causes and
solutions are available in the main help.
3.4 Setting Up Hardware Parameters
If the Sensor is being run for the first time, or if changes have been made to the hardware, then you
may need to set or modify hardware parameters.
1. Click on System in the Main Menu toolbar.
2. Configure the Trigger parameter according to the trigger device being used. For example, if using
the QS18V6ND as the trigger device, then select NPN.
3. Configure the six discrete inputs/outputs.
4. If the controller triggers a strobe light source, set the strobe trigger options.
5. If using the product select, configure the product select and product change lines to be NPN or
PNP as required.
6. Click on Setup in the Main Menu toolbar, select Trigger tab, and configure the remaining
parameters:
• Polarity
• Minimum Trigger Width
• Trigger delay
• Trigger Divide
3.5 Building an Inspection
The automatic screen sequence starts with the Setup screen, hich results from the first button (Setup) in the
Main Menu toolbar. Subsequent screens are shown below in the Main Menu toolbar layout.
26
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 27
1. Setup screen:
a. Set up the camera, lens, and lighting.
b. Choose trigger option Continuous for a live image.
c. Click Auto-exposure to adjust the image brightness.
d. Focus the lens by turning the lens focusing ring until the focus value is maximized.
e. When the desired image is shown, click Next to proceed to the Tools screen.
2. Tools screen:
Getting Started7/2009
a. Add Location tool(s) to find the target to adjust the Regions of Interest (ROI) for translational and rotational
changes.
b. Required: Add Vision tool(s) to inspect the part.
c. Add Measure tools(s) to create distance measurements from points found.
d. Required: Add Test tool(s) to set the Pass/Fail criteria (Vision and Measure tools are inputs to the Test
tool).
e. Click Quick Teach to automatically set all the selected parameters in the Test tool and to proceed to
the Run screen, or click Next to proceed to the Teach screen and to teach a sample set of good products.
Note: To keep specific, user-defined parameters in a Test tool, skip Teach and go directly to Run.
3. Teach screen:
The Teach screen automatically configures the parameters chosen in the Tools screen.
a. Chooose the sample size.
b. Click Start.
c. Trigger the controller with the external trigger device.
d. Click Stop.
Note: Before entering Run, save inspection file to one of the memory locations on the controller.
e. Click Next to proceed to the Run screen.
4. Run screen:
P/N 000000
Note: Save a backup copy of the inspection to the host PC.
Select an inspection fo run, and review the results of the inspection.
27Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 28

To select an inspection (in the Select tab), enable Software Override, and select the inspection file from
•
the list of stored inspections on the camera.
• An alternate method is to use Hardware input to select an inspection via discrete inputs to the controller.
5. Begin inspection:
To begin inspecting, click the Start button in the Run screen.
7/2009Getting Started
28
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 29
Setup
4.1 Setup Screen
The Vision sensor has two modes: running and idle. If the sensor is idle when you start up the PresencePLUS
software while your PC is connected, the software starts in the Setup screen. If the sensor is running, then the
software starts in the Run screen.
4.2 Capturing a Reference Image
The reference image is used as a template for developing an inspection. The Vision tools use this image to
acquire the critical information needed for the inspection.
Acquiring a quality image is crucial for a successful inspection. A quality image shows a measurable and
repeatable difference between good products (which pass inspection) and bad products (which fail inspection).
Most commonly, what determines the quality of the image is the illumination.
4
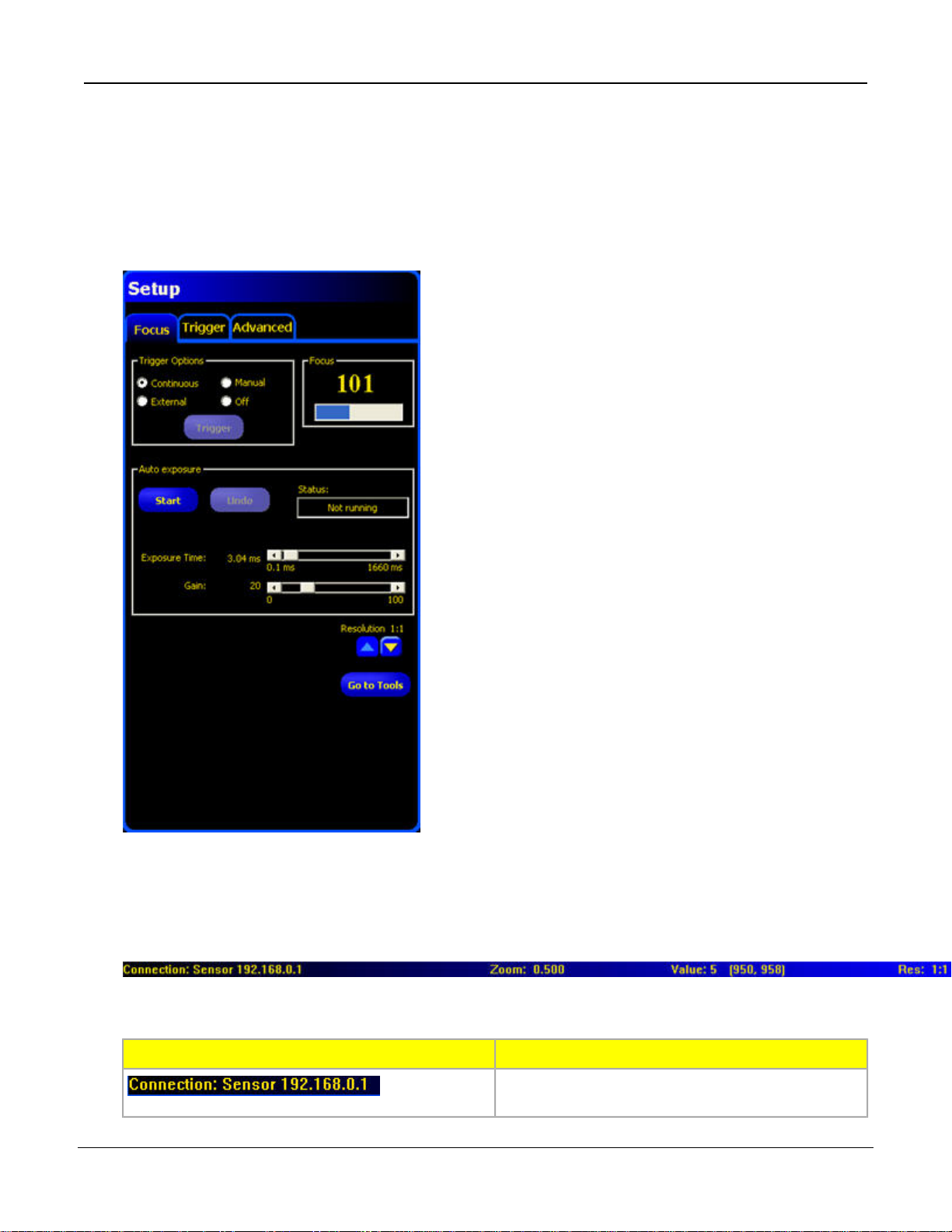
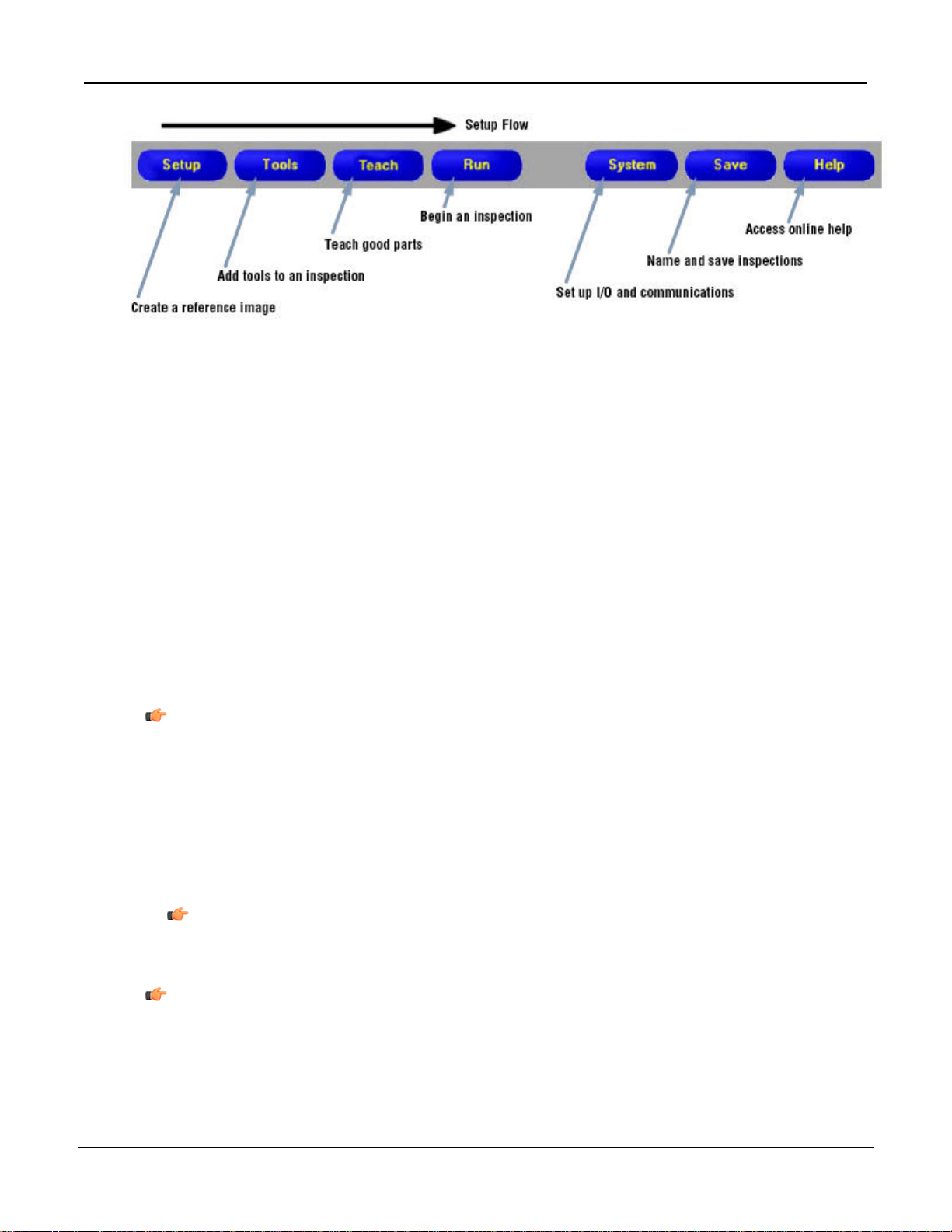
4.3 Focus Tab
The Focus tab on the Setup screen is used to:
•
Reference Image Source4.3.1 Reference Image Source on page 30
•
Focus Value4.3.2 Focus Value on page 31
•
Auto Exposure4.3.3 Auto Exposure on page 31
Focus tab
P/N 000000
Tel: 763.544.3164
29Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 30
7/2009Setup
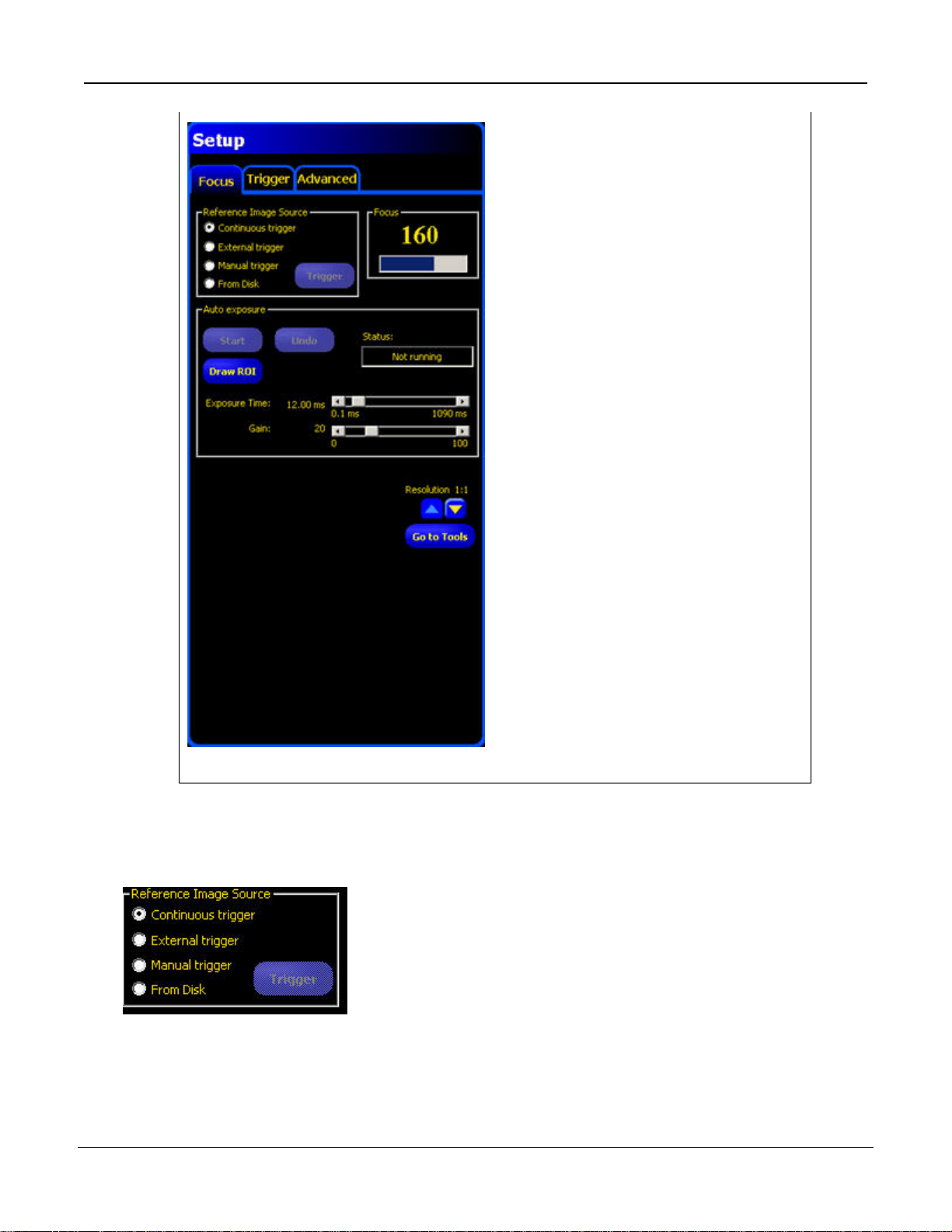
4.3.1 Reference Image Source
Before capturing an image, you need to determine what will trigger the Sensor to capture and image.
The Sensor can be triggered to capture an image in one of the following ways.
30
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 31

Setup7/2009
DescriptionTrigger Option
The sensor will update continuously in Setup mode.Continuous
External
Manual
From Disk
Images are acquired only in reponse to a signal from an external source as configured
on the Trigger tab. Choose External if the part will be moving during the inspection to
capture an image with the same conditions as the inspection conditions.
Images are acquired only then the Trigger button is clicked. The Trigger button is
grayed out when any trigger option other than Manual is selected.
If you check this option, the a Trigger button allows you to browse for an image to
load from disk.
Note: The trigger options described above are used only in the Setup routine. Note, though,
that Run mode does require an external trigger.
4.3.2 Focus Value
The Focus value on the Focus tab is a number between 1 and 255.
To focus the lens, place the target object so that the area to be focused
appears on the center of the displayed image. You can use the image
on the PC to determine when the image is sharp enough, or you can use
this Focus value as a guide. Turn the focus ring on the lens until the
Focus value is at the highest possible number between 1 and 255. Note
there is no optimal value for this number, but it can be used as a guide
if setting up more than one camera focused on the same target.
4.3.3 Auto Exposure
When you click Start in Auto Exposure, the exposure time and gain are optimized for the current inspection
and the Status field provides feedback.
DescriptionField
The following are status possibilities:Status
• Not running -- Auto exposure has not been activated since entering this screen.
P/N 000000
Tel: 763.544.3164
31Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 32

7/2009Setup
DescriptionField
• Running -- Auto exposure is currently running.
• Finished -- Auto exposure has run and is complete.
• Image too dark -- Auto exposure could not brighten the image enough. Add more
light to the inspection, or increase the exposure manually.
• Image too bright -- Auto exposure could not darken the image enough. Remove
light to the inspection, or decrease the exposure manually.
Exposure Time
Gain
Exposure time is the amount of time the camera allows light to energize the image
chip. Increasing the exposure time (that is, moving the slider to the right) allows
more light to energize the image chip, which brightens the image.
Gain is an electronic boost to the image signal. Increasing gain (that is, moving
the slider to the right) increases image brightness without increasing exposure
time.
Note: Gain brightens both the light pixels and dark pixels. High gain values
will make the image appear grainy.
4.4 Trigger Tab
An external trigger is used to tell the Sensor when to capture an image. You can modify the validity and timing
of the trigger by setting the parameters on the Trigger tab.
Note: Parameters set in the Trigger tab are stored in the inspection file and can be different for
each inspection.
Trigger tab
32
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 33

Setup7/2009
4.4.1 Trigger Settings
Trigger Divide (range:
1-10,000 triggers)
Trigger Delay (range:
0-8,000 ms)
Minimum Trigger Width
(range: 1-8,000 ms)
Polarity
DescriptionField
Sets the sequence of valid triggers. If set to 1, an image is captured in response
to every valid trigger; if set to 2, and image is captured in response to every second
valid trigger, and so on.
Fixed time (ms) from the instant the Sensor receives a valid trigger to the instant
the Sensor captures the image.
Eliminates unwanted triggers by accepting triggers only if they are above a
specified duration.
Choose Leading Edge to capture images at the leading edge of a trigger signal.
Choose Trailing Edge to capture images at the trailing edge of the trigger signal.
P/N 000000
Tel: 763.544.3164
33Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 34

7/2009Setup
4.4.2 Resolution
Increases or decreases the resolution on the displayed image. A lower resolution will have a faster PC update.
The resolution does not change the inspection. Resolution options are 1:1, 4:1, 16:1, and 64:1.
4.5 Advanced Tab
The Advanced tab on the Setup screen allows you to adjust the field of view (FOV). The FOV is the image
area at the focal plane of a camera.
You can use the maximum FOV or adjust the FOV to improve performance. The FOV dimensions are shown
in the Advanced tab.
34
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 35

Setup7/2009
Default Mode
Maximum and adjusted FOV
The FOV is denoted by the green box surrounding the image in the Setup screen. The
maximum FOV is shown below.
The Default Mode determines whether to use the Current FOV or
Maximum FOV by default.
P/N 000000
To improve performance, reduce the size of the FOV either vertically, horizontally, or both,
as shown below.
35Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 36

7/2009Setup
36
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 37

Tools Screen
5.1 Overview
Using the Tools screen, the user establishes the inspections that the Sensor will execute. Three
sources of inspections are available:
1. Building an inspection from scratch is the typical method of establishing an inspection. The Tools screen
is designed to aid the user in building an inspection. A typical inspection consists of Location Tools, followed
by Vision Tools, Analysis Tools, and finally (if required) the Communication Tool. The Tools screen, shown
below, supports this inspection organization.
2. Existing inspections can be obtained from the sensor (with or without the reference image) for execution
or modification. This method is very useful if the user has an existing inspection on the controller and needs
to make modifications to establish a new inspection.
3. Existing inspections also can be obtained from host resources using the Library. In this case, the sources
of the inspections are the host’s hard drive or network resources. This method provides access to an
unlimited number of existing inspections (with or without the reference image) for execution or modification.
5
P/N 000000
Tel: 763.544.3164
37Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 38

5.2 Typical Build/Modify Procedure
5.2.1 Choosing a Tool
To choose the right tools for an inspection, consider the tool's parameters and result options:
• Parameters are selected inputs for each tool (for example, relative threshold).
• Results are the information returned from the tool after it has executed.
Some tools perform evaluations, while others provide positional data for the tools that follow. Test tools evaluate,
combine, or compare the results of other tools and determine a Pass-or-Fail judgment.
Note: Test tool must be chosen to evaluate the results of each tool or set of tools.
5.2.2 Adding a Tool
The following steps provide an overview for setting up tools in an inspection. Steps not available for some of
the Location or Analysis tools are noted.
7/2009Tools Screen
1. Click the button of the tool to be added to the inspection.
2. Rename the tool.
3. Draw the ROI (not available for Analysis tools).
4. Set Input options to indicate the expected results (not available for the Test tool).
5. Add a Test tool.
6. Configure the Test tool inputs and, if desired, configure the desired results.
7. Set the judgment tolerances in one of three ways:
• Use Quick Teach.
• Use Teach.
• Manually set the judgment tolerances.
5.2.3 Adding a Test Tool
The following steps provide an overview for adding a Test tool to an inspection.
1. Add a Test tool.
2. Configure the Test tool inputs.
3. Set the judgment tolerances.
5.2.4 Renaming Tools
The default name of each tool can be edited or replaced (examples: GS_1, TT_2). Each name must be unique.
To edit the tool name, click on the Name field (double-click to select the entire name), and type to change or
replace the name.
• Enter up to 49 characters; only alphanumeric characters and underscores are valid.
38
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 39

• The button in the Navigation/Results window that appears will show the first nine characters after
exiting the tool.
5.2.5 Removing a Tool
To remove a tool:
1. Choose the tool to be removed in the Navigation/Results window.
2. Click the Delete button in the lower-left corner of the screen.
5.3 Quick Teach
Quick Teach provides the fastest and easiest method of establishing an inspection. Quick Teach will use the
reference image to establish Pass/Fail parameters of the Test tools.
Quick Teach does the following:
• Executes the inspection on the reference image.
• “Learns” the results of the Vision tools.
• Applies the applicable tolerances (user-determined, but default is 10%) to the selected parameters
in the Test tool (these parameters determine the Pass/Fail criteria for each Test tool within the
inspection).
Tools Screen7/2009
Note: Quick Teach discards any manually-entered values in the Test tool. Manually-entered
values must be entered after Quick Teach has been performed, or they will be lost.
Click Quick Teach to:
• Run all the tools.
• Calculate the measurements.
• Add a percentage of tolerance around taught values.
• Save the inspection to the controller.
• Go to Run.
5.4 Load Tab
The Load provides a way to load a saved inspection and a reference image.
Load Tab
P/N 000000
Tel: 763.544.3164
39Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 40

7/2009Tools Screen
5.4.1 Flexible Inspection Loading
Release 2009R1B introduces a more flexible inspection loading capability that allows most inspections created
by any PresencePLUS vision sensor to be loaded through the PresencePLUS software even if connected to
a different type of PresencePLUS vision sensor. This means that you can now load, for example, an inspection
created by an OMNI 1.3 into PresencePLUS software connected to a standard OMNI. Prior to Release 2009R1B,
inspections could only be loaded into PresencePLUS software that was connected to the same type of
PresencePLUS vision sensor that had created the inspection. In other words, a ProII camera could only load
inspections created by another ProII camera, and an OMNI could only load an inspection saved from another
OMNI, etc.
Note: The one limitation that still exists occurs when trying to load an inspection that uses a
tool that is unavailable (or unlicensed) for the currently connected sensor (for example, attempting
to load to an inspection that uses a Geometric Count tool to a PresencePLUS AREA sensor will
not work because the Geometric Count tool is not supported on the AREA sensor).
40
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 41

Tools Screen7/2009
Inspection
Source
Color sensor (for
example, a Color
OMNI)
Grayscale sensor
(for example, a
standard OMNI)
High Resolution
(1.3) sensor (for
example, an
AREA 1.3 sensor
Destination
Standard grayscale
sensor (for example, a
standard OMNI)
Color sensor (for
example, a Color
OMNI)
Standard VGA sensor
(for example, a
standard AREA
sensor)
ResultInspection
image color has changed and
the inspection loads
image color has changed and
the inspection loads
A dialog indicates that the
image/FOV has been adjusted
and the image loads the image
into the upper-left of the FOV.
) Note that the image may be
cropped at the right and/or
bottom and ROIs may be
outside the image area
Standard VGA
sensor (for
example, a
standard AREA
High Resolution (1.3)
sensor (for example,
an AREA 1.3 sensor)
A dialog indicates that the
FOV has been adjusted and
the inspection loads with the
image centered in the FOV
sensor)
Sensor with 6 I/O
(for example, a
Sensor with 4 I/O (for
example, an OMNI)
inspection uses I/Os not
ProII) available on the sensor and
the inspection loads
Possible Inspection
Modifications
None requiredA dialog indicates that the
None requiredA dialog indicates that the
Reposition image, adjust ROIs and
tools in the FOV, and possibly
acquire a new reference image
Possibly acquire a new reference
image
Adjust I/O as appropriateA dialog indicates that the
Sensor that
supports a larger
maximum trigger
delay, trigger
width, NTSC
fail/hold time, or
exposure time
(for example, a
ProII maximum
Sensor that supports a
smaller maximum
trigger delay, trigger
width, NTSC fail/hold
time, or exposure time
(for example, a
standard OMNI
maximum trigger delay
set to 8000 ms)
A dialog indicates that the
timing was adjusted and the
inspection loads with the
timing(s) adjusted to the
maximum time allowed on that
sensor
Retest and modify timings as
appropriate, and possibly acquire
a new reference image
trigger delay set
to 10000 ms)
5.4.2 Inspection Storage Capacity
The INS file format allows for the storage of inspection files onboard every sensor. The table below shows the
storage capacity for the various Vision sensors. Stored inspections can be modified, run, or deleted on the
sensor.
Number of INS FilesINS Storage MemorySensor Type
Number of INS files
without Reference
Images*
99918864MBPro II
P/N 000000
Tel: 763.544.3164
41Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 42

7/2009Tools Screen
Number of INS FilesINS Storage MemorySensor Type
*Not saving a reference image with the inspection frees up a lot of room onboard the sensor. However,
inspections that include any of the following tools require a reference image to be saved:
Number of INS files
without Reference
Images*
99916064MBPro II Color
500+1508MBArea/GEO/Edge
9998532MBOMNI
9997232MBOMNI Color
9994464MBPro II 1.3
9994464MBOMNI 1.3
400+8BCR
9992032GEO/Edge/Area/BCR 1.3
• Geometric Find
• Geometric Count
• Pattern Find
• Pattern Count
• Color Match
• Color BLOB
5.4.3 Opening an Inspection from the Sensor or a Library
Inspections can be stored on the sensor or to a libary of inspections stored on a PC or network drive. To select
and open an inspection from the sensor or a library:
1. Click the Load tab.
2. From the Load from drop-down list, select the Sensor or a location on a PC or Network.
3. Select the desired inspection.
4. Click the Load button.
The tools from the selected inspection populate the Navigation/Results window. At this point, all tools in the
inspection can be modified. If new tools are to be added, simply select the tool in the Tool screen. If tools are
to be deleted, select the tool and click the Delete icon.
Note: If you want to see the the image stored with the inspection, check the Load reference
image box.
42
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 43

Tools Screen7/2009
P/N 000000
Tel: 763.544.3164
43Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 44

Page 45

6
System Setup Window Overview
To access the System Setup window, click the System button in the Main Menu toolbar on the applcation window.
To clear changes, click Cancel. To save changes and exit the System Setup window, click OK.
To exit the System Setup window without changes, click the X in the upper-right corner of the window.
Note: To make changes to the sensor selections, an inspection must not be running. To stop a running
inspection, click the Stop button in the Run tab. To save changes, click OK before exiting the tab or
closing the window.
The System Setup Window includes the following tabs:
•
Sensor Select Tab6.1 Sensor Select Tab on page 46
•
Communication Tab6.2 Communication Tab on page 51
•
Input/Output Tab
•
Strobe Tab6.4 Strobe Tab on page 84
•
Units Tab6.5 Units Tab on page 85
•
Reset Tab6.6 Reset Tab on page 86
•
Start-Up Inspection Tab6.7 Start-Up Inspection Tab on page 87
•
NTSC Tab6.8 NTSC Tab on page 89
•
Language Tab6.9 Language Tab on page 90
•
Tools Configuration6.10 Tools Configuration on page 91
P/N 000000
System Setup Window
P4 System Setup Window
45Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 46

7/2009System Setup Window Overview
6.1 Sensor Select Tab
Use the Sensor Select tab to establish the Sensor connection with the PC.
Note: An option box to open the Sensor Select tab is automatically displayed if the Sensor either
is not connected or is connected but with the wrong IP Address selected.
Sensor Neighborhood Fields
The Sensor Neighborhood will list sensors in your environment. The following describes the fields in the Sensor
Neighborhood.
46
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 47

System Setup Window Overview7/2009
DescriptionField
Available
If the Icon is green (Yes), the sensor is available; if yellow, a connection can't be
established for some reason; if red (No), the sensor is not available.
Note: The sensor to which you are currently connected will sho up as unavailable
(red icon).
The name of the sensor.Name
The IP address assigned to the sensor.IP Address
The sensor model and type.Product ID
The sensor version.Sensor Version
Indicates whether the sensor is running or not.Running
Inspection
Indicates whether there is an error condition associated with the sensor.Error
The MAC address of the sensor.MAC
PC (GUI) to Sensor Connection Setup
This selection is used to configure the communication link between the GUI (Graphical User Interface) and
the sensor. There are two possible selections, Ethernet (RJ45) and Serial:
• Ethernet (RJ45)
This selection will configure the GUI to communicate with the sensor using the Ethernet (RJ45) connection.
To establish communication you must enter the IP address of the sensor you would like to communicate with
into the "Connection IP Address" edit box or select the desired Sensor from the Sensor Neighborhood results.
Then, click on the "OK" button to connect.
• Serial
This selection will configure the GUI to communicate with a sensor via the Serial connection. To establish
communication you must first start Dial-Up Networking (DUN) on the PC. Then, click on the "OK" button to
connect.
Sensor Select Tab
P/N 000000
Tel: 763.544.3164
47Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 48

7/2009System Setup Window Overview
6.1.1 Change Sensor IP Address
To change a sensor's IP address:
1. Select the sensor in the Sensor Neighborhood
2. Click the Change Sensor IP Address button.
48
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 49

System Setup Window Overview7/2009
3. Click Next
4. Enter an appropriate sensor name in the New Sensor Name field.
5. Click Finish.
6.1.2 PC (GUI) to Sensor Connection Setup
Use this field to select whether the Sensor will communicate via the Ethernet port or a serial connection.
P/N 000000
Tel: 763.544.3164
49Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 50

7/2009System Setup Window Overview
• If you select Ethernet (RJ 45), the Connection IP Address shows the IP address for which the
software is looking. Initially, the IP address should be 192.168.0.1, the default IP address of the
sensor.
• If you select Serial, the IP address is not applicable.
6.1.3 IP Address History
Use this button to view previous IP Addresses and Subnet Masks.
50
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 51

System Setup Window Overview7/2009
6.2 Communication Tab
The Communication tab is used to configure:
• General Communication Setup
• Remote Command Configuration (RCC)
Communication Tab
P/N 000000
Tel: 763.544.3164
51Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 52

7/2009System Setup Window Overview
6.2.1 Communication Setup
Banner Vision sensors support the following communication options:
• Ethernet Sockets 1-10
• Serial 1
• Industrial Ethernet
Ethernet Connection
In order to establish an Ethernet connection , the external device must be directed to the correct IP address
and the correct TCP port. In TCP/IP protocol, a TCP port number is used with the IP address to identify a
specific path or socket. The sensor has sockets 1 to 10, and can send out unique sets of data to 10 different
devices.
52
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 53

System Setup Window Overview7/2009
Valid user TCP/IP port numbers are in the range of 1024 through 65535. The PresencePLUS GUI provides
automatic notification if you attempt to use a reserved port.
To view an Ethernet connection:
1. Click on the System button in the Main Menu toolbar to bring up the System Setup window.
2. Click on the Communication tab.
3. Choose a connection from the fixed Connection drop-down list of the Communication Tool Setup
field.
Each Ethernet socket has a unique TCP port number as shown below
Note: The following addresses are defaults.
PortDefault IP AddressSocket
20000192.168.0.11
20001192.168.0.12
20002192.168.0.13
20003192.168.0.14
20004192.168.0.15
20005192.168.0.16
P/N 000000
Tel: 763.544.3164
53Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 54

7/2009System Setup Window Overview
PortDefault IP AddressSocket
20006192.168.0.17
20007192.168.0.18
20008192.168.0.19
20009192.168.0.110
Serial Connection
The sensor has a single serial connection that you can configure, Serial 1:
• Serial 1 is the DB-9 connector.
Note: The Pro has 2 serial connections. Serial 2 in the dropdown list is to support those sensors.
The sensor has one serial connection that can be configured: Serial 1 is pins 1, 9, and 10. Set up the serial
communication options to match the receiving device. The following table shows the configuration options:
Default SettingAttribute
115200Baud Rate
8Data Bits
NoneParity
1Stop Bit
NoneFlow Control
To setup a serial connection:
1. Click on the System button in the Main Menu toolbar to bring up the System Setup window.
2. Click on the Communication tab.
3. Choose Serial 1 from the Connection drop-down list of the Communication Tool Setup field.
54
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 55

System Setup Window Overview7/2009
Note:
Because there is no flow control for the serial connections, the sensor wil not detect or log a lost or broken
connection
Industrial Ethernet
Protocol
Protocol selects which Industrial Ethernet protocol is being used. This changes the string format and the
word/register values reported in the PLC Map.
32 bit Format
32 bit Format determines how 32 bit integers and floating point values are stored in sequential 16 bit registers
(words) - least significant word first (LSW-MSW) or most significant word first (MSW-LSW).
Character String Order
For Modbus/TCP and PCCC protocols, characters in the string can be packed into registers according to either
the Standard String format or the ControlLogix Format1:
• Standard String Format is used when the Character String Order option is set to “High Byte – Low
Byte” selection.
Please note that the length of the string is stored in one 16-bit register:
P/N 000000
Tel: 763.544.3164
55Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 56

7/2009System Setup Window Overview
• ControlLogix packing format is used to store characters into registers when the Character String
Order option is set to “Low Byte – High Byte” selection.
Please note that in this particular case, the length of the string is still stored in one 16-bit register,
and only the order of characters in each 16-bit register follows the ControlLogix format:
6.2.2 Remote Command Channel Configuration
This section describes the commands that are supported to communicate with a Vision sensor. All commands
are case-insensitive
Remote Command Set
All RCC commands are case-insensitive. Valid characters for commands are 7-bit ASCII alphabetic or numeric
characters (A-Z, a-z, 0-9), dash (-) and underscore (_).
All commands have the following structure:
ACTiON OBJECT_IDENTIFIER QUALIFIER(S)
56
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 57

System Setup Window Overview7/2009
ACTION is an operation the user intends to perform on the OBJECT_IDENTIFIER. There are three possible
actions available:
• GET — used to retrieve information associated with the named object. This information can be a
Boolean value, and unsigned or signed number, a string or, for complex objects like the
Communications tool, a field-delimited record that includes other data types.
• SET — used to assign a value to a named object.
• EXEC — used to execute a pre-defined functional object or activity in the sensor. Activities may
take object identifiers as parameter qualifiers.
The table below identifies objects that are supported in the current RCC release, their identifiers, and the
corresponding actions that they will support. Items highlighted in bold are command keywords. Flag objects
are appended with the FLG suffix, status objects are appended with the STS suffix, and counters are appended
with the CNT suffix.
System
Object,
Component,
or Activity
Change
Flag Reset
Object or
Activity
Identifier
Support
Actions
EXECPRODCHANGEProduct
EXECRESETCounter or
Required
Qualifiers
NoneEXECTRIGGERTrigger
Numeric
Inspection ID
or
PASSFAILCNT
or
MISSTRIGCNT
Qualifiers
Timeout
(msec)
or
NOWAIT
Timeout
(msec)
or
NOWAIT
NoneSYSERRFLG
CommentsOptional
If no qualifiers
are specified, a
30 second
timeout is used.
By default, a 30
second timeout
is used.
Reset either the
System Error
Flag, Pass and
Fail counters, or
Missing Trigger
count.
P/N 000000
NoneEXECRTEACHRemote Teach
Tel: 763.544.3164
TRIGGER or
TRIGGER
Enables remote
teach. If no
qualifiers areNOWAIT or
specified,TRIGGER
remote teachTimeout
(msec) will occur on the
next trigger. If
TRIGGER
qualifier is
specified,
remote teach
will occur
57Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 58

7/2009System Setup Window Overview
System
Object,
Component,
or Activity
Object or
Activity
Identifier
Support
Actions
Required
Qualifiers
CommentsOptional
Qualifiers
immediately,
and the
command will
block until a
default
30-second
timeout expires.
If TRIGGER
NOWAIT is
specified,
remote teach
will occur
immediately,
and the
command will
return right
away. If a
timeout value is
specified, the
command will
block until the
specified
timeout expires.
NoneNoneGETONLINESTSOnline Status
Retrieve the
sensor online
status.
NoneNoneGETREADYFLGReady State
Returns 1 if the
camera is
ready, 0
otherwise
NoneNoneGETINSPNUMCurrent
Inspection
Retrieve
currently
Number running
inspection
Retrieve comm
tool results,
either by
specifying its
Tool Results
NoneGETCOMMTOOLCommunications
CommTool
Numberor
CommTool
Name
sequential
number in the
inspection
58
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 59

System Setup Window Overview7/2009
System
Object,
Component,
or Activity
Object or
Activity
Identifier
Support
Actions
Required
Qualifiers
Qualifiers
NoneNoneGETPASSFAILFLGPass/Fail flag
NoneNoneGETSYSERRFLGSystem Error
NoneNoneGETFRAMENUMFrame Number
CommentsOptional
(1,2,..,n) or by
specifying its
name. By
default, data for
the first comm
tool will be
retrieved.
Retrieve the
value of the
Pass/Fail flag 1 if pass, 0 if fail
Retrieve the
value of the
System Error either 0 or 1
Retrieve the
current frame
number
Count
Count
NoneNoneGETPASSCNTPass Count
Retrieve the
pass count
NoneNoneGETFAILCNTFail Count
Retreive the
failed count
NoneNoneGETITERCNTIteration Count
Retrieve the
Iteration Count
NoneNoneGETSYSERRCNTSystem Error
Retrieve the
system error
count
NoneNoneGETMISSTRIGCNTMissed Trigger
Retrieve the
missed trigger
count
GETIOSTSI/O Line Status
NoneI/O line id,
numeric, either
1 through 4 or 1
Retrieve the
cached status
of the I/O line
through 6
NoneGETGAINGain
Retrieve the
gain
Set the gainNonePositive IntegerSETGAINGain
P/N 000000
Tel: 763.544.3164
59Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 60

7/2009System Setup Window Overview
System
Object,
Component,
or Activity
Tag
Tag
Tag
Object or
Activity
Identifier
Support
Actions
Required
Qualifiers
Qualifiers
NoneGETEXPOSUREExposure
NonePositive NumberSETEXPOSUREExposure
NoneENABLESETFRAMETAGFrame Number
NoneDISABLESETFRAMETAGFrame Number
NoneNoneGETFRAMETAGFrame Number
CommentsOptional
Retrieve the
camera
exposure
Get the camera
exposure
Enables frame
number as
command
acceptance
indicator
Disables frame
number as
command
acceptance
indicator
Retrieve the
status of the
frame tag
indicator
Coordinate tool
Commands
set coordtool tool_name|tool_number x\y|angle
get coordtool tool_name|tool_number x\y|angle
Math tool and the Remote Command Channel
Commands
set mathtool tool_name|tool_number operand_1|operand_2
get mathtool tool_name|tool_number operand_1|operand_2
String tool
Commands
DescriptionSyntax
Returns the specified Coordinate tool output.
Gets the value
DescriptionSyntax
Sets the specified tool operand, if it is a
constant. Value should be a floating number.
Gets the value of the specified tool operand, if
it is a constant.
60
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 61

System Setup Window Overview7/2009
DescriptionSyntax
set stringtool tool_name|tool_number operand_1|operand_2
get stringtool tool_name|tool_number operand_1|operand_2
OCV Tool and the Remote Command Channel
Commands
set ocvtool tool_name|tool_number exp_string value|
get ocvtool tool_name|tool_number exp_string
RCC Return Values
RCC return values are numeric, and are listed below:
Sets the specified tool operand, if it is a
constant. Value should be a quoted string (see
Character Strings 6.2.2.6.1 Character Strings
on page 196).
Gets the value of the specified tool operand, if
it is a constant.
DescriptionSyntax
Sets the expected string, if it is a constant. The
Value should be a quoted string containing
printable ASCII characters (see Character
Strings 6.2.2.6.1 Character Strings on page
196).
Gets the value of the exptected string.
• 0 - command accepted. This return code is generated when a valid SET, GET, and EXEC command
has been completely handled by the sensor. It may be followed by a command-specific return value
or a completion code.
If the frame tag is enabled, the current frame number will be returned instead of 0 as command acceptance
indicator.
• -100 - Invalid command entered by the user.
• Trigger and Product Change error codes:
• -201 - Product change command attempted in the middle of the inspection
• -202 – Trigger command attempted in the middle of product change
• -203 – Trigger command is attempted when the inspection is not executing (sensor is idle)
• -204 – Specified inspection slot is out of range
• -205 – Trigger command attempted in the middle of the inspection
• -206 – Product change command attempted in the middle of a product change
• -207 – Product change command attempted while the sensor is in the Teach mode
• -208 – Product change attempted when the GUI is connected, and the inspection is not executing
• Comm tool error codes
• -301 – get/set tool command attempted while the inspection is not executing
• -302 – get command issued before inspection is triggered for the first time – tool results unavailable
• -303 – get/set tool command attempted in the middle of the inspection
• -304 – get/set tool command attempted in the middle of the product change
• -305 – Tool specified in get/set command not found in the inspection
P/N 000000
Tel: 763.544.3164
61Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 62

7/2009System Setup Window Overview
• -306 – Requested comm tool is not configured for RCC
• -307 - Tool executed with an error or did not execute
• -308 - Specified tool operand is not a constant, and cannot be modified
• Reset command error codes
• -401 – Reset command attempted in the middle of the inspection
• -402 – Reset command attempted in the middle of the product change
• -500 – RCC commands are not accepted because the sensor is in the Playback mode
• Timeout error codes
• -600 – Product change timeout occurred
• -601 – Trigger timeout occurred
• -700 – Specified value is out of range
• -701 – Set Gain command attempted when the GUI is connected and the inspection is not executing
• -702 – Set Exposure command attempted when the GUI is connected and the inspection is not
executing
• -800 – Product Change, Trigger or Get Commtool command attempted when either Product Change
or Trigger Command timeout occurred, but the operation has not yet completed.
Frame Tag Numbers
RCC provides user with a debug facility that allows users to correlate command completion with current frame
numbers. This facility is enabled by issuing a SET FRAMETAG ENABLE command. This command will cause
RCC to send the current frame number as the command acceptance code. This will allow users to track when
each command was issued, and which frame it applies to.
For EXEC TRIGGER command, returned number will be the frame number at the completion of the inspection
execution.
For EXEC TRIGGER command, returned number will be the frame number at the completion of the inspection
execution.
For all other commands, the returned number is the current frame number.
Command Processing
RCC commands are interpreted in the context of the running PPVS system. Due to the constantly changing
system state caused either by external action or by previous RCC commands, certain rules are imposed on
RCC command acceptance and processing. Please note that command acceptance does not constitute
successful completion of the command.
1. EXEC TRIGGER command can be successfully accepted under the following conditions:
• Inspection is Executing and is Ready
2. EXEC PRODCHANGE command can be successfully accepted under the following conditions:
• Sensor is idle (inspection is not loaded), and the GUI is not connected
• Inspection is Executing and is Ready
• Sensor was previously product changed to an invalid slot
3. EXEC RESET command can be successfully accepted under the following conditions:
• Sensor is idle (inspection is not loaded)
62
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 63

System Setup Window Overview7/2009
• Inspection is Executing and is Ready
4. SET GAIN or SET EXPOSURE commands can be successfully accepted under the following
conditions:
• Inspection is Executing and is Ready
5. GET status, counter or flag commands can be accepted at any time. If issued when inspection is
Executing but is not Ready, these values may change as the inspection is executing.
6. GET COMMTOOL command can be successfully accepted if the inspection has been loaded.
However, RCC may not have valid data until the inspection has been triggered (executed) at least
once.
Commands with timeouts, such as EXEC TRIGGER and EXEC PRODCHANGE, will block processing of
additional commands while they are executing if they are invoked without the NOWAIT option. Additional
commands that are issued while processing is blocked will be queued, and will be processed in the order that
they were received when the blocking command finishes its execution.
When blocking commands, such as EXEC TRIGGER and EXEC PRODCHANGE, are invoked with the NOWAIT
option, GET commands that retrieve flags and status are accepted for processing. All other commands are
rejected with an appropriate error code.
RCC Log
RCC Log allows users to monitor and troubleshoot communication inputs and outputs.
Log consists of a circular buffer with up to 400 entries. These entries can be one of three types:
• IN – characters received in the input stream
CMD – commands that were extracted after the frame start and frame end delimiters have been received
•
• OUT – formatted command output, with frame delimiters already included.
Log entries are time stamped with system time and sorted in the order they were received.
Non-displayable ASCII characters are shown in the ASCII Hex string form. The ASCII Hex strings are preceded
by character sequence “\x” (backslash-lower-case-x). The ASCII Hex string will always be two characters long.
For example, NULL will be converted to “\x00”, and carriage return will be converted to “\x0D”. To represent
ASCII Hex digits, only upper case letters, A-F, are used.
Sample RCC log is given below:
0000000118.116 IN e
0000000118.116 IN x
0000000118.116 IN e
0000000118.116 IN c
0000000118.116 IN
0000000118.116 IN t
0000000118.116 IN r
0000000118.116 IN i
0000000118.116 IN g
0000000118.116 IN g
0000000118.116 IN e
0000000118.116 IN r
0000000118.116 IN \x0D
0000000118.116 IN \x0A
P/N 000000
Tel: 763.544.3164
63Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 64

7/2009System Setup Window Overview
0000000118.116 CMD exec trigger
0000000118.483 OUT 0\x0D\x0A
In this example, command exec trigger was sent to RCC interface. The interface was configured to use no
start frame delimiter, and carriage return (\x0D) and line feed (\x0A) as frame delimiters. As soon as valid frame
delimiters were received, the command exec trigger was sent for processing, and the command response was
sent back after inspection finished executing.
Frame and Field Delimiters
The PresencePLUS GUI includes a drop-down list of Frame delimiters as follows:
• <none> for no delimiter
• \r for carriage return (<CR>)
• \n for line feed (LF)
• \r\n for carriage return followed by a line feed (CR-LF)
• \n\r for line feed followed by a carriage return (LF-CR)
In addition to the above field delimiters, you can enter other delimiter types keeping in mind the following:
• ASCII hex format can be used as a delimiter
• a NULL character can be used as a delimiter (specified in ASCII hex format)
• Frame delimiters can be multi-character sequences up to 20 characters long
The PresencePLUS GUI includes a drop-down list of Field delimiters as follows:
• <none> for no delimiter
• , for comma
• ; for semi-colon
• : for colon
• <SPC> for space
• \t for tab
In addition to the above field delimiters, you can enter other delimiter types keeping in mind the following:
• ASCII hex format can be used as a delimiter
• a NULL character can be used as a delimiter (specified in ASCII hex format)
• Field delimiters can be multi-character sequences up to 10 characters long
Character Strings
Communications Tool configured for Barcode or String Tool output may produce strings that contain non-printable
ASCII characters, such as carriage returns, line feeds, and characters in the upper ASCII range.
To output these strings, the following encoding rules are used:
• Tool output strings will be enclosed in double quote characters, “.
• Any non-printable ASCII character, including NULL, will be converted to its ASCII Hex equivalent.
The ASCII Hex string will be preceded by character sequence “\x” (backslash-lower-case-x). The
ASCII Hex string will always be two characters long. For example, NULL will be converted to “\x00”,
and carriage return will be converted to “\x0D”. To represent ASCII Hex digits, only upper case
letters, A-F, will be used.
• Any backslash encountered in the Barcode or String Tool data will be converted to its ASCII Hex
equivalent, “\x5C”.
64
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 65

System Setup Window Overview7/2009
• Any double quote encountered in the Barcode or String Tool will be converted to its ASCII Hex
equivalent, “\x22”.
For RCC input strings, the formatting rules are expanded to accommodate readability as follows:
• Carriage return can be specified as character sequence "\r" (backslash-r).
• Line feed can be specified as character sequence "\n" (backslash-n).
• Double quote can be specified as character sequence "\"" (backslash-doublequote).
• Backslah can be specified as character sequence "\\" (backslash-backslash).
• tab can be specified as character sequence "\t" (backslash-t).
• Embedded NULLL characters are not allowed.
6.2.3 PresencePLUS/Kawasaki Vision Guidance and Inspection
Integrating Banner Vision Sensors with Kawasaki Robot Controllers
Quick Start
This document describes how to integrate a Banner PresencePLUS sensor with Kawasaki Robot Controllers,
and:
•
includes instructions for establishing communications between the PresencePLUS sensor and a
Kawasaki Robot Controller
•
describes how to set up a sample PresencePLUS vision inspection
• provides a sample Kawasaki AS Language program
Below is a quick overview of the procedure for integrating PresencePLUS sensors with Kawasaki Robot
Controllers and, where noted, more details are provided in the document subsections.
Tasks to CompleteMain Steps
Establish communication between
the PresencePLUS sensor and the
Kawasaki Robot Controller. See
Establishing Sensor/Robot
Communication 6.2.3.3
Establishing Sensor/Robot
1.
Install and physically connect a Banner PresencePLUS Vision
Sensor to a Kawasaki controller.
2.
Configure PresencePLUS and Kawasaki controller IP
addresses.
3.
Configure the PresencePLUS Remote Command Channel.
Communication on page 67
Create and save a PresencePLUS
Inspection. See Creating the
PresencePLUS Inspection 6.2.3.4
Creating the PresencePLUS
Inspection on page 69 for more
details.
1. Create a new inspection and configure Vision tools to produce
the desired part location data that outputs it to the RCC
interface. The sample inspection described in this document:
• Locates a part
• Tests for presence of the part
• Outputs X, Y, and Rotation about the Z-axis offsets
2. Save and then start the inspection.
Program the Kawasaki controller
to connect and issue commands
to the PresencePLUS sensor . A
sample AS program is provided to
get you started.
1. Load the sample AS Language program onto robot controller.
The sample program implements the following actions:
• Connects to the RCC.
• Triggers vision sensor and wait for inspection to complete.
P/N 000000
Tel: 763.544.3164
65Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 66

7/2009System Setup Window Overview
Tasks to CompleteMain Steps
• Determines pass/fail condition of the inspection.
• Gets the X, Y, and Rotation about Z-axis offsets.
• Closes the connection to the RCC.
2. Run program.
Note: The IP address and port number within the sample
AS Language program must be modified to match the IP
address and port number of the PresencePLUS sensor.
Overview
The PresencePLUS ProII and P4 sensor families are cost-effective, easy-to-use camera systems with advanced
visual inspection capability. Where other vision systems can be difficult to configure, the PresencePLUS
software is straight-forward. This enables users with minimal experience with vision systems to quickly set an
inspection that inspects and accurately determines product position, and to integrate the PresencePLUS system
into their environment.
To facilitate the implementation of Presence PLUS Vision Sensors with robots to provide vision guidance
and/or product quality tests on a production line, Presence PLUS supports a user-configurable, ASCII-based,
TCP /IP communications interface called the Remote Command Channel. The RCC supports a Kawasaki
protocol specifically designed to communicate with Kawasaki C/D/D+ robot controllers.
Summary of Remote Command Channel Features
The RCC within the Banner PresencePLUS Sensor is configured as a Server device. This means that it does
not initiate connections on its own, but instead waits for a client (robot controller) to connect to it. The
PresencePLUS Remote Command Channel (RCC) supports the following features:
• Triggering the sensor and performing product changes
• Checking sensor status, such as pass, fail, and I/O line state
• Retrieving tool results, and sensor counters including pass/fail
• User-defined frame (command) delimiters and output field separators
• Logging input and output data to assist with RCC/MMI debugging
Prerequisites — Kawasaki Robot
This procedure assumes that you are using an Ethernet-enabled Kawasaki robot controller configuration such
as:
• Kawasaki C Series Controller with a 1HA Ethernet board option
• Kawasaki D Series Controller with a 1KN or 1QN Ethernet board option
• Kawasaki D+ Series Controller with an integrated 1RA Ethernet board
Related Documentation
For more information relating to Banner's Vision Sensors and Kawasaki Robot Controllers, refer to the following
sources:
• Kawasaki Robot TCP/IP Function Instruction Manual
• Kawasaki D Series Controller AS Language Reference Manual
•
PresencePLUS electronic Help
66
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 67

Establishing Sensor/Robot Communication
Main Tasks to CompleteStep 1
System Setup Window Overview7/2009
Install and connect
a PresencePLUS
Vision Sensor
Configure
PresencePLUS
Ethernet ports: The
PresencePLUS
Sensor supports
user-assignable TCP
/IP ports. This
assignment is
1.
Install Banner PresencePLUS Vision Sensor version 2009R1B or later.
2. Connect the Vision Sensor using one of the following approaches:
• connect to an existing Ethernet network via a switch or hub using a straight-through
Ethernet cable with RJ45 connectors
• connect directly to the Kawasaki controller using a cross-over Ethernet cable with
RJ45 connectors.
3.
Configure both the PresencePLUS sensor and the Kawasaki controller with static
IP addresses.
Main Tasks to CompleteStep 2
1. Start the PresencePLUS software.
2. Connect to the sensor.
3.
Click on the System button in the upper right corner of the PresencePLUS GUI to
display the System Setup screen.
4. Click on the Communication tab to display the Communication configuration dialog.
P/N 000000
Tel: 763.544.3164
67Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 68

performed from the
System Setup
Dialog,
Communications tab
7/2009System Setup Window Overview
Main Tasks to CompleteStep 2
The default Ethernet port assignments are from 20000 to 20009.
Note: Valid user TCP/IP port numbers for PresencePLUS sensors are in the range of 1024
through 65535. The PresencePLUS GUI will provide automatic notification if an attempt to use
a reserved port is made. Any changes to the port assignment must be reflected in the AS
Language program included in this document .
Main Tasks to CompleteStep 3
Configure the
PresencePLUS
Remote Command
Channel (RCC)
1. Click on the RCC Protocol drop-down menu, and select "Kawasaki" from the
menu. The default protocol configuration for Kawasaki robot is displayed.
68
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 69

System Setup Window Overview7/2009
Main Tasks to CompleteStep 3
2. Click the OK button to accept the configuration.
Kawasaki Protocol Defaults
The default Kawasaki protocol configuration parameters are:
• Ethernet Socket 1 configured for TCP/IP Port 20000 as the communications channel
• No Frame Start (Command Start) delimiter
• Carriage Return/Line Feed as Frame End (Command End) delimiter
• Space as the input command field separator
• Comma as the output field separator.
Note: You can adjust each of these parameters as necessary, but corresponding
adjustments will have to be made to the sample AS Language program provided
to enable successful communication.
Creating the PresencePLUS Inspection
Enable the
Coordinate Tool in
P/N 000000
Main Tasks to CompleteStep 1
1.
Click the System button in the upper-right corner of the PresencePLUS GUI.
Tel: 763.544.3164
69Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 70

7/2009System Setup Window Overview
Main Tasks to CompleteStep 1
the Tool Configuration
dialog.
2. Select the Tools Configuration tab.
3. Scroll down to the Coordinate Tool, and then select the checkbox next to it, as
shown below.
4. Click the OK button to close the Tool Configuration dialog.
Create a New
Inspection using
Setup.
Add a Geometric
Find tool to locate
Main Tasks to CompleteStep 2
1.
In the PresencePLUS GUI, create a new inspection by pressing the Setup button
in the upper-left corner of the GUI.
2. Capture an image of the part to locate.
3. Press the Goto Tools button in the lower-right corner of the Setup tab.
Main Tasks to CompleteStep 3
1.
In the PresencePLUS GUI, click the Location Tools tab.
70
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 71

the part within the
field-of-view.
System Setup Window Overview7/2009
Main Tasks to CompleteStep 3
2. Click the Geomtric Find button.
3. Draw the tool ROI (Region of Interest) to select the image feature of interest as
shown below.
P/N 000000
4. Click the Apply button to accept the ROI.
5. Click the Next button to return to the Tools menu.
71Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 72

7/2009System Setup Window Overview
Main Tasks to CompleteStep 4
Add a Coordinate
tool to provide
locational data for
the Robot.
1.
In the PresencePLUS GUI, click the Analysis Tools tab.
2. Click the Coordinate tool button to create a Coordinate tool.
3. Select Offset Only from the Tool List Filter drop-down menu.
72
4. Click the Next button to return to the Tools menu.
Note: The X, Y and Rotation selections will default to GF_1.
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 73

System Setup Window Overview7/2009
Main Tasks to CompleteStep 5
Add a Test tool to
receive a positive
confirmation that the
inspection ran
successfully; that is,
the part was found.
1.
In the PresencePLUS GUI, click the Analysis Tools tab.
2. Click the Test tool button.
3. Select Coordinate Tool (COORD_1) from the Input 1 drop-down list.
4. Click on the Coordinate Tool (COORD_1) tab and make sure that the checkmark
next to the X-Coordinate value checked. Enter 0 (zero) in the Min column and a
large number (e.g., 1000) in the Max column.
Note: These settings will cause the Test tool to pass all resulting X values,
but fail if the X value is invalid (that is, if the part is not found).
P/N 000000
5. Uncheck other values.
73Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 74

Main Tasks to CompleteStep 5
6. Click the Back button.
7. Cleck the Next button to exit the Test Tool configuration.
Main Tasks to CompleteStep 6
7/2009System Setup Window Overview
Save and Start Inspection
In the PresencePLUS GUI, click the Go To Run button. When prompted to save
the inspection:
1. Enter a name in the Inspection Name field.
2. Click on the Save button.
3. Once the inspection is saved, click the Start button to start the inspection.
74
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 75

System Setup Window Overview7/2009
Kawasaki AS Language Sample
This sample AS Language code snippet will assist with the integration of a Banner PresencePLUS Vision
Sensor and a Kawasaki C/D/D+ Series Robot Controller.
In this example, the Banner Remote Command Channel (RCC) has been configured to use the Kawasaki RCC
Protocol with Ethernet Socket 1, all other settings are default (TCP port 20000, command and response frame
start delimiter is empty string (<none>) with an end delimiter of carriage return-linefeed (\r\n), and the field
output delimiter is comma (,).
This example assumes that a Banner PresencePLUS inspection that produces X, Y and Angle offsets has
been loaded into the PresencePLUS Vision Sensor and has been started with the PresencePLUS GUI. These
offsets will then be obtained and stored in the following variables:
• X_offset is the offset (in units set in camera) along the horizontal axis of the image, increases to
the right
• Y_offset is the offset (in units set in camera) along the vertical axis of the image, increases downward
• Rz_offset is the angular offset (in degrees) about the Z-axis, increases clockwise
This program implements the following actions:
1. Connect to the RCC.
2. Issue EXEC TRIGGER and wait for inspection to complete.
3. Determine pass/fail condition of the inspection.
4. Get the X, Y, and Rotation about Z-axis offsets.
5. Close the connection to the RCC.
If any failure occurs, such as a TCP communications failure or a RCC command error, then the connection to
the RCC will be severed within this example program.
.PROGRAM banner_vision()
; Global variables
$cmd_del = $CHR(13)+$CHR(10)
$coord_del = ","
tcp_sock_id = -1 ; TCP/IP socket id for the camera
; Local variables
.ret_val = -1
.$cmd_str = "" ; Used for commands to camera
.$rcv_str = "" ; Used for incoming data from camera
.$rsp_str = "" ; Used for response parsing from camera
;
; Open TCP socket and connect to RCC
;
P/N 000000
Tel: 763.544.3164
75Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 76

CALL tcp_open(.ret_val, 20000)
IF .ret_val < 0 THEN
PRINT "Unable to connect to RCC"
RETURN
END
;
; Trigger the camera and wait for the inspection to complete
;
; Send Trigger to camera and wait for the inspection to complete
.$cmd_str = "EXEC TRIGGER"+$cmd_del
CALL tcp_send(.ret_val, .$cmd_str)
IF .ret_val < 0 GOTO tcp_error
; Read command response from camera
.$rcv_str = ""
CALL tcp_recv(.ret_val, .$rcv_str)
IF .ret_val < 0 GOTO tcp_error
; Decode command response - a response of zero indicates that
; the command was accepted for processing, a negative value
; indicates that an error has occurred.
.$rsp_str = $DECODE(.$rcv_str, $cmd_del, 0)
.ret_val = VAL(.$rsp_str)
IF .ret_val < 0 GOTO cmd_error ; Trigger failed
7/2009System Setup Window Overview
;
; Determine whether the inspection passed or failed
;
; Send command to camera to determine if the inspection passed
; the inspection and found the desired part
.$cmd_str = "GET PASSFAILFLG"+$cmd_del
CALL tcp_send(.ret_val,.$cmd_str)
IF .ret_val < 0 GOTO tcp_error
; Read command response from camera
.$rcv_str = ""
CALL tcp_recv(.ret_val, .$rcv_str)
IF .ret_val < 0 GOTO tcp_error ; Get command failed
; Decode command response
.$rsp_str = $DECODE(.$rcv_str, $cmd_del, 0)
.ret_val = VAL(.$rsp_str)
IF .ret_val < 0 GOTO cmd_error ; Get Pass/Fail failed
$temp = $DECODE(.$rcv_str, $cmd_del, 1) ; Remove frame delimiter
; Decode the Pass/Fail status data returned by the Get command
.$rsp_str = $DECODE(.$rcv_str, $coord_del, 0)
.passfail = VAL(.$rsp_str)
IF .passfail <> 1 GOTO notfnd_error
76
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 77

System Setup Window Overview7/2009
;
; Obtain the X, Y, and Rz offset data
;
; Send command to camera to acquire the Communication Tool
; result data
.$cmd_str = "GET COORDTOOL"+$cmd_del
CALL tcp_send(.ret_val,.$cmd_str)
IF .ret_val < 0 GOTO tcp_error
; Read command response from camera
.$rcv_str = ""
CALL tcp_recv(.ret_val, .$rcv_str)
IF .ret_val < 0 GOTO tcp_error
; Decode command response
.$rsp_str = $DECODE(.$rcv_str, $cmd_del, 0)
.ret_val = VAL(.$rsp_str)
IF .ret_val < 0 GOTO cmd_error ; Get Commtool failed
$temp = $DECODE(.$rcv_str, $cmd_del, 1) ; Remove frame delimiter
; Decode the X offset data
.$rsp_str = $DECODE(.$rcv_str, $coord_del, 0)
X_offset = VAL(.$rsp_str)
$temp = $DECODE(.$rcv_str, $coord_del, 1) ; Remove field delimiter
; Decode the Y offset data
.$rsp_str = $DECODE(.$rcv_str, $coord_del, 0)
Y_offset = VAL(.$rsp_str)
$temp = $DECODE(.$rcv_str, $coord_del, 1) ; Remove field delimiter
;Decode the Rz offset data -- rotation about the Z axis
.$rsp_str = $DECODE(.$rcv_str, $coord_del, 0)
O_offset = VAL(.$rsp_str)
$temp = $DECODE(.$rcv_str, $coord_del, 1) ; Remove field delimiter
;
; Handle new coordinate offsets
;
PRINT X_offset, Y_offset, Rz_offset
POINT pick = frame1+TRANS(X_offset, Y_offset, ,Rz_offset)
HOME
LAPPRO pick,100
LMOVE pick
CLAMP 1
LDEPART 100
HOME
; Part not found error
notfnd_error:
PRINT "The part was not found"
GOTO all_done
P/N 000000
Tel: 763.544.3164
77Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 78

; TCP error
tcp_error:
PRINT "Error during send or receive via TCP:", .ret_val
GOTO all_done
; RCC Command error
cmd_error:
PRINT "Error during command to camera:", .ret_val
GOTO all_done
; Done with program
all_done:
CALL tcp_close
.END
;
; Open a TCP connection to the RCC using specified TCP port number
;
.PROGRAM tcp_open(.ret_val, .port)
.ret_val = 0 ; Initialize the return value
.retry_count = 0 ; Initialize the retry count
7/2009System Setup Window Overview
; Set the IP address to 192.168.0.1
ip[1] = 192
ip[2] = 168
ip[3] = 0
ip[4] = 1
connect:
; Connect to the RCC port
TCP_CONNECT tcp_sock_id, .port, ip[1]
; Check whether connection was established
IF tcp_sock_id < 0 THEN
IF .retry_count >= 5 THEN
; Number of retries exceeds 5, exit with error
PRINT "Unable to establish connection with camera"
.ret_val = -1
GOTO connect_error
ELSE
; Increment the retry count and try again
.retry_count = .retry_count + 1
PRINT "TCP_CONNECT error – attempt #", .retry_count
GOTO connect
END
ELSE
PRINT "Established connection, socket id = ", tcp_sock_id
END
; Error occurred during connection attempt(s)
78
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 79

System Setup Window Overview7/2009
connect_error:
RETURN
.END
;
; Close the TCP connection
;
.PROGRAM tcp_close()
.ret_val = 0 ; Initialize the return value
TCP_CLOSE .ret_val, tcp_sock_id
; Check for errors
IF (.ret_val < 0) THEN
PRINT "Unable to close TCP connection, error id = ", .ret_val
ELSE
PRINT "TCP Connection has been closed"
END
.END
;
; Receive data over TCP connection
;
.PROGRAM tcp_recv(.ret_val, .$receive)
.ret_val = 0 ; Initialize the return value
.error_return = -99 ; Return value from TCP_RECV
.timeout_recv = 60 ; Timeout of 60 seconds
.max_recv_len = 255 ; Maximum length of single string element
.$receive = "" ; Empty the return string
.num_elem_recv = 0 ; Number of elements received
; Read the TCP socket
TCP_RECV .error_return, tcp_sock_id, .$recv_buf[1], .num_elem_recv,
.timeout_recv, .max_recv_len
; Process data
IF .error_return < 0 THEN
PRINT "Error receiving data, TCP_RECV error #", .error_return
.ret_val = -1
ELSE
IF .num_elem_recv > 0 THEN
; Ensure the combined return string element lengths do
; not exceed 255 (maximum allowed length of string) – the
; multiplication allows .max_recv_len to be less than 255
IF .num_elem_recv * .max_recv_len <= 255 THEN
; Copy all of the received elements into output buffer
FOR .j = 1 TO .num_elem_recv
.$receive = .$receive+.$recv_buf[.j]
END
P/N 000000
Tel: 763.544.3164
79Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 80

ELSE
PRINT "Received string too long"
.ret_val = -1
END
ELSE
PRINT "Invalid number of elements received"
.ret_val = -1
END
END
.END
;
; Send data over the TCP connection
;
.PROGRAM tcp_send(.ret_val, .$data)
.ret_val = 0 ; Initialize function return code
.$send_buf[1] = .$data ; Data to send
.buf_num = 1 ; Number of array elements
.send_timeout = 60 ; send timeout
.error_return = 0 ; send error return code
TCP_SEND .error_return, tcp_sock_id, .$send_buf[1], .buf_num,
send_timeout
7/2009System Setup Window Overview
IF .error_return < 0 THEN
.ret_val = -1
PRINT "TCP SEND error in SEND, error = ", .error_return
END
.END
PresencePLUS Communication Testing
The RCC interface is not a true Telnet interface, although you can use Telnet to test it. Some of the control
keys, such as Back Space and Delete will not cause mistyped characters to be erased. Instead, they will be
passed on and consumed by the RCC interface. Other control characters will also be consumed by the interface
without the usual Telnet actions.
However, you can test the RCC connection by using a Telnet application to connect to the sensor using the
port that you configured for the RCC (20000 by default). To function correctly, you must set the Newline transmit
value within the Telnet application to be the same as the Command Line End delimiter that you selected in
the RCC configuration menu (Carriage Return/Line Feed by default).
After you have successfully connected to the RCC, you can enter RCC commands and observe responses.
For example, you can enter get onlinests to retrieve the online status of the sensor. Another example is you
can type in the command exec trigger , this will result in the sensor to be triggered, the inspection will be
executed, and you should see the inspection output in the GUI. For a complete list of RCC commands and
return codes, please refer to the PresencePLUS electronic documentation - accessible through the
PresencePLUS GUI.
80
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 81

System Setup Window Overview7/2009
6.2.4 Using Custom_ASCII to Communicate with an External Device Over Ethernet
To select Custom_ASCII, click on the RCC Protocol pull-down menu, and select Custom_ASCII from the
menu. The protocol configuration for Custom_ASCII is displayed as shown below. The default protocol
configuration parameters are:
• Ethernet Socket 1 configured for TCP/IP 20000 as the communications channel
• No Frame Start (Command Start) Delimiter — <none>
• Carriage Return/Line Feed as Frame End (Command End) Delimiter — \r\n
• Comma as the Output Delimiter for the Field Definition — ,
• Space as the Input Delimiter for the Field Definition — <SPC>
P/N 000000
Tel: 763.544.3164
81Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 82

6.3 P4 Input/Output Tab
Use this tab to set t he functionality of the four programmable I/O connections.
7/2009System Setup Window Overview
Inputs and Outputs
I/O 1 through 4 in the I/O column correspond to Pins 5 through 8 in the Pin # column.I/O, Pin #,
Function
Options from the drop-down list are:
• General Input: Input to the sensor.
• General Ouput: Output from the sensor that can be selected in a Test tool.
• Pass: Active when the entire nspection passes.
• Fail: Active when the inspection fails.
• System Error: Active when a system error occurs.
• Ready: Active when the sensor is ready to accept another trigger.
• Product Select: Used in conjunction with Product Change to select inspection
locations at which to begin execution.
Open/Closed
You can select Trigger, Product Change, Remote Teach, and Discrete inputs
and outputs as eith NPN (current sourcing) or PNP (current sinking). Once
NPN or PNP is selected, all inputs and outpus are either NPN or PNP.
Select the state (open or closed) that the output will take when not active.Normally
• Normally Open: The output becomes active when the logic condition controlling
the output becomes True.
• Normally Closed: The output becomes inactive when the logic condition controlling
the output becomes True.
Output Delay
Output
Duration
Output Delay is the time from a trigger to start an inspection until the Sensor output turns
ON. It is available only for general outputs.
Note: If processing time is longer than the output delay, the output will become
active immediately after the processing is finished.
This option is available only for the general outputs; the other outputs (Pass, Fail, System Error,
and Ready) are latched only.
• Latched: Active until the condition changes.
• Time: Active for a specific length of time.
82
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 83

ON
OFF
OFF
ON
Trigger
Output
Output DurationProcessing Time
Delay Latched
Input/Ouput Tab
P4 Input/Output Tab
System Setup Window Overview7/2009
P/N 000000
83Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 84

6.4 Strobe Tab
Use the Strobe tab to set the strobe signal for a strobed light source. The strobe signal is a +5V dc TTL signal.
Fields in the System Setup window's Strobe tab are described below:
Strobe Tab
7/2009System Setup Window Overview
6.4.1 Strobe Width
84
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 85

System Setup Window Overview7/2009
DescriptionStrobe Width Option
The strobe output never becomes active (light off).Off
The strobe output remains active (light on).On
Exposure Duration
Time Duration
The strobe output is active only while the sensor is
acquiring an image. This is the default.
Sets the duration for active strobe output from the
initial valid trigger (minimum pulse width has been
satisfied) to the end of the duration. The range is from
0 to 4,000 ms.
6.4.2 Level
• Active Low -- When given a 0V dc signal, it turns on. This is the default.
• Active High -- When given a +5V dc signal, it turns on.
6.5 Units Tab
Use the Units tab to scale pixels to Engineering units (inches, millimeters, centimeters, etc.) as shown in Units
tab shown below. To scale pixels, folow the instruction
Units Tab
P/N 000000
Tel: 763.544.3164
85Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 86

7/2009System Setup Window Overview
6.6 Reset Tab
Use the Reset tab to read sensor error codes, clear system errors and reestablish Sensor communications.
DescriptionOption
Click to clear the sensor's Red Error LED.Reset Error Flag
Click to clear the error log.Reset Error Log
System Reset
86
Tel: 763.544.3164
Click to reboot the Sensor. (This is a system
reboot and will take several seconds).
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 87

System Setup Window Overview7/2009
DescriptionOption
Get Error Log
Reset Tab
Click to display the System Log icon in the
Navigation/Results window. The System Log
records information about all system failures (such
as communication errors between the PC and
the Sensor).
6.7 Start-Up Inspection Tab
The options on the Start-Up Inspection tab:
P/N 000000
Tel: 763.544.3164
87Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 88

7/2009System Setup Window Overview
• Click on Setup Mode if you want the camera to start in Setup Mode after it is powered down.
• Click on Inspection Name, and select an inspection from the drop-down list to have the sensor
start up to run.
Start-Up Inspection Tab
P4 Start-Up Inspection Tab
88
ProII Start-Up Inspection Tab
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Tel: 763.544.3164
Page 89

System Setup Window Overview7/2009
6.8 NTSC Tab
The Zoom Level adjustment on the NTSC tab is availalble only for single function, low-resolution sensors
such as the Area and Geo. From the drop-down list, select the desired zoom level as it will appear on the
optional NTSC video monitor that you can attach to the sensor. The default is 4:1.
NTSC Tab
P/N 000000
Tel: 763.544.3164
89Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 90

6.9 Language Tab
In the Languages tab, click on the down arrow for a drop-down list of the languages installed from the
PresencePLUS software CD.
Click on the desired language, then click Apply. At the next start-up, the PresencePLUS software will use the
selected language.
To save changes and exit the System Setup window, click OK. To exit the System Setup window without
making any changes, click the X in the upper-right hand corner of the window.
Language Tab
7/2009System Setup Window Overview
90
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 91

System Setup Window Overview7/2009
6.10 Tools Configuration
Tool Configuration provides the ability to customize the Tools page within the PresencePLUS software. Entire
tools, or their enhanced features, can optionally be displayed or hidden. This provides the ability to configure
the system to better support your application, thus further simplifying the creation and modification of inspections.
To assist with the customization, the list of tools for the connected sensor is displayed in a tree view. In this
tree view, all tools which have a check mark are available for use in the inspection, and all tools that are
unchecked are hidden. Similarly, a tool's enhanced feature will be available if checked, and unavailable if
unchecked.
Tools Configuration
P/N 000000
Tel: 763.544.3164
91Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 92

6.10.1 Standard Mode
Choose this option to reset all tool configuration settings for the connected sensor to the factory defaults.
6.10.2 Enhanced Mode
Choose this option to enable all tools and all tool's enhanced features for the connected sensor.
6.10.3 Custom Mode
Choose this mode to customize the tools configuration settings within the tree view. This mode is automatically
selected when changes are made to the tree view.
The Tool Configuration settings will only affect the sensor that the PresencePLUS software is connected these settings are stored with the sensor. Therefore, if the PresencePLUS software connects to a different
sensor, then that sensor's tool configuration will be reflected within the PresencePLUS software.
This feature is available when connected to sensors with 2008R1 or newer versions of firmware.
6.10.4 Tool Licensing
7/2009System Setup Window Overview
Some tools (e.g., barcode and OCR/OCV) require a license to be registered within the sensor before they can
be activated. To purchase a license key, contact Banner with the following information:
- MAC address of the sensor you wish to license
- Product Type of the sensor
- The tool(s) you wish to purchase licenses
- Your company information
- An e-mail address to receive the Key
Please use caution when providing this information, as a license issued for one sensor cannot be registered
on a different sensor.
After receiving a license key, you may register the license key using two different methods:
Method 1 - Use the Firmware Updater (recommended)
- Run the Firmware Updater - version 2.0.4 (2008R1) or newer
- Select the 'Licensing' tab
- Connect to the sensor with the MAC address used for key
- Enter the license key received for the sensor - or browse for the license file
- Click on the 'Register' button
- If necessary, select the 'Update' tab and update the firmware to the latest version
Method 2 - Use the PresencePLUS GUI software
(Use this method if sensor has latest version of firmware)
- Start the PresencePLUS software - version 3.2.0 (2008R1) or newer
- Connect to the sensor with the MAC address used for key
- Click 'System' on the title bar and then select the 'Tool Configuration' tab
92
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 93

System Setup Window Overview7/2009
- Select the tool to activate
- Enter the license key received for the sensor
- Click on the 'Register' button
To view licenses currently registered within the sensor, click the 'Help' button on the title bar and select 'About'
from the menu. The licenses are also displayed next to the product name in the title bar.
P/N 000000
Tel: 763.544.3164
93Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 94

Page 95

PresencePLUS Software Tools
7.1 ROI Types
ROI types include Area, Search, and Linear.
7.1.1 Linear ROI
Linear ROIs are used by tools that scan along a defined line in a defined direction. Data are averaged along
a linear ROI wider than 1 pixel to provide accurate test results. You can adjust the ROI width in increments of
4; that is, 1, 5, 9, 13, and so on. The ROI is widened symmetrically.
Note: Widening an ROI provides an average value/location, which results in improved
repeatability.
7
7.1.2 Area ROI
An Area ROI can be rectangular, elliptical, or circular. Click on Draw ROI in the input tab to expand the list of
ROI shapes from which to select. The shapes are shown below.
Note: An Area ROI can be as large as the entire Field of View (FOV).
P/N 000000
Tel: 763.544.3164
95Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 96

7.1.3 Search ROI
Geometric Find, Geometric Count, Pattern Find, and Pattern Count ROIs, like Area ROIs, can be rectangular,
elliptical, or circular; however, these ROIs are also bounded by a Search ROI. The Search ROI is indicated
by a yellow box that is always rectanagular and, by default, is 20% to 30% larger than the Area ROI, which is
red.
7.2 Location Tools
7.2.1 Locate Tool
7/2009PresencePLUS Software Tools
The Locate tool locates the position of a target in a field of view. This tool finds and marks position of the first
edge along the ROI line. Typically, tools, including additional Locate tools that follow, are relative to this point.
Additionally, the software can calculate the angle at which the Locate tool intersects the feature's edge and
rotates following tools Regions of Interest (ROIs) accordingly.
Usage
The Locate tool is used to align and position Vision tools consistently over the feature of interest.
Fields
The following are fields on the Locate tool Input tab:
•
Threshold Type7.2.1.2 Threshold Type on page 98
•
Filters7.2.1.3 Filters on page 100
•
Results7.2.1.4 Results on page 101
•
Select7.2.1.5 Select on page 101
Supported Platforms
ProII Color
1.3
OMNI ColorProII/ProII
1.3
AREA/AREA1.3OMNI/OMNI
EDGE/EDGE
1.3
GEO/GEO
1.3
BCR/BCR
1.3
YesYesYesYesYesYesYesYes
Locate Tool Tabs
96
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 97

PresencePLUS Software Tools7/2009
Adding a Locate Tool
To add a Locate tool to an inspection:
1. Click the button of the tool to be added to the inspection.
2. If desired, rename the tool.
3. Draw an ROI.
DescriptionField/Button
Use this field to rename the tool. The default is tool_name_1, tool_name_2,
and so on, where the default tool_name depends on the tool being created
(for example, locate, edge or the like). The name can have only alphanumeric
characters and underscores with no spaces.
Click this button to add an ROI to an image.
Click this button to remove an ROI from an image.
P/N 000000
Tel: 763.544.3164
97Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 98

7/2009PresencePLUS Software Tools
Threshold Type
The threshold is used to mark the gray scale transition point. The tool marks the edge when the pixel intensity
crosses the threshold level. From the dropdown list, select one of the following:
• Relative
• Absolute
• Edge Strength
Relative Threshold
Relative threshold is the default, and it finds an edge at a relative pixel intensity. The brightest gray scale level
is 100% and the darkest is 0%. While Relative threshold is more tolerant of light fluctuations between inspections
than other transition types, it may find false edges.
Percent
Polarity
Edge Profile Graph
DescriptionField/Graph
Percent is displayed when the Type is Relative. Choose the percentage value at
which the edge should be marked.
• Bright to Dark finds edges that start above the threshold value and cross below
the threshold value.
• Dark to Bright finds edges that start below the threshold value and cross above
the threshold value.
• Bright or Dark finds any edge.
In the Edge Profile graph displayed when the Relative threshold is selected, the
red line shows the percentage pixel intensity relative to the green threshold line.
The threshold line will move up or down with the percent value.
Absolute Threshold
Absolute threshold finds an edge at a specific gray scale level. While Absolute threshold is less likely to find
a false edge than Relative Threshold, it may miss edges if the light level changes between inspections.
98
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 99

PresencePLUS Software Tools7/2009
DescriptionField/Graph
Value
Polarity
Edge Profile Graph
Value is displayed when Type is Absolute. Enter a specific gray scale value from
0 to 255.
• Bright to Dark finds edges that start above the threshold value and cross below
the threshold value.
• Dark to Bright finds edges that start below the threshold value and cross above
the threshold value.
• Bright or Dark finds any edge.
In the Edge Profile graph displayed when the Absolute threshold is selected, the
red line shows the percentage pixel intensity relative to the green threshold line.
The threshold line will move up or down with the percent value.
Edge Strength
Edge strength measures the rate of change of grayscale values and needs sharply-defined transitions. Edge
strength is more tolerant of gradual changes in light levels across the tool than other transition types and it will
filter out weak or gradual edges.
DescriptionField
Enter an edge bandwidth value from 1 to 255.Edge
Polarity
P/N 000000
• Bright to Dark finds edges that start above the threshold value and cross below
the threshold value.
• Dark to Bright finds edges that start below the threshold value and cross above
the threshold value.
Tel: 763.544.3164
99Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
Page 100

DescriptionField
• Bright or Dark finds any edge.
Graph Tab
When Edge Strength is selected in the Input tab, the software displays the Graph tab. This
tab provides similar information to the Input tab, but displays separate Edge Profile and
Edge Strength graphs for easier viewing.
The Edge Profile graph represents the absolute gray scale level across the tool ROI.
7/2009PresencePLUS Software Tools
Filters
The Edge Strength graph represents the change in gray scale along the tool ROI. Edge
Strength detects an edge when the rate of change (solid red line on the graph) crosses the
selected intensity change amount (dashed green lines on the screen).
A bright-to-dark transition has a negative edge strength value, and a dark-to-bright transition
has a positive edge strength value. When the Edge Strength level is adjusted, both the
negative and positive green dotted lines will adjust together.
100
Tel: 763.544.3164
P/N 000000Banner Engineering Corp. - Minneapolis, MN USA - www.bannerengineering.com
 Loading...
Loading...