

950 MHz to 1575 MHz Quadrature Modulator
V
with Integrated Fractional-N PLL and VCO
ADRF6750
FEATURES
I/Q modulator with integrated fractional-N PLL and VCO
Gain control span: 47 dB in 1 dB steps
Output frequency range: 950 MHz to 1575 MHz
Output 1 dB compression: 8.5 dBm
Output IP3: 23 dBm
Noise floor: −162 dBm/Hz
Baseband modulation bandwidth: 250 MHz (1 dB)
Output frequency resolution: 1 Hz
Functions with external VCO for extended frequency range
SPI and I
Power supply: 5 V/310 mA
2
C-compatible serial interfaces
GENERAL DESCRIPTION
The ADRF6750 is a highly integrated quadrature modulator,
frequency synthesizer, and programmable attenuator. The
device covers an operating frequency range from 950 MHz
to 1575 MHz for use in satellite, cellular and broadband
communications.
The ADRF6750 modulator includes a high modulus fractional-N
frequency synthesizer with integrated VCO, providing better
than 1 Hz frequency resolution, and a 47 dB digitally controlled
output attenuator with 1 dB steps.
Control of all the on-chip registers is through a user-selected
SPI interface or I
power supply ranging from 4.75 V to 5.25 V.
2
C interface. The device operates from a single
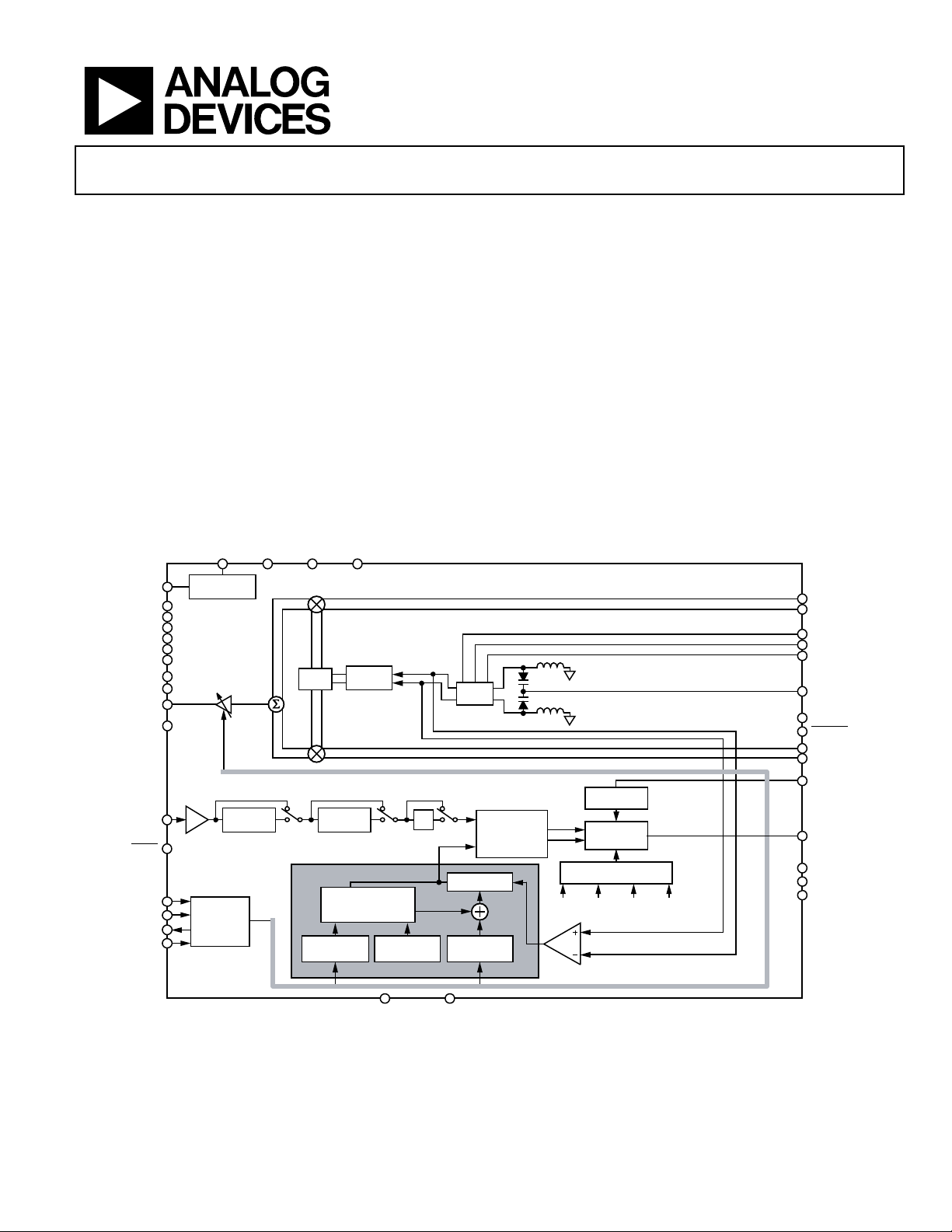
FUNCTIONAL BLOCK DIAGRAM
CC1VCC2VCC3VCC4
REGOUT
VREG1
VREG2
VREG3
VREG4
VREG5
VREG6
LOMONP
LOMONN
RFOUT
TXDIS
REFIN
REFIN
SDI/SDA
CLK/SCL
SDO
CS
3.3V
REGULATOR
47dB
GAIN CONTROL
RANGE
×2
DOUBLER
SPI/
2
I
C
INTERFACE
ADRF6750
0°/90°
5-BIT
DIVIDER
THIRD-ORDER
FRACTIONAL
INTERPOLATOR
FRACTIONAL
REGISTER
OUTPUT
STAGE
÷2
MODULUS
25
2
VCO
CORE
+
FREQUENCY
DETECTOR
–
N-COUNTER
INTEGER
REGISTER
PHASE
REFERENCE
CHARGE
PUMP
CURRENT SETTING
RFCP4 RFCP3 RFCP2 RFCP1
IBBP
IBBN
CCOMP1
CCOMP2
CCOMP3
VTUNE
TESTLO
TESTLO
QBBP
QBBN
RSET
CP
LF3
LF2
LDET
AGND DGND
08201-001
Figure 1.
Rev. A
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2010 Analog Devices, Inc. All rights reserved.

ADRF6750
TABLE OF CONTENTS
Features .............................................................................................. 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
Timing Characteristics ................................................................ 5
Absolute Maximum Ratings ............................................................ 7
ESD Caution .................................................................................. 7
Pin Configuration and Function Descriptions ............................. 8
Typical Performance Characteristics ........................................... 10
Theory of Operation ...................................................................... 18
Overview ...................................................................................... 18
PLL Synthesizer and VCO ......................................................... 18
Quadrature Modulator .............................................................. 20
Attenuator .................................................................................... 21
Voltage Regulator ....................................................................... 21
EXTERNAL vco OPERATION ................................................ 21
I2C Interface ................................................................................ 21
SPI Interface ................................................................................ 23
Program Modes .......................................................................... 25
Register Map ................................................................................... 27
Register Map Summary ............................................................. 27
Register Bit Descriptions ........................................................... 28
Suggested Power-Up Sequence ..................................................... 31
Initial Register Write Sequence ................................................ 31
Evaluation Board ............................................................................ 32
General Description ................................................................... 32
Hardware Description ............................................................... 32
PCB Artwork............................................................................... 35
Bill of Materials ........................................................................... 38
Outline Dimensions ....................................................................... 39
Ordering Guide .......................................................................... 39
REVISION HISTORY
4/10—Rev. 0 to Rev. A
Changes to Table 5 ............................................................................ 9
Changes to LOMON Outputs Section ......................................... 33
Changes to Ordering Guide .......................................................... 39
1/10—Revision 0: Initial Version
Rev. A | Page 2 of 40
ADRF6750
SPECIFICATIONS
VCC = 5 V, TA = 25°C, I/Q inputs = 0.9 V p-p differential sine waves in quadrature on a 500 mV dc bias, baseband frequency = 1 MHz,
REFIN = 10 MHz, PFD = 20 MHz, loop bandwidth = 50 kHz, and LOMONx is off, unless otherwise noted.
Table 1.
Parameter Test Conditions/Comments Min Typ Max Unit
RF OUTPUT RFOUT pin
Operating Frequency Range 950 1575 MHz
Nominal Output Power VIQ = 0.9 V p-p differential −1.6 dBm
Gain Flatness Any 40 MHz ±0.5 dB
Output P1dB 8.5 dBm
Output IP3 f1BB = 3.5 MHz, f2BB = 4.5 MHz, P
Output Return Loss Attenuator setting = 0 dB −12 dB
LO Carrier Feedthrough Attenuator setting = 0 dB to 47 dB −45 dBc
2× LO Carrier Feedthrough Attenuator setting = 0 dB to 47 dB −45 dBm
Sideband Suppression −45 dBc
Noise Floor I/Q inputs = 0 V p-p differential, Attenuator setting = 0 dB −162 dBm/Hz
Attenuator setting = 0 dB to 21 dB, carrier offset = 15 MHz −147 dBc/Hz
Attenuator setting = 21 dB to 47 dB, carrier offset = 15 MHz −170 dBm/Hz
Harmonics −60 dBc
REFERENCE CHARACTERISTICS REFIN pin
Input Frequency With R/2 divider enabled 10 300 MHz
With R/2 divider disabled 10 165 MHz
Input Sensitivity AC-coupled 0.4 VREG V p-p
Input Capacitance 10 pF
Input Current ±100 µA
CHARGE PUMP
ICP Sink/Source Programmable
High Value With RSET = 4.7 kΩ 5 mA
Low Value 312.5 µA
Absolute Accuracy With RSET = 4.7 kΩ 4.0 %
RSET Value 4.7 kΩ
VCO Gain K
SYNTHESIZER SPECIFICATIONS
Frequency Resolution 1 Hz
Spurs Integer boundary < loop bandwidth −55 dBc
>10 MHz offset from carrier −85 dBc
Phase Noise1 Frequency = 950 MHz to 1575 MHz
100 Hz offset −80 dBc/Hz
1 kHz offset −88 dBc/Hz
10 kHz offset −93 dBc/Hz
100 kHz offset −107 dBc/Hz
1 MHz offset −133 dBc/Hz
>15 MHz offset −152 dBc/Hz
Integrated Phase Noise1 1 kHz to 8 MHz integration bandwidth 0.4
Frequency Settling1 Maximum frequency error = 100 Hz 170 s
Maximum Frequency Step for
No Autocalibration
Phase Detector Frequency 10 30 MHz
25 MHz/V
VCO
Frequency step with no autocalibration routine;
Register CR24, Bit 0 = 1
= −6 dBm per tone 23 dBm
OUT
100 kHz
°rms
Rev. A | Page 3 of 40
ADRF6750
Parameter Test Conditions/Comments Min Typ Max Unit
GAIN CONTROL
Gain Range 47 dB
Step Size 1 dB
Relative Step Accuracy Fixed frequency, adjacent steps
All attenuation steps ±0.3 dB
Over full frequency range, adjacent steps ±1.5 dB
Absolute Step Accuracy2 47 dB attenuation step −2.0 dB
Output Settling Time Any step; output power settled to ±0.2 dB 10 µs
OUTPUT DISABLE TXDIS pin
Off Isolation RF OUT, attenuator setting = 0 dB to 47 dB, TXDIS high −110 dBm
LO, Attenuator setting = 0 dB to 47 dB, TXDIS high −90 dBm
2 x LO, Attenuator setting = 0 dB to 47 dB, TXDIS high −50 dBm
Turn-On Settling Time TXDIS high to low (90% of envelope) 180 ns
Turn-Off Settling Time TXDIS low to high (to −55 dBm) 270 ns
MONITOR OUTPUT LOMONP, LOMONN pins
Nominal Output Power −24 dBm
BASEBAND INPUTS IBBP, IBBN, QBBP, QBBN pins
I and Q Input Bias Level 500 mV
1 dB Bandwidth 250 MHz
LOGIC INPUTS
Input High Voltage, V
Input Low Voltage, V
Input High Voltage, V
Input Low Voltage, V
Input Current, I
INH/IINL
Input Capacitance, CIN CS, TXDIS, SDI/SDA, CLK/SCL pins 10 pF
LOGIC OUTPUTS
Output High Voltage, VOH SDO, LDET pins; IOH = 500 A 2.8 V
Output Low Voltage, VOL SDO, LDET pins; IOL = 500 A 0.4 V
SDA (SDI/SDA); IOL = 3 mA 0.4 V
POWER SUPPLIES
Voltage Range VCC1, VCC2, VCC3, and VCC4 4.75 5 5.25 V
REGOUT, VREG1, VREG2, VREG3, VREG4, VREG5, and VREG6 3.3 V
Supply Current
Operating Temperature −40 +85 °C
1
LBW = 50 kHz at LO = 1200 MHz; ICP = 2.5 mA.
2
All other attenuation steps have an absolute error of <±2.0 dB.
CS, TXDIS pins 1.4 V
INH
CS, TXDIS pins 0.6 V
INL
SDI/SDA, CLK/SCL pins 2.1 V
INH
SDI/SDA, CLK/SCL pins 1.1 V
INL
CS, TXDIS, SDI/SDA, CLK/SCL pins ±1 µA
VCC1, VCC2, VCC3, VCC4, VREG1, VREG2, VREG3, VREG4,
VREG5, VREG6, and REGOUT pins
REGOUT normally connected to VREG1, VREG2, VREG3,
VREG4, VREG5, and VREG6
VCC1, VCC2, VCC3, and VCC4 combined; REGOUT con-
310 340 mA
nected to VREG1, VREG2, VREG3, VREG4, VREG5, and VREG6
Rev. A | Page 4 of 40
ADRF6750
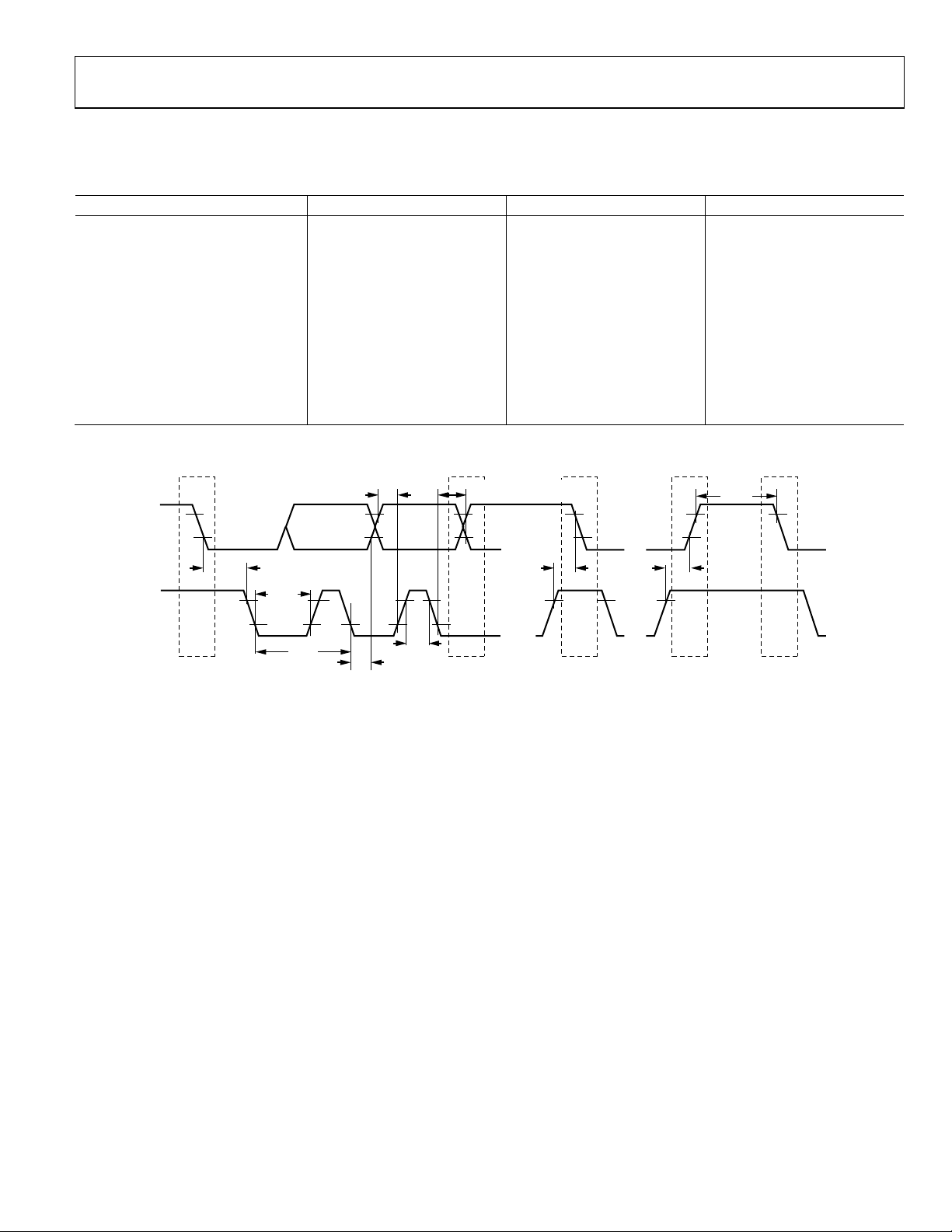
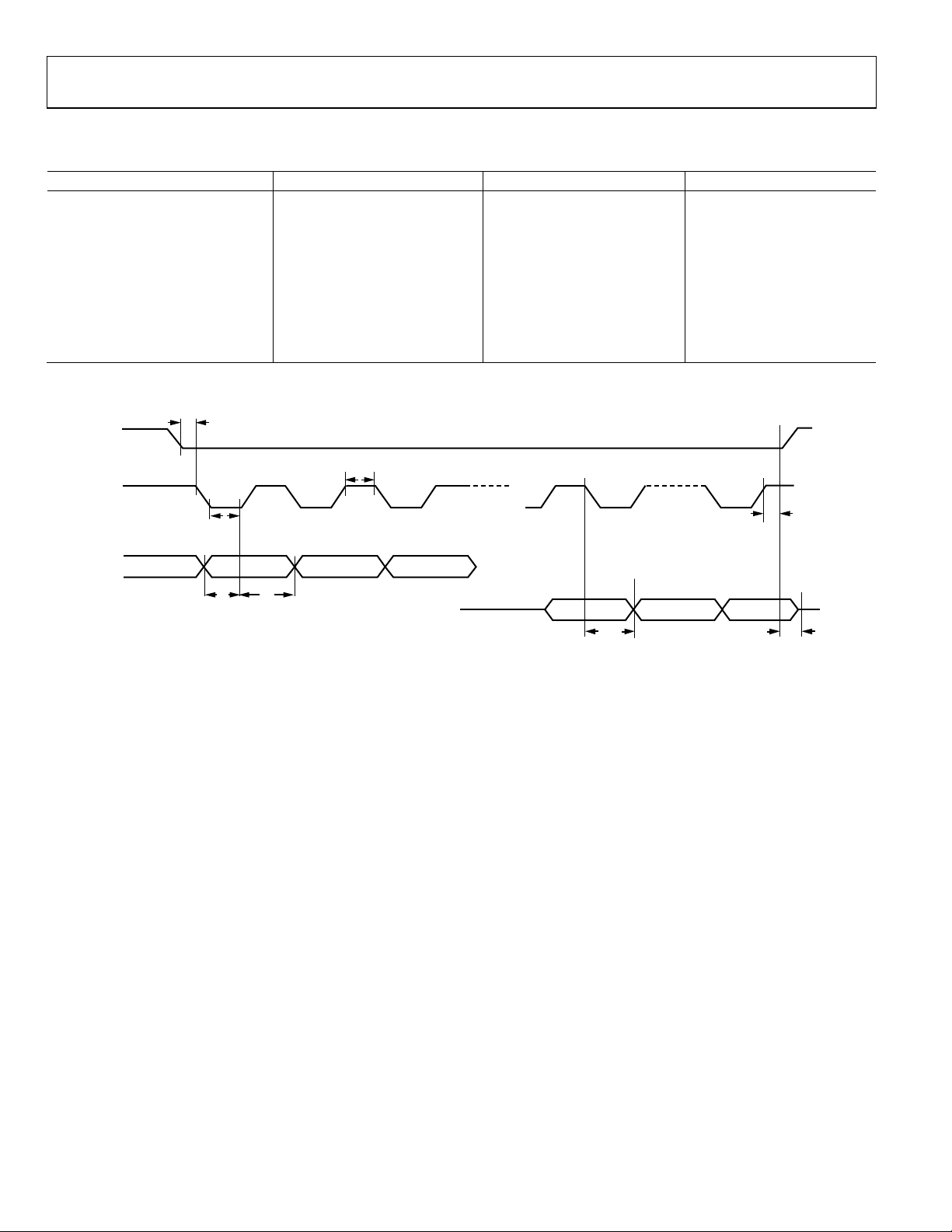
TIMING CHARACTERISTICS
I2C Interface Timing
Table 2.
Parameter1 Symbol Limit Unit
SCL Clock Frequency f
SCL Pulse Width High t
SCL Pulse Width Low t
Start Condition Hold Time t
Start Condition Setup Time t
Data Setup Time t
Data Hold Time t
Stop Condition Setup Time t
Data Valid Time t
Data Valid Acknowledge Time t
Bus Free Time t
1
See Figure 2.
SDA
400 kHz max
SCL
600 ns min
HIGH
1300 ns min
LOW
600 ns min
HD;STA
600 ns min
SU;STA
100 ns min
SU;DAT
300 ns min
HD;DAT
600 ns min
SU;STO
900 ns max
VD;DAT
900 ns max
VD;ACK
1300 ns min
BUF
t
t
SU;DAT
VD;DAT AND
t
VD;ACK (ACK SIGNAL ONLY)
t
BUF
SCL
t
HD;STA
t
LOW
S SSP
START
CONDITION
1/f
SCL
t
HD;DAT
t
HIGH
Figure 2. I
2
C Port Timing Diagram
t
SU;STA
t
SU;STO
STOP
CONDITION
08201-003
Rev. A | Page 5 of 40
ADRF6750
SPI Interface Timing
Table 3.
Parameter1 Symbol Limit Unit
CLK Frequency f
CLK Pulse Width High t1 15 ns min
CLK Pulse Width Low t2 15 ns min
Start Condition Hold Time t3 5 ns min
Data Setup Time t4 10 ns min
Data Hold Time t5 5 ns min
Stop Condition Setup Time t6 5 ns min
SDO Access Time t7 15 ns min
CS to SDO High Impedance t8 25 ns max
1
See Figure 3.
t
3
CS
20 MHz max
CLK
t
1
CLK
SDI
t
t
2
t
t
5
4
SDO
t
7
6
t
8
08201-004
Figure 3. SPI Port Timing Diagram
Rev. A | Page 6 of 40
ADRF6750
ABSOLUTE MAXIMUM RATINGS
Table 4.
Parameter Rating
Supply Voltage VCC1, VCC2, VCC3, and VCC4 −0.3 V to +6 V
Supply Voltage VREG1, VREG2, VREG3, VREG4,
VREG5, and VREG6
IBBP, IBBN, QBBP, and QBBN 0 V to 2.5 V
Digital I/O −0.3 V to +4 V
Analog I/O (Other Than IBBP, IBBN, QBBP,
and QBBN)
TESTLO, TESTLO Difference
θJA (Exposed Paddle Soldered Down) 26°C/W
Maximum Junction Temperature 120°C
Storage Temperature Range −65°C to +150°C
−0.3 V to +4 V
−0.3 V to +4 V
1.5 V
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
Rev. A | Page 7 of 40
ADRF6750
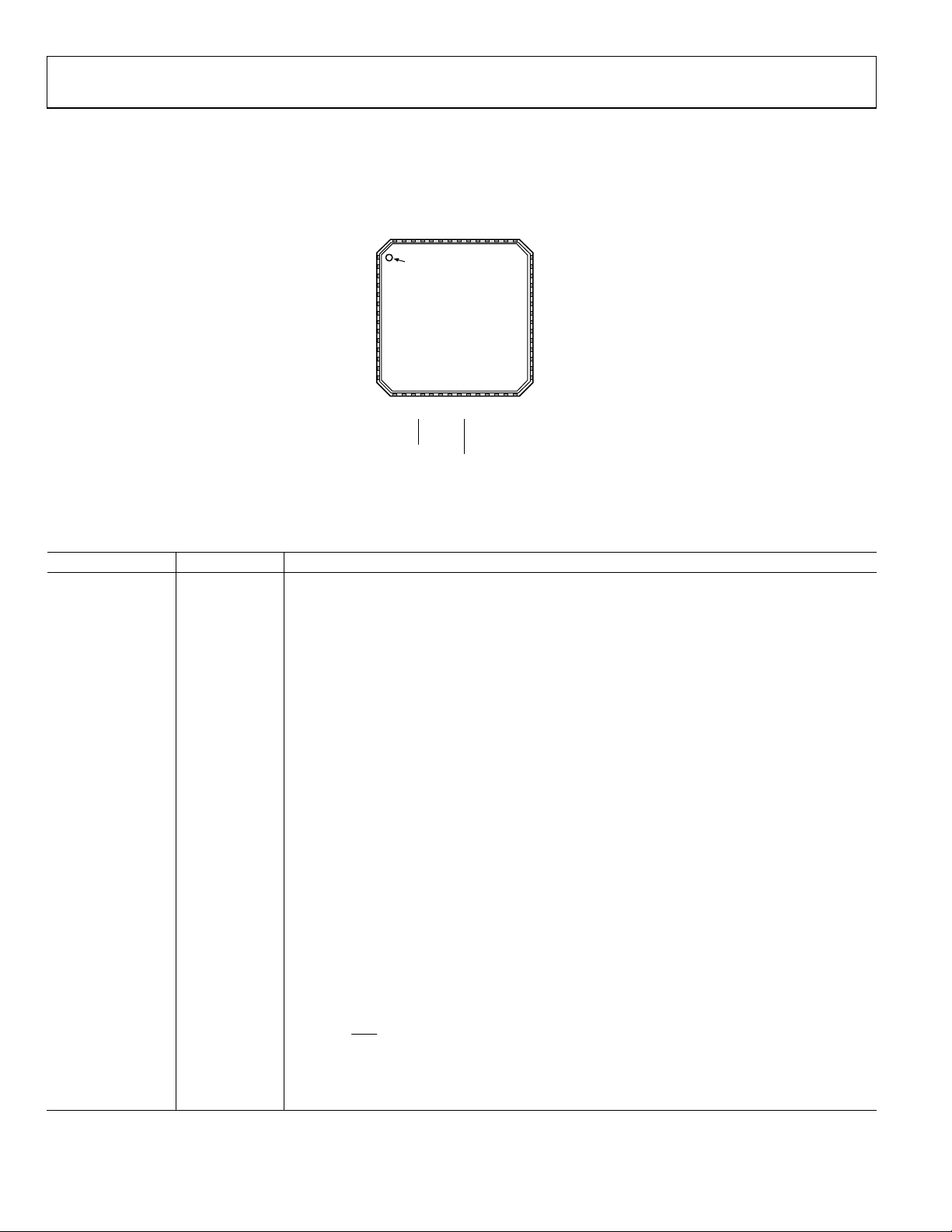
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
D
D
D
VCC2
VCC2
56
1VCC4
2IBBP
3IBBN
4QBBN
5QBBP
6AGND
7RSET
8LF3
9CP
10LF2
11VCC1
12REGOUT
13VREG1
14VREG2
AGN
AGN
AGND
55
52
53
54
PIN 1
INDICATOR
ADRF6750
TOP VIEW
(Not to Scale)
AGND
AGND
50
51
TXDIS
AGND
AGN
RFOUT
AGND
LDET
MUXOUT
45
46
47
48
49
44
43
42 VCC3
41 VCC3
40 AGND
39 AGND
38 VTUNE
37 AGND
36 VREG6
35 CCOMP3
34 CCOMP2
33 CCOMP1
32 DGND
31 VREG5
30 CLK/SCL
29 SDI/SDA
16
15
VREG3
VREG4
NOTES
1. CONNECT EXPOSED PAD TO GROUND PLANE VIA
A LOW IMPEDANCE PATH.
21
17
19
20
22
23
24
25
26
27
18
D
IN
IN
AGND
AGN
AGND
REF
REF
TESTLO
28
S
C
SDO
AGND
MONP
TESTLO
LO
LOMONN
08201-005
Figure 4. Pin Configuration
Table 5. Pin Function Descriptions
Pin No. Mnemonic Description
11, 55, 56, 41, 42, 1 VCC1 to VCC4
Positive Power Supplies for I/Q Modulator. Apply a 5 V power supply to VCC1, which should be
decoupled with power supply decoupling capacitors. Connect VCC2, VCC3, and VCC4 to the same
5 V power supply.
12 REGOUT 3.3 V Output Supply. Drives VREG1, VREG2, VREG3, VREG4, VREG5, and VREG6.
13, 14, 15, 16, 31,
36
6, 19, 20, 21, 24, 37,
VREG1 to
VREG6
Positive Power Supplies for PLL Synthesizer, VCO, and Serial Port. Connect these pins to REGOUT
(3.3 V) and decouple them separately.
AGND Analog Ground. Connect to a low impedance ground plane.
39, 40, 46, 47, 49,
50, 51, 52, 53, 54
32 DGND Digital Ground. Connect to the same low impedance ground plane as the AGND pins.
2, 3 IBBP, IBBN
Differential In-Phase Baseband Inputs. These high impedance inputs must be dc-biased to approximately 500 mV dc and should be driven from a low impedance source. Nominal characterized ac
signal swing is 450 mV p-p on each pin. This results in a differential drive of 0.9 V p-p with a 500 mV
dc bias, resulting in a single sideband output power of approximately −1.6 dBm. These inputs are
not self-biased and must be externally biased.
4, 5 QBBN, QBBP
Differential Quadrature Baseband Inputs. These high impedance inputs must be dc-biased to
approximately 500 mV dc and should be driven from a low impedance source. Nominal characterized ac signal swing is 450 mV p-p on each pin. This results in a differential drive of 0.9 V p-p with
a 500 mV dc bias, resulting in a single sideband output power of approximately −1.6 dBm. These
inputs are not self-biased and must be externally biased.
33, 34, 35
CCOMP1 to
Internal Compensation Nodes. These pins must be decoupled to ground with a 100 nF capacitor.
CCOMP3
38 VTUNE
Control Input to the VCO. This voltage determines the output frequency and is derived from
filtering the CP output voltage.
7 RSET
9 CP
Charge Pump Current Set. Connecting a resistor between this pin and ground sets the maximum
charge pump output current. The relationship between I
5.23
I
CPmax
where R
=
R
SET
= 4.7 kΩ and I
SET
CP max
= 5 mA.
and R
CP
Charge Pump Output. When enabled, this output provides ±I
is as follows:
SET
to the external loop filter, which, in
CP
turn, drives the internal VCO.
Rev. A | Page 8 of 40
ADRF6750
Pin No. Mnemonic Description
27 CS
29 SDI/SDA
30 CLK/SCL
28 SDO Serial Data Output for SPI Port. Register states can be read back on the SDO data output line.
17 REFIN Reference Input. This high impedance CMOS input should be ac-coupled.
18
REFIN
48 RFOUT
45 TXDIS
25, 26
LOMONP,
LOMONN
22, 23
TESTLO,
TESTLO
10, 8 LF2, LF3 No connect pins.
44 LDET
43 MUXOUT
Exposed Paddle EP Exposed Paddle. Connect to ground plane via a low impedance path.
Chip Select, CMOS Input. When CS is high, the data stored in the shift registers is loaded into one of
31 latches. In I2C mode, when CS is high, the slave address of the device is 0x60, and when CS is low,
the slave address is 0x40.
2
Serial Data Input for SPI Port/Serial Data Input/Output for I
impedance CMOS data input, and data is loaded in an 8-bit word. In I
C Port. In SPI mode, this pin is a high
2
C mode, this pin is a bidirec-
tional port.
2
Serial Clock Input for SPI/I
C Port. This serial clock is used to clock in the serial data to the registers.
This input is a high impedance CMOS input.
Reference Input Bar. This pin should be either grounded or ac-coupled to ground.
RF Output. Single-ended, 50 Ω, internally biased RF output. This pin must be ac-coupled to the
load. Nominal output power is −1.6 dBm for a single sideband baseband drive of 0.9 V p-p differential on the I and Q inputs (attenuation = minimum).
Output Disable. This pin can be used to disable the RF output. Connect to high logic level to disable
the output. Connect to low logic level for normal operation.
Differential Monitor Outputs. These pins provide a replica of the internal local oscillator frequency
(1× LO) at four different power levels: −6 dBm, −12 dBm, −18 dBm, and −24 dBm, approximately.
These open-collector outputs must be terminated with external resistors to REGOUT. These outputs
can be disabled through serial port programming and should be tied to REGOUT if not used.
Differential Test Inputs. These inputs provide an option for an external 2× LO to drive the modulator.
This option can be selected by serial port programming. These inputs must be externally dc-biased and
should be grounded if not used.
Lock Detect. This output pin indicates the state of the PLL: a high level indicates a locked condition,
whereas a low level indicates a loss of lock condition.
Muxout. This output is a test output for diagnostic use only. It should be left unconnected by the
customer.
Rev. A | Page 9 of 40
ADRF6750
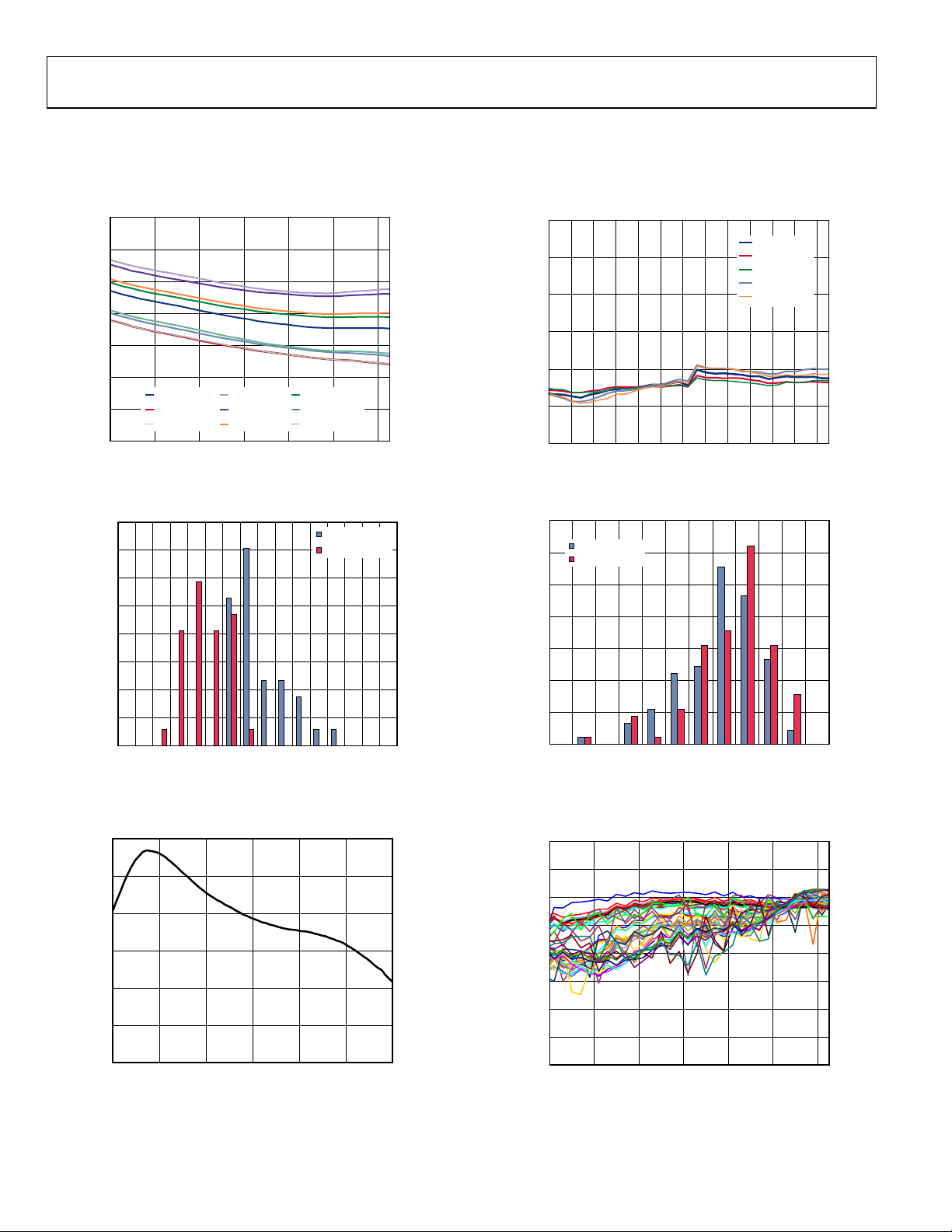
TYPICAL PERFORMANCE CHARACTERISTICS
VCC = 5 V, TA = 25°C, I/Q inputs = 0.9 V p-p differential sine waves in quadrature on a 500 mV dc bias, REFIN = 10 MHz, PFD = 20 MHz,
baseband frequency = 1 MHz, LOMONx is off, unless otherwise noted. A nominal condition is defined as 25°C, 5.00 V, and worst-case
frequency. A worst-case condition is defined as having the worst-case temperature, supply voltage, and frequency.
2
1
0
–1
–2
–3
OUTPUT POWER (dBm)
–4
–5
950
+25°C; 5.00 V
+85°C; 4.75 V
+85°C; 5.25 V
1050
-40°C; 4.75V
-40°C; 5.25V
0°C; 4.75V
1150
LO F REQUENCY (MHz)
1250
0°C; 5.25V
+70°C; 4.75V
+70°C; 5.25V
1350
1450
1550
1575
Figure 5. Output Power vs. LO Frequency, Supply, and Temperature
40
35
30
25
20
15
OCCURRENCE (%)
10
5
0
–3.0
–3.2
–2.8
–2.6
–2.4
–2.2
–2.0
–1.8
OUTPUT PO WER (dBm)
–1.6
–1.4
–1.2
–1.0
NOMINAL
WORST CASE
–0.8
–0.6
–0.4
–0.2
Figure 6. Output Power Distribution at Nominal and
Worst-Case Conditions
1
08201-105
0
08201-106
0
+25°C; 5.00V
1300
1350
+85°C; 4.75V
+85°C; 5.25V
–40°C; 4.75V
–40°C; 5.25V
1400
1450
1500
1550
1575
08201-108
SIDEBAND SUPPRESS ION (dBc)
–10
–20
–30
–40
–50
–60
950
1000
1100
1150
1050
LO FR EQUENCY (MHz)
1200
1250
Figure 8. Sideband Suppression vs. LO Frequency, Supply, and Temperature
35
NOMINAL
30
WORST CASE
25
20
15
OCCURRENCE (%)
10
5
0
–60.0
–62.5
–57.5
–55.0
–52.5
–50.0
SIDEBAND SUPPRESSION (dBc)
–47.5
–45.0
–42.5
–40.0
–37.5
–35.0
–32.5
08201-109
Figu re 9. Sideband Suppression Distribution at Nominal and
Worst-Case Conditions
–40
0
–1
–2
–3
OUTPUT PO WER (dBm)
–4
–5
500 750 1000 1250 1500 1750 2000
LO FREQ UE NCY (M Hz )
Figure 7. Output Power vs. LO Frequency for External VCO Mode
at Nominal Conditions
08201-107
Rev. A | Page 10 of 40
–45
–50
–55
–60
–65
–70
CARRIER FEEDTHROUGH (dBc)
–75
–80
950
1150
1050
LO FREQUENCY (MHz)
1250
1350
1450
Figure 10. LO Carrier Feedthrough vs. Attenuation, LO Frequency,
Supply, and Temperature
1550
1575
08201-110
ADRF6750
60
50
40
30
OCCURENCE (%)
20
10
0
NOMINAL
WORST-CASE
–75–80 –70 –65 –60 –55 –50 –45 –40 –35 –30
LO CARRIER FEEDTHROUGH (dBc)
08201-111
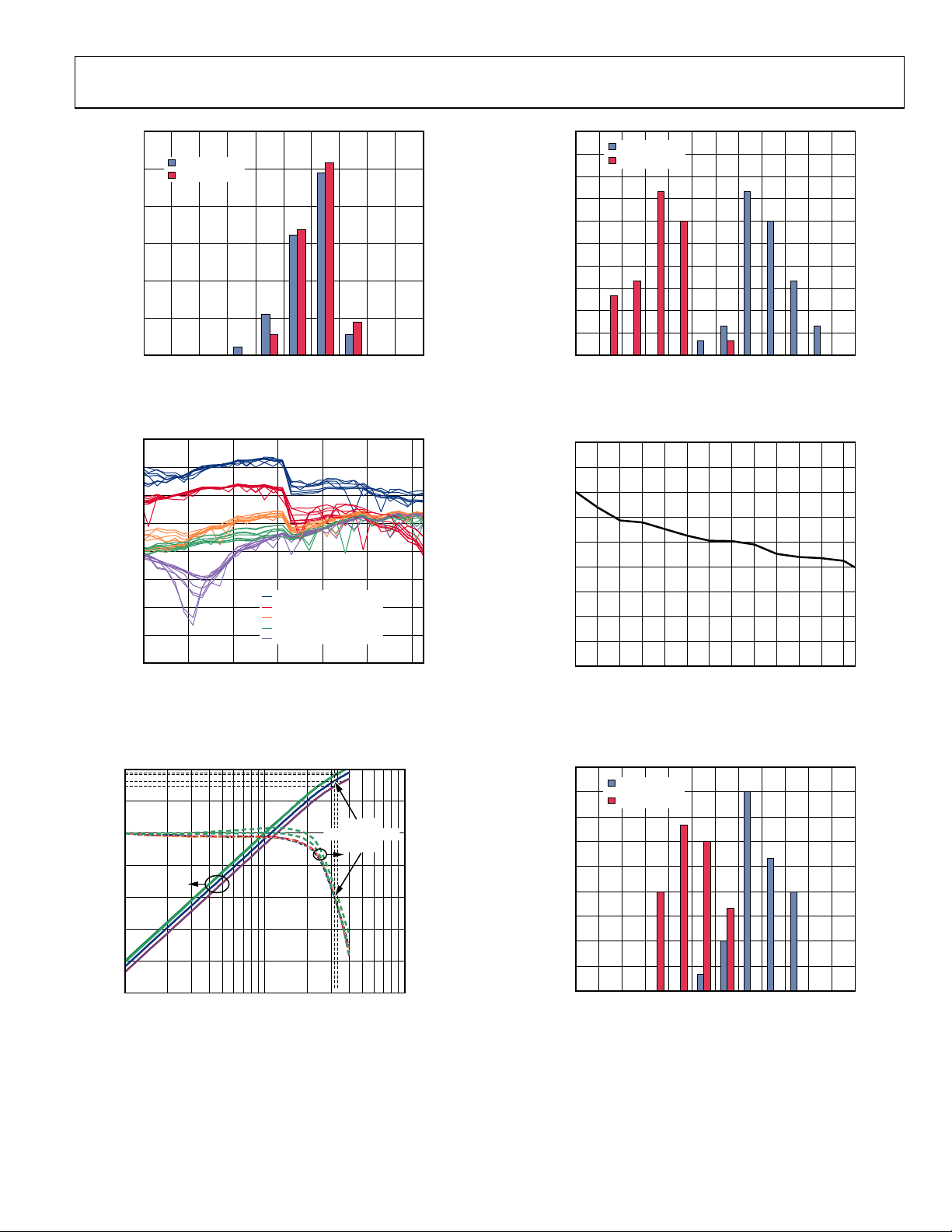
Figure 11. LO Carrier Feedthrough Distribution at Nominal and Worst-Case
Conditions and Attenuation Setting
–40
–50
–60
–70
–80
–90
ATTENUATION = 0dB
ATTENUATION = 12dB
ATTENUATION = 21dB
ATTENUATION = 33dB
ATTENUATION = 47dB
1150
LO FREQUE NCY (MHz)
1250
1350
1450
1550
1575
08201-112
2 × LO CARRIER FEEDTHROUGH (dBm)
–100
–110
–120
950
1050
Figure 12. 2 × LO Carrier Feedthrough vs. Attenuation, LO Frequency,
Supply, and Temperature
10
5
0
–5
–10
–15
OUTPUT PO WER (dBm)
–20
–25
0.1 1 10
DIFFERENTIAL INPUT VOLTAGE (V p-p)
COMPRESSION
1dB
POINT
1.0
0.5
0
–0.5
–1.0
–1.5
–2.0
–2.5
IDEAL OUTPUT POWER – OUTPUT POWER (dBm)
Figure 13. Output P1dB Compression Point at Worst-Case LO Frequency
vs. Supply and Temperature
08201-113
50
45
40
35
30
25
20
OCCURENCE (%)
15
10
5
0
NOMINAL
WORST-CASE
7.06.8 7.2 7.4 7.6 7.8 8.0 8.2 8.4 8.6 8.8 9.0 9.2
OUTPUT P1d B (dBm)
Figure 14. Output P1dB Compression Point Distribution at Nominal
and Worst-Case Conditions
10.5
10.0
9.5
9.0
8.5
8.0
7.5
OUTPUT P1dB (dBm)
7.0
6.5
6.0
950
1100
1000
1150
1050
LO FREQUENCY (MHz)
1200
1250
1300
1350
1400
1450
1500
1550
1575
Figure 15. Output P1dB Compression Point vs. LO Frequency at
Nominal Conditions
45
21.00
NOMINAL
WORST-CASE
21.25
21.50
21.75
22.00
22.25
OUTPUT I P 3 (dBm)
22.50
22.75
23.00
23.25
23.50
23.75
24.00
40
35
30
25
20
OCCURENCE (%)
15
10
5
0
Figure 16. Output IP3 Distribution at Nominal and Worst-Case
Conditions
08201-114
08201-116
08201-115
Rev. A | Page 11 of 40
ADRF6750
30
29
28
27
26
25
24
23
LO FREQ UE NCY (M Hz )
22
21
20
950
1100
1000
1150
1050
OUTPUT IP3 INTERCEPT POINT (dBm)
1200
1250
1300
1350
1400
1450
1500
1550
1575
Figure 17. Output IP3 vs. LO Frequency at Nominal Conditions
–60
–70
ATION (dBm)
LO OFF ISOL
–80
–90
–100
–110
–120
–130
–140
950
ATTENUATION = 0dB
ATTENUATION = 4 7dB
1100
1000
1050
1150
1200
1250
LO FREQ UENCY (MHz)
1300
1350
1400
ATTENUATION
= 21dB
1450
1500
1550
1575
Figure 18. LO Off Isolation vs. Attenuation, LO Frequency, Supply,
and Temperature
–20
–30
–40
–50
–60
ATION (dBm)
–70
–80
–90
2 × LO OFF ISOL
–100
–110
–120
950
1000
ATTENUATION = 0dB
ATTENUATION = 2 1dB
ATTENUATION = 47dB
1100
1150
1050
1200
LO FREQ UE NCY (M Hz )
1250
1300
1350
1400
1450
1500
1550
1575
Figure 19. 2 × LO Off Isolation vs. Attenuation, LO Frequency, Supply,
and Temperature
08201-119
08201-117
08201-118
–40
–50
–60
–70
–80
–90
OUTPUT P OWER (dBc)
–100
LOWER SECOND HARMONIC (fLO –2×fBB)
–110
–120
950
UPPER THIRD HARMONIC (fLO+3×fBB)
UPPER SECOND HARMONIC (fLO+ 2 × fBB)
LOWER THIRD HARMONIC (fLO–3×fBB)
1050
1150
1250
LO FREQUENCY (MHz)
1350
1450
1550
Figure 20. Second-Order and Third-Order Harmonic Distortion vs.
LO Frequency, Supply, and Temperature
100
90
80
70
60
50
40
OCCURENCE (%)
30
20
10
0
–180 –176 –172 –168 –164 –160 –156 –152 –148 –144 –140
(dBm/Hz) NOISE FLOOR AT 15MHz O FFSET FREQUENCY (dBc/Hz)
ATTENUATIO N =
47dB (dBm/Hz)
ATTENUATIO N =
21dB (dBm/Hz)
ATTENUATIO N =
ATTENUATION =
21dB (dBc/Hz)
0dB (dBc/Hz)
Figure 21. Noise Floor at 15 MHz Offset Frequency Distribution at
Worst-Case Conditions and Different Attenuation Settings
–140
–145
–150
–155
–160
NOISE FLOOR (dBm/ Hz)
–165
–170
–25 –20 –15 –10
OUTPUT POWER (dBm)
–5 0 5 10
Figure 22. Noise Floor at 0 dB Attenuation vs. Output Power
at Nominal Conditions
1575
08201-128
08201-121
08201-120
Rev. A | Page 12 of 40

ADRF6750
1
0
–1
–2
–3
–4
NORMALIZED OUTPUT POWER (dB)
–5
1 10M 100M 1G
I AND Q BASEBAND INPUT FREQUENCY (Hz)
Figure 23. Normalized I and Q Input Bandwidth
0
–5
–10
–15
S22 (dB)
–20
–25
ATTENUATION = 0 dB
ATTENUATION = 21dB AND 47dB
08201-141
0
–10
–20
–30
–40
–50
–60
RF OUTPUT ( dBm)
–70
–80
–90
LOWER AND UPPER
SECOND HARM ONICS
1150 1170 1190 1210 1230 1250
LOWER
SIDEBAND
FEEDTHROUGH
SUPPRESSED
LO FREQUENCY (MHz )
CARRIER
SIDEBAND
THIRD
HARMONIC
Figure 26. RF Output Spectral Plot over a 100 MHz Span
0
–10
–20
–30
–40
–50
POWER (dBm)
–60
–70
LOWER
SIDEBAND
HARMONIC
2 × LO
HARMONIC
3 × LO
4 × LO
HARMONIC
5 × LO
HARMONIC
HARMONIC
8 × LO
08201-123
–30
500 750 1000 1250 1500 1750 2000
OUTPUT F RE QUENCY (MHz)
Figure 24. Output Return Loss at Worst-Case Attenuation vs.
LO Frequency, Supply, and Temperature
0
10
20
30
40
50
60
RF OUTPUT ( d Bm)
70
80
90
1195 1196 1197 1198 1199 1200 1201 1202 1203 1204 1205
LOWER
SIDEBAND
CARRIER
FEEDTHROUGH
HARMONIC
LO FREQUENCY (MHz)
SUPPRESSED
SIDEBAND
SECOND
HARMONIC
Figure 25. RF Output Spectral Plot over a 10 MHz Span
THIRD
–80
012345
08201-150
FREQUENCY ( M Hz )
678910
08201-124
Figure 27. RF Output Spectral Plot over a Wide Span
–60
–70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 1
08201-122
OFFSET FREQUENCY (Hz )
0M 100M
08201-129
Figure 28. Phase Noise Performance vs. LO Frequency, Supply,
and Temperature
Rev. A | Page 13 of 40

ADRF6750
–60
–70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M
OFFSET FREQUENCY (Hz )
10M 100M
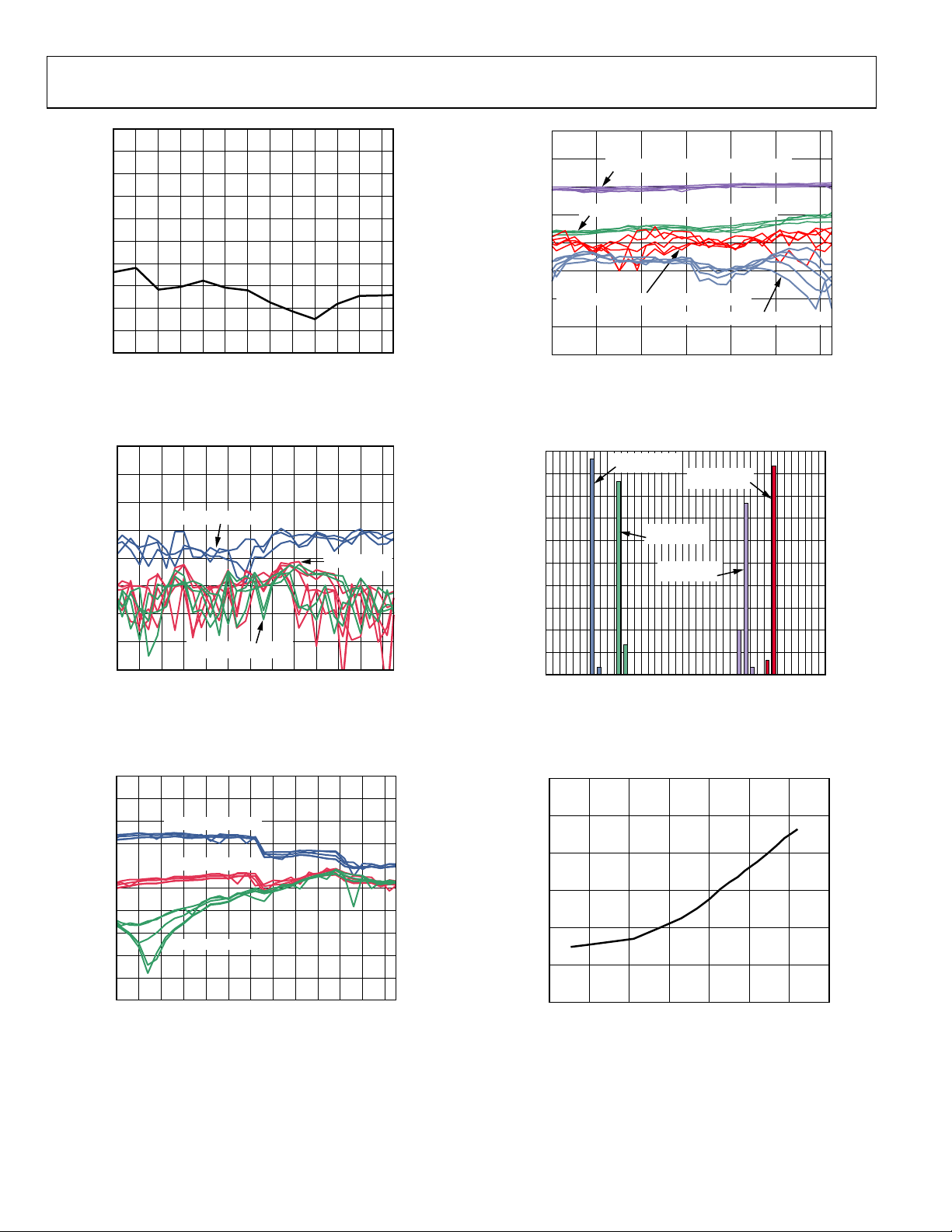
Figure 29. Phase Noise Performance Distribution at Worst-Case Conditions
–40
+25°C; 5.00 V
1350
+85°C; 4.75 V
+85°C; 5.25 V
–40°C; 4.75V
–40°C; 5.25V
1450
1550
1575
INTEGER BO UNDARY SPUR (dBc)
–45
–50
–55
–60
–65
–70
950
1150
1050
LO FREQUENCY (MHz)
1250
Figure 30. Integer Boundary Spur Performance vs. LO Frequency,
Supply, and Temperature
–60
–70
–80
–90
–100
–110
SPURS > 10MHz OFFSET FREQUENCY (dBc)
–120
900
08201-130
1000
PFD SPURS AT 20MHz OFFSET
REFERE NC E SPURS AT 10MHz OFF S ET
1100
1200
1300
LO FREQUENCY (MHz)
1400
1500
1600
1625
08201-127
Figure 32. Spurs > 10 MHz from Carrier vs. LO Frequency,
Supply, and Temperature
0.50
0.45
0.40
0.35
0.30
0.25
0.20
0.15
RMS JITTER (Degrees)
0.10
0.05
0
950
08201-125
1000
1100
1150
1050
LO FR EQUENCY (MHz)
1200
1250
1300
1350
1400
1450
1500
1550
1575
08201-131
Figure 33. Integrated Phase Noise vs. LO Frequency at
Nominal Conditions
80
70
60
50
40
30
OCCURENCE (%)
20
10
0
–85
–80 –75 –70 –65 –60 –55 –50 –45 –40
INTEGER BOUNDARY SPURS (dBc)
NOMINAL
WORST CASE
Figure 31. Integer Boundary Spur Distribution at Nominal
and Worst-Case Conditions
08201-126
Rev. A | Page 14 of 40
60
50
40
30
OCCURENCE (%)
20
10
0
NOMINAL
WORST CASE
0.3000.275 0.325 0.350 0.375 0.400 0.425 0.450 0.475 0.500
RMS JITT E R ( Degrees)
Figure 34. Integrated Phase Noise at Nominal and
Worst-Case Conditions
08201-137

ADRF6750
1G
100M
10M
1M
100k
10k
START OF ACQUISITION
1k
100
FREQUENCY ERROR (Hz)
10
1
0.1
–50 –25 0 25 50 75 100 125 150 175 200 225 250
ON CR0 WRITE
LDET
LDET
CR23[3] = 1
CR23[3] = 0
TIME (µs)
ACQUISITION
TO 100Hz
Figure 35. PLL Frequency Settling Time at Worst-Case Low Frequency
with Lock Detect Shown
0
–5
–10
–15
–20
–25
–30
–35
OUPTUT POWER (dBm)
–40
–45
–50
950
1100
1000
1050
LO FREQUENCY (MHz)
1250
1150
1200
1400
1300
1350
1550
1450
1575
1500
08201-133
Figure 36. Attenuator Gain vs. LO Frequency by Gain Code,
All Attenuator Code Steps
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8
ATTENUATOR RELATIVE STEP ACCURACY (dB)
–1.0
950
1000
1100
1150
1050
LO FREQ UE NCY (M Hz )
1200
1250
1300
1350
1400
1450
1500
1550
1575
Figure 37. Attenuator Relative Step Accuracy over all Attenuation Steps
vs. LO Frequency, Nominal Conditions
08201-132
08201-134
50
45
40
35
30
25
20
OCCURENCE (%)
15
10
5
0
–0.8–1.0 –0.6 –0.4 –0.2 0
ATTENUATO R RELATIVE STEP ACCURACY (dB)
NOMINAL
WORST CASE
0.2 0.4 0.6 0.8 1.0
08201-135
Figure 38. Attenuator Relative Step Accuracy Distribution at Nominal
and Worst-Case Conditions
50
0.25
0.50
NOMINAL
WORST CASE
0.75
1.00
1.25
1.50
1.75
2.00
2.25
08201-140
45
40
35
30
25
20
OCCURENCE (%)
15
10
5
0
–2.00
–2.25
–1.75
–1.50
–1.25
–1.00
ATTENUATO R RELATIVE STEP ACCURACY ACROSS
FULL OUT P UT FREQUENCY RANG E ( dB)
–0.75
0
–0.50
–0.25
Figure 39. Attenuator Relative Step Accuracy Across Full Output
Frequency Range Distribution at Nominal and Worst-Case Conditions
0.5
0.3
0.1
–0.1
–0.3
–0.5
–0.7
–0.9
–1.1
–1.3
ATTENUATOR RELATIVE STEP ACCURACY (d B)
–1.5
500
600
800
700
900
1100
1000
1200
1300
1400
1500
1600
1700
1800
1900
2000
LO FREQUENCY (MHz)
Figure 40. Attenuator Relative Step Accuracy over all Attenuation Steps
vs. LO Frequency for External VCO Mode, Nominal Conditions
08201-136
Rev. A | Page 15 of 40

ADRF6750
0.5
0
–0.5
–1.0
–1.5
–2.0
–2.5
ATTENUATOR ABSOLUTE S T EP ACCURACY (dB)
–3.0
950
1000
1100
1150
1050
LO FREQ UE NCY (MHz)
1200
1250
1300
1350
1400
1450
1500
1550
1575
08201-139
Figure 41. Attenuator Absolute Step Accuracy over all Attenuation Steps
vs. LO Frequency, Nominal Conditions
1.0
0.8
0.6
0.4
0.2
0
–0.2
ATNESS IN ANY 40MHz (dB)
–0.4
–0.6
GAIN FL
–0.8
1.0
950
1000
1100
1150
1050
LO FREQ UE NCY (MHz)
1200
1250
1300
1350
1400
1450
1500
1550
1575
Figure 44. Gain Flatness in any 40 MHz for all Attenuation Steps vs.
LO Frequency at Nominal Conditions
08201-149
70
60
50
40
30
OCCURENCE (%)
20
10
0
–3.2
–3.4
–3.0
–2.8
–2.6
–2.4
–2.2
ATTENUATO R ABSOLUTE ST E P ACCURACY ( d B)
–2.0
–1.8
NOMINAL
WORST CASE
–1.6
–1.4
–1.2
–1.0
–0.8
–0.6
–0.4
08201-138
Figure 42. Attenuator Absolute Step Accuracy Distribution at Nominal
and Worst-Case Conditions
1.5
1.0
0.5
0
–0.5
–1.0
–1.5
–2.0
ATTENUATORABSOLUTE STEP ACCURACY (dB)
–2.5
500
600
700
800
900
1100
1000
1200
1300
1400
1500
1600
1700
1800
1900
LO FREQUENCY (MHz)
2000
08201-142
Figure 43. Attenuator Absolute Step Accuracy over all Attenuation Steps
vs. LO Frequency for External VCO Mode, Nominal Conditions
5.0
4.5
4.0
3.5
3.0
2.5
2.0
SETTLING TIME (µs)
1.5
1.0
0.5
0
INCREASING STEP SIZE
1dB TO 6dB ATTENUATOR STEP SIZ E S
SETTLING TIMETO 0.2dB
SETTLING TIMETO 0.5dB
08201-143
Figure 45. Attenuator Settling Time to 0.2 dB and 0.5 dB for Small Steps
(1 dB to 6 dB) at Nominal Conditions
20
18
16
14
12
10
8
SETTLING TIME (µs)
6
4
2
0
INCREASING STEP SIZE
7dB TO 47dB ATTENUATOR STEP SI ZES
SETTLING TIMETO 0.2dB
SETTLING TIMETO 0.5dB
08201-144
Figure 46. Attenuator Settling Time to 0.2 dB and 0.5 dB for Large Steps
(7 dB to 47 dB) at Nominal Conditions
Rev. A | Page 16 of 40

ADRF6750
100
90
80
70
60
50
40
OCCURENCE (%)
30
20
10
0
0.50 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
NOMINAL SETTLING TIMETO 0.2dB
NOMINAL SETTLING TIMETO 0.5dB
WORST-CASE SET TLING T IME TO 0.2dB
WORST-CASE SET TLING T IME TO 0.5dB
ATTENUATOR SETTLING TIME (µ s)
Figure 47. Attenuator Settling Time to 0.2 dB and 0.5 dB Distribution
at Nominal and Worst-Case Conditions for Typical Small Step
100
90
80
70
60
50
40
OCCURENCE (%)
30
20
10
0
20 4 6 8 10 12 14 16 18 20
NOMINAL SETTLING T I M E TO 0.2dB
NOMINAL SETTLING T I M E TO 0.5dB
WORST-CAS E SETT LING TIME TO 0. 2 dB
WORST-CAS E SETT LING TIME TO 0. 5 dB
ATTENUATOR SETTLING TIME (µs )
Figure 48. Attenuator Settling Time to 0.2 dB and 0.5 dB Distribution
at Nominal and Worst-Case Conditions for Worst-Case Small Step
(36 dB to 42 dB)
100
90
80
70
60
50
40
OCCURENCE (%)
30
20
10
0
NOMINAL SETTLING TIME TO 0.2dB
NOMINAL SETTLING TIME TO 0.5dB
WORST-CASE SETTLING TIME TO 0.2dB
WORST-CASE SETTLING TIME TO 0.5dB
20 4 6 8 10 12 14 16 18 20
ATTENUATOR SETTLING TIME (µs)
08201-146
08201-145
08201-147
80
70
60
50
40
30
OCCURENCE (%)
20
10
0
30 6 9 12151821242730
NOMINAL SETTLING TIMETO 0.2dB
NOMINAL SETTLING TIMETO 0.5dB
WORST-CASE SET TLING T IME TO 0.2dB
WORST-CASE SET TLING T IME TO 0.5dB
ATTENUATOR SETTLING TIME (µs )
Figure 50. Attenuator Settling Time to 0.2 dB and 0.5 dB Distribution at
Nominal and Worst-Case Conditions for Worst-Case Large Step
(47 dB to 0 dB)
0
–10
–20
–30
–40
–50
OUTPUT POWER (dBm)
–60
–70
0 0.51.01.52.02.53.03.54.04.55.0
TURN-ON = 180n s
TURN-OFF = 270ns
TXDIS
TXDIS SETTLING TIME (µs)
Figure 51. TXDIA Turn-On Settling Time at Worst-Case Supply
and Temperature
08201-148
08201-151
Figure 49. Attenuator Settling Time to 0.2 dB and 0.5 dB Distribution at
Nominal and Worst-Case Conditions for Typical Large Step (0 dB to 47 dB)
Rev. A | Page 17 of 40

ADRF6750
THEORY OF OPERATION
OVERVIEW
The ADRF6750 device can be divided into the following basic
building blocks:
• PLL synthesizer and VCO
• Quadrature modulator
• Attenuator
• Vo lt age r e gu l ator
2
• I
C/SPI interface
Each of these building blocks is described in detail in the
sections that follow.
PLL SYNTHESIZER AND VCO
Overview
The phase-locked loop (PLL) consists of a fractional-N frequency
synthesizer with a 25-bit fixed modulus, allowing a frequency
resolution of less than 1 Hz over the entire frequency range. It
also has an integrated voltage-controlled oscillator (VCO) with
a fundamental output frequency ranging from 1900 MHz to
3150 MHz. This allows the PLL to generate a stable frequency at
2× LO, which is then divided down to provide a local oscillator
(LO) frequency ranging from 950 MHz to 1575 MHz to the
quadrature modulator.
Reference Input Section
The reference input stage is shown in Figure 52. SW1 and SW2
are normally closed switches. SW3 is normally open. When
power-down is initiated, SW3 is closed, and SW1 and SW2 are
open. This ensures that there is no loading of the REFIN pin at
power-down.
POWER-DOWN
CONTROL
100kΩ
NC
SW1
NC
SW2
SW3
REFIN
NC
Figure 52. Reference Input Stage
Reference Input Path
The on-chip reference frequency doubler allows the input
reference signal to be doubled. This is useful for increasing the
PFD comparison frequency. Making the PFD frequency higher
improves the noise performance of the system. Doubling the
PFD frequency usually improves the in-band phase noise
performance by 3 dBc/Hz.
The 5-bit R-divider allows the input reference frequency
(REF
) to be divided down to produce the reference clock
IN
to the PFD. Division ratios from 1 to 32 are allowed.
An additional divide-by-2 function in the reference input path
allows for a greater division range.
BUFFER
TO
R-DIVIDER
08201-006
FROM
REFIN
PIN
×2
DOUBLER
Figure 53. Reference Input Path
5-BIT
R-DIVIDER
÷2
TO
PFD
The PFD frequency equation is
= f
f
PFD
× [(1 + D)/(R × (1 + T))] (2)
REFIN
where:
f
is the reference input frequency.
REFIN
D is the doubler bit.
R is the programmed divide ratio of the binary 5-bit
programmable reference divider (1 to 32).
T is the divide-by-2 bit (0 or 1).
RF Fractional-N Divider
The RF fractional-N divider allows a division ratio in the PLL
feedback path that can range from 23 to 4095. The relationship
between the fractional-N divider and the LO frequency is
described in the following section.
INT and FRAC Relationship
The integer (INT) and fractional (FRAC) values make it
possible to generate output frequencies that are spaced by
fractions of the phase frequency detector (PFD) frequency.
See the Example—Changing the LO Frequency section for
more information.
The LO frequency equation is
LO = f
× (INT + (FRAC/225)) (1)
PFD
where:
LO is the local oscillator frequency.
f
is the PFD frequency.
PFD
INT is the integer component of the required division factor
and is controlled by the CR6 and CR7 registers.
FRAC is the fractional component of the required division
factor and is controlled by the CR0 to CR3 registers.
25
TO
PFD
08201-007
FROM VCO
OUTPUT
DIVIDERS
RF N-DIVIDER N = INT + FRAC/2
N-COUNTER
THIRD-ORDER
FRACTIONAL
INTERPOLATOR
INT
REG
Figure 54. RF Fractional-N Divider
FRAC
VALUE
Phase Frequency Detector (PFD) and Charge Pump
The PFD takes inputs from the R-divider and the N-counter and
produces an output proportional to the phase and frequency difference between them (see Figure 55 for a simplified schematic).
The PFD includes a fixed delay element that sets the width of
the antibacklash pulse, ensuring that there is no dead zone in
the PFD transfer function.
08201-008
Rev. A | Page 18 of 40

ADRF6750
HI
+IN
HI
–IN
U1
CLR1
CLR2
U2
UP
Q1D1
DELAY
DOWN
Q2D2
U3
CHARGE
PUMP
CP
08201-009
Figure 55. PFD Simplified Schematic
Lock Detect (LDET)
LDET (Pin 44) signals when the PLL has achieved lock to an
error frequency of less than 100 Hz. On a write to Register CR0,
a new PLL acquisition cycle starts, and the LDET signal goes
low. When lock has been achieved, this signal returns high.
Voltage-Controlled Oscillator (VCO)
The VCO core in the ADRF6750 consists of two separate VCOs,
each with 16 overlapping bands. Figure 56 shows an acquisition
plot demonstrating both the VCO overlap at roughly 1260 MHz
and the multiple overlapping bands within each VCO. The
choice of two 16-band VCOs allows a wide frequency range to
be covered without a large VCO sensitivity (K
) and resultant
VCO
poor phase noise and spurious performance. Note that the VCO
range is larger than the 2× LO frequency range of the part to
ensure that the device has enough margin to cover the full
frequency range over all conditions.
2.5
2.3
2.1
1.9
1.7
1.5
VTUNE (V)
1.3
1.1
0.9
0.7
0.5
800 900 1000 1100 1200 1300 1400 1500 1600 1700
LO FREQUENCY (MHz)
Figure 56. V
vs. LO Frequency
TUNE
08201-057
The correct VCO and band are chosen automatically by the
VCO and band select circuitry when Register CR0 is updated.
This is referred to as autocalibration.
The autocalibration time is set to 50 µs. During this time, the
VCO V
is disconnected from the output of the loop filter
TUNE
and is connected to an internal reference voltage. A typical
frequency acquisition is shown in Figure 57.
G
1
100M
10M
1M
AUTOCAL
TIME (µs)
100k
10k
FREQUENCY E RRO R (Hz)
1k
100
10
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
ACQUISIT ION TO 100Hz
TIME (µs)
08201-158
Figure 57. PLL Acquisition
After autocalibration, normal PLL action resumes and the
correct frequency is acquired to within a frequency error of
100 Hz in 170 s typically.
For a maximum cumulative step of 100 kHz, autocalibration
can be turned off by Register CR24, Bit 0. This enables cumulative PLL acquisitions of 100 kHz or less to occur without the
autocalibration procedure, which improves acquisition times
significantly (see Figure 58).
100k
10k
1k
ACQUISITION TO 100Hz
FREQUENCY E RRO R (Hz)
100
10
0 50 100 150 200
TIME (µs)
08201-159
Figure 58. PLL Acquisition Without Autocalibration for 100 kHz Step
The VCO displays a variation of K
VCO
as V
varies within
TUNE
the band and from band to band. Figure 59 shows how the
K
varies across the full LO frequency range. Also shown
VCO
is the average value for each of the frequency bands. Figure 59
is useful when calculating the loop filter bandwidth and
individual loop filter components.
Rev. A | Page 19 of 40

ADRF6750
40
35
30
25
20
15
10
VCO SENSITIVITY (MHz/V)
5
0
950
1150
1050
LO FREQ UE NCY (M Hz )
Figure 59. K
1250
vs. LO Frequency
VCO
1350
1450
1550
1575
08201-160
QUADRATURE MODULATOR
Overview
A basic block diagram of the ADRF6750 quadrature modulator
circuit is shown in Figure 60. The VCO generates a signal at the
2× LO frequency, which is then divided down to give a signal at the
LO frequency. This signal is then split into in-phase and quadrature
components to provide the LO signals that drive the mixers.
V-TO-I
P
IBB
IBBN
VCO
RFOUT TO
ATTENUATOR
BALUN
Figure 60. Block Diagram of the Quadrature Modulator
The I and Q baseband input signals are converted to currents by
the V-to-I stages, which then drive the two mixers. The outputs
of these mixers combine to feed the output balun, which provides a
single-ended output. This single-ended output is then fed to the
attenuator and, finally, to the external RFOUT signal pin.
Baseband Inputs
The baseband inputs, QBBP, QBBN, IBBP, and IBBN, must be
driven from a differential source. The nominal drive level of
0.9 V p-p differential (450 mV p-p on each pin) should be
biased to a common-mode level of 500 mV dc.
To set the dc bias level at the baseband inputs, refer to Figure 61.
The average output current on each of the AD9779 outputs is
10 mA. A current of 10 mA flowing through each of the 50 Ω
resistors to ground produces the desired dc bias of 500 mV at
each of the baseband inputs.
QUAD
PHASE
SPLITTER
÷2
V-TO-I
QBBP
QBBN
08201-012
CURRENT OUTPUT DAC
(EXAMPLE : AD9779 )
OUT1_P
OUT1_N
OUT2_N
OUT2_P
50Ω
50Ω
50Ω
50Ω
ADRF6750
IBBP
IBBN
QBBN
QBBP
08201-013
Figure 61. Establishing DC Bias Level on Baseband Inputs
The differential baseband inputs (QBBP, QBBN, IBBN, and
IBBP) consist of the bases of PNP transistors, which present
a high impedance of about 30 kΩ in parallel with roughly 2 pF
of capacitance. The impedance looks like 30 kΩ below 1 MHz
and starts to roll off at higher frequency. A 100 Ω differential
termination is recommended at the baseband inputs, and this
dominates the input impedance as seen by the input baseband
signal. This ensures that the input impedance, as seen by the
input circuit, remains flat across the baseband bandwidth. See
Figure 62 for a typical configuration.
CURRENT OUTPUT DAC
(EXAMPLE : AD977 9)
OUT1_P
OUT1_N
OUT2_N
OUT2_P
Figure 62. Typical Baseband Input Configuration
50Ω
50Ω
50Ω
50Ω
LOWPASS
FILTER
LOWPASS
FILTER
100Ω
100Ω
ADRF6750
IBBP
IBBN
QBBN
QBBP
08201-014
The swing of the AD9779 output currents ranges from 0 mA to
20 mA. The ac voltage swing is 1 V p-p single-ended or 2 V p-p
differential with the 50 Ω resistors in place. The 100 Ω differential termination resistors at the baseband inputs have the effect
of limiting this swing without changing the dc bias condition of
500 mV. The low-pass filter is used to filter the DAC outputs
and remove images when driving a modulator.
Another consideration is that the baseband inputs actually
source a current of 240 A out of each of the four inputs. This
current must be taken into account when setting up the dc bias
of 500 mV. In the initial example based on Figure 61, an error
of 12 mV occurs due to the 240 A current flowing through
the 50 Ω resistor. Analog Devices, Inc., recommends that the
accuracy of the dc bias should be 500 mV ±25 mV. It is also
important that this 240 A current have a dc path to ground.
Rev. A | Page 20 of 40

ADRF6750
Optimization
The carrier feedthrough and the sideband suppression performance of the ADRF6750 can be improved over the numbers
specified in Tabl e 1 by using the following optimization
techniques.
Carrier Feedthrough Nulling
Carrier feedthrough results from dc offsets that occur between
the P and N inputs of each of the differential baseband inputs.
Normally these inputs are set to a dc bias of approximately 500 mV.
However, if a dc offset is introduced between the P and N inputs of
either or both I and Q inputs, the carrier feedthrough is affected
in either a positive or a negative fashion. Note that the dc bias
level remains at 500 mV (average P and N level). The I channel
offset is often held constant while the Q channel offset is varied
until a minimum carrier feedthrough level is obtained. Then,
while retaining the new Q channel offset, the I channel offset is
adjusted until a new minimum is reached. This is usually performed at a single frequency and, thus, is not optimized over
the complete frequency range. Multiple optimizations at different
frequencies must be performed to ensure optimum carrier feedthrough across the full frequency range.
Sideband Suppression Nulling
Sideband suppression results from relative gain and relative
phase offsets between the I channel and Q channel and can
be optimized through adjustments to those two parameters.
Adjusting only one parameter improves the sideband suppression
only to a point. For optimum sideband suppression, an iterative
adjustment between phase and amplitude is required.
ATTENUATOR
The digital attenuator consists of six attenuation blocks: 1 dB,
2 dB, 4 dB, 8 dB, and two 16 dB blocks; each is separately
controlled. Each attenuation block consists of field effect
transistor (FET) switches and resistors that form either a pishaped or a T-shaped attenuator. By controlling the states of the
FET switches through the control lines, each attenuation block
can be set to the pass state (0 dB) or the attenuation state (n dB).
The various combinations of the six blocks provide the
attenuation states from 0 dB to 47 dB in 1 dB increments.
VOLTAGE REGULATOR
The voltage regulator is powered from a 5 V supply that is
provided by VCC1 (Pin 11) and produces a 3.3 V nominal
regulated output voltage, REGOUT, on Pin 12. This pin must
be connected (external to the IC) to the VREG1 through VREG6
package pins.
The regulator output (REGOUT) should be decoupled by
a parallel combination of 10 pF and 220 µF capacitors. The
220 µF capacitor, which is recommended for best performance,
decouples broadband noise, leading to better phase noise. Each
VREGx pin should have the following decoupling capacitors:
100 nF multilayer ceramic with an additional 10 pF in parallel,
both placed as close as possible to the DUT power supply pins.
Rev. A | Page 21 of 40
X7R or X5R capacitors are recommended. See the Evaluation
Board section for more information.
EXTERNAL VCO OPERATION
The ADRF6750 can be operated with an external VCO. This
can be useful if the user wants to improve the phase noise
performance or extend the frequency range. Note that the
external VCO needs to operate at a frequency of 2× LO.
To operate the ADRF6750 with an external VCO, follow
these steps:
1. Connect the charge pump output (Pin 9) to the loop filter
and onward to the external VCO input.
The K
of the external VCO needs to be taken into
VCO
account when calculating the loop bandwidth and loop
filter components. Note that a 50 kHz loop bandwidth is
recommended when using the internal VCO. This takes
into account the phase noise performance of the internal
VCO. It is possible for an external VCO to provide better
phase noise performance and a 50 kHz loop bandwidth
may not be optimal in that case. When selecting a loop
bandwidth, consider rms jitter, phase noise performance,
and acquisition time. ADISimPLL™ can be used to optimize the loop bandwidth with a variety of external VCOs.
2. Connect the output of the external VCO to the TESTLO
and
TESTLO
input pins.
It is likely that a low-pass filter will be needed to filter the
output of the external VCO. This is very important if the
external VCO has poor second harmonic performance.
Second harmonic performance directly impacts sideband
suppression performance. For example, −30 dBc second
harmonic performance leads to −30 dBc sideband suppression. Both TESTLO and
TESTLO
need to be dc biased. A
dc bias of 1.7 V to 3.3 V is recommended. The REGOUT
output provides a 3.3 V output voltage.
3. Select external VCO operation by setting the following bits:
• Set Register CR27[3] = 1. This bit multiplexes the
TESTLO and
TESTLO
through to the quadrature
modulator.
• Set Register CR28[5] = 1. This bit powers down the
internal VCO and connects the external VCO to
the PLL.
4. Set the correct polarity for the PFD based on the slope of
the K
. The default is for positive polarity. This bit is
VCO
accessed by Register CR12[3].
When selecting an external VCO, at times it is difficult to select
one with an appropriate frequency range and K
. One solu-
VCO
tion may be the ADF4350, which can function as VCO only
with a range of 137.5 MHz to 4.4 GHz. Note that the ADF4350
requires an autocalibration time of 100 µs which directly
impacts acquisition time.
I2C INTERFACE
The ADRF6750 supports a 2-wire, I2C-compatible serial bus
that drives multiple peripherals. The serial data (SDA) and serial

ADRF6750
clock (SCL) inputs carry information between any devices that
are connected to the bus. Each slave device is recognized by
a unique address. The ADRF6750 has two possible 7-bit slave
addresses for both read and write operations. The MSB of the
7-bit slave address is set to 1. Bit 5 of the slave address is set by
the CS pin (Pin 27). Bits[4:0] of the slave address are set to all
0s. The slave address consists of the seven MSBs of an 8-bit
word. The LSB of the word sets either a read or a write operation (see Figure 63). Logic 1 corresponds to a read operation,
whereas Logic 0 corresponds to a write operation.
To control the device on the bus, the following protocol must
be followed. The master initiates a data transfer by establishing
a start condition, defined by a high-to-low transition on SDA
while SCL remains high. This indicates that an address/data
stream follows. All peripherals respond to the start condition
and shift the next eight bits (the 7-bit address and the R/W bit).
The bits are transferred from MSB to LSB. The peripheral that
recognizes the transmitted address responds by pulling the data
line low during the ninth clock pulse. This is known as an
acknowledge bit. All other devices then withdraw from the bus
and maintain an idle condition. During the idle condition, the
device monitors the SDA and SCL lines waiting for the start
condition and the correct transmitted address. The R/W bit
determines the direction of the data. Logic 0 on the LSB of the
SLAVE ADDRESS[6:0]
1A500000X
MSB = 1 SET BY
PIN 27
(CS)
Figure 63. Slave Address Configuration
S SLAVE ADDR, LSB = 0 (WR) A(S) A(S) A(S)DATASUBADDR A(S) PDATA
S = START BIT P = STOP BIT
A(S) = ACKNOWLEDGE BY SLAVE
Figure 64. I
S
S = START BIT P = STOP BIT
A(S) = ACKNOWLEDGE BY SLAVE A(M) = ACKNOW L E DGE BY MASTER
Figure 65. I
START BIT
SLAVE ADDRESS SUBADDRESS DATA
2
C Write Data Transfer
SSLAVE ADDR, LSB = 0 (WR) SLAVE ADDR, LSB = 1 (RD)A(S) A(S)SUBADDR A(S) DATA A(M) DATA PA(M)
2
C Read Data Transfer
first byte indicates that the master writes information to the
peripheral. Logic 1 on the LSB of the first byte indicates that the
master reads information from the peripheral.
The ADRF6750 acts as a standard slave device on the bus. The
data on the SDA pin (Pin 29) is eight bits long, supporting the
7-bit addresses plus the R/W bit. The ADRF6750 has 34 subaddresses to enable the user-accessible internal registers. Therefore,
it interprets the first byte as the device address and the second
byte as the starting subaddress. Autoincrement mode is supported,
which allows data to be read from or written to the starting subaddress and each subsequent address without manually addressing
the subsequent subaddress. A data transfer is always terminated
by a stop condition. The user can also access any unique subaddress
register on a one-by-one basis without updating all registers.
Stop and start conditions can be detected at any stage of the data
transfer. If these conditions are asserted out of sequence with
normal read and write operations, they cause an immediate jump
to the idle condition. If an invalid subaddress is issued by the
user, the ADRF6750 does not issue an acknowledge and returns
to the idle condition. In a no acknowledge condition, the SDA
line is not pulled low on the ninth pulse. See
Figure 64 and
Figure 65 for sample write and read data transfers, Figure 66 for
the timing protocol, and Figure 2 for a more detailed timing
diagram.
R/W
CTRL
0 = WR
1 = RD
08201-016
08201-017
A(M) = NO ACKNOWLEDGE BY MASTER
08201-018
STOP BIT
SDA
SCL
S
SLAVE
ADDR[4:0]
Figure 66. I
SUBADDR[6:1] DATA[6:1]
2
C Data Transfer Timing
D0D7A0A7A5A6
ACKACKWR ACK
P
08201-002
Rev. A | Page 22 of 40

ADRF6750
SPI INTERFACE
The ADRF6750 also supports the SPI protocol. The part powers
2
C mode but is not locked in this mode. To stay in I2C
up in I
mode, it is recommended that the user tie the CS line to either
3.3 V or GND, thus disabling SPI mode. It is not possible to lock
2
the I
C mode, but it is possible to select and lock the SPI mode.
To select and lock the SPI mode, three pulses must be sent to the
CS pin, as shown in Figure 67. When the SPI protocol is locked
in, it cannot be unlocked while the device is still powered up. To
reset the serial interface, the part must be powered down and
powered up again.
Serial Interface Selection
The CS pin controls selection of the I2C or SPI interface.
Figure 67 shows the selection process that is required to lock
the SPI mode. To communicate with the part using the SPI
protocol, three pulses must be sent to the CS pin. On the third
rising edge, the part selects and locks the SPI protocol. Consistent
with most SPI standards, the CS pin must be held low during all
SPI communication to the part and held high at all other times.
SPI Serial Interface Functionality
The SPI serial interface of the ADRF6750 consists of the CS,
SDI (SDI/SDA), CLK (CLK/SCL), and SDO pins. CS is used to
select the device when more than one device is connected to the
serial clock and data lines. CLK is used to clock data in and out
of the part. The SDI pin is used to write to the registers. The
SDO pin is a dedicated output for the read mode. The part
operates in slave mode and requires an externally applied serial
clock to the CLK pin. The serial interface is designed to allow
the part to be interfaced to systems that provide a serial clock
that is synchronized to the serial data.
Figure 68 shows an example of a write operation to the ADRF6750.
Data is clocked into the registers on the rising edge of CLK using
a 24-bit write command. The first eight bits represent the write
command 0xD4, the next eight bits are the register address, and
the final eight bits are the data to be written to the specific register.
Figure 69 shows an example of a read operation. In this example,
a shortened 16-bit write command is first used to select the
appropriate register for a read operation, the first eight bits
representing the write command 0xD4 and the final eight bits
representing the specific register. Then the CS line is pulsed low
for a second time to retrieve data from the selected register
using a 16-bit read command, the first eight bits representing
the read command 0xD5 and the final eight bits representing
the contents of the register being read. Figure 3 shows the
timing for both SPI read and SPI write operations.
CS
(STARTING
HIGH)
CS
(STARTING
LOW)
SPI LOCKED ON
THIRD RISING ED G E
SPI LOCKED ON
THIRD RISING ED G E
Figure 67. Selecting the SPI Protocol
CBA
SPI FRAMING
EDGE
CBA
SPI FRAMING
EDGE
08201-019
Rev. A | Page 23 of 40

ADRF6750
CS
• • •
CLK
SDI D7D6D5D4D3D2D1D0 D0
START
WRITE
COMMAND [0xD4]
(CONTINUED)
(CONTINUED)
(CONTINUED)
CS
CLK
SDI
•••
•••
•••
D7 D6 D5 D4 D3 D2 D1
REGISTER
ADDRESS
D7 D6 D5 D4 D3 D2 D1 D0
DATA
BYTE
STOP
Figure 68. SPI Byte Write Example
CS
• • •
• • •
• • •
08201-020
CLK
SDI
CS
CLK
SDI
SDO
D7 D6 D5 D4 D3 D2 D1 D0 D0
START
D7 D6 D5 D4 D3 D2 D1 D0
START
WRITE
COMMAND [0xD4]
READ
COMMAND [0xD5]
D7 D6 D5 D4 D3 D2 D1
REGISTER
ADDRESS
XXXXXXX
D7 D6 D5 D4 D3 D2 D1 D0
XXXXXXXX
DATA
BYTE
Figure 69. SPI Byte Read Example
• • •
• • •
X
STOP
08201-021
Rev. A | Page 24 of 40

ADRF6750
PROGRAM MODES
The ADRF6750 has 34 8-bit registers to allow program control
of a number of functions. Either an SPI or an I
can be used to program the register set. For details about the
interfaces and timing, see Figure 63 to Figure 69. The registers
are documented in Ta b le 6 to Table 2 4.
Several settings in the ADRF6750 are double-buffered. These
settings include the FRAC value, the INT value, the 5-bit
R-divider value, the reference frequency doubler, the R/2
divider, and the charge pump current setting. This means that
two events must occur before the part uses a new value for
any of the double-buffered settings. First, the new value is
latched into the device by writing to the appropriate register.
Next, a new write must be performed on Register CR0. When
Register CR0 is written, a new PLL acquisition takes place.
For example, updating the fractional value involves a write to
Register CR3, Register CR2, Register CR1, and Register CR0.
Register CR3 should be written to first, followed by Register CR2
and Register CR1 and, finally, Register CR0. The new acquisition
begins after the write to Register CR0. Double buffering ensures
that the bits written to do not take effect until after the write to
Register CR0.
12-Bit Integer Value
Register CR7 and Register CR6 program the integer value (INT)
of the feedback division factor. The INT value is a 12-bit number
whose MSBs are programmed through Register CR7, Bits[3:0].
The LSBs are programmed through Register CR6, Bits[7:0]. The
INT value is used in Equation 1 to set the LO frequency. Note
that these registers are double-buffered.
25-Bit Fractional Value
Register CR3 to Register CR0 program the fractional value
(FRAC) of the feedback division factor. The FRAC value is a
25-bit number whose MSB is programmed through Register CR3,
Bit 0. The LSB is programmed through Register CR0, Bit 0. The
FRAC value is used in Equation 1 to set the LO frequency. Note
that these registers are double-buffered.
Reference Input Path
The reference input path consists of a reference frequency doubler,
a 5-bit reference divider, and a divide-by-2 function (see Figure 53).
The doubler is programmed through Register CR10, Bit 5. The
5-bit divider is enabled by programming Register CR5, Bit 4,
and the division ratio is programmed through Register CR10,
Bits[4:0]. The R/2 divider is programmed through Register CR10,
Bit 6. Note that these registers are double-buffered.
When using a 10 MHz reference input frequency, enable the
doubler and disable the 5-bit divider and divide-by-2 to ensure
a PFD frequency of 20 MHz. As mentioned in the Reference
Input Path section, making the PFD frequency higher improves
the system noise performance.
2
C interface
Charge Pump Current
Register CR9, Bits[7:4], specify the charge pump current
setting. With an R
value of 4.7 kΩ, the maximum charge
SET
pump current is 5 mA. The following equation applies:
I
CPmax
= 23.5/R
SET
The charge pump current has 16 settings from 312.5 µA to 5 mA.
For the loop filter that is specified in the application solution, a
charge pump current of 2.5 mA (Register CR9[7:4] = 7) gives a
loop bandwidth of 50 kHz, which is the recommended loop
bandwidth setting.
Transmit Disable Control (TXDIS)
The transmit disable control (TXDIS) is used to disable the RF output. TXDIS is normally held low. When asserted (brought high), it
disables the RF output. Register CR14 is used to control which
circuit blocks are powered down when TXDIS is asserted. To meet
both the off isolation power specifications and the turn-on/
turn-off settling time specifications, a value of 0x1B should be
loaded into Register CR14. This effectively ensures that the
attenuator is always enabled when TXDIS is asserted, even if other
circuitry is disabled.
Power-Down/Power-Up Control Bits
The three programmable power-up and power-down control
bits are as follows:
• Register CR12, Bit 2. Master power control bit for the PLL,
including the VCO. This bit is normally set to a default
value of 0 to power up the PLL.
• Register CR27, Bit 2. Controls the LO monitor outputs,
LOMONP and LOMONN. The default is 0 when the monitor
outputs are powered down. Setting this bit to 1 powers up
the monitor outputs to one of −6 dBm, −12 dBm, −18 dBm,
or −24 dBm, as controlled by Register CR27, Bits[1:0].
• Register CR29, Bit 0. Controls the quadrature modulator
power. The default is 0, which powers down the modulator.
Write a 1 to this bit to power up the modulator.
Lock Detect (LDET)
Lock detect is enabled by setting Register CR23, Bit 4, to 1.
Register CR23, Bit 3 sets the number of up/down pulses
generated by the PFD before lock detect is declared. The default
is 3072 pulses, which is selected when Bit 3 is set to 0. A more
aggressive setting of 2048 is selected when Bit 3 is set to 1. This
improves the lock detect time by 50 µs. Note, however, that it
does not affect the acquisition time to 100 Hz. Register CR23,
Bit 2 should be set to 0 for best operation. This bit sets up the
PFD up/down pulses to a coarse or low precision setting.
Rev. A | Page 25 of 40

ADRF6750
VCO Autocalibration
The VCO uses an autocalibration technique to select the correct
VCO and band, as explained in the Volt ag e- C ont rol l ed O sc i ll ator
(VCO) section. Register CR24, Bit 0, controls whether the autocalibration is enabled. For normal operation, autocalibration needs
to be enabled. However, if using cumulative frequency steps of
100 kHz or less, autocalibration can be disabled by setting this
bit to 1 and then a new acquisition is initiated by writing to
Register CR0.
Attenuator
The attenuator can be programmed from 0 dB to 47 dB in steps
of 1 dB. Control is through Register CR30, Bits[5:0].
Revision Readback
The revision of the silicon die can be read back via Register CR33.
Rev. A | Page 26 of 40

ADRF6750
REGISTER MAP
REGISTER MAP SUMMARY
Table 6. Register Map Summary
Register Address (Hex) Register Name Type Description
0x00 CR0 Read/write Fractional Word 4
0x01 CR1 Read/write Fractional Word 3
0x02 CR2 Read/write Fractional Word 2
0x03 CR3 Read/write Fractional Word 1
0x04 CR4 Read/write Reserved
0x05 CR5 Read/write 5-bit reference divider enable
0x06 CR6 Read/write Integer Word 2
0x07 CR7 Read/write Integer Word 1 and muxout control
0x08 CR8 Read/write Reserved
0x09 CR9 Read/write Charge pump current setting
0x0A CR10 Read/write Reference frequency control
0x0B CR11 Read/write Reserved
0x0C CR12 Read/write PLL power-up
0x0D CR13 Read/write Reserved
0x0E CR14 Read/write TXDIS control
0x0F CR15 Read/write Reserved
0x10 CR16 Read/write Reserved
0x11 CR17 Read/write Reserved
0x12 CR18 Read/write Reserved
0x13 CR19 Read/write Reserved
0x14 CR20 Read/write Reserved
0x15 CR21 Read/write Reserved
0x16 CR22 Read/write Reserved
0x17 CR23 Read/write Lock detector control
0x18 CR24 Read/write Autocalibration
0x19 CR25 Read/write Reserved
0x1A CR26 Read/write Reserved
0x1B CR27 Read/write LO monitor output and External VCO control
0x1C CR28 Read/write Internal VCO power-down
0x1D CR29 Read/write Modulator
0x1E CR30 Read/write Attenuator
0x1F CR31 Read only Reserved
0x20 CR32 Read only Reserved
0x21 CR33 Read only Revision code
Rev. A | Page 27 of 40

ADRF6750
REGISTER BIT DESCRIPTIONS
Table 7. Register CR0 (Address 0x00), Fractional Word 4
Bit Description1
7 Fractional Word F7
6 Fractional Word F6
5 Fractional Word F5
4 Fractional Word F4
3 Fractional Word F3
2 Fractional Word F2
1 Fractional Word F1
0 Fractional Word F0 (LSB)
1
Double-buffered. Loaded on the write to Register CR0.
Table 8. Register CR1 (Address 0x01), Fractional Word 3
Bit Description1
7 Fractional Word F15
6 Fractional Word F14
5 Fractional Word F13
4 Fractional Word F12
3 Fractional Word F11
2 Fractional Word F10
1 Fractional Word F9
0 Fractional Word F8
1
Double-buffered. Loaded on the write to Register CR0.
Table 9. Register CR2 (Address 0x02), Fractional Word 2
Bit Description1
7 Fractional Word F23
6 Fractional Word F22
5 Fractional Word F21
4 Fractional Word F20
3 Fractional Word F19
2 Fractional Word F18
1 Fractional Word F17
0 Fractional Word F16
1
Double-buffered. Loaded on the write to Register CR0.
Table 10. Register CR3 (Address 0x03), Fractional Word 1
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Reserved
3 Reserved
2 Reserved
1 Reserved
0 Fractional Word F24 (MSB)1
1
Double-buffered. Loaded on the write to Register CR0.
Table 11. Register CR5 (Address 0x05), 5-Bit Reference
Divider Enable
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 5-bit R-divider enable1
0 = disable 5-bit R-divider (default)
1 = enable 5-bit R-divider
3 Reserved
2 Reserved
1 Reserved
0 Reserved
1
Double-buffered. Loaded on the write to Register CR0.
Table 12. Register CR6 (Address 0x06), Integer Word 2
Bit Description1
7 Integer Word N7
6 Integer Word N6
5 Integer Word N5
4 Integer Word N4
3 Integer Word N3
2 Integer Word N2
1 Integer Word N1
0 Integer Word N0
1
Double-buffered. Loaded on the write to Register CR0.
Table 13. Register CR7 (Address 0x07), Integer Word 1 and
Muxout Control
Bit Description
[7:4] Muxout control
0000 = tristate
0001 = logic high
0010 = logic low
1101 = RCLK/2
1110 = NCLK/2
3 Integer Word N111
2 Integer Word N101
1 Integer Word N91
0 Integer Word N81
1
Double-buffered. Loaded on the write to Register CR0.
Rev. A | Page 28 of 40

ADRF6750
Table 14. Register CR9 (Address 0x09), Charge Pump
Current Setting
Bit Description
[7:4] Charge pump current1
0000 = 0.31 mA (default)
0001 = 0.63 mA
0010 = 0.94 mA
0011 = 1.25 mA
0100 = 1.57 mA
0101 = 1.88 mA
0110 = 2.19 mA
0111 = 2.50 mA
1000 = 2.81 mA
1001 = 3.13 mA
1010 = 3.44 mA
1011 = 3.75 mA
1100 = 4.06 mA
1101 = 4.38 mA
1110 = 4.69 mA
1111 = 5.00 mA
3 Reserved
2 Reserved
1 Reserved
0 Reserved
1
Double-buffered. Loaded on the write to Register CR0.
Table 15. Register CR10 (Address 0x0A), Reference
Frequency Control
Bit Description
7 Reserved1
6 R/2 divider enable1
0 = bypass R/2 divider (default)
1 = enable R/2 divider
5 R-doubler enable1
0 = disable doubler (default)
1 = enable doubler
[4:0] 5-bit R-divider setting1
00000 = divide by 32 (default)
00001 = divide by 1
00010 = divide by 2
…
11110 = divide by 30
11111 = divide by 31
1
Double-buffered. Loaded on the write to Register CR0.
Table 16. Register CR12 (Address 0x0C), PLL Power-Up
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Reserved
3 Reserved
2 Power down PLL
0 = power up PLL (default)
1 = power down PLL
1 Reserved
0 Reserved
Table 17. Register CR14 (Address 0x0E), TXDIS Control
Bit Description
7 Reserved
6 Reserved
5 TxDis_attenuator
0 = attenuator always enabled (default)
1 = disable attenuator when TXDIS = 1
4 TxDis_LOBuf
0 = LOBuf always enabled (default)
1 = disable LOBuf when TXDIS = 1
3 TxDis_QuadDiv
0 = QuadDiv always enabled (default)
1 = disable QuadDiv when TXDIS = 1
2 Reserved
1 TxDis_LOX2
0 = LOX2 always enabled (default)
1 = Disable LOX2 when TXDIS = 1
0 TxDis_RFMON
0 = RFMON always enabled (default)
1 = Disable RFMON when TXDIS = 1
Table 18. Register CR23 (Address 0x17), Lock Detector Control
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Lock detector enable
0 = lock detector disabled (default)
1 = lock detector enabled
3 Lock detector up/down count
0 = 3072 up/down pulses
1 = 2048 up/down pulses
2 Lock detector precision
0 = low, coarse (16 ns)
1 = high, fine (6 ns)
1 Reserved
0 Reserved
Rev. A | Page 29 of 40

ADRF6750
Table 19. Register CR24 (Address 0x18), Autocalibration
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Reserved
3 Reserved
2 Reserved
1 Reserved
0 Disable autocalibration
0 = enable autocalibration (default)
1 = disable autocalibration
Table 20. Register CR27 (Address 0x1B), LO Monitor Output
and External VCO Control
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Reserved
3 External VCO control
0 = internal VCO selected
1 = external VCO selected
2 Power up LO monitor output
0 = power down (default)
1 = power up
[1:0] Monitor output power into 50 Ω
00 = −24 dBm (default)
01 = −18 dBm
10 = −12 dBm
11 = −6 dBm
Table 21. Register CR28 (Address 0x1C), Internal VCO
Power-Down
Bit Description
7 Reserved
6 Reserved
5 Internal VCO power-down
0 = power up (default)
1 = power down
4 Reserved
3 Reserved
2 Reserved
1 Reserved
0 Reserved
Table 22. Register CR29 (Address 0x1D), Modulator
Bit Description
7 Reserved
6 Reserved
5 Reserved
4 Reserved
3 Reserved
2 Reserved
1 Reserved
0 Power up modulator
0 = power down (default)
1 = power up
Table 23. Register CR30 (Address 0x1E), Attenuator
Bit Description
7 Reserved
6 Reserved
[5:0] Attenuator A5 to Attenuator A0
000000 = 0 dB
000001 = 1 dB
000010 = 2 dB
…
011111 = 31 dB
110000 = 32 dB
110001 = 33 dB
…
111101 = 45 dB
111110 = 46 dB
111111 = 47 dB
Table 24. Register CR33 (Address 0x21), Revision Code1
Bit Description
7 Revision code
6 Revision code
5 Revision code
4 Revision code
3 Revision code
2 Revision code
1 Revision code
0 Revision code
1
Read-only register.
Rev. A | Page 30 of 40

ADRF6750
SUGGESTED POWER-UP SEQUENCE
INITIAL REGISTER WRITE SEQUENCE
After applying power to the part, perform the initial register write
sequence that follows. Note that Register CR33, Register CR32,
and Register CR31 are read-only registers. Also note that all writable registers should be written to on power-up. Refer to the
Register Map section for more details on all registers.
1. Write Register CR30: 0x00. Set attenuator to 0 dB gain.
2. Write Register CR29: 0x00. Modulator is powered down.
The modulator is powered down by default to ensure that
no spurious signals can occur on the RF output when the
PLL is carrying out its first acquisition. The modulator
should be powered up only when the PLL is locked.
3. Write Register CR28: 0x01. Power up the internal VCO.
Write 0x21 if using an external VCO.
4. Write Register CR27: 0x00. Power down the LO monitor
and select the internal VCO. Write 0x08 to select an
external VCO.
5. Write Register CR26: 0x00. Reserved register.
6. Write Register CR25: 0x32. Reserved register.
7. Write Register CR24: 0x18. Enable autocalibration.
8. Write Register CR23: 0x70. Enable lock detector and
choose the recommended lock detect timing.
9. Write Register CR22: 0x00. Reserved register.
10. Write Register CR21: 0x00. Reserved register.
11. Write Register CR20: 0x00. Reserved register.
12. Write Register CR19: 0x00. Reserved register.
13. Write Register CR18: 0x00. Reserved register.
14. Write Register CR17: 0x00. Reserved register.
15. Write Register CR16: 0x00. Reserved register.
16. Write Register CR15: 0x00. Reserved register.
17. Write Register CR14: 0x1B. The attenuator is always
enabled, even when TXDIS is asserted.
18. Write Register CR13: 0x18. Reserved register.
19. Write Register CR12: 0x08. PLL powered up.
20. Write Register CR11: 0x00. Reserved register.
21. Write Register CR10: 0x21. The reference frequency doubler
is enabled, and the 5-bit divider and R/2 divider are bypassed.
22. Write Register CR9: 0x70. With the recommended loop
filter component values and R
Figure 71, the charge pump current is set to 2.5 mA for
a loop bandwidth of 50 kHz.
23. Write Register CR8: 0x00. Reserved register.
24. Write Register CR7: 0x0X. Set according to Equation 1 in
the Theory of Operation section. Also sets the MUXOUT
pin to tristate.
= 4.7 kΩ, as shown in
SET
Rev. A | Page 31 of 40
25. Write Register CR6: 0xXX. Set according to Equation 1 in
the Theory of Operation section.
26. Write Register CR5: 0x00. Disable the 5-bit reference divider.
27. Write Register CR4: 0x01. Reserved register.
28. Write Register CR3: 0x0X. Set according to Equation 1 in
the Theory of Operation section.
29. Write Register CR2: 0xXX. Set according to Equation 1 in
the Theory of Operation section.
30. Write Register CR1: 0xXX. Set according to Equation 1 in
the Theory of Operation section.
31. Write Register CR0: 0xXX. Set according to Equation 1 in
the Theory of Operation section. Register CR0 must be the
last register written for all the double-buffered bit writes to
take effect.
32. Monitor the LDET output or wait 170 s to ensure that the
PLL is locked.
33. Write Register CR29: 0x01. Power up modulator. The write
to Register CR29 does not need to be followed by a write to
Register CR0 because this register is not double-buffered.
Example—Changing the LO Frequency
Following is an example of how to change the LO frequency
after the initialization sequence. Using an example in which
the PLL is locked to 1200 MHz, the following conditions apply:
• f
• Divide ratio N = 60, so INT = 60 decimal and FRAC = 0
The INT registers contain the following values:
Register CR7 = 0x00 and Register CR6 = 0x3C
The FRAC registers contain the following values:
Register CR3 = 0x00, Register CR2 = 0x00,
Register CR1 = 0x00, and Register CR0 = 0x00
To change the LO frequency to 1230 MHz, the divide ratio N
must be set to 61.5. Therefore, INT must be set to 61 decimal
and FRAC must be set to 16777216 by writing to the following
registers:
1. Set the INT registers as follows:
2. Set the FRAC registers as follows:
Note that Register CR0 should be the last write in this sequence.
Writing to Register CR0 causes all double-buffered registers to
be updated, including the INT and FRAC registers, and starts a
new PLL acquisition.
If the cumulative frequency step is 100 kHz or less, the user can
turn off autocalibration. This process involves an additional
write of 0x19 to Register CR24, resulting in a smoother
frequency step and shorter acquisition time.
= 20 MHz (assumed)
PFD
Register CR7 = 0x00, Register CR6 = 0x3D
Register CR3 = 0x01, Register CR2 = 0x00,
Register CR1 = 0x00, Register CR0 = 0x00

ADRF6750
EVALUATION BOARD
GENERAL DESCRIPTION
This board is designed to allow the user to evaluate the
performance of the ADRF6750. It contains the following:
• I/Q modulator with integrated fractional-N PLL and VCO
• SPI and I
2
C interface connectors
• DC biasing and filter circuitry for the baseband inputs
• Low-pass loop filter circuitry
• 10 MHz reference clock
• Circuitry to support differential signaling to the TESTLO
inputs, including dc biasing circuitry
• Circuitry to monitor the LOMON outputs
• SMA connectors for power supplies and the RF output
The evaluation board comes with associated software to allow
easy programming of the ADRF6750.
HARDWARE DESCRIPTION
For more information, refer to the circuit diagram in Figure 71.
Power Supplies
An external 5 V supply (DUT +5 V) drives both an on-chip
3.3 V regulator and the quadrature modulator.
The regulator feeds the VREG1 through VREG6 pins on the
chip with 3.3 V. These pins power the PLL circuitry.
The external reference clock generator can be driven by a 3 V
supply or by a 5 V supply. These supplies can be connected via
an SMA connector, VCO +V.
Recommended Decoupling for Supplies
The external 5 V supply is decoupled initially by a 10 µF capacitor
and then further by a parallel combination of 100 nF and 10 pF
capacitors that are placed as close to the DUT as possible for good
local decoupling. The regulator output should be decoupled by a
parallel combination of 10 pF and 220 µF capacitors. The 220 µF
capacitor decouples broadband noise, which leads to better phase
noise and is recommended for best performance. Case Size C
220 µF capacitors are used to minimize area. A parallel combination of 100 nF and 10 pF capacitors should be placed on each
VREGx pin. Again, these capacitors are placed as close to the pins
as possible. The impedance of all these capacitors should be low
and constant across a broad frequency range. Surface-mount
multilayered ceramic chip (MLCC) Class II capacitors provide
very low ESL and ESR, which assist in decoupling supply noise
effectively. They also provide good temperature stability and good
aging characteristics. Capacitance also changes vs. applied bias
voltage. Larger case sizes have less capacitance change vs. applied
bias voltage and also lower ESR but higher ESL. The 0603 size
capacitors provide a good compromise. X5R and X7R capacitors
are examples of these types of capacitors and are recommended
for decoupling.
SPI and I2C Interface
The SPI interface connector is a 9-way, D-type connector that can
be connected to the printer port of a PC. Figure 70 shows the
PC cable diagram that must be used with the provided software.
2
There is also an option to use the I
receptacle connector. This is a standard I
C interface by using the I2C
2
C connector. Pull-up
resistors are required on the signal lines. The CS pin can be used
to set the slave address of the ADRF6750. CS high sets the slave
address to 0x60, and CS low sets the slave address to 0x40.
1
6
2
7
3
8
4
9
5
9-WAY
FEMALE
D-TYPE
1
CLK
DATA
Figure 70. SPI PC Cable Diagram
Rev. A | Page 32 of 40
2
3
LE
4
5
6
GND
7
8
9
10
11
12
13
25-WAY
MALE
D-TYPE
TO PC
PRINTER PORT
14
15
16
17
18
19
20
21
22
23
24
25
PC
08201-022

ADRF6750
Baseband Inputs
The pair of I and Q baseband inputs are served by SMA inputs
so that they can be driven directly from an external generator,
which can also provide the dc bias required. An option is
provided to supply this dc bias through Connector J1, as well.
There is also an option to filter the baseband inputs, although
filtering may not be required, depending on the quality of the
baseband source.
Loop Filter
A fourth-order loop filter is provided at the output of the charge
pump and is required to adequately filter noise from the Σ-
modulator used in the N-divider. With the charge pump current
set to a midscale value of 2.5 mA and using the on-chip VCO,
the loop bandwidth is approximately 60 kHz, and the phase
margin is 55°. C0G capacitors are recommended for use in the
loop filter because they have low dielectric absorption, which is
required for fast and accurate settling time. The use of non-C0G
capacitors may result in a long tail being introduced into the
settling time transient.
Reference Input
The reference input can be supplied by a 10 MHz Taitien clock
generator or by an external clock through the use of Connector J7.
The frequency range of the reference input is from 10 MHz to
20 MHz; if the lower frequency clock is used, the on-chip reference
frequency doubler should be used to set the PFD frequency to
20 MHz to optimize phase noise performance.
TESTLO Inputs
These pins are differential test inputs that allow a variety of
debug options. On this board, the capability is provided to drive
these pins with an external 2× LO signal that is then applied to
an Anaren balun to provide a differential input signal.
When driving the TESTLO pins, the PLL can be bypassed, and the
modulator can be driven directly by this external 2× LO signal.
These inputs also require a dc bias; the following two options
are provided:
• A dc bias point of 3.3 V through a series inductor path.
A resistor in parallel is provided to de-Q any resonance.
• A dc bias point, which can be varied from 0 V to 3.3 V
through a resistor divider network. Note that these resistors
should be large in value to ensure that the current drawn is
small and that the resistors have little effect on the input
resistance.
If these pins are not used, ground them by inserting 0 Ω resistors
in R47 and R54.
LOMON Outputs
These pins are differential LO monitor outputs that provide a
replica of the internal LO frequency at 1× LO. The single-ended
power in a 50 Ω load can be programmed to −24 dBm, −18 dBm,
−12 dBm, or −6 dBm. These open-collector outputs must be
terminated to 3.3 V. Because both outputs must be terminated
to 50 Ω, options are provided to terminate to 3.3 V using onboard 50 Ω resistors or by series inductors (or a ferrite bead),
in which case the 50 Ω termination is provided by the measuring
instrument. If not used, these outputs should be tied to REGOUT.
CCOMPx Pins
The CCOMPx pins are internal compensation nodes that must
be decoupled to ground with a 100 nF capacitor.
MUXOUT
MUXOUT is a test output that allows different internal nodes
to be monitored. It is a CMOS output stage that requires no
termination.
Lock Detect (LDET)
Lock detect is a CMOS output that indicates the state of the
PLL. A high level indicates a locked condition, and a low level
indicates a loss of lock condition.
TXDIS
This input disables the RF output. It can be driven from an external stimulus or simply connected high or low by Jumper J18.
RF Output (RFOUT)
RFOUT is the RF output of the ADRF6750. RFOUT MOD
should be grounded in the user application.
Rev. A | Page 33 of 40

ADRF6750
08201-072
Figure 71. Applications Circuit Schematic
Rev. A | Page 34 of 40
USER-DEFINED VALUE

ADRF6750
PCB ARTWORK
Component Placement
08201-073
Figure 72. Evaluation Board, Top Side Component Placement
Figure 73. Evaluation Board, Bottom Side Component Placement
Rev. A | Page 35 of 40
08201-074

ADRF6750
PCB Layer Information
08201-075
Figure 74. Evaluation Board, Top Side—Layer 1
Figure 75. Evaluation Board, Bottom Side—Layer 4
Rev. A | Page 36 of 40
08201-076

ADRF6750
Figure 76. Evaluation Board, Ground—Layer 2
08201-077
08201-078
Figure 77. Evaluation Board Power—Layer 3
Rev. A | Page 37 of 40

ADRF6750
BILL OF MATERIALS
Table 25. Bill of Materials
Qty Reference Designator Description Manufacturer Part Number
1 DUT ADRF6750 LFCSP, 56-lead 8 mm × 8 mm Analog Devices ADRF6750ACPZ
1 Y2 VCO, 10 MHz Jauch O 10.0-VX3Y-T1
1 SPI Connector, 9-pin, D-sub plug, SDEX9PNTD ITW McMurdo FEC 150750
1 CONN Connector, I2C, SEMCONN receptacle Molex 15830064
2 C1, C21 Capacitor, 10 µF, 25 V, tantalum, TAJ-C AVX FEC 197518
13
15
1 C20 Capacitor, 220 µF, 6.3 V, tantalum, Case Size C AVX FEC 197087
4 C30 to C33 Capacitor spacing, 0402 (do not install)
1 C26 Capacitor, 1 nF, 50 V, XR7, ceramic, 0603 Murata FEC 722170
1 C24 Capacitor, 47 nF, 50 V, Xr7, ceramic, 1206 Murata FEC 1740542
2 C23, C25 Capacitor, 680 pF, 50 V, NPO, ceramic, 0603 Murata FEC 430997
4 C38, C39 Capacitor, 1 nF, 50 V, C0G, ceramic, 0402 Murata FEC 8819556
4 C40, C44, C46, C57 Capacitor, 100 pF, 50 V, C0G, ceramic, 0402 Murata FEC 8819572
12
3 J18, J20, J21 Jumper, 3-pin + shunt Harwin
4 L1, L2 Inductor, 20 nH, 0402, LQW series Murata LQW15AN20N
4 L3, L4 Inductor, 10 µH, 0805, LQM series Murata LQM21FN1N100M
4 R2 to R5 Resistor spacing, 0603 (user-defined values)
5 R6 to R9, R36 Resistor, 0 Ω, 1/16 W, 1%, 0402 Vishay Draloric FEC 1158241
2 R10, R11 Resistor, 0402, spacing (do not install)
1 R13 Resistor, 4.7 kΩ, 1/10 W, 1%, 0603 Bourns CR0603-FX-472
2 R14, R39 Resistor, 1.2 kΩ, 1/10 W, 5%, 0603 Yageo FEC 9233393
2 R12, R16 Resistor, 270 Ω, 1/16 W, 1%, 0603 Multicomp FEC 9330917
1 R15 Resistor, 300 Ω, 1/16 W, 1%, 0603 Multicomp FEC 93330968
2 R17, R18 Resistor, 0603, spacing (do not install)
3 R35, R44, R45 Resistor, 51 Ω, 1/16 W, 5%, 0402 Bourns CR0402-JW-510
4 R48 to R51 Resistor, 330 Ω, 1/10 W, 5%, 0805 Bourns CR0805-JW-331
3 R59 to R61 Resistor, 100 Ω, 1/10 W, 5%, 0805 Bourns CR0805-JW-101
C2, C4, C6, C8, C10, C12, C14, C16,
C18, C19, C48, C53, C55
C3, C5, C7, C9, C11, C13, C15, C17,
C22, C47, C49 to C52, C54
J1 to J5, J7, J10 to J12, J14, J15,
TXDIS
Capacitor, 10 pF, 50 V, ceramic, C0G, 0402 Murata FEC 8819564
Capacitor, 100 nF, 25 V, X7R, ceramic, 0603 AVX FEC 317287
SMA end launch connector Johnson/Emerson 142-0701-851
FEC 148533 and
FEC 150411
Rev. A | Page 38 of 40

ADRF6750
OUTLINE DIMENSIONS
PAD
0.30
0.23
0.18
PIN 1
INDICATOR
56
1
4.95
4.80 SQ
4.65
PIN 1
INDICATOR
8.00
BSC SQ
TOP
VIEW
7.75
BSC SQ
0.60 MAX
43
42
0.60 MAX
EXPOSED
(BOTTOM VIEW)
1.00
0.85
0.80
SEATING
PLANE
12° MAX
0.50
0.40
0.30
0.80 MAX
0.65 TYP
0.50 BSC
COMPLIANT TO JEDEC STANDARDS MO-220-VLLD-2
0.20 REF
0.05 MAX
0.02 NOM
29
28
COPLANARITY
0.08
6.50
REF
14
15
FOR PROPER CONNECTION OF
THE EXPOSED PAD, REFER TO
THE PIN CONFIGURATION AND
FUNCTION DESCRIPTIONS
SECTION OF THIS DATA SHEET.
0.30 MIN
041807-B
Figure 78. 56-Lead Lead Frame Chip Scale Package [LFCSP_VQ]
8 mm × 8 mm Body, Very Thin Quad
(CP-56-3)
Dimensions shown in millimeters
ORDERING GUIDE
Model1 Temperature Range Package Description Package Option
ADRF6750ACPZ-R7 −40°C to +85°C 56-Lead Lead Frame Chip Scale Package [LFCSP_VQ], 7" Tape and Reel CP-56-3
ADRF6750-EVALZ Evaluation Board
1
Z = RoHS Compliant Part.
Rev. A | Page 39 of 40

ADRF6750
NOTES
I2C refers to a communications protocol originally developed by Philips Semiconductors (now NXP Semiconductors).
©2010 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D08201-0-4/10(0)
Rev. A | Page 40 of 40
 Loading...
Loading...