

2.5 MSPS, 20-Bit
Σ∆
ADC
Preliminary Technical Data
FEATURES
High performance 20-bit Sigma-Delta ADC
118dB SNR at 78kHz output data rate
100dB SNR at 2.5MHz output data rate
2.5 MHz maximum fully filtered output word rate
Programmable over-sampling rate (8x to 256x)
Flexible parallel interface
Fully differential modulator input
On-chip differential amplifier for signal buffering
Low pass FIR filter with default or user programmable
coefficients
Over-range alert bit
Digital offset and gain correction registers
Filter bypass modes
Low power and power down modes
SYNC
Synchronization of multiple devices via
APPLICATIONS
Data acquisition systems
Vibration analysis
Instrumentation
PRODUCT OVERVIEW
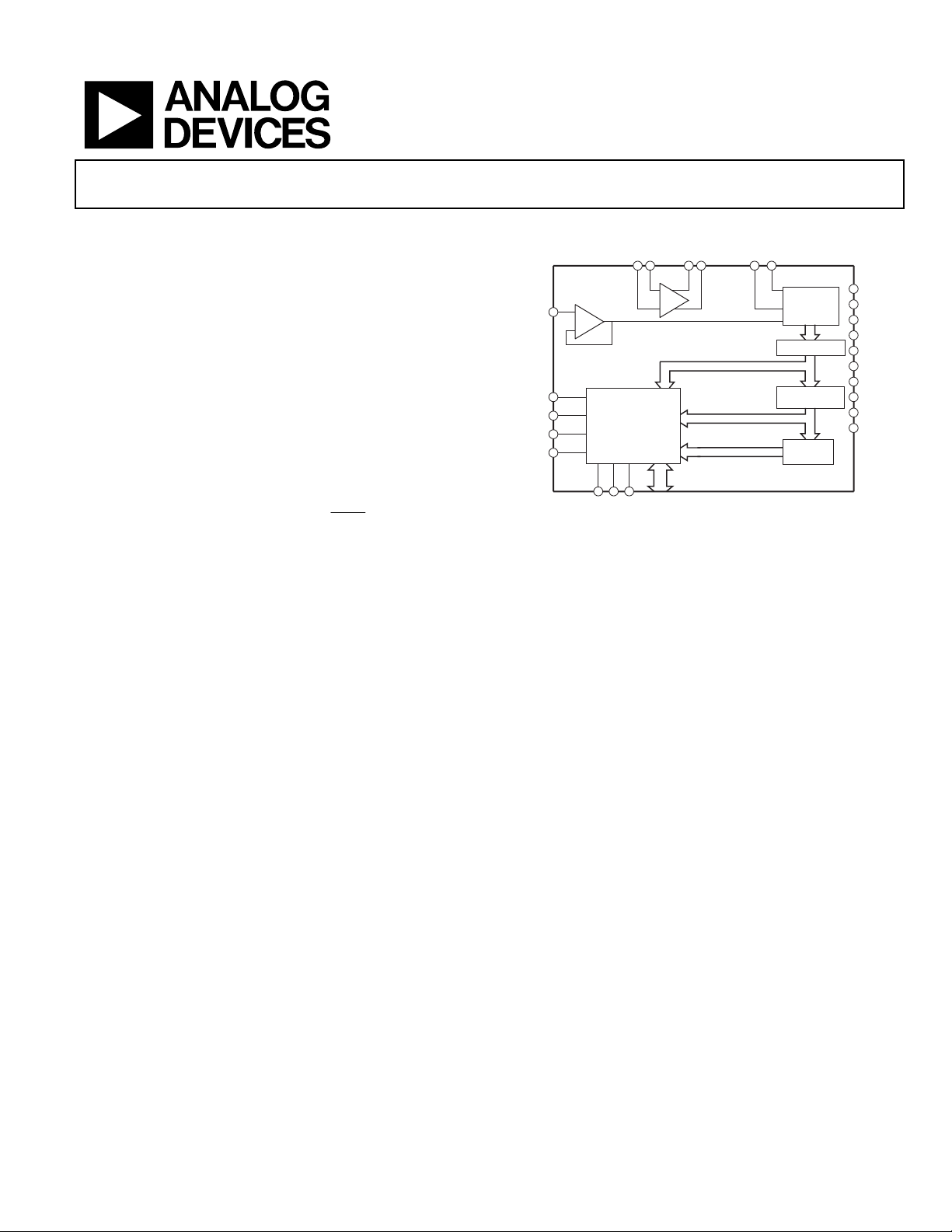
The AD7760 high performance 20-bit sigma delta analog to
digital converter combines wide input bandwidth and high
speed with the benefits of sigma delta conversion with
performance of 100dB SNR at 2.5MSPS making it ideal for high
speed data acquisition. Wide dynamic range combined with
significantly reduced anti-aliasing requirements simplify the
design process. An integrated buffer to drive the reference, a
differential amplifier for signal buffering and level shifting, an
over-range flag, internal gain & offset registers and a low-pass
digital FIR filter make the AD7760 a compact highly integrated
data acquisition device requiring minimal peripheral
component selection. In addition the device offers
programmable decimation rates and the digital FIR filter can be
adjusted if the default characteristics are not appropriate to the
application. The AD7760 is ideal for applications demanding
high SNR without necessitating design of complex front end
signal processing.
pin
AD7760
FUNCTIONAL BLOCK DIAGRAM
VIN+VIN-
AV
Multi-Bit
Sigma-Delta
Modulator
Reconstruction
VREF+
+
BUF
-
DIFF
AD7760
MCLK
MCLK
SYNC
RESET
Control Logic,
I/O and
Registers
DB0 - DB15
CS
DRDY
RD/WR
Figure 1.
The differential input is sampled at up to 40MS/s by an analog
modulator. The modulator output is processed by a series of
low-pass filters, the final one having default or user
programmable coefficients. The sample rate, filter corner
frequencies and output word rate are set by a combination of
the external clock frequency and the configuration registers of
the AD7760.
The reference voltage supplied to the AD7760 determines the
analog input range. With a 4V reference, the analog input range
is ±3.2V differential biased around a common mode of 2V. This
common mode biasing can be achieved using the on-chip
differential amplifiers, further reducing the external signal
conditioning requirements.
The AD7760 is available in an exposed paddle 64-lead TQFP
and 48-lead CSP packages and is specified over the industrial
temperature range from -40°C to +85°C.
Programmable
Decimation
FIR Filter
Engine
DD1
AV
DD2
AV
DD3
AV
DD4
DECAP
R
BIAS
AGND
V
DRIVE
DV
DD
DGND
Rev. PrN
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.

AD7760 Preliminary Technical Data
TABLE OF CONTENTS
TABLE OF CONTE NTS.................................................................. 2
Clocking the AD7760..................................................................... 14
AD7760—Specifications.................................................................. 3
Timing Specifications....................................................................... 5
Timing Diagrams.............................................................................. 6
Absolute Maximum Ratings............................................................ 7
ESD Caution.................................................................................. 7
Pin Configuration and Functional Descriptions.......................... 8
Te r m in o l o g y .................................................................................... 10
Typical Performance Characteristics ...........................................11
Theory of Operation ...................................................................... 12
AD7760 Interface............................................................................13
REVISION HISTORY
Driving The AD7760...................................................................... 15
Using The AD7760..................................................................... 16
Bias Resistor Selection ............................................................... 16
Programmable FIR Filter............................................................... 17
Downloading a User-Defined Filter ............................................18
Example Filter Download ......................................................... 18
AD7760 Registers........................................................................... 20
Non Bit-Mapped Registers ........................................................21
Outline Dimensions....................................................................... 22
Ordering Guide .......................................................................... 22
Rev. PrN | Page 2 of 22
Preliminary Technical Data AD7760
AD7760—SPECIFICATIONS
Table 1. V
Parameter Test Conditions/Comments Specifcation Unit
DYNAMIC PERFORMANCE
Decimate by 256 MCLK = 24.576MHz, ODR = 48kHz, FIN = 1kHz Sine Wave
Signal to Noise Ratio (SNR)
Spurious Free Dynamic Range (SFDR) 1 Non-harmonic 118 dBFS typ
Total Harmonic Distortion (THD)
Intermodulation Distortion (IMD)
Decimate by 16 MCLK = 40MHz, ODR = 1.25MHz, FIN =100kHz Sine Wave
Signal to Noise Ratio (SNR)
Spurious Free Dynamic Range (SFDR) 1 Non-harmonic 103 dBFS typ
Total Harmonic Distortion (THD)
Intermodulation Distortion (IMD)
Decimate by 8 MCLK = 40MHz, ODR = 2.5MHz, FIN = 100kHz Sine Wave
Signal to Noise Ratio (SNR)
Spurious Free Dynamic Range (SFDR) 1 Non-harmonic 100 dBFS typ
Total Harmonic Distortion (THD)
Intermodulation Distortion (IMD)
Intermodulation Distortion (IMD)
DC ACCURACY
Resolution 20 Bits
Integral Nonlinearity
Differential Nonlinearity
Offset Error1 0.03 % typ
Gain Error1 5 LSB typ
Offset Error Drift 0.0006 % /°C
Gain Error Drift 0.1 LSB /°C
DIGITAL FILTER RESPONSE
Decimate by 8
Group Delay MCLK = 40MHz 12 µS typ
Decimate by 16
Group Delay MCLK = 40MHz 24 µS typ
Decimate by 128
Group Delay MCLK = 24.576MHz 480 µS typ
ANALOG INPUT
Differential Input Voltage Vin(+) – Vin(-), V
Vin(+) – Vin(-), V
DC Leakage Current ±2 µA max
Input Capacitance With internal buffer 5 pF typ
With external buffer 55 pF typ
REFERENCE INPUT/OUTPUT
V
REF
V
V
REF
V
REF
POWER REQUIREMENTS
AV
AV
AV
AV
DV
V
DRIVE
= 2.5 V, V
DD1
Input Voltage V
DD2
1
= 5 V, V
1
1
1
1
= 4.096 V, TA = +25°C, Full Power Mode, unless otherwise noted
REF
118 dB typ
1
1
Input Amplitude = -6dB -100 dB typ
-100 dB typ
103 dB typ
1
1
Input Amplitude = -6dB -100 dB typ
-100 dB typ
100 dB typ
1
1
1
Input Amplitude = -6dB -100 dB typ
FIN = 100kHz Sine Wave -100 dB typ
FIN = 1MHz Sine Wave -100 dB typ
At 18 bits 1 LSB typ
Guaranteed monotonic to 20 bits 1 LSB typ
= 2.5V ±2 V pk-pk
REF
= 4.096V ±3.25 V pk-pk
REF
= 3.3V +2.5 Volts
DD3
= 5V +4.096 Volts
DD3
Input DC Leakage Current ±1 µA max
Input Capacitance 5 pF max
(Modulator Supply) ±5% +2.5 Volts
DD1
(General Supply) ±5% +5 Volts
DD2
(Diff-Amp Supply) +3.0/+5.5 V min/max
DD3
(Ref Buffer Supply) +3.15/+5.25 V min/max
DD4
DD
±5% +2.5 Volts
+1.65/+2.7 V min/max
Rev. PrN | Page 3 of 22
AD7760 Preliminary Technical Data
Parameter Test Conditions/Comments Specifcation Unit
Full Power Mode
AI
(Modulator) 50 mA typ
DD1
AI
(General) 35 mA typ
DD2
AI
(Reference Buffer) AV
DD4
Low Power Mode
AI
(Modulator) 26 mA typ
DD1
AI
(General) 20 mA typ
DD2
AI
(Reference Buffer) AV
DD4
AI
(Diff Amp) AV
DD3
D
IDD
Standby Mode
AI
(Modulator) 210 µA typ
DD1
AI
(General) 30 nA typ
DD2
AI
(Diff Amp) AV
DD3
AI
(Reference Buffer) AV
DD4
D
IDD
Clock Running 690 µA typ
POWER DISSIPATION
Full Power Mode
Modulator (P1) 125 mW typ
General (P2) 175 mW typ
Reference Buffer (P4) AV
AV
Low Power Mode
Modulator (P1) 65 mW typ
General (P2) 100 mW typ
Reference Buffer (P4) AV
AV
Differential Amplifier (P3) AV
AV
Digital Power 112.5 mW typ
Standby Mode Clock Stopped 1.2 mW typ
Clock Running 2.3 mW typ
1
See Terminology
= +5V 35 mA typ
DD4
= +5V 10 mA typ
DD4
= +5V, Both Modes 42 mA typ
DD3
Both Modes 45 mA typ
= +5V 30 nA typ
DD3
= +5V 30 nA typ
DD4
Clock Stopped 250 µA typ
= +3.3V 101 mW typ
DD4
= +5V 175 mW typ
DD4
= +3.3V 27 mW typ
DD4
= +5V 50 mW typ
DD4
= +3.3V 116 mW typ
DD3
= +5V 210 mW typ
DD3
Rev. PrN | Page 4 of 22
Preliminary Technical Data AD7760
TIMING SPECIFICATIONS
Tabl e 2. V
Parameter Limit at T
f
MCLK
80 MHz max
f
ICLK
20 MHz max
1
t
1
t
2
t
3
t
4
t
5
t
6
t
7
t
8
t
9
t
10
t
11
t
12
t
13
t
14
t
15
t
16
t
17
t
18
1
t
= 1/f
ICLK
DD1
ICLK
= 2.5 V, V
= 5 V, V
DD2
MIN
= 4.096 V, V
REF
, T
Unit Description
MAX
= TBD V, TA = +25°C, C
DRIVE
= 25pF, Full Power Mode, unless otherwise noted
LOAD
12.288 MHz min Applied Master Clock Frequency
12.288 MHz min Internal Modulator Clock Derived from MCLK.
0.5 × t
ICLK
10 nS min
2 nS min
typ
DRDY Pulse Width
DRDY Falling Edge to CS falling Edge
RD/WR Setup Time to CS Falling Edge
10 nS typ Data Access Time
t
ICLK
t
ICLK
2 nS min
min
min
CS Low Pulse Width
CS High Pulse Width Between Reads
RD/WR Hold Time to CS Rising Edge
10 nS max Bus Relinquish Time
0.5 × t
0.5 × t
ICLK
ICLK
typ
typ
DRDY High Period
DRDY Low Period
15 nS typ Data Access Time
TBD xS min
TBD xS min
Data Valid Prior to
Data Valid After
DRDY Rising Edge
DRDY Rising Edge
10 nS max Bus Relinquish Time
t
ICLK
t
ICLK
xS min
xS min
CS Low Pulse Width
CS High Period Between Address and Data
10 nS min Data Setup Time
10 nS min Data Hold Time
Rev. PrN | Page 5 of 22
AD7760 Preliminary Technical Data
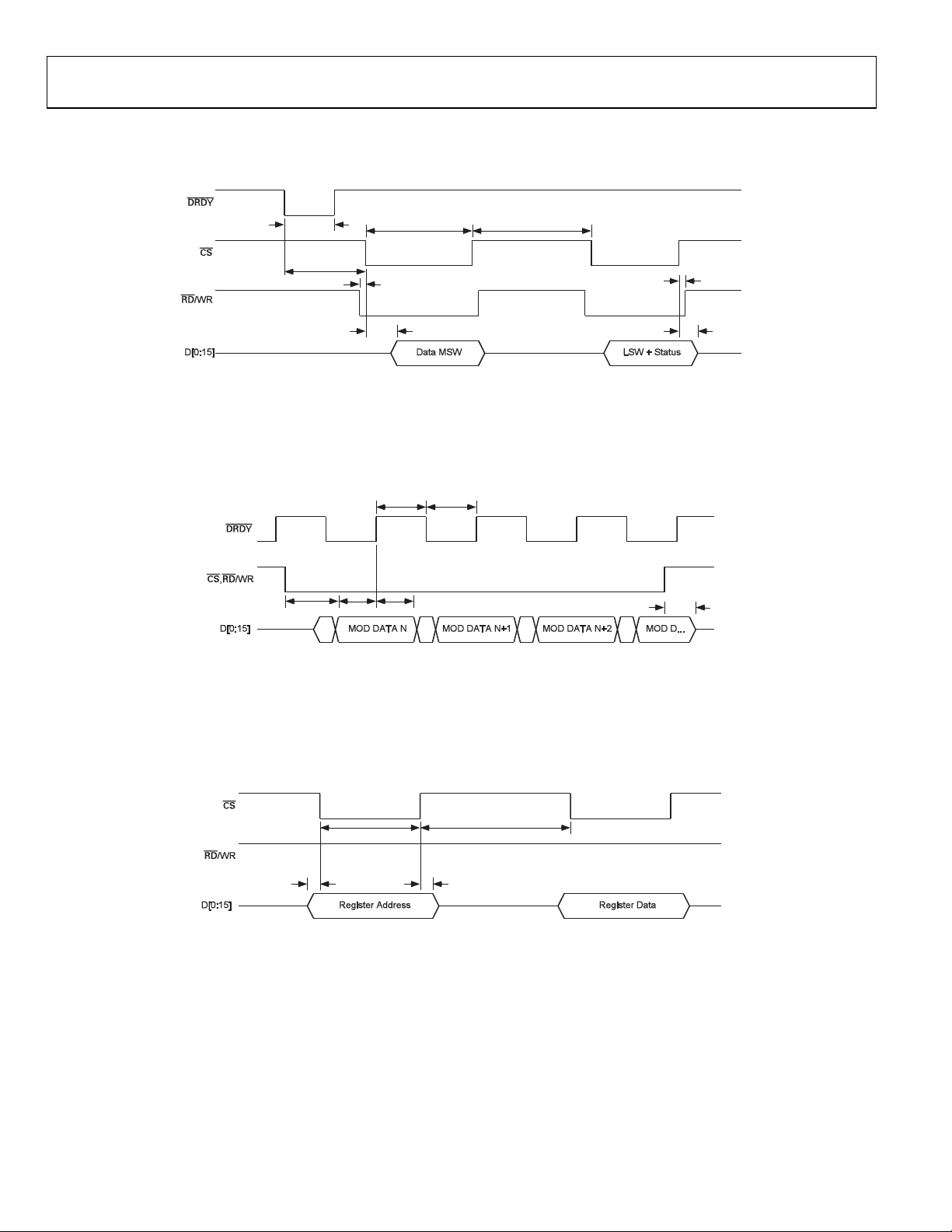
TIMING DIAGRAMS
t
t
1
t
2
5
t
3
t
4
Figure 2. Parallel Interface Timing Diagram
t
t
t
12t13
11
t
9
10
Figure 3. 20MHz Modulator Data Output Mode
t
6
t
7
t
8
t
14
t
15
t
17
t
16
t
18
Figure 4. AD7760 Register Write
Rev. PrN | Page 6 of 22
Preliminary Technical Data AD7760
ABSOLUTE MAXIMUM RATINGS
Table 3. T
Parameters Rating
VDD to GND TBD
V
to GND TBD
IN+
V
to GND TBD
IN–
Digital input voltage to GND TBD
Digital output voltage to GND TBD
V
to GND TBD
REF
Input current to any pin except supplies1TBD
Operating temperature range
Commercial (A, B version) −40°C to +85°C
Storage temperature range −65°C to +150°C
Junction temperature 150°C
TQFP Exposed Paddle Package
θJA thermal impedance 92.7 °C/W
θJC thermal impedance 5.1 °C/W
CSP Package
θJA thermal impedance 26.7 °C/W
θJC thermal impedance 30 °C/W
Lead temperature, soldering
Vapor phase (60 secs) 215°C
Infrared (15 secs) 220°C
ESD TBD kV
1
Transient currents of up to TBD mA do not cause SCR latch-up.
= 25°C, unless otherwise noted.
A
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those listed in the operational sections
of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on the
human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Rev. PrN | Page 7 of 22

AD7760 Preliminary Technical Data
PIN CONFIGURATION AND FUNCTIONAL DESCRIPTIONS
DB11
DB10
DB9
DB8
DB7
DB6
DB5
DB4
DB3
DB2
DB1
DB0
DGND
MCLK
MCLK
AV
DD2
AGND
AV
DD1
AGND
DECAP1
REFGND
V
REF+
AGND
AV
DD4
AGND
AV
DD2
AV
DD2
AGND
DRIVE
V
DGND
DGND
PIN 1
IDENTIFIER
BIAS
AGND
R
A1+
IN
V
DB0
A1-
V
64 63 62 61 60 59 58
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17 18 19 20 21 22 23 24
DB1
DB2
DB3
DB4
DB5
57 56 55 54 53 52 51 50 49
AD7760
TOP VIEW
(Not to Scale)
25
A1-
A1+
OUT
V
OUT
V
AGND
AV
DD3
IN
DB6
DB7
DGND
DB8
DB9
DB10
DB11
48
DB12
47
DB13
46
DB14
45
DB15
44
V
DRIVE
43
DGND
42
DGND
41
DV
DD
40
CS
39
RD/WR
38
DRDY
37
RESET
36
SYNC
35
DGND
34
AGND
33
AV
DD1
29
27
26
-
+
IN
IN
V
V
AV
28
DD2
AGND
DECAP2
31
30
DECAP3
32
AGND
AGND
V
DRIVE
MCLK
MCLK
AV
DD2
AV
DD1
DECAP1
REFGND
V
REF
AV
DD4
AV
DD2
AV
DD2
R
BIAS
+
4847464544434241403938
1
PIN 1
IDENTIFIER
2
3
4
5
6
7
8
9
10
11
12
1314151617181920212223
A1+
IN
V
A1-
A1-
IN
V
OUT
V
AD7760
TOP VIEW
(Not to Scale)
-
+
IN
IN
A1+
V
DD3
V
AV
OUT
V
DD2
AV
Figure 6. 48-PIN LFCSP Pin Configuration
37
DB12
36
DB13
35
DB14
34
DB15
33
V
32
DRIVE
DV
31
DD
CS
30
RD/WR
29
DRDY
28
27
RESET
SYNC
26
AV
25
DD1
24
AGND
AGND
DECAP3
DECAP2
Figure 5. 64-Lead TQFP Pin Configuration
Table 4. Pin Function Descriptions
TQFP Pin
Number
6, 33 5, 25 AV
CSP Pin
Number
Pin Mnemonic Description
DD1
+2.5V power supply for modulator. These pins should be decoupled to AGND with 100nF and
10µF capacitors on each pin.
4, 14, 15,
27
4, 10, 11,
20
24 17 AV
AV
DD2
DD3
+5V power supply. These pins should be decoupled to AGND with TBD nF and TBD µF
capacitors on each pin.
+3.3V to +5V power supply for differential amplifier. These pins should be decoupled to AGND
with a 100nF capacitor.
12 9 AV
DD4
+3.3V to +5V power supply for reference buffer. This pin should be decoupled to AGND with a
10nF capacitor in series with a 22Ω resistor.
5, 7, 11,
13, 16, 18,
23, 28, 31,
23, 24,
Paddle
AGND
Power supply ground for analog circuitry. In the Chip Scale package, most of the internal
AGND pads are down-bonded to the exposed paddle. This paddle then become the main
analog ground connection for the AD7760.
32, 34
9 7 REFGND Reference Ground. Ground connection for the reference voltage.
41 31 DV
DD
+2.5V power supply for digital circuitry and FIR filter. This pin should be decoupled to DGND
with a 470nF capacitor.
44, 63 1, 32 V
DRIVE
Logic power supply input, +1.8V to +2.5V. The voltage supplied at these pins will determine
the operating voltage of the logic interface. Both these pins must be connected together and
tied to the same supply. Each pin should also be decoupled to DGND with a 470nF capacitor.
1, 35, 42,
43, 53, 62,
64
Paddle DGND
Ground Reference for digital circuitry. In the Chip Scale package, all the internal DGND pads
are down-bonded to the exposed paddle. This paddle then becomes the single ground
connection for the AD7760.
Rev. PrN | Page 8 of 22

Preliminary Technical Data AD7760
TQFP Pin
Number
19 13 VINA1+ Positive Input to Full-Power Differential Amplifier 1.
20 14 VINA1- Negative Input to Full-Power Differential Amplifier 1.
21 15 V
22 16 V
25 18 VIN+ Positive Input to the Modulator.
26 19 VIN- Negative Input to the Modulator.
10 8 V
8 6 DECAP1 Decoupling Pin. A 100nF capacitor must be inserted between this pin and AGND.
29 21 DECAP2 Decoupling Pin. A TBD µF capacitor must be inserted between this pin and AGND.
30 22 DECAP3 Decoupling Pin. A TBD µF capacitor must be inserted between this pin and AGND.
17 12 R
45-52,
54-61
37 27
3 3 MCLK
2 2
36 26
39 29
38 28
40 30
CSP Pin
Pin Mnemonic Description
Number
A1- Negative Output from Full-Power Differential Amplifier 1.
OUT
A1+ Positive Output from Full-Power Differential Amplifier 1.
OUT
REF+
BIAS
33-48 DB15 – DB0
RESET A falling edge on this pin resets all internal digital circuitry. Holding this pin lows keeps the
MCLK
SYNC Synchronization Input. A falling edge on this pin resets the internal filter. This can be used to
RD/WR Read/Write Input. This pin, in conjunction with the Chip Select pin, is used to read and write
DRDY Data Ready Output. Each time that new conversion data is available, an active low pulse,
CS Chip Select Input. Used in conjunction with the RD/WR pin to read and write data to and from
Reference Input. The input range of this pin is determined by the reference buffer supply
voltage (AV
). See Reference Section for more details.
DD4
Bias Current setting pin. A resistor must be inserted between this pin and AGND. For more
details on this, see the Bias Resistor Section.
16-bit bi-directional data bus. These are three-state pins that are controlled by the
/WR pins. The operating voltage for these pins is determined by the V
voltage. See
DRIVE
CS and RD
Interfacing Section for more details.
AD7760 in a reset state.
Master Clock Input. A low jitter digital clock must be applied to this pin. The output data rate
will depend on the frequency of this clock. See Clocking Section for more details.
Master Clock ground sensing pin.
synchronize multiple devices in a system.
data to and from the AD7760. If this pin is low when
is high and
½
ICLK period wide, is produced on this pin. See AD7760 Interface Section for further details.
CS is low, a write will occur. See AD7760 Interface Section for more details.
CS is low, a read will take place. If this pin
the AD7760. See AD7760 Interface Section for further details.
Rev. PrN | Page 9 of 22

AD7760 Preliminary Technical Data
()(
)
(
(
)
=
TERMINOLOGY
Signal to (Noise + Distortion) Ratio
The measured ratio of signal to (noise + distortion) at the
output of the ADC. The signal is the rms amplitude of the
fundamental. Noise is the sum of all nonfundamental signals up
to half the sampling frequency (f
/2), excluding dc. The ratio is
S
dependent on the number of quantization levels in the
digitization process; the more levels, the smaller the
quantization noise. The theoretical signal to (noise + distortion)
ratio for an ideal N-bit converter with a sine wave input is given
by
dBNDistortionNoisetoSignal 76.102.6 +=+
Thus, for an 18-bit converter, this is 110.12dBs and for a 20-bit
converter, 122.16 dB.
Total Harmonic Distortion (THD)
The ratio of the rms sum of harmonics to the fundamental. For
the AD7760, it is defined as
2
2
2
2
20dBTHD
= log
()
2
2
4
3
V
1
VVVVV
++++
5
6
where:
V
is the rms amplitude of the fundamental.
1
V
, V3, V4, V5, and V6 are the rms amplitudes of the second to the
2
sixth harmonics.
products at sum and difference frequencies of mfa ± nfb, where
m, n = 0, 1, 2, 3, and so on. Intermodulation distortion terms are
those for which neither m nor n are equal to zero. For example,
the second-order terms include (fa + fb) and (fa − fb), while the
third-order terms include (2fa + fb), (2fa − fb), (fa + 2fb) and (fa
− 2fb).
The AD7760 is tested using the CCIF standard, where two input
frequencies near the top end of the input bandwidth are used.
In this case, the second-order terms are usually distanced in
frequency from the original sine waves, while the third-order
terms are usually at a frequency close to the input frequencies.
As a result, the second- and third-order terms are specified
separately. The calculation of the intermodulation distortion is
as per the THD specification, where it is the ratio of the rms
sum of the individual distortion products to the rms amplitude
of the sum of the fundamentals expressed in dB.
Integral Nonlinearity (INL)
The maximum deviation from a straight line passing through
the endpoints of the ADC transfer function.
Differential Nonlinearity (DNL)
The difference between the measured and the ideal 1 LSB
change between any two adjacent codes in the ADC.
Offset Error
The deviation of the first code transition (000...000 to 000...001)
from the ideal (that is, AGND + 1 LSB).
Peak Harmonic or Spurious Noise
The ratio of the rms value of the next largest component in the
ADC output spectrum (up to f
/2 and excluding dc) to the rms
S
value of the fundamental. Normally, the value of this
specification is determined by the largest harmonic in the
spectrum, but, for ADCs where the harmonics are buried in the
noise floor, it is a noise peak.
Non-Harmonic Spurious Free Dynamic Range (SFDR)
The ratio of the rms signal amplitude to the rms value of the
peak spurious spectral component excluding harmonics.
Intermodulation Distortion
With inputs consisting of sine waves at two frequencies, fa and
fb, any active device with nonlinearities creates distortion
Gain Error
The deviation of the last code transition (111...110 to 111...111)
from the ideal (that is, V
been adjusted out.
− 1 LSB), after the offset error has
REF
Power Supply Rejection Ratio (PSRR)
The ratio of the power in the ADC output at full-scale
frequency, f, to the power of a 100 mV p-p sine wave applied to
the ADC V
input varies from 1 kHz to 1 MHz.
supply of frequency fs. The frequency of this
DD
)
PfsPfdBPSRR log10
Pf is the power at frequency f in the ADC output; Pfs is the
power at frequency fs in the ADC output.
Rev. PrN | Page 10 of 22

Preliminary Technical Data AD7760
TYPICAL PERFORMANCE CHARACTERISTICS
Default Conditions: TA = 25°C, TBD, unless otherwise noted.
000
000
000
000
000
ALL CAPS ( Init ial cap )
000
000
000 000 000 000 000 000
000
000
000
000
ALL CAPS ( Init ial cap )
000
TBD
ALL CAPS ( Init ial cap )
Figure 7. TBD
TBD
000
000
000
ALL CAPS ( Init ial cap )
000
000
000 000 000 000 000 000
000
000
000
000
ALL CAPS ( Init ial cap )
000
TBD
ALL CAPS ( Init ial cap )
Figure 10. TBD
TBD
000
000 000 000 000 000 000
000
000
000
000
ALL CAPS ( Init ial cap )
000
000
000 000 000 000 000 000
ALL CAPS ( Init ial cap )
Figure 8. TBD
TBD
ALL CAPS ( Init ial cap )
Figure 9. TBD
000
000 000 000 000 000 000
000
000
000
000
ALL CAPS ( Init ial cap )
000
000
000 000 000 000 000 000
ALL CAPS ( Init ial cap )
Figure 11. TBD
TBD
ALL CAPS ( Init ial cap )
Figure 12. TBD
Rev. PrN | Page 11 of 22

AD7760 Preliminary Technical Data
THEORY OF OPERATION
The AD7760 employs a sigma-delta conversion technique to
convert the analog input into an equivalent digital word. The
modulator samples the input waveform and outputs an
equivalent digital word to the digital filter at a rate equal to I
CLK
.
BAND OF INTEREST
Due to the high over-sampling rate, which spreads the
quantization noise from 0 to
f
, the noise energy contained in
ICLK
the band of interest is reduced (Figure 13a). To further reduce
the quantization noise, a high order modulator is employed to
shape the noise spectrum; so that most of the noise energy is
shifted out of the band of interest (Figure 13b).
BAND OF INTEREST
The digital filtering which follows the modulator removes the
large out-of-band quantization noise (Figure 13c) while also
reducing the data rate from
f
at the input of the filter to f
ICLK
ICLK
/8
or less at the output of the filter, depending on the decimation
rate used.
BAND OF INTEREST
Digital filtering has certain advantages over analog filtering. It
does not introduce significant noise or distortion and can be
made perfectly linear phase.
The AD7760 employs three Finite Impulse Response (FIR)
filters in series. By using different combinations of decimation
ratios and filter selection and bypassing, data can be obtained
from the AD7760 at a large range of data rates. Multi-bit data
from the modulator can be obtained at a rate of 20MHz. The
first filter receives data from the modulator at 20MHz where it
is decimated by four to output data at 5MHz. This partially
filtered data can also be output at this stage. The second filter
completely bypassed. The third filter has a fixed decimation rate
of 2x and is user programmable as well as having a default
configuration. It is described in detail in the Programmable FIR
Filter Section. This filter can also be bypassed. Table X below
shows some characteristics of the default filter. The group delay
of the filter is defined to be the delay to the centre of the
impulse response and is equal to the computation + filter delays.
The delay until valid data is available (the DVALID status bit is
set) is equal to 2x the filter delay + the computation delay.
allows the decimation rate to be chosen from 2x to 32x or to be
Table 5. Configuration With Default Filter
ICLK
Frequency
Filter 1 Filter 2 Filter 3 Data State
Computation
Delay
20 MHz Bypassed Bypassed Bypassed Unfiltered 0 0 (10 MHz) 20 MHz
20 MHz 4x Bypassed Bypassed Partially Filtered 0.325 1.2µS 1.35 MHz 5 MHz
20 MHz 4x Bypassed 2x Fully Filtered 1.075 10.8µS 1 MHz 2.5 MHz
20 MHz 4x 2x Bypassed Partially Filtered 1.35 3.6µS 562.5 kHz 2.5 MHz
20 MHz 4x 2x 2x Fully Filtered 1.625 22.8µS 500 kHz 1.25 MHz
20 MHz 4x 4x Bypassed Partially Filtered 1.725 6µS 281.25 kHz 1.25 MHz
20 MHz 4x 4x 2x Fully Filtered 1.775 44.4µS 250 kHz 625 kHz
20 MHz 4x 8x Bypassed Partially Filtered 2.6 10.8µS 140.625 kHz 625 kHz
20 MHz 4x 8x 2x Fully Filtered 2.25 87.6µS 125 kHz 312.5 kHz
20 MHz 4x 16x Bypassed Partially Filtered 4.175 20.4µS 70.3125 kHz 312.5 kHz
20 MHz 4x 16x 2x Fully Filtered 3.1 174µS 62.5 kHz 156.25 kHz
20 MHz 4x 32x Bypassed Partially Filtered 7.325 39.6µS 35.156 kHz 156.25 kHz
20 MHz 4x 32x 2x Fully Filtered 4.65 346.8µS 31.25 kHz 78.125 kHz
12.288MHz 4x 8x 2x Fully Filtered 3.66 142.6µS 76.8 kHz 192 kHz
12.288MHz 4x 16x 2x Fully Filtered 5.05 283.2µS 38.4 kHz 96 kHz
12.288MHz 4x 32x Bypassed Partially Filtered 11.92 64.45µS 21.6 kHz 96 kHz
12.288MHz 4x 32x 2x Fully Filtered 7.57 564.5µS 19.2 kHz 48 kHz
QUANTIZATION NOISE
f
ICLK
a.
NOISE SHAPING
f
ICLK
b.
DIGITAL FILTER CUTOFF FREQUENCY
f
ICLK
c.
Figure 13. Sigma-Delta ADC
Filter Delay
Passband
Bandwidth
/2
/2
/2
Output Data
Rate (ODR)
Rev. PrN | Page 12 of 22

Preliminary Technical Data AD7760
AD7760 INTERFACE
Reading Data
The AD7760 uses a 16-bit bi-directional parallel interface. This
interface is controlled by the
two read operating modes depending on the output data rate.
When the AD7760 is outputting data at 5MSPS or less, the
interface operates in a conventional mode as shown in Figure 2.
When a new conversion result is available, an active low pulse is
output on the
AD7760, two 16-bit read operations are performed. The
pulse indicates that a new conversion result is available. Both
RD
/WR and CS go low to perform the first read operation.
Shortly after both these lines go low, the databus becomes active
and the 16 Most Significant Bits (MSBs) of the conversion result
are output. The
period of TBD ns before the second read is performed. This
second read will contain the 8 Least Significant Bits (LSBs) of
the conversion result along with 7 status bits. These status bits
are shown in Table 6. The Cal bit is set to a 1 if a calibration has
been performed. Table 14 contains descriptions of the other
status bits.
Table 6. Status Bits During Data Read
D7 D0
DValid Ovr UFilt LPwr FiltOk DLOk Cal 0
Shortly after RD/WR and CS return high, the databus will
return to a high impedance state. Both read operations must be
completed before a new conversion result is available as the new
result will overwrite the contents on the output register. If a
DRDY
be invalid.
DRDY
pin. To read a conversion result from the
RD
/WR and CS lines must return high for a
pulse occurs during a read operation, the data read will
RD
/WR and CS pins. There are
DRDY
data lines are isolated from the system databus by means of a
latch or buffer to ensure that there is no digital activity on the
D0-D15 pins that is not controlled by the AD7760. If multiple,
synchronized, AD7760 parts that share a properly distributed
common MCLK signal exist in a system, these parts can share a
common bus without being isolated from each other. This bus
can then be isolated from the system bus by a single latch or
buffer.
Writing To The AD7760
After a reset, only a single write operation to power up the
AD7760 is necessary to start the part converting on default
settings. While the AD7760 is configured to convert analog
signals with the default settings on reset, there are many features
and parameters on this part that the user can change by writing
to the device. As some of the programmable registers are 16 bits
wide, to program a register requires two write operations. The
first write contains the register address while the second write
contains the register data. There is an exception to this when a
user filter is being downloaded to the AD7760. This is dealt
with in detail in the following section. The AD7760 Registers
section contains the register addresses and further details.
Figure 4 shows a write operation to the AD7760. The
line is held high while the
of TBD ns. The register address is latched during this period.
CS
The
line is brought high again for a minimum of TBD ns
before the register data is put onto the databus. If a read
operation occurs between the writing of the register address
and the register data, the register address is cleared and the next
write must be the register address again. This also provides a
method to get back to a known situation if the user somehow
loses track whether the next write is an address or data.
CS
line is brought low for a minimum
RD
/WR
When the AD7760 is operating in modulator data output mode,
i.e. Output Data Rate at 20MHz, a different interfacing scheme
is necessary. To obtain data from the AD7760 in this mode, both
RD
/WR and CS lines must be held low. This will bring the
databus out of its high impedance state. Figure 3 shows the
20MHz Output Data Rate operation. A
generated for each word and the data is valid on the rising edge
DRDY
of the
modulator data into a FIFO or as a DMA control signal. Shortly
after the
stop outputting data and the databus will return to high
impedance.
Sharing The Parallel Bus
By its nature, the high accuracy of the AD7760 make it sensitive
to external noise sources. These include digital activity on the
parallel bus. For this reason it is recommended that the AD7760
pulse. This
RD
/WR and CS lines return high, the AD7760 will
DRDY
DRDY
pulse is
pulse could be used to latch the
Rev. PrN | Page 13 of 22
It is envisaged that the AD7760 will be written to and
configured on power-up and very infrequently, if at all, after
that. Following any write operation, the full group delay of the
filter must pass before valid data will be output from the
AD7760.
Reading Status and Other Registers
The AD7760 features a number of programmable registers. To
read back the contents of these registers or the status register,
the user must first write to the control register of the device
setting a bit corresponding to the register they wish to read. The
next read operation will then output the contents of the selected
register instead of a conversion result. More information on the
relevant bits in the control register is given in the AD7760
Registers section.

AD7760 Preliminary Technical Data
CLOCKING THE AD7760
The AD7760 requires an external low jitter clock source. This
signal is applied to the MCLK and
clock signal (ICLK) is derived from the MCLK input signal.
This ICLK controls all the internal operation of the AD7760.
The maximum ICLK frequency is 20MHz but due to an internal
clock divider, a range of MCLK frequencies can be used. There
are three possibilities available to generate the ICLK:
1.
ICLK = MCLK (CDIV[1:0] = 10)
2.
ICLK = MCLK / 2 (CDIV[1:0] = 00)
3. ICLK = MCLK / 4 (CDIV[1:0] = 01)
These options are selected from the control register (See
Register Section for further details). On power-up, the default is
ICLK = MCLK / 4 to ensure that the part can handle the
maximum MCLK frequency of 80MHz. If the user wishes to get
output data rates equal to those used in audio systems, a 12.288
MHz ICLK frequency can be used. As shown in Table 5, output
data rates of 192, 96 and 48kHz are achievable with this ICLK
frequency. As mentioned previously, this ICLK frequency can
be derived from different MCLK frequencies.
MCLK
pins. An internal
=
)(
RMSj
The input amplitude also has an effect on these jitter figures. If,
for example, the input level was 3dB down from full-scale, the
allowable jitter would be increased by a factor of √2 increasing
the first example to 2.53ps RMS. This is due to the fact that the
maximum slew rate is reduced by a reduction in amplitude.
Figure 14 and Figure 15 illustrate this point showing the
maximum slew rate of a sine wave of the same frequency but
with different amplitudes.
π
256
pst
133
=
63
10102.192
××××
The MCLK jitter requirements depend on a number of factors
and are given by the following equation:
t
OSR = Over-sampling ratio =
=
)(
RMSj
OSR
102
f
f
ICLK
×××
IN
π
)(
dBSNR
20
ODR
f
= Maximum Input Frequency
IN
SNR(dB) = Target SNR.
Taking an example from Table 5:
f
ODR = 2.5MHz,
108dB
RMSj
This is the maximum allowable clock jitter for a full-scale
1MHz input tone with the given ICLK and Output Data Rate.
Taking a second example from Table 5:
= 20MHz, fIN (max) = 1MHz, SNR =
ICLK
=
)(
8
π
×××
=
4.56
10102
pst
79.1
Figure 14. Maximum Slew Rate of Sine Wave with Amplitude of 2V Pk-Pk
Figure 15. Maximum Slew Rate of Same Frequency Sine Wave with
Amplitude of 1V Pk-Pk
ODR = 48kHz,
120dB
f
= 12.288MHz, fIN (max) = 19.2kHz, SNR =
ICLK
Rev. PrN | Page 14 of 22

Preliminary Technical Data AD7760
DRIVING THE AD7760
The AD7760 has an on-chip differential amplifier. This
amplifier will operate with a supply voltage (AV
5.5V. For a 4.096V reference, the supply voltage must be 5V.
To achieve the specified performance in full power mode, the
differential amplifier should be configured as a first order antialias filter as shown in Figure 16. Any additional filtering should
be carried out in previous stages using low noise, highperformance op-amps such as the AD8021.
Suitable component values for the first order filter are listed in
Table 7. Using the first row as an example would yield a 10dB
attenuation at the first alias point of 19MHz.
C
FB
R
FB
R
A
B
IN
C
S
R
IN
A1
R
FB
C
FB
Figure 16. Differential Amplifier Configuration
Table 7. Full Power Component Values
ODR V
REF
2.5MHz 4.096v
2.5MHz 2.5v
R
IN
Ω 655 Ω
1k
Ω TBD Ω
TBD
R
FB
) from 3V to
DD3
VIN-
VIN+
C
S
C
FB
5.6pF 33pF
TBD TBD pF
+2.5V
0V
+3.685V
+2.048V
VIN+
A
-2.5V
+2.5V
B
0V
-2.5V
Figure 17. Differential Amplifier Signal Conditioning
0.410V
+3.685V
+2.048V
0.410V
VIN-
To obtain maximum performance from the AD7760, it is
advisable to drive the ADC with differential signals. However, it
is possible to drive the AD7760 with a single ended signal once
the common mode of the signal is within the range of +0.7V to
+2.1V with V
= 5V or +0.7 to +1.25V with V
DD3
= 3.3V. In
DD3
this case the on-chip differential amplifier can be used to
convert the signal from single-ended to differential before being
fed into the modulator inputs. Figure 18 shows how a bipolar
single-ended signal biased around ground can be used to drive
the AD7760 with the use of an external op-amp such as the
AD8021.
C
FB
2R
V
IN
2R
R
AD8021
R
IN
C
R
IN
Figure 18. Single Ended to Differential Conversion
R
FB
VIN-
S
A1
R
FB
C
FB
VIN+
48kHz 4.096v
48kHz 2.5v
TBD
TBD
Ω TBD Ω
Ω TBD Ω
TBD TBD pF
TBD TBD pF
Figure 17 shows the signal conditioning that occurs using the
circuit in Figure 16 with a ±2.5v input signal biased around
ground using the component values and conditions in the first
row of Table 7. The differential amplifier will always bias the
output signal to sit on the optimum common mode of V
REF
/2, in
this case 2.048V. The signal is also scaled to give the maximum
allowable voltage swing with this reference value. This is
calculated as 80% of V
, i.e. 0.8 × 4.096V ≈ 3.275V peak to
REF
peak on each input.
Rev. PrN | Page 15 of 22

AD7760 Preliminary Technical Data
USING THE AD7760
The following is the recommended sequence for powering up
and using the AD7760.
1.
Apply Power
2.
Start clock oscillator, applying MCLK
Ta ke
3.
RESET
low for a minimum of 1 MCLK cycle
BIAS RESISTOR SELECTION
The AD7760 requires a resistor to be connected between the
R
pin and AGND. The value for this resistor is dependant on
BIAS
the reference voltage being applied to the device. The resistor
value should be selected to give a current of 25µA through the
resistor to ground. For a 2.5V reference voltage, the correct
resistor value is 100k
Ω and for a 4.096V reference, 160kΩ.
4.
Wait a minimum of 2 MCLK cycles after
been released.
Write to Control Register 2 to power up the ADC and
5.
the differential amplifiers as required. The correct
Clock Divider (CDIV[1:0]) ratio should be
programmed here also.
6.
Write to Control Register 1 to set up the Output Data
Rate.
Ta ke
7.
Data can now be read from the part using the default filter,
offset, gain and over range threshold values. The
conversion data read will not be valid however until the
group delay of the filter has passed. When this has
occurred, the DVALID bit read with the data LSW will be
set indicating that the data is indeed valid.
The user can now download their own filter if required
(see Downloading a User-Defined Filter). Values for gain,
offset and over range threshold registers can be written or
read at this stage. An internal calibration sequence can also
be initiated at this point.
SYNC
low for a minimum of 2 MCLK cycles.
RESET
has
Rev. PrN | Page 16 of 22

Preliminary Technical Data AD7760
PROGRAMMABLE FIR FILTER
As previously mentioned, the third FIR filter on the AD7760 is
user programmable. The default coefficients that are loaded on
reset are given in Table 8. This gives a frequency response
shown in Figure 19. The frequencies quoted in Figure 19 scale
directly with the Output Data Rate.
Table 8. Default Filter Coefficients
# Dec. Value
0 53656736 332BCA0 24 700847 AB1AF
1 25142688 17FA5A0 25 -70922 401150A
2 -4497814 444A196 26 -583959 408E917
3 -11935847 4B62067 27 -175934 402AF3E
4 -1313841 4140C31 28 388667 5EE3B
5 6976334 6A734E 29 294000 47C70
6 3268059 31DDDB 30 -183250 402CBD2
7 -3794610 439E6B2 31 -302597 4049E05
8 -3747402 4392E4A 32 16034 3EA2
9 1509849 1709D9 33 238315 3A2EB
10 3428088 344EF8 34 88266 158CA
11 80255 1397F 35 -143205 4022F65
12 -2672124 428C5FC 36 -128919 401F797
13 -1056628 4101F74 37 51794 CA52
14 1741563 1A92FB 38 121875 1DC13
15 1502200 16EBF8 39 16426 402A
16 -835960 40CC178 40 -90524 401619C
17 -1528400 4175250 41 -63899 400F99B
18 93626 16DBA 42 45234 B0B2
19 1269502 135EFE 43 114720 1C020
20 411245 6466D 44 102357 18FD5
21 -864038 40D2F26 45 52669 CDBD
22 -664622 40A242E 46 15559 3CC7
23 434489 6A139 47 1963 7AB
Hex
Value
#
Dec.
Value
Hex Value
The default filter should be sufficient for almost all applications.
It is a standard brick wall filter with a symmetrical impulse
response. The default filter has a length of 96, in non-aliasing
with 120dB of attenuation at Nyquist. This filter not only
performs signal anti-aliasing but also suppresses out-of-band
quantization noise produced by the A-D conversion process.
Any significant relaxation in the stop-band attenuation or
transition band width relative to the default filter may result in a
failure to meet the SNR specifications.
• The filter must be even, symmetrical FIR.
• The coefficients are in sign-and-magnitude format
with 26 magnitude bits and sign coded as positive=0.
• The filter length must be between 12 and 96 in steps
of 12.
• As the filter is symmetrical, the number of coefficients
that must be downloaded will be half the filter length.
The default filter coefficients are an example of this
with only 48 coefficients listed for a 96-tap filter.
• Coefficients are written from the center of impulse
response (adjacent to the point of symmetry)
outwards.
• The coefficients are scaled so that the in-band gain of
the filter is equal to 134217726 with the coefficients
rounded to the nearest integer. For a low pass filter
this is the equivalent of having the coefficients sum
arithmetically (including sign) to +67108863 (0x3FF
FFFF) positive value over the half-impulse-response
coefficient set (max 48 coefficients). Any deviation
from this will result in a gain error being introduced.
0
-20
-40
-60
-80
Amplitude (dB)
-100
-120
-140
-160
0 500 1000 1500 2000 2500
Frequency (kHz)
Figure 19. Default Filter Frequency Res ponse (2.5MHz ODR)
Passband Ripple = 0.05 dB
-0.1dB Frequency = 1.004MHz
-3dB Frequency = 1.06MHz
Stopband = 1.25MHz
The procedure for downloading a user-defined filter is detailed
in the Downloading a User-Defined Filter section.
If a user does wish to create their own filter then the following
should be noted:
Rev. PrN | Page 17 of 22

AD7760 Preliminary Technical Data
DOWNLOADING A USER-DEFINED FILTER
As previously mentioned, the filter coefficients are 27 bits in
length; one sign and 26 magnitude bits. Since the AD7760 has a
16-bit parallel bus, the coefficients are padded with 5 MSB zeros
to generate a 32-bit word and split into two 16-bit words for
downloading. The first 16-bit word for each coefficient becomes
(00000, Sign bit, Magnitude[25:16]), while the second word
becomes (Magnitude [15:0]). To ensure that a filter is
downloaded correctly, a checksum must also be generated and
downloaded following the final coefficient. The checksum is a
16-bit word generated by splitting each 32-bit word mentioned
above into 4 bytes and summing all bytes from all coefficients
up to a maximum of 192 bytes (48 coefficients × 4 bytes). The
same checksum is generated internally in the AD7760 and
compared with the checksum downloaded. The DL_OK bit in
the Status Register is set if these two checksums agree. The
following is the procedure for downloading a user filter:
1.
Write to Control Register 1 setting the DL_Filt bit and
also the correct filter length bits corresponding to the
length of the filter about to be downloaded (See Table
9).
2.
Write the first half of the current coefficient data
(00000, Sign bit, Magnitude[25:16]). The first
coefficient to be written must be the one adjacent to
the point of filter symmetry.
3.
Write the second half of the current coefficient data
(Magnitude [15:0]).
4.
Repeat Steps 2 and 3 for each coefficient.
5.
Write the 16-bit checksum.
There are two methods to verify that the filter
6.
coefficients have been downloaded correctly:
a.
Read the Status Register checking the
DL_OK bit.
b.
Start reading data and observe the status of
the DL_OK bit.
Table 9. Filter Length Values
FLEN[3:0] Num Coeffs Filter Length
0000 Default Default
0001 6 12
0011 12 24
0101 18 36
0111 24 48
1001 30 60
1011 36 72
1101 42 84
1111 48 96
It should be borne in mind that since the user coefficients are
stored in RAM, they will be cleared after a
RESET
operation or
a loss of power..
EXAMPLE FILTER DOWNLOAD
The following is an example of downloading a short user
defined filter with 24-taps. The frequency response is shown in
Figure 20.
10
0
-10
-20
-30
-40
Amplitude (dB)
-50
-60
-70
-80
0 100 200 300 400 500 600
Frequency (kHz)
Figure 20. 24-Tap FIR Fre quency Response
The coefficients for the filter are listed in Table 10. The
coefficients are in shown from the center of symmetry
outwards. The raw coefficients were generated using a
commercially available filter design tool and scaled
appropriately so their sum equals +67108863 (0x3FF FFFF).
Table 10. 24-Tap FIR Coefficients
Coeff Raw Scaled
1
2
3
4
5
6
7
8
9
10
11
12
0.365481974
0.201339905
0.009636604
-0.075708848
-0.042856209
0.019944246
0.036437914
0.007592007
-0.021556583
-0.024888355
-0.012379538
-0.001905756
53188232
29300796
1402406
-11017834
-6236822
2902466
5302774
1104856
-3137108
-3621978
-1801582
-277343
Rev. PrN | Page 18 of 22

Preliminary Technical Data AD7760
Table 11 shows the Hex values (in sign and magnitude format)
that are downloaded to the AD7760 to realize this filter. The
table is also split into the bytes which are all summed to
produce the checksum. The checksum generated from these
coefficients is 0x0E6B.
Table 11. Filter Hex Values
Coeff Word 1
1
2
3
4
5
6
7
8
9
10
11
12
Byte 1 Byte 2 Byte 3
03 2B 96
01 BF 18
00 15 66
04 A8 1E
04 5F 2A
00 2C 49
00 50 E9
00 10 DB
04 2F DE
04 37 44
04 1B 7D
04 04 3B
Word 2
Byte 4
88
3C
26
6A
96
C2
F6
D8
54
5A
6E
5F
What follows is a list of 16-bit words that the user would write
to the AD7760 to set up the ADC and download this filter
assuming an output data rate of 1.25MHz has already been
selected.
0x0001 Address of Control Register 1
0x8079 Control Reg Data; DL Filter, Set Filter Length = 24, Set
Output Data Rate = 1.25MHz
0x032B First Coefficient, Word 1
0x9688 First Coefficient, Word 2
0x01BF Second Coefficient, Word 1
0x183C Second Coefficient, Word 2
… …
0x0404 Twelfth (Final) Coefficient, Word 1
0x3B5F Final Coefficient, Word 2
0x0E6B Checksum
Wait TBD xS for AD7760 to fill remaining unused coefficients
with zeros.
0x0001 Address of Control Register
0x0879 Control Reg Data; Set Read Status and maintain filter
length and decimation settings.
Read contents of Status Register. Check Bit 7 (DL_OK) to
determine that the filter was downloaded correctly.
Rev. PrN | Page 19 of 22

AD7760 Preliminary Technical Data
AD7760 REGISTERS
The AD7760 has a number of user-programmable registers. The control registers are used to set the decimation rate, the filter
configuration, the clock divider etc. There are also digital gain, offset and over-range threshold registers. Writing to these registers
involves writing the register address first, then a 16-bit data word. Register Addresses, details of individual bits and default values are given
here.
Table 12. Control Register 1 (Address 0x0001, Default Value 0x001A)
MSB LSB
DL
RD
RD
RD
RD
Filt
Ovr
Gain
Off
CAL SYNC FLEN3 FLEN2 FLEN1 FLEN0
Stat
Bit Mnemonic Comment
15 DL Filt
1
Download Filter. Before downloading a user defined filter, this bit must be set. The Filter Length bits must also be set at
this time. The write operations that follow will be interpreted as the user coefficients for the FIR filter until all the
coefficients and the checksum have been written.
14 RD Ovr
1,2
Read Overrange. If this bit has been set, the next read operation will output the contents of the Overrange Threshold
Register instead of a conversion result.
13 RD Gain
12 RD Off
11 RD Stat
1,2
1,2
Read Gain. If this bit has been set, the next read operation will output the contents of the digital Gain Register.
Read Offset. If this bit has been set, the next read operation will output the contents of the digital Offset Register.
1,2
Read Status. If this bit has been set, the next read operation will output the contents of the Status Register.
10 CAL1 Calibration. Setting this bit will initiate an internal calibration routine. This routine will take 14mS with a 20MHz ICLK.
9 SYNC1
Synchronize. Setting this bit will initiate in internal synchronisation routine. Setting this bit simultaneously on multiple
devices will synchronize all filters.
8-5 FLEN3:0 Filter Length Bits. These bits must be set when the DL Filt bit is set and before a user defined filter is downloaded.
4
BYP F3
3
BYP F1 Bypass Filter 1. If this bit is a 0, Filter 1 will be bypassed. This should only occur when the user requires unfiltered
Bypass Filter 3. If this bit is a 0, Filter 3 (Programmable FIR) will be bypassed.
modulator data to be output.
2-0 DEC2:0
Decimation Rate. These bits set the decimation rate of Filter 2. All zeros implies that the filter is bypassed. A value of 1
corresponds to 2x decimation, a value of 2 corresponds to 4x and so on up to the maximum value of 5, corresponding
to 32x decimation.
BYP F3 BYP F1
DEC2 DEC1 DEC0
1
Bits 15-9 are all self clearing bits.
2
Only one of the bits 14-11 may be set in any write operation as they all determine the contents of the next read operation
Table 13. Control Register 2 (Address 0x0002, Default Value 0x009B)
MSB LSB
0 0 0 0 0 0 0 0 0 0 CDIV1
CDIV0 PD
LPWR 1 D1PD
Bit Mnemonic Comment
5-4 CDIV1:0
Clock Divider Bits. These set the divide ratio of the MCLK signal to produce the internal ICLK. Setting CDIV[1:0] = 00
divides the MCLK by 2, setting CDIV[1:0] = 01 divides MCLK by 4. If CDIV[1:0] = 10 then the MCLK frequency is equal to
the ICLK. CDIV[1:0] = 11 is not allowed.
3 PD Power Down. Setting this bit powers down the AD7760 reducing the power consumption to TBD µW.
2 LPWR
Low Power. If this bit is set, the AD7760 is operating in a low power mode. The power consumption is reduced for a 6dB
reduction in noise performance.
1 Write a ‘1’ to this bit.
0 D1PD Differential Amplifier Power Down. Setting this bit powers down the on-chip differential amplifier.
Rev. PrN | Page 20 of 22

Preliminary Technical Data AD7760
Table 14. Status Register (Read Only)
MSB LSB
PA RT 1 PA RT 0 DIE 2 DIE 1 DIE
0
DVALID LPWR OVR
DL
OK
Filter
OK U Filter
BYP F3 BYP F1
DEC2 DEC1 DEC0
Bit Mnemonic Comment
15,14 PART1:0 Part Number. These bits will be constant for the AD7760.
13-11 DIE2:0 Die Number. These bits will reflect the current AD7760 die number for identification purposes within a system.
10 DVALID Data Valid. This bit corresponds to the DVALID bit in the status word output in the second 16-bit read operation.
9 LPWR Low Power. If the AD7760 is operating in Low Power Mode, this bit is set to a 1.
8 OVR If the current analog input exceeds the current overrange threshold, this bit will be set.
7 DL OK
6 Filter OK
5 U Filter If a user-defined filter is in use, this bit is set.
4
3
2-0 DEC2:0 Decimation Rate. These correspond to the bits set in Control Register 1.
BYP F3
BYP F1
When downloading a user filter to the AD7760, a checksum is generated. This checksum is compared to the one
downloaded following the coefficients. If these checksums agree, this bit is set.
When a user-defined filter is in use, a checksum is generated when the filter coefficients pass through the filter. This
generated checksum is compared to the one downloaded. If they match, this bit is set.
Bypass Filter 3. If Filter 3 is bypassed by setting the relevant bit in Control Register 1, this bit is also set.
Bypass Filter 1. If Filter 1 is bypassed by setting the relevant bit in Control Register 1, this bit is also set.
.
NON BIT-MAPPED REGISTERS
Offset Register (Address 0x0003, Default Value 0x0000)
The Offset Register uses 2’s Complement notation and is scaled such that 0x7FFF (maximum positive value) and 0x8000 (maximum
negative value) correspond to an offset of +0.78125% and -0.78125% respectively. Offset correction is applied after any gain correction.
Using the default gain value of 1.25 and assuming a reference voltage of 4.096V, the offset correction range is approximately ±25mV.
Gain Register (Address 0x0004, Default Value 0xA000)
The Gain Register is scaled such that 0x8000 corresponds to a gain of 1.0. The default value of this register is 1.25 (0xA000). This gives a
full scale digital output when the input is at 80% of V
Over Range Register (Address 0x0005, Default Value 0xCCCC)
The Over Range register value is compared with the output of the first decimation filter to obtain an overload indication with minimum
propagation delay. This is prior to any gain scaling or offset adjustment. The default value is 0xCCCC which corresponds to 80% of V
(the maximum permitted analog input voltage) Assuming V
approximately 6.55v pk-pk differential. Note that the over-range bit is also set immediately if the analog input voltage exceeds 100% of
V
for more than 4 consecutive samples at the modulator rate.
REF
. This ties in with the maximum analog input range of ±80% of V
REF
= 4.096V, the bit will then be set when the input voltage exceeds
REF
Pk-Pk.
REF
REF
Rev. PrN | Page 21 of 22

AD7760 Preliminary Technical Data
PR04975-0-6/04(PrN)
OUTLINE DIMENSIONS
0.60 (0.024)
7.0 (0.276) BSC SQ
PIN 1
INDICATOR
TOP
VIEW
6.75 (0.266)
BSC SQ
0.60 (0.024)
0.42 (0.017)
0.24 (0.009)
0.42 (0.017)
0.24 (0.009)
37
36
BOTTOM
VIEW
0.25 (0.010)
MIN
48
1
5.25 (0.207)
5.10 (0.201) SQ
4.95 (0.195)
0.90 (0.035) MAX
0.85 (0.033) NOM
12°MAX
0.30 (0.012)
0.23 (0.009)
0.18 (0.007)
0.50 (0.020)
BSC
0.70 (0.028) MAX
0.65 (0.026) NOM
0.20 (0.008)
REF
0.50 (0.020)
0.40 (0.016)
0.30 (0.012)
0.05 (0.002)
0.01 (0.0004)
0.0 (0.0)
25
24
5.5 (0.217)
REF
12
13
Figure 21. 48-Lead Frame Chip Scale Package [LFCSP] (CP-48)—Dimensions shown in millimeters
1.60 (0.063) MAX
0.15(0.006)
0.05(0.002)
0.60 ± 0.15
(0.024 ± 0.006)
SEATING
PLANE
12
TYP
o
0
3.5o ± 3.5
o
o
Figure 22. 64-Lead Thin Quad Flat Pack (Exposed Paddle) [TQFP] (SV-64)—Dimensions shown in millimeters
1
16
17
0.50 (0.02)
BSC
12.0(0.47) BSC
10.0(0.39) BSC
TOP VIEW
(0.0087 ± 0.002)
4964
48
33
32
0.22 ± 0.05
6.0(0.235)
BSC
ORDERING GUIDE
Model Temperature Range Package Description Package Option
AD7760BCP –40°C to +85°C Lead Frame Chip Scale Package CP-48
AD7760BSV –40°C to +85°C Thin Quad Flat Pack, Exposed Paddle SV-64
© 2004 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
Printed in the U.S.A.
Rev. PrN | Page 22 of 22
 Loading...
Loading...