


AMD SP5100
BIOS Developer’s Gui de
Technical Reference M anu al
Rev. 3.01
PN: 44415_SP5100_bdg_pub_3.01
2011 Advanced Micro Devices, Inc.

Trademarks
AMD, the AMD Arrow logo, and combinations thereof, are trademarks of Advanced Micro Devices, Inc.
HyperTransport is a licensed trademark of the HyperTransport Technology Consortium.
PCI Express and PCIe are registered trademarks of PCI-SIG.
Microsoft and Windows are registered trademarks of Microsoft Corporation.
Other product names used in this publication are for identification purposes only and may be trademarks of their
respective companies.
Disclaimer
The contents of this document are provided in connection with Advanced Micro Devices, Inc. ("AMD") products. AMD
makes no representations or warranties with respect to the accuracy or completeness of the contents of this publication
and reserves the right to make changes to specifications and product descriptions at any time without notice. No license,
whether express, implied, arising by estoppel, or otherwise, to any intellectual property rights are granted by this
publication. Except for AMD products purchased directly from AMD pursuant to AMD's terms and conditions of sale and
then only as expressly set forth therin, AMD assumes no liability whatsoever, and disclaims any express or implied
warranty, relating to its products including, but not limited to, the implied warranty of merchantability, fitness for a
particular purpose, or infringement of any intellectual property right.
AMD's products are not designed, intended, authorized or warranted for use as components in systems intended for
surgical implant into the body, or in other applications intended to support or sustain life, or in any other application in
which the failure of AMD's product could create a situation where personal injury, death, or severe property or
environmental damage may occur. AMD reserves the right to discontinue or make changes to its products at any time
without notice.
.

©2011 Advanced Micro Devices, Inc.
Table of Contents
Table of Contents
1 Introduction ............................................................................................................. 7
1.1 About this Manual ........................................................................................................................... 7
1.2 Overview ........................................................................................................................................ 7
1.3 Block Diagram ................................................................................................................................ 7
1.4 Internal PCI Devices....................................................................................................................... 8
2 SP5100 Programming Ar chi t ectu re ....................................................................... 9
2.1 PCI Devices and Functions ............................................................................................................ 9
2.2 I/O Map ......................................................................................................................................... 11
2.2.1 Fixed I/O Address Ranges ................................................................................................................... 11
2.2.1.1 Fixed I/O Address Ranges – SP5100 Proprietary Ports ..................................................................................... 11
2.2.2 Variable I/O Decode Ranges................................................................................................................ 11
2.3 Memory Map ................................................................................................................................ 12
3 SP5100 Early-POST Initialization ......................................................................... 13
3.1 512K/1M ROM Enable ................................................................................................................. 13
3.1.1 PCI ROM .............................................................................................................................................. 13
3.1.2 LPC ROM ............................................................................................................................................. 13
3.1.3 LPC ROM Read/Write Protect .............................................................................................................. 13
3.1.4 SPI ROM Controller ............................................................................................................................. 14
3.2 Real Time Clock (RTC) ................................................................................................................ 15
3.2.1 RTC Access ......................................................................................................................................... 15
3.2.1.1 Special Locked Area in CMOS .......................................................................................................................... 15
3.2.1.2 Century Byte ..................................................................................................................................................... 15
3.2.1.3 Date Alarm ........................................................................................................................................................ 15
3.3 BIOS RAM .................................................................................................................................... 16
3.4 Serial IRQ ..................................................................................................................................... 16
3.5 SubSystem ID and SubSystem Vendor ID................................................................................... 17
3.6 AMD K8 Registers ........................................................................................................................ 17
3.7 System Restart after Power Fail .................................................................................................. 18
3.7.1 Power Fail and Alarm Setup................................................................................................................. 18
4 PCI IRQ Routing .................................................................................................... 19
4.1 PCI IRQ Routing Registers .......................................................................................................... 19
4.2 PCI IRQ BIOS Programming ........................................................................................................ 19
4.3 Integrated PCI Devices IRQ Routing ........................................................................................... 20
4.3.1 IRQ Routing for HD Audio .................................................................................................................... 20
4.4 PCI IRQ Routing for APIC Mode .................................................................................................. 21
5 SMBus Programming ............................................................................................ 22
5.1 SMBus I/O Base Address ............................................................................................................ 22
5.2 SMBus Timing .............................................................................................................................. 22
5.3 SMBus Host Controller Programming .......................................................................................... 23
6 IDE Controller ........................................................................................................ 25
6.1 PIO Modes ................................................................................................................................... 25
AMD SP5100 BIOS Developer ’s Guide Page 3

©2011 Advanced Micro Devices, Inc.
Table of Contents
6.1.1 PIO Mode ............................................................................................................................................. 25
6.1.2 PIO Timing ........................................................................................................................................... 25
6.2 DMA Modes .................................................................................................................................. 25
6.2.1 Legacy (Multi-Words) DMA mode ........................................................................................................ 25
6.2.2 Ultra-DMA Mo d e .................................................................................................................................. 26
7 USB Controllers ..................................................................................................... 27
7.1 Interrupt Routing for USB Controllers .......................................................................................... 27
8 Serial ATA (SATA) ................................................................................................. 28
8.1 SATA New Features..................................................................................................................... 29
8.2 Device ID ...................................................................................................................................... 31
8.3 SATA Controller Operating Modes ............................................................................................... 31
8.4 SATA Hot Plug ............................................................................................................................. 32
8.4.1 Sample Code ....................................................................................................................................... 32
9 Power Management ............................................................................................... 33
9.1 SMI Handling – EOS (PM IO Reg10h[Bit0]) ................................................................................ 33
9.2 Programmable I/Os ...................................................................................................................... 33
9.3 Power Management Timers ......................................................................................................... 34
9.3.1 PM Timer 1 (Inactivity Timer) ............................................................................................................... 34
9.3.2 PM Timer 2 (Activity Timer) .................................................................................................................. 34
9.4 SMI Events ................................................................................................................................... 35
9.4.1 Power Button ........................................................................................................................................ 36
9.5 C-State Break Events ................................................................................................................... 36
9.5.1 Break Events for C2 State .................................................................................................................... 36
9.5.2 Break Events for C3 and C4 States ..................................................................................................... 36
9.6 Save/Restore Sequence for S3 State .......................................................................................... 36
9.6.1 Register Save Sequence for S3 State .................................................................................................. 36
9.7 Wake on PCIe® ............................................................................................................................ 37
9.7.1 Legacy PCIe ......................................................................................................................................... 37
9.7.2 Native PCIe .......................................................................................................................................... 37
9.8 Sleep SMI Events ......................................................................................................................... 37
9.8.1 Sleep SMI Control Register .................................................................................................................. 37
9.8.2 Sleep SMI Programming Sequence ..................................................................................................... 38
9.8.2.1 Set Sleep SMI Control Register ......................................................................................................................... 38
9.8.2.2 Enter Sleep SMI# Routine ................................................................................................................................. 38
10 APIC Programming................................................................................................ 39
10.1 Northbridge APIC Enable ............................................................................................................. 39
10.2 Southbridge APIC En abl e ............................................................................................................ 39
10.3 IOAPIC Base Address .................................................................................................................. 39
10.4 APIC IRQ Assignment .................................................................................................................. 39
10.5 APIC IRQ Routing ........................................................................................................................ 40
11 Watchdog Timer .................................................................................................... 41
12 A-Link Bridge ......................................................................................................... 43
AMD SP5100 BIOS Developer ’s Guide Page 4

©2011 Advanced Micro Devices, Inc.
Table of Contents
12.1
Programming Procedure .............................................................................................................. 44
12.2 A-Link Express Configuration DMA Access ................................................................................. 45
12.3 Enable Non-Posted Memory Write for K8 Platform. .................................................................... 46
13 High Precision Event Timer (HPET) ..................................................................... 47
13.1 Initialization ................................................................................................................................... 47
13.1.1 Sample Initialization Code .................................................................................................................... 47
13.2 ACPI HPET Description Table ..................................................................................................... 48
13.3 HPET Support for Vista ................................................................................................................ 48
14 Workarounds ......................................................................................................... 49
14.1 Workaround for SMI Command Port Status Byte ........................................................................ 49
15 Sample Programs .................................................................................................. 51
15.1 IXP700 Register Initialization on Power-Up ................................................................................. 51
15.1.1 Initialization of PCI IRQ Routing before Resource Allocation ............................................................... 51
15.2 Setup Options ............................................................................................................................... 52
15.2.1 64 Bytes DMA ...................................................................................................................................... 52
15.2.2 USB Overcurrent Detection Disable ..................................................................................................... 52
15.2.3 C3 Support ........................................................................................................................................... 52
15.2.4 Subtractive Decoding for P2P Bridge ................................................................................................... 53
15.2.5 Enable/Disable On-Chip SATA ............................................................................................................ 54
15.2.6 Change Class ID for SATA................................................................................................................... 54
15.2.7 Disable AC97 Audio or MC97 Modem ................................................................................................. 56
15.2.8 Enable EHCI Controller ........................................................................................................................ 57
15.2.9 Enable OHCI Controller ....................................................................................................................... 59
15.3 IDE Settings ................................................................................................................................. 59
15.3.1 PIO Mode Settings ............................................................................................................................... 59
15.3.2 Multiword DMA Settings ....................................................................................................................... 61
15.3.3 UDMA Mode Settings ........................................................................................................................... 61
15.3.4 IDE Channel Disable ............................................................................................................................ 62
15.3.5 IDE Channel Enable ............................................................................................................................. 64
15.4 USB Controller Reset at Hard Reset ............................................................................................ 65
15.5 Clock Throttling ............................................................................................................................ 65
15.6 Lid Switch ..................................................................................................................................... 67
15.6.1 Lid Switch Hardware Connection ......................................................................................................... 67
15.6.2 Associated Registers ........................................................................................................................... 67
15.6.3 BIOS Initialization ................................................................................................................................. 67
15.6.4 ACPI Programming .............................................................................................................................. 68
15.7 SATA Hot Plug Sample Program ................................................................................................. 70
15.8 Temperature Limit Shutdown through SMI# ................................................................................ 75
15.8.1 Setting Up ITE 8712 Super I/O Registers ............................................................................................ 76
15.8.2 Initialize Southbridge Registers for SMI# ............................................................................................. 81
15.8.3 SMI Programming to Shut Down the System ....................................................................................... 82
15.9 Sleep Trap through SMI# ............................................................................................................. 83
15.9.1 Enable Sleep SMI# in ACPI ASL code ................................................................................................. 83
15.9.2 Sleep Trap SMI Routine ....................................................................................................................... 84
AMD SP5100 BIOS Developer ’s Guide Page 5

©2011 Advanced Micro Devices, Inc.
Table of Contents
15.10
HD Audio – Detection and Configuration ..................................................................................... 85
16 Chipset Integration Module Extensive (SB7xx CIMx) ......................................... 94
16.1 Introduction ................................................................................................................................... 94
16.2 Distribution Model ......................................................................................................................... 94
16.3 CIMx Architecture ......................................................................................................................... 94
16.4 Binary File .................................................................................................................................... 96
16.4.1 Overview .............................................................................................................................................. 96
16.4.2 Binary Header ...................................................................................................................................... 97
16.5 CIMx Interface Calls Environment ................................................................................................ 97
16.6 Interface Definition ....................................................................................................................... 97
16.6.1 Southbridge Power-On/R eset I nitia liz ation ........................................................................................... 97
16.6.2 SouthBridge BIOS Post Initialization .................................................................................................. 101
16.6.3 S3 Resume Initialization ..................................................................................................................... 110
16.7 Callback Interface Definition ...................................................................................................... 110
16.7.1 SATA OEM Call Back “SATA_PHY_PROGRAMMING” ..................................................................... 110
16.7.2 Integrated Pull-up and Pull-down Settings “PULL_UP_PULL_DOWN_SETTINGS” ............................. 111
16.8 SMM Functions Support ............................................................................................................. 111
16.9 Reference Code ......................................................................................................................... 112
Appendix: Revision History ...................................................................................... 113
AMD SP5100 BIOS Developer ’s Guide Page 6

©
1 Introduction
1.1 About this Manual
This manual provides guidelines for BIOS developers working with the AMD SP5100 (previously called
SB700S) Southbridge. It describes the BIOS and software modifications required to fully support the device.
Other documents on the SP5100 are available at AMD’s NDA website or from your AMD FAE representative.
Note: To help the reader to readily identify changes/updates in this document, changes/updates over the
previous revision are highlighted in red. Refer to Appendix: Revision History at the end of this document for a
detailed revision history.
1.2 Overview
AMD’s SP5100 Southbridge integrates the key I/O, communications, and audio features required in a stateof-the-art server into a single device. These products are specifically designed to operate with AMD’s
RADEON IGP Xpress family of integrated graphics processor products in server products.
1.3 Bl ock Diagram
This section contains a diagram for the SP5100. Figure 1 below shows the SP5100 intern al PCI de vices
and the major function blocks.
2011 Advanced Micro Devices, Inc.
AMD SP5100 BIOS Developers Guide Page 7

©2011 Advanced Micro Devices, Inc.
GPP_P/N (3:0)
LPC
LPC /FWH/SPI Rom interface
PCI Bridge
SMBUS /ACPI
AB
HD Audio
PORT 1 PORT 0
USB:OHCI(x5)
USB:EHCI(x2)
8250 TIMER
GPIO
RTC
ACPI / HW
Monitor
SMBUS
BUS Controler
APIC/ PIC
INTERRUPT
controller
SMI
SIRQ
PM
SPEAKER
GEVENT[7:0],SLPBUTTON
GPM [9:0]TEMPDEAD,
TEMPCAUT,
SHUTDOWN,DC_STOP#
SCIOUT,
SOFF#
INT# H:A
LDTRST#
RESET#
PWRGOOD
A-LINK
B-LINK
PICD[0]
RTC_IRQ#,
PIDE_INTRQ,
USB_IRQ#,
SATA_IRQ#,
AZ_IRQ#
X1/X2
12 USB2.0 + 2
USB1.1 PORTS
SERIRQ#
6 PCI SLOTS
LPC bus
SPI bus
Debug port
B-LINK A-LINK
Alink Express II
IMC
8051
IMC_INT
Clock Gen
CPU_NB_HT
NB Disp Clock
USB Clock
SIO Clock
SATA Clock
USB clock
Flash Cont Clock
CPU_HT_HT
PCIE_GFX_Clock
25MHz X1 / X2
Flash
Controller
SATA
Controller
6 PORTS(
GEN-II)
IDE
1 CHANNEL
FC interface
IDE interface
HD Link
ASF
SMBUS
Figure 1: SP5100 PCI Internal Devices and Major Function Blocks
1.4 Internal PCI Devices
Note: The SP5100 internal PCI devices are listed in Figur e 2 below. The sub-sections that f ollow provide
descriptions of the PCI configuration space, the I/O space, and the memory space registers for each device. PCI
configuration space registers are only accessible with configuration Read or configuration Write cycles and with
the target device selected by settling its corresponding IDSEL bit in the configuration cycle address field.
AMD SP5100 BIOS Developers Guide Page 8

©2011 Advanced Micro Devices, Inc.
LPC
PCI Bridge
Bus 0 DEV 20 Function 4
Device ID 4384h
SMBUS /ACPI
Bus 0 DEV 20 Function 0
AB
HD Audio
PORT 1
PORT 0
USB:OHCI(x5)
Bus 0 DEV 19 Function 0:4
Device ID 4387h : 4388h :
4389h : 438Ah : 438Bh
USB:EHCI(x2)
A-LINK
B-LINK
12 USB2.0 + 2
USB1.1 PORTS
6 PCI SLOTS
LPC bus
SPI bus
Debug port
B-LINK A-LINK
Alink Express II
IMC
8051
IMC_INT
Flash Controller
SATA Controller
IDE
HD Link
Bus 0 DEV 20 Function 1
Bus 0 DEV 20 Function 2
Bus 0 DEV 19 Function 0
Device ID 438Ch
Device ID 438Dh
Bus 0 DEV 20 Function 3
Device ID 4383h
Device ID 4385h
Device ID 4390h
Device ID 4391h
Device ID 4392h
Device ID 4393h
Device ID 4394h
Bus:Device:Function
Function Description
Dev ID
Enable/Disable
Figure 2: SP5100 PCI Internal Devices
2 SP5100 Programmi ng Archit ectur e
2.1 PCI De vic e s and Func t ions
AMD SP5100 BIOS Developers Guide Page 9
Bus 0:Device 14h:Function 0 SMBus Controller 4385h Always enabled
Bus 0:Device 14h:Function 1 IDE Controller 438Ch PM IO Reg59h[Bit3]
Bus 0:Device 14h:Function 2 Azalia Controller 4383h PM IO Reg59h[Bit3]
0: Disables flash controller and
enables ide controller
1: Enables flash controller and
disables ide controller
0: Disables Azalia
1: Enables Azailia

©2011 Advanced Micro Devices, Inc.
Bus 0:Device 14h:Function 3 LPC Controller 438Dh SMBus PCI Reg64h[Bit20]
0: Disables LPC controller
1: Enables LPC controller
Bus 0:Device 14h:Function 4 PCI to PCI Bridge 4384h Always enabled
Bus 0:Device 12h:Function 2
Bus 0:Device 13h:Function 2
Bus 0:Device 12h:Function 0
Bus 0:Device 12h:Function 1
Bus 0:Device 13h:Function 0
Bus 0:Device 13h:Function 1
Bus 0:Device 14h:Function 5
Bus 0:Device 11h:Function 0 Native/Legacy IDE Mode
USB #1EHCI Controller
USB #2EHCI Controller
USB #1 OHCI Controller #0
USB #1 OHCI Controller #1
USB #1 OHCI Controller #0
USB #1 OHCI Controller #1
USB #3 OHCI Controller
AHCI mode
Non-Raid-5 Mode
Raid5 Mode
AMD AHCI mode (uses AMD
AHCI drivers instead of MS
drivers)
4396h
4396h
4397h
4398h
4397h
4398h
438Bh
4390h
4391h
4392h
4393h
4394h
SMBus PCI Reg68h[Bit0]
SMBus PCI Reg68h[Bit4]
0: Enables EHCI controller
1: Disables EHCI controller
SMBus PCI Reg68h[Bit1]
SMBus PCI Reg68h[Bit2]
SMBus PCI Reg68h[Bit5]
SMBus PCI Reg68h[Bit6]
SMBus PCI Reg68h[Bit7]
0: Disables OHCI controller
1: Enables OHCI controller
SMBus PCI Reg ADh[bit 0]
0: Disables SATA controller
1: Enables SATA controller
AMD SP5100 BIOS Developers Guide Page 10

©2011 Advanced Micro Devices, Inc.
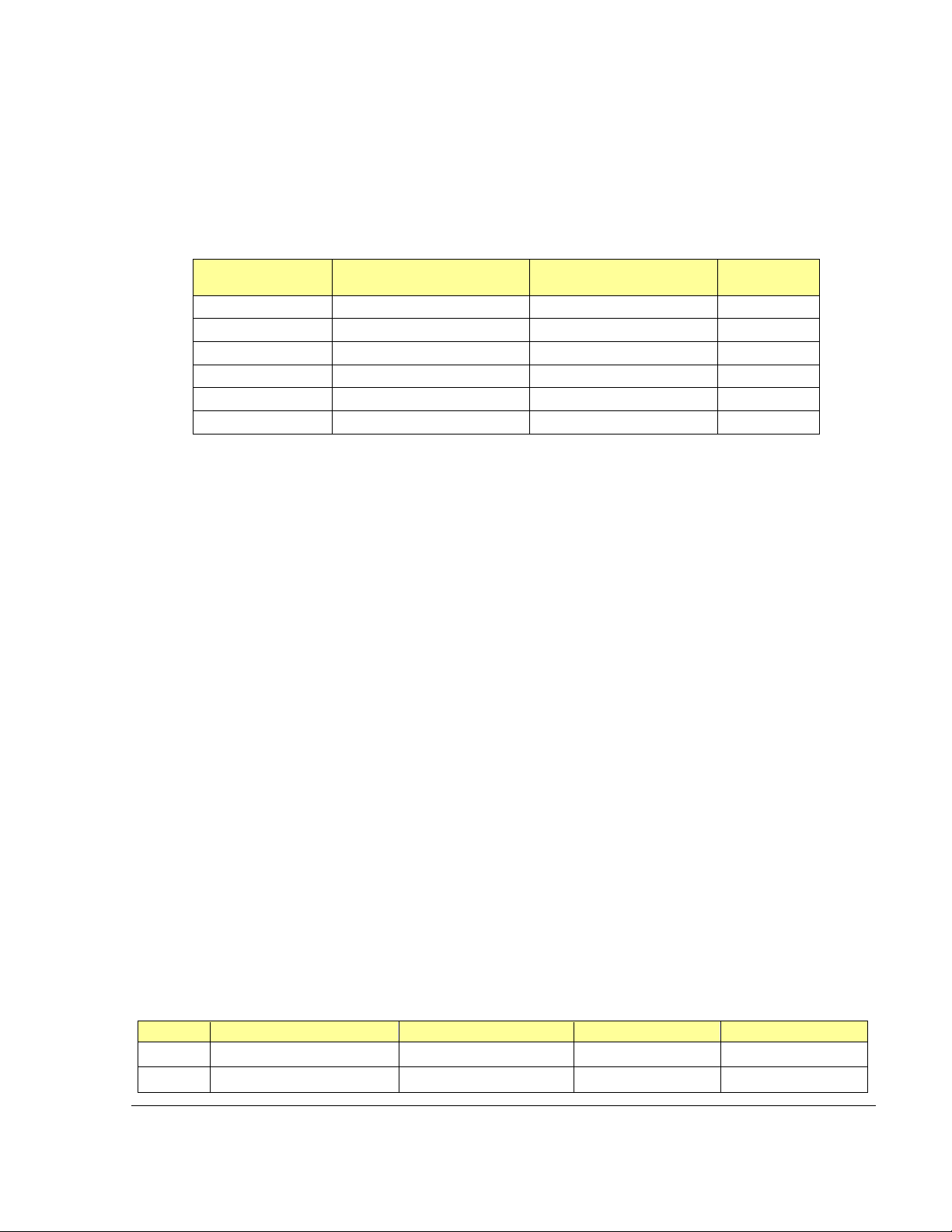
2.2 I/O Map
I/O Address
Description
Enable Bit
I/O Name
Description
Configure Register
Range Size
(Bytes)
The I/O map is divided into Fixed and Variable address ranges. Fixed ranges cannot be moved, but
can be disabled in some cases. Variable ranges are configurable.
2.2.1 Fixed I/O Address Ranges
2.2.1.1 Fixed I/O Address Ranges – SP5100 Proprietary Ports
C00h-C01h IRQ Routing Index/Data register SMBus PCI Reg64h[Bit0]
C14h PCI Error Control register SMBus PCI Reg78h[Bit4]
C50h-C51h Client Management Index /Data
registers
C52h Gpm Port SMBus PCI Reg78h[Bit6]
C6Fh Flash Rom Program Enable SMBus PCI Reg78h[Bit8]
CD0h-CD1h PM2 Index/Data
CD4h-CD5h BIOS RAM Index/Data
CD6h-CD7h Power Management I/O register SMBus PCI Reg64h[Bit2] & Reg78h[Bit9]
SMBus PCI Reg 79h[Bit3]
2.2.2 Variable I/O Decode Ranges
PIO0 Programmable I/O Range 0 PM IO Reg14h & Reg15h <=16
PIO1 Programmable I/O Range 1 PM IO Reg16H & Reg17H <=16
PIO2 Programmable I/O Range 2 PM IO Reg18h & Reg19h <=16
PIO3 Programmable I/O Range 3 PM IO Reg1Ah & Reg1Bh <=16
PIO4 Programmable I/O Range 4 PM IO Reg A0h & Reg A1h <=16
PIO5 Programmable I/O Range 5 PM IO Reg A2h & Reg A3h <=16
PIO6 Programmable I/O Range 6 PM IO Reg A4h & Reg A5h <=16
PIO7 Programmable I/O Range 7 PM IO Reg A6h & Reg A7h <=16
PM1_EVT ACPI PM1a_EVT_BLK PM IO Reg20h & Reg21h 4
PM1_CNT ACPI PM1a_CNT_BLK PM IO Reg22h & Reg23h 2
PM_TMR ACPI PM_TMR_BLK PM IO Reg24h & Reg25h 4
P_BLK ACPI P_BL K PM IO Reg26h & Reg27h 6
GPE0_EVT ACPI GPE0_EVT_BLK PM IO Reg28h & Reg29h 8
SMI CMD Block * SMI Command Block PM IO Reg2Ah & Reg2Bh 2
Pma Cnt Block PMa Control Block PM IO Reg2Ch & Reg2Dh 1
SMBus SMBus IO Space S MBus PCI Reg90h &
16
RegD2h[Bit0]
AMD SP5100 BIOS Developers Guide Page 11

©2011 Advanced Micro Devices, Inc.
Note:
Memory Range
Description
Enable Bit
• The SMI CMD Block must be word aligned, i.e., the least significant bit of the address
must be zero (address[0] must be 0). For example, B0h, B2h, B4h, B6h, B8h etc.
• The SMI CMD Block consists of two ports – the SMI Command Port at base address, and
the SMI Status Port at base address+1.
• The writes to SMI Status Port will not generate an SMI. The writes to the SMI Command
Port will generate an SMI.
• The SMI Command and SMI Status ports may be written individually as 8 bit ports, or
together as a 16-bit port.
2.3 Memory Map
0000 0000h-000D FFFFh
0010 0000h- TOM
000E 0000h-000F FFFFh Either PCI ROM or LPC
FFC0 0000h-FFC7 FFFFh
FF80 0000h-FF87 FFFFh
FFC8 0000h-FFCF FFFFh
FF88 0000h-FF8F FFFFh
FFD0 0000h-FFD7 FFFFh
FF90 0000h-FF97 FFFFh
FFD8 0000h-FFDF FFFFh
FF98 0000h-FF9F FFFFh
FFE0 0000h-FFE7 FFFFh
FFA0 0000h-FFA7 FFFFh
FFE8 0000h-FFEF FFFFh
FFA8 0000h-FFAF FFFFh
FFF0 0000h-FFF7 FFFFh
FFB0 0000h-FFB7 FFFFh
FFF8 0000h-FFFF FFFFh
FFB8 0000h-FFBF FFFFh
Main System Memory
ROM
FWH LPC Reg70h[3:0]
FWH LPC Reg70h[7:4]
FWH LPC Reg70h[11:8]
FWH LPC Reg70h[15:12]
FWH LPC Reg70h[19:16]
FWH LPC Reg70H[23:20]
FWH LPC Reg70h[27:24]
FWH LPC Reg70h[31:28]
PCI ROM : SMBus PCI Reg41h[Bit4]
LPC ROM : LPC Reg68h & LPC_Rom strap
AMD SP5100 BIOS Developers Guide Page 12

©2011 Advanced Micro Devices, Inc.
3 SP5100 Early-POST Initialization
256K ROM
(Default)
512K ROM
Setting
512K ROM
Setting
1 M ROM
Setting
The system BIOS needs to configure the SP5100 at the very beginning of POST. Some of the
settings will change depending on the OEM design, or on the newer revision chipset.
3.1 512K/1M ROM Enable
With the SP5100 design, there can be two possible ROM sources: PCI ROM and LPC ROM. Two pin
straps (UseLpcRom, FWHDisable) decide where the ROM is (see the SP5100 Databook). Upon
system power on, the SP5100 enables 256K ROM by default. The BIOS needs to enable 512K ROM
or up to 1M for LPC ROM, if required.
3.1.1 PCI ROM
Control Bit Description
SMBus PCI Reg41h[Bit1] When set to 1, the address between FFF80000h
to FFFDFFFFh will be directed to the PCI ROM
interface.
SMBus PCI Reg41h[Bit4] When set to 1, the address between 0E0000h to
0EFFFFh will be directed to the PCI ROM
interface.
0 1
0 1
3.1.2 LPC ROM
To use the LPC ROM, the pin straps UseLpcRom, FWHDisable must be set accordingly.
Control Bit(s) Description Default
LPC PCI
Reg68h
LPC PCI Reg6Ch 16-bit starting & end address of the
LPC PCI
Reg48Hh[Bits4:3]
16-bit starting & end address of the
LPC ROM memory address range 1.
LPC ROM memory address range 2.
Enable bits for LPC ROM memory
address range 1 & 2.
Note: with pins straps set to LPC ROM,
these two bits have no effect on Reg68
& Reg6C.
000E0000h 000E0000h 000E0000h
FFFE0000h FFF80000h FFF00000h
00b 11b 11b
3.1.3 LPC ROM Read/Write Protect
The SP5100 allows all or a portion of the LPC ROM addressed by the firmware hub to be read
protected, write protected, or both read and write protected. Four dword registers are provided to
select up to 4 LPC ROM ranges for read or write protection. The ROM protection range is defined by
the base address and the length. The base address is aligned at a 2K boundary. The address length
can be from 1K to 256K in increments of 1K.
AMD SP5100 BIOS Developers Guide Page 13
©2011 Advanced Micro Devices, Inc.
Register 50h, 54h, 58h, 5ch of Device 14h, Function 3
Field Name
Bits
Description
Base Address 31:11 ROM Base address. The most significant 21 bits of the base address
are defined in this field. Bits 10:0 of the base address are assumed to
be zero. Base address, therefore, is aligned at a 2K boundary.
Length 10:2 These 9 bits (0-511) define the length from 1K to 512K in increments of
1K.
Read Protect 1 When set, the memory range defined by this register is read protected.
Reading any location in the range returns FFh.
Write Pr otect 0 When set, the memory range defined by this register is write protected.
Writing to the range has no effect.
Example:
Protect 32K LPC ROM starting with base address FFF80000.
Base address bits 31:11 1111 1111 1111 1000 0000 0 b
Length 32K bit 10:2 = 31h = 000 0111 11 b
Read protect bit 1 = 1
Write protect bit 0 = 1
Register 50h = 1111 1111 1111 1000 0000 0000 0111 1111 b = FFF8007F h
Note:
1. Registers 50h ~ 5Fh can be written once after the hardware reset. Subsequent writes to
them have no effect.
2. Setting sections of the LPC ROM to either read or write protect will not allow the ROM to
be updated by a flash programming utility. Most flash utilities write and verify ROM
sectors, and will terminate programming if verification fails due to read protect.
3.1.4 SPI ROM Controller
The SPI ROM interface is a new feature added to the SP5100. Refer to the AMD SP5100 Register
Reference Manual for more information on this feature.
Note: The LPC ROM Read/Write Protect mentioned in the previous paragraph also applies to SPI.
Two strap pins, PCICLK0 and PCICLK1, determine the SP5100 boot up from LPC ROM or SPI ROM.
There is no register status to reflect whether the current ROM interface is LPC or SPI.
AMD SP5100 BIOS Developers Guide Page 14

©2011 Advanced Micro Devices, Inc.
3.2 Real Time Clock (RTC)
RTCProtect- RW - 8 bits - [PCI_Reg: 6Ah]
Field Name
Bits
Default
Description
RTCProtect
0
0h
When set, RTC RAM index 38h:3Fh will be locked from
read/write. This bit can only be written once.
read/write. This bit can only be written once.
read/write. This bit can only be written once.
RTCProtect
3
0h
When set, RTC RAM index D0h:DFh will be locked from
read/write. This bit can only be written once.
RTCProtect
4
0h
When set, RTC RAM index C0h:CFh will be locked from
read/write. This bit can only be written once.
Reserved
7:5
0h
3.2.1 RTC Access
The internal RTC is div ided into two sections: the c lock and alarm function (registers 0 to 0Dh) , and
CMOS memory (registers 0Eh to FFh). T he clock and alarm func tions must be acces sed through I/O
ports 70h/71h. The CMOS memory (registers 0Eh to FFh) should be accessed through I/O ports
72h/73h.
3.2.1.1 Special Locked Area in CMOS
Some CMOS memory locations may be disabled for read/write. Register 6Ah of SMBus (Bus 0,
Device 14h, Function 0) ha s bits to d isab le these C M OS m emor y locations. T hes e bits can be wr itten
only once after each power up reset or PCI reset.
RTCProtect 1 0h When set, RTC RAM index F0h:FFh will be locked from
RTCProtect 2 0h When set, RTC RAM index E0h:EFh will be locked from
3.2.1.2 Century Byte
The RTC has a century byte at CMOS location 32h. Century is stored in a single byte and the BCD
format is used for the century (for example, 20h for the year 20xx). This byte is accessed using I/O
ports 70h and 71h. (The BIOS must set PMIO register 7Ch bit 4 to 1 to use this century byte at
CMOS location 32h
3.2.1.3 Date Alarm
The RTC has a date alarm byte. This byte is accessed as follows:
1. Set to 1 the RTC register 0Ah , bit 4, using I/O ports 70h and 71h.
2. Write Date Alarm in BCD to register 0Dh using I/O ports 70h and 71h.
3. Clear to 0 the RTC register 0Ah bit 4 using I/O ports 70h and 71h.
Note: It is important to clear RTC register 0Ah bit 4 to zero; otherwise, the CMOS memory may not be
accessed correctly from this point onward.
AMD SP5100 BIOS Developers Guide Page 15

©2011 Advanced Micro Devices, Inc.
3.3 BIOS RAM
Bits in SMBus
PCI Reg69
Power-on
Default
Recommended
Value
The SP5100 has 256 bytes of BIOS RAM. Data in this RAM is preserved until RSMRST# or S5 is
asserted, or until power is lost.
This RAM is accessed using index and data registers at CD4h/CD5h.
3.4 Serial IRQ
The SP5100 s upports seria l IRQ, which all ows one single si gnal to report m ultiple interru pt requests.
The SP5100 supports a m essage f or 21 serial interru pts , which inc lude 15 I RQs, SMI#, IOC HK#, a nd
4 PCI interrupts.
SMBus PCI Reg69h is used for setting serial IRQ.
Description
7 1 – Enables the serial IRQ function
0 – Disables the serial IRQ function
6 1 – Active (quiet) mode
0 – Continuous mode
5:2 Total number of serial IRQs = 17 +
NumSerIrqBits
0 – 17 serial IRQs (15 IRQs, SMI#,
IOCHK#)
1 – 18 serial IRQs (15 IRQs, SMI#,
IOCHK#, INTA#)
...
15 - 32 serial IRQ's
The SP5100 serial IRQ can support
15 IRQs, SMI#, IOCHK#, INTA#,
INTB#, INTC#, and INTD#.
1:0 Number of clocks in the start frame 0 00b
0 1
0 0
0 0100b
Note: T he BIOS s hou ld e nt er t he conti nuo us mode first when enabling the seri al I RQ pr otocol, s o th at
the SP5100 can generate the start frame.
AMD SP5100 BIOS Developers Guide Page 16

©2011 Advanced Micro Devices, Inc.
3.5 SubSystem ID and SubSystem Vendor ID
Register
Name
Default
Description
SubSytem ID and SubSystem Vendor ID can be programmed in various functions of SP5100 register
2Ch. These registers are write-once registers. For example, to program a SubSytem vendor ID of
1002h and SubSystem ID of 4341h in AC97 device 14h, function 5, use the following assembly
language sample code:
mov eax,8000A52Ch
mov dx,0CF8h
out dx,eax
mov dx,0CFCh
mov eax,43411002h
out dx,eax
3.6 AMD K8 Registers
The SP5100 is set for the AMD K8 processor by hardware strap. The following registers in the PM IO
space (accessed through index/data registers at CD6h/CD7h) are specific for the AMD K8 processor.
For the early post initialization these registers may be left at default values.
TM
SMAFx in the table below are sent with STPCLK messages down the HyperTransport
link.
PM IO 80h SMAF0 06h System Management Action for C2 and S4/S5
PM IO 81h SMAF1 21h System Management Action for VFID and C3
PM IO 82h SMAF2 43h System Management Action for S3 and S1
PM IO 83h SMAF3 55h System Management Action for thermal and normal
throttling.
PM IO 85h CF9Rst 00h Full reset/INIT
PM IO 86h Thermal Throttle
Control
PM IO 87h LdtStpCmd 00h Write bit[0] = 1 to generate C3
PM IO 88h LdtStartTime 00h LDTSTP# assertion delay in microseconds
PM IO 8Ah LdtAgpTimeCntl 00h LDTSTP# de-assertion delay select
PM IO 8Bh StutterTime 00h Stutter LDTSTP# duration in microse co nds
PM IO 8Ch StpClkDlyTime 00h STPCLK# assertion in microseconds
PM IO 8Dh AbPmeCntl 0Eh Fake A-link bridge PME
00h Enables time control for thermal throttling.
AMD SP5100 BIOS Developers Guide Page 17

©2011 Advanced Micro Devices, Inc.
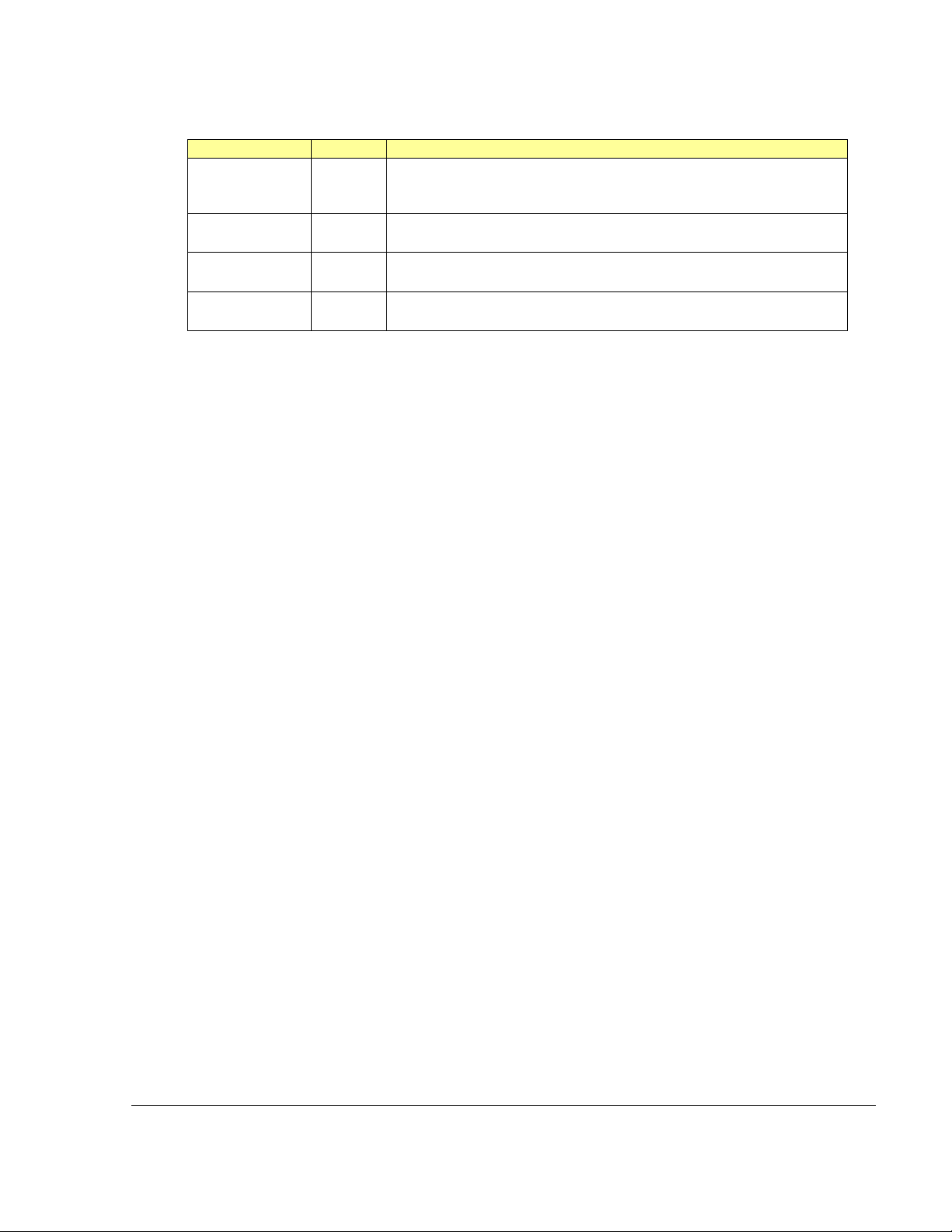
3.7 System Restart after Power Fail
The system will remain off until the power button is pressed.
The way the system restarts following a power-fail/ power-restore cycle depends on the setting of
PMIO register 74h [bits 1:0].
PMIO Register 74h bits[1:0] Description
00b or 10b
01b The system will always restart after the power is restored.
11b At power-up the system will either restart or remain off
depending on the state of the system at power failure. If the
system was on when the power failed, the system will restart
at power-up. If the system was off when the power failed, the
system will remain off after the power is restored. Pressing
the power button is required to restart the system.
Notes on programming the PMIO register 74h:
1. Bits[3:0] should be used for programming. Bits[7:4] are read-only bits and reflect the
same values as bits[3:0].
2. Bit 2 is used by the hardware to save the power on/off status. This bit should not be
modified during software/BIOS programming, however, its value should be restored
(effectively setting a value of ‘1’ as will be the case after every power up) upon every
access into this register. The BIOS programmer should always read PMIO register
74h, modify bit3 and bits[1:0] as required, and write back the PMIO register 74h.
3. PM_Reg:74h is initialized on every cold boot (G3->S5->S0 transition); however, it is
also required to restore the settings in bits [7, 5:4] to bits [3, 1:0] following any
SYS_RST# or RSMRST# assertion.
3.7.1 Power Fail and Alarm Setup
The state of the machine after the power-fail/power-restore cycle is controlled by PMIO register 74h
bits[1:0] as described above. This programming can be over-ridden for the special case when the
alarm is set. When both the alarm and the PMIO register 74h bit3 are set, the system will restart after
the power is restored, regardless of how register 74h bits [1:0] are defined.
AMD SP5100 BIOS Developers Guide Page 18

©2011 Advanced Micro Devices, Inc.
4 PCI IRQ Routing
Address
Register Name
Description
4.1 PCI IRQ Routing Registers
The SP5100 uses one pair of I/O ports to do the PCI IRQ routing. The ports are at C00h/C01h.
C00h PCI_Intr_Index PCI IRQ Routing Index
0 – INTA#
1 – INTB#
2 – INTC#
3 – INTD#
4 – SCI
5 – SMBus interrupt
9 – INTE#
0Ah – INTF#
0Bh – INTG#
0Ch – INTH#
C01h PCI_Intr_Data 0 ~ 1 5 : IRQ0 to IRQ15
IRQ0, 2, 8, 13 are reserved
4.2 PCI IRQ BIOS Programming
PCI IRQs are assigned to interrupt lines using I/O ports at C00h and C01h in index/data format. The
register C00h is used for index as written with index number 0 through 0Ch as described in section
4.1 above. Register C01h is written with the interrupt number as data.
The following assembly language example assigns INTB# line to interrupt 10 (0Ah).
mov dx,0C00h ; To write to IO port C00h
mov al,02h ; Index for PCI IRQ INTB# as defined in section 4.1
out dx,al ; Index is now set for INTB#
mov dx,0C01h ; To write interrupt number 10 (0Ah)
mov al,0Ah ; Data is interrupt number 10 (0Ah )
out dx,al ; Assign IRQB# to interrupt 10
AMD SP5100 BIOS Developers Guide Page 19

©2011 Advanced Micro Devices, Inc.
4.3 Int e grated PCI Devices IRQ Routing
Device
Reg3Dh of
PCI Device
PCI INT#
Description
In the SP5100, the AC’97 and USB need PCI IRQ. Internally, they are routed to different PCI INT#s.
Bus 0:Device 14h:Function 1 01 INTA# IDE Controller*
Bus 0:Device 14h: Function 2 01 Programmable** High Definition Audio
Bus 0:Device 14h: Function 5 03 Programmable*** USB #3 OHCI Controller
Bus 0:Device 12h:Function 0 01 Programmable*** USB #1 OHCI Controller #0
Bus 0:Device 12h:Function 1 01 Programmable*** USB #1 OHCI Controller #1
Bus 0:Device 12h:Function 2 02 Programmable*** USB #1 EHCI Controller
Bus 0:Device 13h: Function 0 01 Programmable*** USB #2 OHCI Controller #0
Bus 0:Device 13h: Function 1 01 Programmable*** USB #2 OHCI Controller #1
Bus 0:Device 13h: Function 2 02 Programmable*** USB #2 EHCI Controller
Bus 0:Device 11h:Function 0 01 Programmable**** SATA Controller #2
Notes:
* IDE controller needs PCI IRQ only if it is set to the native mode.
** Refer to section 4.3.1 for details.
***Refer to section 7.1 for details.
**** Smbus_pci_config 0xAF [4:2] for SATA Controller
4.3.1 IRQ Routing for HD Audio
Interrupt routing for device 14h, function 2 HD Audio is done through PCI SMBUS (device 14h,
function 0) register 63h. Values from INTA# to INTH# can be set in this register.
Sample Code: Set High Definition Audio interrupt routing to INTA#:
mov eax,8000A060h ; Device 14h, function 0, registers 60h-63h
mov dx,0CF8h ; PCI configuration Index register
out dx,eax ; Set to read/write registers 60h-63h
mov dx,0CFFh ; PCI configuration Data register for 63h
mov al,0 ; Set to INTA#
out dx,al ; Write to PCI register 63h
Note: The SP5100 has provisions to modify the interrupt pin register (PCI register 3Dh) for special
conditions. This pin is modified through device 14h, function 2, register 44h. Under normal
circumstances do not modify this register. The default is Pin 1.
AMD SP5100 BIOS Developers Guide Page 20

©2011 Advanced Micro Devices, Inc.
4.4 PCI IRQ Routing for APIC Mode
PCI IRQ
APIC Assignment
INTA# 16
INTB# 17
INTC# 18
INTD# 19
INTE# 20
INTF# 21
INTG# 22
INTH# 23
AMD SP5100 BIOS Developers Guide Page 21

©2011 Advanced Micro Devices, Inc.
5 SMBus Programming
The SP5100 SMBus (System Management Bus) complies with SMBus Specification Version 2.0.
5.1 SMBus I/O Base Address
The BIOS needs to set a valid SMBus I/O base address before enabling the SMBus Controller. The
SMBus I/0 base address should be set at PCI Reg90h in the SMBus Controller (Bus 0, Device 14h,
Function 0).
The SMBus controller enable bit is bit 0, register D2h, of the SMBus device (Bus 0, Device 14h,
Function 0).
The following is a sample code to enable the SMBus with a temporary I/O base address:
SMB_IO EQU 8040h
; Set SMBus I/O base address
mov dx, 0CF8h ; PCI Index Register
mov eax, 8000A090h ; Reg90h on SMBus PCI Control ler
out dx, eax
mov dx, 0CFCh ; PCI Data Register
mov eax, SMB_IO ; Temp SMBus I/O base address
out dx, eax
; Enable the SMBus controller
mov dx, 0CF8h ; PCI Index Register
mov eax, 8000A0D0h ; RegD0 on SMBus PCI Controller
out dx, eax
mov dx, 0CFEh ; PCI Data Register
in al, dx ; Read back from RegD2h
or al, 01 ; Bit [0] for enabling SMBus Controller interface
out dx, al
5.2 SM Bus Timing
The SMBus frequency can be adjusted using different values in an 8-bit I/O register at the SMBus
base + 0Eh location.
The SMBus frequency is set as follows:
SMBus Frequency = (Primary Alink Clock )/(Count in index 0Eh * 4)
The power-up default value in register 0Eh is A0h, therefore the default frequency is (66MHz)/(160 *
4), or approximately 103 KHz.
The minimum SMBus frequency can be set with the value FFh in the register at index 0Eh, which
yields the following: (66MHz)/(255*4) = 64.7 KH z.
AMD SP5100 BIOS Developers Guide Page 22

©2011 Advanced Micro Devices, Inc.
5.3 SM Bus Host Contr oller Programming
Step
Descriptions
Register in
Space
Comments
SMBus I/O
1 Wait until SMBus is idle. Reg00h[Bit0] 0 – Idle
1 – Busy
2 Clear SMBus status. Reg00h[Bit4:1] Write all 1’s to clear
3 Set SMBus command. Reg03h The command will go to SMBus device.
4 Set SMBus device address with
read/write protocol
5 Select SMBus protocol Reg02h[Bit4:2]
6 Do a read from Reg02 to reset
the counter if it’s going to be a
block read/write operation
7 Set low byte when write
command
8 Set high byte when write
command
9 Write the data when block write Reg07h Block write – write data one by one to it
10 Start SMBus command execution Reg02h[Bit6] Write 1 to start the command
11 Wait for host not busy Reg00h[Bit0]
12 Check status to see if there is any
error
13 Read data Reg05h Byte command – It is the read data
14 Read data Reg06h Word command – It is the high byte data
15 Read the data when block write Reg07h Block read – r ead data one by one.
The following flow chart illustrates the steps to program the SMBus host controller.
Reg04h Bit7:1 – address
Bit0 – 1 for read, 0 for write
Reg02h
Reg05h Byte command – It is the written data
Word command – It is the low byte data
Block command – It is block count
Others – Don’t care
Reg06h Word command – It is the high byte data
Others – Don’t care
Others – Don’t care
Reg00h[Bit4:2] With 1 in the bit, there is error
Word command – It is the low byte data
Block command – It is block count
Others – Don’t care
Others – Don’t care
Others – Don’t care
AMD SP5100 BIOS Developers Guide Page 23

©2011 Advanced Micro Devices, Inc.
AMD SP5100 BIOS Developers Guide Page 24
Figure 3: SMBus Host Controller Programming

©2011 Advanced Micro Devices, Inc.
6 IDE Controller
PIO
Command
(In Reg40h)
Recovery Width
The SP5100 IDE controller supports Ultra ATA 33/66/100/133 modes. The IDE controller can be
configured into either the compatible mode or the native mode. Under the compatible mode, the IDE
controller will use the legacy resourc es.
The SP5100 allows programming of the IDE timing and mode for each drive independently on each
channel.
6.1 PIO Modes
The SP5100 supports IDE PIO mode 0, 1, 2, 3, and 4. For PIO mode selection, the BIOS needs to
program not only the PIO mode register, but also the PIO timing register.
6.1.1 PIO Mode
The BIOS can simply give the PIO mode number through Reg4Ah on the IDE controller.
6.1.2 PIO Timing
Two parameters determine the PIO bus-cycle timing: the command width and the recovery width.
CT (bus-cycle timing) = 30ns * ((command width + 1) + (recovery width + 1))
For each PIO mode, the command width and the recovery width must be set by the BIOS
accordingly:
Mode
0 9 9 600ns = 30 * ((9+1) + (9+1))
1 4 7 390ns = 30 * ((4+1) + (7+1))
2 3 4 270ns = 30 * ((3+1) + (4+1))
3 2 2 180ns = 30 * ((2+1) + (2+1))
4 2 0 120ns = 30 * ((2+1) + (0+1))
Width
(In Reg40h) CT
6.2 DMA Modes
The SP5100 IDE controller can run at either the legacy (Multi-Words) DMA mode, or the Ultra-DMA
mode.
6.2.1 Legacy (Multi-Words) DMA mode
The SP5100 IDE controller will run at the legacy DMA mode only when the Ultra-DMA mode is
disabled.
Two parameters determine the DMA bus-cycle timing: the command width and the recovery width.
CT (bus-cycle timing) = 30ns * ((command width + 1) + (recovery width + 1))
AMD SP5100 BIOS Developers Guide Page 25
©2011 Advanced Micro Devices, Inc.
For each legacy DMA mode, the command width and recovery width must be set by the BIOS
Legacy DMA
Command
(In Reg44h)
Recovery
(In Reg44h)
UDMA Mode
Bus-Cycle Timing (ns)
accordingly:
Mode
0 7 7 480ns = 30 * ((7+1) + (7+1))
1 2 1 150ns = 30 * ((2+1) + (1+1))
2 2 0 120ns = 30 * ((2+1) + (0+1))
Width
Width
CT
6.2.2 Ultra-DMA Mod e
The SP5100 IDE controller supports UDMA mode 0, 1, 2, 3, 4, 5, and 6.
It only takes two simple steps to program the SP5100 IDE controller into the UDMA mode:
1. Set the mode number in UDMA mode register (Reg56h).
2. Enable the UDMA mode through the UDMA control register (Reg54h). The UDMA
bus-cycle timing is fixed after the UDMA mode is selected.
0 120
1 90
2 60
3 45
4 30
5 20
6 15
AMD SP5100 BIOS Developers Guide Page 26

©2011 Advanced Micro Devices, Inc.
7 USB Controllers
UsbIntMap - RW - 16 bits - [PCI_Reg: BEh]
Field Name
Bits
Default
Description
UsbInt1Map
2:0
000b
UsbInt1 interrupt mapping to PCI interrupt
UsbInt2Map
5:3
001b
UsbInt2 interrupt mapping to PCI interrupt
Reserved
7:6
UsbInt3Map
10:8
010b
UsbInt3 interrupt mapping to PCI interrupt
UsbInt4Map
13:11
011b
UsbInt4 interrupt mapping to PCI interrupt
Reserved
15:14
UsbIntMap register
Encoding:
EHCI (fun-2) – UsbInt4
Usb3AzIntMap- RW - 8 bits - [PCI_Reg: 63h]
Field Name
Bits
Default
Description
AzIntMap
2:0
110b
Interrupt routing table for HD Audio. Setting this register
circumstance
EcIRQ12En
3
Set to 1 to enable the IRQ12 coming from IMC
Usb3IntMap
6:4
010b
Interrupt routing table for USB3 (stand alone OHCI controller)
EcIRQ1En
7
Set to 1 to make IRQ1 comes from IMC
000 - INTA#, 001 - INTB#, 010 – INTC#, 011 - INTD#, 100 - INTE#, 101 - INTF#, 110 - INTG#, 111 - INTH#
7.1 Int e rrupt Routing for USB Controller s
Bus 0 Dev 14h Func 0 Reg 0BEh is used to program the interrupt routing for the usb controllers 1 &
2.
000 - INTA#, 001 - INTB#, 010 - INTC#, 011 - INTD#, 100 - INTE#, 101 - INTF#, 110 - INTG#, 111 - INTH#
The Interrupt mapping from USB controllers to Interrupt controller is as following,
USB1(device-18) : OHCI0(fun-0)/OHCI1(fun-1) – UsbInt1
EHCI (fun-2) – UsbInt2
USB2(device-19) : OHCI0(fun-0)/OHCI1(fun-1) – UsbInt3
Bus 0 Dev 14h Func 0 Reg 063h is used to program the interrupt routing for the standalone OHCI
controller (Bus 0 Dev 14h Func 5).
routes the HD audio’s interrupt to the specific PCI interrupt
before it is routed to the interrupt controller. In general
software should not need to reroute HDaudio interrupt. SW
only needs to do so for debugging purpose or special
AzIntMap register
Encoding:
AMD SP5100 BIOS Developers Guide Page 27

©2011 Advanced Micro Devices, Inc.
8 Serial ATA (SATA)
MiscSata - RW - 8 bits - [PCI_Reg: ADh]
Field Name
Bits
Default
Description
SATA Enable
0
1
SATA enable
SataSmbusEn
1
0
SATA SMBus enable
SataSmbusMode
2
0
SATA SMBus mode, set to 1 to put SATA I2C on GPIO pins
Enable
MiscSata register
The SP5100 has one SATA controller. The SATA devices are enabled/disabled through register ADh
in the SMBus controller (Device 14h, function 0).
SataPsvEn
5 1 SATA power saving enable
The SATA option ROM initial load size is 64KB, and the run time size is 50KB.
A SATA controller enable/disable sample code is found in section 14.2.5.
A SATA class ID change sample code is found in section 14.2.6.
AMD SP5100 BIOS Developers Guide Page 28
©2011 Advanced Micro Devices, Inc.
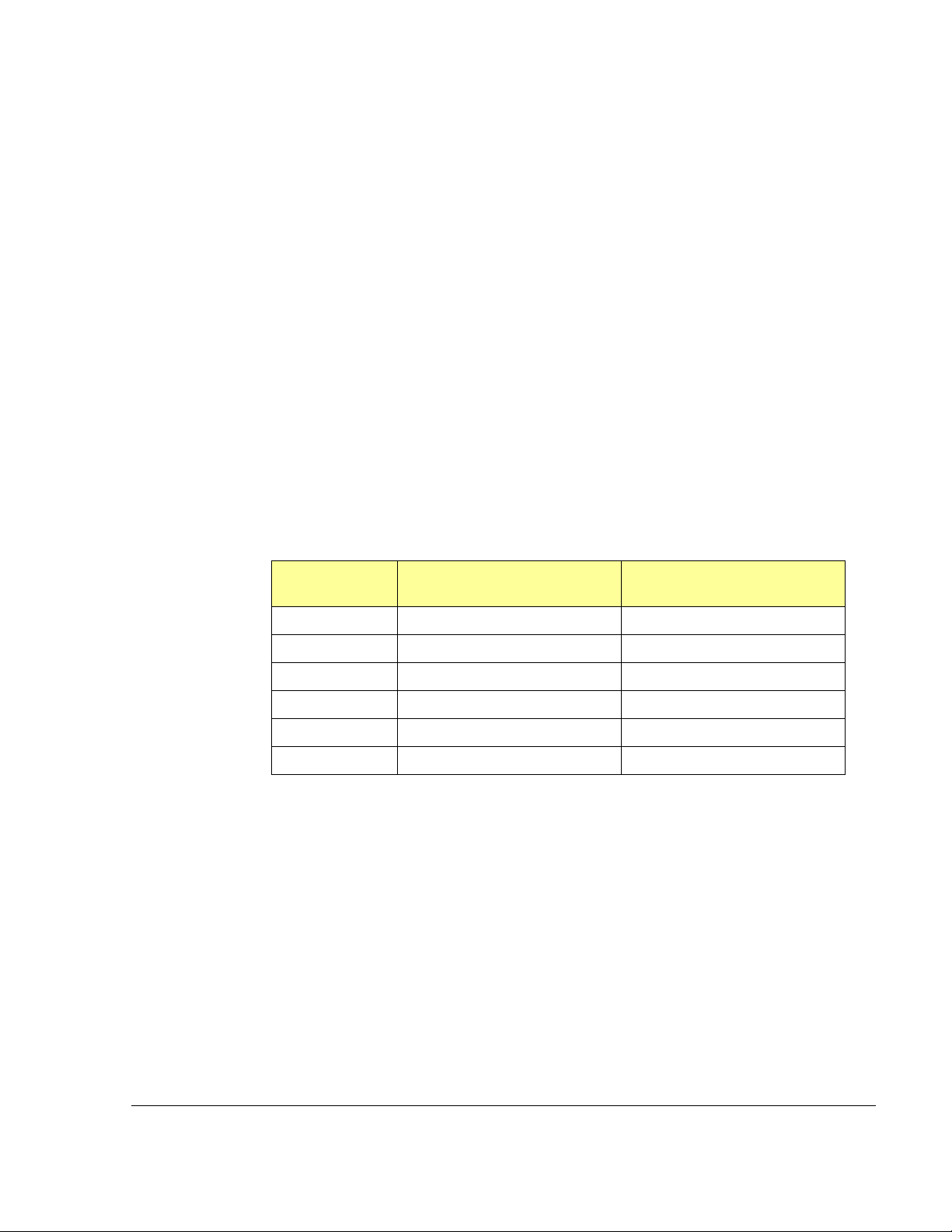
8.1 SATA New Features
Port Number
Primary , Secondary ,
SATA Drive Controlled by
Port 0
Primary master
SATA controller
Port 1
Secondary master
SATA controller
Port 2
Primary slave
SATA controller
Port 3
Secondary slave
SATA controller
Port 4
Primary (Secondary) master
PATA controller
Port 5
Primary (Secondary) slave
PATA controller
The SP5100 SATA controller compared to the previous generation southbridges
differs in two areas:
1. SATA Controller supports two additional ports providing a total of six SATA ports.
2. SATA controller supports a unique architecture that allo ws the user to configure
the SATA controller to work in-conjunction with the PATA controller to provide
configurations that cann ot be supported with SATA c ontroller alone. T his feature
is referred as “Combined Mode” in this document.
In the combined m ode, the SATA Contro ller can be c onfigured as either AHCI mode
or RAID mode and su pport up to f our (4) SAT A ports. Ports 0:3 are ass igned for this
configuration. The other two (2) SATA ports will be configured as PATA ports and
function in IDE mode. Two SATA ports (port 4 and port5) share one IDE channel
(could be either Primary or Secondary channel) from IDE (PATA) controller.
Alternatively, the SATA controller can be configured as IDE mode supporting up to six
IDE channels. In this conf iguration the SATA ports w ill be assigned to the Primar y /
Secondary channels as d efined in Table 1 below. The conf iguration for six IDE por ts
can also be achiev ed in two m odes sim ultaneous l y by usin g the com bined m ode. I.E.
Two IDE ports can be co nfigured to work in Legac y mode while the other f our ports
can be configured to work in Native or compatibility mode.
Table 1 SATA Port Assignment in Combined IDE Mode
Master / Slave Assignment
The following figures show the combined mode configurations:
AMD SP5100 BIOS Developers Guide Page 29

©2011 Advanced Micro Devices, Inc.
Note: In this mode the MS inbox driver will control all PATA drives showing all devices under
two physical IDE controllers.
AMD SP5100 BIOS Developers Guide Page 30
Fig 4: Combined Mode Configurations
©2011 Advanced Micro Devices, Inc.
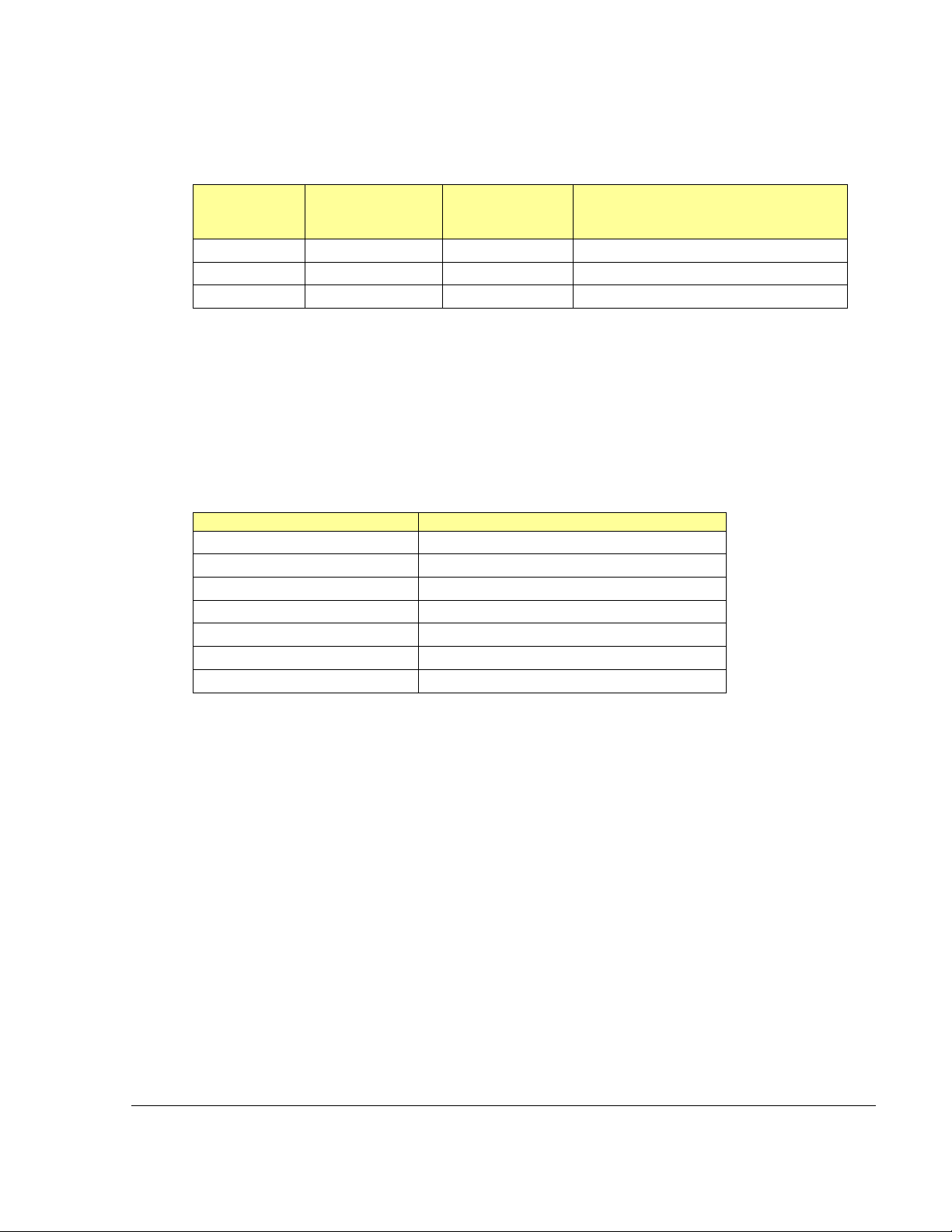
8.2 Device ID
Device ID
Device
4390
SATA in IDE mode
4391
SATA in AHCI mode with Microsoft® driver
4392
SATA in RAID 0, 1, 10 mode
4394
AMD inbox AHCI support for Windows® 7 and Server
The SP5100 SATA will have different device IDs for different drivers, because they are totally
different devices from driver point of view. It’s not sufficient for OS to know whether to load
IDE, AHCI, or RAID driver. In non fresh installed condition, Windows
(vendor ID, device ID, sub-system ID, sub-vendor ID) first, and if they are matched, it will load
the driver. Window will not check sub-class code if 4-IDs are matched. This will cause blue
screen Windows XP when SATA RAID driver loaded, and SATA controller is in IDE mode, if
device ID is shared.
2008 R2
®
will match 4 IDs
8.3 SATA Controller Operating Modes
Whenever SATA is set to any IDE mode (native ide, legacy ide, ide->ahci, ide->hfs) and combined
mode is set to OFF, only 4 ports (0-3) can be supported by the SATA controller and other 2 ports (4-
5) cannot be used (it may work under OS but will not work under BIOS). IDE->Hyperflash mode is
intended only for driver testing and debugging. In IDE->Hyperflash mode, ports 1/3 will not work
under BIOS post and this is a limitation of hardware.
When combined mode is on, ports 4/5 will always be connected through PATA controller, meaning
any device connected to this port will be shown as PATA IDE device. For trevally reference board,
SATA port 4 is the one which is closest to CPU and port 5 is the one which has mobile sata
connector. For Shiner reference board, ports 4/5 are the two e-SATA ports.
Standalone mode was intended for debugging and bringup purposes only. Behind SATA mode will be
the official driver supported mode and all qualifications should be done in this mode.
AMD SP5100 BIOS Developers Guide Page 31

©2011 Advanced Micro Devices, Inc.
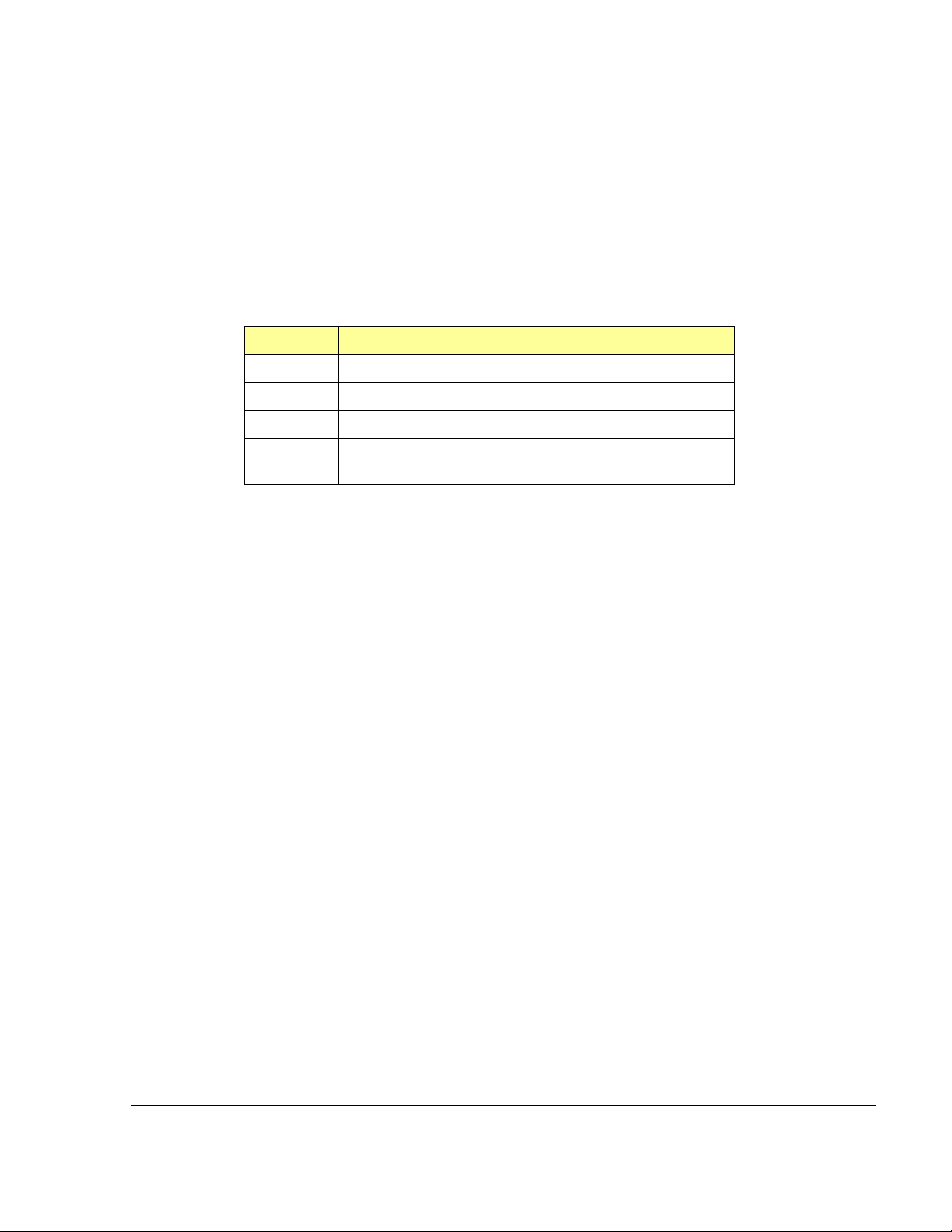
8.4 SATA Hot Plug
The SATA hot plug feature is implemented through the following registers:
1. ACPI GPE0 Block status register bit 31 for SCI status.
2. ACPI GPE0 Block enable register bit 31 for SCI enable.
3. PMIO register 37h bit 2 to trigger SATA hot plug SCI.
1 = Rising edge.
0 = Falling edge trigger.
4. The SATA internal status is set whenever a SATA hard drive is plugged in,
unplugged, powered up, or powered down. The status registers are:
Register BAR 5 + 10Ah, bit 0, for primary channel.
Register BAR 5 + 18Ah, bit 0, for secondary channel.
8.4.1 Sample Code
See section 14.7 for the SATA Hot Plug sample code.
AMD SP5100 BIOS Developers Guide Page 32
©2011 Advanced Micro Devices, Inc.
9 Power Management
I/O Name
Description
Configure Register
Range Size
(Bytes)
I/O Name
Description
Configure Register
Enable
Status
On the SP5100, PM registers can be accessed through I/O ports CD6h/CD7h. Before initiating any
power management functions in the SP5100, the BIOS needs to set the I/O base addresses for the
ACPI I/O register, the SMI Command Port, and the SpeedStep Control register (etc):
PM1_EVT ACPI PM1a_EVT_BLK PM IO Reg20h & Reg21h 4
PM1_CNT ACPI PM1a_CNT_BLK PM IO Reg22h & Reg23h 2
PM_TMR ACPI PM_TMR_BLK PM IO Reg24h & Reg25h 4
P_BLK ACPI P_BLK PM IO Reg26h & Reg27h 6
GPE0_EVT ACPI GPE0_EVT_BLK PM IO Reg28h & Reg29h 8
SMI CMD Bl ock * SMI Command Block PM IO Reg2Ah & Reg2Bh 2
Notes:
• The SMI CMD Block must be word aligned, i.e., the least significant bit of the address
must be zero (address[0] must be 0). For example, B0h, B2h, B4h, B6h, B8h etc.
• The SMI CMD Block consists of two ports – the SMI Command Port at base address, and
the SMI Status Port at base address+1. Note: For an IMC-enabled platform that uses
SMI Status Port at base address=1, word access should be used instead of byte access.
Refer to Section 14.1 ”Workaround for SMI Command Port Status Byte” on how to
program for byte access.
• The writes to the SMI Status Port will not generate an SMI. The writes to the SMI
Command Port will generate an SMI.
• The SMI Command and SMI Status ports may be written individually as 8 bit ports, or
together as a 16 bit port.
9.1 SMI Ha ndli ng – EOS (PM IO Reg10h[Bit0])
Upon each SMI generation, the SP5100 will clear the EOS bit automatically. At the end of the SMI
service, the BIOS needs to clear the status bit of the SMI event and re-enable the EO S; oth erw ise,
the SP5100 will not be able to generate SMI, even if SMI events arrive.
9.2 Pr ogrammable I/Os
There are eight sets of programmable I/Os available on the SP5100. The BIOS can use them for I/O
trapping, which means that an SMI will be generated if any access falls into the PIO range.
The PIO address range can be set to 2, 4, 8, and 16.
PIO0 Programmable I/O Range 0 PM IO Reg14h & Reg15h PM IO Reg1Ch[Bit7] PM IO Reg1Dh[Bit7]
PIO1 Programmable I/O Range 1 PM IO Reg16h & Reg17h PM IO Reg1Ch[Bit6] P M IO Reg1Dh[Bit6]
AMD SP5100 BIOS Developers Guide Page 33

©2011 Advanced Micro Devices, Inc.
I/O Name
Description
Configure Register
Enable
Status
PIO2 Programmable I/O Range 2 PM IO Reg18h & Reg19h PM IO Reg1Ch[Bit5] PM IO Reg1Dh[Bit5]
PM Timer1 Reloading On
Description
Enable
PIO3 Programmable I/O Range 3 PM IO Reg1Ah & Reg1Bh PM IO Reg1Ch[Bit4] PM IO Reg1Dh[Bit4]
PIO4 Programmable I/O Range 4 PM IO RegA0 & RegA1h PM IO Reg A8h[Bit0] PM IO RegA9h[Bit0]
PIO5 Programmable I/O Range 5 PM IO RegA2 & RegA3h PM IO Reg A8h[Bit1] PM IO RegA9h[Bit1]
PIO6 Programmable I/O Range 6 PM IO RegA4 & RegA5h PM IO Reg A8h[Bit2] PM IO RegA9h[Bit2]
PIO7 Programmable I/O Range 7 PM IO RegA6 & RegA7h PM IO Reg A8h[Bit3] PM IO RegA9h[Bit3]
Note: PM IO Reg04h[Bit7] is the overall control bit for enabling all the PIOs. The BIOS must set it before using any
PIO.
9.3 Power Management Timers
There are two PM timers available on the SP5100 – PM Timer 1 and PM Timer 2. The PM Timer 1
(Inactivity Timer) can be programmed to reload on some activities, but not the PM Timer 2 (Activity
Timer).
9.3.1 PM Timer 1 (Inactivity Timer)
The PM Timer 1 is a 6-bit timer with a granularity of 1 minute. The BIOS can set the initial value of the
PM Timer 1 through PM IO Reg0Bh. PM IO Reg0Ch will return the current value of the decrementing
counter.
The PM Timer 1 is typically used as a stand-by timer under the APM mode.
IRQ[15:8] IRQ[15:8] activity. PM IO Reg08h[Bit7:0]
IRQ[7:3], NMI, and IRQ[1:0] IRQ[7:3], NMI, and IRQ[1:0] activity PM IO Reg09h[Bit7:0]
Programmable IO Any access to PIO ports. PM IO Reg0Ah[Bit7]
Parallel Port Parallel ports activity PM IO Reg0Ah[Bit6]
Serial Port Serial Ports activity PM IO Reg0Ah[Bit5]
IDE Port IDE port activity PM IO Reg0Ah[Bit4]
Floppy Port Floppy port activity PM IO Reg0Ah[Bit3]
Game Port Game port (201H) activity PM IO Reg0Ah[Bit2]
ExtEvent1 Assert ExtEvent1 pin PM IO Reg0Ah[Bit1]
ExtEvent0 Assert ExtEvent0 pin PM IO Reg0Ah[Bit0]
9.3.2 PM Timer 2 (Activity Timer)
The PM Timer 2 is an 8-bit timer with a granularity of 500 μs. The BIOS can set the initial value of the
PM Timer 2 through PM IO Reg12h. PM IO Reg13h will return the current value of the decrementing
counter.
Note: The PM Timer 2 cannot be configured to reload on any system activities.
AMD SP5100 BIOS Developers Guide Page 34

©2011 Advanced Micro Devices, Inc.
9.4 SM I Events
SMI Source
Description
Enable
Status
The following is a list of all the SMI events available on the SP5100. The events can only generate
SMI, not SCI or wakeup events.
The global SMI disable bit is PM IO register 53h, bit [3].
PM IO register 53h bit [3] = 0 SMI# enabled (default)
PM IO register 53h bit [3] = 1 SMI# disabled (all events disabled)
Software SMI
(obsolete way)
Software SMI Any writing to SMI Command
PM Timer 1 Timeout on PM Timer 1.
PM Timer 2 Timeout on PM Timer 2.
IRQ[15:8] IRQ[15:8] activity. PM IO Reg02h[Bit7:0] PM IO Reg05h[Bit7:0]
IRQ[7:3], NMI, and
IRQ[1:0]
Programmable I/O Any access to PIO ports PM IO Reg04h[Bit7]
Parallel Port Parallel ports activity PM IO Reg04h[Bit6] PM IO Reg07h[Bit6]
Serial Port Serial Ports activity PM IO Reg04h[Bit5] PM IO Reg07h[Bit5]
IDE Port IDE port activity PM IO Reg04h[Bit4] PM IO Reg07h[Bit4]
Floppy Port Floppy port activity PM IO Reg04h[Bit3] PM IO Reg07h[Bit3]
Game Port Game port (201h) activity PM IO Reg04h[Bit2] PM IO Reg07h[Bit2]
ExtEvent1 Assert ExtEvent1 pin PM IO Reg04h[Bit1] PM IO Reg07h[Bit1]
ExtEvent0 Assert ExtEvent0 pin PM IO Reg04h[Bit0] PM IO Reg07h[Bit0]
Mouse/Keyboard Mouse/Keyboard port activity PM IO Reg1Ch[Bit3] PM I O Reg1Dh[Bit3]
Audio/MSS Audio/MSS port activity PM IO Reg1Ch[Bit2] PM IO Reg1Dh[Bit2]
MIDI MINI port activity PM IO Reg1Ch[Bit1] PM IO Reg1Dh[Bit1]
AD_LIB AD_LIB port activity PM IO Reg1Ch[Bit0] PM IO Reg1Dh[Bit0]
SERR# port System error to report parity
Global Release
Write
Temperature
Warning
Set SmiReq (PM IO
Reg00h[Bit4]) to generate SMI.
port.
Activity on PM IO register 08h,
09h, 0Ah will retrigger timer
(See section 9.3.2)
IRQ[7:3], NMI, and IRQ[1:0]
activity
errors or special cycle command
or other catastrophic system
errors.
OS write to PM1 Control register PM IO 0Eh[Bit 0] PM IO 0Fh[Bit0]
C50/C51, index 03,
Always PM IO Reg01h[Bit4]
PM IO Reg0Eh[Bit2] PM IO Reg0Fh[Bit2]
PM IO Reg00h[Bit1] PM IO Reg01h[Bit1]
PM IO Reg00h[Bit2] PM IO Reg01h[Bit2]
PM IO Reg03h[Bit7:0] P M IO Reg06h[Bit7:0]
PM IO Reg1Dh[Bit7:4]
AND
PM IO Reg1Ch[Bit7:4]
PCI SMBus Reg 66h,
bit[0]
[bit1]
PCI SMBus reg 04h, bit
[30].
PM IO reg 0Fh[Bit 1]
C50/C51, index 02,
[bit1]
AMD SP5100 BIOS Developers Guide Page 35

©2011 Advanced Micro Devices, Inc.
9.4.1 Power Button
Power button is always a wake-up event and can be programmed as an SCI wake-up event. The
power button status register is AcpiPmEvtBlk, bit[8]. The BIOS must make sure this bit is cleared prior
to the entry into any C or S states.
In addition, when the power button is pressed for 4 seconds, the SP5100 will shut do wn the entir e
system (by going to S5). No programming is required for this function.
9.5 C-State Break Events
9.5.1 Break Events for C2 State
Under C2 the break events are as follows:
• PBE#
• Special_message from CPU (K8 mode)
• I/O write to special register (K8 mode)
• SMI#
• NMI
• INIT
• Interrupts (in PIC mode only)
9.5.2 Break Events for C3 and C4 States
All of the events listed (above) as break events in C2 state are also break events in C3 and C4 states.
In addition, the Bus Master Status is also a break event in C3 and C4 states.
9.6 Save/Restore Sequence for S3 State
9.6.1 Register Save Sequence for S3 State
Prior to initiating S3 states, the BIOS must save the registers on the machine. The BIOS reserves a
section of the memory and a section of the CMOS to save the registers. Depending on the BIOS
architecture, these registers may be saved either one time just prior to handing of the control over to
the OS, or every time just before going into the S3 states.
The following registers must be saved:
• Some Northbridge registers in CMOS
• Some Northbridge and Memory Controller registers
• Southbridge PCI registers on the SP5100
• Southbridge non-PCI registers
• PCI registers not on the SP5100
• Super I/O and other I/O registers.
The BIOS typically sets aside an area in the memory to save the registers prior to the S3 state. The
Southbridge registers may be saved in any order as long as those registers are visible to the BIO S .
AMD SP5100 BIOS Developers Guide Page 36

©2011 Advanced Micro Devices, Inc.
Some of the registers, such as SubSystem ID and SubSystem Vendor ID, may be saved, but written
only once as dword. They are handled separately during restore.
9.7 Wake on PCIe®
9.7.1 Legacy PCIe
On SP5100, GPE event 18 will be used to track the PCIe wake up event (refer to SP5100 RRG
section 2.4.3.3 ACPI Registers, AcpiGpe0Blk:00[18] – PCIePmeStatus). Platform BIOS should follow
ACPI specification to implement the corresponding event handler (GPE._L12).
9.7.2 Native PCIe
Platform BIOS informs OSPM of its capability of supporting native PCIe by defining the control
method OSC (Operating System Capabilities). In the control field passed via Capabilities Buffer,
when PCIe Native Power Management Events Control bit (bit 2) is set by OS, OSC should enable
PCIe native mode on SP5100 by setting the following registers:
• PMIO:0x55[3] = 1 // PcieNative – This enables PCIe native PME mode support (sending
PCIePme and Ack message)
• PMIO:0x55[4] = 1 // Pcie_Wak_Mask – This masks out wake event from PCIe devices
• PMIO:0x10[6] = 1 // PciExpWakeDisEn – When set to 1, PciExpWakeDis
(AcpiPmevtBlk:0x02[14] becomes visible
As a reference, SP5100 CIMx also provides a sample OSC implementation as ASL reference code
(ASL\PCI0_OSC.ASL).
9.8 Sleep SMI Events
These events provide an SMI# before the system transits to an SX state (e.g. ACPI S1 , S2, S3,
S4, and S5). This feature helps t he S ystem BIOS to develop software workarounds or
debugging routines before the system goes to sleep state.
9.8.1 Sleep SMI Control Register
There is a Sleep SMI control register in the SP5100. Its base I/O address is defined at PMIO Reg
0x04.
SLP_SMI_EN is a R/W register bit for controlling a Sleep SMI when the system transits to an ACPI
SX state. The register definition is as follows:
• SLP_SMI_EN [Bit7] = 0, Disables Sleep SMI event.
• SLP_SMI_EN [Bit7] = 1, Enables Sleep SMI event.
There is a Sleep SMI Statu s register in the SP5100. Its base I/O address is defined at PMIO Reg
0x07.
SLP_SMI_Status [Bit7] is asserted when the system goes to an ACPI SX state, and when
SLP_SMI_EN is set to enable.
AMD SP5100 BIOS Developers Guide Page 37

©2011 Advanced Micro Devices, Inc.
9.8.2 Sleep SMI Programming Sequence
9.8.2.1 Set Sleep SMI Control Register
The Sleep SMI Control Register does not necessary have to be enabled before the system goes to
the ACPI SX state. One may enable the control the bit in the ACPI ASL code. Please refer to section
14.9 “Sleep Trap Through SMI#” for the sample code.
9.8.2.2 Enter Sleep SMI# Routine
The system does not go into the sleep state (set by ACPI PM1_CNT) when SMI# is asserted. The
System BIOS has to follow the sequence below:
1. Disable Sleep SMI Control register (SLP _S MI_ EN) .
2. Software workaround or system BIOS debugging routing implementation.
3. Write SLP_SMI_Status 1 to clear this event.
4. Rewrite sleep command to ACPI register (ACPI PM1_CNT).
5. RSM if necessary.
AMD SP5100 BIOS Developers Guide Page 38

©2011 Advanced Micro Devices, Inc.
10 APIC Programming
With the AMD integrated chipset solution, the BIOS needs to program both the Northbridge and the
Southbridge in order to support APIC.
10.1 Northbridge APIC Enable
There are three bits in the Northbridge that the BIOS should set before enabling APIC support.
For RS480/RS690:
• Enable Local APIC in K8. (Set bit11 in APIC_BASE MSR(001B) register.)
• Reg4C[bit1] - This bit should be set to enable. It forces the CPU request with address
0xFECx_xxxx to the Southbridge.
• Reg4C[bit18] - This bit should be set to enable. It sets the Northbridge to accept MSI
with address 0xFEEx_xxxx from the Southbridge.
10.2 Southbridge APIC Enable
There are two bits in the Southbridge that the BIOS should set before enabling APIC support.
• Reg64[bit3] = 1 to enable the APIC function.
• Reg64[bit7] = 1 to enable the xAPIC function. It is only valid if Bit3 is being set.
10.3 IOAPIC Base Address
The IOAPIC base address can be defined at SMBus PCI Reg. 74h. The power-on default value is
FEC00000h.
Note: This register is 32-bit access only. The BIOS should not use the byte restore mechanism to
restore its value during S3 resum e.
10.4 APIC IRQ Assignment
SP5100 has IRQ assignments under APIC mode as follows:
• IRQ0~15 – legacy IRQ
• IRQ 16 – PCI INTA
• IRQ 17 – PCI INTB
• IRQ 18 – PCI INTC
• IRQ 19 – PCI INTD
• IRQ 20 – PCI INTE
• IRQ 21 – PCI INTF
• IRQ 22 – PCI INTG
• INT 23 – PCI INTH
• IRQ 09 – ACPI SCI
SCI is still as low-level trigger with APIC enabled.
AMD SP5100 BIOS Developers Guide Page 39

©2011 Advanced Micro Devices, Inc.
10.5 APIC IRQ Routing
During the BIOS POST, the BIOS will do normal PCI IRQ routing through port C00h/C01h. Once
APIC is fully enabled by the OS, the routing in C00h/C01 must be all cleared to zero.
The following is a sample ASL code that may be incorporated into the BIOS:
Name(PICF,0x00)
Method(_PIC, 0x01, NotSe rial i zed)
{
Store (Arg0, PICF)
If(Arg0) {
\_SB.PCI0.LPC0.DSPI() // clear interrupt at 0xC00/0xC01
}
}
OperationRegion(PIRQ, SystemIO, 0xC00, 0x2)
Field(PIRQ, ByteAcc, NoLock, Preserve)
{
PIID, 8,
PIDA, 8
}
IndexField(PIID, PIDA, ByteAcc, NoLock, Preserve)
{
PIRA, 8,
PIRB, 8,
PIRC, 8,
PIRD, 8,
PIRS, 8
Offset(0x09),
PIRE, 8,
PIRF, 8,
PIRG, 8,
PIRH, 8
}
Method(DSPI)
{
Store(0x00, PIRA)
Store(0x00, PIRB)
Store(0x00, PIRC)
Store(0x00, PIRD)
Store(0x00, PIRS)
Store(0x00, PIRE)
Store(0x00, PIRF)
Store(0x00, PIRG)
Store(0x00, PIRH)
}
AMD SP5100 BIOS Developers Guide Page 40

©2011 Advanced Micro Devices, Inc.
11 Watchdog Timer
To enable the watchdog timer in the SP5100, the following registers must be initialized:
• Enable the watchdog timer by resetting bit 0 in PMIO register 069h.
• Set bit 3 in SMBus PCI Config (Bus 0 Device 20 Function 0) Reg 41h to enable the
watchdog decode.
• Ensure that the watchdog timer base address is set to a non zero value, typically
0FEC000F0h. The watchdog base address is set at PMIO address 6Ch-6Fh as shown in
the sample program below. (PMIO is addressed as byte index/data):
Sample Program:
mov dx,0CD6h ; PMIO index register
mov al,6Fh ; Most significant base address location
out dx,al ; Set the index to 6Fh
mov dx,0CD7h ; PMIO data register
mov al,0FEh ; Most significant base address
out dx,al
mov dx,0CD6h ; PMIO index register
mov al,6Eh ; Second significant base address location
out dx,al ; Set the index to 6Eh
mov dx,0CD7h ; PMIO data register
mov al,0C0h ; Second significant base address
out dx,al
mov dx,0CD6h ; PMIO index register
mov al,6Dh ; Third significant base address location
out dx,al ; Set the index to 6Dh
mov dx,0CD7h ; PMIO data register
mov al,00h ; Third significant base address
out dx,al
mov dx,0CD6h ; PMIO index register
mov al,6Ch ; Least significant base address location
out dx,al ; Set the index to 6Ch
mov dx,0CD7h ; PMIO data register
mov al,0F0h ; Least significant base address
out dx,al
AMD SP5100 BIOS Developers Guide Page 41

©2011 Advanced Micro Devices, Inc.
To verify that the watchdog timer works correctly, perform the following steps:
• Write 100 (count) to the watchdog count register at address 0FEC000F4h.
• Enable and start the watchdog timer by writing 00000081h to the watchdog control
register at 0FEC000F0h.
• The counter will start decrementing and will reset the system once it reaches 0. This
means that the watchdog timer is working as designed.
AMD SP5100 BIOS Developers Guide Page 42

©2011 Advanced Micro Devices, Inc.
12 A-Link Bridge
The registers are accessed using an address-register/data-register mechanism. The address register
is AB_INDX[31:0], and the data register is AB_DATA[31:0].
31:30 29:17 16:2 1:0
RegSpace[1:0] Reserved Register address[16:2] Reserved
AB_INDX [31:0]
31:0
Data[31:0]
AB_DATA[31:0]
RegSpace[1:0]
00b AXINDC Index/Data Registers. (AX_INDXC)
01b AXINPD Index/Data Registers (AX_INDXP)
10b Alink Express Configuration (AXCFG)
11b Alink Bridge Configuration (ABCFG)
Definition of RegSpace[1:0]
In order to read or write a particular register, the software will write the register address and the
register space identifier to AB_INDX and then do a read or write to AB_DATA. This is analogous to
how PCI configuration reads and writes work through I/O addresses CF8h/CFCh.
The location of AB_INDX in the I/O space is defined by the abRegBaseAddr register located at
Device 14h, function 0, register 0F0h. The AB_DATA register address is offset 4h from the AB_INDX
address. The address of the AB_INDX must be 8 byte aligned.
31:3 2:0
BaseAddr[31:3] Rsv
abRegBAR[31:0] at Bus 0, Device 14h, Function 0, Register 0F0h
AXCFG and ABCFG registers are accessed indirectly through AB_INDX/AB_DATA. To read or write
a particular register through AB_INDX/AB_DATA, the register address and the register space
identifier is first written to AB_INDX. The specified register is then accessed by doing a read or write
to AB_DATA (see the example below).
Access to AXINDC and AXINDP registers requires a second level of indirection. Registers in these
spaces are addressed through the following indirection registers: AX_INDEXC/AX_DATAC and
AX_INDEXP/AX_DATAP.
AMD SP5100 BIOS Developers Guide Page 43

©2011 Advanced Micro Devices, Inc.
Register
Indirect Address
AX_INDXC
30h
AX_DATAC
34h
AX_INDXP
38h
AX_DATAP
3Ch
Example: To write to register 21h in the INDXC space with a data of 00, the following steps are
required:
1. Out 30h to AB_INDX. This will prepare to write register from INDXC
2. Out 21h to AB_DATA. This will set register 21h of INDXC
3. Out 34h to AB_INDX. This will prepare to write data to register defined in steps 1
and 2 above
4. Out 00 to AB_DATA. This will write the data to the register defined n steps 1 and
2 above.
12.1 Programming Procedure
Indirect access is required to access both A-Link Express Configuration and A-Link Bridge
Configuration register space. The programming procedure is as follows:
Write:
1. Set the A-Link bridge register access address. This address is set at device 14h,
function 0, register 0F0h. This is an I/O address and needs to be set only once
after power-up. The I/O address must be on a 8-byte boundary (i.e., 3 LS bits
must be zeroes).
Example: To set C80h as an A-Link bridge register access address:
mov dx,0CF8h ; To access device 14h, function 0
mov eax,8000A0F0h ;
out dx,eax
mov dx,0CFCh
mov eax,00000C80h ; A-Link bridge register access address
out dx,eax
Note: Although the 32-bit I/O address is set for the A-Link bridge (e.g.,
00000C80h), the bridge may be accessed by a 16-bit address (i.e., 0C80h). The
MS word is set to 00 by default (see the example below).
2. Write the register address in the AB_INDX.
mov dx,0c80h ; I/O address index assigned to A-Link
mov eax, 0C0000090h ; Bits[31:30] = 11 for A-Link Bridge register
out dx,eax ; Register index is set
AMD SP5100 BIOS Developers Guide Page 44
Example: To write to the A-Link Bridge configuration register space at 90h:
; space

©2011 Advanced Micro Devices, Inc.
mov dx,0c84h ; I/O address for data
mov eax,00000001h ; Power down 2 lanes to save power
out dx,eax
Read:
Use a similar indirect procedure to read out the register value inside AB and BIF.
12.2 A-Link Express Configuration DMA Access
To enable A-Link Express Configuration DMA access, a specific register space needs to be
configured first. This register is in the A-Link Express register space that refers to port-specific
configuration registers (see section 12 above for a description of the AB_INDX register). When
configuring the register, bit2 of byte 4 needs to be set to “1” to enable the DMA access.
Follow these steps to initialize A-Link Express configuration DMA access (this initialization has to be
performed during S3 wakeup also):
1. Issue an I/O write to AB_INDX. The write data's bit [31:30] should be 10 b(binary).
The register to be written is in the port-specific configuration register space, and bit
[16:0] should be 0x4 (hex).
2. Issue an I/O write to AB_Data. This write data's bits[31:0] should be 0x4h (i.e.,
32'b0000_0000_0000_0100 binary).
mov dx, _0C80h ; ALINK_ACCESS_INDEX
in eax, dx
and eax, NOT (0C001FFFFh)
or eax, 080000004h
out dx, eax
mov dx, 0C84h ; ALINK_ACCESS_DATA
mov eax, 04h
out dx, eax
;Write AB_INDX 0x30
;Write AB_DATA 0x21
;Write AB_INDX 0x34
;Write AB_DATA 0x00
mov dx, 0C80h ; ALINK_ACCESS_INDEX
mov eax, 30h
out dx, eax
mov dx, 0C84h ; ALINK_ACCESS_DATA
mov eax, 21h
out dx, eax
mov dx,0C80h ; ALINK_ACCESS_INDEX
mov eax, 34h
AMD SP5100 BIOS Developers Guide Page 45

©2011 Advanced Micro Devices, Inc.
out dx, eax
mov dx, 0C84h ; ALINK_ACCESS_DATA
mov eax, 00h
out dx, eax
12.3 Enable Non-Posted Memory Write for K8 Platform.
The register index 10h of AXINDC bit9 should be set to 1.
mov dx,AB_INDX ; AB index register
mov eax,30h ; Address of AXINDC
out dx,eax ; Set register address
mov dx,AB_DATA ; To write register address
mov eax,10h ; Write register address
out dx,eax
mov dx,AB_INDX
mov eax,34h ; To write data portion of the AXINDC
out dx,eax
mov dx,AB_DATA
in eax,dx ; Read the current data
or al,200h ; Set bit 9
out dx,eax ; Write data back.
AMD SP5100 BIOS Developers Guide Page 46

©2011 Advanced Micro Devices, Inc.
13 High Precision Event Timer (HPET)
The SP5100 includes an industry standard High Precision Event Timers (HPET). The details and the
operation of the timer are described in the IA-PC HPET specification. This section describes the timer
initialization in the SP5100 chipset.
13.1 Initialization
For SP5100 is HPET usage is required, then during the early POST, the timer base address must be
programmed in Device 14h, Function 0, register 14h. This base address is also reported to the
operating system through the ACPI table as specified in the specification. In addition, the HPET
interrupts may also be enabled through Device 14h, Function 0, register 64h, bit 10.
13.1.1 Sample Initialization Code
HpetBaseAddress EQU 0FED00000H ; OEM specific address
; Set Base address in Device 14h, Function 0, Register 14h
mov dx,0CF8h ; PCI index register
mov eax,8000A014h ; Bus 0, Device 14h, Function 0, Register 14h
out dx,eax ; Set PCI index to register 14h
mov dx,0CFCh ; PCI data register
mov eax,0FED00000h ; Base address, OEM specific
out dx,eax
; Enable the HPET interrupts, if needed. Set Device 14h, Function 0, Register
64h, bit 10
mov dx,0CF8h ; PCI index register
mov eax,8000A064h ; Bus 0, Device 14h, Function 0, Register
64h
out dx,eax ; Set PCI index to register 64h
mov dx,0CFCh ; PCI data register
in eax,dx ; Read current value of register 64h
or eax,00000400h ; Set bit 10
out dx,eax
AMD SP5100 BIOS Developers Guide Page 47

©2011 Advanced Micro Devices, Inc.
13.2 ACPI HPET Description Table
As described in the specification, an ACPI HPET table is required to report the base address to the
operating system. The table includes a ACPI table header, and HPET table-specific fields. The
sample values for the HPET specific fields are as follows:
Event Timer Block ID DD 00000000h
Base Address (Lower 4 bytes) DD 00000800h
Base Address (Middle 4 bytes) DD 0FED00000h ; Address on 32 bit system
Base Address (Upper 4 bytes) DD 00000000h ; Used on 64 bit system
HPET Number DB 00h
Minimum Clock Tick DW 37EEh ; 14318 (decimal)
13.3 HPET Support f or Vista
For the SP5100, PM_IO register 72h bits [2:0] should be set to 111b for Vista support.
AMD SP5100 BIOS Developers Guide Page 48

©2011 Advanced Micro Devices, Inc.
14 Workarounds
14.1 Workaround for SMI Command Port Stat us Byte
This workaround is required as per erratum # 38 in the SB700/SP5100 Fam ily Product Err ata.
If an IMC-enabled platform is using the SMI command port base +1 with byte (8 bit) access, all such
access should be changed to use word (16 bit) access starting at the SMI command port base
address.
For platforms that use the SMI command port status register, typically software will write to the
command port status byte (base +1) and then write to the command port base consecutively to set up
the software SMI. The following code example shows how to use word access instead of byte access:
//
// Issue command port SMI
//
if (*ArgumentBufferSize == 2) {
//WriteIO (ACPI_SMI_DATA_PORT, AccWidthUint8, &bData);
wValue = bIndex + (bData << 8);
WriteIO (ACPI_SMI_CMD_PORT, AccWidthUint16, &wValue);
} else {
WriteIO (ACPI_SMI_CMD_PORT, AccWidthUint8, &bIndex);
}
Reading from the command port status register will also require using word access:
Get SMI.
VOID
SwGetContext(
IN DATABASE_RECORD *Record,
OUT SMM_CONTEXT *Context
)
{
EFI_STATUS Status;
UINT8 ApmCnt;
Status = mSmst->SmmIo.Io.Read (
&mSmst->SmmIo,
SMM_IO_UINT16,
SmiCmdPort,
0,
&ApmCnt
);
ASSERT_EFI_ERROR (Status);
Context->Sw.SwSmiInputValue = ApmCnt;
}
AMD SP5100 BIOS Developers Guide Page 49

©2011 Advanced Micro Devices, Inc.
Note: The above examples assume that the setting up of SMI is done by writing to the Command port
and Command port+1 consecutively when setting up a software SMI. If the Status byte is read
independently, then care must be taken to disable the SMI command port before doing a word acc es s
to command port base address in order to prevent an SMI interrupt from being generated. The SMI
command port can be enabled after the write is completed. The SMIControl75 field of the
SmiControl4 register (bit [23:22] of SMI_Reg: B0h) is used to enable/disable SMI.
AMD SP5100 BIOS Developers Guide Page 50

©2011 Advanced Micro Devices, Inc.
15 Sample Programs
15.1 IXP700 Register Initialization on P ower-Up
15.1.1 Initialization of PCI IRQ Routing before Resource Allocation
The PCI IRQs are programmed using index/data format through registers C00h/C01h. Index
0 through 3, and 9 through 0Ch, are for PCI IRQ lines. Index 4 is for SCI interrupt generated
for ACPI, and Index 5 is for SMBus interrupt.
Sample Program
The following routine initializes all PCI interrupts to zeroes.
PciIrqInit proc near
push ax ; Save the registers used in the routine
push dx
mov ax,00h ; Start with index = 0, data = 0
ClearPciIrq0To5:
mov dx,0C00h ; PCI interrupt index port
out dx,al ; Set index
mov dx,0C01h ; PCI interrupt data port
xchg ah,al ; Get data in AL = 0
out dx,al
xchg ah,al ; AL = Index
inc al ; Point to next index
cmp al, 05h ; Max index in 0 to 5 series
jbe ClearPciIrq0To5
; Initialize for index 9 through 0Ch
mov ax,0009h ; To clear from index 09 to 0Ch
ClearPciIrq9ToC:
mov dx,0C00h ; PCI interrupt index port
out dx,al ; Set index
mov dx,0C01h ; PCI interrupt data port
xchg ah,al ; Get data in AL = 0
out dx,al
xchg ah,al ; AL = Index
inc al ; Point to next index
cmp al, 0Ch ; Max index in 9 to 0Ch series
jbe ClearPciIrq9ToC
pop dx ; Restore the registers
AMD SP5100 BIOS Developers Guide Page 51

©2011 Advanced Micro Devices, Inc.
pop ax
ret
PciIrqInit endp
15.2 Setup Options
15.2.1 64 Bytes DMA
If 64 bytes DMA is selected for P2P bridge, set PCI to PCI bridge device 14h, function 4, register 4Bh,
bit 4 to 1.
15.2.2 USB Overcurrent Detection Disable
To disable over-current detection for both OHCI and EHCI USB devices, set USB device 13h,
function 0 register 51h, bit 0.
Sample Program
UsbOverCurrentDetectionDisable proc near
push eax ; Save registers used by this device
push dx
mov dx,0CF8h ; PCI configuration space index register
mov eax,8000A850h ; Device 13h, function 0, register 50h-53h
out dx,eax
mov dx,0CFDh ; PCI configuration space. Access reg. 51h
in dx,al ; Read current value
or al,01h ; Set to disable USB OHCI and EHCI overcur rent
out dx,al
pop dx ; Restore registers used by this routine
pop eax
ret
UsbOverCurrentDetectionDisable endp
15.2.3 C3 Support
The C3 support depends on the processor PBE support and HyperThreading. The ACPI FACP table
also needs to be modified for C3 support. The description below applies only to the SP5100 registers
affected by C3 support.
PM I/O register 51h is set to C3 latency as follows:
C3 Latency = (bits[5:0] of PM I/O register 51h) * 8us
Hence for recommended C3 Latency = 40us, set (bits[5:0] of PM I/O register 51h) = 5
AMD SP5100 BIOS Developers Guide Page 52

©2011 Advanced Micro Devices, Inc.
For deep C3 support, in addition to setting register 51h above, PM I/O register 50h bit0 must also be
set to 1.
15.2.4 Subtractive Decod ing for P2P Bridge
To enable the subtractive decoding, set device 14h, function 4, P2P bridge register 40h bit 5 to 1.
Sample Program:
EnableSubtractiveDecoding proc near
push eax ; Save registers used in this routine
push dx
mov dx,0CF8h
mov eax,8000A440h ; Bus 0, device 14h, function 4, register 40h, P2P
out dx,eax
mov dx,0CFCh ; To access register 40h
in al,dx
or al,20h ; Set bit 5 for subtractive decoding
out dx,al
; Set bit 7 of register 4Bh to show subtractive decoding in class code reg. 09h bit 0
mov dx,0CF8h
mov eax,8000A448h ; Bus 0, device 14h, function 4, register 48h-4Bh
out dx,eax
mov dx,0CFFh ; To access register 4Bh
in al,dx
or al,80h ; Control bit for PI register
out dx,al
pop dx ; Restore registers
pop eax
ret
EnableSubtractiveDecoding endp
AMD SP5100 BIOS Developers Guide Page 53

©2011 Advanced Micro Devices, Inc.
15.2.5 Enable/Disable On-Chip SATA
Class
Base Class Code
SubClass Code
Programming
09h
SATA may be disabled/enabled by Miscellaneous SATA register located at bus 0, device 14h,
function 0, register ADh. Bit 0 of this register, when set to 1, enables SATA.
Sample Program:
This sample program will enable SATA
EnableDisableSataSampleProgram proc near
push eax ; Save registers used by this routine
push dx
mov dx,0CF8h ; To access PCI configuration space
mov eax,8000A0ACh ; Register ACh to AFh of device 14h, function 0
out dx,eax
mov dx,0CFDh ; To access register 0ADh
in al,dx ; Read current value
or al,01h ; Set bit 0 to enable SATA
out dx,al ; Write the byte back
pop dx
pop eax
ret
EnableDisableSataSampleProgram endp
15.2.6 Change Class ID for SATA
The SATA device may have multiple PCI class codes. Some of the class codes are as follows:
Register 0Bh
IDE Class 01h 01h 8Fh
AHCI Class 01h 06h 01h
Raid Class 01h 04h 00h
To change the class ID for the SATA*:
1. Enable header write: Set the SATA PCI Bus 0, Device 12h, Function 0 (for SATA),
register 40h, bit 0 to 1.
2. Write to the same SATA device registers (9h, 0Ah, 0Bh) with the class ID.
Register 0Ah
Interface Register
3. Disable header write: Clear the SATA device register 40h, bit 0 to 0.
AMD SP5100 BIOS Developers Guide Page 54

©2011 Advanced Micro Devices, Inc.
Sample Program:
This sample program will set SATA-1, Bus 0, Device 12h, Function 0 to class code for IDE class
01018Fh.
SataClassIdSampleProgram proc near
push eax ; Save registers used by this routine
push dx
; Enable header write. Set register 40h, bit 0 to 1
mov dx,0CF8h ; To access PCI configuration space
mov eax, 80009040h ; SATA-1, Bus 0, Device 12h, Function 0, reg 40h
out dx,eax
mov dx,CFCh ; To access register 40h
in al,dx ; Current register 40h value
or al,01h
out dx,al
; Write class code. Register 08 is read only and will not be modified
mov dx,0CF8h ; To access PCI configuration space
mov eax,80009008h ; Bus 0, Device 12h, Function 0 , register 08h
out dx,eax
mov dx,0CFCh ; To access dword at starting at register 08h
mov eax,01018F00h ; Reg 08 is read only. Reg 9-0b will be written
out dx,eax
; Disable header write. Clear register 40h, bit 0 to 0
mov dx,0CF8h ; To access PCI configuration space
mov eax, 80009040h ; SATA-1, Bus 0, Device 12h, Function 0, reg 40h
out dx,eax
mov dx,0CFCh ; To access register 40h
in al,dx ; Current register 40h value
and al,0FEh
out dx,al
pop dx ; Restore registers used by this routine
pop eax
ret
SataClassIdSampleProgram endp
Note: For SP5100 revision A11 and revision A12, the SATA controller was at Bus 0, Device 13h,
AMD SP5100 BIOS Developers Guide Page 55

©2011 Advanced Micro Devices, Inc.
function 3 and 4.
15.2.7 Disable AC97 Audio or MC97 Modem
For, the AC97 PCI device 14h, functions 5 or 6 may be disabled by setting bits in PM I/O register 59h.
The setting of bit 0 will mask out AC97 device 14h, function 5. the setting of bit 1 will mask out MC97
device 14h, function 6.
Any memory resources assigned to audio and modem PCI devices should also be cleared prior to
disabling these devices.
Sample Program:
The following sample program shows how to disable AC97 audio device 14h, function 5. To disable
MC97 modem device 14h, function 6, set PM I/O register bit 1.
DisableAc97Sample proc near
push eax ; Save registers used by this routine
push dx
; If AC97 audio was previously enabled, clear the memory resources assigned.
mov dx,0CD6h ; PM I/O index register
mov al, 59h ; AC97 Mask register
out dx,al
mov dx,0CD7h ; PM I/O data register
in al,dx ; Read current value
test al,01h ; Is the AC97 audio previously disabled
jnz DisableDone ; Already disabled , so exit the routine
; Clear the address at reg. 10h of AC97 device 14h, function 5 to release the resources
mov dx,0CF8h ; To access PCI configuration register
mov eax,8000A510h ; Device 14h, function 5, register 10h
out dx,eax
mov dx,0CFCh ; To access dword starting at 10h
mov eax,0
out dx,eax
; Disable the AC-97 device by setting PM I/O register 59h bit 0 to 1
mov dx,0CD6h ; PM I/O index register
mov al, 59h ; AC97 Mask register
out dx,al
mov dx,0CD7h ; PM I/O data register
in al,dx ; Read current value
or al,01h ; Set AC97 audio to disable
AMD SP5100 BIOS Developers Guide Page 56

©2011 Advanced Micro Devices, Inc.
out dx,al
DisableDone:
pop dx
pop eax
ret
DisableAc97Sample endp
15.2.8 Enable EHCI Controller
The memory must be in big real mode to access the USB operational registers through the 32-bit
base address register.
push eax
push dx
push ebp
push es
; Set up a temporary Base Address Register (BAR)
; The value of BAR will be board specific and vary with the BIOS vendor
; This step may be skipped if the BAR is already assigned.
mov dx,0CF8h
mov eax,80009810h ; BAR for device 13h, function 0
out dx,eax
mov dx,0CFCh
mov eax,0E0000000h ; This value will differ with the BIOS vendor
out dx,eax
mov ebp,eax
; Enable memory, I/O, and bus master access
mov dx,0CF8h
mov eax,80009A04h
out dx,eax
mov dx,0CFCh
mov al, 07h
out dx,al
; Issue host controller reset through operational register 0
xor ax,ax
mov es,ax ; To access operational registers through BAR
mov eax, es:[ebp]
or eax,02h
AMD SP5100 BIOS Developers Guide Page 57
©2011 Advanced Micro Devices, Inc.
mov es:[ebp],eax
; Enables the USB PHY auto calibration resistor
mov eax, 00020000h
mov es[ebp+0C0h], eax
; Program EHCI FIFO threshold.
; Out threshold = 20h, In threshold = 10h for 2lane NB-SB link
; Out threshold = 20h, In threshold = 40h for 4lane NB-SB link
mov eax,00200010h
mov es:[ebp+0A4h],eax
pop es
pop ebp
pop dx
pop eax
ret
AMD SP5100 BIOS Developers Guide Page 58

©2011 Advanced Micro Devices, Inc.
15.2.9 Enable OHCI Contro ller
OHCI Device 13h, function 1 and 5, may be enabled/disabled by bits 1 and 5 in SMBus device 14h,
function 0, register 068h.
If disable is done after BAR resources are allocated, set BAR to zero.
USB SMI enabled, when appropriate, at SMBus device 14h, function 0, register 65h, bit 7.
Sample Program:
Enable 5 OHCIs .
EnableOhciSample proc near
push eax ; Save registers used in this program
push dx
mov dx,0CF8h ; To access PCI configuration space
mov eax,8000A068h ; SMBus device 14h, function 0, register 68h
out dx,eax
mov dx,0CFCh ; To read register 068h
in al,dx
or al,03Eh ; Set bit [5:1] to enable OHCI
out dx,al
pop dx
pop eax
ret
EnableOhciSample endp
15.3 IDE Settings
The primary IDE channel is enabled on power-up by default. Refer to section 14.3.4 to disable the
IDE channels.
15.3.1 PIO Mode Settings
IDE PIO mode and timing is set through the registers 40h-43h, 4Ah-4Bh, the PIO timing is
programmed in registers 40h-43h, and PIO mode is programmed in registers 4Ah–4Bh.
The PCI IDE device is 14h, function 1.
Reg 40h Primary slave timing
Reg 41h Primary master timing
Reg 42h Secondary slave timing
Reg 43h Secondary master timing
Reg 4Ah, bits[2:0] Primary master mode number
Reg 4Ah bits[6:4] Primary slave mode number
AMD SP5100 BIOS Developers Guide Page 59

©2011 Advanced Micro Devices, Inc.
Reg 4Bh bits[2:0] Secondary master mode number
Reg 4Bh bits[6:4] Secondary slave mode number
PIO timing has two components – the command width, and the recovery width. The widths are stated
in number of cycles of PCICLK and the following values are defined for PCICLK frequency of 33MHz
and 66MHz:
Width PIO Mode 4 PIO Mode 3 PIO Mode 2 PIO Mode 1 PIO Mode 0
Command
Width (cy cles)
Recovery
Width
2 2 3 4 5
0 2 4 7 Dh
Sample Program: Set primary master to PIO mode 4
; Set register 41h with timing and 4Ah, bits[2:0] with mode number
mov dx,0CF8h ; To set PCI configuration space index
mov eax,8000A140h ; To access registers 40h-43h
out dx,eax
mov dx,0CFDh ; To access PCI configuration space data at 41h
mov al,20h ; Timing for mode 4 (See table above)
out dx,al ; Set PIO timing
mov dx,0CF8h ; To set PCI configuration space index
mov eax,8000A148h ; To access registers 48-4Bh
out dx,eax
mov dx,0CFEh ; To access register 4Ah
in al,dx ; Read current value
and al,0F8h ; Clear bits 2:0
or al,4h ; Set to mode 4
out dx,al
AMD SP5100 BIOS Developers Guide Page 60

©2011 Advanced Micro Devices, Inc.
15.3.2 Multiword DMA Settings
Width
MW DMA Mode 2
MW DMA Mode 1
MW DMA Mode 0
IDE multiword DMA setting is done through registers 44h to 47h. The timing for the multiword DMA
modes has two components – the command width, and the recovery width.
Command Width (Cycles) 2h 2h 7h
Recovery Width (Cycles 0h 1h 7h
The register assignment is as follows:
Register 44h Primary slave MW DMA timing
Register 45h Primary master MW DMA timing
Register 46h Secondary slave MW DMA timing
Register 47h Secondary master MW DMA timing
Sample Program:
The following Assembly language code sample programs the secondary master to multiword DMA
Mode 2 (i.e., it programs register 47h to 20h).
mov dx,0CF8h ; To access PCI configuration space, index register
mov eax,8000A144h ; Device 14h, function 1, registers 44h-47h
out dx,eax ;
mov dx,0CFFh ; To access PCI register 47h
mov al,20h ; Timing for MW DMA Mode 2
out dx,al
15.3.3 UDMA Mode Settings
IDE UDMA enable/disable is set through register 54h, and the UDMA mode is set through the
registers 56h-57h. The register assignments are as follows:
Register 54h, bit[0] Primary master. 1 = Enable, 0 = Disable
Register 54h, bit[1] Primary slave. 1 = Enable, 0 = Disable
Register 54h, bit[2] Secondary master. 1 = Enable, 0 = Disable
Register 54h, bit[3] Secondary slave. 1 = Enable, 0 = Disable
Register 56h, bits[2:0] Primary master UDMA mode, 000b-110b
Register 56h, bits[6:4] Primary slave UDMA mode, 000b-110b
Register 57h, bits[2:0] Secondary master UDMA mode, 000b-110b
Register 57h, bits[6:4] Secondary slave UDMA mode, 000b-110b
AMD SP5100 BIOS Developers Guide Page 61

©2011 Advanced Micro Devices, Inc.
Sample Program
The sample program below sets the primary slave to UDMA mode 5:
push eax
push dx
; For primary slave, set register 56h, bits [6:4] to 5 for UDMA mode 5
mov dx,0CF8h ; To access PCI configuration space of IDE controller
mov eax,8000A154h ; Device 14h, function 1, register space 54h – 57h
out dx,eax
mov dx,0CFEh ; To access register 56h
in al,dx ; Current value of register 56h
and al,8Fh ; Clear bits 6:4.
or al,50h ; Set UDMA 5 mode for primary slave.
out dx,al
; Enable primary slave UDMA mode in register 54h, bit 1,
mov dx,CFCh ; To access register 54h
in al,dx ; Current value of register 54h
or al,02h ; Set bit 1
out dx,al
pop dx
pop eax
ret
15.3.4 IDE Channel Disable
To disable an IDE channel, the BIOS must:
1. Set IDE channel programmable logic enable bit in Reg09h.
2. Set IDE channel disable bit in Reg48h to disable IDE channel.
Note: No IDE I/O port access is allowed between step (1) and step (2). It is recommended that the
BIOS execute step (2) immediately after step (1). There should be no ‘in’ instruction between two ‘out’
instructions to register 09h and 48h.
After the IDE disable sequence, the IDE channel programmable logic enable bit will be cleared
automatically.
Sample program: Disable secondary channel
; Read current register 48h-49h on IDE controller
push eax
push bx
push dx
mov eax,8000A148h ; To modify register 48h on the IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for r egister 48h-4Bh
AMD SP5100 BIOS Developers Guide Page 62

©2011 Advanced Micro Devices, Inc.
mov dx,0CFCh ; Set PCI data register for 48h
in ax,dx ; Read register 49h
mov bx,ax ; Save current 48h-49h registers
; Unlock the IDE controller to be enabled/disabled bit
mov eax,8000A108h ; To write to PCI register 08h on IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for registers 08h – 0Bh
mov dx,0CFDh ; To read register 09h
in al,dx ; Read register 09h
or al,08h ; Set bit 3 to enable secondary channel program
out dx,al ; Write back to register
; Disable the secondary IDE channel. The register 48h-49h is saved in BX
mov eax,8000A148h ; To modify register 48h on the IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for register 48h-4Bh
mov dx,0CFCh ; Set PCI data register for 49h
or bx,0100h ; Set bit 8 of 48h
mov ax,bx
out dx,ax
; Lock in the secondary channel to enable/disable bit
mov eax,8000A108h ; To write to PCI register 08h on IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for registers 08h – 0Bh
mov dx,0CFDh ; To read register 09h
in al,dx ; Read register 09h
and al,0F7h ; Clear bit 3 to enable secondary channel program
out dx,al ; Write back to register
pop dx
pop bx
pop eax
; End of secondary channel disable
AMD SP5100 BIOS Developers Guide Page 63

©2011 Advanced Micro Devices, Inc.
15.3.5 IDE Channel Enable
The primary IDE channel is enabled as power-on default. To enable an IDE channel after they have
been disabled, the BIOS must:
1. Set the IDE channel programmable logic enable bit in Reg09h.
2. Clear the IDE channel disable bit in Reg48h to enable the IDE channel.
Note: No IDE I/O port access is allowed between step (1) and step (2). It is recommended that the
BIOS execute step (2) immediately after step (1). There should be no ‘in’ instruction between two ‘out’
instructions to register 09h and 48h.
Sample Program: Enable Primary IDE channel
; Read current register 48h-49h on IDE controller
push eax
push bx
push dx
mov eax,8000A148h ; To modify register 48h on the IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for register 48h-4Bh
mov dx,0CFCh ; Set PCI data register for 48h
in ax,dx ; Read register 49h
mov bx,ax ; Save current 48h-49h registers
; Unlock the IDE controller to enable/dis ab le bit
mov eax,8000A108h ; To write to PCI register 08h on IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for registers 08h – 0Bh
mov dx,0CFDh ; To read register 09h
in al,dx ; Read register 09h
or al,02h ; Set bit 1 to enable primary channel program
out dx,al ; Write back to register
; Enable the primary IDE channel. The register 48h-49h is saved in BX
mov eax,8000A148h ; To modify register 48h on the IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for register 48h-4Bh
mov dx,0CFCh ; Set PCI data register for 49h
and bx,0FFFEh ; Clear bit 0 of 48h
mov ax,bx
out dx,ax
; Lock in the primary channel to enable/disable bit
mov eax,8000A108h ; To write to PCI register 08h on IDE controller
mov dx,0CF8h ; PCI index register
out dx,eax ; Set index for registers 08h – 0Bh
mov dx,0CFDh ; To read register 09h
AMD SP5100 BIOS Developers Guide Page 64

©2011 Advanced Micro Devices, Inc.
in al,dx ; Read register 09h
and al,0FBh ; Clear bit 1 to enable primary channel program
out dx,al ; Write back to register
pop dx
pop bx
pop eax
; End of primary channel enable
15.4 USB Controller Reset at Hard Reset
This USB controller reset sequence is not required for SP5100.
15.5 Clock Throttling
The SP5100 has a register for setting clock duty cycle (throttling). The CLKVALUE register is located
in the ACPI region. Bit 4 of this register, when set to 1, enables clock throttling, while bits [3:1] select
the duty cycle from 12.5% to 87.5%, in seven steps of 12.5% eac h.
The address of ACPI CLKVALUE register is at PM IO location (Index/Data through 0CD6h/0CD7h)
index 26h and 27h.
CLKVALUE register
Bit 4 Bits[3:1] Duty Cyc le
0 x x x 100%
1 0 0 0 Invalid
1 0 0 1 12.5%
1 0 1 0 25%
1 0 1 1 37.5%
1 1 0 0 50%
1 1 0 1 62.5%
1 1 1 0 75%
1 1 1 1 87.5%
Sample program: Clock throttling
ClockThrottleExample proc near
push ax ; Save registers used by this routine
push dx
; Get ACPI CLKVALUE register address from PM IO index 26h and 27h
mov dx,0CD6h ; Set the PM IO register index
mov al, 27h ; Index = High byte, ACPI clock address
out dx,al
mov dx,0CD7h ; Get PM IO register data
AMD SP5100 BIOS Developers Guide Page 65

©2011 Advanced Micro Devices, Inc.
in al,dx ; High byte of ACPI clock address
mov ah,al ; Save High byte of address
mov dx,0CD6h ; Set the PM IO register index
mov al, 26h ; Index = Low byte, ACPI clock address
out dx,al
mov dx,0CD7h ; Get PM IO register data
in al,dx ; Low byte of ACPI clock address
mov dx,ax ; dx = CLKVALUE address
; Enable throttling (set bit 4=1) and set duty cycle to 50%,(Set bits [3:1]=100b
in al,dx ; Read current CLKVALue
and al,0E1h ; Keep the unused bits
or al,18h ; Set bit 4 to enable and bits [3:1]=100b for 50%
out dx,al ; Write new throttling value
pop dx ; Restore registers used by this routine
pop ax
ret
ClockThrottleExample endp
AMD SP5100 BIOS Developers Guide Page 66

©2011 Advanced Micro Devices, Inc.
15.6 Lid Switch
The Lid Switch programming is implementation specific. In a typical implementation the output of the
debounced lid switch is connected to one of the Gevent or GPM pins. The Gevent and GPM pins can
trigger the ACPI event, and the trigger polarity is programmable through the Southbridge register. The
Gevent and GPM pins are in S5 plane and hence can trigger the event in S5 state.
15.6.1 Lid Switch Hardware Connection
This sample program assumes that the SP5100 ExtEvent0 pin is connected to the lid switch.
15.6.2 Associated Registers
The registers associated with ExtEvent0 are:
ExtEvent0 Trigger polarity at PMIO index 37h, bit 0. Set to 1 for rising edge trigger
and clear to 0 for falling edge trigger. (Def ault = 0)
ExtEvent0 signal to S5 region at PMIO index 78h bit 2. Set to 1 for S5 plane. (Default
=1).
ExtEvent0 set as ACPI function at Device 14h, function 0, register 66h, bit 6. Set to 1
to enable ExtEvent0 as ACPI function. ExtEvent0 is a multi function pin and it must be
set for the ACPI function.
ExtEvent0 ACPI event enable. This register is part of ACPI GPE0 block. The address
is BIOS implementation specific (refer to PMIO register at index 28h and 29h). For this
sample program, the ACPI GPE0 block starts at 820h. ExtEvent0 is bit 16 of the
block.
15.6.3 BIOS Initialization
The registers must be initialized during the boot up process. The order of initialization is not critical.
The initialization may be done in the BIOS at any stage of the boot up process after GPE0 block is set
in PMIO registers 28h,29h).
; Select EvtEvent0 as ACPI pin by setting device 14h, function 0, register 66h, bit 6 = 1
mov eax,8000A064h ; To access registers 64h-67h
mov dx,0CF8h ; PCI index register
out dx,eax
mov dx,0CFEh ; PCI data register for 66h
in al,dx ; Read current value
or al,40h ; Set bit 6
out dx,al
; Program ExtEvent0 trigger polarity to 0 (falling edge trigger ) to indicate lid open .
; Clear PMIO register 37h, bit 0 = 0
mov dx,0CD6h ; PMIO in dex
mov al,37h ;
out dx,al ; Set PMIO index
AMD SP5100 BIOS Developers Guide Page 67

©2011 Advanced Micro Devices, Inc.
mov dx,0CD7h ; PMIO data
in al,dx ; Read current value
and al,0Feh ; Falling edge trigger (on closing the lid)
out dx,al
; Enable ExtEvent bit in ACPI GPE0 enable block.
mov dx,824h ; GPE0 enable is offset 4 of GPE0 block
in eax,dx ; Read GPE0 block
or eax,0100h ; Set bit 16, ExeEvent0 enable
out dx,eax
; Enable ExtEvent0 to S5 plane. This step is optional as the bit is set by default.
mov dx,0CD6h ; PMIO index
mov al,78h ; S5 plane enable register
out dx,al
mov dx,0CD7h ; PMIO data register
in al,dx ; Read current register
or al,04h ; ExtEvent0 to S5 plane
out dx,al
15.6.4 ACPI Programming
The ASL code defines the following:
The operation region where the lid polarity resides in address space. In our example
that is at PMIO register 37h, bit 0.
A device called \_SB.LID with HID of PNP0C0D.
Method _LID to return current lid status.
A _PRW package that defines wake from S4 states (which includes wake from S1, S3
also).
Event handler _GPE.
AMD SP5100 BIOS Developers Guide Page 68

©2011 Advanced Micro Devices, Inc.
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Code for Lid Switch control. //
// This code is based on Lid switch connected to ExtEvent0. //
// ExtEvent0 causes ACPI event 16 or 0x10 //
// ExtEvent0 trigger polarity is controlled by GPIO register 37h, bit 0 //
// PMIO reg 37h bit 0 = 0 Trigger ACPI event on falling edge //
// PMIO reg 37h bit 0 = 1 Trigger ACPI event on rising edge //
// //
// In addition, ExtEvent0 needs to be enabled for ACPI event. Device 14h,//
// function 0, register 66h, bit 6 should be set to 1 in the BIOS //
// initialization code for ExtEvent0 to be ACPI event causing SMI. //
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
OperationRegion (PMIO, SystemIO, 0xCD6, 0x2)
Field (PMIO, ByteAcc, NoLock, Preserve)
{
INPM,8,
DAPM,8
}
IndexField (INPM, DAPM, ByteAcc, NoLock, Preserve) //R07
{
Offset(0x37), // To change trigger polarity for ExtEvent0
LPOL,1, // 1 = rising edge, 0 = falling edge
//
} //end of indexed field
// Define the Lid Device. Lid switch is connected to ExtEvent0 which
// causes ACPI event 16 (0x10)
Device(\_SB.LID)
{
Name(_HID, EISAID("PNP0C0D"))
Method(_LID)
{
if(LPOL){Return(0x00)} // Lid is closed
else {Return(0x1)} // Lid is open
}
AMD SP5100 BIOS Developers Guide Page 69

©2011 Advanced Micro Devices, Inc.
Name(_PRW, Package(2)
{ 0x10, 0x03} // ACPI event 0x10 can wake-up from S3
)
}
//ACPI event
Scope(\_GPE)
{ Method(_L10)
{
Not(LPOL, LPOL) // Reverse the polarity from sleep to wake and vice versa
Notify(\_SB.LID, 0x80) // Notify the OS that status has changed.
}
}
15.7 SATA Hot Plug Sample Program
Scope(\_GPE)
{
Method(_L1F,0x0,Notserialized) // GPE0 Block bit 31 is used for SATA hot plug
{
sleep(2000)
// For SATA at Bus 0, Device 12h, Function 0, channel 0 device
// Check if change in the status of the Serial ATA PHY
if(\_SB_.PCI0.SATA.STA0) { // BAR5, offset 10ah, bit0
Notify(\_SB.PCI0.SATA.PRID.P_D0, 0x00)
sleep(2000)
Notify(\_SB.PCI0.SATA.PRID, 0x01)
sleep(2000)
store(\_SB_.PCI0.SATA.STA0,\_SB_.PCI0.SATA.STA0) // Clear Status of master SATA
}
// For SATA at Bus 0, Device 12h, Function 0, channel 1 device
// Check if change in the status of the Serial ATA PHY
if(\_SB_.PCI0.SATA.STA1) { // BAR5, offset 18Ah, bit 0
Notify(\_SB .PCI0.SATA.SE C D. S_ D0, 0x 00)
sleep(2000)
Notify(\_SB.PCI0.SATA.SECD, 0x01)
sleep(2000)
AMD SP5100 BIOS Developers Guide Page 70

©2011 Advanced Micro Devices, Inc.
store(\_SB_.PCI0.SATA.STA1,\_SB_.PCI0.SATA.STA1) // Clear Status of slave SATA
}
// For SATA at Bus 0, Device 11h, Function 0 , channel 0 device
// Check if change in the status of the Serial ATA PHY
if(\_SB_.PCI0.SAT2.STA0){ // BAR5, offset 10ah, bit0
Notify(\_SB.PCI0.SAT2.PRID.P_D0, 0x00)
sleep(2000)
Notify(\_SB.PCI0.SAT2.PRID, 0x01)
sleep(2000)
store(\_SB_.PCI0.SAT2.STA0,\_SB_.PCI0.SAT2.STA0) // Clear Status of master SATA
}
// For SATA at Bus 0, Device 11h, Function 0, channel 1 device
// Check if change in the status of the Serial ATA PHY
if(\_SB_.PCI0.SAT2.STA1) { //BAR4, offset 18Ah, bit 0
Notify(\_SB.PCI0.SAT2.SECD.S_D0, 0x00)
sleep(2000)
Notify(\_SB.PCI0.SAT2.SECD, 0x01)
sleep(2000)
store(\_SB_.PCI0.SAT2.STA1,\_SB_.PCI0.SAT2.STA1) // Clear Status of slave SATA
}
} // End of Method(_L1F)
} // End of Scope(\_GPE)
Scope(\_SB_.PCI0.SATA) // Bus 0, Device 12h, Function 0
{
OperationRegion(BAR5, SystemMemory, 0xFFF80000, 0x1000) // The address should
// be replaced by the
// BIOS
Field(BAR5, AnyAcc, NoLock, Preserve)
{
Offset(0x104), // Channel 0
CSTX, 1, // De vice det ec ted but no communication with Phy
CST0, 1, // Communication with Ph y establishe d. (P h ysgood)
Offset(0x10A), // Channel 0
AMD SP5100 BIOS Developers Guide Page 71

©2011 Advanced Micro Devices, Inc.
STA0, 1, // Change in Phy status
Offset(0x184), // Channel 1
CSTY, 1, // Device detected but no comm unic ations with Phy
CST1, 1, // Communication with Ph y established (Physgood)
Offset(0x18A), // Channel 1
STA1, 1, // Changes in Phy status
} // End of Field(BAR5….)
Method(_INI) { // For Bus 0, Device 12h, Function 0
if(\_SB_.PCI0.SATA.STA0){
store(\_SB_.PCI0.SATA.STA0,\_SB_.PCI0.SATA.STA0) // Clear channel 0 SATA status
}
if(\_SB_.PCI0.SATA.STA1){
store(\_SB_.PCI0.SATA.STA1,\_SB_.PCI0.SATA.STA1) // Clear channel 1 SATA status
}
} // End of Method (_INI)
Device(PRID) {
Name(_ADR, 0) // IDE Primary Channel
Device(P_D0) {
Name(_ADR, 0) // Drive 0 - Master
Method(_STA,0){
if (\_SB_.PCI0.SATA.CST0) { // If SATA detected
return(0x0f)
}
else {
return (0x00)
}
} End of Method (_STA )
} // End of P_D0
} // End of PRID
AMD SP5100 BIOS Developers Guide Page 72

©2011 Advanced Micro Devices, Inc.
Device(SECD) {
Name(_ADR, 1) // IDE Secondary Channel
Device(S_D0) {
Name(_ADR, 0) // Drive 0 - Master
Method(_STA,0){
if (\_SB_.PCI0.SATA.CST1) { // If SATA detected
return (0x0f)
}
else {
return (0x00)
} /
} // End of Method (_STA)
} // End of S_D0
} // End of SECD
} // End of Scope(_SB.PCI0.SATA)
// Bus 0, Device 11h, Function 0
Scope(\_SB_.PCI0.SAT2)
{
OperationRegion(BAR5, SystemMemory, 0xFFF80000, 0x1000) // Replace address in BIOS
Field(BAR5, AnyAcc, NoLock, Preserve)
{
Offset(0x104), //Channel 0
CSTX, 1, // De vice det ec ted but no communication with Phy
CST0, 1, // Communication with PHY established
Offset(0x10A), // Channel 0
STA0, 1, // Change in PHY status
Offset(0x184), // Channel 1
CSTY, 1, // Device detected but no comm unic ation with PHY
CST1, 1, // Communication with PHY established
Offset(0x18A), //Channel 1
STA1, 1, // Change in PHY status
} // End of Field
AMD SP5100 BIOS Developers Guide Page 73

©2011 Advanced Micro Devices, Inc.
Method(_INI) { // For Bus 0, Device 11h, Function 0
if(\_SB_.PCI0.SAT2.STA0){
store(\_SB_.PCI0.SAT2.STA0,\_SB_.PCI0.SAT2.STA0) // Clear SATA channel0 status
}
if(\_SB_.PCI0.SAT2.STA1)
{
store(\_SB_.PCI0.SAT2.STA1,\_SB_.PCI0.SAT2.STA1) // Clear SATA channel 1 status
}
} // End of Method(_INI)
Device(PRID) {
Name(_ADR, 0) // IDE Primary Channel
Device(P_D0) {
Name(_ADR, 0) // Drive 0 - Master
Method(_STA,0){
if (\_SB_.PCI0.SAT2.CST0) { // If SATA detected
return(0x0f)
}
else {
return (0x00)
}
} // End of Method(_STA)
} // End of P_D0
} // End of PRID
Device(SECD) {
Name(_ADR, 1) // IDE Secondary Channel
Device(S_D0) {
Name(_ADR, 0) // Drive 0 - Master
Method(_STA,0){
AMD SP5100 BIOS Developers Guide Page 74

©2011 Advanced Micro Devices, Inc.
if (\_SB_.PCI0.SAT2.CST1) { // If SATA detected
return(0x0f)
}
else {
return (0x00)
}
} //End of Method(_STA)
} // End of S_D0
} // End of SECD
} // End of Scope(\_SB_.PCI0.SAT2)
15.8 Temperature Limit Shutdow n through SM I#
The program to shut down the system when the temperature exceeds a pre-set limit requires the
following:
1. A temperature sensing diode or thermistor positioned under the CPU socket.
2. A Super I/O device capable of monitoring the temperature and toggle an SMI# line when
the temperature exceeds the pre-set limit.
3. SMI programming in the SP5100 to shut down the system.
The discussion below assumes that an ITE-8712 Super I/O is present in the system and is connected
to the thermal diode to measure temperature-1 and temperature-2, and a thermistor to measure
temperature-3. This code example shows thermal programming in the Super I/O, and SMI
programming related to thermal shutdown.
Please refer to ITE-8712 Super I/O device manual for register details.
This code example assumes that the GP47 from Super I/O is connected to the ExtEvent1 pin on the
SP5100.
AMD SP5100 BIOS Developers Guide Page 75

©2011 Advanced Micro Devices, Inc.
15.8.1 Setting Up ITE 8712 Super I/O Registers
ITE 8712 Super I/O registers are set during the boot up process through the BIOS program.
1. Set the Environmental Controller bas e addr ess .
Select a base address in the I/O range which is not used by any device and is also
accessible to the LPC. The address range is 8 bytes. In this example the I/O address 228h –
22Fh will be used. This address is set in Super I/O logical device 04h, registers 60h, and 61h.
After the base address is set, the environment registers are accessed by index/data method
at base address+5 as index, and base address+6 as data. For this example the index/data
address would be 22Dh/22Eh.
; Define equates for index/data, shutdown temperature, and Super I/O access port.
Sensor_Port EQU 22Dh
TemperatureLimit EQU 75
SuperIo_Config_Port EQU 2EH
call SuperIoEnterConfig ; Write 87h, 01h, 55h, 55h to SuperIo
; Enable the access to device 04 registers, i.e. set Super I/O address
; register to 04
; Device 04 is the Environment controller
mov dx,2Eh ; Super I/O index
mov al, 07h ; Register 07 is device select
out dx,al
mov dx,2Fh ; Super I/O data
mov al, 04h ; Set register to 04
out dx,al
; Set Base address to 0228h in registers 60h and 61h of this LDN = 04
; Set MS byte of base address to 02h
mov dx,2Eh
mov dx,60h
out dx,al
mov dx,2Fh ; Super I/O index
mov al,02h ; MS byte of 0228h
out dx,al
; Set LS byte of the base address to 28h
mov dx,2Eh
mov dx,61h
out dx,al
; Logical Device Number (LDN) is now set to 04.
AMD SP5100 BIOS Developers Guide Page 76

©2011 Advanced Micro Devices, Inc.
mov dx,2Fh ; Super I/O index
mov al,28h ; MS byte of 0228h
out dx,al
; The environment (temperature, voltage etc.) registers can now be accessed
; through Base address + 5 (index), and base address + 6, i.e. 22Dh and 22 Eh
mov ah, TemperatureLimit ; Selected through setup or OEM
; Set limit for 1st Thermistor
; Register 40h is for upper limit, register 41h is for lower limit
; If lower limit is set to 7Fh, then the temperature controller is in the
; comparator mode
mov dx,Sensor_Port ; The register is written through index at
; 22Dh
mov al,40h ; To set the upper limit
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get the Temperature upper limit
out dx,al
mov dx,Sensor_Port ; The register is written thr o ugh ind ex at
; 22Dh
mov al,41h ; To set the lower limit
out dx,al
mov dx,Sensor_Port+1
mov al,7fh ; Lower limit of 7Fh to enable the comparator mode
out dx,al
; Set limit for 2nd Thermistor
; Register 42h is for upper limit, register 43h is for lower limit
; If lower limit is 7Fh then it is comparator mode
mov dx,Sensor_Port ; The register is written thr o ugh ind ex at
; 22Dh
mov al,42h ; To set the upper limit
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get the Temperature upper limit
out dx,al
mov dx,Sensor_Port ; The register is written thr o ugh ind ex at
; 22Dh
mov al,43h ; To set the lower limit
out dx,al
AMD SP5100 BIOS Developers Guide Page 77

©2011 Advanced Micro Devices, Inc.
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,7fh ; For comparator mode
out dx,al
; Set limit for 3rd Thermistor
; Register 44h is for upper limit, register 45h is for lower limit
; If lower limit is 7Fh then it is comparator mode
mov dx,Sensor_Port ; The register is written thr o ugh ind ex at
; 22Dh
mov al,44h ; To set the upper limit
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get the temperature upper limit
out dx,al
mov dx,Sensor_Port ; The register is written thr o ugh ind ex at
; 22Dh
mov al,45h ; To s et the lo wer limit
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,7Fh ; For comparator mode
out dx,al
; Set Thermal out limit registers at 52h, 53h, 54h
mov dx,Sensor_Port ; The register is written through index at
; 22Dh
mov al,52h ; Thermal limit for diode 1
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get temperature upper limit
out dx,al
mov dx,Sensor_Port ; The registe r is written through index at
; 22Dh
mov al,53h ; Thermal limit for diode 2
out dx,al
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get temperature upper limit
out dx,al
mov dx,Sensor_Port ; The register is writt en thr o ugh index at
; 22Dh
mov al,54h ; Thermal limit for thermistor 3
out dx,al
AMD SP5100 BIOS Developers Guide Page 78

©2011 Advanced Micro Devices, Inc.
mov dx,Sensor_Port+1 ; The temperature value is written through
; 22Eh
mov al,ah ; Get temperature upper limit
out dx,al
; Read status from register 03 to clear the status
mov dx,Sensor_Port ; The register is read through index at 22Dh
mov al,03h
out dx,al
mov dx,Sensor_Port+1 ; The register is read through data at 22Eh
in al,dx
; Enable Interrupt/SMI# register at 00.
mov dx,Sensor_Port ; The register is written through index at
; 22Dh
mov al,00h
out dx,al
mov dx,Sensor_Port+1 ; The register is written through data at
; 22Eh
in al,dx
or al,07h ; Enable IRQ, SMI# and enable monitoring
out dx,al
; In logical device 7, set SMI registers, thermal out register, and enable the
; SMI.
; 1. Set logical device to 7
mov al,07h
mov dx,SuperIo_Config_Port
out dx,al
mov al,07h
inc dx
out dx,al
; 2. Set SMI pin to GP47 ( 00 100 111 = 27h) in reg 0f4h
; Register F4 is SMI mapping register
mov al,0f4h
mov dx,SuperIo_Config_Port
out dx,al
inc dx
mov al,27h
out dx,al
AMD SP5100 BIOS Developers Guide Page 79

©2011 Advanced Micro Devices, Inc.
; 3. Set Thermal output to GP47(00 100 111 = 27h) in reg 0F5h
; Register 0F is thermal mapping register
mov al,0f5h
mov dx,SuperIo_Config_Port
out dx,al
inc dx
mov al,27h
out dx,al
; Enable generation of SMI# due to environment condition
mov al,0f0h
mov dx,SuperIo_Config_Port
out dx,al
inc dx
in al,dx
or al,10h
out dx,al
; Set GP47 as general purpose pins
; Registers 25h and 28 are global access registers
; Select IRTX/GP47 as GP47
mov al,028h ; For GP-47
mov dx,SuperIo_Config_Port
out dx,al
inc dx
in al,dx
or al,80h
out dx,al
call SuperioExitConfig ; Write 02, 02 to Super IO
AMD SP5100 BIOS Developers Guide Page 80

©2011 Advanced Micro Devices, Inc.
15.8.2 Initialize Southbridge Registers for SMI#
; Enable the base address range (228h-22Fh) in the LPC register.
; Address range 228h-22Fh is enabled in LPC Device 14h, function 3, Register 45h, bit 1
mov dx,0CF8h ; PCI device access index register
mov eax,8000A344h ; Device 14h, function 3, registers 44h-47h
out dx,eax
mov dx,0CFDh ; To access register 45h
in al,dx ; Read register 45h
or al,02h ; Set bit 1
out dx,al
; Configure ExtEvent1 for SMI#. ExtEvent1 is configured through PMIO
; register 32h bit 3:2 = 00
mov dx,0cd6h
mov al,32h
out dx,al
mov dx,0cd7h
in al,dx
and al,0f3h ; Clear bits 3:2
or al,04h ; Set [3:2] = 01 for SMI
out dx,al
; Set ExtEvent1 for SMI, negative edge through PMIO register 37h, bit 1 = 0
mov dx,0cd6h
mov al,37h
out dx,al
mov dx,0cd7h
in al,dx
and al,0fdh ; Clear bit 1 for Negative edge
out dx,al
; Also set PMIO register 04 to enable ExtEvent1 for SMI
mov dx,0cd6h
mov al,04h
out dx,al
mov dx,0cd7h
in al,dx
or al,02h
out dx,al
; End of temperature setting program
AMD SP5100 BIOS Developers Guide Page 81

©2011 Advanced Micro Devices, Inc.
15.8.3 SMI Programming to Shut Do wn th e System
The SMI programming should shut down the system when the line connected to Super I/O for
temperature over run is set.
; Check ExtEvent1 status. The ExtEvent1 status is on the PMIO register 07h, bit1
mov dx,0cd6h
mov al,07h
out dx,al
mov dx,0cd7h
in al,dx
test al,02h ; Bit 1 for ExtEvent1
jnz ShutDownFromTalert ; ExtEvent1 is set, shut down
; Check alternate ExtEvent 1 status
mov dx,0cd6h
mov dl,3ah
out dx,al
mov dx,0cd7h
in al,dx
test al,02h
jz NoShutDown
ShutDownFromTalert:
mov dx,PM1a_CNT_BLK+1
mov al,34h ; Set S5 status
out dx,al
jmp $
NoShutDown:
; Continue with rest of the SMI routine.
AMD SP5100 BIOS Developers Guide Page 82

©2011 Advanced Micro Devices, Inc.
15.9 Sleep Trap through SMI#
This sample code provides an SMI# routine to develop s om e software workarounds or debugging
functions before the system goes into ACPI sleep state.
15.9.1 Enable Sleep SMI# in ACPI ASL code
The following example implements Sleep SMI Control Register enable by the ASL code _PTS
method.
Method(_PTS, 1) {
Store(One, \_SB.PCI0.SMBS.SLPS)
PTS(Arg0)
Store(0, Index(WAKP,0)) // Clear Wake up package.
Store(0, Index(WAKP,1)) // Clear Wake up package.
}
OperationRegion (PMIO, SystemIO, 0xCD6, 0x2)
Field (PMIO, ByteAcc, NoLock, Preserve)
{
INPM,8,
DAPM,8
}
IndexField (INPM, DAPM, ByteAcc, NoLock, Preserve) //R07
{
Offset(0x00),
,1,
TM1E,1, // Set to 1 to enable SMI# when PM_TIMER1 expires
TM2E,1, // Set to 1 to enable SMI# when PM_T IMER2 expires
Offset(0x01),
,1,
TM1S,1, // SB sets this bit to indicate that PM_TIMER1 has expired
TM2S,1, // SB sets this bit to indicate that PM_TIMER2 has expired
Offset(0x04),
,7,
SLPS,1, // Set this bit to enable SLP2SMI
Offset(0x1C),
,3,
MKME,1, //
PI3E,1, //
I2E,1, //
PI1E,1, //
PI0E,1, //
Offset(0x1D),
,3,
MKMS,1, //
PI3S,1, //
PI2S,1, //
PI1S,1, //
PI0S,1, //
Offset(0x55),
SPRE,1, //
AMD SP5100 BIOS Developers Guide Page 83

©2011 Advanced Micro Devices, Inc.
Offset(0x68),
,3,
TPDE,1, //
,1
} //end of indexed field
15.9.2 Sleep Trap SMI Routine
The following example implements the Sleep Trap SMI# routine.
SLPSMI_HANDLER_FAR PROC FAR PUBLIC
; Read PM1_CNT to get sleep type
mov dx, PM_BASE_ADDRESS + SB_PM_IO_PM1_CTRL; (PM1_CNT 04h)
in ax, dx
and ax, PM1_CNT_SLP_TYPE
shr ah, 2
dec ah ; For Table from 0
movzx bx, ah
shl bx, 1
add bx, offset cs:ACPISleepTrapTable
mov bx, cs:[bx]
SleepTrapPatch:
cmp word ptr cs:[bx], 0ffffh
je short SleepTrapPatchDone
push bx
call word ptr cs:[bx]
pop bx
inc bx
inc bx
jmp short SleepTrapPatch
SleepTrapPatchDone:
; Disable SLP2SMI
mov ah, SB_PMU_REG_04 ; PMIO_REG.04h[7] = SLP2SMI Enable
call read_io_pmu
and al, NOT BIT7 ; Disable SLP2SMI
call write_io_pmu
; Clear SLP2SMI Status bit
mov ah, SB_PMU_REG_07 ; PMIO_REG.07h[7] = SLP2SMI Status
call read_io_pmu
call write_io_pmu ; Write 1 to clear SLP2SMI status
; Write SLP_EN to put SB into sleep
mov dx, PM_BASE_ADDRESS + SB_PM_IO_PM1_CTRL ; PM1_CNT 04h
in ax, dx
or ax, Bit13 ; PM1_CNT_SLP_EN
out dx, ax ; This puts SB to sleep state
ret
SLPSMI_H ANDLER _FAR ENDP
ACPISleepTrapTable label byte
dw offset cs:ACPISleepTrapS1
dw offset cs:ACPISleepTrapS2
dw offset cs:ACPISleepTrapS3
dw offset cs:ACPISleepTrapS4
dw offset cs:ACPISleepTrapS5
AMD SP5100 BIOS Developers Guide Page 84

©2011 Advanced Micro Devices, Inc.
ACPISleepTrapS1 label byte
dw offset cs:OemACPISleepTrapS1
dw 0FFFFh
ACPISleepTrapS3 label byte
dw offset cs:Port80_Enabled
dw offset cs:OemACPISleepTrapS3
dw 0FFFFh
ACPISleepTrapS4 label byte
dw offset cs:OemACPISleepTrapS4
dw 0FFFFh
ACPISleepTrapS5 label byte
dw offset cs:OemACPISleepTrapS5
dw 0FFFFh
15.10 HD Audio – Detection and Configuration
:********************************************************************************************
; Equates for HD Audio detection
AMD_PCIE_BAR3 EQU 0E0000000h ; NB BAR3 base at Bus-0,Dev-0, func
; 0,Reg 1c h
AMD_AZALIA_BUS_DEV_FUN EQU (14h) shl 3 + 2
AMD_SMBUS_BUS_DEV_FUN EQU (14H) shl 3 + 0
AMD_AZALIA_ID EQU 0437b1002h
AMD_AZALIA_ExtBlk_Addr EQU 0F8h
AMD_AZALIA_ExtBlk_DATA EQU 0FCh
;*********************************************************************************************
; AMD_SB_Cfg_Azalia *
; *
; Configure HD Audios *
; *
; Input: EBP = 0 *
; ES = 0 *
; *
;*********************************************************************************************
AMD_SB_Cfg_Azalia PROC NEAR
pushad
; OEM specific CMOS setup option to Auto/Disable/enable HD Audio
mov ax,CMOS_Azalia_Option ; OEM specific
call ReadCMOSOption ; OEM specific
cmp ax,1 ; Is it disable?
je DisableAzaliaController ; Jump for Disable HD Audio
; OEMs may have a CMOS setup option for HD Audio clock source.
AMD SP5100 BIOS Developers Guide Page 85

©2011 Advanced Micro Devices, Inc.
; The options may be USB 48 MHz or HD Audio 48 MHz
; Device 14h, function 2, register 43h, bit 0 = 1 for HD Audio clock.
mov ax,CMOS_AZA_CLOCK ; OEM specific
call ReadCMOSOption ; OEM specific
cmp ax,1 ; Is it HD Audio clock at 48 MHz
jne @f ; Jump for USB 48 MHz clock
or Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_AZALIA_BUS_DEV_FUN shl 12 +
043h], BIT0
; Enable xAz48Mhz pin as clock source of 48Mhz
call AMD_fixed_delay_1ms_far ; Wait 1ms
@@:
; OEM may have CMOS setup for HD Audio snoop (0= Disable, 1=Enable)
; Device 14h, function 2, register 42, bits 1 and 0 control snoop option
mov ax,CMOS_AZA_SNOOP ; OEM specific
call ReadCMOSOption ; OEM specific
cmp ax,1 ; Snoop enabled?
jne @f ; Jump for disabled
or Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_AZALIA_BUS_DEV_FUN shl 12 +
042h], BIT1
; Enable Snoop
@@:
; Set subsystem ID at device 14h, function 2, register 2ch
mov Dword PTR es:[ebp+AMD_PCIE_BAR3+AMD_AZALIA_BUS_DEV_FUN shl 12
+2Ch], \
AMD_AZALIA_ID ; Write subsystem ID
; Get HD Audio controller’s memory mapped configuration registers in EBX
mov ebx, Dword PTR es:[ebp+AMD_PCIE_BAR3+AMD_AZALIA_BUS_DEV_FUN shl 12
+10h]
; HD Audio port configuration through Extended registers.
; Extended registers are addressed as index/data through SMBUS(Dev 14h, func0)
; register 0F 8h,
; and 0FCh
; Index 0 is Audio port configuration. 2 bit per port for total of 4 ports
mov Dword PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+AMD_AZALIA_ExtBlk_Addr], 0 ; Set index to 0
; First declare all the lines as GPIO lines by setting index 00 to all 1's.
; Then read the input status of these line at index 02
; If the line is 1, it is guaranteed not to be HD Audio
; This step is necessary because after S4 resume from ring, the AC-97 gives same status
; as HD Audio
AMD SP5100 BIOS Developers Guide Page 86

©2011 Advanced Micro Devices, Inc.
mov Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+SP5100_SMBUS_REGFC], 11111111b ; Set to GPIO
call AMD_fixed_delay_1ms_far ; Wait 1ms
mov ecx, dword PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12
\
+SP5100_SMBUS_REGFC]
shr ecx,10h
mov di,cx ; Save GPIO lines status at di[7:0]
mov Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+AMD_AZALIA_ExtBlk_DATA], 10101010b ; Set pin to HD Audio
; Interrupt routing table for HD Audio is at SMBUS ( Dev 14h, func 0) register 63h
mov Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 +
063h], 0
; Set PCI routing to #INTA
; Attempt to exit the reset state. This is done by command to exit the reset state and
; waiting for status of ready to begin operation.
mov ecx, 10 ; Make up to 10 attempt to exit reset
; state
re_do_reset:
and bx, BIT15+BIT14 ; Clear bit0-13
or Byte PTR ES:[ebx+08h], BIT0 ; Exit the reset state
call AMD_fixed_delay_1ms_far ; Wait 1ms
test Byte PTR ES:[ebx+08h], BIT0 ; Read of 1 = Ready to begin operation
jnz @f ; Go if reset bit is set
loop re_do_reset ; Wait until ready to begin operation
jmp AMD_SB_Cfg_Azalia_exit ; Exit because reset bit can not be set
; Ready to begin operation.
; Check codecs present by examining memory mapped register (pointed by EBX) at 0Eh
@@:
call AMD_fixed_delay_1ms_far ; Wait 1ms
mov al, Byte PTR ES:[ebx+0eh] ; State change status register
and al, 0fh ; Bits 3:0 are for state change status
jnz At_least_one_azalia ; Codec present
; Disable Azalia controller and leave
DisableAzaliaController:
; Clear memory access at PCI register 04
and Word PTR es:[ebp+AMD_PCIE_BAR3+AMD_AZALIA_BUS_DEV_FUN shl 12 +04h],
0
; Disable HD Audio module through PMIO register 59h bit 3
mov dx,0cd6h ; PMIO index register
AMD SP5100 BIOS Developers Guide Page 87

©2011 Advanced Micro Devices, Inc.
mov al,59h ; Set PMIO index to 59h
out dx,al ;
mov dx,0cd7h ; PMIO data register
in al,dx ; Read current data
not al, BIT3 ; Clear bit 3 to disable HD Audio
out dx,al ; Output new data
; HD Audio port configuration through Extended registers.
; Extended registers are addressed as index/data through SMBUS(Dev 14h, func0)
; register 0F8h,
; and 0FCh
; Index 0 is Audio port configuration. 2 bit per port for total of 4 ports
mov Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+AMD_AZALIA_ExtBlk_DATA], 01010101b ;Set pin routine to AC97
jmp AMD_SB_Cfg_Azalia_exit
; Audio codec present
; Register AL has codec present bit map in bits 3:0
; Register EBX points to memory mapped configuration registers
At_least_one_azalia:
mov dl, al
; After resume from S4 through ring, the AC97 lines give same status as HD Audio
; It is necessary to remove HD Audio status from those bits. The AC-97 ring resume
; status is in register
; DI[3:0]
mov ax,di ; Get GPIO status and AC97 S4 ring wakeup
mov ah,0fh ; To keep only bits 3:0
and al,ah ; Keep only bits 3:0
xor al,ah ; Invert the AC97 ring bits
and dl,al ; Remove GPIO and AC-97 bits from HD Audio bits
mov cl, 0
test_SDI:
test dl, BIT0 ; Test for specific codec present
jnz configure_Azalia_channel ; Jump, codec is present
; This specific codec is not present. Set pin config to AC97
; This pin is set through index 0 of extended registers.
; The extended registes are accessed as index/data at SMBus (dev 14h, func 0) registers
; 0F8h/0FCh
; There are two bits per codec. Register CL has the codec number.
mov ah, 01b ; 01 = Set codec as AC97
shl ah, cl ; Move in the position for this codec
shl ah, cl ; Two bits per codec
mov al, 11b ; Mask for this codec
shl al, cl ; Move it in the position for this codec
shl al, cl ; Two bits per codec
AMD SP5100 BIOS Developers Guide Page 88

©2011 Advanced Micro Devices, Inc.
xor al, -1 ; Zero these two bits
and Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+AMD_AZALIA_ExtBlk_DATA], al ; Clear channel pin config
or Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 \
+AMD_AZALIA_ExtBlk_DATA], ah ; Set channel pin config to AC97
jmp test_next_SDI
configure_Azalia_channel:
call AMD_SB_Cfg_Azalia_Pin_CMD ; Configure this pin
test_next_SDI:
shr dl, 1 ; Get next codec present
inc cl ; Update the codec Channel number
cmp cl, 4 ; Completed all channels
je re_do_clear_reset ; Yes, jump. Reset the controller and exit
jmp test_SDI ; Do the next codec
; Reset the controller and wait till it enters reset state.
re_do_clear_reset:
and Byte PTR ES:[ebx+08h], NOT (BIT0) ; Controller transition to reset state
test Byte PTR ES:[ebx+08h], (BIT0) ; Test the reset status. 0 = Controller in
; reset state
jnz re_do_clear_reset ; If 1, wait to enter reset state
AMD_SB_Cfg_Azalia_exit:
popad
ret
AMD_SB_Cfg_Azalia END P
;******************************************************************************************************
; AMD_SB_Cfg_Azalia_Pin_CMD *
; *
; Configure each codec pin *
; *
; Input: cl, = channel number *
; ebx = Memory mapped configuration register address *
; *
;******************************************************************************************************
AMD_SB_Cfg_Azalia_Pin_CMD PROC NEAR
pushad
; OEM may have CMOS setup option for Pin Configuration (0= Disable, 1=Enable)
mov ax CMOS_Pin_Config ; OEM specific
call ReadCMOSOption ; OEM specific
cmp ax,1
jne AMD_SB_Cfg_Azalia_Pin_CMD_exit ; Jump if Pin Configuration is disabled
AMD SP5100 BIOS Developers Guide Page 89

©2011 Advanced Micro Devices, Inc.
; Set codec channel number in bits 31:28
; Write command for ID read
shl ecx, 28
mov eax, 0F0000h ; Read IDs command
or eax, ecx
mov Dword PTR ES:[ebx+60h], eax ; Immediate command output register
call AMD_SB_Cfg_Azalia_Delay ; About 30 uSec delay
mov eax, Dword PTR ES:[ebx+64h] ; Immediate command input
cmp eax, 010ec0880h ; Is it Realtec codec?
jne AMD_SB_Cfg_Azalia_Pin_CMD_exit ; This routine works only with Realtec
; codec
mov si, offset Azalia_Codec_Table_Start
mov di, offset Azalia_Codec_Table_end ; Table end does not include front panel
; OEM may have a CMOS setup selection for Front panel audio (0=Auto, 1=Disable)
mov ax CMOS_Front_Panel ; OEM specific
call ReadCMOSOption ; OEM specific
cmp ax,1 ; Front panel disable
je loop_Immediat_Command_Output_Interface ; Jump for front panel disable
; Front panel option is Auto. GPIO9 detects the front panel audio in the SP5100, and
; GPIO8 detects the front panel audio in SB460.
;Check whether SB460?Call DetectSB460
Jz SB460_Chip ;jmp if SB460
;Control comes here if SP5100
; Set GPIO9 as input through SMBus (Dev 14h, func 0) register A9h, bit 5
; Read GPIO9 through SMBus (Dev 14h, func 9) register AAh, bit 5
or Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 +
0A9h], BIT5
; Set GPIO9 Input
test Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 +
0AAh], BIT5
; GPIO9 0:connected 1:not
jmp DetectFrontPanelAudio
SB460_Chip:
;Control comes here if SB460
; Set GPIO8 as input through SMBus (Dev 14h, func 0) register A9h, bit 4
; Read GPIO8 through SMBus (Dev 14h, func 9) register AAh, bit 4
or Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 +
0A9h], BIT4
; Set GPIO8 Input
test Byte PTR es:[ebp+AMD_PCIE_BAR3+AMD_SMBUS_BUS_DEV_FUN shl 12 +
0AAh], BIT4
; GPIO8 0:connected 1:not
AMD SP5100 BIOS Developers Guide Page 90

©2011 Advanced Micro Devices, Inc.
DetectFrontPanelAudio:
jnz loop_Immediat_Command_Output_Interface ; Jump, Front Panel audio is not
; present
; Front panel audio is present. Extend the end pointer to include front panel commands
mov di, offset Azalia_Codec_Table_FP_Enable_end
; Write the codec commands
loop_Immediat_Command_Output_Interface:
cmp si, di ; End of table?
je AMD_SB_Cfg_Azalia_Pin_CMD_exit ; Jump at the end of the command
test_again:
test Byte PTR ES:[ebx+68h], BIT0 ; Immediate command status register
jnz test_again ; If bit 0 == 1, codec is not ready for
; command
mov eax, cs:[si] ; Get the command from the table
or eax, ecx ; Add codec number 0 to 3
mov Dword PTR ES:[ebx+60h], eax ; Write immediate command
call AMD_SB_Cfg_Azalia_Delay ; About 30 uSec delay
add si, 4 ; Update the pointer
jmp loop_Immediat_Command_Output_Interface ; Next command
AMD_SB_Cfg_Azalia_Pin_CMD_exit:
popad
ret
AMD_SB_Cfg_Azal ia_ P in_C MD ENDP
;********************************************************************************************
: AMD_SB_Cfg_Azalia_Delay *
; *
; Wait about 30 uSec *
; *
: Input : None *
;*********************************************************************************************
AMD_SB_Cfg_Azal ia_ Del a y PROC NEAR
push cx
mov cx, 4
call AMD_fixed_delay_far ; Wait approx cx * 7 uSec
pop cx
ret
AMD_SB_Cfg_Azal ia_ Del a y ENDP
;*********************************************************************************************
; AMD_Fixed_delay_1ms_FAR *
; *
; Delay for approx 1 mSec *
; *
; Input: None *
;*********************************************************************************************
AMD SP5100 BIOS Developers Guide Page 91

©2011 Advanced Micro Devices, Inc.
PUBLIC AMD_fixed_delay_1ms_FAR
AMD_fixed_delay_1ms_FAR PROC FAR
push cx
mov cx, 1000/15
call AMD_fixed_delay
pop cx
ret
AMD_fixed_delay_1ms_FAR ENDP
;*********************************************************************************************
; AMD_fixed_delay_far *
; *
; Delay for about 30 uSec *
; Input: None *
; *
;*********************************************************************************************
AMD_fixed_delay_far PROC FAR
push ax
fixed_delay_1:
in al, 61h ; refresh_port
test al, 00010000b
jz fixed_delay_1
dec cx
jz fixed_delay_2
fixed_delay_3:
in al, 61h ; refresh_port
test al, 00010000b
jnz fixed_delay_3
dec cx
jnz fixed_delay_1
fixed_delay_2:
pop ax
ret
AMD_fixed_dela y ENDP
Azalia_Codec_Table_Start:
dd 01471C10h
dd 01471D40h
dd 01471E01h
dd 01471F01h
dd 01571C11h
dd 01571D10h
dd 01571E01h
dd 01571F01h
dd 01671C12h
dd 01671D60h
dd 01671E01h
AMD SP5100 BIOS Developers Guide Page 92

©2011 Advanced Micro Devices, Inc.
dd 01671F01h
dd 01771C13h
dd 01771D20h
dd 01771E01h
dd 01771F01h
dd 01871C30h
dd 01871D91h
dd 01871Ea1h
dd 01871F01h
dd 01971C00h
dd 01971D00h
dd 01971E00h
dd 01971F40h
dd 01a71C31h
dd 01a71D31h
dd 01a71E81h
dd 01a71F01h
dd 01b71C00h
dd 01b71D00h
dd 01b71E00h
dd 01b71F40h
dd 01c71C70h
dd 01c71D10h
dd 01c71E33h
dd 01c71F99h
dd 01d71C00h
dd 01d71D10h
dd 01d71E7fh
dd 01d71F90h
dd 01e71C50h
dd 01e71D00h
dd 01e71E44h
dd 01e71F01h
dd 01f71C60h
dd 01f71D00h
dd 01f71Ec4h
dd 01f71F01h
Azalia_Codec_Table_end:
dd 01971C20h
dd 01971D91h
dd 01971E21h
dd 01971F02h
dd 01B71C40h
dd 01B71D41h
dd 01B71EA1h
dd 01B71F02h
Azalia_Codec_Table_FP_Enable_end:
AMD SP5100 BIOS Developers Guide Page 93

©2011 Advanced Micro Devices, Inc.
16 Chipset Integration Module Extensive (SB7xx CIMx)
16.1 Introduction
CIMx-SB7xx introduces a new interface and distribution model to help quickly integrate SB7xx
and SP5100 Southbridges support in the customer products.
16.2 Distribution Model
To avoid miscellaneous build issues and simplify integration with different BIOS code bases,
CIMx-SB7xx is distributed in the form of binary files called “B1” and “B2”. B1 contains
minimum initialization required for BIOS recovery, while B2 contains full chipset initialization
code.
16.3 CIMx Architectur e
CIMx is completely re-architected from the previous generation of CIM code. CIMx release
contains two binary files (B1 and B2). B1 image must be integrated in boot block part of the
BIOS in uncompressed form to ensure possibility of recovery if the main BIOS image is
corrupted. There are no restrictions on B2 location. B2 image should be integrated in the main
BIOS in uncompressed form. B1 contains the minimal chipset initialization required for
bootblock recovery. B2 supports the complete chipset initialization which is required for
normal BIOS post.
During power on, the boot block BIOS code should call the B1 module to do the power on
settings required for the chipset. Boot block BIOS code can inform the B1 module the location
of the B2 module and whether B1 module is allowed to call B2 module. If B2 module location
is not given as input, B1 can search for the B2 module. Once B1 module finds the B2 module,
it validates the B2 module and if valid, passes the call to B2 module if the boot block BIOS
allows it to do so. If the B2 module is invalid or if boot block BIOS doesn’t allow B1 to call B2,
then B1 module services the call itself. Since B1 module searches the ROM for B2 module,
B2 module should be integrated into the BIOS as uncompressed. Also to speed up the search
for B2 module, B2 module should be integrated in 32K Byte alignment.
B1 & B2 modules should be given control in 32-bit flat protected mode with both DS, ES & SS
set to 0-4GB flat mode descriptors. B1 & B2 can be executed from ROM or by copying to
memory with cache enabled. Cache needs to be enabled for the modules to be executed in
ROM.
CIMx code is mostly written in ‘C’ in order to be compatible with both legacy BIOS and EFI
environments. Figure 5 shows the flow of system BIOS which has integrated the CIMx
modules to support AMD chipsets.
AMD SP5100 BIOS Developers Guide Page 94
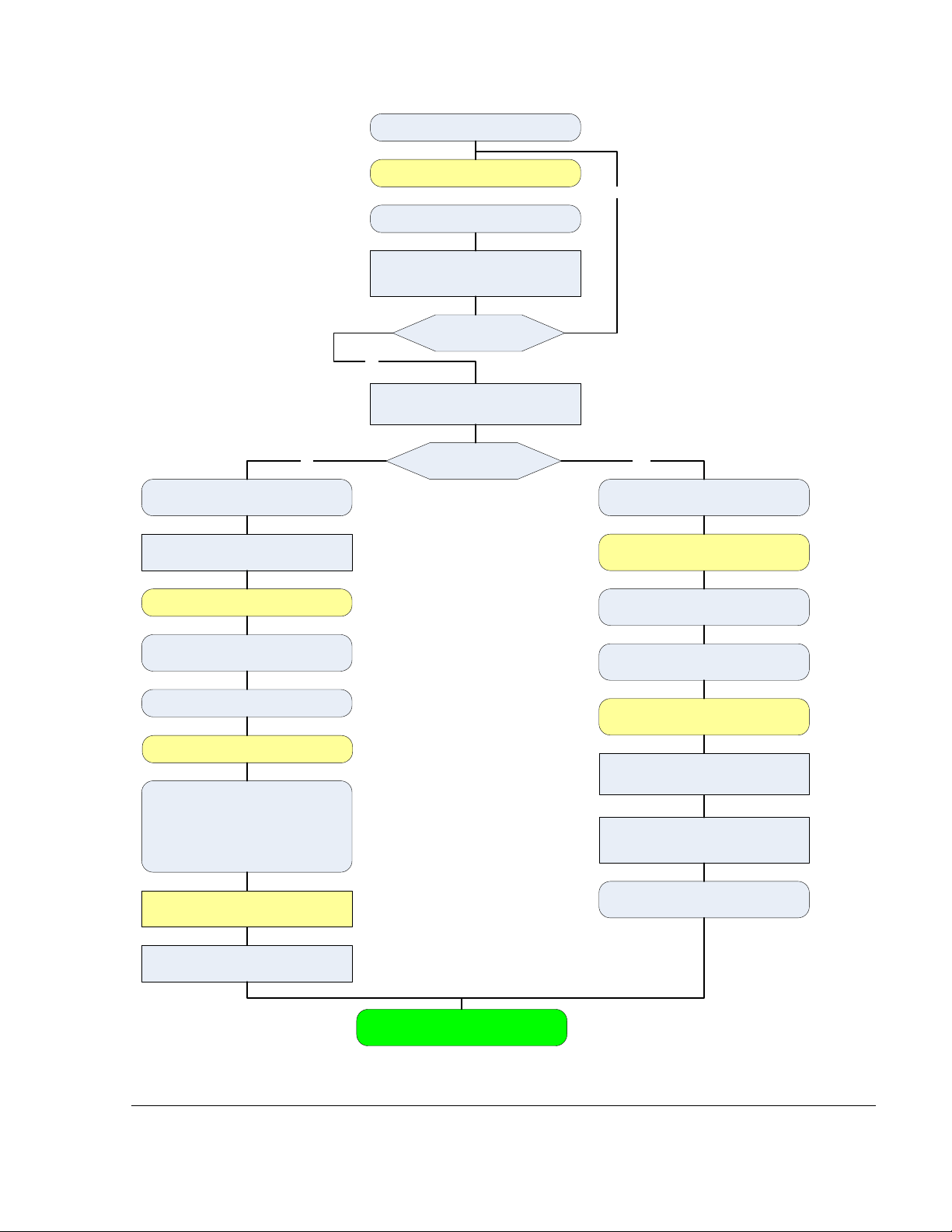
©2011 Advanced Micro Devices, Inc.
Power on Reset
CIM-RD790
Notrhbridge HT Initialization
CIMx-SB7xx POR Init
Memory detection.
System BIOS shadowing
Is S3 Resume
Restore Memory Controller
Restore PCI Device configuration space
Misc. Restore CPU
CIM-RD790
Norhbridge S3 initialization
Misc BIOS restore.
Give control to OS
Operatin System
CIM-RD790
Notrhbridge Start Post Initialization
CIMx-SB7xx - InitSBeforePciEnum
PCI enumeration and resource allocation
Video BIOS call
CIMx-SB7xx - InitSBAfterPciEnum
Cnfigure all IO device.
Enumerate USB.
Detect and initialize all boot devices.
Initialize and execute Option ROM.
BIOS setup, etc
CIM RD790
Norhbridge late Post initialization
Yes
No
CIMx-SB7xx - InitSbBfPciRestore
CIMx-SB7xx - InitSbAfPciRestore
HT Initialization
Warm Reset Required ?
CIM-RD790
Notrhbridge Power On Initialization
CIM RD790
Norhbridge PCIE S3 initialization
Yes
No
CIMx-SB7xx - LatePostInitialization
AMD SP5100 BIOS Developers Guide Page 95
Figure 5 Flowchart of SBIOS with Integrated C IMx

©2011 Advanced Micro Devices, Inc.
16.4 Binary File
MS-DOS 2.0 Compatible
EXE Header
OEM Identifier
OEM Information
Offset to PE Header
PE Header
Section Headers
MS-DOS 2.0 Stub Program
and
Relocation Table
Microsoft PE executabe
Raw Data:
Code
Data
CIM Header
CIMx SB7xx Binary
Raw Data:
Code
Data
debug info
relocations
16.4.1 Overview
CIMX-SB7xx binary file is modified and rebased in 32-bit PE3 2 execut ab le gen er ated b y
Microsoft
®
Visual Studio. (For additional information about Microsoft Visual Studio file format
refer to “Visual Studio, Microsoft Portable Executable and Common Object File Format
Specification”). Figure 6 illustrates the difference between Microsoft PE executable format and
CIMX-SB7xx binary file format.
AMD SP5100 BIOS Developers Guide Page 96
Figure 6 CIMx-SB7xx vs MS PE Executable

©2011 Advanced Micro Devices, Inc.
16.4.2 Binary Header
Offset
Size
Field
Description
0
4
Signature
Signature that identifies this as a CIMx
module
4
4
EntryPointAddress
Address of the entry point relevant to the
beginning of the binary image.
8
4
ModuleSignature
Signature that identify this particular
CIMx module.
12
4
ImageSize
Size in number of bytes of complete binary
including the header.
16
2
ModuleVersion
Version of the binary module.
16
2
Checksum
Checksum of the binary image.
18
5
Reserved
Space reserved for future use.
The CIMx-SB7xx consists of file header followed immediately by Raw Code and Data.
Table 2 CIMx File Header Definition
16.5 CIMx Interfac e Call s E nvi ronment
Prior to calling any CIMx interface, it is required that:
1. Place CPU into 32-bit protected mode.
2. Set CS as 32-bit code segment with Base/Limit – 0x00000000/0xffffffff.
3. Set DS/ES/SS as 32bit data segment with Base/Limit – 0x00000000/0xffffffff.
16.6 Interface Definition
All interface calls to CIMx-SB7xx binary are C like calls to the Entry Point of the binary image.
void (*ImageEntryPointPtr)(void* Config)
16.6.1 Southbridge Power-On/Reset Initialization
Upon system power-on, or cold reset, there is minimal initialization required like SMBus base
address programming, enabling the legacy IO (like port 60/64 etc) decoding etc to bring the
system to a working state. BIOS
power on initialization.
CIMx has assumed a set of default values for all the build parameters such as bios size,
smbus base address, power management base addresses etc. If you wan to use your own
set of values for these configurable options, then you can define the buildparameters
structure and give the 32bit physical pointer as input to the CIMx module. If the pointer is
NULL or set to all 1, then the CIMx module uses the default parameters which are built. Also
the bios developer has the flexibility of changing the oem.h file to redefine the values but in
this, the CIMx module needs to be rebuilt for the new values to be included in the binary.
should call this entry to B1 module at very early stage during
AMD SP5100 BIOS Developers Guide Page 97

©2011 Advanced Micro Devices, Inc.
Bit
Field
Description
[0]
S3Resume
Informs the CIMx module whether the
system is resuming from S3
[1]
RebootRequired
CIMx informs BIOS whether a reboot
settings require a reboot.
[2]
Spi33Mhz
0 – Leave the SPI ROM to default
1 – Bump up the SPI ROM to 33Mhz.
Functions Documentation
void (*ImageEntryPointPtr)(AMDSBCFGBB* Config)
Parameters
typedef struct _AMDSBCFGBB
{
STDCFG StdHeader; //offset 0:16 - 17 bytes
UINT32 MsgXchgBiosCimxBB; //offset 17:20 - 4 bytes
BUILDPARAM *BuildParametersPtr; //offset 21:24 - 4 bytes
}AMDSBCFGBB;
Detail Description
stdHeader – Standard function call
typedef struct _STDCFG{
UINT32 pImageBase;
UINT32 pPcieBase;
UINT8 Func;
UINT32 pCallBack;
UINT32 pB2ImageBase;
}STDCFG;
MsgXchgBiosCimx – Field to exchange message between BIOS & CIMx
stdHeader.Func = 0x01.
pImageBase - Physical address of binary image.
pPcieBase - Address of PCIe Extended configuration space MMIO.
Func – Function identifier.
pCallBack - Address of OEM call back function
pB2ImageBase – Optional parameter. Physical address of “B2” image.
AMD SP5100 BIOS Developers Guide Page 98
is required after returning from
CIMx call. Some internal clock
settings and spread spectrum
speed(16.5MHz)

©2011 Advanced Micro Devices, Inc.
Bit
Field
Description
[3]
SpreadSpectrum
When using external clock
0 – Disable SB internal spread
except USB, SATA and DISP clocks).
[4]
UsbIntClock
0 – Use external 48MHz clock source
source for usb controllers.
[5]
PciClk5
0 – Leave PCIClk5 pin as GPIO.
1 – Enable PCIClk5 pin as PCI CLK.
[7:6]
TimerClockSource
0 – 100MHz PCIe® reference clock.
directly into the internal clock.
[31:9]
MsgXchgBiosCimxDummyBB
Dummy place holder for future use.
spectrum on SB PCI clocks
1 – Enable SB internal spread
specturm on PCI clks. (If this
option is enabled and if the clock
input to SB is already spread, then
it will cause double spread on the
SB PCI clks).
When using internal clock boards
0 – Disable SB internal spread
spectrum.
1 – Enable SB internal spread
specturm on clocks going out from
SB. (if this option is enable, then
it will enable spread on all clocks
for usb controllers.
1 – Use SP5100 internal clock
BuildParametersPtr – This is pointer to build parameter structure. It should point to the following
structure (BUILDPARAM) or should be 0xFFFFFFFF and in that case CIMx will use the default
structure. CIMx also provides the flexibility of changing the default build structure parameters by
editing them in oem.h file. In the case CIMx module need to rebuilt so that the new parameters are
updated. So there are basically three options.
1. Build parameters can be given as input by providing a pointer to BUILDPARAM structure as
input.
Use 100Mhz PCIe reference clock as
timer clock source to SB.
1 – 14MHz using 25M_48M_66M_OSC
pin. Use external 14MHz clock
source for system timer clock by
routing the 25M_X1 pin directly
into the internal clock. In the
platform, the 25M_X1 pin should be
connected to 14MHz clock source for
this option.
2 – Auto. Use external 14MHz clock
source by routing 25M_X1 pin
2. OEM can use the default structure built into the binary by providing a NULL pointer as input.
AMD SP5100 BIOS Developers Guide Page 99

©2011 Advanced Micro Devices, Inc.
3. OEM can change the values of default structure by updating them in oem.h file and use the
updated default structure. In this case a NULL pointer should be provided as input. In this
case, OEM needs to rebuild the CIMx module to have the binary updated with the new
values.
typedef struct _BUILDPARAMBB
{
UINT16 BiosSize:3; //0-128KB, 1-256KB, 2-512KB, 4-1MB,....
UINT16 LegacyFree:1;
UINT16 Dummy0:12;
UINT16 EcKbd:1;
UINT16 EcChannel0:1;
UINT16 Dummy1:14;
UINT32 Smbus0BaseAddress;
UINT16 Smbus1BaseAddress;
UINT32 SioPmeBaseAddress;
UINT32 WatchDogTimerBase;
UINT32 SpiRomBaseAddress;
UINT16 AcpiPm1EvtBlkAddr;
UINT16 AcpiPm1CntBlkAddr;
UINT16 AcpiPmTmrBlkAddr;
UINT16 CpuControlBlkAddr;
UINT16 AcpiGpe0BlkAddr;
UINT16 SmiCmdPortAddr;
UINT16 AcpiPmaCntBlkAddr;
UINT16 EcLdn5MailBoxAddr;
UINT8 EcLdn5Irq;
UINT16 EcLdn9MailBoxAddr;
UINT32 ReservedDword0;
UINT32 ReservedDword1;
UINT32 ReservedDword2;
UINT32 ReservedDword3;
}BUILDPARAMBB;
BiosSize – Size of the BIOS ROM(0-128KB, 1-256KB, 2-512KB, 4-1MB, 5-2MB, 6-4MB, Others:
Reserved)
LegacyFree – Indicates whether the system is Legacy Free ( 0 – Not Legacy Free, 1 – Legacy
Free)
Dummy0 – Dummy place holder for future use
EcKbd – Indicates whether CIMx needs to enable the KBC in the EC
EcChannel0– Indicates whether CIMx needs to enable the Channel0 in the EC
Dummy1 – Dummy place holder for future use
Smbus0BaseAddress – Base Address of SMBus 0.
AMD SP5100 BIOS Developers Guide Page 100
 Loading...
Loading...