

Page 1

USER’S GUIDE
Agilent Technologies
Model N3280A
Component Test DC Source
5
Agilent Part No. 5964-8248
Microfiche No. 5964-8249
June, 2001
Page 2

Warranty Information
CERTIFICATION
Agilent Technologies certifies that this product met its published specifications at time of shipment from the factory.
Agilent Technologies further certifies that its calibration measurements are traceable to the United States National
Institute of Standards and Technology, to the extent allowed by the Bureau's calibration facility, and to the calibration
facilities of other International Standards Organization members.
WARRANTY
This Agilent Technologies hardware product is warranted against defects in material and workmanship for a period
of three years from date of delivery. Agilent Technologies software and firmware products, which are designated by
Agilent Technologies for use with a hardware product and when properly installed on that hardware product, are
warranted not to fail to execute their programming instructions due to defects in material and workmanship for a
period of 90 days from date of delivery. During the warranty period Agilent Technologies will, at its option, either
repair or replace products which prove to be defective. Agilent does not warrant that the operation for the software
firmware, or hardware shall be uninterrupted or error free.
For warranty service, with the exception of warranty options, this product must be returned to a service facility
designated by Agilent Technologies. Customer shall prepay shipping charges by (and shall pay all duty and taxes)
for products returned to Agilent Technologies for warranty service. Except for products returned to Customer from
another country, Agilent Technologies shall pay for return of products to Customer.
Warranty services outside the country of initial purchase are included in Agilent Technologies' product price, only if
Customer pays Agilent Technologies international prices (defined as destination local currency price, or U.S. or
Geneva Export price).
If Agilent is unable, within a reasonable time to repair or replace any product to condition as warranted, the
Customer shall be entitled to a refund of the purchase price upon return of the product to Agilent Technologies.
LIMITATION OF WARRANTY
The foregoing warranty shall not apply to defects resulting from improper or inadequate maintenance by the
Customer, Customer-supplied software or interfacing, unauthorized modification or misuse, operation outside of the
environmental specifications for the product, or improper site preparation and maintenance. NO OTHER
WARRANTY IS EXPRESSED OR IMPLIED. AGILENT TECHNOLOGIES SPECIFICALLY DISCLAIMS THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
EXCLUSIVE REMEDIES
THE REMEDIES PROVIDED HEREIN ARE THE CUSTOMER'S SOLE AND EXCLUSIVE REMEDIES. AGILENT
TECHNOLOGIES SHALL NOT BE LIABLE FOR ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR
CONSEQUENTIAL DAMAGES, WHETHER BASED ON CONTRACT, TORT, OR ANY OTHER LEGAL THEORY.
ASSISTANCE
The above statements apply only to the standard product warranty. Warranty options, extended support contacts,
product maintenance agreements and customer assistance agreements are also available. Contact your nearest
Agilent Technologies Sales and Service office for further information on Agilent Technologies' full line of Support
Programs.
2
Page 3
Safety Summary
F
y
s
y
The following general safety precautions must be observed during all phases of operation of this instrument.
ailure to comply with these precautions or with specific warnings elsewhere in this manual violates safet
tandards of design, manufacture, and intended use of the instrument. Agilent Technologies assumes no liabilit
for the customer's failure to comply with these requirements.
GENERAL
This product is a Safety Class 1 instrument (provided with a protective earth terminal). The protective features of
this product may be impaired if it is used in a manner not specified in the operation instructions.
Any LEDs used in this product are Class 1 LEDs as per IEC 825-1.
ENVIRONMENTAL CONDITIONS
This instrument is intended for indoor use in an installation category II, pollution degree 2 environment. It is
designed to operate at a maximum relative humidity of 95% and at altitudes of up to 4500 meters. Refer to the
specifications tables for the ac mains voltage requirements and ambient operating temperature range.
BEFORE APPLYING POWER
Verify that the product is set to match the available line voltage, the correct fuse is installed, and all safety
precautions are taken. Note the instrument's external markings described under "Safety Symbols".
GROUND THE INSTRUMENT
To minimize shock hazard, the instrument chassis and cover must be connected to an electrical ground. The
instrument must be connected to the ac power mains through a grounded power cable, with the ground wire firmly
connected to an electrical ground (safety ground) at the power outlet. Any interruption of the protective (grounding)
conductor or disconnection of the protective earth terminal will cause a potential shock hazard that could result in
personal injury.
ATTENTION: Un circuit de terre continu est essentiel en vue du fonctionnement sécuritaire de l'appareil.
Ne jamais mettre l'appareil en marche lorsque le conducteur de mise … la terre est d‚branch‚.
FUSES
Only fuses with the required rated current, voltage, and specified type (normal blow, time delay, etc.) should be
used. Do not use repaired fuses or short-circuited fuseholders. To do so could cause a shock or fire hazard.
Vous devrez impérativement utiliser des fusibles calibrés aux spécifications de courant, tension et type
(coupure, délai de coupure, etc ...). N'utilisez jamais de fusibles réparés et ne court-circuitez pas les supports
de fusibles. Sinon, vous risquez de provoquer un choc électrique ou un incendie.
DO NOT OPERATE IN AN EXPLOSIVE ATMOSPHERE
Do not operate the instrument in the presence of flammable gases or fumes.
DO NOT REMOVE THE INSTRUMENT COVER
Operating personnel must not remove instrument covers. Component replacement and internal adjustments must be
made only by qualified service personnel.
Instruments that appear damaged or defective should be made inoperative and secured against unintended
operation until they can be repaired by qualified service personnel.
3
Page 4
SAFETY SYMBOLS
Direct current
Alternating current
Both direct and alternating current
Three-phase alternating current
Earth (ground) terminal
Protective earth (ground) terminal
Frame or chassis terminal
Terminal is at earth potential. Used for measurement and control circuits designed to be
operated with one terminal at earth potential.
Terminal for Neutral conductor on permanently installed equipment
Terminal for Line conductor on permanently installed equipment
WARNING
Caution
On (supply)
Off (supply)
Standby (supply). Units with this symbol are not completely disconnected from ac mains when
this switch is off. To completely disconnect the unit from ac mains, either disconnect the power
cord or have a qualified electrician install an external switch.
In position of a bi-stable push control
Out position of a bi-stable push control
Caution, risk of electric shock
Caution, hot surface
Caution (refer to accompanying documents)
The WARNING sign denotes a hazard. It calls attention to a procedure, practice, or the like,
which, if not correctly performed or adhered to, could result in personal injury. Do not proceed
beyond a WARNING sign until the indicated conditions are fully understood and met.
The CAUTION sign denotes a hazard. It calls attention to an operating procedure, or the like,
which, if not correctly performed or adhered to, could result in damage to or destruction of part
or all of the product. Do not proceed beyond a CAUTION sign until the indicated conditions
are fully understood and met.
4
Page 5
Declaration Page
Manufacturer’s Name:
Manufacturer’s Address:
declares that the product:
Product Name:
DECLARATION OF CONFORMITY
According to ISO/IEC Guide 22 and CEN/CENELEC EN 45014
Responsible Party Alternate Manufacturing Site
Agilent Technologies, Inc. Agilent Technologies
Power Products PGU
140 Green Pond Road
Rockaway, New Jersey 07866
U.S.A
Component Test dc Source
South Queensferry
West Lothian EH30 9TG
United Kingdom
Model Number:
Product Options:
Conforms with the following European Directives:
The product herewith complies with the requirements of the Low Voltage Directive 73/23/EEC and the EMC
Directive 89/336/EEC (including 93/68/EEC) and carries the CE Marking accordingly
EMC information:
The product herewith complies with the requirements of the EMC Directive 89/336/EEC (including
93/68/EEC) and carries the CE Marking accordingly (European Union).
As detailed in
Assessed by:
Safety information:
The product herewith complies with the requirements of the Low Voltage Directive 73/23/EEC and
carries the CE-marking accordingly
N3280A
This declaration covers all options of the above product(s).
Electromagnetic Compatibility (EMC) Certificate of Conformance No.TCF
CC/TCF/01/016 based on Technical Construction File (TCF) No. ANJ13, dated
8/03/2001
Celestica Ltd, Appointed Competent Body
Westfields House, West Avenue
Kidsgrove, Stoke-on-Trent
Straffordshire, ST7 1TL
United Kingdom
Supplemental information
The product conforms to the following safety standards:
IEC 1010-1:1990+A1+A2 / EN 61010-1:1993 +A2
UL 3111-1:1994
CSA C22.2 No. 1010.1:1993
March 19, 2001
Date Hank Kowalla / Quality Manager at PPPGU
For further information, please contact your local Agilent Technologies sales office, agent or distributor.
Authorized EU-representative: Agilent Technologies Deutschland GmbH, Herrenberger Stra
Böblingen, Germany
βe 130, D71034
5
Page 6
Acoustic Noise Information
Herstellerbescheinigung
Diese Information steht im Zusammenhang mit den Anforderungen der
Maschinenläminformationsverordnung vom 18 Januar 1991.
* Schalldruckpegel Lp <70 dB(A)
* Am Arbeitsplatz
* Normaler Betrieb
* Nach EN 27779 (Typprüfung).
Manufacturer's Declaration
This statement is provided to comply with the requirements of the German Sound Emission Directive,
from 18 January 1991.
* Sound Pressure Lp <70 dB(A)
* At Operator Position
* Normal Operation
* According to EN 27779 (Type Test).
Printing History
The edition and current revision of this manual are indicated below. Reprints of this manual containing
minor corrections and updates may have the same printing date. Revised editions are identified by a new
printing date. A revised edition incorporates all new or corrected material since the previous printing
date.
Changes to the manual occurring between revisions are covered by change sheets shipped with the
manual. In some cases, the manual change applies only to specific instruments. Instructions provided on
the change sheet will indicate if a particular change applies only to certain instruments.
This document contains proprietary information protected by copyright. All rights are reserved. No part
of this document may be photocopied, reproduced, or translated into another language without the prior
consent of Agilent Technologies. The information contained in this document is subject to change
without notice.
Copyright 2001 Agilent Technologies, Inc. Edition 1 March, 2001
Update 1 June, 2001
6
Page 7
Table of Contents
Warranty Information 2
Safety Summary 3
Declaration Page 5
Acoustic Noise Information 6
Printing History 6
Table of Contents 7
GENERAL INFORMATION 13
Document Orientation 13
Safety Considerations 13
Options and Accessories 14
Description 14
Remote Programming 14
Output Characteristics 15
Voltage Priority Operation 15
Current Priority Operation 16
Measurement Characteristics 17
Start of a Measurement 18
INSTALLATION 19
Inspection 19
Damage 19
Packaging Material 19
Additional Items 19
Cleaning 19
Location 20
Bench Operation 20
Rack Mounting 20
Power Connections 21
Connect the Power Cord 21
Output Connections 22
Outputs 1 - 4 22
Current Ratings 23
Voltage Drops and Lead Resistance 23
Coaxial Guard Connections 24
Maintaining Stability 25
OVP Considerations 25
External Trigger Connections 25
Computer Connections 25
GPIB Interface 25
GPIB Address 26
TURN-ON CHECKOUT 27
Front Panel Description 27
Checkout Procedure 28
In Case of Trouble 29
Selftest Error Messages 29
Runtime Error Messages 29
Line Fuse 29
7
Page 8

INTRODUCTION TO PROGRAMMING 31
External References 31
GPIB References 31
SCPI References 31
GPIB Capabilities of the DC Source 31
Introduction to SCPI 32
Conventions Used in This Guide 32
Types of SCPI Commands 32
Multiple Commands in a Message 33
Moving Among Subsystems 33
Including Common Commands 33
Using Queries 33
Types of SCPI Messages 34
The Message Unit 34
Channel List Parameter 34
Headers 35
Query Indicator 35
Message Unit Separator 35
Root Specifier 35
Message Terminator 35
SCPI Data Formats 35
Numerical Data Formats 35
Suffixes and Multipliers 36
Response Data Types 36
SCPI Command Completion 36
Using Device Clear 37
PROGRAMMING THE DC SOURCE 39
Introduction 39
Programming the Output 39
Power-on Initialization 39
Enabling the Output 39
Output Voltage 39
Overvoltage Protection 40
Output Current 40
Output Mode 40
Oscillation Protection 41
Triggering Output Changes 41
Output Trigger Model 41
Setting the Voltage and Current Trigger Levels 42
Enabling the Output Trigger System 42
Selecting the Output Trigger Source 42
Generating Output Triggers 43
Making Measurements 43
Average Measurements 43
Power Line Cycles 44
Measurement Samples and Time Interval 44
Current Ranges 45
Window Functions 45
Returning All Measurement Data From the Data Buffer 45
Triggered Measurements 45
Measurement Trigger Model 46
Enabling the Measurement Trigger System 46
Selecting the Measurement Trigger Source 46
Selecting the Sensing Function 47
Output Settling Delay 47
Generating Measurement Triggers 47
8
Page 9

Pre-trigger and Post-trigger Data Acquisition 48
Programming the Status Registers 49
Operation Status Group 50
Questionable Status Group 51
Standard Event Status Group 51
Status Byte Register 51
Determining the Cause of a Service Interrupt 52
Servicing Operation Status and Questionable Status Events 52
LANGUAGE DICTIONARY 53
Introduction 53
Subsystem Commands 53
Common Commands 53
Programming Parameters 53
SCPI Programming Commands - At a Glance 54
Calibration Commands 57
CALibrate:CURRent 57
CALibrate:CURRent:LIMit[:POSitive] CALibrate:CURRent:LIMit:NEGative 57
CALibrate:CURRent:MEASure 57
CALibrate:DATA 58
CALibrate:DATE 58
CALibrate:LEVel 58
CALibrate:PASSword 58
CALibrate:SAVE 59
CALibrate:STATe 59
CALibrate:VOLTage 59
Measurement Commands 60
FETCh:ARRay:CURRent? FETCh:ARRay:VOLTage? 60
FETCh:CURRent? FETCh:VOLTage? 60
MEASure:ARRay:CURRent? MEASure:ARRay:VOLTage? 61
MEASure:CURRent? MEASure:VOLTage? 61
SENSe:CURRent:RANGe 61
SENSe:FUNCtion 62
SENSe:SWEep:NPLCycles 62
SENSe:SWEep:OFFSet:POINts 62
SENSe:SWEep:POINts 63
SENSe:SWEep:TINTerval 63
SENSe:WINDow 63
Output Commands 64
OUTPut 64
OUTPut:OSCProtect 64
OUTPut:PROTection:CLEar 64
[SOURce:]CURRent[:IMMediate] [SOURce:]CURRent:TRIGgered 65
[SOURce:]CURRent:LIMit[:IMMediate] [SOURce:]CURRent:LIMit:TRIGgered 65
[SOURce:]CURRent:LIMit:BWIDth 65
[SOURce:]CURRent:MODE [SOURce:]CURRent:LIMit:MODE 66
[SOURce:]DELay 66
[SOURce:]DELay:MODE 66
[SOURce:]FUNCtion:MODE 67
[SOURce:]VOLTage:ALC:BWIDth 67
[SOURce:]VOLTage[:IMMediate] [SOURce:]VOLTage:TRIGgered 67
[SOURce:]VOLTage:MODE 68
[SOURce:]VOLTage:PROTection:STATe 68
Status Commands 69
STATus:OPERation[:EVENt]? 69
STATus:OPERation:CONDition? 69
STATus:OPERation:ENABle 69
9
Page 10

STATus:OPERation:NTR STATus:OPERation:PTR 70
STATus:PRESet 70
STATus:QUEStionable[:EVENt]? 70
STATus:QUEStionable:CONDition? 71
STATus:QUEStionable:ENABle 71
STATus:QUEStionable:NTR STATus:QUEStionable:PTR 71
System Commands 72
SYSTem:ERRor? 72
SYSTem:VERSion? 72
Trigger Commands 73
ABORt 73
INITiate:NAME 73
TRIGger:ACQuire 73
TRIGger:ACQuire:SOURce 74
TRIGger[:TRANsient]:SOURce 74
TRIGger[:TRANsient] 74
Common Commands 75
*CLS 75
*ESE 75
*ESR? 75
*IDN? 76
*OPC 76
*OPT? 76
*RST 77
*SRE 77
*STB? 77
*TRG 78
*TST? 78
*WAI 78
SPECIFICATIONS 79
Introduction 79
PERFORMANCE TESTS AND CALIBRATION 83
Introduction 83
Equipment Required 83
Performance & Verification Tests 84
Measurement Techniques 84
Electronic Load 85
Programming 85
Test Setup 85
Voltage Priority Tests 86
Voltage Programming and Readback Accuracy 86
Positive Current Limit (+CL) 86
Negative Current Limit (-CL) 87
Current Priority Tests 88
Current Programming and Readback Accuracy 88
Load Effect Tests 89
Voltage Priority, Constant Voltage Load Effect 89
Voltage Priority, +Current Limit Load Effect 90
Voltage Priority, -Current Limit Load Effect Test 90
Current Priority Constant Current Test 91
Source Effect Tests 91
Voltage Priority, Constant Voltage Source Effect 91
Voltage Priority, +Current Limit Source Effect 92
Voltage Priority, -Current Limit Source Effect 92
10
Page 11

Current Priority, Constant Current Source Effect 93
Ripple and Noise Tests 94
Voltage Priority Ripple and Noise 94
Current Priority Ripple and Noise 95
Transient Response Tests 95
Voltage Priority, Transient Recovery Time 95
Current Priority Transient Recovery Time 96
Performance Test Equipment Form 97
Performance Test Record Form 98
Performing the Calibration Procedure 99
Enable Calibration Mode 99
Voltage Priority Mode Programming and Measurement Calibration 99
Negative Current Limit Calibration 100
Positive Current Limit Calibration 100
0.5A Range Current Measurement Calibration 100
15mA Range Current Measurement Calibration 101
Current Priority Mode Programming and 0.5mA Range Measurement Calibration 101
Saving the Calibration Constants 101
Changing the Calibration Password 102
Calibration Error Messages 102
ERROR MESSAGES 103
Error Number List 103
LINE VOLTAGE SELECTION 107
EARLIER VERSION OUTPUT CONNECTORS 109
Mating Connector Part Numbers 109
Rear Panel Pinout Assignments 109
INDEX 111
11
Page 12

Page 13
1
General Information
Document Orientation
This manual describes the operation of the Agilent Model N3280A Component Test DC Source. Unless
otherwise noted, the unit will be referred to by the description "dc source" throughout this manual.
The following Getting Started Map is a general guide to the location of information in this manual. Refer
to the table of contents or index for a complete list of information.
Getting Started Map
Task Where to find information
General information
Capabilities and characteristics
Installing the unit
Line connections
Load connections
Computer connections
Checking out the unit
Verifying proper operation
Using the programming interface
GPIB interface
Programming the unit using SCPI commands
SCPI commands
SCPI programming examples
SCPI language dictionary
Specifications
Verifying and Calibrating the Unit
Chapter 1
Chapter 2
Chapter 3
Chapter 4
Chapters 5 and 6
Appendix A
Appendix B
Safety Considerations
This dc source is a Safety Class 1 instrument, which means it has a protective earth terminal. That
terminal must be connected to earth ground through a power source equipped with a ground receptacle.
Refer to the Safety Summary page at the beginning of this guide for general safety information. Before
installation or operation, check the dc source and review this guide for safety warnings and instructions.
Safety warnings for specific procedures are located at appropriate places in the guide.
13
Page 14
1 - General Information
Options and Accessories
Table 1-1. Options
Option Description
100
220
230
8ZL Add instrument feet - for bench mounting (p/n 5041-9167)
1
AXS
1
1CM
1
Support rails are required when rack mounting units. Use E3663A support rails for Agilent rack cabinets. If you are
using non-Agilent rack cabinets, contact the rack manufacturer to obtain support rails for your cabinet.
Item Part Number
GPIB cables 1.0 meter (3.3 ft) Agilent 10833A
Rack mount with slide - for two side-by-side units Order 5063-9255 and 1494-0015
Rack mount with slide - for one unit Order 5063-9255, 1494-0015, and 5002-3999
87−106 Vac, 47−63 Hz
191−233 Vac, 47−63 Hz
207−253 Vac, 47−63 Hz
Rack mount kit for two side-by-side N3280A units. Consists of:
Lock-link kit (p/n 5061-9694), Flange kit (p/n 5063-9212), Tie bracket (p/n 5002-1587)
Rack mount kit for one unit (p/n 5063-9240)
Table 1-2. Accessories
2.0 meters (6.6 ft) Agilent 10833B
4.0 meters (13.2 ft) Agilent 10833C
0.5 meters (1.6 ft) Agilent 10833D
Description
The Agilent Model N3280A Component Test DC Source is a quad output dc power supply designed to
simplify the testing of integrated circuits. It has the following key features and performance capabilities:
♦ High density – four isolated outputs in a 2U half-rack package
♦ Four quadrant bipolar output
♦ High programming and measurement accuracy (refer to Appendix A)
♦ Active guard available for accurate current measurements
♦ Solid-state output and sense terminal disconnect relays
♦ High GPIB throughput
Additional features include:
♦ Positive and negative overvoltage protection shutdown
♦ Over-temperature and oscillation protection
♦ Programmable current limit in voltage priority mode
Remote Programming
NOTE: With the exception of the power switch, there are no front panel controls for the Agilent
N3280A dc source. The N3280A can be controlled only with SCPI programming commands.
The dc source may be remotely programmed via the GPIB bus. GPIB programming is with SCPI
commands (Standard Commands for Programmable Instruments), which make dc source programs
compatible with those of other GPIB instruments. Dc source status registers allow remote monitoring of a
wide variety of operating conditions. Refer to chapters 5 and 6 for more information.
14
Page 15

General Information - 1
Output Characteristics
Voltage Priority Operation
Each Agilent N3280A output is a four-quadrant bipolar dc source that can be operated in either voltage
or current priority mode. In voltage priority mode the output is controlled by a bi-polar constant voltage
feedback loop, which maintains the output voltage at its positive or negative programmed setting. The
output voltage will remain at its programmed setting as long as the load current remains within the
positive or negative current limit. A single positive value programs both the positive and negative current
limit.
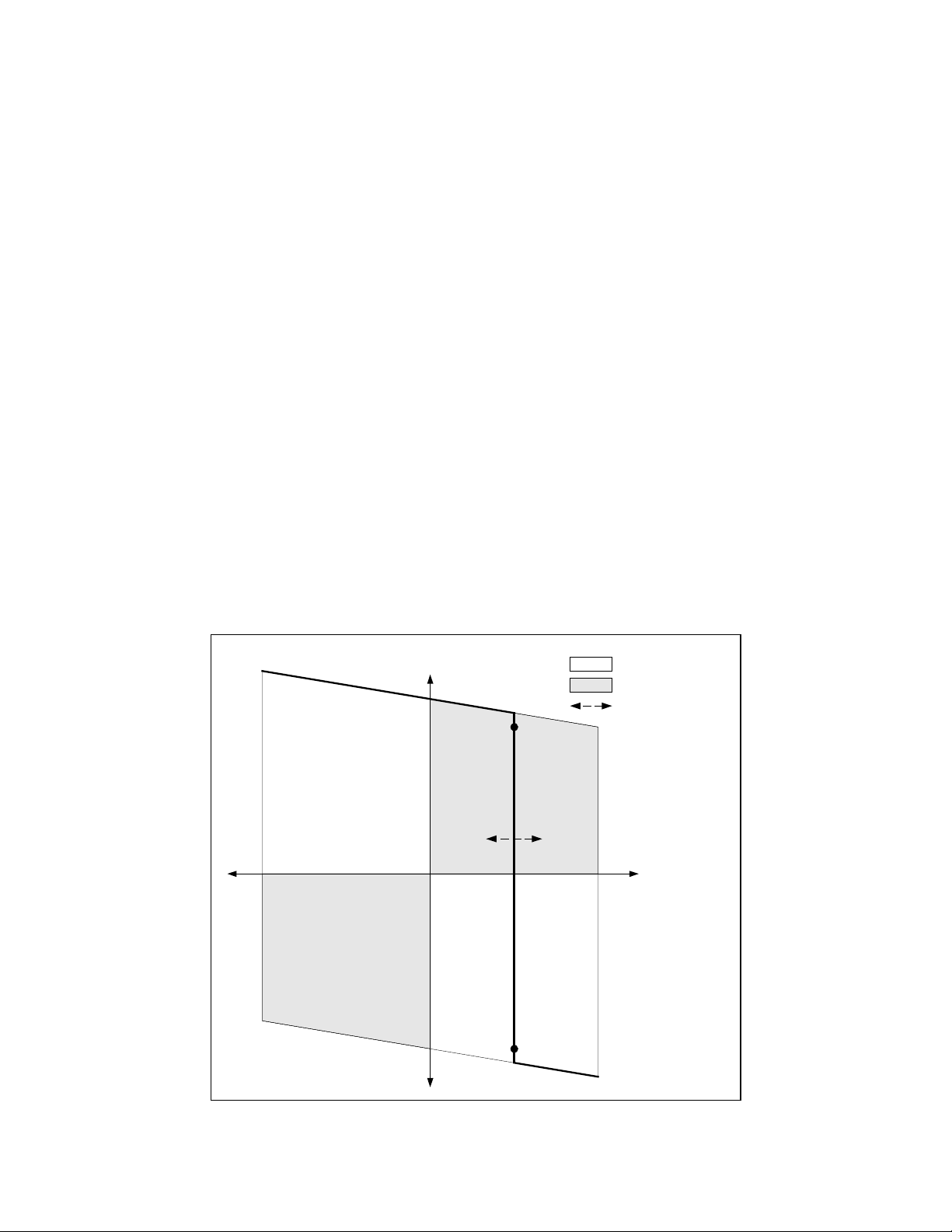
Figure 1-1 shows the voltage priority operating characteristics of the dc source. The area in quadrants 1
and 3 shows the characteristics of the output when it is being operated as a source (sourcing power). The
area in quadrants 2 and 4 shows the characteristics of the output when it is being operated as a load
(sinking power).
+ 10.25V
-
- 10.25V
- 512.5mA
+ OV
-I limit
Output
Voltage
+
V setting
1+
324
+I limit
-
- OV
+ 512.5mA
Key
Sinking power
Sourcing power
Programmable
Output
Current
Figure 1-1. Output Characteristic (Voltage Priority)
The heavy line illustrates the locus of possible operating points as a function of the output load, which
may be purely resistive, or possibly include external voltage or current sources. In voltage priority mode,
the constant voltage loop will regulate the output voltage as the load changes, unless the output current
attempts to exceed the current limit setting.
If this occurs, either the negative or the positive current limit loop will regulate the output current at the
programmed value. Either a CV (constant voltage), CL+ (positive current limit), or CL− (negative current
limit) status flag is set to indicate which loop is presently controlling the output.
15
Page 16
1 - General Information
If the output voltage exceeds either the positive or negative overvoltage set point, the output will shut
down and be disabled, automatically opening the output and sense relays. This leaves the output in a
high-impedance state.
The full ±512.5 milliampere output current is available only in voltage priority mode. In this mode, the
output voltage should be programmed to the desired positive or negative value. A positive current limit
value should also be programmed. Note that the negative current limit tracks the positive current limit set
point. The output will regulate at the desired voltage level, provided that the current limit has been set
higher that the actual output current requirement of the external load. Note that if the current limit is set
to a value between zero and 75 µA, the actual current limit will be ±75 µA. Thus, it is not possible to
program current limit values less than 75 µA in voltage priority mode. (This limitation does not apply in
current priority mode.)
Current Priority Operation
Each Agilent N3280A output is a four-quadrant bipolar dc source that can be operated in either voltage
or current priority mode. In current priority mode the output is controlled by a bi-polar constant current
feedback loop, which maintains the output current (source or sink) at its programmed setting. The output
current will remain at its programmed setting as long as the load voltage remains within the positive and
negative voltage limits. The voltage limits are not programmable and vary somewhat with the output
current. When the output current is zero, the voltage limits are typically ±10.75 V.
Figure 1-2 shows the current priority operating characteristics of the dc source. The area in quadrants 1
and 3 shows the characteristics of the unit when it is being operated as a source (sourcing power). The
area in quadrants 2 and 4 shows the characteristics of the unit when it is being operated as a load (sinking
power).
+ 12V
-
+V limit
Output
Voltage
+
+ 10.75V
+VL status set
I setting
132
4
Key
Sinking power
Sourcing power
Programmable
+ 9.5V
+
Output
Current
16
- 9.5V
- 0.5125mA
-VL status set
- 10.75V
-
-V limit
+ 0.5125mA
- 12V
Figure 1-2. Output Characteristic (Current Priority)
Page 17

General Information - 1
The heavy line illustrates the locus of possible operating points as a function of the output load, which
may be purely resistive, or possibly include external voltage or current sources. In current priority mode,
the constant current loop will regulate the output current as the load changes, until the positive or
negative voltage limit is reached. A CC (constant current) status flag indicates when the current loop is
controlling the output.
If the output voltage reaches either the positive or negative voltage limit, the unit no longer operates in
constant current mode and the output current is no longer held constant. Instead, the output current is
limited at either the positive or negative voltage limit line. When the unit is sinking power, the output
voltage will continue to increase in the positive or negative direction as more current is forced into the
unit. Note that a VL+ (positive voltage limit) or VL− (negative voltage limit) status bit will be set to
register a voltage limit at about 0.8 V before the positive or negative voltage line is reached.
The maximum current available in current priority mode is about 0.5 mA, which is ideal for testing
sensitive devices such as input diodes. In this mode, the output current must be programmed to the
desired positive or negative value. However, the positive and negative voltage limits are not
programmable, and vary with the actual output current as shown in the figure. The typical positive
voltage limit ranges from about 10.75V at no load to about 9.5V at full load. The typical negative voltage
limit ranges from about –10.75V to about –9.5V.
NOTE: Overvoltage protection is not functional in current priority mode.
Measurement Characteristics
The N3280A uses a digitizing measurement system with a single timebase for all output channels. The
number of measurement samples and the sampling interval of the timebase can be explicitly programmed.
These values will apply to measurements taken on all outputs. For example, if simultaneous
measurements are made on four output channels and one of the three channels is set to one power line
cycle (PLC), then all three channels will be set to one power line cycle per measurement.
Conversely, each output channel of the N3280A has its own measurement buffer. This means that each
output can be configured to measure a different parameter (either voltage or current), and a different
current range. However, the number of measurement samples and sampling interval for each type of
measurement is the same for all channels.
There is one voltage measurement range and three current measurement ranges. The current range must
be selected explicitly. If a measured value exceeds the presently selected range, an error message is
returned. Voltage measurements and current measurements using the 0.5A or 15mA range can be made to
full accuracy using the default measurement sample (5 data points @30.4µs intervals = 152 µs). To
achieve full accuracy on the 0.5mA current range, a longer sampling interval of one power line cycle
(PLC) is required to filter out line noise. Thus, a full accuracy measurement on the 0.5mA current range
will typically take between 18 and 21.3 ms, depending on the line frequency.
Note that faster measurements using lower PLC values (<1) are only appropriate for loads that do not
draw currents with a significant noise component. If the load current is noisy, it may be necessary to
increase the sampling interval to provide additional filtering.
All voltage and current measurements return the average value of the samples taken. Measurements can
be made using either a Rectangular or Hanning window. The default Rectangular window is used on all
17
Page 18

1 - General Information
measurement ranges to make fast measurements. The Hanning window can be used to reduce errors
caused by other periodic noise sources, provided that the sample period is long enough to capture three or
more noise waveform cycles. Using a Hanning window will result in slower measurement speed.
Start of a Measurement
The dc source delays the start of a measurement until a previous output voltage or current change has
settled. When voltage or current settings are changed in either voltage priority or in current priority
mode, an internal timer is started that delays any subsequent measurements. At power-on or after *RST
this delay allows the output to settle to better than 0.1% of its final value. In voltage priority mode, the
final value is based on a 20 ohm load. In current priority mode, the final value is based on a short-circuit
load.
The settling delay can also be explicitly programmed. This may be required, for example, if the load
requires more or less delay than the representative load or if the measurement requires less accuracy.
18
Page 19
2
Installation
Inspection
Damage
When you receive your dc source, inspect it for any obvious damage that may have occurred during
shipment. If there is damage, notify the shipping carrier and the nearest Agilent Sales and Support Office
immediately. The list of Agilent Sales and Support Offices is at the back of this guide. Warranty
information is printed in the front of this guide.
Packaging Material
Until you have checked out the dc source, save the shipping carton and packing materials in case the unit
has to be returned. If you return the dc source for service, attach a tag identifying the owner's name and
address, the model number, and a brief description of the problem.
Additional Items
Table 2-1. Items Supplied
Item Part Number Description
Power Cord contact the nearest Agilent
Sales and Support Office
4 - Output
connectors
Trigger
connector
Line Fuse 2110-0638
User's Guide 5964-8248 This manual.
1253-4893 A 6-terminal connector plug for connecting the output,
1252-8670 3-terminal digital plug for connecting the trigger input
2110-0773
A power cord appropriate for your location.
sense, ground, and guard. The connector installs in the
back of the unit.
signal. The connector installs in the back of the unit.
3.15 AT (time delay) for 100/120 Vac operation
1.6 AT (time delay) for 220/230 Vac operation
Cleaning
Use a dry cloth or one slightly dampened with water to clean the external case. Do NOT open the unit.
WARNING: To prevent electric shock, unplug the unit before cleaning.
19
Page 20
2 - Installation
Location
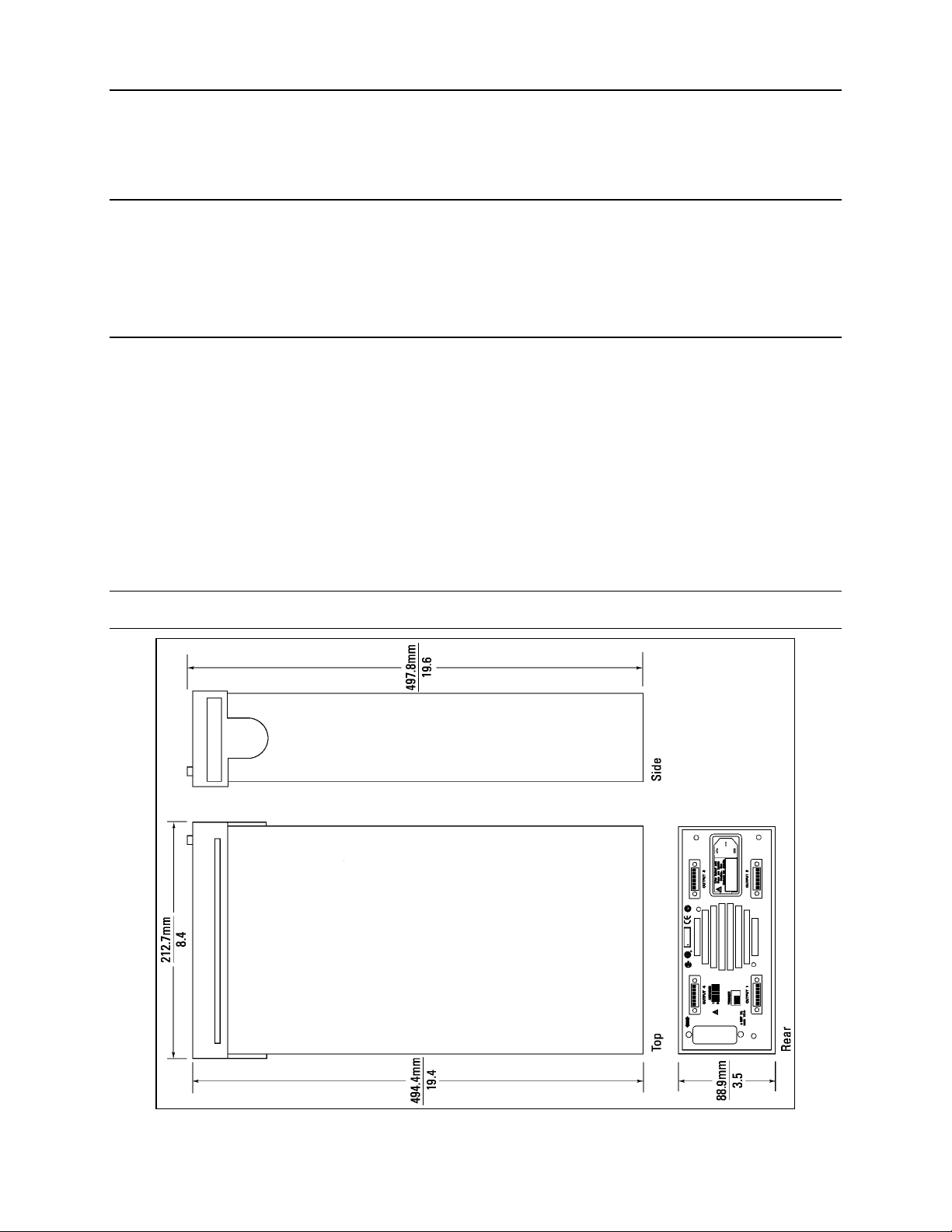
Figure 2-1 gives the dimensions of your dc source. The dc source must be installed in a location that
allows enough space at the sides and back of the unit for adequate air circulation (see Bench Operation).
NOTE: This dc source generates magnetic fields that may affect the operation of other
instruments. If your instrument is susceptible to operating magnetic fields, do not locate
it in the immediate vicinity of the dc source. Typically, at 5 millimeters from the dc
source, the electromagnetic field is less than 5 gauss. Many CRT’s, such as those used in
computer displays, are susceptible to magnetic fields much lower than 5 gauss. Check
susceptibility before mounting any display near the dc source.
Bench Operation
Do not block the fan exhaust at the rear of the unit.
A fan cools the dc source by drawing air in through the sides and exhausting it out the back. Minimum
clearances for bench operation are 1 inch (25 mm) along the sides.
Rack Mounting
The dc source can be mounted in a standard 19-inch rack panel or cabinet. Table 1-1 documents the part
numbers for the various rack mounting options that are available for the dc source. Installation
instructions are included with each rack mount option.
NOTE: Support rails or an instrument shelf is required when rack mounting units.
20
Figure 2-1. Outline Diagram
Page 21
Installation - 2
Power Connections
Connect the Power Cord
Connect the power cord to the IEC 320 connector on the rear of the unit. If the wrong power cord was
shipped with your unit, contact your nearest Agilent Sales and Support Office to obtain the correct cord
(refer to the list at the back of this guide).
Check the line voltage rating label on the back of the unit to make sure that it agrees with your ac mains
voltage. Refer to appendix E if the voltage at your site is different from the voltage indicated on the unit.
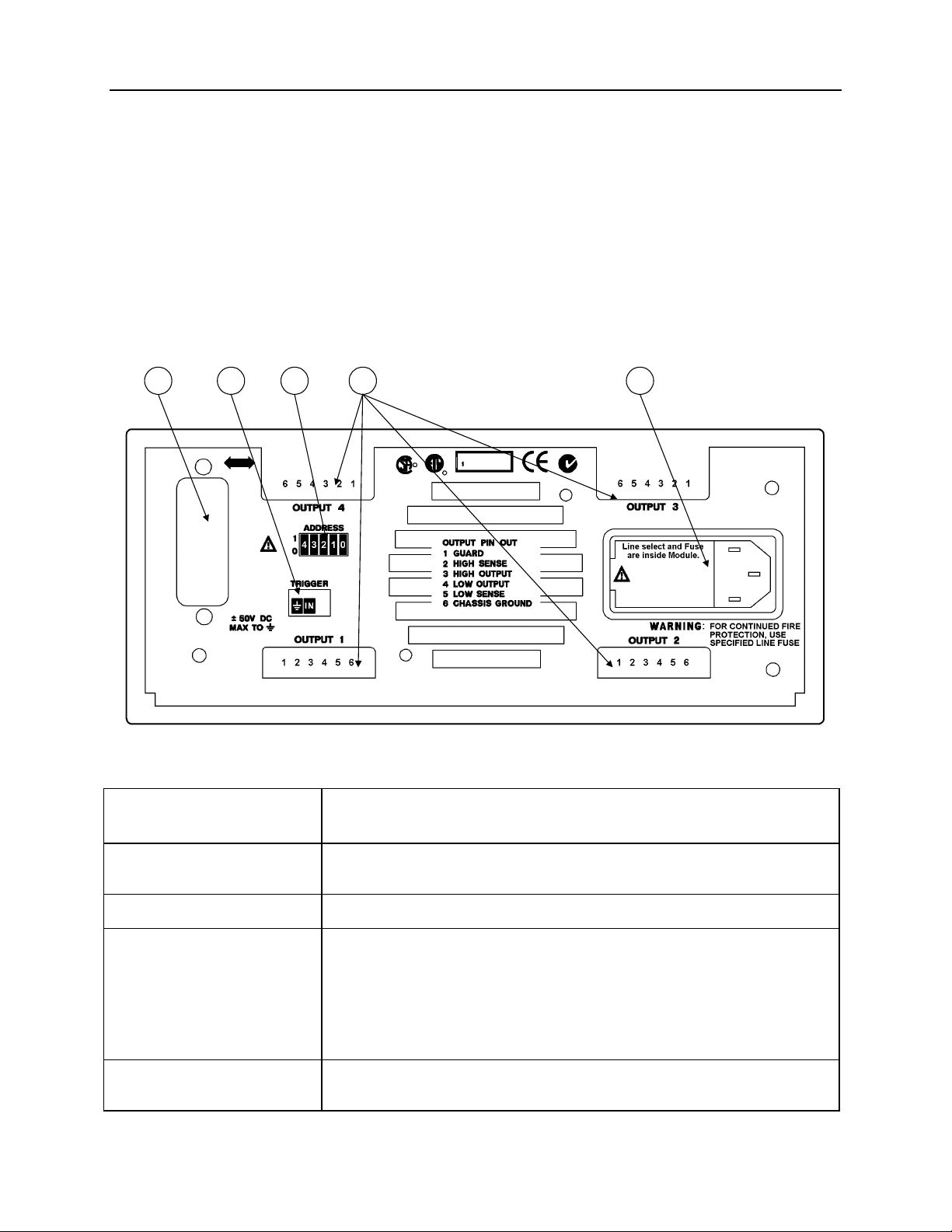
Figure 2-2 identifies all rear panel connections on the dc source.
1 42 3 5
QQQQ GPIB
connector
RRRR Trigger Connector
SSSS Address Switch
TTTT Output
Connectors (4)
UUUU Line
Figure 2-2. Rear Panel Connectors and Switches
GPIB connector for computer connection.
A 3-terminal trigger input connector. Only the center and left-most
terminals are used.
Switch to select GPIB address. Refer to the end of this chapter.
Pin 1 = Active guard
Pin 2 = High sense
Pin 3 = High output
Pin 4 = Low output
Pin 5 = Low sense
Pin 6 = chassis ground connection
AC line cord is installed here. Also used to set the ac line voltage see
Appendix E.
21
Page 22
2 - Installation
Output Connections
Turn the unit off before connecting any wires.
Outputs 1 - 4
Disconnect the mating plug from the unit by pulling it straight back.
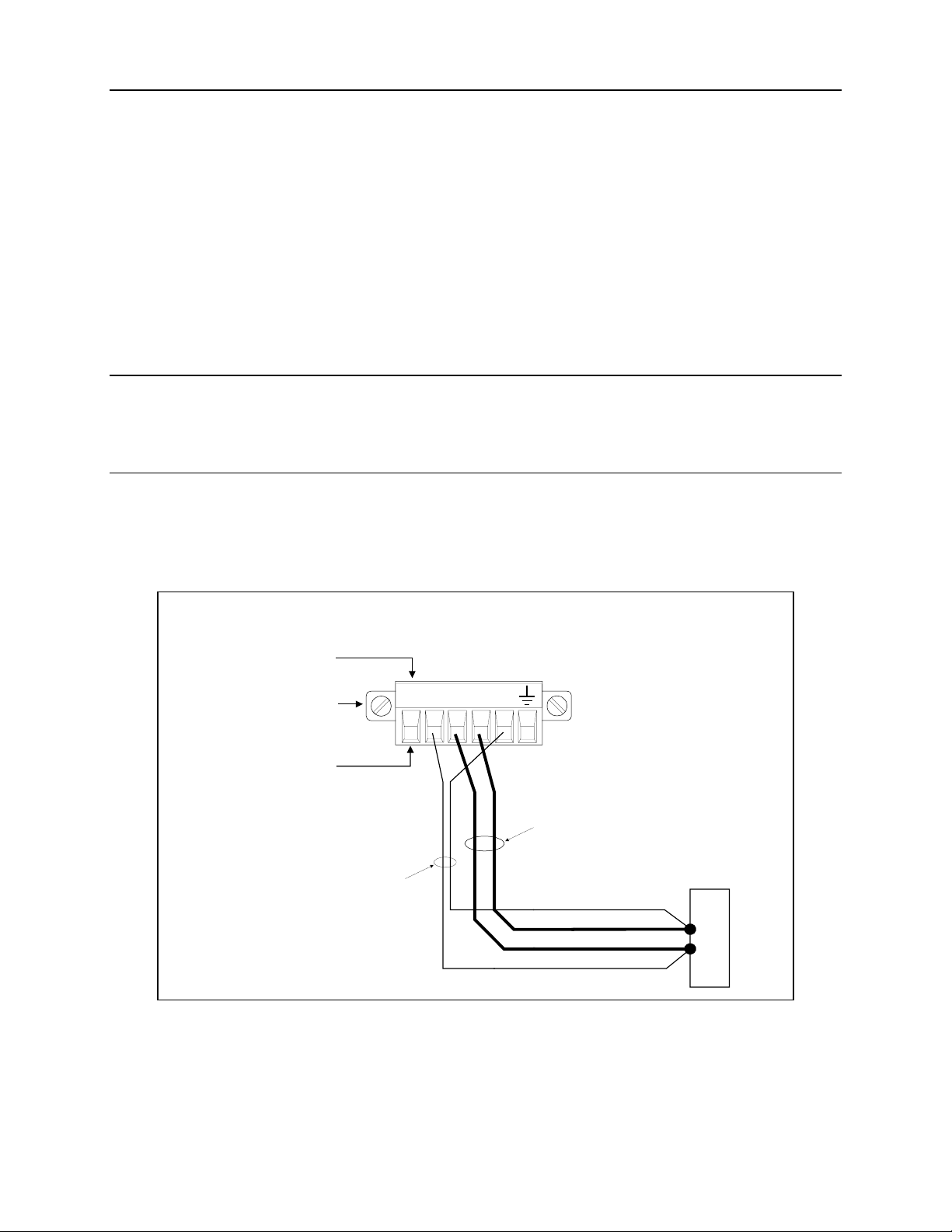
The output connectors (outputs 1-4) have a termination for the Hi and Lo output terminals, the Hi and Lo
sense terminals, a guard terminal, and an earth ground terminal (see figure 2-3). For proper operation of
the dc source, you must connect the Hi sense and Lo sense terminals to their respective high and low
monitoring points. Install the connector plug with its sense terminals connected before applying power to
the unit.
CAUTION: Connect the sense leads carefully so that they do not become open-circuited. If the sense
leads are left unconnected or become open during operation, the dc source will revert to
a local sense mode using internal sense protect resistors. This will result in an incorrect
voltage being applied at the load terminals.
The 6-pin connector is removable and accepts wires sizes from AWG 28 to AWG 16. Insert the wire into
the wire terminal, then use a small, flat-bladed screwdriver to tighten the wire terminal. Agilent
Technologies does not recommend using wire sizes smaller than AWG 24. After you insert the mating
plug into the output connector, tighten the two locking screws to secure the connection.
OUTPUT 1
MATING PLUG
TIGHTEN SCREWS
LOCKING SCREW
INSERT WIRES
TWIST PAIR
SHOWN
Hsen Hi Lo Lsen
TWIST LEADS
_
LOAD
+
Figure 2-3. Remote Sense Connections
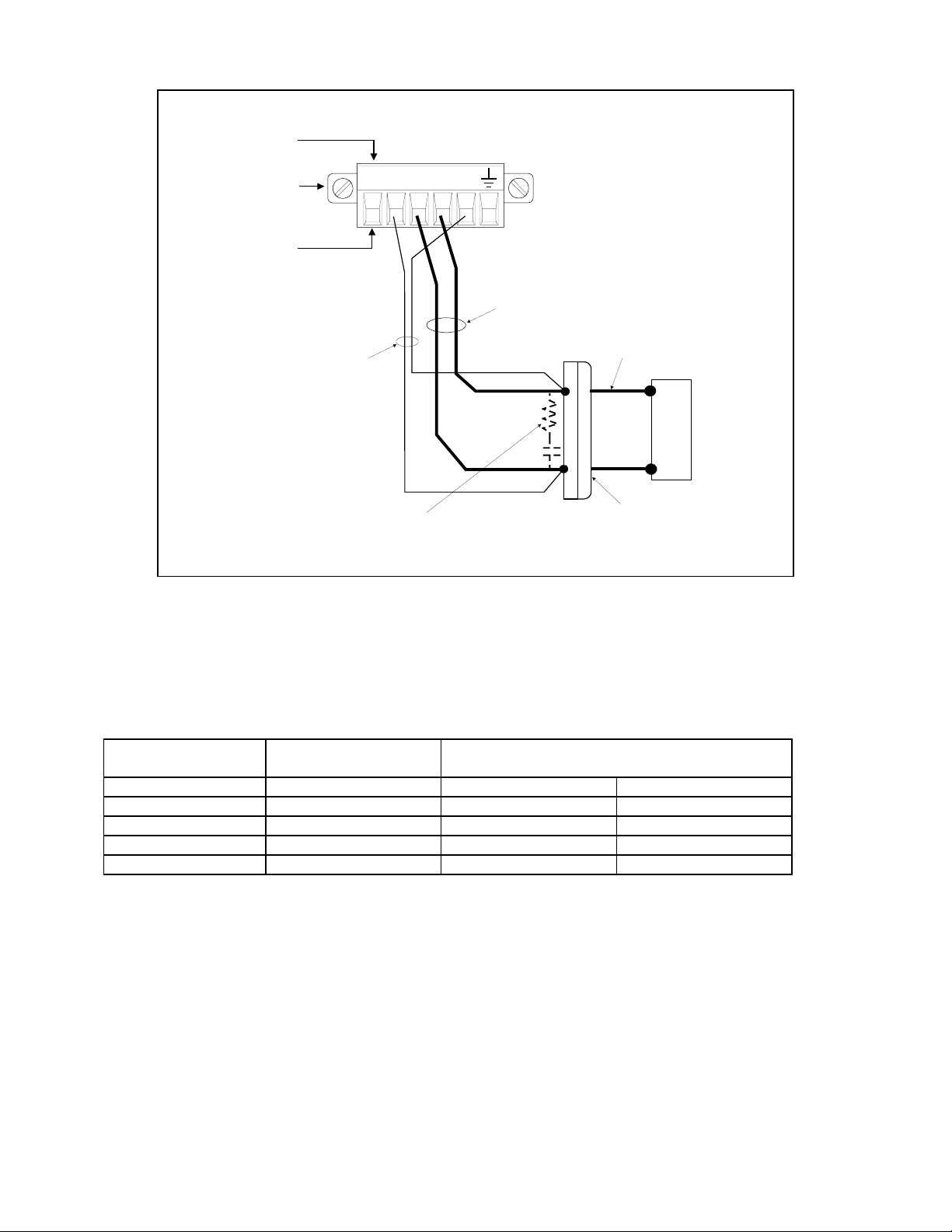
Figure 2-4 shows how to connect remote sense and load leads when using a removable test fixture. For
best transient response and load regulation, keep the resistance and inductance as low as possible, as
illustrated in the figure. The addition of a low-leakage RC network may help improve output transient
response when the unit is operating in voltage priority mode.
22
Page 23
TIGHTEN SCREWS
Installation - 2
OUTPUT 1
MATING PLUG
SHOWN
LOCKING SCREW
INSERT WIRES
Current Ratings
Hsen Hi Lo Lsen
TWIST LEADS
TWIST PAIR
ADDITION OF LOW-LEAKAGE
RC NETWORK MAY IMPROVE
TRANSIENT RESPONSE IN
VOLTAGE PRIORITY MODE.
KEEP RESISTNCE AND
INDUCTANCE LOW.
USE TWISTED PAIR OR
SANDWICHED PCB TRACKS.
_
+
FIXTURE
CONNECTIONS
Figure 2-4. Remote Sense Connections with Test Fixture
LOAD
The following table lists the characteristics of AWG (American Wire Gauge) copper wire for some
common wire sizes that can be accommodated in the output connectors.
Table 2-2. Ampacity and Resistance of Stranded Copper Conductors
AWG No. Maximum Ampacity (in
free air)
Resistance (at 20 deg. C)
ΩΩΩΩ/m ΩΩΩΩ/ft
24 3.52 0.0843 0.0257
22 5.0 0.0531 0.0162
20 8.33 0.0331 0.0101
18 15.4 0.0210 0.00639
16 19.4 0.0132 0.00402
Voltage Drops and Lead Resistance
To optimize the performance and transient response in your test system, please observe the following
guidelines:
♦ Twist the load leads together and keep them short. The shorter the leads, the better the performance.
♦ Twist the sense leads together, but do not bundle the sense leads with the load leads.
♦ For best performance, keep the total cable length to the load to about 5 meters (15 ft) or less.
The load wires must also be of a diameter large enough to avoid excessive voltage drops due to the
impedance of the wires. In general, if the wires are heavy enough to carry the maximum short circuit
current without overheating, excessive voltage drops will not be a problem.
23
Page 24
2 - Installation
NOTE: Any voltage drop in the load leads must be subtracted from the full-scale voltage
available at the output terminals.
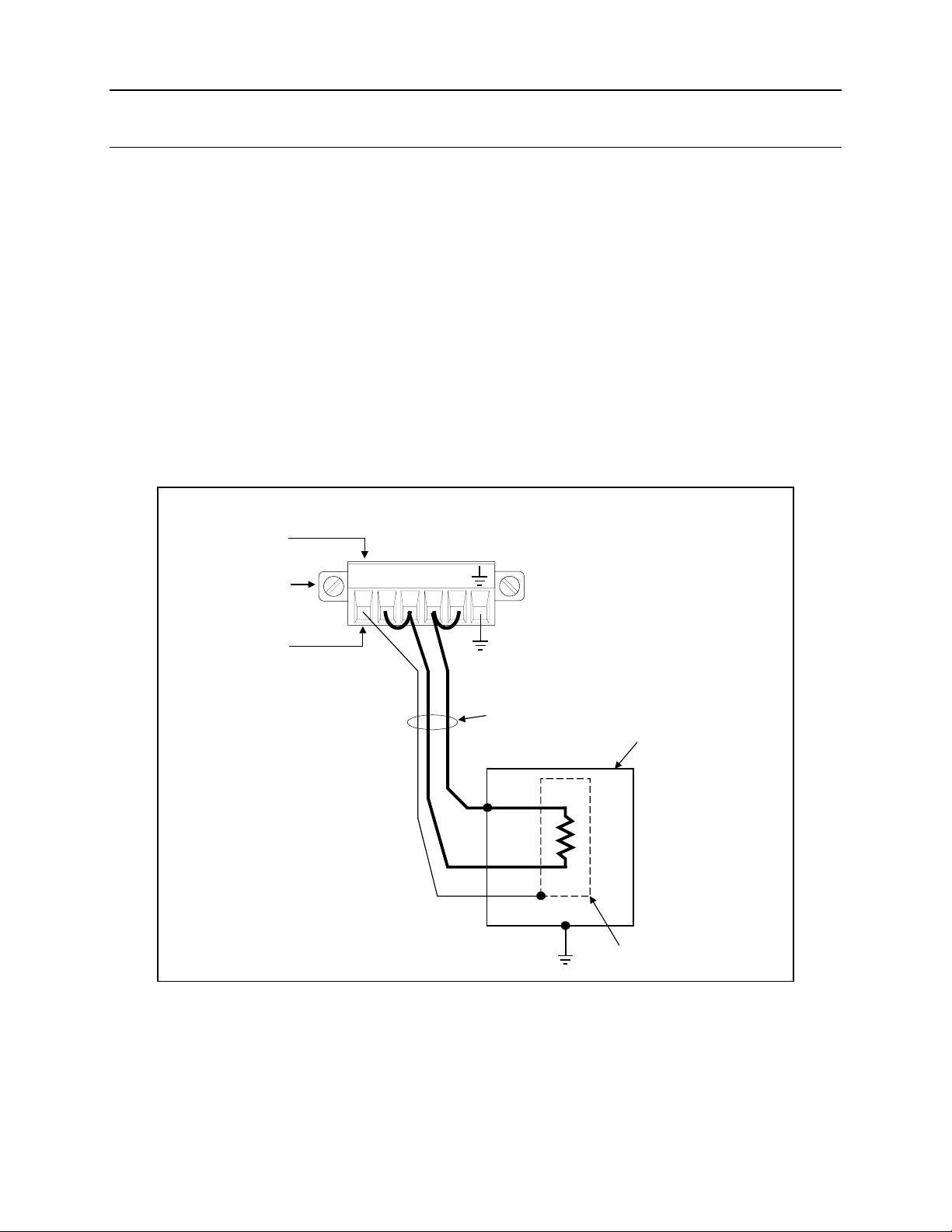
Coaxial Guard Connections
An active guard connection is available at the output connector. When the guard connection is extended
to a test fixture for example, it can be used to eliminate the effects of leakage current that can exist
between the Hi and Lo output terminals when testing high-impedance devices. In particular, the Hi output
terminal and the Hi sense terminal may benefit from guarding. In this way, any leakage current that is not
load current will be collected by the circuit and not be included in the output current measurement.
The guard connection is always enabled and provides a buffered voltage that is at approximately the
same potential as the Hi output terminal. The output impedance of the guard is approximately 2.1K
ohms.
If you are using tri-axial cables to extend the guard connection to the test fixture, use the center
connector for the Hi connection, the inner shield for the guard connection, and the outer shield as the Lo
connection (see figure 2-5).
OUTPUT 1
MATING PLUG
TIGHTEN SCREWS
SHOWN
LOCKING SCREW
INSERT WIRES
Hsen Hi Lo Lsen
TRIAXIAL CABLE
TEST FIXTURE
_
+
GUARD SHIELD
Figure 2-5. Guard Connections for Test Fixtures
24
Page 25
Installation - 2
Maintaining Stability
In voltage priority mode, the constant voltage loop has the following three compensation bandwidths:
♦ 30 kHz, 20 kHz; and 10 kHz
In current limit operation, only two compensation bandwidths are available:
♦ 30 kHz and 10 kHz
If the output of your unit is being shut down by the oscillation protection circuit because of long load
wires or a high Q load impedance, you can reprogram the output compensation bandwidth to try and
eliminate the oscillation. As shipped from the factory, the compensation bandwidth is set to 30 kHz.
OVP Considerations
CAUTION: Disabling the OVP protection circuit may cause excessive output voltages, such as can
occur if remote sense leads are shorted, to damage the equipment under test.
The dc source is shipped from the factory with its overvoltage protection circuit enabled. You can disable
the OVP circuit using the VOLTage:PROTection:STATe command as explained in chapter 6. The
overvoltage circuit automatically turns the output off and opens the output relays if the output voltage
exceeds +11.5V (±0.3V) or −11.5V (±0.3V)
External Trigger Connections
This rear panel connector has an external trigger input.
The trigger input pin is normally at a TTL high level. To generate a trigger, you can provide a negativegoing TTL signal to the trigger input, or momentarily connect a short (contact closure) from the trigger
input pin to the chassis ground pin on the trigger connector. In any case, the device that you use to
implement the trigger must be able to sink approximately 1mA.
The external trigger input can trigger both output voltage/current changes and output measurements.
Computer Connections
The dc source can be controlled through a GPIB interface.
GPIB Interface
Follow the GPIB card manufacturer's directions for card installation and software driver setup. Dc
sources may be connected to the GPIB interface in series configuration, star configuration, or a
combination of the two, provided the following rules are observed:
♦ The total number of devices including the GPIB interface card is no more than 15.
♦ The total length of all cables used is no more than 2 meters times the number of devices connected
together, up to a maximum of 20 meters. (Refer to table 1-2 for a list of available GPIB cables.)
♦ Do not stack more than three connector blocks together on any GPIB connector.
♦ Make sure all connectors are fully seated and the lock screws are firmly finger-tightened.
25
Page 26
2 - Installation
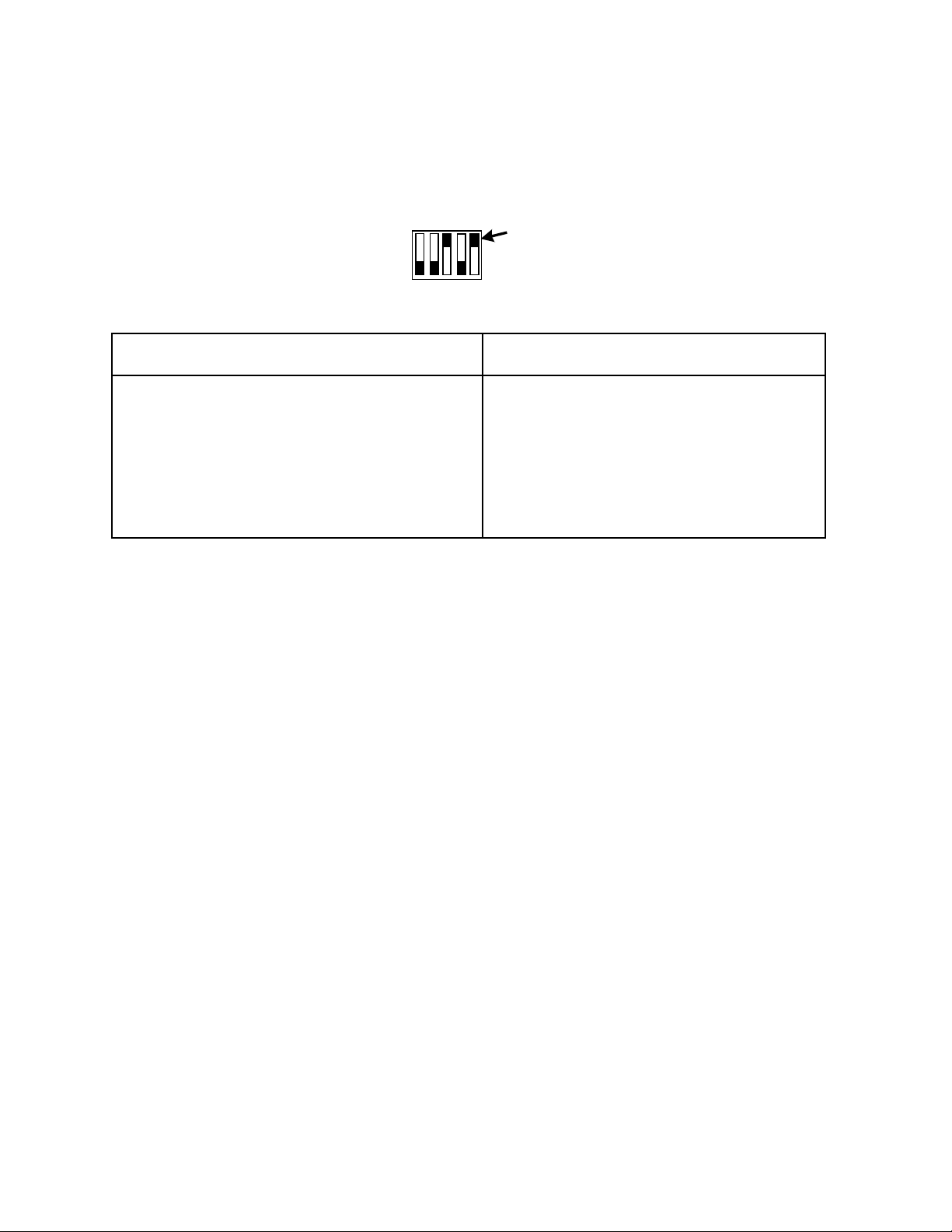
GPIB Address
Each dc source has its own GPIB bus address, which can be set using the rear panel Address switch. The
dc source is shipped with its GPIB address set to 5. Refer to the following table for additional address
switch positions.
4 3 2 1 0
1
0
Address = 5
Handle
Table 2-3. Settings for Power Module Configuration Switch
GPIB Switch Setting GPIB Switch Setting
Address 4 3 2 1 0 Address 4 3 2 1 0
000000801000
100001901001
2 0 001 0 10 01 0 10
3 0 001 1 11 01 0 11
4 0 010 0 12 01 1 00
5
00101 13 01I01
6 0 011 0 14 01 1 10
7 0 011 1 15 01 1 11
26
Page 27
Turn-On Checkout
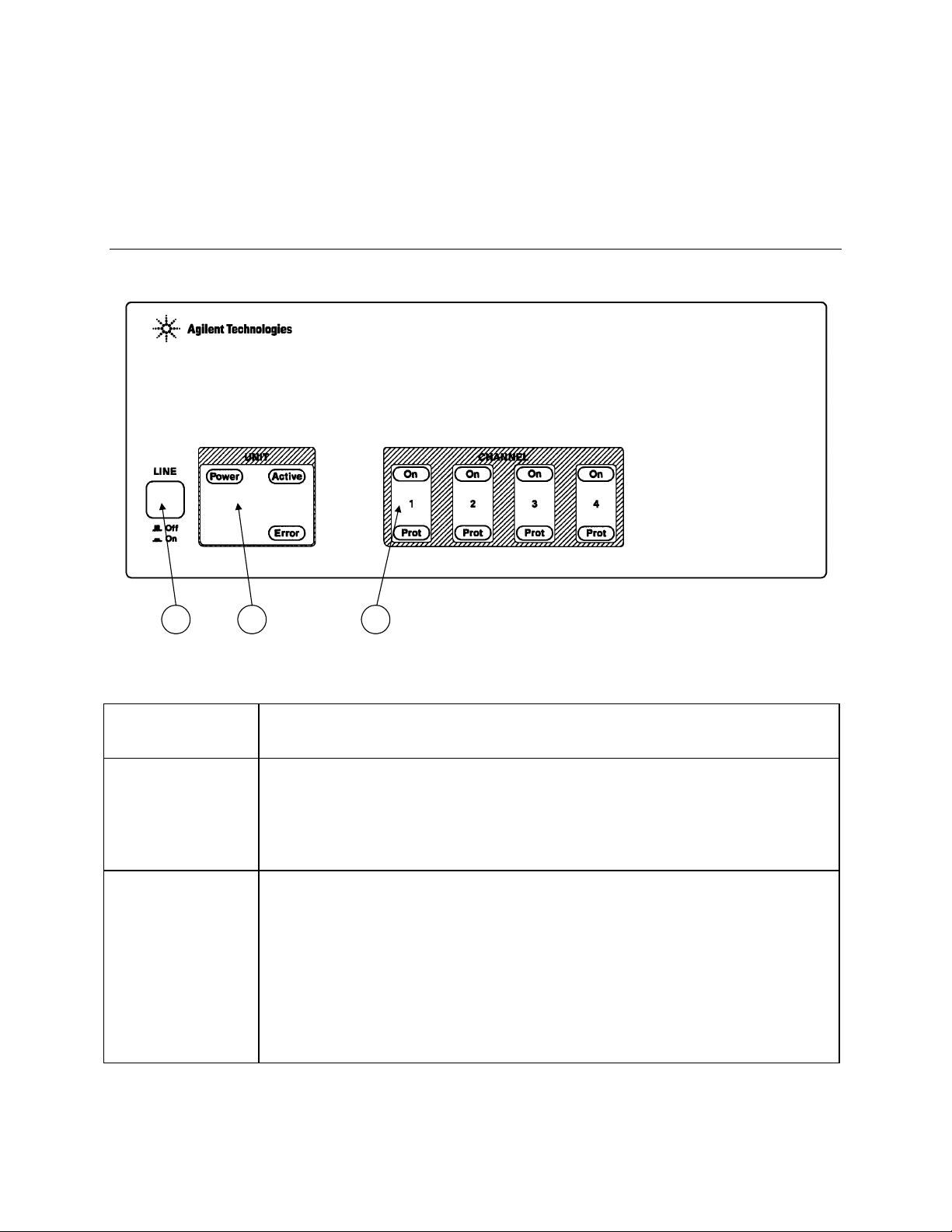
Front Panel Description
N3280A 10V, 0.5A
Component Test DC Source
3
1 2 3
QQQQ Line
Switch
RRRR Unit
Indicators
SSSS Channel
Indicators
Figure 3-1. Front Panel, Overall View
AC mains power switch.
Unit indicators light to indicate the following operating conditions:
Power The dc source is turned on.
Active The dc source is addressed to talk or listen.
Error There is a message in the SCPI error queue.
Channel indicators light to indicate the following channel conditions:
On The specified output channel is enabled.
Prot The specified output channel has entered protection mode due to:
Overtemperature,
Overvoltage,
Oscillation protect, or
Power clear.
Query the status registers of the affected channel to determine which
protection feature is tripped.
27
Page 28
3 – Turn-On Checkout
Checkout Procedure
Successful tests in this chapter provide a high degree of confidence that your unit is operating properly.
Complete performance tests are given in Appendix B.
NOTE: To perform the checkout procedure, you will need a computer with a GPIB interface.
You will also need a digital multimeter for making voltage and current measurements.
If you have not already done so, connect your unit to the computer's GPIB interface. Also connect the
power cord to the unit and plug it in.
Procedure Explanation
1. Connect the Hi sense terminal to the Hi
terminal. Connect the Lo sense terminal to
the Lo terminal. Connect the voltage inputs
of the voltmeter across the Hi and Lo sense
terminals of output 1.
2. Turn the unit on. The unit undergoes a selftest when you first turn it on.
3. Check that the fan is on. You should be able to hear the fan and feel air coming from
4.
Program
5.
Program "
6. Create a variable for a measurement.
Program
Read the variable value.
7.
Program
8.
Program
Read the variable value.
9.
Program
"Output On, (@1)"
Voltage 10, (@1)"
"Measure:Voltage? (@1)"
"Voltage -10, (@1)"
"Measure:Voltage? (@1)"
"Output Off, (@1)"
The external voltmeter is used to verify the output.
During selftest, all indicators light simultaneously and then
light individually in a clockwise manner to test the
functionality of the display
the back of the unit.
Turn the output on.
Check the voltmeter display to verify the voltage
programming.
Reads the voltage of output 1.
This should agree with the value displayed on the voltmeter.
Check the voltmeter display to verify the voltage
programming.
Reads the voltage of output 1.
This should agree with the value displayed on the voltmeter.
Turn the output off.
10. Connect the current measurement inputs of
the ammeter across Hi and Lo output
terminals of output 1. Observe polarity.
11.
Program
12.
Program
13.
Program
14. Create a variable for a measurement.
Program
Read the variable value.
15.
Program
Disconnect the multimeter.
16. Repeat steps 3 through 15 for outputs 2, 3,
and 4.
"Output On, (@1)"
"Function:Mode CURR, (@1)"
"Current 0.0005, (@1)"
"Measure:Current? (@1)"
"Output Off, (@1)"
28
Use the ammeter to short the output of the unit and verify the
output current.
Turn the output on.
Program the unit for current priority mode.
Reads the current of output 1.
This should agree with the value displayed on the ammeter.
Turn the output off.
Substitute the channel that you are programming after the @
symbol. For example, if you are programming channel 2,
program "(@2)" in all commands.
Page 29

Turn-On Checkout - 3
In Case of Trouble
Dc source failure may occur during power-on selftest or during operation. Either the Error or the Prot
indicator on the front panel may be lit to indicate that a failure has occurred. If this occurs, turn the
power off and then back on to see if the error persists. If the error persists, the dc source requires service.
Selftest Error Messages
Error numbers and messages are read back with the SYSTem:ERRor? query. SYSTem:ERRor? returns
an NR1 and a string error message.
Table 3-1. Power-On Selftest Errors
Error No. Failed Test
Error 0 No error
Error 1
Error 2
Error 3
Error 4
Error 5
Error 10
Output 1 non-volatile RAM CAL section checksum failed
Output 2 non-volatile RAM CAL section checksum failed
Output 3 non-volatile RAM CAL section checksum failed
Output 4 non-volatile RAM CAL section checksum failed
Non-volatile RAM CONFIG section checksum failed
RAM selftest
Runtime Error Messages
Appendix C lists other error messages that may appear at runtime.
Line Fuse
If the dc source appears "dead" with the Power LCD off and the fan is not running, check your ac mains
to be certain line voltage is being supplied to the dc source. Also check that the line module on the rear of
the unit is set to the correct voltage. If the ac mains is normal, the internal line fuse may be defective.
Refer to Appendix E and follow the procedure described in the appendix for accessing and replacing the
line fuse located inside the unit. Unless the line voltage setting is incorrect, do not change the line
voltage setting.
NOTE: If the dc source has a defective fuse, replace it only once. If it fails again, the dc source
requires service.
29
Page 30

Page 31

4
Introduction to Programming
External References
GPIB References
The most important GPIB documents are your controller programming manuals - BASIC, GPIB
Command Library for MS DOS, etc. Refer to these for all non-SCPI commands (for example: Local
Lockout). The following are two formal documents concerning the GPIB interface:
♦ ANSI/IEEE Std. 488.1-1987 IEEE Standard Digital Interface for Programmable Instrumentation.
Defines the technical details of the GPIB interface. While much of the information is beyond the
need of most programmers, it can serve to clarify terms used in this guide and in related documents.
♦ ANSI/IEEE Std. 488.2-1987 IEEE Standard Codes, Formats, Protocols, and Common Commands.
Recommended as a reference only if you intend to do fairly sophisticated programming. Helpful for
finding precise definitions of certain types of SCPI message formats, data types, or common
commands.
The above two documents are available from the IEEE (Institute of Electrical and Electronics Engineers),
345 East 47th Street, New York, NY 10017, USA. The WEB address is www.ieee.org.
SCPI References
The following documents will assist you with programming in SCPI:
♦ Standard Commands for Programmable Instruments Volume 1, Syntax and Style
♦ Standard Commands for Programmable Instruments Volume 2, Command References
♦ Standard Commands for Programmable Instruments Volume 3, Data Interchange Format
♦ Standard Commands for Programmable Instruments Volume 4, Instrument Classes
To obtain a copy of the above documents, contact: Fred Bode, Executive Director, SCPI Consortium,
8380 Hercules Drive, Suite P3, Ls Mesa, CA 91942, USA
GPIB Capabilities of the DC Source
All dc source functions except for setting the GPIB address are programmable over the GPIB. The IEEE
488.2 capabilities of the dc source are listed in the Specifications table in Appendix A.
The dc source operates from an GPIB address that is set from the rear panel. To set the GPIB address, set
the Address switches on the rear panel (see chapter 2). The address can be set from 0 to 30.
31
Page 32

4 - Introduction to Programming
Introduction to SCPI
SCPI (Standard Commands for Programmable Instruments) is a programming language for controlling
instrument functions over the GPIB. SCPI is layered on top of the hardware-portion of IEEE 488.2. The
same SCPI commands and parameters control the same functions in different classes of instruments.
Conventions Used in This Guide
Angle brackets < >
Items within angle brackets are parameter abbreviations. For example, <NR1>
indicates a specific form of numerical data.
Vertical bar |
Vertical bars separate alternative parameters. For example, VOLT | CURR
indicates that either "VOLT" or "CURR" can be used as a parameter.
Square Brackets [ ]
Items within square brackets are optional. The representation [SOURce:].
VOLTage means that SOURce: may be omitted.
Braces { }
Braces indicate parameters that may be repeated zero or more times. It is used
especially for showing arrays. The notation <A>{<,B>} shows that parameter "A"
must be entered, while parameter "B" may be omitted or may be entered one or
more times.
Parentheses ( )
Items within parentheses are used in place of the usual parameter types to specify a
channel list. The notation (@1:3) specifies a channel list that includes channels 1,
2, and 3. The notation (@1,3) specifies a channel list that includes only channels 1
and 3.
Computer font
Computer font is used to show program lines in text.
TRIGger:ACQuire:SOURce BUS shows a program line.
Types of SCPI Commands
SCPI has two types of commands, common and subsystem.
♦ Common commands generally are not related to specific operation but to controlling overall dc
source functions, such as reset, status, and synchronization. All common commands consist of a
three-letter mnemonic preceded by an asterisk: *RST *IDN? *SRE 8
♦ Subsystem commands perform specific dc source functions. They are organized into an inverted tree
structure with the "root" at the top. The following figure shows a portion of a subsystem command
tree, from which you access the commands located along the various paths. You can see the complete
tree in Appendix. D.
ROOT
:OUTPut [:STATe]
[:STATe]
:CLEar
:CONDition?
:STATus
:OSCProtect
:PROTection
:OPERation [:EVEN]?
Figure 4-1. Partial Command Tree
32
Page 33

Introduction to Programming - 4
Multiple Commands in a Message
Multiple SCPI commands can be combined and sent as a single message with one message terminator.
There are two important considerations when sending several commands within a single message:
♦ Use a semicolon to separate commands within a message.
♦ There is an implied header path that affects how commands are interpreted by the dc source.
The header path can be thought of as a string that gets inserted before each command within a message.
For the first command in a message, the header path is a null string. For each subsequent command the
header path is defined as the characters that make up the headers of the previous command in the
message up to and including the last colon separator. An example of a message with two commands is:
OUTPut:STATe ON,(@1);PROTection:CLEar (@1)
which shows the use of the semicolon separating the two commands, and also illustrates the header path
concept. Note that with the second command, the leading header "OUTPut" was omitted because after
the "OUTPut:STATe ON" command, the header path was became defined as "OUTPut" and thus the
instrument interpreted the second command as:
OUTPut:PROTection:CLEar (@1)
In fact, it would have been syntactically incorrect to include the "OUTP" explicitly in the second
command, since the result after combining it with the header path would be:
OUTPut:OUTPut:PROTection:CLEar (@1)
which is incorrect.
Moving Among Subsystems
In order to combine commands from different subsystems, you need to be able to reset the header path to
a null string within a message. You do this by beginning the command with a colon (:), which discards
any previous header path. For example, you could clear the output protection and check the status of the
Operation Condition register in one message by using a root specifier as follows:
OUTPut:PROTection:CLEar(@1);:STATus:OPERation:CONDition?(@1)
The following message shows how to combine commands from different subsystems as well as within
the same subsystem:
VOLTage:LEVel 7.5,(@1);PROTection ON,(@1);:CURRent:LIMit 0.25,(@1)
Note the use of the optional header LEVel to maintain the correct path within the subsystems, and the use
of the root specifier to move between subsystems.
Including Common Commands
You can combine common commands with system commands in the same message. Treat the common
command as a message unit by separating it with a semicolon (the message unit separator). Common
commands do not affect the header path; you may insert them anywhere in the message.
VOLTage:TRIGgered 10,(@1);:INITiate:NAME TRAN;*TRG
OUTPut OFF,(@1);*RCL 2;OUTPut ON,(@1)
Using Queries
Observe the following precautions with queries:
♦ Add a blank space between the query indicator (?) and any subsequent parameter such as a channel.
♦ Set up the proper number of variables for the returned data.
♦ Read back all the results of a query before sending another command to the dc source. Otherwise a
Query Interrupted error will occur and the unreturned data will be lost.
33
Page 34

4 - Introduction to Programming
Types of SCPI Messages
There are two types of SCPI messages, program and response.
♦ A program message consists of one or more properly formatted SCPI commands sent from the
controller to the dc source. The message, which may be sent at any time, requests the dc source to
perform some action.
♦ A response message consists of data in a specific SCPI format sent from the dc source to the
controller. The dc source sends the message only when commanded by a program message "query."
Figure 4-2 illustrates the SCPI message structure.
Channel
Data
Message Unit Query Indicator
Keywords
VOLT : LEV 10 (@1) ; PROT ON, (@1) ; : CURR? (@1) <NL>
Keyword Separator
The Message Unit
The simplest SCPI command is a single message unit consisting of a command header (or keyword)
Message Unit Separators
Figure 4-2. Command Message Structure
Root Specifier
Space
Message Terminator
followed by a message terminator. The message unit may include a parameter after the header. The
parameter can be numeric or a string.
ABORt<NL>
VOLTage 20<NL>
Channel List Parameter
The channel parameter is required to address one or more channels. It has the following syntax:
(@<channel> [,<channel>][,<channel>][,<channel>])
You can also specify a range of sequential channels using the following syntax:
<start_channel> : <end_channel>
For example, (@2) specifies channel 2 and (@1:3) specifies channels 1 through 3. The Agilent N3280A
only supports channels 1 through 4. A maximum of 4 channels may be specified through a combination
of single channels and ranges. Query and measurement channel lists are order-sensitive. Results are
returned in the order they are specified in the list.
NOTE: When adding a channel list parameter to a query, you must include a space (white space)
between the query indicator (?) and the channel list parameter. Otherwise error –103,
Invalid separator will occur
34
Page 35

Introduction to Programming - 4
Headers
Headers, also referred to as keywords, are instructions recognized by the dc source. Headers may be
either in the long form or the short form. In the long form, the header is completely spelled out, such as
VOLTAGE, STATUS, and DELAY. In the short form, the header has only the first three or four letters,
such as VOLT, STAT, and DEL.
Query Indicator
Following a header with a question mark turns it into a query (VOLTage?, VOLTage:TRIGgered?). If a
query contains a parameter, place the query indicator at the end of the last header.
VOLTage:TRIGgered? MAX,(@1)
Message Unit Separator
When two or more message units are combined into a compound message, separate the units with a
semicolon.
STATus:OPERation?(@1);QUEStionable?(@1)
Root Specifier
When it precedes the first header of a message unit, the colon becomes the root specifier. It tells the
command parser that this is the root or the top node of the command tree.
Message Terminator
A terminator informs SCPI that it has reached the end of a message. Three permitted messages
terminators are:
♦ newline (<NL>), which is ASCII decimal 10 or hex 0A.
♦ end or identify (<END>)
♦ both of the above (<NL><END>).
In the examples of this guide, there is an assumed message terminator at the end of each message.
SCPI Data Formats
All data programmed to or returned from the dc source is ASCII. The data may be numerical or character
string.
Numerical Data Formats
Symbol
<NR1> Digits with an implied decimal point assumed at the right of the least-significant digit. Examples: 273
<NR2> Digits with an explicit decimal point. Example: .0273
<NR3> Digits with an explicit decimal point and an exponent. Example: 2.73E+2
Parameter Formats
<Nrf> Extended format that includes <NR1>, <NR2> and <NR3>. Examples: 273 273. 2.73E2
<Nrf+> Expanded decimal format that includes <NRf> and MIN MAX. Examples: 273 273. 2.73E2
MAX. MIN
specification for the parameter.
<Bool> Boolean Data. Example: 0 | 1 or ON | OFF
and MAX are the minimum and maximum limit values that are implicit in the range
Response Formats
35
Page 36

4 - Introduction to Programming
Suffixes and Multipliers
Class
Current A ampere MA (milliampere)
Amplitude V volt MV (millivolt)
Time S second MS (millisecond)
1E3 K kilo
1E-3 M milli
1E-6 U micro
Response Data Types
Character strings returned by query statements may take either of the following forms, depending on the
Suffix Unit Unit with Multiplier
Common Multipliers
length of the returned string:
Character Response Data. Permits the return of character strings.
<CRD>
<AARD>
<SRD>
Arbitrary ASCII Response Data. Permits the return of undelimited 7-bit ASCII. This data type has an
implied message terminator.
String Response Data. Returns string parameters enclosed in double quotes.
SCPI Command Completion
SCPI commands sent to the dc source are processed either sequentially or in parallel. Sequential
commands finish execution before a subsequent command begins. Parallel commands allow other
commands to begin executing while the parallel command is still executing. Commands that affect
trigger actions are among the parallel commands.
Following is a list of parallel commands. A user should use some form of synchronization before
assuming that these commands have completed.
OUTPUT:STATE INITIATE
VOLT OUTPUT:PROTECTION:CLEAR
CURR FUNC:MODE
CURR:LIM VOLT:ALC:BWIDTH
NOTE: The power supply already provides automatic source settling delay for the special case of
VOLT, CURR, or CURR:LIM followed by a measure query, so it is not necessary to use
*WAI before a measure if the only pending operations are in this group.
The *WAI, *OPC, and *OPC? common commands provide different ways of indicating when all
transmitted commands, including any parallel ones, have completed their operations. The syntax and
parameters for these commands are described in chapter 6. Some practical considerations for using these
commands are as follows:
*WAI
This prevents the dc source from processing subsequent commands until all pending
operations are completed.
*OPC?
36
This places a 1 in the Output Queue when all pending operations have completed.
Because it requires your program to read the returned value before executing the next
program statement, *OPC? can be used to cause the controller to wait for commands to
complete before proceeding with its program.
Page 37

Introduction to Programming - 4
*OPC
This sets the OPC status bit when all pending operations have completed. Since your
program can read this status bit on an interrupt basis, *OPC allows subsequent
commands to be executed.
NOTE: The trigger subsystem must be in the Idle state for the status OPC bit to be true. As far
as triggers are concerned, OPC is false whenever the trigger subsystem is in the Initiated
state.
OUTPUT:STATE Example
OUTPUT:STATE ON starts a sequence of operations in the unit that closes the output and sense relays
and sets the output voltage and current at the user’s settings. It is often important to know when these
parallel operations are finished, so that the next step in a test sequence can be synchronized with the
completion of a power supply command.
Two types of synchronization are provided:
♦ External synchronization is required when the test system needs to control something other than the
power supply after the power supply has finished all previous sent commands. External
synchronization is provided by the *OPC? Query and the *OPC command. The *OPC? Query returns
the value 1 when all pending operations are completed. The GPIB will be held up waiting for the
response to the query until this occurs. The *OPC command will cause bit 0 of the standard event
status register to be set when all pending operations are completed. The controller can either poll for
this status bit or set up an SRQ when this occurs.
♦ Internal synchronization is required when the test system needs to change a power supply setting or
make a power supply internal measurement after the supply has finished all previous sent commands.
Internal synchronization is provided by the *WAI command. When the power supply receives the
*WAI command, it holds up processing of any further bus commands until all pending parallel
operations are completed. For example, the *WAI command can be used to make a current
measurement after an output on command has completed:
OUTPUT ON,(@1);*WAI;:MEAS:CURR 0.5,(@1)
Using Device Clear
You can send a device clear at any time abort a SCPI command that may be hanging up the GPIB
interface. The status registers, the error queue, and all configuration states are left unchanged when a
device clear message is received. Device clear performs the following actions:
♦ The input and output buffers of the dc source are cleared.
♦ The dc source is prepared to accept a new command string.
The following statement shows how to send a device clear over the GPIB interface using Agilent BASIC:
CLEAR 705 IEEE-488 Device Clear
The following statement shows how to send a device clear over the GPIB interface using the GPIB
command library for C or QuickBASIC:
IOCLEAR (705)
37
Page 38

Page 39

Programming the DC Source
Introduction
This chapter contains examples on how to program your dc source. Simple examples show you how to
program:
K output voltage and current functions
K internal and external triggers
K measurement functions
K the status and protection functions
NOTE: The examples in this chapter show which commands are used to perform a particular
function, but do not show the commands being used in any particular programming
environment.
5
Programming the Output
Power-on Initialization
When the dc source is first turned on, it wakes up with the output state set to OFF. In this state the
output voltage is set to 0. The following commands are given implicitly at power-on:
*RST *SRE 0 STAT:PRES
*CLS *ESE 0
*RST is a convenient way to program all parameters to a known state. Refer to the Common Commands
section in chapter 6 for a complete description of the above commands.
Enabling the Output
To enable all four outputs, use the command:
OUTP ON,(@1:4) or OUTP ON,(@1,2,3,4)
To enable only outputs 1 and 3 use the command.
OUTP ON,(@1,3)
Output Voltage
The output voltage is controlled with the VOLTage command. To set all four outputs to 5 volts, use:
VOLT 5,(@1:4)
The maximum output voltage that can be programmed can be queried with:
VOLT? MAX,(@<channel list>)
39
Page 40

5 - Programming the DC Source
Overvoltage Protection
The dc source will turn off its output and open the output relays if the output voltage exceeds +11.5V
( ±0.3V) or −11.5V ( ±0.3V) when measured at the output terminals. Overvoltage protection is only
available when operating in voltage priority mode. It is enabled with:
VOLT:PROT:STAT<bool>,(@<channel list>)
where <bool> is the protection state (0 | OFF; 1 | ON).
CAUTION: If overvoltage protection is disabled, the dc source or the equipment under test will not
be protected from excessive external voltages.
Output Current
When operating in voltage priority mode, the dc source has a programmable current limit, which applies
to both positive and negative output currents. The command to program the current limit is:
CURR:LIM <n>,(@<channel list>)
where <n> is the current limit in amperes.
If the load attempts to draw more current than the programmed limit, the output voltage is reduced to
keep the current within the limit.
To query the maximum output current limit that can be programmed, use:
CURR:LIM? MAX,(@<channel list>)
When operating in current priority mode, the dc source has a programmable output current. The
maximum output current that can be programmed in current priority mode is ±0.5125 mA. The command
to program the current is:
CURR <n>,(@<channel list>)
To query the programmed output current setting for output 1, use:
CURR?,(@<channel list>)
Output Mode
You can program the unit to operate in either voltage priority or current priority mode. In voltage priority
mode the output is controlled by a constant voltage feedback loop, which maintains the output voltage at
its programmed setting. In current priority mode the output is controlled by the constant current feedback
loop, which maintains the output load or source current at its programmed setting.
Use the following command to configure the output mode:
FUNC:MODE <mode>,(@<channel list>)
where <mode> is the operating mode (VOLT | CURR)
NOTE: If the output is on, changing the output mode will cause the output to turn OFF, cycle
modes, and then turn ON. Also, there is no interaction or coupling between modes.
Switching back and forth between modes does not change the programmed values.
40
Page 41

Programming the DC Source - 5
Oscillation Protection
Oscillation protection is a built in function that shuts down the output in about 10 milliseconds if a
persistent and severe oscillation condition is detected. Oscillation protection can be enabled or disabled
using the following command:
OUTP:OSCP <bool>,(@<channel list>) where <bool> is the protection state (0 | OFF | 1 | ON).
If the output of your unit is being shut down by the oscillation protection circuit, you can reprogram the
output compensation bandwidth to try and eliminate the oscillation. This can be especially effective if
capacitive loads or long load leads are causing the output to oscillate. You can program the output
compensation to operate in a lower bandwidth using the following command:
VOLT:ALC:BWID <n>,(@<channel list>) where <n> is one of 3 bands (30000 | 20000 | 10000)
If your unit is being operated in current limit, your can select from one of two compensation bands using
the following command:
CURR:LIM:BWID <n>,(@<channel list>) where <n> is one of 2 bands (30000 | 10000)
NOTE: If the output is on, programming a different compensation band will cause the output to cycle
OFF, then ON.
Triggering Output Changes
The dc source has two independent trigger systems. One is used for triggering output changes, and the
other is used for triggering measurements. This section describes the output trigger system. The
measurement trigger system is described under "Triggering Measurements". Briefly, to generate an
output trigger:
1 Program the triggered output level (voltage, current , or current limit)
2 Set the triggered function mode to STEP
3 Initiate the trigger system
Output Trigger Model
Figure 5-1 is a model of the output trigger system. The rectangular boxes represent states. Arrows show
the transitions between states. Arrows are labeled with the event that causes the transition to occur.
IDLE STATE
INITiate:NAME TRAN
INITIATED STATE
TRIGGER RECEIVED
ABOR
*RST
OUTPUT CHANGES
Figure 5-1. Model of Output Trigger System
41
Page 42

5 - Programming the DC Source
Setting the Voltage and Current Trigger Levels
You can program a trigger level (or alternate value) that the output voltage, output current, or output
current limit function will go to when a trigger is received. To use the output trigger function, you must
first specify a voltage or current trigger level that the output will go to once a trigger signal is received.
Once you program a trigger level and then trigger the output, the output will stay at the triggered level
until the output is reprogrammed. Use the following commands to program an output trigger level:
VOLT:TRIG <n>,(@<channel list>)
CURR:TRIG <n>,(@<channel list>)
CURR:LIM:TRIG <n>,(@<channel list>)
Once you have specified which function that you want to trigger, you must then enable that function to
respond to trigger commands. Unless the function is enabled to respond to triggers, nothing will happen
even if you have programmed a trigger level for the function. Use the following commands to enable a
function to respond to triggers:
VOLT:MODE STEP,(@<channel list>)
CURR:MODE STEP,(@<channel list>)
CURR:LIM:MODE STEP,(@<channel list>)
In Step mode, the triggered value becomes the immediate value when the trigger is received. If the mode
is set to Fixed, nothing will happen when a trigger is received; the immediate value remains in effect.
Enabling the Output Trigger System
When the dc source is turned on, the trigger subsystem is in the idle state. In this state, the trigger system
is disabled, ignoring all triggers. Sending the following commands at any time returns the trigger system
to the idle state:
ABOR
*RST
The INITiate commands move the trigger system from the idle state to the initiated state. This enables
the dc source to receive triggers. To initiate the trigger system, use:
INIT:NAME TRAN
After a trigger is received and the action completes, the trigger system will return to the idle state. Thus it
will be necessary to enable the system each time a triggered action is desired.
Selecting the Output Trigger Source
The trigger system is waiting for a trigger signal in the initiated state. Before you generate a trigger, you
must select a trigger source.
To select GPIB bus triggers, use:
TRIG[:TRAN]:SOUR BUS
To select external triggers use:
TRIG[:TRAN]:SOUR EXT
42
Page 43

Programming the DC Source - 5
Generating Output Triggers
After you have specified the appropriate trigger source, you can generate triggers as follows:
GPIB Triggers
Send one of the following commands over the GPIB:
TRIG:IMM (not affected by the trigger source setting)
*TRG
an IEEE-488 Group Execute Trigger bus command
EXTernal Triggers
When the trigger system enters the Output Change state upon receipt of a trigger (see figure 5-1), the
Provide a negative-going TTL signal to the trigger input.
triggered functions are set to their programmed trigger levels. When the triggered actions are completed,
the trigger system returns to the Idle state.
Making Measurements
All measurements are performed by digitizing the instantaneous output voltage or current for a defined
number of samples and sample interval, storing the results in a buffer, and then calculating the average.
NOTE: There is one measurement buffer for each output channel in the dc source. However,
only the following measurement parameters can be configured independently for each
channel: SENSe:FUNCtion, SENSe:CURRent:RANGe.
There are two ways to make measurements:
♦ Use the MEASure queries to immediately start acquiring new voltage or current data, and return
measurements from this data as soon as the buffer is full. This is the easiest way to make
measurements, since it requires no explicit trigger programming.
♦ Use a triggered measurement when you need to synchronize the data acquisition with a transition in
the output voltage or current. Then use the FETCh queries to return the measurement data. FETCh
queries do not trigger the acquisition of new measurement data, they only return the data that was
acquired by the trigger. Note that if you acquired voltage data, you can only fetch voltage data.
Average Measurements
To measure the average output voltage or current, use:
MEAS:VOLT? (@<channel list>)
MEAS:CURR? (@<channel list>)
Average voltage and current is measured by acquiring a number of readings at the selected time interval,
applying the selected window function to the readings, and averaging the readings. Windowing is a
signal conditioning process that reduces the error in average measurements made in the presence of
periodic signals and noise. Refer to the discussion of the Window functions later in this chapter and in
chapter 6. The power-on and *RST sample interval and sweep size settings yield a data acquisition time
of 152 microseconds per measurement (5 data points at 30.4µs intervals).
Ripple rejection is a function of the number of cycles of the ripple frequency contained in the acquisition
window. More cycles in the acquisition window results in better ripple rejection. The two methods of
increasing data acquisition time is to either increase the number of power line cycles, or increase the
number of measurement samples and the time interval between samples.
43
Page 44

5 - Programming the DC Source
Power Line Cycles
After a power-on or *RST, the dc source automatically makes measurements based on a 0.00912 power
line cycles (for 60 Hz line). This results in a default measurement sample of 5 points separated by 30.4
microsecond time intervals. The easiest way to increase the data acquisition time is to increase the
number of power line cycles in the measurement. By doing this the unit automatically sets the sweep time
interval, sweep offset, and sweep points, based on sampling the maximum number of points to provide
the best noise filtering.
To change the power line cycles on which a measurement is based, use:
SENS:SWE:NPLC <n>
If your load does not draw currents with a significant noise component, use a setting of 0.00912 PLC for
fast measurements. Use a setting of 1 PLC to achieve full accuracy on the 0.5mA current range.
Measurement Samples and Time Interval
You can vary both the number of data points in a measurement sample, as well as the time between
samples. This is illustrated in figure 5-2.
<
>
<
Figure 5-2. Commands that Control Measurement Time
When the instrument is turned on and at *RST, the output voltage or current sampling rate is 30.4
microseconds, and the sweep size is set to 5 data points. This means that it takes about 152 microseconds
per measurement. You can vary this data sampling rate with:
SENS:SWE:TINT <sample period>
SENS:SWE:POIN <points>
For example, to set the time interval to 60.8 microseconds per measurement with 1500 samples, use
SENS:SWE:TINT 60.8E-6;POIN 1500.
Note that increasing the number of sample points increases the accuracy of the measurement; however,
the tradeoff is it takes a longer time to make the measurement.
NOTE: The total number of data points cannot exceed 4096. This means that the count
multiplied by the points in each measurement cannot exceed 4096; otherwise an error
will occur.
44
Page 45

Programming the DC Source - 5
Current Ranges
The dc source has three current measurement ranges. The command that controls the ranges is:
SENS:CURR:RANG <value>, (@<channel list>)
Enter the value of the current that you expect to measure. When the range is set to MAX, the maximum
current that can be measured is the maximum rating of the unit. Other measurement ranges are:
Range Value to select range
0.5 A values greater than 0.015A
15 mA values greater than 0.0005A up to 0.015A
0.5 mA values less than and up to 0.0005A
Window Functions
The dc source lets you select from two measurement window functions: Rectangular and Hanning. To
select a window function, use:
SENS:WIND: HANN | RECT
At power-on, the dc source measurement window is Rectangular. The Rectangular window calculates
average measurements without any signal conditioning. However, in the presence of periodic signals
such ac line ripple, a Rectangular window can introduce errors when calculating average measurements.
This can occur due to the last partial cycle of acquired data when a non-integral number of cycles of data
has been acquired. One way to overcome this limitation of the Rectangular window is to specify an
integral number of power line cycles with SENSe:SWEep:NPLCycles before making a measurement.
Another way of dealing with ac line ripple is to use a Hanning window.
The Hanning window applies a cos
4
weighting function to the data in the measurement buffer when
calculating average measurements. This attenuates the ac noise in the measurement window. The best
attenuation is achieved when at least three or more waveform cycles are in the measurement buffer.
Returning All Measurement Data From the Data Buffer
The MEASure:ARRay and FETCh:ARRay queries return all data values of the instantaneous voltage or
current buffer. No averaging is applied, only raw data is returned from the buffer. The commands are:
MEAS:ARR:CURR? (@<channel list>)
MEAS:ARR:VOLT? (@<channel list>)
Triggered Measurements
Use the measurement trigger system to synchronize the acquisition of measurements with either a BUS or
an external trigger. Use FETCh commands to return voltage or current information from the data
acquired by the measurement system. Briefly, to make a triggered measurement:
1 Select a sweep interval and sample size
2 Select the trigger source
3 Initiate the trigger system
4 Fetch the triggered measurements
45
Page 46

5 - Programming the DC Source
Measurement Trigger Model
Figure 5-3 is a model of the measurement trigger system. The rectangular boxes represent states. The
arrows show the transitions between states. These are labeled with the input or event that causes the
transition to occur.
IDLE STATE
INITiate:NAME ACQ
INITIATED STATE
TRIGGER RECEIVED
IS AN OUTPUT
CHANGE IN
PROGRESS?
NO
SETTLING DELAY
DATA ACQUIRED
ABOR
*RST
YES
Figure 5-3. Model of Measurement Trigger System
Enabling the Measurement Trigger System
When the dc source is turned on, the trigger system is in the idle state. In this state, the trigger system is
disabled and it ignores all triggers. Sending the following commands at any time returns the trigger
system to the idle state:
ABORt
*RST
The INITiate commands move the trigger system from the idle state to the initiated state. This enables
the measurement system to receive triggers. To initiate the measurement trigger system, use:
INIT:NAME ACQ
After a trigger is received and the data acquisition completes, the trigger system will return to the idle
state. Thus it will be necessary to initiate the system each time a triggered measurement is desired.
Selecting the Measurement Trigger Source
The trigger system is waiting for a trigger signal in the initiated state. Before you generate a trigger, you
must select a trigger source. The following measurement trigger sources can be selected:
BUS -
EXTernal -
Selects GPIB bus triggers.
Selects the external trigger input as the trigger source.
46
Page 47

Programming the DC Source - 5
To select GPIB bus triggers, use:
TRIG:ACQ:SOUR BUS
To select external triggers use:
TRIG:ACQ:SOUR EXT
Selecting the Sensing Function
Each output channel has its own measurement buffer. Since both voltage and current measurements are
supported, you must specify a measurement function before you generate a measurement trigger. Use the
following command to specify a measurement function:
SENS:FUNC "CURR", (@<channel list>) or
SENS:FUNC "VOLT", (@<channel list>)
Using this command makes it possible to measure output voltage on some channels while measuring
output current on other channels.
Output Settling Delay
If an output change has been programmed to occur in conjunction with a measurement trigger, the dc
source will delay the start of a measurement until the output has settled. This is an automatic function
that allows the output to settle to approximately 0.1% of final value for a representative load that is a
function of the selected sourcing mode. The representative load in voltage priority mode is a 20 ohm
resistor with the current limit set to MAXimum. The representative load in current priority mode is a zero
ohm short circuit.
To change the source settling delay, you must first change the source delay mode to MANual, then set a
value for the delay time. Use the following commands:
SOUR:DEL:MODE MAN, (@<channel list>)
SOUR:DEL:<time>, (@<channel list>) where <time> is specified in seconds.
The minimum time interval that can be programmed is specified by SENS:SWE:TINT. In addition to the
minimum time interval, the delay time required for a given measurement accuracy is also function of
load, measurement parameter, and required accuracy. It may be convenient to characterize the delay
required for a particular load so that the test throughput can be optimized. Use the MEAS:ARRAY query
to obtain a record of the voltage or current as a function of time after a source change, so that the best
speed/accuracy tradeoff can be made.
Generating Measurement Triggers
After you specify the appropriate trigger source, sensing function, and optional settling delay, generate
triggers as follows:
GPIB Triggers
Send one of the following commands over the GPIB:
TRIG:IMM (not affected by the trigger source setting)
*TRG
an IEEE-488 Group Execute Trigger bus command
EXTernal Triggers
Provide a negative-going TTL signal to the trigger input.
47
Page 48

5 - Programming the DC Source
When the acquisition finishes, any of the FETCh queries can be used to return the results. Once the
measurement trigger is initiated, if a FETCh query is sent before the data acquisition is triggered or
before it is finished, the response data will be delayed until the trigger occurs and the acquisition
completes. This may tie up the computer if the trigger condition does not occur immediately.
One way to wait for results without tying up the computer is to use the SCPI command completion
commands. For example, you can send the *OPC command after INITialize, then occasionally poll the
OPC status bit in the standard event status register for status completion while doing other tasks. You can
also set up an SRQ condition on the OPC status bit going true and do other tasks until the SRQ interrupts.
Pre-trigger and Post-trigger Data Acquisition
The measurement system lets you capture data before, after, or at the trigger signal. When a measurement
is initiated, the dc source continuously samples the instantaneous signal level of the sensing function. As
shown in figure 5-4, you can move the block of data being read into the acquisition buffer with reference
to the acquisition trigger. This permits pre-trigger or post-trigger data sampling.
To offset the beginning of the acquisition buffer relative to the acquisition trigger, use:
SENS:SWE:OFFS:POIN <offset>
The range for the offset is -4096 to 2,000,000,000 points. As shown in the figure, when the offset is
negative, the values at the beginning of the data record represent samples taken prior to the trigger. When
the value is 0, all of the values are taken after the trigger. Values greater than zero can be used to
program a delay time from the receipt of the trigger until the data points that are entered into the buffer
are valid. (Delay time = offset x sample period).
NOTE: If, during a pre-trigger data acquisition, a trigger occurs before the pre-trigger data count
is completed, the measurement system ignores this trigger. This will prevent the
completion of the measurement if another trigger is not generated.
=-
=-
=
=
Figure 5-4. Pre-trigger and Post-trigger Acquisition
48
Page 49

Programming the DC Source - 5
Programming the Status Registers
Status register programming lets you determine the operating condition of the dc source at any time. For
example, you may program the dc source to generate an interrupt (SRQ) when an event such as a current
limit occurs. When the interrupt occurs, your program can act on the event in the appropriate fashion.
Figure 5-5 shows the status register structure of the dc source. Table 5-1 defines the status bits. The
Standard Event, Status Byte, and Service Request Enable registers and the Output Queue perform
standard GPIB functions as defined in the IEEE 488.2 Standard Digital Interface for Programmable
Instrumentation. The Operation Status and Questionable Status registers implement functions that are
specific to the dc source.
QUESTIONABLE STATUS
(IDENTICAL REGISTERS FOR EACH CHANNEL)
PCLR
Meas
OV+
OV -
OT
UNR
OSC
Ovld
CONDITION
0
1
2
2
4
10
1024
12
4096
14
16384
PTR/NTR
1
44
16
1
2
16
1024
4096
16384
EVENT ENABLE
1
22
44
16
1024
4096
16384
1
16
1024
4096
16384
LOGICAL
OR
SAME
AS
CHAN 1
CHAN 2
CHAN 3
CHAN 4
QSUMCHAN 1
QSUM
QSUM
QSUM
LOGICAL
OR
CV
CL+
CL -
CC
VL+
VL -
OFF
STANDARD EVENT
STATUS
EVENT ENABLE
0
OPC
QYE
DDE
EXE
CME
PON
0
1
2
3
4
5
6
1
2
4
3
8
4
16
5
32
7
128
(IDENTICAL REGISTERS FOR EACH CHANNEL)
CONDITION
1
2
4
8
16
32
64
1
4
8
16
32
128
OPERATION STATUS
PTR/NTR EVENT
1
2
4
8
16
32
64
1
2
4
8
16
32
64
OUTPUT QUEUE
DATA
QUEUE
LOGICAL
OR
NOT
EMPTY
SAME
AS
CHAN 1
CHAN 1
CHAN 2
CHAN 3
CHAN 4
OSUM
OSUM
OSUM
OSUM
LOGICAL
OR
DATA
DATA
ENABLE
1
2
4
8
16
32
64
Figure 5-5. DC Source Status Model
WTG
QUES
MAV
ESB
MSS
OPER
LOGICAL
OR
STATUS BYTE
2
3
8
4
16
5
32
6
7
128
GENERATION
RQS
SERVICE
REQUEST
SERVICE
REQUEST
ENABLE
8
16
32
128
LOGICAL
OR
49
Page 50

5 - Programming the DC Source
Table 5-1. Bit Configurations of Status Registers
Bit Signal Meaning
0
1
2
3
4
5
6
0
1
2
4
10
12
14
0
2
3
4
5
7
2
3
4
5
6
7
CV
CL+
CL-
CC
VL+
VL-
OFF
OV+
OV-
PCLR
OT
UNR
OSC
MeasOvld
OPC
QYE
DDE
EXE
CME
PON
WTG
QUES
MAV
ESB
MSS
RQS
OPER
Operation Status Group
The selected output is in constant voltage mode (applies only in voltage priority mode)
The selected output is in positive current limit (applies only in voltage priority mode)
The selected output is in negative current limit (applies only in voltage priority mode)
The selected output is in constant current mode (applies only in current priority mode)
The selected output is in positive voltage limit (applies only in current priority mode)
The selected output is in negative voltage limit (applies only in current priority mode)
The selected output is OFF
Questionable Status Group
The positive overvoltage protection has tripped
The negative overvoltage protection has tripped
No communication with the selected output
The overtemperature protection has tripped
The output is unregulated
The oscillation protection has tripped
Output measurement exceeded capability of the range
Standard Event Status Group
Operation complete
Query error
Device-dependent error
Execution error
Command error
Power-on
Status Byte and Service Request Enable Registers
The unit is waiting for a trigger
Questionable status summary bit
Message Available summary bit
Event Status Summary bit
Master Status Summary bit
Request Service bit
Operation status summary bit
Operation Status Group
The Operation Status registers record signals that occur during normal operation. As shown below, the
group consists of a Condition, PTR/NTR, Event, and Enable register. The outputs of the Operation Status
register group are logically-ORed into the OPERation summary bit (7) of the Status Byte register.
Register Command Description
Condition STAT:OPER:COND? (@<channel list>) A register that holds real-time status of the circuits
being monitored. It is a read-only register.
PTR Filter STAT:OPER:PTR <n> (@<channel list>) A positive transition filter that functions as described
under STAT:OPER:NTR|PTR commands in chapter 6.
It is a read/write register.
NTR Filter STAT:OPER:NTR <n> (@<channel list>) A negative transition filter that functions as described
under STAT:OPER:NTR|PTR commands in chapter 6.
It is a read/write register.
Event STAT:OPER:EVEN? (@<channel list>) A register that latches any condition that is passed
through the PTR or NTR filters. It is a read-only
register that is cleared when read.
Enable STAT:OPER:ENAB <n> (@<channel list>) A register that functions as a mask for enabling specific
bits from the Event register. It is a read/write register.
50
Page 51

Programming the DC Source - 5
Questionable Status Group
The Questionable Status registers record signals that indicate abnormal operation. As shown below, the
group consists of the same register types as the Status Operation group. The outputs of the Questionable
Status group are logically-ORed into the QUEStionable summary bit (3) of the Status Byte register.
Register Command Description
Condition STAT:QUES:COND? (@<channel list>) A register that holds real-time status of the circuits
being monitored. It is a read-only register.
PTR Filter STAT:QUES:PTR <n> (@<channel list>) A positive transition filter that functions as described
STAT:QUES:NTR|PTR commands in chapter
under
6. It is a read/write register.
NTR Filter STAT:QUES:NTR <n> (@<channel list>) A negative transition filter that functions as described
STAT:QUES:NTR|PTR commands in chapter
under
6. It is a read/write register.
Event STAT:QUES:EVEN? (@<channel list>) A register that latches any condition that is passed
through the PTR or NTR filters. It is a read-only
register that is cleared when read.
Enable STAT:QUES:ENAB <n> (@<channel list>) A register that functions as a mask for enabling specific
bits from the Event register. It is a read/write register..
Standard Event Status Group
This group consists of an Event register and an Enable register that are programmed by Common
commands. The Standard Event event register latches events relating to instrument communication status
(see figure 5-5). It is a read-only register that is cleared when read. The Standard Event enable register
functions similarly to the enable registers of the Operation and Questionable status groups.
Command Action
*ESE
*ESR?
Status Byte Register
This register summarizes the information from all other status groups as defined in the IEEE 488.2
programs specific bits in the Standard Event enable register.
reads and clears the Standard Event event register.
Standard Digital Interface for Programmable Instrumentation. See Table 5-1 for the bit configuration.
Command Action
*STB? reads the data in the register but does not clear it (returns MSS in bit 6)
serial poll clears RQS inside the register and returns it in bit position 6 of the response.
The MSS and RQS Bits
MSS is a real-time (unlatched) summary of all Status Byte register bits that are enabled by the Service
Request Enable register. MSS is set whenever the dc source has one or more reasons for requesting
service. *STB? reads the MSS in bit position 6 of the response but does not clear any of the bits in the
Status Byte register.
The RQS bit is a latched version of the MSS bit. Whenever the dc source requests service, it sets the
SRQ interrupt line true and latches RQS into bit 6 of the Status Byte register. When the controller does a
serial poll, RQS is cleared inside the register and returned in bit position 6 of the response. The
remaining bits of the Status Byte register are not disturbed.
The MAV Bit and Output Queue
The Output Queue is a first-in, first-out (FIFO) data register that stores dc source-to-controller messages
until the controller reads them. Whenever the queue holds one or more bytes, it sets the MAV bit (4) of
the Status Byte register.
51
Page 52

5 - Programming the DC Source
Determining the Cause of a Service Interrupt
You can determine the reason for an SRQ by the following actions:
Step 1 Determine which summary bits are active. Use:
*STB? or serial poll
Step 2
Read the corresponding Event register for each summary bit to determine which events
caused the summary bit to be set. Use:
STAT:QUES:EVEN?
(@<channel list>)
STAT:OPER:EVEN? (@<channel list>)
ESR?
When an Event register is read, it is cleared. This also clears the corresponding
summary bit.
Step 3 Remove the specific condition that caused the event. If this is not possible, the event
may be disabled by programming the corresponding bit of the status group Enable
register or NTR|PTR filter. A faster way to prevent the interrupt is to disable the service
request by programming the appropriate bit of the Service Request Enable register.
Servicing Operation Status and Questionable Status Events
This example assumes you want a service request generated whenever the dc source switches to the CC
(constant current) operating mode, or whenever the dc source's overvoltage, overcurrent, or
overtemperature circuits have tripped. From figure 5-5, note the required path for a condition at bit 10
(CC) of the Operation Status register to set bit 6 (RQS) of the Status Byte register. Also note the
required path for Questionable Status conditions at bits 0, 1, and 4 to generate a service request (RQS) at
the Status Byte register. The required register programming is as follows:
Step 1 Program the Operation Status PTR register to allow a positive transition at bit 6 to be
latched into the Operation Status Event register, and allow the latched event to be
summed into the Operation summary bit. Use:
STAT:OPER:PTR 64,(@<channel list>);ENAB 64,(@<channel list>)
Step 2
Step 3
Step 4
You can also monitor a status signal for both its positive and negative transitions. For example, to
Program the Questionable Status PTR register to allow a positive transition at bits 0, 1, or
4 to be latched into the Questionable Status Event register, and allow the latched event to
be summed into the Questionable summary bit. Use:
STAT:QUES:PTR 19,(@<channel list>);ENAB 19 ,(@<channel list>) (1 + 2 + 16 = 19)
Program the Service Request Enable register to allow both the Operation and the
Questionable summary bits from the Status Byte register to generate RQS. Use:
*SRE 136 (8 + 128 = 136)
When you service the request, read the event registers to determine which Operation
Status and Questionable Status Event register bits are set, and clear the registers for the
next event. Use:
STAT:OPER:EVEN? (@<channel list>);QUES:EVEN? (@<channel list>)
generate RQS when the dc source either enters the CC+ (constant current) condition or leaves that
condition, program the Operational Status PTR/NTR filter as follows:
STAT:OPER:PTR 8,(@<channel list>);NTR 8,(@<channel list>)
STAT:OPER:ENAB 8,(@<channel list>);*SRE 128,(@<channel list>)
52
Page 53

6
Language Dictionary
Introduction
This section gives the syntax and parameters for all the IEEE 488.2 SCPI commands and the Common
commands used by the dc source. It is assumed that you are familiar with the material in chapter 4, which
explains the terms, symbols, and syntactical structures used here and gives an introduction to
programming. You should also be familiar with chapter 5, in order to understand how the dc source
functions.
The programming examples are simple applications of SCPI commands. Because the SCPI syntax
remains the same for all programming languages, the examples given for each command are generic.
Syntax Forms
Syntax definitions use the long form, but only short form headers (or "keywords")
appear in the examples. Use the long form to help make your program selfdocumenting.
Parameters
Most commands require a parameter and all queries will return a parameter. The
range for a parameter may vary according to the model of dc source. When this is the
case, refer to the Specifications table in Appendix A.
Related
Commands
Where appropriate, related commands or queries are included. These are listed
because they are either directly related by function, or because reading about them
will clarify or enhance your understanding of the original command or query.
Order of
Presentation
The dictionary is organized according to the following functions: calibration, display,
measurement, output, status, system, trigger, and common commands. Both the
subsystem commands and the common commands that follow are arranged in
alphabetical order under each heading.
Subsystem Commands
Subsystem commands are specific to functions. They can be a single command or a group of commands.
The groups are comprised of commands that extend one or more levels below the root.
The subsystem command groups are arranged according to function: Calibration, Display, Measurement,
Output, Status, System, and Trigger. Commands under each function are grouped alphabetically.
Commands followed by a question mark (?) take only the query form. When commands take both the
command and query form, this is noted in the syntax descriptions. Table 6-1 lists all of the subsystem
commands in alphabetical order.
Common Commands
Common commands begin with an * and consist of three letters (command) or three letters and a ?
(query). They are defined by the IEEE 488.2 standard to perform common interface functions. Table 6-2
lists all of the common commands in alphabetical order.
Programming Parameters
Table 6-3 lists all of the output programming parameters.
53
Page 54

6 – Language Dictionary
SCPI Programming Commands - At a Glance
Table 6-1. Subsystem Commands Syntax
ABORt
CALibrate
:CURRent
[:LEVEL] (@channel)
:LIMit
[:POSitive] (@channel)
:NEGative (@channel)
:MEASure <max_val>, (@channel)
:DATA <n>
:DATE <date>
:LEVel <level>
:PASSword <n>
:SAVE
:STATE <bool> [,<n>]
:VOLTage (@channel)
INITiate
[:IMMediate]
:NAME <name>
FETCh
:ARRay
:CURRent [:DC]? (@list)
:VOLTage [:DC]? (@list)
[:SCALar]
:CURRent [:DC]? (@list)
:VOLTage [:DC]? (@list)
Resets the trigger system to the Idle state
Calibrate output current and low current measurement range
Calibrate positive current limit
Calibrate negative current limit
Calibrate high and medium current measurement range
Enters the calibration value
Sets the calibration date
Advance to next calibration step (P1 | P2)
Set numeric calibration password
Save new cal constants in non-volatile memory
Enable or disable calibration mode
Calibrate output voltage and voltage measurement range
Enable the named trigger system (TRANsient | ACQuire)
Returns the digitized instantaneous current
Returns the digitized instantaneous voltage
Returns output current dc measurement
Returns output voltage dc measurement
MEASure
:ARRay
:CURRent [:DC]? [max_val,] (@list)
:VOLTage [:DC]? (@list)
[:SCALar]
:CURRent [:DC]? [max_val,] (@list)
:VOLTage [:DC]? (@list)
OUTPut
[:STATe] <bool>, (@list)
:OSCProtect
[:STATe] <bool>, (@list)
:PROTection
:CLEar (@list)
SENSe
:CURRent[:DC]
:RANGe [:UPPer] <max_val>, (@list)
:FUNCtion <function>, (@list)
:SWEep
:NPLCycles <n>
:OFFSet
:POINts <n>
:POINts <n>
:TINTerval <n>
:WINDow [:TYPE] <type>
Digitizes and returns the instantaneous output current
Digitizes and returns the instantaneous output voltage
Digitizes and returns average (dc) output current
Digitizes and returns average (dc) output voltage
Enables/disables the selected dc source output
Enables/disables oscillation protection on the selected output
Reset latched protection
Selects the current measurement range
Configures the measurement sensor ("VOLTage" | "CURRent" )
Sets the number of ac power line cycles
Defines the trigger offset in the measurement sweep
Defines the number of data points in the measurement
Sets the measurement sample interval
Sets measurement window function (HANNing | RECTangular)
54
Page 55
Table 6-1. Subsystem Commands Syntax (continued)
[SOURce:]
CURRent
[:LEVel]
[:IMMediate][:AMPLitude] <n>, (@list)
:TRIGgered [:AMPLitude] <n>, (@list)
:LIMit [:POSitive]
[:IMMediate][:AMPLitude] <n>, (@list)
:BWIDth <bandwidth> , (@list)
:TRIGgered [:AMPLitude] <n>, (@list)
:MODE <mode>, (@list)
DELay
[:TIME] <n>, (@list)
:MODE <mode>, (@list)
FUNCtion
:MODE <mode>, (@list)
VOLTage
:ALC
:BWIDth <bandwidth> , (@list)
[:LEVel]
[:IMMediate][:AMPLitude] <n>, (@list)
:TRIGgered [:AMPLitude] <n>, (@list)
:MODE <mode>, (@list)
:PROTection
[:STATe] <bool>, (@list)
Language Dictionary - 6
Sets the output current (in current priority mode)
Sets the triggered output current (in current priority mode)
Sets the current limit (in voltage priority mode)
Sets the output compensation bandwidth
Sets the triggered current limit (in voltage priority mode)
Sets the current trigger mode (FIXed | STEP)
Sets the output settling delay time in Manual mode
Sets the output settling delay mode (AUTO | MANual )
Sets the output mode (VOLTage | CURRent)
Sets the output compensation bandwidth
Sets the output voltage (in voltage priority mode)
Sets the triggered output voltage (in voltage priority mode)
Sets the voltage trigger mode (FIXed | STEP)
Enables/disables overvoltage protection on the selected output
STATus
:OPERation
[:EVENt]? (@list)
:CONDition? (@list)
:ENABle <n>, (@list)
:NTRansition<n>, (@list)
:PTRansition<n>, (@list)
:PRESet
:QUEStionable
[:EVENt]? (@list)
:CONDition? (@list)
:ENABle <n>, (@list)
:NTRansition<n>, (@list)
:PTRansition<n>, (@list)
SYSTem
:ERRor?
:VERSion?
TRIGger
:ACQuire
[:IMMediate]
:SOURce <source>
[:TRANsient]
[:IMMediate]
:SOURce <source>
Returns the value of the event register
Returns the value of the condition register
Enables specific bits in the Event register
Sets the Negative transition filter
Sets the Positive transition filter
Presets all enable and transition registers to power-on
Returns the value of the event register
Returns the value of the condition register
Enables specific bits in the Event register
Sets the Negative transition filter
Sets the Positive transition filter
Returns the error number and error string
Returns the SCPI version number
Triggers the measurement immediately
Sets the measurement trigger source (BUS | EXTernal)
Triggers the output immediately
Sets the output trigger source (BUS | EXTernal)
NOTE: Some [optional] commands have been included for clarity. Refer to chapter 6 for a
complete description of all programming commands.
55
Page 56

6 – Language Dictionary
*CLS
*ESE <n>
*ESE?
*ESR?
*IDN?
*OPC
*OPC?
*OPT?
*RST
*SRE <n>
*SRE?
*STB?
*TRG
*TST?
*WAI
Table 6-2. Common Commands Syntax
Clear status
Standard event status enable
Return standard event status enable
Return event status register
Return instrument identification
Enable "operation complete" bit in ESR
Return a "1" when operation complete
Return option number
Reset
Set service request enable register
Return service request enable register
Return status byte
Trigger
Perform selftest, then return result
Hold off bus until all device commands done
Table 6-3. Output Programming Parameters
Parameter Value
[SOUR:]CURR[:LEV][:IMM] and
−0.5125 mA to +0.5125 mA
[SOUR:]CURR[:LEV]:TRIG
[SOUR:]CURR:LIM[:IMM] and
[SOUR:]CURR:LIM:TRIG
*RST Current [Level] Value
*RST Current Limit Value
[SOUR:]VOLT[:LEV][:IMM] and
µA to +0.5125 A
+75
−75µA to −0.5125 A
0 A
75µA
−10.25 V to +10.25 V
[SOUR:]VOLT[:LEV]:TRIG
*RST Voltage Value 0 V
[SOUR:]DEL
0
− 1000
56
Page 57

Language Dictionary - 6
Calibration Commands
Calibration commands let you enable and disable the calibration mode, change the calibration password,
calibrate current and voltage programming, and store new calibration constants in nonvolatile memory.
Only one output channel may be calibrated at a time.
NOTE: If calibration mode has not been enabled with CALibrate:STATe, programming the
calibration commands will generate an error. You must also save any changes that you
made using CALibrate:SAVE, otherwise all changes will be lost when you exit
calibration mode.
CALibrate:CURRent
This command initiates the calibration of the current priority mode as well as the 0.5mA current range
measurement circuit.
Command Syntax
Parameters
Examples
Related Commands
CALibrate:CURRent[:LEVel] (@<channel>)
None
CAL:CURR(@1) ! start current calibration
CAL:CURR:LIM, CAL:CURR:MEAS
CALibrate:CURRent:LIMit[:POSitive] CALibrate:CURRent:LIMit:NEGative
This command initiates the calibration of the positive or negative current limit.
Command Syntax
Parameters
Examples
Related Commands
CALibrate:CURRent:MEASure
This command initiates the calibration of the 0.5A or 15mA current range measurement circuit.
Command Syntax
Parameters
Unit
Examples
Related Commands
CALibrate:CURRent:LIMit[:POSitive] (@<channel>)
CALibrate:CURRent:LIMit:NEGative (@<channel>)
None
CAL:CURR:LIM (@1)
CAL:CURR:LIM:NEG (@1)
CAL:CURR CAL:CURR:MEAS
CALibrate:CURRent:MEASure <NRf>, (@<channel>)
A value that falls within the 0.5A or 15mA current range
A (amperes)
CAL:CURR:MEAS 0.5,(@1) !0.5A range
CAL:CURR:MEAS 0.005,(@1) !15mA range
CAL:CURR, CAL:CURR:LIM
57
Page 58

6 – Language Dictionary
CALibrate:DATA
This command enters a calibration value that you obtain by reading an external meter. You must first
select a calibration level (with CALibrate:LEVel) for the value being entered.
Command Syntax
Parameters
Unit
Examples
Related Commands
CALibrate:DATE
This command stores the date the unit was last calibrated. Enter any ASCII string up to 31 characters.
Command Syntax
Parameters
Examples
Query Syntax
Returned Parameters
CALibrate:DATA <NRf>
<external reading>
A or V (amperes or volts)
CAL:DATA 3222.3 MA CAL:DATA 5.000
CAL:STAT CAL:LEV
CALibrate:DATE <date>
<date>
CAL:DATE "3/22/01" CAL:DATE "22.3.99"
CALibrate:DATE?
<SRD>
CALibrate:LEVel
This command selects the next point in the calibration sequence. P1 is the first calibration point,
P2 is the second calibration point.
Command Syntax
Parameters
Examples
CALibrate:PASSword
This command lets you change the calibration password. A new password is automatically stored in
CALibrate:LEVel <point>
P1 | P2
CAL:LEV P2
nonvolatile memory and does not have to be stored with CALibrate:SAVE. The default password is the
model number of the unit. If the password is set to 0, password protection is removed and the ability to
enter the calibration mode is unrestricted.
Command Syntax
Parameters
Examples
Related Commands
CALibrate:PASSword <NRf>
<model number> (default)
CAL:PASS 1234
CAL:SAV
58
Page 59
Language Dictionary - 6
CALibrate:SAVE
This command saves any new calibration constants after a calibration procedure has been completed in
nonvolatile memory. If CALibrate:STATe OFF is programmed without a CALibrate:SAVE, the previous
calibration constants are restored..
Command Syntax
Parameters
Examples
Related Commands
CALibrate:STATe
This command enables and disables calibration mode. The calibration mode must be enabled before the
CALibrate:SAVE
None
CAL:SAVE
CAL:PASS CAL:STAT
dc source will accept any other calibration commands.
The first parameter specifies the enabled or disabled state. The second parameter is the password. A
password is required if calibration mode is being enabled and the existing password is not 0. If the
password is not entered or is incorrect, an error is generated and the calibration mode remains disabled.
The query returns only the state, not the password.
NOTE: Whenever the calibration state is changed from enabled to disabled, any new calibration
constants are lost unless they have been stored with CALibrate:SAVE.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
CALibrate:VOLTage
This command initiates the calibration of the output voltage and the voltage measurement circuit.
Command Syntax
Parameters
Examples
CALibrate:STATe <bool>[,<NRf>]
0 | OFF | 1 | ON [,<password>]
OFF
CAL:STAT 1,3280 CAL:STAT OFF
CALibrate:STATe?
<NR1>
CAL:PASS CAL:SAVE *RST
CALibrate:VOLTage (@<channel>)
None
CAL:VOLT (@1)
59
Page 60

6 – Language Dictionary
Measurement Commands
Measurement commands consist of fetch, measure, and sense commands.
Measure commands measure the output voltage or current. Measurements are performed by digitizing
the instantaneous output voltage or current for a specified number of samples, storing the results in a
buffer, and calculating the measured result. Two types of measurement commands are available:
MEASure and FETCh. MEASure commands trigger the acquisition of new data before returning the
reading. Measurement overflows return a reading of 9.91E+37. FETCh commands return a reading
computed from previously acquired data. If you take a voltage measurement, you can fetch only voltage
data. If you take a current measurement, you can fetch only current data.
♦ Use MEASure when the measurement does not need to be synchronized with any other event.
♦ Use FETCh when it is important that the measurement be synchronized with either a trigger or with a
particular part of the output waveform.
Sense commands control the current measurement range, the bandwidth detector of the dc source, and
the data acquisition sequence.
FETCh:ARRay:CURRent? FETCh:ARRay:VOLTage?
These queries return an array containing either the digitized output current in amperes or output voltage
in volts. The data returned is the result of the last measurement command or acquisition trigger. The data
is valid until the next *RST, MEASure, or INITiate command occurs.
Query Syntax
Parameters
Examples
Returned Parameters
Related Commands
FETCh:ARRay:CURRent[:DC]? (@<channel list>)
FETCh:ARRay:VOLTage[:DC]? (@<channel list>)
None
FETC:ARR:CURR? (@1) FETC:ARR:VOLT? (@1)
<NR3> [,<NR3>]
SENS:SWE:TINT SENS:SWE:OFFS SENS:SWE:POIN
FETCh:CURRent? FETCh:VOLTage?
These queries return either the dc output current in amperes or output voltage in volts. The data returned
is the result of the last measurement command or acquisition trigger. The data is valid until the next
*RST, MEASure, or INITiate command occurs.
60
Query Syntax
Parameters
Examples
Returned Parameters
Related Commands
MEASure[:SCALar]:CURRent[:DC]? (@<channel list>)
FETCh[:SCALar]:CURRent[:DC]? (@<channel list>)
None
MEAS:CURR? (@1) FETC:CURR:DC? (@1)
<NR3> [,<NR3>]
MEAS:VOLT? MEAS:CURR?
Page 61

Language Dictionary - 6
MEASure:ARRay:CURRent? MEASure:ARRay:VOLTage?
These queries initiate and trigger a measurement and return an array containing either the digitized output
current in amperes or output voltage in volts. The output voltage or current is digitized whenever a
measurement command is sent or an acquisition trigger occurs. The time interval is set by
SENSe:SWEep:TINTerval. The position of the trigger relative to the beginning of the data buffer is
determined by SENSe:SWEep:OFFSet. The number of points returned is set by SENSe:SWEep:POINts.
NOTE: You can specify an optional maximum value parameter. The dc source will select the
proper current range to measure the maximum current.
Query Syntax
Parameters
Examples
Returned Parameters
Related Commands
MEASure:ARRay:CURRent[:DC]? [<maximum value>,] (@<channel list>)
MEASure:ARRay:VOLTage[:DC]? (@<channel list>)
None
MEAS:ARR:CURR? 0.1,(@1) MEAS:ARR:VOLT? (@1)
<NR3>[,<NR3>]
SENS:SWE:TINT SENS:SWE:OFFS SENS:SWE:POIN
MEASure:CURRent? MEASure:VOLTage?
These queries initiate and trigger a measurement and return either the output current in amperes or
output voltage in volts. The total measurement time is specified by SENSe:SWEep:NPLCycles.
NOTE: You can specify an optional maximum value parameter. This lets you use a different
current range for a single measurement without having to change current ranges.
Query Syntax
Parameters
Examples
Returned Parameters
Related Commands
MEASure[:SCALar]:CURRent[:DC]? [<maximum value>,] (@<channel list>)
MEASure[:SCALar]:VOLTage[:DC]? (@<channel list>)
None
MEAS:CURR? 0.1,(@1) MEAS:VOLT? (@1)
<NR3> [,<NR3>]
FETC:VOLT? FETC:CURR? SENS:SWE:NPLC
SENSe:CURRent:RANGe
This command selects one of the following dc current measurement ranges based on the value entered:
0.5 A
15 mA
0.5 mA
The programmed value must be the maximum current that you expect to measure. Crossover values are
0.5 mA and 15 mA respectively. When queried, the returned value is the maximum dc current that can be
measured on the range that is presently set.
Command Syntax
Parameters
*RST Value
Query Syntax
Returned Parameters
Enter values greater than 0.015A
Enter values greater than 0.0005A up to 0.015A
Enter values less than and up to 0.0005A
SENSe:CURRent[:DC]:RANGe[:UPPer] <Nrf>, (@<channel list>)
The maximum current that you expect to measure (see table 6-3)
Unit
Examples
A (amperes)
0.5 A
SENS:CURR:RANG 0.4,(@1)
SENSe:CURRent:RANGe? (@<channel list>)
<NR3>
61
Page 62

6 – Language Dictionary
SENSe:FUNCtion
This command configures the sensing function for triggered measurements. The dc source has two
measurement sensors as described below. The query returns the function setting.
CURRent
VOLTage
Returned Parameters
Senses the output current at the selected output
Senses the output voltage at the selected output
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
SENSe:FUNCtion <function>, (@<channel list>)
"VOLTage" | "CURRent"
VOLT
SENS:FUNC "VOLT",(@1)
SENSe:FUNCtion? (@<channel list>)
<SRD>
SENSe:SWEep:NPLCycles
This command specifies the total measurement acquisition time in terms of ac power line cycles. It
automatically sets the sweep time interval, sweep offset, and sweep points. The values are chosen to
sample the maximum number of points possible and to provide the best noise filtering.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
SENSe:SWEep:NPLCycles <NRf+>
1 through <n>
0.00912 (for 60Hz line)
0.0076 (for 50Hz line)
SENS:SWE:NPLC 10
SENSe:SWEep:NPLCycles?
<NR3>
SENSe:SWEep:OFFSet:POINts
This command defines the offset in a data sweep when an acquire trigger is used. Negative values
represent data samples taken prior to the trigger. Positive values represent the delay after the trigger
occurs but before the samples are acquired.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
62
SENSe:SWEep:OFFSet:POINts <NRf+>
-4095 through 2,000,000,000
0
SENS:SWE:OFFS:POIN -2047
SENSe:SWEep:OFFSet:POINts?
<NR3>
SENS:SWE:TINT SENS:SWE:POIN MEAS:ARR
Page 63

SENSe:SWEep:POINts
This command defines the number of points in a measurement.
Language Dictionary - 6
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
SENSe:SWEep:POINts <NRf+>
1 through 4096
5
SENS:SWE:POIN 1024
SENSe:SWEep:POINts?
<NR3>
SENS:SWE:TINT SENS:SWE:OFFS MEAS:ARR
SENSe:SWEep:TINTerval
This command defines the time period between samples. The value that you enter for the time interval
will be rounded to the nearest 30.4 microsecond increment.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
SENSe:SWEep:TINTerval <NRf+>
30.4 microseconds through 60800 seconds
30.4 microseconds
SENS:SWE:TINT 60.8E-6
SENSe:SWEep:TINTerval?
<NR3>
SENS:SWE:POIN SENS:SWE:OFFS MEAS:ARR
SENSe:WINDow
This command sets the window function that is used in dc measurement calculations. The following
functions can be selected:
HANNing
RECTangular
NOTE: Neither window function alters the instantaneous voltage or current data returned in the
Returned Parameters
A signal conditioning window that reduces errors in dc measurement calculations in
the presence of periodic signals such ac line ripple. The Hanning window multiplies
each point in the measurement sample by the function cosine
A window that returns measurement calculations without any signal conditioning.
measurement array.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
SENSe:WINDow[:TYPE] <type>
HANNing | RECTangular
RECTangular
SENS:WIND RECT
SENSe:WINDow[:TYPE]?
<CRD>
4
.
63
Page 64

6 – Language Dictionary
Output Commands
Output commands consist of output and source commands.
Output commands enable the output and oscillation functions.
Source commands program the actual output voltage and current settings.
OUTPut
This command enables or disables the dc source output. The state of a disabled output is a condition of
zero output voltage and a model-dependent minimum source current (see *RST). The output and sense
relays are closed when the output is enabled and opened when the output is disabled. The query returns 0
if the output is off, and 1 if the output is on.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
OUTPut[:STATe] <bool>, (@<channel list>)
0 | OFF | 1 | ON
OFF
OUTP ON,(@1:4)
OUTPut[:STATe]? (@<channel list>)
<NR1> 0 | 1
OUTPut:OSCProtect
This command enables or disables the oscillation protection on the selected output.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
OUTPut:OSCProtect[:STATe] <bool>, (@<channel list>)
0 | OFF | 1 | ON
ON
OUTP:OSCP ON,(@1:4)
OUTPut:OSCProtect[:STATe]? (@<channel list>)
<NR1> 0 | 1
OUTPut:PROTection:CLEar
This command clears the latch that disables the output when an overvoltage, overtemperature, or
oscillation status condition is detected. All conditions that generate the fault must be removed before the
latch can be cleared. The output is then restored to the state it was in before the fault condition occurred.
Command Syntax
Parameters
Examples
64
OUTPut:PROTection:CLEar (@<channel list>)
None
OUTP:PROT:CLE (@1:4)
Page 65

Language Dictionary - 6
[SOURce:]CURRent[:IMMediate] [SOURce:]CURRent:TRIGgered
These commands set the immediate and the pending triggered current level of the dc source. They only
apply in current priority mode. The immediate level is the output current setting. The pending triggered
level is a stored value that is transferred to the output when a trigger occurs. To respond to a trigger, the
[SOUR:]CURR:MODE must be set to STEP, and the trigger system must be initiated.
Command Syntax
Parameters
Default Suffix
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
[SOURce:]CURRent[:LEVel][:IMMediate][:AMPLitude] <Nrf+>, (@<channel list>)
[SOURce:]CURRent[:LEVel]:TRIGgered[:AMPLitude] <Nrf+>, (@<channel list>)
see table 6-3
A ( amperes)
0
CURR 0.0001 ,(@1) CURR:TRIG 0.0002,(@1)
[SOURce:]CURRent[:LEVel][:IMMediate][:AMPLitude]? (@<channel list>)
[SOURce:]CURRent[:LEVel]:TRIGgered[:AMPLitude]? (@<channel list>)
<NR3>
INIT CURR:MODE
[SOURce:]CURRent:LIMit[:IMMediate] [SOURce:]CURRent:LIMit:TRIGgered
These commands set the immediate and the pending triggered current limit of the dc source. They only
apply in voltage priority mode. The current limit setting applies to both the positive and negative current
limits. The pending triggered limit is a stored value that applies when a trigger occurs. To respond to a
trigger, the [SOUR:]CURR:LIM:MODE must be set to STEP, and the trigger system must be initiated.
Command Syntax
Parameters
Default Suffix
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
[SOURce:]CURRent:LIMit[:POSitive][:IMMediate] <Nrf+>, (@<channel list>)
[SOURce:]CURRent:LIMit[POSitive]:TRIGgered <Nrf+>, (@<channel list>)
see table 6-3
A ( amperes)
0.001
CURR:LIM 0.25,(@1) CURR:LIM:TRIG 0.35,(@1)
[SOURce:]CURRent:LIMit[:POSitive][:IMMediate]? (@<channel list>)
[SOURce:]CURRent:LIMit[POSitive]:TRIGgered? (@<channel list>)
<NR3>
INIT CURR:LIM:MODE
[SOURce:]CURRent:LIMit:BWIDth
This command configures the output compensation band of the current limit circuit. If capacitive loads
cause the output to oscillate, use this command to select a lower compenstion band. Note that if the
output is on, changing the compensation will cause the output to cycle OFF, then ON. The following
compensation bandwidths may be programmed: 30 kHz or 10 kHz.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
[SOURce:]CURRent:LIMit:BWIDth <Nrf>, (@<channel list>)
10000 | 30000
30000
CURR:LIM:BWID 10000,(@1)
[SOURce:]CURRent:LIMit:BWIDth? (@<channel list>)
<NR3>
65
Page 66

6 – Language Dictionary
[SOURce:]CURRent:MODE [SOURce:]CURRent:LIMit:MODE
These commands determine what happens to the output current and current limit during a triggered event.
FIXed
STEP
Command Syntax
Returned Parameters
The output current and output current limit is unaffected when a trigger occurs.
The output current is set by the CURR:TRIG value when a trigger occurs.
The current limit is set by the CURR:LIM:TRIG value when a trigger occurs.
[SOURce:]CURRent:MODE <mode>, (@<channel list>)
[SOURce:]CURRent:LIMit:MODE <mode>, (@<channel list>)
Parameters
*RST Value
Examples
Query Syntax
FIXed | STEP
FIXed
CURR:MODE FIX,(@1) CURR:LIM:MODE FIX,(@1)
[SOURce:]CURRent:MODE? (@<channel list>)
[SOURce:]CURRent:LIMit:MODE? (@<channel list>)
<CRD>
[SOURce:]DELay
This command sets the delay when [SOUR:]DEL:MODE is set to MANUAL. If an output is changed and
a subsequent measurement is requested, the measurement will be delayed to allow the output to settle.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
[SOURce:]DELay[:TIMe] <Nrf+>, (@<channel list>)
0 to 1000 (seconds)
0
DEL .001,(@1)
[SOURce:]DELay[:TIMe]? (@<channel list>)
<NR3>
[SOURce:]DELay:MODE
This command selects the source delay mode.
AUTO
MANual
Returned Parameters
66
The dc source selects an appropriate delay for the present output voltage or current
The delay programmed by [SOURce:] will be used as the delay.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
[SOURce:]DELay:MODE <mode>, (@<channel list>)
AUTO | MANual
AUTO
DEL:MODE AUTO,(@1)
[SOURce:]DELay:MODE? (@<channel list>)
<CRD>
Page 67

Language Dictionary - 6
[SOURce:]FUNCtion:MODE
This comand configures the output operating mode. Note that if the output is on, changing the output
mode will cause the output to cycle OFF, then ON.
VOLTage
CURRent
Returned Parameters
Configures the output for voltage priority operation
Configures the output for current priority operation
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
[SOURce:]FUNCtion:MODE <mode>,(@<channel list>)
VOLTage | CURRent
VOLT
FUNC:MODE VOLT,(@1)
[SOURce:]FUNC:MODE? (@<channel list>)
<CRD>
[SOURce:]VOLTage:ALC:BWIDth
This command configures the output compensation band for the voltage mode. If capacitive loads cause
the output to oscillate, use this command to select a lower compenstion band. Note that if the output is
on, changing the compensation will cause the output to cycle OFF, then ON. The following
compensation bandwidths may be programmed: 30 kHz, 20 kHz, or 10 kHz.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
[SOURce:]VOLTage:ALC:BWIDth <Nrf>, (@<channel list>)
10000 | 20000 | 30000
30000
VOLT:ALC:BWID 10000,(@1)
[SOURce:]VOLTage:ALC:BWIDth? (@<channel list>)
<NR3>
[SOURce:]VOLTage[:IMMediate] [SOURce:]VOLTage:TRIGgered
These commands set the immediate and the pending triggered voltage level of the dc source. The
immediate level is the voltage programmed for the output terminals. The pending triggered level is a
stored value that is transferred to the output terminals when a trigger occurs. To respond to a trigger, the
[SOUR:]VOLT:MODE must be set to STEP, and the trigger system must be initiated.
Command Syntax
Parameters
Default Suffix
*RST Value
Examples
Query Syntax
Returned Parameters
Related Commands
[SOURce:]VOLTage[:LEVel][:IMMediate][:AMPLitude]<NRf+>, (@<channel list>)
[SOURce:]VOLTage[:LEVel]:TRIGgered[:AMPLitude] <Nrf+>, (@<channel list>)
see table 6-3
V (volts)
0
VOLT 2.5,(@1) VOLT:TRIG 20,(@1)
[SOURce:]VOLTage[:LEVel][:IMMediate][:AMPLitude]? (@<channel list>)
[SOURce:]VOLTage[:LEVel]:TRIGgered[:AMPLitude]? (@<channel list>)
<NR3>
INIT VOLT:MODE
67
Page 68

6 – Language Dictionary
[SOURce:]VOLTage:MODE
This command determines what happens to the output voltage during a triggered event.
FIXed
STEP
Command Syntax
Query Syntax
Returned Parameters
Related Commands
The output voltage is unaffected when a trigger occurs.
The output voltage is programmed to the value set by VOLT:TRIG when a trigger occurs.
[SOURce:]VOLTage:MODE <mode>, (@<channel list>)
Parameters
*RST Value
Examples
FIXed | STEP
FIXed
VOLT:MODE FIX,(@1)
[SOURce:]VOLTage:MODE? (@<channel list>)
<CRD>
VOLT:TRIG
[SOURce:]VOLTage:PROTection:STATe
This command enables or disables the overvoltage protection (OVP) function. The command only
applies in voltage priority mode. When enabled, the output of the unit will shut down and the output
relays will open when the output voltage exceeds +11.5V (±0.3V), or −11.5V (±0.3V).
CAUTION: Disabling the overvoltage protection function may cause excessive output voltages, such
as can occur if remote sense leads are shorted, to damage the equipment under test.
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
Returned Parameters
[SOURce:]VOLTage:PROTection:STATe <bool>, (@<channel list>)
0 | OFF | 1 | ON
ON
VOLT:PROT:STAT 0,(@1)
[SOURce:]VOLTage:PROTection:STATe? (@<channel list>)
<NR1>0 or 1
68
Page 69

Language Dictionary - 6
Status Commands
Status commands program the dc source status registers. The dc source has three groups of status
registers; Operation, Questionable, and Standard Event. The Standard Event group is programmed with
Common commands as described later in this section. The Operation and Questionable status groups
each consist of the Condition, Enable, and Event registers and the NTR and PTR filters. Chapter 5
explains how to read specific register bits and use the information they return.
STATus:OPERation[:EVENt]?
This query returns the value of the Operation Event register. The Event register is a read-only register,
which stores (latches) all events that are passed by the Operation NTR and/or PTR filter. Reading the
Operation Event register clears it.
Query Syntax
Parameters
Returned Parameters
Examples
Related Commands
STATus:OPERtion[:EVENt]? (@<channel list>)
None
<NR1>(register value)
STAT:OPER? (@1)
*CLS STAT:OPER:NTR STAT:OPER:PTR
Table 6-4. Bit Configuration of Operation Status Registers
Bit Position
Bit Name
Bit Value
OFF =The selected output is off
VL- =The selected output is in negative voltage limit
VL+ =The selected output is in positive voltage limit
CC =The selected output is in constant current
6543210
OFF VL- VL+ CC CL- CL+ CV
64 32 16 8 4 2 1
CL- =The selected output is in negative current limit
1
CL+ =The selected output is in positive current limit
1
CV =The selected output is in constant voltage
1
1
Current priority mode only. 2Voltage priority mode only.
2
2
2
STATus:OPERation:CONDition?
This query returns the value of the Operation Condition register. That is a read-only register, which holds
the live (unlatched) operational status of the dc source.
Query Syntax
Parameters
Examples
Returned Parameters
STATus:OPERation:CONDition? (@<channel list>)
None
STAT:OPER:COND? (@1)
STATUS:OPERATION:CONDITION? (@1)
<NR1> (register value)
STATus:OPERation:ENABle
This command and its query set and read the value of the Operational Enable register. This register is a
mask for enabling specific bits from the Operation Event register to set the operation summary bit
(OPER) of the Status Byte register. This bit (bit 7) is the logical OR of all the Operatonal Event register
bits that are enabled by the Status Operation Enable register.
Command Syntax
Parameters
Preset Value
Examples
Query Syntax
Returned Parameters
Related Commands
STATus:OPERation:ENABle<NRf>,(@<channel list>)
0 to 32767
0
STAT:OPER:ENAB 1312,(@1)
STATus:OPERation:ENABle? (@<channel list>)
<NR1> (register value)
STAT:OPER?
69
Page 70

6 – Language Dictionary
STATus:OPERation:NTR STATus:OPERation:PTR
These commands set or read the value of the Operation NTR (Negative-Transition) and PTR (PositiveTransition) registers. These registers serve as polarity filters between the Operation Enable and
Operation Event registers to cause the following actions:
K When a bit in the Operation NTR register is set to 1, then a 1-to-0 transition of the corresponding bit
in the Operation Condition register causes that bit in the Operation Event register to be set.
K When a bit of the Operation PTR register is set to 1, then a 0-to-1 transition of the corresponding bit
in the Operation Condition register causes that bit in the Operation Event register to be set.
K If the same bits in both NTR and PTR registers are set to 1, then any transition of that bit at the
Operation Condition register sets the corresponding bit in the Operation Event register.
K If the same bits in both NTR and PTR registers are set to 0, then no transition of that bit at the
Operation Condition register can set the corresponding bit in the Operation Event register.
Command Syntax
STATus:OPERtion:NTRansition<NRf>, (@<channel list>)
STATus:OPERtion:PTRansition<NRf>, (@<channel list>)
Parameters
Preset Value
Examples
Query Syntax
0 to 32767
NTR register = 0; PTR register = 32767
STAT:OPER:NTR 32,(@1) STAT:OPER:PTR 1312,(@1)
STAT:OPER:NTR? (@<channel list>)
STAT:OPER:PTR? (@<channel list>)
Returned Parameters
<NR1> (register value)
STATus:PRESet
This command sets all defined bits in the Status Subsystem PTR registers and clears all bits in the
subsytem NTR and Enable registers.
Command Syntax
Parameters
Examples
STATus:PRESet
None
STAT:PRES STATUS:PRESET
STATus:QUEStionable[:EVENt]?
This query returns the value of the Questionable Event register. The Event register is a read-only register
that stores (latches) all events that are passed by the Questionable NTR and/or PTR filter. Reading the
Questionable Event register clears it.
Query Syntax
Parameters
Examples
Returned Parameters
Related Commands
STATus:QUEStionable[:EVENt]? (@<channel list>)
None
STAT:QUES? (@1)
<NR1> (register value)
*CLS STAT:QUES:ENAB STAT:QUES:NTR STAT:QUES:PTR
Table 6-5. Bit Configuration of Questionable Status Registers
Bit Position
Bit Name
Bit Value
Meas Ovld = The output measurement exceeded the
capability of the range
OSC = The oscillation protection has tripped
UNR = The output is unregulated
15 14 13 12 11 10 9-5 4 3 2 1 0
not
used
Meas
Ovld
16384 4096 1024 16 2 1
not
used
OSC not
70
used
UNR not
used
OT = The overtemperature protection has tripped
PCLR = No communication with the selected output
OV- = The negative overvoltage protection has tripped
OV+ = The positive overvoltage protection has tripped
OT not
used
PCLR OV- OV+
Page 71

Language Dictionary - 6
STATus:QUEStionable:CONDition?
This query returns the value of the Questionable Condition register. That is a read-only register, which
holds the real-time (unlatched) questionable status of the dc source.
Query Syntax
Parameters
Examples
Returned Parameters
STATus:QUEStionable:CONDition? (@<channel list>)
None
STAT:QUES:COND? (@1)
<NR1> (register value)
STATus:QUEStionable:ENABle
This command and its query set and read the value of the Questionable Enable register. This register is a
mask for enabling specific bits from the Questionable Event register to set the questionable summary bit
(QUES) of the Status Byte register. This bit (bit 3) is the logical OR of all the Questionable Event
register bits that are enabled by the Questionable Status Enable register..
Command Syntax
Parameters
Preset Value
Examples
Query Syntax
Returned Parameters
Related Commands
STATus:QUEStionable:ENABle<NRf>, (@<channel list>)
0 to 32767
0
STAT:QUES:ENAB 4096,(@1) !enables OSC
STATus:QUEStionable:ENABle? (@<channel list>)
<NR1> (register value)
STAT:QUES?
STATus:QUEStionable:NTR STATus:QUEStionable:PTR
These commands allow you to set or read the value of the Questionable NTR (Negative-Transition) and
PTR (Positive-Transition) registers. These registers serve as polarity filters between the Questionable
Enable and Questionable Event registers to cause the following actions:
K When a bit of the Questionable NTR register is set to 1, then a 1-to-0 transition of the corresponding
bit of the Questionable Condition register causes that bit in the Questionable Event register to be set.
K When a bit of the Questionable PTR register is set to 1, then a 0-to-1 transition of the corresponding
bit in the Questionable Condition register causes that bit in the Questionable Event register to be set.
K If the same bits in both NTR and PTR registers are set to 1, then any transition of that bit at the
Questionable Condition register sets the corresponding bit in the Questionable Event register.
K If the same bits in both NTR and PTR registers are set to 0, then no transition of that bit at the
Questionable Condition register can set the corresponding bit in the Questionable Event register.
Command Syntax
Parameters
Preset Value
Examples
Query Syntax
Returned Parameters
Related Commands
STATus:QUEStionable:NTRansition<NRf>, (@<channel list>)
STATus:QUEStionable:PTRansition<NRf>, (@<channel list>)
0 to 32767
NTR register = 0; PTR register = 32767
STAT:QUES:NTR 16,(@1) STAT:QUES:PTR 512,(@1)
STAT:QUES:NTR? (@<channel list>)
STAT:QUES:PTR? (@<channel list>)
<NR1>(Register value)
STAT:QUES:ENAB
71
Page 72

6 – Language Dictionary
System Commands
System commands control system functions that are not directly related to output control or measurement
functions.
SYSTem:ERRor?
This query returns the next error number followed by its corresponding error message string from the
remote programming error queue. The queue is a FIFO (first-in, first-out) buffer that stores errors as they
occur. As it is read, each error is removed from the queue. When all errors have been read, the query
returns 0,NO ERROR. If more errors are accumulated than the queue can hold, the last error in the queue
will be -350,TOO MANY ERRORS (see Appendix C for other error codes).
Query Syntax
Parameters
Returned Parameters
Examples
SYSTem:ERRor?
None
<NR1>,<SRD>
SYST:ERR?
SYSTem:VERSion?
This query returns the SCPI version number to which the instrument complies. The returned value is of
the form YYYY.V, where YYYY represents the year and V is the revision number for that year.
Query Syntax
Parameters
Returned Parameters
Examples
SYSTem:VERSion?
None
<NR2>
SYST:VERS?
72
Page 73

Language Dictionary - 6
Trigger Commands
Trigger commands consist of trigger and initiate commands.
Initiate commands initialize the trigger system.
Trigger commands control the remote triggering of the dc source. They are used to generate output and
measurement triggers.
NOTE: Before you generate a measurement trigger, you must specify either a voltage or current
measurement acquisition using the SENSe:FUNCtion command.
ABORt
This command cancels any trigger actions presently in process. Pending trigger levels are reset to their
corresponding immediate values. ABORt also resets the WTG bit in the status byte (see chapter 5 about
programming the status registers). ABORt is executed at power turn on and upon execution of *RST.
Command Syntax
Parameters
Examples
Related Commands
ABORt
None
ABOR
INIT *RST *TRG TRIG
INITiate:NAME
This command controls the enabling of both output and measurement triggers. When a trigger is enabled,
an event on a selected trigger source causes the specified triggering action to occur. If the trigger system
is not enabled, all triggers are ignored.
Command Syntax
Parameters
Examples
Related Commands
INITiate[:IMMediate]:NAME <name>
TRANsient | ACQuire
INIT:NAME TRAN
ABOR INIT:CONT TRIG *TRG
TRIGger:ACQuire
This command generates a measurement trigger. When the trigger system is initiated, the measurement
trigger causes the dc source to measure either the output voltage or current and store the results in a
buffer. The SENS:FUNC command determines which signal will be measured.
Command Syntax
Parameters
Examples
Related Commands
TRIGger:ACQuire[:IMMediate]
None
TRIG TRIG:IMM
ABOR INIT *TRG SENS:FUNC
73
Page 74

6 – Language Dictionary
TRIGger:ACQuire:SOURce
This command selects the trigger source for the measurement trigger system.
EXT
BUS
Returned Parameters
External trigger input signal
GPIB device, *TRG, or <GET> (Group Execute Trigger)
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
TRIGger:ACQuire:SOURce <source>
BUS | EXTernal
BUS
TRIG:ACQ:SOUR EXT
TRIGger:ACQuire:SOURce?
<CRD>
TRIGger[:TRANsient]:SOURce
This command selects the trigger source for the output trigger system.
EXTernal
BUS
Returned Parameters
External trigger input signal
GPIB device, *TRG, or <GET> (Group Execute Trigger)
Command Syntax
Parameters
*RST Value
Examples
Query Syntax
TRIGger[:TRANsient]:SOURce <source>
BUS | EXTernal
BUS
TRIG:SOUR EXT
TRIGger[:TRANsient]:SOURce?
<CRD>
TRIGger[:TRANsient]
This command generates an output trigger. Output triggers affect the following functions: voltage,
current, and current limit. To program an output trigger you must specify a trigger level for the selected
function, set the selected function to STEP mode, and initiate the trigger system.
Once these conditions are met, the output trigger will:
1. Initiate a pending level change as specified by [SOURce;]CURRent:TRIGgered,
[SOURce;]CURRent:LIMit:TRIGgered, or [SOURce;]VOLTage:TRIGgered.
2. Clear the WTG bit in the Status Operation Condition register after both transient and acquire trigger
sequences have completed. (WTG is the logical-or of both transient and acquire sequences.)
Command Syntax
Parameters
Examples
Related Commands
74
TRIGger[:TRANsient][:IMMediate]
None
TRIG TRIG:IMM
ABOR INIT *TRG VOLT:TRIG CURR:TRIG
CURR:LIM:TRIG CURR:MODE CURR:LIM:MODE
VOLT:MODE
Page 75

Language Dictionary - 6
Common Commands
*CLS
This command causes the following actions (see chapter 5 for the descriptions of all registers):
K Clears the Standard Event Status, Operation Status Event, and Questionable Status Event registers
K Clears the Status Byte and the Error Queue
K If *CLS immediately follows a program message terminator (<NL>), then the output queue and the
MAV bit are also cleared.
Command Syntax
Parameters
*CLS
None
*ESE
This command programs the Standard Event Status Enable register bits. The programming determines
which events of the Standard Event Status Event register (see *ESR?) are allowed to set the ESB (Event
Summary Bit) of the Status Byte register. A "1" in the bit position enables the corresponding event. All
of the enabled events of the Standard Event Status Event Register are logically ORed to cause the Event
Summary Bit (ESB) of the Status Byte Register to be set. The query reads the Standard Event The query
reads the Standard Event Status Enable register.
Table 6-6. Bit Configuration of Standard Event Status Enable Register
Bit Position 7 6 5 4 3 2 1 0
Bit Name PON 0 CME EXE DDE QUE 0 OPC
Bit Weight 128 64 32 16 8 4 2 1
PON = Power-on has occurred
CME = Command error
EXE = Execution error
Command Syntax
Parameters
Power-On Value
Examples
Query Syntax
Returned Parameters
Related Commands
*ESE <NRf>
0 to 255
0
*ESE 129
*ESE?
<NR1> (register value)
*ESR? *PSC *STB?
DDE = Device-dependent error
QUE = Query error
OPC = Operation complete
*ESR?
This query reads the Standard Event Status Event register. Reading the register clears it. The bit
configuration is the same as the Standard Event Status Enable register (see *ESE).
Query Syntax
Parameters
Returned Parameters
Related Commands
*ESR?
None
<NR1> (register binary value)
*CLS *ESE *ESE? *OPC
75
Page 76

6 – Language Dictionary
*IDN?
This query requests the dc source to identify itself. It returns a string composed of four fields separated
by commas.
Query Syntax
Returned Parameters
Example
*IDN?
<AARD> Field Information
Agilent Technologies Manufacturer
xxxxxA model number followed by a letter suffix
0 zero or the unit's serial number if available
<A>.xx.xx Revision levels of firmware.
AGILENT TECHNOLOGIES,N3280A,0,A.00.01
*OPC
This command causes the instrument to set the OPC bit (bit 0) of the Standard Event Status register when
the dc source has completed all pending operations. (See *ESE for the bit configuration of the Standard
Event Status register.) Pending operations are complete when:
K all commands sent before *OPC have been executed. This includes overlapped commands. Most
commands are sequential and are completed before the next command is executed. Overlapped
commands are executed in parallel with other commands. Commands that affect output voltage,
current or state, relays, and trigger actions are overlapped with subsequent commands sent to the dc
source. The *OPC command provides notification that all overlapped commands have been
completed.
K all triggered actions are completed
*OPC does not prevent processing of subsequent commands, but bit 0 will not be set until all pending
operations are completed.
*OPC? causes the instrument to place an ASCII "1" in the Output Queue when all pending operations are
completed. Unlike *OPC, *OPC? prevents processing of all subsequent commands. It is intended to be
used at the end of a command line so that the application program can then monitor the bus for data until
it receives the "1" from the dc source Output Queue.
Command Syntax
Parameters
Query Syntax
Returned Parameters
Related Commands
*OPC
None
*OPC?
<NR1> 1
*OPC *TRIG *WAI
*OPT?
This query requests the dc source to identify any options that are installed. Options are identified by
number. A 0 indicates no options are installed.
Query Syntax
Returned Parameters
*OPT?
<AARD>
76
Page 77

Language Dictionary - 6
*RST
This command resets the dc source to a factory-defined state as defined in the following table. *RST also
forces an ABORt command.
Table 6-7. *RST Settings
CAL:STAT OFF [SOUR:]CURR:LIM
OUTP OFF [SOUR:]CURR:LIM:TRIG
OUTP:OSCP ON [SOUR:]CURR:LIM:BWID 30000
SENS:CURR:RANG .5 [SOUR:]CURR:LIM:MODE FIXed
SENS:FUNC VOLT [SOUR:]FUNC:MODE VOLT
SENS:SWE:NPLC .00912 (60 Hz); [SOUR:]DEL 0
.0076 (50 Hz) [SOUR:]DEL:MODE AUTO
SENS:SWE:POIN 5 [SOUR:]VOLT:ALC:BWID 30000
SENS:SWE:OFFS:POIN 0 [SOUR:]VOLT 0
SENS:SWE:TINT
SENS:WIND RECTangular [SOUR:]VOLT:MODE FIXed
[SOUR:]CURR 0 [SOUR:]VOLT:PROT:STAT ON
[SOUR:]CURR:TRIG 0 TRIG:ACQ:SOUR BUS
[SOUR:]CURR:MODE FIXed TRIG:SOUR BUS
30.4E
−6
[SOUR:]VOLT:TRIG 0
1E
1E
−3
−3
Command Syntax
Parameters
*RST
None
*SRE
This command sets the condition of the Service Request Enable Register. This register determines which
bits from the Status Byte Register (see *STB for its bit configuration) are allowed to set the Master
Status Summary (MSS) bit and the Request for Service (RQS) summary bit. A 1 in any Service Request
Enable Register bit position enables the corresponding Status Byte Register bit and all such enabled bits
then are logically ORed to cause Bit 6 of the Status Byte Register to be set.
When the controller conducts a serial poll in response to SRQ, the RQS bit is cleared, but the MSS bit is
not. When *SRE is cleared (by programming it with 0), the dc source cannot generate an SRQ to the
controller. The query returns the current state of *SRE.
Command Syntax
Parameters
Power-on Value
Example
Query Syntax
Returned Parameters
Related Commands
*SRE <NRf>
0 to 255
0
*SRE 20
*SRE?
<NR1> (register binary value)
*ESE *ESR
*STB?
This query reads the Status Byte register, which contains the status summary bits and the Output Queue
MAV bit. Reading the Status Byte register does not clear it. The input summary bits are cleared when
the appropriate event registers are read. The MAV bit is cleared at power-on, by *CLS' or when there is
no more response data available.
A serial poll also returns the value of the Status Byte register, except that bit 6 returns Request for
Service (RQS) instead of Master Status Summary (MSS). A serial poll clears RQS, but not MSS. When
MSS is set, it indicates that the dc source has one or more reasons for requesting service.
77
Page 78

6 – Language Dictionary
Table 6-8. Bit Configuration of Status Byte Register
Bit Position 7 6 5 4 3 2 1 0
Bit Name OPER MSS
ESB MAV QUES WTG 0 0
(RQS)
Bit Value 128 64 32 16 8 4 2 1
OPER = Operation status summary
MSS = Master status summary
(RQS) = Request for service
ESB = Event status byte summary
MAV = Message available
QUES = Questionable status summary
WAI = Waiting for a trigger
Query Syntax
Returned Parameters
*STB?
<NR1> (register binary value)
*TRG
This common command generates a trigger when the trigger subsystem has BUS selected as its source.
The command has the same affect as the Group Execute Trigger (<GET>) command.
Command Syntax
Parameters
Related Commands
*TRG
None
ABOR INIT TRIG[:IMM] <GET>
*TST?
This query causes the dc source to do a self-test and report any errors. 0 indicates that the dc source
passed self-test. 1 indicates that one or more tests failed. Selftest errors are written to the error queue (see
Appendix C).
Query Syntax
Returned Parameters
TST?
<NR1>
*WAI
This command instructs the dc source not to process any further commands until all pending operations
are completed. "Pending operations" are as defined under the *OPC command. *WAI can be aborted
only by sending the dc source an GPIB DCL (Device Clear) command.
Command Syntax
Parameters
Related Commands
78
*WAI
None
*OPC* OPC?
Page 79

A
Specifications
Introduction
Table A-1 lists the specifications of the dc source. Unless otherwise noted, specifications are warranted
at 25°C ± 5°C after a 30-minute warm-up period. Sense terminals must be connected to their respective
output terminals.
Table A-1. Specifications
Parameter Voltage Priority Current Priority
Output Ratings
(refer to derating
characteristic)
Programming Accuracy
Readback Accuracy
1
0.5A Curr. Range:
15mA Curr. Range:
0.5mA Curr. Range:
Ripple and Noise
(In the range of
20 Hz to 20 MHz )
±Current Limit (rms)3:
Load Effect
(Change from no load to full
load or full load to no load
by varying a resistive load)
Source Effect
(change in output voltage or
current for any line change
within ratings)
Output Transient
Voltage (@ 10kHz)5:
Response
1
Voltage accuracy specification in voltage priority mode guaranteed between –10.25V to +10.25V. 0.5A current range accuracy specification
in voltage priority mode guaranteed between –0.5125A and +0.5125A. Readback for Voltage, 0.5A, and 15mA current ranges is based on
capturing 5 data points at intervals of 30.4µs and averaging the readings. Readback for 0.5mA current range is based on averaging the readings
over 1 power line cycle (60 Hz = 548 points @ 30.4µs). The default setting for all readback ranges is the average of 5 data points 30.4µs apart.
2
Program Vset to ±10V using a 20 ohm load resistor.
3
Program current to +500mA using a 20 ohm load resistor. Program Vset to ±10.25V.
4
Program current to ±0.5mA using a 16K ohm load resistor.
5
Measured with a 10uF output capacitor with 0.2 ohm ESR across the output with the current limit set to +0.5125A. The load current rise time
is approximately 10us for a current change of 0.25Ato 0.5A or 0.5A to 0.25A. Measure the output voltage recovery time to within 40mV of its
final value.
6
Measured following a voltage change of –1V to +1V or +1V to –1V with approximately 25us time constant with the current priority current
level set to 0uA. Measure the output current recovery time to within ±1mA of its final value.
Voltage:
Current:
Voltage
+ Current Limit:
- Current Limit:
Current:
Voltage:
Voltage (rms)2:
Voltage (p-p)2:
Current (rms)4:
Voltage:
+ Current Limit:
- Current Limit:
Current:
Voltage:
+ Current Limit:
- Current Limit:
Current:
(@ 20kHz):
(@ 30kHz):
Current6:
-10.25V to +10.25V
- 0.5125A to +0.5125A
0.1%±2mV
0.1%±50µA
0.1%±50µA
N/A
0.1%±2mV (5 points)
0.1%±200µA (5 points)
0.1%±5µA (5 points)
0.1%±200nA (1 PLC)
0.380mV
4mV
40µA
N/A
±400µV
±30µA
±30µA
N/A
±200µV
±10µA
±10µA
N/A
60µs
45µs
35µs
N/A
-8V to +8V (min. with full resistive load)
-11.25V to +11.25V (max. with no load)
- 0.5125 mA to +0.5125 mA
N/A
N/A
N/A
0.1%±1µA
0.1%±2mV (5 points)
0.1%±200nA ( 1 PLC)
0.1%±200nA ( 1 PLC)
0.1%±200nA ( 1 PLC)
N/A
N/A
N/A
1.5µA
N/A
N/A
N/A
±25nA
N/A
N/A
N/A
±10nA
N/A
N/A
N/A
90µs
79
Page 80

A - Specifications
Table A-2 lists the supplemental characteristics, which are not warranted but are descriptions of typical
performance determined either by design or type testing.
Table A-2 Supplemental Characteristics
Parameter Voltage Priority Current Priority
Output Programming
Limits
+ Current Limit
Programming
Resolution
Programming
Accuracy
Temperature
Coefficients
Bandwidth Voltage
+/-Current Limit
Typical Output
Readback Ranges
0.5A Curr. Range:
15mA Curr. Range:
0.5mA Curr. Range:
Readback
Resolution
0.5A Curr. Range:
15mA Curr. Range:
0.5mA Curr. Range:
Readback
Accuracy
Temperature
Coefficient
DC Readback speed
(with no change on the
output)
4
0.5A Curr. Range:
15mA Curr. Range:
0.5mA Curr. Range:
0.5A Curr. Range:
15mA Curr. Range:
0.5mA Curr. Range:
Voltage:
- Current Limit:
Current:
Voltage:
+ Current Limit:
- Current Limit:
Current:
Voltage:
+ Current Limit:
- Current Limit:
Current:
Voltage:
Voltage:
Voltage:
Voltage:
1
:
2
:
3
:
Peak Current Limit
(not programmable)
CV to CL mode
crossover
Voltage Programming
Settling Time
5
6
Programming Output
Rise Time
1 If current limit is programmed less than 75uA, the current limit will be set to 75µA (no error will be generated).
2
Approximate voltage loop bandwidth with no external capacitor.
3
Approximate current limit circuit bandwidth with output shorted.
4
Time from the start of bus communication to final byte returned on bus. Assumes the default of 5 data points 30.4µs apart.
5
With any voltage bandwidth setting, and 30kHz current limit bandwidth setting.
6 With a 20 ohm load resistor and current limit set to +0.5125A, program voltage 0V to ±10V. Measure time for voltage to settle
within 20mV of final value.
7
With 20 ohm load resistor and current limit set to +0.5125A, program voltage from 0V to ±10V.
8
With 20 ohm load resistor and voltage set to 10.25V, program current limit from 0A to 0.5A.
9
With 20 ohm load resistor and voltage set to –10.25V, program current limit from 0A to 0.5A.
10
With 1k load resistor, program current from –0.5mA to +0.5mA. Measure time from –0.4mA to +0.4mA.
Vset = ±5V, Curr. Limit = 0.5125A:
Vset = ±10V, Curr. Limit = 0.1A:
Voltage (to within 20mV@10kHz):
Voltage (to within 20mV@30kHz):
Voltage7(10% to 90% @10kHz):
+Curr. Lim
-Curr. Lim
Current
8
(10% to 90%):
9
(10% to 90%):
10
(-80% to +80%):
-10.25V to 10.25V
75µA
to 0.5125A
tracks + Current Limit
N/A
16 bits / 312µV
16 bits / 8µA
16 bits / 8µA
N/A
90 ppm + 80µV
110 ppm + 5µA
110 ppm + 5µA
N/A
10kHz; 20kHz; 30kHz
10kHz; 30kHz
-13.25V to +13.25V
-0.6A to +0.6A
-15.375mA to +15.375mA
-0.5125mA to +0.5125mA
16 bits / 312µV
16 bits / 18µA
16 bits / 460nA
16 bits / 16nA
70 ppm + 100µV
60 ppm + 5µA
40 ppm + 40nA
30 ppm + 2nA
1.3ms (5 points)
1.3ms (5 points)
1.3ms (5 points)
1.3ms (5 points)
±1.3A (typical) ±5mA (typical)
±1A for 200µs (typical)
±0.2A for 600µs (typical)
420µs
350µs
150µs
450µs
450µs
N/A
- 0.5125mA to +0.5125mA
16 bits / 16nA
70 ppm + 30nA
-13.25V to +13.25V
-0.5125mA to +0.5125mA
-0.5125mA to +0.5125mA
-0.5125mA to +0.5125mA
16 bits / 312µV
16 bits / 16nA
16 bits / 16nA
16 bits / 16nA
70 ppm + 100µV
30 ppm + 2nA
30 ppm + 2nA
30 ppm + 2nA
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
N/A
160
µs
80
Page 81

Specifications - A
Table A-2 Supplemental Characteristics (continued)
Parameter Voltage Priority Current Priority
Programming Output
Fall Time
Maximum Output
Cable Impedance
Overvoltage Protection
15
Output Common Mode
Current
16
Trigger in
Trigger latency
GPIB Interface
Capabilities
Output Derating
Output Disconnect
Altitude Derating
Secondary Isolation
RFI
Safety
Regulatory Compliance
Calibration Interval
Dimensions
Weight
Input
Voltage11 (90% to 10%
@10kHz):
+Curr Lim
-Curr Lim
Current
(shorting either Hi or Low
12
(90% to 10%):
13
(90% to 10%):
14
(-80% to +80%):
Lead R:
Lead L:
Positive:
Negative:
terminal to the chassis)
Up to 7500 feet:
> 7500 feet up to 15000
feet:
To Chassis:
Output to Output:
Listing pending:
Certified to:
Conforms to:
Complies with:
Height:
Width:
Depth:
Shipping:
Net:
150µs
450µs
450µs
N/A
1Ω
10µH
+11.5V ±0.3V
-11.5V ±0.3V
<2µA rms
Chassis ground referenced TTL levels.
30µs maximum
AH1, C0, DC1, DT1, E1,
L4, PP0, RL1, SH1, SR1, T6
Full current to 40° C.
Linearly derated to 50% of full current at 55° C.
Accomplished via solid state disconnect relays.
Output impedance in open state is approximately 100K
Full current @40° C.
Derated by 1.1 degrees C for every additional 1000 feet
±50V
±100V
Level A
UL, CSA, CE
UL 3111-1
CSA 22.2 No. 1010.1
IEC 1010-1, EN 61010-1
EMC directive 89/336/EEC (ISM group 1 Class A)
1 Year
3.5” (88.9 mm)
8 3/8” (212.7 mm)
19.6” (497.8 mm)
26 lbs (11.8 kg)
22 lbs (10 kg)
RMS Input
Current
Peak Inrush
current
Voltage Range Line Fuse Typ. Max. Typ. Max. Typ. Max.
100 Vac (87-106 Vac):
120 Vac (104-127 Vac):
220 Vac (191-233 Vac):
230 Vac (207-253 Vac):
3.15AT
3.15AT
1.6AT
1.6AT
1.75A
1.4A
0.8A
0.7A
1.85A
1.55A
0.90A
0.80A
56A
48A
34A
32A
60A
53A
40A
36A
N/A
N/A
N/A
160µs
100µH
N/A
Full Load
Input Power
130W
130W
130W
130W
140W
140W
140W
140W
11
With no load and current limit set to +0.5125A, program voltage from ±10V to 0V.
12
With 20 ohm load resistor and voltage set to 10.25V, program current limit from 0.5A to 0A.
13
With 20 ohm load resistor and voltage set to –10.25V program current limit from 0.5A to 0A.
14
With 1k load resistor, program current from +0.5mA to –0.5mA. Measure time from +0.4mA to –0.4mA.
15
Output is shut down and output relays are opened
16
Measurement taken with ammeter having approx. 1k shunt resistance and 10Hz to 1kHz bandwidth. Input ac is 120V, 60Hz.
81
Page 82

A - Specifications
OUTPUT IMPEDANCE (ohms)
OUTPUT IMPEDANCE (ohms)
8
4
2
1
0.5
0.25
0.125
8
4
2
1
0.5
0.25
0.125
Phase
e
d
u
t
i
n
g
a
M
1k 10k 100k 1M
FREQUENCY (Hz)
VOLTAGE PRIORITY (bandwidth = 30kHz)
Phase
e
d
u
t
i
n
g
a
M
-45
-90
-45
-90
o
90
o
45
-45
-90
o
0
o
o
PHASE (degrees)
128
64
o
90
32
o
45
o
16
0
o
8
o
4
2
1
1k
Phase
M
a
g
n
i
t
u
d
e
10k 100k 1M
FREQUENCY (Hz)
CURRENT LIMIT (bandwidth = 30kHz)
o
90
o
45
o
0
64
o
90
32
o
45
o
16
0
o
8
4
o
2
Phase
M
a
g
n
i
t
u
d
e
1
-45
-90
o
o
PHASE (degrees)
OUTPUT IMPEDANCE (ohms)
8
4
2
1
0.5
0.25
0.125
1k 10k 100k 1M
FREQUENCY (Hz)
VOLTAGE PRIORITY (bandwidth = 20kHz)
Phase
e
d
u
t
i
n
g
a
M
1k 10k 100k 1M
FREQUENCY (Hz)
VOLTAGE PRIORITY (bandwidth = 10kHz)
Figure A-1. Output Impedance Graphs (all outputs)
-45
-90
1k
10k 100k
1M
FREQUENCY (Hz)
CURRENT LIMIT (bandwidth = 10kHz)
o
90
32k
16k
o
8k
90
o
4k
45
o
2k
0
o
1k
o
500
M
Phase
a
g
n
i
t
u
d
e
250
45
-45
-90
o
o
0
o
o
PHASE (degrees)
125
62.5
1k
10k 100k
FREQUENCY (Hz)
CURRENT PRIORITY MODE
82
Page 83

Performance Tests and Calibration
Introduction
This appendix contains test procedures to verify that the dc source is operating normally and is within
published specifications. There are three types of tests as follows:
B
Built-in Self Tests
Turn on Checkout
Calibration Verification
/Performance Tests
If the dc source fails any of the tests or if abnormal test results are obtained after performing a
calibration, return the unit to an Agilent Technologies repair facility.
This appendix also includes calibration procedures for the Agilent N3280A. Instructions are given for
performing the procedures from a controller over the GPIB.
IMPORTANT: Perform the Programming Accuracy and Readback Accuracy tests before calibrating
your dc source. If the dc source passes the Programming Accuracy and Readback
Accuracy tests, the unit is operating within its calibration limits and does not need to be
re-calibrated.
These tests run automatically when the dc source is turned on. They
check most of the digital circuits and the programming and readback
DACs.
These tests, described in chapter four, provide a high degree of
confidence that your unit is operating properly.
These tests, documented in this appendix, verify that the dc source is
properly calibrated, and that the dc source meets all of the specifications
listed in Appendix A
Equipment Required
The equipment listed in the following table, or the equivalent to this equipment, is required for the
calibration and performance tests. A test record sheet with specification limits (when test using the
recommended test equipment) may be found at the back of this section.
Table B-1. Equipment Required
Type Specifications Recommended Model
Digital multimeter Resolution: 10nV @ 1V; Readout: 8 1/2
digits; Accuracy: 20 ppm
Electronic load 20 V, 5A minimum, with transient capability
and a a slew rate of 0.833A/µs or better.
GPIB controller Full GPIB capabilities (only required if you
are calibrating the unit over the GPIB)
Agilent 3458A or
equivalent
Agilent N3300A
mainframe, with N3303A
module 6063A/B
HP Series 200/300 or PC
with GPIB capability
83
Page 84

B - Performance and Calibration Procedures
Table B-1. Equipment Required (continued)
Oscilloscope Sensitivity: 1 mV/div.
Bandwidth Limit: 20 to 30 MHz
Probe: 1:1 with RF tip
RMS voltmeter True RMS
Bandwidth: 20 Mhz min.
Sensitivity: 100 µV
Variable-voltage transformer
or ac source
Tektronixs current probe
amplifier and power module
Pulse/function generator +/- 1V Square Wave , 400-1kHz Agilent 8116A
Load resistor, 20 ohms 20 ohm 10W 0811-3896 or equivalent
Resistor 0.2 ohm 5- 1 ohm resistors in parallel 5 – 0699-0208 or equivalent
Resistor 1k ohm 1k ohm for 15mA range accuracy 0757-0280 or equivalent
Resistor 20K ohm 20k ohm for 0.5mA range accuracy 0757-0449 or equivalent
Resistor 16k ohm 16.2k ohm for rms noise measurements 0757-0447 or equivalent
Resistor 50 ohm 50 ohm series resistor for noise
Adjustable to highest rated input voltage
range. Power: 500 VA
20mA/div AM503B
measurements
Agilent Infinium or
equivalent
Rhode & Schwartz
Model URE3 RMS-P-P
Voltmeter
Agilent 6800 series
TM501 or 2A
0757-0706 or equivalent
Capacitor 10uF for voltage
transient response
Capacitor for current
transient response
3- 3.3uF film type capacitors in parallel 3 – 0160-7308 or equivalent
0.47uF film type capacitor 1060-0970 or equivalent
Performance & Verification Tests
Enter all of the performance test results and calculated measurements in the Performance Test Record
Form that is provided at the end of this section.
Measurement Techniques
If more than one meter or if a meter and an oscilloscope are used, connect each to the terminals by a
separate pair of leads to avoid mutual coupling effects. For constant voltage dc tests, connect only to HI
sense and LO sense terminals, since the unit regulates the voltage that appears at the sense terminals, not
the output terminals. Use twisted-pair wiring to avoid noise pickup on the test leads.
NOTE: When using the Agilent 3458A as an ammeter, always select the specific current measurement
range that you will be using. Do not use the autoranging feature of the ammeter, as this may
introduce noise in your current measurements by toggling between measurement ranges.
Always use the lowest range possible to provide the best measurement accuracy.
84
Page 85

Performance and Calibration Procedures
Electronic Load
Many of the test procedures require the use of a variable load capable of dissipating the required power.
For most tests, an electronic load is considerably easier to use than load resistors, but it may not be fast
enough to test transient recovery time and may be too noisy for the noise (PARD) tests.
NOTE: When using an electronic load with a bi-polar dc source, be sure to reverse the polarity
of the load connections to match the appropriate polarity.
Fixed load resistors may be used in place of a variable load, with minor changes to the test procedures. If
resistors are used, switches should also used to connect, disconnect, or short the load resistors.
Programming
You can only program the dc source from a GPIB controller when performing the tests. The test
procedures are written assuming that you know how to program the dc source remotely from an GPIB
controller. Also, when performing the verification tests from a GPIB controller, you may have to
consider the relatively slow settling times and slew rates of the dc source as compared to computer and
system voltmeters. Suitable WAIT statements can be inserted into the test program to give the dc source
time to respond to the test commands.
Test Setup
OUTPUT 1 MATING PLUG SHOWN
A.
Hsen Hi Lo Lsen
Hsen Hi Lo Lsen
I
or
or
Scope
-+
DC voltmeter
DC ammeter
50
Current
Probe
(optional)
Hsen Hi Lo Lsen
+
DC voltmeter
B.
Hsen Hi Lo Lsen
I
Electronic
Load
Hsen Hi Lo Lsen
-
DC ammeter
C
Hsen Hi Lo Lsen
-+
Current
Probe
I
-+
Scope
-+
F
Function
Generator
-+
-+
Scope
or
RMS meter
D
E
Figure B-1. Verification and Calibration Test Setup
85
Page 86

B - Performance and Calibration Procedures
Voltage Priority Tests
Voltage Programming and Readback Accuracy
These tests verify that the voltage programming and GPIB readback functions are within specifications.
Action Program Commands
1. Reset the dc source and connect a DVM as shown in Figure B-1a.
Connect the DVM directly across the HI and LO sense terminals.
(*RST resets the dc source to its default settings with the output off.)
2. Turn on the dc source and program the current limit to 0.5125A.
Measure the output voltage and current.
3. Set the DVM to the 10V range, and record the output voltage reading.
The DVM reading and measurement query result should be within the
limits specified in the performance test record card under Voltage
Priority Programming Accuracy @0V and Readback Accuracy @0V.
(The current measurement query result should be approximately zero.)
4. Program the output voltage to full-scale positive output. Measure the
output voltage.
“*RST”
“OUTP ON,(@1)”
“CURR:LIM 0.5125,(@1)”
“MEAS:VOLT? (@1)”
“MEAS:CURR? (@1)”
“VOLT 10,(@1)”
“MEAS:VOLT? (@1)”
5. Record the output voltage reading on the DVM. The DVM reading
should be within the limits specified in the test record card under
Voltage Priority Programming Accuracy @ +10V. The
between the DVM reading and the measurement query result should
be within the limits specified under Readback Accuracy @ +10V.
6. Program the output voltage to full-scale negative output. Measure the
output voltage.
7. Record the output voltage reading on the DVM. The DVM reading
should be within the limits specified in the test record card under
Voltage Priority Programming Accuracy @
between the DVM reading and the measurement query result should
be within the limits specified under Readback Accuracy @
-10V. The difference
difference
“VOLT -10,(@1)”
“MEAS:VOLT? (@1)”
-10V.
Positive Current Limit (+CL)
Action Program Commands
1. Reset the dc source and connect an ammeter directly across the HI and
LO terminals as shown in Figure B-1a.
(*RST resets the dc source to its default settings with the output off.)
2. Turn on the dc source and program the output voltage to 10 volts.
(The default output current limit is set to 1mA.)
3. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The ammeter reading should be within the
limits specified in the performance test record card under Voltage
Priority Programming Accuracy + 1mA Current limit.
4. Program the output current limit to 0.5A. Measure the output current.
“*RST”
“OUTP ON,(@1)”
“VOLT 10,(@1)”
“CURR:LIM 0.5,(@1)”
“MEAS:CURR? (@1)”
86
Page 87

Performance and Calibration Procedures
5. Set the ammeter to the 1A range, and record the output current
reading on the ammeter. The ammeter reading should be within the
limits specified in the test record card under Voltage Priority
Programming Accuracy + 0.5A Current limit. The
the ammeter reading and the measurement query result should be
within the limits specified under Readback Accuracy + 0.5A current.
6. Turn off the output and connect a 1k ohm resistor in series with the
ammeter across the output as shown in Figure B-1c. You do not need
a shorting switch.
7.
Turn on the output and program the
Measure the output current.
8. Set the ammeter to the 10mA range, and record the output current
reading on the ammeter. The
and the measurement query result should be within the limits specified
Readback Accuracy +15mA Current Limit.
9. Turn off the output and connect a 20k ohm resistor in series with the
ammeter across the output as shown in Figure B-1c. You do not need
a shorting switch.
10.
Turn on the output and program the
Measure the output current.
15mA current readback range.
difference between the ammeter reading
0.5mA current readback range.
difference between
“OUTP OFF,(@1)”
“OUTP ON,(@1)”
“SENS:CURR:RANG 0.015,(@1)”
“MEAS:CURR? (@1)”
“OUTP OFF,(@1)”
“OUTP ON,(@1)”
“SENS:CURR:RANG 0.0005,(@1)”
“MEAS:CURR? (@1)”
11. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The
and the measurement query result should be within the limits specified
Readback Accuracy +0.5mA Current Limit.
difference between the ammeter reading
Negative Current Limit (-CL)
Action Program Commands
1. Reset the dc source and connect an ammeter directly across the HI and
LO terminals as shown in Figure B-1a.
(*RST resets the dc source to its default settings with the output off.)
2.
Turn on the dc source and program the output voltage to
(The default output current limit is set to 1mA.)
3. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The ammeter reading should be within the
limits specified in the performance test record card under Voltage
Priority Programming Accuracy
4. Program the output current limit to 0.5A. Measure the output current.
5. Set the ammeter to the 1A range, and record the output current
reading on the ammeter. The ammeter reading should be within the
limits specified in the test record card under Voltage Priority
Programming Accuracy
the ammeter reading and the measurement query result should be
within the limits specified under Readback Accuracy
6. Turn off the output and connect a 1k ohm resistor in series with the
ammeter across the output as shown in Figure B-1c. You do not need
a shorting switch.
−0.5A Current limit. The difference between
−1mA Current limit.
−10 volts.
−0.5A current.
“*RST”
“OUTP ON,(@1)”
“VOLT −10,(@1)”
“CURR:LIM 0.5,(@1)”
“MEAS:CURR? (@1)”
“OUTP OFF,(@1)”
87
Page 88

B - Performance and Calibration Procedures
7.
Turn on the output and program the
Measure the output current.
8. Set the ammeter to the 10mA range, and record the output current
reading on the ammeter. The
and the measurement query result should be within the limits specified
Readback Accuracy
9. Turn off the output and connect a 20k ohm resistor in series with the
ammeter across the output as shown in Figure B-1c. You do not need
a shorting switch.
10.
Turn on the output and program the
Measure the output current.
11. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The
and the measurement query result should be within the limits specified
Readback Accuracy
−15mA Current Limit.
−0.5mA Current Limit.
15mA current readback range.
difference between the ammeter reading
0.5mA current readback range.
difference between the ammeter reading
Current Priority Tests
Current Programming and Readback Accuracy
“OUTP ON,(@1)”
“SENS:CURR:RANG 0.015,(@1)”
“MEAS:CURR? (@1)”
“OUTP OFF,(@1)”
“OUTP ON,(@1)”
“SENS:CURR:RANG 0.0005,(@1)”
“MEAS:CURR? (@1)”
NOTE: The voltage limits in Current Priority Mode are not programmable.
Action Program Commands
1. Reset the dc source and connect an ammeter directly across the HI and
LO terminals as shown in Figure B-1a.
(*RST resets the dc source to its default settings with the output off.)
2. Turn on the dc source and program the Current Priority mode.
(The default output current is set to 0A.)
3.
Set the ammeter to the 1
reading on the ammeter. The reading should be within the limits
specified in the performance test record card under Current Priority
Programming Accuracy @ 0A.
4. Program the output current to 0.5mA. Measure the output current.
5. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The reading should be within the limits
specified in the performance test record card under Current Priority
Programming Accuracy @ 0.5mA.
6.
Program the output current to
7. Set the ammeter to the 1mA range, and record the output current
reading on the ammeter. The reading should be within the limits
specified in the performance test record card under Current Priority
Programming Accuracy @
µA range, and record the output current
−0.5mA. Measure the output current.
−0.5mA.
“*RST”
“OUTP ON,(@1)”
“SOUR:FUNC:MODE CURR,(@1)”
“CURR 0.0005,(@1)”
“CURR -0.0005,(@1)”
88
Page 89

Performance and Calibration Procedures
Load Effect Tests
The following tests verify the dc regulation of the output voltage and current. To insure that the values
read are truly dc and not affected by output ripple, several dc measurements should be made and the
average of these readings calculated. An example of how to do this is given below using an Agilent
3458A System Voltmeter programmed from the front panel. Set up the voltmeter and execute the
"Average Reading" program follows:
a. Program 10 power line cycles per sample by pressing NPLC 1 0 ENTER .
b. Program 100 samples per trigger by pressing (N Rdgs/Trig) 1 0 0 ENTER .
c. Set up voltmeter to take measurements in the statistical mode as follows:
Press Shift key, f0, Shift key, N
Press ^ (up arrow) until MATH function is selected, then press >.
Press ^ (up arrow until STAT function is selected then press (ENTER).
d. Set up voltmeter to read the average of the measurements as follows:
Press Shift key, f1, Shift key, N.
Press down arrow until RMATH function is selected, then press >.
Press ^ (up arrow) until MEAN function is selected, then press ENTER.
e. Execute the program by pressing f0, ENTER, TRIG, ENTER
f. Wait for 100 readings and then read the average measurement by pressing f1, ENTER.
To repeat the measurement, perform steps (e) and (f).
Voltage Priority, Constant Voltage Load Effect
This test measures the change in output voltage resulting from a change in output current from about zero
amps to about 0.5 amps.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1b
with the DMM across the HI and LO sense terminals. Connect the 20
ohm load resistor and switch across the HI and LO output terminals.
2. Start with the load disconnected (switch open). Turn on the dc source,
program the output voltage to the full-scale value (10.0V), and the
current limit to the maximum value (0.5125A).
3. Set the DVM to the 10V range, and record the output voltage reading.
(zero-load value)
4. Connect the 20 ohm load resistor across the output (close the switch).
Keep the DVM connected.
6.
Read back the N3280A status to be sure that it’s in the
query should return a Bit value of “
1” for CV mode.
CV mode. This
“*RST”
“OUTP ON,(@1)”
“VOLT 10,(@1)”
“CURR:LIM 0.5125,(@1)”
“STAT:OPER:COND? (@1)”
If it is not in CV mode, use a slightly higher value resistor so that the
output current drops slightly.
7. Record the output voltage reading on the DVM. (full-load value)
The difference between these two DVM readings is the Load Effect
voltage and should be within the limits listed in the performance test
record card under Voltage Priority Load Effect Voltage.
89
Page 90

B - Performance and Calibration Procedures
Voltage Priority, +Current Limit Load Effect
This test measures the change in output current resulting from a change in output voltage from about zero
volts to about 10 volts.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1c
with an ammeter in series with a 20 ohm load resistor across the Hi and
Lo output terminals. Also connect a shorting switch across the resistor.
2. Start with a short across the output (switch closed). Turn on the dc
source and program the output voltage to the maximum positive value
(+10.25V), and the current limit to 0.5A.
3. Set the ammeter to the 1A range, and record the output current reading
on the ammeter. (shorted-output value)
4. Remove the short (open the switch) from the output of the dc source.
5.
Read back the N3280A status to be sure that it’s in the +
This query should return a Bit value of “
If it is not in +CL mode, decrease the current limit setting slightly. If
you adjusted the current limit, close the switch and go back to step 3.
6. Record the output current reading on the ammeter. (full-load current
value)
2” for +CL mode.
CL mode.
“*RST”
“OUTP ON,(@1)”
“VOLT 10.25,(@1)”
“CURR:LIM 0.5,(@1)”
“STAT:OPER:COND? (@1)”
The difference between the two current readings is the Load effect
current and should be within the limits listed in the performance test
record card under Voltage Priority Source Effect +Current.
Voltage Priority, -Current Limit Load Effect Test
This test measures the change in output current resulting from a change in output voltage from about zero
volts to about −10 volts.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1c
with an ammeter in series with a 20 ohm load resistor across the Hi and
Lo output terminals. Also connect a shorting switch across the resistor.
2. Start with a short across the output (switch closed). Turn on the dc
source and program the output voltage to the maximum negative value
(–10.25V), and the current limit to 0.5A.
3. Set the ammeter to the 1A range, and record the output current reading
on the ammeter. (shorted-output value)
4. Remove the short (open the switch) from the output of the dc source.
5.
Read back the N3280A status to be sure that it’s in the –
query should return a Bit value of “
If it is not in –CL mode, decrease the current limit setting slightly. If
you adjusted the current limit, close the switch and go back to step 3.
4” for –CL mode.
CL mode. This
“*RST”
“OUTP ON,(@1)”
“VOLT –10.25,(@1)”
“CURR:LIM 0.5,(@1)”
“STAT:OPER:COND? (@1)”
6. Record the output current reading on the ammeter. (full-load current
value)
The difference between the two current readings is the Load effect
current and should be within the limits listed in the performance test
record card under Voltage Priority Source Effect –Current.
90
Page 91

Performance and Calibration Procedures
Current Priority Constant Current Test
This test measures the change in output current resulting from a change in output voltage from about zero
volts to the maximum output voltage.
NOTE: The voltage limits in Current Priority Mode are not programmable.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1c
with an ammeter in series with a 16k ohm load resistor across the Hi
and Lo output terminals. Also connect a shorting switch across the
resistor.
2. Start with a short across the output (switch closed). Turn on the dc
source and program the Current Priority mode. Program the current to
the maximum value (0.5mA).
3. Set the ammeter to the 1A range, and record the output current
reading on the ammeter (shorted-output value).
5. Remove the short from the output (open the switch).
6.
Read back the N3280A status to be sure that it’s in the
query should return a Bit value of “
8” for CC mode.
CC mode. This
“*RST”
“OUTP ON,(@1)”
“SOUR:FUNC:MODE CURR,(@1)”
“CURR 0.0005,(@1)”
“STAT:OPER:COND? (@1)”
7. Record the output current reading on the ammeter (full-load current
value).
The difference between the two current readings is the Load Effect
current and should be within the limits listed in the performance test
record card for the appropriate model under Current Priority Load
Effect Current.
Source Effect Tests
These tests measure the change in output voltage or current that results from a change in ac line voltage
from the minimum to maximum value within the line voltage specifications. The tests should all be done
at 60Hz line frequency.
Voltage Priority, Constant Voltage Source Effect
Action Program Commands
1. Connect the ac input of the dc source to a variable voltage transformer
(or ac source). Set the transformer to nominal line voltage.
Connect the output as shown in Figure B-1b with a 20 ohm resistor or an
electronic load across the output terminals and a DVM across the Hi
and Lo sense terminals.
2. Turn on the dc source, program the output voltage to the full-scale value
(10.0V), and the current limit to the maximum value (0.5125A).
“OUTP ON,(@1)”
“VOLT 10,(@1)”
“CURR:LIM 0.5125,(@1)”
3. If you are using an electronic load, adjust it for the full-scale output
current, 0.5A.
91
Page 92

B - Performance and Calibration Procedures
4.
Read back the N3280A status to be sure that it's in the
query should return a Bit value of “
If it is not in CV mode, adjust the load or the output voltage slightly
until the unit goes into CV mode.
5. Adjust the transformer to the lowest rated line voltage.
(e.g., 104 Vac for a 120 Vac nominal line voltage input).
Set the DVM to the 10V range, and record the output voltage reading on
the DVM. (low-line value)
6. Adjust the transformer to the highest rated line voltage.
(e.g., 127 Vac for 120 Vac nominal line voltage input).
Record the output voltage reading on the DVM. (high-line value)
7. The difference between the low-line and the high-line value is the source
effect voltage and should be within the limits listed in the performance
test record card under Voltage Priority Source Effect Voltage.
1” for CV mode.
CV mode. This
“STAT:OPER:COND? (@1)”
Voltage Priority, +Current Limit Source Effect
Action Program Commands
1. Connect the ac input of the dc source to a variable voltage transformer
(or ac source). Set the transformer to nominal line voltage.
Connect the output as shown in Figure B-1a with an ammeter directly
across the Hi and Lo output terminals.
2. Turn on the dc source and program the output voltage to the maximum
positive value (+10.25V), and the current limit to 0.5A.
“OUTP ON,(@1)”
“VOLT 10.25,(@1)”
“CURR:LIM 0.5,(@1)”
3.
Read back the N3280A status to be sure that it’s in the +
query should return a Bit value of “
4. Adjust the transformer to the lowest rated line voltage
(e.g., 104 Vac for a 120 Vac nominal line voltage input).
Set the ammeter to the 1A range, and record the current reading on the
ammeter. (low-line value)
5. Adjust the transformer to the highest rated line voltage
(e.g., 127 Vac for 120 Vac nominal line voltage input).
Record the current reading on the ammeter. (high-line value)
6. The difference between the low-line and the high-line values is the
source effect voltage and should be within the limits listed in the
performance test record card under Voltage Priority Source Effect
+Current Limit.
2” for +CL mode.
CL mode. This
“STAT:OPER:COND? (@1)”
Voltage Priority, -Current Limit Source Effect
Action Program Commands
1. Connect the ac input of the dc source to a variable voltage transformer
(or ac source). Set the transformer to nominal line voltage.
Connect the output as shown in Figure B-1a with an ammeter directly
across the Hi and Lo output terminals.
2. Turn on the dc source and program the output voltage to the maximum
negative value (–10.25V), and the current limit to 0.5A.
“OUTP ON,(@1)”
“VOLT -10.25,(@1)”
“CURR:LIM 0.5,(@1)”
92
Page 93

Performance and Calibration Procedures
3.
Read back the N3280A status to be sure that it’s in the –
query should return a Bit value of “
4. Adjust the transformer to the lowest rated line voltage
(e.g., 104 Vac for a 120 Vac nominal line voltage input).
Set the ammeter to the 1A range, and record the current reading on the
ammeter. (low-line value)
5. Adjust the transformer to the highest rated line voltage
(e.g., 127 Vac for 120 Vac nominal line voltage input).
Record the current reading on the ammeter. (high-line value)
6. The difference between the low-line and the high-line values is the
source effect voltage and should be within the limits listed in the
performance test record card under Voltage Priority Source Effect
–Current Limit.
4” for –CL mode.
CL mode. This
“STAT:OPER:COND? (@1)”
Current Priority, Constant Current Source Effect
NOTE: The voltage limits in Current Priority Mode are not programmable.
Action Program Commands
1. Connect the ac input of the dc source to a variable voltage transformer
(or ac source). Set the transformer to nominal line voltage.
Connect the output as shown in Figure B-1a with an ammeter directly
across the Hi and Lo output terminals.
2. Turn on the dc source and program the Current Priority mode.
Program the current to 0.5mA.
“OUTP ON,(@1)”
“SOUR:FUNC:MODE CURR,(@1)”
“CURR 0.0005,(@1)”
3.
Read back the N3280A status to be sure that it’s in the
query should return a Bit value of “
4. Adjust the transformer to the lowest rated line voltage
(e.g., 104 Vac for a 120 Vac nominal line voltage input).
Set the ammeter to the 1mA range, and record the current reading on the
ammeter. (low-line value)
5. Adjust the transformer to the highest rated line voltage
(e.g., 127 Vac for 120 Vac nominal line voltage input).
Record the current reading on the ammeter. (high-line value)
6. The difference between the low-line and the high-line values is the
source effect current and should be within the limits listed in the
performance test record card under Current Priority Source Effect
Current.
8” for CC mode.
CC mode. This
“STAT:OPER:COND? (@1)”
93
Page 94

B - Performance and Calibration Procedures
Ripple and Noise Tests
Voltage Priority Ripple and Noise
Periodic and random deviations (PARD) in the output (ripple and noise) combine to produce a residual
ac voltage superimposed on the dc output voltage. PARD is specified as the rms or peak-to-peak output
voltage in the frequency range specified in Appendix A.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1d
to an oscilloscope (ac coupled) between the HI and LO terminals. (You
can use the Model URE3 P-P Voltmeter in place of the scope.)
Remember to include a 50 ohm series resistor at the dc source end of the
cable. Also connect a 20 ohm load resistor across the HI and LO
terminals. Set the scope's bandwidth limit to 20 MHz. Use shielded
cable < 1 meter in length if possible. Attach the cable as close to the dc
source connector as possible.
2. Turn on the dc source and program the Voltage Priority mode (this is the
default mode). Program the output voltage to the full-scale value
(10.0V), and the current limit to the maximum value (0.5125A).
3. Note that the waveform on the oscilloscope should not exceed the peakto-peak limit in the performance test record card under Voltage Priority
PARD Voltage (peak to peak).
4. Disconnect the oscilloscope and connect an ac rms voltmeter in its
place. The rms voltage reading should be within the rms limit in the
performance test record card for the appropriate model under Voltage
Priority PARD Voltage (rms).
5.
Program the output voltage to the maximum positive value (+10.25V),
and the current limit to 0.45A.
“*RST”
“OUTP ON,(@1)”
“VOLT 10,(@1)”
“CURR:LIM 0.5125,(@1)”
“VOLT 10.25,(@1)”
“CURR:LIM 0.45,(@1)”
6.
Read back the N3280A status to be sure that it’s in the +
query should return a Bit value of “
If it is not in +CL mode, decrease the current limit setting slightly.
7. Divide the voltage reading of the ac rms voltmeter by 20 (the value of
the load resistor). The result should be within the limit in the
performance test record card under Voltage Priority PARD Current
Limit.
8.
Program the output voltage to the maximum negative value (–10.25V).
9.
Read back the N3280A status to be sure that it’s in the
query should return a Bit value of “4” for −CL mode.
If it is not in −CL mode, decrease the current limit setting slightly.
10. Divide the voltage reading of the ac rms voltmeter by 20 (the value of
the load resistor). The result should be within the limit in the
performance test record card under Voltage Priority PARD Current
Limit.
2” for +CL mode.
CL mode. This
−CL mode. This
“STAT:OPER:COND? (@1)”
“VOLT −10,(@1)”
“STAT:OPER:COND? (@1)”
94
Page 95

Performance and Calibration Procedures
Current Priority Ripple and Noise
Periodic and random deviations (PARD) in the output combine to produce a residual ac current, as well
as an ac voltage superimposed on the dc output. PARD is specified as the rms output current in a
frequency range specified in Appendix A.
NOTE: The voltage limits in Current Priority Mode are not programmable.
Action Program Commands
1. Turn off the dc source and connect the output as shown in Figure B-1d
to an ac rms voltmeter. Remember to include a 50 ohm series resistor at
the dc source end of the cable. Also connect a 16k ohm load resistor
across the HI and LO terminals.
2. Turn on the dc source and program the Current Priority mode. Program
the current to the maximum value (0.5mA).
“OUTP ON,(@1)”
“SOUR:FUNC:MODE CURR,(@1)”
“CURR 0.0005,(@1)”
3.
Read back the N3280A status to be sure that it’s in the
query should return a Bit value of “
4. Divide the voltage reading ac rms voltmeter by 16k (the value of the
load resistor). The result should be within the limit in the performance
test record card under Current Priority PARD Current.
8” for CC mode.
CC mode. This
“STAT:OPER:COND? (@1)”
Transient Response Tests
Voltage Priority, Transient Recovery Time
This test measures the time for the output voltage to recover to within the specified value following a
50% change in the load current using an RC network of a 10
output. The test must be performed in all three bandwidths: 10kHz, 20kHz, and 30kHz.
Action Program Commands
1. Turn off the dc source and connect the output as in Figure B-1e with
the oscilloscope across the HI and LO sense terminals. Remember to
connect the RC network (10
2. Turn on the dc source and program the Voltage Priority mode (this is
the default mode). Program the output voltage to the full-scale value
(10.0V), the current to the maximum value (0.5A), and the
bandwidth to 10kHz.
3. Program the Electronic Load as follows:
Input current = 0.25A Transient current level = 0.5A
Transient frequency = 2kHz Current slew rate = 0.167A/
Transient duty cycle = 50% Turn the transient generator on.
4. Adjust the oscilloscope for a waveform similar to that in Figure B-2.
The output voltage should return to within
45µs, or 35µs following a 0.25A to 0.5A load change. Check both
loading and unloading transients by triggering on the positive and
negative slope. Record the voltage at time “t” in the performance test
record card under Voltage Priority Transient Response Voltage.
µF & 0.2 ohm).
±40mV in less than 60µs,
µF capacitor and 0.2 ohm resistor across the
“OUTP OFF,(@1)”
“OUTP ON,(@1)”
“SOUR:FUNC:MODE VOLT,(@1)”
“VOLT 10,(@1)”
“CURR:LIM 0.5,(@1)”
“VOLT:ALC:BWID 10000,(@1)”
µs
Loading
tttt
Transient
v
Unloading
Transient
t
v
t
5. Repeat steps 2 through 4 for the 20kHz and the 30kHz bandwidths.
“VOLT:ALC:BWID 20000,(@1)”
“VOLT:ALC:BWID 30000,(@1)”
95
Page 96

B - Performance and Calibration Procedures
Figure B-2. Transient Waveform Voltage Priority
Current Priority Transient Recovery Time
This test measures the time for the output current to recover to within the specified value following a
±1V change in the output voltage. The test setup uses a 0.47
generator to form an approximate 25
µs time constant with the 50 ohm output of the function generator.
NOTE: Turn off the output of the dc source before connecting the function generator.
Action Program Commands
1. Turn off the dc source and connect the output as in Figure B-1f with
the function generator across the HI and LO terminals. Remember to
connect the capacitor (0.47
all leads as short as possible.
2. Turn on the dc source and program the Current Priority mode.
Program the current to zero amps.
Program the Function Generator as follows:
3.
Frequency = 400Hz to 1kHz Duty cycle = 50%
Wave shape =
Set the Tektronics current probe to measure current at 2mA/div.
4. Adjust the oscilloscope for a waveform similar to that in Figure B.
The output current should return to within
Check both loading and unloading transients by triggering on the
positive and negative slope. Record the voltage at time “t” in the
performance test record card under Current Priority Transient
Response Current.
±1V square wave.
µF) close to the function generator. Keep
±1mA in less than 90µs.
µF capacitor across the output of the
“OUTP OFF,(@1)”
“OUTP ON,(@1)”
“SOUR:FUNC:MODE CURR,(@1)”
“CURR 0,(@1)”
Loading
tttt
Transient
v
Unloading
Transient
t
v
t
96
Page 97

Performance and Calibration Procedures
Figure B-3. Transient Waveform Current Priority
Performance Test Equipment Form
Test Facility:_________________________
____________________________________ Date _________________________________
____________________________________ Customer _____________________________
____________________________________ Tested By ____________________________
Model ______________________________ Ambient Temperature (C) ________________
Serial No. ____________________________ Relative Humidity (%) ___________________
Options _____________________________ Nominal Line Frequency __________________
Firmware Revision ____________________
Special Notes:
Test Equipment Used:
Description Model No. Trace No. Cal. Due Date
AC Source
DC Voltmeter
RMS Voltmeter
Oscilloscope
Electronic Load
______________ _________________ _________________ _________________
_________________ _________________ _________________
_________________ _________________ _________________
_________________ _________________ _________________
_________________ _________________ _________________
_________________ _________________ _________________
Report Number ________________________
97
Page 98

B - Performance and Calibration Procedures
Performance Test Record Form
Model Agilent N3280A - Output 1 Report No ______________ Date __________________
Test Description Minimum
Specification
VOLTAGE PRIORITY TESTS
Programming Accuracy (DMM readings)
Voltage ( 0V)
Voltage (+10V)
Voltage (-10V)
+ 1mA Current limit
+ 0.5A Current limit
− 1mA Current limit
− 0.5A Current limit
− 2mV
9.988 V
− 9.988 V
0.949mA
0.49945 A
−0.949mA
− 0.49945 A
Readback Accuracy (MEAS? readings)
Voltage ( 0V)
Voltage (+10V)
Voltage (-10V)
+ 0.5A range current
− 0.5A range current
+ 15mA range current
− 15mA range current
+ 0.5mA range current
− 0.5mA range current
− 2mV
Vout
Vout
Iout
Iout
Iout
Iout
Iout
Iout
− 12mV
− 12mV
− 0.7mA
− 0.7mA
− 15µA
− 15µA
− 0.7µA
− 0.7µA
Load Effect
Voltage
+ Current limit
− Current limit
− 400µV
− 30µA
− 30µA
Source Effect
Voltage
+ Current limit
− Current limit
− 200µV
− 10µA
− 10µA
PARD (Ripple and Noise)
Voltage (rms)
Voltage (peak-to-peak)
±Current limit (rms)
Transient Response Time Low( 10kHz):
Med ( 20kHz):
High ( 30kHz):
CURRENT PRIORITY TESTS
Programming Accuracy (DMM readings)
Current ( 0A )
Current ( 0.5mA)
Current (
−0.5mA)
− 1µA
0.0004985 A
− 0.0004985 A
Load Effect
Current
− 25nA
Source Effect
Current
− 10nA
PARD (Ripple and Noise)
Current (rms)
Transient Response Time
Results Maximum
Specification
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
_________
+ 2mV
10.012 V
− 10.012 V
1.051mA
0.50055 A
− 1.051mA
− 0.50055 A
+ 2mV
Vout + 12mV
Vout + 12mV
Iout + 0.7mA
Iout + 0.7mA
Iout + 15
Iout + 15
Iout + 0.7
Iout + 0.7
µV
+ 400
µA
+ 30
+ 30µA
− 200µV
− 10µA
− 10µA
µV
380
4mV
µA
40
µs
60
45µs
35µs
+ 1µA
0.0005015 A
− 0.0005015 A
_________ + 25nA
_________ + 10nA
_________
_________
1.5
90µs
µA
µA
µA
µA
µA
98
Page 99

Performance and Calibration Procedures
Performing the Calibration Procedure
You can only calibrate the dc source by using SCPI commands within your controller programming
statements. The SCPI calibration commands are explained in chapter 8. Calibration error messages that
can occur during GPIB calibration are shown in table B-3.
Table B-1 lists the equipment required for calibration. Figure B-1 shows the test setup. Calibrating the
N3280A power supply requires an HP 3458 DMM or something with equivalent voltage and current
measurement accuracy. For all calibration steps, connect the high sense terminal to the high output, and
the low sense terminal to the low output. A general outline of the calibration procedure is as follows:
1. Enable calibration by sending the CAL:STATE ON <password> command. The password argument
is a number which is set at the factory to the model number of the power supply, and can be changed
by the user.
2. Calibrate one or more subsystems using the commands given in the following sections. Calibrate
only one of the 4 output channels at a time. The calibration commands accept only a single channel
number for the channel list arguments.
3. Whenever a subsystem's calibration is changed, all subsystems listed below it must also be re-
calibrated. However, voltage and current subsystems are independent (changing the calibration of
one does not require re-calibration of the other).
4. As each subsystem's procedure is completed, the instrument calculates new calibration constants and
begins using them. These constants are not saved in nonvolatile memory until the CAL:SAVE
command is given. CAL:SAVE can be given after each subsystem is done or given once after all
subsystems are done.
5. Disable calibration by sending CAL:STATE OFF. Any subsystems that were calibrated with a
subsequent CAL:SAVE revert to their previous calibration constants. Note that *RST also sets the
calibration state to OFF.
Enable Calibration Mode
Action Program Commands
1. Reset the unit.
2. Enable calibration mode. (lf the password is incorrect, an error occurs.)
“*RST”
“CAL:STAT ON, 0”
Voltage Priority Mode Programming and Measurement Calibration
Action Program Commands
1. Jumper the High sense terminal to the High output terminal.
Jumper the Low sense terminal to the Low output terminal.
Connect the voltage input of the 3458A multimeter directly to output 1.
2. Select voltage calibration for output 1.
3. Select the first calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
4. Set the 3458A multimeter to the 10V range, measure the output
voltage, and enter the data into the dc source.
5. Select the second calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
6. Measure the output voltage and enter the data into the dc source.
“CAL:VOLT (@1)”
“CAL:LEV P1;*OPC?”
“CAL:DATA <value>”
“CAL:LEV P2;*OPC?”
“CAL:DATA <value>”
99
Page 100

B - Performance and Calibration Procedures
Negative Current Limit Calibration
Action Program Commands
1. Jumper the High sense terminal to the High output terminal.
Jumper the Low sense terminal to the Low output terminal.
Connect the current input of the 3458A multimeter directly to output 1.
2. Select negative current limit calibration for output 1.
3. Select the first calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
4. Set the 3458A multimeter to the 1A range, measure the output current,
and enter the data into the dc source.
5. Select the second calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
6. Measure the output current and enter the data into the dc source.
“CAL:CURR:LIM:NEG (@1)”
“CAL:LEV P1;*OPC?”
“CAL:DATA <value>”
“CAL:LEV P2;*OPC?”
“CAL:DATA <value>”
Positive Current Limit Calibration
Action Program Commands
1. Jumper the High sense terminal to the High output terminal.
Jumper the Low sense terminal to the Low output terminal.
Connect the current input of the 3458A multimeter directly to output 1.
2. Select positive current limit calibration for output 1.
3. Select the first calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
4. Set the 3458A multimeter to the 1A range, measure the output current,
and enter the data into the dc source.
5. Select the second calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
6. Measure the output current and enter the data into the dc source.
“CAL:CURR:LIM:POS (@1)”
“CAL:LEV P1;*OPC?”
“CAL:DATA <value>”
“CAL:LEV P2;*OPC?”
“CAL:DATA <value>”
0.5A Range Current Measurement Calibration
Action Program Commands
1. Jumper the High sense terminal to the High output terminal.
Jumper the Low sense terminal to the Low output terminal.
Connect the current input of the 3458A multimeter directly to
output 1.
2. Select the 0.5A range current measurement calibration for output 1.
3. Select the calibration point. *OPC? prevents processing of all
subsequent commands to ensure that the output is stable.
4. Set the 3458A multimeter to the 1A range, measure the output
current, and enter the data into the dc source.
100
“CAL:CURR:MEAS 0.5,(@1)”
“CAL:LEV P1;*OPC?”
“CAL:DATA <value>”
 Loading...
Loading...