

Page 1

ADAM 4000
Data Acquisition Modules
User's Manual
Page 2

ADAM 4000 Series
Data Acquisition Modules
User’s Manual
Copyright Notice
This document is copyrighted, 1997, by Advantech Co., Ltd. All rights are
reserved. Advantech Co., Ltd., reserves the right to make improvements to the
products described in this manual at any time without notice.
No part of this manual may be reproduced, copied, translated or transmitted in
any form or by any means without the prior written permission of Advantech Co.,
Ltd. Information provided in this manual is intended to be accurate and reliable.
However, Advantech Co., Ltd. assumes no responsibility for its use, nor for any
infringements upon the rights of third parties, which may result from its use.
CE Notification
The ADAM-4000 series developed by Advantech Co., Ltd. has passed the CE
test for environmental specifications when operated within an industrial enclosure
(ADAM-4950-ENC). Therefore, in order to protect the ADAM modules from
being damaged by ESD (Electric Static Discharge), we strongly recommend that
the use of CE-compliant industrial enclosure products when using any ADAM
module.
Acknowledgments
ADAM is a trademark of Advantech Co., Ltd.
IBM and PC are trademarks of International Business
Machines Corporation.
Ninth Edition
July 2004
Page 3

Table of Contents
Chapter 1 Introduction ..….....……..................…..................…….. 1-1
1.1 Overview .......................…................................….........….…… 1-2
1.2 Applications ..................….........................…….............…....... 1-4
Chapter 2 Installation Guideline ...................….................…....... 2-1
2.1 System Requirements to set up an ADAM network ..…....... 2-2
2.2 Basic configuration and hook-up ....................……............... 2-5
2.3 Baud rate and Checksum .................................……............... 2-7
2.4 Multiple Module Hookup ...............................………............... 2-10
2.5 Programming Example.....................................……................ 2-11
Chapter 3 I/O Modules ..................................................…............. 3-1
3.1 ADAM-4011/4011D Thermocouple Input Modules ...…......... 3-2
3.2 ADAM-4012 Analog Input Module ………………..…............... 3-9
3.3 ADAM-4013 RTD Input Modules .......………………….…….... 3-14
3.4 ADAM-4015 6-channel RTD Input Module .…………….......... 3-16
3.5 ADAM-4015T 6-channel Thermistor Input Module ....…........ 3-19
3.6 ADAM-4016 Analog Input/Output Module....………….…....... 3-20
3.7 ADAM-4017/4017+/4018/4018M/4018+ 8-channel Analog Input
Modules ........……………………………………………………..... 3-25
3.8 ADAM-4019 8-channel Universal Analog Input Module ....... 3-35
3.9 ADAM-4021 Analog Output Module ........................…........... 3-38
3.10 ADAM-4024 4-ch. Analog Output Module ..........….............. 3-41
3.11 ADAM-4050 Digital I/O Module ……………………………..... 3-43
3.12 ADAM-4051 16-channel Isolated Digital Input Module ..…. 3-45
3.13 ADAM-4052 Isolated Digital Input Module ……………..…... 3-47
3.14 ADAM-4053 16-channel Digital Input Module …..……..…... 3-49
3.15 ADAM-4055 16-channel Isolated Digital I/O Module ……... 3-51
3.16 ADAM-4056S 12-ch. Sink Type Isolated Digital Output
Module …………………………………………………….……..... 3-54
3.17 ADAM-4056SO 12-ch. Source Type Isolated Digital Output
Module ………….…………………………………………..……... 3-56
Page 4

3.18 ADAM-4060/4068 Relay Output Module ................…........... 3-58
3.19 ADAM-4080/4080D Counter/Frequency Input Modules ….. 3-62
Chapter 4 Command Set ..................................................…......... 4-1
4.1 Introduction.................................................................….......... 4-2
4.2 Syntax .........................................................................….......... 4-2
4.3 I/O Module Commands Search Table ......................….......... 4-4
4.4 Analog Input Module Command ..................…...................... 4-44
4.4.1 Analog Input Command Set ...........................................……............ 4-44
4.4.2 Data Conversion and Display Command Set ..................………........ 4-79
4.4.3 Analog Input Data Logger Command Set .........................….…......... 4-91
4.4.4 Digital I/O, Alarm and Event Command Set ...................………......... 4-104
4.4.5 Excitation Voltage Output Command Set ......................……….......... 4-119
4.5 Analog Output Module Command .........................……......... 4-127
4.6 Digital I/O and Relay Output Module Command ......……..... 4-150
4.7 Counter/Frequency Module Command .....................……..... 4-173
4.7.1 Configuration, Counter Input and Display Command Set ..………….. 4-173
4.7.2 Counter Setup Command Set ..........................................………..... .. 4-185
4.7.3 Digital Filter and Programmable Threshold Command Set .………… 4-194
4.7.4 Digital Output and Alarm Command Set ......................………........... 4-205
Chapter 5 Calibration ...........................................…..................... 5-1
5.1 Analog Input Module Calibration ............................…........... 5-2
5.2 Analog Input Resistance Calibration .................................... 5-7
5.3 Analog Output Calibration ..................................................... 5-9
Appendix A Technical Specifications..............................…......... A-1
A.1 ADAM-4011 Thermocouple Input Module ................…......... A-2
A.2 ADAM-4011D Thermocouple Input Module with LED
Display .......................................................................……...... A-5
A.3 ADAM-4012 Analog Input Module ......................................... A-8
A.4 ADAM-4013 RTD Input Module ......................................….... A-10
A.5 ADAM-4014D Analog Input Module with LED Display …..... A-12
A.6 ADAM-4016 Strain Gauge Input Module .....................…...... A-14
Page 5

A.7 ADAM-4017, 4017+ 8-Channel Analog Input Module ..…..... A-16
A.8 ADAM-4018, 4018+ 8-channel Analog Input Module ...…..... A-18
A.9 ADAM-4018M 8-channel Analog Input Data Logger ....….... A-21
A.10 ADAM-4021 Analog Output Module .................................... A-24
A.11 ADAM-4050 Digital I/O Module.................................…......... A-26
A.12 ADAM-4052 Isolated Digital Input Module ................…...... A-28
A.13 ADAM-4053 16-channel Digital Input Module ............…..... A-30
A.14 ADAM-4056S 12-ch. Sink Type Isolated Digital Output
Module ........…………………………………………………...….. A-32
A.15 ADAM-4056SO 12-ch. Source Type Isolated Digital Output
Module ........………………………………………………….….... A-34
A.16 ADAM-4060 Relay Output Module....................................... A-36
A.17 ADAM-4080 Counter/Frequency Input Module .................. A-38
A.18 ADAM-4080D Counter/Frequency Input Module with LED
Display …................................................................................. A-40
Appendix B Data Formats and I/O Ranges ..................…............ B-1
B.1 Analog Input Formats.............................................…............. B-2
B.1.1 Engineering Units .............................................................…….......... B-2
B.1.2 Percent of FSR .................................................................…............. B-3
B.1.3 Twos complement hexadecimal .....................................……............ B-4
B.1.4 Ohms ..............................................................................……............ B-5
B.2 Analog Input Ranges.............................................….............. B-6
B.3 Analog Output Formats ..............................................…........ B-11
B.3.1 Engineering Units ............................................................………........ B-11
B.3.2 Percent of Span ........................................................…….................. B-11
B.3.3 Hexadecimal ............................................................………............... B-11
B.4 Analog Output Ranges .......................................…................ B-12
Appendix C Technical Diagrams .................................…............. C-1
C.1 ADAM Dimensions ..............................................…................ C-2
C.2 Installation .............................................................….............. C-3
C.2.1 DIN-Rail Mounting ......................................................…...….............. C-3
C.2.2 Panel Mounting .............................................................…….............. C-5
C.2.3 Piggyback Stack ....................................................….....…................. C-7
Page 6

Appendix D Utility Software .................................…..................... D-1
D.1 ADAM-4000 Utility Software ......................…......................... D-2
Appendix E RS-485 Network .............................…........................ E-1
E.1 Basic Network Layout ................................…......................... E-3
E.2 Line Termination .........................................…........................ E-5
E.3 RS-485 Data Flow Control ..................................................... E-7
Appendix F How to use the Checksum feature ..........…............ F-1
F.1 Checksum Enable/Disable ......................................…............ F-2
Appendix G ADAM-4000 I/O Modbus Mapping Table ....…......... G-1
Appendix H Changing Configuration to Modbus Protocol ....... H-1
Page 7

Introduction 1
Page 8

Introduction
1.1 Overview
The ADAM Series is a set of intelligent sensor-to-computer interface
modules containing built-in microprocessor. They are remotely
controlled through a simple set of commands issued in ASCII format
and transmitted in RS-485 protocol. They provide signal conditioning,
isolation, ranging, A/D and D/A conversion, data comparison, and
digital communication functions. Some modules provide digital I/O
lines for controlling relays and TTL devices.
Software Configuration and Calibration
ADAM modules contain no pots or switches to set. By merely issuing a
command from the host computer, you can change an analog input
module to accept several ranges of voltage input, thermocouple input or
RTD input. All the module’s configuration parameters including I/O
address, speed, parity, HI and LO alarm, calibration parameters settings
may be set remotely. Remote configuration can be done by using either
the provided menu-based software or the command set’s configuration
and calibration commands.
By storing configuration and calibration parameters in a nonvolatile
EEPROM, modules are able to retain these parameters in case of power
failure.
Watchdog Timer
A watchdog timer supervisory function will automatically reset the
ADAM modules in the event of system failure. Maintenance is thus
simplified.
Power Requirements
Although the modules are designed for standard industrial unregulated
power supply , they accept any power unit that supplies power
24 V
DC
within the range of +10 to +30 V
. The power supply ripple must be
DC
limited to 5 V peak-to-peak, and the immediat e ripple v ol t age s h ould be
maintained between +10 and +30 V
.
DC
Connectivity and Programming
ADAM modules can connect to and communicate with all computers
and terminals. They use RS-485 transmission standards, and
communicate with ASCII format commands. The command set for
every module type consists of approximately ten different commands.
2
ADAM 4000 Series User’s Manual
1-
Page 9
Chapter 1
The command set for input modules is larger because it incorporates
alarm functions. All communications to and from the module are
performed in ASCII, which means that ADAM modul es c an be
programmed in virtually any high-level language.
RS-485 Network
The RS-485 network provides lower-noise sensor readings, as modules
can be placed much closer to the source. Up to 256 ADAM modules
may be connected to an RS-485 multi-drop network by using th e
ADAM RS-485 repeater, extending the maximum communication
distance to 4,000 ft. The host computer is connected to the RS-485
network with one of its COM ports through the ADAM RS-232/RS-485
converter.
To boost the network’s throughput, the ADAM RS-485 repeaters use a
logical RTS signal to manage the repeater’s direction. Only two wires
are needed for the RS-485 network: DATA+ and DATA-. Inexpensive
shielded twisted pair wiring is employed.
Panel/DIN Rail mounting
-3
Chapter 1 Introduction 1
Page 10

Introduction
ADAM modules mount on any panel, on provided brackets, on DIN
rails or may be stacked together.
The RS-485 network, together with screw-terminal plug connectors,
allows for system expansion, reconfiguration and repair without
disturbing field wiring.
Protection against the environment
Hardened plastic packing forms the outer shell of every module. Since
all configuration is controlled by software, the module is not designed
to be opened. This greatly enhances resistance against corrosive
materials, moisture and vibration. ADAM modules’ low power
requirements help them to operate in temperatures from 0 to 70
in humidities from 0 to 95% (non-condensing). They’re built compactly
using automated SMT technology so you can pack them into watertight and explosion-proof industrial enclosures.
1.2 Applications
• Remote data acquisition
• Process monitoring
• Industrial process control
• Energy management
• Supervisory control
• Security systems
• Laboratory automation
• Building automation
• Product testing
• Direct digital control
o
C, and
4
ADAM 4000 Series User’s Manual
1-
Page 11

Installation Guideline 2
Page 12

Installation Guideline
This chapter provides guidelines to what is needed to set up and install
an ADAM network. A quick hookup scheme is provided that lets you
configure modules before they are installed in a network.
To help you to connect ADAM modules with sensor inputs, several
wiring examples are provided. Finally, you will find at the end of this
chapter a programming example using the ADAM command set.
Be sure to carefully plan the layout and configur ation of your network
before you start. Guidelines regarding layout are given in Appendix E:
RS-485 Network.
NOTICE: Except for the communication modules, which have onboard switches for their baud rate setting, ADAM modules should not
be opened. There is no need to open the ADAM modules: all
configuration is done remotely and there are no user serviceable parts
are inside. Opening the cover will therefore void the warranty.
2.1 System Requirements to set up an ADAM network
The following list gives an overview of what is needed to setup, install
and configure an ADAM environment.
• ADAM modules
• A host computer, such as an IBM PC/AT compatible, that can
output ASCII characters with an RS-232C or RS-485 port.
• Power supply for the ADAM modules (+10 to +30 V
• ADAM Series Utility software
• ADAM Isolated RS-232/RS-485 Converter (option a l)
• ADAM Repeater (optional)
DC
)
Host computer
Any computer or terminal that can output in ASCII format over either
RS-232 or RS-485 can be connected as the host computer. When only
RS-232 is available, an ADAM RS-232/RS-485 Converter is re quired
to transform the host signals to the correct RS-485 protocol. The
converter also provides opto-isolation and transformer-based isolation
to protect your equipment.
2
ADAM 4000 Series User’s Manual
2-
Page 13

Chapter 2
Power supply
For the ease of use in industrial environments the ADAM modules are
designed to accept industry standard +24 V
Operation is guaranteed when using any power supply between +10 and
+30 V
. Power ripples must be limited to 5 V peak to peak while the
DC
voltage in all cases must be maintained between +10 and +30 V
power supply specifications are referenced at module connector. When
modules are powered remotely, the effects of line voltage drops must be
considered.
All modules use on-board switching regulators to sustain good
efficiency over the 10-30 V input range, therefore we can assume that
the actual current draw is inversely proportional to the line voltage. The
following example shows how to calculate the required current that a
power supply should be able to provide.
Assume that a +24 V
will be used to power five ADAM-4011 Analog
DC
Input Modules. The distance from power supply to modules is not so
big that significant line voltage drop will occur. One ADAM-4011
module consumes a maximum of 1.2 Watts. The total required power
will equal 5 x 1.2 = 6 Watts. A power supply of +24 V
therefore be able to supply a minimal current of 6 / 24 = 0.25 Amps.
Small systems may be powered by using wall-mounted modular power
supplies. Also when modules operate on long communication lines
(>500 feet) it is often more reliable to power the modules locally with
modular power supplies. These inexpensive units can easily be obtained
from any electronics retail store.
The power cables should be selected according to the number of
modules connected and the length of the power lines. When using a
network with long cables, we advise the use of thicker wire to limit the
line voltage drop. In addition to serious voltage drops, long voltage
lines can also cause interference with communication wires.
unregulated power.
DC
. All
DC
should
DC
Chapter 2 installation Guideline 2
-3
Page 14
Installation Guideline
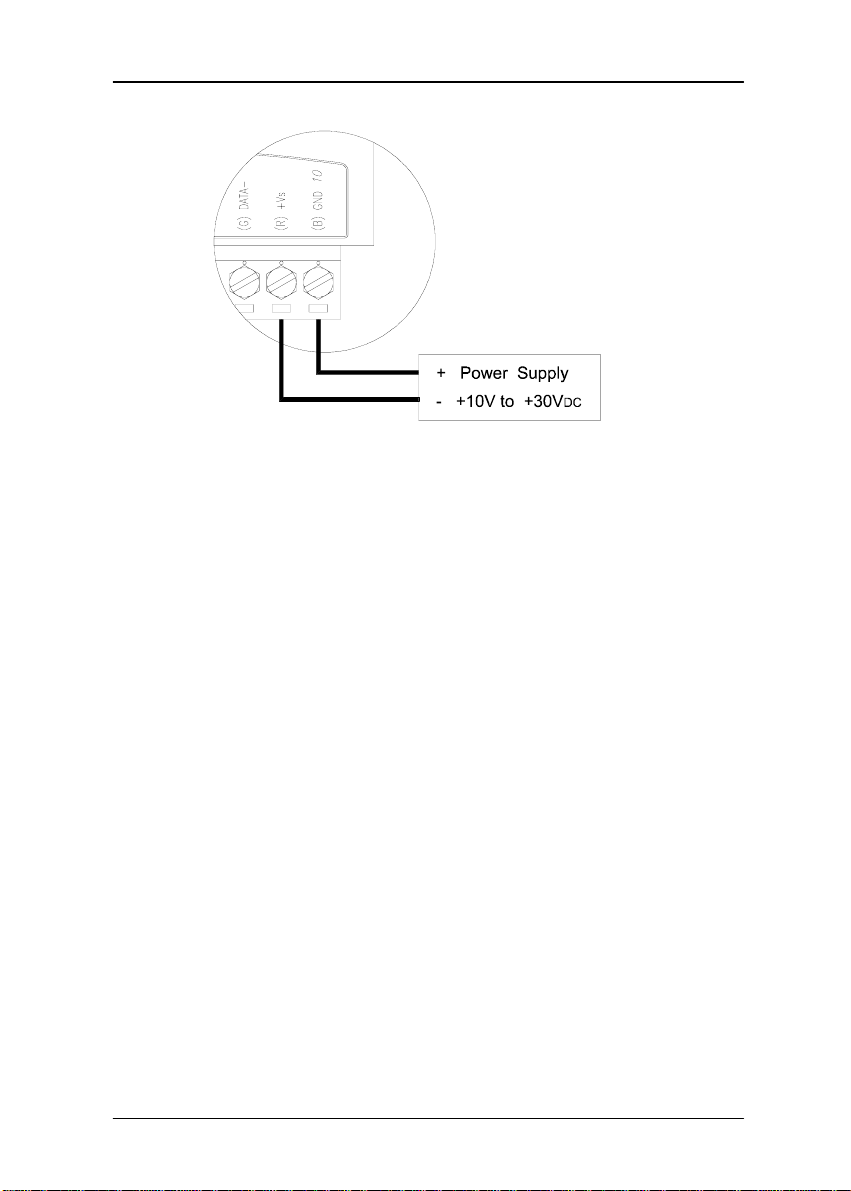
Figure 2-1 Power Supply Connections
We advise that the following standard colors (as indicated on the
modules) be used for power lines:
+Vs (R) Red
GND (B) Black
Communication Wiring
We recommend that shielded-twisted-pair cables that comply with the
EIA RS-485 standard be used with the ADAM network to reduce
interference. Only one set of twisted-pair cables is required to transmit
both Data and RTS signals. We advice that the following standard
colors (as indicated on the modules) be used for the communication
lines:
DATA+ (Y) Yellow
DATA- (G) Green
ADAM Utility Software
A menu-driven utility program is provided for ADAM module
configuration, monitoring and calibration. It also includes a terminal
emulation program that lets you easily communicate through the
ADAM command set. (See Appendix D, Utility Software)
ADAM Communication Speed
In ADAM series, the baudrate can be configured from 1200 bps to 38.4
Kbps. And the baudrate of all modules in an RS-485 network must be
the same.
4
ADAM 4000 Series User’s Manual
2-
Page 15
Chapter 2
ADAM Isolated RS-232/RS485 Converter (optional)
When the host computer or terminal has only a RS-232 port, an ADAM
Isolated RS-232/RS-485 Converter, connected to the host’s RS-232
port, is required. Since this module is not addressable by the host, the
baud rate must be set using a switch inside the module. The factory
default setting is 9600 baud.
ADAM Repeater (optional)
When communication lines exceed 4000 ft (1200 meter) or the number
of ADAM modules connected is more than 32, a repeater should be
connected to expand the first segment. Up to 8 Repeater modules can
be connected allowing connection of up to 256 ADAM modules. As
with the Converter module, the Repeater module is not addressable by
the host and the baud rate must be set by changing the switch inside the
module. The factory default setting is 9600 baud.
2.2 Basic configuration and hook-up
Before placing a module in an existing network, the module should be
configured. Though all modules are initially configured at the factory, it
is recommended to check that the baud rate is set correctly.
Default Factory Settings
Baud rate: 9600 Bit/sec.
Address: 01 (hexadecimal)
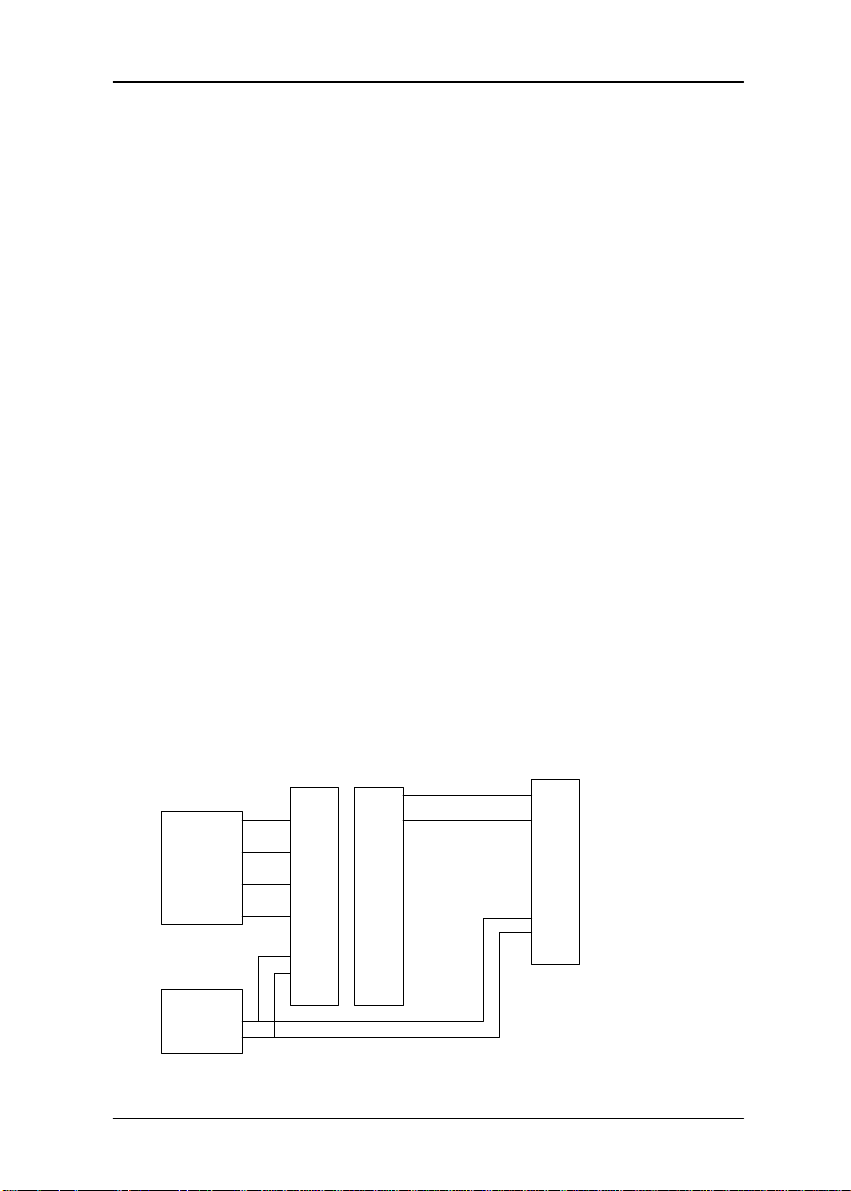
The basic hook-up for module configuration is shown below.
ADAM-4520 RS-232/RS-485 Converter
DATA+
DATA-
+Vs
GND
ADAM
I/O
Module
HOST PC
RS-232
TXD (3)
RXD (2)
RTS (7)
GND (5)
+Vs
GND
DATA+
DATA-
RS-485
POWER
+10~+30 V
DC
()=pin number on EIA-232-D
connector (RS-232)
Figure 2-2 Basic Hook-up of ADAM Module to Host Switches
Chapter 2 installation Guideline 2
-5
Page 16

Installation Guideline
The following items are required to configure a module: an ADAM
converter module, a personal computer with RS-232 port (baud rate set
to 9600) and the ADAM utility software.
Configuration with the ADAM Utility Software
The easiest way to configure the ADAM module is by using the ADAM
utility software: an easy-to-use menu-structured program will guide you
through every step of the configuration. (See Appendix D, Utility
Software)
Changing the protocol from ADAM ASCII to Modbus
Some ADAM-4000 modules support b ot h A DAM ASCII protocol and
Modbus protocol . The factory default setting of these modules is
ADAM ASCII protocol. If you would like to configure the modules to
Modbus protocol, please refer to Appendix H which describe how to
change the protocol in ADAM utility.
Configuration with the ADAM command set
ADAM modules can also be configured by issuing direct commands
from within a terminal emulation program that is part of the ADAM
utility software.
The following example guides you through the setup of an analog input
module. Assume that an ADAM-4011 Analog Input module still has its
default settings (baud rate 9600 and address 01h). Before the module is
reconfigured, it is first requested to send its default settings.
NOTICE: An analog input module requires a maxi mu m of 7 seco nds to
perform auto calibration and ranging after it is rebooted or powered on.
During this time span, the module can not be addressed to perform any
other actions.
Example:
Make sure that the module is properly connected as shown in figure 2-5.
Power up all the connected devices, start the terminal emulation
program, and issue the following command:
$012(cr)
requests that module with address 01 send its configuration status
!01050600
Module at address 01 responds that it is configured for an input range
of +/-2.5 V, baud rate 9600, integration time of 50 ms (60 Hz),
engineering units and no checksum checking or generation.
6
ADAM 4000 Series User’s Manual
2-
Page 17

Chapter 2
To change the configuration setting of the analog input module, the
following command is issued:
%01070F0600(cr)
% = change configuration
01 = target module at address 00 to:
07 = change address to 07 hexadecimal
0F = set input range to Type K thermocouple
06 = set baud rate to 9600
00 = set integration time to 50 ms (60 Hz)
disable checksum
set data format to engineering units
(See Chapter 4, Command Set for a full description of the syntax of the
configuration command for an analog input module)
When the module received the configuration command it will respond
with its new address:
!07(cr)
Wait 7 seconds to let the new configuration settings take effect before
issuing a new command to the module.
NOTICE: All reconfiguration except changing of baud rate and
checksum values can be done dynamically, i.e. the modules need not to
be reset. When changing the baud rate or checksum, these changes
should be made for all connected devices. After reconfiguration, all
modules should be powered down and powered up to force a reboot
and let the changes take effect. See the next page for a strategy for
changing baud rate and or checksum for an entire network.
2.3 Baud rate and Checksum
Adam modules contain EEPROMs to store configuration information
and calibration constants. The EEPROM replaces the usual array of
switches and pots required to specify baud rate, input/output range etc.
All of the ADAM modules can be configured remotely through their
communication ports, without having to physically alter pot or switch
settings.
Chapter 2 installation Guideline 2
-7
Page 18

Installation Guideline
Since there is no visual indication of a module’s configuration status, it
is impossible just by looking at it what the baud rate, address and other
settings are. It might not be possible to establish communications with a
module whose baud rate and address are unknown. To overcome this
problem, every module has an input terminal labeled INIT*. By booting
the module while connecting the INIT* terminal with the module’s
GND terminal, the modules configuration is forced into a known state.
This state is called the INIT* state.
INIT* state defaults:
Baud rate: 9600
Address: 00h
Checksum: disabled
Forcing the module in the INIT* state does not change any parameters
in the module’s EEPROM. When the module is in the INIT* state with
its INIT* and GND terminals shorted, all configuration settings can be
changed and the module will respond to all other commands normally.
Changing Baud rate and Checksum
Baud rate and checksum settings have several things in common:
• They should be the same for all modules and host computer.
• Their setting can only be changed by putting a module in the INIT*
state.
• Changed settings can only take effect after a module is rebooted
To alter baud rate or checksum settings you must perform the following
steps:
• Power on all components except the ADAM Module.
• Power the ADAM module on while shorting the INIT* and GND
terminals (See Figure 2-3).
8
ADAM 4000 Series User’s Manual
2-
Page 19
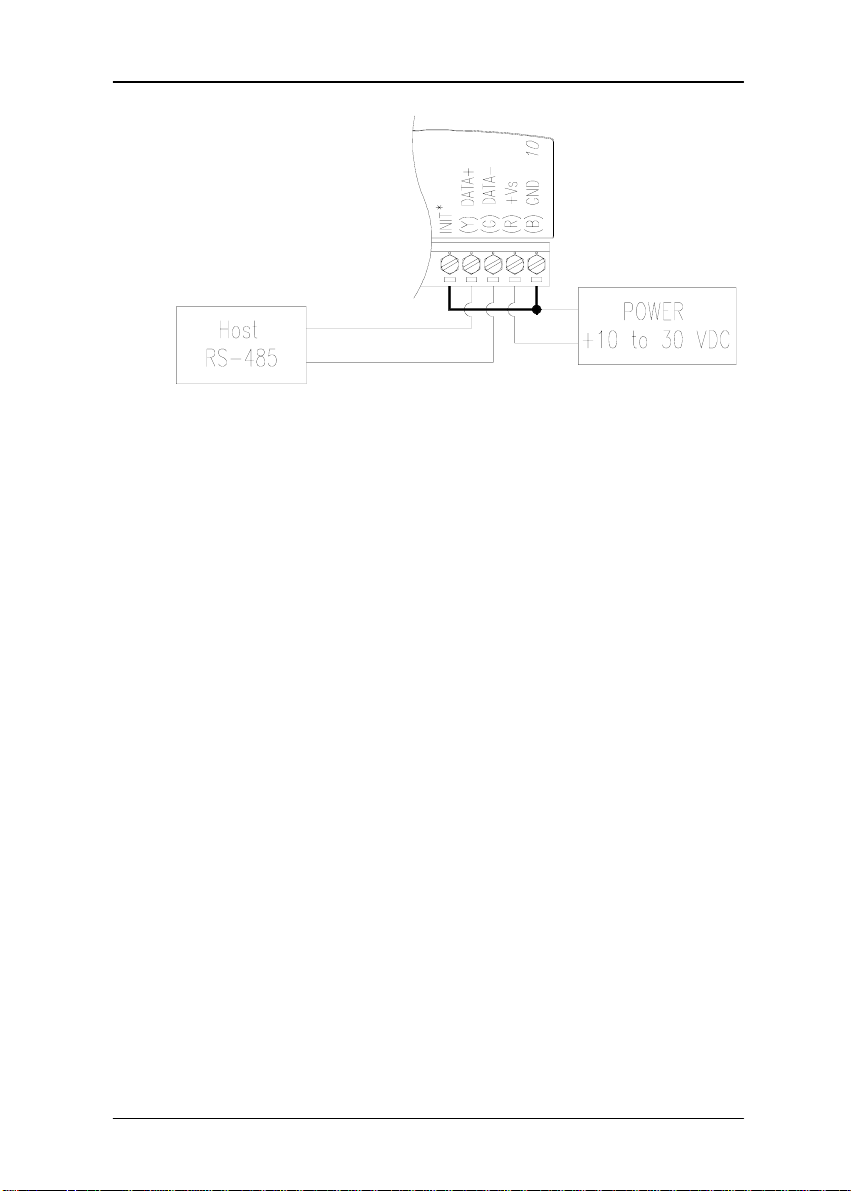
Chapter 2
Figure 2-3 Grounding the INIT* Terminal
• Wait at least 7 seconds to let self calibration and ranging take effect.
• Configure the checksum status and/or the baud rate.
• Switch the power to the ADAM Module OFF.
• Remove the grounding of the INIT* terminal and power the module
on.
• Wait at least 7 seconds to let self calibration and ranging take effect.
• Check the settings (If the baud rate has changed, the settings on the
host computer should be changed accordingly).
Chapter 2 installation Guideline 2
-9
Page 20
Installation Guideline
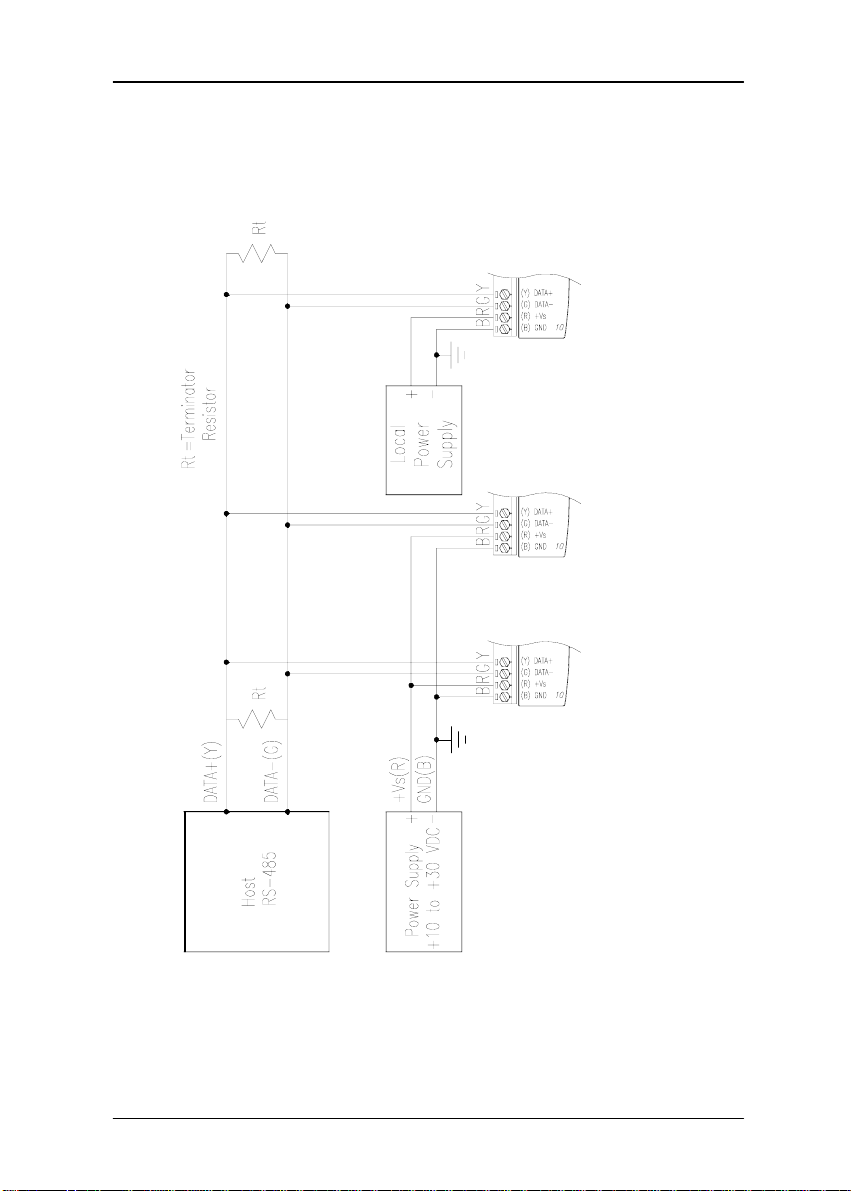
2.4 Multiple Module Hookup
The Figure below shows how ADAM modules are connected in a
multiple module example:
Figure 2-4 Multi-module Connection
10
ADAM 4000 Series User’s Manual
2-
Page 21
Chapter 2
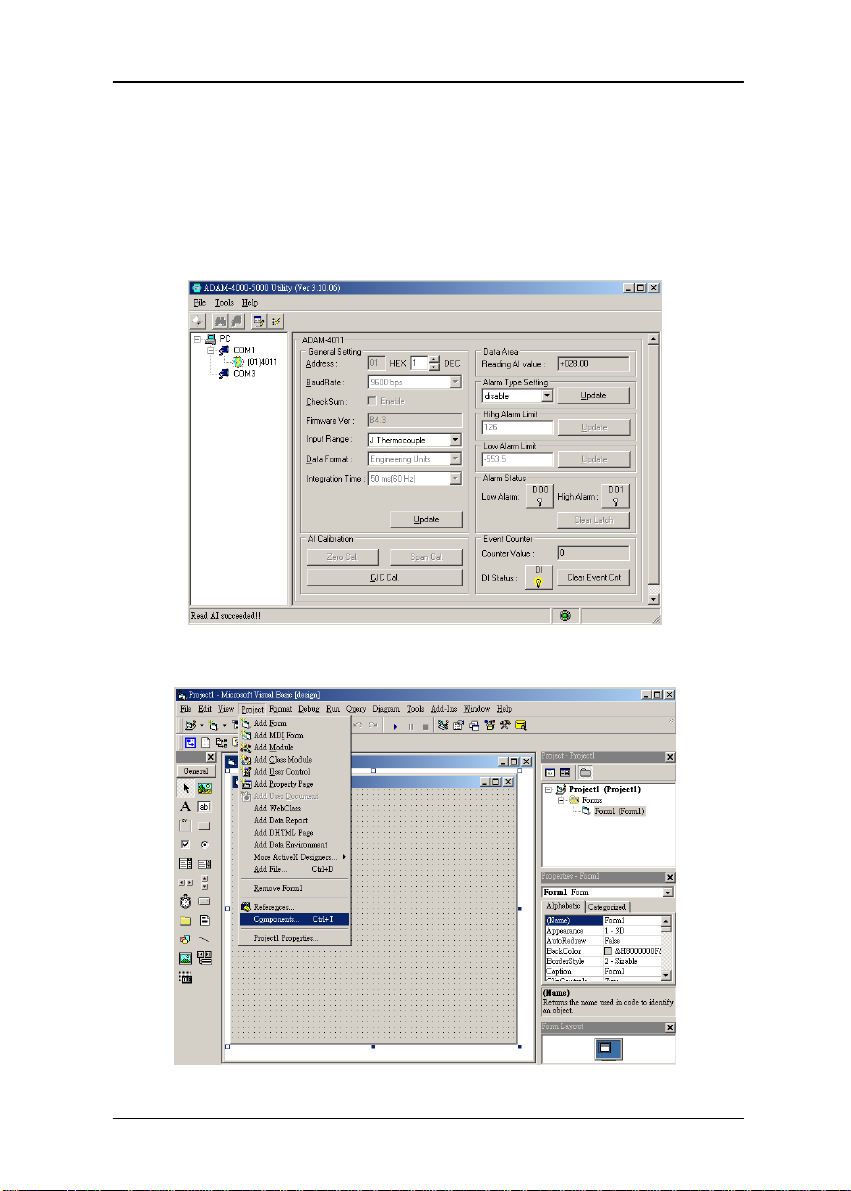
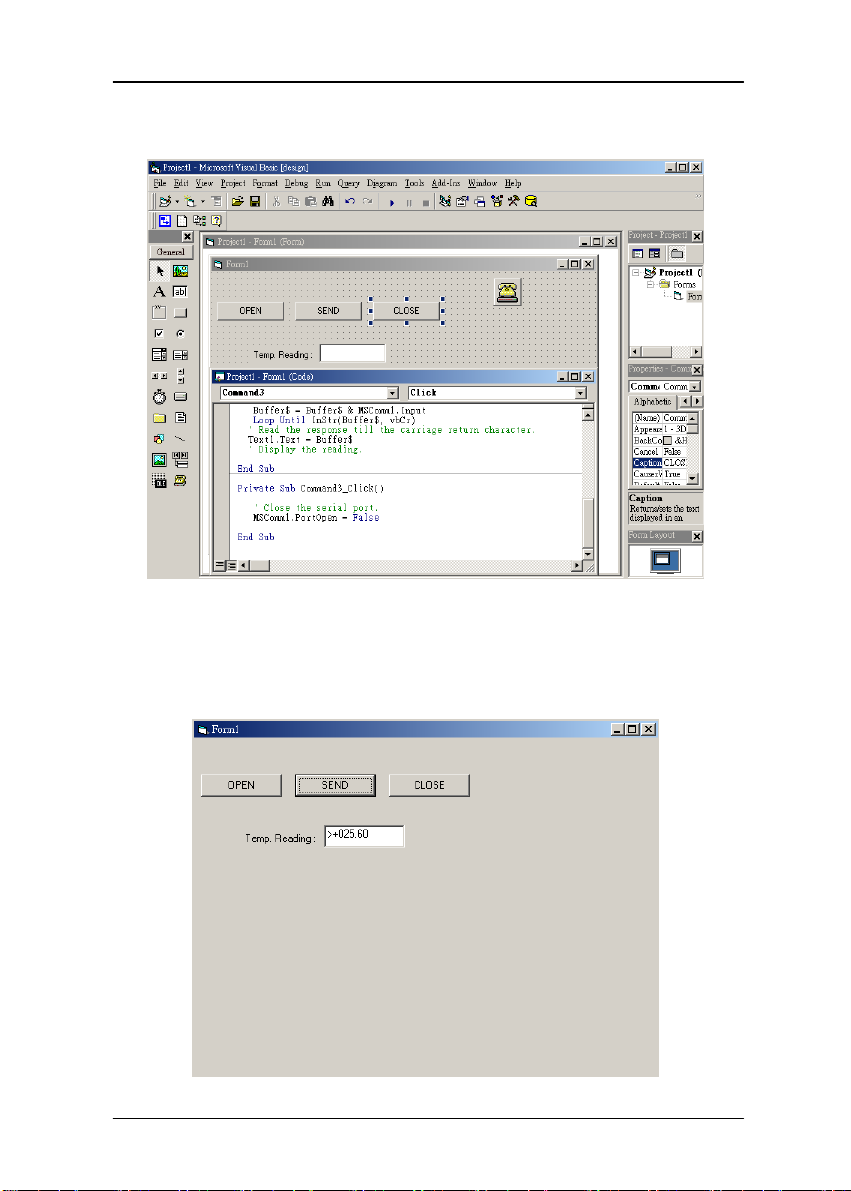
2.5 Programming Example
The following example is a simple program written in Visual Basic 6.0
that demonstrates how to get temperature reading from ADAM-4011
module, which is addressed at 01H.
Step 1. Using ADAM Utility to check the settings of “Address = 01H”,
“Baud rate = 9600” and “Checksum = Disabled” as following.
Step 2. Run VB 6.0 and add a control via “Project\Component”.
Chapter 2 installation Guideline 2
-11
Page 22
Installation Guideline
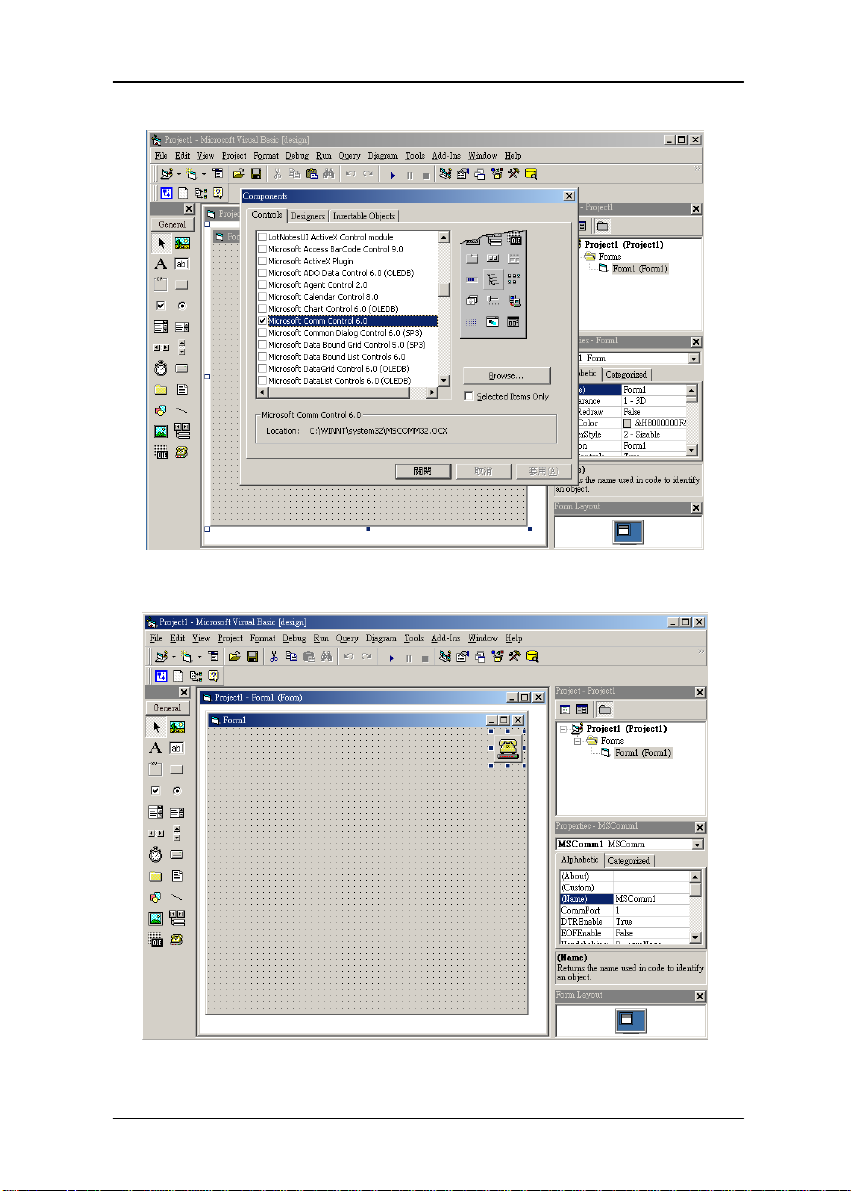
Step 3. Select “Microsoft Comm Control”
Step 4. Add the Comm Control on the form.
12
ADAM 4000 Series User’s Manual
2-
Page 23

Step 5. Add three Command Buttons on the form as following
Step 6. Add one Label and one Text on the form as following.
Chapter 2
Chapter 2 installation Guideline 2
-13
Page 24
Installation Guideline
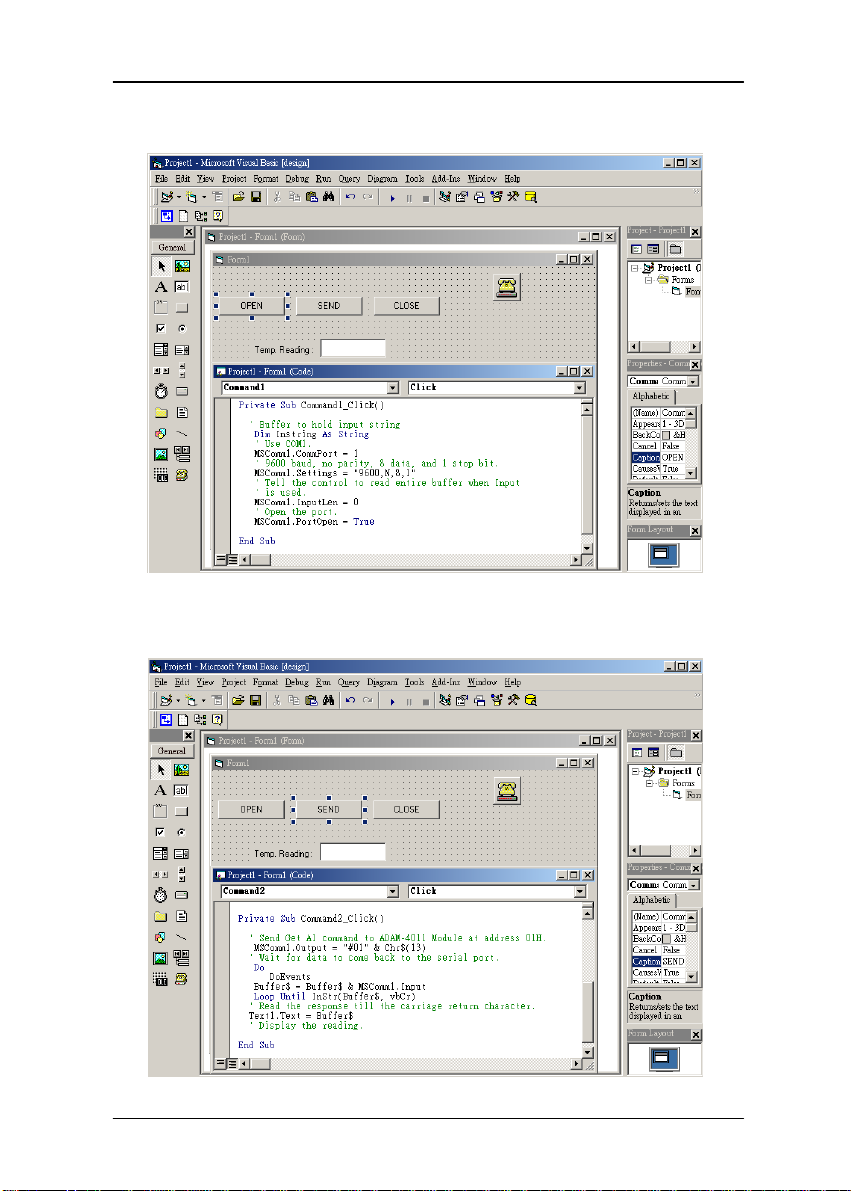
Step 7. Click OPEN Button and type following codes. The source codes are
listed at the end of this section.
Step 8. Click SEND Button and type following codes. The source codes are
listed at the end of this section.
14
ADAM 4000 Series User’s Manual
2-
Page 25
Chapter 2
Step 9. Click CLOSE Button and type following codes. The source codes are
listed at the end of this section.
Step 10. Run the Project → Click OPEN to open COM1 → Click SEND to
send the Get Temperature Reading Command. Now you will find the reading
is displayed as following format.
Chapter 2 installation Guideline 2
-15
Page 26
Installation Guideline
Program Source Codes:
OPEN Command Button:
Private Sub Command1_Click()
' Buffer to hold input string
Dim Instring As String
' Use COM1.
MSComm1.CommPort = 1
' 9600 baud, no parity, 8 data, and 1 stop bit.
MSComm1.Settings = "9600,N,8,1"
' Tell the control to read entire buffer when Input
' is used.
MSComm1.InputLen = 0
' Open the port.
MSComm1.PortOpen = True
End Sub
SEND Command Button:
Private Sub Command2_Click()
' Send Get AI command to ADAM-4011 Module at address 01H.
MSComm1.Output = "#01" & Chr$(13)
' Wait for data to come back to the serial port.
Do
DoEvents
Buffer$ = Buffer$ & MSComm1.Input
Loop Until InStr(Buffer$, vbCr)
' Read the response till the carriage return character.
Text1.Text = Buffer$
' Display the reading.
End Sub
CLOSE Command Button
Private Sub Command3_Click()
' Close the serial port.
MSComm1.PortOpen = False
End Sub
16
ADAM 4000 Series User’s Manual
2-
Page 27

I/O Modules 3
Page 28

I/O Modules
3.1 ADAM-4011/4011D Thermocouple Input Modules
ADAM-4011/4011D Thermocouple Input Modules use a
microprocessor-controlled integrating A/D converter to convert sensor
voltage, current or thermocouple signal into digital data. The digital
data is then translated into either engineering units, two’s co mplement
hexadecimal format or percentage of full-scale range (FSR) according
to the module’s configuration. When prompted by the host computer,
the data is sent through a standard RS-485 interface.
The ADAM-4011/4011D Thermocouple Input Modules offer signal
conditioning, A/D conversion, ranging, and RS-485 digital
communication functions. They protect your equipment from ground
loops and power surges by providing opto-isolation of the A/D input
and transformer based isolation up to 3000 V
transformer-based isolation up to 500 V
Open Thermocouple Detection and Input Surge Protection
(ADAM-4011D only)
The ADAM-4011D provides an open thermocouple detection function.
Users can use a simple command to detect whether the thermocouple is
open or closed. The module also provides surge protection on its input
channel. Internal high-speed transient suppressor on its input channel
protects the module from dangerous spikes and voltages.
. (ADAM-4011 has
DC
)
DC
Front Panel LED Indicator (ADAM-4011D only)
The 4½ digits LED display on the back of the ADAM-401 1D let s yo u
monitor process readings right at their source. The module displays
readings in a wide variety of formats as well as high-low alarm
messages. The ADAM-4011D offers flexibility, ease of installation
and direct availability of process data. For critical process monitoring,
this module is the ideal choice.
Digital Input/Output
ADAM-4011/4011D Thermocouple Input Modules also contain two
digital outputs and one digital input. Outputs are open-collector
transistor switches that may be controlled by the host computer. They
can control solid-state relays, which in turn may control heaters, pumps,
and other electrical powered equipment. The digital inputs may be read
by the host computer and used to sense the state of a remote digital
signal.
2
ADAM 4000 Series User’s Manual
3-
Page 29

Chapter 3
Event counting
The event counter is connected to the Digital Input channel and can be
used to keep track of the total amount of external low-speed pulses. Its
accumulated maximal count is 65535. The number 65535 is held, even
if the actual number of events exceeds 65535. The counter can be read
or reset to 0 by the host computer.
Since the Event counter’s data is not stored in EEPROM, the event
counter is cleared and set to zero after every reset or power up of the
analog input module.
Alarm signaling
Analog input modules include High and Low alarm functions. High and
Low alarm limits may be downloaded into the module’s EEPROM by
the host computer.
The alarm functions can be enabled or disabled remotely. When the
alarm function is enabled, both Digital Output channels are used to
indicate the High and Low alarm state. Digital Output channel 1 (DO1)
equals High alarm state and Digital Output channel 0 (DO0) equals
Low alarm state. The High and Low alarm states can be read at any
time by the host computer.
Every A/D conversion will be followed by a comparison with the High
and Low limit. When the input value exceeds one of these limits, the
High or Low alarm state is set to ON.
There are two alarm mode options: Momentary and Latching.
If the alarm is in Latching mode, the alarm will stay on even when the
input value returns within limits. An alarm in Latching mode can be
turned OFF by issuing a Clear Alarm command from the host computer.
A Latching alarm is cleared by the module when the opposite alarm is
set. For example: the alarm is in latching mode and the High alarm is
turned ON.
When the module receives a value that is lower than the Low alarm
limit, it will clear the High alarm and turn the Low alarm ON.
When the alarm is in Momentary mode, the alarm will be turned OFF
as soon as the input value returns to within limits.
The arrangement of coupling High and Low alarm states with Digital
Output lines may be utilized to build ON/OFF controllers that can
operate without host computer involvement.
Chapter 3 I/O Modules
3-3
Page 30

I/O Modules
Function Description for the ADAM-4011 analog input
module
To provide a better understanding of the functioning of the ADAM
modules, the following is a description of the module with the most
extensive set of functions, the ADAM-4011.
All analog input data first flows through the PGA (programmable gain
amplifier). The amplifier can vary its gain from 1 to 128. The PGA
automatically adjusts the signal to a range of -2.5 V to +2.5 V. This
ensures optimal input voltage and resolution for the A/D converter.
The A/D conversion is supervised by the microprocessor that holds the
calibration software. Two kinds of calibration take place automatically
on startup or reset: Auto Zero calibration and Auto Span calibration.
Normal calibration is used to adjust the signal according to calibration
parameters defined by the user.
The digital 10 Hz filter provides a steady state output by using the ΔΣ
function.
Before the data enters the microprocessor it passes through an optical
isolation device. The opto-isolation prevents ground loops and limits
the chance of damage from power surges.
The microprocessor has six basic functions:
- Linearization of T/C (Thermocouple)
- Communication software and command set
- Calibration software
- Alarm monitoring
- Event counting
- Management of the EEPROM device that holds the system parameters
- Data transformation
After data has been transformed to the right data format its is passed on
the RS-485 output port.
If an input value exceeds the High alarm setting or falls below the Low
alarm setting, a flag is set in one of the Digital Output channels.
Finally, the on-board switching regulator accepts voltage between +10
and +30 V
protect your equipment from damage from power surges.
. This power circuit has an isolation value of 500 VDC to
DC
4
ADAM 4000 Series User’s Manual
3-
Page 31

ADAM-4011
Chapter 3
Figure 3-1 ADAM-4011 Thermocouple Input Module
Accepts:
- J, K, T, E, R, S and B thermocouples
- millivolt inputs: ±15 mV, ±50 mV, ±100 mV and ±500 mV
- Volt inputs: ±1 V and ±2.5 V
- Current input: ±20 mA (Requires a 125 Ω resistor)
Two digital output channels and one digital input chann e l are
provided.
Depending on the module’s configuration setting, it can forward the
data to the host computer in one of the following formats:
- engineering units (
o
C, mV, V, or mA)
- percent of full-scale range (FSR)
- two’s complement hexadecimal
Chapter 3 I/O Modules
3-5
Page 32

I/O Modules
ADAM-4011D
Figure 3-2 ADAM-4011D Thermocouple Input Module with LED Display
Accepts:
- J, K, T, E, R, S and B thermocouples
- millivolt inputs: ±15 mV, ±50 mV, ±100 mV and ±500 mV
- Volt inputs: ±1 V and ±2.5 V
- Current input: ±20 mA (Requires a 125 Ω resistor)
Two digital output channels and one digital input channel are provided.
Depending on the module’s configuration setting, it can forward the
data to the host computer in one of the following formats:
- engineering units (
o
C, mV, V, or mA)
- percent of full-scale range (FSR)
- Two’s complement hexadecimal
6
ADAM 4000 Series User’s Manual
3-
Page 33

Application Wiring
Chapter 3
Figure 3-3 Thermocouple Input
Figure 3-4 Millivolt and Volt Input
Figure 3-5 Process Current Input
Chapter 3 I/O Modules
3-7
Page 34

I/O Modules
Figure 3-6 Digital Output used with SSR (HI-LO alarm)
Figure 3-7 Digital Output used with SSR (HI-LO alarm)
Figure 3-8 Digital Output used with SSR (HI-LO alarm)
8
ADAM 4000 Series User’s Manual
3-
Page 35

Chapter 3
3.2 ADAM-4012 Analog Input Module
ADAM-4012 Analog input module uses a microprocessor-controlled
integrating A/D converter to convert sensor voltage or current signals
into digital data. The digital data is then translated into either
engineering units, two’s complement hexadecimal format or percentage
of full-scale range (FSR) according to the module’s configuration.
When prompted by the host computer, the data is sent through a
standard RS-485 interface.
ADAM-4012 Analog Input Modules offer signal conditioning, A/D
conversion, ranging, and RS-485 digital communication functions.
They protect your equipment from ground loops and power surges by
providing opto-isolation of the A/D input and transformer based
isolation up to 3000 V
Digital Inputs/Outputs
ADAM-4012 also contains two digital outputs and one digital input.
Outputs are open-collector transistor switches that may be controlled by
the host computer. They can control solid-state relays, which in turn
may control heaters, pumps, and other electrical powered equipment.
The digital inputs may be read by the host computer and used to sense
the state of a remote digital signal.
Event counting
The event counter is connected to the Digital Input channel and can be
used to keep track of the total amount of external low-speed pulses. Its
accumulated maximal count is 65535. The number 65535 is held, even
if the actual number of events exceeds 65535. The counter can be read
or reset to 0 by the host computer.
Since the Event counter’s data is not stored in EEPROM, the event
counter is cleared and set to zero after every reset or power up of the
analog input module.
.
DC
Alarm signaling
Analog input modules include High and Low alarm functions. High and
Low alarm limits may be downloaded into the module’s EEPROM by
the host computer.
The alarm functions can be enabled or disabled remotely. When the
alarm function is enabled, both Digital Output channels are used to
indicate the High and Low alarm state. Digital Output channel 1 (DO1)
equals High alarm state and Digital Output channel 0 (DO0) equals
Low alarm state. The High and Low alarm states can be read at any
time by the host computer.
Chapter 3 I/O Modules
3-9
Page 36

I/O Modules
Every A/D conversion will be followed by a comparison with the High
and Low limit. When the input value exceeds one of these limits, the
High or Low alarm state is set to ON.
There are two alarm mode options: Momentary and Latching.
If the alarm is in Latching mode, the alarm will stay on even when the
input value returns within limits. An alarm in Latching mode can be
turned OFF by issuing a Clear Alarm command from the host computer.
A Latching alarm is cleared by the module when the opposite alarm is
set. For example: the alarm is in latching mode and the High alarm is
turned ON.
When the module receives a value that is lower than the Low alarm
limit, it will clear the High alarm and turn the Low alarm ON.
When the alarm is in Momentary mode, the alarm will be turned OFF
as soon as the input value returns to within limits.
The arrangement of coupling High and Low alarm states with Digital
Output lines may be utilized to build ON/OFF controllers that can
operate without host computer involvement.
10
ADAM 4000 Series User’s Manual
3-
Page 37

ADAM-4012
Chapter 3
Figure 3-9 ADAM-4012 Analog Input Module
Accepts:
- millivolt inputs ± 150 mV and ±500 mV
- volt inputs: ±1 V, ±5 V and ±10 V
- current input: ±20 mA (requires a 125 Ω resistor)
Two digital output channels and one digital input channel are provided.
Depending on the module's configuration setting, it can forward the
data to the host computer in one of the following formats:
- engineering units (mV, V, or mA )
- percent of full-scale range (FSR)
- two’s complement hexadecimal
Chapter 3 I/O Modules
3-11
Page 38

I/O Modules
Application Wiring
Figure 3-12 Digital Output used with SSR (HI-LO alarm)
12
ADAM 4000 Series User’s Manual
3-
Figure 3-10 Millivolt and Volt Input
Figure 3-11 Process Current Input
Page 39

Chapter 3
Figure 3-13 Digital Output used with SSR (HI-LO alarm)
Figure 3-14 Digital Output used with SSR (HI-LO alarm)
Chapter 3 I/O Modules
3-13
Page 40

I/O Modules
3.3 ADAM-4013 RTD Module
ADAM-4013 RTD input module support s o ne RT D in p ut chan nel fo r
temperature measurement. This module can accept 2 wire, 3 wire or 4
wire RTD sensor. The module offers signal conditioning, A/D
conversion, ranging, and RS-485 digital communication functions.
They protect your equipment from ground loops and power surges by
providing opto-isolation of the A/D input and transformer based
isolation up to 3000 V
ADAM-4013
.
DC
Figure 3-15 ADAM-4013 RTD Input Module
Accepts:
- input from platinum and nickel RTDs
Depending on the module’s configuration setting, it can forward the
data to the host computer in one of the following formats:
- engineering units ( °C )
- percent of full-scale range (FSR)
- two’s complement hexadecimal
14
ADAM 4000 Series User’s Manual
3-
Page 41

Application Wiring
Chapter 3
Figure 3-16 RTD Inputs
Chapter 3 I/O Modules
3-15
Page 42

I/O Modules
蚓蚓
蚓蚓
3.4 ADAM-4015 6-channel RTD Input Module
A RTD module is popular for temperature measurement. Unlike the
traditional design, the ADAM-4015 provides six RTD input channels
for different types of RTD signal as an effective solution in industrial &
building automation. Usually, broken external wiring will lead to
inaccurate current value. The ADAM-4015 provides a broken wiring
detecting function so users can easily troubleshoot broken wiring
problems.
ADAM-4015
-
-
-
3
2
2
D
M
T
O
R
C
CODE
(IEC/JIS) 30/35
(IEC/JIS) 30/35
(IEC/JIS) 30/35
(IEC/JIS) 30/35
(IEC/JIS) 30/35
40
41
42
43
1
+
2
M
D
O
T
R
C
TYPE
Pt 100
Pt 1000
BALCO 500
+
D
3
3
N
D
M
D
T
G
O
T
R
C
R
6
2
-
0
+
+
1
0
1
0
D
D
M
D
D
T
T
O
T
T
R
R
R
C
R
4
1
RANGE
-50 - 150
-
0 - 100
蚓蚓
-
0 - 200
蚓蚓
-
0 - 400
蚓蚓
-
-200 - 200
-40 - 160
蚓蚓
-30 - 120
蚓蚓
Ni
-80 - 100
蚓蚓
Ni
0 - 100
蚓蚓
Figure 3-17: ADAM-4015 6-channel RTD Input Module
16
ADAM 4000 Series User’s Manual
3-
3
1
4
5
-
+
-
4
M
D
O
T
R
C
+
4
5
5
M
D
D
D
O
T
T
T
R
R
C
R
+
-
1
A
s
A
D
T
T
V
N
A
A
+
*
G
D
D
T
)
A
A
/
/
N
N
)
)
)
I
B
R
G
Y
N
(
(
(
(
I
Page 43

D
D
Application Wiring
14
Chapter 3
RTD 1+
2-wire RT
COM 0
RTD 0-
RTD 0+
RTD 1+
COM 0
RTD 0-
RTD 0+
14
Figure 3-18: ADAM-4015 RTD Input Module Wiring Diagram
3-wire RT
Chapter 3 I/O Modules
3-17
Page 44

I/O Modules
Technical specification of ADAM-4015
Channel
Input Type
Input type and
temperature range
Pt100, Pt1000, BALCO500, Ni
Pt100: -50 to 150° C 0 to 100° C 0 to 200° C 0 to
400° C -200 to 200° C Pt1000: -40 to 160° C
BALCO500: -30 to 120° C Ni: -80 to 100° C 0 to
100° C
6
Isolation Voltage
Sampling Rate
Input Impedance
Accuracy
Power Consumption
I/O Connector Type
Table 3-1: Technical specification of ADAM-4015
3000 VDC
12 sample/sec (total)
10 MΩ
+/- 0.1% or better
1 W
13- pin plug-terminal
18
ADAM 4000 Series User’s Manual
3-
Page 45

3.5 ADAM-4015T 6-channel Thermistor Input Module
A Thermistor module is popular for temperature measurement. Unlike
the traditional design, the ADAM-4015T provides six Thermistor
input channels for different types of Thermistor signal as an effective
solution in industrial & building automation. Usually, broken external
wiring will lead to inaccurate current value. The ADAM-4015T
provides a broken wiring detecting function so users can easily
troubleshoot broken wiring pr obl ems.
ADAM-4015T
Chapter 3
Application Wiring
Figure 3-19 ADAM-4015T 6-channel Thermistor Input Module
Figure 3-20 ADAM-4015T Thermistor Input Module Wiring
Diagram
Chapter 3 I/O Modules
3-19
Page 46

I/O Modules
3.6 ADAM-4016 Analog Input/Output Module
A strain gauge input module uses a microprocessor-controlled
integrating A/D converter to convert sensor voltage or current signals
into digital data for load cell and stress measurement. The digital data is
then translated into either engineering units, two’s complement
hexadecimal format or percentage of full-scale range (FSR) according
to the module’s configuration. When prompted by the host computer,
the data is sent through a standard RS-485 interface.
The strain gauge input module offers signal conditioning, A/D
conversion, ranging, and RS-485 digital communication functions.
They protect your equipment from ground loops and power surges by
providing opto-isolation of the A/D input and transformer based
isolation up to 3000 V
Excitation Voltage Output
A strain gauge input module can supply single channel voltage output
for excitation. The module receives digital input from the host
computer. The format of the data is engineering units. It then uses its
microprocessor-controlled D/A converter to convert the digital data into
output signals.
Strain gauge input modules protect your equipment from ground loops
and power surges by providing opto-isolation of the D/A output and
transformer-based isolation up to 3000 V
Digital Outputs
A strain gauge input module also contains 4 digital outputs. Outputs are
open-collector transistor switches that may be controlled by the host
computer. They can control solid-state relays which in turn may control
heaters, pumps, and other electrical equipment.
.
DC
.
DC
Alarm signaling
Strain Gauge input modules include High and Low alarm functions.
High and Low alarm limits may be downloaded into the modu le’s
EEPROM by the host computer.
The alarm functions can be enabled or disabled remotely. When the
alarm function is enabled, both Digital Output channels are used to
indicate the High and Low alarm state. Digital Output channel 1 (DO1)
equals High alarm state and Digital Output channel 0 (DO0) equals
Low alarm state. The High and Low alarm states can be read at any
time by the host computer.
20
ADAM 4000 Series User’s Manual
3-
Page 47

Chapter 3
Every A/D conversion will be followed by a comparison with the High
and Low limit. When the input value exceeds one of these limits, the
High or Low alarm state is set to ON.
There are two alarm mode options: Momentary and Latching.
If the alarm is in Latching mode, the alarm will stay on even when the
input value returns within limits. An alarm in Latching mode can be
turned OFF by issuing a Clear Alarm command from the host computer.
A Latching alarm is cleared by the module when the opposite alarm is
set. For example: the alarm is in latching mode and the High alarm is
turned ON.
When the module receives a value that is lower than the Low alarm
limit, it will clear the High alarm and turn the Low alarm ON.
When the alarm is in Momentary mode, the alarm will be turned OFF
as soon as the input value returns to within limits.
The arrangement of coupling High and Low alarm states with Digital
Output lines may be utilized to build ON/OFF controllers that can
operate without host computer involvement. .
Chapter 3 I/O Modules
3-21
Page 48

I/O Modules
ADAM-4016
Figure 3-21 ADAM-4016 Analog Input/Output Module
Accepts:
- millivolt inputs: ±15 mV, ±50 mV, ±100 mV, ±500 mV Strain Gauge
- Current input: ±20 mA
- Excitation voltage output: 0 ~ 10 V
Four digital output channels are provided.
Depending on the module’s configuration setting, it can forward the
data to the host computer in one of the following formats:
- engineering units (mV or mA)
- percent of full-scale range (FSR)
- Two’s complement hexadecimal
22
ADAM 4000 Series User’s Manual
3-
Page 49

Application Wiring
Figure 3-22 Strain Gauge Voltage Input
Chapter 3
Figure 3-23 Strain Gauge Current Input
Chapter 3 I/O Modules
3-23
Page 50

I/O Modules
Figure 3-24 Digital Output used with SSR
24
ADAM 4000 Series User’s Manual
3-
Page 51

Chapter 3
3.7 ADAM-4017/4017+/4018/4018M/4018+ 8-channel Analog Input Modules
ADAM-4017/4018 8-channel Analog Input Module
The ADAM-4017/4017+/4018/4018+ is a 16-bi t , 8-channel analog
input module that provides programmable input ranges on all channels.
This module is an extremely cost-effective solution for industrial
measurement and monitoring applications. Its opto-isolated inputs
provide 3000 V
protecting the module and peripherals from damage due to high inputline voltages.
ADAM-4017/4017+/4018/4018+ offers signal conditioning, A/D
conversion, ranging and RS-485 digital communication functions. The
module protects your equipment from ground loops and power surges
by providing opto-isolation of A/D input and transformer based
isolation up to 3000 V
The ADAM-4017/4017+/4018/4018+ uses a 16-bit microprocessorcontrolled sigma-delta A/D converter to convert sensor voltage or
current into digital data. The digital data is then translated into
engineering units. When prompted by the host computer, the module
sends the data to the host through a standard RS-485 interface.
ADAM-4018M 8-channel Analog Input Data logger
The ADAM-4018M is a 16-bit, 8-channel analog input data logger
featuring programmable input ranges on all channels. This reliable and
easy to use analog input logger can store up to 38,000 measurements
for a maximum duration of 20 years. The ADAM-4018M can accept
various analog inputs, such as thermocouple, mV, V and mA, and
offers three configurable logging modes: standard log, event log, and
mixed log. Optically isolated inputs provide 500 V
between the module and the analog input, pro t ecting the module and
peripherals from damage due to high voltages on the input lines. The
ADAM-4018M is an extremely cost-effective solution for industrial
measurement and monitoring applications.
of isolation between the analog input and the module,
DC
.
DC
of isolation
DC
ADAM-4017+ 8-channel Differential Analog Input Module
Here comes a solution to the demand for more channels of analog input.
Similar to its counterpart, the ADAM-4017+ enables eight differential
channels with multiple input ranges. This multi-ch/multi-range structure
allows channels with different input ranges at the same time, say
channel 1 with the range +/- 5 V meanwhile the others with +/- 10 V
and +/- 20 mA.
Chapter 3 I/O Modules
3-25
Page 52

I/O Modules
Instead of leaving two single-ended channels in ADAM-4017 module
due to the limit number of pins, the ADAM-4017+ uses a jumper to
switch AGND and INIT* to Vin6- and Vin7-, respectively, to allow 8channel input. Additionally, the ADAM-401 7+ has been expanded to
accept 4 ~ 20 mA so the user can employ it in various applications
ADAM-4018+ 8-ch. Thermocouple Input Module
Here comes a solution to the demand for more channels of
thermocouple input. Similar to its counterpart, the ADAM-4018+
enables eight differential channels with multiple input types. This
multi-ch/multi-type structure allows channels with different input types
at the same time, say channel 1 with K input type meanwhile the others
with R and S types.
ADAM-4018+ is an 8-channel T/C input module. Compared with the
universal analog input module ADAM-4019, it is rather dedicated to
T/C and 4 ~ 20 mA inputs for those with special request. It improves
ADAM-4018, the traditional design six differential and two singleended channels, to enhance the steadiness and reliability of wiring.
Usually, broken external will lead to inaccurate current value. ADAM4018+ provides burned-out detection so that users can easily
troubleshoot broken wiring pr obl ems.
26
ADAM 4000 Series User’s Manual
3-
Page 53

ADAM-4017
Chapter 3
Vin 4-
Vin 4+
STRAIN GAUGE
Vin 5+
Vin 5-
Vin 3-
DATA
ACQUISITION
MODULE
INPUT:
mV, V, mA
OUPUT:
RS-485
Vin 6+
Vin 2-
Vin 3+
Vin 2+
ADAM-4017
CODE INPUT RANGE
08
09
0A
0B
0C
0D
AGND
Vin 7+
INIT*
?0 V
? V
? V
?00 mV
?00 mV
?0 mA
Vin 1-
Vin 0-
Vin 0+
Vin 1+
(Y) DATA+
(B) GND
(G) DATA-
(R) +Vs
Figure 3-25 ADAM-4017 8-channel Analog Input Module
Channels:
- six differential, two single-ended
Accepts:
- Millivolt inputs: ±150 mV and ±500 mV
- Volt inputs: ±1 V, ±5 V, and ±10 V
- Current input: ±20 mA (requires a 125 Ω resistor)
The module forwards the data to the host computer in engineering units
(mV, V, or mA)
Chapter 3 I/O Modules
3-27
Page 54

I/O Modules
A
ADAM-4017+ 8-channel Differential Analog Input Module
-
-
-
+
+
4
3
2
4
3
n
n
n
i
V
CQUISITION
5
n
i
V
i
V
DATA
MODULE
INPUT:
mV, V, mA
OUPUT:
RS-485
+
6
n
i
V
n
i
V
D
N
G
A
n
i
V
ADAM-4017+
CODE INPUT RANGE
08
09
0A
0B
0C
0D
07 4 ~20 mA
+
7
n
i
V
i
V
STRAIN GAUGE
+
5
n
i
V
Figure 3-26 ADAM-4017+ 8-ch. differential analog input module
-
-
+
1
n
i
V
?0 V
? V
? V
?00 mV
?00 mV
?0 mA
+
A
T
A
D
)
Y
(
+
0
1
0
n
i
n
n
i
i
V
V
V
A
D
T
s
A
N
V
D
+
G
)
)
)
B
G
R
(
(
(
+
2
n
i
V
*
T
I
N
I
Jumper setting
1. JP9 and JP10 (default setting is six differential and two single-ended)
JP9, JP10
Six differential and two single-ended
Eight differential
2. JP1~JP8
JP1~
JP8
Mapping to
Channel
28
ADAM 4000 Series User’s Manual
3-
20 mA Input Range
Voltage Input range
Ch.1 Ch.2 Ch.3 Ch.4 Ch.5 Ch.6 Ch.7 Ch.8
JP 1 JP 3 JP 5 JP 7 JP 2 JP 4 JP 6 JP 8
Page 55

Chapter 3
3. JP13
JP13
4. JP12 can Enable/Disable Watchdog Timer Function. The default
setting is closed, i.e., Watchdog Timer Function Enabled. Please
always keep JP12 closed and enable/disable the watchdog timer
function in ADAM-utility.
Technical specification of ADAM-4017+
Channel 8
Input Type mV, V, mA
Input range +/- 150 mV, +/- 500 mV, +/- 1 V, +/- 5
Isolation Voltage 3000 VDC
Fault and over-voltage
protection
Sampling Rate 10 sample/sec (total)
Input Impedance 20 MW
Accuracy +/- 0.1% or better
Power Consumption 1.2 W
I/O Connector Type 10-pin plug-terminal
Table 3-2 Technical specification of ADAM-4017+
System is normal mode
System is initial mode
V, +/- 10 V, +/- 20 mV, 4 ~ 20 mA
With stands over-voltage up to +/-35 V
Chapter 3 I/O Modules
3-29
Page 56

I/O Modules
ADAM-4018
Vin 4-
Vin 5+
Vin 3-
Vin 4+
ACQUISITION
MODULE
mV, V, mA
Thermocouple
OUPUT:
Vin 5-
Vin 6+
DATA
INPUT:
RS-485
Vin 2-
Vin 3+
Vin 2+
ADAM-4018
CODE INPUT RANGE
00
01
02
03
04
05
06
DE
DF
10
11
12
13
14
AGND
Vin 7+
INIT*
?5 mV
?0 mV
?00 mV
?00 mV
? V
?.5 V
?0 mA
T/C J
T/C K
T/C T
T/C E
T/C R
T/C S
T/C B
Vin 1-
Vin 0-
Vin 0+
Vin 1+
(Y) DATA+
(B) GND
(G) DATA-
(R) +Vs
Figure 3-27 ADAM-4018 8-channel Thermocouple Input Module
Channels:
- six differential, two single-ended
Accepts:
- J, K, T, E, R, S and B thermocouples
- Millivolt inputs: ±15 mV, ±50 mV, ±100 mV and ±500 mV
- Volt inputs: ±1 V and ±2.5 V
- Current input: ±20 mA (requires a 125 Ω resistor)
The module forwards the data to the host computer in engineering units
o
(
C, mV, V, or mA)
30
ADAM 4000 Series User’s Manual
3-
Page 57

ADAM-4018M
Chapter 3
Vin 4-
Vin 5+
Vin 3-
Vin 4+
ACQUISITION
MODULE
mV, V, mA
Thermocouple
OUPUT:
Vin 5-
Vin 6+
DATA
INPUT:
RS-485
Vin 2-
Vin 3+
Vin 2+
ADAM-4018M
CODE INPUT RANGE
00
?5 mV
01
?0 mV
02
?00 mV
03
?00 mV
04
? V
05
?.5 V
?0 mA
06
T/C J
DE
DF
T/C K
T/C T
10
T/C E
11
T/C R
12
T/C S
13
T/C B
14
AGND
Vin 7+
INIT*
Vin 1-
Vin 0-
Vin 0+
Vin 1+
(Y) DATA+
(B) GND
(G) DATA-
(R) +Vs
Figure 3-28 ADAM-4018M 8-channel Analog Input Data Logger
Channels:
- six differential, two single-ended
Accepts:
- J, K, T, E, R, S and B thermocouples
- Millivolt inputs: ±15 mV, ±50 mV, ±100 mV, ±500 mV
- Volt inputs: ±1 V and ±2.5 V
- Current input: ±20 mA (requires a 125 Ω resistor)
The module forwards the data to the host computer in engineering units
o
(
C, mV, V, or mA)
Storage Capacity:
- 128 KB flash memory
Chapter 3 I/O Modules
3-31
Page 58

I/O Modules
A
ADAM-4018+ 8-ch. Thermocouple Input Module
-
-
+
4
3
4
n
n
i
n
i
i
V
V
V
DATA
CQUISITION
MODULE
INPUT:
Thermocouple
OUPUT:
RS-485
+
-
+
5
5
6
n
n
n
i
i
i
V
V
V
Figure 3-29 ADAM-4018+ 8-ch. thermocouple input module
-
+
+
2
3
2
n
n
i
n
i
i
V
V
V
ADAM-4018+
CODE INPUT RANGE
0E
0F
10
11
12
13
14
+
D
*
7
N
T
I
n
G
i
N
A
V
I
-
+
1
1
n
n
i
i
V
V
T/C J
T/C K
T/C T
T/C E
T/C R
T/C S
T/C B
-
+
A
A
T
T
A
A
D
D
)
)
Y
G
(
(
-
+
0
0
n
i
n
i
V
V
D
s
N
V
+
G
)
)
B
R
(
(
Technical specification of ADAM-4018+
Channel 8
Input Type Thermocouple
T/C type and Temperature Range J 0 ~ 760° C
K 0 ~ 1000° C (New for 0~1370° C)
T -100 ~ 400° C
E 0 ~ 1000° C
R 500 ~ 1750° C
S 500 ~ 1750° C
B 500 ~ 1800° C
Isolation Voltage 3000 VDC
Fault and over-voltage protection Withstands over voltage up to +/- 35 V
Sampling Rate 10 sample/sec (total)
Input Impedance 20 MW
Accuracy +/- 0.1% or better
Power Consumption 0.5 W
I/O Connector Type 10-pin plug-terminal
Table 3-3 Technical specification of ADAM-4018+
32
ADAM 4000 Series User’s Manual
3-
Page 59

Application Wiring
Chapter 3
mV/V
Vin0-
Vin0+
11
Figure 3-30 Differential Input (CH0 to CH5)
+
-
Figure 3-31 Single-ended Input (CH6 to CH7)
-
V
mV/V
+
Vin5+
Vin5-
Vin6+
AGND
Vin7+
1
Chapter 3 I/O Modules
3-33
Page 60

I/O Modules
V
A
Vin 1-
Vin 1+
-
11
Vin 0Vin 0+
mV/V
+
Vin 1-
Vin 1+
-
Vin 0-
±
4~20 mA
Vin 0+
11
Built-in 120 Ohm Resister
Figure 3-32 ADAM-4017+ voltage and current input
+
Vin 1-
Vin 1+
-
Vin 0-
11
Vin 0+
T/C or 4~20m
+
Figure 3-33 ADAM-4018+ thermocouple input
34
ADAM 4000 Series User’s Manual
3-
Page 61

Chapter 3
3.8 ADAM-4019 8-channel Universal Analog Input Module
Here comes good news for users needing various analog input signals.
If there are different types of analog input, such as V, mV, mA, or
thermocouple signals, users have to prepare individual modules for data
acquisition. Now Advantech announces the ADAM-4019 universal
analog input module to integrate the various AI modules as one. It not
only reduces hardware cost, but also simplifies wiring engineering.
ADAM-4019
-
-
-
-
-
+
A
A
A
4
/
/
/
N
6
2
4
n
i
N
N
n
i
V
V
CODE
02
03
04
05
08
09
0D
0E
0F
10
11
12
13
14
+
3
3
n
i
n
i
V
V
INPUT RANGE
? 100 mV
500 mV
?
1 V
?
2.5 V
?
10 V
?
5 V
?
20 mA
?
T/C,J
T/C,K
T/C,Y
T/C,E
T/C,R
T/C,S
T/C,B
+
2
2
n
i
n
i
V
V
+
+
0
1
0
1
n
n
i
i
n
n
i
i
V
V
V
V
4
1
3
1
-
+
5
A
n
/
i
V
N
+
+
-
5
7
6
6
n
n
n
n
i
i
i
i
V
V
V
V
+
-
1
A
s
A
D
T
T
V
N
A
7
n
i
V
A
+
*
G
D
D
T
)
)
)
)
A
I
/
N
N
I
B
G
R
Y
(
(
(
(
Figure 3-34: ADAM-4019 8-channel Universal AI
Chapter 3 I/O Modules
3-35
Page 62

I/O Modules
Application Wiring
Vin 1-
Vin 1+
14
14
Vin 0-
Vin 0+
Vin 1-
Vin 1+
Vin 0-
Vin 0+
Vin 1-
Vin 1+
125
0.1%
-
mV/V
V
+
Ω
? ~20 mA
Vin 0-
Vin 0+
14
Figure 3-35: ADAM-4019 Universal AI wiring diagram
36
ADAM 4000 Series User’s Manual
3-
T/C
Page 63

Technical specification of ADAM-4019
Channel 8
Input Type V, mV, mA, T/C
Input type and temperature range
Isolation Voltage 3000 VDC
Sampling Rate 6 sample/sec (total)
Input Impedance 20 MW
Accuracy +/- 0.1% or better
Power Consumption 1 W
I/O Connector Type 13-pin plug-terminal
V: +/-1V , +/-2.5V, +/-5V , +/-10V
mV: +/- 100mV , +/-500mV
mA: +/-20mA (w/125W resister)
Thermocouple:
J 0 to 760° C
K 0 to 1370° C
T -100 to 400° C
E 0 to 1400° C
R 500 to 1750° C
S 500 to 1750° C
B 500 to 1800° C
Table 3-4: Technical specification of ADAM-4019
Chapter 3
Chapter 3 I/O Modules
3-37
Page 64

I/O Modules
3.9 ADAM-4021 Analog Output Module
Analog output module receives their digital input through an RS-485
interface from the host computer. The format of the data is either
engineering units, two’s complement hexadecimal format or percentage
of full-scale range (FSR), depending on the module’s configuration. It
then uses its microprocessor-controlled D/A converter to convert the
digital data into output signals.
You get a true read-back of the analog output signal from the unit’s
ADC, which independently monitors the output. You can specify slew
rates and start up currents through the configuration software. The
Analog Output Module can supply single-channel analog output in a
range of voltages or currents.
They protect your equipment from ground loops and power surges by
providing opto-isolation of the D/A output and transformer based
isolation up to 3000 V
Slew Rate
The slew rate is defined as the discrepancy between the number of
milliamps (or Volts) per second of the present and the required output
currents (or voltages). An ADAM analog output module may be
configured for a specific slew rate.
.
DC
38
ADAM 4000 Series User’s Manual
3-
Page 65

Chapter 3
ADAM-4021
Figure 3-36 ADAM -4021 Analog Output Module
Depending on its configuration settings the module accepts the
following formats from the host computer:
- Engineering units
- Percent of full-scale range (FSR)
- Two’s complement hexadecimal format,
Output types:
- Voltage: 0 to 10 V
(Slew rate: 0.0625 to 64 V/sec)
- Currents: 0 to 20 mA, or 4 to 20 mA.
(Slew rate: 0.125 to 128 mA/sec)
Chapter 3 I/O Modules
3-39
Page 66

I/O Modules
Application Wiring
Figure 3-37 Analog Output
40
ADAM 4000 Series User’s Manual
3-
Page 67

Chapter 3
3.10 ADAM-4024 4-channel Analog Output Module
ADAM-4024 is a 4-channel analog output with module mixed type
module. Currently, there is not any ADAM-4000 series module
providing more than one analog output channel. Under some
circumstances, however, it is a demand for multiple analog outputs to
fulfill particular applications without many duplicated modules.
ADAM-4024 is designed to achieve this purpose by integrating four A/O
channels and four isolated D/I channels into only one module. The four
digital input channels function as interlock for emergency latch output.
ADAM-4024, inherited from both ADAM4019 the multi-channel
universal A/I module and ADAM4021 multi-range A/O support, is
allowed its four A/O channels working at the same time with different
and more output ranges, e.g. 4 to 20 mA and +/- 10 V. To ensure the
operation of machines and facilities, ADAM-4024 has the functionality
of slew rate control. Output slope is programmable through
ramping/clamping the slew rate. Unlike traditional mechanism, ADAM4024 permits start-up user value to substitute its default value. Users can
easily set up and configure the module to be more adaptive and
customized.
Figure 3-38 ADAM-4024 4-ch. analog output module
Chapter 3 I/O Modules
3-41
Page 68

I/O Modules
Technical specification of ADAM-4024
• Effective resolution: 12-bit
• Output type: mA, V
• Output range: 0 to 20 mA, 4 to 20 mA, and ±10V
• Isolation voltage: 3000 V
• Output Impedance: 0.5 O
• Accuracy:
±0.1% of FSR for current output
±0.2% of FSR for voltage output
• Resolution: ±0.015% of FSR
• Zero drift: Voltage output: ±30 µV/° C, Current output: ±0.2 µA/° C
• Span temperature coefficient: ±25 ppm/° C
• Programmable output slope:
0.125 ~ 128 mA/sec.
0.0625 ~ 64.0 V/sec.
• Current load resistor: 0 to 500 & (source)
• Built-in Watchdog Timer
• Isolated Digital Input:
Channel: 4
Level 0: +1V max
Level 1: +10~30 V
Application Wiring
DC
DC
Figure 3-39 ADAM-4024 4-ch. analog output module wiring diagram
42
ADAM 4000 Series User’s Manual
3-
Page 69

Chapter 3
3.11 ADAM-4050 Digital I/O Module
The ADAM-4050 features seven digital input channels and eight digital
output channels. The outputs are open-collector transistor switches that
you can control from the host computer. You can also use the switches
to control solid-state relays, which in turn can control heaters, pumps
and power equipment. The host computer can use the module's digital
inputs to determine the state of limit or safety switches or remote digital
signals.
ADAM-4050
Figure 3-40 ADAM-4050 Digital I/O Module
Channels:
- 7 input channels
- 8 output channels
Digital Input:
- logic level 0: +1 V max.
- logic level 1: +3.5 V to +30 V
Digital Output:
- open collector to 30 V, 30 mA max. load
Chapter 3 I/O Modules
3-43
Page 70

I/O Modules
Application Wiring
Figure 3-41 TTL Input (ADAM-4050)
Figure 3-42 Contact Closure Input (ADAM-4050)
Figure 3-43 Digital Output used with SSR (ADAM-4050)
44
ADAM 4000 Series User’s Manual
3-
Page 71

Chapter 3
3.12 ADAM-4051 16-channel Isolated Digital Input Module
The ADAM-4051 is a 16-ch. Digital Input Module built with 2500V
optical isolation, it is suitable to critical applications. Different from
other modules, the ADAM-4051 accept 10 ~ 50V input voltage to fit
various digital signals, such as 12 V, 24 V, 48 V. Moreover, users can
read the current status from the LED indicators on the front panel.
ADAM-4051
DC
Figure 3-44 ADAM-4051 16-channel Digital Input Module
• Channel: 16 (4-channel/group)
• Optical Isolation: 2500 VDC
• Opto-isolator response time: 25 s
• Over-voltage Protect: 70 VDC
• ESD (Electro Static Discharge) : 2000 VDC
• LED Indicator : On: Active; Off: Non-active
• Input Voltage: Logic level 1: 10 ~ 50 V
Logic level 0: 3 V
• Power consumption: 1W
• I/O Connector Type: 13-pin plug-terminal*2
Chapter 3 I/O Modules
3-45
Page 72

I/O Modules
Application Wiring
Figure 3-45 Dry Contact Wiring (ADAM-4051)
Figure 3-46 Wet Contact Wiring (ADAM-4051)
46
ADAM 4000 Series User’s Manual
3-
OR
Page 73

3.13 ADAM-4052 Isolated Digital Input Module
The ADAM-4052 provides eight digital input channels: six fully
independent isolated channels and two isolated channels with a
common ground. All have 5000 V
isolation to prevent ground loop
RMS
effects and prevent damage from power surges on the input lines.
ADAM-4052
Chapter 3
Figure 3-47 ADAM-4052 Isolated Digital Input Module
Channels: 8
- 6 differential
- 2 single ended
Digital Input:
- logic level 0: +1 V max.
- logic level 1: +3.5 V to +30 V
Chapter 3 I/O Modules
3-47
Page 74

I/O Modules
Application Wiring
Figure 3-48 Isolation Digital Input (ADAM-4052)
48
ADAM 4000 Series User’s Manual
3-
Page 75

3.14 ADAM-4053 16-channel Digital Input Module
The ADAM-4053 provides 16 digital input chan nel s fo r dr y contact or
wet contact signals. For dry contact, effective distance from DI to
contact point is up to 500 m.
ADAM-4053
Chapter 3
Figure 3-49 ADAM-4053 16-channel Digital Input Module
Channels: 16
Digital Input:
-Dry contact
logic level 0: Close to GND
logic level 1: OPEN
-Wet contact
logic level 0: +2 V max.
logic level 1: +4 V to +30 V
Chapter 3 I/O Modules
3-49
Page 76

I/O Modules
*
Application Wiring
DI15 INIT* DI15 INIT
DI15
IN IT *
Figure 3-50 Wet Contact Input (ADAM-4053)
Figure 3-51 Contact Closure Input (ADAM-4053)
50
ADAM 4000 Series User’s Manual
3-
Page 77

Chapter 3
3.15 ADAM-4055 16-channel Isolated Digital I/O Module
The ADAM-4055 offers 8-ch. isolated digital input and 8-ch. isolated
digital output for critical applications. The inputs accept 10~50V
voltage, and the outputs supply 5~40V
user friendly, the ADAM-4055 also built with LED indicator for status
reading easily.
ADAM-4055
open collector. Considere d to
DC
Figure 3-52 ADAM-4055 16-channel Digital I/O Module
Chapter 3 I/O Modules
3-51
Page 78

I/O Modules
ADAM-4055 Technical Specifications:
• Number of Input Channel : 8 (4-channel/group)
• Optical Isolation : 2500 VDC
• Opto-isolator response time : 25 µs
• Over-voltage Protect: 70VDC
• ESD (Electro Static Discharge): 2000 VDC
• Input Voltage:
Dry Contact Logic level 0: Open
Logic level 1: Close to GND
Wet Contact Logic level 1: 10 ~ 50 V
Logic level 0: 3 V
Dry Contact & Wet contact Selectable
• Number of Output Channel: 8 (8-channel/group)
• Optical Isolation: 2500 VDC
• Opto-isolator response ti me: 25 µs
• Supply Voltage: Open Collector 5 ~ 40 VDC
• Sink Current: 200 mA max/channel
• LED Indicator: On: Active Off: Non-active
• Power Consumption: 1 W
• I/O Connector Type: 13-pin plug-terminal * 2
Application Wiring:
Figure 3-53 Digital Output wiring (ADAM-4055)
52
ADAM 4000 Series User’s Manual
3-
Page 79

Chapter 3
Figure 3-54 Digital Input Dry Contact Wiring (ADAM-4055)
Figure 3-55 Digital Input Wet Contact Wiring (ADAM-4055)
OR
Chapter 3 I/O Modules
3-53
Page 80

I/O Modules
3.16 ADAM-4056S 12-channel sink type isolated digital output
module
ADAM-4056S is a 12-channel sink type isolated digital output module.
The isolated channels are designed for digital output in critical
applications. Open collector outputs can provide from +5 VDC to +40
VDC. Both ADAM ASCII and Modbus/RTU protocols are supported.
LED indicators are used for convenient status reading.
Figure 3-56 ADAM-4056S
Technical Specification of ADAM-4056S
Number of Output Channel: 12
Digital Output: Open Collector from +5V to +40V, 200mA( Sink)
LED Indicator: On: Active, Off: Non-active
Power Consumption: 0.6 W
Optical isolation: 5000 VDC
Supports Modbus/RTU protocol
I/O Connector Type: 10-pin plug-terminal*2
54
ADAM 4000 Series User’s Manual
3-
Page 81

Application Wiring
Figure 3-57 Digital Output Wiring
-
LOAD
+
+5V ~ +40V
Chapter 3 I/O Modules
Chapter 3
3-55
Page 82

I/O Modules
3.17 ADAM-4056SO 12-channel source type isolated digital
output module
ADAM-4056SO is 12-channel source type isolated digital output
module. The 12 isolated digital output channels are designed for
critical applications. The digital output signals are sent at +10 ~ +35
VDC with maximum 1A per channel. Both ADAM ASCII and
Modbus/RTU protocols are supported. The LED indicators provides
convenient status reading.
Figure 3-58 ADAM-4056SO
Technical Specification of ADAM-4056SO
Number of Output Channel: 12
Digital Output: VCC: +10V~ +35V, 1A per Channel ( Source)
LED Indicator: On: Active, Off: Non-active
Power Consumption: 0.4 W
Optical isolation: 5000 VDC
Supports Modbus/RTU protocol
I/O Connector Type: 10-pin plug-terminal*2
56
ADAM 4000 Series User’s Manual
3-
Page 83

Application Wiring
Chapter 3
+10V ~ +35V
LOAD
Figure 3-59 Digital Output Wiring
Chapter 3 I/O Modules
3-57
Page 84

I/O Modules
3.18 ADAM-4060/4068 Relay Output Module
The ADAM Relay Output Module is a low-cost alternative to SSR
modules. The ADAM-4060 Relay Output M od ul e pr ovides four relay
channels, two of Form A and two of Form C. The ADAM-4068 Relay
Output Module provides eight channels, four of Form A and four of
Form C. These two modules are excellent for ON/OFF control or lowpower switching applications.
ADAM-4060
Figure 3-60 ADAM-4060 Relay Output Module
Contact rating for Form A and Form C:
AC: 0.5 A / 120 V
DC: 1 A / 24 V
58
ADAM 4000 Series User’s Manual
3-
AC
DC
Page 85

ADAM-4068
Chapter 3
C
C
O
O
M
N
N
O
C
4
3
L
L
4
R
R
L
R
RELAY
M
O
O
O
N
C
N
5
5
6
L
L
L
R
R
R
M
M
N
O
O
2
C
C
L
3
2
R
L
L
R
R
TYPE
RE LA Y 3 ,4,5,6 F orm A
RELAY 0,1,2,3
RE LA Y 0 ,1,2,7 F orm C
RELAY 4,5,6,7
0
1234567
M
M
O
O
O
C
N
C
6
7
7
L
L
L
R
R
R
O
N
2
L
R
C
N
7
L
R
C
O
M
N
O
1
C
L
1
R
L
R
SIGNAL
FORM A
FORM C
*
T
I
C
N
I
N
O
M
N
N
N
O
0
C
1
0
L
L
L
0
R
R
R
L
R
0
1
-
+
A
A
D
T
s
T
A
N
A
V
D
+
D
G
)
)
)
)
Y
G
B
R
(
(
(
(
Figure 3-61 ADAM-4068 8-channel Relay Output Module
Contact Rating :
AC 125V@0.6A; 250V@0.3A
DC 30V@2A; 110V@0.6A
Chapter 3 I/O Modules
3-59
Page 86
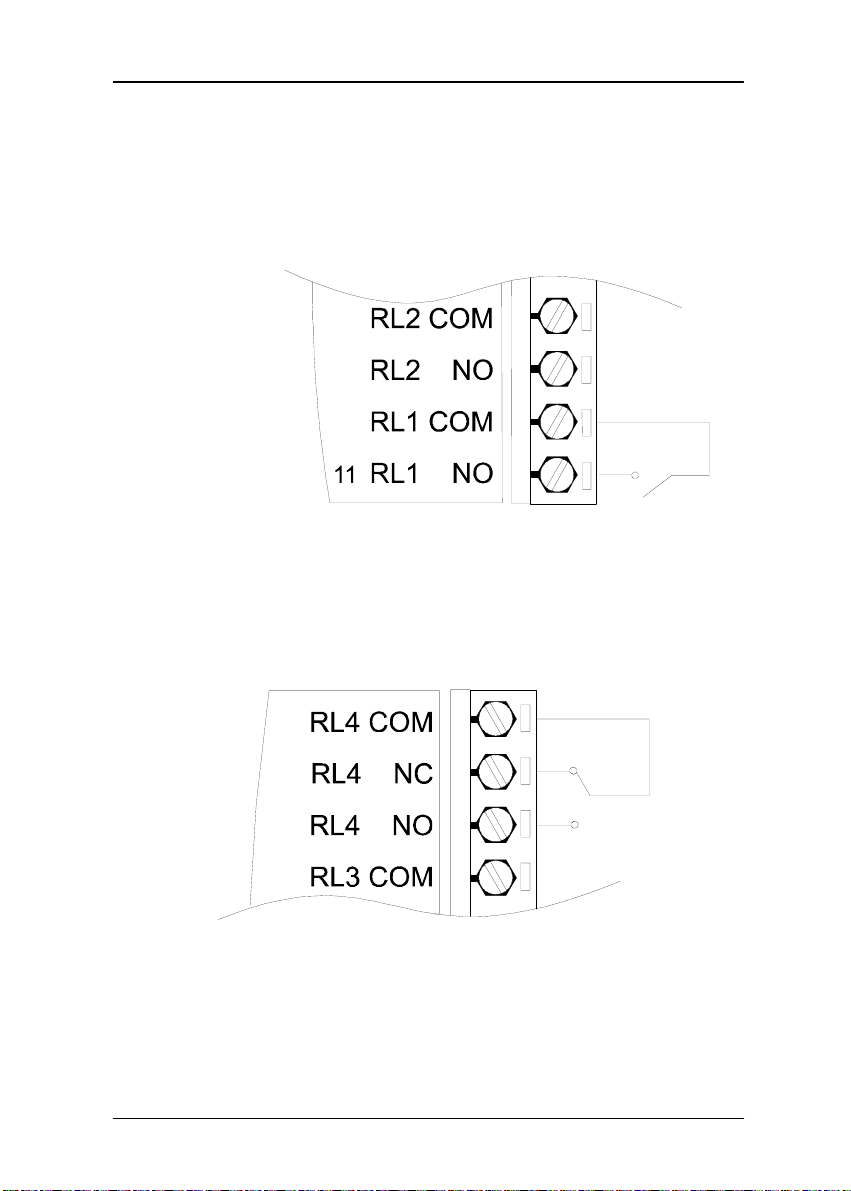
I/O Modules
Application Wiring
The following gives you examples on how to connect form A and form
C relay output applications to your ADAM modules.
Figure 3-62 Form A relay output (ADAM-4060)
Figure 3-63 Form C relay output (ADAM-4060)
60
ADAM 4000 Series User’s Manual
3-
Page 87

RL1 NO
RLO NO
RLO COM
Chapter 3
RLO NO
Figure 3-64 Form C relay output (ADAM-4068)
RL4 NO
RL4 COM
RL3 NO
RL3 COM
Figure 3-65 Form A relay output (ADAM-4068)
Chapter 3 I/O Modules
3-61
Page 88

I/O Modules
3.19 ADAM-4080/4080D Counter/Frequency Input Modules
ADAM-4080/4080D Counter/frequency input module has two 32-bit
counter input channels (counter 0 and counter 1) with built-in
programmable timer for frequency measurement. These cost-effective
modules let you monitor counter/frequency data as measurements are
taken.
Front Panel LED Indicator (ADAM-4080D only)
The 5-digit LED display of the ADAM-4080D lets you monitor its
counter data right at the source. The module's LED display shows
counter values as well as high-low alarm messages as a counter exceeds
its programmed limits (direct display).
Another option is to display data send by the host computer. The
module first sends counter data to the host computer for conversion or
calculation. The host computer sends the data back to the ADAM4080D and the module shows it on the module's LED display (remote
display).
Signal Input Mode
The ADAM-4080/4080D provides separate t erminals for photo isolated
input and non-isolated input to simplify wiring. Opto-isolated input
provides 2500 V
loops. After you make the physical connections, program the module to
identify which of its two sets of input terminals it should activate
(isolated or non-isolated terminals).
isolation to protect your equipment from ground
RMS
Programmable Digital Filter
The ADAM-4080/4080D module includes a unique programmable
digital filter to reject noise on the input lines. You can specify separate
time constants, such as minimum signal width at high level and
minimum signal width at low level, to provide stable output readings.
Programmable Threshold
When the ADAM-4080/4080D is programmed for non-isolated input
you can set a high and low trigger level. Like the programmable digital
filter, the programmable threshold rejects noise on the input lines and
provides stable input readings
62
ADAM 4000 Series User’s Manual
3-
Page 89

Chapter 3
External Control (Gate mode)
Besides the GND and counter terminal each channel has a gate terminal
to connect an external gate signal. The gate signal (high or low) can
trigger the counter to start or stop counting. The gate mode can be
either low, high or disabled (low means that counting starts when the
gate signal is low and stops when the gate signal becomes high)
Programmable Alarm Output
The ADAM-4080 module provides a configurable alarm for each
counter. The ADAM-4080D provides high and low alarm functions for
counter 0. When the counter reaches an alarm limit, it will trigger the
built-in digital output for machine ON/OFF control. The alarm limits
may be downloaded into the module's EEPROM by the host computer.
The initial count value of ADAM-4080 module's counter can be
configured as any v alues.
The alarm functions can be enabled or disabled remotely. When the
alarm functions are enabled, digital output channels are used to indicate
the alarm states. For ADAM-4080, digital output channel 0 equals the
alarm state of counter 0, and digital output channel 1 equals the alarm
state of counter 1. For ADAM-4080D, digital output channel 0 equals
the low alarm state of the counter 0 and digital output channel 1 equals
the high alarm state of the counter 0.
Every A/D conversion will be followed by a comparison with the alarm
limits. If the input value exceeds one of these limits, the corresponding
alarm state is set to ON.
There are two alarm mode options for the ADAM-4080D: momentary
and latching. If the alarm is in latching mode, the alarm will stay on
even when the input value returns within limits. An alarm in latching
mode can be turned off by issuing a Clear Alarm command from the
host computer. A latching alarm is cleared by the module when the
opposite alarm is set. For example: the alarm is in latching mode and
the high alarm is turned ON. When the module receives a value that is
lower than the low alarm limit, it will clear the high alarm and turn the
low alarm ON.
When the alarm is in Momentary mode, the alarm will be turned OFF
as soon as the input value returns to within limits.
The arrangement of coupling high and low alarm states with digital
output lines may be utilized to build ON/OFF controllers that can
operate without host computer involvement.
Chapter 3 I/O Modules
3-63
Page 90

I/O Modules
ADAM-4080
DO 1
IN 0
DO 0
IN 0+
ACQUISITION
MODULE
(Non-isolation)
GATE 0
D.GND
IN 0-
DATA
IN 1
IN 1+
GATE 0-
GATE 0+
ADAM-4080
CODE INPUT RANGE
50
COUNTER
51
FREQUENCY
(Y) DATA+
GATE 1
INIT*
(G) DATA-
IN 1-
GATE 1-
GATE 1+
(B) GND
(R) +Vs
Figure 3-66 ADAM-4080 Counter/Frequency Input Module
Channels: Two independent 32-bit counters (counter 0 and counter 1)
Input frequency: 50 kHz max.
Input mode: Isolated or non-isolated
Isolation input level:
-Logic level 0: +1 V max
-Logic level 1: +3.5 V to +30 V
Non-isolation input level (programmable threshold) :
- Logic level 0: 0 to +5V (default=0.8 V)
- Logic level 1: 0 to +5V (default = 2.4 V)
64
ADAM 4000 Series User’s Manual
3-
Page 91

ADAM-4080D
Chapter 3
DO 1/HI
IN 0
IN 0+
DO 0/LO
ACQUISITION
MODULE
(Non-isolation)
GATE 0
D.GND
IN 0-
(Photo-isolation)
DATA
IN 1
IN 1-
IN 1+
GATE 0-
GATE 0+
ADAM-4080D
CODE INPUT RANGE
50
COUNTER
51
FREQUENCY
(Y) DATA+
GATE 1
INIT*
(G) DATA-
GATE 1-
GATE 1+
(B) GND
(R) +Vs
Figure 3-67 ADAM-4080D Counter/Frequency Input Module with LED Display
Channels: Two independent 32-bit counters (counter 0 and counter 1)
Input frequency: 50 kHz max.
Input mode: Isolated or non-isolated
Isolation input level:
-Logic level 0: +1 V max
-Logic level 1: +3.5 V to +30 V
Non-isolation input level (programmable threshold) :
- Logic level 0: 0 to +5V (default=0.8 V)
- Logic level 1: 0 to +5V (default = 2.4 V)
Chapter 3 I/O Modules
3-65
Page 92

I/O Modules
Application Wiring
Counter Input
Gate Control
GND
GATE1+
GATE1-
11
Figure 3-68 Non-isolated Input
IN1+
IN1-
+
-
+
-
Figure 3-69 Photo-isolated Input
IN0
GATE0
D.GND
Counter Input
GATE Control
1
66
ADAM 4000 Series User’s Manual
3-
Page 93

Command Set 4
Page 94

Command Set
4.1 Introduction
To avoid communication conflicts when several devices try to send data
at the same time, all actions are instigated by the host computer. The
basic form is a command/response protocol with the host initiating the
sequence.
When modules are not transmitting they are in listen mode. The host
issues a command to a module with a specified address and waits a
certain amount of time for the module to respond. If no response arrives,
a timeout aborts the sequence and returns control to the host.
Changing ADAM’s configuration might require the module to perform
auto calibration before changes can take effect. Especially when
changing the range, the module has to perform all stages of auto
calibration that it also performs when booted. When this process is
under way, the module does not respond to any other commands. The
command set includes the exact delays that might occur when modules
are reconfigured.
4.2 Syntax
[delimiter character][address][command][data][checksum] [carriage
return]
Every command begins with a delimiter character. There are four valid
characters: a dollar sign $, a pound sign #, a percentage sign % and an
at sign @.
The delimiter character is followed by a two-character address
(hexadecimal) that specifies the target module. The actual two character
command follows the address. Depending on the command, an optional
data segment follows the command string. An optional two character
checksum may be appended to the total string. Every commands is
terminated by a carriage return (cr).
ALL COMMANDS SHOULD BE ISSUED IN UPPERCASE
CHARACTERS!
2
ADAM 4000 Series User’s Manual
4-
Page 95

Chapter 4
Before the command set, we provide the I/O module commands search
table to help you find the commands you wish to use. The command set
is divided into the following four subsections:
• Analog Input Module commands
• Analog Output Module commands
• Digital I/O and Relay Output Module commands
• Counter/Frequency Module commands
Every subsection starts with a command summary of the particular type
of module, followed by datasheets that give detailed information about
individual commands.
Although commands in different subsections sometimes share the same
format, the effect they have on a certain module can be completely
different than they have on another. For example, the configuration
command: %AANNTTCCFF affects analog input modules and analog
output modules differently. Therefore, the full command set for every
module is listed.
Chapter 4 Command Set
4-3
Page 96

Command Set
4.3 I/O Module Commands Search Table
ADAM-4011 Command Table
Command Syntax Command Name Command Description Page No.
%AANNTTCCFF Configuration Sets the address, input range,baud
rate, data format, checksum
status, and/or integration time for a
specified analog input module
#AA Analog Data In Returns the input value from a
specified analog input module in
the currently configured data
format
$AA0 Span Calibration Calibrates an analog input module
to correct for gain errors
$AA1 Offset Calibration Calibrates an analog input module
to correct for offset errors
#** Synchronized
Sampling
$AA4 Read Synchronized
Data
$AA2 Configuration Status Returns the configuration
$AA3 CJC Status Returns the value of the CJC
$AA9 CJC Offset
Calibration
$AAF Read Firmware
Version
$AAM Read Module Name Return the module name from the
Orders all analog input modules to
sample their input values and store
them in special registers
Returns the value that was stored
in the specified module's register
after the #** command
parameters for the specified
analog input module
sensor for a specified analog input
module
Calibrates the CJC sensor for
offset errors
Return the firmware version code
from the specified analog input
module
specified analog input module
4-47
4-55
4-60
4-61
4-62
4-63
4-51
4-66
4-67
4-53
4-54
(Continued on following page)
4
ADAM 4000 Series User’s Manual
4-
Page 97

Chapter 4
Command Syntax Command Name Command Description Page No.
@AADI Read Digital I/O and
Alarm Status
@AADO(data) Set Digital Output Set the values of the module's two
@AAEAT Enable Alarm Enables the alarm in either
@AAHI(data) Set High Alarm Downloads the High alarm limit
@AALO(data) Set Low Alarm Downloads the Low alarm limit
@AADA Disable Alarm Disables all alarm functions 4-113
@AACA Clear Latch Alarm The latch alarm is reset 4-114
@AARH Read High Alarm The addressed analog input
@AARL Read Low Alarm The addressed analog input
@AARE Read Event Counter The addressed module is asked to
@AACE Clear Event Counter The event counter is set to 0 4-118
The addressed module returns the
state of its digital input channel, its
two digital output channels and the
status of its alarm
digital outputs (ON or OFF)
Momentary or Latching mode
value
value
module is asked to return its high
alarm value
module is asked to return its low
alarm value
return its event counter value
4-105
4-107
4-109
4-111
4-112
4-115
4-116
4-117
(Continued on following page)
Chapter 4 Command Set
4-5
Page 98

Command Set
ADAM-4011D Command Table
Command Syntax Command Name Command Description Page No.
%AANNTTCCFF Configuration Sets the address, input range,baud
rate, data format, checksum
status, and/or integration time for a
specified analog input module
#AA Analog Data In Returns the input value from a
specified analog input module in
the currently configured data
format
$AA0 Span Calibration Calibrates an analog input module
to correct for gain errors
$AA1 Offset Calibration Calibrates an analog input module
to correct for offset errors
#** Synchronized
Sampling
$AA4 Read Synchronized
Data
$AA2 Configuration Status Returns the configuration
$AA3 CJC Status Returns the value of the CJC
$AA9 CJC Offset
Calibration
$AAF Read Firmware
Version
$AAM Read Module Name Return the module name from the
$AAB Open Thermocouple
Detection
Orders all analog input modules to
sample their input values and store
them in special registers
Returns the value that was stored
in the specified module's register
after the #** command
parameters for the specified
analog input module
sensor for a specified analog input
module
Calibrates the CJC sensor for
offset errors
Return the firmware version code
from the specified analog input
module
specified analog input module
Ask the module to respond
whether the thermocouple is open
or not
(Continued on following page)
4-47
4-55
4-60
4-61
4-62
4-63
4-51
4-66
4-67
4-53
4-54
4-65
6
ADAM 4000 Series User’s Manual
4-
Page 99

Chapter 4
Command Syntax Command Name Command Description Page No.
@AADI Read Digital I/O and
Alarm Status
@AADO(data) Set Digital Output Set the values of the module's two
@AAEAT Enable Alarm Enables the alarm in either
@AAHI(data) Set High Alarm Downloads the High alarm limit
@AALO(data) Set Low Alarm Downloads the Low alarm limit
@AADA Disable Alarm Disables all alarm functions 4-113
@AACA Clear Latch Alarm The latch alarm is reset 4-114
@AARH Read High Alarm The addressed analog input
@AARL Read Low Alarm The addressed analog input
@AARE Read Event Counter The addressed module is asked to
@AACE Clear Event Counter The event counter is set to 0 4-118
The addressed module returns the
state of its digital input channel, its
two digital output channels and the
status of its alarm
digital outputs (ON or OFF)
Momentary or Latching mode
value
value
module is asked to return its high
alarm value
module is asked to return its low
alarm value
return its event counter value
4-105
4-107
4-109
4-111
4-112
4-115
4-116
4-117
Chapter 4 Command Set
4-7
Page 100

Command Set
ADAM-4012 Command Table
Command Syntax Command Name Command Description Page No.
%AANNTTCCFF Configuration Sets the address, input range,baud
rate, data format, checksum
status, and/or integration time for a
specified analog input module
#AA Analog Data In Returns the input value from a
specified analog input module in
the currently configured data
format
$AA0 Span Calibration Calibrates an analog input module
to correct for gain errors
$AA1 Offset Calibration Calibrates an analog input module
to correct for offset errors
#** Synchronized
Sampling
$AA4 Read Synchronized
Data
$AA2 Configuration Status Returns the configuration
$AAF Read Firmware
Version
$AAM Read Module Name Return the module name from the
Orders all analog input modules to
sample their input values and store
them in special registers
Returns the value that was stored
in the specified module's register
after the #** command
parameters for the specified
analog input module
Return the firmware version code
from the specified analog input
module
specified analog input module
(Continued on following page)
8
ADAM 4000 Series User’s Manual
4-
4-47
4-55
4-60
4-61
4-62
4-63
4-51
4-53
4-54
 Loading...
Loading...