

Page 1
Page 2

Bitte beachten Sie diese Warnung!
Warnung:
ACR kann trotz aller Bestrebungen nach Genauigkeit in all Ihren Publikationen nicht
ausschließen, dass in diesem Dokument Fehler enthalten sind. Dieses Dokument kann ohne
Ankündigung von ACR geändert werden. ACR für etwaige direkte, indirekte, zufällige oder
Folgefehler auf Grund der Benutzung des Gerätes verantwortlich zu machen ist unzulässig.
ACR Teile dürfen nur mit der dezidierten schriftlichen Bestätigung von ACR in Geräten oder
Systemen zur Lebensrettung eingesetzt werden. Ohne diese Bestätigung ist es vorstellbar,
dass die Sicherheit des Benutzers oder anderer Personen gefährdet ist.
Warning:
Although ACR strives for accuracy in all its publications; this material may contain errors or
omissions, and is subject to change without prior notice. ACR shall not be made liable for any
specific, indirect, incidental or consequential damages as a result of its use. ACR components
may only be used in safety of life devices or systems, with the express written approval of
ACR, as the failure of such components could cause the failure of the ACR device or system.
If these fail, it is reasonable to assume that the safety of the user or other persons may be
endangered.
Copying of this document, and giving it to others and the use or communication of the
contents thereof, are forbidden without express authority. Offenders are liable to the payment
of damages.
Weitergabe sowie Vervielfältigung dieser Unterlage, Verwertung und Mitteilung ihres
Inhaltes nicht gestattet, soweit nicht ausdrücklich zugestanden. Zuwiderhandlungen
verpflichten zu Schadenersatz.
Toute communication ou reproduction de ce document, toute exploitation ou communication
de son contenu sont interdites, sauf autorisation expresse. Tout manquement à cette règle
est illicite et expose son auteur au versement de dommages et intérêts.
Sin nuestra expresa autorización, queda terminantemente prohibida la reproducción total o
parcial de este documento, así como su uso indebido y/o su exhibición o comunicación a
terceros. De los infractores se exigirá el correspondiente resarcimiento de daños y perjuicios.
Y1-03-0212-1 Rev D I
Page 3

NAUTICAST™ Inland AIS Benutzerhandbuch
Index Seitennummer
1 EINLEITUNG .......................................................................................................................................................................1
1.1 Beschreibung des Nauticast™ Inland AIS ..................................................................................................................1
1.2 AIS im Einsatzbereich ................................................................................................................................................2
1.3 AIS Netzwerke ...........................................................................................................................................................3
2 NAUTICAST™ INLAND AIS ................................................................................................................................................4
2.1 Systemübersicht ........................................................................................................................................................4
3 INSTALLATION ...................................................................................................................................................................5
3.1 Installationshinweise ..................................................................................................................................................5
3.2 Installationsübersicht .................................................................................................................................................5
3.3 Übersicht der Schnittstellen .......................................................................................................................................7
3.4 Beschreibung der NMEA Schnittstellen ......................................................................................................................8
3.4.1 Sensorschnittstellen CH1, CH2, CH3 ...............................................................................................................8
3.4.2 ECDIS – Schnittstelle für externe Anzeigegeräte CH 4 .....................................................................................8
3.4.3 Pilot Port CH 5 .................................................................................................................................................9
3.4.4 Long Range CH 8 ............................................................................................................................................9
3.4.5 DGPS – DGNSS Channel 9 ........................................................................................................................... 10
3.4.6 Alarmmeldeeinrichtung – BIIT Channel 10 ..................................................................................................... 10
3.4.7 Herstellerspezifische Sätze ............................................................................................................................ 10
3.5 Begriffserklärung Sensorschnittstellen ..................................................................................................................... 11
3.5.1 Zur Schaltung der Schnittstellensendestufe .................................................................................................... 11
3.5.2 Die Schnittstellenempfangsstufe .................................................................................................................... 11
3.5.3 Galvanische Trennung ................................................................................................................................... 11
3.5.4 Maximum Spannung am Bus.......................................................................................................................... 11
3.5.5 Datenübertragung .......................................................................................................................................... 11
3.6 Hinweise zu den Sensoren ...................................................................................................................................... 12
3.7 Anschluss der Sensoren ................................................................................................................................ .......... 12
3.7.1 Verdrahtung einer RS422 Schnittstelle ........................................................................................................... 12
3.8 Einstellmöglichkeiten der Sensoren ......................................................................................................................... 14
3.8.1 Einleitung ....................................................................................................................................................... 14
3.8.2 Einstellung der Übertragungsrate, Checksumme(CRC) und NMEA Sender und Satzkennung ...................... 14
3.8.3 Echtzeitanalyse des NMEA Datensatzstroms ................................................................................................. 17
3.8.4 Sensorausgabe auf den Bildschirm zur Problemanalyse ................................................................................ 19
3.8.5 Priorität der einzelnen NMEA Sätze ............................................................................................................... 20
3.8.6 Unterstützte NMEA 0183 Sätze ...................................................................................................................... 20
3.8.7 Errechnete Werte ........................................................................................................................................... 24
3.8.8 Versionen der NMEA Sätze ............................................................................................................................ 24
3.9 Pinbelegung AIS Kabel / Stecker 50 polig ................................................................................................................ 25
3.10 Pinbelegung des 50poligen AIS Kabels ............................................................................................................... 26
3.11 Pinnbelegung Kommunikationskabel Buchse 50 Pins ......................................................................................... 27
3.12 Kommunikationskabel RS232 u. Blue Sign (Sub-D 50 Socket) ............................................................................ 28
3.13 Installation der VHF/GPS Antenne ...................................................................................................................... 29
3.13.1 Installation der VHF Antenne .......................................................................................................................... 29
3.13.2 Installation der GNSS Antenne ....................................................................................................................... 30
3.14 Stromversorgung................................................................................................................................................. 31
4 STARTEN DES NAUTICAST™ INLAND AIS .................................................................................................................... 32
4.1 Erstmaliges Einrichten des NAUTICAST™ Inland AIS ............................................................................................. 32
4.2 Eingabe der MMSI, IMO, DAC und ESN Nummer ................................................................ .................................... 33
4.3 Eingabe der Schiffsdaten ......................................................................................................................................... 36
4.4 Eingabe der Reisedaten ........................................................................................................................................... 38
4.5 Entering Inland AIS Configuration ............................................................................................................................ 42
4.6 Passworte ................................................................................................................................................................ 44
5 ABHILFEMAßNAHMEN BEI STÖRUNGEN ....................................................................................................................... 49
5.1 Alarm Status prüfen ................................................................................................................................................. 49
5.2 Alarm Codes ............................................................................................................................................................ 50
5.3 Text Nachrichten (TXT Status) ................................................................................................................................ 51
5.4 Reset / System Neustart ................................................................................................................................ .......... 51
6 ZUBEHÖR ......................................................................................................................................................................... 52
7 TECHNISCHE INFORMATION.......................................................................................................................................... 53
7.1 ERI Schiffstypen ...................................................................................................................................................... 54
8 KONTAKT- UND UNTERSTÜTZUNGSADRESSEN .......................................................................................................... 56
9 APPENDIX ........................................................................................................................................................................ 57
9.1 Samples for battery calculation ................................................................................................ ................................ 57
9.1.1 Typical Installation .......................................................................................................................................... 57
9.1.2 RM GMDSS Compact-Console Area A3 with 250 W MF/HF........................................................................... 58
9.1.3 RM GMDSS Compact-Console Area A3 with 400 W MF/HF........................................................................... 58
9.2 Passwort Informationen ........................................................................................................................................... 60
9.3 Zeichnungen und Zertifikate ..................................................................................................................................... 61
Y1-03-0212-1 Rev D II
Page 4
Änderungsprotokoll
Date
Version
Rev.
Status
Comments
Responsible
2005-11-01
1.0.0
A
Released
A. Lesch
2006-07-14
1.0.1
B
Released
Editorial work
M. D‘Arcangelo
2006-10-11
1.0.2
C
Released
Character Change-out Edits
M.D‘Arcangelo
2008-12-05
1.0.5
D
Released
Update according to VTT&T;
Deutsche Übersetzung; Update
Blue Sign, Passwort
C. Kabinger;
B.Werner
Y1-03-0212-1 Rev D III
Page 5
1 Einleitung
1.1 Beschreibung des Nauticast™ Inland AIS
Wofür steht die Bezeichnung AIS?
AIS bedeutet ―Automatisches Identifizierungssystem‖
Was ist ein AIS?
Entsprechend den Richtlinien der IALA wird das AIS wie folgt beschrieben:
Sehr vereinfacht ist das AIS ein Sendegerät auf Rundfunkbasis, operierend mit them VHK
maritime mobile Band. Es ist fähig, Information über ein Schiff wie zum Beispiel
Identifikation, Positionskurs, Geschwindigkeit und mehr, an andere Schiffe und zum
Festland zu senden. Es kann mehrfache Berichte mit einer hohen Aktualisierungsrate
verarbeiten und verwendet ein selbst organisierendes Zeitschlitzverfahren um diese
hohen Funkraten zu erreichen und verlässliche Schiff-zu-Schiff-zu-Land Funktion zu
garantieren.
Was sind die Leistungsstandards eines AIS?
IMO definiert die Leistungsstandards wie folgt:
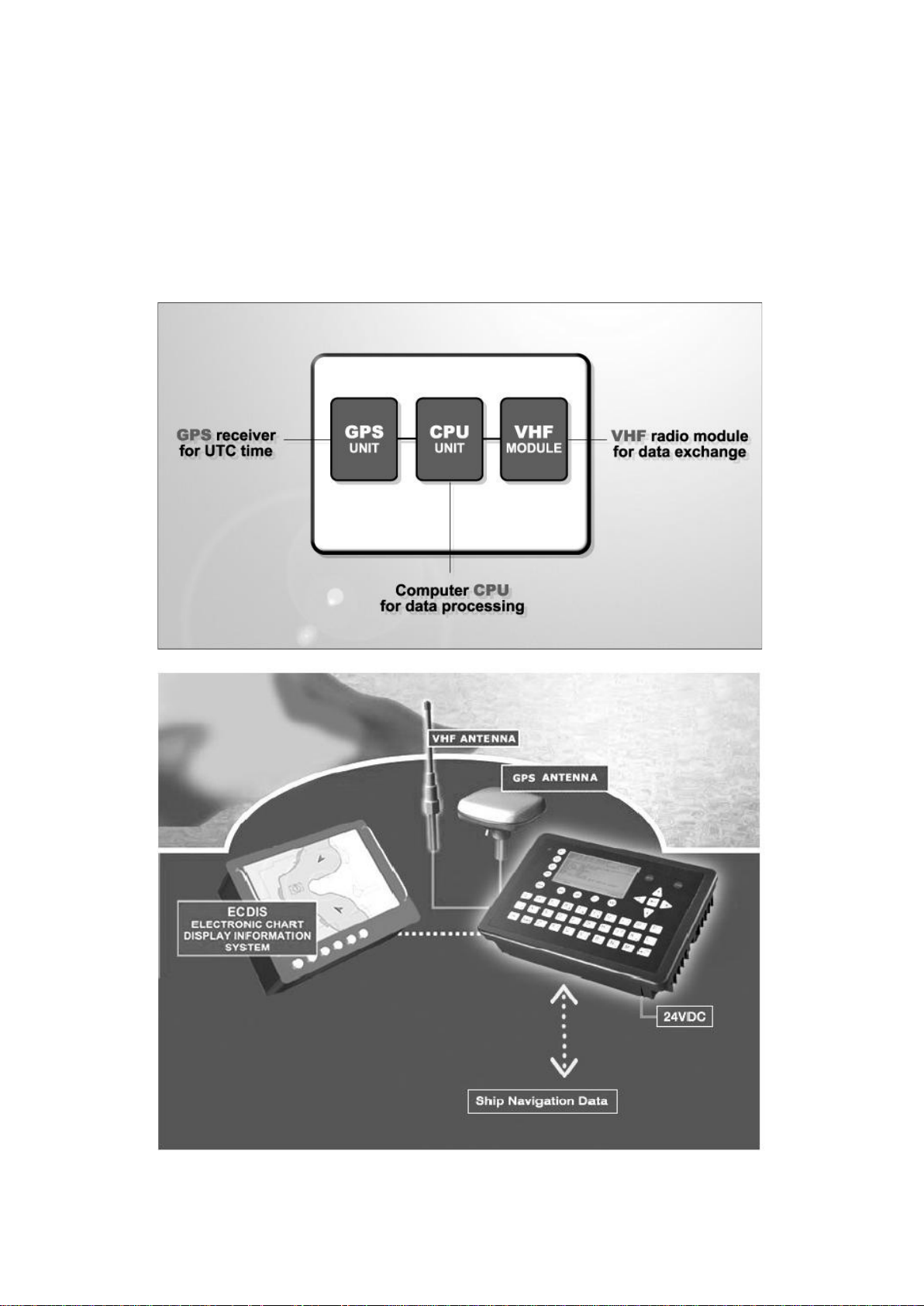
Aus welchen Modulen besteht ein AIS?
Die Module:
Dazugehörende Anwendungssoftware verbindet die unterschiedlichen Module
In welchen Verfahren funktioniert das AIS?
Es ist erforderlich, dass das AIS in verschiedenen Verfahren fehlerlos funktioniert. Die
maßgeblichen Vorschriften erfordern:
Das System soll zu folgendem fähig sein:
- Schiff zu Schiff Funktionalität
- Schiff zu Schiff Funktionalität inklusive weiträumige Anwendbarkeit
- Automatischer und beständiger Betrieb
- Bereitstellung von Informationsdaten
- Nutzung der maritimen VHF Kanäle
- DGPS / GPS Empfänger
- VHF Radio
- Antenne
- Computer (CPU)
- Stromversorgung
- Ein ―unabhängiger und beständiger‖ Modus für den Einsatz in allen Gebieten.
Dieser Modus soll in der Lage sein, von einem Fachmann von oder zu einer der
folgenden Betriebsweisen umgeschaltet zu werden:
- Ein ―assigned‖ Modus für den Einsatz in einem Gebiet, der abhängig von der für
Verkehrsüberwachung zuständigen Behörde ist, damit die
Y1-03-0212-1 Rev D 1
Page 6
Datenübertragungsintervalle und/oder Time Slots von dieser Behörde
ferngesteuert werden können.
- Ein "polling oder controlled" Modus, wo der Datentransfer als Rückmeldung von
einem Schiff oder einer zuständigen Behörde auftritt.
1.2 AIS im Einsatzbereich
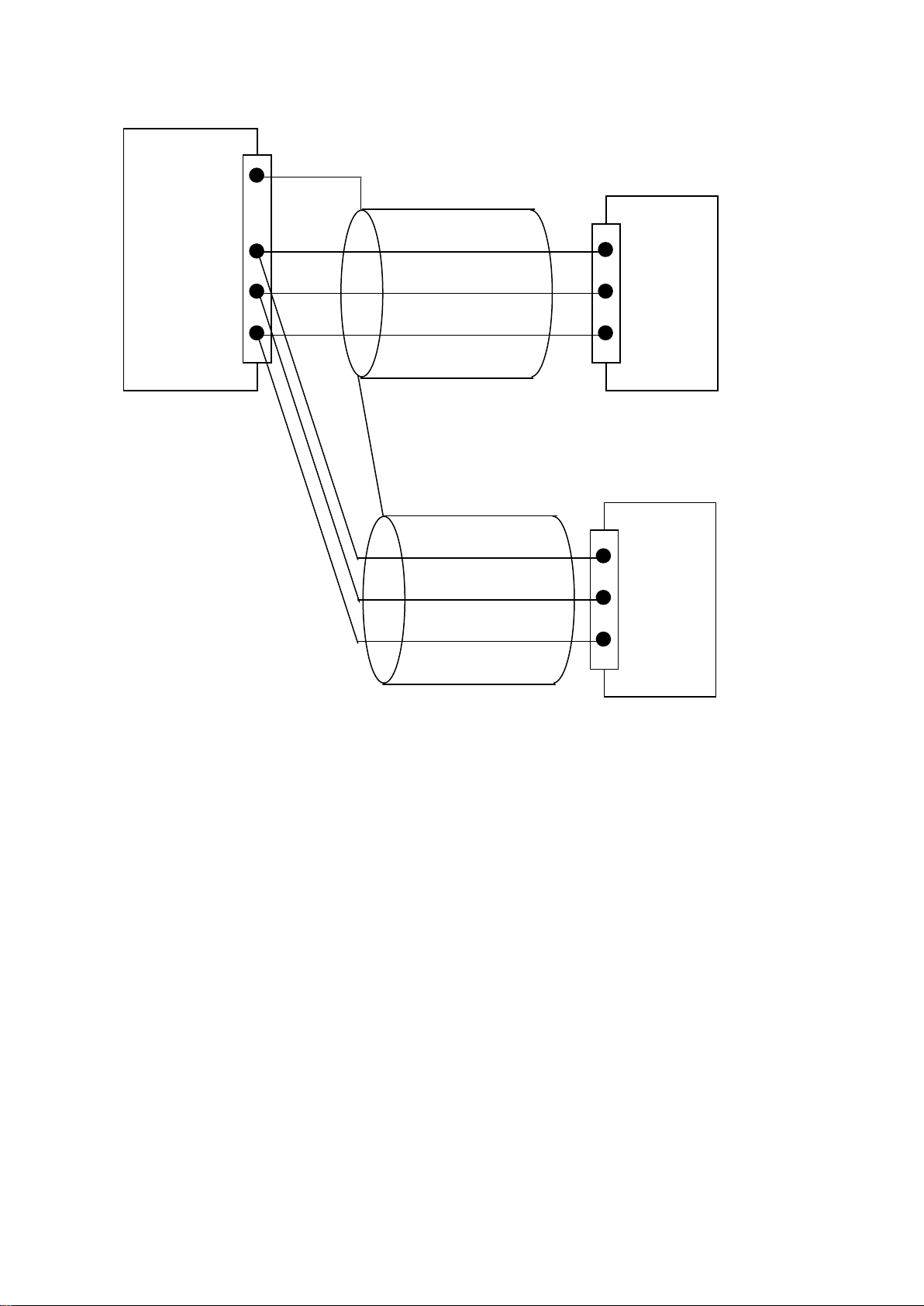
Diese Zeichnung veranschaulicht ein typisches AIS System, wo zwei oder
mehrere mit AIS Systemen ausgerüstete Schiffe (und Systeme an Land)
automatisch miteinander kommunizieren.
Weiter unten wird eine typische NAUTICAST™ INLAND AIS installation in häufiger
Umgebung gezeigt. Das NAUTICAST™ INLAND AIS ist verbunden mit der
Notstromversorgung des Schiffes, und mit der zusätzlichen Verbindung zu der VHF and
GPS Antenna sind die minimalen Anforderungen für den Einsatz des Transponders
erfüllt.
Beide Schiffe in der Illustrations sind mit einem NAUTICAST™ INLAND AIS (oder
irgendeinem anderen geprüften AIS Transponder) ausgerüstet. Aufgrund der „ZeitSynchronisation― verwenden sie dieselbe Gliederung von freien und reservierten
Fenstern (Slots) in dem gemeinsam benutzen VHF Daten Link um Botschaften zu
senden und zu erhalten (diese Methode wird „Self Organized Time Division Multiple
Access― genannt).
Ohne aktives Eingreifen wissen beide Schiffe genau, wer oder was in der Nähe ist und
welchen Kurs das Objekt verfolgt.
Y1-03-0212-1 Rev D 2
Page 7
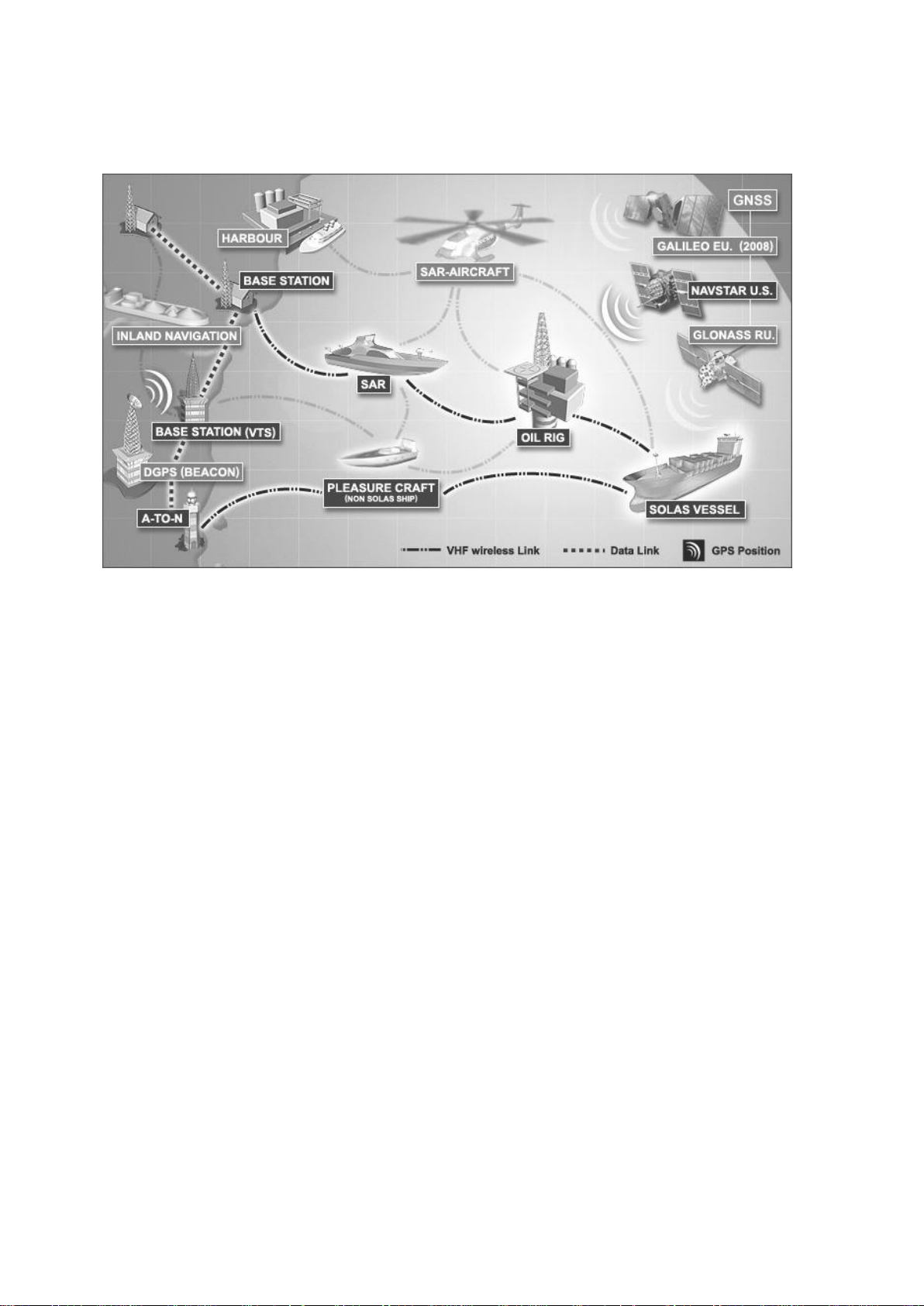
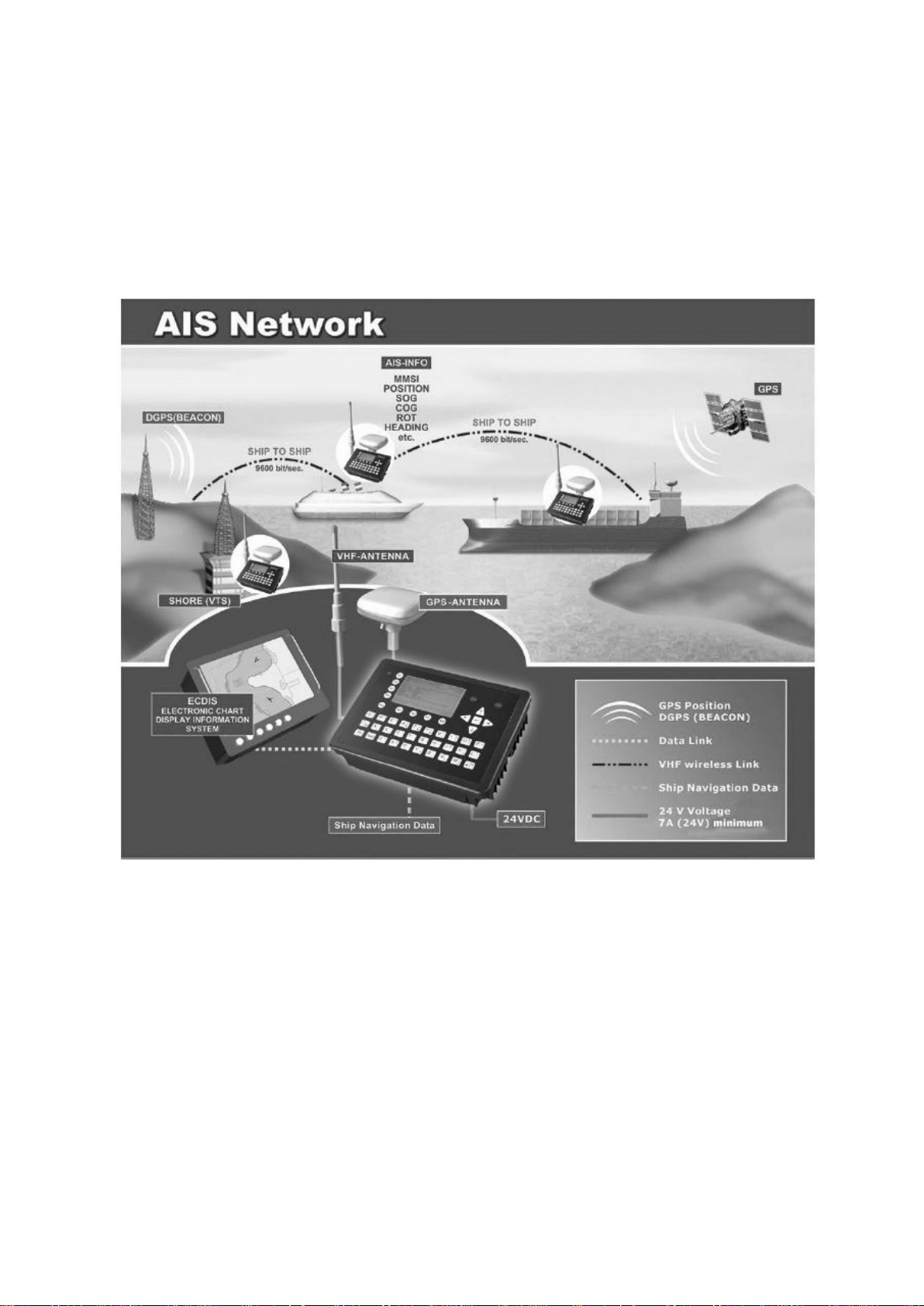
1.3 AIS Netzwerke
Das nachfolgende Szenario zeigt ein AIS versorgtes Gebiet (inclusive allem Zubehör und der
kompletten Land-Infrastruktur).
Die Transport-Anforderungen treffen gegenwärtig auf SOLAS Schiffe zu und sollen für InlandWasserwege erweitert werden.
Y1-03-0212-1 Rev D 3
Page 8
2 NAUTICAST™ INLAND AIS
2.1 Systemübersicht
Anders als andere AIS Geräte, vereint das NAUTICAST™ INLAND AIS alle erforderlichen
Funktionen in einem Gehäuse. Zusätzlich bietet das NAUTICAST™ INLAND AIS dem
Betreiber eine Menge zusätzlicher Möglichkeiten (einfache Montage und Installation,
Umweltschutz und geringe Ausmaße).
Y1-03-0212-1 Rev D 4
Page 9

3 Installation
WICHTIG: Die BEHÖRDEN VERPFLICHTEN zur kompletten Eingabe aller
Schiffsdaten nach der erfolgten physikalischen Installation. Lesen Sie Kapitel 4 für
weiterführende Information.
3.1 Installationshinweise
Generelle Anforderungen
Bitte beachten Sie, dass internationale Abkommen, Bestimmungen, Anweisungen und
Richtlinien bei der Installation des NAUTICAST™ Inland AIS unbedingt eingehalten werden
müssen.
Folgende Punkte müssen vor der Inbetriebnahme befolgt werden:
- Um dieses Gerät installieren zu können benötigen sie eine Zulassung der lokalen
Behörden.
- Die Installation darf nur durch geschultes Personal durchgeführt werden.
- Der NAUTICAST™ INLAND AIS muss an einer gut erreichbaren Stelle auf der Brücke
installiert werden.
- Die VHF und GPS Antennen müssen so installiert werden dass ein optimaler
Empfang gewährleistet ist.
- Alle Verfügbaren Schnittstellen müssen installiert werden
- Eine Ausreichende Stromversorgung am Schiff muss gewährleistet sein und eine
GMDSS Stromversorgung muss verwendet werden.
Die Installation des Pilotsteckers muss am Arbeitsplatz des Pilots erfolgen.
3.2 Installationsübersicht
Überblick
Das AIS wird als Teil der Funkeinrichtung am Schiff gesehen und wird gemeinsam mit den
Funkgeräten überprüft. Überprüfungen auf Schiffen die der SOLAS Konvention unterliegen,
werden anhand der IMO Res. A 746(18) "Survey Guidelines under the harmonized system of
survey and certification" (R) 8, und "Protocol of 1988 relating to the International Convention
for the Safety of Life at Sea, 1974." durchgeführt.
The NAUTICAST™ INLAND AIS besteht aus einem Gerät, welches alle notwendigen Module
integriert hat.
Y1-03-0212-1 Rev D 5
Page 10
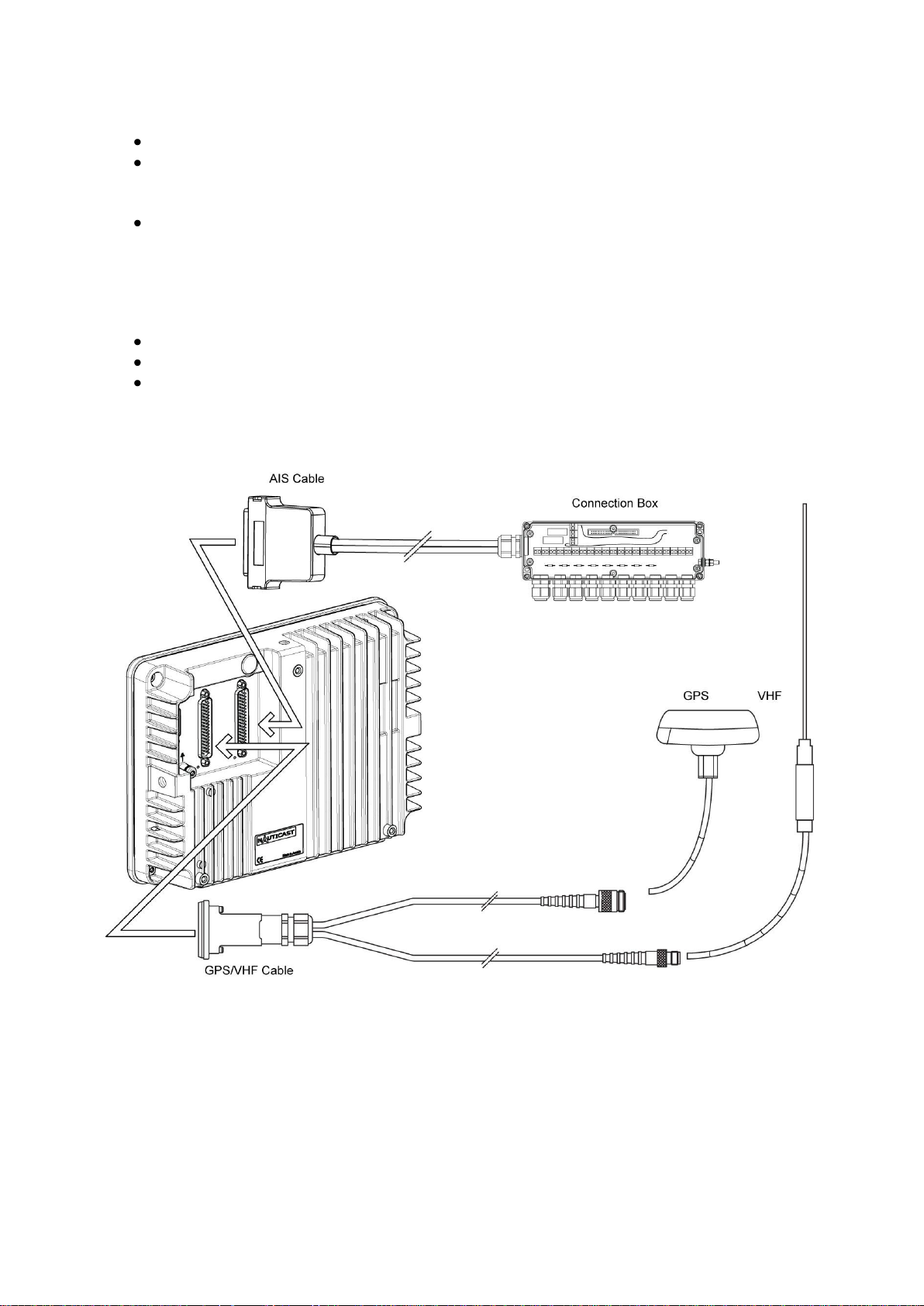
Installation, Schritt für Schritt
Montieren Sie den NAUTICAST™ INLAND AIS nahe dem Navigationsplatz
Verwenden Sie das VHF Adapterkabel (Art.Nr.2612), den VHF Stecker sowie den
TNC Stecker um die VHF und GPS Antenne mit den entsprechenden Kabeln zu
verbinden
Die Sensoren, ECDIS, PC, long range, pilot und externe Displays können unter
Zuhilfenahme der connection box angeschlossen werden. Für die Stromversorgung
des Geräts benötigen Sie ein Netzteil mit einer Spannung von 24V und einem Strom
von 7Amp, das an die Connection box angeschlossen wird. Das AIS sollte an eine
Notstromversorgung (Batterie) angeschlossen werden. Weitere Hinweise zur GMDSS
Ausstattung und zur Berechnung der Batterie.finden Sie im Anhang 9.1.
Nach dem ordnungsgemäßen Anschluß geht das Gerät selbstständig in Betrieb.
Die Masse des Geräts muss mit der Masse des Schiffs verbunden werden.
Konfigurieren Sie das Gerät wie in Kapitel 4 beschrieben.
NAUTICAST™ INLAND AIS Anschlussdiagramm
Achtung: Die original Connection box ist mit einer 6,3A/T Sicherung ausgestattet, wird das
Gerät ohne Zuhilfenahme der Connection box angeschlossen muss eine externe Sicherung
6,3Amp. / Träge installiert werden.
Y1-03-0212-1 Rev D 6
Page 11
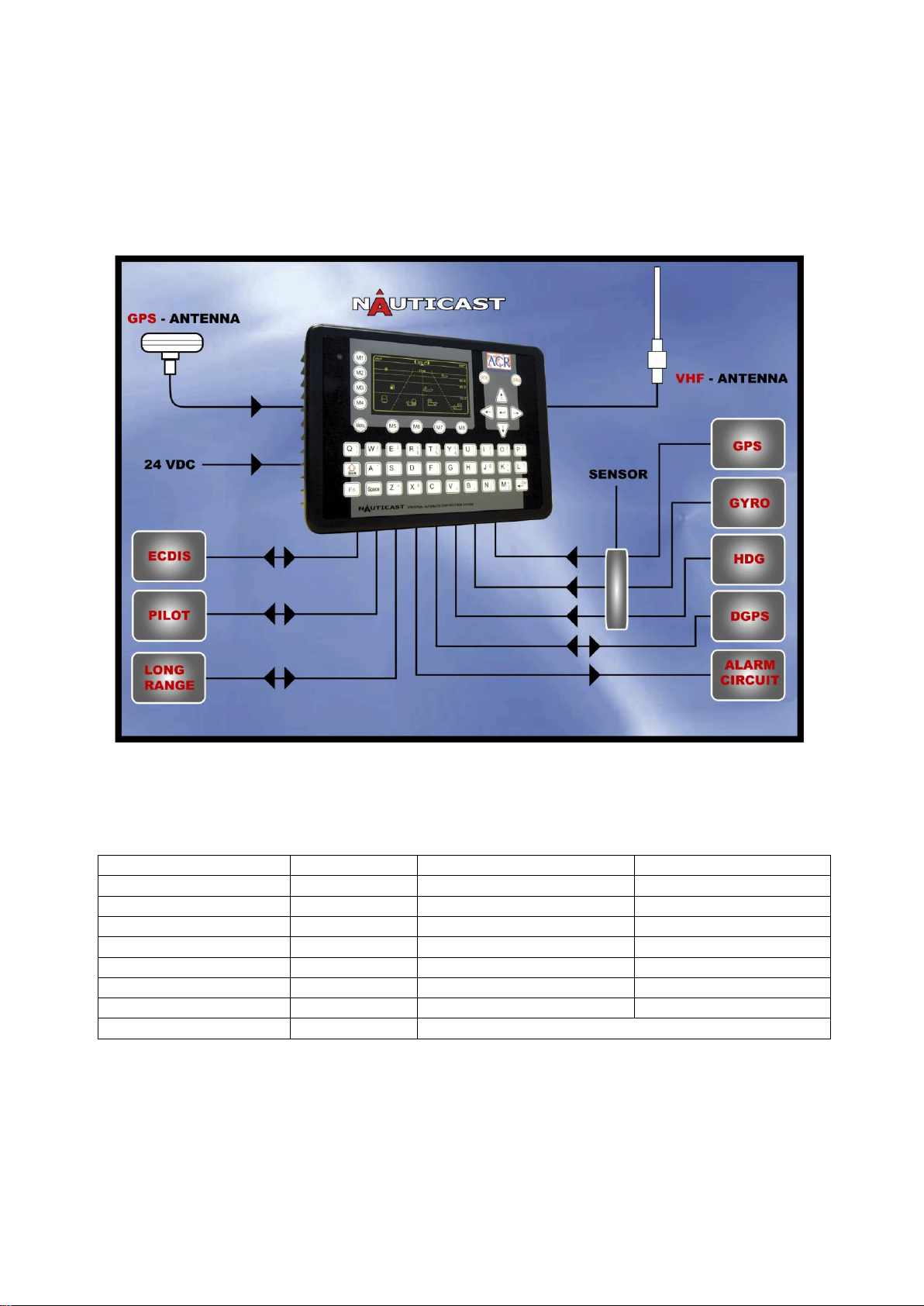
Schnittstelle
Bezeichnung
Übertragungsrate
Übertragungsrichtung
Sensor 1
CH 1
4800bps or 38400bps
Eingang
Sensor 2
CH 2
4800bps or 38400bps
Eingang
Sensor 3
CH 3
4800bps or 38400bps
Eingang
ECDIS
CH 4
38400bps
Bidirektional
PILOT
CH 5 / CH 15
38400bps
Bidirektional
LONG RANGE
CH 8
38400bps
Bidirektional
DGPS (RTCM SC104)
CH 9
9600bps
Bidirektional
ALARM CIRCUIT
CH 10
Relaiskontakt
Komponenten und Schnittstellen
Das Anschlussdiagramm zeigt die Anschlussmöglichkeiten des NAUTICAST™ Inland AIS.
Weitere Informationen zum Anschluss z.B. eines Gyro an den NAUTICAST™ Inland AIS
finden Sie unter Kapitel
3.5 Begriffserklärung Sensorschnittstellen
3.3 Übersicht der Schnittstellen
Y1-03-0212-1 Rev D 7
Page 12
3.4 Beschreibung der NMEA Schnittstellen
Satzbeschreibung / Sentence Formatters
E/A - Richtung
Used Fields
ABK
UAIS Addressed and binary broadcast
acknowledgement
Ausgabe vom AIS
All fields are
provided for Input
and Output.
For further
information please
refer to
IEC 61993-2 /
NMEA 0183 HS
V3.0 for detailed
field information.
ACA
AIS Channel assignment message
Bidirektional
ACK
Acknowledge Alarm
Eingabe zum AIS
AIR
UAIS Interrogation Request
Eingabe zum AIS
ALR
Set Alarm State
Ausgabe vom AIS
ABM
UAIS Addressed binary and safety related message
Eingabe zum AIS
BBM
UAIS Broadcast Binary Message
Eingabe zum AIS
DSC
Digital Selective Calling Information
Ausgabe vom AIS
DSE
Expanded Digital Selective Calling
Ausgabe vom AIS
DSI
DSC Transponder Initialize
Ausgabe vom AIS
DSR
DSC Transponder Response
Ausgabe vom AIS
LRI
UAIS Long-Range Interrogation
Ausgabe vom AIS
LRF
UAIS Long-Range Function
Ausgabe vom AIS
SSD
Station Static Data
Eingabe zum AIS
TXT
Text Transmission
Ausgabe vom AIS
VSD
Voyage Static Data
Eingabe zum AIS
VDM
UAIS VHF Data-link Message
Ausgabe vom AIS
VDO
UAIS VHF Data-link Own-vessel report
Ausgabe vom AIS
3.4.1 Sensorschnittstellen CH1, CH2, CH3
Eine detaillierte Beschreibung der Schnittstellenkonfiguration finden Sie im Kapitel 3.8.
3.4.2 ECDIS – Schnittstelle für externe Anzeigegeräte CH 4
Y1-03-0212-1 Rev D 8
Page 13

3.4.3 Pilot Port CH 5
Sentence Formatters
Richtung
LRI
UAIS Long Range Interrogation
Eingabe zum AIS
LRF
UAIS Long-Range Function
Bidirektional
LR1
UAIS Long-Range Reply Sentence l
Ausgabe vom AIS
LR2
UAIS Long-Range Reply Sentence 2
Ausgabe vom AIS
LR3
UAIS Long-Range Reply Sentence 3
Ausgabe vom AIS
Field Information:
All fields are provided for input and output.
For further information please refer to
IEC 61993-2 / NMEA 0183 HS V3.0 for detailed field
information.
Für den Pilot Anschluss gelten die selben NMEA Sätze wie für den ECDIS.
Note:
Ein Pilotanschluss ist Teil einer Class-A Installation. Eine angeschlossene Buchse muss gut
erreichbar am Arbeitsplatz des Lotsen montiert werden.
Der Pilot Plug muss wie folgt konfiguriert sein:
Bezug nehmend auf: SUB-COMMITTEE ON SAFETY OF NAVIGATION NAV48/18 2.4.2002
Folgende Buchse der Firma AMP ist zur Montage zu verwenden:
AMP/Receptacle (Square Flanged (-1) or Free-Hanging (-2)), Shell size 11, 9-pin,
Std. Sex 206486-1/2 or equivalent with the following connections:
Pinbelegung der Buchse:
- Tx A (out-) verbunden mit Pin 1
- Tx B (out+) verbunden mit Pin 4
- Rx A (in-) verbunden mit Pin 5
- Rx B (in+) verbunden mit Pin 6
- Schirmung verbunden mit Pin 9
3.4.4 Long Range CH 8
Zur Nutzung der long range Funktionalität wird ein kompatibles Satelliten
Kommunikationssystem benötigt.
Y1-03-0212-1 Rev D 9
Page 14

3.4.5 DGPS – DGNSS Channel 9
Field / Protocol information:
Weitere Informationen entnehmen Sie bitte folgender Norm ITU-R M.823-2 / RTCM SC 104
3.4.6 Alarmmeldeeinrichtung – BIIT Channel 10
Der Alarmausgang des AIS muss an eine Meldeeinheit oder wenn vorhanden an das
Schiffsalarmsystem angeschlossen werden.
Alternativ kann das Melden eines Alarms vom BIIT(build in integrity test) System auch über
einen entsprechenden NMEA Satz am Ch4 über die ECDIS angezeigt werden.
3.4.7 Herstellerspezifische Sätze
Die Herstellerspezifischen NMEA Sätze haben die vom Hersteller regitrierte talker ID „NAU―.
Die $PNAU Sätze sind zusätzlich zu den Sätzen des Standards und bitten anderen
Herstellern Zugriff auf das AIS. Eine detaillierte Beschreibung der erweiterten NMEA Sätze
finden Sie im „Extended NMEA command set― Manual das auf Bestellung erhältlich ist.
Herstellerspezifische NMEA Sätze $PNAU
MID - Mobile (MMS) Id
ASD - Advanced Ship Data
RCS - Read Configuration Settings
STO - Set Transponder Options
TSI - Transponder State Information
SCR - Sensor Configuration Request
SCA - Sensor Configuration Acknowledge
SCD - Sensor Configuration Data
SCM - Sensor Configuration Mode
AIQ - Request status information from the Transponder
IVD – Inland AIS voyage data
SPW- Inland AIS security password sentence
SPR- Inland AIS security password response
Y1-03-0212-1 Rev D 10
Page 15

3.5 Begriffserklärung Sensorschnittstellen
Alle Schnittstellen des NAUTICAST™ INLAND AIS entsprechen der IEC-61162-1 / -2 und
NMEA-0183 HS 3.0 Spezifikationen (aligned to RS422 parameters).
3.5.1 Zur Schaltung der Schnittstellensendestufe
Der maximale Ausgangsstrom der Schnittstellen ist mit 50mA begrenzt. Die
Schnittstellenschaltung entspricht damit den Anforderungen der ITU-T V.11.
3.5.2 Die Schnittstellenempfangsstufe
Es können mehrere Empfangsstufen an einen Sender angeschlossen werden. Ein
Abschlusswiderstand von 120Ohm für jeden Eingang befindet sich in der Connection Box.
Die Eingänge des Geräts sind galvanisch getrennt. Die Eingangsimpedanz ist 30KOhm
3.5.3 Galvanische Trennung
Die beiden Signalleitungen A und B sind zueinander galvanisch getrennt d.h. sie haben keine
elektrische Verbindung miteinander. Die Signalmasse C darf nicht an die Schiffsmasse oder
die Masse der Versorgungsspannung angeschlossen werden. Diese Trennung entspricht der
IEC 60945.
3.5.4 Maximum Spannung am Bus
Die Höchstzulässige Spannung zwischen den Signalleitungen A und B und zwischen AB und
der Masse C ist in der ITU-T V11. geregelt. Zum Schutz vor Verpolung oder
unbeabsichtigtem Anschluss an alte Sendestufen sind alle Eingangsstufen für eine
höchstzulässige Spannung von 15V zwischen den beiden Signalleitungen und zwischen
Signalleitung und Masse ausgelegt die für eine unbestimmte Zeit anliegen darf.
3.5.5 Datenübertragung
Die Daten werden seriell asynchron und in Kompatibilität zur IEC 61162-1 übertragen. Das
Erste Bit ist das Start-Bit, welches von den Daten-Bits gefolgt wird (das least significant bit ist
das Erste).
Die folgenden Parameter werden benutzt:
– Baud rate 38 400 (bits/s) 9600 (bits/s) 4 800 (bits/s)
– Data bits 8 (D7 = 0), parity none
– Stop bits 1.
Y1-03-0212-1 Rev D 11
Page 16

3.6 Hinweise zu den Sensoren
Externe Sensoren
Das AIS ist mit Sensoreingängen ausgestattet (konfigurierbar laut IEC61162-1 oder 61162-2)
für Position, Geschwindigkeit(SOG), Heading und Drehrate(ROT). Bei einer Installation nach
SOLAS Richtlinien siehe Kapitel V müssen diese Sensoren angeschlossen werden.
Externes GPS
GNSS Positionssensoren haben üblicherweise Ausgänge entsprechend der IEC 61162 und
können daher meist direkt an das AIS angeschlossen werden.
• Das AIS ist in der Lage zwei Referenzpunkte (1 x intern, 1 x extern) für unterschiedliche
Antennenpositionen zu speichern. Wenn mehr als ein externer Referenzpunkt benutzt wird,
muss die entsprechende Information im AIS aktualisiert werden.
Externes Heading
Ein Gyrokompass der das Headingsignal liefert ist obligatorisch. Liefert der Gyrokompass
keine direkten NMEA Sätze so ist ein Konverter (z.B. Art.Nr. 2641) zum Anschluss
erforderlich. Dieser Konverter setzt ein „Synchro― oder ―Step‖ Signal vom Gyrokompass in
NMEA Sätze laut 0183 v.3.0 um.
Externe Geschwindigkeit und Richtung(COG)
Wenn ein sogenanntes „bottom track (BT) log― für „Speed Over Ground (SOG)‖ information
verfügbar ist, sollte es an das AIS angeschlossen werden. Ein Konverter (z.B.: Art.Nr. 2641)
wird benötigt, falls das BT-log keine IEC 61162 Ausgabe unterstützt.
External Rate of Turn
Nicht alle Schiffe sind mit einem Drehratengeber nach IMO A.526 ausgestattet. Trotzdem
muss ein vorhandener Drehratengeber an das AIS angeschlossen warden sofern er über
einen NMEA Ausgang nach IEC61162 verfügt.
Wenn die Drehrate durch einen entsprechenden Sensor nicht verfügbar ist so kann diese aus
folgenden Daten abgeleitet werden.
• Vom Gyrokompass selbst.
• Von einem externen Konverter
• Vom AIS intern selbst berechnet
3.7 Anschluss der Sensoren
3.7.1 Verdrahtung einer RS422 Schnittstelle
In den meisten Fällen wird das vom GPS gelieferte Signal bereits für andere Geräte
verwendet. Es ist möglich mehrere Geräte an eine RS422 Schnittstelle anzuschließen.
Sollte das Signal durch zu viele Empfänger stark gedämpft werden so muss ein Splitter
verwendet werden.
Y1-03-0212-1 Rev D 12
Page 17
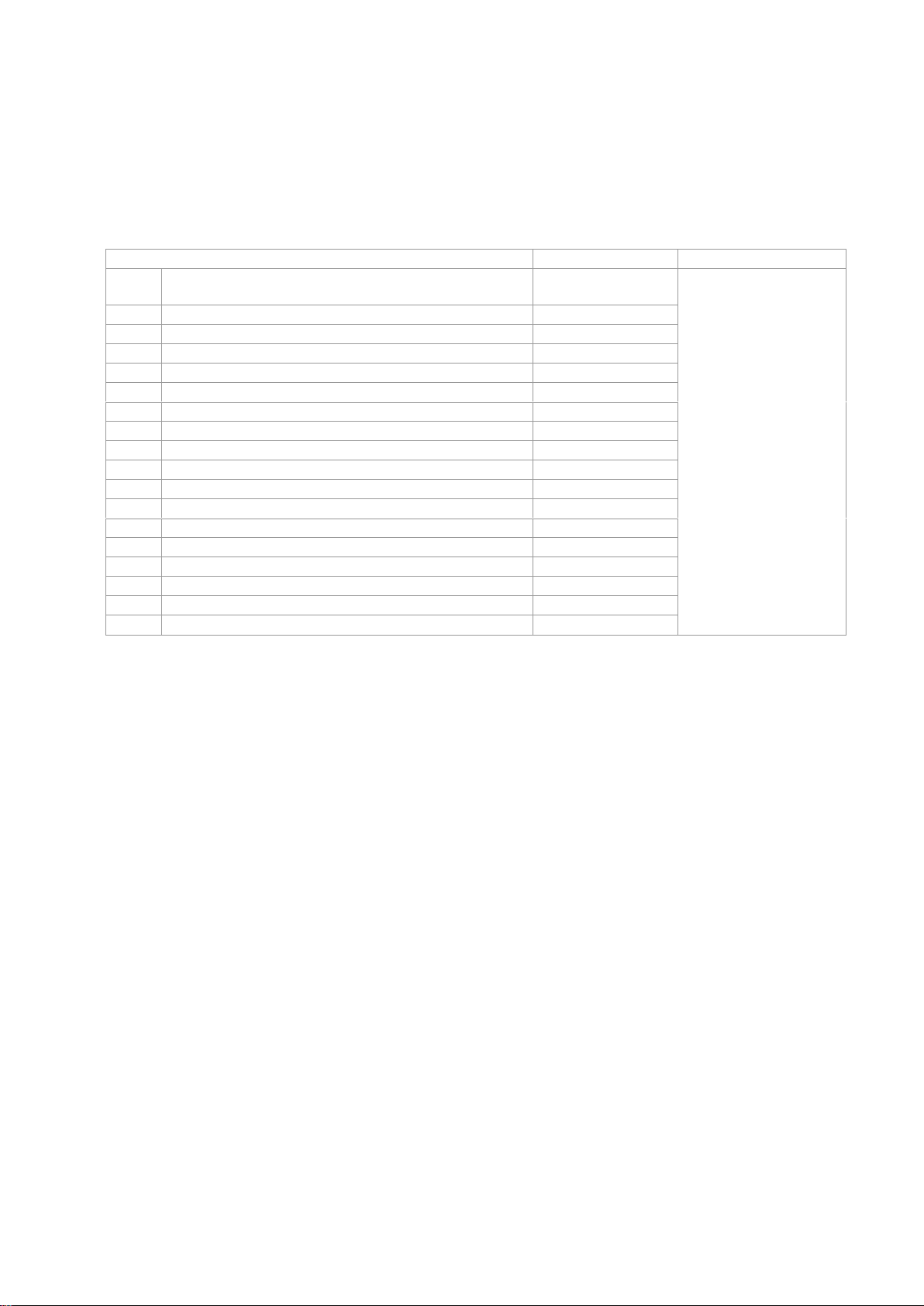
Beispiel für den Anschluss mehrerer Empfänger an einen Sender
AIS Connection Box
Listener (other
equipment)
A B C (GND)
- IN
+ IN
G1 (or 2,3)
Shields
A B C (GND)
Talker (e.g.: GPS)
Die Schnittstelle Sensor 1-3, ECDIS und PILOT sind serielle RS422 Schnittstellen. Die
Schirmung der Schnittstelle darf nicht mit der Masse des Geräts und/oder mit der
Schiffsmasse verbunden werden.
Y1-03-0212-1 Rev D 13
Page 18
3.8 Einstellmöglichkeiten der Sensoren
N 1o19' E 0o13' |1> N/A|2>0.00|3>0.10nm
|--------------------------------- | 5. Transponder Configuration
-----| |
| +- 1. Change User Password
View | +- 2. Region Settings
| +- 3. Alarm Settings
-----| +- 4. Interrogation Settings
| +- 5. Sensor Settings
Msg. |
|
-----|
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
3.8.1 Einleitung
Der NAUTICAST™ INLAND AIS muss an verschiedene Sensoren anschließbar sein. Die
Einstellmöglichkeiten der Sensoreingänge soll die Kompatibilität zu verschiedenen Sensoren
gewährleisten. Dieses Kapitel zeigt die Möglichkeiten auf die zur Verfügung stehen um das
AIS an die Erfordernisse der Sensoren anzupassen.
Der NAUTICAST™ INLAND AIS bietet folgende Einstellmöglichkeiten
Einstellung der Datenrate 4800/9600/38400 baud
Anzeige des angeschlossenen Sensors für jeden Eingang
Anzeige und Einstellung der Konfiguration über OSD
Auswertung der Empfangenen Sensordaten
Anzeige der Empfangenen Daten im Rohformat
Verschiedene NMEA Protokolle einstellbar
Gegebenenfalls müssen Schritte wiederholt werden bis die gewünschte Konfiguration erreicht
ist. Während des Konfigurierens ist der NAUTICAST™ INLAND AIS nicht Betriebsbereit.
3.8.2 Einstellung der Übertragungsrate, Checksumme(CRC)
und NMEA Sender und Satzkennung
Die Einstellung der Sensorparameter erfolgt über das Menü 5(Transponder Configuration)
und weiter im Untermenü 5/5 (Sensor Settings) Der Zugang zu diesen Menüs ist
Passwortgeschützt. (Siehe Anhang 9.2 Passwort Informationen).
Y1-03-0212-1 Rev D 14
Page 19
N 1o19' E 0o12' |1> N/A|2>0.00|3>0.10nm
*********** Sensor Settings ************
BaudRate Sensor1:< 4800> CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
1>Start Monitor>
BaudRate Sensor2: 4800 CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
2>Start Monitor>
BaudRate Sensor3: 38400 CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
3>Start Monitor>
--------------------------------------- | Save | Default | Analyze | Back
Folgendes Bild zeigt das Hauptmenü zur Sensoreinstellung.
Mit den Pfeiltasten nach oben und unten wechseln Sie zwischen verschiedenen
Einstellfelder. Mit den Pfeiltasten links und rechts werden die Werte der Felder geändert.
Sie können durch drücken der Tasten 1 bis 3 direkt einen Sensor anwählen. (Weitere
Informationen finden Sie unter Kapitel 3.8.4)
Folgende Änderungen können mit den Pfeiltasten links und rechts durchgeführt werden:
o Ändern der Datentransferrate (4800,9600, 38400 baud)
o Prüfen der Checksumme eines NMEA Satzes ein bzw. ausschalten
<auto> NMEA Sätze werden mit und ohne Checksumme akzeptiert
<on> NMEA Sätze ohne Checksumme werden Ignoriert.
o Es kann in der Praxis notwendig sein das ein bestimmter Satz vom AIS nicht
angenommen wird. Mit der Funktion Ignored kann diesbezüglich ein Filter gesetzt
werden. In den jeweils fünf zur Verfügung kann mit den ersten beiden nach der
Senderkennung gefiltert werden und mit den letzten drei nach einer Satzkennung.
(z.B. Die Standardeinstellung ―HC‖ bedeutet das alle NMEA Sätze beginnend mit HC
ignoriert werden.
HC bedeutet Magnetischer Norden und soll daher ignoriert werden.
Beispiel:
—VTG bedeutet das unter anderem Sätze wie GPVTG oder GNVTG ignoriert werden
sollen. VW--- bedeutet das unter anderem VWVHW oder VWVBW ignoriert werden.
Mit der Taste Save[M5] werden Änderungen in diesem Menü gespeichert.
Mit der Taste Default[M6] wird das gesamte Menü auf Werkseinstellung zurückgesetzt.
Mit der Taste Back[M8] wechseln Sie ins nächst höhere Menü ohne die Einstellungen zu
speichern.
Mit der Taste Analyze[M7] haben Sie die Möglichkeit die hereinkommenden Daten zu
Analysieren. Nachdem Sie die Taste gedrückt haben startet eine Echtzeitanalyse der drei
Sensoreingänge. Der Vorgang dauert etwa 30sec.
Y1-03-0212-1 Rev D 15
Page 20
*********** Sensor Settings ************
**************************************
* *
* Please stay... *
* analyze Sensor 1..3 *
* this takes max. 30sec. *
* *
**************************************
--------------------------------------- | | | | Back
N 1o18' E 0o12' |1> N/A|2>0.00|3>0.10nm
************ Sensor Analyze ************
Analyze:
Date Src Used CHx Update
Position: Ext >$GPGLL 1,2 820ms
: Int $GPGGA i,1 273ms
: Int $GPRMC i,1,3 656ms
UTC : Ext $GPGLL 1,2 820ms
: Int $GPGGA i,1 273ms
: Int $GPRMC i,1,3 656ms
Date : Int $GPRMC i,1,3 656ms
COG : Ext $GPVTG 1,2 792ms
: Int $GPRMC i,1,3 656ms
SOG : Ext $VDVBW 1,2 820ms>
--------------------------------------- | Select | | | Back
Der Vorgang kann mit der Taste Back [M8] unterbrochen werden.
Nach Abschluß der Analyse wird das Ergebniss wie im folgenden Bild angezeigt.
Y1-03-0212-1 Rev D 16
Page 21
N 1o19' E 0o13' |1> N/A|2>0.00|3>0.10nm
********* Details on Sentence **********
$VDVBW ext. on <Ch1> :SOG
Sentence : VBW Talker : VD
Update Rate: 1093ms ChkSum : Ok
Used Fields: 4,5,6
4:LonGS 5:TraGS
6:Data Valid
[09:21:53,062] $VDVBW,19.63,-01.32,V,19.
63,-01.33,A*47
[09:21:51,859] $VDVBW,19.63,-01.31,V,19.
63,-01.33,A*44
--------------------------------------- | | Next | | Back
N 1o19' E 0o13' |1> N/A|2>0.00|3>0.10nm
************ Sensor Analyze ************
Analyze:
Date Src Used CHx Update
Position: Ext $GPGLL 1,2,3 898ms
: Int $GPGGA i,1,3 291ms
: Int $GPRMC i,1,3 812ms
UTC : Ext $GPGLL 1,2,3 898ms
: Int $GPGGA i,1,3 291ms
: Int $GPRMC i,1,3 812ms
Date : Int $GPRMC i,1,3 812ms
COG : Ext $GPVTG 1,2,3 898ms
: Int $GPRMC i,1,3 812ms
SOG : Ext >$VDVBW 1,2,3 934ms>
--------------------------------------- | Select | | | Back
3.8.3 Echtzeitanalyse des NMEA Datensatzstroms
Nachdem die Sensoranalyse abgeschlossen ist werden die Ergebnisse ausgewertet und wie
im Bild unten dargestellt.
„Date― zeigt an um welche Art Information es sich handelt.
„SRC― zeigt die Herkunft der Daten an
„Used― zeigt an aus welchen Sätzen die Informationen stammen
„Chx― von welchem Sensoreingang stammt die Information
Um noch mehr Informationen zu erhalten kann die zusammengefasste Auswertung weiter
aufgegliedert werden.
Um detaillierte Informationen über einen Wert zu erhalten steuern Sie den Cursor auf das
entsprechende Feld und drücken dann die Entertaste. Die Detailinformationen werden wie
folgt angezeigt.
Mit der Taste ―Next‖[M6] können Sie in den Rohdaten des entsprechenden Sensor scrollen.
Durch drücken der Taste „Back―[M8] kommen Sie zurück in die Übersicht.
Y1-03-0212-1 Rev D 17
Page 22
Bei jeder durchgeführten Analyse wird ein Bericht über die ECDIS Schnittstelle ausgegeben.
$PNAUSCA,4800,4800,4800,1
$PNAUSCD,------------ Sensor Settings -----------$PNAUSCD,Date : 06/22/2004 08:57:05
$PNAUSCD,Hardware: AIS Transponder Class A
$PNAUSCD,Software: 2.0.0.11R3
$PNAUSCD,SW Stamp: Jun 14 2004 11:46:10
$PNAUSCD,LAT : N 53o30.123' LON : E 10o 1.234'
$PNAUSCD,Heading : ExtHDT:0o iRot : 0o/min
$PNAUSCD,IMO No. : 303174162 MMSI: 2222222
$PNAUSCD,ShipName: U4 CS : D11233
$PNAUSCD,ShipType: Pilot vessel
$PNAUSCD,Length : 220m Beam: 43m
$PNAUSCD,RefPtExt: A200 B20 C10 D33m
$PNAUSCD,RefPtInt: A190 B30 C20 D23m
$PNAUSCD,Cargo : N/A or harmless
$PNAUSCD,Draught : 24.8m
$PNAUSCD,Dest. : CASABLANCA
$PNAUSCD,ETA : 10/13 12:31
$PNAUSCD,NavStat : Engaged in fishing
$PNAUSCD,EPFDType: GPS
$PNAUSCD,------------ Sensor Settings -----------$PNAUSCD,BaudRate Sensor1: 4800 CRC:auto
$PNAUSCD,Ignored:$-----$-----$-----$----$PNAUSCD, :$-----$-----$-----$----$PNAUSCD,BaudRate Sensor2: 4800 CRC:auto
$PNAUSCD,Ignored:$HC---$-----$-----$----$PNAUSCD, :$-----$-----$-----$----$PNAUSCD,BaudRate Sensor3: 4800 CRC:auto
$PNAUSCD,Ignored:$HC---$-----$-----$----$PNAUSCD, :$-----$-----$-----$----$PNAUSCD,------------ Sensor Settings -----------$PNAUSCD,Analyze:
$PNAUSCD,Date Src Used CHx Update
$PNAUSCD,Position: Ext $GPGLL 1 955ms
$PNAUSCD,UTC : Int $GPGGA i 952ms
$PNAUSCD,Date : Int $GPRMC i 951ms
$PNAUSCD,COG : Ext $VDVBW 1 Calc 952ms
$PNAUSCD,SOG : Ext $VDVBW 1 Calc 952ms
$PNAUSCD,Heading : Ext $TIHDT 1 953ms
$PNAUSCD,ROT : Ext $TIROT 1 949ms
$PNAUSCD,------------ Sensor Settings -----------$PNAUSCD,Monitoring Sensor Channel 1
$PNAUSCD,[08:56:35,000] $TIROT,0.0,A
$PNAUSCD,[08:56:35,255] $GPGLL,5330.1234,N,01001
$PNAUSCD,.2345,E,141800.00,A,A
$PNAUSCD,[08:56:35,410] $GPVTG,350.0,T,,M,10.0,N
...
...
$PNAUSCD,[08:49:50,806] $TIHDT,359.9,T
$PNAUSCD,------------ ROT : -----------------$PNAUSCD,$TIROT ext. on Ch1 :ROT
$PNAUSCD,
$PNAUSCD,Sentence : ROT Talker : TI
$PNAUSCD,Update Rate: 949ms ChkSum : N/A
$PNAUSCD,Used Fields: 1,2
$PNAUSCD, 1:Rate Of Turn
$PNAUSCD, 2:Data Valid
$PNAUSCD,
$PNAUSCD,[08:49:52,900] $TIROT,0.0,A
$PNAUSCD,[08:49:51,950] $TIROT,0.0,A
$PNAUSCD,[08:49:51,001] $TIROT,0.0,A
$PNAUSCD,
$PNAUSCD,------------ Sensor Settings ------------
Dieser Bericht kann als Konfigurationsbericht verwendet werden.
Y1-03-0212-1 Rev D 18
Page 23
*********** Sensor Settings ************
Monitoring Sensor Channel 2 PAGE 1/4
[08:26:48,000] $GPGLL,5330.1234,N,01001
.2345,E,141800.00,A,A
[08:26:48,328] $GPVTG,350.0,T,,M,10.0,N
,,K,A
[08:26:48,437] $VDVBW,11.00,01.00,A,12.
00,02.00,A,,V,,V
[08:26:48,547] $TIHDT,359.9,T
[08:26:48,656] $TIROT,0.0,A
[08:26:48,765] $GPGLL,5330.1234,N,01001
.2345,E,141800.00,A,A
[08:26:48,875] $GPVTG,350.0,T,,M,10.0,N
,,K,A >
--------------------------------------- |Cfg CH2 |Monitor 1|Monitor 3|<-Back
N 1o21' E 0o15' |1> N/A|2>0.00|3>0.10nm
*********** Sensor Settings ************
BaudRate Sensor1:< 4800> CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
1>Start Monitor>
BaudRate Sensor2: 4800 CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
2>Start Monitor>
BaudRate Sensor3: 38400 CRC: auto
Ignored:$HC---$-----$-----$-----
$-----$-----$-----$-----
3>Start Monitor>
--------------------------------------- | Save | Default | Analyze | Back
3.8.4 Sensorausgabe auf den Bildschirm zur Problemanalyse
Um spezifische Informationen aus den NMEA Sätzen zu sehen können die eingehenden
Daten eines bestimmten Sensoreingangs auf dem Display ausgegeben werden.
Um die Sensorrohdatenanzeige für einen Sensor zu starten gehen Sie ins Menü 5/5 und
steuern den Cursor im Display auf den Text „1>Start Monitor― dann drücken sie die Pfeiltaste
rechts. Der folgende Vorgang dauert 30sec. und danach werden die Daten wie im Bild unten
angezeigt.
Es werden die NMEA Sätze für den gewählten Sensor im Rohformat angezeigt.
Durch Drücken der Taste [M5] können Sie den entsprechenden Sensor Konfigurieren.
Mit den Tasten [M6] und [M7] können Sie die Darstellung eines anderen Sensoreingangs
starten. Mit der Taste „Back― [M8] kommen sie zurück in das nächst höhere Menü.
Y1-03-0212-1 Rev D 19
Page 24
Positioning System
Source
Priority
HIGH
Time of Position
Latitude/Longitude
GNS
Position accuracy
GLL
GGA
RMC
Rate of Turn(ROT)
ROT
Reference Datum
DTM
Speed over Ground
VBW
VTG
OSD
RMC
Heading
HDT
OSD
RAIM Indicator
GBS
LOW
3.8.5 Priorität der einzelnen NMEA Sätze
Folgende Tabelle zeigt die Priorität der NMEA Sätze. Sätze mit höherer Priorität sind oben
gelistet.
3.8.6 Unterstützte NMEA 0183 Sätze
DTM - Reference
1 2 3 4 5 6 7 8 9
| | | | | | | | |
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
Beschreibung der Felder
1) Local datum code (W84,W72,S85,P90,999-user defined, IHO datum code)
2) Local datum subdivision code
3) latitude offset, minutes
4) N or S (North or South)
5) longitude offset, minutes
6) E or W (East or West)
7) altitude offset, meters
8) Reference datum code ((W84,W72,S85,P90)
9) CRC
Used Fields: 1,8
1: Local datum code
8: Reference datum code
GGA - Positioning System Fix Data
Time, Position and fix related data form GPS receiver.
11
1 2 3 4 5 6 7 8 9 10 | 12 13 14 15
| | | | | | | | | | | | | | |
$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh
Field Numbers:
1) UTC
2) Latitude
3) N or S (North or South)
Y1-03-0212-1 Rev D 20
Page 25

4) Longitude
5) E or W (East or West)
6) GPS Quality Indicator,
0 - fix not available,
1 - GPS fix,
2 - Differential GPS fix
7) Number of satellites in view, 00 - 12
8) Horizontal Dilution of precision
9) Antenna Altitude above/below mean-sea-level (geoid)
10) Units of antenna altitude, meters
11) Geoidal separation, the difference between the WGS-84 earth
ellipsoid and mean-sea-level (geoid), \-\ means mean-sea-level
below ellipsoid
12) Units of geoidal separation, meters
13) Age of differential GPS data, time in seconds since last SC104
type 1 or 9 update, null field when DGPS is not used
14) Differential reference station ID, 0000-1023
15) CRC
Used Fields: 1,2,3,4,5,6,7
1:UTC 2:Lat 3:LaInd 4:Lon
5:LoInd 6:Acc 7:Sat
GLL - Position - Latitude/Longitude
1 2 3 4 5 6 7 8
| | | | | | | |
$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A,a*hh<CR><LF>
Field Numbers:
1) Latitude
2) N or S (North or South)
3) Longitude
4) E or W (East or West)
5) Universal Time Coordinated (UTC)
6) Status A - Data Valid, V - Data Invalid
7) Mode indicator
8) CRC
Used Fields: 1,2,3,4,5,6,7
1:Lat 2:LaInd 3:Lon 4:LoInd
5:UTC 6:Valid 7:Acc
GNS - Fix Data
1 2 3 4 5 6 7 8 9 10 11 12 13
| | | | | | | | | | | | |
$--GNS,hhmmss.ss,llll.ll,a,yyyyy.yy,a,c--c,xx,x.x,x.x,x.x,x.x,x.x*hh
Field Numbers:
1) UTC
2) Latitude
3) N or S (North or South)
4) Longitude
5) E or W (East or West)
6) Mode indicator
7) Total number of satellites in use,00-99
8) HDROP
9) Antenna altitude, meters, re:mean-sea-level(geoid)
10) Goeidal separation meters
11) Age of differential data
12) Differential reference station ID
13) CRC
Y1-03-0212-1 Rev D 21
Page 26
Used Fields: 1,2,3,4,5,6,7
1:UTC 2:Lat 3:LaInd 4:Lon
5:LoInd 6:Acc 7:Sat
RMC - Minimum Navigation Information
12
1 2 3 4 5 6 7 8 9 10 11| 13
| | | | | | | | | | | | |
$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,ddmmyy,x.x,a,a*hh<CR><LF>
Field Numbers:
1) UTC Time
2) Status, V = Navigation receiver warning
3) Latitude
4) N or S
5) Longitude
6) E or W
7) Speed over ground, knots
8) Course over Ground, degrees true
9) Date, ddmmyy
10) Magnetic Variation, degrees
11) E or W
12) Mode Indicator
13) CRC
Used Fields: 1,2,3,4,5,6,7,8,9,10,11,12
1:UTC 2:Valid 3:Lat 4:LaInd 5:Lon 6:LoInd
7:SOG 8:COG 9:Date 10:MagV 11:MagIn 12:Acc
VBW - Ground/Water Speed
1 2 3 4 5 6 7
| | | | | | |
$--VBW,x.x,x.x,A,x.x,x.x,A*hh<CR><LF>
Field Numbers:
1) Longitudinal water speed, \-\ means astern
2) Transverse water speed, \-\ means port
3) Status, A = Data Valid
4) Longitudinal ground speed, \-\ means astern
5) Transverse ground speed, \-\ means port
6) Status, A = Data Valid
7) CRC
Used Fields: ,5,6
4:LonGS 5:TraGS 6:Valid
VTG - made good and Ground speed
1 2 3 4 5 6 7 8 9 10
| | | | | | | | | |
$--VTG,x.x,T,x.x,M,x.x,N,x.x,K,A*hh<CR><LF>
Field Numbers:
1) Track Degrees
2) T = True
3) Track Degrees
4) M = Magnetic
5) Speed Knots
6) N = Knots
7) Speed Kilometres per Hour
8) K = Kilometres per Hour
Y1-03-0212-1 Rev D 22
Page 27
9) Status, A = Data Valid
10)CRC
Used Fields: 1,5,6,7,8,9
1:COG 5:SOG 6:SOGIn 7:SOG 8:SOGIn 9:Valid
OSD - Ship Data
1 2 3 4 5 6 7 8 9 10
| | | | | | | | | |
$--OSD,x.x,A,x.x,a,x.x,a,x.x,x.x,a*hh<CR><LF>
Field Numbers:
1) Heading, degrees true
2) Status, A = Data Valid
3) Vessel Course, degrees True
4) Course Reference
5) Vessel Speed
6) Speed Reference
7) Vessel Set, degrees True
8) Vessel drift (speed)
9) Speed Units
10) CRC
Used Fields: 1,2,3,4,5,6,9
1:HDT 2:HDTVal 3:COG 4:COGRef
5:SOG 6:SOGRef 9:SOGInd
HDT - True
1 2 3
| | |
$--HDT,x.x,T*hh<CR><LF>
Field Numbers:
1) Heading Degrees, true
2) T = True
3) CRC
Used Fields: 1,2
1:HDT 2:HDTRu
ROT - Of Turn
1 2 3
| | |
$--ROT,x.x,A*hh<CR><LF>
Field Numbers:
1) Rate Of Turn, degrees per minute, \-\ means bow turns to port
2) Status, A means data is valid
3) CRC
Used Fields: 1,2
1:ROT 2:Valid
Y1-03-0212-1 Rev D 23
Page 28

3.8.7 Errechnete Werte
ROT > +10°/min
Output +720°/min
ROT < -10°/min
Output -720°/min
Other
Output 0°/min
Dynamische Schiffsdaten werden generell aus NMEA Sätzen generiert.
Ausnahme:
Einige Werte wie z.B. die Drehrate können errechnet werden. Wurde ein Wert zur
Berechnung eines anderen herangezogen so wird das im Menü „Analyze Sensor
Configuration― neben der Angabe des Sensors durch die Meldung „Calc― angezeigt.
Berechnung der Drehrate(ROT) aus dem heading
Die Drehrichtung links/rechts = -/+ wird aus dem heading Wert berechnet wenn keine TIROT
Sätze verfügbar sind. Nur Sender mit der Kennung „TI― sind gültige Drehratengeber.
Der Kurs(COG) errechnet aus einem VBW Satz
COG wird aus dem VBW generiert, wenn HDT verfügbar ist. In diesem Fall bilden der atan2
der longitudinal und transversalen Geschwindigkeit sowie das Heading die Basis der
Berechnung.
Longitudinal/Transversal SOG aus dem VBW
Wenn der VBW verfügbar ist, kann der SOG auch ohne dem HDT berechnet werden.
3.8.8 Versionen der NMEA Sätze
RMC
v2.30 - $GPRMC,122500.00,A,5330.1234,N,01001.2345,E,11.2,352.2,120202,2.0,E,A
v2.20 - $GPRMC,122500.00,A,5330.1234,N,01001.2345,E,11.2,352.2,120202,2.0,E
GLL
v2.30 - $GPGLL,5330.1234,N,01001.2345,E,141800.00,A,A
v2.00 - $GPGLL,5330.1234,N,01001.2345,E,141800.00,A
v1.50 - $GPGLL,5330.1234,N,01001.2345,E
GGA
v2.00 - $GPGGA,092854,5330.1234,N,01001.2345,E,1,3,1.2,65.2,M,45.1,M,,
v1.50 - $GPGGA,092854,5330.1234,N,01001.2345,E,1,3,1.2,65.2,M,45.1,M
VBW
v2.30 - $VDVBW,11.00,01.00,A,12.00,02.00,A,,V,,V
v2.20 - $VDVBW,11.00,01.00,A,12.00,02.00,A
VTG
v2.30 - $GPVTG,350.0,T,,M,10.0,N,,K,A
v2.20 - $GPVTG,350.0,T,,M,10.0,N,,K
OSD
v2.30 - $INOSD,359.9,A,5.2,B,12.6,B,150.0,1.2,N
v2.20 - $INOSD,359.9,A,5.2,B,12.6,B,150.0
Y1-03-0212-1 Rev D 24
Page 29

3.9 Pinbelegung AIS Kabel / Stecker 50 polig
AIS Stecker ( Sub-D 50 Plug )
1
CH5_out+
34
Spare
18
Ch4_out+
2
CH5_out-
35
Spare
19
CH4_out-
3
CH5_gnd
36
Spare
20
CH4_gnd
4
CH5_in+
37
Spare
21
CH4_in+
5
CH5_in-
38
Spare
22
CH4_in-
6
CH6_Vin
39
CH9_gnd
23
CH8_in+
7
CH6_gnd
40
CH9_out-
24
CH8_in-
8
CH6_CANL
41
CH9_in-
25
CH8_gnd
9
CH6_CANH
42
CH9_in+
26
CH8_in+
10
CH1_in-
43
CH9_out+
27
CH8_in-
11
CH1_gnd
44
Spare
28
Spare
12
CH1_in+
45
Spare
29
CH3_in-
13
CH2_in-
46
CH10_1
30
CH3_gnd
14
CH2_gnd
47
CH10_2
31
CH3_in+
15
CH2_in+
48
Vin_gnd
32
Vin_gnd
16
Vin+ (24V)
49
Vin_gnd
33
Vin+ (24V)
17
Vin+ (24V)
50
Spare
CH1
Sensor
CH4
ext. Display
CH8
Long Range
CH2
Sensor
CH5
aux. Display
CH9
DGNSS
CH3
Sensor
CH6
opt. 61162-3
CH10
BIIT / Relay
(max. 30V DC / 1A)
Spare
Do not use
AIS Plug and Socket
TxA out –
TxB out +
RxA in –
RxB in +
Y1-03-0212-1 Rev D 25
Page 30

3.10 Pinbelegung des 50poligen AIS Kabels
CH1_in+ 12
CH1_in- 10
CH1_gnd 11
CH2_gnd 14
CH2_in+ 15
CH2_in- 13
CH3_in+ 31
CH3_in- 29
CH3_gnd 30
CH4_gnd 20
CH4_in+ 21
CH4_in- 22
CH4_out+ 18
CH4_out- 19
CH5_in+ 4
CH5_in- 5
CH5_out+ 1
CH5_out- 2
CH5_gnd 3
CH8_gnd 25
CH8_in+ 26
CH8_in- 27
CH8_out+ 23
CH8_out- 24
CH9_in+ 42
CH9_in- 41
CH9_out+ 43
CH9_out- 40
CH9_gnd 39
Spare_gnd 36
Spare_in+ 35
Spare_in- 34
Spare_out+ 38
Spare_out- 37
CH6_CANH 9
CH6_CANL 8
CH6_Vin 6
CH6_gnd 7
CH10_1 46
CH10_2 47
+ 24 VDC/max 5A rd
+ 24 VDC rd
+ 24 VDC rd
0 V bl
0 V bl
0 V bl
Sensor 1,2,3
ECDIS
Pilot Port
Long Range
DGPS
CAN
BIIT Relais
16
17
33
48
49
32
Note:
TxA out –
TxB out +
RxA in –
RxB in +
Alarm unit
CAN
unit
Service
unit
RTCM
SC104
unit
e.g.
Inmarsat
unit
6
5
4
1
NC
AMP
Pilot
Plug
e.g ECDIS
viewer
e.g. GYRO
HDT,ROT
e.g. GPS
GLL, VTG,
DTM
SPEED
LOG
VBW
NC
NC
NC
AIS-Cable
Open
1 WH/BK
2 BR/BK
3 SL/GN
7 YL/SL
5 PK/GN
6 YL/PK
9 GN/BL
10 YL/BL
11 GN/RD
17 YL/RD
13 GN/BK
14 YL/BK
15 SL/BL
16 PK/BL
19 SL/RD
20 PK/RD
21 SL/BK
22 PK/BK
23 WH/SL
29 SL/BR
25 WH/PK
26 PK/BR
27 WH/BL
28 BR/BL
31 WH/YL
32 YL/BR
33 WH/GN
34 BR/GN
35 SL/PK
41 RD/BL
37 SL
38 PK
39 GN
40 YL
43 WH
44 BR
45 RD
46 BL
49 BK
50 VI
Schwarz BK
Weiß WH
Rot RD
Grün GN
Braun BR
Blau BL
Orange OR
Gelb YL
Violett VI
Grau SL(Slate)
Rosa PK
Y1-03-0212-1 Rev D 26
AIS Kabel Sub-D 50 Plug
Page 31

3.11 Pinnbelegung Kommunikationskabel Buchse 50 Pins
Kommunikationskabel / Socket ( Sub-D 50 Socket )
1 34
18
2 35
19 3 36 20 4 37
21
5 38
22
6 39 23
7 40
24
8 41
25 9 42 26 10 43
27
11 44
Blue Sign - Switch
28
Blue Sign - Switch
12 45 29
13 46
30
14 47
31 15
CH15_TxD
48 32
CH15_RxD
16 49
CH15_GND
33
17 50
CH15
Communication
RS232
Spare
Do not use
Communication Socket (female)
Y1-03-0212-1 Rev D 27
Page 32

CH15_RxD 32
CH15_TxD 15
CH15_gnd 49
Communication
PC
RS232
SUB-DB9
3
2
5
BlueSign Switch 28
BlueSign Switch 44
3.12 Kommunikationskabel RS232 u. Blue Sign (Sub-D 50 Socket)
Kabel Type 2635 (NAU-B502) für Anschluss eines Blue Sign Schalter und RS232 mit DB9..
Y1-03-0212-1 Rev D 28
Page 33

3.13 Installation der VHF/GPS Antenne
Interferenzen im VHF Sprechfunkgerät
Das AIS sowie jedes andere Schiffs Daten Übertragungssystem arbeitet im maritimen VHF
Band. Dies kann zu Interferenzen wie z.B. ein periodisches Klicken im Sprechfunkgerät
führen. Je näher die jeweiligen Antennen zueinander montiert sind desto eher kann es zu
Störungen der Geräte untereinander kommen..
Wählen Sie die Montageart und Ort der Montage und bestmöglicher Berücksichtigung der
Antennencharakteristik.
3.13.1 Installation der VHF Antenne
Montageort der Antenne
Wählen Sie den Standort der Antenne sorgfältig aus. Ein ungünstig gewählter Montageort
kann zur Beeinträchtigung der Anlage führen. Unter Umständen kann es erforderlich sein die
Antenne der Sprechfunkanlage neu zu positionieren.
Beachten Sie folgende Richtlinien bei der Montage um störende Einflüsse möglichst zu
vermeiden.
Die VHF Antenne sollte eine möglichst Kugelförmige Richtcharaktaristik haben eine
vertikaler Polarisation und sollte etwa 3 bis 5dB Verstärkung bieten
Die AIS VHF Antenne soll möglichst freistehend montiert werden. Zu Objekten aus
magnetisch leitfähigem Material muss ein Mindestabstand von 2 Metern eingehalten
werden.. Vermeiden Sie die Montage in der Nähe von Vertikalen Flächen.
Ein Mindestabstand von 3 Metern soll zu Sendeanlage hoher Energiedichte wie z.B.
Radargeräten eingehalten werden. Achten Sie darauf, dass die VHF Antenne nicht im
Sendebereich der Radaranlage steht.
Es sollen nicht zwei Antennen auf selber Höhe montiert werden. Die AIS VHF Antenne
sollte direkt über oder unter der primären Sprechfunkantenne nicht horizontal verschoben
und mindestens 2 Meter in der Höhe verschoben montiert werden.
Verkabelung
Halten Sie das Kabel so kurz wie möglich um die Kabeldämpfung möglichst gering zu halten.
Verwenden Sie zur Installation ein doppelt geschirmtes Kabel des Typs RG214 oder mind.
Gleichwertig. Die Dämpfung pro Meter RG214 Kabel beträgt ca. 0,07dB. 45Meter
entsprechen daher ca3,15dB/m. Die VHF Frequenz liegt bei etwa 162MHz.
Die Stecker der Antenne müssen durch eine isolierende Schutzschicht vor
Witterungseinflüssen geschützt werden. Eindringendes Wasser zerstört das Antennenkabel.
Das Antennenkabel darf nicht gemeinsam in einem Schacht mit einer Energieleitung verlegt
werden. Der Mindestabstand zu einer Energieleitung beträgt in jedem Fall 10cm.
Kabelkreuzungen soll in einem Winkel von 90° verlegt werden. Koaxialkabel dürfen nicht
geknickt werden. Ein Biegeradius kleiner als 5mal der Außendurchmesser des Kabels ist
nicht zulässig.
Y1-03-0212-1 Rev D 29
Page 34

Grounding
Coaxial down-leads müssen für alle Empfangsantennen benutzt werden und der coaxial
screen soll am Ende auf Masse verbunden werden.
3.13.2 Installation der GNSS Antenne
Eine Class-A AIS muss an eine GNSS Antenne angeschlossen werden.
Montageplatz
Der Empfangsbereich der Antenne ist horizontal 360° und vertikal von 5° bis 90°. Der
Montageplatz ist daher so zu wählen das eine freie Sicht über den gesamten Himmel immer
gewährleistet ist. Objekte mit geringem Durchmesser wie z.B. Masten beeinträchtigen den
Empfang kaum.
Der Montageplatz der Antenne muss mindestens drei Meter entfernt und nicht im
Sendebereich einer Leistungssendeanlage (S-Band Radar, Inmarsat System) liegen. Dies gilt
auch für die AIS VHF Antenne. Beispiele eines Montagelayouts finden Sie im Anhang 8.2
Verkabelung
Um eine optimale Leistung zu erzielen ist es wichtig die Dämpfung der Anlage an die
Verstärkung der Antenne angepasst wird. Die resultierende Verstärkung der Anlage
(Antennenverstärkung –Kabeldämpfung) sollte in einem Bereich von 0 bis 10dB liegen.
Dämpfung des RG214 Kabels im GPS Frequenzbereich 0,35dB/m (45m = 15,75dB). GPS
Frequenz 1,2GHz.
Dämpfung
Wie weiter oben beschrieben muss die resultierende Dämpfung in einem Bereich von 0 bis
10dB liegen. Ein zu hohes Eingangssignal (über 18dB) kein den GPS Empfangsteil
beschädigen.
Y1-03-0212-1 Rev D 30
Page 35

Attenuation values
Artikel
Typenbezeichnung
Artikelnummer
Verstärkungsfaktor
GPS-Antenne
GPS-Antenne Marina 2
2625
+35dBi
GPS-Antenne
Procom GPS4
2622
+35dBi
KombiGPS/VHF-Antenne
Comrod AC-17
2624
+20dBi (GPS amp gain)
Kabel
RG214
2630
-15.75 dB
Adapter
GPS-VHF Adapter Kabel mit
1m RG58 / TNC Stecker
2612
-1dB
Stecker
TNC Stecker RG214 crimp
2633
-0.1dB
Procom GPS4
+ 35.00dBi
11m RG214 0,35 dB/m
- 3.85dB
evtl. 2 TNC Stecker
- 0.20dB
Adapter P/N 2610
-1.00dB
Total
29.95dB
mindestens erforderliche
Dämpfung
(=> 12dB Dämpfungsglied
notwendig)
≥11.95dB
GPS Eingangssignal
≤18.00dB
Beispiel
Achtung
Der Hersteller übernimmt keine Haftung für Schäden aufgrund von nicht Beachtung des
Signalpegel oder einer sonst nicht ordnungsgemäß durchgeführten Installation.
Lageplan der Antennen
Die Position der VHF und GNSS Antenne müssen dem Lageplan der Antennen am Schiff
beigefügt werden.
3.14 Stromversorgung
Der NAUTICAST™ Inland AIS muss von einer Ausfallssicheren Stromquelle versorgt werden.
Eine weitere Anforderung ist ein Notstromsystem laut GMDSS Vorgaben. Diesbezüglich
muss eine Neuberechnung der Batteriekapazität durchgeführt werden. Information und
Beispiele finden Sie im Anhang unter 9.1 (Samples for battery calculation)
Folgende Dokumente sind für eine Bewilligte Anlage notwendig
Lageplan der Antennen
Berechnung der Batteriekapazität
Anschluss/Verdrahtungsplan mit Betriebsmittelkennzeichnung
Typengenehmigung
Y1-03-0212-1 Rev D 31
Page 36

4 Starten des NAUTICAST™ Inland AIS
LAT: N/A SOG: N/A 00/00/00
LON: N/A COG: N/A 24:60:60
IntN/A: STOP ! 7A 1T
++++++++++++++++++++++++++++++++++++++++
Time 24:60 00/00
[!] ALARM ID:56
AIS: ENTER MMSI NUMBER
Please press OK to enter MMSI number!
Tx temporary suppressed
++++++++++++++++++++++++++++++++++++++++
4.1 Erstmaliges Einrichten des NAUTICAST™ Inland AIS
ACHTUNG:
BEHÖRDEN VERLANGEN, DASS DIESE INFORMATIONEN EINGEGEBEN WERDEN.
Nachdem die Antennen und Geräte installiert worden sind, müssen die nachfolgenden
Informationen eingegeben werden. Nach dem Start (einschalten der Spannungsversorgung)
geben Sie die folgenden Informationen ein:
a) Eingabe der MMSI Nummer – siehe Abschnitt Error! Reference source not found.
zur Eingabe dieser Information.
Nach dem ersten Start oder wenn die Einstellungen zurückgesetzt wurden („factory
settings―), wird der Benutzer angewiesen, eine gültige MMSI-Nummer einzugeben. So
lange dies nicht geschehen ist, kann das System nicht senden. Dies erscheint als
Alarm mit der ID 56 mit dem Text „AIS: ENTER MMSI NUMBER―.
b) Eingabe der IMO-Nummer, des „Designated Area Code― (DAC) und der „European
Ship Number― (ESN) – siehe Abschnitt 4.2 zur Eingabe dieser Information.
c) Auswahl des AIS-Modus – Entsprechend lokaler Vorschriften muss der AIS-Modus
eingestellt werden. Es stehen „Inland AIS― und „SOLAS AIS― zur Verfügung.
d) Statische Schiffsdaten („Ship Settings Data―) – Nach der erstmaligen Eingabe müssen
alle Änderungen in den Schiffsdaten entsprechend eingegeben werden. Siehe
Abschnitt 4.3 zur Eingabe dieser Information.
Eingabe des Rufnamens („Call Sign―)
Eingabe des Schiffsnamens („Ships Name―)
Eingabe der Länge des Schiffs („Length of Ship―)
Eingabe der Breite des Schiffs („Beam of Ship―)
Eingabe der Position der internen GPS-Antenne („Internal GPS antenna Position―)
Falls vorhanden, Eingabe der Position der internen GPS-Antenne („External GPS
Antenna Position―)
Eingabe der Schiffstype „Ship Type―)
e) Reisedaten („Voyage Related Data―) – Nach der erstmaligen Eingabe müssen alle
Änderungen entsprechend korrigiert werden. Siehe Abschnitt 4.4 zur Eingabe dieser
Information.
Eingabe der Frachtart („Cargo Type―)
Y1-03-0212-1 Rev D 32
Eingabe des Tiefgangs („Draught―)
Eingabe des Zielhafens („Destination―)
Eingabe der voraussichtlichen Ankunftszeit („ETA―)
Eingabe des Navigations-Status („Navigation Status―)
Page 37

f) Passwort – „Service― und „User― Passworte; siehe Abschnitt 4.6 und Anhang 9.2
N 1o21' E 0o14' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 6. Service Configuration
-----| |
| +- 1. Change Service Password
View | +- 2. User Password Settings
| +- 3. Change MMSI / IMO
-----| +- 4. Change DAC / ESN
| +- 5. Change AIS Mode
Msg. | +- 6. Restore Factory Settings
|
-----|
|
Displ|
---------------------------------------NUM| Select->| | |<-Back
N 1o19' E 0o13' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | Menu
-----| |
| +- 1. Messages
View | +- 2. AIS Status
| +- 3. Voyage Settings
-----| +- 4. Ship Settings
| +- 5. Transponder Configuration
Msg. | +- 6. Service Configuration
| +- 7. Display Settings
-----| +- 8. Graphical Display Settings
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
Passwort Informationen).
4.2 Eingabe der MMSI, IMO, DAC und ESN Nummer
Im Hauptmenü wählen Sie „Service Configuration“ (Nr. 6). Das Menü ist mit dem
SERVICE-Passwort geschützt, (Siehe Anhang 9.2 Passwort Informationen). Geben Sie das
Service-Passwort ein und wählen Sie mit den Hinauf- und Hinunter-Tasten die einzugebende
bzw. zu korrigierende Bezeichnung. Danach drücken Sie „Select― (M5) oder Sie geben die
Nummer des Menüpunkts auf der Tastatur ein, z.B. die 3.
Geben Sie die MMSI und IMO Nummern ein und drücken Sie „Save―, um die Eingabe zu
speichern. Das Gerät wird daraufhin neu starten. Falls keine IMO-Nummer verfügbar ist,
geben Sie 0 (Null) ein.
Beispiel des „Service Configuration Menu“:
Achtung: die MMSI-Nummer hat genau 9 Stellen (eventuell führende Nullen sollten
angegeben werden) und die IMO-Nummer hat maximal 9 Stellen.
Y1-03-0212-1 Rev D 33
Page 38

N 1o21' E 0o14' |1> N/A|2>0.00|3>0.10nm
********** Change MMSI / IMO ***********
MMSI :119302468
IMO No.:303174162
---------------------------------------NUM| Save | | | Back
N 1o21' E 0o14' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 6. Service Configuration
-----| |
| +- 1. Change Service Password
View | +- 2. User Password Settings
| +- 3. Change MMSI / IMO
-----| +- 4. Change DAC / ESN
| +- 5. Change AIS Mode
Msg. | +- 6. Restore Factory Settings
|
-----|
|
Displ|
---------------------------------------NUM| Select->| | |<-Back
Wählen Sie das Untermenü 4 „Change DAC / ESN― mit den Pfeiltasten „Oben― und „Unten―
oder drücken Sie die „4― auf der Tastatur.
Y1-03-0212-1 Rev D 34
Page 39

Geben Sie die neue DAC / ESN Nummern ein und drücken Sie „Save― (M5), um die
N 1o21' E 0o14' |1> N/A|2>0.00|3>0.10nm
*********** Change DAC / ESN ***********
DAC : 200
ESN : A123456B
---------------------------------------NUM| Save | | | Back
Eingaben zu speichern. Drücken Sie „Back― (M8), um in das Untermenü zurückzukehren,
ohne die Daten zu speichern.
Achtung:
Die Regionskennung (DAC; Designated Area Code) ist mit der Zahl „200― vorbelegt. Geben
Sie nur dann eine andere 3-stellige Nummer ein, wenn Ihre Behörde das vorschreibt,
anderenfalls könnten Sie wichtige AIS-Informationen verlieren.
Die ESN („European Ship Number―) ist mit 8 Buchstaben und Ziffern limitiert.
Y1-03-0212-1 Rev D 35
Page 40

4.3 Eingabe der Schiffsdaten
N 1 o23' E 0 o16' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | Menu
-----| |
| +- 1. Messages
View | +- 2. AIS Status
| +- 3. Voyage Settings
-----| +- 4. Ship Settings
| +- 5. Transponder Configuration
Msg. | +- 6. Service Configuration
| +- 7. Display Settings
-----| +- 8. Graphical Display Settings
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
N 1 o19' E 0 o12' |1>0.01|2>1.30|3>1.80nm
************ Ship Settings *************
Atis Code :max. 7ASCII +------+
ShipName :Nauticast(tm) Inland AIS
| |
Length(Conv):400m | A
Beam(Conv) :32m | |
RefPtExt :A380 B20 C8 D24m | x--|
RefPtInt :A380 B20 C8 D24m | | B
Length(ship):600dm | | |
Beam(ship) :220dm +-C-+D-+
--------------------------------------- | Save | | | Back
Wählen Sie aus dem Hauptmenü das Untermenü „Ship Settings― (Menü 4). Das Menü ist mit
dem USER-Passwort geschützt, (Siehe Anhang 9.2 Passwort Informationen). Geben Sie das
Passwort ein und wählen Sie mit den Pfeiltasten „Hinauf― und „Hinunter― und drücken Sie die
Eingabetaste oder wählen Sie mit einer Ziffer direkt den gewünschten Menüpunkt.
Speichern Sie die Eingaben im Untermenü.
Beispiel Hauptmenü:
Wählen Sie „Ship Settings― und drücken Sie M5. Geben Sie das Passwort ein und drücken
Sie die Eingabetaste.
Beispiel „Ship Settings Menu“:
„ATIS Code“ – der zugewiesene ATIS Code
„Ship Name“ – Schiffsname
„Length of Convoy – Länge des Konvois in Meter
„Beam of Convoy“ – Breite des Konvois in Meter
„Internal and External GPS antenna positions“ – Position der GPS-Antenne(n)
„Length of Ship“ – Länge des Schiffes in Dezimeter
„Beam of Ship“ – Breite des Schiffes in Dezimeter
Y1-03-0212-1 Rev D 36
Page 41

Eingabe der Position der internen und externen GPS-Antenne
Achtung: Es ist von größter Bedeutung, dass diese Daten korrekt eingegeben werden,
damit andere Schiffe Ihre Position und Lage zu Ihrem Schiff richtig beurteilen können.
Beispiel: Länge des Schiffs bzw. Konvois = 400m und Breite = 32m.
GPS Antennen-Position am Schiff (das „x― in obiger Menü-Abbildung) ist 380 Meter vom
Bug (Wert „A―) und 24 Meter von Steuerbord (Wert „D―).
Achtung: Sie können die Werte A und D eingeben; die Werte B und C werden automatisch
berechnet.
Geben Sie A380D24 (ohne Leerzeichen, Dezimalstellen und Kommas).
Dann drücken Sie „Save― (M5).
Die Zeile sollte dann, wie in obigem Beispiel gezeigt, den Wert für den externen
Referenzpunkt anzeigen.
Achtung: Wenn nur die interne Antenne verwendet wird, ist es zulässig, die Standardwerte
für die externe Antenne zu verwenden, da diese nicht verwendet wird.
Eingabe des Referenzpunktes der externen GPS-Antenne („RefPointExt“)
RefPointExt = A380 B20 C8 D24m
A = Abstand vom Bug zur Antenne
B = Abstand von der Antenne zum Heck
C = Abstand von Backbord zur Antenne
D = Abstand von Steuerbord zur Antenne
Eingabe des Referenzpunktes der internen GPS-Antenne („RefPointInt“)
Analog zur Eingabe der externen Antenne
Speichern der Eingaben
Durch Drücken der Taste „Save― (M5) werden die Eingaben im Gerät gespeichert.
Drücken Sie „Back― (M8), um ins Hauptmenü zurückzukehren, ohne die Eingaben zu
speichern.
Y1-03-0212-1 Rev D 37
Page 42

4.4 Eingabe der Reisedaten
N 1 o20' E 0 o13' |1> N/A|2>0.00|3>0.10nm
|--------------------------------- | Menu
-----| |
| +- 1. Messages
View | +- 2. AIS Status
| +- 3. Voyage Settings
-----| +- 4. Ship Settings
| +- 5. Transponder Configuration
Msg. | +- 6. Service Configuration
| +- 7. Display Settings
-----| +- 8. Graphical Display Settings
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
N 1 o31' E 0 o24' |1>0.01|2>1.30|3>1.80nm
----------------------------------------
++++++++++++++++++++++++++++++++++++++++
User password protected!
Please enter user password:
++++++++++++++++++++++++++++++++++++++++
----------------------------------------
| Enter | | | Exit
Wählen Sie aus dem Hauptmenü das Untermenü „Voyage Settings― (Menü 3). Das Menü ist
mit dem USER-Passwort geschützt, (Siehe Anhang 9.2 Passwort Informationen). Geben Sie
das Passwort ein und wählen Sie mit den Pfeiltasten „Hinauf― und „Hinunter― und drücken Sie
die Eingabetaste oder wählen Sie mit einer Ziffer direkt den gewünschten Menüpunkt.
Speichern Sie die Eingaben im Untermenü.
Beispiel Hauptmenü:
Das Feld zur Eingabe des Passwortes erscheint. Geben Sie das Passwort ein und drücken
Sie „Enter― (M5).
Y1-03-0212-1 Rev D 38
Page 43

N 1 o18' E 0 o12' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 3. Voyage Settings
-----| |
| +- 1. General Settings
View | +- 2. Cargo / Voyage
| +- 3. Persons on Board
-----| +- 4. Destination
|
Msg. |
|
-----|
|
Displ|
|
---------------------------------------NUM|Select->| | |<-Back
N 1o18' E 0o12' |1>0.01|2>1.30|3>1.80nm
***********General Settings*************
SOLAS Draught:>=20.0m
Airdrauht :>=4000cm
NavStat. :<under way using engine>
----------------------------------------
| Save | | | Exit
Wählen Sie das Untermenü 1 „General Settings― mit den Pfeiltasten „Hinauf― und „Hinunter―
oder drücken Sie die Taste „1―.
Gehen Sie die Punkte durch, indem Sie die Eingabetaste betätigen und geben Sie die Daten
Ihres Schiffes ein. Geben Sie den SOLAS-Tiefgang („draught―) in Metern ein (max. 20.0m),
und die Höhe über Wasser („air-draught―) in Zentimetern (max. = 4000cm). Geben Sie auch
den korrekten Navigations-Status an.
Speichern Sie, falls erwünscht, die Eingaben durch Drücken der Taste „Save― (M5). Drücken
Sie die Taste „Exit― (M8), um in das Hauptmenü zurückzukehren.
Y1-03-0212-1 Rev D 39
Page 44

N48°12' E 16°26' |1> N/A|2> N/A|3> N/Anm
******** Cargo/Voyage Settings *********
ERI ship type :<Vessel, type unknown>
Blue Cones : Default/Unknown
Un/ Loaded : Default/Unknown
--------------------------------------- | Save | | | Exit
Wählen Sie das Untermenü 2 „Cargo/Voyage Settings― mit den Pfeiltasten „Hinauf― und
„Hinunter― oder drücken Sie die Taste „2―.
Wählen Sie die Einstellungen für „ERI ship type― (siehe unterschiedliche Schiffstypen in der
Tabelle im Appendix 7.1), „Blue Cones― Gefahrengut mit der Anzahl blauer Kegel „Blue
Cones― [0-3, B-Flag, Default/Unknown] , so wie Beladen oder unbeladen „Un/ Loaded―
[Loaded, Unloaded].
Speichern Sie, falls erwünscht, die Eingaben durch Drücken der Taste „Save― (M5). Drücken
Sie die Taste „Exit― (M8), um in das Hauptmenü zurückzukehren.
Y1-03-0212-1 Rev D 40
Page 45

Wählen Sie das Untermenü 3 „Persons on Board― mit den Pfeiltasten „Hinauf― und
N 1o18' E 0o12' |1>0.01|2>1.30|3>1.80nm
************* Destination***************
use mask [*]/[ ] input string
UN Country :NL
UN Location :DOR
Fairway section:02552
Terminal code :LEUVE
Fairway hector :00000
ETA(MMDDhhmm) :10/31 10:05
--------------------------------------- | Save | | | Exit
N 1o18' E 0o12' |1>0.01|2>1.30|3>1.80nm
************* PoB Settings *************
Crew Members:0-254 (255 = unknown = default)
Passenger :0-8190(8191= unknown = default)
S. Personal :0-254 (255 = unknown = default)
-------------------------Total :nnnn Members
M6: Send addressed PoB Message
M7: Broadcast PoB Message
---------------------------------------Num| Save |Addressed |Broadcast | Exit
„Hinunter― oder drücken Sie die Taste „3―.
Achtung:
Die Gesamtzahl der Personen an Bord wird automatisch berechnet. Im Hochseebetrieb
(„High Seas―) wird diese Anzahl bei der Übermittlung von AIS-Nachrichten verwendet.
Wie dieses Menü zur Übermittlung von PoB-Informationen verwendet werden kann, wird im
Benutzerhandbuch beschrieben.
Wählen Sie das Untermenü 4 „Destination― mit den Pfeiltasten „Hinauf― und „Hinunter― oder
drücken Sie die Taste „4―.
Wählen Sie zwischen maskierter und direkter Eingabe des Zielhafens.
Maskierte Eingabe:
Wählen Sie durch Drücken der Eingabetaste das zu bearbeitende Feld aus und geben Sie
die entsprechenden Daten ein. Im Feld „ETA― („estimated time of arrival―) wird die
voraussichtliche Ankunftszeit eingegeben.
Speichern Sie, falls erwünscht, die Eingaben durch Drücken der Taste „Save― (M5). Drücken
Sie die Taste „Exit― (M8), um in das Hauptmenü zurückzukehren.
Y1-03-0212-1 Rev D 41
Page 46

Direkte Eingabe:
N 1o18' E 0o12' |1>0.01|2>1.30|3>1.80nm
************* Destination***************
use mask [ ]/[*] input string
Destination :NLDOR02552LEUVE00000
ETA(MMDDhhmm) :10/31 10:05
--------------------------------------- | Save | | | Exit
N48^12' E 16^26' |1> N/A|2> N/A|3> N/Anm
|--------------------------------- | Menu
-----| |
| +- 1. Messages
View | +- 2. AIS Status
| +- 3. Voyage Settings
-----| +- 4. Ship Settings
| +- 5. Transponder Configuration
Msg. | +- 6. Service Configuration
| +- 7. Display Settings
-----| +- 8. Graphical Display Settings
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
Die Eingabe aller oben beschriebenen Eingaben erfolgt in einer Zeichenkette.
Achtung: Alle Zeichen sind erlaubt. Es ist die Verantwortung des Bedieners, die korrekten
Zeichen einzugeben. Die oben beschriebene maskierte Eingabe würde direkt eingegeben als:
Die ETA muss im separat im entsprechenden Feld eingegeben werden.
4.5 Entering Inland AIS Configuration
Auswahl aus dem Hauptmenu ―5. Transponder Configuration‖ Das Menu ist USER
Passwort geschützt (Siehe Anhang 9.2 Passwort Informationen). Eingabe des User
Passwort, danach [Enter] or [M5].
Y1-03-0212-1 Rev D 42
Page 47

BlueSign
Blue Sign
<not available> kein Blue Sign Schalter angeschlossen
<used> wenn Blue Sign Schalter angeschlossen ist.
Dynamic Keys: Inland AIS Configuration
[M5]
[Save]
Speichern
[M8]
[Exit]
Verlassen ohne
Speichern
N48^12' E 16^26' |1> N/A|2> N/A|3> N/Anm
|--------------------------------- | 5. Transponder Configuration
-----| |
| +- 1. Change User Password
View | +- 2. Region Settings
| +- 3. Alarm Settings
-----| +- 4. Interrogation Settings
| +- 5. Sensor Settings
Msg. | +- 6. GPS Settings
| +- 7. Inland AIS Configuration
-----|
|
Displ|
----------------------------------------
NUM|Select->| | |<-Back
N48°12' E 16°26' |1> N/A|2> N/A|3> N/Anm
******* Inland AIS Configuration *******
Quality information
Speed : Low
Course : Low
Heading: Low
BlueSign :<used>
--------------------------------------- | Save | | | Exit
Auswahl Untermenu 7 “Inland AIS Configuration‖ mit Cursor [Up] & [Down] oder durch
drücken von Nr. 7 am Keyboard.
Es können hier die Einstellungen über die Qualität der Sensordaten wie Geschwindigkeit,
Heading und Kurs getroffen werden. Standardeinstellung is „low―.
Hinweis:
Es wird empfohlen die Einstellungen auf „low― zu setzen
Blue Sign:
Einstellung <used> wenn ein Blue Sign Schalter angeschlossen wird. Mit dem externen
Schalter kann dann Blue Sign ON/OFF geschaltet werden. Anschluss des Schalters siehe
Kapitel 3.11. Notwendiges Kabel: 2635 (NAU-B502).
Einstellung < not available > wenn kein Blue Sign Schalter verwendet wird.
Y1-03-0212-1 Rev D 43
Page 48

4.6 Passworte
Hinweis:
Das Standardpasswort der Werkseinstellung befindet sich auf der Displayfolie (Siehe Anhang
9.2 Passwort Informationen).
Das Transponder-System ist mit einem zweistufigen Passwortschutz ausgestattet, das „User―
und das „Service― Passwort.
1) Das „User― Passwort, das für die niedrigere Sicherheitsstufe verantwortlich ist, erlaubt den
Zugriff auf alle Menus außer Menü 6 („Service Configuration―), welches mit dem „Service―
Passwort geschützt ist.
2) Das „Service― Passwort wird benötigt, um in das „Service Configuration Menu― zu
gelangen. Dieses Menü benötigt eine höhere Sicherheitsstufe und kann daher nicht mit dem
„User― Passwort angesprochen werden. Damit wird sichergestellt, dass nur autorisierte
Servicetechniker darauf zugreifen können.
Der Schiffskommandant hat dafür Sorge zu tragen, dass nur autorisierte Personen
Änderungen im „Service Configuration Menu― machen können. Daher wird empfohlen, nach
Inbetriebnahme das AIS das Passwort zu ändern. (Siehe auch Anhang 9.2 Passwort
Informationen).
Passwortformat:
Mindestens 6 bis maximal 8 Zeichen lang
Nur GROSSBUCHSTABEN Zeichensatz A-Z und Zahlen 0- 9
Kombination aus Buchstaben und Nummer ist möglich
WARNUNG: Das Passwort muss sicher verwahrt werden und darf auf keinen Fall
vergessen werden. (Siehe Anhang 9.2 Passwort Informationen). Wenn das Passwort nicht
mehr bekannt ist können im Gerät keine Eingaben durchgeführt werden. Ein Hauptschlüssel
existiert nicht und das Gerät muss kostenpflichtig zum Service eingeschickt werden.
Das „User― Passwort kann im „Service Configuration Menu― durch Eingabe eines neuen
Passwortes zurückgesetzt werden.
Ändern des „Service“ Passwortes
Wählen Sie das Untermenü 6 „Service Configuration― mit den Pfeiltasten „Hinauf― und
„Hinunter― oder drücken Sie die Taste „6―. Das Feld zur Eingabe des Passwortes erscheint.
Geben Sie das Passwort ein (Siehe Anhang 9.2 Passwort Informationen) und drücken Sie
„Enter― (M5).
Y1-03-0212-1 Rev D 44
Page 49

N 1o24' E 0o17' |1>0.10|2>1.30|3>1.80nm
----------------------------------------
++++++++++++++++++++++++++++++++++++++++
Service password protected!
Please enter service password:
++++++++++++++++++++++++++++++++++++++++
----------------------------------------
| Enter | | | Exit
Wählen Sie das Untermenü 1 „Change Service Password― mit den Pfeiltasten „Hinauf― und
„Hinunter― oder drücken Sie die Taste „1―.
Y1-03-0212-1 Rev D 45
Page 50

Beispiel „Service“ Menü:
N 1o25' E 0o18' |1>0.10|2>1.30|3>1.80nm
******* Change Service Password ********
Enter new password :
Repeat new password:
{Length: 4..8 characters}
----------------------------------------
| Save | | | Back
N 1o21' E 0o14' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 6. Service Configuration
-----| |
| +- 1. Change Service Password
View | +- 2. User Password Settings
| +- 3. Change MMSI / IMO
-----| +- 4. Restore Factory Settings
|
Msg. |
|
-----|
|
Displ|
---------------------------------------NUM| Select->| | |<-Back
Beispiel „Service“ Passwort Menü:
Geben Sie ein neues Passwort ein und drücken Sie dann „ Enter― (M5).
Geben Sie das Passwort erneut ein und drücken Sie wieder „ Enter― (M5).
Es müssen mindestens 4 und maximal 8 Zeichen eingegeben werden. Sollte das Passwort
Ziffern beinhalten, dann benutzen Sie die Umschalttaste, um dies zu bewerkstelligen.
Drücken Sie „Save―, um das geänderte Passwort zu speichern.
Y1-03-0212-1 Rev D 46
Page 51

Ändern des „User“ Passwortes
N 1o21' E 0o14' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 6-2. User Password Settings
-----| |
| +- 1. Change User Password
View | +- 2. Change Password Protection
|
-----|
|
Msg. |
|
-----|
|
Displ|
---------------------------------------NUM| Select->| | |<-Back
N 1o21' E 0o14' |1>0.01|2>1.30|3>1.80nm
|--------------------------------- | 6. Service Configuration
-----| |
| +- 1. Change Service Password
View | +- 2. User Password Settings
| +- 3. Change MMSI / IMO
-----| +- 4. Restore Factory Settings
|
Msg. |
|
-----|
|
Displ|
---------------------------------------NUM| Select->| | |<-Back
Wählen Sie das Untermenü 2 „User Password Settings― mit den Pfeiltasten „Hinauf― und
„Hinunter― oder drücken Sie die Taste „2―.
Wählen Sie das Untermenü 1 „Change User Password― mit den Pfeiltasten „Hinauf― und
„Hinunter― oder drücken Sie die Taste „1―.
Geben Sie ein neues Passwort ein und drücken Sie dann „ Enter― (M5).
Geben Sie das Passwort erneut ein und drücken Sie wieder „ Enter― (M5).
Passwortformat:
Mindestens 6 bis maximal 8 Zeichen lang
Zeichensatz A-Z ´(Nur GROSSBUCHSTABEN) und Zahlen 0- 9
Kombination aus Buchstaben und Zahlen ist möglich
Y1-03-0212-1 Rev D 47
Page 52

Drücken Sie „Save―, um das geänderte Passwort zu speichern.
N 1o25' E 0o18' |1>0.10|2>1.30|3>1.80nm
******* Change User Password ***********
Enter new password :
Repeat new password:
{Length: 4..8 characters}
----------------------------------------
| Save | | | Back
(Siehe Anhang 9.2 Passwort Informationen).
Y1-03-0212-1 Rev D 48
Page 53

5 Abhilfemaßnahmen bei Störungen
N 1o19' E 0o12' |1> N/A|2>0.00|3>0.10nm
|--------------------------------- | Menu
-----| |
| +- 1. Messages
View | +- 2. AIS Status
| +- 3. Voyage Settings
-----| +- 4. Ship Settings
| +- 5. Transponder Configuration
Msg. | +- 6. Service Configuration
| +- 7. Display Settings
-----| +- 8. Graphical Display Settings
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
N 1o21' E 0o14' |1> N/A|2>0.00|3>0.10nm
|--------------------------------- | 2. AIS Status
-----| |
| +- 1. State / Conditions
View | +- 2. Own Ship Data
| +- 3. Own VHF Status
-----| +- 4. Alarm Status
| +- 5. TXT Status
Msg. | +- 6. Version Info
| +- 7. Security Log
-----|
|
Displ|
---------------------------------------NUM|Select->| | |<-Back
5.1 Alarm Status prüfen
Das AIS speichert vorliegende Probleme im Alarm od. TXT Status. Diese beiden Status Logs
informieren den Benutzer über bedeutende anstehende System Fehlfunktionen oder den
Ausfall der angeschlossenen Sensoren. Der Alarmeintrag wird selbsttätig gelöscht sobald der
Fehler behoben ist. Alarme von nicht verwendeten Sensoren wie externes GPS od. Kompass
können bedenkenlos quittiert werden. Sie bleiben aber gespeichert und zeigen damit an das
dieser Sensor nicht vorhanden ist.
Der TXT Status bestätigt zusätzlich die Sensor Funktion und deren Genauigkeit. Er informiert
auch ob die UTC – Zeit wie vorgesehen vom internen GPS kommt.
Bei Fehlermeldungen an den Hersteller bitte immer Alarm- und TXT Status auslesen und im
Report vermerken.
Auswahl ―2. AIS Status‖ mit den Pfeiltasten [Nach Oben] und [Nach Unten] oder durch
drücken von 2 auf der Tastatur.
Auswahl ―4. Alarm Status‖ oder „5. TXT Status mit den Pfeiltasten [Nach Oben] und [Nach
Unten] oder durch drücken von 4 oder 5 auf der Tastatur.
Y1-03-0212-1 Rev D 49
Page 54

5.2 Alarm Codes
ID
Beschreibung
Von
Bedeutung / Abhilfe
01
AIS: Tx malfunction
VHF Antenne
Das AIS hört auf zu Senden. Wenn Alarm 01 und 02 gemeinsam
vorkommen, dann liegt ein Problem mit der VHF Antenne vor.
Stehwellenverhältnis ist 10:1
Abhilfe:
Überprüfung der Antenne, Kabel und Stecker auf Rost, Wassereintritt und
Bruch. Richtiger Frequenzbereiche 156-162MHz. Messen des Kabels auf
Kurzschluss oder Unterbrechung. Wenn nur Alarm 01 permanent auftritt
muss das AIS zur Reparatur gebracht werden. Ein Fehler in der
Funkendstufe wäre möglich.
02
AIS: Antenna VSWR
exceeds limit
(VSWR - Voltage
Standing Wave Ratio)
VHF Antenne
Das AIS misst einen Stehwellenfehler und sendet aber mit verringerter
Leistung noch weiter.
Abhilfe:
Überprüfung von Antenne und Kabel wie bei Alarm 01, richtiges Kabel ist
RG214 mit 50 Ohm Impedanz.
03
AIS: Rx channel 1
malfunction
VHF Antenne
Interner Test meldet einen Fehler des betroffenen Funk Kanals. AIS
sendet auf dem anderen Kanal weiter.
Abhilfe:
Kommt es wiederholt zu diesem Alarm und liegt kein Antennenproblem
vor, dann sollte das AIS vom Hersteller überprüft werden.
04
AIS; Rx channel 2
malfunction
05
AIS: Rx channel 70
malfunction
06
AIS: General failure
Interner Test
Beim internen Systemtest wird ein unbekannter Fehler festgestellt.
Abhilfe:
Reset des AIS. Bei Wiederholung AIS zur Reparatur schicken.
25
AIS; External EPFS lost
(EPFS = electronic
Position Fixing System
such as GPS)
Sensor Daten Fehler
GPS
Das AIS arbeitet mit der Position vom internen GPS weiter.
Abhilfe:
Keine Sensor daten vom externen GPS. Ausgang u. Einstellung des
externen GPS prüfen. Es werden die NMEA 0183 V2.5 Sätze wie GLL,
GNS, GGA, RMC benötigt. ACHTUNG!: Wenn kein externes GPS
verwendet wird (wie zumeist bei Inland Schiffen), keine Bedeutung!
26
AIS: No sensor position in
use
Sensor Daten Fehler
GPS
Das AIS sendet noch weiter aber ohne Position!
Abhilfe:
Überprüfung der GPS Antenne, deren Kabel und Stecker auf Bruch, Rost,
Wassereintritt. Messen des Kabels auf Kurzschluss oder Unterbrechung.
Speisespannung für GPS-Antenne ist 5V DC.
29
AIS: No valid SOG
information
Sensor Daten Fehler
GPS
Das AIS sendet weiter aber ohne SOG (Geschwindigkeit über Grund)!
Abhilfe:
Wenn ein externes GPS angeschlossen wird, werden NMEA 0183 V2.5
Daten wie die Sätze VBW, VTG; RMC benötigt. Die fehlenden Daten
werden nicht vom internen GPS genommen! Einstellungen des externen
GPS prüfen. Siehe auch Kapitel Sensor Konfiguration
30
AIS: No valid COG
Information
Sensor Daten Fehler
GPS
Das AIS sendet weiter aber ohne COG! (Kurs über Grund)
Abhilfe:
Wenn ein externes GPS angeschlossen wird, werden NMEA 0183 V2.5
Daten wie Sätze VBW, VTG; RMC benötigt. Die fehlenden Daten werden
nicht vom internen GPS genommen! Siehe auch Kapitel Sensor
Konfiguration
32
AIS: Heading lost/invalid
Sensor Daten Fehler
Kompass
AIS sendet weiter aber ohne Angaben über Ausrichtung des Schiffes
(Heading)
Abhilfe:
Es wird der NMEA 0183 Satz HDT benötigt. Wenn kein Gyro Kompass
angeschlossen ist, dann bedeutungslos.
35
AIS: No valid ROT
Information
Sensor Daten Fehler
Drehrate
AIS sendet weiter aber ohne Angaben über die Drehrate (bei
Kurswechsel) des Schiffes
Abhilfe:
Der NMEA 0183 Satz ROT wird benötigt. Wenn kein Gyro Kompass oder
Drehratens Sensor (ROT) angeschlossen ist, dann bedeutungslos.
53
AIS: BATTERY SOON
LOW
Interner Test
Der interne system Test meldet eine leere Backup Batterie. Die
Konfigurations- Daten, vor allem die MMSI Nummer können verloren
gehen
Abhilfe: AIS dringend warten lassen. Die Batterie muss von einer
autorisierten Fachwerkstätte getauscht werden.
55
AIS: PRESS ENTER TO
EXIT 1W/AUTO TX MODE
Ausgangsleistung 1
Watt
Ausgangsleistung ist auf 1 Watt eingestellt aber muss vom AIS
automatisch erhöht werden da die notwendigen Bedingungen nicht
eingehalten werden:
Geschwindigkeit größer 3kn oder >3kn and / or
Der ‗Navigations Status‘ [Navstat] :ist nicht ‗moored / at anchor‘
oder
der Schiffstyp [Ship Type] ist nicht ein ―Tanker‖!
Abhilfe:
AIS Konfiguration wie ‚Navstat u. Shiptype‘ überprüfen.
Wenn GPS nicht funktioniert tritt der Alarm auch auf!
56
AIS: ENTER MMSI
NUMBER
Interner Test
Keine Gültige MMSI Nummer vorhanden, das AIS sendet nicht!
Abhilfe: Gültige MMSI Nummer der Funkanlage eingeben!
Y1-03-0212-1 Rev D 50
Page 55

5.3 Text Nachrichten (TXT Status)
ID
Beschreibung
Von
Bedeutung / Abhilfe
07
AIS: UTC clock lost
Internes GPS
AIS sendet mit indirekter Synchronisation weiter.
Abhilfe:
Überprüfen GPS Antenne des AIS: Kabel und Stecker auf Bruch, Rost,
Wassereintritt. Messen des Kabels auf Kurzschluss oder
Unterbrechung. Speisespannung für GPS-Antenne ist 5V DC.
21
AIS: external DGNSS in
use
Information
Externe Positions- Quelle hat DGPS Genauigkeit.
Keine Abhilfe notwendig.
22
AIS: external GNSS in
use
Information
Externe Positions- Quelle hat von GPS wird verwendet.
Keine Abhilfe notwendig.
23
AIS: internal DGNSS in
use (beacon) 023
Information
Internes GPS hat DGPS Genauigkeit. Keine Abhilfe notwendig
24
AIS: internal DGNSS in
use (message 17)
25
AIS: internal GNSS in
use
Information
Position des internen GPS wird verwendet. Keine Abhilfe notwendig
falls kein externes GPS verwendet wird.
27
AIS: external SOG/COG
in use
Information
Geschwindigkeit (SOG) und Kurs (COG) eines externen GPS werden
verwendet.
Keine Abhilfe notwendig.
28
AIS: internal SOG/COG
in use
Information
Geschwindigkeit (SOG) und Kurs (COG) des internen GPS werden
verwendet.
Keine Abhilfe notwendig falls kein externes GPS verwendet wird.
Ansonst siehe Kapitel Sensor Konfiguration!
31
AIS: Heading valid
Information
Heading, Schiffsausrichtung ist vorhanden.
Keine Abhilfe notwendig.
33
AIS: Rate of Turn
Indicator in use
Information
Drehsensor ist in Funktion.
Keine Abhilfe notwendig.
34
AIS: Other ROT source
in use
Information
Drehsensor ist angeschlossen aber versorgt das AIS nur mit HDROT
Daten. Es kann nur unterschieden werden zwischen:
+ 127 Drehung nach Steuerbord größer als 720 ° pro Minute
– 127 Drehung nach Backbord größer als 720 ° pro Minute
5.4 Reset / System Neustart
Ein Systemneustart (Reset) kann durch gleichzeitiges drücken der 3 Tasten
―Shift‖ + ―Fn‖ + ―Del‖ ausgelöst werden.
Y1-03-0212-1 Rev D 51
Page 56

6 Zubehör
NAUTICAST™ Inland AIS
1 NAUTICAST™ Inland AIS Transponder
1 Installationshandbuch, 1 Benutzerhandbuch
3 Steckerabdeckkappen
1 Kabelklemme (M5 Schraube)
3 Winkel und 3 Montageschrauben
PRODUCT
NUMBER
PRODUCT DESCRIPTION
AIS Cable
2610
AIS Interface Cable (Power & Data) between Transponder and Connection Box & Pilot Plug, 3 meters (9.8ft)
Halogen Free, IP67
2611
AIS Interface Cable (Power & Data) between Transponder and Connection Box & Pilot Plug, 10 meters (32.8ft)
Halogen Free. IP67
2614
AIS Interface Cable (Power & Data) between Transponder and ECS, 1.5 meters (4.9ft)
2617
AIS Interface Cable (Power & Data) between Transponder and PC 1.5 meters (2 sensor only)
GPS/VHF Cable
2612
GPS/VHF Interface Cable, 1meter (3.3ft) Includes 1 each Female N and TNC connectors installed and 1 each
Male N and TNC connectors for RG214 cable (specify length) Not Required with P/N 2624 VHF/GPS Combi
Antenna.
2613
GPS/VHF Interface Cable, 10 meters( 32.8ft) Includes 1 each Male PL & TNC connector installed. (Not
Required with P/N 2624 VHF/GPS Combi Antenna.)
ACR VHF Antenna Solution
2628
VH-3200 VHF Stainless Steel Whip Antenna 91.4cm (36in) Includes Mounting Kit & Plug PL Male for RG214
2621
Comrod AV 7 VHF Fiberglass Antenna 1.22m(4ft) Includes Aluminum mount (Vert or Horiz.. stanchion, or
bulkhead) When used with P/N 2612, 1 P/N 2632 PL Male Connector & P/N 2630 cable (specify length) are
required.
ACR GPS Antenna Solution
2622
ProCom GPS4 Quadrifilar Helix Antenna 5 Volt. When used with P/N 2612 interface, one P/N 2633 TNC
Connector & P/N 2630 cable (Specify length) are required. Mount P/N 2623 is required.
2623
ProCom FLG Deck Mounting Kit Metal Horiz.. surface (for P/N 2622)
ACR VHF/GPS Combination Antenna Solution (in lieu of individual VHF and GPS antenna solutions)
2624
Comrod AC17 Combi Antenna (combined GPS/VHF) includes Aluminum mount (Vert or Horiz.. Stanchion or
bulkhead) & 1m interface cable. If longer cable required, order P/N 2630 cable (specify length) and 2 P/N 2631
Male N connectors. P/N 2612 or 2613 are not required with this option.
Optional VHF/GPS Antenna Cable extensions and Plugs (select or supply own cable)
2630
GPS/VHF RF Antenna Cable extension cable RG214 (No Plugs) Sold per meter
2631
N Male RG214 Crimp
2632
PL Male RG214 Crimp
2633
TNC Male RG214 Crimp
Optional AIS Cable Connection Box (Required for Advanced Installation with ECDIS, etc.)
2640
Connection Box
Optional 12vt to 24vt DC to DC Converter ( Required for 12vt power systems)
2642
12v to 24v DC to DC Power Converter.
Optional Mounting Bracket Assemblies for UAIS NAUTICAST™ Inland AIS™
2650
Mounting Bracket Gimbal Style (Includes 4 screws and 2 Mounting Knobs)
2651
Retro Fit Frame Drop In Mount (Includes 3 screws, nuts, clips to hold display to bracket)
2652
Frame for Rack Mount. 48.3cm (19in) Includes 3 Bolts and Nuts to hold display to bracket. Discontinued
Das folgende Material ist im NAUTICAST™ Inland AIS inkludiert.
Der NAUTICAST™ Inland AIS wird mit einigen der unten angeführten Komponenten
ausgeliefert (der Umfang wird kundenspezifisch definiert).
Y1-03-0212-1 Rev D 52
Page 57

7 Technische Information
PHYSICAL
Size in mm / inch (w)
281,26mm / 11,07inch
Size in mm / inch (h)
60mm / 2,36inch
Size in mm / inch (d)
201,26mm / 7,92inch
Weight
2490g / 5,50pound
Operating Temperature
-15°C to +55°C / 5°F to 131°F
POWER SUPPLY
Supply Voltage (galvanic isolated)
24 V DC (-10% +30%)
Input Current
min.7 A (24V)
INTERFACES
Number of Data Ports
3 Input / 4 I-O / 1 Output
IEC 61162-1/2
( RS422 / NMEA 0183)
ITU-R M.823-2
( RS422 / RTCM SC104)
Bitrate
CH1 Sensor Input; (i.E.: GPS)
4800 bps or 38400 bps
CH2 Sensor Input; (i.E.: GYRO)
4800 bps or 38400 bps
CH3 Sensor Input; (i.E.: HDG)
4800 bps or 38400 bps
CH4 ECDIS Port (In- / Output)
AIS targets, AIS messages
in/ out 38400 bps
CH5 Pilot Port (In- / Output)
AIS targets, AIS messages
in/out 38400 bps
CH8 Long Range Port (In- /
Output)
in/out 38400 bps
CH9 DGPS correction (In- /
Output) (RTCM SC104)
in/out 9600 bps
Alarm Circuit CH10
Dry relay contact (see BIIT –
Alarm System)
Blue Sign Switch
BUILT IN GPS
Receiver Architecture
12 channel differential
Tracking Capability
12 satellites sim.
Accuracy Horizontal
10m / 2drms *
Accuracy Vertical
15m / 2drms *
GPS Antenna Connector
TNC
DGPS Accuracy
< 5m / 2drms
*) depends on SA
GPS Solutions
VHF interop. (DGPS over Msg.17)
Beacon interoperability
Combined GPS/VHF Antenna
BIIT – Alarm System
Relay breaking capacity
30V DC
8A
250V AC
8A
OPTIONAL INTERFACES
Number of Data Ports RS232
Bitrate
Simplex / Duplex
up to 5
Up to 115000 bps
Duplex
Number of Data Ports IEC
61162-3 CAN (RS485)
Bitrate
1
up to 1 Mbps
KEYBOARD
Integrated
alphanumerical
SPECIFIED STANDARDS
IMO MSC.74(69) Annex 3
ITU-R M.1371 (Class A)
IALA Techn.Clar. of ITU-R M.1371-1
(Ed.1.3)
IEC 61993-2 (2002)
IEC 61162-1 (2000)
NMEA 0183-3
IEC 61162-2 (1998)
NMEA 0183-3
IEC 61162-3
NMEA 2000
ITU-R M.823-2
VTT&T
IEC 61108-1 (1996)
IEC 60 945 (1996)
ITU-R M.825-3
ITU-R M.1084-3
VHF
Frequency Range
156 MHz - 162MHz
Channel Spacing
12.5 or 25kHz
Number of RF Channels
3 Receiv. / 1 Transm.
Number of AIS Receivers
2
Number of DSC Receivers
1
Frequency Error
+/- 2.5ppm
VHF TRANSMITTER
Output Power
2 Watt to 12.5 Watt
(adjustable)
Receive to Transmit Switching Time
< 1ms
Transmit release time
< 1ms
Automatic shutdown
1 sec.
Channel switching time
< 25ms
Attack Time
< 1ms
VHF RECEIVER
Max. Useable Sensitivity
< -110dBm
Co-channel Rejection
> -8dB (25kHz);
> -12dBm (12.5kHz)
Adjacent Channel Selectivity
> 70dB (25kHz);
> 60dB (12.5kHz)
Inter-modulation Rejection
> 65dB
Spurious Response Rejection
> 70dB
Blocking
> 84dB
VHF MODEM
Bitrate GMSK
9600 bps
RF Baud Rate (DSC)
1200bps
Modulation
GMSK / FSK
SOFTWARE
NAUTICAST™ INLAND AIS Version 2.0.x
- installed and ready for use
- implemented configuration Software
- User friendly Interface
to System and AIS Information
- additional Interface to System
Configuration
(Windows 2000®)
- NAUTICAST™ AIS Demonstrator
for training purposes
(Windows 2000 Windows XP®)
HARDWARE
NAUTICAST™ INLAND AIS Version 1.0.x
DISPLAY
Integrated
Text 40x16 chars
graphical 240 x 128
adjustable brightness
and contrast
Y1-03-0212-1 Rev D 53
Page 58

7.1 ERI Schiffstypen
Code
U
Ship name
Msg 5 (1-99)
Ship Type - SOLAS
dig1
dig2
Type (first digit)
Cargo (Second digit)
8000
No
Vessel, type unknown
9 9 Other types of Ship
No additional information
8010 V Motor freighter
7 9 Cargo Ships
No additional information
8020 V Motor tanker
8 9 Tanker
No additional information
8021 V Motor tanker, liquid cargo, type N
8 0 Tanker
All ships of this type
8022 V Motor tanker, liquid cargo, type C
8 0 Tanker
All ships of this type
8023 V Motor tanker, dry cargo as if liquid (e.g. cement)
8 9 Tanker
No additional information
8030 V Container vessel
7 9 Cargo Ships
No additional information
8040 V Gas tanker
8 0 Tanker
All ships of this type
8050 C Motor freighter, tug
7
9 No additional information
8060 C Motor tanker, tug
8 9 Tanker
No additional information
8070 C Motor freighter with one or more ships alongside
7 9 Cargo Ships
No additional information
8080 C Motor freighter with tanker
8 9 Tanker
No additional information
8090 C Motor freighter pushing one or more freighters
7 9 Cargo Ships
No additional information
8100 C Motor freighter pushing at least one tank-ship
8 9 Tanker
No additional information
8110
No
Tug, freighter
7 9 Cargo Ships
No additional information
8120
No
Tug, tanker
8 9 Tanker
No additional information
8130 C Tug freighter, coupled
3 1 Vessel
Towing
8140 C Tug, freighter/tanker, coupled
3 1 Vessel
Towing
8150 V Freightbarge
9 9 Other types of Ship
No additional information
8160 V Tankbarge
9 9 Other types of Ship
No additional information
8161 V Tankbarge, liquid cargo, type N
9 0 Other types of Ship
All ships of this type
8162 V Tankbarge, liquid cargo, type C
9 0 Other types of Ship
All ships of this type
8163 V Tankbarge, dry cargo as if liquid (e.g. cement)
9 9 Other types of Ship
No additional information
8170 V Freightbarge with containers
8 9 Tanker
No additional information
8180 V Tankbarge, gas
9 0 Other types of Ship
All ships of this type
8210 C Pushtow, one cargo barge
7
9
Cargo Ships
No additional information
8220 C Pushtow, two cargo barges
7
9
Cargo Ships
No additional information
8230 C Pushtow, three cargo barges
7
9
Cargo Ships
No additional information
8240 C Pushtow, four cargo barges
7
9
Cargo Ships
No additional information
8250 C Pushtow, five cargo barges
7
9
Cargo Ships
No additional information
Y1-03-0212-1 Rev D 54
Page 59

Y1-03-0212-1 Rev D 55
Code
U
Ship name
Msg 5 (1-99)
Ship Type - SOLAS
dig1
dig2
Type (first digit)
Cargo (Second digit)
8260 C Pushtow, six cargo barges
7
9
Cargo Ships
No additional information
8270 C Pushtow, seven cargo barges
7
9
Cargo Ships
No additional information
8280 C Pushtow, eigth cargo barges
7
9
Cargo Ships
No additional information
8290 C Pushtow, nine or more barges
7
9
Cargo Ships
No additional information
8310 C Pushtow, one tank/gas barge
8
0
Tanker
All ships of this type
8320
C
Pushtow, two barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8330
C
Pushtow, three barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8340
C
Pushtow, four barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8350
C
Pushtow, five barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8360
C
Pushtow, six barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8370
C
Pushtow, seven barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8380
C
Pushtow, eight barges at least one tanker or gas
barge
8
0
Tanker
All ships of this type
8390
C
Pushtow, nine or more barges at least one tanker or
gas barge
8
0
Tanker
All ships of this type
8400 V Tug, single
5 2 Tugs
-
8410
No
Tug, one or more tows
3 1 Vessel
Towing
8420 C Tug, assisting a vessel or linked combination
3 1 Vessel
Towing
8430 V Pushboat, single
9 9 Other types of Ship
No additional information
8440 V Passenger ship, ferry, cruise ship, red cross ship
6 9 Passenger Sips
No additional information
8441 V Ferry 6 9
Passenger Sips
No additional information
8442 V Red cross ship
5 8 Medical transports
-
8443 V Cruise ship
6 9 Passenger Sips
No additional information
8444 V Passenger ship without accomodation
6 9 Passenger Sips
No additional information
8450 V Service vessel, police patrol, port service
9 9 Other types of Ship
No additional information
8460
V
Vessel, work maintenance craft, floating derrick,
cable-ship, buoy-ship, dredge
3 3 Vessel
Engaged in dredging or
underwater operations
8470 C Object, towed, not otherwise specified
9 9 Other types of Ship
No additional information
8480 V Fishing boat
3 0 Vessel
All ships of this type
8490 V Bunkership
9 9 Other types of Ship
No additional information
Page 60

Code
U
Ship name
Msg 5 (1-99)
Ship Type - SOLAS
dig1
dig2
Type (first digit)
Cargo (Second digit)
8500 V Barge, tanker, chemical
8 0 Tanker
All ships of this type
8510 C Object, not otherwise specified
9 9 Other types of Ship
No additional information
1500 V General cargo Vessel maritime
7
9
Cargo Ships
No additional information
1510 V Unit carrier maritime
7
9
Cargo Ships
No additional information
1520 V Bulk carrier maritime
7 9 Cargo Ships
No additional information
1530 V Tanker 8 0
Tanker
All ships of this type
1540 V Liquified gas tanker
8 0 Tanker
All ships of this type
1850 V Pleasure craft, longer than 20 metres
3 7 Vessel
Pleasure Craft
1900 V Fast ship
4 9 HSC – high speed craft
No additional information
1910 V Hydrofoil
4 9 HSC – high speed craft
No additional information
1920 V Catamaran fast
4 9 HSC – high speed craft
No additional information
8 Kontakt- und Unterstützungsadressen
Kontaktieren Sie Ihren lokalen Händler zur Unterstützung bei Ihrem NAUTICAST™ INLAND
AIS. Zur Information über unser Servicenetzwerk gehen ersuchen wir Sie die Website
www.acr-europe.com zu besuchen.
ACR Electronics Europe GmbH
Handelskai 388 / Top 632
A-1020 Vienna, Austria
Tel: +43 (1) 5 237 237 - 0
Fax: +43 (1) 5 237 237 - 150
Email: Technical.Support@acr-europe.com
Web: www.acr-europe.com
ACR Electronics
Customer Service
5757 Ravenswood Road
Fort Lauderdale, FL 33312, U.S.A.
Tel.: +1 (954) 981-3333
Fax: +1 (954) 983-5087
Email: info@acrelectronics.com
Web: www.acrelectronics.com
Y1-03-0212-1 Rev D 56
Page 61

9 Appendix
Pos
Qty.
Equipment
I-max
(A)
I-standby
(A)
Total (A)
(I-max/2 + I-standby )*Qty.)
1
1
Skanti TRP 8751D Radiotelephone
45,00
3,00
25,50
2
1
Debeg 3818 DSC Controller
0,21
0,21
3
2
T&T 3020 Inmarsat-C Transceiver
3,20
0,40
4,00
4
2
Inmarsat-C Monitor
0,85
1,70
5
2
Inmarsat-C Printer
1,00
0,20
1,40
6
1
CI 8501 Navtex Receiver
0,50
0,50
7
2
Skanti USE 300 VHF Radiotel.
2,80
0,05
2,90
8
2
Debeg 3817 VHF DSC Controller
0,21
0,42
9
1
Sailor RT2047 VHF Radio Tel.
6,50
1,00
4,25
10
1
Simrad GN 33 GPS
0,63
0,63
11
1
Koden KGP 900 GPS
4,00
0,63
2,63
12
1
Koden LR 771 Loran C
0,42
13
1
Emergency light
2,00
2,00
14
1
AIS NAUTICAST™ Inland AIS
7,00
0,75
0,84
Total
46,98
9.1 Samples for battery calculation
9.1.1 Typical Installation
GMDSS Battery size calculation for 1 hour (Battery size calculation based on the IMO regulations
Chapter IV - Reg.13)
Ship Name QMIII
Battery capacity 230Ah
Battery Type 2x (12V / 135)
Area A1, A2, A3
Battery located in battery chest on observation deck
K1
partly discharged battery
K1
= K1 x 1 / 0,30 106,78 Ah
-30°
K5 =K1
Selected Battery (K5) = 230,00 Ah
K1
partly discharged battery
correction factor taking care that the battery might not be fully charged
(we assume that in worst case the battery is only at 80% fully charged)
K1
=
-30°
correction factor taking care that the battery may be used
at ambient temperature of - 30 degress
(at -30 degrees the battery has only 30% of nominal capacity)
K5 = correction factor taking care of that the battery
is defined by manufacturer for 5 hours discharge time
Calculation for AIS =
transmit pulse length 26,6ms with a maximum repetition rate of 2 seconds results in a maximum of 30
pulses/minute 1800 pulses/hour x 26,6 ms 47880 ms 47,88 seconds transmit time during one
hour 47,88 seconds 0,8 minutes 0,0133 hours transmitting time during one hour operation
Up-Rounded to 0,02 hrs transmitting time
Above mentioned calculation assumes that all equipment is in operation which is normally not valid,
that means that the actual consumption is lower.
= Total consumption x 1,25 =58,73 Ah
/ 0,65 164,28 Ah
-30°
=
Y1-03-0212-1 Rev D 57
Page 62

9.1.2 RM GMDSS Compact-Console Area A3 with 250 W MF/HF
Equipment
Type
Transmitting
Receiving
Additional
MF/HF
STR 2000 R
15 A
4 A incl.DSC
Inmarsat C
STR 1500 CN
5 A
1,8 A incl.EGC
VHF 1 with DSC
VHF1000DSC
6,5 A
0,65 A incl.DSC
VHF 2 with DSC
VHF1000DSC
6,5 A
0,65 A incl.DSC
AIS
RM 808 AIS
5,0 A
1,0 A
Emergency Light
2,5 A
Total
38 A
8,1 A
2.5 A
Equipment
Type
Transmitting
Receiving
Additional
MF/HF
STR 2000
18.75 A
4 A incl.DSC
Inmarsat C
STR 1500 CN
5 A
1,8 A incl.EGC
VHF 1 with DSC
VHF1000DSC
6.5 A
0,65 A incl.DSC
VHF 2 with DSC
VHF1000DSC
6.5 A
0,65 A incl.DSC
AIS
RM 808 AIS
5.0 A
1,0A
Emergency Light
2,5 A
Total
41.75 A
8,1 A
2.5 A
GMDSS Reserve Battery Calculation ( 24 V DC ) for Raytheon Marine GmbH GMDSS
Compact-Console Area A3 with 250 W MF/HF
According to IMO Regulation COMSAR/Circ.16 4. March 1998
A: with Emergency Generator (SOLAS IV 13.2 )
The GMDSS equipment shall be able to operate one (1) hour on reserve power
with 50% of time in transmission mode and 50% in receiving mode.
B: without Emergency Generator (SOLAS IV 13.2 )
The GMDSS equipment shall be able to operate six (6) hours on reserve power
with 50% of time in transmission mode and 50 % of receiving mode.
Calculation:
Case A:
1h x ( 0.5 I TX + I RX + I Add ) x 1.4 = 41.44 Ah
recommend battery capacity is 86 Ah
Charger:
I Charg x 0.1 I Batt/h = 8.6 A
recommend charger is type 20 A
Case B:
6h x ( 0.5 I TX + I RX + I Add ) x 1.4 = 248.66 Ah
The battery calculation should not be used for uninterruptible power supply (UPS)
configuration.
9.1.3 RM GMDSS Compact-Console Area A3 with 400 W MF/HF
GMDSS Reserve Battery Calculation (24 V DC) for Raytheon Marine GmbH GMDSS
Compact-Console Area A3 with 400 W MF/HF
According to IMO Regulation COMSAR/Circ.16 4. March 1998
A: with Emergency Generator ( SOLAS IV 13.2 )
The GMDSS equipment shall be able to operate one (1) hour on reserve power
With 50% of time in transmission mode and 50% in receiving mode.
B: without Emergency Generator ( SOLAS IV 13.2 )
The GMDSS equipment shall be able to operate six (6) hours on reserve power
with 50% of time in transmission mode and 50 % of receiving mode.
Calculation:
Y1-03-0212-1 Rev D 58
Page 63

Case A:
1h x ( 0.5 I TX + I RX + I Add ) x 1.4 = 44.06 Ah
recommend battery capacity is 86 Ah
Charger:
I Charg x 0.1 I Batt/h = 8.6 A
recommend charger is type 20 A
Case B:
6h x ( 0.5 I TX + I RX + I Add ) x 1.4 = 264.39 Ah
The battery calculation should not be used for uninterruptible power supply (UPS)
configuration
Y1-03-0212-1 Rev D 59
Page 64

9.2 Passwort Informationen
Ship Service
Password:
(min. 6 - max. 8 Zeichen.
GROSSBUCHSTABEN,
A-Z; 0-9)
Ship User
Password:
(min. 6 - max. 8 Zeichen.
GROSSBUCHSTABEN,
A-Z; 0-9)
Wo ist das
Passwort
außerhalb des
Schiffs
gespeichert?
(Beispiel: ―Schiffs Manager Tel. Nr _________‖, ―Rederei ___________‖, ―Service Manager‖, etc.)
Der AIS Transponder bietet zwei unterschiedliche Passwort- Hierarchien an. Das ―USER
Password‖ öffnet den Bereich der Daten, die vom User regelmäßig geändert werden müssen.
Das sind z.B. Reisedaten (Voyage Data) und Statische Daten, wie Abmessungen, Tiefgang,
und Ladung des Schiffs. Mit dem ‖SERVICE Password‖ ist man berechtigt Service
Einstellungen wie MMSI u. IMO Nummer zu ändern.
Es wird empfohlen, nach Inbetriebnahme des AIS, das Passwort unbedingt zu ändern.
Passwortformat:
Mindestens 6 bis maximal 8 Zeichen lang
Zeichensatz A-Z ´(Nur GROSSBUCHSTABEN) und Zahlen 0- 9
Kombination aus Buchstaben und Zahlen ist möglich
Hinweis:
Das Standardpasswort der Werkseinstellung befindet sich auf der Displayfolie. Es wird
empfohlen, das Passwort nach der Inbetriebnahme zu ändern und zu Notieren.
WARNUNG: Das Passwort muss sicher verwahrt werden und darf auf keinen Fall
vergessen werden. Wenn das Passwort nicht mehr bekannt ist können im Gerät keine
Eingaben durchgeführt werden. Ein Hauptschlüssel existiert nicht und das Gerät muss
kostenpflichtig zum Service eingeschickt werden.
Nach Änderung des Passwortes sollte es in den vorgesehen Feldern vermerkt werden:
Y1-03-0212-1 Rev D 60
Page 65

9.3 Zeichnungen und Zertifikate
Diese Dokumente sind in den folgenden Seiten enthalten:
(1) Maßzeichnungen
(2) Typengenehmigungen
(3) Anschlussdiagramme
(4) Antennen Anschlussdiagramme
Y1-03-0212-1 Rev D 61
Page 66

Page 67

Page 68

Page 69

Page 70

Page 71

Page 72

Page 73

Page 74

Page 75

Page 76

Source, Draw.-No. 46-EX-D-X00001-C, coyright Raytheon Marine GmbH, Kiel, Germany
Page 77

Page 78

Page 79

Page 80

Page 81

Page 82

Page 83

V
EG - Konformitätserklärung
EC - Declaration of Conformity
Diese Konformitätserklärung bestätigt, dass das unten benannte Zubehör gleich oder besser dem im untenstehenden
Zertifikat ausgewiesenen Zubehör ist.
This declaration of conformity certifies that the mentioned accessory is equal or better to the equipment stated in the
beyond Certificate.
Produktbezeichnung:
Product Name / Nom du produit
OEM Name:
Trade Name / Marque Déposée
Zertifikate der benannten Stelle:
Certificates from the notified Body /
Certificats des Organismes Notifiés
Spezifizierte Standards:
Specified Standard(s) /
Standard(s) Spécifié(s)
Zubehörtyp:
Type of Accessory
ACR Part Number:
Dokumentennummer:
Document number / Num. du document
Hersteller:
Manufacturer / Fabricant
Anschrift EU-Vertretung:
Address EU-Representative /
Adresse du Représentant pour l'UE
Ort, Datum:
place, date / Lieu,Date
Unterschrift:
Signature / Signature
Diese Erklärung bescheinigt die Übereinstimmung mit den genannten Richtlinien, ist jedoch keine Zusicherung von Eigenschaften. Die Sicherheitshinweise
der mitgelieferten Produktdokumentation sind zu beachten.
This declaration certifies the compliance with the indicated directives but implies no warranty of properties. The safety instructions of the accompanying
product documentation shall be observed.
Cette déclaration certifie la conformité avec les directives indiquées mais n'implique aucune garantie des propriétés. Les instructions de sécurité de la
documentation accompagnant le produit doivent être suivies.
ISO 9001:2000 Zertifizierung / ISO 9001:2000 Certification
ACR Electronics Europe GmbH hat ein Qualitätsmanagement System nach ISO 9001:2000 implementiert, und ist seit Juli 2003 ISO-zertifiziert.
ACR Electronics Europe GmbH maintains a Quality Management System according to ISO 9001:2000, and received ISO certification in July 2003.
X-Pack DS (Inland AIS)
Nauticast™ Inland AIS
EC Type Examination (Module B) Certificate: BSH/6412/4320296/06
EC Quality System (Module D) Certificate: BSH/4613/05101/0555/07
Issued by: Bundesamt für Seeschifffahrt und Hydrographie (BSH),
Notified Body No. 0735
Bernhard-Nocht-Str. 78, 20359 Hamburg, Germany
Inland AIS Type Approval Certificate No: R - 4 - 203
Issued by: Fachstelle der WSV für Verkehrstechniken
Weinbergstraße 11-13, 56070 Koblenz, Germany
IMO MSC.74(69) Annex 3
ITU-R M.1371-3 (Class A)
IALA Technical Clarifications of Rec. ITU-R M.1371-1 (Ed. 1.3)
ITU-R M.825-3
ITU-R M1084-3
IEC 61993-2 (2001)
IEC 61162-1 (2000), -2 (1998)
IEC 60945 (1996)
IEC 61108-1 (1996)
Technical Specification for Vessel Tracking and Tracing Systems for Inland
Waterways (Ed. 1.01 dated 10.10.2007)
Test Standard for Inland AIS,(Edition 1.0 dated 31.5.2007)
HF Antenna
Comrod AV-7
2621
2008-10
ACR Electronics Inc.,
5757 Ravenswood Road, Fort Lauderdale, Florida, 33312 USA
ACR Electronics Europe GmbH
Handelskai 388 / Top 632
A-1020 Vienna, Austria
Vienna, 2008-12-05
Andreas Lesch
Managing Director
ACR Electronics Europe GmbH page 1 of 1 2008-10 EC - DoC Comrod AV7.docx
Page 84

EG - Konformitätserklärung
EC - Declaration of Conformity
Diese Konformitätserklärung bestätigt, dass das unten benannte Zubehör gleich oder besser dem im untenstehenden
Zertifikat ausgewiesenen Zubehör ist.
This declaration of conformity certifies that the mentioned accessory is equal or better to the equipment stated in the
beyond Certificate.
Produktbezeichnung:
Product Name / Nom du produit
OEM Name:
Trade Name / Marque Déposée
Zertifikate der benannten Stelle:
Certificates from the notified Body /
Certificats des Organismes Notifiés
Spezifizierte Standards:
Specified Standard(s) /
Standard(s) Spécifié(s)
Zubehörtyp:
Type of Accessory
ACR Part Number:
Einschränkungen / Hinweise
Restrictions / Comments
Dokumentennummer:
Document number / Num. du document
Hersteller:
Manufacturer / Fabricant
Anschrift EU-Vertretung:
Address EU-Representative /
Adresse du Représentant pour l'UE
Ort, Datum:
place, date / Lieu,Date
Unterschrift:
Signature / Signature
Diese Erklärung bescheinigt die Übereinstimmung mit den genannten Richtlinien, ist jedoch keine Zusicherung von Eigenschaften. Die Sicherheitshinweise
der mitgelieferten Produktdokumentation sind zu beachten.
This declaration certifies the compliance with the indicated directives but implies no warranty of properties. The safety instructions of the accompanying
product documentation shall be observed.
Cette déclaration certifie la conformité avec les directives indiquées mais n'implique aucune garantie des propriétés. Les instructions de sécurité de la
documentation accompagnant le produit doivent être suivies.
ISO 9001:2000 Zertifizierung / ISO 9001:2000 Certification
ACR Electronics Europe GmbH hat ein Qualitätsmanagement System nach ISO 9001:2000 implementiert, und ist seit Juli 2003 ISO-zertifiziert.
ACR Electronics Europe GmbH maintains a Quality Management System according to ISO 9001:2000, and received ISO certification in July 2003.
X-Pack DS (Inland AIS)
Nauticast™ Inland AIS
EC Type Examination (Module B) Certificate: BSH/6412/4320296/06
EC Quality System (Module D) Certificate: BSH/4613/05101/0555/07
Issued by: Bundesamt für Seeschifffahrt und Hydrographie (BSH),
Notified Body No. 0735
Bernhard-Nocht-Str. 78, 20359 Hamburg, Germany
Inland AIS Type Approval Certificate No: R - 4 - 203
Issued by: Fachstelle der WSV für Verkehrstechniken
Weinbergstraße 11-13, 56070 Koblenz, Germany
IMO MSC.74(69) Annex 3
ITU-R M.1371-3 (Class A)
IALA Technical Clarifications of Rec. ITU-R M.1371-1 (Ed. 1.3)
ITU-R M.825-3
ITU-R M1084-3
IEC 61993-2 (2001)
IEC 61162-1 (2000), -2 (1998)
IEC 60945 (1996)
IEC 61108-1 (1996)
Technical Specification for Vessel Tracking and Tracing Systems for Inland
Waterways (Ed. 1.01 dated 10.10.2007)
Test Standard for Inland AIS,(Edition 1.0 dated 31.5.2007)
Combined GPS/VHF Antenna
Comrod AC17 combined GPS/VHF Antenna + Splitter (in Cable integrated)
2624
Verlegte Kabellänge < 40m
Installed Cable lenght <40m
2008-09
ACR Electronics Inc.,
5757 Ravenswood Road, Fort Lauderdale, Florida, 33312 USA
ACR Electronics Europe GmbH
Handelskai 388 / Top 632
A-1020 Vienna, Austria
Vienna, 2008-12-05
Andreas Lesch
Managing Director
ACR Electronics Europe GmbH page 1 of 1 2008-09 EC - DoC Comrod AC17.docx
Page 85

EG - Konformitätserklärung
EC - Declaration of Conformity
Diese Konformitätserklärung bestätigt, dass das unten benannte Produkt den Auflagen der EC Council Directive 96/98/EC vom 20
Dezember 1996 für maritime Ausrüstung, geändert durch die EC Council Directive 2002/75/EC vom 2. September 2002 entspricht und
von der benannten Stelle Nr. 0735 (BSH) typengeprüft wurde. Darüber hinaus ist die Konformität gemäß Commission Regulation (EC)
No. 415/2007 zum „Standard Schiffsverfolgung und Aufspürung in der Binnenschifffahrt, Edition 1.01 vom 10.10.2007“ sowie zum „Test
Standard for Inland AIS Edition 1.0“ vom 31. May 2007 gewährleistet.
This declaration of conformity certifies that the specified equipment is in compliance with EC Council Directive 96/98/EC of 20
December 1996 on Marine Equipment (MED), as amended by Commission Directive 2002/75/EC of 2 September 2002. The
Commission Regulation (EC) No. 415/2007 concerning Vessel Tracking and Tracing Systems on Inland Waterways, defined in the Tes t
Standard for Inland AIS Edition 1.0 of 31
Produktbezeichnung:
Product Name / Nom du produit
OEM Name:
Trade Name / Marque Déposée
Zertifikate der benannten Stelle:
Certificates from the notified Body /
Certificats des Organismes Notifiés
Spezifizierte Standards:
Specified Standard(s) /
Standard(s) Spécifié(s)
Dokumentennummer:
Document number / Num. du document
Hersteller:
Manufacturer / Fabricant
Anschrift EU-Vertretung:
Address EU-Representative /
Adresse du Représentant pour l'UE
Ort, Datum:
place, date / Lieu,Date
Unterschrift:
Signature / Signature
Diese Erklärung bescheinigt die Übereinstimmung mit den genannten Richtlinien, ist jedoch keine Zusicherung von Eigenschaften. Die Sicherheitshinweise
der mitgelieferten Produktdokumentation sind zu beachten.
This declaration certifies the compliance with the indicated directives but implies no warranty of properties. The safety instructions of the accompanying
product documentation shall be observed.
Cette déclaration certifie la conformité avec les directives indiquées mais n'implique aucune garantie des propriétés. Les instructions de sécurité de la
documentation accompagnant le produit doivent être suivies.
ISO 9001:2000 Zertifizierung / ISO 9001:2000 Certification
ACR Electronics Europe GmbH hat ein Qualitätsmanagement System nach ISO 9001:2000 implementiert, und ist seit Juli 2003 ISO-zertifiziert.
ACR Electronics Europe GmbH maintains a Quality Management System according to ISO 9001:2000, and received ISO certification in July 2003.
st
May 07 has been type examined.
X-Pack DS (Inland AIS)
Nauticast™ Inland AIS
EC Type Examination (Module B) Certificate: BSH/6412/4320296/06
EC Quality System (Module D) Certificate: BSH/4613/05101/0555/07
Issued by: Bundesamt für Seeschifffahrt und Hydrographie (BSH),
Notified Body No. 0735
Bernhard-Nocht-Str. 78, 20359 Hamburg, Germany
Inland AIS Type Approval Certificate No: R - 4 - 203
Issued by: Fachstelle der WSV für Verkehrstechniken
Weinbergstraße 11-13, 56070 Koblenz, Germany
IMO MSC.74(69) Annex 3
ITU-R M.1371-3 (Class A)
IALA Technical Clarifications of Rec. ITU-R M.1371-1 (Ed. 1.3)
ITU-R M.825-3
ITU-R M1084-3
IEC 61993-2 (2001)
IEC 61162-1 (2000), -2 (1998)
IEC 60945 (1996)
IEC 61108-1 (1996)
Technical Specification for Vessel Tracking and Tracing Systems for Inland
Waterways (Ed. 1.01 dated 10.10.2007)
Test Standard for Inland AIS,(Edition 1.0 dated 31.5.2007)
2008-08
ACR Electronics Inc.,
5757 Ravenswood Road, Fort Lauderdale, Florida, 33312 USA
ACR Electronics Europe GmbH
Handelskai 388 / Top 632
A-1020 Vienna, Austria
Vienna, 2008-12-04
Andreas Lesch
Managing Director
ACR Electronics Europe GmbH page 1 of 1 2008-08 EC - DoC Nauticast Inland AIS.docx
Page 86

A
EG - Konformitätserklärung
EC - Declaration of Conformity
Diese Konformitätserklärung bestätigt, dass das unten benannte Zubehör gleich oder besser dem im untenstehenden
Zertifikat ausgewiesenen Zubehör ist.
This declaration of conformity certifies that the mentioned accessory is equal or better to the equipment stated in the
beyond Certificate.
Produktbezeichnung:
Product Name / Nom du produit
OEM Name:
Trade Name / Marque Déposée
Zertifikate der benannten Stelle:
Certificates from the notified Body /
Certificats des Organismes Notifiés
Spezifizierte Standards:
Specified Standard(s) /
Standard(s) Spécifié(s)
Zubehörtyp:
Type of Accessory
ACR Part Number:
Dokumentennummer:
Document number / Num. du document
Hersteller:
Manufacturer / Fabricant
Anschrift EU-Vertretung:
Address EU-Representative /
Adresse du Représentant pour l'UE
Ort, Datum:
place, date / Lieu,Date
Unterschrift:
Signature / Signature
Diese Erklärung bescheinigt die Übereinstimmung mit den genannten Richtlinien, ist jedoch keine Zusicherung von Eigenschaften. Die Sicherheitshinweise
der mitgelieferten Produktdokumentation sind zu beachten.
This declaration certifies the compliance with the indicated directives but implies no warranty of properties. The safety instructions of the accompanying
product documentation shall be observed.
Cette déclaration certifie la conformité avec les directives indiquées mais n'implique aucune garantie des propriétés. Les instructions de sécurité de la
documentation accompagnant le produit doivent être suivies.
ISO 9001:2000 Zertifizierung / ISO 9001:2000 Certification
ACR Electronics Europe GmbH hat ein Qualitätsmanagement System nach ISO 9001:2000 implementiert, und ist seit Juli 2003 ISO-zertifiziert.
ACR Electronics Europe GmbH maintains a Quality Management System according to ISO 9001:2000, and received ISO certification in July 2003.
X-Pack DS (Inland AIS)
Nauticast™ Inland AIS
EC Type Examination (Module B) Certificate: BSH/6412/4320296/06
EC Quality System (Module D) Certificate: BSH/4613/05101/0555/07
Issued by: Bundesamt für Seeschifffahrt und Hydrographie (BSH),
Notified Body No. 0735
Bernhard-Nocht-Str. 78, 20359 Hamburg, Germany
Inland AIS Type Approval Certificate No: R - 4 - 203
Issued by: Fachstelle der WSV für Verkehrstechniken
Weinbergstraße 11-13, 56070 Koblenz, Germany
IMO MSC.74(69) Annex 3
ITU-R M.1371-3 (Class A)
IALA Technical Clarifications of Rec. ITU-R M.1371-1 (Ed. 1.3)
ITU-R M.825-3
ITU-R M1084-3
IEC 61993-2 (2001)
IEC 61162-1 (2000), -2 (1998)
IEC 60945 (1996)
IEC 61108-1 (1996)
Technical Specification for Vessel Tracking and Tracing Systems for Inland
Waterways (Ed. 1.01 dated 10.10.2007)
Test Standard for Inland AIS,(Edition 1.0 dated 31.5.2007)
ntenna
GPS
GPS Antenna AIS-A W/5M Coax
2639
2008-11
ACR Electronics Inc.,
5757 Ravenswood Road, Fort Lauderdale, Florida, 33312 USA
ACR Electronics Europe GmbH
Handelskai 388 / Top 632
A-1020 Vienna, Austria
Vienna, 2008-12-05
Andreas Lesch
Managing Director
ACR Electronics Europe GmbH page 1 of 1 2008-11 EC - DoC GPS Antenna AIS-A W.docx
Page 87

Austauschanleitung
1. Notwendiges Werkzeug:
Schraubendreher (Schlitz), Gabelschlüssel G13
User Passwort: [persönliches Passwort]
(Passwort der Werkseinstellungen ist ‘NAUT’)
2. Auslesen der AIS
Konfigurationsdaten:
Drücke Menu
Drücke 2 2.AIS Status
Drücke 2 2.Own Ship Data
Ausgelesene Konfigurationsdaten hier vermerken:
IMO No. : Dest :
ShipName : EAT :
ShipType : MMSI :
Length : CS :
Cargo : Beam :
Draught :
Drücke Menu
Drücke 4 4.Ship Settings
Eingabe [UserPassword] Drücke Enter
Ausgelesene Konfigurationsdaten hier vermerken:
RefPtExt:A B C D
RefPtInt: A B C D
Drücke Menu
Drücke 5 5.Transponder Configuration
Eingabe [UserPassword] Drücke Enter
Drücke 5 5.Sensor Settings
Ausgelesene Konfigurationsdaten hier vermerken:
BaudRate Sensor1:
BaudRate Sensor2:
BaudRate Sensor3:
Drücke M8 Back
3. AIS Gerät ausbauen
3.1. AIS vom Bügel abbauen
3.2. (Oder) aus Konsole ausbauen
4. Abziehen der Kabel vom AIS
4.1. Verschraubungen beider Stecker lösen
4.2. Kabel abziehen
5. Auspacken des neuen AIS
6. Kabel anstecken
6.1. AIS - Kabel anstecken
6.2. Stecker auf richtigen Sitz prüfen und
unbedingt anschrauben
7. Neues AIS einbauen
7.1. Bracket Mounting
7.2. Frame Mounting
8. Konfiguration eingeben:
Ausgelesene Daten wieder eingeben
AIS zeigt nach dem start: ‘ENTER MMSI
NUMBER’
Drücke M5 OK
Eingabe MMSI and IMO Nummer
Drücke M5 Save (Neustart des AIS)
Drücke Menu
Drücke 4 4.Ship Settings
Eingabe NAUT Drücke Enter (Passwort der
Werkseinstellungen)
Eingabe folgender Konfigurationsdaten aus
zuvor angelegter Liste:
CallSign: ShipName: Length: Beam:
RefPtExt: AxxCxx* *(B and D are
calculated by the AIS)
RefPtInt: AxxCxx* *(B and D are calculated by
the AIS)
ShipType:
Drücke Menu
Drücke 5 5.Transponder Configuration
Eingabe NAUT Drücke Enter (Werks Passwort)
Drücke 5 5.Sensor Settings
Eingabe folgender Konfigurationsdaten aus
zuvor angelegter Liste
BaudRate Sensor1: BaudRate Sensor2:
BaudRate Sensor3:
Drücke M5 Save
9. Überprüfen der Funktion
Drücke Menu
Drücke Pr2 2.AIS Status
Drücke Pr2 2.Own Ship Data
Anzeige der eigenen Daten mit richtigen
Werten für LAT, LON, SOG, COG, UTC Zeit
9.1. Ändern des User Passwortes
Drücke Menu
Drücke 6 6.Service Configuration
Eingabe Passwort NAUT Drücke Enter (Passwort
der Werkseinstellungen)
Drücke 2 2.User Password Settings
Drücke 1 1.Change User Password
Eingabe [neues Passwort]
Wiederholen [neues Passwort]
Drücke M5 Save
 Loading...
Loading...