

Page 1

User’s
Manual
EXA 202
Fieldbus Communication
IM 12A00A01-61E
IM 12A00A01-61E
2nd Edition
Page 2

TABLE OF CONTENTS
1. INTrOduCTION .................................................................................................. 1-1
2. SAFETy PrECAuTIONS .................................................................................... 2-1
3. FOuNdATION FIELdBuS ..................................................................................3-1
3-1 About Foundation Fieldbus ..............................................................................3-1
3-1-1 Outline ..............................................................................................................................3-1
3-1-2 Internal Structure of EXA ..................................................................................................3-1
3-1-2-1 System/network Management VFD ....................................................................3-1
3-1-2-2 Function Block VFD ............................................................................................3-1
3-1-3 Logical Structure of Each Block .......................................................................................3-1
3-1-4 Wiring System Configuration ............................................................................................3-2
3-2 Getting started .................................................................................................3-2
3-2-1 Connection of Devices ......................................................................................................3-2
3-2-1-1. Fieldbus Preparation ..........................................................................................3-2
3-2-1-2. Cables, terminals and glands ............................................................................3-3
3-2-2 Host Setting ......................................................................................................................3-4
3-2-3 Bus Power ON ..................................................................................................................3-4
3-2-4 Integration of DD ..............................................................................................................3-5
3-2-5 Reading the Parameters ...................................................................................................3-5
3-2-6 Continuous Record of Values ...........................................................................................3-5
3-2-7 Generation of Alarm .........................................................................................................3-5
3-3 Configuration ...................................................................................................3-6
3-3-1 Network Design ................................................................................................................3-6
3-3-2 Network Definition.............................................................................................................3-7
3-3-3 Definition of Combining Function Blocks ..........................................................................3-8
3-3-4 Setting of Tags and Addresses ........................................................................................3-9
3-3-5 Communication Setting...................................................................................................3-10
3-3-5-1 VCR Setting.......................................................................................................3-10
3-3-5-2 Function Block Execution Control .....................................................................3-12
3-3-6 Block Setting ...................................................................................................................3-12
3-3-6-1 Link Object ........................................................................................................3-12
3-3-6-2 Trend Object......................................................................................................3-13
3-3-6-3 View Object .......................................................................................................3-14
3-3-6-4 Function Block Parameters ...............................................................................3-18
3-4 In-process operation ...................................................................................... 3-22
3-4-1 Mode Transition ..............................................................................................................3-22
3-4-2 Generation of Alarm ......................................................................................................3-22
3-4-2-1 Indication of Alarm ............................................................................................3-22
3-4-2-2 Alarms and Events ............................................................................................3-22
3-4-3 Simulation Function ........................................................................................................3-23
3-5 Device status .................................................................................................3-25
3-6 List of parameters for each block of the EXA ................................................. 3-28
3-6-1 Resource Block...............................................................................................................3-28
3-6-2 Analog input Block ..........................................................................................................3-30
3-6-3 Transducer Block ............................................................................................................3-32
3-6-3-1 Transducer Block PH202 ..................................................................................3-32
3-6-3-2 Transducer Block SC202 ..................................................................................3-35
3-6-3-3 Transducer Block ISC202 .................................................................................3-38
3-6-3-4 Transducer Block DO202 ..................................................................................3-41
3-7 Application setting and change of basic parameters .....................................3-43
3-7-1 Applications and selection of basic parameters .............................................................3-43
3-7-2 Setting and change of basic parameters ........................................................................3-44
3-7-3 Setting the AI Function Blocks .......................................................................................3-44
3-7-4 Setting the Transducer Block .........................................................................................3-45
IM 12A00A01-61E
2nd Edition: Sep. 2007(YK)
All Rights Reserved, Copyright © 2007, Yokogawa Electric Corporation
IM 12A00A01-61E
Page 3

3-8 Operation of each parameter in failure mode ................................................3-46
3-8-1 Operation of each parameter in failure mode PH202 ....................................................3-46
3-8-2 Operation of each parameter in failure mode SC202 ....................................................3-48
3-8-3 Operation of each parameter in failure mode ISC202 ...................................................3-50
3-8-4 Operation of each parameter in failure mode DO202 ....................................................3-52
4. PrOFIBUS ........................................................................................................... 4-1
4-1. About Profibus ................................................................................................4-1
4-1-1 Outline ..............................................................................................................................4-1
4-1-2 Internal Structure of EXA ..................................................................................................4-1
4-1-3 Logical Structure of Each BLOCK ....................................................................................4-1
4-1-4 Wiring System Configuration ............................................................................................4-2
4-2. Preparation .....................................................................................................4-4
4-2-1. Cables, terminals and glands ..........................................................................................4-4
4-2-2. Shielding and grounding ..................................................................................................4-4
4-3. GETTING STARTED ......................................................................................4-5
4-3-1 Connection of Devices ......................................................................................................4-5
4-3-2 Host Setting ......................................................................................................................4-6
4-3-3 Bus Power ON ..................................................................................................................4-6
4-3-4 Reading cyclic parameters ...............................................................................................4-6
4-3-5 Reading acyclic parameters .............................................................................................4-7
4-4. Function block parameters and Methods ........................................................4-8
4-4-1. Physical Block Parameters ..............................................................................................4-8
4-4-2. Analog Input Block Parameters .......................................................................................4-8
4-4-3. Transducer block parameters ..........................................................................................4-9
4-4-3-1. Transducer block parameters PH202 ................................................................4-9
4-4-3-2. Function Block Parameters SC202 ..................................................................4-12
4-4-3-3. Function Block Parameters ISC202 .................................................................4-14
4-4-3-4. Function Block Parameters DO202..................................................................4-17
4-4-4 Methods ..........................................................................................................................4-19
APPENdIX 1. LINK MASTEr FUNCTIONS ........................................................... 5-1
A1-1 Link Active Scheduler .................................................................................... 5-1
A1-2 Link Master .................................................................................................... 5-1
A1-3 Transfer of LAS .............................................................................................5-2
A1-4 LM Functions ................................................................................................. 5-3
A1-5 LM Parameters .............................................................................................. 5-4
A1-5-1 LM Parameter List ..........................................................................................................5-4
A1-5-2 Descriptions for LM Parameters.....................................................................................5-6
A1-6 FAQs .............................................................................................................5-8
rEvISION rECOrd ....................................................................................................
1
IM 12A00A01-61E
Page 4
Introduction 1-1
Manual Name IM No. Instruments mentioned
2-wire pH/ORP Transmitter IM 12B07D02-01E PH202G, PH202S
2-wire Conductivity or Resistivity Transmitter IM 12D08B02-01E SC202G, SC202S
2-wire Inductive Conductivity Transmitter IM 12D06A03-01E ISC202G, ISC202S
2-wire Dissolved Oxygen Transmitter IM 12J05C01-01E DO202G, DO202S
T01.EPS
1. IntroductIon
In the standard user’s manual delivered with the 202 analyzer all necessary information about HART-communication is included. This manual describes only those topics that are required for operation of the fieldbus communications.
For information about instruments related to the EXA202, refer to the following User’s Manuals.
IM 12A00A01-61E
Page 5
Safety Precautions 2-1
WARNING
CAUTION
IMPORTANT
WARNING
CAUTION
2. SAFETy PrECAUTIONS
• For the protection and safety of the operator and the instrument or the system including the instrument,
please be sure to follow the instructions on safety described in this manual when handling this instrument.
In case the instrument is handled in contradiction to these instructions, Yokogawa does not guarantee
safety.
• For the intrinsically safe equipment and explosionproof equipment, in case the instrument is not restored
to its original condition after any repair or modification undertaken by the customer, intrinsically safe
construction or explosionproof construction is damaged and may cause dangerous condition. Please
contact Yokogawa for any repair or modification required to the instrument.
• The following safety symbol marks are used in this Manual:
Indicates a potentially hazardous situation which, if not avoided, could result in death or serious injury.
Indicates a potentially hazardous situation which, if not avoided, may result in minor or moderate injury. It
may also be used to alert against unsafe practices.
Indicates that operating the hardware or software in this manner may damage it or lead to system failure.
NOTE
Draws attention to information essential for understanding the operation and features.
• Instrument installed in the process is under pressure. Never loosen or tighten the process connector bolts
as it may cause dangerous spouting of process fluid.
• During draining condensate or venting gas in transmitter pressure-detector section, take appropriate care
to avoid contact with the skin, eyes or body, or inhalation of vapors, if the accumulated process fluid may
be toxic or otherwise harmful.
Since draining condensate or bleeding off gas gives the pressure measurement distur-bance, this should
not be done when the loop is in operation.
• If the accumulated process fluid may be toxic or otherwise harmful, take appropriate care to avoid
contact with the body, or inhalation of vapors even after dismounting the instrument from process line for
maintenance.
This instrument is tested and certified as intrinsically safe type or explosionproof type. Please note that the
construction of the instrument, installation, external wiring, maintenance or repair is strictly restricted, and
non-observance or negligence of these restriction would result dangerous condition.
IM 12A00A01-61E
Page 6
Foundation Fieldbus 3-1
System/network management VFD
Function block VFD
PD Tag
Sensor
input
Resource block
Block tag
Parameters
Communication
parameters
VCR
Node address
Function block
execution schedule
AI function
block
AI function
block
Output
AI function
block
Block tag
OUT
Parameters
Transducer
block
Block tag
Parameters
Sensor
3. FOUNdATION FIELdBUS
3-1 About Foundation Fieldbus
3-1-1 Outline
Fieldbus is a bi-directional digital communication protocol for field devices, which offers an advancement implementation technologies for process control systems and is widely employed by numerous
field devices.
EXA Series Fieldbus communication type employs the specification standardized by The Fieldbus
Foundation, and provides interoperability between Yokogawa devices and those produced by other
manufacturers. Fieldbus comes with software consisting of three AI function blocks, providing the
means to implement flexible instrumentation system.
For information on other features, engineering, design, construction work, startup and maintenance of
Fieldbus, refer to http://www.yokogawa.com/fbs/fbs-index.htm.
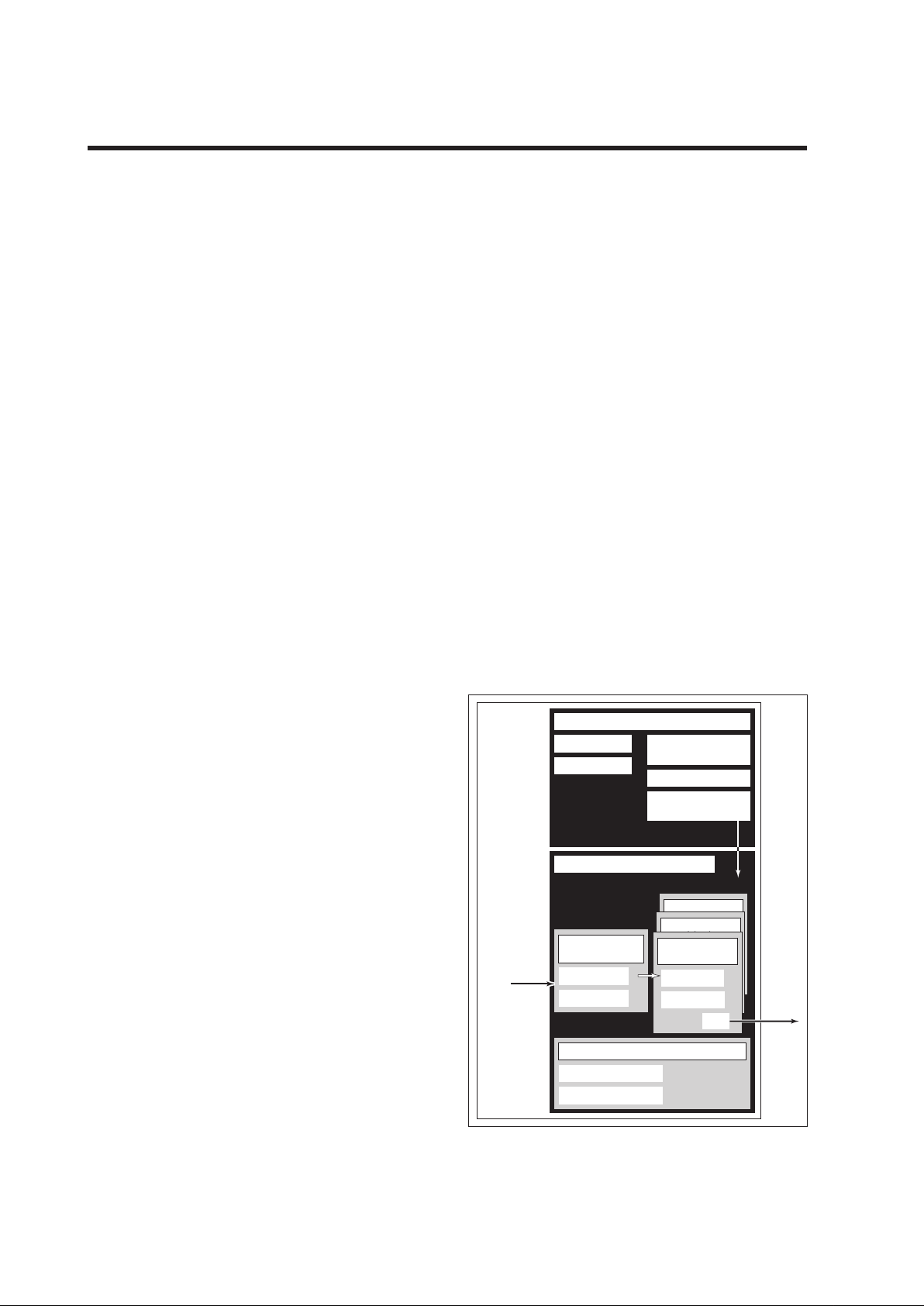
3-1-2 Internal Structure of EXA
The EXA contains two virtual field devices (VFD) that share the following functions.
3-1-2-1 System/network Management vFd
• Sets node addresses and Physical Device tags (PD Tag) necessary for communication
• Controls the execution of function blocks
• Manages operation parameters and communication resources (Virtual Communication Relationship:
VCR)
3-1-2-2 Function Block vFd
(1) resource block
• Manages the status of EXA hardware
• Automatically informs the host of any detected
faults or other problems
(2) Transducer block
• Converts sensor output to process values and
transfers to AI function block by channels
(3) AI1, AI2, AI3 function block
• Conditions raw data from the Transducer block
• Outputs conditioned process values
• Carries out scaling, damping and square root
extraction
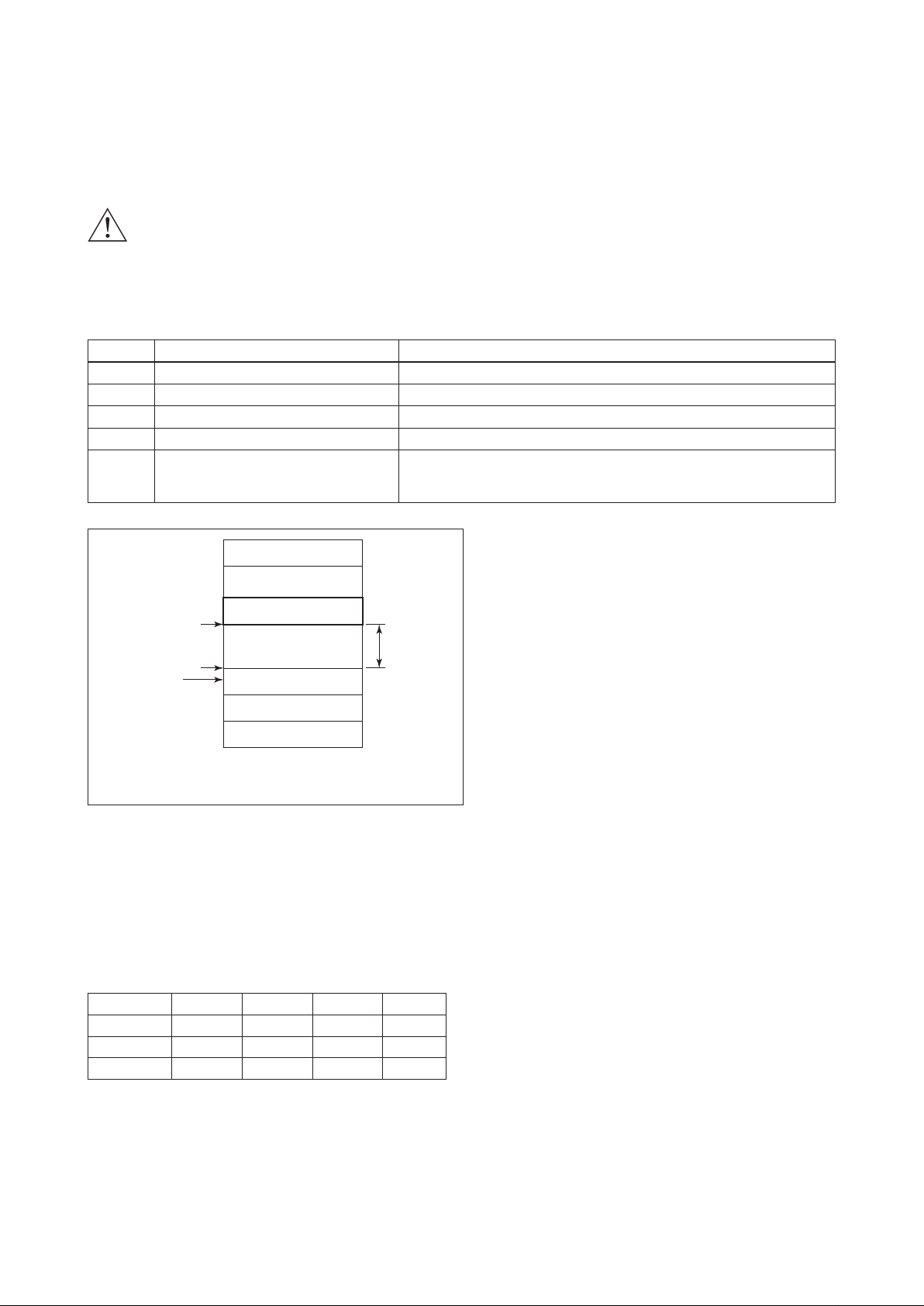
3-1-3 Logical Structure of Each Block
Setting of various parameters, node addresses, and
PD Tags shown in Figure 3.1 is required before
starting operation.
Figure 3.1 Logical Structure of Each Block
IM 12A00A01-61E
Page 7

3-2 Foundation Fieldbus
Sensor cable
gland
Foundation Fieldbus®
cable gland
Grounding terminal
(connect to safety ground,
only if power supply is not grounded)
3-1-4 Wiring System Configuration
The number of devices that can be connected to a single bus and the cable length vary depending on system design. When constructing systems, both the basic and overall design must be carefully considered to
allow device performance to be fully exhibited.
3-2 Getting started
Fieldbus is fully dependent upon digital communication protocol and differs in operation from conventional
4 to 20 mA transmission communication protocol. It is recommended that novice users use field devices in
accordance with the procedures described in this section. The procedures assume that field devices will be
set up on a bench or an instrument shop.
3-2-1 Connection of Devices
3-2-1-1. Fieldbus Preparation
The Foundation Fieldbus® connections and the sensor connections should be made in accordance with figure 3.2 and 3.3. The terminals are of a plug in style for ease of mounting.
The EXA 202 FF is provided with two cable glands. The first is used for the electrode wiring as the other is
used for the power/foundation® Fieldbus wiring shown in figure 3.2.
To open the EXA 202 for wiring:
1. Loosen the four frontplate screws and remove the cover.
2. The terminal strip is now visible.
3. Connect the power supply to the green connector according figure 3.3. Use the gland on the left for this
cable.
4. Connect the sensor input, using the gland on the right (see figure 3.2). Switch on the power.
Commission the instrument as required or use the default settings.
5. Replace the cover and secure frontplate with the four screws.
Figure 3.2 Glands to be used for cabling
Figure 3.3 Green connector for power supply
IM 12A00A01-61E
Page 8
Foundation Fieldbus 3-3
EXA
Power
supply
Terminator
HOST
Coupler/terminator
IMPORTANT
3-2-1-2. Cables, terminals and glands
The EXA202 is equipped with terminals suitable for the connection of finished cables in the size range:
0.13 to 2.5 mm (26 to 14 AWG). The glands will form a tight seal on cables with an outside diameter in the
range of 6 to 12 mm (0.24 to 0.47 inches).
The following instruments are required for use with Fieldbus devices:
• Power supply
Fieldbus requires a dedicated power supply. It is recommended that current capacity be well over the
total value of the maximum current consumed by all devices (including the host). Conventional DC
current cannot be used as is.
• Terminator
Fieldbus requires two terminators. Refer to the supplier for details of terminators that are attached to the
host.
• Field devices
Connect EXA Fieldbus communication type.
Two or more EXA devices or other devices can be connected.
• Host
Used for accessing field devices. A dedicated host (such as DCS) is used for an instrumentation line
while dedicated communication tools are used for experimental purposes. For operation of the host, refer
to the instruction manual for each host. No details of the host are explained in the rest of this material.
• Cable
Used for connecting devices. Refer to “Fieldbus Technical Information” (TI 38K03A01-01E) for details of
instrumentation cabling.
Fieldbus uses twisted pair wires. To meet the Electro Magnetic Interference standards a shielded twisted
pair is obligated.
Refer to Yokogawa when making arrangements to purchase the recommended equipment.
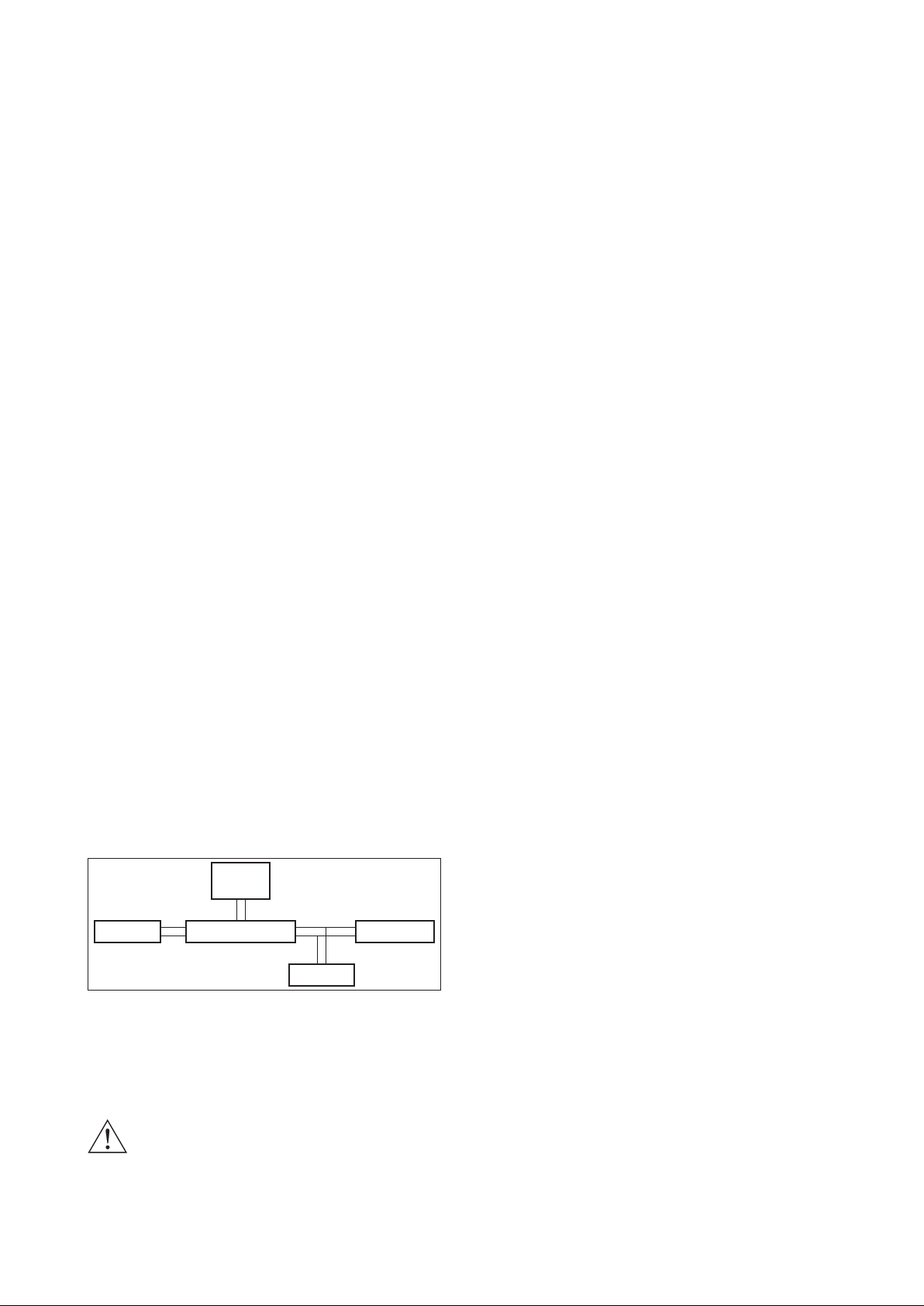
Connect the devices as shown in Figure 3.4. Connect the terminators at both ends of the trunk, with a mini-
mum length of the spur laid for connection.
The polarity of signal and power must be maintained.
Figure 3.4 Cabling
NOTE
Before using a Fieldbus configuration tool other than the existing host, confirm it does not affect
the loop functionality in which all devices are already installed in operation. Disconnect the relevant
control loop from the bus if necessary.
Connecting a Fieldbus configuration tool to a loop with its existing host may cause communication data scrambles
resulting in a functional disorder or a system failure.
IM 12A00A01-61E
Page 9
3-4 Foundation Fieldbus
IMPORTANT
Not used
LM device
Not used
Basic device
Default address
Portable-device address
V (FUN)
V (FUN) + V (NUN)
V (NUN)
0xFF
0xFC
0xFB
0xF8
0xF7
0x00
0x0F
0x10
0x13
0x14
Bridge device
Note 1: LM device: with bus control function (Link Master function)
Note 2: BASIC device: without bus control function
EXA
3-2-2 Host Setting
To activate Fieldbus, the following settings are required for the host.
Do not turn off the power immediately after setting. When the parameters are saved to the EEPROM, the
redundant processing is executed for an improvement of reliability. If the power is turned off within 60 seconds after
setting is made, the modified parameters are not saved and the settings may return to the original values.
Table 3.1 Operation Parameters
Symbol Parameter Description and Settings
V (ST) Slot-Time Set 4 or greater value.
V (MID) Minimum-Inter-PDU-Delay Set 4 or greater value.
V (MRD) Maximum-Reply-Delay Set so that V (MRD) X V (ST) is 12 or greater
V (FUN) First-Unpolled-Node Define the first address that can be used by the host. Set 0x15 or greater.
V (NUN) Number-of-consecutive-Unpolled-Node This sets the number of consecutive unpolled nodes. EXA address is
factory-set to 0xEB. Set this address to be within the range of the BASIC
device in Figure 3.5.
Figure 3.5 Available Address Range
3-2-3 Bus Power ON
Turn on the power of the host and the bus. First all segments of the display are lit, then the display begins
to operate. If the indicator is not lit, check the polarity of the power supply.
Using the host device display function, check that the EXA is in operation on the bus.
Unless otherwise specified, the following settings are in effect when shipped from the factory.
PH202 SC202 ISC202 DO202
PD tag PH1001 SC1001 ISC1001 DO1001
Node addr. 232 233 234 235
DEV_TYPE 0x0830 0x0831 0x0832 0x0833
If no EXA is detected, check the available address range and the polarity of the power supply. If the node
address and PD tag are not specified when ordering, default value is factory set. If two or more EXA’s are
connected at a time with default value, only one EXA will be detected from the host as EXA’s have the
same initial address.
Separately connect each EXA and set a different address for each.
IM 12A00A01-61E
Page 10

Foundation Fieldbus 3-5
3-2-4 Integration of dd
If the host supports DD (Device Description), the DD of the EXA needs to be installed. Check if host has the
following directory under its default DD directory.
594543\DEV_TYPE
(594543 is the manufacturer number of Yokogawa Electric Corporation, and DEV_TYPE is the EXA device
number, respectively.)
If this directory is not found, DD of EXA has not been included. Create the above directory and copy the DD
file (0m0n.ffo,0m0n.sym) (m, n is a numeral) (to be supplied separately) into the directory.
Once the DD is installed in the directory, the name and attribute of all parameters of the EXA are displayed.
Off-line configuration is possible by using Capability file (CFF).
3-2-5 reading the Parameters
To read EXA parameters, select the AI1 block of the EXA from the host screen and read the OUT parameter. The current process value is displayed. Check that MODE_BLOCK of the function block and resource
block is set to AUTO.
3-2-6 Continuous record of values
If the host has a function of continuously recording the indications, use this function to list the indications
(values). Depending on the host being used, it may be necessary to set the schedule of Publish (the function that transmits the indication on a periodic basis).
3-2-7 Generation of Alarm
If the host is allowed to receive alarms, generation
of an alarm can be attempted from EXA. In this case, set the reception of alarms on the host side. EXA’s
VCR-7 is factory-set for this purpose. For practical purposes, all alarms are placed in a disabled status; for
this reason, it is recommended that you first use one of these alarms on a trial basis. Set the value of link
object-3 (index 30002) as “0, 299, 0, 6, 0”. Refer to section 3-3-6-1 Link Object for details.
Since the LO_PRI parameter (index 4029) of the AI1 block is set to “0”, try setting this value to “3”. Select
the Write function from the host in operation, specify an index or variable name, and write “3” to it.
The LO_LIM parameter (index 4030) of the AI1 block
determines the limit at which the lower bound alarm for the process value is given. In usual cases, a very
small value is set to this limit. Set a value higher than the current process value, a lower bound alarm is
raised. Check that the alarm can be received at the host. When the alarm is confirmed, transmission of the
alarm is suspended.
The above-mentioned items are a description of the simple procedure to be carried out until EXA is connected to Fieldbus. In order to take full advantage of the performance and functionality of the device, it is
recommended that it be read together with Chapter 5 of relevant User’s Manual, which describes how to
use the EXA.
IM 12A00A01-61E
Page 11

3-6 Foundation Fieldbus
3-3 Configuration
This chapter contains information on how to adapt the function and performance of the EXA to suit specific
applications. Because two or more devices are connected to Fieldbus, settings including the requirements
of all devices need to be determined. Practically, the following steps must be taken.
(1) Network design
Determines the devices to be connected to Fieldbus and checks the capacity of the power supply.
(2) Network definition
Determines the tag and node addresses for all devices.
(3) definition of combining function blocks
Determines the method for combination between each function block.
(4) Setting tags and addresses
Sets the PD Tag and node addresses one by one for each device.
(5) Communication setting
Sets the link between communication parameters and function blocks.
(6) Block setting
Sets the parameters for function blocks.
The following section describes each step of the procedure in the order given. Using a dedicated configuration tool allows the procedure to be signifi-cantly simplified. This section describes the procedure to be
assigned for a host which has relatively simple functions.
3-3-1 Network design
Select the devices to be connected to the Fieldbus network. The following instruments are necessary for
operation of Fieldbus.
• Power supply
Fieldbus requires a dedicated power supply. It is recommended that current capacity be well over the
total value of the maximum current consumed by all devices (including the host). Conventional DC
current cannot be used as is. A power conditioner is reguired.
• Terminator
Fieldbus requires two terminators. Refer to the supplier for details of terminators that are attached to the
host.
• Field devices
Connect the field devices necessary for instrumentation. EXA has passed the interoperability test
conducted by The Fieldbus Foundation. In order to properly start Fieldbus, it is recommended that the
devices used satisfy the requirements of the above test.
• Host
Used for accessing field devices. A minimum of one device with bus control function is needed.
• Cable
Used for connecting devices. Refer to “Fieldbus Technical Information” for details of instrumentation
cabling. Provide a cable sufficiently long to connect all devices. For field branch cabling, use terminal
boards or a connection box as required.
IM 12A00A01-61E
Page 12

Foundation Fieldbus �-� �-�
Not used
LM device
Not used
Basic device
Default address
Portable-device address
V (FUN)
V (FUN) + V (NUN)
V (NUN)
0xFF
0xFC
0xFB
0xF8
0xF7
0x00
0x0F
0x10
0x13
0x14
Bridge device
Note 1: LM device: with bus control function (Link Master function)
Note 2: BASIC device: without bus control function
(EXA 0xEB)
First, check the capacity of the power supply. The power supply capacity must be greater than the sum of
the maximum current consumed by all devices to be connected to Fieldbus. The maximum current consumed (power supply voltage 9 to �2 V) for EXA is 26.0 mA. The cable must have the spur in a minimum
length with terminators installed at both ends of the trunk.
3-3-2 Network Definition
Before connection of devices with Fieldbus, define the Fieldbus network. Allocate PD Tag and node
addresses to all devices (excluding such passive devices as terminators).
The PD Tag is the same as the conventional one used for the device. Up to �2 alphanumeric characters
may be used for definition. Use a hyphen as a delimiter as required.
The node address is used to specify devices for communication purposes. Because data is too long for a
PD Tag, the host uses the node address in place of the PD Tag for communication.
A range of 20 to 24� (or hexadecimal 0x14 to 0xF�) can be set.
Addresses of devices with Link Master capabilities are set in a low address range smaller than V(FUN).
Addresses of basic devices are set in a higher range bigger than V(FUN) + V(NUN).
Specify the adress range used by setting the following two parameters in the LM-device:
Table 3.2 Parameters for Setting Address Range
Symbol Parameters Description
V (FUN) First-Unpolled-Node Indicates the address next to the address range used for the host or other
LM device.
V (NUN) Number-of-consecutive-Unpolled-Nodes Unused address range
The devices within the address range written as “Not used” in Figure �.6 cannot be used on a Fieldbus. For
other address ranges, the range is periodically checked to identify when a new device is connected. Care
must be taken not to allow the address range to become wider, which can lead to exhaustive consumption
of Fieldbus communication performance.
Figure 3.6 Available Range of Node Addresses
To ensure stable operation of Fieldbus, determine the operation parameters and set them to the LM devices. While the parameters in Table �.� are to be set, the worst-case values of all the devices to be connected to the same Fieldbus must be used. Refer to the specification of each device for details. Table �.� lists
EXA specification values.
IM 12A00A01-61E
Page 13

3-8 Foundation Fieldbus
LIC100
FIC100
FC100
FI100
EXA
#2
LI100
EXA
#1
Table 3.3 Operation Parameter Values of the EXA to be Set to LM Devices
Symbol Parameters Description and Settings
V (ST) Slot-Time Indicates the time necessary for immediate reply of the device. Unit of time is in octets
(256 µs). Set maximum specification for all devices.
For EXA, set a value of 4 or greater.
V (MID) Minimum-Inter-PDU-Delay Minimum value of communication data intervals. Unit of time is in octets (256 µs). Set the
maximum specification for all devices.
For EXA, set a value of 4 or greater.
V (MRD) Maximum-Reply-Delay The worst case time elapsed until a reply is recorded. The unit is Slot-time; set the value
so that V (MRD) 3V (ST) is the maximum value of the specification for all devices.
For EXA, the setting must be a value of 12 or greater.
3-3-3 Definition of Combining Function Blocks
The input/output parameters for function blocks are combined. For the EXA, three AI blocks output parameter (OUT) are subject to combination. They are combined with the input of the control block as necessary.
Practically, setting is written to the EXA link object with reference to “Block setting” in Section 3-3-6 for
details. It is also possible to read values from the host at proper intervals instead of connecting the EXA
block output to other blocks.
The combined blocks need to be executed synchronously with other blocks on the communications schedule. In this case, change the EXA schedule according to the following table. Enclosed values in the table
are factory-settings.
Table 3.4 Execution Schedule of the EXA Function Blocks
Index Parameters Setting (Enclosed is factory-setting)
269(SM) MACROCYCLE_DURATION
276(SM) FB_START_ENTRY.1
277(SM) FB_START_ENTRY.2
278(SM) FB_START_ENTRY.3
279(SM) to
289(SM)
FB_START_ENTRY.4 to 14 Not used.
Cycle (MACROCYCLE) period of control or measurement. Unit is 1/32 ms. (32000
= 1 s)
AI1 block startup time. Elapsed time from the start of MACROCYCLE specified in
1/32 ms. (0 = 0 s)
AI2 block startup time. Elapsed time from the start of MACROCYCLE specified in
1/32 ms. (9600 = 0.3 s)
AI3 block startup time. Elapsed time from the start of MACROCYCLE specified in
1/32 ms. (19200 = 0.6 s)
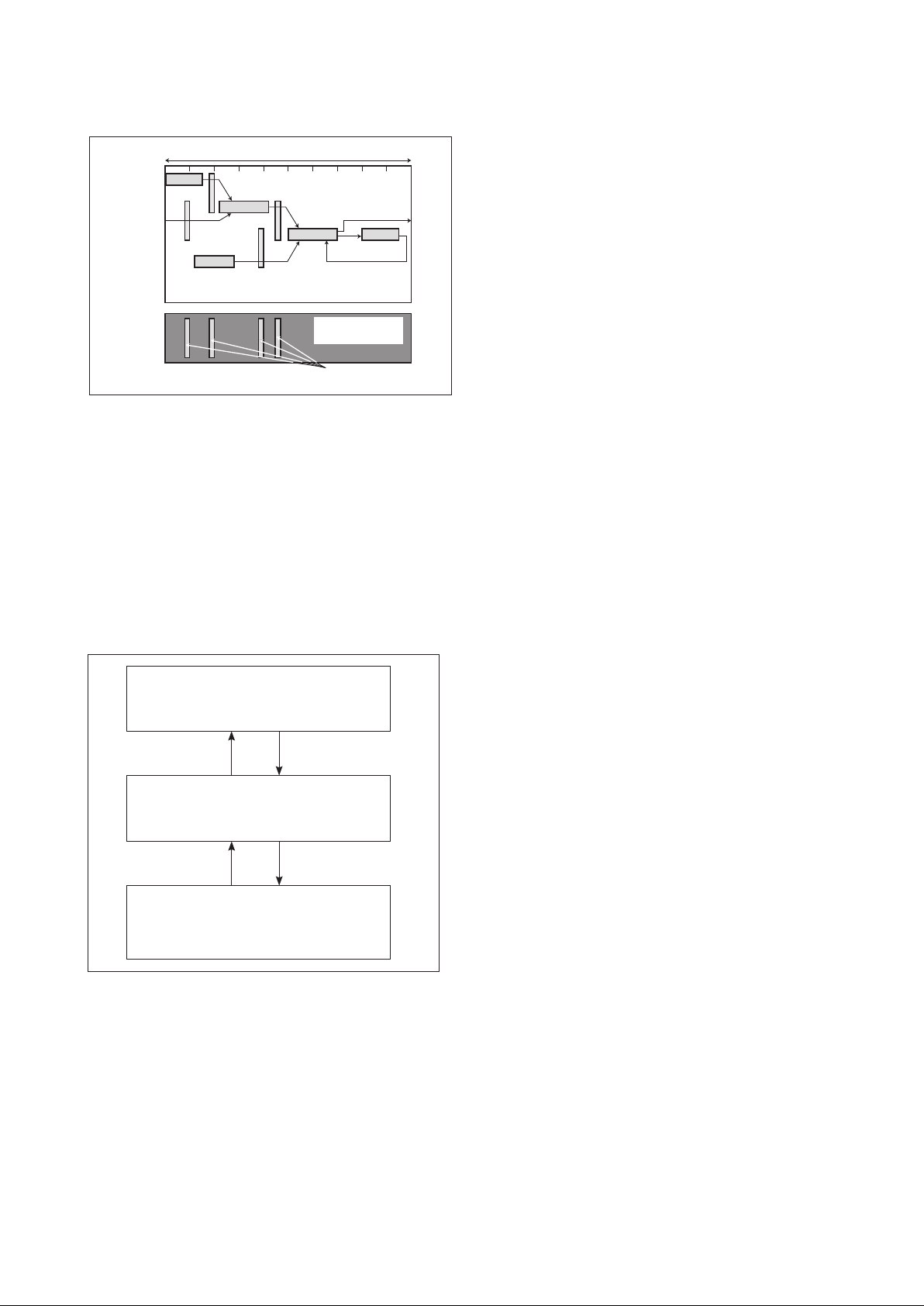
A maximum of 29 ms is taken for execution of an AI block. Executions of AI blocks should be scheduled
sequentially. In no case should two AI function blocks of the EXA be executed at the same time (execution
time is overlapped). 29 ms after AI block execution start the out value is available for further processing.
Figure 3.8 shows an example of schedule based on the loop shown in Figure 3.7.
Figure 3.7 Example of Loop Connecting Function Block of Two EXA with Other Instruments
IM 12A00A01-61E
Page 14
Foundation Fieldbus 3-9 3-9
LI100
LIC100
FIC100
FC100
FI100
Commu-
nication
Schedule
OUT
IN
OUT
CAS_IN
BKCAL_OUT
BKCAL_IN
BKCAL_IN
BKCAL_OUT
IN
Unscheduled
Communication
Scheduled
Communication
Macrocycle (Control Period)
Figure 3.8 Function Block Schedule and Communication Schedule
When the macrocycle is set to more than 4 seconds, set the following intervals to be more than 1% of the
macrocycle.
- Interval between “end of block execution” and “start of sending CD from LAS”
- Interval between “end of block execution” and “start of the next block execution”“end of block execution” and “start of the next block execution”
3-3-4Settingof Tags andAddresses Setting of Tags and Addresses
This section describes the steps in the procedure to set PD Tags and node addresses in the EXA.
There are three states of Fieldbus devices as shown in Figure 3.9, and if the state is other than SM_
OPERATIONAL state, no function block is executed. EXA must be transferred back to this state after a tag
or address is changed.
UNINITIALIZED
(No tag nor address is set)
Tag clear Tag setting
INITIALIZED
(Only tag is set)
Address clear Address setting
SM_OPERATIONAL
(Tag and address are retained, and
the function block can be executed.)
Figure 3.9 Status Transition by Setting PD Tag and Node Address
EXA has a PD Tag and node address that are set upon shipment from the factory unless otherwise specified. To change only the node address, clear the address once and then set a new node address. To set
the PD Tag, first clear the node address and clear the PD Tag, then set the PD Tag and node address
again.
Devices whose node address was cleared will await the default address (randomly chosen from a range
of 248 to 251, or from hexadecimal F8 to FB). It is necessary to confirm the device ID in order to correctlyorder to correctly
specify the device. The device ID of the EXA is 594543083xxxxxxxxx. (The xxxxxxxxx at the end of the
above device ID is a total of 9 alphanumeric characters. The characters displyed on the screen when each
instrument is powered on, correspond to the xxxxxxxxx and if necessary, should be recorded.)
IM 12A00A01-61E
Page 15

3-10 Foundation Fieldbus
3-3-5 Communication Setting
To set the communication function, it is necessary to change the database residing in SM-VFD.
3-3-5-1 VCR Setting
Set VCR (Virtual Communication Relationship), which specifies the called party for communication and
resources. EXA has 33 VCRs whose application can be changed, except for the first VCR, which is used for
management.
EXA has VCRs of 3 types:
Publisher(-Subscriber) VCR
Publisher-Subscriber VCR’s are designed to link Function Blocks. When a publishing Function Block runs,
its output data is stored in the buffer of the Publisher VCR. Then the LAS (LM) sends a CD to this VCR to
force it to transfer the data. Subscriber VCRs receive this data and gives this to the subscribing Function
Blocks. Typical example is a linkage from an output of an Analog Input (AI) block to the process value input
of the PID control block.
Publisher-Subscriber model is one-to-many one-way Communication. Subscribers are able to know whether
data is updated since the last publish. This mechanism is important because Data Link Layer transfers data
as scheduled regardless the publishing Function Block updates the data in the buffer.
(Client-)Server Model
Client-Server model is universal and used in many communication technologies. An application called
“Client” requests another application called “Server” to do a specific action. When the Server finishes the
requested action, its result is transferred back to the Client. It is an one-to-one two-way communication.
Typical example is a human-machine interface (Client) to read data of a Function Block (Server). The Client
sends a Read request to the Server and then the Server sends back the data to the Client. This communication is unscheduled and is handled during the unscheduled interval in the macrocycle. A Client may want
to issue many requests at a time. A Client-Server VCR has a queue to store those requests and sends the
requests one by one when the node has the token.
Source(-Sink) Model
A Source-Sink VCR is designed to broadcast messages. It is one-to-many one-way communication without
any schedule. This model is sometimes called “Report Distribution Model.” A Source VCR transfers a message in the queue to an assigned global address when the device has the token. Sink VCRs are set to the
same global address and receive the same message from a Source. Foundation devices use this model for
two specific purposes. One is to report alarms or events detected in the Source and the other is to transmit
trends of Source Function Blocks. Alarms are acknowledged through a Client-Server VCR. It is desirable for
an alarm logger to receive alarms from all devices with just one VCR. A Sink can receive messages from
many Sources if the Sources are configured to send messages to the same global address.
A Source VCR transmits data without established connection. A Sink (QUU) VCR on another device can
receive it if the Sink is configured so. A Publisher VCR transmits data when LAS requests so. An explicit
connection is established from VCR(s) so that a Subscriber knows the format of published data.
Each VCR has the parameters listed in Table 3.5. Parameters must be changed together for each VCR
because modification for each parameter may cause inconsistent operation.
IM 12A00A01-61E
Page 16

Table 3.5 VCR Static Entry
Subindex
1 FasArTypeAndRole Indicates the type and role of
2 FasDllLocalAddr Sets the local address to
3 FasDllConfigured
4 FasDllSDAP Specifies the quality of
5 FasDllMaxConfirm
6 FasDllMaxConfirm
7 FasDllMaxDlsduSize Specifies maximum DL Service
8 FasDllResidual
9 FasDllTimeliness
Parameter Description
communication (VCR). The
following 3 types are used for
EXA.
0x32: Server (Responds to
requests from host.)
0x44: Source (Transmits alarm
or trend.)
0x66: Publisher (Sends AI
block output to other
blocks.)
specify VCR in EXA. A range of
0x20 to 0xF7 in hexadecimal.
Sets the node address of the
RemoteAddr
DelayOnConnect
DelayOnData
ActivitySupported
Class
called party for communication
and the address (DLSAP or
DLCEP) used to specify VCR
in that address. For DLSAP
or DLCEP, a range of 0x20 to
0xF7 in hexadecimal is used.
Addresses in Subindex 2 and
3 need to be set to the same
contents of the VCR as the
called party (local and remote
are reversed).
communication. Usually, one of
the following types is set.
0x2B: Server
0x01: Source (Alert)
0x03: Source (Trend)
0x91: Publisher
To establish connection for
communication, a maximum
wait time for the called party’s
response is set in ms. Typical
value is 60 seconds (60000).
For request of data, a
maximum wait time for the
called party’s response is
set in ms. Typical value is 60
seconds (60000).
Data unit Size (DLSDU).
Set 256 for Server and Trend
VCR, and 64 for other VCRs.
Specifies whether connection is
monitored. Set TRUE (0xff) for
Server. This parameter is not
used for other communication.
Not used.
Foundation Fieldbus 3-11
Subindex
10 FasDllPublisherTime
11 FasDllPublisher
12 FasDllSubsriberTime
13 FasDllSubscriber
14 FmsVfdId Sets VFD for EXA to be used.
15 FmsMaxOutstanding
16 FmsMaxOutstanding
17 FmsFeatures
Parameter Description
Not used.
WindowSize
Not used.
SynchronizaingDlcep
Not used.
WindowSize
Not used.
SynchronizationDlcep
0x1: System/network
management VFD
0x1234: Function block VFD
Set 0 to Server. It is not
ServiceCalling
ServiceCalled
Supported
used for other applications.
Set 1 to Server. It is not
used for other applications.
Indicates the type of
services in the application
layer. In the EXA, it is
automatically set according
specific applications.
3-11
33 VCRs are factory-set as shown in the table 3.6.
IM 12A00A01-61E
Page 17

3-12 Foundation Fieldbus
Table 3.6 VCR List VCR List
Index (SM) VCR Number Factory Setting
293 1 For system management (Fixed)
294 2 Server (LocalAddr = 0xF3)
295 3 Server (LocalAddr = 0xF4)
296 4 Server (LocalAddr = 0xF7)
297 5 Trend Source (LocalAddr = 0x07, Remote Address=0x111)
298 6 Publisher for AI1 (LocalAddr = 0x20)
299 7 Alert Source (LocalAddr = 0x07, Remote Address=0x110)
300 8 Server (LocalAddr = 0xF9)
301 to 325 to 325 9 to 33 Not set
3-3-5-2 Function Block Execution Control
According to the instructions given in Section 3-3-3, set the execution cycle of the function blocks and
schedule of execution.
3-3-6 Block Setting
Set the parameter for function block VFD.
3-3-6-1 Link Object
Link object combines the data voluntarily sent by the function block with VCR. The EXA has 40 link objects.
A single link object specifies one combination. Each link object has the parameters listed in Table 3.7.
Parameters must be changed together for each VCR because the modifications made to each parameter
may cause inconsistent operation.
Table 3.7 Link Object Parameters
Subindex
1 LocalIndex Sets the index of function block parameters to be combined; set “0” for Trend and Alert.
2 VcrNumber Sets the index of VCR to be combined. If set to “0”, this link object is not used.
3 RemoteIndex Not used in EXA. Set to “0”.
4 ServiceOperation
5 StaleCountLimit
Parameters Description
Set one of the following. Only one link object is used for Alert and/or Trend.
0: Undefined
2: Publisher
6: Alert
7: Trend
Set the maximum number of consecutive stale input values which may be received before the input
status is set to BAD. To avoid the unnecessary mode transition caused when the data is not correctly
received by subscriber, set this parameter to “2” or more.
Set link objects as shown in Table 3.8.
Table 3.8 Factory-Settings of Link Objects (example)
Index Link Object# Factory Settings
30000 1 AI1.OUT VCR#6
30001 2 Trend VCR#5
30002 3 Alert VCR#7
30003 to 30039 4 to 40 Not used
IM 12A00A01-61E
Page 18
Foundation Fieldbus 3-13
SMIB
(System
Management
Information
Base)
NMIB
(Network
Management
Information
Base)
AI3
OUT
AI1
OUT
AI2
OUT
FBOD
Alert
Trend
VCR
DLSAP
DLCEP
Fieldbus Cable
0xF8 0xF3 0xF4 0xF7
0xF9
0x20 0x220x21
0x07
#5
Device 3
#10
#1 #4
#3
#2
Resource
block
Transducer
block
Host 1
Host 2
Device 1
Device 2
Link
object
#1
#2
#3 #4
#5
#6
#7
#8
#9
3-13
3-3-6-2 Trend Object
It is possible to set the parameter so that the function block automatically transmits Trend. The EXA has
ten Trend objects: eight for trends of analog paramenters and two for discrete parameters. A single Trend
object specifies the trend of one parameter.
Each Trend object has the parameters listed in Table 3.9. The first four parameters are the items to be set.
Before writing to a Trend object, it is necessary to release the WRITE_LOCK parameter.
Table 3.9 Parameters for Trend Objects
Sub-index Parameters Description
1 Block Index Sets the leading index of the function block that takes a trend.
2 Parameter Relative
Index
3 Sample Type Specifies how trends are taken. Choose one of the following 2 types:
4 Sample Interval Specifies sampling intervals in units of 1/32 ms. Set the integer multiple of the function block
5 Last Update The last sampling time.
6 to 21 List of Status 16 samples of status.
21 to 37 List of Samples 16 samples of data.
Sets the index of parameters taking a trend by a value relative to the beginning of the function
block. In the EXA AI block, the following three types of trends are possible.
7: PV
8: OUT
19: FIELD_VAL
1:Sampled upon execution of a function block.
2:The average value is sampled.
execution cycle.
Ten trend objects are factory-set as shown Table 3.10.
Table 3.10 Trend Object are Factory-Set
Index Parameters Factory Settings
32000 to 32007 TREND_FLT.1 to TREND_FLT.8 Not used.
32008 to 32009 TREND_DIS.1 to TREND_DIS.2 Not used.
Figure 3.10 Example of Default Configuration
IM 12A00A01-61E
Page 19
3-14 Foundation Fieldbus
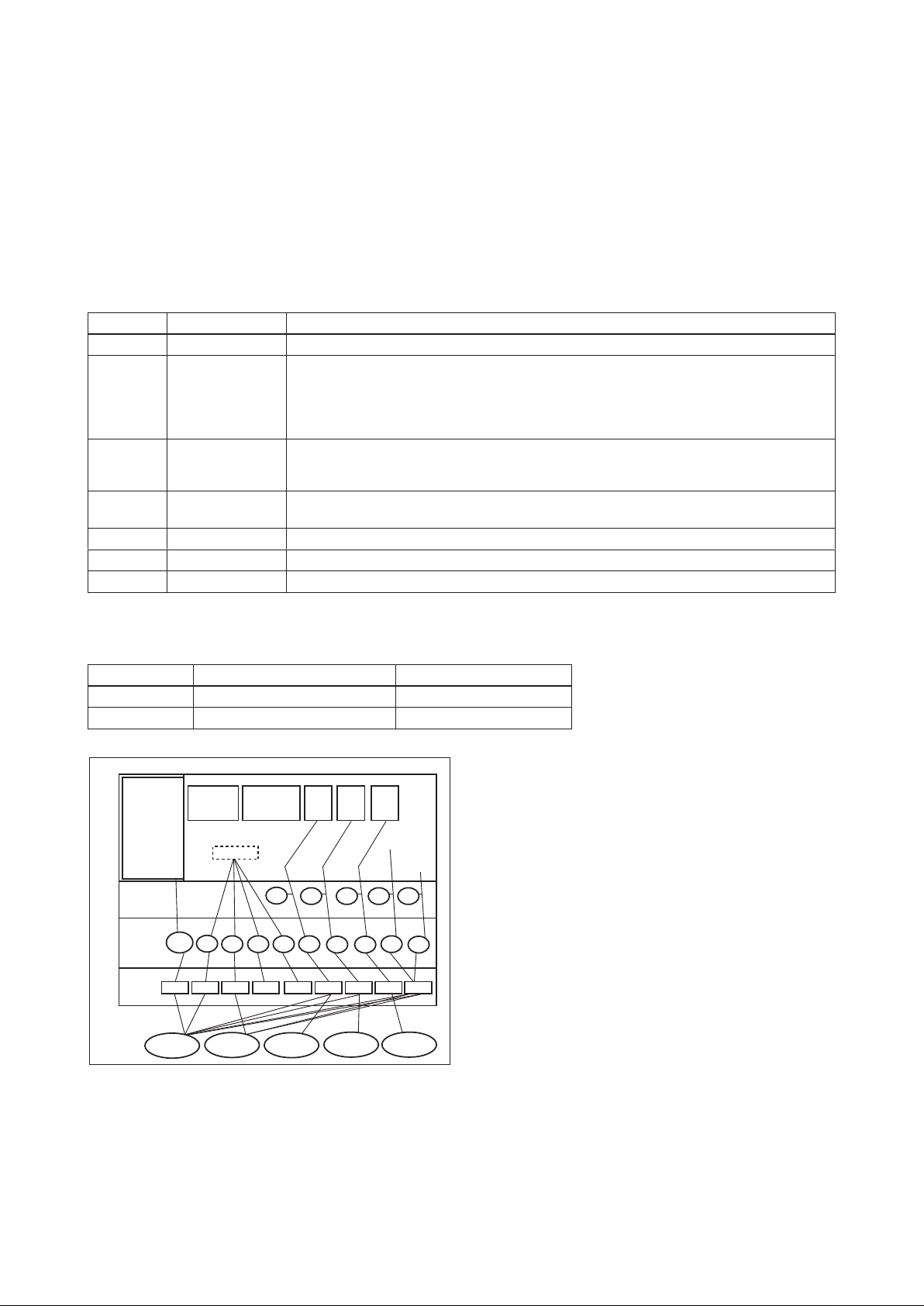
3-3-6-3 ViewObject6-3 View Object
This is the object to form groups of parameters in a block. One advantage of forming groups of parameters
is the reduction of load for data transaction. The EXA has four View Objects for each Resource block,
Transducer block and AI1, AI2, AI3 function block, and each View Object has the parameters listed in Table
3.12 to 3.14.
Table 3.11 Purpose of Each View Object
Description
VIEW_1 Set of dynamic parameters required by operator for plant
operation. (PV, SV, OUT, Mode etc.)
VIEW_2 Set of static parameters which need to be shown to plant
operator at once. (Range etc.)
VIEW_3 Set of all the dynamic parameters
VIEW_4 Set of static parameters for configuration or maintenance.
Table 3.12 Indexes of View for Each Block
VIEW_1 VIEW_2 VIEW_3 VIEW_4
Resource Block 40100 40101 40102 40103
Transducer Block 40200 40201 40202 40203
AI1 Function Block 40400 40401 40402 40403
AI2 Function Block 40410 40411 40412 40413
AI3 Function Block 40420 40421 40422 40423
IM 12A00A01-61E
Page 20
Table 3.13 View Object for Resource Block Table 3.13 View Object for Resource Block
Foundation Fieldbus 3-15
(contineous)
Relative
Index
1 ST_REV 2 2 2 2
2 TAG_DESC
3 STRATEGY 2
4 ALERT_KEY 1
5 MODE_BLK 4 4
6 BLOCK_ERR 2 2
7 RS_STATE 1 1
8 TEST_RW
9 DD_RESOURCE
10 MANUFAC_ID 4
11 DEV_TYPE 2
12 DEV_REV 1
13 DD_REV 1
14 GRANT_DENY 2
15 HARD_TYPES 2
16 RESTART
17 FEATURES 2
18 FEATURE_SEL 2
19 CYCLE_TYPE 2
20 CYCLE_SEL 2
21 MIN_CYCLE_T 4
22 MEMORY_SIZE 2
23 NV_CYCLE_T 4
24 FREE_SPACE 4
25 FREE_TIME 4 4
26 SHED_RCAS 4
27 SHED_ROUT 4
28 FAULT_STATE 1 1
29 SET_FSTATE
30 CLR_FSTATE
31 MAX_NOTIFY 1
32 LIM_NOTIFY 1
33 CONFIRM_TIME 4
34 WRITE_LOCK 1
35 UPDATE_EVT
36 BLOCK_ALM
37 ALARM_SUM 8 8
38 ACK_OPTION 2 2
39 WRITE_PRI
40 WRITE_ALM
41 ITK_VER 2
42 SOFT_REV
43 SOFT_DESC
44 SIM_ENABLE_MSG
45 DEVICE_STATUS_1 4
46 DEVICE_STATUS_2 4
47 DEVICE_STATUS_3 4
48 DEVICE_STATUS_4 4
Parameter Mnemonic VIEW1VIEW2VIEW3VIEW
Relative
4
Index
49 DEVICE_STATUS_5 4
50 DEVICE_STATUS_6 4
51 DEVICE_STATUS_7 4
52 DEVICE_STATUS_8 4
53
54
55
56
57
58
Table 3.14 View Object for AI1.AI2.AI3 Function Block
Relative
Index
1 ST_REV 2 2 2 2
2 TAG_DESC
3 STRATEGY 2
4 ALERT_KEY 1
5 MODE_BLK 4 4
6 BLOCK_ERR 2 2
7 PV 5 5
8 OUT 5 5
9 SIMULATE
10 XD_SCALE 11
11 OUT_SCALE 11
12 GRANT_DENY 2
13 IO_OPTS 2
14 STATUS_OPTS 2
15 CHANNEL 2
16 L_TYPE 1
17 LOW_CUT 4
18 PV_FTIME 4
19 FIELD_VAL 5 5
20 UPDATE_EVT
21 BLOCK_ALM
22 ALARM_SUM 8 8
23 ACK_OPTION 2
24 ALARM_HYS 4
25 HI_HI_PRI 1
26 HI_HI_LIM 4
27 HI_PRI 1
28 HI_LIM 4
29 LO_PRI 1
30 LO_LIM 4
31 LO_LO_PRI 1
32 LO_LO_LIM 4
33 HI_HI_ALM
34 HI_ALM
35 LO_ALM
36 LO_LO_ALM
Parameter Mnemonic VIEW1VIEW2VIEW3VIEW
SOFTDWN_PROTECT
SOFTDWN_FORMAT
SOFTDWN_COUNT
SOFTDWN_ACT_AREA
SOFTDWN_MOD_REV
SOFTDWN_ERROR
TOTALS (# BYTES) 22 30 73 35
Parameter Mnemonic VIEW1VIEW2VIEW3VIEW
TOTALS (# BYTES) 31 26 31 46
3-15
4
1
1
2
1
16
2
4
IM 12A00A01-61E
Page 21

3-16 Foundation Fieldbus
Table 3.15 View Object for Transducer Block PH202 Table 3.15 View Object for Transducer Block PH202
(contineous)
Relative
Index
0 BLOCK HEADER
1 ST_REV 2 2 2 2
2 TAG_DESC
3 STRATEGY 2
4 ALERT_KEY 1
5 MODE_BLK 4 4
6 BLOCK_ERR 2 2
7 UPDATE_EVT
8 BLOCK_ALM
9 TRANSDUCER_
10
11 XD_ERROR 1 1
12 COLLECTION_
13
14 PRIMARY_VALUE 5 5
15
16 SENSOR_TYPE_PH
17 SENSOR_MV
18 CAL_POINT_HI 4
19 CAL_POINT_LO 4
20 CAL_MIN_SPAN 4
21 SLOPE 4
22 SLOPE_UNIT 2
23 ZERO 4
24 ZERO_UNIT 2
25 ISOPOTENTIAL_PH 4
26
27 SENSOR_CAL_DATE 8
28
29 SECONDARY_
30
31 SENSOR_TEMP_
32
33 SENSOR_
34
35 TERTIARY_VALUE 5 5
36 TERTIARY_VALUE_
37 TERTIARY_ZERO 4
38 GLASS_IMPEDANCE 4
39 REFERENCE_
40 ALARM_SUM 8 8
41 DEV_ALARM 4 4
42 LOGBOOK1_RESET
43 LOGBOOK1_EVENT
44 LOGBOOK2_RESET
45 LOGBOOK2_EVENT
46 LOGBOOK_CONFIG 23
47 TEST_1
48-59 TEST_2 ... TEST_13
60 STABLE_TIME
61 STABLE_VALUE
62 CALL_MAINT_TIME_
63 CALL_MAINT_TIME_
64 INPUT_1_
65 INPUT_1_
PARAMETER NAME VIEW_1VIEW_2VIEW_3VIEW
_4
DIRECTORY
TRANSDUCER_TYPE
DIRECTORY
PRIMARY_VALUE_TYPE
PRIMARY_VALUE_
RANGE
SENSOR_CAL_METHOD
SECONDARY_VALUE
VALUE_UNIT
SENSOR_TEMP_COMP
MAN_VALUE
SENSOR_TYPE_TEMP
CONNECTION_TEMP
TERTIARY_VALUE_TYPE
RANGE
IMPEDANCE
COUNTD.
RELOAD
IMPEDANCE_LO_LIM
IMPEDANCE_HI_LIM
2 2 2 2
2
11
1
5 5
2
1
4
2
1
2
11
4
1
1
4
4
Relative
Index
66 INPUT_2_
67 INPUT_2_
68 BUFFER1_ID
69 BUFFER1
70 BUFFER2_ID
71 BUFFER2
72 BUFFER3_ID
73 BUFFER3
74 TEMPERATURE_
75 PASSCODE_
76 PASSCODE_
77 PASSCODE_SERVICE
78 SAMPLE_PV 4
79 SAMPLE_PV2 4
80 SAMPLE_TEMP 4
81 ERROR_CONFIG 4
82 CONFIGURATION 4
83 TRANSMITTER_TIME 6
84 SOFTDWN_TEST 1
Table 3.16 View Object for Transducer Block SC202/ISC202
Realtive
Index
0 BLK_DATA
1 ST_REV 2 2 2 2
2 TAG_DESC[32]
3 STRATEGY 2
4 ALERT_KEY 1
5 MODE_BLK 4 4
6 BLOCK_ERR 2 2
7 UPDATE_EVT
8 BLOCK_ALM
9 TRANSDUCER_
10 TRANSDUCER_TYPE 2 2 2 2
11 XD_ERROR 1 1
12 COLLECTION_
13 PRIMARY_VALUE_
14 PRIMARY_VALUE 5 5
15 PRIMARY_VALUE_
16 SENSOR_CONST 4
17 CAL_POINT_HI 4
18 CAL_POINT_LO 4
19 CAL_MIN_SPAN 4
20 SENSOR_CAL_
21 SENSOR_CAL_DATE 8
22 SECONDARY_VALUE 5 5
23 SECONDARY_VALUE_
24 SENSOR_TEMP_COMP 1
25
26 SENSOR_TYPE_TEMP 2
27
28 SENSOR_TYPE_COND 2
29 SENSOR_OHMS
PARAMETER NAME VIEW_1VIEW_2VIEW_3VIEW
IMPEDANCE_LO_LIM
IMPEDANCE_HI_LIM
COEFFICIENT
MAINTENANCE
COMMISSIONING
TOTALS (# BYTES) 38 18 65 119
Parameters
Mnemonic
DIRECTORY[2]
DIRECTORY[7]
TYPE
RANGE
METHOD
UNIT
SENSOR_TEMP_MAN_
VALUE
SENSOR_CONNECTION_
TEMP
View1View2View3View
2
2
_4
4
4
4
11
1
1
IM 12A00A01-61E
Page 22
Table 3.16 View Object for Transducer Block SC202/ISC202
(contineous)
Realtive
Index
30 XD_MAN_ID[32]
31 TEMPERATURE_
32 CONCENTRATION 5 5
33 TERTIARY_VALUE 5 5
34 REFERENCE_
35 COMP_METHOD 1 1
36 COMP_MATRIX_SEL 1
37 TERTIARY_COMP_
38 TERT_TEMPERATURE_
39 ALARM_SUM 8 8
40 DEV_ALARM 4 4
41 LOGBOOK1_RESET
42 LOGBOOK1_EVENT
43 LOGBOOK2_RESET
44 LOGBOOK2_EVENT
45 LOGBOOK_CONFIG[16] 16
46 TEST_1
58 TEST_13
59 CALIB_SENSOR_
60 MATRIX_TEMP_RANGE
61 SOLUTION_1
62 SOLUTION_2
63 SOLUTION_3
64 SOLUTION_4
65 SOLUTION_5
66 CONCENTRATION_
67 CONCENTRATION_0
68 CONCENTRATION_100
69
70
71
72 E5_LIMIT 4
73 E6_LIMIT 4
74 DISPLAY_RESOLUTION 1
75 PASSCODE_
76 PASSCODE_
77 PASSCODE_SERVICE 2
78 ERROR_CONFIG 4
79 CONFIGURATION 4
80 TRANSMITTER_TIME 6
81 SOFTDWN_TEST 1
Table 3.17 View Object for Transducer Block DO202
Realtive
Index
0 BLK_DATA
1 ST_REV 2 2 2 2
2 TAG_DESC[32]
3 STRATEGY 2
4 ALERT_KEY 1
5 MODE_BLK 4 4
6 BLOCK_ERR 2 2
7 UPDATE_EVT
8 BLOCK_ALM
Parameters
Mnemonic
COEFF
TEMPERATURE
METHOD
COEFF
CONST
MEASUREMENT
CONCENTRATION_
TABLE_LOW
CONCENTRATION_
TABLE_MID
CONCENTRATION_
TABLE_HIGH
MAINTENANCE
COMMISSIONING
TOTALS (# BYTES) 43 17 54 96
Parameters
Mnemonic
View1View2View3View
4
View1View2View3View
Table 3.17 View Object for Transducer Block DO202
Foundation Fieldbus 3-17
(continues)
Realtive
4
Index
9 TRANSDUCER_
4
10 TRANSDUCER_TYPE 2 2 2 2
11 XD_ERROR 1 1
12 COLLECTION_
4
13
14 PRIMARY_VALUE 5 5
15 PRIMARY_VALUE_
1
16
4
17
18 SAMPLE_CAL
19 ZERO_CURRENT 4
20 SENSITIVITY 4
21
22 AMP_SPAN_
23 AMP_ZERO_
24 SALINITY 4
25 BAR_PRESSURE 4
26
27
28
29 SECONDARY_VALUE 5 5
30 SECONDARY_
31
1
32 SENSOR_TEMP_
33
34 TEMP_SENSOR_CAL 4
35 SENSOR_CURRENT 5 5
36
37
38 ZERO_CAL
39 RESERVED1
40 RESERVED2
41 RESERVED3
42
2
43 PASSCODE_
2
44 PASSCODE_
45 PASSCODE_SERVICE
46 LOGBOOK1_RESET
47 LOGBOOK1_EVENT
48 LOGBOOK2_RESET
49 LOGBOOK2_EVENT
50
51 CALL_MAINT_TIME_
52 CALL_MAINT_TIME_
4
53 ERROR_CONFIG 4
54 CONFIGURATION 4
55 ALARM_SUM 8 8
56 DEV_ALARM 4 4
57 TEST_1
69 TEST_13
70 SOFTDWN_TEST 1
Parameters
Mnemonic
DIRECTORY[2]
DIRECTORY[7]
PRIMARY_VALUE_TYPE
RANGE
PRIMARY_VALUE_UNIT
SENSOR_TYPE_OXYGEN
AMP_STABILIZE_TIME
STABILIZE _VALUE
STABILIZE_VALUE
BAR_PRESSURE_UNIT
PERCENT_SATURATION_
PRESSURE
CHLORINE_
CALIBRATION_RANGES
VALUE_UNIT
SENSOR_TEMP_COMP
MAN_VALUE
SENSOR_TYPE_TEMP
PERCENT_SATURATION
ZERO_CURRENT_LIMIT
TRANSMITTER_TIME[6]
MAINTENANCE
COMMISSIONING
LOGBOOK_CONFIG[25]
RELOAD
COUNTDOWN
TOTALS (# BYTES) 43 12 50 102
View1View2View3View
3-17
4
2
11
2
2
4
4
4
2
4
2
1
4
2
5 5
4
6
25
1
1
IM 12A00A01-61E
Page 23

3-18 Foundation Fieldbus
3-3-6-4 Function Block Parameters
Function block parameters can be read from the host or can be set. For a list of the parameters of blocks
held by the EXA, refer to “3-6 List of parameters for each block of the EXA”. The following is a list of important parameters with a guide how to set them.
MODE_BLK:
This mode parameter is very important as it gives the state of the block. In O/S (Out_Of_Service) mode the
block is out of operation. In this mode it is allowed to update parameters. Manual mode gives the operator
the possibility to manually update a selected number of parameters (values, scaling e.g.) in order to test the
system. In automatic mode the function block is executed and block parameters are automatically updated.
Under normal operating circumstances, set the Auto mode for normal operation. Auto mode is the factory
default.
Note:
The actual mode is changed by setting the target mode. When the resource block mode is set to
OOS all function blocks in the VFD are set to OOS mode.
CHANNEL:
Transducer blocks convert raw signals into process values. The values are assigned to channels.
For the EXA 202 three or four channels are available.
PH202
1: pH,
2: Temperature,
3: ORP/rH
Channel value unit
1 primary_value primary_value_range.unit
2 secondary_value secondary_value_unit
3 tertiary_value tertiary_value_range.unit
SC202
1: Conductivity/Resistivity,
2: Temperature,
3: Second Conductivity/Resistivity,
4: Concentration
Channel value unit
1 primary_value primary_value_range.units
2 secondary_value secondary_value_unit
3 tertiary_value primary_value_range.units
4 concentration always %
ISC202
1: Conductivity,
2: Temperature,
3: Second Conductivity,
4: Concentration
Channel value unit
1 primary_value primary_value_range.units
2 secondary_value secondary_value_unit
3 tertiary_value primary_value_range.units
4 concentration always %
IM 12A00A01-61E
Page 24

Foundation Fieldbus 3-19
3-19
DO202
1: Dissolved Oxygen,
2: Temperature,
3: Percent Saturation,
4: Sensor Current
Channel Value Unit
1 primary_value primary_value_range.units
2 secondary_value secondary_value_unit
3 percent_saturation %
4 sensor_current nA
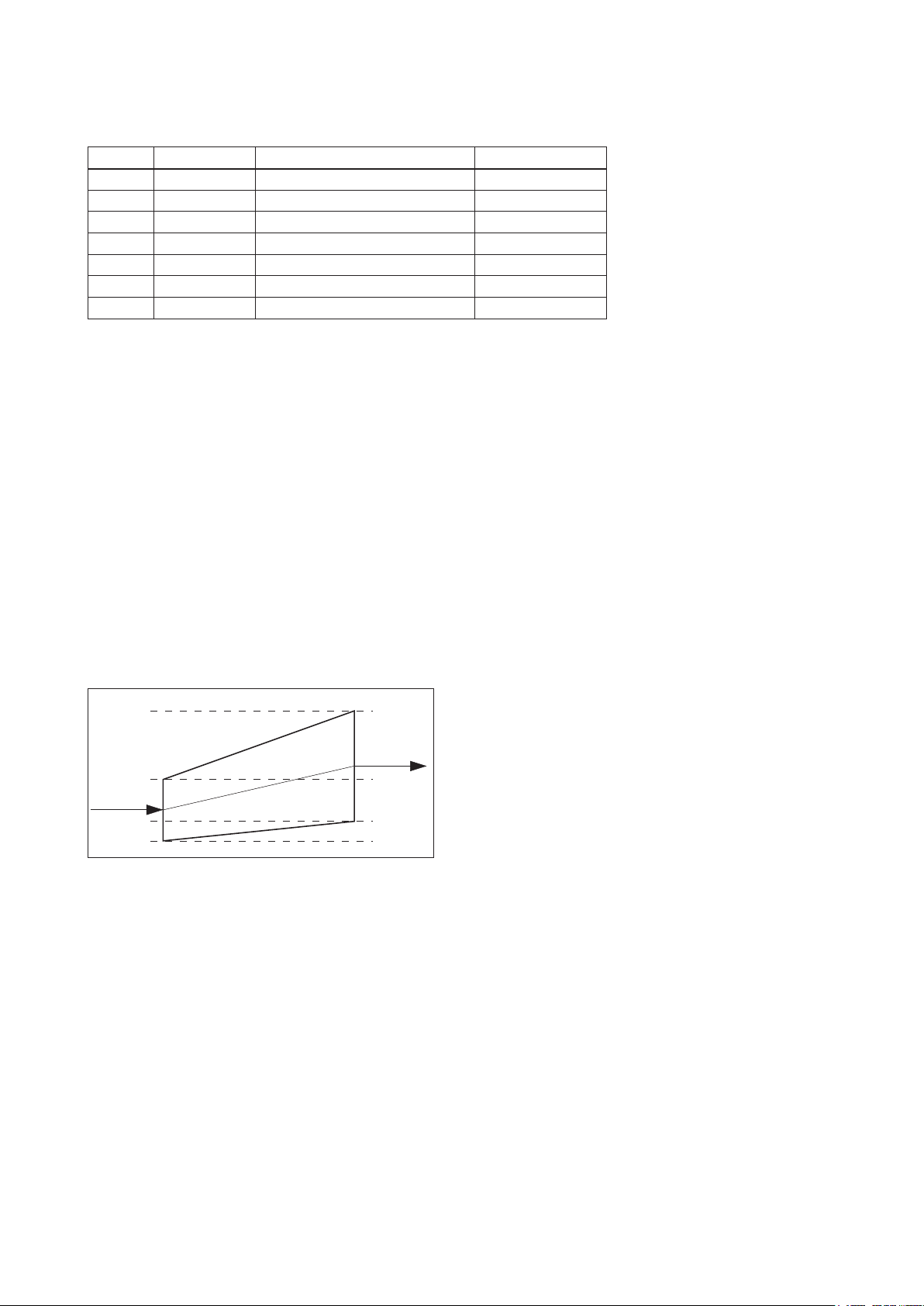
XD_SCALE/OUT_SCALE:
Scaling information is used for two purposes. Display devices need to know the range for bar graphs and
trending, as well as the units code. Control blocks need to know the range to use internally as percent of
span, so that the tuning constants may remain dimensionless. This is converted back to a number with units
by using the range of OUT_SCALE. The AI block has the parameter XD_SCALE to define the units expected from the transducer.
Transducer scaling (XD_SCALE) is applied to the value from the channel to produce the FIELD_VAL in percent. The XD_SCALE units code must match the channel units code.
The EXA transmitter does this automatically when the Service Codes are changed. See table 3.18 to 3.21
for the Service codes and their results.
If L_TYPE is set to Indirect or Ind Sqr Root, OUT_SCALE determines the conversion from FIELD_VAL to
the output. PV and OUT always have identical scaling. OUT_SCALE provides scaling for PV. The PV is
always the value that the block will place in OUT if the mode is Auto.
Table 3.18 Unit Index by XD_SCALE PH202
Channel FF parameters Service code XD_SCALE.UNITS
1 - SC01 (set to 0) pH
2 2029 SC11 (set to 0) ºC
2 2029 SC11 (set to 1) ºF
3 - SC01 (set to 1) mV
3 - SC01 (set to 0), SC02 (set to 1) mV
3 - SC01 (set to 0), SC02 (set to 2) rH
Table 3.19 Unit Index by XD_SCALE SC202
Channel FF parameters Service code XD_SCALE.UNITS
2 2023 SC11 (set to 0) °C (1001)
2 2023 SC11 (set to 1) °F (1002)
1, 3 - SC01 (set to 1) Ω•cm (1295)
1, 3 - SC01 (set to 0) S/cm (1594)
4 - Default % % (1342)
Table 3.20 Unit Index by XD_SCALE ISC202
Channel FF parameters Service code XD_SCALE.UNITS
2 2023 SC11 (set to 0) °C (1001)
2 2023 SC11 (set to 1) °F (1002)
1, 3 - Default S/cm S/cm (1594)
4 - Default % % (1342)
IM 12A00A01-61E
Page 25
3-20 Foundation Fieldbus
0%, 0ºC
100%, 212ºF
0%, 32ºF
CHANNEL
PV / OUT
OUT_SCALEXD_SCALE
100%, 100ºC
Table 3.21 Unit Index by XD_SCALE DO202
Channel FF parameters Service code XD_SCALE.UNITS
2 FF2030 SC11 (set to 0) °C (1001)
2 FF2030 SC11 (set to 1) °F (1002)
1 FF2016 SC56 (set to 0) ppm (1423)
1 FF2016 SC56 (set to 1) ppb (1424)
1 FF2016 SC56 (set to 2) % (1342)
3 - Default % % (1342)
4 - Default nA nA (1213)
L_TYPE:
Specifies the operation function of the AI block. If set to “Direct”, the input delivered to CHANNEL is directly
reflected on OUT. If set to “Indirect”, scaling by XD_SCALE and OUT_SCALE is carried out and is reflected
on OUT. If set to “Indirect SQRT”, after scaling by XD_SCALE, the square root is extracted and the value
scaled by OUT_SCALE is reflected on OUT.
Example:
Channel range is defined as 0 to 100 °C but °F units is required for HOST display.
Set the following parameters:
XD_SCALE: EU@0% = 0 °C
EU@100% = 100 °C
Unit = °C
Decimal point = 2
OUT_SCALE: EU@0% = 32 °F
EU@100% = 212 °F
Unit = °F
Decimal point = 2
Figure 3.11 Scaling applied to temperature conversion.
PV_FTIME:
Sets the time constant of the damping function within AI block (primary delay) in seconds.
Alarm Priority:
Indicates the priority of the process alarm. If a value of 3 or greater is set, an alarm is transmitted.
The factory default is 0.
Four types of alarm can be set:
HI_PRI, HI_HI_PRI, LO_PRI, and LO_LO_PRI.
Alarm Threshold:
Sets the threshold at which a process alarm is generated. The factory default setting is a value that does
not generate an alarm.
Four types of alarm can be set:
HI_LIM, HI_HI_LIM, LO_LIM, and LO_LO_LIM.
IM 12A00A01-61E
Page 26
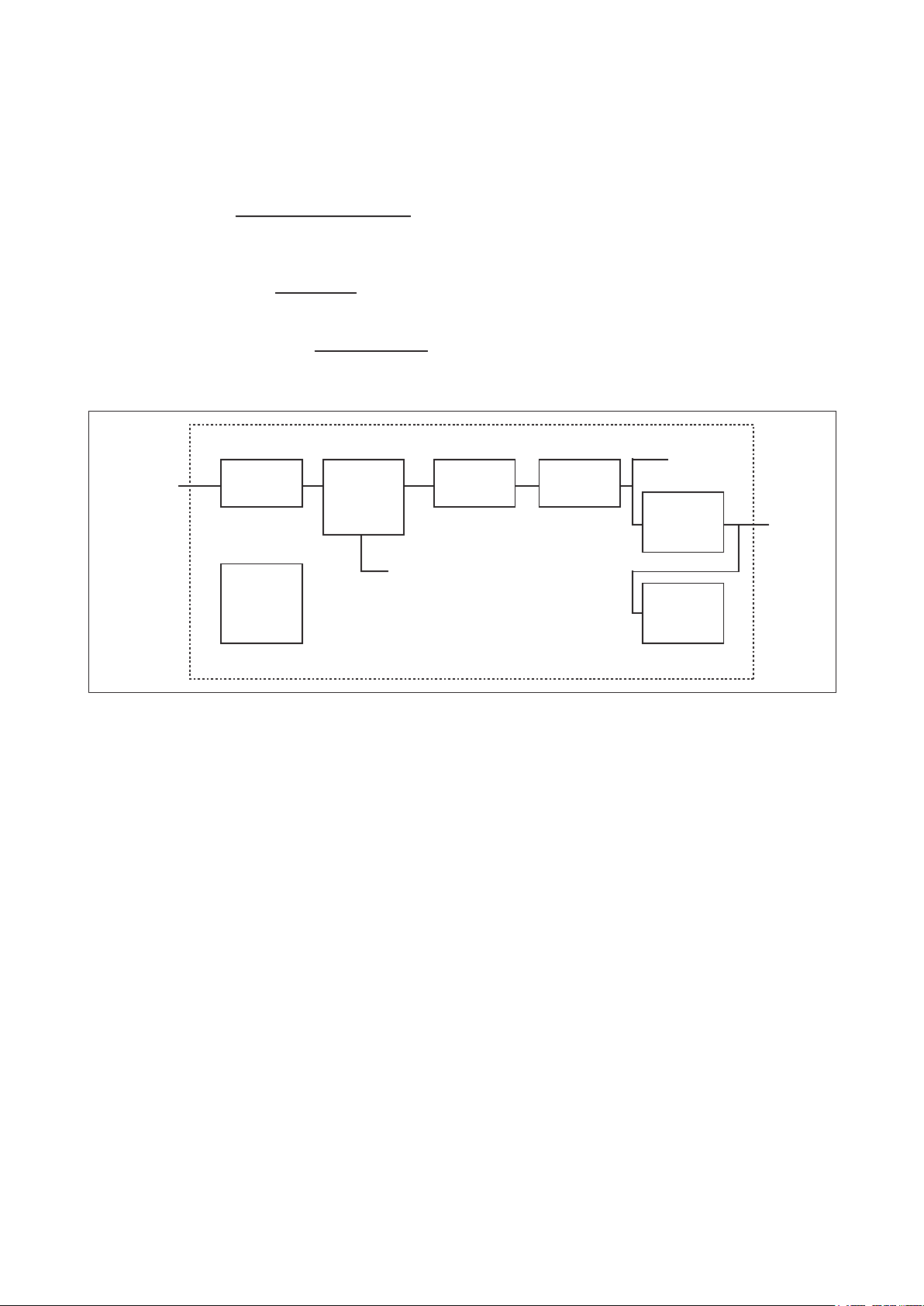
Equations:
Simulate Convert Cutoff Filter
CHANNEL SIMULATE L_TYPE LOW_CUT PV_FTIME
XD_SCALE Output
OUT_SCALE
Mode
Alarms
HI/LO
PV
OUT
FIELD_VAL
Foundation Fieldbus 3-21
3-21
FIELD_VAL = 100 [XD_SCALE]
(channel value - EU@0%)
(EU@100% - EU@0%)
Direct: PV = channel value
Indirect: PV = EU@0% + (EU@100% - EU@0%) [OUT_SCALE]
FIELD_VAL
100
Ind Sqr Root: PV = EU@0% + (EU@100% - EU@0%) [OUT_SCALE]
√(FIELD_VAL)
100
IM 12A00A01-61E
Page 27

3-22 Foundation Fieldbus
3-4 In-process operation
This chapter describes the procedure performed when changing the operation of the function block of the
EXA in process.
3-4-1 Mode Transition
When the function block mode is changed to Out_Of_Service, the function block pauses and a block alarm
is issued.
When the function block mode is changed to Manual, the function block suspends updating of output values. In this case alone, it is possible to write a value to the OUT parameter of the block for output. Note that
no parameter status can be changed.
3-4-2 Generation of Alarm
3-4-2-1 Indication of Alarm
Figure 3.12 Error Identification on Indicator
3-4-2-2 Alarms and Events
Following alarm or event can be reported by EXA as an alert if allowed.
Analog Alerts
(Generated when a process value exceeds threshold)
By AI1 Block Hi-Hi Alarm, Hi Alarm, Low Alarm, Low-Low Alarm
By AI2 Block Hi-Hi Alarm, Hi Alarm, Low Alarm, Low-Low Alarm
By AI3 Block Hi-Hi Alarm, Hi Alarm, Low Alarm, Low-Low Alarm
Discrets Alerts
(Generated when an abnormal condition is detected)
By Resource Block Block Alarm, Write Alarm
By Transducer Block Block Alarm
By AI1 Block Block Alarm
By AI2 Block Block Alarm
By AI3 Block Block Alarm
Update Alerts
(Generated when a important (restorable) parameter is updated)
By Resource Block Update Event
By Transducer Block Update Event
By AI1 Block Update Event
By AI2 Block Update Event
By AI3 Block Update Event
IM 12A00A01-61E
Page 28

An alert has following structure:
Simulation
Enable
Not used
1
2
off on
Table 3.22 Alert Object
Subindex
Analog
Alert
1 1 1 Block Index Index of block from which alert is generated
2 2 2 Alert Key Alert Key copied from the block
3 3 3 Standard Type Type of the alert
4 4 4 Mfr Type Alert Name identified by manufacturer specific DD
5 5 5 Message Type Reason of alert notification
6 6 6 Priority Priority of the alarm
7 7 7 Time Stamp Time when this alert is first detected
8 8 Subcode Enumerated cause of this alert
9 9 Value Value of referenced data
10 10 Relative Index Relative index of referenced data
11 11 9 Unit Index Unit code of referenced data
Discrete
Alert
Update
Alert
8 Static Revision Value of static revision (ST_REV) of the block
Parameter Name Explanation
Foundation Fieldbus 3-23
3-23
3-4-3 Simulation Function
The simulation function simulates the input of a function block and lets it operate as if the data was received
from the transducer block. It is possible to conduct testing for the downstream function blocks or alarm processes.
A SIMULATE_ENABLE switch is mounted on the FF PCB assembly. This is to prevent the accidental operation of this function. When this is switched on, simulation is enabled. (See Figure 3.13) To initiate the same
action from a remote terminal, if REMOTE LOOP TEST SWITCH is written to the SIM_ENABLE_MSG
parameter (index 1044) of the resource block, the resulting action is the same as is taken when the above
switch is on. Note that this parameter value is lost when the power is turned OFF. In simulation enabled status, an alarm is generated from the resource block, and other device alarms will be masked; for this reason
the simulation must be disabled immediately after using this function.
FF PCB
assembly
Figure 3.13 SIMULATE_ENABLE Switch Position
IM 12A00A01-61E
Page 29

3-24 Foundation Fieldbus
The SIMULATE parameter of AI block consists of the elements listed in Table 3.23 below.
Table 3.23 SIMULATE Parameter
Sub-index Parameters Description
1 Simulate Status Sets the data status to be simulated.
2 Simulate Value Sets the value of the data to be simulated.
3 Transducer Status Displays the data status from the transducer block. It cannot be changed.
4 Transducer Value Displays the data value from the transducer block. It cannot be changed.
5 Simulate En/Disable Controls the simulation function of this block.
1: Simulation disabled (standard)
2: Simulation started
When Simulate En/Disable in Table 3.23 above is set to 2, the applicable function block uses the simulation value set in this parameter instead of the data from the transducer block. This setting can be used for
propagation of the status to the trailing blocks, generation of a process alarm, and as an operation test for
trailing blocks.
IM 12A00A01-61E
Page 30

Foundation Fieldbus 3-25
3-5 Device status
Device setting status and failures of EXA are indicated by using parameter DEVICE_STATUS_1,
DEVICE_STATUS_2 and DEVICE_STATUS_3 (index 1045, 1046 and 1047) in Resource Block.
Table 3.24 Contents of DEVICE_STATUS_1, DEVICE_STATUS_2 and DEVICE_STATUS_3
3-25
DEVICE_STATUS_1
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000
0x04000000
0x02000000
0x01000000
0x00800000 Sim.enable Jmpr On
0x00400000 RB in O/S mode
0x00200000
0x00100000
0x00080000 Fbus EEPROM error
0x00040000
0x00020000
0x00010000
0x00008000 Link Obj.1 not open
0x00004000 Link Obj.2 not open
0x00002000 Link Obj.3 not open
0x00001000 Link Obj.4 not open
0x00000800 Link Obj.5 not open
0x00000400 Link Obj.6 not open
0x00000200 Link Obj.7 not open
0x00000100 Link Obj.8 not open
0x00000080 Link Obj.9 not open
0x00000040 Link Obj.10 not open
0x00000020 Link Obj.11 not open
0x00000010 Link Obj.12 not open
0x00000008 Link Obj.13 not open
0x00000004 Link Obj.14 not open
0x00000002 Link Obj.15 not open
0x00000001 Link Obj.16 not open
DEVICE_STATUS_3
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000 Transducer Block is in O/S mode
0x04000000
0x02000000
0x01000000
0x00800000
0x00400000
0x00200000
0x00100000
0x00080000
0x00040000
0x00020000 Simulation is enabled in AI3 Function Block
0x00010000 AI3 Function Block is in Manual mode
0x00008000 AI3 Function Block is inO/S mode
0x00004000 Simulation is enabled in AI2 Function Block
0x00002000 AI2 Function Block is in Manual mode
0x00001000 AI2 Function Block is in O/S mode
0x00000800 AI1 Function Block is not scheduled
0x00000400 Simulation is enabled in AI1 Function Block
0x00000200 AI1 Function Block is in Manual mode
0x00000100 AI1 Function Block is in O/S mode
0x00000080
0x00000040
0x00000020
0x00000010
0x00000008
0x00000004
0x00000002
0x00000001
IM 12A00A01-61E
Page 31

3-26 Foundation Fieldbus
DEVICE_STATUS_2 PH202
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000
0x04000000
0x02000000
0x01000000
0x00800000
0x00400000
0x00200000
0x00100000
0x00080000 FF interface checksum error
0x00040000 EXA checksum error (E21)
0x00020000 Internal communication failure
0x00010000 FF interface eeprom failure
0x00008000 EXA eeprom failure (E20)
0x00004000 mismatch between FF- and EXA parameter
0x00002000
0x00001000
0x00000800
0x00000400
0x00000200
0x00000100 calibration timer expired (E16)
0x00000080 reference impedance exceeds low limit (E4.2)
0x00000040 reference impedance exceeds high limit (E5.2)
0x00000020 glass impedance exceeds low limit (E4.1)
0x00000010 glass impedance exceeds high limit (E5.1)
0x00000008 temperature sensor shorted (E8)
0x00000004 temperature sensor open (E7)
0x00000002 tertiary value exceeds limits (E12)
0x00000001 primary value exceeds limits (E9)
DEVICE_STATUS_2 SC202
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000
0x04000000
0x02000000
0x01000000
0x00800000
0x00400000
0x00200000
0x00100000
0x00080000 FF interface checksum error
0x00040000 EXA checksum error (E21)
0x00020000 Hart communication failure
0x00010000 FF interface eeprom failure
0x00008000 EXA eeprom failure (E20)
0x00004000 mismatch between FF- and EXA parameter
0x00002000
0x00001000
0x00000800
0x00000400
0x00000200
0x00000100 matrix error (E4)
0x00000080 concentration table error (E18)
0x00000040 conductivity exceeds usp limit (E13)
0x00000020 polarization detected (E1)
0x00000010 temperature compensation error (E2)
0x00000008 temperature sensor shorted (E8)
0x00000004 temperature sensor open (E7)
0x00000002 conductivity exceeds low limit (E6)
0x00000001 conductivity exceeds high limit (E5)
IM 12A00A01-61E
Page 32

Foundation Fieldbus 3-27
3-27
DEVICE_STATUS_2 ISC202
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000
0x04000000
0x02000000
0x01000000
0x00800000
0x00400000
0x00200000
0x00100000
0x00080000 FF interface checksum error
0x00040000 EXA checksum error (E21)
0x00020000 Hart communication failure
0x00010000 FF interface eeprom failure
0x00008000 EXA eeprom failure (E20)
0x00004000 mismatch between FF- and EXA parameter
0x00002000
0x00001000
0x00000800
0x00000400
0x00000200
0x00000100 matrix error (E4)
0x00000080 concentration table error (E18)
0x00000010 temperature compensation error (E2)
0x00000008 temperature sensor shorted (E8)
0x00000004 temperature sensor open (E7)
0x00000002 conductivity exceeds low limit (E6)
0x00000001 conductivity exceeds high limit (E5)
DEVICE_STATUS_2 DO202
Hexadecimal Display through DD
0x80000000
0x40000000
0x20000000
0x10000000
0x08000000
0x04000000
0x02000000
0x01000000
0x00800000
0x00400000
0x00200000
0x00100000
0x00080000 FF interface checksum error
0x00040000 EXA checksum error (E21)
0x00020000 Internal communication failure
0x00010000 FF interface eeprom failure
0x00008000 EXA eeprom failure (E20)
0x00004000 mismatch between FF- and EXA parameter
0x00002000
0x00001000
0x00000800
0x00000400
0x00000200
0x00000100
0x00000080
0x00000040 Call for maintenance (E16)
0x00000020 Sensor current abnormal (E9)
0x00000010 temperature sensor shorted (E8)
0x00000008 temperature sensor open (E7)
0x00000004
0x00000002 Zero out of limits (E2)
0x00000001
IM 12A00A01-61E
Page 33

3-28 Foundation Fieldbus
3-6 List of parameters for each block of the EXA
Note: The Write Mode column contains the modes in which each parameter is write enabled.
O/S: Write enabled in O/S mode.
MAN: Write enabled in Man mode and O/S mode.
AUTO: Write enabled in Auto mode, Man mode, and O/S mode.
3-6-1 Resource Block
Relative
Index Index
0 1000 Block Header TAG:“RS” Block Tag
1 1001 ST_REV – – The revision level of the static data associated with the resource
2 1002 TAG_DESC Null AUTO The user description of the intended application of the block.
3 1003 STRATEGY 1 AUTO The strategy field can be used to identify grouping of blocks.
4 1004 ALERT_KEY 1 AUTO The identification number of the plant unit. This information may
5 1005 MODE_BLK AUTO AUTO The actual, target, permitted, and normal modes of the block.
6 1006 BLOCK_ERR – – This parameter reflects the error status associated with the
7 1007 RS_STATE – – State of the resource block state machine.
8 1008 TEST_RW – AUTO Read/write test parameter-used only for conformance testing and
9 1009 DD_
10 1010 MANUFAC_ID 0x00594543 – Manufacturer identification number-used by an interface device
11 1011 DEV_TYPE PH202: 0x0830
12 1012 DEV_REV 3 – Manufacturer revision number associated with the resource-used
13 1013 DD_REV 1 – Revision of the DD associated with the resource-used by an
14 1014 GRANT_DENY 0 AUTO Options for controlling access of host computer and local control
15 1015 HARD_TYPES Scalar input – The types of hardware available as channel numbers.
16 1016 RESTART – – Allows a manual restart to be initiated. Several degrees of restart
17 1017 FEATURES Soft write lock
18 1018 FEATURE_SEL Soft write lock
19 1019 CYCLE_TYPE Scheduled –
20 1020 CYCLE_SEL Scheduled AUTO Used to select the block execution method for this resource.
21 1021 MIN_CYCLE_T 3200 (100ms) – Time duration of the shortest cycle interval of which the resource
22 1022 MEMORY_SIZE 0 – Available configuration memory in the empty resource. To be
23 1023 NV_CYCLE_T 0 – Interval between writing copies of NV parameters to non-volatile
24 1024 FREE_SPACE 0 – Percent of memory available for further configuration. EXA has
Parameter
Name Factory Default
Null – String identifying the tag of the resource which contains the
RESOURCE
SC202: 0x0831
ISC202: 0x0832
DO202: 0x0833
supported
Report supported
supported
Report supported
Write
Mode Explanation
Information on this block such as Block Tag, DD Revision,
= O/S
– Manufacturer’s model number associated with the resource-used
– Used to show supported resource block options.
AUTO Used to select resource block options defined in FEATURES.
Execution Time etc.
block. The revision value is incremented each time a static
parameter alue in this block is changed.
This data is not checked or processed by the block.
be used in the host for sorting alarms, etc.
hardware or software components associated with a block. It is a
bit string, so that multiple errors may be shown.
simulation.
Device Description for this resource.
to locate the DD file for the resource.
by interface devices to locate the DD file for the resource.
by an interface device to locate the DD file for the resource.
interface device to locate the DD file for the resource.
panels to operating, tuning and alarm parameters of the block.
bit0: Scalar input
bit1: Scalar outputbit1: Scalar output
bit2: Discrete inputbit2: Discrete input
bit3: Discrete outputbit3: Discrete output
are possible. They are 1: Run, 2: Restart resource, 3: Restart
with initial value specified in FF functional spec. (*1), and 4:
Restart processor.
*1: FF-891 Foundation TM Specification Function Block*1: FF-891 Foundation TM Specification Function Block
Application Process Part 2.
bit0: Scheduled
bit1: Event driven
bit2: Manufacturer specified
Identifies the block execution methods available for this resource.
is capable.
checked before attempting a download.
memory. Zero means never.
zero which means a preconfigured resource.
IM 12A00A01-61E
Page 34

Foundation Fieldbus 3-29
3-29
Relative
Index Index
25 1025 FREE_TIME 0 – Percent of the block processing time that is free to process
26 1026 SHED_RCAS 640000 (2S) AUTO Time duration at which to give up on computer writes to function
27 1027 SHED_ROUT 640000 (2S) AUTO Time duration at which to give up on computer writes to function
28 1028 FAULT_STATE 1 – Condition set by loss of communication to an output block, failure
29 1029 SET_FSTATE 1 AUTO
30 1030 CLR_FSTATE 1 AUTO Writing a Clear to this parameter will clear the device fail-safe
31 1031 MAX_NOTIFY 3 – Maximum number of unconfirmed notify messages possible.
32 1032 LIM_NOTIFY 3 AUTO Maximum number of unconfirmed alert notify messages allowed.
33 1033 CONFIRM_TIM 640000 (2S) AUTO The minimum time between retries of alert reports.
34 1034 WRITE_LOCK Not locked AUTO If set, no writes from anywhere are allowed, except to clear
35 1035 UPDATE_EVT – – This alert is generated by any change to the static data.
36 1036 BLOCK_ALM – – The block alarm is used for all configuration, hardware,
37 1037 ALARM_SUM Enable – The current alert status, unacknowledged states, unreported
38 1038 ACK_OPTION 0xFFFF AUTO
39 1039 WRITE_PRI 0 AUTO Priority of the alarm generated by clearing the write lock.
40 1040 WRITE_ALM – – This alert is generated if the write lock parameter is cleared.
41 1041 ITK_VER 4 – Version number of interoperability test by Fieldbus Foundation
42 1042 SOFT_REV – EXA software revision number.
43 1043 SOFT_DESC – Yokogawa internal use.
44 1044 SIM_ENABLE_
45 1045 DEVICE_
46 1046 DEVICE_
47 1047 DEVICE_
48 1048 DEVICE_
49 1049 DEVICE_
50 1050 DEVICE_
51 1051 DEVICE_
52 1052 DEVICE_
53 1053 SOFTDWN_
54 1054 SOFTDWN_
55 1055 SOFTDWN_
56 1056 SOFTDWN_
57 1057 SOFTDWN_
58 1058 SOFTDWN_
Parameter
Name Factory Default
Null AUTO Software switch for simulation function.
MSG
0 – Device status (VCR setting etc.)
STATUS_1
0 – Device status (failure or setting error etc.)
STATUS_2
0 – Device status (function block setting.)
STATUS_3
0 – Not used.
STATUS_4
0 – Not used.
STATUS_5
0 – Not used.
STATUS_6
0 – Not used.
STATUS_7
0 – Not used.
STATUS_8
1 – Not used.
PROTECT
1 – Not used.
FORMAT
0 – Not used.
COUNT
0 – Not used.
ACT_AREA
1, 0, 0, 0, 0, 0,
MOD_REV
ERROR
0, 0, 0
0 – Not used.
Write
Mode Explanation
additional blocks. EXA does not support this.
block RCas locations. Supported only with PID function.
block ROut locations. Supported only with PID function.
promoted to an output block or a physical contact. When fail-safe
condition is set, Then output function blocks will perform their
FSAFE actions.
Allows the fail-safe condition to be manually initiated by selecting Set.
state if the field condition, if any, has cleared.
WRITE_LOCK. Block inputs will continue to be updated
connection failure or system problems in the block. The cause of
the alert is entered in the subcode field. The first alert to become
active will set the Active status in the Status attribute.
As soon as the Unreported status is cleared by the alert
reporting task, another block alert may be reported without
clearing the Active status, if the subcode has changed.
states, and disabled states of the alarms associated with the
function block.
applied to EXA.
– Not used.
IM 12A00A01-61E
Page 35

3-30 Foundation Fieldbus
3-6-2 Analog input Block
Relative Parameter Factory Write
Index Name Default Mode Explanation
0 Block Header TAG: “AI1” or Block Tag Information on this block such as Block Tag, DD
“AI2” or “AI3” = O/S Revision, Execution Time etc.
1 ST_REV – – The revision level of the static data associated with the function block. The
revision value will be incremented each time a static parameter value in the block
is changed.
2 TAG_DESC (blank) AUTO The user description of the intended application of the block.
3 STRATEGY 1 AUTO The strategy field can be used to identify grouping of blocks. This data is not
checked or processed by the block.
4 ALERT_KEY 1 AUTO The identification number of the plant unit. This information may be used in the
host for sorting alarms, etc.
5 MODE_BLK AUTO AUTO The actual, target, permitted, and normal modes of the block.
6 BLOCK_ERR – – This parameter reflects the error status associated with the hardware or software
components associated with a block. It is a bit string, so that multiple errors may
be shown.
7 PV – – Either the primary analog value for use in executing the function, or a process
value associated with it. May also be calculated from the READBACK value of an
AO block.
8 OUT – Value= The primary analog value calculated as a result of
MAN executing the function.
9 SIMULATE Disable AUTO Allows the transducer analog input or output to the block to be manually supplied
when simulate is enabled. When simulation is disabled, the simulate value and
status track the actual value and status.
10 XD_SCALE – O/S The high and low scale values, engineering units
code, and number of digits to the right of the decimal point used with the value
obtained from the transducer for a specified channel. Refer to Table 3.18 to 3.21
for the unit available.
11 OUT_SCALE – O/S The high and low scale values, engineering units
code, and number of digits to the right of the decimal point to be used in
displaying the OUT parameter and parameters which have the same scaling as
OUT.
12 GRANT_DENY 0 AUTO Options for controlling access of host computers and local control panels to
operating, tuning and alarm parameters of the block.
13 IO_OPTS 0 O/S Options which the user may select to alter input and output block processing
bit6: Low cutoff
14 STATUS_OPTS Propagate Fault O/S Options which the user may select in the block
Forward processing of status
15 CHANNEL AI1: 1 O/S The number of the logical hardware channel that is
AI2: 2 connected to this I/O block. This information defines the transducer to be
AI3: 3 used going to or from the physical world.
16 L_TYPE Direct (1) MAN Deterines if the values passed by the transducer time of order block to the AI
block may be used directly (Direct) or if the value is in different units and must be
converted linearly (Indirect), or with square root (Ind Sqr Root), using the input
range defined by the transducer and the associated output range.
17 LOW_CUT Linear: 0% AUTO Sets low cut point of output. This low cut value become available by setting
“Low cutoff“ to “IO_OPTS“.
18 PV_FTIME 2sec AUTO Time constant of a single exponential filter for the PV, in seconds.
19 FIELD_VAL – – Raw value of the field device in percent of thePV range, with a status reflecting
the Transducer condition, before signal characterization (L_TYPE) or filtering
(PV_FTIME).
20 UPDATE_EVT – – This alert is generated by any change to the static data.
21 BLOCK_ALM – – The block alarm is used for all configuration, hardware, connection failure or
system problems in the block. The cause of the alert is entered in the subcode
field. The first alert to become active will set the Active status in the Status
attribute. As soon as the Unreported status is cleared by the alert reporting task,
another block alert may be reported without clearing the Active status, if the
subcode has changed.
IM 12A00A01-61E
Page 36

Foundation Fieldbus 3-31
Relative Parameter Factory Write
Index Name Default Mode Explanation
22 ALARM_SUM – – The current alert status, unacknowledged states, unreported states, and
disabled states of the alarms associated with the function block.
23 ACK_OPTION 0xFFFF AUTO Selection of whether alarms associated with the block will be automatically
acknowledged.
24 ALARM_HYS 0.5% AUTO Amount the PV must return within the alarm limits before the alarm condition
clears. Alarm Hysteresis is expressed as a percent of the PV span.
25 HI_HI_PRI 0 AUTO Priority of the high high alarm.
26 HI_HI_LIM +INF AUTO The setting for high high alarm in engineering units.
27 HI_PRI 0 AUTO Priority of the high alarm.
28 HI_LIM +INF AUTO The setting for high alarm in engineering units.
29 LO_PRI 0 AUTO Priority of the low alarm.
30 LO_LIM -INF AUTO The setting for the low alarm in engineering units.
31 LO_LO_PRI 0 AUTO Priority of the low low alarm.
32 LO_LO_LIM -INF AUTO The setting of the low low alarm in engineering units.
33 HI_HI_ALM – – The status for high high alarm and its associated time stamp.
34 HI_ALM – – The status for high alarm and its associated time stamp.
35 LO_ALM – – The status of the low alarm and its associated time stamp.
36 LO_LO_ALM – – The status of the low low alarm and its associated time stamp.
3-31
IM 12A00A01-61E
Page 37

3-32 Foundation Fieldbus
3-6-3 Transducer Block 3-6-3-1 Transducer Block PH202
Index Parameter name Factory Valid Description
Default Range
2000 BLOCK HEADER TAG: “TB” General information about the function block
2001 ST_REV - - The revision level of the static data associated with the function
block. The revision value will be incremented each time a static
parameter value in the block is changed.
2002 TAG_DESC “ “ The user description of the intended application of the block.
2003 STRATEGY 1 The strategy field can be used to identify grouping of blocks. This
data is not checked or processed by the block.
2004 ALERT_KEY 1 The identification number of the plant unit. This information may be
used in the host for sorting alarms, etc.
2005 MODE_BLK AUTO The actual, target, permitted, and normal modes of the block
2006 BLOCK_ERR - This parameter reflects the error status associated with a block. It
is a bit-string, so that multiple errors can be shown.
2007 UPDATE_EVT - The alert is generated by any change to the static data.
2008 BLOCK_ALM - The block alarm is used for all configuration error, hardware
connection failure or system problems in the block. The cause of
the alert is entered in the subcode field. The first alert to become
active will set Active status in Status attribute.
2009 TRANSDUCER_DIRECTORY A directory that specifies the number and starting indices of the
transducers.
2010 TRANSDUCER_TYPE Standard PH, ORP transducer block.
pH/ORP
2011 XD_ERROR - The error code in transducer:
- No failure,
- Electronics failure,
- I/O failure,
- Mechanical failure
2012 COLLECTION_DIRECTORY - A directory that specifies the number, starting indices and DD item
IDs of the data collection in each transducer within a transducer
block.
2013 PRIMARY_VALUE_TYPE PH pH, None Type of measurement represented by primary value.
2014 PRIMARY_VALUE - -2 to 16 Primary value of the instrument is pH.
2015 PRIMARY_VALUE_RANGE -2.00 to 16.00 -2 to 16 The pH range of the instrument. (can not change)
2016 SENSOR_TYPE_PH pH/ORP pH/ORP PH is measured with a glass- and a reference electrode.
sensor sensor Redox is measured with a metal- and a reference electrode. When
a glass, metal and ref. Electrode are combined one can measure
pH and Redox simultaneously.
2017 SENSOR_MV - - The output of the electrode in mV
2018 CAL_POINT_HI 16 -2 to 16 Highest calibration point
2019 CAL_POINT_LO -2 -2 to 16 Lowest calibration point
2020 CAL_MIN_SPAN 1 1 to 18 Minimum span between two calibration points
2021 SLOPE 100 70 to 110% Sensitivity of the glass electrode
2022 SLOPE_UNIT % % Slope is presented as percentage of theoretical slope
(59,16 mV/pH equals 100%)
2023 ZERO 0 -120 to 120 mV, A balanced electrode system gives 0 mV output at pH=7.
mV -2 to 16 pH Zero (asymmetry potential) indicates the offset in mV.
2024 ZERO_UNIT mV mV, pH As an alternative to Asymmetry Potential, the Zero point can be
used to define and calibrate the EXA pH transmitter conform to the
DIN standard for instruments No. IEC 746-2.
2025 ISOPOTENTIAL_PH 7 -2 to 16 pH This is the pH value at which the sensor has the same mV output
independent of the process temperature.
2026 SENSOR_CAL_METHOD 0 1 point, not used
2 point
2027 SENSOR_CAL_DATE - till 2104 Date the sensor was last calibrated.
2028 SECONDARY_VALUE - -30 to 140°C , Temperature value
-20 to 280 °F
IM 12A00A01-61E
Page 38

Foundation Fieldbus 3-33
Index Parameter name Factory Valid Description
Default Range
2029 SECONDARY_VALUE_UNIT °C °C, °F Temperature unit
2030 SENSOR_TEMP_COMP automatic Off, manual, Select off when no temperature compensation is required.
automatic Select manual when no temperature element is available and the
temperature is stable and select auto when a temperature element
is available
pH: man + auto
orp: off + auto
2031 SENSOR_TEMP_MAN_VALUE 25 -30 to 140°C, manual temperature value
-20 to 280°F
2032 SENSOR_TYPE_TEMP Pt1000 Pt1000, Pt100, Temperature element used:
5k1, 3kBalco,
8k55, 350,
NTC10k, 6k8
2033 SENSOR_CONNECTION 2 2 Only 2-wire connections supported
_TEMP
2034 TERTIARY_VALUE_TYPE None None, ORP, rH When a metal electrode is used in combination with a glass and
reference electrode one has the possibility to measure a tertiary
value:
2035 TERTIARY_VALUE - -1500 to 1500 mV, The third value is expresed in mV or rH units
0 to 55 rH
2036 TERTIARY_VALUE_RANGE -1500 -1500 to 1500 mV, The high and low range limits for the tertiary value.
to 1500 0 to 55 rH
2037 TERTIARY_ZERO 0 -120 to 120mV Redox offset can be set in mV.
2038 GLASS_IMPEDANCE - 1MΩ to 2 GΩ (HI) Value that indicates the state of the glass membrane.
1kΩ to 1MΩ (LO) Depending on the jumper setting the range is set to High or Low.
2039 REFERENCE_IMPEDANCE - 1MΩ to 2 GΩ (HI) Value that indicates the state of the reference system.
1kΩ to 1MΩ (LO) Depending on the jumper setting the range is set to High or Low.
2040 ALARM_SUM -
2041 DEV_ALARM - Device Alarm is used to give the status of the transmitter. Device_
status in RB displays the device Alarms.
2042 LOGBOOK1_RESET - Reset the pointer to the first (oldest) event in logbook 1.
2043 LOGBOOK1_EVENT - Event whereto the pointer is referenced. When parameter is read,
the pointer is increased by one.
2044 LOGBOOK2_RESET - Reset the pointer to the first (oldest) event in logbook 2.
2045 LOGBOOK2_EVENT - Event whereto the pointer is referenced. When parameter is read,
the pointer is increased by one.
2046 LOGBOOK_CONFIG - Per event one can decide whether it should be logged and in which
logbook (1 or 2) it should be logged.
2047 TEST_1 - Service parameter
.... - 2048 to 2058 are, like 2047 and 2059, service parameters
2059 TEST_13 - Service parameter
2060 STABLE_TIME 5 5.0 to 30.0 Stability criteria used during automatic calibration.
2061 STABLE_VALUE 0.02 0.01 to 1.0 Stability criteria used during automatic calibration.
2062 CALL_MAINT_TIME_
COUNTDOWN 250 1 to 250 The remaining days till maintenance is required.
2063 CALL_MAINT_TIME_RELOAD 250 1 to 250 The interval of the maintenance timer.
2064
2065
2066
2067
2068 BUFFER1_ID 4 0 to 9 The ID of buffer one, used during automatic calibration.
2069 BUFFER1 4.0 -2.0 to 16.0 The first user defined calibration buffer.
2070 BUFFER2_ID 7 0 to 9 The ID of buffer two, used during automatic calibration.
2071 BUFFER2 7.0 -2.0 to 16.0 The second user defined calibration buffer.
2072 BUFFER3_ID 9 0 to 9 The ID of buffer three, used during automatic calibration.
2073 BUFFER3 9.0 -2.0 to 16.0 The third user defined calibration buffer.
2074
-100.0 to 100.0
INPUT_1_IMPEDANCE_LO_LIM
INPUT_1_IMPEDANCE_HI_LIM
INPUT_2_IMPEDANCE_LO_LIM
INPUT_2_IMPEDANCE_HI_LIM
TEMPERATURE_COEFFICIENT
1.00E6 100.0 to 1.0E9 The low limit of the input 1 impedance.
1.00E9 100.0 to 1.0E9 The high limit of the input 1 impedance.
100 100.0 to 1.0E9 The low limit of the input 2 impedance.
200000 100.0 to 1.0E9 The high limit of the input 2 impedance.
0.0 -1.0 to 1.0 The temperature coefficient of the primary value.
3-33
IM 12A00A01-61E
Page 39

3-34 Foundation Fieldbus
Index Parameter name Factory Valid Description
Default Range
2075 PASSCODE_MAINTENANCE 0 0, 111, 333, 777, Passcode used to protect the maintenance menu.
888, 123, 957,
331, 546, 847
2076 PASSCODE_COMMISSIONING 0 0, 111, 333, 777, Passcode used to protect the commissioning menu.
888, 123, 957,
331, 546, 847
2077 PASSCODE_SERVICE 0 0, 111, 333, 777, Passcode used to protect the service menu.
888, 123, 957,
331, 546, 847
2078 SAMPLE_PV Process value of the sample taken.
2079 SAMPLE_PV2 Second process value of the sample taken.
2080 SAMPLE_TEMP Temperature of the sample taken.
2081 ERROR_CONFIG* Soft/Hard fail configuration
(checked = hard; unchecked = soft)
2082 CONFIGURATION* Instrument specific configuration
2083 TRANSMITTER_TIME Transmitter time.
2084 TEST_14 Service parameter.
* Enumerated parameters (4 bytes, 32 bits) where each bit can be set individually.
Error_config
0x00002000 (bit 14), “input 1 impedance exceeds low limit (E4.1)” ,
0x00001000 (bit 13), “input 1 impedance exceeds high limit (E5.1)” ,
0x00000800 (bit 12), “input 2 impedance exceeds low limit (E4.2)” ,
0x00000400 (bit 11) “input 2 impedance exceeds high limit (E5.2)” ,
0x00000200 (bit 10), “temperature sensor open (E7)” ,
0x00000100 (bit 9), “temperature sensor shorted (E8)” ,
0x00800000 (bit 24), “primary value exceeds limits (E9)” ,
0x00010000 (bit 17), “calibration timer expired (E16)”
Configuration
0x08000000 (bit 28), “Process compensation enabled” ,
0x00800000 (bit 24), “Aspot check enabled” ,
0x00400000 (bit 23), “Slope check enabled” ,
0x00200000 (bit 22), “Display resolution 0.01 pH” ,
0x00100000 (bit 21), “Auto return enabled” ,
0x00080000 (bit 20), “Maintenance timer enabled” ,
0x00002000 (bit 14), “Input 1 impedance measurement enabled” ,
0x00008000 (bit 16), “Input 1 impedance high” ,
0x00004000 (bit 15), “Input 1 impedance compensation enabled” ,
0x00000400 (bit 11), “Input 2 impedance measurement enabled” ,
0x00001000 (bit 13), “Input 2 impedance high” ,
0x00000800 (bit 12), “Input 2 impedance compensation enabled” ,
0x00000010 (bit 5), “Take sample”
IM 12A00A01-61E
Page 40

Foundation Fieldbus 3-35
3-35
3-6-3-2 Transducer Block SC202
Index Parameter name Factory Valid Description
Default Range
2000 BLOCK HEADER TAG: “TB” General information about thefunction block
2001 ST_REV - - The revision level of the static data associated with the function
block. The revision value will be incremented each time a static
parameter value in the block is changed
2002 TAG_DESC “ “ The user description of the intended application of the block
2003 STRATEGY 1 The strategy field can be used to identify grouping of blocks.
This data is not checked or processed by the block
2004 ALERT_KEY 1 The identification number of the plant unit. This information may be
used in the host for sorting alarms, etc.
2005 MODE_BLK AUTO The actual, target, permitted, and normal modes of the block
2006 BLOCK_ERR - This parameter reflects the error status associated with a block. It is
a bit-string, so that multiple errors can be shown
2007 UPDATE_EVT - The alert is generated by any change to the static data.
2008 BLOCK_ALM - The block alarm is used for all configuration error, hardware
connection failure or system problems in the block. The cause of
the alert is entered in the subcode field. The first alert to become
active will set Active status in Status attribute.
2009 TRANSDUCER_DIRECTORY A directory that specifies the number and
starting indices of the transducers.
2010 TRANSDUCER_TYPE Standard conductivity Conductivity transducer block
Conductivity
2011 XD_ERROR - The error code in transducer:
No failure,
Electronics failure,
I/O failure,
Mechanical failure
2012 COLLECTION_DIRECTORY -
2013 PRIMARY_VALUE_TYPE Conductivity conductivity / Type of measurement represented by primary value
resistivity
2014 PRIMARY_VALUE - 0 to 2 S/cm Primary value of the instrument is Conductivity
2015 PRIMARY_VALUE_RANGE 0 to 2 S/cm 0 to 2 S/cm The range of the instrument (can not change)
2016 SENSOR_CONST 0.1 0.005 to 50 cm-1 The conductivity cell has a specific cell constant determined by the
2017 CAL_POINT_HI 1.999 0 to 2 S/cm Highest calibration point
2018 CAL_POINT_LO 0 0 to 2 S/cm Lower calibration point
2019 CAL_MIN_SPAN 0,0001 > 0,0001 S/cm Minimum span between two calibration points
2020 SENSOR_CAL_METHOD - 1point, 2point not used
2021 SENSOR_CAL_DATE - till 2104 Date the sensor was last calibrated
2022 SECONDARY_VALUE - -20 to 250 ºC , Temperature value
0 to 500ºF
2023 SECONDARY_VALUE_UNIT ºC ºC, ºF Temperature unit
2024 SENSOR_TEMP_COMP automatic automatic
2025 SENSOR_TEMP_MAN_VALUE - - No manual temp. value can be set. Always Automatic
2026 SENSOR_TYPE_TEMP Pt1000 Pt1000, Pt100, Temperature element used:
Ni100, Pb36, 8k55
2027 SENSOR_CONNECTION_ 2 2 Only 2-wire connections supported
TEMP
2028 SENSOR_TYPE_COND contact 2-electrode, Either 2-electrode or 4-electrode contacting
2-electrode 4-electrode conductivity cell can be selected
2029 SENSOR_OHMS - Actual cell resistance
2030 XD_MAN_ID “ “
2031 TEMPERATURE_COEFF 2.1 0 to 3.5%/ºC (%/ºF) Process temperature compensation factor
2032 CONCENTRATION - - Conductivity combined with temperature can be directly related to
2033 TERTIARY_VALUE - 0 to 2 S/cm Second compensated conductivity value
A directory that specifies the number, starting indices and DD item Ids
of the data collection in each transducer within a transducer block
dimensions of the cell
the concentration. Concentraion is expressed in percentage
IM 12A00A01-61E
Page 41

3-36 Foundation Fieldbus
Index Parameter name Factory Valid Description
Default Range
2034 REFERENCE_ 25 0 to 100 ºC, Conductivity can be process compensated to a standard
TEMPERATURE 32 to 212 ºF reference temperature. Mostly 20ºC or 25ºC is used
2035 COMP_METHOD NaCl NaCl, TC, matrix
2036 COMP_MATRIX_SEL HCl HCl cation (0-80 °C) When matrix compensation is required one can make a
Ammonia, (0-80 °C) selection out of 5 predefined matrices and one user
Ammonia, (0-80 °C) definable matrix
HCl (0-5%, 0-60 °C)
NaOH (0-5%, 0-100 °C),
User defined
2037 TERTIARY_COMP_METHOD NaCl NaCl, TC, matrix Method of process temperature compensation for the
2038 TERT_TEMPERATURE 2.1 0 to 3.5%/ºC Process temperature compensation factor for the
_COEFF second conductivity value
2039 ALARM_SUM -
2040 DEV_ALARM - Device Alarm is used to give the status of the
2041 LOGBOOK1_RESET Idle Idle, Reset Reset the pointer to the first (oldest) event in logbook 1
2042 LOGBOOK1_EVENT - Event whereto the pointer is referenced. When parameter is
2043 LOGBOOK2_RESET Idle Idle, Reset Reset the pointer to the first (oldest) event in logbook 2
2044 LOGBOOK2_EVENT - Event whereto the pointer is referenced. When parameter is
2045 LOGBOOK_CONFIG[16] - Per event one can decide whether it should be logged and
2046 TEST_1 -
.... - 2047 to 2057 are, like 2046 and 2058, service parameters
2058 TEST_13 2059 CALIB_SENSOR_CONST 0.1 0.005~50 The calibrated cell constant [1/cm].
2060 MATRIX_TEMP_RANGE -20~250, 0~500 The temperature values of the user defined matrix.
2061 SOLUTION_1 0~1.999S/cm, 0~999MΩ•cm The conductivity/resistivity values of solution 1.
2062 SOLUTION_2 0~1.999S/cm, 0~999MΩ•cm The conductivity/resistivity values of solution 2.
2063 SOLUTION_3 0~1.999S/cm, 0~999MΩ•cm The conductivity/resistivity values of solution 3.
2064 SOLUTION_4 0~1.999S/cm, 0~999MΩ•cm The conductivity/resistivity values of solution 4.
2065 SOLUTION_5 0~1.999S/cm, 0~999MΩ•cm The conductivity/resistivity values of solution 5.
2066 CONCENTRATION_ disabled 0=Not initialized, Enabling/Disabling of concentration measurement.
MEASUREMENT 1=disabled, 2=enabled
2067 CONCENTRATION_0 0 0~100 The concentration [%] corresponding to the 0 percent table value
2068 CONCENTRATION_100 100 0~100 The concentration [%] corresponding to the 100 percent table value
2069 CONC._TABLE_LOW 0~1.999S/cm, 0~999MΩ•cm The first part of the concentration table (0 till 30 percent).
2070 CONC._TABLE_MID 0~1.999S/cm, 0~999MΩ•cm The second part of the concentration table (35 till 65 percent).
2071 CONC._TABLE_HIGH 0~1.999S/cm, 0~999MΩ•cm The third part of the concentration table (70 till 100 percent).
2072 E5_LIMIT 0.25, 4 0~0.5S, 0~10MΩ The upper range accuracy limit of the analyzer [S or Ohm].
2073 E6_LIMIT 1μ, 1M 0~0.5S, 0~10MΩ The lower range accuracy limit of the analyzer [S or Ohm].
2074 DISPLAY_RESOLUTION 1 0 to 8 Display resolution, 0, Not initialized (can not change)
2075 PASSCODE_MAINT 0 0, 111, 333, 777, 888, Passcode used to protect the maintenance menu
123, 957, 331, 546, 847
2076 PASSCODE_COMM 0 0, 111, 333, 777, 888, Passcode used to protect the commissioning menu.
123, 957, 331, 546, 847
2077 PASSCODE_SERVICE 0 0, 111, 333, 777, 888, Passcode used to protect the service menu.
123, 957, 331, 546, 847
2078 ERROR_CONFIG* 0=soft, 1=hard Soft/Hard fail configuration (checked = hard unchecked = soft).
2079 CONFIGURATION*
2080 TRANSMITTER_TIME Transmitter time.”
2081 TEST_14 Service parameter.
polarization on,
USP off, bitnr. setting autoreturn on
Instrument specific configuration. See below for correct
Method of process temp. compensation for the primary value
second conductivity value
analyser. See separate table for error messages
read, the pointer is increased by one.
read, the pointer is increased by one
in which logbook (1 or 2) it should be logged
1,Auto Ranging, 2, x.xxx μS/cm, MΩ•cm,
3, xx.xx μS/cm, MΩ•cm, 4, xxx.x μS/cm, MΩ•cm,
5, x.xxx mS/cm, kΩ•cm, 6, xx.xx mS/cm, kΩ•cm,
7, xxx.x mS/cm, kΩ•cm, 8, xxxx mS/cm, kΩ•cm
IM 12A00A01-61E
Page 42

* Enumerated parameters (4 bytes, 32 bits) where each bit can be set individually.
ERROR_CONFIG
0x00008000 (bit 15), “polarization detected (E1)”
0x00000800(bit 11), “conductivity exceeds high limit (E5)”
0x00000400 (bit 10), “conductivity exceeds low limit (E6)”
0x00000200 (bit 9), “temperature sensor open (E7)”
0x00000100 (bit 8), “temperature sensor shorted (E8)”
0x00080000 (bit 19), “conductivity exceeds USP limit (E13)”
CONFIGURATION
0x00004000 (bit 14), “Polarization check enabled”
0x00800000 (bit 23), “Auto return enabled”
0x00000001 (bit 0), “USP enabled”
Foundation Fieldbus 3-37
3-37
IM 12A00A01-61E
Page 43

3-38 Foundation Fieldbus
3-6-3-3 Transducer Block ISC202
Index Parameter name Factory Valid Description
Default Range
2000 BLOCK HEADER TAG: “TB” General information about thefunction block
2001 ST_REV - - The revision level of the static data associated with the function
block. The revision value will be incremented each time a static
parameter value in the block is changed
2002 TAG_DESC “ “ The user description of the intended application of the block
2003 STRATEGY 1 The strategy field can be used to identify grouping of blocks.
This data is not checked or processed by the block
2004 ALERT_KEY 1 The identification number of the plant unit. This information may be
used in the host for sorting alarms, etc.
2005 MODE_BLK AUTO The actual, target, permitted, and normal modes of the block
2006 BLOCK_ERR - This parameter reflects the error status associated with a block. It
is a bit-string, so that multiple errors can be shown
2007 UPDATE_EVT - The alert is generated by any change to the static data.
2008 BLOCK_ALM - The block alarm is used for all configuration error, hardware
connection failure or system problems in the block. The cause of
the alert is entered in the subcode field. The first alert to become
active will set Active status in Status attribute.
2009 TRANSDUCER_DIRECTORY A directory that specifies the number and starting indices of the
transducers.
2010 TRANSDUCER Conductivity conductivity Conductivity transducer block
_TYPE Transmitter
2011 XD_ERROR - The error code in transducer:
No failure,
Electronics failure,
I/O failure,
Mechanical failure
2012 COLLECTION_DIRECTORY - A directory that specifies the number, starting indices and DD item
Ids of the data collection in each transducer within a transducer
block
2013 PRIMARY_VALUE_TYPE conductivity, conductivity Type of measurement represented by primary value
2014 PRIMARY_VALUE - 0 to 2 S/cm Primary value of the instrument is Conductivity
2015 PRIMARY_VALUE_RANGE 0 to 2 S/cm 0 to 2 S/cm The range of the instrument (can not change)
2016 SENSOR_CONST 1.88 0.2 to 19.99 cm-1 The conductivity cell has a specific cell constant determined by the
dimensions of the cell
2017 CAL_POINT_HI 1.999 0 to 2 S/cm Highest calibration point
2018 CAL_POINT_LO 0 0 to 2 S/cm Lower calibration point
2019 CAL_MIN_SPAN 0,0001 > 0,0001 S/cm Minimum span between two calibration points
2020 SENSOR_CAL_METHOD - 1point, 2point not used
2021 SENSOR_CAL_DATE - till 2104 Date the sensor was last calibrated
2022 SECONDARY_VALUE - -20 to 140 ºC , Temperature value
0 to 280ºF
2023 SECONDARY_VALUE_UNIT ºC ºC, ºF Temperature unit
2024 SENSOR_TEMP automatic automatic auto when a temperature element is available
2025 SENSOR_TEMP_MAN_VALUE - - No manual temp. value possible. Always automatic
2026 SENSOR_TYPE _TEMP NTC30K Pt1000, NTC30k Temperature element used:
2027 SENSOR_CONNECTION_ 2 2 Only 2-wire connections supported
TEMP
2028 SENSOR_TYPE_COND toroidal toroidal Non contacting toroidal sensor.
2029 SENSOR_OHMS - Actual cell resistance
2030 XD_MAN_ID “ “
2031 TEMPERATURE_COEFF 2.1 0 to 3.5%/ºC (%/ºF) Process temperature compensation factor
2032 CONCENTRATION - Conductivity combined with temperature can be directly related to the
concentration. Concentraion isexpressed in percentage
2033 TERTIARY_VALUE - 0 to 2 S/cm Second compensated conductivity value
2034 REFERENCE_TEMPERATURE 25 0 to 100 ºC Conductivity can be process compensated to a standard
(32 to 212ºF) reference temperature. Mostly 20ºC or 25ºC is used
IM 12A00A01-61E
Page 44

Foundation Fieldbus 3-39
Index Parameter name Factory Valid Description
Default Range
2035 COMP_METHOD NaCl NaCl, TC, matrix
2036 COMP_MATRIX_SEL H2SO4 H2SO4, 0 -100ºC, 0 - 5%, When matrix compensation is required one can
2037 TERTIARY_COMP_METHOD NaCl NaCl, TC, matrix Method of process temperature compensation
for the second conductivity value
2038 TERT_TEMPERATURE 2.1 0 ~ 3.5 %/ºC Process temperature compensation factor for the
_COEFF second conductivity value
2039 ALARM_SUM -
2040 DEV_ALARM - Device Alarm is used to give the status of the analyser.
2041 LOGBOOK1_RESET Idle Idle, Reset Reset the pointer to the first (oldest) event in logbook 1
2042 LOGBOOK1_EVENT - Event whereto the pointer is referenced. When parameter
2043 LOGBOOK2_RESET Idle Idle, Reset Reset the pointer to the first (oldest) event in logbook 2
2044 LOGBOOK2_EVENT - Event whereto the pointer is referenced. When parameter
2045 LOGBOOK_CONFIG - Per event one can decide whether it should be logged and
2046 TEST_1 -
.... - 2047 to 2057 are, like 2046 and 2058, service parameters
2058 TEST_13 2059 CALIB_SENSOR_CONST 1.88 0.2~19.99 cm-1 The calibrated cell constant [1/cm].
2060 MATRIX_TEMP_RANGE -20~140ºC, 0~280ºF The temperature values of the user defined matrix.
2061 SOLUTION_1 0~1.999 S/cm The conductivity values of solution 1.
2062 SOLUTION_2 0~1.999 S/cm The conductivity values of solution 2.
2063 SOLUTION_3 0~1.999 S/cm The conductivity values of solution 3.
2064 SOLUTION_4 0~1.999 S/cm The conductivity values of solution 4.
2065 SOLUTION_5 0~1.999 S/cm The conductivity values of solution 5.
2066 CONCENTRATION_ disabled
MEASUREMENT 2=enabled
2067 CONCENTRATION_0 0 0~100 The concentration [%] corresponding to the 0 percent table value
2068 CONCENTRATION_100 100 0~100 The concentration [%] corresponding to the 100 percent table value
2069 CONC._TABLE_LOW 0~1.999 S/cm The first part of the concentration table (0 till 30 percent).
2070 CONC._TABLE_MID 0~1.999 S/cm The second part of the concentration table (35 till 65 percent).
2071 CONC._TABLE_HIGH 0~1.999 S/cm The third part of the concentration table (70 till 100 percent).
2072 E5_LIMIT 3 (3 S) 0~5 S The upper range accuracy limit of the analyzer [Siemens].
2073 E6_LIMIT 5e-6 (5 μS) 0~5 S The lower range accuracy limit of the analyzer [Siemens].
2074 DISPLAY_RESOLUTION 1 0 to 8 Display resolution, 0, Not initialized (can not change)
2075 PASSCODE_MAINT 0 0, 111, 333, 777, Passcode used to protect the maintenance menu
2076 PASSCODE_COMM 0 0, 111, 333, 777, Passcode used to protect the commissioning menu.
2077 PASSCODE_SERVICE 0 0, 111, 333, 777, Passcode used to protect the service menu.
2078 ERROR_CONFIG* 0=soft, 1=hard Soft/Hard fail configuration (checked = hard unchecked = soft).
2079 CONFIGURATION*
2080 TRANSMITTER_TIME Transmitter time.”
2081 TEST_14 Service parameter.
autoreturn on
bitnr. setting
H2SO4, 0 -100ºC, 2.5 - 25%
HCl, 0 - 60ºC, 0.5 - 5%, one user definable matrix
HNO3, 0 - 80ºC, 0.5 - 5%
HNO3, 0 -80ºC, 2.5 - 25%
NaOH, 0 -100ºC, 0.5 - 5%
NaOH, 0 -100ºC, 0.5 - 15%
User programmable matrix
0=Not initialized, 1=disabled,
888, 123, 957, 331, 546, 847
888, 123, 957, 331, 546, 847
888, 123, 957, 331, 546, 847
Instrument specific configuration. See below for correct
Method of process temperature compensation for the primary value
, make a selection out of 8 predefined matrices and
See separate table for error messages
is read, the pointer is increased by one.
is read, the pointer is increased by one
in which logbook (1 or 2) it should be logged
Enabling/Disabling of concentration measurement.
1, Auto Ranging, 2, x.xxx μS/cm, 3, xx.xx μS/cm,
4, xxx.x μS/cm, 5, x.xxx mS/cm, 6, xx.xx mS/cm,
7, xxx.x mS/cm, 8, xxxx mS/cm
3-39
IM 12A00A01-61E
Page 45

3-40 Foundation Fieldbus
* Enumerated parameters (4 bytes, 32 bits) where each bit can be set individually.
ERROR_CONFIG
0x00000800(bit 11), “conductivity exceeds high limit (E5)”
0x00000400 (bit 10), “conductivity exceeds low limit (E6)”
0x00000200 (bit 9), “temperature sensor open (E7)”
0x00000100 (bit 8), “temperature sensor shorted (E8)”
CONFIGURATION
0x00800000 (bit 23), “Auto return enabled”
IM 12A00A01-61E
Page 46

Foundation Fieldbus 3-41
3-6-3-4 Transducer Block dO202
Index Parameter Factory valid range description
Name default
2000 BLK_DATA TAG: “TB” General information about the function block
2001 ST_REV - - The revision level of the static data associated with the
function block. The revision value will be incremented
each time a static parameter value in the block is
changed.
2002 TAG_DESC “ “ The user description of the intended application of the
block.
2003 STRATEGY 1 The strategy field can be used to identify grouping of
blocks. This data is not checked or processed by the
block
2004 ALERT_KEY 1 The identification number of the plant unit. This
information may be used in the host for sorting alarms,
etc.
2005 MODE_BLK AUTO The actual, target, permitted, and normal modes of the
block
2006 BLOCK_ERR - This parameter reflects the error status associated with a
block. It is a bit-string, so that multiple errors can be shown.
2007 UPDATE_EVT - The alert is generated by any change to the static data.
2008 BLOCK_ALM - The block alarm is used for all configuration error,
hardware connection failure or system problems in the
block. The cause of the alert is entered in the subcode
field. The first alert to become active will set Active
status in Status attribute.
2009 TRANSDUCER A directory that specifies the number and starting
_DIRECTORY indices of the transducers.
2010 TRANSDUCER_TYPE DO DO Yokogawa specific Dissolved Oxygen transducer block
2011 XD_ERROR - The error code in transducer:
- No failure
- Electronics failure
- I/O failure
- Mechanical failure
2012 COLLECTION - A directory that specifies the number, starting indices
_DIRECTORY and DD item IDs of the data collection in each
transducer within a transducer block.
2013 PRIMARY_VALUE Dissolved Oxygen Dissolved Oxygen The type of measurement represented by primary
_TYPE value.
2014 PRIMARY_VALUE - 0 to 50 ppm Primary measuring value of the instrument including
0 to 1999 ppb status information.
0 to 600 %
2015 PRIMARY_VALUE - 0 to 50 ppm The measuring range of the instrument associated with
_RANGE 0 to 1999 ppb the selected unit type.
0 to 600 %
2016 PRIMARY_VALUE_UNIT ppm ppm, ppb, % Select the unit in which the primary value must be
presented
2017 SENSOR_TYPE Polarographic Polarographic, Galvanic Select the type of sensor connected to the instrument,
_OXYGEN Galvanic or Polarographic
2018 SAMPLE_CAL - 0 to 50 ppm Enter the correct (current) measured value. This value
0 to 1999 ppb is used to calculate the new sensitivity (slope)
0 to 600 %
2019 ZERO_CURRENT 0 +- ZERO_CURRENT Directly overwrites the current zero current, which is
_LIMIT (param 2037) the leak current of the sensor
2020 SENSITIVITY 7.5 1.000 to 1999 nA/ppm Directly overwrites the sensitivity (slope) of the sensor
2021 AMP_STABILIZE_TIME 60 5 to 600 seconds Stability criteria used during automatic calibration.
2022 AMP_SPAN_STABILIZE 0.1 0 to 50 ppm Stability criteria used during automatic span calibration.
_VALUE
IM 12A00A01-61E
Page 47

3-42 Foundation Fieldbus
Index Parameter Factory valid range description
Name default
2023 AMP_ZERO_STABILIZE - 0 to 50 ppm Stability criteria used during automatic zero calibration.
_VALUE 0 to 1999 ppb
0 to 600 %
2024 SALINITY 0 0 to 99.9 ppt Salinity value of the process liquid that can be used to
compensate the DO value
2025 BAR_PRESSURE 101.3 0.0 to 999 kPa Manual value of the pressure used to compensate the
DO reading (during calibration)
2026 BAR_PRESSURE_UNIT kPa kPa The engineering unit of barometric pressure value
2027 PERCENT_SATURATION 101.3 0.0 to 999 kPa Manual value of the pressure used to compensate
_PRESSURE the DO reading (during measuring)
2028 CHLORINE_CALI- not used
BRATION_RANGES
2029 SECONDARY_VALUE - -20 to 150 °C, -4 Temperature value
to 302 °F
2030 SECONDARY_VALUE °C °C, °F Temperature unit
_UNIT
2031 SENSOR_TEMP_COMP automatic automatic, manual Select manual when no temperature element is available
and the temperature is stable and select auto when a
temperature element is available
2032 SENSOR_TEMP_MAN 25° 0 - 100 °C 32 - 212 °F manual temperature value
_VALUE
2033 SENSOR_TYPE_TEMP NTC22K
2034 TEMP_SENSOR_CAL - -20 to 150 °C, -4 Enter the correct (current) measured value. This value
2035 SENSOR_CURRENT - 0 to 1200 nA, The actual cell current of the DO sensor
2036
PERCENT_SATURATION
2037
ZERO_CURRENT_LIMIT
2038 ZERO_CAL - 0 to 50 ppm Enter the correct (current) measured value. This value
2039 RESERVED1 not used
2040 RESERVED2 not used
2041 RESERVED3 not used
2042
TRANSMITTER_TIME[6]
2043 PASSCODE 0 0, 111, 333, 777, 888, Passcode used to protect the maintenance menu.
_MAINTENANCE
2044 PASSCODE 0 0, 111, 333, 777, 888, Passcode used to protect the commissioning menu
_COMMISSIONING
2045 PASSCODE_SERVICE 0 0, 111, 333, 777, 888, Passcode used to protect the service menu.
2046 LOGBOOK1_RESET - Reset the pointer to the first (oldest) event in logbook 1.
2047 LOGBOOK1_EVENT - Event whereto the pointer is referenced. When
2048 LOGBOOK2_RESET - Reset the pointer to the first (oldest) event in logbook 2.
2049 LOGBOOK2_EVENT - Event whereto the pointer is referenced. When
2050
LOGBOOK_CONFIG[25]
2051 CALL_MAINT_TIME 250 1 to 250 days The interval of the maintenance timer
_RELOAD
2052 CALL_MAINT_TIME 250 1 to 250 days The remaining days till maintenance is required.
_COUNTDOWN
2053 ERROR_CONFIG* E9,E2,E7,E8 hard fail. Soft/Hard fail configuration (checked = hard;
- 0 to 600 % The DO value expressed as a percentage of the
0 to 199.9 nA, Limit used during zero calibration for the sensor
Transmitter time.
- Per event one can decide whether it should be logged
E16 soft fail unchecked = soft)
NTC22K, Pb36, PT1000
to 302 °F is used to calculate the temperature offset
0 to 50 µA
0 to 19.99 µA current (different for polarographic or galvanic sensor)
0 to 1999 ppb is used to calculate the new offset (zero)
0 to 600 %
123, 957, 331, 546, 847
123, 957, 331, 546, 847
123, 957, 331, 546, 847
Temperature element used
maximum saturation.
parameter is read, the pointer is increased by one.
parameter is read, the pointer is increased by one.
and in which logbook (1 or 2) it should be logged.
IM 12A00A01-61E
Page 48

Foundation Fieldbus 3-43
Index Parameter Factory valid range description
Name default
2054 CONFIGURATION* Instrument specific configuration
2055 ALARM_SUM -
2056 DEV_ALARM - Device Alarm is used to give the status of the transmitter.
Device_status in RB displays the device Alarms.
2057 TEST_1 - Service parameter
…. - 2058 to 2068 are, like 2057 and 2070, service
parameters
2070 TEST_14 - Service parameter
* Enumerated parameters (4 bytes, 32 bits) where each bit can be set individually.
Error_config
0x00800000 (bit 23),
“Sensor current abnormal (E9)”
0x00010000 (bit 16), “Call for maintenance (E16)”
0x00004000 (bit 14), “Zero out of limits (E2)”
0x00000200 (bit 9), “Temperature sensor open (E7)”
0x00000100 (bit 8),
“Temperature sensor shorted (E8)”
Configuration
0x00008000 (bit 15), “Zero calibration enabled”
0x00001000 (bit 12), “Auto return on”
0x00000800 (bit 11), “Salinity compensation on”
0x00000400 (bit 10), “Call for maintenance on”
0x00000100 (bit 8), “Manual pressure in maintenance menu”
3-7 Application setting and change of basic parameters
3-7-1 Applications and selection of basic parameters
Setting Item (applicable parameters) Summary
Tag No. Sets PD Tag and each block tag.
Up to 32 alphanumeric characters can be set for both tags.
Refer to “Tag and address” in Section 3-3-4
Calibration range setup
(XD_SCALE)
Output scale setup
(OUT_SCALE)
Output mode setup
(L_TYPE)
Output signal low cut mode setup
(LOW_CUT)
Damping time constant setup
(PV_FTIME)
Simulation setup
(SIMULATE)
Sets the range of input from the transducer block corresponding to the 0% and 100%
points in operation within the AI function block. The calibrated range (0% and 100%) is the
factory default setting. Sets the range unit number of decimals required.
Sets the scale of output corresponding to the 0% and 100% points in operation within
the AI function block. It is possible to set a unit and scale that differs from the calibration
range. Sets the range unit and the number of decimals required.
Selects the operation function of the AI function block. It may be chosen from among
Direct, Indirect, and IndirectSQRT.
Direct:
Indirect:
IndirectSQRT:
If the output falls below the setting of this parameter, the output is set to Zero. It can be
set individually with Direct, Indirect, and IndirectSQRT.
Sets the time constant of the damping (primary delay) function in the AI function block in
seconds.
Performs simulation of the AI function block.
The input value and status for the calibration range can also be set.
It is recommended that this parameter be used for loop checks and other purposes.
Refer to “Simulation Function” in Section 3-4-3.
The output of the transducer block is directly output only via filtering
without scaling and square root extraction.
Output processed by proportion at the AI function block.
Output processed by square root extraction at the AI function block.
IM 12A00A01-61E
Page 49

3-44 Foundation Fieldbus
IMPORTANT
3-7-2 Setting and change of basic parameters
This section describes the procedure taken to set and change the parameters for each block. Obtaining
access to each parameter differs depending on the configuration system used.
For details, refer to the instruction manual for each configuration system.
Access the block mode (MODE_BLK) of each block.
Set the Target of block mode (MODE_BLK) to Auto,
Man or O/S (*Note 2) according to the Write Mode of the
parameter to be set or changed.
When “actual mode” has changed (*Note 1),
data associated with the function block
can be maintenanced.
back to Auto (*Note 2) .
Set the Target (*Note 1) of block mode
Do not turn the power OFF immediately after parameter setting. When the parameters are saved to the
EEPROM, the redundant processing is executed for an improvement of reliability. Should the power be
turned OFF within 60 seconds after setting of parameters, changed parameters are not saved and may
return to their original values.
Note 1: Block mode consists of the following four modes that are controlled by the universal parameter that
displays the running condition of each block.
Target: Sets the operating condition of the block.
Actual: Indicates the current operating condition.
Permit: Indicates the operating condition that the block is allowed to take.
Normal: Indicates the operating condition that the block will usually take.
Note 2: The following are the operating conditions which the individual blocks will take.
Refer to the “List of parameters for each block of the EXA” for details of the Write Mode for each block.
AI Function Block Transducer Block resource Block
Automatic (Auto) Yes Yes Yes
Manual (Man) Yes
Out of Service (O/S) Yes Yes Yes
3-7-3 Setting the AI Function Blocks
(1) Setting the output scale
As explained in section 3-3-6-4 the OUT_SCALE can used to convert the channel’s value to a different
scale. If the channel’s unit (= XD_SCALE unit) is the same as the output unit DO NOT use scaling or let the
OUT_SCALE have the same scaling as XD_SCALE. If L_TYPE is set to Indirect or Ind
determines the
conversion from FIELD_VAL to the output. PV and OUT always have identical scaling. OUT_
SCALE provides scaling for PV. The PV is always the value that the block will place in OUT if the mode is Auto.
For AI1 set L_TYPE to Direct
IM 12A00A01-61E
Sqr Root, OUT_SCALE
Page 50

Foundation Fieldbus 3-45
With the EXA, the channel values are displayed on the display indicator, independant of the scaling in the
AI blocks.
(2) Setting the output mode
Access the L_TYPE parameter.
Set the output mode.
1: Direct (Sensor output value)
2: Indirect (Linear output value)
3: IndirectSQRT (Square root extraction
output value)
(3) Setting the damping time constant
Access the PV_FTIME parameter.
Set the damping time (in seconds).
(4) Simulation
By optionally setting the input value to the calibration range and status, perform simulation of the AI
function block.
Access the Simulate Value parameter.
Set an optional input value.
Access the Simulate Status parameter.
Set the status code.
Access the Simulate En/Disable parameter.
Set whether Simulation is enabled or disabled.
2: Enabled
1: Disabled
If simulation is enabled, AI block uses Simulate Status and Simulate Value as the input, and if disabled, the
AI block uses Transducer Status and Transducer Value as input.
Refer to Section 3.4.3 Simulation Function.
3-7-4 Setting the Transducer Block
To access function specifics of the EXA of the transducer block, the DD (Device Description) for EXA needs
to have been installed in the configuration tool used. For integration of DD, refer to “Integration of DD” in
Section 3-2-4.
IM 12A00A01-61E
Page 51

3-46 Foundation Fieldbus
3-8 Operation of each parameter in failure mode 3-8-1 Operation of each parameter in failure mode PH202
• Following table summarizes the value of EXA parameters when LCd display indicates an Alarm.
EXA display
E9
E12
E7
E8
E5.1
E4.1
E5.2
E4.2
E16
E20
E21
error description resource block transducer block transducer block transducer block transducer block transducer block transducer block AI1 (channel = 1) AI2 (channel = 2) AI3 (channel = 3)
BLOCK_ERR DEV_ALARM BLOCK_ERR XD_ERROR PV.status SV.status TV.status OUT.status OUT.status OUT.status
primary value 0x80000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS BAD, SENS_FAIL
exceeds limits _ERR _FAIL
tertiary value 0x40000000 INPUT_FAILURE MECHANICAL_FAILURE
exceeds limits _ERR
temperature 0x20000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS BAD, SENS
sensor open _ERR _FAIL _FAIL
temperature 0x10000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS BAD, SENS
sensor shorted _ERR _FAIL _FAIL
glass impedance 0x08000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS
exceeds high limit _ERR _FAIL
glass impedance 0x04000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS
exceeds low limit _ERR _FAIL
reference impedance 0x02000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS
exceeds high limit _ERR _FAIL
reference impedance 0x01000000 INPUT_FAILURE MECHANICAL_FAILURE BAD, SENS
exceeds low limit _ERR _FAIL
calibration timer expired
NOW_ERR _SPECIFIC _SPECIFIC
not used 0x00400000
not used 0x00200000
not used 0x00100000
not used 0x00080000
not used 0x00040000
mismatch between FF 0x00020000 NEEDS_MAINT_ ELECTRONICS_FAILURE BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL
interface and EXA NOW_ERR _FAIL _FAIL
parameter
EXA eeprom failure 0x00010000 NEEDS_MAINT_
NOW_ERR _FAIL _FAIL
FF interface eeprom LOST_STATIC_ERR, 0x00008000 NEEDS_MAINT_
failure LOST_NV_ERR NOW_ERR _FAIL _FAIL
Hart communication 0x00004000 NEEDS_MAINT_ ELECTRONICS_FAILURE BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL
failure NOW_ERR _FAIL _FAIL
EXA checksum error 0x00002000 ELECTRONICS_FAILURE BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL
FF interface checksum 0x00001000 _FAIL _FAIL
error
resource block out of OUT_OF_SERVICE_ERR 0x00000800 BAD, NON BAD, NON BAD, NON BAD, NON_SPECIFIC BAD, NON_SPECIFIC BAD, NON_SPECIFIC
service _SPECIFIC _SPECIFIC _SPECIFIC
transducer block out of 0x00000400 OUT_OF_ BAD, OUT BAD, OUT BAD, OUT_OF BAD, NON_SPECIFIC BAD, NON_SPECIFIC BAD, NON_SPECIFIC
service SERVICE_ERR _OF_SERVICE _OF_SERVICE _SERVICE
AI1 out of service 0x00000200
AI1 in manual mode 0x00000100
AI1 in simulation mode SIMULATE_ACTIVE_ERR 0x00000080
0x00800000 NEEDS_MAINT_ BAD, NON BAD, NON BAD, NON_SPECIFIC BAD, NON_SPECIFIC
DATA_INTEGRITY_ERROR
DATA_INTEGRITY_ERROR
BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL
BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL BAD, DEV_FAIL
AI1 not scheduled 0x00000040
AI2 out of service 0x00000020
AI2 in manual mode 0x00000010
AI2 in simulation mode SIMULATE_ACTIVE_ERR 0x00000008
AI3 out of service 0x00000004
AI3 in manual mode 0x00000002
AI3 in simulation mode SIMULATE_ACTIVE_ERR 0x00000001
IM 12A00A01-61E
Page 52

Foundation Fieldbus 3-47
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL
BAD, SENS_FAIL BAD, SENS_FAIL
BAD, OUT_OF_SERVICE
BAD, OUT_OF_SERVICE
BAD, OUT_OF_SERVICE
IM 12A00A01-61E
Page 53

3-48 Foundation Fieldbus
3-8-2 Operation of each parameter in failure mode SC202
• Following table summarizes the value of EXA parameters when LCD display indicates an Alarm.
error description EXA dev_alarm resource block transducer block channel = 1 (AI1) channel = 2 (AI2) channel = 3 (AI3) channel = 4
display
BLOCK_ERR BLOCK_ERR XD_ERROR PV.status SV.status TV.status CONCENTRATION.status OUT.status OUT.status OUT.status OUT.status
conductivity exceeds E5 0x80000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL
high limit _ERR _FAILURE _FAIL _FAIL _FAIL
conductivity exceeds E6 0x40000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL
low limit _ERR _FAILURE _FAIL _FAIL _FAIL
temperature sensor E7 0x20000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
open _ERR _FAILURE _FAIL _FAIL _FAIL _FAIL
temperature sensor E8 0x10000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
shorted _ERR _FAILURE _FAIL _FAIL _FAIL _FAIL
temperature E2 0x08000000 BAD, NON_ BAD, NON BAD, NON_SPECIFIC BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
compensation error SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
polarization detected E1 0x04000000 INPUT_FAILURE BAD, NON_ BAD, NON BAD, NON_SPECIFIC BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
_ERR SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
conductivity exceeds E13 0x02000000 BAD, NON_ BAD, NON BAD, NON_SPECIFIC BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
usp limit SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
concentration table E18 0x01000000 BAD, CONFIG BAD, CONFIG BAD, CONFIG_ERR BAD, CONFIG BAD, CONFIG_ BAD, CONFIG_ERR
error _ERR _ERR _ERR ERR
matrix error E4 0x00800000 BAD, CONFIG BAD, CONFIG BAD, CONFIG_ERR BAD, CONFIG BAD, CONFIG_ BAD, CONFIG_ERR
_ERR
not used 0x00400000 _ERR _ERR ERR
not used 0x00200000
not used 0x00100000
not used 0x00080000
not used 0x00040000
mismatch between FF 0x00020000 NEEDS_MAINT_ ELECTRONICS BAD, DEV BAD, DEV BAD, DEVL BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
interface and EXA NOW_ERR _FAIL _FAIL _FAI _FAIL FAIL
parameter _FAILURE
EXA eeprom failure E20 0x00010000 NEEDS_MAINT_ DATA_INTEGRITY BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
NOW_ERR _ERROR _FAIL _FAIL _FAIL _FAIL FAIL
FF interface eeprom 0x00008000 LOST_STATIC NEEDS_MAINT_ DATA_INTEGRITY BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
failure _ERR, LOST_ NOW_ERR _ERROR _FAIL _FAIL _FAIL _FAIL FAIL
NV_ERR
Hart communication 0x00004000 NEEDS_MAINT_ ELECTRONICS BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
failure NOW_ERR _FAILURE _FAIL _FAIL _FAIL _FAIL FAIL
EXA checksum error E21 0x00002000 ELECTRONICS BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
_FAILURE _FAIL _FAIL _FAIL _FAIL FAIL
FF interface checksum 0x00001000
error
resource block out of 0x00000800 OUT_OF_ BAD, NON BAD, NON BAD, NON_ BAD, NON BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
service SERVICE_ERR _SPECIFIC _SPECIFIC SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
transducer block out of 0x00000400 OUT_OF_ BAD, OUT_OF_ BAD, OUT_ BAD, OUT_ BAD, NON BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
service SERVICE_ERR SERVICE OF_SERVICE OF_SERVICE _SPECIFIC SPECIFIC SPECIFIC
AI1 out of service 0x00000200 BAD, OUT_OF
_SERVICE
AI1 in manual mode 0x00000100
AI1 in simulation mode 0x00000080 SIMULATE_
ACTIVE_ERR
AI1 not scheduled 0x00000040
AI2 out of service 0x00000020 BAD, OUT_
OF_SERVICE
AI2 in manual mode 0x00000010
AI2 in simulation mode 0x00000008 SIMULATE_
ACTIVE_ERR
AI3 out of service 0x00000004 BAD, OUT_
OF_SERVICE
AI3 in manual mode 0x00000002
AI3 in simulation mode 0x00000001 SIMULATE_
ACTIVE_ERR
IM 12A00A01-61E
Page 54

Foundation Fieldbus 3-49
IM 12A00A01-61E
Page 55

3-50 Foundation Fieldbus
3-8-3 Operation of each parameter in failure mode ISC202
• Following table summarizes the value of EXA parameters when LCD display indicates an Alarm.
error description EXA dev_alarm resource block transducer block channel = 1 (AI1) channel = 2 (AI2) channel = 3 (AI3) channel = 4
display
BLOCK_ERR BLOCK_ERR XD_ERROR PV.status SV.status TV.status CONCENTRATION.status OUT.status OUT.status OUT.status OUT.status
conductivity exceeds E5 0x80000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL
high limit _ERR _FAILURE _FAIL _FAIL _FAIL
conductivity exceeds E6 0x40000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL
low limit _ERR _FAILURE _FAIL _FAIL _FAIL
temperature sensor E7 0x20000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
open _ERR _FAILURE _FAIL _FAIL _FAIL _FAIL
temperature sensor E8 0x10000000 INPUT_FAILURE MECHANICAL BAD, SENS BAD, SENS BAD, SENS BAD, SENS_FAIL BAD, SENS BAD, SENS_FAIL BAD, SENS_FAIL BAD, SENS_FAIL
shorted _ERR _FAILURE _FAIL _FAIL _FAIL _FAIL
temperature E2 0x08000000 BAD, NON_ BAD, NON BAD, NON_SPECIFIC BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
compensation error SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
concentration table E18 0x01000000 BAD, CONFIG BAD, CONFIG BAD, CONFIG_ERR BAD, CONFIG BAD, CONFIG_ BAD, CONFIG_ERR
error _ERR _ERR _ERR ERR
matrix error E4 0x00800000 BAD, CONFIG BAD, CONFIG BAD, CONFIG_ERR BAD, CONFIG BAD, CONFIG_ BAD, CONFIG_ERR
_ERR
not used 0x00400000 _ERR _ERR ERR
not used 0x00200000
not used 0x00100000
not used 0x00080000
not used 0x00040000
mismatch between FF 0x00020000 NEEDS_MAINT_ ELECTRONICS BAD, DEV BAD, DEV BAD, DEVL BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
interface and EXA NOW_ERR _FAIL _FAIL _FAI _FAIL FAIL
parameter _FAILURE
EXA eeprom failure E20 0x00010000 NEEDS_MAINT_
NOW_ERR _ERROR _FAIL _FAIL _FAIL _FAIL FAIL
FF interface eeprom 0x00008000 LOST_STATIC NEEDS_MAINT_
failure _ERR, LOST_ NOW_ERR _ERROR _FAIL _FAIL _FAIL _FAIL FAIL
NV_ERR
Hart communication 0x00004000 NEEDS_MAINT_ ELECTRONICS BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
failure NOW_ERR _FAILURE _FAIL _FAIL _FAIL _FAIL FAIL
EXA checksum error E21 0x00002000 ELECTRONICS BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
_FAILURE _FAIL _FAIL _FAIL _FAIL FAIL
FF interface checksum 0x00001000
error
resource block out of 0x00000800 OUT_OF_ BAD, NON BAD, NON BAD, NON_ BAD, NON BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
service SERVICE_ERR _SPECIFIC _SPECIFIC SPECIFIC _SPECIFIC SPECIFIC SPECIFIC
transducer block out of 0x00000400 OUT_OF_
service SERVICE_ERR SERVICE
AI1 out of service 0x00000200 BAD, OUT_OF
_SERVICE
AI1 in manual mode 0x00000100
AI1 in simulation mode 0x00000080 SIMULATE_
ACTIVE_ERR
AI1 not scheduled 0x00000040
AI2 out of service 0x00000020 BAD, OUT_
OF_SERVICE
AI2 in manual mode 0x00000010
AI2 in simulation mode 0x00000008 SIMULATE_
ACTIVE_ERR
AI3 out of service 0x00000004 BAD, OUT_
OF_SERVICE
AI3 in manual mode 0x00000002
AI3 in simulation mode 0x00000001 SIMULATE_
ACTIVE_ERR
DATA_INTEGRITY
DATA_INTEGRITY
BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
BAD, DEV BAD, DEV BAD, DEV BAD, DEV BAD, DEV_FAIL BAD, DEV_ BAD, DEV_FAIL
BAD, OUT_OF_ BAD, OUT_
OF_SERVICE
BAD, OUT_ BAD, NON BAD, NON_ BAD, NON_ BAD, NON_SPECIFIC
OF_SERVICE _SPECIFIC SPECIFIC SPECIFIC
IM 12A00A01-61E
Page 56

Foundation Fieldbus 3-51
IM 12A00A01-61E
Page 57

3-52 Foundation Fieldbus
3-8-4 Operation of each parameter in failure mode dO202
• Following table summarizes the value of EXA parameters when LCD display indicates an Alarm.
error description dev_alarm EXA resource block transducer block dO value
eror BLOCK_ERR BLOCK_ERR XD_ERROR PV.status
calibration not stable 0x80000000 E1
S_QUALITY_BAD
zero out of limits 0x40000000 E2 INPUT_FAILURE_ERR MECHANICAL_FAILURE S_SUBS_SENS_FAIL
S_LIMIT_NON
sensitivity out of limits 0x20000000 E3
S_QUALITY_BAD
temp. sensor open 0x10000000 E7 INPUT_FAILURE_ERR MECHANICAL_FAILURE S_SUBS_SENS_FAIL
S_LIMIT_NON
S_QUALITY_BAD
temp. sensor shorted 0x08000000 E8 INPUT_FAILURE_ERR MECHANICAL_FAILURE S_SUBS_SENS_FAIL
S_LIMIT_NON
S_QUALITY_BAD
sensor current abnormal 0x04000000 E9 INPUT_FAILURE_ERR MECHANICAL_FAILURE S_SUBS_SENS_FAIL
S_LIMIT_NON
calibration timer expired 0x02000000 E16
not used 0x01000000
not used 0x00800000
not used 0x00400000
not used 0x00200000
not used 0x00100000
not used 0x00080000
not used 0x00040000
mismatch between FF S_QUALITY_BAD
interface and 0x00020000
EXA parameter S_LIMIT_NON
S_QUALITY_BAD
EXA eeprom failure 0x00010000 E20
S_LIMIT_NON
failure
S_LIMIT_NON
S_QUALITY_BAD
Hart communication
failure
S_LIMIT_NON
S_QUALITY_BAD
EXA checksum error 0x00002000 E21
S_LIMIT_NON
FF interface checksum
error
resource block out of
service
transducer block out of
service
AI1 out of service 0x00000200
AI1 in manual mode 0x00000100
AI1 in simulation mode 0x00000080 SIMULATE_ACTIVE_ERR
AI1 not scheduled 0x00000040
AI2 out of service 0x00000020
AI2 in manual mode 0x00000010
AI2 in simulation mode 0x00000008 SIMULATE_ACTIVE_ERR
AI3 out of service 0x00000004
AI3 in manual mode 0x00000002
AI3 in simulation mode 0x00000001 SIMULATE_ACTIVE_ERR
0x00008000
0x00004000
0x00001000
0x00000800 OUT_OF_SERVICE_ERR S_BAD_NON_SPECIFIC
0x00000400 OUT_OF_SERVICE_ERR
LOST_NV_ERR
LOST_STATIC_ERR S_QUALITY_BAD
NEEDS_MAINT_NOW_ERR
NEEDS_MAINT_NOW_ERR ELECTRONICS_FAILURE
NEEDS_MAINT_NOW_ERR DATA_INTEGRITY_ERROR
NEEDS_MAINT_NOW_ERR DATA_INTEGRITY_ERROR
NEEDS_MAINT_NOW_ERR ELECTRONICS_FAILURE
S_BAD_NON_SPECIFIC
S_SUBS_DEV_FAIL
S_SUBS_DEV_FAIL
S_SUBS_DEV_FAIL
S_SUBS_DEV_FAIL
ELECTRONICS_FAILURE
S_SUBS_DEV_FAIL
S_BAD_OUT_OF_SERVICE
FF interface eeprom
IM 12A00A01-61E
Page 58

Foundation Fieldbus 3-53
Temperature value Saturation percentage Cell current AI1 (channel = 1) AI2 (channel = 2) AI3 (channel = 3)
SV.status TV.status QV.status OUT.status OUT.status OUT.status
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON
S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD S_QUALITY_BAD
S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL S_SUBS_SENS_FAIL
S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_LIMIT_NON S_QUALITY_BAD
S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC
S_BAD_OUT_OF_SERVICE S_BAD_OUT_OF_SERVICE S_BAD_OUT_OF_SERVICE
S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC S_BAD_NON_SPECIFIC
S_BAD_OUT_OF_SERVICE
S_BAD_OUT_OF_SERVICE
S_BAD_OUT_OF_SERVICE
IM 12A00A01-61E
Page 59

Profibus 4-1
Sensor
input
Physical block
Block tag
Parameters
Node address
Output
AI function
block
Block tag
OUT
Parameters
AI function
block
Block tag
OUT
Parameters
AI function
block
Block tag
OUT
Parameters
Block tag
Parameters
Sensor
Transducer
block
4. PrOFIBUS
4-1. About Profibus
4-1-1 Outline
Profibus is a bi-directional digital communication protocol for field devices, which offers an advancement
implementation technologies for process control systems and is widely employed by numerous field devices.
EXA Series Profibus communication type employs the specification standardized by the Profibus organisation, and provides interoperability between Yokogawa devices and those produced by other manufacturers.
Profibus comes with software consisting of three AI function blocks, providing the means to implement flexible instrumentation system.
For information on other features, engineering, design, construction work, startup and maintenance of
Profibus, refer to the profibus organisation website: www.profibus.com
4-1-2 Internal Structure of EXA
The EXA contains a structured mapping of function blocks. Each function block serves a specific task.
(1) Physical block
• Manages the status of EXA hardware.
• Automatically informs the host of any detected faults or other problems.
(2) Transducer block
• Converts sensor input to process values which are transfered to AI function block by channels.
(3) AI1, AI2, AI3 function blocks
• Conditions raw data from the Transducer block.
• Outputs conditioned process values
• Carries out scaling, damping and square root extraction.
4-1-3 Logical Structure of Each BLOCK
Figure 4.1 Logical Structure of Each Block
IM 12A00A01-61E
Page 60

4-2 Profibus
Node adress, block tags and contained parameters within a function block are structured in the EXA device
as shown in figure 4.1.
4-1-4 Wiring System Configuration
The number of devices (<32) that can be connected to a single bus and the cable length vary depending on
system design. When constructing systems, both the basic and overall design must be carefully considered
to allow device performance to be fully exhibited.
Figure 4.2 Internal view of EXA wiring compartment
See Figure 4.4.
IM 12A00A01-61E
Page 61

Figure 4.3 Glands to be used for cabling
Sensor cable
gland
Profibus cable gland
Grounding terminal
(connect to safety ground,
only if power supply is not grounded)
Profibus 4-3
Figure 4.4 Pinhead connector
Figure 4.5 Gland connection
IM 12A00A01-61E
Page 62

4-4 Profibus
Power
unit
trunck cable
Spur
Spur
Field
device
Field
device
Junction
box
V
1
V
3
V
2
V
4
V
1 = V2 = V3 = V4
Potential equalisation line (German practice)
Power
unit
trunck cable
Spur
Spur
Field
device
Field
device
Junction
box
High integrity eart, 0.1R or better
Neutral star-point bonding (English practice)
A
B
4-2. Preparation
The EXA 202 Profibus is provided with two cable glands. The first is used for the electrode wiring as the
other is used for the power wiring shown in figure 4.3.
To open the EXA 202 for wiring:
1. Loosen the four frontplate screws and remove the cover.
2. The terminal strip is now visible.
3. Connect the power supply according figure 4.4. Use the gland on the left for this cable.
4. Connect the sensor input, using the gland on the right (see figure 4.3). Switch on the power.
Commission the instrument as required or use the default settings.
5. Replace the cover and secure frontplate with the four screws.
4-2-1. Cables, terminals and glands
The EXA202 is equipped with terminals suitable for the connection of finished cables in the size range:
0.13 to 2.5 mm (26 to 14 AWG). The glands will form a tight seal on cables with an outside diameter in the
range of 6 to 12 mm (0.24 to 0.47 inches).
4-2-2. Shielding and grounding
Grounding and shielding of the transmitter is necessary for a safe and reliable operation. Please use one of
the following schemes (A or B) as these will give proper shielding and grounding. One should pay special
attention to instruments that required an external power supply (besides the 9-32V supplied by the bus).
Figure 4.6 Shielding and grounding
IM 12A00A01-61E
Page 63

Profibus 4-5
EXA
Power
supply
Terminator
HOST
Coupler/terminator
4-3. GETTING STArTEd
Profibus is fully dependent upon digital communication protocol (EN 50170 Volume 2 and IEC 61158 for
IS areas, Profibus PA) and differs in operation from the conventional 4 to 20 mA transmission communication protocol. It is recommended that novice users use field devices in accordance with the procedures
described in this section. The procedures assume that field devices will be set up on a bench or an instrument shop.
4-3-1 Connection of devices
The following instruments are required for use with Profibus devices:
• Power supply:
Profibus requires a dedicated power supply. It is recommended that the current capacity be well over
the total value of the maximum current consumed by all devices (including the host). Conventional DC
current cannot be used as is.
• Terminator:
Profibus requires two terminators. Refer to the suppliers manual for details of terminators.
• Field devices / slaves
Several field devices or slave devices can be connected to the same link. depending on the power
consuption, up to 32 devices can be connected. A maximum of 500mA may be used so the theoretical
number of devices is 500mA / Power consumption per device.
• Host / Masters
Used for accessing field devices. A dedicated Master Class 1 host (such as PLC) is used for dedicated
cyclic communication. A master Class 2 Host is used for device management puposes such as changing
the “ device address” or parameter settings. For operation of the host, refer to the instruction manual for
each host. No details of the host are explained in the rest of this material.
• Cable:
Used for connecting devices. Refer to IEC 61158 for details of instrumentation cabling.
Profibus PA uses twisted pair wires up to 1900 metre. To meet the Electro Magnetic Interference
standards a shielded twisted pair is obligated.
For applications in intrinsically safe areas, the transmission method defined in IEC 61158-2 is used with
PROFIUS-PA The transmission rate in this case is 31.25 kbit/s. DP transmission via RS 485 to IEC 61158-2
is implemented with the network components (DP/PA coupler or DP/PA link)
Connect the devices as shown in Figure 4.7. Connect the terminators at both ends of the trunk, with a minimum length of the spur laid for connection.
The polarity of signal and power must be maintained.
Figure 4.7 Cabling
NOTE
Before using a Profibus configuration tool other than the existing host, confirm it does not affect
the loop functionality in which all devices are already installed in operation. Disconnect the relevant
control loop from the bus if necessary.
IM 12A00A01-61E
Page 64

4-6 Profibus
IMPORTANT
IMPORTANT
Connecting a Profibus configuration tool to a loop with its existing host may cause communication data
scrambles resulting in a functional disorder or a system failure.
4-3-2 Host Setting
To activate Profibus, the following settings are required for the host.
Do not turn off the power immediately after setting. When the parameters are saved to the EEPROM, the
redundant processing is executed for an improvement of reliability. If the power is turned off within 60 seconds after settings are made, the modified parameters are not saved and the settings may return to their
original values.
For cyclic data communication a GSD file is required. This file contains all necessary information to start
this type of communication. Please make sure the gsd file is in the right directory so the information is available to the HOST. Refer to the HOST’s manual for guidance.
For acyclic communication several configuration tools can be used. Each communication tool requires
it’s own device driver. We currently support only Siemens Simatic PDM. All parameter lists and methods
described in this manual are based on this acyclic communication tool. Please make sure the device driver
is in the proper directory. Most HOST systems come with an “install device driver” package which places all
required files in the designated folders.
4-3-3 Bus Power ON
Turn on the power of the host and the bus. First all segments of the display are lit, then the display begins
to operate. If the indicator is not lit, check the polarity of the power supply.
Using the host device display function, check that the EXA is in operation on the bus.
Unless otherwise specified, the following settings are in effect when shipped from the factory.
If no EXA is detected, check the available address. Please set all addresses of the devices in advance or
separately connect each EXA and set a different address for each. Make sure to note the address after
changing it as from this point on the device can only be accessed through this address.
4-3-4 Reading cyclic parameters
In general, slave devices exchange data cyclically with the master (class 1, e.g. PLC). The EXA (slave) gets
the data from the sensor, makes some calculations and makes the outcome available through analog input
blocks. The controller device (Master) requests for these process values, makes some calculation (PID,
ratio) and sends the result to an actuator. The EXA contains three analog input blocks and therefore three
Process values for cyclic data transfer.
The master class 1 device gets the information (of the EXA) by consulting the GSD file. A device specific
GSD file should be available for each device and should have an unique identifier. All information necessary
for cyclic data transfer is described in the GSD file. The YP01078X.gsd file and a bitmap file YP01078X.dib
(device independent bitmap) should be placed in dedicated folders (“directories”). Refer to the manual of the
Master Class 1 device for these folders. With these files, the Master Class 1 devices are able to start cyclic
data transfer.
IM 12A00A01-61E
Page 65

Profibus 4-7
Beforehandone must configure which information will be exchanged.
According with the Profibus-PA Profile 3.01, there are two kinds of configurations possible. The Identifier
byte (or short identifier) and the Extended Identifier Format (or long identifier). The EXA supports both kinds
of configurations. The user can choose either “Analog Input (short)” or “Analog Input (long)” and will end up
with the same result.
The function blocks of the EXA are in a specific order. The configuration of the cyclic data should be done
in the same order.
For the EXA. the process values are mapped as follows:
PH202 SC202 ISC202 DO202
slot (1) “AI1” pH SC1 SC1 Dissolved Oxygen
slot (2) “AI2” Temperature Temperature Temperature Temperature
slot (3) “AI3” ORP/rH SC2 SC2 Percent Saturation
The GSD file of the EXA 202 specifies 3 modules:
;Empty module
Module = “Empty Module” 0x00
1
EndModule
;Modules for Analog Input
Module = “Analog Input (AI)short” 0x94
2
EndModule
;Modules for Analog Input
Module = “Analog Input (AI)long” 0x42,0x84,0x81,0x81
3
EndModule
;--- Description of the module assignment: --;
SlotDefinition
Slot(1) = “AI1” 3 1,2,3
Slot(2) = “AI2” 3 1,2,3
Slot(3) = “AI3” 3 1,2,3
Examples:
- Configuring the output of the AI block 1 (pH) and the output of AI block 2 (temperature):
“Analog Input (short) “ and “Analog Input (short) “ and “Empty Module” or “0x94, 0x94, 0x00”
- Configuring the output of AI block 1 (pH) only:
“Analog Input (long) “ and “Empty module” and “Empty module” or “0x42, 0x84, 0x81, 0x81, 0x00, 0x00”
Note:
Most Master Class 1 devices have an advanced Human Machine Interface and will guide you through
these configurations.
4-3-5 Reading acyclic parameters
Communications occur on a peer-to-peer basis. A cyclic communication services for parametrization, operation, monitoring, alarm/error handling and diagnostics of intelligent devices may be handled in parallel to
cyclic transfer.
IM 12A00A01-61E
Page 66

4-8 Profibus
4-4. Function block parameters and Methods
4-4-1. Physical Block Parameters
Parameter Default Alternatives R/W Slot, Index Data Type
(byte,bit) (bytes)
Software revision “R3.01” R 0,24 visible string (16)
Hardware revision “R3.01” R 0,25 visible string (16)
Device manufacturer ID 37hex (Yokogawa) R 0,26 unsigned16 (2)
Device ID PH202 “5945430850” R 0,27 visible string (16)
SC202 “5945430851” R 0,27 visible string (16)
ISC202 “5945430852” R 0,27 visible string (16)
DO202 “5945430853” R 0,27 visible string (16)
Device serial number “00000000U9313508” (example) R 0,28 visible string (16)
Diagnosis for details see .gsd file R 0,29 bit string (4)
Diagnosis extension for details see .gsd file R 0,30 bit string (6)
Diagnosis mask R 0,31 bit string (4)
Diagnosis mask extension R 0,32 bit string (6)
Device certifiacation R 0,33 visible string (32)
Write locking Write enable (2457) Write disable (0) R/W 0,34 unsigned16 (2)
Factory reset 0 factory reset (1), warm start (2506),
reset bus address to 126 (2712) R/W 0,35 unsigned16 (2)
Descriptor YOKOGAWA PROFIBUS
-PA ANALYZER R/W 0,36 visible string (32)
Device message YOKOGAWA PROFIBUS
-PA ANALYZER R/W 0,37 visible string (32)
Device install date “” R 0,38 visible string (16)
Ident number selector manufacturer specific
ident no (1) profile specific ident number (0) R/W 0,40 unsigned8 (1)
Device configuration “” R 0,52 visible string (32)
Init state run (2) R/W 0,53 unsigned8 (1)
Device state run (2) R/W 0,54 unsigned8 (1)
Global status 0 bit0 - failure, bit1 - maintenance requested,
bit2 - function check, bit3 - limits exceeded,
bit4~15 - reserved R 0,55 bit string (2)
4-4-2. Analog Input Block Parameters
Parameter Default Alternatives R/W Slot, Index Data Type
(byte,bit) (bytes)
AI1, AI2, AI3
Static Revision No. R 1,17 unsigned16 (2)
Channel PH202: pH(284) Temp (298), ORP/rH(305)
SC202: SC1(284) Temp (292), SC2(303), Conc(302)
ISC202: SC1(284) Temp (292), SC2(303), Conc(302)
DO202: DO(284) Temp (299), %Sat(306), sensor current(305) R/W 1,30 unsigned16 (2)
Linearization type Non linearization (0) R/W 1,29 unsigned 8 (1)
Unit R 1,28 DS-36 (11)
Decimal point 1 R/W 1,28 DS-36 (11)
Filter Time Const R/W 1,32 float (4)
Process Value Scale
Lower Value R/W 1,27 float[2] (8)
Upper Value R/W 1,27 float[2] (8)
Output Scale
Lower Value R/W 1,28 DS-36 (11)
Upper Value R/W 1,28 DS-36 (11)
Output Limits
Upper Limit Alarm Maximum of float R/W 1,37 float (4)
Upper Limit Warning Maximum of float R/W 1,39 float (4)
Lower Limit Warning Minimum of float R/W 1,41 float (4)
Lower Limit Alarm Minimum of float R/W 1,43 float (4)
Limit Hysteresis 0.5 % R/W 1,35 float (4)
IM 12A00A01-61E
Page 67

Profibus 4-9
4-4-3. Transducer block parameters
4-4-3-1. Transducer block parameters PH202
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Primary value Type 111(pH) R 4, 27 unsigned16 (2)
Measured Value pH R 4, 28 DS-33 (5)
Status R 4, 28 DS-33 (5)
Sensor type pH pH/ORP sensor(160) pH/ORP sensor(160) R 4, 30 unsigned16 (2)
Sensor mV mV R 4, 31 float (4)
Secondary value Parameters
Value ºC R 4, 42 DS-33 (5)
Status R 4, 42 DS-33 (5)
Secondary value unit ˚C ˚F R/W 4, 43 unsigned16 (2)
Sensor temp comp Automatic(2) Off(0), Manual(1) R/W 4, 44 unsigned8 (1)
Sensor temp man value ºC R/W 4, 45 float (4)
Temperature sensor Pt1000(148) Pt100(128), 5k1(150), 3kBalco(145), R/W 4, 46 unsigned16 (2)
8k55(151), 350(153), PTC10k(158),
6k8(157)
Temp. connection type 1 R 4, 47 unsigned8 (1)
Process compensation Disabled(0) Enabled(1) R/W 4, 167(1.0) unsigned32 (4)
Temperature Coefficient mV/
10ºC R/W 4, 159 float (4)
Tertiary value Parameters
Tertiary value type None(1) ORP(2), rH(3) R 4, 48 unsigned16 (2)
Value mV R 4, 49 DS-33 (5)
Status R 4, 49 DS-33 (5)
Calibration Parameters
Calibration High pH R/W 4, 32 float (4)
Calibration Low pH R/W 4, 33 float (4)
Cal min span pH R 4, 34 float (4)
Slope check Enabled(1) Disabled(0) R/W 4, 167(1.1) unsigned32 (4)
Slope % R/W 4, 35 float (4)
Slope unit %(1342) %(1342) R 4, 36 unsigned16 (2)
Zero check Enabled(1) Disabled(0) R/W 4, 167(1.0) unsigned32 (4)
Zero mV R/W 4, 37 float (4)
Zero unit mV(1243) pH(1422) R/W 4, 38 unsigned16 (2)
Isopotential pH pH R/W 4, 39 float (4)
Tertiary zero mV R/W 4, 51 float (4)
Calibration method not calibrated(0) one point(107), two point(108), other(255) R/W 4, 40 unsigned8 (1)
Date of Calibration R 4, 41 DS-21
Stable Time 5.0 sec S R/W 4, 97 float (4)
Stable Value 0.02pH pH R/W 4, 98 float(4)
diagnostic Settings
Glass impedance ohm R 4, 52 float (4)
Glass impedance Lo Lim ohm R/W 4, 101 float (4)
Glass impedance Hi Lim ohm R/W 4, 102 float (4)
Glass impedance check Enabled(1) Disabled(0) R/W 4, 167(2.2) unsigned32 (4)
Glass impedance circuit High(1) Low(0) R/W 4, 167(2.0) unsigned32 (4)
Glass impedance comp. Enabled(1) Disabled(0) R/W 4, 167(2.1) unsigned32 (4)
Glass impedance exceeds
low limit (E4.1) Hard fail(1) Soft fail(0) R/W 4, 166(2.2) unsigned32 (4)
Glass impedance exceeds
high limit (E5.1) Hard fail(1) Soft fail(0) R/W 4, 166(2.3) unsigned32 (4)
Reference impedance ohm R 4, 53 float (4)
Reference impedance
low limit ohm R/W 4, 103 float (4)
Reference impedance
high limit ohm R/W 4, 104 float (4)
Reference impedance check
Enabled(1) Disabled(0) R/W 4, 167(2.5) unsigned32 (4)
IM 12A00A01-61E
Page 68

4-10 Profibus
4-4-3-1. Transducer block parameters PH202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Reference impedance circuit
Reference impedance
compensation Disabled(0) Enabled(1) R/W 4, 167 (2.4) unsigned32 (4)
Ref. impedance exceeds
low limit (E4.2) Hard fail(1) Soft fail(0) R/W 4, 166 (2.4) unsigned32 (4)
Ref. impedance exceeds
high limit (E5.2) Hard fail(1) Soft fail(0) R/W 4, 166 (2.5) unsigned32 (4)
Temp. sensor open (E7) Hard fail(1) Soft fail(0) R/W 4, 166 (2.6) unsigned32 (4)
Temp. sensor shorted (E8) Hard fail(1) Soft fail(0) R/W 4, 166 (2.7) unsigned32 (4)
Primary value exceeds
limits (E9) Hard fail(1) Soft fail(0) R/W 4, 166 (1.0) unsigned32 (4)
Calibration timer
expired (E16) Soft fail(0) Hard fail(1) R/W 4, 166 (1.7) unsigned32 (4)
Passcode Configuration
Passcode Maintenance - 000, 111, 333, 777, 888, 123, 957,
Passcode Commissioning - 000, 111, 333, 777, 888, 123, 957,
Passcode Service - 000, 111, 333, 777, 888, 123, 957,
display Settings
Display precision 0.1 pH(0) 0.01 pH(1) R/W 4, 167 (1.2) unsigned32 (4)
Auto return Enabled(1) Disabled(0) R/W 4, 167 (1.3) unsigned32 (4)
Logbook Configuration
power up Logbook 2(3), Not Logged(1), Logbook 1(2) R/W 4, 60 unsigned8 (1)
power down Logbook 2(3), Not Logged(1), Logbook 1(2) R/W 4, 61 unsigned8 (1)
system error Logbook 1(2), - R 4, 62 unsigned8 (1)
defaults loaded Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 63 unsigned8 (1)
logbook erased Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 64 unsigned8 (1)
init performed Logbook 1(2), - R 4, 65 unsigned8 (1)
error on Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 66 unsigned8 (1)
error off Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 67 unsigned8 (1)
temperature adjust Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 68 unsigned8 (1)
manual temperature Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 69 unsigned8 (1)
aspot changed Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 70 unsigned8 (1)
slope changed Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 71 unsigned8 (1)
aspot 2 changed Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 72 unsigned8 (1)
temperature coefficient Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 73 unsigned8 (1)
input 1 imp after cal Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 74 unsigned8 (1)
input 2 imp after cal Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 75 unsigned8 (1)
delta ph changed Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 76 unsigned8 (1)
delta t changed Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 77 unsigned8 (1)
isothermal point changed Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 78 unsigned8 (1)
zeropoint changed Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 79 unsigned8 (1)
new sensor installed Logbook 1(2), Not Logged(1), Logbook 2(3) R/W 4, 80 unsigned8 (1)
one point calibration Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 81 unsigned8 (1)
two point calibration Not Logged(1), Logbook 1(2), Logbook 2(3) R/W 4, 82 unsigned8 (1)
Buffer Solution 1
Buffer1 ID 4.00 R/W 4, 105 unsigned8 (1)
Buffer1 at 0°C 4.00 R/W 4, 106 float (4)
Buffer1 at 5°C 4.00 R/W 4, 107 float (4)
Buffer1 at 10°C 4.00 R/W 4, 108 float (4)
Buffer1 at 15°C 4.00 R/W 4, 109 float (4)
Low(0) High(1) R/W 4, 167 (2.3) unsigned32 (4)
331, 546, 847 R/W 4, 160 unsigned16 (4)
331, 546, 847 R/W 4, 161 unsigned16 (4)
331, 546, 847 R/W 4, 162 unsigned16 (4)
IM 12A00A01-61E
Page 69

Profibus 4-11
4-4-3-1. Transducer block parameters PH202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Buffer1 at 20°C 4.00 R/W 4, 110 float (4)
Buffer1 at 25°C 4.01 R/W 4, 111 float (4)
Buffer1 at 30°C 4.02 R/W 4, 112 float (4)
Buffer1 at 35°C 4.02 R/W 4, 113 float (4)
Buffer1 at 40°C 4.04 R/W 4, 114 float (4)
Buffer1 at 45°C 4.05 R/W 4, 115 float (4)
Buffer1 at 50°C 4.06 R/W 4, 116 float (4)
Buffer1 at 55°C 4.08 R/W 4, 117 float (4)
Buffer1 at 60°C 4.09 R/W 4, 118 float (4)
Buffer1 at 65°C 4.11 R/W 4, 119 float (4)
Buffer1 at 70°C 4.13 R/W 4, 120 float (4)
Buffer1 at 75°C 4.15 R/W 4, 121 float (4)
Buffer1 at 80°C 4.16 R/W 4, 122 float (4)
Buffer Solution 2
Buffer2 ID 7.00 R/W 4, 123 unsigned8 (1)
Buffer2 at 0°C 6.98 R/W 4, 124 float (4)
Buffer2 at 5°C 6.95 R/W 4, 125 float (4)
Buffer2 at 10°C 6.92 R/W 4, 126 float (4)
Buffer2 at 15°C 6.90 R/W 4, 127 float (4)
Buffer2 at 20°C 6.88 R/W 4, 128 float (4)
Buffer2 at 25°C 6.87 R/W 4, 129 float (4)
Buffer2 at 30°C 6.85 R/W 4, 130 float (4)
Buffer2 at 35°C 6.84 R/W 4, 131 float (4)
Buffer2 at 40°C 6.84 R/W 4, 132 float (4)
Buffer2 at 45°C 6.83 R/W 4, 133 float (4)
Buffer2 at 50°C 6.83 R/W 4, 134 float (4)
Buffer2 at 55°C 6.83 R/W 4, 135 float (4)
Buffer2 at 60°C 6.84 R/W 4, 136 float (4)
Buffer2 at 65°C 6.84 R/W 4, 137 float (4)
Buffer2 at 70°C 6.85 R/W 4, 138 float (4)
Buffer2 at 75°C 6.85 R/W 4, 139 float (4)
Buffer2 at 80°C 6.86 R/W 4, 140 float (4)
Buffer Solution 3
Buffer3 ID 9 R/W 4, 141 unsigned8 (1)
Buffer3 at 0°C 9.46 R/W 4, 142 float (4)
Buffer3 at 5°C 9.40 R/W 4, 143 float (4)
Buffer3 at 10°C 9.33 R/W 4, 144 float (4)
Buffer3 at 15°C 9.28 R/W 4, 145 float (4)
Buffer3 at 20°C 9.23 R/W 4, 146 float (4)
Buffer3 at 25°C 9.18 R/W 4, 147 float (4)
Buffer3 at 30°C 9.14 R/W 4, 148 float (4)
Buffer3 at 35°C 9.10 R/W 4, 149 float (4)
Buffer3 at 40°C 9.07 R/W 4, 150 float (4)
Buffer3 at 40°C 9.04 R/W 4, 151 float (4)
Buffer3 at 50°C 9.01 R/W 4, 152 float (4)
Buffer3 at 55°C 8.99 R/W 4, 153 float (4)
Buffer3 at 60°C 8.96 R/W 4, 154 float (4)
Buffer3 at 65°C 8.94 R/W 4, 155 float (4)
Buffer3 at 70°C 8.92 R/W 4, 156 float (4)
Buffer3 at 75°C 8.90 R/W 4, 157 float (4)
Buffer3 at 80°C 8.89 R/W 4, 158 float (4)
IM 12A00A01-61E
Page 70

4-12 Profibus
4-4-3-2. Function Block Parameters SC202
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Primary value Parameters
Primary value Type Conductivity(113) conductivity(113), resistivity(116) R 4, 27 unsigned16 (2)
Measured Value S/cm 4, 28
Status 4, 28
Conductivity sensor type 2 electrode(146) contact 2-electrode(146),
contact 4-electrode(163) R/W 4, 42 unsigned16 (2)
Secondary value Parameters
Value -20~250, 0~500 °C R 4, 36 DS-33 (5)
Status 4, 36
Secondary value unit °C(1001) °C(1001), °F(1002) R/W 4, 37 unsigned16 (2)
Sensor temp comp Automatic(3) auto(3) R 4, 38 unsigned8 (1)
Sensor temp man value 25 0 °C R 4, 39 float (4)
Temperature sensor Pt1000(148) Pt1000(148), Pt100(128), Ni100(149),
8k55(151), Pb36/JIS6k(152) R/W 4, 40 unsigned16 (2)
Temp. connection type 2 2 R 4, 41 unsigned8 (1)
Tertiary value Parameters
Value S/cm R 4, 47 DS-33 (5)
Status 4, 47
Compensation Parameters
Reference temperature 25 0~100, 32~212 °C R/W 4, 48 float (4)
Compensation method NaCl(1) NaCl(1), TC(2), matrix(3) R/W 4, 49 unsigned8 (1)
Temperature coefficient 2.1 0~3.5 %/°C R/W 4, 45 float (4)
Matrix selection HCl cation(1), Ammonia pure water(2),
Morpholine pure water(3), HCl 0-5%(4),
Natrium hydroxide 0-5%, user defined(9) R/W 4, 50 unsigned8 (1)
Tertiary comp. method NaCl(1) NaCl(1), TC(2), matrix(3) R/W 4, 51 unsigned8 (1)
Tertiary temp. coefficient 2.1 0~3.5 R/W 4, 52 float (4)
Concentration Parameters
Concentration value 0 R 4, 46 DS-33 (5)
Concentration status 4, 46
Concentration Measurement
Concentration 0% 0 0~100 % R/W 4, 121 float (4)
Concentration 100% 100 0~100 % R/W 4, 122 float (4)
Concentration Table 0% 0 0~1.999, 0~999MΩ•cm S/cm R/W 4, 123 float (4)
Concentration Table 5% 0.00005 S/cm R/W 4, 124 float (4)
Concentration Table 10% 0.0001 S/cm R/W 4, 125 float (4)
Concentration Table 15% 0.00015 S/cm R/W 4, 126 float (4)
Concentration Table 20% 0.0002 S/cm R/W 4, 127 float (4)
Concentration Table 25% 0.00025 S/cm R/W 4, 128 float (4)
Concentration Table 30% 0.0003 S/cm R/W 4, 129 float (4)
Concentration Table 35% 0.00035 0~1.999, 0~999MΩ•cm S/cm R/W 4, 130 float (4)
Concentration Table 40% 0.0004 S/cm R/W 4, 131 float (4)
Concentration Table 45% 0.00045 S/cm R/W 4, 132 float (4)
Concentration Table 50% 0.0005 S/cm R/W 4, 133 float (4)
Concentration Table 55% 0.00055 S/cm R/W 4, 134 float (4)
Concentration Table 60% 0.0006 S/cm R/W 4, 135 float (4)
Concentration Table 65% 0.00065 S/cm R/W 4, 136 float (4)
Concentration Table 70% 0.0007 0~1.999, 0~999MΩ•cm S/cm R/W 4, 137 float (4)
Concentration Table 75% 0.00075 S/cm R/W 4, 138 float (4)
Concentration Table 80% 0.0008 S/cm R/W 4, 139 float (4)
Concentration Table 85% 0.00085 S/cm R/W 4, 140 float (4)
Concentration Table 90% 0.0009 S/cm R/W 4, 141 float (4)
Concentration Table 95% 0.00095 S/cm R/W 4, 142 float (4)
Concentration Table 100%
Disabled(1) Enabled(2) 4, 120 unsigned8(1)
0.001 S/cm R/W 4, 143 float (4)
IM 12A00A01-61E
Page 71

Profibus 4-13
4-4-3-2. Function Block Parameters SC202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Calibration Parameters
Nominal cell constant 0.1 0.005~50 1/cm R/W 4, 30 float (4)
Calibrated cell constant 0.1 0.005~50 1/cm R 4, 89 float (4)
Calibration method Not calibrated(0) 1 point(107), 2 point(108) R/W 4, 34 unsigned8 (1)
Diagnostic Settings
Polarisation check Enabled(1) Disable(0) 4, 151(2.1)
Polarization detected (E1) Hard fail(1) Soft fail(0) 4, 150(2.0)
E5 Limit 0.25 0~0.5, 0~10MΩ S R/W 4, 144 float (4)
E6 Limit 0.000001 0~0.5, 0~10MΩ S R/W 4, 145 float (4)
Conductivity exceeds
high limit (E5) Hard fail(1) Soft fail(0) 4, 150(2.4)
Conductivity exceeds
low limit (E6) Hard fail(1) Soft fail(0) 4, 150(2.5)
Temp. sensor open (E7) Hard fail(1) Soft fail(0) 4, 150(2.6)
Temp. sensor shorted (E8)
USP Disabled
Conductivity exceeds
USP limit (E13) Soft fail(0) Hard fail(1) R/W 4, 150(1.4) unsigned32 (4)
Passcode Configuration
Passcode Maintenance 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 147 unsigned16 (2)
Passcode Commissioning 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 148 unsigned16 (2)
Passcode Service 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 149 unsigned16 (2)
display Settings
Display Resolution Auto Ranging(1) auto(1), x.xxx µS/cm(2), xx.xx µS/cm(3)
Auto return Enabled(1) Disable(0) R 4, 151(1.0)
Logbook Configuration
Power up Logbook 2(3) off(1), logbook1(2), logbook2(3) R/W 4, 59 unsigned8 (1)
Power down Logbook 2(3) R/W 4, 60 unsigned8 (1)
System error Logbook 1(2) R/W 4, 61 unsigned8 (1)
Defaults loaded Not logged(1) R/W 4, 62 unsigned8 (1)
Logbook erased Not logged(1) R/W 4, 63 unsigned8 (1)
Init performed Logbook 1(2) R/W 4, 64 unsigned8 (1)
Error on Not logged(1) R/W 4, 65 unsigned8 (1)
Error off Not logged(1) R/W 4, 66 unsigned8 (1)
Temperature adjust Logbook 1(2) R/W 4, 67 unsigned8 (1)
Cell constant Logbook 1(2) R/W 4, 68 unsigned8 (1)
Air calibration Logbook 1(2) R/W 4, 69 unsigned8 (1)
Calibration Logbook 1(2) R/W 4, 70 unsigned8 (1)
Reference temperature Not logged(1) R/W 4, 71 unsigned8 (1)
Temperature coefficient 1 Not logged(1) R/W 4, 72 unsigned8 (1)
Matrix selection Not logged(1) R/W 4, 73 unsigned8 (1)
Temperature coefficient 2 Not logged(1) R/W 4, 74 unsigned8 (1)
User defined matrix
Temperature 1 0 -20~250, 0~500 °C R/W 4, 90 float (4)
Temperature 2 25 °C R/W 4, 91 float (4)
Temperature 3 50 °C R/W 4, 92 float (4)
Temperature 4 75 °C R/W 4, 93 float (4)
Temperature 5 100 °C R/W 4, 94 float (4)
Solution 1 at Temp. 1 0.031 0~1.999, 0~999MΩ•cm S/cm R/W 4, 95 float (4)
Solution 1 at Temp. 2 0.053 S/cm R/W 4, 96 float (4)
Solution 1 at Temp. 3 0.076 S/cm R/W 4, 97 float (4)
Solution 1 at Temp. 4 0.0975 S/cm R/W 4, 98 float (4)
Solution 1 at Temp. 5 0.119 S/cm R/W 4, 99 float (4)
Solution 2 at Temp. 1 0.061 0~1.999, 0~999MΩ•cm S/cm R/W 4, 100 float (4)
Hard fail(1) Soft fail(0) 4, 150(2.7)
xxx.x µS/cm(4), x.xxx mS/cm(5), xx.xx mS/
cm(6) xxx.x mS/cm(7), xxxx mS/cm(8) R 4, 146 unsigned8 (1)
IM 12A00A01-61E
Page 72

4-14 Profibus
4-4-3-2. Function Block Parameters SC202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Solution 2 at Temp. 2 0.101 S/cm R/W 4, 101 float (4)
Solution 2 at Temp. 3 0.141 S/cm R/W 4, 102 float (4)
Solution 2 at Temp. 4 0.182 S/cm R/W 4, 103 float (4)
Solution 2 at Temp. 5 0.223 S/cm R/W 4, 104 float (4)
Solution 3 at Temp. 1 0.086 0~1.999, 0~999MΩ•cm S/cm R/W 4, 105 float (4)
Solution 3 at Temp. 2 0.145 S/cm R/W 4, 106 float (4)
Solution 3 at Temp. 3 0.207 S/cm R/W 4, 107 float (4)
Solution 3 at Temp. 4 0.264 S/cm R/W 4, 108 float (4)
Solution 3 at Temp. 5 0.318 S/cm R/W 4, 109 float (4)
Solution 4 at Temp. 1 0.105 0~1.999, 0~999MΩ•cm S/cm R/W 4, 110 float (4)
Solution 4 at Temp. 2 0.185 S/cm R/W 4, 111 float (4)
Solution 4 at Temp. 3 0.286 S/cm R/W 4, 112 float (4)
Solution 4 at Temp. 4 0.339 S/cm R/W 4, 113 float (4)
Solution 4 at Temp. 5 0.41 S/cm R/W 4, 114 float (4)
Solution 5 at Temp. 1 0.127 0~1.999, 0~999MΩ•cm S/cm R/W 4, 115 float (4)
Solution 5 at Temp. 2 0.223 S/cm R/W 4, 116 float (4)
Solution 5 at Temp. 3 0.319 S/cm R/W 4, 117 float (4)
Solution 5 at Temp. 4 0.408 S/cm R/W 4, 118 float (4)
Solution 5 at Temp. 5 0.495 S/cm R/W 4, 119 float (4)
4-4-3-3. Function Block Parameters ISC202
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Primary value Parameters
Primary value Type Conductivity(113) conductivity(113), resistivity(116) R 4, 27 unsigned16 (2)
Measured Value S/cm 4, 28
Status 4, 28
Conductivity sensor type toroidal(147) R/W 4, 42 unsigned16 (2)
Secondary value Parameters
Value -20~140, 0~280 °C R 4, 36 DS-33 (5)
Status 4, 36
Secondary value unit °C(1001) °C(1001), °F(1002) R/W 4, 37 unsigned16 (2)
Sensor temp comp Automatic(3) auto(3) R 4, 38 unsigned8 (1)
Sensor temp man value 25 0 °C R 4, 39 float (4)
Temperature sensor NTC30k(154) Pt1000(148) R/W 4, 40 unsigned16 (2)
Temp. connection type 2 2 R 4, 41 unsigned8 (1)
Tertiary value Parameters
Value S/cm R 4, 47 DS-33 (5)
Status 4, 47
Compensation Parameters
Reference temperature 25 0~100, 32~212 °C R/W 4, 48 float (4)
Compensation method NaCl(1) NaCl(1), TC(2), matrix(3) R/W 4, 49 unsigned8 (1)
Temperature coefficient 2.1 0~3.5 R/W 4, 45 float (4)
Matrix selection H2SO4 0.5-5.0%, 0-100ºC(1), 2.5-25%,
0-100ºC(2) HCl 0-5%, 0-60ºC(3), 1-20%,
0-60ºC(4) HNO3 0.5-5.0%, 0-80ºC(5),
2.5-25%, 0-80ºC(6) NaOH 0.5-5.0%,
0-100ºC(7), 0.5-15%, 0-100ºC(8)
user defined(9) R/W 4, 50 unsigned8 (1)
Tertiary comp. method NaCl(1) NaCl(1), TC(2), matrix(3) R/W 4, 51 unsigned8 (1)
Tertiary temp. coefficient 2.1 0~3.5 R/W 4, 52 float (4)
Concentration Parameters
Concentration value 0 %/°C R 4, 46 DS-33 (5)
Concentration status 4, 46
Concentration Measuremen
t Disabled(1) Enabled(2) % 4, 120 unsigned 8 (1)
IM 12A00A01-61E
Page 73

Profibus 4-15
4-4-3-3. Function Block Parameters ISC202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Concentration 0% 0 0~100 % R/W 4, 121 float (4)
Concentration 100% 100 0~100 % R/W 4, 122 float (4)
Concentration Table 0% 0 0~1.999 S/cm R/W 4, 123 float (4)
Concentration Table 5% 0.05 S/cm R/W 4, 124 float (4)
Concentration Table 10% 0.1 S/cm R/W 4, 125 float (4)
Concentration Table 15% 0.15 S/cm R/W 4, 126 float (4)
Concentration Table 20% 0.2 S/cm R/W 4, 127 float (4)
Concentration Table 25% 0.25 S/cm R/W 4, 128 float (4)
Concentration Table 30% 0.3 S/cm R/W 4, 129 float (4)
Concentration Table 35% 0.35 0~1.999 S/cm R/W 4, 130 float (4)
Concentration Table 40% 0.4 S/cm R/W 4, 131 float (4)
Concentration Table 45% 0.45 S/cm R/W 4, 132 float (4)
Concentration Table 50% 0.5 S/cm R/W 4, 133 float (4)
Concentration Table 55% 0.55 S/cm R/W 4, 134 float (4)
Concentration Table 60% 0.6 S/cm R/W 4, 135 float (4)
Concentration Table 65% 0.65 S/cm R/W 4, 136 float (4)
Concentration Table 70% 0.7 0~1.999 S/cm R/W 4, 137 float (4)
Concentration Table 75% 0.75 S/cm R/W 4, 138 float (4)
Concentration Table 80% 0.8 S/cm R/W 4, 139 float (4)
Concentration Table 85% 0.85 S/cm R/W 4, 140 float (4)
Concentration Table 90% 0.9 S/cm R/W 4, 141 float (4)
Concentration Table 95% 0.95 S/cm R/W 4, 142 float (4)
Concentration Table 100%
Calibration Parameters
Nominal cell constant 1.88 0.005~50 1/cm R/W 4, 30 float (4)
Calibrated cell constant 0.1 0.005~50 1/cm R 4, 89 float (4)
Calibration method Not calibrated(0) 1 point(107), 2 point(108) R/W 4, 34 unsigned8 (1)
Diagnostic Settings
E5 Limit 3 0~0.5Ω S R/W 4, 144 float (4)
E6 Limit 0.000005 0~0.5Ω S R/W 4, 145 float (4)
Conductivity exceeds
high limit (E5) Hard fail(1) Soft fail(0) 4, 150(2.4)
Conductivity exceeds
low limit (E6) Hard fail(1) Soft fail(0) 4, 150(2.5)
Temp. sensor open (E7) Hard fail(1) Soft fail(0) 4, 150(2.6)
Temp. sensor shorted (E8)
Passcode Configuration
Passcode Maintenance 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 147 unsigned16 (2)
Passcode Commissioning 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 148 unsigned16 (2)
Passcode Service 0 0, 111, 333, 777, 888, 123, 957, 331, 546, 847 R/W 4, 149 unsigned16 (2)
display Settings
Display Resolution Auto Ranging(1)
Auto return Enabled(1) Disable(0) R 4, 151(1.0)
Logbook Configuration
Power up Logbook 2(3) off(1), logbook1(2), logbook2(3) R/W 4, 59 unsigned8 (1)
Power down Logbook 2(3) R/W 4, 60 unsigned8 (1)
System error Logbook 1(2) R/W 4, 61 unsigned8 (1)
Defaults loaded Not logged(1) R/W 4, 62 unsigned8 (1)
Logbook erased Not logged(1) R/W 4, 63 unsigned8 (1)
Init performed Logbook 1(2) R/W 4, 64 unsigned8 (1)
Error on Not logged(1) R/W 4, 65 unsigned8 (1)
Error off Not logged(1) R/W 4, 66 unsigned8 (1)
Temperature adjust Logbook 1(2) R/W 4, 67 unsigned8 (1)
Cell constant Logbook 1(2) R/W 4, 68 unsigned8 (1)
Air calibration Logbook 1(2) R/W 4, 69 unsigned8 (1)
1 S/cm R/W 4, 143 float (4)
Hard fail(1) Soft fail(0) 4, 150(2.7)
auto(1), xxx.x µS/cm(4) x.xxx mS/cm(5), xx.xx
mS/cm(6) xxx.x mS/cm(7), xxxx mS/cm(8)
R 4, 146 unsigned8 (1)
IM 12A00A01-61E
Page 74

4-16 Profibus
4-4-3-3. Function Block Parameters ISC202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Calibration Logbook 1(2) R/W 4, 70 unsigned8 (1)
Reference temperature Not logged(1) R/W 4, 71 unsigned8 (1)
Temperature coefficient 1 Not logged(1) R/W 4, 72 unsigned8 (1)
Matrix selection Not logged(1) R/W 4, 73 unsigned8 (1)
Temperature coefficient 2 Not logged(1) R/W 4, 74 unsigned8 (1)
User defined matrix
Temperature 1 0 -20~140, 0~280 °C R/W 4, 90 float (4)
Temperature 2 25 °C R/W 4, 91 float (4)
Temperature 3 50 °C R/W 4, 92 float (4)
Temperature 4 75 °C R/W 4, 93 float (4)
Temperature 5 100 °C R/W 4, 94 float (4)
Solution 1 at Temp. 1 0.0338 0~1.999 S/cm R/W 4, 95 float (4)
Solution 1 at Temp. 2 0.0470 S/cm R/W 4, 96 float (4)
Solution 1 at Temp. 3 0.0575 S/cm R/W 4, 97 float (4)
Solution 1 at Temp. 4 0.0637 S/cm R/W 4, 98 float (4)
Solution 1 at Temp. 5 0.0680 S/cm R/W 4, 99 float (4)
Solution 2 at Temp. 1 0.0635 0~1.999 S/cm R/W 4, 100 float (4)
Solution 2 at Temp. 2 0.0923 S/cm R/W 4, 101 float (4)
Solution 2 at Temp. 3 0.1120 S/cm R/W 4, 102 float (4)
Solution 2 at Temp. 4 0.1260 S/cm R/W 4, 103 float (4)
Solution 2 at Temp. 5 0.1380 S/cm R/W 4, 104 float (4)
Solution 3 at Temp. 1 0.0950 0~1.999 S/cm R/W 4, 105 float (4)
Solution 3 at Temp. 2 0.1350 S/cm R/W 4, 106 float (4)
Solution 3 at Temp.3 0.1660 S/cm R/W 4, 107 float (4)
Solution 3 at Temp.4 0.1890 S/cm R/W 4, 108 float (4)
Solution 3 at Temp. 5 0.2060 S/cm R/W 4, 109 float (4)
Solution 4 at Temp. 1 0.1240 0~1.999 S/cm R/W 4, 110 float (4)
Solution 4 at Temp. 2 0.1780 S/cm R/W 4, 111 float (4)
Solution 4 at Temp. 3 0.2200 S/cm R/W 4, 112 float (4)
Solution 4 at Temp. 4 0.2490 S/cm R/W 4, 113 float (4)
Solution 4 at Temp. 5 0.2730 S/cm R/W 4, 114 float (4)
Solution 5 at Temp. 1 0.1540 0~1.999 S/cm R/W 4, 115 float (4)
Solution 5 at Temp. 2 0.2180 S/cm R/W 4, 116 float (4)
Solution 5 at Temp. 3 0.2700 S/cm R/W 4, 117 float (4)
Solution 5 at Temp. 4 0.3070 S/cm R/W 4, 118 float (4)
Solution 5 at Temp. 5 0.3360 S/cm R/W 4, 119 float (4)
IM 12A00A01-61E
Page 75

Profibus 4-17
4-4-3-4. Function Block Parameters dO202
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Primary value parameters
Primary value Type
Measured Value ppm R 4,28 DS-33 (5)
Status R 4,28 DS-33 (5)
Sensor type DO polarographic (2) galvanic (1) R/W 4,31 unsigned16 (2)
Primary value unit ppm (1423) % saturation (1342), ppb (1424) R 4,30 unsigned16 (2)
Secondary value Parameters
Value °C R 4,43 DS-33 (5)
Status R 4,43 DS-33 (5)
Secondary value unit °C (1001) °F (1002) R/W 4,44 unsigned16 (2)
Sensor temp comp auto (2) manual (1) R/W 4,45 unsigned8 (1)
Sensor temp man value 25 °C R/W 4,46 float (4)
Temperature sensor NTC22k (160) Pt1000 (148), Pb36 (152) R/W 4,47 unsigned16 (2)
Other value Parameters
Sensor current nA R 4,49 float (4)
%Saturation % R 4,50 float (4)
Calibration Parameters
Zero calibration disabled (0) enabled (1) R/W 4,97 (1.0) unsigned32 (4)
Zero current 0.0 -199.9 ~ 199.9 nA R/W 4,33 float (4)
Zero current limit 199.9 nA R/W 4,51 float (4)
Sensitivity 7.5 1.0 ~ 1999.9 nA/
Stable time 60 5 ~ 600 s R/W 4,35 float (4)
Stable value (sensitivity) 0.1 0 ~ 50.0 ppm R/W 4,36 float (4)
Stable value (zero) 0.1 0 ~ 50.0 ppm R/W 4,37 float (4)
Calibration pressure 101.3 (kPa) 0 ~ 999 kPa R/W 4,39 float (4)
Compensation Parameters
Salinity compensation disabled (0) enabled (1) R/W 4,97 (1.4) unsigned32 (4)
Salinity 0.0 0 ~ 99.9 ppt R/W 4,38 float (4)
%Saturation pressure 101.3 (kPa) 0 ~ 999 kPa R/W 4,41 float (4)
diagnostic Settings
Calibration not stable (E1) Hard fail (1) Soft fail (0) R/W 4,96 (1.0) unsigned32 (4)
Zero out of limits (E2) Hard fail (1) Soft fail (0) R/W 4,96 (1.1) unsigned32 (4)
Temp. sensor open (E7) Hard fail (1) Soft fail (0) R/W 4,96 (1.6) unsigned32 (4)
Temp. sensor shorted (E8)
Primary value exceeds
limits (E9) Hard fail (1) Soft fail (0) R/W 4,96 (2.0) unsigned32 (4)
Calibr. timer expired (E16) Soft fail (0) Hard fail (1) R/W 4,96 (2.7) unsigned32 (4)
Passcode Configuration
Passcode Maintenance 000 111,333,777,888,123,957,331,546,847 R/W 4,62 float (4)
Passcode Commisioning 000 111,333,777,888,123,957,331,546,848 R/W 4,63 float (4)
Passcode Service 000 111,333,777,888,123,957,331,546,849 R/W 4,64 float (4)
display Settings
Manual pressure in
maintenance menu disabled (0) enabled (1) R/W 4,97 (1.7) unsigned32 (4)
Auto return enabled (1) disabled (0) R/W 4,97 (1.3) unsigned32 (4)
Logbook Configuration
Power up logbook2 (3) not logged (1), logbook1 (2) R/W 4,69 unsigned8 (1)
Power down logbook2 (3) not logged (1), logbook1 (2) R/W 4,70 unsigned8 (1)
System error logbook1 (2) - R 4,71 unsigned8 (1)
Defaults loaded not logged (1) logbook1 (2), logbook2 (3) R/W 4,72 unsigned8 (1)
Logbook erased not logged (1) logbook1 (2), logbook2 (3) R/W 4,73 unsigned8 (1)
Init performed logbook1 (2) - R 4,74 unsigned8 (1)
Error on not logged (1) logbook1 (2), logbook2 (3) R/W 4,75 unsigned8 (1)
Error off not logged (1) logbook1 (2), logbook2 (3) R/W 4,76 unsigned8 (1)
Temperature adjust logbook1 (2) not logged (1), logbook2 (3) R/W 4,77 unsigned8 (1)
dissolved oxyg. (65520)
Hard fail (1) Soft fail (0) R/W 4,96 (1.7) unsigned32 (4)
R 4,27
ppm R/W 4,34 float (4)
unsigned16
(2)
IM 12A00A01-61E
Page 76

4-18 Profibus
4-4-3-4. Function Block Parameters dO202 (continued)
Parameter default Alternatives Unit r/W Slot, Index data Type
(byte,bit) (bytes)
Manual temperature logbook1 (2) not logged (1), logbook2 (3) R/W 4,78 unsigned8 (1)
Manual calibration (0%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,83 unsigned8 (1)
Manual calibration (100%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,79 unsigned8 (1)
Air calibration (0%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,92 unsigned8 (1)
Air calibration (100%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,80 unsigned8 (1)
H2O calibration (0%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,82 unsigned8 (1)
H2O calibration (100%) logbook1 (2) not logged (1), logbook2 (3) R/W 4,81 unsigned8 (1)
Zero setting changed logbook1 (2) not logged (1), logbook2 (3) R/W 4,84 unsigned8 (1)
Sensitivity changed logbook1 (2) not logged (1), logbook2 (3) R/W 4,90 unsigned8 (1)
Delta t for calibation
changed not logged (1) logbook1 (2), logbook2 (3) R/W 4,86 unsigned8 (1)
Delta PV for calibration
changed (0%) not logged (1) logbook1 (2), logbook2 (3) R/W 4,85 unsigned8 (1)
Delta PV for calibration
changed (100%) not logged (1) logbook1 (2), logbook2 (3) R/W 4,91 unsigned8 (1)
Salinity compensation
changed not logged (1) logbook1 (2), logbook2 (3) R/W 4,87 unsigned8 (1)
%Saturation pressure
changed not logged (1) logbook1 (2), logbook2 (3) R/W 4,88 unsigned8 (1)
Calibration pressure
changed not logged (1) logbook1 (2), logbook2 (3) R/W 4,89 unsigned8 (1)
New sensor installed logbook1 (2) not logged (1), logbook2 (3) R/W 4,93 unsigned8 (1)
IM 12A00A01-61E
Page 77

Profibus 4-19
4-4-4 Methods
The EXA supports methods. A method is a tool to provide the user with a “step by step” user interface for
changing settings and providing information.
The following screendumps are derived from a Siemens PDM package.
display and y-t diagram methods
The EXA provides three process values simultaneously. These can be viewed with the display method for
bargraphs or with Y-t diagram.
Clock method
This method can be used to set the time of the EXA.
IM 12A00A01-61E
Page 78

4-20 Profibus
Status method
This method can be used to obtain general information of the EXA like serial number and software revision.
This method also provides the user with the current status of the EXA. This can be usefull when the EXA
shows errors.
Logbook method
One of the powerfull features of the EXA is the logbook functionality. All events can be stored in one of the
two logbooks. To read (upload) the logbook information, simply use this method and the user is provided
with all stored events. Each logbook can obtain up to 50 events.
IM 12A00A01-61E
Page 79

APPENDIX 1. LINK MASTER FUNCTIONS 5-1
LM
Node address:
0x15
SlotTime = 5
LM
Node address:
0x16
SlotTime = 5
Node address: 0x14
SlotTime = 5
Basic device
Node address:
0xF1
Basic device
Node address:
0xF2
Basic device
Node address:
0xF3
Basic device
Node address:
0xF4
LAS
There are 3 LMs on this segment.
LM
APPENdIX 1. LINK MASTEr FUNCTIONS
A1-1 Link Active Scheduler
A link active scheduler (LAS) is a deterministic, centralized bus scheduler that can control communications
on an H1 fieldbus segment. There is only one LAS on an H1 fieldbus segment.
A EXA202 supports the following LAS functions.
• PN transmission: Identifies a fieldbus device newly connected to the same fieldbus segment. PN is short
for Probe Node.
• PT transmission: Passes a token governing the right to transmit, to a fieldbus device on the same
segment. PT is short for Pass Token.
• CD transmission: Carry out a scheduled transmission to a fieldbus device on the same segment. CD is
short for Compel Data.
• Time synchronization: Periodically transmits the time data to all fieldbus devices on the segment and
returns the time data in response to a request from a device.
• Live list equalization: Sends the live list data to link masters on the same segment.
• LAS transfer: Transfers the right to be the LAS on the segment to another link master.
A1-2 Link Master
A link master (LM) is any device containing a link active scheduler. There must be at least one LM on a
segment. When the LAS on a segment has failed, another LM on the same segment starts working as the
LAS.
Figure A1-1. Example of Fieldbus configuration-3 LMs on Same Segment
IM 12A00A01-61E
Page 80

5-2 APPENDIX 1. LINK MASTER FUNCTIONS
LM
Node address:
0x15
SlotTime = 5
LM
Node address:
0x16
SlotTime = 5
Node address: 0x14
SlotTime = 5
Basic device
Node address:
0xF1
Basic device
Node address:
0xF2
Basic device
Node address:
0xF3
Basic device
Node address:
0xF4
LAS
LAS
In the event that the current LAS in
this segment (node address 0x14)
fails, the LM with the address of 0x15
takes its place to become the LAS.
LM
Not used
LM device
Not used
Basic device
Default address
Portable-device address
V (FUN)
V (FUN) + V (NUN)
V (NUN)
0xFF
0xFC
0xFB
0xF8
0xF7
0x00
0x0F
0x10
0x13
0x14
Bridge device
Sub-
index
Element
Device1Device2Device
3
Description
1
3
6
SlotTime
MaxResponse
Delay
MinInterPdu
Delay
4
3
4
8
6
8
10
3
12
20
5
10
Capability value
for V(ST)
Capability value
for V(MRD)
Capability value
for V(MID)
DlmeBasicInfo (EXA202 Index 361 (SM))
EXA202
Subindex
Element
ConfiguredLinkSettingsRecord
(EXA202 Index 369 (SM))
Description
Setting
(Default)
V (ST)
V (MRD)
V (MID)
20
6
12
(4095)
(5)
(12)
SlotTime
MaxResponseDelay
MinInterPduDelay
1
3
6
A1-3 Transfer of LAS
There are two procedures for an LM to become the LAS:
• If the LM whose value of [V(ST)3V(TN)] is the smallest on a segment, with the exception of the current
LAS, judges that there is no LAS on the segment, in such a case as when the segment has started up or
when the current LAS has failed, the LM declares itself as the LAS, then becomes the LAS. (With this
procedure, an LM backs up the LAS as shown in the following figure.)
• The LM whose value of [V(ST)3V(TN)] is the smallest on a segment, with the exception of the current
LAS, requests the LAS on the same segment to transfer the right of being the LAS, then becomes the
LAS.
Figure A1-2. Backup of LAS
To set up a EXA202 as a device that is capable of
backing up the LAS, follow the procedure below.
NOTE: When changing the settings in a EXA202,
add the EXA202 to the segment in which an
LAS is running. After making changes to
the settings, do not turn off the power to the
EXA202 for at least 60 seconds.
(1) Set the node address of the EXA202.
In general, use an address from 0x14 to
[V(FUN) – 1].
(2) In the LAS settings of the EXA202, set the
values of V(ST), V(MRD), and V(MID) to
the same as the respective lowest capability
values in all the devices within the segment.
An example is shown below.
In this case, set SlotTime, MaxResponseTime,
and MinInterPduDelay as follows:
Figure A1-3. Node Address ranges
IM 12A00A01-61E
Page 81

(3) In the LAS settings of the EXA202, set the
Subindex
Element
ConfiguredLinkSettingsRecord
(EXA202 Index 369 (SM))
Description
Default Value
V (FUN)
V (NUN)
0x25
0xBA
FirstUnpolledNodeId
NumConsecUnpolledNodeId
4
7
No. Function Description
LM initialization
Startup of other
nodes (PN and
Node Activation
SPDU
transmissions)
PT transmission
(including final bit
monitoring)
CD transmission
Time synchronization
Domain download
server
Live list equalization
LAS transfer
Reading/writing of
NMIB for LM
Round Trip Delay
Reply (RR)
Reply to DLPDU
Long address
1
2
3
4
5
6
7
8
9
10
11
When a fieldbus segment starts,
the LM with the smallest [V(ST) ×
V(TN)] value within the segment
becomes the LAS. At all times,
each LM is checking whether or not
a carrier is on the segment.
Transmits a PN (Probe Node)
message, and Node Activation
SPDU message to devices which
return a new PR (Probe Response)
message.
Passes a PT (Pass Token)
message to devices included in the
live list sequentially, and monitors
the RT (Return Token) and final bit
returned in reply to the PT.
Transmits a CD (Compel Data)
message at the scheduled times.
Supports periodic TD (Time
Distribution) transmissions and
transmissions of a reply to a CT
(Compel Time).
Sets the schedule data. The
schedule data can be equalized
only when the Domain Download
command is carried out from
outside the LM in question. (The
version of the schedule is usually
monitored, but no action takes
place, even when it changes.)
Transmits SPDU messages to LMs
to equalize live lists.
Transfers the right of being the LAS
to another LM.
See Section A1-5.
Not yet supported in the current
version.
Not yet supported in the current
version.
values of V(FUN) and V(NUN) so that they
include the node addresses of all nodes within
the same segment. (See also Figure A1-3.)
A1-4 LM Functions
APPENDIX 1. LINK MASTER FUNCTIONS 5-3
IM 12A00A01-61E
Page 82

5-4 APPENDIX 1. LINK MASTER FUNCTIONS
362
363
364
365
366
367
368
369
0
1 MaxSchedulingOverhead
2 DefMinTokenDelegTime
3 DefTokenHoldTime
4 TargetTokenRotTime
5 LinkMaintTokHoldTime
6 TimeDistributionPeriod
7 MaximumInactivityToClaimLasDelay
8
LasDatabaseStatusSpduDistributionPeriod
0
1 Element1
2 Element2
3 Element3
4 Element4
5 Element5
6 Element6
7 Element7
8 Element8
0
1 SlotTime
2 PerDlpduPhlOverhead
3 MaxResponseDelay
4 FirstUnpolledNodeId
5 ThisLink
6 MinInterPduDelay
7 NumConseeUnpolledNodeId
8 PreambleExtension
9 PostTransGapExtension
10 MaxInterChanSignalSkew
11 TimeSyncClass
0
1 SlotTime
2 PerDlpduPhlOverhead
3 MaxResponseDelay
4 FirstUnpolledNodeId
5 ThisLink
6 MinInterPduDelay
7 NumConseeUnpolledNodeId
8 PreambleExtension
9 PostTransGapExtension
10 MaxInterChanSignalSkew
11 TimeSyncClass
0x04
0
100
300
4096
400
5000
8
6000
–
–
0x0000×16, 0x012c×16
0x012c×5, 0x0000×27
0x0000×32
0x0000×32
0x0000×32
0x0000×32
0x0000×31, 0x012c
0x012c×32
0x02
0x01
4095
4
5
37
0
12
186
2
1
0
4
LAS: True = 0xFF; non-LAS: False = 0x00
0x01 (basic device); 0x02 (LM)
Settings for LAS
RW
RW
RW
R
RW
RW
R
RW
Meanings of Access column entries: RW = read/write possible; R = read only
DLME_LINK_MASTER_CAPABILITIES_VARIABLE
DLME_LINK_MASTER_
INFO_RECORD
PRIMARY_LINK_MASTER_FLAG_VARIABLE
LIVE_LIST_STATUS_ARRAY_VARIABLE
MAX_TOKEN_HOLD_
TIME_ARRAY
BOOT_OPERAT_FUNCTIONAL_CLASS
CURRENT_LINK_
SETTING_RECORD
CONFIGURED_LINK_
SETTING_RECORD
Index
(SM)
Sub-parameter Name
Access
(Sub Index)
Parameter Name
Default Factory
Setting
Remarks
A1-5 LM Parameters
A1-5-1 LM Parameter List
The tables below show LM parameters of a EXA202.
IM 12A00A01-61E
Page 83

APPENDIX 1. LINK MASTER FUNCTIONS 5-5
370
371
372
373
374
375
376
377
378
0
1 ChannelStatisticsSupported
2 MediumAndDataRatesSupported
3 IecVersion
4 NumOfChannels
5 PowerMode
0
1 channel-1
2 channel-2
3 channel-3
4 channel-4
5 channel-5
6 channel-6
7 channel-7
8 channel-8
0
1 InterfaceMode
2 LoopBackMode
3 XmitEnabled
4 RcvEnabled
5 PreferredReceiveChannel
6 MediaTypeSelected
7 ReceiveSelect
0
1 NumOfSchedules
2 NumOfSubSchedulesPerSchedule
3 ActiveScheduleVersion
4 ActiveSheduleOdIndex
5 ActiveScheduleStartingTime
0
1 Version
2 MacrocycleDuration
3 TimeResolution
0
1 Version
2 MacrocycleDuration
3 TimeResolution
0x00
0x4900000000000000
1 (0x1)
1 (0x1)
0 (0x0)
0 (0x0)
128 (0x80)
128 (0x80)
128 (0x80)
128 (0x80)
128 (0x80)
128 (0x80)
128 (0x80)
0 (0x0)
0 (0x0)
1 (0x1)
1 (0x1)
1 (0x1)
73 (0x49)
1 (0x1)
0
1
0
0
0
0
0
0
0
0
0
Read/write impossible. Get-OD possible.
Read/write impossible. Get-OD possible.
R
R
R
RW
R
R
R
Index
(SM)
Sub-parameter Name
Access
(Sub Index)
Parameter Name
Default Factory
Setting
Remarks
PLME_BASIC_
CHARACTERISTICS
CHANNEL_STATES
PLME_BASIC_INFO
LINK_SCHEDULE_ACTIVATION_VARIABLE
LINK_SCHEDULE_LIST_
CHARACTERISTICS_
RECORD
DLME_SCHEDULE_
DESCRIPTOR.1
DLME_SCHEDULE_
DESCRIPTOR.2
DOMAIN.1
DOMAIN.2
IM 12A00A01-61E
Page 84

5-6 APPENDIX 1. LINK MASTER FUNCTIONS
Meaning
Bit
Position
Value
Description
1
0
0
LAS Schedule
in Non-volatile
Memory
Last Values
Record
Supported
Link Master
Statistics
Record
Supported
Whether the LAS schedule can
(= 1) or cannot (= 0) be saved
to the non-volatile memory
Whether to support (= 1) or not
to support (= 0)
LastValuesRecord.
Whether to support (= 1) or not
to support (= 0)
DlmeLinkMasterStatisticsRecord.
B3: 0x04
B2: 0x02
B1: 0x01
Element
Sub-
index
Descrip-
tion
Size
[bytes]
1
2
2
2
2
4
2
2
V(MSO)
V(DMDT)
V(DTHT)
V(TTRT)
V(LTHT)
V(TDP)
V(MICD)
V(LDDP)
MaxSchedulingOverhead
DefMinTokenDelegTime
DefTokenHoldTime
TargetTokenRotTime
LinkMaintTokHoldTime
TimeDistributionPeriod
MaximumInactivityToClaimLasDelay
LasDatabaseStatusSpduDistributionPeriod
1
2
3
4
5
6
7
8
0x00 00 84 00 00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00
Bit correspondences: 0 0 0 0 0 0 0 0 0 0 0
0×00
0 0 0 0 0 1 0 0 0 0 1 0 0...
0×10 0×15
Element
Sub-
index
Descrip-
tion
Size
[bytes]
2
1
1
1
2
1
1
1
1
1
1
V(ST)
V(PhLO)
V(MRD)
V(FUN)
V(TL)
V(MID)
V(NUN)
V(PhPE)
V(PhGE)
V(PhIS)
V(TSC)
SlotTime
PerDlpduPhlOverhead
MaxResponseDelay
FirstUnpolledNodeId
ThisLink
MinInterPduDelay
NumConsecUnpolledNodeId
PreambleExtension
PostTransGapExtension
MaxInterChanSignalSkew
TimeSyncClass
1
2
3
4
5
6
7
8
9
10
11
A1-5-2 descriptions for LM Parameters
The following describes LM parameters of a
EXA202 transmitter.
NOTE: Do not turn off the power to the EXA202
for 60 seconds after making a change to its
parameter settings.
(1) dlmeLinkMasterCapabilitiesvariable
(2) dlmeLinkMasterInforecord
(5) MaxTokenHoldTimeArray
An 8- by 64-byte array variable, in which each set
of 2 bytes represents the delegation time (set as
an octet time) assigned to a device. The delegation time denotes a time period that is given to a
device by means of a PT message sent from the
LAS within each token circulation cycle.
The leading 2 bytes correspond to the device
address 0x00, and the final 2 bytes to the device
address 0xFF. Specify the subindex to access
this parameter.
(6) BootOperatFunctionalClass
Writing 1 to this parameter in a device and restarting the device causes the device to start as a
basic device. On the contrary, writing 2 to this
parameter and restarting the device causes the
device to start as an LM.
(3) PrimaryLinkMasterFlagvariable
Explicitly declares the LAS. Writing “true” (0xFF)
to this parameter in a device causes that device to
attempt to become the LAS. However, a request
of writing “true” to this parameter in a device is
rejected if the value of the same parameter in
any other device that has a smaller node address
within the same segment is true.
(4) LiveListStatusArrayvariable
A 32-byte variable, in which each bit represents
the status of whether a device on the same segment is live or not. The leading bit corresponds
to the device address 0x00, and final bit to 0xFF.
The value of LiveListStatusArrayVariable in the
case where devices having the addresses 0x10
and 0x15 in the fieldbus segment is shown below.
IM 12A00A01-61E
(7) CurrentLinkSettingrecord and Config-
uredLinkSettingsrecord
CurrentLinkSettingRecord indicates the bus
parameter settings currently used. ConfiguredL
inkSettingsRecord indicates the bus parameter
settings to be used when the device becomes
the LAS. Thus, when a device is the LAS, its
CurrentLinkSettingRecord and ConfiguredLinkSetti
ngsRecord have the same values.
Page 85

APPENDIX 1. LINK MASTER FUNCTIONS 5-7
Element Description
Sub-
index
Size
[bytes]
2
1
1
1
2
1
1
1
1
1
Indicates the capability
value for V(ST) of the
device.
V(PhLO)
Indicates the capability
value for V(MRD) of
the device.
V(TN), node address
V(TL), link-id
Indicates the capability
value for V(MID) of the
device.
Indicates the capability
value for V(TSC) of the
device.
V(PhPE)
V(PhGE)
V(PhIS)
SlotTime
PerDlpduPhlOverhead
MaxResponseDelay
ThisNode
ThisLink
MinInterPduDelay
TimeSyncClass
PreambleExtension
PostTransGapExtension
MaxInterChanSignalSkew
1
2
3
4
5
6
7
8
9
10
Element Value Description
Sub-
index
Size
[bytes]
1
8
2
1
1
Statistics data
are not
supported.
Wire medium,
voltage mode,
and 31.25 kbps
are supported.
IEC 4.3 is
supported.
0: Bus-powered;
1: Self-powered
Channel
Statistics
Supported
Medium
AndData
Rates
Supported
IceVersion
NumOf
Channels
Power
Mode
0
0x4900000000000000
0x0403
1
0
1
2
3
4
5
Element
Value
Description
Sub-
index
Size
[bytes]
1
1
1
1
1
1
1
1
In Use, No Bad since last
read, No Silent since last
read, No Jabber since last
read, Tx Good, Rx Good
Unused
Unused
Unused
Unused
Unused
Unused
Unused
Channel 1
Channel 2
Channel 3
Channel 4
Channel 5
Channel 6
Channel 7
Channel 8
0x00
0x80
0x80
0x80
0x80
0x80
0x80
0x80
1
2
3
4
5
6
7
8
Element
Value
Description
Sub-
index
Size
[bytes]
1
1
1
1
1
1
1
0: Half duplex;
1: Full duplex
0: Disabled; 1: MAU;
2: MDS
Channel 1 is enabled.
Channel 1 is enabled.
Channel 1 is used for
reception.
Wire medium, voltage
mode, and 31.25 kbps
are selected.
Channel 1 is used for
reception.
InterfaceMode
LoopBackMode
XmitEnabled
RcvEnebled
PreferredReceive
Channel
MediaType
Selected
ReceiveSelect
0
0
0x01
0x01
0x01
0x49
0x01
1
2
3
4
5
6
7
Element Description
Sub-
index
Size
[bytes]
1
1
2
2
6
Indicates the total number of
LAS schedules that have been
downloaded to the domain.
Indicates the maximum number
of sub-schedules an LAS
schedule can contain. (This is
fixed to 1 in the Yokogawa
communication stacks.)
Indicates the version number of
the schedule currently executed.
Indicates the index number of
the domain that stores the
schedule currently executed.
Indicates the time when the
current schedule began being
executed.
NumOf
Schedules
NumOfSub
SchedulesPer
Schedule
ActiveSchedule
Version
ActiveSchedule
OdIndex
ActiveSchedule
StaringTime
1
2
3
4
5
(8) dlmeBasicInfo
(9) PlmeBasicCharacteristics
(11) PlmeBasicInfo
(12) LinkScheduleActivationvariable
Writing the version number of an LAS schedule, which has already been downloaded to the
domain, to this parameter causes the corresponding schedule to be executed. On the other hand,
writing 0 to this parameter stops execution of the
active schedule.
(10) ChannelStates
(13) LinkScheduleListCharacteristicsrecord
IM 12A00A01-61E
Page 86

5-8 APPENDIX 1. LINK MASTER FUNCTIONS
Element Description
Sub-
index
Size
[bytes]
2
4
2
Indicates the version number of
the LAS schedule downloaded
to the corresponding domain.
Indicates the macro cycle of the
LAS schedule downloaded to
the corresponding domain.
Indicates the time resolution
that is required to execute the
LAS schedule downloaded to
the corresponding domain.
Version
Macrocycle
Duration
TimeResolution
1
2
3
(14) dlmeScheduledescriptor
This parameter exists for the same number as
the total number of domains, and each describes
the LAS schedule downloaded to the corresponding domain. For the domain to which a schedule
has not yet been downloaded, the values in this
parameter are all zeros.
(15) domain
Read/write: impossible; get-OD: possible
Carrying out the GenericDomainDownload command from a host writes an LAS schedule to the
domain.
A1-6 FAQs
Q1. When the LAS stops, a EXA202 does not
back it up by becoming the LAS. Why?
A1-1. Is that EXA202 running as an LM? Check
that the value of BootOperatFunctionalClass
(index 367) is 2 (indicating that it is an LM).
Q3. On a segment where a EXA202 works as
the LAS, another device cannot be connected. Why?
A3-1. Check the following bus parameters that indi
cate the bus parameter as being the LAS for
the EXA202 and the capabilities of being the
LAS for the device that cannot be connected:
• V(ST), V(MID), and V(MRD) of EXA202:
ConfiguredLinkSettingsRecord (index 369)
• V(ST), V(MID), and V(MRD) of problematic
device: DlmeBasicInfo
Then, confirm that the following conditions are
met:
EXA202 Problematic Device
V(ST) > V(ST)
V(MID) > V(MID)
V(MRD) > V(MRD)
A3-2. Check that the node address of the problem
atic device does not lie within either 0x00 to
0x10 or the range of unused (unpolled) node
addresses determined by the EXA202’s LM
parameter settings, which is 0x00 to 0x10 or
V(FUN) to V(FUN) + V(NUM). (Refer to Section 3-3-2, “Network Definition.”)
A1-2. Check the values of V(ST) and V(TN) in all
LMs on the segment and confirm that the following condition is met:
EXA202 Other LMs
V(ST) 3 V(TN) < V(ST) 3 V(TN)
Q2. How can I make a EXA202 become the
LAS?
A2-1. Check that the version numbers of the active
schedules in the current LAS and the EXA202
are the same by reading:
LinkScheduleListCharacteristicsRecord
(index 374 for a EXA202)
- ActiveScheduleVersion (subindex 3)
A2-2. Make the EXA202 declare itself as and be
come the LAS by writing:
• 0x00 (false) to PrimaryLinkMasterFlagVari
able in the current LAS; and
• 0xFF (true) to PrimaryLinkMasterFlagVari
able (index 364) in the EXA202.
IM 12A00A01-61E
-
-
-
Page 87

Revision Re�o��Re�o��
Manual Title : EXA202 Fieldbus Communication
Manual Number : IM 12A00A01-61E
E�ition Date Rema�k (s)
1st Apr. 2007 Newly published
2nd Sep.2007 Revised as follows
p1-1 IM No. to be refered revised; p3-2 Figure No. to be refered corrected;
p3-4 Some error correction of Table 3.1; p3-7, p3-12 Section No. to be refered
corrected; p3-19 Error of reference Table No. for XD_SCALE corrected;
p3-20 Some error correction; p3-30 Error of reference Table No. for XD_
SCALE corrected; p3-34, p3-37, p3-40 Some error correction;
p4-8 Some error correction of Sec 4-4-1; p5-3 Some error correction.
IM 12A00A01-61E
Page 88

User’s
EXA 202
Manual
Fieldbus Communication
Supplement
Thank you for selecting our EXA202 Fieldbus Communication.
User's Manual, IM12A00A01-61E, 2nd Edition, supplied with the product, some revisions/additions have been
made. Please replace the corresponding pages in your copy with the attached, revised pages.
Revisions:
- Page 3-19, Some revision of Table 3.19 and 3.20, because Unit Index Code has been corrected.
- Page 3-54, Operational Precaution with FieldMate added.
All Rights Reserved, Copyright © 2009, 2nd Edition: Oct. 2009 (YK)
Subject to change without notice.
IM12A00A01-61E
2nd Edition
Page 89

Foundation Fieldbus 3-19 3-19
DO202
1: Dissolved Oxygen,
2: Temperature,
3: Percent Saturation,
4: Sensor Current
Channel Value Unit
1 primary_value primary_value_range.units
2 secondary_value secondary_value_unit
3 percent_saturation %
4 sensor_current nA
XD_SCALE/OUT_SCALE:
Scaling information is used for two purposes. Display devices need to know the range for bar graphs and
trending, as well as the units code. Control blocks need to know the range to use internally as percent of
span, so that the tuning constants may remain dimensionless. This is converted back to a number with units
by using the range of OUT_SCALE. The AI block has the parameter XD_SCALE to define the units expected from the transducer.
Transducer scaling (XD_SCALE) is applied to the value from the channel to produce the FIELD_VAL in percent. The XD_SCALE units code must match the channel units code.
The EXA transmitter does this automatically when the Service Codes are changed. See table 3.18 to 3.21
for the Service codes and their results.
If L_TYPE is set to Indirect or Ind Sqr Root, OUT_SCALE determines the conversion from FIELD_VAL to
the output. PV and OUT always have identical scaling. OUT_SCALE provides scaling for PV. The PV is
always the value that the block will place in OUT if the mode is Auto.
Table 3.18 Unit Index by XD_SCALE PH202
Channel FF parameters Service code XD_SCALE.UNITS
1 - SC01 (set to 0) pH
2 2029 SC11 (set to 0) ºC
2 2029 SC11 (set to 1) ºF
3 - SC01 (set to 1) mV
3 - SC01 (set to 0), SC02 (set to 1) mV
3 - SC01 (set to 0), SC02 (set to 2) rH
Table 3.19 Unit Index by XD_SCALE SC202
Channel FF parameters Service code XD_SCALE.UNITS
2 2023 SC11 (set to 0) °C (1001)
2 2023 SC11 (set to 1) °F (1002)
1, 3 - SC01 (set to 1) Ω•cm (1295)
1, 3 - SC01 (set to 0) S/cm (1680)
4 - Default % % (1342)
Table 3.20 Unit Index by XD_SCALE ISC202
Channel FF parameters Service code XD_SCALE.UNITS
2 2023 SC11 (set to 0) °C (1001)
2 2023 SC11 (set to 1) °F (1002)
1, 3 - Default S/cm S/cm (1680)
4 - Default % % (1342)
IM 12A00A01-61E
Page 90

3-54 Foundation Fieldbus
u Operational Precaution
This document supplements information regarding Operational Precaution.
Operate the product carefully based on the following note.
Display on the FieldMate (*)
With using Yokogawa’s FieldMate on the Fieldbus communication of the EXA202 Series instrument,
even when unit setting is changed on the instrument, units on AI function blocks on the FieldMate are not
changed.
Process values on the FieldMate are changed to their new process values for the new units.
After changing settings on the instrument, upload the new settings to the FieldMate.
Uploading function on the FieldMate (*)
With using Yokogawa’s FieldMate on the Fieldbus communication of the EXA202 Series instrument,
uploading the instrument’s setting to the FieldMate starts with showing an indicator window.
On this window, progression of uploading is indicated by a bar and a percentage.
Occasionally this percentage on the window doesn’t reach 100%, although uploading is finished.
In this case, just close the indicator window.
(*) FieldMate is a communication tool for HART and Fieldbus.
IM 12A00A01-61E
 Loading...
Loading...