


AC Servo Drives
-V Series
USER'S MANUAL
Setup
Rotational Motor
SGDV SERVOPACK
SGMJV/SGMAV/SGMPS/SGMGV/SGMSV/SGMCS Servomotors
MANUAL NO. SIEP S800000 43G
Overview of Setup
Installation
Wiring and Connection
Safety Function
(Checking Servomotor Operation)
Trial Operation
1
2
3
4
5

Copyright © 2007 YASKAWA ELECTRIC CORPORATION
All rights reserved. No part of this publication may be reproduced, stored in a retrieval
system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of Yaskawa. No
patent liability is assumed with respect to the use of the information contained herein.
Moreover, because Yaskawa is constantly striving to improve its high-quality products,
the information contained in this manual is subject to change without notice. Every
precaution has been taken in the preparation of this manual. Nevertheless, Yaskawa
assumes no responsibility for errors or omissions. Neither is any liability assumed for
damages resulting from the use of the information contained in this publication.

About this Manual
This manual describes procedures required for installation, wiring, and connecting
Σ-V Series servo drives, including a JOG operation for servomotors not connected to
machinery.
Be sure to refer to this manual and perform setup operations correctly.
Keep this manual in a location where it can be accessed for reference whenever
required.
Description of Technical Terms
The following table shows the meanings of terms used in this manual.
Ter m Meaning
Servomotor
SERVOPACK Σ-V Series SGDV SERVOPACK
Servo Drive
Servo System
Analog pulse model
M-II model
M-III model
Command option
attachable type
Σ-V Series SGMJV, SGMAV, SGMPS, SGMGV, SGMSV, or
SGMCS (Direct Drive) servomotor
A set including a servomotor and SERVOPACK (i.e., a servo
amplifier)
A servo control system that includes the combination of a servo
drive with a host controller and peripheral devices
Analog voltage and pulse-train reference used for SERVOPACK
interface.
MECHATROLINK-II communications reference used for
SERVOPACK interface.
MECHATROLINK-III communications reference used for
SERVOPACK interface.
SERVOPACK for which a command option module can be
installed.
IMPORTANT Explanations
The following icon is displayed for explanations requiring special attention.
• Indicates important information that should be memorized, as well as
precautions, such as alarm displays, that do not involve potential damage
to equipment.
Notation Used in this Manual
In this manual, the names of reverse signals (ones that are valid when low) are written
with a forward slash (/) before the signal name, as shown in the following example:
Example
= /S-ON
S-ON
iii

Manuals Related to the Σ-V Series
Refer to the following manuals as required.
Name
Σ-V Series
Product Catalog
(KAEP S800000 42)
Σ-V Series
User's Manual
Design and
Maintenance
Rotational Motor/
Analog Voltage and
Pulse Train
Reference
(SIEP S800000 45)
Σ-V Series
User's Manual
Design and
Maintenance
Rotational Motor/
MECHATROLINK-II
Communications
Reference
(SIEP S800000 46)
Σ-V Series
User’s Manual
MECHATROLINK-II
Command
(SIEP S800000 54)
Σ-V Series
User’s Manual
Operation of Digital
Operator
(SIEP S800000 55)
Σ-V Series
User's Manual
Design and
Maintenance
Rotational Motor/
Command Option
Attachable Type
(SIEP S800000 60)
Selecting
Models
and
Peripheral
Devices
Ratings
and
Specifi-
cations
99
System
Design
Panels
and
Wiring
Tria l
Operation
999 9
999 9
Tria l
Operation
and
Servo
Adjustment
Maintenance
and
Inspection
*
9
*
9
999
99 9
999 9 9
iv

Name
Σ-V Series
User’s Manual
MECHATROLINK-III
Command
(SIEP S800000 63)
Σ-V Series
User's Manual
Design and
Maintenance
Rotational Motor/
MECHATROLINK-III
Communications
Reference
(SIEP S800000 64)
Σ-V Series
User's Manual
Indexer Module
(SIEP C720829 02)
Σ-V Series
User's Manual
EtherCAT (CoE)
Network Module
(SIEP C720829 04)
AC SERVOMOTOR
Safety Precautions
(TOBP C230200 00)
Σ-V Series
AC SERVOPACK
SGDV Safety
Precautions
(TOBP C710800 10)
Σ-V Series
Option Module
Safety Precautions
(TOBP C720829 00)
Σ-V Series
Command Option
Module
Installation Guide
(TOBP C720829 01)
(cont’d)
Selecting
Models
and
Peripheral
Devices
Ratings
and
Specifi-
cations
System
Design
Panels
and
Wiring
Trial
Operation
Trial
Operation
and
Servo
Adjustment
Maintenance
and
Inspection
999
999 9
999 9
999 9
9
9
9
*
*
*
99
99 9
99 9
99 9
v

Name
Σ-V Series
Indexer Module
Installation Guide
(TOBP C720829 02)
Σ-V Series
Feedback Option
Module
Installation Guide
(TOBP C720829 03)
Σ Series
Digital Operator
Safety Precautions
(TOBP C730800 00)
∗ Refer to these manuals for troubleshooting of problems which may occur during setup.
(Troubleshooting which is common for command option modules is described in
User's Manual Design and Maintenance Rotational Motor/Command Option Attachable
Typ e (SIEP S800000 60).
(cont’d)
Selecting
Models
and
Peripheral
Devices
Ratings
Specifi-
cations
99 9
99 9
and
System
Design
Panels
and
Wiring
Tria l
Operation
Tria l
Operation
and
Servo
Adjustment
Maintenance
and
Inspection
9
Σ
-V Series
vi

Safety Information
WARNING
CAUTION
PROHIBITED
MANDATORY
The following conventions are used to indicate precautions in this manual. Failure to
heed precautions provided in this manual can result in serious or possibly even fatal
injury or damage to the products or to related equipment and systems.
Indicates precautions that, if not heeded, could
possibly result in loss of life or serious injury.
Indicates precautions that, if not heeded, could result
in relatively serious or minor injury, damage to the
product, or faulty operation.
In some situations, the precautions indicated could
have serious consequences if not heeded.
Indicates prohibited actions that must not be
performed. For example, this symbol would be used to
indicate that fire is prohibited as follows:
Indicates compulsory actions that must be performed.
For example, this symbol would be used as follows to
indicate that grounding is compulsory:
vii

Safety Precautions
These safety precautions are very important. Read them before performing any procedures such as checking products on delivery, storage and transportation, installation, wiring, operation and inspection, or disposal. Be sure to always observe these
precautions thoroughly.
• Never touch any rotating motor parts while the motor is running.
Failure to observe this warning may result in injury.
• Before starting operation with a machine connected, make sure that an
emergency stop can be applied at any time.
Failure to observe this warning may result in injury or damage to the product.
• Never touch the inside of the SERVOPACKs.
Failure to observe this warning may result in electric shock.
• Do not remove the cover of the power supply terminals while the power is
ON.
Failure to observe this warning may result in electric shock.
• After the power is turned OFF or after a voltage resistance test, do not
touch terminals while the CHARGE lamp is ON.
Residual voltage may cause electric shock.
• Follow the procedures and instructions provided in this manual for trial
operation.
Failure to do so may result not only in faulty operation and damage to equipment,
but also in personal injury.
• The multi-turn output range for the Σ-V Series absolute position detecting
system is different from that of earlier systems (15-bit and 12-bit encoders).
In particular, change the system to configure the Σ series infinite-length
positioning system with the Σ-V Series.
• The multi-turn limit value need not be changed except for special applications.
Changing it inappropriately or unintentionally can be dangerous.
• If the Multi-turn Limit Disagreement alarm occurs, check the setting of
parameter Pn205 in the SERVOPACK to be sure that it is correct.
If Fn013 is executed when an incorrect value is set in Pn205, an incorrect value
will be set in the encoder. The alarm will disappear even if an incorrect value is set,
but incorrect positions will be detected, resulting in a dangerous situation where
the machine will move to unexpected positions.
• Do not remove the front cover, cables, connectors, or optional items from
the upper front of the SERVOPACK while the power is ON.
Failure to observe this warning may result in electric shock.
• Do not damage, press, exert excessive force on, or place heavy objects on
the cables.
Failure to observe this warning may result in electric shock, stopping operation of
the product, or fire.
• Do not modify the product.
Failure to observe this warning may result in injury, fire, or damage to the product.
WARNING
viii

• Provide an appropriate braking device on the machine side to ensure
safety. The holding brake on a servomotor with a brake is not a braking
device for ensuring safety.
Failure to observe this warning may result in injury.
• Do not come close to the machine immediately after resetting a momentary
power loss. The machine may restart unexpectedly. Take appropriate measures to ensure safety against an unexpected restart.
Failure to observe this warning may result in injury.
• Connect the ground terminal according to local electrical codes (100 Ω or
less for a SERVOPACK with a 100, 200 V power supply. 10 Ω or less for a
SERVOPACK with a 400 V power supply.)
Improper grounding may result in electric shock or fire.
• Installation, disassembly, or repair must be performed only by authorized
personnel.
Failure to observe this warning may result in electric shock or injury.
• The person who designs a system using the safety function (Hard Wire
Baseblock function) must have full knowledge of the related safety standards and full understanding of the instructions in
ual Design and Maintenance (SIEP S800000 45/46/60/64).
Failure to observe this warning may result in injury or damage to the product.
Storage and Transportation
• Do not store or install the product in the following locations.
Failure to observe this caution may result in fire, electric shock, or damage to the
product.
• Locations subject to direct sunlight
• Locations subject to temperatures outside the range specified in the storage/
installation temperature conditions
• Locations subject to humidity outside the range specified in the storage/installation humidity conditions
• Locations subject to condensation as the result of extreme changes in temperature
• Locations subject to corrosive or flammable gases
• Locations subject to dust, salts, or iron dust
• Locations subject to exposure to water, oil, or chemicals
• Locations subject to shock or vibration
• Do not hold the product by the cables, motor shaft or detector while transporting it.
Failure to observe this caution may result in injury or malfunction.
• Do not place any load exceeding the limit specified on the packing box.
Failure to observe this caution may result in injury or malfunction.
WARNING
CAUTION
Σ
-V Series User’s Man-
ix

Storage and Transportation (cont’d)
CAUTION
• If disinfectants or insecticides must be used to treat packing materials such
as wooden frames, pallets, or plywood, the packing materials must be
treated before the product is packaged, and methods other than fumigation
must be used.
Example: Heat treatment, where materials are kiln-dried to a core
temperature of 56
If the electronic products, which include stand-alone products and products
installed in machines, are packed with fumigated wooden materials, the electrical
components may be greatly damaged by the gases or fumes resulting from the
fumigation process. In particular, disinfectants containing halogen, which includes
chlorine, fluorine, bromine, or iodine can contribute to the erosion of the capacitors.
°C for 30 minutes or more.
Installation
CAUTION
• Never use the product in an environment subject to water, corrosive gases,
inflammable gases, or combustibles.
Failure to observe this caution may result in electric shock or fire.
• Do not step on or place a heavy object on the product.
Failure to observe this caution may result in injury.
• Do not cover the inlet or outlet ports and prevent any foreign objects from
entering the product.
Failure to observe this caution may cause internal elements to deteriorate resulting
in malfunction or fire.
• Be sure to install the product in the correct direction.
Failure to observe this caution may result in malfunction.
• Provide the specified clearances between the SERVOPACK and the control panel or with other devices.
Failure to observe this caution may result in fire or malfunction.
• Do not apply any strong impact.
Failure to observe this caution may result in malfunction.
x

Wiring
CAUTION
• Be sure to wire correctly and securely.
Failure to observe this caution may result in motor overrun, injury, or malfunction.
• Do not connect a commercial power supply to the U, V, or W terminals for
the servomotor connection.
Failure to observe this caution may result in injury or fire.
• Securely connect the main circuit power supply terminals and servomotor
connection terminals.
Failure to observe this caution may result in fire.
• Do not bundle or run the main circuit cables together with the I/O signal
cables or the encoder cables in the same duct. Keep them separated by at
least 30 cm.
Failure to do so may result in malfunction.
• Use shielded twisted-pair wires or multi-core shielded twisted-pair wires for
I/O signal cables and the encoder cables.
• I/O signal cables must be no longer than 3 m, encoder cables must be no
longer than 50 m, and control power supply (+24 V, 0 V) cables for a 400 V
input SERVOPACK must be no longer than 10 m.
• Do not touch the power terminals while the CHARGE lamp is ON after turn-
ing power OFF because high voltage may still remain in the SERVOPACK.
Make sure the charge indicator is off first before starting an inspection.
• Observe the following precautions when wiring main circuit terminals.
• Remove detachable main circuit terminals from the SERVOPACK prior to wiring.
• Insert only one main circuit cable per opening in the main circuit terminals.
• Make sure that no part of the core wire comes into contact with (i.e., short-circuit) adjacent wires.
• Install a battery at either the host controller or the battery unit of the
encoder, but not both.
It is dangerous to install batteries at both ends simultaneously, because that sets up
a loop circuit between the batteries.
• Always use the specified power supply voltage.
An incorrect voltage may result in fire or malfunction.
• Take appropriate measures to ensure that the input power supply is supplied within the specified voltage fluctuation range. Be particularly careful in
places where the power supply is unstable.
An incorrect power supply may result in damage to the product.
• Install external breakers or other safety devices against short-circuiting in
external wiring.
Failure to observe this caution may result in fire.
• Take appropriate and sufficient countermeasures for each form of potential
interference when installing systems in the following locations.
• Locations subject to static electricity or other forms of noise
• Locations subject to strong electromagnetic fields and magnetic fields
• Locations subject to possible exposure to radioactivity
• Locations close to power supplies
Failure to observe this caution may result in damage to the product.
xi

Wiring (cont’d)
CAUTION
• Do not reverse the polarity of the battery when connecting it.
Failure to observe this caution may result in damage to the battery, the SERVOPACK, or cause an explosion.
• Wiring or inspection must be performed by a technical expert.
• Use a 24 VDC power supply with double insulation or reinforced insulation.
• Failures caused by incorrect wiring or wrong voltage application in the
brake circuit may damage the equipment or cause an accident resulting in
death or injury. Follow the procedures and instructions for wiring and trial
operation precisely as described in this manual.
• Leakage current may increase depending on the type of noise filter and the
grounding conditions.
When using a detector or a breaker for leakage current, select the appropriate one by considering the type of noise filter and the grounding conditions. For details, contact the manufacturer of the noise filter.
• Incorrect wiring or incorrect voltage application to the output circuit may
cause short-circuit.
The above failures will prevent the holding brake from working, which may damage the machine or cause an accident resulting in death or injury.
• Inverting the polarity of the brake signal (/BK), i.e. positive logic, will prevent the holding brake from working in case of its signal line disconnection.
If this setting is absolutely necessary, check the operation and confirm that
there are no safety problems.
Operation
CAUTION
• Conduct trial operations on the servomotor alone, with the motor shaft disconnected from the machine to avoid accidents.
Failure to observe this caution may result in injury.
• During trial operation, confirm that the holding brake works correctly. Furthermore, secure system safety against problems such as signal line disconnection.
• Before starting operation with a machine connected, change the settings to
match the parameters of the machine.
Starting operation without matching the proper settings may cause the machine to
run out of control or malfunction.
• Do not frequently turn power ON and OFF.
• Frequently turning power ON and OFF causes elements inside the SERVOPACK
to deteriorate. Do not use the servo drive with an application that requires frequently turning power ON and OFF.
• After the actual operation starts, the allowable interval for turning power ON and
OFF is one hour or longer.
xii

Operation (cont’d)
• When using JOG operations (Fn002) origin search operations (Fn003), or
EasyFFT operations (Fn206), the dynamic brake function does not work for
reverse overtravel or forward overtravel. Take necessary precautions.
Failure to observe this caution may result in damage to the product.
• When using the servomotor for a vertical axis, install safety devices to prevent workpieces from falling due to alarms or overtravels. Set the servomotor so that it will stop in the zero clamp state when overtravel occurs.
Failure to observe this caution may cause workpieces to fall due to overtravel.
• When not using turning-less function, set to the correct moment of inertia
ratio (Pn103).
Setting to an incorrect moment of inertia ratio may cause vibration.
• Do not touch the SERVOPACK heatsinks, regenerative resistor, or servomotor while power is ON or soon after the power is turned OFF.
Failure to observe this caution may result in burns due to high temperatures.
• Do not make any extreme adjustments or setting changes of parameters.
Failure to observe this caution may result in injury or damage to the product due to
unstable operation.
• When an alarm occurs, remove the cause, reset the alarm after confirming
safety, and then resume operation.
Failure to observe this caution may result in damage to the product, fire, or injury.
• Do not use the holding brake of the servomotor for braking.
Failure to observe this caution may result in malfunction.
• Always use the servomotor and SERVOPACK in one of the specified combinations.
Failure to observe this caution may result in fire or malfunction.
• The servomotor stopping method of turning the main-circuit or control-circuit power OFF without turning the servo OFF during operation can not be
set in Parameter Pn001. Use the following method to stop the servomotor.
• When turning the main-circuit power OFF without turning the servo OFF:
The servomotor will be stopped by dynamic braking (DB).
• When turning the control-circuit power OFF without turning the servo OFF:
The stopping method will vary depending on the SERVOPACK model.
Refer to the Σ-V Series User's Manual Design and Maintenance for details.
CAUTION
xiii
Maintenance and Inspection
CAUTION
• Do not disassemble the SERVOPACK.
Failure to observe this caution may result in electric shock or injury.
• Do not attempt to change wiring while the power is ON.
Failure to observe this caution may result in electric shock or injury.
• When replacing the SERVOPACK, resume operation only after copying the
previous SERVOPACK parameters to the new SERVOPACK.
Failure to observe this caution may result in damage to the product.
• Be sure to eliminate static electricity before operating buttons and switches
inside the front cover.
Failure to observe this caution may result in damage to the product.
Disposal
CAUTION
• When disposing of the products, treat them as ordinary industrial waste.
General Precautions
Observe the following general precautions
to ensure safe application.
xiv
• The products shown in illustrations in this manual are sometimes shown without covers or protective guards. Always replace the cover or protective guard as specified
first, and then operate the products in accordance with the manual.
• The drawings presented in this manual are typical examples and may not match the
product you received.
• If the manual must be ordered due to loss or damage, inform your nearest Yaskawa
representative or one of the offices listed on the back of this manual.

Warranty
(1) Details of Warranty
Warranty Period
The warranty period for a product that was purchased (hereinafter called "delivered
product") is one year from the time of delivery to the location specified by the customer or 18 months from the time of shipment from the Yaskawa factory, whichever
is sooner.
Warranty Scope
Yaskawa shall replace or repair a defective product free of charge if a defect attributable to Yaskawa occurs during the warranty period above. This warranty does not
cover defects caused by the delivered product reaching the end of its service life and
replacement of parts that require replacement or that have a limited service life.
This warranty does not cover failures that result from any of the following causes.
1. Improper handling, abuse, or use in unsuitable conditions or in environments not
described in product catalogs or manuals, or in any separately agreed-upon specifications
2. Causes not attributable to the delivered product itself
3. Modifications or repairs not performed by Yaskawa
4. Abuse of the delivered product in a manner in which it was not originally
intended
5. Causes that were not foreseeable with the scientific and technological understanding at the time of shipment from Yaskawa
6. Events for which Yaskawa is not responsible, such as natural or human-made
disasters
(2) Limitations of Liability
1. Yaskawa shall in no event be responsible for any damage or loss of opportunity to
the customer that arises due to failure of the delivered product.
2. Yaskawa shall not be responsible for any programs (including parameter settings)
or the results of program execution of the programs provided by the user or by a
third party for use with programmable Yaskawa products.
3. The information described in product catalogs or manuals is provided for the purpose of the customer purchasing the appropriate product for the intended application. The use thereof does not guarantee that there are no infringements of
intellectual property rights or other proprietary rights of Yaskawa or third parties,
nor does it construe a license.
4. Yaskawa shall not be responsible for any damage arising from infringements of
intellectual property rights or other proprietary rights of third parties as a result of
using the information described in catalogs or manuals.
xv

(3) Suitability for Use
1. It is the customer’s responsibility to confirm conformity with any standards,
codes, or regulations that apply if the Yaskawa product is used in combination
with any other products.
2. The customer must confirm that the Yaskawa product is suitable for the systems,
machines, and equipment used by the customer.
3. Consult with Yaskawa to determine whether use in the following applications is
acceptable. If use in the application is acceptable, use the product with extra
allowance in ratings and specifications, and provide safety measures to minimize
hazards in the event of failure.
• Outdoor use, use involving potential chemical contamination or electrical
interference, or use in conditions or environments not described in product
catalogs or manuals
• Nuclear energy control systems, combustion systems, railroad systems, aviation systems, vehicle systems, medical equipment, amusement machines, and
installations subject to separate industry or government regulations
• Systems, machines, and equipment that may present a risk to life or property
• Systems that require a high degree of reliability, such as systems that supply
gas, water, or electricity, or systems that operate continuously 24 hours a day
• Other systems that require a similar high degree of safety
4. Never use the product for an application involving serious risk to life or property
without first ensuring that the system is designed to secure the required level of
safety with risk warnings and redundancy, and that the Yaskawa product is properly rated and installed.
5. The circuit examples and other application examples described in product catalogs and manuals are for reference. Check the functionality and safety of the
actual devices and equipment to be used before using the product.
6. Read and understand all use prohibitions and precautions, and operate the
Yaskawa product correctly to prevent accidental harm to third parties.
xvi
(4) Specifications Change
The names, specifications, appearance, and accessories of products in product catalogs and manuals may be changed at any time based on improvements and other reasons. The next editions of the revised catalogs or manuals will be published with
updated code numbers. Consult with your Yaskawa representative to confirm the
actual specifications before purchasing a product.

Applicable Standards
North American Safety Standards (UL)
Model
SERVOPACK • SGDV UL508C (E147823)
•SGMJV
Servomotor
∗ Underwriters Laboratories Inc.
•SGMAV
•SGMPS
• SGMGV
•SGMSV
UL∗ Standards
(UL File No.)
UL1004 (E165827)
European Standards
Model
SERVOPACK •SGDV
•SGMJV
Servomotor
Note: Because SERVOPACKs and servomotors are built into machines, certification is
required after installation in the user’s product.
•SGMAV
•SGMPS
• SGMGV
•SGMSV
Low Voltage
Directive
EN50178
EN61800-5-1
IEC60034-1
IEC60034-5
IEC60034-8
IEC60034-9
EMC Directive
EMI EMS
EN55011
group 1 class A,
EN61800-3
EN55011
group 1 class A,
EN61800-3
EN61800-3
EN61000-6-2
EN61800-3
EN61000-6-2
Safety
Standards
EN954-1
IEC61508-
1 to 4
–
xvii

Contents
About this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Applicable Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
1 Overview of Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
2 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.1 Installation Environment and Applicable Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.1 Servomotor Installation Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.2 SERVOPACK Installation Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.1.3 Installation Conditions for Applicable Standards . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.2 Servomotor Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.1 Orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.2 Installation Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.3 Connecting Servomotor to Machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.2.4 Protective Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.2.5 Other Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2.3 SERVOPACK Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.3.1 Orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.3.2 Installation Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.4 EMC Installation Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
2.4.1 SGDV-01 (Analog Pulse Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
2.4.2 SGDV-11 (M-II Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-21
2.4.3 SGDV-21 (M-III Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-29
2.4.4 SGDV-E1A (Command Option Attachable Type) . . . . . . . . . . . . . . . . . 2-37
2.4.5 Other Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-37
3 Wiring and Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1 Precautions for Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.2 System Configuration Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3.2.1 Connecting to SGDV-01 SERVOPACK (Analog Pulse Model) . . . . . . 3-3
3.2.2 Connecting to SGDV-11 SERVOPACK (M-II Model) . . . . . . . . . . . . . 3-7
3.2.3 Connecting to SGDV-21 SERVOPACK (M-III Model) . . . . . . . . . . . . 3-11
3.2.4 Connecting to SGDV-E1A SERVOPACK
(Command Option Attachable Type) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-15
3.3 Main Circuit Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
3.3.1 Names and Functions of Main Circuit Terminals . . . . . . . . . . . . . . . . . . . . . . . . 3-19
3.3.2 SERVOPACK Main Circuit Wire Size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-20
3.3.3 Typical Main Circuit Wiring Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-24
3.3.4 Wiring the Main Circuit Terminal Connector (Spring Type) . . . . . . . . . . . . . . . . 3-28
3.4 Connecting Regenerative Resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-31
3.4.1 Connecting Regenerative Resistor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-31
xviii

4 Safety Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4.2 Hard Wire Base Block (HWBB) Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.3 Safety Function Signal (CN8) Names and Functions . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.4 Precautions When Not Using the Safety Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.5 Connecting a Safety Function Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
5 Trial Operation (Checking Servomotor Operation) . . . . . . . . . . . . . . . 5-1
5.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5.2 Inspection and Checking before Trial Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5.3 JOG Operation Using a Panel Operator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5.4 JOG Operation Using a Digital Operator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5.5 JOG Operation Using SigmaWin+ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Revision History
xix

1
Overview of Setup
Overview of Setup
This chapter describes how to set up the Σ-V series of servo drives.
1
1-1

1 Overview of Setup
This chapter describes the flow of the setup procedure from installation until a JOG
operation. A panel operator, a digital operator, and SigmaWin+, (which is an engineering tool that can be used with a PC) are available to set up a servo drive.
The panel operator is included with the SERVOPACK of analog pulse models, and
the digital operator and SigmaWin+ are sold separately.
• An alarm or warning may be generated if communications are executed with the
host controller during operation using SigmaWin+ or the digital operator.
If an alarm or warning is generated, the process currently being executed may be aborted
and the system may stop.
Install the servomotor and
SERVOPACK.
Perform the required wiring and
connections for a JOG operation.
Perform a JOG operation for the
servomotor using
• the panel operator
• the digital operator, or
•SigmaWin+
CAUTION
Be sure to read 5.2 Inspection and Checking before Trial Operation.
Operation Reference (in this manual)
Chapter 2 Installation
↓
Chapter 3 Wiring and Connection
↓
Chapter 5 Trial Operation (Checking
Servomotor Operation)
zTrial Operation Using the Panel
Operator
→5.3 JOG Operation Using a Panel
Operator
zTrial Operation Using the Digital
Operator
→5.4 JOG Operation Using a Digital
Operator
zTrial Operation Using SigmaWin+.
→5.5 JOG Operation Using
SigmaWin+
*
1-2
∗ Trial operation using the panel operator
is available with analog pulse models
only.

2
Installation
2
Installation
This chapter describes how to install the servomotor and the SERVOPACK.
2.1 Installation Environment and Applicable Standards . . . . . . . . . 2-2
2.1.1 Servomotor Installation Environment . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.2 SERVOPACK Installation Environment . . . . . . . . . . . . . . . . . . . . 2-3
2.1.3 Installation Conditions for Applicable Standards . . . . . . . . . . . . . . 2-4
2.2 Servomotor Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.1 Orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.2 Installation Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.2.3 Connecting Servomotor to Machine . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.2.4 Protective Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.2.5 Other Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2.3 SERVOPACK Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.3.1 Orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.3.2 Installation Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.4 EMC Installation Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
2.4.1 SGDV-01 (Analog Pulse Model) . . . . . . . . . . . . . . . . . 2-13
2.4.2 SGDV-11 (M-II Model) . . . . . . . . . . . . . . . . . . . . . . . . 2-21
2.4.3 SGDV-21 (M-III Model) . . . . . . . . . . . . . . . . . . . . . . . . 2-29
2.4.4 SGDV-E1A (Command Option Attachable Type) . . . . . . 2-37
2.4.5 Other Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-37
2-1

2 Installation
Horizontal
Impact Applied to the
Servomotor
Vertical
Front to
Back
Side to Side
2.1.1 Servomotor Installation Environment
2.1 Installation Environment and Applicable Standards
The installation environment and the applicable standards for servomotors and
SERVOPACKs are described in this section.
2.1.1 Servomotor Installation Environment
Ambient temperature: 0 to 40°C
Ambient humidity: 80% RH or less (with no condensation)
Altitude: 1, 000 m or less
Vibration resistance
The servomotor will withstand the following
vibration acceleration in three directions: vertical,
side to side, and front to back.
Servomotor Model
SGMJV, SGMAV, SGMPS,
SGMCS-02 to -35
SGMGV-03 to -44,
SGMSV-10 to -50
SGMGV-55 to -1E,
SGMCS-45 to -2Z
SGMSV-70
Vibration Acceleration
at Flange
2
49 m/s
2
49 m/s
(Front to back direction:
2
)
24.5m/s
2
24.5 m/s
2
14.7 m/s
2-2
Shock resistance: 490 m/s2 at servomotor flange
Installation site: An environment that satisfies the following conditions
• Indoors and free of corrosive or explosive gases
• Well-ventilated and free of dust and moisture
• Facilitates inspection and cleaning
• Free of high magnetic field

2.1 Installation Environment and Applicable Standards
2
Installation
2.1.2 SERVOPACK Installation Environment
Surrounding air temperature: 0 to 55°C
Ambient humidity: 90% RH or less (with no condensation)
Altitude: 1,000 m or less
Vibration resistance: 4.9 m/s
Shock resistance: 19.6 m/s
2
2
Installation Precautions
• Mounting in a Control Panel
To prevent the temperature around the SERVOPACK from exceeding 55°C, take into
account the size of the control panel, the layout of the SERVOPACK, and the cooling
method. For details, refer to 2.3 SERVOPACK Installation.
• Mounting Near a Heating Unit
To prevent the temperature around the SERVOPACK from exceeding 55°C, suppress
radiant heat from the heating unit and temperature rise due to convection.
• Mounting Near a Vibration Source
To prevent vibration from being transmitted to the SERVOPACK, install a vibration
isolator underneath the SERVOPACK.
• Mounting to a Location Exposed to Corrosive Gas
Take measures to prevent exposure to corrosive gas. Corrosive gases will not immediately affect the SERVOPACK, but will eventually cause electronic components and
contactor-related devices to malfunction.
• Other Locations
Do not mount the SERVOPACK in locations subject to high temperatures, high
humidity, dripping water, cutting oil, dust, iron filings, or radiation.
<Note>
When storing the SERVOPACK with the power OFF, store it in an environment with
the following temperature and humidity:
• -20 to +85°C, 90% RH or less. (with no condensation)
2-3

2 Installation
2.1.3 Installation Conditions for Applicable Standards
2.1.3 Installation Conditions for Applicable Standards
Applicable
Standards
Operating
Conditions
Installation
Conditions
UL508C
EN50178, EN55011 group 1 class A, EN61000-6-2, EN61800-3, EN618005-1, EN954-1, IEC61508-1 to 4
Overvoltage Category: III
Pollution degree: 2
Protection class: IP10
UL Standard and Low Voltage Directive:
Satisfy the conditions outlined in
Precautions (TOBP C710800 10)
EMC Directive:
Certification is required after installation in the user’s machine under the
conditions outlined in 2.4 EMC Installation Conditions of this manual.
Σ
-V Series AC SERVOPACK SGDV Safety
2-4

2
Installation
2.2 Servomotor Installation
2.2.1 Orientation
Servomotors can be installed either horizontally or vertically.
Servomotors with gears can be installed only horizontally, depending on gear lubrication conditions. Refer to
2.2.2 Installation Standards
The motor rated specifications (rated output, rated torque, and rated speed) are the
continuous allowable values at an ambient temperature of 40°C when servomotors
are installed with heat sinks.
For more information on heat sinks, refer to
S800000 42).
When a motor is mounted on a small surface, the motor temperature may rise considerably because of the limited heat radiating abilities of the surface. To restrict the
temperature rise, you should either mount a heat sink or limit the electrical, thermal,
and mechanical stress on the motor (derating). Refer to
(KAEP S800000 42) for the relation between heat sink size and derating. The data in
the catalog is given only for reference, as the actual temperature rise depends on how
the heat sink (motor mounting section) is fixed on the installation surface and what
material is used for the motor mounting section. Always check the actual motor temperature.
Σ
-V Series Product Catalog (KAEP S800000 42) for details.
2.2 Servomotor Installation
Σ
-V Series Product Catalog (KAEP
Σ
-V Series Product Catalog
If the servomotor is covered, or if a heating element is installed near the servomotor,
the motor temperature may rise considerably. In this case, take following countermeasures.
• Reduce the load ratio.
• Reconsider the motor heating conditions.
• Install a cooling fan to forcedly cool the motor.
2-5

2 Installation
2.2.3 Connecting Servomotor to Machine
2.2.3 Connecting Servomotor to Machine
The end of the motor shaft is coated with anticorrosive paint. Thoroughly remove the
paint prior to installation.
Align the shaft of the servomotor with the shaft of the machine, and then couple the
shafts. Install the servomotor so that alignment accuracy falls within the following
range. Vibration will damage the bearings or encoders if the shafts are not properly
aligned.
Do not allow direct impact to be applied to the shafts when installing the coupling as
the encoder mounted on the opposite end of the shaft may be damaged.
Alignment Accuracy
Measure this distance at four
different positions on the
circumference. The difference
between the maximum and
minimum measurements must be
0.03 mm or less.
(Turn together with coupling.)
2-6

2
Installation
2.2.4 Protective Structure
Through shaft section
Shaft
Flange
This refers to the gap where
the shaft protrudes from
the end of the motor.
The servomotor protective structure* is described below.
Model Without Gears With Gears
SGMJV, SGMAV IP65 IP55
SGMPS
SGMGV IP67 −
SGMSV
SGMCS-02 to -35
SGMCS-45 to -2Z IP44 −
∗ Except through shaft section. The protective structure specifications can be satisfied only
when using a specified cable.
When the through shaft section is subject to oil exposure, refer to 2.2.5 Other Pre-
cautions.
(SGMSV-70 servomotor only:
(expect for gaps on the rotating
IP55
IP67 (Optional)
IP67
IP22)
IP42
section of the shaft)
2.2 Servomotor Installation
IP55
−
−
2-7

2 Installation
2.2.5 Other Precautions
2.2.5 Other Precautions
Handling Oil and Water
If the servomotor is used in a location that is subject to water or oil mist, use a servomotor with an oil seal to seal the through shaft section. Precautions on using a servomotor with an oil seal are described below.
• Put the oil surface under the oil seal lip.
• Use an oil seal in favorably lubricated condition.
• When using a servomotor with its shaft upward direction, be sure that oil will not
stay in the oil seal lips.
Cable Stress
Make sure there are no bends or tension on the motor main circuit cables and encoder
cables.
Be especially careful to wire encoder cables so that they are not subject to stress
because the core wires are very thin at only 0.2 or 0.3 mm2.
Connectors
Observe the following precautions:
• Make sure there is no foreign matters such as dust and metal chips in the connector
before connecting.
• When the connectors are connected to the motor, be sure to connect the end of
motor main circuit cables before connecting the encoder cable’s end.
If the encoder cable’s end is connected, the encoder may break because of the voltage differences between FG.
• Make sure of the pin arrangement.
• Do not apply shock to resin connectors. Otherwise, they may be damaged.
• When handling a servomotor with its cables connected, hold the servomotor or the
connectors and cables will be damaged.
• Fix the connector to SGMJV, SGMAV, SGMPS-01/-02/-04 or SGMGV-03/-05
servomotors with screws. Make sure that the connector is securely fixed with
screws.
If not, the protective construction specifications may not be satisfied.
• Be sure not to apply stress on the connector. The connector may be damaged by
stress.
2-8
Radial and Thrust loads
Design the mechanical system so thrust and radial loads applied to the servomotor
shaft end during operation fall within the allowable ranges of each motor. Refer to
Σ
-V Series Product Catalog (KAEP S800000 42) for the allowable ranges.

2
Installation
2.3 SERVOPACK Installation
Air Flow
Base
2.3.1 Orientation
The SERVOPACK is available in models that are base-mounted, models that are
rack-mounted, and models that are duct-ventilated. In any case, mount the SERVOPACK with a vertical orientation.
Firmly secure the SERVOPACK to the mounting surface, using either two or four
mounting holes depending on the SERVOPACK capacity.
Note: For SERVOPACKs of command option attachable type, installation conditions may dif-
fer depending on the attached option module. For details, refer to the user’s manual for
each option module.
• Base-mounted
2.3 SERVOPACK Installation
• Rack-mounted
Rack
Air Flow
2-9

2 Installation
Air Flow
Duct
2.3.1 Orientation
• Duct-ventilated
2-10

2
Installation
2.3.2 Installation Standards
Fan
30 mm
or more
40 mm or more
40 mm or more
Width varies with
SERVOPACK model
Fan
Observe the standards for mounting SERVOPACKs in control panels, including those
for the mounting SERVOPACKs side by side in one control panel as shown in the
following illustration.
Note: For SERVOPACKs of command option attachable type, installation conditions may dif-
fer depending on the attached option module. For details, refer to the user’s manual for
each option module.
• SERVOPACK Mounting Orientation
Mount the SERVOPACK vertically to the wall, with the front panel (the side with the
panel operator display) facing out.
• Cooling
Refer to the following diagram and leave sufficient space for cooling by fans and natural convection.
• Mounting SERVOPACKs Side by Side in a Control Panel
2.3 SERVOPACK Installation
Leave sufficient space on each side and at the top and the bottom of each SERVOPACK. The width on each side varies in accordance with the models of the SERVOPACKS u s e d .
SERVOPACK Model
SGDV-
R70F, R90F, 2R1F,
R70A, R90A, 1R6A, 2R8A
2R8F, 3R8A, 5R5A, 7R6A 1 mm or more 10 mm or more
120A, 180A, 200A, 330A,
470A, 550A, 590A, 780A,
1R9D, 3R5D, 5R4D, 8R4D,
120D, 170D, 210D, 260D,
280D, 370D
Side
Left Right
1 mm or more
10 mm or more
Top and bottom
40 mm or more
Also install cooling fans above the SERVOPACKs to disperse local pockets of
warmer air around the SERVOPACKs.
2-11

2 Installation
2.3.2 Installation Standards
• Inside the Control Panel
The conditions inside the control panel should be the same as the environmental conditions of the SERVOPACK. Refer to 2.1.2 SERVOPACK Installation Environment.
The SGDV-B SERVOPACKs have an Installation Environment monitor
(Un022). With this monitor, operation conditions in the installation environment can
be observed and measured.
The value shown on this monitor should be equal to or less than 100% for optimum
operating conditions.
If this value is over 100%, one of the following measures must be taken to ensure
safe operation and a long product life.
Improve air circulation around SERVOPACKs.
Minimum Air Circulation Rate
Top (10 mm): 0.5 m/s
Bottom (10 mm): 0.2 m/s
To improve the air circulation to meet these minimum standards and to lower the percentage shown on the monitor, widen the space between the SERVOPACKs or lower
the temperature of the surrounding air.
<Note>
For every increase of 10°C, the percentage shown on the monitor will also increase
by approximately ten.
2-12

2.4 EMC Installation Conditions
2
Installation
Power supply:
Single-phase
100 VAC
U, V, W
L1, L2
L1C, L2C
CN2
CN1
Shield box
SERVOPACK
PE
PE
Encoder
Servomotor
Brake
1
3
4
5
Clamp
Noise
filter
Brake Power
Supply
Clamp
Clamp
Clamp
CN8
2
Surge
absorber
Two turn
One turn
CoreCore
Core
Core Core
Core
Two turn
Two turn
Clamp
Host
controller
Safety unit
One turn
2.4 EMC Installation Conditions
This section describes the recommended installation conditions that satisfy EMC
guidelines for each model of the SGDV SERVOPACK. The conditions required for
the standard type (base-mounted) of SERVOPACK are described. Refer to this section for other SERVOPACK models such as the rack-mounted types as well.
This section describes the EMC installation conditions satisfied in test conditions
prepared by Yaskawa. The actual EMC level may differ depending on the actual system’s configuration, wiring, and other conditions. However, because this product is
built-in, check that the following conditions are still met after being installed in the
user’s product.
The applicable standards are EN55011 group 1 class A, EN61800-3, and EN61000-6-
2.
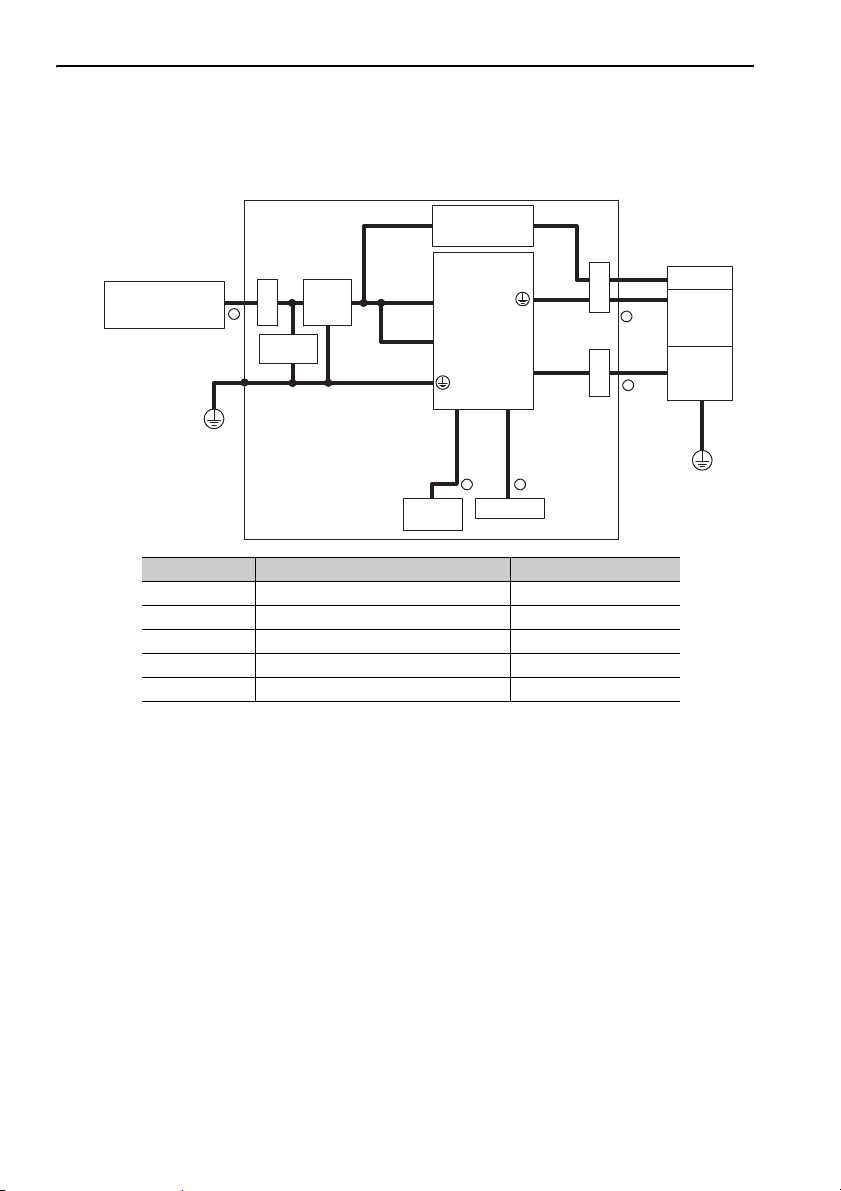
2.4.1 SGDV-01 (Analog Pulse Model)
Single-phase 100 V
•SGDV-F01A ( = R70, R90, 2R1, 2R8)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
2-13
2 Installation
Power supply:
Three-phase
200 VAC
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
Shield box
SERVOPACK
PE
PE
1
3
4
5
Clamp
Noise
filter
Brake Power
Supply
Clamp
Clamp
CN8
2
Surge
absorber
Encoder
Servomotor
Brake
Host
controller
Safety unit
2.4.1 SGDV-01 (Analog Pulse Model)
Three-phase 200 V
•SGDV-A01B ( = R70, R90, 1R6, 2R8)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
2-14

2.4 EMC Installation Conditions
2
Installation
Power supply:
Three-phase
200 VAC
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
Shield box
SERVOPACK
PE
PE
1
3
4
5
Clamp
Noise
filter
Brake Power
Supply
Clamp
Clamp
Clamp
CN8
2
Surge
absorber
One turn
One turn
CoreCore
Core
Core Core
Core
Two turn
Two turn
Clamp
Encoder
Servomotor
Brake
Host
controller
Safety unit
Three-phase 200 V
•SGDV-A01A ( = R70, R90, 1R6, 2R8, 3R8, 5R5, 7R6)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
2-15

2 Installation
1
3
4
5
2
Power supply:
Three-phase
200 VAC
Shield box
SERVOPACK
Clamp
Noise
filter
Brake Power
Supply
Clamp
Clamp
Clamp
Surge
absorber
CoreCore
Core Core
Two turn
Two turn
Clamp
Encoder
Servomotor
Brake
Host
controller
Safety unit
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
PE
PE
CN8
One turn
2.4.1 SGDV-01 (Analog Pulse Model)
Three-phase 200 V
•SGDV-A01A ( = 120)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
2-16

2
Installation
Three-phase 200 V
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
PE
PE
1
3
4
5
CN8
2
Power supply:
Three-phase
200 VAC
Shield box
SERVOPACK
Clamp
Noise
filter
Brake Power
Supply
Clamp
Clamp
Clamp
Surge
absorber
Core
Core Core
Two turn
Two turn
Clamp
Encoder
Servomotor
Brake
Host
controller
Safety unit
One turn
•SGDV-A01A ( = 180, 200, 330)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
2.4 EMC Installation Conditions
2-17

2 Installation
Power supply:
Three-phase
200 VAC
Shield box
SERVOPACK
Noise
filter
Brake Power
Supply
Surge
absorber
Host
controller
Safety unit
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
B1, B2
PE
PE
Encoder
Servomotor
Brake
Cooling fan
1
3
4
5
Clamp
Clamp
Clamp
Clamp
CN8
2
Clamp Clamp
Regenerative
resistor unit
Clamp
6
7
2.4.1 SGDV-01 (Analog Pulse Model)
Three-phase 200 V
•SGDV-A01A ( = 470, 550, 590, 780)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h Regenerative resistor unit cable Non-shield cable
i Cooling fan cable Shield cable
2-18

2.4 EMC Installation Conditions
2
Installation
SERVOPACK
Brake Power
Supply
Host
controller
Safety unit
Encoder
Servomotor
Brake
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
U, V, W
L1, L2, L3
24 V, 0 V
CN2
CN1
Shield box
PE
PE
1
2
3
4
6
5
Clamp
Clamp
Core
Core
Clamp
Core
Core
Clamp
Noise
filter*
3
Core
CN8
Core
Surge
absorber
Surge
absorber
Core
Noise
filter*
2
Control
power
supply
24 VDC*
1
Clamp
Clamp Clamp
One turn
One turn
Two turnTwo turn
One turn
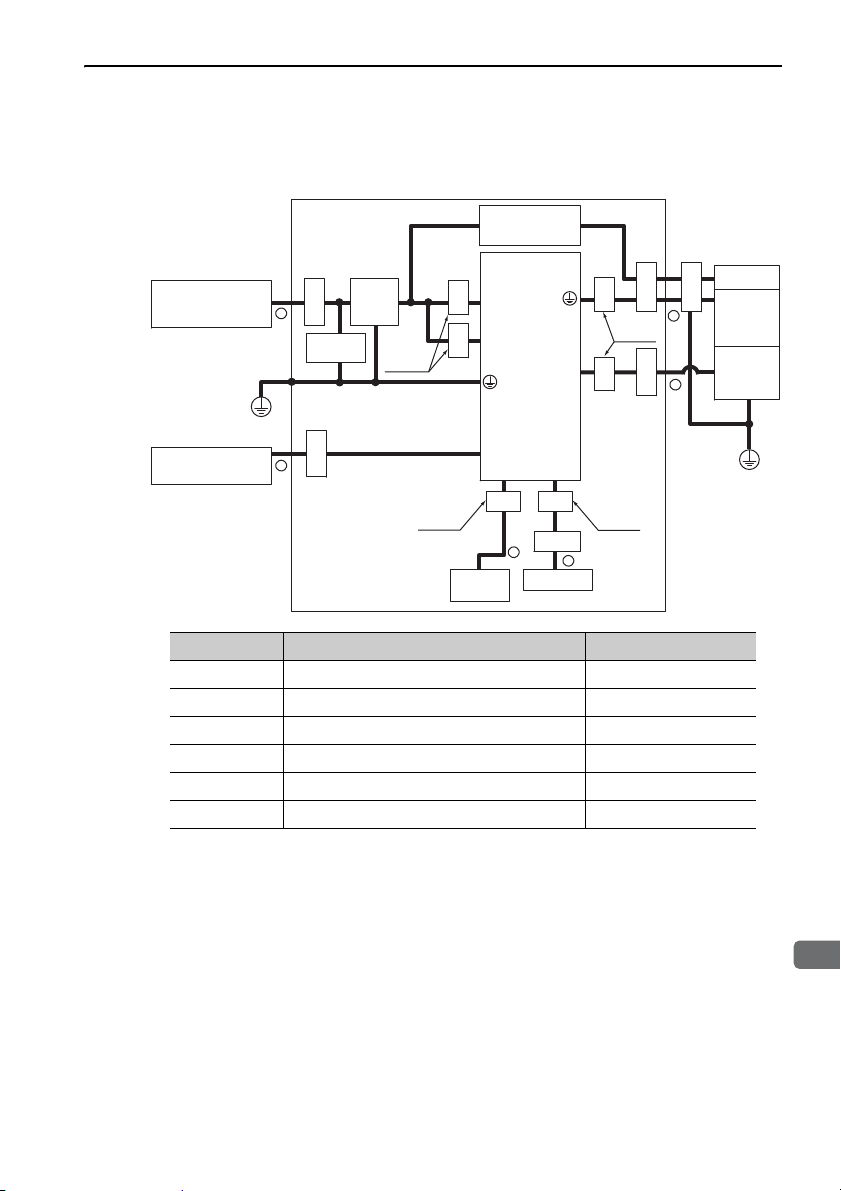
Three-phase 400 V
•SGDV-D01A ( = 1R9, 3R5, 5R4, 8R4, 120, 170)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Control power cable Shield cable
h Main circuit cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
∗3. For more information on this filter, refer to
42)
Σ
-V Series Product Catalog. (KAEP S800000
2-19

2 Installation
SERVOPACK
Brake Power
Supply
Host
controller
Safety unit
Encoder
Servomotor
Brake
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
U, V, W
L1, L2, L3
24 V, 0 V
CN2
CN1
Shield box
PE
PE
1
2
3
4
6
5
Clamp
Clamp
Clamp
Clamp
Noise
filter*
3
CN8
Surge
absorber
Surge
absorber
Noise
filter*
2
Control
power
supply
24 VDC*
1
Clamp
Clamp Clamp
B1, B2
Regenerative
resistor unit
cable
7
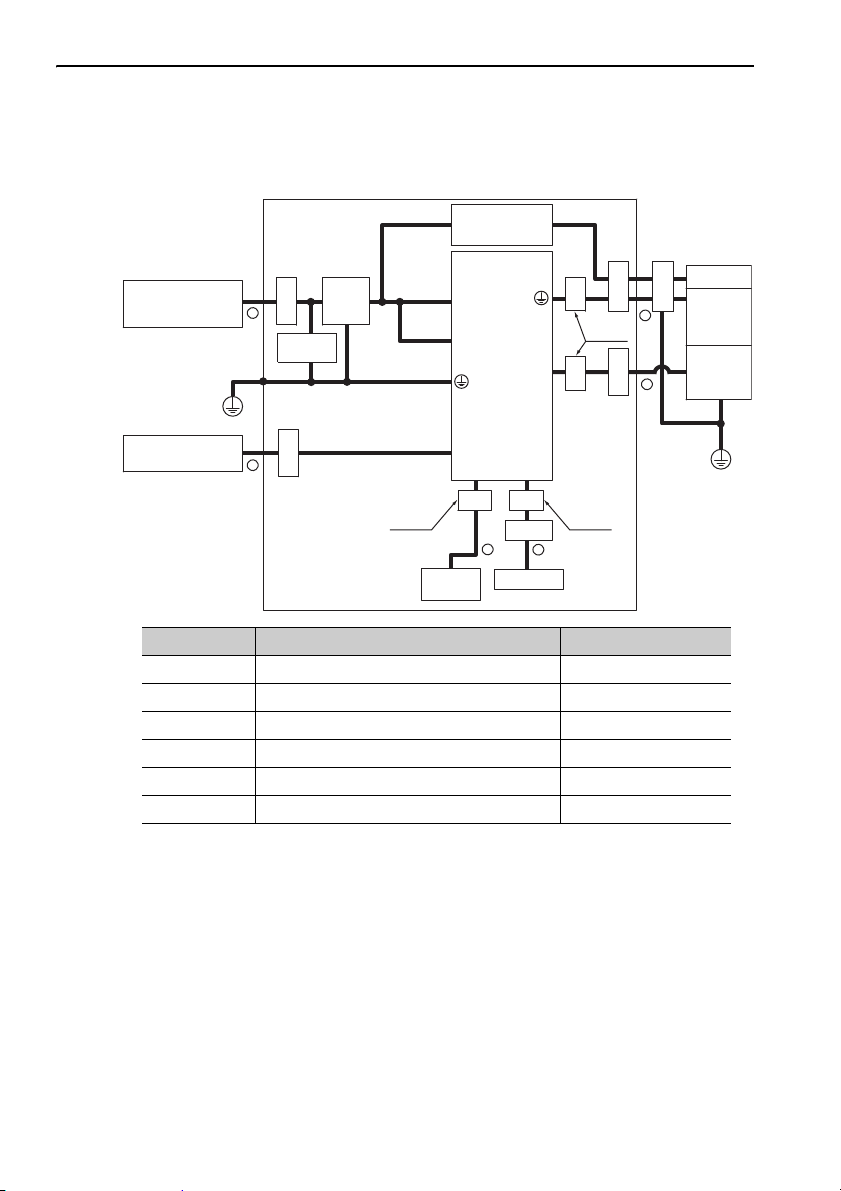
2.4.1 SGDV-01 (Analog Pulse Model)
Three-phase 400 V
•SGDV-D01A ( = 210, 260, 280, 370)
2-20
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Control power cable Shield cable
h Main circuit cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
i Regenerative resistor unit cable Non-shield cable
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
∗3. For more information on this filter, refer to
42)
Σ
-V Series Product Catalog. (KAEP S800000

2
Installation
2.4.2 SGDV-11 (M-II Model)
U, V, W
L1, L2
L1C, L2C
CN2
CN1
Shield box
PE
PE
1
3
4
5
Clamp
Clamp
Clamp
CN8
2
One turn
CoreCore
Two turn
Two turn
Clamp
MECHATROLINK-II
controller
CN6A,CN6B
6
Clamp
Power supply:
Single-phase
100 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Two turn
Core
Core Core
Core
Safety unit
One turn
Host
controller
Single-phase 100 V
•SGDV-F11A ( = R70, R90, 2R1, 2R8)
2.4 EMC Installation Conditions
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-II communication cable Shield cable
2-21

2 Installation
Shield box
Clamp
Clamp
MECHATROLINK-II
controller
Clamp
Power supply:
Three-phase
200 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Safety unit
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
PE
PE
2
1
3
4
5
6
CN8
Host
controller
2.4.2 SGDV-11 (M-II Model)
Three-phase 200 V
•SGDV-A11B ( = R70, R90, 1R6, 2R8)
2-22
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-II communication cable Shield cable
2.4 EMC Installation Conditions
2
Installation
Shield box
Clamp
Clamp
Clamp
One turn
CoreCore
Two turn
Two turn
Clamp
MECHATROLINK-II
controller
Clamp
Power supply:
Three-phase
200 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Core
Core Core
Core
Safety unit
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
PE
PE
2
1
3
4
5
6
CN8
One turn
Host
controller
Three-phase 200 V
•SGDV-A11A ( = R70, R90, 1R6, 2R8, 3R8, 5R5, 7R6)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-II communication cable Shield cable
2-23
2 Installation
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
PE
PE
2
1
3
4
5
6
CN8
Shield box
Clamp
Clamp
Clamp
One turn
CoreCore
Two turn
Two turn
Clamp
MECHATROLINK-II
controller
Clamp
Power supply:
Three-phase
200 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Core Core
Safety unit
Host
controller
2.4.2 SGDV-11 (M-II Model)
Three-phase 200 V
•SGDV-A11A ( = 120)
2-24
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-II communication cable Shield cable

2
Installation
Three-phase 200 V
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
PE
PE
1
3
4
5
CN8
2
CN6A, CN6B
6
Shield box
Clamp
Clamp
Clamp
One turn
Core
Two turn
Two turn
Clamp
MECHATROLINK-II
controller
Clamp
Power supply:
Three-phase
200 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Core Core
Safety unit
Host
controller
•SGDV-A11A ( = 180, 200, 330)
2.4 EMC Installation Conditions
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-II communication cable Shield cable
2-25

2 Installation
U, V, W
L1, L2, L3
L1C, L2C
B1, B2
CN2
CN1
PE
PE
1
3
4
5
CN8
2
MECHATROLINK-II
controller
CN6A, CN6B
8
Clamp
6
7
Power supply:
Three-phase
200 VAC
Shield box
SERVOPACK
Noise
filter
Brake Power
Supply
Surge
absorber
Safety unit
Encoder
Servomotor
Brake
Cooling fan
Clamp
Clamp
Clamp
Clamp
Clamp Clamp
Regenerative
resistor unit
Clamp
Host
controller
2.4.2 SGDV-11 (M-II Model)
Three-phase 200 V
•SGDV-A11A ( = 470, 550, 590, 780)
2-26
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h Regenerative resistor unit cable Non-shield cable
i Cooling fan cable Shield cable
j MECHATROLINK-II communication cable Shield cable

2.4 EMC Installation Conditions
2
Installation
U, V, W
L1, L2, L3
24 V, 0 V
CN2
CN1
PE
PE
1
2
3
6
5
CN8
4
CN6A, CN6B
7
Clamp
MECHATROLINK-II
controller
SERVOPACK
Brake Power
Supply
Safety unit
Encoder
Servomotor
Brake
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
Shield box
Clamp
Clamp
Core
Core
Clamp
Core
Core
Clamp
Noise
filter*
3
Core Core
Surge
absorber
Surge
absorber
Core
Noise
filter*
2
Control
power
supply
24 VDC*
1
Clamp
Clamp Clamp
One turn
One turn
Two turnTwo turn
One turn
Host
controller
Three-phase 400 V
•SGDV-D11A ( = 1R9, 3R5, 5R4, 8R4, 120, 170)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Control power cable Shield cable
h Main circuit cable Shield cable
i MECHATROLINK-II communication cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
Σ
∗3. For more information on this filter, refer to
42)
-V Series Product Catalog. (KAEP S800000
2-27

2 Installation
2.4.2 SGDV-11 (M-II Model)
Three-phase 400 V
•SGDV-D11A ( = 210, 260, 280, 370)
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
5
Clamp
Surge
absorber
6
Clamp
Surge
absorber
Noise
filter*
2
Noise
filter*
Control
power
supply
24 VDC*
3
1
Brake Power
Supply
SERVOPACK
24 V, 0 V
L1, L2, L3
U, V, W
CN2
Shield box
Clamp
Clamp
Brake
Clamp
3
Servomotor
Encoder
4
PE
MECHATROLINK-II
controller
Regenerative
resistor cable
8
Clamp
7
B1, B2
CN6A, CN6B
Clamp Clamp
Host
controller
CN1
1
Safety unit
CN8
2
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Control power cable Shield cable
h Main circuit cable Shield cable
i Regenerative resistor unit cable Non-shield cable
j MECHATROLINK-II communication cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
Σ
∗3. For more information on this filter, refer to
-V Series Product Catalog. (KAEP S800000
42)
PE
2-28

2
Installation
2.4.3 SGDV-21 (M-III Model)
Single-phase 100 V
•SGDV-F21A ( = R70, R90, 2R1, 2R8)
One turn
Power supply:
Single-phase 100 VAC
MECHATROLINK-III
controller
5
PE
6
Clamp
Surge
absorber
Clamp
Noise
filter
Two turn
Core
Core
Host
controller
Brake Power
Supply
SERVOPACK
U, V, W
L1, L2
L1C, L2C
CN6A, CN6B
CN1
Core Core
1
Safety unit
2.4 EMC Installation Conditions
Shield box
Clamp
CN2
CN8
Clamp
CoreCore
One turn
Two turnTwo turn
2
Clamp
Clamp
3
Servomotor
Encoder
4
Brake
PE
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-III communication cable Shield cable
2-29

2 Installation
Shield box
Clamp
Clamp
MECHATROLINK-III
controller
Clamp
Power supply:
Three-phase
200 VAC
SERVOPACK
Encoder
Servomotor
Brake
Clamp
Noise
filter
Brake Power
Supply
Surge
absorber
Safety unit
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
PE
PE
2
1
3
4
5
6
CN8
Host
controller
2.4.3 SGDV-21 (M-III Model)
Three-phase 200 V
•SGDV-A21B ( = R70, R90, 1R6, 2R8)
2-30
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-III communication cable Shield cable

2.4 EMC Installation Conditions
2
Installation
MECHATROLINK-III
controller
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
Shield box
SERVOPACK
PE
PE
Encoder
Servomotor
Brake
Clamp
Noise
filter
Clamp
Clamp
Clamp
CN8
Surge
absorber
CoreCore
Core
Core Core
Core
Clamp
Host
controller
Safety unit
Clamp
Power supply:
Three-phase 200 VAC
5
6
One turn
One turn
Two turn Two turn
1
2
Brake Power
Supply
3
4
Three-phase 200 V
•SGDV-A21A ( =R70, R90, 1R6, 2R8, 3R8, 5R5, 7R6)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-III communication cable Shield cable
2-31

2 Installation
MECHATROLINK-III
controller
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
CN6A, CN6B
SERVOPACK
PE
PE
Encoder
Servomotor
Brake
Clamp
Noise
filter
Clamp
Clamp
Clamp
CN8
Surge
absorber
CoreCore
Core Core
Clamp
Host
controller
Safety unit
Clamp
Power supply:
Three-phase 200 VAC
One turn
Shield box
Brake Power
Supply
Two turn Two turn
5
6
12
3
4
2.4.3 SGDV-21 (M-III Model)
Three-phase 200 V
•SGDV-A21A ( = 120)
2-32
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-III communication cable Shield cable

2
Installation
Three-phase 200 V
Power supply:
Three-phase 200 VAC
U, V, W
L1, L2, L3
L1C, L2C
CN2
CN1
SERVOPACK
PE
PE
Encoder
Servomotor
Brake
Clamp
Noise
filter
Clamp
Clamp
Clamp
CN8
Surge
absorber
Core
Core Core
Clamp
Host
controller
Safety unit
MECHATROLINK-III
controller
CN6A, CN6B
Clamp
Shield box
Brake Power
Supply
One turn
Two turn Two turn
5
6
12
3
4
•SGDV-A21A ( = 180, 200, 330)
2.4 EMC Installation Conditions
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h MECHATROLINK-III communication cable Shield cable
2-33

2 Installation
2.4.3 SGDV-21 (M-III Model)
Three-phase 200 V
•SGDV-A21A ( = 470, 550, 590, 780)
Brake Power
Supply
Shield box
Clamp
7
Cooling fan
SERVOPACK
Power supply:
Three-phase 200 VAC
MECHATROLINK-III
controller
PE
Noise
Clamp
Surge
absorber
Regenerative
Clamp
filter
resistor unit
6
Host
controller
5
8
U, V, W
L1, L2, L3
L1C, L2C
B1, B2
CN6A, CN6B
CN1
CN8
ClampClamp
12
Safety unit
CN2
Clamp
Clamp
3
4
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Main circuit cable Shield cable
h Regenerative resistor unit cable Non-shield cable
i Cooling fan cable Shield cable
j MECHATROLINK-III communication cable Shield cable
Clamp
Servomotor
Brake
Encoder
PE
2-34

2.4 EMC Installation Conditions
2
Installation
1
2
3
6
5
4
7
U, V, W
L1, L2, L3
24 V,
0 V
CN2
CN1
PE
PE
CN8
CN6A, CN6B
MECHATROLINK-III
controller
SERVOPACK
Brake Power
Supply
Safety unit
Encoder
Servomotor
Brake
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
Shield box
Clamp
Clamp
Core
Core
Clamp
Core
Core
Clamp
Noise
filter*
3
Core Core
Surge
absorber
Surge
absorber
Core
Noise
filter*
2
Control
power
supply
24 VDC*
1
Clamp
Clamp Clamp
One turn
One turn
Two turnTwo turn
One turn
Host controller
Three-phase 400 V
•SGDV-D21A ( = 1R9, 3R5, 5R4, 8R4, 120, 170)
Symbol Cable Name Specification
c I/O signal cable Shield cable
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
g Control power cable Shield cable
h Main circuit cable Shield cable
i MECHATROLINK-III communication cable Shield cable
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
Σ
∗3. For more information on this filter, refer to
KAEP S800000 42).
-V Series Product Catalog (literature no.:
2-35

2 Installation
CN2
1
2
3
6
5
8
7
4
U, V, W
L1, L2, L3
B1, B2
24 V,
0 V
CN1
PE
PE
CN8
CN6A, CN6B
MECHATROLINK-III
controller
Brake Power
Supply
SERVOPACK
Safety unit
Encoder
Servomotor
Brake
Power supply:
Single-phase
200 VAC
Power supply:
Three-phase
400 VAC
Shield box
Clamp
Clamp
Clamp
Clamp
Clamp
Noise
filter*
3
Regenerative
resistor unit
Surge
absorber
Surge
absorber
Surge
absorber
Noise
filter*
2
Control
power
supply
24 VDC*
1
Clamp
Clamp Clamp
Host controller
2.4.3 SGDV-21 (M-III Model)
Three-phase 400 V
•SGDV-D21A ( = 210, 260, 280, 370)
2-36
Symbol Cable Name Specification
d Safety signal cable Shield cable
e Motor main circuit cable Shield cable
f Encoder cable Shield cable
g Control power cable Shield cable
h Main circuit cable Shield cable
i Regenerative resistor unit cable Non-shield cable
j MECHATROLINK-III communication cable Shield cable
c I/O signal cable Shield cable
∗1. Products that have received CE marking are recommended for the 24 VDC power supply.
∗2. Install the following noise filter on the power line between the single-phase 200 V power
supply and the 24 VDC power supply.
Model number: FN2070-6/07 (SCHAFFNER)
∗3. For more information on this filter, refer to
KAEP S800000 42).
Σ
-V Series Product Catalog (literature no.:

2.4 EMC Installation Conditions
2
Installation
Cable
Ferrite core
Cable
Ferrite core
Host controller side
Ground plate
Cable
Cable
clamp
Shield (cable sheath stripped)
Fix and ground the cable shield
using a piece of conductive metal.
Remove paint on mounting surface.
2.4.4 SGDV-E1A (Command Option Attachable Type)
For SERVOPACKs of command option attachable type, EMC installation conditions
may differ depending on the attached option module. For details, refer to the user’s
manual for each option module.
2.4.5 Other Precautions
Attachment Methods of Ferrite Cores
One turn Two t urn
Recommended Ferrite Core
Cable Name Ferrite Core Model Manufacturer
Motor main circuit cable ESD-SR-250 NEC TOKIN Corp.
Recommended Noise Filter and Surge Absorber
For more information on recommended noise filters and surge absorbers, refer to Σ-V
Series Product Catalog (literature no.: KAEP S800000 42).
Fixing the Cable
Fix and ground the cable shield using a piece of conductive metal.
• Example of Cable Clamp
Shield Box
A shield box, which is a closed metallic enclosure, is effective as reinforced shielding
against electromagnetic interference (EMI) from SERVOPACKs. The structure of the
box should allow the main body, door, and cooling unit to be attached to the ground.
The box opening should be as small as possible.
<Note>
Do not connect the digital operator and the analog monitor cable to the SERVOPACK
during operations. Connect them only when the machinery is stopped during maintenance.
2-37

3
Wiring and Connection
This chapter describes how to set up the wiring and connections required for trial
operation.
For more information on the wiring and connection, refer to the following manuals.
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/
3.1 Precautions for Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.2 System Configuration Diagram . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3.2.1 Connecting to SGDV-01 SERVOPACK
3.2.2 Connecting to SGDV-11 SERVOPACK
3.2.3 Connecting to SGDV-21 SERVO-
3.2.4 Connecting to SGDV-E1A SERVOPACK
3.3 Main Circuit Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
3.3.1 Names and Functions of Main Circuit Terminals . . . . . . 3-19
3.3.2 SERVOPACK Main Circuit Wire Size . . . . . . . . . . . . . . . 3-20
3.3.3 Typical Main Circuit Wiring Examples . . . . . . . . . . . . . . 3-24
3.3.4 Wiring the Main Circuit Terminal Connector
3.4 Connecting Regenerative Resistors . . . . . . . . . . . . . . . . . . . . 3-31
3.4.1 Connecting Regenerative Resistor . . . . . . . . . . . . . . . . 3-31
3
Wiring and Connection
Analog Voltage and Pulse Train Reference (SIEP S800000 45)
MECHATROLINK-II Communications Reference (SIEP S800000 46)
Command Option Attachable Type (SIEP S800000 60)
MECHATROLINK-III Communications Reference (SIEP S800000 64)
(Analog Pulse Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
(M-II Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
PACK (M-III Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
(Command Option Attachable Type) . . . . . . . . . . . . . . . 3-15
(Spring Type) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
3-1

3 Wiring and Connection
3.1 Precautions for Wiring
• Be sure to wire correctly and securely.
Failure to observe this caution may result in motor overrun, injury, or malfunction.
• Do not bundle or run the main circuit cables together with the I/O signal cables or
the encoder cables in the same duct. Keep them separated by at least 30 cm.
Failure to do so may result in malfunction.
• Use shielded twisted-pair wires or multi-core shielded twisted-pair wires for I/O
signal cables and the encoder cables.
• I/O signal cables must be no longer than 3 m, encoder cables must be no longer
than 50 m, and control power supply (+24 V, 0 V) cables for a 400 V input SERVOPACK must be no longer than 10 m.
• Do not touch the power terminals while the CHARGE lamp is ON after turning
power OFF because high voltage may still remain in the SERVOPACK.
Make sure the charge indicator is off first before starting an inspection.
• Leakage current may increase depending on the type of noise filter and the
grounding conditions.
When using a detector or a breaker for leakage current, select the appropriate
one by considering the type of noise filter and the grounding conditions.
For details, contact the manufacturer of the noise filter.
• Incorrect wiring or incorrect voltage application to the output circuit may cause
short-circuit.
The above failures will prevent the holding brake from working, which may damage the
machine or cause an accident resulting in death or injury.
• Inverting the polarity of the brake signal (/BK), i.e. positive logic, will prevent the
holding brake from working in case of its signal line disconnection.
If this setting is absolutely necessary, check the operation and confirm that there
are no safety problems.
CAUTION
3-2

3
Wiring and Connection
3.2 System Configuration Diagram
SGDV-F01A
SERVOPACK
SGMJV/SGMAV/SGMPS
Servomotor
Power supply
Single-phase 100 VAC
R T
100 VAC
SGDV-2R1F01ASGDV-2R1F01A
100100
V
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Host controller
Battery case
(when an absolute
encoder is used.)
3.2.1 Connecting to SGDV-01 SERVOPACK (Analog
Pulse Model)
SGDV-F01A
3.2 System Configuration Diagram
∗1. Use a 24 VDC power supply. (not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
3-3

3 Wiring and Connection
200 VAC
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
R S T
SGDV-A01
SERVOPACK
Power supply
Three-phase 200 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Host controller
Battery case
(when an absolute
encoder is used.)
Magnetic contactor
3.2.1 Connecting to SGDV-01 SERVOPACK (Analog Pulse Model)
SGDV-A01
• Using a Three-phase, 200-V Power Supply
∗1. Use a 24 VDC power supply. (not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
3-4

3.2 System Configuration Diagram
3
Wiring and Connection
• Using a Single-phase, 200-V Power Supply
The Σ-V Series SERVOPACK for a 200-V power supply input has input specifications for a three-phase power supply, but some models can also be used with a single-
Σ
phase 200-V power supply. For details, refer to
-V Series User's Manual Design and
Maintenance Rotational Motor/Analog Voltage and Pulse Train Reference (SIEP
S800000 45).
Power supply
Single-phase 200 VAC
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Noise filter
Used to eliminate
external noise from
the power line.
RT
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
SGDV-A01
SERVOPACK
Connection cable
for digital operator
Connection cable
for personal computer
Personal
computer
Digital
operator
200 VAC
Brake power supply*
Used for a servomotor
with a brake.
∗1. Use a 24 VDC power supply. (not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
Regenerative
2
resistor*
1
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
necting Regenerative Resistors.
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
I/O signal cable
Host controller
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
Encoder cable
3-5

3 Wiring and Connection
3.2.1 Connecting to SGDV-01 SERVOPACK (Analog Pulse Model)
SGDV-D01A
Power supply
Three-phase 400 VAC
R S T
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Noise filter
Used to eliminate
external noise from
the power line.
100/200 VAC
Brake power
supply*
Used for a
servomotor
with a 90 V brake.
DC power
supply (24 V)
Regenerative
2
resistor*
3
Magnetic contactor
Turns the brake power
supply
ON and OFF.
Install a surge absorber.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
*1
SGDV-D01A
SERVOPACK
Battery case
(when an absolute
encoder is used.)
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Digital
operator
Personal
computer
Host controller
Safety function
devices
3-6
Encoder cable
SGMGV/SGMSV
Servomotor
Motor main
circuit cable
∗1. Use a 24 VDC power supply with double insulation or reinforced insulation. (The power
supply is not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
Σ
∗3. Use a following power supply for 90 V brake. For details, refer to
-V series Product Cat-
alog (KAEP S800000 42).
• For 200 V input voltage: LPSE-2H01-E
• For 100 V input voltage: LPDE-1H01-E

3
Wiring and Connection
3.2.2 Connecting to SGDV-11 SERVOPACK (M-II Model)
Connect to the
MECHATROLINK-II
SGDV-F11A
SERVOPACK
SGMJV/SGMAV/SGMPS
Servomotor
Power supply
Single-phase 100 VAC
R T
100 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Host controller
Battery case
(when an absolute
encoder is used.)
SGDV-F11A
3.2 System Configuration Diagram
∗1. Use a 24 VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
3-7

3 Wiring and Connection
R S T
200 VAC
Connect to the
MECHATROLINK-II
SGDV-A11
SERVOPACK
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
Power supply
Three-phase 200 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Host controller
Battery case
(when an absolute
encoder is used.)
3.2.2 Connecting to SGDV-11 SERVOPACK (M-II Model)
SGDV-A11
• Using a Three-phase, 200-V Power Supply
3-8
∗1. Use a 24 VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.

3
Wiring and Connection
200 VAC
Connect to the
MECHATROLINK-II
SGDV-A11
SERVOPACK
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
Power supply
Single-phase 200 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Host controller
Battery case
(when an absolute
encoder is used.)
RT
• Using a Single-phase, 200-V Power Supply
The Σ-V Series SERVOPACK for a 200-V power supply input has input specifications for a three-phase power supply, but some models can also be used with a singlephase 200-V power supply. For details, refer to
Maintenance Rotational Motor/MECHATROLINK-II Communications Reference
(SIEP S800000 46).
3.2 System Configuration Diagram
Σ
-V Series User's Manual Design and
∗1. Use a 24 VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
3-9

3 Wiring and Connection
3.2.2 Connecting to SGDV-11 SERVOPACK (M-II Model)
SGDV-D11A
Power supply
Three-phase 400 VAC
R S T
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Noise filter
Used to eliminate
external noise from
the power line.
SGDV-D11A
SERVOPACK
Connect to the
MECHATROLINK-II
Digital
operator
3-10
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
100/200 VAC
Brake power
supply*
Used for a
servomotor
with a 90 V brake.
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
DC power
supply (24 V)*
Regenerative
*2
resistor
3
1
SGMGV/SGMSV
Servomotor
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
Encoder cable
Personal
computer
Host controller
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
∗1. Use a 24 VDC power supply with double insulation or reinforced insulation. (The power
supply is not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
Σ
∗3. Use a following power supply for 90 V brake. For details, refer to
-V series Product Cat-
alog (KAEP S800000 42).
• For 200 V input voltage: LPSE-2H01-E
• For 100 V input voltage: LPDE-1H01-E

3.2 System Configuration Diagram
3
Wiring and Connection
3.2.3 Connecting to SGDV-21 SERVOPACK (M-III
Model)
SGDV-F21A
Power supply
Single-phase 100 VAC
R T
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the circuit
OFF when overcurrent
is detected.
Noise filter
Used to eliminate
external noise from
the power line.
Magnetic contacator
Turns the servo
ON and OFF.
Install a surge
absorber.
100 VAC
Brake power supply
Used for a servomotor with
a brake.
Regenerative
*2
resistor
*1
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
SGDV-F21A
SERVOPACK
100V
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
SGMJV/SGMAV/SGMPS
Servomotor
Connect to the
MECHATROLINK-III.
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
Digital
operator
Personal
computer
Host controller
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specially for the safety function.
Safety function
devices
Encoder cable
∗1. Use a 24 VDC power supply (not included.).
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
3-11

3 Wiring and Connection
3.2.3 Connecting to SGDV-21 SERVOPACK (M-III Model)
SGDV-A21
• Using a Three-phase, 200-V Power Supply
Power supply
Three-phase 200 VAC
R S T
Molded-case
circuit breaker
(MCCB)
Protcts the power supply
line by shutting the
circuit OFF when
overcurrent is detected.
Noise filter
Used to eliminate
external noise from
the power line.
Magnetic contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
SGDV-A21
SERVOPACK
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
Connect to the
MECHATROLINK-III.
Host controller
Digital
operator
Personal
computer
3-12
200 VAC
Regenerative
∗2
resistor
Brake power supply
Used for a servomotor
with a brake.
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
∗1
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
Encoder cable
∗1. Use a 24 VDC power supply (not included.).
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.

3
Wiring and Connection
Molded-case
circuit breaker
(MCCB)
Protcts the power supply
line by shutting the
circuit OFF when
overcurrent is detected.
Noise filter
Used to eliminate
external noise from
the power line.
Magnetic contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
200 VAC
3.2 System Configuration Diagram
• Using a Single-phase, 200-V Power Supply
The Σ-V Series SERVOPACK for a 200-V power supply input has input specifications for a three-phase power supply, but some models can also be used with a single-
Σ
phase 200-V power supply. For details, refer to
-V Series User's Manual Design and
Maintenance Rotational Motor/MECHATROLINK-III Communications Reference
(manual no.: SIEP S800000 64).
Power supply
Single-phase 200 VAC
RT
Regenerative
∗2
resistor
Brake power supply
Used for a servomotor
with a brake.
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
SGDV-A21
SERVOPACK
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
∗1
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
Connect to the
MECHATROLINK-III.
Host controller
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Encoder cable
Digital
operator
Personal
computer
Safety function
devices
∗1. Use a 24 VDC power supply (not included.).
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV
Servomotor
necting Regenerative Resistors.
3-13

3 Wiring and Connection
Motor main
circuit cable
Encoder cable
SGMGV/SGMSV
Servomotor
Brake power
supply
*3
Magnetic contactor
Noise filter
Molded-case
circuit breaker
MCCB)
Magnetic
contactor
I/O signal cable
Power supply
Three-phase 400 VAC
R S T
Protects the power
supply line by shutting
the circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Used for a servomotor
with a 90 V brake.
Turns the servo
ON and OFF.
Install a surge
absorber.
Turns the brake power
supply ON and OFF.
Install a surge absorber.
Personal
computer
Connection cable
for personal computer
Digital
operator
Connection cable
for digital operator
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
*2
SGDV-D21A
SERVOPACK
DC power
supply (24 V)
*1
100/200 VAC
Host controller
Regenerative
resistor
Connect to the
MECHATROLINK-III.
Battery case
(when an absolute
encoder is used.)
3.2.3 Connecting to SGDV-21 SERVOPACK (M-III Model)
SGDV-D21A
3-14
∗1. Use a 24 VDC power supply with double insulation or reinforced insulation (The power
supply is not included).
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
∗3. Use a following power supply for 90 V brake. For details, refer to
alog (literature no.: KAEP S800000 42).
• For 200 V input voltage: LPSE-2H01-E
Σ
-V series Product Cat-
• For 100 V input voltage: LPDE-1H01-E

3
Wiring and Connection
Option module*
3
R T
External LED indicator,
external device, etc.
SGDV-FE1A
SERVOPACK
SGMJV/SGMAV/SGMPS/SGMCS
Servomotor
Power supply
Single-phase 100 VAC
100 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Protects the
power
supply line by
shutting the
circuit OFF when
overcurrent is
detected.
Battery case
(when an absolute
encoder is used.)
3.2 System Configuration Diagram
3.2.4 Connecting to SGDV-E1A SERVOPACK (Command
Option Attachable Type)
SGDV-FE1A
∗1. Use a 24-VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
∗3. For connection to the command option module, refer to the user’s manual of the corre-
sponding option module.
3-15

3 Wiring and Connection
3.2.4 Connecting to SGDV-E1A SERVOPACK (Command Option Attachable Type)
SGDV-AE1A
• Using a Three-phase, 200-V Power Supply
Power supply
Three-phase 200 VAC
R S T
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Noise filter
Used to eliminate
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
200 VAC
external noise from
the power line.
Regenerative
resistor*
Brake power supply*
Used for a servomotor
with a brake.
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
2
1
SGDV-AE1A
SERVOPACK
Option module*
Connection cable
for digital operator
Connection cable
for personal computer
I/O signal cable
Battery case
(when an absolute
encoder is used.)
Motor main
circuit cable
Digital
operator
3
Personal
computer
External LED indicator,
external device, etc.
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
Encoder cable
3-16
SGMJV/SGMAV/SGMPS/
SGMGV/SGMSV/SGMCS
Servomotor
∗1. Use a 24-VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
∗3. For connection to the command option module, refer to the user’s manual of the corre-
sponding option module.

3
Wiring and Connection
RT
Option module*
3
External LED indicator,
external device, etc.
SGDV-AE1A
SERVOPACK
SGMJV/SGMAV/SGMPS/SGMCS
Servomotor
Power supply
Single-phase 200 VAC
200 VAC
Noise filter
Molded-case
circuit breaker
(MCCB)
Protects the power supply
line by shutting the
circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Magnetic
contactor
Turns the servo
ON and OFF.
Install a surge
absorber.
Brake power supply*
1
Magnetic contactor
Regenerative
resistor*
2
Used for a servomotor
with a brake.
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Motor main
circuit cable
Encoder cable
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
I/O signal cable
Connection cable
for digital operator
Connection cable
for personal computer
Digital
operator
Personal
computer
Battery case
(when an absolute
encoder is used.)
• Using a Single-phase, 200-V Power Supply
The Σ-V Series SERVOPACK for a 200-V power supply input has input specifications for a three-phase power supply, but some models can also be used with a singlephase 200-V power supply. For details, refer to
Maintenance Rotational Motor/Command Option Attachable Type (SIEP S800000
60).
3.2 System Configuration Diagram
Σ
-V Series User’s Manual Design and
∗1. Use a 24-VDC power supply. (not included.)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
∗3. For connection to the command option module, refer to the user’s manual of the corre-
sponding option module.
3-17

3 Wiring and Connection
R S T
Noise filter
Molded-case
circuit breaker
(MCCB)
Magnetic
contactor
I/O signal cable
Power supply
Three-phase 400 VAC
Protects the power
supply line by shutting
the circuit OFF when
overcurrent is
detected.
Used to eliminate
external noise from
the power line.
Turns the servo
ON and OFF.
Install a surge
absorber.
Connection cable
for digital operator
Connection cable
for personal computer
Personal
computer
Motor main
circuit cable
Encoder cable
SGMGV/SGMSV
Servomotor
When not using the safety
function, use the SERVOPACK
with the safety function jumper
connector (JZSP-CVH05-E,
provided as an accessory)
inserted.
When using the safety function,
insert a connection cable
specifically for the safety function.
Safety function
devices
SGDV-DE1A
SERVOPACK
Digital
operator
Brake power
supply*
3
Magnetic contactor
Turns the brake power supply
ON and OFF.
Install a surge absorber.
Used for a servomotor
with a 90 V brake.
Regenerative
resistor
*
2
DC power
supply (24 V)
100/200 VAC
*
1
Option module
External LED indicator,
external device, etc.
*
4
Battery case
(when an absolute
encoder is used.)
3.2.4 Connecting to SGDV-E1A SERVOPACK (Command Option Attachable Type)
SGDV-DE1A
3-18
∗1. Use a 24-VDC power supply with double insulation or reinforced insulation. (The power
supply is not included)
∗2. Before connecting an external regenerative resistor to the SERVOPACK, refer to 3.4 Con-
necting Regenerative Resistors.
∗3. Use a following power supply for 90-V brake. For details, refer to
Catalog (KAEP S800000 42).
• For 200-V input voltage: LPSE-2H01-E
• For 100-V input voltage: LPDE-1H01-E
∗4. For connection to the command option module, refer to the user’s manual of the corre-
Σ
-V series Product
sponding option module.

3
Wiring and Connection
3.3 Main Circuit Wiring
A
The names, specifications, and functions of the main circuit terminals required for
trial operation are given below.
3.3.1 Names and Functions of Main Circuit Terminals
3.3 Main Circuit Wiring
SGDV-1R6AE1A
nalog Pulse Models M-II Models M-III Models
Name
Main circuit input
terminals
Control power
input terminals
Terminal
Symbols
Model SGDV-
L1, L2 F
A
L1, L2, L3
D
F
L1C, L2C
A
24V, 0V D
Command Option
Attachable Types
Description
Single-phase 100 to 115 V,
+10% to -15% (50/60 Hz)
Three-phase 200 to 230 V,
+10% to -15% (50/60 Hz)
Three-phase 380 to 480 V,
+10% to -15% (50/60 Hz)
Single-phase 100 to 115 V,
+10% to -15% (50/60 Hz)
Single-phase 200 to 230 V,
+10% to -15% (50/60 Hz)
24 VDC,
±15%
3-19
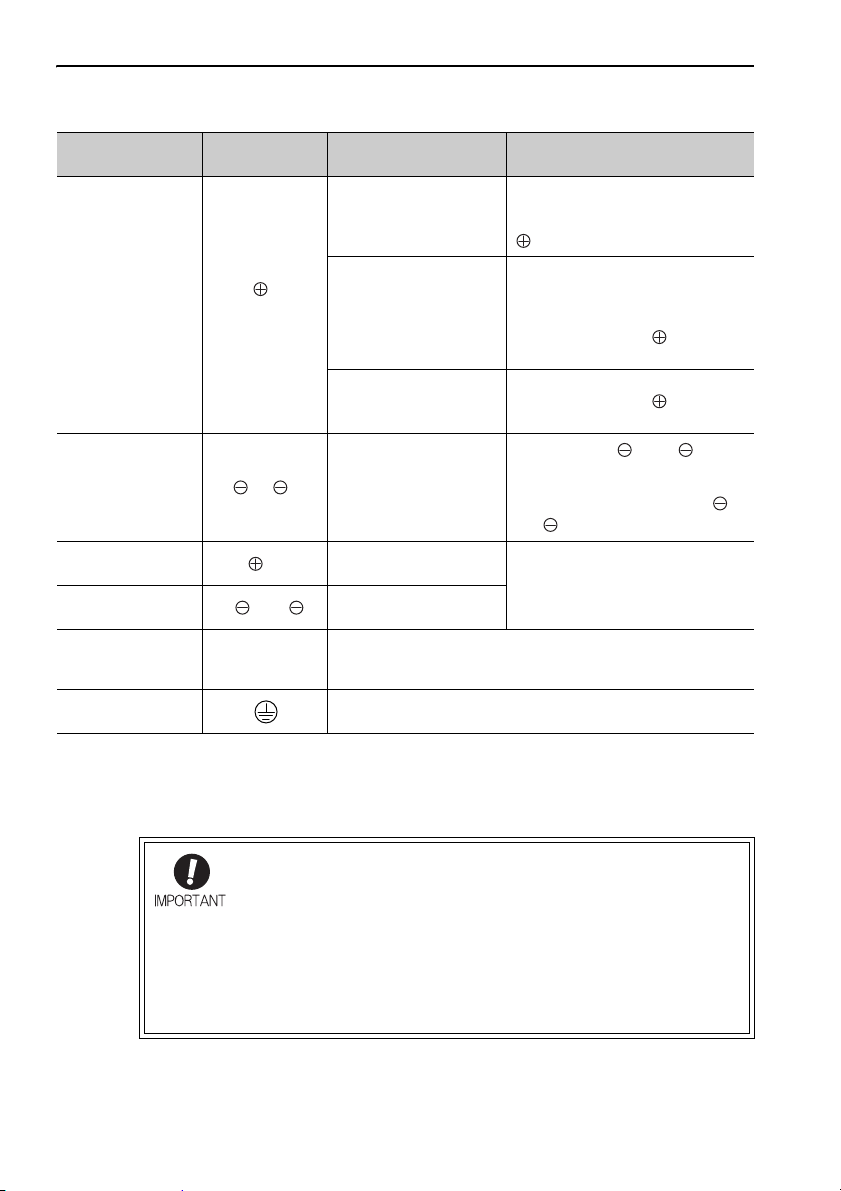
3 Wiring and Connection
3.3.2 SERVOPACK Main Circuit Wire Size
Name
External
regenerative
resistor terminals
DC reactor
connection
terminals for
power supply
harmonic
suppression
Main circuit plus
terminals
Main circuit minus
terminals
Servomotor
connection
terminals
Ground terminals
(× 2)
Terminal
Symbols
B1/ , B2,
or
B1, B2
1, 2
B1/ or B1
2 or
U, V, W Use for connecting to the servomotor.
Model SGDV-
R70F, R90F, 2R1F, 2R8F,
R70A, R90A, 1R6A,
2R8A
3R8A, 5R5A, 7R6A,
120A, 180A, 200A,
330A, 1R9D, 3R5D,
5R4D, 8R4D, 120D,
170D
470A, 550A, 590A,
780A, 210D, 260D,
280D, 370D
A
D
A
D
A
D
Use for connecting the power supply ground terminal and servomotor ground terminal.
(cont’d)
Description
If the regenerative capacity is insufficient, connect an external regenerative resistor (option) between B1/
and B2.
If the internal regenerative resistor is
insufficient, remove the wire
between B2 and B3 and connect an
external regenerative resistor
(option) between B1/ and B2, or
B1 and B2.
Connect a regenerative resistor unit
(option) between B1/ and B2, or
B1 and B2.
Normally short 1 and 2.
If a countermeasure against power
supply harmonic waves is needed,
connect a DC reactor between 1
and 2.
Use when DC power supply input is
used.
3.3.2 SERVOPACK Main Circuit Wire Size
This section describes the SERVOPACK Main Circuit Wire Size.
1. Wire sizes are selected for three cables per bundle at 40°C sur-
rounding air temperature with the rated current.
2. Use a wire with a minimum withstand voltage of 600 V for the
main circuit.
3. If cables are bundled in PVC or metal ducts, take into account the
reduction of the allowable current.
4. Use a heat-resistant wire under high surrounding air or panel
temperatures, where polyvinyl chloride insulated wires will rapidly
deteriorate.
3-20

3
Wiring and Connection
Wire Types
Use the following type of wire for main circuit.
3.3 Main Circuit Wiring
Cable Type
Symbol Name
IV 600 V polyvinyl chloride insulated wire 60
HIV
600 V grade heat-resistant polyvinyl chloride
insulated wire
Allowable Conductor
Temperature °C
75
The following table shows the wire sizes and allowable currents for three wires. Use
wires with specifications equal to or less than those shown in the table.
• 600 V grade heat-resistant polyvinyl chloride insulated wire (HIV)
Nominal
AWG
Size
20 0.5 19/0.18 39.5 6.6 5.6 4.5
19 0.75 30/0.18 26.0 8.8 7.0 5.5
18 0.9 37/0.18 24.4 9.0 7.7 6.0
16 1.25 50/0.18 15.6 12.0 11.0 8.5
14 2.0 7/0.6 9.53 23 20 16
12 3.5 7/0.8 5.41 33 29 24
10 5.5 7/1.0 3.47 43 38 31
8 8.0 7/1.2 2.41 55 49 40
6 14.0 7/1.6 1.35 79 70 57
4 22.0 7/2.0 0.85 91 81 66
Cross
Section
Diameter
(mm
2
)
Configuration
(Number of
Wires/mm
2
Conductive
Resistance
)
(Ω/km)
Allowable Current at
Surrounding Air Temperature
30°C 40°C 50°C
(A)
Note: The values in the table are for reference only.
3-21

3 Wiring and Connection
3.3.2 SERVOPACK Main Circuit Wire Size
Single-phase, 100 V
External Terminal Name
Main circuit power input
terminals
Terminal
Symbols
L1, L2 HIV1.25 HIV2.0
SERVOPACK Model SGDV-
R70 R90 2R1 2R8
Control power input terminals L1C, L2C HIV1.25
Servomotor connection
terminals
External regenerative
resistor connection terminals
U, V, W HIV1.25
B1/ , B2
HIV1.25
Ground terminal HIV2.0 or higher
Three-phase, 200 V
External
Terminal
Name
Main circuit
power input
terminals
Control
power input
terminals
Servomotor
connection
terminals
Terminal
Symbols
L1, L2,
L3
L1C,
L2C
U, V, W
R70 R90 1R6 2R8 3R8 5R5 7R6 120 180 200 330 470 550 590 780
HIV1.25 HIV2.0 HIV3.5
HIV1.25 HIV2.0
SERVOPACK Model SGDV-
HIV1.25
HIV
HIV
3.5
5.5
External
regenerative
resistor
connection
B1/ ,
B2
HIV1.25
HIV
2.0
HIV
3.5
terminals
Ground
terminal
HIV2.0 or higher
HIV
HIV
5.5
8.0
HIV
HIV14.0 HIV22.0
8.0
HIV
HIV8.0 HIV22.0
5.5
HIV
14.0
HIV22.0
3-22

3
Wiring and Connection
Three-phase, 400 V
3.3 Main Circuit Wiring
External
Terminal Name
Main circuit
power input
terminals
Control power
input terminals
Servomotor
connection
terminals
External
regenerative
resistor
connection
terminals
Ground terminal HIV2.0 or higher
Terminal
Symbols
L1, L2, L3 HIV1.25 HIV2.0 HIV3.5
24V, 0V HIV1.25
U, V, W HIV1.25 HIV2.0
B1/ , B2
(B1, B2)
1R9 3R5 5R4 8R4 120 170 210 260 280 370
SERVOPACK Model SGDV-
HIV
3.5
HIV1.25
HIV
2.0
HIV
HIV5.5
HIV3.5
5.5
HIV
8.0
HIV
8.0
HIV
5.5
HIV
14.0
HIV
14.0
HIV
8.0
3-23

3 Wiring and Connection
3.3.3 Typical Main Circuit Wiring Examples
3.3.3 Typical Main Circuit Wiring Examples
• Use a molded-case circuit breaker (1QF) or fuse to protect the
main circuit.
The SERVOPACK connects directly to a commercial power supply; it is not isolated through a transformer or other device.
Always use a molded-case circuit breaker (1QF) or fuse to protect the servo system from accidents involving different power
system voltages or other accidents.
• Install a ground fault detector.
The SERVOPACK does not have a built-in protective circuit for
grounding.
To configure a safer system, install a ground fault detector
against overloads and short-circuiting, or install a ground fault
detector combined with a molded-case circuit breaker.
• Do not frequently turn power ON and OFF.
• Frequently turning power ON and OFF causes elements
inside the SERVOPACK to deteriorate. Do not use the servo
drive with an application that requires frequently turning power
ON and OFF.
• After the actual operation starts, the allowable interval for turning power ON and OFF is one hour or longer.
The following wiring examples show the Σ-V Series SGDV SERVOPACK (Analog
pulse model).
3-24
Single-phase 100 V, SGDV-F (SGDV-R70F, R90F, 2R1F, 2R8F)
3SA
RT
1QF
1FIL
Servo power
supply ON
1QF: Molded-case circuit breaker
1FIL: Noise filter
1KM: Magnetic contactor (for control power supply)
2KM: Magnetic contactor (for main power supply)
1Ry: Relay
1KM
2KM
1KM
alarm display)
1Ry
Servo power
supply OFF
1Ry1KM
(For servo
1PL
1KM
1SA
2KM
2SA
SERVOPACK
SGDV-F
U
V
W
L1
L2
L1C
L2C
B1/
ALM+
B2
ALM−
1PL: Indicator lamp
1SA: Surge absorber
2SA: Surge absorber
3SA: Surge absorber
1D: Flywheel diode
CN1
31
32
1Ry
1D
M
ENC
+24 V
0 V
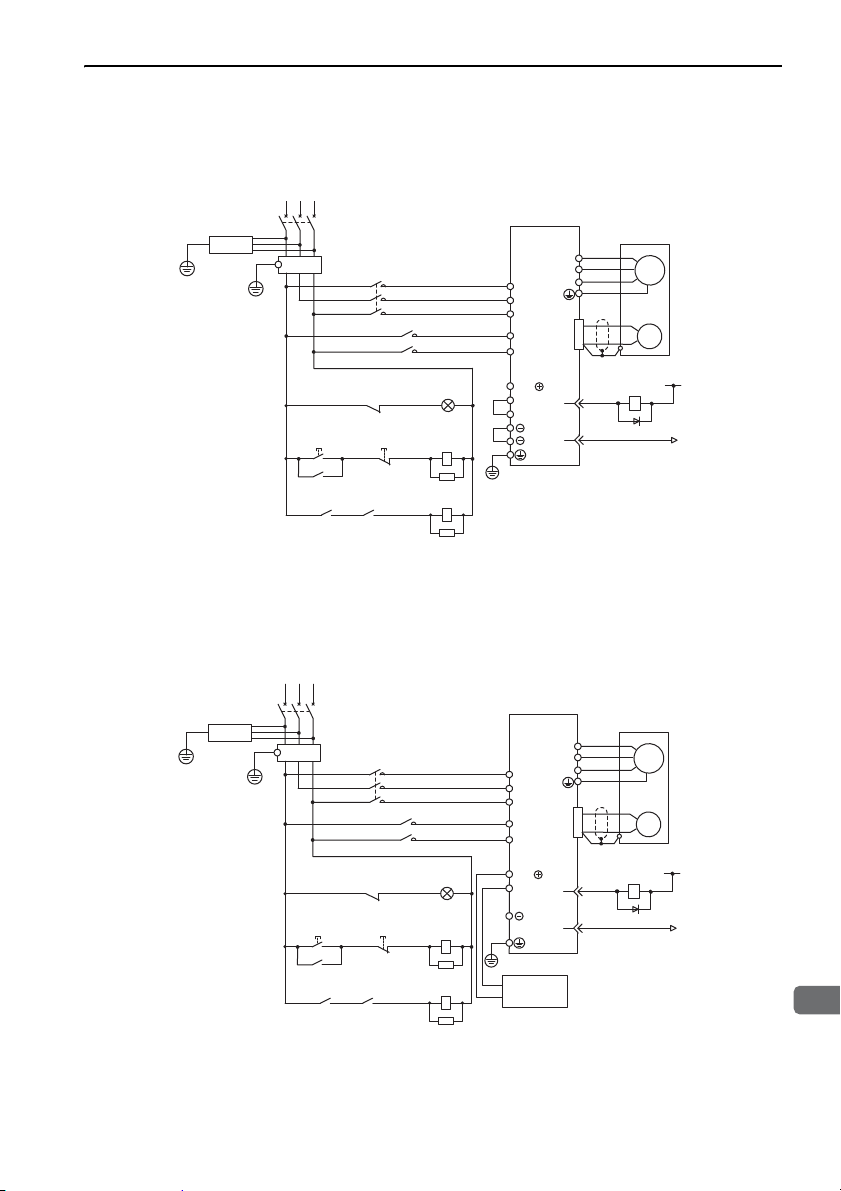
3.3 Main Circuit Wiring
3
Wiring and Connection
1PL: Indicator lamp
1SA: Surge absorber
2SA: Surge absorber
3SA: Surge absorber
1D: Flywheel diode
1QF: Molded-case circuit breaker
1FIL: Noise filter
1KM: Magnetic contactor (for control power supply)
2KM: Magnetic contactor (for main power supply)
1Ry: Relay
2KM
L1
ENC
SERVOPACK
SGDV-A
U
V
W
M
0 V
1Ry
ALM+
ALM−
31
32
1D
B2
B3
L2
CN1
1KM
L1C
L3
L2C
1QF
RS T
1FIL
+24 V
1
2
3SA
∗
B1/
1Ry
1PL
1KM
2KM
1SA
1Ry1KM
2SA
1KM
(For servo
alarm display)
supply ON
Servo power
supply OFF
Servo power
Three-phase 200 V, SGDV-A
• SGDV-R70A, R90A, 1R6A, 2R8A, 3R8A, 5R5A, 7R6A, 120A, 180A, 200A,
330A
∗ For SGDV-R70A, -R90A, -1R6A, -2R8A, terminals B2 and B3 are not short-circuited.
• SGDV-470A, 550A, 590A, 780A
1QF
3SA
RS T
1FIL
Servo power
supply ON
1KM
1QF: Molded-case circuit breaker
1FIL: Noise filter
1KM: Magnetic contactor (for control power supply)
2KM: Magnetic contactor (for main power supply)
1Ry: Relay
2KM
1KM
1Ry
Servo power
supply OFF
1Ry1KM
(For servo
alarm display)
1PL
1KM
1SA
2KM
2SA
SERVOPACK
SGDV-A
L1
L2
L3
L1C
L2C
B1/
B2
Regenerative
resistor unit
U
V
W
CN1
31
ALM+
ALM−
32
1PL: Indicator lamp
1SA: Surge absorber
2SA: Surge absorber
3SA: Surge absorber
1D: Flywheel diode
1Ry
1D
M
ENC
+24 V
0 V
3-25

3 Wiring and Connection
ENC
SGDV-D
U
V
W
M
0 V
1Ry
ALM+
ALM−
31
32
1D
CN1
1QF
R
ST
1FIL
+24 V
3SA
B2
1
2
B1/
1Ry
1PL
1KM
2KM
1SA
1Ry1KM
2SA
L1
2KM
L2
L3
24 V
DC power
supply
(24 V)
+
−
1KM
0 V
1KM
Regenerative
resistor unit
(For servo
alarm display)
supply ON
Servo power
supply OFF
Servo power
SERVOPACK
1QF: Molded-case circuit breaker
1FIL: Noise filter
1KM: Magnetic contactor (for control power supply)
2KM: Magnetic contactor (for main power supply)
1Ry: Relay
1PL: Indicator lamp
1SA: Surge absorber
2SA: Surge absorber
3SA: Surge absorber
1D: Flywheel diode
3.3.3 Typical Main Circuit Wiring Examples
Three-phase 400 V, SGDV-D
• SGDV-1R9D, 3R5D, 5R4D, 8R4D, 120D, 170D
R
ST
1QF
3SA
1FIL
Servo power
supply ON
2KM
DC power
supply
24 V
1Ry
Servo power
supply OFF
+
−
(For servo
alarm display)
1PL
1KM
1KM
SERVOPACK
SGDV-D
L1
L2
L3
24 V
0 V
B1/
ALM+
B2
B3
1
ALM−
2
U
V
W
CN1
M
ENC
+24 V
1Ry
31
1D
32
0 V
1KM
1QF: Molded-case circuit breaker
1FIL: Noise filter
1KM: Magnetic contactor (for control power supply)
2KM: Magnetic contactor (for main power supply)
1Ry: Relay
• SGDV-210D, 260D, 280D, 370D
1Ry1KM
1SA
2KM
2SA
1PL: Indicator lamp
1SA: Surge absorber
2SA: Surge absorber
3SA: Surge absorber
1D: Flywheel diode
3-26

3
Wiring and Connection
L1
L2
L3
L1C
L2C
SERVOPACK
Servomotor
Servomotor
M
Servomotor
M
M
Relay
terminal
Relay
terminal
Relay
terminal
1QF:
1FIL:
1KM: Magnetic contactor
(for control power supply)
2KM:
(for main power supply)
1Ry:
1PL:
1SA:
2SA:
3SA:
1D:
Molded-case circuit breaker
Noise filter
Relay
Magnetic contactor
Indicator lamp
Surge absorber
1Ry
+24 V
CN1
CN1
CN1
31
ALM+
32ALM
-
0 V
L1
L2
L3
31
ALM+
32
ALM
-
L1
L2
L3
L1C
ID
31
ALM+
32
ALM
-
L2C
L1C
L2C
SERVOPACK
SERVOPACK
Surge absorber
Surge absorber
Flywheel diode
supply ON
1KM
RS T
1QF
2KM
Power supply
1FIL
Relay
terminal
3SA
1KM
(For servo alarm
display)
1Ry
1PL
1KM
2KM
1SA
Servo power
supply OFF
Servo power
1Ry1KM
2SA
3.3 Main Circuit Wiring
Precautions When Using More Than One SERVOPACK
This section shows an example of the wiring when more than one SERVOPACK is
used and the precautions.
• Wiring Example (Analog pulse model)
Connect the alarm output (ALM) terminals for the three SERVOPACKs in series to
enable alarm detection relay 1RY to operate.
When the alarm occurs, the ALM output signal transistor is turned OFF.
3-27

3 Wiring and Connection
3.3.4 Wiring the Main Circuit Terminal Connector (Spring Type)
• Precautions
When using more than one SERVOPACK with a DC power supply, refer to these
manuals here for the appropriate wiring, connections, and required settings.
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/Analog Voltage and Pulse Train Reference (SIEP S800000 45)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/MECHATROLINK-II Communications Reference (SIEP S800000 46)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/Command Option Attachable Type
(SIEP S800000 60)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/MECHATROLINK-III Communications Reference (SIEP S800000 64)
3.3.4 Wiring the Main Circuit Terminal Connector (Spring Type)
Two types of main circuit terminals are available: a connector type and a terminal
screw type.
• SERVOPACKs with terminal screws:
SGDV-180A, 200A, 330A, 470A, 550A, 590A, 780A, 8R4D, 120D, 170D, 210D, 260D,
280D, 370D
• SERVOPACKs with connectors:
SGDV-R70F, R90F, 2R1F, 2R8F, R70A, R90A, 1R6A, 2R8A, 3R8A, 5R5A, 7R6A, 120A,
1R9D, 3R5D, 5R4D
3-28
A spring connector is used for SERVOPACKs with connectors. The following section describes how to wire the main circuit terminal using a connector.
CAUTION
• Observe the following precautions when wiring main circuit terminal connectors.
• Do not turn ON the power to the SERVOPACK until all wiring has been completed,
including the main circuit terminal connectors.
• Remove detachable main circuit terminal connectors from the SERVOPACK prior to
wiring.
• Insert only one main circuit cable per opening in the main circuit terminal connector.
• Make sure that no part of the core wire comes into contact with (i.e., short-circuit)
adjacent wires.

3.3 Main Circuit Wiring
3
Wiring and Connection
Main circuit
terminal connector
Enlarged View
Lock
1㧚Press
the lock.
2. Remove the main
circuit terminal
connector while
pressing the lock.
Applicable wire sizes:
8 to 9 mm
Refer to 3.3.2 SERVOPACK
Main Circuit Wire Size.
Wire
Spring opener
Wiring Procedure
1. Remove the main circuit terminal connector from the SERVOPACK.
2. Strip the end of the wires.
3. Open the wire terminal on the terminal connector housing with a tool,
using the following methods. Either method can be used to open the
wire terminal.
Using a spring opener
Use the spring opener provided with the SERVOPACK to open the wire terminal as
shown in the diagram.
Note: The spring opener (1981045-1) made by Tyco Electronics AMP K.K. can also be used.
3-29

3 Wiring and Connection
3.3.4 Wiring the Main Circuit Terminal Connector (Spring Type)
Using a screwdriver
Use a commercially available flat-blade screwdriver with a blade width of 3.0 to 3.5
mm. Insert the screwdriver into the slot and press down firmly to open the wire terminal.
4. Insert the wire core into the opening, and then secure the wire into
position by removing the opener or screwdriver to close the opening.
5. Make all the required connections in the same way.
6. Attach the connector to the SERVOPACK.
3-30

3.4 Connecting Regenerative Resistors
3
Wiring and Connection
Enlarged View
3.4 Connecting Regenerative Resistors
This section describes how to connect regenerative resistors and set the regenerative
resistor capacity. To learn how to select a regenerative resistor, and for detailed specifications, refer to Σ-V Series Product Catalog (KAEP S800000 42).
For more information on how to set the capacity of regenerative resistors, refer to
Σ
-V Series User’s Manual Design and Maintenance (SIEP S800000 45/46/60/64).
WARNING
• Be sure to connect the regenerative resistor correctly.
Failure to observe this warning may result in fire or damage to the product.
3.4.1 Connecting Regenerative Resistor
SERVOPACKs: Model SGDV-R70F, R90F, 2R1F, 2R8F, R70A, R90A,
1R6A, 2R8A
Connect an external regenerative resistor between B1/ and B2 terminals. After
connecting a resistor, select the capacity.
3-31

3 Wiring and Connection
Enlarged View
3.4.1 Connecting Regenerative Resistor
SERVOPACKs: Model SGDV-3R8A, 5R5A, 7R6A, 120A, 180A,
200A, 330A, 1R9D, 3R5D, 5R4D, 8R4D, 120D, 170D
Disconnect the wiring between the SERVOPACK’s B2 and B3 terminals and connect
an external regenerative resistor between the B1/ and B2 terminals or between the
B1 and B2 terminals.
Note: Be sure to take out the lead wire between the B2 and B3 terminals.
3-32

3.4 Connecting Regenerative Resistors
3
Wiring and Connection
Regenerative Resistor Unit
JUSP-RA-E
SERVOPACK
SERVOPACKs: Model SGDV-470A, 550A, 590A, 780A, 210D, 260D,
280D, 370D
No built-in regenerative resistor is provided, so the external regenerative resistor is
required. The regenerative resistor units are as follow:
Main
Circuit
Power
Supply
Threephase
200 V
Threephase
400 V
Applicable
SERVOPACK
Model SGDV
470A JUSP-RA04-E
550A, 590A,
780A
210D, 260D JUSP-RA18-E
280D, 370D JUSP-RA19-E
Applicable
Regenerative
Resistor Unit
JUSP-RA05-E
Resistance
(Ω)
6.25
3.13
18
14.25
Specifications
25 Ω (220 W); 4 resistors in parallel
25 Ω (220 W); 8 resistors in parallel
18 Ω (220 W); 2 resistors in series
with 2 in parallel.
28.5 Ω (220 W); 2 resistors in
series with 4 in parallel.
Connect a regenerative resistor unit between B1/ and B2 terminals.
When using a regenerative resistor unit, set Pn600 to 0 W (factory setting).
3-33

4
Safety Function
4
Safety Function
This chapter describes the safety functions.
4.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4.2 Hard Wire Base Block (HWBB) Function . . . . . . . . . . . . . . . . . 4-3
4.3 Safety Function Signal (CN8) Names and Functions . . . . . . . . 4-4
4.4 Precautions When Not Using the Safety Function . . . . . . . . . . 4-4
4.5 Connecting a Safety Function Device . . . . . . . . . . . . . . . . . . . . 4-5
4-1

4 Safety Function
4.1 Outline
The safety function is incorporated in the SERVOPACK to reduce the risk associated
with the machine by protecting workers from injury and by securing safe machine
operation. Especially when working in hazardous areas inside the safeguard, as for
machine maintenance, it can be used to avoid adverse machine movement.
The person who designs a system using the safety function (Hard Wire Baseblock
function) must have full knowledge of the related safety standards and full understanding of the following manuals.
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/Analog Voltage and Pulse Train Reference (SIEP S800000 45)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/MECHATROLINK-II Communications Reference (SIEP S800000 46)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/Command Option Attachable Type
(SIEP S800000 60)
• Σ-V Series User's Manual
Design and Maintenance Rotational Motor/MECHATROLINK-III Communications Reference (SIEP S800000 64)
4-2

4.2 Hard Wire Base Block (HWBB) Function
4
Safety Function
/HWBB1+ 4
3
6
5
/HWBB1-
/HWBB2+
/HWBB2-
0 V
Control circuit
Run signal
SERVOPACK
CN8
Switch
Block
Block
Power module
Power supply
24-V power supply
Fuse
Motor
4.2 Hard Wire Base Block (HWBB) Function
The Hard Wire Base Block function (hereinafter referred to as HWBB function) is a
safety function designed to baseblock the motor (shut off the motor current) by using
the hardwired circuits: Each circuit for two channel input signals blocks the run sig-
nal to turn off the power module, and the motor current is shut off. (Refer to the dia-
gram below.)
Note: For safety function signal connections, the input signal is the 0V common and the output
signal is the source output. This is opposite to other signals described in this manual. To
avoid confusion, the ON and OFF status of signals for safety functions are defined as follows:
ON: The state in which the relay contacts are closed or the transistor is ON and current
flows into the signal line.
OFF: The state in which the relay contacts are open or the transistor is OFF and
no current flows into the signal line.
• Perform risk assessment for the system and confirm that the safety requirements
with the following standards are fulfilled before using the HWBB function.
EN954-1 Category3
IEC61508-1 to 4 SIL2
WARNING
4-3

4 Safety Function
4.3 Safety Function Signal (CN8) Names and Functions
The following table shows the terminal layout of safety function signals (CN8).
Pin No.
*
1
*
2
3 /HWBB1-
4 /HWBB1+
5 /HWBB2-
6 /HWBB2+
7 EDM1-
8 EDM1+
∗ Do not use unused terminals. (connected to the internal circuits)
Signal
Name
−− −
−− −
Hard wire baseblock input 1
Hard wire baseblock input 2
Monitored circuit status output 1
Function
Hard wire baseblock input
Baseblock (motor current off)
when OFF
ON when the /HWBB1 and the
/HWBB2 signals are input and
the SERVOPACK enters a
baseblock state.
4.4 Precautions When Not Using the Safety Function
When not using the safety function or when performing a JOG operation, use the
SERVOPACK with the safety function jumper connector (JZSP-CVH05-E, provided
as an accessory) inserted. If the SERVOPACK is used without the jumper connector
inserted into CN8, no current will flow to the motor and no torque will be output.
When Hbb is displayed on the panel operator and digital operator, the motor is baseblocked by the safety function. Check to see if the JZSP-CVH05-E jumper connector
is correctly inserted into CN8.
4-4

4.5 Connecting a Safety Function Device
4
Safety Function
Servomotor
connection
terminal connector
Enlarged View
Lock
1㧚Press the lock.
2㧚Remove the servomotor
connection terminal connector
while pressing the lock.
4.5 Connecting a Safety Function Device
There are the following two types of safety function’s jumper connectors that are provided with the SERVOPACKs. The safety function’s jumper connector must be
removed to attach a safety function device. Read the following procedure carefully
and then attach the safety function device.
Previous model New model
Connect a safety function device using the following procedure.
1. Remove the servomotor connection terminal connector while pressing
the lock.
Applicable SERVOPACKs:
SGDV-R70F, -R90F, -2R1F, -R70A, -R90A, -1R6A, -2R8A, -1R9D, -3R5D, 5R4D
For SERVOPACK models not listed above, it is not necessary to remove the
servomotor connection terminal connector. Go to step 2.
4-5

4 Safety Function
Lock injector
Safety function’s
jumper connector
1. Slide the lock injector
to the SERVOPACK
side.
Enlarged View
Remove the safety function’s jumper
connector while the lock injector is slid
to the SERVOPACK side.
2.
C
N
8
C
N
2
C
N
1
C
N
8
C
N
2
Enlarged View
Safety function’s
jumper connector
Hold the jumper connector with
two fingers and pull it out.
2. <Using previous model>
Slide the lock injector of the safety function’s jumper connector to the
SERVOPACK side to unlock and remove the safety function’s jumper
connector.
Note:The safety function’s jumper connector may be damaged if removed while the lock
is still on.
<Using new model>
Remove the safety function’s jumper connector from CN8.
4-6
3. Connect a safety function device to CN8.
Note:When not using the safety function, use the SERVOPACK with the safety function’s
jumper connector (JZSP-CVH05-E provided as an accessory) inserted in CN8. If
the SERVOPACK is used without the jumper connector inserted into CN8, no current will flow to the servomotor and no torque will be output. In this case, "Hbb"
will be displayed on the digital operator.

5
Trial Operation (Checking Servomotor Operation)
5
Trial Operation (Checking Servomotor Operation)
This chapter describes how to perform trial operation.
5.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5.2 Inspection and Checking before Trial Operation . . . . . . . . . . . . 5-2
5.3 JOG Operation Using a Panel Operator . . . . . . . . . . . . . . . . . . 5-5
5.4 JOG Operation Using a Digital Operator . . . . . . . . . . . . . . . . . . 5-7
5.5 JOG Operation Using SigmaWin+ . . . . . . . . . . . . . . . . . . . . . 5-10
5-1

5 Trial Operation (Checking Servomotor Operation)
5.1 Outline
The trial operation described here is a JOG operation for servomotors not connected
to machinery (without a load). The purpose of this trial operation is to check whether
the SERVOPACK and servomotor are properly connected and whether the servomotor is operating normally.
To conduct trial operation executed from the host controller for the servomotor without load, or for the servomotor connected to the machine, refer to the following manuals.
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/Analog
Voltage and Pulse Train Reference (SIEP S800000 45)
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/MECHA-
TROLINK-II Communications Reference (SIEP S800000 46)
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/Command
Option Attachable Type (SIEP S800000 60)
• Σ-V Series User's Manual Design and Maintenance Rotational Motor/MECHA-
TROLINK-III Communications Reference (SIEP S800000 64)
• Conduct trial operation on the servomotor alone with the motor shaft disconnected from the machine to avoid any unexpected accidents. If it is unavoidable
to perform trial operation while connected to a machine, then always make sure
that an emergency stop can be immediately executed.
CAUTION
5.2 Inspection and Checking before Trial Operation
To ensure safe and correct trial operation, inspect and check the following items
before starting trial operation.
Servomotors
Inspect and check the following items, and take appropriate measures before performing trial operation if any problem exists.
• Are all wiring and connections correct?
• Are all nuts and bolts securely tightened?
• If the servomotor has an oil seal, is the seal undamaged and is the motor oiled?
• If the servomotor has a brake, is the brake released beforehand? To release the
brake, apply the specified voltage (24 VDC or 90 VDC). The following diagram
shows an example of the circuit wiring needed to release the holding brake before a
trial operation.
5-2

5.2 Inspection and Checking before Trial Operation
5
Trial Operation (Checking Servomotor Operation)
Servomotor
with brake
SERVOPACK
Power supply
A 24 VDC power supply is not included.
Brake power supply Input voltage of 200 V: LPSE-2H01-E
M
BK
ENC
U
V
W
CN2
AC DC
L1
L2
L3
L1C
L2C
24 VDC power supply
or
Brake power supply
24 VDC or 90 VDC
Input voltage of 100 V: LPDE-1H01-E
An example of the circuit wiring
Relay Circuit Example
0V
Emergency stop
5 to 24 VDC
SERVOPACK
Photocoupler
Configure the relay circuit to apply the holding brake by the emergency stop.
SERVOPACKs
Inspect and check the following items, and take appropriate measures before performing trial operation if any problem exists.
• Are all installation, wiring and connections correct?
• Is the correct power supply voltage being supplied to the SERVOPACK?
5-3
 Loading...
Loading...