

Page 1

シリーズSGM □/ SGDA
ユーザーズマニュアル
ACサーボドライブ
サーボモータSGM /SGMP
サーボパックSGDA
YASKAWA
YA S K A WA
資料番号 TS-S800-15E
Page 2
安全に関するシンボルマーク
本マニュアルでは安全に関する内容により,下記のシンボルマークを使用しています。
安全に関するシンボルマークのある記述は,重要な内容を記載していますので必ず守っ
てください。
取扱いを誤った場合に,危険な状況が起こりえて,死亡または重傷を受ける可能性が想
危険
注意
定される場合。
取扱いを誤った場合に,危険な状況が起こりえて,中程度の傷害や軽傷を受ける可能性
が想定される場合および物的損害のみの発生が想定される場合。
安全に関するシンボルマーク
ISO
規格
注意
に記載した事項でも,状況によっては重大な結果に結びつく可能性が
JIS
規格
なお,
あります。
危険に関するシンボルマークは ISO 規格と JIS 規格で異なります。
本マニュアルでは ISO 規格のシンボルマークを使用しています。
製品の警告表示ラベルは ISO 規格と JIS 規格の場合があります。どちらも同様のお取り
扱いをお願いします。
iii
Page 3
アイコンの表示
説明内容の区分がすぐ分かるように,下記の「アイコン」を設けました。左端のスペー
スを「アイコン欄」とし,必要個所に「アイコン」を表示して,ご理解の助けとしまし
た。
これは便利
これは便利
覚えておくと便利な機能であることを示します。
重要
用語?
JUSP-OP02A-1
JUSP-OP03A
注意事項
危険な事柄,してはいけないこと,および「アラーム」関連事項です。
分かりにくい用語の解説,および,事前の説明なしに出てきた用語を説明して
います。
「ハンディタイプ」のディジタルオペレータ(JUSP-OP02A-1)を使う場合の
操作方法を示します。
「マウントタイプ」のディジタルオペレータ(JUSP-OP03A)を使う場合の操
作方法を示します。
Copyright ã 1995 株式会社 安川電機
本書の内容の一部または全部を,当社の文書による許可なしに,転載または複製することは,固くお断り致
します。
iv
Page 4
概要目次
章タイトル ページ 参照記号
1
AC
章
サーボを初めて扱う方へ
ACサーボの概要と,Σシリーズがどのようなものかを解説します。
1-1 a,b...........................................
2
章 Σシリーズの使い方(基本編)
現品到着時の確認や,基本的な配線方法と使い方を説明します。
3
章 Σシリーズの使い方(応用編)
Σシリーズが持つ多くの機能を効果的に使う方法を用途別に説明します。
4
章 ディジタルオペレータの使い方
Σシリーズの試運転や,機能 のオ ン/ オフ ,制 御定 数の 設定 など の操 作方法 を
詳しく説明します。
5
章 サーボの選定とデータシート
Σシリーズ・サーボドライブ と周 辺機 器の 選定 方法 およ び, それ らの 仕様・ 特
性を示します。
6
章 保守と点検の仕方
ユーザーが行う簡単な保守と,アラーム発生時の処置方法について説明します。
A SGD
付録
付録Bサーボ調整の手引き
付録C入出力信号一覧
付録Dユーザー定数一覧
付録Eアラーム表示一覧
付録F索引
形サーボパックとの相違点
2-1 b........................................
3-1 b........................................
4-1 b........................................
5-1 a,b..........................................
6-1 c...................................................
A-1 a,b, c.....................................
B-1 b, c...............................................
C-1 b, c...................................................
D-1 b, c.................................................
E-1 b, c.................................................
F-1 a, b, c.............................................................
参照記号の説明
a:サーボの選定に役立つ章
b:サーボシステムの設計に役立つ章
c:メンテナンスに役立つ章
...........
...........
v
Σシリーズの製品知識を習得したり,サーボの
選定をされる方
...
Σシリーズを使用して,サーボ制御システムの
設計,設置,または立ち上げを行う方
Σシリーズの保守やトラブルシュートと処置を
行う方
Page 5

詳細目次
安全に関するシンボルマーク iii..........................................
アイコンの表示 iv......................................................
マニュアルの概要 xi....................................................
マニュアルの使い方 xi
安全上のご注意 xii......................................................
..................................................
章
1
章 Σシリーズの使い方(基本編)
2
サーボを初めて扱う方へ
AC
1.1 AC
2.1
2.2
2.3
サーボの基礎知識
1.1.1 サーボメカニズムとは 1 - 2..............................................
1.1.2 サーボの構成とその要素 1 - 5............................................
1.1.3 Σシリーズサーボの特長 1 - 10............................................
注意していただきたいこと
2.1.1 ご使用の際に注意していただきたいこと 2 - 2..............................
取付けに当たって
2.2.1 現品到着時の確認 2 - 4..................................................
2.2.2 サーボモータの取付け 2 - 5..............................................
2.2.3 サーボパックの取付け 2 - 8..............................................
2.2.4 電力損失 2 - 10..........................................................
接続・配線をする
2.3.1 各部品との接続の仕方 2
2.3.2 主回路の配線と電源投入シーケンス 2 - 14..................................
2.3.3 入出力信号の接続例 2
.......................................
..................................
..........................................
..........................................
..............................................
................................................
1 - 1..........................
1-2
2 - 1.......................
2-2
2-4
2-11
-
11
-
16
2.4
試運転をしてみよう
2.4.1 試運転のステップ 2 - 23..................................................
2.4.2 ステップ1:モータ単体での試運転 2 - 25...................................
2.4.3 ステップ2:モータを機械に接続して行う試運転 2
2.4.4 試運転時の補足事項 2
2.4.5 最低限のユーザー定数と入力信号 2
章 Σシリーズの使い方(応用編)
3
この章を読むにあたって
3.1
機械に合わせた設定をする
3.1.1 モータの回転方向を変える 3
3.1.2 オーバトラベルを設定する 3 - 5..........................................
3.1.3 トルク制限をかける 3
........................................
................................................
.........................................
..................................
..........................................
................................................
.......................
....................................
2-23
-
30
-
31
-
33
3 - 1.......................
3-3
3-4
-
-
4
8
vi
Page 6

3.2
上位装置に合わせた設定をする
3.2.1 速度指令を与える 3 - 14..................................................
3.2.2 位置指令を与える 3 - 17..................................................
3.2.3 エンコーダ出力を使う 3 - 22..............................................
3.2.4 接点入出力を使用する 3 - 26..............................................
3.2.5 電子ギヤを使う 3 - 28....................................................
3.2.6 内部設定速度選択を使う 3 - 32............................................
3.2.7 トルク制御を使う 3
3.2.8 トルクフィードフォワード機能を使う 3 - 42................................
3.2.9 アナログ電圧指令によるトルク制限機能を使う 3 - 44........................
3.2.10 指令パルス阻止機能(INHIBIT機能)を使う 3 - 45...........................
3.2.11 指令パルス入力部フィルタの選択機能を使う 3
..................................................
..............................
..........................
3-14
-
37
-
47
3.3
Σサーボパック自身を設定する
3.3.1 ユーザー定数を設定する 3
3.3.2 ジョグ速度を設定する 3 - 49..............................................
3.3.3 エンコーダパルス数を設定する 3 - 49......................................
3.3.4 使用モータを設定する 3
3.4
停止のための設定をする
3.4.1 オフセットを調整する 3 - 51..............................................
3.4.2 ダイナミックブレーキを使う 3 - 52........................................
3.4.3 ゼロクランプを使う 3 - 53................................................
3.4.4 保持ブレーキを使う 3
3.5
滑らかに動かす
3.5.1 ソフトスタートをかける 3 - 59............................................
3.5.2 スムージングをかける 3 - 59..............................................
3.5.3 ゲインの調整を行う 3
3.5.4 オフセットの調整を行う 3
3.5.5 トルク指令フィルタ時定数を設定する 3 - 61................................
3.6
もっと速く位置決めする
3.6.1 オートチューニングを使う 3 - 62..........................................
3.6.2 サーボゲインを設定する 3
3.6.3 フィードフォワードをかける 3 - 64........................................
3.6.4 比例動作指令を使う 3 - 64................................................
3.6.5 速度バイアスを設定する 3 - 66............................................
3.6.6 モードスイッチを使う 3 - 66..............................................
3.6.7 速度ループ補償機能を使う 3
............................................
............................................
..............................................
....................................
................................................
................................................
............................................
....................................
............................................
..............................
..........................................
3-48
-
48
-
50
3-51
-
55
3-59
-
60
-
60
3-62
-
62
-
72
3.7
保護シーケンスを組む
3.7.1 サーボアラーム出力,アラームコード出力を使う 3 - 73......................
3.7.2 サーボオン入力を使う 3
3.7.3 位置決め完了出力を使う 3 - 77............................................
3.7.4 速度一致出力を使う 3 - 78................................................
3.7.5 回転検出出力を使う 3 - 79................................................
3.7.6 瞬時停電の取扱い 3 - 81..................................................
......................................
..............................................
vii
3-73
-
76
Page 7

3.8
特殊な配線をする
3.8.1 配線するうえでの注意 3 - 83..............................................
3.8.2 ノイズ対策の配線をする 3 - 85............................................
3.8.3 複数台のサーボを使う 3 - 89..............................................
3.8.4 回生ユニットを使う 3 - 90................................................
3.8.5 絶対値エンコーダを使う 3 - 93............................................
3.8.6 エンコーダケーブルを延ばす 3 - 102........................................
3.8.7 異電圧で使用する 3
3.8.8 コネクタ端子配列一覧 3 - 106..............................................
章 ディジタルオペレータの使い方
4
..........................................
..................................................
3-83
-
104
4 - 1.......................
4.1
基本の操作をやってみよう
4.1.1 ディジタルオペレータを接続する 4 - 2....................................
4.1.2 サーボアラームのリセット方法 4
4.1.3 基本機能とモードの切り替え方 4 - 4......................................
4.1.4 状態表示モードでの操作 4 - 5............................................
4.1.5 ユーザー定数設定モードでの操作 4
4.1.6 モニタモードでの操作 4 - 13..............................................
4.2
実際に機能を使ってみる
4.2.1 アラームトレースバックモードでの操作 4 - 16..............................
4.2.2 ディジタルオペレータから運転する 4 - 18..................................
4.2.3 オートチューニングを行う 4
4.2.4 速度指令オフセットを自動調整する 4 - 27..................................
4.2.5 速度指令オフセットをマニュアル調整する 4 - 30............................
4.2.6 アラームトレースバックデータをクリアする 4
4.2.7 モータ機種を確認する 4
4.2.8 ソフトウェアバージョンを確認する 4
章 サーボの選定とデータシート
5
5.1
Σサーボの選定方法
5.1.1 サーボモータの選定 5 - 3................................................
5.1.2 サーボパックの選定 5 - 8................................................
5.1.3 ディジタルオペレータの選定 5
....................................
..............................................
........................................
..................................
......................................
....................................
..........................................
..........................
..................................
........................................
4-2
-
-
4-16
-
21
-
32
-
34
-
35
5 - 1..........................
5-3
-
10
3
8
5.2
サーボモータの定格と特性
5.2.1 定格および仕様 5 - 12....................................................
5.2.2 機械的な特性 5 - 25......................................................
5.3
サーボパックの定格と特性
5.3.1 定格および仕様 5 - 27....................................................
5.3.2 過負荷特性 5
5.3.3 始動時間・停止時間 5 - 33................................................
5.3.4 負荷イナーシャ 5 - 33....................................................
5.3.5 マイナス負荷 5 - 36......................................................
5.3.6 突入電流・電力損失 5 - 36................................................
5.4
Σサーボの外形図
5.4.1 サーボモータ外形図 5 - 37................................................
5.4.2 サーボパック外形図 5 - 70................................................
5.4.3 ディジタルオペレータ外形図 5 - 72........................................
........................................................
..........................................
..................................
..................................
viii
5-12
5-27
-
32
5-37
Page 8

5.5
周辺機器の選定方法
5.5.1 周辺機器の選定 5 - 73....................................................
5.5.2 ご注文リスト 5 - 79......................................................
........................................
5-73
5.6
周辺機器の仕様と外形図
5.6.1 使用電線と周辺機器 5 - 86................................................
5.6.2 モータ用ケーブル 5 - 88..................................................
5.6.3 コネクタキット 5 - 90....................................................
5.6.4 ブレーキ電源 5 - 93......................................................
5.6.5 エンコーダ用ケーブル 5 - 94..............................................
5.6.6 絶対値エンコーダ用電池 5 - 100............................................
5.6.7 1CNコネクタ 5
5.6.8 コネクタ端子台変換ユニット 5 - 103........................................
5.6.9 1CN付きケーブル片側バラ出し 5 - 105......................................
5.6.10 配線用遮断器 5
5.6.11 ノイズフィルタ 5 - 106....................................................
5.6.12 電磁接触器 5 - 107........................................................
5.6.13 サージサプレッサ 5
5.6.14 回生ユニット 5 - 108......................................................
5.6.15 速度設定用ボリューム 5 - 110..............................................
5.6.16 エンコーダ信号変換ユニット 5
5.6.17 パソコン専用接続ケーブル 5 - 111..........................................
章 保守と点検の仕方
6
6.1
保守・点検を行う
6.1.1 サーボモータの点検 6
6.1.2 サーボパックの点検 6
6.1.3 絶対値エンコーダ用電池の交換方法 6
....................................
......................................................
......................................................
..................................................
........................................
..........................................
................................................
................................................
..................................
5-86
-
101
-
105
-
107
-
110
6 - 1...................................
6-2
-
-
-
2
3
4
6.2
異常診断とその処置を行う
6.2.1 アラーム表示の原因とその処置 6
6.2.2 その他の不具合と処置 6 - 27..............................................
6.2.3 内部接続図と機器間接続例 6 - 29..........................................
付録
A SGD
形サ・ ボパックとの相違点
付録Bサーボ調整の手引き
B.1
ΣシリーズACサーボのゲイン調整
B.1.1 ΣシリーズACサーボパックとゲイン調整の方法 B - 2........................
B.1.2 ゲイン調整の基本的なルール B
B.2
速度制御形サーボパックの調整方法
B.2.1 オートチューニングを使って調整する B - 4................................
B.2.2 マニュアルで調整する B - 6..............................................
B.3
位置制御形サーボパックの調整方法
B.3.1 オートチューニングを使って調整する B
B.3.2 マニュアルで調整する B - 9..............................................
B.4
ゲイン設定の参考値
B.4.1 負荷イナーシャ比によるゲイン設定の目安 B - 12............................
........................................
..................................
......................................
...........................
........................................
..........................
..........................
................................
6-5
-
A - 1.....................
B - 1...............................
B-2
-
B-4
B-8
-
B-12
5
3
8
ix
Page 9

付録C入出力信号一覧
C - 1...................................
付録Dユーザー定数一覧
付録Eアラーム表示一覧
付録F索引
改版履歴
D - 1.................................
E - 1.................................
F - 1.............................................
x
Page 10
マニュアルの概要
J
マニュアルの説明範囲
本マニュアルは「Σシリーズ」のユーザーを対象に,次のような範囲について説明してい
ます。
S サーボを初めて扱う方への概要説明
S 現品の確認と基本的な使い方
S 装備している機能の応用的使い方
S サーボの選定方法と注文の仕方
S 保守と点検の仕方
マニュアルの使い方
安全上のご注意
J
マニュアルの章区分
対象読者への指針として,本書の各章を,a,b,c の3種に区分し,「概要目次」に示しま
した。該当する章を参考にしてください。
a:サーボの選定に役立つ章 Σシリーズの製品知識を習得したり,サーボの...........
選定をされる方
b:サーボシステムの設計に役立つ章 Σシリーズを使用して,サーボ制御システムの...
設計,設置,または立ち上げを行う方
c:メンテナンスに役立つ章 Σシリーズの保守やトラブルシュートと処置を...........
行う方
J
基本用語の意味
本書では,特に断らない限り,次の用語の意味を以下のとおりとします。
S サーボモータ = Σシリーズの,SGMG,SGMD,SGMS,SGM,SGMP形サーボ
モータ
S サーボパック = Σシリーズの,SGDB-□AD形サーボパック
S サーボドライブ = 一組の,サーボモータとサーボパック
S サーボシステム = 上記「サーボドライブ」と,上位装置や周辺機器とを組み合わせ
た,一組の完結したサーボ制御系
用語?
J
専門用語の解説
本文の中で専門用語は,ページの下端に設けた「用語解説欄」で簡潔に説明しています。
その一例を,下記に示します。
z 用語解説欄
次のような用語の解説を心がけています。
・サーボシステムや電子機器に,あまりなじみのない方への用語の解説
・「Σシリーズ」サーボ独自の用語で,機能の説明に必要な用語の解説
xi
Page 11
安全上のご注意
ここでは,現品到着時の確認,取付け,配線,運転,保守・点検にあたって,必ず守って
いただきたい重要な注意事項について記載しています。
J
現品到着時の確認上の注意
D サーボモータとサーボパックは,指定された組合せでご使用ください。
火災,故障発生の原因となります。
J
取付け上の注意
D 水のかかる場所や腐食性の雰囲気,引火性のガスの雰囲気,可燃物のそばでは絶対に使用しな
いでください。
感電や火災発生のおそれがあります。
注意
注意
J
配線上の注意
危険
D サーボパックの接地端子 を必ず接地極(第3種接地)に接続してください。
感電,火災のおそれがあります。
注意
D サーボパックの出力端子UVWには三相電源を接続しないでください。
けが,火災のおそれがあります。
D 電源端子,モータ出力端子のねじ締めは確実に行ってください。
火災のおそれがあります。
xii
Page 12
安全上のご注意
J
運転上の注意
危険
D 運転中,モータの回転部には絶対に触れないでください。
けがのおそれがあります。
注意
D 試運転に際しては,予期せぬ事故を避けるため,サーボモータ単体(モータのシャフトを機械
に接続しない状態)で行ってください。
けがのおそれがあります。
D 相手機械に取り付けて運転を始める場合は,あらかじめその機械に合わせたユーザー定数の設
定を行ってください。
設定をせずに運転を始めると,機械の暴走や故障が発生するおそれがあります。
D 相手機械に取り付けて運転を始める場合は,いつでも非常停止できる状態にしてから行ってく
ださい。
けがのおそれがあります。
D 運転中はヒートシンク部に触れないでください。
高温によるやけどのおそれがあります。
J
保守・点検上の注意
危険
D サーボパックの内部には絶対に触れないでください。
感電のおそれがあります。
D 通電状態では,必ずパネルカバーをしてください。
感電のおそれがあります。
D 電源をオフした後,5分間は端子に触れないでください。
残留電圧により,感電のおそれがあります。
注意
D サーボモータは分解しないでください。
感電,けがのおそれがあります。
D 通電中の配線変更はしないでください。
感電,けがのおそれがあります。
xiii
Page 13
J
一般注意事項
使用に際してご注意ください。
S
本マニュアルに掲載している図解は,細部を説明するために,カバーまたは安全のた
めの遮へい物を取り外した状態で描かれている場合があります。この製品を運転する
ときは,必ず規定どおりのカバーや遮へい物を元どおりに戻し,本マニュアルに従っ
て運転してください。
S
本マニュアルに掲載している図は,代表事例であり,お届けした製品と異なることが
あります。
S
本マニュアルは,製品の改良,仕様変更,ならびにマニュアルの使いやすさの向上の
ために,適宜変更することがあります。
この変更は,本マニュアルの資料番号を更新し,改訂版として発行します。
S
損傷,紛失などで本マニュアルを注文される場合は,当社代理店または,裏表紙に記
載した最寄りの当社営業所へ,表紙の資料番号をご連絡ください。
S
お客様が改造を行った製品は,当社の品質保証の対象外となります。改造製品に起因
する一切の傷害や損傷に対して,当社は責任を負いません。
xiv
Page 14

1
章
ACサーボを初めて扱う方へ
この章は,ACサーボを初めて取り扱う方のために,サーボメカニ
ズム(サーボ機構)の基本的な構成と基本的なサーボ用語について
解説しています。
サーボについて経験のある方も,本章に一通り目を通して,Σシ
リーズの特長を理解してからお使いください。
1.1 ACサーボの基礎知識 1 - 2..................
1.1.1 サーボメカニズムとは 1 - 2.....................
1.1.2 サーボの構成とその要素 1 - 5...................
1.1.3 Σシリーズサーボの特長 1 - 10...................
1
1-1
Page 15
AC
サーボを初めて扱う方
1.1.1サーボメカニズムとは
1.1 ACサーボの基礎知識
この節では,サーボメカニズムの基本的な構成と用語について解説します。また,Σシ
リーズの特長についても説明しています。
1
1.1.1 サーボメカニズムとは
次の言葉を聞いたことがありませんか?
D サーボ
D サーボ機構
D サーボメカニズム
D サーボ制御システム
これらは皆,同じことを意味しています。
つまり,これらの言葉の意味は,目標位置などの物理量に追従する,制御メカニズムであ
ると言えるでしょう。
もっと簡単にいえば,「主人の指示のとおり,忠実に,素早く仕事を実行する召使い」と言
えるでしょう。これは,比喩ではありません。「サーボ(Servo)」という言葉は,「召使い
(Servant)」から由来しているのですから。
「サーボメカニズム」をもう少し具体的に定義すると,次のようになります。
D 指令したとおりの「速度」で動いたり,
用語?
D 指令したとおりの「位置」へ位置決めを行う
ところの「メカニズム(機構)」です。
サーボ機構
z
「JIS規格」の用語定義によれば,「物体の位置,方向,姿勢などを制御量とし,目標値の任意の変化に
追従するように制御する機構」・・・と難しい。もっと簡単に,「目標位置などの物理量に追従する,
制御メカニズム」と言ってよいでしょう。また,備考には,「サーボ機構では,フィードバック制御を
行うのが普通である。」とあります。(JIS B0181 より)
1-2
Page 16
1.1 ACサーボの基礎知識
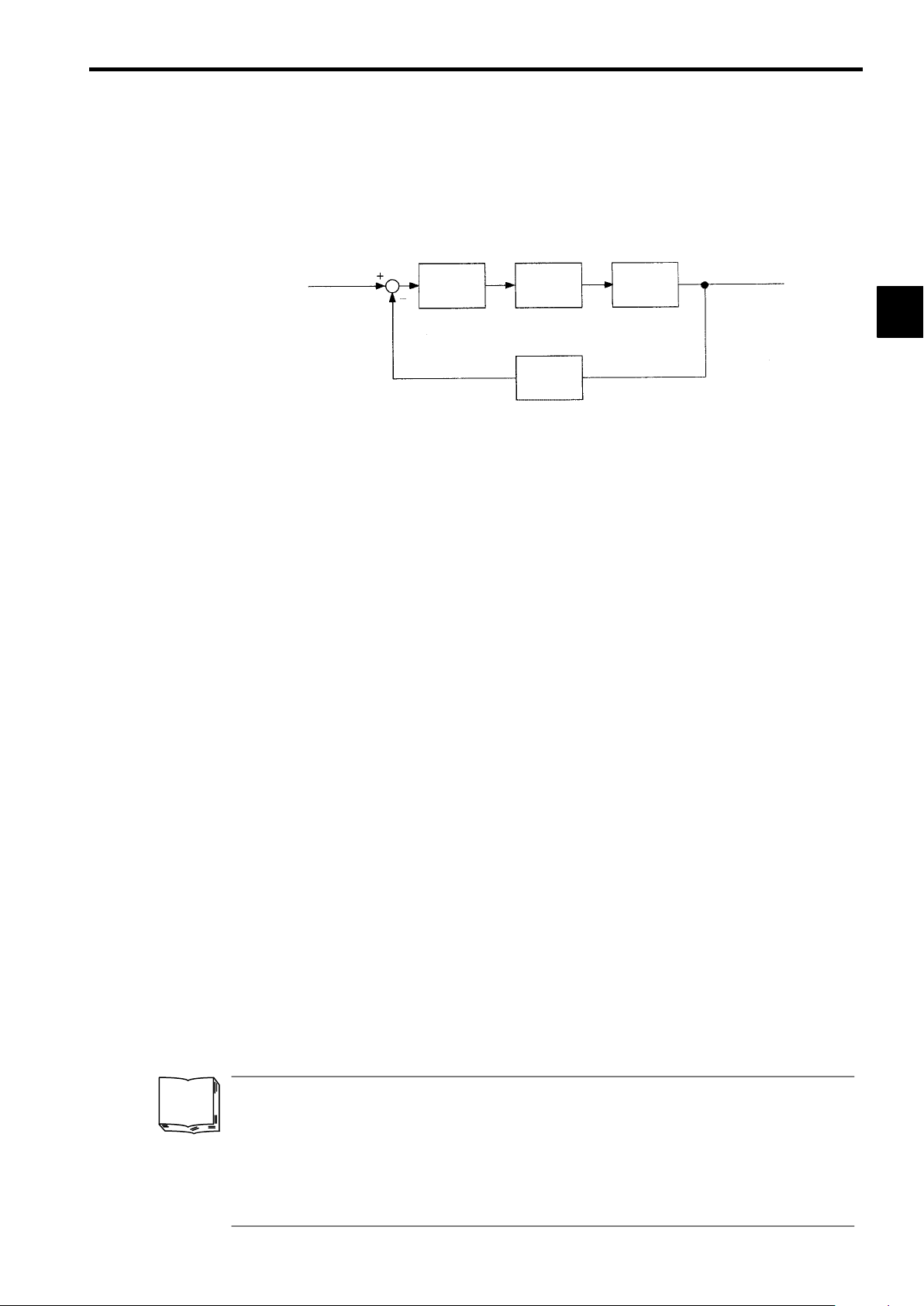
前ページの「メカニズム(機構)」を作るためには,「フィードバック制御」を含んだ「自
動制御系」を組まなければなりません。この「自動制御系」は一般的に,次のブロック図
で表されます。
サーボメカニズムの構成ブロック図
目標位置
入力
サーボ
増幅器
サーボ
モータ
フィードバック部
検出器
制御対象
(負荷)
機械位置
出力
この「サーボメカニズム」は,出力である「機械位置」を検出して入力側に「フィード
バック」し,入力である「目標位置」と比較し,その「差の値」を使って「制御対象」を
動かそうとする「自動制御系」です。
つまり,指令した「入力」の値のとおりに,正確に「出力」側の値を強制する制御システ
ムです。
例えば,「目標位置」が移動していけば,そのとおりに追従して行くメカニズムなのです。
上記の例では,「入力」を「位置」にしましたが,どんな「物理量」で あっ ても構 いませ
ん。「角度(方位)」,「水圧」や「電圧」などでもOKです。
「位置」,「速度」,「力(トルク)」そして「電流」などは,「サーボメカニズム」の格好の
制御対象と言えます。
1
用語?
ここで,用語の使い方を次のように決めておきましょう。
J
「サーボ機構」
「サーボメカニズム」と,同義語です。本書では,「サーボメカニズム」の方を使用し
ます。
J
「サーボ」
「サーボメカニズム」と,同じ意味で一般に使用されますが,「メカニズム」を省略し
た分だけ,意味があいまいです。つまり「サーボメカニズム」全体でなく,その中心
となる一部分(たとえばサーボモータとアンプな ど)を指す場合もあり ます。本書
も,このように多少あいまいな使い方をします。
「フィードバック制御」
z
制御量を入力側へ戻して「閉ループ」を組む制御を,「フィードバック制御」と呼びます。また,「閉
ループ制御」,「帰還制御」とも呼ばれます。入力側へ戻すとき,マイナス(負)の信号で戻す場合を,
「負帰還制御」と言います。系を安定にするための「フィードバック」には,普通「負帰還制御」を
使用します。「フィードバック」をかけない制御を,「開ループ制御」または,「オープンループ制御」と
呼びます。
1-3
Page 17
ACサーボを初めて扱う方
1.1.1サーボメカニズムとは
J
「サーボ制御システム」
「サーボメカニズム」とほぼ同じ用語ですが,「制御系」に焦点をあてた用語です。本
書では,「制御」を削除して短くした「サーボシステム」と言う用語を,この同義語と
して使います。
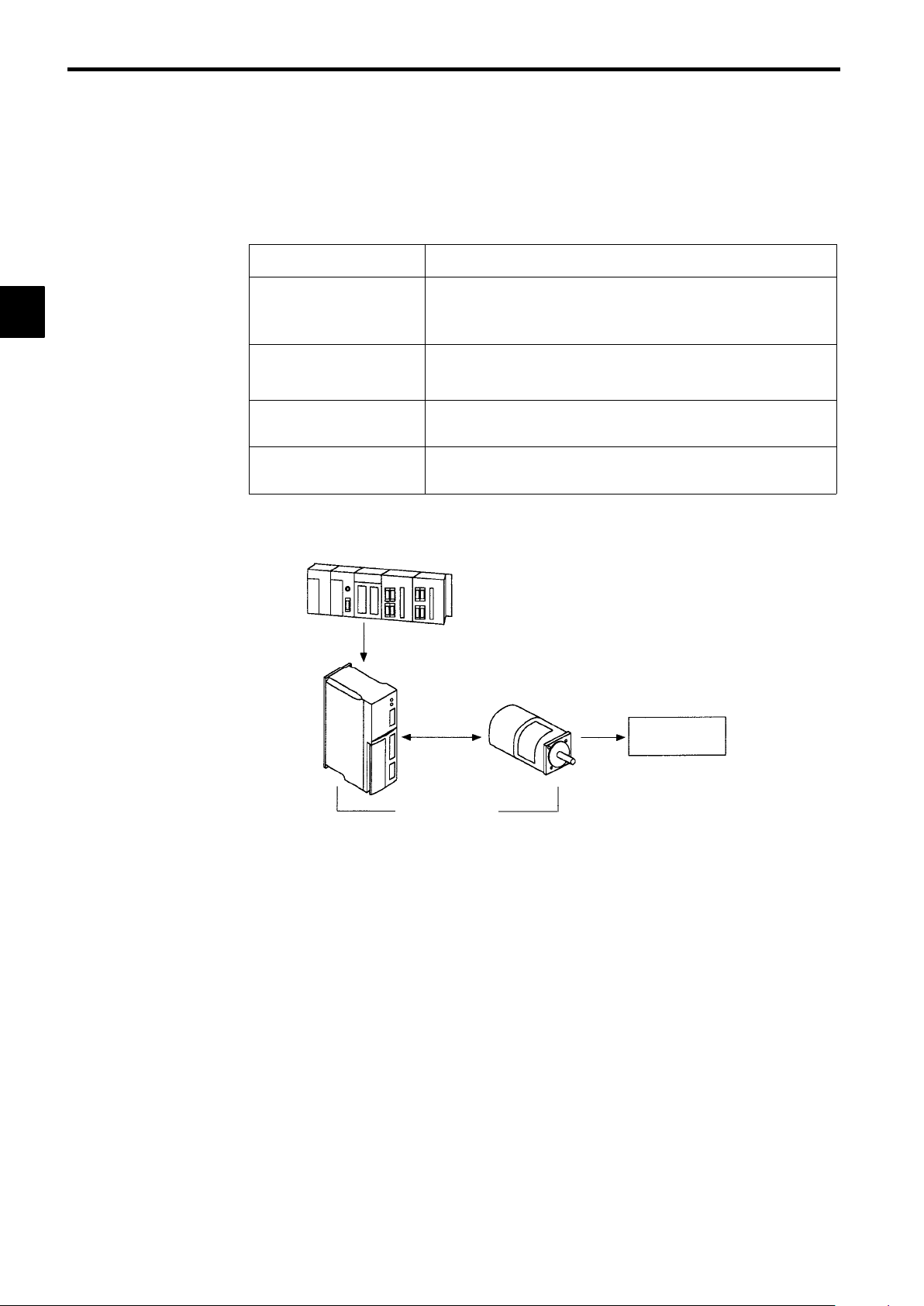
本書での関連用語 意味
1
サーボモータ 一般のサーボモータまたは,当社の「
「SGMP形サーボモータ」。位置検出器(エンコーダ)を含むと
きもあります。
サーボパック サーボ増幅器の当社商品名:「SGDA形サーボパック」。
「速度・トルク制御用」と「位置制御用」があります。
サーボドライブ 一対のサーボモータとサーボパックを指します。これを「サー
ボ」と言う場合もあります。
サーボシステム 上位装置+サーボドライブ+制御対象・・・を含む一つの閉じた
制御系。サーボメカニズムを成り立たせる「制御系」。
上位装置
指令
サーボパック
サーボモータ
駆動
SGM形サーボモータ」
制御対象
サーボドライブ
サーボシステム
1-4
Page 18
1.1 ACサーボの基礎知識
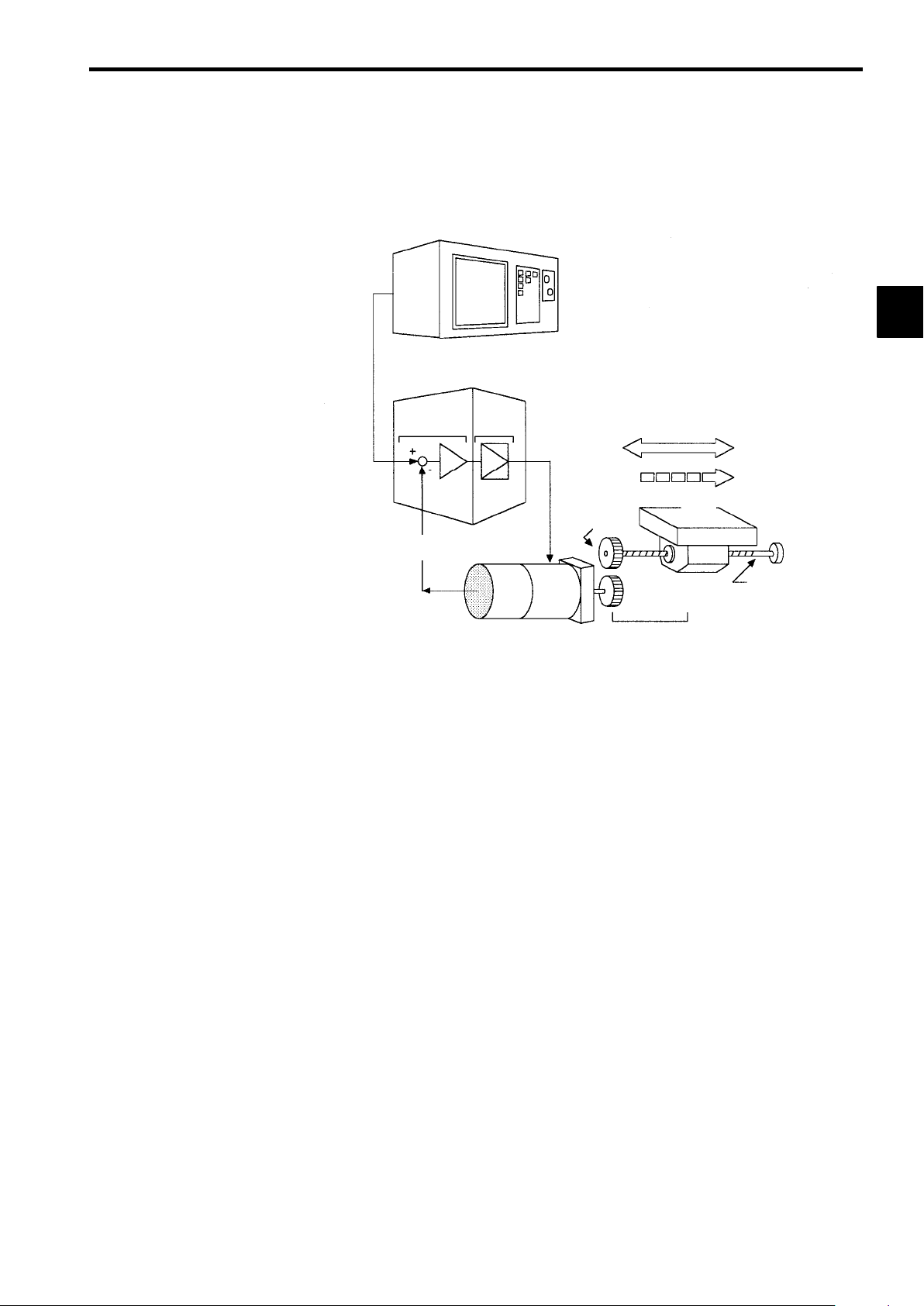
1.1.2
サーボの構成とその要素
サーボメカニズムの基本的な構成について解説します。
位置または
速度の指令
(入力)
位置または速度の
フィードバック
比較・制
御増幅器
パワー
増幅器
上位装置
(5)
サーボ増幅器
(4)
モータ
駆動線
ギヤ
(2)(3)
(出力)
(1)
制御対象
1
位置
速度
可動テーブル
ボールねじ
検出器
(1)
制御対象: 「位置」または「速度」を制御する対象のメカニカル機構。
サーボ
モータ
伝達機構
サーボモータからの力の「伝達機構」を含みます。
(2)
サーボモータ: 「制御対象」を駆動する代表的なアクチュエータ。ACサーボ
モータと
(3)
検出器: 「位置」または「速度」の検出器。位置の検出には,モータ
DC
サーボモータがあります。
にマウントした「エンコーダ」を一般的に使用します。
(4)
サーボ増幅器: 「指令」と「フィードバック」の「誤差信号」を処理して最
終的に「サーボモータ」を駆動するアンプです。「誤差信号」
を処理する「比較・制御増幅器」部と,モータを駆動する
「パワー増幅器」部を持っています。
(5)
上位装置: 「位置」または「速度」を目標値として,「サーボ増幅器」に
指令する装置です。
1-5
Page 19
1
ACサーボを初めて扱う方
1.1.2サーボの構成とその要素
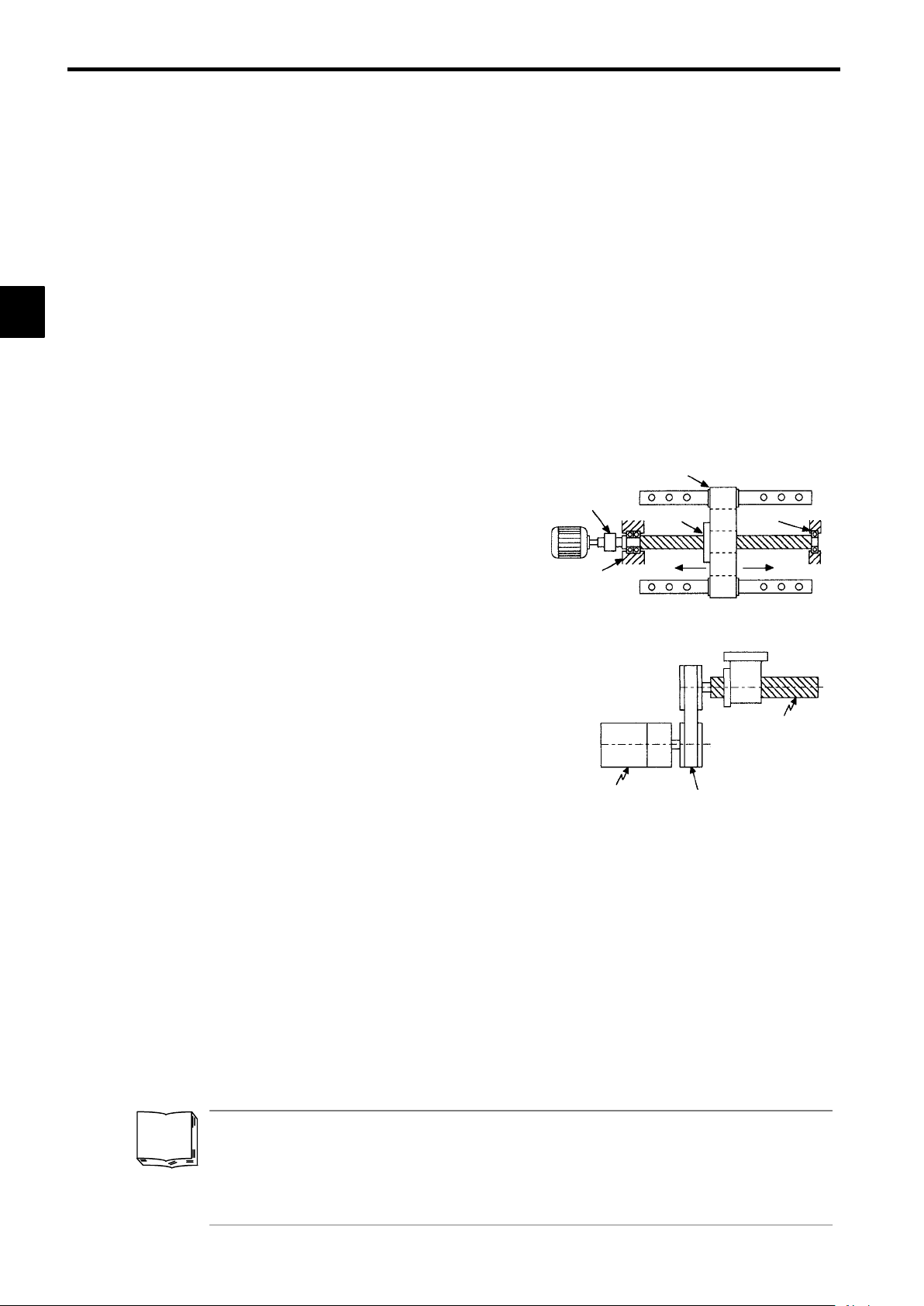
(1) 〜(5)のサーボ構成要素について,以下にその概要を解説します。
J
「制御対象」
前図では,「位置または速度」を出力とする「可動テーブル」を「制御対象」にしてい
ます。「可動テーブル」は「ボールねじ」で駆動され,「ギヤ」で「サーボモータ」と結
合しています。従って,力の「伝達機構」は,
「ギヤ」+「ボールねじ」
連結比が自由にとれて,位置の精度も高いので,最も一般的に使われる機構です。た
だし,ギヤの「ガタ」は極力小さくします。
可動テーブルを「制御対象」とする場合の「伝達機構」には,他に以下のようなもの
があります。
「カップリング」+「ボールねじ」
「カップリング」は,連結比を「1:1」で結合
転がり案内
する場合に「ガタ」がなく便利です。
この機構は,工作機械などに多く 使用さ
カップリング
ボールねじ
転がり軸受
れています。
ハウジング
「タイミングベルト」+「台形ねじ」
「タイミングベルト」は,連結 比を 自由 にと れ
て,ガタのない連結機構です。
「台形ねじ」は,位置の精度が あま りよ くあ り
ません。少数派の連結機構です。
台形ねじ
良い「サーボメカニズム」にするためには,「剛
性が高く」かつ「ガタがない」 「伝 達機 構」 を
サーボモータ
タイミングベルト
選択することが重要です。
制御の目的に合った「伝達機構」を使用して「制御対象」を構成してください。
用語?
「伝達機構」
z
「伝達機構」は,「駆動メカニズム」とも言えます。アクチュエータ(サーボモータなどの駆動要素)
と制御対象を結合して,動力の伝達,角度の伝達,回転/直線の運動変換などを行う,機械的な制御
要素を指します。
1-6
Page 20
1.1 ACサーボの基礎知識
J 「サーボモータ」
「DCサーボ」と「ACサーボ」
「サーボモータ」には,「DC(直流)サーボモータ」と「AC(交流)サーボモータ」
があります。
直流電流で駆動する「DCサーボモータ」の歴史は古く,1980年代までは「サーボモー
タ」と言えば,「DCサーボモータ」を指していました。
マイクロプロセッサなどの発達によって,1984年から,交流電流で駆動する「ACサー
ボモータ」が登場しました。そして今日では,次のような利点があるため,広く使用
されています。
《
ACサーボの利点》
• メンテナンス・フリー:ブラシがない
• 高い回転速度 :整流の限界速度などがない
1
ただし,サーボモータ,サーボパックには機械的摩耗や経年劣化を生じる部品も使用
しています。予防保全のため,定期点検と部品の定期交換を行ってください。詳細は
6章「保守と点検の仕方」を参照してください。
「ACサーボモータ」
「ACサーボモータ」には,「同期電動機タイプ」と「誘導電動機タイプ」があります。
一般には,「同期電動機タイプ」が多く使われています。
「同期電動機タイプ」のサーボモータは,交流電流の周波数を変えることにより回転
速度を制御します。
停止時の保持トルクが強いので,精密な位置決めに向いています。従って,「位置」の
「サーボメカニズム」のためには,このタイプを使用します。
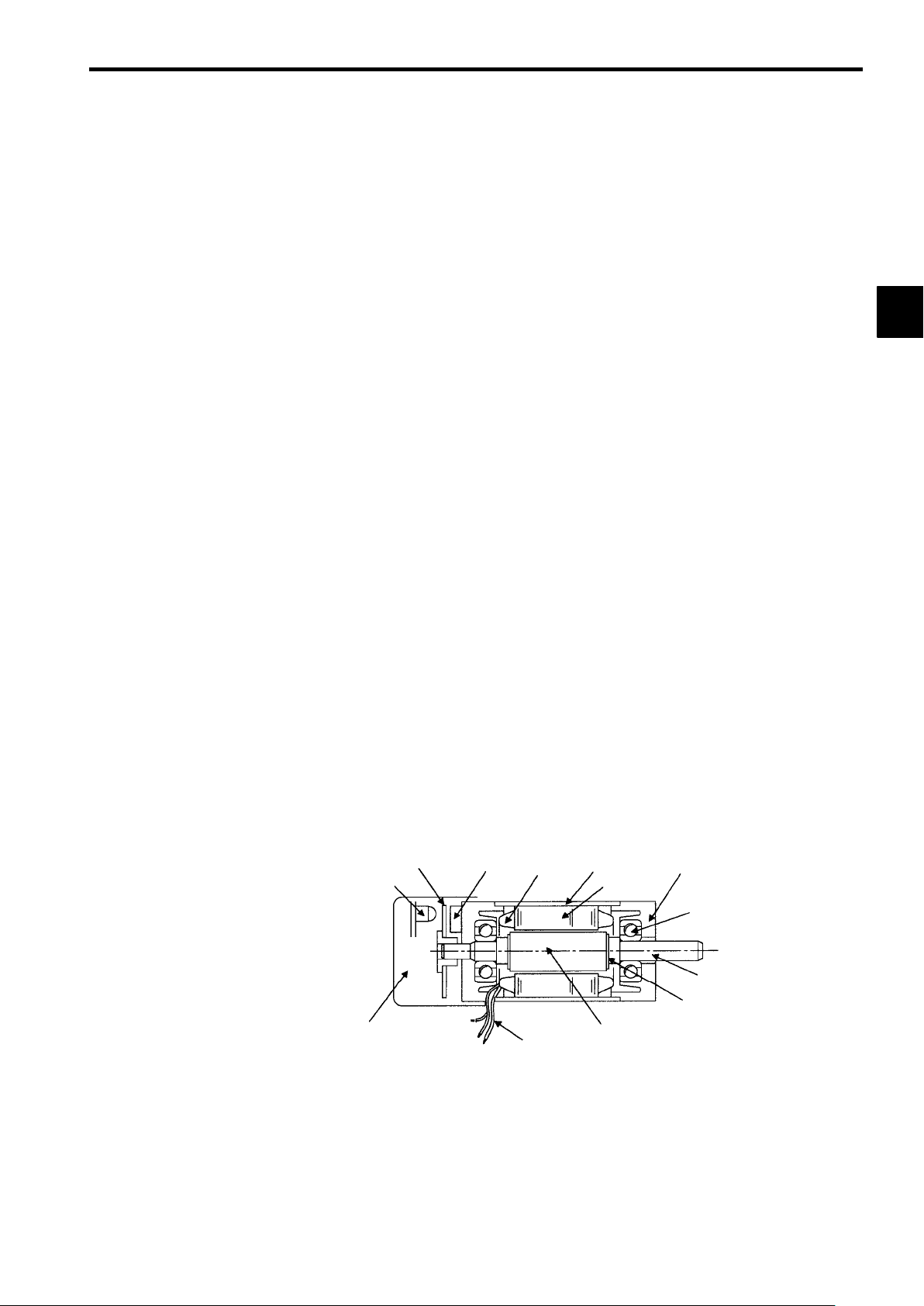
「同期電動機タイプ」のサーボモータの構造を,下図に示します。
回転デスク 受光素子
発光素子
電機子巻線
ハウジング
ステータコア
フロントキャップ
ボールベアリング
シャフト
ロータコア
位置検出器
(エンコーダ)
リード線
磁極マグネット
当社の「SGM形サーボモータ」「SGMP形サーボモータ」は,この「同期電動機タイ
プ」のサーボモータです。
1-7
Page 21
AC
サーボを初めて扱う方
1.1.2サーボの構成とその要素
J
サーボモータの性能
サーボモータには,「動け」と指令したら,さっと動く「瞬発力」が必要です。この
「瞬発力」を表す性能用語として「定格パワーレート (kW/s)」 があります。つまり,
1秒間に何ワットの電力を出せるかを表しています。この値が大きいものほど,優秀な
サーボモータであると言えます。
「検出器」
1
サーボシステムには実際の「位置または速度」の検出を行うための「検出器」が必要
です。検出の方法には,光学式と磁気式の二通りがあります。検出器として光学式あ
るいは磁気式の「エンコーダ」を,「サーボモータ」にマウントして使用します。「エン
コーダ」には,次の二種類があります。
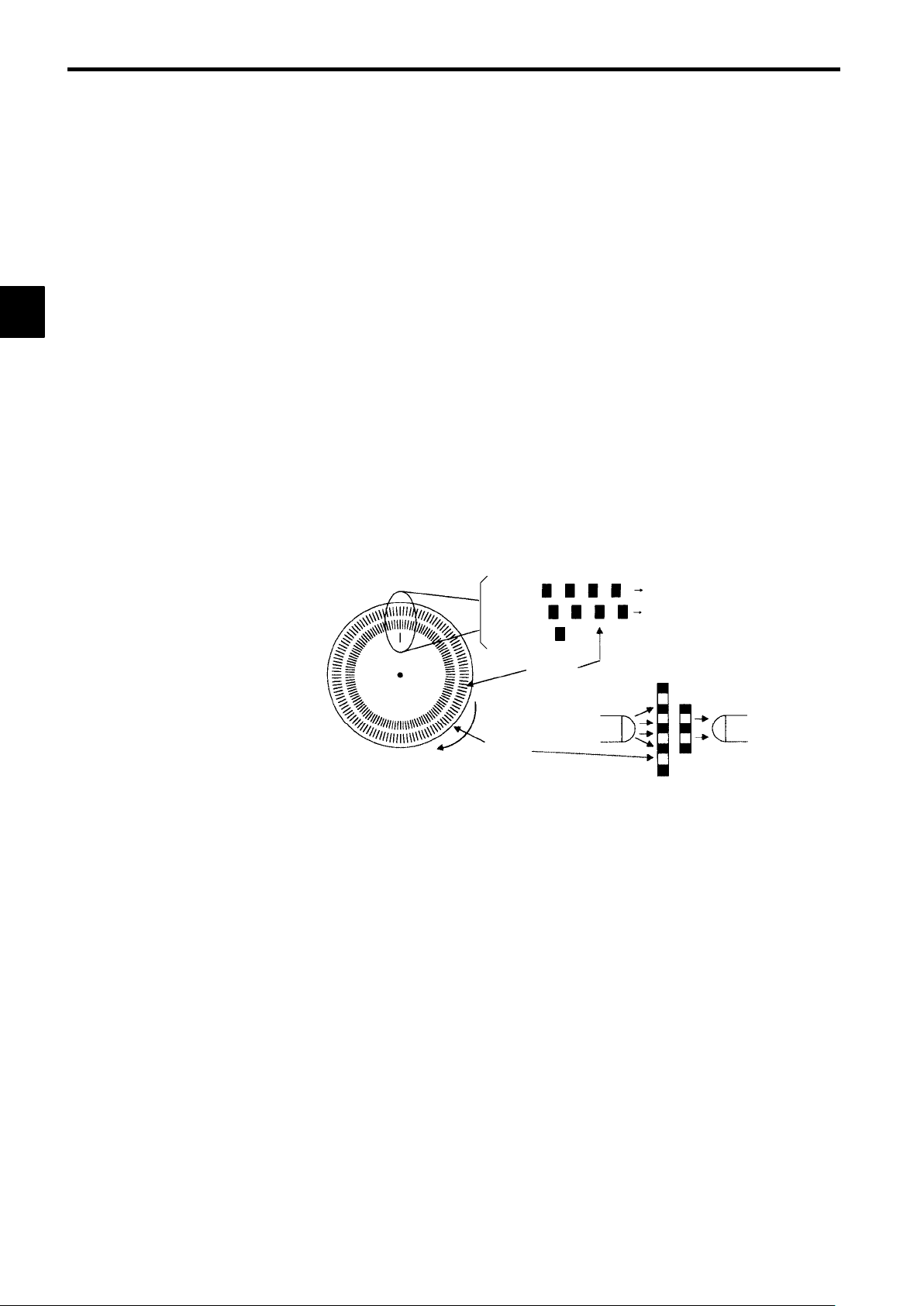
インクリメンタルエンコーダ
一回転当たり,例えば2000パルスを発生するような「パルス発生器」です。1パルス
= 0.001mm などとなるように機械系に連結すれば,「パルス発生器」は位置の検出器
となります。ただし,一回転内の絶対位置は検知せず,単純にパルス列を出力する方
式です。従って,位置決め運転などの始めに「原点復帰」操作が必要になります。例
として,光学式の「パルス発生器」の動作原理を下図に示します。
A相
B相
Z相
スリット
回転中心
投光素子
回転板
→ A相パルス列
→ B相パルス列
固定スリット
受光素子
回転スリット
絶対値エンコーダ
インクリメンタルエンコーダの機能に追加して,「絶対値データ」(絶対的な回転角
度)を検知できるようにした方式のエンコーダです。従って,絶対値エンコーダを使
用すれば,運転の始めに「原点復帰」操作が不要なシステムを作ることができます。
インクリメンタルエンコーダと絶対値エンコーダの違い
絶対値エンコーダは停電中にモータが回転しても ,モータ軸の位置を検 知していま
す。インクリメンタルエンコーダは,これができません
。
1-8
Page 22
1.1 ACサーボの基礎知識
J
「サーボ増幅器」
「ACサーボモータ」を自在に駆動するために,「サーボ増幅器」が必要です。
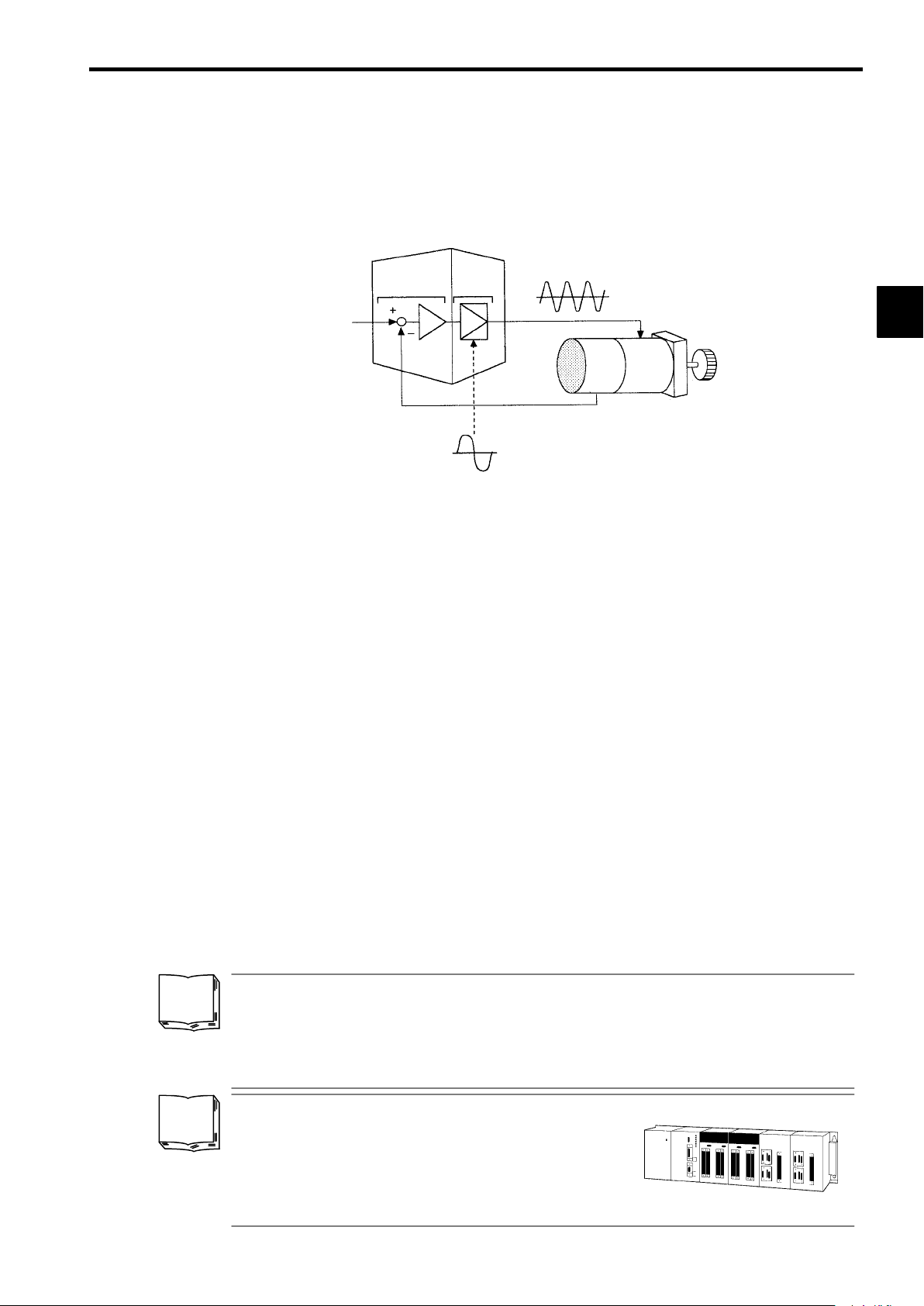
「サーボ増幅器」の構成は,下図のとおりです。
サーボ増幅器
モータ駆動交流
サーボモータ
商用交流電源
指令入力
比較・制御
増幅器
フィードバック
パワー
増幅器
次の二つの部分で構成されています。
比較・制御増幅器
まず,「位置または速度」の「指令入力」と,フィードバック信号を比較して,その
「差の信号」を作る「比較部」があります。
次に,「差の信号」を増幅したり,変形する「制御部」があります。つまり「比例制御
(P制御)」や,「比例・積分制御(PI制御)」を行う部分です(ここでは,このような
サーボ用語があることだけを知ってください)。
パワー増幅器
1
用語?
用語?
前記の「比較・制御増幅器」の出力に比例した速度やトルクで「サーボモータ」を駆
動する部分です。つまり,50 Hzまたは60 Hzの商用電源から,指令速度に比例した周
波数の交流を作り出し,これでサーボモータを動かします。当社の「サーボパック」
は,ちょうどこの「サーボ増幅器」に相当します。
J
「上位装置」
「サーボ増幅器」に,「位置または速度」を目標値として指令する装置を指します。
「速度」を指令する場合は,「位置」のフィードバック信号を受け取って,「位置制御
ループ」を「上位装置」側で組む場合があります。この場合の代表的な「上位装置」
に,当社の「PROGIC-8」があります。
「比例・積分制御(PI制御)」
z
「P」は「比例 = PROPORTIONAL」の,「I」は「積分 = INTEGRAL」のイニシャルを取った用語が
「PI制御」です。すなわち「比例・積分制御」です。普通に使用される「比例制御」に対して「PI制
御」は,「位置または速度」の制御精度が良くなります。
z「PROGIC-8
当社のプログラマブル・マシンコントローラです。最大8軸の速
度制御用「サーボ増幅器」と組み合わせて,「位置制御」を行う
ことができる装置です。プログラマブルコントローラの機能も装
備しています。
」
1-9
Page 23
ACサーボを初めて扱う方
1.1.3 Σシリーズサーボの特長
1
1.1.3
Σシリーズサーボの特長
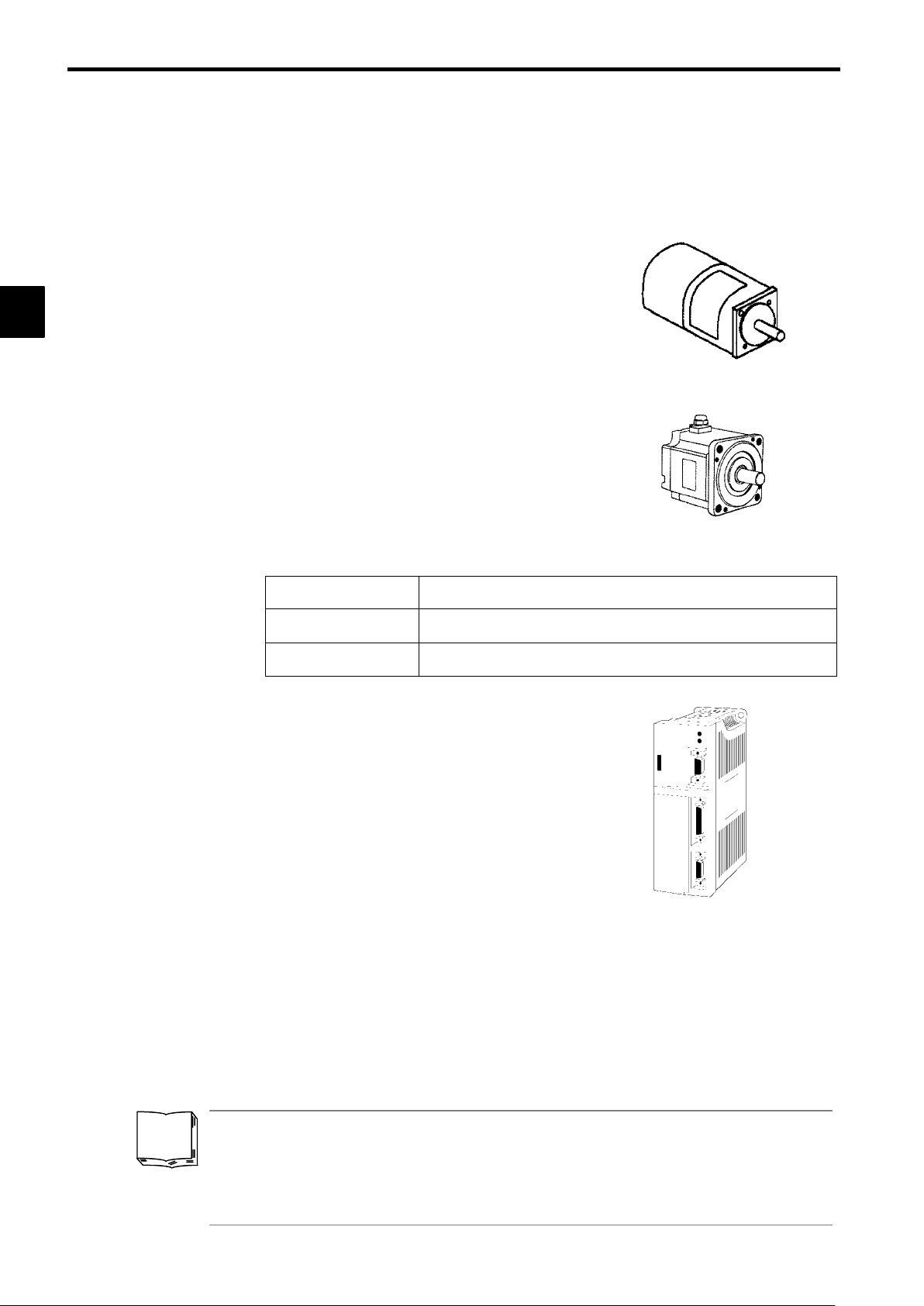
「SGM(SGMP)形サーボモータ」は,「同期電動機タイプ」のサーボモータで,その主な
特長は,以下のとおりです。
体積比で1/3,質量比でも1/3の小ささです(当社
比)。とにかく,コンパクトさを狙ったサーボ
モータです。マシンをすっきり まと める のに 役
立ちます。
サーボ性能( = パワーレート)は 3倍になりま
した(当社比)。3倍に向上した「定格パワー
レート(kW/s)」のおかげで,どんな用途にも
使えます。
30Wから750Wまでラインナップしています。
電源電圧 定格出力
SGM形
SGMP形
AC 100 V
AC 200 V用 30 W,50 W,100 W,200 W,400 W,750 W
SGDA
「
用
30 W,50 W,100 W
形サーボパック」には,用途別に使い
,
200 W,300 W
やすくまとめた,次の二つのモデルがあります。
速度・トルク制御用
SGDA
-
□□□
S
形「速度」または「トルク」を
指令入力とするタイプです。具体的には,「アナ
ログ電圧」を指令入力として与えます。
位置制御用:SGDA-□□□P形
「位置」を指令入力とするタイ プで す。 具体 的
には,「パルス列」を位置の指令入力として与え
ます。
用語?
「定格パワーレート(
z
サーボモータの応答性能を表す定数です。「定格トルク」の二乗を「モータイナーシャ」で割った値で
す。1秒間に,何ワットの出力を出せるサーボモータかを意味します。従って,この値が大きいほど,
良いサーボモータと言えます。
kW/s
)」
1-10
Page 24
1.1 ACサーボの基礎知識
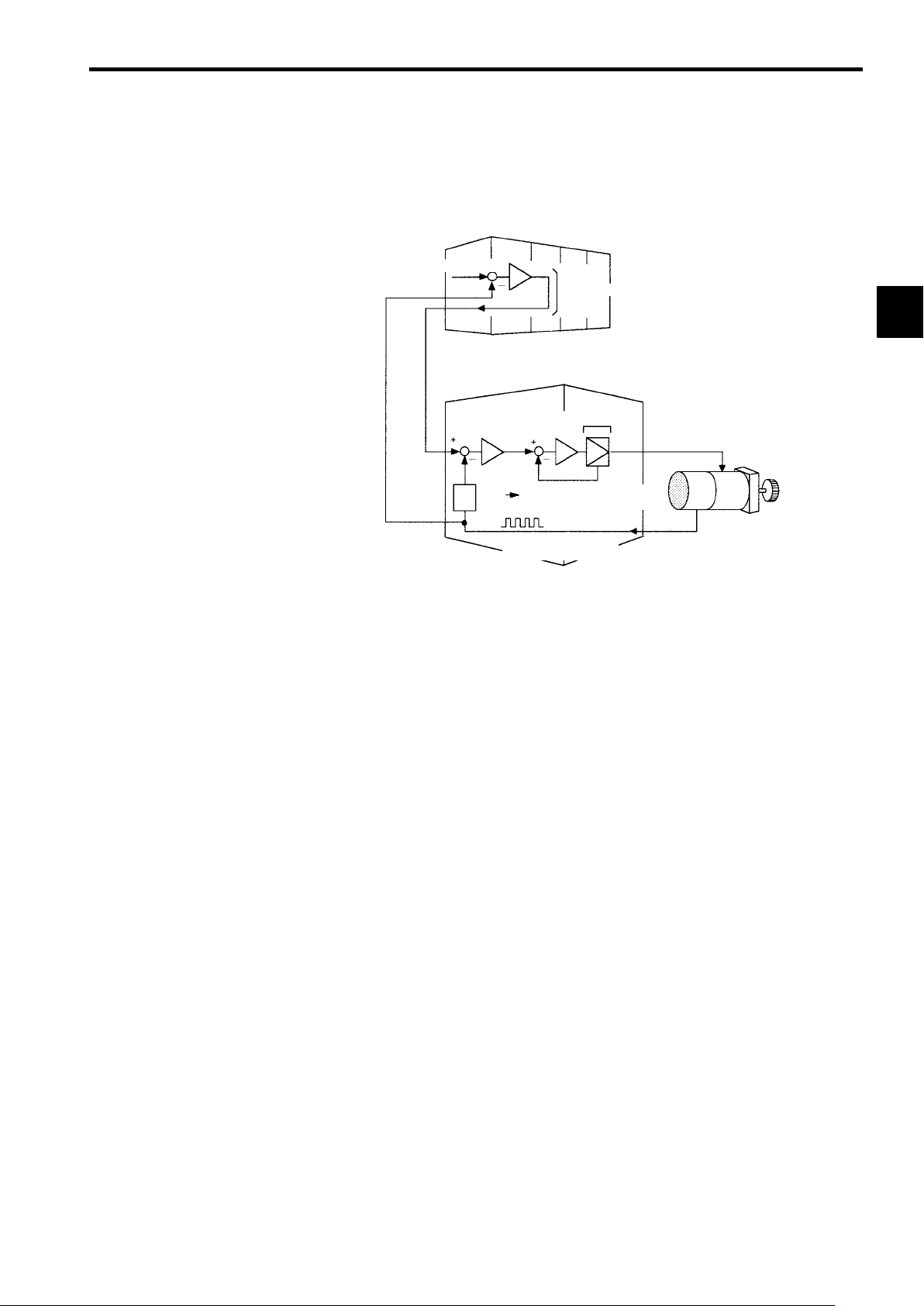
「速度・トルク制御用」のサーボパックの最も標準的な使い方は,下図のとおりです。
「速度・トルク制御用」サーボパックの使い方(速度制御)
上位装置
位置の指令
位置制御ループ
1
位置の
フィード
バック
(アナログ
電圧)
速度の指令
位置 速度
速度・トルク制御用
サーボパック
パワー
増幅器
トルク(電流)
変換
位置フィードバック
フィードバック
パルス列
サーボモータ
エンコーダ
上図のように,「上位装置」側で「位置制御ループ」を組みます。すなわち,「位置の指
令」と「位置のフィードバック」との比較・制御の処理を行った出力を,「速度の指
令」としてサーボパックに与えます。
こうすることにより,サーボメカニズムの目的に合った制御を,「上位装置」側で自由
に行うことができます。サーボパックは,「速度制御ループ」以降の制御を引き受けま
す。
このための,代表的な「上位装置」として,当社の制御装置「プログラマブル・マシ
ンコントローラ:PROGIC-8」があります。
1-11
Page 25
1
ACサーボを初めて扱う方
1.1.3 Σシリーズサーボの特長
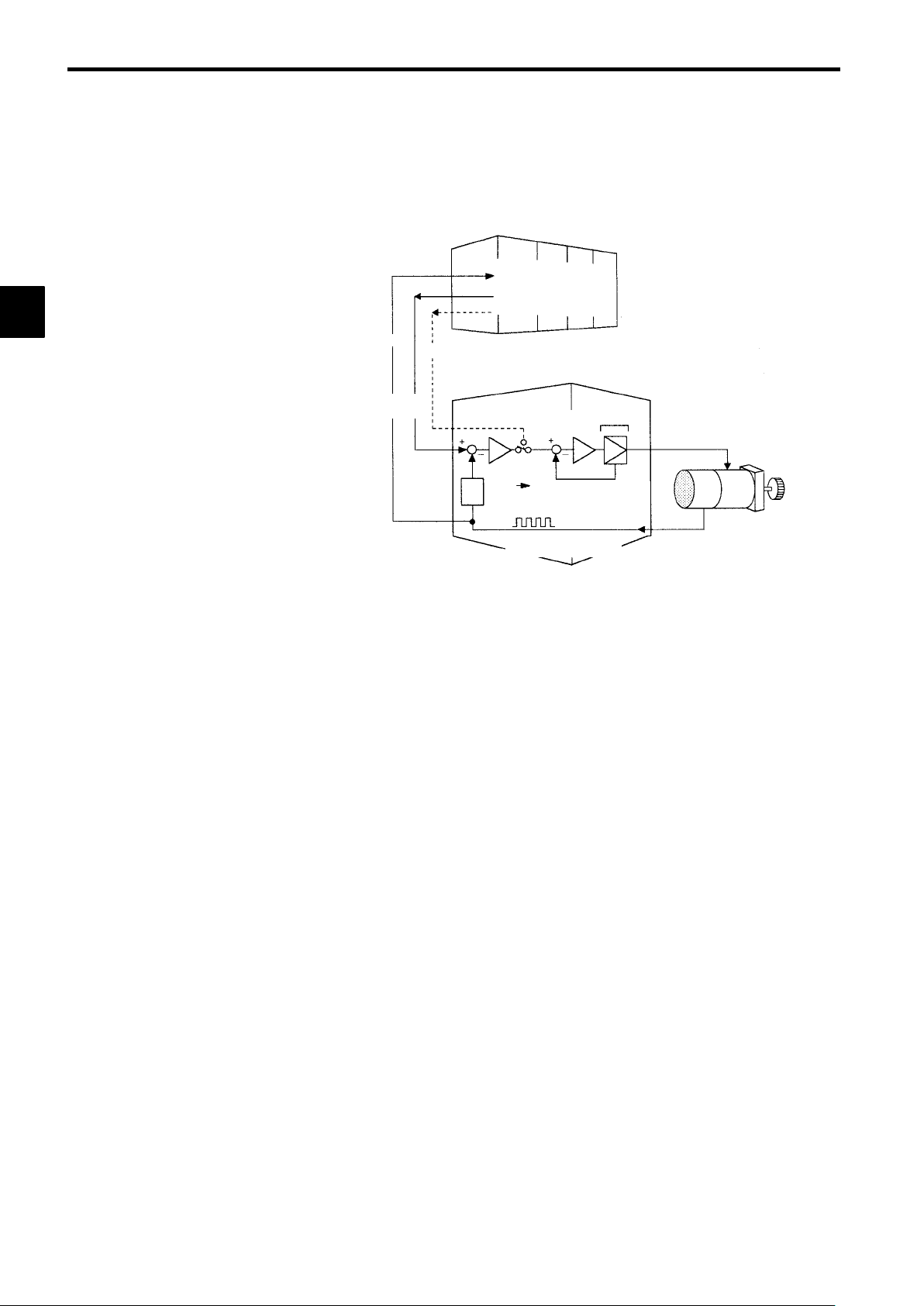
また,「速度・トルク制御用」のサーボパックは,次のような「トルク制御」ができます。
「速度・トルク制御用」サーボパックの使い方(トルク制御)
上位装置
位置の監視に
位置の情報
速度の指令
トルクの指令
(アナログ
電圧)
(アナログ電圧)
位置 速度
変換
位置フィードバック エンコーダ
速度・トルク制御用
サーボパック
パワー
増幅器
トルク(電流)
フィードバック
パルス列
サーボモータ
サーボパックの「ユーザー定数」を切り替えることにより,次のいずれかの使い方が
できます。
D 「トルクの指令」を与えて「サーボモータ」をトルク制御する。
(トルク制御 I )
D 「トルクの指令」と「速度の指令」を切り替えながら運転する。
(トルク制御 II)
「上位装置」は,「トルクの指令」または「速度の指令」を与えて,サーボパックをコ
ントロールします。また,「上位装置」では,位置の情報としての「パルス列」をサー
ボパックから受け取って,「位置の監視」ができます。
1-12
Page 26
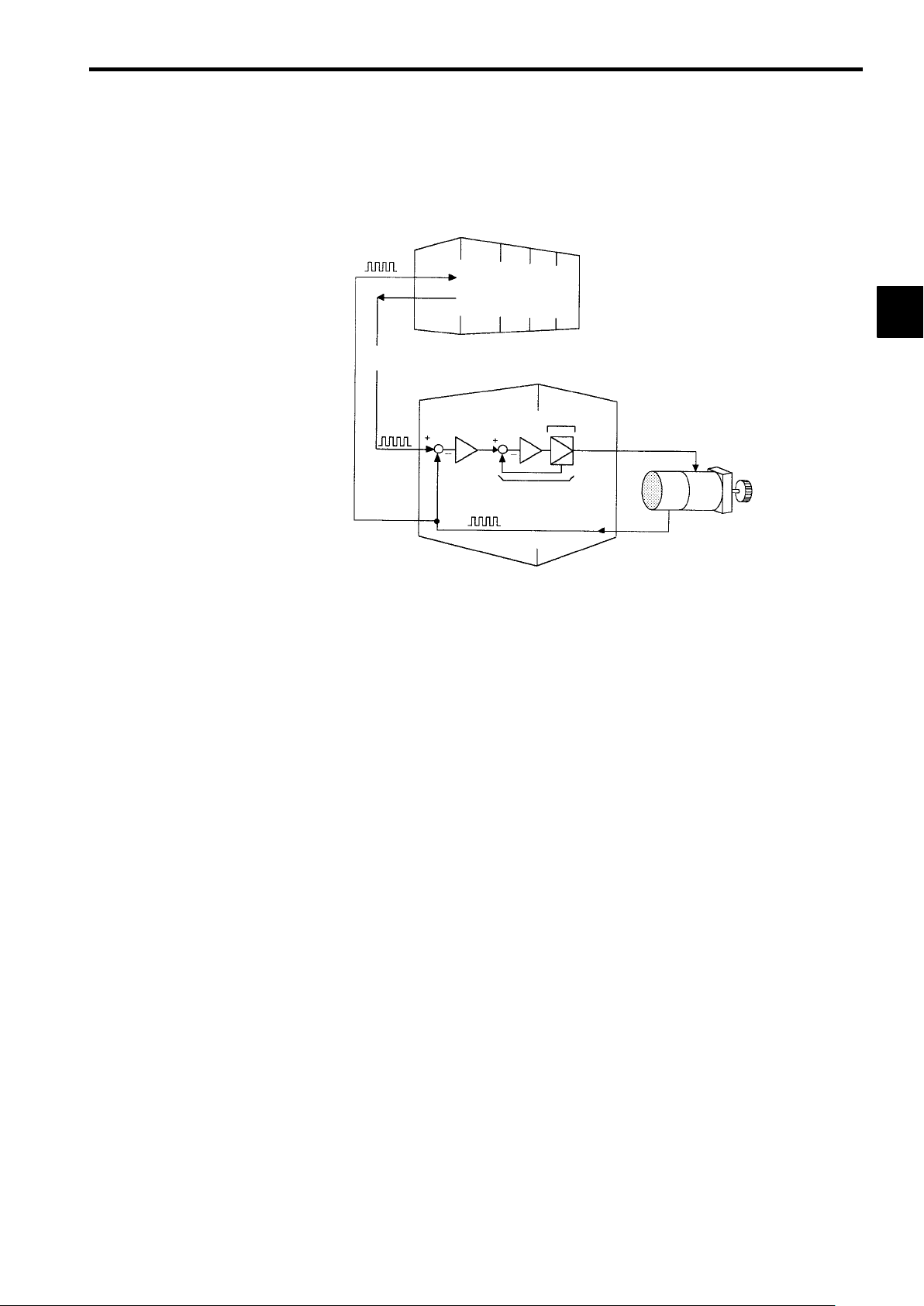
「位置制御用」のサーボパックは,次のような使い方ができます。
「位置制御用」サーボパックの使い方(位置制御)
上位装置
位置の監視に
位置の指令
位置制御用サーボパック
位置の情報
パルス列
速度,電流ループ
位置フィードバック
パワー
増幅器
サーボモータ
パルス列
エンコーダ
1.1 ACサーボの基礎知識
1
「上位装置」から,「位置の指令」として「パルス列」をサーボパックに与えて,位置
決めや,補間運転を行うことができます。すなわち,このタイプのサーボパックは,
「位置制御ループ」を含んでいます。
指令する「パルス列」として,次のいずれかを,「ユーザー定数」を使って選択できま
す。
D 符号とパルス列
D 90°位相差 二相パルス列
D 正転パルス列と逆転パルス列
「上位装置」では,位置の情報としての「パルス 列」をサーボパックか ら受け取っ
て,「位置の監視」ができます。
サーボパックの「ユーザー定数」を,「ディジタルオペレータ」を使って設定すること
により,
D 装備している機能を「オン/オフ」する。
D 機能に必要な定数を設定する。
ことができます。
作りたい「サーボシステム」に合わせて「ユーザー定数」を設定してください。
1-13
Page 27

2
章
Σシリーズの使い方(基本編)
この章は,Σシリーズの現品を受け取った方に,まずしていただき
たいことについて述べています。そして,Σシリーズの最も基本的
な,接続と運転の仕方について説明しています。サーボの初心者も
ベテランも,必ず目を通してください。
2.1 注意していただきたいこと 2 - 2............
2.1.1 ご使用の際に注意していただきたいこと 2 - 2......
2.2 取付けに当たって 2 - 4....................
2.2.1 現品到着時の確認 2 - 4.........................
2.2.2 サーボモータの取付け 2 - 5.....................
2.2.3 サーボパックの取付け 2 - 8.....................
2.2.4 電力損失 2 - 10.................................
2.3 接続・配線をする 2 - 11....................
2.3.1 各部品との接続の仕方 2 - 11.....................
2
2.3.2 主回路の配線と電源投入シーケンス 2 - 14..........
2.3.3 入出力信号の接続例 2 - 16.......................
2.4 試運転をしてみよう 2-23..................
2.4.1 試運転のステップ 2 - 23.........................
2.4.2 ステップ1:モータ単体での試運転 2 - 25..........
2.4.3 ステップ2:モータを機械に接続して行う試運転 2 - 30
2.4.4 試運転時の補足事項 2 - 31.......................
2.4.5 最低限のユーザー定数と入力信号 2 - 33............
2-1
Page 28
Σシリーズの使い方(基本編)
2.1.1 ご使用の際に注意していただきたいこと
2
2.1
注意していただきたいこと
この節では,Σシリーズを使用するに当たって,お客様に特に守っていただきたい事項に
ついて説明します。
2.1.1 ご使用の際に注意していただきたいこと
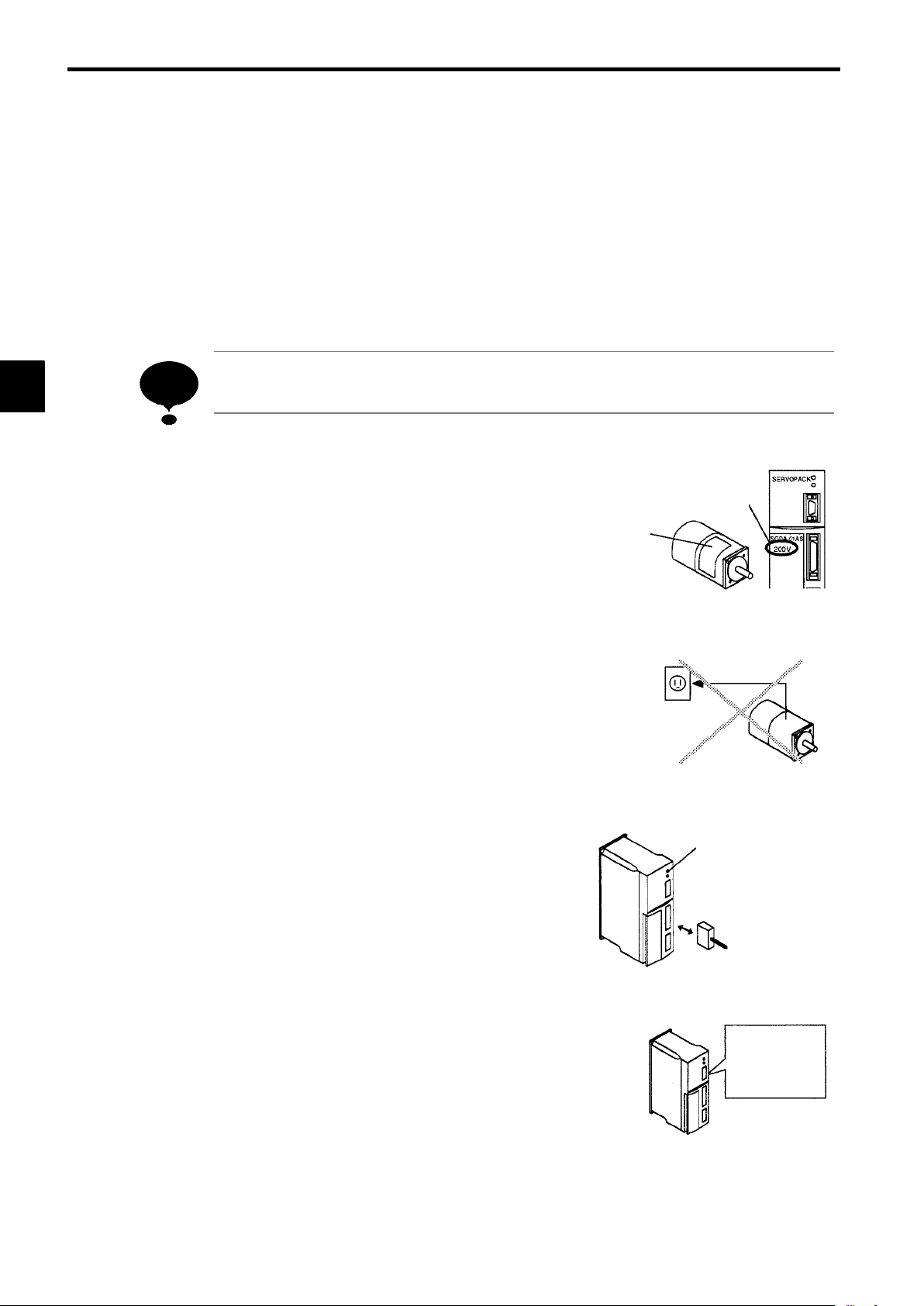
重要
安全に使用してしていただくために,次のことは必ず守ってください。
D 電源電圧は100 V用と200 V用があります
サーボパック,サーボモータと もに ,そ れぞ れ
100 V用と200 V用があります。正しい電圧でご
使用ください。
電圧表示
形式NP
SGM-01A312
A:200 V用
B:100 V用
D SGMサーボモータは必ずSGDAサーボパックと組み合わせてご使用ください
SGMサーボモータは,SGDAサーボパックでな
直接接続する
いと運転できません。直接,商 用電 源を つな ぐ
ことは絶対に避けてください。(モータが壊れま
す。)
200 V電源
100 V電源
壊れます!
D 通電中の配線変更はしないでください
コネクタの抜き差しは,電源をオフしてから
消灯
行ってください。ただし,ディ ジタ ルオ ペレ ー
タ(JUSP-OP02A-1, JUSP- OP03A)は除きま
す。
電源をオフしてか
らコネクタを抜き
差しする。
D 電源を切っても内部に電気がたまっています
電源を切っても,サーボパック 内部 のコ ンデ ン
サに電気がたまっています。感 電防 止の ため ,
点検作業は電源オフ後,5分以上たってから行っ
危険!
内部のコンデンサ
に電気がたまって
います。
てください。
2-2
5分待つ
Page 29
2.1 注意していただきたいこと
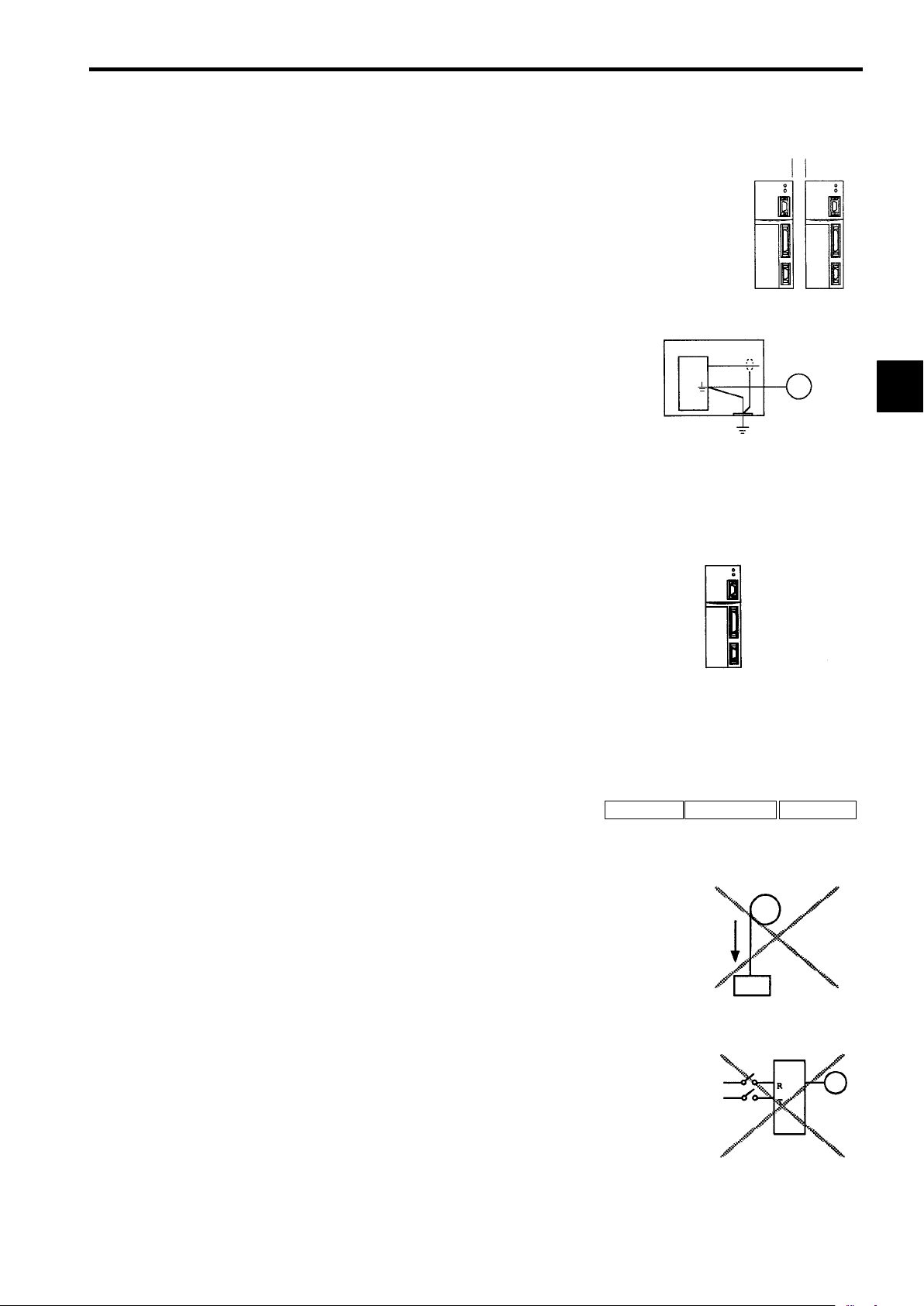
D 設置は決められた方法で行ってください
サーボパックは熱を発生します 。放 熱に 十分 に
注意して設置してください。また,結露,振
動,衝撃にご注意ください。
D ノイズ処理,接地の処理をしっかり行ってください
信号線にノイズが乗ると振動や 動作 不良 が起 こ
ります。
D 強電線と弱電線は分離してください。
D 配線は極力短くしてください。
D サーボモータ,サーボパックの設置は一点
接地で第3種接地以上としてください。
D モータ回路に電源入力用ラインフィルタを
使用することは絶対に避けてください。
D 耐電圧試験は以下の方法で行ってください
D 電圧 AC 1500 Vrms 1分間
D 遮断電流 20 mA
周囲温度:0〜55℃
外箱
サーボパック
信号線
すき間をあける
10 mm
サーボモータ
2
第3種接地
耐電圧試験
左記の条件で行う
D 周波数 50/60 Hz
D 電圧印加点 R,T端子とFG端子間(RとT
端子間は確実に接続してください)
D 漏電ブレーカは高速形を使用してください
漏電ブレーカを設置する場合は 高速 形, また は
インバータ用を指定ください。 時延 形は 使用 で
きません。
D マイナス負荷の連続運転はできません
モータが負荷から回され,これを回生制動ブ
レーキをかけながら連続運転す るこ とは でき ま
せん。サーボパックの回生制動 能力 は, モー タ
の停止時間程度の短時間定格仕 様に なっ てい ま
す。
D 電源のオン/オフでの運転はできません
電源のオン/オフを頻繁に行う と内 部の 回路 素
子の劣化を招きます。モータの 運転 /停 止は ,
指令信号で行ってください。
漏電ブレーカ
○×
高速形 インバータ用 時延形
○
サーボモータ
連続的に回生制動を
かける
サーボパック
電源
2-3
電源のオン/オフで
運転/停止を行う
Page 30
Σシリーズの使い方(基本編)
2.2.1現品到着時の確認
2
2.2
2.2.1
取付けに当たって
この節では,Σシリーズが到着したときの現品の確認と,それを正規に取り付ける際の注
意事項について説明します。
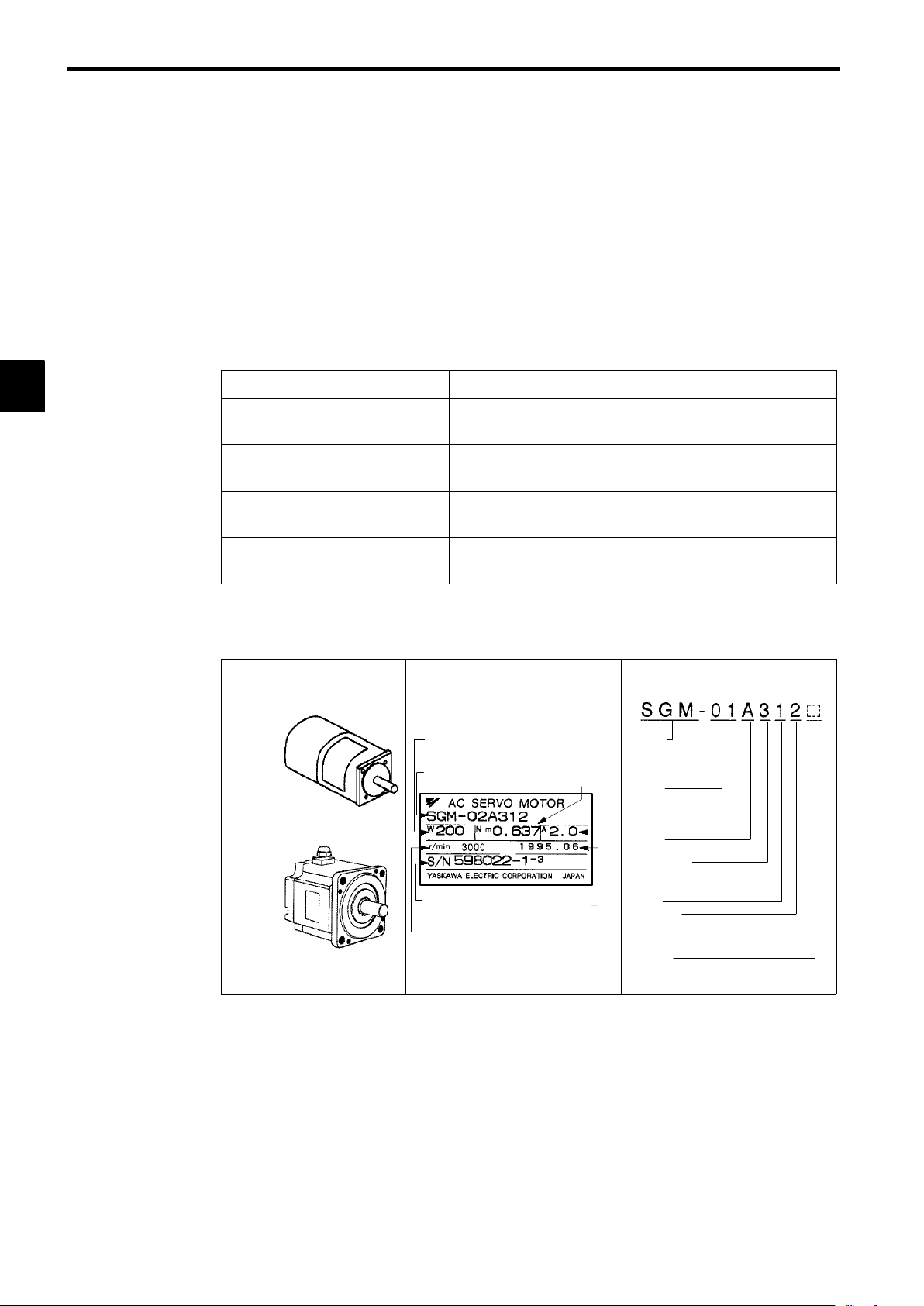
現品到着時の確認
Σシリーズの現品が,お手元に届きましたら,次の確認と点検を行ってください。
確認・点検項目 備考
現品はご注文の品に相違ありませ
んか?
モータの回転軸は,スムーズに回
りますか?
破損した個所がありませんか? 全体の外観を見て,輸送などによる傷がないかを点検してく
ねじなど,締め付け部にゆるみは
ありませんか?
サーボモータ,サーボパックのネームプレートの「形式」欄
でご確認ください。(下表を参照)
手で回して軽く回ればOKです。ただし,「ブレーキ付き」の
場合は回りません。
ださい。
必要により,ドライバなどでチェックしてください。
以上の項目に不具合な点がありましたら,直ちに,ご購入いただいた代理店または,当社
の営業所へご連絡ください。
外観 ネームプレートの内容 形式
サーボ
モータ
Σシリーズ
SGM形サーボモータ
Σシリーズ
SGMP形サーボモータ
定格出力
モータ形式
製造番号
定格回転速度
定格出力電流
定格出力トルク
製造年月
Σシリーズ
SGM: SGM形
サーボモータ
SGMP:SGMP形
サーボモータ
定格出力
A3:30 W A5:50 W
01:100 W 02:200 W
03:300 W 04:400 W
08:750 W
電源電圧
A:200 V B:100 V
エンコーダ仕様
3: 2048 P/R
インクリメンタルエンコーダ
W: 12ビット 絶対値エンコーダ
設計順位
シャフト仕様
2:ストレート,キーなし
4:ストレート,キー付き
6:ストレート,キー付き,軸端ねじ穴付き
オプション
B:ブレーキ付き S:オイルシール付きD:
ブレーキ オイルシール付き
P:防滴処理
2-4
Page 31

サーボ
パック
外観 ネームプレートの内容 形式
サーボパック形式
Σシリーズ
SGDA 形サーボパック
定格出力
A3:30 W A5:50 W
01:100 W 02:200 W
03:300 W 04:400 W
08:750 W
電源電圧
A:200 V B :100 V
モデル
S:速度,トルク制御用
P:位置制御用
出荷時適用モータ
なし: SGM形サーボモータ
P: SGMP形サーボモータ
Σシリーズ
SGDA 形サーボパック
製造番号
適用モータ容量
適用電源
2.2
取付けに当たって
2
2.2.2
サーボモータの取付け
サーボモータ「
けても構いません。しかし,「取付けの方法」や「取付けの場所」が悪いと,モータの寿命
が短くなったり,思わぬ事故の原因になります。次の注意を守って,正しく取り付けてく
ださい。
J
取付け前にしていただくこと
軸端部には,「さび止め塗料」が塗ってあります。「シンナー」を布(ウエス)にしみこ
ませて,この塗料をきれいにふき取ってください。
重要
その際,ほかの部分に,シンナーを付けないよう,ご注意ください。
SGM
形」および「
SGMP
形」は,水平方向,垂直方向のいずれに取り付
さび止め塗料
J
保存の際のご注意
通電せず,保存する場合は,下記の保存温度を守ってください。
• 温度が「−20〜+60℃」の範囲の所
2-5
Page 32

2
Σシリーズの使い方(基本編)
2.2.2サーボモータの取付け
J
取付け場所の注意
サーボモータ「SGM形」および「SGMP形」は,「一般の屋内」での使用を対象として
います。従って,次のような取付け環境でご使用願います。
また,水滴または油滴がかかる場所で使用する場合は,水滴または油滴よけのカバー
を取り付けるなどの対策を行ってください。
J
心出し
相手機械との結合に当たって,サーボモータと相手機械の軸心が一直線になるように
カップリングで結合してください。下図の「心出し精度」内に入るように取り付けま
す。
• 屋内で,腐食性または爆発性のガスのない所
• 風通しがよく,ほこり,ごみや湿気のない所
• 周囲温度が「0〜40℃」の範囲の所
• 湿度は「20〜80%RH」で,結露しない所
• 点検や,清掃のしやすい所
全周4個所測定して最大,最小の差が3/100mm以下
(カップリング共回し)
重要
用語?
全周4個所測定して最大,最小の差が3/100mm以下
(カップリング共回し)
心出しが不十分ですと,振動を起こし,軸受を傷めるおそれがあります。
軸端にかかる衝撃は,10G,2回以内に押さえてください。
運転中に,サーボモータの軸端にかかる「スラスト荷重,ラジアル荷重」は,次ペー
ジの表の許容値に入るように,機械的な設計を行ってください。
「スラスト荷重,ラジアル荷重」
z
①スラスト荷重:軸心に平行な方向にかかる軸端の荷重を言います。
②ラジアル荷重:軸心に直角な方向にかかる軸端の荷重を言います。
モータ
②
①
2-6
軸端
Page 33

• インクリメンタルエンコーダ付きの場合
LR
LR
2.2 取付けに当たって
モータ形式 許容ラジアル荷重
Fr〔N (kgf )〕
SGM-A3 68 (7) 54 (5.5) 20
SGM-A5 68 ( 7 ) 54 (5.5) 20
SGM-01 78 (8) 54 (5.5) 20
SGM-02 245 (25) 74 (7.5) 25
SGM-03 245 (25) 74 (7.5) 25
SGM-04 245 (25) 74 (7.5) 25
SGM-08 392 (40) 147 (15) 35
SGMP-01 78 (8) 49 (5) 20
SGMP-02 245 (25) 68 (7) 25
SGMP-03 245 (25) 68 (7) 25
SGMP-04 245 (25) 68 (7) 25
SGMP-08 392 (40) 147 (15) 35
許容スラスト荷重
Fs〔N (kgf )〕
• 絶対値エンコーダ付きの場合
LR (mm) 参考図
2
モータ形式 許容ラジアル荷重
Fr〔N (kgf )〕
SGM-A3 49 (5) 19 (2) 20
SGM-A5 68 (7) 19 (2) 20
SGM-01 68 (7) 19 (2) 20
SGM-02 196 (20) 49 (5) 25
SGM-03 196 (20) 68 (7) 25
SGM-04 196 (20) 68 (7) 25
SGM-08 343 (35) 98 (10) 35
SGMP-01 78 (8) 49 (5) 20
SGMP-02 245 (25) 49 (5) 25
SGMP-03 245 (25) 49 (5) 25
SGMP-04 245 (25) 49 (5) 25
SGMP-08 392 (40) 49 (5) 35
許容スラスト荷重
Fs〔N (kgf )〕
LR (mm) 参考図
(注) 上記ラジアル荷重,スラスト荷重は,モータトルクから発生する荷重と,外部
から軸に加えられる荷重の和の限界値です。
2-7
Page 34

Σシリーズの使い方(基本編)
2.2.3サーボパックの取付け
2
2.2.3
サーボパックの取付け
Σシリーズ・サーボパック「SGDA形」はブッ
ク形をしたコンパクトなサーボ コン トロ ーラ で
す。取り付け方法を誤まると, 故障 の原 因と な
りますので,以下の取付け上の 注意 事項 に従 っ
てください。
J
保存の際のご注意
通電せず,保存する場合は,下 記の 保存 温度 を
守ってください。
• 温度が「−20〜+85℃」の範囲の所
J
取り付け場所の注意
取り付け場所について,一般的に注意していただくことは以下のとおりです。
ケース 取付け上の注意
制御盤内に収納する場合
SGDA形サーボパック
サーボパックの周辺部が,「55℃」以下となるように,制
御盤の大きさ,ユニットの配置および冷却の方法を設計
してください。
サーボパックの周辺部が,「55℃」以下となるように,発
発熱体が近くにある場合
震動源が近くにある場合
腐食性ガスがある場合
その他
J
取付けの方向は?
熱体からの幅射熱や,対流による温度上昇を抑えてくだ
さい。
振動がサーボパックに伝わらないよう,防振器具を介し
て取り付けてください。
防止の工夫をしてください。すぐには影響は出ません
が,接触器関連の機器の故障の原因になります。
高温・多湿の場所や,じんあい,鉄粉の多い雰囲気は,
避けてください。
図に示すように,垂直に「壁掛 け」 とな る方 向
に取り付けます。
自然対流方式で冷却を行います ので ,取 付け に
際しては,この方向を守ってください。
取付けは,3個所または4個所の「取付け穴」を
使用して,取付け面に,しっか り固 定し てく だ
さい。
通風
2-8
Page 35

2.2 取付けに当たって
J
取り付け方法は?
複数のサーボパックを並べて取り付ける場合(以降,「列盤する場合」といいます)を
含めて,制御盤への取り付け方法の基準を以下に示します。
ファン
50 mm以上
50 mm以上
フ
ィ
ン
30 mm以上
ファン
10 mm以上
D サーボパックの正面(コネクタ類のある面)が,操作者に対面するように壁面に
垂直に取り付けてください。
D 自然対流による冷却ができるよう,サーボパックの周囲空間を,許せる限り十分
とります。
D 列盤する場合,上図に示すように,横方向の両側に「10 mm」以上ずつ,上下方
向は,「50 mm」以上ずつ,すき間を設けてください。また,サーボパックの上部
に撹拌用のファンを設けます。これはサーボパックの周辺温度が,局部的に高く
ならないように制御盤内の温度を均一にするために必要です。
D その他の制御盤内の環境条件として,次の仕様を守ってお使いください。
2
• サーボパックの周囲温度:0〜55℃
• 湿度:90%RH(相対湿度)以下
2
• 振動:0.5G(4.9 m/s
)
• 凍結,結露は発生しないようにしてください。
• 長期にわたって信頼性を保つためには,「45℃」以下の周囲温 度でお使いください。
2-9
Page 36

Σシリーズの使い方(基本編)
2.2.4電力損失
2
2.2.4
電力損失
サーボパックの電力損失を下記に示します。
定格出力時の電力損失
サーボパック形式 入力電源 容量
SGDA-A3A
SGDA-A5A□□ 50 0.60 18
SGDA-01A□□ 100 0.87 20
SGDA-02A□□ 200 2.0 35
SGDA-04A□□ 400 2.6 45
SGDA-08A□□ 750 4.4 60
SGDA-A3B□□
SGDA-A5B□□ 50 0.90 20
SGDA-01B□□ 100 2.2 30
SGDA-02B□□ 200 2.7 47
□□
AC 200 V
AC 100 V
出力電流
W
30 0.42 15
30 0.63 17
A (rms)
電力損失
W
SGDA-03B□□ 300 3.7 70
2-10
Page 37

2.3 接続・配線をする
この節では,Σシリーズと周辺機器との接続および,主回路の配線の代表例を示します。
また,主な上位装置との接続例も挙げていますので実作業にお役立てください。
2.3.1 各部品との接続の仕方
次ページにΣシリーズと周辺機器との標準的な接続例を示します。ここでは,どの部品を
どこへ接続するかがわかる程度の説明にとどめています。
2.3 接続・配線をする
2
2-11
Page 38

Σシリーズの使い方(基本編)
2.3.1
各部品との接続の仕方
・ACサーボドライブΣシリーズの標準的な接続を下図に示します。
配線用遮断器(MCCB)
電源ラインの保護のため
に使用します。過電流が
流れると回路をオフしま
す。
ディジタル
各種ユー ザー定 数の設定 ,運転指令,状態表
示,アラ ーム表 示を手元 で行います。パーソ
ナルコンピュータのほかに,2種類のタイプ
が選べます。
2
ノイズフィルタ
電源ラインからの外
来ノイズを防ぐため
に取り付けます。
LF-205A形(SGDA-A3A, A5B, 01A, 02A, A3B, A5B, 01B形用)
LF-210形(SGDA-04A, 02B形用)
LF-220形(SGDA-03B, 08A形用)
電磁接触器
サーボ電源をオン/オフ
します。サージサプレッ
サを付けて,使用してく
ださい。
HI-15E5形(30 A)
ブレーキ電源
サーボモータがブレーキ付き 仕様の場合に使用し
ます。
LPSE-2H01形(200 V入力)
LPDE-1H01形(100 V入力)
電源単相
または
単相
ブレー
キ制御
用
リレー
200 V
100 V
マウントタイプ(
サーボパックに直接,取り付けます。
JUSP-OP03A
形)
Σシリーズサーボパック
R
T
P
N
U
V
W
回生ユニット
負荷イナーシャが,
許容負荷イナーシャ
以内である場合は必
要ありません。
JUSP-RG08
JUSP-RG08C
形
形
ブレーキ付きの場合
に必要な配線です。
2 - 12
PG
用コネクタ
(
サーボパック側
*以下の部品をご注文のお客様は,PG用,モータ用コネクタキット
は不要です。
・両端コネクタ付きケーブル
・コネクタとアンプ端子付きケーブル
)
Page 39

2.3 接続・配線をする
オペレータ
ハンディタイプ(JUSP-OP02A-1形)
ハンディタイプのオペレータです。1mのケーブルを
付属しています。
1CN用
コネクタキット
(
DP9420007
1C N用ケーブ
形)
ル片側バラ出し
(1m)
(
DE9404859
形)
パーソナルコンピュータ
パーソナルコンピュータとサーボパックを
接続するケーブルを準備しています。
DE9405258
形(ケーブル長2m)
コネクタ端子台変換ユニット
(
JUSP-TA36P
端子台を使って,上位
装置へ接続できます。
形)
1CN用コネクタと
ケーブル0.5m付き
上位装置
サーボパックは,当社の上位装置だけではな
く,他社製品にも接続することができます。
指令形態は,アナログ入力,パルス列入力を
使用します。
PROGIC-8
PG用ケーブル
サーボモータのエンコーダとサーボパックを接続
するケーブルです。
エンコーダの種類に従い,二つの種類がありま
す。
インクリメンタルエンコーダ用(両端コネクタ付き)
S
3 m DP9320089-1
5 m DP9320089-2
10 m DP9320089-3
15 m DP9320089-4
20 m DP9320089-5
絶対値エンコーダ用(両端コネクタ付き)
S
3 m DP9320088-1
5 m DP9320088-2
10 m DP9320088-3
15 m DP9320088-4
20m DP9320088-5
なお,サーボパック側リードバラ出しタイプ,ケーブル線材のみの
納入もいたします。
2
PG用コネクタ
(モータ側)
モータ用コネクタ
Σシリーズサーボモータ
PG用コネクタキット
モータ側 サーボパック側
2CN
ケーブル線材のみ,ご購入のお客様は,このコネクタキットが必要
です。また,可動部に使う場合は,別途ロボット用ケーブルが必要
です。
モータ用ケーブル
サーボモータとサーボパックを接続するパワーケーブルです。
ブレーキ付き仕様の場合は,ブレーキの配線も兼ねています。
ブレーキなしの場合(コネクタとアンプ端子付き)
S
3 m DP9320081-1
5 m DP9320081-2
10 m DP9320081-3
15 m DP9320081-4
20 m DP9320081-5
ブレーキ付きの場合(コネクタとアンプ端子付き)
S
3 m DP9320083-1
5 m DP9320083-2
10 m DP9320083-3
15 m DP9320083-4
20 m DP9320083-5
なお,ケーブル線材のみの納入もいたします。
モータ用コネクタキット
モータ側モータ用コネクタ
ケーブル線材のみ,ご購入のお客様は,このコネクタキットが必要です。
2-13
Page 40

Σシリーズの使い方(基本編)
2.3.2
主回路の配線と電源投入シーケン
2.3.2 主回路の配線と電源投入シーケンス
Σシリーズの主回路の配線を行うときは,以下の代表的な配線例を参考にしてくださ
い。
2
単相
AC 200 V〜230 V
+ 10
–15
(
50/60 Hz
% ,
1MCCB
: 配線用遮断器
1FIL
: ノイズフィルタ
1MC
: コンタクタ
1Ry
: リレー
1SUP
: サージサプレッサ
1D
: フライホイールダイオード
)
AC 100 V
単相
1PL
用
AC100 V〜115V
:パトライト
+ 10
–15
(
50/60 Hz
% ,
サーボパック
)
主回路端子の名称とその概要は,以下のようになっています。
端子記号 名 称 概 要
R T
U V
電源入力端子
W
モータ接続端子
単相交流
U
モータ「青」端子を接続
アース端子 モータアース端子(緑)と接 続し,アースに落とします。
N
P
回生ユニット接続端子 回生ユニット使用時に,回生ユニットへ接続
* 100 V 用は単相交流100〜115 V
200〜230 V
とモータ「赤」端子,Vとモータ「白」端子,Wと
+ 10
%
,50/60 Hzです。
–15
+ 10
–15
%
,
50/60 Hz*
2 - 14
Page 41

2.3 接続・配線をする
SGDA
J
電源投入シーケンスを組むとき
D 「サーボアラーム」の信号が出力されたら,電源が「オフ」となるように電源投
入シーケンスを組んでください。(前ページの回路を参照。)
D また,電源投入押ボタンは2秒以上押し続けてください。サーボパックは,電源
を「オン」すると,最大約2秒間「サーボアラーム」信号を出力します。これ
は,サーボパック内部の初期設定のために必要です。
電源
「サーボアラーム(ALM)」出力信号
2
重要
電源を「オフ」しても,5分間は電源端子に触れないでください。サーボパック内に
S
高電圧が残っていることがあります。
頻繁に電源をオン/オフしないでください。サーボパック「
S
コンデンサがあるため,電源を「オン」したときに,大きな充電電流(充電時間
秒)が流れます。そのため,頻繁に電源をオン/オフしますと,サーボパック内部
の主電源素子の劣化を招き,思わぬトラブルを生じることがあります。
サーボパック「
S
停アラーム」となる場合があります。下表の時間を過ぎてから再度,電源を「オン」
するようにしてください。
機種
SGDA-
形」は,電源を「オフ」したあとすぐに「オン」しますと,「瞬
SG DA
単相
AC 200 V
A3A□,A5A
01A□,02A□,04A
□
08A
□
□
単相
AC 100 V
□
A3B
A5B□,01B□,02B□10
□
03B
形」は,電源部に
SGD A
電源電圧残留時間
秒
6
秒
秒
15
0 . 2
2-15
Page 42

Σシリーズの使い方(基本編)
2.3.3入出力信号の接続例
2
2.3.3
重要
入出力信号の接続例
上位装置との代表的な接続例を示します。ここに示していない上位装置との接続も
主な
もちろん可能です。接続例を参考にしながらそれぞれの上位装置の技術資料に従って接
続してください。
「 SGD A形」サーボパックに関連する信号のみを示します。その他の信号など,詳細な内容につき
ましては,それぞれの技術資料を参照ください。
J
PROGIC-8との接続例
SGDA-□□□S
速度・トルク
サーボパック:速度・トルク制御用の場合
(株) 安川電機製
MCユニット
サーボパック
アキ
(予約)
FG
(コネクタフレーム)
*
1 SV2〜SV4もピン番号は同一です。
2 サーボパックのユーザー定数は標準設定のままご使用ください。
*
2-16
Page 43

SGDA-
J
GL
シリーズ 位置決めモジュール
サーボパック:速度・トルク制御用の場合
□□□
S
B2833
との接続例
2.3
接続・配線をする
速度・トルク
35
(株)
安川電機製
サーボ正常
減速LS
サーボパック
D/A出力
2
*1
異常
1 電源投入時,約2秒間出力されるのでシーケンス上注意。また,リレー1Ryにてサー
*
ボパックへの主回路電源供給を停止させる。
2-17
Page 44

Σシリーズの使い方(基本編)
2.3.3入出力信号の接続例
J
GL
シリーズ 位置決めモジュール
B2813
との接続例
2
SGDA-
位置
□□□
サーボパック:位置制御用の場合
P
(株)安川電機製
サーボ正常
35
減速LS
サーボパック
*2
異常
1 電源投入時,約2秒間出力されるのでシーケンス上注意。また,リレー1Ryにてサー
*
ボパックへの主回路電源供給を停止させる。
2 パラメータCn-02を以下のように変更する。
*
ビットNo.
ビットNo.4
ビットNo.5
3 CLR信号は1kΩの抵抗でプルアップしてください。
*
パラメータCn
ビットNo.
3=1
0
=
0
=
-02を以下のように変更する。
A=1
2-18
Page 45

SGDA-
J
OMRON
D サーボパック:速度・トルク制御用の場合
□□□
S
製 位置制御ユニット
C500-NC222
2.3 接続・配線をする
との接続例
速度・トルク
C500-NC222
(オムロン製)
I/O用電源
X軸(Y軸)
位置決め中止にてON
近点検出にてON
サーボパック
2
* 電源投入時,約
2秒間出力されるのでシーケンス上注意。また,リレー1R y にて サー
ボパックへの主回路電源供給を停止させる。
注
(
) オムロン製シーケンサ:C500-NC222と安川電機製サーボパック:SG
□□□Sに関する信号のみを記載しています。
A-
D
2-19
Page 46

Σシリーズの使い方(基本編)
2.3.3入手つy録信号の接続例
J
OMRON製 位置制御ユニットC500-NC11 2との接続例
2
SGDA-□□□P
位置
サーボパック:位置制御用の場合
C500-NC112
(オムロン製)
CW
界
CCW
界
非常停
外部割込み
止
原点近傍
ローカル
パルス出力
限
限
原点
レディ
CW+CCW
方向出力
CW
I/O用電源
+24
v
近点検出にて
(
11A
11B
12A
12B
7A
7B
+24V
O N)
+5v
O24v
サーボパック
外部電源
+24V
1 電源投入時,約2秒間出力されるのでシーケンス上注意。また,リレー1Ryにてサー
*
ボパックへの主回路電源供給を停止させる。
2 パラメータCn-02を以下のように変更する。
*
ビットNo.
ビットNo.4
ビットNo.5
オムロン製シーケンサ:C500-NC112と安川電機製サーボパック:SG
(注)
3=1
=
=
0
0
A-
D
□□□Pに関する信号のみを記載しています。
2-20
Page 47

2.3
接続・配線をする
SGDA-□□□S
速度・トルク
J
三菱電機製 位置決めユニット
AD72
サーボパック:速度・位置制御用の場合
I/O用電源
AD72
(三菱電機製)
速度指令
位置決め中止にてON
近点検出にてON
との接続例
サーボパック
2
1 電源投入時,約2秒間出されるのでシーケンス上注意。また,このリレー1Ryにて
*
サーボパックへの電源供給を停止させる。
2X軸,Y軸ともにピン番号は同一である。
*
注
(
) 三菱製シーケンサ:AD72と安川電機製サーボパック:SGDA-□□□Sに関す
る信号のみを記載しています。
2-21
Page 48

Σシリーズの使い方(基本編)
2.3.3
入出力信号の接続例
2
SGDA-□□□P
位置
J
三菱電機製 位置決めユニット
サーボパック:位置制御用の場合
用電源
I/O
タイプ
AD71(B
(三菱電機製)
)
軸)
X軸(Y
AD71(Bタイプ)との接続例
サーボパック
近点検出にて
位置決め中止にて
ON
ON
19
024V
外部電源
+24V
1 電源投入時,約2秒間出力されるのでシーケンス上注意。また,このリレー1Ryに
*
てサーボパックへ の電源供給を停止させる。
2 安川コントロ・ ル(株)製
*
注
(
) 三菱製シーケンサ:AD71(Bタイプ)と安川電機製サーボパック:SG
A-
D
□□□Pに関する信号のみを記載しています。
2-22
Page 49

2.4 試運転をしてみよう
この節では,試運転を二つのステップに分けて,わかりやすく説明しています。ステッ
1による試運転を十分に行ってから,ステップ2へ進むようにしてください。
プ
2.4.1 試運転のステップ
配線が終わったら,いよいよ試運転に入ります。
2.4 試運転をしてみよう
重要
一般的に,サーボドライブの試運転は難しいと言われていますが,以下の二つのステッ
プを順番に行えば,安全に確実に試運転を行うことができます。
予期せぬ事故を避けるため,始めにサーボモータを「無負荷状態」(カップリングやベルトなどを
切り離した,モータ単体)にして,試運転を行ってください。始めから機械に接続した状態で,
サーボモータを動かさないでください。
ここでは試運転を「ステップ1」と「ステップ2」に分けています。
「ステップ1」による試運転が完了してから「ステップ2」へ進むようにしてください。
各ステップの目的を,次ページに示します。
2
2-23
Page 50

2
Σシリーズの使い方(基本編)
2.4.1 試運転のステップ
ステップ1:モータ単体での試運転・・・配線が正しく行われているかを確認する
配線の確認
ステップ2:機械とモータを組み合わせた試運転・・機械の特性に合わせてサーボ
ディジタルオペ
レータからの運
転
機械に接続しない
モータのシャフトを機械に接続しないで試運転を行い
ます。
目的 • 電源回路配線の確認
• モータ配線の確認
• 入出力信号配線(1CN)の確認
内容 • 電源投入
• ディジタルオペレータからの運転
• 入出力信号(1CN)のモニタチェック
• 入出力信号を使った試運転
パックを調整する
機械に接続して試運転を行います。
オートチューニング速度調整
機械に接続する
目的 • オートチューニング操作を使って,機械
の特性に合わせる。
• 回転方向,速度など機械仕様への一致。
• 最終制御形態の確認。
内容
• オートチューニング
• ユーザー定数の調整
• ユーザー定数の記録
試運転終了
「ブレーキ付きモータ」をご使用 のお 客様は ,2.4.4「試運転時 の補 足事 項」の 中の ,「■
ブレーキ付きモータを使用する場合」に目を通してから,試運転を行うようにしてくだ
さい。
次ページから具体的に,試運転の操作手順を説明します。
2-24
Page 51

2.4 試運転をしてみよう
2.4.2
ステップ
「ステップ1」では,配線が正しく行われているかを確認します。サーボドライブの試運
転で,モータがうまく動かない場合,その原因のほとん どは,配線ミスによるもので
す。以下の手順に従って,モータ単体 での試 運転を 行って くださ い。な お,「ブレーキ付
きモータ」をご使用のお客様は,2.4.4「試運転時の補足事項」の中の,「■ブレーキ付き
モータを使用する場合」を参照してください。
1:モータ単体での試運転
ディジタルオペレータか
らの運転
2
配線の確認
機械に接続しない
重要
J
モータの固定
取付け穴を使って,サーボモー タを 固定 して く
ださい。回転時にモータが横転 する こと を防 ぐ
ためです。モータを機械に取り 付け て, カッ プ
サーボモータを固定する
取付け穴で固定する
シャフトには何
もつながない
(無負荷状態)
リング,ベルトなどを切り離す方法もありま
す。
J
配線の確認
1CNコネクタを外したのち,電源回路モータの
配線を確認する。
1CNコネクタ
を外す
1CNコネクタ
を外す
このとき1CNの入出力信号は使いません。混乱
を避けるため,外しておいてください。
絶対値エンコーダをご使用の場合は,バッテリのみ接続してください。また,絶対値エンコーダの
セットアップ(初期化)を行ってください。詳細は,3.8.5「絶対値エンコーダを使う」を参照し
てください。
J
アラーム信号回路を短絡する
電源
+24V0V
このリレーを強制的に
る
ONさせ
1CNコネクタを外した状態なのでアラ ーム信 号
により電源回路が遮断され,電 源が 入れ られ ま
せん。このため,一時的にアラ ーム 回路 を短 絡
します。
短絡する
1CNを外した
2-25
Page 52

Σシリーズの使い方(基本編)
2.4.2ステップ1:モータ単体での試運転
2
重要
J
電源を入れる
サーボパックへの電源を入れま す。 ディ ジタ ル
正常な表示
交互に表示
オペレータの表示が点灯します 。サ ーボ オフ 状
態のため,モータへは通電され ませ ん。 電源 が
正常に供給されると,ディジタ ルオ ペレ ータ に
アラーム時の表示例
付録 E「アラーム表
示一覧」
図のように表示されます。
これ以外のアラーム表示が出た場合は電源回路,モータ配線,エンコーダ配線に誤り
があります。電源をオフにしてから修正してください。
絶対値エンコーダを使用の場合
絶対値エンコーダを使用されている場合は,電源を入れた後,次の操作を行ってください。
1. Cn-01
2. Cn-11
3. Cn-0A
一度電源をオフし,ディジタルオペレータの表示が消えるのを待ってから,再度電源をオンす
4.
のビットEを「1」にセットする。
(エンコーダパルス数)を「
(エンコーダパルス分周比)を「
る。
」にセットする。
1024
または
1024
以下」の値にする。
1024
J
ディジタルオペレータからの運転
ディジタルオペレータからの操 作で モー タを 動
かしてみます。モータが異常な く動 くこ とを 確
認ください。
操作方法は 4.2.2「ディジタルオペレータから
運転する」を参照ください。
J
信号線の接続
以下の手順で1CNコネクタを接続します。
1. 電源をオフする。
2. 一時的に行ったアラーム信号の短絡を外す。
3. 1CNコネクタを接続する。
4. 電源を再びオンする。
ディジタルオペレータから
の運転モード
このときアラームが発生した場合も
電源回路,モータ配線,エンコーダ
配線に問題があると考えられます。
電源をオフしてから…短絡を外す
1CNコネクタを
接続する
2-26
Page 53

2.4 試運転をしてみよう
J
入力信号の確認
モニタモードで入力信号の配線 をチ ェッ クし ま
す。操作方法は4.1.6「モニタモードでの操作」
内部ステータスのビット表示
(Un-05,Un-06)
Un-05の例
N-CL(1CN-12) P-CL(1CN-11)
を参照ください。
チェック方法接続した各信号を オン /オ フさ せ
てモニタのビット表示が変わる こと を確 認し ま
す。
入力信号 オン/オフ モニタビット表示
レベルまたは開
H
レベル
0V
オフ 消灯
オン 点灯
S-ON
(1CN-14)
P-CON
(1CN-17)
P-OT
(1CN-16)
N-OT
(1CN-17)
なお,以下の信号は正しく配線していないと,モ ータが回らない原因に なりますの
で,確実に配線してください。使用しない場合は ,必要に応じ短絡処理 してくださ
い。外部での短絡配線を省略したいときはメモリ スイッチで設定するこ ともできま
す。(3-4,3-75ページ参照)
P-OT 1CN-16 0V
N-OT 1CN-17 0V
でモータが正転可能になります。
でモータが逆転可能になります。
2
S-ON 1CN-14 0V
J
サーボオン(モータ通電)
でサーボオンされますが,ここではまだサーボオフ状態にしておい
てください。
以下の手順で「サーボオン」状態にします。
1. 指令が入力されていないことを 確認しま
す。
• 速度・トルク制御用(SGDA-□□□
S)の場合,V- REF (1CN-3),T-REF
(1CN-1)が0V
• 位置制御用(SGDA-□□□P)の場合
PULS (1CN-1),SIGN (1CN-3) が固定
2. 「サーボオン」信号を「オン」にする。
• 「S-ON (1CN-14)」を0Vにします。異
常がなければ,モータに通電されディ
ジタルオペレータの表示が右のように
なります。アラーム表示の場合は,付
録E「アラーム表示一覧」に従い処置
ください。
サーボパック
サーボオンさせる
サーボオン時の表示
サーボモータ
2-27
Page 54

Σシリーズの使い方(基本編)
2.4.2ステップ1:モータ単体での試運転
J
指令による運転
使用するサーボパックの制御により,手順が異なります。
2
SGDA-□□□S
速度・トルク
速度・トルク制御用(SGDA-□□□S)の場合
(標準設定の速度制御の場合に つい て説 明し ま
サーボパック
サーボモータ
す。)
1. 速度指令入力(V-REF,1CN-3)の電圧を
徐々に上げていきます。これで モータが
回転します。
指令電圧に比例
した速度で回転
します。
プログラマブルコントローラなど,上位装置で位置制御を行う場合には,直接速度指
令電圧を入れにくい場合があります。この場合も,動作を確実にするために,一度電
圧指令を入力することをおすすめします。
2. モニタモードを使って,以下 のチ ェッ クポ イン トを確 認し ます 。4.1.6「モニタ
モードでの操作」を参照ください。
Un-00
Un-01
実際のモータ回転速度
指令速度
• 指令速度が入っているか
• 設定どおりの回転速度か
• モータの回転速度と一致しているか
• 指令をなくすとモータが停止するか
3. 指令電圧として0Vを指令したのに ,モータが微小 速度で回転する 場合→4.2.4
「速度指令オフセットを自動調整 する 」を参 考に して, 指令 電圧 の補正 を行 っ
てください。
4. 回転速度,回転方向を変更する場 合は ,下記 のユ ーザー 定数 を参 考にし てく だ
さい。
Cn-03
Cn-02
ビット
速度指令調整ゲイン
える」を参照
逆回転モード
0
変える」を参照
3.1.1
「速度指令を与
3.2.1
「モータの回転方向を
2-28
Page 55

2.4 試運転をしてみよう
C
SGDA-□□□P
位置
位置制御用(SGDA-□□□P)の場合
1. ユーザー定数「Cn-02」の設定により,指令パルス形態を上位装置の出力形態に
合わせます。(ユーザー定数の設定方法は4-8ページ参照)
指令パルス形態の選択
ビット
n-02
ビット
ビット
ビット
(
3
4
5
D
2. 次に,上位装置から遅い速度の パルスを
入れて低速運転をします。
ページ参照)
3-19
上位装置
指令
パルス
サーボパック
3. モニタモードを使って以下のチ ェックポ
イントを確認します。(4-13ページ参
照)
Un-00
Un-07
Un-08
実際のモータ回転速度
指令パルスの速度表示
位置偏差量
サーボ
モータ
2
• 指令パルスが入っているか
• 設定どおりの回転速度か
• モータの回転速度と一致しているか
• 指令をなくすとモータが停止するか
4. 回転速度,回転方向などを変更す る場 合は, 下記 のユー ザー 定数 を参考 にし て
ください。
Cn-24
Cn-02
,
Cn-25
ビット
電子ギヤ比
照
0
逆回転モード
変える」を参照
「電子ギアを使う」を参
3.2.5
「モータの回転方向を
3.1.1
以上の操作でアラームが発生したり,動かなかったりした場合は,1CNの配線を
誤っているか,ユーザー定数の設定が,上位 装置の 仕様と 一致し ていな いことが 考
えられます。配線を確認するか,ユーザー定 数の設 定を見 直して から, もう一度 ス
テップ1の操作をやり直してください。
参照 付録E「アラーム表示一覧」
付録D「ユーザー定数一覧」....
以上で「ステップ1:モータ単体での試運転」が完了します。このほか,上位装置と
の調整などは,できる限りこのステップ1で,モータを機械に取り付ける前に行って
ください。
2-29
Page 56

Σシリーズの使い方(基本編)
2.4.3
ステップ2:モータを機械に接続して行う試運転
2.4.3 ステップ2:モータを機械に接続して行う試運転
「ステップ1」が終了 したら,モ ータを実際 に機械へ 接続して試 運転を行う ,「ステップ
2」へ進みます。「ステ ップ 2」では,機械の特性に合わせて,サーボパックを調整するこ
とが目的です。以下の手順に従って,確実に試運転を行ってください。
2
重要
・目的
SGDA
サーボパック
「ステップ2」に入る前に,不安がなくなるまでモータ単体での試験をしてください。モータと機
械を接続した状態での操作ミスは,機械の破損ばかりでなく,場合によっては人身事故に至りま
す。ユーザー定数,配線など,できる限り,最終形に近い状態で,モータ単体の試運転を行って
おいてください。
サーボモータ
機械に接続する
1. 電源が「オフ」であることを確認する
オートチューニング
1)
速度調整
2)
電源
サーボパック
サーボパックへの電源を「オフ 」にして
ください。
電源オフ
2. モータと機械を接続する
サーボモータを機械に取り付けます。
2.2.2「サーボモータの取付け」を参照し
て行ってください。
3. オートチューニングをする
サーボパックを機械の特性に合わせて
チューニングします。4.2.3「オート
チューニングを行う」を参照ください。
4. 指令による運転
モータ単体での試運転と同様に ,ステッ
プ1の「指令による運転」を行ってくださ
い。上位装置との調整もここで 行ってく
ださい。
サーボモータを機械に
取り付ける
サーボモータ
オートチューニング
自動的に機械の特性を測定
して最適チューニング
サーボパック サーボモータ
上位装置
指令
サーボパック
サーボモータ
2-30
Page 57

2.4 試運転をしてみよう
5. ユーザー定数の設定と記録
そのほか,必要に応じてユーザ ー定数を
設定ください。また,保守のた め設定後
のユーザー定数はすべて記録し ておいて
ください。
以上で,試運転はすべて終了です。
なお,試運転時は,一般に機械のなじみが十分でないた め摩擦が大きいことがありま
す。試運転が終了したら,十分に「なじみ運転」をするようにしてください。
2.4.4 試運転時の補足事項
下記の場合は,以降に述べる説明を読んでから,試運転に入るようにしてください。
• ブレーキ付きモータを使用する場合
• 上位装置で位置制御を行う場合
J
ブレーキ付きモータを使用する場合
サーボパック
ユーザー定数
記録しておく
2
重要
垂直軸(あるいは外力がかかる軸)では,モータに通電しない状態で重力(あるいは
外力)によって,モータが回転するのを防ぐために,ブレーキ付きのモータを使用し
ます。
ブレーキ付きモータの保持ブレーキ動作は,サーボパックの「ブレーキインタロック
出力(BK)」信号で制御します。
• 垂直軸
サーボモータ
保持ブレーキ
電源オフ時の重力
による移動を防ぐ
重力(あるいは外力)による誤動作を防ぐため,モータと機械を切り離した「モータ単体」の状態
で,モータの動作と保持ブレーキ動作を確認してください。その後で,モータを機械に接続して,
試運転を行ってください。
• 外力がかかる軸
外力
サーボモータ
2-31
Page 58

2
Σシリーズの使い方(基本編)
2.4.1 試運転のステップ
ブレーキ付きモータの配線につきましては,3.4.4「保持ブレーキを使う」を参照して
ください。
ブレーキ制御用リ
レー
ブレーキ電源
LPSE-2H01形 (200 V入力)
LPDE-1H01形 (100 V入力)
J
上位装置で位置制御を行う場合
電源
単相200 Vまたは
単相100 V
サーボパック
ブレーキ付きモータ
用ケーブル
3 m DP9320083-1
5 m DP9320083-2
10 m DP9320083-3
15 m DP9320083-4
20 m DP9320083-5
ブレーキ付きサーボモータ
次ページの表を参考にして,モータ動作を確認してから,試運転を行ってください。
速度制御用
SGDA-□□□S
速度指令
上位装置
モータ単体
速度制御
重要
位置制御
モータと機械を切り離した,モータ単体の状態で,動作を確認してください。上位装置の位置制御
が不完全な場合は,モータが暴走するおそれがあります。
上位装置からの指令 確認事項 確認方法 見直し個所
次の方法で,モータの速度を確認
する。
で試運転
ジョグ動作
(上位装置から一定速
モータ回転速度
度の指令を入力)
簡単な位置決め モータ回転量
オーバトラベル動作
(「
OT
」および「
P-OT
」信号を使用してい
る場合)
「
」,「
P-OT
N-
信号入力でモータが回
転を停止するかどうか
N-OT
」の
ディジタルオペレータの速度モ
D
ニタ
(Un-00)
モータを低速で動かしてみる。
D
例えば,
を使う。
60 r/min
の速度指令を
入力し,1秒ごとに1回転するこ
とを確認する。
モータ1回転相当の指令を入力
D
し,モータ軸が1回転すること
を,目で見て確認する。
モータ連続回転中に「
D
「
」信号をオンしたとき,
N-OT
P-OT」,
モータが停止することを確認す
る。
2-32
速度指令調整ゲイン「
Cn-03
」が
正しいかどうか,ユーザー定数の
設定値を確認してください。
分周パルス数「
Cn-0A
」が正しいか
どうか,ユーザー定数の設定値を
確認してください。
モータが停止しない場合は「
」の配線を,もう一度見直
,「N-OT
P-OT
してください。
」
Page 59

2.4 試運転をしてみよう
2.4.5
最低限のユーザー定数と入力信号
試運転を行う際に最低限必要となるユーザー定数は,以下のとおりです。
それぞれのユーザー定数の設定の仕方は,4.1.5「ユーザー定数設定モードでの操作」を
参照してください。
J
速度・トルク制御用サーボパックの場合
ビット
Cn-01
Cn-02
Cn-03
Cn-0A
Cn-11
J
位置制御用サーボパックの場合
Cn-01
Cn-02
Cn-02
E
ビット
8
ビット
E
ビット
8
ビット3,4,
エンコーダの選択(
モータ選択(
速度指令調整ゲイン(
エンコーダパルス分周比(
エンコーダパルス数
エンコーダの選択(
モータ選択(
5
指令パルス形態の選択(
3-50
ページ)
3-25
ページ)
3-17
(3 - 5 0
3-25
ページ)
3-50
ページ)
ページ)
3-25
ページ)
ページ)
3-19
2
ページ)
Cn-02
Cn-02
Cn-0A
Cn-11
Cn-24
Cn-25
ビット
ビット
D
F
指令パルスの論理(
指令パルスの出力形態(
エンコーダパルス分周比(
エンコーダパルス数(
電子ギヤ比(
電子ギヤ比(
3-30
3-30
3-19
3 - 4 7
3-50
ページ)
ページ)
ページ)
ページ)
ページ)
3-25
ページ)
「Cn-02」の設定値を変更したときは,希望の設定値へ変更した後,一度電源を「オ
フ」してください。再度,電源を「オン」にすると,変更された設定値が有効となり
ます。
2-33
Page 60

Σシリーズの使い方(基本編)
2.4.5最低限ノユーザー定数ト入力信号
モータの回転方向を指令した方向とは逆にしたいとき,検討していたモータ回転の指
令方向と実際の回転方向が異なっている場合は, 配線が誤っている可能 性がありま
す。もう一度,配線を確認してください。そのうえで,回転方向を逆にしたいときは
次のユーザー定数を設定してください。
2
Cn-02ビット0
Cn-02
「
」の設定値を変更したときは,希望の設定値へ変更した後,一度電源を「オ
逆回転モード(3 - 4ページ)
フ」してください。再度,電源を「オン」にすると,変更された設定値が有効となり
ます。
試運転を行う際に最低限必要となる入力信号は下表とおりです。各信号の詳細につき
ましては,参照ページを参考にしてください。
信号名 ピン番号 内容
モータの通電状態と非通電状態の切り替え
S-ON
P-OT
N-OT
サーボオン
正転側駆動禁止
逆転側駆動禁止
1CN-14
1CN-16
1CN-17
(メモリスイッチ設定で配線を省略できます)
(3-75ページ)
オーバトラベルリミットスイッチ
(メモリスイッチ設定で配線を省略できます)
(3-5ページ)
2-34
Page 61

3
章
Σシリーズの使い方(応用編)
この章は,「Σシリーズの使い方(基礎編)」をマスタされ,更に応
用的な使い方をしたい方のために用意しました。目的に合わせた設
定方法や,機能の使い方を説明しています。必要な項目を選んでお
読みください。
3.1 機械に合わせた設定をする 3 - 4............
3.1.1 モータの回転方向を変える 3 - 4.................
3.1.2 オーバトラベルを設定する 3 - 5.................
3.1.3 トルク制限をかける 3 - 8.......................
3.2 上位装置に合わせた設定をする 3 - 14........
3.2.1 速度指令を与える 3 - 14.........................
3
3.2.2 位置指令を与える 3 - 17.........................
3.2.3 エンコーダ出力を使う 3 - 22.....................
3.2.4 接点入出力を使用する 3 - 26.....................
3.2.5 電子ギヤを使う 3 - 28...........................
3.2.6 内部設定速度選択を使う 3 - 32...................
3.2.7 トルク制御を使う 3 - 37.........................
3.2.8 トルクフィードフォワード機能を使う 3 - 42........
3.2.9 アナログ電圧指令によるトルク制限機能を使う 3 - 44
3.2.10 指令パルス阻止機能(INHIBIT機能)を使う 3 - 45...
3.2.11 指令パルス入力部フィルタの選択機能を使う 3 - 47..
3.3 Σサーボパック自身を設定する 3 - 48........
3.3.1 ユーザー定数を設定する 3 - 48...................
3.3.2 ジョグ速度を設定する 3 - 49.....................
3.3.3 エンコーダパルス数を設定する 3 - 49.............
3.3.4 使用モータを設定する 3 - 50.....................
3-1
Page 62

3
Σシリーズの使い方(応用編)
3.4 停止のための設定をする 3 - 51..............
3.4.1 オフセットを調整する 3 - 51.....................
3.4.2 ダイナミックブレーキを使う 3 - 52...............
3.4.3 ゼロクランプを使う 3 - 53.......................
3.4.4 保持ブレーキを使う 3 - 55.......................
3.5 滑らかに動かす 3 - 59......................
3.5.1 ソフトスタートをかける 3 - 59...................
3.5.2 スムージングをかける 3 - 59.....................
3.5.3 ゲインの調整を行う 3 - 60.......................
3.5.4 オフセットの調整を行う 3 - 60...................
3.5.5 トルク指令フィルタ時定数を設定する 3 - 61........
3.6 もっと速く位置決めする 3 - 62..............
3.6.1 オートチューニングを使う 3 - 62.................
3.6.2 サーボゲインを設定する 3 - 62...................
3.6.3 フィードフォワードをかける 3 - 64...............
3.6.4 比例動作指令を使う 3 - 64.......................
3.6.5 速度バイアスを設定する 3 - 66...................
3.6.6 モードスイッチを使う 3 - 66.....................
3.6.7 速度ループ補償機能を使う 3 - 72.................
3.7 保護シーケンスを組む 3 - 73................
3.7.1 サーボアラーム出力,アラームコード出力を使う 3 - 73.
3.7.2 サーボオン入力を使う 3 - 76.....................
3.7.3 位置決め完了出力を使う 3 - 77...................
3.7.4 速度一致出力を使う 3 - 78.......................
3.7.5 回転検出出力を使う 3 - 79.......................
3.7.6 瞬時停電の取扱い 3 - 81.........................
3.8 特殊な配線をする 3 - 83....................
3.8.1 配線するうえでの注意 3 - 83.....................
3.8.2 ノイズ対策の配線をする 3 - 85...................
3.8.3 複数台のサーボを使う 3 - 89.....................
3.8.4 回生ユニットを使う 3 - 90.......................
3.8.5 絶対値エンコーダを使う 3 - 93...................
3.8.6 エンコーダケーブルを延ばす 3 - 102...............
3.8.7 異電圧で使用する 3 - 104.........................
3.8.8 コネクタ端子配列一覧 3 - 106.....................
3-2
Page 63

この章を読むにあたって
この章では,サーボパック(SGDA形)の「入出力信号(1CNコネクタ)」および,それ
に関係する「ユーザー定数」の使い方を,使用目的ごとに説明しています。
「入出力信号(1CNコネクタ)」を一覧表で見たい方は,付録C「入出力信号一覧」をご参
照ください。また「入出力信号(1CNコネクタ)」の端子配列を見たい方は,3.8.8「コネ
クタ端子配列一覧」をご覧ください。
入出力信号
上位装置,
外部回路
「ユーザー定数」を一覧表で見たい方は、付録D「ユーザー定数一覧」をご参照くださ
い。
「ユーザー定数」には,次の2種類があります。
メモリスイッチ
Cn-01,Cn-02
定数設定
以降
Cn-03
ビットごとにオン/オフを切り替えて,機能を選択します。
1
トルク制限値,速度ループゲインなど,数値を設定します。
SGDAサーボパック
ユーザー定数
3
「ユーザー定数」の設定の方法は,4.1.5「ユーザー定数設定モードでの操作」をご参照く
ださい。
3-3
Page 64

Σシリーズの使い方(応用編)
3.1.1 モータの回転方向を変え
3.1 機械に合わせた設定をする
この節では,適用する機械の寸法や性能に合わせて,「ユーザー定数」などを設定する方法
について説明します。
3
3.1.1
モータの回転方向を変える
サーボモータの配線をいじらずに,モータの回転方向を反転させる「逆回転モード」を,
本サーボパックは持っています。標準設定での「正転方向」は,モータの負荷側から見て
「反時計回り」です。
下記の「逆回転モード」を設定すると,モータの回転方向だけを反転させてその他は変わ
りません。当然,その軸の移動方向(+,−)は反転します。
正転指令
逆転指令
標準設定 逆回転モード
サーボパックから
のエンコーダ出力
PAO
(A相)
PBO(B相)
サーボパックから
のエンコーダ出力
PAO (A相)
PBO(B相)
サーボパックから
のエンコーダ出力
PAO (A相)
PBO(B相)
サーボパックから
のエンコーダ出力
PAO (A相)
PBO(B相)
J
「逆回転モード」の設定方法
以下の2通りの設定方法があります。通常は,より簡単な「設定方法1」を使う方が便
利です。
設定方法1(メモリスイッチの設定による方法)
メモリスイッチ「
-
ビット0回転方向選択 出荷時設定0速度・トルク制御用
02
Cn
Cn-02
」のビット0で「逆回転モード」を選択します。
位置制御用
モータの回転方向を設定します。
設定 内容
モータを負荷側から見てCCW方
0
向を正転とします。
モータを負荷側から見てCW方
1
向を正転とします。
(標準設定)
(逆回転モード)
3-4
Page 65

設定方法2(2CNのコネクタ内の短絡配線による方法)
3.1 機械に合わせた設定をする
3.1.2
エンコーダ用コネクタ
2CN
を 設定できます。ユーザー定数を標準化し
たい場合などでメモリスイッチでの変更を避
けたい場合に使用します。
この場合,メモリスイッチの設定にかかわら
ず,逆回転モードに設定されます。
オーバトラベルを設定する
「オーバトラベル」とは,機械の可動部が移動できる領域を越えると,強制停止させる機
能です。
「オーバトラベル」機能を使用するためには,下記の入力信号を正しく接続してくださ
い。
→ 入力
P-OT 1CN-16
でも逆回転モード
正転側駆動禁止
(正転側オーバトラベル)
SGDAサーボパック SGMサーボモータ
エンコーダ
2CNコネクタ内で2CN-1と
2CN-7を短絡配線します。
SGDA
サーボパック
3
速度・トルク制御用
位置制御用
→ 入力
N-OT 1CN-17
逆転側駆動禁止
(逆転側オーバトラベル)
オーバトラベルリミットスイッ チの 入力 端子 で
す。
直線駆動などの場合,機械の破 損を 防ぐ ため に
リミットスイッチを接続して使います。
P-OT
N-OT
オンのとき
1CN-16が“L”
オフのとき
1CN-16が“H”
オンのとき
1CN-17が“L”
オフのとき
1CN-17が“H”
レベル
レベル
レベル
レベル
正転駆動許可状態。通常運転状態。
正転駆動禁止状態。(逆転方向には動きます。)
逆転駆動許可状態。通常運転状態。
逆転駆動禁止状態。(正転方向には動きます。)
逆転側 正転側
SGM
サーボモータ
速度・トルク制御用
位置制御用
リミット
スイッチ
SGDA
サーボパック
3-5
Page 66

Σシリーズの使い方(応用編)
ビット
ビット
3.1.2モータの回転方向を変え
オーバトラベル用入力信号を「使用する/しない」の切り替えは,次の「ユーザー定数
(メモリスイッチ)」で行うことができます。
-
Cn
01
ビット
P-OT入力信号を使用する/しない 出荷時設定0速度・トルク制御用
2
位置制御用
3
Cn-01
ビット3N-OT入力信号を使用する/しない 出荷時設定0速度・トルク制御用
オーバトラベル用の正転禁止入力信号「P-OT」
(1CN-16),逆転禁止入力信号「N-OT」(1CN-17)
を使用するかしないかを設定します。
外部配線を省略するとき「
ビット 設定 内容
正転禁止入力信号(
0
(
2
正転禁止入力信号(
1
(常時正転許可。
逆転禁止入力信号(
0
(
3
逆転禁止入力信号(
1
(常時逆転許可。
1」を設定します。
)を使用する。
P-OT
が開で正転禁止,0Vで正転許可。)
1CN-16
)を使用しない。
P-OT
1CN-16を0V
)を使用する。
N-OT
が開で逆転禁止,0Vで逆転許可。)
1CN-17
)を使用しない。
N-OT
1CN-17を0V
に短絡と同等)
に短絡と同等)
位置制御用
SGDAサーボパック
「P-OT」「N-OT」を使用しないときは,
図の短絡配線を省略できます。
オーバトラベルを「使用する」に設定した場合,以下の「ユーザー定数」を,モータの停
止方法に合わせて設定してください。
-
ビット8オーバトラベル時のモータ停止
01
Cn
方法選択
Cn-01
ビット9オーバトラベル時の停止後の処理選択出荷時設定0速度・トルク制御用
D 正転禁止入力(P-OT,1CN-16)
D 逆転禁止入力(N-OT,1CN-17)
モータ回転中に,これらの信号 が入 力さ れた と
きの停止方法を選択します。
出荷時設定0速度・トルク制御用
位置制御用
位置制御用
オーバトラベル
停止方法 停止後
DB停止
0
0
ビット8
1
ビット6
1
減速停止
フリーラン停止
DB解除
サーボオフ
0
ビット9
1
ゼロクランプ
3-6
Page 67

3.1 機械に合わせた設定をする
ビット
8
速度・トルク制御用(SGDA-□□□S)でトルク制御を選択した場合は,ビット8の設
定にかかわらずサーボオフ時と同じ停止方法となります。
設定 内容
サーボオフ時と同じ停止方法とする。
停止またはフリーラン停止します。
DB
0
Cn-01
ビ
これらの選択は,
ビット6で選択します。
Cn-01
設定されたトルクで減速停止する。
1
設定値:
Cn-06(EMGTRQ
)非常停止トルク。
上記で減速停止を選択した場合の,停止後の処理を選択します。
設定 内容
減速停止後,サーボオフとする。
Cn-01
ビット
0
9
減速停止後,ゼロクランプ状態とする。
1
3
Cn-06
EMGTRQ
非常停止トルク
単位%設定範囲
0〜MAX
オーバトラベル時(正転禁止入 力, 逆転 禁止 入
力)の停止トルクを設定します。
設定単位は,定格トルクに対する%です。
-
Cn
ビット6サーボオフ時のモータ停止方法
01
選択
Cn-01
ビット7サーボオフ時の停止後の処理選択 出荷時設定1速度・トルク制御用
SGDAサーボパックは以下の場合にサーボオフ
になります。
D サーボオン入力信号オフ時(S-ON,1CN-14)
D サーボアラーム発生時
トルク
出荷時設定
MAX
正転禁止入力
P-OT(1CN-16)
逆転禁止入力
N-OT(1CN-17)
速度・トルク制御用
トルク
位置制御用
メモリスイッチ
非常停止
トルク
DB停止
フリーラン
停止
出荷時設定0速度・トルク制御用
位置制御用
位置制御用
サーボオフ
0
ビット6
1
停止方法
DB停止
フリーラン停止
DB解除
0
ビット7
DB保持
1
停止後
D 電源オフ時
モータ回転中に,これらの状態 にな った とき の
停止方法を,次のメモリスイッ チを 使っ て選 択
します。
3-7
ダイナミックブレーキとは,モータの回
転エネルギーを抵抗で消費させることに
より電気的にブレーキをかける機能です。
Page 68

Σシリーズの使い方(応用編)
3.1.3トルク制限をかける
Cn-01
ビット
上記でDB停止を選択した場合の,停止後の処理を選択します。
Cn-01
ビット
設定 内容
ダイナミックブレーキ(DB)で停止します。
0
6
設定 内容
7
フリーラン停止します。
1
モータは非通電状態です。機械の摩擦で停止させます。
停止後,ダイナミックブレーキを解除します。
DB
0
停止後,ダイナミックブレーキを解除しません。
DB
1
3
3.1.3 トルク制限をかける
SGDAサーボパックは,次のようなトルクのコントロールができます。
トルク制限
D
トルク制御
D
この項では,「レベル1および2」の「トルク制限」機能の使い方を説明します。
J
「レベル1:内部トルク制限」の場合の設定方法
下記のユーザー定数に設定した値に,最大トルクを制限します。
TLMTF
-
Cn
08
Cn-09
TLMTR
レベル1:機械やワークの保護のため,出力トルクの最大値を制限
したい。
レベル2:モータである位置まで動かしてから,トルクを制限した
い。
レベル3:速度ではなく,常に出力トルクをコントロールしたい。
レベル4:速度制御とトルク制御を切り替えて使いたい。
正転トルク制限 単位%設定範囲
0〜MAX
逆転トルク制限 単位%設定範囲
0〜MAX
トルク
トルク
出荷時設定
トルク
MAX
出荷時設定
トルク
MAX
速度・トルク制御用
位置制御用
速度・トルク制御用
位置制御用
それぞれ正転側,逆転側のトル クの 制限 値を 設
定します。
機械条件などにより,トルクを 制限 した いと き
に使います。
制限は常時働き,制限値に達し たと きに は右 記
の信号を出力します。
設定単位は,定格トルクに対する%です。
3-8
トルク制限時の出力信号
• TGON
• 状態表示モードビットデータ
• モニタモード「Un-05」ビット4
出力する条件:
メモリスイッチ「Cn-01」ビット4 =1
(1CN-9)
Page 69

適用例:機械の保護
3.1 機械に合わせた設定をする
トルク制限
回転速度
あまり小さい値を設定すると,加減
速時にトルク不足となります。
ご注意ください。
トルク
「TGON
」信号の使い方
接点出力信号「TGON」を「トルク制限検出出力」として使用するときの取り扱い方法
は,以下のとおりです。
電源
SGDAサーボパック
または
ホトカプラ出力
1出力当たり
最大使用電圧:DC 30 V
最大出力電流:DC 50 mA
24 V
3
出力 →
TGON 1CN-9
トルク制限検出出力
(回転検出出力)
速度・トルク制御用
位置制御用
モータの出力トルク(電流)が制限中であることを示します。
オン状態
オフ状態
1CN-9,10
1CN-9が“L”
1CN-9,10
1CN-9が“H”
間が閉
レベル
間が開
レベル
モータ出力トルク制限中。(内部トルク指令が設
定値以上より大きい)出力トルクは,トルク制
限値に制限されています。
トルク制限をしていない。(内部トルク指令が設
定値以下)
設定値:Cn-08(TLMTF)
Cn-09(TLMTR)
Cn-18(CLMIF):P-CL入力時のみ
Cn-19(CLMIR):N-CL入力時のみ
ただし,メモリスイッチ「Cn-01」の「ビット4」の設定により,別の機能に変わりま
すので,ご注意ください。
出力信号「TGON
」を「トルク制限検出信号」として使う場合,次のメモリスイッチを
「1」に設定します。
3-9
Page 70

Σシリーズの使い方(応用編)
3.1.3トルク制限をかける
このメモリスイッチは,次に述べる「レベル2」のトルク制限にも有効です。
Cn
出力信号TGON(1CN-9)の出力条件を設定します。
設定 内容
-
ビット4TGON出力信号の選択 出荷時設定0速度・トルク制御用
01
位置制御用
出力信号を回転検出出力とする。
TGON
3
モータの回転速度と「
Cn-0B」(TGONLV
値を比較します。
0
モータ回転速度≧設定
値のとき
モータ回転速度<設定
値のとき
出力信号をトルク制限検出出力とする。
TGON
1CN-9,10
る。
1CN-9,10
る。
SGDAサーボパック内部トルク(電流)指令と設定
値を比較します。
設定値
Cn-08(TLMTF)
:
Cn-09(TLMTR)
1
内部トルク(電流)指令
≧設定値のとき
内部トルク(電流)指令
<設定値のとき
Cn-18(CLMIF):P-CL入力時のみ
Cn-19(CLMIR):N-CL入力時のみ
1CN-9,10間を開とす
る。
1CN-9,10間を閉とす
る。
)の設定
間を閉とす
間を開とす
メモリスイッチ「Cn-01」
ビット4
回転検出
トルク
検出
出力信号とともに,以下
TGON
のビット表示の内容も変更さ
れます。
• 状態表示モードビットデータ
• モニタモード「Un-05」ビッ
ト4
J
「レベル2:外部トルク制限」の場合の設定方法
あらかじめ,ユーザー定数に設定したトルク
(電流)制限を接点入力信号に よっ て有 効に し
ます。正転側,逆転側それぞれ 独立 して 設定 で
きます。
この機能を使うときは,メモリスイッチ
「Cn-02」のビット2 = 0としてください。(標準
設定)内部設定速度選択機能は使えません。
SGDAサーボパック
トルク制限
正転側
逆転側
なし
トルク制限
トルク制限
なし
トルク制限
回
転
速
度
回転
速度
回転
速度
回転
速度
トルク
トルク
トルク
トルク
3-10
Page 71

3.1 機械に合わせた設定をする
P-CL
N-CL
オンのとき
1CN-11が “L” レベル
オフのとき
1CN-11が “H” レベル
オンのとき
1CN-12が “L” レベル
オフのとき
1CN-12が “H” レベル
トルク制限は,右記の信号を出力
します。
適用例:
D
押しつけ停止動作
正転側にトルク制限がかかる。 制限値
Cn-18
正転側にトルク制限がかからない。通常
運転。
逆転側にトルク制限がかかる。 制限値
Cn-19
逆転側にトルク制限がかからない。通常
運転。
トルク制限時の出力信号
• TGON
• 状態表示モードビットデータ
• モニタモード「Un-05」ビット4
出力する条件:メモリスイッチ「Cn-01」ビット4=1
(1CN-9)
3
D
ロボットのワーク保持
-
18
Cn
Cn-19
CLMIF
正転側外部トルク制限
CLMIR
逆転側外部トルク制限
単位%設定範囲
0〜MAX
単位%設定範囲
0〜MAX
トルク
トルク
出荷時設定
100
出荷時設定
100
速度・トルク制御用
位置制御用
速度・トルク制御用
位置制御用
外部接点入力によって,トルクの制限をかける場合の制限値を設定します。
メモリスイッチ「Cn-02」のビット2 = 0のときに有効です。
P-CL
N-CL
(
(
)入力時 「
1CN-11
)入力時 「
1CN-12
」のトルク制限がかかります。
Cn-18
」のトルク制限がかかります。
Cn-19
アナログ電圧指令による制限機能については、3.2.9「アナログ電圧指令によるトルク
制限機能を使う」を参照してください。
3-11
Page 72

Σシリーズの使い方(応用編)
P-CL
N-CL
3.1.3トルク制限をかける
「P-CL,N-CL」信号の使い方
3
入力信号「P-CL
,N-CL」を「トルク制限入力」として使用するときの取り扱い方法
は,以下のとおりです。
SGDAサーボパック
5mA
正転側外部トルク制限入力
(速度選択
逆転側外部トルク制限入力
(速度選択
→ 入力
→ 入力
24 V電源
上位装置
P-CL 1CN-11
N-CL 1CN-12
正転側および逆転側の,外部ト ルク (電 流) 制
限の入力です。
押しつけ停止動作などに使用す ると ,便 利な 機
能です。
ホトカプラ
速度・トルク制御用
)
1
)
2
位置制御用
速度・トルク制御用
位置制御用
トルク制限時の出力信号
• TGON
• 状態表示モードビットデータ
• モニタモード「Un-05」ビット4
(1CN-9)
トルク制限中は,右記の信号を出力します。
オンのとき
1CN-11が“L”
オフのとき
1CN-11が“L”
オンのとき
1CN-12が“L”
オフのとき
1CN-12が“H”
レベル
レベル
レベル
レベル
正転側にトルク制限がかかる。 制限値
正転側にトルク制限がかからない。通常
運転。
逆転側にトルク制限がかかる。 制限値
逆転側にトルク制限がかからない。通常
運転。
出力する条件:
メモリスイッチ「Cn-01」
ビット4 = 1
Cn-18
Cn-19
ただし,メモリスイッチ「Cn-02」の「ビット2」の設定により,別の機能に変わりま
すので,ご注意ください。
入力信号「P-CL
,N-CL」を「トルク制限入力」とするために,下記のメモリスイッチ
を「0」に設定してください。
ビット
Cn
-
02
内部設定速度選択 有効/無効 出荷時設定0速度・トルク制御用
2
位置制御用
内部設定速度選択機能を無効にします。
内部設定速度選択機能を使用す る場 合, 以下 に
示す入力信号の内容が変わります。
3-12
SGDAサーボパック
接点入力
内部に設
定した速
度でモー
タを運転
する。
SGM
サーボモータ
Page 73

3.1 機械に合わせた設定をする
なお,このメモリスイッチの設定に伴い,次の信号の意味も変更になります。
モニタモード「Un-05」ビット7,ビット8
設定 内容 入力信号
P-CON
内部設定速度選
0
1
択機能を使用し
ない。
内部設定速度選
択機能を使用す
る。
(1CN-15)
P-CL
(1CN-11)
N-CL
(1CN-12)
P-CON P-CL N-CL
回転方向選択
:正転
0
:逆転
1
PI制御/P制御の切り替えに使用する。
(速度・トルク制御用の場合は
「Cn-01」ビットA,Bに従う。)
正転側外部トルク制限入力
逆転側外部トルク制限入力
0:OFF,1:ON
速度設定
00
01
11
10
通常の速度・トルク/位
置制御
「
Cn-1F」SPEED1
「
Cn-20」SPEED2
「
Cn-21」SPEED3
「TGON」信号の取扱いについては,「レベル1:内部トルク制限」の場合と同一です。
3-9ページの「TGON
」信号の使い方」をご参照ください。
3
3-13
Page 74

Σシリーズの使い方(応用編)
3.2.1速度指令を与える
3.2 上位装置に合わせた設定をする
この節では,Σシリーズサーボの上位制御装置との接続方法と,関係する「ユーザー定
数」について説明します。
3.2.1 速度指令を与える
速度指令は,下記の入力信号「速度指令入力」に与えます。いろいろな使い方ができます
ので,作りたいシステムに最適の指令入力を設定してください。
SGDAサーボパック
3
SGDA-□□□S
速度・トルク
トルク指令入力
(アナログ電圧入力)
速度指令入力
(アナログ電圧入力)
→ 入力
→ 入力
V-REF 1CN-3
SG-V 1CN-4
トルク指令
速度指令
P:ツイストペア線を示します。
速度指令入力 速度・トルク制御用
速度指令入力用シグナル
グランド
速度制御を選択したときに使用します。(メモリ
スイッチ「Cn-01」のビットA,B)
通常の速度制御では必ず配線してください。
V-REF ,SG-V間の入力電圧に比例した速度で
モータを速度制御します。
J
標準設定
指令速度
(標準設定)
のみ
速度・トルク制御用
のみ
−1500
−3000
−4500
入力電圧(V)
傾きは「Cn-03」
(VREFGN)に設定
します。
Cn-03 = 500:6Vで定格回転速度(3000 r/min)
例)
+6V入力→正方向 3000 r/min
+1V入力→正方向 500 r/min
−3V入力→逆方向 1500 r/min
ユーザー定数「Cn-03」を使って,電圧入力範囲を変更することができます。
J
入力回路例(右図を参照)
1/2 W以上
ノイズ対策のため,配線には必 ずツ イス トペ ア
線を使用ください。
可変抵抗器の例 栄通信工業製 25HP-10B形
3-14
SGDAサーボパック
Page 75

3.2
上位装置に合わせた設定をする
□□□
SGDA-
速度・トルク
プログラマブルコントローラな ど上 位装 置で 位
置制御を行う場合,上位装置の 速度 指令 出力 端
子に接続します。
上位装置 SGDAサーボパック
速度指令
出力端子
この場合,出力電圧仕様に合わせて「Cn-03」を
調整してください。
下記の4つのうちのどのモードで使用するかを,下記の「メモリスイッチ」と入力信号
S
「P-CON
Cn
Cn-01
」で選択します。
-
ビットA制御形態の選択 出荷時設定0速度・トルク制御用
01
ビットB制御形態の選択 出荷時設定0速度・トルク制御用
フィード
バックパル
ス入力端子
P:ツイストペア線を示します。
のみ
のみ
速度・トルク制御用(SGDA-□□□S)のSGDAサーボパックは4種類の制御形態が選択
できます。
3
3-15
Page 76

Σシリーズの使い方(応用編)
0
0
す。
0
1
に入ります
条件
設定値以下
条件2:モータ速度が設定値以下
3.2.1速度指令を与える
Cn-01 設定
ビットBビット
制御形態
A
3
0 0
速度制御
通常の速度制御です。
D V-REF(1CN-3)から速度指令を入力しま
す。
D P-CON(1CN-15)をP/PI制御の切り替え
信号に使います。
1CN-15が開 PI制御
1CN-15が0V P制御
D トルク指令入力「T-REF」(1CN-1)は使
用できません。
ゼロクランプ機能付き速度制御
停止時にゼロクランプ機能が設定できる速
度制御です。
D V-REF(1CN-3)から速度指令を入力しま
す。
D P-CON(1CN-15)をゼロクランプ機能の
オン/オフに使います。
1CN-15が開
ゼロクランプ機能
オフ
1CN-15が0V
ゼロクランプ機能
オン
SGDAサーボパック
速度指令
P/PI切り替え
速度指令
ゼロクランプ
SGDAサーボパック
以下の二つの条件がともに
整ったときゼロクランプ動作
に入りま
条件1:「
。
P-CON
2
:モータ速度が
設定値:
」がオン
Cn-0F
ZCLVL
(
)
D トルク指令入力「T-REF」(1CN-1)は使
用できません。
1 0
1 1
「トルク制御」については,
「P-CON
」信号の使い方
→ 入力
トルク制御
トルク制御
I
II
3.2.7「トルク制御を使う」をご参照ください。
P-CON 1CN-15
比例動作指令など 速度・トルク制御用
位置制御用
入力信号「P-CON」は,メモリスイッチの設定によりその機能が変わります。
SGDAサーボパック
P/PI制御の切り替え
ゼロクランプ有効/無効切り替え
メモリ
スイッチ
トルク制御/速度制御切り替え
回転方向の切り替え
3-16
Page 77

メモリスイッチ
Cn-02
ビット2
Cn-01
ビットB
Cn-01
ビットA
3.2 上位装置に合わせた設定をする
P-CONの意味
SGDA-□□□S
速度・トルク
0 0 0
0 0 1
0 1 0
0 1 1
1
‑ ‑ 内部設定速度選択時の回転方向切り替え
比例(P)/比例・積分(PI)切り替え
速度・トルク制御用(SGDA-□□□S)のみ
ゼロクランプ有効/無効切り替え
速度・トルク制御用(SGDA-□□□S)のみ
(使用しません)
速度・トルク制御用(SGDA-□□□S)のみ
トルク制御/速度制御の切り替え
速度指令のゲインは,下記の「ユーザー定数」で調整します。
Cn
速度指令調整ゲイン
VREFGN
-
03
速度・トルク制御用(
SGDA-
単位
(
r/min)/V
□□□S)のみの
ユーザー定数です。速度指令入力「
1CN-3
(
)の電圧範囲を設定します。上位装置
V-REF
設定範囲
0〜2162
」
出荷時設定
500
指令速度
(r/min)
や外部回路の出力形態に合わせて設定くださ
い。
速度・トルク制御用
のみ
この傾きを設
定します。
指令電圧
(V)
3
3.2.2
用語?
出荷時の設定は 定格回転速度(
位置指令を与える
SGDA-□□□P
位置
位置指令は,下記の入力信号「指令パルス入力」などに与えます。いろいろな使い方
ができますので,作りたいシステムに最適の指令入力を設定してください。
パルス入力によって移動指令を与えます。
以下の3種類の出力形態に対応できます。
D
ラインドライバ出力
D +12 V
D +5V
z ゼロクランプ機能
オープンコレクタ出力
オープンコレクタ出力
3000 r/min)/6V=500
指令パルス入力
指令符号入力
クリア入力
P
:ツイストペア線を示します。
です。
SGDA
サーボパック
ホトカプラ
上位装置が,「速度指令」入力を使って「位置ループ」を組まないシステムの場合,使用します。つま
り,速度指令を「0」にしても,停止位置はわずかずつ,ずれていきます。「ゼロクランプ」を「オン」
にすれば,内部で位置ループを組みますので,停止位置をしっかりクランプすることができます。
3-17
Page 78

Σシリーズの使い方(応用編)
3.2.2
位置指令を与える
接続例1(ラインドライバ出力の場合)
3
適用ラインドライバ
TI製SN75174またはMC3487 相当品
上位装置
ライン
ドライバ
接続例2(オープンコレクタ出力の場合)
入力電流 i が必ず以下の範囲に
上位装置 SGDAサーボパック
入るように,制限抵抗R1の値を
設定ください。
入力電流 i7〜 15 mA
例)
SGDA
サーボパック
ホトカプラ
i
ホトカプラ
SGDA-
位置
□□□
D Vccが12 Vのとき
R1 = 1 kΩ
D Vccが5Vのとき
R1 = 180 Ω
(注) オープンコレクタ出力の場合,信号の論理は以下のとおりです。ご注意くださ
い。
Tr1がON
Tr1がOFF
下記の「メモリスイッチ」で使用する,「指令パルス形態」を選択します。
P
→入力
→ 入力*
→入力
→ 入力*
のとき
のとき
PULS 1CN-1
PULS 1CN-2
SIGN 1CN-3
SIGN 1CN-4
レベル入力相当
”H”
レベル入力相当
”L”
指令パルス入力 位置制御用のみ
指令パルス入力 位置制御用のみ
指令符号入力 位置制御用のみ
指令符号入力 位置制御用のみ
P:ツイストペア線を示します。
入力パルスに比例した角度だけ,モータが回転します。
3-18
Page 79

3.2 上位装置に合わせた設定をする
0
0
90
位相差
)
1
90
位相差
)
Cn-02
Cn-02
Cn-02
ビット3指令パルス形態の選択 出荷時設定0位置制御用のみ
ビット4指令パルス形態の選択 出荷時設定0位置制御用のみ
ビット5指令パルス形態の選択 出荷時設定0位置制御用のみ
外部からSGDAサーボパックに与える指令パル
スのパルス形態を設定します。
上位装置の仕様に合わせて設定ください。
また,「Cn-02」のビットDで入力パルスの論理を
選択できますので,合わせて設定してくださ
い。
Cn-02
ビ
ビ
ビットD
ッ
ト
ビ
ッ
ト
3
入力逓倍
ッ
ト
5
4
指令パルス
形態
上位装置
モータ正転指令 モータ逆転指令
位置指令
パルス
SGDA
サーボパック
3
(正論理
設定
1
(負論理
設定
0 0 0
0 1 0
0 1 1
1 0 0
0 0 1
0 0 0
0 1 0
0 1 1
1 0 0
0 0 1
×1
×2
×4
×1
×2
×4
符号
+
パルス列
°
二相
パルス列
CWパルス
+
CCWパルス
符号+
パルス列
°
二相
パルス列
CWパルス
+
CCWパルス
3-19
Page 80

Σシリーズの使い方(応用編)
3.2.2位置指令を与える
入力逓倍機能
゜
90
位相差二相パルス列の指令形態の場合,指
令パルス逓倍機能を使うことができます。
また,このほかに電子ギヤ機能 を使 って も, 入
力パルスを変換することができます。
入出力信号のタイミング例
モータの
移動パルス量
×4の場合
×2の場合
×1の場合
入力指令パルス
3
サーボオン
ベースブロック
符号+パルス列
PGパルス
(注)1
解除
サーボオン信号を「オン」してから指令パルスを入力するまでの間隔は,
てください。サーボオン信号の「オン」から
パルスが入っていないことがあります。
2
クリア信号の「オン」は20μs以上としています。20μs以下の場合,無効となります。
40 ms
以内に指令パルスを入力すると,指令
≦ 30ms
t
1
t
≦ 6ms
2
(ユーザー定数Cn-12
が「0」の場合)
t
≧ 40ms
3
t
4,t5,t6
t
≧ 20μs
7
40 ms
以上あけ
≦ 2ms
3-20
Page 81

3.2 上位装置に合わせた設定をする
「指令パルス入力」信号の許容電圧レベルおよびタイミング
指令パルス信号形態 電気的仕様 備考
符号+パルス列入力
(SIGN+PULS 信号)
最大指令周波数
450 kpps
90°位相差二相パルス
(A相+B相)
最大指令周波数
×1逓倍 450 kpps
×2逓倍 400 kpps
×4逓倍 200 kpps
CCWパルス+CWパルス
最大指令周波数
450 kpps
¨ 指令 © 指令
A相
B相
¨ 指令 © 指令
B相はA相より
90°進み
¨ 指令 © 指令
B相はA相より
90°遅れ
CCWパルス
符号(SIGN)
H ¨.....
L ©.....
指令となります
逓倍モードの切り替えは
ユーザー定数「Cn-02」
(ビット3, 4, 5)で設定
3
CWパルス
SGDA-□□□P
位置
「偏差カウンタ」の内容をクリアする方法は,次のとおりです。
→入力
→ 入力*
CLR 1CN-5
CLR 1CN-6
CLR信号をHレベルにすると,以下の動作をし
クリア入力 位置制御用のみ
クリア入力 位置制御用のみ
SGDAサーボパック
ます。
D SGDAサーボパック内部の偏差カウンタを「0」にする。
D 位置ループ動作を効かなくする。
クリアする
位置ループ
偏差カウンタ
上位装置から偏差をクリアした いと きに 使い ま
す。
なお,メモリスイッチ「Cn-02」のビットAにより,クリア動作を入力信号の立ち上が
り時に,一度だけ行うように変更することができます。
3-21
Page 82

Σシリーズの使い方(応用編)
3.2.3
エンコーダ出力を使う
3
3.2.3
Cn-02
位置制御用(
ビットA偏差カウンタクリア信号の選択 出荷時設定0位置制御用のみ
SGDA-
偏差カウンタクリア信号CLR(1CN-5)の信号形態を選択します。
設定 内容
レベルでクリア状態とする。
H
0
レベルの間,偏差パルスはたまりませ
H
ん。
立ち上がりエッジでクリアする。
1
立ち上がりで一度だけクリアします。
エンコーダ出力を使う
エンコーダの出力をサーボパック内部で分周したあとの出力信号を,外部に出力できま
す。上位装置で,「位置制御ループを組む」ためなどに使用することができます。
□□□P)の場合のみ
クリア状態
ここで一度だけクリアする。
SGMサーボモータ
エンコーダ
A相
B相
C相
SGDAサーボパック
分周
回路
この出力の説
明です
A相
B相
C相
上位装置
用語?
z 分周したあとの
モータにマウントしたエンコーダからの入力パルス列を基にして,設定したパルス密度に変換して出
力することを意味します。ここでの単位は「パルス数/1回転」です。
3-22
Page 83

3.2 上位装置に合わせた設定をする
出力回路は,ラインドライバ出力です。以下の回路を参考にして接続ください。
SGDAサーボパック
A相
B相
C相
P:ツイストペア線を示します。
上位装置
ラインレシーバ
A相
4
+5V
B相
C相
チョーク
コイル
平滑
コンデンサ
適用ラインレシーバ:T-I 製SN75175またはMC3486
R(ターミネイト抵抗):220〜470Ω
C(デカップコンデンサ):0.1μF
相当品
3
入出力信号の詳細は,次のとおりです。
出力 →
出力 → *
出力 →
出力 → *
出力 →
出力 → *
PAO 1CN-20
PAO 1CN-21
PBO 1CN-22
PBO 1CN-23
PCO 1CN-24
PCO 1CN-25
エンコーダ出力A相 速度・トルク制御用
位置制御用
エンコーダ出力A相 速度・トルク制御用
位置制御用
エンコーダ出力B相 速度・トルク制御用
位置制御用
エンコーダ出力B相 速度・トルク制御用
位置制御用
エンコーダ出力C相 速度・トルク制御用
位置制御用
エンコーダ出力C相 速度・トルク制御用
位置制御用
分周されたエンコーダの信号が出力されます。
上位装置で位置ループを組んで位置制御を行う場合,必ず接続します。
分周比は以下のユーザー定数に設定します。
分周比設定
PG
Cn-0A PGRAT
分周比は,位置制御用(SGDA-□□□P)の電子ギヤ機能のギヤ比設定(Cn-24,25)
には関係しません。
3-23
Page 84

Σシリーズの使い方(応用編)
3.2.3エンコーダ出力を使う
出力位相形態
D インクリメンタルエンコーダの場合
正転時 逆転時
A相
B相
A相
B相
3
C相
D 絶対値エンコーダの場合
正転時 逆転時
A相
B相
C相
信号入力 速度・トルク制御用
→入力
→入力
出力 →
出力 →
→入力
→入力
SEN 1CN-5
0SEN 1CN-6
PSO 1CN-26
PSO 1CN-27
BAT 1CN-28
BAT0 1CN-29
SEN
信号入力 速度・トルク制御用
SEN
エンコーダ出力S相 速度・トルク制御用
エンコーダ出力S相 速度・トルク制御用
バッテリ(
バッテリ(−) 速度・トルク制御用
C相
A相
B相
C相
のみ
のみ
位置制御用
位置制御用
+) 速度・トルク制御用
位置制御用
位置制御用
「SEN」〜「BAT0」の信号は,「絶対値エンコーダ」を使用するときに使います。詳細
は、3.8.5「絶対値エンコーダを使う」をご参照ください。
出力 →
出力 →
SG 1CN-19
FG 1CN-36
エンコーダ出力用シグナル
グランド
フレームグランド 速度・トルク制御用
速度・トルク制御用
位置制御用
位置制御用
SG:上位装置の「0V」に接続します。
FG:ケーブルのシールド線に接続します。
3-24
Page 85

3.2 上位装置に合わせた設定をする
下記のメモリスイッチに,使用する「エンコーダの種類」を設定します。
-
ビットEエンコーダの種類選択 出荷時設定0速度・トルク制御用
01
Cn
位置制御用
エンコーダの種類に従って設定します。サーボモータの形式に合わせて設定してくだ
さい。
このメモリスイッチは,変更後,一度電源を落としてから,再立ち上げを行ってくだ
さい。
モータ形式 エンコーダパルス数(P/R)
SGM-
SGM-
□□□31□
□□□W1□
インクリメンタルエンコーダ
絶対値エンコーダ
1024P/R
2048P/R
設定値
0
1
パルスの分周比は,次の「ユーザー定数」で設定します。
PGRAT PG
-
0A
Cn
外部へのPG出力信号(PA O,*PA O ,PBO,
*PBO)の出力パルス数を設定します。
モータのエンコーダ(PG)からのパルスを,こ
こで設定されたパルス数に分周して出力しま
分周比設定 単位
P/R
設定範囲
16
〜
エンコーダパルス
出荷時設定
2048
SGM
サーボモータ
エンコーダ
速度・トルク制御用
位置制御用
サーボパック
SGDA
分周
出力端子
PAO (1CN-20)
*PAO (1CN-21)
PBO (1CN-22)
*PBO (1CN-23)
相
A
出力
相
B
す。
設定値はモータ1回転当たりの出力パルス数です。機械やコントローラの指令単位に合
わせて設定してください。
設定範囲は使用するエンコーダによって異なります。
設定値の例
設定値:16
3
モータ形式 エンコーダパルス数(
SGM-
SGM-
□□□31□
□□□W1□
インクリメンタルエンコーダ2048P/R
絶対値エンコーダ
3-25
1024P/R
1回転
) 設定範囲
P/R
16〜2048
16〜1024
Page 86

Σシリーズの使い方(応用編)
3.2.4接点入出力を使用する
3
3.2.4
接点入出力を使用する
接点入力信号は,次のように接続してください。
SGDAサーボパックの動作をコントロールする,シーケンス入力信号です。必要に応じて
接続ください。
SGDAサーボパック
24 V電源
ホトカプラ
上位装置
重要
使用電源
端子はありません。
入力用外部電源の仕様:
出力回路と同一の電源を使用することをお勧めします。
→入力 +
は,外部に別途準備してください。
24 V
DC 24 V±1V
以上
50 mA
24VIN 1CN-13
SGDA
24 V外部電源入力 速度・トルク制御用
接点入力信号共通の外部電源入力端子です。
対象接点入力信号:P-CL
N-CL
S-ON
P-CON
(1CN-11)
(1CN-12)
(1CN-14)
(1CN-15)
P-OT (1CN-16)
N-OT (1CN-17)
ALMRST
(1CN-18)
サーボパックから外部に出力する電源
位置制御用
SGDAサーボパック
24 V電源
24V外部電源を接続してください。
3-26
Page 87

接点出力信号は,次のように接続してください。
3.2 上位装置に合わせた設定をする
重要
SGDAサーボパックの動作状態
を示すシーケンス出力信号で
す。
ホトカプラ出力
1出力当たり
最大使用電圧:DC 30 V
最大出力電流:DC 50 mA
オープンコレクタ出力
1出力当たり
最大使用電圧:DC 30 V
最大出力電流:DC 20 mA
使用電源
子はありません。入力回路と同一の電源を使用することをお勧めします。
は外部に別途準備してください。
24 V
SGDAサーボパック
ホトカプラ
サーボパックから外部に出力する電源端
S GDA
または
24 V電源
3
上位装置
出力
→
SG-COM 1CN-10
出力信号グランドコモン 速度・トルク制御用
位置制御用
以下のシーケンス出力信号のシグナルグランドです。外部電源の0Vに接続します。
対象接点出力信号:BK
V-CMP
COIN
TGON
(1CN-8) (速度・トルク制御用のみ)
(1CN-8) (位置制御用のみ)
(1CN-9)
(1CN-7)
3-27
Page 88

Σシリーズの使い方(応用編)
3.2.5電子ギヤを使う
3
3.2.5
電子ギヤを使う
位置制御用(SGDA-□□□P)のみ
SGDA-□□□P
位置
概要
「電子ギヤ」機能は,入力指令パルス当たりのモータ移動量を,任意の値に設定でき
る機能です。指令パルスを発生する「上位装置」は,機械の減速比やエンコーダのパ
ルス数を意識することなく制御を行うことができます。
電子ギヤ機能を使わないと 電子ギヤ機能を使えば
エンコーダパルス:2048 ボールねじピッチ:6mm
ワークを10 mm動かすには
1回転で6mmだから
10 ÷ 6 = 1.6666回転
2048×4パルスで1回転だから
1.6666 × 2048 × 4 = 13653パルス
13653パルスを指令入力する。
この換算を上位装置で行う必要がある。
ワーク
ワーク
指令単位:1μm
エンコーダパルス:2048 ボールねじピッチ:6mm
電子ギヤであらかじめ機械条件,指令
単位を定義しておく。
ワークを10 mm動かすには
指令単位1μmだから
10mm
= 10000パルス
1 μ
J
電子ギヤの設定方法
以下の手順に従って,「電子ギヤ比(B/A)」を計算し,ユーザー定数「Cn-24,Cn-25」
にその値を設定してください。
1. まず,機械仕様を確認します。
電子ギヤに関係する要素
• 減速比
ボールねじピッチ
減速比
• ボールねじピッチ
• プーリ径 など
2. SGMサーボモータのエンコーダパルス数を確認します。
モータ形式 エンコーダの種類 エンコーダパルス数(P/R)
□□□31□
SGM-
□□□W1□
SGM-
ユーザー定数「
*
インクリメンタルエンコーダ
絶対値エンコーダ
」の設定値と同じです。
Cn-11
2048
1024
3-28
Page 89

3. 指令単位を決定します。
3.2
上位装置に合わせた設定をする
指令単位とは...
負荷を移動させる位置データの最小単位で
す。(上位装置で指令する最小単位)
例)
0.01 mm,0.001 mm,0.1°,0.01インチ
1パルスの指令入力で,1指令単位移動しま
す。
例)
指令単位 1μmのとき
指令パルスを50000パルス入力すると,
50000 × 1μm = 50 mm移動します。
4. 負荷軸1回転当たりの負荷移動量を,指令単位で求めます。
負荷軸1回転当たりの移動量(指令単位) =
例)
ボールねじピッチ5mm指令単位 0.001 mmのとき
5
= 5000(指令単位)
0.001
負荷軸を1回転させると移動する量
テーブル移動を0.001mm単位で
指令する場合
指令単位は機械仕様・位置決め精度など
を考慮して決定してください。
指令単位:0.001 mm
3
指令単位
重要
ボールねじ 円テーブル ベルト+プーリ
負荷軸
P
:ピッチ
P
=
1回転
5. 電子ギヤ比
モータ軸と負荷軸の減速比を
(モータが m 回転したとき,負荷軸が n 回転する場合)
電子ギヤ比
ここで,以下の条件が満足されていることを確認してください。
0.01≦電子ギヤ比
範囲を越えている場合は,サーボパックは正しい動作をしません。
機械構成または指令単位を変更してください。
指令単位
B
を求めます。
A
B
=
A
1回転
n
とすると
m
エンコーダパルス数 × 4
負荷軸1回転当たりの移動量(指令単位)
B
100
≦
A
=
指令単位
負荷軸
360°
負荷軸
1回転
m
×
n
D
:プーリ径
π
=
指令単位
D
3-29
Page 90

Σシリーズの使い方(応用編)
3.2.5電子ギヤを使う
6. ユーザー定数に設定します。
電子ギヤ比
うに選んで,ユーザー定数に設定します。
B
の値を約分して,A,Bともに「65535」より小さい整数値になるよ
A
3
B
A
以上で電子ギヤの設定が終了します。
-
24
Cn
Cn-25
位置制御用(
数です。
電子ギヤのギヤ比を設定します 。機 械仕 様に 合
わせて設定ください。
電子ギヤ比数字スペース
B=
[(エンコーダパルス数)×4]×[モータ軸回転速度]
A=
[指令単位(負荷軸1回転時の負荷移動量)]×[負荷軸回転速度]
Cn-24 RATB 電子ギヤ比(分子)
Cn-25 RATA 電子ギヤ比(分母)
RATB
電子ギヤ比(分子)
RATA
電子ギヤ比(分母)
SGDA-
□□□P)のみのユーザー定
B
A
単位なし設定範囲
単位なし設定範囲
Cn・24
=
Cn・25
出荷時設定1位置制御用のみ
1〜65535
出荷時設定1位置制御用のみ
1〜65535
入力指令パルス
SGDAサーボパック
電子ギヤ
SGM
サーボモータ
なお,設定値には次の制限があります。ご注意ください。
B
0.01
≦
≦
100
A
3-30
Page 91

3.2 上位装置に合わせた設定をする
電子ギヤの設定例:各種の負荷機構における設定例を示します。
ボールねじ
=
6mm
0.001mm
Cn‑24
Cn‑25
指令単位:0.001 mm
負荷軸
負荷軸1回転当たりの負荷移動量 =
2048 × 4 × 1
B
電子ギヤ比
=
6000 × 1
A
= 6000
インクリメンタ
ルエンコーダ
2048 P/R
ボールねじピッチ:6mm
設定値
Cn-24
Cn-25
8192
6000
円テーブル
360°
指令単位:0.1°
負荷軸
減速比
3:1
インクリメンタル
エンコーダ
2048 P/R
負荷軸1回転当たりの負荷移動量 =
2048 × 4 × 3
B
電子ギヤ比
=
3600 × 1
A
=
設定値
0.1°
Cn‑24
Cn‑25
Cn-24
Cn-25
= 3600
24576
3600
ベルト+プーリ
指令単位:0.0254 mm
負荷軸
減速比
2.4:1
絶対値エンコーダ1024 P/R
プーリ径φ100 mm
負荷軸1回転当たりの負荷移動量=
1024 × 4 × 2.4
B
=
=
A
49152
61810
12362 × 1
電子ギヤ比
9830.4
=
12362
3.14×100mm
=
設定値
0.0254mm
Cn‑24
Cn‑25
Cn-24
Cn-25
= 12362
49152
61810
制御ブロック図:ご参考用に,位置制御用サーボパック(SGDA-□□□P)の制御ブ
ロック図を示します。
3
SGDAサーボパック(位置制御用)
微分
指令
パルス
PG信号
出力
スムー
ジング
フィードフォワード
ゲイン
分周
偏差
カウンタ
一次遅れ
フィルタ
バイアス
速度
ループ
COIN
信号
電流
ループ
SGM
サーボモータ
エンコーダ
3-31
Page 92

Σシリーズの使い方(応用編)
3.2.6内部設定速度選択を使う
3
3.2.6
内部設定速度選択を使う
簡単な速度制御を行う方法として,「内部設定速度選択」機能があります。これは,あ
らかじめ「ユーザー定数」に運転速度を3種類設定しておいて,外部からの接点入力に
よりいずれかの速度を選択し,運転を行うものです。
この機能は,速度・トルク制御用(SGDA-□□□S),位置制御用(SGDA- □□□P )
の,どちらでも使用できます。
接点入力
外部の速度設定器やパルス
発生器は必要ありません。
SGDAサーボパック
SGM
サーボモータ
速度選択
ユーザー定数に設定した速度で
モータを運転します。
ユーザー定数
「内部設定速度選択」を使用するために,次の設定を行ってください。
J
下記の「メモリスイッチ」を「1」に設定します。
-
ビット2内部設定速度選択 有効/無効 出荷時設定0速度・トルク制御用
02
Cn
内部設定速度選択機能を有効にします。
内部設定速度選択機能を使用す る場 合, 以下 に
示す入力信号の内容が変わります。
接点入力
SGDAサーボパック
内部に設
定した速
度でモー
タを運転
する。
なお,このメモリスイッチの設 定に 伴っ て以 下
の信号の意味も変更になります。
モニタモード「Un-05」ビット7,ビット8
位置制御用
SGMサーボモータ
3-32
Page 93

3.2 上位装置に合わせた設定をする
能(指令
0
:正転
能(指令パルス
1
:逆転
用できません
設定 内容 入力信号
P-CON(1CN-15) PI制御/P制御の切り替えに使
用する。(速度・トルク制御用の
内部設定速度選択
0
機能を使用しな
い。
P-CL(1CN-11)
場合は「Cn-01」のビットA,B
に従う。)
正転側外部電流制限入力
N-CL(1CN-12)
内部設定速度選択
機能を使用する。
* 位置制御の場
1
J
運転速度を「ユーザー定数」に設定します。
合,INHIBIT機
パルス
阻止機能)は使
。
SPEED1
-
Cn
1F
第1速度
(内部設定速度選択)
SPEED2
Cn-20
第2速度
(内部設定速度選択)
P-CON P-CL N-CL
回転方向選択
0:正転
1:逆転
単位
r/min
単位
r/min
設定範囲
0〜MAX
設定範囲
0〜MAX
逆転側外部電流制限入力
0:OFF,1:ON
速度設定
0 0
0 1 Cn-1F,SPEED1
1 1 Cn-20,SPEED2
1 0 Cn-21,SPEED3
出荷時設定
速度
出荷時設定
速度
停止
(またはパルス指令)
速度・トルク制御用
100
200
位置制御用
速度・トルク制御用
位置制御用
3
Cn-21
SPEED3
第3速度
(内部設定速度選択)
単位
r/min
設定範囲
0〜MAX
内部設定速度選択を選択したと きの モー タ回 転
速度を設定します。(メモリスイッチ「
Cn-02
」
のビット2で選択します。)
速度選択入力信号「
(1CN-12)
(1CN-15)
および回転方向選択信号「
によって,ここに設定した速度でモー
P-CL」(1CN-11),「N-CL
P-CON
」
」
タを運転することができます。
出荷時設定
速度
300
内部設定速度選択
(メモリスイッチ「Cn-02」ビット2 = 1)
SGDAサーボパック
内部に設定
した速度で
モータを運
接点入力
転する。
速度・トルク制御用
位置制御用
SGM
サーボモータ
3-33
Page 94

Σシリーズの使い方(応用編)
3.2.6内部設定速度選択を使う
J
「ソフトスタート時間」を設定します。
3
単位ms設定範囲
0〜10000
単位ms設定範囲
0〜10000
-
07
Cn
Cn-23
SFSACC
ソフトスタート時間
(加速度)
SFSDEC
ソフトスタート時間
(減速度)
速度指令に,SGDAサーボパック内部でこの設
定値の加減速をかけて速度制御を行います。
ステップ状の速度指令を入力す る場 合や 内部 設
定速度選択時に滑らかな速度制 御が 行え ます 。
(通常速度制御では「0」を設定してくださ
い。)
設定値には,以下の時間を設定してください。
D Cn-07:停止状態からMAX回転速度(4500
r/min)に達するまでの時間
D Cn-23:MAX回転速度から停止状態に達す
るまでの時間
出荷時設定0速度・トルク制御用
位置制御用
出荷時設定0速度・トルク制御用
位置制御用
速度指令
ソフトスタート
SGDA
サーボパック
内部速度指令
Cn-07:この時間を設定する
Cn-23:この時間を設定する
重要
位置制御形では,内部設定速度選択機能使用時のみ,ソフトスタート機能が有効となります。
3-34
Page 95

「内部設定速度選択」による運転は次のように行います。
選択速度
停止
選択速度
パルス指令入力
下記の入力信号で,起動/停止を行います。
3.2 上位装置に合わせた設定をする
→入力
→入力
J
内部設定速度選択(
P-CL 1CN-11
N-CL 1CN-12
Cn-02
ビット
速度選択
(正転側外部トルク制限入力)
速度選択
(逆転側外部トルク制限入力)
2 = 1
)のとき
D 速度・トルク制御用の場合 0:OFF,1:ON
接点信号 ユーザー定数
Cn-02 Cn-01
P-CON
− 0 0
回転方向
0:正転
P-CL N-CL
0 1 SPEED 1(Cn-1F)
1 1
ビット2ビットAビット
1
1
2
0 0
1 0
0 1
1 1
− −
速度・トルク制御用
位置制御用
速度・トルク制御用
位置制御用
3
B
内部速度指令0にて停止
ゼロクランプにて停止
アナログ速度指令(V-REF)入力
ゼロクランプ機能付き
SPEED 2(Cn-20)
1:逆転
−
部分の設定値(0または1),および入力信号の状態は任意です。
D
位置制御用の場合0:
接点信号 ユーザー定数
P-CON P-CL N-CL
− 0 0
回転方向
0:正転
1:逆転
−
部分の設定値(0または1),および入力信号の状態は任意です。
D
内部設定速度選択機能の使用時は,指令パルス阻止機能は使用できません。
1 0 SPEED 3(Cn-21)
OFF,1:ON
Cn-02 Cn-01
ビット
2
0 1
1 1
1 0 SPEED 3(Cn-21)
1
ビット F
0
1
−
停止
SPEED 1(Cn-1F)
SPEED 2(Cn-20)
3-35
Page 96

Σシリーズの使い方(応用編)
3.2.6内部設定速度選択を使う
J
標準設定(Cn-02 ビット2 = 0)のとき
入力信号は,「外部トルク制限入力」として使用します。
3
重要
入力信号「P-CON
→入力
J
内部設定速度選択(Cn-02 ビット2 = 1)のとき
入力信号「P-CON
P-CON
」で,モータの回転方向を選択します。
P-CON 1CN-15
比例動作指令など 速度・トルク制御用
」で,サーボモータの回転方向を指定します。
意味
1
0
逆回転方向を選択
正回転方向を選択
位置制御用
0:OFF(Hレベル),1:ON(Lレベル)
J
標準設定(Cn-02 ビット2 = 0)のとき
「比例動作,ゼロクランプ,トルク/速度制御切り替え」などに使用します。
速度・トルク制御形は,ユーザー定数
使用する場合,外部指令(電圧指令)による制御が可能です 。位置制御形は,ユーザー定 数
ビットFの設定によって内部設定速度選択を使用する場合,外部指令(パルス指令)による
Cn
01
-
制御が可能です。
ビットA,Bの設定によって内部設定速度選択機能を
01
-
Cn
「内部設定速度選択」による運転例を下記に示します。ソフトスタート機能を使用する
と,速度切り替え時のショックが少なくなります。
内部設定速度選択の使用例
モータ回転速度
第2速度
第1速度
停止
OFF OFF OFF OFF OFF
OFF
ON ON ON ON
第3速度
ON ON ON ON
OFF OFF
加減速設定は,Cn-07,Cn-23
「ソフトスタート時間」で行い
ます。
停止
第1速度
第2速度
OFF
ON
第3速度
OFF OFF
停止
3-36
Page 97

3.2 上位装置に合わせた設定をする
重要
位置制御形では,ソフトスタート機能は「本内部設定速度選択時にのみ」働きます。パルス指令
入力時は,ソフトスタート機能は使用できません。位置制御形では,第1〜第3速度のいずれかで
運転中にパルス指令入力へ切り替える際,サーボパックでのパルス指令の受付は,位置決め完了
信号 (COIN
) が出力されてからとなります。お客様の上位装置からのパルス指令の出力開始
は,必ずサーボパックからの位置決め完了信号が出力された後に行ってください。
位置制御形での信号のタイミング
モータ速度
0 r/min
COIN
パルス指令
N-CL
P-CL
選択速度
(注)1
上図は,ソフトスタート機能を使用した場合のものです。
2t
の値は,ソフトスタート機能の使用の有無によって左右されません。
1
込みには,最大
第1速度
第2速度
6ms
の遅れが生じます。
第3速度
パルス指令
第1速度
P-CL,N-CL
の読み
3
3.2.7 トルク制御を使う
SGDA
SGDA-□□□S
速度・トルク
下記の「メモリスイッチ」の設定によって,「レベル3 :トルク制御 I」または「レベル
4:トルク制御 II」を選択します。
サーボパックは,次のようなトルクのコントロールができます。
• トルク制限
• トルク制御
この項では,「レベル3および4」の「トルク制御」機能の使い方を説明します。
-
Cn
Cn-01
ビットA制御形態の選択 出荷時設定0速度・トルク制御用
01
ビットB制御形態の選択 出荷時設定0速度・トルク制御用
レベル1:機械やワークの保護のため,出力トルクの最大値を制限
したい。
レベル2:モータである位置まで動かしてから,トルクを制限した
い。
レベル3:速度ではなく,常に出力トルクをコントロールしたい。
レベル4:速度制御とトルク制御を切り替えて使いたい。
のみ
のみ
本格的なトルク制御です。
外部から直接モータ出力トルクを指令値としてSGDAサーボパックに入力し,トルクの
制御を行います。
3-37
Page 98

3
Σシリーズの使い方(応用編)
3.2.7トルク制御を使う
適用例
D 張力コントロールをする場合
D 圧力コントロールをする場合
Cn-01
ビットBビット
1 0
設定
A
トルク制御
I
トルク制御専用モードです。
D T-REF(1CN-1
)からトルク指令を入力し
ます。
D P-CON
D
は使用しません。
速度指令入力
V-REF(1CN-3
ません。
ユーザー定数「
D
」で最大速度の制限
Cn-14
が可能です。
制御形態
)は使用でき
トルク指令
SGDA
サーボパック
1 1
1 1
適用例
張力コントロール
トルク制御
張力
II
SGDA
サーボ
パック
トルク制御と速度制御を切り替えることが
できます。
D V-REF(1CN-3
)から速度指令または速度
制限値を入力します。
D T-REF(1CN-1
)から制御形態により,ト
ルク指令・トルクフィードフォワード指
令
トルク制限値のいずれかを入力します。
D
D P-CON
(
)をトルク制御と速度制
1CN-15
御の切り替えに使います。
が「開」
1CN-15
1CN-15が「0V
トルク制御時(
D T-RE F
の指令に従ってトルク制御を行いま
」
P-CON
トルク制御
速度制御
がオフのとき)
す。
D V-REF
によって速度制限をかけることがで
きます。
D V-REF
電圧(+)によって正転および逆転
方向の速度を制限します。
速度制限の原理
制限速度範囲外では,制限速度との速度差
に比例したトルクを負帰還することで,制
限速度範囲内へ戻そうとします。従って,
実際のモータ回転速度制限値は,負荷条件
により幅が生じます。
速度指令
トルク指令
速度指令/
トルク指令
の切り替え
モータ速度
SGDA
サーボパック
速度制限範囲
V-REF
3-38
Page 99

Cn-01 設定
備考
(
V
-REF
)
(
T
-REF
)
備考
同じです
)
0
1
付き速度制御 詳
ビットBビット
A
3.2 上位装置に合わせた設定をする
制御形態
1 1
速度制御時(
P-CON
がオンのとき)
ユーザー定数Cn-01のビットFおよびCn-02のビットFの値により,以下の
ようになります。
ユーザー定数
Cn-01 Cn-02
ビットFビット
速度指令入力
(V-REF)
(1CN-3,4)
トルク入力
(T-REF)
(1CN-1,2)
F
速度制御
0 0
速度指令
使用できませ
ん
Cn-02 ビット Fへ
トルクフィードフォワード付
き速度制御
の設定は任意で
す。
(0, 1どちらでも
1 −
速度指令
トルクフィー
ドフォワード
トルクフィード
フォワード付き速
度制御の詳細は,
。
3.2.8を参照。
3
アナログ電圧指令によるトル
0 1
ク制限付き速度制御
速度指令 トルク制限値
0 0
0 1
速度制御(標準設定)
ゼロクランプ付き速度制御
「トルク制御」を行う入力信号は次のとおりです。
SGDAサーボパック
トルク指令入力
(アナログ電圧入力)
速度指令入力
(アナログ電圧入力)
P:ツイストペア線を示します。
トルク
指令
速度
指令
アナログ電圧指令
によるトルク制限
付き速度制御の詳
細は,3.2.9を参
照。
3-39
Page 100

Σシリーズの使い方(応用編)
3.2.7トルク制御を使う
3
→入力
→入力
T-REF 1CN-1
SG-T 1CN-2
トルク指令入力 速度・トルク制御用
トルク指令入力用シグナル
グランド
のみ
速度・トルク制御用
のみ
トルク制御を選択したときに使用します。(メモ
リスイッチ「Cn-01」のビットA,B)
指令トルク(%)
T-REF ,SG-T間の入力電圧に比例したトルクで
モータをトルク制御します。
標準設定
標準設定
Cn-13 = 30:3Vで定格トルク
例)
+3V入力: 正方向に定格トルク
+9V入力: 正方向に定格の300%トルク
−0.3V入力:逆方向に定格の10%トルク
ユーザー定数「Cn-13」を使って,電圧入力範囲を変更することができます。
入力回路側(右図を参照)
1/2 W以上
SGDAサーボパック
D ノイズ対策のため,配線には必ず
ツイストペア線を使用してください。
入力電圧(V)
傾きは
「Cn-13」
(TCRFGN)に
設定します。
D 可変抵抗器の例 :
栄通信工業製 25HP-10B形
→入力
→入力
V-REF 1CN-3
SG-V 1CN-4
速度指令入力
(または速度制限入力)
速度指令入力用シグナル
グランド
速度制御を選択したときに使用します。(メモリ
スイッチ「Cn-01」のビットA,B)
通常の速度制御では必ず配線してください。
V-REF ,SG-V間の入力電圧に比例した速度で
モータを速度制御します。
標準設定
Cn-03 = 500:6Vで定格回転速度(3000 r/min)
例) +6V入力: 正方向 3000 r/min
+1V入力: 正方向 500 r/min
−3V入力: 逆方向 1500 r/min
標準設定
指令速度(r/min)
速度・トルク制御用
のみ
速度・トルク制御用
のみ
入力電圧(V)
傾きは「Cn-03」
(VREFGN)に設定
します。
3-40
 Loading...
Loading...