

Page 1
2-Loop Graphical Profile Controller & Recorder
Concise Product Manual (59541-4) Page 1 of 6
A Full Product Manual is also available from your supplier.
The following symbols are use on the product labels:
Caution: Potential danger to life
or limb. Refer to installation
manual when connecting
Equipment protected throughout by double insulation
Alternating current
Both direct and alternating
current
1. INSTALLATION
CAUTION: Installation should be only performed by technically
competent personnel. It is the responsibility of the installing engineer
to ensure that the configuration is safe. Local regulations regarding
electrical installation & safety must be observed - e.g. US National
Electrical Code (NEC) and/or Canadian Electrical Code. Impairment of
protection will occur if the product is used in a manner not specified by
the manufacturer.
Installing Plug-in Modules
Board Mounting Struts (x8) &
Front Removal Latch (x1)
Plug-in Module A
2nd Universal Input & Base
Option 2 Board
Plug-in Module 3
1st Universal Input & Base
Option 1 Board
Power Supply Board
Plug-in Module 1
Plug-in Module 2
USB/Digital Input C Option
Board
To access the plug-in modules, first remove the instrument from the housing.
a. Pull front out to engage Front Latch. This prevents removal without a tool.
b. Press latch with screwdriver through top vent hole. Remove front from case.
c. Detach main boards by lifting first the upper, and lower mounting struts.
d. Plug required modules into the correct connectors, as shown below.
e. Locate the module tongues in corresponding slot(s) on the opposite board.
f. Hold the Power and Input boards together while relocating on their mountings.
g. Push the boards forward to ensure correct connection to the Display board.
h. Replace the instrument by aligning the boards with the guides in the housing,
then slowly push the instrument back into position.
NOTE: Plug-in modules are automatically detected at power up.
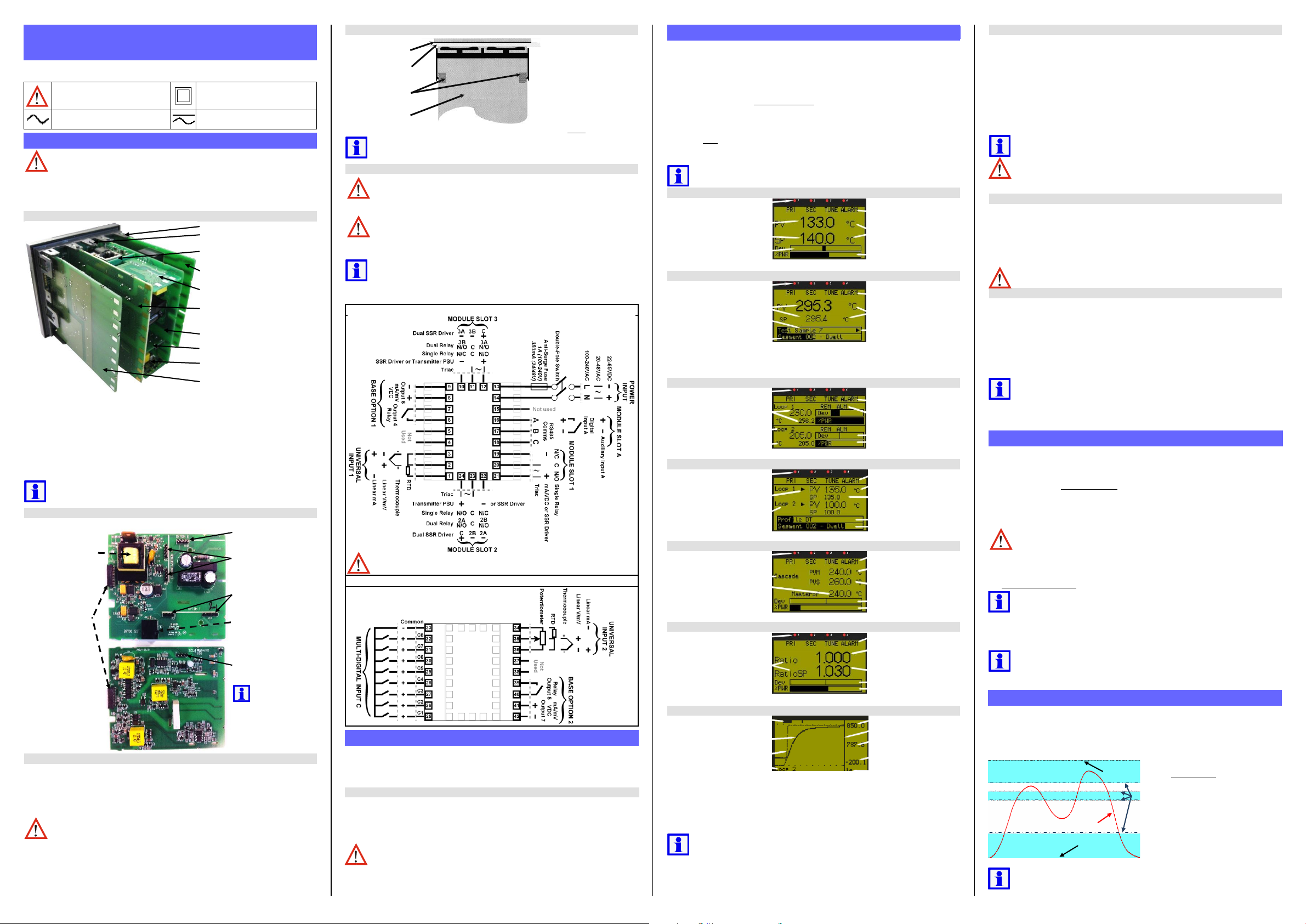
Main Board Connectors
POWER SUPPLY
BOARD
Transformer Colour
Code
100-240V (Yellow)
24-48V (Blue)
Display Board
Connections
1st UNIVERSAL
INPUT / BASE
OPTION 1
BOARD
Module Slot 3
Connector PL4B
Module Slot A
Connectors
PL5, & PL6
Module Slot 1
Connectors PL7 & PL8
PC Configurator
Socket SK1
Module Slot 2
Connector PL4A
NOTE: Plastic
pegs prevent
fitting of older nonreinforced single relay
modules –remove the
peg to fit dual relays
Re-fitting the Main Boards
This product is designed to allow the user to reconfigure some hardware options in
the field by changing the modules fitted in slots 1, 2, 3, & A. The main boards
(display/CPU, power supply, inputs 1 & 2 and digital input/USB) are factory fitted, but
may be removed while reconfiguring the plug-in modules. Take care when re-fitting
these boards. Observe the power supply board transformer colour, and case labelling
to check the supply voltage, otherwise irreparable damage may occur.
CAUTION: In the event of a fault, replacement of defective main boards
should only be carried out by trained personnel.
Panel Mounting
Gasket
Mounting Panel
Ratchets
Instrument
Housing
1. Insert instrument into the
panel cut-out.
2. Hold front bezel firmly
(without pressing on the
display area), and re-fit
mounting clamp. Push the
clamp forward, using a tool
if necessary, until gasket
compresses and instrument
is held firmly in position.
NOTE: For an effective IP66 seal against dust and moisture, ensure
gasket is well compressed against the panel, with the 4 tongues
located in the same ratchet slot.
Rear Terminal Wiring
CAUTION: The instrument is double insulated. All external circuits
connected must provide double insulation.
Failure to comply with the installation instructions may impact the
protection provided by the unit.
CAUTION: Check correct operating voltage on the side label before
connecting power. A UL listed anti-surge fuse should be fitted to the
power input. An IEC60947-1 & IEC60947-3 compliant isolation switch
should be fitted close to the unit, in easy reach of the operator, and
appropriately marked.
NOTE: The wiring diagrams show all possible option combinations. The
connections required depend on the options & modules fitted.
Use single strand (1.2mm / AWG18 max size) copper wire, except for
thermocouple inputs, where the correct thermocouple or compensating
cable and connectors should be used.
Central Terminals 1 to 24
CAUTION: External computing devices connected to the
communications port must comply with the standard, UL 60950.
Outer Terminals 25 to 42
2. POWER UP SEQUENCE
Following the power-up self-test and logo screen, the instrument normally enters
Operation Mode, from which the user can select the instrument’s Main Menu (refer to
the Screen Sequences on page 5). The exceptions to this are the first power-up after
purchase where the Setup Wizard is shown, or if a plug-in module error is detected.
Plug-in Module Errors
If an invalid or unknown module is detected in one of the plug-in module slots the
message “Fault Found, Press R, for details” followed by “Replace faulty module in
Module Slot n, Press R,” (where n identifies the problem slot). The Service Contact
information is displayed next showing details of who to contact if a fault persists
CAUTION: Do not continue using the product until the issue causing
the error is resolved.
3. OPERATION MODE
This mode is entered at power on, or can be accessed from the Main Menu.
The initial screens shown in operation mode vary depending on the options fitted and
the configuration. Subsequent screens display and may allow the selection or
adjustment* of Setpoints, setpoint ramps, enable/disable control, auto/manual
operation, alarm status, profiler & recorder status and graphical trend views.
Some screens will persist until the user navigates away, others will ‘time-out’ back to
the main screen (refer to Operation Mode: in Screen Sequences).
Press R or L briefly to move forward/back through parameters. Where adjustment is
possible*, press D or U to alter the values. The next/previous screen follows the last
parameter - or hold down R or L >1sec to skip straight to next/previous screen
accepting ALL values shown.
* If required, all Operation Mode parameters can be made read only (see Display
Configuration on page 6) and others may be removed from this mode altogether.
NOTE: Configuration must be completed before starting normal
operations.
Single Control Loop: Normal Operation
LED Indicators
LED Function Labels
Process Variable Value
Engineering Units
Actual Setpoint Value
Control Deviation Graph
scaled ±5% of input span
Power Graph
1-Loop Operation
Single Control Loop: Profiler Status
LED Indicators
LED Function Labels
Process Value & Setpoint
Engineering Units
Profile Name & Progress
Segment No, Type &
Progress or Delay Time
Profile Status Indicator:
► Run, ▌▌ Held, ■ Stopped
1-Loop Profile Status
If enabled in Display Configuration, the prior screen allows the user to Select, Run,
Hold or Abort a profile. The next screen shows the profile event output status.
Two Control Loops: Normal Operation
LED Indicators
Process Variable* & Actual
Setpoint Values*
LED Function Labels
Indicators for Alarm and
Remote Setpoint active*
Loop Descriptions*
Engineering Units*
Control Deviation (±5% of
span) & Power Graphs*
* = in loop 1 & 2 screen area
2-Loop Operation
Two Control Loops: Profiler Status
LED Indicators
LED Function Labels
Profile Status Indicators*:
► Run, ▌▌ Held, ■ Stopped
Engineering Units*
Process Variable Values
& Setpoints*
Loop Descriptions*
Profile Name & Progress
Segment No. Type &
Progress or Delay Time
* = in loop 1 & 2 screen area
2-Loop Profile Status
Cascade Control: Normal Operation
LED Indicators
LED Function Labels
Master Process Value
Cascade Status
Slave Process Value
Master Setpoint (Slave SP if
Cascade Open)
Control Deviation (±5% of
span) & Power Graphs
Cascade Control
Ratio Control: Normal Operation
LED Indicators
LED Function Labels
Relative Process Value
Ratio & Setpoint Labels
Relative Setpoint
Control Deviation (±5% of
span) & Power Graphs
Ratio Control
Trend Views
Active Alarm(s)
Trend Upper Scale Value
Cursor Line
Process Variable Trend
PV Value At Cursor Line
Setpoint Trend (dotted)
Trend Lower Scale Value
Loop No, & Time Markers
(10 samples per marker)
Sample Interval (or Time
At Cursor Line)
Trend View
The Trend Views graph PV; PV & SP; or Max/Min PV between samples, plus active
alarms. Graph format and sample intervals are set in Display Configuration. Trend
scale values adjust automatically to visible data (between 2 to 100% of input span).
120 of 240 historical data points visible. Pressing D or U moves the Cursor Line
back through the last 240 data points.
NOTE: Data is not retained at power down or if the sample interval is
changed.
Manual Control
Depending on the Control Configuration settings, automatic or manual control can be
selected from the Auto/Manual selection screen, or via a digital input. Switching to or
from manual mode is via Bumpless Transfer.
In Manual mode the Setpoint display is replaced by a -100 to 100% power output
level, labelled “Man”.
Press D or U to set the required manual power.
When using VMD control, Manual mode replaces the Setpoint display with the valve
movement status (Opening, Closing or Stopped), and is labelled “Man”.
The U key opens the valve and the D key closes the valve.
If Manual control is selected when in Cascade mode, the slave loops % power value
is shown. This is the power output fed directly to the control actuator (e.g. heaters).
NOTE: Selecting Manual Control will cause a running profile to hold
until control is returned to automatic mode.
CAUTION: Manual mode overrides the automatic control loop. It also
ignores any output power limits, valve open/close limits and the control
enable/disable setting. The operator is responsible for maintaining the
process within safe limits.
Over/Under Range & Input Fail Indications
If the process or auxiliary inputs are >5% above or below the scale max/min, the
displayed value is replaced with the word “HIGH” or “LOW”.
If a signal break is detected, the value is replaced with “OPEN”; except in Ratio
control where an open input 1 or 2 is shown as “x1-Open” or “x2-Open”.
An un-calibrated input is replaced by “ERROR”.
In OPEN or ERROR conditions, the Control Outputs go to the pre-set power value
(see Control Configuration on page 6).
CAUTION: Correct the problem causing the error condition before
continuing normal operation.
Customising Operator Mode
The user can choose to enable or disable some operator mode screens from the
Display Configuration menu (see page 6). These are: cascade mode switching;
auto/manual control selection; setpoint ramp-rate values; selecting the setpoint
source; control enable/disable; clear latched outputs; manually triggering a recording;
recorder status information and trend views – these are marked ◘ in the screen list on
page 5 to indicate that they are optional.
In addition, up to 50 configuration mode parameters can be copied into operation
mode using the PC software. Any parameters selected in this way are shown at the
end of the normal operator mode screen sequence.
NOTE: Configuration mode parameters copied into operation mode
are not pass code protected.
It is recommended that you only enable operator mode screens if they are important
for daily operation. Consider using Supervisor Mode (see section 21) for parameters
that the operator may need less often or that you want to limit access to.
4. AUTOMATIC TUNING
To automatically optimise the PID tuning (PI tuning in VMD mode) for the process, you
can use Pre-Tune, Self-Tune or Auto Pre-Tune independently for each loop.
Pre-tune performs a single start-up disturbance test. It stops running when the test
has completed. The user chooses which PID set the new tuning terms will be applied
to, and this selection does not change the selected “active PID set”. There are two
modes; Standard Pre-Tune which tests the process response half-way from the
activation point (the process value when pre-tune began running) to the current
setpoint; or Pre-Tune at Value which allows the user to specify the exact process
value at which the test will occur.
CAUTION: Consider possible process over-shoot when selecting the
value to tune at. If there is a risk of damage to the product or equipment
select a safe value.
If Auto Pre-Tune is selected, a Standard Pre-tune will attempt to run at every power
up. If Self-Tune is selected it constantly monitors the process and adjusts the tuning
when control errors occur. Auto pre-tune and self-tune apply the new tuning terms to
the current Active PID set. Auto pre-tune and self-tune are not possible with cascade.
NOTE: To pre-tune a cascade, first select “Cascade-Open” to tune the
PID set(s) on the slave. After the slave has successfully tuned,
remember to pre-tune the master/slave combination (this time select
“Cascade-Closed”). The cascade remains open until you do this.
See PID Sets & Gain Scheduling on this page and Automatic Tuning on page 5. Refer
to the Full Product Manual (from your supplier) for more about tuning.
NOTE: Automatic tuning will not engage if either proportional band is
set to On/Off control. Also, pre-tune (including and auto pre-tune
attempt) will not engage if the setpoint is ramping, a profile is running,
or the Process Variable is <5% of span from setpoint.
5. PID SETS & GAIN SCHEDULING
Up to 5 sets of PID tuning terms (primary & secondary proportional bands or on-off
differential, integral & derivative times, overlap/deadband) can be entered for each
control loop, allowing the unit to be pre-set for differing conditions. For each loop one
set can be selected as the “Active PID” set, or alternatively, if the process conditions
change significantly during use (e.g. if it is partially exothermic as the temperature
rises) Gain Scheduling can be employed.
Gain scheduling ‘bumplessly’ switches
PID sets automatically at successively
higher setpoint or process values, giving
optimal control across a wide range of
process conditions. PID set 1 is used
from the scaled input lower limit until the
“breakpoint” for set 2 is passed and that
set becomes active. Set 2 is used until
the breakpoint for Set 3 is reached etc. If
any breakpoint is set to OFF, the
subsequent PID sets are not used.
See Automatic Tuning section 4 for tuning the PID sets.
NOTE: ON/OFF control is possible with the individual PID sets but
cannot be used with gain scheduling. On/off control is replaced with
the default proportional band if gain scheduling is turned on.
PID Set 1
PID Set 2
PID Set 3
PID Set 4
PID Set 5
PV or SP
Scale Upper
Limit
Scale Lower
Limit
Breakpoints
Page 2
2-Loop Graphical Profile Controller & Recorder
Concise Product Manual (59541-4) Page 2 of 6
6. APPLICATION SETUP
Setup Wizard
An easy Setup Wizard runs automatically at first ever power-up. Follow the wizard to
setup parameters required for basic applications. The screens/parameters marked “w”
in the Screen Sequences lists are included, see pages 5 & 6. The wizard can be run
again at any time from the main menu. An option to reset all parameters to default
(recommended) is offered when manually running the wizard.
Pre-commissioning Considerations
The next sections provide guidance for more complex applications where the wizard is
not sufficient. It is important to understand how the instrument is to be used before
commencing with the setup. Consideration must be given to the following questions:
If fitted, how will the 2nd input be used?
One loop only (2nd input not used in this application)
Two independent control loops.
Valve feedback for loop 1
A “redundant” backup for the 1st input (see section 10).
Cascaded with the first control loop (see section 7).
A reference input for ratio control (see section 8).
How will the instrument control the process?
Primary only or primary & secondary control outputs (see section 12).
Direct valve motor drive outputs (see section 11).
The table below shows the main input and control configuration settings for these
application types (see page 6 for the configuration menus).
Process Type*
Loop 1 / Master
Loop 2 / Slave
(only if 2nd
input fitted)
Control
Configuration:
Control Select
Control
Configuration:
Control Type
Control
Configuration:
Control Select
Control
Configuration:
Control Type
One Loop*
Input 2
Configuration |
Input 2 Usage
= Not Used
Standard PID
Control Select
= Control Standard
Primary Only
Control Type
= Single
Primary / Secondary
Control Type
= Dual
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Two Loops*
Input 2
Configuration |
Input 2 Usage
= Standard
Standard PID
Control Select
= Control Standard
Primary Only
Control Type
= Single
Standard PID
Control Select
= Control Standard
Primary Only
Control Type
= Single
Primary / Secondary
Control Type
= Dual
Primary / Secondary
Control Type
= Dual
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
+Feedback*
Input 2
Configuration |
Input 2 Usage
= Feedback
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Redundant*
Input 2
Configuration |
Input 2 Usage
= Redundant
Input
Standard PID
Control Select
= Control Standard
Primary Only
Control Type
= Single
Primary / Secondary
Control Type
= Dual
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Cascade*
Input 2
Configuration |
Input 2 Usage
= Standard
AND
Loop 1 / Master
Configuration |
Control Mode
= Cascade
Standard PID
Control Select
= Control Standard
Primary Only
Control Type
= Single
Primary / Secondary
Control Type
= Dual
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Ratio*
Input 2
Configuration |
Input 2 Usage
= Standard
AND
Loop 1 / Master
Configuration |
Control Mode
= Ratio
Standard PID
Control Select
= Control Standard
Valve Motor Drive
Control Select
= VMD (TPSC)
Control
Which outputs will be used for control, and are alarms or event outputs needed?
Output configuration (see page 6).
Alarms & Profile Events (see pages 5 & 6).
Where will the controller setpoint come from?
Local setpoint(s) only, or a remote setpoint input (see page 6).
Profile Control (see section 15).
Is Input re-configuration required:
Analogue input calibration & scaling (see section 13).
Digital input functions (see section 9).
Which other features are to be used?
Data Recorder (see section 17).
Serial Communications (see section 19).
USB Interface (see section 16).
CAUTION: Configuration & commissioning must be completed before
proceeding to Operation Mode. It is the responsibility of the installing
engineer to ensure that the configuration is safe.
7. CASCADE CONTROL MODE
Applications with long time lags (e.g. with two or more capacities such as heated
jackets) can be difficult to control with a single control loop. The solution is to split the
process into two or more cascaded loops consisting of a Master and Slave(s) acting
on a common actuator. Ideally, the slave loop’s natural response time should be at
least 5 times faster than the master.
The master loop compares the process temperature with the desired setpoint and its
correcting variable (0 to 100% PID output) becomes the slave loops effective setpoint
(scaled to suit the process). This setpoint is compared to the slave’s process input,
and the controlling actuator is adjusted accordingly.
NOTE: Cascade control is available on models fitted with the 2nd
Universal Input. The master connects to input 1; the slave to input 2.
Example
In this example the controlling actuator is a heater, indirectly heating the product via
an oil jacket. The maximum input to the slave represents 300ºC, thus restricting the
jacket temperature. At start-up the master compares the product temperature
(ambient) to its setpoint (250ºC) and gives 100%. This sets the maximum slave
setpoint (300ºC), which is compared to the oil temperature (ambient) and the slave
requests maximum heater output.
As the oil temperature rises towards the slave setpoint, its output falls. Eventually, the
product temperature will also begin rising, at a rate dependant on the transfer lag
between the oil jacket and the product. This causes the master’s PID output to
decrease, reducing the slave setpoint. The oil temperature is reduced towards the
new slave setpoint. This continues until the system becomes balanced. The result is
quicker, smoother control with the ability to cope with changes in the load. Overshoot
is minimised and the jacket temperature is kept within acceptable limits.
Cascade Operation
Normal Cascade Operation
During operation, the master and slave are coupled together and. "Cascade" is
displayed. The master process value and setpoint are most relevant to the user. This
setpoint is directly adjustable, and the process value of the slave controller is
displayed for information only.
Cascade-Open
The cascade can be disconnected (via digital inputs or menu selection), switching
from normal operation to direct control of the slave. "Cascade-Open" is displayed.
The process is then controlled and adjusted solely by the slave controller using its
internal setpoint (displayed as SlaveSP). Switching back to Cascade is “Bumpless”.
CAUTION: The master process value is not under control when the
cascade is open, but will be affected by the slave process. The
operator is responsible for maintaining safe conditions.
Manual Mode
The controller can be put into manual mode (via digital inputs or menu selection),
bypassing the cascade to take direct control of the slave loop’s correcting variable.
Manual power is adjusted from -100 to 100%. "MAN" is displayed in manual mode.
CAUTION: Manual mode disables the cascade loop. It also ignores any
output power limits, valve open/close limits and the control
enable/disable setting. The operator is responsible for maintaining the
process within safe limits.
Cascade Tuning
The user can tune manually or use the pre-tune feature (see Automatic Tuning).
In either case the slave control loop must first be optimised on its own, followed by
the master loop in combination with the previously tuned slave.
To pre-tune a cascade:
1. Go to the Automatic Tuning menu
2. Select “Cascade-Open” to tune the PID set(s) on the slave.
3. After the slave has successfully tuned, pre-tune the master/slave combination
(this time select “Cascade-Closed”). The cascade remains open until you do this.
To manually tune a cascade:
1. Open the cascade, breaking the link from master to slave.
2. Set the slave controller setpoint manually to an appropriate value.
3. Tune the slave for relatively fast control (‘proportional only’ is often sufficient).
4. Close the cascade and tune the master/slave combination.
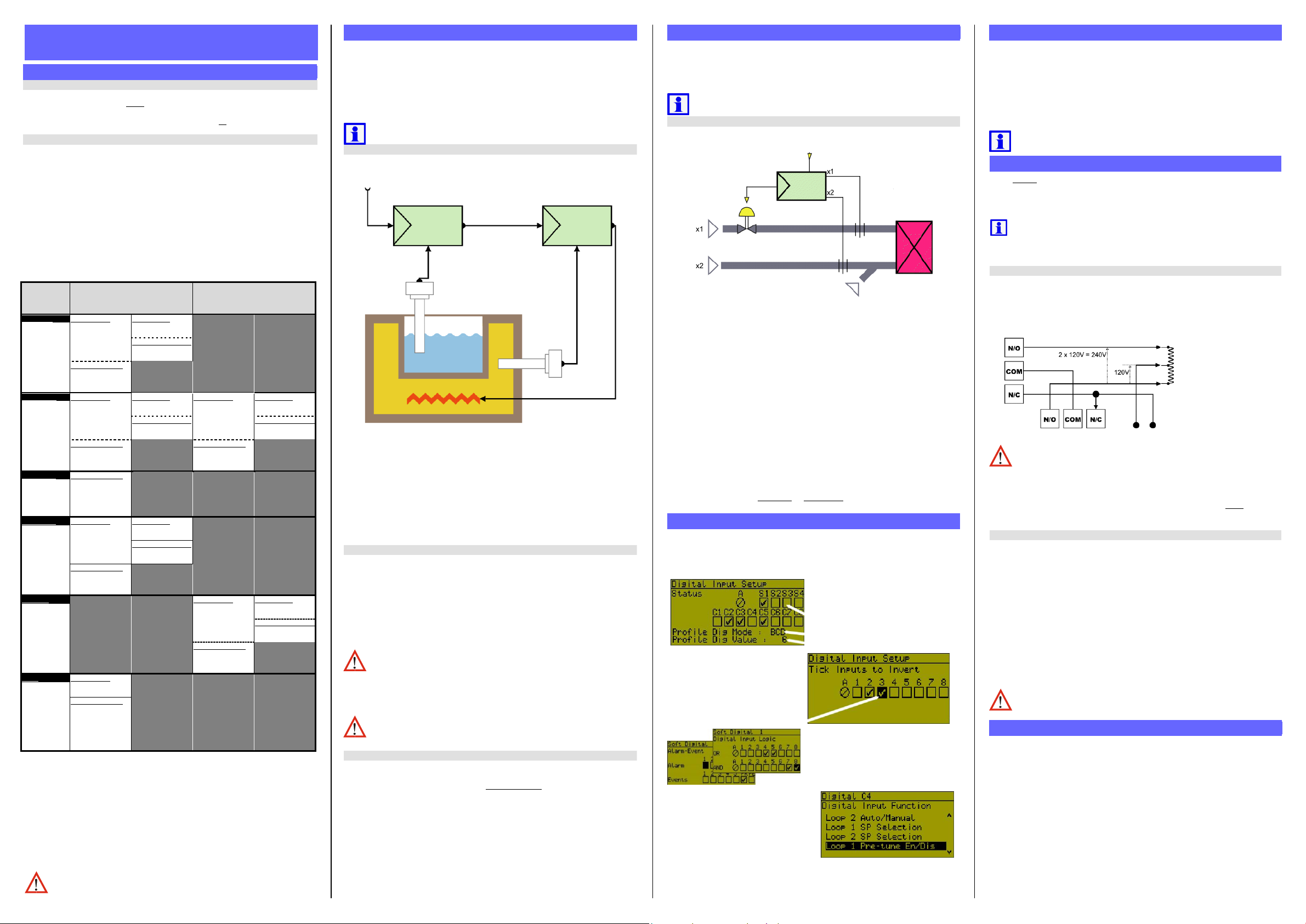
8. RATIO CONTROL MODE
A ratio control loop is used where the quantity of one of the material is to be controlled
in proportion to the measured quantity of a second material. The controller mixes the
materials at the desired ratio by adjusting the flow of input 1. The flow of input 2 may
be controlled separately, but is not controlled by this loop.
The process value used by the controller is therefore determined by the ratio of the
two inputs rather than being measured as one process variable.
NOTE: Ratio control is available on models fitted with the 2nd Universal
Input. Connect the Air flow to input 1 and the fuel to input 2.
Stoichiometric combustion
Below is an example of standard ratio control using stoichiometric combustion.
For optimum combustion the fuel-air ratio must be controlled. The ratio is selected so
that there are no inflammable residues in the waste gas.
It is normal in this application to display the process value and setpoint as relative
values rather than the physical ratio or absolute values. A scaling factor is set such
that the displayed value will be 1.00 at the correct stoichiometric ratio for the
application.
Inputs 1 and 2 are configured and scaled to match the attached flow meters.
In this example a 4 to 20mA signal at x1 represents 0 to 1000m3/h of airflow controlled
by a valve. The second 4 to 20mA signal at x2 represents 0 to 100m3/h of fuel oil. The
fuel flow is not affected by this control loop.
Atomizing air is fed in with the fuel oil at a constant rate ‘NO’. This must be considered
when calculating the correct fuel/air mix. Total airflow is x1 + NO.
The stoichiometric factor, SFac is entered to match the desired ratio. E.g for 10 parts
total airflow to one part fuel, SFac would be 10.
The setpoint (entered as a relative value such as 1.00) is multiplied by SFac when
calculating the control deviation. E.g. with a setpoint of 1.00 and SFac of 10 the
controller attempts to make the physical ratio 10. With a setpoint of 1.03 it would
attempt to make the ratio 10.3 for 3% excess air.
The instantaneous (controlled) process value is calculated from the physical ratio,
divided by SFac. Like the setpoint, this is displayed as relative value.
E.g. if SFac is 10, 59.5m3/h air is measured at x1, 0.5m3/h atomising air is applied at
NO and 6m3/h fuel is measured at x2, the instantaneous process value would be:
9. DIGITAL INPUTS
Digital inputs are driven to one of two states (active or inactive) by an applied voltage
signal or a contact opening/closing. They can be used for profile selection (see Digital
Input Setup sub-menu on page 6), with any remaining inputs available for functions
such as selecting setpoint sources, running a profile or driving an output on/off (the
Digital Input Specifications on page 4 lists all possible functions).
A diagnostic screen assists commissioning
and fault finding by showing the current
signal state for all digital inputs.
Slot A, C1 to C8 & Soft digital input status
( = Active, Ø = Unavailable)
Profile select bit format (BCD or Binary)
Profile selected (e.g. BCD 6 from C1-C3)
Digital inputs can be inverted to reverse
their action with an “on” input turning off.
Step thorough each input using the R
key. Press U to invert the highlighted
input and D to un-invert . Hold R down
to skip to next screen accepting the
values shown.
Highlighted Input
Four “soft” digital inputs can be configured
by combining physical inputs, alarms &
events using Boolean logic. The input AND
selections are globally OR’d with input OR
selections, alarms & events. By using the
invert inputs function, NAND & NOR
equivalents can be created.
Soft inputs and any physical digital inputs
not allocated for profile selection can be
used to change the instrument status.
Functions include: Setpoint or Auto/man
select; control on/off; automatic tuning;
clearing latched outputs; profile control;
data recording; forcing outputs on/off or
mimicking key presses.
10. REDUNDANT INPUT
If the 2nd universal input is fitted, it can be used with a backup sensor so that if the
main sensor fails, the instrument automatically switches to the redundant sensor. In
this condition, if input 1 has a signal break alarm configured it will activate, but any
other process input or control status alarms seamlessly switch to the 2nd input. This
input continues to be used until the signal to input 1 is restored. The user may not
even be aware of the sensor fault, so signal break alarms should be configured for
both inputs to provide notification.
The redundant sensor must be of the same type, and be correctly located in the
application ready to take over if needed. If this option is selected, the 2nd input cannot
be used for other functions.
NOTE: If both signals are lost at the same time, the PV is replaced with
“OPEN” and the normal sensor break actions occur.
11. VALVE MOTOR / 3-POINT STEPPING CONTROL
When directly controlling motorised modulating valves, set the Control Mode to VMD
in configuration mode to enable the 3-point stepping Valve Motor Drive control
algorithm. This provides switched outputs to move the valve further open, or further
closed when a control deviation error is detected. If the error is reduced to zero no
further output is required until the load conditions change.
NOTE: Some modulating valves have positioning circuitry to adjust the
valve position. These need a DC linear mA or voltage output and use the
standard control algorithm (Set Control Mode to Standard).
VMD doesn’t allow On-Off Control (Prob. Band minimum is 0.5% of input span) and
usually requires PI control, where the Derivative parameter is turned OFF.
Special Wiring Considerations for Valve Motor Control
Valve Motor Drive (VMD) mode requires two identical outputs to be assigned to
position the valve. One to Open and one to Close the valve. These outputs can
be two single relays, two triacs, two SSR drivers or one dual relay, but it is
recommended to use two single relays (SPDT change-over contacts), and to
interlock the wiring as shown. This prevents both motor windings from being
driven at the same time, even under fault conditions.
CAUTION: The windings of a valve motor effectively form an
autotransformer. This causes a voltage doubling effect when power is
applied to either the Open or Close terminal, causing twice the
supplied voltage at the other terminal.
Switching actuators directly connected to the valve motor must only be used up to
half of their rated voltage. The internal relay and triac outputs are rated at 240VAC
Therefore, the maximum motor voltage when using them is therefore 120V unless
interposing relays are used. Interposing relays or other devices used to control the
valve must themselves be rated for twice the motor supply voltage.
Position Feedback
The VMD mode in this instrument uses a boundless, open-loop, algorithm. It does not
require any kind of position feedback in order to correctly control the process and can
therefore avoid problems associated with faulty feedback signals.
However, where feedback is available it can still be displayed as a percentage (0 to
100%) of the possible valve opening.
Valve Position Feedback is usually provided by means of a potentiometer
mechanically linked to the valve. The output of a related flow meter can also be used
to indicate the relative valve position. Flow meters typically have linear 0-20/4-20mA
or 0-5/0-10V signals. To display the position/flow signal the 2nd input is must be
configured for this purpose.
The input is adjusted and scaled to read 0 to 100% for valve fully closed to fully open
or for the flow rate equating to fully closed and open.
Valve Limiting
When Valve Position Indication is to be used the signal can be used by the
instrument to limit the valve movement. Valve limits can be set beyond which the
controller will not attempt to drive the valve.
CAUTION: These limits must be used with care. They are effectively
control power limits. Do not set values that prevent proper control of
the process!
12. CONTROL TYPE
The control type defines if a control loop has single (unidirectional) or dual
(bidirectional) control outputs. Single control has a primary output only. This can drive
the process in one direction (e.g. heating only, cooling only, increasing humidity etc).
Dual control has both primary and secondary outputs which can force the process to
increase or decrease (e.g. heating & cooling, humidifying & dehumidifying etc). This
selection isn’t required for VMD control which provides direct 3-point stepping control
for valves, and always has one output to increase and another to decrease the
process value (see section 11).
“Open” Relay
“Close” Relay
120V Supply
Open Valve Winding
Close Valve Winding
Valve Common
0-300°C
Slave SP
0-100%
Output
SLAVE SENSOR
MASTER SENSOR
Master
Setpoint
250°
HEATER
OIL JACKET
MASTER
IP1
OP
SP
SLAVE
IP2
OP
SP
PRODUCT
Atomization Air
NO
Burner
Air
Fuel
Page 3

2-Loop Graphical Profile Controller & Recorder
Concise Product Manual (59541-4) Page 3 of 6
13. INPUT CALIBRATION & SCALING
The process inputs can be adjusted to match the characteristics of the attached
process or to remove sensor errors. For each loop, independent use of base
(unadjusted), single point offset or two point calibration strategies are possible, as is
the use of multi-point scaling for the displayed values.
CAUTION: Calibration & Scaling must be used with care. Careless
use could lead to the displayed value bearing no meaningful
relationship to the actual process variable. There is no front panel
indication of when these parameters are in use.
NOTE: These methods do not alter the internal instrument calibration.
Simply choose Base Calibration to restore normal measured values.
Re-calibration of the internal base values is possible, but should only be
attempted by qualified personnel as it overwrites the factory calibration refer to the Full Product Manual if this is required.
Single Point Calibration
This is a ‘zero offset’ applied to the process variable across the entire span. Positive
values are added to the reading, negative values are subtracted. It can be used if
the error is constant across the range, or the user is only interested in a single
critical value. Simply enter a value equal, but opposite to the observed error.
This example shows a positive
offset value.
E.g. if the process displays 27.8
when it should read 30, an
offset of +2.2 would correct the
displayed value to 30.
The same offset is applied to all
values, so at 100.0 the new
value would be 102.2.
Two Point Calibration
This method is used where an error is not constant across the range.
Separate offsets are applied at two points in the range to eliminate both zero and
span errors. Measure the error at a low point in the process, and again at a high
point. In the Input Calibration, enter the desired low point as the Calibration Low PV
value, and an equal, but opposite value to the observed error as the Calibration Low
Offset. Repeat this for the high point PV and calibration offset in the next screen.
This example shows the effect
of adding a positive Low Offset
and a negative High Offset.
E.g. if the process displays +0.0
at the low end, an offset of +0.5
would change the value to +0.5
A high end value of 100 with a -
1.7 offset would read 98.3.
There is a linear relationship
between the two calibration
points.
NOTE: Choose values as near as possible to the bottom and top of
your usable span to achieve maximum calibration accuracy. The
effect of any error can grow past the chosen calibration points.
Multi-point Scaling
If an input is connected to a linear signal (mA, mV or VDC), multi-point scaling can
be enabled for that input from the Input Configuration sub-menu, so that a non-linear
signal can be linearized.
The scaled input upper & lower limits define the values shown when the input is at
minimum and maximum values. Up to 15 breakpoints can scale the input vs.
displayed value between these limits.
Enter the 1st Scaling point (this is a % of the scaled input span), and the desired
display value to be shown at that input value. Next set the 2nd point and display
value, followed by the 3rd etc. Continue unit all breakpoints are used or you have
reached 100% of the input span. A breakpoint set at 100% ends the sequence
It is advisable to concentrate the break points in the area of the range with the most
non-linearity, or an area of particular importance to the application.
14. SETPOINT SOURCES
The setpoint is the target value at which the instrument attempts to maintain the
process variable. Each loop can have a Main “local” setpoint set from the keypad
and Alternate setpoint. The alternate setpoint sources can be either another local
Setpoint” or a remote setpoint (RSP), set by a mA or V DC signal fed to the auxiliary
or 2nd process input. The controller can only use one setpoint source at a time for
each loop. This is called the “Active Setpoint”.
Main/alternate setpoint selection can be made via a digital input; from Control
Configuration or if enabled in Display Configuration, an operator menu can be used
to select the setpoint.
Refer to the control configuration screen on page 6 for setpoint settings.
NOTE: In profile control mode, the selected profile provides the
active setpoint source for one or both control loops (see section 15).
Once profile control mode is exited, the selected Main or Alternate
setpoints become active again.
15. PROFILER OPTION
The Profiler (or setpoint programmer) feature allows the user to store up to 255
profile segments (each with the possibility of 2 setpoints in two-loop control), shared
between a maximum of 64 Profiles. Each profile controls the value of the setpoint(s)
over time; increasing, decreasing or holding their values as required.
NOTE: If this feature is fitted, Profiler options are added to the Main
Menu, and optionally to Operation Mode. See sections 3 & 20.
Profiler Enabling
Controllers supplied without the Profiler option can be upgraded in the field by
purchasing a licence code. To obtain the correct code you must tell your supplier the
instrument serial number – this can be found in Service & Product Information.
To enter this code, hold down the L + D keys during the power-up splash screen.
Enter the 16-character licence code in the displayed screen, then press R.
To confirm if profiling is installed, refer to Service & Product Information.
General Profile Configuration
General profile configuration settings apply to all profiles. They enable/disable profile
editing while running, and automatic starting of profiles that were setup with delay or
day & time start triggers. When disabled profiles can only be manually started, and
this is with immediate effect even if they have a delay or day & time trigger defined.
When enabled, delayed starts are possible, and if the selected profile has a day &
time trigger it will wait and then start at the time set.
Profile Header & Segment Information
Each profile has its own header information plus 1 or more segments. The header
contains the profiles name; if it is to control one or both loop; how it should start &
stop; abort/power-loss recovery actions and if it should repeat. Segments can be
ramps, dwells, steps or special segments such as holds, ends, joins or loop backs.
NOTE: Header information is only stored as the Segment creation
sequence begins. No profile is created if you exit before this point.
Segment information is stored as each segment is created, but the
profile remains invalid until an end or join segment is defined.
Profile Starting & Basic Segments
PROFILE 1
PROFILE 9
Target
Setpoint
Ramp
(Time/Rate)
Starting
Setpoint
Start
Trigger
Step
End
Timer or Delay Dwell
Join (Profile 1 to Profile 9)
Following a Start Trigger, profiles can start immediately, or if enabled after a delay,
or at a specified day & time (Recorder only).
NOTE: Profiles with segments outside of the current setpoint limits will
not run, A “profile not valid” error shows.
Segments have an end of segment Target Setpoint. If the 1st segment is a Ramp-
Time, the slope needed to reach the target changes with the Starting Setpoint
value. For a Ramp-Rate segment, the time will change instead. A Dwell (or “soak”)
holds the last segments value. Step segments jump straight to the target value.
Segments in two-loop controllers control the setpoints of both loops.
NOTE: If the last segment is a Join, the join target profile will start, but
if the join target has been deleted the profile sequence will abort.
An End segment ends the profile or sequence of joined profiles.
2-Loop Profiles
If required, the setpoint of both
control loops can be maintained
when profiling. The example to
the right shows how this works.
Auto-Hold settings and target
setpoints are independent for
each loop, but the segment types
and time settings are the same.
Seg. ➀ & ➁ shows a ramp and a
dwell with the shared time base.
Independent
Setpoints
Loop 1
Loop 2
Seg. Nos
Both loops on same time-base
The ramp direction can be different (Seg. ➂), and although one loop cannot ramp
while the other dwells, a "dwell" is achieved by a ramp with its final setpoint value at
the same value as the previous segment (Seg. ➄). Similarly, if only one loop is to
Step to a new value, make the other “step” to its existing setpoint value. If you later
change the previous setpoint, you may have to change both segments.
The Loop-back feature takes both loops back to the previous segment.
Ramp-Rate segments are not possible with 2-loop profiling.
NOTE: Either loop can cause the profile to auto-hold. The profile
continues only when both loops are back within their hold bands.
Run/Hold & Hold Segments
Hold Start
Run
Continue
Triggers
End
Hold Stop
Hold Segments
A Hold condition during a segment maintains the current setpoint value of both
loops. Once the hold is stopped the Ramp or Dwell continues.
NOTE: A running segment will hold if the operator or a digital input
instructs it to, during “auto-hold”, if one of the profile control loops is
disabled, if a cascade is set to “open” or if manual control is selected.
A Hold Segment maintains the value of the last segment. The profile does not
continue until a Continue Trigger occurs. This can be via a key press, a digital
input signal or after waiting for a time of day (Recorder only).
Loops Segments
Loop back target segment
Loop Segment
End
A Loop Segment goes back to a specified segment. This action is repeated for the
required number of times (1 to 9999) before the profile continues onwards. More
than one Loop Segment can be used, but they must not cross.
Profile Cycles & Repeat Sequences
PROFILE 4
PROFILE 31
PROFILE 7
Join (Profile 4 to Profile 31)
Join (Profile 31 to Profile 7)
A profile can be made to run itself 1 to 9999 times or continuously using the Profile
Cycles setting. A profile ending with Repeat Then End will run the entire sequence
of profiles again 1 to 9999 times or continuously.
Auto-Hold
Each segment has independent Auto-Hold settings. If used, these ensure process
and profile remain synchronised. If the process does not closely match the setpoint,
the profile can be held until it returns within bounds. The segment time is increased
by the time that the process is out of bounds. When Auto-Hold is active the profile
status is shown as Held. The user can choose to hold the profile if the process
beyond the Hold Band Above only, Below only or Band (either side of the setpoint).
2-loop profiling has individual Auto-Hold settings for the two loops. The entire profile
(i.e both loops) will be held if either process is outside of its Auto-Hold Band.
Held if Auto-Hold set to Above Setpoint or Band
Dwell
Segment
Setpoint
Hold Band
Process
Variable
Held if Auto-Hold set to Below Setpoint or Band
Held if Auto-Hold set to Above Setpoint or Band
Setpoint
(without
Auto-Hold)
Setpoint
(with Auto-
Hold)
Hold Band
Process
Variable
Held if Auto-Hold set to Below Setpoint or Band
End, Abort and Power/Signal Lost Recovery
If the power is cut or the input is lost (either signal for 2-loop profiling) while a profile
is running, the instrument will use the defined Profile Recovery Method once the
signal / power returns. These options are explained below.
A
End the profile and maintain the profile value from the time the power failed.
B
End the profile and use Controller Setpoint value.
C
End the profile with the control outputs off – setpoint value display says “OFF”
D
Restart the profile again from the beginning.
E
Continue profile from the point it had reached when the power failed
On Recorder versions, option E will always be used if the power / signal is lost for
less than the Profile Recovery Time. If the power / signal is lost for more than this
time the defined Profile Recovery Method is used.
Similar options are offered for the Profile End Action taken at the normal profile
end, or for the Profile Abort Action if the profile is force to end before it is finished.
These can be defined to act in a similar manner as A, B or C above
16. THE USB INTERFACE
The USB Interface can be used to upload or download instrument settings to or
from a USB memory stick. It allows easy configuration of multiple instruments or the
transfer of settings to/from the PC configuration software.
If the Data Recorder or Profiler options are fitted, recordings and profile information
can also be transferred via USB memory stick.
NOTE: If this feature is fitted, a USB Menu option is added to the Main
Menu. See USB Port information in section 20.
USB Memory Stick Folders & Files
When a USB stick is inserted, the instrument looks for, and if necessary creates the
DEVICE, CONFIG, PROFILE and RECORDER folders. Files must be located in
these folders in order to be used. When preparing to upload files from your PC,
ensure that you save them to the correct folder on the memory stick.
NOTE: To speed up the disk operation, keep the number of files stored
in these folders to a minimum.
DEVICE – This folder must be located
in the Root of the USB memory stick
CONFIG – Configuration files (*.bct)
PROFILE – Profile program files (*.pfl)
RECORDER – Recorder log
folders/files The user is asked for a new
recorder sub-folder name before
transferring recorder data to USB. The
log files (*.csv) are placed in this folder.
CAUTION: If the file name already
exists, data will be overwritten
CAUTION: Do not remove the memory stick from the USB port whilst
a data transfer operation is in progress. Data loss or corruption may
result.
The first recorder log file is named 001-0001.csv. A new file is created with the first
3 digits incremented (e.g. 002-0001.csv; 003-0001.csv etc) each time the data being
recorded is changed. The last 4 digits increment (e.g. 001-0002.csv; 001-0003.csv
etc) if the file size reaches 65535 lines, if a recording is stopped then re-started or if
there is a period of >10s without an alarm when recording from an alarm trigger.
CAUTION: During Data Transfer, normal operation carries on in the
background, but operator access to other screens is not possible.
Transfer of full memory can take up to 20 minutes. Only begin a
transfer when access (e.g. setpoint changes) will not be required.
17. DATA RECORDER
This option can record the process conditions to memory over time. It operates
independently from the Trend Views.
NOTE: If fitted, Recorder options are added to the Configuration and
Main Menus. Recorder Control can be also added to Operation Mode.
See Data Recorder information in section 20.
CAUTION: This feature includes a battery backed Real Time Clock
(RTC). Servicing and replacement of the internal lithium battery
should only be carried out by a trained technician.
The RTC also expands the profiling capabilities and allows a “calibration due”
reminder at a specified date. See page 5 for Profile Setup:, & page 6 - Input
Configuration: for the calibration reminder, and Clock Configuration for RTC settings.
Recorded Data
For each control loop, a combination of values can be recorded at each sample,
selected from: Process Variable; Maximum or Minimum PV (since the previous
sample); Setpoint; Primary Power, Secondary Power or Auxiliary Input values.
Additionally the status of Alarms and Profiler Events can be recorded, as can when
the unit is turned On/Off.
NOTE: If recorded, each alarm/event change forces an extra sample
to be recorded, reducing the remaining recording time available.
Sample rates between 1 second and 30 minutes are possible, with the data
recorded until the memory is full, or continuous First In/First Out memory overwriting
the oldest data with new. See Recorder Configuration on Page 6 for more details.
Recorder Triggers
Options for starting/stopping recordings include Manually (from the recorder menu
or a screen added to operation mode); a Digital Input; during a Running Profile;
or Record on Alarm. Any active trigger that has been configured will cause the
recorder to run. The recorder status screen has a % memory used bar graph and
icons for the active record triggers.
Manual Record ON
Digital Input ON
Profile Record ON
Alarm Record ON
Downloading Recordings
Recordings can be transferred to a memory stick using the USB Port or downloaded
to the PC software via the configuration port or serial communications if fitted.
Recordings are stored in Comma Separated format (.csv) which can be opened and
analysed with the optional PC software. The recorded data files can also be opened
directly into a spreadsheet, or imported into other software. See Section 16Error!
Reference source not found. for file information.
NOTE: Analysis with the PC software is limited to 8 analogue
channels, so only the first 8 will be displayed. The number of
recorded alarms & event channels is not limited.
Calibration Reminder
The recorders RTC allows a "calibration due reminder" to be shown if the date is
equal to or after the Calibration Reminder Date. The reminder screen persists until
the R key is pressed. If due, the reminder is shown at Power-up, and repeated
every 24hrs until the reminder date is changed.
See Input Configuration: for the calibration reminder settings.
Single Point ‘Offset
Calibration’ value
New Displayed Value
Original Displayed Value
Original Displayed Value
New Displayed Value
Calibration High Offset
Calibration Low Offset
Calibration Low
Process Value
Calibration High
Process Value
x 50
Example:
Runs segments 1 to 5, then
repeats 3 to 5 for 50 cycles,
before continuing with 7 to 9.
This sequence is repeated
10 more times.
Profile 31
Cycles = 3
Repeat Sequence = 10
Repeat Then End
(times to repeat = 10)
Profile 4
Cycles = 1
Profile 7
Cycles = 1
Controller SP
Run
(Start-on SP)
Power / Input Lost
Power / Input Returns
= Control Off
Planned Profile
Off Time
Page 4

2-Loop Graphical Profile Controller & Recorder
Concise Product Manual (59541-4) Page 4 of 6
18. SPECIFICATIONS
Sampling Rate:
10 per second.
Resolution:
16 bits. Always four times better than display resolution.
Impedance:
>10M resistive, except DC mA (5) and V (47k ).
Temp Stability:
Error <0.01% of span per °C change in ambient temperature.
Supply Variation:
Supply voltage influence negligible within supply limits.
Humidity Influence:
Negligible if non-condensing.
Process Display:
Displays up to 5% over and 5% under span limits.
User Calibration:
Single or two point. +ve values added to Process Variable, -ve
values subtracted from Process Variable
Sensor Break
Detection:
Thermocouple & RTD - Control goes to pre-set power value.
High & Sensor Break alarms activate.
Linear (4 to 20mA, 2 to 10V and 1 to 5V only) - Control goes to
pre-set power value. Low & Sensor Break alarms activate.
Isolation:
Reinforced safety isolation from outputs and other inputs.
Supported
Thermocouple
Types & Ranges:
Type
Range °C
Range °F
B
+100 to 1824°C
+211 to 3315°F
C
0 to 2320°C
32 to 4208°F
D
0 to 2315°C
32 to 4199°F
E
-240 to 1000°C
-400 to 1832°F
J
-200 to 1200°C
-328 to 2192°F
*
K
-240 to 1373°C
-400 to 2503°F
*
L
0 to 762°C
32 to 1402°F
*
N
0 to 1399°C
32 to 2551°F
*
PtRh 20%:40%
0 to 1850°C
32 to 3362°F
R
0 to 1759°C
32 to 3198°F
S
0 to 1762°C
32 to 3204°F
T
-240 to 400°C
-400 to 752°F
*
Optional decimal place can be displayed on all ranges
Thermocouple
Calibration:
0.1% of full range, 1LSD (1°C for internal CJC if enabled).
Linearization better than better 0.2C (0.05 typical) on ranges
marked * in the table above. Linearization for other ranges is
better than better than 0.5C.
BS4937, NBS125 & IEC584
Supported RTD
Types & Ranges:
Type
Range °C
Range °F
3-Wire PT100
-199 to 800°C
-328 to 1472°F
NI120
-80 to 240°C
-112 to 464°F
Optional decimal place can be displayed on all ranges
RTD Calibration:
0.1% of full range, 1LSD.
Linearization better than 0.2C (0.05 typical).
PT100 input to BS1904 & DIN43760 (0.00385//°C).
RTD Excitation:
Sensor current 150μA 10%.
Lead Resistance:
<0.5% of span error for max 50per lead, balanced.
Supported Linear
Types & Ranges:
Type
Range
Offset Range
mA DC
0 to 20mA DC
4 to 20mA DC
mV DC
0 to 50mV DC
10 to 50mV DC
V DC
0 to 5V DC
1 to 5V DC
V DC
0 to 10V DC
2 to 10V DC
Potentiometer
≥100 ohms
N/A
Scalable from -2000 to 100000. Decimal point selectable from
0 to 3 places, but rounds to 2 places above 99.999; 1 place
above 999.99 and no decimal above 9999.9.
Maximum Overload:
1A or 30V on voltage input terminals (at 25°C ambient).
DC Calibration:
0.1% of full range, 1LSD.
DC Input Multi-Point
Linearization:
Up to 15 scaling values can be defined anywhere between 0.1
and 100% of input.
Input Functions:
Function
Input 1
Input 2
Process Control
Loop 1
Loop 2
Cascade Control
Master Loop
Slave Loop
Ratio Control
Controlled
Variable
Un-controlled
Variable
Remote Setpoint (RSP)
-
RSP on loop 1
Valve Position Feedback
-
Valve on loop 1
RSP Linear inputs only, scalable between -9999 to 10000, but
actual setpoint value is kept within the setpoint limit settings
AUXILIARY INPUT A
Supported Input
Types & Ranges:
Type
Range
Offset Range
MA DC
0 to 20mA DC
4 to 20mA DC
V DC
0 to 5V DC
1 to 5V DC
V DC
0 to 10V DC
2 to 10V DC
Accuracy:
0.25% of input range 1 LSD.
Sampling Rate:
4 per second.
Resolution:
16 bits.
Impedance:
>10M resistive, except DC mA (10) and V (47k).
Sensor Break
Detection:
4 to 20mA, 2 to 10V and 1 to 5V ranges only. Control goes to
pre-set power value if Aux Input is the active setpoint source.
Isolation:
Reinforced safety isolation from outputs and other inputs.
Input Function:
Remote Setpoint (RSP) input, Scalable between ±0.001 &
±10000, but always constrained by the setpoint limit settings.
DIGITAL INPUTS A & C
Selectable Digital
Input Functions:
Function
Logic High*
Logic Low*
┌ ┐
Loop 1 Control Select
Enabled
Disabled
┌ ┐
Loop 2 Control Select
Enabled
Disabled
┌ ┐
Loop 1 Auto/Manual Select
Automatic
Manual
┌ ┐
Loop 2 Auto/Manual Select
Automatic
Manual
┌ ┐
Loop 1 Setpoint Select
Main SP
Alternate SP
┌ ┐
Loop 2 Setpoint Select
Main SP
Alternate SP
┌ ┐
Loop 1 Pre-Tune Select
Stop
Run
┌ ┐
Loop 2 Pre-Tune Select
Stop
Run
┌ ┐
Loop 1 Self-Tune Select
Stop
Run
┌ ┐
Loop 2 Self-Tune Select
Stop
Run
┌ ┐
Profile Run/Hold
Hold
Run
┌ ┐
Profile Hold Segment Release
No Action
Release
█
Profile Abort
No Action
Abort █ Data Recorder Trigger
Not Active
Active
█
Output n Forcing
Off/Open
On/Closed
█
Clear All Latched Outputs
No Action
Reset
█
Output n Clear Latch
No Action
Reset
█
Key n Mimic (for L D U R)
No Action
Key Pressed
█ Inputs C1-C7 can be used as
Binary or BCD Profile Selection
Binary 0
Binary 1
*The High/Low function can be switched using Inputs to Invert.
Digital Input
Sensitivity:
Inputs work in parallel with equivalent menus, so either can
change the function status. Response <0.25 second.
█ = Level Sensitive: High or low sets status.
┌ ┐
= Edge Sensitive: High-Low or Low-High transition changes
function. Pre-Tune always off at power on (except auto pretune), but others retain their power-off status at power-on.
Std. Logic State:
Volt-free (or TTL):
Inputs held high via pull-up resistors.
Logic High = Open contacts (>5000or 2 to 24VDC signal.
Logic Low = Closed contacts (<50 or -0.6 to +0.8VDC signal.
Inverted Logic:
Swaps the actions listed above (e.g. Profile Aborts on Logic
High if selected input is inverted).
Number Available
0 to 9. One from Module Slot A, 8 from Multi-Digital Input C
Isolation:
Reinforced safety isolation from outputs and other inputs.
OUTPUTS
Caution: Plastic pegs prevent fitting of older non-reinforced single relay modules –
Remove the peg to fit dual relays (all dual relay modules have reinforced isolation)
Single Relay 1-3
Type:
1 x Single pole double throw (SPDT). Plug-in Modules 1, 2 & 3.
Rating:
2A resistive at 120/240VAC with >500,000 operations at full rated
AC voltage/current. De-rate for DC loads.
Isolation:
Reinforced safety isolation from inputs and other outputs.
Dual Relay 2-3
Type:
2 x Single pole single throw (SPST*). Plug-in Modules 2 & 3.
Rating:
2A resistive at 120/240VAC with >200,000 operations at full rated
AC voltage/current. De-rate for DC loads.
*Dual relay modules have shared common terminal.
Isolation:
Reinforced safety isolation from inputs and other outputs.
Base Relay 4-5
Type:
1 x single pole single throw (SPST). Base outputs 4 & 5.
Rating:
2A resistive at 120/240VAC with >200,000 operations at full rated
voltage/current. De-rate for DC loads.
Isolation:
Reinforced safety isolation from inputs and other outputs.
SSR Driver 1-3
Type:
1 x Logic / SSR Driver output. Plug-in Modules 1, 2 & 3.
Drive Capability:
Driver voltage >10V into 500 minimum.
Isolation:
Isolated, except from other SSR driver & configuration socket.
2x SSR Driver 2-3
Type:
2 x Logic / SSR Driver outputs*. Plug-in Modules 2 & 3.
Drive Capability:
Driver voltage >10V into 500 minimum.
*Dual SSR Driver modules have shared positive terminal.
Isolation:
Isolated, except from other SSR driver & configuration socket.
Triac 1-3
Type:
1 x Triac output. Plug-in Modules 1, 2 & 3.
Operating Voltage:
20 to 280Vrms (47 to 63Hz)
Current Rating:
0.01 to 1A (full cycle rms on-state @ 25°C);
de-rates linearly above 40°C to 0.5A @ 80°C.
Isolation:
Reinforced safety isolation from inputs and other outputs.
Linear DC 1, 6-7
Type:
1 x Analogue DC output. Plug-in Module 1 & Base outputs 6 & 7.
Ranges
0 to 5, 0 to 10, 2 to 10V & 0 to 20, 4 to 20mA (selectable) with
2% over/under-drive when used for control outputs, or 0-10V
adjustable Transmitter PSU (max 20mA).
Resolution:
8 bits in 250mS (10 bits in 1s typical, >10 bits in >1s typical).
Accuracy:
0.25% of range, (mA @ 250, V @ 2k). Degrades linearly to
±0.5% for increasing burden (to 500 specification limit).
Isolation:
Reinforced safety isolation from inputs and other outputs.
Transmit PSU 2-3
Type:
1 x DC Excitation output. Plug-in Modules 2 & 3. Caution: Only
one Transmit PSU is supported. Do not fit in both positions.
Power Rating:
24V nominal (19 to 28V DC) into 910 minimum resistance.
(Option to use DC Linear output as 0-10V stabilised PSU).
Isolation:
Reinforced safety isolation from inputs and other outputs.
COMMUNICATIONS
PC Configuration
Functions
PC software configuration, data extraction and profile creation.
Connection:
RS232 via PC Configurator Cable to RJ11 socket under case.
Isolation:
Isolated from all inputs/output except SSR drivers. Not
recommended for use in live applications.
RS485
Functions
Setpoint broadcast master or general communications slave
(inc. extraction of data recordings, transfer of configuration &
profile files to/from PC software).
Connection:
Plug-in Module Slot A. Connection to rear terminals 16-18.
Protocol:
Modbus RTU.
Address Range
Slave address 1-255 or Setpoint master broadcast mode.
Supported
Speeds:
4800, 9600, 19200, 38400, 57600 or 115200 bps.
Data Type:
10 or 11 (1 start & 1 stop bit, 8 data bits plus 1 optional parity bit).
Isolation:
240V reinforced safety isolation from all inputs and outputs.
Ethernet
Functions
General communications (inc. extraction of data recordings,
transfer of configuration & profile files to/from PC software).
Connection:
Locates in Module Slot A. Connection via RJ45 connector on top
of case.
Protocol:
Modbus TCP. Slave only.
Supported Speed:
10BaseT or 100BaseT (automatically detected).
Isolation:
240V reinforced safety isolation from all inputs and outputs
USB
Functions
Extraction of data recordings, transfer of configuration & profiles
files to/from PC software or direct to another controller.
Connection:
Connection via optional front mounted connector.
Protocol:
USB 1.1 or 2.0 compatible. Mass Storage Class.
Supply Current:
Up to 250mA.
Targeted
Peripheral:
USB Memory Stick with FAT32 formatted file system.
Isolation:
Reinforced safety isolation from all inputs and outputs.
LOOP CONTROL
Control types
1 or 2 control loops, each with either standard PID (single or
dual control) or Valve Motor Drive (3-point stepping PID control).
2 internally linked cascade loops, with standard PID (single or
dual control) or Valve Motor Drive (3-point stepping PID control).
1 Ratio loop for combustion control.
VMD Feedback
Second input can provide valve position feedback or flow
indication. Feedback not required or used for control algorithm.
Tuning Types:
Pre-tune, Auto Pre-tune, Self-tune or manual tuning with up to 5
PID sets stored internally.
Gain Scheduling
Automatically switches the 5 PID sets at user definable breakpoints relating to PV or SP value.
Proportional
Bands:
Single (Primary) or Dual (Primary & Secondary - e.g. Heat &
Cool) 1 to 9999 display units or On-Off control.
Automatic Reset:
Integral Time Constant, 1s to 99min 59s or OFF
Rate:
Derivative Time Constant, 1s to 99 min 59s or OFF
Manual Reset:
Bias 0 to 100% (-100% to +100% with Dual control).
Deadband/
Overlap:
Overlap (+ve values) or Deadband (-ve values) between Primary
& Secondary Proportional Bands for Dual Control. Adjustable In
display units - limited to 20% of the combined primary &
secondary proportional band width.
Differential:
ON-OFF switching differential 1 to 300 display units
Auto/Manual
Control:
Selectable with “bumpless” transfer when switching between
Automatic and Manual control.
Cycle Times:
Selectable from 0.5s to 512s.
Setpoint Ramp:
Ramp rate selectable 1 to 9999 LSDs per hour or Off (infinite).
ALARMS
Alarm Types:
7 alarms can be assigned as Process High; Process Low; PV-SP
Deviation; Band; Control Loop; Rate Of Signal Change per
minute – all with adjustable minimum duration* before activation
and optional start-up inhibit function.
Input Signal Break; % Recorder Memory Used, Control Power
High, Control Power Low or Unused.
*CAUTION: If the duration is less than this time, the alarm will
not activate no matter what the signal value is.
Alarm Hysteresis:
Adjustable deadband from 1 LSD to full span (in display units) for
Process, Band or Deviation Alarms.
Combination
Alarm & Events
Outputs:
Logically AND or OR any alarm or profile event (inc Profile
running or ended) to switch an output. This can be when the
condition is true, or the condition is not true.
DATA RECORDER
Recording
Memory:
1Mb non-volatile flash memory. Data retained when power is
turned off.
Recording Interval:
1; 2; 5; 10; 15; 30 seconds or 1; 2; 5; 10; 15; 30 minutes.
Recording
Capacity:
Dependant on sample rate and number of values recorded.
Example: Two values will record for 21 days at 30s intervals.
More values or faster sample rates reduce the duration.
RTC Battery Type:
VARTA CR 1616 3V Lithium.
Clock runs for >1 year without power.
RTC accuracy
Real Time Clock error <1second per day.
PROFILER
A Profiler Enable Key can be purchased from your supplier if the feature is disabled.
Profile Capacity
Max 255 segments, shared by max 64 profiles
Segment Types
Ramp Up/Down over time, Ramp Rate Up/Down*, Step, Dwell,
Hold, Loop, Join A Profile, End or Repeat Sequence Then End.
*Ramp Rate Up/Down is not available when profile controls two
loops
Timebase
hh:mm:ss (Hours, Minutes & Seconds).
Segment Time
Maximum segment time 99:59:59 hh:mm:ss. Use loop-back for
longer segments (e.g. 24:00:00 x 100 loops = 100 days).
Ramp Rate
0.001 to 9999.9 display units per hour.
Hold Segment
Release
Release With Key Press, At Time Of Day or Digital Input.
Profile Starting
Point
The first segment setpoint(s) begin from either the setpoint, or
current measured input value, of the controlled loop(s)
Delayed Start
After 0 to 99:59 (hh:mm) delay, or at specified day(s) & time.
End On
Keep Last Profile Setpoint, Use Controller Setpoint or Control
Outputs Off.
Abort Action
Keep Last Profile Setpoint, Use Controller Setpoint or Control
Outputs Off.
Power/signal Loss
Recovery
Continue Profile, Restart Profile, Keep Last Profile Setpoint, Use
Controller Setpoint or Control Outputs Off.
Auto-Hold
Hold if input >Band above and/or below SP for each segment.
Profile Control
Run, Manual Hold/Release, Abort or jump to next segment.
Profile Timing
Accuracy
0.02% Basic Profile Timing Accuracy.
<0.5 second per Loop, End or Join segment.
Profile Cycling
1 to 9999 or Infinite repeats per profile.
Sequence Repeats
1 to 9999 or Infinite repeats of joined profile sequence.
Loop Back
1 to 9999 loops back to specified segment.
Segment Events
Events turn on for the duration of the segment. For End
Segments, the event state persists until another profile starts, the
user exits from profiler mode, or the unit is powered down.
OPERATING CONDITIONS (FOR INDOOR USE)
Temperature:
0°C to 55°C (Operating), –20°C to 80°C (Storage).
Relative Humidity:
20% to 90% non-condensing.
Altitude
<2000m above sea level.
Supply Voltage
and Power:
Mains versions: 100 to 240VAC 10%, 50/60Hz, 20VA.
Low voltage versions: 20 to 48VC 50/60Hz 15VA or
22 to 65VDC 12W.
Front Panel
Cleaning
Wash with warm soapy water and dry immediately.
Close the USB cover (if fitted) before cleaning.
CONFORMANCE NORMS
EMI:
CE: Complies with EN61326.
Safety
Considerations:
CE: Complies with EN61010-1 edition 3.
UL, cUL to UL61010C-1. Pollution Degree 2, Installation
Category II.
Front Panel
Sealing:
To IP66 (IP65 front USB connector). IP20 behind the panel.
(IP rating not recognised / approved by UL).
DISPLAY
Display Type:
160 x 80 pixel, monochrome graphic LCD with a two colour
(red/green) backlight.
Display Area:
66.54mm (W) x 37.42mm (H).
Display
Characters:
0 to 9, a to z, A to Z, plus ( ) @ ö ß - and _
Trend Views:
One optional trend graph for each control loop each with 120 of
240 data points shown in a scrollable window. Data is not
retained when power turned off or if time base is changed.
Trend Data:
Any active alarm, plus PV (solid) & SP (dotted) at sample time or
Max/Min PV between samples (candle-stick graph).
Auto scales from 2 to 100% of Input Span.
Trend Sample
Rate:
1; 2; 5; 10; 15; 30 seconds or 1; 2; 5; 10; 15; 30 minutes.
Set independently for each trend graph.
DIMENSIONS
Weight:
0.65kg maximum.
Size:
96 x 96mm (Front Bezel). 117mm (Depth Behind Panel).
Mounting Panel:
Panel must be rigid. Maximum thickness 6.0mm (0.25inch).
Panel Cut-out
Size:
92mm x 92mm. Tolerance +0.5, -0.0mm.
Ventilation
20mm gap required above, below and behind.
19. SERIAL COMMUNICATIONS
Refer to Communications Configuration on page 6 for general communications
settings, and Configuration via Software in section 22 if you need to set the Ethernet
options IP address.
NOTE: The Full Product Manual (from your supplier) has detailed
communications protocol and parameter addressing information.
Page 5

2-Loop Graphical Profile Controller & Recorder Concise Product Manual (59541-4) Page 5 of 6
20. SCREEN SEQUENCES
Menus & screens displayed depend on how the instrument is configured. Most screens revert to Operation Mode after 2 minutes without key activity, those marked below persist.
Menus marked
= Require un-lock codes for access. Screens marked W are repeated in the Setup Wizard. Screens marked ◘ are only shown if enabled in Display Configuration.
Screen Navigation
L = Accept Value & Move Back D = Next Item/Increment U = Prior Item/Decrement R = Accept Value & Move Forward U + R = Move Up One Menu Level
L or R for >1sec accepts ALL values & skips to next/previous screen. Symbols show to the right of menu lists when more options are available above or below .
MAIN MENU OPTIONS
Select Main Menus Option from list. Press R to continue. - Press U+ R to move from Operation Mode to Main Menu
Operation Mode:
- Screens marked ◘ are only shown if they are enabled in Display Configuration.
Calibration Check Due Warning
If a Calibration Reminder is set in Input Configuration, and the due date has passed. - Recorder version only. Press D + U to postpone calibration.
BASE SCREEN OPTIONS
Single
Loop
LED Labels:
Process Value & Setpoint (or MAN):
Bar Graphs:
LED indicator functions. Defaults are PRI, SEC, TUNE & ALARM - LED functions and their labels can be altered with the configuration software.
Process values and effective Setpoint (%Manual Power in Manual Mode or Valve Open / Stop / Close for VMD Manual Mode).
Control Deviation graph (±5% span) and Power graph (0-100% primary, ±100% primary & secondary or Valve OPEN / STOP / CLOSE in VMD mode).
If VMD Control with input 2 used for position feedback, the power bar-graph shows 0 to 100% valve position.
Two
Loop
LED Labels:
Process Value & Setpoints (or MAN):
Bar Graphs:
LED indicator functions. Defaults are PRI, SEC, TUNE & ALARM – LED functions and their labels can be altered with the configuration software.
Process values and effective Setpoint values for both loops (%Manual Power in Manual Mode or Valve Open / Stop / Close for VMD Manual Mode).
Control Deviation graphs (±5% span) and Power graphs (0-100% primary, ±100% primary & secondary or Valve OPEN / STOP / CLOSE in VMD mode).
Cascade
Control
LED Labels:
Cascade Status, Master & Slave
Process Values & Setpoint (or MAN):
Bar Graphs:
LED indicator functions Defaults are PRI, SEC, TUNE & ALARM - these labels can be altered with configuration software.
Cascade Status. Cascade = Cascade operating; Cascade Open = master / slave loops not linked. Master & Slave Process Values. Master Setpoint
value (Slave Setpoint if Cascade Open, or Manual Power level in Manual Mode).
Control Deviation graph (±5% span) and Power graph (0-100% primary, ±100% primary & secondary or Valve OPEN / STOP / CLOSE in VMD mode).
Ratio
Control
LED Labels:
Ratio:
Ratio Setpoint (or MAN):
Bar Graph:
LED indicator functions. Defaults are PRI, SEC, TUNE & ALARM - these labels can be altered with configuration software.
Relative Ratio value and relative Setpoint value.
Ratio Setpoint value (or Manual Power level when in Manual Mode).
Control Deviation graph (±5% span) and Power graph (0-100%).
◘ Profile Control
If a profile is running, from: Do Nothing; Abort Profile (end immediately); Jump to Next Profile Segment; Hold Profile or Release Hold
If profile not running, from: Do Nothing; Run Profile; Select Profile; End Profile Control; (return to std. controller operation).
Profile
Info
LED Labels:
Process Value & Setpoints (or MAN):
Bar Graphs:
LED indicator functions. Defaults are PRI, SEC, TUNE & ALARM - these labels can be altered with configuration software.
Process values and effective Setpoint values (%Manual Power in Manual Mode or valve Open / Stop / Close for VMD Manual Mode).
Profile name & progress bar graph with Running/Held/Stopped indicator.
Current profile segment progress bar graph, with segment number and type.
Event Status
Active / inactive status of all configured Events - Profiler mode only.
◘ Cascade Mode
Cascade-Open breaks the master-slave link when commissioning & tuning. Slave SP is adjustable directly. Caution: Return to Cascade when finished!
◘ Auto/Manual Control Selection
Switches the loop shown between automatic and manual control - setpoint replaced by manual power level in manual mode.
These screens possible
for each control loop in
turn - if configured for
2-loop or cascade
operation.
Setpoint Value Display & Adjustment
View and adjust local (internal) setpoints for the loop. The “active” SP is marked. - Remote setpoints are read only.
◘ Setpoint Ramp Rate
Setpoint Ramp Rate adjustment for the loop shown (in display units per hour).
◘ Select Active Setpoint
Selects if the main or alternate setpoint is active for the loop shown.
◘ Control Enable
Enables/disables the control loop outputs for the loop shown - setpoint is replaced by “OFF” when disabled.
Alarm Status
Lists any active alarms. The titles “Alarm n” can be replaced with the PC configuration software to a user defined 8 character name for each alarm.
◘ Clear Latched Outputs
Hold down D or U for 3 seconds to clear selected latched output – Output only resets if the condition that caused it to latch on is no-longer present.
Recorder Memory Full Warning
Warns if the recorder memory is used up and that recording has either stopped or is overwriting older data if in FIFO recording mode.
◘ Manual Recorder Trigger
Set the manual recording trigger on or off. Even if set to off, recording will still take place if another recording trigger is active.
◘ Recorder Status Information
Status (Recording or Stopped); active trigger icons; recording mode & time remaining and a %memory bar-graph - see the Data Recorder, section 17.
◘ Trend View (Loop 1)
A trend graph of PV & SP, or the Max/Min value of the PV between samples. Any active alarm(s) are indicated at the top of the graph.
◘ Trend View (Loop 2)
A trend graph of PV & SP, or the Max/Min value of the PV between samples. Any active alarm(s) are indicated at the top of the graph.
- Custom Display screens …
Up to 50 Configuration parameters can be copied into Operation Mode using the PC software. In this mode they are not pass code protected.
Note: Operation Mode screens can be made globally read only from Display Configuration
Setup Wizard:
Setup Wizard Unlocking
w
Enter correct code number to access Setup Wizard. Default Value = 10
Reset Defaults or Continue
w
Decide whether start wizard with current settings or default values (recommended). Caution: Resetting defaults all parameters, not just those covered by
the quick setup wizard. For more complex applications the user may have to reconfigure other Configuration Mode settings before using the instrument.
- Screens marked w …
w
Press R to select each major configuration parameter in turn. Follow the on-screen prompts to alter the values.
Setup Wizard Completed
w
Confirms completion of the Setup Wizard. Exits to Operation Mode.
Supervisor Mode:
Supervisor Mode Unlocking
If Supervisor Mode is configured (requires PC software to configure screens sequence), enter correct code number to continue. Default Value = 10
- Supervisor Mode Screens …
Press R to select up to 50 Configuration parameters in turn. Follow on-screen prompts to alter values. – see their Configuration Menu entry for details.
Configuration Menu:
Refer to the Configuration Menu sequences
on the following page for information about
the Configuration Sub-Menus
Configuration Mode Unlocking
Enter correct code number to access Configuration Mode. Default Value = 10
Configuration Options
Select required Configuration Menu Option from list. Press R to continue.
USB Menu:
.
USB Mode Unlocking
Enter correct code number to access USB Menu. Default Value = 10
Read/Write To USB Device
From: Read/Write Configuration File; Write Recorder Log File or Read/Write Profile File.
Write
Select Profile To Write
If writing a profile to the USB Memory Stick, choose a profile to write from the list provided.
Enter A File or Folder Name
Enter an 8-character folder name for logs, or a file name for configurations and profiles. An extension (bct for configurations, .pfl for profiles) is added
automatically. Caution: Existing files/folders with the same name will be over-written.
Writing Profile/Configuration/Log
Recorder log, profile or configuration being written to USB. Caution: Do not disconnect USB device until completed! Data loss or corruption may result.
Transfer Successful
Confirmation of successful data transfer. Press R to continue
Read
Select File
Select the Configuration or Profile file to transfer from the USB stick. Caution: A configuration read overwrites all existing instrument settings.
Reading Profile/Configuration
Profile or configuration is being read. Caution: Do not remove the memory stick whist this operation is in progress. Data loss or corruption may result.
Transfer Successful
Confirmation of successful data transfer. Press R to continue
Transfer Failure
For write failures, check the disk space on the USB stick. For read failures, check the maximum number of profiles/segments is not being exceeded.
Recorder Control:
Recorder Mode Unlocking
Enter correct code number to access Data Recorder Menu – Default Value = 10.
Manual Recorder Trigger
Turn on or off the manual recording trigger. Note: Recording continues if another trigger active (e.g. on alarm/profile; manual start or digital input).
Recorder Status Information
Status (Recording or Stopped); active trigger icons; recording mode & time remaining and a %memory bar-graph - see the Data Recorder in section 17.
Clear Recordings?
Clears the recorder memory. Caution: Permanently removes All recorded data. – Only shown if recording is stopped>
MAIN MENU OPTIONS
(Continued)
Profile Setup:
Profile Setup Menu Unlocking
Enter correct code number to access the Profile Setup Menu. Default Value = 10
General Profile Configuration:
Sub-menu with global settings affecting all profiles. Press D + R to return to Profile Setup Menu
Enable Edit While Running
Enables/disables the ability to edit profiles whist a profile is running. Note: current or next segment will not change until after profile is restarted.
Timer Start Function
If enabled, delayed timer starts are possible, and if the selected profile has a day & time trigger waits until the time set, then starts automatically.
If disabled, profiles can only be manually started, and with immediate effect (delays or timer starts ignored).
Create A Profile
Sub-menu to Create profiles. A warning is displayed if 64 profiles or 255 segments is exceeded. Press D + R to return to Profile Setup Menu
Profile Header Details
Enter Profile Name
Up to 16 characters can be used to give each profile a unique descriptive name.
Number of Loops Linked to
Profile.
Select if this profile will: 1) Control the setpoint of first loop only or; 2) Control the setpoint of both loops. This setting cannot be edited later.
Note: the segment type and time settings are common to both loops.
Profile Starting Setpoint
From: Current Setpoint or Current Process Variable. Uses the measured PV or effective SP when profile is started, for the beginning of the first segment.
Profile Start Trigger
From: None (profile start is not delayed); After Delay or Day and Time. Note: Delay and Timer triggers only effective if enabled with Timer Start Function.
Profile Start Time
The time (hh:mm) when the profile should run. – if Day and Time is the Profile Start Trigger. Caution: Take care not to clash with other profiles.
Profile Start Day(s)
Day(s) when the profile should run. From: Mon; Tue; Wed; Thu; Fri; Sat; Sun; Mon-Fri; Mon-Sat; Sat-Sun or Every Day. – if Day and Time is the Trigger.
Profile Start Delay Time
The delay time, up to 99:59 (hh:mm), for a profile to wait after the start request has been given. Profile only begins when this time has elapsed.
Profile Recovery Method
Power-on action if profile was running at power-down (e.g. a power cut), or following correction of a signal break. From: Control outputs off;
Restart profile; Maintain last profile setpoint; Use controller setpoint; Continue profile from where it was when power failed.
Profile Recovery Time
Recovery Method is ignored (profile continues from where power failed), if power is off for less than this time. Max 99:59 (hh:mm). - Recorder only.
Profile Abort Action
Action after profile is forced to stop before its end. From: Control outputs off; Maintain last profile setpoint or Use controller setpoint.
Profile Cycles
The number of times the program should run each time it is started (1-9999 or Infinite).
Profile Segment Details
Segment Number
Shows the number of the profile segment being created from 1-255
Segment Type
From: Ramp Time (time to reach target SP); Ramp Rate (rate of change towards target SP – Single loop profiles only); Step (jump to target SP), Dwell
(keep current SP); Hold (hold profile until released); Loop (back to previous segment); Join (to another profile); End or Repeat Sequence Then End.
Loop 1 Target Setpoint.
The setpoint value Loop 1 should reached by the end of this segment if type is Ramp Time, Ramp Rate or Step.
Loop 2 Target Setpoint.
The setpoint value Loop 2 should reached by the end of this segment if type is Ramp Time or Step.- Two-Loop profiles only.
Segment Ramp Time
The time (hh:mm:ss) for the loops to reach their Segment Target Setpoints - if segment type is Ramp Time.
Segment Ramp Rate
The rate of change towards the Segment Target Setpoint if segment type is Ramp Rate. The rate can be set from 0.001 to 9999.9 units per hour.
Segment Dwell Time
The time (hh:mm:ss) the loop(s) maintain their current setpoint(s).
Number of Loops
For Loop Segments, enter the number of times to loop back to a previous segment, before continuing forward to the next segment.
Back to Segment Number
For Loop Segments, enter the segment to loop back to from the list of segments shown. Note: loops must not cross.
Loop 1 Auto-Hold Type
From: None (no auto-hold); Above Setpoint (hold if too high); Below Setpoint (hold if too low) or Band (hold if too high or low).
Loop 1 Auto-Hold Band Value
The distance from loop 1 setpoint beyond which the profile is held.
For Two-Loop Profiles, either loop can cause the profile to hold.
Note: The Profile continues only when both loops are back within their Auto-
Hold Bands.
Loop 2 Auto-Hold Type
Options as for Loop 1 - Two-Loop profiles only.
Loop 2 Auto-Hold Band Value
The distance from loop 2 setpoint beyond which the profile is held.
Hold Segment Release Type
A hold segment can either be released by an Operator/Digital input or be set wait until a specified Time of Day - Recorder version only.
Hold Release Time
Time of day (hh:mm) when a Hold Segment will release - if Release Type is Time Of Day. The segment releases at the next occurrence of this time.
Times To Repeat Sequence
The number of times the entire sequence of profiles should run. – if the last segment is Repeat Sequence Then End.
Segment End Type
Action after profile ends. From: Control outputs off; Maintain last profile setpoint; Use controller setpoint.
Select Profile To Join
Choose a profile to join to from the list provided. Chosen profile will start immediately the current profile ends. – if final segment set as a Join.
Event n
Select if events (1 to 5) are active during this segment. For end segments, Active events stay on until the unit exits profiler mode or a new profile runs.
Edit A Profile Header
Choose the profile to be edited from the list of profile names provided. The number of loops in a profile cannot be changed.
For profile header &
segment details see
“Create A Profile” above.
Edit A Profile Segment
Choose the profile and segment to be edited from the lists. Other segments cannot be changed into End, Join or Repeat types.
Insert A Segment
Choose the profile and position of new segment from the lists provided. End, Join or Repeat segments cannot be inserted.
Delete A Segment
Choose the profile and then the segment to be deleted from the lists provided. End, Join or Repeat segments cannot be deleted.
Delete A Profile
Choose the profile to be deleted from the list of names is provided.
Delete All Profiles
Deletes all profiles from memory. The user is prompted to confirm that all profiles should be deleted. Caution: Use with care!
Profile Control:
Profile Control Menu Unlocking
Enter correct code number to access the Profile Control Menu. Default Value = 10
Profile Control
If a profile is running, from: Do Nothing; Abort Profile (end immediately); Jump to Next Profile Segment; Hold Profile or Release Hold
If profile not running, from: Do Nothing; Run Profile; Select Profile; End Profile Control; (return to std. controller operation).
Select Profile
The profile chosen to run. Following confirmation, the selected profile starts (after a delay or at the
Day & Time if set and enabled).
Selection is “read only” if profile selection is via
digital input. If not choose from the list of profiles.
Service and Product Info:
Plug-in Modules
Lists the type of Plug-in Modules (if any) fitted in module Slots 1, 2, 3 or A – see model code matrix for full list of field upgradeable plug-in options.
Base Options
Lists factory fitted base build options, from: 2nd Universal/Aux input; Output 4 & 5 Relay; Output 5 & 6 Linear.
Optional Features
Lists which other optional features are fitted/enabled, from: Profiler; USB Port; Data Recorder and 8 Digital Inputs.
Firmware Information
Type and version of firmware.
Product Revision Level
Software and Hardware update status
Serial Number
The Instrument serial number.
Date of Manufacture
The instrument Date of Manufacture (date format is dd/mm/yyyy).
Input 1 Calibration Status
Calibration status of mVDC, VDC, mADC, RTD and Thermocouple CJC inputs. Caution: All should be “Calibrated”.
Input 2 Calibration Status
Calibration status of mVDC, VDC, mADC, RTD and Thermocouple CJC inputs. – Two Input versions only. Caution: All should be “Calibrated”.
For Service Contact Information
Contact information for Service, Sales or Technical Support.
Automatic Tuning:
Automatic Tuning Mode Unlocking
Enter correct code number to access Automatic Tuning Menu.
- Control loop 1 or 2 ...
For 2-loop controllers, select the loop to tune. If required the screens can be repeated for the other control loop.
Cascade Mode
To pre-tune a cascade slave, select open-cascade. Note: When slave tune complete, repeat choosing open-cascade to tune the master.
Pre-Tune Method
Pre-Tune Standard or Pre-Tune at Value
Standard Pre-Tune tests the process response half-way from the activation point to the setpoint. Pre-Tune at
Valve allows the user to specify where the process test will occur. Caution: Consider possible over-shoot!
The new PID terms can be stored to any set, but without changing the “active set” from control configuration.
Pre-Tune Value
Set the value at which process is tested.
Pre-Tune Save Location
Store pre-tune result to one of 5 PID sets.
Run Pre-Tune on Set n Now?
w
Runs Pre-Tune for the chosen PID Set.
Note: Pre-Tune is disabled if the control loop is in On-Off Mode or disabled; if the PV is <5% of span from
SP; if a Ramping Setpoint is set, or during Profiles. The reason is shown if pre-tune cannot run.
Pre-Tune Status
Pre-Tune status: Running or Stopped.
Engage Self-Tune
Runs Self-Tune for the active PID Set.
Note: Self-Tune disabled if control is On-Off or disabled. If engaged during setpoint ramping, profile ramps or
pre-tuning it is suspended until the ramp or pre-tune is completed. The reason is shown if it cannot engage.
Self-Tune Status
Self-Tune status: Running or Stopped.
Auto Pre-Tune at Power Up?
Enables/Disables Automatic Pre-Tune. Note: Attempts to tune the active PID set using standard pre-tune engagement rules, at every power-up.
21. SUPERVISOR MODE
The purpose of this function is to allow selected operators access to a lock-code
protected sub-set of the configuration parameters, without providing them with the
higher level configuration menu unlock code. The PC software is used to copy up to
50 parameters from configuration menus for inclusion in the supervisor mode screen
sequence. If the parameter is normally displayed on screen with another parameter,
both parameters will appear.
NOTE: Supervisor mode is only available if one or more screens has
been configured from the PC software. It is not possible to configure
supervisor mode screens without using the software.
Continued.....
Page 6

CONFIGURATION MENU OPTIONS
Select required menu option from list. Press R to continue. - Press U+ R to move up one menu level.
Input Configuration:
Input 1 Setup
Sub-menu to setup 1st input. Press D + R to return to Input Configuration Menu
Input Type
w
From Thermocouple, RTD and Linear inputs (mA, mV & VDC or Potentiometer). – see the specifications (page 4) for details.
Note: Always re-check
units & decimal position
after changing input type.
Engineering Units
w
Select display units from: °C; °F; K; bar; %; %RH; pH; psi or none. Temperature sensor inputs are limited to °C; °F
Decimal Point Position
w
Display resolution with 0; 1; 2 or 3 decimal places. Temperature sensor inputs are limited to 0 or 1 decimal place.
Scaled Input Lower Limit
Sets the usable span (min = 100 display units, max = range limits - see specs) for temperature inputs. For linear inputs, the Upper & Lower Limits define
the values shown (from -9999 to 9999.9) when input is at minimum and maximum values. Min span = 100 display units.
Scaled Input Upper Limit
Enable Multi-Point Scaling
Enables/disables Linear Input Multi-Point Scaling – not possible with temperature sensor inputs
Scaling Point n
If Multi-Point Scaling is enabled, up to 15 breakpoints* link % input values with the value to be displayed at that input. Adjustable between the linear
input scale limits. *A Scaling Point set to 100% input ends the sequence.
Display Value n
Cold Junction Compensation
Enables/disables the internal Thermocouple Cold Junction Compensation. The default value is Enabled. – Thermocouple inputs only.
Input Filter Time
Filters unwanted noise from input signal. Adjustable from 0.1 to 100.0 seconds or OFF (default = 2s). Caution: Use with care!
Input 1 Calibration
Sub-menu to calibrate 1st input. Press D + R to return to Input Configuration Menu
Calibration Type
Base (normal) Calibration; Single or 2 point Calibration. Use single or two point calibration to adjust readings. Caution: Use with care!
Calibration Offset
The single point calibration offset. Limited by input span, +Ve values add to, –Ve values subtract from measured input. Default = “OFF”.
Calibration Low Value
The controller displayed value at which the low end calibration is being performed. Choose a value close to the bottom of application range.
Calibration Low Offset
Set low offset at known calibrated input minus the displayed value (e.g. for low cal displayed as 10, if known actual =10.4, Low offset would be +0.4).
Calibration High Value
The controller displayed value at which high end calibration is being performed. Choose a value close to the top of application range.
Calibration High Offset
Set high offset at known calibrated input minus the displayed value (e.g. for high cal displayed as 500, if known actual =497 Low offset would be -3).
Input 2 Setup
Sub-menu to setup 2nd input – if fitted. Press D + R to return to Input Configuration Menu
Input Usage
w
Standard (following options as for input 1), Not Used, Redundant or Feedback. Redundant or Feedback disables use as 2nd control loop.
- Std use: Input 2 type, units, scaling etc. options as for input 1. Redundant: Input 1 settings duplicated. Feedback: mA, mV, VDC or Potentiometer only and used for valve or flow indication only.
Set Valve Lower Position
Press D + U to begin feedback limit adjustment for the minimum valve travel - if Input 2 is Feedback.
Move valve to minimum travel (e.g. fully closed) using D to close or U to open. Pressing D + U together stores feedback value at minimum travel.
Set Valve Upper Position
Press D + U to begin feedback limit adjustment for the maximum valve travel - if Input 2 is Feedback
Move valve to maximum travel (e.g. fully open) using D to close or U to open. Pressing D + U together stores feedback value at maximum travel.
Input 2 Calibration
Sub-menu to calibrate 2nd input – if fitted (procedures as shown for Input 1 Calibration). Press D + R to return to Input Configuration Menu
Calibration Reminder
Sub-menu to setup a calibration reminder – if recorder is fitted. Press D + R to return to Input Configuration Menu
Calibration Reminder Enable/Disable
Enables/disables a Calibration Reminder shown at start-up (and daily thereafter), if the due date has passed.
Calibration Reminder Date
Sets the due date for Calibration Reminder - Recorder version only.
Auxiliary Input A Setup
Sub-menu to setup auxiliary A input – if fitted. Press D + R to return to Input Configuration Menu
Auxiliary Input A Type
From 0-20 or 4-20mA; 0-5, 1-5, 0-10 or 2-10VDC Linear.
Aux A Input Lower Limit
Scales the values used (between ±0.001 & ±10000) when auxiliary input A is at minimum and maximum values for a remote setpoint. The scaled input
value becomes the effective setpoint (constrained within setpoint limits). Caution: Take care to scale correctly especially if used by both loops.
Aux A Input Upper Limit
Auxiliary Input A Offset
Offset for Auxiliary Input A, from +/-0.001 to 20000 units or OFF. +Ve values add to, –Ve values subtract from measured input. Default = OFF.
Digital Input Setup
Sub-menu to setup the digital inputs – if fitted. Press D + R to return to Input Configuration Menu
Digital Input Status
Digital inputs A; C1 - 8 and “Soft “digital inputs S1 – 4 diagnostic status. If used for Profile Selection, shows bit pattern type and selected profile number.
Tick Digital Inputs To Invert
Select digital inputs with to invert operation (make them OFF when actual state is ON). Inputs shown as Ø are not available.
Profile Selection Type
The bit pattern to be used for profile selection. Binary or Binary Coded Decimal (BCD). Select None if profile selection not required.
Choose Profile Selection
Select inputs C1-Cn for highest profile number required. Binary or BCD bit patterns can be used.
Note: These inputs not available for other uses.
Profiles are numbered 0 to 63. 1st Profile = 0 (all
inputs open), 2nd profile = 1 (C1 only closed) etc.
Binary: C1 = 2; C1-C2 = 4; C1-C3 = 8; C1-C4 = 16; C1-C5 = 32; C1-C6 = 64.
BCD C1 = 2; C1-C2 = 4; C1-C3 = 8; C1-C4 = 10; C1-C5 = 20; C1-C6 = 40; C1-C7 = 64 (≥65 invalid).
Configure Digital Inputs
Select any available digital input or soft digital input to be configured. The current status is shown as Assigned or Unused.
Soft Digital Input n Digital Input Logic
Boolean OR and AND of physical inputs for the Soft input
“Soft” digital inputs result from the AND selection globally OR’d with any other selections.
Press U or D to select / deselect the options. Inputs shown as Ø are not available.
Soft Digital Input n Alarm-Event
Boolean OR of Alarms & Events for the Soft digital input.
Digital Input n Function
Select the function to be operated from digital input n. – A full list of possible functions can be found in the specifications section.
Control Configuration:
Control Loop 1
Sub-menu to setup the 1st control loop. Press D + R to return to Control Configuration Menu
Control Mode
From: Standard; Cascade or Ratio. Caution: Choosing Cascade or Ratio disables the use of the 2nd input as a fully independent control loop.
Cascade Mode
Cascade-Open breaks the master-slave connection. Allows slave loop to be tuned & adjusted. Caution: Return to Cascade-Closed when finished!
Control Select
Control Standard or VMD (TPSC) Control. VMD is Valve Motor Drive using 3-point stepping control. It provides direct valve open/close outputs.
Control Enable/Disable
Select control Enabled (normal) or Disabled – when disabled, control output(s) for this loop are turned off and the setpoint value is replaced by “OFF”
Control Type
Single - Primary Control (e.g. Heating or Cooling) or Dual - Primary & Secondary (e.g. Heating and Cooling). - Dual not with Ratio or VMD.
Auto/Manual Control Selection
Switches the control loop between automatic and manual control. In manual mode the setpoint value is replaced by “MAN”
Primary Control Action
Reverse or Direct. Reverse = “apply primary power when below setpoint”. Secondary output action always opposite to Primary.
Control Status
Display of the current loop 1 process variable and effective setpoint values – Read Only.
Power Output Levels
Display of the current loop 1 primary and secondary control % output power levels – Read Only. Not shown with VMD Control.
Gain Schedule PID Set in use
Shows the PID set in use based on the current setpoint or process variable value. – If Gain Scheduling in use. Read Only.
PID Set Selection
Use PID Set 1 to 5; or choose Gain Schedule on SP or PV. – select set to be “Active”; or automatically switch sets based changes in SP or PV values.
Set n – Primary Pb
Primary Proportional Band for Gain Set n (n = up to 5). On-Off control, or 1 display unit to 9999 units – Only set(s) in use shown.
Set n – Secondary Pb
Secondary Proportional Band for Gain Set n (n = up to 5). On-Off control or 1 display unit to 9999 units – Standard & Dual Control, and for set(s) used.
Set n – Integral
Integral Time value (Automatic Reset) for Gain Set n (n = up to 5). From 1s to 99min 59s or OFF – Only set(s) in use shown.
Set n – Derivative
Derivative Time value (Rate) for Gain Set n (n = up to 5). From 1s to 99 min 59s or OFF – Only set(s) in use shown.
Set n – Overlap / Deadband
Overlap (+ve) or Deadband (-ve) between primary & secondary proportional bands. In display units - limited to 20% of primary + secondary prop band.
Set n – On/Off Diff
On-Off Control hysteresis (deadband) PID Set n (n = up to 5). From 1 display unit to 300 – Only set(s) in use shown.
Set n - Breakpoint
The SP or PV value where the PID Set n begins. Set 1 used from Scaled Input Lower Limit to Set 2 Breakpoint, then Set 2 used to Set 3 Breakpoint etc.
If a breakpoint is set to OFF subsequent PID sets are not used. The final PID set runs to Scaled Input Upper Limit. – If Gain Scheduling in use
Manual Reset (Bias)
Manual Reset value (biasing of control working point) from 0-100% for single control or 100 to +100% for dual control. Lower values inhibit overshoot
Anti Wind-Up Limit
10 to 100% power level, where further integral action is suspended. Lower values inhibit overshoot. Caution: Too low can cause control offset!
Ratio SFAC
The ratio scaling factor used for Stoichiometric Ratio Control. From 0.010 to 99.999.
Ratio NO
A constant between 0.0 & 9999.0, added x1 (input 1) value in Ratio Control mode when calculating the process value. Total is x1 + NO.
Primary Cycle Time
Primary Power Cycle Time from 0.5s to 512s. Relay, SSR Driver or Triac Control Outputs only. Not for VMD Control.
Secondary Cycle Time
Secondary Power Cycle Time from 0.5s to 512s. Relay, SSR Driver or Triac Control Outputs only. Not for VMD Control.
Primary Power Lower Limit
Minimum limit for Primary Output Power, from 0 to 90%. Must be ≥10% below the upper limit.
Caution: Use with care!
Incorrect use of power limits can prevent the
controller from maintaining the process the
required setpoint.
Primary Power Upper Limit
Maximum limit for Primary Output Power, from 10 to 100%. Must be ≥10% above the lower limit.
Secondary Power Lower Limit
Minimum limit for Secondary Output Power, from 0 to 90%. Must be ≥10% below than the upper limit.
Secondary Power Upper Limit
Maximum limit for Secondary Output Power, from 10 to 100%. Must be ≥10% above the lower limit.
Sensor Break Pre-set Power Output
Power applied (-100 to +100% or Valve Open/Close) if input or active RSP is lost. Default is OFF (0%). Caution: Set to a safe value for the process!
Motor Travel Time
The motor travel time (valve time fully open to fully closed in mm:ss). From 5s to 5 mins - In VMD Control Mode only.
Minimum Motor On Time
The minimum drive effort to begin moving the valve. From 0.02 to (Motor Travel Time / 10) in seconds - In VMD Control Mode only.
Valve Open Limit
The maximum position the valve will be driven to. From Valve Close Limit +1.0 to 100.0% (fully open).
- Only with VMD Control + Feedback.
Valve Close Limit
The minimum position valve will be driven to. From 0.0% (fully closed) to Valve Open Limit -1.0.
Slave SP Scale Min
The effective cascade slave setpoint value equating to 0% power demand from the master loop.
Caution: Set to safe values for the process!
- Limited by slave input scaling.
Slave SP Scale Max
The effective cascade slave setpoint value equating to 100% power demand from the master loop.
Valve Sensor Break Action
The direction to drive the valve if the PV input (or active RSP) is lost. - In VMD Control Mode only. Caution: Set to a safe value for the process!
Setpoint Lower Limit
Minimum allowable setpoint value. Adjustable within Input Span limits.
Caution: Set to safe values for the process!
Applies to local, remote and profile setpoints.
Setpoint Upper Limit
Maximum allowable setpoint value. Adjustable within Input Span limits.
Setpoint Ramp Rate
Setpoint Ramp Rate value (1 to 9999 LSDs per hour or OFF). Ramp applied when SP value or source is changed; and from current PV to SP start-up.
Main Setpoint Source
Select Local Setpoint or Not used.
Alternate Setpoint Source
From: Local Setpoint; Auxiliary Input A; Input 2 or not used – depending on available hardware.
Main Setpoint Value
The current value of the Main Setpoint.
Local setpoints are adjustable between the Setpoint Upper and Lower Limits. Remote setpoints are read
only. – The setpoint active/inactive status is shown. Unused setpoints not shown.
Alternate Setpoint Value
The current value of the Alternate Setpoint.
Main Setpoint Offset
An offset applied to the Main Setpoint.
+ve values are added and -ve values subtracted. Use when unit is a multi-zone slave to change the
effective setpoint. Caution: It should be set to zero if an offset is not required. - if RS485 comms fitted.
Alternate Setpoint Offset
An offset applied to the Alternate Setpoint.
Select Active Setpoint
Choose if the Main or Alternate setpoint will be used as the Active setpoint.
Control Loop 2
Sub-menu to setup the 2nd control loop – if fitted and configured. Press D + R to return to Control Configuration Menu
- 2nd Control Configuration screens ...
Similar screens to Control Loop 1. Cascade and Ratio Control modes use both inputs, limiting the screens shown here accordingly.
Output Configuration:
- Output n Configuration screens ...
Up to 9 outputs are listed, with any already used shown as “Assigned” or “Digital”. The relevant screen sequences are repeated for each output fitted.
Linear Output n Type
w
From: 0-5, 0-10, 1-5, 2-10V & 0-20, 4-20mA or 0-10VDC adjustable Transmitter PSU.
Adjustable 0-10V Transmitter PSU n
w
Voltage required if Output n is used as a 0-10VDC adjustable Transmitter PSU.
Output n Usage
w
Loop1 or 2 Primary / Secondary Power; Logical OR or AND of Alarms & Profile Events (direct or reverse); Retransmission (loop 1 or 2 SP, Input 1 or 2).
OPn OR Selection
w
Logically OR Alarms or Events
Press U or D to select ☑ or deselect ☐ Alarms 1 to 7; Events 1 to 5; PR (Profile running); PE (Profile Ended).
Direct outputs turn on & reverse outputs turn off according to the selected logical OR or AND combination.
OPn AND Selection
w
Logically AND Alarms or Events
Output n Latch Enable
w
If enabled, an output remains on after the ON condition has passed. It must be reset to clear the latch. Note: Latched status retained after power off/on.
Output n Lower Retransmit Limit
w
Displayed value at which the retransmission output reaches its minimum level (e.g. 4mA if type is 4-20mA). Adjustable from -9999 to 9999.
Output n Upper Retransmit Limit
w
Displayed value at which the retransmission output gives its maximum level (e.g. 20mA if type is 4-20mA). Adjustable from -9999 to 9999.
Alarm Configuration:
- Alarm n Configuration screens ...
7 alarms are listed with any already used shown as “Assigned”. The relevant screen sequences are repeated for each alarm.
Alarm n Type
w
From: Unused; Process High; Process Low; PV-SP Deviation; Band; Control Loop; Rate Of Signal Change per minute; Input Signal Break;
% of Recorder Memory Used, Control Power High, Control Power Low.
Alarm n Source
w
Signal to activate alarm n. From: Input 1, 2 & Aux A; Control Loop 1 & 2; or Loop 1 & 2 Primary/Secondary Power – Aux A signal break alarm only.
Alarm n Value
w
The Alarm n activation point value – not required for Control Loop or Input Signal Break alarm types.
Alarm n Hysteresis
w
Deadband on “safe” side of alarm, through which signal must pass before alarm n deactivates. – except signal change & break, memory or loop alarms.
Alarm n Minimum Duration
w
Minimum time alarm n must pass its threshold before activating. 0.0 to 9999.0 secs – except signal break, memory or loop alarms.
Alarm n Inhibit
w
Prevents alarm activation if the alarm condition is true at power up. Activation occurs only after the condition has passed and then reoccurred.
Control n Loop Alarm Type
w
From: Manual Loop Alarm Time (from Loop Alarm Time screen) or Automatic (2x Integral Time Constant) – if any alarm set for control loop on loop n.
Control n Loop Alarm Time
w
Time allowed (after PID power reaches min or max), for the process to begin responding. Alarm activates if no response. – for Manual Alarm time only.
Communications Configuration
No Communications Warning
If Communications Configuration menu is entered without a communications module fitted.
Modbus Parity
Modbus parity bit checking. From: Odd; Even or None.
– if RS485 or Ethernet fitted. Note: With Ethernet, data rate & parity only
affect internal data transfers. Leave at defaults (9600 & None) unless the
Ethernet card settings are also changed (not recommended).
Modbus Data Rate
Modbus data speed. From: 4800; 9600; 19200; 38400; 57600 or 115200 bps.
Master Mode, or Slave Address
Modbus Slave address (1 to 255), or multi-zone Setpoint Master Mode – if RS485 fitted (Master mode not supported via Ethernet).
Target Register In Slave
Target register for Setpoint value in attached setpoint slave controllers (when in Modbus Master mode).
Master Mode Format
The data format required by the attached setpoint slaves. From: Integer; integer with 1 decimal place & Floating Point (when in Modbus Master mode).
Master Setpoint Select
Select the source loop for the setpoint master function. The actual setpoint value of the selected loop is broadcast to the slave controllers.
Serial Communications Write Enable
Enables/disables writing via RS485 or Ethernet. When disabled, all parameters are read only.
Recorder Configuration:
No Recorder Warning
If the Recorder Configuration menu is entered on an instrument without this option.
Recording In Progress Warning
If recording in progress when Recorder Configuration entered. - Access to the configuration is denied unless the recording is paused.
Pause (Override Trigger)
To continue with Recorder configuration, pause the recording. Note: Recording restarts automatically on exit from Recorder Configuration.
Recorder Status Information
Status (Recording or Stopped); active trigger icons; recording mode & time remaining and a %memory bar-graph - see the Data Recorder in section 17.
Recording Mode
Record Until Memory Used (stops recording when full) or Continuous FIFO. Caution: FIFO (First In / First Out overwrites oldest data when full).
Recording Sample Interval
From: Every 1; 2; 5; 10; 15; 30 Seconds, or Every 1; 2; 5; 10; 15; 30 Minutes. (does not affect Trend View sample rates).
Recorder Auto Trigger
Automatic recording triggers. From: None; On Alarm; During Profile and Alarm or Profile. Records if any trigger active (inc. manual start or digital input).
Trigger On Alarms
Select alarms 1 to 7 can be set to trigger (TRG) or not (OFF). If any selected alarms is active, recording will take place.
Loop 1 Values To Record
For each control loop, any combination of values can be recorded from: Process Variable; Maximum or Minimum PV (since previous sample); Setpoint;
Primary Power or Secondary Power. For each parameter, REC = Record.
Loop 2 Values To Record
Other Values To Record
Aux Input A Value. REC = Record.
Activities To Record
The status of Alarms (1 to 7) and Profiler Events (1 to 5 ) can be
recorded, as can when the unit is turned On/Off.
Note: If an Alarm or Profile Event changes state between samples, this will also be
recorded, using extra memory. Remaining recording time is therefore reduced.
Profiler Events To Record
Clock Configuration:
Date Format
w
The format used for displayed dates: dd/mm/yyyy (Day / Month / Year) or mm/dd/yyyy (Month / Day / Year).
– Recorder versions only.
Note: Clock settings cannot be changed
when the data recorder is active.
Set Date
w
Sets the internal clock Date. Entered in the format defined by Date Format screen.
Set Time
w
Sets the internal clock Time. - In hh:mm:ss (Hours : Minutes : Seconds) format.
Display Configuration:
Language
Select English or the alternate local language. The alternate language type purchased can be changed using the PC software.
Read Only Operation Mode
Allows Operation Mode to be Read-Only or Read/Write. Operation Mode screens can be seen but their values cannot be changed if set to Read-Only.
Display Colour
Red only; Green only; Red to Green or Green to Red on active Alarm; Red to Green or Green to Red on active Alarm OR Latched Output (default).
Invert Display
Standard or Inverted (negative) display image.
Display Contrast
Screen contrast (0 and 100) to improve clarity. 100 = maximum contrast.
Loop 1 Trend Sample Interval
The time between value updates on the loop 1 trend graph. From: Every 1; 2; 5; 10; 15; 30 Seconds, or 1; 2; 5; 10; 15; 30 Minutes.
The settings and
sample rates for
the two trend views
and the optional
Data Recorder are
completely
independent.
Loop 1 Trend View Mode
The data to display on the loop 1 trend graph. From: Process Value only, PV (solid) & SP (dotted) at sample time, or the Max & Min
PV between samples (candle-stick graph). Alarm active indication is always shown at top of graph.
Loop 2 Trend Sample Interval
The time between value updates on the loop 2 trend graph. From: Every 1; 2; 5; 10; 15; 30 Seconds, or 1; 2; 5; 10; 15; 30 Minutes.
Loop 2 Trend View Mode
The data to display on the loop 2 trend graph. From: Process Value only, PV (solid) & SP (dotted) at sample time, or the Max & Min
PV between samples (candle-stick graph). Alarm active indication is always shown at top of graph.
Operator Visibility
Extra parameters to be visible/adjustable in Operation Mode from: Profile Control; Recorder Start/Stop; Recorder Status; Loop 1 & 2 Setpoint Select;
Loop 1 & 2 Auto/Manual Select; Loop 1 & 2 Control Select; Loop 1 & 2 Trend View; Loop 1 & 2 Setpoint Ramp Rate. See ◘ in Operator Mode lists.
Lock Code Configuration:
Lock Code Values
Setup Wizard; Configuration Mode; Tuning Menu and Supervisor Mode Lock Codes, plus if fitted, the USB Menu; Recorder Menu; Profiler Setup Menu
and Profiler Control Menu Lock Codes. All independently adjustable (1-9999 or OFF). Default Value for all menus = 10.
Reset To Defaults:
Reset To Defaults
Set all parameters (except Clock time & date and LED labels) to default values. Caution: After reset, the user must reconfigure all required settings to
the correct values before using the instrument.
22. PC SOFTWARE SETTINGS
Connection from PC to Rear RS485 Communications Option
Device connector = Bus. PC connector = the PC Serial Com port that you are
connected to. Start and Stop bits = 1. Data bits = 8.
Parity, Bit Rate & Address settings must match those set in the instruments
Communication Configuration menu.
A communications settings screen is shown whenever the user attempts to connect
to the instrument from the PC configuration software. If the settings are not as shown
below, the PC configuration software cannot communicate with the instrument.
Connection from PC to Bottom Configuration Socket
Connection from PC/Network to Ethernet Port
Device connector = Configuration Socket. PC connector = the PC Serial Com port
that you are connected to. Start and Stop bits = 1. Data bits = 8.
Parity, Bit Rate & Address settings must match those in the table below.
Device connector = Bus. PC connector = Ethernet (bus coupler).
IP Address = Instrument IP address
– see note below*.
Port Address = 502.
The supported data rates
10/100BASE-T (10 or 100 Mbps) are
automatically detected.
NOTE: When uploading or downloading via the bottom mounted
configuration port, the required software communication settings
depend on the module fitted in slot A. See the table below:
Slot A Module
Bit Rate
Parity
Address
NOTE: *An IP address must be set before connecting via Ethernet. Use
the default address of 0.0.0.0 if your network uses DHCP, BootP or
AutoIP or ask your network administrator for a valid address.
Use the Lantronix XPort® DeviceInstaller™ tool if you need to change the IP
address. For the latest version, go to:
http://www.lantronix.com/device-networking/utilities-tools/device-installer.html.
It is recommended to keep internal transfer settings at defaults.
Slot A Empty
19200
None 1 Digital Input
19200
None 1 Ethernet Comms
9600
None 1 Auxiliary Input
4800
None
1
RS485 Comms
Must match the Communication
Configuration menu settings.
©WCS – Specifications may be subject to change without notice - E&OE
2-Loop Graphical Profile Controller & Recorder Concise Product Manual (59541-4) Page 6 of 6
Continued.....
 Loading...
Loading...