

Page 1

ISO 9001
EZ-ZONE® RM Scanner Module
User’s Guide
RM Scanner Module
TOTAL
CUSTOMER
SATISFACTION
3 Year Warranty
Registered Company
1241 Bundy Boulevard., Winona, Minnesota USA 55987
Phone: +1 (507) 454-5300, Fax: +1 (507) 452-4507
http://www.watlow.com
0600-0071-0000 Rev. D Made in the U.S.A.
Winona, Minnesota USA
March 2016
Page 2
Safety Information
We use note, caution and warning symbols throughout this book to draw your attention to
important operational and safety information.
• A “NOTE” marks a short message to alert you to an important detail.
• A “CAUTION” safety alert appears with information that is important for protecting your
equipment and performance. Be especially careful to read and follow all cautions that
apply to your application.
• A “WARNING” safety alert appears with information that is important for protecting you,
others and equipment from damage. Pay very close attention to all warnings that apply to
your application.
• The safety alert symbol, (an exclamation point in a triangle) precedes a general
CAUTION or WARNING statement.
• The electrical hazard symbol, (a lightning bolt in a triangle) precedes an electric shock
hazard CAUTION or WARNING safety statement. Further explanations follow:
Symbol Explanation
CAUTION – Warning or Hazard that needs further explanation than label on
unit can provide. Consult User's Guide for further information.
ESD Sensitive product, use proper grounding and handling techniques when
installing or servicing product.
Unit protected by double/reinforced insulation for shock hazard prevention.
Do not throw in trash, use proper recycling techniques or consult manufacturer for proper disposal.
Enclosure made of Polycarbonate material. Use proper recycling techniques or consult manufacturer for proper disposal.
Unit can be powered with either alternating current (ac) voltage or direct
current (dc) voltage.
Unit is a Listed device per Underwriters Laboratories®. It has been evaluated to United States and Canadian requirements for Process Control
Equipment. UL 61010 and CSA C22.2 No. 61010. File E185611 QUYX,
QUYX7. See: www.ul.com
Unit is a Listed device per Underwriters Laboratories®. It has been evaluated to United States and Canadian requirements for Hazardous Locations
Class 1 Division II Groups A, B, C and D. ANSI/ISA 12.12.01-2007. File
E184390 QUZW, QUZW7. See: www.ul.com
Page 3
Unit is compliant with European Union directives. See Declaration of
Conformity for further details on Directives and Standards used for
Compliance.
Unit has been reviewed and approved by CSA International for use as
Temperature Indicating-Regulating Equipment per CSA C22.2 No. 24. See:
www.csa-international.org
Warranty
The EZ-ZONE® RM Scanner module is manufactured by ISO 9001-registered processes and is
backed by a three-year warranty to the first purchaser for use, providing that the units have
not been misapplied. Since Watlow has no control over their use, and sometimes misuse, we
cannot guarantee against failure. Watlows' obligations hereunder, at Watlows' option, are limited to replacement, repair or refund of purchase price, and parts which upon examination
prove to be defective within the warranty period specified. This warranty does not apply to
damage resulting from transportation, alteration, misuse or abuse. The purchaser must use
Watlow parts to maintain all listed ratings.
Technical Assistance
If you encounter a problem with your Watlow controller, review your configuration information to verify that your selections are consistent with your application: inputs, outputs,
alarms, limits, etc. If the problem persists, you can get technical assistance from your local
Watlow representative (see back cover), by e-mailing your questions to wintechsupport@watlow.com or by dialing +1 (507) 494-5656 between 7 a.m. and 5 p.m., Central Standard Time
(CST). Ask for for an Applications Engineer. Please have the following information available
when calling:
• Complete model number
• All configuration information
• User’s Guide
• Factory Page
Return Material Authorization (RMA)
1. Call Watlow Customer Service, (507) 454-5300, for a Return Material Authorization (RMA)
number before returning any item for repair. If you do not know why the product failed,
contact an Application Engineer or Product Manager. All RMA’s require:
• Ship-to address
• Bill-to address
• Contact name
• Phone number
• Method of return shipment
• Your P.O. number
• Detailed description of the problem
• Any special instructions
• Name and phone number of person returning the product.
Page 4

2. Prior approval and an Return Merchandise Authorization number from the Customer
Service Department is required when returning any product for credit, repair or evaluation. Make sure the Return Merchandise Authorization number is on the outside of the carton and on all paperwork returned. Ship on a Freight Prepaid basis.
3. After we receive your return, we will examine it and try to verify the reason for returning
it.
4. In cases of manufacturing defect, we will enter a repair order, replacement order or issue
credit for material returned. In cases of customer misuse, we will provide repair costs and
request a purchase order to proceed with the repair work.
5. To return products that are not defective, goods must be in new condition, in the origi-
nal boxes and they must be returned within 120 days of receipt. A 20 percent restocking
charge is applied for all returned stock controls and accessories.
6. If the unit cannot be repaired, you will receive a letter of explanation and be given the
option to have the unit returned to you at your expense or to have us scrap the unit.
7. Watlow reserves the right to charge for no trouble found (NTF) returns.
This EZ-ZONE® RM Scanner User’s Guide is copyrighted by Watlow Electric, Inc., © March 2016
with all rights reserved.
EZ-ZONE RM is covered by U.S. Patent No. 6,005,577 and Patents Pending
Page 5

TC
Table of Contents
Table of Contents ..................................1
Chapter 1: Overview ................................4
Functions ................................................7
Inputs ...................................................7
Outputs .................................................8
Actions ..................................................8
Chapter 2: Install and Wire ...........................18
Dimensions .............................................18
RMS Installation and Removal on a DIN Rail ...................22
Wiring .................................................25
Conventions Used in the Menu Pages .........................46
Chapter 3: Operations Pages .........................49
Analog Input Menu .......................................51
Process Value Menu ......................................52
Digital Input/Output Menu ..................................53
Action Menu .............................................53
Alarm Menu .............................................54
Linearization Menu ........................................55
Compare Menu ..........................................56
Timer Menu .............................................57
Counter Menu ...........................................58
Logic Menu .............................................58
Math Menu ..............................................60
Chapter 4: Setup Pages .............................62
Analog Input Menu .......................................65
Process Value Menu ......................................69
Digital Input/Output Menu ..................................73
Action Menu .............................................76
Output Menu ............................................78
Alarm Menu .............................................82
Linearization Menu ........................................85
Compare Menu ..........................................89
Timer Menu .............................................91
Watlow EZ-ZONE® RMS Module • 1 • Table of Contents
Page 6

TC
Table of Contents (cont.)
Counter Menu ...........................................94
Logic Menu .............................................97
Math Menu .............................................106
Variable Menu ..........................................113
Global Menu ............................................114
Communications Menu ...................................115
Chapter 5: Factory Pages ...........................117
Control Module Factory Page Parameters .....................117
Custom Setup Menu .....................................118
Security Setting Menu ....................................118
Diagnostics Menu .......................................121
Calibration Menu ........................................122
Chapter 6: Features ...............................124
Saving and Restoring Settings Using an RUI ..................125
Inputs .................................................125
10 Point Linearization ...................................128
Alarms ................................................128
Process Alarms ........................................129
Alarm Set Points .......................................129
Alarm Hysteresis .......................................129
Alarm Latching ........................................129
Alarm Silencing ........................................130
Alarm Blocking ........................................130
Using Password Security ..................................130
Modbus - Using Programmable Memory Blocks ................132
Software Configuration ...................................132
EZ-ZONE Configurator Software ...........................133
Function Block Descriptions ...............................137
Action Function ........................................137
Alarm Function ........................................138
Analog Input Function ...................................140
Compare Function ......................................142
Counter Function ......................................144
Watlow EZ-ZONE® RMS Module • 2 • Table of Contents
Page 7
TC
Table of Contents (cont.)
Custom Function .......................................145
Diagnostic Function ....................................145
Digital Input/Output Function .............................146
Global Function ........................................147
Linearization Function ...................................148
Logic Function ........................................150
Math Function .........................................154
Modbus® Function .....................................159
Output Function .......................................160
Process Value Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Security Function ......................................166
Timer Function ........................................167
Variable Function ......................................173
Chapter 8: Appendix ..............................174
Troubleshooting Alarms, Errors and Control Issues .............174
Modbus® - Programmable Memory Blocks ...................175
Troubleshooting Alarms, Errors and Module Issues .............179
RMS Specifications ......................................184
RMS Ordering Information ................................190
How to Reach Us ........................................192
Watlow EZ-ZONE® RMS Module • 3 • Table of Contents
Page 8
1
Chapter 1: Overview
Available EZ-ZONE RM System Literature and Resources
Document Title and Part Number Description
EZ-ZONE Rail Mount Access
(RMA) User's Guide, part number: 0600-0072-0000
EZ-ZONE Rail Mount Controller
(RMC) User's Guide, part number: 0600-0070-0000
EZ-ZONE Rail Mount High Density
(RMH) User's Guide, part number: 0600-0074-0000
EZ-ZONE Rail Mount Expansion
(RME) User's Guide, part number: 0600-0073-0000
EZ-ZONE Rail Mount Limit (RML)
User's Guide, part number: 0600-
0075-0000
EZ-ZONE Remote User Interface
(RUI) User's Guide, part number:
0600-0060-0000
Describes how to connect the RM system into an industrial network, how to use data logging, module backup
and the real-time clock.
The RMC module is an advanced integrated controller
capable of PID and limit control. This document describes how to configure and program all loops of control and communications.
This module extends the density of the standard RM
modules (number of control loops and I/O points). The
User Guide describes common usage, communications
and the number I/O points available.
When additional I/O is needed the Expansion module
fills the gap. This document describes common usage
and the various types of I/O available.
The RML module will protect against unwanted thermal
runaway and over temperature conditions. The User
Guide describes configuration, programming and communications capabilities.
The RUI provides a visual LED display to the RM configuration and setup menus. This document illustrates
and describes connections and also describes the Home
Page for each RM module as viewed from the RUI.
EZ-ZONE RM Specification Sheet,
part number: WIN-EZRM-0414
Watlow Support Tools DVD, part
number: 0601-0001-0000
The DVD described above ships with the product and as stated contains all of the literature
above as well as much more. If the DVD is not available one can be acquired by contacting
Watlow Customer Service at 1-507-454-5300.
As an alternative to the DVD, all of the user documentation described above can also be
found on the Watlow website. Click on the following link to find your document of choice:
http://www.watlow.com/literature/index.cfm. Once there, simply type in the desired part
number (or name) into the search box and download free copies.
Watlow EZ-ZONE® RMS Module • 4 • Chapter 1 Overview
Describes RM hardware options, features, benefits and
technical specifications.
Contains all related user documents, tutorial videos,
application notes, utility tools, etc...
Page 9
Your Comments are Appreciated
In an effort to continually improve our technical literature and ensure that we are providing
information that is useful to you, we would very much appreciate your comments and suggestions. Please send any comments you may have to the following e-mail address: TechlitCom-
ments@watlow.com
Introduction
The EZ-ZONE® RM Scanner (RMS) is capable of monitoring from 1 to 16 inputs. As is the case
with all of the RM family modules the RMS can be used as a standalone device or it can be
used as part of a larger system of interconnected RM modules. The RMS takes the pain out of
solving your need for high density monitoring requirements as either a stand-alone module or
in applications that require distributed control.
It just got a whole lot easier to solve the thermal requirements of your system. The RMS module is provided in a space-saving, rail-mount package and is highly scalable where you only
pay for what you need. For those applications that require the ability to configure/monitor
the control over a network, Modbus RTU communications is an option. Other communications
protocols are also available (e.g., EtherNet/IP, DeviceNet, Modbus TCP and Profibus DP) when
used in conjunction with an RM Access (RMA) module or when using a Remote User Interface/
Gateway (RUI/GTW).
Standard Features and Benefits
Communication Capabilities
• Supports network connectivity to a PC or PLC
• Watlow Standard Bus or Modbus® RTU
• Provides plug and play capabilities with Remote User Interface (RUI’s) and RMA module
• Free standard bus communications port and free PC software (EZ-ZONE Configurator and
Composer)
Additional Control Integration Options
• Includes programmable timer functions
• Includes programmable counter functions
• Allows for simple math and logic programming options
Integrated Thermal Loop Diagnostics
• Users can easily tell that the entire thermal system is functioning properly
• Provides complete system diagnostics that are far superior to simple discrete level diagnostics
• Allows for flexible synergistic use of hardware, such as using one loop's sensor as a backup
to another loop in the event of sensor failure.
• Helps prevent load loss or allow for maintenance to be scheduled when more convenient.
• Provides notification of system problems to help reduce maintenance and service costs
Off-the-Shelf Designed System Solution
• Improves system reliability with a factory integrated solution that minimizes inter-module
connections and potential problems at screw termination points.
• Reduces installation cost
• Eliminates compatibility headaches often encountered with using many different components and brands
Watlow EZ-ZONE® RMS Module • 5 • Chapter 1 Overview
Page 10
Scanner Handles High Ambient Temperatures
• Operates in an unprecedented temperature range of -18 to 65°C (0 to 149°F) for cabinets
and panel enclosures with elevated temperature levels
Memory for Saving and Restoring User-Defined Parameter Default Settings
• Allows customers to save and restore their own defined defaults for machine parameter
settings
• Reduces service calls and downtime due to inadvertent end user parameter adjustments
Synergistic Module Control (SMC)
• Allows outputs selected for control (heat/cool), alarms or events to be located in any physical module, regardless of which module is connected to the input sensor
Split-Rail Control (SRC)
• Allows modules to be mounted together or mounted remotely from one another (maximum
distance 200 feet or 61 meters)
• Shares control operation via Synergistic Module Control (SMC) capability
• Allows individual modules to be mounted closer to the physical input and output devices
to which they are wired
• Improves system reliability and lowers wiring costs
®
Agency Approvals: UL
listed, CE, RoHS, W.E.E.E. FM, SEMI F47-0200, Class 1 Div. 2 Rating
on Selected Models
• Assures prompt product acceptance
• Reduces panel builder's documentation and agency costs
Removable Connectors
• Assures reliable wiring and reduces service calls
• Simplifies installation
Three-Year Warranty
• Demonstrates Watlow’s reliability and product support
A Conceptual View of the RMS Module
The flexibility of the RMS software and hardware allows for variation in configurations. Acquiring a better understanding of its functionality and capabilities while at the same time planning
out how the controller can be used will deliver maximum effectiveness in your application.
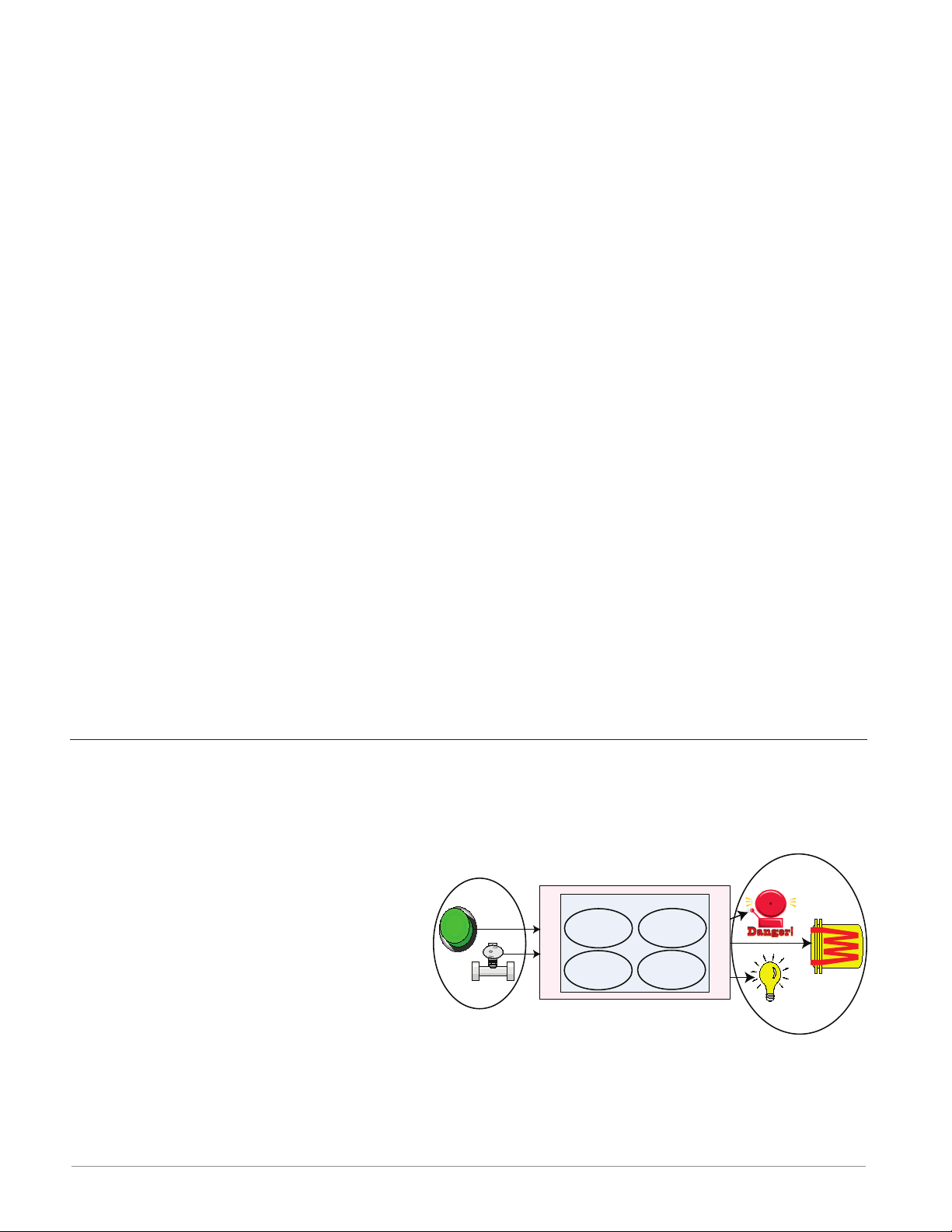
It is useful to think of the scanner in
three parts: inputs, procedures and outputs. Information flows from an input to
a procedure to an output when the scanner is properly configured. An RMS module can carry out several procedures at
Inputs
Prodedures
Process
Alarm
High
Silence
Alarms
Process
Alarm
Low
Tu rn Loop
Alarms off
the same time, e.g., monitoring inputs for
several different alarm situations, monitoring and acting upon digital inputs, and
outputs can be configured to drive devices such as heaters, audible alarms, lights. Each process needs to be thought out carefully and the scanner’s inputs, procedures and outputs set
up properly.
Outputs
Watlow EZ-ZONE® RMS Module • 6 • Chapter 1 Overview
Page 11
Functions
Functions use input signals to calculate a value. A function may be as simple as reading a digital input to set a state to true or false, or reading a temperature to set an alarm state to on
or off. Alternatively, if a failure with the primary sensing device should occur, sensor backup
could be utilized to avoid an unwanted shutdown.
To set up a function, one of the first things that must be considered is the function source
and instance. For example, if the control is equipped with Digital Inputs (source) and it was
decided to use DI 9 (instance) it can then be associated with an Action to reset an individual
alarm or all alarms.
To configure a Digital Input as described above:
1. Navigate to the Setup Page and then to the Digital I/O menu.
2. Select the desired instance and set the direction to input voltage or input dry contact.
3. Navigate to the Setup Page and then the Action menu.
4. Set the Action Function to Alarm
5. Select which alarm instance will be reset (0 equals all)
6. Select the Source Function to Digital I/O
7. Select the Source Instance (step 2 above)
8. Select the Source Zone (0 equals the module being configured).
9. Select the Transmitter Active Level to execute the desired function.
This configuration is now complete. When the selected digital input is active, the alarm or all
alarms that are latched without a currently existing alarm condition will be reset. If a specific
alarm instance (1 - 16) is selected (step 5) it will be that instance alone that will be reset.
Note:
Alarms will reset automatically when the condition that caused the alarm goes back to a
non-alarm state if the Latching prompt is set to non-latching (Setup Page, Alarm Menu).
Keep in mind that a function is a user-programmed internal process that does not execute any
action outside of the controller. To have any affect outside of the controller, an output must
be configured to respond to a function.
Inputs
The inputs provide the information that any given programmed procedure can act upon. Simply stated, this information may come from an operator pushing a button or from a sensor
monitoring the temperature of a part being heated or cooled.
Each analog input typically uses a thermocouple, RTD or thermistor to read the process temperature. It can also read volts, current or resistance, allowing it to use various devices to
read humidity, air pressure, operator inputs and others values. Each analog input must be configured to match the device connected to that input (see: Analog Input Menu, Setup Page).
Each digital input reads whether a device is active or inactive. An RMS module equipped with
digital input/output hardware includes two sets of terminals where each of which can be used
as either an input or an output. Each pair of terminals must be configured to function as either an input or an output with the direction parameter (see: Digital Input/Output Menu, Setup Page).
Watlow EZ-ZONE® RMS Module • 7 • Chapter 1 Overview
Page 12
The inputs provide the information that any given programmed procedure can act upon. Simply stated, this information may come from an operator pushing a button or from a sensor
monitoring the temperature of a part being heated or cooled.
Each analog input typically uses a thermocouple, RTD or thermistor to read the process temperature. It can also read volts, current or resistance, allowing it to use various devices to
read humidity, air pressure, operator inputs and others values. Each analog input must be configured to match the device connected to that input (see: Analog Input Menu, Setup Page).
Each digital input reads whether a device is active or inactive. An RMS module equipped with
digital input/output hardware includes two sets of terminals where each of which can be used
as either an input or an output. Each pair of terminals must be configured to function as either an input or an output with the direction parameter (see: Digital Input/Output Menu, Setup Page).
Outputs
Outputs can perform various functions or actions in response to information provided by a
function, such as removal of the control voltage to a contactor; driving a heater; turning a
light on or off; unlocking a door; or turning on an audible alarm.
Assign an output to a function in the Output Menu or Digital Input/Output Menu. Then select
which instance of that function will drive the selected output. For example, in using an RMS
module, an output can be configured to respond to the output of the PID algorithm from another RM module to drive a heater.
You can assign more than one output to respond to a single instance of a function. For example, alarm 2 could be used to trigger a light connected to output 1 and a siren connected to
digital output 5.
Actions
Based on a given input (Digital I/O, Event output, Logic function, etc..) the Action function
can cause other functions to occur. To name a few, set alarms to off, silencing alarms and re-
storing user memory.
A Conceptual View of RM Hardware Configurations
Due to the scalability and flexibility in the RM system a user has several options available in
the way that the hardware can be connected. Listed below are a few examples.
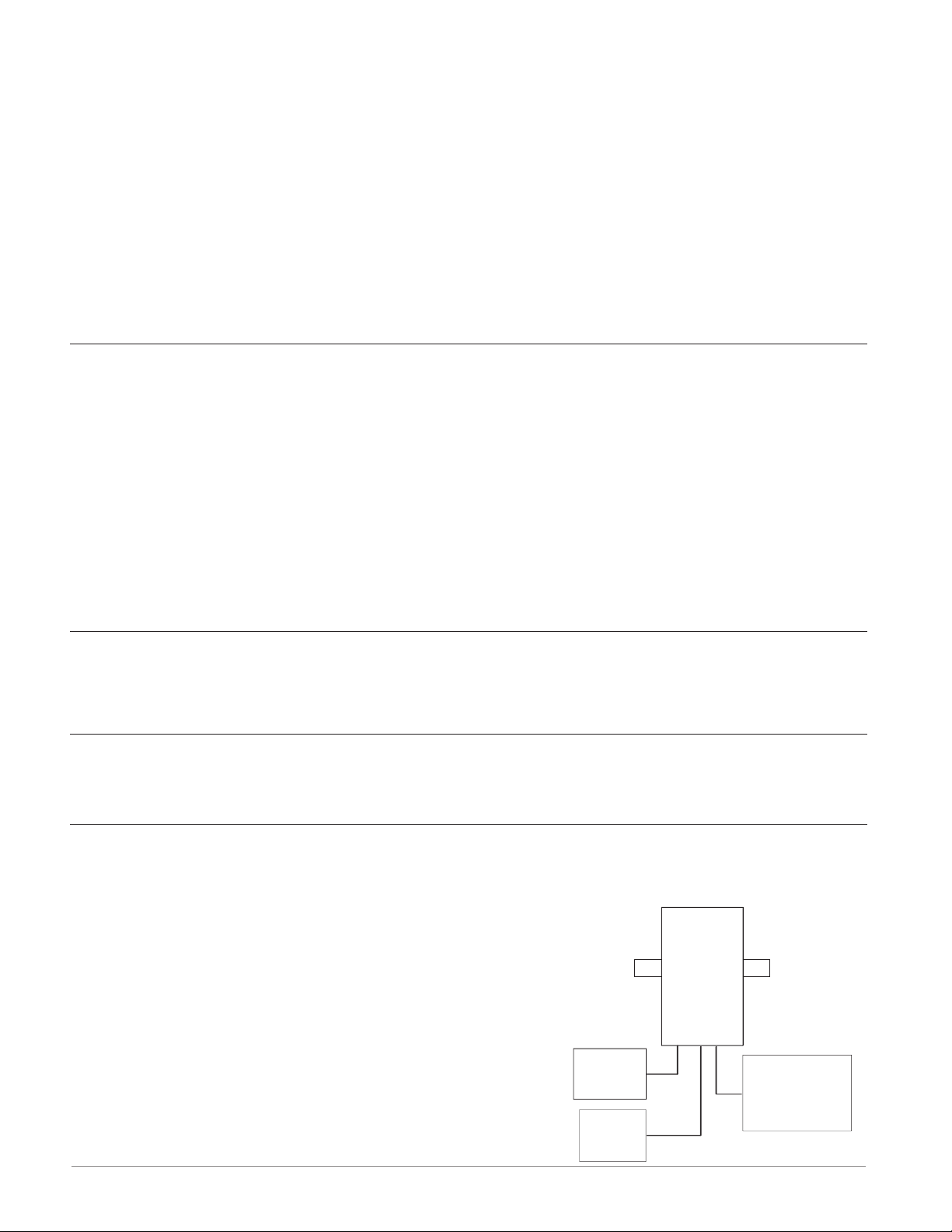
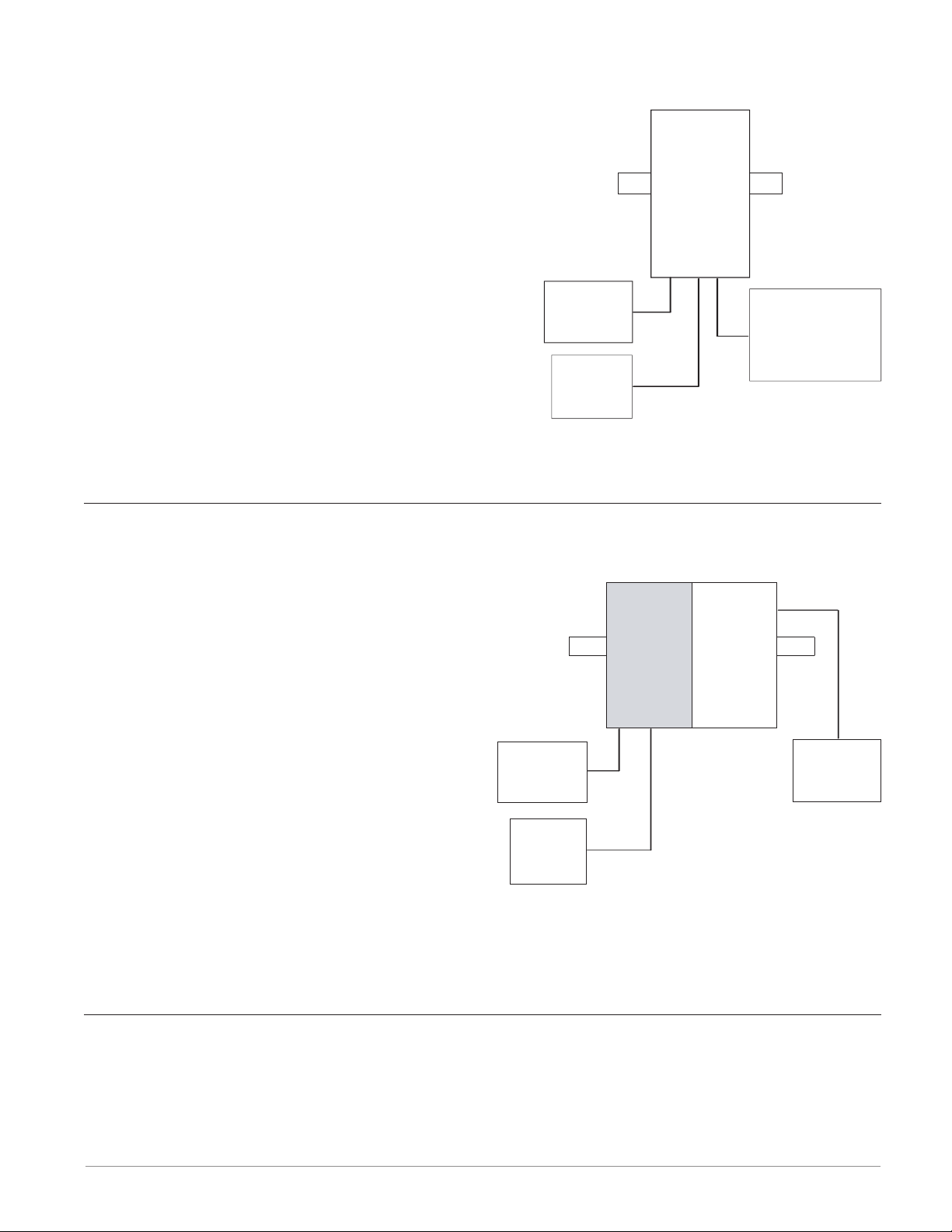
RMS Connected to a Remote User Interface (RUI) and a Personal Computer (PC)
In this configuration the RUI and PC are connected to the RMS module via Watlow's Standard
Bus where both will be able to talk directly to the RMS module.
In the graphic to the right, the PC running EZ-ZONE
Configurator software and or the RUI can be used to configure and then monitor the RMS and other modules connected to it
RMS
Scanner
Slot C
Power
Supply
RUI
Watlow EZ-ZONE® RMS Module • 8 • Chapter 1 Overview
PC Running
EZ-ZONE
Configurator
Page 13
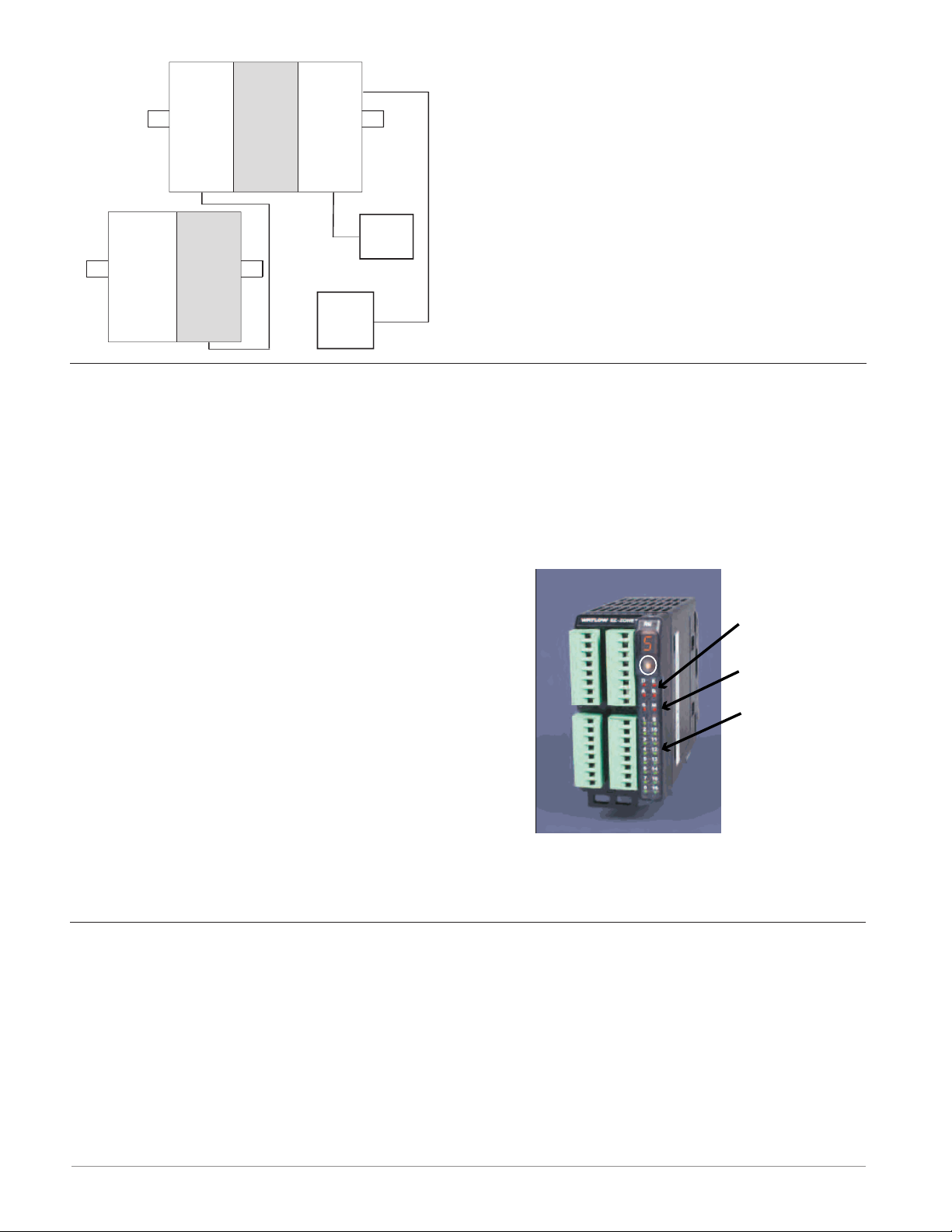
RMS Module Connected to a Programmable Logic Controller (PLC) on a DIN Rail
In the illustration shown below, the PLC and the RMS module must be equipped with Modbus
RTU.
Note:
If it is intended to use an RUI or a PC using
EZ-ZONE Configurator software it will be necessary to switch the protocol on the RMS to Watlow's
Standard Bus to successfully communicate; follow
the steps below to switch the RMS to the Standard
bus protocol.
1. Disconnect all Modbus devices from the network
2. Push and hold the orange button on the face of
the module for approximately 6 seconds
3. When the LED display (above the orange button)
changes to P, momentarily release the orange
button and then push it again where S will appear (symbol for Standard Bus), release the orange button
4. Push the orange button again for approximately 3 seconds (LED display will become
brighter) to change the Standard Bus address if needed
Power
Supply
PLC
RMS
Scanner
Slot C
PC Running
EZ-ZONE
Configurator
RMS Module Connected to an Operator Interface Terminal (OIT) through an RMA
In this configuration the RMS can be connected to the OIT through the RMA running any of a
number of available protocols. The RMA and the OIT must be using the same protocol while
the communications from RMA to the RMS module is accomplished over the backplane using
Watlow's Standard Bus protocol. Available protocols in the RMA follow:
1. EtherNet/IP and or Modbus TCP
2. DeviceNet
3. Modbus RTU
4. Profibus DP
Notice that in the example to the right that
there is an optional RUI connected to the RMS
module. An OIT is not generally used to configure a control but is used more for run-time
information. As an alternative for configuration
the RUI could be used to configure and monitor in a remote location.
If using Modbus, one advantage in using an RMA module while also having an RUI and a PC
connected is that the RMS could be set for Standard Bus all of the time while the RMA can simultaneously run Modbus and Standard Bus protocols, no protocol switching required.
RUI
Power
Supply
RMS
Scanner
Slot C
RM
Access
Slot C
Slot E
OIT
RMS Connected to a Split Rail with OIT
In this configuration both the inter-module bus (backplane communications) and Standard Bus
are connected between rails to allow for remote capabilities. It is recommended that the split
rail connection not exceed 100 feet. In this configuration the OIT can communicate with all
modules (maximum 16 modules any combination with one Access module).
Watlow EZ-ZONE® RMS Module • 9 • Chapter 1 Overview
Page 14
RMC
Controller
RMS
Scanner
Slot E
RM
Access
RMC
Controller
Slot C
Slot C
RMS
Scanner
Slot C
Slot C
Slot C
Power
Supply
OIT
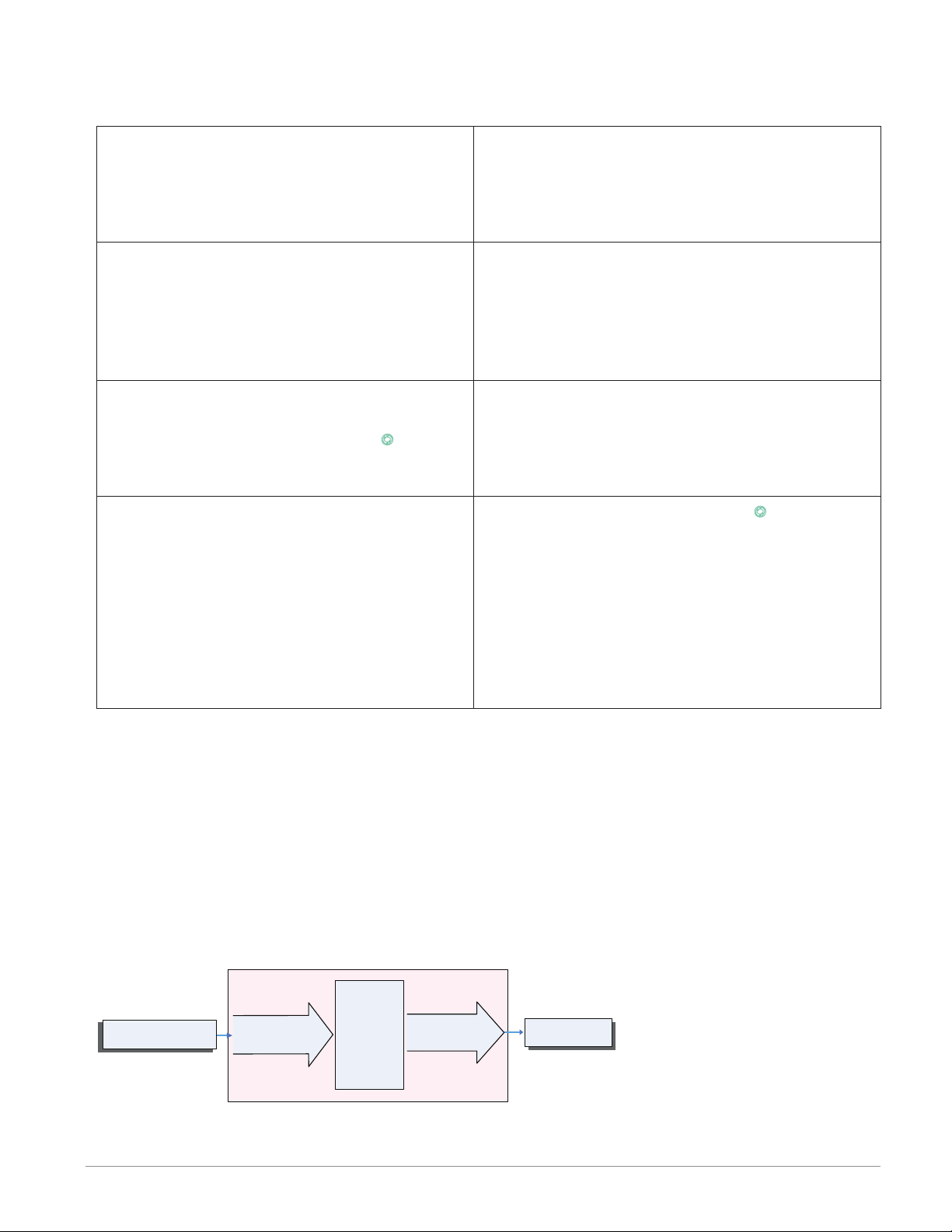
Module Orientation
The picture below represents one of six possible RM modules. All six will have four slots on
the face (slot A, B, D, and E) and one on the bottom (slot C) not shown. All of these slots are
not always used on all modules.
Note:
For correct operation and accuracy, the module must be mounted in a vertical orientation
as shown.
On the face of the module there is a button (white circle) under the Zone address (5) that
when pushed and held has the following functions:
1. For any module, push and hold the orange button for approximately 2 seconds. The address
will intensify indicating that it can now be
E
changed. Release and repeatedly press to change
D
to the desired unique address.
2. For the scanner module, if equipped with the
Modbus protocol (RMSxxxxxxxxx1xx), pushing
B
A
and holding the orange button for approximately
6 seconds will cause the module to display P for
protocol. Releasing the button and then pushing
it again (within 6 seconds), the display will toggle
between N (Modbus) and S (Standard Bus). Valid addresses for Modbus and Standard bus
range from 1 -16 (1 - 9, A is 10, B is 11, C is 12, d is 13, E is 14, F is 15, and h is 16).
The Access module is shipped at address J or 17.
Module Status
(Slot A, B, D, or E)
Protocol
Standard Bus - red
Modbus - green
Module Outputs
1 through 16, all may or
may not be used depending
on module type
Getting Started Quickly
Consider taking the following steps to quickly commission your control:
• Wire and connect the power source to the control
• Wire and connect input and output devices to the control
• Power up the control and navigate to the Setup Page to configure inputs, outputs, adjust
set points, alarms, etc...
The RMS controller has a page and menu structure that is listed below along with a brief description of its purpose. The menu structure can be easily seen and navigated using EZ-ZONE
Configurator software or the Remote User Interface (RUI).
Watlow EZ-ZONE® RMS Module • 10 • Chapter 1 Overview
Page 15
Note:
EZ-ZONE RMS Default Configuration
The menu navigation as described below applies when the RMS is connected to the RUI
which is optional equipment.
Setup Page
Using the RUI, push and hold the up and
down keys (¿ ¯) for 6 seconds to enter.
(See the Setup Page for further information)
Operations Page
Using the RUI push and hold the up and
down keys (¿ ¯) for 3 seconds to enter.
(See the Operations Page for further information)
Factory Page
Using the RUI push and hold the Infinity
and the green Advance keys (ˆ ‰) for 6
seconds to enter. (See the Factory Page
for further information)
Home Page
When using the RUI, the control is at the
Home Page when initially powered up
where it will display the value of Analog
Input 1 in the upper display and the value
of Analog Input 2 in the lower display.
Note:
The Home Page is visible only when using the RUI.
A user would want to setup their control prior
to operation. As an example, define the input
type, alarm sides (high and or low) or set the
output function.
After setting up the control to reflect your
equipment, the Operations Page would be
used to monitor or change runtime settings.
As an example, the user may want to see the
current status (on or off) of an event in the
Action Menu.
For the most part the Factory Page has no
bearing on the control when running. A user
may want to enable password protection,
view the control part number or perhaps create a custom Home Page.
Pushing the green Advance Key ‰ will cause
the display to show the value of Analog Input
1 in the upper display and Analog Input 2 in
the lower display. With each successive push
of the green advance key the display will
sequentially show the value of all remaining
analog inputs in the upper display and the
lower display will show the corresponding LED
display. (e.g., Ain3 for input 3)
The default RMS loop configuration out of the box is shown below:
• All Analog Input functions are set to thermocouple, type J (to change go to the Setup Page,
Analog Input Menu)
• All Process Value functions are set to off (to change go to the Setup Page, Process Value
Menu)
• All outputs are set to off (to change go to the Setup Page, Output Menu)
Once the scanner has been wired and setup, power up the control. If using an RUI the upper
display will show the value of Analog Input 1 and the lower display will show the value of Analog Input 2
.
Input
Function
Input Sensor
All Analog Inputs
Thermocouple Type J
Alarm
Types
All Outputs
Off
Output
Function
Off
Watlow EZ-ZONE® RMS Module • 11 • Chapter 1 Overview
Page 16

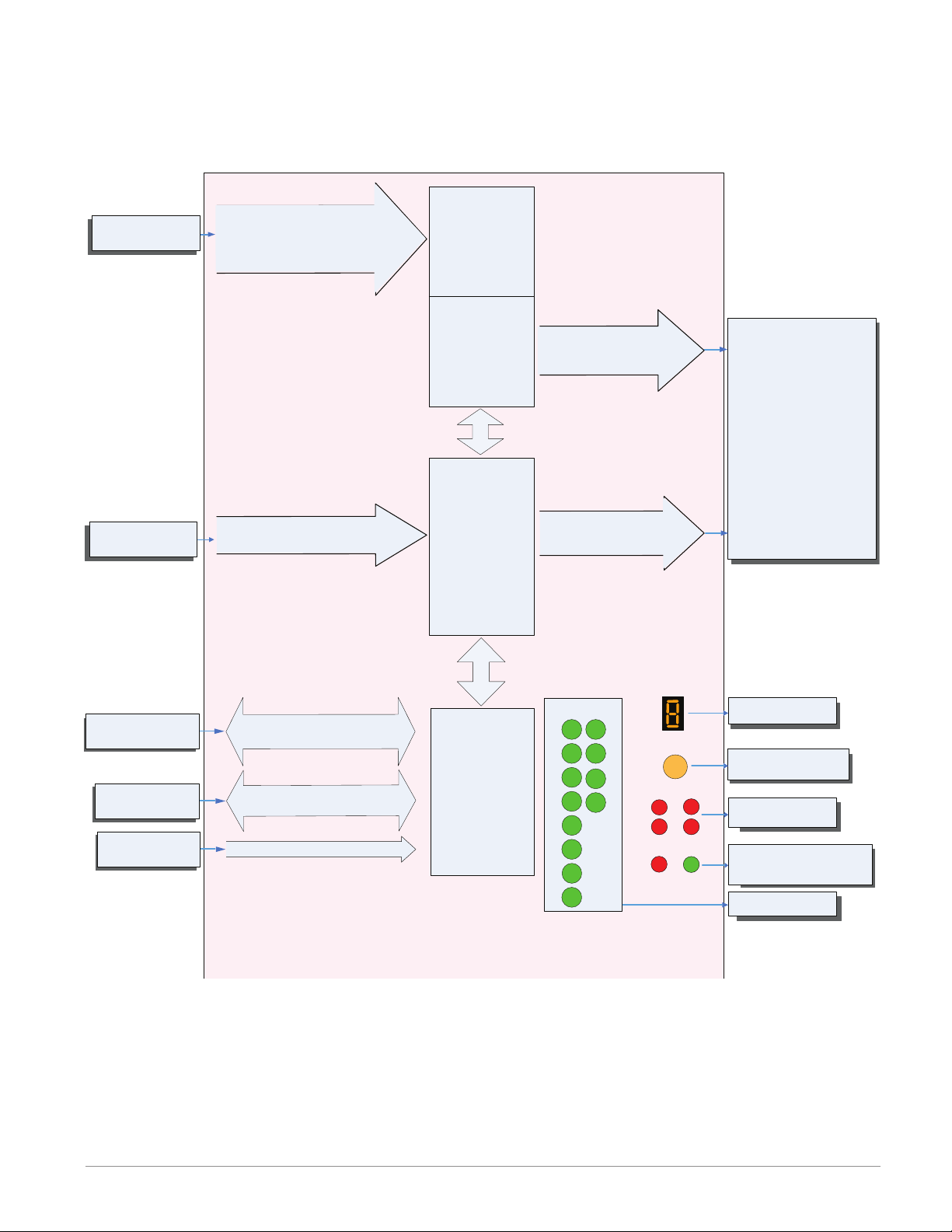
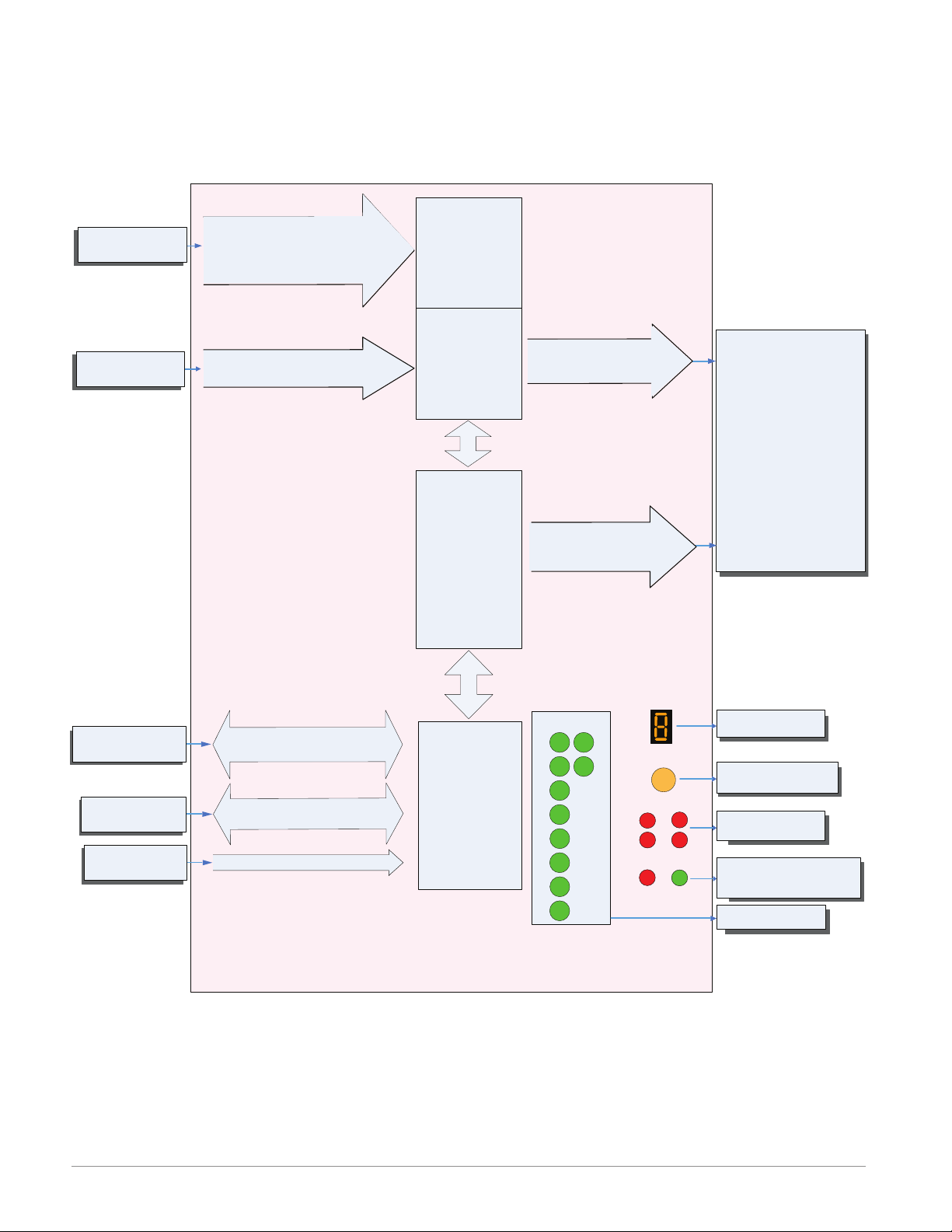
EZ-ZONE RMS Module - System Diagram
16 Scanner Channels - Slots A, B, D and E
R M S x - [R,P] [R,P] [R,P] [R,P] - A A A A
Input
Function
Input Sensor
RUI,
PC, PLC or HMI
Other RM Modules
Power Supply
Analog Input 1 through 16
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac or Vdc
Alarms
Slot A, B, D, E
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
Zone and Status
LED
Zone Selection
Button
D
A
S
Function
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Output
Address
Watlow EZ-ZONE® RMS Module • 12 • Chapter 1 Overview
Page 17
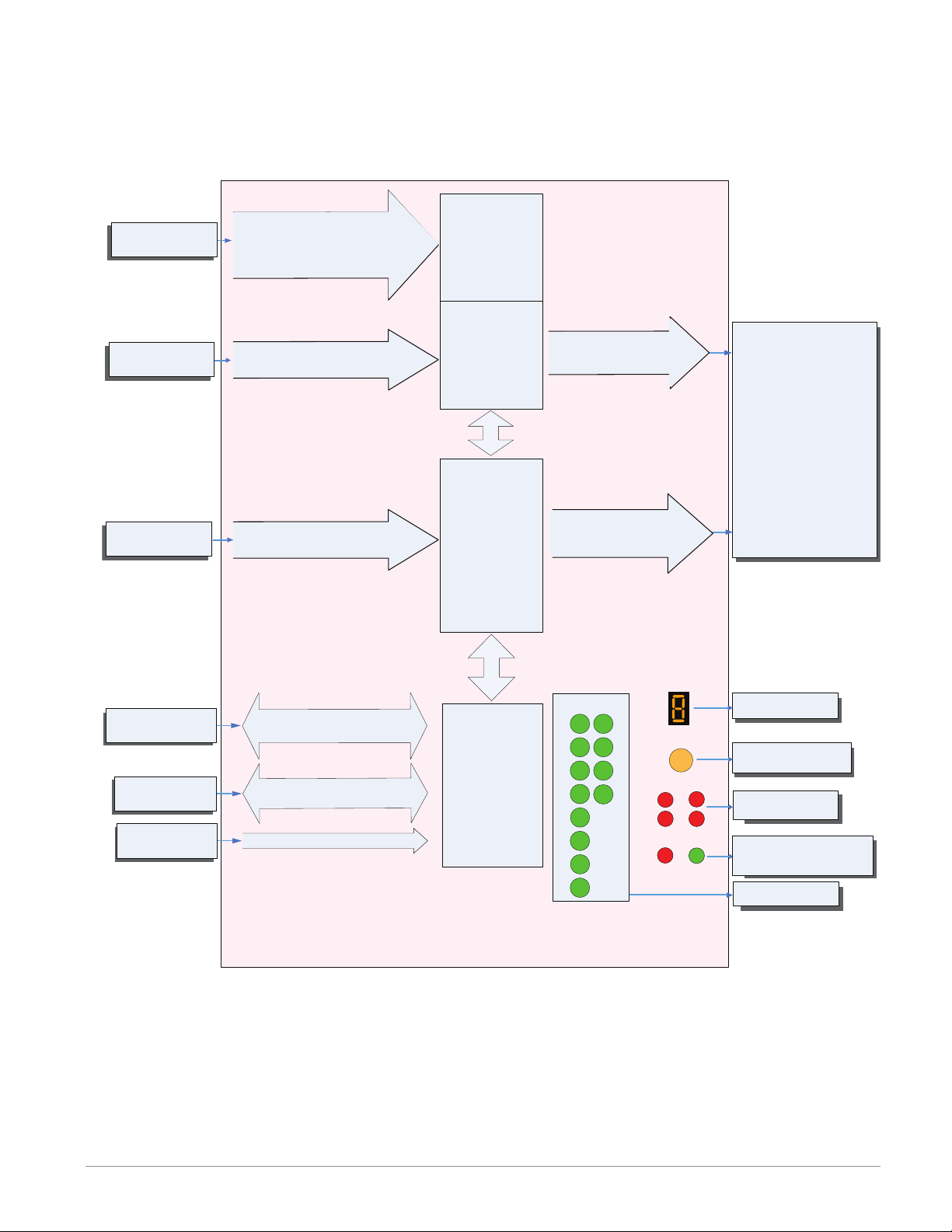
EZ-ZONE RMS Module - System Diagram
Output
Input
8 Scanner Channels - Slots A, B
4 - Form A Mechanical Relays - Slot D
6 - Digital I/O - Slot E
R M S x - [R,P] [R,P] J C - A A A A
Function
Input Sensor
Input Device
Analog Input 1 through 8
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
Digital Input 7, 8, 9, 10, 11 or 12
Switch contact or volts dc
Alarms
Slot A, B
4 - Mechanical
Relay Outputs
Form A
Slot D
6 - Digital
Inputs / Outputs
any combination
Slot E
Output 1, 2, 3, 4
5A Mechanical Relay Form A
Output 7, 8, 9, 10, 11 or 12
switched dc/open collector
Function
Analog Input
Alarm
Cool Power
Heat Power
Compare
Counter
Digital I/O
Profile Event Output A-H
Function Key
Linearization
Logic
Math
Process Value
Special Output Function 1-4
Timer
Variable
Off
RUI,
PC, PLC or HMI
Other RM Modules
Power Supply
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac oe Vdc
Some input/output combinations not possible, see ordering matrix
Zone and Status
Output Status
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
1
2
3
4
5
6
7
8
LEDs
9
10
11
12
LED
Zone Selection
Button
D
A
S
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Indicates I/O
Address
Status
Watlow EZ-ZONE® RMS Module • 13 • Chapter 1 Overview
Page 18
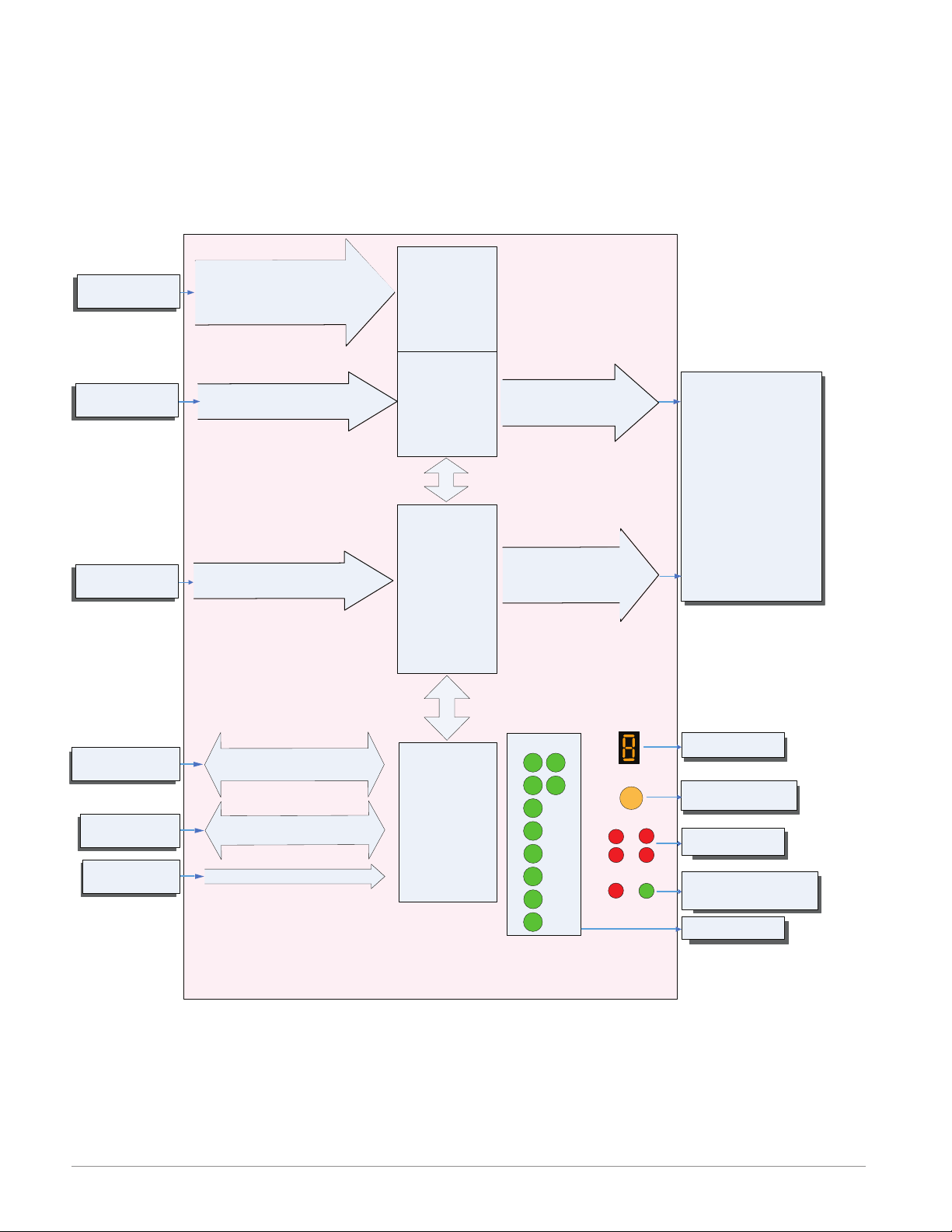
EZ-ZONE RMS Module - System Diagram
Output
Input
8 Scanner Channels - Slots A, B
6 - Digital I/O - Slot D
4 - Form A Mechanical Relays - Slot E
R M S x - [1,2] [1,2] C J - A A A A
Function
Input Sensor
Input Device
Analog Input 1 through 8
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
Digital Input 1, 2, 3, 4, 5 or 6
Switch contact or volts dc
Alarms
Slot A, B
6 - Digital
Inputs / Outputs
any combination
Slot D
4 - Mechanical
Relay Outputs
Form A
Slot E
Output 1, 2, 3, 4, 5 or 6
switched dc/open collector
Output 7, 8, 9, 10
5A Mechanical Relay Form A
Function
Analog Input
Alarm
Cool Power
Heat Power
Compare
Counter
Digital I/O
Profile Event Output A-H
Function Key
Linearization
Logic
Math
Process Value
Special Output Function 1-4
Timer
Variable
Off
RUI,
PC, PLC or HMI
Other RM Modules
Power Supply
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac oe Vdc
Some input/output combinations not possible, see ordering matrix
Zone and Status
Output Status
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
LEDs
1
2
3
4
5
6
7
8
9
10
LED
Zone Selection
Button
D
A
S
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Indicates I/O
Address
Status
Watlow EZ-ZONE® RMS Module • 14 • Chapter 1 Overview
Page 19
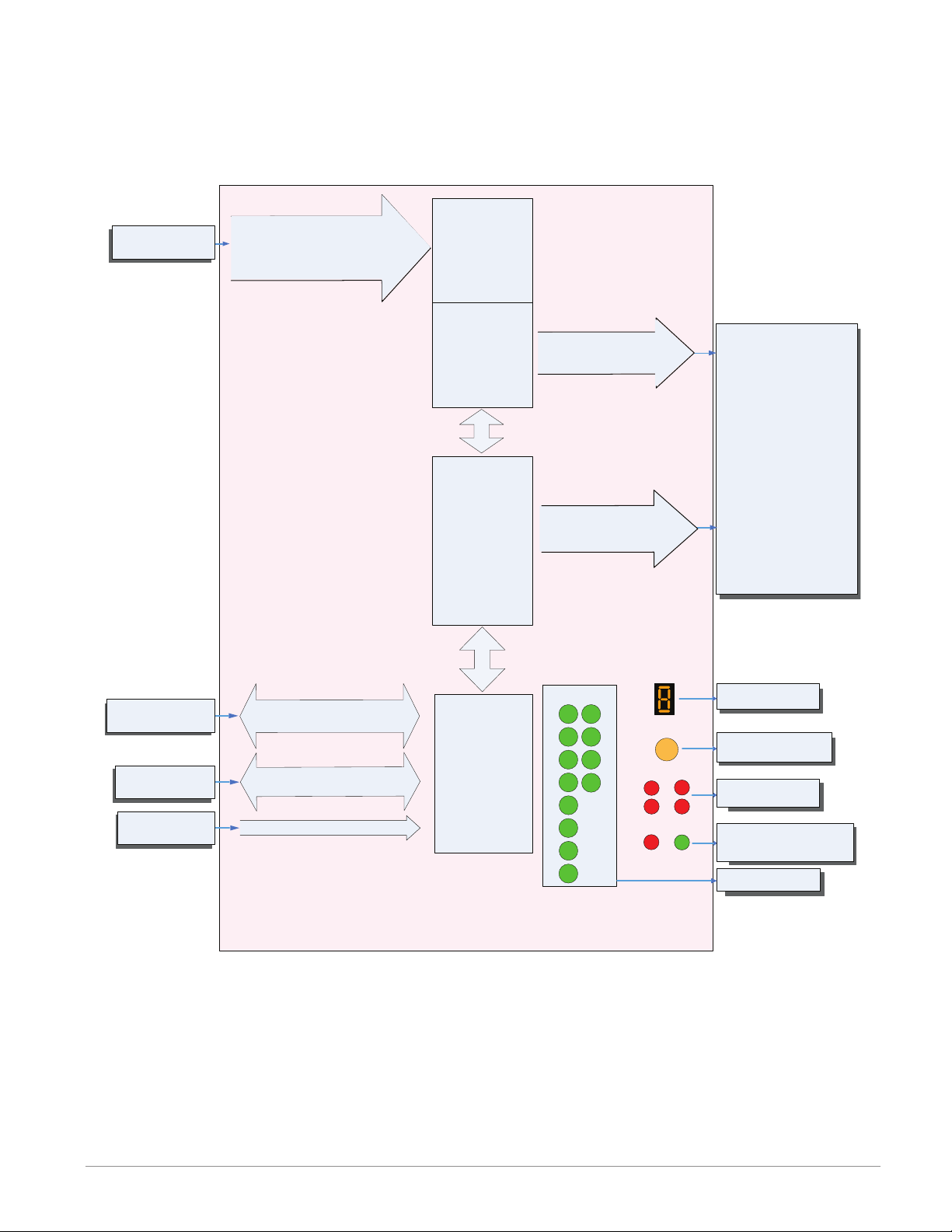
EZ-ZONE RMS Module - System Diagram
Output
Input
8 Scanner Channels - Slots A, B
6 - Digital I/O - Slot D
6 - Digital I/O - Slot E
R M S x - [1,2] [1,2] C C - A A A A
Function
Input Sensor
Input Device
Input Device
Analog Input 1 through 8
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
Digital Input 1, 2, 3, 4, 5, 6
Switch contact or volts dc
Digital Input 7, 8, 9, 10, 11, 12
Switch contact or volts dc
Alarms
Slot A, B
6 - Digital
Inputs / Outputs
any combination
Slot D
6 - Digital
Inputs / Outputs
any combination
Slot E
Output 1, 2, 3, 4, 5, 6
switched dc/open collector
Output 7, 8, 9, 10, 11, 12
switched dc/open collector
Function
Analog Input
Alarm
Cool Power
Heat Power
Compare
Counter
Digital I/O
Profile Event Output A-H
Function Key
Linearization
Logic
Math
Process Value
Special Output Function 1-4
Timer
Variable
Off
RUI,
PC, PLC or HMI
Other RM Modules
Power Supply
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac oe Vdc
Some input/output combinations not possible, see ordering matrix
Zone and Status
Output Status
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
1
2
3
4
5
6
7
8
LEDs
9
10
11
12
LED
Zone Selection
Button
D
A
S
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Indicates I/O
Address
Status
Watlow EZ-ZONE® RMS Module • 15 • Chapter 1 Overview
Page 20
EZ-ZONE RMS Module - System Diagram
8 Scanner Channels - Slots A, B
6 - Digital I/O - Slot D
1 - Digital Input/2 Mechanical Relays - Slot E
R M S x - [1,2] [1,2] C B - A A A A
Input
Function
Input Sensor
Input Device
Input Device
Analog Input 1 through 8
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
Digital Input 1, 2, 3, 4, 5 or 6
Switch contact or volts dc
Digital Input 9
Switch contact or volts dc
Alarms
Slot A, B
6 - Digital
Inputs / Outputs
any combination
Slot D
1 - Digital Input
2 - Mechanical
Relay Outputs
Slot E
Output 1, 2, 3, 4, 5 or 6
switched dc/open collector
Output 7
5A Mechanical Relay Form C
Output 8
5A Mechanical Relay Form A
Output
Function
Analog Input
Alarm
Cool Power
Heat Power
Compare
Counter
Digital I/O
Profile Event Output A-H
Function Key
Linearization
Logic
Math
Process Value
Special Output Function 1-4
Timer
Variable
Off
RUI, EZ-ZONE PM/ST,
PC, PLC or HMI
Other RM Modules
Power Supply
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac oe Vdc
Some input/output combinations not possible, see ordering matrix
Zone and Status
Output Status
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
LEDs
1
2
3
4
5
6
7
8
9
10
LED
Zone Selection
Button
D
A
S
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Indicates I/O
Address
Status
Watlow EZ-ZONE® RMS Module • 16 • Chapter 1 Overview
Page 21
EZ-ZONE RMS Module - System Diagram
Output
Input
8 Scanner Channels - Slots A, B
3 - Process Outputs - Slot D or E
4 - SSR Outputs - Slot D or E
R M S x - [R, P] [R, P] [F, L] [F, L] - A A A A
Function
Input Sensor
Analog Input 1 through 8
None, Thermocouple, 2-Wire RTD (100, 1k),
Thermistor (5k, 10K, 20k, 40k), Process
(V, mV, mA) or 1K Potentiometer
Alarms
Slot A, B
3 - Universal/
Retransmit
or
4 - 2A SSR
Outputs
Slot D
3 - Universal/
Retransmit
or
4 - 2A SSR
Outputs
Slot E
Output 1, 2, 3, 4
Process, 2A Solid-State
Relay Form A
** The functions listed to the right
with purple text apply to the
Process output only, where
the orange text applies to the
SSR output only. All others
apply to both output types.
Output 7, 8, 9, 10
Process, 2A Solid-State
Relay Form A
Function
Off
Analog Input
Current*
Alarm*
Cool Power
Heat Power
Power*
Compare*
Counter*
Digital I/O*
Profile Event Output A-H*
Function Key*
Linearization
Logic
Math
Process Value
Set Point Closed*
Set Point Open*
Special Output Function 1-4
Timer*
Variable
RUI,
PC, PLC or HMI
Other RM Modules
Power Supply
EIA - 485 Communications
Standard Bus
(optional Modbus RTU)
Inter-module Bus
20.4 to 30.8 Vac or Vdc
Some input/output combinations not possible, see ordering matrix
Zone and Status
Output Status
Modbus RTU
Address 1 - 16
Standard Bus
Zone 1 - 16
Supervisory &
Power Board
Slot C
LEDs
1
2
3
4
5
6
7
8
9
10
11
12
LED
Zone Selection
Button
D
A
S
Indicates Zone
Push to select Zone
Address and Protocol
E
B
M
Card Status
Slots A, B, D, E
Indicates communications
activity (Modbus or Standard Bus)
Indicates I/O
Address
Status
Watlow EZ-ZONE® RMS Module • 17 • Chapter 1 Overview
Page 22
2
Chapter 2: Install and Wire
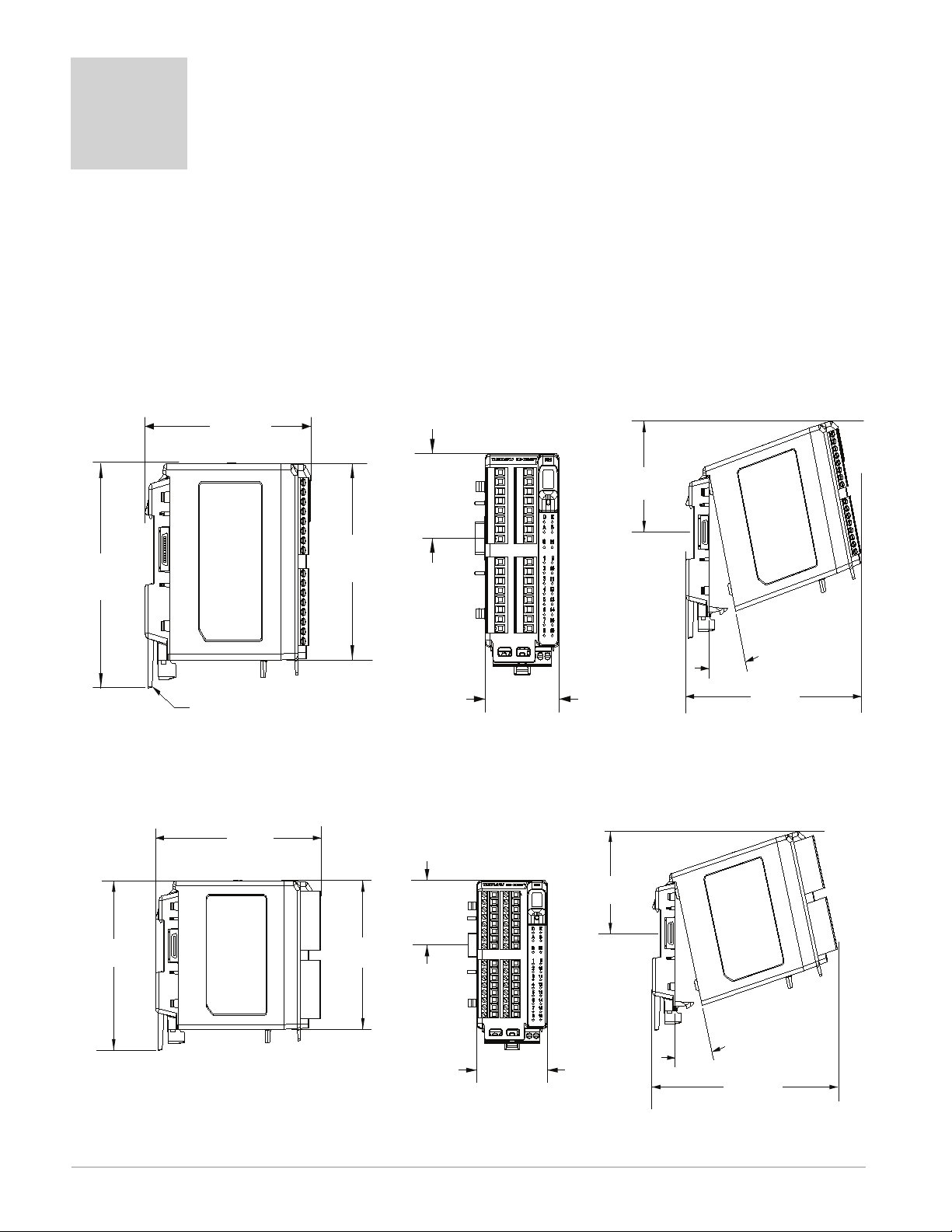
Dimensions
As can be seen below the dimensions of the RMS module will change slightly based on the
type of connector used.
Note:
Modules should always be mounted vertically. For easy removal and placement of modules
it is recommended that there be a 76.2 mm (3.00 in) clearance on the top, bottom and
front of each module.
Module Removal Clearance Standard Connectors
147.07 mm
( 5.8 in )
75.08 mm
( 3.0 in )
116.08 mm
( 4.57 in )
44.45 mm
( 1.75 in )
101.60 mm
( 4.00 in )
51.56 mm
Latch in open position
( 2.03 in )
Module Removal Clearance Straight Connectors
155 mm
( 6.10 in )
44.45 mm
( 1.75 in )
116.08 mm
( 4.57 in )
101.60 mm
( 4.00 in )
51.56 mm
( 2.03 in )
75.08 mm
( 3.0 in )
15
165 mm
( 6.50 in )
Module Removal Displacement
15
°
173.90 mm
( 6.85 in )
Module Removal Displacement
Watlow EZ-ZONE® RMS Module • 18 • Chapter 2 Install and Wire
Page 23
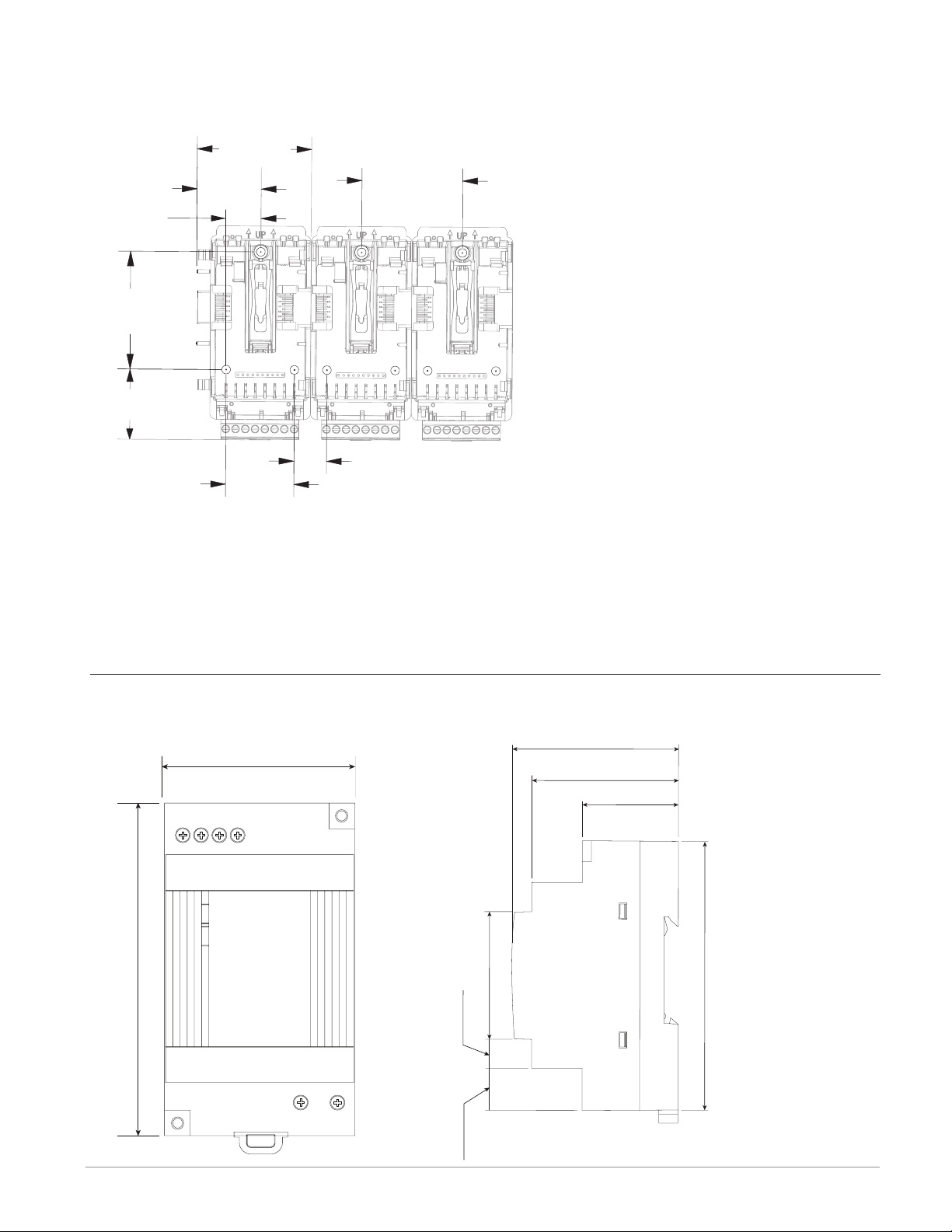
Dimensions (cont.)
56
53.00 mm
91.00 mm
14.20 mm
9.75 mm
55.6 mm
0.559 in
Chassis Mount Front View (Module Removed) - Screw Connection Pattern
58.67 mm
17.53 mm
( 0.69 in )
60.45 mm
( 2.38 in )
35.81 mm
( 1.41 in )
( 2.31 in )
32.77 mm
( 1.29 in )
35.05 mm
( 1.38 in )
51.56 mm
( 2.03 in )
16.76 mm
( 0.67 in )
The view above is representative of the modular backplane without the module.
Recommended chassis mount hardware:
1. #8 screw, 3/4" long
2. Torque to 10 -15 in-lb
3. No washers of any kind
Power Supplies
DSP 30
2.189 in
32.10 mm
1.264 in
3.583 in
91.00 mm
1234
++
3.583 in
2.087 in
-
-
DC LO
DC OK
DSP30
1.697 in
43.1 mm
49.00 mm
1.929 in
0.384 in
LN
Watlow EZ-ZONE® RMS Module • 19 • Chapter 2 Install and Wire
Page 24
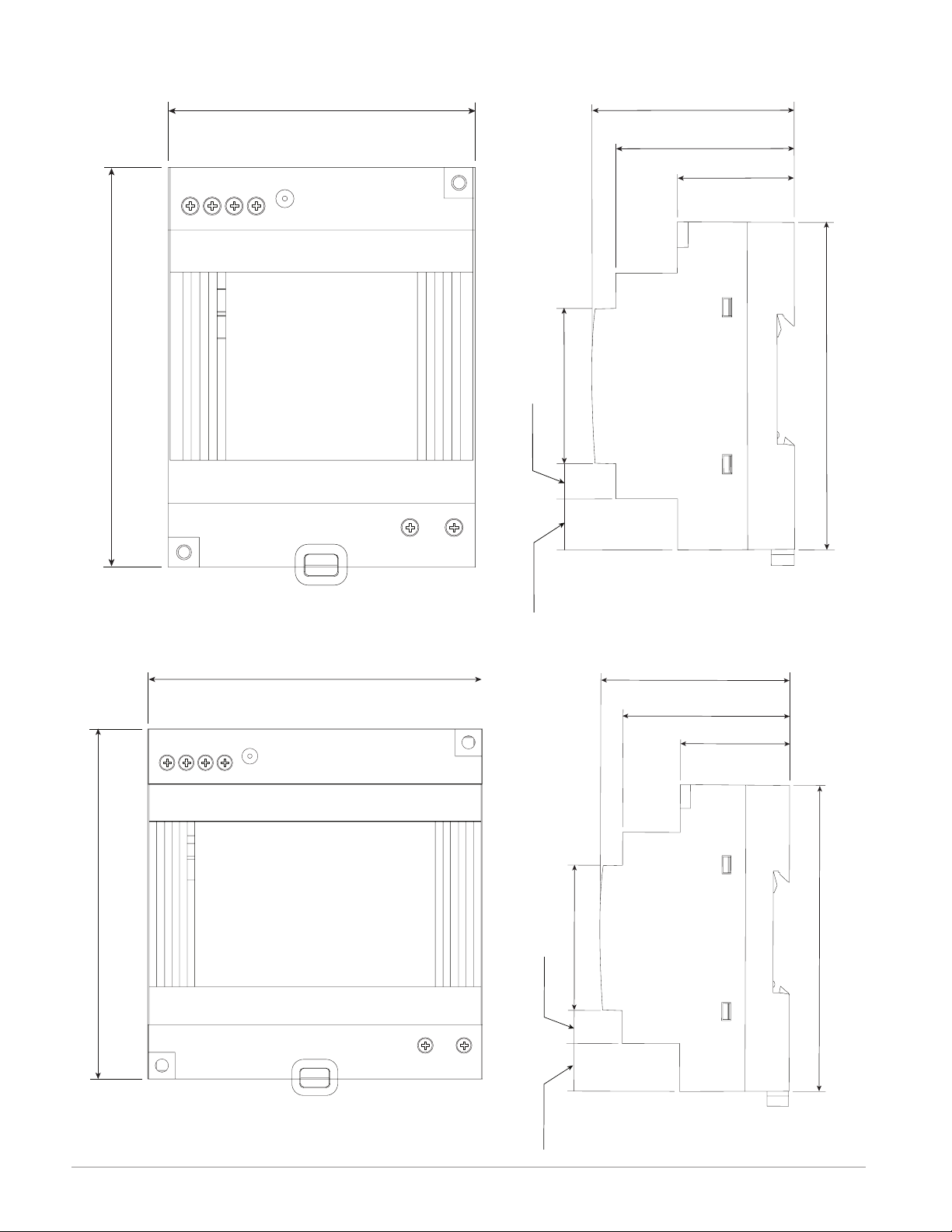
DSP 60
LN
56
71.00 mm
91.00 mm
14.20 mm
9.75 mm
55.6 mm
0.559 in
14.20 mm
9.75 mm
56.8 mm
0.559 in
LN
56
89.9 mm
91.00 mm
1
++
3.583 in
2
34
-
-
DC LO
DC OK
2.795 in
vout ADJ.
DSP60
1.697 in
43.1 mm
0.384 in
49.00 mm
1.929 in
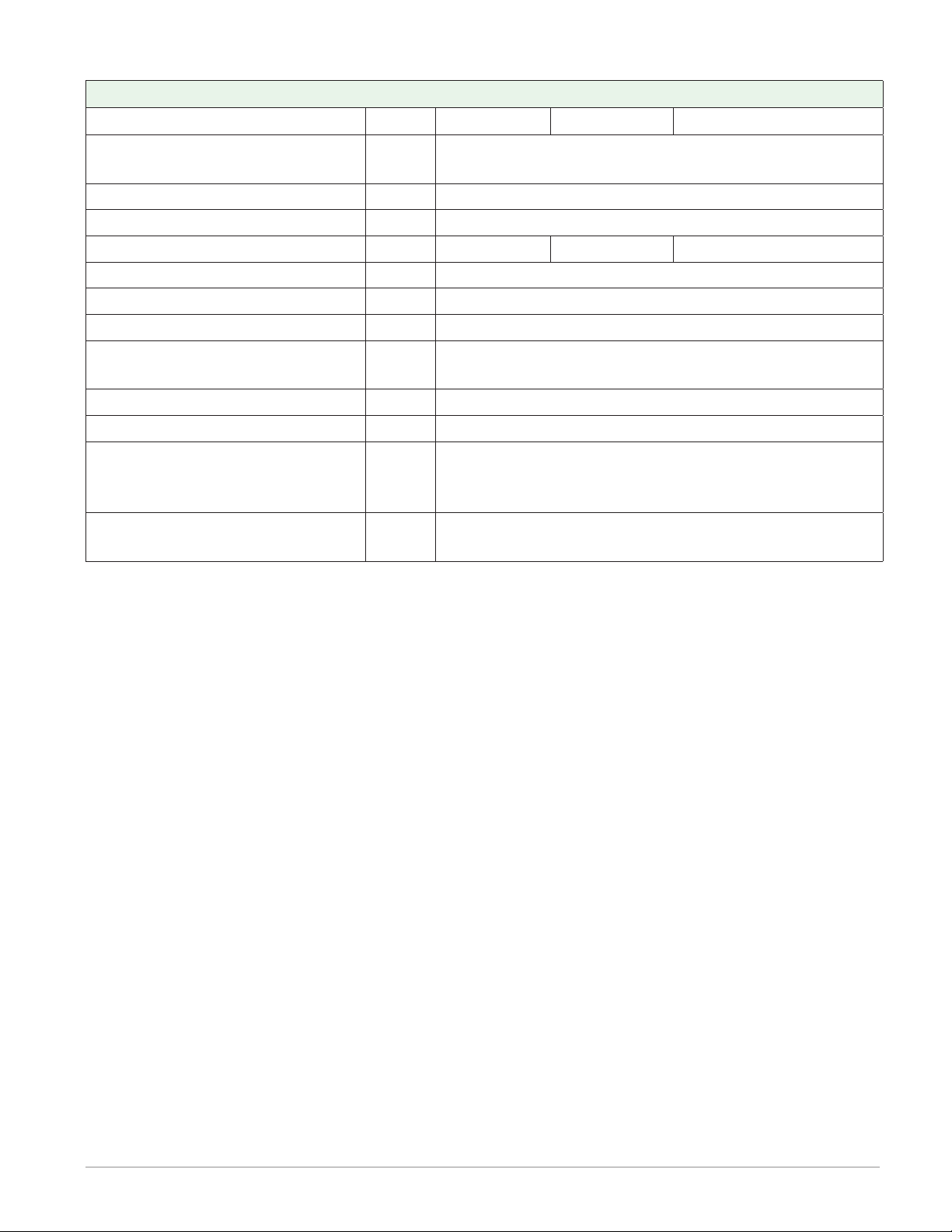
2.189 in
32.10 mm
1.264 in
3.583 in
91.00 mm
1234
++
3.583 in
-
-
DC LO
DC OK
3.539 in
vout ADJ.
DSP100
DSP 100
1.697 in
43.1 mm
0.384 in
49.00 mm
1.929 in
2.236 in
32.10 mm
1.264 in
3.583 in
91.00 mm
Watlow EZ-ZONE® RMS Module • 20 • Chapter 2 Install and Wire
Page 25
Power Supply Specifications
DSP 30 DSP60 DSP100
AC Input Voltage Range VAC
Input Frequency Hz 47 - 63Hz
DC Input Voltage range VDC 120 - 370VDC
Inrush Current (115 / 230VAC) A 25 / 50A 30 / 60A 30 / 60A
Output Voltage Accuracy % ±1% of Nominal
Over voltage Protection V 120 - 145%
LED Indicators - - - - Green LED = On, Red LED = DC Output Low
Operating Temperature - - - -
Storage Temperature - - - - -25 to +85°C
Operating Humidity - - - - 20 - 95% RH (non condensing)
Vibration (Operating) - - - -
Safety Agency Approvals
90 - 264VAC, Class II double insulated (No ground
connection required)
-25 to +71°C (Derate linearly 2.5%/°C from 55 to
71°C)
IEC 60068-2-6 (Mounting by rail: Random wave,
10-500 Hz, 2G, ea. along X, Y, Z axes 10 min/
cycle, 60 min)
UL1310 Class 2(1), UL508 Listed, UL60950-1,
EN60950-1, CE
For a comprehensive listing of these specifications point your browser to : http://us.tdk-lamb-
da.com/lp/products/dsp-series.htm
Watlow EZ-ZONE® RMS Module • 21 • Chapter 2 Install and Wire
Page 26
RMS Installation and Removal on a DIN Rail
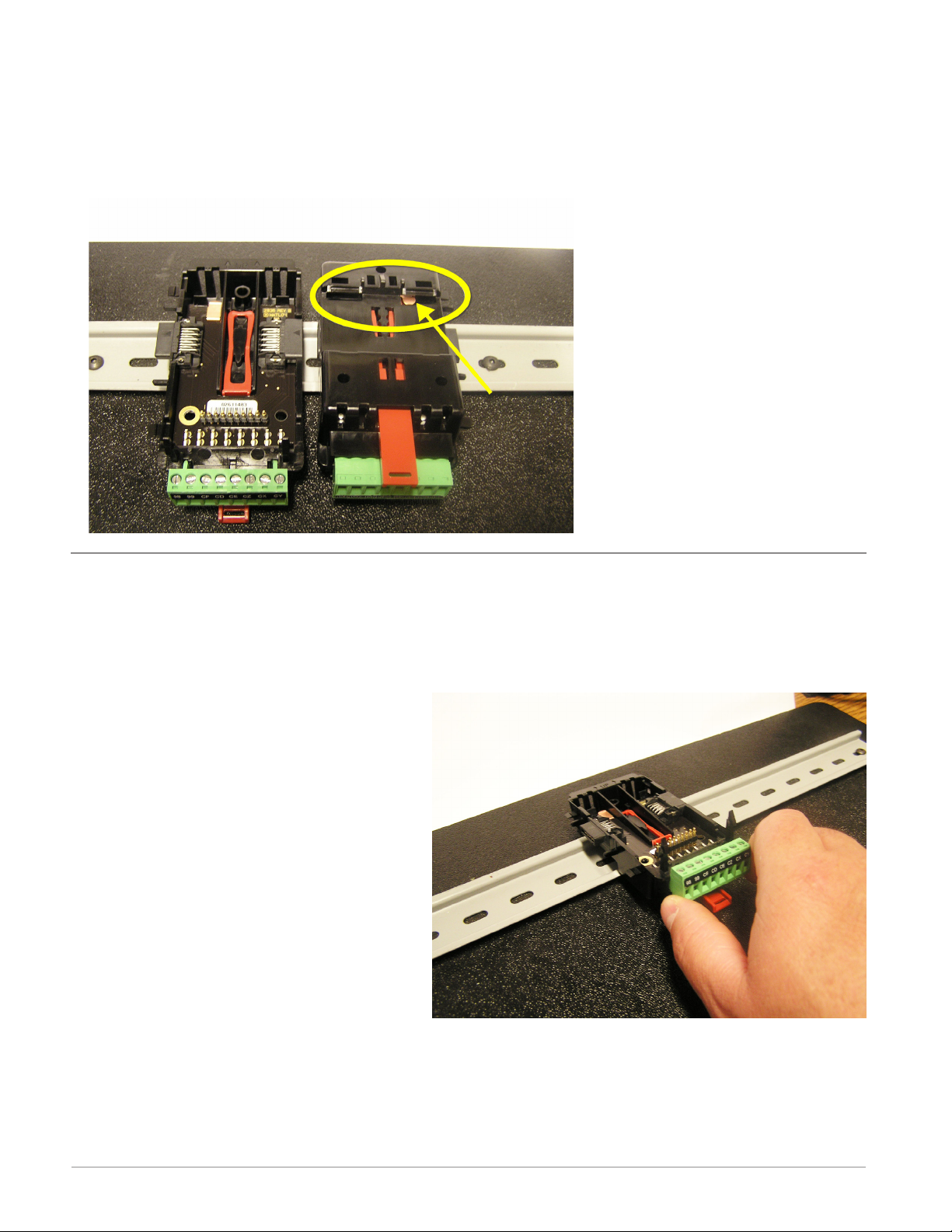
Modular Backplane Connector
The picture on the right shows the Modular Backplane Connector, both front and rear view.
The rear view is bringing in to focus a metal clip. If the DIN rail is grounded the Modular
Backplane Connector and the module connected to it will be also (recommended).
Installing the Modular Backplane Connector
To install the backplane follow the steps below:
1. Hook backplane assembly to upper edge of DIN rail, (see rear view above, backplane
hook detail that mates with upper rail edge is circled)
2. Next, rotate back plane assembly downward to engage the lower edge of the rail. (Note:
Din Rail clipping distance ranges
from 1.366 -1.389 inches. The back
plane assembly will not latch onto
the rail successfully if the rail is out
of dimension).
3. For final positioning and locking, the
red tab is to be pushed upward to
further engage the bottom edge of
the rail with an over center snap action latch. (The red locking tab protrudes from the bottom side of the
back plane assembly).
Note:
For easy removal and placement of
modules it is recommended that there be a 76.2 mm (3.00 in) clearance on the top, bottom and front of each module.
Watlow EZ-ZONE® RMS Module • 22 • Chapter 2 Install and Wire
Page 27

Installing Multiple Modular Backplane Connectors
Multiple modules are easily aligned and latched together. Each module includes matched mating geometry that facilitates accurate and consistent interconnections.
To install backplane connectors follow the steps below:
1. Attach individual modules to the rail separately.
2. Laterally slide the modules together until
they touch.
3. When the multi-module system is attached
and laterally positioned to the desired
placement the locking tab should be engaged to secure the control system to the
rail.
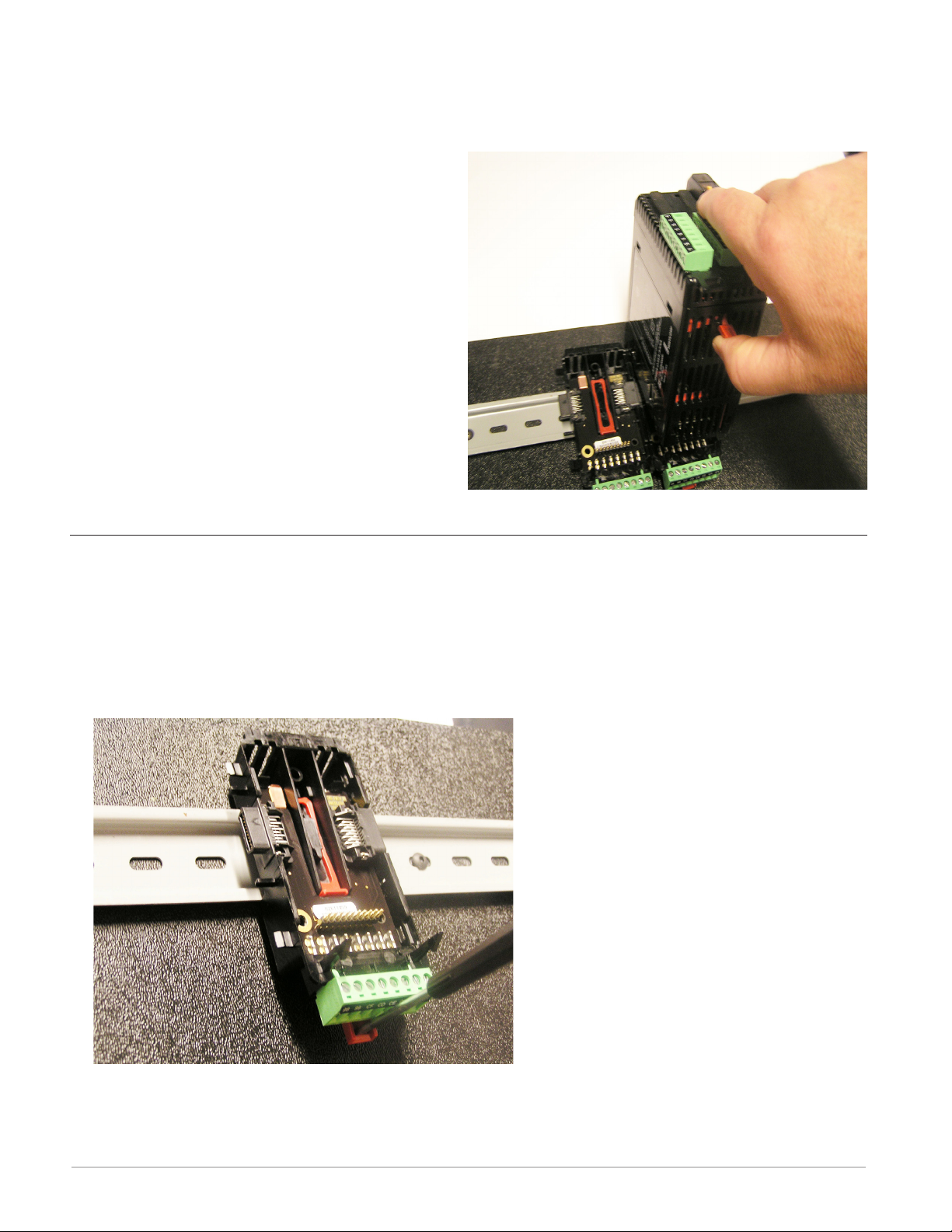
Module Installation
In the picture to the right notice that the arrow is pointing at the top lip of the module (on
side).
To install modules on the backplane follow the steps below:
1. Slide the lip of the module over the top of the Modular Backplane Connector and then
push down on the rear of the module. The module will then slide over the two posts just
above the green connector (see pictures below).
Watlow EZ-ZONE® RMS Module • 23 • Chapter 2 Install and Wire
Page 28
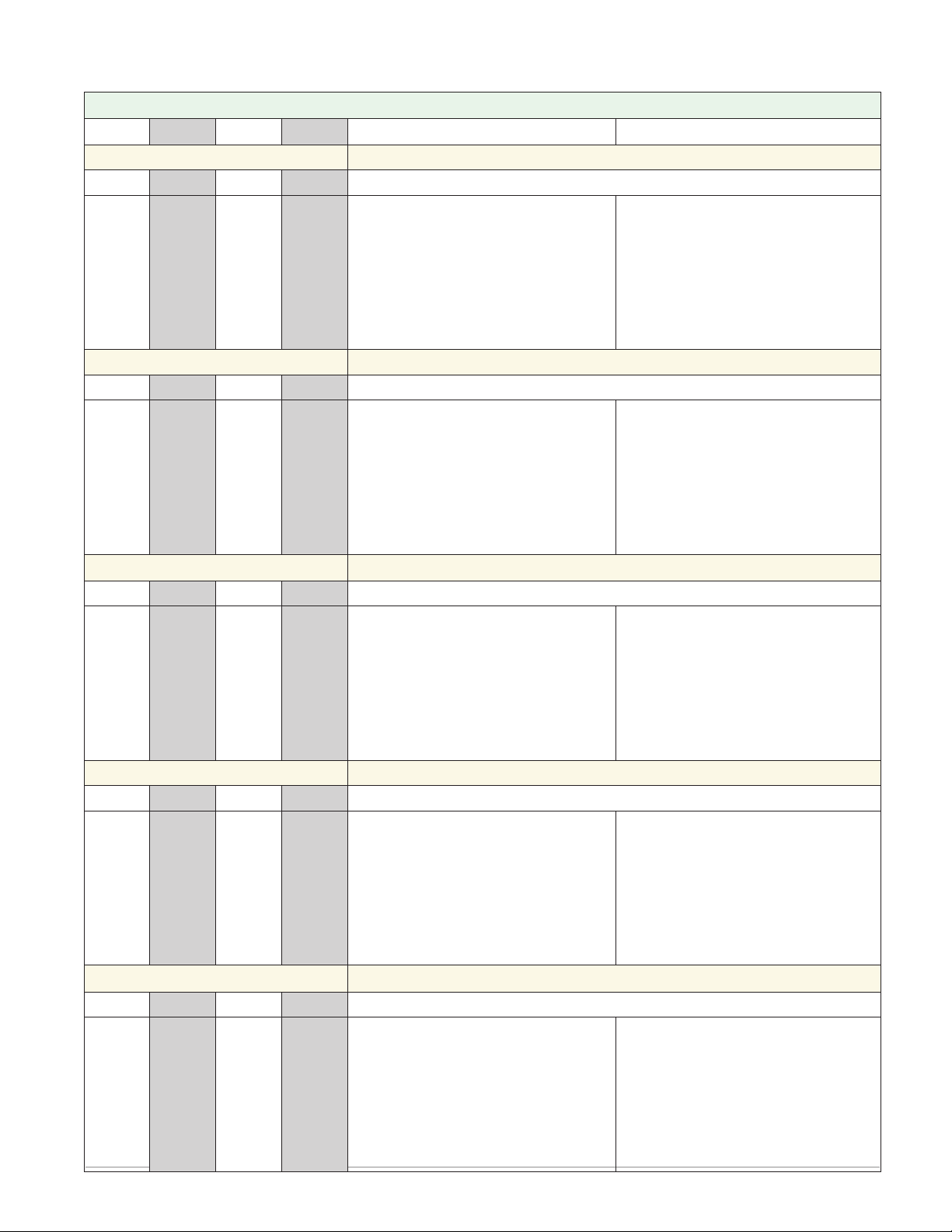
Module Removal
To remove a module from the backplane follow the steps below:
1. Find the red tab protruding from the bottom of the module and pull back on it as shown
to the right.
2. Pull back on the red tab, the two
mounting posts will then release the
module.
3. Lift the module up and slide it up; this
will release the module lip from the
backplane.
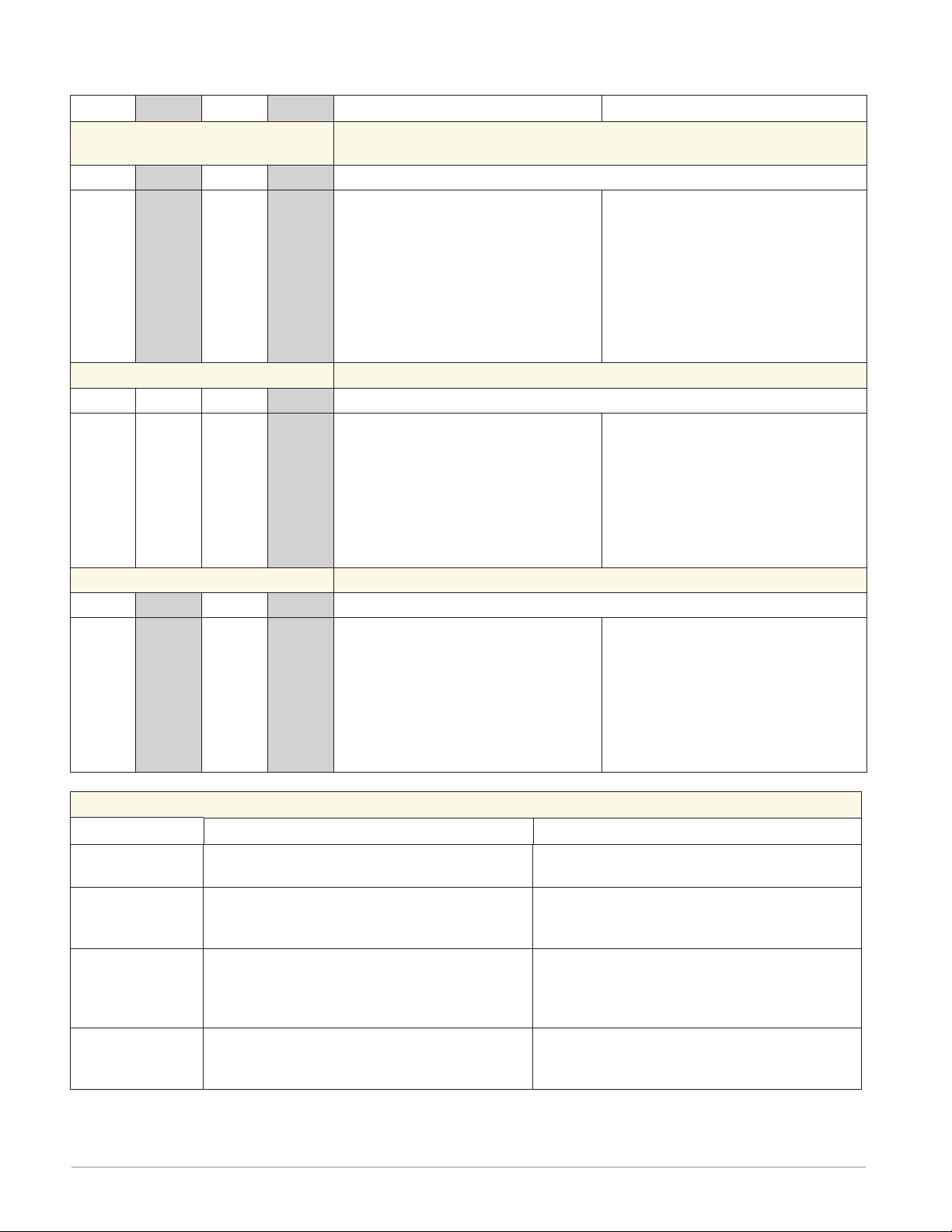
Backplane Removal from DIN Rail
To remove a modular backplane connector from the DIN rail follow the steps below:
1. Insert a screw driver into the red locking tab just behind the green connector.
2. Apply downward pressure on the tab by lifting the screwdriver upwards..
3. When released, the tab will move downward and the connector can then be lifted up off
of the DIN rail.
Watlow EZ-ZONE® RMS Module • 24 • Chapter 2 Install and Wire
Page 29
Wiring
Scanner Module (R M S x - x x x x - x x x x)
Slot A Slot B Slot D Slot E Terminal Function Configuration
Inputs Universal, RTD, Potentiometer and Thermistor Inputs 1 - 16
1 - 4 5 - 8 9 - 12 13 - 16
S1
R1
S2
R2
S3
R3
S4
R4
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
S5
R5
S6
R6
S7
R7
S8
R8
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
S9
R9
S10
R10
S11
R11
S12
R12
S13
R13
S14
R14
S15
R15
S16
R16
1 - 6 7-12
B1
D1
D2
D3
D4
D5
D6
Z1
B7
D7
D8
D9
D10
D11
D12
Z7
S_ (RTD), thermocouple -, volts
- , mA -, potentiometer wiper or
thermistor
R_ (RTD), thermocouple +, volts +,
mA +, potentiometer or thermistor
Digital Inputs 1 - 6 and 7 - 12
Common
DC +input
DC +input
DC +input
DC +input
DC +input
DC +input
Internal Supply
Digital Input 9
Universal/Thermistor Input
Part # Digits 5, 6, 7, 8
Input 1-4: RMSx-[R,P]xxx-xxxx
Input 5-8: RMSx-x[R,P]xx-xxxx
Input 9-12: RMSx-xx[R,P]x-xxxx
Input 13-16: RMSx-xxx[R,P]-xxxx
Digital Inputs (DI)
Part # Digit 7, 8
Slot A: Option not valid
Slot B: Option not valid
Slot D: RMSx-xx[C]x-xxxx
Slot E: RMSx-xxx[C]-xxxx
- - - - - - - - - 9
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - B9
D9
Digital Input (DI)
Part # Digit 8
Slot A: Option not valid
Slot B: Option not valid
Slot D: Option not valid
Slot E: RMSx-xxx[B]-xxxx
Common
DC +input
Outputs Form A - Mechanical Relay Outputs 1- 4 and 7 - 10
- - - - - - - 1 - 4 7 - 10
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
L1
K1
L2
K2
L3
K3
L4
K4
L7
K7
L8
K8
L9
K9
L10
K10
normally open
common
normally open
common
normally open
common
normally open
common
Mechanical Relay 5 A, Form A
Part # Digits 7, 8
Slot D: : RMSx-xx[J]x-xxxx
Slot E: : RMSx-xxx[J]-xxxx
Digital Outputs 1 - 6 and 7 - 12
- - - - - - 1 - 6 7 - 12
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
B1
D1
D2
D3
D4
D5
D6
Z1
B7
D7
D8
D9
D10
D11
D12
Z7
Common
open collector/ switched dc
open collector/ switched dc
open collector/ switched dc
open collector/ switched dc
open collector/ switched dc
open collector/ switched dc
Internal Supply
Digital Outputs (DO)
Part # Digit 7, 8
Slot A: Option not valid
Slot B: Option not valid
Slot D: RMSx-xx[C]x-xxxx
Slot E: RMSx-xxx[C]-xxxx
Watlow EZ-ZONE® RMS Module • 25 • Chapter 2 Install and Wire
Page 30
Wiring (cont.)
Slot A Slot B Slot D Slot E Terminal Function Configuration
Outputs (cont.)
- - - - - - - - - - 7, 8
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
L7
K7
J7
L8
K8
- - -
- - -
- - -
- - - - - - 1 - 4 7 - 10
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
L1
K1
L2
- - -
- - L3
K3
L4
L7
K7
L8
- - -
- - L9
K9
L10
- - - - - - 1 - 3 7 - 9
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
F1
H1
- - F2
H2
- - F3
H3
F7
H7
- - F8
H8
- - F9
H9
Form C - Mechanical Relay Output 7 and Form A - Mechanical Re-
lay Output 8
normally open
common
normally closed
normally open
common
Form C and Form A Relay Outputs
Part # Digit 8
Slot A: Option not valid
Slot B: Option not valid
Slot D: Option not valid
Slot E: RMSx-xxx[B]-xxxx
Quad 2A - Solid-State Relay (SSR) Form A Outputs
normally open
common
normally open
not used
not used
normally open
common
normally open
Slot A: Option not valid
Slot B: Option not valid
Slot D: RMS _ - _ _ [L] _ - _ _ _ _
Slot E: RMS _ - _ _ _ [L] - _ _ _ _
2A SSR Outputs
Part # Digits 7, 8
Tri-State Process/Retransmit Outputs
voltage or current voltage + or current +
not used
voltage or current voltage + or current +
not used
voltage or current voltage + or current +
Slot A: Option not valid
Slot B: Option not valid
Slot D: RMS _ - _ _ [F] _ - _ _ _ _
Slot E: RMS _ - _ _ _ [F] - _ _ _ _
Tri-Process Outputs
Part # Digits 7, 8
Power and Communications
Slot C
98
99
CF
CD
CE
CC
CA
CB
CZ
CX
CY
Power input: ac or dc+
Power input: ac or dc-
Standard Bus EIA-485 common
Standard Bus EIA-485 T-/RStandard Bus EIA-485 T+/R+
Standard Bus or Modbus RTU EIA-485 common
Standard Bus or Modbus RTU EIA-485 T-/RStandard Bus or Modbus RTU EIA-485 T+/R+
Inter-module Bus
Inter-module Bus
Inter-module Bus
Terminal Function Configuration
All
Standard Bus
Part # Digit 10
RMSx-xxxx-x[A]xx
Standard Bus or Modbus
Part # Digit 10
RMSx-xxxx-x[1]xx
Inter-module Bus
Watlow EZ-ZONE® RMS Module • 26 • Chapter 2 Install and Wire
Page 31

RMS Module - Front View -
S
l
o
t
C
Standard Connector
Slot D
Slot A
98
Slot E
Slot B
Slot C
99
power
Watlow EZ-ZONE® RMS Module • 27 • Chapter 2 Install and Wire
Page 32

RMS System Isolation Blocks
Controller Power Supply
20.4 to 30.8VÎ (dc)
20.4 to 30.8VÅ (ac)
Safety Isolation
Mechanical Relay,
Outputs
Safety Isolation
Safety Isolation
Controller
Low Voltage Power Bus
Low-voltage Isolation: 42V peak
Safety Isolation: 1,528VÅ (ac)
No Isolation
Low-voltage
Isolation
Low-voltage
Isolation
Digital Inputs & Outputs
Analog Input 1 - 16
Communications Ports
Watlow EZ-ZONE® RMS Module • 28 • Chapter 2 Install and Wire
Page 33

Warning:
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Scanner Module Wiring (RMSx-xxxx-xxxx)
Low Power RMS- ALL Model Numbers
t
C
l
o
S
99
98
power
Communications RMS Part # Digit 10 is A
t
C
l
o
S
CF
CE
CD
CZ
CY
CX
Standard Bus
Common
T- / R-
Common
T+ / R+
Inter-module Bus
-
Communications RMS Part # Digit 10 is 1
t
C
l
o
S
CC
CB
CA
T- / R-
Common
Modbus
CZ
Common
T+ / R+
CX
CY
Inter-module Bus
-
+
• 20.4 to 30.8 V Å (ac) / Î (dc) 14VA
• 47 to 63 Hz
• Controller module power consumption,
7 Watts maximum
• 31 Watts maximum power available for
P/S part #:0847-0299-0000
• 60 Watts maximum power available for
P/S part #:0847-0300-0000
• 91 Watts maximum power available for
P/S part #:0847-0301-0000
• Class 2 or Safety Extra Low Voltage
(SELV) power source required to meet
UL compliance standards
• CF, CD, CE - Standard Bus EIA485
Communications
• CZ, CX, CY - Inter-module Bus
EIA485 Communications
• Do not route network wires with
power wires. Connect network
+
wires in daisy-chain fashion when
connecting multiple devices in a
network
• CC, CA, CB - Modbus and Standard Bus EIA-485 Communications
(selectable via push button under
zone address)
• CZ, CX, CY - Inter-module Bus EIA485 Communications
• Do not route network wires with
power wires. Connect network
wires in daisy-chain fashion when
connecting multiple devices in a
network
Watlow EZ-ZONE® RMS Module • 29 • Chapter 2 Install and Wire
Page 34

Warning:
Slot A, B, D, E
Slot A, B, D, E
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Inputs 1 through 16 Thermocouple RMS Part # Digits 5, 6, 7, 8
-
S_
+
R_
-
S_
+
R_
-
S_
+
R_
-
S_
+
R_
• 2K Ω maximum source resistance >20 MΩ in-
put impedance
• 3 microampere open-sensor detection
• Thermocouples are polarity sensitive. The
negative lead (usually red) must be connected to S terminal
• To reduce errors, the extension wire for
thermocouples must be of the same alloy as
the thermocouple.
- Input 1 - 4 (top to bottom): RMSx-(R)xxx-
xxxx
- Input 5 - 8 (top to bottom): RMSx-x(R)xx-
xxxx
- Input 9 - 12 (top to bottom): RMSx-xx(R)x-
xxxx
- Input 13 - 16 (top to bottom): RMSx-
xxx(R)-xxxx
Inputs 1 through 16 Potentiometer RMS Part # Digits 5, 6, 7, 8
CW
S_
R_
CCW
CW
CCW
CW
CCW
CW
CCW
S_
R_
S_
R_
S_
R_
• Use a 1 kΩ potentiometer.
- Input 1 - 4 (top to bottom): RMSx-(R)xxx-xxxx
- Input 5 - 8 (top to bottom): RMSx-x(R)xx-xxxx
- Input 9 - 12 (top to bottom): RMSx-xx(R)x-xxxx
- Input 13 - 16 (top to bottom): RMSx-xxx(R)-xxxx
Watlow EZ-ZONE® RMS Module • 30 • Chapter 2 Install and Wire
Page 35

Warning:
Slot A, B, D, E
Slot A, B, D, E
RTD
Slot A, B, D, E
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
prevent ground loops.
Warning:
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
ç
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
.
to
ç
ç
Inputs 1 through 16 Process RMS Part # Digits 5, 6, 7, 8
-
S_
+
R_
-
S_
+
R_
-
S_
+
R_
-
S_
+
R_
volts
-
+
-
+
-
+
-
+
S_
R_
S_
R_
S_
R_
S_
R_
amperes
• 0 to 20 mA @ 100 Ω input impedance
• 0 to 10VÎ (dc) @ 20 kΩ input im-
pedance
• 0 to 50 mVÎ (dc) @ 20 MΩ input
impedance
• Scalable
- Input 1: RMS(1,3,5)xxxxxxxxxxx
(S1-/R1+),(T1+/S1-)
- Input 2: RMSxx(1,5)xxxxxxxxx
(S2-/R 2+),(T2+/S2-)
- Input 3: RMSxxxx(1,5)xxxxxxx
(S3-/R3+),(T3-S3-R3)
- Input 4: RMSxxxxxx(1,5)xxxxx
(S4-/R4+),(T4+/S4-)
Inputs 1 through 16 RTD RMS Part # Digits 5, 6, 7, 8
• Platinum, 100 and
S_
R_
S_
R_
S_
R_
S_
R_
2-wire
1,000 Ω @ 0°C
• Calibration to DIN curve
(0.00385 Ω/Ω/°C)
• RTD excitation current
of 0.09 mA typical.
Each ohm of lead resistance may affect the
reading by 2.55°C for a
100 ohm platinum sensor or 2.5 ohms for a
1000 ohm sensor.
- Input 1 - 4 (top to
bottom): RMSx-(R)
xxx-xxxx
- Input 5 - 8 (top to
bottom): RMSx-x(R)
xx-xxxx
AWG Ohms/1000ft
14 2.575
16 4.094
18 6.510
20 10.35
22 16.46
24 26.17
26 41.62
28 66.17
Watlow EZ-ZONE® RMS Module • 31 • Chapter 2 Install and Wire
- Input 9 - 12 (top to
bottom): RMSx-xx(R)
x-xxxx
- Input 13 - 14 (top
to bottom): RMSxxxx(R)-xxxx
Page 36

Warning:
Slot A, B, D, E
Slot D, E
Int
Slot E
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
prevent ground loops.
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Inputs 1 through 16 Thermistor RMS Part # Digits 5, 6, 7, 8
• >20 MΩ input impedance
S_
R_
S_
R_
S_
R_
S_
R_
Thermistor
- Input 1 - 4 (top to bottom): RMSx-(P)
xxx-xxxx
- Input 5 - 8 (top to bottom): RMSx-x(P)
xx-xxxx
- Input 9 - 12 (top to bottom): RMSxxx(P)x-xxxx
- Input 13 - 16 (top to bottom): RMSxxxx(P)-xxxx
Digital Inputs 1 through 12
RMS Part # Digit 7, 8 is C and or B Respectively
Digital Input
Event Conditions
• Voltage
- Input inactive
when < 2V
- Input active
when > 3V
• Dry Contact
- Input inactive
when > 100KΩ
- Input active
when < 50Ω
• Six user configurable digital
inputs/outputs
per slot
- Slot D DI 1 - 6
RMSx-xx(C) xxxxxx
- Slot E DI 7
- 12, RMSxxxx(C)-xxxx
- Slot E DI 9,
RMSx-xxx(B)xxxx
Voltage Input
common
_
B
Vdc
_
D
Dry Contact
Slot D
_
D
24 Vdc
_
Z
RMSx-xxx(C)-xxx
RMSx-xxx(B)-xxx
Note:
For part number RMSxxxx(B)-xxxx connection is
made between pins B9 and
D9 when configured as a
dry contact (Digital Input 9
Slot E).
to
Common
DC Input
DC Input
DC Input
DC Input
DC Input
DC Input
ernal
Supply
Common
DC Input
B_
D_
D_
D_
D_
D_
D_
Z_
B9
D9
Slot E
_
B
_
D
24 Vdc
Watlow EZ-ZONE® RMS Module • 32 • Chapter 2 Install and Wire
Page 37

Warning:
witched dc
Slot D, E
witched dc
witched dc
witched dc
witched dc
witched dc
D_
D_
Zone 1 Zone 2
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
prevent ground loops.
Note:
If the last two digits of the part
number are "12", this equipment
is suitable for use in CLASS I,
DIVISION 2, Groups A, B, C and
D or Non-Hazardous locations
only. Temperature Code T4
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for
Warning:
Explosion Hazard - Do not dis-
CLASS I, DIVISION 2.
ç
connect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Quencharc Note:
Switching pilot duty inductive
loads (relay coils, solenoids,
etc.) with the mechanical relay,
solid state relay or open collector
output options requires use of an
R.C. suppressor.
to
Connecting a Digital Output from One Zone (RMC - Zone 1) to a
Digital Input of Another Zone (RMS - Zone 2)
RMC Part # Digit 11 is C
Slot D
Slot A Slot B
Slot E
B7
D7
D8
D9
D10
D11
Digital Output
D12
Z7
In the example above, digital output D8 from Zone 1 is connected
to digital input D8 of Zone 2.
Note:
As shown in the graphic above, for this configuration, a pull-up
resistor is required.
RMS Part # Digit 8 is C
Slot D
Slot A Slot B
Slot E
B7
D7
D8
D9
D10
Digital Input
D11
D12
Z7
Pull-up resistor
required 1K
to 10K Ohms
Digital Outputs 1 - 12 RMS Part # Digit 7, 8 is C
B_
D_
D_
D_
D_
D_
D_
Z_
Common
open collector/s
open collector/s
open collector/s
open collector/s
open collector/s
open collector/s
Internal
Supply
• Maximum switched
voltage is 32VÎ(dc)
• Internal supply
provides a constant power output of 750mW
• Maximum output
sink current per
output is 1.5A (external class 2 or
*SELV supply required)
• Total sink current
for all outputs not
to exceed 8A
• Do not connect
outputs in parallel
- Slot D DO 1 - 6
RMSx-xx(C)x-xxxx
- Slot E DO 7 - 12
RMSx-xxx(C)-xxxx
* Safety Extra Low
Voltage
Open Collector/
Switched DC Outputs
B_
D_
D_
D_
D_
Z_
Watlow EZ-ZONE® RMS Module • 33 • Chapter 2 Install and Wire
Page 38

Warning:
AGC-1 1/2
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Note:
If the last two digits of the part
number are "12", this equipment
is suitable for use in CLASS I,
DIVISION 2, Groups A, B, C and
D or Non-Hazardous locations
only. Temperature Code T4
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for
Warning:
CLASS I, DIVISION 2.
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Quencharc Note:
Switching pilot duty inductive
loads (relay coils, solenoids,
etc.) with the mechanical relay,
solid state relay or open collector
output options requires use of an
R.C. suppressor.
Switched DC Wiring Example Using DO 1-12
Collector Outputs
VDC
Internal Circuitry
Note:
As a switched DC output; this output is a constant current output delivering 750 mW, current limited to 400 mA. The internal
supply does have a maximum open circuit voltage of 22 VDC and
minimum open circuit voltage of 19 VDC. Pin Z_ is shared to all
digital outputs. This type of output is meant to drive solid-state
relays, not mechanical relays.
Common
B_
D_
D_
D_
D_
D_
D_
Z_
Internal Supply
Htr 3
Htr 2
Htr 1
+
-
+
-
+
-
DC90-60C0-0000
Open Collector Wiring Example Using DO 1-12
Power Supply
5 to 32 VDC
Diode
-
Fuse
An example fuse is
Bussmann
Relay
VDC
Collector Outputs
Internal Circuitry
Common
B_
D_
D_
D_
D_
D_
D_
Z_
Internal Supply
+
Watlow EZ-ZONE® RMS Module • 34 • Chapter 2 Install and Wire
Page 39

Warning:
Slot D
Slot E
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Note:
If the last two digits of the part
number are "12", this equipment
is suitable for use in CLASS I,
DIVISION 2, Groups A, B, C and
D or Non-Hazardous locations
only. Temperature Code T4
As an open collector output (see graphic below), use an external
power supply with the negative wired to B_, the positive to the coil
of a pilot mechanical relay and the other side of the coil wired to
the output of choice (D_). Each open collector output can sink 1.5
A with the total for all open collector outputs not exceeding 8 amperes. Ensure that a kickback diode is reversed wired across the relay coil to prevent damage to the internal transistor.
Output 1 - 4 and 7 - 10 Mechanical Relay, Form A
RMS Part # Digit 7, 8 is J
Mechanical Relay Form A
L_
K
Internal Circuitry
L1
K1
L2
K2
L3
K3
L4
K4
L7
K7
L8
K8
L9
K9
L10
K10
normally open
common
normally open
common
normally open
common
normally open
common
normally open
common
normally open
common
normally open
common
normally open
common
• 5 A at 240VÅ (ac) or
30VÎ (dc) maximum
resistive load
• 20 mA at 24V minimum load
• 125 VA pilot duty @
120/240VÅ (ac), 25 VA
at 24VÅ (ac)
• 100,000 cycles at rated load
• Output does not supply p owe r.
• For use with ac or dc
See Quencharc note.
- Slot D Outputs 1 - 6
RMSx-xx(J)x-xxxx
- Slot E Outputs 7 - 10
RMSx-xxx(J)-xxxx
_
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for
Warning:
CLASS I, DIVISION 2.
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Quencharc Note:
Switching pilot duty inductive
loads (relay coils, solenoids,
etc.) with the mechanical relay,
solid state relay or open collector
output options requires use of an
R.C. suppressor.
Watlow EZ-ZONE® RMS Module • 35 • Chapter 2 Install and Wire
Page 40

Slot D, E
Open
Open
Open
Open
Quad 2 Amp SSR Derating Curve - All Outputs 100% Duty Cycle
Amps per Output
Multiple Quad SSR Cards
Warning:
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Quad 2A SSR Outputs 1-4, 7-10 RMS Part # Digit 7, 8 is L
_
Not Used
Not Used
L
Normally
_
K
Common
_
L
Normally
_
L
Normally
_
K
Common
_
L
Normally
normally open
L_
common
K_
normally open
L_
normally open
L_
common
K_
normally open
L_
• 2 A at 20 to 264VÅ
(ac) maximum resistive load
• 50 VA 120/240VÅ
(ac) pilot duty
• Optical isolation,
without contact
suppression
• Maximum off state
leakage of 105 microamperes
• Output does not
su pp ly power.
• Do not use on dc
loads.
• N.O., COM, N.O wiring (shared common) between each
set of outputs.
• Minimum holding
current 10mA
- See Quencharc note.
2.25
2.00
1.75
1.50
1.25
0.75
0.50
0.25
1.0
0
-15
-20
10
20
0-5-10
5
Ambient Temperature (oC)
15
25 30 35 40
45 50 55 60
65
1 Quad SSR
70
Note:
Each of the four SSR outputs has internal circuitry that will protect it from over heating. Outputs may be disabled (shut off)
automatically if internal temperatures exceed those listed in the
graph above. After the output temperature drops approximately
10 °C the outputs will once again be enabled for operation.
Watlow EZ-ZONE® RMS Module • 36 • Chapter 2 Install and Wire
Page 41

Warning:
Slot D, E
current +
User Load
ç
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
.
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
to
prevent ground loops.
Warning:
ç
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
ç
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
Tri-Process/Retransmit Outputs 1-3, 7-9 RMS Part # Digit 7, 8 is F
volts or current -
F_
volts +/current +
H_
volts or current -
F_
volts +/current +
H_
volts or current -
F_
volts +/current +
H_
• 0 to 20 mA into
400Ω maximum
load
• 0 to 10VÎ (dc)
into 4 kΩ minimum load
• Outputs are
scalable
• Output supplies
power
• Each output can
be independently set for voltage or current.
0 to 20 mA
0 to 20 mA
0 to 20 mA
0 to 10 V
0 to 10 V
0 to 10 V
Not Used
Not Used
_
F
_
H
_
F
_
H
_
F
_
H
negative
volts +
or
current +
negative
volts +
or
current +
negative
volts +
or
• Output may be
used as retransmit or control.
Quencharc Wiring Example
• In this example the
Quencharc circuit
(Watlow part# 08040147-0000) is used
to protect internal
circuitry from the
counter electromagnetic force from the
inductive user load
when deenergized. It
is recommended that
this or an equivalent
Quencharc be used
when connecting inductive loads to outputs.
L_
K
Quencharc
_
N
Watlow EZ-ZONE® RMS Module • 37 • Chapter 2 Install and Wire
Page 42

Warning:
Slot C
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
prevent ground loops.
ç
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
.
to
Standard Bus EIA-485 Communications
• Wire T-/R- to the
A terminal of the
98 99 CF CD CE CZ CX CY
common
T-/R-
T+/R+
EIA-485 port.
• Wire T+/R+ to the
B terminal of the
EIA-485 port.
• Wire common to
the common terminal of the EIA485 port.
• Do not route network wires with
power wires.
Connect network wires in
daisy-chain fashion
when connecting
multiple devices
in a network.
• A 120 Ω termina-
tion resistor may
be required across
T+/R+ and T-/R-,
placed on the last
controller on the
network.
• Do not connect
more than 16
EZ-ZONE RM controllers on a network.
• Maximum network
length: 1,200 meters (4,000 feet)
• 1/8th unit load on
EIA-485 bus
RMSx-xxxx-x(A)xx
* All models include Standard Bus
communications
Warning:
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
ç
ç
Watlow EZ-ZONE® RMS Module • 38 • Chapter 2 Install and Wire
Page 43

Warning:
Slot C
Use National Electric (NEC) or
other country-specific standard
wiring and safety practices when
wiring and connecting this controller to a power source and to
electrical sensors or peripheral
devices. Failure to do so may
result in damage to equipment
and property, and/or injury or
loss of life.
Note:
Maximum wire size termination
and torque rating:
• 0.0507 to 3.30 mm2 (30 to 12
• 0.57 Nm (5.0 in-lb.) torque
Note:
Adjacent terminals may be labeled differently, depending on
the model number
Note:
To prevent damage to the controller, do not connect wires to
unused terminals.
Note:
Maintain electrical isolation
between digital input-outputs,
switched dc/open collector
outputs and process outputs
prevent ground loops.
Warning:
Explosion Hazard – Substitution
of component may impair suitability for CLASS I, DIVISION 2.
Warning:
Explosion Hazard - Do not disconnect while the circuit is live
or unless the area is known to be
free of ignitable concentrations
of flammable substances.
ç
AWG) single-wire termination
or two 1.31 mm
2
(16 AWG)
.
to
ç
ç
Modbus RTU or Standard Bus EIA-485 Communications
• Wire T-/R- to the
A terminal of the
98 99 CC CA CB CZ CX CY
common
T-/R-
T+/R+
EIA-485 port.
• Wire T+/R+ to the
B terminal of the
EIA-485 port.
• Wire common to
the common terminal of the EIA485 port.
• Do not route network wires with
power wires.
Connect network wires in
daisy-chain fashion
when connecting
multiple devices
in a network.
• A termination
resistor may be
required. Place
a 120 Ω resistor across T+/R+
and T-/R- of last
controller on network.
Modbus-IDA
Terminal
EIA/TIA-485
Name
Watlow Termi-
nal Label
DO A CA or CD T-/R-
D1 B CB or CE T+/R+
common common CC or CF common
Note:
Do not leave a USB to EIA-485 converter connected to Standard
Bus without power (i.e., disconnecting the USB end from the
computer while leaving the converter connected on Standard
Bus). Disturbance on the Standard Bus may occur.
• Only one protocol
per port is available at a time: either Modbus RTU
or Standard Bus.
• Do not connect
more than 16
EZ-ZONE controllers on a Standard
Bus network.
• Maximum number of EZ-ZONE
controllers on a
Modbus network is
24 7.
• Maximum network
length: 1,200 meters (4,000 feet)
• 1/8th unit load on
EIA-485 bus
• RMSx-xxxx-x(1)xx
Function
Watlow EZ-ZONE® RMS Module • 39 • Chapter 2 Install and Wire
Page 44

Scr
1 is
2 is
6 is GND
DB9 connect
1 is
2 is
5 is GND
DB9 connect
1 is DC
2 is RX
3 is
4 is DT
5 is Gn
6 is DS
USB
http://www.bb-elec.com/
Port
PC Software Protocol
Standard Bus
EZ-Configurator
EZ-ZONE® RM
to B&B Converter
Model ULINXTM 485USBTB-2W
USB to RS-485 Adapter
using Standard Bus
98 99
CF CD CE CZ CW CY
Data format
38,400 baud
8 data bits
no parity
1 start bit
1 stop bit
TM
USB
LINX
USB Serial Conversion
U
Model 485TB-2W
B&B electronics
0847-0326-0000
Use twisted pair wires such as Cat 5 cabling.
Do not route with power carrying conductors.
A(-)
B(+)
A(-)
B(+)
GND
R
EZ ZONE
DE
AB
98 99
CF CD CE CZ CW CY
RM
1
D
E
A
B
SM
9
1
10
2
3
11
4
12
5
13
6
14
7 15
16
8
ew terminal connector pin-out:
Data –(A), connects to pin CD or CA
Data +(B), connects to pin CE or CB
, connects to pin CF or CC
or, EIA485 half duplex pin-out:
Data –(A), connects to pin CD or CA
Data +(B), connects to pin CE or CB
, connects to pin CF or CC
or, EIA232 pin-out:
D
D
TXD
R
d
R
EZ-ZONE RM
to Serial Gear Converter
Model USB-COMi-M
Use twisted pair wires such as Cat 5 cabling.
Do not route with power carrying conductors.
Daisy chain wire up to 247 EZ-ZONE
If first device on 485 network, set
jumpers as shown
1 - 2
Tx termination 120 ohm
3 - 4
Tx pull-up 750 ohm
Tx pull-down 750 ohm
5 - 6
7 - 8
Rx termination 120 (422)
Rx pull-up 750 ohm
9 - 10
Rx pull-down 750 ohm
11 - 12
13 - 14
CTS termination 120 (422)
http://serialgear.com/1-Port-Serial-USB-USB-COMi-M.html
Internal
Jumpers
1
13
JP1
R
®
EZ ZONE
RM
1
D E
A
®
devices.
DE
98 99
CF CD CE CZ CW CY
USB
6
5
1
234
PWR
RxD
TxD
2
USB-COMi-M
AB
SerialGear
SW
ON
1234
Mode
14
485
232
1
ON
OFF
Serial
DB9
3
2
OFF
OFF OFF
ON ON ON
98 99
CF CD CE CZ CW CY
4
B
SM
9
1
10
2
3
11
4
12
5
13
6
14
7 15
16
8
C
t
o
l
S
Watlow EZ-ZONE® RMS Module • 40 • Chapter 2 Install and Wire
Page 45

USB
Port
PC Software Protocol
Modbus RTU Third Party
EZ-ZONE® RM
to B&B Converter
Model ULINXTM 485USBTB-2W
USB to RS-485 Adapter
using Modbus RTU
A(-)
B(+)
A(-)
B(+)
GND
98 99
Data format
9,600, 19,200, 38,400 baud
8 data bits
even, odd, no parity
1 start bit
1 stop bit
TM
LINX
USB Serial Conversion
U
Model 485TB-2W
B&B electronics
S
B
U
Use twisted pair wires such as Cat 5 cabling.
Do not route with power carrying conductors.
0847-0326-0000
CF CD CE CZ CWCY
R
EZ ZONE
DE
AB
98 99
CF CD CE CZ CWCY
RM
1
D E
A
B
SM
9
1
10
2
3
11
4
12
5
13
6
14
7 15
16
8
http://www.bb-elec.com/
Note:
Do not leave a USB to EIA-485 converter connected to Standard Bus without power (i.e.,
disconnecting the USB end from the computer while leaving the converter connected on
Standard Bus). Disturbance on the Standard Bus may occur.
Note:
When connecting the USB converter to the PC it is suggested that the Latency Timer be
changed from the default of 16 msec to 1 msec. Failure to make this change may cause
communication loss between the
PC running ZE-ZONE Configurator
software and the control.
To modify Latency Timer settings
follow the steps below:
1. Navigate to Device Manager on
the PC.
2. Double click on Ports.
3. Right click on the USB serial port
in use and select Properties.
4. Click the tab labele Port settings
and then click the Advance but-
ton.
Watlow EZ-ZONE® RMS Module • 41 • Chapter 2 Install and Wire
Page 46

Wiring a Serial EIA-485 Network
Do not route network wires with power wires. Connect network wires in daisy-chain fashion
when connecting multiple devices in a network. Only one protocol per port is available at a
time: either Modbus RTU or Standard Bus.
Note:
A termination resistor is required. Place a 120 Ω resistor across T+/R+ and T-/R- of the
last controller on a network.
A network using Watlow's Standard Bus and an RUI/Gateway.
EZ-ZONE
CF
99
98
EZ-ZONE
Slot C
CD
CE
®
RMS
CX
CZ
®
PM
common
- A
+ B
fuse
Power
Supply
CY
+ B
- A
com m o n
98
99
CF
CD
CE
B5
D6
D5
RUI/Gateway
98
99
common
- A
+ B
Watlow EZ-ZONE® RMS Module • 42 • Chapter 2 Install and Wire
CF
CD
CE
Page 47

A network using Modbus RTU
EZ-ZONE
Slot C
CC
CA
99
98
EZ-ZONE
CB
®
CZ
RMS
CX
CY
®
PM
common
- A
+ B
fuse
Power
Supply
+ B
- A
common
98
99
CC
CA
CB
B5
D6
D5
+ B
- A
PLC
common
common
- A
+ B
Watlow EZ-ZONE® RMS Module • 43 • Chapter 2 Install and Wire
Page 48

Connecting the Modules
Inter-module
RM System Connections
The RMS module can be installed as a stand-alone module or it can be interconnected on the
DIN rail as shown below. When modules are connected together as shown, power and communications are shared between modules over the modular backplane
interconnection (red circle). Therefore, bringing the necessary
power and communications wiring to any one module (connector
in slot C) is sufficient. The modular backplane interconnect comes
standard with every module ordered and is generic in nature,
meaning any of the RM modules can use it.
Notice in the split rail system diagram that a single power supply
is being used across both DIN rails. One notable consideration
when designing the hardware layout would be the available power supplied and the loading
affect of all of the modules used. Watlow provides three options for power supplies listed below:
1. 90-264 Vac to 24Vdc @ 31 watts (Part
#: 0847-0299-0000)
2. 90-264 Vac to 24Vdc @ 60 watts
(Part #: 0847-0300-0000)
3. 90-264 Vac to 24Vdc @ 91 watts
(Part #: 0847-0301-0000)
With regards to the modular loading affect, maximum power for each is listed
below:
1. RMCxxxxxxxxxxxx @ 7 watts / 14VA
2. RMEx-xxxx-xxxx @ 7 watts / 14VA
3. RMAx-xxxx-xxxx @ 4 watts / 9VA
4. RMLx-xxxx-xxxx @ 7 watts / 14VA
5. RMHx-xxxx-xxxx @ 7 watts / 14VA
Low Voltage
Class 2
Power Supply
Slot E
_
_
_
_
_
_
_
_
Slot B
_
_
_
_
_
_
_
_
CX
CZ
RM Scanner
Module
RMSx-xxxx-xAxx
Slot D
_
_
_
Standard Bus
_
Address 2
_
_
_
_
Slot A
_
_
_
_
_
_
_
_
CF
CY
99
98
RM Controller
Module
RMCxxxxxxxxxAxx
Slot D
_
_
_
Standard Bus
_
Address 1
_
_
_
_
Slot A
_
_
_
_
_
_
_
_
Slot C
CD
CE
CF
99
98
Split Rail Configuration
RM Controller
Module
RMCxxxxxxxxxAxx
Slot D
_
_
_
_
_
_
_
_
Slot A
_
_
_
_
_
_
_
_
98
Standard Bus
Address 4
Slot C
CD
CF
99
Slot E
_
_
_
_
_
_
_
_
Slot B
_
_
_
_
_
_
_
_
CX
CE
CY
CZ
Slot C
CD
CE
Standard Bus
RM Expansion
Module
RMEx-xxxx-xxxx
Slot D
_
_
_
_
_
_
_
_
Slot A
_
_
_
_
_
_
_
_
98
Slot E
_
_
_
_
_
_
_
_
Slot B
_
_
_
_
_
_
_
_
CX
CY
CZ
Standard Bus
Address 5
Slot C
CF
99
RM Access
Module
RMAx-xxxx-xxx
Slot D
_
_
_
_
_
_
_
_
Slot A
_
_
_
_
_
_
_
_
99
98
Slot E
Slot B
CD
CX
CE
CZ
Standard Bus
Address 3
Slot C
CD
CE
CF
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
CY
Slot E
_
_
_
_
_
_
_
_
Slot B
_
_
_
_
_
_
_
_
CX
CY
CZ
Bus
6. RMSx-xxxx-xxxx @ 7 watts / 14VA
So, in the split rail system diagram, the
maximum current draw on the supply
would be 38 Watts.
RUI
EZKB-_ A _ _- _ _ _ _
CD
CE
CF
98
99
Standard Bus
- 1 RMC modules consumes 7W
- 1 RME modules consumes 7W
- 1 RMA module consumes 4W
- 1 RMS modules consumes 7W
- 1 RMH modules consumes 7W
- 1 Remote User Interface consumes 6W
With this power requirement the second or third power supply could be used.
Watlow EZ-ZONE® RMS Module • 44 • Chapter 2 Install and Wire
Page 49

Another hardware configuration scenario that could present itself (graphic not shown) would
be a configuration that requires more than one supply. Lets make some assumptions pertaining to the split rail system diagram shown above. The power supply used is the 91W supply.
The top DIN rail now has the following modules:
- 2 RMC modules consumes 14W
- 1 RMA consumes 4W
- 11 RME modules consumes 77W
As it can now be understood, the total power requirement exceeds 91W. In this case, another
power supply would be required. To incorporate another supply in this system simply disconnect pins 99 and 98 on the remote DIN rail and connect another appropriately sized power
supply to those same pins.
When using a split rail configuration ensure that the interconnections for the Inter-module Bus
and Standard Bus do not exceed 200 feet. Standard Bus and the Inter-module Buses are different protocols and both are required for split rail configurations. Without having both connected, communications between modules would not be possible.
Note:
Unit is not provided with a disconnect, use of an external disconnect is required. It should
be located in close proximity to the unit and be labeled as the disconnect for the unit.
Note:
Connecting power supplies in parallel is not allowed. When power consumption is greater
than 91 watts use a split rail configuration.
Watlow EZ-ZONE® RMS Module • 45 • Chapter 2 Install and Wire
Page 50

Conventions Used in the Menu Pages
To better understand the menu pages that follow review the naming conventions used. When
encountered throughout this document, the word "default" implies as shipped from the factory. Each page (Operations, Setup and Factory) and their associated menus have identical
headers defined below:
Header Name Definition
Display Visually displayed information from the control.
Parameter Name Describes the function of the given parameter.
Range
Default Values as delivered from the factory.
Modbus Relative
Address
CIP (Common Industrial Protocol)
Profibus Index
Parameter ID
Data Type and Access (R/W)
Defines options available for this prompt, i.e., min/max values (numerical), yes/no, etc... (further explanation below).
Identifies unique parameters using either the Modbus RTU or Modbus
TCP protocols (further explanation below).
If used in conjunction with an RMA module identifies unique parameters using either the DeviceNet or EtherNet/IP protocol (further explanation below).
If used in conjunction with an RMA module identifies unique parameters using Profibus DP protocol (further explanation below).
Identifies unique parameters used with other software such as, LabVIEW.
uint = Unsigned 16 bit integer
dint = Signed 32-bit, long
string = ASCII (8 bits per character)
float = IEEE 754 32-bit
RWES = Readable
Writable
EEPROM (saved)
User Set (saved)
Display
When the RMS module is used in conjunction with the RUI (optional equipment) visual information from the control is displayed to the observer using a fairly standard 7 segment display.
Due to the use of this technology, several characters displayed need some interpretation, see
the list below:
1 = 1 ϯ = 7
, {= c i= i o= o u= u
щ
2 = 2 8 = 8 ц= d J= J P= P v= v
3 = 3 q = 9 E= E H= K q= q ФІ= W
4 = 4 0 = 0 F= F L= L r= r y= y
5 = 5 џ = g= g ЛЏ= M S= S Z= Z
6 = 6 Ѥ= b h= h n= n t= t
Watlow EZ-ZONE® RMS Module • 46 • Chapter 2 Menu Conventions
Page 51

Range
Within this column notice that on occasion there will be numbers found within parenthesis.
This number represents the enumerated value for that particular selection. Range selections
can be made simply by writing the enumerated value of choice using any of the available
communications protocols. As an example, turn to the Control Module Setup Page and look at
the Analog Input menu and then the Sensor Type. To turn the sensor off using Modbus simply
write the value of 62 (off) to register 388 and send that value to the control.
Communication Protocols
All modules come with the standard offering of Watlow's Standard Bus protocol used primarily
for inter-module communications as well as for configuration using EZ-ZONE Configurator software (free download from Watlow's web site (http://ww w.watlow.com). Along with Standard
Bus, the RMS module can also be ordered with Modbus RTU (only one protocol can be active
at any given time). The RMA module has options for several different protocols listed below:
- Modbus RTU 232/485
- EtherNet/IP, Modbus TCP
- DeviceNet
- Probus DP
To learn more about the RM Access module click on the link below. Once there simply type in
RM in the Keyword field. http://w ww.watlow.co m/literature/manuals.cfm
Modbus RTU Protocol
All Modbus registers are 16-bits and as displayed in this manual are relative addresses (actual).
Some legacy software packages limit available Modbus registers to 40001 to 49999 (5 digits).
Many applications today require access to all available Modbus registers which range from
400001 to 465535 (6 digits). Watlow controls support 6 digit Modbus registers.
Note:
In this User's Guide all values shown representing Modbus addresses are added to 400,001
or 40,001 to acquire the absolute address. As an example, notice above (under the Range
header) the Modbus address identified for Sensor type. Compare this to the value listed
for this same parameter found in the Setup Page under the Analog Input Menu.
For parameters listed as float notice that only one (low order) of the two registers is listed,
this is true throughout this document. By default, the low order word contains the two low
bytes of the 32-bit parameter. As an example, look in the module Operations Page for the
Analog Input Value. Find the column identified in the header as Modbus and notice that it lists
register 380. Because this parameter is a float it is actually represented by registers 380 (low
order bytes) and 381 (high order bytes). The Modbus specification does not dictate which register should be high or low order so Watlow provides the user the ability to swap this order
(Setup Page, Communications Menu) from the default low/high to high/low.
It should also be noted that some of the cells in the Modbus column contain wording pertaining to an offset. Several parameters in the control contain more than one instance; such as,
alarms (24), analog inputs (16), etc... The Modbus register shown always represents instance
one. Take for an example the Alarm Silencing parameter found in the Setup Page under the
Alarm menu. Instance one is shown as address 2510 and +60 is identified as the offset to the
next instance. If there was a desire to read or write to the same member instance 3, simply
add 120 to 2510 to find its address; in this case, the instance 3 address for Alarm Silencing is
2630.
Watlow EZ-ZONE® RMS Module • 47 • Chapter 2 Menu Conventions
Page 52

Note:
There are two columns shown in the menus that follow for communications protocols identified as CIP (Common Industrial Protocol) and Profibus. These columns will be useful if this
control is used in conjunction with the RMA module or the EZ-ZONE Remote User Interface/
Gateway (RUI/GTW) where those protocols can be selected as optional hardware. For this
module (RMS), as a secondary protocol beyond Standard Bus, Modbus RTU can be ordered
as optional hardware.
To learn more about the RUI/GTW point your browser to the link below and search for keyword EZ-ZONE. http://www.watlow.com/literature/pti_search.cfm
Watlow EZ-ZONE® RMS Module • 48 • Chapter 2 Menu Conventions
Page 53

3
Chapter 3: Operations Pages
Scanner Module Operation Page Parameters
To navigate to the Operations Page using the RUI, follow the steps below:
1. From the Home Page, press both the Up ¿ and Down ¯ keys for three seconds. Ai will ap-
pear in the upper display and oPEr will appear in the lower display.
2. Press the Up ¿ or Down ¯ key to view available menus.
3. Press the Advance Key ‰ to enter the menu of choice.
4. If a submenu exists (more than one instance), press the Up ¿ or Down ¯ key to select and
then press the Advance Key ‰ to enter.
5. Press the Up ¿ or Down ¯ key to move through available menu prompts.
6. Press the Infinity Key ˆ to move backwards through the levels: parameter to submenu, submenu to menu, menu to Home Page.
7. Press and hold the Infinity Key ˆ for two seconds to return to the Home Page.
On the following pages, top level menus are identified with a yellow background color.
Note:
Some of these menus and parameters may not appear, depending on the controller's options. See model number information in the Appendix for more information. If there is
only one instance of a menu, no submenus will appear.
Note:
Some of the listed parameters may not be visible. Parameter visibility is dependent upon
controller part number.
Note:
Some values will be rounded off to fit in the four-character RUI display. Full values can be
read with other interfaces. In firmware 9.0 and above, a user may specify ranges greater
than may displayed by an RUI. If greater or less than an RUI can display, the display will
show Value High uAL.H or Value Low uAL.L
Ai
opEr Analog Input Menu
1
Ai Analog Input (1 to 16)
Ain Analog Input Value
i.Er Input Error
i.CA Calibration Offset
Pu
opEr Process Value Menu
1
Pu Process Value (1 to 16)
Su.A Source Value A
Su.b Source Value B
Su.C Source Value C
Su.d Source Value D
Su.E Source Value E
oFSt Offset
o.u Output Value
dio
opEr Digital Input/Output
Menu
1
dio Digital Input/Output
(13 to 24)
do.S Output State
di.S Input State
ACt
opEr Action Menu
1
ACt Action (1 to 16)
Ei.S Event Status
aLЛЏ
opEr Alarm Menu
1
aLЛЏ Alarm (1 to 16)
A.Lo Low Set Point
a.hi High Set Point
Watlow EZ-ZONE® RMS Module • 49 • Chapter 3 Operations Page
Page 54

a.CLr Clear Alarm *
a.Sir Silence Alarm *
a.st Alarm State *
Lnr
opEr Linearization Menu
1
Lnr Linearization (1 to 24)
Su.a Source Value A
ofst Offset
o.u Output Value
CpE
opEr Compare Menu
1
CpE Compare (1 to 24)
Su.a Source Value A
Su.b Source Value B
o.u Output Value
tЛЏr
opEr Timer Menu
1
tЛЏr Timer (1 to 24)
Su.a Source Value A
Su.b Source Value B
E.t Elapsed Time
o.u Output Value
Su.F Source Value F
Su.g Source Value G
Su.h Source Value H
o.u Output Value
ЛЏat
opEr Math Menu
1
pasr Math (1 to 24)
Su.a Source Value A
Su.b Source Value B
Su.C Source Value C
Su.d Source Value D
Su.E Source Value E
ofst Offset
o.u Output Value
Ctr
opEr Counter Menu
1
Ctr Counter (1 to 24)
Cnt Count
Su.a Source Value A
Su.b Source Value B
o.u Output Value
LgC
opEr Logic Menu
1
LgC Logic (1 to 24)
Su.a Source Value A
Su.b Source Value B
Su.C Source Value C
Su.d Source Value D
Su.E Source Value E
Watlow EZ-ZONE® RMS Module • 50 • Chapter 3 Operations Page
Page 55

RM Scanner Module • Operations Page
Display
Parameter Name
Description
Range Default
Ai
opEr
Analog Input Menu
Ain
Ain
No Display
i.Er
i.Er
Analog Input (1 to 16)
Analog Input Value
View the process
value.
Note:
Ensure that the Error
Status (below) indicates no error (61)
when reading this
value using a field bus
protocol. If an error
exists, the last known
value prior to the error occurring will be
returned.
Analog Input (1 to 16)
Filtered Process Value
View the process
value when filtering is
turned on.
Analog Input (1 to 16)
Input Error
View the cause of the
most recent error. If
the attn message
is Er.i1 to Er.iя or
Er.10 to Er.i6, this
parameter will display
the cause of the input
error.
i.Ca
i.CA
** R: Read, W: Write, E: EEPROM, S: User Set
Analog Input (1 to 16)
Calibration Offset
Offset the input reading to compensate for
lead wire resistance
or other factors that
cause the input reading to vary from the
actual process value.
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
nonE None (61)
OpEn Open (65)
shrt Shorted
(127)
E.ЛЏ Measurement
Error (140)
E.CaL Bad Calibra-
tion Data (139)
Er.ab Ambient Er-
ror (9)
E.rtd RTD Error
(141)
faiL Fail (32)
-1,999.000 to
9,999.000°F or
units
-1,110.555 to
5,555.000°C
Modbus
Relative
Address
- - - - 380
[offset
90]
- - - - 422
[offset
90]
- - - - 382
[offset
90]
0.0 402
[offset
90]
CIP
Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
1
0x68
(104)
1 to 16
0x16 (22)
0x68
(104)
1 to 0x10
2
0x68
(104)
1 to 16
0xC (12)
Data
Pro-
fibus
Index
0 4001 float
- - - - 4022 float
1 4002 uint
2 4012 float
Param-
eter
ID
Type
and
Access
**
R
R
R
RWES
Watlow EZ-ZONE® RMS Module • 51 • Chapter 3 Operations Page
Page 56

RM Scanner Module • Operations Page
Display
No Dis-
play
Parameter Name
Description
Analog Input (1 to 16)
Clear Error
Clear latched input
when input error condition no longer exists.
Range Default
Clear Error (1221) - - - - 436
Pu
opEr
Process Value Menu
Su.a
Su.A
Su.b
Su.b
Su.C
Su.C
Su.d
Su.d
Su.E
Su.E
ofst
oFSt
o.u
o.u
** R: Read, W: Write, E: EEPROM, S: User Set
Process Value (1 to 16)
Source Value A
View the value of
Source A.
Process Value (1 to 16)
Source Value B
View the value of
Source B.
Process Value (1 to 16)
Source Value C
View the value of
Source C.
Process Value (1 to 16)
Source Value D
View the value of
Source D.
Process Value (1 to 16)
Source Value E
View the value of
Source E.
Process Value (1 to 16)
Offset
Set an offset to be applied to this function's
output.
Process Value (1 to 16)
Output Value
View the value of this
function block's output.
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
off Off (62)
on On (63)
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
Modbus
Relative
Address
[offset
90]
- - - - 5210
[offset
70]
- - - - 5212
[offset
70]
- - - - 5214
[offset
70]
- - - - 5216
[offset
70]
- - - - 5218
[offset
70]
0 5224
[offset
70]
5222
[offset
- - - -
70]
CIP
Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
0x1D (29)
0x7E
(126)
1 to 16
0x10 (16)
0x7E
(126)
1 to 16
0x11 (17)
0x7E
(126)
1 to 16
0x12 (18)
0x7E
(126)
1 to 16
0x13 (19)
0x7E
(126)
1 to 16
0x14 (20)
0x7E
(126)
1 to 16
0x17 (23)
0x7E
(126)
1 to 16
0x16 (22)
Data
Pro-
fibus
Index
- - - - 4029 uint
- - - - 26016 float
- - - - 26017 float
- - - - 26018 float
- - - - 26019 float
- - - - 26020 float
- - - - 26023 float
- - - - 26022 float
Param-
eter
ID
Type
and
Access
RW
R
R
R
R
R
RWES
R
**
Watlow EZ-ZONE® RMS Module • 52 • Chapter 3 Operations Page
Page 57

RM Scanner Module • Operations Page
Display
No Dis-
play
Parameter Name
Description
Process Value (1 to
16)
Error
View reported cause
for Process output
malfunction.
dio
opEr
Digital Input/Output Menu
do.s
do.S
di.s
di.S
No Dis-
play
Digital Output (1 to
12)
Output State
View the state of this
output.
Digital Input (1 to 12)
Input State
View this event input
state.
Digital Input (1 to 12)
Source Error
View reported cause
for input malfunction.
Range Default
None (61)
Open (65)
Shorted (127)
Measurement error
(140)
Bad calibration
data (139)
Ambient error (9)
RTD error (14)
Fail (32)
Math error (1423)
Not sourced (246)
Stale (1617)
off Off (62)
on On (63)
off Off (62)
on On (63)
None (61)
Open (65)
Shorted (127)
Measurement error
(140)
Bad calibration
data (139)
Ambient error (9)
RTD error (14)
Fail (32)
Math error (1423)
Not sourced (246)
Stale (1617)
Modbus
Relative
Address
- - - - 5232
[offset
70]
- - - - 1832
[offset
30]
- - - - 1840
[offset
30]
- - - - 1848
[offset
30]
CIP
Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
0x1B
(27)
0x6A
(106)
1 to 12
7
0x6A
(106)
1 to 12
0x0B (11)
0x6A
(106)
1 to 12
0x0F (15)
Data
Pro-
fibus
Index
- - - - 26027 uint
46 6007 uint
- - - - 6011 uint
- - - - 6015 uint
Param-
eter
ID
Type
Access
R
R
R
R
and
**
aCt
opEr
Action Menu
Ei.s
Ei.S
** R: Read, W: Write, E: EEPROM, S: User Set
Action (1 to 16)
Event Status
View this input state.
off Off (62)
on On (63)
Watlow EZ-ZONE® RMS Module • 53 • Chapter 3 Operations Page
- - - -
2188
[offset
20]
0x6E
(110)
1 to 16
5
81 10005 uint
R
Page 58

RM Scanner Module • Operations Page
Display
No Display
No Display
Parameter Name
Description
Function Key (1)
Function Key State
View current state of
function key 1.
Function Key (2)
Function Key State
View current state of
function key 2.
Range Default
Off (62)
On (63)
Off (62)
On (63)
aLЛЏ
opEr
Alarm Menu
a.Lo
A.Lo
a.hi
A.hi
A.CLr
A.CLr
A.sir
A.Sir
A.st
A.St
No Dis-
play
** R: Read, W: Write, E: EEPROM, S: User Set
Alarm (1 to 16)
Low Set Point
If Type (Setup Page,
Alarm Menu) is set to:
Process - set the process value that will
trigger a low alarm.
Alarm (1 to 16)
High Set Point
If Type (Setup Page,
Alarm Menu) is set to:
Process - set the process value that will
trigger a high alarm.
Alarm (1 to 16)
Clear Alarm
Write to this register
to clear an alarm
Alarm (1 to 16)
Silence Alarm
Write to this register
to silence an alarm
Alarm (1 to 16)
Alarm State
Current state of alarm
Alarm (1 to 16)
Alarm Clearable
Read to see if alarm
can be cleared.
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
0 - - - - - - - - - - - - - - - - 9026
0 - - - - - - - - - - - - - - - - 9027
str Startup (88)
nonE None (61)
bLo Blocked (12)
aL.L Alarm Low
(8)
aL.h Alarm High
(7)
aL.E Error (28)
No (59)
Yes (106)
CIP
Modbus
Relative
Address
- - - - - - - - - - - - - - - - 3024 uint
- - - - - - - - - - - - - - - - 3030 uint
32.0°F
or units
0.0°C
300.0
°F or
units
150.0
°C
- - - - 2516
- - - - 2522
2502
[offset
60]
2500
[offset
60]
[offset
60]
[offset
60]
Class
Instance
Attribute
hex (dec)
0x6D
(109)
1 to 16
2
0x6D
(109)
1 to 16
1
0x6D
(109)
1 to 16
9
0x6D
(109)
1 to 16
0xC (12)
Pro-
fibus
Index
18 9002 float
19 9001 float
- - - - 9010 uint
- - - - 9012 uint
Param-
eter
ID
R
R
uint
W
uint
W
Data
Type
and
Access
**
RWES
RWES
R
R
Watlow EZ-ZONE® RMS Module • 54 • Chapter 3 Operations Page
Page 59

RM Scanner Module • Operations Page
Display
No Dis-
play
No Dis-
play
No Dis-
play
No Dis-
play
No Dis-
play
No Dis-
play
No Dis-
play
Parameter Name
Description
Alarm (1 to 16)
Silenced
Read to see if alarm
is active but has been
silenced by Silence
Alarm.
Alarm (1 to 16)
Latched
Read to see if alarm
is currently latched.
Alarm (1 to 16)
Clear Request
Write to this register
to clear an alarm
Alarm (1 to 16)
Silence Request
Write to this register
to silence an alarm
Alarm (1 to 16)
Alarm Working Process Value
Read process value
used by alarms
Alarm (1 to 16)
Alarm Working Set
Point
Read set point used
by alarms
Alarm (1 to 16)
Output Value
Read state of alarm
output
Range Default
Yes (106)
No (59)
Yes (106)
No (59)
Clear (0)
No Change (255)
Clear (0)
No Change (255)
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
On (63)
Off (62)
Modbus
Relative
Address
- - - - 2520
[offset
60]
- - - - 2518
[offset
60]
None 2524
[offset
60]
None 2526
[offset
60]
None 2536
[offset
60]
None 2538
[offset
60]
None 2546
[offset
60]
CIP
Class
Instance
Attribute
hex (dec)
0x6D
(109)
1 to 16
0x0B
(11)
0x6D
(109)
1 to 16
0x0A
(10)
0x6D
(109)
1 to 16
0xD (13)
0x6D
(109)
1 to 16
0x0E (14)
0x6D
(109)
1 to 16
0x13 (19)
0x6D
(109)
1 to 16
0x14 (20)
0x6D
(109)
1 to 16
0x18 (24)
Data
Pro-
fibus
Index
- - - - 9011 uint
- - - - 9010 uint
32 9013
33 9014
- - - - 9019
- - - - 9020
- - - - 9024
Param-
eter
ID
Type
and
Access
R
R
uint
RW
uint
RW
float
R
float
R
uint
R
**
Lnr
opEr
Linearization Menu
Su.a
Su.A
ofst
oFSt
** R: Read, W: Write, E: EEPROM, S: User Set
Linearization (1 to
24)
Source Value A
View the value of
Source A.
Linearization (1 to
24)
Offset
Set an offset to be
applied to this function's output.
Watlow EZ-ZONE® RMS Module • 55 • Chapter 3 Operations Page
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
- - - - 11346
[offset
70]
0 11350
[offset
70]
0x86
(134)
1 to 24
4
0x86
(134)
1 to 24
6
- - - - 34004 float
R
- - - - 34006 float
RWES
Page 60

RM Scanner Module • Operations Page
Display
o.u
o.v
No Dis-
play
Parameter Name
Description
Linearization (1 to
24)
Output Value
View the value of this
function's output.
Linearization (1 to
24)
Error
View reported cause
for Linearization output malfunction.
Range Default
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
None (61)
Open (65)
Shorted (127)
Measurement error
(140)
Bad calibration
data (139)
Ambient error (9)
RTD error (14)
Fail (32)
Math error (1423)
Not sourced (246)
Stale (1617)
Can't process
(1659)
Modbus
Relative
Address
- - - - 11352
[offset
70]
- - - - 11394
[offset
70]
CIP
Class
Instance
Attribute
hex (dec)
0x86
(134)
1 to 24
7
0x86
(134)
1 to 24
0x1C
(28)
Data
Pro-
fibus
Index
- - - - 34007 float
- - - - 34028 uint
Param-
eter
ID
Type
and
Access
**
R
R
CpE
opEr
Compare Menu
Su.a
Su.A
Su.b
Su.b
o.u
o.v
** R: Read, W: Write, E: EEPROM, S: User Set
Compare (1 to 24)
Source Value A
View the value of
Source A.
Compare (1 to 24)
Source Value B
View the value of
Source B.
Compare (1 to 24)
Output Value
View the value of this
function's output.
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
off Off (62)
on On (63)
- - - - 8232
[offset
40]
- - - - 8234
[offset
40]
- - - - 8238
[offset
40]
0x80
(128)
1 to 24
7
0x80
(128)
1 to 24
8
0x80
(128)
1 to 24
0xA (10)
- - - - 28007 float
R
- - - - 28008 float
R
- - - - 28010 uint
R
Watlow EZ-ZONE® RMS Module • 56 • Chapter 3 Operations Page
Page 61

RM Scanner Module • Operations Page
Display
No Dis-
play
Parameter Name
Description
Compare (1 to 24)
Error
Read reported cause
for compare error
Range Default
None (61)
Open (65)
Shorted (127)
Measurement Error
(140)
Bad Cal Data (139)
Ambient Error (9)
RTD Error (141)
Fail (32)
Math Error (1423)
Not Sourced (246)
Stale (1617)
tЛЏr
opEr
Timer Menu
Su.a
Su.A
Su.b
Su.b
E.t
E.t
o.u
o.v
No Display
No Dis-
play
** R: Read, W: Write, E: EEPROM, S: User Set
Timer (1 to 24)
Source Value A
View the value of
Source A.
Timer (1 to 24)
Source Value B
View the value of
Source B.
Timer (1 to 24)
Elapsed Time
View the value of this
function's elapsed
time.
Timer (1 to 24)
Output Value
View the value of this
function's output.
Timer (1 to 24)
Running
Read to determine if
timer is running
Timer (1 to 24)
Error
Read reported cause
for timer error
off Off (62)
on On (63)
off Off (62)
on On (63)
0 to 9,999.000
seconds
off Off (62)
on On (63)
Off (62)
On (63)
None (61)
Open (65)
Shorted (127)
Measurement Error
(140)
Bad Cal Data (139)
Ambient Error (9)
RTD Error (141)
Fail (32)
Math Error (1423)
Not Sourced (246)
Stale (1617)
Modbus
Relative
Address
- - - - 8244
[offset
40]
- - - - 10152
[offset
50]
- - - - 10154
[offset
50]
- - - - 10170
[offset
50]
- - - - 10158
[offset
50]
- - - - 10168
[offset
50]
- - - - 10174
[offset
50]
CIP
Class
Instance
Attribute
hex (dec)
0x80
(128)
1 to 24
0x0D
(13)
0x83
(131)
1 to 24
7
0x83
(131)
1 to 24
8
0x83
(131)
1 to 24
0x10 (16)
0x83
(131)
1 to 24
0x11 (17)
0x83
(131)
1 to 24
0x0F (15)
0x83
(131)
1 to 24
0x12 (18)
Data
Pro-
fibus
Index
- - - - 28013 uint
- - - - 31007 uint
- - - - 31008 uint
- - - - 31016 float
- - - - 31010 uint
- - - - 31015 uint
- - - - 31018 uint
Param-
eter
ID
Type
and
Access
**
R
R
R
R
R
R
R
Watlow EZ-ZONE® RMS Module • 57 • Chapter 3 Operations Page
Page 62

RM Scanner Module • Operations Page
Display
Parameter Name
Ctr
opEr
Counter Menu
Cnt
Cnt
Su.a
Su.A
Su.b
Su.b
o.u
o.v
No Dis-
play
Counter (1 to 24)
Count
View the function's
total count.
Counter (1 to 24)
Source Value A
View the value of
Source A.
Counter (1 to 24)
Source Value B
View the value of
Source B.
Counter (1 to 24)
Output Value
View the value of this
function's output.
Counter (1 to 24)
Error
Read reported cause
for counter error
Description
Modbus
Range Default
0 to 9,999 - - - - 9208
off Off (62)
- - - - 9192
on On (63)
off Off (62)
- - - - 9194
on On (63)
off Off (62)
- - - - 9198
on On (63)
None (61)
Open (65)
Shorted (127)
Measurement Error
(140)
Bad Cal Data (139)
Ambient Error (9)
RTD Error (141)
Fail (32)
Math Error (1423)
Not Sourced (246)
Stale (1617)
- - - - 9210
Relative
Address
[offset
40]
[offset
40]
[offset
40]
[offset
40]
[offset
40]
CIP
Class
Instance
Attribute
hex (dec)
0x82
(130)
1 to 24
0xF (15)
0x82
(130)
1 to 24
7
0x82
(130)
1 to 24
8
0x82
(130)
1 to 24
0xA (10)
0x82
(130)
1 to 24
0x10 (16)
Data
Pro-
fibus
Index
217 30015 uint
- - - - 30007 uint
- - - - 30008 uint
- - - - 30010 uint
- - - - 30016 uint
Param-
eter
ID
Type
and
Access
R
R
R
R
R
**
LgC
opEr
Logic Menu
Su.a
Su.A
Su.b
Su.b
** R: Read, W: Write, E: EEPROM, S: User Set
Logic (1 to 24)
Source Value A
View the value of
Source A.
Logic (1 to 24)
Source Value B
View the value of
Source B.
off Off (62)
on On (63)
off Off (62)
on On (63)
Watlow EZ-ZONE® RMS Module • 58 • Chapter 3 Operations Page
- - - - 6348
[offset
80]
- - - - 6350
[offset
80]
0x7F
(127)
1 to 24
0x19 (25)
0x7F
(127)
1 to 24
0x1A
(26)
- - - - 27025 uint
R
- - - - 27026 uint
R
Page 63

RM Scanner Module • Operations Page
Display
Su.C
Su.C
Su.d
Su.d
Su.E
Su.E
Su.f
Su.F
Su.g
Su.g
Su.h
Su.h
o.u
o.v
No Dis-
play
** R: Read, W: Write, E: EEPROM, S: User Set
Parameter Name
Description
Logic (1 to 24)
Source Value C
View the value of
Source C.
Logic (1 to 24)
Source Value D
View the value of
Source D.
Logic (1 to 24)
Source Value E
View the value of
Source E.
Logic (1 to 24)
Source Value F
View the value of
Source F.
Logic (1 to 24)
Source Value G
View the value of
Source G.
Logic (1 to 24)
Source Value H
View the value of
Source H.
Logic (1 to 24)
Output Value
View the value of this
function's output.
Logic (1 to 24)
Error
Read reported cause
for logic error
Range Default
off Off (62)
on On (63)
off Off (62)
on On (63)
off Off (62)
on On (63)
off Off (62)
on On (63)
off Off (62)
on On (63)
off Off (62)
on On (63)
off Off (62)
on On (63)
None (61)
Open (65)
Shorted (127)
Measurement Error
(140)
Bad Cal Data (139)
Ambient Error (9)
RTD Error (141)
Fail (32)
Math Error (1423)
Not Sourced (246)
Stale (1617)
Modbus
Relative
Address
- - - - 6352
[offset
80]
- - - - 6354
[offset
80]
- - - - 6356
[offset
80]
- - - - 6358
[offset
80]
- - - - 6360
[offset
80]
- - - - 6362
[offset
80]
- - - - 6366
[offset
80]
- - - - 6370
[offset
80]
CIP
Class
Instance
Attribute
hex (dec)
0x7F
(127)
1 to 24
0x1B
(27)
0x7F
(127)
1 to 24
0x1C
(28)
0x7F
(127)
1 to 24
0x1D
(29)
0x7F
(127)
1 to 24
0x1E (30)
0x7F
(127)
1 to 24
0x1F (31)
0x7F
(127)
1 to 24
0x20 (32)
7F (127)
1 to 24
0x22 (34)
0x7F
(127)
1 to 24
0x24 (36)
Data
Pro-
fibus
Index
- - - - 27027 uint
- - - - 27028 uint
- - - - 27029 uint
- - - - 27030 uint
- - - - 27031 uint
- - - - 27032 uint
- - - - 27034 uint
- - - - 27036 uint
Param-
eter
ID
Type
and
Access
R
R
R
R
R
R
R
R
**
Watlow EZ-ZONE® RMS Module • 59 • Chapter 3 Operations Page
Page 64

RM Scanner Module • Operations Page
Display
Parameter Name
Description
Range Default
ЛЏat
opEr
Math Menu
Su.a
Su.A
Su.b
Su.b
Su.C
Su.C
Su.d
Su.d
Su.E
Su.E
ofst
oFSt
o.u
o.v
** R: Read, W: Write, E: EEPROM, S: User Set
Math (1 to 24)
Source Value A
View the value of
Source A.
Math (1 to 24)
Source Value B
View the value of
Source B.
Math (1 to 24)
Source Value C
View the value of
Source C.
Math (1 to 24)
Source Value D
View the value of
Source D.
Math (1 to 24)
Source Value E
View the value of
Source E.
Math (1 to 24)
Offset
Set an offset to be
applied to this function's output.
Math (1 to 24)
Output Value
View the value of this
function's output.
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
off Off (62)
on On (63)
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
-1,999.000 to
9,999.000°F or
units
-1,128.000 to
5,537.000°C
Modbus
Relative
Address
- - - - 3530
[offset
70]
- - - - 3532
[offset
70]
- - - - 3534
[offset
70]
- - - - 3536
[offset
70]
- - - - 3538
[offset
70]
0 3544
[offset
70]
- - - - 3542
[offset
70]
CIP
Class
Instance
Attribute
hex (dec)
0x7D
(125)
1 to 24
0x10 (16)
0x7D
(125)
1 to 24
0x11 (17)
0x7D
(125)
1 to 24
0x12 (18)
0x7D
(125)
1 to 24
0x13 (19)
0x7D
(125)
1 to 24
0x14 (20)
0x7D
(125)
1 to 24
0x17 (23)
0x7D
(125)
1 to 24
0x16 (22)
Data
Pro-
fibus
Index
- - - - 25016 float
- - - - 25017 float
- - - - 25018 float
- - - - 25019 float
- - - - 25020 uint
- - - - 25023 float
- - - - 25022 float
Param-
eter
ID
Type
and
Access
**
R
R
R
R
R
RWES
R
Watlow EZ-ZONE® RMS Module • 60 • Chapter 3 Operations Page
Page 65

RM Scanner Module • Operations Page
Display
No Dis-
play
** R: Read, W: Write, E: EEPROM, S: User Set
Parameter Name
Description
Math (1 to 24)
Error
Read reported cause
for logic error
Range Default
None (61)
Open (65)
Shorted (127)
Measurement Error
(140)
Bad Cal Data (139)
Ambient Error (9)
RTD Error (141)
Fail (32)
Math Error (1423)
Not Sourced (246)
Stale (1617)
Modbus
Relative
Address
- - - - 3556
[offset
70]
CIP
Class
Instance
Attribute
hex (dec)
0x7D
(125)
1 to 24
0x1D
(29)
Data
Pro-
fibus
Index
- - - - 25029 uint
Param-
eter
ID
Type
and
Access
R
**
Watlow EZ-ZONE® RMS Module • 61 • Chapter 3 Operations Page
Page 66

4
Chapter 4: Setup Pages
RMS Module Setup Page Parameters
To navigate to the Setup Page using the RUI, follow the steps below:
1. From the Home Page, press and hold both the Up ¿ and Down ¯ keys for six seconds. Ai
will appear in the upper display and SEt will appear in the lower display.
Note:
If keys are released when opEr is displayed, press the Infinity Key ˆ or reset key to exit
and repeat until SEt is displayed.
2. Press the Up ¿ or Down ¯ key to view available menus.
3. Press the Advance Key ‰ to enter the menu of choice.
4. If a submenu exists (more than one instance), press the Up ¿ or Down ¯ key to select and
then press the Advance Key ‰ to enter.
5. Press the Up ¿ or Down ¯ key to move through available menu prompts.
6. Press the Infinity Key ˆ to move backwards through the levels: parameter to submenu,
submenu to menu, menu to Home Page.
7. Press and hold the Infinity Key ˆ for two seconds to return to the Home Page.
On the following pages, top level menus are identified with a yellow background color.
Note:
Some of these menus and parameters may not appear, depending on the controller's options. See model number information in the Appendix for more information. If there is
only one instance of a menu, no submenus will appear.
Note:
Some of the listed parameters may not be visible. Parameter visibility is dependent upon
controller part number.
Note:
Some values will be rounded off to fit in the four-character RUI display. Full values can be
read with other interfaces. In firmware 9.0 and above, a user may specify ranges greater
than may displayed by an RUI. If greater or less than an RUI can display, the display will
show Value High uAL.H or Value Low uAL.L.
Ai
sEt Analog Input Menu
1
Ai Analog Input (1 to 16)
sEn Sensor Type
Lin TC Linearization
Unit Units
s.Lo Scale Low
s.hi Scale High
r.Lo Range Low
r.hi Range High
P.EE Process Error En-
able
P.EL Process Error Low
Value
t.C Thermistor Curve
r.r Resistance Range
Co.a Custom Coefficient
A
Co.b Custom Coefficient
B
Co.C Custom Coefficient
C
fiL Filter
i.Er Input Error Latch-
ing
dEC Display Precision
i.Ca Calibration Offset
ain Analog Input Value
*
i.Er Input Error *
Watlow EZ-ZONE® RMS Module • 62 • Chapter 4 Setup Page
Page 67

Pu
sEt Process Value
1
Pu Process Value (1 to 16)
fn Function
Sfn.a Source Function A
Si.a Source Instance A
Sfn.b Source Function B
Si.b Source Instance B
sz.b Source Zone B
Sfn.C Source Function C
Si.C Source Instance C
sz.C Source Zone C
Sfn.d Source Function D
Si.d Source Instance D
sz.d Source Zone D
Sfn.E Source Function E
Si.E Source Instance E
sz.E Source Zone E
C.p Cross Over Point
C.b Cross Over Band
p.unt Pressure Units
a.unt Altitude Units
b.pr Barometric Pres-
sure
fiL Filter
dio
sEt Digital Input/Output
Menu
1
dio Digital Input/Output
(13 to 24)
dir Direction
fn Function
fi Output Function In-
stance
sz.a Output Source Zone
o.Ct Time Base Type
o.tb Fixed Time Base
o.Lo Low Power Scale
o.hi High Power Scale
aCt
sEt Action Menu
1
aCt Action (1 to 16)
fn Action Function
fi Function Instance
sfn.a Source Function A
si.a Source Instance A
sz.a Source Zone A
LEv Active Level
otpt
sEt Output Menu
1
otpt Output (1 to 4, 7 to
10)
fn Function
fi Output Function In-
stance
sz Output Source Zone
o.Ct Time Base Type
o.tѤ Fixed Time Base
o.Lo Low Power Scale
o.hi High Power Scale
otpt Output (1 to 3, 7 to
9) process
o.ty Output Type
fn Function
fi Output Function In-
stance
sz.a Source Zone A
s.Lo Scale Low
s.hi Scale High
r.Lo Range Low
r.hi Range High
o.Ca Calibration Offset
aLЛЏ
sEt Alarm Menu
1
aLЛЏ Alarm (1 to 16)
a.ty Type
sr.a Alarm Source
is.a Alarm Source In-
stance
sz.a Alarm Source Zone
a.hy Hysteresis
a.Lg Logic
a.sd Sides
a.Lo Low Set Point *
a.hi High Set Point *
a.La Latching
a.bL Blocking
a.si Silencing
a.dsp Display
a.dL Delay Time
a.CLr Clear Alarm *
a.sir Silence Alarm *
a.st Alarm State *
Lnr
sEt Linearization Menu
1
Lnr Linearization (1 to 24)
fn Function
sfn.a Source Function A
Si.a Source Instance A
sz.a Source Zone A
Unit Units
ip.1 Input Point 1
op.1 Output Point 1
ip.2 Input Point 2
op.2 Output Point 2
ip.3 Input Point 3
op.3 Output Point 3
ip.4 Input Point 4
op.4 Output Point 4
ip.5 Input Point 5
op.5 Output Point 5
ip.6 Input Point 6
op.6 Output Point 6
ip.7 Input Point 7
op.7 Output Point 7
ip.8 Input Point 8
op.8 Output Point 8
ip.q Input Point 9
op.q Output Point 9
ip.10 Input Point 10
op.10 Output Point 10
CpE
sEt Compare Menu
1
CpE Compare (1 to 24)
1 Function
toL Tolerance
Sfn.a Source Function A
Si.a Source Instance A
Sz.a Source Zone A
Sfn.b Source Function B
Si.b Source Instance B
Sz.b Source Zone B
Er.h Error Handling
Watlow EZ-ZONE® RMS Module • 63 • Chapter 4 Setup Page
Page 68

tЛЏr
sEt Timer Menu
1
tЛЏr Timer (1 to 24)
fn Function
Sfn.a Source Function A
Si.a Source Instance A
Sz.a Source Zone A
sas.a Run Active Level
Sfn.b Source Function B
Si.b Source Instance B
Sz.b Source Zone B
sas.b Reset Active Level
ti Time
LEv Transmitter Active
Level
Ctr
sEt Counter Menu
1
Ctr Counter (1 to 24)
fn Function
Sfn.a Source Function A
Si.a Source Instance A
Sz.a Source Zone A
sas.a Count Active Level
Sfn.b Source Function B
Si.b Source Instance B
Sz.b Source Zone B
sas.b Reset Active Level
Load Load Value
trgt Target Value
Lat Latching
LgC
sEt Logic Menu
1
LgC Logic (1 to 24)
fn Function
Sfn.a Source Function A
Si.a Source Instance A
Sz.a Source Zone A
Sfn.b Source Function B
Si.b Source Instance B
Sz.b Source Zone B
Sfn.C Source Function C
Si.C Source Instance C
Sz.C Source Zone C
Sfn.d Source Function D
Si.d Source Instance D
Sz.d Source Zone D
Sfn.E Source Function E
Si.E Source Instance E
Sz.E Source Zone E
Sfn.f Source Function F
Si.f Source Instance F
Sz.f Source Zone F
Sfn.g Source Function G
Si.g Source Instance G
Sz.g Source Zone G
Sfn.h Source Function H
Si.h Source Instance H
Sz.h Source Zone H
Er.h Error Handling
ЛЏat
sEt Math Menu
1
ЛЏat Math (1 to 24)
fn Function
Sfn.a Source Function A
Si.a Source Instance A
Sz.a Source Zone A
Sfn.b Source Function B
Si.b Source Instance B
Sz.b Source Zone B
Sfn.C Source Function C
Si.C Source Instance C
Sz.C Source Zone C
Sfn.d Source Function D
Si.d Source Instance D
Sz.d Source Zone D
Sfn.E Source Function E
Si.E Source Instance E
Sz.E Source Zone E
s.Lo Scale Low
S.hi Scale High
Unit Units
r.Lo Range Low
r.hi Range High
p.unt Pressure Units
a.unt Altitude Units
fiL Filter
var
sEt Variable Menu
1
var Variable (1 to 24)
typE Data Type
Unit Units
dig Digital
anLg Analog
gLbL
sEt Global Menu
gLbL Global
C_f Display Units
aC.Lf AC Line Frequency
ЛЏaK Maximum
ЛЏin Minimum
d.prs Display Pairs
Usr.s Save Settings As
Usr.r Restore Settings
From
COЛЏ
sEt Communications Menu
COЛЏ Communications
baUd Baud Rate
par Parity
ЛЏ.hL Modbus Word Order
C_f Display Units
nu.s Non-volatile Save
Watlow EZ-ZONE® RMS Module • 64 • Chapter 4 Setup Page
Page 69

RM Scanner Module • Setup Page
Dis-
play
Parameter Name
Description
Ai
sEt
Analog Input Menu
sEn
SEn
Lin
Lin
Analog Input (1 to
16)
Sensor Type
Set the analog sensor
type to match the
device wired to this
input.
Note:
There is no open
sensor protection
for process inputs.
Analog Input (1 to
16)
TC Linearization
Set the linearization
to match the thermocouple wired to this
input.
Range Default
off Off (62)
tC Thermocouple (95)
ЛЏu Millivolts (56)
voLt Volts dc (104)
ЛЏa
Milliamps dc (112)
r0.1H RTD 100 Ω (113)
r1.0H RTD 1,000 Ω (114)
pot Potentiometer 1 kΩ
(155)
thEr Thermistor (229)
b B (11) H K (48)
C C (15) n N (58)
d D (23) r R (80)
E E (26) s S (84)
f F (30) t T (93)
J J (46)
Modbus
Relative
Address
Thermocouple
or
Thermistor
J 390
388
[offset
90]
[offset
90]
CIP Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
5
0x68
(104)
1 to 16
6
Data
Pro-
fibus
Index
3 4005 uint
4 4006 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
**
Unit
Unit
Analog Input (1 to
16)
Units
Set the type of units
the sensor will measure.
a.tp Absolute Temperature
(1540)
rh Relative Humidity
(1538)
pro Process (75)
Process 462
[offset
90]
0x68
(104)
1 to 16
0x2A (42)
5 4042 uint
PФІr Power (73)
s.Lo
S.Lo
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Analog Input (1 to
16)
Scale Low
Set the low scale for
process inputs. This
value, in millivolts,
volts or milliamps,
will correspond to
the Range Low output of this function
block.
-100.0 to 1,000.0 0.0 408
[offset
90]
0x68
(104)
1 to 16
0xF (15)
6 4015 float
RWES
RWES
Watlow EZ-ZONE® RMS Module • 65 • Chapter 4 Setup Page
Page 70

RM Scanner Module • Setup Page
Dis-
play
s.hi
S.hi
r.Lo
r.Lo
r.hi
r.hi
Parameter Name
Description
Analog Input (1 to
16)
Scale High
Set the high scale
for process inputs.
This value, in millivolts, volts or milliamperes, will correspond to the Range
High output of this
function block.
Analog Input (1 to
16)
Range Low
Set the low range for
this function block's
output.
Analog Input (1 to
16)
Range High
Set the high range
for this function
block's output.
Modbus
Range Default
-100.0 to 1,000.0 20.0 410
-1,999.000 to 9,999.000 0.0 412
-1,999.000 to 9,999.000 9,999 414
Relative
Address
[offset
90]
[offset
90]
[offset
90]
CIP Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
0x10 (16)
0x68
(104)
1 to 16
0x11 (17)
0x68
(104)
1 to 16
0x12 (18)
Data
Pro-
fibus
Index
7 4016 float
8 4017 float
9 4018 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
p.EE
P.EE
p.EL
P.EL
t.C
t.C
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Analog Input (1 to
16)
Process Error Enable
Turn the Process Error Low feature on
or off.
Analog Input (1 to
16)
Process Error Low
Value
If the process value
drops below this
value, it will trigger
an input error.
Analog Input (1 to
16)
Thermistor Curve
Select a curve to apply to the thermistor
input.
off Off (62)
LoФІ Low (53)
-100.0 to 1,000.0 0.0 440
a Curve A (1451)
b Curve B (1452)
C Curve C (1453)
CUst Custom (180)
Off
Curve A 454
438
[offset
90]
[offset
90]
[offset
90]
0x68
(104)
1 to 16
0x1E (30)
0x68
(104)
1 to 16
0x1F (31)
0x68
(104)
1 to 16
0x26 (38)
10 4030 uint
11 4031 float
- - - - 4038 uint
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 66 • Chapter 4 Setup Page
Page 71

RM Scanner Module • Setup Page
Dis-
play
r.r
r.r
Co.a
Co.A
Co.b
Co.b
Co.C
Co.C
Parameter Name
Description
Analog Input (1 to
16)
Resistance Range
Set the maximum
resistance of the
thermistor input.
Analog Input (1 to
16)
Custom Coefficient
A
Enter custom Thermistor coefficients.
Analog Input (1 to
16)
Custom Coefficient
B
Enter custom Thermistor coefficients.
Analog Input (1 to
16)
Custom Coefficient
C
Enter custom Thermistor coefficients.
Range Default
5 5K (1448)
10 10K (1360)
20 20K (1361)
40 40K (1449)
-3.4e38 to 3.4e38 0
-3.4e38 to 3.4e38 0
-3.4e38 to 3.4e38 0
Modbus
Relative
Address
40K 452
[offset
90]
- - - -
- - - -
- - - -
CIP Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
0x25 (37)
- - - - - - - - 4039 float
- - - - - - - - 4040 float
- - - - - - - - 4041 float
Pro-
fibus
Index
- - - - 4037 uint
Param-
eter
ID
Data
Type
and
Access
**
RWES
RWES
RWES
RWES
fiL
FiL
i.Er
i.Er
dEC
dEC
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Analog Input (1 to
16)
Filter
Filtering smooths out
the process signal to
both the display and
the input. Increase
the time to increase
filtering.
Analog Input (1 to
16)
Input Error Latching
Turn input error
latching on or off. If
latching is on, errors
must be manually
cleared.
Analog Input (1 to
16)
Display Precision
Set the precision of
the displayed value.
0.0 to 60.0 seconds 0.5 406
[offset
90]
off Off (62)
on On (63)
0 Whole (105)
0.0 Tenths (94)
0.00 Hundredths (40)
Off 434
[offset
90]
Whole 418
[offset
90]
0.000 Thousandths (96)
0x68
(104)
1 to 16
0xE (14)
0x68
(104)
1 to 16
0x1C (28)
0x68
(104)
1 to 16
0x14 (20)
12 4014 float
- - - - 4028 uint
- - - - 4020 uint
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 67 • Chapter 4 Setup Page
Page 72

RM Scanner Module • Setup Page
Dis-
play
i.Ca
i.CA
ain
Ain
i.Er
i.Er
Parameter Name
Description
Analog Input (1 to
16)
Calibration Offset *
Offset the input
reading to compensate for lead wire
resistance or other
factors that cause
the input reading to
vary from the actual
process value.
Analog Input (1 to
16)
Analog Input Value *
View the process
value.
Note:
Ensure that the Error
Status (below) indicates no error (61)
when reading this
value using a field
bus protocol. If an
error exists, the last
known value prior to
the error occurring
will be returned.
Analog Input (1 to
16)
Input Error *
View the cause of
the most recent error.
Range Default
-1,999.000 to 9,999.000°F
or units
-1,110.555 to 5,555.000°C
-1,999.000 to 9,999.000°F
or units
-1,128.000 to 5,537.000°C
nonE None (61)
OpEn Open (65)
shrt Shorted (127)
E.ЛЏ Measurement Error
(140)
E.CaL Bad Calibration Data
(139)
Er.ab Ambient Error (9)
E.rtd RTD Error (141)
faiL Fail (32)
Modbus
Relative
Address
0.0 402
[offset
90]
- - - - 380
[offset
90]
- - - - 382
[offset
90]
CIP Class
Instance
Attribute
hex (dec)
0x68
(104)
1 to 16
0xC (12)
0x68
(104)
1 to 16
1
0x68
(104)
1 to 16
2
Data
Pro-
fibus
Index
2 4012 float
0 4001 float
1 4002 uint
Param-
eter
ID
Type
and
Access
**
RWES
R
R
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 68 • Chapter 4 Setup Page
Page 73

RM Scanner Module • Setup Page
Dis-
play
Parameter Name
Description
Pu
sEt
Process Value Menu
fn
Fn
Process Value (1 to
16)
Function
Set the function that
will be applied to the
source or sources.
Range Default
off Off (62)
s.ba Sensor Backup (1201)
avg Average (1367)
C.o Crossover (1368)
ФІ.b Wet Bulb Dry Bulb
(1369)
s.o Switch Over (1370)
diff Differential (1373)
rati Ratio (1374)
add Add (1375)
ЛЏUL Multiply (1376)
a.dif Absolute Difference
(1377)
ЛЏin Minimum (1378)
ЛЏaH Maximum (1379)
root Square Root (1380)
vsLa Vaisala (1648)
aLt Pressure to Altitude
(1649)
Modbus
Relative
Address
Off 5220
[offset
70]
CIP Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
0x15 (21)
Data
Pro-
fibus
Index
123 26021 uint
Param-
eter
ID
Type
and
Access
RWES
**
sfn.a
SFn.A
si.a
Si.A
sfn.b
SFn.b
Process Value (1 to
16)
Source Function A
Set the type of function that will be used
for this source.
Process Value (1 to
16)
Source Instance A
Set the instance of
the function selected
above.
Process Value (1 to
16)
Source Function B
Set the type of function that will be used
for this source.
nonE None (61)
ai Analog Input (142)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
var Variable (245)
1 to 250 5190
nonE None (61)
ai Analog Input, (142)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
Analog
Input
None 5182
5180
[offset
70]
[offset
70]
[offset
70]
0x7E
(126)
1 to 16
1
0x7E
(126)
1 to 16
6
0x7E
(126)
1 to 16
2
- - - - 26001 uint
- - - - 26006 uint
- - - - 26002 uint
var Variable (245)
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 69 • Chapter 4 Setup Page
Page 74

RM Scanner Module • Setup Page
Dis-
play
si.b
Si.b
sz.b
SZ.b
sfn.C
SFn.C
Parameter Name
Description
Process Value (1 to
16)
Source Instance B
Set the instance of
the function selected
above.
Process Value (1 to
16)
Source Zone B
Set the zone of the
function selected
above.
Process Value (1 to
16)
Source Function C
Set the type of function that will be used
for this source.
Modbus
Range Default
1 to 250 1 5192
0 to 24 0 5202
nonE None (61)
None 5184
ai Analog Input (142)
Lnr Linearization (238)
Relative
Address
[offset
70]
[offset
70]
[offset
70]
ЛЏat Math (240)
pu Process Value (241)
var Variable (245)
CIP -
Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
7
0x7E
(126)
1 to 16
0xC(12)
0x7E
(126)
1 to 16
3
Data
Pro-
fibus
Index
- - - - 26007 uint
- - - - 26012 uint
- - - - 26003 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
RWES
**
si.C
Si.C
sz.C
SZ.C
sfn.d
SFn.d
si.d
Si.d
Process Value (1 to
16)
Source Instance C
Set the instance of
the function selected
above.
Process Value (1 to
16)
Source Zone C
Set the zone of the
function selected
above.
Process Value (1 to
16)
Source Function D
Set the type of function that will be used
for this source.
Process Value (1 to
16)
Source Instance D
Set the instance of
the function selected
above.
1 to 250 1 5194
[offset
70]
0 to 24 0 5204
[offset
70]
nonE None (61)
ai Analog Input, (142)
Lnr Linearization (238)
None 5186
[offset
70]
ЛЏat Math (240)
pu Process Value (241)
var Variable (245)
1 to 250 1 5196
[offset
70]
0x7E
(126)
1 to 16
8
0x7E
(126)
1 to 16
0x0D (13)
0x7E
(126)
1 to 16
4
0x7E
(126)
1 to 16
9
- - - - 26008 uint
RWES
- - - - 26013 uint
RWES
- - - - 26004 uint
RWES
- - - - 26009 uint
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 70 • Chapter 4 Setup Page
Page 75

RM Scanner Module • Setup Page
Dis-
play
sz.d
SZ.d
sfn.E
SFn.E
Parameter Name
Description
Process Value (1 to
16)
Source Zone D
Set the zone of the
function selected
above.
Process Value (1 to
16)
Source Function E
Set the type of function that will be used
by this source to trigger a switch between
Source A and Source
B.
Modbus
Range Default
0 to 24 0 5206
nonE None (61)
None 5188
aLЛЏ Alarm (6)
CpE Compare (230)
Relative
Address
[offset
60]
[offset
70]
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
tЛЏr Timer (244)
var Variable (245)
CIP Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
0x0E (14)
0x7E
(126)
1 to 16
5
Data
Pro-
fibus
Index
- - - - 26014 uint
- - - - 26005 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
**
si.E
Si.E
sz.E
SZ.E
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Process Value (1 to
16)
Source Instance E
Set the instance of
the function selected
above.
Process Value (1 to
16)
Source Zone E
Set the zone of the
function selected
above.
1 to 250 1 5198
[offset
70]
0 to 24 0 5208
[offset
70]
0x7E
(126)
1 to 16
0xA (10)
0x7E
(126)
1 to 16
0xF (15)
- - - - 26010 uint
RWES
- - - - 26015 uint
RWES
Watlow EZ-ZONE® RMS Module • 71 • Chapter 4 Setup Page
Page 76

RM Scanner Module • Setup Page
Dis-
play
C.p
C.P
C.b
C.b
p.unt
P.unt
Parameter Name
Description
Process Value (1 to
16)
Cross Over Point
When the value of
source A is <= cross
over point - crossover
band divided by 2
then the output value will use source A.
Process Value (1 to
16)
Cross Over Band
The source will
transition between
Source A and Source
B when within this
band at a progressive
rate
Process Value (1 - 16)
Pressure Units
If Process Value
function is set for
Pressure to Altitude
units, define units of
measure for conversion.
Modbus
Range Default
-1999.000 to 9999.000 100.0 5226
-1999.000 to 9999.000 10.0 5228
psi Pounds per Square
Inch (1671)
PSI 5234
pasc Pascal (1674)
Relative
Address
[offset
70]
[offset
70]
[offset
70]
atЛЏ Atmosphere (1675)
ЛЏbr Millibar (1672)
torr Torr (1673)
CIP Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
0x18 (24)
0x7E
(126)
1 to 16
0x19 (25)
0x7E
(126)
1 to 16
0x1C (28)
Data
Pro-
fibus
Index
- - - - 26028 uint
Param-
eter
ID
26024 float
26025 float
Type
and
Access
RWES
RWES
RWES
**
a.unt
A.unt
b.pr
b.Pr
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Process Value (1 - 16)
Altitude Units
If Process Value
function is set for
Pressure to Altitude
units, define units of
measure for conversion.
Process Value (1 - 16)
Barometric Pressure
If Process Value function is set for Wet
Bulb / Dry Bulb, define pressure value
used for humidity
calculation.
Hft Kilofeet (1677)
ft Feet (1676)
10.0 to 16.0 14.7 5238
HFt 5236
[offset
70]
[offset
70]
0x7E
(126)
1 to 16
0x1D (29)
0x7E
(126)
1 to 16
0x1E (30)
- - - - 26029 uint
- - - - 26030 float
RWES
RWES
Watlow EZ-ZONE® RMS Module • 72 • Chapter 4 Setup Page
Page 77

RM Scanner Module • Setup Page
CIP -
Dis-
play
fiL
FiL
Parameter Name
Description
Process Value (1 to
16)
Filter
Filtering smooths out
the output signal of
this function block.
Increase the time to
increase filtering.
Modbus
Range Default
0.0 to 60.0 seconds 0.0 5230
Relative
Address
[offset
70]
Class
Instance
Attribute
hex (dec)
0x7E
(126)
1 to 16
0x1A (26)
Pro-
fibus
Index
- - - - 26026 float
dio
sEt
Digital Input/Output Menu
dir
dir
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Digital Input/Output
(13 to 24)
Direction
Set this function to
operate as an input
or output.
Otpt Output (68)
in Input Voltage (193)
iCon Input Dry Contact
(44)
Output 1820
[offset
30]
0x6A
(106)
13 to 24
1
38 6001 uint
Param-
eter
ID
Data
Type
and
Access
**
RWES
RWES
Watlow EZ-ZONE® RMS Module • 73 • Chapter 4 Setup Page
Page 78

RM Scanner Module • Setup Page
Dis-
play
fn
Fn
Parameter Name
Description
Digital Output (13
to 24)
Function
Select what function
will drive this output.
Range Default
off Off (62)
ai Analog Input (142)
aLЛЏ Alarm (6)
C.pr Cool Power, Control
Loop (161)
h.pr Heat Power, Control
Loop (160)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sof.1 Special Function
Output 1 (1532)
sof.2 Special Function
Output 2 (1533)
sof.3 Special Function
Output 3 (1534)
sof.4 Special Function
Output 4 (1535)
tЛЏr Timer (244)
var Variable (245)
h..Er Heater Error (184)
Modbus
Relative
Address
Off 1828
[offset
30]
CIP Class
Instance
Attribute
hex (dec)
0x 6A
(106)
13 to 24
5
Data
Pro-
fibus
Index
39 6005 uint
Param-
eter
ID
Type
and
Access
RWES
**
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 74 • Chapter 4 Setup Page
Page 79

RM Scanner Module • Setup Page
Dis-
play
fi
Fi
sz
SZ
o.Ct
o.Ct
Parameter Name
Description
Digital Output (13
to 24)
Output Function Instance
Set the instance of
the function selected
above.
Digital Output (13
to 24)
Output Source Zone
Set the zone of the
function selected
above.
Digital Output (13
to 24)
Time Base Type
Set the output control type. This parameter is only used
with PID control, but
can be set anytime.
Modbus
Range Default
1 to 250 1 1830
0 to 24 0 1842
ftb Fixed Time Base (34)
vtb Variable Time Base
(103)
Fixed
Time
Base
Relative
Address
[offset
30]
[offset
30]
1822
[offset
30]
CIP Class
Instance
Attribute
hex (dec)
0x6A
(106)
13 to 24
6
0x6A
(106)
13 to 24
0xC (12)
0x6A
(106)
13 to 24
2
Data
Pro-
fibus
Index
40 6006 uint
- - - - 6012 uint
41 6002 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
RWES
**
o.tb
o.tb
o.Lo
o.Lo
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Digital Output (13
to 24)
Fixed Time Base
Set the time base
for fixed-time-base
control.
Digital Output (13
to 24)
Low Power Scale
The power output
will never be less
than the value specified and will represent the value at
which output scaling
begins.
0.1 to 60.0 seconds 1.0 1824
[offset
30]
0.0 to 100.0 0.0 1836
[offset
30]
0x6A
(106)
13 to 24
3
0x6A
(106)
13 to 24
9
42 6003 float
43 6009 float
RWES
RWES
Watlow EZ-ZONE® RMS Module • 75 • Chapter 4 Setup Page
Page 80

RM Scanner Module • Setup Page
Dis-
play
o.hi
o.hi
Parameter Name
Digital Output (13
to 24)
High Power Scale
The power output
will never be greater
than the value specified and will represent the value at
which output scaling
stops.
aCt
sEt
Action Menu
fn
Fn
Action (1 to 16)
Action Function
Set the action that
will be triggered by
this function.
Description
Modbus
Range Default
0.0 to 100.0 100.0 1838
nonE None (61)
None 2184
Usr.r User Settings Re-
store (227)
Relative
Address
[offset
30]
[offset
20]
aLЛЏ Alarm (6)
siL Silence Alarms (108)
aof Control Loops Off
and Alarms to Non-alarm
State (220)
f.aL Force Alarm to Occur
(218)
CIP Class
Instance
Attribute
hex (dec)
0x6A
(106)
1 to 12
A (10)
0x6E
(110)
1 to 16
3
Data
Pro-
fibus
Index
44 6010 float
79 10003 uint
Param-
eter
ID
Type
and
Access
**
RWES
RWES
fi
Fi
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Action (1 to 16)
Function Instance
Set the instance of
the function selected
above.
0 to 25 0 2186
[offset
20]
0x6E
(110)
1 to 16
4
80 10004 uint
RWES
Watlow EZ-ZONE® RMS Module • 76 • Chapter 4 Setup Page
Page 81

RM Scanner Module • Setup Page
Dis-
play
sfn.a
SFn.A
Parameter Name
Description
Action (1 to 16)
Source Function A
Set the event or
function that will
trigger the action.
Range Default
nonE None (61)
aLЛЏ Alarm (6)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LiЛЏ Limit (126)
LgC Logic (239)
tЛЏr Timer (244)
var Variable (245)
h..Er Heater Error (184)
Modbus
Relative
Address
None 2190
[offset
20]
CIP Class
Instance
Attribute
hex (dec)
0x6E
(110)
1 to 16
6
Data
Pro-
fibus
Index
- - - - 10006 uint
Param-
eter
ID
Type
and
Access
RWES
**
si.a
Si.A
sz.a
SZ.A
LEv
LEv
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Action (1 to 16)
Source Instance A
Set the instance of
the function selected
above.
Action (1 to 16)
Source Zone A
Set the zone of the
function selected
above.
Action (1 to 16)
Active Level
Set the action that
will be considered a
true state.
1 to 250 1 2182
[offset
20]
0 to 24 0 2192
[offset
20]
LoФІ Low (53)
high High (37)
High 2180
[offset
20]
0x6E
(110)
1 to 16
2
0x6E
(110)
1 to 16
7
0x6E
(110)
1 to 16
1
- - - - 10002 uint
RWES
- - - - 10007 uint
RWES
137 10001 uint
RWES
Watlow EZ-ZONE® RMS Module • 77 • Chapter 4 Setup Page
Page 82

RM Scanner Module • Setup Page
Dis-
play
Parameter Name
Description
otpt
sEt
Output Menu
fn
Fn
Output Digital (1 to
4 and 7 to 10)
Function
Select what function
will drive this output.
Note:
Limit function is
available only for
the slot in which the
Limit resides.
Range Default
off Off (62)
ai Analog Input (142)
aLЛЏ Alarm (6)
C.pr Cool Power, Control
Loop (161)
h.pr Heat Power, Control
Loop (160)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sof.1 Special Function
Output 1 (1532)
sof.2 Special Function
Output 2 (1533)
sof.3 Special Function
Output 3 (1534)
sof.4 Special Function
Output 4 (1535)
tЛЏr Timer (244)
var Variable (245)
h..Er Heater Error (184)
Modbus
Relative
Address
off 1828
[offset
30]
CIP Class
Instance
Attribute
hex (dec)
0x6A
(106)
1 to 10
5
Data
Pro-
fibus
Index
39 6005 uint
Param-
eter
ID
Type
and
Access
RWES
**
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 78 • Chapter 4 Setup Page
Page 83

RM Scanner Module • Setup Page
Dis-
play
fi
Fi
sz.A
SZ.A
o.Ct
o.Ct
Parameter Name
Description
Output Digital (1 to
4 and 7 to 10)
Output Function Instance
Set the instance of
the function selected
above.
Output Digital (1 to
4 and 7 to 10)
Output Source Zone
Set the instance of
the function selected
above.
Output Digital (1 to
4 and 7 to 10)
Time Base Type
Set the output control type. This parameter is only used
with PID control, but
can be set anytime.
Modbus
Range Default
1 to 250 1 1830
0 to 24 0 1842
ftb Fixed Time Base (34)
vtb Variable Time Base
(103)
Fixed
Time
Base
Relative
Address
[offset
30]
[offset
30]
1822
[offset
30]
CIP Class
Instance
Attribute
hex (dec)
0x6A
(106)
1 to 10
6
0x6A
(106)
1 to 10
0xC (12)
0x6A
(106)
1 to 10
2
Data
Pro-
fibus
Index
40 6006 uint
- - - - 6012 uint
41 6002 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
RWES
**
o.tb
o.tb
o.Lo
o.Lo
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Output Digital (1 to
4 and 7 to 10)
Fixed Time Base
Set the time base
for fixed-time-base
control.
Output Digital (1 to
4 and 7 to 10)
Low Power Scale
The power output
will never be less
than the value specified and will represent the value at
which output scaling
begins.
0.1 to 60.0 seconds (solidstate relay or switched dc)
5.0 to 60.0 seconds (mechanical relay or NO-ARC
power control)
0.0 to 100.0% 0.0% 1836
1.0 sec.
[SSR &
sw dc]
20.0
sec.
[mech,
relay,
NO-ARC]
1824
[offset
30]
[offset
30]
0x6A
(106)
1 to 10
3
0x6A
(106)
1 to 10
9
42 6003 float
43 6009 float
RWES
RWES
Watlow EZ-ZONE® RMS Module • 79 • Chapter 4 Setup Page
Page 84

RM Scanner Module • Setup Page
Dis-
play
o.hi
o.hi
o.ty
o.ty
fn
Fn
Parameter Name
Description
Output Digital (1 to
4 and 7 to 10)
High Power Scale
The power output
will never be greater
than the value specified and will represent the value at
which output scaling
stops.
Output Process (1 to
3, and 7 to 9)
Type *
Select whether the
process output will
operate in volts or
milliamps.
Output Process (1 to
3, 7 to 9)
Function
Set the type of
function that will
drive this output.
Modbus
Range Default
0.0 to 100.0% 100.0% 1838
voLt Volts (104)
Volts 17546
ЛЏa Milliamps (112)
off Off (62)
Off 17548
ai Analog Input (142)
CUrr Current (22)
Relative
Address
[offset
30]
[offset
60]
[offset
60]
C.pr Cool Power (161)
h.pr Heat Power (160)
pФІr Power (73)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sp.C Set Point Closed (242)
sp.o Set Point Open (243)
sof.1 Special Function
Output 1 (1532)
sof.2 Special Function
Output 2 (1533)
sof.3 Special Function
Output 3 (1534)
sof.4 Special Function
Output 4 (1535)
var Variable (245)
ФІat Wattage (1697)
Ld.Uo Load Voltage (1698)
Ld.r Load Resistance
(1183)
CIP -
Class
Instance
Attribute
hex (dec)
0x6A
(106)
1 to 10
0xA (10)
0x76
(118)
1-3, 7-9
1
0x76
(118)
1-3, 7-9
2
Data
Pro-
fibus
Index
44 6010 float
- - - - 18001 uint
- - - - 18002 uint
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 80 • Chapter 4 Setup Page
Page 85

RM Scanner Module • Setup Page
Dis-
play
fi
Fi
zs.a
ZS.A
s.Lo
S.Lo
Parameter Name
Description
Output Process (1 to
3, 7 to 9)
Function Instance *
Set the instance of
the function selected above.
Output Process (1 to
3, 7 to 9)
Source Zone A *
Set the zone of the
function selected
above.
Output Process (1 to
3, 7 to 9)
Scale Low *
Set the scale low
for process output
in electrical units.
This value, in volts
or milliamps, will
correspond to 0%
PID power output or
the range low value.
Modbus
Range Default
1 to 250 1 17522
0 to 24 0 17582
-100.0 to 100.0 0.00 17562
Relative
Address
[offset
60]
[offset
60]
[offset
60]
CIP Class
Instance
Attribute
hex (dec)
0x76
(118)
1-3, 7-9
4
0x76
(118)
1-3, 7-9
0x13 (19)
0x76
(118)
1-3, 7-9
9
Data
Pro-
fibus
Index
- - - - 18004 uint
- - - - 18019 uint
99 18009 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
S.hi
S.hi
r.Lo
r.Lo
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Output Process (1 to
3, 7 to 9)
Scale High *
Set the scale high
for process output
in electrical units.
This value, in volts
or milliamps, will
correspond to 0%
PID power output
or the range high
value.
Output Process (1 to
3, 7 to 9)
Range Low *
Use to set the minimum value in process units. This will
correspond with the
Scale Low value.
-100.0 to 100.0 10.00 17564
[offset
60]
-1,999.000 to 9,999.000°F
or units
-1,128.000 to 5,537.000°C
0.0°F or
units
-18°C
17566
[offset
60]
0x76
(118)
1-3, 7-9
0xA (10)
0x76
(118)
1-3, 7-9
0xB (11)
- - - - 18010 float
- - - - 18011 float
RWES
RWES
Watlow EZ-ZONE® RMS Module • 81 • Chapter 4 Setup Page
Page 86

RM Scanner Module • Setup Page
Dis-
play
r.hi
r.hi
o.Ca
o.CA
Parameter Name
Output Process (1 to
3, 7 to 9)
Range High *
Use to set the maximum value in process units. This will
correspond with the
Scale High value.
Output Process (1 to
3, 7 to 9)
Calibration Offset *
Set an offset value
for a process output.
aLЛЏ
sEt
Alarm Menu
a.ty
A.ty
Alarm (1 to 16)
Type
Select whether the
alarm trigger is a
fixed value or will
track the set point.
Description
Range Default
-1,999.000 to 9,999.000°F
or units
-1,128.000 to 5,537.000°C
-1,999.000 to 9,999.000°F
or units
-1,110.555 to 5,555.000°C
off Off (62)
pr.aL Process Alarm (76)
dE.aL Deviation Alarm (24)
Modbus
Relative
Address
100 F
or units
38 C
0.0°F or
units
0.0°C
Off 2528
17568
[offset
60]
17558
[offset
60]
[offset
60]
CIP -
Class
Instance
Attribute
hex (dec)
0x76
(118)
1-3, 7-9
0xC (12)
0x76
(118)
1-3, 7-9
7
0x6D
(109)
1 to 16
0xF (15)
Data
Pro-
fibus
Index
- - - - 18012 float
- - - - 18007 float
20 9015 uint
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
sr.a
Sr.A
Alarm (1 to 16)
Alarm Source
Select what will trigger this alarm.
nonE None (61)
ai Analog Input (142)
CUrr Current (22)
pФІr Power (73)
Analog
Input
2532
[offset
60]
0x6D
(109)
1 to 16
0x11 (17)
21 9017 uint
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
var Variable (245)
Cu.r Current Read is Sam-
ple Hold (179)
ФІat Wattage (1697)
Ld.Uo Load Voltage (1698)
Ld.r Load Resistance
(1183)
is.a
iS.A
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Alarm (1 to 16)
Alarm Source Instance
Set the instance of
the function selected
above.
1 to 250 1 2534
[offset
60]
0x6D
(109)
1 to 16
0x12 (18)
22 9018 uint
RWES
RWES
Watlow EZ-ZONE® RMS Module • 82 • Chapter 4 Setup Page
Page 87

RM Scanner Module • Setup Page
Dis-
play
sz
SZ
a.hy
A.hy
a.Lg
A.Lg
Parameter Name
Description
Alarm (1 to 16)
Alarm Source Zone
Set the zone of the
function selected
above.
Alarm (1 to 16)
Hysteresis
Set the hysteresis
for an alarm. This
determines how far
into the safe region
the process value
needs to move before the alarm can
be cleared.
Alarm (1 to 16)
Logic
Select what the output condition will
be during the alarm
state.
Modbus
Range Default
0 to 24 0 2548
0.001 to 9,999.000°F or
units
0.001 to 5,555.000°C
aL.C Close On Alarm (17)
AL.o Open On Alarm (66)
1.0°F or
units
1.0°C
Close On
Alarm
Relative
Address
[offset
60]
2504
[offset
60]
2508
[offset
60]
CIP Class
Instance
Attribute
hex (dec)
0x6D
(109)
1 to 16
0x19 (25)
0x6D
(109)
1 to 16
3
0x6D
(109)
1 to 16
5
Data
Pro-
fibus
Index
23 9025 uint
24 9003 float
25 9005 uint
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
a.sd
A.Sd
a.Lo
A.Lo
a.hi
A.hi
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Alarm (1 to 16)
Sides
Select which side or
sides will trigger this
alarm.
Alarm (1 to 16)
Low Set Point *
If Alarm Type (Setup
Page, Alarm Menu)
is set to:
Process - set the
process value that
will trigger a low
alarm.
Alarm (1 to 16)
High Set Point
If Alarm Type (Setup
Page, Alarm Menu)
is set to:
Process - set the
process value that
will trigger a high
alarm.
both Both (13)
high High (37)
LoФІ Low (53)
-1,999.000 to 9,999.000°F
or units
-1,128.000 to 5,537.000°C
-1,999.000 to 9,999.000°F
or units
-1,128.000 to 5,537.000°C
Both 2506
[offset
60]
32.0°F
or units
0.0°C
300.0°F
or units
150.0°C
2502
[offset
60]
2500
[offset
60]
0x6D
(109)
1 to 16
4
0x6D
(109)
1 to 16
2
0x6D
(109)
1 to 16
1
26 9004 uint
18 9002 float
19 9001 float
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 83 • Chapter 4 Setup Page
Page 88

RM Scanner Module • Setup Page
Dis-
play
a.La
A.LA
a.bL
A.bL
a.si
A.Si
Parameter Name
Description
Alarm (1 to 16)
Latching
Turn alarm latching
on or off. A latched
alarm has to be
turned off by the
user.
Alarm (1 to 16)
Blocking
Select when an alarm
will be blocked. After startup and/or
after the set point
changes, the alarm
will be blocked until
the process value
enters the normal
range.
Alarm (1 to 16)
Silencing
Turn alarm silencing
on to allow the user
to disable this alarm.
Range Default
nLat Non-Latching (60)
Lat Latching (49)
off Off (62)
str Startup (88)
stpt Set Point (85)
both Both (13)
off Off (62)
on On (63)
Modbus
Relative
Address
NonLatching
Off 2514
Off 2510
2512
[offset
60]
[offset
60]
[offset
60]
CIP -
Class
Instance
Attribute
hex (dec)
0x6D
(109)
1 to 16
7
0x6D
(109)
1 to 16
8
0x6D
(109)
1 to 16
6
Data
Pro-
fibus
Index
27 9007 uint
28 9008 uint
29 9006 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
RWES
**
a.dsp
A.dSP
a.dL
A.dL
a.CLr
A.CLr
a.sir
A.Sir
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Alarm (1 to 16)
Display
Display an alarm
message when an
alarm is active.
Alarm (1 to 16)
Delay Time
Set the span of time
that the alarm will
be delayed after the
process value exceeds the alarm set
point.
Alarm (1 to 16)
Clear Alarm
Write to this register to clear an alarm
Alarm (1 to 16)
Silence Alarm
Write to this register
to silence an alarm
off Off (62)
on On (63)
0 to 9,999 seconds 0 2540
0 Ignore - - - - - - - - - - - - 9026
0 Ignore - - - - - - - - - - - - 9027
On 2530
[offset
60]
[offset
60]
0x6D
(109)
1 to 16
0x10 (16)
0x6D
(109)
1 to 16
0x15 (21)
30 9016 uint
31 9021 uint
RWES
RWES
uint
W
uint
W
Watlow EZ-ZONE® RMS Module • 84 • Chapter 4 Setup Page
Page 89

RM Scanner Module • Setup Page
Dis-
play
a.st
A.St
Parameter Name
Description
Alarm (1 to 16)
Alarm State
Current state of
alarm
Lnr
sEt
Linearization Menu
Fn
Fn
sfn.a
SFn.A
Linearization (1 to
24)
Function
Set how this function
will linearize Source
A.
Linearization (1 to
24)
Source Function A
Set the type of function that will be used
for this source.
Range Default
Startup (88)
None (61)
Blocked (12)
Alarm low (8)
Alarm high (7)
Error (28)
off Off (62)
intr Interpolated (1482)
stpd Stepped (1483)
nonE None (61)
ai Analog Input (142)
CUrr Current (22)
C.pr Cool Power, Control
Loop (161)
h.pr Heat Power, Control
Loop (160)
pФІr Power, Control Loop
(73)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sp.C Set Point Closed,
Control Loop (242)
sp.o Set Point Open, Con-
trol Loop (243)
var Variable (245)
CIP -
Modbus
Relative
Address
Startup - - - - - - - - - - - - 9009 uint
Off 11348
[offset
70]
None 11340
[offset
70]
Class
Instance
Attribute
hex (dec)
0x86
(134)
1 to 24
5
0x86
(134)
1 to 24
1
Pro-
fibus
Index
86 34005 uint
- - - - 34001 uint
Param-
eter
ID
Data
Type
and
Access
R
RWES
RWES
**
si.a
Si.A
sz.a
SZ.A
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Linearization (1 to
24)
Source Instance A
Set the instance of
the function selected
above.
Linearization (1 to
24)
Source Zone A
Set the zone of the
function selected
above.
1 to 250 1 11342
[offset
70]
0 or 24 0 11344
[offset
70]
0x86
(134)
1 to 24
2
0x86
(134)
1 to 24
3
- - - - 34002 uint
RWES
- - - - 34003 uint
RWES
Watlow EZ-ZONE® RMS Module • 85 • Chapter 4 Setup Page
Page 90

RM Scanner Module • Setup Page
Dis-
play
Unit
Unit
ip.1
ip.1
op.1
op.1
Parameter Name
Description
Linearization (1 to
24)
Units
Set the units of the
output value.
Linearization (1 to
24)
Input Point 1
Set the value that
will be mapped to
output 1.
Linearization (1 to
24)
Output Point 1
Set the value that
will be mapped to
input 1.
Modbus
Range Default
src Source (1539)
nonE None (61)
a.tp Absolute Tempera-
ture (1540)
Source 11396
Relative
Address
[offset
70]
r.tp Relative Tempera-
ture (1541)
pФІr Power (73)
pro Process (75)
rh Relative Humidity
(1538)
-1,999.000 to 9,999.000 0.0 11354
[offset
70]
-1,999.000 to 9,999.000 0.0 11374
[offset
70]
CIP -
Class
Instance
Attribute
hex (dec)
0x86
(134)
1 to 24
0x1D (29)
0x86
(134)
1 to 24
8
0x86
(134)
1 to 24
0x12 (18)
Data
Pro-
fibus
Index
87 34029 uint
88 34008 float
89 34018 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
ip.2
ip.2
op.2
op.2
ip.3
ip.3
op.3
op.3
Linearization (1 to
24)
Input Point 2
Set the value that
will be mapped to
output 2.
Linearization (1 to
24)
Output Point 2
Set the value that
will be mapped to
input 2.
Linearization (1 to
24)
Input Point 3
Set the value that
will be mapped to
output 3.
Linearization (1 to
24)
Output Point 3
Set the value that
will be mapped to
input 3.
-1,999.000 to 9,999.000 1.0 11356
[offset
70]
-1,999.000 to 9,999.000 1.0 11376
[offset
70]
-1,999.000 to 9,999.000 2.0 11358
[offset
70]
-1,999.000 to 9,999.000 2.0 11378
[offset
70]
0x86
(134)
1 to 24
9
0x86
(134)
1 to 24
0x13 (19)
0x86
(134)
1 to 24
0xA (10)
0x86
(134)
1 to 24
0x14 (20)
90 34009 float
RWES
91 34019 float
RWES
92 34010 float
RWES
93 34020 float
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 86 • Chapter 4 Setup Page
Page 91

RM Scanner Module • Setup Page
Dis-
play
ip.4
ip.4
op.4
op.4
ip.5
ip.5
Parameter Name
Description
Linearization (1 to
24)
Input Point 4
Set the value that
will be mapped to
output 4.
Linearization (1 to
24)
Output Point 4
Set the value that
will be mapped to
input 4.
Linearization (1 to
24)
Input Point 5
Set the value that
will be mapped to
output 5.
Modbus
Range Default
-1,999.000 to 9,999.000 3.0 11360
-1,999.000 to 9,999.000 3.0 11380
-1,999.000 to 9,999.000 4.0 11362
Relative
Address
[offset
70]
[offset
70]
[offset
70]
CIP Class
Instance
Attribute
hex (dec)
0x86
(134)
1 to 24
0xB (11)
0x86
(134)
1 to 24
0x15 (21)
0x86
(134)
1 to 24
0xC (12)
Data
Pro-
fibus
Index
94 34011 float
95 34021 float
96 34012 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
op.5
op.5
ip.6
ip.6
op.6
op.6
ip.7
ip.7
Linearization (1 to
24)
Output Point 5
Set the value that
will be mapped to
input 5.
Linearization (1 to
24)
Input Point 6
Set the value that
will be mapped to
output 6.
Linearization (1 to
24)
Output Point 6
Set the value that
will be mapped to
input 6.
Linearization (1 to
24)
Input Point 7
Set the value that
will be mapped to
output 7.
-1,999.000 to 9,999.000 4.0 11382
[offset
70]
-1,999.000 to 9,999.000 5.0 11364
[offset
70]
-1,999.000 to 9,999.000 5.0 11384
[offset
70]
-1,999.000 to 9,999.000 6.0 11366
[offset
70]
0x86
(134)
1 to 24
0x16 (22)
0x86
(134)
1 to 24
0xD (13)
0x86
(134)
1 to 24
0x17 (23)
0x86
(134)
1 to 24
E (14)
97 34022 float
RWES
98 34013 float
RWES
99 34023 float
RWES
100 34014 float
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 87 • Chapter 4 Setup Page
Page 92

RM Scanner Module • Setup Page
Dis-
play
op.7
op.7
ip.8
ip.8
op.8
op.8
Parameter Name
Description
Linearization (1 to
24)
Output Point 7
Set the value that
will be mapped to
input 7.
Linearization (1 to
24)
Input Point 8
Set the value that
will be mapped to
output 8.
Linearization (1 to
24)
Output Point 8
Set the value that
will be mapped to
input 8.
Modbus
Range Default
-1,999.000 to 9,999.000 6.0 11386
-1,999.000 to 9,999.000 7.0 11368
-1,999.000 to 9,999.000 7.0 11388
Relative
Address
[offset
70]
[offset
70]
[offset
70]
CIP -
Class
Instance
Attribute
hex (dec)
0x86
(134)
1 to 24
0x18 (24)
0x86
(134)
1 to 24
0xF (15)
0x86
(134)
1 to 24
0x19 (25)
Data
Pro-
fibus
Index
101 34024 float
102 34015 float
103 34025 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
ip.q
ip.9
op.q
op.9
ip.10
ip.10
op.10
op.10
Linearization (1 to
24)
Input Point 9
Set the value that
will be mapped to
output 9.
Linearization (1 to
24)
Output Point 9
Set the value that
will be mapped to
input 9.
Linearization (1 to
24)
Input Point 10
Set the value that
will be mapped to
output 10.
Linearization (1 to
24)
Output Point 10
Set the value that
will be mapped to
input 10.
-1,999.000 to 9,999.000 8.0 11370
[offset
70]
-1,999.000 to 9,999.000 8.0 11390
[offset
70]
-1,999.000 to 9,999.000 9.0 11372
[offset
70]
-1,999.000 to 9,999.000 9.0 11392
[offset
70]
0x86
(134)
1 to 24
0x10 (16)
0x86
(134)
1 to 24
0x1A (26)
0x86
(134)
1 to 24
0x11 (17)
0x86
(134)
1 to 24
0x1B (27)
104 34016 float
RWES
105 34026 float
RWES
106 34017 float
RWES
107 34027 float
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 88 • Chapter 4 Setup Page
Page 93

RM Scanner Module • Setup Page
Dis-
play
Parameter Name
Description
CpE
sEt
Compare Menu
fn
Fn
toL
toL
Compare (1 to 24)
Function
Set operator that will
be used to compare
Source A to Source B.
Compare (1 to 24)
Tolerance
If the difference
between Source A
and Source B is less
than this value the
two will appear to be
equal.
Modbus
Range Default
off Off (62)
g.t Greater Than (1435)
L.t Less Than (1436)
Off 8236
Relative
Address
[offset
40]
E Equal To (1437)
nE Not Equal To (1438)
goE Greater or Equal
(1439)
LoE Less or Equal (1440)
0 to 9,999.000 0.1 8240
[offset
40]
CIP Class
Instance
Attribute
hex (dec)
0x80
(128)
1 to 24
9
0x80
(128)
1 to 24
0xB (11)
Data
Pro-
fibus
Index
137 28009 uint
138 28011 float
Param-
eter
ID
Type
and
Access
**
RWES
RWES
sfn.a
SFn.A
si.a
Si.A
Compare (1 to 24)
Source Function A
Set the type of function that will be used
for this source.
Compare (1 to 24)
Source Instance A
Set the instance of
the function selected
above.
nonE None (61)
ai Analog Input (142)
CUrr Current (22)
None 8220
[offset
40]
C.pr Cool Power, Control
Loop (161)
h.pr Heat Power, Control
Loop (160)
pФІr Power, Control Loop
(73)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sp.C Set Point Closed,
Control Loop (242)
sp.o Set Point Open, Con-
trol Loop (243)
var Variable (245)
ФІat Wattage (1697)
Ld.Uo Load Voltage (1698)
Ld.r Load Resistance
(1183)
1 to 250 1 8224
[offset
40]
0x80
(128)
1 to 24
1
0x80
(128)
1 to 24
3
- - - - 28001 uint
RWES
- - - - 28003 uint
RWES
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 89 • Chapter 4 Setup Page
Page 94

RM Scanner Module • Setup Page
Dis-
play
sz.a
SZ.A
sfn.b
SFn.b
Parameter Name
Description
Compare (1 to 24)
Source Zone A
Set the zone of the
function selected
above.
Compare (1 to 24)
Source Function B
Set the type of function that will be used
for this source. This
represents the timer
reset signal.
Modbus
Range Default
0 to 24 0 8228
nonE None (61)
None 8222
ai Analog Input (142)
CUrr Current (22)
Relative
Address
[offset
40]
[offset
40]
C.pr Cool Power, Control
Loop (161)
h.pr Heat Power, Control
Loop (160)
pФІr Power, Control Loop
(73)
Lnr Linearization (238)
ЛЏat Math (240)
pu Process Value (241)
sp.C Set Point Closed,
Control Loop (242)
sp.o Set Point Open, Con-
trol Loop (243)
var Variable (245)
ФІat Wattage (1697)
Ld.Uo Load Voltage (1698)
Ld.r Load Resistance
(1183)
CIP -
Class
Instance
Attribute
hex (dec)
0x80
(128)
1 to 24
5
0x80
(128)
1 to 24
2
Data
Pro-
fibus
Index
- - - - 28005 uint
- - - - 28002 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
**
si.b
Si.b
sz.b
SZ.b
Er.h
Er.h
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Compare (1 to 24)
Source Instance B
Set the instance of
the function selected
above.
Compare (1 to 24)
Source Zone B
Set the zone of the
function selected
above.
Compare (1 to 24)
Error Handling
Use Error Handling to
select the output value and error output
state of this function
if it receives an error
signal from one or
more sources and it
cannot determine the
output value.
1 to 250 1 8226
[offset
40]
0 to 24 0 8230
[offset
40]
t.g True Good (1476)
t.b True Bad (1477)
f.g False Good (1478)
False
Bad
8242
[offset
40]
f.b False Bad (1479)
0x80
(128)
1 to 24
4
0x80
(128)
1 to 24
6
0x80
(128)
1 to 24
0xC (12)
- - - - 28004 uint
- - - - 28006 uint
- - - - 28012 uint
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 90 • Chapter 4 Setup Page
Page 95

RM Scanner Module • Setup Page
Dis-
play
Parameter Name
tЛЏr
sEt
Timer Menu
fn
Fn
sfn.a
SFn.A
Timer (1 to 24)
Function
Set how the timer
will function.
Timer (1 to 24)
Source Function A
Set the type of function that will be used
for this source. This
represents the timer
run signal.
Description
Range Default
off Off (62)
on.p On Pulse (1471)
dEL Delay (1472)
o.s One Shot (1473)
rEt Retentive (1474)
nonE None (61)
aLЛЏ Alarm (6)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
sof.1 Special Function
Output 1 (1532)
sof.2 Special Function
Output 2 (1533)
sof.3 Special Function
Output 3 (1534)
sof.4 Special Function
Output 4 (1535)
tЛЏr Timer (244)
h..Er Heater Error (184)
var Variable (245)
Modbus
Relative
Address
Off 10156
[offset
50]
None 10140
[offset
50]
CIP Class
Instance
Attribute
hex (dec)
0x83
(131)
1 to 24
9
0x83
(131)
1 to 24
1
Data
Pro-
fibus
Index
131 31009 uint
- - - - 31001 uint
Param-
eter
ID
Type
and
Access
RWES
RWES
**
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Watlow EZ-ZONE® RMS Module • 91 • Chapter 4 Setup Page
Page 96

RM Scanner Module • Setup Page
CIP -
Dis-
play
si.a
Si.A
sz.a
SZ.A
sas.a
SAS.A
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Parameter Name
Description
Timer (1 to 24)
Source Instance A
Set the instance of
the function selected
above.
Timer (1 to 24)
Source Zone A
Set the zone of the
function selected
above.
Timer (1 to 24)
Run Active Level
Set what state will
be read as on.
Range Default
1 to 250 1 10144
0 to 24 0 10148
high High (37)
High 10160
LoФІ Low (53)
Modbus
Relative
Address
[offset
50]
[offset
50]
[offset
50]
Class
Instance
Attribute
hex (dec)
0x83
(131)
1 to 24
3
0x83
(131)
1 to 24
5
0x83
(131)
1 to 24
0xB (11)
Pro-
fibus
Index
- - - - 31003 uint
- - - - 31005 uint
- - - - 31011 uint
Param-
eter
ID
Data
Type
and
Access
**
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 92 • Chapter 4 Setup Page
Page 97

RM Scanner Module • Setup Page
Dis-
play
sfn.b
SFn.b
Parameter Name
Description
Timer (1 to 24)
Source Function B
Set the type of function that will be used
to reset a retentive
timer.
Range Default
nonE None (61)
aLЛЏ Alarm (6)
C.pr Cool Power (161)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
sof.1 Special Function
Output 1 (1532)
sof.2 Special Function
Output 2 (1533)
sof.3 Special Function
Output 3 (1534)
sof.4 Special Function
Output 4 (1535)
tЛЏr Timer (244)
h..Er Heater Error (184)
var Variable (245)
Modbus
Relative
Address
None 10142
[offset
50]
CIP Class
Instance
Attribute
hex (dec)
0x83
(131)
1 to 24
2
Data
Pro-
fibus
Index
- - - - 31002 uint
Param-
eter
ID
Type
and
Access
RWES
**
si.b
Si.b
sz.b
SZ.b
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Timer (1 to 24)
Source Instance B
Set the instance of
the function selected
above.
Timer (1 to 24)
Source Zone B
Set the zone of the
function selected
above.
1 to 250 1 10146
[offset
50]
0 to 24 0 10150
[offset
50]
0x83
(131)
1 to 24
4
0x83
(131)
1 to 24
6
- - - - 31004 uint
RWES
- - - - 31006 uint
RWES
Watlow EZ-ZONE® RMS Module • 93 • Chapter 4 Setup Page
Page 98

RM Scanner Module • Setup Page
Dis-
play
sas.b
SAS.b
ti
ti
LEv
LEv
Parameter Name
Description
Timer (1 to 24)
Reset Active Level
Set what state will
be read as on.
Timer (1 to 24)
Time
Set the time span
that will be measured in tenths of a
second.
Timer (1 to 24)
Transmitter Active
Level
Set which output
state will indicate
on.
Ctr
sEt
Counter Menu
Modbus
Range Default
high High (37)
High 10162
LoФІ Low (53)
0 to 9,999.000 0.1 10164
high High (37)
High 10166
LoФІ Low (53)
Relative
Address
[offset
50]
[offset
50]
[offset
50]
CIP -
Class
Instance
Attribute
hex (dec)
0x83
(131)
1 to 24
0xC (12)
0x83
(131)
1 to 24
0xD (13)
0x83
(131)
1 to 24
0xE (14)
Data
Pro-
fibus
Index
- - - - 31012 uint
224 31013 float
- - - - 31014 uint
Param-
eter
ID
Type
and
Access
**
RWES
RWES
RWES
fn
Fn
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Counter (1 to 24)
Function
Set whether the
counter increments
or decrements the
count value. Decrementing 0 returns
9,999. Incrementing
9,999 returns 0.
Up Up (1456)
dn Down (1457)
Up 9196
[offset
40]
0x82
(130)
1 to 24
9
- - - - 30009 uint
RWES
Watlow EZ-ZONE® RMS Module • 94 • Chapter 4 Setup Page
Page 99

RM Scanner Module • Setup Page
Dis-
play
sfn.a
SFn.A
Parameter Name
Description
Counter (1 to 24)
Source Function A
Set the type of function that will be used
for the counter clock
signal.
Range Default
nonE None (61)
aLЛЏ Alarm (6)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
tЛЏr Timer (244)
h..Er Heater Error (184)
var Variable (245)
Modbus
Relative
Address
None 9180
[offset
40]
CIP Class
Instance
Attribute
hex (dec)
0x82
(130)
1 to 24
1
Data
Pro-
fibus
Index
- - - - 30001 uint
Param-
eter
ID
Type
and
Access
RWES
**
si.a
Si.A
sz.a
SZ.A
sas.a
SAS.A
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Counter (1 to 24)
Source Instance A
Set the instance of
the function selected
above.
Counter (1 to 24)
Source Zone A
Set the zone of the
function selected
above.
Counter (1 to 24)
Count Active Level
Set what output
state will indicate
on.
1 to 250 1 9184
[offset
40]
0 to 24 0 9188
[offset
40]
both Both (130)
high High (37)
LoФІ Low (53)
High 9200
[offset
40]
0x82
(130)
1 to 24
3
0x82
(130)
1 to 24
5
0x82
(130)
1 to 24
0xB (11)
- - - - 30003 uint
- - - - 30005 uint
- - - - 30011 uint
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 95 • Chapter 4 Setup Page
Page 100

RM Scanner Module • Setup Page
Dis-
play
sfn.b
SFn.b
Parameter Name
Description
Counter (1 to 24)
Source Function B
Set the type of function that will be used
for the counter load
signal.
Range Default
nonE None (61)
aLЛЏ Alarm (6)
CpE Compare (230)
Ctr Counter (231)
dio Digital I/O (1142)
Ent.a Profile Event Out A
(233)
Ent.b Profile Event Out B
(234)
Ent.C Profile Event Out C
(235)
Ent.d Profile Event Out D
(236)
Ent.E Profile Event Out E
(247)
Ent.f Profile Event Out F
(248)
Ent.g Profile Event Out G
(249)
Ent.h Profile Event Out H
(250)
fUn Function Key (1001)
LgC Logic (239)
tЛЏr Timer (244)
h..Er Heater Error (184)
var Variable (245)
Modbus
Relative
Address
None 9182
[offset
40]
CIP -
Class
Instance
Attribute
hex (dec)
0x82
(130)
1 to 24
2
Data
Pro-
fibus
Index
- - - - 30002 uint
Param-
eter
ID
Type
and
Access
RWES
**
si.b
Si.b
sz.b
SZ.b
sas.b
SAS.b
Load
LoAd
* These parameters/prompts are available in these menus with firmware revisions 6.0 and above.
** R: Read, W: Write, E: EEPROM, S: User Set
Counter (1 to 24)
Source Instance B
Set the instance of
the function selected
above.
Counter (1 to 24)
Source Zone B
Set the zone of the
function selected
above.
Counter (1 to 24)
Reset Active Level
Set what output
state will indicate
on.
Counter (1 to 24)
Load Value
Set the counter's initial value.
1 to 250 1 9186
[offset
40]
0 to 24 0 9190
[offset
40]
both Both (130)
high High (37)
LoФІ Low (53)
0 to 9,999 0 9204
High 9202
[offset
40]
[offset
40]
0x82
(130)
1 to 24
4
0x82
(130)
1 to 24
6
0x82
(130)
1 to 24
0x0C (12)
0x82
(130)
1 to 24
(13)
- - - - 30004 uint
- - - - 30006 uint
- - - - 30012 uint
123 30013 uint
RWES
RWES
RWES
RWES
Watlow EZ-ZONE® RMS Module • 96 • Chapter 4 Setup Page
 Loading...
Loading...